/












































































































































































































































































































































































































Текст
ULTRASONIC TRANSDUCERS
Edited hy
YOSHIMITSU KIKUCHI
Professor Research Institute
of
Electrical Communication
Tohoku University
CORONA PUBLISHING COMPANY, LTD. TOKYO
1969
УЛЬТРАЗВУКОВЫЕ
ПРЕОБРАЗОВАТЕЛИ
Под ре да к j щей
Е. КИКУЧИ
Перевод с английского
под редакцией
И. П. ГОЛЯМИНОЙ
ИЗДАТЕЛЬСТВО «МИР» МОСКВА . 1972
УДК 534.143 -I 621.034
Книга написана группой крупных японских
ученых-акустиков на базе их собственных оригинальных исследований
и представляет собой первое в современной научной
литературе издание, спецпалыю посвященное ультразвуковым
преобразователям. В пей рассматривается широкий круг вопросов,
связанных с работой и с методами конструирования
преобразователей, основанных на магиитострикциошюм и
пьезоэлектрическом эффектах. Наряду с основами теории
преобразователей в книге приводится обширный методический и
экспериментальный материал, а также большое число расчетных
формул и графиков, которые могут быть использованы при
разработке и конструировании преобразователей для различных
конкретных задач.
Книга представляет интерес для паучных работников
и инженеров, работающих в области физической акустики,
гидроакустики, физики и техники ультразвука, и студентов
соответствующих специальностей, а также для специалистов,
занимающихся разработкой электромеханических резонаторов
и фильтров.
Редакция литературы по физике
2-3-3
57-72
У^едиидуковые преобразователи
Редактор Я. Л. ТЕЛЕСН11Н
Художник А. Д. Смеллпов. Художественный редактор А. Г. Антонова
Технический редактор II. Д. Толстлкова. Корректор Т. П. Пашковская
Сдано в набор 3/III—1972 г. Подписано к печати 23/VIII—197 2 г. Бумэи кн.
журн. 00X901/16=13,25 бум. л. лсч. л. 26.50. Уч.-изд. л. 23,56, Изд. Л1 2/G168.
Цена 1 р. 84 к. Зак. 0231
ИЗДАТЕЛЬСТВО «МИР»
Москва, 1-й Рижский пер., 2
Ордена Трудового Красного Знамени
Московская типография № 7 «Искра революции»
Главполиграфпрома Комитета по печати при Совете Министров СССР.
г. Москва, Трехпрудный пер., 9.
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
И предлагаемой вниманию читателей книге «Ультразвуковые
преобразователи» рассматриваются на современном уровне
различные проблемы, связанные с электроакустическими — магнито-
стрикционными и пьезоэлектрическими — преобразователями
ультразвукового диапазона. Эти типы преобразователей служат в
настоящее время в качестве наиболее употребительных излучателей
и приемников ультразвуковых волн, роль которых в науке и
технике трудно переоценить. Пьезоэлектрические и магнитострик-
циоппые преобразователи являются основным видом
преобразователей в современной гидроакустике; на их использовании основано
большинство технологических применений ультразвука,
ультразвуковая дефектоскопия, медицинская диагностика, терапия и т. п.;
значительное число методов применения ультразвуковых волн
для исследования вещества также базируется на использовании
ыагиитострикционных и пьезоэлектрических излучателей и
приемников.
Несмотря на такую широкую область применения, в научной
литературе последних лет вопрос об ультразвуковых
преобразователях освещен довольно скудно. Имеются отдельные главы
о новых электромеханически активных материалах и их
применениях в коллективных монографиях советских акустиков
(«Физика и техника мощного ультразвука» под редакцией Л. Д. Розен-
берга) и американских ученых (серия книг «Физическая акустика»
под редакцией У. Мэзона); разделы, содержащие общие сведения
о преобразователях, вводятся, как правило, в большинство
технических изданий, посвященных ультразвуку. Однако, кроме
данной книги, пожалуй, нельзя назвать ни одного издания,
специально посвященного этому вопросу.
Книга является коллективной монографией, изданной под
редакцией видного японского ученого-акустика проф. Е. Кикучи,
который известен как автор интересных работ в области
технической, медицинской акустики и акустоэлектроники, в частности, как
автор серьезных исследований по ультразвуковым
преобразователям. Отдельные главы книги написаны крупными японскими
специалистами, много лет проработавшими в данной области; кроме
самого Кикучи, это Фукусима, Судзуки, Симицу, Сибаяма, Сане-
С Предисловие редактора перевода
ёси. Книге в полной мере присущи достоинства и недостатки
коллективных- изданий. К достоинствам в первую очередь относится
тот факт, что каждый раздел написан специалистом, посвятившим
какой-то период своей исследовательской деятельности именно
данному конкретному вопросу, а основным недостатком является
отсутствие единого подхода к различным аспектам проблемы,
различная глубина освещения разных вопросов, разностильность
изложения.
Книга основана на оригинальных исследованиях ее авторов.
Зачастую в нее введены лишь с небольшой редакционной
доработкой появившиеся ранее в периодических научных изданиях
публикации. Это несколько вредит стройности изложения. Однако
сам материал книги представляет существенный интерес для
советского читателя. Дело в том, что японские исследователи
много занимались ультразвуковыми преобразователями и добились
в этой области серьезных успехов, однако большинство их работ
опубликовано в малодоступных для советского читателя
периодических изданиях и часто только на японском языке. Поэтому с
целым рядом экспериментальных и теоретических результатов
читатель — специалист в области преобразователей и
ультразвука — познакомится в этой книге впервые. Вместе с тем
научным работникам и инженерам, не являющимся такими
специалистами, книга дает возможность познакомиться с
вопросом в общих чертах и получить представление о его
современном состоянии: в каждой главе сообщениям о новых задачах
и последних достижениях обычно предшествует изложение основ
данной конкретной проблемы.
Книга не претендует на исчерпывающее изложение материала
и в этом плане .не является классической монографией учебного
характера. С этим обстоятельством связано и отсутствие полной
библиографии — в каждой главе приводятся ссылки в основном
лишь на японские работы и изредка, для обоснования отдельных
выводов или предположений, упоминаются наиболее известные
работы западных авторов. Ссылки на труды советских авторов
практически отсутствуют; нет ссылок даже на основополагающий
работы II. Н. Андреева, Л. Я. Гутина, А. А. Харкевича, которые
должны были быть упомянуты хотя бы по праву приоритета.
Возможно, что ограничение в цитировании литературы связано
с юбилейным характером японского издания, призванного
подчеркнуть достижения японских исследователей за 25 лет
существования Института электросвязи Университета Тохоку. Этим
можно объяснить и не всегда оправданное подчеркивание
приоритета японских ученых. При всем том наличие ссылок на
литературу, наименее известную советскому читателю,
—положительный факт с точки зрения увеличения библиографической
информации.
Лредисловие редакяпора перевода
7
Теория преобразователей излагается в книге в различных
аспектах: даются дифференциальные уравнения активной среды
и производится их интегрирование для конкретных форм
вибраторов, используется способ представления преобразователей в виде
четырехполюсников, а также проводится их рассмотрение на
основе эквивалентных схем. Строгого перехода от одного способа
представления к другому авторы не делают, и это вполне
оправданно, так как излишняя строгость привела бы только к
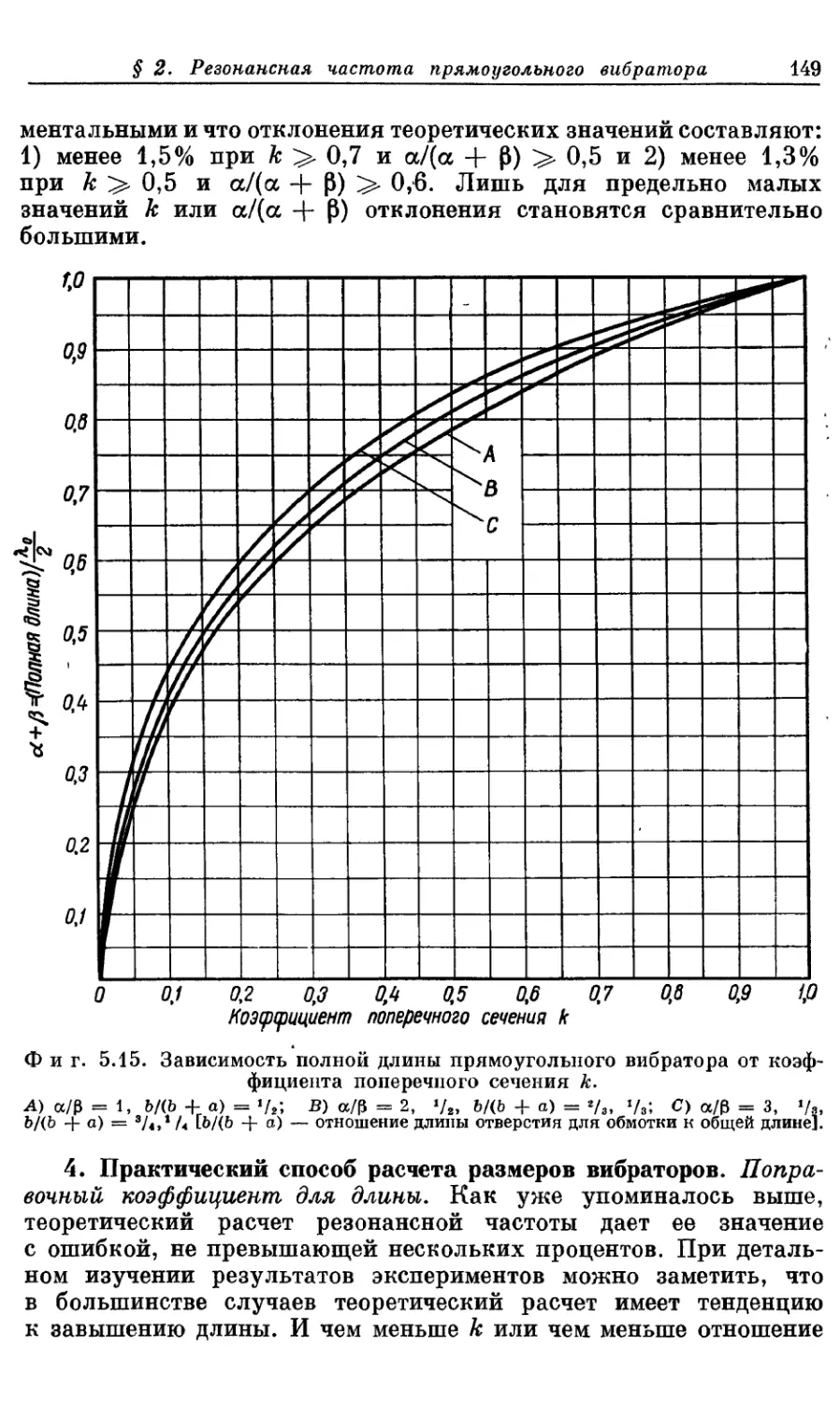
громоздкости и схоластике в изложении в ущерб ясности понимания самих
явлений. Основной же теоретический аппарат для решения задач,
возникающих при разработке преобразователей, в книге имеется.
Безусловно правильным следует считать использованный в ряде
случаев подход к магнитострикционным и пьезоэлектрическим
элементам как к обобщенным «пьезоактивным» элементам с
переносом результатов, полученных для одного конкретного вида
материалов, на другие материалы на основании аналогии основных
уравнений.
В основу приводимых в книге расчетов преобразователей
положена линейная теория, однако для магнитострикторов авторы
рассматривают зависимость свойств от амплитуды. В частности,
амплитудные зависимости учитываются при рассмотрении потерь,
при исследованиях влияния статических механических
напряжений или определении постоянной индукции подмагничивания.
Особую ценность представляет рассмотрение вопроса о предельных
возможностях магнитострикционных преобразователей,
ограничении их интенсивности излучения прочностью материала, его
магнитным насыщением.
В периодической литературе по этому вопросу имеется пока
очень мало данных. Весьма интересен и подход к оценке
эффективности преобразователей с учетом согласования их с
питающими генераторами.
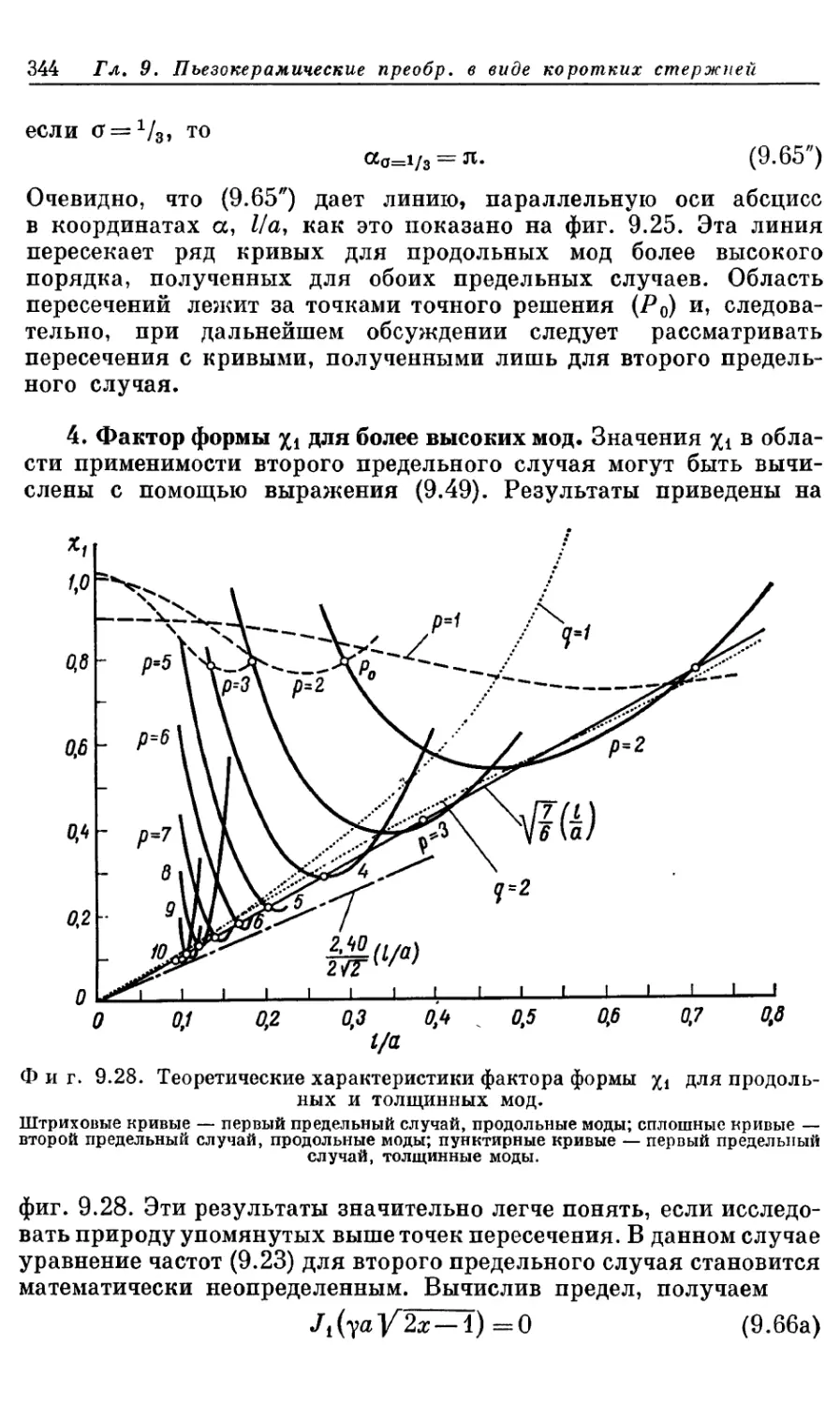
Большое достоинство книги — наличие в ней расчетных
формул и графиков, специально приспособленных для того, чтобы
читатель мог использовать их при решении своих конкретных
задач. Обозначения, формулы для различных типов
пьезоэлектрических преобразователей и их основные характеристики
сведены в таблицы, что делает изложение более четким и облегчает
для читателя ориентировку в материале. Специальная глава
отведена пьезокерамическим преобразователям в виде коротких
стержней, т. е. вибраторам, не удовлетворяющим приближениям
для стержней или пластин, для которых нет хорошо
разработанной теории. К типу вибраторов в виде коротких стержней
относятся весьма широко распространенные пьезокерамические
составные преобразователи, поэтому материал этой главы
представляется весьма полезным.
В книге приводится обширный экспериментальный материал,
8
Предисловие редактора перевода
либо иллюстрирующий теоретические положения, либо имеющий
самостоятельный интерес. Подробно описываются методики и
аппаратура для измерений характеристик пьезоактивных
материалов и преобразователей; некоторые из приводимых методик
являются оригинальными.
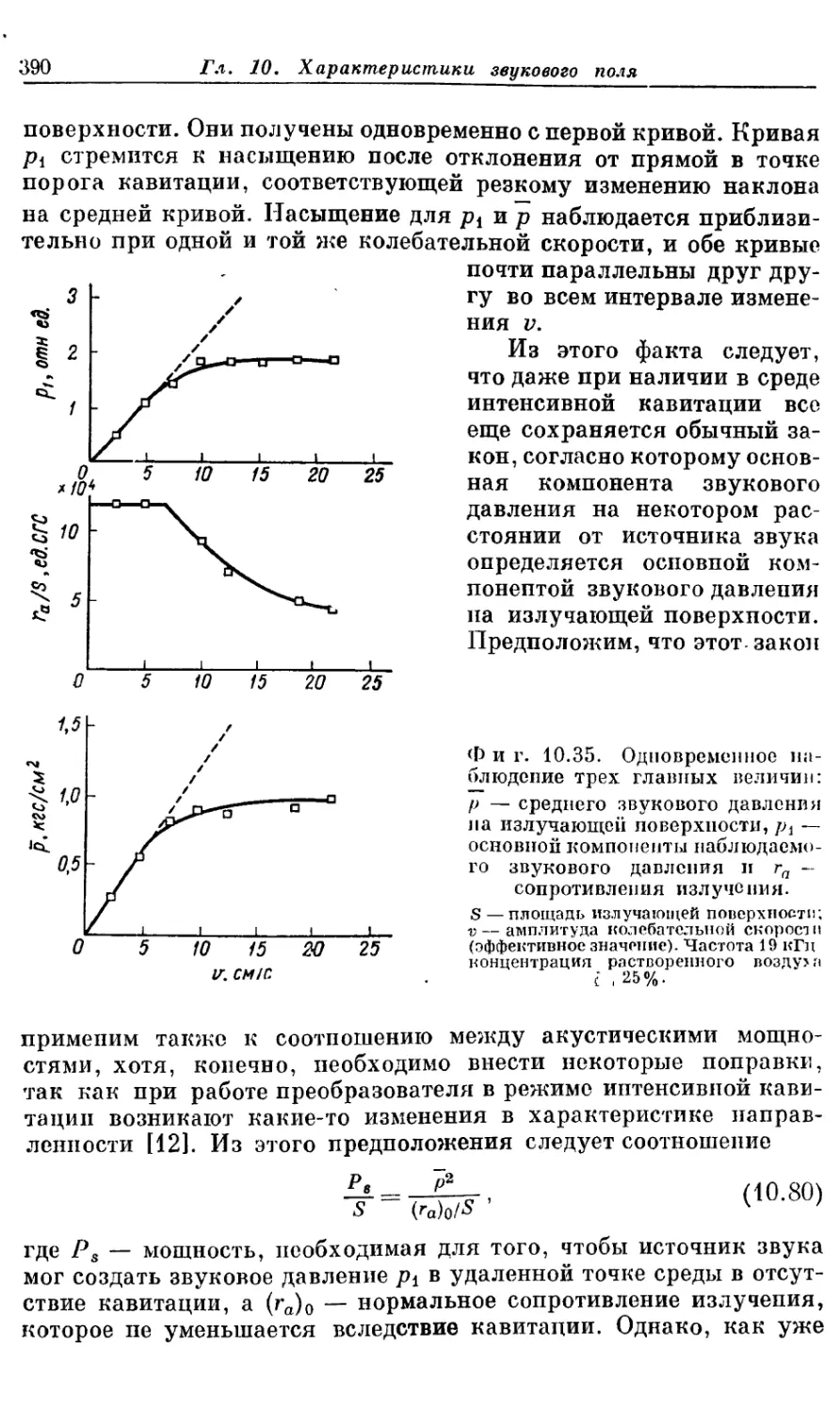
Для полноты охвата всех вопросов, связанных с
преобразователями, в книгу включена специальная глава, материал которой
не касается непосредственно свойств преобразователей, а
посвящен излучению и приему звука с точки зрения ультразвукового
поля. Характеристики поля рассматриваются как с позиций
применения преобразователей в гидроакустике (направленность,
отражающая способность и сила цели), так и с позиций
ультразвуковой технологии (особенности поля и характеристики среды
при наличии кавитации).
Несколько выпадает из общего содержания книги последняя
глава, посвященная механическим и электромеханическим
фильтрам. Она представляет интерес в основном для читателей,
непосредственно занимающихся инженерной разработкой фильтров
и резонаторов для целей радиотехники.
К особенностям изложения японских авторов относится
применение ряда непривычных для советского и западного читателя
обозначений, оборотов, терминов и даже отдельных понятий.
В некоторых случаях при редактировании была произведена
замена терминов на более употребительные. Например, в книге
преобразователи из современных керамических материалов, сами
материалы и константы преобразования обозначены термином
«электрострикционныс», хотя везде имеется в виду эффект
линеаризованной постоянным полем электрострикции,
феноменологически аналогичный обычному пьезоэффекту. В переводе такие
преобразователи и материалы названы пьезокерамическими, а
соответствующие константы — пьезоэлектрическими константами.
Для обозначения резонансных частот, упругости и механической
добротности преобразователей при условии поддержания
постоянного поля или постоянной намагниченности (поляризации)
авторы применяют термины: резонанс или упругость «типа А» и
«типа В». Эти термины также заменены на общеупотребительные.
Вместо выражения «вибродвижущая сила» в переводе
употребляется выражение «возбуяедающая магнитострикционная (или
пьезоэлектрическая) сила». При редактировании устранен ряд
неточностей, описок и незначительных ошибок, введены единообразные
буквенные обозначения для различных глав. Некоторые не
совсем привычные буквенные обозначения сохранены, тем более
что авторы дают сопоставление их со стандартными обозначениями.
В целом книга представляет несомненный интерес и может
быть практически полезной для широкого круга научных
работников и инженеров, связанных с исследованиями, разработкой
Предисловие редактора перевода \)
и применением современных электроакустических и
электромеханических преобразователей ультразвукового диапазона. Сюда
относятся в первую очередь специалисты, работающие в области
физической акустики, гидроакустики, физики и техники
ультразвука, а также занимающиеся разработкой резонаторов и
фильтров для целей радиотехники. Книга будет полезна и студентам
старших курсов, специализирующийся в области гидроакустики
и ультразвуковой техники.
Перевод книги выполнили Е. С. Рейзин (гл. 1—4), Е. К. Гри-
щенко (гл. 5, 6), Л. О. Макаров (гл. 7—9), Е. М. Алексеев
(гл. 10, 11).
//. П. Голямина
ПРЕДИСЛОВИЕ К ЯПОНСКОМУ ИЗДАНИЮ
Эта книга представляет собой техническую монографию,
охватывающую проблемы, связанные с ультразвуковыми
преобразователями. Вместе с тем при составлении книги мы позаботились
о том, чтобы начинающие легко могли добраться до сути
современных проблем с помощью вводных описаний в различных
главах, составленных на уровне элементарного учебника. Для
инженеров и техников, занимающихся непосредственно разработкой
и изготовлением ультразвуковых преобразователей, в книгу
включено много полезных для практики графиков и таблиц,
сопровождаемых объяснениями принципов, на основе которых эти графики
и таблицы были получены.
В гл. 1 дается обзор современных применений ультразвуковых
преобразователей и их исторического развития. Инженеры и
ученые, собирающиеся заняться исследованиями в области
ультразвуковых преобразователей, могут использовать этот обзор для
получения общего представления и основных знаний в этой
области техники.
Глава 2 знакомит читателя с элементами явлений магнитострик-
ции, электрострикции и пьезоэлектричества, па которых основаны
почти все ультразвуковые преобразователи. В ней приведено
также довольно большое число примеров эквивалентных
электрических схем, полученных на основе применения к
ультразвуковым преобразователям метода электромеханических аналогий.
Эти аналогии будут полезны тем читателям, которые пришли
в данную область из электротехники.
В гл. 3 приводятся определения основных констант,
называемых магнитострикционными, электрострикционными или
пьезоэлектрическими константами; помещены справочные таблицы
и уравнения, связывающие эти константы. Теоретическое
рассмотрение ограничено одномерным случаем для продольных мод
колебаний, чтобы начинающие легко могли понять физический
смысл определений и выведенных уравнений.
В гл. 4 достаточно полно описаны методы измерений,
применяемые для оценки магнитострикционных материалов. Обращено
внимание на возможность непосредственного использования
различных методов — от упрощенных практических до методов,
в которых требуется точность. Приведена таблица электрических
Предисловие Е. Кипучи
И
и механических констант наиболее важных магнитострикцион-
ных материалов. Для никеля приведены все имеющиеся в
современной инженерной практике и технологии сведения о его
свойствах, включая характеристики при работе на больших
амплитудах.
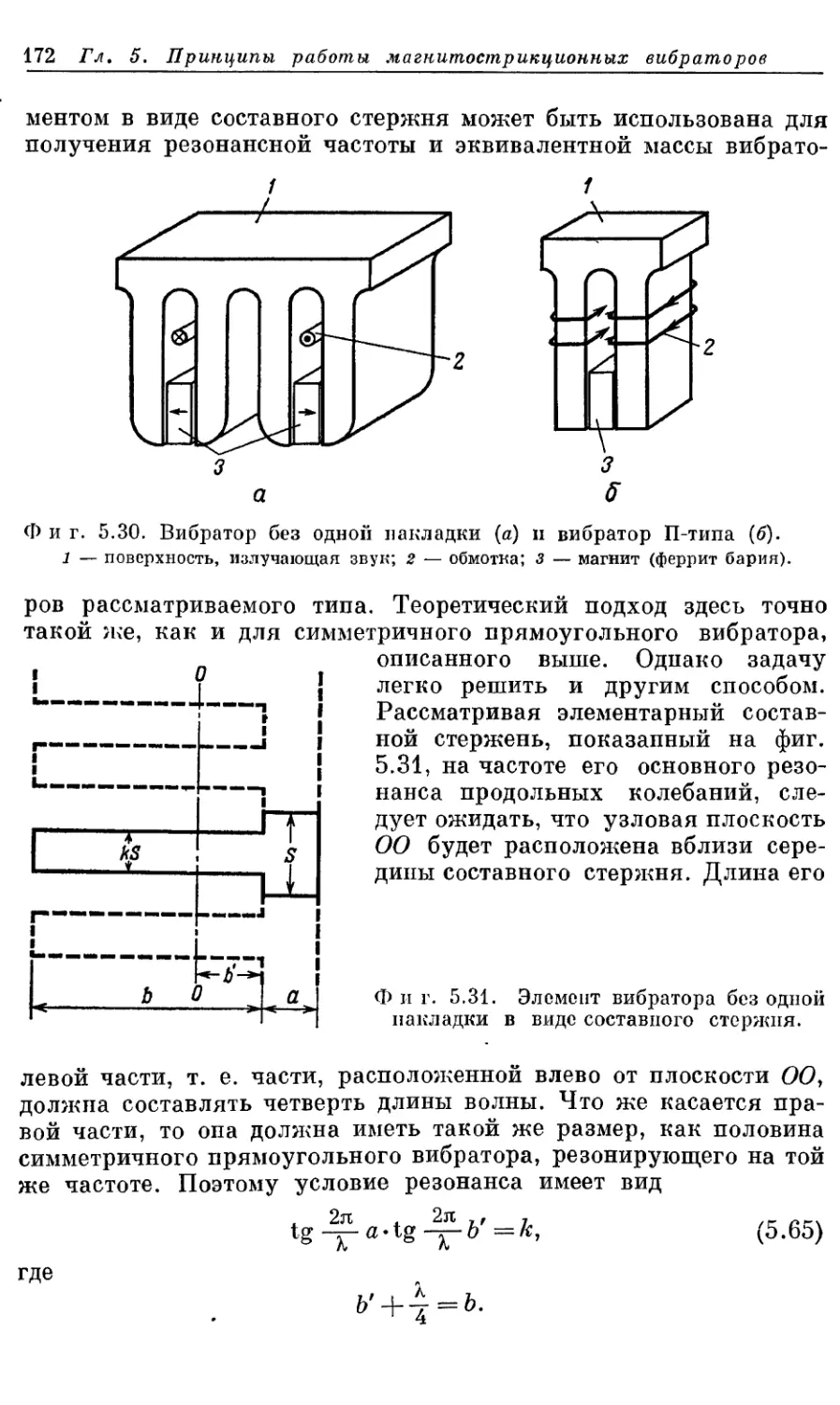
В гл. 5 подробно рассмотрены методы конструирования
магнитострикционных вибраторов и приведены соответствующие
графики. Эти методы распространены далее на случай больших
амплитуд колебаний, а численные примеры приведены с учетом
будущего развития техники, когда, несомненно, будет использоваться
большая мощность ультразвука.
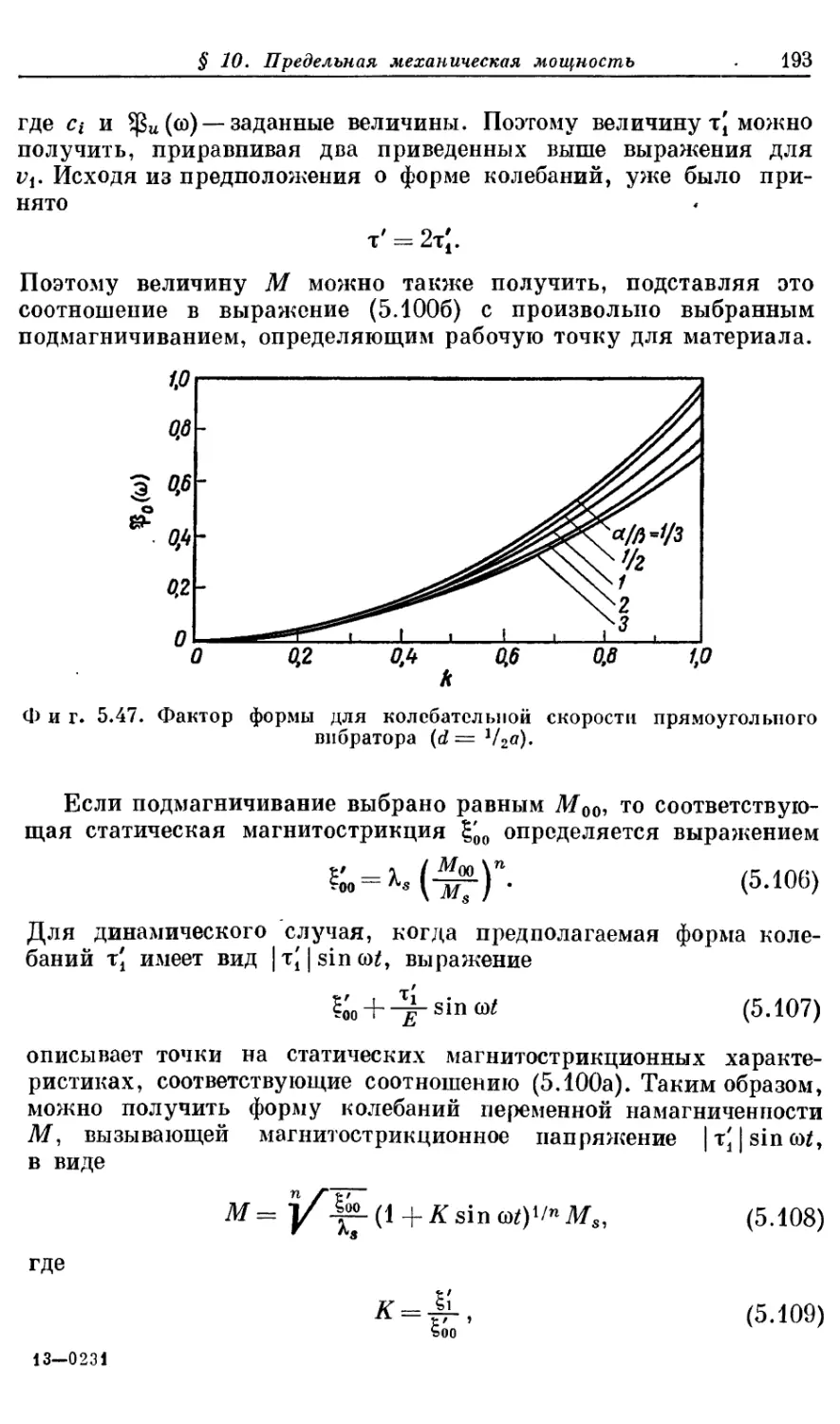
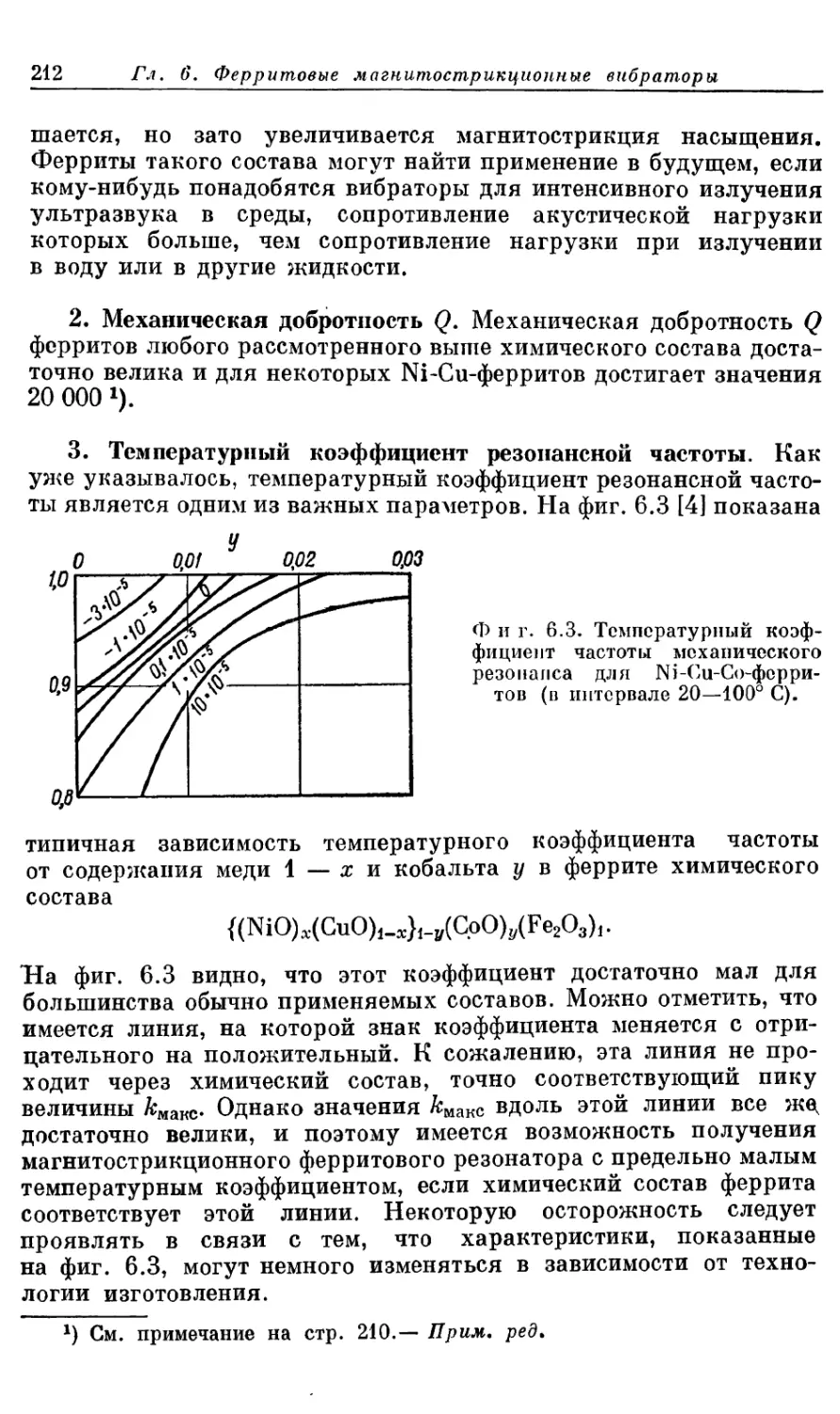
В гл. 6 суммированы данные о свойствах магнитострикционных
вибраторов из ферритов в связи с быстрым ростом промышленного
применения пьезомагнитной керамики.
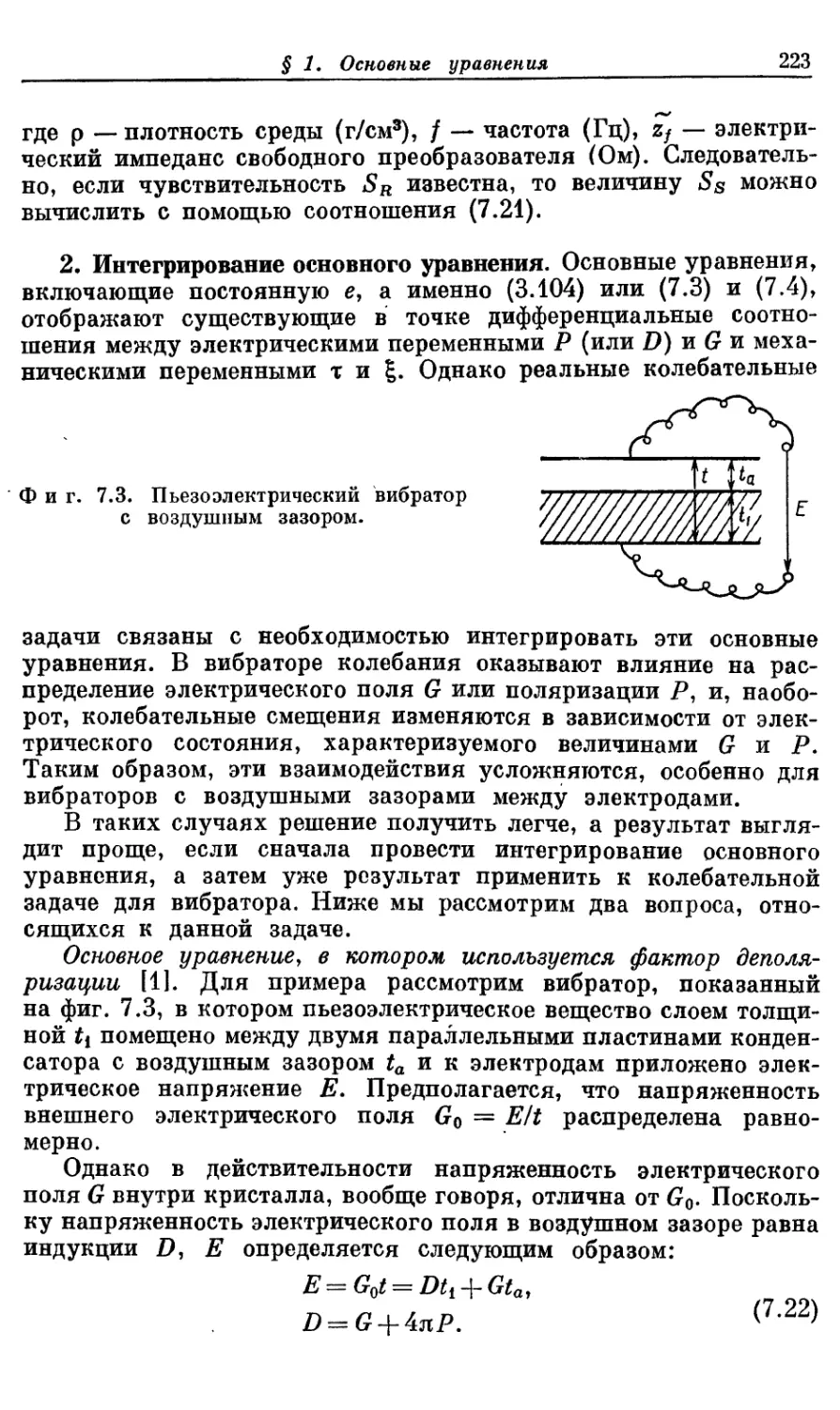
В гл. 7 даны основы теории пьезоэлектрических вибраторов
настолько подробно, насколько это возможно в пределах
ограниченного числа страниц; там же приведено несколько
пояснительных таблиц, не только полезных для понимания особенностей
различных типов пьезоэлектрических вибраторов, но и
являющихся удобной основой для дальнейшей разработки такого рода
вибраторов, резонаторов или чувствительных элементов различного
назначения.
В гл. 8 приведены графики эффективного затухания (к. п. д.
преобразования), применимые в одинаковой степени для оценки
магнитострикционных, пьезокерамических или
пьезоэлектрических вибраторов. В сопровождающих графики описаниях
изложены основные принципы их построения для того, чтобы
разработчики и потребители вибраторов могли непосредственно
пользоваться этими графиками.
В гл. 9 подробно обсуждаются основы теории резонаторов
и пьезокерамических преобразователей в виде коротких стержней,
широко применяемых в настоящее время. Рассматриваются также
вибраторы типа Лаижевена. Приведено несколько рисунков и
номограмм, облегчающих понимание и позволяющих
конструировать преобразователи без проведения утомительных
вычислений.
Глава 10 посвящена особенностям звукового поля, связанным
непосредственно с ультразвуковыми преобразователями;
изложена теория направленности и импеданса излучения
преобразователей и даны графики, пригодные для практического
использования. В связи с широким применением метода ультразвуковой
эхо-локации препятствий в активных гидролокаторах или
ультразвуковых дефектоскопах далее приведены результаты
теоретических и экспериментальных исследований отражающей
способности, или силы цели, для тел различных размеров и форм.
Предлагается метод анализа полученных данных с учетом ультразвуке-
12
Предисловие Е. Кипучи
вой кавитации, которая сопровождает интенсивное
ультразвуковое излучение.
В гл. И описаны механические фильтры. Поскольку эта тема
не относится непосредственно к кругу вопросов, рассматриваемых
в данной книге, описание ограничивается фильтрами,
иллюстрирующими применение изложенных выше сведений. Это магнито-
стрикционные и чисто механические фильтры, в особенности
фильтры с резонаторами в виде коротких стержней, хотя
существует много других типов фильтров с использованием
механических колебаний твердых тел, которые быстро входят в практику.
Авторы отдельных глав этой книги — первоклассные ученые,
выбранные среди специалистов, многие годы работавших в
соответствующей области науки в Научно-исследовательском
институте электросвязи Университета Тохоку. Редактор предложил им
написать различные главы, уделяя основное внимание
результатам собственных исследований. Этот план возник из представления
о том, что сведения и проблемы, связанные с ультразвуковыми
преобразователями, должды быть всесторонне рассмотрены с
позиций единого методически последовательного подхода.
Следовательно, эта книга не принадлежит к числу изданий, в которых
собраны результаты всех проведенных в рассматриваемой области
исследований, но, как видно из сделанных выше замечаний об
отдельных главах или из оглавления, она тем не менее
представляет собой исчерпывающую монографию об ультразвуковых
преобразователях. Более того, благодаря достаточно подробным
вводным описаниям эту книгу можно использовать в качестве
учебника для начинающих, а также для ученых и инженеров,
которые никогда не занимались ультразвуком.
Есимицу Кипучи
Научно-исследовательский институт электросвязи
Университет Тохоку,
Сендаи, август 1969 г.
Глава 1
ВВЕДЕНИЕ
?. Кикучи
§ 1. ПРИМЕНЕНИЯ УЛЬТРАЗВУКА
В настоящее время ультразвук широко применяется в
разных областях науки и промышленности. Для различных целей
непосредственно используются физическое, химическое или
биологическое действия ультразвука. Ультразвуковые волны
применяются и как средство связи для обмена информацией или ее
получения. В паши дни в качестве излучателей ультразвуковых воли
применяются главным образом ультразвуковые преобразователи,
основанные на принципе преобразования электрической энергии
в акустическую; те же преобразователи играют роль
приемников ультразвуковой энергии.
Для научных целей ультразвук применяется в качестве
средства исследования природы или свойств различных объектов
па основе анализа ультразвуковых колебаний с
сопровождающими их физико-химическими или биологическими явлениями.
Методы непосредственного применения ультразвуковой
энергии можно подразделить па две категории: 1) использование
различных воздействий ультразвуковой кавитации, возникающей
в жидкостях, и 2) использование других явлений, не обязательно
связанных с кавитацией. Ультразвуковая кавитация,
возбуждаемая в жидкой среде, производит физические и химические действия,
такие, как дегазация, гомогенизация, диспергирование,
частичная агломерация, окисление, эмульгирование, деполимеризация
высокополимерных соединений и т. д. Для промышленного
применения этих воздействий ультразвука в настоящее время серийно
выпускается аппаратура различного пазпачения и разпых
размеров. Наряду с общепринятым применением ультразвуковых
вибрационных систем или установок ультразвуковой очистки в
металлургии, машиностроении, химической или текстильной
промышленности аппаратура средних и малых размеров используется
в госпиталях для очистки медицинских инструментов. Очень
малые установки ультразвуковой очистки теперь можно увидеть
даже в оптических и часовых мастерских.
Энергия- механических колебаний ультразвуковой частоты
используется в промышленности также для обработки твердых
материалов, для ультразвуковой пайки алюминия,
ультразвуковой сварки металлов, для ускорения процесса протяжки тонкой
14
Гл. 1. Введение
проволоки. В этих случаях практического применения
ультразвука для увеличения амплитуды возбуждаемых механических
колебаний ультразвуковых частот обычно используется твердый
концентратор.
В последние годы биологическое действие ультразвуковой
энергии начали использовать в медицине, и уже в массовом
масштабе поставляются разнообразные приборы, предназначенные
для этой цели. Ультразвуковые волны соответствующей
интенсивности вводятся в тело человека для лечения болей, судорог или
воспалений;- при этом используется тепловое действие
ультразвуковых колебаний. С другой стороны, ультразвуковые колебания
очень высокой интенсивности оказывают разрушающее действие
на живые биологические ткани, и этот эффект также используется
в медицине. С помощью акустических линз и зеркал
ультразвуковые волны фокусируются в некотором участке человеческого
тела для того, чтобы разрушать только одну определенную ткань.
Такое применение ультразвука можно рассматривать как новый
метод проведения хирургических операций при лечении
некоторых болезней.
Ультразвуковые волны оказывают заметное воздействие на
полупроницаемые перегородки. Проводятся научные эксперименты
по использованию этого эффекта для создания компактной
искусственной почки.
Применение ультразвуковых волн для связи распространилось
на самые различные области. Так, одной из широких областей
подобного применения является измерение глубин с помощью
ультразвука. В ультразвуковом эхолоте импульсный
электрический сигнал возбуждает преобразователь, который излучает
в воду ультразвуковой импульс; акустический эхо-сигнал,
отраженный от дна, принимается с помощью преобразователя, который
превращает его в электрический сигнал. Преобразованный эхо-
сигнал затем усиливается и поступает в соответствующий прибор,
где измеряется промежуток времени между моментами
излучения и приема, определяющий глубину. В ультразвуковых
рыбопоисковых приборах механизм определения местоположения
рыбного косяка такой же, как и при ультразвуковом измерении
глубин. В ультразвуковых активных гидролокаторах — сонарах —
направление излучения и приема ультразвука обычно
горизонтально, так что в воде могут быть обнаружены любые цели, а также
измерены их азимуты и расстояния до них.
В большинстве упомянутых выше случаев применения
ультразвука, исключая хирургию, частота ультразвуковых волн обычно
заключена в диапазоне от 5 до 100 кГц, в котором широко
используются магнитострикционные преобразователи, конкурирующие
с пьезоэлектрическими или пьезокерамическими
преобразователями.
§ 1. Применения ультразвука 15
Импульсный ультразвуковой эхо-метод находит также
применение для обнаружения дефектов в стали и других материалах
пли в готовых деталях машин. Ультразвуковые дефектоскопы,
основанные на этом принципе, широко используются для целей
контроля как в тяжелой индустрии, так и в машиностроении.
Гот же принцип используется в медицинской диагностике, и
приборы, основанные на нем, широко применяются в повседневной
практике в медицинских клиниках. В этих случаях частота ультра-
инука обычно лежит между 0,5 и 10 МГц, поэтому для преобразо-
пнтолей используются кристаллы кварца, пьезокерамика типа
ЦТС или другие пьезоэлектрические материалы.
Фиг. 1.1. Механический фильтр.
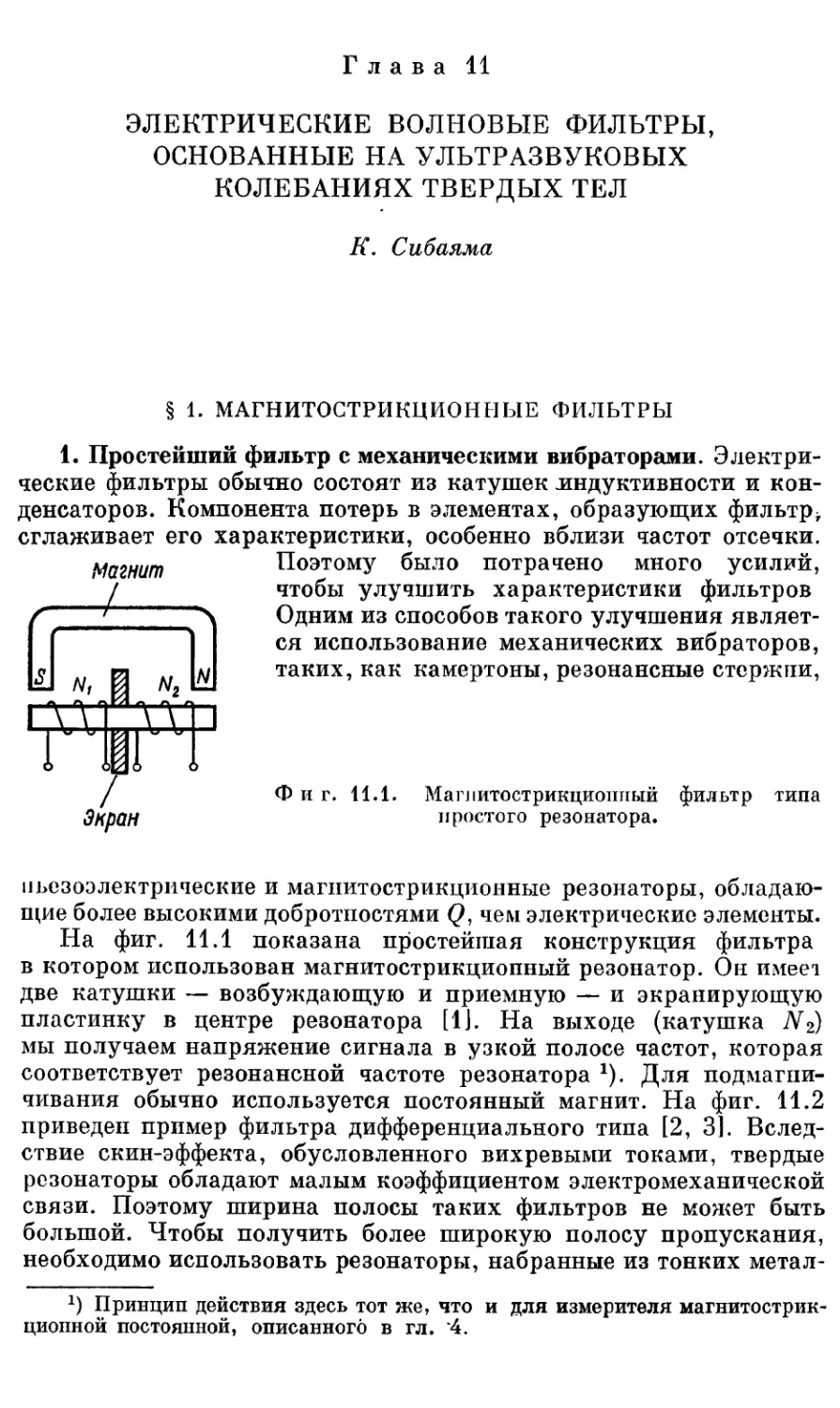
'- Ультразвук находит применение и при конструировании
волновых фильтров. Механическая цепочка (фиг. 1.1), собранная
из соответствующего числа механически связанных цилиндров,
круглых дисков или других твердых резонаторов, оказывает
фильтрующее действие на распространяющиеся вдоль нее
ультразвуковые волны. Электрические сигналы системы связи
преобразуются в механические колебания с помощью
электромеханического преобразователя, связанного с цепочкой, а ультразвуковые
волны, достигающие противоположного конца цепочки, снова
преобразуются в электрический сигнал с помощью другого
преобразователя, так что такая электромеханическая система может
работать в качестве волнового фильтра в аппаратуре связи.
Системы такого типа называются механическими фильтрами.
С другой стороны, некоторые магнитострикционные или
пьезоэлектрические резонаторы используются как элементы
электрических волновых фильтров. Характеристики электрического
импеданса таких резонаторов аналогичны подобным характеристикам
резонансных контуров, состоящих из чисто электрических
элементов, а добротность много выше добротности чисто электрических
резонансных контуров. В соответствии с теорией фильтров
электрические концы этих резонаторов соединяются таким образом,
что образуется устройство в виде четырехполюсника (фиг. 1.2).
Фильтры этого типа называются магнитострикционными или
пьезоэлектрическими (кристаллическими) фильтрами. Хотя идея
магнитострикционных фильтров была предложена давно, их
промышленное применение было ограниченным по сравнению с меха-
16 * Гл. 1. Введение
ническими и кристаллическими фильтрами. Однако недавно были
предложены магнитострикционные резонаторы из ферритов, что
значительно улучшило характеристики фильтров. Возобновились
также исследования магнитострикционных дифференциальных
фильтров (гл. 11), и можно ожидать появления дальнейших
разработок.
В качестве новейшего направления в области применения
ультразвука можно упомянуть использование ультразвуковых
Фиг. 1.2. Магнитострикционный фильтр.
волн сверхвысокочастотного и высокочастотного диапазонов в
качестве средства исследования физических свойств материи.
Получаемые здесь интересные результаты побуждают
инженеров-исследователей находить все новые технические применения, такие,
как ультразвуковые линии задержки, ультразвуковые усилители
с бегущей волной и т. д. Преобразователи для излучения и приема
таких гиперзвуковых волн (высокочастотных и
сверхвысокочастотных звуковых волн) должны иметь исключительно малую толщину,
поэтому они изготавливаются обычно в виде напыленных тонких
пленок из пьезоэлектрических веществ или в виде диффузионных
или обедненных слоев некоторых пьезоэлектрических
полупроводников. Так как методы изготовления преобразователей для этих
частотных диапазонов относятся к весьма специальной области
техники, в данной книге они не описываются. Но теория и методы
расчета таких преобразователей не слишком отличаются от
приведенных здесь.
§ 2. УЛЬТРАЗВУКОВЫЕ ПРЕОБРАЗОВАТЕЛИ. ИСТОРИЧЕСКИЙ ОБЗОР
Можно сказать, что ультразвуковые преобразователи родились
в воде. В 1826 г. в одном озере *) впервые была измерена скорость
распространения звука в воде с помощью церковного колокола.
Еще до этого эксперимента Леонардо да Винчи отметил, что вода
*) Речь идет об опытах Колладоне и Штурма на Женевском озере.—
Прим. ред.
§ 2. Ультразвуковые преобразователи. Исторический обзор 17
хорошо проводит звук. Однако можно вполне определенно считать,
что эксперимент 1826 г. является первым случаем применения
для излучения звука в воду резонансного устройства.
В дальнейшем подводные колокола,
возбуждаемые электромагнитными или
пневматическими молоточками,
использовались для измерения глубин
акустическим методом и для других
навигационных целей. По своей форме подводный
сигнальный колокол (фиг. 1.3) отличался
от церковного. Край его был сделан очень
толстым, чтобы улучшить резонансные
свойства колокола при работе в воде,
акустический импеданс которой более чем
в 3000 раз превышает акустический
импеданс воздуха. В качестве гидрофонов в то
время использовались угольные
микрофонные капсулы, заключенные в
металлический корпус.
Для получения повышенной
акустической мощности в течение некоторого
Ф л г. 1.3t Подводный сигнальный колокол.
времени использовались водяные сирены, подвижная часть
которых врагцалась в водяном баке, прикрепленном к
внутренней поверхности корпуса корабля. Но в 1907 г. появился
Фиг. 1.4» Генератор (преобразователь) Фессендена.
генератор Фессендена (фиг. 1.4), который и был применен для
подводной сигнализации. Генератор был создан на основе индук-
2-0231
¦х# <ЭЯУЩ
18
Гл. 1, Введение
ционного (асинхронного) двигателя с использованием
электродинамического эффекта. Колебания толстой металлической
диафрагмы возбуждались толстой медной трубкой определенной длины,
которая могла свободно перемещаться в осевом направлении
в сильном постоянном радиальном магнитном поле. Первичная
обмотка, по которой протекал переменный ток, была намотана
на расположенный внутри сердечник таким образом, что медная
трубка представляла собой единственный короткозамкнутый виток
вторичной обмотки. Индуцированный в медной трубке вторичный
ток, взаимодействуя с постоянным полем, создавал переменную
механическую силу. Механическая система генератора была очень
массивной, чтобы преодолевать большой акустический импеданс
среды. Переменный ток подводился от высокочастотного
генератора, и частота выбиралась равной резонансной частоте
диафрагмы, соприкасающейся с водой, так как эффективность
электроакустического преобразования при возбуждении вне
механического резонанса заметно падает. Генераторы Фессендена с
резонансными частотами 540, 1050 и 3000 Гц выпускались
промышленностью и в течение довольно длительного времени использовались
на практике для подводной сигнализации и измерения глубин
акустическим методом.
Вплоть до тех отдаленных времен ультразвуковые волны
совсем не использовались. Но при разумных габаритах излучателя
звук слышимых частот распространяется в воде ненаправленно.
Кроме того, слышимый звук может очень раздражать пассажиров
и команду корабля. С этих точек зрения, а также с учетом
определенных военных применений стала ясна необходимость
использования ультразвуковых волн. В 1920 г. появился подходящий
ультразвуковой излучатель, предназначенный для сигнализации
с подводных лодок и названный излучателем Ланжевена (фиг. 1.5).
Этот излучатель представляет собой мозаику, набранную из кусков
кварца Х-среза и заключенную между двумя толстыми
металлическими пластинами. Если к пластинам приложено переменное
электрическое напряжение, то в кристаллах кварца возникает
пьезоэлектрическая вынуждающая сила, и они вместе с жестко
связанными с ними пластинами начинают колебаться как единая
механическая система. Частота возбуждающего электрического
напряжения выбирается равной частоте основной продольной
моды колебаний этой трехслойной структуры. (В первое время
на практике, по-видимому, использовались частоты 17, 45 кГц
и т. д.) Поверхность металлической пластины, обращенная к воде,
совершает поршневые колебания, и направленность излучателя
оказывается достаточной при диаметре пластины порядка 30—
40 см. Противоположная поверхность другой пластины
соприкасается обычно с воздухом, так что она не дает акустического
излучения.
§ 2. Ультразвуковые преобразователи. Исторический обзор 19
Фиг. 1,5. Излучатель (преобразователь) Ланжевена.
В 1933 г. были изобретены магнитострикционные вибраторы
из тонких листов металла. Колеблющийся сердечник такого
вибратора изготавливается в виде набора сотен склеенных между собой
тонких пластин, отштампованных из листового никеля (фиг. 1.6).
fHfq
?*"*/"//
/./ ЬОн/Ц tCfriy
Фиг. 1.6. Магнитострикционные вибраторы (преобразователи), набираемые
из пластин.
Электрические обмотки размещаются в предусмотренных при
штамповке окнах. Магнитострикционная вынуждающая сила
2*
20
Гл. 1. Введение
создается переменным током, частота которого выбирается обычно
равной частоте механического резонанса сердечника. Толщипа
отдельной пластины выбирается в соответствии с рабочей
частотой с учетом магнитной проницаемости и электрического
сопротивления материала так, чтобы потери на вихревые токи не
превышали некоторого значения,, поскольку они являются главным
фактором, определяющим электроакустический коэффициент
полезного действия преобразователя.
Магнитострикционные преобразователи такого типа могли
совершенствоваться за счет разработки новых сплавов,
обладающих все большим и большим магнитострикционным эффектом
и, следовательно, возможностью преобразования большей
мощности. В отличие от этого излучатели Лапжевена, источник
возбуждающей силы которых зависит от природы кристаллов кварца,
обладали меньшими возможностями совершенствования. Их
акустическая мощность ограничивалась напряжением пробоя
кристалла. Кроме того, прочная и равномерная приклейка мозаики
из кристаллов к большой поверхности металлической пластины,
подверженной сильным переменным напряжениям, связана с
техническими трудностями. Напротив, в магпитострикционных
вибраторах склеиваемые поверхности в точности параллельны
направлению колебаний, и поскольку речь идет о переменных
механических напряжениях, нет необходимости принимать меры
предосторожности для обеспечения прочности склейки. Эти преимущества
магнитострикционпых вибраторов способствовали быстрому
вытеснению ими преобразователей Ланжевена. Далее проводились
исследования различных сплавов, и в 1942 г. был получен сплав
алюминия с железом, названный альфером, применение которого
снизило стоимость магнитострикционпых преобразователей.
Вибраторы из этого сплава быстро нашли широкое применение не
только в ультразвуковых эхолотах, но и в рыболокаторах различных
типов.
Вскоре, однако, был обнаружен большой пьезоэлектрический
эффект в искусственном сегнетоэлектрике, названном керамикой
титаната бария, а развитие технологических методов сделало
изделия из керамики достаточно механически прочными для
использования их в режиме ультразвуковых колебаний. Это произошло
за промежуток времени с 1947 по 1950 г. Вынуждающая сила
возникает в таком материале при воздействии на него переменного
электрического поля, как и в кристалле кварца, но в данном
случае нужна еще постоянная электрическая поляризация —
электрическое смещение. Коэффициент электромеханической
связи для керамики титаната бария значительно выше, чем для
кварца, и благодаря этому снова вспомнили об излучателе Ланжевена.
В связи с разработкой прочных искусственных смол, таких, как
аралдит, ультразвуковые преобразователи типа Ланжевена с ке-
§ 3. Предложение термина «пъезоактивность»
21
рамическими пластинками из титаната бария вместо кварцевой
мозаики вновь вошли в практику. Высокий коэффициент
электромеханической связи материала и малые диэлектрические
потери в нем позволили надеяться на то, что применение таких
преобразователей будет способствовать повышению общей
эффективности различных ультразвуковых установок. Несмотря на то
что упомянутые выше трудности, присущие техпике сборки,
не были преодолены и для преобразователя Ланжевена из
титаната бария, он нашел достаточно широкое практическое применение
в различной маломощной ультра- *
звуковой аппаратуре, в
частности в компактных рыболокато-
рах, где выступил серьезным
конкурентом магнитострикцион-
ных преобразователей из аль-
фера или никеля.
i
0-' '' ¦
""" W:
фЖЩ
4Г>
f^
Фиг. 1.7. Ферритовые магнит о-
стрикциоииые вибраторы.
За время с 1954 по 1957 г. были получены новые полезные
магнитострикционные материалы — ферриты; в результате
промышленной разработки их технологии была достигнута
механическая прочность ферритов, достаточная для излучения
ультразвука большой мощности. Ввиду того что ферриты имеют очень
высокое электрическое сопротивление, потери на вихревые токи
не ощущаются для них в любом моиолитпом объеме материала,
и вибратор может быть изготовлен сразу в окончательной форме
из ферритового порошка путем прессования и последующего
обжига (фиг. 1.7). Электроакустический коэффициент полезного
действия ферритов, очевидно, выше, чем к. п. д. металлических
магнитострнкциоиных вибраторов, набранных из тонких пластин,
и обычно превышает последний примерно в 3 раза, достигая
80—90%. Характерные преимущества магнитострикционного
преобразователя по сравнению с пьезоэлектрическим присущи любому
преобразователю из ферритов. Поэтому во многих областях
промышленного применения ультразвука в настоящее время
используются преимущественно ферритовые преобразователи.
§ 3. ПРЕДЛОЖЕНИЕ ТЕРМИНА «ПЬЕЗОАКТИВНОСТЬ»
При разработке и использовании пьезоэлектрических и маг-
нитострикционных преобразователей постоянно имела место
конкурентная борьба между ними, а ученые, технологи и инженеры,
/
22
Гл. 1. Введение
имевшие дело с ультразвуковыми преобразователями того и
другого типа, часто были одними и теми же людьми. Более того,
значительная часть созданных теорий и методов проектирования
может быть для обоих типов преобразователей общей. В связи
с этим в качественных описаниях часто появляется длинное
выражение «пьезоэлектрические, магнитострикционные и сегнетоэлек-
трические». При теоретическом подходе, как будет видно в
последующих главах, теории, разработанные для одной области, могут
быть использованы и для другой при соответствующей замене
только математических обозначений.
Исходя из сказанного, вместо упомянутого длинного
выражения автор предложил в 1954 г. термин «пьезоактивные» *). Этот
термин был одобрен инженерами, работающими в области
акустики, по крайней мере в Японии. Хотя данный термин
предлагается в настоящей книге впервые и по этому вопросу могут быть
разные мнения, автор надеется, что читатели будут довольны
связанными с употреблением этого термина простотой описаний
и удобством при рассмотрении различных явлений.
*) В отечественной научной литературе в последние годы для
обозначения магнитострикционных, пьезоэлектрических и сегиетоэлектрических
материалов при рассмотрении общей теории или возможностей практического
применения употребляется термин «электромеханически активные материалы»
или просто «активные материалы». [Последний термин употребляется наряду
с термином «пассивные материалы», принятым для обозначения
конструкционных материалов, используемых при изготовлении преобразователей
и не обладающих связью механических и электрических (магнитных)
параметров состояния.]— Прим. ред.
Глава 2
ОСНОВЫ ТЕОРИИ ПЬЕЗОАКТИВНЫХ КОЛЕБАНИЙ
Е. Кипучи (§ 1—3, 6), К. Фукусима (§ 4, 5)
§ 1. ПРОЯВЛЕНИЯ ПЬЕЗОАКТИВНОСТИ
1. Пьезоактивный материал. Когда никель, кобальт и другие
ферромагнитные вещества претерпевают некоторую механическую
деформацию, их магнитные свойства изменяются. Титанат бария
и другие сегнетоэлектрические вещества под воздействием
деформации меняют свои электрические свойства. Механическая
деформация кристаллов кварца, сегнетовой соли, ADP и других
пьезоэлектрических кристаллов приводит к их поляризации.
Если же эти вещества поместить в электрическое поле или
магнитное поле, то в них возникнет механическая деформация,
вызывающая небольшие изменения размеров тела. Чтобы
предотвратить эти изменения, необходимо приложить внешнюю
механическую силу. С другой точки зрения можно считать, что при
намагничивании или поляризации вещества в нем возникает
механическая сила.
Как прямой, так и обратный эффекты, в которых проявляется
связь между упругим и электрическим или магнитным
состояниями упомянутых выше веществ, могут быть использованы для
преобразования электрической энергии в механическую и обратно.
Устройство, осуществляющее такое преобразование, называется
преобразователем. В качестве материалов для преобразователей
применяются вещества с сильно выраженной связью упругого
и электрического или магнитного состояний. Для удобства мы
будем называть эти вещества пьезоактивными, а преобразователи
из них — пьезоактивными преобразователями.
2. Пьезоактивное механическое напряжение. Рассмотрим часть
пьезоактивного материала, к которой приложено электрическое
или магнитное поле. Обозначим вызванную этим полем
добавочную пьезоактивную деформацию А?', а приложенное извне
механическое напряжение, необходимое для компенсации этой
деформации, Ат; тогда механическое напряжение Ат', определяемое
выражением
Дт'=^—Дт = ДДБ\ B.1)
можно рассматривать как следствие пьезоактивного эффекта,
т. е. как пьезоактивное напряжение. Здесь Е — модуль упруго-
24 Гл. 2. Основы теории пъезоактивных колебаний
сти, соответствующий типу рассматриваемого внешнего
напряжения или деформации. Например, если мы ограничиваемся
рассмотрением только продольной деформации, то Е — модуль Юнга.
Л
AM или АР
«• /
* ^
-»Ul|
/||'=
л*
А-С'-
-AZ-
Фиг. 2.1. Схема нозникновснпя пьезоактишгого напряжения.
а — пьезоактивпый преобразопатсль; б — ньезоактивнап деформация; в —механическое
напря/ксние, обусловленное пьезоактшшостыо.
В случае магнитострикционного материала напряжение Дт'
вызывается приращением намагниченности AM и при достаточно
малом AM пропорционально ему. Поэтому мы можем написать
Дт' --- ТАМ,
B.2)
Здесь пьезоактивпос напряжение Дт' называется магпитострик-
циопным, а коэффициент Г —магиитострикциошюй постоянной;
последняя связана с магиитострикциошюй деформацией Д?'
соотношением
Обозначая дифференциальную магнитную восприимчивость
материала через ид, получаем для Дт' следующее выражение:
Дт'-хдГДЯ, B.4)
где АН — изменение магнитного поля, соответствующее
изменению намагниченности AM.
Если АН и, следовательно, AM изменяются синусоидально
с угловой частотой со, выражение B.2) можно переписать в виде
(Дт') *"<»«-о> = Г*-* (AM) e*»«, B.5)
или
т' = ГЛ/. B.5')
§ 1. Проявления пъезоактивности
25
Тогда выражение B.4) примет вид
т' = хГ#, B.6)
где х — обычная комплексная магнитная восприимчивость,
определенная в рабочей точке кривой намагничивания для малых
амплитуд переменного магнитного поля.
3, Принцип подстановки. Если в приведенных выше
выражениях для магнитострикционных веществ вместо намагниченности
М подставить электрическую поляризацию Р, то все эти
уравнения станут пригодными для описания пьезоактивных явлений
в пьезоэлектрических или сегнетоэлсктрических веществах. При
такой подстановке вместо напряженности магнитного поля //
следует подставить, конечно, напряженность электрического поля
G. Тогда выражения B.5') и B.6) принимают вид
ГЛ B.7)
еГЕ, B.8)
где т' — переменное пьезоэлектрическое напряжение, е —
динамическая диэлектрическая восприимчивость, выражаемая как
комплексная величина, а коэффициент Г называется
пьезоэлектрической постоянной. Этот метод подстановки был предложен
Кикучи Ц]. Как будет подробно объяснено ниже (гл. 3 и др.),
все уравнения, описывающие процессы, происходящие в
магнитострикционных преобразователях, можно использовать в качестве
уравнений, описывающих процессы в пьезоэлектрических
преобразователях, если провести следующую замену:
М-+Р, H->G. B.9)
4. Пьсзоактивная магнитодвижущая сила. Механическая
деформация, создаваемая в магнитострикционном материале,
изменяет его магнитные свойства. Это явление может быть истолковано
как возникновение внутри вещества магнитодвижущей силы АН',
обусловленной этой механической деформацией Д| и вызывающей
соответствующее приращение намагниченности, что можно записать
в виде
ДЯ' = ГД?,
где ДЛ/'/ДЯ* —дифференциальная восприимчивость хд.
Величина Г' оказывается равной Г, согласно закону сохранения энер-
т =
26 Гл. 2. Основы теории пьезоактивных колебаний
гии1) [2], и, следовательно,
АМ' = хдГД?. B.11)
Если деформация изменяется синусоидально, то переменная
магнитодвижущая сила Н\ вызванная деформацией ?, и
переменная намагниченность М\ соответствующая Н\ выражаются
следующим образом:
W - Г|,
~ _!1 B.12)
М' = хГ?.
5, Пьезоактивная электродвижущая сила. При
пьезоэлектрических колебаниях в веществе возникает переменная
электрическая поляризация, соответствующая этим колебаниям. Это
явление можно описать соотношениями
_ Л, B.13)
полученными путем применения принципа подстановки,
описанного в п. 3, к уравнениям B.12).
§ 2. ФАКТОР СИЛЫ
Выберем для обобщенного электроакустического
преобразователя некоторую поверхность в качестве его механического выхода.
Обозначим далее через I ток, протекающий на его электрическом
входе, а через F' — возбуждающую силу, возникающую на
механическом выходе в соответствии с этим током. Коэффициент,
равный отношению этих величин, называется фактором силы.
Обозначая его через Ai9 имеем
л;=у-. B.14)
С другой стороны, если преобразователь помещен в
акустическое поле и колеблется под действием звукового давления,
отношение напряжения холостого хода Е\ возникающего на
электрическом выходе, к соответствующей колебательной скорости v
на входе можно назвать обратным фактором силы А 2. Выражение
х) Равенство величин Г7 и Г следует не только из закона сохранения
энергии, но также из второго начала термодинамики и справедливо, строго
говоря, лишь для обратимых, процессов; однако обычно оно оказывается
с достаточной точностью применимым к магнитострикционным и
пьезоэлектрическим явлениям.— Прим. ред.
§ 2. Фактор силы
27
для обратного фактора силы имеет вид
7 Я'
B.15)
Используя законы термодинамики, можно доказать
справедливость соотношения
Ау = Аг
B.16)
Рассмотрим в качестве примера фактор силы для
цилиндрического (кольцевого) магнитострикционного вибратора,
совершающего простые пульсирующие
радиальные колебания. Ток J,
подводимый к электрическому входу,
вызывает однородную вдоль кольца
намагниченность М, вследствие чего
возникает направленное по
окружности переменное магнитострикцион-
яое механическое напряжение
1см. выражение B.5)].
Ф и г. 2.2. Радиальная мода колебаний
цилиндрического (кольцевого) вибратора.
:1
УЛ
1
Если в качестве механического выхода цилиндрического
вибратора рассматривать его наружную поверхность, то сила на выходе
F', определяемая величиной т', выразится как
F' = 2nSiW1
где St — площадь поперечного сечения круглого кольца,
представленного на фиг. 2.2. Ток / и намагниченность М связаны
соотношением
М-
4kNk
2nR
/,
где TV —общее число витков обмотки. В результате для Ai
получается выражение
AnNSt
7 F'
R
хГ.
B.17)
28 Гл. 2. Основы теории пъезоактивных колебаний
Обратный фактор силы А2 можно определить следующим
образом. Механическая деформация кольца | связана с
соответствующей колебательной скоростью и на механическом входе:
где о —угловая частота 2л/. Из уравнений B.12) получаем
следующее выражение для направленной но окружности
намагниченности М'\
уЧоЯ *
Напряжение ?", возникающее на электрическом выходе, равно
E' = ja>NSr4nM\
и, следовательно, обратный фактор силы А2 определяется
выражением
А2 = — = —тг^^Г. B.18)
Факторы силы такого типа используются в тех случаях, когда
уравнения электроакустического преобразования выражаются
через импедансы, поэтому они называются факторами силы импе-
дансного типа.
Фактор силы можно определить также как отношение силы Fu
возникающей на механическом выходе, к приложенному на
электрическом входе напряжению Е, а именно
? = f-; B.19)
соответствующий обратный фактор силы А2 определяется при
этом как протекающий через короткозамкиутый электрический
выход ток 7', отнесенный к скорости на механическом входе:
А2 = ^. B.20)
и
Факторы силы такого типа используются в тех случаях, когда
уравнения преобразования электрической эпергии в акустическую
и обратно выражаются через проводимости; эти два фактора силы
называются факторами силы адмиттансного типа.
\\ 3. ПРЕДСТАВЛЕНИЕ О КИНЕТИЧЕСКОМ ИМПЕДАНСЕ
1. Импеданс свободного преобразователя и кинетический
импеданс. Помещая резонансный электроакустический
преобразователь в акустическую среду и измеряя его импеданс на электриче-
§ 3. Представление о кинетическом импедансе 29
ской стороне, получаем импеданс-диаграмму, подобную
показанной на фиг. 2.3, т. е. имеющую петлю в определенном интервале
частот. Попытаемся выяснить смысл этой петли на примере маг-
нитострикционного вибратора. Предположим, что для измерения
импеданса к вибратору подведен заданный ток /; тогда на ипдук-
тивпом и эффективном омическом сопротивлениях его обмотки
возникнет падение напряжения Ed, зависящее от переменного
магнитного потока внутри вибратора. Это происходит так же,
Ф и г. 2.3. Импеданс-диаграмма свободного
преобразователя. I
как в случае обычной катушки индуктивности с железным
сердечником. Но магнитострикционный вибратор, совершающий
механические колебания, геперирует пьезоактивнуго
магнитодвижущую силу (§ 1, п. 4), и обусловленный этой силой поток
накладывается па первичный магнитный поток. Если напряжение»
индуцированное в обмотке этим новым потоком, обозначить Е', то
напряжение па электрических зажимах будет равно Ёа -\- Ёг.
Электрический импеданс Zf представляет собой отношение суммы
напряжений Е& + Е' к току /:
1 I I
Напряжепие Е' пропорционально колебательной скорости Ъ
вибратора, как это видно из выражений B.15) или B.18); когда
частота тока / приближается к частоте механического резонанса
вибратора, модуль напряжения Е' возрастает, а его электрический
фазовый угол быстро изменяется. Поэтому составляющая E'fl
импеданса Zf образует петлю па частотах, близких к резонансной
частоте. Полагая
¦^• = 2* ~- = Zmi B.21)
можно записать Z/ в виде
Zf = Zd + Zm, B.22)
где Zf — импеданс свободного вибратора. Так как Zm — часть
импеданса вибратора, связанная только с его механическими
v±
30 Гл. 2. Основы теории пьезоактивных колебаний
колебаниями, назовем ее кинетическим импедансом. Если каким-
либо способом воспрепятствовать колебаниям вибратора, то Zm
обратится в нуль и импеданс на электрических зажимах станет
равным лишь Zd. В этом смысле Zd можно назвать импедансом
заторможенного вибратора.
Многие ультразвуковые преобразователи проектируются в
расчете на использование только в диапазоне частот, близких к
частоте механического резонанса. Вблизи резонансной частоты их
механические колебательные характеристики могут рассматриваться
как характеристики простой резонансной системы, состоящей
из массы т, упругости s и механического сопротивления г;
механический импеданс этой системы, определяемый на ее
акустическом выходе, т. е. отношение возбуждающей силы F к
колебательной скорости*;, может быть представлен в следующем виде:
Z-*I=^ + rt+ /©/» + .?- ; B.23)
здесь za — импеданс, на который нагружен вибратор, т. е.
импеданс, обусловленный акустической средой и называемый
импедансом излучения, или импедансом нагрузки.
Согласно выражению B.14), сила F'> обусловленная
протекающим д преобразователе током /, определяется выражением
F' = AJ, B.24)
а вызванная этой силой колебательная скорость и равна
J7=4^-s , B.25)
Z
Электродвижущая сила Е', возбуждаемая колебательной
скоростью у, определяется выражением B.15):
Ё' = А&. B.26)
Следовательно, Zm в B.21) принимает вид
Zro = -i^L. B.27)
Z
Поскольку za, входящее в г, и произведение А {А2 меняются
в окрестности резонансной частоты не слишком быстро, частотная
зависимость вектора Zm определяется величиной, обратной 7 =
= г + /cam. + s/yco. График z на плоскости z представляет собой
прямую линию (фиг. 2.4, а), а график обратной величины —
правильную окружность. Обозначая фазовый угол величины AiAz
через 2fJ, получаем импеданс-диаграмму вектора Zm в виде пра-
Jx
+ co(ct)=oo)
rarf
Плоскость Z«
(O-Jdp
(J
-oo(u)=0)
a 6
Фиг. 2.4. Диаграмма механического импеданса на плоскостиЩ (а)~и~кру-
говая диаграмма кинетического импеданса (б).
Ф и г. 2.5.
Импеданс-диаграмма
заторможенного
преобразователя.
Фиг. 2.6. Петля импеданса
свободного преобразователя,
полученная суммированием диаграмм
импеданса заторможенного
преобразователя J,d (o>) и
кинетического импеданса ?т (о).
32 Гл. 2. Основы теории пьезе активных колебаний
вильной окружности, проходящей через начало координат О
плоскости Zm; проходящий через начало координат диаметр этой
окружности составляет с осью Rm угол 2C, как показано на фиг.
2.4, б. Эта окружность называется круговой диаграммой
кинетического импеданса.
С другой стороны, импеданс заторможенного преобразователя
Zd есть не что иное, как импеданс катушки индуктивности с
неподвижным магнитным сердечником, поэтому рост его с частотой
происходит монотонно и почти пропорционально 0) с постепенным
загибанием графика, как показано на фиг. 2.5. Так как импеданс
свободного преобразователя Z/ представляет собой сумму величин
Zd и Zm, обладающих описанными выше свойствами, его
диаграмма имеет вид, показанный на фиг. 2.6. Хотя импеданс-диаграмма
Zm — правильная окружность, но Zd также в большей или
меньшей степени меняется в окрестности резонанса, поэтому конец
вектора Zj описывает не правильную окружность, а сплющенную
петлю.
2. Электроакустический коэффициент полезного действия
преобразователя. Акустическая мощность Ра, излучаемая вибратором
в окружающую среду, определяется выражением
Ра = Га~*,
если импеданс -za представлен в виде
za = ra + jxa. B.28)
При использовании для v выражения B.25) выражение,
определяющее акустическую мощность, принимает вид
р _г I й/ |2_ га \А\П\
'•-г-|—|-|ЦП~#
Обычно А1^=А2, и мы имеем
Pa = -?-\Zm\7*. B.29)
hi
При неизменном значении тока / выходная мощность имеет
максимальное значение при резонансной частоте импеданса z.
Обозначим это максимальное значение Ра0. Если размеры
излучающей поверхности вибратора не слишком малы по сравнению
с длиной волны в акустической среде, то в большинстве случаев
можно считать, что га ^> ха. Тогда на резонансной частоте
справедливо соотношение
z = ra + rt.
§ 3. Представление о кинетическом импедансе
33
Значение Zm, соответствующее выполнению этого условия,
обозначим Zm0; тогда
PaO = TI±T-\Zrno\T2. B.30)
Та "Т г1
Чтобы определить величину га/(га + г4) по измерениям на
электрической стороне вибратора, измеряют резонансный
кинетический импеданс Zm00, помещая вибратор в среду с га = 0,
т. е. в вакуум (допускается и воздух, если преобразователь
предназначен для работы в жидкости). Поскольку импеданс Zm00
определяется выражением
справедливо следующее соотношение:
га л %mQ
При этом выражение B.30) принимает вид
.-(.
ZmOO
)\Zm\P. B.31)
Фазовый угол отношения Zm0/Zm00 должен быть равен нулю
с точностью до ошибок измерения.
Если импеданс свободного преобразователя на резонансной
частоте представить в виде
2/, = Д/в + /Х/в, B.32)
то входная мощность РЕо на электрических зажимах, очевидно,
будет равна
PE^Rhl\
Следовательно, отношение выходной акустической мощности
к входной электрической мощности
^^il^/^l^x B<33)
^?0 Яу0 V Zm00 /
Таким образом, электроакустический коэффициент полезного
действия г] 0 может быть определен путем количественных измерений
только на электрической стороне. Более детально этот вопрос
рассмотрен в гл. 5.
3-0231
34 Гл. 2. Основы теории пъезоактивпых колебаний
§ 4. ОСНОВНЫЕ УРАВНЕНИЯ ЭЛЕКТРОАКУСТИЧЕСКОГО
ПРЕОБРАЗОВАТЕЛЯ
Предположим, что магнитострикционный преобразователь
помещен в некоторую среду, как показано на фиг. 2.7; к концам его
обмотки приложено переменное иа-
п „ пряжение Ее*®1, а на излучающую
/^УХЛ *~г поверхность действует внешняя воз-
I l) 1) ГП _^~ буждающая сила Fei®* той же час-
' ' *-* тоты. Если протекающий по обмотке
и
Ф и г. 2.7. Магнитострикционный
преобразователь.
ток равен Iej(ot, а колебательная скорость на механической
стороне равна vei®1, то справедливы следующие уравнения:
E = ZI + A&, B.34)
F= —AJ+lu. B.35)
В этих уравнениях все величины — ?, F, /, v, Z, 7, Ai и Л2 —
комплексные. В уравнении B.35) z" — механический импеданс
колеблющейся части самого преобразователя, A J — сила,
возникающая за счет магнитострикционного эффекта, которая вместе
с внешней силой F заставляет преобразователь колебаться,
преодолевая механический импеданс z; это легко видеть, если переписать
уравнение B.35) в виде
v= —ч~— .
В уравнении B.34) Z — электрический импеданс обмотки;
в этом случае, однако, в обмотке благодаря обратному магпито-
стрикциопному эффекту индуцируется электродвижущая сила
A 2v, действующая навстречу приложенной извне
электродвижущей силе Е. А у и А 2 — факторы силы, определенные в § 2; при
этом Ах — Ач на основании законов термодинамики. В
дальнейшем мы будем обозначать факторы силы просто через Л, опуская
индексы.
Если в уравнении B.34) положить и = 0, то мы получим
E = ZI,
т. е. то же уравнение, что и для обычной электрической цепи.
Это означает, что Z представляет собой импеданс преобразователя
§ 4. Основные уравнения электроакустического преобразователя 35
для случая, когда на механической стороне он полностью
заторможен. Поэтому Z называется импедансом заторможенного
преобразователя.
Пусть преобразователь работает как ^ /~Х~УГ\ I I "* zeu
акустический излучатель, передающий
звуковую энергию в некоторую среду
(фиг. 2.8). При этом на его
механической стороне возникает тормозящая
сила, обусловленная реакцией среды.
Если акустический импеданс нагрузки
за
ч
Ф и г. 2.8. Преобразователь, работающий
как акустический излучатель.
L-e-l
со стороны среды на излучающей поверхности есть za, то сила
реакции равна
F = —zav.
В этом случае из уравнения B.35) получаем
IT
и =
*-Г*а
Подставляя в уравнение B.34) это значение и, имеем
А* \ ~
Выражение B.38) содержит кажущийся импеданс обмотки с
учетом влияния колебаний преобразователя. Следовательно, импеданс
\ z A-z„ I
B.36)
B.37)
B.38)
~ ~ АЧ.
B.39)
можно назвать импедансом свободного преобразователя, а
импеданс
&т —
B.40)
— кинетическим импедансом, как это уже было сделано в § 3, и. 1.
Если преобразователь соединен с электрическим источником
питания, э. д. с. которого равна Е0, а внутренний импеданс Z0, та
E = E0 — IZ0.
3*
36 Гл. 2. Основы теории пъезоактивных колебаний
Тогда выражение B.38) можно записать в следующем виде:
Е0 = [Z0
-Z + ^
z + za
)'¦
B.41)
Если преобразователь используется как приемник звука,
черпающий акустическую энергию из звукового поля и выделяющий
преобразованную электрическую энергию на импедансе нагрузки,
подключенной к электрическому выходу (фиг. 2.9), то мы имеем
E=-ZJ.
B.42)
Обозначим через F0 действующую со стороны звукового ноля
силу, которая появилась бы на принимающей звук поверхности
полностью заторможенного
преобразователя. Тогда по
аналогии с известной из
теории электрических цепей
теоремой Тевенина реальная
т\
AV
-*~F=F0-ZaV
w
Ф и г. 2.9. Преобразователь,
работающий как акустический
приемник.
поверхности, колеблющейся со
скосила F, возникающая на
ростью v, будет равна
F^F0-^av. B.43)
Здесь za — импеданс нагрузки, обусловленный действием
окружающей среды на поверхность преобразователя.
Подставляя выражения B.42) и B.43) в уравнения B.34)
и B.35), получаем
Za+Z'
B.44)
B.45)
Z0 + Z
z0-\-z I
Эти выражения имеют такую же форму, как B.37) и B.41) [за
исключением знака минус в выражении B.44)], причем Е
соответствует F, а / соответствует v.
Уравнения B.34) и B.35) справедливы не только для магнито-
стрикционных преобразователей, но и для преобразователей
любых типов, в которых взаимное превращение электрической
и механической энергий происходит на основе законов электро-
§ 4. Основные уравнения электроакустического преобразователя 37
»i ¦ —
магнетизма; сюда входят, следовательно, и все виды
преобразователей с подвижной катушкой и подвижным сердечником. Эти
уравнения мы будем называть основными уравнениями
электроакустических преобразователей.
Однако в случае пьезоэлектрических преобразователей в
уравнениях магнитострикционного эффекта следует заменить
напряженность магнитного поля Н и намагниченность М на
напряженность электрического поля G и поляризацию Р соответственно
Фиг. 2.10. Пьезоэлектрический
преобразователь.
:t |=Ь
(§ 1, п. 3). В магпитострикционном преобразователе
напряженность магнитного поля Н пропорциональна току /, а напряжение
на обмотке пропорционально производной dMldt. В
пьезоэлектрическом преобразователе, наоборот, напряженность
электрического поля G пропорциональна приложенному напряжению Е,
Источник
/пока
ш*оР Фиг. 2.11. Пьезоэлектрический
преобразователь, работающий как
^Jf акустический излучатель.
а ток / пропорционален производной по времени от поляризации
dP/dt. Поэтому для получения основных уравнений
преобразователя пьезоэлектрического типа в уравнениях B.34) и B.35)
следует поменять местами Е и / и вместо импеданса Z подставить
проводимость Y. Следовательно,
I = YE + Av,
B.46)
-AE + zv.
B.47)
В этих уравнениях А — также фактор силы, а У —
проводимость заторможенного преобразователя.
Для пьезоэлектрического преобразователя, используемого в
качестве акустического излучателя (фиг. 2.И), из уравнений B,37)
38 Гл. 2, Основы теории пьезоактивных колебаний
и B.41) можно получить
АЕ
/о =
(Yo±Y+ •=$=-) Ё.
B.48)
B.49)
Здесь У0 — собственная проводимость, /0 — ток короткого
замыкания источника электрического тока, AV(z + zj и У + 42/(z +
+ za) — кинетическая проводимость и проводимость свободного
преобразователя соответственно.
F-Fg-ZaV Фиг. 2.12. Пьезоэлектрический
^ преобразователь, работающий как
—*-и акустический приемник.
Для преобразователя, работающего как акустический приемник
(фиг. 2.12), уравнения B.44) и B.45) следует переписать в виде
? =
Av
P^{^ + Z + ^?)Z
' Yo-\-Y
B.50)
B.51)
§ 5. ЭКВИВАЛЕНТНЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЕЙ
Для преобразователей электростатического типа, таких, как
пьезоэлектрические и емкостные, справедливы основные
уравнения B.46) и B.47). Разрешая уравнение B.46) относительно Ё,
получаем
B.52)
ъ i 7 А-
Y Y
Подставляя B.52) в уравнение B.47), находим
B.53)
Эти два уравнения имеют точно такой же вид, как уравнения
электрического четырехполюсника, если F и v являются
аналогами напряжения и тока на выходе. Поэтому эквивалентную схему
электроакустического преобразователя можно представить в виде
§ 5. Эквивалентные схемы преобразователей
39
четырехполюсника, показанного на фиг. 2.13. На этой фигуре
Т — идеальный трансформатор с отношением витков 1 : А.
В большинстве случаев практического применения
ультразвуковые преобразователи используются обычно на частотах, близких
Ф и 1. 2.13. Эквивалентная схема
преобразователя
электростатического типа.
к одной из их резонансных частот. В таких случаях механический
импеданс можно аппроксимировать импедансом простой
резонансной системы, определяемым из B.23) в виде
Акустический импеданс излучения обычно также имеет активную
и реактивную компоненты и может быть записан в виде
Za = ra + jxa. B.54)
При использовании преобразователя в качестве акустического
излучателя удобнее исключить идеальный трансформатор, введя
Ф и г. 2.14. Эквивалентная счема
излучателя звука
электростатического тшга.
вторичную механическую цепь в первичную, как показано
на фиг. 2.14. В этой схеме
Ln
Л2 ' Ст~— ' Нт~^
Да=1Ь Xa:
А*
Ток, протекающий через зажимы 2, 2', равен
Tv = Av,
B.55)
B.56)
40 Гл. 2, Основы теории пьезоактивных колебаний
а напряжение на зажимах 2, 2' равно
r,-f
Если преобразователь используется в качестве акустического
приемника, то эквивалентная схема должна быть приведена к
механической стороне, как показано на фиг. 2.15. Если У0 —
проводимость нагрузки, а?и/- напряжение и ток в ней, то эти
величины следует заменить соответственно на Y0/A2, AE и НА.
/' г'
Ф и г. 2.15. Эквивалентная схема приемника звука электростатического типа.
Для магнитострикционных преобразователей ситуация
несколько иная. Если мы попытаемся рассматривать силу F и
скорость v как аналоги напряжения и тока соответственно, то
возникнет существенная трудность, обусловленная тем фактом, что
коэффициенты преобразования Аг и Ах в основных уравнениях
B.34) и B.35) имеют противоположные знаки, чего никогда
не бывает в обычных электрических цепях.
Преобразуя уравнения B.34) и B.35), получаем
E = (Z + A*y)I + AyF, B.57)
v = AyT+yF, B.58)
где у = 1/2 — механическая проводимость, или подвижность
упругой системы преобразователя. Если же принять другую
систему электромеханических аналогий, считая, что скорость и
аналогична электрическому напряжению, а сила F — току, то эти два
уравнения будут тождественны уравнениям обычной
электрической цепи, и четырехполюсник, представленный на фиг. 2.16,
явится точной эквивалентной схемой преобразователя. На схеме
Т — идеальный трансформатор с отношением витков А : 1, а
механическую проводимость у следует рассматривать как
электрический импеданс. В этой эквивалентной схеме сила F — втекающий
ток, скорость v — напряжение на механических зажимах 2, 2\
В диапазоне частот, ограниченном окрестностью резонансной
§ 5. Эквивалентные схемы преобразователей
41
частоты, электрический импеданс у может быть представлен
параллельной цепью, состоящей из сопротивления 1/г, емкости т
и индуктивности 1/s.
Фиг. 2.16. Эквивалентная схема
магнитострикциошюго
преобразователя.
/о ГП-
-02
/'О
А'1
-ot
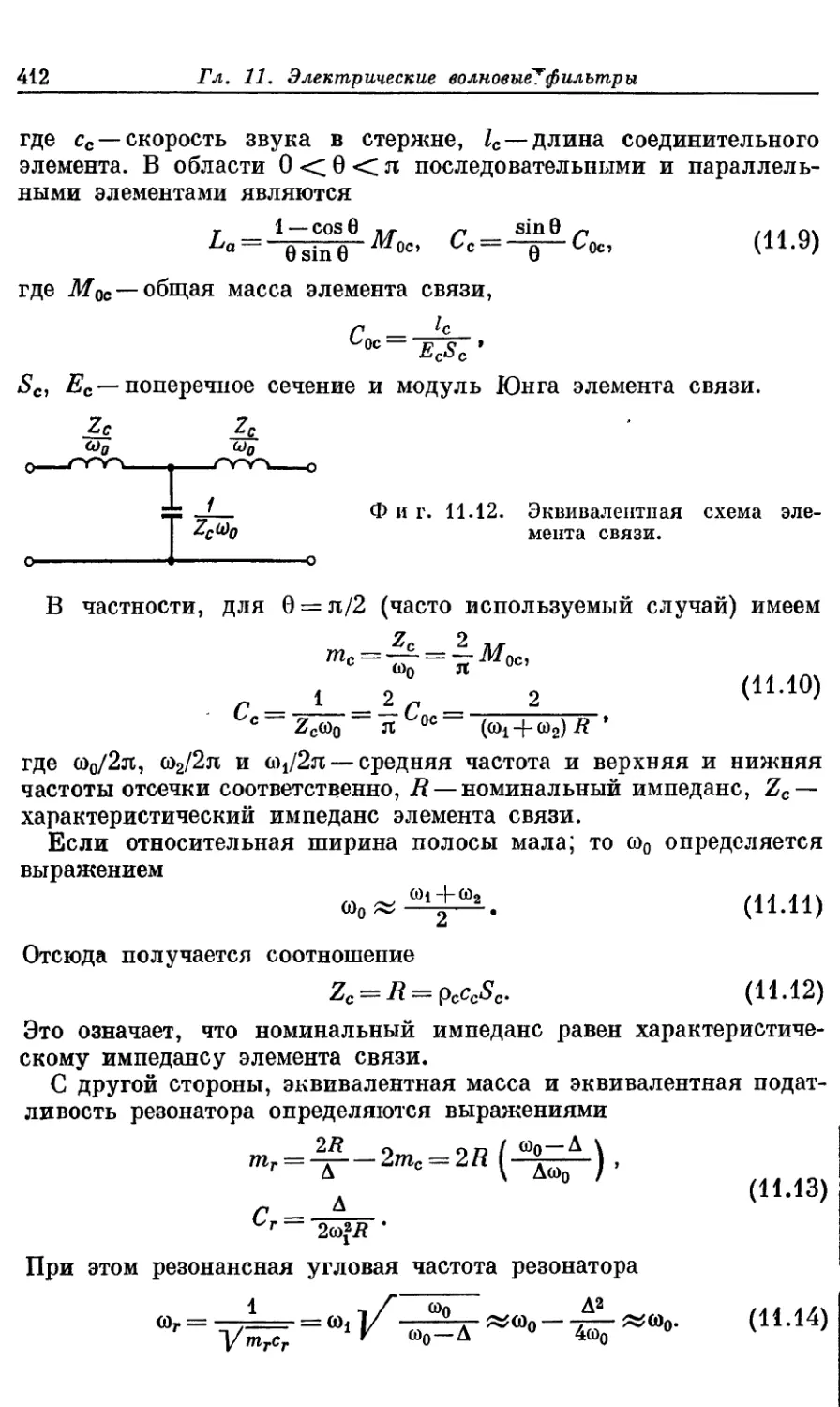
Если преобразователь, подключенный к источнику питания
с электродвижущей силой Е0 и внутренним импедансом Z0,
излучает звуковую энергию в нагрузку, представленную акустическим
7
"/»> ^
—^ &
/' 2'
Фиг. 2.17. Эквивалентная схема магнитострикциошюго излучателя звука.
импедансом ra -\- jxa, то его эквивалентная схема имеет вид,
показанный на фиг. 2.17. Элементы схемы имеют следующие
значения:
сопротивление
индуктивность
емкость
_ Л2
»=- —
Л2
S
т
Л*
R
г — Л"
cm =
активная проводимость Ga = ~^-
Л2
реактивная проводимость 5а = -^-.
B.59)
B.E0)
Ток и падение напряжения на механических зажимах 2, 2' равны
FIA и Av соответственно.
На фиг. 2.18 представлена эквивалентная схема магнитострик-
ционного приемника звука. Если через F0 обозначить силу, с
которой внешняя среда действовала бы на полностью заторможенную
42
Гл. 2. Основы теории пъезоактивных колебаний
принимающую звук поверхность, то для отображения этой силы
в эквивалентную схему следует ввести источник тока /0 = FJA.
Сердечники магнитострикционных преобразователей из
металлических материалов (т. е. все сердечники, за исключением ферри-
товых) обладают значительными потерями, несмотря на то что
они изготовляются из тонких металлических пластин. Поэтому
Ф и г. 2.18. Эквивалентная схема магнитострикцмолпого приемника звука.
переменная намагниченность отстает по фазе от тока на некоторый
угол G и, следовательно, возбуждаемая магнитострикционная
•сила также не будет в фазе с током. При этом разности фаз между
Фиг. 2.19. Преобразование импеданса.
намагниченностью и возбуждаемой ею силой практически не
наблюдается. Реактивное сопротивление заторможенного
преобразователя и фактор силы имеют ту же задержку по фазе 0 и могут
быть записаны в следующем виде:
А = Ае-'в.
B.61)
B.62)
Предположим, что импеданс свободного преобразователя,
определяемый выражением B.39), представлен параллельным
соединением двух импедансов Z и Zm-VZa, как показано на фиг. 2.19.
Результирующий импеданс этой цепи равен
7 % (%м + za)
Lj = ——— ^г-
Z + zm + Z а
Z(Z + ZM + ZA)-Z* = ^r
ху*'
Условие идентичности этого выражения и
имеет вид
ИР»-*26 ^ ix^-fro
выражения
B.63)
B.39)
§ 5. Эквивалентные схемы преобразователей 43
Таким образом, импеданс свободного магнитострикционного
преобразователя может быть представлен схемой, изображенной
на фиг. 2.20, при условии что
См =
А
Xd
А
А
Xd
r-Rdi
m — Ld,
B.64)
2_L
s
Xa
A
Ll
A
Га,
Xa*
B.65)
Ток, протекающий через импеданс Ra + J%a, пропорционален
/о-
lm {» Рм г
-опЛ—1| fifr о.
Т
Ф и г. 2.20. Эквивалентная схема
магнитострикционного
преобразователя, приведенная к
электрической стороне.
/и»
/'©-
ш
-О-
скорости излучающей поверхности и равен
^2,2' =;
Z + ZM + Zd
l=jXd€-
= J\
xd
A\e
-ie _
*e
A
xd
A l~
Л
rd
V.
W
Падение напряжения на зажимах 2, 2' равно
^2,2' = /2,2'(Лл+/Хл) = 7
^2а
х.
х.
(>*а + JXa) =
B.66)
B.67)
Для преобразователей, используемых в качестве акустических
приемников, схема фиг. 2.20 может быть приведена к импедансу
механической стороны, как показано на фиг. 2.21, где
I А |2
r-Rd\ A ]
г
т'
xd
¦ГП — La
Ха
B.68)
с = — ,
s
44 Гл. 2. Основы теории пьезоактивных колебаний
В этой эквивалентной схеме ток и напряжение на зажимах
2, Г сдвинуты по фазе на 90° по отношению к истинным току
-#т
т
г С'
f—n^n—1| АЛА
лк
ж
-Or
f
Ф и г. 2.21. Эквивалентная
схема магнитострикционного
акустического приемника,
приведенная к механической
стороне.
и напряжению на электрических зажимах преобразователя; они
выражаются как
А
А
Xd
Ё.
B.69)
§ 6. КОЭФФИЦИЕНТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СВЯЗИ
Рассмотрим механическую энергию Wm, запасаемую в пьезо-
активном материале в результате пьезоэффектал), и
электрическую энергию We, запасаемую за счет электрических свойств.
(Если явление следует гармоническому закону, то будем брать
соответствующие амплитудные значения.) При частотах
существенно ниже механической резонансной частоты в материале
существует только механическая деформация ?' (эффективное
значение), возникающая в результате пьезоэффекта. Поэтому
механическая энергия единицы объема Wm равна
Wm = ±E{V2l')\
B.70)
где /Г—модуль упругости. Для магнитострикционного вибратора
справедливо следующее соотношение [см. B.1) и B.5')]:
ТМ
Отсюда
г=-
Wm =
1ЧМ*
Е
B.71)
Обозначив эффективные значения напряженности магнитного
поля и намагниченности через Н и М соответственно, можно
1) Под термином «пьезоэффект» здесь подразумевается любой эффект,
обусловливающий связь механического и электрического (магнитного)
состоянии вещества, т. е. пьезоэлектрический, магпитострикционный или
сегнетоэлектрический эффект.— Прим. ред.
Литература
45
выразить магнитную энергию, введенную в магнитострикционныи
вибратор электрическим путем, в виде
We = ±(V2M)(V2H) = M^, B.72)
где у. = М/Н. Из B.71) и B.72) получаем
Wm _ ПЛ/2 х _ чГ2
РКе ~ Е М*— Е * ^-'°'
Обозначим эту величину /с2, где /с —коэффициент
электромеханической связи1). Таким образом, коэффициент электромеханической
«вязи для магнитострикционных материалов определяется как
ft =
/*-/^- <"<>
Для пьезоэлектрических или сегнетоэлектрических материалов
принцип подстановки, рассмотренный в § 1, п. 3 (М-+Р, H-+G),
приводит к следующему выражению, определяющему
коэффициент к:
ЛИТЕРАТУРА
1. Kikuchi У., Sci. Rep. Res. Inst., Tohoku Univ., B3, № 1, 7 A951).
2. Kikuchi Y., Nippon Elcctr. Coram. Eng., № 30 (Oct. 1942).
*) Ниже будет описан метод измерения этого коэффициента и более
детально определены величины к, е, Е, Г и т. д.
Глава 3
. ТЕОРЕТИЧЕСКИЙ АНАЛИЗ
ПЬЕЗОАКТИВНЫХ КОНСТАНТ
ДЛЯ СЛУЧАЯ ПРОДОЛЬНЫХ КОЛЕБАНИЙ
Е. Кипучи
§ 1. ВВЕДЕНИЕ
В данной главе мы рассмотрим пьезоактивные константы для
продольного эффекта. Эти константы всегда появляются при
различных теоретических трактовках пьезоактивных колебаний,
как уже было показано на элементарных примерах в гл. 2. При
общем строгом рассмотрении вопроса о пьезоактивных колебаниях
для магнитострикционных, пьезоэлектрических и сегнетоэлек-
трических материалов, обладающих, кроме продольного, еще
и поперечным, или сдвиговым, эффектом, следует учитывать
взаимное влияние этих эффектов, что существенно усложняет
математический аппарат; этот аппарат становится особенно
сложным в случае колебаний монокристалла, где положение
усугубляется анизотропией самих пьезоактивных констант.
Чтобы облегчить понимание основ явления, мы ограничимся
в этой главе рассмотрением пьезоактивных констант для случая
колебаний, в которых преобладающую роль играет продольный
эффект. Случаи, для описания которых должны быть привлечены
тензорные выражения, будут рассмотрены в следующих главах.
Приняв эти ограничения, рассмотрим сначала магнитострик-
ционныс константы и доведем это рассмотрение до установления
количественной связи между статическими магнитострикционными
характеристиками материала и динамическими константами; затем
коснемся способа вычисления магнитострикционных
характеристик поликристаллов, основанного на представлении о доменах.
В § 2, п. 6, мы рассмотрим вопрос с инженерной точки зрения;
там же будут приведены соответствующие примеры.
В теоретических соотношениях в качестве основной
независимой переменной принят вектор намагниченности М и,
следовательно, используется пьезоактивная константа Г. Такой подход
уже давно был предложен Кикучи [1], однако мы приводим также
широко известные магнитострикционные константы, введенные
Смитом и Баттервортом [2, 3], а также другими авторами, и
выясняем их связь с константой Г.
Затем мы перейдем к рассмотрению пьезоэлектрических
констант. Сначала рассмотрим основы метода аналогий с помощью
принципа подстановки, предложенного Кикучи [4] (этот принцип
кратко описан в гл. 2), и покажем, что почти все то, что известно
§ 2. Магнитострикционные константы
47
о магнитострикционных колебаниях, можно применять и в этом
случае. Учитывая широкое распространение обозначений,
установленных стандартами Американского института
радиоинженеров [5] для величин, характеризующих пьезоэлектрические
колебания, мы сопоставим их с обозначениями, принятыми в этой книге.
Кроме того, для удобства читателей мы рассмотрим различные
пьезоэлектрические константы и основные уравнения
пьезоэлектрических колебаний с использованием тех и других обозначений
и обсудим их связь друг с другом.
§ 2. МАГНИТОСТРИКЦИОННЫЕ КОНСТАНТЫ
1. Магнитострикционная постоянная |1|. Полагая, что
физическими величинами, характеризующими состояние вещества,
являются магнитное поле //, намагниченность М, механическое
напряжение т и механическая деформация ?, введем следующую
функцию:
Б = Е(т,М). C.1)
где М в свою очередь является функцией
M = M(H,t). C.2)
Приращение деформации Д? выражается полным
дифференциалом функции C.1)
Пользуясь общим соотношением
(*),--DU&).. «>•<>
перепишем выражение C.3) в следующем виде:
«-№)-{*-(&). М- <ЗЙ»
Второй член выражения в скобках, а именно (дт/дМ)^ ДМ,
представляет собой приращение внешнего механического напряжения,
которое должно уравновесить пьезоактивное напряжение ДтЛ
(гл. 2, § 1, п. 1 и 2), возникающее в материале в результате
увеличения намагниченности на величину ДМ. Поэтому выражение
C.5) можно переписать в виде
*Н*)Л4'+(^)?А"}. C-е)
18 Гл. 3, Теоретический анализ пьезоактивных констант
Если ввести далее магнитострикционную постоянную Г и модуль
упругости Е:
(w)rr' <3-7»
(*)„-*• C4)
то выражение C.G) принимает вид
А? = ^(Ат + ГДМ). C.9)
Если явление описывается синусоидальным законом, то входящие
в это выражение величины можно представить в комплексном
виде, и мы получаем
1= * (т-|-ГЛГ). C.10)
Е
С другой стороны, полный дифференциал фуцкции C.2)
имеет вид
**-(™г),4И+(т).* <ЗИ)
а с помощью соотношения
этот дифференциал можно переписать в виде
™=(ж)ЛАИ-(%)„<*}¦ <313'
.Второй член выражения в скобках (<9#/д|)мД? представляет
собой приращение магнитного поля, которое должно
уравновесить пьезоактивную магнитодвижущую силу ЛЯ' (гл. 2, § 1,
л. 1 и 2), возникающую в материале под действием
деформации Д?. Поэтому выражение C.13) можно представить в виде
Определим теперь магнитострикционную постоянную для
обратного эффекта Г' и магнитную восприимчивость к как
96
дМ
Выражение C.14) для величин, изменяющихся по
синусоидальному закону, принимает вид
M = Z(H + T'%. C.17)
§ 2. Магнитострикционные константы
49
2. Соотношения взаимности для Г и Г'. Справедливость
соотношения взаимности для двух магнитострикционных постоянных,
определяемых выражениями C.7) и C.15), легко доказать
методами термодинамики. Что же касается магнитострикционных
постоянных Т и Г' для периодических процессов, описываемых
выражениями C.10) и C.17), то из законов термодинамики следует
соотношение взаимности лишь для их абсолютных величин, т. е.
а соотношение взаимности для фазовых углов ^_ Г и /_ Г"х)
доказано быть не может. Было установлено только [1], что Г
и Г' — сопряженные величины, т. е. что
Из этого соотношения следует, что либо 1) /_Y — — /__ Г", либо
2) ^Т = ,/Т' = 0. Результаты многочисленных экспериментов
свидетельствуют о том, что справедливо второе равенство.
Рассмотрим теперь эту задачу с позиций доменной теории
ферромагнетизма. При определении магнитострикционной
постоянной Г в выражении C.6) мы предполагали, что приращение
намагниченности AM и приложенное извне механическое напряжение
Ат воздействуют на материал одновременно таким образом, что
внешнее напряжение препятствует возникновению
магнитострикционной деформации Д|', которая появилась бы под действием
приращения намагниченности AM в механически свободпом
материале. Попытаемся истолковать этот механизм, используя
представление о доменах. Приращение AM вполне эквивалентно
повороту доменов на определенный угол, и между этими
явлениями не должно быть никакой задержки во времени. С другой
стороны, эффект Джоуля, т. е. изменение размеров при
намагничивании, есть макроскопическое проявление векторной суммы
изменений размеров магнитных доменов в заданном направлении,
обусловленных изменением направления спонтанной
намагниченности, т. е. поворотом доменов. Инерция массы каждой части
макроскопического тела вызывает небольшую задержку во
времени между моментом поворота доменов и моментом проявления
эффекта Джоуля. Однако если изменению размеров тела
препятствует приложенное в момент поворота доменов внешнее
механическое напряжение Дт, то уравновешивающее внутреннее
напряжение Дт' (определенное выше кйк магнитострикционное напря-
х) Для обозначения фазовых углов комплексных величин автор
применяет обозначение Z, т. е. фазовый угол величины L обозначается как
Z.L.— Прим. ред.
4-0231
50 Гл. 3. Теоретический анализ пьегоактивных констант
жение) возникнет в тот же момент без временной задержки, так
как в этом случае нет движения масс. Следовательно, изхменение
намагниченности AM и возникновение магнитострикционного
напряжения Дт' могут рассматриваться как одновременные
явления, и поэтому естественно считать фазовый угол Г равным нулю.
Хотя остаются еще не решенными некоторые вопросы, связанные
с сопровождающими вращение доменов вихревыми
микротоками, однако можно утверждать на основе доменных представлений,
что фазовый угол Г в выражении т' = ТМ должен быть равен
нулю:
Zr = 0. C.18)
Из тождества Zr + Zl"=0 тогда следует, что фазовый угол Г
также равен нулю:
Zr' = 0. C.19)
Отсюда получаем
f = Г' = |Г|. C.20)
Приведенное выше заключение сделано с позиций доменной
теории, примененной для описания эффекта Джоуля. Применив
подобный метод к эффекту Виллари, можно показать, что
«механическая деформация Д? и возникновение магнитострикциоыной
магнитодвижущей силы АН* — явления одновременные».
Рассуждения, подобные предыдущим, приводят к тому, что
^/ I1' = 0, а следовательно, и ^ Г = 0. В общих чертах
рассуждения сводятся к следующему: приращение деформации в материале
меняет распределение в нем магнитных доменов по сравнению
с первоначальным, соответствовавшим определенному состоянию
равновесия. Новому распределению должно соответствовать новое
равновесное состояние. Другими словами, при возникновении
деформации магнитные домены стремятся повернуться. Так как
вращение доменов сопровождается микровихревыми токами, для
достижения нового равновесного состояния требуется некоторое
время; однако приложение деформации и возникновение
стремления к повороту — явления одновременные. Понятие
магнитострикциоыной магнитодвижущей силы АН' связано с тем, что
возникновение стремления доменов к повороту рассматривается
как приложение некоторого добавочного магнитного поля, и
отсюда вытекает, что фазовый угол Г' в выражении Н' = Г'? следует
считать равным нулю. Кроме того, поле И1 не связано с
действительным магнитным потоком, а представляет собой воображаемое
магнитное поле и поэтому не образует сцепления с обмоткой.
Действительное изменение магнитного потока возникает в
результате поворота магнитных доменов.
§ 2. Магнитострикционные константы
51
Как видно из C.14), связь между полем Н' и соответствующей
намагниченностью М' аналогична обычной зависимости между
магнитным полем Н и соответствующей ему намагниченностью;
справедливо также считать, что возникающий из-за
микровихревых токов сдвиг по времени между появлением упомянутого
выше стремления магнитных доменов к повороту и моментом
завершения поворота будет таким же, как обычная задержка
между приложением магнитного поля #0фф и завершением
поворота магнитных доменов. Следовательно, обычное соотношение
между Н и М, выражаемое с помощью
магнитной восприимчивости, должно быть
применимо и к описанию связи между
величинами Нг и М''.
3. Скин-эффект вихревых токов.
Сердечники современных магнитострикцион-
ных преобразователей почти всегда
набираются из тонких металлР1ческих пластин;
исключение составляют преобразователи
из ферритов. Необходимо отметить, что
при намагничивании металлических
пластин переменным магнитным полем
вследствие скин-эффекта вихревых токов как
напряженность магнитного поля, так и
намагниченность неравномерно распреде-
Фиг. 3.1. Распределение переменной
намагниченности в поперечном сечении металлической
пластины.
лены по поперечному сечению пластины. Следовательно, даже
в том случае, когда переменная деформация в пластине однородна,
намагниченность М, определяемую выражением C.17), а именно
М — к (Н + Г?), нельзя считать постоянной по сечению.
Рассмотрим поэтому среднее по сечению значение
намагниченности, обозначив его М\ эту величину легко определить
экспериментально. Так как в случае ? = 0 магнитострикционный
преобразователь не отличается от обычной катушки индуктивности
с набранным из пластин сердечником, рассматривать этот случай
нет необходимости. Суть же дела заключается в следующем:
на фиг. 3.1, изображающей поперечное сечение пластины толщиной
2а, распределение переменной магнитной индукции В (х)>
перпендикулярной плоскости поперечного сечения, описывается
4*
52 Гл. 3. Теоретический анализ пьезоактивных констант
выражением
где
?(a) = 4^-ch?*, . C.21)
ch та
т=±УЩ. C.22)
Вычисляя среднее по сечению значение индукции, получаем
д = 1 [S(x)dx= „B(aL shma = B(a)^^. C.23)
а J та ch та та
Обозначая напряженность магнитного поля на поверхности
пластины через П0, имеем В (a) = |u7/0, так как на поверхности
вихревые токи не влияют на величину В. Используя соотношения
В(а) = Н0 + 4лМ(а)
и
jx = 1 + 4лх,
получаем
М(а) = хН0. C.24)
Назовем отношение среднего значения намагниченности М к Н0
кажущейся магнитной восприимчивостью и обозначим его через х.
Если В в выражспии C.23) записать как
Ё = Й + 4лМ
и отношение В к Н0 обозначить ju,, то получим
~ S И , , ~
A = -^— = -sr- + 4jtX.
Всегда справедливо неравенство Н/Н0<19 кроме, того, для
обычных ферромагнитных] пластин можно принять 4ях > 1; отсюда
получаем
ji ^ 4ях,
Следовательно,
C.25)
J5 « 4яМ.
w "^ fr th та
М = х#0 -——
та
§ 2. Магнитострикционные константы
53
М ~ ~ th та
-^— = х = И—^
Н0 та
C.26)
Рассмотрим теперь намагниченность М' = хГ'?,
обусловленную эффектом Виллари, в случае, когда переменная деформация
равномерно распределена по поперечному сечению пластины.
Распределение намагниченности М' по сечению неравномерно;
соответствующий поток переменной магнитной индукции {В' =
— 4яМ') возбуждает в металле электрическое поле, создающее
вихревой ток (фиг. 3.2). Этот вихревой ток I направлен так, что
он препятствует изменению переменного
магнитного потока. Если переменный магнитный
ноток перпендикулярен плоскости фигуры
(направлен вдоль оси у), а металлическая
пластина имеет достаточную протяженность I А
в направлении оси z, то можно считать,
Фиг. 3.2. Вихревой ток в поперечном сечении
металлической пластины.
ОУ
¦*>#
что величина В' и плотность вихревого тока / зависят только от х.
Обозначая удельное электрическое сопротивление металла через а,
получаем соотношение J = g/a между наведенным электрическим
полем g и плотностью тока /; это соотношение можно представить
в виде
d/(*)_
dx
:;со5' (z).
C.27)
Поскольку магнитное поле А, возбужденное вихревым током,
стремится уменьшить В', справедливо уравнение
^М = 4я/(,).
C.28)
Решая эти два уравнения при граничном условии / @) = 0,
выражающем симметрию распределения плотности тока /, получаем
/ (х) = 2А sh тх
В' (х) = -г— 2Ат ch m х,
х ' /со
C.29)
C.30)
54 Гл. 3. Теоретический анализ пъезоактивных констант
где Л —постоянная интегрирования,
т = ±-|/^. C.31)
Из этих соотношений видно, что индукция В' (х), вызванная
эффектом Виллари, распределена так же, как В (х) в выражении
C.21). Обозначив индукцию В' на поверхности пластины через
В' (а), определим постоянную интегрирования:
2от ch та
Следовательно,
B'(x) = ^^chmx. C.32)
ch та
Вычисляя среднее по сечению значение индукции В\ вызванной
эффектом Виллари, и применяя тот же метод, что и при выводе
выражения C.23), получаем
Ъ> = В'{а)^.
та
Здесь индукция В'(а), пе зависящая от вихревых токов,
определяется выражением
5'(а)-4яМ'(а)-4яхГ'|.
Подставляя теперь В' = Л' -\-4лМ'г) и ограничиваясь областью,
где справедливо предположение
Н < 4nif,
получаем
4лЙ' « 4яхГ'|-^-. C.33)
та
В соответствии с определением магнитодвижущей силы,
обусловленной эффектом Виллари,
ff=#',
откуда _
?_ = ~thmaLt C34)
IV та v '
г) Как можно заключить из приведенных выше математических
выкладок, Н' зависит от вихревых токов и не является, следовательно, средним
по поперечному сечению пластины значепием магнитодвижущей силы Я',
обусловленной эффектом Виллари.
§ 2. Магнитострипциопные константы
55
Сравнивая полученное выражение с C.26), находим
-^- = х. C.35)
Я'
Другими словами, при наличии вихревых токов среднее по
сечению пластины из магнитострикционного материала значение
намагниченности М\ вызванной эффектом Виллари, можно
получить путем умножения величины Н' (т. е. Г'?) на кажущуюся
магнитную восприимчивость х. Следовательно, с учетом вихревых
токов выражение C.17) принимает вид
М = х(Я0 + Г'|). C.36)
Как уже было показано [см. C.24)], Н0 в этом выражении
представляет собой магнитное поле, наблюдаемое на поверхности
пластины и возбуждаемое протекающим в обмотке током или любым
другим способом, за исключением магнитострикционного эффекта.
Таким образом, магнитострикционные колебания при наличии
вихревых токов могут быть описаны основным уравнением такого
же вида, как C.17). Например, в вибраторе с замкнутой
магнитной цепью (кольцевой вибратор) ток в обмотке / всегда
непосредственно связан с напряженностью поля Н0; деформацию ? можно
считать равномерно распределенной по сечению, и, следовательно,
полный магнитный поток равен намагниченности М, умноженной
на площадь поперечного сечения и на An. Таким образом,
появляется возможность рассматривать при наличии вихревых токов
импеданс свободного вибратора, кинетический импеданс
вибратора и т. д. Используемая здесь магнитная восприимчивость х
представляет собой кажущуюся комплексную магнитную
восприимчивость, вводимую в обычной электромагнитной теории; отсюда
ясно, что при рассмотрении магнитострикционных колебаний
магнитный гистерезис и скин-эффект вихревых токов могут
учитываться таким же образом, как в случае обычных магнитных
материалов. Принимая во внимание это обстоятельство, а также
то, что Z.T = О (как было показано в предыдущем параграфе),
рассмотрение магнитострикционных колебаний можно упростить.
С другой стороны, если намагниченность М в выражении C.10)
I = A/Е) (т + ТМ) не постоянна по сечению и мы возьмем вместо
нее величину М, то произведение ТМ будет представлять
усредненное по сечению магнитострикционное напряжение. При
рассмотрении колебаний по длине тела, столь длинного, что размеры
его поперечного сечения малы по сравнению с длиной, можно счи-
56 Гл. 3. Теоретический анализ пье го активных констант
тать, что среднее магнитострикционное напряжение ТМ действует
равномерно по всему сечению, и соотношение
|= * (т + ГМ) C.37)
h>
остается справедливым.
Таким образом, как показано выше, в случае существования
вихревых токов при использовании среднего по сечению
значения намагниченности М, значения магнитного поля Н0 на
поверхности материала, а также при введении кажущейся магнитной
восприимчивости х='М/Н0 основные уравнения магнитострик-
ционных колебаний
М = х(Я0 + Г'|),
имеют такой же вид, как уравнения C.10) и C.17). Теперь с целью
упрощения опустим черточки, обозначающие средние значения
величин. Оставляя в уравнениях только обозначение Н0,
введенное в связи с наличием вихревых токов, запишем их в следующем
виде:
М = х(Я0 + Г|),
~ 1 ~ ~~ C-37а)
?—^-(т + ГАГ).
Другими словами, во всех уравнениях, где_фигурирует #0,
обозначения М и х необходимо читать как М и х.
4. Связь между статическими и динамическими магнитострик-
ционными явлениями. Здесь мы рассмотрим пекоторые вопросы,
касающиеся понимания связи между статическими и
динамическими магнитострикционными явлениями. Из соотношений C.4)
и C.7) и других, приведенных в п. 1 данного параграфа, получаем
выражение
(дЦдН)% (dT/dQM n ос,
1 - (дМ/дН)х ' К° ;
где первый множитель {дЦдН)х характеризует крутизну кривой
статической магнитострикции, снятой при постоянном
механическом напряжении и приведенной на фиг. 3.3; второй множитель —
модуль упругости при постоянной намагниченности (обозначаемый
далее Ем); знаменатель характеризует крутизну обычной кривой
намагничивания, снятой при постоянном механическом
напряжении, и определяется как дифференциальная восприимчивость
(в дальнейшем обозначаемая хт). Рассматривая эти три множителя,
§ 2, Магпитоетрикциоиные константы
37
можно получить зависимость Г от поля подмагничивания HDC>
но при этом следует иметь в виду, что все зависимости от поля
HDc обычно связаны с гистерезисом.
Ф и г. 3.3. Зависимость статической магнитострикции от постоянного
магнитного поля для никеля [21].
Если график фиг. 3.3 преобразовать, пользуясь кривой
намагничивания (фиг. 3.4), то получатся кривые, приведенные на
фиг. 3.4а, где гистерезис существенно не проявляется. Этот факт
Фиг. 3.4. Кривая намагничивания для того же материала, что и па фиг. 3.3.
можно истолковать как однозначную зависимость явления
магнитострикции от М. Определим крутизну (д%/дМ)г этой кривой
и используем ее в выражении
г=ШЛж)„' C-39)
являющемся простой модификацией выражения C.38); при этом мы
получим сплошную кривую, показанную на фиг. 3.5. Штриховая
58 Гл. 3. Теоретический анализ пьезоактивных констант
кривая на фиг. 3.5 —та же характеристика, полученная в
результате анализа экспериментальных данных для магнитострикцион-
ного вибратора, набранного из тонких пластин того же материала
(никеля). Обе кривые хорошо совпадают.
-1-20-КГ5
-Ш -300 -200 -100
Фиг. 3.4а. Зависимость статической машитост, икции от
намагниченности.
Проведем рассмотрение в обратном порядке и выведем кривую
статической магнитострикции Ы/l из характеристик магнито-
xfOr
3
I I I I Л - \
I 1 I I • >п I
Ф и г. 3.5. Магнитострикцнон-
2 I I 1 \&*~ I I пая постоянная Г при
различных значениях постоянной
намагниченности МDC.
Сплошная линия соответствует
выражению C.39). Штриховая
линия — экспериментальные данные,
обнаруживающие хорошее
количественное совпадение с теорией.
О 100 200 300 U00 500
стрикционных колебаний. Статическая магнитострикция
определяется выражением
м м
*-И*),"-J (*),(-?-).«¦
О О
Используя формулу C.38), получаем
м
4
/
#г
р
/
§ 2. Магнитострикционные константы
59
Затем следует подставить значения Г и Ем, соответствующие
разным значениям постоянной намагниченности MDC, и
проинтегрировать полученное выражение. Эту операцию обычно проводят
графическим методом.
Проведенный анализ показывает, что количественную связь
между статическими и динамическими явлениями легко получить,
если рассматривать Г как функцию постоянной намагниченности;
но при этом константу К х) получить непосредственно из
статической кривой невозможно. Последнее обстоятельство связано
с тем, что К = ХдГ, а дифференциальная восприимчивость хд
в большинстве случаев существенно отличается от
дифференциальной восприимчивости хт, использованной в выражении C.38), т. е.
Я-хдГ^ИхГ. C.41)
Иначе говоря, произведение модуля Юнга Ем [т. е. {дх1д\)м\
и производной (дУдЩъ, характеризующей наклон статической
кривой магнитострикции, подобной показанной на фиг. 3.3,
равно ххГ, а не ХдГ. В большинстве случаев ХдГ значительно
меньше, чем хтГ.
В качестве итога проведенного рассмотрения на фиг. 3.6 в одну
таблицу сведены различные характеристики магнитострикции
для чистого железа и чистого никеля. В левой колонке для
каждого металла представлены характеристики в зависимости от
постоянного поля Я, а в правой — в зависимости от постоянной
намагниченности М.
5. Синтез магнитострикционных характеристик для
поликристаллических металлов [6]. Вероятность вклада микрокристаллов.
Пусть поликристаллический металл намагничивается в каком-
либо произвольном направлении; рассмотрим вклад отдельных
микрокристаллов в характеристики магнитострикции в этом
направлении. Микрокристалл, кристаллографическая ориентация
которого [ix, iin iz] совпадает с произвольно выбранным
направлением в пбликристалле, назовем кристаллом [i]. Если
поликристаллическое вещество состоит из нерегулярного скопления
большого числа микрокристаллов, то вероятность wt появления
кристалла [г] в выбранном направлении зависит от значения &,
и вероятность эта будет больше, если [iXJ iy, iz] совпадает с
направлением большей кристаллографической симметрии. Кроме того,
микрокристалл не всегда является правильным многогранником,
так как форма его зависит от процесса изготовления: он может
расти в одних направлениях больше, в других — меньше.
Отношения размеров микрокристаллов положим равными dt : d2 : d3 :...
• . . dt . . . dn.
x) Эта константа рассматривается в п» 7 данного параграфа.
60 Гл. 3. Теоретический анализ пьезоактивных констант
Вещество
Магнито-
стрикция
Чистое железо
характеристики
в зависимости
от магнитного
поля
характеристики
в зависимости
от
намагниченности
Чистый никель
характеристики
в зависимости
от магнитного
поля
характеристики
в зависимости
от
намагниченности
Статическая
магннтострик-
ция
I ~*
Магнитострик-
циоиная
постоянная
-Г\
Т=Е
AM
hz
м
Магнитная
восприимчивость
ДМ
АН
х
L
Магиитострик-
циопная
постоянная
К = хТ
ио*
V*
м
Г\7
Ф иг. 3.6. Некоторые основные мапштострикциошше и магнитные
характеристики (качественная иллюстрация).
Рассмотрим влияние длины каждого из микрокристаллов
на длину L0 поликристаллического тела. Длина каждого из
микрокристаллов пропорциональна dt, d2> d3, . . ., dn
соответственно, а вероятность появления его в направлении L0 равна м?$.
Следовательно, ожидаемое вероятное значение длины
поликристаллического образца пропорционально величине
/= 2 diWi.
C.42)
Полагая L0 = Nl, где N—большое число, найдем вероятность pir
с которой характеристики микрокристалла в направлении [?]
§ 2. Магиитострикционные константы 61
дают вклад в длину L0 поликристалла, в виде
Pi = *p-. C.43)
Такова же вероятность вклада в макрохарактеристики
поликристалла различных величин, связанных с характеристиками
по длине. При этом условии деформация 6L/L в направлении LQ
принимает вид
п
S (-f ),Р,. C-44)
L
Статистические магиитострикционные характеристики.
Обозначим через || (М) статическую характеристику магнитострик-
ции в направлении [i], представленную в виде функции
намагниченности М. Для поликристалла аналогичная функция имеет вид
Ъ'(М)=%р&(М). C.45)
Синтезированные таким образом характеристики [6] для железа
и никеля хорошо согласуются с экспериментальными значениями,
полученными на образцах поликристаллических металлов. Для
функции ?! (М) были использованы априорные характеристики,
которые приведены в следующем параграфе. Выбор п был
простейшим — п полагали равным трем, о чем также будет сказано
s дальнейшем.
Магнитострикционное напряжение т' в поликристалле. Если
модуль Юпга поликристалла обозначить Е, то соотношение между
механическим напряжением т и деформацией 6L/L будет иметь вид
ЬЬ _ т
Обозначая модуль Юнга отдельного монокристалла через /?,-,
получаем для кристалла механическую деформацию,
возникающую под действием упругого напряжения т в направлении [i]
в виде
\ 1 }г~* Ei #
Используя вероятности вкладов различных характеристик
по длине, получаем
п
6L ^i т
— = 2j -егр**
i=l
откуда
4=2 t- C-46)
i=i
62 Гл. 3. Теоретический анализ пьезоактивных констант
Из определения магнитострикционной постоянной Г для
поликристалла ясно, что
г-Till 1 -Г*?'(М) F\
1 [ дМ ]mdc~1 дМ *h
\mdc L ом jmdc
Подставляя C.45) и C.46) в это выражение, получаем
Hi W
г-[2*ЗГ/2-&]„„• <м»>
Таким образом, если известны теоретические значения величин
\\ (М) и Et для каждого направления U], то можно вычислить
магнитострикционную постоянную поликристалла.
Примеры определения магнитострикционной постоянной.
Статическая магнитострикция отдельного монокристалла есть сумма
спонтанных деформаций его магнитных доменов; поэтому если
известно распределение доменов в зависимости от
намагниченности, то можно определить априори значения магнитострикционной
постоянной для данной намагниченности М. В литературе
приводятся различные значения магнитострикции монокристаллов,
полученные расчетным путем на основе предположений о моделях
распределения доменов и доменных процессах; ниже приведены
результаты Гейзенберга [7], Ганса и Гарлема [8], Фаулера [91
и других (г| — М/М8).
Железо:
Itiooj = | Л-1001 (— И- КГ+З^5),
1 ,, . ,о ¦./-, гг-=» /ч ^.. - 1
Stiioj« = -J-1 Я.10О | B — -К4 — 6*|»), 0<л<-у=-,
?[но]ь = ~|Х100|—1|Хш|Bл»-1), -ф=-<г\<\,
1[1Н]а = 0, 0<t].
Уз '
1[1Н]ь=-4-1^пК3т12-1)' -тг<г1<1-
Численные результаты, полученные для значений XJ00 = 17.10~6,
Хш= —13-Ю-6, приведены на фиг. 3.7.
Никель:
(б[юою = 0, 0<п<^4=-,
1[юо]ь = — l^-iool \'YV\2~'YJ > ~уТ<*1< *'
§ 2. Магнитострикционные константы
63
Йио]ь=-|Х10о|Dч*-т)-"т1^«1т>я. J^T<T,<1'
?[1ив= —l^inh2-
re [но] re[w]
*w
Fe [too]
10
WO
Т
5
0
-5
•т
-15
0,
2 0,
4
0
0 С
m/ms
fi Щ
' °
2 0.4 ДО ДО W
M/Ms
\
>
\
_N
Фиг. 3.7. Полученные расчетным путем магнитострикциоппые
характеристики для монокристаллов железа (продольный эффект).
Результаты вычислений для значений Я100 = —50-10, Яш =
= —27,1 «Ю-6 приведены на фиг. 3.8.
Выберем теперь в качестве направлений [i] три направления
[100], [110] и [111] и проведем полный расчет магнитострикцион-
О 0
-10
-20
М
1-30
• -40
-SO
N
.2 0,4 0
1
N1 [100]
1
1/М5
6 О
\
\
>
в 1,0 i
V
\
\л
? 0.2 0
NC
i
Л
.4 0
'110\
I
t/Ms
.6 0
б W 1
7 0
2 ОМ 0.6 0.0 1.0
N1
1
/"]
1
Фиг. 3.8. Полученные расчетным путем магнитострикциоппые
характеристики для монокристаллов никеля (продольный эффект).
ной постоянной. Предположим сначала, что dt = 1. Из условий
симметрии для кристаллов кубической системы вероятность pt
равна
6 12 8
/?[Ю0] —6" ' Р[Н0] = -2б"> Р[Н1]=6"*
64 Гл. 3. Теоретический анализ пъезоактивных констант
Значения модуля Юнга Et возьмем по данным Кимура и Оно [10],
Хонда и Ширакава [11] и Ямамото [12]:
Я[Ю0]» Д™/™2
^[110]» Дин/см2
Я[1И], дин/см2
Железо
1,31.1012
2,16.1012
2,77.1012
Никель
1,2.1012
2,0-1012
2,6-1012
Результаты, полученные при подстановке приведенных
значений в выражение C.47), представлены на фиг. 3.9 и 3.10.
Пунктирная линия с точками соответствует экспериментальным
значениям магнитострикционной постоянной; эти значения
определены при возбуждении колебаний вибратора с сердечником из одной
K10S
2С
^2
V
у""
а
г
г
—
10
с -
о
60
0
—о
Д
ч>.
10
\
т
i
i
i
и?
ч
\
12
[
\
у,
\
^1'
10
DL
К
00
16(
ос
10
Ф и г. 3.9. Расчетная зависимость магнитострикционной постоянной от под-
магничивающего поля для поликристаллического однородного железа.
Точки — экспериментальные значения для пластины из чистого железа, измеренные
динамическим методом.
пластины чистого железа или чистого никеля, изготовленной
столь тщательно, что она не имела собственной анизотропии.
Проблемы анизотропии магнитострикционных характеристик,
часто возникающей в поликристаллических материалах при
технологической обработке (прокат, анизотропный рост
монокристаллов в процессе рекристаллизации и т. д.), были рассмотрены
аналогичным методом. Не останавливаясь на деталях, отсылаем
читателя к работе [6].
§ 2. Магнитострикционные константы
65
6. Магнитоупругие взаимодействия. Магнитоупорная связь.
Уравнения C.10) и C.17), описывающие магнитострикционные
колебания, имеют вид
!=4-Сн-гм),
Исключая из этих двух уравнений М, получаем
1
5 = -тп
^-^-(т + ГхЯ).
Е(\-хГГ'/Е)
Исключая таким же способом ?, получаем
М-
i — хГГ'/Е \ Е !
C.48)
C.49)
C.50)
В этих новых уравнениях приложенное извне напряжение т
и магнитное поле Н являются независимыми переменными, а
деформация | и намагниченность М зависят от обоих. По форме
100 200
Мое
300 400
500
Ф и г. 3.10. Расчетная за-
нисимость магнитострикци-
онноп постоянной от нод-
магничпвающего поля для
поликристаллического
однородного никеля.
Точки — экспериментальные
значения для пластины из
чистого никеля.
Г^
¦<к
. А
Л
\
и
ft
1
1
^
Ч4"
V
\
\
Ь
V
к
^
-Щ
г
эти уравнения не отличаются от уравнений C.48), но в них для
величин 1/Е и х вводится поправка, включающая выражение
~ хГГ'
C.51)
С учетом этой поправки модуль упругости Е' и эффективная
магнитная восприимчивость х' принимают вид
E' = E(l-g),
C.52)
к =¦
l-g
6-0231
66 Гл. 3. Теоретический анализ пъезоактивных констант
Если уравнения C.48) переписать с использованием величин
#0 и к, как это сделано в п. 3 данного параграфа, то можно
получить выражения, подобные C.49) и C.50), но в которых вместо
х стоит х, вместо Н — Н0 и вместо М — М. При наличии
вихревых токов удобно рассматривать Е' и х' именно таким образом.
Проанализируем теперь происхождение величины хГТ',
появляющейся в приведенных выше выражениях, рассматривая
мысленно картину происходящих процессов. Предположим, что в маг-
нитострикционном веществе имеют место механические
колебания. Следовательно, в веществе возникает переменная деформация
?. Эта деформация возбуждает магнитодвижущую силу
которая в соответствии с магнитной восприимчивостью вещества
вызывает пьезоактивную намагниченность
М' = кН' = xff.
Поскольку М' — реально существующая намагниченность, она
возбуждает магнитострикционное напряжение т", которое можно
определить путем умножения М' на константу Г:
?' = ГМ' = ГхГ'?
Применяя соотношение ^ Г + Z. Г' = 0, получаем
? = || хГ2 | (cos Z *+ / sin Z >0- C.53)
Таким образом, деформация \ возбуждает новое
магнитострикционное напряжение т'\ фаза которого сдвинута на /_ъ
относительно фазы деформации. Так как /_% — фазовый угол,
характеризующий запаздывание намагниченности относительно
магнитного поля, то он всегда отрицателен. Свойства и проявлепия нового
напряжения т" представлены в табл. 3.1.
Как уже было сказано выше, величина хГ2 характеризует
связь между магнитным и упругим состояниями вещества, поэтому
мы называем ее модулем магнитоупругой связи. Физическая
размерность хГ2 всегда идентична размерности модуля упругости
(модуля Юнга в случае тонкого стержня) независимо от того,
применена ли электромагнитная, электростатическая или какая-
либо другая система единиц. хГ2 — важная величина, имеющая
непосредственную связь с коэффициентом полезного действия
преобразователя, как будет видно из объяснений в следующей
главе; она является поэтому мерой качества материала
преобразователя, и в этом смысле её называют также «модулем магнито-
§ 2. Магнитострикционные константы 67
Таблица 3.1
1.
2.
3.
4.
Свойства и проявления т"
Упругая компонента
If | к Г2 | cos z.~n
В фазе с деформацией
Добавляется к
существующей деформации
Проявляется в уменьшении
модуля Юнга
Понижает частоту
механического резонанса
1.
2.
3.
4.
Диссипативная компонента
"|1 кГ2 | sin z к
В фазе с колебательной
скоростью
Оказывает тормозящее
влияние на скорость
Действует как механическое
активное сопротивление
Уменьшает остроту
резонанса
стрикционной активности» [1]. Корень квадратный из
безразмерного отношения хГ2 к Е, т. е.
к
-Ут-
C.54)
мы будем называть коэффициентом магнитомеханической связи.
Эта величина эквивалентна коэффициенту электромеханической
связи (гл. 2, § 6),
определенному для данного материала.
Резонансы при
постоянном поле и при постоянной
намагниченности [13]. На
фиг. 3.11 представлены ре-
* №0\
4800
Фиг. 3.11. Зависимость
резонансной частоты никелевого
кольцевого вибратора от постоянного
подмагничивающего поля.
то
/
/
г~
-+-+
' '•
ь>
•S
S
S
А
10 15 20 25 30
зультаты измерений резонансной частоты /0 для основной моды
колебаний никелевого кольцевого вибратора среднего радиуса R.
По горизонтальной оси отложены значения подмагничивающего
поля Нвс, а по вертикальной — значения 2ni?/0. Точки на нижней
кривой соответствуют частотам, при которых амплитуда колебаний
достигает максимума при поддержании постоянной амплитуды
переменного магнитного поля Н0 с изменением частоты, а точки на
верхней кривой—аналогичным частотам при поддержании постоян-
5*
68 Гл. 3. Теоретический анализ пьезоактивных констант
ной амплитуды переменной намагниченности. Резонанс первого
типа называется резонансом при постоянном поле, а второго типа—
резонансом при постоянной намагниченности; соответствующие
частоты обозначаются как частота резонанса /ог и частота
антирезонанса/0а *). Резонанс первого типа соответствует
уравнению C.49) при постоянном Н или Н0, резонанс второго типа —
уравнениям C.48) при постоянном М или М. Чтобы сделать эти
особенности более понятными, перепишем уравнения в форме,
соответствующей кольцевому вибратору.
Для кольцевого вибратора связь между деформацией \ вдоль
окружности среднего радиуса R и радиальной колебательной
скоростью v выражается
соотношением
;со/?!-?. C.55)
Пусть, как показано на фиг. 3.12,
на обе торцевые поверхности эле-
Ф и г. 3.12. Магпитострикционный
кольцевой вибратор.
F — направленная вдоль окружности сила
v —радиальная колебательная скорость.
мента кольца с центральным углом 66 действуют силы F,
направленные вдоль окружности, радиальные компоненты которых
равны F sin F0/2), или приближенно 1/2F6Q. Обозначая массу
рассматриваемого элемента через биг, получаем уравнение
движения
Ьт^-= -FM.
at
Вводя плотность материала р, для массы получаем
Sm = pSR8e,
и уравнение движения принимает вид
jwpSR=—F. C.56)
Силу F, действующую на элемент объема, можно представить
как F = tS, используя для т первое из уравнений C.48) или
х) Автор использует термины «резонанс типа А» и «резонанс типа Б»,
предложенные Кикучи [13]. При переводе мы заменили их терминами,
обычно употребляемыми в отечественной литературе.— Прим. ред.
§ 2. Магпитострикциопные константы
69
уравнение C.49). Тогда получим
~ А _Л C.57)
F=:(E'l — 7iTH)S.
Подставляя эти выражения в C.56), преобразуем последнее
уравнение, используя соотношение |=у//о)Д. Применяя первое из
выражений C.57) для F, получаем
Представляя
Ё=ЕХ-]Е2 C.58)
и вводя полную массу кольца m — 2nRSp, перепишем уравнение
движения в следующем виде:
2nSTM = v (ig- Ег + jam -j^-E,) . C.59)
В предположении Е2 <С #i вычислим частоту шоа, при которой v
достигает максимума, если амплитуда намагниченности М
поддерживается постоянной с изменением частоты:
Эта частота соответствует резонансу при постоянной
намагниченности и называется частотой антирезонанса.
Если же для F применить второе из выражений C.57), то мы
получим уравнение
SxTH^v (joRpS-j 4§-) . C.61)
В соответствии с формулой C.52) Е' = Е — хГГ". Полагая
X = Щ — /Х2
и используя соотношение ГТ" = Г2 (п. 2 настоящего параграфа),
имеем
Е' = (Et- х^2) - j (E2 + х2Г2). C.62)
Следовательно, уравнение движения принимает вид
2nSxrH = v {-М-(?2 + к2Р) + 7шт-7 ^-(^-XjP)} . C.63)
Как было сказано выше, в случае использования Н0 вместо
Н уравнения не меняются при условии замены х на х. Следова-
70
Гл. 3. Теоретический анализ пьезоактивных констант
тельно, вычисляя частоту со0г, при которой v достигает
максимума, если амплитуда возбуждающего поля Я0 поддерживается
постоянной с изменением частоты, получаем
«V = /1М=У^. C.64)
Эта частота соответствует резонансу при постоянном поле и
называется частотой резонанса.
Таким образом, различие частот (о0г и <о0а механического
резонанса магнитострикционного вибратора в зависимости от
способа их определения связано с тем, что при одном способе магни-
тоупругая связь оказывает
влияние на результаты измерений,
а при другом способе не
оказывает. Определяя модуль
упругости Е с помощью
соотношения C.8)
\дх)м Е
и рассматривая для переменных
процессов его упругую состав-
Ф и г. 3.13. Резонансные кривые,
полученные экспериментально при
постоянном поле (А) и при
постоянной намагниченности (В).
ляющую Ei и диссипативную составляющую Еъ можно сказать,
что механический резонанс в экспериментах при постоянной
намагниченности определяется колебательными
характеристиками твердого тела, модуль упругости которого равен Еи а
резонанс в экспериментах при постоянном поле определяется
характеристиками тела, модуль упругости которого равен Ev -— ^Г2 *).
Всегда справедливо неравенство
<*>ог<ю0а. C.65)
Острота механического резонанса также различна для
экспериментов при постоянном поле и при постоянной
намагниченности. На фиг. 3.13 представлены резонансные кривые для кольце-
*) Коэффициент электромеханической связи к пьезоактивных
материалов может быть определен с помощью этих соотношений (см. гл. 8, § 2,
п. 2).
96 96 100 102
Отношение частот, %
§ 2. Магпитострикционные константы
71
вого вибратора, рассмотренного в предыдущем примере. Кривая,
полученная в эксперименте с постоянной намагниченностью,
острее. Разница в виде кривых зависит от того, проявляется ли при
данном эксперименте влияние магнитоупругой связи или нет.
Если выразить это влияние с помощью декремента затухания А,
то из уравнения C.63) для резонанса при постоянном поле получим
•Ая=^. C-66)
Таким же образом из уравнения C.59) для резонанса при
постоянной намагниченности получаем
Лм = ^. C.67)
Следовательно, всегда
Ам<Дя. C.68)
Затухание для резонанса при постоянном поле больше, чем для
резонанса при постоянной намагниченности, на величину, равную
диссипативной составляющей х2Г2 коэффициента магнитоупругой
связи хГ2, деленной на 2соЯ2р.
АЕ-эффект и магнитомеханическое затухание. Общие
соображения. Изменение модуля упругости Е с подмагничи-
ванием, о котором упоминалось выше, есть не что иное, как так
называемый Д?-эффект, который уже давно был отмечен как
интересное физическое явление, наблюдаемое в ферромагнитных
веществах. Физический интерес представляет главным образом
изменение модуля Юнга AES при переходе вещества из
размагниченного состояния в состояние насыщения. Проблемы,
связанные с переходом из одного состояния в другое, в достаточной
степени исследованы, и результаты исследований опубликованы.
В этих публикациях имеется много полезных данных [14],
которые могут быть использованы при конструировании
преобразователей. На фиг. 3.14. например, представлены температурные
зависимости модуля Юнга мягкого никеля [15]; параметром
кривых служит относительная намагниченность M/Ms (Ms —
намагниченность насыщения). При каждой температуре модуль
Юнга монотонно возрастает с ростом отношения MIMS.
Например, при 24° С он возрастает приблизительно на 6% с
увеличением отношения M/Ms от 0 до 1. Однако степень возрастания
модуля Юнга с подмагничиванием чувствительна к остаточному
напряжению в веществе и заметно зависит от температуры
отжига. Чем мягче материал, тем больше AES [14]. Например, при
комнатной температуре A5° С) материал, отожженный при 1300° С,
имеет почти вдвое большее значение АЕ8, чем материал,
отожженный при 700° С.
72 Гл. 3. Теоретический анализ пьезоактивных констант
Если при измерениях Д2?-эффекта достаточно хорошо
выполняется условие постоянства намагниченности, то можно
утверждать, что результаты этих измерений характеризуют поведение
модуля упругости, обозначенного ?t в этой книге. Как видно из
верхней кривой на фиг. 3.11, частота антирезонанса /0а
(соответствующая постоянной намагниченности) монотонно возрастает
22
21 V*
I
iio
i
49
Ifi
*no>
Г \\
г vV
1 l I
\ д"'-°
^V4b^2V
^Ъ^^?---<>-^^ь
\ °?//f?
^v °^Y
, уО , . , 1
О 50 W0 150 ZOO 250 300 350 400
Температура, °С
Ф и г. 3.14. Температурные зависимости модуля Юнга мягкого никеля;
параметр — намагниченность (по Зигелю и Квимби).
с ростом подмагпичивающего поля и стремится к постоянному
значению с приближением к намагниченности насыщения.
Известно, что
А/оа 1 ЛЯ 1 .
/оа
2 Е{
C.69)
следовательно, изменение частоты /0а на 3,5% соответствует
изменению Е на 7%.
С другой стороны, величина XtF2 обращается в нуль для
вещества как в размагниченном состоянии, так и в состоянии
насыщения и достигает максимума при определенном оптимальном
значении подмагничивающего поля (фиг. 3.6). Поэтому кривая
зависимости /0г от HDc начинается со значения /0г> равного
значению /оа при Нвс = 0, и снова стремится к f0a при достаточно
большом значении подмагничивающего поля; между этими
значениями поля есть область, где монотонное возрастание Е\ в
значительной степени перекрывается величиной х4Г2, оказывающей
в данном случае сильное влияние. Поэтому характеристика /0г>
§ 2. Магнитострикционные константы
73
т. е. нижняя кривая на фиг. 3.11, проходит почти горизонтально
или даже несколько спадает в области небольших постоянных
магнитных полей и затем снова поднимается.
Долгое время вызывало интерес то обстоятельство, что
механические колебания ферромагнитного вещества сопровождаются
специфическим затуханием, которого нет в неферромагнитных
веществах; были проведены исследования этого явления,
выявившие три типа затухания, обусловленного различными видами
потерь [16].
Первый вид потерь — это потери на микровихревые токи.
В зависимости от механических напряжений внутри вещества
меняется распределение магнитных доменов. В случае
переменного напряжения каждый домен определенным образом
поворачивается (сюда входит и процесс смещения доменных границ) и
возбуждает при этом местный вихревой ток. Таков механизм
возникновения потерь на вихревые токи при переменных механических
напряжениях. Другими словами, так возникают потери из-за
механических колебаний. В данной книге этот механизм
трактуется с помощью диссипативной компоненты Е2 модуля упругости.
Второй вид потерь — потери на магнитомеханический
гистерезис. При действии механического напряжения на ферромагнитное
вещество происходит необратимый поворот доменов (включая
смещение границ), поэтому зависимость между напряжением
и намагниченностью должна иметь гистерезис. А это значит, что
на необратимое вращение доменов расходуется механическая
энергия, приводя к затуханию колебаний. В данной книге эти
потери также трактуются как часть Е2- Не исключена
возможность экспериментального разделения потерь упомянутых двух
видов, если принять во внимание тот факт, что поглощение второго
вида не зависит от частоты колебаний, а поглощение,
обусловленное микровихревыми токами, зависит от нее.
Третий вид потерь — потери на макровихревые токи.
Механизм их возникновения связан с вихревыми токами,
возбуждаемыми при переменном намагничивании всего вибратора в целом
и потребляющими в конечном счете механическую энергию, что
приводит к затуханию колебаний. Это затухание учитывается
с помощью величины х2Г2, влияние которой рассмотрено в
таблице 3.1.
Анализ. Как видно из сравнения уравнения C.59),
описывающего возбуждение при постоянной намагниченности, с
уравнением C.63), описывающим возбуждение при постоянном поле,
потери третьего вида, т. е. механическое затухание,
обусловленное величиной х2Г2, могут возникать или не возникать в
зависимости от способа возбуждения образца. Величина х2Г2 стремится
к нулю при достаточно больших и достаточно малых значениях
подмагничивающего поля, поэтому затухание как в условиях
74 Гл. 3. Теоретический анализ пьезоактивных констант
постоянства поля, так и в условиях постоянства намагниченности
определяется значениями Е2 при этих экстремальных подмагни-
чивающих полях. Но поскольку величина х2Г2 при подмагничи-
вании, оптимальном для х^2, достигает максимума, возбуждение
при постоянном поле в промежуточной между двумя
экстремальными значениями подмагничивания области сопровождается
затуханием, определяемым величиной х2Г2, и этот тип затухания
приобретает большее значение, чем основной, определяемый
величиной Е2, т. е. характерный для возбуждения при постоянной
намагниченности. Этот факт проявляется, например, в виде
заметного различия между кривыми, соответствующими
экспериментам при постоянном поле и при постоянной намагниченности
в области оптимального подмагничивания, что можно видеть
на фиг. 3.13.
Мы приведем зависимости Е{ и Е2 от подмагничивающего поля
Hdcj полученные в результате анализа кинетического импеданса
никелевого кольца [1, 3]. Поскольку частота, на которой
кинетический импеданс максимален, есть частота резонанса f0r, то из нее
можно получить скорость распространения звука сн в материале
образца, соответствующую условиям возбуждения при
постоянном поле:
ея-/13, C.70)
Как подробно показано в гл. 4, постоянную затухания Ля,
величину Xif2 и т. п. также можно получить путем анализа
кинетического импеданса. Из C.70) следует
Et = pch + xil*. C.71)
Полагая в выражении C.66) со = 2я/г и 2nRfr = cH, получаем
Я2 = 2ЛсирДн-х2Г2. C.72)
На фиг. 3.15 и 3.16 представлены характеристики Е{ и Е2,
получепные путем обработки данных измерений для технически
чистого никеля при различных значениях HDc- Рассматривая
состояние при HDC = 0 как начальное, находим, что во всей
области измерений AEi положительно, а Д/?2 отрицательно,
т. е. Е\ монотонно возрастает, а Е2 монотонно убывает с ростом
поля. Поскольку мы не проводили измерений вплоть до
насыщения намагниченности MDC, характеристики при больших полях
пока неизвестны, однако монотонное возрастание Еи
по-видимому, должно продолжаться, как это следует из фиг. 3.15. Что же
касается монотонного уменьшения Е2, то здесь мы еще пе
располагаем удовлетворительными сведениями. Логарифмический
декремент затухания для никеля, измеренный Зигелем и Квимби [15],
монотонно падает с ростом постоянной намагниченности М- в пре-
§ 2. Магнитострикционные константы
75
делах всей исследованной области температур. Однако существуют
различные данные и мнения, касающиеся этого вопроса [16]. Одни
утверждают, что монотонного убывания нет и нормальный ход
зависимости характеризуется наличием максимума при некотором
аначении M/Ms; по мнению других, вид характеристики зависит
от температурной обработки образца. Практический опыт автора
свидетельствует о том, что зависимость Ег от подмагничивания
может иметь максимум в том случае, когда условия возбуждения
хЮп
206
* Ш
?202
*Х200
198
xW*
„*.**
i
\у?"
ЛЕ,
\
'
10
15
20
Фиг. 3.15. Упругая компонента Et
модуля Юнга, полученная путем
анализа кинетического импеданса
никелевого вибратора.
2.0
W
•§ 1.2
ч?1,0
0,8
0,6
F
—ч
i
,
Л?2
10
HDCi3
15 20
Фиг. 3.16. Диссипативпая
компонента Е2 модуля Юнга,
полученная путем анализа
кинетического импеданса никелевого
вибратора.
колебаний при постоянной намагниченности поддерживаются
недостаточно строго в пределах всего интервала изменения MDC\
максимум возникает из-за частичного наложения затухания,
обусловленного величиной х2Г2, хотя модуль Е2 образца
монотонно убывает.
Связь между &Е-эффектом и kMai<c [17]. Недавно автор
данной главы и Симицу обнаружили существование определенной
зависимости между Д1?-эффектом и максимальным значением
коэффициента электромеханической связи [16]. Общая идея
состоит в следующем: согласно доменным представлениям,
теоретическое значение отношения АЕ/Е для поликристаллического
магнитного вещества в предположении изотропности магнитострик-
ционных характеристик (А,100 « А,ш я^ Xs) можно представить
в следующем виде [17]:
где ха — начальная восприимчивость, Я8 — магнитострикция
одного домена, а С — константа, обычно близкая к единице.
76 Гл. 3. Теоретический анализ пьезоактивных констант
С другой стороны, статическая магнитострикция ?' есть
функция намагниченности М, и эмпирическое соотношение для никеля
[18] имеет вид
?' = аМ*,
где п в среднем равно 2,25 г). Эксперименты, проведенные позднее
на других магнитострикционных материалах, таких, как альфер,
ферриты и т. п., показывают, что это эмпирическое соотношение
хорошо выполняется, но для многих материалов значение п
W \
g J Щ0,в
111
'Л6
?0,4
* *0,2
QJ* Ofi
M/Ms
Ф и г. 3.17. Зависимость ?', х и к2 от относительной постоянной
намагниченности MlM«.
близко к 3, даже для некоторых сортов никеля. Таким образом,
эмпирическое соотношение записывается в следующем общем виде:
Б' _ { м у
71 = 3.
C.74)
Оно иллюстрируется кривой А на фиг. 3.17.
Зависимость между обратимой восприимчивостью х и
намагниченностью уже давно была найдена Гансом [14]; ее можно
представить в виде
?-»(?)¦ <ЗЛ5>
Эта зависимость представлена кривой В на фиг. 3.17.
Выведем выражение для коэффициента электромеханической
связи к, пользуясь соотношениями C.74) и C.75). Как было
установлено в гл. 2,
Г = Е
ill.
дМ ?
х) Подробнее см. гл, 4, § 9, п. 4.
§ 2. Магнитострикционные константы
77
подставляя в это выражение значение ?' из C.74), получаем
Els d(l'/Xs) 20з
М8 d(M/Ms) Ms
I м \
М \»-1
C.76)
Подставляя выражения для и и Г C.75) и C.76) в формулу
C.54)
*¦= хГ2
Е
получаем
№--
/ М \2(п-1) / М \
C.77)
Это выражение для лг = 3 представлено кривой С на фиг. 3.17 [по
оси ординат отложена величина к2/(каЕК1/М1)]; ее максимум
равен 0,565. В результате
получается выражение
хаЕ11
35
0,565-
М1
C.78)
Сравнивая его с
выражением C.73), мы видим, что
Величина Аймаке прямо про-
порциоиальна отношению
Ф и г. 3.18. Экспериментальная
зависимость между у (&E/E)S
И Амакс Для различных магпито-
стрикционпых ферритов.
Штриховые линии — границы
разброса.
^
30 Ь
^25
з
20
15
10
Л**
•• /л>
/ V
мл У
jL
j_
_i_
10
15 20
25
30
(AE/E)S. Подставляя теперь С = 1 в C.73), получаем следующее
соотношение:
/(^ = 1,33*
макс»
C.79)
Хотя это соотношение не подвергалось еще всесторонней
экспериментальной проверке, мы имеем уже для него результаты,
полученные при экспериментальном исследовании большого числа
стержневых образцов из магнитострикционных ферритов,
различных по составу и технологии изготовления; эти результаты
представлены точками на фиг. 3.18. Почти все точки лежат в
области
1,5Лмакс>|/Г(^-)в>1,1 км
C.80)
78 Гл. 3. Теоретический анализ пьезоактивных констант
В качестве другого примера на фиг. 3.19 приведены результаты,
полученные при некоторых исследованиях серий материалов
с различным содержанием определенной химической компоненты,
обозначенной у. Хорошо виден
почти одинаковый ход кривых
V(&E/E)S и Лмаис.
7. Другие определения маг-
нитострикционных постоянных.
Смит [2] определяет магнитострик-
ционные константы К и К'
соотношениями
Р = КН, / = ^-. C.81)
Фиг. 3.19. Параллелизм между
величинами ']/(&ElE)s и &макс для
ферритов состава UNiOH>85 (CuOH,15}i-y
.(CoO)y.(Fe203).
Здесь использованы его обозначения: Р — магнитострикционное
напряжение, обозначаемое в этой книге через т'; J —
намагниченность, возбуждаемая за счет обратного эффекта (эффекта Вил-
лари), которая в этой книге обозначается через М'. Поскольку
R — радиус кольцевого образца, а ? -— радиальное смещение,
|/д _ механическая деформация внутри вещества, обозначаемая
в этой книге через |. В наших обозначениях соотношения C.81)
имеют вид
К = ±-, К' = ^. C.82)
Используя соотношения B.6) и B.12)
? = xftf, АГ' = хГ'!, C.83)
получаем
К = кТ и К' = хГ. C.84)
Хотя Смит и не касался вопроса о фазовых сдвигах, вносимых
вихревыми токами и гистерезисом, подстановка в его
соотношения равенства ^ |f = Z Г'а= О, доказанного в п. 2 данного
параграфа, приводит, как легко видеть, к следующему равенству:
^? = Ztf' —Z*- C-85)
tf&fflTs
§ 2. Магнитострикционные константы 79
Позднее Баттерворт и Смит [3] ввели магнитострикционные
константы X и у следующим образом:
S = XB, Н = у%, C.86)
где S соответствует т' в обозначениях этой книги, В—
магнитная индукция, Н соответствует И' в обозначениях этой книги,
а \ — та же величина, что и у нас. При введении наших
обозначений эти определения принимают вид
к=тг* ?=Т" C'87)
Таким образом, непосредственно из уравнения B.12) мы имеем
7 = Г\ C.88)
Что касается постоянной X, то, полагая Н <С 4яЛ/ в
соотношении между магнитной индукцией ВЦи намагниченностью М
(В = Н-\-4лМI мы имеем Вж4пМ и Х — х'/АпМ, что дает
4лА, = Г. C.89)
Приближение В ^ 4яМ, использованное выше, хорошо
выполняется на практике; но оно же выдвигает интересную проблему,
касающуюся сущности теории явления магнитострикции. Уже
ясно, что намагничивание до М тождественно повороту доменов
и что поворот и спонтанная магнитострикция непосредственно
связаны между собой. Но возникает вопрос, вносит ли само
магнитное поле Н, приложенное к веществу, прямой вклад в маг-
нитострикцию. Хотя и можно считать, что в случае очень
большого поля, сравнимого с полем Вейсса в доменной теории, некоторый
вклад возникает, однако при обычных значениях поля //,
входящего в соотношение В = Н + 4яЛ/, дополнительной
магнитострикции за счет поля не появляется. Это и является главной
причиной предложения в качестве основной характеристики
эффекта магнитострикционной постоянной Г, описанной в п. 1
данного параграфа.
Взаимосвязь' между К, X, у, Г и Г'. Выше было
показано, что три пары уравнений C.82), C.87) и B.12) дают
взаимосвязь трех систем магнитострикционных констант. Эта
связь представлена в табл. 3.2, где х — комплексная магнитная
восприимчивость при некоторой частоте со, равная векторному
отношению переменных величин М и Н или М' и Н' при
постоянном подмагничивающем поле:
AM
х =
АН
0)
Здесь ф — фазовый угол между переменными величинами М и Н
или М' и Н\ обусловленный вихревыми токами и гистерезисом
?0 Гл. 3. Теоретический анализ пьезоактивных констант
Таблица 3.2
Связь между тремя видами магнитострикционных констант 1)
Обозначения
констант
Г, Г'
Я, у
К, К'
К, К' (Смит)
К'=ху
—
к, у (Баттерворт,
Смит)
Х=Г/4л;2)
7=Г
—
у = К'/х
Г, Г' (Кикучи)
—
Т' = К'/к
1) В советской научной литературе при рассмотрении режима излучения для
магнитострикционных колебаний используется обычно константа а-—х /В, равная
константе Баттсрворта и Смита К или Г/4я, где Г — употребляемая в данной книге
константа Кикучи. Для режима приема иногда используется константа Л = В'/х, где х —
создаваемое внешней силой механическое напряжение. В обозначениях данной книги
Л =- Г'Ьпк/Е. — Прим. ред.
2) Предполагается, что #^4лЛ/.
в магнитострикционном материале. Для каждой системы
магнитострикционных постоянных с помощью законов термодинамики
могут быть доказаны соотношения взаимности
К = К', у = 4пХ и Г-Г.
§ 3. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ КОНСТАНТЫ
1. Аналогии, вводимые посредством принципа подстановки [4J.
Для описания пьезоэлектрических явлений при продольных
колебаниях выберем функции
i==l(T'P)' C 90)
где Р — электрическая поляризация, a G — напряженность
электрического поля; их полные дифференциалы имеют вид
*И?)р*+(*),ар.
^=(?).**+«а*
C.91)
C.92)
G помощью тех же математических преобразований, что и в § 2,
п. 1, пьезоэлектрическую постоянную, соответствующую постоян-
§ #. Пьезоэлектрические константы
81
ной, определяемой выражением C.7), можно представить в
следующем виде:
г—(?).-(?-).• <3-93>
а постоянную, соответствующую постоянной C.15), можно
представить в виде
г~(т),-(та- <зда>
Согласно C.93), константа Г определяется как коэффициент,
равный отношению пьезоэлектрического напряжения т',
возникающего в материале при постоянной деформации, к приложенной
извне электрической поляризации Р, а Г" в выражении C.93')
определяется как коэффициент, равный отношению
пьезоэлектрической электродвижущей силы G', возникающей в материале при
постоянной электрической поляризации, к созданной за счет
внешнего воздействия механической деформации ?. Очевидно,
для явлений, изменяющихся по синусоидальному закону, с
помощью тех же рассуждений, что и в § 2, п. 1, уравнения
преобразуются к виду
Е'=4-(т + ГП C.94)
Р=%(ё+Т%. C.95)
Легко видеть, что уравнения C.94) и C.95) точно совпадают по
форме с основными уравнениями магнитострикционпых
колебаний, т. е. эти уравнения можно получить из уравнений C.10)
и C.17) путем замены в них М и И на Р и G соответственно. Этим
доказывается справедливость принципа подстановки, изложенного
в гл. 2, § 1, п. 3. Из этого принципа следует, что различные
постоянные, использованные выше для описания явлений магыи-
тострикции, могут быть использованы и для описания
пьезоэлектрических явлений при следующей замене:
М-+-Р, #-*G, xVe,
т. е. при замене магнитной восприимчивости на диэлектрическую
восприимчивость. Например, антирезонансная частота <о0а
пьезоэлектрического вибратора, определяемая при постоянной
электрической поляризации, по аналогии с выражением C.60) может
быть записана в виде
^оа = 7Г j/y-. P=z const> C-96)
а резонансная частота <о0Р, определяемая при постоянном
электрическом поле, может быть записана в виде
«or = ^-|/"^S^, G = const, C.97)
ti—0231
82 Гл. 3. Теоретический анализ пъезоактивных констант
где
8 = 8! — ] е2. C.98)
Таким образом, все результаты, полученные в теории магнито-
стрикционных колебаний, могут быть применены при
рассмотрении пьезоэлектрических колебаний, и, следовательно, принцип
подстановки избавляет нас от необходимости заново решать
многие вопросы, связанные с пьезоэлектрическими колебаниями.
Например, для описания явлений в пьезоэлектрическом вибраторе,
напряжение к которому приложено через электроды с воздушным
зазором, достаточно ввести деполяризующую силу, подобно тому
как в случае магнитострикционного вибратора с магнитным
зазором вводится размагничивающая сила. Деполяризующая сила
вводится обычным способом, не связанным ни с
пьезоэлектрическими, ни с^ магнитострикциониыми явлениями.
2. Другие определения пьезоэлектрических констант.
Основные уравнения пьезоактивных явлений, приведенные выше, были
получены при рассмотрении функций
1 = Цх,Р) и /> = Р(СД).
Но поскольку для описания этих явлений в качестве независимых
переменных могут быть выбрапы любые пары величин из ?, т,
Р и G, для удобства при практических применениях можно
предложить разные формы уравнений. А различные пьезоактивные
коэффициенты, появляющиеся в этих уравнениях, определяются
как соответствующие пьезоэлектрические константы. Например,
при использовании функций
? = Е(т,С) и P = P{x,G)
получаются уравнения
Обозначая коэффициенты при втором члене первого уравнения
и при первом члене второго уравнения через d и d'
соответственно, имеем
'-lit
Эти коэффициенты можно назвать пьезоэлектрическими
константами, а также доказать, что d = d'.
Обозначения величин ?, т, Р, G и т. д. различны в разных
книгах и статьях. Так как обозначения, введенные недавно Коми-
§ 3. Пьезоэлектрические константы
83
тетом по пьезоэлектрическим кристаллам Института инженеров
по электротехнике и радиоэлектронике (ИИЭР) [5], найдут,
очевидно, широкое применение, приведем здесь сравнительную
таблицу наших обозначений и обозначений ИИЭР (табл. 3.3).
Таблица 3.3
Сравнение обозначений
Величина
Механическая деформация
Механическое напряжение
Модуль упругости
Упругая податливость
Электрическое поле
Электрическая поляризация
Электрическая индукция
Поляризация/поле
Индукция/поле
(диэлектрическая постоянная)
Частный дифференциальный
коэффициент
Обозначения
ИИЭР
S
Т
с (упругость)
s (податливость)
Е
Р
D{ = E+4nP)
Р/Е=ц
D/E = e
предложенные
авторами
6
т
Е
i/E
G
Р
D( = G+4nP)
P/G =
г—диэлектрическая
восприимчивость
D/G^K
Ниже приводятся основные уравнения в различных формах,
использующие эти системы обозначений, и проводится сравнение
уравпеиий в обозначениях ИИЭР и в наших обозначениях.
Уравнения с константой Г. Осповиые уравпения][пьезоэффек-
та C.94) и C.95) имеют вид
S = sP(T + ГР), |= J- (т + ТР)У
ер^ C.101)
P = rf(E + T'S), P = es (G-|- Г'!).
Переменные ? и Р входят в эти уравнения таким образом, что
одна величина является независимой переменной^в одном
уравнении и в то же время выступает как зависимая переменная
в другом; поэтому мы назовем этот вид уравнений «уравнениями
с циркулирующими переменными».
Уравнения с константой d {независимые переменные поле — меха-
ническое напряжение). Переписывая уравнение C.99) с
использованием обеих систем обозначений, получаем
^ "Г ' (ЗЛ02)
P = dT + г\ТЕ, Р = dx + еД
6*
84 Гл. 3. Теоретический анализ пьезоактивных констант
Выражения C.100) в обозначениях ИИЭР имеют вид
d==(w)T'
Коэффициент d называется пьезоэлектрической константой
деформации. В соответствии с основными соотношениями d в первом
из выражений C.103) определяется как отношение
пьезоэлектрической деформации к вызывающему ее электрическому полю
в механически свободном пьезоэлектрическом веществе (т = 0).
Во втором из выражений C.103) df определяется как отношение
поляризации в пьезоэлектрическом веществе к вызывающему
ее механическому напряжению при короткозамкнутых
электродах, т. е. при G = 0.
Уравнения с константой е {независимые переменные поле —
деформация). Разрешая уравнения C.102) относительно величин
т и Р, получаем следующие уравнения:
T = cES-eE, x = EG%-7G,
~ ~1 ~~ C.104)
P = eS-\-rfE, Р = вМ-еьб,
где
* = —' e = dEG,
$ъ ~ ~
С " ^
Величина е называется пьезоэлектрической константой
напряжения. Как видно из основных уравнений, константа е равна
и, следовательно, е определяется как отношение механического
напряжения, возникающего под действием электрического поля
в пьезоэлектрическом веществе, находящемся в заторможенном
состоянии (т. е. при 5 = 0), к величине этого поля. Определяя е
с точки зрения обратного эффекта, имеем
-"-(?).(*).-(?).• <"">
т. е. е определяется величиной пьезоэлектрической поляризации,
возникающей в пьезоэлектрическом веществе под действием
механической деформации при короткозамкнутых электродах (т. е. при
G = 0), отнесенной к величине этой деформации.
§ S. Пьезоэлектрические константы
85
Уравнения с переменной D. Другие формы основных уравнений
можно получить, используя электрическую индукцию D вместо
электрической поляризации Р. Эти новые уравнения
соответствуют тем уравнениям, которые были получены для магнито-
стрикционных явлений при замене в основных уравнениях
намагниченности М на магнитную индукцию В. Автор утверждает,
что магнитострикциоппые явления не связаны непосредственно
с индукцией В, определяемой выражением В = И -|- АпМ, а могут
рассматриваться как прямо зависящие от внутренней индукции,
т. е. от намагниченности М. По той же причине было бы
неправильно рассматривать для пьезоэлектрических явлений в
качестве одной из переменных электрическую индукцию D (= G +
+ 4яР). В ущерб строгости, однако, при установлении некоторых
соотношений, относящихся к электрическим схемам, а не к
собственно вибратору, иногда бывает удобно^ рассматривать в
качестве переменной именно индукцию D, и D часто используется
в этих случаях.
Уравнения с переменной D, часто появляющиеся в качестве
основных уравнений пьезоэффекта, выводятся из
функциональных зависимостей
Е = Б(т,С), D = D(x,G). C.107)
Эта форма уравнений аналогична уравнениям C.99), в [которых
вместо Р подставлено D. Исходя из того, что явление зависит
лишь от внутренней электрической индукции, и используя
соотношение
D = AnP, C.108)
можпо определить диэлектрическую постоянную К в виде
Кх = 4jtet, (ет = 4ят1г)ИИэр.
При этом непосредственно из уравнений C.102) получаются
уравнения
S = s*T + dE, f= JLx + dS,
Яо_ _ C.109)
D =-- AndT + еТЕ, D= Andx + KZG.
Правильно было бы заменить коэффициент And другим символом,
но обычно применяется постоянная d, определенная так, как
показано выше.
Кроме того, используются и уравнения, представляющие собой
измененные уравнения C.104) с переменной D\ комбинация 4яе,
появляющаяся в них, также в большинстве случаев используется
без замены ее другим символом 2).
х) В советской научной литературе чаще всего используются
пьезоэлектрические константы d и е.— Прим, ред.
86 Гл. 3. Теоретический анализ пьезоактивных констант
Соотношения между константами. Выясним сначала связь
между константами Г и е. Преобразуя выражение C.93) Г =
= (dx'ldP)^ можно получить его в виде
г=г @r'/ac)g
(дР/дв)г '
Здесь числитель представляет собой константу е, определяемую
выражением C.105), а знаменатель—диэлектрическую
восприимчивость при постоянной деформации. Отсюда получаем соотношение
При подстановке в это соотношение е = dEG получаем связь
между Г и d в виде
Г = ЯСD) = [)Е41 • (ЗЛИ)
V eg / L yf _1ииЭР
Применяя принцип [подстановки к выражениям C.52), легко
получить соотношение между модулями Юнга EG и ЕР:
Ёь = ЁР-цТ\ C.112)
или соотношение
c* = cp_4- (ЗЛ13)
с использованием обозначений ИИЭР.
ЛИТЕРАТУРА
1. Kikuchi Y., Nippon Electr. Gomra. Eng., № 30 (Oct. 1942).
2. Smith F. ?>., Proc. Pliys. Soc. (London), 42, 181 A930).
3. Butterworth S., Smith F. Z>., Proc. Phys. Soc. (London), 43, 166 A931).
4. Kikuchi Y., Sci. Rep. Res. Inst., Tohoku Univ. B3, № 1, 7 A951).
5. IRE Piezoelectric Crystals Committee, IRE Standard on Piezoelectric
Crystals, Proc. IRE, 37, 1378 A949); 45, 353 A957); 46, 764 A958); 49,
1161 A961).
6. Kikuchi Y., Sci. Rep. Res. Inst., Tohoku Univ., B4, № 2, 259 A953).
7. Heisenberg W., Zs. Phys., 69, 287 A931).
8. Gans Л., von Harlem /., Ann. Phys., 16, 162 A933).
9. Fowler R. #., Statistical Mechanics, II ed., Cambridge, 1936, p. 517.
10. Kimura Л., Ohno K., Sci. Rep., Tohoku Univ., 23, 359 A934).
11. Honda K., Shirakawa Y., Journ. Japan Inst. Metals, 1, 217 A937).
12. Yamamoto M., Journ. Japan Inst. Metals, 5, 167 A941).
13. Kikuchi Y., Journ. Acoust. Soc. Japan, 13 A943).
14. Bozorth R. M., Ferromagnetism, New York—London, 1951 (см. перевод:
P. Бозорт, Ферромагнетизм, М., 1956).
15. Siegel ?., Quimby S. L., Phys. Rev., 49, 663 A936).
16. Kikuchi Y., Shimizu #., Journ. Inst. Electr. Comm. Eng. Japan, № 717
A959) (на японском языке).
17. Kikuchi Y., Sci. Rep. Res. Inst., Tohoku Univ., B4, № 2, 255 A953)
(первая публикация на японско1м языке в 1942 г.).
18. Mashiyama Y., Sci. Rep., Tohoku Univ., 26, 1 A937).
Глава
МАГНИТОСТРИКЦИОННЫЕ МАТЕРИАЛЫ
И МЕТОДЫ ИЗМЕРЕНИЯ ИХ ХАРАКТЕРИСТИК
Е. Кипучи
§ 1. ОБЪЕКТ ИЗМЕРЕНИЯ
Работа магнитострикционного преобразователя определяется
взаимодействием намагниченности и упругой деформации в
материале его сердечника, поэтому магнитострикционные постоянные,
характеризующие связь между упомянутыми двумя величинами,
являются наиболее важными при определении свойств материала.
Но для того, чтобы намагнитить материал, мы пропускаем через
обмотку преобразователя электрический ток, и, следовательно,
магнитные характеристики материала также должны быть известны.
Так как расчет и анализ работы магнитострикционных
вибраторов проводится в большинстве случаев методами
электроакустики, для описания их свойств удобно пользоваться именно этими
методами, хотя имеются и другие способы описания *). В гл. 2 и 3
уже было показано, что фактор силы прямо пропорционален
комплексной восприимчивости к и магнитострикционной
постоянной Г материала. В последующих главах (гл. 5, 8 и другие) мы
увидим, что эффективность электромеханического преобразования
обычно увеличивается с ростом величины хГ2. Таким образом,
выбор материала для изготовления конкретпого вибратора можно
производить путем сравнения значений хГ2 различных
материалов. При рассмотрении материалов, отличающихся модулем
Юнга Е, можно пользоваться величиной хГ2/2? или
коэффициентом электромеханической связи /с. Соотношение между этими
двумя величинами имеет вид
(см. гл. 2, § 6, и гл. 3, § 2, п. 6).
х) Использование только методов электроакустики приводит к
определенным ограничениям. Так, все описываемые в данной главе методы
определения динамических магнитострикционных и магнитных постоянных
основаны на измерениях вибраторов по электрической стороне в
предположении линейной зависимости между их параметрами. Таким образом, эти
методы оказываются применимыми лишь для работы при относительно
небольших амплитудах. Нелинейное поведение материалов принимается
в расчет лишь при определении магнитных потерь, где используются
стандартные методы электротехники.— Прим. ред.
88
Гл. 4, Магнитострикционпые материалы
Следующая очень важная характеристика, связанная с
существованием упругих колебаний в материале,— скорость
распространения звука с. Обозначая плотность материала через р,
получаем выражение для с в виде
'-/?¦'
D.2)
где Е зависит от магнитного состояния материала. Между модулем
Юнга Еп, соответствующим резонансу при постояппом поло,
а/0с
но 0%д
7
LL
_1_
5
4
3
2
1\-
I V
_|
10 20 30 АО
а
10 20 30 АО
Нпс*Э
6
хЮ
х0ггв
6
4
2
to
s^*^
у
- /
•
¦ /
-/
/
•• i . 1 i i
10
20 30 АО
Нвс,Э
6
Mi
ВС.
300
200
100
L л—•
V
и
v . , , ,
10 15 20 25
нт,з
2
Ю 20 30 АО
Нвс,Э
д
Ф иг. 4.1. Зависимость характеристик магпитострикциошюго материала
(отожженного листового никеля) от постоянного подмагничивающего поля.
а — магпитострикционная постоянная К0 (К0 — и0Г); б — комплексная восприимчивость
к0; в — магпитострикционная активность и0Г2; г — скорости распространения звука
стг и см\ д — кривая намагничивания.
и модулем Юнга Ем, соответствующим резонансу при постоянной
намагниченности, имеется следующее соотношение:
Ён = Ём-кГ* . D.3)
(см. гл. 3, § 2, п. 6).
Все рассмотренные константы меняются в зависимости от
постоянной намагниченности, поэтому они должны быть представлены
как функции постоянного нодмагничивающего поля HDC или
постоянной намагниченности MDC. На фиг. 4.1 и 4.2 показаны
примеры таких характеристик для листового никеля.
§ 1ь Объект измерения
89
Поправка на вихревые токи. Поскольку измерение констант
производится обычно на высоких частотах, на результатах в той
или иной степени сказывается влияние вихревых токов. Величины,
представленные на фиг. 4.1 и 4.2, приведены к случаю отсутствия
вихревых токов. Индекс нуль в их обозначениях свидетельствует
7
5
А
3
2
1
_ "~~*"*ч,.
>\^ ^
\
1 L. .1111
100 200 300
М
DC
Ф и г. 4.2. Зависимость характеристик магпитострикциоиного материала
от постоянной намагниченности (образец тот же, что и на фиг. 4.1).
а — магнитострикционная постоянная Г; б — комплексная посприимчивость х0; в —
статическая магнитострикция Ы/1.
о том, что введены поправки на вихревые токи. В гл. 3, § 2, н. 2,
показано, что постоянная Г не зависит от вихревых токов и поэто-.
му не нуждается в введении поправки в отличие от величины х.
Теоретические основания этого рассмотрены в гл. 3, § 2, п. 3.
Согласно обозначениям, введенным в C.37а), выразим магнитную
проницаемость как
u==|j,:^ 1-]-4лх. D.4)
Истинные значения проницаемости и восприимчивости (в
отсутствие вихревых токов) обозначаются с индексом нуль (\\,0 и х0):
A0=1+4ях0. D.5)
И а основании C.26) получаем соотношение между величинами \i0
и [I для листового материала в виде
ц ihma
Но
~ 1/ /4яи
Млцрсо
D.6)
где 2а — толщина листа, а — удельное Электрическое
сопротивление материала, а о> = 2я/. Соотношение D.6) иллюстрируется
на фиг. 4.3 [1], где угол гистерезисных потерь обозначен как
Zu=-M D.7)
90 Гл. 4. Магнитострикционные материалы
В случае 1 <^ 4ян имеем
1 ~
1 V
1 Но
X
х0
/?о«/5<о. D.9)
При этом графики фиг. 4.3 могут быть использованы для
преобразования х в х0-
0 W 2ft 3,0
та
Фиг. 4.3. Влияние скин-эффекта вихревых токов на комплексную
восприимчивость х" (графики для расчетов).
По оси ординат отложены % = Гх/и0 I — fil/Tio I — th та/та и —? = ?. ? По оси абсцисс
отложено j ггга |, где 2а — толщина листа, m = I К j^jijieo/a [ (or — удельное
электрическое сопротивление в ед. СГСМ, ц0 = 4ях0)- Параметр — угол гистерезисиых потерь
е^ (— ел = ^ iTe).
§ 2. ИЗМЕРЕНИЕ СТАТИЧЕСКОЙ МАГНИТОСТРИКЦИИ
Для измерения статической магнитострикции можно, конечно,
использовать любой метод определения изменений линейных
размеров. Фукусима [1] разработал для этой цели специальный
метод наблюдения кривой статической магнитострикции на экране
§ 3. Метод собственного кинетического импеданса 91
электроннолучевой трубки при возбуждении магнитострикцион-
ной деформации в образце с помощью тока очень низкой частоты
(фиг. 4.4).
Образец
Намагничивающая
катушка
д Генератор
очень низкой,
частоты
Sh
Высокочастотный
генератор
Й>
; Усилитель Детектор
Электронно-
лучедая
трубка
1) и г. 4.4. Электроннолучевой характериограф для наблюдения кривой
статической магнитострикции.
В этом методе магнитострикционпое растяжение и сжатие
образца вызывают перемещение пластины дифференциального
конденсатора.
§ 3. МЕТОД СОБСТВЕННОГО КИНЕТИЧЕСКОГО ИМПЕДАНСА
1. Кольцевой образец. Изготовлепный образец кольцевой
формы *) с площадью поперечного сечения St помещается в корпус,
как показано на фиг. 4.5, с тем чтобы ничто не препятствовало
его колебаниям; затем на корпус наносится тороидальная обмотка.
Механический резонанс, соответствующий основной моде
колебаний кольца, имеет место на частоте
?°-~2ШУ ~~р*
D.10)
где Е — модуль Юнга, р — плотность материала, R — средний
радиус кольца.
Вблизи этой частоты в образце возбуждается переменная
однородная деформация (растяжение или сжатие) в направлении вдоль
окружности. Если частота /0 известна, то можно определить
скорость распространения продольной упругой волны в образце
с = УЩ.
х) Пластина кольцевой формы, отштампованная из листового материала,
или набор из нескольких тонких пластин, склеенных между собой.
92
Гл. 4. Магнитострикционпые материалы
Фактор силы для такой моды колебаний определен
выражениями B.17) и B.18). Принимая полное число витков обмотки
равным N, имеем
Л-*^ЙГ.
D.11)
Из этого соотношения можно найти хГ, если измерена
величина А . При измерении
ОЯмотна импеданса свободного
образца Zj вблизи
резонансной частоты имеем
Отберстие
Отберстие
Образец
Z, = Zd + Zn. D.12).
Импеданс заторможенного
образца Zd и кинетический
импеданс Zm можно
разделить. Обозначая величину
Zd на резонансной частоте
Фиг. 4.5. Кольцевой образец.
через Zdo и определяя се подобно импедансу катушки
индуктивности с железным сердечпиком, имеем
2ft=*0 + yffl(Le + i5^?)f
D.13)
где RQ ¦— сопротивление потерь в медном проводе электрической
обмотки, Z/0—-индуктивность рассеяния, lR — длина магнитопро-
вода, в данном случае равная 2яН. Здесь \i — кажущаяся
комплексная проницаемость, связанная с % соотношением
поэтому значение х в выражении D.11) можно получить из этой
величины Zd0. Выражая импеданс тороидальной катушки той же
формы и размеров, что и катушка образца, но без сердечника,
в виде
Z0 = R0-{-j(i)L0 Ом,
а импеданс зажатого преобразователя на резонансной частоте как
Zdo = RdQ + ]<dLdo Ом,
§ 3. Метод собственного кинетического импеданса 93
получаем для к выражение
Пао-^о
).Ю9 ед. СГСМ. D.14)
8nSi№ \-"" "и ' /со
Далее, обозначая кинетический импеданс Zm на резонансной
частоте1) через Zm0, имеем (см. гл. 2, § 3, п. 1)
Z — _2_
то — ~~Г"" •
D.15)
Соотношение между механическим сопротивлением г и
механической постоянной затухапия А 2) в окрестности основной резо-
нанспой частоты имеет вид
а~бг. D-16>
где т — полная масса кольца.
С другой стороны, пользуясь
соотношением
Л = я(/2-/1), D.17)
Ф и г. 4.6. Круговая диаграмма
кинетического импеданса на плоскости
можно определить А из квадрантных частот /t и /2 круговой
диаграммы кинетического импеданса (фиг. 4.G) и, следовательно.
^тп "—
А*
2/W
откуда
2rt(/2-/i)/» '
Сравнивая это выражение с выражением D.11), имеем
^ = Й^>Г(/2-Л)^то =
R
y(f2-fi)mZma. D.18)
Величина Zm0 обычно измеряется в омах, в то время как хГ
выражается в единицах дип/см2-Э. Поэтому в приведенное выше
выражение следует подставлять значение Zm0 в омах, умноженное
на 10е.
2. Образец в виде прямоугольной полоски. При измерении
различных магнитострикциониых констант на образце в виде
г) Здесь и далее в этой главе под резонансной частотой подразумевается
частота /г, т. е. частота резонанса при постоянном поле.— Прим. ред.
2) Введенная автором постоянная затухания А равна логарифмическому
декременту затухания, умноженному на резонансную частоту. — Прим. ред.
94
Гл. 4. Магнитострикционные материалы
прямоугольной полоски *) длиной I см резонансная частота образца
в, таким образом, мы имеем
c = y'j- = 2M. D.20)
Далее, для такого вибратора возбуждающая сила
F'Q = 2T'Sh D.21)
где т' — магнитострикционное возбуждающее напряжение,
подробно рассмотренное в гл. 2. Полагая переменную
намагниченность М однородной по всей длине образца, имеем
т'=ТМ = хГЯ0. D.22)
Магнитное поле Н0 в катушке равно
Я0 = 4ялГ, D.23)
откуда
F'0 = 8nnStxrT,
где~тг — число витков на 1 см, а / — электрический ток в обмотке.
Таким образом, фактор силы А оказывается равным
4, = # = 8я«5,хГ. D.24)
Намагниченность образца в виде полосы, вообще говоря,
неоднородна по всей его длине, поэтому и распределение т' также
неоднородно. Поправка на неоднородность подробно рассматривается
в § 4, п. 2. Но если образец достаточно длинный и тонкий, то,
принимая в качестве М среднюю по длине намагниченность и
рассматривая Н0 в выражении D.22) как внешнее поле, мы вправе
пользоваться выражениями такого же вида, как D.21) и D.23).
При этом D.23) принимает вид
,—> **#
Лвнеш = 4шг/
и
М = ккйтНЛят, ' D.25)
откуда
Л1 = 8ял5,хКажР. D.26)
х) В дальнейшем такой образец будет называться стержневым образцом.
Он представляет собой вырезанпую из листового материала тонкую полоску
или набор из нескольких таких полосок.
§ 3. Метод собственного кинетического импеданса 95
С другой стороны, поскольку деформация распределена по
закону косинуса (начало координат в середине образца), то с учетом
обратного магнитострикционного эффекта распределение магнито-
стрикционной магнитодвижущей силы также должно быть коси-
нусоидальным. Интуитивно невозможно установить, каким будет
распределение магнитного потока, вызванного такой
магнитодвижущей силой, и каково сцепление этого потока с обмоткой.
Поэтому введем кажущуюся восприимчивость Икаж таким
образом, чтобы колебательная скорость торца образца v0 и
индуцированное в обмотке напряжение Е'0 были связаны соотношением
Е; = &ш5^ажГ1;0. D.27)
Тогда мы имеем
A2=8mSin'KRKT. D.28)
Невозможно непосредственно определить, будет ли эта
величина Хкаж равной иКаж в выражении D.25). Но если
предположить, что в этом случае имеет место соотношение взаимности
для факторов силы, т. е. Ах —Аъ то должно быть
справедливым соотношение
Икаж = Икаж» A.ZJ)
С учетом этих предположений кинетический импеданс Zm0
на резонансной частоте выражается в виде
z ъ = (в*^икажТ)«
Лте0 2n(/2-/i)"i 2я(/2-/1)« '
где т — эквивалентная масса образца, равная половине его
полной массы1). Полагая N=nly имеем
и„ажГ = .*.„ V{h-fi)mZm. D.30)
4 у 2Я о iN
Обозначая полную массу через М, перепишем это выражение
в следующем виде:
4"\/2;
kw^(f*~~fi)^Zmu D'31)
г) Эквивалентная масса т определяется из равенства величины 1/2л">2о
кинетической энергии Т всего стержня. Таким образом, полагая v (x) =
= и0 sin (stx/l) в равенстве
V2/
1 [* 1
-Vii
мы получаем
1
т = ур?/#
Гл. 4. Магнитострикционные материалы
§ 4. МЕТОД ВЗАИМНОГО КИНЕТИЧЕСКОГО ИМПЕДАНСА
1. Принцип метода. Рассмотрим образец в виде тонкой полоски,
длина которой 21х), полная масса М и площадь поперечного
сечения St. Обмотки Nd и Nz равномерно намотаны каждая на
соответствующей половине образца, как показано на фиг. 4.7, а
посередине помещепа экранирующая пластина, чтобы исключить
взаимоиндукцию между обей-
Экранирующая пластина
21
1лтп
ф
^
гттт\
N7
ми обмотками. Если менять
частоту тока в обмотке Nd,
поддерживая его амплитуду
постоянной, то частоте меха-
Ф it г. 4.7. Принципиальная
слома метода взаимного
кинетического импеданса.
нического резонанса образца будет соответствовать
максимальное значение напряжения на обмотке Nz. Отношение
напряжения на обмотке Nz к току в обмотке Nd называется
взаимным кинетическим импедансом; его значение в точке резонанса ZmQ
определяет магнитострикционную постоянную Г. Этот метод был
предложен в 1942 г. [3] и усовершенствован в 1948 и 1954 гг. [4, 51;
в результате усовершенствований точность его стала настолько
высокой, что измерения этим методом могут сравниться с
измерениями на кольцевом образце. Здесь мы опишем этот метод
в усовершенствованном виде. Основные усовершенствования
состоят в использовании второй гармоники резонансных колебаний
образца и введении синусоидального распределения плотности
намотки катушек.
При возбуждении стержня на второй гармонике существуют
две пучности амплитуды переменной деформации: одна —
посередине катушки Nd, другая — посередине катушки Nz. Если
катушки намотаны равномерно, то фактор силы для возбуждающей силы
катушки Nd, приведенной к одному из торцов стержня, может
быть найден по формуле D.26) в виде
s±d — , лкаж1 •
D.32)
С другой стороны, фактор силы для индуцированного в обмотке
Nz напряжения может быть определен по формуле D.28) в виде
D.33)
л? — ^ лкажх .
х) Длина образца полагается равной 21 только в этом параграфе, так
как это удобно при выводе выражений, описывающих резонансные явления
на второй гармонике.
§ 4. Метод взаимного кинетического импеданса
97
Вызванная возбуждающей силой колебательная скорость конца
стержня равна
Z
При достаточно остром резонансе колебательная скорость другого
конца стержня будсч иметь такое же значение. Отсюда
напряжение ?2, индуцируемое в катушке Nz, будет равно
^ = Л2у--^7. D.34)
Z
Следовательно, взаимный кинетический импеданс
Zm = 4*---=-^-. D.35)
/ Z
Здесь z — механический импеданс всего стержня, один из концов
которого рассматривается как механический выход.
Вблизи частоты второй гармоники стержня, т. е. вблизи
частоты
/о.2 = ж|/|. D-36)
z выражается следующим образом:
* = г-Н-^(ю2--<2),
где эквивалентная масса гпе равна половине полной массы
стержня, т. е.
Используя соотношение для постоянной затухания г/2пге —
— л;(/г — /i)i которое можно переписать в виде
г = 2я/пв(/2-/1), D.38)
получаем следующее выражение для взаимного кинетического
импеданса при резонансе:
AdAy iVi^NdNzS\ ~ ~,
Zmo ^ —у1- -"= /22я/пе(/2 —/,) (х"а»«х»аж) Г2- D-39)
Нетрудно видеть, что это выражение, описывающее связь
обмоток Nd и Nz со стержнем, симметрично по отношению к
обмоткам Nd и Лг2. Следовательно, приведенные выше рассуждения
не изменятся, если возбуждать стержень с помощью обмотки Nz,
а индуцированное напряжение наблюдать на обмотке Nd. Поэто-
7-023!
98 Гл. 4. Магиитострикциоппые материалы
му можно считать, что
Икаж = Икаж*
При этом условии ив предыдущего равенства имеем
>Ci<
8я yNdNzS
¦V2nVU2-fi)meZl
то z
¦V{h-U)Mzm.
от/—лт—л7~ су ' \J'? л/ *•¦**" mv [Ч.ЧЮу
Взаимный кинетический импеданс | Zm0 I можно измерить
простым методом сравнения напряжений. Схема измерений
приведена на фиг. 4.8. Пропуская через катушку Nd ток / постоянной
Усилитель ,_
*Х2>
Фиг. 4.8. Метод прямого
отсчета взаимного
кинетического импеданса.
амплитуды, настраиваем его частоту па резонанс,
соответствующий максимуму напряжения Ег\ затем регулируем величипу
сопротивления Rs таким образом, чтобы показания выходного
прибора не менялись при переключении тумблера S. В результате
такой настройки и регулировки будет выполнено равенство
и, следовательно,
\RJ\ = \Et\,
Rs — | Zm01.
Таким образом, значение | Zm0 | можпо отсчитывать прямо
по сопротивлению Rs.
2. Измерение величины хкаж. Магнитное поле Ншет,
создаваемое током в обмотке Nd, равно
¦" 1Ш< Ш
4nN(,I
I
а переменная намагниченность распределена вдоль стержня
неравномерно из-за рассеяния магнитного потока. Предположим, что
ее распределение описывается функцией / (х), где расстояние х
отсчитывается вдоль стержня от его левого конца. Исходя из
предположения, что вклад распределения намагниченности / (х)
§ 4. Метод взаимного кинетического импеданса
99
в создание магнитострикционной возбуждающей силы
пропорционален распределению переменной деформации
iosin —,
рассмотрим пару сосредоточенных возбуждающих сил
о
действующих на левый конец и среднее поперечное сечение стержня
(где установлена экранирующая пластина). Сила F представляет
Фиг. 4.9. Система измерительных
катушек для измерителя магиито-
стрикциошюй постоянной,
состоящая из катушек с равномерным и
синусоидальным распределением
обмоток.
собой некое усреднение действия возбуждающих сил,
возникающих в каждом элементе стержня и входящих в расчет среднего
значения соответственно степени своего вклада.
Так как фактор силы равен A d = 2FII, то для него в этом
случае получится выражение
г
Hmwml/AnNd 2/
YSi \ J (^)sin-^ dx.
о
Сравни вая это выражение с выражением D.32), имеем
i
*каж = -~ -4г \ /(*) sin-^ dx. D.41}
Из этого выражения следует, что при измерении кажущейся
восприи мчивости хьаж необходимо иметь в виду среднее значение
намагниченности с учетом весового множителя, описываемого
функцией sin (лх/l), а не просто среднее значение функции J (x).
В дальнейшем необходимо проверить в экспериментах,
справедлива ли такая точка зрения. Для проведения измерений с
помощью описанной схемы непосредственного отсчета взаимного
кинетического импеданса поверх обмоток Nd и Nz должны быть
намотаны обмотки Nym и Лгх соответственно (фиг. 4.9). Обмотки N^
и N'K совершенно одинаковы по конструкции и числу витков.
Витки распределены в этих обмотках синусоидально. Если
стержень заторможен, то индуцированное в обмотке Лгх напряжение
{Ev)d пропорционально коэффициенту взаимоиндукции Мх между
катушками Nx и Nd. Если же стержень колеблется, то напряже-
100 l\i. 4. Mагнитоспгрикциониые материалы
ние, связанное с колебаниями, накладывается на напряжение,
соответствующее заторможенному стержню. Поскольку
напряжение, связанное с колебаниями, равно напряжению,
индуцированному в обмотке N'K на правой половине стержня, оно может
быть скомпенсировано при
последовательном и
противофазном включении
обмоток N'n и Ny,.
Следовательно, с помощью схемы,
Фи1. 4.10. Принципиальная
схема измерителя маглито-
стрикцпопной постоянной с
прямым отсчетом.
показанной на фиг. 4.10, можно непосредственно отсчитать
напряжение на заторможенном образце по сопротивлению Rs
следующим образом:
1 (?*),/
= И*
Если теперь (как показано пунктиром на фиг. 4.10) включить
катушки с коэффициентом взаимоиндукции М0, равным
коэффициенту взаимоиндукции М0 между обмотками Nd и N.A в случае,
когда в них нет образца, таким образом, чтобы вторичная обмотка
была в противофазс, то
(Ек), ji»{Mx-M,)I,
и, следовательно, можно определить величину, пропорциональную
переменной намагниченности в заторможенном образце. Катушка
Ny, имеет синусоидально распределенную обмотку, поэтому мы
определяем с ее помощью намагниченность в образце, имеющую
такое же распределение. Если катушки выбраны правильно,
так что поток сцепления в Лтх определяется средней намагничен-
|Дшсш D.41), ТО
/
(Ey)d = jtotnNxSi -щ- \ J (ос) sin ~^~ dx.
о
ностыо, равной хь
откуда
Rs^-
(Ey)d
i^nN^Si
- со f-^- | к
H mom* t*nNd
«I.
4y- \ J (x) sin ^- dx
D.42)
§ 4. Метод взаимного кинетического импеданса
101
и мы можем, таким образом, прямо отсчитывать величину | хкаж I
по сопротивлению Rs 1). Разделив величину | хкаж Г I*
определяемую выражением D.40), на величину | хкаж|, измеренную
указанным способом, можно получить истинное значение магнито-
стрикционной постоянной Г.
3, Измерение истинной восприимчивости х. Упомянутая выше
величина хиаж есть кажущаяся восприимчивость, специальным
образом определенная и введенная для того, чтобы получать
значение магнитострикционной постоянной Г, возможно более
близкое к истинному значению, при измерениях на стержневых
образцах. Отправляясь от этого измеренного значения, даже при
компенсации размагничивающего поля стержневого образца
истинную восприимчивость определить невозможно. Поэтому истинную
восприимчивость материала х следует измерять непосредственно
обычным методом. Описывать этот метод подробно здесь нет
необходимости, но для удобства читателей мы дадим его краткое
описание.
Если размагничивающий фактор, определяемый формой
стержневого образца, обозначить 91, то размагничивающее поле /jTd,~
создаваемое свободными магнитными полюсами на концах
стержня, будет равно
//,,=-9Ш.
Здесь М — среднее по длине значение намагниченности,
91—средний размагничивающий фактор. Соотношение между внешним
магнитным полем HBU0V1 и истинным магнитным полем в образце
#г>фф имеет вид
¦" офф — •" biioju « d " " вггсш JvX/i офф-
ТаКИМ образом, мы имеем
4^^=14-Их.
"офф
Поскольку М/Нтсш =¦ Хвнсш и М/НЭфф = к, предыдущее
соотношение можно переписать в следующем виде:
т-2—= 1-ИЛх. D.43)
Возьмем катушку, создающую магнитное поле Ншсш = Апп17
измерим хв„ош на Двух частотах, расположенных выше и ниже
резонансной частоты образца достаточно далеко от нее, чтобы
образец почти не колебался, и вычислим методом интерполяции
среднее значение хвнеш для резонансной частоты. С другой сторо-
]) Обмотка Лх подгоняется экспериментально.
102
Гл. 4. Магнитострикционпые материалы
ны, измеряя кажущуюся восприимчивость х0Внеш на частоте,
столь низкой, что влиянием вихревых токов можно пренебречь,
и компенсируя размагничивающее поле в соответствии с
приведенным выше соотношением, мы получаем истинную
восприимчивость х0.
Методика измерений состоит в следующем: берем соленоид,
N'
i
Л Усилитель
Г
ю
75Г
Ф и г. 4.11. Метод прямого отсчета восприимчивости, применимый в
измерителе мапштострпкцношюм постоянной.
длина которого равпа длине образца BZ), и измеряем его импеданс
в отсутствие образца
Затем помещаем образец внутрь катушки и вновь измеряем
импеданс
Используя эти измеренные величины, получаем
Хпнсш- {4nJSN* [Ld-Lo-r j^— j , D-44)
где N — полное число витков, S — площадь поперечного сечения
образца и 2/ — полная длина образца.
Второй вариант определения величины хВпеш основан на
измерении коэффициента взаимоиндукции. Наматывая на упомянутую
выше катушку вторичную обмотку из N' витков и обозпачая
коэффициент взаимоиндукции через М0 в отсутствие образца и через
Ms при помещении образца внутрь катушки, имеем
21 (Ms-M0). D.45)
Ивнеш —
DлJ NN'S
Это значение | хвнеш I можно определить непосредственно по
величине сопротивления Rs в схеме, показанной на фиг. 4.И. Если
сопротивление Rs подобрано так, что при переключениях тумбле-
§ 4. Метод взаимного кинетического импеданса
103
pa S значения напряжения на нем одинаковы, то мы имеем
Пё=\<*М\9
и, таким образом, из этих двух измерений с образцом и без
образца в катушке получаем
|ЛГв—ЛГ01 = -1-(Лв —Л.о). D.40)
Если имеется установка, показанная на фиг. 4.10, то катушку
взаимоиндукции М0, предназначенную для компенсации потока
рассеяния, следует изготовить так, чтобы она могла служить
и для этой цели. Эта установка удобна для практического
применения, так как с ее помощью можно измерять хвпсш и
соответственно х и к0, лишь перемещая образец из катушки Nd — Nz
в катушку взаимоиндукции.
В обоих случаях вторая катушка взаимоиндукции с
фиксированным значением М0 может быть полезна, так как это
позволяет определить | Ms | с помощью одного измерения при наличии
дополнительной дифференциальной схемы, основанной на
подобном принципе.
4. I Гример измерительной установки для практического
применения. На фиг. 4.12 показан прибор, позволяющий легко
и быстро измерять магиитострикциопную постоянную по методам,
<D и г. 4.12. Прибор для измерения
магнитострикционпой постоянной.
1 — гнездо для образца; 2 — катушка М0;
3 — Г-катушка; 4 — катушка Гельмгольца.
описанным в п. 1 и 2 данного параграфа, а также определять
восприимчивость по методу, описанному в п. 3.
Размеры образца соответствуют нашей стандартной полоске,
ширина которой 6 мм, а длина 150 мм. Постоянное поле подмаг-
ничивания создается в образце с помощью катушек
Гельмгольца 4. Размещая систему для измерения магнитострикционной
104
Гл. 4. Магнитострикционпые материалы
постоянной, т. е. систему катушек Nd, N*, N'K и Nz (Г-катушки)»
на оси катушки Гельмгольца и вставляя внутрь образец, можно
измерить величину Г.
Как указывалось выше, катушка М0 имеет такую же длину,
как образец. Вставляя в нее образец и перемещая устройство
с катушкой М0 так, чтобы ее ось совпадала с осью катушек
Гельмгольца, измеряем | x„„om I и |х0Вяош I-
Что касается техники изготовления катушки с
синусоидальным распределением витков, то с этой целью каркас катушки был
Efkk
м
МШ
52\50
ты
Ф и г. 4.13. Синусоидальное распределение числа витков в обмотке.
разделен на 15 равных секций и число витков в каждой секции
было таким, как показано на фиг. 4.13.
Результаты сравнения метода взаимного кинетического
импеданса с методом измерения собственного кинетического импеданса
на образцах, изготовленных из магнитострикционных материалов
нескольких типов в форме тонких полосок, а также результаты
сравнения этих методов с измерениями на кольцевых образцах,
имеющих те же характеристики, что и образцы в виде полосок,
свидетельствуют о том, что с помощью метода взаимного
кинетического импеданса можно измерять постоянные с ошибкой, не
превышающей 10%. Более точные результаты можно получить,
если сделать каркасы катушек Nd и N„ настолько тонкими,
насколько это возможно. Что же касается распределения их
витков, то, по-видимому, значение постоянной Г получается более
точным в том случае, когда обмотка немного плотнее в середине,
другими словами, распределение витков ближе к синусоидальному,
чем к однородному.
§ 5. ИЗМЕРЕНИЕ КИНЕТИЧЕСКОГО ИМПЕДАНСА
ДИФФЕРЕНЦИАЛЬНЫМ МЕТОДОМ [5, 7]
Некоторые магнитострикционные материалы обладают таким
большим удельным электрическим сопротивлением, что можно
почти полностью пренебречь влиянием на них вихревых токов;
в особенности это относится к ферритовым магнитострикционным
материалам. Константы таких материалов можно измерять с
достаточной точностью простым методом, описанным в этом параграфе.
Характерной особенностью материалов этого типа является
то, что для них импеданс заторможенного преобразователя можно
§ 5. Измерение кинетического импеданса
103
считать чисто реактивным, пропорциональным частоте. Это
означает также, что угол наклона круговой диаграммы кинетического
импеданса равен нулю. Поэтому, присоединяя дифференциально
катушку с переменным коэффициентом взаимоиндукции без
сердечника или с сердечником, обладающим очень малыми потерями,
к такой же вторичной обмотке, намотанной на измеряемом образце,
можно скомпенсировать реактивное сопротивление
заторможенного образца и выделить его кинетический импеданс из импеданса
свободного образца.
Ф и г. 4.14. Принципиальная схема дифференциального метода измерения
собственного кинетического импеданса и квадрантных частот.
В измерительной схеме, представленной на фиг. 4.14, S —
образец, Md — катушка с переменным коэффициентом
взаимоиндукции. Сопротивления R3i& R,t достаточно велики, чтобы
обеспечить режим постоянства тока при изменении импеданса образца.
При проведении измерений сначала взаимоиндукция Md
подгоняется таким образом, чтобы напряжение вторичной цепи
(в положении А переключателя 52) стало равным нулю на частоте,
достаточно удаленной от частоты механического резонанса
образца. Затем частота изменяется до тех пор, пока выходное
напряжение не достигнет максимума, что соответствует резонансной
частоте /0. Далее, устанавливая переключатель S^ в положение 1
и подбирая Rs так, чтобы напряжения при положениях А и В
переключателя S2 были равными, получают собственный
кинетический импеданс образца Zm0 в виде
ZmQ =- -щ Rs
D.47)
Так как квадрантные частоты /t и /2 представляют собой
частоты, при которых | Zm | становится равным | Zm0 |//2", для их
определения следует найти две частоты, на каждой из которых
наблюдаемое на приборе Е2 напряжение падает в |/2 раз. Для
удобства поиска соотношение сопротивлений делителя Д4, R2
106 Гл. 4. Магнитострикционные материалы
в схеме выбрано так, чтобы оно отвечало условию
D.48)
Д1 + Л2" уГ
а частота меняется до тех пор, пока напряжение при положении 2
переключателя St и при положении А переключателя S2 не станет
одинаковым. Это соответствует частоте /4 или /2.
Значения констант материала получаются из величин А/ =
= /г — /i и 2т0 путем вычислений, описанных в § 3 этой главы.
§ 6. РАЗМАГНИЧИВАЮЩИЙ ФАКТОР
Если поперечное сечение образца близко к квадратному, то
для него можно использовать размагничивающий фактор,
вычисленный для круглого стержня, площадь поперечного сечения
которого равна площади поперечного сечения образца.
Для образца в виде длипной полосы, поперечное сечение
которой представляет собой вытянутый прямоугольник, недавно
были опубликованы результаты исследований Сакаки и др. [6].
В этих исследованиях установлено, что размагничивающий
фактор Ш образца в виде тонкой пластины длиной I х), шириной 26
и толщиной t определяется выражением
M = 8nKt-jfln^-. D.49)
Значение К, входящее в это выражение, было получено
экспериментально в предположении, что К является функцией только
отношения Ъ/l. На основании этих результатов автор данной
книги с сотрудниками составил таблицу, удобную для
практического использования. Переписывая выражение D.49), имеем
-^-» = 16дхАГ D"J in т > D-5°)
где правая часть представляет собой функцию только b/L
В табл. 4.1 представлены результаты вычислений, полученные
с использованием значений К, приведенных Сакаки и др. [6].
Задаваясь отношениями размеров образца Ъ/l и 2b/t, можно
определить Ш непосредственно из таблицы.
Номограмма для компенсации размагничивающего поля.
Уравнение D.43) можно представить в виде
± = -i Ю. D.51)
*) В § 4 длина образца обозначалась 21; поэтому следует быть
внимательным при применении формул.
§ 7. Точный метод измерения разности квадрантных частот 107
Таблица 4.1
Размагничивающий фактор для образца в виде длинной полосы
Ъ/1
тъ/t
0,015
0,0465
0,02
0,0741
0,025
0,1073
0,03
0,1443
0,035
0,1841
0,04
0,2297
0,045
0,278
0,05
0,329
0,055
0,383
41
ть/i
0,00
0,437
0,065
0,495
0,07
0,553
0,075
0,613
0,08
0,073
0,085
0,733
0,09
0,795
0,095
0,850
0,10
0,918
Это уравнение используется для определения истинной
восприимчивости к по кажущейся восприимчивости хВНСш путем
исключения влияния размагничивающего поля. При этом удобно
использовать номограмму, проградуированную в обратных величинах,
(А)оо 100 5040 30 20 15
(В)со 3020107 5 4 3 2 15
I1UII11III ' ' '
10 9 8 7
1 0,9 0Х8 0,7
5
05
i 111 i i I i м i I I i t i iii i
(А) 0 ¦ 0,02 0.0k 0,06 0.06 0J
(Я) 0 0,1 0,2 0.3 04 0t5 0.6 01 0.8 0,9 1
I ¦ I ,1 . I .1 , 1 ¦ I ¦ l ¦ I ¦ I , I
•n
Ф и г. 4.15. Номограмма для исключения размагничивающего поля (по Кику-
чи и Симицу).
которая показана на фиг. 4.15. Снимая с помощью циркуля
значение 91 с нижней шкалы и смещая значение хвнеш IJa верхней
шкале влево на величину, равную раствору циркуля, можно
прочесть значение к на верхней шкале.
§ 7. ТОЧНЫЙ МЕТОД ИЗМЕРЕНИЯ РАЗНОСТИ
КВАДРАНТНЫХ ЧАСТОТ
При измерении разности квадрантных частот резопатора,
т. е. величины /2 — /i, могут возникнуть обусловленные
различными причинами ошибки в тех случаях, когда механическая
добротность резонатора Q велика. Чтобы уменьшить, насколько
возможно, эти ошибки и сократить время, необходимое для
проведения измерений, автор предложил метод, основанный на
использовании модулированного тока [7]. Метод состоит в следующем:
108
Гл. 4. Магиитострикционные материалы
измерительный ток ультразвуковой частоты модулируется
сигналом низкой частоты р с помощью модулятора, подавляющего
несущую частоту. Если частота р в процессе измерения стала
такой, что обусловленное колебаниями электрическое напряжение
уменьшилось до 1/|/~2, то это значение р связано с разностью
квадрантных частот соотношением
Рассмотрим основную идею этого метода. Выражение для
кинетического импеданса Zm можно переписать в виде
''то
1 ,.у<>(Л_ «о)
'Х \(О0 О) /
D.52)
где Zm0 — кинетический импеданс на резонансной частоте. Если
добротность Q достаточно велика, то на первой квадрантной
частоте /, имеем1)
и на второй квадрантной частоте /2
Модулированный ток при подавлении несущей равен
i = -у {cos (со0 — р) I + cos (<o0 -|- р) /}. D.53)
Если р выбрано так, что
1 1
Р = ~2 (<»2 — со,) = уА(о, D.54)
то при выполнении приближенного соотношения
УЧ^«^Ц^ D.55)
падение напряжения ет на кинетическом импедансе составляет
— ¦^{•~К-(т'-т)] + «-К+(т'-т)]}-
A56)
Из этого выражения следует, что амплитуда напряжения ет
составляет l/j/~2 от напряжения /Zm0, где / — ток несущей часто-
l) «Z 45°» и « — Z 45°»— форма записи, применяемая автором для
обозначения опережения и запаздывания по фазе на 45° величины Zm
относительно Zm0.— Прим. ред.
§ 7. Точный метод измерения разности квадрантных частот 109
ты, а огибающая напряжения подобна огибающей
модулированного тока г. Поскольку модулирующий сигнал частоты р создается
генератором низкой частоты, величина Дсо может быть отсчитана
о достаточной точностью.
Описанный метод основан на предположении, что среднее
арифметическое двух частот, расположенных по обе стороны
резонансного пика и соответствующих одинаковым значениям
импеданса, равно резонансной частоте; поэтому параметры такой
а 6
Ф ]i г. 4.16. Огибающие выходного напряжения в случае возбуждения пьезо-
актииного резонатора модулированным током при подавлении несущей.
а — точно при резонансе; б — при малом отклонении от резонанса.
резонансной кривой должны несколько отличаться от
параметров истинной резонансной кривой. Для истинной резонансной
кривой имеют место соотношения
tort 2
Вычисляя из этих соотношений (со, -|- со2)/2, получаем
Отсюда следует, что применение приближенного уравнения
D.55) вносит ошибку, не превышающую 1/800, если Q > 10.
Описанный способ может непосредственно применяться при
измерении разности квадрантных частот методом взаимного
кинетического импеданса или дифференциальным методом (см. выше).
Даже при использовании метода собственного кинетического
импеданса, если кинетический импеданс достаточно велик по
сравнению с импедансом заторможенного преобразователя, этот метод
может быть применен для повышения точности измерений и
значительной экономии времени. Кроме того, наблюдая огибающую
ет на осциллографе, можно отчетливо видеть, совпадает или не
совпадает несущая частота с резонансной частотой резонатора /0.
Если она совпадает, то благодаря симметричности резонансной
кривой токи боковых частот при подавленной несущей, т. е. токи
частот со0 — р и со0 + р, равны по величине и кривая ет выглядит
так, как показано на фиг. 4.16, а. Если же несущая частота откло-
Основные магнитострикционные материалы
Таблица 4J
25
—>(
Материал
Чистый
никель (мягкий;
отжиг в
водороде при
900° С)
Чистый никель
(средней
мягкости; отжиг
в водороде при
600° С)
Альфср [9]
Гиперко [10]
Внброкс I
Виброкс II
Химический
состав, %
Ni > 98
Ni>98
АНЗ
ост. Fe
СгО, 4-0,5
Со 34,5-35,5
ост. Fe
Ni-Cu-Co-фср-
рит [11]
Ni-Cu-Co-фер-
рит [11]
Статическая маг-
нито-
стрикция
насыщения
|(Д//Ов-Ю«
-40
-35
} 40
| 40
30
Подмагничи-
вающее поле
(индукция),
Э (Гс)
tfDC = 10-
20
остаточное
остаточное
Hdc = 6—-
10
BDC = 15 000
остаточное
20
HDC = lb-\
20
Магнито-
стрик-
цнонная
активность
х0Г2. 10-Ю
5-13
2,9
4
5
6
4
8
И
Коэффициент
механической
связи ft,
%
16-25
12
14
17-20
17
14
22
27
Эффективная
проницаемость
Но, ед.
СГСМ
60
(Ям = 15)
50
19
190
(tfDC = 10)
75
123
12
(HDC = 20)\
22
(ffDC = 20)
Удельное
электрическое
сопротивление а,
Ом-см
7.10-е
7-10-в
9,8.10-е
91.10-е
} 23-10-е
500-10в
500-10в
Скорость
звука с,
м/с
4750-4900
4750
4750
4300-5200
5080
5600
5400
ПЛОТНО CTi
р>
г /см
8,*
8,-
5,1
5,1
§ 9. Характеристики магнитострикционных колебаний в никеле 111
няется даже незначительно от частоты /0, то сигналы боковых
частот отличаются по амплитуде, и кривая напряжения ет
принимает вид, представленный на фиг. 4.16, б. Форма кривой очень
чувствительна к изменению частоты, и, следовательно, частоту /0,
можно определить с большой точностью.
§ 8. ОСНОВНЫЕ МАГНИТОСТРИКЦИОННЫЕ МАТЕРИАЛЫ
В табл. 4.2 представлены различные константы основных
магнитострикционных материалов; значения х0Г2, к и \х0
соответствуют либо оптимальному полю подмагничивания HDC
(оптимальной постоянной индукции BDC), либо состоянию остаточной
намагниченности материала.
Наряду с материалами, приведенными в таблице, в качестве
магнитострикционных материалов могут использоваться
изготавливаемые промышленностью для применения в магнитных
сердечниках пермаллой-40 и пермаллой-50 (гиперник [11]), для которых
и0Г2 = D — 6) -1010 при HDC = 7—15 Э. Что касается ферритов,
то некоторые из производимых фирмой «Филипс» феррокскубов
могут быть также использованы в качестве превосходных
магнитострикционных материалов [12].
§ 9. НЕКОТОРЫЕ СВЕДЕНИЯ О ХАРАКТЕРИСТИКАХ
МАГНИТОСТРИКЦИОННЫХ КОЛЕБАНИЙ В НИКЕЛЕ
1. Холодная обработка. Технически чистый листовой никель.
Для технически чистого листового никеля степень холодной
обработки Д, т. е. отношение
Р (толщина перед прокаткой) — (толщина поело прокатки) (, гоч
~~ (толщина перед прокаткой) ' \ • )
составляет обычно 8—13%. Но так как он подвергается еще
доводке поверхности, то даже среди листов одной и той же партии
степень обработки, вообще говоря, неодинакова. Если материал
отожжен достаточно хорошо, то обычно не возникает большого
разброса в значениях магнитострикционных постоянных. Однако
требования к некоторым параметрам магнитострикционных
вибраторов, таким, как их резонансные частоты, обычно гораздо строже,
и материал следует подбирать по значениям модуля упругости
(и соответственно скорости звука) очень тщательно, не допуская
даже малейших отклонений. При использовании различных
партий листов проблема становится еще более серьезной. В случае,
когда большой ультразвуковой излучатель набирается из
нескольких магнитострикционных вибраторов среднего размера,
их характеристики, и особенно резонансные частоты, должны
быть достаточно хорошо согласованы. В этом случае число партий
112 Гл. 4. Магнитострикционные материалы
листов материала весьма велико и обеспечить необходимую
точность подбора обычно почти не удается. При этом хороший
результат может быть достигнут, если все элементы вибраторов
перемешаны случайным образом перед началом процесса их сборки.
Характеристика листового никеля, подвергнутого обработке
с высоким R. На фиг. 4.17 показаны результаты [13] исследования
10 20 30 kO 0 10 20 30 ЬО 0 10 20 30 ЦО 0 10 20 30 kO 50
Hdc>3
Ф и г. 4.17. Изменение характеристик х0Г2 для листового никеля в
зависимости от степени холодной обработки.
Направление по отношению к прокатке: /. — паралцельно, О — под углом 45°, Т — пер-
иелндикулярно.
различных магиитострикционных характеристик никелевых
листов, подвергнутых холодной обработке, характеризуемой
значениями R = 20, 40, 60 и 80%, и последующему отжигу при
температуре 1000° С.
Никелевые листы с холодной обработкой R = 20% имеют
наибольшую анизотропию величины х0Г2. Фиг. 4.18 иллюстрирует
связь между резонансной частотой, т. е. скоростью звука, и
степенью обработки. Материалы, отожженные при 600° С, обладают
значительной остаточной анизотропией. Однако в материалах,
отожженных при температуре 1000° С, анизотропия почти исчезает
независимо от степени предшествующей холодной обработки.
2. Гистерезис магнитострикции. Результаты измерений
гистерезиса статической магнитострикции в чистом никеле
представлены на фиг. 4.19, а 114]. G помощью кривой намагничивания
образца, показанной на фиг. 4.19, б, кривая статической
магнитострикции преобразуется в кривую зависимости магнитострикции от
намагниченности М, представленную на фиг. 4.19, в; мы видим,
что для такой характеристики магнитострикции гистерезис
проявляется лишь в незначительной степени, гораздо меньшей, чем
на фиг. 4.19, а.
На фиг. 4.20, а представлены характеристики
магиитострикционных колебаний, измеренные на образце в виде длинной полосы
из чистого листового никеля. Зависимость магнитострикционной
«г
5 I
н 5300 \
1
€ 5200
%.5!00
1 5000\
1
Щ-4900
^700
§4600
W500
г- 18JD
L- /50
20 40 50 60 /00
(Г
5ШГ Щ
5300V
54001
5300\
5200
5/00
^5000
^4900
№0
то
то
то
- щ
17.5
- 17,0
*/5,5
- /5,0
15.5
L /5,0
i—°[—a
x^ I
0 20 40 50 60 WO
*>%
6
5200
5100
5000 kw
О WO
mo
U700
1*600
mo
17.0
^16,5\
he*
№P\
15,5\
¦— /5/?!
H#t
0 20 40 60 60 100
RX
6
Ф ifr. 4.18. Изменение скорости звука в листовом никеле в зависимости
от степени холодной обработки R.
а — непосредственно после прокатки; б —после отжига при 600° С; в — после отжига
при 1000° С. Направление по отношению к прокатке: L — параллельно, О — под углом
45° и Т — перпендикулярно. Я = 47 Э.
8-0231
114 Гл. 4. Магнитострикционные материалы
постоянной Г от постоянного поля Н, представленная на
фигуре 4.20, а, обнаруживает значительный гистерезис. Однако на
кривых зависимости Г от постоянной индукции MDC (фиг. 4.20, в),
45 -10 -5 0 5 10 15
1-го -ю'6
Ф и г. 4.19. Гистерезис статической магнитострикции в никеле.
полученных путем перестроения с помощью петли статического
намагничивания образца, показанной на фиг. 4.20, б, гистерезис
почти не проявляется.
Исходя из этих и многих других экспериментальных фактов,
мы предлагаем метод рассмотрения различных явлений,
основанный на следующей гипотезе [15]: «Величина магнитострикционной
постоянной однозначно определяется величиной постоянной
намагниченности MDC и не связана с гистерезисом зависимости MDc
§ 9. Характеристики магнитострикционных колебаний в никеле 115
от магнитного поля HDC» (первая гипотеза). Такой подход удобен
при расшифровке сложных явлений.
3. О потерях на магнитный гистерезис при
магнитострикционных колебаниях большой амплитуды. В режиме мощных
магнитострикционных колебаний очень большая переменная
механическая деформация в материале образца накладывается на очень
М
DC
-20 -10 10
30 40
400
1\ф
J ¦/ У* ' I I L
V l0\ W 2i
~100
200
300
400
20 30 UO
H,9
1 [•
in 1 У
W1 1 I 1 1 /
?/? $A
Ur
Inn ~»*T \ III
0 WO 200 300 400
в
Ф и г. 4.20. Гистерезис, проявляющийся в характеристиках магпитострик-
циониой постоянной Г.
а — зависимость Г от постоянного подмагничивающего поля; б — кривая статического
намагничивания образца; в — зависимость Г от постоянной намагниченности.
большую переменную намагниченность при наличии еще
постоянной намагниченности. Потери на магнитный и упругий гистерезис
в этом случае представляют важную техническую проблему.
Кикучи и Симицу [16] пришли к следующему выводу: при
магнитострикционных колебаниях потери на магнитный гистерезис
определяются только амплитудой переменной намагниченности
и не зависят от одновременно существующей механической дефор-
8*
116 Гл. 4. Магнитострикционные материалы
мации вибратора; потери на упругий гистерезис, с другой стороны,
определяются амплитудой механической деформации вибратора
и не зависят от переменной намагниченности.
Эти авторы измерили потери на магнитный гистерезис в никеле
для симметричной и песимметричной петель при различных
значениях упругого растягивающего напряжения. Измерения
показали, что потери на гистерезис довольно мало изменяются с
напряжением, в особенности для несимметричной петли в области
положительных значений поля подмагничивания, т. е. в рабочей
н,
if
щ
м
\
/ 0
ы,
А //
an
^*\
AM
Нг
\-~н
Фиг. 4.21. Обозначения, относящиеся к петлям гистерезиса.
— симметричная петля гистерезиса; б — несимметричная петля гистерезиса.
области почти всех магнитострикционных вибраторов. Измепепия
потерь не превышают 10—20%. Поэтому ист оснований возражать
против утверждения о том, что потери на магнитный гистерезис
при магнитострикционных колебаниях равны потерям в
отсутствие механических напряжений при той же амплитуде
намагниченности.
Ниже представлены экспериментальные результаты с
использованием для характеристик петель гистерезиса обозначений Мт,
ДМ, Нт и т. д., приведенных на фиг. 4.21. Растягивающие
напряжения в образце были равны 0, 2,37 и 4,38 кгс/мм2. На фиг. 4.22
представлены потери на гистерезис, соответствующие
симметричной петле. В использованием для построения графиков
логарифмическом масштабе точки, полученные для данного
растягивающего напряжения, ложатся на почти прямую линию, из чего
можно вывести эмпирическое соотношение Wh = Л^™-
На фиг. 4.23 представлены потери на гистерезис,
соответствующие несимметричной петле, для различных растягивающих
напряжений. Измерения проводились при разных значениях
§ 9. Характеристики магнит остр икционных колебаний в никеле 117
постоянного подмагничивающего поля HDc г) и при различной
амплитуде переменной намагниченности, изменяющейся с частотой
16 Гц. На фиг. 4.24 показана зависимость Мт от Нт, полученная
из экспериментально измеренных петель гистерезиса и
называемая реверсивной кривой намагничивания. На фиг. 4.25
представлена связь между величинами ДМ и М&, где Md — постоянная
намагниченность,
вычисляемая из следующего
соотношения:
здесь М2 — максимальное
мгновенное значение
намагниченности,
соответствующее значению Мт на
фиг. 4.24 при Нт =
= H2(=HDC+AH/2). На
фиг. 4.26 приведены
зависимости Wh от Md при
значениях параметра AM =
= 200, 250, 300, 350, 400,
Ф и г. 4.22. Потери на
магнитный гистерезис в никеле для
случая симметричной петли,
измеренные при разных
растягивающих напряжениях.
450 и 500 Гс; эти кривые получены в результате
преобразования кривых фиг. 4.23 и 4.25, где параметром была
величина HDC.
При практическом использовании магпитострикционных
колебаний в мощном ультразвуковом излучателе вибратор работает
только в области положительных значений намагниченности при
определенном постоянном подмагничивании; поэтому потери на
гистерезис могут рассматриваться только при AM/2^Md> т. е.
•в области, лежащей справа от пунктирных линий на фиг. 4.26.
В пределах этой области, как легко определить путем
сравнения кривых на фиг. 4.26, изменение потерь на гистерезис Wh
при изменении механического напряжения составляет не более
г) Значения магнитного поля соответствуют внешнему полю без
поправки на эффект размагничивания. Но для потерь на гистерезис это не играет
существенной роли.
юооо
6000
6000
то
2000
^
1000
600
600
цоо
300
I/
/
У/ Г
X / /
А*/
/
—&
\*=0
3k
Vkz
—\А
гфм2\
с/мм*\
60 60100
200 300 k00 600
Мт,Гс
5000 \
то
зооо
2000
<W00
d 600
500
UOQ
300
200
1 /
6=
г—
и - ¦¦¦
°-Нвс=3№ 3
*-HDC= 5,36 3
ь-Н„с=9М Э
а- НрсЧ9,д9 3
и
5000
АООО
3000
1000
^1000
Ц-вОО
^ 600
500
W
300
200
Л
'?
6 =
/
1/
W
V
7
2,37кгс/ммгН
к
/А
f
/
*-Н 90 = 2525 3
о- Нк = Щ07 Э
300
200
,/,«.« 9,95 3
ь-Нх = ЗЬ%Ь2Э
1'50 200 300 №500500 600
AM
150 200 300 Ш 500600 600
AM
150 200
300 № 500 6001
AM
Фиг. 4.23. Потери на магнитный гистерезис в никеле для случая
несимметричной петли, измеренные при разных растягивающих напряжениях,
в зависимости от переменной намагниченности ДМ".
Параметр кривых — подмагничивающее поле Hdc.
10 20 30 1*0 50 60 70 80 90
Фиг. 4.24. Кривые намагничивания для никеля при разных растягивающих
напряжениях, измеренные с помощью характериографа В — #.
300
200
i
100
' \1б=:
V
>w
*
\
: \
-
I ., 1 . 1
ZJ37k2C/mm4
\^-
Y*
\s>
\ cP
\*
V
4^4
V
4*
X
\
x
\
, 1 1 1
200 400 600
ЛМ.Гс
0 200 400 600
АМ,Гс
300
200
WO
6=4,38кгс/ммг\
: ^
1 1 1 I
= ^
^x^x
„_„_J r_,_l 1 _ \ J 1 J
0 200 kOO 600
AMfc
.25. Постоянная намагниченность М& измеренная при больших
значениях переменной намагниченности AM,
WO 200
100 200 300
Md
Фиг. 4.26. Потери на магнитный гистерезис в никеле для случая
несимметричной петли при различных растягивающих напряжениях в зависимости
от постоянной намагниченности М&.
Параметр — переменная намагниченность ДМ.
120 Гл. 4. Магнитострикционные материалы
10—20%. На этом основании можно почти достоверно утверждать,
что в случае магнитострикционных колебаний потери на
магнитный гистерезис при определенной амплитуде намагниченности
и определенном переменном напряжении равны потерям на
магнитный гистерезис при той же амплитуде намагниченности в
отсутствие переменных напряжений, если постоянная
намагниченность сохраняет заданное значение.
Найдем теперь эмпирическую формулу для потерь на гистерезис
в никеле при несимметричной петле, используя
модифицированную формулу Болла [17] *)
Wh = <a + *MP)(t%-y'\ D.5-J)
Определим величины г\ и а. Известно, что формула Болла
справедлива, как правило, в области относительно малых
амплитуд магнитной индукции. Если считать, что закон подобия в
ферромагнетизме имеет силу для никеля, то область применимости
формулы D.59) будет лежать в пределах ДМ/2 < 500/4 = 125 Гс,
т. е. AM < 250 Гс. Оставаясь в рамках такого рассмотрения,
значения п и а следует искать среди величин, соответствующих
о = 0 на фиг. 4.22 (потери на гистерезис для симметричной петли),
и величин, соответствующих AM = 200 на фиг. 4.26 (потери
для несимметричной петли); таким образом, г\ и а имеют
следующие значения:
Л -0,28, а-2,6.10. D.G0)
При этом эмпирическая формула для потерь на гистерезис в
никеле при несимметричной петле переписывается в виде
Wfc = @,28+2,6.10-Wi'9) (^)M эрг/см3-Гц. D.61)
Эта формула может применяться при инженерных расчетах
потерь на гистерезис в случае несимметричной петли, хотя она
пока не подтверждена экспериментально для области AM <C 200.
4. Эмпирическая формула для магнитострикции в никеле.
Эмпирическая формула для магнитострикции
поликристаллического никеля была выведена Кикучи [181 следующим образом.
Наблюдаемая в чистом никеле статическая характеристика
эффекта Джоуля представляется в логарифмических координатах почти
прямой линией, как показано на фиг. 4.27; эта характеристика
выражается эмпирической формулой
Ig^nlgM + lga, D.62)
*) Формула Болла была выведена для магнитной индукции В. Авторы
преобразовали ее к виду, зависящему от намагниченности М; необходимые
обозначения даны на фиг. 4.21.
§ 9. Характеристики магнитострикционных колебаний в никеле 121
ИЛИ
М
= аМпч
D.63)
2,246. В этой
хорошо согласующейся с экспериментом при п
формуле М — намагниченность.
На фиг. 4.28 представлена та же характеристика, полученная
динамическим методом [15] на образце чистого листового никеля
-юо\ мм I 1 | | | та юо
-10
-/
'
—\
ч
/
/
г
ш\\\
Ж
мо*Ц\\\
Ч I
10
100
м
1000
Mill Ач
/ \(
Wf
п
\
100
м
1000
Ф и г. 4.27. Зависимость
статической магиитострикцин никеля Al/l
от намагниченности М (по данным
Масияма).
Ф и г. 4.28. Результат графического
интегрирования магпитострикциоп-
иой характеристики для листового
никеля, теоретически
пропорциональной Al/l, основанный па дан-
пых экспериментального изучения
магнит-ост ришщошшх колебаний
динамическим методом (по данным
Кик учи).
толщиной 0,3 мм промышленного производства. По оси ординат
отложен результат графического интегрирования магнитострик-
ционной постоянной Г. Как уже было показано в гл. 3, § 2, п. 4,
результат интегрирования Г непосредственно связан со
статической магнитострикцией соотношением
м
Г
f=i^".
D.64)
где Е — модуль Юнга. На фиг. 4.28 точки хорошо ложатся на
прямую линию, и зависимость можно выразить эмпирической
122
Гл. 4. Магнитосщрикционпые материалы
формулой
lg ^TdM = nlgMDC + lgy,
D.65)
или
n-1
Т = пуМЪЪ
D.66)
В этой формуле AfDC —
где величина п положена равной 2,257.
постоянная намагниченность.
Эмпирические константы п в обоих случаях почти равны друг
другу, как видно из сравнения наклона прямых на фиг. 4.27
и 4.28. Следовательно, магнитострикциоппые характеристики
поликристаллического чистого никеля для статического и
динамического случаев могут быть выражены с помощью одной и той же
эмпирической константы.
Как видно из выражений D.63) и D.64), константы уиа
связаны соотношением
у = аЕ. D.67)
Следовательно, для определения величин у и. а можно
использовать результаты как статических, так и динамических измерений.
Значения констант приведены в табл. 4.3, где видно, что
результаты, полученные двумя методами, хорошо совпадают.
Таблица 4.3
Постоянные эмпирической формулы
для машитострикцни
Постоянная
п
а
У
Способ исследования магнитострикцпи
статический
,246
3,39.10-и
65,81)
динамический
2,257
3,32.10-и
64,5
1) Значение определено из соотношения D.67)
Е= 1,94.1012.
при
На фиг. 4.29 нанесены все данные, полученные при
исследовании различных образцов никеля, отличающихся происхождением
и характером обработки. Образцы были отобраны из большого
числа по-разному обработанных листов технически чистого
никеля. Прямая соответствует эмпирической формуле при п = 2,25
и у = 65; она удовлетворительно согласуется с
экспериментальными данными.
§ 9. Характеристики магнитострикционных колебаний в никеле 123
5. Выражения, описывающие магнитострпкционные
характеристики при механическом напряжении. Симицу и др. [19]
пытались найти выражения, описывающие характеристики
намагничивания и магнитострикции в случае, когда к магнитному
материалу приложено большое механическое напряжение, и провели
соответствующие эксперименты с никелем. Результаты показали,
хЮ5
10 —
V
г
V
10 50 100 500
Мм
Фиг. 4.29. Сравнение эмпирической формулы с экспериментально
определенными значениями Г для листового никеля различного происхождения,
подвергнутого разной термической обработке.
1 — отжиг при 900° С; 2 — отжиг при 900° С; 3 — отжиг при 900° С; 4 — закалка на
воздухе при 700° С; 5 — с остаточной деформацией сдвига; 6 — холодная прокатка с
обжатием на 60%.
что полученные выражения достаточно хорошо применимы в
широком интервале напряжений. Поскольку эти выражения не могут
быть получены чисто теоретическим путем, лучше рассматривать
их как эмпирические формулы. Однако они в достаточной степени
универсальны, так как в основу рассмотрения авторы положили
результаты доменной теории.
Е==[
F #/
Ь x2
Г A3
Ь П4
1 о 5
Г ®
| X
в
\
х\
ш
HV
г^гт
:.\r li
vS
ттт—jr
\\\ *
* с
\м
щ
yi—_
JJ, ,
*Ш_Ш
X
124
Гл. 4. Магнитострикционные материалы
В качестве предварительного условия при рассмотрении
предполагалось, что поликристаллические магнитные вещества почти
изотропны в отношении магнитострикции (Я10о = ^ш = hs) и при
прокатке или другой механической обработке они не приобретают
анизотропии магнитострикционных свойств. Предполагалось
также, что механическая деформация ? является однозначной
функцией намагниченности М и напряжения т, т. е. явление
гистерезиса не учитывалось ввиду его малости. Однако магнитный
гистерезис в зависимости намагниченности М от магнитного поля Н
учитывался. При упомянутых условиях, вводя постоянную
материала а, имеющую тот же знак, что и спонтанная стрикция ka,
и обладающую размерностью механического напряжения,
получаем
Г = -1 D.68)
Предположим, что вещество намагничивается от значения М = О
до намагниченности насыщения М8. Значение магнитострикции
насыщения ?s различно для разных значений напряжений
растяжения или сжатия т, действующих в образце. Эту связь можно
выразить соотношением
s/a&e 1 + У2е2Т
D.69)
а изменение статической магнитострикции ?' с изменением
намагниченности можно тогда определить с помощью этого
коэффициента к следующим образом:
Соотношения D.69) и D.70), хотя они и выражены через простые
функции, точно описывают следующие факты, предсказанные
доменной теорией или полученные экспериментально: деформация
|з в соответствии с D.69) становится равной к8 при Т = 0,
асимптотически стремится к нулю при увеличении Т в
положительном направлении и стремится к 3/2A,s ПРИ увеличении Т в
отрицательном направлении; деформация ?' в соответствии с D.70)
пропорциональна М2, когда Т имеет достаточно большое
отрицательное значение (т. е. к = 1); в случае когда М ->¦ Ms, ?'
асимптотически стремится к величине 3/2^s {(M/MsJ — A — к)} и
производная (д?)'/дМ)х становится независимой от т. Как будет
показано ниже, а в соотношении D.68) представляет собой
структурно чувствительную константу, обратно пропорциональную
восприимчивости, и, таким образом, равенство D.69) показывает,
что чем мягче в магнитном отношении материал, тем сильнее
изменяется & под действием напряжения т.
§ 9, Характеристики магнитострикционных колебаний в никеле 125
Сравнение соотношений D.69) и D.70) с немногими
имеющимися в настоящее время экспериментальными данными проведено
на фиг. 4.30 и 4.31. Использованные здесь экспериментальные
МЛ
ц
Ъф5
-0,5-
—Л 9К
vfiO
О"
J°§=
-2D
-1,0
0 ifl
T=X/6
W
3fl
Фиг. 4.30. Сравнение соотношения D.69) с экспериментальными данными:
зависимость магнитострикции насыщения ?? от механического напряжения т,
действующего в материале.
Сплошная линия — теоретическая кривая; точки — экспериментальные данные для
никеля при о = — 5,2 кгс/мм*.
0,2- Qfi 0,6
(M/MsJ
Ofi ifl
Фиг. 4.31. Сравнение соотношения D.70) с экспериментальными данными:
зависимость магнитострикции §' от намагниченности М.
По оси абсцисс отложена величина, пропорциональная М2.
данные для никеля получены Кирхнером [20]. В области, к
которой относятся рассматриваемые эксперименты, совпадение можно
считать хорошим.
126
Гл. 4. Магпитострикциопные материалы
При использовании полученных соотношений в качестве
формул, определяющих статическую магнитострикцию, можно
вывести различные характеристики, как это описано ниже.
Механическая деформация ? (М, т). В состоянии,
соответствующем намагниченности насыщения Ms, вращение магнитных
доменов отсутствует, и поэтому можно считать, что механическая
деформация ? линейно зависит от т, пока т не выходит за пределы
области упругости, т. е.
I
Ъм=м& = К + -д- т.
Вычитая 1's(t) из этого выражения, получаем деформацию (%)м=о>
а прибавляя затем ?'(М, т), находим ? как функцию Мит.
Таким образом, используя соотношения D.69) и D.70), мы имеем
Изменение кривой намагничивания. Из законов термодинамики
в применении к явлениям магиитострикции можно получить
соотношение
\дм)Т \дх)м
(см. гл. 3, § 2, п. 1). Используя это соотношение и
соотношения D.69) и D.70), мы можем выразить магнитострикционную
магнитодвижущую силу #', т. е.
о
в виде
я'-тШ1Е'('",пШ- <4-73>
где Et (х) — экспоненциальная интегральная функция. Это
соотношение представлено в виде графиков на фиг. 4.32.
Кривую намагничивания материала, в котором действуют
силы растяжения или сжатия, можно получить из характеристик
материала, не подверженного напряжению, при смещении их
на величину #', определяемую приведенным выше выражением.
Кривые сдвигаются в сторону более высокой проницаемости, если
величина Н' положительна, и в противоположную сторону, если
Н' отрицательна.
Если к материалу приложено постоянное напряжение,
характеризуемое положительным и большим значением Г, нарастание
кривой намагничивания идет очень круто. Определяя значение
§ 9. Характеристики магнитострикциопиых колебаний в никеле 127
постоянной материала сг по кривой, соответствующей Т = оо
на фиг. 4.32 в предположении, что нарастание этой кривой идет
почти перпендикулярно, получаем
где хт — максимальное значение восприимчивости. Из доменной
теории следует, что это значение а близко к значению внутреннего
напряжения *).
3 ? f 0 -1 -2 -3 -Ь -б
H/(bs/MsN
Ф л г. 4.32. Универсальные графики для определения магнитострикцион-
ной магнитодвижущей силы Я', построенные в соответствии с
соотношением D.73).
На фиг. 4.33 проведено сравнение значений, измеренных
на образцах из никеля (кружки), с расчетными кривыми
намагничивания (сплошные линии), полученными с помощью графиков
фиг. 4.32 и соотношения D.74). Мы видим, что наблюдается вполне
удовлетворительное совпадение. Пунктирными линиями показаны
кривые, вычисленные для случая действия сжимающих
напряжений.
G. Влияние окисной пленки на никеле. Во избежание влияния
вихревых токов пластины, из которых набирается сердечник
магнитострикционного вибратора, изолируются друг от друга
окисной пленкой, которая образуется на никелевых пластинах
2) По-видимому, автор делает такое заключение на основании сравнения
выражения D.74) с формулой для начальной восприимчивости, полученной
в предположении процесса вращения магнитных доменов при наличии
больших внутренних напряжений.— Прим. ред.
128 Гл. 4. Магнитострикционпые материалы
при обжиге их в воздухе. Если температура термической
обработки выбрана неправильно, то окисная пленка оказывает заметное
влияние как на характеристики намагничивания, так и на магни-
тострикционные характеристики никеля. Опишем особенности
этого явления и способы уменьшения его влияния, предложенные
Кикучи и Симицу [21].
Если никелевый образец, предварительно в достаточной
степени отожженный в атмосфере водорода, подвергается термической
Ф ifr. 4.33. Кривые намагничивания никеля прд1 разных растягивающих
или сжимающих напряжениях.
Сплошные и пунктирные линии — теоретические кривые, для которых Ms = 500 Гс,
Я. — —32-Ю-б, хт = 28 ед. СГСМ и о — —2,85 кгс/мм2; точки — экспериментальные
данные.
обработке при высокой температуре в воздухе для получения
окисной пленки, то его характеристики намагничивания и магни-
тострикции претерпевают следующие заметные изменения:
1) Наклон кривой намагничивания становится очень малым;
кривая приближается к характеристикам с постоянной
проницаемостью.
2) Коэрцитивная сила меняется незначительно; остаточная
намагниченпость заметно снижается.
3) Магнитострикционная постоянная Г становится прямо
пропорциональной постоянной намагниченности MDC, а значение Г,
соответствующее данному значению MDC, возрастает.
На фиг. 4.34 и 4.35 приведены примеры полученных
результатов; кривые А на обеих фигурах представляют собой
характеристики образца, предварительно отожженного в водороде;
кривые В — те же характеристики после термической обработки
§ 9. Характеристики магнитострикционных колебаний в никеле 129
образца, проведенной в воздухе при температуре 900°С в
течение 15 мин для получения окисной пленки.
Эти изменения характеристик очень похожи на изменения,
которые претерпевают характеристики никеля под действием
значительных растягивающих напряжений. Имея это в виду,
можно обсудить предполагаемый механизм, обусловливающий
Ф и г. 4.34. Изменение кривых Ф и г. 4.35. Изменение магни-
памагничивания, обусловленное тострикционной постоянной Г,
образованием окисной пленки на обусловленное образованием
никелевой пластине. окисной пленки на никелевой
пластине.
влияние на характеристики никеля термической обработки,
проводимой для получения окисной пленки. После термической
обработки в воздухе, при которой возникает окиспая пленка,
никелевый образец остывает до комнатной температуры. Если
считать, что при этом охлаждении из-за разности коэффициентов
теплового расширения окисной пленки и металла внутри никеля
возникают большие растягивающие усилия, то характеристики
после термообработки должны получиться такими, как у
материала, находящегося под воздействием напряжения. При удалении
окиспой пленки путем электролитической полировки
характеристики приобретают вид кривых С на фиг. 4.34 и 4.35, т. е.
практически восстанавливаются характеристики, имевшиеся до
окисления образца. Из этого факта следует, что появление характеристик
вида В не связано с ухудшением качества самого материала,
а определяется лишь упомянутыми выше растягивающими
усилиями.
На фиг. 4.36 представлены результаты экспериментального
определения магнитострикционной активности | хГ2 |; здесь
кривая 1 — характеристика, полученная после отжига образца в
водороде, кривые 2 и 3 — те же характеристики, полученпые после
проведения дополнительной термической обработки для
образования окисной пленки в течение 30 мин при температуре 700° С
9—0231
130
Гл. 4. М агнитострикциониые материалы
и в течение 15 мин при температуре 900° С соответственно.
Проведя еще и другие разнообразные эксперименты с различными
видами термической обработки, мы пришли к следующим
заключениям:
1. Если пластины из промышленного чистого никеля,
прошедшие холодную обработку с п « 30%, подвергнуть термической
обработке в воздухе при температуре 900° С продолжительностью
15 мин, то окисная пленка получается достаточно прочной; однако
Ф и г. 4.36. Зависимость величины хГ2
от подмаишчивающего поля HDC для
никелевых пластин, прошедших разную
термическую обработку.
1 — от^шг в водороде при 1000° С; 2 — после
образования окисной пленки при температуре
700° С, воздействующей в течение 30 мин;
3 — после образования пленки при 900° С
в течение 15 мин.
20 30
она оказывает значительное влияние на кривые намагничивания
и поэтому не позволяет получить удовлетворительные
характеристики никелевого магнитострикционного вибратора. Даже если
бы операции отжига и окисления проводились одновременно,
то мы могли бы получить лучшие характеристики, лишь снижая
температуру термической обработки до 700° С и увеличивая ее
время до 30 мин.
2. Если пластина сначала отжигается в водороде или в
вакууме, а затем для получения окисной пленки подвергается
термической обработке на воздухе при 700° С в течение 30 мин,
заметного ухудшения характеристик не наблюдается.
ЛИТЕРАТУРА
1. Fukushima К, et al., Prepared Paper for the 17th Joint Meeting of Institutes
of Electrical Engineers of Japan, № 39, Oct. 1940.
2. Kikuchi Y., Fukushima #., Journ. Inst. Telegraph and Telephone Eng.
Japan, 382 A942).
3. Fukushima K. et al.y Record of Electr. and Comm. Eng. Conversazione,
Tolioku Univ. A948) (па японском языке).
4. Kikuchi Y., Shimizu #., Sanpei Y., Record of Electr. and Comm. Eng.
Conversazione, Tohoku Univ. A954).
5. Shimizu #., Research for Ferrite Magnetostriction Vibrators, Doctor
Thesis, Tohoku Univ., 1961, p. 40 (на японском языке).
6. Sakaki Y. et aL, Prepared Paper for the 24th Joint Meeting of the Three
Institutes of Electrical Engineers of Japan, 1950.
7. Kikuchi Y., Shimizu #., Terashima ikf., Sci. Rep. Res. Inst., Tohoku
Univ., B7 № 1, 17 A955).
Литература
131
8. Masumoto H. et ah, Sci Rep. Res. Inst., Tohoku Univ., Al, № 4, 341
A949); A2, № 3, 413 A950).
9. Sussman #., Ehrlich S. L., Journ. Acoust. Soc. Amer., 22, 499 A950).
10. Kikuchi Y. et ah, Sci. Rep. Res. Inst., Tohoku Univ., B7, № 1, 1; № 3,
171 A955); Record of Electr. and Comm. Eng. Conversazione, Tohoku
Univ., 27, № i, 49 A958).
11. Nishina Y., Fukushima K.> Inoue //., Journ. Inst. Electr. Comm. Eng.
Japan, 24 A937) (на японском языке).
12. Van der Burgt 6*. M., Philips Techn. Rev., 18, № 10, 285 A956/57).
13. Kikuchi Y., Fukushima Jf., Journ. Inst. Electr. Eng. Japan, 62, № 647,
325 A942).
14. Mashiyama Y., Sci. Rep., Tohoku Univ., 26, 1 A937).
15. Kikuchi Y., Journ. Inst. Electr. Comm. Eng. Japan, № 229, 252 A942)
(на японском языке); Nippon Electr. Comm. Eng., № 30 A942).
16. Kikuchi Y., ShimizuH., Sci. Rep. Res. Inst., Tohoku Univ., Bl-2, № 3,
365 A951),
17. Spooner Т., Properties and Testing of Magnetic Material, New York, 1927,
p. 82.
18. Kikuchi Y., Sci. Rep. Res. Inst., Tohoku Univ., B4, № 2, 255 A953)
(первая публикация на японском языке в 1942 г.).
19. Kikuchi Y., Shimizu //., Record of Ultrasonic Professional Group, Inst.
Electr. Comm. Eng. of Japan, May 19, 1961 (на японском языке).
20. Kirchner Я., Ann. Phys., 27, 49 A936).
21. Kikuchi Y., Shimizu #., Record of 1954 Joint Meeeting of Three
Institutes of Electrical Engineers of Japan in Tokyo, № 204
A954); Ultrasonic Engineering Manual, Tokyo, 2nd ed., 1966, p. 301
(на японском языке).
9*
Глава 5
ПРИНЦИПЫ РАБОТЫ И МЕТОДЫ КОНСТРУИРОВАНИЯ
МАГНИТОСТРИКЦИОННЫХ ВИБРАТОРОВ
Е. Кипучи
В настоящее время магнитострикционные вщбраторы широко
применяются для излучения и приема ультразвуковых волн
в воде или в других средах. Они являются важнейшими составными
частями подводных сигнальных устройств, таких, как эхолоты,
рыбопоисковые приборы, гидролокаторы и т. п.
Фиг. 5.1. Прямоугольный маг- Фиг. 5.2. Кольцевой
питострикционпый вибратор. машитострикционный
вибратор.
Для эффективного излучения вибратором ультразвуковой
энергии должны быть выполнены следующие условия:
1) набор сердечника из тонких пластин металла, чтобы свести
к минимуму потери на вихревые токи (ферритовые сердечники
изготавливаются монолитными);
2) достаточно большая излучающая звук поверхность;
3) замкнутый магнитопровод для устранения эффекта
размагничивания;
4) достаточная механическая прочность по отношению к
требуемой амплитуде переменных механических напряжений.
Существует два типа вибраторов — вибраторы прямоугольной
и кольцевой формы, показанные на фиг, 5.1 и 5.2.
§ 1. Описание конструкции прямоугольного вибратора 133
§ 1. ОПИСАНИЕ КОНСТРУКЦИИ ПРЯМОУГОЛЬНОГО ВИБРАТОРА
Как показано на фиг. 5.1, прямоугольный вибратор состоит
из магнитострикционного сердечника и обмотки. Сердечник
набирается по толщине из тонких пластин, изготовленных из
магнитострикционного металла и склеенных между собой подходящим
связующим материалом. Витки обмотки проходят сквозь
отверстия, проштампованные в пластинах так, чтобы создавался
замкнутый магнитный поток.
Переменный ток соответствующей частоты, протекающий по
обмотке вместе с постоянным током подмагничивания> вызывает
продольные механические колебания в заданном направлении;
при этом звуковая энергия может излучаться обеими торцевыми
поверхностями.
Набор сердечника из тонких пластин способствует уменьшению
потерь на вихревые токи, и благодаря этому, а также применению
замкнутой магнитной системы, создается возможность
эффективного излучения ультразвуковой энергии, даже если размер
излучающей поверхности сравнительно велик.
1. Приблизительные размеры. При конструировании
вибратора могут быть заданы следующие основные факторы:
1) вид среды, в которую должен излучаться звук;
2) резонансная частота /0, на которой должен работать
вибратор;
3) направленность звукового излучения.
Как будет показано ниже, основная резонансная частота /0
зависит не только от общей длины сердечника, но также и от
размеров различных его частей — отверстий для обмотки,
стержней, накладок (фиг. 5.3). При этом, однако, если Xt — длина
продольной упругой волны в магнитострикционном материале, то для
длины вибратора I всегда выполняется условие I ^ Я,гУ2, где Xt =
= ^//0, а С| — скорость распространения волны. В обычных
конструкциях, как будет показано ниже, длина вибратора I
выражается формулой
I = @,4-0,8)^. E.1)
Для большинства металлических материалов скорость ct
составляет 4500—5000 м/с. Таким образом, примерная длина вибратора
определяется частотой /0.
Размеры излучающей звук поверхности определяются
условиями излучения звука. Как известно, направленность
прямоугольного поршня в бесконечном твердом экране выражается
формулой
d _ I sin x sin #1 /с; о\
134 Гл. 5. Принципы работы магнитострикционных вибраторов
где
# = ^cos(p, w=^cos9. E.3)
Здесь la и 1ь — размеры сторон излучающей поверхности, А,0 —
длина волны звука в среде, а <р и 0 — углы между рассматриваемым
направлением Р и осями X и Y соответственно (фиг. 5.4).
Фиг. 5.3. Отштампованная пластина для набора сердечника
прямоугольного вибратора.
I — длина; 1 — элемент в виде составного стержня; 2 —стержень; з — накладка, d —
отверстие для обмотки.
Угловая полуширина основного лепестка, т. е. угол между
максимумом и первым нулем характеристики направленности,
представлена на фиг. 5.4 в зависимости от размера стороны 1а.
Таким образом, размер стороны можно определить, исходя из
требуемой направленности. На фиг. 5.4 представлен также
коэффициент усиления по основному направлению для квадратного
поршня [2].
2. Выбор магиитострикционного материала. Материал для
вибратора должен обладать следующими важными
характеристиками:
1) большая магнитострикционная активность,
характеризуемая величиной хГ2 *);
2) по возможности малое поле подмагничивания;
3) низкая стоимость материала.
*) Здесь х — обратимая магнитная восприимчивость, а Г —
магнитострикционная константа материала; Г определяется как изменение
внутреннего механического напряжения, вызванное изменением намагниченности
на единицу (см. гл. 2).
§ 1. Описание конструкции прямоугольного вибратора 135
Для металлических материалов, кроме того, должны выполняться
следующие требования:
4) материал должен легко прокатываться в тонкие листы;
5) он должен обладать малыми потерями на вихревые токи
(если толщина листа задана, то потери на вихревые токи тем
меньше, чем меньше отношение магнитной проницаемости \i
к удельному электрическому сопротивлению а);
6) материал должен легко поддаваться обработке штамповкой.
\25
1
1 /
/
/
1 /
/
/
у
0 1
1 /
1 /
\ /
А
2
а
и
9о
Ч^
> 5
пина а
пана t
>
тронь
олны
7^
У 1
/ Ja
А
J б
•I
/0 2
90
V 60
1 70
^ 50
§-40
з
4*30
*20
10
Ф и г. 5.4. Направленность а и коэффициент усиления по основному
направлению g0 для прямоугольного вибратора.
Характеристики различных материалов, применяемых для
изготовления вибраторов, приведены в табл. 4.2.;
3. Определение толщины листов. Если частота /0 и материал
вибратора заданы, то, принимая во внимание допустимые потери
на вихревые токи, можно определить толщину пластин, из
которых набирается сердечник.
Кажущаяся комплексная магнитная проницаемость |Л
отличается от истинной комплексной магнитной проницаемости
материала |х0, измеренной на предельно низкой частоте, вследствие
скин-эффекта вихревых токов (гл. 3, § 2, п. 3). Отношение этих
величин равно
где
~ u, th та
X = -?г- — —~
Цо та
E.4)
136 Гл. 5. Принципы работы магнитострикционпых вибраторов
со = 2я/0 рад/с, сг— удельное сопротивление в единицах СГСМ,
2а — толщина листа в сантиметрах.
Фазовый угол магнитной проницаемости \i0 обусловлен
магнитным гистерезисом и зависит не только от подмагничивающего
поля, но и от амплитуды переменной намагниченности.
В предыдущей главе характеризующая скин-эффект величина
| % | уже была представлена в зависимости/ от | та \ на фиг. 4.3,
где обусловленный гистерезисом, фазовый угол 0 истинной
магнитной проницаемости jli0 был принят в качестве параметра. Фазовый
угол р величипы \х (не просто фазовый угол величины %, а сумма
фазовых углов величин \i0 и %) также показан на фиг. 4.3.
Электромеханический коэффициент полезного действия цето
на резонансной частоте магнитострикциониого вибратора
определяется следующим выражением:
1 подводимая электрическая мощность
г\ето мощность, преобразованная в механическую (включая
механические потери)
^ flrfo-|-lf,no|cos20' = Rd0 +Cos2Qf- E6)
i ZmO I I %т0 |
В этом выражении Zm0 — электрический кинетический импеданс
на резонаиспой частоте, 0' — фазовый угол кажущейся
восприимчивости х на этой частоте и Rd0 — активная часть
электрического импеданса заторможенного вибратора.
В большинстве случаев фазовый угол 0 кажущейся магнитной
проницаемости ^l приблизительно равен углу 0' кажущейся
восприимчивости х, поскольку jLi = 1 + 4ях. Основная часть
величины Rd0 обусловлена потерями в сердечнике, поэтому для
прямоугольного вибратора (фиг. 5.5)
^о^16я^5Мо|~|8.п9 E7)
И
SnNkS ~„ 2nd\2
1—.— 1
иГ cos -
lR ki-L. E.8)
ri + ra
Подробнее эти выражения будут рассмотрены в § 4.
Подставляя эти выражения в формулу E.6) и принимая
определенные предположения (о которых будет сказано ниже),
получаем приближенную формулу
— 7ZT- ci ^ а -f cos 20. E.9)
"Пето 4|Х0Г2||Х1 S
Принятые предположения сводятся к следующему: 1) длина
магнитной цепи lR составляет приблизительно 0,4—0,8 от А^/2, 2) коэф-
§ 1. Описание конструкции прямоугольного вибратора 137
фициент поперечного сечения к обычно также составляет 0,4—
0,8 и 3) cos Bnd/Xt) можно считать близким к единице.
Если вибратор предназначен для работы в воде, то удельное
механическое сопротивление акустического излучения в среде
rJS = 1,5 «Ю5 дин-с/см3, и, следовательно, можно принять
г\+га
2-105 дин-с/см3.
В обычных материалах скорость распространения упругих волн
ct составляет примерно 5-Ю5 см/с, и если мы примем х0Г2^
= 5.1010, то
-cos 26. E.10)
1 , а sin О
ж 1,6
"Пето 1
Из этого соотношения можно определить
верхний предел угла магнитных потерь 0,
при котором коэффициент полезного дей-
Ф и г. 5.5. Обозначения размеров
прямоугольного вибратора.
Si — hS, N — число витков обмотки на одном стержне.
к-
laid
I
ъ
А/(=4>
ствия преобразователя т)ет0 имеет значение выше некоторой
заданной величины. В то же время угол 0 определяется величипой та,
как видпо из выражения E.5) или на фиг. 4.3, и, следовательно,
можно рассчитать зависимость между заданным к. п. д.
преобразователя Цет.о и требуемым значением та. Такая зависимость
дана в табл. 5.1. (Угол потерь на гистерезис Qh здесь принят
равным нулю.)
Таблица 5.1
Зависимость между та и заданным коэффициентом
полезного действия преобразователя т|ет0
(хГ2=:5.101(\ 0Л = 0)
%т0» %
90
80
70
60
Угол магнитных
потерь 0, °
5
12
25,5
35
j та j, ед. СГСМ
0,5
0,8
1,3
1,65
На основании данных этой таблицы можно рассчитать
толщину пластин в зависимости от частоты. Эта зависимость для различ-
1.0
0,7
0,5
ОА
0,3
0.2
^ 0,1
1 0,07
0,05
0,0k
0,03
0,02
0,01
t
'<?
^0
9q
a
^
V-
щ
0,7
S
5
a
3
0,5
о.ь
0,3
0,2
0,1
0,07
0,05
3 0.М
?
0,03
0,02
5 7 10
20 30 4050 70 100
Частота Ъ,*Щ
200
0,01
L ПП
Гк1 Trf^
TnJ^v^
LJJ Р^ч^
^
Ч^?«
*0
*Ч
ч
?
Ч
5 7 10
200
Ф п г. 5.6. Зависимость толщины 2а
никелевых пластин, необходимой
для. получения заданного
электромеханического коэффициента
полезного действия Лето» 0Т частоты
ультразвука /0 (н0Г2 = 5 • 1010, 6Л —
= 0).
Фиг. 5.7.
териала
20 30 40 50 70 100
Частота Г0$кГц
Толщина пластин из ма-
альфер (к0Г2 = 5-1010,
0л-0).
5 7 10
200 300
20 30 50 70 100
Частота f0fnri(
Фиг. 5.8. Влияние угла гистерезнсиых потерь бд на требуемую
предельную толщину никелевых пластин.
Сплошные линии — 6д » 0, штрих-пунктирные линии — 8Л = 2°; штриховые линии —
0h = 4°; ИоГ* = 5-Ю10.
§ 2. Резонансная частота прямоугольного вибратора 139
ных материалов показана на фиг. 5.6 и 5.7, где в качестве
параметра выбран к. п. д. преобразователя. На фиг. 5.8 показано
влияние угла гистерезисных потерь 0^' на требуемую толщину
пластин из никеля.
§ 2. РЕЗОНАНСНАЯ ЧАСТОТА ПРЯМОУГОЛЬНОГО ВИБРАТОРА
Все точки торцевой поверхности прямоугольного вибратора
совершают колебания с одинаковой амплитудой и фазой и все
стержни колеблются синфазно на одной и той же моде продольных
колебаний. Следовательно, для анализа колебаний вибратора
достаточно рассмотреть продольные колебания одного элемента,
получающегося в результате разделения вибратора на
симметричные части и состоящего из одного стержня и части накладки
(фиг. 5.9, а).
1. Продольные колебания симметрично нагруженного
составного стержня. Если мы имеем в виду чисто продольный тип
колебаний, то выбранный элемент эквивалентен стержню с
неоднородным поперечным сечением (составному стержню): площадь
поперечного сечения стержня в средней части в к раз меньше, чем
на концах. При этом к называется коэффициентом поперечного
сечения. Если к обеим торцевым поверхностям приложена
одинаковая механическая нагрузка, то вибратор колеблется
симметрично, т. е. две торцевые поверхности А я А' имеют равные и
противоположно направленные скорости, и средняя плоскость 00'
становится узловой плоскостью.
В этом случае достаточно рассмотреть только правую половину
элемента (фиг. 5.9, б). Магнитный поток проходит вдоль стержня
и направляется по накладке в соседний элемент, поэтому магнито-
стрикционное напряжение распределено в области, находящейся
с внутренней стороны от плоскостей сечения РиР';
следовательно, РиР' являются местом приложения эквивалентной
возбуждающей силы.
Эквивалентная электрическая линия. Составной стержень,
изображенный на фиг. 5.9, б, можно считать эквивалентным стержню,
однородному по сечению (фиг. 5.9, в), но с меняющимися скачком
в плоскости*/? плотностью и упругостью. Распределение
амплитуды продольных колебаний в составном стержне аналогично
распределению тока в составной электрической. линии, показанной
на фиг. 5.9, г. Так как в сечении О стержня находится узловая
плоскость колебаний, эквивалентную электрическую линию в
точке О следует считать разомкнутой. Волновое сопротивление линии
на участке ОБ в к раз ниже, чем на участке АВ, в то время как
постоянная распространения остается одинаковой для всех
участков; электродвижущая сила F соответствует магнитострикцион-
Акустическая
нагрузка
Акустическая
нагрузка
Ф и г. 5.9. Эквивалентная электрическая линия для симметрично
нагруженного стержня.
§ 2. Резонансная частота прямоугольного вибратора 141
ной возбуждающей силе. Распределения тока и напряжения
в эквивалентной линии представляют соответственно
распределения скорости и произведения механического напряжения на
площадь сечения вибратора.
Механическое сопротивление для бегущей волны на
участке ВА равно z0 = pcS, а на участке OB kz0 = pckS, где S —
площадь поперечного сечения торца, рс — волновое
сопротивление материала, с — скорость распространения продольной
упругой волны, ар — плотность. Как известно, с = У 2?/р, где Е —
комплексный модуль упругости (модуль Юнга).
Очень удобно считать модуль упругости Е комплексной
величиной, чтобы учесть затухание, обусловленное внутренним
трением и другими потерями. При этом постоянная распространения
выражается формулой
Т = 7'<»-^4=- E.11)
VE/p
Колебательная скорость в различных точках. Как видно
из фиг. 5.9, г, для эквивалентной линии механический импеданс
в сечении В, рассматриваемый в направлении (9, равен
zB = ^th (?& + /-?). E.12)
Следовательно, импеданс в сечении Р в направлении О имеет
вид
Ip = ^lh [у(a — d) + arlh[A;th(vb + 7-|-)J}. E.13)
А импеданс в сечении Р в направлении А
Ip-I0th(vd + arth#)t E.14)
где za — механический импеданс акустической нагрузки на
торце Л.
Отсюда колебательная скорость в сечении Р
~ F
Zp + Zp
zo th (yd+ 8а) + & [y{a-d) + 8iT th ik th G^+/^)} 1 '
E.15)
где
9A-arth^-. E.16)
20
142 Гл. 5. Принципы работы магнитострикционных вибраторов
Поскольку Vp/ch (yd + QA) = ^л/ch QA, имеем
z0 ch(yd+QA)
X „ „ pZ 7 7Z ^TYV EЛ7>
th (Yd+0A) + th [ y (a-d)-j-ar th |&th ( yb+i -y) J J
Условие резонанса. Резонансная частота определяется как
частота, на которой скорость торца vA, определяемая
выражением E.17), принимает максимальное значение; из этого
выражения следует, что резонансная частота зависит не только от
размеров вибратора, например от а или Ъ (на фиг. 5.9, г), но и от
угла QA, который меняется с акустической нагрузкой.
В большинстве случаев QA « 0, поскольку z0 ^> za. Так,
например, если вибратор изготовлен из никеля или других
металлов, а средой, в которую излучается звуковая энергия, является
вода или какая-либо другая жидкость, то z0 = 40-105 S дин «с/см,
тогда как za составляет 1,5-105 S дин -с/см.
Полагая знаменатель в выражении E.17) равным нулю, а
также QA = 0, получаем условие резонанса в виде
thya-thyb + k = 0. E.18)
Это условие резонанса не зависит от расстояния d, на котором
расположена плоскость приложения эквивалентной силы.
2. Теория колебаний асимметрично нагруженного составного
стержня. Эквивалентная составная электрическая линия. Если
только один конец прямоугольного вибратора имеет акустическую
нагрузку, а другой остается свободным, т. е., например, помещен
в вакуум или в воздух, или же имеет соответствующий экран,
как это бывает при практических применениях, то эквивалентная
элементу такого вибратора составная электрическая линия имеет
вид, представленный на фиг. 5.10. На фиг. 5.10, а показан
составной стержень, являющийся элементом вибратора, а на
фигуре 5.10, б — эквивалентная ему линия. Механическое
сопротивление для бегущей волны на концевых участках А В или А В* равно
z0 = pcS, а в средней части В В' это сопротивление равно kz0 =
= pckS, где к, р, с и S обозначают те же величины, что и в
предыдущем разделе.
Если, пренебрегая потоком рассеяния, мы предположим, что
линии потока магнитной индукции проходят так, как показано
на фиг. 5.10, а, то магнитострикционное возбуждающее
напряжение можно считать распределенным однородно на участке
§ 2. Резонансная частота прямоугольного вибратора 143
РВОВ'Р'; такое состояние эквивалентно приложению двух равных
по величине и противоположно направленных внешних^возбуждаю-
щих сил ± F.
Предположим, что торец А' акустически не нагружен, а торец
А имеет акустическую нагрузку с импедансом 2а?тогда^эквива-
лентная электрическая линия должна быть KopoiKo замкнутой
в точке А\
г*—*"
1 V
/'"
ш
А' Р' 1
*о
А'
1
« b ф Ь ,
—. ф 1
^ чК Г
'
• i
\ ! 1
|**о
V \о
1
«* *4
1 1
у 1 L
я Г
*Ч 1
1 if I
3 Р А
^к
3 А
Ф и г. 5.10. Эквивалентная электрическая линия для асимметрично
нагруженного составного стержня.
С помощью теоремы Тевенина колебательную скорость в
точке А можно записать в виде
1)A = JA\ , . E.19)
где zA — внутренний механический импеданс вибратора, т. е.
импеданс в точке А на фиг. 5.10, б, рассматриваемый в направлении
внутрь вибратора, a FA0 — полная сила на торцевой
поверхности А, которая проявилась бы, если бы торцевая поверхность
была полностью заторможена (или za-+oo).
Вычислим сначала zA следующим образом:
IA=^0th J7a + arth[feth {2y& + arth (у1Ь^)}]} • E-20)
Положим zA = tiz0 и назовем ? коэффициентом эквивалентного
импеданса, тогда
2(k + thyathyb)(thya + kthyb)
С =
A + к th^a th yb) (fc + th7a th yb) + (th ya + к th yb) (k th ya + ihyb)
E.21)
144 Гл. 5. Принципы работы магнитострикционных вибраторов
Затем, чтобы найти связь между FA0 и Ь\ рассмотрим
специальный случай za = 0. В этом случае
и это выражение должно быть равно выражению E.17), в
котором величина вА положена равной нулю. Введем теперь
коэффициент трансформации силы W в виде }? = FA0/F. Тогда
^ = -
2(thYa + fcth yb) {chyd (fclhya-\-thyb) — sh yd(k+th ya th yb)}
(th ya 4- k th yb) (k th ya + th yb) + A + k th ya th yb) {k + th ya th yb)
E.22)
Используя коэффициент эквивалентного импеданса ? и
коэффициент трансформации силы *Р, определяемые формулами E.21)
и E.22) соответственно, выражение E.19) можно переписать
в виде
E.23)
vA = ^=——.
Физический смысл этого выражения
состоит в следующем. Однородно рас-
Фиг. 5.11. Эквивалентная электрическая
схема вибратора при асимметричной нагрузке.
пределенная на участке РР' магнитострикционная
возбуждающая сила эквивалентна сосредоточенной возбуждающей силе,
приложенной к торцевой поверхности Ли в "V раз большей,
чем эта магнитострикционная сила, а эквивалентный внутренний
импеданс для этой сосредоточенной силы равен ?z0- Таким
образом, эквивалентная электрическая схема имеет вид, показанный
на фиг. 5.11.
Частотные характеристики коэффициента эквивалентного
импеданса ? и коэффициента трансформации силы Y. На фиг. 5.12
и 5.13 представлены результаты расчета ^иТ для случая а = Ъ
ий = а/2 и при условии пренебрежения внутренними
механическими потерями. По оси абсцисс отложена безразмерная частота,
т. е. отношение частоты к основной резонансной частоте /00
однородного стержня той же длины. Как известно, основная
резонансная частота однородного стержня длиной 2 (а + Ъ) определяется
§ 3. Резонансная частота прямоугольного вибратора 14г
формулой
По кривым для к = 1 на фиг. 5.12 видно, что для стержня с
постоянным поперечным сечением резонансные частоты (т. е. частоты
Фиг. 5.12. Коэффициент эквивалентного импеданса ? при а == Ь и прг
пренебрежении механическими потерями.
на которых ? обращается в нуль) равны 0, 1./00, 2-/о0, 3-/00 и т. д
Из этих частот на резонансах, соответствующих четным
гармоникам, гР обращается в нуль; это означает, что четные гармоникг
не возбуждаются.
При уменьшении коэффициента поперечного сечения к
основная резонансная частота понижается, а частота третьей гармоникг
повышается. Резонансы четных гармоник остаются неизменными
но это происходит потому, что здесь рассматривается частные
случай а = Ь.
Условия резонанса. Чтобы в выражении E.21) было Z = О
должно выполняться условие
lh yaih'yb + k = 0 E.25
10-0231
146 Гл. 5. Принципы работы магнитострикционных вибраторов
ИЛИ
thya + kth yb = 0. E.26)
Уравнение E.25) определяет резонансы, соответствующие
нечетным гармоникам, а уравнение E.26) — четным. Для четных
гармоник, как легко можно показать путем подстановки E.26)
в выражение E.22), коэффициент трансформации силы Ф всегда
Ф н г. 5.13. Коэффициент преобразования силы Ч? при я— b, d = al'2 и при
пренебрежении внутренними потерями.
обращается в нуль. Поэтому на частотах четных гармоник сила,
действующая на торцевую поверхность, всегда равна нулю,
какова бы ни была величина к.
3. Соотношение между резонансной частотой и размерами
вибратора. Это соотношение мы сначала рассмотрим теоретически
и приведем графики, которые можно использовать для расчетов
при конструировании вибраторов. Затем мы приведем некоторые
экспериментальные подтверждения, полученные на образцах
различной формы.
§ 2. Резонансная частота прямоугольного вибратора 147
Теоретические значения. Условия резонанса для
прямоугольного вибратора выражены уравнениями E.25) и E.26). Но на
практике чаще всего используется основной резонанс, а механические
потери в материалах пренебрежимо малы, поэтому постоянную
распространения у можно считать чисто мнимой величиной, и
уравнение E.25) преобразовать к виду
ter*?tg2*-*, E.27)
где оH/2л: — основная резонансная частота, а с = УЕ/р —
скорость распространения продольной упругой волны в материале
вибратора.
При подстановке в уравнение E.27) значения к = 1
получается хорошо известный результат для однородного стержня:
резонансная частота однородного стержня <о0о определяется
выражением
Цро (<* + &)_ Л
с - 2 '
или
1 . 4/0о 4
Другими словами, при резонансе полная длина стержня 2 (а + Ъ)
равна половине длины звуковой волны.
Если к меньше единицы, то полная резонансная длина будет
меньше, чем половина длины волны. Чтобы представить эту
особенность количественно, введем коэффициенты а и р:
а = а-^-, Ь = Р^, E.28)
где
^о = ^-. E.29)
Затем найдем а и р из условия, что вибратор должен иметь
заданную резонансную частоту /0. Сначала перепишем
уравнение E.27), используя аир. Оно примет вид
tg^tg-^-fc. E.27')
Результат решения этого уравнения представлен на фиг. 5.14
и 5.15. На фиг. 5.14 для разных значений величины к,
рассматриваемой в качестве параметра, представлена зависимость а от р.
А на фиг. 5.15 показана связь между к и а + р, где последняя
величина представляет отношение полной длины вибратора
2 (а + Ь) к половине длины волны Х0/2. На фиг. 5.15 параметром
является отношение
а а толщина накладки
Р Ь половина высоты отверстия для обмотки
10*
148 Гл. 5. Принципы работы магнитострикционных вибраторов
Графики на фиг. 5.14 и 5.15 очень удобны для определения
размеров вибратора. Для заданного значения к полная длина 2 (а + Ь)
принимает минимальное значение при а = Ъ, т. е. при условии,
что высота отверстия для обмотки, отнесенная к полной длине,
О 0J 0,2 0,3 0/i 0,5 Ofi 0,7 Qfi 0,9 1,0
Фиг. 5.14. Универсальный график для определения резонансных размеров
вибратора.
равна V2> или 2Ы2{а + Ь) = х1г. Вблизи этой точки изменение
полной длины при небольшом отклонении отношения а/($ весьма
незначительно.
Сравнение рассчитанного значения резонансной частоты с
экспериментальными результатами. Экспериментальная проверка
приведенной выше теории была проведена [1] на образцах с
сердечниками из одной тонкой пластины, имевшими разную ширину
отверстия для обмотки и разные значения отношения а/(а + Р)
при фиксированном значении к.
В этих экспериментах было установлено, что теоретические
значения резонансной ^частоты хорошо согласуются с экспери-
§ 2. Резонансная частота прямоугольного вибратора 149
ментальными и что отклонения теоретических значений составляют:
1) менее 1,5% при к > 0,7 и а/(а + р) > 0,5 и 2) менее 1,3%
при к > 0,5 и а/(а + (J) ;> 0,6. Лишь для предельно малых
значений к или а/(а + Р) отклонения становятся сравнительно
большими.
0 0J 0,2 0,3 0,U 0,5 0,6 0J 0,8 0,9 1,0
Коэффициент поперечного сечения к
Фиг. 5.15. Зависимость полной длины прямоугольного вибратора от
коэффициента поперечного сечения к.
А) 06/Э = 1, ЬПЬ + а) = >/»'. В) а/Р = 2, >/., ЬЦЬ + о) = 2/3, 7з1 С) а/3 = 3, >/•,
b/(b -f а) = 8/|»!/< [Ь/(Ь -fa)-— отношение длины отверстия для обмотки к общей длине].
4. Практический способ расчета размеров вибраторов.
Поправочный коэффициент для длины. Как уже упоминалось выше,
теоретический расчет резонансной частоты дает ее значение
с ошибкой, не превышающей нескольких процентов. При
детальном изучении результатов экспериментов можно заметить, что
в большинстве случаев теоретический расчет имеет тенденцию
к завышению длины. И чем меньше к или чем меньше отношение
150 Гл. 5. Принципы работы магнитострикционных вибраторов
а/(а + (J), тем больше проявляется эта тенденци. На этом
основании было выдвинуто предположение, что основная причина
этого явления связана с колебаниями частей сердечника,
заштрихованных на фиг. 5.16. Хотя при теоретическом рассмотрении
1—ч
1 i
1 1
1 А
г Ч
__р—
""К
>
~т
г%
I
Фиг. 5.16. Пассивная масса*
эти части были приняты за участки обычной распределенной
линии, на самом деле они играют роль сосредоточенных
пассивных масс. Следовательно, для корректировки рассчитанной
теоретически длины достаточно
выбрать при
конструировании вибратора его
фактическую длину несколько
меньшей, чем рассчитанное
значение.
Выразим ширину
элемента в виде составного стержня
- . . как у%0/А и предположим,
2~h~ "НтГ-1 что чем больше значение у,
I h
Фиг. 5.17. I-образный (а) и
Сообразный (б) образцы с
обозначением размеров.
тем больше влияние пассивной массы. Тогда формула для длины
с учетом поправки будет иметь вид
* = A-ФТ)(« + Р)^-
E.30)
В этой формуле поправочный множитель ф зависит от А: и р/(а + |5).
В табл. 5.2 представлено несколько значений поправочного
множителя ф, полученных экспериментально на I-образном
образце с прямоугольным окном (фиг. 5.17). Если форма окна отлична
от прямоугольной, то этот поправочный множитель может
оказаться совершенно иным. А если вибратор имеет несколько окон,
§ 2. Резонансная частота прямоугольного вибратора 151
как это бывает на практике, то величина множителя меняется
незначительно.
Точное определение размеров путем измерений
экспериментальных образцов. Теоретическим путем с учетом поправки можно
рассчитать размеры вибратора на заданную частоту. Однако, если
Таблица 5.2
Поправочный множитель,
учитывающий пассивную массу
2/3
0,5
0,3
0,5
0,03-0,05
0,1
0,16
0,7
0,02-0,03
0,05-0,1
требуется особенно точное значение резонансной частоты, следует
предусмотреть проверку размеров путем испытаний
экспериментальных образцов. Для этого вначале изготавливают
несколько Ьобразных
сердечников, имеющих все
расчетные размеры, за
исключением длины, которая
немного отличается от
расчетной в большую или
меньшую сторону. После
Фиг. 5.18. Точное
определение длины вибратора 1-образ-
пой формы (с = 10 мм).
стандартной термообработки образцов измеряют их резонансные
частоты при рабочем значении подмагничивания, и
интерполяционным или графическим методом определяют длину, которая
точно соответствует требуемой резонансной частоте (фиг. 5.18).
Затем изготавливают несколько прямоугольных С-образных
образцов, имеющих определенную указанным способом длину
и расчетный размер окна, а ширину, несколько отличную от
расчетной, равной S/2. Путем резонансных измерений и интерполяции
(фиг. 5.19)* т. е. методом, аналогичным описанному выше,
определяют ширину, которая соответствуют той же заданной резо-
31000
Ч 300001 *~
61 62 63
Lmm
54 65
152 Гл. 5. Принципы работы магнитострикциоппых вибраторов
нансной частоте. Эта ширина будет шириной концевых частей
сердечника вибратора.
Окончательные размеры штампуемых из металлических листов
пластин для набора сердечника вибратора определяются путем
комбинации этих I-образных и С-образных элементов.
Доводка торцевой поверхности и ее влияние на резонансную
частоту. У вибраторов, изготовленных из тонких, склеенных
между собой пластин, торцевые поверхности в большинстве случаев
3@00
30500
«? 30000
29500
kfi 4,9 5,0 5J 5,2
С\нм
Фиг. 5.19. Определение ширины торцов вибратора С-образной формы
(J= 62,55 мм).
недостаточно гладки по технологическими причинам; иногда из-за
такой шероховатости излучающей звук поверхности к ней
прилипают в воде воздушные пузырьки, существенно снижающие
чувствительность вибратора. В таких случаях необходима
окончательная доводка торцевой поверхности, и этот процесс доводки
может одновременно служить для подгонки резонансной частоты.
С этой целью при штамповке пластин длина вибратора берется
с некоторым припуском, и после склейки пластип торцевая
поверхность подвергается постепенной механической обработке и
полировке с периодическим измерением частоты. Здесь следует
заметить, что изменение частоты при уменьшении длины может не
совпадать с ожидаемым на основании графика фиг. 5.18, так как
в начальной стадии доводки большая часть снимаемого материала
состоит из клея, скрепляющего пластины, а не из металла.
Указанным методом одновременно осуществляется точная
подгонка частоты и механическая доводка торцевой поверхности.
С достаточно высокой точностью заданную частоту можно получить
при разбиении операции механической обработки по крайней
мере на два этапа, между которыми проводится измерение
частоты. Вибраторы, изготовленные этим методом, обладают весьма
высокой степенью точности по частоте; включение такого метода
в технологический процесс изготовления вибраторов, к частоте
t=62,55 мм
Л I L_! L
§ 2. Резонансная частота прямоугольного вибратора 153-
которых предъявляются жесткие требования, следует всячески
рекомендовать, поскольку большинство сплавов промышленного
производства имеет довольно большой разброс значений модуля
упругости,
5. Резонансная частота вибраторов с выступами для
крепления. Колебания I-образного элемента с выступами для крепления
л \dtd. ь
S kS qkS kS
I i ! 1
Акустическая
нагрузка
Ф и г. 5.20. Эквивалентная электрическая линия прямоугольного
составного стержня с выступами для крепления.
могут быть представлены составной электрической линией,
показанной на фиг. 5.20. В случае прямоугольного С-образного
элемента с такими выступами эквивалентная электрическая линия
имеет такой же вид. Условие резонанса этих элементов
получается следующим образом. Продольный размер выступа для
крепления обозначим через 2d, а ширину элемента в области
выступа — через qkS и применим к дайной составной линии метод,
изложенный в п. 2 этого параграфа. Получаем уравнение,
аналогичное уравнению E.27'). В этом случае условие резонанса
имеет вид [3]
*(«т)
¦ к:
здесь
а
=4?. Р-4-
6 = 4
154 Гл. 5, Принципы работы магнитострикционных вибраторов
где Х0 — та же величина, что и в уравнении E.29). Выступы
для крепления всегда имеют малые размеры, и можно считать,
что в любом случае 6<0,3; обычно же 5<0,1. При этих
ограничениях справедливо приближенное соотношение
*««(•*) — (!*)•
Подставляя его в точное уравнение, приведенное выше, получаем
условие резонанса в виде
М«т)*{(Р+тв)тН-
Это уравнение имеет такой же вид, как уравнение для элемента
без крепежного выступа, т. е. уравнение E.27'), и поэтому
графики, приведенные в п. 4, можно использовать и в данном случае,
если заменить р на р + AЛ/) б. Экспериментальная проверка
подтвердила такую возможность.
6. Резонансные частоты паразитных колебаний по ширине.
Прямоугольный магнитострикционный вибратор применяется,
1 С\ W
е | w \с
\Т2
М,
к
а 6
Фиг» 5.21. Форма элементов прямоугольного вибратора.
как правило, на частоте механического резонанса колебаний
по длине, поэтому желательно, чтобы резонансные частоты
колебаний вибратора по ширине не находились слишком близко
к частоте его основного резонанса.
Форма прямоугольного вибратора обычно имеет вид,
показанный на фиг. 5.21, а или б, или же представляет собой тг-кратное
повторение изображенных элементов, соединенных боковыми
сторонами.
Условие резонанса для колебаний по ширине можно
рассчитать с помощью эквивалентной электрической линии,
аналогичной эквивалентной линии для колебаний по длине. С
учетом только нечетных гармбник получаются следующие резуль-
§ 2. Резонансная частота прямоугольного вибратора 155
таты [4]. Пусть
I
р-
Тогда условие резонанса для вибраторов обеих форм,
представленных на фиг. 5.21, имеет вид
1) при /г = 1
2) при п — 2
(ХЧ
3) при п — Ъ
XY = TTW> (D
(Х2 + У2)^1^Х2у2 + 2^^-ХУ--1=0, (II)
ХГ-rSr (П1)
1+р2
[это уравнение совпадает с уравнением (I)] или
3(Х2 + У2)-1~р22+р4Х2У2 + 4^-ЬР1хУ~1=0;
здесь
Все эти уравнения, представляющие условия резонанса, являются
симметричными как относительно X, так и относительно У, т. е.
как относительно с, так и относительно w. Поэтому можно
утверждать, что для вибратора с заданным значением р:
1) резонансные частоты колебаний по ширине одинаковы
для вибраторов, состоящих из элементов, изображенных на
фигуре 5.21;
2) при взаимной замене размеров с и w резонансные частоты
вибратора остаются неизменными.
На основании приведенных данных нельзя ожидать, что
небольшая подгонка отношения c/w для прямоугольных вибраторов
обычного вида приведет к существенному изменению резонансных
частот колебаний по ширине. А область регулирования величины
р обычно ограничена требованиями, предъявляемыми к
характеристикам основных колебаний по длине. Поэтому для того,
чтобы заметно сдвинуть резонансные частоты колебаний по
ширине, нужно увеличивать число окон для обмотки п. На фиг. 5.22
представлены графики приведенных выше уравнений (I) — (III),
определяющие условия резонанса для колебаний по ширине.
В табл. 5.3 приведены результаты расчетов и
экспериментальные данные для некоторых практически применяемых вибраторов.
В данном случае экспериментальные результаты согласуются
156 Гл. 5. Принципы работы магнитострикциоиных вибраторов
Таблица 5.3
Резонансные частоты колебаний по ширине
Число элементов вибратора п
Основная
резонансная частота, кГц
Резонансная частота
колебаний по ширине,
кГц
измеренная
вычисленная
измеренная
вычисленная
п=[
48,7
48,2
56,5
50,5
п-3
77,8
78,7
17,0; 66,7; 96,0
22,7; 66,4;
101,7
с расчетом не так хорошо, как в случае колебаний по длине.
Это объясняется тем, что рассмотрение при помощи одномерной
О 0.2 0,k Ofi 0,в 1,0
2,0 К !
О 0,05 OJ 0J5 0,2 0,25 0.3 1/3
а
О 0J 0,2 0,3 0,4 0,5
а
6
Ф и г. 5.22. Расчетные графики для резонансной частоты поперечной моды
колебаний.
а - сплошные линии соответствуют уравнению (III), штриховые — уравнению (I); б —
сплошные линии соответствуют уравнению (II).
передающей линии не вполне правомерно для колебаний по
ширине. Тем не менее полученные результаты можно использовать
§ 3. Эквивалентные элементы для прямоугольного вибратора 157
при расчетах вибраторов, чтобы дальше отодвинуть
нежелательный резонанс колебаний по ширине от основного резонанса по
длине, поскольку в этом случае не требуется такая точность
численных расчетов, которая важна для основного резонанса.
§ 3. ЭКВИВАЛЕНТНЫЕ ЭЛЕМЕНТЫ И ФАКТОР СИЛЫ
ДЛЯ ПРЯМОУГОЛЬНОГО ВИБРАТОРА
Почти во всех практических случаях вибраторы используются
на частотах, лежащих вблизи основного резонанса. Поэтому их
импеданс представляется очень просто в виде механической
последовательной цепочки, составленной из эквивалентных
элементов г, т, s. Перепишем выражение E.20) в виде
и рассчитаем каждый эквивалентный элемент указанным ниже
способом.
1. Соотношение между эквивалентной массой т и полной
массой М. Рассматривая величину dzA/dcd на основной резонанс*
ной частоте и пренебрегая внутренними механическими потерями,
получаем следующее соотношение:
• [?(Щ=г\? ij H-^)}L^=>'2m- E-32)
Подставляя в выражение E.21) y — j(o/c (где /Чо/с — чисто мнимая
величина) и дифференцируя по <о, а затем принимая во внимание
резонансное соотношение
*=tg—tg—,
получаем
Сравнивая этот результат с соотношением E.32), можно выразить
эквивалентную массу в виде
» = Sp<a + tt){i + ^i=*«in»i^}. E.34)
С другой стороны, полная масса вибратора определяется
выражением
М = 25р{а + Щ = (а + Щ ^ , E.35)
и если коэффициент эквивалентной массы от определить
соотношением
М
158 Гл. 5. Принципы работы магнитострикционпых вибраторов
ТО
СГт=1
Р 1-fcg
а + Arp А:
sin4
,ая
E.36)
Значения от для отдельных значений отношения а/р можно
представить в простом виде. Эти значения приведены в табл. 5.4.
Таблица 5.4
Коэффициент эквивалентной массы оп
а _ а
длина отверстия
полная длина
1
2
1/2
1/3
3
1/2
1/3
2/3
3/4
1/4
1 + Л
2
1 + /с
2 + &
2Аг+1
1 —Л2 3A + *) —g 1)
*+-
А(А+1/3) 5 + ЗЛ —g
1 — Л2 2/с2
г)
/с(/с + 3) 3A + /с) —д + 2/с2
1)<Z = V9 A -т-Л)*- 4ft.
Из выражения E.36) следует, что при /с = 1 всегда от = 1т
а это значит, что эквивалентная масса однородного стержня равна
половине его полной массы, что хорошо известно. Если 0 < к < 1,
то коэффициент от принимает значения между 1 и 2. Зависимость
между к и от для нескольких значений относительных высот
окна представлена на фиг. 5.23, а. Множитель (а + /ф) в
формуле E.35) называют коэффициентом полного веса, поскольку
величина р?Х0/2 выражает полный вес однородного стержня, имеющего
ту же резонансную частоту. Для удобства расчета вибраторов
значения этого коэффициента графически представлены на фиг.
5.23, б.
2. Эквивалентная упругость s. Поскольку резонансная угловая
частота со0 равна "j/Vm, эквивалентную упругость s можно
определить следующим образом:
Bnf0Jm--
4я2с2 М
Ц 2
^(* + Щот. E.37)
§ 3, Эквивалентные элементы для прямоугольного вибратора 159
В этом выражении (а + /ф) — коэффициент полного веса,
который представлен на фиг. 5.23, б, а <гт — коэффициент
эквивалентной массы, представленный на фиг. 5.23, а; таким образом,
эквивалентную упругость s легко вычислить. Эквивалентная
упругость однородного стержня, нагруженного с одной стороны^
2J0
ffi
ч>*
^N
^
>
,а=П d = 2R
4
^a =зп
ct
J*
2
s>C
<-±a
a\
—
0 OJ 0t2 0,3 0.4 0,5 0,6 0,7 0,8 09 10
h
Ф и г. 5.23. Коэффициент эквивалентной массы от (а) и коэффициент [пол
ного веса а + /ф (б).
равна n2ES/X0, поэтому (а + &P)crm называют коэффициентом
эквивалентной упругости составного стержня. Этот коэффициент
эквивалентной упругости представлен на фиг. 5.24.
3. Случай наличия внутренних механических потерь.
Поскольку внутренние потери не слишком велики, они мало влияют
на резонансную частоту; в зависимости от величины потерь
меняется только острота резонанса, как и при обычных
резонансных явлениях.
160 Гл. 5. Принципы работы магнитострикционных вибраторов
Внутренние механические потери можно считать следствием
вязкости х), присущей колеблющемуся материалу; они приводят
к наличию разности фаз между переменными напряжением и
деформацией и могут быть учтены с помощью комплексного модуля
Юнга
? = ЯA+/ц).
Первый член этого выражения Е равен отношению совпадающих
ло^фазе компонент напряжения и деформации; другими словами,
/э1/
0,8
5?
?0,4
0,2
0
/л
у
0.
/
1
у
0
2
0
3
<*^
0
Е
4
0
5
а
6
0.
7
0
б
0
9
к
Ф и г. 5.24. Коэффициент эквивалентной упругости
первый член соответствует чисто упругой компоненте. Второй член
-цЕ равен отношению сдвинутых по фазе на 90° компонент
напряжения и деформации и выражает затухание, или потери энергии.
На основании этих соображений мы определяем комплексную
упругость выражением
7=»»*<'+M>g(g + Jtp)gw. E.38)
АО
Для большинства магнитострикционных материалов т] < 0,01,
поэтому, не вводя существенной ошибки, практически можно
заменить | Е | на Е.
4. Эквивалентное сопротивление внутренних механических
потерь г. Предположим, что механическое сопротивление г в
выражении E.31) обусловлено в основном вязкими потерями в мате-
*) Внутренние потери включают также эффект затухания колебаний
вследствие вихревых токов, обусловленный магнитострикционным
взаимодействием.
§ 3, Эквивалентные элементы для прямоугольного вибратора 161
риале; тогда соотношение между г и комплексной упругостью s
можно представить в виде х)
J®
Таким^образом, из выражения E.38) получаем
r=w(a+/cP)<Tm'
или, поскольку ©А,0 = 2я У^/р,"
г = SL wcs (a + ft?) am. E.39)
5, Коэффициент трансформации силы Wq на основной
резонансной частоте. Принимая, что 7 — чисто мнимая величина,
и подставляя условие резонанса E.25) в выражение E.22),
получаем коэффициент трансформации силы на основной
резонансной частоте в виде
Т0 = 2 cos^, E.40)
' 6. Фактор силы А. Фактор силы А определяется как
возбуждающая сила на торцевой поверхности, отнесенная к току в
обмотке. Следовательно, с учетом выражения E.22)
4=^*2. E.41)
Величина F является внутренней возбуждающей* силой,
обусловленной магпитострикциеи; она равна величине ГМ, умноженной
на площадь поперечного сечения, т. е.
F^TMkS, E.42)
где М—переменная намагниченность в стержне, а Г —магнито-
стрикционная постоянная.
Если число витков обмотки, приходящееся на элемент
вибратора в виде составного стержня, равно N, а соответствующая
длина магиитопровода равна /д, то
где х—комплексная эффективная магнитная восприимчивость.
Подставляя эти величины в выражение E.41), получаем
А=тог %r cos -ц-ДИП/А- <5-43)
*) Фактически, кроме этих вязких потерь, имеются потери на трение,
обусловленные обмотками и крепежными устройствами, соприкасающимися
с вибратором.
11-0231
162 Гл. 5. Принципы работы магнитострикционных вибраторов
Пусть вибратор состоит из р элементов. Если все обмотки
соединены последовательно, то возбуждающая сила на его торцевой
поверхности будет в р раз больше, чем на торцевой поверхности
элемента, а ток остается при этом неизменным. Следовательно,
фактор силы для всего вибратора тоже в р раз больше, чем для
одного элемента. Обозначим общую площадь торцевой
поверхности вибратора через St; тогда St = pS. Следовательно, фактор
силы для вибратора можно выразить путем подстановки St вместо
S в выражение E.43). При этом необходимо помнить, что
значения N и lR соответствуют одному элементу, хотя St представляет
собой общую площадь торцевой поверхности вибратора.
§ 4. ИМПЕДАНСЫ ПРЯМОУГОЛЬНОГО ВИБРАТОРА
1. Импеданс заторможенного вибратора. Пусть вибратор
состоит из р элементов в виде составных стержней (фиг. 5.25). Величи-
-V~*""*y--*-у-*~у""*т^\
i
i
о®
®®
®®
®®
!
i
00
00
00
00
i
i
i
*
i
{
®®
®®
®@
®®
00
00
00
00
*A*dSiL_A А А J
Ф иг. 5.25. Распределение
магнитного потока в вибраторе
(# = 4, JV'= 8).
ны N и lR имеют тот же смысл, что и при расчете фактора силы
в предыдущем параграфе, т. е. обозначают число витков и длину
магнитопровода одного элемента соответственно.
Рассматривая импсдапс заторможенного вибратора, будем
считать, что обмотки его элементов соединены последовательно.
На фиг. 5.25 число N' витков, проходящих через одно окно,
равно 2N. Рассмотрим секцию, составленную из двух элементов
и обладающую полностью замкнутым магпитопроводом,
показанным на фиг. 5.26 пунктирными линиями. Эта секция, будучи
в магнитном отношении независимой от соседних секций,
представляет собой единичную индуктивную ячейку, индуктивность
которой V может быть вычислена по длине 2lR и площади
поперечного сечения магнитопровода kSy а именно
j, __ AnNf4Sy = 2 bnN4S^
lR
lR
где |х —эффективная комплексная магнитная проницаемость
материала.
Если вибратор состоит из р стержневых элементов, то в нем
имеется р/2 индуктивных ячеек, соединенных последовательно.
§ 4. Импедансы прямоугольного вибратора
163
Поэтому полная индуктивность вибратора
Zt=P.L'^^^, E.44)
где St = р5 — общая площадь торцевой поверхности вибратора,
а N и ZR —величины, характеризующие стержневой элемент.
Фиг. 5.26. Элемент вибратора, для
которого рассчитывается индуктивность
(N = 4, #'= 8).
Если сопротивление обмотки и индуктивность рассеяния
обозначить через Ri Ом и Li Г соответственно, то импеданс
заторможенного вибратора можно записать в виде
Zd = Rt + jnL, + ;ш 4-^?^. ю-» О»
E.45)
В большинстве случаев импеданс рассеяния Bi + jaLi много
меньше, чем третий член выражения E.45); поэтому
lR
E.46)
где (х — комплексная величина (\i = \лг — /ji"). Действительная
часть выражения E.46) представляет собой сопротивление
внутренних потерь сердечника.
2. Кинетический импеданс. Кинетический импеданс вибратора
выражается через фактор силы и механический импеданс (каждая
из этих величин определена выше). Таким образом,
2та = =Д=-Н(Г90м,
2А + %
E.47)
гдега = ra + jxa — импеданс акустического излучения (дин«с/см),
zA = г + j((x>m — s/co) — механический импеданс вибратора
(дин*с/см) и А — фактор силы вибратора (Ю-1 дин/А).
Если резонанс механического импеданса соответствует
простой моде колебаний, то годограф кинетического импеданса
вибратора Zm представляет собой окружность, диаметр которой равен
И*
164 Гл. 5. Принципы работы магнитострищионных вибраторов
резонансному кинетическому импедансу:
|2то| = -^-10-9Ом
г~Гга
(вектор Zm0 составляет с направлением оси R угол —20, где
G — фазовый угол магнитного потока, § 1, п. 3), г —
эквивалентное механическое сопротивление, обусловленное внутренними
потерями в вибраторе; пренебрегая трением в креплении и т. п.,
г можно выразить с помощью формулы E.39), а выражение для
сопротивления акустического излучения га дается ниже.
3. Импеданс акустического излучения. На фиг. 5.27
представлены активная и реактивная компоненты импеданса
акустического излучения для колеблющихся квадратной пластинки и
прямоугольной пластинки, одна из сторон которой вдвое больше другой.
О 05 1,0 1,5 2,0 2,5 3ft
Фиг. 5.27. Импеданс акустического излучения za = ra -j- jxa.
Сплошные линии — квадратный поршень; штриховые линии — прямоугольный поршень
Aа = 21^)', штрихпунктирные линии — круглый поршень (Я = Vs/n) в бесконечном
экране.
Там же для сравнения представлен импеданс излучения круглого
поршня в экране
~ „ Г, 2Jj{2kR) , :2K{BkR)-\
где ра — плотность среды, са — скорость распространения звука
в среде (см/с), к = соЛга = 2яАа, S — площадь колеблющегося
поршня, R — радиус круглого поршня.
§ 5. Влияние коэффициента к на к. п. д. преобразователя 165
Из данных фиг. 5.27 видно, что приблизительное значение
импеданса излучения для прямоугольного вибратора можно
получить путем расчета этой величины для эквивалентного круглого
поршня, имеющего ту же площадь излучения. Радиус
эквивалентного круглого поршня определяется формулой R = Y~S/n.
§ 5. ВЛИЯНИЕ КОЭФФИЦИЕНТА ПОПЕРЕЧНОГО СЕЧЕНИЯ к
НА КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ПРЕОБРАЗОВАТЕЛЯ
Электроакустический коэффициент полезного действия
преобразователя тH на резонансной частоте определяется формулой
J_ = Rd+\Zmo\cos2Q r+ra ,g ^g,
По \Zm0\ ra У • '
Этот коэффициент полезного действия можно разбить на два
множителя, первый из которых
п \Zmo\
Цето — — ~~ J —
#d + |Zmo|cos20
представляет собой отношение мощности, преобразованной в
механическую, к входной электрической мощности, а второй
Га
Лто —
Г + Га
выражает мсханоакустический коэффициент полезного действия,
т. е. отношение полезной акустической мощности к полной
механической мощности.
Рассмотрим влияние к на эти коэффициенты полезного
действия. Во-первых, сопротивление потерь в проводах обмотки Ru
составляющее часть сопротивления заторможенного вибратора,
уменьшается с увеличением площади отверстия для обмотки, так
как оно пропорционально сопротивлению постоянному току
•"ПОСТ*
*il = /запоет?
где /s — множитель, учитывающий влияние скин-эффекта. Если
о — удельное сопротивление материала обмотки, kw —
множитель, учитывающий пространственное расположение витков, с —
ширина элемента вибратора и lt — толщина вибратора, то
сопротивление постоянному току обмотки одного элемента имеет вид
д™«ма-*)с**- E-49)
Таким образом, сопротивление обмотки растет с увеличением к,
хотя при конструировании сердечника высота отверстия Ь
увеличивается в той же степени, что и к.
166 Гл. 5. Принципы работы магнитострикционных вибраторов
Далее, сопротивление, обусловленное потерями в сердечнике,
равно действительной части выражения E.46), т. е.
Rd__ 4«в*||Г|8Ш8 N^
а с учетом приближенного соотношения lR « (ее + Р) %0/2
Таким образом, Rat увеличивается с ростом к. Следовательно,
и величина R& в выражении E.48) с ростом к должна
увеличиваться. Кинетический импеданс вибратора Лто на основании
соотношений E.47) и E.43) может быть представлен в виде
E.51)
"т0 " г + га ~ (г + гв) (а -|- P)ttj/4
Из анализа этого выражения видно, что Zm0 также увеличивается
с ростом к. Однако в выражении E.48) Zm0 входит как в
числитель, так и в знаменатель. В большинстве случаев, за
исключением двух экстремальных по к (к ->• 0 и к ->- 1), Zm0 заметно
превышает Rd [1], поэтому можно считать, что г|0 почти не зависит
от к для вибраторов обычной конструкции при работе их в воде.
Некоторые численные характеристики можно получить из
универсальных графиков, приведенных в гл. 8.
§ 6. РАСПРЕДЕЛЕНИЕ КОЛЕБАТЕЛЬНОЙ СКОРОСТИ
ДЛЯ ПРЯМОУГОЛЬНОГО ВИБРАТОРА
1. Колебательные скорости в различных точках. Скорость
на акустическом выходе, в качестве которого рассматривается
торец А (х — 0), определяется выражением E.23) (фиг. 5.28), т. е.
vA-
?*0 + *а
А сила, действующая на акустическую среду в этой точке,
FA = uAza. E.52)
Скорость vx в некоторой точке, отстоящей на расстояние х от
торца, может быть рассчитана путем рассмотрения эквивалентной
электрической линии. Например, если 0 ^ х ^ d, то
vx = Va ch ух -f -^ sh ух = vA (ch yx -f z sh yx), E.53)
§ 6. Распределение колебательной скорости
167
где z — отпошение импеданса акустической нагрузки к волновому
сопротивлению вибратора, т. е.
20
E.54)
Далее, в точке P(x=d)
vp = vA (chyd+zshyd), E.55)
и сила, действующая с внутренней стороны на плоскость Р
Фиг. 5.28. Распределение
скорости в эквивалентной
электрической линии
прямоугольного вибратора.
A'U\P'
В'
2Ь
и
(слева от возбуждающей силы F), равна
Рр = vAzQ {z ch yd + sh yd} — F;
E.56)
при d <; x <; a
vx = vPchy(x — d)-\- ^~ sh у (х — d)
и т. д. В качестве конечного результата мы получаем
1) 0<*< d
ФУ
i/x — ^~~
(z + Qzo
(chyx~\-zshyx),
2) d < х < а
vx = ^ (ch ух + z sh ух) — — sh у (х — с?),
3) а < я < а + 2Ъ
4F
^ = -~^[{(l+k)chyx--(i--k)c\iyBa-x)} +
- + z{(l+k)shyz— A— /с) shy Bа — я)}] —
E.57)
2fcz,
=-{A + Л)8Ьу(ж —d) —A—A)shvBa-a;—d)},
168 Гл. 5. Принципы работы магнитострищионных вибраторов
4) а + 2&<*<2а + 2Ь — d
^F d , ~ 1+Athyathfb 1 , ~/0 . 0, ч ,
r -Jl + z /~~ ,;,,Ч ^ЬтBа + 2& —ж) +
(z + 0 zo ^ th уа -|- /с th yb J
(
+ -?-shyBa + 2b — x — d),
5) 2а4-26— d<z<2a + 2fc
vx =
L th va + /с th 76 J
(* + t)*o ^ thya + Zcthyb
Преобразуя эти выражения, можно выразить колебательную
скорость в любой точке через заданную скорость на торце vA
в виде
vx = и0иЛ + z 1/.2уЛ. E.58)
Здесь и0 дает распределение скорости для вибратора в свободном
состоянии, т. е. при za = 0, а иг характеризует поправку на
импеданс акустической нагрузки для односторонне нагруженного
вибратора при1га =Ш0.
2. Коэффициенты распределения скорости в отсутствие
нагрузки. Чтобы получить величину и0, введенную в формуле E.58),
положим z = 0 в выражениях E.57). Тогда получаем
1) 0<^<;d (между А и Р)
щ = ch ух,
2) d^x^a (между Р и В)
~ ~ 7 ~
u0 — chyx —sh^ (x — d),
3) a^.x^.a + 2b (между В и В')
~ 1 ~ ~,
ио^-2к W1 + *)сп 7^ — A — ^) ch у Bа — ж)} —
— "^-{(l+ft)shv(a:-d) —A —ft)shYBa-a;-d)}],
4) a + 2&<*<2a + 26 —d (между Вг и Р')
ц,= — chy Ba + 2b - х) + 4r shy Ba + 2b - x — d),
5) 2a + 26 —d<s<2a + 2& (между P' и А')
u0= — ch у Ba -{-2b — x).
E.59)
§ 6. Распределение колебательной скорости
169
Таким образом, распределение скорости для ненагруженного
вибратора выражается формулой
их0 = и<рА. E.60)
Распределение и0 симметрично относительно середины; это легко
показать: при замене i на Л' выражения E), D) и C) переходят
соответственно в A), B) и C).
3. Коэффициенты распределения компоненты скорости,
обусловленной нагрузкой. Выразим величину uz из формулы E.57),
учитывая определение E.58); тогда получим следующие
выражения:
1) 0<><;<2 (между Л и Р)
uz = sh ух,
2) d^x^a (между Р и В)
1
wz— sh yx — ""^~shy(;r-- d),
3) а^х^а + 2Ь (между В и В')
7/z==~2aT W* +^)snY-r— A —/c)sh7B« — x)} —
-~^{(l-\-k)shy(x--d)--(l-k)shyBa-x-d)}]7 E.61)
4) а + 2Ь<ж<2а + 2Ь—d (между В' и Р')
^ 1 4- k Ih гд th vfc i ~/o . or \ ,
mz = ^ !—^-ch yBa-\-2b — x) |-
th 7a + A: lhT&
+ 4-shYBa + 2b-*-d),
5) 2a + 26 —<*<х<2л + 2Ь (между P' и А')
~ 1+ A: th vath'vu 1 ~/0 ,07 \
wz = '— ¦—~— ch у Ba 4-2b — x).
thvo + Ajth-yb
4. Распределение скорости при резонансе. Теперь можно
вычислить распределение скорости при резонансе. Будем считать,
что вибратор не имеет внутренних потерь; при этом условии
у — чисто мнимая величина, а % =• 0, Т = 2 cos BяйА0) и
tg Bла/%0) tg Bnb/X0) = к. Следовательно, коэффициенты
распределения скорости в отсутствие нагрузки имеют вид
1) 0<я<а
u0 = cos—2^-, E.62)
170 Гл. 5. Принципы работы магнитострикционных вибраторов
2) а<я<а + 2&
1 Г/4 , ;ч 2я# ,, 7Ч 2л Bд—х) }
щ==1Ик {(*+*)cosi A —A)cos—^—^-j.
Коэффициенты распределения компоненты скорости,
обусловленной нагрузкой и2, имеют вид
1) 0<z<d
~ . . 2яа;
UZ = J Sin —г— ,
2) d<z<0
-" / / . 2л.г , . 2nd 2лх \
3) а<^<а + 2б
+ {(l+^)cos^^(l-/i:)cos2jTB;-3;)}tg^]y E.63)
4) а + 2Ь<я<2а + 2б — d
~ .Г J 1— ftg tgBnd/X) ]
Wz ~~ 7 L I tg BяаД) + к tg Bя5/Х) 2 J
X
2лBа-|-2& —я) . 1 . 2лBа-}-2Ь — х)
X cos * j- - + у Sin * ~ '-
5) 2a + 2b — d*Cz^C2a + 2b
~ _ . 1 —fe2 2яBа + 2Ь—х)
Uz~] tgBna/X) + ktgBnbfk) C0S A,
В этих случаях и0 — всегда действительная величина, a uz —
чисто мнимая величина. Поэтому если импеданс нагрузки za
чисто реактивный, то изменение распределения скорости,
обусловленное нагрузкой (т. е. zuzvA), находится в фазе с распределением
скорости для ненагруженного преобразователя и0иА; при этом
узловая плоскость несколько сдвигается от середины. А если
нагрузка чисто активная, то величина z uzvA (изменение скорости,
обусловленное нагрузкой) сдвинута по фазе на я/2 относительно
u0vA и, следовательно, узловая плоскость исчезает. Однако в
выражении E.58) можно, как правило, принять z <^ 1, z uzvA <C u0vA;
поэтому скорость в среднем сечении очень мала и распределение
скорости в основном определяется только членом u0vA. На
фиг. 5.29 в качестве примера представлены значения и0 и uz для
вибратора с параметрами а = b, d = а/2 и к = 0,6.
§ 7. Резонансная частота прямоугольного вибратора 171
Если импеданс акустической нагрузки za на одном торце
вибратора задан,
по формуле
то распределение
скорости можно
А' Рч В1 п
рассчитать
В Р А
. *а
J^ = Uo + j^-U2.
E.64) Г ^|jfc=^^b
l~h—T~—h-t-J
Значения щ и иг подставляются
в эту формулу из приведенных
выше графиков. Приведем в
качестве примера вычисления
колебательной скорости в середине
вибратора при нагрузке одного
его конца на воду. Обычно
za 1,5-105 1 .
z0 ""¦ 45-105 "0'
из графиков фиг. 5.29 получаем
{Uz]x=a+b = 0,65, [щ]х=а+Ъ = 0.
Фиг. 5.29. Коэффициенты
распределения скорости при к = 0,6, а = b
и d= a/2,
а — без нагрузки; б — с нагрузкой.
Отсюда для рассматриваемого случая
Г_^] =;0,023.
L VA Jx=a+b J
Другими словами, амплитуда скорости в среднем сечении
составляет только 2% амплитуды на торце.
§ 7. РЕЗОНАНСНАЯ ЧАСТОТА ПРЯМОУГОЛЬНОГО ВИБРАТОРА
БЕЗ ОДНОЙ НАКЛАДКИ
1. Вибраторы без одной накладки и вибраторы П-типа.
На практике часто используются прямоугольные вибраторы
особой формы, показанные на фиг. 5.30. Эти два вида вибраторов
были разработаны с целью использования для подмагничивания
постоянных магнитов, а также для облегчения процесса намотки.
Их можно назвать вибраторами без одной накладки, а вибратор,
показанный на фиг. 5.30, б, получил название «вибратор П-типа».
2. Графики резонансной частоты вибраторов без одной
накладки [5]. Аналогия между составной электрической линией и эле-
172 Гл. 5. Принципы работы магкитострикционных вибраторов
ментом в виде составного стержня может быть использована для
получения резонансной частоты и эквивалентной массы вибрато-
UJL>2dt
Ф и г. 5.30. Вибратор без одной накладки (а) и вибратор П-типа (б).
1 — поверхность, излучающая звук; 2 — обмотка; з — магнит (феррит бария).
JL
о
4-
ров рассматриваемого типа. Теоретический подход здесь точно
такой же, как и для симметричного прямоугольного вибратора,
описанного выше. Однако задачу
легко решить и другим способом.
Рассматривая элементарный
составной стержень, показанный на фиг.
5.31, на частоте его основного
резонанса продольных колебаний,
следует ожидать, что узловая плоскость
00 будет расположена вблизи
середины составного стержня. Длина его
I
I
—! I
¦т
т-Ц
I ь о ~H_g.
f<—— ¦ »4< >
Ф и г. 5.31. Элемент вибратора без одной
накладки в виде составного стержня.
левой части, т. е. части, расположенной влево от плоскости 00,
должна составлять четверть длины волны. Что же касается
правой части, то опа должна иметь такой же размер, как половина
симметричного прямоугольного вибратора, резонирующего на той
же частоте. Поэтому условие резонанса имеет вид
где
А 2я , 2л ,
ь'+4 = ь-
:А,
E.65)
§ 7. Резонансная частота прямоугольного вибратора 173
Однако в соотношение E.65) входит величина Ьг. Исключив
из него V с помощью последнего равенства, получим
tg— a.lg— (i-T)=fc.
Вводя далее обозначения
а 0 Ь — V4 /i , о &
а=Ж» P = ~V4-» или 1+Р = т?Г'
получаем
tg-f-a.tg-?-p = ft. E.66)
Таким образом, графики фиг, 5.14 могут быть использованы
также для нахождения связи между a, р и к в данном случае.
О 1,0 1У2 1,4 f,6 Ifi 2,0
1+А
Ф и г. 5.32. Универсальный график для определения резонансных размеров
вибратора без одной накладки.
В практике конструирования вибраторов часто встречаются
случаи, когда заданы значения как /с, так и alb при
дополнительных требованиях, налагаемых на расположение обмотки и размер
постоянного магнита. Поскольку
а а
то а и р могут быть найдены из соотношения
а = ±A + р). E.67)
Это соотношение соответствует семейству прямых линий с угловым
коэффициентом а/Ъ на координатной плоскости, где по оси абсцисс
отложена величина 1 + р, а по оси ординат — а. Следовательно,
как видно на фиг. 5.32, величины аир, удовлетворяющие урав-
174 Гл. 5. Принципы работы магнитострикционпых вибраторов
нению E.66) и уравнению E.67), можно определять путем
нахождения точки пересечения прямой, соответствующей
уравнению E.67), и кривой, перенесенной с фиг. 5.14 с преобразованием
первоначальной системы координат а, Р в систему координат а,
1 + р.
3. Эффективная масса вибратора без одной накладки.
Эффективная масса mFy связанная со скоростью излучающей
поверхности вибратора без одной накладки, получается на основании
5
4
3
2,5
г
О 0t2 Ofi Ofi Qfi ffi
k
Ф и г. 5.33. Коэффициспт эквивалентной массы для вибраторов без одной
иакладки.
ш
\\\\\л%
аналогии с длинной линией способом, описанным в § 3, п. 1.
Полная масса М вибратора без одпой накладки связана с mF
соотношением
_. м
VfiF — ®тпр ~~2~»
E.68)
которое получается путем введения коэффициента эффективной
массы а™, определяемого в виде
1
ат =14
,, , , j— sin2 а -9-
E.69)
На фиг. 5.33 этот коэффициент отр представлен в зависимости
от fc, а отношение а/b служит параметром (см. рассмотренный
выше случай, когда а определяется из условия резонанса при
заданных alb и к).
§ 8. Резонансная частота кольцевого вибратора 175
§ 8. РЕЗОНАНСНАЯ ЧАСТОТА КОЛЬЦЕВОГО ВИБРАТОРА
С ОТВЕРСТИЯМИ ДЛЯ ОБМОТКИ
1. Эквивалентная масса и эквивалентная упругость. Здесь
мы выведем'формулу для резонансной частоты-кольцевого
вибратора с отверстиями для обмотки, расположенными вблизи
внешней (или внутренней) цилиндрической поверхности [71. Разделим
Фиг. 5.34. Сердечник кольцевого вибратора
с отверстиями.
вибратор, изображенный на фиг. 5.34, на две концентрические
области А и В, как показано на фиг/ 5.35, и рассчитаем
эквивалентную массу и упругость для радиальных колебаний каждой
sA =-
Ф и г. 5.35. Часть кольцевого вибратора.
из областей. Как известно, эквивалентная масса тА и упругость
sA для кольца А определяются формулами
2nSAE
о с ' EЛ0)
тА = 2лг2оАр.
Для кольца В предположим, как обычно, что диаметр его велик
по сравнению с шириной а0. [Это предположение было
использовано и для получения выражений E.70).] Часть кольца В в
увеличенном масштабе показана на фиг. 5.36. Теперь необходимо
определить периферическое удлинение AZ, вызванное
механическим напряжением %t. Если тангенциальное напряжение на рас-
176 Гл. 5. Принципы работы магпитострикциопных вибраторов
стоянии х от центра отверстия для обмотки равно т^, то
и удлинение е элементарного отрезка длиной Д# на расстоянии х
(фиг. 5.36) определяется выражением
Следовательно, полное удлинение Д?2 между точками 2 и 3 равно
d/2 d/2
AZ2= j edx = 2 J Tt-^-±dx.
-d/2. 0
Теперь представим себе стержень однородного сечения, который
имеет такое же удлинение AZ2 на участке такой же длины d
Ф и г. 5.36. Часть кольцевого вибратора, соответствующая периферийной
области с отверстиями.
при действии той же силы rta0. Эквивалентная ширина а{ этого
однородного стержня определяется выражением
Из очевидного соотношения ах = а0 — 2 У (d/2J — x2 следует, что
d/2
«1 d J ttn_
d#
а0-2 V(d/2J —^2#
E.71)
Удлинение AZj между точками 1 ж 2 равно
§ 8. Резонансная частота кольцевого вибратора 177
где п — число отверстий для обмотки по окружности. Полное
удлинение 2л Дг по периферии кольца В определяется выражением
2nAr = n(Ali + M2)=^L tenn + nd (-J--l)}.
Упругость кольца В по отношению к всестороннему давлению,
действующему на его наружную цилиндрическую поверхность, равна
2лг^Ьрг
sB = -
Дг
SB, то
E.72)
и так как 2xta0b = 2гфрг и а0Ь ¦-
BяJ SBE
в~ 2яг4-| nd [(ao/ai) — !] *
где aQ/a} можно вычислить путем
интегрирования выражения E.71).
Обозначая я0/с? = /с;>1, получаем
а0 __ 2fc*
¦arctg
У А-1
¦1с.
«1 уа-2-1 —& у k-i г
E.73)
Зависимость отношения a0/#i от &
представлена на фиг. 5.37.
Ф и г. 5.37. График величины a0/at.
5
U
0
/
3
2
1
Z 3 4 56 610
Эффективная масса тв кольца В равна его полной массе,
и поэтому
Го П&
тв= j 2лг4а0 —
/г I 6р.
E.74)
2. Формула для резонансной частоты. Резонансная угловая
частота выражается формулой
cog= SA+SB . E.75)
Если в эту формулу подставить величины E.70), E.72) и E.74),
то можно вычислить частоту щ. Однако на практике
целесообразнее измерять скорость распространения упругих волн, а не Е
и р в отдельности. Поэтому для определения со0 удобна формула
со0 =
где с = Y^/p.
12-0231
Ар
r2a0 -|- г4д0 — n
l/2
E.76)
178 Гл. 5. Принципы работы магнитострикционных вибраторов
3. Влияние коэффициента заполнения объема. При
изготовлении вибратора тонкие металлические пластины склеивают друг
с другом. Вследствие наличия тонких слоев склеивающего
материала между пластинами коэффициент заполнения объема магни-
тострикционным материалом <jj всегда меньше единицы. Обычно
модуль Юнга склеивающего материала составляет менее V10
модуля Юнга магнитострикционного металла; поэтому влияние
склейки почти не сказывается на упругости, а проявляется в виде
дополнительной пассивной массы. Если плотность склеивающего
материала ps, то дополнительная масса ms, обусловленная
склейкой, равна
ms = (mA + mB)-^- (—— l) ;
в этом случае величина Ъ в формуле "E.74) должна
соответствовать толщине только магнитострикционного материала.
Резонансная угловая частота теперь равна
< = V !? + '1 - . E-77)
т. е. она несколько ниже, чем частота, полученная из формулы
E.75), а отношение этих частот равно
Полагая, например, ps/p? = 0,3 и аь = 0,9, получаем 0H/<ю'0 =
= 1,017. В большинстве других случаев этот эффект также можно
считать небольшим.
При выводе приведенных выше формул было сделано
несколько упрощающих предположений; тем не менее они остаются
в силе во всех случаях, за исключением тех, где требуется очень
высокая точность. В инженерных расчетах эти формулы вполне
применимы, поскольку погрешности за счет разброса свойств
самих материалов в несколько раз больше, чем погрешность
формул.
§ 9. ВЛИЯНИЕ КОЭФФИЦИЕНТА ЗАПОЛНЕНИЯ ОБЪЕМА
НА КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ
МАГНИТОСТРИКЦИОННОГО ВИБРАТОРА
Уменьшение коэффициента заполнения объема вибратора
активным материалом является причиной уменьшения фактора силы,
но при этом механические потери вибратора также уменьшаются,
если для склейки пластин использован должным образом
подобранный материал. Поэтому для увеличения коэффициента
полезного действия в некоторых случаях рекомендуется помещать
§ 10. Предельная механическая мощность
179
между магнитострикционными пластинами прокладки из
подходящего материала.
Путем расчета [1] было установлено, что если прокладки
неметаллические (например, тонкие пластинки стекла), то с
увеличением толщины промежуточных слоев внутренние
механические потери вибратора уменьшаются. Здесь прокладки являются
положительным фактором, за счет которого может быть увеличен
электроакустический коэффициент полезного действия вибратора.
С другой стороны, с увеличением количества промежуточного
материала уменьшается кинетический импеданс вибратора. Это
уже отрицательный фактор, уменьшающий коэффициент
полезного действия. Исходя из этого, было установлено, что для магни-
тострикционного вибратора, изготовленного из тонких
металлических пластин с неметаллическими прокладками, имеется
некоторое оптимальное количество промежуточного материала,
позволяющее получить максимальный электроакустический коэффициент
полезного действия.
§ 10. ПРЕДЕЛЬНАЯ МЕХАНИЧЕСКАЯ МОЩНОСТЬ
МАГНИТОСТРИКЦИОННЫХ ВИБРАТОРОВ
1. Введение. Поскольку магнитострикционные материалы
являются ферромагнетиками, обладающими по своей природе
магнитным насыщением, они издавна рассматриваются как
материалы, в которых при использовании их для возбуждения
механических колебаний должно проявляться магнитострикционное
насыщение. Однако теоретические основы этого явления не были
ясны вплоть до 1946 г., когда было проведено исследование [81
автором настоящей главы. Путем изучения ряда4 вопросов, прямо
или косвенно связанных с данной проблемой, автору с
сотрудниками удалось дать технический расчет предела выходной
механической мощности магнитострикционных вибраторов [9—18].
Хотя экспериментальное изучение проблемы проводилось
многими исследователями, теоретический подход такого рода,
насколько это известно автору, применялся лишь очень немногими.
В этом параграфе суммируются результаты проведенного автором
теоретического рассмотрения, которые могут быть использованы
при инженерных расчетах магнитострикционных вибраторов,
работающих с большой амплитудой колебаний. Теория
учитывает тот установленный количественно факт, что применение
магнитострикционных материалов в вибраторах ограничено одним
из следующих двух факторов в зависимости от механической или
акустической нагрузки: 1) магнитным насыщением,
ограничивающим значение магнитострикционной возбуждающей силы, или
2) механической усталостной прочностью, ограничивающей
переменное механическое напряжение в материалах.
12*
180 Гл. 5. Принципы работы магнитострикционных вибраторов
Явление насыщения магнитострикционного напряжения.
Статическая магыитострикция материала является функцией М,
и соответствующая кривая, представленная на фиг. 5.38,
обрывается при конечном значении М8, определяемом ферромагнитным
Ф иг. 5.38. Зависимость
статической магнитострикции от
намагниченности.
насыщением материала. Магиитострикционное возбуждающее
напряжение т' определяется как напряжение, равное некоторому
внешнему механическому напряжению, действующему на
вещество так, что при наличии добавочной намагниченности М
относительное изменение" размеров ?', соответствующее статической
магнитострикционной
характеристике, не происходит
(гл. 2). Из этого определения
следует
Ф и г. 5.39. Мапштострикцион-
ная возбуждающая сила для
синусоидальной переменной
намагниченности при наличии под-
магничивания.
где Е — модуль Юнга материала. Поскольку характеристика,
изображенная на фиг. 5.38, не является прямой линией,
переменные процессы, описываемые этим выражением, также нелинейны.
Для пояснения приведена фиг. 5.39, на которой синусоидальная
переменная намагниченность накладывается на постоянную
намагниченность ЧгМ&, достигая намагниченности насыщения
материала М8. Легко видеть, что форма возбуждающего напряжения %'
в некоторой степени искажена, и полный размах его колебаний
приблизительно равен
где ks — статическая магнитострикция насыщения, а именно
Xs = ?' (М8). Отсюда следует, что т' никогда не может быть
§ 10, Предельная механическая мощность
181
больше, чем %'s; другими словами, для магнитострикционного
возбуждающего напряжения также имеет место явление
насыщения.
Обозначая основную компоненту возбуждающего напряжения
через т\ (мгновенное максимальное значение), можно
приближенно считать
2т;«т'
при условии, что форма волны искажена не слишком сильпо.
Таким образом, т^, очевидно, достигает насыщения вблизи
области, где т' равно Тд.
Ф и г. 5.40. Кривые в системе координат напряжение — деформация,
характеризующие физическое состояние вещества при больших амплитудах
механического напряжения и намагниченности.
Магнитострикционные характеристики в системе координат
напряжение — деформация. Если частота возбуждающей силы
приближается к частоте механического резонанса
магнитострикционного образца, возбуждаемого таким большим напряжением, как
описанное выше, то в материале возникает переменная
деформация большой амплитуды. Для описания физического состояния
вещества, в котором одновременно существуют намагниченность
и деформация большой амплитуды, удобно использовать
предложенное автором настоящей главы [8] рассмотрение в системе
координат напряжение — деформация (фиг. 5.40). По оси абсцисс
откладывается механическое напряжение т, действующее на
вещество, а по оси ординат — деформация ?• Начало координат
соответствует состоянию М = 0 и т = 0.
В состоянии М — 0, когда на вещество действует извне
механическая сила, характеристика его представлена кривой 00,
182 Гл. 5. Принципы работы магнитострикционных вибраторов
проходящей через начало координат, В состоянии М = М6
характеристикой является кривая SS, пересекающая ось ординат
в точке Х8. Наклон каждой кривой обратно пропорционален
модулю Юнга в данном физическом состоянии. Для простоты,
пренебрегая Д?-эффектом, будем считать эти кривые прямыми [14, 15].
Тогда характеристики для различных промежуточных состояний
намагниченности изображаются штриховыми прямыми,
расположенными между 00 и SS почти параллельно друг другу.
Приближенная оценка максимальной отдаваемой мощности.
В процессе механических колебаний вещества при любых условиях
его физическое состояние в каждый момент времени можно
представить точкой, лежащей внутри области между кривыми 00
и SS. Однако если переменная механическая деформация
превышает определенное значение, то материал разрушается. А
многократно повторяющиеся деформации даже меньшей величины могут
привести к явлению механической усталости. Предел, до
достижения которого это явление не возникает, называется пределом
усталости и может быть выражен либо через напряжение, либо
через деформацию. Используя напряжение, обозначим предел
усталости через тт и на фиг. 5.40 положим его равным ±3. Тогда
пригодная для работы область физического состояния вещества
будет расположена внутри четырехугольника, показанного на
фиг. 5.40.
В случае, когда форма колебаний переменных величин не имеет
значения, максимальная механическая работа совершается маг-
нитострикционным вибратором при условии, что соответствующая
его физическому состоянию точка описывает на графике за цикл
траекторию, совпадающую с четырехугольником. За один цикл
такого обхода единичный объем материала затрачивает
механическую энергию, равную площади четырехугольника Ат. Считая
кривые почти прямыми линиями, можно выразить эту площадь
в виде
Лт « (Х8)т=0-2тт. E.79)
Основную компоненту этой отдаваемой энергии можно
приближенно оценить как равную площади Ami некоторого эллипса,
вписанного в четырехугольник (Д?-эффект не учитывается). Пло-
шадь эллипса
Л»1 = я(-^)т==отт, E.80)
или
Ат1 = ±Ат. E.81)
Если часть вибратора, которая работает при этих физических
условиях, имеет длину 1М и площадь поперечного сечения 5,
а рабочая частота равна /, то максимальная достижимая на
резонансной частоте мощность магнитострикционного вибратора Рт
§ 10. Предельная механическая мощность
183
выражается формулой
Pm = AmifSlM. E.82)
Однако теоретическая оценка 1М для реального вибратора
сложна, и методы такой оценки будут рассмотрены ниже.
Условия согласования нагрузки. Для получения от магнито-
стрикционного вибратора максимальной возможной механической
мощности механическая нагрузка его должна быть выбрана так,
чтобы переменное механическое напряжение в материале
достигало значения тш при
колебаниях переменной
намагниченности между нулем и М8
около заданной постоянной
намагниченности. Это
условие и определяет
согласование.
В большинстве
практических случаев условия меха-
Ф и г. 5.41. Эллипсы для
основной частоты, демонстрирующие
два случая несогласованной па-
грузки: 1 — недогрузка, 2 —
перегрузка.
нического нагружения не совпадают с условием согласования.
В этом смысле все нагрузки можно разделить на следующие два
типа:
1. Механическая нагрузка так незначительна, что переменное
напряжение достигает предела усталости раньше, чем переменная
намагниченность достигает насыщения. Этот случай мы назовем
случаем «недогрузки».
2. Механическая нагрузка так велика, что переменное
напряжение меньше, чем предел усталости, даже если переменная
намагниченность достигает насыщения. Этот случай мы определим
как случай «перегрузки».
В каждом из этих двух случаев площадь рабочего эллипса,
очевидно, меньше, чем Ami, как это видно на фиг. 5.41, и
соответственно предельная мощность, отдаваемая магнитострикцион-
ным вибратором, конечно, меньше, чем максимальная
предельная мощность, которую можно получить при условии
согласования механической нагрузки.
Изучение условий согласования для различных типов
ультразвуковых вибраторов, имеющих в настоящее время практическое
184 Гл. 5. Принципы работы магнитострикционных вибраторов
применение, показало, что почти все они работают при
недогрузке, если используются в газообразной или в жидкой среде. И чем
лучше материал, из которого они изготовлены, тем дальше от
условий согласования они работают, поскольку лучший материал
имеет большее значение Х8. С другой стороны, вибраторы,
изготовленные из более высококачественного материала, достигают
предельной отдаваемой мощности при меньших амплитудах
намагниченности. Кикучи и Симицу [11] рассмотрели все три случая
условий для нагрузки. Однако в данном параграфе ради простоты
теория будет изложена лишь для случая недогрузки.
2. Общая формула для~ предельной излучаемой мощности.
Механическое сопротивление нагрузки. Несмотря на то что при
большой амплитуде колебаний механическая нагрузка может
стать существенно нелинейной, острота резонанса вибратора
остается достаточно большой до тех пор, пока он работает в
условиях недогрузки. Поэтому колебательную скорость излучающей
поверхности можно считать почти синусоидальной. Обозначая
ее мгновенное максимальное значение через vu можно выразить
механическую мощность Р, отдаваемую вибратором в нагрузку,
в виде
P = \rav\, E.83)
где га — основная компонента механического сопротивления
нагрузки на излучающей поверхности; г0 можно определить
в виде
-^ = re + /se, E.84)
где Fx — результирующая сила на излучающей поверхности,
создаваемая основной компонентой искаженного звукового
давления.
Пусть, например, вибратор, работающий с большой
амплитудой в жидкости, вызывает кавитацию, которая приводит к
значительному искажению формы звукового давления на его
излучающей поверхности. При допустимом предположении, что скорость
vi почти синусоидальна, можно измерить величину га.
Общий вид характеристики га показан на фиг. 5.42, где
обобщены результаты многочисленных наблюдений [19] в различных
жидких средах для достаточно широкой области значений у1#
Величина га начинает резко падать при некоторой колебательной
скорости vtiJ соответствующей началу кавитации. При очень
большой колебательной скорости величина га понижается в
несколько раз по сравнению с ее значением в отсутствие кавитации.
§ 10. Предельная механическая мощность 185
Как известно, на излучающей поверхности, размеры которой
велики по сравнению с длиной волны излучаемого звука,
сопротивление излучения равно
где раса — акустическое волновое сопротивление среды.
Обозначая степень уменьшения сопротивления из-за кавитации через ?,
получаем выражение для га в виде
ra = ZpaCaS. E.85)
При оценке предельной излучаемой мощности в случае недогрузки
для надежности следует использовать минимальное значение ?
га0
Ф и г. 5.42. Амплитудная
зависимость механического сопротивления fe
нагрузки в жидкой среде. А
из ожидаемых в различных практических приложениях, поскольку
чем больше ч интенсивность кавитации, тем меньше нагрузка
вибратора, и, следовательно, вибратор достигает деформации,
соответствующей пределу усталости, при меньшей выходной
мощности.
Другими примерами, в которых существенное значение имеет
предельная мощность магнитострикционных вибраторов,
являются ультразвуковая механическая обработка и ультразвуковая
сварка, при которых к вибратору приклеивается твердый
концентратор для увеличения колебательной скорости на конце.
Так как вибратор почти во всех случаях таких применений также
недогружен, то с точки зрения предельной выходной мощности
для надежности при конструировании вибратора следует
использовать минимальное значение ожидаемого механического
импеданса на рабочем конце концентратора.
Зависимость между допустимой деформацией ?т и
колебательной скоростью iv Другим важным фактором, непосредственно
связанным с предельной мощностью, является переменная
деформация ?1? возникающая в вибраторе. К счастью, зависимость
между деформацией ?4 и колебательной скоростью vx на
излучающей поверхности линейна до тех пор, пока деформация не
превышает предела усталости материала, даже в случае больших
186 Гл. 5. Принципы работы магнитострикционных вибраторов
амплитуд. Поэтому никакого специального рассмотрения не
требуется даже для деформации большой амплитуды.
Если рассматривать вибратор в форме однородного стержня
длины Z, то при работе его на полуволновом резонансе точка
максимальной деформации расположена, как известно,* в середине
стержня. Зависимость между амплитудой деформации %i и
колебательной скоростью i>i на торцевой поверхности имеет вид
*>1 = ю0 —?ь
где со0 = 2я/0 — резонансная угловая частота. Если это
соотношение возвести в квадрат и использовать условие полуволнового
резонанса /=1/2С*7/о» to мы получим
v*-c&\n 2f0) '
где ct — скорость распространения продольных волн в материале
вибратора. Если рассматривается предельная мощность, то it
в этой формуле следует заменить деформацией ?т,
соответствующей пределу усталости. Значения ct и ?т определяются просто
из данных для материала вибратора. Выражение в круглых
скобках представляет собой коэффициент, учитывающий
влияние формы вибратора на его основную механическую резонансную
частоту. Хотя для однородного стержня множитель в круглых
скобках всегда равен единице, его называют фактором формы и
обычно обозначают через 5$5m(g>). При этом получаем
*! = с?Й$иИ. E-86)
Общее выражение для выходной мощности вибратора.
Подставляя полученную выше формулу в выражение E.83) и
используя выражение E.85) для га, получаем общее выражение для
выходной мощности в виде
^- = ^PaCoc!g$u@)). E.87)
Если в этом выражении ^ заменить допустимой предельной
деформацией ?т, то оно будет давать предельную выходную
мощность в случае недогрузки. Когда задается допустимое
предельное напряжение тт, можно использовать соотношение
^>т==~1Г* E.88)
В выражении для выходной мощности величина ?раса часто
является функцией i?i, как, например, в случае кавитации; в свою
очередь vt является функцией ?1# Поэтому необходимо сначала,
§ 10. Предельная механическая мощность
187
используя линейную зависимость, рассчитать vt для случая ?4 =
= ?т, а затем получить величину Р, используя значение ?,
соответствующее данному значению vi9
3. Фактор формы 5pw(o>) для выходной мощности. $pu(fc))
для прямоугольного вибратора. Множитель 5pw(co) входит в
выражение E.87) для выходной мощности вибратора. Можно также
рассматривать $pw(<o) как
множитель, определяемый на
основании соотношения E.86) в виде
5М©Н
v\
с\&
E.89)
Для прямоугольного магиито-
стрикционного вибратора,
показанного на фиг. 5.43, распреде-
Фиг. 5.43. Элемент в виде
составного стержня как часть обычного
прямоугольного магнитострикцион-
ного вибратора.
Le
—
~\
м ,
1 4
S kS
1 *
щ
1
и
~1
• - -1 1
- -,
н
1
ь АТаА
. .. J
х=-(а+Ь)
ление скорости их вдоль его длины рассмотрено в § 6 данной
главы; следовательно, можно получить и распределение
деформации %х- В случае малого сопротивления механической нагрузки
деформация ?4 в середине вибратора определяется выражением
g ^coagnag.) 5уо
При таком математическом рассмотрении используется следующее
резонансное условие [см. уравнение E.27)]:
7 * 2я 2л ,
E.91)
где А,—-длина упругой волны в материале вибратора, а к, а и Ъ
обозначены на фиг. 5.43. Выражение E.89) теперь можно
представить в виде
^co) = [fn<Wn2
л при подстановке
оно принимает вид
а-
№
_созBяаД)]
' Р~~А,/4
w«>=[S-J
E.93)
E.94)
188 Гл. 5. Принципы работы магнитострикционных вибраторов
Как следует из этого выражения, $ри(й>) представляет собой
коэффициент, определяемый величинами а и р, и поэтому его
значение инвариантно относительно резонансных частот
вибраторов, если их форма остается неизменной. Однако между а и р»
существует определенная зависимость, основанная на условии
резонанса E.91), где к является параметром. Поэтому
соотношения между рассматриваемыми величинами удобно представить
Ф и г. 5.44. Зависимость фактора формы для выходной мощности от
коэффициента поперечного сечения к для прямоугольных вибраторов различной
формы в случае недогрузки.
в виде графика, при построении которого приняты во внимание
резонансные условия. На фиг. 5.44 приведены примеры таких
графиков для зависимости *pu(w) от коэффициента поперечного
сечения к при разных значениях а/р.
$ра(со) для вибраторов без одной накладки. Элемент в виде
составного стержня для вибратора без одной накладки показан
на фиг. 5.45. Распределение колебательной скорости в нем справа
от узловой плоскости 00 имеет такой же вид, как и для
прямоугольного симметричного вибратора, рассмотренного выше. Ясно
также, что амплитуда деформации максимальна в узловой
плоскости. Следовательно, коэффициент 5ри(со), определяемый
скоростью на торце вибратора vt и деформацией в узловой плоскости
?1? будет таким же, как в случае прямоугольного вибратора.
Однако практически для вибраторов без одной накладки, размер V
которых, определяющий положение узловой плоскости 00, не
задается в явном виде, коэффициент $ри(о>) удобнее выражать
через толщину накладки а и длину стержневой части Ъ. На фиг. 5.46
представлены графики для случая такой более удобной трактовки.'
Эти графики получены путем перестроения графиков фиг. 5.44
с учетом резонансных условий для вибраторов без одной накладки
(§ 7, п. 2).
§ 10. Предельная механическая мощность
189
$ра(со) для кольцевых вибраторов. В кольцевом вибраторе,
совершающем радиальные колебания, радиальная скорость v^
и деформация по окружности ^ связаны соотношением
^-Ц-, • E.95)
где Я — средний радиус кольца, р —плотность материала
и Е — его модуль Юнга. Поскольку условие резонанса для этого
вибратора имеет вид
приведенное выше соотношение принимает вид
У1 = с&. E.96)
Следовательно, для 5Ри(со) получается равенство
$и(<»)^1. E.97)
Из этого равенства следует, что предельная выходная
механическая мощность кольцевого вибратора, работающего в условиях
г-
i
I
I
т
Jri
S ш
UJ
L i
r-ь-*
^^*
Фиг. 5.45. Составной
стержень как часть вибратора
без одной накладки.
Ф и г. 5.46. Фактор формы для
выходной мощности вибратора без одной
накладки в случае недогрузки.
недогрузки, не зависит от ширины кольца. Но для практически
применяемых кольцевых вибраторов, имеющих отверстия для
обмотки, расположенные вдоль окружности, это положение может
и не оправдываться.
4. Магнитные потери. Применение формул, используемых в
электротехнике. В случае колебаний большой амплитуды, когда
необходимо учитывать предельную механическую мощность, нет
190 Гл. 5. Принципы работы магнитострикционных вибраторов
смысла пользоваться формулами для малых амплитуд при
рассмотрении потерь на магнитный гистерезис и на вихревые токи.
Для потерь на гистерезис следует исходить из факта,
установленного автором настоящей работы и Симицу [10]: «Потери
на гистерезис при наложении переменной деформации большой
амплитуды не отличаются от потерь в отсутствие деформации».
В соответствии с этим можно применять формулу Болла (гл. 4*.
§ 9, п. 3)
wh=(y] + aM^) (^-I,6 эрг/см3/Гц. E.98)
Величины т) и а в этой формуле получаются путем измерений
обычными методами на образце магнитострикционного
материала, используемого для вибраторов г).
Что касается потерь на вихревые токи, то для них можно
пользоваться формулой
we = -^Bt7tfBmJ-1.0-16 Вт/см3, E.99)
обычной в электротехнических расчетах. Здесь 2t — толщина
листа, а — удельное сопротивление материала и Вт —
амплитуда магнитной индукции. Следует отметить, что при паложении
механической деформации удельное сопротивление а немного
изменяется и что оно немного меняется также при изменении
состояния намагниченности. Однако эти изменения обычно не
превышают нескольких процентов, поэтому удельное сопротивление
можно принять не отличающимся от номинального значения для
данного материала.
Форма колебаний возбуждающего напряжения и
намагниченности. При оценке амплитуды намагниченности ДМ/2 или
амплитуды магнитной индукции Вт полезно исходить из
следующего положения. Поскольку при решении задачи о магнитных потерях
в магнитострикционных вибраторах не требуется такой точности,,
как в других задачах, можно выбрать самый легкий путь
рассмотрения. Двойная амплитуда г' магнитострикционного
возбуждающего напряжения была определена выше как произведение модуля
Юнга Е на^ статическую магнитострикцию ?'(М),
соответствующую изменению намагниченности М, т. е.
Статические магнитострикционные характеристики для никеля
или для материалов типа никеля могут быть описаны с помощью
следующего выражения (гл. 4, § 9, п. 4):
Ь'(М) = Ь.(-щ)П. E.100а)
х) Для никеля можно принять т) = 0,28 и а = 2,6«Ю-6 (см. гл. 4, § 9У
п. 3). '
§ 10. Предельная механическая мощность
191
а т' можно выразить в виде1)
v' = EXs (-§-)", E.1006)
где п = 2 или 3, Я8 — статическая магнитострикция насыщения.
Теперь представим себе вибратор, работающий с допустимым
ограничением амплитуды деформации ?т в режиме недогрузки.
Если амплитуда переменной намагниченности равна М, а
соответствующая амплитуда основной компоненты магнитострикцион-
ного напряжения равна т'г то можно рассматривать два
предельных случая формы колебаний этих величин:
1. Вибратор возбуждается такой формой колебаний М, что
форма колебаний т' синусоидальна.
2. Вибратор возбуждается синусоидальной намагниченностью
с такой амплитудой М, что основная компонента т' в точности
равна 2т^.
Был проведен анализ Фурье для разных режимов подмаг-
ничивания с использованием выражения E.1006) при п — 2 или 3,
и было найдено, что различие между значениями М и tj в этих
двух случаях формы колебаний не превышает нескольких
процентов. Поэтому для упрощения вычислений в дальнейшем мы
будем рассматривать случай синусоидального магнитострикцион-
ного напряжения.
Амплитуда переменной намагниченности. Для
прямоугольного вибратора полная возбуждающая сила F равна произведению %'х
на площадь поперечного сечения стержня вибратора kS:
F = kSj[. E.101)
В случае кольцевого вибратора для его первой радиальной моды
F выражается формулой
f^-jt-Sxl, E.102)
где 5 —площадь внешней цилиндрической поверхности.
Если ввести коэффициент W0 преобразования этих
возбуждающих сил в силы, действующие на излучающей поверхности,
то колебательная скорость поверхности ^ выразится в виде
где г0 — внутреннее механическое сопротивление вибратора,
связанное с механоакустическим коэффициентом полезного действия
х) Строгое рассмотрение с учетом изменения магнитострикционных
характеристик, обусловленного большой амплитудой напряжения, дано
в работах [14, 15].
192 Гл. 5. Принципы работы магиитострикционных вибраторов
х\т следующим образом:
„ = Z>PacaS
Ы r0 + l9acaS "
Отсюда предыдущее выражение для v± можно представить в виде
1 ? PaCaS '
Коэффициент преобразования силы Ч^ для прямоугольного
вибратора в режиме одностороннего излучения равен
Ч'о = 2 cos —*-— d
(§ 3, п. 5), а для кольцевого вибратора в режиме излучения
наружной цилиндрической поверхностью тот же коэффициент
преобразования силы равен
Yi
0—l.
В соответствии с этим скорости v{ выражактся следующим
образом: для прямоугольного вибратора
х\т 2kS cos Bn;dA) /
для кольцевого вибратора
ть (alR) S .
Вводя величину 5р0(соI/з для учета формы вибраторов в этих
выражениях и записывая скорость vt в виде
v^j*gfL<t E.103)
получаем для $р0 (со) следующие выражения:
$оИ = (kcos-ir-) »
V A ' E.104)
для прямоугольного и для кольцевого вибраторов соответственно.
Для прямоугольных вибраторов обычной формы с достаточной
степепыо точпости d = V2a. На фиг. 5.47 представлены графики
$р0 (со) для вибратора такой формы.
С другой стороны, как уже было показано, связь между v{
и деформацией в режиме предельной излучаемой мощности имеет
вид
v^Cibn^uH1^ E.105)
§ 10. Предельная механическая мощность
193
где с% и 5|5U (о) — заданные величины. Поэтому величину т[ можно
получить, приравнивая два приведенных выше выражения для
Vi. Исходя из предположения о форме колебаний, уже было
принято
т' = 2т;.
Поэтому величину М можно также получить, подставляя это
соотношение в выражение E.1006) с произвольно выбранным
подмагиичиванием, определяющим рабочую точку для материала.
Ф и г. 5.47. Фактор формы для колебательной скорости прямоугольного
вибратора (d=1/2a).
Если подмагничивание выбрано равным М00, то
соответствующая статическая магнитострикция |р0 определяется выражением
^»=ЧжТ- <5-10б>
Для динамического случая, когда предполагаемая форма
колебаний х\ имеет вид | т^ | sin co^, выражение
?oo + ^-sinotf E.107)
описывает точки на статических магнитострикционных
характеристиках, соответствующие соотношению E.100а). Таким образом,
можно получить форму колебаний переменной намагниченности
М, вызывающей магнитострикционное напряжение | т^ | sin co^,
в виде
М = У^*-Ц+К81пшУ'пМ81 E.108)
где
tf = #, E.109)
ьоо
13-0231
194 Гл. 5. Принципы работы магнигпострикционных вибраторов
а х[/Е = %; или, используя соотношение
j/^Ms==M00, E.110)
являющееся одной из возможных форм выражения E.106),
получим для М выражение1)
M = ikro0(l+^sinco01/n. E.111)
Если максимальное значение переменной намагниченности
обозначить ikf+, а минимальное обозначить Mj.
Mf=M00(l+K)Un, E.112)
M- = M00(l-K)Vn, E.113)
то двойная амплитуда (полный размах колебаний) переменной
намагниченности ДМ получается в виде
ДМ = (М+ — М_). E.114)
Величина М& в формуле Болла соответствует половине
изменения намагниченности, т. е.
М(, = 1(М+ + М_). E.115)
В формуле для потерь на вихревые токи величину Вт можно
определять в виде
Ят = 4л^~. E.116)
При этом полные магнитные потери вибратора можно
получить в виде суммы величин Wh и we, умноженной на объем! части
вибратора, в которой локализован переменный магнитный поток.
5. Исследование рабочих условий. В'проведенных выше
расчетах предполагается, что вибратор, предназначенный для работы
с большими амплитудами, работает в режиме недогрузки. Теперь
необходимо проверить, может ли вибратор в действительности
работать в таком режиме. В принципе проверку можно провести
путем сравнения Р из выражения E.87) с максимальной
предельной механической мощностью Рт, которая может быть получена
в случае согласованной нагрузки.
Фактор формы для максимальной предельной выходной
мощности. Как было установлено в предыдущих параграфах,
согласованная нагрузка соответствует такому физическому состоянию
материала, при котором амплитуда переменной деформации ?t
х) В работе [16] приведено разложение Фурье для этого выражения,
анализ получающихся магнитпых потерь и примеры их численных зпачений.
§ 10, Предельная механическая мощность
195
как раз достигает значения |т при изменении намагниченности
в пределах от 0 до М8. Подставляя в выражение E.1006) М = М8,
найдем
2т; &ЕХ8. E.117)
Теперь можно получить vu если это значение т^ подставить
в выражение E.103). Максимальная предельная мощность
получается в виде
Это выражение можно переписать в более общем виде, не
включая члена ?раса:
-^ = | ЦтЯЭД*0 И^Ыи (<D)V., E.118)
если один из двух множителей г;, в приведенном выше
выражении для Рт представить в виде E.105).
Ввода теперь новую величину ?рт (<*>), определяемую
выражением
5Рт И = 1ЛМ<0).ЗМ©), E119)
приведем выражение E.118) к виду
Ь*. =^у\тЕКа1т^т И, E.120)
где Еу Яв, Cj и \т имеют определенные значения для данного
материала вибратора, а цт — величина, которую при численных
расчетах обычно можно принять равной 0,7—0,95 *): Величина
$рт (со) получается при подстановке в выражение E.119) уже
известных из предыдущих параграфов величин 5|50(со) и s^u(co).
Результаты имеют следующий вид:
^тп (COJ _ /С COS О ,
ю , , а E.121)
для прямоугольного и для кольцевого вибраторов соответственно.
Здесь б = 2nd/X, a d обычно принимается равным г/2а- На
фиг. 5.48 представлены графики $рт для наиболее часто
реализуемых случаев. Для кольцевого вибратора графики не нужны,
поскольку 5рт(ш) определяется только шириной кольца а и
средним радиусом кольца R.
х) Чтобы оценить механические потери при работе на больших
амплитудах, необходимо рассматривать характеризующие потери компоненты
модуля Юнга и магнитострикционной постоянной как функции переменной
деформации большой амплитуды. Однако ни методик, основанных на этом
подходе, ни соответствующих данных в литературе, к сожалению, найти
не удалось.
13*
196 Гл. 5. Принципы работы магнитострикционпых вибраторов
Теперь все величины, входящие в E.120), известны, и можно
провести численное сравнение величины Р, определяемой
выражением E.87), с величиной Рт, определяемой выражением E.120).
Условие недогрузки. Если такое сравнение показывает, что
Р < Рт, то имеет место режим недогрузки. Однако целесообразно
0 0,2 0,U 0,6 Ofl 1ft
И
Ф и г. 5.48. Фактор формы для выходной мощности прямоугольного
вибратора в случае согласования с нагрузкой (d — V2a).
рассмотреть условие недогрузки более детально. Используя E.87)
и E.120), это условие можно выразить в следующем виде:
1 1
у l9aCacWw^u И < у ЧтЕКс&т^т (©).
Если это неравенство преобразовать с учетом того, что ?* = с|рг-,
то оно примет вид
Введем обозначение
®h=/W- E-123)
Величина @ (со) для случая d = V2a представлена на фиг. 5.49.
При заданной форме вибратора @ (со) определяется из этих
графиков, и проверка режима работы легко производится с помощью
неравенства E.122). Если сравнение показывает, что обе части
E.122) равны, то совершенно ясно, что рабочий режим
соответствует полному согласованию нагрузки; если правая часть
меньше левой, то имеет место перегрузка.
Подобным же образом в случае кольцевого вибратора @ (со)
получается с помощью выражений E.97) для 5J5tt (со) и E.104)
§ 10. Предельная механическая мощность
197
для 5jfS0 {&) и выражается в виде
@(со) =
2Л
E.124)
Величина @ (со) становится большой, если средний диаметр
кольца велик по сравнению с его шириной а.
Фиг. 5.49. График для определения условий согласования (d — Ч^а).
6. Численные примеры. Прямоугольный вибратор.
Предельная выходная мощность и
исследование рабочего режима. Предположим, что
прямоугольный вибратор изготовлен из никелевых пластин, форма которых
определяется следующими данными:
коэффициент поперечного сечения к = 0,5,
отношение размеров в продольном направлении a/|J = alb = 1.
Большинство широко применяемых на практике вибраторов
по целому ряду причин имеет конфигурацию, близкую к
рассматриваемой. Из графиков фиг. 5.44 имеем
5М<о) = 0,5.
Если предел усталости для переменного напряжения в никеле
тт задается равным 400 кгс'см2 (мгновенное максимальное
значение), то допустимый предел переменной деформации равен
b»=^ = 200.10-ef
где Е принимается равным 2«106 к г с/см2. Подставляя это
значение |т вместо ?4 в выражение E.96) и полагая величину ci
равной 4750 м/с, получаем численное значение
Г74 = 67 СМ/С.
Это значение является допустимым пределом колебательной
скорости излучающей поверхности.
198 Гл. 5. Принципы работы магнитострикциопных вибраторов
Если вибратор нагружен на воду, то при колебательной
скорости 67 см/с, естественно, возникает явление кавитации.
Коэффициент кавитации ? для такой большой амплитуды можно оценить
путем соответствующей экстраполяции полученных автором
результатов [20], основной вывод из которых гласит: «При
достаточно интенсивной кавитации сопротивление излучения га
понижается до такого значения, чтобы усредненное звуковое давление рг
на излучающей поверхности было равно примерно одной атмосфере
(эффективное значение), независимо от колебательной скорости
излучающей поверхности и{». Таким образом, применяя
соотношение
j/2^ 5125
для случая ^1 = 67 см/с, получаем
? = 0,15.
Теперь все величины в формуле E.87) известны, и путем
численных расчетов получаем значение
-j- = 5 Вт/см2.
С другой стороны, если значения 5рт((о) = 0,32 (из данных
фиг. 5.48), #=2.1012 дин/см2, Xs = 32-10^e (E и %8 для никеля)
и rjm = 0,8 (грубая оценка механоакустического к. п. д.)
подставить в выражение E.120), то получим численное значение
^-=77,8 Вт/см2.
Сравнение Рт с полученным выше значением Р показывает, что
Р < Рт1 и это подтверждает, что условия работы в достаточной
мере соответствуют режиму недогрузки.
Амплитуда намагниченности и
магнитные потери. Чтобы получить амплитуду намагниченности,
следует вначале определить магнитострикционное напряжение т1У
необходимое для поддержания заданного режима колебаний.
Расчет производится по формуле E.103) с подстановкой значения
5р0 (о)) = 0,23, полученного для данного вибратора из графиков
на фиг. 5.47. Тогда
Tj = 2 кгс/см2.
Рассмотрим сначала случай, когда подмагничивание М00=^1/3МВ.
Поскольку для никеля Afs = 500, имеем
М00=Ж Гс.
По формуле E.106) для п = 3 получаем
н;0= U7.10-*.
§ 10. Предельная механическая мощность
199
С другой стороны,
Отсюда для К по формуле E.109) получаем значение
# = -|Ь = 0,855.
ьоо
Поэтому, согласно формуле E.111), форма колебаний
намагниченности получается в виде
М = 166 A+0,855 sin artI*.
Подставив значения М00=166, К= 0,855 и га = 3 в формулы
E.112) и E.113), получим максимальное и минимальное
мгновенные значения намагниченности
М+ = 205, ЛГ_ = 87,4.
Для амплитуды ДМ/2 по формуле E.114) получаем
i АЛ/= 58,8.
По формуле E.115) получаем значение М& в формуле Болла
Md=146.
Теперь можно вычислить потери па гистерезис wh путем
подстановки численных значений для никеля Т1 = 0,28и а = 2,6»10*~в
в формулу E.98); опи оказываются равными
юл = 212 эрг/см3/Гц.
Если резонансная частота вибратора равна 20 кГц, то
1^ = 0,42 Вт/см8 (при 20 кГц).
Потери на вихревые токи we, вычисленные по формуле E.99)
для значений а=7«10~6 Ом-см и ? = 0,125 мм, равны
we=3,3 Вт/см3 (при 20 кГц).
Объем вибратора, соответствующий единичной площади
излучающей поверхности, вычисляется по обычным расчетным
формулам. Для вибратора, показанного на фиг. 5.43, длина I равна
lss («+PU, =925 см>
где а + Р = 0,78 для данного вибратора (/0=20 кГц, & = 0,5,
а = Ь); размеры а и Ъ при этом получаются равными
я = 6= 2,31 см§
200 Гл. 5, Принципы работы магнитострикционных вибраторов
В предположении, что магнитопровод вибратора ограничен
областью, отстоящей на глубину 1/2а от торцевой поверхности,
объем магнитопровода V, приходящийся на единицу площади
излучающей поверхности, вычисляется по формуле
У = 2(уа + йб)=4,6 см3/см2.
Следовательно, магнитные потери этой области равны
{wh + we)V=n,l Вт/см2.
Оценка механического сопротивления
акустической нагрузки для режима
согласования нагрузки. Для примера рассчитаем теперь,
3000
Л2000.
Л1000
Ф и г. 5.50, Численный пример прямоугольного никелевого вибратора,
излучающего предельную мощность в воду при наличии заметной кавитации.
Электроакустический коэффициент полезного действия г\еа, потери на вихревые токии>е>
потери на гистерезис wh и квадрат подмагничивающего поля Яде Рассчитаны в
зависимости от постоянной намагниченности MDq.
как велико должно быть механическое сопротивление нагрузки,
чтобы рассматриваемый вибратор работал точно в режиме
согласования. Выше уже было найдено, что Pm/S = 77,8 Вт/см2 и^ =
= 67 см/с; поэтому величину ? для случая согласования можно
вычислить с помощью общего соотношения P/S = 1I^acavl путем
подстановки в него этих численных значений и значения раса =
= 1,5 «Ю5 дин-с/см3; при этом получается ? = 2,3. Это значение
показывает, что согласование достигается при акустической
нагрузке, в 2,3 раза превышающей нагрузку, соответствующую
излучению в воду в отсутствие кавитации.
§ 10. Предельная механическая мощность
201
Зависимость характеристик от под маг-
ничивания. Выше мы привели подробный расчет для случая
постоянной намагниченности MDC — XUMS. Подобным же
образом были проведены расчеты для других значений постоянной
намагниченности; полученные численные значения основных
характеристик вибратора приведены в табл. 5.5 и на фиг. 5.50.
С ростом постоянной намагниченности как Wh, так и we резко
падают, что приводит к увеличению коэффициента полезного
действия преобразователя. Однако вследствие необходимого
увеличения постоянного подмагничивающего поля HDC сильно
увеличивается мощность постоянного тока, пропорциональная НЪс-
Таблица 5.5
Результаты расчетов для магнитострикционного
вибратора при п = 3х)
~""-\^^^ Подмагничиваиие
>*-^ч<|>>><^
^^ч***^«>%<1><1^
^ч^^»^^^
Характеристики ^^"^^
MDC
Idc- ю*
К
ДМ/2
Md
Wfa Вт/см3
we, Вт/см3
Леа
hdc, э
//2
nDC
1
4-м
3 s
166
1,17
0,855
58,8
146
0,42
3,3
0,21
7,52)
56
1
4-м
2 «
250
4,0
0,25
21
249
0,098
0,41
0,58
14 2)
196
з
— м„
4 «
375
13,5
0,074
9
375
0,035
0,075
0,74
55 2)
3025
1) Вибратор изготовлен из никелевых пластин толщиной 0,25 мм,
/ = 20 кГц, ft = 0,5, o = b, P/S = b Вт/см2 (gj = 1-10-6), ^ = 0,8.
2) На основании кривой намагничивания для никелевых пластин,
отожженных при 900° С.
Кольцевой вибратор. Фактор формы a/R (отношение ширины
кольца к радиусу) для широко используемых в практике
кольцевых вибраторов составляет приблизительно 0,2-— 0,3. В качестве
примера мы приводим результаты расчетов для a/R = 0,25.
Основные результаты состоят в следующем: колебательная
скорость vi на цилиндрической поверхности, соответствующая
допустимому пределу деформации по окружности |т = 200 -10"&
(никель) и вычисленная по формуле E.96), составляет
Vi = С& = 95 см/с«
202 Гл. 5. Принципы работы магнитострикционпых вибраторов
Коэффициент кавитации ? для цилиндрических поверхностей,
совершающих радиальные колебания, еще не известен. Поэтому
здесь мы примем его равным 0,15 даже в случае р4 = 95 см/с.
Если конфигурация кольцевого вибратора такова, что длина
цилиндра больше величины лД, то можно считать га/раса = 0,95
[21]. Величина $ри(о>) всегда равна единице, а величина P/S,
определенная по формуле E,87),
-у- = 9,6 Вт/см2.
С другой стороны, из формулы E.121) для %$т(<й) получаем
ЗМ<о) = 0,125,
а из формулы E.120) при rbi = 0,8 для Рт находим
^ = 30 Вт/см2.
Сравнив это значение с полученным выше значением Р,
убеждаемся, что Р<Рт. Таким образом, в рассматриваемом случае
имеет место условие недогрузки.
Из формулы E.104) имеем 5JJ0 (со) = 0,0155; подставляя это
значение в формулу E.103), получаем
т; = 10,2.106 дин/см2.
Если для материала задан режим подмагничивания,
соответствующий постоянной намагниченности М00 — V^M^* то величина if,
определяемая формулой E.109), достигает значения К = li/?'o0 >
> 1, а это означает, что возбуждение невозможно. Другими
словами, подмагничивание должно быть выше, чтобы можно было
использовать более крутую часть характеристик мощности для п
(в данном случае п = 3).
Поскольку ток подмагничивания желательно поддерживать
минимальным, рассмотрим теперь случай К = 1. Проводя
вычисления так же, как в рассмотренном выше случае, получаем
1^ = 2,42 Вт/см8 (при 20 кГц),
шв = 28 Вт/см8 (при 20 кГц)
{толщина никелевых листов принята равной 0,25 мм). Радиус R
кольцевого вибратора с резонансной частотой 20 кГц равен 3,8 см.
Объем магнитопровода У, приходящийся на единицу площади
излучающей поверхности, численно равен ширине кольца а.
При alR = 0,25 имеем а = 0,95. Магнитные потери получаются
равными
(wh + we)V = 28,9 Вт/см2.
§ 10, Предельная механическая мощность
203
Поскольку излучаемая акустическая мощность равна 9,6 Вт/см2,
а механоакустический коэффициент полезного действия цт принят
равным 0,8, для электроакустического коэффициента полезного
действия получаем значение г\еа = 0^235.
Случай возбуждения без подмагничивания. Возбуждение магни-
тострикционных вибраторов без подмагничивания соответствует
режиму, получившему название «работа на двойной частоте».
Однако характеристики вибратора в этом случае можно получить
тем же способом, который описан выше. Качественные
характеристики, соответствующие фиг. 5.39, изображены на фиг. 5.51.
Фиг. 5.51. Магнитострикционпая возбуждающая сила для синусоидально
изменяющейся намагниченности в случае возбуждения без подмагничивания.
Имея в виду эти графики и прослеживая все выкладки от
соотношения E.79) до E.97), можно прийти к выводу, что весь ход
рассмотрения в этом случае остается в силе, за исключением того,
что амплитуда намагниченности в материале должна быть в 2 раза
больше, а ее частота в 2 раза меньше. Более того, если можно
принять то же приближенное описание формы колебаний, что
и раньше, то можно использовать и выражение E.1006).
В качестве примера рассмотрим тот же прямоугольный
вибратор. Параметры колебаний при таком возбуждении получатся
такими же, как и в предыдущем случае: допустимая
колебательная скорость vi = 67 см/с, PIS = 5 Вт/см2 при ? = 0,15, т[ =
= 2*106 дин/см2, т' = 2%[ = 4«106 дин/см2, максимальная
предельная излучаемая мощность Pm/S = 77,8 Вт/см2.
Соотношение между х[ и ИМ в этом случае таково, что
половина AM соответствует 2т[; поэтому соотношение E.1006), а именно
т' = EXS (M/M$)n, нужно переписать в следующем виде:
*-«-т*-
E.126)
204 Гл. 5. Принципы работы магнитострикционных вибраторов
Подставляя приведенные выше численные значения для никеля
в это выражение при п = 3, получаем
При оценке потерь на гистерезис по формуле Болла следует
положить в ней Md — О. При этом условии формула Болла
переходит в формулу Штеинмеца, которая дает
wh = 0,28-2001*6- 1340 эрг/см3/Гц.
Так как вибратор работает на резонансной частоте 20 кГц,
частота переменной намагниченности равна 10 кГц;
следовательно,
wh -1340.10-103-10-7= 1,34 Вт/см3.
Приближенное вычисление потерь на вихревые токи we
производится с помощью соотношения Вт = 4я ДМ/2, если в этом
случае сделано то же предположение, что и выше: «вибратор
возбуждается такой формой колебаний М, что форма колебаний
т' точно синусоидальна». Этот приближенный расчет не может
привести к большим ошибкам, хотя, строго говоря, потери на
вихревые токи следовало бы вычислять с учетом искажения формы
волны намагниченности. Приближенный результат равен
we = 9,5 Вт/см3.
Полные магнитные потери, приходящиеся па единицу площади
излучающей поверхности, составляют
(и?л + мдк = A,34 + 9,5).4,6 = 50 Вт/см2.
Отсюда видно, что потери в данном случае выше, чем при наличии
подмагничивания, хотя предельная выходная механическая
мощность при тех же условиях согласования нагрузки здесь имеет
то же значение 5 Вт/см2.
Прямоугольный ферритоеый вибратор. В качестве последнего
численного примера рассмотрим предельную излучаемую
мощность для прямоугольного ферритового вибратора, имеющего те же
форму и размер, что и рассмотренный выше никелевый вибратор.
Хотя предел усталости тт для магнитострикционных ферритов *),
используемых в ультразвуковых вибраторах, пока окончательно
не определен, наблюдения, проведенные до настоящего времени,
показывают, что ферритовые вибраторы с гарантированным
пределом усталости 400 кгс/см2 выпускаются промышленностью
с хорошей воспроизводимостью свойств. Для предела усталости,
равного 400 кгс/см2, допустимая амплитуда деформации ?т
г) Имеется в виду Ni-Cu-Co-феррит [22], промышлешю разработанный.
в Японии.
Литература ' 205
составляет
U = 250.10-6
(модуль Юнга для данного феррита принят равным 1,6 406 кгс/см2).
Скорость распространения звука в феррите составляет 5500 м/с.
При этом предельная излучаемая мощность на единицу
поверхности, вычисленная по формуле E.87), равна
~=10,6 Вт/см2.
Это значение приблизительно в 2 раза больше, чем для никелевого
вибратора г).
Что касается магнитных потерь, то ни один из определяющих
их основных коэффициентов еще не был получен для магнито-
стрикционных ферритов при работе с большими амплитудами
механических деформаций и намагниченности. Поэтому расчетные
значения магнитных потерь здесь не приводятся. Однако
эксперименты показывают, что потери значительно меньше, чем в случае
никелевых вибраторов, поскольку ферриты в основном обладают
потерями только на гистерезис и не имеют потерь на вихревые токи.
На протяжении всего этого параграфа рассмотрение
проводилось для случая работы вибраторов в условиях недогрузки,
однако все теоретические соотношения и приведенные графики
применимы и для других условий нагружения.
ЛИТЕРАТУРА
1. Kikuchi У., Fukushima К., Sci. Rep. Res. Inst, Tohoku Univ., Bl-2, № 1,
141 A951).
2. Kikuchi У., Fukushima K., Journ. Inst. Telegraph and Telephone Eng.
Japan, 773 A937) (на японском языке).
3. Kikuchi У., Shimizu II., Prepared Paper for the Autumn Meeting of the
Acoustical Society of Japan, № 1-1-7, Oct. 1955 (на японском языке).
4. Kikuchi У., Shimizu #., Prepared Paper for the Joint Meeting of the Four
Institutes of Electrical Engineers of Japan, № 814, May 1958 (на
японском языке).
5. Nomura У., Aida У., Record of Electr. and Comra. Eng. Conversazione,
Tohoku Univ., 17, № 2 A948) (на японском языке).
6. Kikuchi У., Shimizu II., Okuyama D., Prepared Paper for the Joint Meeting
of the Four Institutes of Electrical Engineers of Japan, № 1075, July
1960 (на японском языке).
7. Kikuchi У., Journ. Inst. Electr. Comm. Eng. Japan, № 209, 523 A940)
(на японском языке).
8. Kikuchi У., Journ. Inst. Electr. Comm. Eng. Japan, 29, 197 A946) (на
японском языке).
9. Tsukamoto К., Graduate Thesis, Eng. Dept., Tohoku Univ., March 15,
1950 (па японском языке).
*) Сравнительный расчет предельной мощности для ферритовых и
никелевых вибраторов проведен без учета зависимости коэффициента ? в
формуле E.87) от и^. Более точный расчет показывает, что отношение
предельных мощностей составляет примерно 1,4.— Прим. ред.
206 Гл. 5. Принципы работы магнитострикционпых вибраторов
10. Kikuchi У., Shimizu Я., Sci. Rep. Res. Inst., Tohoku Univ., Bl-2, № 3,
365 A951).
11. Kikuchi У., Shimizu Я., Record of Annual Meeting, Acoust. Soc. Japan,
N° 1-3-17, May 1957 (на японском языке).
12. Kikuchi У., Shimizu Я., Okuyama D., Record of Electr. and Comm. Eng.
Conversazione, Tohoku Univ., 27, № 2, .33 A958) (на японском языке);
Sci. Rep. Res. Inst., Tohoku Univ., B17, №3—4,51 A965).
13. Kikuchi У., Shimizu Я., Journ. Acoust. Soc. Amer., 31, № 10, 1385 A959).
14. Kikuchi У.,- Shimizu #., Record of Joint Meeting of Four Electr. Inst.
Japan, № 1055, April 1961 (на японском языке).
15. Kikuchi У., Shimizu Я., Record of Ultrasonic Professional Group, Inst.
Electr. Comm. Eng. of Japan, May 19, 1961 (на японском языке).
16. Kikuchi У., Record of Ultrasonic Professional Group, Inst. Electr. Comm.
Eng. of Japan, May 18, 1964 (на японском языке).
17. Kikuchi У., Shimizu Я., Uekusa Т., Reports of the 1964 Spring Meeting,
Acoust. Soc. Japan, № 1-1-8, May 1964 (на японском языке).
18. Kikuchi У. et ah, Reports of the 1966 Autumn Meeting, Acoust. Soc.
Japan, До 1-1-11, Nov. 1966 (на японском языке).
19. Kikuchi У., Shimizu Я., Okuyama D., Sci. Rep. Res. Inst. Tohoku Univ.,
B17, № 3-4, 65 A965); вкниге Ultrasonic Energy (Ed. Kelly), Univ. Illinois,
1965, p. 23.
20. Kikuchi У., Shimizu Я., Record of Ultrasonic Professional Group, Inst.
Electr. Comm. Eng. of Japan, Nov. 1960 (на японском языке).
21. Fukushima К., Prepared Paper for the Meeting of Acoust. Soc. Japan, Oct.
1949.
22. Kikuchi У. et al„ Sci. Rep. Res. Inst., Tohoku Univ., B7, № 1, 1 A955);
B7? № 3, 171 A955); Record of Electr. and Comm. Eng. Conversazione,
Tohoku Univ., 27, № 1, 49 A958) (па японском языке).
Глава 6
ФЕРРИТОВЫЕ МАГНИТОСТРИКЦИОННЫЕ ВИБРАТОРЫ
Е. Кипучи
§ 1. ОБЩИЕ ЗАМЕЧАНИЯ
Ферромагнитное вещество, называемое по его молекулярной
структуре ферритом, получается путем смешивания в
определенной пропорции порошкообразного окисла железа и
порошкообразных окислов различных других металлов, прессования этой
смеси и последующего обжига при высокой температуре. Такой
процесс обычно называют керамической технологией. Многие
из изготавливаемых таким способом материалов имеют очень
высокое удельное электрическое сопротивление и могут считаться
почти изоляторами; поэтому они нашли широкое применение
в качестве материала для магнитных сердечников разнообразных
катушек индуктивности. Как и металлическим магнитным
материалам, ферритовым материалам для сердечников присуще
свойство магнитострикции [1]. Если бы эти материалы могли найти
применение для магнитострикционных вибраторов, то благодаря
отсутствию потерь на вихревые токи коэффициент полезного
действия вибраторов был бы очень высоким-. Однако химический
состав ферритов, используемых для обычных сердечников, был
разработан с целью получения большой магнитной
проницаемости, и поэтому они не пригодны для магнитострикционных
вибраторов. Более того, их механическая прочность в режиме колебаний
обычно невелика.
Учитывая сказанное, автор данной главы с сотрудниками
начали выполнение широкой программы научных исследований
и разработали несколько различных типов ферритов, обладающих
одновременно большим коэффициентом'электромеханической связи
и высокой механической прочностью. В программу исследований
входило изучение различных ферритов с целью обнаружения среди
них наиболее перспективных. Были исследованы Ni-Cu-, Ni-Cu-Co-,
Ni-Cu-Co-Mn-, Ni-V-, Ni-Cu-V-, Ni-Cu-V-Co, Ni-Cu-W-, Ni-Cr-,
Ni-Cu-Zn-, Ni-Cu-Cd-, Ni-Cu-Zn-Cd-, Ni-Li-, Ni-Cu-Li-, Ni-Cu-Li-
Co-, Ni-Li-V-ферриты и другие ферриты; одновременно изучалось
поведение этих ферритов при введении небольших количеств таких
добавочных компонентов, как MgO, Si02, MnO, Na20, K20, А1203,
Ti02, As203, CaO, BaO, SrO, PbO, Sb203 и им подобных, которые
могут влиять на магнитострикционные и механические
характеристики ферритов. Многие из этих ферритов были
запатентованы в нескольких странах [2].
208 Гл. 6. Ферритовые магии тост рикциоиные вибраторы
После проведения основных исследований промышленные
разработки были сосредоточены на Ni-Cu- [3] и Ni-Cu-Co-ферритах [4],
признанных наилучшими для применения в ультразвуковых
вибраторах, поскольку они были сочтены достаточно
технологичными для промышленного производства [5—9].
Разработанные таким образом магнитострикционные ферриты
получили название «виброкс». После многих трудоемких
производственных экспериментов была создана их производственная
технология, и ферриты марок виброкс-1 и виброкс-2 начали
изготавливаться в Японии серийно; об их широком выпуске сообщалось
в течение нескольких прошедших лет.
Виброкс имеет следующий химический состав:
{(NiOH>g5_o,9o(CuOH>15-0,10/0,996-0,985(CoO)o,o04-0,015 (Fe203).-
В этих интервалах компонент феррит, содержащий меньше меди
и больше кобальта и называемый виброкс-1, имеет больший
коэффициент электромеханической связи при оптимальном подмаг-
ничивании &макс, а феррит, содержащий больше меди и меньше
кобальта и называемый виброкс-2, характеризуется лучшей
температурной стабильностью частоты механического резонанса и
более высокой механической прочностью.
Одновременно научные исследования проводились фирмой
«Филипс» в Нидерландах, и были опубликованы [10, 11]
магнитострикционные динамические характеристики разработанных
ферритов, получивших коммерческое название «феррокскуб» и
предназначенных для магнитных сердечников. Публикация включала
результаты исследований ферритов с добавками Со. Сообщались
также некоторые данные 112] о связи между пористостью
образцов и их механической прочностью при колебаниях.
§ 2. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К МАГНИТОСТРИКЦИОИНЫМ ФЕРРИТАМ
Рассмотрим, каким требованиям должны удовлетворять
ферриты, чтобы их можно было использовать для изготовления магнито-
стрикционных вибраторов. Для ультразвукового преобразователя,
работающего на частоте механического резонанса в воде, обычно
достаточно, чтобы характеризующая его материал величина
yi0T2/Ci [13] (см. также гл. 8, § 3, п. 1) составляла не менее 2*105;
при этом можно ожидать значительного улучшения эффективности
преобразования за счет снижения потерь на вихревые токи. Потери
в ферритовом материале, как правило, близки к нулю; поэтому
ферриты, у которых величина х0Г2/сг- превышает 2-Ю5, могут
служить для изготовления превосходных вибраторов. Связь между
этой характеризующей материал величиной и обычным
коэффициентом электромеханической связи к выражается соотноше-
§ 2. Требования, предъявляемые к магиитострикционным ферритам 209
нием
здесь Е — модуль Юнга, связанный с ct соотношением
где р—плотность материала. Полагая сф для ферритов равным
2,75-10°, перепишем приведенное выше требование относительно
величины к в виде
/О 0,27.
Достижение такого значения к является одной из основных целей
при разработке магнитострикцйонных ферритов.
Следующим важным требованием является механическая
прочность, которая должна быть достаточно высокой для резонансных
колебаний большой амплитуды. Поскольку феррит является
материалом, изготавливаемым по керамической технологии и пе
похожим на металлический магнитострикционный материал, его
механическая прочность должна рассматриваться по аналогии
с прочностью керамических материалов, т. е. в связи с
пористостью образца, и, следовательно, с температурой его спекания.
Пористость обычно уменьшается по мере приближения
температуры спекания к точке плавления, что приводит к более высокой
механической прочности. Ферриты, как и все керамические
материалы, обладают прочностью на сжатие, в десять раз большей,
чем прочность на растяжение.
Третье требование для магнитострикцйонных ферритов
касается характеристик спекания при промышленном производстве.
Химический состав должен быть выбран так, чтобы основные
сформулированные выше требования могли быть выполнепы при
возможпо более низкой температуре спекания, поскольку
стоимость ферритовых изделий в значительной степени зависит от
стоимости высокотемпературной обработки. Кроме того, выбирая
химический состав, следует позаботиться о том, чтобы некоторые
незначительные отклонения от заданного состава не влияли
заметно на воспроизводимость свойств для отдельных образцов.
Четвертое требование для магпитострикционных ферритов
заключается в малости температурного коэффициента резонансной
частоты, что особенно существенно в случае их применения в
механических или магнитострикцйонных фильтрах. Во всех случаях
применения ферритов в фильтрах температурный коэффициент
частоты должен быть меньше 10~\ а для узкополосных фильтров
этот коэффициент должен быть меньше 10. Механическая
добротность Q должна быть велика; удовлетворительными являются
14-0231
210 Гл. 6. Ферритовые магнитострикционпые вибраторы
ее значения, превышающие 2000—3000 *). Вместе с тем в случае
применения ферритов в узкополосных устройствах величина х0Г2
в большинстве случаев является достаточной, даже если
химический состав выбран с единственной целью получения малого
температурного коэффициента частоты, хотя для магнитострик-
ционных фильтров имеется определенное конструктивное
ограничение, связанное с зависимостью между величиной х0Г2 и
относительной шириной полосы фильтра Ъ (гл. 11).
Требования относительно температурного коэффициента
частоты в случае применения ферритов для ультразвуковых
преобразователей не так свободны, как часто полагают, поскольку
повышение температуры иногда бывает настолько значительным, что
наблюдается серьезное отклонение резонансной^ частоты.
§ 3. ХАРАКТЕРИСТИКИ МАГНИТОСТРИКЦИОННЫХ
ФЕРРИТОВ
Как было указано в предыдущем параграфе, вплоть до
настоящего времени промышленные разработки были сосредоточены
на Ni-Cu- и Ni-Cu-Co-ферритах. В связи с этим здесь приводятся
характеристики лишь для ферритов указанных составов; по
некоторым параметрам эти ферриты сравниваются с Ni-Zn-феррита-
ми [14].
1. Коэффициент электромеханической связи. На фиг. 6.1
показан типичный пример характерного изменения коэффициента
электромеханической связи при оптимальном подмагничивании
&макс в зависимости от х и у для ферритов химических составов
1. (NiOI_^J/(ZnO)x(Fe203I+I/,
2. (NiO),(CuOI^(Fe203)i.
Изменения х и у для первого, Ni-Zn-феррита [14] ограничены
областью значений х от 0 до 0,4 и у от —0,1 до +0,1, а для второго,
Ni-Cu-феррита [3] х меняется в пределах от 0 до 1. Было найдено,
что наибольшее значение &Макс> достигающее 22%, соответствует
химическому составу Ni-Cu-феррита с х = 0,85 и температурой
спекания 1350° С.
Достаточно подробно были изучены также Ni-Cu-Co-ферри-
ты [2, 4]. При этом изучались химические составы вида
{(NiO)x(CnOI_3C}1.J,(CoO)J,(Fe203)i«
На фиг. 6.2 показаны типичные зависимости коэффициента
электромеханической связи &Макс от х и у при изменении химиче-
х) Здесь речь может идти лишь о добротности при малых амплитудах
колебаний, поскольку с ростом амплитуды у всех магнитострикционных
ферритов добротность заметно падает.— Прим, ред.
§ 3. Характеристики магнитострикционпых ферритов 211
20
J
15
10
I 1350°С
Г /ШЪи
/150'С S^/AJ
/ //
к
1 1 J J
Яъ^Ч
f Г f
то'с
_i 1
0,2
О/* Ofi
X
а
Ofi 1,0
О OJ Q? 0t3 О/*
X
б
Фиг. 6Л. Коэффициент электромеханической связи для различных Ni-Cu-
и Ni-Zn-ферритов при оптимальном подмагничивапии для каждого состава.
а — Ni-Cu-феррит (NiOyCuO)^ (Fe203),'; б — Ni-Zn-феррит (NiO)^.^ (Zi»0)x
(Fe208I+y; i — у = —0,1; 2 — у-0; з — у = 0,1.
ского состава. Найдено, что kMai<c достигает 27% в области
у = 0,01—0,02 при добавлении СоО к Ni-Cu-ферриту, для
которого х = 0,85. Так как этот Ni-Cu-феррит имеет, как показано выше,
наибольшее значение /гмакс среди Ni-Zn- и Ni-Cu-ферритов, можно
(NfD)oe (CoOHf1 (Fje203)
lW-Fe2Q3 у
0 0,01 0J02 0.03 0,04 0,05 0,06 0,07 0.08 0.09 0J
1.0 г
0,9 \
0.7
:0fi
Ofi
Ofi
Ofi
0,2\
0,1
0
^Ф=з=^
CC?=ao)
\1d *
ЧК
10
/
^\
)
/10
Cu0-Fe203
Ofll 0.02 0,03 0,04 0,05 0,06 0,07 Ofid 0,09 0,1
У (СиОH9(СоОHг1(РегО,)
Фиг. 6.2. Линии равных значений коэффициента электромеханической
связи для Ni-Cu-Co-ферритов.
сказать, что значение kMahC для него повышается за счет малой
добавки СоО. При больших значениях у значение /смакс умень-
14*
212 Гл. 6. Ферритовые магнитострикциопные вибраторы
шается, но зато увеличивается магнитострикция насыщения.
Ферриты такого состава могут найти применение в будущем, если
кому-нибудь понадобятся вибраторы для интенсивного излучения
ультразвука в среды, сопротивление акустической нагрузки
которых больше, чем сопротивление нагрузки при излучении
в воду или в другие жидкости.
2. Механическая добротность Q. Механическая добротность Q
ферритов любого рассмотренного выше химического состава
достаточно велика и для некоторых Ni-Cu-ферритов достигает значения
20 000*).
3. Температурный коэффициент резонансной частоты. Как
уже указывалось, температурный коэффициент резонансной
частоты является одним из важных параметров. На фиг. 6.3 [4] показана
У
_0 0,07 0,02 0,03
Ф иг. 6.3. Температурный
коэффициент частоты механического
резонанса для Ni-Cu-Co-форри-
тов (в интервале 20—100° С).
типичная зависимость температурного коэффициента частоты
от содержания меди 1 — х и кобальта у в феррите химического
состава
{(NiO)x(CuOI^}1_I,(GpO),(Fe203I.
На фиг. 6.3 видно, что этот коэффициент достаточно мал для
большинства обычно применяемых составов. Можно отметить, что
имеется линия, на которой знак коэффициента меняется с
отрицательного на положительный. К сожалению, эта линия не
проходит через химический состав, точно соответствующий пику
величины &макс. Однако значения &макс вдоль этой линии все же,
достаточно велики, и поэтому имеется возможность получения
магнитострикционного ферритового резонатора с предельно малым
температурным коэффициентом, если химический состав феррита
соответствует этой линии. Некоторую осторожность следует
проявлять в связи с тем, что характеристики, показанные
на фиг. 6.3, могут немного изменяться в зависимости от
технологии изготовления.
*) См. примечание на стр. 210.— Прим. ред*
§ 4. Механическая прочность ферритов 213
§ 4. МЕХАНИЧЕСКАЯ ПРОЧНОСТЬ ФЕРРИТОВ,
ИСПОЛЬЗУЕМЫХ ПРИ БОЛЬШИХ
АМПЛИТУДАХ КОЛЕБАНИЙ
Были проведены многочисленные эксперименты в
промышленном масштабе по изучению механической прочности ферритов.
На прочность влияют различные факторы технологического
процесса, такие, как предварительный обжиг, помол в шаровой
мельнице, прессование в прессформах, сушка, окончательный обжиг
и т. д. Поддерживая тесный контакт с исследователями, японские
промышленники оказались способными разработать технологию
производства достаточно прочных ферритовых вибраторов,
предназначенных для излучения интенсивного ультразвука с высоким
коэффициентом полезного действия. Прочность этих вибраторов
сравнима с прочностью никелевых вибраторов, а их коэффициент
полезного действия много выше, чем у никелевых вибраторов.
В согласии с теоретическими исследованиями предельной
выходной механической мощности магнитострикционных вибраторов
(гл. 5, § 10, п. 6) и с некоторыми аналитическими расчетами [24]
концентрации динамических напряжений в месте перехода стержня
в накладку у прямоугольных вибраторов были подтверждены
следующие результаты.
Проведенные до настоящего времени наблюдения (которые
еще продолжаются) показывают, что магнитострикционный феррит
(Ni-Cu-Co-феррит), производимый промышленностью в Японии
и применяемый для ультразвуковых преобразователей,
по-видимому, обладает такими свойствами, что его прочность на
растяжение и предел усталости по напряжению имеют одинаковый
порядок величины. Это характерно для всех керамических материалов.
Однако само значение прочности существенно зависит от качества
производственного процесса и год от года возрастает по мере его
усовершенствования. До последних лет [15] максимальная
прочность для промышленных ферритов составляла 150 кгс/см2, и
расчеты всех вибраторов производились с учетом именно этого значения;
однако новые исследования [16] показывают, что теперь обычно
получаются значения прочности около 300 кгс/см2, а при введении
на производстве операции тщательной отбраковки изделий
доступными для промышленного производства становятся вибраторы
с гарантированной прочностью 400 кгс/см2.
В общих чертах метод отбраковки состоит в следующем: все
образцы испытываются в течение 1 мин на нескольких уровнях
колебаний, от очень низкого до максимального гарантированного
уровня. При этом небольшое число тех вибраторов, которые
почему-либо содержат дефекты или микротрещины, может разрушиться.
В отобранных таким образом гарантированных вибраторах
позднее, при фактической эксплуатации, разрушений не наблюдается.
214 Гл. 6. Ферритовые магнитострикционные вибраторы
Гарантированный уровень определяется следующим образом!
из партии образцов отбирается некоторое число вибраторов,
которые подвергаются испытанию на динамическую прочность.
Новые результаты испытаний такого рода показывают, что
предельная амплитуда переменного механического напряжения
составляет 570, 800, 810 или 960 кгс/см2, изменяясь от партии к партии г).
В соответствии с этим изготовители гарантируют непрерывную
работу вибраторов на уровне, который составляет половину
значения, полученного для каждой партии продукции при
испытании на прочность. Если принять здесь значение предела
усталости 400 кгс/см2, то допустимая предельная излучаемая мощность,
рассчитанная по методу, описанному в гл. 5, § 10, п. 6, должна
составлять 10,6 Вт/см2 на излучающей поверхности ферритового
вибратора обычной конфигурации, даже если последний
используется в кавитирующей воде.
§ 5. ПРИМЕНЯЕМЫЕ НА ПРАКТИКЕ ФЕРРИТОВЫЕ ВИБРАТОРЫ
С учетом специфической природы ферритового материала и
основных технологических процессов прессования порошка и
высокотемпературного обжига для практического использования было
предложено и испытано несколько типов магнитострикционных
вибраторов, отличающихся по .конструкции и конфигурации.
1. Простые типы вибраторов. Прямоугольные сердечники
из феррита с несколькими отверстиями для обмотки, показанные
Фиг. 6.4. Простые типы феррито-
вых магнитострикционных
вибраторов.
а — прямоугольный вибратор; б —
вибратор с выступающей накладкой.
на фиг. 6.4, применяются на частоте механического резонанса
продольной моды колебаний. Размеры их выбираются таким
образом, чтобы вблизи основного резонанса не возбуждались другие
паразитные резонансы (гл. 5, § 2, п. 6). Подмагничивание
обеспечивается либо за счет остаточной намагниченности самого
материала, либо за счет пропускания по обмотке постоянного тока.
Поскольку методом прессования, по-видимому, трудно изготовить
очень толстые вибраторы, большую излучающую поверхность
обычно формируют, располагая отдельные вибраторы рядом^друг
х) Частное сообщение фирмы «Тохоку метал индастриз».
У^
е
о
§ 5. Применяемые на практике ферритовые вибраторы 215
с другом в двух направлениях. В этом случае обмотку
рекомендуется делать общей. Иногда для механической развязки
отдельных вибраторов друг от друга необходимы губчатые прокладки,
чтобы предотвратить понижение к. п. д. преобразования,
обусловленное возникновением связанных колебаний [17].
Чтобы отдельные вибраторы можно было размещать как можно
ближе друг к другу, автор настоящей работы предложил [18]
тип вибратора с выступающими накладками, показанный на фиг.
6.4, б. Стержни этого вибратора изготовлены более тонкими
как по ширине, так и по толщине, так что витки обмотки не
занимают пространства, лежащего за пределами, определяемыми
излучающей поверхностью.
2. Тип вибратора с подмагничиванием постоянными
магнитами. В отличие от металлических постоянных магнитов ферритовые
магниты обладают очень высоким электрическим сопротивлением,
Фиг. 6.5. Ферритовые магнитострикциоииые вибраторы с
подмагничиванием при помощи постоянных магнитов.
а »¦• вибратор с одиночным магнитом; б — вибратор с пушпульными магнитами; в —
вибратор на двойную частоту.
поэтому переменный магнитный поток может пронизывать их
так же легко, как воздух. Для использования этого их свойства
с целью подмагничивания ферритовых магнитострикционных
преобразователей были предложены [5] специальные типы вибраторов,
изображенные на фиг. 6.5. Применимы для такого
подмагничивания и асимметричные формы [5а]. В качестве материала для
магнитов рекомендуется использовать бариевый феррит. В этом случае
необходимое подмагничивание можно создавать при помощи
магнитов в виде тонких пластин, так как Ва-феррит обладает
высокой коэрцитивной силой Не, превышающей 1000 Э, а
магнитная проницаемость магнитострикционных ферритов, обжигаемых
прд температуре от 1300 до 1400° С, сравнительно высока, хотя
они и обладают большой магнитострикцией. Кроме того, сам факт,
что намагниченность насыщения в ферритах значительно ниже,
216 Гл. 6. Ферритовые магнитострикционные вибраторы
чем в металлических магнитострикционных материалах, создает
благоприятные условия применения тонких магнитов.
Вибратор на двойную частоту. В вибраторе, показанном на
фиг. 6.5, в, переменный магнитный поток не проходит через
магниты. Магнитострикционные возбуждающие напряжения в верхней
и нижней половинах каждого стержня находятся в противофазе,
так что фактор силы для основной частоты равен нулю. Поэтому
такой тип вибратора исполь-
Hi-Zu-cpeppum
Ы-феррит
зуется на второй или другой
более высокой гармонике и
называется «вибратором на
двойную частоту» [19]. Если
же обмотку какой-либо одной
половины стержня включить
в противоположном
направлении, то вибратор будет
работать на основной
частоте.
Фиг. 6.6. Вибратор на
двойную частоту (размеры в мм).
На фиг. 6.6 изображен действующий образец ферритового
вибратора на двойную частоту с вклеенным постоянным магнитом.
Число витков на каждой половине стержня равно 33, и если
обмотки включены согласно обозначениям на фиг. 6.6 (крестики и точки
в кружках), то вибратор используется на более высокой частоте.
Экспериментальные данные [19], полученные методом измерения
кинетического импеданса вибратора, представлены в табл. 6.1.
Его электроакустический коэффициент полезного действия цеа
в воде равен 92,1% на частоте 46 кГц, соответствующей второй
гармонике. Как указано выше, если обмотки соединить иначе,
то вибратор работает на основной частоте. Результаты,
приведенные в табл. 6.1, показывают, что при этом по-прежнему достигается
высокий электроакустический коэффициент полезного действия
(83%).
3. Вибраторы без одной накладки. Конструирование и расчет
вибраторов без одной накладки уже рассмотрено в § 7 предыдущей
главы. Вибраторы такого типа, изготовленные из феррита с
вставленными постоянными магнитами [20, 21], широко применяются
и имеют превосходные характеристики. В некоторых случаях
рекомендуются прессованные обмотки, так как таким способом
проще изготовить обмотки с высоким сопротивлением и легче
§ 5, Применяемые на практике ферритовые вибраторы 217
Таблица 6.1
Экспериментальные результаты для ферритового вибратора
на двойную частоту (фиг. 6.6) при работе его на второй
гармонике и на основной частоте
Частота
Вторая
гармоника
Основная
частота
Среда
Воздух
Вода
Воздух
Вода
/о, кГц
46,242
46,058
28,721
28,600
Q
766
44,5
654
24,6
zm0'
Ом
6200
348
860
25,5
zd0»
Ом
350
135,5
%т>
%
97,5
86,2
%
94,4
97,0
%
92,1
83,0
Примечание. Г\ет — электромеханический к.п.д. f rjwa — механоакустический к.п.д.,
1)еа — электроакустический к.п.д.
достигнуть изоляции в жидкостях. Наблюдения показывают, что
вставленный магнит не влияет на колебания стержней, хотя он
и притянут к одному из них. Причина, по-видимому, состоит
в том, что магнит контактирует со стержнем только в нескольких
точках и, таким образом, связан с ним через малую упругость.
Пока вибратор без одной накладки используется для излучения
ультразвука, против вставленных магнитов не возникает никаких
возражений. Однако в режиме приема иногда наблюдается шум,
если вибраторы смонтированы на кораблях или других
качающихся объектах. Исследования показали, что при качке магниты,
по-видимому, скользят взад и вперед, возбуждая обусловленные
трением и микросоударениями шумы в самом вибраторе. Чтобы
избавиться от этих шумов, рекомендуется между поверхностями
магнитов и стержней дополнительно помещать тонкие пластиковые
пленки или вязкое вещество.
4. Вибраторы кольцевого типа. Наряду с обычными
кольцевыми вибраторами было предложено [22] использовать простое
ферритовое ярмо, расположенное с внутренней стороны кольца.
На пути магнитных силовых линий в ярме закреплено
соответствующее число постоянных магнитов, чтобы создать постоянную
намагниченность. Если толщина ферритового цилиндра
сравнительно мала, то вибратор обладает широкополосной частотной
характеристикой в сочетании с хорошим к. п. д. преобразования.
Так, для цилиндрического ферритового вибратора радиуса 8,6 см
и толщины 0,6 см коэффициент полезного действия равен 62%
на частоте 9,8 кГц, а ширина полосы составляет около 6 кГц.
218 Гл. в. Ферритовые магнитострищионные вибраторы
ЛИТЕРАТУРА
1. Takei Т., Nakamura Н., Prepared Paper for the Joint Meeting of the Inst,
of Electr. Eng. Japan, № 36, 45, Apr. 1943 (на японском языке).
2. Kikuchi Y. et at., Japanese Pat. № 251927, 239673, 264568, 264569,
266860, 266862; US Pat. № 713557, 737445; Canada Pat. № 745220
751974, 751975, 751976; Great Britain Pat. № 4817/58; France Pat.
№ 758351, 766394, 766395, 766396, etc.
3. Kikuchi Y. et al., Sci Rep. Res. Inst., Tohoku Univ., B-7, № 3, 171
A955).
4. Kikuchi Y., et al., Prepared Paper for 1957 National Meeting of Inst.
Electr. Comm. Eng. of Japan, № 39, Nov. 1957 (на японском языке).
5. Kikuchi Y. et al., Sci. Rep. Res. Inst., Tohoku Univ., B-7, № 1, 9 A955).
5a. Kikuchi Y., Shimizu H., Okuyama />., Mishina M., Record of Electr.
and Comm. Eng. Conversazione, Tohoku Univ., 26, № 1, 33 A957) (на
японском языке).
6. Kikuchi У., Journ. Acoust. Soc. Amer., 29, № 5, 569 A957).
7. Kikuchi Y. et ah, Record of Annual Meeting, Acoust. Soc. Japan, № 1-3-17,
May 1957 (на японском языке).
8. Kikuchi У. et al., Prepared Paper for 1957 National Meeting of Inst.
Electr. Comm. Eng. of Japan, № 38, Nov. 1957 (па японском языке).
9. Kikuchi У., Proc. 3rd Intn'l Congress of Acoust., Stuttgard 1959, Vol.
II, 1961, p. 1192.
10. Van der Burgt С M., Philips Res. Rep., 8, 91 A953).
11. Van der Burgt С. M., Journ. Acoust. Soc. Amer., 28, 1020 A956).
12. Van der Burgt С. M. Philips Techn. Rev., 18, № 10, 285 A957).
13. Kikuchi У., Fukushima K., Sci. Rep. Res. Inst., Tohoku Univ., B-l-2,
№ 1, 141 A951).
14. Kikuchi У. et al., Sci. Rep. Res. Inst., Tohoku Univ., B7, № 1, 1 A955).
15. Kikuchi Y. et al., Record of Ultrasonic Professional Group, Inst. Electr.
Comm. Eng. of Japan, Febr. 1959 (на японском языке).
16. Kikuchi Y. et al., Record of Annual Meeting, Acoust. Soc. Japan, № 1-1-8,
May 1963 (на японском языке).
17. Kikuchi У., Shimizu H., Record of the Meeting of Acoust. Soc. Japan,
№ 1-1-10, May 1962 (на японском языке).
18. Kikuchi Y., Jap. Pat. № 285174, Oct. 12, 1961.
19. Kikuchi Y., Shimizu II., Okuyama D., Prepared Paper for 1957 National
Meeting of Inst. Electr. Comm. Eng. Japan, № 40, Nov. 1957.
20. Kikuchi Y., Shimizu H., Okuyama D., Prepared Paper for the Joint Meeting
of Inst, of Electr. Eng. of Japan, № 1075, July 1960.
21. Kikuchi Y., Shimizu II., Jap. Model-Pat. № 573899, July 20, 1962.
22. Ookawa M., Shimbo I., Record of the Meeting of Acoust. Soc. Japan,
№ 1-1-10, May 1958 (на японском языке).
23. Kikuchi У., Shimizu II., Okuyama D., Record of the Meeting of Acoust.
Soc. Japan, № 1-1-11, May 1962 (на японском языке).
Глава 7
ОСНОВНЫЕ ТИПЫ ПЬЕЗОЭЛЕКТРИЧЕСКИХ
ПРЕОБРАЗОВАТЕЛЕЙ
Г. Судзуки
§ 1. ОСНОВНЫЕ УРАВНЕНИЯ
1. Основное уравнение электроакустического преобразования.
Электроакустические характеристики преобразователей полностью
определяются следующими основными уравнениями
электроакустического преобразования:
F = — AE + zv, G.1)
I = YE + Ah. G.2).
Эти уравнения уже упоминались в гл. 2 [уравнения B.46) и B.47)]
Тремя главными постоянными в них являются фактор силы Л,
электрическая проводимость заторможенного преобразователя Y
и мехапический импеданс z. Эти постоянные необходимо определить
для того, чтобы выяснить характеристики преобразователя. Метод
определения постоянных состоит в применении к вибратору
основного уравнения пьезоэффекта и решении его для условий
колебательной задачи.
Как указывалось в гл. 3, § 3, существуют различные формы
основных уравнений пьезоэффекта. Однако в случае
преобразователей удобно использовать форму, в которую входит
пьезоэлектрическая постоянная напряжения е:
x^sG\-eG, G.3)
D^Anel + KzG, G.4)
или
P = el + elG1 G.5)
так как в этих уравнениях величины т, ?, D и G соответствуют
величинам F, v, I и Е в уравнениях G.1) и G.2), и, таким
образом, уравнения G.1), G.2) оказываются полностью аналогичными
уравнениям G.3), G.4).
Простой пример. Поясним эти соображения на примере.
Рассмотрим электроакустическое преобразование в случае
показанного на фиг. 7.1 пьезоэлектрического вибратора с поперечным пьезо-
эффектом, один конец которого закреплен, а другой свободен.
Обозначения приведены на фиг. 7.1. Между электродами
вибратора приложено внешнее переменное напряжение Е, и если между
кристаллом и электродами нет зазора, то электрическое поле
220 Гл. 7. Основные типы пьезоэлектрических преобразователей
имеет напряженность G = Elt и создает вдоль кристалла
механическое напряжение т = —eE/t, где е — пьезоэлектрическая
постоянная напряжения. Умножая механическое напряжение
на площадь поперечного сечения Ы, получаем силу — ЪеЕ. Пусть
теперь вибратор находится под действием внешней силы F и колеб-
лется со скоростью v на
свободном конце, причем его
механический импеданс равен z; тогда
из условия равновесия сил
получаем уравнение
F= -beE + zu. G.6)
Фиг. 7.1. Пьезоэлектрический
вибратор (один конец закреплен).
Обозначая смещение на свободном конце через и и полагая
деформацию ? однородной в продольном направлении, имеем
? = и/1. Электрическая индукция Z?, вызываемая деформацией,
определяется из основного уравнения G.4) и равна D = ineu/l.
Если D и и гармонически меняются во времени с угловой
частотой со, то электрический ток 1%, обусловленный
пьезоэлектрическим эффектом, равен
A = «i'°
1
4я at - W ~ы №п = i**beu = bev-
Предположим, что электрическая мощность поступает от
источника тока Д и обозначим электрическую проводимость через У;
тогда из условия баланса токов получаем уравнение
1 = УЁ + Ьеи. G.7)
Положив в уравнениях G.6) и G.7)
А = Ье,
можно получить уравнения G.1) и G.2). Здесь А — фактор силы.
Эквивалентная схема. Если механический и электрический
источники F и I имеют внутренний импеданс !z0 и внутреннюю
проводимость У о соответственно, то основные уравнения G.1)
и G.2) принимают вид
F=-AE + (l+70)v, G.8)
7=(Y0 + Y)E + aZ. G.9)
§ 1. Основные уравнения
221
Если механический или электрический источник отсутствует,
то z0 или Y0 обозначают механическую или электрическую
нагрузку. Эквивалентная схема, соответствующая приведенному выше
уравнению, показана на фиг. 7.2.
Чувствительность, Чувствительность при приеме SR
определяется выражением
«*¦
sK =
В/(дин/см2),
G.10)
где Ej — напряжение на разомкнутых клеммах преобразователя,
а р — звуковое давление в свободном поле.
/ 2 3
Ф и г. 7.2. Эквивалентная схема пьезоэлектрического преобразователя.
J-электрический генератор; 2-вибратор; '«? -источник механических колебаний.
Полагая / = 0 и У0 = 0 в уравнениях G.8) и G.9), имеем
A F
Е< =
G.11)
У zo + z + A*/Y
Пусть S — эффективная площадь принимающей звук поверхности,
а а —показатель преломления волны; тогда
F = aSp. G.12)
Используя формулы G.11) и G.12), получаем для
чувствительности при приеме выражение
A aS
Sn =
Полагая
У zo + z + A*/Y
~ ~ } А*
1 Y '
преобразуем это выражение к виду
A aS
5R =
G.13)
G.14)
G.15)
где zj — механический импеданс в случае, когда ток /
поддерживается постоянным или равен нулю.
222 Гл. 7'. Основные типы пьезоэлектрических преобразователей
В статических условиях или в области частот,
существенно меньших резонансной частоты, имеют место соотношения
А = А0 (А0 — фактор силы при со = 0),
?о = о,
Zj = -^- E/0 — статическая упругость при / = 0), G.16)
а = 1,
Y = j<oC (С — емкость).
Обозначая SR при этих условиях через З'до^получаем
*»-$?. G.17)
С другой стороны, в области частот, в которой механический
импеданс 20 + z7 представлен колебательной системой с одной
степенью свободы1), т. е. z0-f 2г = г + /(соиг-— Sj/co), где г, /тс
и 5/ — эквивалентные сопротивление, масса и упругость соответ-
ственно, выражение G.15) принимает вид
5й=—/aAS а. ¦ ' <7Л8>
Q = ^-. <? = ^L = -^, G.19)
где
й0/ v Г 0H/Г
G>o/ = l/ — — резонансная частота при постоянном токе.
На резонансной частоте со0/ чувствительность при приеме SR
в a(sI0/sj)(A/A0)Q раз больше, чем SR0.
Чувствительность при излучении Ss определяется следующим
образом:
S8 =
Pd
Es
(дин/см2)/В, G.20)
где Es — выходное напряжение генератора, a р^ —звуковое
давление на расстоянии d см от излучателя. Между Ss и SR существует
определенное соотношение, основанное на принципе взаимности,,
которое можно выразить в виде
"Й = "йГ' 10? (дин2/см4)/В2' G-21>
*) Эта область частот расположена вблизи основной частоты
механического резонанса вибратора.— Прим. ред.
§ 1. Основные уравнения
223
где р — плотность среды (г/см3), / — частота (Гц), zf —
электрический импеданс свободного преобразователя (Ом).
Следовательно, если чувствительность SR известна, то величину Ss можно
вычислить с помощью соотношения G.21).
2. Интегрирование основного уравнения. Основные уравнения,
включающие постоянную е, а именно C.104) или G.3) и G.4),
отображают существующие в точке дифференциальные
соотношения между электрическими переменными Р (или D) и G и
механическими переменными т и ?. Однако реальные колебательные
Фиг. 7.3. Пьезоэлектрический вибратор ут
с воздушным зазором. /А
ш
задачи связаны с необходимостью интегрировать эти основные
уравнения. В вибраторе колебания оказывают влияние на
распределение электрического поля G или поляризации Р, и,
наоборот, колебательные смещения изменяются в зависимости от
электрического состояния, характеризуемого величинами G и Р.
Таким образом, эти взаимодействия усложняются, особенно для
вибраторов с воздушными зазорами между электродами.
В таких случаях решение получить легче, а результат
выглядит проще, если сначала провести интегрирование основного
уравнения, а затем уже результат применить к колебательной
задаче для вибратора. Ниже мы рассмотрим два вопроса,
относящихся к данной задаче.
Основное уравнение, в котором используется фактор
деполяризации [11. Для примера рассмотрим вибратор, показанный
на фиг. 7.3, в котором пьезоэлектрическое вещество слоем
толщиной ti помещено между двумя параллельными пластинами
конденсатора с воздушным зазором ta и к электродам приложено
электрическое напряжение Е. Предполагается, что напряженность
внешнего электрического поля G0 = Elt распределена
равномерно.
Однако в действительности напряженность электрического
поля G внутри кристалла, вообще говоря, отлична от G0.
Поскольку напряженность электрического поля в воздушном зазоре равна
индукции D, Е определяется следующим образом:
E=G0t = Dtl + Gta>
D = G + inP. G'22)
224 Гл. 7. tf> поеные типы пьепо.иентрических преобразователей
Иг|,.ч1очпи D из приведенных уравнений, получаем выражение
G=G0-*f±P, G.23)
Как видно из этого выражения, напряженность G в общем случае
может быть представлена в виде
G = G0 + |3P; G.24)
при этом величина р называется фактором деполяризации. Такой
подход соответствует представлению о факторе размагничивания
в магнитном веществе. Если подставить выражение G.24) в
уравнения G.3) и G.5) и заменить переменную G на G0, то эти
уравнения примут вид
x = s'ol-e'G0,
где s'G, e' и 8| —эффективные постоянные для данной системы,
определяемые выражениями
Sg = $g~
1-8,C '
s i-еф '
Для случая, представленного на фиг. 7.3, величина |3
определяется из формул G.23) и G.24) в виде
Р=-^а. G.27)
и соотношения G.26) принимают вид
е' = 1 + D«в/*)е6' G-29)
¦Hi+iuroi;- G.зо)
Из этих соотношений можно точно определить влияние
воздушного зазора.
Уравнение, в котором используется электрическая индукция.
Как указапо выше, в продольно колеблющемся вибраторе с
поперечным пьезоэффектом напряженность электрического поля в
направлении поля однородна по всему кристаллу и можно
использовать представление о факторе деполяризации. Однако если
§ i. Основные уравнения
225
вибратор продольного типа колеблется в направлении
электрического поля, то напряженность поля не остается постоянной
вследствие воздействия механических колебаний и представление
о факторе деполяризации использовать нельзя.
В этом случае следует принять во внимание, что если площадь
поперечного сечения, через которую проходит поток
электрической индукции, постоянна, то электрическая индукция D также
остается постоянной, даже если G и Р
распределены по-разному. Учитывая
это, следует проводить интегрирование
только основного уравнения [21.
В качестве примера рассмотрим
случай, показанный на фиг. 7.4:
пьезоэлектрическое вещество слоем
толщиной t{ помещено между параллельными
Ф и г. 7.4. Пьезоэлектрический вибратор
с воздушным зазором, колеблющийся в
направлении электрического поля.
-*/ —
Lq -t ~lf
пластинами конденсатора, расстояние между которыми равно г,
и к пластинам подведено электрическое напряжение Е. Располагая
пачало координат посередине слоя пьезоэлектрика и проводя
интегрирование уравнения G.4) между пластинами конденсатора (имея
в виду, что А'5 = 1,е = 0иС = Ов воздушном зазоре), получаем
fi/2 «i/2
tD = taD + I<t j Gdx + 4ne ( Idx, G.31)
где ta = t—ti. Поскольку электрическое напряжение Е
определяется выражением
/i/2
E = Dta+ \ Gdx, G.32)
-fl/2
уравнение G.31) принимает вид
D = iqG0 + 4ne'l, G.33)
где^ C0 —напряженность приложенного извне электрического поля,
а ? — среднее значение деформации ?:
Г - Е
«1/2
%={ j \dx.
G.34)
-И/2
15—0231
22Г> Гл. 7. Основные типы пьезоэлектрических преобразователей
Кромо того, Щ и е'-—эффективная диэлектрическая проницаемость
и пьезоэлектрическая постоянная соответственно, которые могут
быть представлены в виде
1 1+4Я86*а/* * /у. 35)
где
Подставляя G.33) в основные уравнения G.3) и G.4), имеем
т=_е'С0-^1|+,^ G.36)
*d = sg + ^. G.37)
Чтобы решить задачу о колебаниях пьезоэлектрических
вибраторов, часто бывает необходимо найти величину dx/dx, так как
она обозначает силу, действующую на единицу объема в
направлении оси х. Если G является функцией х, то в уравнении G.3)
величина dGldx отлична от нуля, тогда как в уравнении G.36)
G0 и | не являются функциями х, и, таким образом, мы имеем
Используя это соотношение, легко решить колебательную задачу,
как будет видно из уравнения G.124).
3. Основные уравнения пьезоэлектрического и электрострик-
ционного эффектов. 1. Пьезоэлектрические кристаллы обладают
различными упругими, диэлектрическими и пьезоэлектрическими
свойствами в разных кристаллографических направлениях;
следовательно, при изучении их колебаний необходимо использовать
векторные и тензорные величины. Если же мы зададим
определенные электрическое и механическое направления в кристалле
и будем рассматривать только свойства, относящиеся к этим
направлениям, то уравнения могут быть написаны в простой
форме G.3) и G.4).
Как отмечалось в гл. 3, § 3, основные уравнения
пьезоэлектрического эффекта имеют много различных форм. Эти уравнения
вместе с соотношениями между постоянными приведены в табл.
7.1. Следует отметить, что символы s и с обозначают
механическую упругость и податливость соответственно (а не наоборот,
как принято во многих работах). Постоянная Г совпадает с
константой /, которую использовали Мэзон и другие авторы в ранних
исследованиях сегнетовой соли; постоянная Г приближенно равна
постоянной h, когда 4яе ^> 1.
Таблица 7,1
Основные уравнения пьезоэлектрического эффекта
Переменные
Основные
уравнения
Соотношения между
постоянными
Механические
переменные
Электрические
переменные
Способ выражения
через Г
через h
через d
через е
через g
Упругость sPi sq,
Диэлектрическая
проницаемость К%,
Диэлектрическая
восприимчивость
Пьезоэлектрическая постоянная Г
Деформация |
Поляризация Р
Индукция D
При использовании
Р
t=-L{x+rp)
Sp
Р = е6(С + ГВ
l = ±-x+dG
SG
P = dx + zxG
x — SQ^ — eG
P = el + B%G
Sp = SG + E^
SD^SG + ^net/Kt
\ 4 4
— h
~ *|-1
Напряжение т
Напряженность
электрического
поля G
(D = G + 4nP)
При использовании
D
•Т="*-А(Т5-)
D = 4ndx+KXG
x^SQ^ — eG
15*
228
Гл. 7. Основные типы пьгхохн-кт/яппч них преобразователей
Продолжение табл. 7.1
Соотношении между
постоянными
Пьсзомодуль или
пьезоэлектрическая постоянная
деформации d
Пьезоэлектрическая постоянная
напряжения е
Пьезоэлектрическая постоянная
деформации g
Пьезоэлектрическая постоянная
напряжения h
Коэффициент
электромеханической связи к
sg
4я
Г = 8рГ
SG 6
IU
К%
e==SGd = l^s»g = !&h = EtT
_ 4я/ _ 1 , _ 1 4я
~ Кх ~~ sD ~ sD K^
А =
4яе
К*
= *!# = -
к%
Добавим несколько кратких замечаний относительно
некоторых практически используемых кристаллов. В кварце возникает
напряжение Хх = eilLGx вдоль оси х и напряжение Yy = —ei2Gx
вдоль оси у, если электрическое поле Gx приложено в направлении
оси х. Это продольный и поперечный пьезоэлектрические эффекты
соответственно, и они используются в вибраторах толщинного
и продольного типов. В кварце возникает также сдвиговое
напряжение Xz = —euGy под действием электрического поля Gy,
которое используется в вибраторах изгибного типа.
Все пьезоэлектрические эффекты в сегнетовой соли носят
сдвиговой характер, и максимальный связан с действующим в
направлении оси х электрическим полем Gx, вызывающим
сдвиговое напряжение Yz = —euGx. Напряжение сдвига У2
эквивалентно напряжению сжатия — euGx вдоль оси г/' и напряжению
растяжения euGx вдоль оси z\ если оси у' и z образуют угол 45° с осями
у и z, как показано на фиг. 7.5. Пластинка, вырезанная подобно
изображенной на фиг. 7.5 (ось х направлена по ее толщине),
называется пластинкой 45-градусного Х-среза D5° Х-среза) и
используется для вибраторов продольного типа.
§ 1. Основные уравнения
229
Пьезоэлектрические эффекты в кристаллах ADP (дигидрофос-
фата аммония) также носят сдвиговый характер, и максимальный
эффект обусловлен действием электрического поля Gz вдоль оси z.
Поэтому для вибраторов продольного типа из ADP используется
пластинка 45° Z-среза.
2. Электрострикционное вещество, такое, как керамика тита-
ната бария, в отличие от кристаллов можно считать изотропным;
его электрострикционные свойства
характеризуются двумя постоянными q{i
и д12, которые описывают продольный
и поперечный эффекты соответственно.
В прямоугольных координатах х, у и z
введем обозначения: XXJ Yy, Zz, Xy,
Фиг. 7.5. Пластинка 45°Х-среза.
Yz, Zx — напряжения; хх, уу, zz, ху, yz, zx — деформации; Ер —
модуль Юнга; \ip — модуль сдвига и о — коэффициент Пуассона*).
Тогда основные уравнения электрострикции принимают вид
xx = ^~[Xx^a(Yy + Zz) + qnPl-qii(Pl + Pl)},
yy = ^lYy-a(Z, + Xx) + qilPl--qi2(P* + Pl)],
zz = ir-[Zz~-e(Xx + Yv) + q«Pl - qi2 (P% + P»)],
G.39)
=¦['.-
Я11+Я12 p p "I .
[2.P
Gx + (i-2a)*l + a) № ~ CT) qn — 2ct?12' x* +
+ (ag„- q12) (y, + zz)} + 2И+1» {PlZx + PyXy)] ,
Г 2Pv
Py = 4 lGv + A_2o)(l + a) W1 -CT) «" - 2aq^ У'у + G.40)
+ (oqu - qa) (zz + xx)} + M±f 2 (PxXy + Pzyz) | ,
Gz + (i-2o) A +a) *[A ~~ a) qil ~ 2aq,2] Zz +
+ ton - ga) (xx + yy)} + ^±^ (Pyyz + Pxzx)].
*) Для простоты мы опускаем индекс р у а.
230 Гл. 7. Основные типы пьезоэлектрических преобразователей
Чтобы возбудить колебания, мы должны прежде всего создать
постоянную, или остаточную, поляризацию Рх0 вдоль оси я,
а затем наложить на нее переменную компоненту Рх. Если Рх <^
< Рх0, то Р% « Р%0 + 2РХ0РХ. При этом для переменных
компонент на основе приведенных выше уравнений мы получаем
хх = -i- [Хх - ГиРя- а {Уу + Zz)],
yy = j^[Yy-ri2Px-e(Zz + Xx)h
1
Zz~~~E~ [Zz—FftPx — G{Xx-\rYy)], ,y ^
Xy~ |ip 1Лу+ 2 l + o *vy
Рзс^ей[^х + A^2(т1)A + о){[A-а)Г11-2(тГ12]^ +
+ (аГи-Г12)(^ + ^)},
где
Г14 = 2Pxoqlu T12 = 2PxQgi2. G.42)
Здесь Ги характеризует продольный, аГ12- поперечный эффекты
линеаризованной постоянным полем электрострикции, или в
соответствии с принятой по аналогии с пьезокристаллами
терминологией Гии Г12 характеризуют продольный и поперечный
пьезоэлектрические эффекты в керамике.
§ 2. ПРЕОБРАЗОВАТЕЛИ ПРОДОЛЬНОГО ТИПА*)
Существуют два способа возбуждения колебаний по длине
в пьезоэлектрических вибраторах прямоугольной формы: один
заключается в использовании поперечного, а другой —
продольного пьезоэлектрических эффектов. На фиг, 7.6, а показан случай
использования поперечного эффекта. К таким случаям относятся
кварцевая пластинка Х-среза, возбуждаемая механически в
направлении у электрическим полем, направленным по оси ху
пластинка из сегнетовой соли 45° Х-среза и пластинка из ADP 45°
Z-среза. На фиг. 7.6, б показан случай использования
продольного пьезоэффекта; примером может служить кварцевая пластинка
Х-среза, колеблющаяся в направлении х под действием
электрического поля, также приложенного в направлении х. В этом
случае расстояние между электродами оказывается, как правило,.
большим, а емкость — малой; поэтому такой способ возбуждения
обычно не применяется. Однако применяется особый
вибратор, в котором расстояние между электродами уменьшено за счет
х) Преобразователями или вибраторами продольного типа здесь
называются вибраторы прямоугольной формы с колебаниями в направлении длины.—
Прим, ред.
§ 2. Преобразователи продольного типа
231
присоединения к кристаллу с обеих сторон накладок из пассивного
упругого вещества; он называется составным вибратором (см. ниже
и табл. 7.2).
Выведем постоянные электроакустического преобразования
для нескольких типов вибраторов.
<+v
а 5
Фиг. 7.6. Два пьезоэлектрических вибратора продольного типа.
а —с поперечным пьезоэффектом; б —с продольным пьезоэффектом.
1. Вибратор продольного типа с дополнительной массой [3].
Такой тип вибратора показал на фиг. 7.7. Присоединенная на его
свободном конце дополнительная масса М влияет на его
резонансную частоту и другие характеристики. Поскольку этот вибратор
Фиг. 7.7. Вибратор продольного типа
с дополнительной массой М.
У1
i
М
относится к вибраторам так называемого «плавающего типа»,
одно из его преимуществ заключается в том, что па
пьезоэлектрический кристалл при использовании его в качестве элемента
гидрофона можно не накладывать непосредственно статического
усилия, в связи с чем он не испытывает разрушающего
воздействия гидростатического давления.
Один из методов вывода уравнения электроакустического
преобразования основан на использовании теории электрических
длинных линий [3]. Однако здесь будет описап другой метод,
основанный на решении волнового уравнения.
Введем обозначения: Ь — ширина вибратора, t — толщина,
S = Ы — площадь поперечного сечения, I — длина, р —
плотность материала, EG — модуль Юнга кристалла в направлении
его длины, с = У"Ес/р — скорость распространения звука, и —
смещение. Поместим начало координат на конце кристалла и
рассмотрим случай, когда на механической стороне действует
переменная возбуждающая сила Fe*®* (приложенная ц концу
кристалла), а электроды замкнуты накоротко (т. е. Е = 0).
232 Гл. 7. Основные типы пьезоэлектрических преобразователей
Волновое уравнение. Для вибратора дифференциальное
уравнение движения имеет вид волнового уравнения:
д2и о д2и 1П /0.
Припимая, что смещение и синусоидально изменяется со временем
по закону е*ш, имеем
Общее решение этого уравнения имеет вид
ы= Л cos f-#sin— » ('-45)
где Л и 5 —произвольные постоянные. Граничные условия имеют
следующий вид:
при * = 0 EGS^-=-F, G.46)
, 1/Г д2*г а ди
при * = J j|f__=_tfcs_,
#?
^'^ "<*"~^~
т. е.
Ma>*u = EGS^-. G.47)
Подставляя в выражение G.45) граничные условия G.46) и G.47),
можно определить произвольные постоянные А и В. Введем
вместо х и со новые переменные X и а:
Х = у, G.48)
a = ^-Z. G.49)
Тогда выражение G.45) упрощается и принимает вид
Z*±-W-, G.50)
?G? а да + tg а v '
где
U (X) = (qatga—l) cos ocX — (qa + tg а) sinaZ G.51)
и
дополнительная масса ММ .- r«v
^~~* масса кристалла plS М0 ' V • /
Выражение G.50) является искомым решением колебательной
задачи, a U (X) в G.51) даст распределение амплитуды
смещений вдоль стержня, соответствующее данной моде.
§ 2. Преобразователи продольного типа
233-
Резонансная частота определяется выражением
со -^li/Ж
где ап — корни уравнения
G.53)
G.54)
которое получается при приравнивании нулю знаменателя в вы-
ражспии G.50). Значения ап изменяются в зависимости от qy
&п
7
6
5
4
3
г
1
0
-2п
1*
п
i".
мь
—
МГ^
иН^
111
Ofit
oj
10
Фиг. 7.8. Корни уравнения G.54) ап в зависимости от отношения
дополнительной массы к массе кристалла q = M/plS.
как показано на фиг. 7.8. Распределение амплитуды колебаний
при резонансе Un (X) определяется из уравнений G.51) и G.54)
в следующем виде:
Un (X) = cos anX. G.55)
Механический импеданс z. Чтобы определить механический
импеданс z в случае, когда конец кристалла свободен (т. е. кристалл
свободен с механической стороны), необходимо вычислить
колебательную скорость i?@) на механическом выходе с помощью
выражения G.50):
V @) = 70) [U]х=0 = 7°) -р-с Т~7
v ' J l 1Л v J EqS a gaH-tga
Отсюда
~ F
Z = -
v@)
1 v 1 — qa tg a
G.56)
G.57)
Частотные характеристики z показаны на фиг. 7.9.
234 Гл. 7. Основные типы пъезоэлектрических преобразователей
Для получения эквивалентной схемы механического
импеданса z используется теорема Миттага-Леффлера [4]:
откуда
1 — да
2а
qa + tg а A + q) a ' 4J A + q cos2an)(a2 _ a2 j >
71=1
± = _L_+ у 1
G.58)
G.59)
Ф и г. 7.9. Частотная характеристика механического импеданса !Г== /рс??
G.57); woo = яс/Z.
здесь тп(т0) и sn — эквивалентные масса и упругость
соответственно, которые определяются выражениями
т0 = М + М0, G.60)
тп
1
Т A + д cos2a„) M0 = огпМ0,
a^-=-2"(l+^cos2an),
sn = -^ а?г A -!- ? cos2 an) -у-.
G.61)
G.62)
G.63)
В этих выражениях ап — коэффициент эквивалентной массы
тп, показанный на фиг. 7.10. Таким образом, эквивалентная
•схема механического импеданса z может быть представлена
параллельным соединением простых последовательных резонансных
§ 2. Преобразователи продольного типа 235
контуров, как показано на фиг. 7.11 (эквивалентная схема
механического импеданса колеблющегося тела обычно представляется
в таком виде). Ветвь т0 на фиг. 7.11 отражает перемещение тела
как целого и поэтому отсутствует, если вибратор на одном конце
закреплен.
0.6
V
*t I I IIIIIII I I
6j |гШ11
0.0/
0J
10
Ф и г. 7.10. Зависимость коэффициента эквивалентной массы ап от
отношения дополнительной массы к массе кристалла q.
Фактор силы А. Предположим, что вибратор
пьезоэлектрически возбуждается электрическим напряжением Ее^х и, кроме
того, с механической стороны на него действует возбуждающая
сила Fe^K
Если амплитуду и фазу силы F подобрать так, чтобы скорость и
(или смещение и) вибратора на механической стороне обратились
в нуль, то фактор силы А будет
определяться отношением — FIE. Ход рассуж-
депий здесь следующий. Если к
кристаллу приложено электрическое
напряжение Е, то в отсутствие воздушного
Ф и г. 7.11. Эквивалентная схема
механического импеданса 7.
So
зазора между электродами возникает однородное электрическое
поле, которое создает однородное механическое напряжение —eElt
вдоль длины вибратора. Оно эквивалентно механическому
напряжению, которое было бы создано в вибраторе парой
противоположно направленных сил —eSE/t = —ЪеЕ, приложенных к обоим
его концам.
Режим колебаний под действием этих сил получается путем
решения волнового уравнения методом, подобным описанному выше.
236 Гл. 7. Основные типы пьезоэлектрических преобразователей
Результат имеет следующий вид:
~, ЬеЁ I 1 1
U ~~ EGS S a qa+tgaX
X j (^a-h^g-y) tgacosaX — (ga-f- tga)sinaX \ . G.64)
Смещение и @) на механическом выходе можно определить,
если в приведенном выше выражении положить X = 0 [смещение
w@) на механической стороне под действием возбуждающей
силы F определено выражением G.56)]; полагая и @) = и' @),
получаем следующее выражение для фактора силы А:
A=-l~ -tef + tgta/2tga. G.65)
? 1 — да tg a & v '
Этот фактор силы выведен из первого основного уравнения.
Попытаемся теперь получить фактор силы, относящийся ко
второму основному уравнению. В этом случае А определяется
отношением I/v, в котором задана колебательная скорость на
механическом выходе и, а / — вызванный ею ток короткого
замыкания между электродами. Мода колебаний, т. е. распределение
смещений, определяется величиной U (X) [выражение G.51)],
если задана возбуждающая сила F; следовательно, в этом случае
ток короткого замыкания Id имеет вид
о ^
7d = /a> ^ be-^ff^ dX = jo)be {U@)--U A)} =
i
= j(dbetga (tfa-i-tg ^) • G.66)
Скорость v@) на механическом выходе выводится из выражения
G.51) и равна
v@) = j<oU@) = j®(qatga — l). G.67)
Отсюда фактор силы А равен
A = d^=-beqAa + XZa/2tga. G.68)
v@) 1 — qatga б ч 7
Следует отметить, что это выражение полностью совпадает с
выражением G.65). Частотные характеристики фактора силы
показаны на фиг. 7.12.
Проводимость заторможенного вибратора. Проводимостью
заторможенного вибратора Y называется отношение тока к
электрическому напряжению на электрической стороне в случае,
§ 2. Преобразователи продольного типа
237
когда колебательная скорость на механическом выходе
поддерживается равной нулю. Это не означает, что колебательная
скорость равна нулю во всех точках вибратора, поэтому
проводимость У не всегда равна проводимости /шС, обусловленной
емкостью С пьезоэлектрического материала. В результате вычислений
для У получаем выражение
У = ;шС + /-
b*e*tgal/c
ьуМ
pcS
(оМ
-tg-
iol
G.69)
2. Простые вибраторы продольного типа. Выше показан метод
определения таких электромеханических параметров, как рас-
И
Ф и г. 7.12. Частотные характеристики фактора силы А = be 91 G.68).
пределение амплитуды колебаний U (X), резонансная частота соп,
механический импеданс z, эквивалентная масса тп,
эквивалентная упругость sn и фактор силы А. Этот метод основан на
решении волнового уравнения. В случае простых продольных
вибраторов решения легко найти либо методом, аналогичным
описанному, либо при помощи уже полученных результатов. Эти
результаты приведены в табл. 7.2.
Вибратор с одним закрепленным концом. Решение для него
можно получить, приравнивая бесконечности дополнительную
массу М в решении для вибратора с дополнительной массой.
При работе на основном резонансе длина вибратора I равна
четверти длины волны, т. е. Я/4, где % — длина волны. Так как
в случае излучения звука в жидкость сравнительно трудно pea-
Вибраторы продольного типа
а = <й1/с, X = х/1, Mq — масса вибратора, S — площадь поперечного сечения.
Таблица 7.2
Форма вибратора
Механический
выход
Постоянные
С одним закрепленным концом
На свободном
конце
FI
и = -
^,tf(X) = sinaX,<o„=^j/^L.
egs
ап — корни уравнения cosa = 0: an = w —(?i=-l, 3, 5, ..
7 = /( — ctg a) pcS, mn^ — M0, $n = n*-^ y— , A = be
С обоими свободными концами
На обоих
свободных концах
~ F
и —
I
ЩХ)
2 EGS a cos (a/2)
Ш' и™=°*«х> «*-^/^
ап— корни уравнения cos-^-=0: ап = пя (п = 1, 3, 5, ...);
С дополнительной массой
На свободном
конце
и =
ЩХ)
, ?/"(Х) = (да tg a — 1) cos aX —
EGS a(qa-{-tga)
-(ga + tga)sinaX, Un(X) ~cosanX, <dn = -^y- 1/ — I
Л — корни уравнения tja + tga = 0,
я=
- . qcc + tga т м + м
wn^-y^ + tfcos2^)^, sn = — (l + qcos*an)—?-,
^=_<?« + t8(«/2)
1 — ga tg a
(В отсутствие дополнительной массы следует положить <у —0.)
Составной
Постоянные
пьезоэлектрического участка имеют индекс 1,
постоянные упругих
участков— индекс 2
*02 Р2С2«^2
На одном
свободном конце
Ниже указаны лишь нечетные моды (к — постоянная)
0<x<Cby un(x) = Xcosl^f-\sin (-^-),
6<x<a + 6, un{z)=--lsin (-^Л cos-^ib + a — x).
Резонансная частота соп равна частоте со, удовлетворяющей уравнению
А cob . coa .
~ -2 tg((»N/ci) tg(@a/c2) —z0,/z02
7 tg(^/ci) + (zoi/z02)tg(u)a/c2) 02'
240 Гл. 7. Основные типы пьезоэлектрических преобразователей
лизовать условия, в которых один конец закреплен, то в этом
случае условия закрепления можно имитировать, помещая позади
вибратора четвертьволновую пластинку.
Вибратор с двумя свободными концами. На основном резонансе
длина вибратора I равна половине длине волны Х/2. Случай 2
в табл. 7.2, когда оба конца вибратора рассматриваются в
качестве механического выхода, используется главным образом тогда,
когда излучение звука не является основной целью, как это имеет
место для элементов фильтров и т. п. Решение для случая с
механическим выходом на одном свободном конце можно получить,
если положить М = 0 в уравнении для вибратора с
дополнительной массой (случай 3 в табл. 7.2). В этом случае свободная
поверхность, которая не излучает звук в жидкость, помещена в воздух
или закрыта заполненной воздухом пористой резиновой
пластинкой, так что эта поверхность оказывается слабо нагруженной.
Вибратор подперт или подвешен на слабой пружине в узловой
плоскости, расположенной посередине, так что он может
рассматриваться как вибратор плавающего типа.
3. Составной вибратор продольного типа. Вибратор, в котором
-к элементу из пьезоэлектрического материала присоединен
дополнительный элемент из упругого материала для того, чтобы можно
было управлять его колебательными характеристиками, например
резонансной частотой, называется составным вибратором. В табл.
7.2 (случай 4) рассмотрен составной симметричный вибратор,
в котором к пьезоэлектрическому элементу присоединены два
упругих элемента одинаковой длины. Колебания вибратора
в этом случае аналогичны колебаниям прямоугольного магнито-
стрикционного вибратора, и решение для него представлено
в табл. 7.2. Что же касается метода расчета, то в этом случае
применим тот же метод, что и для прямоугольного магнитострик-
ционного вибратора (гл. 5), если не слишком велик его
поперечный размер.
Вычисление переменного механического напряжения. При
использовании вибратора для получения интенсивных
ультразвуковых волн максимальное механическое напряжение, возникающее
в нем, не должно превышать предела прочности
пьезоэлектрического материала.
Для составного вибратора, показанного в табл. 7.2 (случай 4),
распределение смещений и (х) в пьезоэлектрическом элементе
на резонансной частоте можно представить в виде
и (х) = ?А COS (Ш/С2) gin ©* 7 70
v ' /со sin (oofc/cj) c{ ' v • /
где иА — скорость на механическом выходе (на одном свободном
конце), a ct и с2 — скорости распространения продольной волны
§ 2. 11 реобразователи продольного типа
241
в пьезоэлектрическом и упругом материалах соответственно. Если
модуль Юнга пьезоэлектрического материала обозначить Еи
то пап ряжение т имеет вид
Т — ?i | г = -. VА —:—;—П—Г COS • ( / . / 1)
i дх ) с1 sin ((db/ci) сi v ;
Из этого выражения следует, что максимальное напряжение тт
имеет место в точке х — О, т. е. посредине, и равно
cos(o>a/c2) ,« 70ч
f ' х sin ((objс{) Л' ч '
где Р! — плотность пьезоэлектрического материала.
С другой стороны, удельная акустическая мощность W (Вт/см2)
на излучающей поверхности определяется выражением
i>Sra = WM07, G.73)
где ra —удельное акустическое сопротивление излучения в г/см2-с.
Из приведенных двух выражений получаем соотношение
Tm^3,15-10^cosi°7f2! P*LVW, G.74)
определяющее зависимость между выходной акустической
мощностью W и максимальным напряжением тт.
Если теперь Е — возбуждающее электрическое напряжение,
А — фактор силы, S — площадь поверхности излучения, гА —
удельное внутреннее механическое сопротивление, то скорость
vA на механической стороне при резонансе определяется
выражением
»*=т$Ы- <7-75>
Из выражений G.73) и G.75) получаем соотношение
я=зоо^^/^в, G.76)
определяющее зависимость между выходной акустической
мощностью W и возбуждающим электрическим напряжением Е.
В качестве численного примера рассмотрим пьезоэлемент
из керамики титаната бария и зададим следующие значения:
РЛ = 2,08.10е г/см2.с, А =5,15-107 ед. СГСЭ,
ra= 15-10* г/см2.с, г =1,9.10* г/см2-с, G.77)
^JL.0,1, ^==JLo,81, 5 = 38,5 см2-
16-0231
242 Гл. 7. Основные типы пьезоэлектрических преобразователей
В этом случае максимальное механическое напряжение тт
и возбуждающее электрическое напряжение Е равны
тт = 32,8 VlF кгс/см2,
# = 3101/ТУ В. G.78)
Предположим, что Z? = 1000 В, тогда
й^-9,5 Вт/см2,
тш-100 кгс/см2. G.79)
Механическая прочность керамики титаната бария
приближенно равна 200 кгс/см2 при растяжении и 2000 кгс/см2 при сжатии.
Поэтому может оказаться по-
Упругое бещестбо лезным снабдить преобразо-*
пьезоэлектрик /\ ватель дополнительными
сжимающими механическими
устройствами с болтами и
гайками.
Асимметричный
вибратор. Кроме рассмотренного»
Фиг. 7.13. Асимметричный
ставной вибратор.
v2r в/ У у , | v,
л
у\\
1
*
D
ь
к
\v2 v2
а
Г
•*¦
ч
выше случая часто используется асимметричный вибратор,
показанный на фиг. 7.13. Распределение колебаний и постоянные для
вибратора такого типа могут быть выведены из данных для
симметричного вибратора. Если плоскость Р на фиг. 7.13 является
узловой, то вибратор можно разделить на две части, форма колебаний
каждой из которых соответствует форме колебаний половины
соответствующего симметричного вибратора [5].
Если все величины, относящиеся к части II вибратора,
обозначить буквами со штрихами, то решение для этой части будет
соответствовать приведенному в табл. 7.2 (случай 4), но с указанным
изменением обозначений. Поскольку силы по обе стороны
от плоскости Р равны, имеем
дх J*=o 1G М_
Следовательно, отношение постоянных X
дующим образом:
V_ _ gpt cos (сопа/р2)
~X z'oi cos (G)na'A?2)
? о Г dUn (*) 1
dx
Jac'=0
G.80)
и V определяется еле-
G.81).
§ 2. Преобразователи продольного типа
243
Таким образом, можно определить форму колебаний для данной
моды. Определим теперь эквивалентную массу ть приведенную
к торцевой поверхности Q, принятой в качестве механического
выхода. Обозначая эквивалентные массы частей I и II вибратора
через иг и т' соответственно, а колебательные скорости на
поверхностях Q и Q' через v2f и и'ф получаем
i;2/-?ismi^, i4, = X'sin^-\ G.82)
Из условия равенства кинетических энергий следует
— miVlf = _. mv% + у т' (v'2fJt
откуда
mt = m + m' №J. G.83)
Фактор силы At в этом случае может быть получен
применением соотношения
которое выводится непосредственно из уравнения G.33); G и I —
здесь средние значения напряженности электрического поля G
и деформации ? соответственно, которые можно представить в виде
6=0,
Ток It, вызванный деформацией при короткозамкнутых
электродах, определяется выражением
b-iiKS-lv^DS-ja®, G.85)
где S — площадь поперечного сечения пьезоэлектрического
элемента. Колебательная скорость на торце Q равна
17 = /юи(л + &). G.86)
Отсюда фактор силы равен
At = ^ = ^u{b)-u'^eS. G.87)
Подставляя в это выражение и(х) и и' (х) из табл. 7.2 (случай 4)
и используя соотношение G.81), получаем
г Ъ + Ъ' с2 \ l z'oi sin {(dnb/Ci) J v '
16*
Таблица 7 3
Электромеханические постоянные пьезокерамических вибраторов различного типа [1]
Тип
колебаний
Продольные колебания по длине
продольный пьезоэффект
поперечный пьезоэффект
Колебания по толщине
Направление
постоянной
поляризации
Направление
электрического
поля
Направление
механических
колебаний
Механические
условия
Вибратор свободен в
направлениях у и z
Вибратор свободен в направлениях х и z
Нет смещений в направлениях
У и z
. Хх\
Форма
вибратора
¦Ч
Ур**
Уг
у////ум/щ
VL
^~а_.
D-*
\хх^г**~
т^^
Основные
уравнения A)
хх = ^(Хх + ТпРх)
*Р
Уу = ^(Ху-Т12рх)
Рх="^сь(^х~^12Уу)
1_
рт
(ХХ + ТТРХ)
"Е
^(Gx-\-TTxx), где
A-а)Гц-2аГ1а
(l + g)(l-2a)
Основные
уравнения B)
+ EGLxx
Px = eCLGxJr
+ (есьГц)лж
Yy-KvTi2)Ox + EGLtyy
Xx=-(8lTT)Gx + EGTxx
Рх = Ц&х\ (^т)хх
Кажущаяся
восприимчивость
заторможенного
элемента ecL, ecI,
_ Ч
ьс1/
1-
28i(ar11-ri2J
(l~2o)(i+o)Ep
1-8,
A-о) Г121-4аГ11Г12+A+сг+2а2) Г*2
A + а)A-2о)Яр
Модуль Юнга
#<з или
упругость fta
#Gi
^ A
(«-*)
EGT = EpT[i--JL.X
f A-Р)Гц-2оГ„1а-1
I (i + o)(l-2a) } J'
1—a
г«е ?РГ= (i +о) A_2о) ЕР
X
Диэлектрическая
восприимчивость
свободного вибратора
е/ь =
^»-ecLrfifcL
е/ь =
Яр-е^ГЬ &cL'
е/
{
т = в6Гц-Л-х
I. tGT
A-0)Ги-2о-Г12-|2
A+о)A-2о)
П
Пьезоэлектрическая
постоянная
(соответствующая
постоянной е)
eczJu
8с1/Г12
егТт
Коэффициент
электромеханической связи к
(при 1 < 4 Я8?)
/:
^ьг„
V
Еп
Y\
ЛГТ
246 Гл. 7. Основные типы пьезоэлектрических преобразователей
4. Пьезокерамический вибратор продольного типа. Вибратор,
в котором используется продольный пьезоэлектрический эффект
в керамике типа титаната бария, изготавливается из
поляризованного пьезокерамического вещества с длинной стороной,
ориентированной в направлении я, и снабжается парой электродов,
как показано в первом столбце табл. 7.3. Пусть вибратор свободен
в направлениях у и z, а внешняя сила действует вдоль оси х;
тогда, полагая в основном уравнении G.41) Yy = Zz = О и Ру ~
= Pz — 0, получаем следующие уравнения:
хх = "й- [Хх + ГцРх],
Vv=Zz= -4-lTi2Px + oXx], G.89)
Р.=ч[0я+ A_2g;A+g) {[A-а)Ги-2аГ12]^4
+ (аГи-Г12)(^ + гг)>].
Исключая из этих уравнений уу и г2, получаем соотношение
Px = *ez.(Gx+rux,). G.90)
Это соотношение приведено как одно из основных уравнений A)
в табл. 7.3; в нем ecL — диэлектрическая восприимчивость
вибратора, зажатого вдоль оси я. Заменяя переменные в основном
уравнении A), можно получить соотношение с константой е в
качестве основного уравнения B) в той же таблице, в которой 8сьГц
соответствует пьезоэлектрической постоянной напряжения е.
Рассмотрим теперь случай, когда к двум свободным торцевым
поверхностям (механическим выходам) приложены силы, равные
vlzF и направленные противоположно, и предположим, что
смещения на свободных торцах равны !; и —? соответственно, a t —
расстояние между электродами, расположенными на свободных
торцевых поверхностях, Е — разность потенциалов, Q — заряд
на электродах; тогда величины XXi хх, Gx и Рх в основном
уравнения B) в табл. 7.3 будут равны
F „ о Б г Е d Q _ <Ь
X
X '
2S[
хх - z t 9 ьх- t t ^*- ? — 4я •
В квазистатических условиях1) при этом имеют место
следующие соотношения:
х) На частотах, лежащих значительно ниже резонансной частоты.—
Прим. ред.
§ 3. Вибраторf колеблющийся по толщине
247
Таким образом, фактор силы А0, шунтирующая емкость Cd
и упругая константа при постоянном электрическом поле sE0
определяются выражениями
4o=(eei,r«J?, sE0 = lo^-, Cd = ±(l+4meL). G.92)
Ниже будет показано [уравнение G.167)], что коэффициент
электромеханической связи
k ~~ У sEoCd 1 + AlHsjsoCj)' (?,93)
Следовательно, в данном случае
>
v
* = -,/ ^ Г„. G.94)
В частности, когда 4лес1/^>1, имеем
/
^ Ги. G.95)
Константы для вибратора продольного типа, в котором
используется поперечный пьезоэлектрический эффект, можно получить
таким же методом. Результаты для этого вибратора приведены
во втором столбце табл. 7.3.
§ 3. ВИБРАТОР, КОЛЕБЛЮЩИЙСЯ ПО ТОЛЩИНЕ
Если электрическое поле приложено в направлении толщины
вибратора, которая мала по сравнению с его шириной и длиной,
то резонансная частота такого вибратора определяется
исключительно толщиной и считается, что смещения возникают только
по толщине, а не в перпендикулярном направлении. Резонансная
частота fn рассматривается только для нечетных гармоник и
определяется выражением
/»=-?-j/"t- <я=1' 3'5' •••)' G-96)
где р —- плотность, a sG — не модуль Юнга, а упругая постоянная
для случая, когда запрещены все смещения, кроме смещения
в направлении толщины, называемая «продольной упругостью».
В этом случае колебательные смещения возникают вдоль
направления электрического поля, и, таким образом, строго говоря,
необходимо применять теоретическое рассмотрение, приведенное
в § 1, п. 2. Согласно результатам точного анализа, выражение G.96)
является приближенным решением, а эквивалентная масса равна
приблизительно половине полной массы вибратора [2]. Фактор
248 Гл. 7. Основные типы пьезоэлектрических преобразователей
СИЛЫ
Л = ^е, G.97)
где S — площадь электродов, е — пьезоэлектрическая постоянная
напряжения и t — толщина.
1. Кварцевые пластинки X-среза. В тонких пластинках кварца,
вырезанных перпендикулярно оси х, под действием
электрического поля Gx возбуждаются напряжения вдоль той же оси х;
поэтому в таких пластинках возникают колебания по толщине.
Они называются «пластинками Х-среза» и широко применяются
для возбуждения ультразвука в диапазоне частот 0,5—20 МГц.
Чтобы получить представление о численных значениях,
вычислим для примера механическое напряжение т и удлинение At,
Пусть к пластинке Х-среза толщиной 3 мм приложено вдоль оси х
электрическое напряжение 3000 В A0 ед. СГСЭ). Для кварца
*и = 4,8-10* ед. СГСЭ,
du= -6,45.Ю-8 сд. СГСЭ, G*98>
откуда получаем
T--eIlGx = 4,8.10*?J^= 1,6.10е дин/см2,
°'d G.99)
At = dtfixt= -6,45.10-8~3= -0,00645 мкм.
О, о
Механическое напряжение здесь весьма значительно, тогда как
удлинение очень мало.
Коэффициент электромеханической связи к равен 0,095, а
частотная постоянная (резонансная частота, умноженная па
толщину) составляет 285 кГц «см.
2. Вибратор Ланжевена. Чтобы создать вибратор продольного
типа с резонансной частотой порядка нескольких десятков
килогерц, используя кварцевую пластинку Х-среза, необходимо иметь
довольно толстую пластинку, что в свою очередь требует наличия
большого исходного кристалла и высокого электрического
напряжения. Чтобы обойти это неудобство, берут некоторое количество
кварцевых пластинок Х-среза и вклеивают их в виде мозаики
между двумя пассивными упругими пластинами, так что резопанс-
ная частота зависит уже не от толщины кварцевых пластин,
а от суммарной толщины вибратора, включающей упругие
пластины. Вибратор такого типа называется вибратором Ланжевена
(фиг. 7.14).
Если вместо кварца использовать пьезокерамику, например
керамику титаната бария, то часто не возникает необходимости
прибегать к мозаичной конструкции, поскольку из керамики
§ 4. Вибратор с радиальными модами колебаний 249
можно изготовить достаточно большую цельную пластину.
Большинство используемых в настоящее время преобразователей
Ланжевена относится именно к этому типу.
Колебания вибратора Ланжевена обычной формы, показанного
на фиг. 7.14, не относятся ни к чисто толщипным, ни к чисто
продольпым колебаниям. Они представляют собой сложные
колебания, в которых продольная мода связана с поперечпой, и
должны рассматриваться на основе теоретических соображений,
справедливых для короткого цилиндра (гл. 9).
Пьезозлектрик
I Упругое бещестбо
Направление I *L / / ^иГ°
колебаний 1 |^эЦ*-----4--гТ^я о-^ л
Фиг. 7.14. Вибратор Ланжевена.
Однако если длина вибратора достаточно велика по сравнению»
с поперечным размером, то к нему применима теория составного
продольного вибратора, описанного выше.
3. Основное уравнение колебании пьезокерамического элемента
по толщине. В этом случае нет иных смещений, кроме смещений
в направлении толщины. Тогда, полагая уу = zz = О в основном
уравнении G.41) и исключая уу и zz, мы получаем основное
уравнение A) в табл. 7.3. В этой таблице Epi —модуль упругости
для растяжения по толщине в случае, когда другие смещения
запрещены; ТТ и efr — постоянная Г и восприимчивость
свободного вибратора соответственно для этого случая. Замепой
переменных можно получить основное уравнение B) в табл. 7.3, которое
является уравнением с константой е. Пьезоэлектрическая
постоянная напряжения в данном случае представлена в виде 8^ГГ.
§ 4. ВИБРАТОР С РАДИАЛЬНЫМИ МОДАМИ КОЛЕБАНИЙ
Таким вибратором является вибратор в виде круглой
пластинки, симметрично колеблющейся в радиальном направлении.
В основном для подобных вибраторов используется керамический
материал типа титаната бария. В этом случае основпые
уравнения, записанные в прямоугольных координатах х, у, z, т. е.
уравнения G.39) и G.40), удобно преобразовать в уравпепия,
записанные в цилиндрических координатах г, 0, z. В результате
преобразования переменные хх, уу, zz, yz, zx, ху заменяются на ?гг, ?0о>
Таблица 7.4
Электромеханические постоянные пьезокерамических вибраторов различного типа [2J
Тип колебаний
Направление
постоянной
поляризации
Направление
электрического
поля
Направление на
блюден пя
Механические
условия
Форма вибратора
Основные
уравнения A)
^ Радиальные колебания
z
Z
г
*zz = rrz = rQz = Чгв =¦ 0
">1 N4^r 2 j/rrr
Trr '
1
1
Ы = -w (tee — сгтгг — Г12Р2)
Сдвиговые колебания
X
У
сдвиг в плоскости ху
ш
№
\
—ft ДА_/
Р1>-е6^ + 2 1+g *у)
I
I
Основные
уравнения B)
тгг —
Eg
1-е;
EG
г(&гг + °аЬе) + евРг
тоо = I — a* (GGlrr + See) И - *я?*
1
Pz = ecHG2 - ел (grr + gee), где <?д ==
1—a
(еснГ12)
Кажущаяся
восприимчивость
заторможенного
вибратора
eCR =
Ч
1-е*
{A-а)Гц-2аГ12}«
6 A-2а)A-о2)Яр
Модуль Юнга 2?с,
коэффициент
Пуассона crG и
упругость \iG
?crTi2
EG =
1 —a Ep
1-* Яп
Д,
1+^есдГ52
<tg-=-
l-g ?p
l + qeeflrfg
u._u /i e /*ГИ + Гда\2 i .
Диэлектрическая
восприимчивость
свободного
вибратора
EfR=r=Ec
RL 2 ееДГ?Л
I 1-е En )
Б/И =
eS
e*U 1-t-a / fip
Пьезоэлектрическая постоянная
(соответствующая
*г = -уз5(есяГ12)
1 Ги + Г18
2es l + o
Коэффициент
электромеха н
ической связи к (при
1 < 4Я?|)
/
2 ?СД
1-я ДЕ
12
-,/8/1 Гц + Г12\
К |ipU l-ra J
252 Гл. 7. Основные типы пьезоэлектрических преобразователей
Izzi 2|вг> 2?zr, 2?r0; переменные Xx, YV,.ZZ, Yz, Zx, Xy — на тгг,
Toe, t2Z, тб2, tzr, тг0; переменные Px, Py9 Pz — на Pr, PQ, Pz,
a Gx, Gy, Gz — на G>, G0, Gz. Полагая теперь, что ось z является
направлением поляризации и что пластинка достаточно тонка,
можно пренебречь механическим напряжением вдоль оси z, а также
считать напряжение на поверхности равным нулю. Поскольку
направление колебаний является радиальным, xzz = xTZ == тг0 =
= 0и, конечно, Pr = PQ = 0. Из этих соотношений можно
получить основное уравнение A)в табл. 7.4, а также основное
уравнение B), решая уравнение A) относительно переменных тгг, То<ъ ^V
Пьезоэлектрическая постоянная напряжения еТ для радиального-
вибратора равна 8сНГ12/A — а), где есЛ — диэлектрическая
восприимчивость при закреплении вибратора по окружности.
Если коэффициент электромеханической связи для этого случая
обозначить kr, то оказывается, что кт в /2/A - а) раз (примерно
в 1,7 раза) больше коэффициента связи для продольной моды кь.
Рассмотрим теперь радиальные колебания круглой пластинки.
Уравнение движения в цилиндрических координатах имеет вид [6]
Здесь
д2иг __ дтгг . 1 дтг9 . dxrz . Trr —Tqq /7 \Г)()\
V а^а — 5r f г 38 "^ й "Г г ' l'-*w/
тге = тгг = 0, G.101)
%г = •??-, 1ее = ^ <7Л02>
Подставляя эти соотношения, а также основное уравнение B)
из табл. 7.4 в уравнение G.100) и полагая, что ит имеет
гармоническую зависимость от времени по закону e^ot, получаем
где
^-ЭГ^г)^^ <7-103>
Решение имеет вид
c=V ,fc ».• <7-io4>
' рA —aG)
Ыг = С/,(-^-г), G.105)
где Jt— функция Бесселя первого порядка, С — произвольная
постоянная. Из граничного условия хтт = 0 на окружности можно
§ 4. Вибратор с радиальными модами колебаний 253
•определить постоянную С; тогда решение принимает вид
4--М-)
иг = -* =-. С . G.10G)
Характеристическое уравнение получается приравниванием нулю
знаменателя этого выражения:
тA-^)/«(?)-т/о(т)=°- GЛ0Т)
Обозначив корни этого уравнения через ал (/г= 1, 2, ...) и
применив соотношение G.104), получим для резонансной частоты
выражение
где ai = 2,03 при условии, что crG-=0,27.
Рассмотрим теперь фактор силы А. Если приложено
электрическое напряжение ?, то в радиальном направлении возникает
механическое напряжение erE/t. Предполагается, что это
напряжение уравновешивается внешней силой F и, следовательно,
имеет место соотношение
F=Bnat)er-^1
из которого можно получить фактор силы
A=--L = 2naer. G.109)
Е
Вычислим теперь другой фактор силы. Поскольку мода
колебаний определена выражением G.105) для случая короткозамкну-
тых электродов (Gz —0), то в результате подстановки выражений
G.105) и G.102) во второе основное уравнение B) в табл. 7.4
для поляризации Pz получаем следующее выражение:
_Pz=Cer^-J0(^r). G.110)
Ток Idy обусловленный этой поляризацией, равен
а
Id = j(o\ \ Bnr)Pzdr =/юСег Bяа)/i (—а). •
о
Колебательная скорость и при г = а равна
254 Гл. 7. Основные типы пьезоэлектрических преобразователей
Отсюда для фактора силы А получаем выражение
А = 4?-==2паег, G.111)
и
которое полностью совпадает с выражением G.109).
§ 5. КОЛЬЦЕВОЙ, ИЛИЩИЛИНДРИЧЕСКИЙ ВИБРАТОР
Как показано на фиг. 7.15, на элемент кольцевой или
цилиндрической формы из пьезокерамики, поляризованной в радиальном
направлении, нанесены электроды и к ним приложено
электрическое напряжение. При этом вдоль окружности возникает
деформация, которая преобразуется в радиальную силу, в свою очередь
1
Фиг. 7.15. Кольцевой вибратор-
вызывающую радиальные колебания. Ниже мы рассмотрим случайг
когда внутренняя боковая поверхность кольца или цилиндра
полностью экранирована от излучения, а внешняя боковая
поверхность подвержена действию однородного акустического поля.
Поскольку кольцо или цилиндр равномерно колеблется во всех
точках, его эквивалентная масса равна полной массе М = 2natlp,
а упругость в радиальном направлении s = 2zdtEGla. При этом
основная резонансная частота определяется выражением
/o=i/^ = ^|/^. G.112).
В этом случае по окружности укладывается одна длина волны.
Фактор силы. Если к вибратору приложено электрическое
напряжение Е, то вдоль окружности возникает механическое
напряжение т = e\E/t, преобразующееся в радиальную силу.
Предполагается, что эта сила уравновешивает внешнюю силу.
Соотношение между радиальным давлением р на внешней
цилиндрической поверхности и направленным по внешней окружности
ко-льца или цилиндра механическим напряжением т имеет вид
P = -j*. G-ИЗ)
Радиальное давление р, обусловленное электрическим
напряжением Е, равно/? = A/л)'е^Г42Я, а радиальная сила F, обуслов-
§ 5. Кольцевой, или цилиндрический вибратор 255>
ленная этим давлением р, равна F = 2nalp = 2zile\E.
Следовательно, фактор силы определяется в виде
Л = -4— 2nfc;.Lrj2. G.114)
Е
С другой стороны, путем вычисления отношения тока короткого
замыкания Id к радиальной колебательной скорости v можно
получить второй фактор силы, который полностью совпадает
с приведенным выше.
Чувствительность. Вычислим теперь чувствительность при
приеме в квазистатических условиях SR0 = A0S/CsIO, которая
была определена выражением G.17). Так как емкость вибратора
равна С = 2nalK'cL/4ttt, а значения А0 и S соответствуют
вычисленным выше, то мы имеем
%
-•agi2, G.115)
Р I
причем здесь использованы соотношения Г = KiSDgl{K% — 1)
и ED = sD (табл. 7.1).
Приведенный выше результат можно получить
непосредственно. Напряжение т уже было определено соотношением G.113),
полученным для случая, когда внешняя сторона вибратора
подвергается воздействию звукового давления р. Напряженность,
электрического поля в разомкнутой цепи G/, обусловленная
механическим напряжением т, равна Gf = #12т, где gi2 —
пьезоэлектрическая постоянная деформации (поперечный эффект). Отсюда
электрическое напряжение при разомкнутой цепи равно
Ef=tGf = agi2py G.116)
и, значит, электрическое напряжение в режиме холостого хода,
приходящееся на единицу звукового давления, т. е.
чувствительность по напряжению в квазистатических условиях, равно
4?- = <W12. G.117)
р
При этом анализе предполагалось, что толщина цилиндра
мала и пьезоэлектрическое напряжение, вызванное электрическим
полем, обусловлено поперечным пьезоэлектрическим эффектом.
Однако если толщина увеличивается, то нельзя пренебрегать
и напряжением, обусловленным продольным эффектом. Согласно
точному анализу [7], чувствительность по напряжению,
соответствующая выражению G.115), равна
5»=^«0+т^"й-}« <7Л18>
256 Гл. 7. Основные типы пьезоэлектрических преобразователей
где а— внешний радиус, gn — продольная пьезоэлектрическая
постоянная. Для керамики титапата бария отношение
постоянных рашю
ill «-0,4.
en
Другой метод радиального возбуждения кольцевого или
цилиндрического вибратора основан на использовании продольного
пьезоэлектрического эффекта [7]. Вибратор разделен па п частей
Ф и г. 7.16. Расположение электродов для
поляризации по окружности.
с нанесенными на плоскости сечений электродами. На фиг. 7.16
показан случай, когда п = 4. Каждая отдельная часть
поляризуется по окружности и дает удлинение вдоль окружности,
зависящее от электрического поля G = Е/Bпа/п).
Описанным выше методом получаем для фактора силы А и
чувствительности по напряжению SRQ следующие выражения:
А^п-^-ВсгХи, G.119)
Sm = i-=*g-gli. G.120)
§ 6. ВИБРАТОР СДВИГОВОГО ТИПА
В данном случае имеются две моды колебаний: одна — для
сдвига по толщине, другая — для сдвига в плоскости.
1. Вибратор со сдвигом по толщине. В таком вибраторе сдвиг
происходит параллельно электроду, как показано на фиг. 7.17.
Если толщина мала по сравнению с перпендикулярным ей
размером, то резонансная частота зависит только от толщины t и
определяется выражением G.96), где в этом случае % — сдвиговая
упругая постоянная. Если к кварцевой пластинке приложено
электрическое поле Gy, то деформация возникает в плоскости х, i/,
и константа sG равна se6 (в стандартных обозначениях ИИЭР это с66).
Фактор силы определяется выражением G.97), но в данном случае
§ 7. Изгибный вибратор
257
е — сдвиговая пьезоэлектрическая постоянная. Эквивалентная
масса равна половине полной массы.
В пластинке из пьезокерамики с заранее созданной постоянной
поляризацией Рх0 вдоль оси х (направление осей показано
в табл. 7.4) при наложении вдоль оси у переменной поляризации
Рув^1 возникают сдвиговые колебания с частотой со.
Ф иг. 7.17. Вибратор со сдвигом
по толщине.
2. Вибратор со сдвигом в плоскости. Это вибратор, в котором
прямоугольная форма поверхности пластинки искажается при
колебаниях, принимая форму ромба, как показано на фиг. 7.18,
Фиг. 7 .18. Вибратор со сдвигом в плоскости.
i
\
\
1
а резонансная частота в отсутствие связанных колебаний
приближенно определяется выражением
где а и Ь — длина и ширина пластинки, а т и п — номера моды
колебаний; для основной моды т = п = 1.
Колебания со сдвигом в плоскости можно получить в
кварцевой пластинке У-среза, так как в пей при приложении
электрического поля G„ возникает деформация сдвига в плоскости х, z.
В кристаллах сегнетовой соли и дигидрофосфата аммония также
могут возбуждаться колебания такого типа. Однако если пластинка
вырезана под углом 45°, то можно получить и колебания
по длине, как показано на фиг. 7.18.
§ 7. ИЗГИБНЫЙ ВИБРАТОР
Если электрод на пьезоэлектрических кристаллах, обладающих
поперечным эффектом (например кварц, сегнетова соль или
дигидрофосфат аммония), разделен на две части, как показано
17-0231
258 Гл. 7. Основные типы пьезоэлектрических преобразователей
на фиг. 7.19, и электрическое поле приложено так, что верхняя
часть удлиняется, в то время как нижняя сжимается, то
плоскость х, у кристалла прогибается в направлении z и,
следовательно, могут возбуждаться изгибные колебания.
Такой же тип колебаний можно получить, если прижать друг
к другу две пьезоэлектрические пластинки, которые удлиняются
и укорачиваются в продольном направлении, причем при
удлинении одной пластинки другая укорачивается. Это так называемый
Ф и г. 7.19. Изшбный вибратор.
«вибратор биморфного типа», резонансная частота которого
сравнительно низка и обычно находится в интервале от нескольких
десятков герц до приблизительно 15 кГц, а механический импеданс
мал. Поэтому он часто используется для микрофонов, адаптеров,
измерителей скорости или ускорения в диапазоне слышимых
Упругая
пластина
Пьезоэлектрические
пластины
Д,
Ж
П'
Фиг. 7.20. Биморфный вибратор.
частот. Между кристаллическими пластинками часто помещают
пластинку из пассивного упругого материала, так как это полезно
для увеличения прочности и повышения чувствительности
вибратора.
1. Электроакустические характеристики вибратора
биморфного типа [8J. Пусть длина, ширина и толщина упругой пластинки
равны Z, Ъ и 2t2 соответственно, а длина, ширина и толщина
кристаллической пластинки равны I и Ъ и ?t, как это показано на
фиг. 7.20. Предположим, что вибратор прогибается на величину и
§ 7. Изгибный вибратор
259
в направлении у при приложении электрического напряжения Е.
Для простоты условимся, что между электродами нет воздушного
зазора. Деформация | на высоте у над нейтральной поверхностью
(у = 0) определяется выражением
!=У-?г. G-122)
где кривизна представлена множителем д2и/дх2. Таким образом,
деформация пропорциональна расстоянию у от нейтральной
поверхности и, следовательно, распределения поляризации Р
и напряженности электрического поля G также
пропорциональны у. Подобные случаи рассматриваются способом, приведенным
в § 1, п. 2, с использованием уравнения G.36). При этом среднее
значение | деформации ? получается равным
Используя уравнения G.36), G.122) и G.123), для механического
напряжения в любой точке получаем выражение
т= -eG0+ [EDy-^-\{tt + 2t2))^- , G.124)
где ED — модуль Юнга кристалла при равспстве нулю
электрической индукции. Механическое напряжение в упругой пластинке
равно Е2уд2и/дх2, где Е2 — модуль Юнга в пластинке. Если извне
приложен изгибающий момент М, который уравновешивает момент,
созданный электрическим полем G, то для него можно получить
выражение
M = 2b{\E2y*^dy+ J xydv}-
= -b(tt + tjeE+ {Я--|"^-'i(<i+ 2*2J} 4§-, G.125)
где й — изгибная упругость, определяемая выражением
Й = 26 j^ady + 26 j ВД^Л G.126)
о *2
Обозначим площади поперечных сечений кристалла и упругой
пластинки и радиусы вращения этих сечений вокруг линии их
пересечения с нейтральной плоскостью «Sj, S2, и Ru R2
соответственно; тогда
Й = ВДйНВДД^4и^М^ + Зу2 + Зф + ед. G.127)
17*
260 Гл. 7. Основные типы пьезоэлектрических преобразователей
Положив
Ям = Я—|"ТГ«!('! +^sI. ' G-128)
можно получить следующее окончательное выражение для М в
формуле G.125I):
М^-Ъ^ + ЩеЕ + Ъ^. G.129)
величина Км, определяемая выражением G.128), является
эффективной изгибной упругостью, полученной вычитанием из
упругости К части, обусловленной пьезоэлектрической реакцией.
Волновое уравнение. Обозначим плотности и площади
поперечных сечений кристалла и упругой пластинки р4, р2 и St, S% (где
Si = 2bti9 S2 = 2bt2) и введем величину pS следующим образом: •
pS = pI51 + p^S2. G.130)
Пусть далее F и Л/"—сдвиговая сила и изгибающий момент
соответственно, действующие на элемент 8х длины вибратора. Тогда
дифференциальное уравнение движения имеет следующий вид:
(pS&x) •%?- = &. G.131)
Обозначая момент инерции элемента относительно линии
пересечения соответствующего ему поперечного сечения с нейтральной
плоскостью через J, получаем для вращательного движения
следующее уравнение:
№)-&¦ (-§-) = ™ + F6x. G.132)
Для случая, когда приложено электрическое напряжение Е,
из уравнений G.129), G.131) и G.132) получаем
(Е постоянно для любых значений х). Если пренебречь
вращательной инерцией, то это уравнение принимает вид
*SL + l^i^ = o G.134)
x) Здесь мы рассматриваем случай, когда пьезоэлектрический эффект
существует только в направлении х. Однако если наряду с пьезоэффектом
в направлении х существует другой пьезоэлектрический эффект в
направлении z, то кажущаяся диэлектрическая восприимчивость будет равна
величине 8|jtf, несколько отличной от eg, и кажущаяся пьезоэлектрическая
постоянная напряжения станет равной е = St^T вместо е = е^Г [10].
§ 7. Изгибный вибратор
261
Уравнение G.134) является волновым уравнением для вибратора
изгибного типа. Если величина и меняется во времени как е*®*,
то оно переходит в уравнение
где
A* = i^-. G.136)
Общее решение уравнения G.135) имеет вид
и — A sin kx + В cos kx -|- С sh kx -\- D ch kx, G.137)
где А, В, С и D — произвольные постоянные, которые
определяются из граничных условий. Кроме того, если пренебречь
вращательной инерцией, то из уравнения G.132) получается
следующее простое соотношение:
F= ~-~. G.138)
Форма колебаний и электроакустические постоянные
вибраторов с одним закрепленным и одним свободным концами.
Расположил! начало координат для х на закрепленном конце.
Приложение к вибратору напряжения Е эквивалентно действию на
свободном конце изгибающего момента
MB=b(li + 2tfdeE4 G.139)
как это следует из выражения G.125). Граничные условия имеют
вид
и = 0, ~=--0 при х = 0 G.140)
и с учетом выражений G.129) и G.138)
*3- = 1^Мв' -^г = 0 ПРИ* = /- G-141)
Подставив эти соотношения в выражение G.137) и определив
произвольные постоянные, можно получить следующее
колебательное решение:
U 2йм а2 1 + cosacha e ' {1.Ш)
где
h «=«=V &'^ <7-143)
С/ (X) = (cos a -f- ch a) (cos ая — ch ax) +
+ (sin a — sh a) (sin ая — sh ax). G.144)
262 Гл. 7. Основные типы пьезоэлектрических преобразователей
Величина U(X) описывает форму колебаний, соответствующую
данной моде, а резонансная частота ш^ получается из G.143):
®»=4-l/' GJ45)
где ап — корни уравнения
l + cosacha = 0. G.146)
Таким образом, величины <хп приближенно равны нечетным
кратным величины я/2 и выражаются следующим образом:
а„ = Bп-1)^—(-1)»р„. G.147)
Значения ап даны в табл. 7.5, а значения $п приведены в
книге [И].
Рассмотрим теперь случай, когда возбуждающая сила Fe*®*
действует на свободный конец, а Е = 0. Граничные условия
имеют вид
и = 0, -?- = 0 при х = 0 G.148)
и
д2и Л д3и F 7 ,П i/nv
-^ = °< вр-=—й]7 при X==L GЛ49)
Следовательно, решение имеет вид
~ у *2 и&) п 150)
и~ 2®м a? 1-hcosacha ' \t.iov)
где
U (X) = (sin a + sh a) (cos ax — ch ax) —
— (cos a + ch a) (sin ax — sh ax). G.151)
Принимая за переменную на механическом выходе
колебательную скорость свободного конца, получаем для нее выражение
~ . t~i F I3 cos ash a— sinach a tn ,гоч
"/ = /»fel = ^7 A + coscxcha) • GЛ52>
Отсюда механический импеданс z может быть вычислен как
отношение F/v следующим образом:
~= a(l + cosacha) VpS®M 7 ^\
J sh a cos a-—choc sin a I \ • )
Частотная характеристика механического импеданса z показана
на фиг. 7.21. Кроме того, на основе теоремы Миттага-Леффлера [4]
§ 7. Изгибный вибратор
263
импеданс z можно представить также в виде
оо
1
¦2
П— 1
j(umn + snfj(u '
где
тп =
pis
4 '
9 OCtjM ДГ
G.154)
G.155)
4Р
Отсюда следует, что эквивалентная схема для механического
импеданса z может быть представлена в виде параллельного
соединения последовательных резонансных контуров. Эквивалентная
*.*
и
я
(
\
у
*?-
-**
?»
;
<
\)
й
А
ч
\
1 \\
\\
и \
\ 1
^
*v
г %
*
(
V
? >
7
1
N
ГН
т
7\\
i
/1
1J 1 1
-16
-20
Ф и г. 7.21. Частотные характеристики механического импеданса и фактора
силы для биморфного вибратора с одним свободным и одним закрепленным
концами.
т_ц"рЭД«. „-я b(,y-2t2)^-
а= -|/.
^М
масса, приведенная к свободному концу, не зависит от моды
колебаний и равна четверти полной массы.
Для случая, когда к вибратору приложено электрическое
напряжение EejCit, скорость на свободном конце vE можно
определить, положив X = 1 в выражении G.150) и умножив результат
?>Я
40
3D
10
0
-20
-30
ни
)
J
;
,
/
/
/
_
? 5
}/*
/я
Г
К
4 .
"—*
5 i
\
>
5
М
К
1 ' К/\ 1 1 1 1 1 / 1
7 в 9/10 11 12 13 /4 15 /16 \
_L</ *
X
\
1
5п\
\ *5
Ф и г. 7.22. Частотные характеристики механического импеданса и фактора
силы для бпморфпого вибратора с двумя опертыми концами
(обозначения те же, что па фиг. 7.21).
Щ
30
20
о
-10
-20
-30
-401
-50'
Ф и г. 7.23. Частотные характеристики механического импеданса и фактора
силы для биморфного вибратора с двумя свободными концами (обозначения
те же, что на фиг. 7.21).
1 1 г/1 \Щ \ \У
11/11 ^л^
1 1^2 3 4 5Хб7\<
\Шг\ \т
1 1 Г1/1 1 II
II/
1_1 1 IHJ 1 1 1
? 9
10 1
*? \ А \
Г/12 13 /4 15 16 |
' 11 l\l I
II
jjf 7. Изгибный вибратор
265
на ;оз:
~ . Mr Г2 2 sin a slice .п лгпх
^^^lur^-l-i-cosacha ' <Мо6>
Фактор силы А можно получить, приравняв vE и vF
[выражение G.152)] и задав отношение F/E в виде
Л = ЯЬ(^ + 2/2)у, G.157)
где
21- -=——t— . G.158)
Как уже известно, фактор силы А является функцией частоты,
и его характеристики приведены на фиг. 7.21. Из них, в
частности, следует, что при резонансе, когда величина а имеет
значения ОСл,
2Ia = a„tg{450 + (-l)n-|-}, G.159)
т. е. ?1„ = 1,375, 4,79, 7,85, 10,995, . . . для значений п = 1, 2, 3,
4, . . . соответственно.
Форма колебаний и электроакустические постоянные для других
случаев. Тот же метод применим и для других граничных условий,
например для вибраторов, свободных или опертых на обоих
концах. На фиг. 7.22 и 7.23 показаны частотные характеристики
механического импеданса z и фактора силы А для свободных
и опертых на обоих концах вибраторов. Электроакустические
постоянные для разных граничных условий представлены в табл. 7.5.
2. Коэффициент электромеханической связи. Сравнение
коэффициентов электромеханической связи для вибраторов разных
типов [9]. Коэффициент электромеханической связи полезен
не только для сравнения эффективности различных
пьезоэлектрических материалов, но также и для сравнения поведения
вибраторов разных типов. В последнем случае рассматривается диапазон
частот, в котором основную роль играет упругость, т. е. частоты,
лежащие существенно ниже резонансной частоты вибратора.
В случае вибратора, управляемого упругостью, механический
импеданс z и электрическая проводимость Y могут быть записаны
в виде
z = -g, Y = /a>Cdf ! G.1G0)
где sE0 — статическая упругость вибратора при постоянной
напряженности электрического поля, а С а — емкость заторможенного
вибратора при постоянной деформации. Пусть и и Q — механиче-
Форма колебаний и электромеханические
Граничные
условия
Один конец закреплен,
а другой свободный
Оба конца свободны
Механический
выход
на свободном конце
на обоих свободных концах
Распределение
амплитуды смещений
Un (X) (сплошные
линии) и кривизны
U"n(X) (штриховые
линии)
П = 1
022U
"^
ошь
Угловая
резонансная частота
9s
ai = 1,875
а2 = 4,69
а3 = 7,85
ai = 4,73
а3= 10,99
Эквивалентная
масса тп(М^~
общая масса)
\м,
Мп
Эквивалентная
упругость sn
aiflj
«tft
м
4ZS
4Z3
Нормированный
фактор силы Шп
А -Я Ь^+^в
Щ = 1,378
й2 = 4,79
^1з-7,85
Й1 = 9,3
а8 = 21,98
1 4яе2 2
Примечание. $м = $-_b-^— <i <*1 + 2*2J, $ = Я1ЗД2 + E2S2R| = -у- b
/2 — плотность, модуль Юнга и толщина пьезоэлектрической и упругой пластин соот
мость и пьезоэлектрическая постоянная напряжения соответственно.
постоянные биморфных вибраторов
Таблица 7.5
Оба конца оперты
Оба конца закреплены
в середине длины
в середине длины
/?•/
п=3
п*1
0Ж1
п=3
а4 = я
а3 = 3л
оы = 4,73
а2 = 10,99
•Ма
mi = 0,397Af0
т3 = 0>4Ш0
а*®
м
2/з
Si =
affin
2,52Р
2,04й
1Л = 0
213 = 18,8
[?iM'f +3*i*2+ 3/|)+E2'3], pS = PiSi + p2S2 = 2b(«tPi + /2P2); Pi, Р2, El, #2, *i,
ветственно; b и Z — ширина и длина вибратора; К* и е — диэлектрическая проницае-
268 Гл. 7. Основные типы пьезоэлектрических преобразователей
ское смещение и электрический заряд соответственно:
и = -^, Q= — . G.161)
/(О х /(О v
Тогда из уравнений G.1); G.2), G.160) и G.161) мы получаем
соотношения
?=-А0Е + 8в?, G.162)
Q = Cj!+Adu, G.163)
где ^4„ — фактор силы в квазистатических условиях. Заменой
переменных в этих соотношениях можно получить соотношения
Z= (Js_) Ё+ (-Ц ?Л
[seJ л {seo' G.164)
где С/ — емкость свободного вибратора
C/ = Crf+-^-. G.165)
Для электрической энергии С/г-, запасаемой свободным
вибратором при заданном электрическом напряжении Е на его входе
(при F = 0), имеем
Ut=±CfE*.
Смещение и равно
V SE0 I
SE0 -
Следовательно, преобразованная механическая] энергия U0 равна
\ 1 42
TJ _ Х с ,.2 _ J_ Л» JT2
^о-^-^о^ - 2 1^ •
Отсюда коэффициент электромеханической связи к определяется
вы ражением
k2=U±^_JL-. G.166)
Ui SEQ^f
используя соотношение G.165), его можно также представить
в виде
-г^-тйй- <7-167>.
Таким образом, установлено, что значение коэффициента связи к
определяется основными постоянными вибратора А0, sE0 и С&-
В табл. 7.6 приведены значения этих постоянных и к для вибратора
продольного типа, вибратора сдвигового типа, биморфного изгиб-
§ 7. Изгибный вибратор
269
ного вибратора с пластинкой треугольной формы, биморфного
изгибного вибратора с прямоугольной пластинкой и биморфного
крутильного вибратора.
Теоретические основы измерений коэффициента связи. Хотя
коэффициент связи /с, как указывалось выше, введен для
квазистатического состояния, определение этого коэффициента
обычно проводится в динамическом режиме путем измерения
Си
II
<Р и г. 7.24. Эквивалентная схема
вибратора.
резонансных и аптирезоиансиых частот. Статические постоянные
sKo и -4 о» как правило, отличаются от динамических постоянных
sE и А.
Введем коэффициенты а{ и rt:
__ A*/sEi C{
1 A*/sE0 A*/sL0 '
_ Cd (/ЛЬ8)
где Ci — эквивалентная емкость па первом резонансе (фиг. 7.24),
а Г! — отношение емкостей. Для продольных колебаний с^ — 8/д2.
Таким образом, имеем
Л1 1
и из соотношения G.167) для коэффициента связи получаем
k2 = -r-± . G.169)
1 + airi v }
Из эквивалентной схемы вибратора, приведенной на фиг» 7.24,
получаем (если не учитывать высшие моды), что первая
антирезонансная частота /Л1 приближенно равна
/л1 = /ш]/ц-§-==/Л1|/1-|--^, G.170)
гДе fm — первая резонансная частота. Тогда из выражения G.169)
имеем
*. = ,-Ц — «JLi^L, G.171)
где
A/ = /ai-/ri.
Электрические, механические и электромеханические характеристики
Тип пьезо вибратора
Конструкция
Фактор силы А0
Вибратор продольного типа
t
beczJ
Вибратор сдвигового типа
t
-fi?-
tt
If
ь
L
-l-
bEpV
Биморфный изгибпый
вибратор с треугольной
пластиной
*г t, 2t,
I
есмГ
Биморфный пзгибный
вибратор с прямоугольной
пластиной
b-i
3 b(tt + 2t2)
2 /
^смГ
Биморфный крутильный
вибратор
*,t, zt*
26(«1 + 2<2)е6Г
Примечание. Обозначения е», есЬ, есЛ//, ? д $ и ^ соответствуют иснользу,
связи получена в предположении, что диэлектрическая восприимчивость достаточно
Таблица 7.6
пьезоэлектрических виораторов, управляемых упругостью
Механическая упругость при
постоянном электрическом
напряжении sEQ
¦^-(Ер-есьТ*)
-7-G*p-e8r")
^ {«-!(<!-h2/2)^eciwpj
&.{я-±A% + 2№1'смГш}
^{««-г^ч-ад^г»].
Емкость
заторможенного вибратора
eiDmcL+i)
ш <***<+1>
•й-(**«и+1)
шDяеем+1)
¦?-<*««+ D
Коэффициент
электромеханической связи /г
/^Г
' /?Г
}/^-(h + 2t2)r
/^(«. + 21.) Г
/^.A,+адг
емым в работе [9]. Приближенная формула для коэффициента электромеханической
велика.
272 Гл. 7. Основные типы пьезоэлектрических преобразователей
Другое приближенное решение, несколько более точное, можно
получить путем подстановки Cj — Ci вместо Cd в выражение G.170)
и использования формул G.16G) и G.168). Оно имеет вид [12]
Ci _ 1 #1-/д1 _ 1 2А/ GЛ?-
А:2:
1
а4 6Ty otj
/*
:2
А1
«1 /Л1
§ 8. ИЗМЕРЕНИЕ ПОСТОЯННЫХ ПЬЕЗОЭЛЕКТРИЧЕСКИХ
ЩПЬЕЗОКЕРАМИЧЕСКИХ МАТЕРИАЛОВ
1. Сегнетова соль. Измерение диэлектрической проницаемости
[10]. Диэлектрическая проницаемость (или восприимчивость) сег-,
нетовой соли существенно меняется в зависимости от температуры
и напряженности
электрического поля. На
измеряемую величину влияет
даже малый зазор между
электродами и кристаллом.
Проводились измерения па
большом количестве
образцов методом изменения
толщины при помощи моста
переменного тока на
частоте 1000 Гц. Анализ
результатов показал, что
разброс данных при
измерениях емкости
обусловлен нерегулярностями не
1000
700\
500
200
200
ъЮО
«о
^ 70
к 50
30
20
10
ш.
ТТ/1,*
ш
Ф
1
i
и
ц
II
ц
и
И
W
И
Л
Л
Л
Л
Л
Л
Л
А
Л
Л
Л
Л
\
0 5 10 15 20 25 30 35 40'С
Температура, °С
Ф и г. 7.25. Пример
доверительного интервала для
диэлектрической восприимчивости
свободного кристалла сегне-
товой соли, определенного
методом изменения толщины
(напряженность ЭЛСКТрИЧ0СКО1 О
поля 5 В/см).
только зазора, но и самого кристалла, даже если температура,
влажность и напряженность электрического поля поддерживаются
постоянными. На фиг. 7.25 приведен пример полученной в
результате статистической обработки зависимости доверительного
интервала для свободной восприимчивости ет11 от температуры.
Прямое измерение пьезоэлектрической постоянной Г14. Если
в пластинке сегнетовой соли 45° Х-среза по длине (в направле-
$' 8. Измерение постоянных пьезоэлектрических материалов 273
нии у) действует напряжение Y'y, по ширине деформация свободна,
а электрическая поляризация Рх по толщине (в направлении х)
поддерживается равной нулю, то напряженность наведепного
электрического поля Gx вдоль направления х может быть
представлена в виде
A + а)Г14У-
G
¦-{•
Е,
"jPc-0*
G.173)
где Ер — модуль Юнга, а о — коэффициент Пуассона при
постоянной поляризации Р.
Проводник
Электроды
Пластинка сегнетодой соли 45 Я-среза
Лрододнин
Образец
Магнит
а б
Ф и г. 7.26. Устройство для возбуждения образца.
Если комплексные эффективные значения величин Y'y и Gx
для гармонических колебаний обозначить Y'y и Gx, то
комплексное эффективное значение пьезоэлектрической постоянной Г14
будет равно
Р»=-Т^г(|Й . G-174)
где предполагается, что Ер и о — действительные числа. В этом
выражении величина Gx для заданного значения Yy должна
быть измерена при нулевой поляризации. Условие Рх = 0
приближенно выполняется с ошибкой менее 1% при электрически
разомкнутых электродах. Если известны возбуждающая сила F,
приложенная к поверхности, перпендикулярной оси у' пластинки,
и величина наведенного электрического напряжения Z? на
разомкнутых электродах, то Yy и Gx имеют вид
У
F
U
Г Е
где Ь и t — ширина
фиг. 7.26, а.
и толщина пластинки, как показано на
18—0231
274 Гл. 7. Основные типы пьезоэлектрических преобразователей
Прямое измерение постоянной Г14 можно провести следующим
образом: электрический ток, протекающий через проводник,
прикрепленный к исследуемой пластинке, помещенной в
параллельное оси х магнитное поле, создает электромагнитную силу,
которая и является возбуждающей силой F. На фиг. 7.26, а
показана предназначенная для измерений пластинка с
прикрепленным проводником и нанесенными электродами. На фиг. 7.26, б
Образец """
Фиг. 7.27. Схема для измерения наведенного напряжения.
показано сечение возбуждающего устройства плоскостью х, у.
Если магпитная индукция в воздушном зазоре и ток в проводнике
равны В и / соответственно, то возбуждающая сила
F = bBl7 G.175)
где Ъ — длина проводника, параллельного оси z\
Как показано на фиг. 7.27, для измерения наведенного между
электродами образца напряжения Е используется потенциометр
переменного тока. Пусть для сбалансированного потенциометра
сопротивление и коэффициент взаимоиндукции равны R и М
соответственно. Тогда наведенное напряжение
Д = (Д + 7ЧоЛГ)/,
G.176)
где со — частота возбуждающего тока /.
Длина образца должна быть подходящей и достаточной для
того, чтобы на частоте измерений основную роль играла упругость.
Из приведенных выше соотношений получаем
Ег
1 + в В
(R + j®M).
G.177)
Средние значения и стандартные отклонения измеренных
значений Г14 для 20 образцов при различных температурах
приведены в работе [10]. Следует отметить, что мнимая часть величины
§ 8. Измерение постоянных пьезоэлектрических материалов 275
Г14 составляет менее 1% ее действительной части, так что на часто,
те 1000 Гц Г14 можно считать действительной величиной.
Измеряемые величины почти не меняются в диапазоне частот до нескольких
тысяч герц. Они остаются также постоянными при изменении
воздействующих механических напряжений вплоть до 5000 дин/см2.
Другие результаты измерений. Константы можно измерять
также резонансным методом. Для 40 пластинок сегнетовой соли
45° Х-среза в табл. 7.7 приведены средние значения, стандартные
отклонения и коэффициенты изменения постоянных ED, Eg, Г14»
ет, б? и еи.
Таблица 7.7
Измеренные постоянные для пластинки сегнетовой соли
45° А-среза (при 12° С)
Постоянные
Модуль Юнга ED
Модуль Юнга EG
Пьезоэлектрическая
постоянная Г14
Восприимчивость свободной
пластинки 8Т
Восприимчивость
заторможенной пластинки eg
Пьезоэлектрическая
постоянная напряжения <?i4
Среднее значение,
ед. СГСЭ
3,26-1011
(по Мэзону ЗД4.10И)
2,26-ЮИ
7,26-104
(по Мэзону 7,7-104,
по Хонда 6,6.104)
17,7
12,1
1,1-104
Стандартное
отклонение,
сд. СГСЭ
0,061.10И
0,147-1011
0,74-104
2,87
1,64
Коэффициент
изменения, %
1,9
6,5
10,2
16,3
13,5
Изменение постоянных, обусловленное напряженностью
электрического поля. Все рассмотренные выше измерения проводились
при малой напряженности электрического поля. Возрастание
ее может влиять на величину постоянных. По-видимому,
причиной изменения постоянных, так же как и при изменении
температуры, является изменение восприимчивости е^. При изменении е%
меняются и другие постоянные. Что касается пластинок сегнето-
18*
276 Гл. 7. Основные типы пьезоэлектрических преобразователей
вой соли 45° Х-среза, то с увеличением возбуждающего
напряжения происходит понижение резонансных частот продольной моды
колебаний вибратора. Таким образом, модуль Юнга EG с ростом
напряженности электрического поля падает. Результаты
измерений показаны кривой 1 на фиг. 7.28. Если предположить, что ED
75
70
65
60
55
50
h5
UO
35
30
25
20
15
10
5
СГСЭ
4>
1>Ц 20 40 60 60 100 120 ШО 160 160
СВ/см
Ф и г. 7.28. Модуль Юнга EQ A), восприимчивость свободпого элемента
ет C) и восприимчивость заторможенного элемента е^ B, 4) в зависимости
от напряженности электрического поля G.
и Г не зависят от напряженности электрического поля, то
обусловленное ею изменение величины е^ можно вычислить из
соотношения
EG = ED — 8|Г2. G.178)
Эта зависимость представлена кривой 2 на фиг. 7.28. С другой
стороны, из измерений емкости на частоте 1000 Гц получены
значения свободной восприимчивости ет, представленные
кривой 5. Соотношение между величинами е* и et имеет следующий
§ 8. Измерение постоянных пьезоэлектрических материалов 277
вид:
откуда можно вычислить восприимчивость 8| (кривая 4 на'# фиг.
7.28). Кривые 2 и 4 должны совпадать друг с другом, но на деле
этого не происходит. Расхождение можно объяснить следующим
образом: величина eg рассматривается как функция
напряженности электрического поля G. Но если существует деформация |,
то поляризация Р определяется величиной Gt, которая равна
Gt = G + Tt . G.180)
как легко получить из основного уравнения (выражение для Г
в табл. 7.1). Таким образом, величину eg следует рассматривать
не как функцию G, а как функцию Gt и EG, а гх следует
рассматривать как функцию Gt- Величина eg, представленная кривой 2,
была получена из измерений резонансных частот, и в этом случае
деформация ? была сравнительно велика. Величина же eg,
показанная на фиг. 7.28 кривой 4, была получена в почти статическом
состоянии, в котором деформация ? относительно майа. Таким
образом, хотя в этих двух случаях значения G одинаковы, но
значения Gt различны.
Попробуем теперь представить постоянные EG и eg в
зависимости от Gt, а не от G. Чтобы представить EG как функцию Gt,
следует, используя соотношения EG/ED= eg/eT и G.179), вывести
выражение
*°=7raW- <7-181>
А при малых механических напряжениях т соотношение между
Gt и G имеет вид
G< = G-|?. . G.182)
Это соотношение можно получить, положив т = 0в основном
уравнении для константы Г. Поскольку величина ет уже была
измерена в функции G, то EG можно представить как функцию Gt,
использовав два приведенные выше соотношения. Результат показан
на фиг. 7.29, причем для величины EG в соотношении G.182)
использованы не значения, полученные из измерений резонансных частот,
а значения, вычисленные с помощью выражения G.181) по
измеренным значениям гх. Подставляя вычисленные значения EG
в выражение G.178), можно получить eg в функции Gt, как
показано крестиками на фиг. 7.29. С другой стороны, величина eg
в выражении G.179) может быть представлена как функция Gt
путем использования выражения G.182), как показано кружками
278 Гл. 7. Основные типы пьезоэлектрических преобразователей
на фиг. 7.29. Крестики и кружки почти точно ложатся на одну
кривую; таким образом, при наличии деформации g величину е^
следует рассматривать как функцию Gt, а не G.
20 W 60 60 100 120 1U0 160 160
G{, В/см
Фиг. 7.29. Модуль Юига Eq и восприимчивость заторможен л ого элемента
Е? сегнетовой соли в зависимости от напряженности электрического поля Gv
2. Измерение постоянных керамики титаната бария. В
керамике титаната бария радиальные колебания имеют довольно
высокий коэффициент электромеханической связи, сравнительно
низкую резонансную частоту и не сопровождаются паразитными
модами, потому эти колебания удобно использовать для
измерения постоянных материала. Коэффициент связи к вычисляется
по формуле G.172), в которой оц определяется выражением G.168),
т. е. а{ = 0,788 для а = 0,3. Таким образом, коэффициент связи
к определяется из измерений fR и /А.
Другим методом определения постоянных является измерение
кинетической проводимости вибратора вблизи резонансной
частоты и вычисление постоянных по диаграмме этой проводимости.
Для керамики угол диэлектрических потерь настолько мал,
§ 8. Измерение постоянных пьезоэлектрических материалов 279
фазовый угол фактора силы столь близок к нулю, а добротность Q
настолько велика, что петлю проводимости свободного вибратора
можно считать совпадающей с петлей для кинетической
проводимости и близкой по форме к окружности. Тогда, измерив
проводимость на резонансной частоте и на двух квадрантных частотах,
можно определить и всю диаграмму кинетической проводимости.
Один из примеров показан на фиг. 7.30. Из круговой диаграммы
кинетической проводимости получаем диаметр окружности | Ym0 \
30
20
5 w
о
40
-20
Ф и г. 7.30. Пример диаграммы кинетической проводимости (указаны
измеренные частоты).
и разность между двумя квадрантными частотами А/. Если
эквивалентная масса т задана теоретически г), то фактор силы
определяется следующим выражением:
-4 = 1^2ято(Д/)|Уто|. G.183)
Следовательно, величины ег и Г12 можно определить из
выражения G.109) и других соответствующих выражений. Коэффициент
связи к можно вычислить следующим образом:
*=/тЬ"ё"г«- > <7-184>
Результаты измерений и вычислений приведены в табл. 7.8.
На продольных колебаниях образца из керамики титапата
бария можно измерить пьезоэлектрические постоянные Гц
(продольный эффект) и Г12 (поперечный эффект). Приведем интересный
!) В случче радиальных колебаний круглой пластинки эквивалентная
масса т определяется выражением т = 0,77 М0, где М0 — полная масса,
причем коэффициент Пуассона полагается равным 0,27.
44,31 кГц
4Ь,Ь9кГц
Таблица 7.8
Определение постоянных для радиальных колебаний вибраторов
Величина
Диаметр
Толщина
Масса
Плотность
Поляризующее электрическое
поле (при 125° С)
Резонансная частота
Ширина полосы
Механическая добротность
Емкость
Диэлектрическая
восприимчивость
Диаметр круговой диаграммы
кинетической проводимости
Фактор силы х)
Пьезоэлектрическая постоянная
Пьезоэлектрическая
постоянная 2)
Частотная постоянная
Скорость звука
Модуль Юнга
Обозначение
D
t
М0
Р
G
/о
А/
Q
cd
&CR
\Ym0\
А
«сдГд
Гд
hD
С
Eg
Единицы
измерения
СМ
мм
г
г/см3
В/мм
кГц
кГц
безразмерная
пф
ед. СГСЭ
мСм
107 ед. СГСЭ
106 ед. СГСЭ
104 ед. СГСЭ
кГц-см
м/с
10П ед. СГСЭ
Измерена или рассчитана
по формуле
измерена
»
»
р = М0/(я/4)Д2*
измерена
»
измерена по круговой
диаграмме
Q = hlM
измерена на 20 кГц
Cd = ^D*If-
измерена по круговой
диаграмме
A = V2im{M)\YmQ\
ecRTR = A/(nD)
Гя = (есдГл)/еся
измерена
2,03 1
in = о
h DI2 ЙУТ^
EG = pc2
На одном
образце
6,47
5,15
90,34
5,34
400
43,885
1,242
181
9950
139
30
5.39
2,05
1,91
284
4220
9,3
На 14 образцах
среднее
значение
6,40
5,01
89,2
5,5
—
43,47
—
199
10800
152
43,6
6,17
3,04
2,03
279
4150
9,44
стандарт-
ное
отклонение, %
—
—
2,0
—
—
—
21
—
10
—
—
19 .
12
, —
0,2
1) Механический выход выбирался на окружности и соответственно* к окружности же относится и фактор силы. Теоретически
при а = 0,27 приведенная к окружности эквивалентная масса т = 0,7 7 М0.
2) Предполагается, что ес^ — е , а пьезопостоянная определяется выражением Гд = Fi2/( 1—сг).
Литература
281
пример: для первого измерения вырезались образцы размерами
1 X 1 X 2,7 см3, электроды наносились на грани 1 х 1см2 и
образцы поляризовались по длине. Образцы для следующих измерений
вырезались из образцов, использованных в предыдущем случае;
таким способом было также изготовлено два образца размерами
2,6 X 1 X 0,2 см3 с электродами, нанесенными на поверхности
2,6 X 1 см2 и с поляризацией по толщине. Измерения
кинетической проводимости образцов дали следующие результаты:
Ги = 5,13-104 ед. СГСЭ (среднее значение шести измерений,
отношение стандартного отклонения к
среднему значению составляет 6,7%);
Г12= 1,76-104 ед. СГСЭ (среднее значение двух измерепий;
отношение стандартного отклонения к
среднему значению составляет 1,1%).
Отношение Гц/Г12 == 2,9, тогда как измеренное Мэзопом значение
было равно 2,7 [6]. Причина расхождения заключается,
по-видимому, в различии использованных материалов и разных методах
создания постоянной поляризации. Во всяком случае, следует
отметить, что продольный эффект примерно в 2—3 раза больше
поперечного.
ЛИТЕРАТУРА
1. Nukiyama #., Study on tho Electroacoustic Transducer, Tokyo, 1948
(на японском языке).
2. Suzuki Т., On the Vibration of Piezoelectric Vibrator which Vibrates
on the Direction of Electric Field, Joint Meeting of Three Electrical
Inst, of Japan, 1962 (на японском языке).
3. Nukiyama #., Sakurai N., Journ. Inst. Electr. Comm. Eng. Japan, 224,
687 A941) (на японском языке).
4. Whittaker, Watson, Modern Analysis, 4th ed., p. 134.
5. Camp L., Journ. Acoust. Soc. Amer., 20, 616 A948).
6. Mason W. P., Piezoelectric Crystals and their Application to Ultrasonics,
New York, 1950 (см. перевод: Мозои У., Пьезоэлектрические кристаллы
и нх применение в ультраакустике, М., 1952).
7. Langevin R. A., Journ. Acoust. Soc. Amer., 26, № 3 A954).
8. Nukiyama II., Suzuki 7\, Journ. Inst. Electr. Comm. Eng. Japan, 231,
367 A942) (на японском языке).
9. Honda S., Sci. Rep. Res. Inst., Tohoku Univ., B3, 95 A952).
10. Honda S., Sci. Rep. Res. Inst., Tohoku Univ., Bl-2, 117 A951).
11. Rayleigh, The Theory of Sound, vol. 1, New York, 1945 [см. перевод:
Дж. В. Стрэтт (лорд Рэлей), Теория звука, М., 1955].
12. Marutake М., IRE, 49, 967 A961).
\
Глава 8
ЭФФЕКТИВНОЕ ЗАТУХАНИЕ В ПЬЕЗОАКТИВНЫХ
ПРЕОБРАЗОВАТЕЛЯХ И ХАРАКТЕРИЗУЮЩИЕ
ИХ УНИВЕРСАЛЬНЫЕ ГРАФИКИ [1-4]
X. Симицу
§ 1. ВВЕДЕНИЕ. ПРЕДСТАВЛЕНИЕ ОБ ЭФФЕКТИВНОМ
ЗАТУХАНИИ
Для электроакустических преобразователей было
предложено [5] ввести представление об эффективном затухании,
определяемом следующим образом. Пусть преобразователь связан
с источником электрического тока, обладающим внутренним
импедансом Z0, и работает как излучатель звука; если Ра —
акустическая мощность, излучаемая им, а Р0 — максимальная
мощность, которая может быть получена от источника, то
эффективное затухание определяется как величина В в выражении
е-2В^-^. (8.1)
Пусть теперь преобразователь работает как приемник звука;
обозначим через Ре активную электрическую мощность, выделяемую
на импедансе нагрузки Z0 на его выходе, а через Р'0 —
максимальную мощность, которая может быть получена на
акустическом входе преобразователя из звукового поля; тогда эффективное
затухание определяется как величина Вг в выражении
1 О
Если в приемном и передающем режимах для обратимого
преобразователя используется один и тот же импеданс Z0, то можно
доказать, что
В = ВГ. (8.3)
Другими словами, эффективное затухание является величиной,
не зависящей от направления преобразования мощности в
преобразователе. Поэтому можно считать, что эта величина весьма
удобна для обобщенного рассмотрения таких характеристик,
как коэффициент полезного действия и чувствительность
преобразователей в режимах излучения и приема.
Обозначим входную электрическую мощность при работе
преобразователя в режиме излучения через Рь и положим
§ 1. Введение, Представление об эффективном затухании 283
И
4. = -^-. (8-5)
Тогда, перемножив выражения (8.4) и (8.5), можно получить
выражение (8.1) в виде
ч)в^=е-2В = г\ецеа, (8.6)
гДе 41 еа — так называемый электроакустический к. п. д. Величину
у\е назовем электрическим к. п. д., а величину г\в —
эффективным к. п. д. преобразования.
В этой главе рассматривается эффективное затухание в пьезо-
активных преобразователях и приводятся универсальные графики,
показывающие связь между этим затуханием и свойствами
материала, а также формой и размерами преобразователей.
Эффективное затухание зависит также от условий работы преобразователя,
к которым относятся: а) рабочая частота, б) акустическая
нагрузка и в) условия согласования импедансов на электрической
стороне. Поэтому здесь при построении универсальных графиков
упомянутые условия выбраны соответствующими обычным рабочим
условиям для наиболее общих случаев использования пьезоактив-
ных преобразователей. Рассмотрим подробнее эти условия.
Рабочая частота. Пьезоактивные преобразователи
используются главным образом на основной резонансной частоте. Однако
существует два типа резонансов, а именно резонанс при
постоянном поле и резонанс при постоянной намагниченности или
поляризации, упоминавшиеся в гл. 3, § 2, п. 6. Другими словами,
при электрическом возбуждении магнитострикционного
преобразователя существует некоторая разница между частотами,
при которых колебательная скорость имеет максимум, в случаях,
когда резонанс наблюдают при постоянной амплитуде тока
возбуждения (т. е. переменного магнитного поля) или же когда
поддерживают постоянной амплитуду напряжения на зажимах
преобразователя (т. е. переменную намагниченность). Первую
обозначают как частоту резонанса /оп вторую — как частоту
антирезонанса /0а- Обычно частоту резонанса при постоянном поле
называют просто резонансной частотой, и на ней, как правило,
и используются преобразователи *). Однако электроакустический
к. п. д. достигает максимума не на частоте /0г, а на частоте f0(V
как это будет показано в § 3. В этом смысле можно утверждать,
что преобразователь следует использовать скорее на частоте
г) Это утверждение представляется сомнительным. Работа
преобразователей на той или иной частоте зависит от соотношения выходного
сопротивления генератора и входного сопротивления преобразователя, и на
практике чаще всего реализуется промежуточный случай, т. е. рабочая частота
лежит между частотами резонансов при постоянном поле и при постоянной
намагниченности.— Прим, ред.
284 Гл. 8. Эффективное затухание в пьезоактивных преобразователях
антирезонанса, чем на частоте резонанса. В данной главе
вычислено эффективное затухание на резонансных частотах как /0г,
так и /0а и проведено сравнение этих значений затухания.
Акустическая нагрузка. Предположим, что размер излучающей
звук поверхности того же порядка или больше, чем длина
звуковой волны в окружающей среде. Тогда импеданс акустической
нагрузки при излучении za можно рассматривать почти как чисто
активное сопротивление, которое записывается в виде
za = ra = pacaS, (8.7)
где S — площадь излучающей поверхности, ра — плотность
среды, са — скорость распространения звука в ней. Акустической
нагрузкой па других поверхностях, кроме излучающей, мы
пренебрегаем.
Согласование электрических импедансов. Предполагается, что
электрический внутренний импеданс источника (или нагрузочный
импеданс преобразователя) Z0 является чисто активным
сопротивлением 7?о и согласован с импедансом Zf свободного
преобразователя. Эффективное затухание рассматривается как для случая
электрического согласования по модулю (т. е. для RQ = \Zj |),
так и для случая согласования по модулю и по фазе.
Рассмотрение сначала проводится для магнитострикциониых
преобразователей. Однако все рассуждения и полученные
результаты можно применить и к пьезоэлектрическим преобразователям
путем простой замены переменных и констант, как это показано
в последнем параграфе данной главы.
§ 2. УГЛОВЫЕ ЧАСТОТЫ РЕЗОНАНСОВ ПРИ
ПОСТОЯННОМ ПОЛЕ И ПРИ
ПОСТОЯННОЙ НАМАГНИЧЕННОСТИ щг И оHа
1. Общие соотношения между ю0г и со0а. Основные уравнения
электроакустического преобразования для магнитострикциониых
преобразователей имеют следующий общий вид:
V=Zd7 + Av, (8.8)
F0= -AI+{ra + zH)v, (8.9)
где V — напряжение на обмотке преобразователя, / —
электрический ток в обмотке, Zd — электрический импеданс
заторможенного преобразователя, А — фактор силы, F0 — внешняя
возбуждающая сила на акустической стороне, и — колебательная
скорость на акустической стороне, zH — собственный механический
§ 2. Угловые частоты резонансов со0г и G)^
285
импеданс преобразователя 1), га — акустический импеданс
излучения (для простоты он рассматривается как чисто активное
сопротивление). Уравнения (8.8) и (8.9) можно переписать в
следующем виде:
l=YdV-YdAv, (8.10)
F0 = - YdAV + (ra +1M) v, (8.11)
где
?,!*:=-* (8.12)
Zd JMLd
zM-zH + YdA^zH + ^r, (8.13)
)<*>Ld
a Ld — индуктивность обмотки преобразователя в заторможенном
состоянии.
При /~0 = 0 из уравнения (8.9) для колебательной скорости
получаем
v = ^=-7. (8.14)
Соответственно частотой, при которой величина | и | становится
максимальной, если при изменении частоты переменного тока /
его амплитуда | / | поддерживается постоянной, т. е. частотой
резонанса при постоянном поле со0г/2я, является частота, при
которой мнимая часть величины ъц становится равной нулю. С
другой стороны, согласно уравнению (8.11), величину v можно записать
в виде
v= Ydi V. (8.15)
Предполагается, что величина | YdV | приближенно
пропорциональна амплитуде намагниченности | М | и еще более
приближенно — значению | V | вблизи резонанса. Соответственно частотой,
при которой | v | достигает максимума, если с изменением частоты
возбуждающего напряжения V значения | М | или | V |
поддерживаются постоянными, т. е. частотой резонанса при постоянной
намагниченности со0а/2л;, является частота, при которой мнимая
часть zM становится равной нулю.
1) Для магнитострикционных вибраторов индекс Н при величинах z,
г, s, Q соответствует условиям работы при постоянном поле Я, а индекс
М — при постоянной намагниченности М\ для пьезоэлектрических
вибраторов эти индексы следует заменить на G и D (или Р) соответственно,— Прим.
ред.
286 Гл. 8. Эффективное затухание в пьезоактивных преобразователях
Вблизи резонанса zM можно выразить в виде
Тогда из уравнения (8.13) получаем
2л = гм + /шт-
SM
A-^4-
1® v LdsM
Представив теперь это выражение в виде
zH=rH + j(dm +
/со
гн = гм +
sinp,
мы можем выразить щ и s# следующим ооразом:
: = *лс (l —
где
А*
LdsM
COS
»)•
(8.16)
(8.17)
(8.18)
(8.19)
(8.20)
(8.21)
Поскольку импеданс потерь в обмотке преобразователя обычно
пренебрежимо мал, можно считать, что для фазовых углов Ld,
А и к имеют место соотношения
P = Z* = Z4 = Z?*
(8.22)
где % — магнитная восприимчивость в заторможенном состоянии1).
Из выражения (8.16) для частоты резонанса при постоянной
намагниченности получаем
со
2 __ SM
0а~~" т
(8.23)
а из (8.18) и (8.20) можно получить следующее соотношение
между частотами резонансов при постоянном поле и при
постоянной намагниченности:
СО;
Or"
:СО
Оа
А*
LdsM
cos
»)•
(8.24)
х) Если магнитная цепь состоит из участков с различной
восприимчивостью (например, в случае преобразователя с воздушным зазором), то в
качестве величины и следует ввести кажущуюся восприимчивость для
активного мапштострикционного участка.
§ 2. Угловые частоты резонансов щг и со^
287
2. Точки, соответствующие частотам резонансов при постоянном
поле и при постоянной намагниченности на круговых диаграммах
комплексного импеданса и проводимости свободного
преобразователя. Кинетический импеданс магнитострикционного
преобразователя Zm выражается в виде
Zm = -4^-. (8.25)
Следовательно, | Zn
достигает максимума при о
со or»
Импеданс свободного преобразователя Zf = Zd + Zm образует на
комплексной плоскости петлю, показанную на фиг. 8.1; эта петля
Фиг. 8.1. Точки,
соответствующие резонаисам при постоянном
поле и при постоянной
намагниченности на круговой диаграмме
импеданса свободного
преобразователя.
/*f
(t) /
/У/
1
Le
^^Г
^Ас
^W)
близка по форме к правильной окружности, если механическая
добротность Q достаточно велика. Тогда на фиг. 8.1 точка А
соответствует частоте резонанса при постоянном поле, если DA —
диаметр окружности, проходящей через точку D,
соответствующую (Zd)o)=co0r-
С другой стороны, проводимость свободного
магнитострикционного преобразователя может быть записана в виде
= Yd + Yn
(8.26)
где Ym—кинетическая проводимость. Из уравнений (8.10) и (8.14)
для величины Ym получаем
Ym =
Y\&
(8-27)
Проводимость свободного преобразователя описывает на плоскости
У/ петлю, показанную на фиг. 8.2. Эта петля также
приближается к правильной окружности, если достаточно велика
добротность QMy определяемая выражением
(8.28)
288 Гл. 8. Эффективное затухание в пъе го активных преобразователях
Из выражения (8.27) видно, что величина Ym почти достигает
максимума на резонансной частоте/0rt = (о0а/2л. При этом точка В
на фиг. 8.2 соответствует частоте резонанса при постоянной
намагниченности, если DB — диаметр окружности, проходящей через
точку D, соответствующую A^)©=© . И если можно пренебречь
импедансом потерь в обмотке преобразователя, то, как это следует
из выражений (8.22) и (8.27),
Z(?m)<o=MO?I=0 (8.29)
независимо от угла
магнитных потерь р. Поэтому можно
считать, что (о0а/2п — это
Ф и г. 8.2. Точки,
соответствующие резопансам при постоянном
поле и при постоянной
намагничен! гости на круговой диаграмме
проводимости свободного
преобразователя.
частота, при которой проводимость свободного преобразователя G/
достигает максимума. Другими словами, можно считать, что
частота резонанса при постоянной намагниченности — это такая
частота, на которой входная электрическая мощность становится
максимальной при постоянном электрическом напряжении на
зажимах преобразователя.
Найдем теперь точку, соответствующую резонансу при
постоянном поле, на петле проводимости свободного преобразователя,
показанной на фиг. 8.2. Из выражения (8.13) имеем
Уд + гя =| У Л2 ш
Используя выражения (8.26) и (8.27), можно переписать
приведенное выше соотношение следующим образом:
'g+JH =1+4^ = _gL . (8.30)
га ~Г ZM Yd Уа
На частоте резонанса при постоянном поле фазовый угол
величины ra + ZH, T. е. /_{га-\ ZH)a)=(Oor' PaB6H НУЛЮ-
Пусть теперь фазовый угол
/L (Га+*м)ш=со0г= ФА «О), (8.31)
А (и>ог)
В((О0а)
§ 2. Угловые частоты резонансов <о0г и со^
289
тогда из соотношения (8.30) можно записать фА в виде
9A=(Z?d-Z.?/Wcoor, (8.32)
а поскольку
Z (^)@=<Оог ^ Z (^d)o)=@Oa? (8.33)
то, используя выражения (8.27) и (8.31), можпо представить фЛ
также в виде
ФА = Z (Ym)«=*0a - Z (?m)co=(Oor- (8.34)
Если на фиг. 8.2 точка А на окружности соответствует соог, то
прямая DB изображает (Fm)cD=a>oa> а DA — величину (Рт)<о=соог-
При этом из выражений (8.34) и (8.32) ясно, что
^ADB = \q>A\^^AOD.
С другой стороны, если /? —точка пересечения продолжения
прямой OD с окружностью, то очевидно, что
ZABD=ZAED,
Отсюда
A ABD ~ а АЕО,
а поскольку DB является диаметром окружности, то
Поэтому ЕС также является диаметром окружности, если С —
точка пересечения продолжения прямой ОА с окружностью.
Следовательно, точка, соответствующая резонансу при постоянном
поле, на петле проводимости свободного преобразователя может
быть легко получена следующим образом: продлим прямую OD
до пересечения с окружностью в точке Е; проведем диаметр ЕС
и соединим точку С с началом координат О прямой линией; тогда
точка, в которой линия СО пересечет окружность, и будет искомой
точкой А. Можно также провести другую окружность диаметром
ОЕ\ тогда пересечение этой окружности с окружностью
кинетической проводимости также даст точку А.
Аналогично рассуждая, точку, соответствующую резонансу
при постоянной намагниченности на петле импеданса свободного
преобразователя, показанной на фиг. 8.1, можно получить
следующим образом: соединим точку D и начало координат О прямой
линией, которая пересечет окружность в точке Е; проведем
диаметр ЕС и соединим точку С с началом координат; тогда точка В,
в которой линия ОС пересечет окружность, и будет искомой
точкой, соответствующей резонансу при постоянной намагниченности.
19-0231
290 Гл. 8. Эффективное затухание в пьезоактивных преобразователях
Или же проведем другую окружность диаметром ОЕ\ тогда
пересечение этой окружности с окружностью кинетического импеданса
также даст точку В.
3. Собственные механические^импедансы преобразователя zM
и ?н- Из уравнения (8.11) известно, что величина zM —
собственный механический импеданс преобразователя при V — 0, т. е. при
М « 0, тогда как из уравнения (8.9) известно, что zH —
собственный механический импеданс при / = 0, т. е. при Н = 0. При этом
в zM (или в гм и sM) не содержится компоненты, обусловленной
магпитострикционной реакцией (макроскопическим магнитоупру-
гим взаимодействием), тогда как zH (или гн и sH) включает в себя
эту компоненту (см. гл. 3, § 2). Второй член в выражении (8.19),
дающем величину гя, и второй член в выражении (8.20), дающем
величину s#, являются соответственно компонентами активного
сопротивления и упругости, обусловленными магнитострикцион-
ной реакцией.
Теоретическое выражение для zH обычно получают, полагая,
как это было сделано в гл. 5, распределение магнитного поля //
однороднымх). Модуль Юнга в этом выражении равен Е' =
= Е — хГ2, т. е. в него включена компонента магнитострикцион-
ной реакции. С другой стороны, теоретическое выражение для zM
легко получить в предположении однородного распределения
намагниченности ikf, и это выражение совпадает с выражением
для zH, в котором Ег заменено на Е.
В качестве собственного механического импеданса, как
правило, используется величина яя, а не zM. Однако использование
величин гм и sM, не содержащих компонент магнитострикционной
реакции, предпочтительнее, чем гн и sH, ввиду простоты
получающихся выражений для электроакустического к. п. д. и
эффективного затухания и удобства их представления на универсальных
графиках. Соответственно в последующем рассмотрении будут
использоваться величины гм и sM.
х) Строго говоря, ни предположение об однородном магнитном поле,
ни предположение об однородной намагниченности не являются
правильными, за исключением особого случая кольцевого магнитострикцион-
ного вибратора. Однако результаты, полученные в этих двух
предположениях, приблизительно правильны и почти одинаковы. Можно считать, что
для обычных преобразователей, в которых используется продольная магни-
тострикция, более подходящим является предположение об однородной
намагниченности.
§ 3. Электроакустический к. п. д. к\еа
291
§ 3. ЭЛЕКТРОАКУСТИЧЕСКИЙ К. П. Д. цеа
1. Частота, при которой г\еа достигает максимума. Используя
выражение (8.15), можно представить выходную акустическую
мощность преобразователя Ра в следующем виде:
Ра
\YdA?.\V\\
Входная электрическая мощность Pi определяется выражением
Pi = Gr\V\\
где Gf — проводимость свободного преобразователя. Тогда
электроакустический к. п. д. цса равен
Из формул (8.26), (8.27) и (8.12) следует
G/==Re(-L_+ *'&#}.
I jaLd ra + zM J
Положим фазовый угол ra-\-zM равным ф, т. е.
Z(^ + 2m)-cP, (8.36)
и пренебрежем импедансом потерь в обмотке; тогда, используя
(8.22), можно выразить Gf в виде
G/
Из (8.36) имеем
1
sin p +
A4(<s>Ld)*
(DLd
СОБф.
COS ф
Используя эти соотношения, можно представить выражение (8.35)
в следующем виде:
Леа = -
га + ГМ
AZ/toQaLd
га + ГМ
C0S29
_^_sinp +
A*/(x>oaLd
(8.37)
COS2 ф
Из (8.36), (8.16) и (8.28) можно получить следующее
соотношение между ф и со:
tf'-MiSHS)- <8-38>
Подставляя (8.38) в выражение (8.37), можно записать ч\еа в виде
| _A*/G>0aLd I
^-. (8.37')
Лед =
га-\-гм
га + гМ
<°0а
{<+«Ч^-^)>»е+
A2/(UQgLd
Га+Гм
19*
292 Гл. 8. Эффективное затухание в пьезоактивных преобразователях
Если р = 0, то г\еа не зависит от рабочей частоты и всегда
выражается в виде
Если Р=т^=0, то г\еа достигает максимума на частоте со0, которую
можно получить из уравнения [dx\eJd (co/(ooa)]Cl)=aH = 0 в
следующем виде:
/ Щ у_BQM-l) + VBQlf-l)* + 12Qif^ (g39)
В большинстве случаев, когда (?дг>Ю> выражение (8.39) можно
переписать в виде
J5L«1— * . (8.39')
Если ф при о) = со0 обозначить через ср0, то из (8.39) и (8.39')
получим
*g%«—4^"- (8-40)
Теперь можно утверждать, что угловая частота со0, при
которой х\еа становится максимальным, лежит несколько ниже частоты
резонанса при постоянной намагниченности со0а и практически
может считаться равной ей.
2. Электроакустический к. п. д. г\еа при соог и при (о0а. Если
положить
ЗКм = -^, - (8.41)
'а.
^«ra^Uiu , (8.42)
то выражение (8.37') можно переписать в виде
^^^HfefF' <8'43>
При резонансе при постоянной намагниченности, т. е. на частоте
со = (ооа, электроакустический к. п. д. становится равным
Уравнение (8.24), которое дает связь между величинами со0г и со0а,
при помощи (8.23) и (8.42) преобразуется к виду
§ 3, Электроакустический к. п. д. г\еа
293
При резонансе при постоянном поле, т. е. на частоте (о = соог,
электроакустический к. п. д. (%а)ю0г можно получить из
уравнений (8.43) и (8.45):
х Км
(8.46)
Почти во всех случаях можно предположить, что A/Qm) %Imcos P <С 1 •
Тогда выражение (8.46) преобразуется к виду
х ? *М , , (8.46')
%м+ |l + *Sf cos2p+ _i_ фЪ cos* р-1) <йм cos p| sin 0
а в более грубом приближении
(ПваЦг « ГЙ^ Юм + A + »Sf COS2 Р) Sin Э • (8-4?)
Формула (8.47) дает сравнительно хорошее приближение, а если
Qm > 5, то ошибка при вычислении по ней составляет менее 5%
точного значения даже в случае такого большого коэффициента
электромеханической связи преобразователя, как %lM/QM — 0>4.
Поэтому эта формула вполне приемлема для использования
на практике.
Отношение (цеа)щг к (Цеа)ща получается из формул (8.47)
и (8.44):
0Г - 1 (8.48)
(ъЛии А , ^cos^psinp
^M + sinp
Ha фиг. 8.3 приведены графики этого отношения.
Универсальные графики. Теоретический анализ работы магни-
тострикционного' преобразователя проводился в большинстве
случаев для однородного распределения поля. Однако, как
упоминалось в § 2, п. 3, если в выражения для zHnA, полученные
в предположении однородного поля, подставить Е вместо Е', то эти
выражения дадут значения zM и А в предположении однородного
распределения намагниченности. Чтобы решить стоящую теперь
перед нами задачу, примем предположение об однородной
намагниченности и применим упомянутый подход к теоретическим
результатам, приведенным в гл. 5 ив работах [1, 2, 6—8]. Тогда
можно показать, что Шм и %1М почти для всех преобразователей
294 Гл. 8. Эффективное затухание в пъезоактивных преобразователях
выражаются следующим образом:
»«Чг2(°*тг-тг-).'
^ ^ \ JJ 9aPa V0M / г
Я-
4
м-
-й<
«-
Рем
А!.
(8.49)
(8.50)
яA + ая^) -« раса
В этих выражениях величины й^# и й^ зависят только от
конструкции, формы и мод колебаний преобразователей, а величина (Jqm
определяется выражением
t?T=lfr <М1>
где Е2—компонента потерь (или мнимая часть) комплексного
модуля Юнга Е. Величина ке в выражении (8.50) является коэф-
1,0 Г
0.9
^0,в
f
1? 07
0,6
1 1
"С
,. -J
№9
^?>o
i
i i
0,5
0 0,2 Ofi Qfi Qfi 1,0 1,2 Ifi 1ft 1ft 2,0
Ям
Фиг. 8.3. Зависимость отношения электроакустических к. п. д. на
резонансе при постоянном поле и на резонансе при постоянной намагниченности
от параметра 91 м (8.42).
фициентом электромеханической связи
КГ*
fCfi
Е
(8.52)
где Г —постоянная магнитострикции (см. гл. 2), а см — скорость
распространения звука при постоянной намагниченности, т. е.
cM=yrlj±. (8.53)
Знак 2 в выражении (8.49) означает, что если преобразователь
i
состоит из колеблющихся участков, изготовленных из активных
§ 3. Электроакустический к. п. д. г\еа
295
и из пассивных материалов х), то необходимо суммировать
значения для всех участков. Если преобразователь изготовлен только
из однородного магнитострикционного материала, или если
механическими потерями в немагнитострикционных участках можно
пренебречь, или же если фазовый угол модуля Юнга Е для всех
материалов, из которых изготовлен преобразователь, можно
считать одинаковым, то величина Шм может быть просто
представлена в виде [2, 6, 8]
Величины Qgjj и Q^ определяются, например, следующим
образом. Для кольцевого преобразователя [6]
О - 2 а
"«-IT'S"'
г» п а
для прямоугольного преобразователя [2]
йш = (а + Щот,
Й, 2nd
го = /с COS -т .
В этих формулах а — ширина кольца, R — его средний радиус,
к — коэффициент поперечного сечения прямоугольного
вибратора, (а + /ф) ат — эквивалентный коэффициент упругости, %м —
длина волны, соответствующая скорости см, т. е. cMlf.
Если подставить выражения (8.49) и (8.50) в формулы (8.44)
и (8.47), то величины {ч\еа)ща и OwW бУДУт выражены через
% (РСм/раО *?, S [Q2R (рСм/раСа) A/<Лм)Ь и Р- ЭТИ СООТНОШв-
i
ния графически изображены на фиг. 8.4. Здесь по оси абсцисс
отложен первый из этих факторов, а второй является параметром
семейств кривых. Величина (v)ea)(x>0a представлена сплошными
линиями, а величина (у]еа)щт — штриховыми линиями для {$ = 0,
5, 10, 20 и 30°. Поскольку факторы, определяющие форму
преобразователя, полностью учтены в Йэд и й^, эти графики имеют
универсальное применение для любых конструкций и форм
преобразователей.
Как видно из этих графиков, при $ Ф 0 к. п. д. (т]еа)сооа
увеличивается с ростом pcMkl и стремится к 1/A + Шм) независимо
х) Например, магнитострикционный вибратор из составных стержней
или пьезоэлектрический вибратор типа Ланжевена, который будет
рассмотрен ниже.
(8.55)
(8.5С)
Фиг. 8.4. Универсальные графики электроакустических к. п. д. для резо-
нансов при постоянном поле и при постоянной намагниченности.
Кривая
0
1
2
3
?(-*?).
0
1/15
2/15
4/15
§ 4. Эффективное затухание при со^ и юог
297
от значения р, тогда как к. п. д. (г\еа)щг имеет максимум при
определенном значении рсм&2 и уменьшается после того, как
рсмк2е превысит это значение.
§ 4. ЭФФЕКТИВНОЕ ЗАТУХАНИЕ ПРИ со0а И со0г
Эффективный к. п. д. преобразования у\в, связанный с
эффективным затуханием В соотношением г\в = е~2В, выражается
в виде произведения электроакустического к. п. д. г\еа на
электрический к. п. д. це [выражение (8.6)]. Поскольку
электроакустический к. п. д. х\еа уже определен выше, эффективный к. п. д.
преобразования т]в можно получить, определив г\е. Электрический
к. п. д. г\е зависит от условий согласования импедансов па
электрической стороне. Рассмотрим теперь оба случая согласования,
упомянутые в § 1,— согласование по модулю и согласование
по модулю и по фазе.
1. Случай согласования по модулю на электрической стороне.
Максимальная мощность Р0, которая может быть получена от
источника электрического тока /0, полная внутренняя
проводимость которого чисто активна и равна G0 = 1/До> определяется
выражением
Po-Go
ж\ • <8-57)
Pi = Gf
Go+Yf
Из формул (8.5), (8.57) и (8.59) имеем
tl> = —
iGpGf
Если проводимость свободного преобразователя, подключенного
к источнику, равна
Yt = G,-jBf, (8.58)
то электрическая входная мощность Pi на преобразователе может
быть записана в виде
(8.59)
_ - (8.60)
IGo + K/l2
В случае электрического согласования по модулю
\zf\ = R0, или |У,| = е0; (8.61)
тогда выражение (8.60) преобразуется следующим образом:
_ 4(G//|f/|) __ 4cos9 ._, 2cos9 (R „„.
I,e~ |1 + ?,/|У,|р ~~ |l + cose + /sin9p - 1 + cose ' Kp^c'>
298 Гл. 8. Эффективное затухание в пъезоактивных преобразователях
где угол G равен фазовому углу Zf или —Yf
Q = AZf=-ZY,. (8.63)
Резонанс при постоянной намагниченности. Если пренебречь
импедансом потерь в обмотке преобразователя и использовать
выражение (8.22), то
^(^)«=1^ = Р-(я/2) И Z(?m)co^Oa = 0
независимо от значения {$. Поэтому получается следующее
выражение:
Gf!*=%a iFdl^einp + lY^
где Эм обозначает угол 0 при о) = со0а. Используя (8.42), это
выражение можно привести к виду
Подставляя (8.64) в формулу (8.62), получаем для
электрического к. п. д. (т]е)ю при резонансе при постоянной
намагниченности выражение, зависящее только от величин 5Км и E:
(це)аоа = , ,2 ___„ ... (8.65)
l + /l+(-^
sinp+ 9lM)
Эффективный к. п. д. преобразования при резонансе при постоян-
' ной намагниченности (у\в)а0а определяется как произведение
выражений (8.44) и (8.65). При помощи формул (8.49) и (8.50)
величины {у]е)ща и 01в)соОа М0ГУТ быть представлены в виде
универсальных графиков, показанных на фиг. 8.5.
Резонанс при постоянном поле. Из соотношений (8.32) и (8.36)
для угла 0Я при о) = оHг получаем следующее выражение:
ея = ФА^(?Ло0г-^-р + Фг. (8.66)
Тогда
«гв„ = с,е№-ф.)_1|^ам. (8.67)
Из формул (8.31), (8.38) и (8.45) находим
tgq>A = <?M{(l—^-9iMCOspI/2-(l—J-9lMcosp)~V2}. (8.68)
В большинстве случаев (l/^>MMRMcosp < 1; поэтому мы имеем
tgqu « — 9fiMcosp. (8.68')
'Я Раса
Фиь 8.5. Универсальные графики электрического к. п. д. (г\е) ф и
эффективного к. п. д. преобразования (т1в)<ооа Для резонанса при постоянной
намагниченности (в случае согласования по модулю на электрической стороне).
Кривая
0
1
2
3
0
1/15
2/15
4/15
О Р°М к2
Фиг. 8.6. Универсальные графики электрического к. п. д. (rje)a>or и
эффективного к. п. д. преобразования (Лв)<й0Г Для резонанса при постоянном
поле (в случае согласования по модулю на электрической стороне).
Кривая
0
1
2
3
?NSte^)i
0
1/15
2/15
4/15
§ 4, Эффективное затухание при (DQa и со0г
301
При этом выражение (8.67) принимает вид
y*~wXZ- <8-M>
Если подставить (8.69) в формулу (8.62), то электрический
к. п. д. (Tje)a>0 при резонансе при постоянном поле будет
приближенно выражаться в виде функции только величин У1М и 0:
Ыо)Л « ~ , (8.70)
^Г ^Vtgp+^MCOsp/ 1 + sinp + ^Mcos2p
Эффективный к. п. д. преобразования (ч)в)щг ПРИ резонансе при
постоянном поле определяется как произведение выражений (8.70)
и (8.47) и приближенно выражается только через величины 9ЛМ,
91м и р. Если использовать формулы (8.49) и (8.50), то величины
(т)е)о)ОГ и (т)вHог могут быть представлены в виде универсальных
графиков, показанных на фиг. 8.6.
2. Случай согласования по модулю и по фазе на электрической
стороне. Поскольку импеданс Zf свободного магнитострикционно-
Фиг. 8.7. Электрическая схема со- f ^ Y§ <?*ф^. N<^
гласования по модулю и по фазе ! - L
для магнитострикционного преобра- 'I 1 г>"
зователя
<гг
w
го преобразователя имеет индуктивный характер *),
электрическое согласование по модулю и по фазе осуществляется путем
подключения параллельно обмотке преобразователя
конденсатора 2), как показано на фиг. 8.7.
^ х) На частоте /0а импеданс Z/ всегда индуктивен. На частоте /0г импеданс
Zf также индуктивен, если Шм sin р < 1, что справедливо в большинстве
случаев для акустически нагруженных преобразователей. Если же 9lM sin p>
> 1 и импеданс Z/ при /0г имеет емкостный характер, то т)е достигает почти
100%, и тогда нет необходимости обсуждать этот случай.
2) Конденсатор может быть подключен и последовательно с обмоткой
преобразователя. В этом случае также применимо приводимое ниже
рассмотрение.
302 Гл. 8, Эффективное затухание в пьезоактивных преобразователях
Если Ус — полная проводимость согласующего конденсатора,
то входная электрическая мощность на преобразователе
Г 12
Pt = Gf
(8.71)
\G0+Yc + Yf
Электрический к. п. д. т]е, согласно (8.71), (8.57) и (8.5),
определяется выражением
т^ ^G<fif „ . (8.72)
\G0 + Yc+Yf\*
Условие согласования по модулю и по фазе имеет вид
YC + Y, = G0. (8.73)
Если Ус записать в виде
Ye = Ge + jBe, (8.74)
то уравнение (8.73) можно представить в виде
?с + ?/ = ^о»
Вс~ В;.
При подстановке уравнения (8.73) в (8.72) получаем
(8.73')
Лв =
Вс Gf
или
У]е = } , (8.75)
где (?с — добротность согласующего конденсатора, т. е.
&=-§-. (8-7С>
Если вместо tg 9 в выражение (8.75) подставить tg 6М из (8.64)
или tg QH из (8.69), то можно соответственно получить значения
(Ле)с>оа и Ь\е)щг Для случая согласования по модулю и по фазе.
Добротность Qc обычных конденсаторов очень велика, поэтому
tg 9 <€ Qc (кроме случая, когда |S « 0 и SftM < 1). Следовательно,
на основании выражения (8.75) электрический к. п. д. магнито-
стрикционного преобразователя в случае согласования по модулю
и по фазе можно считать близким к значению
T|*«100%. (8.77)
При этом эффективный к. п. д. преобразования определяется как
Лв ~ Леси (8-78)
§ 4, Эффективное затухание при со^ и 0Hг
303
и универсальные графики для (цеа)ща и OleaW (Фиг- 8-4)
применимы также соответственно для (т)в)Ща и (г\в)Щг.
Однако в случае Р » 0 следует учитывать, что величина г\е
будет резко уменьшаться при малых значениях абсциссы на
универсальных графиках, т. е. при малых значениях Цд (рсм/раса) ^2-
0fi2 0t0k 0,06 0,0д 0J
*•№*
Ф и г. 8.8. Универсальные графики электрического к. п. д. в случае cowia-
сования по модулю и по фазе. (Параметр Qc — добротность согласующею
конденсатора; Р = 0°.)
Кривая
0
1
2
3
0
1/15
2/15
4/15
Если р = 0, то величина х\еа не зависит от Q^ (pcM/paca) k\, и,
значит, уменьшение це преобладает над уменьшением х\в при малых
значениях величины % (рсм1раса) к*. При {$ = 0 из формул (8.64)
и (8.69) следует
1
tg9M=tgeH:
й
м
(при р = 0),
(8.79)
304 Гл. 8. Эффективное затухание в пьезоактиеных преобразователях
Подставляя (8.79) в выражение (8.75), получим
Ш%а = Ш%г = Ц— (при р = 0). (8.80)
При использовании формул (8.49) и (8.50) выражение (8.80) можно
представить в виде универсальных графиков, показанных на
фиг. 8.8, где величина Qc является параметром. В случае E = 0
эффективный к. п. д. преобразования г\в определяется путем
умножения величины т]в, полученной из этих графиков, на
величину v)ea, которая равна 1/A + Шм) независимо от значения
абсциссы.
§ 5. ТРЕБОВАНИЯ К МАГНИТОСТРИКЦИОННЫМ МАТЕРИАЛАМ
Рассмотрим требования, предъявляемые к свойствам магнито-
стрикционных материалов для преобразователей с точки зрения
эффективного затухания в случае, когда акустической средой
является вода. Для воды
раса = 1,5.10б дин с/см3.
Как было показано выше, эффективный к. п. д. преобразования
на резонансе при постоянной намагниченности (цв)ща всегда
больше соответствующего к. п. д. на резонансе при постоянном
поле (у\в)<х>0г- Если Р Ф 0, то величина (цв)щг достигает
максимума при определенном значении произведения постоянных
материала рсмк2е и уменьшается, когда pcMkl превышает это значение.
Напротив, величина {г\в)ща всегда увеличивается с ростом pcMk%
и стремится к 1/A -|- 501 м) независимо от значения р. Однако если
произведение рсмЩ больше некоторого определенного значения,
то заметного увеличения (т)л)шоа при его дальнейшем возрастании
Таблица 8.1
Значения Qgfj рсмД:|, при которых
(к|в)ю = 0,9/A+ 9J?jtf) (в случае согласования по модулю)
2(й^~ )•
ti \ ^аса Чом/г
0
1/15
2/15
4/15
0,9
!+^а
0,9
0,815
6,744
0,635
Э
0°
1,7.10»
1,9-105
2,1^105
2,3-105
5°
2,2-105
2,5-105
2,7.105
3,1-105
10°
2,7-105
3,1-105
3,4-105
4,0-105
20°
4,2-105
4,6-105
> 5.105
> 5-105
30°
> 5-105
> 5-105
> 5.105
> 5-105
§ 5. Требования к магнитострикционным материалам 305
Таблица 8,2
Значения йде рсде&|, при которых (Цв)^ =^/(* + 9йм)
(в случае согласования по модулю и по фазе)
г V Раса U0M/г
0
1/15
2/15
1 15
0,9
Н-^а
0,9
0,815
0,744
0,035
3
0°
0,44.105
0,48-105
0,52.105
0,6-105
5°
0,9-105
1,0-105
1,1-105
1,3-105
10°
1,9-105
2,1-105
2,3.105
2,7.105
20°
3,7-105
4,0-105
4,3-105
> 5-105
30°
> 5-105
> 5-105
> 5.105
> 5-105
не происходит. Поэтому можно утверждать, что применение
материалов, обладающих значением pcMk2ej превосходящим указанное
выше значение, не является необходимым.
В табл. 8.1 и 8.2 приведены значения Ц^ рсмк2е, полученные
путем умножения взятых из универсальных графиков на фиг. 8.4—
8.6 и 8.8 значений (Q$) (рсм/раса) kl, при которых (у\в)ща ~
= 0,9/A + Sfta), на значение раса = 1,5-105 дин-с/см8. Данные
табл. 8.1 соответствуют случаю электрического согласования
по модулю, а данные табл. 8.2 — случаю согласования по модулю
и по фазе. Для р = 0 данные табл. 8.2 соответствуют весьма малым
значениям добротности согласующего конденсатора, например 25.
Можно считать, что при умножении значений, приведенных в этих
таблицах, на 1/Ц^ получаются требуемые значения рсм№е для
материалов, используемых в магнитострикционных
преобразователях, работающих на резонансе при постоянной
намагниченности. В обычно используемых прямоугольных магнитострикционных
преобразователях коэффициент поперечного сечения равен
приблизительно 0,5. При этом из формулы (8.56) следует, что й^
равно приблизительно 0,5. В обычных кольцевых
преобразователях отношение a/R равно приблизительно V3; тогда из
формулы (8.55) следует, что Q^ равно приблизительно V4.
Следовательно, значения, приведенные в табл. 8.1 и 8.2 и умноженные на 2
и на 4, и являются искомыми максимальными значениями pcMkl.
Как видно из этих таблиц, требуемое максимальное значение
существенно зависит от угла магнитных потерь р и уменьшается
с уменьшением р. Для чистого никеля или альфера рсмк\ «
« 3* 105 дин -с/см8 (гл. 4). Даже в случае согласования по модулю
и по фазе эта величина не достигает требуемого максимального
значения, которое в 2—4 раза больше значений, приведенных
20-0231
306 Гл. 8. Эффективное затухание в пьезоактиеных преобразователях
в табл. 8.1 и 8.2, если угол р составляет не менее 5°. Широко
известно, что в преобразователях, изготовленных из
металлических магнитострикционных материалов, |3 трудно уменьшить
из-за вихревых токов, если только не делать толщину пластин
материала очень малой. Следовательно, для того чтобы повышать
дальше значение (т]в)со0а» необходимо использовать материал,
у которого рсмк% больше, чем у никеля. С другой стороны,
например, для ферритов, которые имеют чрезвычайно высокое
сопротивление, так что Р « 0, максимальное значение рсмк\, необходимое
в случае согласования по модулю и по фазе и равное
четырехкратному значению, приведенному в табл. 8.2, становится
приблизительно равным 2-Ю5 дин-с/см8, так что можно получить
гораздо более высокие значения (т)в)<о0а при значениях pcMkze,
даже меньших, чем у альфера и никеля.
Упругие потери в материале также сильно влияют на
эффективный к. п. д.1 преобразования г\в. Значение цв не может стать
больше, чем величина 1/A + 1m)j которая определяется
параметром универсальных графиков Йэд (рсм/Ра^а) A/Qom), даже если
Р — 0 и произведение рсмк\ сколь угодно велико. Данные в табл.
8.3 показывают соотношение между Q^J? (Р^м/рл) A/(?ом)
и Qom/Qjr Для никеля, альфера и феррита. При составлении этой
Таблица 8.3
Соотношение между Щ} (рсм/раеа) О IQom) и <Мм!®УI
QbJJJ<P^aca>A/(W
1/15
2/15
4/15
^ол//°ЗЙ
никель
433
207
103
альфер
300
150
75
феррит
275
138
69
таблицы значения рсм для никеля, альфера и феррита были
приняты равными 4,13-106, 3-Ю6 и 2,75 «106 дин «с/см3 соответственно,
а значение раса было принято равным 1,5«105 дин*с/см3.
Добротность Q0M для отожженного никеля равна приблизительно 100—
200, тогда как для магнитострикционного феррита легко получить
значение (?ом, превышающее 10001). Из формул (8.55) и (8.56)
видно, что коэффициент Цде составляет приблизительно 0,2 для
обычного кольцевого преобразователя и около 0,5—0,8 для
обычного! прямоугольного преобразователя. Таким образом,
можно считать, что параметр Цдо (рсм/раса) A/<?0м) Для феррита
настолько мал, что его можно полагать равным нулю.
х) См. примечание на стр. 210. — Прим. ред.
§ 6. Распространение результатов на пьезоэлектрические преобр. 307
При разработке новых магнитострикционных материалов
необходимо, конечно, искать материалы с более высоким
коэффициентом электромеханической связи. Однако из проведенного выше
рассмотрения можно заключить, что при условиях работы
преобразователей' на механическом резонансе нет необходимости
в материалах с существенно большим значением Ле, чем у никеля,
и поиски материалов с меньшим Р и большим Q0M могут
оказаться более полезными с точки зрения понижения эффективного
затухания в преобразователях. В тех же редких случаях, когда
магнитострикциониый преобразователь используется не на
механическом резонансе, необходим значительно более высокий
коэффициент электромеханической связи.
При разработке материалов для преобразователей,
предназначенных для интенсивного излучения ультразвуковых волн, могут
возникнуть трудности, связанные с явлениями насыщения
намагниченности и магнитострикции и с механической усталостью,
обусловленной колебаниями в материале, как это уже отмечалось
в гл. 5.
§ 6. РАСПРОСТРАНЕНИЕ ПОЛУЧЕННЫХ
ТЕОРЕТИЧЕСКИХ РЕЗУЛЬТАТОВ
НА ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Приведенные выше положения, относящиеся к магнитострик-
ционным преобразователям, можно непосредственно
распространить на пьезоэлектрические преобразователи путем следующих
подстановок [9]:
ток / Z^ напряжение F,
электрический импеданс Z ^ полная проводимость У,
электрическое активное сопротивление R ^
^ активная проводимость G,
электрическое реактивное сопротивление X ^
^ реактивная проводимость В,
намагниченность М ->- электрическая поляризация Р,
напряженность магнитного поля Н ->-
-> напряженность электрического поля G,
магнитная восприимчивость х -»-
-*- диэлектрическая восприимчивость е,
индуктивность L ->¦ емкость С.
Здесь следует заметить, что почти во всех случаях для
пьезоэлектрических преобразователей фазовый угол е, т. е. р, при-
20*
Ж)8 Гл. 8. Эффективное затухание в пьезоактивных преобразователях
мерно равен нулю. Следовательно, для них электроакустический
к. п. д.
1
если величина 9^ = 1^/2^1©=©^ не слишком мала. Это значение
электроакустического к. п. д. х\еа почти не зависит от частоты
до тех пор, пока преобразователь используется вблизи резонанса,
и также не зависит от коэффициента электромеханической связи ке.
В случае пьезоэлектрических преобразователей дли получения
согласования по модулю и по фазе на электрической стороне
следует использовать катушку индуктивности, так как
электрический импеданс свободного преобразователя, работающего в
резонансном режиме, почти всегда имеет емкостный характер. В этом
случае применимы выражения (8.75) и (8.80) и графики фиг. 8.8,
если считать, что Qc — добротность согласующей катушки
индуктивности. В общем случае добротность катушки не так велика,
как добротность конденсатора; поэтому уменьшение т)*,,
обусловленное Qc, у пьезоэлектрических преобразователей выражено
более заметно, чем у магнитострикционных преобразователей.
ЛИТЕРАТУРА
1. Kikuchi Y.j Journ. Inst. Electr. Comm. Eng. Japan, 32, 225 A949) (на
японском языке).
2. Kikuchi У., Fukushima К*ч Sci. Rep. Res. Inst. Tohoku Univ., Bl-2, 141
A951).
3. Kikuchi У., Shimtzu #., Sci. Rep. Res. Inst. Tohoku Univ., B4, 173 A952).
4. Kikuchi У., Shimizu #., Sci. Rep. Res. Inst. Tohoku Univ., B3, 13 A951).
5. Nukiyama #., Researches on Electro-acoustic Instruments, Tokyo, 1948
(на япопском языке).
6. Kikuchi У., Shimizu #., Sci. Rep. Res. Inst. Tohoku Univ., B3, 1 A951).
7. Kikuchi Y., Suzuki 7\, Shimizu #., The Performance Theory of the Lange-
vins Type Transducer, The Record of Electr. and Comm. Eng. Conversazione,
Tohoku Univ., 1951 (на японском языке).
8. Kikuchi У., Magnetostriction Vibration and its Application to Ultrasonics,
Tokyo, 1952 (па японском языке).
9. Kikuchi У., Sci. Rep. Res. Inst. Tohoku Univ., B3, 7 A951).
Глава 9
ПЬЕЗОКЕРАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
В ВИДЕ КОРОТКИХ СТЕРЖНЕЙ
К. Сибаяма
§ 1. ВВЕДЕНИЕ
Как известно, колебания длинных стержней и тонких дисков
можно анализировать при помощи одномерной теории.
Полученные результаты хорошо совпадают с экспериментом. Однако если
вибраторы по своей форме не являются достаточно длинными
стержнями или тонкими по сравнению с диаметром дисками,
то характер их колебаний становится значительно более сложным,
и возникает заметное расхождение между экспериментами и
одномерной теорией. В этой главе рассматриваются колебания
коротких стержней применительно к использованию пьезокерамических
преобразователей в области электроакустики.
§ 2. СВОБОДНЫЕ КОЛЕБАНИЯ ИЗОТРОПНОГО СТЕРЖНЯ
1. Продольные моды колебаний. Известно, что волновые
уравнения для аксиально симметричных колебаний изотропного
короткого стержня в цилиндрических координатах (г, 0, z) имеют вид
[1—ю]
d*w ,. . 0 ч дА 2р д , ~ . (9#1)
где и — радиальное смещение, w — аксиальное смещение,
д 1 д (ги) , дш
г дг ' dz
0~ ди дш
р —плотность материала стержня, X и ц — постоянные Ламе.
Пусть размеры стержня определяются его радиусом а и длиной 21,
как это показано на фиг. 9.1; тогда граничные условия имеют вид
xzr = 0 J ПрИ 2 = =fcZ' (9e2a)
GГГ = 0, )
т =0 / При Г = а' (9'26^
?10 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
где azz и оТТ — нормальные компоненты напряжения на любой
плоскости, перпендикулярной оси z, и на любой плоскости сг =
= const соответственно, а тГ2 и т2Г — тангенциальные компоненты
напряжения на соответствующих плоскостях.
Решение уравнений (9.1) с граничными условиями (9.2)
рассмотрено многими авторами [1—10]. Согласно их данным, обычно
принято рассматривать следующие два предельных случая,
поскольку трудно точно удовлетворить сразу всем граничным
условиям. Первый предельный случай
соответствует тонким дискам. В этом
случае плоские поверхности,
перпендикулярные оси z, свободны от
всех напряжений, но цилиндрическая
поверхность не может
рассматриваться как полностью свободная. Второй
Фиг. 9.1. Принятые обозначения для
вибратора в виде короткого стержня#
предельный случай относится к длинным стержням. В этом случае
условия (9.2а) не могут быть удовлетворены при получающихся
смещениях, тогда как условия (9.26) удовлетворяются полностью.
Первый предельный случай: тонкие диски. Полагая
и = ?7ехр(го)/),
w = Wex])(i(dt),
(9.3)
уравнение частот можно представить в виде
thpZ _ 4afe2 ,q4v
thai ~~ (PH-g2J ' K '
где а и P — действительные или мнимые постоянные. Они
представляют собой фазовые постоянные для компонент растяжения
и сдвига в аксиальном направлении; g — фазовая постоянная
для радиального направления; a, Р и g связаны соотношением
?2 = а2 + Л2 = Р2 + &2, (9.5)
где
рсо2
№-.
Ь + 2ц
И
А» =
рсо2
(9.6)
(9.7)
§ 2. Свободные колебания изотропного стержня 311
Постоянная g определяется корнями уравнения [3]
О
или
^+^'.W-0. (9.8')
Эти уравнения означают, что нормальные напряжения на
цилиндрической поверхности обращаются в нуль, если пренебречь
усредненной и тангенциальной компонентами. При анализе весьма
полезны следующие соотношения:
Р=ф0, п=^- (действительная величина), (9.9)
Q = al, (9.10)
\k) " (, + 2)(пЧ-1) ~\V ) ' V'll>
где
VS=-g-. (9.12)
А« = Л*(* + 2) (9.14)
и
(^J = -^+1й2. (9-15)
Используя эти соотношения, можно представить уравнения (9.4)
и (9.8') в следующем виде:
tgnfl _4»(f+l)(j+2+n») Q
thQ E + 2-5/г2J » l»-10;
(ga)Jo(ga) _ 2(s+2 + n2)
¦M*«) ~ (H-2)(«* + l) * 1*Л/'
Лемб [1], Kora [3] и другие нашли q-ж корень Qq уравнения (9.16)
и р-й корень (ga)p уравнения (9.17) для заданных параметров
п и s. Было найдено собственное значение apq = (kl)pq в
зависимости от На, т. е. от отношения длины к диаметру. Численные
значения приведены на фиг. 9.2. Собственные частоты свободного
короткого стержня получаются в виде
Распределение амплитуд, соответствующее данной моде, имеет
следующий вид*
CPq(t, y)=BpqUJ0(apt>)W(?iqy) + iT(-l)Ji(apt,)U(Qqy)), (9.19)
312 Гл. 9. Пьезокерамические преобр. в виде коротких стержней
где U и гг —единичные векторы для аксиального и радиального
направлений соответственно,
W (Цу) = Pt sh Qqy + Р2 sin nQqy,
Л =
W2S_S_2 sinnQg
itf + s ' 2
2 (w« + l) E+2) shQe ' 2 (/i2 + l)(s + 2)
U (Qqy) = (?! ch Qgz/ + <?2 cos «Qgy,
(9.20)
(9.21)
а=ад, л^. лг=/=!^+2,
+1
a /0 и /j —функции Бесселя первого рода.
Второй предельный случай: длинные стержни. Разделим
постоянную распространения g, рассмотренную выше для первого
2,6
2fi
2,0
W
1,6
и
5S 1Л
1,0
0,6
0,6
ом
02\
\ \ \ \ М l 1 l 1 М ' 1 \ I I 1 I I » I ' I ' Л ' I I I ' Л—
<*=#/>
, /?/?г/%-*оо1
* ^
Точное решение
6=0,35^^
~0J
II
б=азо\
6 =0.35 \
l^SStf^tf
б='А
^Jh>~1
1 1 i I i 1 1 i i 1 i i 1 1 i 1 1 i i I i i i i i i i i i 1 i
0 Of Ц2 0,3 ОМ 0,5 0,6 Q7 0,0 0,9 1,0 if 1,2 1.3 /,4 /,5 1,5
а
Фиг. 9.2. Основные собственные значения для вибратора в виде короткого
стержня.
Точка Ро соответствует точному решению. Собственные частоты получены по формуле
(9.18). 1 и и — первый и второй предельные случаи.
случая, на две части, одна из которых К обусловлена компонентой
растяжения, а другая к' — компонентой вращения. Постоянная
§ 2. Свободные колебания изотропного стержня 313
же распространения вдоль стержня у здесь только одна, тогда
как при рассмотрении первого предельного случая она состояла
из двух частей аир. Таким образом,
h'2 = №—y\ /c'2 = A;2-Y2, (9.22)
где h и /с — те же постоянные, что и в выражениях (9.6) и (9.7).
Уравнение частот, определенное граничными условиями на
цилиндрической поверхности, может быть записано в виде
(х ~ 1J ф фа) + A _ fax) {х _ ф фа)} = 0, (9.23)
где
х = 4-{1 + о), ' (9.25).
С\
О
и с0 = УЕ/р (скорость звука в стержне). Если стержень
ограничен двумя плоскими сечениями, то допустимые значения у
определяются выражениями
Y* = fb (9.27)
где q — положительное нечетное целое число. Конечно,
тангенциальные компоненты напряжения на соответствующих плоских
поверхностях не учитываются. Подставляя выражения (9.25)
и (9.26) в формулы (9.22), имеем
/г'2 = у2(М-1)> к'* = уЦ2х-1). (9.28)
Собственные значения apq определяются из уравнений (9.23)
и (9.27) в виде
apq = qnY -j-.
Распределение амплитуд выражается следующим образом:
jj г Г J*WaQ (A r\ W*®} on-, qKy
, U - Ь \ /i (к'а) V Х) Jx (h'a) ) COt> ~T '
W = C j/2^^4^- + -7^- 4^1 sin ™
|/ Ji(k'a) ¦ У$lX— 1 Л(Л'а) J 2
Промежуточный случай. Рассмотрим промежуточный случай,
когда форму вибратора нельзя представить ни в виде диска, ни
в виде длинного стержня. Из фиг. 9.2 видно, что все кривые а
для первого и второго предельных случаев проходят через точку Р0
независимо от величины коэффициента Пуассона. Это означает,
что все граничные условия (9.2) в точке Р0 выполняются точно.
Значение На в этой точке равно я/2а! « 0,853, где а{ является
(9.29)
(9.30)
314 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
первым корнем уравнения <р(/с'а) = 1 вида (9.24), причем at »
« 1,84. Значение а в этой точке становится равным зх/|/^2 « 2,22.
Из фиг. 9.2 видно также, что наклон всех кривых а в точке Р0
приблизительно одинаков:
для первого предельного случая
а для второго предельного случая
Г-^1 -4-(«i Ч«0,92.
L'(v)J„ vA "'
Кроме того, все тангенсы наклона кривых в точке Р0 не зависят
от коэффициента Пуассона а. Легко видеть, что если кривые для
обоих предельных случаев, т. е. кривые для вибраторов дискового
типа с малым отношением На и кривые для вибраторов типа
длинного стержня с большим отношением Z/a, соединить друг
с другом плавными кривыми, проходящими через точку Р0, то
эти проведенные кривые для собственных значений не будут
сильно отличаться от кривых для истинных собственных
значений *).
Распределение амплитуд колебаний и отношение амплитуд
осевой и радиальной компонент. На фиг. 9.3 приведены типичные
примеры распределения амплитуды смещения или колебательной
скорости для продольной моды, определяемого выражениями (9.19)
и (9.30). На фиг. 9.3, а показан тонкий диск, для которого
смещение цилиндрической поверхности больше, чем смещение
плоских поверхностей. Это хорошо известный случай радиальных
колебаний тонкого диска. На фиг. 9.3, б показано распределение
амплитуды колебаний для случая На = 0,42; здесь смещение
торцевых поверхностей становится таким же существенным, как
и смещение цилиндрической поверхности. На фиг. 9.3, в показан
случай, когда На = 1,25; при этом смещение торцевых
поверхностей значительно больше, чем смещение цилиндрической
поверхности.
Амплитуда компоненты W достигает максимального значения
М^маьс в центре торцевой поверхности, а амплитуда компоненты
*) При рассмотрении вынужденных колебаний необходима большая
осторожность. Решения для предельных случаев свободных колебаний (9.19)
и (9.30) являются неполными при вынужденных колебаниях, для которых
решение строится путем суперпозиции собственных функций. Тем не менее
можно условно считать, что собственные функции вибраторов типа короткого
стержня представляются выражениями (9.19) и (9.30), если рассматривать
поведение вибраторов в резонансных точках, где они обладают достаточно
высокими значениями добротности Q (см. также § 8).
w
—JE^L.'-M.ju!-'
-га-
НЭ
№1
Фиг. 9.З. Распределение амплитуды смещений для основной симметричной
продольной моды вибратора в виде короткого стержня.
а — 1/а = 0,24 (первый предельный случай); б — 1/а = 0,42 (первый предельный
случай); « — На = 1,25 (второй предельный случай).
3.5
3,0
2.5
§2,0
9 1.5
1.0
0.5
¦И Ь 491 </а
jjhrfaMft
П \L I I I I I I L_J L_
0 0,2 Ofi 0,6 Ofi W 1,2 i,k 1fi 1,5
i/a
Ф и г. 9.4. Отношение амплитуд | WM&KC/UMtLKC I Для основной
симметричной продольной моды вибратора в виде короткого стержня (а= V3).
I и II - первый и второй предельные случаи.
316 Гл. 9. Льезокерамические преобр. в виде коротких стержней
U имеет максимальное значение С/макс при z = 0, т. е. на
окружности, являющейся линией пересечения средней плоскости
сечения, перпендикулярной оси, и цилиндрической поверхности.
На фиг. 9.4 приведено отношение | И^макс/^макс \\ из этих данных
имеем
W*
ик
21
(9.31)
Саку рай, Сирахазе и Анзаи [И J недавно наблюдали методом
оптического интерферометра распределение амплитуд смещений
для вибратора Ланжевена. Их результаты хорошо согласуются
с результатами, полученными из формулы (9.31).
2. Моды колебаний по толщине. Ранее предполагалось, что
колебания по толщине тонкого свободного диска из титаната
10 12 3b
Радиус диска\ш
<° \п Радиус диет, см
i i i ХУ ' ¦ l I-
Результирующая и/и и
0 12 3 4
Радиус диена, см
10 12 3 4
Радиус диена, см
О W 2 3~ 4
Радиус диена, см
Фиг. 9.5. Измеренные и рассчитанные распределения амплитуд смещений
при колебаниях по толщине (диск диаметром 83 мм).
а — наблюдаемое смещение; распределение измерялось датчиком емкостного типа; б —
рассчитанное смещение для толщинной моды; в — рассчитанное смещение для
продольной моды, р = 7; а — рассчитанное смещение для продольной моды, р = 8; д —
рассчитанное суммированное распределение смещений: 1,0 (толщинная мода)+ 0,5 (мода р —
k = 7) -Ь 0,5 (мода v = 8).
§ 2. Свободные колебания изотропного стержня
317
Ф и г. 9.6. Собственные значения для мод колебаний по толщине.
Ts-1 — первая симметричная толщинная мода; Tas-2 — вторая несимметричная толщин-
ная мода; Ls-1 —первая симметричная продольная мода и т. д. Пример нахождения
собственного значения а: для первой симметричной толщинной моды при 1/а = 0,2
вспомогательное построение приводит к значению gl — 0,47 и а = 2,86.
бария имеют поршнеобразный характер. Но это мнение было почти
полностью опровергнуто в ряде экспериментов, в частности в
экспериментах, результаты которых представлены на фиг. 9.5, а.
Остановимся на теоретической стороне вопроса. Уравнения
колебаний по толщине легко выводятся из соответствующих
уравнений продольных колебаний. Выражения (9.16), (9.17), (9.19) —
(9.21) можно преобразовать в выражения для толщинных мод,
если положить
гг = у/и, Qg = ;Q;. (9.32)
Собственное значение аря (р = 1, q = 1 и 2) может быть
получено из графиков фиг. 9.6, если задано отношение 1/а. Примеры
318 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
полученного теоретическим путем распределения амплитуды
колебаний приведены на фиг. 9.5, б. Колебания в случаях q = 1 и q = 2
при малых значениях На расположены на частотной оси близка
друг к другу. Смещение параллельных плоскостей имеет
наибольшее значение в центре диска и монотонно убывает от центра к
периферии. Однако теоретический результат еще достаточно далек
от экспериментального. Причиной расхождения может служить
приближенный характер теории (использованное здесь
приближение соответствует первому из описанных выше предельных
случаев для продольных мод). Предположим, что
экспериментальные результаты являются суперпозицией простой моды колебаний
по толщине и нескольких радиальных мод более высокого порядка.
По-видимому, наиболее близкими к толщинной моде являются
7-я и 8-я продольные радиальные моды. Теоретические
распределения амплитуд смещений для этих мод показаны на фиг. 9.5, ей г.
Они вычислены на основе второго из описанных выше предельных
случаев. Путем суперпозиции этих трех теоретических
распределений может быть получена кривая, очень близкая к
экспериментальному распределению (фиг. 9.5, а). На фиг. 9.5, д показана
попытка такой суперпозиции при отношении амплитуд 1 : 0,5 : 0,5.
3. Асимметричные колебания. Моды с распределением
амплитуд, асимметричным по отношению к средней плоскости вибратора,
анализируются методами, аналогичными методам анализа
симметричных мод. Некоторые численные результаты приведены
на фиг. 9.6. С другой стороны, Мацудайра и Такеи [12] разработали
другое приближение, имеющее вид
где
для первого приближения или
л={1-дA-д)}{1-!>.Ц!J(-1-М <9-33б>
для третьего приближения; здесь
1 Ц^ i + a
a Km является т-м корнем уравнения
Щ + Ш^У!^. (9.33b)
При т = 1 и a = 0,25 имеем Хт = 2.98
§ 3. Эквивалентная масса
319
Эти выражения получены путем комбинации уравнения
распространения для пластинки и частотного уравнения для тонкого
круглого диска [см. уравнение (9.33в)]. Эксперименты достаточно
надежно подтвердили справедливость выражений (9.33) при
На < 0,2.
§ 3. ЭКВИВАЛЕНТНАЯ МАССА
1. Нормировка. Первый предельный случай. В соответствии
с общей теорией вынужденных колебаний [13] выражение (9.19),
определяющее распределение колебаний продольных мод, может
быть преобразовано к следующему виду:
2Р9 = Kpgr{izJ0 (aPl) W (Qqy) + ir (-1) /4 (aPt) U (Qqy)}, (9.34)
где Epq — нормированнаяс собственная функция, a Kpq —
коэффициент нормировки. Коэффициент Kpq можно вычислить из
соотношения
1 Jr/!(ep). (935)
где
Kpq Kpq
hr = В» Ы Zn (О,) + R'„ Ы Zn (Ц),
Kpq
1
1
л„(вР;- 1/2/f(ap) -*ao ep^/i(ep)j-,
i
Z2i (Q,) = [ W» (Q^) dj/ =J- p(shQgchQg-Qg) +
о q
2PiP2 (sin /iQg ch Qg — n cos nQq sh Qq)
PI (nQq — sin nQq cos /iQg) -
1 2n
Zv (Q,) = J C/a (Qtf) d» = 4- [QIChQ.chQ^Q,) +
о q
2QiQ2 (cos rcQ^ sh Qq + л sin nQq ch Qg)
, Q| (sin rcQq cos wQg + rcQg) -•
2л J'
Таблица 9.1
Эквивалентные массы вибраторов типа короткого стержня
Механический
выход
Эквивалентна» масса
перпый предельный случай
второй предельный случай
Фигура
Центры двух
торцевых плоскостей
с координатами
5 = 0, у = ±1
М 4
[K'pq см. (9.35)]
М
К2
pq
Г 1/7» 7 1 ' 1~дг 1 I2
L И * Jiik'a)" Vp^—I Л(А'л) J
[?pg см. (9.36)]
Фиг. 9.7, а,
кривая 1
Две торцевые
плоскости у = ±1
М
(tf^)« 8in2nQg
(т)'[-
у* (Pi*-*)
2/^@!-1)
М
Фиг. 9.7, я,
кривая 2
Окружность ? — 1,
1
(*' J \и (°I2
М
__1 1_
К2 х2
М
Фиг. 9.7, б
§ 4. Некоторые предположения о пъезокерамических вибраторах 321
Второй предельный случай. Из формул (9.30) можно получить
следующее выражение для коэффициента нормировки:
-Ф(М^^ + Ф(^)^ + (уаJ^|^т^} ; (9.36)
индексы р и q здесь для простоты опущены. Предельное
значение X для длинного стержня равно
К= ?±—— . (9.37)
V Pi—1
2. Эквивалентная масса. Эквивалентная масса на заданном
механическом выходе по отношению к р,#-моде получается
методом, показанным в табл. 9.1 и на фиг. 9.7.
§ 4. НЕКОТОРЫЕ ПРЕДПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО
ПЪЕЗОКЕРАМИЧЕСКИХ ВИБРАТОРОВ
Пьезокерамические вибраторы следует, конечно, рассматривать
как анизотропные [14, 15]. Однако если хотя бы упругие
постоянные материала можно считать изотропными, то анализ
существенно упростится. Попробуем поэтому ввести следующие
предположения относительно вибратора.
а. Стержень, поляризованный в направлении его длины,
считается изотропным телом, если речь идет о его упругих
постоянных. Но абсолютные значения упругих постоянных, которые
в этом случае предполагаются изотропными, зависят от рабочих
условий на электрической стороне вибратора. Введя обозначения
Ер, ор и ер для модуля Юнга, коэффициента Пуассона и
диэлектрической восприимчивости при постоянной электрической
поляризации и обозначения EG, oG и eG для тех же величин при
постоянной напряженности электрического поля, получим следующие
соотношения между характеристиками материала в этих двух
случаях:
?G EP ll Г Ер |,
б. Пьезоэлектрические постоянные Гц и Г12 связаны
соотношением
Г12 = аГ„. (9.39)
Эти предположения основаны на следующих соображениях:
1. Известные одномерные теории получены на основе
упрощенного волнового уравнения, в котором отброшены некоторые
2J -0231
0,1
II
" /
на бесконечности
-j—j i i i_
0 0,2 0/t 0,6 Цд 1J0 tf 1ft 1,6 1,6 2,0 ?Z2tk 2,6 2ft 3,0
l/a
a
6от
2,6
2fi
2,2
2,0 Y
1,6
1,6Y
1ft
1,2
1,0
0,6
Oft
Oh
0,2
0
h-2a-H
01 0,2 0,3 Ofi Oft Oft 0,7 Oft Oft 1ft 1J 1,2 1ft 1ft 1ft 1ft 1ft
l/a
б
Фиг. 9.7. Коэффициенты эквивалентных масс о0т = mjM для основной симметричной продольной моды
колебаний коротких стержней (cr=V3)-
а, кривая J — механический выход — центры двух торцевых плоскостей с координатами ? = 0 и у = ±1, кривая 2 — механический
выход
торцевые плоскости в целом, координаты которых у = ±\\ б — механический выход — окружность с координатами ?
у = 0; 1 и II — первый и второй предельные случаи соответственно.
§ 5, Фактор силы
323
компоненты деформациии напряжения. Например, теория
продольных колебаний длинного стержня получена при учете напряжений
и деформаций только в продольном направлении и пренебрежении
всеми остальными. Однако здесь делается попытка ввести все
упругие постоянные, которые, конечно, зависят от
пьезоэлектрического эффекта, в уравнения в упрощенной форме.
2. Согласно экспериментам, проведенным Кикучи и Судзуки
[16], Г12/Ги = 1/2,9 = 0,334 (гл. 7).
3. Недавно было установлено, что для керамики титаната
бария коэффициент Пуассона а = 0,31 [17].
§ 5. ФАКТОР СИЛЫ
1. Общее выражение для фактора силы. Если пьезокерамиче-
ский вибратор, подобный показанному на фиг. 9.8, возбуждается
на некоторой частоте, то следует иметь в виду, что возбуждающая
сила, обусловленная пьезоэффектом, в общем случае действует
Фиг. 9.8. Пьезокерамический
вибратор с поверхностными электродами.
не только на плоские поверхности, но и на цилиндрическую
поверхность вибратора. Введем обозначения fs для силы,
действующей на единицу площади плоской торцевой поверхности,
и msfs Для силы, действующей на единицу площади
цилиндрической поверхности. Сила /s определяется как eYnV/2l, где V —
электрическое напряжение, приложенное к вибратору. Фактор
силы для р, g-моды по отношению к рассматриваемому
механическому выходу X может быть представлен в виде
Ах^вГц -
1 Si S2
*>xBPIW
(9.40)
В предположении Г12 = <тГ11, введенном в § 4, величина ms
обращается в нуль. Тогда выражение (9.40) принимает вид
А,-
(9.400
* bxBpq(X) #
2. Факторы формы. Если известна диаграмма кинетической
проводимости, определенная при помощи моста полных
сопротивлений или каким-либо другим подходящим методом, то, как
известно, фактор силы на данном механическом выходе опреде-
21*
324 Г л. 9. Пъезокерамические преобр. в виде коротких стержней
ляется выражением
^нзмер — " | * то I ?-> (J- кЧ
где | Yт01 — диаметр круговой диаграммы проводимости, г —
эквивалентное механическое сопротивление того же образца, которое
определяется выражением
r = 2n(U-fi)m(h (9.42)
где /2 — /i — разность квадрантных частот, а т0 —
эквивалентная масса для соответствующего механического выхода. Обычно
Ф и г. 9.9. Преобразователь с внутренними электродами.
используют теоретическое значение т0, вычисленное по общей
массе вибратора. Если приравнять выражения (9.41) и (9.40), то для
еГи можно получить следующую формулу:
еГ" ~ гг,- ^1 ПТ «m ^^U2-h)M\Ym0l (9.43)
Si S2
V2n(f2-h)M\Ym\,
(9.44)
Результаты показывают, как и следовало ожидать, что
пьезоэлектрическая постоянная еГи должна быть независимой от выбора
механического выхода. Для вибратора с внутренними электродами,
показанного на фиг. 9.9, величина гГп может быть найдена с
помощью выражения
еГи= .(. 1уо
S
если положить ms = 0.
При введении двух факторов %х и %2 выражения (9.43) и (9.44)
можно представить следующим образом: выражение (9.43)— в виде
(9.43')
(9.45)
где
вГ11== —хИо,
ла1
Si S2
§ 5. Фактор силы
325
(М— полная масса вибратора), а выражение (9.44) —в виде
1
er«=iirfox*4o,
где
Х1Х2 =
naly0
H(SM^) "
(9.46)
При реальных расчетах можно использовать следующие
выражения:
Первый предельный случай. При условии ms — 0 имеем
Xi=-j- Qg AT
(9.47)
1У(ад j_ y0sin»Qg ,Q ,^v
*2~ ^° ИМЗД 2 PiShQ^oH-PjSinnQ^o ' [ }
Когда условие ms=^0 не выполняется, выражение (9.47)
принимает следующий вид:
Xi = -
Kpq Sin««g _1__
/V
(9.47')
Н-2
Величину Xi можно рассматривать как фактор формы для
вибратора, плоская поверхность электродов которого расположена
1,1
1,0
0,9
Ofi
Ц7
Ofi
i I i I i I '
Теория радиальных
колебаний тонких
дисков
, ч
I ' I 1 1 ' I ' l ' l \
II
1 Точное решение ''
» ' ¦ '
i i i i i i i 1
' О 0J 0,2 0,3 Ofi Ofi Ofi 0,7 Ofi 0,9 1,0 1,1 1,2 1,3 Ifi 1,5 1,8
ь
а
Ф if г. 9.10. Кривые фактора формы %\ для основных продольных мод
колебании, вычисленные при о- 1/з-
I и // — первый и второй предетьиые случаи
при у = ±1, а величину ул — как фактор формы для вибратора
с внутренними электродами при у = ±г/0 (фиг. 9.9). На фиг. 9.10
326 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
и 9.11 приведены численные результаты для %i и %2 в
зависимости от отношения На.
Второй предельный случай. Величина %i в этом приближении
равна
%i~ 2 X *(Pi-l) " ^ '
Численные результаты для этого случая также приведены
на фиг. 9.10. При Z/a->oo выражение (9.49) принимает вид
Таким образом, для длинных стержней %i пропорционально На,
как это показано штриховой кривой на фиг. 9.10.
ОМ
J L.
_ J-0-
Второй предельный случай и теория
однородных длинных линий
0 0,1 0,2 0,3 Ofi 0,5 0,6 0,7 Oft 0,9 1,0 1,1 1,1 1t3
1
a
Фиг. 9.11.-Кривые фактора формы у2 для основных продольных мод
колебаний, вычисленные при a=^V3.
Величина %2 во втором предельном случае становится функцией
только г/о» и> следовательно, любая зависимость %2 от На
представляется горизонтальной линией для любого значения г/0,
как это видно на фиг. 9.11. Как показано на этой фигуре,
горизонтальная линия пересекается с кривой для первого предельного
случая, соответствующей каждому данному значению у0, в
точке Р0.
3. Численные примеры фактора силы. Несколько численных
примеров для основных продольных мод дано в табл. 9.2 и на
фиг. 9.12.
Приведем несколько соотношений, полезных для
практического определения численных значений фактора силы.
1. Соотношения между факторами силы и факторами формы:
Л1 = еГ11яаЯ, (9.51)
Таблица 9.2
Фактор силы для преобразователей в виде коротких стержней
Механический выход
Центры двух плоских торцевых
поверхностей с координатами ? = 0,
Плоские торцевые поверхности
y = ±i
Окружность ? = 1, у-=0
Фактор силы
Для преобразователен с внутренними электродами (первый предельный случай)
а _Рг tTT„9 ;iW a W^qyo)
ap I yQW(Qq)
Для преобразователей с поверхностными электродами при Г\2-/-оГц (порвый
предельный случай)
Для преобразователей с внутренними электродами (первый и второй
предельные случаи)
1 1
Л1 = еГила —-7Т-ГТ-;
/г {11 а)
Х2 см. (9.48) и фиг. 9.11
. г „ W (Qq) / 1 s v\ l
I
Zi2(Qq)= j ^(Qqy)dy = -g- (<?ishQq-l-Q2sinMQq); W (Qq) = ^sinnQq;
о "-<2
?7@) представляет случай, когда в (9.21) подставлено j/ = 0.
328 Гл. 9. Пъезокеромические преобр. в виде коротких стержней
где
8Г
1 1
Xt X2 S (X) •
2. Соотношения между факторами силы и эквивалентными
массами:
У(°0т)а У(а0т)ь
(9.52)
где {Ах)а и (А{)ь — факторы силы по отношению к любому
механическому выходу а или Ъ, выбранному на преобразователе,
а (°от)а и (tfom)b — коэффициенты экврталентных масс,
приведенных к тем же выходам.
0.2 0.3 0,Ц 0,5 Од OJ 0,6 0,9 1,0 /,/ 1,2 1,3 Ifi 1,5 ifi 1,7 Ifl 1,9 2ft
t/a
Ф и г. 9.12. Коэффициент фактора силы для основной симметричной
продольной моды колебаний.
Механические выходы: центры двух торцевых поверхностей с координатами ? = О,
у = ±1 (сплошные линии). Кривая у0 = 1 соответствует преобразователю с
поверхностными электродами, а кривые у9 < 1 — преобразователю с внутренними электродами
Штрихован кривая для механического выхода в виде двух торцевых поверхностей у —
= ±1 в целом (а = 1/.,). I и II — предельные случаи.
§ 6. КОЭФФИЦИЕНТЫ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СВЯЗИ
Рассмотренные выше теоретические соотношения были
выведены на основе использования представлений о пьезоэлектрических
постоянных еГ или Г. Однако во многих работах электромехани-
§ 6. Коэффициенты электромеханической связи
329
ческие преобразователи рассматриваются на основе теории,
базирующейся на представлении о коэффициенте электромеханической
связи [14]. Чтобы облегчить возможность сравнения результатов
работ, использующих тот или иной подход, приведем
соотношение между основными постоянными.
В случае основной продольной симметричной моды для
короткого стержня коэффициент электромеханической связи ке
определяется выражением *)
А:е^|/?^Х1х2, (9.53)
где
Л2
Известно, что для длинного тонкого стержня в режиме работы,
когда основную роль играет упругость, коэффициент
электромеханической связи равен УеТ^/Е. В этом случае должен
использоваться модуль Юнга Ер [18].
1. Преобразователь с поверхностными электродами. Поведение
коэффициента связи для такого преобразователя определяется
только коэффициентом х1? поскольку, как легко видеть из
формулы (9.60), х2 для него становится равным единице. Численный
результат для о = V3 представлен на фиг. 9.13, а. В предельном
случае На ->- оо выражение (9.53) принимает вид
\кеI/а-+оо — л у —?~ — ~~^~~ (^еоолфодольн (J.50)
(для второго предельного случая); при Z/a->0 имеем
// \ s -i/3s-| 2 1 i/~eT|7
V'.h.-o = трг V -7+2- у-. _(,-,., У "/Г "
(для первого предельного случая); здесь s — отношение
постоянных Ламе. Если а=1/3, *то
(ke)l/a-*Q9 а=1/3 ~ 0,5116 j/-^ . (9.57')
х) Подробности определения коэффициента электромеханической связи
приведены в гл. 2.
(9.54)
(9.55)
ке-кем%1%2
6=1/3 При ь/а •* <»*%=Wm
OJ 0,2 0,3 ОМ 0,5 0,6 0,7 0,0 0,9 10 1,1 1,2 « ffi 1,5 1,6 1,7 1,6
t/a
a 6
01 0,2 0,3 Ofi 0,5 0,6 0,7 Ofi 0,9 1,0 1,1 1,2 1,3 1,4
l/a
0,2 Ofi Ofi Ofi 1,0
Уо
г
Ф и г. 9.13. Коэффициент электромеханической связи ке для основной
симметричной продольной моды колебаний коротких стержней.
a-XiB зависимости от 1/а (9.54); б —пример поведения kQ при &еоо продолЫ1= 50%;
«-х,в зависимости от 1/а (9.55); г — ч2 в зависимости от г/0 для второго предельного
случая.
§ в. Коэффициенты электромеханической связи 331
Известно, что для так называемых радиальных колебаний
коэффициент связи
(^оо)рад = Ytt Y^W-' <9'58>
Если предположить, что Г12 = сгГ11, то выражение (9.57)
принимает вид
(*«)l/«0 = (Ае)рад = Y^ti=o 2 <4 + °> ^ZTTi
«-A-С2)
~ (&<?оо)рад }/ a2_(i_a2) • (9.57 )
Из этого выражения получаем1)
(^еоо)рад — (^е)рад
2A + а) ' <9'59)
Как видно на фиг. 9.13, а, коэффициент электромеханической
связи для коротких стержней всегда меньше, чем для длинных
тонких стержней. Так, например, если (&еоо)продольн = 50%,
то (ke)i/a^>00 составляет 45%, как это видно из фиг. 9.13, б, и по
мере уменьшения отношения На эта величина убывает до 25%,
т. е. до значения коэффициента связи тонких дисков. (На фиг.
9.13, б представлен коэффициент электромеханической связи
для коротких стержней, изготовленных из обычной керамики
титаната бария, поляризованных в осевом направлении.)
2. Преобразователи с внутренними электродами. Если
электроды помещены внутри преобразователя при у = ±г/0> то мы
должны дополнительно, кроме х1? учитывать второй
коэффициент х2. Для второго предельного случая легко показать, что х2
х) Согласно Мэзону [14], коэффициент электромеханической связи для
тонкого диска в первом приближении определяется выражением
fR 1+* {l1
в обозначениях, использовапных в оригинале. Как известно, выражение A)
переходит в
h~ «J 2(i+a) ' B)
где (со^ — соя)/@к — коэффициент связи на резонансе, обозначенный в этой
книге через ке. Величины к и RY соответствуют величинам (&еоо)рад и ар>
используемым в данной книге. Следовательно, выражение B) можно записать
в виде
2 2 ар-A-а2>
(*еоо)рад=(Ьв)рад 2 A+с) * C)
что совпадает с (9.59).
332 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
не зависит от отношения На, как это следует из выражения
К2==—n I >) У о ^дЛЯ ВТОрОГО предельного случая). (9.60)
С другой стороны, при //а->0 величина %2 обращается в единицу,
и мы имеем
(и2)//а->.о = У г/о-
(9.61)
На фиг. 9.13, в приведены значения х2 в зависимости от На, а на
фиг. 9.13, г дано решение уравнения (9.60).
§ 7. НЕКОТОРЫЕ ЭКСПЕРИМЕНТЫ ДЛЯ ОСНОВНЫХ
ПРОДОЛЬНЫХ МОД
1- Эксперимент I- Один из экспериментов был проведен на 64
дисках из титаната бария. Образцы изготавливались путем
измельчения и спекания материала, взятого из одной партии, и
распределялись по трем группам по диаметру — 20, 30 и 50 мм.
Измерения проводились при помощи моста полных сопротивлений.
0 0J 0,2 0,3 0,Ь 0,5 0,6 0,7 0,8 0,9 f,0 1,1 1,2 1,3 /,4 1,5
1/а
Ф и г. 9.14. Собственные значения, полученные в эксперименте I.
1 — диаметр 20 мм; 2
30 мм; 3 — 50 мм. Сплошная линия — теоретическая припая
(а --¦= 1/3).
Наблюдавшиеся резонансные частоты приведены на фиг. 9.14.
где они преобразованы к собственным значениям а с
использованием значения ]/и,/р = 2550 м/с. Это значение представляет собой
скорость звука в стержне диаметром 19,8 мм и длиной 17,1 мм,
§ 7'. Некоторые эксперименты для основных продольных мод 333
что соответствует отношению 1/а = 0,86, обозначенному на фиг.
"9.14 как «стандарт». Все точки очень хорошо ложатся на
теоретическую кривую (сплошная линия), приведенную на фиг. 9.2.
л!
7
ее
Ъ
3
О6
" Ч* 8 ^ х
Pf< од АО х
- [ Z* *
A ^
А
1 1 1 1—
X /
о 2
А У
1 1 1 1 1
1
__1 i_
ДЗ
14
1 8
" *\
Среднее значение'
1 I 1 I
0 0) 0,2 0,3 0,4 0,5 0.6 0,7 0,8 0.9 1,0 1,1 1,2 1,3 ffi 1,5
l/d .,1
Ф и г. 9.15. Пьезоэлектрическая постоянная еГи в зависимости от На,
полученная из экспериментов 1 и II.
Для эксперимента II показана толстой вертикальной линией только область наблюденных
значений. 1 — диаметр 20 мм; 2 — 30 мм; 5 — 50 мм, 4 — 60 мм.
Следует подчеркнуть, что все экспериментальные данные для
дисков, относящихся к трем различным группам по диаметру,
ложатся на один график функции 1/а.
^3\-
х /
о 2
I
А
Л
[F
41МГН1
А
А
A3
I 4
х *\
А
Среднее значено „•
j i_
0 0,/ 0,2 ДО 0,4 0,5 <?б 0.7 0,5 0,9 1,0 1,1 1,2 1,3 1,Ь 1,5
1/а
Ф и г. 9.16. Пьезоэлектрическая постоянная Ги в зависимости от 1/а,
полученная из экспериментов I и II.
Для эксперимента II показана толстой вертикальной линией только область
наблюденных значений. 1 — диаметр 20 мм; 2 — 30 мм; 5 — 50 мм; 4—60 мм.
Для случая пьезокерамического вибратора воспользуемся
данными из § 5: на фиг. 9.15 представлена в зависимости от 1/а
пьезоэлектрическая постоянная еГи для стержней, а на фиг.
9.16 — постоянная Ги. Если кумулятивную частоту х) для
*) Под кумулятивной частотой автор понимает отношение числа
образцов, имеющих значение постоянной не ниже данного, к общему числу
испытанных образцов. Фиг. 9.17 приведена для характеристики разброса
значений пьезоэлектрической постоянной.— Прим. ред.
334 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
99,9
99
95
90
80
70
60
50
40
30
го\
ю
V
МММ
о эксперимент I
х эксперимент II
1
oi
у
)
1
/
1
/
Г
/
1
/
k567
ЕГ„,ед.СГСЗ
*Ю*
пьезоэлектрической постоянной,
измеренной на всех образцах,
построить в вероятностном масштабе, то
получается, как видно из фиг. 9.17,
прямая линия, за исключением
участка вблизи ее начала. Аномалия
этой части кривой на фигуре
обусловлена тем фактом, что
наблюдавшиеся значения для стержней
диаметром 50 мм аномально малы.
Аналогичные результаты получены и для
постоянной Ги. Средние значения
постоянных на прямом участке
равны: еГи =6,0.10", Ги =4,4.10* ед.
СГСЭ, а стандартные отклонения для
этих двух величин составляют
соответственно 0,6-106 и 0,4-104ед. СГСЭ,
т. е. каждое из этих отклонений
составляет 10% среднего значения.
Фиг. 9.17. Кривая кумулятивной частоты
для пьезоэлектрической постоянной еГ41.
Средние измеренные значения основных параметров при
температуре 30° С составляю^:
плотность (р)т = 5,6 г/см3,
диэлектрическая проницаемость (К)т = 1730 (в
поляризованном состоянии),
диэлектрическая восприимчивость (г)т = 136 ед. СГСЭ
(в поляризованном состоянии),
скорость звука Y\*Jp = 2550 м/с или У~Е/р = 4170 м/с
для or = V3»
пьезоэлектрическая постоянная еГ14 = 6,0«106 ед. СГСЭ =
= 20 ед. СИ,
пьезоэлектрическая постоянная Ги = 4,4-10* ед. СГСЭ.
Из этих данных можно получить некоторые другие основные
постоянные.
1. Модуль Юнга
Я = 9,75.10й дин/см2.
§ 7. Некоторые эксперименты для основных продольных мод 335
Как отмечалось в § 4, это значение может меняться в зависимости
от различных электрических условий измерений, даже если
стержень находится при одной и той же температуре *).
2. (Тп/Е)т = 4,52-10"8 ед. СГСЭ = 13,5-Ю В-м/Н. Это
значение соответствует так называемому коэффициенту выходного
напряжения2).
3. Коэффициент электромеханической связи ке = У^г/ЕТц =
= 0,52 3).
2. Эксперимент II4). Чтобы исследовать неожиданно большие
отклонения пьезоэлектрических постоянных, отмеченные в ходе
эксперимента I, был проведен другой эксперимент. Для него
было приготовлено 10 дисков диаметром 50 мм и длиной 5 мм,
возбуждаемых на так называемой радиальной моде. Эти диски
изготавливались путем размола порошка из одной партии и
последующего спекания в одинаковых условиях. Результаты вместе
с данными эксперимента I приведены на фиг. 9.15—9.17.
Интересно отметить тот факт, что кривая кумулятивной частоты
пьезоэлектрической постоянной в этом эксперименте ложится на
соответствующую кривую для эксперимента I, что видно из фиг. 9.17.
Из этого факта можно сделать следующий вывод. В
эксперименте I образцы имели размеры во всем интервале значений На, и,
следовательно, наблюдавшиеся отклонения пьезоэлектрических
постоянных могли содержать не только разброс, обусловленный
неоднородностью материала, но и ошибки, вызванные
приближениями, принятыми при теоретическом рассмотрении. Эти
приближения не полностью удовлетворяют всем граничным условиям,
детально описанным в § 2, и в результате возникали сомнения,
не обусловлено ли стандартное отклонение в эксперименте I
главным образом ошибками приближения, а не разбросом свойств
материала. Однако в эксперименте II для стержней одинаковых
размеров были получены те же значения отклонений. Поэтому
ошибки, обусловленные неточностью теории, хотя и могут быть
2) Для модуля Юнга в длинных стержнях Кикучи и Судзуки [16]
получили значепис 10,3-1011 дин/см2 при постоянной поляризации
и 8,2 «Ю11 дин/см2 при постоянной напряженности электрического поля.
Мэзон [14] приводит значение 11,3 -Ю11 дип/см2.
2) Для растяжения по толщине приводится значение 12,7 «К)-3 В «м/Н [19].
3) Согласно некоторым исследованиям [16], значение этого коэффициента
составляет для растяжения по толщине 45%. В опытах Кикучи и Судзуки
с длинными стержнями для продольного эффекта было получено значение 59%.
4) Кикучи и Судзуки [20] независимо получили результаты, аналогичные
результатам, полученным в эксперименте II. Было испытано 10 образцов
диаметром 64 мм и длиной 5 мм; Средняя пьезоэлектрическая постоянная для
радиальной моды Гд была равна 2,03-104 ед. СГСЭ со стандартным
отклонением от среднего значения 11,7%. Этот результат соответствует значению
Гц = 4,06«104 ед. СГСЭ для о = 1/3ъ обозначениях, применяемых в данной
книге.
336 Гл. 9. Льезокерамические преобр. в виде коротких стержней
более или менее существенными, но на практике перекрываются
отклонениями, обусловленными разбросом свойств самого
материала, и не могут быть выделены. Другими словами, можно считать,
что развитая выше теория вполне достаточна для практического
применения.
3. Эксперимент III. Был проведен также эксперимент,
связанный с фактором формы %2> который должен определяться
положением электродов г/0 (фиг. 9.18), как это было показано
теоретически в § 5. Стержень в этом эксперименте представлял собой
вибратор типа сэндвича, состоящий из трех дисков из керамики титаната
21
—у-/
У=Уо_
У=~Уо
Л/а2
-/Vs/-
№-3
-2а-
Ф и г. 9.18, Вибратор типа сэндвича в эксперименте III Bа
21 = 25 мм, у0 = 0,2 мм).
60 мм,
бария. Элемент № 1 был заключен между элементами № 2 и 3.
Измерения проводились последовательно на каждой паре из
четырех выводов 1, 2, 3 и 4, показанных на фиг. 9.18, и были получены
следующие результаты:
А. Если измерения проводились на выводах 2 и 3,
расположенных на внутреннем участке вибратора, то резонансная частота /0
была равна 47,80 кГц в случае, если выводы 1 и 4 были
электрически разомкнуты, и 45,81 кГц, если обе пары выводов,
соответственно 1—2 и 4—3, были замкнуты накоротко. Резонансная частота
во втором случае была ниже, чем в первом. Однако значение
пьезоэлектрической постоянной Г в обоих случаях получалось
равным 4,10 '104 ед. СГСЭ, если при анализе измеренных
результатов для г/о — 0?2 мм использовалось' теоретическое значение
%2 = 0,86. Предполагается, что это значение соответствует
постоянной для среднего элемента № 1. Этот результат хорошо
согласуется со значением 4,05-104 ед. СГСЭ, которое было получено
ранее для отдельного элемента до установки его в вибратор типа
сэндвича.
Б. При проведении измерений на выводах 1 и 4 (выводы 2 и 3
оставались свободными) полученные результаты должны были
характеризовать вибратор типа сэндвича в целом. Эксперимент
дал значение Ги = 4Д4-104 ед. СГСЭ. Это значение близко к зна-
§ 7. Некоторые эксперименты для основных продольных мод 337
чению Гц для элемента № 1, помещенного на внутреннем участке,
но существенно отличается от значений 4,77 -104 для элемента № 2
и 4,9«104 для элемента № 3, полученных при предварительных
исследованиях элементов по отдельности.
Из рассмотрения этих экспериментов можно видеть, что
теоретические значения %i и %2, приведенные в § 5, правильны.
4. Эксперимент IV. Если известны резонансная частота /0,
диаметр круговой диаграммы кинетической проводимости | Ym0 |,
' 0 0,1 0,2 0,3 0,Ц 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 19h 1,5 1,6 1,7 1,6
1/а
Фиг. 9.19. Результаты экспериментального исследования коэффициентов
электромеханической связи,
механическая добротность Q и емкость заторможенного
вибратора Cd, то коэффициент электромеханической связи можно найти
по формуле
Ifmol
# = -
Q<*Cd
На фиг. 9.19 приведены результаты такого расчета для образцов,
исследованных в эксперименте I. По оси ординат отложена
величина &е/(^?)//а-»эо, где (&е)г/а-*оо — коэффициент связи для длинного
стержня, который в этом частном случае мы приняли равным 46 %.
2а=20мм
\21 =30мм
21 -19мм
21 =9мм
—*
,
—*
21 =16мм
21-2мм
21 =Ь,5мм
Фиг. 9.20. Ряд образцов, использованных в эксперименте IV.
Другие серии экспериментов были проведены с образцами,
полученными из стержня пьезокерамики титаната бария путем
постепенного его укорачивания, как показано на фиг. 9.20. Резуль-
22—0231
338 Гл. 9. Пызо керамические преобр. в виде коротких стержней
таты показаны крестиками па фиг. 9.19 и хорошо совпадают с
теоретическими значениями, рассчитанными с помощью
выражений (9.53) и (9.54).
5. Эксперимент V (исследование эквивалентных масс).
Рассмотрим малый тонкий стержень, припаянный к вибратору, как
-это показано на фиг. 9.21. Резонансную частоту такой системы
можно найти из уравнения [21]
Уо + П = 0, (9.62)
где У0 — механическая проводимость на выходе 1 вибратора в том
случае, когда вибратор свободен, иУ^ — механическая проводи-
Ф и г. 9.21. Вибратор в виде короткого
стержня с дополнительным тонким стержнем.
мость на выходе 1 тонкого стержня, когда второй его конец
свободен. Эквивалентная масса вибратора легко определяется из
уравнения (9.62) следующим образом:
^ = ^AilS^PcCoSc, (9.63)
где 1С — длина гонкого стержня, ы0/2п — резонансная частота
вибратора, ы'0/2п — резонансная частота системы стержень —
вибратор и pcccSc — механический импеданс стержня для
бегущей волны. Если частота <о^ близка к со0, т. е. если длина стержня
близка к целому числу полуволн, то выражение (9.63)
принимает следующий вид:
Рс^с^с
(-24
"»~4я A/ -' <9-63'>
где
A/j =
Ц>о — 6>o
2л;
Это выражение дает прямую линию в системе координат,
примененной на фиг. 9.22.
Каждый из использованных в эксперименте вибраторов был
изготовлен из мягкой стали, и к вибратору был припаян кусок
рояльной проволоки. Колебательное возбуждение вибратора
осуществлялось электростатическим способом, как показано на
фиг. 9.23, а смещение наблюдалось другим электростатическим
датчиком. При постепенном укорачивании проволоки электрон-
§ 7. Некоторые эксперименты для основных продольных мод 339
ным частотомером измерялась каждая резонансная частота. На
фиг. 9.22 приведен в качестве примера один из полученных
результатов. Экспериментальные данные для коротких стержней с
различными значениями отношения На приведены в табл. 9.3 и на фиг.
9.24. Интересно сравнить наблюденные значения эквивалентных
масс с теоретическими значениями,
изображенными на фиг. 9.24 сплошными
линиями. При этом можно заметить
следующие закономерности.
а) Если На < 0,6, то
экспериментальные точки лежат несколько ниже
теоретической кривой, построенной для коэффи-
Ф и г. 9.22. Наблюдаемые изменения
резонансной частоты в зависимости от длины стержня;
координаты приведены к виду,
использовавшемуся при измерении эквивалентных масс
(образец № 2 в табл. 9.3).
циепта Пуассона а = V3« Причина этого расхождения может быть
обусловлена отличием истинного коэффициента Пуассона от этого
значения.
б) Экспериментальные точки вблизи На = 0,8 расположены
между кривыми для первого и второго предельных случаев;
Таблица 9.3
Некоторые результаты измерений
№
1
2
6
7
Диаметр
2а, мм
30,01
27,14
20,00
20,00
Толщина
21, мм
8,00
10,99
17,14
20,05
1/а
0,207
0,405
0,857
1,000
Резонансная
частота /о,
кГц
115,724
125,021
133,038
119,019
Полная
масса
М, г
44,30
49,СО
42,40
49,57
Эквивалентная
масса то,
г
89,51
48,94
14,23
17,08
Коэффициент
эквивалентной массы
эксперимент
2,020
0,990
0,335
0,334
теория
2,060/)
1,040 1)
0,3351)
0,335 2)
0,3301)
0,3602)
1) Для первого предельного случая.
2) Для второго предельного случая.
Свойства рояльной проволоки: Кя 1 — диаметр 0,99 мм, >ЛЕ/р = 5100 м/с;
№ 2—7 — диаметр 1,2 мм, /Ь7р=5070 м/с.
22*
340 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
такого результата следовало ожидать, исходя из выбранного
метода аппроксимации.
0,01мк<Р
Электронный
Вольтметр
Генератор
Электронный
частотомер
Опора
Частотно - модулированный
измеритель микросмещений
Ф и г. 9.23. Блок-схема измерений эквивалентных масс вибраторов в виде
короткого стержня.
В другом эксперименте мы выбрали в качестве механического
выхода окружность ? = 1, у = 0. Эксперимент был проведен
На бесконечности
J I I I L
7
02 03 04 0,5 0,6 0,7 0,д 0,9 1,0 1,1 1,2 1,3 1,Ц 1,5 1,6 1J 1,6 1,9 2,0
' ' г/а
Фиг. 9.24. Коэффициенты эквивалентной массы для вибраторов в виде
коротких стержней.
Теоретические кривые, показанные сплошными линиями, совпадают с кривыми,
представленными на фиг. 9.7, а (кривая 1) для коэффициента Пуассона о = У»; кружками
обозначены экспериментальные точки.
на вибраторе с отношением размеров 11а = 0,498. Измеренный
коэффициент эквивалентной массы получился равным 0,72, тогда
как теория дает значение 0,75 для коэффициента Пуассона а = V3.
§ 8. Продольная мода с узловыми окружностями
§ 8. ПРОДОЛЬНАЯ МОДА С УЗЛОВЫМИ ОКРУЖНОСТЯМИ
1. Частотные характеристики. Существует большое колт-
ство электромеханических устройств с дисками из титаната бар.
в которых для получения высокой электромеханической свя
используется мода колебаний по толщине. Как правило, nTrTTt
Фиг. 9.25. Собственные значения для симметричных мод
ного стержня.
Штриховые кривые — первый предельный случай; сплошные кривь-
ный случай, продольные симметричные моды; пунктирные кривы*
ный случай, толщинные моды: р и q — номера мод соответственно
щинном направлениях; собственные частоты f ~ могут быть получе»--
— a J2nl Ve/2 A -|- а)Гр. Кривые^вычислены для о = i/з; точки *>0 -
колебания по толщине сопровождаются сильны*
колебаниями с резонансными частотами, располоъ
это видно из импедансных характеристик дисков,
с частотой основной моды. Поэтому не только для рас
практической работы важно уяснить себе поведем-
ных мод.
342 Гл. 9. Пъезокерамические преобр. в виде коротких стержней
Проведем исследование мод колебаний по толщине и
продольных мод более высокого порядка, связанных с узловыми
окружностями. Некоторые численные результаты для мод высшего порядка,
основанные на теоретических соотношениях § 2, показаны на
фиг. 9.25.
2. Факторы формы как критерии качества с точки зрения
интенсивности колебаний. На фиг. 9.26 приведен пример
частотной характеристики импеданса пьезоэлектрического
преобразователя, полученной при постоянном электрическом напряжении.
I 1 1 I I 1 I I J I I I 1 I г I I
100 200 300 400
Частота, кГц
Ф и г. 9.2G. Пример частотной характеристики импеданса для диска из ткта-
ната бария диаметром 83 мм и толщиной 10 мм при постоянном электрическом
напряжении.
1 — генератор; 2 — образец; з — аттенюатор с входным сопротивлением 20 Ом; 4 —
усилитель; 5 — линейный индикатор.
Кривая имеет несколько ярко выраженных максимумов и
минимумов, расположенных вблизи частоты, которую обычно пазывают
резонансной частотой колебаний по толщине. Однако трудно
указать, какой именно максимум относится к этой моде колебаний.
Настоящее исследование было направлено на решение этого
вопроса с точки зрения фактора формы, введенного в § 5.
Эквивалентная схема пьезокерамического вибратора [22]
показана на фиг. 9.27, где Yt — проводимость заторможенного
вибратора, Ym = A2/(z0 + Zi), A — фактор силы вибратора, z0 —
импеданс механической нагрузки и zA — внутренний
механический импеданс самого вибратора.
Обычно, если вибратор свободно колеблется в воздухе, У4 =
= ](йС и z0 « 0. Очевидно, что входной ток 12 на фиг. 9.27
состоит из двух компонент: тока, пропорционального частоте
возбуждения, и тока пьезореакции, обусловленного механическими
§ 8. Продольная мода с узловыми окружностями 343
колебаниями вибратора. Очевидно также, что ордината кривой
импеданса на фиг. 9.26 пропорциональна диаметрам круговых
диаграмм \Ym0 |.
Предположим, что круговые диаграммы проводимости пьезо-
керамического вибратора получены каким-либо способом.
На основании формулы (9.43') произведение разности квадрантных
частот (/2 — /j) на диаметр диаграммы проводимости | YmQ | можно
представить в виде
(еГиJ 1
(/2-Л)|Г«0|
(9.64)
2лМ A/яаJ XI "
Из этого выражения следует, что произведение (/2 — /i) | Уто I
обратно пропорционально квадрату фактора формы %i до тех
пор, пока
пьезоэлектрическая постоянная инвариантна
но отношению ко всем модам
колебаний вибратора. А это
означает, что величина Xi
Ф и г. 9.27. Эквивалентная схема
пьсзоксрамичсского вибратора.
может быть принята в качестве критерия интенсивности
колебаний; т. е. чем меньше %i> тем больше интенсивность колебаний.
Поэтому можно сказать, что при малых Xi на кривой импеданса
появляются чрезвычайно резкие максимумы и минимумы, так
как разности /2 — /4 предполагаются почти одинаковыми для
всех мод.
3. Мода колебаний по толщине. Поскольку исследование
проводится с целью объяснения поведепия системы вблизи резонанса
колебаний по толщине, область исследования величины %х для
продольных мод может быть ограничена областью применимости
второго предельного случая. Резонансная частота колебаний
по толщине тонкой пластинки определяется следующим
выражением:
/=
B1) V A-
A—о)Е
2B1) У <1-2о)A + а)р'
а собственное значение а — выражениемх)
я Vs + 2
а-
(9.65)
(9.65')
х) Строго говоря, это выражение справедливо только при На -*¦ 0, как
ото видно из графиков фиг. 9.25; см. также § 2, п. 2.
344 Гл. 9. Пьезокерамические преобр. в виде коротких стержней
если а==1/3, то
aa=i/3 = n. (9.65")
Очевидно, что (9.65") дает линию, параллельную оси абсцисс
в координатах а, На, как это показано на фиг. 9.25. Эта линия
пересекает ряд кривых для продольных мод более высокого
порядка, полученных для обоих предельных случаев. Область
пересечений лежит за точками точного решения (Р0) и>
следовательно, при дальнейшем обсуждении следует рассматривать
пересечения с кривыми, полученными лишь для второго
предельного случая.
4. Фактор формы %i для более высоких мод. Значения %i в
области применимости второго предельного случая могут быть
вычислены с помощью выражения (9.49). Результаты приведены на
Ф и г. 9.28. Теоретические характеристики фактора формы %t для
продольных и толщинных мод.
Штриховые кривые — первый предельный случай, продольные моды; сплошные кривые —
второй предельный случай, продольные моды; пунктирные кривые — первый предельный
случай, толщинные моды.
фиг. 9.28. Эти результаты значительно легче понять, если
исследовать природу упомянутых выше точек пересечения. В данном случае
уравнение частот (9.23) для второго предельного случая становится
математически неопределенным. Вычислив предел, получаем
Jt(yaV2x — l) =0 (9.66а)
§ 5. Продольная мода с узловыми окружностями 345
и одновременно
х = -
(9.666)
где Pi зависит только от коэффициента Пуассона а, как это видно
из формулы (9.26). Например, если о равно 1/3 или х/4, то
величина ft равна соответственно V2 и 2/3. Из формул (9.66а) и (9.27)
находим соответствующее значение 1/а
V а I pq (Уа)р
./?-'
(9.67)
где д —номер моды колебаний по толщине, a Yp = yaY%/$i — 1 —
корни уравнения (9.66а), которые приведены в табл. 9.4. Фактор
Таблица 9,4
Значения 1/а и Xi при ж = 1/р1 = 2, или а = 1/3
р
yp
1/а
Xi
1
—
—
—
2
3,8317
0,7100
0,766
3
7,0156
0,3878
0,408
4
10,1735
0,2674
0,289
5
13,3237
0,2042
0,220
6
16,4706
0,1652
0,178
7
19,6159
0,1387
0,150
8
22,7601
0,1195
0,129
9
25,9037
0,1050
0,114
10
29,0468
0,0937
0,101
11
32,1897
0,0845
0,092
формы Xi в этом случае имеет вид
<*>-т(т)и^/ЧтНJз4гг+<
Если о = 1/3 и q = 1, то
/J\ _ Уз я
УР 2
./"/ *
w^kKtI/^ItL
(9.68)
(9.67')
(9.68')
Численные значения 1/а и %и полученные из формул (9.67) и (9.68),
приведены в табл. 9.4 *).
2) Естественно было бы положить номер моды р равным нулю для
основной моды: во-первых, в силу того, что существует соответствие между
номером моды р и порядком корней: уравнения /j = 0 (табл. 9.4), и, во-вторых,
в связи с независимостью поведения основной моды от других мод по
отношению к уравнению частот (9.16). Но в этой главе, исходя из
общепринятой практики, мы приписываем основной моде номер р = 1.
34(> Гл. 9. Пъезокерамические преобр. в виде коротких стержней
Хотя зпачения На и %{, соответствующие точкам минимума
на фиг. 9.28, не точно совпадают со значениями, соответствующими
х = 1/pt, они близки к значениям, приведенным в табл. 9.4 и
приближаются к {l/a)x=i/^ и (Xib-i/Pt при На -> 0. Для х = 1/р±
Ф и г. 9.29. а — рассчитанное распределение амплитуды колебаний,
соответствующее условиям р = 4, Z/a я& 0,2674 и а = V3; б — экспериментально
полученное Шоу распределение амплитуды колебаний для р = 4 и Z/a =
= 0,259 (штриховая кривая рассчитана теоретически).
распределение амплитуды колебаний на торцевых поверхностях,
соответствующее данной моде, имеет вид
1 Чтг-1)
( — р<?)торц. поверхн — *z ( Ч -FT- — X
Xf(i--1)^7^+1]. (9-69)
где
Пс = {1^1}^ = -^- (^- _ IJ [2 (-±- - I)" 2^p7+ l] .
a iz — единичный вектор в осевом направлении.
§ 8. Продольная мода' с узловыми окружностями 347
В качестве примера на фиг. 9.29, а показано распределение
амплитуды колебаний для случая р = 4, о = V3, т. е. На « 0,2674
(табл. 9.4). В экспериментах, проведенных Шоу [23],
использовался диск из титаната бария с отношением размеров а/1 — 3,86,
или На = 0,259, что не очень сильно отличается от описанного
примера; его экспериментальные и теоретические результаты
приведены на фиг. 9.29, б, и представляется интересным сравнить
их с данными, приведенными па фиг. 9.29, а.
Здесь следует обратить внимание на то, что означает условие
х = Щи Из соотношения (9.28) Л'2 = /г2 — -у2/= Т2 (Pi^ — 1)
следует, что компонента растяжения для постоянной
распространения в радиальном направлении Ы обращается в нуль при х =
= 1/Pi (конечно, компонента вращения для радиального
направления не равна нулю), тогда как постоянная распространения
для осевого направления становится равной h.
5. Фактор формы 7i Для колебаний по толщине. Кривые Xi
для мод колебаний по толщине также показаны на фиг. 9.28.
Для обеих кривых с q =¦ 1 и q = 2 величина %i становится
пропорциональной На при На ->¦ 0, т. е.
В этой области кривые почти совпадают друг с другом, и вплоть
до окрестности точки На » 0,15 нельзя обнаружить какого-либо
различия между ними. Однако кривая для q = 1 обращается
в бесконечность при На « 0.8378, а кривая для q = 2 — при
На « 1,6735.
Из этих результатов следует, что пьезокерамический вибратор
сильно возбуждается на модах продольных колебаний высшего
порядка в радиальном направлении, близких по частоте к
основной моде колебаний по толщине. Следует также принять во
внимание, что эти моды могут быть сильно связаны друг с другом,
особенно при малых значениях На.
6. Пример. Для примера рассмотрим преобразователь из
титаната бария диаметром 83 мм и толщиной 10 мм, частотная
характеристика импеданса которого приведена на фиг. 9.26. Круговая
диаграмма кинетической проводимости измерялась на нем обычным
мостовым методом. На фиг. 9.30 полученные значения отношения
р-й резонансной частоты к первой резонансной частоте отложепы
в функции номера моды р (крестики); приведены также
теоретические резонансные частоты (кружки, соединенные ломаной
линией).
Фиг. 9.31 приведена здесь для обсуждения зависимости
пьезоэлектрической связи от номера моды р. По оси ординат отложена
величина {[| Ym0 I (/2 — /i)VU Ym0 | (/2 — /Oh}1'*, которая лег-
3 4 5 6 7
Номер моды р
8 9 Толщин-
ноя мода
Фиг. 9.30. Резонансные частоты образца диаметром 83 мм.
1 — эксперимент; 2 — теория. А — первый предельный случай, В — второй предельный
случай.
2 3 4 5 6 7
Номер моды р
8 9
Ф и г. 9.31. Изменение произведения | Ym0 | (/2 — /i) для образца
диаметром 83 мм и соответствующее теоретическое значение фактора формы Xi«
1 — эксперимент; 2 — теория.
§ 9, Вибратор Ланжевена
349
ко определяется из измеренных круговых диаграмм
проводимости. Чтобы сравнить экспериментальные результаты с теорией,
на фиг. 9.31 в том же масштабе представлены вычисленные
значения (%i)i/(Xi)P, поскольку существует соотношение
Wz
V-
[|^nol(/2-/l)]r
(Xi)t
ia\ - v ~ --,-,-. (9.71)
Wi V l\Ym\(f2-h)]t (Xi)p
Можно сказать, что результаты эксперимента удовлетворительно
совпадают с результатами теоретического анализа.
§ 9. ВИБРАТОР ЛАНЖЕВЕНА
В^так называемом вибраторе Ланжевена пьезокерамический
материал заключен между двумя слоями упругого материала,
как показано на фиг. 9.32. Этот тип вибраторов используется
9.|
т
21 У
\9я-9»
J-u.-f
Ш
1 —
-2а-
Фиг. 9.32. Вибратор Ланжевена.
в качестве ультразвуковых излучателей большой мощности или
преобразователей в электромеханических фильтрах. Если
суммарная длина вибратора достаточно велика по сравнению с
диаметром, то к нему применима теория составного длинного
стержня [24]. Однако если толщина вибратора становится настолько
малой, что может быть сравнима с диаметром, то
экспериментальные характеристики вибратора очень сильно отличаются от
теоретических.
Вибратор типа сэндвича, описанный в § 7, п. 3, можно
рассматривать как предельный случай вибратора Ланжевена. Для
него мы получили хорошие результаты, использовав теорию
короткого стержня. Можно предполагать, что аналогичный подход
пригоден в общем случае и для вибратора Ланжевена, состоящего
из произвольной комбинации материалов. Но получить точное
решение очень трудно, поэтому мы введем в рассмотренную выше
теорию короткого стержня вспомогательный фактор (%з)а-
Предположим, что на основе информации, полученной из
измерений круговой диаграммы проводимости, пьезоэлектрическая
постоянная материала определяется выражением
еГи = — (хОь Шь (Хз)а (А0)ь,
(9.72)
350 Г л. 9. Пъезокерамические преобр. в виде коротких стержней
где
(А0)ь = У2ли2-и)Мь\Гт\ь,
(Xi)b и (х2)ь — факторы формы, введенные в (9.46) г), (%3)а —
вспомогательный фактор, состоящий из следующих трех частей:
Фиг. 9.33. Экспериментальная зависимость резонансной частоты от^отно-
шения IIа для вибратора Ланжевена.
По оси абсцисс отложено отношение полной толщины к диаметру; по оси ординат —
резонансная частота, нормированная по резонансной частоте целиком стального
вибратора. 1 — образцы диаметром 20 мм; 2 — 30 мм; 3 — 50 мм. Вычисление в
рамках одномерной теории проводилось при условии, что отношение импедансов
feu = (PiVbiS1)/(p2Vb2S2) — 0,6 (в данном случае Si = S2) и отношение стержневых
скоростей Vbi/Vb2 = 0,8. Стрелки на оси ординат обозначают резонансные частоты,
полученные из теории для тонкого преобразователя Ланжевена.
а) %з — множителя, обусловленного разностью волновых
импедансов материалов 1и2(в дальнейшем этот фактор можно будет
Л) Эти факторы можно найти, используя графики на фиг. 9.10 и 9.11.
Если считать, что абсцисса на фиг. 9.10 и 9.11 представляет собой суммарную
толщину рассматриваемого преобразователя Ланжевена, деленную на
диаметр, то ордината дает величину (%\)ь или (%z)l-
§ Р. Вибратор Ланжевена
35!
получить теоретически); б) %4 — множителя, обусловленного
наличием склейки, которым можно пренебречь, если
усовершенствовать методику склейки, т. е. улучшить акустический контакт
частей вибратора; в) %ь — множителя, учитывающего отклонения,
связанные с использованием предположения о том, что
пьезоэлектрическую среду можно рассматривать как однородную (см. § 4).
1,0
0,9
Ofi
0,7 Y
1,0
0,9
0,6
0.7
10
0,9
0,8
1,0
0.9
Jfi
$1.1
1,0
0,9
. ofi
1,0
0,9
W
0,9
Ofi
Уо=0,15
—*
_L_
Чо-ОЯ
*х
~«г
о
оо
У о-0.25
X
X
Уо-0.3
у о-ом
Уо'0,5
h-**
-*-х-
Z
Уо=0,6
Одномерная
теория
0,2 Ofi Ofi Ofi 1fi 1,2 1M 1,6 1,8 2,0
l/a
Ф и г. 9.34. Экспериментальная зависимость фактора (%3)а от отношения
На для вибратора Ланжевена.
Обозначения те же, что на фиг. 9.33, за исключением треугольников, относящихся к
другой группе экспериментов.
Однако в настоящее время настолько трудно определить эти
множители в отдельности, что мы будем рассматривать их
произведение
Ша=х3%аь- (9.73)
352 Гл. 0. Лъезокерамические преобр. в виде коротких стержней
Для вибратора типа сталь — титанат бария — сталь было
проведено в общем более 200 экспериментов. Результаты приведены
на фиг. 9.33 и 9.34. Резонансная частота /0 показана на фиг. 9.33,
где по оси ординат отложено отношение УУ/оо (/оо — резонансная
частота вибратора, состоящего только из стали). На фиг. 9.34
дана величина (хз)о- Горизонтальные линии в правой части
каждой фигуры показывают результаты, полученные из одномерной
теории. Если На достаточно велико, то экспериментальные кривые
должны к ним асимптотически приближаться. Приведенные
графики полезны для расчета преобразователей, так как формы
вибраторов, исследованных в этих экспериментах, близки к
формам практически используемых преобразователей большой
мощности.
ЛИТЕРАТУРА
1. Lamb #., Proc. Roy. Soc, 93A, 114 A917).
2. Sezawa K.> Vibration, Tokyo, 1932 (на японском языке).
3. Koga I.у Journ. Inst. Electr. Eng. Japan, 50, 1209 A930) (па японском
языке).
4. Matsudaira M., Takei K.> The Record of Electr. and Comm. Eng.
Conversazione, Tohoku Univ., 22, 65 A953) (на японском языке).
5. Aggarwal R. Я., Journ. Acoust. Soc. Amer., 24, 463, 663 A952); 25, 533
A953).
6. Aggarwal R. i?., Shaw E. A. G., Journ. Acoust. Soc. Amer., 26, 341 A954).
7. Pochhamer L., Journ. Math., 81, 324 A876).
8. Love A. E. #., Mathematical Theory of Elasticity, London, 1927 (имеется
перевод' А. Ляв, Математическая теория упругости, М.—Л., 1935).
9. Bancroft. Д., Phys. Rev., 59, 588 A941).
10. Holden Л. М, BSTJ, 956 A951).
11. Sakurai 7\, Shirahase /?., Anzai 7\, Journ. Acoust» Soc. Amer., 32, 839
A960).
12. Matsudaira M.9 Takei K., The paper for the Meeting of the Acoustical
Engineering of the Res. Inst, of Electr. Comm., Tohoku Univ., 1955
(на японском языке).
13. Hayasaka 7\, The Theory of Acoustic and Mechanical Vibration, Tokyo,
1948 (на японском яыке).
14. Mason W. P., Piezoelectric Crystals and their Applications to Ultrasonics,
New York, 1950 (имеется перевод: У. Мэзоп, Пьезоэлектрические
кристаллы и их применение в ультра акустике, М., 1952).
15. Shimizu #., The Paper for the Meeting of the Acoustical Engineering
of the Res. Inst, of Electr. Comm. Tohoku Univ., 1954 (на японском языке).
16. Kikuchi У., Suzuki Т., Ito 0., The Prepared Issue of the Papers for the
Meeting of the Acoust. Soc. Japan, Nov. 1954 (на японском языке).
17. Hueter Г. ?., Dozois ?., Journ. Acoust. Soc. Amer., 24, 85 A952).
18. Honda S., Sci. Rep. Res. Inst., Tohoku Univ., B3, 95 A952).
19. Brush Electronics Co., Piezotronic Technical Data, 1952.
20. Kikuchi У., Suzuki Т., Ito 0., The Prepared Issue of the Papers for the
Meeting of the Acoust. Soc. Japan, May 1954 (на японском языке).
21. Yasuda Г., Journ. Inst. Electr. Comm. Eng. Japan, 37, 37 A954).
22. Nukiyama #., Researches on Electro-acoustic Instruments, Tokyo, 1948
(на японском языке).
23. Shaw E. A. G.> Journ. Acoust. Soc. Amer., 28, 38 A956).
24. Kikuchi Y\, Suzuki 7\, Shimizu #., The Paper for the Meeting of the
Acoustical Engineering of the Res. Inst, of Electr. Comm., Tohoku Univ.,
July 1951 (на японском языке).
Глава 10
ХАРАКТЕРИСТИКИ ЗВУКОВОГО ПОЛЯ,
СВЯЗАННЫЕ С РАБОТОЙ УЛЬТРАЗВУКОВЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
К. Фукусима, Д. Санеёси, Е. Кипучи
§ 1. НАПРАВЛЕННОСТЬ
В большинстве случаев размеры ультразвуковых излучателей
сравнимы с длиной волны звука в среде. Поэтому излучаемая
ими звуковая энергия в той или иной мере концентрируется
в определенном направлении. Если представить себе очень
большую сферическую поверхность с излучателем в центре, то
звуковое давление на этой поверхности будет различным в разных
направлениях. Относительное значение звукового давления,
выраженное в функции азимутального угла, называется
характеристикой направленности.
При использовании ультразвукового преобразователя для
приема звукового сигнала его чувствительность зависит от
направления прихода волны. Направленность приема звука иногда
оказывается эффективным средством выделения полезного сигнала
на случайном шумовом фоне. Поскольку излучение и прием
звука взаимно обратимы, направленность данного
преобразователя по приему и по излучению одинакова.
1. Принцип Гюйгенса и уравнение Рэлея. В любой точке
звукового поля колебательная скорость частиц v и звуковое давление
р могут быть выражены через акустический потенциал скоростей <f>
в этой точке следующим образом:
y=-V<b A0.1)
Р-9^~\ (Ю.2)
здесь р — плотность среды, а V — оператор [i {д/дх) + / {д/ду) +
-1- k (d/dz)]. Если мы рассматриваем синусоидальные колебания
с угловой частотой со, то потенциал скоростей ф = ф^'©*
удовлетворяет волновому уравнению
(У2 + /с2)Ф = 0. A0.3)
В этом уравнении А:—-волновое число:
, -, /"~р~ со 2я
23-0231
354
Гл. 10. Характеристики звукового поля
где X — длина волны звука, с — скорость распространения, К —
модуль объемной упругости среды, в которой
распространяется звук.
Дифференциальное уравнение звукового поля A0.3) можно
преобразовать в интегральную форму. Рассмотрим замкнутую
поверхность S в звуковом поле. Если в замкнутом объеме не
существует источников звука, то потенциал скоростей в произвольной
;;;////;;;//$
^ГТ
' ур/////№Ш
Фиг. 10.1. Двухслойный излучатель с антисимметричным распределением
скоростей (а) и плоский излучатель в бесконечном экране (б).
точке Р внутри объема, ограниченного поверхностью S, можно
получить путем интегрирования граничных условий по
поверхности S в виде
Ф,
-Ш(
dOs\
-for
дп I
dS+ j<Dfi
e-jhr
дп
dS
], A0.4)
где Ф-g — значение потенциала скоростей на элементарной
площадке dS поверхности S, г — расстояние между Р и dS и п —-
нормаль к d*S, направленная внутрь. Величина ип — —дФ8/дп —
нормальная компонента колебательной скорости на
поверхности S. Соотношение A0.4) выражает принцип Гюйгенса.
Если излучатель звука представляет собой двухслойную
систему и состоит из двух плоских диафрагм, колеблющихся с
антисимметричным распределением скоростей, как показано на фиг. 10.1, а,
то его переднюю и заднюю поверхности можно принять за
поверхность Sy для того чтобы определить потенциал скоростей в
точке Р. При этом вторые члены в A0.4) компенсируют друг друга,
а первый член удваивается, и в результате получается уравнение
Рэлея в следующем виде:
S
Это уравнение справедливо также для плоской излучающей
поверхности, колеблющейся в бесконечном плоском жестком экране,
как показано на фиг. 10.1, б.
§ 1. Направленность
355
2. Направленность круглого диска, колеблющегося в
бесконечном экране. Пусть круглый диск радиуса р0 колеблется в
бесконечной жесткой плоскости я, у, как показано на фиг. 10.2.
Если распределение скоростей по диску аксиально симметрично
и представлено функцией а (р), то направленность в
соответствии с A0.5) определяется вы- р
ражением
Ро
D (9) = С J0 (кр sin в) а (р) р dp,
A0.6)
где 0 — угол между
рассматриваемым направлением и осью я,
Фиг. 10.2. Круглый диск в
бесконечном жестком экране.
р — радиальное расстояние точки на диске от центра, а /0 —
функция Бесселя нулевого порядка.
Если распределение скоростей а (р) постоянно и не зависит
от р, то выражение A0.6) сводится к выражению для случая
круглого поршня в бесконечном экране:
д 9 2/iJ*)
v ; * A0.7)
х = /cp0sinO.
Выражение A0.6) показывает, что выбором подходящего
распределения скоростей а (р) можно синтезировать заданную
характеристику направленности. Обозначим требуемую
направленность через D0(Q). Вводя новую переменную ? = к sin 6,
перепишем D0(Q) как функцию от ?:
^о(в) = /о(В.
Однако аналогично интегралу Фурье любую произвольную
функцию /0(Н) можно выразить в интегралах функций Бесселя:
оо оо
/о (I) = j /о (РЮ Р dp j /о (|i) /о (р|х) и d\i. A0.8)
о о
Из сравнения выражений A0.8) и A0.6) видно, что если
распределение скоростей выбрать в виде
«(Р)= J /oOO-MPlOMlA.
A0.9)
то направленность круглого диска будет равна D0(Q)*
23*
356
Гл. 10, Характеристики звукового поля
Такой путь синтеза направленности является эффективным
методом подавления боковых лепестков диаграммы
направленности излучателя. Так, например, если задано условие
><е<ес,
А)F)Ч п — п <0<_
!1 при 0.
0 при 0С
то распределение скоростей должно иметь вид
ftb
а(р)= j/0(p|i)|irf|i = -j-/i(**P), (Ю.10)
где
а(р)
Ь = sin 0C.
Первый нуль выражения A0.10) получается при р = 3,83/&6,
и для подавления бокового излучения достаточно ограничить
радиус излучающего диска этим значением и отбросить значения
A0.10) для больших
радиусов.
!' Другой метод синтеза
I направленности может
\а быть реализован за счет
Фиг. 10.3. Круглый диск со
ступенчатым распределением
скоростей.
использования ступенчатого распределения скоростей, показанного
на фиг. 10.3. По формуле A0.7) направленность такого диска
равна
iti Xi (io.li)
Z>(9):
2*
где
At = diiipi, Xi = kpt sin 0.
! Вместе с тем любую функцию / (х) можно разложить в ряд
Фурье — Бесселя в соответствии с выражением
Нх)=2л.*Ц&..
»=1
A0.12)
§ 1. Направленность
357
где Xs — положительные корни уравнения Ji(x)—Q. Свойство
сопряженности функции Бесселя Jt(K8x) дает удобный метод
определения коэффициентов As в виде
^Bi»i/Wii/|M&
A0.13)
Из сравнения выражений A0.12) и A0.11) видно, что радиусы ps
должны быть выбраны следующим образом:
Р* = -у-> 5=1, 2, ... .
Если требуется выполнение условий ZHF)=l при 0<;9^6С
и Z?o(9) = 0 при 6с<9<я/2, то А3 и а8 должны иметь вид
А _ а2/2(а^)
As~ JKK) г
к* аУ2(аХ5) a_sin0
На фиг. 10.4 показаны характеристики направленности для
круглых дисков с различным распределением скоростей.
Ф и г. 10.4. Характеристики направленности круглых дисков с различным
распределением скоростей.
А — однородное распределение; В — ступенчатое распределение, как на фиг. 10.3
(р, — 0,377р0, at = 0,365, р2 = 0,690р0, а2 = 0,407, р3 = р0, аа = 0,228); С —
параболическое распределение, а (р) = 1 — (р/р0J-
358 Гл. 10, Характеристики звукового поля
3. Направленность прямоугольной пластинки, колеблющейся
в бесконечном жестком экране. Для группы точечных источников
звука и для группы плоских излучателей в бесконечном экране
справедлив принцип суперпозиции. Если излучающая звук
система представляет собой группу из нескольких подсистем,
обладающих одинаковой направленностью D± @, ф), то направленность
всей системы определяется выражением
Дд@, Ф) = Д(9, ф)Д2<е, Ф). (Ю.14)
где D2 (9, ф) — направленность группы точечных источников,
каждый из которых расположен в центре излучения
соответствующей подсистемы.
Характеристика направленности прямоугольной пластинки
с однородным распределением скоростей (т. е. поршневой
диафрагмы), помещенной в бесконечном экране, может быть вычислена
Фиг. 10.5. Прямоугольный пор- Фиг. 10.6. Шестиугольный поршень
шень в бесконечном экране. в бесконечном экране.
на основе принципа суперпозиции. Если длины сторон
прямоугольника равны 2а и 26 в направлениях х и у соответственно,
как это показано на фиг. 10.5, то направленность имеет вид
п( ft4 __ sin (ka cos a) sin (kb cos ft) tin 4K\
D^ P>- kacosa kb cos $ ' (WAb>
где аир — углы между направлением излучения и осями х и у
соответственно. Первый множитель в выражении A0.15), т. е.
sin {ka cos a)lka cos а, представляет собой направленность
линейного источника длиной 2а, а второй — направленность линейного
источника длиной 2Ь.
Направленность в плоскости х, z шестиугольного поршневого
вибратора, показанного на фиг. 10.6, может быть представлена
как комбинация направленностей совокупности однородных линей-
§ i. Направленность
359
ных источников длины liy ориентированных в направлении х,
и совокупности проекций таких же источников на направление х.
Характеристика направленности в плоскости х, z выражается
при этом в виде
sin.zi sinar2
D(a) = -
Xi
Xf-
%l\
-cos a, ^2 —"
x2
JtZo
A0.16)
-cos a,
где a — угол между осью x и направлением наблюдения.
Рекомендуется выбирать lz = 1\ 1^2, чтобы уменьшить боковое
излучение (фиг. 10.7).
У
ЦШ А я-^г ст
о 1 г
Ф и г. 10.7. Характеристика направленности шестиугольного поршня.
3 4 5 6 7 в 9 10 И 12
Излучатель ступенчатой формы, показанный на фиг. 10.8,
также может быть использован для подавления боковых
лепестков. Направленность его в плоскости х, z является комбинацией
направленности прямоугольной пластинки длиной d и
направленности эквидистантной совокупности точечных источников с интен-
сивностями А о, Аи А2- При этом
D(a) = ?^(A0 + 2Aicosw + 2A2cos2w), A0.17)
где
я = -?- cos a, w = —г— cos a.
При определении значений At, соответствующих ширине
ступеней, можно использовать разложение в ряд Фурье [2]. Другой
способ заключается в использовании разработанной Чебышевым
А0- 0,300
А, = 0,236
Аг=0Л2
d =0,75%
90° 60* 70* 60° 50* W 30°20*0*
ос
Фиг. 10.8. Поршневой излучатель ступенчатой формы с малыми боковыми
лепестками диаграммы направленности.
**з "*» "^ S S "*» ч»
«о 55 5» «о 5» 55. S?
^> ^ «* ^> 35* ^ с^
F(iff)-Sln6<p Р /,.и_ sin 12w
№№?№
<t = 09657l
Ь0° ЗР° 20*100
ОС
Фиг. 10.9. Система прямоугольных вибраторов, позволяющая подавить
боковое излучение.
§ 1, Направленность 361
методики аппроксимации степенного ряда по я к нулю в области
| х | < 1, так как cos mw можно разложить в< степенной ряд по
COS W.
На фиг. 10.9 показана система прямоугольных поршневых
излучателей, обладающая характеристикой направленности с
очень малыми боковыми лепестками. Эту систему можно
представить как линейную систему из 8 групп излучателей,
расположенных на расстоянии 9/8d друг от друга, где каждая группа состоит
из 12 прямоугольных излучателей шириной 1/8d, расположенных
на одной линии на расстоянии d друг от друга. Направленность
системы в плоскости х, % имеет вид
sin х sin \lw sin 8ф
D(a).
x 12 sin w 8 sin cp
A0.18)
где
zid
nd
? = -gr--cosa, w = —r-cosa, <p:
Qjtd
8k
cos a.
4. Направленность цилиндрического источника звука C, 4].
Рассмотрим показанный на фиг. 10.10 цилиндрический источник
звука радиуса а и высоты Z,
а также представим себе две
бесконечно длинные жесткие
цилиндрические стенки такого
же радиуса, простирающиеся
в направлениях -fz и — z.
Вычислим сначала
направленность приема звука. Если
плоская волна приходит с
произвольного направления ф0, 60,
Фиг, 10.10. Цилиндрический
источник звука.
то потенциал скоростей в произвольной точке г, ф, z имеет вид.
Фг- = (IHeJfcrsmeocos((p--(po) gjfczcos9o#
Это выражение можно разложить по функциям Бесселя
следующим образом:
оо
Ф* = Ф0 [-«J- Jo (кг sin 0О) + 2 JnJn (kr sin 0o)cos n (Ф — ФоI eiftzcose°*
n=l
A0.19)
362
Гл. 10. Характеристики звукового поля
Падающая волна отражается бесконечным жестким цилиндром
радиуса а. При этом результирующий потенциал скоростей
на жесткой стенке будет иметь вид
Ф(а, Ф, 2) = (Ф,- + Фг)г=а =
оо
= Ф0 S /m^m(bsin90);cos/ra(q)-<})o)eiftzcos9o, A0.20)
m=0
где
F (v\—T (тЛ ^m-l (*) — Jm+i (s) гт<2) / \
A0.21)
Если часть цилиндрической стенки в области —1/2 <С z < Z/2
колеблется с определенным распределением скоростей и (ф, z),
а остальная часть
находится в покое, то в силу
существующего между
(J приемом и излучением
звука соотношения
взаимности направленность
источника звука может быть
представлена в виде
1/2 Л
#(фо>ео)= J J v(y,z)x
-1/2 -Л
хФ (а, ф, z) ad ф dz. A0.22)
В частном случае, когда
цилиндрическая поверх-
Ф и г. 10.11. Направленность
цилиндрического излучателя
(ка= 3,80, kl= 3,04).
ность высоты I колеблется с постоянной радиальной скоростью,
г;(ф, z) не зависит ни от ф, ни от я, и выражение A0.22)
принимает вид
sinz
где
W={'o(*)--?$Eg^.M*)}
kl
х = ка sin 90, z = -g- cos 0O.
A0.23)
§ 2. Импеданс излучения
363
На фиг. 10.11 показана направленность цилиндрического
источника радиуса а = 6,25 см и высоты 1 — 5 см, колеблющегося
на радиальной моде в воде на частоте 14,5 кГц. В этом случае
ка = 3,80 и М = 3,04. На фиг. 10.11 видно, что сила звука в
направлении оси z @О = 0) больше, чем в направлении главного
луча 90 = 90°. Однако поскольку первое направление имеет
существенно меньший телесный угол, чем второе, большая часть
излученной энергии сосредоточена вокруг направления 60 = 90°.
Выражение A0.22) можно использовать при разработке зву-
коизлучающих систем с заданной характеристикой
направленности D (<р0) в плоскости #, у для подбора соответствующего
распределения скоростей v (ф) [4].
§ 2. ИМПЕДАНС ИЗЛУЧЕНИЯ
Когда излучающая поверхность ультразвукового
преобразователя колеблется с однородно распределенной нормальной
колебательной скоростью v и передает в окружающую среду
акустическую энергию, на эту поверхность действует реакция со стороны
среды в виде звукового давления. Если давление на элементарную
площадку dS равно рау то механический импеданс излучения
преобразователя определяется в виде
\PadS
*а = .
Величина
называется средним удельным импедансом излучения или просто
удельным импедансом излучения.
Удельный импеданс излучения состоит из действительной
и мнимой частей, а именно удельного активного сопротивления
излучения га и удельного реактивного сопротивления излучения ха.
Полная излученная преобразователем акустическая мощность
определяется выражением
pa = v2raS.
Реактивное сопротивление излучения не имеет прямого отношения
к излучаемой мощности; оно интерпретируется как присоединенная
масса, обусловленная влиянием окружающей среды. Если
размеры излучающей поверхности очень велики по сравнению с длиной
волны звука в среде, то удельное активное сопротивление
излучения стремится к волновому сопротивлению среды рс, а реактивное
сопротивление излучения обращается в нуль. Если же размеры
излучающей поверхности очень малы, то удельное активное
сопротивление излучения также очень мало и в большинстве случаев
364
Гл. 10, Характеристики звукового поля
пропорционально квадрату линейных размеров излучающей
поверхности, а удельное реактивное сопротивление
пропорционально линейным размерам.
1. Импеданс излучения круглого поршня. Удельный импеданс
излучения круглого поршня радиуса а, колеблющегося в
бесконечном экране, определяется формулой
где Jx (x) — функция Бесселя первого рода первого порядка,
Ki(x)—модифицированная функция Бесселя (определенная Рэлеем)
Л1^~ я \ 3 Ж!-1" 32.52.7 "" ••/ •
Кривые удельного импеданса излучения для различных значений
ка приведены на фиг. 10.12 (кривые /); сплошная линия
соответствует активной, а штриховая — реактивной его части.
Фиг. 10.12. "Удельный импеданс излучения круглых дисков.
I — для круглого поршня в бесконечном экране; II — для круглого поршня с
фиксированной задней поверхностью; III — для круглого поршня в свободном пространстве.
Если жесткий круглый диск бесконечно малой толщины
колеблется в свободном пространстве без экрана, то его импеданс
излучения может быть получен как предельный случай импеданса
§ 2. Импеданс излучения
365
сплющенного сфероида [5, 6], и в этом случае он равен
za = ±pcka 2 4чОIо Ге"@)- A°-26)
пнечетн
Здесь гвп (х) — сферическая волновая функция, A™, i —
коэффициент, который появляется в результате разложения сферической
волновой функции ре% (х) в ряд по присоединенным функциям
Лежандра Pf (x), a Nn0 — нормировочный коэффициент для ре\.
Импеданс излучения такого излучателя показан на фиг. 10.12
(кривые ///). В этом случае удельное активное сопротивление
излучения для малых ка очень мало и пропорционально ка*.
В случае источника звука с фиксированной задней
поверхностью (т. е. двухслойного круглого источника, у которого в
свободном пространстве колеблется только передняя поверхность,
а задняя остается неподвижной) импеданс излучения для передней
поверхности является средним арифметическим выражений A0.25)
и A0.26). Удельный импеданс излучения для такого двухслойного
диска с фиксированной задней поверхностью показан на
фиг. 10.12 (кривые II).
2. Импеданс излучения прямоугольного поршня в бесконечном
экране. Удельный импеданс излучения прямоугольной
пластинки, колеблющейся в бесконечном жестком экране, определяется
следующим интегралом:
Л/2 Ь
— 4А"РС Г f d® С {sin (arcos 6) sin {br sin 0)}2 ,
Za~~ лЧЪ \ J cos* 6 sin* Э J гз -\/W~^ "•
о о v
Jt/2 oo
, . f dQ Г {sin (arcos Q) sin Fr sin6)}2 л Л
^J J cos2esin2e J гз л/т^-& J *
0 h v
Здесь 2a и 2b — длины двух боковых сторон пластинки. Разлагая
подынтегральное выражепие в бесконечный ряд и проводя
интегрирование, получаем [7]
oo m
Га _ 1 ^ ( —l)mBfrgJm+2 _ х2т-2п+1Г (щ — П + 1/а) Г (п + 1/2)
рс"яТ/я^ Г(т + з/2) 2л Bп + 2)!Bт-2л + 2)!
v m=0 п=0
A0.27)
l?L^JL(A-\ \1 (-1)пBа*02"+1 ¦
qc 2 \ х ) Zl Bгс + 3)! ^
n=0
, 2 у (-l)nBafeJn+l "^ x2n-2m (Д „ m - 1) I г (m + V2) ,
лт/я ZJ 2n\ j?J Bn — 2™ + l)! Bm + 2)!
v n=i m=0
366
Гл. 10. Характеристики звукового поля
т—1
2_ ^ ( — 1)™Г(го + */2) ^ X2n-2m B/n — 2гс - 2)! BgfcJn+i
я1/я^ Bm + 2)! ^J (то —n)!n!
* m=l n=0
n=0
•*(и+т)-<2*B)+т>]'
A0.28)
где х = Ь/а, Г (ж) — гамма-функция, г|з (ж) = Г' (z)/r (х) иу =
На фиг. 10.13 приведены результаты численных расчетов для
квадратной пластинки и для прямоугольной пластинки, одна
1Л\
1,0
Об
0.2
к-гб-ч
Л
/?>
ф
0,5
1,0
1.5
2,0
2,5
3,0 3,5
fVti-fVS
Ф и г. 10.13. Удельный импеданс излучения для прямоугольных пластинок
в бесконечном экране.
Сплошные линии — квадратная пластинка; штриховые — прямоугольная пластинка
с Ь/а = 2; штрихи у нктирные — круглый диск той же площади.
сторона которой вдвое длиннее другой. Для сравнения приведены
также данные для круглого диска [выражение A0.25)] такой же
площади. Импеданс квадратной пластинки почти полностью
совпадает с импедансом круглого поршня равной площади, а для
прямоугольной пластинки с неравными длинами сторон имеют
место некоторые отличия.
В предельном случае удельный импеданс излучения для
бесконечно длинной полосы шириной 2а в бесконечно большом неподвиж-
§ 2. Импеданс излучения 367
ном экране имеет вид
f Г ein«(ta?) г ,int(toB -|
рс яаА; I J ?2 т/i g:
J i2 Vs2
Проводя численное интегрирование, получаем [7]
сю
г„ _, v (-l)»4-iBto)an-i 1-3-5... Bn-3)
— -ка-f- 2j 2^! 2-4-6... Bл-2)
A0.29)
n—О
#a
рс
\/-Z 2j n!Bn
BЛаJ«+1
y^ ^J п!Bп + 2IГA/*-«)
Г 71=0
X
X {2фBп + 3) + 1> (^ + l)-i|)(i-^n)-21gBto)}- A0.30)
Результаты численного расчета приведены на фиг. 10.14.
Ф и г. 10.14* Удельный импеданс излучения бесконечной полосы в
бесконечном жестком экране.
3. Импеданс излучения цилиндрического источника. Удельный
импеданс излучения бесконечно длинного цилиндра радиуса 2а
определяется выражением [8]
Если высота цилиндрического источника конечна и
обозначена через Z, как это показано на фиг. 10.10, и если предположить,
OJ 0,2
OJ* 0,5 0,6 OJ 0,8 0.9 1ft 1J
Га/рс
5
Фиг. 10.15. a — удельный импеданс излучения цилиндрического источника
при разных значениях ка (I — Una =0,1» // — Una = 0,2, /// — Una =
= 1,0, IV — Una = oo); б — то же при ка = 3 (источник в бесконечном
жестком цилиндре того же диаметра).
§ 3. Отражение ультразвуковых волн от препятствий 369
что на обоих концах излучающей поверхности имеются
бесконечные цилиндрические жесткие стенки того же радиуса, то удельный
импеданс излучения получается равным [3]
1 • 2 (JlL t \
*а ¦ ka-kl Г Г81Р \ 2 fe) ЛУ>(&аУ1-Е») ^ _L
рс У я LJ (-M-lJ /ml/l-g2//i2>(Ara Vl-?2) * '
? sin2() K0(kayp=i) d?-| A0 g2)
где #@2) и Я(!2) — функции Ханкеля второго рода нулевого и
первого порядков соответственно, а К0, К\ — модифицированные
функции Бесселя.
На фиг. 10.15, а приведены диаграммы импедапса излучения;
по оси абсцисс отложена величина га/рс, а по оси ординат —
величина ха/рс. Кривые /, //, /77 и IV относятся к случаям, когда
отношение высоты к половине длины окружности Una составляет
0,1, 0,2, 1,0 и оо соответственно; значенрш ка являются
параметром.
Для магнитострикционного преобразователя кольцевого типа
ка приближается к 3, если преобразователь используется для
подводной сигнализации. На фиг. 10.15, б приведены значения
импеданса излучения, соответствующие этому значению ка для
разных значений L
§ 3. ОТРАЖЕНИЕ УЛЬТРАЗВУКОВЫХ ВОЛН
ОТ ПРЕПЯТСТВИЙ КОНЕЧНЫХ РАЗМЕРОВ
1. Введение. В гидролокационно.й технике необходимо знать
звуковое давление или силу звука в месте расположения источника
для волн, отраженных от таких целей, как подводные лодки, мины,
киты, рыбы и морское дно. В связи с этим один из авторов этой
главы вывел аналитически приближенные формулы для
отражающей способности цели и опубликовал их вместе с некоторыми
экспериментальными результатами на японском языке в 1943 г. [9].
Позднее дополненные более точными экспериментальными
данными эти формулы били опубликованы на английском языке [10].
Понятие «отражающей способности цели» введено автором
для отношения звукового давления отраженной от цели волны
в месте расположения источника к звуковому давлению
отраженной волны в той же точке при условии, что цель заменена
бесконечной идеально отражающей нормальной плоскостью. Эта
«отражающая способность» может быть легко преобразована в «силу
цели» — величину, которая широко используется в настоящее
время в США.
24-0231
370
Гл. 10. Характеристики звукового поля
Приводимые ниже вычисления основаны на следующих
предположениях: 1) поверхность целей идеально жесткая, 2)
расстояние от цели до источника звука значительно больше длины волны
и 3) радиус кривизны поверхности цели значительно больше длины
волны. Вычисления проводятся для целей, имеющих форму
круглого диска, прямоугольной пластинки, произвольной
выпуклой поверхности с двумя главными радиусами кривизны или
цилиндра конечной длины.
Результаты анализа весьма просты и удобны для практического
применения. Используя полученные формулы, можно оценить
интенсивность эхо-сигнала, отраженного от произвольных целей,
имеющих различную форму и размеры.
2. Плоские поверхности. Круглый диск. На фиг. 10.16 целью
является круглый диск радиуса /?, а точечный источник звука А
Фиг. 10,16. Круглый диск в качестве цели.
расположен на оси на расстоянии х от диска. Расстояние от
источника до любой окружности радиуса у на поверхности диска равно
х -f б. Предположим, что х > А, и х > Д, где I — длина^ волны,
и что объемная скорость для точечного источника равна А.
Если цель достаточно удалена, то потенциал скоростей
падающей волны Ф^ в любой точке на окружности радиуса у выражается
в виде
где к — волповое число. При этом колебательная скорость частиц
в той же точке имеет вид
~ дФ = _3_ ! + /*(*+Д) e-jh(x+&)
A0.34)
§ 3. Отражение ультразвуковых волн от препятствий 371
Если диск фиксирован и поверхность его не колеблется, то
потенциал скоростей отраженной волны в точке А можно
вычислить по следующей формуле (потенциал отраженной волны можно
считать равным потенциалу волны, излученной диском,
колеблющимся со скоростью —vt в среде, в которой отсутствует падающая
волна, причем эта скорость не постоянна по поверхности диска):
A0.35)
В предположении х^> R справедливы следующие
приближенные соотношения:
6 = У^+72-*~-|~ A0.36)
и
(х + 8Jжх*. A0.37)
Учитывая эти соотношения и то, что dS—2nydy,
выражение A0.35) можно переписать в следующем виде:
Потенциал скоростей волн, отраженных от бесконечной
идеально плоской поверхности, равеп потенциалу скоростей
падающгй волны фг2х в точке А' на расстоянии 2х от источника:
Следовательно, абсолютное значение отражающей способности
диска равно
Фг0
Ф«2
= | 1 — е-№Чх\ =
2 am яда |( A041)
Хх
Как видно на фиг. 10.17, диаграмма г на комплексной
плоскости представляет собой окружность единичного радиуса, центр
которой расположен в точке A, /0). На фиг. 10.18 видно, что
абсолютное значение г по мере возрастания RlY^x колеблется между 0
и 2. Однако, когда величина R/]/~\x возрастает, приближаясь
к бесконечности, г должно стремиться к единице, так как диск
превращается в идеально отражающую плоскость. Это
несоответствие обусловлено приближением б <С %, использованным при
интегрировании, которое становится неприменимым, если Д/уТя
24*
372 Гл. JO, Характеристики звукового поля
стремится к бесконечности. Если бы это приближение можно было
исключить, то колебания постепенно затухали бы и величина г
приближалась бы к единице.
С другой стороны, для очень малых значений Л, или для
R < ]/W3, получаем
1Г1*-ЕГ- = ТГ- A0/i2)
В этой области отражающая способность пропорциональна
площади S диска. Если радиус R увеличивается и выходит за пределы
*Ш
дейстби- ^jQ
тельная
О 0,2 0.4 0,6 0,6 1,0 1,2
fi/Vxx
/,4 Ifi Ifi 2/)
Ф и г. 10.17. Диаграмма
отражающем способности круглого диска.
Ф и г. 10.18. Абсолютное значение
отражающей способности круглого диска.
этой области, то величина г проходит через значение 1 при R =
= VW6 = 0,408 ]/"Ях. Это означает, что диск таких размеров
обладает отражающей способностью, равной отражающей
способности бесконечной плоскости. Когда радиус R становится равным
Ф и г. 10.19, Прямоугольная плас
тиика в качестве цели.
Y%J2 = 0,707 \fkx, величина г достигает максимального
значения, равного 2, а дальнейшее увеличение радиуса приводит
к уменьшению отражающей способности.
Из этих дапных следует критерий для размеров отражающей
плоскости, который позволяет судить о том, можно или нельзя
рассматривать ее как бесконечную плоскость. Размеры плоскости
$ 3. Отражение ультразвуковых волн от препятствий 373
должны сравниваться не только с длиной волны %, но и с
величиной УХх, т. е. со средним геометрическим произведения длины
волны и расстояния.
Прямоугольная пластинка. Рассмотрим теперь отражающую
способность показанной на фиг. 10.19 прямоугольной пластинки
в случае, когда источник расположен на оси, перпендикулярной
пластинке и проходящей через ее центр. Чтобы проинтегрировать
выражение A0.35), положим
{х + бJ « х\ б - Ya* + y* + z* - х « УУ . A0.43)
Тогда
^ ... a b
=- ~tS?- { J '- j"y2/v <Ц { J <Hte,/a! dff} • (Ю.44)
о о
Результат интегрирования может быть представлен интегралами
Френеля, и тогда
' ФгО
г =
ф*2*
где
= 2Vr(& + aO(S8-+S-)t (Ю.45)
-7=-, Ь' = -71Г, ' (Ю.46)
?а' = J cos^-dt;, ?a'= (sin-^-di;, A0.47)
о о
b' b'
Eb,= \ cos-^-dy, ^b'= l sin^y-A;; A0.48)
о о
здесь v — переменная интегрирования и
Я i?2 А7/2
для формул A0.47) и
ли2 kz2
2 ~ х
для формул A0.48).
Интегралы Френеля представлены графически на фиг. 10.20
(эта кривая известна как спираль Корню), а множители
выражения A0.45) легко получить как расстояние от начала
координат до соответствующей точки на спирали.
374
Гл. 10. Характеристики звукового поля
Если 2а > Vlx и 2& > Vlx, то величины ? и ?
приблизительно равны 0,5, а величина г приблизительно равна 1. Это
соответствует случаю бесконечной плоскости. Если 2а <^ V^x и 26 <С
'Ofi
Ofi
Ofi
0,2
\о
-J
w
L^
/,б/
r6t
(nx
^й
ffi
т-ч2
20
0?^
,4s
i7/7
J,2
/2,2 \
nR
tip
/ofi
'*>'
W
0,2 Ofi Ofi Ofi 1fi
$a> %b'
Ф и г. 10.20. Графическое представление интеграла Френеля, или спираль
Корню.
< УЛл, то g0» « а', ?Ь' ~ &', ?а# « 0, ?Ь' ~ 0. Следовательно,
|r|„2eV-^—g-. A0.49)
Этот результат совпадает с результатом A0.42) для малого
круглого диска.
|r|=2ft}+6j)
?t0
f,0 2,0 3,0 4,0
a'=2a/i/?Cz
Ф и г. 10.21. Абсолютное значение отражающей способности квадратной
пластинки.
Квадратная пластинка. Если Ь' = а\ то
Й = 2(К. + В0. A0.50)
§ 3. Отражение ультразвуковых воли от препятствий 375
Абсолютные значения г приведены на фиг. 10.21. Наименьшее
значение величины 2а для | г | = 1 равно 0,74 Y^x] величина г
достигает максимума при 2а — 1,2 УТх.
Достаточно длинная и узкая полоса. В этом
случае для размеров должны выполняться соотношения 2а ^> У~Хх
и 2Ъ <С У^х. Следовательно, ?а' ~ ?,а* ~ Q>5 и ?ь# « &', ?ь> ~ 0.
Тогда получаем
|Г| = 0,56'=-^-. A0.51)
3. Изогнутые поверхности. Изогнутая прямоугольная
пластинка. Применим теперь аналогичный метод к целям, обладающим
изогнутой поверхностью, предполагая, что радиусы кривизны
Ф и г. 10.22. Изогнутая поверхность в качестве цели.
Pi — радиус кривизны в плоскости х, у, р, — в плоскости х, z.
существенно больше длины волны. На основе предыдущего
анализа мы установили, что отражающая способность цели определяется
главным образом ее центральной частью, где волна падает почти
перпендикулярно поверхности. Поэтому мы рассмотрим
произвольную изогнутую прямоугольную пластину, имеющую главный
радиус кривизны pt в плоскости х, у и главный радиус кривизны
р2 в плоскости х, z (фиг. 10.22).
В этом случае возможен тот же подход, что и в случае плоской
цели, и применимо выражение A0.35). Однако разность хода б
здесь записывается в следующем виде:
0--!г- + -^-г-^-+2р2~ 2 \х + pj r
2х
2х
^ 2 \ х ^ р2 / 2р ^
2pi 2pj
A0.52)
376
Г л, 10. Характеристики звукового поля
где
111 111
величины р[ и р* будем называть эффективными радиусами
кривизны. Тогда вместо A0.44) получим выражение
ь
jkAe-W*
- = —^й?- { 1 <-*"'« **} { J '-»""* dz} . A0.54)
Далее, применяя аналогичный метод, получаем для отражающей
способности
,~ 2УЙЙ /(§¦, +&)(&+ 8-), A0.55)
1 * X
где
A0.50)
ЛР2 VXpJ " ^2*
Если для проверки положить в формулах A0.53) и A0.56)
Pi = рг = °°ч то получим те же результаты, что и в случае
прямоугольной плоской пластинки.
Цель с изогнутой поверхностью. Цель с двумя
главными радиусами кривизны. В большинстве случаев
гидролокации радиус кривизны поверхности цели значительно
меньше расстояния до нее. При этом выражения A0.56) можно
представить в виде
Ц=, Ь' = —^=-. . (Ю.57)
УХр! ' УХр:
Если, кроме того, размеры изогнутой поверхности достаточно
велики, или а'>4, //>4, то значение интеграла Френеля
в A0.55) составляет
с точностью в пределах ± 10%. Тогда отражающая способность
цели определяется формулой
|7| = З^Р?. A0.58)
По этой формуле можно оценить отражающую способность и ее
направленность для подводных лодок, если принять для них
упрощенную форму.
§ 3. Отражение ультразвуковых воли от препятствий 377
Сфера. В случае сферы р1^р2==:р; следовательно,
Й = ?. (Ю.59)
Стопцсль [И] точно рассчитал дифракцию на сфере. Для наших
целей его результаты: можно представить в следующем виде:
|r| = ^-|Z|, A0.00)
где Z — функция /ф, и если &р>7, то абсолютная величина Z
стремится к 0,5 с ошибкой, меньшей ± 10%. Поэтому наш
результат A0.59) приблизительно совпадаете результатом Стенцеля.
Цилиндрическая цель (р2 = оо и pi <С #) • Из
соотношений A0.56) и A0.53) получаем
24^, 6' = —^=-, pj = «>. A0.01)
13 этом случае также можно предположить, что обычно а';>4,
и тогда мы получаем
Подставляя в A0.55), получаем
| г| = |/^К 1^2ЩПГЩ. (Ю.62)
Если длина цилиндра не очень велика, или Ь'<0,C (т. е. 26<
<0,bVfac), то
VW^lb» ь' =—/!=-.
Подставляя этот результат в A0.62), находим
М = /?^г- A0ЛЗЗ>
4. Обсуждение. Переход к «силе цели». Сила цели Ts
определяется как
Ts^^A, A0.64)
где Iri — интенсивность отраженной волны в точке,
расположенной на единичном расстоянии от эффективного центра отраженной
волны, a Iix — интенсивность падающей волны в месте
-расположения цели при отсутствии последней.
Отражающая способность, которая была определена в п. 1
данного параграфа, равна
*=¦??—-т?-* <10-firi)
y*'l2X Pl2X
378
Гл. 10. Характеристики звукового поля
Таблица 10.1
Отражающая способность и сила цели для целей простой формы
Форма цели
Круглая пластинка
(нормальное падение)
Изогнутая
поверхность с радиусами
кршшзны pi и р2
Сфера
Короткий цилиндр
(падение
перпендикулярно оси)
г
2S
Кх
У~Р1Р2
X
X
,/pi2&
V х х
Формула
A0.42)
A0.49)
A0.58)
A0.59)
A0.63)
Та
(iY
PLP2
4
Р2
4
$*
Дополнительные
условия
*<м
Ь < PU P2
Pi» P2<*
*.<0,9р, р<€х
26 < 0,6 ~\/1х
Хх<^Ь
Обозначения: х — расстояние между гидролокатором и целью; S — шюшадь
пластинки; К — длина полны; pi, р$ — главные радиусы кривизны поверхности в точке, в
которой волна падает перпендикулярно поверхности; р — радиус сферы; pi -~ радиус
цилиндра; 2Ь— длина цилиндра.
Где prQ __ давление отраженной от цели волны в месте
расположения источника или в точке, расположенной на расстоянии х
от цели, a pi2x — давление отраженной волны в месте
расположения источника в случае, когда цель заменена идеально
отражающей плоскостью (которое равно давлению падающей волны в точке,
расположенной на расстоянии 2х от источника). С другой стороны,
/rl==iu^i, A0.66)
jix=V?lz2L, A0.67)
где рс — волновое сопротивление среды. Подставляя выражения
A0.66) и A0.67) в A0.64), получаем
При помощи этого соотношения отражающую способность легко
преобразовать в силу цели.
На фиг. 10.23 для удобства при практических расчетах
приведена сила цели с базой 1 м. Хотя на основании определения сила
цели представляется безразмерной величиной, выражение для нее
имеет размерность L2. Это противоречие обусловлено наличием
§ 3. Отражение ультразвуковых воли от препятствий 379
понятия «единичное расстояние» в определении силы цели.
Поэтому при вычислении Ts следует использовать те же единицы,
которые применялись для «единичного расстояния».
В общем случае отраженная волна может рассматриваться
как сферическая волна, расходящаяся из эффективного центра
цели, при условии что сила цели не зависит от х. Соответственно
истинное звуковое давление отраженной волны в месте
расположения источника должно быть обратно пропорционально #2.
30
20
10
J§ О
*-Ю
-20
-30
0J 0,2 0/4 0,6 1 2 4 5 10 20 U060
Ф и г. 10.23. Сила цели (с базой 1 м) 7's для сфер радиуса р и произвольных
выпуклых поверхностей со средним радиусом кривизны VpipT
(длина волны < радиуса кривизны <С расстояния).
С другой стороны, если в качестве цели рассматривается
морское дно и его поверхность представляет собой достаточно гладкую
и жесткую плоскость, то отражающая способность не зависит
от х, а сила цели должна быть пропорциональна х2. В этом случае
отраженную волну нужно рассматривать как сферическую волну,
которая расходится из виртуального источника, расположенного
на расстоянии 2х, и истинное звуковое давление отраженной волны
в месте расположения источника должно быть обратно
пропорционально х.
Эквивалентно отражающая область. Описанный выше анализ
отражающей способности для плоскости конечных размеров
показывает, что главный вклад в отражение вносит центральная
область. Опираясь на этот факт, мы введем понятие
эквивалентно отражающей области.
Как видно из формулы A0.41) или фиг. 10.24, относящихся
к круглой пластинке, годографом величины г на комплексной
плоскости является окружность, которая в начале координат
касается мнимой оси. Когда круглый диск имеет такой радиус, что
абсолютное значение г в первый раз достигает единицы, фазовый
1 1 1 1 1 1 I I I I
Т5=201д(р/2)=201д(Щ/2)дБ
W2
10
1
ю-'
«г2
380
Гл. JO. Характеристики звукового поля
угол вектора ОР равен 60° и угол между касательной в точке Р
и мнимой осью также равен 60°. Это означает, что волна,
отраженная от элемента поверхности, расположенного на краю
круглого диска, запаздывает по фазе на 60° по сравнению с волной,
отраженной от элемента поверхности, расположенного в центре.
Разность хода 6, обеспечивающая запаздывание на 60°, должна
быть равна
6=тЬ
так как
2Л6 =
4л6
A0.69)
Другими словами, если из бесконечной отражающей
плоскости вырезан диск, ограниченный окружностью, все точки которой
Фиг. J0.24. Схематическая
диаграмма для определения
эквивалентно отражающей области.
деистбительная
ось
удалены от источника на расстояние, большее минимального
расстояния от него до плоскости па величину Я/12, то амплитуда
волны, отраженной от такого круглого диска, равна амплитуде
волны, отраженной от всей бесконечной плоскости. В этом смысле
мы и называем поверхность круглого диска эквивалентно
отражающей областью.
Аналогичное представление может быть применено и к
отражению от изогнутой поверхности. Полагая в A0.52) 6 = Я/12,
линию, ограничивающую некоторую вырезанную область, можно
представить следующим уравнением:
2р{ 2р'2 12'
Это уравнение является уравнением эллипса. Полагая pi <C ^ и
р2<С #, получаем
Площадь такого эллипса равна
1.
A0.70)
§ 3. Отражение ультразвуковых волн от препятствий 381
В соответствии с A0.42) или A0.49) отражающая способность
части плоскости, ограниченной эллипсом, уравнение которого
имеет вид A0.70), равна
\r\=^=^^^\fi\1^2l. A0.72)
КХ о X X
Сравнивая это выражение с A0.58), мы видим, что отражающая
способность эллиптической плоской пластинки несколько больше,
но разность составляет всего 4,7%. Следовательно, мы можем
рассматривать такую эллиптическую область как эквивалентно
отражающую.
Направленность отражающей способности. На основе
проведенного анализа можно вывести направленность отражающей
способности плоской поверхности конечных размеров.
Направленность излучения ограниченного участка поверхности,
колеблющегося как поршень с колебательной скоростью v0 и
окруженного бесконечным экраном, может быть получена хорошо
известным способом, с применением формулы
ф7Ж = ^^| je-WW, A0.73)
где Фух — потенциал скоростей излученной волны в точке,
расположенной на расстоянии х от центра в любом заданном
направлении у, а б — разность хода, определяемая направлением у
и положением элемента поверхности dS.
Например, если поршень представляет собой круглый диск
радиуса R, то направленность его излучения
где
Z = &/?siny, A0.75)
а Фох — потенциал скоростей в точке, расположенной на том же
расстоянии в перпендикулярном направлении.
Для отражающей способности разность хода или разность фаз
в подынтегральном выражении в A0.73) должна быть удвоена
(падение и отражение), как это видно из аналогичной
формулы A0.35). Поэтому результат A0.74) не изменится, по величина Z
должна быть удвоена при условии, что угол у мал и R < У %х/Ъ.
Ото означает, что вместо выражения A0.75) доляшо быть
использовано выражение
Z = 2kli sin у. A0.76)
Другими словами, направленность отражающей способности
равна направленности излучения поршня двойных размеров.
Можно сказать, что характеристика направленности отражающей
2-MZ)
Z
A0.74)
382
Гл. 10. Характеристики звукового поля
способности вдвое острее характеристики направленности
излучения той же пластинки при условии* что kR не очень мало. Это
доказывают эксперименты с круглой пластинкой.
5. Эксперименты *). Метод и аппаратура. Эксперименты были
проведены в воздухе на частоте 14,2 кГц (А, = 2,38 см). Подводные
эксперименты, проведенные в 1943 г. на частоте 94 кГц, оказались
недостаточно точными, так как было трудно, во-первых, получить
подходящий материал для цели, которую можно было бы
рассматривать в воде как достаточно жесткую, и, во-вторых, удержать
преобразователи и цель в соответствующих положениях и режиме.
Мишень
Лреобразобатели
4
Бетонная V,
стенка V,
1
Ф и г. 10.25. Установка для измерения отражающей способности в воздухе.
Использованные в данном эксперименте магнитострикционные
преобразователи были изготовлены из сплава альфер (87% Fe,
13% AY) и имели поверхность излучения 14 х 9 см. Как видно
на фиг. 10.25, для передачи и приема были использованы два
преобразователя, установленные на полках, прикрепленных к
вращающемуся деревянному стержню. Преобразователи были
установлены так, что их акустические оси пересекались в месте
расположения цели. Раствор общей характеристики направленности
по излучению и приему, соответствующий половине
максимального зпачения сигнала, составлял ±5°; при этом ширина луча
в месте расположения цели (на расстоянии 3 м) составляла ±26 см.
Цели (мишени) в виде деревянной или стальной пластинки
прикреплялись к кронштейну из изогнутой стальной полосы.
Чтобы свести к минимуму отражение от кронштейна, эта полоса
была изогнута так, что ее сечение представляло собой треугольник
с острой вершиной, направленной к преобразователям.
Генератор запускался от механического прерывателя,
приводимого в движение мотором; частота повторения составляла
12 имп/с, длительность импульсов — 6 мс.
) Описанные здесь эксперименты были проведены Мацубарой в 1953 г.
Ф и г. 10.20. Зависимость отражающей способности прямоугольных пласти-
. нок от их длины.
Экспериментальные данные (точки) и теоретические кривые.
0 4 8 12 16 20 24
RtCM
Ф и г. 10.27. Зависимость отражающей способности круглых пластинок
от их радиуса.
Экспериментальные данные (точки) и теоретические кривые.
0 4 д 12 16 20 24
Я. см
Ф и г. 10.28. Зависимость отражающей способности круглых пластинок
от их радиуса.
Экспериментальные данные (точки) и теоретические кривые.
384
Гл. JO. Характеристики звукового поля
При измерении отраженной волны амплитуда отраженного
импульса на экране электронного осциллографа поддерживалась
постоянной при помощи калиброванного потенциометра в
усилителе. Для относительного
измерения уровня звука
использовалась волна,
отраженная от бетонной стены,
расположенной на таком же
расстоянии, но в
противоположном направлении.
Ф и г. 10.29. Зависимость
отражающей способности сфер от их
радиуса.
Экспериментальные данные (точки)
и теоретические кривые. Л — г = р/я
(автор): В — Стенцель.
цио
№
0.02
Г
0,01
0t006
0,0 Ob
0,002
~
х-
= 300
--2,36
В
см
см
• • /
: • у
?*' А
-J 1 1 1 i i 1
L 1
U 6
ft, см
10
20
Результаты. Измеренные значения отражающей способности
приведены на фиг. 10.26—10.32. Они показывают, что результаты
анализа практически надежны.
цо
0,4
Г
0,2
0,1
0,0д
006
- X = 300 см
- Я = 2,38 см
р=10СМ
•
- /^^
г •/
Г • уГ
\ /\ I I I
•
•
L
• I
• I
• 1
• 1
• 1
1 . 1 >
10
20
2Ь,т
Ь0 дО 6С
Ф н г. 10.30. Зависимость
отражающей способности цилиндров
конечной длины от их длины.
Экспериментальные данные .. (точки)
и теоретические кривые.
0.6
оуц
Г
0,1
ofid
0,06
[-
L
k
F
-Х-Х-
! « !
-2Ъ*
-Ям
-2b-
I ! !
\,
20 cm
20 cm
12 cm
P-
<
\
I
--10 см
щ. oV
X
¦ \.
W 50 100 20G
X,CM
m i oo
Ф и г. 10.31. Зависимость
отражающей способности цилиндров
конечной длины от расстояния.
Экспериментальные данные (точки)
и теоретические кривые.
6. Заключение. Результаты этой работы позволяют оценить
интенсивность эхо-сигналов, отраженных от различных целей,
которые встречаются в гидролокационной технике. Эти данные
впервые были использованы во время войны для получения основ-
§ 4. Некоторые стороны ультразвуковой кавитации 385
ной формулы, необходимой при разработке гидролокаторов и
известной теперь как «формула сонара».
^ \ Хотя анализ проводился для геометрически простых
поверхностей, результаты его являются весьма полезными для практики:
благодаря им картина отражения от конечных тел становится
/0 6 64202463 10 отражение
20 16 12 6 4 0 4 д 12 16 20 излучение
Угол, град
Ф и г. 10.32. Направленность отражающей способности и излучения
круглого диска радиуса R — 10 см.
Штриховая линия и точки — отражение (эксперимент); сплошная линия — излучение
(теория); % — 1,55 см, hR = 40.
совершенно ясной. В частности, тот факт, что относительно
небольшая пластинка с размерами, сравнимыми с УКх, обладает
отражающей способностью, почти равной отражающей способности
бесконечной плоскости, может быть использован и в ряде других
областей, таких, как контроль шумов, акустика помещений,
ультразвуковая дефектоскопия и микроволновая техника.
§ 4. НЕКОТОРЫЕ СТОРОНЫ УЛЬТРАЗВУКОВОЙ КАВИТАЦИИ
В течение многих лет некоторые исследователи занимались
изучением ультразвуковой кавитации, но количественное описание
связанных с ней явлений настолько трудно, что оно до сих пор не
было дано. Автор и его сотрудники исследовали эти явления в
течение ряда лет и убеждепы, что описание ультразвуковой кавитации
может быть получено на основе измерений изменения
сопротивления акустического излучения источника звука [12]. В гл. 5
25-0231
386
Гл. 10. Характеристики звукового поля
показано, что предельные акустические мощности, связанные
с кавитацией, но не вызывающие механических повреждений
преобразователя, очень сильно зависят от характеристик
сопротивления излучения, измеренных в таких жидкостях, как вода
и ряд других жидких сред. Изменения сопротивления излучения
тесно и весьма определенным образом связаны также с
акустическим насыщением. Можно сказать, что до настоящего времени
не найдено лучшего метода, чем предлагаемый здесь метод
описания явлений ультразвуковой кавитации, по крайней мере до тех
пор, пока эти яаления рассматриваются в связи с источником
звука.
Как в непрерывном, так и в импульсном режиме излучения
было изучено влияние сопротивления излучения, содержания газа
в жидкости и частоты ультразвука. Сопротивление излучения
всегда сильно падает с началом кавитации. Первое сообщение
об этом явлении было опубликовано авторами в 1959 г. [13];
затем были опубликованы новые данные [14—16].
1. Типичные характеристики сопротивления излучения при
высоких уровнях звука. Для наблюдения характеристик
сопротивления излучения в качестве ультразвуковых преобразователей
*/0<
Ф и г. 10.33. Типичное
соотношение между сопротивлением
излучения и колебательной
скоростью на излучающей
поверхности.
га _ сопротивление излучения; S —
площадь излучающей поверхности;
v — амплитуда колебательной скорости
(эффективное значение); я_—первая
критическая скорость, т?.^ — вторая
критическая скорость. Частота 28 кГц,
концентрация растворенного воздуха
30%.
использовались .ферритовые магнитострикционные вибраторы,
излучающая поверхность которых непосредственно погружалась
в жидкую среду. На фиг. 10.33 приведены типичные значения
сопротивления излучения, полученные для частоты 28 кГц в обез-
гаженной воде с концентрацией растворенного воздуха, равной
30% номинальной концентрации в насыщенном состоянии при
комнатной температуре. По оси ординат отложено сопротивление
излучения на единицу площади излучающей поверхности,
совершающей поршневые колебания, а по оси абсцисс —
колебательная скорость этой поверхности. По мере увеличения
колебательной скорости v сопротивление излучения га начинает круто падать,
О 5 10 15 20 25
V, см/с
§ 4. Некоторые стороны ультразвуковой кавитации 387
так что наклон кривой явно изменяется или происходит крутой
излом при некотором значении колебательной скорости, которое
автор назвал «критической скоростью» и обозначил vti.
Приблизительно при том же значении колебательной скорости становится
слышным типичней свистящий шум кавитации и на колеблющейся
поверхности излучателя начинают появляться малые
осциллирующие пузырьки. По мере дальнейшего увеличения колебательной
скорости сопротивление излучения приближается к значению,
составляющему V5 начального значения.
При уменьшении колебательной скорости от значения для
этого состояния интенсивной кавитации наблюдается гистерезис,
и характеристики, как показано штриховой кривой на фиг. 10.33,
возвращаются к первоначальному значению при определенной
колебательной скорости, обозначенной vt2 и названной «второй
критической скоростью».
2. Определение сопротивления излучения и метод наблюдения.
Сопротивление излучения первоначально было определено для
бесконечно малых амплитуд следующим образом: пусть р
обозначает давление, усредненное по всей излучающей поверхности
a S — площадь этой поверхности; тогда сила реакции среды F,
действующая на поверхность, может быть представлена в виде
F = pS. A0.77)
Эта сила пропорциональна переменной скорости v поверхности
излучения до тех пор, пока физическая природа акустической
среды не меняется с увеличением звукового давления.
Коэффициентом пропорциональности, в случае когда излучающая поверхность
достаточно велика по сравнению с длиной волны в среде, является
сопротивление излучения, которое обычно обозначается га:
г*=т=т5- <10-78>
Если амплитуда колебаний увеличивается настолько, что
среда теряет линейные свойства, то в звуковом давлении
появляются более высокие гармоники, даже когда колебательная
скорость излучающей поверхности продолжает сохранять
синусоидальный характер. Сопротивление излучения в этом нелинейном
состоянии может быть определено тем же соотношением, если
вместо величин р и и подставить соответствующие основной
частоте компоненты звукового давления и колебательной скорости.
Колебательная скорость излучающей поверхности остается
почти синусоидальной до тех пор, пока магнитострикционный
вибратор используется как преобразователь в жидкой среде вблизи
частоты своего механического резонанса. При этих условиях
из выражения A0.78) следует, что сопротивление излучения г0
25*
388
Гл. 10. Характеристика звукового поля
можно получить путем измерения только усредненного звукового
давления р. Однако р невозможно измерить, не искажая
звукового поля перед преобразователем. Поэтому был разработан
метод измерения этой величины с электрической стороны
ультразвукового преобразователя. Этот метод подробно описан в статьях
[14, 161; здесь мы изложим его лишь кратко.
При наличии кавитации обусловленное ею изменение
акустического сопротивления излучения га проявляется как изменение
определенной электрической величины на электрической стороне
преобразователя, так как сопротивление излучения является
в конечном счете нагрузкой на преобразователь. Предложенный
метод заключается в том, что изменение электрической величины,
непосредственно связанной с механической нагрузкой,
количественно выделяется из других электрических изменений,
связанных с нелинейностями самого преобразователя. Из этого
выделенного изменения электрической величины получается изменение
соответствующей механической величины.
3. Порог кавитации. Излом на кривой сопротивления
излучения, показанной на фиг. 10.33, проявляется в таком виде почти
во всех случаях, независимо от условий наблюдения, которые
могут меняться в широких пределах. Более того, с большой
определенностью можно утверждать, что этот излом соответствует
так называемому порогу кавитации, т. е. точке, в которой
кавитация только начинается или исчезает. Интересно отметить, что
существует очень мало методов, позволяющих определить порог
кавитации с такой точностью, как этот метод. В прошлом обычно
использовался метод, основанный на зависимости амплитуды
звукового давления от тока или напряжения, приложенного
к преобразователю, и начало кавитации определялось как точка,
в которой график, изображающий эту зависимость, начинает
отклоняться от прямой линии. Как правило, одпако, эта точка
была не очень определенной, так как кривая отклоняется от
прямой постепенно. Кроме того, такие графики могут иметь излом
или изменение наклона и в отсутствие кавитации, так как это
изменение может быть обусловлено нелинейностями фактора силы
и собственного механического сопротивления самого
преобразователя. Предложенный же здесь метод позволяет наблюдать
звуковое давление в зависимости от колебательной скорости
излучающей поверхности. Поэтому результаты наблюдения не зависят
от внутренних характеристик преобразователя, что является
одним из факторов, обеспечивающих очень точное определение
порога кавитации.
4. Акустическая мощность в случае кавитации. Описанным
методом можно измерить характеристики сопротивления излуче-
§ 4. Некоторые стороны ультразвуковой кавитации 389
ния при различных колебательных скоростях поверхности и на этой
основе оценить выходную акустическую мощность преобразователя
Pa = rav\ A0.71))
На фиг. 10.34 показана характеристика выходной мощности. Она
получена с помощью соотношения A0.79), причем в качестве
характеристики сопротивления га использовалась сплошная кривая,
показанная на фиг. 10.33. Выходная мощность в случае малых
4
«м 3
«?
о
0 5 10 15 20 25
i/t с м/с
Ф зг г. 10.34. Зависимость кыходпон акустической мощности и амплитуды
звуковою давления от колебательной скорости.
Ра — выходная акустическая мощность;. S — площадь излучающей поверхности; /> -
среднее звуковое давление на излучающей поверхности; v — амплитуда колебательной"
скорости (эффективное значение). Частота 28 кГц, концентрация* воздуха 30%.
колебательных скоростей пропорциональна квадрату скорости.
Но в области, где колебательная скорость превышает критическую
скорость vti, мощность становится приблизительно
пропорциональной первой степени скорости. Этот факт представляет
значительный интерес и имеет большое значение при практическом
использовании ультразвуковой энергии.
На фиг. 10.34 представлена также характеристика
усредненного звукового давления р, которую также легко получить из
сопротивления излучения. После начала кавитации среднее давление
более не увеличивается, хотя выходная акустическая мощность
существенно возрастает.
Эти факты приводят к следующему интересному вопросу:
какова характеристика мощности звуковой волны на некотором
расстоянии от источника звука? На фиг. 10.35 приведена
характеристика основной компоненты звукового давления ри
наблюдаемого на определенном расстоянии от преобразователя. Другие
две кривые на этой фигуре изображают сопротивление излучения
преобразователя и усредненное звуковое давление на излучающей
L А
Г i
/W~ с
{ t y>
L У 4 v+~
/ /
ЧУ. ?',
-
р
р^-
V
1 1_
1fi
W
'.2\
и> %
Ofi S
Ofi ,с^
V*
0.2
0
390 Гл. 10. Характеристики звукового поля
поверхности. Они получены одновременно с первой кривой. Кривая
Pi стремится к насыщению после отклонения от прямой в точке
порога кавитации, соответствующей резкому изменению наклона
на средней кривой. Насыщение для Р\Ир наблюдается
приблизительно при одной и той же колебательной скорости, и обе кривые
почти параллельны друг
другу во всем интервале
изменения V.
Из этого факта следует,
что даже при наличии в среде
интенсивной кавитации все
еще сохраняется обычный
закон, согласно которому
основная компонента звукового
давления на некотором
расстоянии от источника звука
определяется основной
компонентой звукового давления
на излучающей поверхности.
Предположим, что этот закон
Ф и г. 10.35. Одновременное
наблюдение трех главных величин:
р — среднего звукового давлении
па излучающей поверхности, /^ —
основной компоненты
наблюдаемого звукового давления и га —
сопротивления излучения.
S — площадь излучающей поверхности;
v—амплитуда колебательной скорости
(эффективное значение). Частота 19 кГц
концентрация растворенного возду> а
I ,25%.
применим также к соотношению между акустическими
мощностями, хотя, конечно, необходимо внести некоторые поправки,
так как при работе преобразователя в режиме интенсивной
кавитации возникают какие-то изменения в характеристике
направленности [12]. Из этого предположения следует соотношение
*-*&?¦ <,o•8o,
Где р8 _ мощность, необходимая для того, чтобы источник звука
мог создать звуковое давление р± в удаленной точке среды в
отсутствие кавитации, а (гаH — нормальное сопротивление излучения,
которое не уменьшается вследствие кавитации. Однако, как уже
§ 4. Некоторые стороны ультразвуковой кавитации 391
отмечалось, преобразователь излучает акустическую мощность Ра,
которая не достигает полпого насыщения. Разность между
величинами Ра и Ps, представленная на фиг. 10.36, с точки зрения
передачи ультразвуковых сигналов является мощностью потерь, тогда
как с точки зрения использования кавитации эта часть мощности
Ф и г. 10.36. Зависимость разпости
между Ра и Р^ от колебательной
скорости.
Рв — мощность, требуемая от источника
звука для того, чтобы создать звуковое
давление |j, в отсутствие кавитации; ра —
выходная акустическая мощность,
излучаемая преобразователем при наличии
кавитации в надпороговой области: S —
площадь излучающей поперхпости; v —
амплитуда колебательной скорости
(эффективное значение).
также является полезной; Ps —- мощность, которая
распространяется за пределы области кавитации, хотя она и может в то
же время действовать как катализатор, поддерживающий
кавитацию.
5. Зависимость сопротивления излучения от концентрации
воздуха в воде. На фиг. 10.37 представлены результаты,
полученные для воды с различным содержанием растворенного воздуха.
На фиг. 10.37, а показаны характеристики сопротивления
излучения при увеличении колебательпой скорости, а на фиг. 10.37, б —
06
-S 0,6
02
1,0
0,8
^ пв
1? '
7? о.и
i^T
Г-?
\
/*&.
71°// А^
/
827. у
1
^-/4 У.
^30°/е
Г^447.
Чг4Г/,
i i
\
\
L
N
Ь
\ S^v N
wfK
"^/4%
""""-- 30 У,
ч
S2%
1
1 1 1
10 15 20
и, см/с
25
0
10
15
и, см/с
6
20 25
Ф и г. 10.37. Влияние концентрации растворенного воздуха на
сопротивление излучения.
Концентрация дана в процентах по отношению к значению концентрации насыщения при
комнатной температуре; га — сопротивление излучения; (гаH — нормальное
сопротивление излучения (при слабых колебаниях и в отсутствие навигации); v — амплитуда
колебательной скорости (эффективное значение). Параметр кривых — концентрация воздуха.
а — при увеличении и б — ири уменьшении колебательной скорости.
392
Гл. 10. Характеристики звукового поля
при ее уменьшении. Каждая из кривых обоих семейств опускается
вниз почти до одного и того же уровня, но критическая скорость
vti или vt2 (фиг. 10.33) сдвигается в сторону меньших значений
с увеличением содержания воздуха. Вторая критическая скорость
игг всегда меньше первой критической скорости vti для каждой
данной концентрации воздуха в воде.
6. Зависимость сопротивления излучения от частоты
ультразвука. На фиг. 10.38 показана частотная зависимость
сопротивления излучения, измеренная в обезгаженной воде с содержанием
10 15 20
V, С М/С
10 . 15 20
V,CM/C
Фиг. 10.38. Частотная зависимость сопротивления излучения, измеренная
в обезгаженной воде при концентрации воздуха 29% от концентрации при
насыщении.
га — сопротивление излучения; S — площадь излучающей поверхности; v — амплитуда
колебательной скорости (эффективное значение).
воздуха, составляющим 29% значения при насыщении. С
увеличением частоты критическая скорость смещается в сторону
больших значений, а сопротивление уменьшается в большей
степени при меньших частотах. Гистерезис, появляющийся при
уменьшении уровня возбуждения, сильнее выражен при более высоких
частотах. Аналогичные наблюдения были проведены в необезга-
женной воде с содержанием воздуха, составляющим 73% значения
при насыщении. Хотя критические скорости для каждой частоты
§ 4. Некоторые стороны ультразвуковой кавитации 393
оказались здесь меньше соответствующих скоростей в обезгажен-
ной воде, но общая тенденция сохранялась, т. е. чем выше была
частота, тем больше критическая скорость.
7. Создание зародышей кавитации. В ходе экспериментов был
обнаружен интересный факт. Если протирать пальцами
излучающую поверхность непосредственно перед каждым измерением,
то гистерезис между кривыми, соответствующими увеличению
уровня возбуждающего сигнала и уменьшению этого уровня,
полностью исчезает.
Автор и его сотрудники выдвинули гипотезу о том, что
протирание пальцами излучающей поверхности приводит к появлению
на ней группы молекул воздуха, причем каждая группа действует
как зародыш кавитации. Другими словами, можно считать,
что такое протирание создает необходимое количество зародышей.
Именно в этом смысле используются в дальнейшем слова «создание
зародышей». Известно, что ряд зародышей возникает непрерывно
в результате каждого захлопывания полости после того, как
кавитация началась, и, кроме того, известно, что возникшие таким
образом зародыши уменьшают звуковое давление, необходимое
для поддержания кавитации. Если это справедливо, то та же
тенденция к уменьшению звукового давления должна
осуществляться и в тот момент, когда повышается уровень возбуждающего
сигнала, если при этом поступление зародышей кавитации
оказывается достаточным. Предложенная операция, названная
«созданием зародышей», может как раз соответствовать обеспечению
достаточного их количества. Подобные наблюдения были
проведены и для необезгаженной воды для ряда частот в диапазоне
от 19 до 97 кГц и было найдено, что во всех случаях создание
зародышей уничтожает гистерезис. Было также найдено, что каждая
характеристика, полученная при нарастании уровня сигнала для
случая «создания зародышей», очень хорошо совпадает с
соответствующей кривой для уменьшающегося уровня возбуждающего
сигнала, полученной в отсутствие операции создания зародышей.
Эффект создания зародышей значительно лучше проявляется
на более высоких частотах (см. [15], фиг. 14).
8. Сопротивление излучения в случае импульсного
возбуждения. Импульсное возбуждение можно характеризовать такими
параметрами, как длительность импульса и период повторения,
в дополнение к тем трем параметрам, которые использовались
при рассмотрении непрерывного возбуждения, т. е. концентрации
растворенного воздуха в среде, частоте ультразвука и амплитуде
колебательной скорости на излучающей поверхности.
Влияние длительности импульса. На фиг. 10.39 показан
типичный пример влияния длительности импульса At. Совершенно
394 Гл. 10. Характеристики звукового поля
очевидно, что чем короче импульс, тем меньше падение
сопротивления излучения и тем больше критическая скорость. Эти факты
показывают, что при высоких уровнях сигнала можно получить
излучение без кавитации, если использовать импульсы
ограниченной длительности.
хЮ4
14{
12
«ъ д
io В
t'
0 s ю 15 го 35
v, см/с
Ф и г. 10.39. Влияние длительности импульса на сопротивление излучения.
Д* — длительность акустического импульса; га —сопротивление изчучоиия; S
—площадь излучающей поверхности; период повторения акустических импу.п.оов Тг =_250 мс;
« — амплитуда колебательной скорости (эффективное значение). Частота 74'_кГц,
концентрация растворенного воздуха 28%.
16
^ 10
* 8
^ 6
* *
. 2
0
1 2 3 U 567 10 20 30 50 100 200
М,мс
Ф и г. 10.40. Влияние периода повторения импульсов на зависимость
сопротивления излучения от длительности импульса.
Тг — период повторения акустических импульсов; д*— длительность акустического
импульса; га —^сопротивление излучения; S — площадь излучающей поверхности.
Частота 74 кГц, концентрация воздуха 28%, амплитуда колебательной скорости v = 24,5 см/с.
Влияние периода повторения. На фиг. 10.40 показано
поведение кавитации в зависимости от периода повторения импульсов.
Колебательная скорость поддерживалась постоянной на самом
высоком уровне, достижимом с помощью применявшейся
аппаратуры. В данном случае удалось получить излучение, свободное
J I 1 1 Mill 1 I I I Mill
§ 4. Некоторые стороны ультразвуковой кавитации 395
от кавитации, при длительности импульсов до 50 мс и периоде
повторения 500 мс, тогда как при периоде повторения 30 мс
свободное от кавитации излучение могло существовать в течение
лишь нескольких миллисекунд.
2 3 k 567 10 20 3040 60 100 200
At,MC
Фки г. 10.41. Влияние частоты на зависимость сопротивления излучения
от длительности импульса.
At *- длительность акустического импульса; г0 — сопротивление излучения; (гаH —
нормальное сопротивление излучения (при слабых колебаниях и в отсутствие кавитации).
Период повторения акустических импульсов TV «= 500 мс, концентрация
растворенного воздуха 28%.
Z 3 4S67 10 20
А1.МС
40 60 100 200
Фиг. 10.42. Влияние концентрации воздуха на зависимость сопротивления
излучения от длительности импульса.
Та — сопротивление излучения; S — площадь излучающей поверхности; Д< —
длительность акустического импульса. Период попторепия импульсов Гг в 300 мс, частота
30 кГц.
Влияние частоты. На фиг. 10.41 показано влияние частоты,
причем* верхняя кривая повторяет верхнюю кривую фиг. 10.40.
Если период повторения поддерживается постоянным и равным
500 мс, а частота понижается, то свободное от кавитации
излучение оказывается возможным лишь при более коротких импульсах.
396
Гл. JO. Характеристика звукового поля
Влияние концентрации воздуха. Типичные кривые,
показывающие влияние концентрации воздуха, приведены на фиг. 10.42.
С увеличением концентрации воздуха свободное от кавитации
излучение оказывается ограниченным областью более коротких
импульсов, и эта область в конце концов сдвигается влево и
выходит за пределы данной фигуры. Частота ультразвука в этом
случае была равна 30 кГц, колебательная скорость
поддерживалась на максимальном уровне, период повторения составлял 500 мс.
Если импульсы следуют чаще, то эта область оказывается еще более
узкой. Если колебательная скорость уменьшается, то область
свободного от кавитации излучения по всем рассмотренным выше
параметрам расширяется.
9. Влияние шероховатости поверхности. Грубую поверхность
можно рассматривать как стабильную область адгезии молекул
воздуха, которые могут действовать как зародыши кавитации.
Однако наблюдения показали, что этот эффект существует только
в определенном интервале концентраций воздуха, даже когда
эти наблюдения проводились в области шероховатостей от 0,37
до 9,1 мкм (усредненное отклонение от средней линии).
10. Влияние эрозии поверхности. Эрозия поверхности приводит
к некоторым интересным явлениям. Вибраторы с полированными
излучающими поверхностями были погружены как в обезгажен-
иую, так и в необезгажениую воду для того, чтобы возбудить
непрерывную интенсивную кавитацию, и была проведена серия
повторяющихся наблюдений над степенью эрозии и
характеристиками сопротивления излучения. В необезгаженной воде после
озвучивания в течение 16 ч были обнаружены незначительные
изменения характеристик, хотя в конце эксперимента поверхность
была сильно повреждена. Микроскопические наблюдения
показали наличие плотного распределения эрозионных ямок со средней
глубиной 0,2 мм.
Напротив, в обезгаженной воде (в отсутствие зародышей)
было обнаружено, что с увеличением эрозии критическая скорость
смещается вниз, а падение сопротивления все более и более
увеличивается *).
11. Влияние обезгаживания поверхности. В результате
проведенных экспериментов возник вопрос о том, могут или не могут
молекулы воздуха захватываться эрозионными ямками, создавая
таким образом зародыши кавитации. Чтобы подтвердить это
предположение, был проделан ряд экспериментов, в ходе которых
*) См. [15], где рассмотрены детали эксперимента и приведены
фотографии эродированной поверхности.
§ 4. Некоторые стороны ультразвуковой кавитации 397
поверхность обезгаживалась. Ферритовый вибратор с
подвергнутой эрозии поверхностью погружался в хорошо обезгаженную
воду и вся установка помещалась под колокол низкого давления
на 30 ч, после чего следовало облучение в течение 2 ч
ультразвуком большой амплитуды. После такого обезгаживаиия
характеристики снова измерялись при атмосферном давлении и было
найдено, что первоначальные кривые бескавитационного
характера почти полностью сохранились. Однако после просушивания
поверхности на воздухе характеристики меняли свою природу.
В результате этих экспериментов можно сказать, что падение
сопротивления излучения с увеличением эрозии не обусловлено
непосредственно сильной шероховатостью поверхности, а связано
с созданием зародышей кавитации, как и предполагалось ранее.
Молекулы воздуха могут с большей легкостью оседать в
эрозионных ямках, чем на поверхности средней шероховатости.
12. Эксперименты в других жидкостях. Аналогичные
наблюдения были проведены в других жидкостях, таких, как
трансформаторное, касторовое и машинное масло. В этих жидкостях,
вязкость которых больше вязкости воды, были обнаружены
различные интересные явления. В частности, в касторовом масле
было обнаружено весьма странное влияние обезгаживаиия
поверхности. На частоте 28 кГц, когда колебательная скорость хорошо
отполированной ферритовой поверхности, колеблющейся в обез-
гаженном касторовом масле, сначала увеличивалась, а затем
уменьшалась, гистерезис характеристик оказался значительно
более ярко выраженным, чем в воде. Когда процесс обезгажива-
ния поверхности был осуществлен методом, предложенным для
воды, порог кавитации заметно повысился и на кривой не
наблюдался спад вплоть до скоростей, превышающих 28 см/с. Но как
только излучатель возбуждался до уровня, при котором
начиналась кавитация, характеристики, наблюдаемые при уменьшении
уровня возбуждающего сигнала, полностью меняли свой вид и
становились почти такими же, как и без обезгаживаиия поверхности.
Более того, уменьшившееся сопротивление излучения больше
не возвращалось к первоначальным значениям, если излучение
ультразвука не прекращалось на значительный период времени
или если не повторялась вновь операция по обезгаживанию
поверхности.
Дальнейшие исследования [17] были проведены для определения
порога кавитации в таких вязких жидкостях, как смазочные
масла Джемикос ЕС, ЕЕ и TL, авиационное масло № 1100,
трансформаторное масло, анилин, касторовое масло и т. д., при
различных температурах, а также в воде и четыреххлористом углероде
как в образцах жидкостей с малой вязкостью. Вязкость в
различных экспериментах менялась в пределах от 1 до 1000 сП.
398
Гл. 10. Характеристики звукового поля
Результаты исследований показали, что, во-первых, необходим
специальный метод полного обезгаживания вязких жидкостей
и, во-вторых, порог кавитации для обезгаженных таким образом
жидкостей почти совсем не зависит от их вязкости. Эти результаты
полностью отличны от результатов, полученных Бриггсом,
Джонсоном и Мэзоном [18] в 1947 г.
Исследовалась также зависимость порога кавитации от
поверхностного натяжения и давления паров жидкости. Связь с
поверхностным натяжением не была обнаружена. Однако была четко
АО
3.0
k
2.0
1,0 V
I-
Трансформаторное
масло
Анилин
Касторовое
масло
Вода Л
j)pu20 С
W"
,ССЦ
\прц 209С
vBoda
\при 60*С
ecu
\npu45X
" ' i i_
ю-
10~г 10'' 0J*5 / Ю18 00100150275760
Давление паров, мм рт. ст.
Фиг. 10.43. Порог кавитации для различных жидкостей в зависимости
от давления паров при условии, что жидкости обезгажены вакуумированием
при давлении 0,1 мм рт. ст.
установлена определенная зависимость от давления паров в
широком интервале давлений — от 10 мм рт. ст. (в трансформаторном
масле) до 20 мм рт. ст. (в воде при 20° С). Вне этого интервала
также наблюдался характерный загиб вниз кривой порога
кавитации. Эти результаты приведены на фиг. 10.43. По оси ординат
отложен порог кавитации по звуковому давлению pt на
излучающей поверхности ферритового магнитострикционного вибратора.
Значения pt определялись путем измерения га при скорости uti
но формуле pt = ravti (фиг. 10.33).
13. Влияние материала поверхности. Недавние наблюдения
[19] показали, что критическая скорость uti1 при которой
начинается резкое падение сопротивления излучения га, существенно
зависит от материала излучающей поверхности. Стекло, латунь
и нержавеющая сталь характеризуются большими критическими
скоростями, чем феррит. Таким образом, возникает техническая
Литература
399
задача выбора материала поверхности в зависимости от того,
требуется ли получить ультразвуковое излучение с минимально
возможной кавитацией или, наоборот, кавитация является
основным полезным фактором.
ЛИТЕРАТУРА
i. Menges К., Akust. Zs., 90 (Marz 1941).
2. Wolff /., IRE, 630 (May 1937).
3. Fukushima A\, Cylindrical Sound Source of Finite Length, Annual Meeting
Acoust. Soc. Japan, Oct. 1949 (на японском языке).
4. Fukushima К., Sci. Rep. Res. Inst. Tohoku, Univ., B9, 155 A958).
5. Nimura Т., Watanabe Y., Technology Rep. Tohoku Univ., 14, 79 A950).
6. Nimura Т., Watanabe Y., Journ. Inst. Electr. Eng. Japan, 68, 263 A948)
(на японском языке).
7. Nimura Y., Aida Y., Sci. Rep. Res. Inst. Tohoku Univ., Bl-2, 337 A951).
8. Kobayashi K., Toyoshima, Characters of Cylindrical Wave, General Meeting
Japanese Engineering Society Apr. 1936 (на японском языке).
9. Saneyoshi «/., Journ. Acoust. Soc. Japan, 4, 1 A943) (на японском языке).
10. Saneyoshi J., Bui. Tokyo Inst. Technol., Ser. B, № 3, 103 A958).
11. Stenzel II., Elektr. Nachr. Techn., 15, 71 A939).
12. Kikuchi Y., Recent Results of Research and Development in the Field
of Ultrasonics in Japan, Proc. of the 3rd Intern. Congr. on Acoust.
(Stuttgart, 1959), 2, 1193 A961).
13. Kikuchi Y., Shimizu II., Journ. Acoust. Soc. Amer., 31, 1385 A959).
14. Kikuchi Y., Shimizu II., Okuyama D., Ultrasonic Energy, ed. by E. Kellv,
USA, 1965.
15. Kikuchi Y., Shimizu H., Okuyama D., Sci. Rep. Res. Inst. Tohoku Univ.,
Ser. B, 17, До 3-4, 65 A965).
16. Kikuchi Y., Shimizu II., Okuyama D., Sci. Rep. Res. Inst. Tohoku Univ.,
Ser. B, 17, № 3-4, 51 A965).
17. Kikuchi Y., Okuyama D., Nakanishi 7\, Shimizu II., On the Relationship
between Cavitation Threshold and Physical Properties of Liquids, Prepared
Paper for the Meeting Acoust. Soc. Japan, May 1964, p. 129 (на японском
языке).
18. Briggs II. В., Johnson /. В., Mason W. P., Journ. Acoust. Soc. Amer.,
19, 664 A947).
19. Kikuchi Y., Okuyma D., Sannomiya Т., Saito Л., The Variation of Acoustic
Radiation Resistance due to Cavitation (Influence of Material of Radiation
Surface), Prepared Paper for the Meeting of Acoust Soc. Japan, Nov. 1966,
p. 205 (на японском языке).
Глава 11
ЭЛЕКТРИЧЕСКИЕ ВОЛНОВЫЕ ФИЛЬТРЫ,
ОСНОВАННЫЕ НА УЛЬТРАЗВУКОВЫХ
КОЛЕБАНИЯХ ТВЕРДЫХ ТЕЛ
К. Сибаяма
§ 1. МАГНИТОСТРИКЦИОННЫЕ ФИЛЬТРЫ
1. Простейший фильтр с механическими вибраторами.
Электрические фильтры обычно состоят из катушек лндуктивности и
конденсаторов. Компонента потерь в элементах, образующих фильтр^
сглаживает его характеристики, особенно вблизи частот отсечки.
Поэтому было потрачено много усилий,
чтобы улучшить характеристики фильтров
Одним из способов такого улучшения
является использование механических вибраторов,
таких, как камертоны, резонансные стержни,
Фиг. 11.1. Маглитострикциоиный фильтр типа
ЭнрОН простого резонатора.
пьезоэлектрические и магнитострикционные резонаторы,
обладающие более высокими добротностями Q, чем электрические элементы.
На фиг. 11.1 показана простейшая конструкция фильтра
в котором использован магнитострикциопный резонатор. Он имее!
две катушки — возбуждающую и приемную — и экранирующую
пластинку в центре резонатора [1]. На выходе (катушка N2)
мы получаем напряжение сигнала в узкой полосе частот, которая
соответствует резонансной частоте резонатора г). Для подмагни-
чивания обычно используется постоянный магнит. На фиг. 11.2
приведен пример фильтра дифференциального типа [2, 3].
Вследствие скин-эффекта, обусловленного вихревыми токами, твердые
резонаторы обладают малым коэффициентом электромеханической
связи. Поэтому ширина полосы таких фильтров не может быть
большой. Чтобы получить более широкую полосу пропускания,
необходимо использовать резонаторы, набранные из тонких метал-
х) Принцип действия здесь тот же, что и для измерителя магнитострик-
ционной постояпной, описанного в гл. 4.
§ 1. Магнитострикционные фильтры
401
лических пластин, или ферритовые вибраторы; при этом влияние
вихревых токов становится пренебрежимо малым.
90
60
70
60
ъ50
1
I
30
20
10
0
\
\
1
7
7
If
9J 9fi 9,9 IQfl WJ 1Ц2 10,3
Частота. кГц
Фиг. 11.2. Узкополосный магнитострикциониый фильтр
дифференциального тина.
Используются резонаторы из сплавов никель — медь.
2. Эквивалентная схема магнитострикционного резонатора.
Согласно основным уравнениям, рассмотренным в гл. 2,
импеданс Zf свободного магнитострикционного вибратора может быть
представлен в следующем виде:
Zf = Rd + j,Ld + 1-n^T-JJ-. (Ц.1)
Это выражение справедливо вблизи резонансной частоты. Из него
можно получить эквивалентную схему, показанную на фиг. 11.3
[4], где
Аг
¦ г ГП?
4- Ld = —^
mZd
А*
А*
sZd
1/2 го—0231
402
Гл. 11. Электрические волновые фильтры,
здесь т, s и г—эквивалентная масса, упругость и активное
сопротивление вибратора соответственно, Za — импеданс
заторможенного вибратора и А — фактор силы.
Обозначим через б отношение L<t к Lm в эквивалентной схеме,
равное следующим величинам:
Л__ хГ2 для первой симметричной моды колебаний
Е кольца,
« ~ * (И.2)
с ^ 8 *аГа Для основной продольной моды колеба-
" ^ "й*" ? ний длинного стержня,
где хГ2 — магнитострикционная активность, рассмотренная в гл. 3,
§ 2. Отношение б определяет максимальную относительную полосу
**
Фиг. 11.3. Эквивалентная схема магни-
тострикционного резонатора.
магнитострикционных фильтров; Фукусима [5, 6] назвал его
«коэффициентом относительной ширины полосы». Этот
коэффициент равен квадрату величины, называемой коэффициентом
электромеханической связи.
Величинами Rd и Rm в случае резонаторов, набранных из
пластин, или в случае ферритовых резонаторов можно пренебречь.
Реактивное сопротивление двухполюсника может быть
представлено следующим выражением:
где (ог — частота резонанса, а сот—частота антирезонанса; оба эти
резонанса были определены i гл. 3, § 2 и гл. 8, § 2. Эти частоты
связаны соотношением
< = A + 8H* = ---^. A1.4)
Таким образом, если в магнитострикционном фильтре
используются подобные резонаторы, то к нему применима обычная
теория LC-фильтров.
3. Магнитострикционные фильтры дифференциального типа.
Две пары резонаторов связаны таким образом, что образуют
ячейку, показанную на фиг. 11.4. Если резонансная частота одной
пары выбрана так, что она равна антирезонансной частоте другой,
то они образуют полосовой фильтр. Относительная полоса Ъ
Схема фильтра
Эквивалентная
схема
Zo, О
V* м
*»я1У".г
I л * ^(j
i7^
•»--/ 'ЯЛА
чГ^/^
5"*^
*ws.
~|7Г^/
1 /
ftt
Фиг. 11.4. Магнитострикционные фильтры типа ячеек и дифференциального
типа.
26*
404
Гл. 11. Электрические волновые фильтры
для фильтра типа I, показанного на фиг. 11.4, равна
С0т2-
-0V1
2@т1
6,
A1.5)
а для фильтров типов II и III (к типу I добавлены
регулировочные конденсаторы)
2
<О02-
2
-coal
2соН
/2 (а —1)
Уб,
(и.6)
где а — параметр, который должен быть определен из требований,
предъявляемых к характеристикам затухания фильтра. Обычно
его значение лежит между 1,6 и 1,8.
50
45
3,0 j
2,9
2fi
2 J
2,6
2,5
2,4
2,3
2,2
cf 2f/
s 2,0
eft*
/,7
',«
/,*
',*
U
U2
V
1
\ /II
/ /II
/ / II
//II
// II'
/ / ' //
/ / ' //
$/ 1 ill
ъу / 1
У °v <$/ Л
/ / I /fa
/ / 111
/ / 1/1
/ / 1 //
- / / / //
/ / / //
/ / 1 / /
" / / / / /
1 X ' / /
Г/ x /XX
l/ ^?У
r i шг^^0^ ' ' » i i—
Jfl30
j 0,25
jfi2«
-Ю24
Jo.22
10,20^
¦W*3*
J0,/5
\o,12
WW
\0,06
\0,06
WOA
AOfiZ
J0
40
*5
30
25
i
20
15
10
1t0 1t1 1,2 1,3 1fi 1,5 1fi 1J 1,8 1,9 2,0
Q
Фиг. 11.5. Характеристики магнитострикциопного фильтра типа II,
показанного на фиг. 11.4 (см. также табл. 11.1), в зависимости от параметра а.
Конструкция типа ячейки требует наличия двух пар
резонаторов, имеющих одинаковые характеристики. Этого неудобства
§ 1. Магнитострикционные фильтры
405
можно избежать, если использовать дифференциальное
соединение [51. Фильтры типа II, б и III, б, показанные на фиг. 11.4^
являются характерными примерами фильтров такого рода с
параллельными или последовательными конденсаторами на входе и на
выходе. Эквивалентные
схемы для них такие же, как
и для ячеек, показанных на
фигуре. Характеристики
фильтров приведены в табл. 60 \
11.1. На фиг. 11.5 показаны
Фиг. 11.6. Экспериментально
полученные характеристики
затухания магнитострикциопного
фильтра дифференциального типа
(тип II, б) (сплошная линия с
темными кружками) и результат
теоретического расчета (штриховая
линия со светлыми кружками).
Материал резонатора — сплав NiCr,
подмапшчппанис при помощи
постоянных магнитов.
До 1
№2
кГц
28,65
29,05
6, %
0,60
0,81
dd, %
4
4
dnv %
0,3
0,2
J_J
24 26 26 30 U2 2Ь 36 36
Частота, кГц
некоторые важные для проектирования фильтров величины в
зависимости от параметра а. В предельных случаях в табл. 11.1
{тип III) можно положить
La = Lb = 0 или La~ Lb — 0 и Са — оо.
Пусть коэффициент электрических потерь равен dd=l/Qd,
а коэффициент механических потерь равен dm= i/Qm; вносимое
этими потерями в полосе пропускания затухание можно
представить в виде
a = 20Jg{l+(dd + dM)(-^L + |-)} »20Ig(l + rfd-§-) дБ.
A1.7)
Эти потери также сглаживают пики затухания фильтра, что
можно представить в следующем виде:
6000 = 8,686 {lnb + lngm + ln^g^g} дБ. A1.8)
Таблица 11-Т
Характеристики магнитострикционных фильтров типов II и III
Тип II
Тип III
Импеданс последовательных ветвей
или ячеек (г = 1, 2)
1
Zi=— /(D-;
-<i
1 * __J
Ldf С
2
"mi— r .r .'»Чг
L2
/^pi — V>aiy_ I COmt — (ddi у | fi
V COaj / \ 0)di / ' 5
Соотношение частот
^1 = <2==^A+&/в)»
©|2 = 0J A+&).
Коэффициент удельной ширины
полосы
1/6 = 1/2 (a~l).&/a.
Мнимый импеданс
1 УТ+Ш
где a>* = a>j(l + bQ).
Характеристики затухания
«4-
(Q+4) V^i
(o-t)VQ+T
= ^з @),
; = ±1/2a-l
К eB-a'
th-'
где 5 =
B-
_ Ba —1K/2+o1/2 B—aK/2
(a-lI/2(e + lK/2
a
COs — 0>b
0H
Импеданс последовательных ветвей
или ячеек A = 1, 2)
1~7 СО 0J-0? '
0J
1
Ki+e>Si)=e>bi+a+eo«)e>!r
Соотношение частот
«4l=«8(l-b).
u)|l=a)r2 = u>oa + ^).
0J2 = 0JA + 6).
Коэффициент удельной ширины полосы
_ Ъ У2(а—1)
a lnF6/a
Мнимый импеданс
601=-
^0 —^О уЬфг* &
Yi-a2
V1 + 6Q
где 0J = ш§A + Ш).
Характеристики затухания
2 " ^T/Q-l
aQ + l9"
6,
CV2 + CVa
?2 = ^Ь + ?/J»
Ax + ^b + Aoi
0! =
§ 1. Магнитострикциоппые фильтры
•W
Поэтому если Ь мало и а-* 1, т. е. полоса пропускания узка
и пики затухания расположены близко к частотам отсечки, то
резонаторы должны иметь высокую добротность Q *).
Экспериментальный пример показан на фиг. 11.6; штриховая линия
соответствует расчету по формулам A1.7) и A1.8). В подписи к фиг. И.С
Резонатор
мз Hi- |
феррита I
45
Магнит из Ъа-среррита
а
40
35
30
%25
Ъо
^ 15
I
L I
nil NИ
м п
и!
ни
1 ' I I I ' I 1 I J-1_L 1 1 1 I I
Ф и г. 11.7. Магнитострикцион-
ный фильтр с ферритовыми
резонаторами (тип II, б).
а — конструкция; б — характеристики
затухания.
380400 МО 4k0 460 480 Ш 520 540
Частота, кГц
6
приведены основные характеристики резонаторов. На фиг. 11.7
показан фильтр, в котором использована более высокая мода
колебаний ферритовых резонаторов [71. Следует отметить, что потери
в полосе пропускания в этом случае^уменыпаются.
1) К. С и б а я м а, «Магнитострикционный фильтр» (август 1947 г
не опубликовано).
408
Гл. 11. Электрические волновые фильтры
4. Магнитострикционный фильтр совместно с электрической
цепью. Более широкое применение магнитострикционные
резонаторы для фильтров могут найти при использовании их в
комбинации с электрическими цепями [8, 9]. При этом одной из основных
501-
40 Ь
S 30
I
I 20
10
w
0,0799мнФ
о ^
6,5вмГ
0,545мГ
7,9нФТ.
I
Т
0M57
мкФ
¦0,266%
}l Гт= 16110 Гц
1.и=0,42мГ
V_...
j—u
J L
Т-Г
J L
10 11 12 13 1U 15 16 17 18 19 20 21 22 23 2b 25 26 27 26 29 30
Частота, кГц
Ф и г. 11.8. Полосовой магнитострикционный фильтр с крутой
характеристикой отсечки снизу.
целей ставится получение более крутых характеристик отсечки.
На фиг. 11.8 показан пример полосового фильтра с крутой
характеристикой отсечки снизу [8] и даны для него экспериментальные
результаты.
5. Резонатор: материал и конструкция. Резонаторы,
используемые для магнитострикционных фильтров, должны обладать
следующими характеристиками: а) малым температурным
коэффициентом частоты, б) достаточно большим коэффициентом
электромеханической связи, в) малыми потерями при механических
колебаниях х). Недавние успехи в разработке материалов
позволяют почти полностью удовлетворить этим требованиям. Как
было указано в гл. 6, одну из таких возможностей дают некоторые
составы ферритов. Для сравнительно узкополосного фильтра
необходимым требованиям удовлетворяют такие металлические
сплавы, как Co-элинвар или ниспен-С.
!) Например, чтобы получить достаточно хорошую частотную
характеристику для магнитострикционного фильтра дифференциального типа с
центральной частотой 455 кГц, желательно иметь следующие параметры
резонатора: механическую добротность Q = 700 — 1000, коэффициент
электромеханической связи ке — 3—8%, температурный коэффициент частоты 10~5.
§ 1. Магпитострикционные фильтры
409
Резонаторы для диапазона частот от 10 до 500 кГц обычно
имеют форму длинного стержня, в котором возбуждаются
продольные колебания. Для получения хороших характеристик
затухания необходимо, чтобы электрическая добротность Q резонатор-
ной системы, включающей обмотки и постоянный магнит, была
Обмотка
Фиг. 11.9. Магпптострикционный
резонатор с высокой электрической
добротностью.
Вибратор из
феррита
Магнит из
Ва-реррита
Ярмо
с большим ju,
достаточно большой. На фиг. 11.9 показан пример конструкции
фильтра с высокой электрической добротностью в промежуточном
диапазоне частот [10].
6. Определение параметров эквивалентной схемы магнито-
стрикционных резонаторов. Хорошо известно, что параметры
эквивалентной схемы резонаторов могут быть определены методом
Фиг. 11.10. Измерительные схемы для определения характеристик
эквивалентной схемы резонатора.
1 — генератор; 2 — усилитель; з — электронный вольтметр; 4 — болыпоз сопротивление;
5 — малое сопротивление.
кинетического импеданса. Однако, чтобы получить нужные данные
для фильтра, необходимо провести целый ряд измерений. Поэтому
были предприняты попытки упростить эти измерения. Некоторые
способы приведены на фиг. 11.10 и в табл. 11.2 [6]. Если
конденсатор С на фиг. 11.10 подобран так, что выполняется условие
/т = /а/э или fr = fjb (эта операция на практике легко
выполняется при помощи переменного конденсатора), то параметры
эквивалентной схемы определяются из табл. 11.2. В случаях,
когда желательно иметь низкий импеданс источника питания,
27-0231
Таблица 11*2
Определение эквивалентных параметров резонаторов
Метод параллельного
конденсатора
i
1
i
•И-—- -I
Метод последовательного
конденсатора
о-| p^)-^vrx«Y^
/? = /а/ь» настройка С
L,=.
1
/
б+-^
Bя/т)*С*
1Д,
1
Bя/г)«С '
а>х
2coi
/'
«,1
s . б2
б_гТ"- 2ш?
«k+4
VT /b — /а
0^
2nfmLd
drttd
fr
Rg,b
2nfrLs
2nfrLs
6<i
6 = -
dd =
Rd
d^ = ^L
Rm
«d =
1
TO
1
У Lrcr~yi + d'
?,=
Rs
coLs
4*
« <*d»
1 + 6 '
1
УТ^с *
R<
3 <*mC {dd + dm±y б dd) )/"lTy 6
§ 2. Электромеханические фильтры
411
чтобы избежать емкостных помех, можно использовать схему,
показанную на фиг. 11.10, б. Индикатор переменного напряжения
(электронный вольтметр) показывает максимум при /а и fb и
минимум при /г.
§ 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ФИЛЬТРЫ
Электромеханическими или просто механическими фильтрами
называются такие фильтры, в которых характеристики затухания
зависят главным образом от четырехполюсника, состоящего из
механических элементов, а магнитострикционные или пьезокера-
мические элементы используются только как
электромеханические преобразователи энергии. (В отличие от этого в магнитострик-
ционных фильтрах, описанных выше, используются импедансные
характеристики двухполюсников — магнитострикционных
резонаторов.)
1. Общие представления о проектировании по аналогии с
трехэлементной схемой х). Как известно, характеристики
электромеханических фильтров, показанных на фиг. 11.11, а, можно
получить из эквивалентной схемы, представленной на фиг. 11.11, б,
г,
1, 1 ЧлГ
В
Vy3, т t-
О * Г
т,
A:1 UA
б
, Г»Т К I I I I ill } о
6
Фиг. 11.11. Эквивалентная схема электромеханических фильтров.
At В, С, D — элементы связи; 1, 2, 3 — резонаторы; Т±, Т% — преобразователи.
если считать электрическое напряжение аналогичным силе.
Элементами связи на фиг. 11.11, а являются стержни, в которых
возбуждаются продольные колебания (фиг. 11.12). Положим
1)Е. Кикучи, К. Сибаяма, К. Миягучи,
«Электромеханический фильтр» (март 1958 г., не опубликовано); [11].
27*
412
Гл. 11. Электрические волновые'*фильтры
о—
Zc
0)Q
¦ ч ¦ ¦ Н
- /
¦ -
—о
где сс — скорость звука в стержне, 1С—-длина соединительного
элемента. В области 0 < 0 <С я последовательными и
параллельными элементами являются
Т 1-cose м с __ sin8 r ж q.
а~~ 9 sin6 0с> °с — —§—t'Oo V11<yJ
где Мос — общая масса элемента связи,
5с, /?с — поперечное сечение и модуль Юнга элемента связи.
Ф и г. 11.12. Эквивалентная схема
элемента связи.
В частности, для 0 = я/2 (часто используемый случай) имеем
12 2 <11Л0>
w~~ 2ссо0 ~~ я ос~ (coi + cog)/? f
где оH/2зх, со2/2я и о^я — средняя частота и верхняя и нижняя
частоты отсечки соответственно, Л —номинальный импеданс, Zc —
характеристический импеданс элемента связи.
Если относительная ширина полосы мала; то со0 определяется
выражением
<o„«J2i±^. (И.И)
Отсюда получается соотношение
Zc = R = pcccSc. A1.12)
Это означает, что номинальный импеданс равен
характеристическому импедансу элемента связи.
С другой стороны, эквивалентная масса и эквивалентная
податливость резонатора определяются выражениями
2R о ос / ®о-А
Ц_^-^_М(^-),
10 ' (И.13)
При этом резонансная угловая частота резонатора
§ 2. Электромеханические фильтры
413
Присоединим преобразователь к фильтру так, чтобы
образовалась секция типа секции с постоянным значением К (фиг. 11.13, а).
Если элементы mt и Ct на фиг. 11.13, а разделить на две части
wzti, mt2 и Ctl9 Ct2, то получится схема, показанная на фиг. 11.13, б.
rt mt ^t mc mc MrCrMc тс
Преобразовательная
часть
механическая
колебательная часть
/о-
/'о-
mr . /flr
^% 32 Щ\ Щ 2 \ 2 тс тс
11 U ^ Ctt IN 2?rj 2^1
J" | J
3' 2' 4'
Преобразовательная >|< Механическая
часть колебательная часть
б
Фиг. 11.13. Соединение преобразователей с фильтрами.
Полоса пропускания преобразователя А' часто выбирается шире,
чем полоса пропускания основного фильтра А, чтобы избежать
трудностей, связанных с температурными характеристиками
преобразователя [12]. Если теперь фильтр А связан с фильтром А'
в точках 2—2', как показано на фиг. 11.13, б, то эквивалентная
масса, эквивалентная податливость и резонансная частота
преобразователя определяются следующими выражениями:
i?B<D0—А')
A'coq "
Ct = -
®*-у 2(о0-а' «^oji + e \co0j ;
J(H.15)
где (о[ — нижняя угловая частота отсечки преобразователя. Расчет
резонаторов и преобразователей, удовлетворяющих требуемым
резонансным частотам и эквивалентным массам, определяемым
выражениями A1.13) — A1.15), осуществляется на основе
результатов теории механических колебаний. Так, например, если мы
414
Гл. 11. Электрические волновые фильтры
рассмотрим длинный стержень, в котором возбуждена основная
продольная мода колебаний (что является простейшим и наиболее
широко известным случаем), то резонансная частота его
определяется выражением /г = с/21, где с = VE/p, а эквивалентная
масса равна половине общей массы резонатора.
Что касается выхода фильтра, если он осуществляется
электрическим путем, то электрическое сопротивление выходного
звена должно определяться выражениями
Де = ^1-9.1011Ом,
где Л — фактор силы преобразователей пьезоэлектрического типа
(в ед. СГСЭ), или
Де = ^--10-9Ом, A1.16)
где Л — фактор силы преобразователей магнитострикционного типа
(в ед. СГСМ). В этом случае коэффициент электромеханической
связи преобразователя должен быть настолько велик, чтобы
выполнялись условия:
ке>В
в случае согласования но модулю и но фазе,
ke>VB
в случае системы трехэлементного типа и
в случае системы с постоянным К, где
Я = А. (ц.17)
2. Некоторые примеры электромеханических фильтров.
Рассмотрим в качестве примеров электромеханических фильтров
фильтры типа короткого стержня [13] и кольцевого типа [14].
Оба эти типа фильтров были разработаны в нашей лаборатории.
Фильтр типа короткого стержня. На фиг. 11.14 приведены
экспериментальные результаты для фильтра типа короткого
стержня, состоящего из коротких стержней в качестве
резонаторов и тонких длинных стержней в качестве элементов связи.
Фильтр был рассчитан для средней частоты /0 = 172,94 кГц
и ширины полосы 3,5 кГц с использованием данных предыдущего
раздела и гл. 9. Фильтры этого типа обладают следующими
особенностями:
1. Диаметр элемента связи больше, а общая длина фильтра
меньше, чем соответствующие значения для фильтра типа длинного
стержня, рассчитанного для той же частоты и ширины полосы.
§ 2. Электромеханические фильтры
415
70
60
50
оГ МО
I 30
20
10
.
щш
9<к
щ
Щ
7ЯЙ
"nVl i /
?,00 '>+'*' V«* ГТ
Шестцсекционный\ 1
фильтр th
М
1 '
1
/ MQ(jQ
' колебаний
-А--,
Т
*
тЬп
_bL-J
Яш
ш/е
/?0 толщине
169
177
171 173 175
Частота, кГц
Фиг. 11.14. Характеристики • затухания электромеханических фильтров
с резонаторами г виде коротких стержней.
2. К одному резонатору через его цилиндрическую
поверхность легко присоединить несколько соединительных элементов.
Фильтр кольцевого типа. Фильтр кольцевого типа состоит
из полых дисковых резонаторов, колеблющихся на радиальной
Фиг. 11.15.
Электромеханический фильтр кольцевого типа
(/о = 100 кГц, А = 3 кГц).
Керамика титанита бария
моде, и элементов связи в виде коротких цилиндрических
оболочек; он показан на фиг. 11.15. Элемент связи ведет себя довольно
сложным образом [15]. Податливость его состоит из двух частей:
416
Гл. 11. Электрические волновые фильтры
податливости, связанной с деформацией по окружности и
существующей в области соединения кольца с оболочкой, и
податливости растяжения цилиндрической оболочки по длине.
3. Преобразователи и выходные устройства фильтров.
Большим преимуществом является то обстоятельство, что
характеристики затухания электромеханических фильтров не зависят
непосредственно от поведения преобразователя. Другими словами,
J2
Частота,кГц (полоса 10кГц)
76 60 64 86 92
Керамика титаната
бария
Склейка
•V
??7 — V4?Q
62 6U 86
Частота,кГц
Фиг. 11.16. Температурные характеристики преобразователей Ланжевена
из обычной керамики титаната бария (конструкция с постоянным К).
как это видно из примера, приведенного на фиг. 11.16 [12], для
преобразователя может быть использован такой обычный и весьма
чувствительный к изменениям температуры материал, как
керамика титаната бария. Это преимущество существенно облегчает
разработку электромеханических фильтров *).
Одним из возможных выходных устройств фильтров является
электрический выход, описанный выше в этом параграфе. Иногда
выход осуществляется в виде секции с постоянной величиной К,
содержащей преобразователь [17] (фиг. И.13 и 16). Это полезно
не только для того, чтобы улучшить согласование выходного
устройства в широком диапазоне частот, но также и для того,
чтобы улучшить положение с паразитными резонансами [18].
Другой путь создания выходного устройства для фильтра —
механический. Пример механического выходного звена приведен
на фиг. 11.17, а [18]. Поглотитель резонаторного типа Аг связан
с преобразователем через элемент связи, как это показано на
фигуре. Эквивалентная схема этой части фильтра представлена на
фиг. 11.17, б. Обозначим через zoi механический импеданс на
механическом выходе А. Если поглотитель имеет подходящую доброт-
*) Проводились опыты по изготовлению элементов фильтра из
материала для преобразователей [16]. Разработка фильтров такого типа может
оказаться весьма перспективной в связи с достижениями в разработке
материалов с хорошими температурными характеристиками.
Ar
Ф и г. 11.17. Поглотитель резонаторного типа,
а — конструкция: механический выход в центре А пластинки преобразователя; б
эквивалентная схема.
1,0 ¦
0,9
0,8
0,7
Ofi
^0,5
су
Ofi
0,3
0,2
0,1
0
,—- Q2=f580
\
ч
\ а
- \
\
\
\
-
^
-
—i—i—1—i—i—I--I- -1 г...
^_^
А о 0 о \
лч?»°фо\
оо®о®оо I
Veo0e0o /
V о © о у
°
о
о
._. 1 1.. 1 ' 1
0132 ОМ
0,06
от
0,10
0,12 OJif
Фиг. И.IS. Механическая добротность резонатора в виде короткого
стержня с малыми отверстиями.
Диаметр стержня 28,4 мм, толщина 10,44 мм, число отверстий 31, диаметр
отверстий 2,5 мм. а — пример стержня, в котором двенадцать отверстий заполнены вязкоупру-
гим материалом; б — зависимость механической добротности Q от содержания
наполнителя X, определенного как отношение объема вязкоупругого материала к полному
объему. Экспериментальные значения показаны кружками; штриховая кривая
рассчитана по формуле A1.19).
418
Гл. 11. Электрические волновые фильтры
ность QQ, to можно использовать z01 как выходное сопротивление.
Требуемое значение Q0 определяется формулой
Г) — ф°
A1.18)
где А и а)о/2я — ширина полосы пропускания и средняя частота
выходной схемы. Практически резонансный поглотитель с
добротностью Qq получается путем подходящей комбинации вязко-
упругих и упругих материалов. Так, например, добротность
коротких стержней с малыми
отверстиями можно изменить путем
добавления наполнителя, как показано
на фиг. 11.18; количество
наполнителя X определяется как
отношение объема вязкоупругого
материала к полному объему.
Эксперименты проводились для основной
продольной моды колебаний
короткого стержня (/о — 100 кГц).
Результаты различных
экспериментов хорошо описываются
следующей эмпирической формулой:
Q __ 2Г(а0-1М-1
1,0
0,5
Ofi
0,3
0,2
0,1
с?
с*
0,05
OfiU
0,03
0,02
001
Упругий
материал
Вязкоипригии
материал
*=
1
Л
\-\
к-
Т
—
—
-М:
л
$
®
1 1 1
f ' 1 1
fifsuuew/ionu
%
t
*^s
si
Q2/Q,=1Q\
'=/
Ь
Л=1,0
0
/Qi
=foo\
(a Q»
-1
К
A1.19)
0 0,2 0,4 Ofi Ofi 1P
*t/(n/2)
где aQ — некоторое число.
Штриховая линия на фиг. 11.18
соответствует а0 = 1,2 и Q2/Qi = 26.
Фиг. 11.19. Механическая добротность
составных вязкоупругих резонаторов
типа сэндвича.
По оси абсцисс отложен безразмерный
параметр xi = (ci)o/ci){,, где Ci — скорость
распространения в вязкоупругой среде; ft =
= (PiCiiS1)/(p2C2S2) — отношение импедансов;
Q, — механическая добротность
вязкоупругого материала; Q2 — добротность упругого
материала.
Аналогичные кривые механической добротности составного
вязкоупругого резонатора показаны на фиг. 11.19. Э?и кривые
рассчитаны на основе одномерной теории. [Интересно отметить,
что формула A1.19) дает хорошее приближение, если положить
X = xt (я/2) и а0 = 2,6.]
Литература 419
ЛИТЕРАТУРА
1. Hall #.#., I.R.E., 1328 (Sept. 1933).
2. Fukushima K.<, Denki-hyoron, 704 (Oct. 1940) («а японском языке).
3. Fukushima A\, Matsuki Т., Sci. Rep. Res. Inst. Tohoku Univ., B4, № 1,
165 A952).
4. Aoyagi K., Endo <?., Journ. Inst. Electr. Eng. Japan, 398 (May 1934).
5. Fukushima K., Koichihara Г., Journ. Inst. Electr. Comm. Eng. Japan,
233 (May 1939).
6. Fukushima K.y Shibayama K., Prepared Issue of Papers for Allied Meeting
of Institutes of Electrical Engineers of Japan, Apr. 1940, p. 21.
7. Fukushima K., Fujino /?., Prepared Issue of Papers for Allied Meeting
of Institute of Electrical Engineers of Japan, Oct. 1955.
8. Kamiya /?., Fukushima K., Shibayama K.y Kondo S., Journ. Inst. Electr.
Eng. Japan, № 231, 396 (June 1942).
9. Fukushima K.y Shibayama K.y Kondo ?., Prepared Issue of Papers for
Allied Meeting of Three Institutes of Electrical Engineers of Japan, Apr.
1942.
10. Shibayama K.y Kikuchi У., Sato 7\, Prepared Issue of Papers for Meeting
of the Acoust. Society of Japan, May 1965.
11. Konno M.y Electromechanical Filter, Tokyo, 1959.
12. Kikuchi У"., Shibayama K.y Miyaguchi K.y Prepared Issue of Papers for
Meeting of Acoustical Society of Japan, May 1957.
13. Kikuchi У., Shibayama K.y Prepared Issue of Papers for Meeting of
Institute of Electrical Communication Engineers of Japan, Nov. 1957, p. 51.
14. Kikuchi У., Shibayama K.y Miyaguchi K., Prepared' Issue of Papers for
Meeting of Acoustical Society of Japan, Oct. 1958, p. 61.
15. Kikuchi У., Shibayama K., Prepared Issue of Papers for Meeting of
Acoustical Society of Japan, Oct. 1958, p. 63.
16. Honda S.j Nakazava Y\, Yanagizawa Y\, Proc. Network Committee in the
Institute of Electr. Comm. Eng. Japan (Dec. 1957).
17. Kikuchi У., Shibayama K.y Tagava Y.> Takahashi K., Japanese Patent
№ 5601 (June 1959).
18. Kikuchi У., Shibayama K.y Miyaguchi K.y Prepared Issue of Papers for
Allied Meeting of Four Institutes of Electr. Eng. of Japan, May 1958,
p. 780.
ОГЛАВЛЕНИЕ
Предисловие редактора перевода 5
Предисловие к японскому изданию 10
Глава 1. Введение (Е. Кипучи) 13
§ 1. Применения ультразвука 13
§ 2. Ультразвуковые преобразователи. Исторический обзор . . 16
§ 3. Предложение термина «пьезоактивность» 21
Глава 2. Основы теории пьезоактивиых колебаний (Е. Кипучи,
К, Фупусима) 23
§ 1. Проявления пьезоактивности 23
1. Пьезоактивный материал B3). 2. Пьезоактивное
механическое напряжение B3). 3. Принцип подстановки B5).
4. Пьезоактивная магнитодвижущая сила B5). 5. Пьезо-
активная электродвижущая сила B6).
§ 2. Фактор силы 26
§ 3. Представление о кинетическом импедансе 28
1. Импеданс свободного преобразователя и кинетический
импеданс B8). 2. Электроакустический коэффициент
полезного действия преобразователя C2).
§ 4. Основные уравнения электроакустического преобразователя 34
§ 5. Эквивалентные схемы преобразователей 38
§ 6. Коэффициент электромеханической связи 44
Литература • •••••••• 45
Глава 3. Теоретический анализ пъезоактивных конетант для случая
продольных колебаний (Е. Кипучи) 46
§ 1. Введение 46
§ 2. Магнитострикционные константы 47
1. Магнитострикционная постоянная D7). 2. Соотношения
взаимности для Г и Г' D9). 3. Скин-эффект вихревых токов
E1). 4. Связь между статическими и динамическими маг-
нитострикционными явлениями E6). 5. Синтез магнито-
стрикционных характеристик для поликристаллических
металлов E9). 6. Магнитоупругие взаимодействия F5).
7. Другие определения магнитострикционных
постоянных G8).'
§ 3. Пьезоэлектрические константы 80
1. Аналогии, вводимые посредством принципа
подстановки (80). 2. Другие определения пьезоэлектрических
констант (82).
Литература л 86
Глава 4. Магнитострикционные материалы и методы измерения их
характеристик (Е. Кипучи) 87
§ 1. Объект измерения 87
§ 2. Измерение статической магнитострикции 90
§ 3. Метод собственного кинетического импеданса 91
1. Кольцевой образец (91). 2. Образец в виде прямоугольной
полоски (93).
§ 4. Метод взаимного кинетического импеданса 96
1. Принцип метода (96). 2. Измерение величины "хКаж (98).
3. Измерение истинной восприимчивости и A01). 4. Пример
измерительной установки для практического
применения A03).
Оглавление
421
§ 5. Измерение кинетического импеданса дифференциальным
методом 104
§ 6. Размагничивающий фактор 106
§ 7. Точный метод измерения разности квадрантных частот . . 107
§ 8. Основные магнитострикционные материалы 111
§ 9. Некоторые сведения о характеристиках магнитострикцион-
иых колебаний в никеле 111
1. Холодная обработка A11). 2. Гистерезис магнитострик-
ции A12). 3. О потерях на магнитный гистерезис при магни-
тострикционпых колебаниях большой амплитуды A15).
4. Эмпирическая формула для магнитострикции в
никеле A20). 5. Выражения, описывающие магнитострикционные
характеристики при механическом напряжении A23).
6. Влияние окиснбй пленки на никеле A27).
Литература 130
Глава 5. Принципы работы и методы конструирования магнитострик-
ционных вибраторов (Е. Кипучи) 132
§ 1. Описание конструкции прямоугольного вибратора .... 133
1. Приблизительные размеры A33). 2. Выбор магнитострик-
ционного материала A34). 3. Определение толщины
листов A35).
§ 2. Резонансная частота прямоугольного вибратора 139
1. Продольные колебания симметрично нагруженного
составного стержня A39). 2. Теория колебаний асимметрично
нагруженного составного стержня A42). 3. Соотношение
между резонансной частотой и размерами вибратора A46).
4. Практический способ расчета размеров вибраторов A49).
5. Резонансная частота вибраторов с выступами для
крепления A53). 6. Резонансные частоты паразитных колебаний
по ширине A54).
§ 3/Эквивалентные элементы и фактор силы для
прямоугольного вибратора 157
1. Соотношение между эквивалентной массой т и полной
массой М A57). 2. Эквивалентная упругость s A58). 3.
Случай наличия внутренних механических потерь A59). 4.
Эквивалентное сопротивление внутренних механических потерь
г A60). 5. Коэффициент трансформации силы ?<> на
основной резонансной частоте A61). 6. Фактор силы А A61).
§ 4. Импедансы прямоугольного вибратора 162
1. Импеданс заторможенного вибратора A62). 2.
Кинетический импеданс A63). 3. Импеданс акустического
излучения A64).
§5. Влияние коэффициента поперечного сечения к на
коэффициент полезного действия преобразователя 165
§ 6. Распределение колебательной скорости для
прямоугольного вибратора 166
1. Колебательные скорости в различных точках A66). 2.
Коэффициенты распределения скорости в отсутствие нагрузки
A68). 3. Коэффициенты распределения компоненты
скорости, обусловленной нагрузкой A69). 4. Распределение
скорости при резонансе A69).
§ 7. Резонансная частота прямоугольного вибратора без одной
накладки 171
1. Вибраторы без одной накладки и вибраторы П-типаA71).
2. Графики резонансной частоты вибраторов без одной
накладки A71). 3. Эффективная масса вибратора без одной
накладки A74).
422
Оглавление
§ 8. Резонансная частота кольцевого вибратора с отверстиями
для обмотки 175
1. Эквивалентная масса и эквивалентная упругость A75).
2. Формула для резонансной частоты A77). 3. Влияние
коэффициента заполнения объема A78).
§ 9. Влияние коэффициента заполнения объема на коэффициент
полезного действия магнитострикционного вибратора ... 178
§ 10. Предельная механическая мощность магнитострикциопных
вибраторов 179
1. Введение A79). 2. Общая формула для предельной
излучаемой мощности A84). 3. Фактор формы *$и (со) для
выходной мощности A87). 4. Магнитные потери A89). 5.
Исследование рабочих условий A94). 6. Численные примеры A97).
Литература 205
Глава 6. Ферритовые магнитострикци онные вибраторы (Е. Кипучи) 207
§ 1. Общие замечания 207
§ 2. Требования, предъявляемые к магпитострикциопным
ферритам 208
§ 3. Характеристики магнитострикциопных ферритов 210
1. Коэффициент электромеханической связи B10). 2.
Механическая добротность Q B12). 3. Температурный
коэффициент резонансной частоты B12).
§ 4. Механическая прочность ферритов, используемых при
больших амплитудах колебаний 213
§ 5. Применяемые на практике ферритовые вибраторы 214
1. Простые типы вибраторов B14). 2. Тип вибратора с под-
мапшчиванисм постоянными магнитами B15). 3.
Вибраторы без одной накладки B16). 4. Вибраторы кольцевого
типа B17).
Литература 218
Глава 7. Основные типы пьезоэлектрических преобразователей
(Г. Судзуки) 219
§ 1. Основные уравнения 219
1. Основное уравиепие электроакустического
преобразования B19). 2. Интегрирование основного уравнения B23).
3. Основные уравнения пьезоэлектрического и электрострик-
ционного эффектов B26).
5 2. Преобразователи продольного типа 230
1. Вибратор продольного типа с дополнительной массой
B31). 2. Простые вибраторы продольного типа B37).
3. Составной вибратор продольного типа B40). 4. Пьезо-
керамический вибратор продольного типа B46).
3. Вибратор, колеблющийся по толщине 247
1. Кварцевые пластинки Х-среза B48). 2. Вибратор Ланже-
вена B48). 3. Основное уравнение колебаний пьезокера-
мического элемента по толщине B49).
§ 4. Вибратор с радиальными модами колебаний 249
§ 5. Кольцевой, или цилиндрический вибратор 254
§ 6. Вибратор сдвигового типа 256
1. Вибратор со сдвигом по толщине B56). 2, Вибратор со
сдвигом в плоскости B57).
§ 7. Изгибный вибратор 257
1. Электроакустические характеристики вибратора биморф-
Оглавление
423
ного типа B58). 2. Коэффициент электромеханической
связи B65).
§ 8. Измерение постоянных пьезоэлектрических и ньезокера-
мических материалов 272
1. Сегиетова соль B72). 2. Измерение постоянных
керамики титаната бария B78).
Литература 281
Глава 8. Эффективное затухание в пьезоактивных преобразователях
и характеризующие их универсальные графики (X. Симицу) 282
§ 1. Введение. Представление об эффективном затухании .... 282
§ 2. Угловые частоты резонансов при постоянном поле и при
постоянной намагниченности со0г и ыоа 284
1. Общие соотношения между <о0г и со0а B84). 2. Точки,
соответствующие частотам резонансов при постоянном поле
и при постоянной намагниченности на круговых
диаграммах комплексного импеданса и проводимости свободного
преобразователя B87). 3. Собственные механические нмие-
дансы преобразователя zM и z# B90).
§ 3.. Электроакустический к. п. д. х\са 291
1. Частота, при которой ч\еа достигает максимума B91).
2. Электроакустический к. п. д. т\еа при оHг и при сооа B92).
§ 4. Эффективное затухание при (о0а и <о0г 297
1. Случай согласования по модулю па электрической
стороне B97). 2. Случай согласования по модулю и по фазе
на электрической стороне C01).
§ 5. Требования к магнитострикционным материалам 304
§ 6. Распространение полученных теоретических результатов на
пьезоэлектрические преобразователи 307
Литература v 308
Глава 9. Пьезокерамичсские преобразователи в виде коротких
стержней (К. Сибаяма) 309
§ 1. Введение 309
§ 2. Свободные колебания изотропного стержня 309
1. Продольные моды колебаний C09). 2. Моды колебаний
по толщине C16). 3. Асимметричные колебания C18).
§ 3. Эквивалентная масса 319
1. Нормировка C19). 2. Эквивалентная масса C21).
§ 4. Некоторые предположения относительно пьезокерамических
вибраторов 321
§ 5. Фактор силы 323
1. Общее выражение для фактора силы C23). 2. Факторы
формы C23). 3. Численные примеры фактора силы C26).
§ 6. Коэффициенты электромеханической связи 328
1. Преобразователь с поверхностными электродами C29).
2. Преобразователи с внутренними электродами C31).
§ 7. Некоторые эксперименты для осповпых продольных мод . . 332
1. Эксперимент I C32). 2. Эксперимент II C35). 3.
Эксперимент III C36). 4. Эксперимент IV C37). 5. Эксперимент V
(исследование эквивалентных масс) C38).
§ 8. Продольпая мода с узловыми окружностями 341
1. Частотные характеристики C41). 2. Факторы формы как
критерии качества с точки зрения интенсивности колеба-
424
Оглавление
ний C42). 3. Мода колебаний по толщине C43). 4. Фактор
формы х\ Для более высоких мод C44). 5. Фактор формы
Xi для колебаний по толщине C47). 6. Пример C47).
§ 9. Вибратор Ланжевена 349
Литература 352
Глава 10. Характеристики звукового поля, связанные с работой
ультразвуковых преобразователей (К. Фукусима, Д. Санеё-
си, Е. Кипучи) 353
1. Направленность 353
1. Принцип Гюйгенса и уравнение Рэлея C53). 2.
Направленность круглого диска, колеблющегося в бесконечном
экране C55). 3. Направленность прямоугольной
пластинки, колеблющейся в бесконечном жестком экране C58).
4. Направленность цилиндрического источпика звука C61).
§ 2. Импеданс излучения 363
1. Импеданс излучения круглого поршня C64). 2. Импеданс
излучения прямоугольного поршня в бесконечном
экране C65). 3. Импеданс излучения цилиндрического
источника C67).
§ 3. Отражение ультразвуковых волн от препятствий конечных
размеров 369
1. Введение C69). 2. Плоские поверхности C70). 3.
Изогнутые поверхности C75). 4. Обсуждение C77). 5.
Эксперименты C82). 6. Заключение C84).
§ 4. Некоторые стороны ультразвуковой кавитации 385
1. Типичные характеристики сопротивления излучения при
высоких уровнях звука C86). 2. Определение
сопротивления излучения и метод наблюдения C87). 3. Порог
кавитации C88). 4. Акустическая мощность в случае кавитации
C88). 5. Зависимость сопротивления излучения от
концентраций воздуха в воде C91). 6. Зависимость
сопротивления излучения от частоты ультразвука C92). 7. Создание
зародышей кавитации C93). 8. Сопротивление излучения
в случае импульсного возбуждения C93). 9. Влияние
шероховатости поверхности C96). 10. Влияние эрозии
поверхности C96). 11. Влияние обезгаживаиия поверхности C96).
12. Эксперименты в других жидкостях C97). 13. Влияние
материала поверхности C98).
Литература 399
Глава 11. Электрические волновые фильтры, основанные на
ультразвуковых колебаниях твердых тел (К. Сибаяма) 400
1. Магпитострикционные фильтры 400
1. Простейший фильтр с механическими вибраторами D00).
2. Эквивалентная схема магнитострикциошюго резопато-
ра D01). 3. Магпитострикционные фильтры
дифференциального типа D02). 4. Магнитострикционный фильтр совместно
с электрической цепью D08). 5. Резонатор: материал и
конструкция D08). 6. Определение параметров
эквивалентной схемы магнитострикционных резонаторов D09).
§ 2. Электромеханические фильтры 411
1. Общие представления о проектировании по аналогии
с трехэлементной схемой D11). 2. Некоторые примеры
электромеханических фильтров D14). 3. Преобразователи
и выходные устройства фильтров D16).
Литература 419