















































































































































































































































































































































































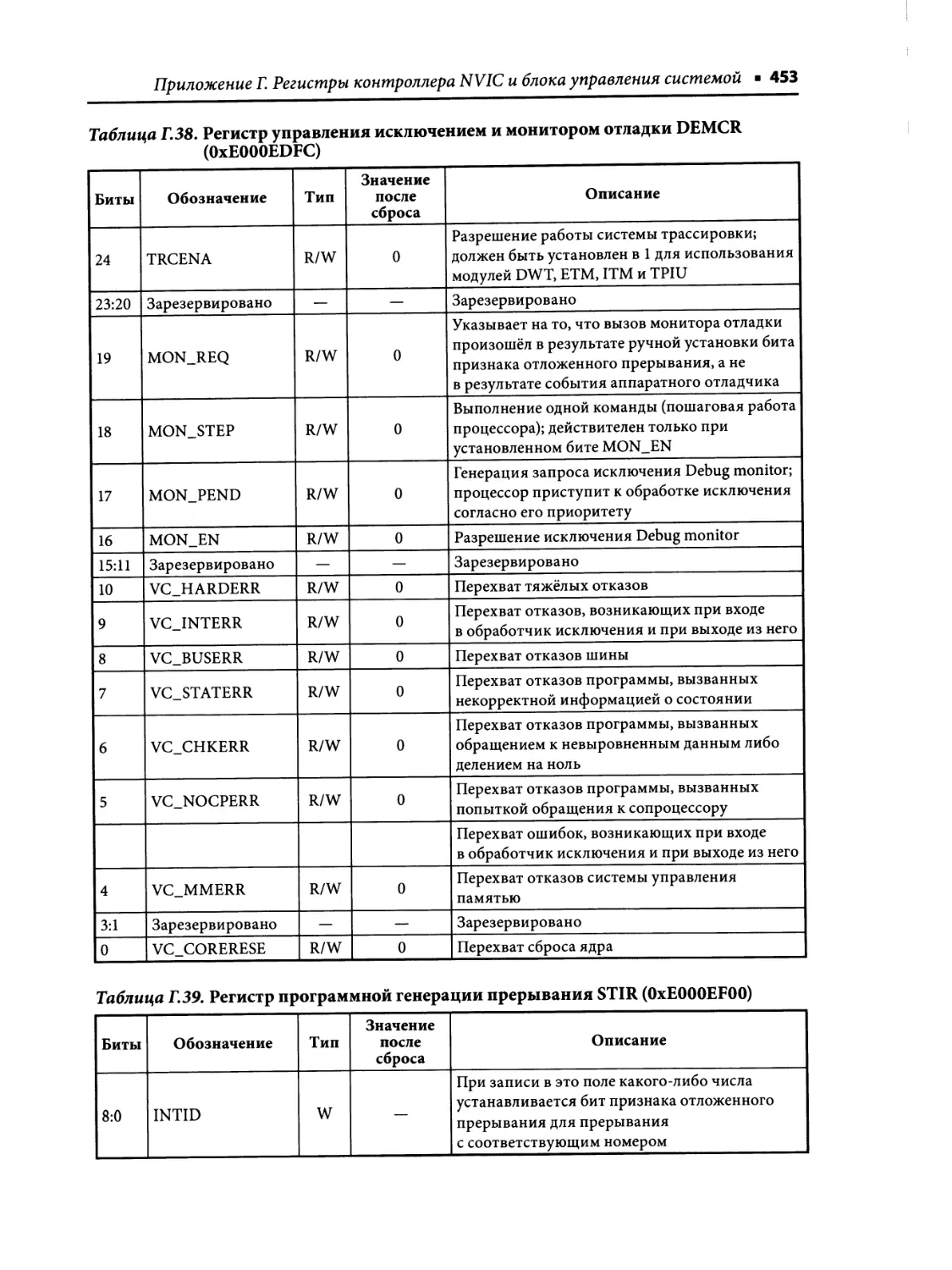










































































Автор: Ю Дж.
Теги: блоки обработки данных процессоры программирование электроника электротехника
ISBN: 978-5-94120-243-0
Год: 2012




Текст
Ядро Cortex..M3 компании ARM
Полное руководство
Ь4 Э КА
Joseph Yiu
ТНЕ DEFINITIVE GUIDE
ТО ТНЕ ARM CORTEX..M3
Newnes
СЕРИЯ
МИРОВАЯ ЭЛЕКТРОНИКА
Джозеф Ю
ЯДРО CORTEX..M3
КОМПАНИИ ARM
Полное руководство
Перевод А. В. Евстифеева
$4. Э КА
Москва
Издательский дом «Додэка
ХХI»
2012
УДК 004.31(035.3)
ББК 32.973
04я81
Юll
Данное издание подrотовлено при участии компании «Компэл» и российско
ro представительства компании Texas Instruments. На сайтах www.compel.ru и
www.ti.com/ru вы можете получить консультацию, а также заказать бесплатные
образцы микросхем.
Телефон rорячей линии технической поддержки ТI +7
495
981
07
01.
Ю, Джозеф.
Юll Ядро Cortex
M3 компании ARM. Полное руководство / Джозеф Ю; пер. с
анrл. А. В. Евстифеева.
М. : Додэка
ХХI, 2012.
552 с. : ил.
(Мировая
электроника).
Доп. тит. л. анrл.
ISBN 978
5
94120
243
0.
Настоящая книrа представляет собой исчерпывающее руководство по HOBO
му 32
битному процессору компании ARM
Cortex
M3. В данном руководстве
подробно описана архитектура процессорноrо ядра Cortex
M3 и ero подсистемы
памяти. Также подробно рассмотрены остальные узлы процессора, в том числе
контроллер векторных прерываний NVIC, модуль защиты памяти MMU и разно
образные компоненты отладки. Приводится детальное описание новой системы
команд Thumb
2, поддерживаемой данным процессором.
Книrа содержит большое число примеров проrраммноrо кода как на языке
Си, так и на ассемблере.
Это руководство должно присутствовать на столе любоrо разработчика, ис
пользующеrо в своей работе микроконтроллеры с ядром Cortex
M3. Полнота и яс
ность изложения материала книrи также позволяет рекомендовать её студентам
соответствующих специальностей и подrотовленным радиолюбителям.
УДК 004.31(035.3)
ББК 32.973
04я81
Все права защищены. Никакая часть этоrо издания не может быть воспроизведе
на в любой форме или любыми средствами, электронными или механическими,
включая фотоrрафирование, ксерокопирование или иные средства копирования или
сохранения информации, без письменноrо разрешения издательства.
Книrа «Ядро Cortex
M3 компании ARM. Полное руководство» Дж. Ю подrо
товлена и издана по доrовору с Elsevier Inc., 30 Corporste Drive, 4th Floor, Burlington,
МА 01803, USA.
ISBN 978
5
94120
243
0 (рус.)
ISBN 978
1
85617
963
8 (анrл.)
@ 2010 Elsevier Inc. АН rights reserved.
@ Издательский дом «Додэка
ХХI», 2012
СОДЕРЖАНИЕ
]J(:1f)fIIII1f
JIIJII()
(:JI()]J() ................................................................... 1
]J(:1f)'IIII1f
JIIJII()
(:1I()]J() ...................................................................
]J(:1f)'IIII1f
JIIJII()
(:1I()]J() ...................................................................
]J[I'
II(:JI()]JII
Ci]J1f()I'Ci.....................................................................
()()()
IICi'l
III1J1 ................................................................................ :;
lI()(:(:Cil'lIii ..................................................................................... ()
JICi]JCi 1.
]J]J
III1
........................................................................
1.1. Процессор ARM Cortex
M3
что же это такое? . ...................................................... 9
1.2. ARM
компания и архитектура .......................................................................... 11
1.2.1. Историческая справка........................................ ....................................... ............ .11
1.2.2. Версии архитектуры...... .......... ............................................ .................... .............. 12
1.2.3. Обозначения процессоров ......................................................................... .......... .14
1.3. Развитие набора команд .... ............... ...... ..... ....... ..... .... ...... .............. ...... .......... ....... 16
1.4. Технолоrия Thumb
2 и архитектура набора команд .......................................... 17
1.5. Области применения процессора Cortex
M3....................................................... 18
1.6. Структура книrи .. ....... ........... .................... ........ .... ... ... ... .... ..... ...... ...... ..... ............... 19
1.7. Дополнительная литература .................................................................................. 19
lICi]JCi
.
()()
()I' C()rt
x
M
..........................................................
1
2.1. Основные сведения ......... ........... ................ .......... ... ... ..... ....... ........ ..... ............... ..... 21
2.2. Реrистры.......................................... ........... ......... ... ... .... ... .......... .... ...... ....... ... ....... .... 22
2.2.1. RO.. .R12
реrистры общеrо назначения......................................................... 23
2.2.2. R 13
указатели стека.................................................................................... ....... 23
2.2.3. R14
реrистр связи.................................. ............................... .............................. 23
2.2.4. R15
счётчи к команд... ....................... ........ ........... ............. .................... ............. 23
2.2.5. Реrистры специальноrо назначения .................................................................. 23
2.3. Режимы работы ............ ...... .......... ..................... ......... ...... .................................... ... 24
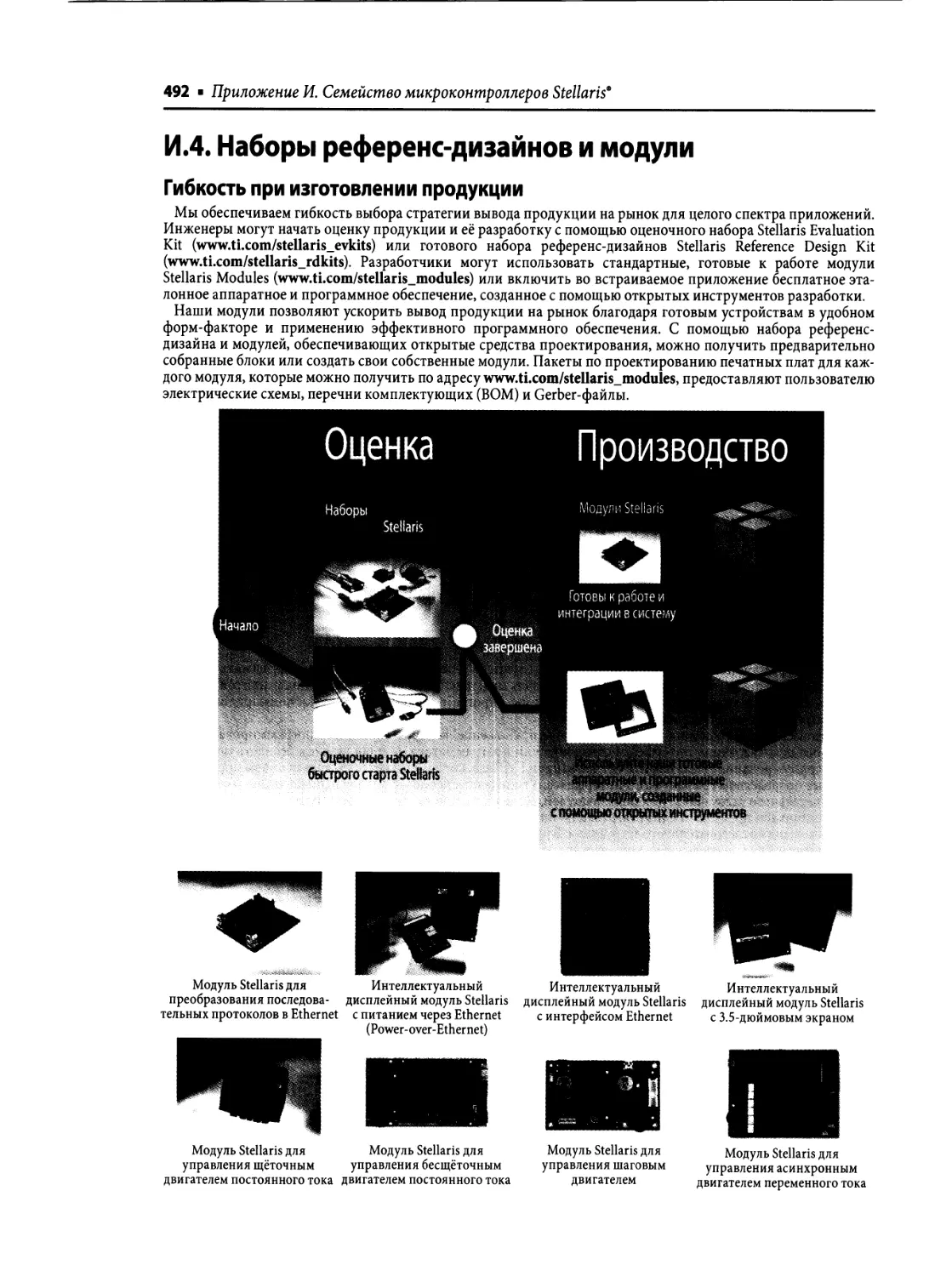
МИКРОl(онтроллеры Stellaris
,.:: j) 'I1{ft; .' .... @
на! базе ААМ Соrtех..МЗ
И ААМ@ Corte
,..;,;; . ' '''a '''' ur '' , '1 \",
Четыре основных преимущества Stellaris@
+ Ф Расширенные коммуникационные возмо.ности:
встроенные 10/1 00 Ethernet МАС/РНУ, CAN, USB..KoHTponnepbI
+ Ф DSР инструкции и модуль вычислений с плавающей точкой (FP
(Cortex..M4F)
+ Ф Простота разработки с использованием библиотек BepXHero
уровня API Stellaris Peripheral Driver Library для проrраммирования
встроенных периферийных модулей
+ Ф Возросшая энерrоэффективность за счет HOBoro техпроцессw-
65 нм (Cortex M4F)
Москва
Тел.: (495) 995 0901
E mail: ti(g1compel.ru
Санкт Петербурr
Тел.: (812) 327 9404
E mail: ti@ compel.ru
tI НОJИDэJ
www.compel.ru
Содержание . VII
2.4. Встроенный контроллер вложенных векторных прерываний........................ 25
2.4.1. Поддержка вложенных прерываний .................... ............................................. 25
2.4.2. Поддержка векторных прерываний .................................................................. 26
2.4.3. Поддержка динамическоrо изменения приоритетов ................................... 2б
2.4.4. Уменьшение времени реакции на прерывание .............................................. 2б
2.4.5. Маскирование прерываний........ ... ............................ .......... ......... .... .......... ......... 2б
2.5. Карта памяти ......... ....... ..................................... ..... .... ... ........ ........... ........ ............. ... 26
2.6. Интерфейсы шин.. .................................. .......... ...... ... ..... .......... .......... ..... ................ 27
2.7. Модуль защиты памяти MPU ................................................................................28
2.8. Набор команд ........ ................................... ......... ...... ... ..... ....... ......... ... ..... ................. 28
2.9. П рерывания и исключения ... .......... ........ ......... ..... ... ..... .................. ....... ............... 30
2.9.1. Низкое энерrопотребление и высокая энерrоэффективность ....................31
2.10. Возможности отладки ................................ ........ .... .... ... ... ................. ..... .... ... ........ 32
2.11. J?е
юме......................................................................................................................33
2.11.1. Высокая производительность . ................ ....... ........ ................. ................ ........... 33
2.11.2. Развитые средства поддержки прерываний.................................................. 34
2.11.3. Низкое энерrопотребление.... ................. ...................... ................. ........ ............. 35
2.11.4. Системные возможности.. .......... .................. ........... ... ........................ .......... ...... 35
2.11.5. Поддержка отладки............. ..... ............ ............ .................. ........ .............. ............ 35
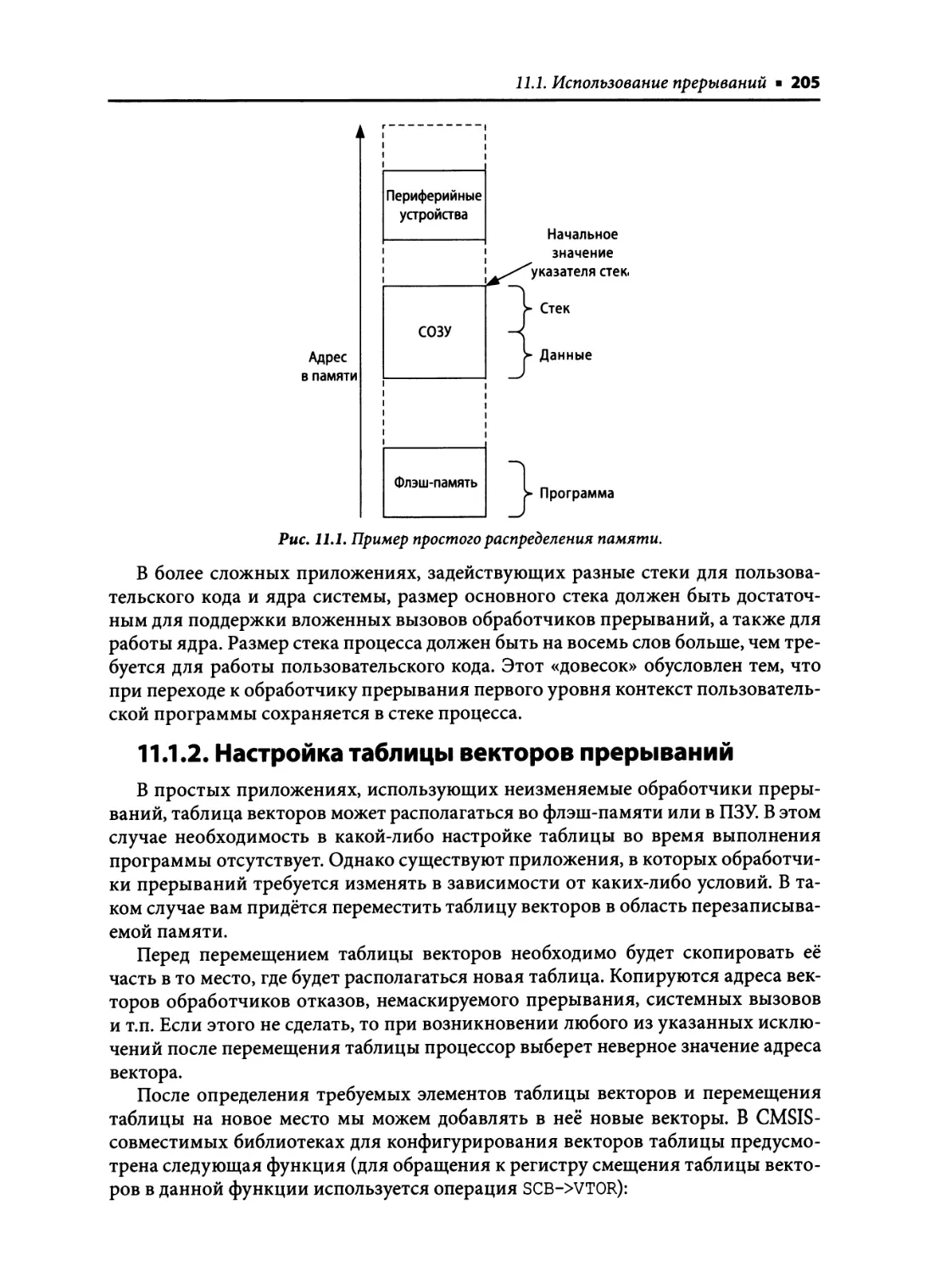
fJICi]Ja
. ()(:II()]JbI C()rt
x
M
.......................................................
7
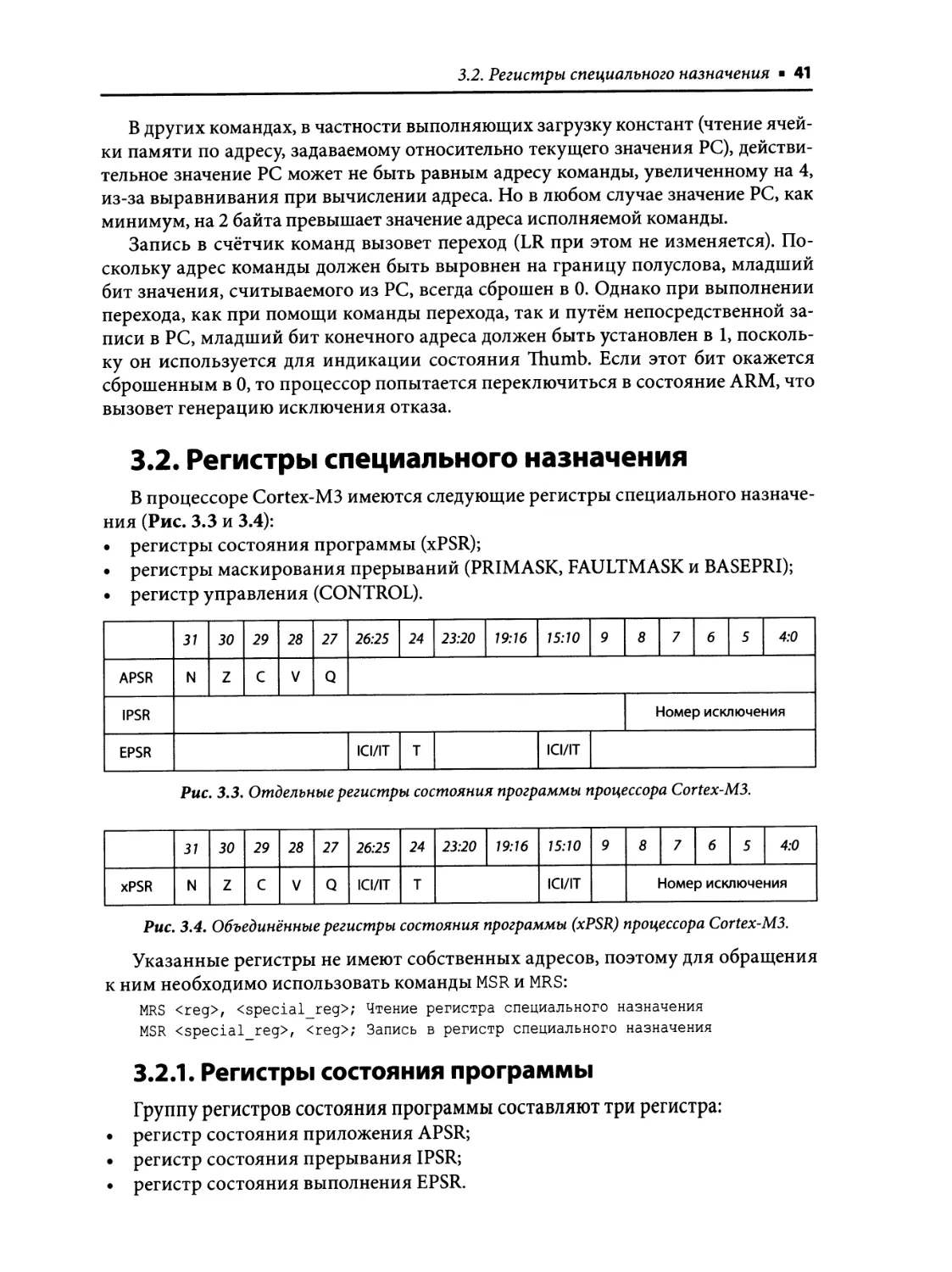
3.1. J?eJlIIC:TpJ)I ....................................................................................................................
7
3.1.1. Реrистры общеrо назначения с RO по R7 ........................................................... 37
3.1.2. Реrистры общеrо назначения с R8 по R12 ........................................................ 37
3.1.3. Указатель стека R13...................... .... ............................. .......... ......................... ....... 37
3.1.4. Реrистр связи R14 ............ .......... ....... ................................... ..................... ......... ...... 40
3.1.5. Счётчи К команд R15 ...... ............... ................... ............ ....... ...................... ....... ....... 40
3.2. J?еrистры специальноrо назначения ....................................................................41
3.2.1. Реrистры состояния проrраммы .............................. .......................................... 41
3.2.2. Реrистры PRIMASK, FAULTMASK и BASEPRI ............................................... 43
3.2.3. Реrистр управления CONTROL .......................................................................... 44
3.3. Режимы работы........................................................................................................ 45
3.4. Исключения и прерывания .. .............. ........... ..... .... ..... ........ ........ ..... .......... ... ........ 47
3.5. Таблица векторов..................................................................................................... 49
3.{). С::те)( ............................................................................................................................45»
3.б.l. Основные стековые операции..... ... ............. ................... ................ ........... ...... .... 50
3.б.2. Реализация стека в процессоре Cortex
М3 .......................................................51
3 .б. 3. Два стека процессора Cortex
М3.................................. ....................... .......... ...... 52
3.7. Цикл сброса............................................................................................................... 54
JlCi]Ja
. ]J[a()()}> J()
all
.............................................................
()
4.1. Основы языка ассемблера ...................... .... .................. .......................................... 56
4.1.1. Язык ассемблера: основы синтаксиса ................................................................ 5б
4.1.2. Язык ассемблера: использование суффиксов.................................................. 57
4.1.3. Язык ассемблера: унифицированный язык ассемблера ............................... 58
ortex-M3
от Texas Instruments ..
мноrообразие интерфейсов
КЛЮЧЕВЬIЕ ОСОБЕННОСТИ:
· Производительность до 100 MIPS
· 3аrруженные в АОМ библиотека
драйверов периферии
и таблицы AES и САС
· Физический уровень Ethernet
на кристалле
· BootLoader для обновления
пользовательскоrо ПО, том числе
для Ethernet
· 32..разрядная шина для подключения
внешней периферии и памяти
· Усовершенствованный алrоритм
управления приводом
· Три аналоrовых компаратора
· Два 8-канальных 12..разрядных АЦП
Содержание . IX
4.2. Список команд. ..... ....................... .................... ..... .... ...... ........ ......... ..... ............. ... ... 59
4.2.1. Неподдерживаемые команды.. ................ ....... ........ ........... ..... ........ .......... ........... 64
4.3. Описание команд.. .............. ......................... ....... .... .... .... ...................... ....... ............ 65
4.3.1. Язык ассемблера: пересылка данных................................................................. 66
4.3.2. Псевдокоманды LD R и AD R... ...... .......... ... ............. ... ........... .......................... ...... 69
4.3.3. Язык ассемблера: обработка данных ................................................................. 70
4.3.4. Язык ассемблера: вызов подпроrрамм и безусловный переход................. 75
4.3.5. Язык ассемблера: условное выполнение и переходы .................................... 76
4.3.6. Язык ассемблера: объединение операций сравнения и условноrо
пер ехода ....................................................................... ................................... 79
4.3.7. Язык ассемблера: команды барьерной синхронизации ................................81
4.3.8. Язык ассемблера: операции насыщения........................................................... 82
4.4. Некоторые полезные команды процессора Cortex
M3 ......................................85
4.4.1. Команды MSR и MRS ............................................................................................. 85
4.4.2. Ещё раз об IT
блоке .... ..... ..... ..... ............... ........... ............... ......... .... ..... ......... ......... 86
4.4.3. Команды SD IV и UD IV . ..... ............. .............. ............... ... ........................ ........... .... 87
4.4.4. Команды REV, REVH и REVSH ........................................................................... 88
4.4.5. Перестановка битов.. ..... ..... .......... ................................... ........................ .......... ..... 88
4.4.6. Команды SXTB, SXTH, UXTB и UXTH . ............................................................ 88
4.4.7. Очистка и вставка битовоrо поля ....................................................................... 89
4.4.8. Команды UBFX и SBFX.. ..... ............. ........... ............. ......... ...... .................. ............. 89
4.4.9. Команды LD RD и STRD .... ........... .... ............................ ...................................... ... 89
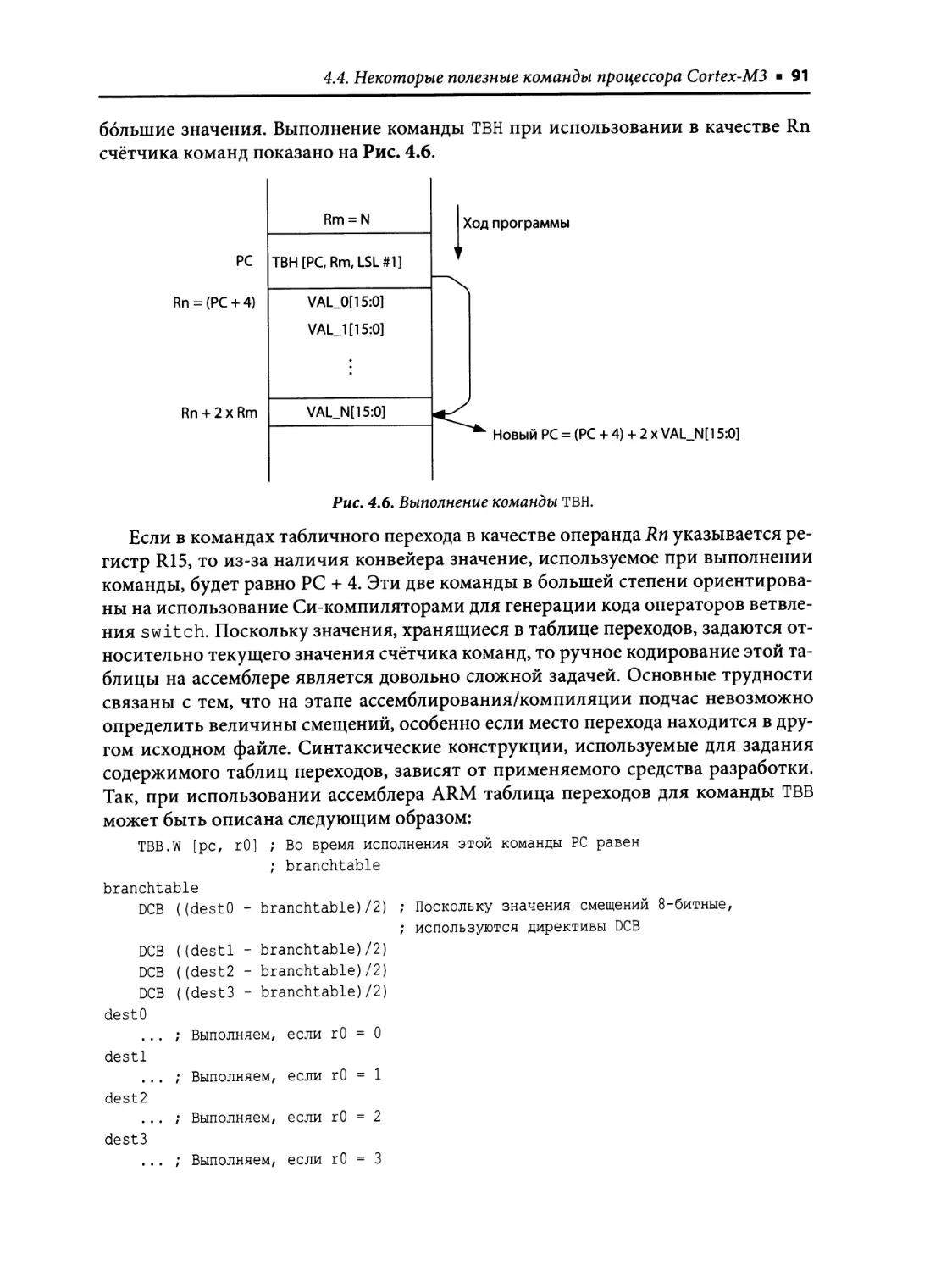
4.4.10. Команды табличноrо перехода ТВВ и ТВН.................................................... 90
fJICiIJa 5. CII(:1f
Ma паМJl1f1l ........................................................... 9
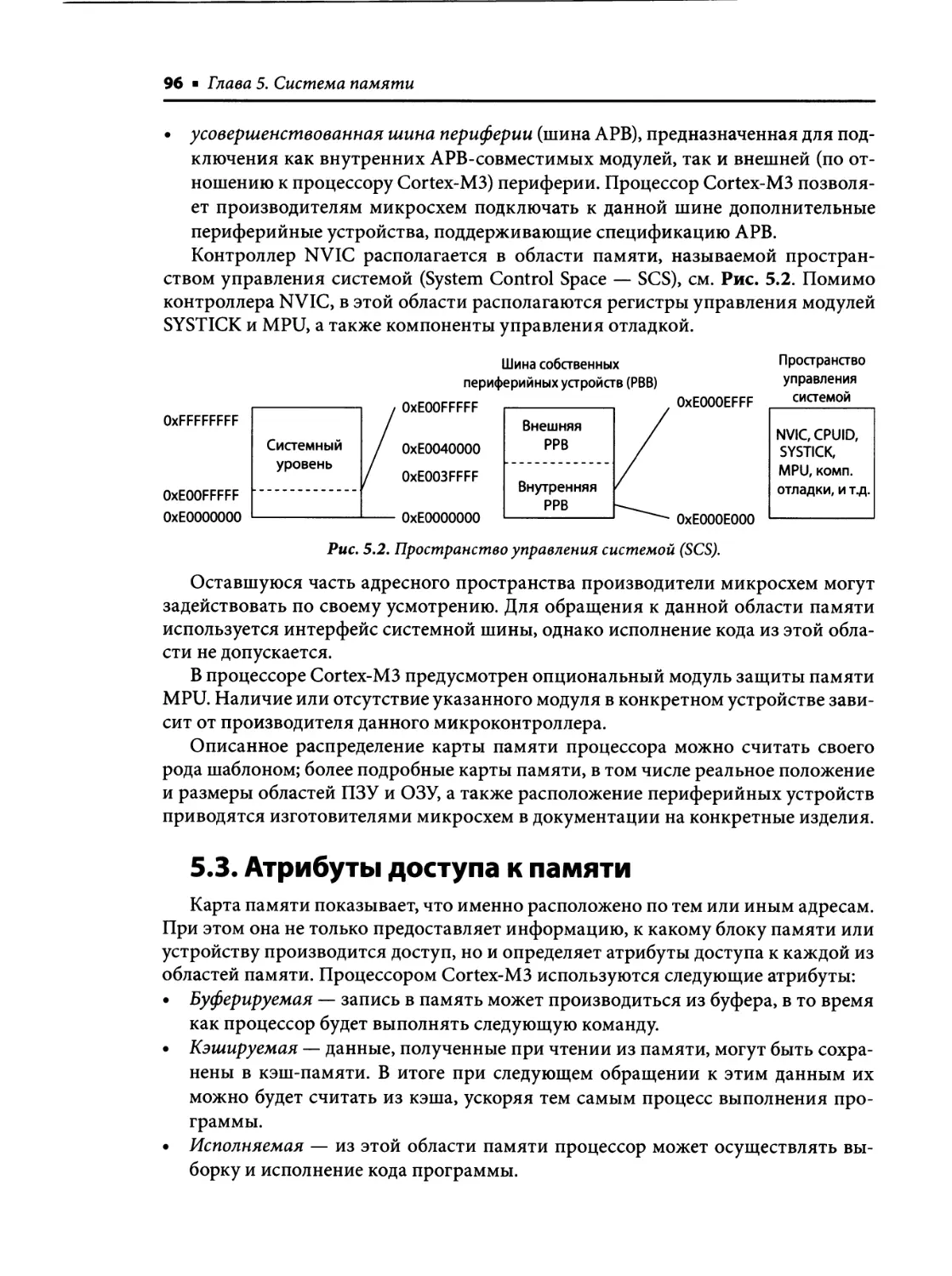
5.1. Основные особенности системы памяти ............................................................. 93
5.2. Карта памяти ......... ..................................... ......... .... ... ..... ......... ......... ..... ........... ... .... 93
5.3. Атрибуты доступа к памяти ..................... ........ .... ... ...... ......... ......... ..... ............ ...... 96
5.4. Права доступа к памяти, принятые по умолчанию ........................................... 98
5.5. Операции побитовоrо доступа .............................................................................. 99
5.5.1. Преимущества использования метода bit
band............................................ 103
5.5.2. Битовые операции с данными разной разрядности ................................... 106
5.5.3. Битовые операции в Си
проrраммах .............................................................. 106
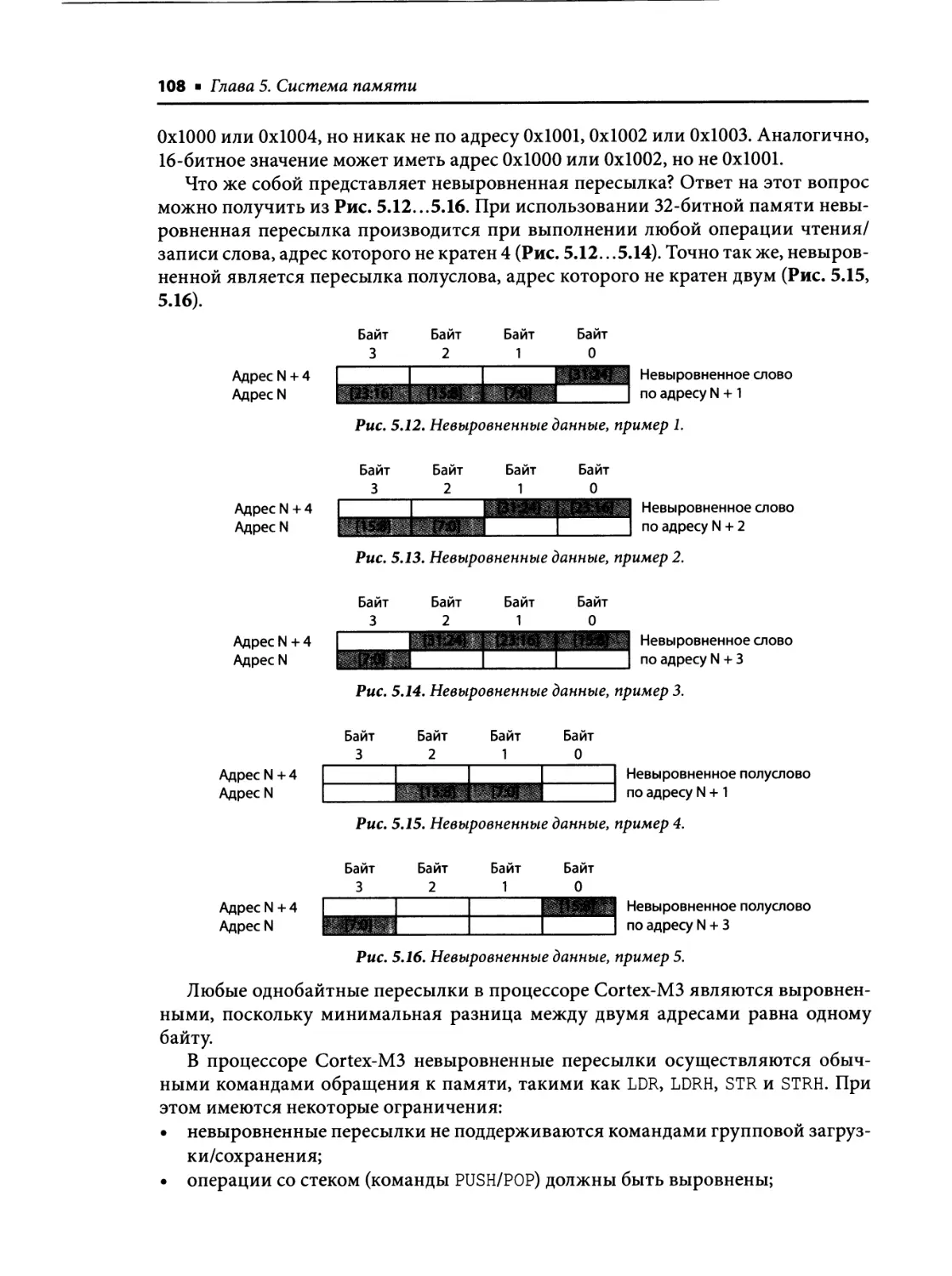
5.6. Обращения к невыровненным данным ............................................................. 107
5.7. Монопольный доступ ............................. .......... ....... .... ... ..... ................ ........ ... ....... 109
5.8. Порядок расположения байтов ............................................................................111
fJIaIJa (). ()(:()()
III1()(:1fIlI'
CilIlI
Ciцllll C()rt
x
M
........................ 11
6.1. Конвейер.................................................................................................................. .114
6.2. Подробная блок
схема . ......... ................. .......... ..... ... ... ....... ................. .......... ........ 116
6.3. Интерфейсы шин в процессоре Cortex
M3........................................................ 119
6.3.1. Шина 1
Code..... ............ ..... ..................... ........ ..................... ......... ........ ........... ........ 120
6.3.2. Шина D
Code ... ................ .................... .......... ....................... ..... ......... ........... ........ 120
6.3.3. Системная шина.... ......... ..... .... ..... .................... ................ ....... ................... ........... 120
6.3.4. Внешняя шина РРВ .... ..... ..... ..... ....... ... ...... ........... ...... .... ..... ......................... ......... 120
Решения по питанию для микроконтроллеров
на базе ядра Cortex..M3/Cortex..M4
Семейство Stellaris от Texas Instruments ведущее в отрасли микроконтроллеров реальноrо времени (MCU)t
основанных на революционной Cortex M3/M4 технолоrии от ДАМ.
Управление питанием для ТИПОВblХ применений
· Размер pewettIIЯ 12 ""
· Вwccж. PSRR (ао 90 16)
· Режимы
на мaлoi нarpyзtr8
· ВХОАМОе от 0.3 В
· AвтoмaПIчecкoв
м-.. ltllW" яоеи.......
II I10181Ca101Ц8rO
· Peжммw энeprос6ереЖ81111R
на мanoi нarpyзкe
· ДIIanaaoи ВХО,l&ИOrO
_...... : 1,8... 5.5 В
· До9ККПД
· Peжммw 8f_
на мanoi нarpyзtr8
· ДIIanaaOН в-..нoro
..........: 3.5 ... 28 В
· PacвнIpeиныI Teмnepaтypныl
AМ8R83OК : 1WC
. ,..... aнeproc6epeжett
....... ttarpy3кt
· Диапазон вxoднoro
нanpaж.etIU: 2,3 .. 6 В
· OДIIН 6ООМА DC/OC
· даа 200 МА LOO
· ф-циI CPI3IIbltIII» ч-:roтw..
умро.... .. _11 ШМIIII эмм
· д-Iaэoн вxoaнoro
нanpяжeиIItI: 3,0 17 В
· КПДRR9S%
· Ток nOТPe6JIettIII < 20 IIA
· J'IrIwIIII IllfAYCFptIII PSRR
. Дocmoчнo
4.7 мteФ
· кopqyc ЗхЗ...... soм.s
TPS65000x
..81 ...."
ТРS6ЗОО1
I$ {'.,
>- Для заказа образцов, демонстрационных оnат It референс д.заiНОВ обращаiтесь на сайт www.compel.ru
ми по эпепронноi оочте: U О compel.ru
Содержание . XI
6.3.5. Шина DAP ......... ........... ................................ ... ......... ..... ........... ..................... .......... 120
6.4. Друrие интерфейсы процессора Cortex
M3....................................................... 121
6.5. Внешняя шина РРВ ... .................................... ... .... ... .... .... ..................... ................. 121
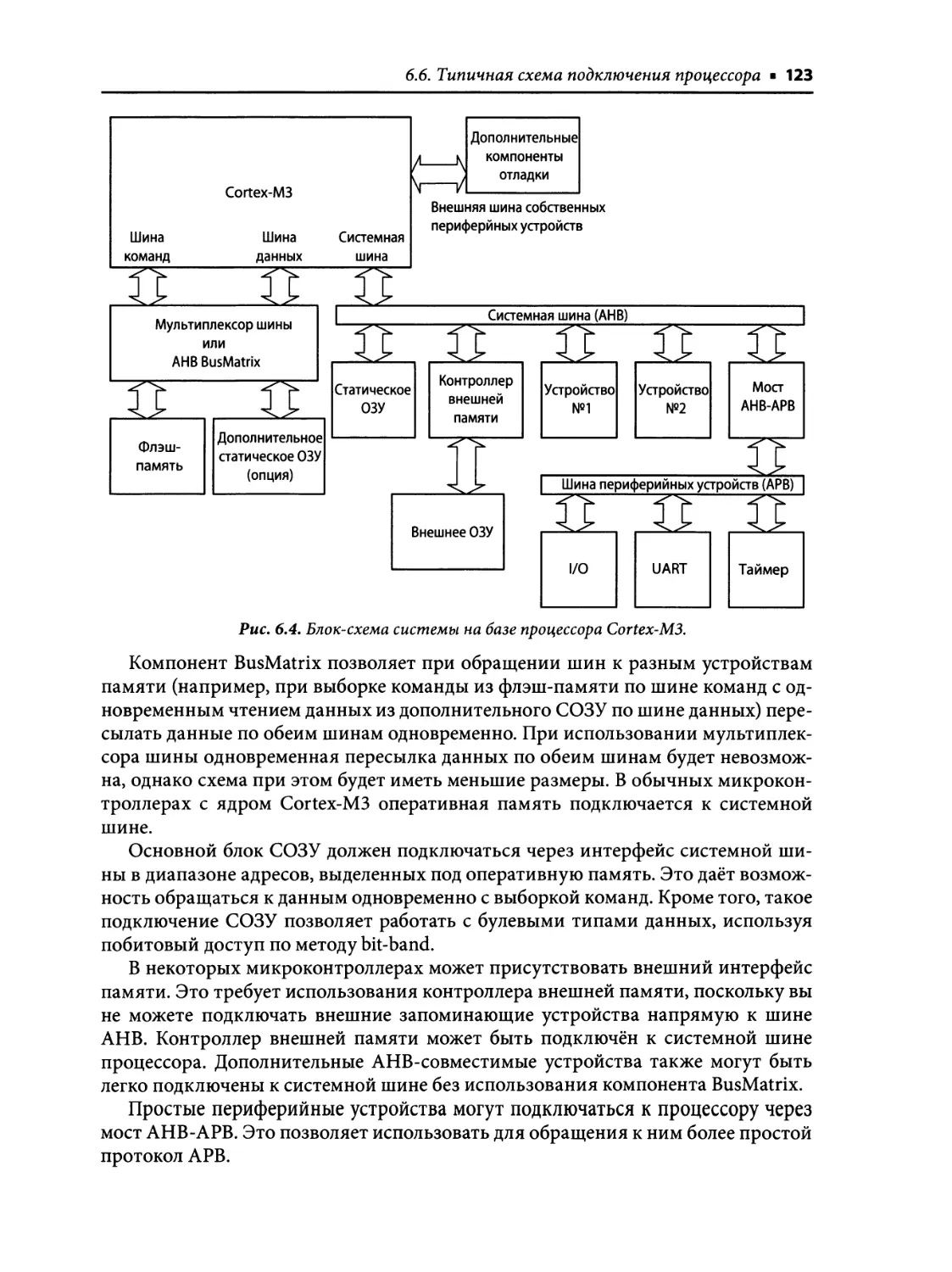
6.6. Типичная схема подключения процессора....................................................... 122
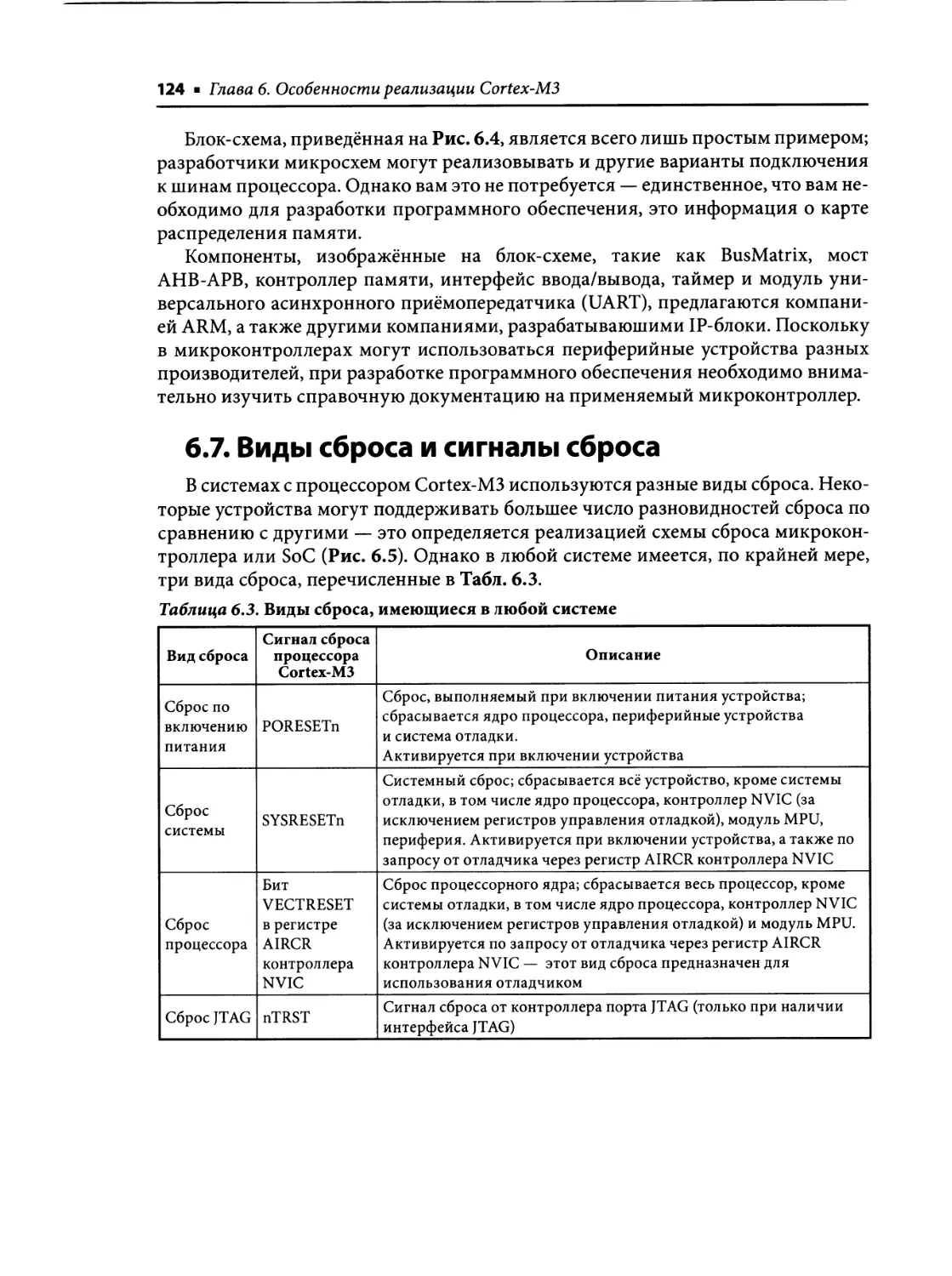
6.7. Виды сброса и сиrналы сброса............................................................................. 124
lICiBCi 7. исКlIю'l
lIиJl.................................... ........ .................. .12()
7.1. Типы исключений.. .................. ............ ....... ........ .... ... ..... ........ ............... ................ 126
7.2. Приоритеты исключений .................. ....... ........ ..... ... .... ........ .......... ....... ............... 128
7.3. Таблица векторов ... .............................. ...... ......... ... ... ..... ....... ................. ................ 134
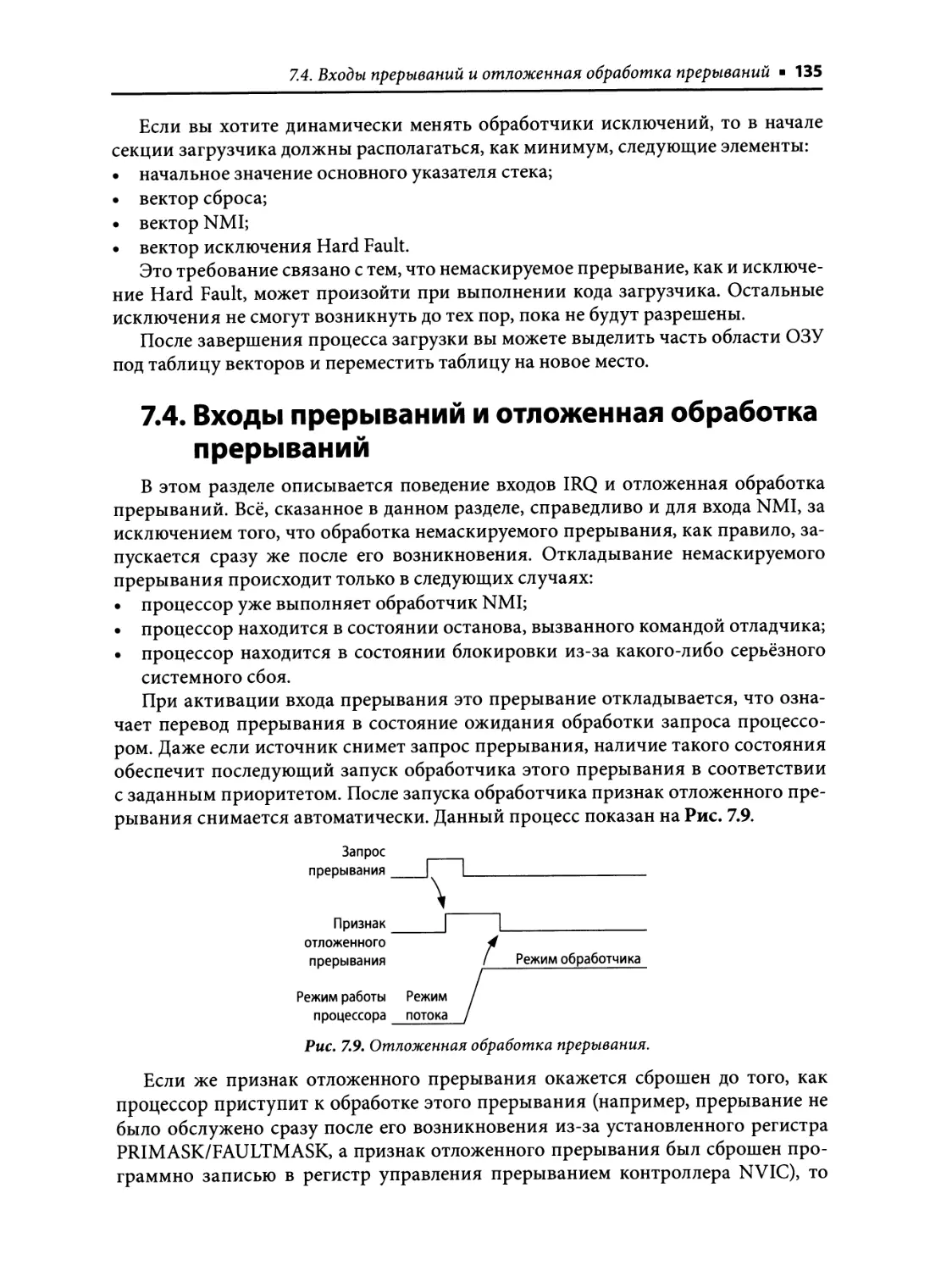
7.4. Входы прерываний и отложенная обработка прерываний............................ 135
7.5. Исключения отказов ................................ ........... ... ... ..... ....... .......... ...... ................ 138
7.5.1. Отказы шины..................... ..... ............................................... ................................. 138
7.5.2. Отказы системы управления памятью ........................................................... 140
7.5.3. Отказы проrраммы.... ..... ............. ..................................... ................................ .... .141
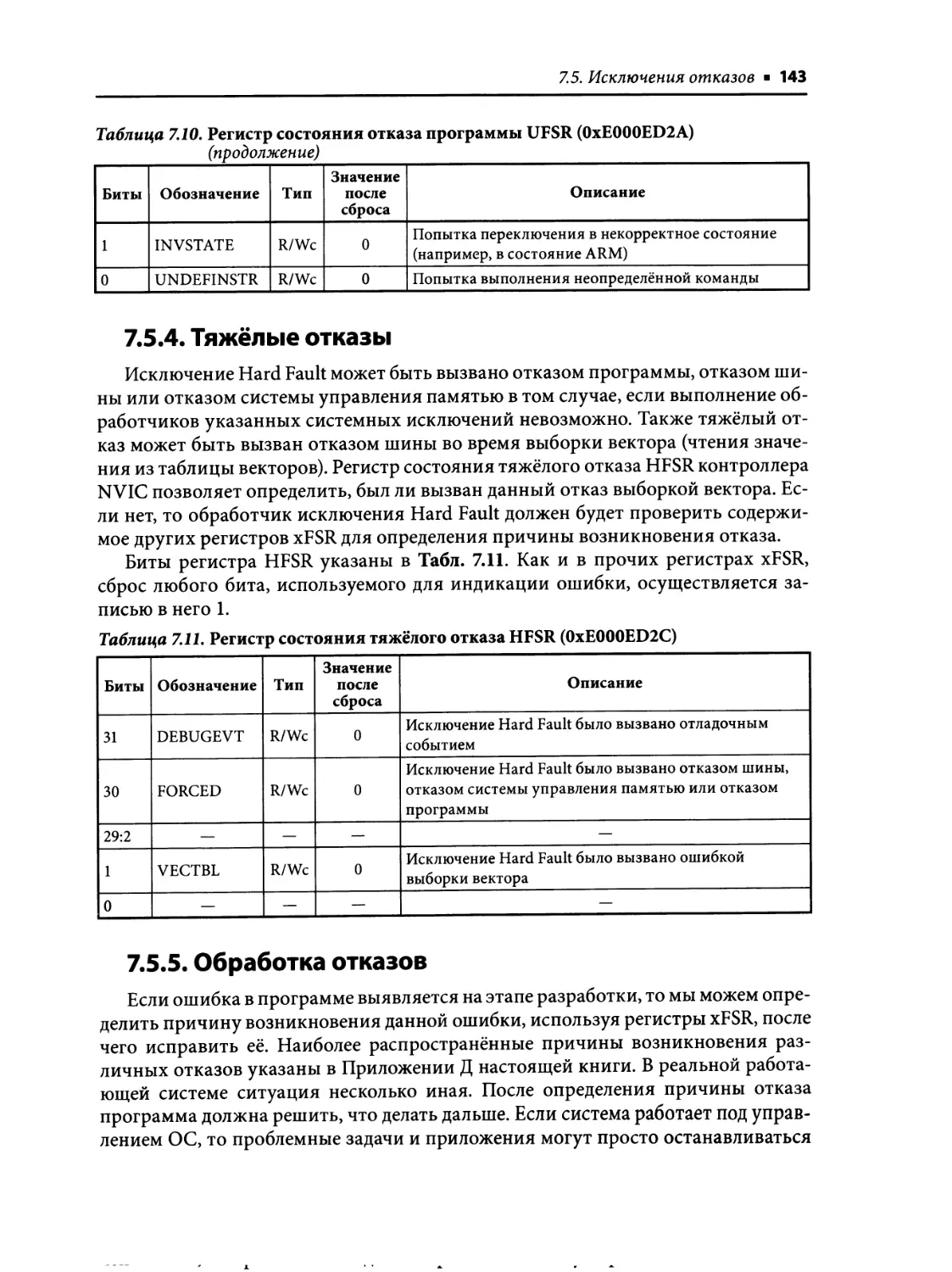
7.5.4. Т яжёлые отказы...................................... ....................... .............. ..... ..... ......... ....... 143
7.5.5. Обработка отказов................................................ ............................ .................... 143
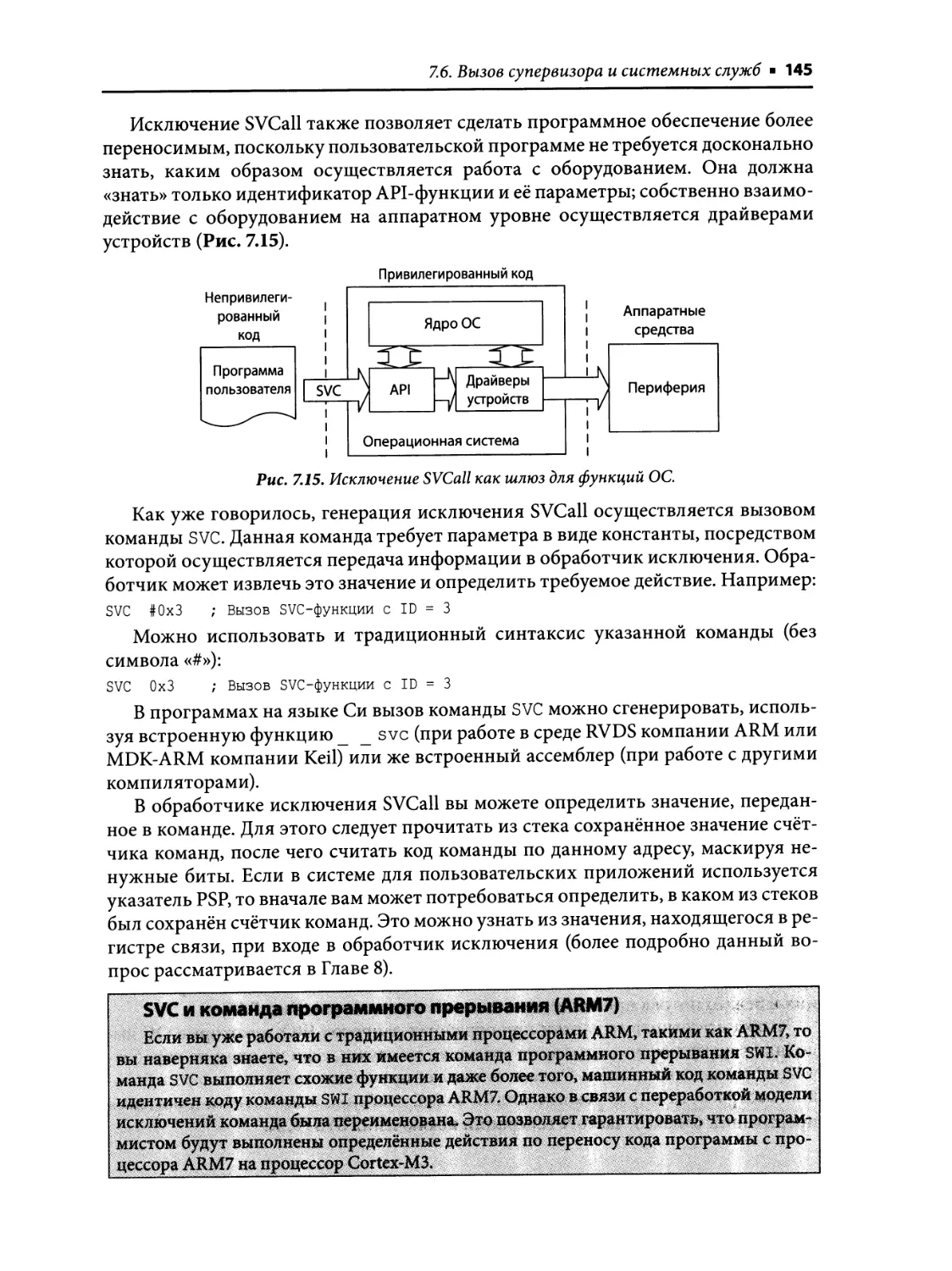
7.6. Вызов супервизора и системных служб ............................................................. 144
flIaBCi 8. K()II1fI'()lIlIel' IJlI()жеllIlЫХ IJeK1f()l'lIbIX IIl'еl'ЫВCillиii
и )'III'CiВlIеllие Пl'еl'ываllИJlМИ ...................................149
8.1. Общие сведения о контроллере прерываний ................................................... 149
8.2. Базовые средства конфиrурации прерываний ................................................ 150
8.2.1. Разрешение и запрещение прерываний.......................................................... 150
8.2.2. Установка/сброс признака отложенноrо прерывания ............................... 153
8.2.3. Уровни приоритета.............................................................................................. 153
8.2.4. Активное состояние............................................ ........................... ..... ......... ........ 153
8.2.6. Реrистр BASEPRI ........... ......... ........................... ............... ............................... ...... 155
8.2.7. Конфиrурационные реrистры остальных исключений ............................. 156
8.3. Примеры инициализации прерывания ............................................................ 158
8.4. Проrраммные прерывания .............. ........ ....... ..... ... .... ........ ........... ...... ................ 160
8.5. Системный таймер SYSTI СК....................... ....... .... ... .... ......... ..... .... ...... ............... 161
flIalJa 9. Пl'еl'ЫIJаllllJl ..............................................................1()4
9.1. Последовательность обработки прерываний/исключений ............................ 164
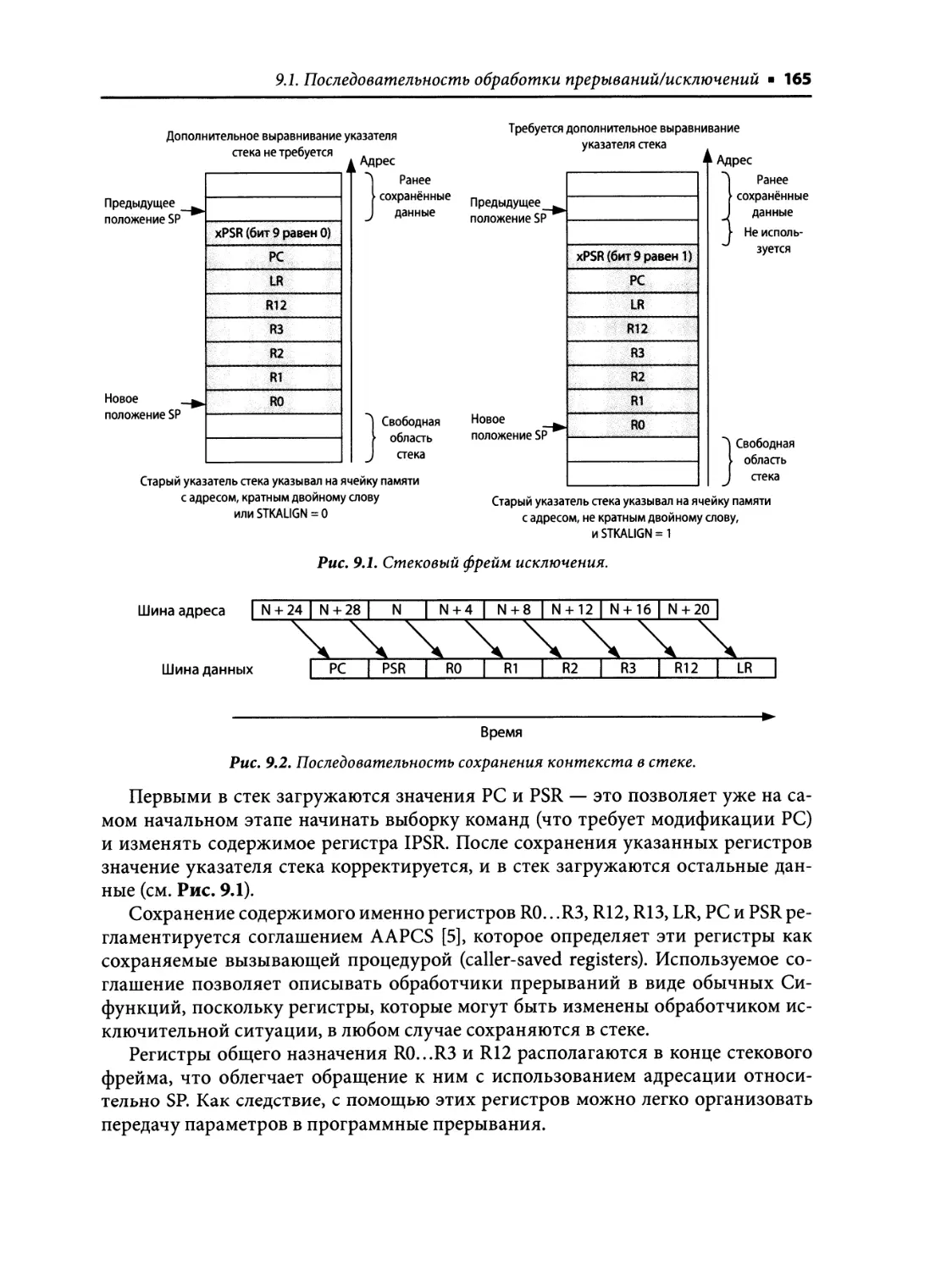
9.1.1. Сохранение контекста... ................ ....................................................................... 164
9.1.2. Выборка вектора..................................................................... ..... .................. ........ 166
9.1.3. Обновление реrистров ..................... ................................................. ................... 166
9.2. Выход из исключения ......... ............ ........... ....... .... ... .... ........ ............ .... .............. ... 166
9.3. Вложенные прерывания. ............................. ...... .... ... .... .......... .......... ..... ............... 167
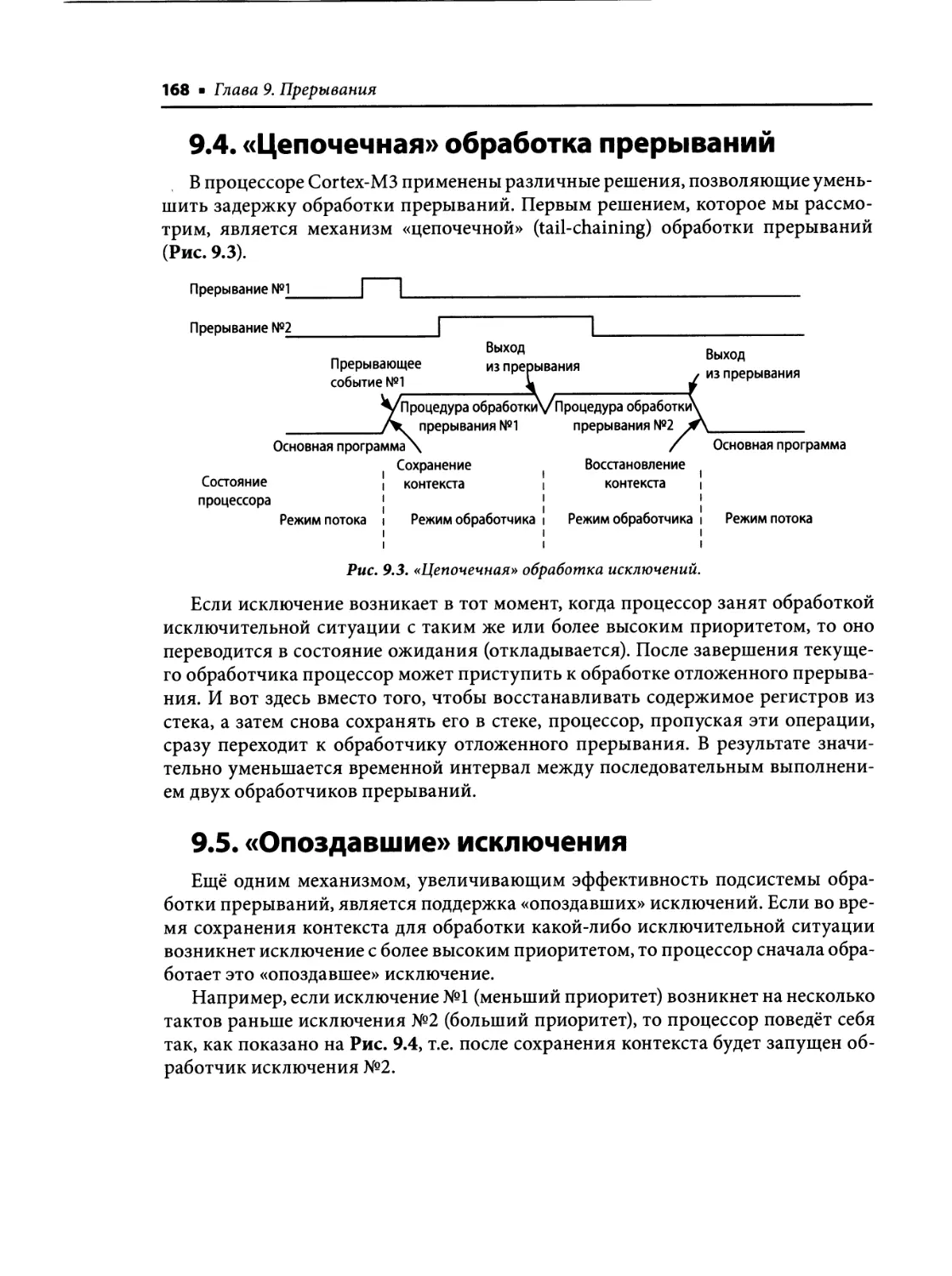
9.4. «Цепочечная» обработка прерыВаНий............................................................... 168
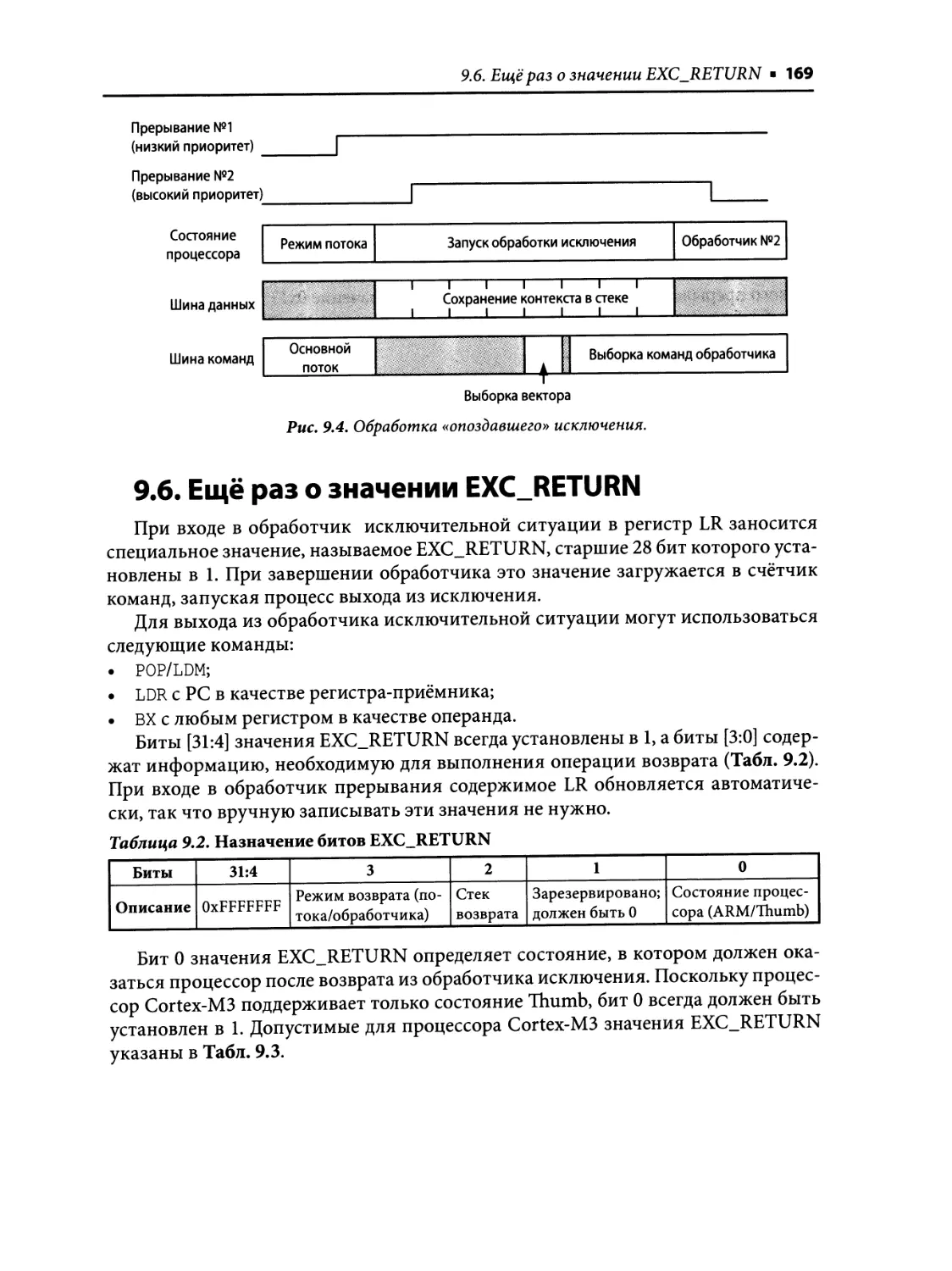
9.5. «Опоздавшие» исключения.................................................................................. 168
9.6. Ещё раз о значении EXC
RETURN ..................................................................... 169
9.7. Задержка обработки прерывания ....................................................................... 171
XII . Содержание
9.8. Отказы, связанные с прерываниями ................................................................. 172
9.8.1. Сохранение контекста.......................................................... ..... .... ................... .... 172
9.8.2. Восстановление контекста................................... ......................... ...................... 172
9.8.3. Выборка вектора .... ............................................. ... ........................... .................... 173
9.8.4. Некорректный возврат.......................................... ....................... ................... .... 173
flIaBa 10. Пр()rраММllр()lJаllllе C()rtex
M
................................. 174
10.1. Общие сведения ...... .... ..... .... .... ..... ..... .... .... ...... .... ..... ...... .... .... ..... ..... .... ..... ..... .... ..174
10.2. Типичный процесс разработки ПО ...................................................................174
10.3. Использование языка Си.................................................................................... 175
10.3.1. Компиляция простой Си
проrраммы в пакете RVDS ...............................176
10.3.2. Компиляция простой Си
проrраммы в пакете MDK
ARM ................... 179
10.3.3. Отображённые в память реrистры и язык Си ............................................ 180
10.3.4. Встроенные функции.... ....................... ..... ......................................................... 182
1 0.3.5. Встроенный и iпliпе
ассемблер................ ....... ... ............................................. 183
10.4. Стандарт CMSIS ....... .... .... ...... ... ......... ..... .... ...... ... .... ....... .... ..... ..... ..... .... ...... ..... ... 183
10.4.1. Предпосылки появления стандарта CMSIS ................................................. 183
10.4.2. Области стандартизации.................................................................................. 185
10.4.3. Структура CMSIS .................. .............................................................................. 185
10.4.4. Использование стандарта CMSIS .................... ............. ........................... ....... 187
10.4.5. Выrода от использования CMSIS ................. ............................................... .... 189
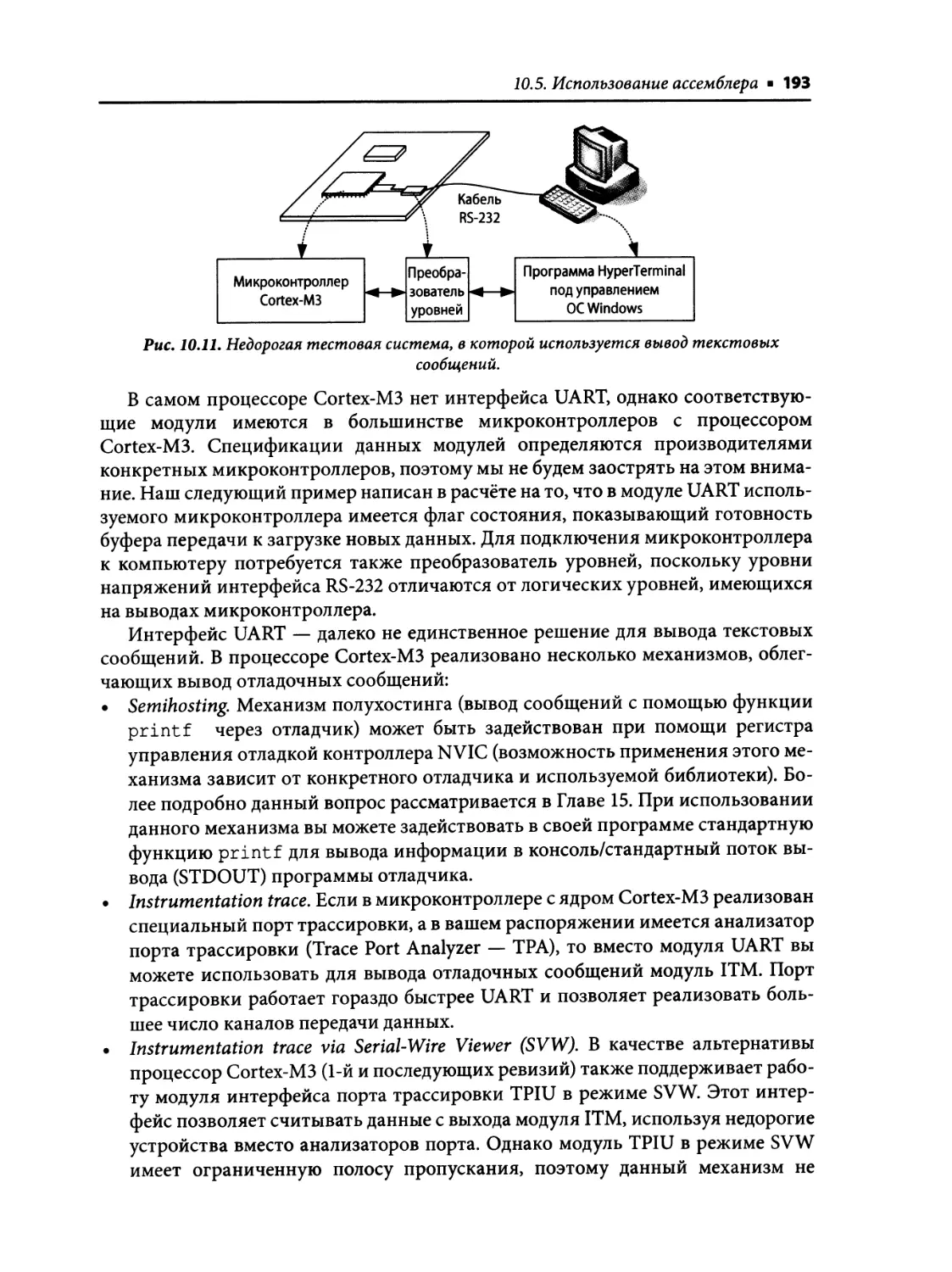
10.5. Использование ассемблера. ... .... ..... ... ...... .... ..... .... ..... ...... .... .... ..... .... .... ...... .... .... 190
10.5.1. Интерфейс между ассемблером и Си............................................................. 190
10.5.2. Проrраммирование на ассемблере
первые шаrи ......................................... 191
10.5.3. Вывод результатов работы проrраммы ........................................................ 192
10.5.4. П porpaMMa «Неllо W orld» ..... .............................. ................................... ........... 194
10.5.5. Использование памяти данных ............ ....... ................. ....... ............. ........ ...... 197
10.6. Монопольный доступ и семафоры .................................................................... 198
10.7. Метод bit
band и семафоры ................................................................................. 201
10.8. Использование команд извлечения битовоrо поля
и команд табличных переходов ......................................................................... 202
flIaBa 11. Pa()()1fa с IIрерыВаllllяМll/llсКlIю'lеllllяМII.................204
11.1. Использование прерываний ..............................................................................204
11.1.1. Конфиrурирование стека.................................................................................. 204
11.1.2. Настройка таблицы векторов прерываний .................................................205
11.1.3. Назначение приоритетов прерываний..........................................................206
11.1.4. Разрешение прерываний ................................................................................... 207
11.2. Обработчики исключений/прерываний .........................................................209
11.3. Проrраммные прерывания ................................................................................ 211
11.4. При мер перемещения таблицы векторов . ....................................................... 213
11.5. Использование команды SVC ............................................................................ 216
11.6. При мер использования команды SVC: функции вывода текстовых
сообщений ............................................................................................................. 217
11.7. Использование команды SVC в проrраммах на языке Си............................. 220
Содержание. XIII
flIalJa 12. ]J[1'()ДIJИII)f1fые ПI'Оfl'аММllые ВО3М()ЖIIО(:1fИ
11 П()IJедеllllе (:1I(:1feMbI .................................................
12.1. Реализация системы с двумя раздельными стеками .....................................223
12.2. Выравнивание стека на rраницу двойноrо слова ..........................................226
12.3. Переход в режим потока с любоrо уровня вложенности .
............................ 227
12.4. Пара слов о производительности ...................................................................... 229
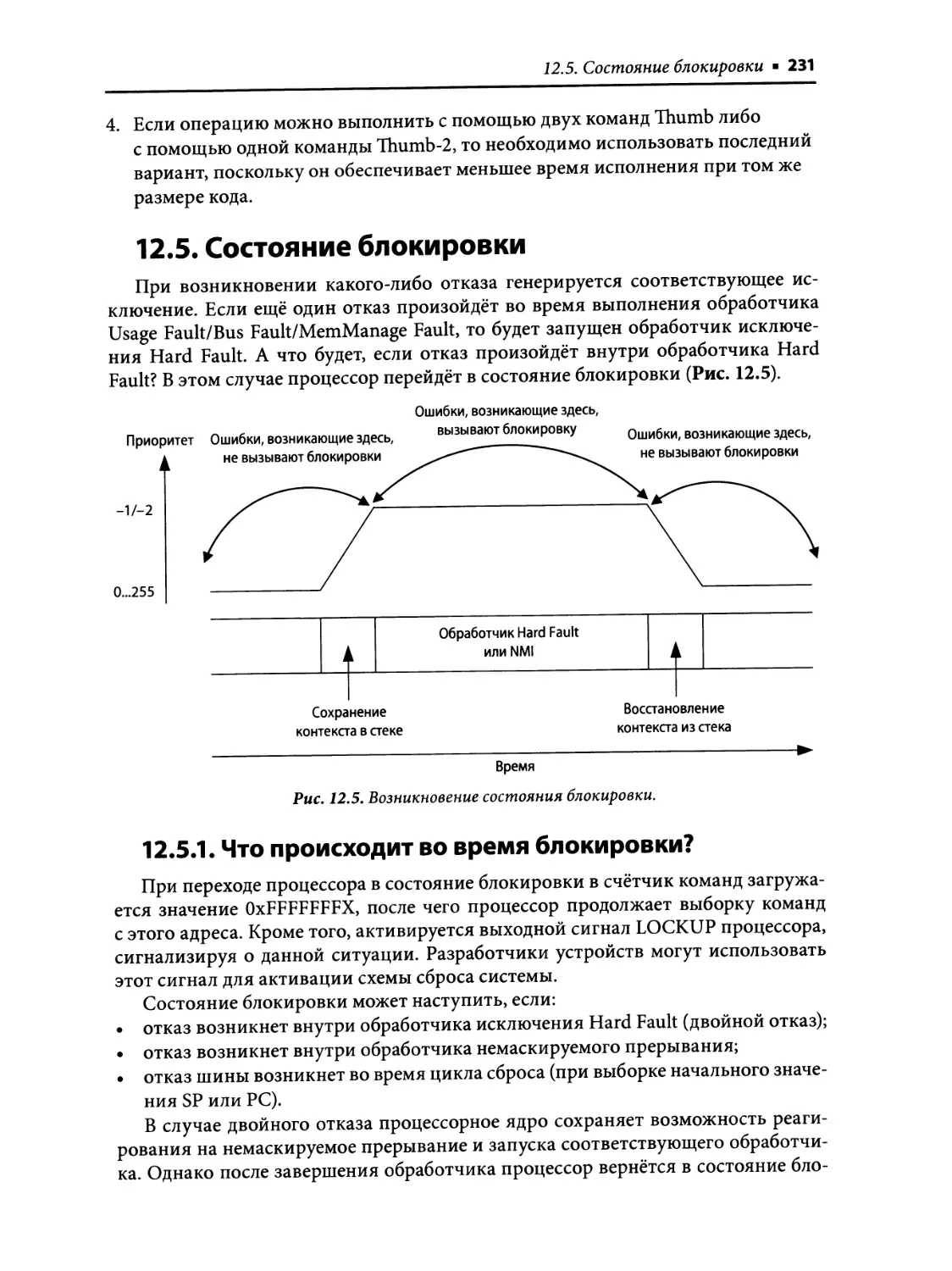
12.5. Состояние блокировки .................... ...... ......... .... ... ... .... ................... ...... .... ......... 231
12.5.1. Что происходит во время блокировки? ........................................................ 231
12.5.2. Предотвращение блокировки ......................................................................... 232
12.(). J>eJlllc1rp J?AllJ
T1\I.[A
........................................................................................... 233
lIaBa 13. MOA)'lIlJ
аЩИ1fЫ паМJl1fИ MPU ...................................2
4
13.1. Общие сведения ... ....................................... ...... .... ... ...... ....... .......... ..... ............. ... 234
13.2. Реrистры модуля MPU ..................... ........ .......... .... .... ... .... ............... ....... ....... ..... 235
13.3. Настройка модуля MPU ................... ..... ........ ..... ... .... .... .......... ......... ..... .............. 241
13.4. Типичный процесс настройки модуля MPU ...................................................247
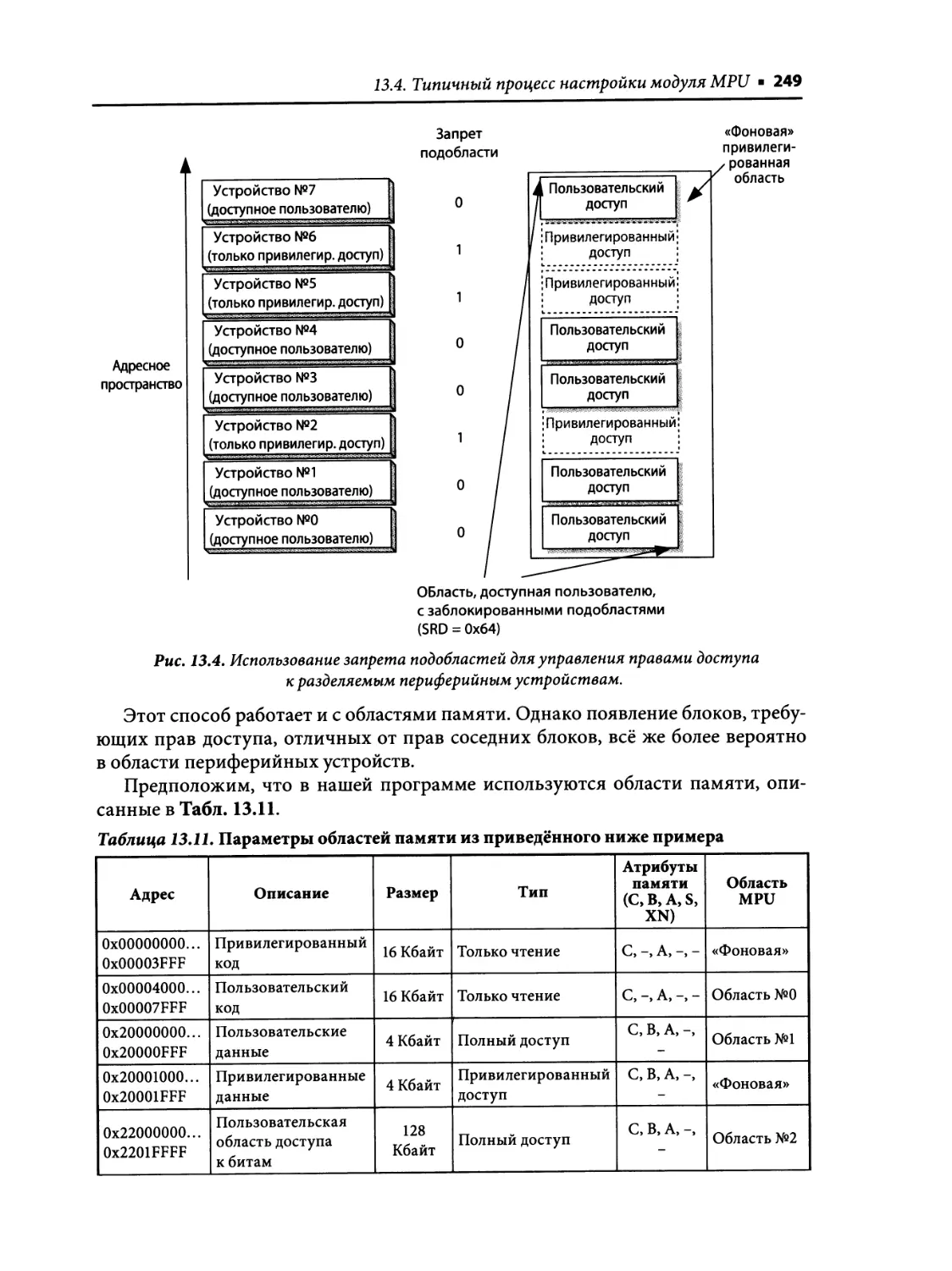
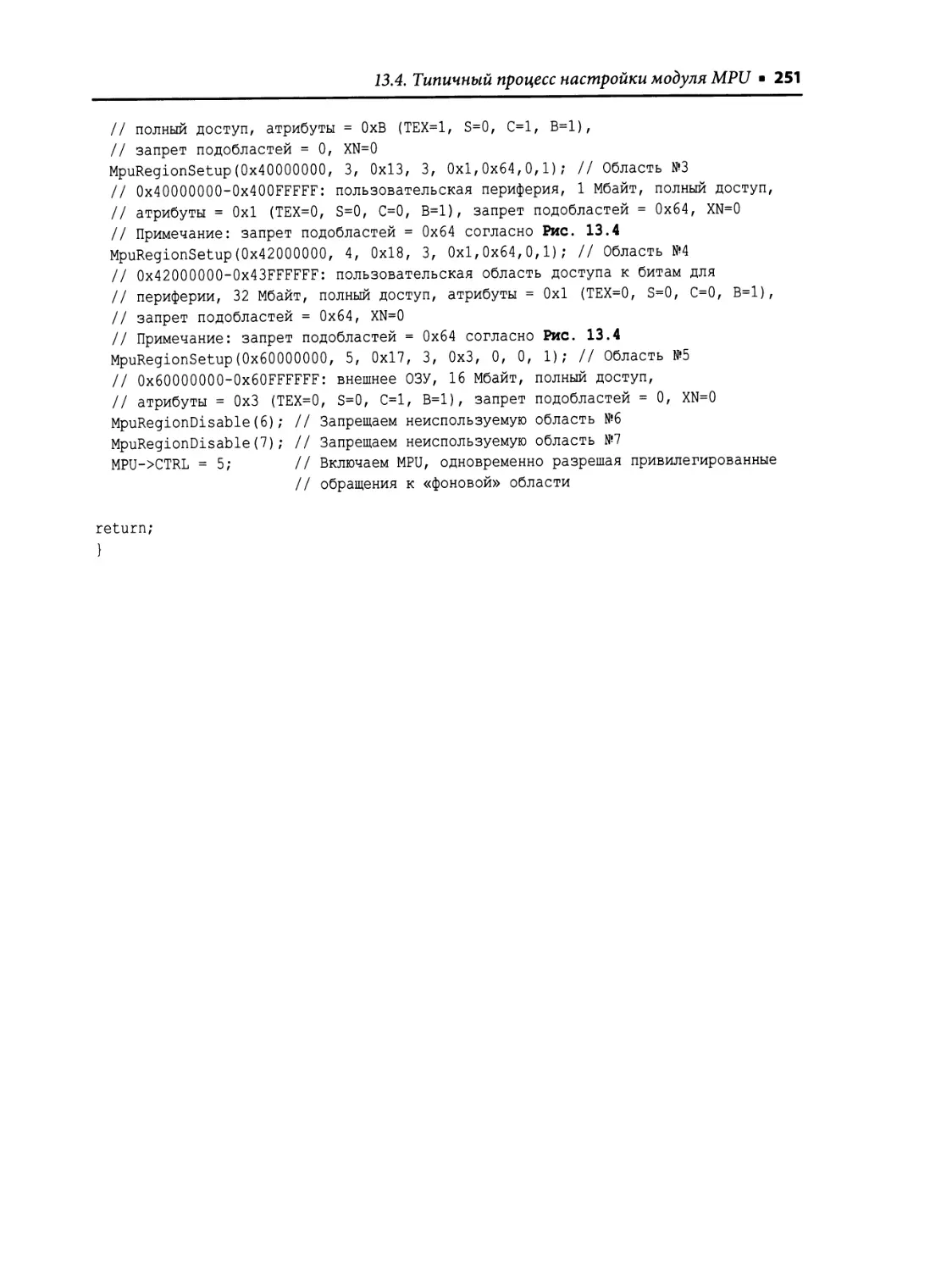
13.4.1. При мер использования запрета подобластей ............................................. 248
lIalJa 14. ]J[1'()'1ие IJО
МОжIlОС1fи Пl'оце(:СОl'а Cortex
M
...........25
14.1. Системный таймер
Y
TIC
.............................................................................. 252
14.2. Управление электропитанием .................. ........ ... ... ..... ...... ............... .............. ... 255
14.2.1. Спящие режимы..... ................................... ....... ............... ......................... ........... 255
14.2.2. Функция Sleep
Оп
Exit...................................................................................... 257
14.2.3. Контроллер WI С .............. ............................... ................... ............. .................... 258
14.3. Межпроцессорный обмен......................... .......... .... ... ....... ................ ......... .... ..... 260
14.4. Управление сбросом .................... .............. ....... .... ... ..... ...... ................ ............. .... 264
lICilJa 15. АI'ХИ1fеК1f)'l'а (:ИС1fемы 01flIадки .................................
()()
15.1. Общие сведения о возможностях отладки ...................................................... 266
15.2. Обзор архитектуры Core
ight ......... ..... .......... .... .... ... ... .... ............... ...... ............. 266
15.2.1. Отладочный интерфейс процессора................... ........................................... 267
15.2.2. Интерфейс хоста отладки......................... ................................................... ..... 267
15.2.3. Модули DP, АР и DAP ........................................................................................268
15.2.4. Интерфейс трассировки ................................................................................... 269
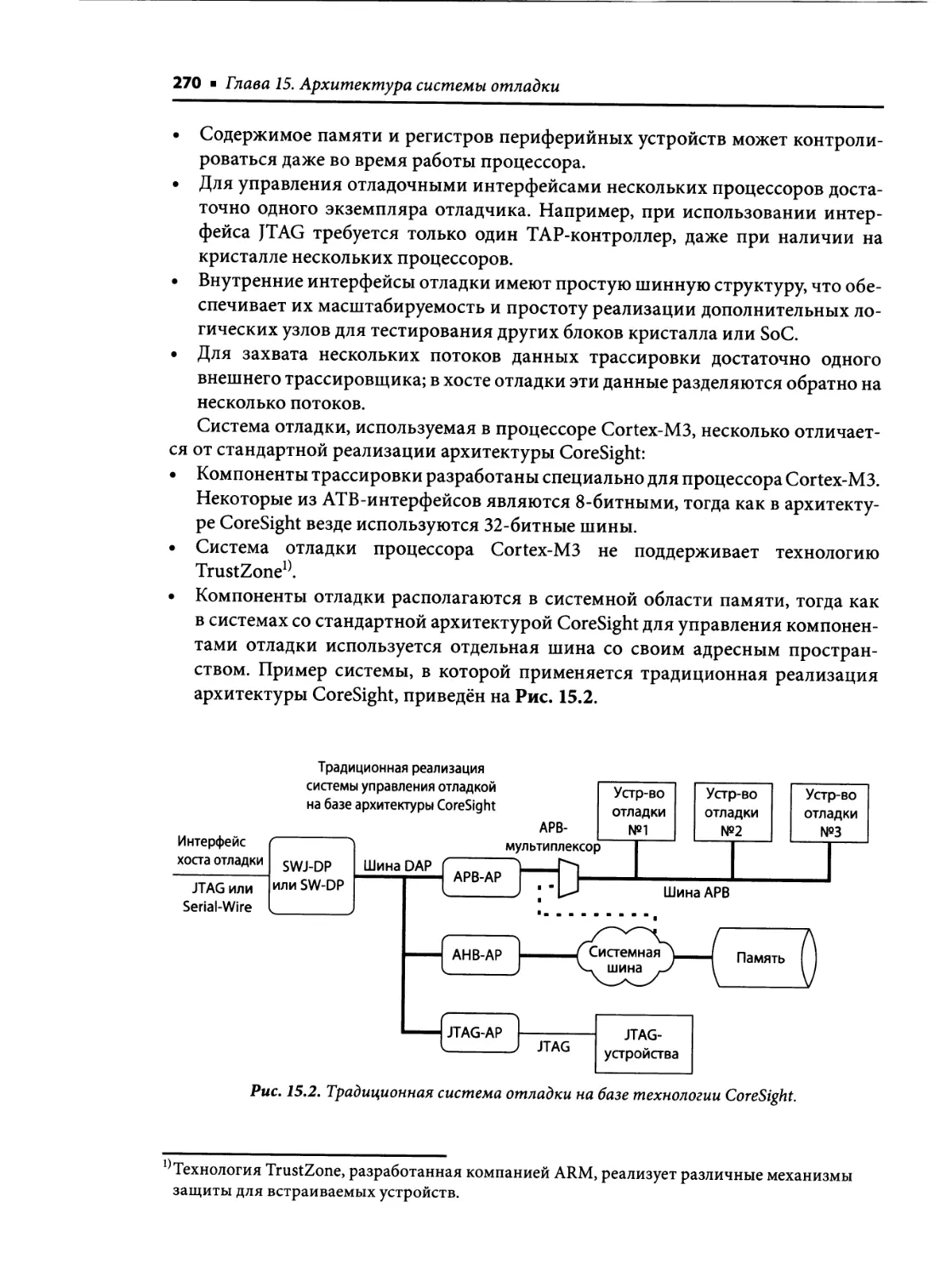
15.2.5. Характеристики архитектуры CoreSight ...................................................... 269
15.3. Режимы отладки .. .................................. .......... ... ... .... .... ................... ..... .............. 271
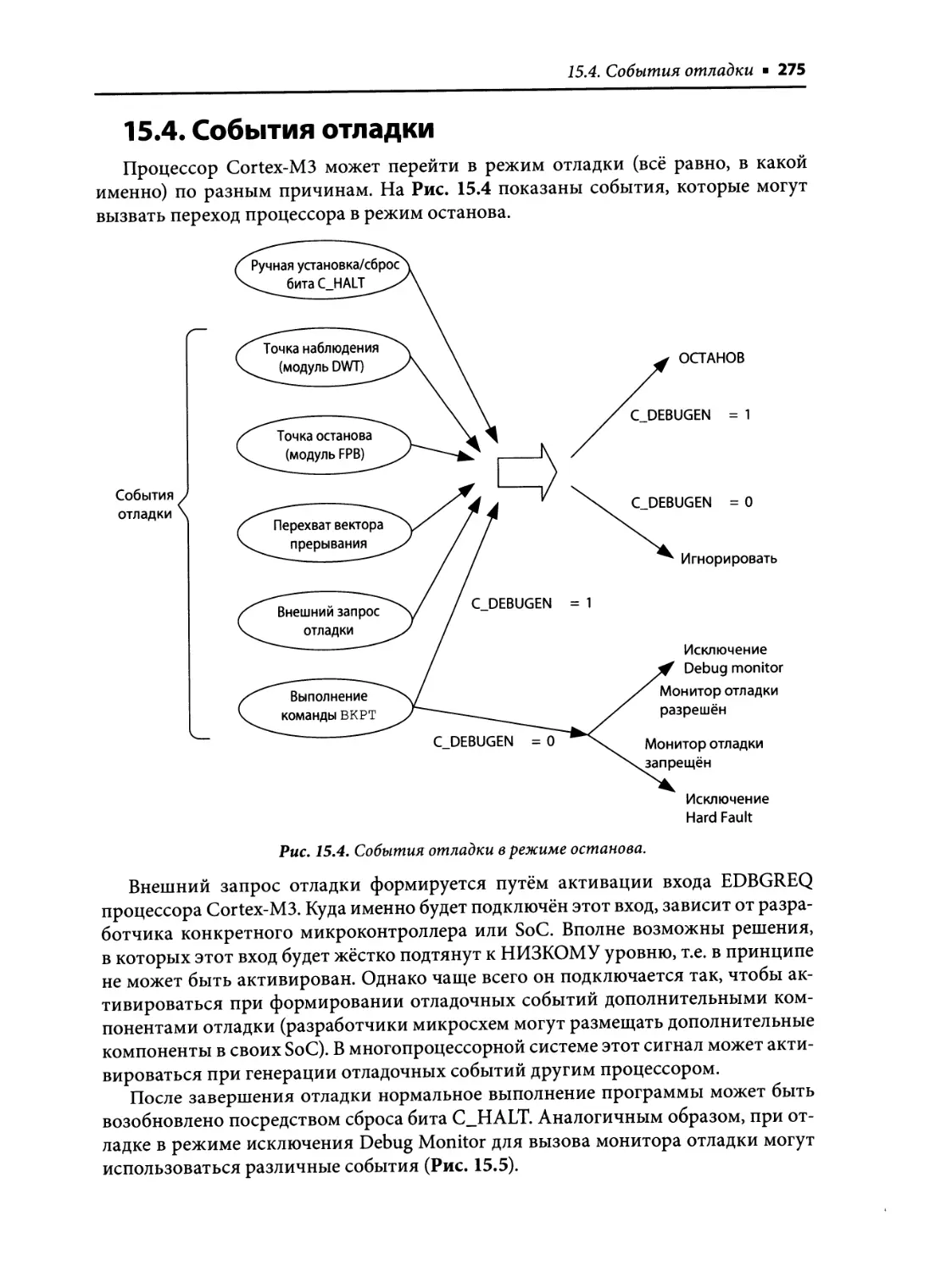
15.4. События отладки .......... .............. .............. ......... .... ... .... .......... ......... .... ................ 275
15.5. Точки останова в процессоре Cortex
М3 .......................................................... 276
15.6. Получение доступа к содержимому реrистров при отладке ......................... 277
15.7. Прочие отладочные возможности ядра............................................................ 278
XIV . Содержание
lIalJa 1(). К()МП()lIеll1fЫ ()1flIaAKII ................................................
80
16.1. Общие сведения .. ..... .... ....... ... .... ....... ... ...... ..... ...... .... ....... .... ..... ..... ..... ........... ...... 280
16.1.1. Система трассировки в процессоре Cortex
M3 ........................................... 280
16.2. Компоненты трассировки: модуль DWT ......................................................... 281
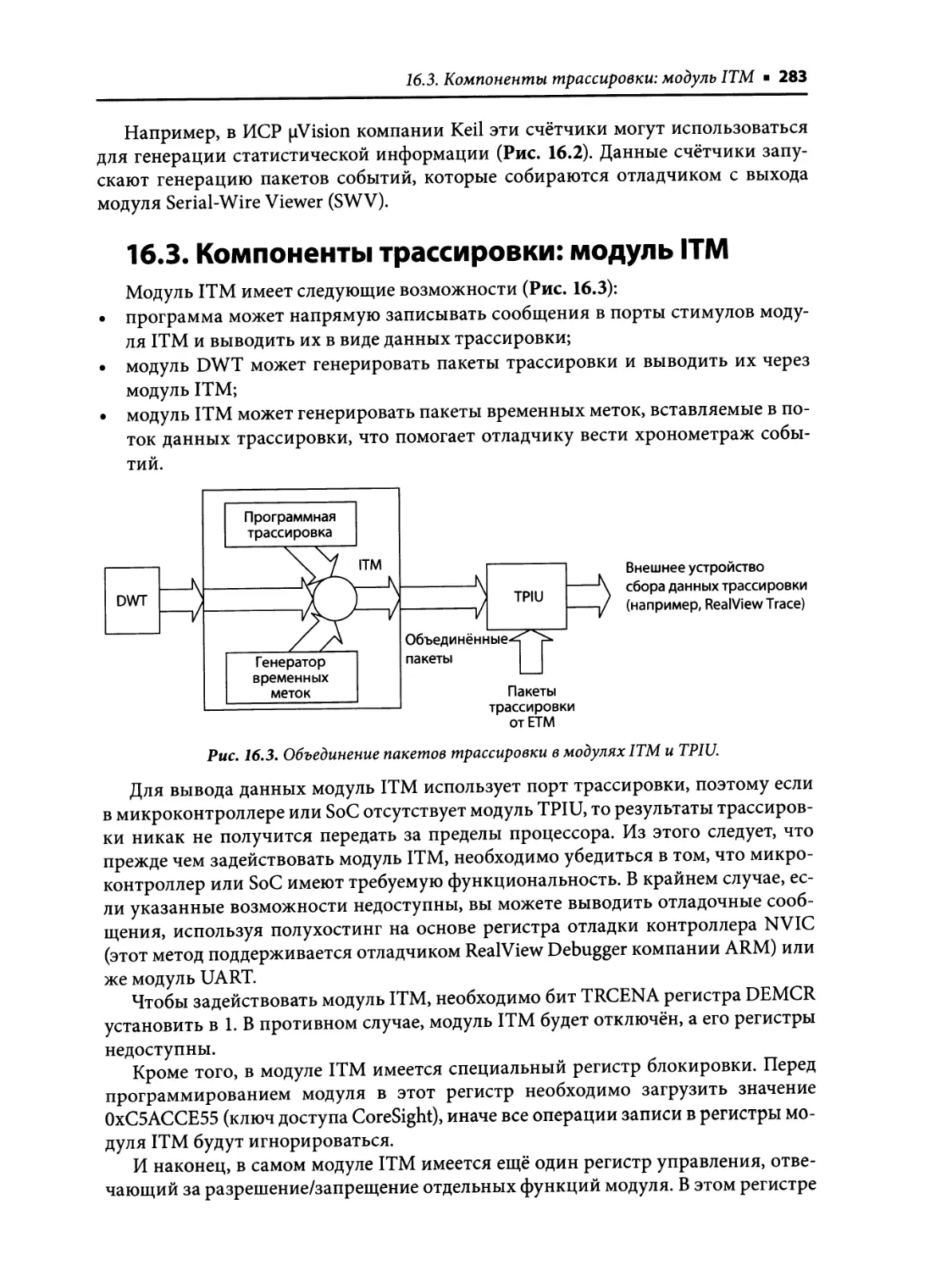
16.3. Компоненты трассировки: модуль ITM ...........................................................283
16.3.1. Проrраммная трассировка с использованием модуля ITM.................... 284
16.3.2. Аппаратная трассировка с использованием модулей ITM и DWT ......... 285
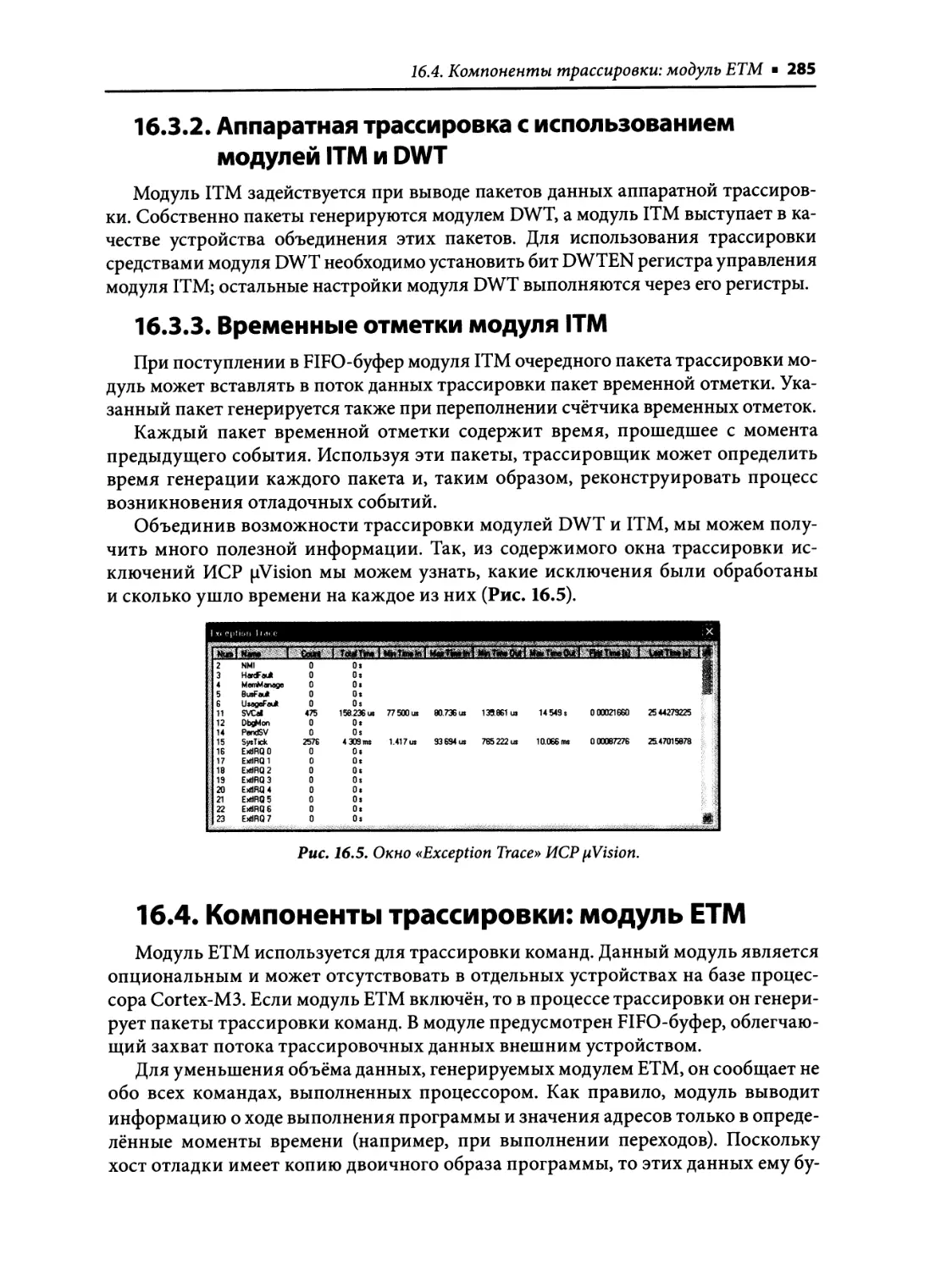
16.3.3. Временные отметки модуля ITM ..................... ........... .............................. ...... 285
16.4. Компоненты трассировки: модуль ЕТМ ..........................................................285
16.5. Компоненты трассировки: модуль TPIU..........................................................286
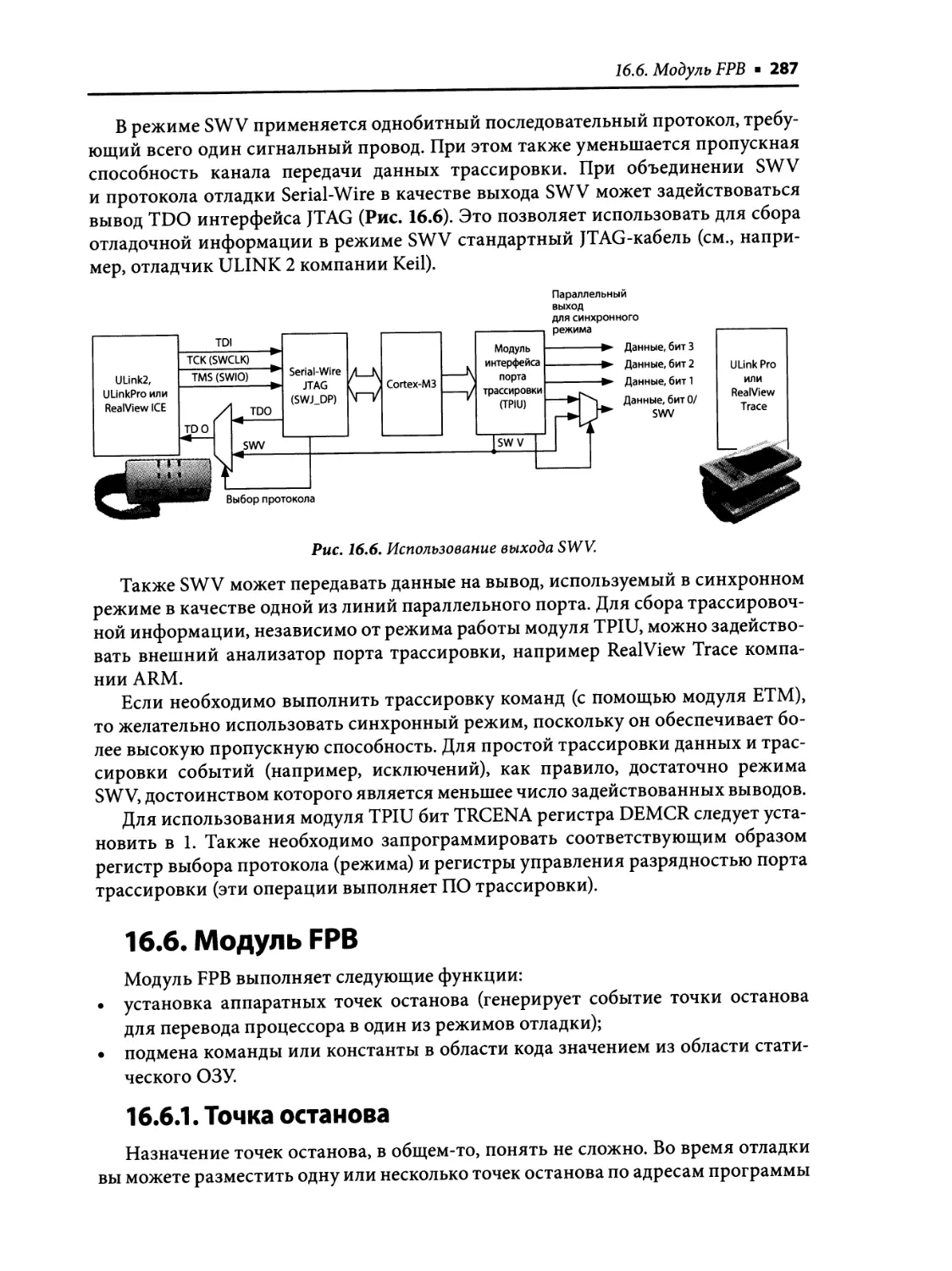
16.6. Модуль FPB .... .... ....... ..... ....... ... .... ...... .... .... ...... ...... ..... ....... .... ... ....... .... ........... ...... 287
16.6.1. Точка останова................... ................................. ......... ........................................ 287
16.6.2. Функция Flash Patch .......................................................................................... 288
16.6.3. Компараторы.................................... .................................................................... 288
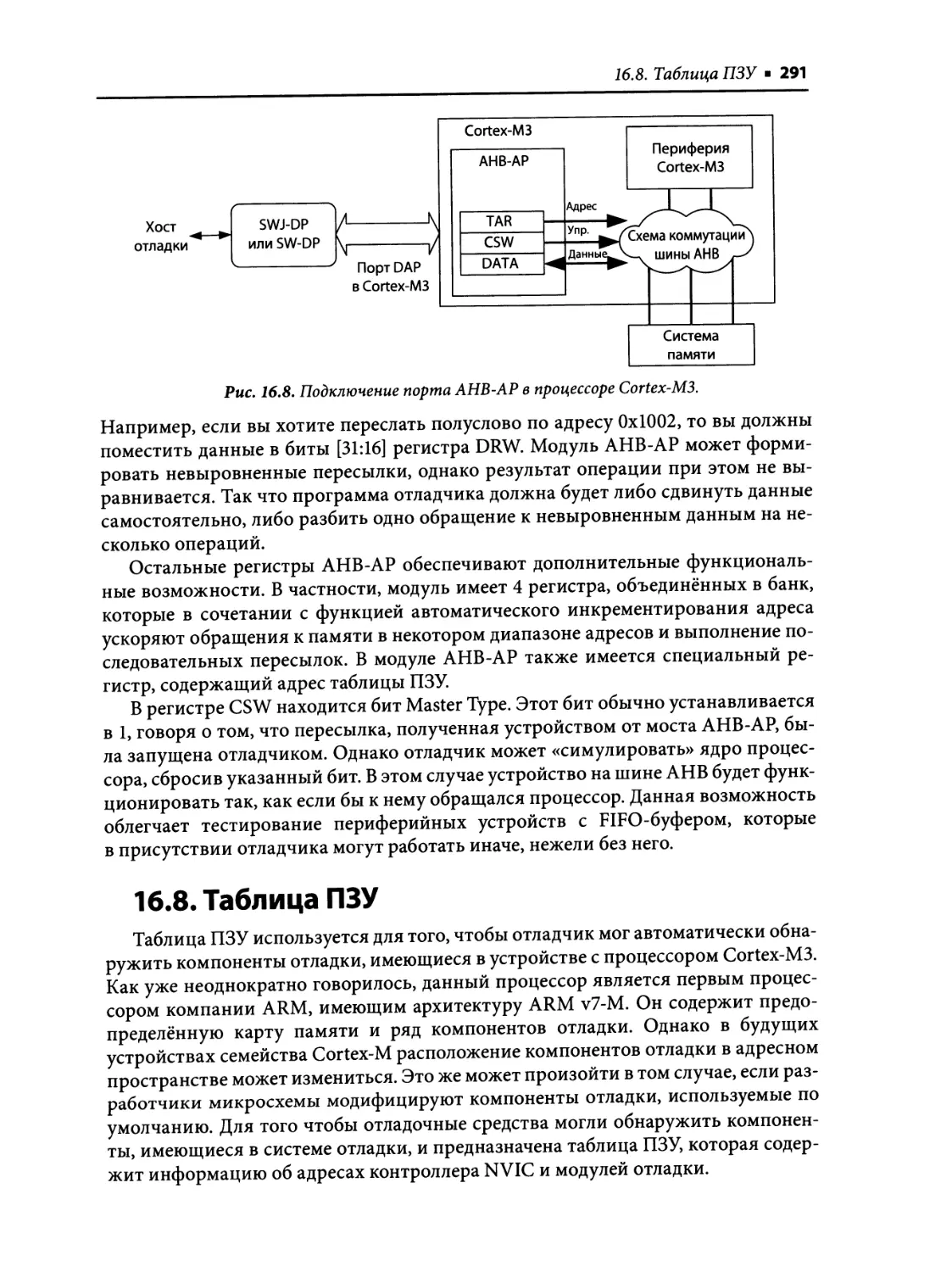
16.7. Порт доступа шины АНВ ....................................................................................290
16.8. Таблица ПЗУ ...... ....... ..... ...... .... ... ....... ... ..... ...... ..... .... ....... ..... .... ..... ..... ..... ...... ... .... 291
lIaBa 17. ]J[I'И(:1f)'пая к I'Ci()()1f
(: ПI'()це(:с()I'()М C()rtex
M
.........294
17.1. Выбор устройства с ядром Cortex
M3................................................................294
17.2. Средства разработки.... ........ ... ... ...... ..... ... ..... .... ..... ...... .... ......... ....... ... ...... ... ... .... 295
17.2.1. Си
компиляторы и отладчики.... .............................. ... ......... .... .................. ..... 296
17.2.2. Поддержка встраиваемых ОС ........... ............ ....... ................................ ........... 297
17.3. Различия между процессорами Cortex
M3 ревизий О и 1..............................298
17.3.1. Ревизия 1
замена модуля JTAG
DP на SWJ
DP....................................... 300
17.4. Различия между процессорами Cortex
M3 ревизий 1 и 2..............................300
17.4.1. Выравнивание стека на rраницу двойноrо слова по умолчанию........... 300
17.4.2. Дополнительный реrистр управления . ......................................................... 301
17.4.3. Новое значение реrистров идентификации................................................. 301
17.4.4. Возможности отладки................................. ............... ..... ....... ............................ 301
17.4.5. Особенности режима пониженноrо энерrопотребления ........................302
17.5. Чем же хороша ревизия 2 процессора Cortex
M3? .........................................303
17.6. Различия между процессорами Cortex
M3 и Cortex
MO ................................ 304
17.6.1. Модель проrраммирования .......................................................... ................... 305
17.6.2. Исключения и контроллер NVI С.... ..... . .......................................................... 305
17.6.3. Набор команд.................................................................... ...... ...... ....................... 306
17.6.4. Особенности системы памяти.... ..................................................................... 307
17.6.5. Возможности отладки................. ....................................................................... 307
17.6.6. Совместимость...................................... .................................................... ........... 307
lIaBa 18. ]J[epell()(: IIl'lIlI()жеllИЙ (: ПI'()це(:(:()l'а ARM7
lIа IIр()це(:(:()р C()rtex
M3 ............................................
O
18.1. Общие сведения ... ...... .... ...... ... .... ....... .... ..... ...... ..... ..... ...... ... ........... ...... .... ..... ...... 309
18.2. Особенности системы ... ....... ... ...... .... ...... ..... ...... ... ....... .... ..... ...... ...... .... ...... ... ..... 309
18.2.1. Карта памяти.................. ........ .............. ..... ...... ..................................................... 309
Содержание . xv
18.2 . 2 . Пр еры в а ни я .......................................................................................................... 31 О
18.2.3. Модуль MPU .............................................. ...................... .............................. .......311
18.2.4 . Управление системой............. ............. ... ..... ............................. .... ..... ......... ...... ...311
18.2.5. Режимы работы .......................... .............. ..... ................................ .... .......... .........311
18.3. Файлы с ИСХОДНЫМ текстом на ассемблере....................................................... 312
18.3.1. Режим Thumb ................. .... ......... .......... ... ..... ............................. .... ...... ........ .........313
18.3.2. Состояние ARM .............. .... ............. .............. ............ ......................................... .313
18.4. Файлы с исходным текстом на Си ..................................................................... 315
18.5. Скомпилированные объектные файлы ........................................................... 316
18.6. Оптимизация ....................................................................................................... 316
flIalJa 1
. Pa
l'a()()1fKa Пl'lIlI()жеllИЙ AlIJI C()rtex
M
(: II(:II()lIIJЗ()lJаllием GNU .............................................
18
19.1. Общие сведения... ............................. ....... .......... .... .... .... .... .................. ................. 318
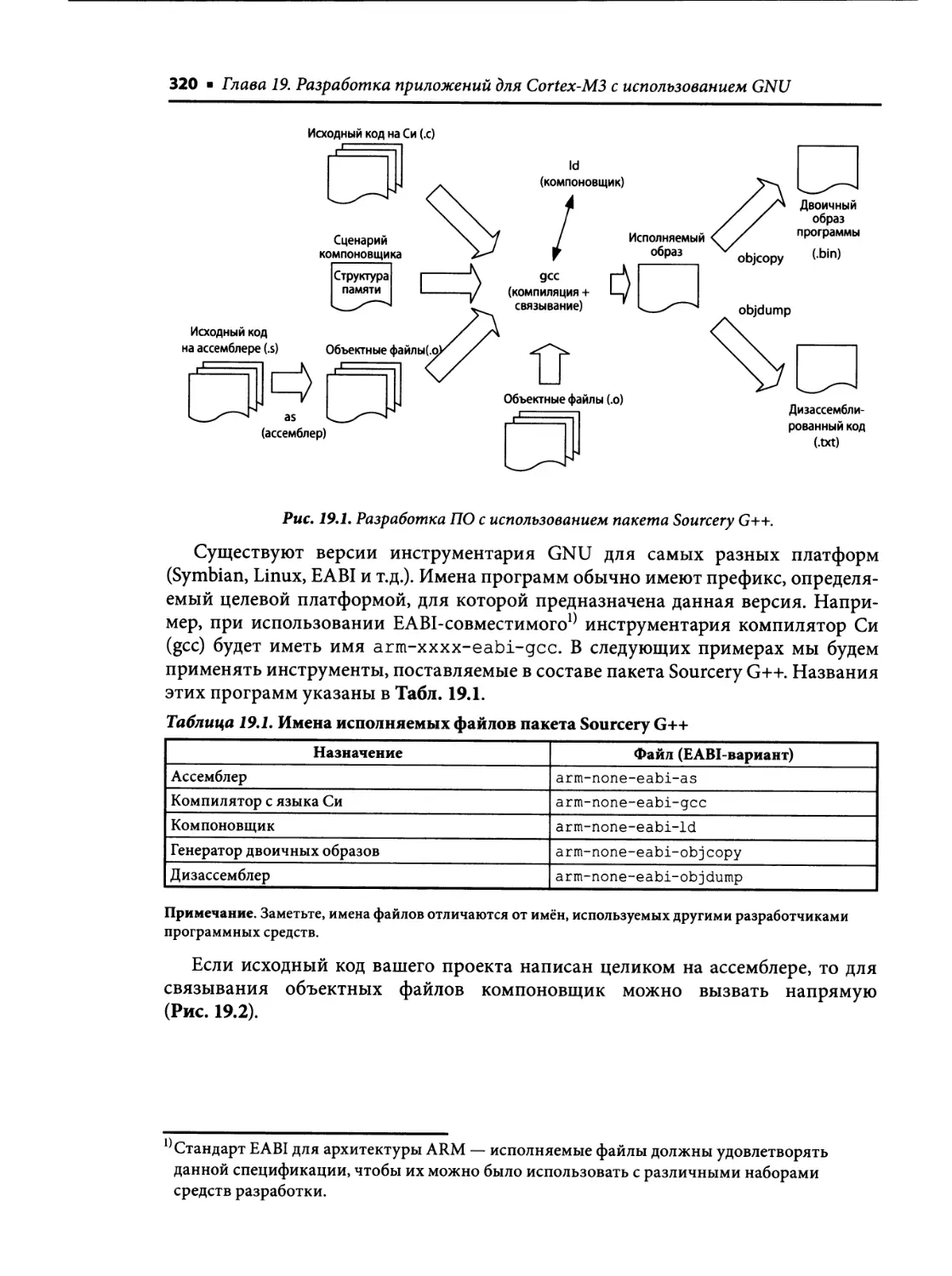
19.2. Приобретение инструментария GNU ............................................................... 319
19.3. Процесс разработки проrраммы ....................................................................... 319
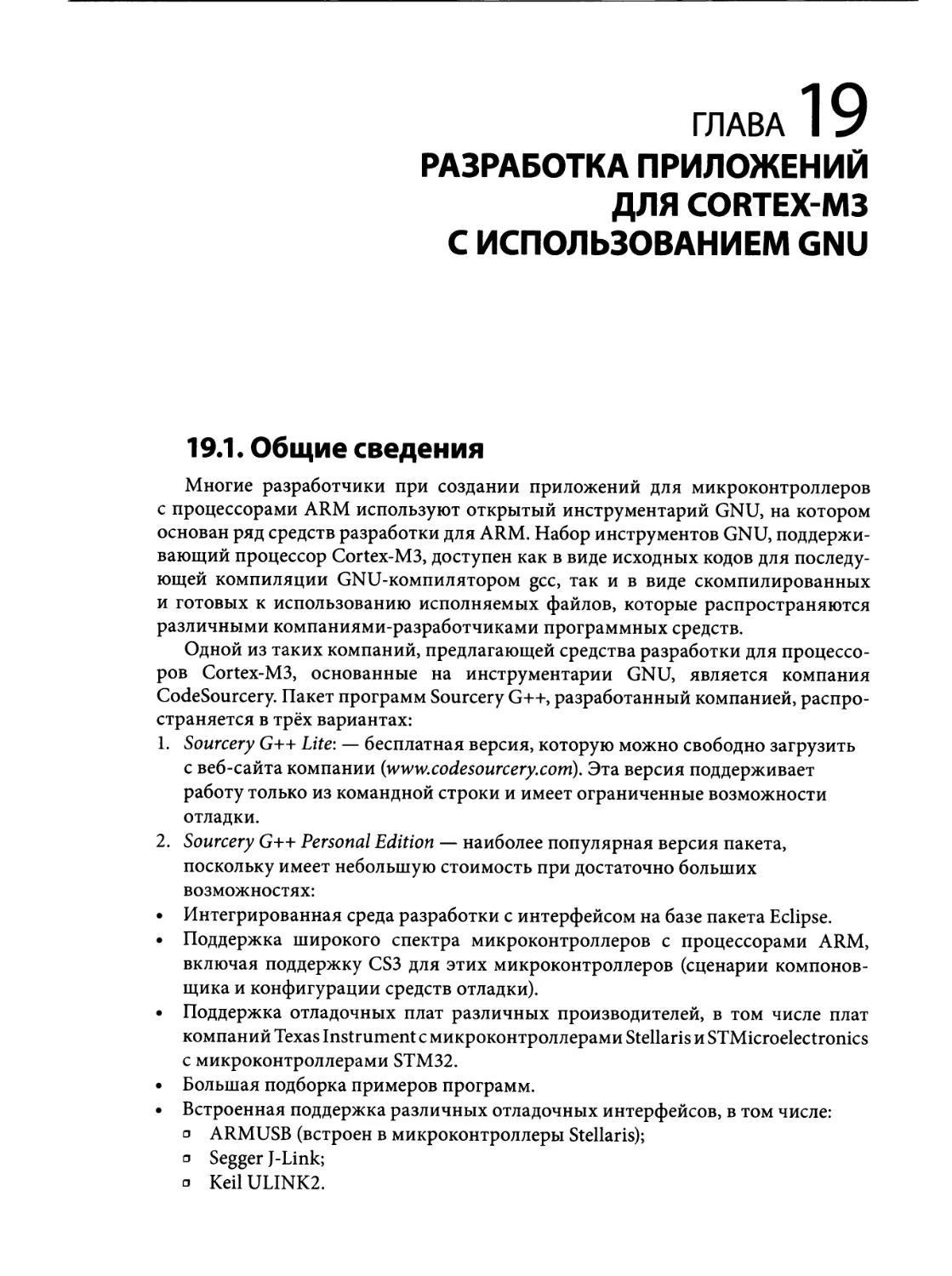
19.4 . При меры................................................................................................................ 321
19.4 .1. При мер 1: первая проrрамма ......................... .............. ............. ....................... 321
19.4.2. При мер 2: связывание нескольких . файлов................................................. 323
19.4.3. При мер 3: простая проrрамма «Неllо World».............................................. 324
19.4.4. При мер 4: данные в ОЗУ ................................................................................... 326
19.4.5. При мер 5: проrрамма на Си ............................................................................. 327
19.4.6. При мер 6: перенаправление вывода в проrрамме на си.......................... 330
19.4.7. При мер 7: реализация собственной таблицы веКторов.............................331
19.5. Обращения к реrистрам специальноrо назначения ...................................... 332
19.6. Использование неподдерживаемых команд ................................................... 332
19.7. Iпliпе
ассемблер в компиляторе GCC ............................................................... 332
lIalJa
o. и(:П()lIlJ
()lJаllllе паке1fа RealView MDK
ARM
К()МIIаIlИИ Keil............................................................
20.1. Общие сведения. ................................... ............ .... .... .... ... ................... ................. 334
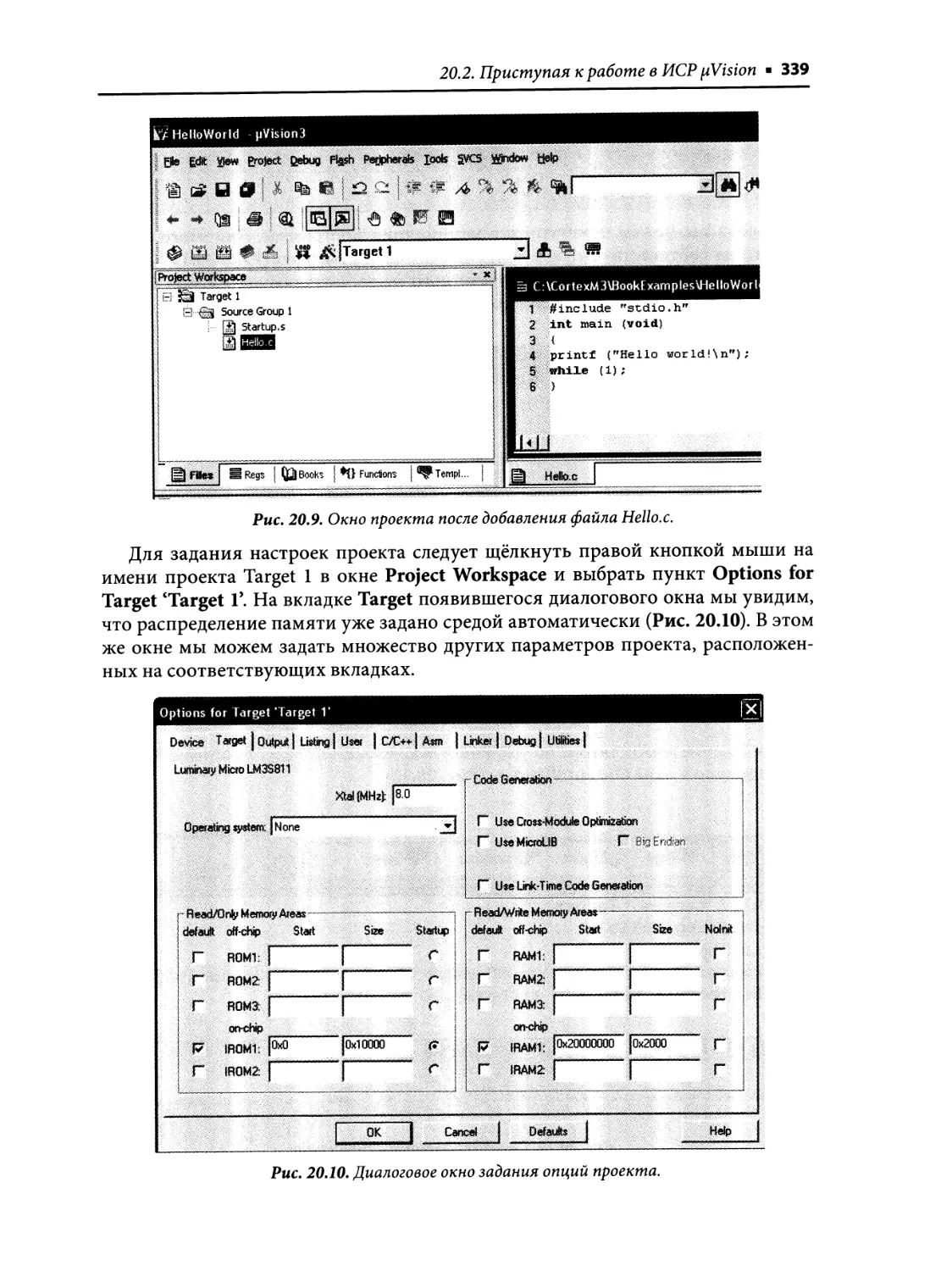
20.2. При ступая к работе в ИСР ,...Vision....................................................................334
20.3. Вывод сообщения «Hello World» по интерфейсу UART ................................ 341
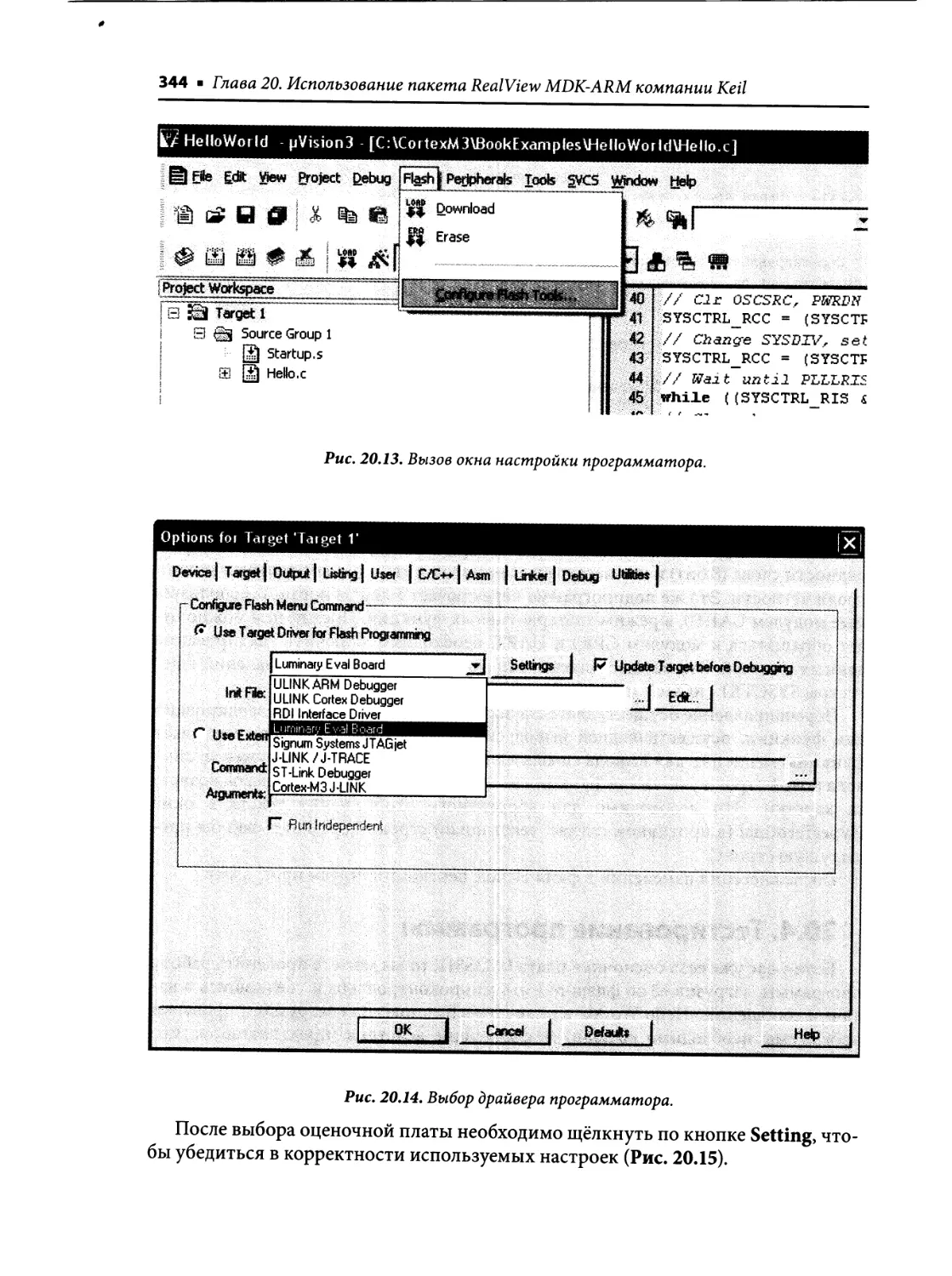
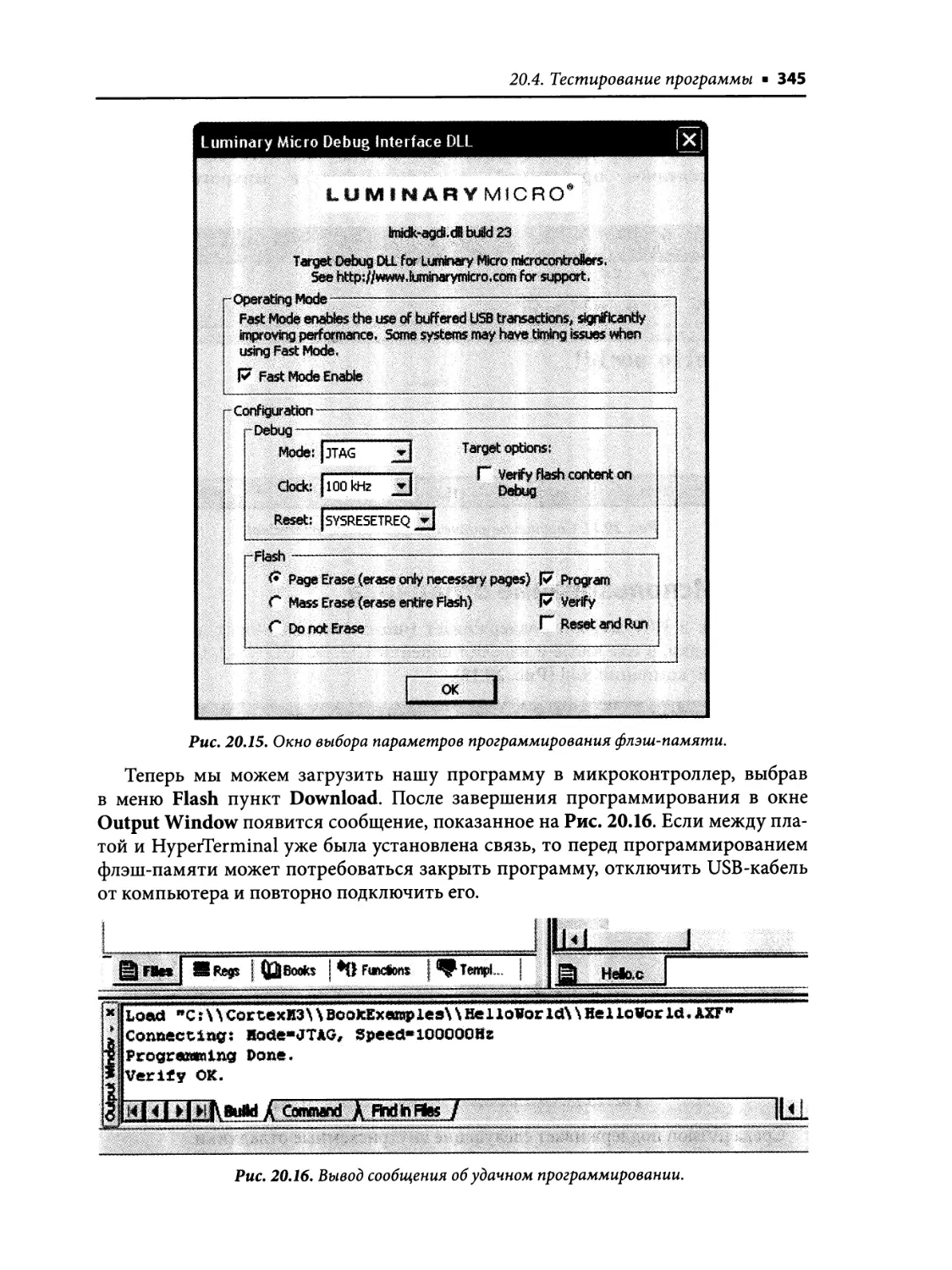
20.4. Тестирование проrраммы ............................ ..... .... ... ............ ........... ......... ... ....... 343
20.5. Использование отладчика....................... .......... ... .... ....................... ..... ... ........... 346
20.6. Симулятор ............................................................................................................ 350
20.7. Модификация таблицы векторов ..................................................................... 353
20.8. Прерывания и стандарт CMSIS ......................................................................... 354
20.9. Перевод существующих приложений на стандарт CMSIS ............................ 360
fлава 21. ]J[роrраммирование Cortex
M3 в LabVIEW ..............361
21.1. Общие сведения.. .................................. .......... ....... ... .... ...................... .................. 361
21.2. Знакомство с Lab VIEW ........................................................................................ 361
21.2.1. Типичные области применения .................... .................................................. 362
XVI . Содержание
21.2.2. Что нам нужно, чтобы использовать LabVIEW и ARM ........................... 363
21. 3. Процесс разработки... .... ...... .... ... ......... ..... ......... .... ..... ...... .... ........... ..... ........ .... ... 364
21.4. Пример использования среды LabVIEW ..........................................................366
21.4.1. Создание проекта......................................... .... ........ .... ....................................... 366
21.4.2. Определение входов и ВыходоВ....................................................................... 367
21.4.3. Создание проrраммы ....................................... ........ ........................... ... ..... ....... 368
21.4.4. Компиляция проrраммы и тестирование приложения........................... 370
21.5. Как это работает ...... ..... ........... .... .... ... ... ..... ......... ..... ...... ...... .... ...... ...... .......... ...... 371
21.6. Дополнительные возможности LabVIEW . ....................................................... 372
21.7. Перенос проекта на друrие процессоры ARM ..................................................... 374
]J[РlllIожеllllе А. На()()р комаllД C()rtex
M
.
СПl'аIJ()'1I1IJIЙ Ma1fel'lIalI ...................................
7:;
]J[l'lIlIожеllllе Б. l()
()И1fllые КОМCiIlДЫ Thumb
11 IJel'<:1I1I aI'XIl1feK1f)'l'bI ARM ...........................4
7
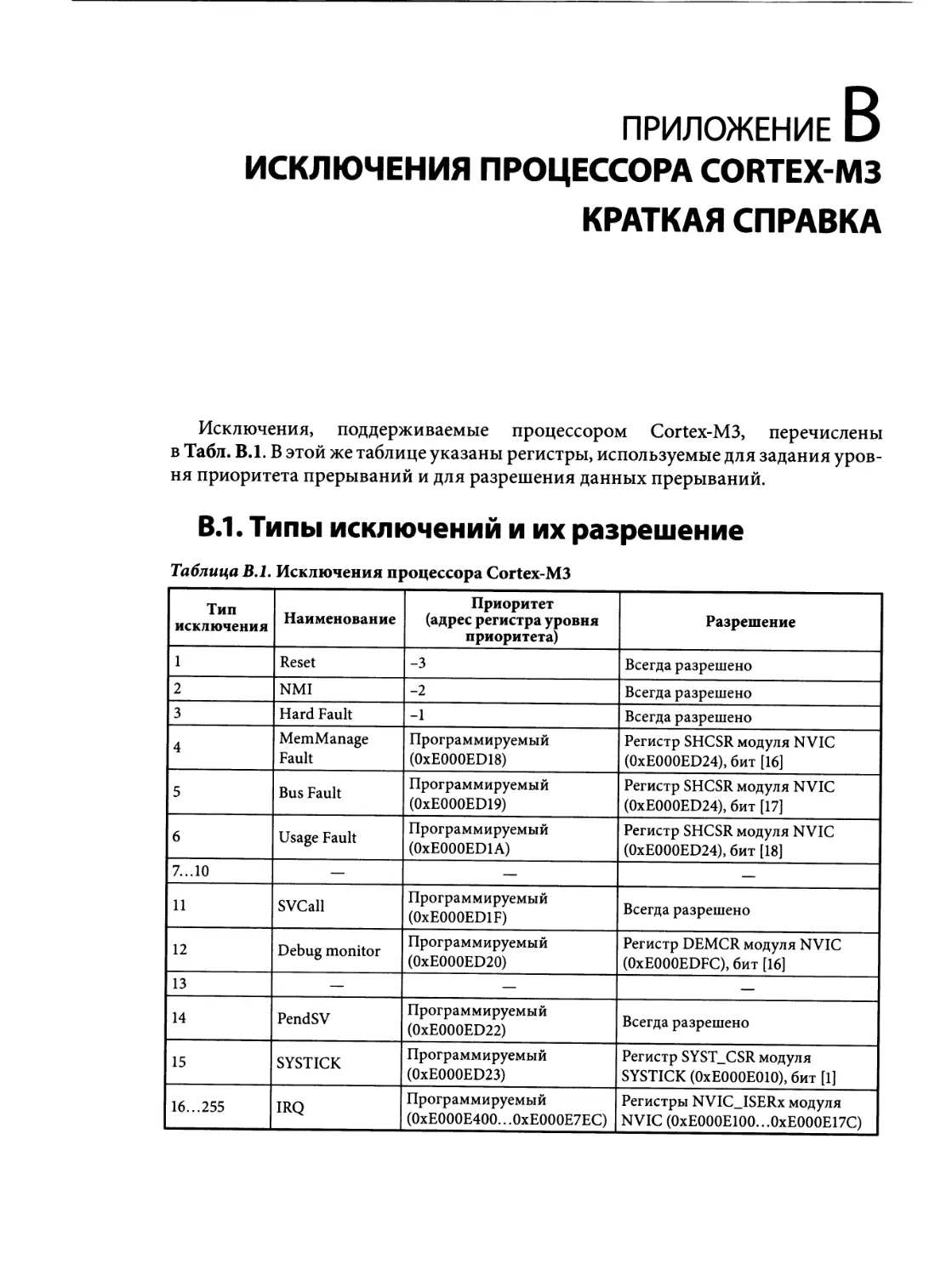
]J[РlllI()жеllllе ]J. И<:КlIЮ'lеIlIlЯ ПI'()це<:<:()l'а C()rtex
M
...............4
8
]J[I'ИlI()жеllllе
. Реfll<:1fры K()II1fp()lIlIel'a NVIC
и ()lI()Ka УПl'аIJlIеllИJI <:1I<:1fем()й ...................... 440
]J[l'lIlI()жеllllе д. РУК()IJ()Д<:1fIJ() П() lI()каlIlI
аЦIIII ОШII()ОК
IJ Пl'()fl'аммах ДlIJI C()rtex
M
..........................455
]J[РlllI()жеllllе Е. ]J[I'IIMel' <:цеllаl'lIЯ К()МII()II()ВЩlIка
ДlIЯ паке1fа S()ur<:ery G++ ................................468
]J[РlllI()жеllllе ж. ФУIIКЦIIII Д()<:1f)'IIа к JlДР)' <:1fаllдаl'1fа CMSIS ..47
ПРllл()жеНllе з. С()еДIIНlIтеЛII для п()ДключеНIIЯ
()1flIаД()'1I1ЫХ <:ред<:1fIJ.... ............ ........... ............ .480
]J[РlllI()жеllllе и. СемеЙ<:1fIJ() MIIKI'()K()II1fp()lIlIep()1J Stellaris@ ..... 484
СПIf<:ОК JIIf1reI>a1rYI>I»I...................................................................5
Предме1fIlI»IЙ )'Ka
a1felIlJ ... ...... ........... ..................... .................... :;
O
ВСТУПИТЕЛЬНОЕ СЛОВО
С момента выхода первоrо издания книrи прошло не так уж MHoro времени,
а темпы развития сообщества пользователей микроконтроллеров с процессора
ми ARM уже превзошли самые смелые ожидания. Безо всякоrо преувеличения
можно сказать, что продукция нашей компании произвела настоящую револю
цию в мире микроконтроллеров. На сеrодняшний день в мире насчитывается TЫ
сячи и тысячи конечных пользователей микроконтроллеров, построенных на
процессорах ARM, что даёт все основания считать данную технолоrию наиболее
быстро развивающейся из представленных на рынке. Поэтому второе издание
книrи Джозефа, содержащее наиболее актуальную информацию о данной TeXHO
лоrии МК, появилось как нельзя вовремя.
О развитии сообщества можно судить по таким фактам, как увеличение чис
ла компаний, предлаrающих свои изделия на базе процессора Cortex M3 (на ce
rодняшний день насчитывается более 30 таких компаний), разработка стандарта
CMSIS, облеrчающеrо перенос приложений как между различными вариантами
процессора Cortex, так и между устройствами разных производителей, а также
появление более совершенных средств разработки. Нельзя не упомянуть и о BЫ
пуске процессора Cortex MO, который открыл перед микроконтроллерами ARM
нишу чрезвычайно дешёвых устройств.
Всё это свидетельствует о наступлении эры встраиваемых систем на базе про
цессора Cortex M3!
Ричард Йорк (Richard York)
Руководитель подразделения маркетинrа продукции, компания ARM
ВСТУПИТЕЛЬНОЕ СЛОВО
Люди, пишущие проrраммы для микроконтроллеров, в чём то подобны боже
ствам. Подчиняя микроконтроллеры своей воле, они вдыхают жизнь в застыв
шие конструкции и в итоrе создают фантастические изделия. Далеко не послед
нюю роль в этом акте творения иrрают средства разработки вот почему в rруп
пу, основной задачей которой было упрощение и в то же время усовершенствова
ние процессора ARM7TDMI, помимо разработчиков ЦПУ, вошли специалисты
отдела разработки проrраммных средств компании ARM.
В результате TaKoro cOBMecTHoro творчества на свет появился процессор
СоrtехТМ М3, явивший собой потрясающее развитие ориrинальной архитектуры
ARM. Новый процессор орrанично сочетает в себе все преимущества 32 битной
архитектуры ARM с поддержкой чрезвычайно эффективноrо набора команд
Thumb 2, обеспечивая при этом ряд новых возможностей. Однако, несмотря на
все усовершенствования, процессор Cortex M3 сохранил упрощённую модель
проrраммирования, которая хорошо знакома всем приверженцам архитектуры
ARM.
Уэйн Лайонз (Wayne Lyons)
Руководитель подразделения встраиваемых решений, компания ARM
ВСТУПИТЕЛЬНОЕ СЛОВО
Сеrодня мноrие российские разработчики и специалисты хорошо знакомы
или начинают знакомиться с продукцией компании ARM, в том числе с новыми
продуктами серии Cortex (МО, М3, М4.. .). На все вопросы, связанные с преиму
ществами архитектуры ядра Cortex M3, призвана ответить данная книrа. Это
первый и пока единственный технический материал на русском языке, рассказы
вающий о данной архитектуре, выпущенный при содействии компаний Texas
Instruments и КОМПЭЛ.
В предисловиях автора и сотрудников компании ARM rоворится о тенденци
ях в мире микроконтроллеров и актуальных темах, связанных с архитектурой
ядра. В свою очередь, я бы хотела сфокусировать внимание непосредственно на
компании Texas Instruments, которая также использует продукты ARM в своих
разработках, в том числе в микроконтроллерах на ядре Cortex M3 (семейство
Stellaris, см. Приложение И).
Итак, Texas Instruments (TI) один из самых крупных производителей полу
проводниковыхкомпонентов с номенклатурой более 80 000 наимен ований,КОТО
рая значительно расширилась в 2011 в связи с приобретением компании National
Semiconductor.
Компания ТI была основана в 1930 r. и изначально занималась сейсмоrрафиче
ской разведкой нефти, но уже с 1952 r. переориентировалась на электронику, а в
1958 r. сотрудник ТI Джек Килби изобрел первую в мире интеrральную микросхе
му. С этоrо момента началась новая эпоха в развитии электроники. Компания ТI
самостоятельно разрабатывала микроконтроллеры и цифровые сиrнальные про
цессоры. Тем не менее, важной особенностью развития бизнеса ТI была и покупка
друrих фирм, в основном в области аналоrовых компонентов. Это помоrло компа
нии вырасти из нишевой в rиrанта с широчайшей номенклатурой полупроводни
ковых компонентов. Из самых значимых приобретений Silicon Systems в 1996 r.,
Unitrode и Power Trends в 1999 r., Burr Brown в 2000 r., Chipcon в 2007 r., Luminary
Micro в 2009 r. и самая большая покупка на сеrодня компания National
Semiconductor в 2011 r. Последние приобретения открывают для ТI новые техноло
rии и продукты. Например, с покупкой Luminary Micro компания приобрела ми
кроконтроллеры семейства Stellaris на базе ядра Cortex M3. Ero описанию посвя
щено отдельное приложение в рамках этоrо издания. ТI не останавливается про
сто на покупке: с момента присоединения Luminary Micro линейка продуктов
продолжает расти. Совсем недавно анонсирована линейка новых микроконтрол
леров LM4F на базе ядра Cortex M4. Данная архитектура расширила семейство
Stellaris, которое получило не только новые вычислительные возможности, но и
фирменную технолоrию производства Texas Instruments. Тополоrической нормой
для производства новых контроллеров стала отработанная в течение последних
пяти лет 65 нанометровая технолоrия. В результате стало возможным достичь He
бывалоrо компромисса между производительностью и энерrопотреблением.
Надеюсь, эта книrа станет для вас не просто настольным справочником, а Ha
стоящим помощником в работе с микроконтроллерами, сделанными на базе ядра
Cortex M3 от компании ARM.
Мария Рудяк
Руководитель направления по работе с продукцией Texas Instruments
КОМПЭЛ
ПРЕДИСЛОВИЕ АВТОРА
Данная книrа предназначена как для разработчиков, так и для проrрамми
стов, заинтересовавшихся процессором Соrtех ТМ М3 компании ARM. Разумеется,
в официальных документах, таких как «Cortex M3 Techпical Refereпce Maпual»
и «ARMv7 M Architecture Applicatioп Level Refereпce Maпual», содержится практи
чески вся информация по этому процессору_ Однако указанные документы из
лишне подробны и MorYT оказаться слишком сложными для понимания.
Эта же книrа писалась в расчёте на проrраммистов, разработчиков встраива
емых устройств, разработчиков систем на кристалле, радиолюбителей, учёных
в общем, самых разных людей, изучающих процессор Cortex M3 и хоть в какой
то мере знакомых с микроконтроллерами либо микропроцессорами. В книrе дo
статочно подробно рассматриваются архитектура процессора Cortex M3, набор
команд с примерами использования некоторых из них, различные аппаратные
возможности, а также развитая система отладки процессора. Кроме Toro, в книrе
также приведены примеры проrрамм, позволяющие читателю освоить азы раз
работки ПО дЛЯ процессора Cortex M3 с использованием инструментариев ARM
и GNU. Эта книrа также приrодится разработчикам, переносящим свои проекты
с процессора ARM7TDMI на Cortex M3, поскольку описывает как различия меж
ду двумя указанными процессорами, так и собственно процесс переноса при
кладных проrрамм с процессора ARM7TDMI на Cortex M3_
Бпаrодарности
Прежде Bcero, я хотел бы поблаrодарить всех тех, кто своими советами, KOH
сультациями и отзывами оказал мне оrромную помощь в написании первоrо
и BToporo изданий книrи: Ричарда Йорка (Richard York), Эндрю Фрейма (Andrew
Frame), Рейнхарда Кейла (Reinhard КеН), Ника Сампейза (Nick Sampays), Дэва Ба
нерджи (Dev Banerjee), Роберта Бойза (Robert Boys), Доминика Паджака (Dominic
Pajak), Алана Тринrхэма (Alan Tringham), Стивена Теобальда (Stephen Theobald),
Дэна Брука (Dan Brook), Дэвида Браша (David Brash), rайдна Поуви (Haydn Povey),
[эри Кэмпбелла (Gary СаmрЬеll), Кевина Макдермотта (Kevin McDermott), Ричар
да Ирншоу (Richard Earnshaw), Шияма Садасивана (Shyam Sadasivan), Саймона
Краске (Simon Craske), Саймона Аксфорда (Simon Axford), Такаши Уrаджина (Ta
kashi Ugajin), Уэйна Лайонза (Wayne Lyons), Самина Иштиака (Samin Ishtiaq)
и Саймона Смита (Simon Smith).
Я хотел бы особо поблаrодарить Яна Белла (Ian ВеН) и Джейми Бреттль (Jamie
Brettle) из компании National Instruments за помощь в написании rлавы, посвящён
ной пакету LabVIEW, и за их поддержку_ Также я хотел бы выразить мою призна
тельность Карлосу О'Донеллу (Carlos O'Donell), Брайану Баррере (Brian Barrera) и
Дэниелу Якобовицу (Daniel Jakobowitz) из компании CodeSourcery за их поддержку
и помощь в подборе материалов, касающихся разработки ПО в пакете Sourcery
G++. И, конечно же, orpoMHoe спасибо всем сотрудникам издательства Elsevier за
их профессионализм, проявленный при подrотовке данной книrи к публикации.
Наконец, я хотел бы высказать блаrодарность Питеру Коулю (Peter cole) и Ивану
Ярдли (Ivan Yardley) за их постоянную поддержку и заинтересованность в этом проекте.
ОБО3НАЧЕНИЯ
в данной книrе используются следующие обозначения и правила оформле
ния:
Обычный ассемблерный код
MOV RO, Rli Копируем содержимое реrистра Rl в реrистр RO
Ассемблерный код с использованием обобщёННОIО синтаксиса
Элементы, обозначенные уrловыми скобками, необходимо заменить названи
ями реrистров:
MRS <reg>, <special reg>
Тексты npOlpaMM на языке Си
for (i=Оii<Зiitt) { funcl()i }
псевдокод
if (а > Ь)
Значения
1. 4'ЬС, Ох123 шестнадцатеричные значения.
2. #3 элемент NQ3 (например, IRQ #3 означает IRQ с номером 3).
3. #immed 12 12 битное непосредственное значение (константа).
Биты pelucmpOB
Обычно используются для указания части содержимоrо реrистра; например,
запись «биты [15:12]» относится к битам с 15 ro по 12 й.
Доступность битов pelucmpOB обозначается следующим образом:
1. R доступен только для чтения.
2. W доступен только для записи.
3. R/W доступен для чтения и для записи.
4. R/Wc доступен для чтения, при записи сбрасывается.
rЛОССАРИЙ
ADK АМВА Design Kit
Набор разработки АМВА
АНВ Advanced High Performance Bus
Усовершенствованная высокопроизводительная шина (шина АНВ)
AHB AP АНВ Access Port
Порт доступа к шине АНВ
АМВА Advanced Microcontroller Bus Architecture
Усовершенствованная шинная архитектура для микроконтроллеров
АРВ Advanced Peripheral Bus
Усовершенствованная шина периферии (шина АРБ)
ARM ARM ARM Architecture Reference Manual
Справочное руководство по архитектуре ARM
ASIC Application Specific Integrated Circuit
Заказная интеrральная схема
АТВ Advanced Trace Bus
Усовершенствованная шина трассировки (шина АТВ)
BE 8 Byte invariant big Endian mode
Обратный порядок байтов с неизменным расположением байтов
(формат хранения данных)
CMSIS Cortex Microcontroller Software Interface Standard
Стандарт проrраммноrо интерфейса микроконтроллеров с ядром
Cortex
СРI Cycles Per Instruction
Число тактов на команду
CPU Central Processing Unit
Центральный процессор, ЦПУ
CS3 CodeSourcery Соmmоп Start up Code Sequence
Общий стартовый код ИСР CodeSourcery
DAP Debug Access Port
Порт доступа к модулю отладки (порт DAP)
DSP Digital Signal Processor/Digital Signal Processing
Процессор цифровой обработки сиrналов / Цифровая обработка
сиrналов
DWT Data Watchpoint and Trace unit
Модуль трассировки и поддержки контрольных точек данных
EABI/ABI Embedded Application Binary Interface
Двоичный интерфейс встраиваемых приложений (интерфейс EABI)
ЕТМ Embedded Trace Macrocell
Встроенная макроячейка трассировки
FPB Flash Patch and Breakpoint unit
Модуль коррекции флэш памяти и задания точки останова
FPGA Field Programmable Gate Array
Проrраммируемая вентильная матрица
fлоссарuй . 7
FSR Fault Status Register
Реrистр состояния отказа
НТМ CoreSight АНВ Trace Macrocell
Макроячейка трассировки АНВ
ICE In Circuit Emulator
Внутрисхемный эмулятор
IDE Integrated Development Environment
Интеrрированная среда разработки, ИСР
IRQ Interrupt ReQuest
Запрос прерывания (обычно применяется с внешними
прерываниями)
ISA Instruction Set Architecture
Архитектура набора команд
ISR Interrupt Service Routine
Процедура обработки прерывания
ITM Instrumentation Trace Macrocell
Макроячейка инструментальной трассировки
JTAG Joint Test Action Group
Объединённая рабочая rруппа по автоматизации тестирования;
название стандарта интерфейсов тестирования и отладки
JTAG DP JTAG Debug Port
Порт отладки JTAG
LR Link Register
Реrистр связи
LSB Least Significant Bit
Младший значащий бит
MCU MicroController Unit
Микроконтроллер (МК)
MDK ARM КеН Microcontroller Development Kit for ARM
Пакет разработки для ARM компании КеН
MMU Memory Management Unit
Модуль управления памятью
MPU Memory Protection Unit
Модуль защиты памяти
MSB Most Significant Bit
Старший значащий бит
MSP Main Stack Pointer
Основной указатель стека
NMI NonMaskable Interrupt
Немаскируемое прерывание
NVIC Nested Vectored Interrupt Controller
Контроллер вложенных векторных прерываний
OS Operating System
Операционная система (ОС)
8 . rлоссарuй
РС
PMU
PSP
РРВ
PSR
SCB
SCS
SIMD
SoC
SP
SRPG
SW
SW DP
SWJ DP
SWV
тем
ТРА
TPIU
UAL
UART
WIC
Program Counter
Счётчик команд
Power Management Unit
Модуль управления питанием
Process Stack Pointer
Указатель стека процесса
Private Peripheral Bus
Шина собственных периферийных устройств (шина РРВ)
Program Status Register
Реrистр состояния проrраммы
System Control Block
Блок управления системой
System Control Space
Пространство управления системой
Single Instruction, Multiple Data
Один поток команд несколько потоков данных (архитектура
SIMD)
System on Chip
Система на кристалле
Stack Pointer
Указатель стека
State Retention Power Gating
Технолоrия SRPG
Serial Wire
Интерфейс Serial Wire
Serial Wire Debug Port
Порт отладки Serial Wire
Serial Wire JTAG Debug Port
Порт отладки Serial Wire/JTAG
Serial Wire Viewer
Модуль наблюдения за шиной Serial Wire (один из режимов работы
модуля TPIU)
Tightly Coupled Memory
Тесно связанная память (характеристика Cortex Ml)
Trace Port Analyzer
Анализатор порта трассировки
Trace Port Interface Unit
Модуль интерфейса порта трассировки
Unified Assembly Language
Унифицированный язык ассемблера
Universal Asynchronous Receiver Transmitter
Универсальный асинхронный приёмопередатчик
Wakeup Interrupt Controller
Контроллер пробуждающих прерываний
rЛАВА 1
ВВЕДЕНИЕ
1.1. Процессор ARM Cortex M3 что же зто такое?
Рынок микроконтроллеров поистине orpoMeH по проrнозам аналитиков
в 2010 rоду будет продано более 20 миллиардов данных устройств. На этом рынке
идёт непрерывная конкурентная борьба между различными производителями,
моделями и архитектурами микроконтроллеров. Рост запросов со стороны про
мышленноrо сектора вызвал потребность в более производительных микрокон
троллерах; в частности, возникла необходимость в микроконтроллерах, которые
при той же частоте или потребляемой мощности выполняли бы большее число
операций. Кроме Toro, микроконтроллеры становятся всё более «коммуника
бельными», используя для связи с окружающим миром шину USB, Ethernet или
радиоканал, и вполне естественно, что для поддержки этих каналов связи и раз
витых периферийных устройств требуются дополнительные вычислительные pe
сурсы. Одновременно растёт сложность самих приложений, что обусловлено ис
пользованием более изощрённых пользовательских интерфейсов, необходимо
стью поддержки мультимедиа и увеличением функциональности устройств.
Процессор ARM СоrtехТМ М3 первый представитель процессоров семейства
Cortex, выпущенных компанией ARM в 2006 rоду изначально был нацелен на
рынок 32 битных микроконтроллеров. Данный процессор, несмотря на неболь
шое число лоrических вентилей, требуемых для ero реализации, обладает велико
лепной производительностью и предлаrает MHoro новых возможностей, которые
ранее были доступны только в самых «навороченных» процессорах. Процессор
Cortex M3 удовлетворяет самым разным требованиям рынка 32 битных процес:'
соров для встраиваемых систем, предлаrая:
. Большую производительность позволяет выполнять больший объём вычис
лений без необходимости увеличения частоты или потребляемой мощности.
. Низкое энерzопотребление обеспечивает большее время автономной рабо
ты, что особенно критично для портативных устройств, в том числе использу
ющихся в беспроводных сетях.
. Улучшенный детерминизм rарантирует, что переход к обслуживанию кри
тических задач и прерываний будет осуществляться за минимально возмож
ное и, rлавное, точно определённое время.
10 . fлава 1. Введение
· Увеличенную плотность кода позволяет разместить необходимый код даже
в памяти небольшоrо объёма.
· Простоту использования обеспечивает лёrкость проrраммирования и OT
ладки для растущеrо числа пользователей, переходящих с 8 и 16 битных
платформ на 32 битную.
· Низкую стоимость позволяет приблизить стоимость 32 битных систем
к стоимости классических 8/16 битных устройств и предлаrать 32 битные ми
кроконтроллеры начальноrо уровня по цене, составляющей менее одноrо дол
лара США.
· Большой выбор средств разработки от недороrих или вообще бесплатных
компиляторов до развитых пакетов от различных производителей средств
разработки.
Микроконтроллеры, созданные на базе процессора Cortex M3, уже напрямую
конкурируют с устройствами, имеющими друrие архитектуры. Причём, если
раньше разработчики обращали внимание на стоимость отдельных устройств, то
теперь они, в первую очередь, стремятся к уменьшению стоимости системы в цe
лом. По существу, происходит аrреrирование устройств, блаrодаря чему появля
ется потенциальная возможность замены трёх или четырёх традиционных 8 бит
ных устройств одним более мощным.
Ещё одним из направлений снижения себестоимости является увеличение
объёмов кода, используемоrо повторно в различных изделиях. Поскольку микро
контроллеры с процессорным ядром Cortex M3 рассчитаны на проrраммирова
ние с использованием языков BbIcoKoro уровня, в частности языка Си, и имеют
установившуюся архитектуру, это значительно упрощает перенос и повторное
использование проrрамм, уменьшая тем самым время разработки и затраты на
тестирование.
Следует отметить, что Cortex M3 не первый процессор компании ARM,
предназначенный для создания микроконтроллеров общеrо назначения. До сих
пор на этом рынке пользуется успехом несколько устаревший процессор ARM7,
получивший оrромную популярность блаrодаря различным партнёрам компа
нии ARM, таким как NXP (Philips), Texas Instruments, Atmel, OKI, а также мноrим
друrим производителям, предлаrающим надёжные 32 битные микроконтролле
ры. Вообще rоворя, процессор ARM7 является самым распространённым из
коrда либо выпускавшихся 32 битных встраиваемых процессоров каждый rод
выпускалось и продолжает выпускаться более 1 миллиарда процессоров, находя
щих применение в самых различных устройствах, от мобильных телефонов до
автомобилей.
Предполаrается, что процессор Cortex M3 будет иметь не меньший успех, по
скольку он позволяет создавать микроконтроллеры, предлаrающие более про
стую модель проrраммирования и отладки и при этом имеющие большие вычис
лительные возможности. Кроме Toro, процессор Cortex M3 предоставляет ряд
функциональных возможностей и технолоrий, востребованных разработчиками
микроконтроллеров. Это и наличие немаскируемых прерываний для поддержки
критических задач, и поддержка вложенных векторных прерываний с высокой
степенью детерминизма, и атомарные битовые операции, и даже опциональный
1.2. ARM компания и архитектура. 11
модуль защиты памяти (Memory Protection Unit MPU). Всё это делает процес
сор Cortex M3 привлекательным не только для тех, кто уже использует процессо
ры ARM, но и для массы новых пользователей, задумывающихся оприменении
32 битных микроконтроллеров в своих устройствах.
1.2. ARM ........ компания и архитектура
1.2.1. Историческая справка
Чтобы нам было леrче разобраться в мноrообразии процессоров ARM и Bep
сий их архитектур, совершим краткий экскурс в историю компании ARM.
Компания ARM (Advanced RISC Machines Ltd.) была основана в 1990 rоду как co
вместное предприятие компаний Apple Computer, Arcon Computer Group и VLSI
Technology. В 1991 rоду компания ARM представила семейство процессоров ARM6,
лицензию на выпуск которых первой получила компания VLSI. После Toro как ли
цензии на использование процессора ARM приобрели и друrие компании, в том
числе Texas Instruments, NEC, Sharp и ST Microelectronics, эти процессоры стали
широко применяться в мобильных телефонах, компьютерных жёстких дисках,
КПК, бытовой аудио и видеоаппаратуре и прочих потребительских товарах.
12 . fлава 1. Введение
в наши дни партнёры компании ARM ежеrодно поставляют более двух мил
лиардов процессоров ARM. В отличие от мноrих друrих полупроводниковых
компаний, компания ARM не занимается ни изrотовлением процессоров, ни
продажей микросхем. Вместо этоrо ARM предлаrает своим бизнес партнёрам,
в числе которых большинство ведущих мировых полупроводниковых компаний,
лицензии на использование разработанных ею процессорных ядер. На основе дe
шёвых и экономичных решений от ARM её партнёры создают собственные про
цессоры, микроконтроллеры и системы на кристалле. Такая бизнес модель назы
вается лицензированием интеллектуальной собственности (Intellectual
Property IP).
Помимо процессорных ядер, компания ARM также лицензирует IР блоки си
cTeMHoro уровня и различные проrраммные решения. Для поддержки своей про
дукции компания ARM предлаrает разнообразные аппаратные и проrраммные
средства, призванные облеrчить партнёрам создание собственных продуктов.
1.2.2. Версии архитектуры
На протяжении Bcero времени cBoero существования компания ARM продол
жала разработку новых процессоров и системных блоков. Эволюция функцио
нальных возможностей и постепенное совершенствование процессоров привело
к последовательному появлению нескольких версий архитектуры ARM. Причём,
что интересно, номера версий архитектуры никак не привязаны к обозначениям
процессоров. Скажем, в основе процессора ARM7TDMI лежит архитектура
ARMv4T (буква «Т» указывает на поддержку набора команд ThumЬ Ф ).
Архитектура ARMv5E была реализована в процессорах семейства ARM9,
в частности в процессорах ARM936E S и ARM946E S. В этой версии архитектуры
появилась поддержка «расширенных» команд цифровой обработки сиrналов,
предназначенных для реализации мультимедиа приложений.
Процессоры следующеrо поколения ARMll имели уже новую архитектуру
ARMv6. В данной версии архитектуры была улучшена подсистема памяти и поя
вилась поддержка мультимедийных SIМD команд. Архитектуру ARMv6, в част
ности, имеют процессоры ARMI136J(F) S, ARMl156T2(F) S и ARMI176JZ(F) S.
Буквально сразу же после выпуска на рынок семейства ARMll руководство
компании пришло к выводу, что мноrие новые технолоrии, в частности оптими
зированный набор команд Thumb 2, были бы востребованы и в бюджетных cer
ментах рынков микроконтроллеров и компонентов для автомобильной электро
ники. Также было принято решение о необходимости разработки процессорных
архитектур, которые бы максимально полно удовлетворяли требованиям KOH
кретных классов приложений. Наличие таких архитектур позволило бы созда
вать как содержащие малое число вентилей процессоры для cerMeHToB рынка,
критичных к стоимости компонентов, так и высокопроизводительные и MHoro
функциональные процессоры для устройств BepxHero ценовоrо диапазона.
За последние несколько лет компания ARM значительно расширила HOMeH
клатуру своей продукции путём диверсификации процесса разработки ЦП
1.2. ARM компания и архитектура · 13
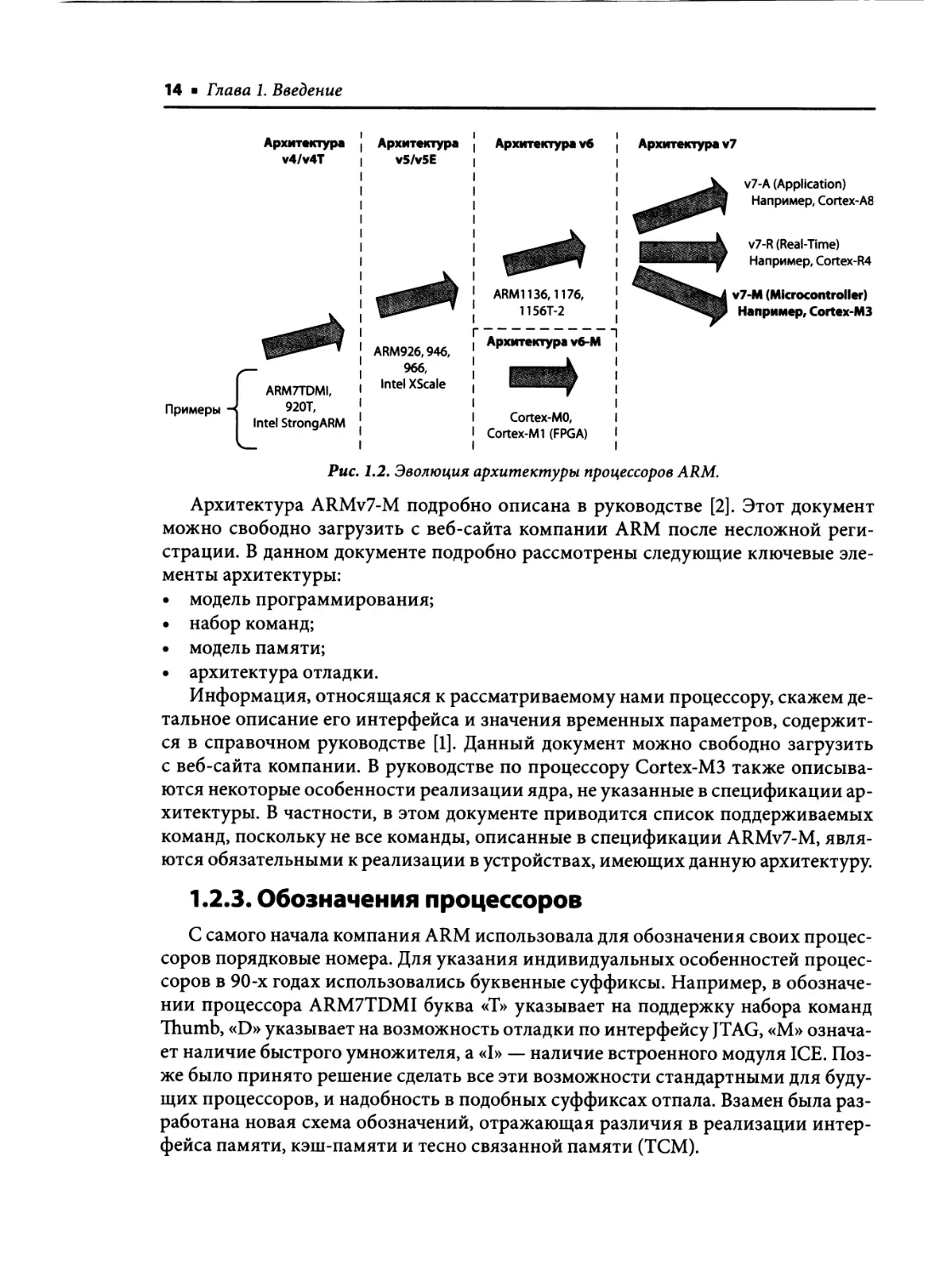
в новой версии в рамках единой архитектуры было выделено три подсемейства
(профиля):
. Профuль А для высокопроизводительных открытых платформ.
. Профuль R для мноrофункциональных встраиваемых систем, работающих
в режиме реальноrо времени.
. Профuль М для встраиваемых систем на базе микроконтроллеров.
Рассмотрим сферы применения различных профилей более подробно:
. Профuль А (ARMv7 A) прикладные процессоры, предназначенные для под
держки сложных приложений, в частности «тяжёлых» встраиваемых опера
ционных систем, таких как Symbian, Linux и Windows Embedded. От этих про
цессоров требуются максимальная вычислительная мощность, поддержка си
стемы виртуальной памяти посредством модулей управления памятью
(MMU) и, по возможности, расширенная поддержка языка Java и обеспечение
безопасной среды выполнения проrраммы. В качестве примера целевых
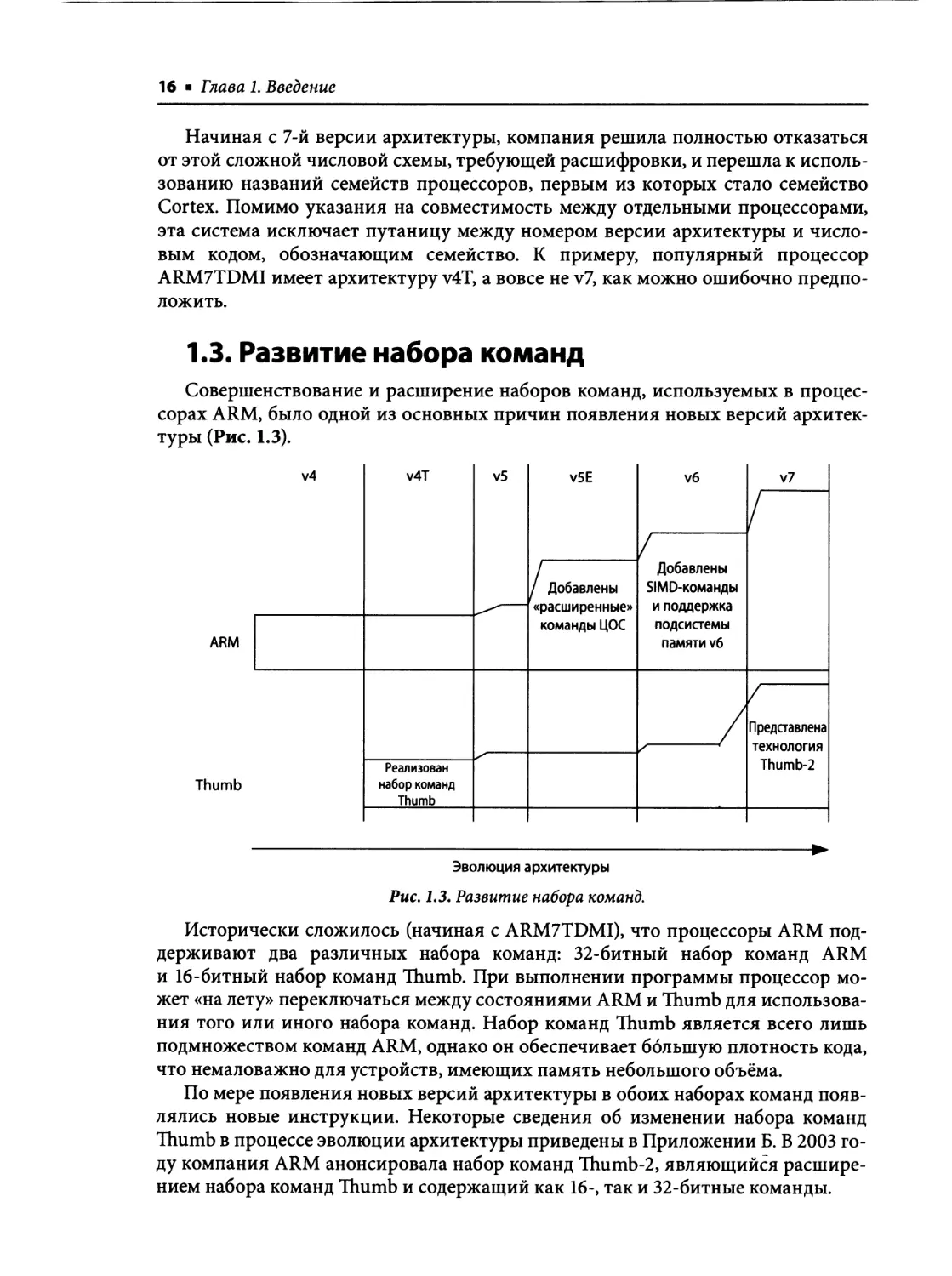
устройств можно указать дороrие мобильные телефоны и электронные KO
шельки для проведения финансовых операций.
. Профuль R (ARMv7 R) высокопроизводительные процессоры, предназна
ченные для создания устройств, работающих в условиях жёсткоrо реальноrо
времени!), таких как системы торможения современных автомобилей и KOH
троллеры жёстких дисков. Подобные приложения требуют большой вычисли
тельной мощности, высокой надёжности и как можно меньшей латентности.
. Профuль М (ARMv7 M) процессоры для бюджетных приложений, в KOTO
рых, помимо высокой производительности, критичными являются такие па
раметры, как стоимость, энерrопотребление, время реакции на прерывания
и простота использования, а также процессоры для систем управления произ
водственными процессами, в том числе систем управления реальноrо BpeMe
ни.
Семейство Cortex является первым семейством, имеющим архитектуру у7,
при этом процессор Cortex M3 основан на профиле ARMv7 M, предназначенном
для микроконтроллеров.
Эта книrа посвящена процессоруСоrtех М3, но не стоит забывать, что данный
процессор является Bcero лишь одним из представителей семейства, имеющеrо
архитектуру ARMv7. Помимо Cortex M3, существует ещё Cortex A8 (прикладной
процессор), основанный на профиле ARMv7 A, и Cortex R4 (процессор реальноrо
времени), основанный на профиле ARMv7 R (Рис. 1.2).
l)Вообще то это большой вопрос, можно ли получить систему «реальноrо времени»,
используя процессоры общеrо назначения. По определению, термин «реальное время»
означает, что система может получить отклик в течение rарантированноrо интервала
времени. В любых системах, основанных на использовании процессоров, возможность
получения или неполучения TaKoro отклика будет зависеть от выбранной ОС, величины
задержки обработки прерываний или от времени доступа к памяти, не rоворя уже о том,
что в требуемый момент времени процессор может быть занят обработкой прерывания
с более высоким приоритетом.
14 . rлава 1. Введение
Архитектура
у4/У4Т
Архитектура
У5/у5Е
Архитектура v6
Архитектура у7
v7 A (Application)
Например, Cortex A8
v7 R (Real Time)
Например, Cortex R4
АRМ7ТDМI,
920Т,
IntelStrongARM
ARMl136,1176,
1156T 2
r l
I Архитектура y M I
I I
I I
I I
I I
I Cortex MO, I
I Cortex M 1 (FPGA) I
I I
Рис. 1.2. Эволюция архитектуры процессоров ARM.
y7 M (Microcontroller)
Например, Cortex M3
Примеры
ARM926, 946,
966,
Intel XScale
Архитектура ARMv7 M подробно описана в руководстве [2]. Этот документ
можно свободно заrрузить с веб сайта компании ARM после несложной реrи
страции. В данном документе подробно рассмотрены следующие ключевые эле
менты архитектуры:
· модель проrраммирования;
· набор команд;
· модель памяти;
· архитектура отладки.
Информация, относящаяся к рассматриваемому нами процессору, скажем дe
тальное описание ero интерфейса и значения временных параметров, содержит
ся в справочном руководстве [1]. Данный документ можно свободно заrрузить
с веб сайта компании. В руководстве по процессору Cortex M3 также описыва
ются некоторые особенности реализации ядра, не указанные в спецификации ap
хитектуры. В частности, в этом документе приводится список поддерживаемых
команд, поскольку не все команды, описанные в спецификации ARMv7 M, явля
ются обязательными к реализации в устройствах, имеющих данную архитектуру.
1.2.3. Обозначения процеССОрО8
е caMoro начала компания ARM использовала для обозначения своих процес
соров порядковые номера. Для указания индивидуальных особенностей процес
соров в 90 x rодах ИСПОЛЬЗ0вались буквенные суффиксы. Например, в обозначе
нии процессора ARM7TDMI буква «Т» указывает на поддержку набора команд
Thumb, «D» указывает на возможность отладки по интерфейсу JT AG, «М» означа
ет наличие быстроrо умножителя, а «1» наличие BCTpoeHHoro модуля ICE. Поз
же было принято решение сделать все эти возможности стандартными для буду
щих процессоров, и надобность в подобных суффиксах отпала. Взамен была раз
работана новая схема обозначений, отражающая различия в реализации интер
фейса памяти, кэш памяти и тесно связанной памяти (тем).
1.2. ARM компания и архитектура . 1S
Например, процессорам ARM с кэш памятью и MMU были присвоены коды
26 или 36, тоrда как процессоры с MPU получили код 46 (например, ARM946E 5).
Кроме Toro, были введены новые суффиксы, отражающие использование TeXHO
лоrии синтезируемоrо 1 ) кода (5) и технолоrии Jazelle (J). Различные названия про
цессоров сведены в Табл. 1.1.
Таблица 1.1. Обозначении процессоров ARM
Название Версия Возможности по управлению Прочие возможности
процессора архитектуры памятью
ARM7TDMI ARMv4T
ARM7TDMI S ARMv4T
ARM7EJ S ARMv5E DSP, J azelle
ARM920T ARMv4T MMU
ARM922T ARMv4T MMU
ARM926EJ S ARMv5E MMU DSP, J azelle
ARM946E..S ARMv5E MPU DSP
ARM966E S ARMv5E DSP
ARM968E S ARMv5E DMA, DSP
ARM966HS ARMv5E MPU (опция) DSP
ARMI020E ARMv5E MMU DSP
ARMI022E ARMv5E MMU DSP
ARMI026EJ"S ARMv5E MMU или MPU DSP, J azelle
ARMl136J(F) S ARMv6 MMU DSP, J azelle
ARMl176JZ(F) S ARMv6 MMU + TrustZone DSP, J azelle
ARMll MPCore ARMv6 MMU + поддержка DSP, J azelle
мноrопроцессорноrо кэша
ARMl156T2(F) S ARMv6 MPU DSP
Cortex MO ARMv6 M NVIC
Cortex Ml ARMv6 M FPGA ТСМ интерфейс NVIC
Cortex М3 ARMv7..M MPU (опция) NVIC
Cortex R4 ARMv7 R MPU DSP
Cortex R4F ARMv7 R MPU DSP + поддержка операций
с плавающей точкой
DSP, Jazelle, NEON +
Cortex A8 ARMv7..A MMU + TrustZone поддержка операций
с плавающей точкой
MMU + TrustZone + поддержка DSP, Jazelle, NEON +
Cortex A9 ARMv7 A мноrопроцессорных поддержка операций
конфиrураций с плавающей точкой
1) Синтезируемое процессорное ядро поставляется в виде поведенческоrо описания,
выполненноrо на языке описания аппаратуры, таком как Verilog или VHDL. Посредством
проrраммы синтезатора это описание может быть преобразовано в список соединений
(электрическую схему) процессора.
16 . Тлава 1. Введение
Начиная с 7 й версии архитектуры, компания решила полностью отказаться
от этой сложной числовой схемы, требующей расшифровки, и перешла к исполь
зованию названий семейств процессоров, первым из которых стало семейство
Cortex. Помимо указания на совместимость между отдельными процессорами,
эта система исключает путаницу между номером версии архитектуры и число
вым кодом, обозначающим семейство. К примеру, популярный процессор
ARM7TDMI имеет архитектуру v4T, а вовсе не v7, как можно ошибочно предпо
ложить.
1.3. Развитие набора команд
Совершенствование и расширение наборов команд, используемых в процес
сорах ARM, было одной из основных причин появления новых версий архитек
туры (Рис. 1.3).
ДRM
v4 v4T v5 v5E vб v7
/
/
/ Добавлены Добавлены
SIМD команды
«расширенные» И по.цдержка
команды цое подсистемы
памяти у6
/
/ Представлена
./ технолоrия
i/ Thumb 2
Реализован
набор команд
Thumb
Thumb
Эволюция архитектуры
Рис. 1.3. Развитие набора команд.
Исторически сложилось (начиная с ARM7TDMI), что процессоры ARM под
держивают два различных набора команд: 32 битный набор команд ARM
и 16 битный набор команд 1humb. При выполнении проrраммы процессор MO
жет «на лету» переключаться между состояниями ARM и 1humb для использова
ния Toro или иноrо набора команд. Набор команд 1humb является Bcero лишь
подмножеством команд ARM, однако он обеспечивает б6льшую плотность кода,
что немаловажно для устройств, имеющих память небольшоrо объёма.
По мере появления новых версий архитектуры в обоих наборах команд появ
лялись новые инструкции. Некоторые сведения об изменении набора команд
1humb в процессе эволюции архитектуры приведены в Приложении Б. В 2003 ro
ду компания ARM анонсировала набор команд 1humb 2, являющийся расшире
нием набора команд 1humb и содержащий как 16 , так и 32 битные команды.
1.4. Технолоzuя 7humb 2 и архитектура набора команд · 17
Подробная информация о системе команд содержится в справочном PYKOBOД
стве по архитектуре ARM «Тhe ARM Architecture Refereпce Maпual», также называ
емом «ARM ARM». Этот документ обновлялся одновременно с выпуском на pы
нок очередной архитектуры ARMv5, ARMv6 и ARMv7. С появлением архитекту
ры ARMv7 это руководство было разбито на отдельные документы из за появле
ния различных профилей. Собственно набор команд процессора Cortex M3 под
робно описан в руководстве [2]. Вся информация, касающаяся набора команд, KO
торая необходима для разработки проrраммноrо обеспечения, также приведена
в Приложении А данной книrи.
1.4. Технолоrия Thumb..2 и архитектура набора
команд
Внедрение технолоrии 1humb 21) значительно расширило архитектуру систе
мы команд (Instruction Set Architecture ISA) 1humb и позволило получить BЫ
сокоэффективный и мощный набор команд, обладающий серьёзными преиму
ществами перед своим предшественником в части простоты использования,
плотности кода и производительности (Рис. 1.4). Расширенный набор команд
1humb 2 является надмножеством 16 битноrо набора команд 1humb, в который
были добавлены как дополнительные 16 битные, так и новые 32 битные KOMaH
ды. Новый набор команд позволяет выполнять в состоянии 1humb более слож
ные операции, обеспечивая, таким образом, большую эффективность за счёт
уменьшения числа переключений между состояниями ARM и 1humb.
...
,;
,;
"
"
/
I
I
I
I
\
\
\
\
,
,
....
...
...
...
Соrtех МЗ
Архитектура
ARMv7 M
Технолоrия Thumb 2,
З2 6итные и 1 б 6итные
команды Thumb
............
........
........--....----........ -- ........
Рис. 1.4. Взаимосвязь между наборами команд 1humb и 1humb 2.
В связи с тем, что процессор Cortex M3 рассчитан на применение в устрой
ствах с малыми объёмами памяти, таких как микроконтроллеры, а также с целью
уменьшения занимаемой им площади кристалла данный процессор поддержива
ет только набор команд 1humb 2 (наряду с традиционным 1humb). Поэтому
Cortex M3 использует команды набора 1humb 2 для выполнения любых опера
ций, тоrда как прежним процессорам для выполнения некоторых операций при
ходилось задействовать команды ARM. Как следствие, между процессором
1) Thumb и Thumb 2 являются зареrистрированными товарными знаками компании ARM.
18 . Тлава 1. Введение
Cortex M3 и традиционными процессорами ARM отсутствует обратная COBMe
стимость. То есть процессор Cortex M3 не сможет выполнить код) предназначен
ный для процессора ARM7. В то же время Cortex M3 может выполнять практиче
ски все 16 битные команды набора Thumb) включая все команды) поддерживае
мые семейством ARM7, что облеrчает перенос приложений.
С появлением набора 1humb 2) содержащеrо как 16 ) так и 32 битные KOMaH
ды) отпала необходимость в переключении процессора между состояниями
1humb (16 битные команды) и ARM (32 битные команды). Так) в случае исполь
зования процессора семейства ARM7 или ARM9) для выполнения сложных BЫ
числений или большоrо числа условных операций без потери производительно
сти моrло потребоваться переключение в состояние ARM. При использовании же
процессора Cortex M3 вы можете свободно смешивать 32 битные и 16 битные KO
манды без необходимости смены состояния, получая без всяких проблем BЫCO
кую плотность кода и высокую производительность.
Набор команд 1humb 2 очень важный элемент архитектуры ARMv7. По
сравнению с командами) поддерживаемыми процессорами семейства ARM7 (ap
хитектура ARMv4T)) набор команд процессора Cortex M3 имеет MHoro новых
возможностей. Прежде Bcero) это команда аппаратноrо деления и несколько KO
манд аппаратноrо умножения) позволяющие ускорить сложные вычисления.
Кроме Toro) процессор Cortex M3 поддерживает обращение к невыровненным
данным (ранее эта возможность имелась только в самых старших процессорах).
1.5. Области применения процессора Cortex..M3
Имея высокую производительность) обеспечивая высокую плотность кода
и занимая небольшую площадь на кристалле) процессор Cortex M3 является иде
альным выбором для самых различных приложений:
· НедОРО2ие микроконтроллеры. Процессор Cortex M3 замечательно подходит
для создания недороrих микроконтроллеров) повсеместно используемых в ca
мых разных потребительских товарах от иrрушек до электроприборов. На
этом рынке существует очень сильная конкуренция со стороны широко pac
пространенных 8 и 16 битных микроконтроллеров друrих производителей.
Малая мощность) потребляемая процессором Cortex M3) ero высокая произ
водительность и простота применения стимулирует переход разработчиков
встраиваемых устройств на 32 битную платформу и разработку изделий уже
на базе архитектуры ARM.
· Автомобильная электроника. Ещё одной областью применения, как будто
специально созданной для процессора Cortex M3) является автомобильная
промышленность. Процессор Cortex M3 имеет очень высокую производи
тельность и малое время реакции на прерывания) что позволяет использовать
ero в системах реальноrо времени. Поддержка процессором до 240 внешних
прерываний) наличие в нём BCTpoeHHoro контроллера с поддержкой вложен
ных прерываний) а также наличие опциональноrо модуля MPU делает
Cortex M3 идеальным кандидатом на использование в чувствительных к CTO
1.6. Структура KHUZU . 19
имости устройствах автомобильной электроники с высокой степенью инте
rрации.
. Передача данных. Малое энерrопотребление процессора и ero высокая эффек
тивность) а также наличие команд работы с битовыми полями) появившими
ся В наборе 1humb 2) делает Cortex M3 идеальным выбором для большинства
коммуникационных приложений) таких как Bluetooth и ZigBee.
. Автоматизация производства. Ключевыми факторами для устройств управ
ления промышленным оборудованием являются простота) время реакции
и надёжность. И опять же) наличие в процессоре Cortex M3 продвинутоrо
контроллера прерываний) малое время реакции на прерывание и расширен
ные средства обеспечения отказоустойчивости делают этот процессор OCHOB
ным кандидатом на использование в данной области.
. Потребительские товары. Во мноrих потребительских товарах используется
один или несколько высокопроизводительных микропроцессоров. Процессор
Cortex M3) будучи небольшим по размеру) имеет высокую эффективность
и малое энерrопотребление. Кроме Toro) этот процессор поддерживает выпол
нение сложноrо проrраммноrо обеспечения) рассчитанноrо на использование
модуля MPU) обеспечивая надёжную защиту памяти.
На рынке уже предлаrается MHoro изделий) содержащих процессор Cortex M3)
включая устройства начальноrо уровня) стоимость которых не превышает OДHO
ro доллара США. То есть стоимость микроконтроллеров ARM сравнялась или дa
же опустилась ниже стоимости большинства 8 битных микроконтроллеров.
1.6. Структура книrи
Данная книrа содержит общую информацию о процессоре Cortex M3) KOTO
рая структурирована следующим образом:
. [лавы 1 и 2 Введение и обзор Cortex M3.
. [лавы 3...6 Основы Cortex M3.
. [лавы 7...9 Исключительные ситуации и прерывания.
. [лавы 10 и 11 Проrраммирование Cortex M3.
. [лавы 11...14 Аппаратные особенности Cortex M3.
. [лавы 15 и 16 Поддержка отладки в Cortex M3.
. [лавы 17.. .21 Разработка приложений с использованием Cortex M3.
. Приложения.
1.7. Дополнительная литература
Эта книrа никоим образом не является исчерпывающим руководством по
процессору Cortex M3. Цель данной книrи предоставить начальные сведения
тем, кто впервые сталкивается с Cortex M3, а также служить дополнительным
справочником для разработчиков, использующих микроконтроллеры с ядром
Cortex M3. Для получения более подробных сведений о процессоре Cortex M3
следует обращаться к фирменной документации) которую можно заrрузить с веб
сайта компании ARM (www.arт.coт) и веб сайтов её партнёров:
20 · Тлава 1. Введение
· Справочное руководство «Тhe Cortex M3 Techпical Refereпce Maпual» [1] coдep
жит полную информацию о процессоре) в том числе о модели проrраммиро
вания) карте памяти) а также о времени выполнения команд.
· Справочное руководство «Тhe ARMv7 M Architecture Applicatioп Level Refereпce
Maпual» [2] содержит детальную информацию о наборе команд и модели па
мяти.
· Справочная документация (datasheet) на конкретные микроконтроллеры
с ядром Cortex M3. Эту документацию можно найти на веб сайте изrотовите
ля Toro микроконтроллера, который вы намереваетесь использовать.
· Руководства пользователя «Cortex M3 User Guide» предоставляются произво
дителями микроконтроллеров. В ряде случаев этот документ является частью
общеrо руководства на микроконтроллер. В руководстве пользователя) KOTO
рое адаптируется каждым производителем в соответствии с конкретными pe
ализациями их микроконтроллеров) описывается модель проrраммирования
процессора Cortex M3 и приводится подробное описание набора команд.
· Спецификация «АМБА Speci.ficatioп 2.0» [4] содержит полную информацию
о реализации протокола внутренней системной шины АМВА.
· Руководство по применению «AN179. Cortex M3 Eтbedded Software
Developтeпt» [7]) предлаrаемое компанией ARM) содержит полезные советы,
касающиеся проrраммирования процессора Cortex M3 на языке Си.
Данная книrа рассчитана на тех читателей) которые уже имеют некоторый
опыт в проrраммировании встраиваемых систем) предпочтительно для процес
соров ARM. Если же вы, будучи менеджером или студентом, хотите Bcero лишь
ознакомиться с процессором Cortex M3 и не желаете тратить время на чтение
всей книrи или изучение справочноrо руководства по процессору, то peKOMeH
дую прочитать вторую rлаву) в которой приводятся основные сведения о процес
соре Cortex M3.
rЛАВА 2
ОБ30Р CORTEX..M3
2.1. Основные сведения
Процессор СоrtехТМ М3 представляет собой 32 битный микропроцессор. Он
имеет 32 битную шину данных, 32 битный банк реrистров и 32 битные интер
фейсы памяти (Рис. 2.1).
Соrtех МЗ
Ядро процессора
Прерывания
о.
о
I--ct
", :J:
0.",
:s: о
3
Q)
с{
АЛУ
s
со
О
а.
s
u
u
а.
.....
u
'S
Q)
-е-
а.
Q)
.....
:s:
Система
отладки
Трассировка
):S:
:s:
:J:
",
CD
::о
о.
Q)
о. ..........
E::U
0. >
Q)z
с:::: ..........
с::
о
о.
1--
:J:
О
:s:
o.ct
ож
'f2",
.й
СЮ О
5
с::::
LQ
Банк
реrистров
Интерфейс памяти
Шина команд
Модуль
защиты памяти
(MPU)
Шина данных
Интерфейс
отладки
Отладка
Межшинные соединения
Память
проrрамм
Подсистема памяти
и периферийные
устройства
Собственные
периферийные
устройства
Опциональные
компоненты
Рис. 2.1. Упрощённая блок схема Cortex M3.
Процессор выполнен по rарвардской архитектуре) т.е. имеет раздельные ши
ны команд и данных. Это позволяет осуществлять выборку команд OДHOBpeMeH
но с обращением к данным. В результате увеличивается производительность
процессора) поскольку операции доступа к данным никак не влияют на конвейер
команд. Это позволило реализовать в процессоре Cortex М3 несколько шинных
интерфейсов) каждый из которых оптимизирован для выполнения определён
ных функций и, В то же время, может использоваться одновременно с друrими
22 . Тлава 2. Обзор Cortex M3
интерфейсами. При этом шины команд и данных разделяют одно и то же aдpec
ное пространство (единая система памяти). Друrими словами) наличие раздель
ных шинных интерфейсов вовсе не означает) что вы сможете использовать па
мять размером 8 [байт.
Для поддержки сложных приложений) требующих более развитой системы
памяти) в процессоре Cortex M3 предусмотрены опциональный модуль защиты
памяти (Memory Protection Unit MPU) и возможность использования внешней
кэш памяти. Поддерживаются системы памяти) использующие как прямой (little
endian)) так и обратный (big endian) порядок байтов.
В составе процессора Cortex M3 имеется ряд встроенных компонентов отлад
ки. Эти компоненты осуществляют поддержку основных отладочных операций
и возможностей) таких как точки останова (breakpoints) и точки наблюдений
(watchpoints).
Предусмотрены и опциональные компоненты) поддерживающие расширен
ные возможности отладки) в частности трассировку команд) а также различные
типы отладочных интерфейсов.
2.2. Реrистры
Процессор Cortex M3 имеет 16 реrистров с RO по R15 (Рис. 2.2). При этом pe
rистр R13 (указатель стека) реализован в виде банка из двух реrистров (в каждый
момент времени доступен только один из реrистров).
Реrистр
RO
Rl
R2
RЗ
R4
R5
Rб
R7
R8
R9
Rl0
Rll
R12
RlЗ( RlЗ (PSP)
R14 I
R15 I
Функции
Реrистр 06щеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр общеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Реrистр 06щеrо назначения
Указатель OCHOBHoro стека (MSP), Указатель стека процесса (PSP)
Младшие реrистры
Старшие реrистры
Реrистр связи (LR)
Сч тчиккоманд(РС)
Рис. 2.2. Pezucтpbl процессора Cortex М3.
2.2. Pezucтpbl · 23
2.2.1. RO...R12....... реrистры общеrо назначения
Реrистры с RO по R12 являются 32 битными реrистрами общеrо назначения)
предназначенными для хранения обрабатываемых данных. Некоторые 16 бит
ные команды Thumb@ MorYT обращаться только к младшим реrистрам (RO...R7).
2.2.2. R13 ....... указатели стека
Процессор Cortex M3 содержит два указателя стека (RI3). Они объединены
в банк) поэтому в каждый момент времени виден только один из них:
. Основной указатель стека (Main Stack Pointer MSP) указатель стека) ис
пользуемый ядром операционной системы и обработчиками исключитель
ных ситуаций.
. Указатель стека процесса (Process Stack Pointer PSP) указатель стека) ис
пользуемый прикладной проrраммой.
Два младших бита указателей стека всеrда сброшены в О) т.е. эти указатели
всеrда выровнены на rраницу 32 битноrо слова.
2.2.3. R14 ....... реrистр связи
в этом реrистре при вызове подпроrраммы запоминается адрес возврата.
2.2.4. R15 ....... счётчик команд
Счётчик команд (Program Counter РС) содержит адрес выполняемой в дaH
ный момент команды. Этот реrистр может быть изменён для управления ходом
выполнения проrраммы.
2.2.5. Реrистры специальноrо назначения
в процессоре Cortex M3 также имеется несколько реrистров специальноrо Ha
значения (Рис. 2.3):
. реrистры состояния проrраммы (xPSR);
. реrистры маскирования прерываний (PRIMASK) FAULTMASK и BASEPRI);
. реrистр управления (CONTROL).
Эти реrистры выполняют специальные функции и для обращения к ним необ
ходимо использовать особые команды. Указанные реrистры не MorYT задейство
ваться для обработки и хранения обычных данных (Табл. 2.1).
Реrистр
Функции
xPSR
Реrистры состояния nporpaMMbI
PRIMASK
Реrистрымаскирования
прерываний
Реrистры
специальноrо
назначения
FAULTMASK
BASEPRI
CONTROL
Реrистр управления
Рис. 2.3. Pezucтpbl специальноzо назначения процессора Cortex M3.
24 · Тлава 2. Обзор Cortex M3
Таблица 2.1. Реrистры специальноrо назначения и их функции
Реrистр Назначение
Содержат флаrи результатов выполнения арифметических и лоrических
xPSR операций (флаr нуля и флаr переноса), состояние выполнения проrраммы
и номер обрабатываемоrо в данный момент прерывания
PRIMASK Запрещает все прерывания, за исключением немаскируемоrо прерывания (NMI)
и исключения Hard Fault
FAULTMASK Запрещает все прерывания, за исключением NMI
BASEPRI Запрещает все прерывания, имеющие уровень приоритета, равный или меньший
заданноrо
CONTROL Определяет уровень доступа и используемый указатель стека
Примечание. Более подробно эти реrистры рассмотрены в [лаве 3.
2.3. Режимы работы
Процессор Cortex M3 имеет два режима работы и поддерживает два уровня
доступа к коду проrраммы. Режимы работы 1hread (режим потока) и Handler (pe
жим обработчика) определяют, какой код выполняет процессор в данный момент
времени код обычной проrраммы или же код обработчика исключительной
ситуации, такой как прерывание или системное исключение (Рис. 2.4). Два ypOB
ня доступа к коду (привилеrированный и пользовательский) обеспечивают безо
пасное обращение к критическим областям памяти, а также реализуют базовую
модель механизма защиты.
При выполнении обработчика
исключительной ситуации
При выполнении прочеzо кода
(например, основной пpozpaMMbI)
Привипеrиро
ванный доступ
Режим обработчика
(Handler)
Режим потока
(rh read)
Непривипеrиро
ванный доступ
Рис. 2.4. Режимы работы и уровни доступа к коду процессора Cortex M3.
При работе процессора в режиме потока допускается как привилеrированное,
так и непривилеrированное выполнение проrраммы, тоrда как обработка исклю
чительных ситуаций всеrда осуществляется на привилеrированном уровне. После
сброса процессор находится в режиме потока справами привилеrированноrо дo
ступа к коду. В состоянии привилеrированноrо доступа проrрамма может обра
щаться к любым областям памяти (за исключением тех, доступ к которым запре
щён настройками модуля MPU) и использовать все поддерживаемые команды.
Проrраммное обеспечение, выполняющееся на привилеrированном уровне,
может переключиться на пользовательский уровень, используя реrистр управле
ния. В случае возникновения исключительной ситуации процессор автоматиче
ски переключится на привилеrированный уровень, а при выходе из обработчи
ка вернётся на исходный. Пользовательская проrрамма не может самостоя
тельно переключиться на привилеrированный уровень посредством записи в pe
rистр управления (Рис. 2.5). Для этоrо необходим обработчик исключительной
ситуации, который заrрузит в реrистр управления такое значение, чтобы при
2.4. Встроенный контроллер вложенных векторных прерываний · 2S
возврате в режим потока процессор переключился на привилеrированный ypo
вень.
Начало
( сброс)
Рис. 2.5. Диаzрамма допустимых переходО8 между режимами работы процессора Cortex M3.
Наличие двух уровней доступа увеличивает надёжность системы, запрещая
непроверенному коду доступ к реrистрам, определяющим конфиrурацию систе
мы. При наличии модуля MPU он может использоваться совместно с привилеrи
рованным уровнем доступа для защиты критических секций памяти, например
содержащих исполняемый код и данные ядра ОС.
Так, на привилеrированном уровне доступа, обычно используемом ядром
операционной системы, допускается обращение к любым областям памяти, не за
блокированным настройками модуля MPU. При запуске системой пользователь
cKoro приложения, оно, в большинстве случаев, выполняется на непривилеrиро
ванном (пользовательском) уровне, что позволяет защитить систему от возник
новения сбоев из за HeKoppeKTHoro функционирования пользовательских про
rpaMM.
2.4. Встроенный контроллер вложенных
v
векторных прерывании
в составе процессора Cortex M3 имеется контроллер вложенных векторных
прерываний (Nested Vectored Interrupt Controller NVIC). Он тесно связан
с ядром процессора и выполняет следующие функции:
. поддержка вложенных прерываний;
. поддержка векторных прерываний;
. поддержка динамическоrо изменения приоритетов;
. уменьшение задержки обработки прерывания;
. маскирование прерываний.
2.4.1. Поддержка ВI10женных прерываний
Контроллер NVIC обеспечивает поддержку вложенных прерываний. Всем
внешним прерываниям и большинству системных исключений MorYT быть Ha
значены различные уровни приоритета. При возникновении прерывания KOH
троллер сравнивает ero приоритет с приоритетом прерывания, обрабатываемоrо
26 . fлава 2. Обзор Cortex M3
в данный момент. Если новое прерывание имеет более высокий приоритет, то об
работка текущеrо прерывания приостанавливается и запускается обработчик
HOBoro прерывания.
2.4.2. Поддержка векторных прерываний
в процессоре Cortex M3 реализована поддержка векторных прерываний.
В случае возникновения разрешённоrо прерывания стартовый адрес COOTBeT
ствующей процедуры обработки прерывания (Interrupt Service Routine ISR) бе
рётся из таблицы векторов, расположенной в памяти. Причём, определение CTap
TOBoro адреса ISR и переход на Hero осуществляется полностью аппаратно, что
ускоряет обслуживание запроса прерывания.
2.4.3. Поддержка динамическоrо изменения
приоритетов
Уровни приоритета прерываний MorYT изменяться проrраммно. При этом aK
тивация обслуживаемых в данный момент прерываний блокируется до выхода
из процедуры обработки прерывания, что исключает нежелательный повторный
вызов обработчиков прерываний при изменении приоритетов.
2.4.4. Уменьшение времени реакции на прерывание
в процессоре Cortex M3 также реализованы определённые решения, позволя
ющие уменьшить задержку обработки прерываний. Это автоматическое coxpa
нение и восстановление содержимоrо некоторых реrистров, уменьшение задерж
ки при переходе от одной процедуры обработки прерывания к друrой, а также
обработка «опоздавших» прерываний. Более подробно эти возможности процес
сора рассматриваются в [лаве 9.
2.4.5. Маскирование прерываний
Прерывания и системные исключения MorYT быть маскированы в COOTBeT
ствии с их уровнями приоритета или же полностью при помощи реrистров Ma
скирования BASEPRI, PRIMASK и FAULTMASK. Эти реrистры MorYT использо
ваться для Toro, чтобы исключить прерывание cTporo оrраниченных во времени
задач, тем самым rарантируя их своевременное завершение.
2.5. Карта памяти
в процессоре Cortex M3 используется фиксированное распределение aдpec
Horo пространства. Это позволяет обращаться к встроенным периферийным
устройствам, таким как контроллер прерываний и компоненты системы отладки,
посредством обычных команд доступа к памяти. То есть большинство системных
функций можно использовать напрямую из проrрамм, написанных на языке Си.
Предопределённая карта памяти также обеспечивает чрезвычайно высокую CKO
рость работы процессора и облеrчает ero интеrрацию в системы на кристалле
(System оп а Chip SoC).
2.6. Интерфейсы шин · 27
Распределение общеrо адресноrо пространства размером 4 rбайт показано на
Рис. 2.6.
OxFFFFFFFF
ОхЕООООООО
OxDFFFFFFF
ОхАООООООО
Ox9FFFFFFF
Ох60000000
Ox5FFFFFFF
Ох40000000
ОхЗFFFFFFF
Ох20000000
Ox1FFFFFFF
ОхОООООООО
Системная область
Внешние устройства
Внешнее ОЗУ
Периферийные устройства
СОЗУ
Код
Собственная периферия,
включая встроенный контроллер
прерываний (NVIC), реrистры
управления MPU и компоненты
отладки
Используется внешними
периферийными устройствами
Используется внешней памятью
Используется различными
периферийными устройствами
Используется, в основном,
внутренним статическим ОЗУ
Используется, в основном,
для хранения кода проrраммы. После
включения процессора содержит
также таблицу векторов прерываний
Рис. 2.6. Карта памяти процессора Cortex M3.
Процессор Cortex M3 имеет внутреннюю шинную инфраструктуру, которая
оптимизирована для использования памяти, распределённой в соответствии
с Рис. 2.6. Кроме Toro, конструкция процессора позволяет задействовать указан
ные области различным образом. Так, память данных может быть размещена
в секции кода, а код проrраммы может запускаться из секции внешнеrо 03
В системных областях памяти располаrаются контроллер прерываний и KOM
поненты отладки. Эти устройства имеют фиксированные адреса, полная инфор
мация о которых приведена в rлаве 5. Размещение этих периферийных устройств
по фиксированным адресам значительно облеrчает перенос приложений между
микроконтроллерами различных производителей.
2.6. Интерфейсы шин
в процессоре Cortex M3 реализовано несколько шин, что позволяет ему ocy
ществлять выборку команд одновременно с обращением к данным. Можно Bыдe
лить следующие основные интерфейсы шин:
. шины памяти кода;
. системная шина;
. шина собственных периферийных устройств.
28 · rлава 2. Обзор Cortex M3
Шины памяти кода предназначены для обеспечения доступа к одноимённой
области памяти и физически реализованы в виде двух шин, называемых I Code
и D Code. Такое решение позволило уменьшить время выборки команд, увели
чив тем самым быстродействие процессора.
Системная шина используется для доступа к памяти и периферийным устрой
ствам. С её помощью производятся обращения к статическому ОЗУ (СОЗУ), пе
риферии, внешнему ОЗУ, внешним устройствам, а также к некоторым системным
областям памяти.
Шина собственных периферийных устройств обеспечивает доступ к опреде
лённой части памяти, зарезервированной для использования встроенными пе
риферийными устройствами процессора, такими как компоненты отладки.
2.7. Модуль защиты памяти MPU
в процессоре Cortex M3 предусмотрен опциональный модуль защиты памяти
MPU. Этот модуль позволяет задавать правила доступа к памяти на привилеrи
рованном и пользовательском уровнях. При нарушении правил доступа rенери
руется исключение отказа, в обработчике KOToporo можно проанализировать
проблему и, по возможности, скорректировать её.
Модуль MPU можно задействовать различным образом. В общем случае ОС
может настроить MPU для защиты данных, используемых ядром ОС и друrими
привилеrированными процессами, от недостаточно надёжных пользовательских
проrрамм. Помимо этоrо, модуль MPU может применяться для перевода опреде
лённых областей памяти в режим «только для чтения», позволяя тем самым пре
дотвратить случайное повреждение данных или же изолировать области памяти
различных задач в мноrозадачной системе. В общем и целом, модуль MPU помо
raeT повысить надёжность и отказоустойчивость встроенных систем.
Модуль MPU является необязательным компонентом процессора, и решение
о ero использовании принимается на этапе реализации микроконтроллера или
системы на кристалле. Более подробно о модуле MPU рассказывается в [лаве 13.
2.8. Набор команд
Процессор Cortex M3 поддерживает набор команд Thumb 2. Это одна из наи
более важных особенностей процессора, поскольку позволяет совместно исполь
зовать 16 и 32 битные команды, обеспечивая одновременно как высокую эффек
тивность, так и высокую плотность кода. Набор Thumb 2 rибкий, мощный
и при этом простой в использовании набор команд.
В предыдущих процессорах компании ARM центральный процессор (ЦПУ)
Mor находиться в одном из двух состояний: 32 битном состоянии ARM и 16 бит
ном состоянии Thumb. В состоянии ARM все команды являются 32 битными, что
обеспечивает очень высокую производительность. В состоянии Thumb команды
являются 16 битными, позволяя получить более высокую плотность кода. OДHa
ко эти команды имеют оrраниченную функциональность по сравнению с KOMaH
дами ARM, поэтому для выполнения определённых операций может потребо
ваться большее число команд.
2.8. Набор команд . 29
Для использования преимуществ обоих состояний код большинства прило
жений состоит из смеси команд ARM и Thumb. Однако такой подход не всеrда ce
бя оправдывает. На переключение процессора между состояниями расходуется
как время, так и место в памяти (Рис. 2.7). К тому же наличие двух наборов KO
манд может потребовать разбиения исходноrо кода на отдельные файлы, каждый
из которых будет скомпилирован с использованием соответствующеrо набора.
Это усложняет разработку проrраммноrо обеспечения и уменьшает максималь
ную производительность ядра ЦП
Состояние Thumb
(16 битные команды)
Основная nporpaMMa
в состоянии Thumb
Издержки
Код, критичный ко Возврат
времени выполнения, (например, ВХ LR)
в состоянии ARM I
i l
I I
Переход I
со сменой состояния :
(например, BLX) I
I
I
I
I
Основная
nporpaMMa
в состоянии
Thumb
Состояние ARM
(З2 битные команды)
I
I
I
I
I
I
I
I
I
I
.
Время
Рис. 2.7. Переключение между состояниями ARM и 1humb 8 классическом процессоре ARM,
таком как ARM7.
С появлением набора команд Thumb 2 стало возможным выполнять все необ
ходимые операции, находясь в одном состоянии, необходимость в переключе
нии между двумя рабочими состояниями полностью исчезла. Следует отметить,
что процессор Cortex M3 вообще не поддерживает набор команд ARM. Даже пре
рывания теперь обрабатываются в состоянии Thumb (ранее при входе в процеду
ры обработки прерываний процессор переключался в состояние ARM). Посколь
ку процессору Cortex М3 не требуется переключаться между рабочими состояни
ями, он имеет ряд преимуществ по сравнению с традиционными процессорами
ARM:
. отсутствуют накладные расходы на переключения между состояниями, в pe
зультате чеrо уменьшается время выполнения и размер кода проrраммы;
. отсутствует необходимость разделения исходных файлов на файлы с кодом
ARM и файлы с кодом Thumb, что облеrчает разработку проrрамм и их даль
нейшее сопровождение;
. упрощается достижение максимальной эффективности и производительно
сти, что, в свою очередь, облеrчает разработку проrраммноrо обеспечения (не
требуется перепрыrивать с одноrо набора команд на друrой, пытаясь достичь
лучшеrо соотношения между размером кода и производительностью).
Процессор Cortex M3 поддерживает ряд интересных и мощных команд. Вот
только некоторые из них:
· UBFX, BFI и BFC извлечение, вставка и очистка битовоrо поля;
30 . fлава 2. Обзор Cortex M3
. UDIV и SDIV беззнаковое и знаковое деление;
. WFE, WFI и SEV ожидание события, ожидание прерывания и rенерация co
бытия; эти команды используются для перевода процессора в режим пони
женноrо энерrопотребления и для поддержки синхронизации между задача
ми в мноrопроцессорных системах;
. MSR и MRS пересылка данных между реrистрами общеrо назначения и реrи
страми специальноrо назначения.
Поскольку процессор Cortex M3 поддерживает только набор команд Thumb 2,
то для использования существующеrо кода, предназначенноrо для друrих про
цессоров ARM, требуется ero перенос на новую архитектуру. В большинстве слу
чаев процедура переноса заключается в перекомпиляции исходных текстов на
языке Си с применением HOBoro компилятора, поддерживающеrо процессор
Cortex M3. Некоторые фраrменты проrраммы, написанные на ассемблере, при
дётся переписать с учётом новой архитектуры и HOBoro унифицированноrо язы
ка ассемблера.
Обратите внимание, что в процессоре Cortex M3 реализованы не все команды
из набора Thumb 2. В соответствии с [2] обязательным к реализации является
только определённое подмножество команд Thumb 2. В частности, в процессоре
Cortex M3 отсутствует поддержка команд сопроцессора (MorYT быть подключены
внешние устройства обработки данных), а также не реализованы SIМD команды
(один поток команд несколько потоков данных). Кроме Toro, не поддержива
ются некоторые команды Thumb, такие как команда перехода BLX (использова
лась для переключения процессора из состояния Thumb в состояние ARM), ряд
команд изменения состояния процесс а (CPS), а также команды изменения пред
ставления мноrобайтных чисел (SETEND), появившиеся в архитектуре у6. Полный
список поддерживаемых команд приведён в Приложении А.
2.9. Прерывания и исключения
в процессоре Cortex M3 реализована новая модель исключений, разработан
ная для архитектуры ARMv7 M. Данная модель отличается от классической MO
дели исключений ARM и обеспечивает очень эффективную поддержку исключи
тельных ситуаций. В этой модели предусмотрено несколько системных исключе
ний плюс некоторое количество внешних запросов прерываний (входы внешних
прерываний). В процессоре Cortex M3 отсутствует быстрое прерывание FIQ,
имеющееся в процессорах ARM7/ARM9/ARMI0/ARMll. С друrой стороны, он
поддерживает приоритеты прерываний, а также вложенные прерывания. Поэто
му не составляет никакоrо труда реализовать систему с поддержкой вложенных
прерываний (прерывание с более высоким приоритетом может приостановить
выполнение обработчика прерывания с более низким приоритетом), которые бу
дут вести себя аналоrично прерыванию PIQ в предыдущих процессорах ARM.
За поддержку прерываний в процессоре Cortex M3 отвечает контроллер пре
рываний NVIC. Помимо внешних прерываний, процессор также поддерживает
несколько внутренних источников исключений, предназначенных, в частности,
для обработки системных отказов. Соответственно, в процессоре имеется He
сколько предопределённых типов исключений (Табл. 2.2).
2.9. Прерывания и исключения · 31
Таблица 2.2. Типы исключений Cortex M3
Номер Тип исключения Приоритет* Описание
исключения
О Исключение отсутствует
1 Reset 3 (Наивысший) Сброс
2 NMI 2 Немаскируемое прерывание (вход
внешнеrо немаскируемоrо прерывания)
3 Hard Fault 1 Любой отказ, если соответствующий
обработчик не разрешён
Отказ системы управления памятью;
4 MemManage Fault Проrраммируемый нарушение правил доступа, заданных
модулем MPU, или обращение по
некорректномуадресу
5 Bus Fault Проrраммируемый Отказ шины (отказ предвыборки или
отказ данных)
6 U sage Fault Проrраммируемый Отказ проrраммы
7.. .10 Зарезервировано Зарезервировано
11 SVCall Проrраммируемый Вызов супервизора
Исключение монитора отладки (точки
12 Debug monitor Проrраммируемый останова, точки наблюдения или
внешняя команда отладки)
13 Зарезервировано Зарезервировано
14 PendSV Проrраммируемый Запрос системной службы
15 SYSTICK Проrраммируемый Системный таймер
16 IRQ #0 Проrраммируемый Внешнее прерывание NQO
17 IRQ #1 Проrраммируемый Внешнее прерывание NQl
. . . . . . . . . . . .
255 IRQ #239 Проrраммируемый Внешнее прерывание NQ239
* Если допускает проrраммирование, то по умолчанию равен О.
Примечание. Количество входов внешних прерываний определяется изrотовителями микросхем
(поддерживается до 240 входов). Кроме Toro, Cortex M3 имеет вход немаскируемоrо прерывания NMI,
при активации KOToporo в обязательном порядке запускается обработчик немаскируемоrо прерывания.
2.9.1. Низкое знерrопотребпение и высокая
знерrозффективность
в процессоре Cortex M3 применён ряд решений, позволяющих разработчи
кам создавать экономичные и энерrоэффективные изделия. Прежде Bcero, это
наличие двух режимов пониженноrо энерrопотребления, позволяющих исполь
зовать различные стратеrии для уменьшения потребления во время простоя.
BO BTOpЫX, снижению потребляемой мощности способствует относительно
небольшое число лоrических вентилей, образующих процессор, а также опреде
лённые схемотехнические решения, позволяющие уменьшить активность OT
дельных ero узлов. Кроме Toro, процессор Cortex M3 обеспечивает высокую плот
насть кода, что снижает требования к объёму памяти проrрамм. В т'о же время
все эти особенности позволяют ускорить выполнение различных задач обработ
32 . rлава 2. Обзор Cortex M3
ки данных и, соответственно, возврат процессора в спящий режим для сокраще
ния энерrопотребления. В результате энерrоэффективность процессора
Cortex M3 оказывается лучшей, нежели у большинства 8 и 16 битных микрокон
троллеров.
Во второй ревизии процессора Cortex M3 появился новый модуль контрол
лер «пробуждающих» прерываний (Wakeup Interrupt Controller WIC). Этот MO
дуль позволяет отключать питание процессорноrо ядра с сохранением состояния
процессора, а также обеспечивает практически мrновенный возврат процессора
в активное состояние при возникновении прерывания. Подобная возможность
позволяет использовать процессор Cortex M3 во мноrих приложениях со CBepx
низким потреблением, которые прежде моrли быть выполнены только на 8 или
16 битных микроконтроллерах.
2.10. Возможности отладки
Процессор Cortex M3 поддерживает различные функции отладки, такие как
управление процессом выполнения проrраммы, включая останов и пошаrовое
исполнение, точки останова и точки наблюдения данных, обращение к реrистрам
процессора и к памяти «на лету», профилирование и трассировку.
Аппаратные средства отладки процессора Cortex M3 базируются на архитек
туре СоrеSight ТМ . В отличие от традиционных процессоров ARM, в самом ядре
процессора интерфейс JTAG отсутствует. Вместо этоrо интерфейс отладки реали
зован в виде отдельноrо модуля, для связи с которым в процессоре предусмотрен
специальный интерфейс, называемый портом доступа к средствам отладки
(Debug Access Port DAP). С помощью указанноrо интерфейса внешние отлад
чики MorYT обращаться как к реrистрам управления аппаратных средств отлад
ки, так и к системе памяти даже во время выполнения процессором проrраммы.
Управление данным интерфейсом осуществляется через внешний порт отладки
(Debug Port DP). В настоящее время реализованы следующие порты: Serial
Wire JTAG Debug Port (SWJ DP), поддерживающий как традиционный протокол
JTAG, так и протокол Serial Wire, и SW DP (поддерживает только протокол Serial
Wire). Также можно использовать модуль JTAG DP из семейства продукции
СоrеSight ТМ от ARM. Производители микроконтроллеров MorYT реализовать ин
терфейс отладки на базе любоrо из указанных модулей.
Для обеспечения возможности трассировки команд производители микро
схем MorYT также включать в свои изделия модуль встроенной макроячейки тpac
сировки (Embedded Trace Macrocell ЕТМ). Трассировочная информация BЫBO
дится через модуль интерфейса порта трассировки (Trace Port Interface Unit
TPIU). Далее информация о выполненных командах с помощью внешнеrо аппа
paTHoro трассировщика передаётся хосту отладки, в качестве KOToporo обычно
применяется персональный компьютер.
В самом процессоре для запуска отладочных действий MorYT использоваться
различные события. Источниками этих событий MorYT служить точки останова,
точки наблюдения, отказы или сиrналы от внешнеrо отладчика. При возникнове
нии любоrо из указанных событий процессор может либо перейти в режим OCTa
нова, либо запустить обработчик исключения монитора отладки.
2.11. Резюме. 33
Функция точек наблюдения данных реализуется модулем просмотра и тpac
сировки данных (Data Watchpoint and Trace DWT) процессора Cortex M3. Этот
модуль может быть задействован для останова процессора (или для запуска обра
ботчика исключения монитора отладки) или же для rенерации информации
о трассировке данных. При осуществлении трассировки соответствующая ин
формация выводится через модуль TPIU. Следует отметить, что в архитектуре
CoreSight единственный порт трассировки может использоваться совместно He
сколькими устройствами трассировки.
Помимо описанных базовых средств отладки, в процессоре Cortex M3 также
имеется модуль коррекции флэш памяти и задания точки останова (Flash Patch
and Breakpoint FPB). Этот модуль может использоваться для установки про
стых точек останова или же для переназначения адресов команд из области флэш
памяти в область 03
Макроячейка инструментальной трассировки (Instrumentation Trace Macro
сеll ITM) предоставляет разработчику новый канал для передачи данных в OT
ладчик. Данные, записываемые в реrистры модуля ITM, MorYT быть получены OT
ладчиком по интерфейсу трассировки для их последующеrо отображения или
обработки. Этот метод прост в использовании и более быстрый, нежели вывод по
интерфейсу JTAG.
Управление всеми указанными компонентами отладки осуществляется по
шине интерфейса DAP процессора Cortex M3 или же проrраммой, выполняемой
процессором. Вся информация о процессе трассировки может быть получена из
модуля TPIU.
2.11. Резюме
Почему процессор Cortex M3 считается революционным устройством? Какие
преимущества даёт ero использование? Ответы на эти и аналоrичные вопросы
можно найти в данном разделе.
2.11.1. Высокая производитепьность
Процессор Cortex M3 обеспечивает высокое быстродействие микроконтрол
леров:
. Большинство команд, включая команды умножения, выполняются за один
такт. По данному параметру Cortex M3 опережает большинство популярных
микроконтроллеров.
. Раздельные шины команд и данных позволяют одновременно выполнять опе
рации выборки команд и обращения к данным.
. Набор команд Thumb 2 исключает непроизводительные издержки на пере
ключение состояний процессора. Больше не нужно тратить время на переход
между 32 битным состоянием ARM и 16 битным состоянием ТЬиmЬ, что YBe
личивает скорость выполнения проrраммы и уменьшает её размер. ЭТО HOB
шество также упрощает разработку проrраммноrо обеспечения, что, в свою
очередь, сокращает время выхода продукции на рынок и облеrчает последую
щее сопровождение кода.
34 . rлава 2. Обзор Cortex M3
· Набор Thumb 2 является чрезвычайно rибким. Мноrие операции MorYT быть
выполнены с использованием меньшеrо числа команд. Как следствие,
Cortex M3 обеспечивает большую плотность кода и требует меньше памяти
для хранения проrрамм.
· Выборка команд осуществляется 32 битными словами, соответственно, за
один такт может быть выбрано до двух команд. В результате обеспечивается
более высокая пропускная способность для передачи данных.
· Конструкция процессора Cortex M3 позволяет создавать микроконтроллеры,
работающие на высокой частоте (при использовании современных техпроцес
сов более 100 М[ц). Но даже при работе на той же частоте, что и большин
ство друrих микроконтроллеров, Cortex M3 имеет лучшее соотношение числа
тактов на одну команду (CPI). Это позволяет выполнять большее число опера
ций в пересчёте на меrаrерц тактовой частоты или же даёт возможность сни
зить тактовую частоту для уменьшения энерrопотребления.
2.11.2. Развитые средства поддержки прерываний
Средства поддержки прерываний в процессоре Cortex M3 леrки в использо
вании, обладают большой rибкостью и обеспечивают высокую производитель
ность при обработке прерываний:
· Встроенный контроллер прерываний NVIC поддерживает до 240 входов
внешних прерываний. Поддержка векторных прерываний значительно YMeHЬ
шает задержку обработки прерываний, поскольку выбор необходимоrо обра
ботчика осуществляется полностью аппаратно. Кроме Toro, не требуется при
беrать к проrраммным ухищрениям для обеспечения поддержки вложенных
прерываний.
· Процессор Cortex M3 при входе в процедуру обработки прерывания aBTOMa
тически сохраняет в стеке реrистры RO.. .R3, R12, LR, PSR и РС и извлекает их
из стека при выходе из обработчика. Это уменьшает задержку обработки за
про са прерывания и даёт возможность описывать обработчик прерывания
в виде обычной функции на языке Си (см. [лаву 8).
· Система прерываний является чрезвычайно rибкой, поскольку NVIC позво
ляет задавать приоритет индивидуально для каждоrо прерывания. Поддер
живаются не менее 8 уровней приоритета, причём приоритет может изме
няться динамически.
· Для уменьшения задержки обработки прерываний используются такие спе
циальные методы, как принятие «опоздавших» прерываний и прямой переход
(tail chain) от одноrо обработчика прерывания к друrому.
· Допускается прерывание некоторых операций, выполняемых за несколько
тактов, в том числе операций заrрузки/сохранения нескольких реrистров
(LDM/STM) и операций сохранения в стеке и извлечения из стека (PUSH/POP).
При появлении запроса немаскируемоrо прерывания rарантируется HeMeд
ленный запуск обработчика этоrо прерывания, если только система не является
полностью заблокированной. Наличие немаскируемоrо прерывания является
2.11. Резюме . 35
очень важным фактором для большинства приложений, предъявляющих повы
шенные требования к безопасности.
2.11.3. Низкое знерrопотребление
Процессор Cortex M3 может использоваться в самых разных приложениях,
требующих низкоrо энерrопотребления:
. Процессор Cortex M3 позволяет создавать устройства с низким энерrопотре
блением, поскольку содержит относительно небольшое число лоrических BeH
тилей.
. Процессор Cortex М3 имеет два режима пониженноrо потребления (SLEEPING
и SLEEPDEEP). ДЛЯ перехода в эти режимы используются команды WFI или
WFE. Конструкцией процессора предусмотрено раздельное тактирование ero
основных блоков, что позволяет останавливать большинство узлов процессо
ра на время спящеrо режима.
. Полностью статическое, синхронное и синтезируемое ядро позволяет леrко
изrотавливать данный процессор как по специальному (low power), так и по
стандартному техпроцессам.
2.11.4. Системные возможности
в процессоре Cortex M3 реализованы определённые возможности, позволяю
щие использовать ero в самых разных приложениях:
. Поддерживается прямой доступ к битам данных (метод bit band), хранение
данных в формате с обратным порядком и неизменным расположением бай
тов (byte invariant big endian), а также обращения к невыровненным данным.
. Расширенная поддержка обработки системных отказов, в том числе наличие
разных типов исключений и реrистров состояния отказов, облеrчает обнару
жение источника проблемы.
. Блаrодаря наличию TeHeBoro указателя стека, области стека ядра ОС и пользо
вательских процессов MorYT быть изолированы друr от друrа. При использо
вании опциональноrо модуля MPU возможностей процессора оказывается
более чем достаточно для разработки отказоустойчивоrо проrраммноrо обе
спечения и надёжных устройств.
2.11.5. Поддержка отладки
Процессор Cortex M3 имеет боrатые функции отладки, облеrчающие пользо
вателям разработку своих устройств:
. Поддерживает отладочные интерфейсы JTAG или Serial Wire.
. Блаrодаря использованию технолоrии отладки CoreSight, состояние процессо
ра и содержимое памяти может быть получено без останова ядра процессора.
. Имеется встроенная поддержка до шести точек останова и до четырёх точек
наблюдения.
. Имеется опциональный модуль ЕТМ дЛЯ трассировки команд и модуль DWT
дЛЯ трассировки данных.
36 . Тлава 2. Обзор Cortex M3
· Новые возможности отладки, включая реrистры состояния отказов, новые ис
ключения отказов и поддержка функций коррекции флэш памяти (Flash
Patch) значительно облеrчают процесс отладки.
· Модуль ITM предоставляет удобный способ вывода отладочной информации
из TecToBoro кода.
· Схема выборки значений счётчика команд и счётчики, имеющиеся в модуле
DWT, предоставляют информацию, необходимую для профилирования кода.
rлдвд 3
OCHOBbl CORTEX..M3
3.1. Реrистры
Как мы уже знаем, процессор СоrtехТМ М3 имеет 16 реrистров с RO по R15 и He
сколько реrистров специальноrо назначения. Реrистры с RO по R12 являются pe
rистрами общеrо назначения. Ряд команд набора Thumb MorYT обращаться толь
ко к младшим реrистрам RO.. .R7, тоrда как 32 битные команды Thumb 2 MorYT
работать со всеми реrистрами. Реrистры специальноrо назначения выполняют
предопределённые функции и для обращения к ним необходимо использовать
особые команды.
3.1.1. Реrистры общеrо назначения с RO по R7
Реrистры общеrо назначения с RO по R7 также называются младшими pe2и
страми. Обращаться к этим реrистрам MorYT все команды как 16 битноrо набора
Thumb, так и 32 битноrо набора Thumb 2. Все указанные реrистры имеют разряд
ность 32 бита, состояние реrистров после сброса может быть любым.
3.1.2. Реrистры общеrо назначения с R8 по R12
Реrистры общеrо назначения с R8 по R12 также называются старшими pe2и
страми. Обращаться к этим реrистрам MorYT все команды набора Thumb 2 и He
которые команды набора Thumb. Все указанные реrистры имеют разрядность
32 бита, состояние реrистров после сброса может быть любым (Рис. 3.1).
3.1.3. Указатель стека R13
Реrистр процессора R13 используется в качестве указателя стека, причём
в процессоре Cortex M3 имеется два таких указателя. Наличие двух указателей
позволяет реализовать два независимых стека. Используя идентификатор R13,
можно обращаться только к текущему указателю, друrой указатель при этом бу
дет недоступен. Обратиться к недоступному в данный момент указателю можно
только с помощью команд пересылки между реrистром общеrо назначения и ре-
rистром специальноrо назначения (MSR и MRS). Итак, в процессоре Cortex M3
имеются следующие указатели стека:
38 . Тлава 3. Основы Cortex M3
Функции
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Основной указатель стека (MSP), Указатель стека процесса (PSP)
Реrистр
RO
Rl
R2
RЗ
R4
R5
R6
R7
R8
R9
Rl0
Rll
R12
RlЗ (MSP) I RlЗ (PSP)
R14
R15
Реrистр связи (LR)
Счётчик команд (РС)
I xPSR
I PRIMASK
I FAULTMASK
I BASEPRI
I CONTROL
Реrистры состояния проrраммы
Реrистрымаскирования
прерываний
Реrистр управления
Младшие реrистры
Старшие реrистры
Реrистры
специальноrо
назначения
Рис. 3.1. Pezucтpbl процессора Cortex M3.
· Основной указатель стека MSP (в документации ARM он обозначается как
SP main). Это указатель, используемый по умолчанию. Он используется ядром
операционной системы, обработчиками исключительных ситуаций, а также
всеми проrраммными модулями, требующими привилеrированноrо доступа
к памяти.
· Указатель стека процесса PSP (в документации ARM он обозначается как
SP process). Этот указатель используется прикладной проrраммой (если толь
ко не выполняется обработчик исключительной ситуации).
Разумеется, совсем необязательно использовать оба указателя стека. В про
стых приложениях вполне можно обойтись одним указателем, MSP. В любом слу
чае указатели стека применяются при операциях со стеком, таких как помещение
в стек и извлечение из стека.
3.1. Pezucтpbl · 39
в процессоре Cortex M3 для работы со стеком предусмотрены команды PUSH
(заrрузка реrистров в стек) и РОР (извлечение реrистров из стека). Эти команды
имеют следующий синтаксис (текст после каждоrо символа «;» является KOMMeH
тарием):
PUSH {RO} ; R13 = R13 4, затем Memory[R13] = RO
РОР {RO} ; RO = Memory[R13], затем R13 = R13 + 4
В процессоре Cortex M3 реализован «полный» убывающий стек (более под
робно об этом можно узнать из раздела 3.6 «Операции со стеком»). COOTBeTCTBeH
но, указатель стека при помещении HOBoro значения в стек декрементируется. Ko
манды PUSH и РОР обычно используются для сохранения содержимоrо реrистров
в стеке при входе в подпроrрамму и последующеrо восстановления содержимоrо
этих реrистров из стека перед выходом из подпроrраммы. С помощью одной KO
манды можно заrрузить в стек или восстановить из стека сразу несколько реrи
стров:
subroutine 1
PUSH {RO R7, R12, R14} ,
РОР
ВХ
{RO R7, R12, R14}
R14
Сохраняем реrистры I
Выполняем требуемые действия
Восстанавливаем реrистры
Возвращаемся в вызвавшую функцию
40 · Тлава 3. Основы Cortex M3
Вместо названия реrистра RIЗ в проrрамме можно использовать символиче
ское имя SP, эти обозначения полностью эквивалентны. И к указателю MSP,
и к указателю PSP из проrраммы можно обращаться как к RIЗ/SР. Тем не менее,
используя команды доступа к реrистрам специальноrо назначения (MRS/MSR),
можно обратиться к конкретному указателю.
Указатель MSP, также называемый SP тaiп в документации ARM, является
указателем стека по умолчанию после включения процессора; он используется
ядром ОС и обработчиками исключений. Указатель PSP, также называемый
SP process в документации ARM, обычно задействуется пользовательскими про
цессами при наличии встроенной операционной системы.
Поскольку операции сохранения реrистров в стеке и восстановления реrи
стров из стека всеrда выровнены на rраницу 32 битноrо слова (их адреса должны
быть равны Охоо, ОхО4, ОхО8, .. .), биты О и 1 реrистра SP/R13 аппаратно сброшены
во.
3.1.4. Реrистр связи R14
Реrистр R14 используется в качестве реrистра связи (Link Register LR). В ac
семблерной проrрамме вы можете использовать любое из обозначений реrи
стра R14 или LR. Реrистр связи при меняется для сохранения адреса возврата
при вызове процедуры или функции, например при выполнении команды пере
хода со ссылкой (BL):
main Основная проrрамма
BL functionl Вызываем functionl, используя команду перехода со ссылкой
; РС = адрес functionl, а
; LR = адрес следующей команды в main
functionl
; Тело подпроrраммы functionl
ВХ LR ; Возвращаемся
Несмотря на то что бит О счётчика команд всеrда сброшен в о (поскольку KO
манды выровнены на rраницу слова или полуслова), бит О реrистра LR доступен
как для чтения, так и для записи. Это связано с тем, что в наборе команд ТЬитЬ
О й бит часто используется для указания состояния ARM/Thumb процессора.
Чтобы проrраммы, написанные для процессора Cortex M3, моrли запускаться на
друrих процессорах ARM, поддерживающих технолоrию Тbиmb 2, младший бит
реrистра связи сделан доступным и для чтения, и для записи.
3.1.5. Счётчик команд R15
Реrистр R15 служит в качестве счётчика команд РС. ДЛЯ обращения к дaHHO
му реrистру можно использовать любое из обозначений R15 или РС. Из за Ha
личия в процессоре Cortex M3 конвейера значение, считанное из этоrо реrистра,
будет отличаться от адреса исполняемой в данный момент команды (как прави
ло, на 4).
Охl000 : MOV RO, РС ; RO = Охl004
3.2. Pezucmpbl специальноzо назначения · 41
в друrих командах, в частности выполняющих заrрузку констант (чтение ячей
ки памяти по адресу, задаваемому относительно текущеrо значения Ре), действи
тельное значение Ре может не быть равным адресу команды, увеличенному на 4,
из за выравнивания при вычислении адреса. Но в любом случае значение Ре, как
минимум, на 2 байта превышает значение адреса исполняемой команды.
Запись в счётчик команд вызовет переход (LR при этом не изменяется). По
скольку адрес команды должен быть выровнен на rраницу полуслова, младший
бит значения, считываемоrо из РС, всеrда сброшен в О. Однако при выполнении
перехода, как при помощи команды перехода, так и путём непосредственной за
писи в ре, младший бит конечноrо адреса должен быть установлен в 1, посколь
ку он используется для индикации состояния ТЬиmЬ. Если этот бит окажется
сброшенным в О, то процессор попытается переключиться в состояние ARM, что
вызовет rенерацию исключения отказа.
3.2. Реrистры специапьноrо назначения
в процессоре Cortex M3 имеются следующие реrистры специальноrо назначе
ния (Рис. 3.3 и 3.4):
. реrистры состояния проrраммы (xPSR);
. реrистры маскирования прерываний (PRIMASK, FAULTMASK и BASEPRI);
. реrистр управления (CONTROL).
31 30 29 28 27 26:25 24 23:20 19: 16 15: 1 О 9 8 7 6 5 4:0
APSR N Z ( V Q
IPSR Номер исключения
EPSR I(I/IT Т I(I/IT
Рис. 3.3. ОтдеЛЬНblе pezucmpbl состояния npozpaMMbl процессора Cortex M3.
31 30 29 28 27 26:25 24 23:20 19: 16 15: 1 О 9 8 7 6 5 4:0
xPSR N Z ( V Q I(I/IT Т 1(I/lT Номер исключения
Рис. 3.4. ОбъединёННblе pezucmpbl состояния npozpaMMbl (xPSR) процессора Cortex M3.
Указанные реrистры не имеют собственных адресов, поэтому для обращения
к ним необходимо использовать команды MSR и MRS:
MRS <reg>, <special reg>; Чтение реrистра специальноrо назначения
MSR <special reg>, <reg>; Запись в реrистр специальноrо назначения
3.2.1. Реrистры состояния npOrpaMMbI
rруппу реrистров состояния проrраммы составляют три реrистра:
. реrистр состояния приложения APSR;
. реrистр состояния прерывания IPSR;
. реrистр состояния выполнения EPSR.
42 . Тлава 3. Основы Cortex M3
Обращения к этим трём реrистрам производятся посредством команд MSR
и MRS, причём обращаться можно как к каждому реrистру по отдельности, так
и одновременно ко всем реrистрам rруппы. В последнем случае используется
обозначение xPSR.
С помощью команды MSR можно выполнять чтение всех реrистров состояния
проrраммы, а используя команду MRS, можно осуществлять запись в реrистр
APSR (реrистры IPSR и EPSR доступны только для чтения). Например:
MRS rO, APSR Считать состояние флаrов в RO
MRS rO, IPSR Считать состояние исключения/прерывания
MRS rO, EPSR Считать состояние выполнения
MSR APSR, rO Записать состояние флаrов
При одновременном обращении ко всем реrистрам состояния используется
обозначение PSR:
MRS rO, PSR ; Чтение всех реrистров состояния проrраммы
MSR PSR, rO ; Запись во все реrистры состояния проrраммы
Назначение битов реrистров состояния проrраммы указано в Табл. 3.1.
Таблица 3.1. Биты реrистров состояния nporpaMMhI
Бит Описание
N Отрицательное значение
Z Нулевое значение
С Перенос/заём
V Переполнение
Q Насыщение
ICIIIT Состояние команды, возобновляемой после прерывания (ICI); состояние
команды 1F THEN (1Т)
Т Признак состояния ТЬиmЬ, всеrда установлен в 1. Попытка сброса этоrо бита
вызовет rенерацию исключения отказа
Номер Содержит номер исключения, обрабатываемоrо процессором в данный момент
исключения
Если сравнить эти реrистры с реrистром текущеrо состояния проrраммы
CPSR процессора ARM7, то можно заметить отсутствие некоторых битов. Так,
были убраны биты режима (М), поскольку Cortex M3 не имеет режимов работы
в том виде, в котором они были определены в процессоре ARM7. Бит Thumb (Т)
был перемещён в 24 й бит реrистра. Биты состояния прерывания (1 и Р) были за
менены новым реrистром PRIMASK. ДЛЯ сравнения, на Рис. 3.5 показаны форма
ты реrистра CPSR традиционных процессоров ARM.
31 30 29 28 27 26:25 24 23:20 19: 16 15: 1 О 9 8 7 6 5 4:0
ARM N Z С V Q 'т J 3арезе GЕ[З:О] 'Т Е Д F Т м [4:0]
(обобщённый) вировано
АRМ7ТDМI N Z С V F Т м [4:0]
Рис. 3.5. Pezucmpbl сосmояния npozpaMMbl 8 традиционных процессорах ARM.
3.2. Pezucтpbl специальноzо назначения · 43
3.2.2. Реrистры PRIMASK, FAULTMASK и BASEPRI
Реrистры PRIMASK, FAULTMASK и BASEPRI используются для запрещения
исключений (Табл. 3.2).
Таблица 3.2. Реrистры маскирования прерываний
Реrистр
Описание
Однобитный реrистр, который, будучи установлен в 1, разрешает rенерацию
только немаскируемоrо прерывания и исключения Hard Fault; все остальные
прерывания и исключения маскируются. По умолчанию этот реrистр содержит О,
что означает отсутствие маскирования
Однобитный реrистр, который, будучи установлен в 1, разрешает rенерацию
только немаскируемоrо прерывания; все прерывания и системные исключения
маскируются. По умолчанию этот реrистр содержит О, что означает отсутствие
маскирования
Реrистр разрядностью до 8 бит (зависит от разрядности реrистров, используемых
для задания уровня приоритета). Данный реrистр определяет уровень
приоритета маскируемых прерываний. Запись в этот реrистр значения,
отличноrо от нуля, запрещает все прерывания, имеющие такой же или меньший
приоритет (большее значение уровня приоритета). Прерывания с более высоким
приоритетом при этом разрешены. При наличии в реrистре нулевоrо значения
(состояние по умолчанию) маскирование прерываний отключено
PRIMASK
FAULTMASK
BASEPRI
Реrистры PRIMASK и BASEPRI полезны для BpeMeHHoro запрещения преры
ваний в задачах, критичных ко времени исполнения. Операционная система MO
жет использовать реrистр FAULTMASK дЛЯ BpeMeHHoro запрещения обработки
отказов при аварийном завершении задачи. В этом случае MorYT возникать раз
личные исключения. Однако после Toro, как ядром ОС был запущен процесс BOC
становления из HeKoppeKTHoro состояния, прерывание ero работы друrим исклю
чением, вызванным «упавшим» процессом, может оказаться нежелательным. Ta
ким образом, реrистр FAULTMASK предоставляет ядру ОС время, необходимое
для принятия соответствующих мер при возникновении сбоя.
Для обращения к реrистрам PRIMASK, FAULTMASK и BASEPRI используют
ся специальные функции, которые входят в состав библиотек, предоставляемых
изrотовителями микроконтроллеров. Например:
х = get BASEPRI(); // Чтение реrистра BASEPRI
х = get PRIМARK(); // Чтение реrистра PRIМASK
х = get FAULTМASK(); // Чтение реrистра FAULTМASK
set BASEPRI(x); // Запись HOBoro значения в BASEPRI
set PRIМASK(x); // Запись HOBoro значения в PRIМASK
set FAULTМASK(x); // Запись HOBoro значения в FAULTМASK
disable irq(); // Очистка PRIМASK, разрешение прерываний
enable irq(); // Установка PRIМASK, запрещение прерываний
Более подробно эти функции доступа к реrистрам процессорноrо ядра описа
ны в Приложении ж. Достаточно полные сведения о стандарте CMSIS (Cortex
Microcontroller Software Interface Standard стандарт nporpaMMHoro интерфейса
микроконтроллеров с ядром Cortex) можно найти в [лаве 10.
В ассемблерных проrраммах для этих же целей используются команды MRS
и MSR, например:
44 . fлава 3. Основы Cortex M3
MRS rO, BASEPRI ; Считать реrистр BASEPRI в RO
MRS rO, PRlМASK Считать реrистр PRIМASK в RO
МRS rO, FAULTМASK Считать реrистр FAULTМASK в RO
MSR BASEPRI, rO Записать RO в реrистр BASEPRI
MSR PRlМASK, rO Записать RO в реrистр PRlМASK
MSR FAULTМASK, rO Записать RO в реrистр FAULTМASK
Реrистры PRIMASK, FAULTMASK и BASEPRI недоступны на пользователь
ском (непривилеrированном) уровне доступа.
3.2.3. Реrистр управления CONTROL
Реrистр управления используется для задания уровня доступа и выбора YKa
зателя стека. Этот реrистр содержит два бита, назначение которых указано
в Табл. 3.3.
Таблица 3.3. Реrистр управления Cortex M3
Бит Описание
Состояние стека:
1 используется альтернативный стек;
CONTROL[l] О используется основной стек (MSP).
При работе процессора в режиме потока альтернативным стеком является PSP.
ДЛЯ режима обработчика дополнительный стек не определён, поэтому при
работе процессора в режиме обработчика этот бит должен быть сброшен в О
О привилеrированный уровень доступа в режиме потока;
CONTROL[O] 1 пользовательский уровень доступа в режиме потока.
В режиме обработчика процессор всеrда работает на привилеrированном уровне
доступа
CONTROL[1]
При нахождении процессора Cortex M3 в режиме обработчика бит
CONTROL[I] всеrда сброшен в О. в режиме потока этот бит может быть равным
как О, так и 1.
Этот бит доступен для записи только при работе ядра процессора в режиме
потока на привилеrированном уровне. При работе на пользовательском уровне
или в режиме обработчика запись в указанный бит запрещена. Изменить данный
бит можно не только записью в реrистр, но и изменив 2 й бит реrистра LR при
возврате из обработчика исключения. Более подробно об этом будет сказано
в [лаве 8, посвящённой исключениям.
CONTROL[O]
Бит CONTROL[Q] доступен для записи только в привилеrированном состоя
нии. После переключения процессора на пользовательский уровень доступа
единственный способ возврата в прежнее состояние состоит в rенерации преры
вания и изменении состояния процессора в обработчике этоrо прерывания.
Для обращения к реrистру управления из проrрамм на языке Си в CMSIS
совместимых библиотеках драйверов устройств предусмотрены следующие
функции:
х = get CONTROL(); // Считать текущее значение реrистра CONTROL
3.3. Режимы работы . 4S
set CONTROL(x); // Заrрузить в реrистр CONTROL значение х
В ассемблерных проrраммах для обращения к реrистру управления использу
ются команды MRS и MSR:
MRS rO, CONTROL Прочитать содержимое реrистра CONTROL в RO
MSR CONTROL, rO ; Записать RO в реrистр CONTROL
3.3. Режимы работы
Процессор Cortex M3 поддерживает два режима работы и два уровня доступа
к коду проrраммы (Рис. 3.6).
Привилеzированный
Пользоваrпельский
При выполнении обрабоrпчика
исключения
Режим обработчика
(CONTROL[1] = О)
При выполнении НЕ обрабоrпчика
исключения
(например, ОСН. пpozpaMMbI)
Режим потока
(CONTROL[O] = О)
Режим потока
(CONTROL[O] = 1)
CONTROL[1] можеrп быrпь О или 1
Рис. 3.6. Режимы работы и уровни доступа к коду процессора Cortex M3.
При работе процессора в режиме потока он может находиться как на привиле
rированном, так и на пользовательском уровне, тоrда как обработка исключи
тельных ситуаций всеrда осуществляется на привилеrированном уровне. После
сброса процессор находится в режиме потока справами привилеrированноrо дo
ступа к коду.
На пользовательском уровне доступа (режим потока) обращения к простран
ствууправления системой (System Control Space SCS) области памяти, coдep
жащей реrистры конфиrурации и компоненты отладки, заблокированы. Более
Toro, на этом уровне запрещено даже использование команд, обращающихся
к реrистрам специальноrо назначения (таких как MSR, за исключением обраще
ний к реrистру APSR). Если проrрамма, выполняющаяся на пользовательском
уровне доступа, попытается обратиться к пространству SCS или к реrистрам спе
циальноrо назначения, то будет сrенерировано исключение отказа.
Проrраммное обеспечение, работающее на привилеrированном уровне, MO
жет переключиться на пользовательский уровень, используя реrистр управле
ния. При возникновении исключительной ситуации процессор всеrда переклю
чается на привилеrированный уровень, а при выходе из обработчика исключе
ния возвращается на исходный. Пользовательская проrрамма не может сама
переключиться на привилеrированный уровень, выполнив запись в реrистр
управления. Она должна воспользоваться обработчиком исключения, который
запроrраммирует реrистр CONTROL так, чтобы процессор переключился на
привилеrированный уровень при возврате в режим потока (Рис. 3.7).
46 . Тлава 3. Основы Cortex M3
Переключаемся
Привилеrир. уровень в пользовательский режим,
Режим обработчика выполнив запись
в реrистр CONTROl
Привилеrир. уровень C . I
Р тартовыи +
ежим потока код Исключение
Перепроrраммируем
реrистр CONTROl
Пользоват.уровень
Режим потока
Привилеrиро
ванный поток
Рис. З.7: Переключение режимов работы процессора.
Поддержка процессором двух уровней доступа обеспечивает более безопас
ную и надёжную архитектуру. Например, при некорректной работе пользова
тельской проrраммы она никоrда не сможет повредить содержимое реrистров
управления контроллера прерываний. А при наличии модуля MPU можно вооб
ще заблокировать пользовательским проrраммам доступ к областям памяти, ис
пользуемым привилеrированными процессами.
В простых приложениях нет нужды разделять привилеrированный и пользо
вательский уровни доступа. В таких случаях пользовательский уровень доступа
не используется и, соответственно, проrраммирование реrистра управления не
требуется.
Вы можете отделить стек пользовательскоrо приложения от стека ядра опера
ционной системы, чтобы предотвратить крах системы из за некорректной рабо
ты со стеком в пользовательской проrрамме. В этом случае пользовательская
проrрамма, работающая в режиме потока, будет использовать указатель PSP,
а обработчики исключений указатель MSP. Переключение между указателями
стеков осуществляется автоматически при входе в обработчики и при выходе из
них (см. подраздел 3.6.3). Более подробно этот вопрос рассматривается в [лаве 8.
Режим работы процессора и уровень доступа к коду определяются реrистром
управления. Если О й бит реrистра управления сброшен в О, то при rенерации ис
ключения режим процессора будет изменён (Рис. 3.8 и 3.9).
Привилеrир.уровень
Режим обработчика
Привилеrиро
ванный поток
Пользоват.уровень
Режим потока
Рис. З.8. Простая npozpaMMa, не использующая пользовательский уровень доступа в режиме
потока.
3.4. Исключения и прерЫ8ания . 47
Событие,
вызвавшее
Основная преРЫВJие
nporpaMMa
Возврат
из прерывания
Процедура обработки I
прерывания (lSR) :
Режим обработчика
(привилеrированный)
Восста новл(tн ие
контекста:
I
I
I
I
I
I
Сохранение
контекста
Режим потока
(привилеrированный)
.
Время
Режим потока
(привилеrированный)
Рис. 3.9. Переключение режима работы процессора в прерываниu.
Если О Й бит реrистра управления установлен в 1, то при rенерации исключе
ния будут изменены и режим процессора, и уровень доступа (Рис. 3.10).
Основная
nporpaMMa
Событие,
вызвавшее
прерывание
Возврат
из прерывания
Процедура обработки :
прерывания (lSR) I
Режим потока
(пользовательский)
Режим обработчика
(привилеrированный)
Восстановлtние
контекста:
I
I
: Режим потока
I (пользовательский)
I
.
Время
Сохранение
контекста
Рис. 3.10. Переключение режима работы процессора и уровня доступа в прерывании.
Запись в О й бит реrистра управления допускается только на привилеrирован
ном уровне (см. Рис. 2.5). Чтобы проrрамма, выполняющаяся на пользователь
ском уровне, смоrла переключиться в привилеrированное состояние, она должна
сrенерировать прерывание (например, посредством команды вызова супервизо
ра svc) и изменить бит CONTROL[O] в обработчике прерывания.
3.4. Исключения и прерывания
Процессор Cortex M3 поддерживает определённое число исключений, в том
числе фиксированное количество системных исключений и ряд прерываний,
обычно называемых IRQ. Количество входов прерываний в микроконтроллерах
с процессором Cortex M3 зависит от конкретной реализации. Прерывания, reHe
рируемые периферийными устройствами процессора, за исключением системно
ro таймера, тоже подключаются к входам прерываний. Как правило, использует
ся 16 или 32 входа прерываний. Однако вы вполне можете встретить микрокон
троллеры, имеющие большее (или меньшее) число прерываний.
48 . Тлава 3. Основы Cortex M3
Помимо входов обычных прерываний, в процессоре также имеется вход HeMa
скируемоrо прерывания (NMI). Фактическое использование немаскируемоrо
прерывания зависит от KOHKpeTHoro микроконтроллера или системы на кристал
ле. В большинстве случаев вход NMI может быть подключён к сторожевому тай
меру или блоку контроля напряжения питания, который сообщит процессору
о падении напряжения ниже заданноrо уровня. Немаскируемое прерывание MO
жет быть активировано в любой момент времени, в том числе сразу же после BЫ
хода процессора из состояния сброса.
Перечень исключений, поддерживаемых процессором Cortex M3, приведён
в Табл. 3.4. Некоторые системные исключения предназначены для обработки OT
казов процессора и MorYT rенерироваться при возникновении различных He
штатных ситуаций. В контроллере NVIC также имеется несколько реrистров co
стояния отказов, с помощью которых обработчики исключений MorYT опреде
лить причину возникновения исключительной ситуации.
Более подробно исключения процессора Cortex M3 рассматриваются в rлавах 7.. .9.
Таблица 3.4. Типы исключений в процессоре Cortex M3
Номер Тип исклю
исклю Приоритет Описание
чения
чения
1 Reset 3 (наивысший) Сброс
2 NMI 2 Немаскируемое прерывание
Любой отказ, если соответствующий обработчик не
3 Hard Fault 1 может быть запущен (исключение в данный момент
запрещено или маскировано)
Отказ системы управления памятью; нарушение пра
MemManage Проrраммируе вил доступа, заданных модулем MPU, или обращение
4 Fault мый по некорректному адресу (например, при выборке KO
манды из области памяти, не предназначенной для
храненияисполняемоrокод
5 Bus Fault Проrраммируе Отказ шины; возникает при отказе предвыборки
мый команды или при ошибке доступа к данным
Отказ проrраммы; обычно возникает при попытке
6 Usage Fault Проrраммируе исполнить неверную команду или переключиться
мый в недопустимое состояние (скажем, переключить
процессор Cortex M3 в состояние ARM)
7.. .10 Зарезервировано
11 SVCall Проrраммируе Вызов супервизора посредством команды SVC
мый
12 Debug Проrраммируе Исключение монитора отладки
monitor мый
13 Зарезервировано
14 PendSV Проrраммируе Запрос системной службы
мый
15 SYSTICK Проrраммируе Системный таймер
мый
16.. .255 IRQ Проrраммируе Вход прерывания NQO...239
мый
3.5. Таблица векторов · 49
3.5. Таблица векторов
При возникновении события, rенерирующеrо исключение (если данное ис
ключение разрешено), запускается обработчик соответствующеrо исключения.
Для определения начальноrо адреса обработчика предназначена таблица BeKTO
ров. Таблица векторов представляет собой массив 32 битных значений, располо
женных в системной области памяти, каждое из которых является начальным
адресом обработчика одноrо KOHKpeTHoro исключения. Положение таблицы BeK
торов можно изменять оно определяется реrистром смещения таблицы BeKTO
ров VTOR контроллера NVIC. После сброса этот реrистр содержит нулевое зна
чение, поэтому при включении процессора таблица векторов располаrается, Ha
чиная с адреса ОхОО (см. Табл. 3.5).
Таблица 3.5. Таблица векторов после сброса
Номер исключения Смещение Вектор обработчика исключения
18.. .255 Ох48.. .Ox3FF IRQ N22.. .239
17 Ох44 IRQ N21
16 Ох40 IRQ N20
15 Ох3С SYSTICK
14 Ох38 PendSV
13 Ох34 Зарезервировано
12 Ох30 Debug monitor
11 Ох2С SVCall
7.. .10 ОхlС.. .Ох28 Зарезервировано
6 Ох18 Usage Fault
5 Ох14 Bus Fault
4 Охl0 MemManage Fault
3 ОхОС Hard Fault
2 ОхО8 NMI
1 Ох04 Сброс
О ОхОО Начальноезначение SР
К примеру, если событие сброса является исключением с номером 1, то адрес
вектора сброса равен 1 х 4 (каждое слово содержит 4 байта), т.е. ОхОООООО04. BeK
тор NMI (номер 2) расположен по адресу 2 х 4 = ОхОООООО08. Адрес ОхОООООООО
используется для хранения начальноrо значения OCHoBHoro указателя стека.
Младший бит каждоrо вектора указывает, в каком состоянии должен выпол
няться соответствующий обработчик. Поскольку процессор Cortex M3 поддер
живает только команды Thumb, младшие биты всех векторов исключений долж
ны быть установлены в 1.
3.6. Стек
Процессор Cortex M3 поддерживает обычные проrраммно управляемые опе
рации заrрузки в стек и извлечения из стека. Кроме Toro, операции заrрузки
в стек и извлечения из стека выполняются автоматически при входе и выходе из
50 · fлава 3. Основы Cortex M3
обработчика исключения/прерывания. В данном разделе мы рассмотрим про
rраммную работу со стеком (стековые операции при обработке исключений pac
сматриваются в rлаве 9).
3.6.1. Основные стековые операции
в общем случае стековые операции представляют собой операции записи или
чтения памяти по адресу, определяемому указателем стека. Содержимое реrи
стров сохраняется в стеке посредством операции заrрузки в стек и может быть
восстановлено позже посредством операции извлечения из стека. При выполне
нии этих операций указатель стека изменяется автоматически таким образом,
чтобы мноrократная заrрузка данных в стек не привела к стиранию ранее coxpa
нённых данных.
Стек предназначен для BpeMeHHoro сохранения содержимоrо реrистров в па
мяти и последующеrо ero восстановления после завершения некоторой задачи.
При обычном использовании стека каждой операции заrрузки должна COOTBeT
ствовать своя операция извлечения, причём адрес, используемый в этих опера
циях, должен быть одним и тем же (Рис. 3.11). При выполнении команд PUSH/POP
указатель стека инкрементируется и декрементируется автоматически.
Основная nporpaMMa
; RO
BL
Х, Rl У, R2
functionl
z
Подпроrрамма
functionl
PUSH
PUSH
PUSH
РОР
РОР
РОР
ВХ
{RO} Сохраняем RO в стеке (SP инкрементируется)
{Rl} ; Сохраняем Rl в стеке (SP инкрементируется)
{R2} Сохраняем R2 в стеке (SP инкрементируется)
Выполняем задачу (RO, Rl и R2
можно изменять)
{R2} Восстанавливаем R2 (SP декрементируется)
{Rl} ; Восстанавливаем Rl (SP декрементируется)
{RO} ; Восстанавливаем RO (SP декрементируется)
LR ; Возврат
; Вернулись в основную проrрамму
; RO Х, Rl У, R2 Z
... , Следующие команды
Рис. 3.11. ОСНО8ные стеКО8ые операции: одна операция один pezucтp.
При возврате управления в основную проrрамму содержимое реrистров
RO.. .R2 будет таким же, что и до вызова подпроrраммы. Обратите внимание на
порядок выполнения операций: операции извлечения из стека выполняются
в обратном порядке по сравнению с операциями заrрузки в стек.
Данный процесс можно упростить, так как команды PUSH и РОР поддержива
ют сохранение и восстановление нескольких реrистров. В этом случае порядок
3.6. Стек · S1
реrистров, восстанавливаемых из стека, автоматически изменяется процессором
на обратный (Рис. 3.12).
Основная nporpaMMa
; RO
BL
Х, Rl У, R2
functionl
z Подпроrрамма
function 1
PUSH
{RO R2} ; Сохраняем RO, Rl, R2 в стеке
Выполняем задачу (RO, Rl и R2
можно изменять)
{RO R2} Восстанавливаем RO, Rl, R2
LR ; Возвращаемся
РОР
ВХ
; Вернулись в основную проrрамму
; RO Х, Rl У, R2 z
... , Следующие команды
Рис. 3.12. Основные стековые операции: одна операция несколько pezucmpoB.
Вы также можете объединить операцию возврата из подпроrраммы с опера
цией извлечения из стека. Для этоrо необходимо сохранить содержимое реrистра
LR в стеке и извлечь ero в счётчик команд в конце подпроrраммы (Рис. 3.13).
Основная nporpaMMa
; RO Х, Rl У, R2 z
BL functionl
Подпроrрамма
functionl
PUSH {RO R2, LR} ; Сохраняем реrистры,
; включая реrистр связи
Выполняем задачу (RO, Rl и R2
; можно изменять)
РОР
{RO R2, РС}
Восстанавливаем реrистры
и возвращаемся
; Вернулись в основную проrрамму
; RO Х, Rl У, R2 z
; Следующие команды
Рис. 3.13. Основные стековые операции: объединение операции извлечения из стека
с операцией возврата.
3.6.2. Реализация стека в процессоре Cortex..M3
в процессоре Cortex M3 используется модель «полноrо» убывающеrо стека.
Указатель стека указывает на последнее значение, помещённое в стек, и инкре
ментируется перед выполнением новой операции заrрузки в стек. В качестве при
мера на Рис. 3.14 показано выполнение команды PUSH {RO}.
52 · Тлава 3. Основы Cortex M3
RO I Ох12З45678
Адрес
в памяти
Занято
Занято
Последние (охран. данные ......
.....
PUSH {RO}
SP с)
Занято
Занято
Занято
Ох12З45678
SP
[L
Рост
стеКе
Рис. 3.14. Реализация операции заzрузки в стек.
Во время операции извлечения из стека данные считываются из памяти по
адресу, определяемому указателем стека, после чеrо указатель инкрементируется.
Содержимое ячейки памяти не изменяется, однако оно будет перезаписано при
выполнении последующей операции заrрузки в стек (Рис. 3.15).
Адрес
в памяти
Занято
Занято
Занято
Ох12З45678 ......
.....
РОР {RO}
с)
Занято
Занято
Занято
Ох12З45678
u
SP
SP
RO
RO I
Рис. 3.15. Реализация операции извлечения из стека.
Поскольку при выполнении каждой операции заrрузки в стек и извлечения из
стека осуществляется пересылка 4 байт данных (каждый реrистр содержит одно
слово, или 4 байт), значение указателя стека уменьшается/увеличивается на 4
или, при одновременном сохранении/восстановлении нескольких реrистров, на
величину, кратную четырём.
В процессоре Cortex M3 в качестве указателя стека используется реrистр R13.
При возникновении прерывания некоторые реrистры будут автоматически co
хранены в стеке. При возврате из обработчика прерывания эти реrистры также
автоматически будут восстановлены из стека, а значение указателя стека изме
нится соответствующим образом.
3.6.3. Два стека процессора Cortex..M3
Как уже было сказано, в процессоре Cortex M3 имеется два указателя стека:
основной MSP и дополнительный PSP. Используемый в настоящий момент указа
тель определяется битом 1 реrистра управления (далее этот бит обозначается как
CONTROL[I]).
Если бит CONTROL[I] сброшен в О, то указатель MSP используется в обоих pe
жимах работы процессора (Рис. 3.16). В этом случае и основная проrрамма, и об
работчики исключений задействуют под стек одну и ту же область памяти. Такое
поведение используется по умолчанию после включения процессора.
3.6. Стек . 53
Основная
проrрамма
Событие,
вызвавшее
прерывание
Возврат
из прерывания
Процедура обработки :
прерывания (lSR) I
Режим потока
(используется MSP)
Режим обработчика
(используется MSP)
ВосстановлEtние
контекста:
I
I
: Режим потока
: (используется MSP)
.
Время
Сохранение
контекста
Рис. 3.16. CONTROL[1] = о; основной стек используется и в режиме потока, и в режиме
обработчика.
Если бит CONTROL[I] установлен в 1, то в режиме потока используется указа
тель PSP (Рис. 3.17). В этом случае основная проrрамма и обработчики прерыва
ний задействуют под стеки разные области памяти. Это позволяет предотвратить
порчу стека, используемоrо операционной системой, при наличии ошибок
в пользовательской проrрамме (предполаrается, что пользовательская проrрам
ма выполняется только в режиме потока, а ядро ОС выполняется в режиме обра
ботчика).
Основная
проrрамма
Событие,
вызвавшее
прерывание
Возврат
из прерывания
Процедураобработки :
прерывания (lSR) I
Режим потока
(используется PSP)
Режим обработчика
(используется MSP)
Восстановление
контекста:
I
I
I
I Режим потока
I
I (используется PSP)
.
Время
Сохранение
контекста
Рис. 3.17. CONTROL[l] = 1; в режиме потока используется стек процесса, а в режиме
обработчика основной стек.
Заметьте, что в этом случае при автоматическом сохранении и восстановле
нии реrистров будет использоваться дополнительный стек, тоrда как при CTeKO
вых операциях внутри обработчиков основной стек.
В процессоре предусмотрена возможность непосредственной записи/чтения
указателей MSP и PSP, независимо от Toro, на какой из них ссылается в данный
момент реrистр R13. При работе на привилеrированном уровне для доступа к co
дерЖИМQМУ указателей MSP и PSP можно использовать следующие функции:
х = get MSP(); // Чтение значения MSP
set MSP(x); // Установка значения MSP
х = get PSP(); // Чтение значения PSP
54 · fлава 3. Основы Cortex M3
set PSP(x); // Установка значения PSP
Вообще rоворя, изменять значение текущеrо указателя стека внутри Си
функций крайне не рекомендуется, поскольку в стеке MorYT храниться локальные
переменные. Для обращения к указателям стека из ассемблерноrо кода можно ис
пользовать уже известные нам команды MRS и MSR:
MRS RO, MSP ; Чтение OCHoBHoro указателя стека в RO
MSR MSP, RO Запись RO в основной указатель стека
MRS RO, PSP Чтение указателя стека процесса в RO
MSR PSP, RO Запись RO в указатель стека процесса
Считав значение PSP посредством команды MRS, ОС может прочитать данные,
помещённые в стек пользовательской проrраммой (скажем, содержимое реrи
стров перед вызовом супервизора командой SVC). Более Toro, ОС может изменить
значение указателя PSP, например при переключении контекста в мноrозадачной
системе.
3.7. ЦИКЛ сброса
После выхода процессора из состояния сброса он считывает из памяти два
32 битных значения (Рис. 3.18):
· по адресу ОхОООООООО начальное значение R13 (указателя стека);
· по адресу ОхОООООО04 вектор сброса (адрес, с KOToporo начинается выполне
ние проrраммы; младший бит значения должен быть установлен в 1 для YKa
зания состояния Thumb).
Выборка начальноrо Выборка
значения SP вектора сброса
Выборка
команды
--..----..--..............
I
Адрес = ,
вектор сброса I I
L I
Адрес =
ОхОООООООО
Адрес =
ОхООООООО4
.
Время
Рис. 3.18. Цикл сброса.
Эта последовательность отличается от поведения традиционных процессоров
ARM. Предыдущие процессоры компании ARM выполняли проrраммный код, Ha
чиная с нулевоrо адреса. Более Toro, таблица векторов предыдущих процессоров
ARM содержала команды (вы должны были поместить в таблицу команду перехода
на начало обработчика исключения, расположенноrо в каком нибудь друrом месте).
В процессоре же Cortex M3 в самом начале карты памяти размещается началь
ное значение MSP, после Hero располаrается таблица векторов (позже, во время BЫ
полнения проrраммы, таблица векторов может быть перемещена в друrое место).
К тому же в таблице векторов содержатся не команды перехода, а значения адресов.
Первым вектором в таблице является вектор сброса, который представляет собой
второе значение, считываемое процессором при выходе из состояния сброса.
Поскольку в процессоре Cortex M3 реализована модель «полноrо» убывающе
ro стека (указатель стека декрементируется перед заrрузкой значения в стек), Ha
3.?: Цикл сброса · ss
чальное значение указателя должно указывать на первую ячейку памяти, распо
ложенную выше области стека. Например, если вы отвели под стек область памя
ти с адресами Ох20007СОО.. .Ox20007FFF (1 Кбайт), то начальное значение указате
ля стека будет равно Ох20008000.
Таблица векторов располаrается сразу же после начальноrо значения указате
ля стека. Первым вектором в таблице является вектор сброса. Не забывайте, что
младшие биты адресов в таблице векторов процессора Cortex M3 должны быть
установлены в 1, указывая на использование кода ТЬитЬ. По этой причине значе
ние вектора сброса в предыдущем при мере равно Охl0l, тоrда как код заrрузчика
располаrается, начиная с адреса Охl00 (Рис. 3.19). После выборки вектора сброса
процессор может приступить к выполнению проrраммы, начиная с адреса, pac
положенноrо по указанному вектору. Столь ранняя инициализация указателя
стека необходима, потому что некоторые исключения (такие как NMI) MorYT воз
никнуть сразу же после сброса процессора, а обработчикам этих исключен й MO
жет потребоваться стек.
Остальная память
Начальное значение SP
........ Ох20008000
Ох20008000
Ох20007 FFC
Ох20007 FF8
1 й элемент в стеке
2 й элемент в стеке
Стек
Стек растёт
вниз
i
i
I I
Ох20007 СОО I I
JJ
Остальная память
Флэш память
ОхОООООl00
3аrрузчик
]
Вектор
сброса
Вектора остальных
исключений
ОхОООООО04
ОхОООООООО
ОхОООООl0l
Ох20008000
Рис. 3.19. Начальные значения указателя стека и счётчика команд.
в различных средствах разработки проrраммноrо обеспечения MorYT исполь
зоваться разные способы задания начальноrо значения указателя стека и значе
ния вектора сброса. Если вам необходима более подробная информация по этому
вопросу, то лучше Bcero обратиться к при мерам, входящим в состав используе
Moro пакета. В [лавах 10 и 20 данной книrи приведены простые при меры для
средств разработки компании ARM, а в [лаве 19 для инструментария GNU.
rЛАВА 4
НАБОР КОМАНД
4.1. ОСНОВЫ языка ассемблера
в данном разделе вы познакомитесь с базовыми синтаксическими KOHCTPYK
циями языка ассемблера ARM, что поможет вам понять фраrменты кода, coдep
жащиеся в последующих rлавах книrи. Большая часть ассемблерноrо кода из
данной книrи рассчитана на использование средств разработки компании ARM.
Исключение составляет ряд примеров из [лавы 19, демонстрирующих примене
ние инструментария GNU.
4.1.1. Язык ассемблера: основы синтаксиса
в ассемблерных проrраммах при записи команд обычно используется следую
щее форматирование:
<метка>
<код операции> операндl, операнд2, ...; Комментарий
Элемент <метка> является необязательным. Метки MorYT размещаться перед
некоторыми командами для Toro, чтобы с их помощью можно было определять
адреса этих команд. После необязательной метки располаrается <код опера
ции> (команда), сопровождаемый некоторым количеством операндов. Как пра
вило, первый операнд является приёмником результата операции. Число операн
дов зависит от типа команды, формат записи операндов также может быть раз
личным. Скажем, константы обычно записываются в виде #число, как показано
в следующем примере:
MOV RO, #Ox12 ; 3аrрузить в RO число Ox12 (шестнадцатеричная константа)
MOV Rl, #'А' ; 3аrрузить в Rl символ ASCII 'А'
Текст после символа «;» является комментарием. Эти комментарии не влияют
на выполнение проrраммы, однако позволяют сделать текст проrраммы более по
нятным для человека.
Вы можете определить константу с помощью директивы ассемблера EQU, а за
тем использовать её в проrрамме. Например:
NVIC IRQ SETENO EQU OxEOOOEIOO
NVIC IRQO ENABLE EQU Oxl
4.1. ОСНОВЬ! ЯЗblка ассемблера . 57
LOR RO, =NVIC IRQ SETENO LOR является псевдокомандой,
которая преобразуется ассемблером
в команду за:rрузки, использующую адресацию
относительно РС
MOV Rl, #NVIC IRQO ENABLE Пересылка константы в ре:rистр
STR Rl, [RO] Разрешаем IRQO, записывая Rl по адресу,
содержащемуся в RO
Имеется также несколько директив описания данных, предназначенных для
вставки констант непосредственно в ассемблерный код. Так, директива DCI
(Define Constant Instruction) может применяться для вставки команды в том слу
чае, если используемый вами ассемблер не может сrенерировать нужную KOMaH
ду и если вы знаете её двоичный код.
OCI ОхВЕОО ; Точка останова (ВКРТ О), lб битная команда
Для определения в коде проrраммы однобайтных констант, например симво
лов, можно использовать директиву DCB (Define Constant Byte), а для определения
32 битных констант директиву DCD (Define Constant Data):
LOR Rз,=МУ NUМВЕR Получаем адрес константы MY NUMBER
LOR R4, [R3] Считываем значение Ох12345б78 в R4
LOR RO,=HELLO TXT
BL PrintText
Получаем начальный адрес строки HELLO ТХТ
Вызываем функцию PrintText
для отображения строки
МУ NUMBER
ОСО Ox12345678
HELLO ТХТ
ОСВ «Hello\n»,O ; Строка, завершающаяся нулевым символом
Следует заметить, что синтаксис языка ассемблера зависит от используемоrо
инструментария. В данном случае описывается синтаксис ассемблера ARM. Изу
чение синтаксиса друrих ассемблеров лучше Bcero начинать с рассмотрения при
меров проrрамм, поставляемых вместе со средствами разработки.
4.1.2. Язык ассемблера: использование суффиксов
в ассемблере для процессоров ARM при записи мнемоник команд MorYT ис
пользоваться дополнительные суффиксы, указанные в Табл. 4.1.
Таблица 4.1. Суффиксы мнемоник команд
Суффикс Описание
S Изменить реrистр состояния приложения APSR (флаrи операций), например:
AOOS RO, Rl ; Эта команда повлияет на содержимое APSR
EQ, NE, LT, GT Условное выполнение; EQ = «Равно», NE = «Не равно», LT = «Ме'ньше»,
GT = «Больше» и т.д. Например:
и Т.п.
BEQ <Label> ; Перейти, если «равно»
Суффиксы условноrо выполнения в процессоре Cortex M3 обычно использу
ются В командах переходов. Тем не менее, эти суффиксы MorYT при меняться
и в друrих командах, если те располаrаются внутри блока IF THEN (мы познако
58 . Тлава 4. Набор команд
мимся С данной конструкцией чуть позже). При этом суффикс S и суффиксы
условноrо выполнения MorYT использоваться одновременно. В общей сложности
имеется 15 условий выполнения команд, которые будут описаны далее.
4.1.3. Язык ассемблера: унифицированный язык
ассемблера
Для поддержки набора команд ThumЬФ 2 и использования всех предоставляе
мых этим набором преимуществ, компания ARM разработала унифицированный
язык ассемблера (Unified Assembler Language UAL). Применение данноrо языка
облеrчает переход между кодами ARM и ТЬиmЬ за счёт использования одинако
Boro синтаксцса для обоих наборов команд.
АDD RO, R1 ; RO = RO + R1, используется традиционный синтаксис Thumb
АDD RO, RO, R1 ; Эквивалентная команда, использующая синтаксис UAL
При этом, как и прежде, можно использовать традиционный синтаксис
ТЬиmЬ. Для указания Toro, каким образом ассемблер должен интерпретировать
текст проrраммы, обычно применяются специальные директивы. Так, для acceM
блера ARM наличие директивы СОDЕlб в заrоловке проrраммы означает исполь
зование в проrрамме традиционноrо синтаксиса ТЬиmЬ, тоrда как директива
THUMB указывает на использование HOBoro синтаксиса UAL.
При применении традиционных команд 1humb не забывайте, что некоторые
из них изменяют флаrи реrистра APSR независимо от наличия суффикса s. В син
таксисе UAL влияние команды на флаrи состояния всеrда определяется этим
суффиксом. Например:
AND RO, R1 ; Традиционный синтаксис Thumb
ANDS RO, RO, R1 ; Эквивалентный синтаксис UAL (указан суффикс S)
В связи с появлением в наборе Тbитb 2 новых команд некоторые операции Te
перь MorYT быть выполнены как при помощи команд ТЬитЬ, так и при помощи
команд Тbитb 2. К примеру, операция инкрементирования RO = RO + 1 может
быть реализована посредством 16 битной команды 1humb или же 32 битной KO
манды 1humb 2. Для указания разрядности команды в UAL предусмотрены спе
циальные суффиксы:
ADDS RO, #1 Используем 1б битную команду Thumb по умолчанию
для получения более компактноrо кода
ADDS.N RO, #1 Используем 1б битную команду Thumb; N = Narrow (узкая)
ADDS.W RO, #1 Используем 32 битную команду Thumb 2; W = Wide (широкая)
Суффикс . w указывает на использование 32 битной команды. При отсутствии
суффикса ассемблер может вставить команду любой разрядности; как правило,
по умолчанию применяются 16 битные команды ТЬитЬ для уменьшения разме
ра кода. Для явноrо указания 16 битных команд ТЬитЬ вы также можете исполь
зовать суффикс . N, при условии, что этот суффикс поддерживается ассемблером.
Ещё раз подчеркну, что всё сказанное выше относится к ассемблеру ARM.
Прочие ассемблеры MorYT использовать друrой синтаксис. Если суффикс не YKa
зан, то ассемблер может сам выбрать необходимую команду.
В большинстве случаев приложения пишутся на языке Си, а компиляторы
с этоrо языка везде, rде только можно, задействуют 16 битные команды для полу
4.2. Список команд · S9
чения наиболее компактноrо кода. Команды Тbиmb 2 вставляются компилято
ром при использовании непосредственных значений, выходящих за rраницы
определённоrо диапазона, а также в тех случаях, коrда 32 битные команды позво
ля ют выполнить требуемую операцию наиболее эффективным образом.
Команды Тbиmb 2 MorYT быть выровнены на rраницу полуслова, например:
Охl000 LDR rO, [rl] 16 битная команда (располаrается по адресам
; Oxl000 Oxl00l)
Охl002 RBIT.W rO З2 битная команда Thumb 2 (располаrается
по адресам Охl002. ..Охl005)
Большинство 16 битных команд MorYT обращаться только к реrистрам RO.. .R7,
тоrда как 32 битные команды не имеют подобноrо оrраничения. Тем не менее,
в некоторых командах не допускается использование счётчика команд (RI5). Бо
лее подробно этот вопрос рассмотрен в [2] (раздел А.4.6).
4.2. Список команд
Команды, поддерживаемые процессором Cortex M3, перечислены
в Табл. 4.2.. .4.9. Подробное описание всех команд процессора можно найти в [2].
Кроме Toro, основная информация о поддерживаемых командах содержится
в Приложении А данной книrи.
Таблица 4.2. Команды обработки данных (16 битные)
Мнемоника Описание
АDС Сложение с переносом
АОО Сложение
ADR Сложение РС и константы с заrрузкой результата в реrистр
AND Лоrическое И
A8R Арифметический сдвиr вправо
BIC Очистка битов (операция «Лоrическое И» между одним значением и результатом
лоrической инверсией друrоrо значения)
CMN Сравнение с отрицательным операндом (сравнение одноrо значения
с дополнительным кодом друrоrо значения и изменение флаrов)
смр Сравнение (сравнение двух значений и изменение флаrов)
Копирование (появилась в архитектуре v6; пересылает содержимое одноrо
сру старшеrо или младшеrо реrистра в друrой старший или младший реrистр);
синоним команды MOV
EOR Исключающее ИЛИ
181 Лоrический сдвиr влево
18R Лоrический сдвиr вправо
MOV Пересылка (может использоваться для пересылки данных между реrистрами или
для заrрузки констант)
MU1 Умножение
MVN Пересылка с инверсией (пересылает результат лоrической инверсии значения)
NEG Отрицание (вычисляет дополнительный код значения), эквивалент команды R8B
ORR Лоrическое ИЛИ
R8B Обратное вычитание
60 · fлава 4. Набор команд
Таблица 4.2. Команды обработки данных (16 битные) (продолжение)
Мнемоника Описание
ROR Циклический сдвиr вправо
SBC Вычитание с переносом
SUB Вычитание
TST Проверка битов (выполняет операцию «Лоrическое И»; влияет на флаr Z,
результат операции не сохраняется)
REV Перестановка байтов в 32 битном реrистре (появилась в архитектуре у6)
REV16 Перестановка байтов в каждом полуслове 32 битноrо реrистра (появилась
в архитектуре У6)
REVSH Перестановка байтов в младшем полуслове 32 битноrо реrистра и расширение
знака результата (появилась в архитектуре У6)
SXTB Расширение знака байта (появилась в архитектуре У6)
SXTH Расширение знака полуслова (появилась в архитектуре У6)
UXTB Дополнение нулями байта (появилась в архитектуре У6)
UXTH Дополнение нулями полуслова (появилась в архитектуре У6)
Таблица 4.3. Команды для ветвления (16 битные)
Мнемоника Описание
В Переход
B<cond> Условный переход
Переход со ссылкой; вызывает подпроrрамму и сохраняет адрес возврата в LR
В1 (в действительности это 32 битная команда, но она также имеется в наборе Thumb
традиционных процессоров ARM)
В1Х Косвенный переход со ссылкой и изменением состояния (только В1Х <reg»*
ВХ <reg> Косвенный переход с изменением состояния
CBZ Сравнение и переход, если ноль (архитектура У7)
CBNZ Сравнение и переход, если не ноль (архитектура У7)
IT Блок 1 F THEN (архитектура У7)
* Команда BLX с использованием непосредственноrо значения не поддерживается, поскольку при её
выполнении происходит переключение в состояние ARM) не поддерживаемое процессором
Cortex M3. Попытка использования команды BLX <reg> для переключения процессора в состояние
ARM вызовет rенерацию исключен ия U sage Fault.
Таблица 4.4. Команды заrрузки и сохранения (16 битные)
Мнемоника Описание
1DR Заrрузка слова из памяти в реrистр
1DRH Заrрузка полуслова из памяти в реrистр
LDRB Заrрузка байта из памяти в реrистр
LDRSH Заrрузка полуслова из памяти в реrистр с расширением знака
LDRSB Заrрузка байта из памяти в реrистр с расширением знака
STR Сохранение слова из реrистра в памяти
STRH Сохранение полуслова из реrистра в памяти
STRB Сохранение байта из реrистра в памяти
4.2. Список команд . 61
Таблица 4.4. Команды заrрузки и сохранения (16 битные) (продолжение)
Мнемоника Описание
1DM/1DMIA Заrрузка нескольких реrистров/Заrрузка нескольких реrистров
с постинкрементом
STM/STMIA Сохранение нескольких реrистров/Сохранение нескольких реrистров
с пост инкрементом
PUSH Заrрузка реrистров в стек
РОР Извлечение реrистров из стека
Таблица 4.5. Прочие 16 битные команды
Мнемони Описание
ка
SVC Вызов супервизора
SEV rенерация события
WFE Ожидание события при нахождении в спящем режиме
WFI Ожидание прерывания при нахождении в спящем режиме
Точка останова; если отладка разрешена) то эта команда переводит процессор
ВКРТ в режим отладки (останова) или же) если разрешено исключение монитора
отладки) вызывает исключение отладки. В противном случае) rенерируется
исключение отказа
NOP Нет операции
CPSIE Разрешение прерываний) очищает реrистр PRIMASK (CPSIE i)/FAULTMASK
(CPSIE f)
CPSID Запрещение прерываний) устанавливает реrистр PRIMASK (CPSIE i)/FAULTMASK
(CPSIE f) в 1
Таблица 4.6. Команды обработки данных (32 битные)
Мнемоника Описание
ADC Сложение с переносом
ADD Сложение
ADDW Сложение с 12 битной константой
ADR Сложение РС и константы с заrрузкой результата в реrистр
AND Лоrическое И
ASR Арифметический сдвиr вправо
BIC Очистка битов (операция «Лоrическое И» между одним значением и результатом
лоrической инверсии друrоrо)
BFC Очистка битовоrо поля
BFI Вставка битовоrо поля
CMN Сравнение с отрицательным операндом (сравнение одноrо значения
с дополнительным кодом друrоrо и изменение флаrов)
СМР Сравнение (сравнение двух значений и изменение флаrов)
C1Z Подсчёт ведущих нулевых битов
EOR Исключающее ИЛИ
1S1 Лоrический сдвиr влево
62 . Тлава 4. Набор команд
Таблица 4.6. Команды обработки данных (32 битные) (продолжение)
Мнемоника Описание
LSR Лоrический сдвиr вправо
MLA Умножение со сложением
MLS Умножение с вычитанием
MOV Пересылка
MOVW Пересылка 16 битной константы в реrистр
MOVT Пересылка старшеrо полуслова (заrрузка константы в старшее полуслово
реrистра)
MVN Пересылка с инверсией
MUL Умножение
ORR Лоrическое ИЛИ
ORN Лоrическое ИЛИ с инверсией
RBIT Перестановка битов
REV Перестановка байтов слова
REV16 Перестановка байтов в каждом полуслове
REVSH Перестановка байтов в младшем полуслове и расширение знака
ROR Циклический сдвиr вправо
RSB Обратное вычитание
RRX Расширенный циклический сдвиr вправо
SBFX Извлечение битовоrо поля со знаком
SDIV Знаковое деление
SMLAL Длинное знаковое умножение со сложением
SMULL Длинное знаковое умножение
SSAT Знаковое насыщение
SBC Вычитание с переносом
SUB Вычитание
SUBW Вычитание 12 битной константы
SXTB Расширение знака байта
SXTH Расширение знака полуслова
TEQ Проверка на равенство (выполняет операцию «Исключающее ИЛИ»; влияет на
флаrи, результат операции не сохраняется)
TST Про верка битов (выполняет операцию «Лоrическое И»; влияет на флаr Z,
результат операции не сохраняется)
UBFX Извлечение беззнаковоrо битовоrо поля
UDIV Беззнаковое деление
UMLAL Длинное беззнаковое умножение со сложением
UMULL Длинное беззнаковое умножение
USAT Беззнаковое насыщение
UXTB Дополнение нулями байта
UXTH Дополнение нулями полуслова
4.2. Список команд . 63
Таблица 4.7. Команды заrрузки и сохранения (32 битные)
Мнемоника Описание
LDR Заrрузка слова из памяти в реrистр
LDRT Заrрузка слова из памяти в реrистр (непривилеrированный уровень доступа)
LDRB Заrрузка байта из памяти в реrистр
LDRBT Заrрузка байта из памяти в реrистр (непривилеrированный уровень доступа)
LDRH Заrрузка полуслова из памяти в реrистр
LDRHT Заrрузка полуслова из памяти в реrистр (непривилеrированный уровень
доступа)
LDRSB Заrрузка байта из памяти в реrистр с расширением знака
LDRSBT Заrрузка байта из памяти в реrистр с расширением знака
(непривилеrированный уровень доступа)
LDRSH Заrрузка полуслова из памяти в реrистр с расширением знака
LDRSHT Заrрузка полуслова из памяти в реrистр с расширением знака
(непривилеrированный уровень доступа)
LDM/LDMIA Заrрузка нескольких реrистров с пост инкрементом
LDMDB Заrрузка нескольких реrистров с преддекрементом
LDRD Заrрузка двух слов из памяти в реrистры
STR Сохранение слова из реrистра в памяти
STRT Сохранение слова из реrистра в памяти (непривилеrированный уровень
доступа)
STRB Сохранение байта из реrистра в памяти
STRBT Сохранение байта из реrистра в памяти (непривилеrированный уровень
доступа)
STRH Сохранение полуслова из реrистра в памяти
STRHT Сохранение полуслова из реrистра в памяти (непривилеrированный уровень
доступа)
STM/STMIA Сохранение нескольких реrистров с постинкрементом
STMDB Сохранение нескольких реrистров с преддекрементом
STRD Сохранение двух слов из реrистров в памяти
PUSH Заrрузка реrистров в стек
РОР Извлечение реrистров из стека
Таблица 4.8. Команды ветвления (32 битные)
Мнемоника Описание
В Переход
B<cond> Условный переход
BL Переход со ссылкой
твв Табличный переход с однобайтными смещениями; переход в прямом направлении
с использованием таблицы, содержащей однобайтные смещения
твн Табличный переход с 2 байтными смещениями; переход в прямом направлении
С использованием таблицы, содержащей 2 байтные смещения
64 . fлава 4. Набор команд
Таблица 4.9. Прочие 32 битные команды
Мнемоника Описание
LDREX Монопольная заrрузка в реrистр
LDREXH Монопольная заrрузка полуслова в реrистр
LDREXB Монопольная заrрузка байта в реrистр
STREX Монопольное сохранение реrистра
STREXH Монопольное сохранение полуслова из реrистра
STREXB Монопольное сохранение байта из реrистра
CLREX Блокирование монопольноrо доступа для локальноrо процессора
MRS Пересылка из РСН в РОН
MSR Пересылка из РОН в РСН
NOP Нет операции
SEV rенерация события
WFE Перевод в спящий режим и ожидание события
WFI Перевод в спящий режим и ожидание прерывания
ISB Барьер синхронизации команд
DSB Барьер синхронизации данных
DMB Барьер памяти данных
4.2.1. Неподдерживаемые команды
Некоторые команды ТЬитЬ не поддерживаются процессором Cortex M3; эти
команды перечислены в Табл. 4.10.
Таблица 4.10. Неподдерживаемые команды Thumb
Мнемоника Описание
Это команда перехода со ссылкой и изменением состояния. При использовании
в качестве операнда непосредственноrо значения эта команда всеrда переводит
BLX label процессор в состояние ARM. Поскольку процессор Cortex M3 не поддерживает
состояние ARM, все команды, пытающиеся переключить ero в данное состояние,
вызывают rенерацию исключения Usage Fault
Эта команда ТЬитЬ, появившаяся в архитектуре v6, изменяет порядок байтов
мноrобайтных значений во время выполнения проrраммы. Поскольку
SETEND процессор Cortex М3 не поддерживает динамическое изменение порядка байтов,
попытка выполнения команды SETEND вызовет rенерацию исключения Usage
Fault
Ряд команд, описанных в [2], также не поддерживаются процессором
Cortex M3. Так, в архитектуре ARM y7 M предусмотрены команды сопроцессора,
однако в процессоре Cortex M3 поддержка сопроцессора полностью отсутствует.
Соответственно, попытка исполнения любой из команд сопроцессора, перечис
ленных в Табл. 4.11, вызовет rенерацию исключения Usage Fault с одновременной
установкой бита NOCP в реrистре UFSR контроллера NVIC.
4.3. Описание команд . 65
Таблица 4.11. Неподдерживаемые команды сопроцессора
Мнемоника Описание
MCR Пересылка данных из процессора ARM в сопроцессор
MCR2 Пересылка данных из процессора ARM в сопроцессор
MCRR Пересылка в сопроцессор двух реrистров ARM
MRC Пересылка данных из сопроцессора в реrистр ARM
MRC2 Пересылка данных из сопроцессора в реrистр ARM
MRRC Пересылка данных из сопроцессора в два реrистра ARM
LDC 3аrрузка сопроцессора; заrрузка последовательно расположенных данных
из памяти в сопроцессор
STC Сохранение сопроцессора; сохранение данных из сопроцессора в памяти
по последовательно расположенным адресам
Некоторые из команд изменения состояния процесса (Cps) также не поддер
живаются процессором Cortex M3 (см. Табл. 4.12). Это связано с изменением KOH
цепции реrистра состояния проrраммы (PSR) и, соответственно, с отсутствием
в процессоре Cortex M3 некоторых битов, определённых в архитектуре ARM v6.
Таблица 4.12. Неподдерживаемые команды изменения состояния процесса
Мнемоника Описание
CPS<IEIID>.W А В процессоре Cortex M3 бит А отсутствует
CPS. W #mode В реrистре PSR процессора Cortx М3 биты режима отсутствуют
Кроме Toro, команды подсказки (hiпt команды), перечисленные в Табл. 4.13,
исполняются процессором Cortex M3 как команда NOP.
Таблица 4.13. Неподдерживаемые Hint KoMaHAbI
Мнемоника Описание
DBG Hint команда системы отладки и трассировки
PLD Предварительная заrрузка данных; hint команда для кэш памяти. Поскольку в про
цессоре Cortex M3 кэш память отсутствует, эта команда эквивалентна команде NOP
Предварительная заrрузка команды; hint команда для кэш памяти. Поскольку
PLI в процессоре Cortex M3 кэш память отсутствует, эта команда эквивалентна
команде NOP
Нint команда, позволяющая мноrопоточному приложению информировать
YIELD процессор о завершении задачи, которая может быть выrружена для улучшения
общей производительности системы
При попытке исполнения всех остальных неопределённых команд rенериру
ется исключение Usage Fault.
4.3. Описание команд
в этом разделе мы познакомимся с основными командами, которые наиболее
широко применяются в ассем6лерных проrраммах. Некоторые команды Moryr
иметь различные опции, в частности использовать предварительный сдвиr опе
66 . rлава 4. Набор команд
рандов; подобные варианты использования команд в этом разделе практически
не рассматриваются.
4.3.1. Язык ассемблера: пересыпка данных
Одной из основных функций процессора является пересылка данных. Про
цессор Cortex M3 поддерживает следующие типы пересылок:
· пересылка данных между реrистрами общеrо назначения;
. пересылка данных между памятью и реrистром общеrо назначения;
· пересылка данных между реrистром специальноrо назначения и реrистром
общеrо назначения;
. пересылка непосредственноrо значения в реrистр общеrо назначения.
Для пересылки данных между реrистрами предназначена команда MOV. CKa
жем, пересылка содержимоrо реrистра R3 в реrистр R8 записывается следующим
образом:
MOV R8, RЗ
Имеется ещё одна команда пересылки, которая пересылает инверсное значе
ние исходноrо содержимоrо реrистра, это команда MVN.
Основными командами, посредством которых выполняются обращения к па
мяти, являются команды заrрузки и сохранения. Команда заrрузки (LDR) пересы
лает данные из памяти в реrистры процессора, а команда сохранения (STR) пере
сылает содержимое реrистров в память. При этом поддерживается пересылка
данных любоrо размера (байт, полуслово, слово и двойное слово), как указано
в Табл. 4.14.
Таблица 4.14. Наиболее часто используемые команды обращения к памяти
Пример Описание
LDRB Rd, [Rn, #offset] Чтение байта из памяти по адресу Rn + offset
LDRH Rd, [Rn, #offset] Чтение полуслова из памяти по адресу Rn + offset
LDR Rd, [Rn, #offset] Чтение слова из памяти по адресу Rn + offset
LDRD Rdl, Rd2, [Rn, #offset] Чтение двойноrо слова из памяти по адресу Rn + offset
STRB Rd, [Rn, #offset] Сохранение байта в памяти по адресу Rn + offset
STRH Rd, [Rn, #offset] Сохранение полуслова в памяти по адресу Rn + offset
STR Rd, [Rn, #offset] Сохранение слова в памяти по адресу Rn + offset
STRD Rdl, Rd2, [Rn, #offset] Сохранение двойноrо слова в памяти по адресу Rn + offset
Команды rрупповой заrрузки (LDM) и сохранения (STM) дают возможность за
один раз выполнить несколько одноимённых операций, как указано в Табл. 4.15.
При этом символ «!» после первоrо операнда указывает на необходимость обнов
ления реrистра Rd после выполнения команды. Пусть в R8 содержится значение
Ох8000, тоrда:
STMIA.W R8!, {RО RЗ}
STMIA.W R8 , {RО RЗ}
После сохранения данных R8 станет равным Ох8010
(инкрементируется на 4 для каждой операции пересылки)
R8 не изменится
4.3. Описание команд · 67
Таблица 4.15. Команды rрупповой заrрузки/сохранения
При мер Описание
Чтение нескольких слов из памяти, начиная с адреса, находящеrося в Rd;
LDMIA Rd! , <reg list> адрес инкрементируется после (Increment After IA) каждой пересылки
(16 битная команда ТЬиmЬ)
Сохранение нескольких слов в памяти, начиная с адреса, находящеrося
STMIA Rd! , <reg list> в Rd; адрес инкрементируется после (Increment After IA) каждой пере
сылки (16 битная команда ТЬиmЬ)
Чтение нескольких слов из памяти, начиная с адреса, находящеrося в Rd;
LDMIA. W Rd (!), <reg list> адрес инкрементируется после каждой операции чтения (суффикс.W ro
ворит о том, что это 32 битная команда Тbиmb 2)
Чтение нескольких слов из памяти, начиная с адреса, находящеrося в Rd;
LDMDB. W Rd ( ! ) , <reg list> адрес декрементируется перед (Decrement Before DB) каждой операци
ей чтения (суффикс.W rоворит о том, что это 32 битная команда Тbиmb 2)
Сохранение нескольких слов в памяти, начиная с адреса, находящеrося
STMIA.W Rd(!), <reg list> в Rd; адрес инкрементируется после каждой операции записи (суффикс.W
rоворит о том, что это 32 битная команда Тbиmb 2)
Сохранение нескольких слов в памяти, начиная с адреса, находящеrося
STMDB. W Rd (! ) , <reg list> в Rd; адрес декрементируется перед каждой операцией записи (суффикс
.W rоворит о том, что это 32 битная команда Тbиmb 2)
Также процессоры ARM поддерживают обращение к памяти с использовани
ем пред и постиндексации. В случае прединдексации содержимое реrистра, в KO
тором хранится адрес ячейки памяти, перед выполнением операции изменяется.
То есть пересылка данных будет осуществлена уже по новому адресу. Например:
LDR.W RO, [Rl, #offset]! ; Читаем из памяти по адресу [Rl+offset],
; после операции Rl становится равным Rl+offset
Наличие символа «!» указывает на изменение базовоrо реrистра Rl. Этот сим
вол является необязательным, при ero отсутствии команда выполнит обычную
операцию пересылки из ячейки памяти, определяемой смещением относительно
базовоrо адреса. в rруппе команд обращения к памяти с прединдексацией име
ются команды заrрузки и сохранения данных различной разрядности (Табл. 4.16).
Таблица 4.16. При меры команд обращения к памяти с прединдексацией
Пример Описание
LDR. W Rd, [Rn, #offset] !
LDRB . W Rd, [Rn, #offset] ! Команды заrрузки с прединдексацией (слово, байт,
LDRH . W Rd, [Rn, #offset] ! полуслово, двойное слово)
LDRD. W Rdl, Rd2, [Rn, #offset] !
LDRSB. W Rd, [Rn, #offset] ! Команды заrрузки с пред индексацией
LDRSH.W Rd, [Rn, #offset] ! и расширением знака (байт, полуслово)
STR.W Rd, [Rn, #offset] !
STRB.W Rd, [Rn, #offset] ! Команды сохранения с прединдексацией (слово,
STRH.W Rd, [Rn, #offset] ! байт, полуслово, двойное слово)
STRD. W Rdl, Rd2, [Rn, #offset] !
68 · fлава 4. Набор команд
Команды обращения к памяти с постиндексацией осуществляют пересылку
данных с использованием базовоrо адреса, определяемоrо реrистром, после чеrо
изменяют содержимое этоrо реrистра. Например,
LDR.W RO, [Rl], #offset ; Читаем из памяти по адресу [Rl], после операции
; Rl становится равным Rl+offset
При применении команд с постиндексацией нет необходимости в использова
нии знака «!», поскольку команды данноrо типа в любом случае изменяют pe
rистр, содержащий базовый адрес, тоrда как в случае команд с прединдексацией
вы сами решаете, изменять этот реrистр или нет.
Как и в rруппе команд с прединдексацией, в rруппе команд с постиндексаци
ей имеются команды пересылки данных различной разрядности (Табл. 4.17).
Таблица 4.17. Примеры команд обращения к памяти спостиндексацией
При мер Описание
LDR.W Rd, [Rn] , #offset
LDRB.W Rd, [Rn] , #offset Команды заrрузки с постиндексацией (слово, байт,
LDRH.W Rd, [Rn] , #offset полуслово, двойное слово)
LDRD. W Rdl, Rd2, [Rn] , #offset
LDRSB.W Rd, [Rn] , #offset Команды заrрузки с постиндексацией и расширением
LDRSH.W Rd, [Rn] , #offset знака(байт,полуслово)
STR.W Rd, [Rn] , #offset
STRB.W Rd, [Rn] , #offset Команды сохранения с постиндексацией (слово, байт,
S TRH . W Rd, [Rn] , #offset полуслово, двойное слово)
STRD.W Rdl, Rd2, [Rn] , #offset
К классу операций с памятью относятся также операция заrрузки данных
в стек и операция извлечения данных из стека. Для выполнения этих операций
предназначены команды PUSH и РОР соответственно. Например,
PUSH {RO, R4 R7, R9} ; Заrружаем RO, R4, R5, R6, R7, R9 в стек
РОР {R2,RЗ} ; Извлекаем R2 и RЗ из стека
Как правило, команде PUSH соответствует команда РОР с тем же списком apry
ментов, однако это не является обязательным. В качестве примера подобноrо ис
ключения из правил можно указать использование команды РОР для возврата из
подпроrраммы:
PUSH {RО RЗ, LR} ; Сохраняем содержимое реrистров в начале подпроrраммы
Выполняем требуемые действия
РОР {RО RЗ, РС} Восстанавливаем содержимое реrистров и возвращаемся
В этом случае вместо восстановления содержимоrо реrистра LR и последую
щеrо перехода по данному адресу мы заrружаем адрес возврата непосредственно
в счётчик команд.
Как было сказано в [лаве 3, процессор Cortex M3 имеет несколько реrистров
специальноrо назначения. Для обращения к этим реrистрам используются KO
манды MRS и MSR. Например,
MRS RO, PSR ; Считать состояние процессора в RO
MSR CONTROL, Rl ; Записать содержимое Rl в реrистр управления
4.3. Описание команд. 69
Ещё раз напомню, что обращение ко всем реrистрам специальноrо назначе
ния, кроме реrистра APSR, допускается только в привилеrированном режиме.
Очень часто возникает необходимость заrрузки в реrистр непосредственноrо
значения. Скажем, для Toro чтобы обратиться к реrистру периферийноrо устрой
ства, вам необходимо сначала заrрузить в реrистр процессора требуемый адрес.
Для заrрузки значений разрядностью 8 бит и менее вы можете использовать KO
манду MOVS. Например,
MOVS RO, #Ох12 ; 3аrружаем Ох12 в RO
ДЛЯ заrрузки значений большей разрядности (более 8 бит) вам придётся BOC
пользоваться командой пересылки из набора 1humb 2. Например,
MOVW.W RO, #Ох789А ; 3аrружаем Ох789А в RO
В случае 32 битной константы вы можете использовать две команды для за
rрузки старшей и младшей частей значения:
MOVW.W RO,#Ox789A 3аrружаем Ох789А в младшие 16 бит RO
MOVT.W RО,#ОхЗ456 ; 3аrружаем ОхЗ456 в старшие 16 бит RO
; Теперь RO = ОхЗ456789А
В качестве альтернативы вы можете воспользоваться псевдокомандой LDR,
имеющейся в ассемблере ARM. Например,
LDR RO, =ОхЗ456789А
Это не ассемблерная команда; ассемблер преобразует указанную инструкцию
в команду заrрузки значения с использованием адресации относительно РС.
Данный способ rенерации 32 битных констант является более предпочтитель
ным, нежели применение пары команд MOVW. W и MOVT . W, поскольку обеспечивает
лучшую читаемость, а также позволяет уменьшить расход памяти в случае, если
данное значение используется в разных местах проrраммы.
4.3.2. Псевдокоманды LDR и ADR
Обе команды LDR и ADR MorYT применяться для заrрузки в реrистры значений
адреса памяти. Однако синтаксис и поведение этих команд различаются. При ис
пользовании команды LDR, если адрес расположен в области кода проrраммы, ac
семблер автоматически установит младший бит заrружаемоrо значения в 1. Ha
пример,
LDR RO, =address1 3аrружаем Ох4001 в RO
address1
MOV RO, R1
; Метка соответствует адресу Ох4000
address1 содержит код проrраммы
Вы сможете увидеть, что команда LDR заrрузит в Rl значение Ох4001; младший
бит устанавливается в 1, указывая на использование кода 1humb. Если addressl
является адресом в области данных, то младший бит значения не изменяется. Ha
пример,
LDR RO, =address1 3аrружаем Ох4000 в RO
address1
Метка соответствует адресу Ох4000
70 . fлава 4. Набор команд
DСD ОхО
; addressl содержит данные
Используя команду ADR, вы можете заrрузить в реrистр значение адреса про
rpaMMbI без автоматическоrо изменения младшеrо бита. Например,
ADR RO, addressl
addressl
MOV RO, Rl
Метка соответствует адресу Ох4000
addressl содержит код проrраммы
При использовании команды ADR в реrистр будет заrружено значение Ох4000.
Обратите внимание на отсутствие в выражении знака равенства.
Команда LDR размещает константу в коде проrраммы и заrружает её значение
в реrистр, используя адресацию относительно РС. Команда ADR пытается сфор
мировать значение константы с помощью команд сложения и вычитания (напри
мер, основываясь на текущем значении РС). Как следствие, используя команду
ADR, нельзя получить любые значения, т.е. искомый адрес должен находиться на
небольшом расстоянии от команды. Тем не менее, команда ADR может rенериро
вать более компактный код по сравнению с командой LDR.
Команда ADR является 16 битной и требует, чтобы конечный адрес был BЫpOB
нен на rраницу слова (кратен четырём). Если конечный адрес не выровнен на rpa
ницу слова, то вы можете использовать 32 битный вариант команды ADR. w. Ec
ли конечный адрес расположен за пределами области в :t4095 байт относительно
текущеrо значения РС, то можно задействовать псевдокоманду ADRL, которая по
зволяет обращаться к адресам в диапазоне :tl Мбайт.
4.3.3. Язык ассемблера: обработка данных
Процессор Cortex M3 поддерживает множество самых разных команд, пред
назначенных для обработки данных. В настоящем подразделе будут рассмотрены
наиболее часто используемые из этих команд. Следует отметить, что большин
ство команд обработки данных MorYT иметь несколько форматов записи. Напри
мер, команда сложения АОD может выполнять операцию между двумя реrистра
ми или же между реrистром и непосредственным значением:
АDD RO, RO, Rl RO RO + Rl
ADDS RO, RO, #Ох12 ; RO RO + Ох12
ADD.W RO, Rl, R2 ; RO Rl + R2
Все команды из приведённоrо примера являются командами АОО, однако они
имеют разные форматы записи и разное двоичное представление.
При использовании 16 битноrо кода Thumb и традиционноrо синтаксиса для
записи команд Thumb команда АDD влияет на флаrи в реrистре состояния процес
сора. В то же время 32 битный код Thumb 2 может изменять эти флаrи, а может
и не изменять. Если выполнение последующих операций зависит от состояния
флаrов, то следует использовать суффикс S, указывающий на необходимость их
изменения:
ADD.W RO, Rl, R2 Не влияет на состояние флаrов
ADDS.W RO, Rl, R2 Влияет на состояние флаrов
4.3. Описание команд · 71
Помимо команды АDD, процессор Cortex M3 поддерживает такие команды
арифметических операций, как команда вычитания (SUB), команда умножения
(MUL), а также команды беззнаковоrо и знаковоrо деления (UDIV/SDIV). HeKOTO
рые наиболее широко используемые команды арифметических операций приве
дены в Табл. 4.18.
Таблица 4.18. При меры команд арифметических операций
Команда Операция
АDD Rd, Rn, Rm ; Rd = Rn + Rm
АDD Rd, Rd, Rm ; Rd = Rd + Rm
Сложение
АDD Rd, #immed ; Rd = Rd + #immed
АDD Rd, Rn, # immed ; Rd = Rn + #immed
АDС Rd, Rn, Rm ; Rd = Rn + Rm + перенос
АDС Rd, Rd, Rm ; Rd = Rd + Rm + перенос Сложение с переносом
АDС Rd, #immed ; Rd = Rd + # immed + пере нос
ADDW Rd, Rn, #immed ; Rd = Rn + #immed Сложение реrистра и 12 битной
константы
SUB Rd, Rn, Rm ; Rd = Rn Rm
SUB Rd, #immed ; Rd = Rd #immed Вычитание
SUB Rd, Rn, #immed ; Rd = Rn # immed
SBC Rd, Rm ; Rd = Rd Rm заём
SBC.W Rd, Rn, #immed ; Rd = Rn #immed заём Вычитание с заёмом (инверсия
переноса)
SBC . W Rd, Rn, Rm ; Rd = Rn Rm заём
RSB . W Rd, Rn, #immed ; Rd = #immed Rn
RSB . W Rd, Rn, Rm Rd = Rm Rn Обратное вычитание
;
MUL Rd, Rm ; Rd = Rd * Rm
Умножение
MUL . W Rd, Rn, Rm ; Rd = Rn * Rm
UDIV Rd, Rn, Rm ; Rd = Rn/Rm
SDIV Rd, Rn, Rm Rd Rn/Rm Деление
; =
Эти команды MorYT применяться как с суффиксом S, указывающим на то, что
команда воздействует на реrистр APSR, так и без данноrо суффикса. В большин
стве случаев при использовании синтаксиса UAL и отсутствии в мнемонике KO
манды суффикса S в код будет вставлен 32 битный вариант команды, поскольку
практически все 16 битные команды Thumb влияют на состояние реrистра APSR.
Также процессор Cortex M3 поддерживает команды 32 битноrо умножения
и умножения со сложением, формирующие 64 битный результат. Имеются как
знаковые, так и беззнаковые варианты этих команд (Табл. 4.19).
Таблица 4.19. Команды 32 битноrо умножения
Команда Операция
SMULL RdLo, RdHi, Rn, Rm ; {RdHi, RdLo} = Rn * Rm Команды 32 битноrо умножения
SMLAL RdLo, RdHi, Rn, Rm . {RdHi, RdLo} t= Rn * Rm чисел со знаком
,
UMULL RdLo, RdH i , Rn, Rm ; {RdHi,RdLo} = Rn * Rm Команды 32 битноrо умножения
UMLAL RdLo, RdH i, Rn, Rm ; {RdHi,RdLo} += Rn * Rm чисел без знака
72 · rлава 4. Набор команд
Ко второй rруппе команд обработки данных относятся команды лоrических
операций и сдвиrа. Некоторые из наиболее широко используемых команд данной
rруппы приведены в Табл. 4.20. Эти команды тоже MorYT применяться с суффик
сом S, указывающим на необходимость изменения реrистра APSR. При использо
вании синтаксиса UAL и отсутствии в записи команды суффикса S в код будет
вставлен 32 битный вариант команды, поскольку все 16 битные команды лоrиче
ских операций влияют на состояние реrистра APSR.
Таблица 4.20. Команды лоrических операций
Команда Операция
AND Rd, Rn ; Rd == Rd & Rn
AND. W Rd, Rn,#irnrned ; Rd == Rn & # irnrned Побитовое И
AND. W Rd, Rn, Rrn ; Rd == Rn & Rd
ORR Rd, Rn ; Rd == Rd I Rn
ORR. W Rd, Rn, #irnrned ; Rd == Rn I #irnrned Побитовое ИЛИ
ORR. W Rd, Rn, Rrn ; Rd == Rn I Rd
BIC Rd, Rn ; Rd == Rd & (--- Rn)
BIC.W Rd, Rn,#irnrned ; Rd == Rn & (---# irnrned) Очистка битов
BIC.W Rd, Rn, Rrn ; Rd == Rn & (---Rd)
ORN . W Rd, Rn,#irnrned ; Rd == Rn I (---# irnrned)
ORN . W Rd, Rn, Rrn Rd == Rn I (---Rd) Побитовое ИЛИ с инверсией
;
EOR Rd, Rn ; Rd == Rd л Rn
EOR.W Rd, Rn, #irnrned . Rd == Rn I # irnrned Побитовое «Исключающее ИЛИ»
,
EOR. W Rd, Rn, Rrn ; Rd == Rn I Rd
Как уже было сказано, в процессоре Cortex M3 имеются команды простоrо
и циклическоrо сдвиrа. В некоторых случаях операция циклическоrо сдвиrа MO
жет объединяться с друrими операциями, например при вычислении смещения
адреса для команд заrрузки/сохранения. При меры команд, выполняющих опера
ции сдвиrа, приведены в Табл. 4.21. И опять же, при использовании синтаксиса
UAL и отсутствии в мнемонике команды суффикса S в код вставляется 32 бит
ный вариант команды.
Таблица 4.21. Команды сдвиrа
Команда Операция
A5R Rd, Rn, # irnrned ; Rd == Rn » irnrned
A5R Rd, Rn ; Rd == Rd » Rn Арифметический сдвиr вправо
A5R.W Rd, Rn, Rrn ; Rd == Rn » Rrn
L5L Rd, Rn, #irnrned ; Rd == Rn « irnrned
L5L Rd, Rn ; Rd == Rd « Rn Лоrический сдвиr влево
LSL.W Rd, Rn, Rrn ; Rd == Rn « Rrn
L5R Rd, Rn, #irnrned ; Rd == Rn » irnrned
LSR Rd, Rn ; Rd == Rd » Rn Лоrический сдвиr вправо
LSR.W Rd, Rn, Rrn ; Rd == Rn » Rrn
4.3. Описание команд . 73
Таблица 4.21. Команды сдвиrа (продолжение)
Команда Операция
ROR Rd, Rn ; Rd = Rd rot Ьу Rn
ROR.W Rd, Rn, #immed . Rd = Rn rot Ьу immed Циклический сдвиr вправо
,
ROR.W Rd, Rn, Rm ; Rd = Rn rot Ьу Rm
RRX.W Rd, Rn ; {С, Rd} = {Rn, С} Расширенный циклический сдвиr вправо
При использовании синтаксиса UAL и при наличии суффикса S команды
обычноrо и циклическоrо сдвиrов также MorYT изменять состояние флаrа пере
носа (16 битные команды Thumb всеrда влияют на этот флаr), как показано на
Рис. 4.1. При сдвиrе содержимоrо реrистра на несколько битов состояние флаrа
переноса С будет равно значению последнеrо бита, выдвинутоrо из реrистра.
Лоrический сдвиr влево (LSL)
I С 14 1 Реrистр 14 О
Лоrический сдвиr вправо (LSR)
О .1 Реrистр 1 .1 с I
Циклический сдвиr вправо (ROR) 1 Р1 с
.1 Реrистр 1
Арифметический сдвиr вправо (ASR) I .0 Реrистр I .1 с 1
Расширенный циклический 1 .СЬ
сдвиr вправо (RRX) .! 1
Реrистр
Рис. 4.1. Команды обычноzо u цuклuческоzо caBuza.
Для изменения разрядности знаковоrо значения с байта или полуслова до сло-
ва в процессоре Cortex M3 предусмотрено две команды, приведённые в Табл. 4.22.
Имеются как 16 битный, так и 32 битный варианты этих команд, причём 16 бит
ные команды MorYT обращаться только к младшим реrистрам.
74 . rлава 4. Набор команд
Таблица 4.22. Команды расширения знака
Команда Операция
SXTB Rd, Rm ; Rd == signext (Rm [7: О]) Расширение знака байта до слова
SXTH Rd, Rm ; Rd == signext(Rm[15:0]) Расширение знака полуслова до слова
Ещё 9дна rруппа команд обработки данных предназначена для перестановки
байтов содержимоrо реrистра (Табл. 4.23). Эти команды обычно используются
для преобразования данных с прямым порядком байтов в данные с обратным по
рядком байтов, и наоборот (Рис. 4.2). Имеются как 16 битный, так и 32 битный
варианты этих команд, причём 16 битные команды MorYT обращаться только
к младшим реrистрам.
Таблица 4.23. Команды изменения порядка байтов
Команда Операция
REV Rd, Rn ; Rd == rev (Rn) Перестановка байтов слова
REV16 Rd, Rn ; Rd == rev16 (Rn) Перестановка байтов каждоrо полуслова
REVSH Rd, Rn ; Rd == revsh (Rn) Перестановка байтов младшеrо полуслова и расширение
знака результата
REV.W
(Перестановка байтов слова)
RЕV1б.W
(Перестановка байтов полуслова)
REVSH.W
(Перестановка байтов младшеrо
полуслова и расширение знака результата)
Биты
[З 1 :24]
Биты
[2З:1 б]
Биты
[15:8]
Биты
[7:0]
оо
Расширение знака
Рис. 4.2. Команды перестановкu байтов.
Последнюю rруппу команд обработки данных составляют команды операций
с битовыми полями. Все команды из этой rруппы перечислены в Табл. 4.24. При
меры использования этих команд при водятся в последнем разделе rлавы.
4.3. Описание команд. 75
Таблица 4.24. Команды операций с битовыми полями
Команда Операция
BFC . W Rd, Rn, #<width> Очистка битовоrо поля в реrистре
BFI . W Rd, Rn, #<lsb>, #<width> Вставка битовоrо поля в реrистр
CLZ. W Rd, Rn Подсчёт ведущих нулевых битов
RBIT. W Rd, Rn Перестановка битов в реrистре
SBFX. W Rd, Rn, #<lsb>, #<width> Копирование битовоrо поля из реrистра источника
и расширение ero знака
UBFX.W Rd, Rn, #<lsb>, #<width> Копирование битовоrо поля из реrистра источника
4.3.4. Язык ассемблера: вызов nOAnporpaMM
и безусловный переход
Наиболее часто в проrраммах используются следующие команды ветвления:
в label ; Переход по адресу, обозначенному меткой
ВХ reg ; Переход по адресу, определяемому реrистром
В случае команды ВХ младший бит значения, находящеrося в реrистре, опре
деляет следующее состояние (1humbIARM) процессора. Поскольку процессор
Cortex M3 всеrда работает в состоянии 1humb, этот бит должен быть установлен
в 1. Если он окажется сброшенным, то произойдёт rенерация исключения Usage
Fault, поскольку в данном случае команда попытается переключить процессор
в состояние ARM.
ДЛЯ вызова функции следует использовать команду перехода со ссылкой.
BL label Переход по адресу, обозначенному меткой, с сохранением
адреса возврата в LR
Переход по адресу, определяемому реrистром, с сохранением
адреса возврата в LR
При выполнении этих команд адрес возврата сохраняется в реrистре связи
(LR), что даёт возможность вернуться в вызвавший подпроrрамму процесс с по
мощью команды ВХ LR. При использовании команды BLX необходимо убедиться,
что младший бит содержимоrо реrистра установлен в 1. В противном случае, бу
дет сrенерировано исключение Usage Fault, поскольку команда попытается пере
ключить процессор в состояние ARM.
Операции перехода также можно выполнять, используя команды MOV и LDR,
например
MOV R15, RO
LDR R15, [RO ]
BLX reg
РО Р { R15 }
Переход по адресу, содержащемуся в RO
Переход по адресу, содержащемуся в ячейке памяти
с адресом, определяемым RO
Извлекаем значение адреса возврата из стека
в счётчик команд
Выполняя переходы с помощью указанных методов, не забывайте о необходи
мости установки младшеrо бита HOBoro значения счётчика команд в 1. В против
ном случае, будет rенерироваться исключение Usage Fault, поскольку команды
будут пытаться переключить процессор в состояние ARM, которое им не поддер
живается.
76 . rлава 4. Набор команд
4.3.5. Язык ассемблера: условное выполнение
и переходы
Большинство команд условных переходов в процессорах ARM принимают pe
тение о выполнении перехода на основании состояний флаrов реrистра APSR.
Этот реrистр содержит пять флаrов, четыре из которых используются KOMaHдa
ми условных переходов (Табл. 4.25).
Таблица 4.25. Флаrи реrистра APSR, используемые при выполнении условных
переходов
Флаr Позиция Описание
N 31 Отрицательное значение (результатом последней операции было
отрицательное значение)
Z 30 Ноль (результатом последней операции было нулевое значение)
С 29 Перенос (последняя операция вызвала перенос или заём)
V 28 Переполнение (последняя операция вызвала переполнение)
в 27 M бите реrистра расположен пятый флаr Q. Этот флаr предназначен
для выполнения математических операций с насыщением и не при меняется в KO
мандах условных переходов.
4.3. Описание команд . 77
Различные комбинации четырёх флаrов (N, Z, С и У) позволяют определить
15 условий переходов (Табл. 4.26). Используя эти условия, команды ветвления
MorYT быть записаны следующим образом:
BEQ label ; Переход по адресу 'label', если флаr Z установлен
Таблица 4.26. Условия для команд переходов и прочих условно выполняемых
операций
Мнемоника Условие Флаr
EQ Равно Z установлен
NE Не равно Z сброшен
С5/Н5 Перенос/выше или то же С установлен
(беззнаковое « »)
CC/LO Нет переноса/ниже (беззнаковое С сброшен
«<» )
МI Минус/отрицательное значение N установлен
PL Плюс/положительное значение N сброшен
или ноль
У5 Переполнение V установлен
УС Нет переполнения V сброшен
НI Выше (беззнаковое «>>» С установлен и Z сброшен
L5 Ниже или то же (беззнаковое « ») С сброшен или Z установлен
GE Больше или равно (знаковое « ») N установлен и V установлен или N сброшен
и V сброшен (N == У)
LT Меньше (знаковое «<») N установлен и V сброшен или N сброшен и v
установлен (N != У)
78 . fлава 4. Набор команд
Таблица 4.26. Условия для команд переходов и прочих условно выполняемых
операций (продолжение)
Мнемоника Условие Флаr
Z сброшен и либо N установлен и V
GT Больше (знаковое «>>» установлен, либо N сброшен и V сброшен
(Z == О, N == У)
Z сброшен или либо N установлен и V сброшен,
LE Меньше или равно (знаковое « ») либо N сброшен и V установлен (Z == 1 или
N != У)
AL Всеrда (безусловное выполнение)
Если конечный адрес расположен достаточно далеко, то можно использовать
32 битные варианты этих команд, например
BEQ.W label ; Переход по адресу 'label', если флаr Z установлен
Условия переходов также MorYT использоваться в условных блоках IF THEN
ELSE. Например,
смр RO, Rl
ITTEE GT
Сравниваем RO и Rl
Проверяем условие RO > Rl:
; если истина, то выполняются две первые команды,
если ложь, то выполняются две оставшиеся команды
MO VGT R2, RO R2 = RO
MO VGT RЗ, Rl RЗ = Rl
MO VLE R2, Rl R2 = Rl
MOV LE RЗ, RO RЗ = RO
Состояние флаrов APSR может изменяться в следующих случаях:
. при выполнении большинства 16 битных команд арифметических и лоrиче
ских операций;
. при выполнении 32 битных (Thumb 2) команд в случае указания суффикса S,
например ADDS. W;
. при выполнении команд сравнения (например, смр) и проверки (например,
TST и TEQ);
. при непосредственной записи в реrистр APSR/xPSR.
Большинство 16 битных команд Thumb влияют на состояние флаrов N, Z, С
и у. Команды Thumb 2 MorYT влиять на эти флаrи, а MorYT и не влиять. Например:
ADDS.W RO, Rl, R2 ; Эта З2 битная команда Thumb влияет на состояние флаrов
ADD.W RO, Rl, R2 ; Эта З2 битная команда Thumb не влияет на состояние флаrов
Будьте внимательны при повторном использовании ранее написанноrо кода
из старых проектов. Если в старом проекте использовался традиционный син
таксис Thumb, то
АОD RO, Rl ; Эта lб битная команда Thumb влияет на состояние флаrов
АОD RO, #Oxl ; Эта lб битная команда Thumb влияет на состояние флаrов
Если же вы вставите этот код в nporpaMMY, использующую синтаксис UAL
(в проrрамме имеется директива ассемблера THUMB), то
АОD RO, Rl Эта lб битная команда Thumb влияет на состояние флаrов
АОD RO, #Охl Эта запись соответствует З2 битной команде Thumb,
которая не влияет на состояние флаrов
4.3. Описание команд · 79
Чтобы rарантировать получение корректно работающеrо кода при использо
вании различных средств разработки, вы должны всеrда явно указывать суф
фикс S, если для выполнения последующих команд, таких как команды условно
ro перехода, требуются актуальные значения флаrов.
Команда сравнения (СМР) вычитает одно значение из друrоrо и обновляет фла
rи (аналоrично команде SUBS), однако результат вычитания ниrде не сохраняет
ся. Команда СМР имеет следующие форматы записи:
смр RO, R1 ; Вычисляет RO R1 и обновляет флаrи
смр RO, #Ох12 ; Вычисляет RO Ох12 и обновляет флаrи
Похожая команда CMN сравнивает одну величину с отрицательным значением
(дополнением до двух) друrой величины; флаrи обновляются, однако результат
ниrде не сохраняется.
CMN RO, R1 ; Вычисляет RO ( R1) и обновляет флаrи
CMN RO, #Ох12 ; Вычисляет RO ( Ox12) и обновляет флаrи
Команда проверки TST очень похожа на команду AND. Она выполняет побито
вую операцию И между двумя значениями и обновляет флаrи, однако результат
этой операции ниrде не сохраняется. Как и команда СМР, данная команда имеет
два формата записи:
TST RO, R1 Вычисляет RO AND R1 и обновляет флаrи
TST RO, #Ох12 ; Вычисляет RO AND Ох12 и обновляет флаrи
4.3.6. Язык ассемблера: объединение операций
сравнения и условноrо перехода
В процессоре Cortex M3 имеются две новые команды, выполняющие cpaBHe
ние с нулем и последующий переход в зависимости от результата сравнения. Это
команды CBZ (сравнение и переход, если ноль) и CBNZ (сравнение и переход, если
не ноль).
Команды сравнения и перехода поддерживают переходы только в прямом Ha
правлении. Возьмём, к примеру, такой фраrмент проrраммы на языке Си:
i == 5;
while (i !== О
{
func1 () ;
// Вызов функции
l ;
}
В результате компиляции может быть получен следующий код:
MOV RO, #5 Инициализируем счётчик цикла
loop1 CBZ RO, loop1exit Если счётчик == О, то выходим из цикла
BL func1 Вызываем функцию
SUB RO, #1 Декрементируем счётчик цикла
В loop1 ; К следующей итерации
loop1exit
Использование команды CBNZ полностью аналоrично использованию KOMaH
ды CBZ, за исключением Toro, что переход выполняется при сброшенном флаrе Z
(результат не равен нулю). К примеру, фраrмент исходноrо текста:
80 . fлава 4. Набор команд
status = strchr(ernail address, '@');
if (status == О) { // status = О, если в ernail address отсутствует символ @
show error rnessage();
exit(l);
}
может быть скомпилирован следующим образом:
BL strchr
CBNZ RO, ernail looks okay ; Переходим, если результат не равен нулю
BL show error rnessage
BL exit
ernail looks okay
Команды CBZ и CBNZ не влияют на содержимое реrистра APSR.
Язык ассембпера: усповное выпопнение с испопьзованием
команд IT
Такие конструкции, как Iт блоки (IF THEN), очень полезны для реализации
небольших по объёму фраrментов условно выполняемоrо кода. Они позволяют
избавиться от недостатков, связанных с использованием команд перехода, по
скольку не вмешиваются в ход выполнения проrраммы. Эти блоки MorYT coдep
жать до четырёх условно выполняемых команд.
В первой строке Iт блока располаrается команда IT, после которой указывает
ся проверяемое условие. Первое выражение после команды IT выполняется в слу
чае истинности проверяемоrо условия. Последующие выражения (со BToporo по
четвёртое) MorYT выполняться либо в случае истинности условия, либо при ero
ложности. В команде IT это указывается в виде ITxyz, rде истинности COOTBeT
ствует символ «Т» (THEN), а ложности символ «Е» (ELSE):
IT<x><y><z> <cond> Команда IT «х>, <у>, <z>
; MorYT быть Т или Е)
instrl<cond> <operands> l я команда (условие <cond> должно
быть таким же, как в команде IT)
instr2<cond или not cond> <operands> 2 я команда (условие может быть таким
же, как в команде IT, или обратным)
instr3<cond или not cond> <operands> 3 я команда (условие может быть таким
же, как в команде IT, или обратным)
instr4<cond или not cond> <operands> ; 4 я команда (условие может быть таким
же, как в команде IT, или обратным)
Если выражение должно выполняться в случае ложности условия <cond>, то
суффикс условия команды должен быть обратным тому условию, которое указа
но в команде IT. Так, для условия EQ обратным является условие NE, для условия
GT LE и т.д. Ниже приведён простой пример использования условноrо выпол
нения команд:
if (Rl<R2) then
R2=R2 Rl
R2=R2/2
else
4.3. Описание команд . 81
Rl=Rl R2
Rl=Rl/2
На языке ассемблера этот код будет выrлядеть следующим образом:
смр Rl, R2 Если Rl < R2 (меньше чем),
ITTEE LT то выполняются команды 1 и 2
; (на это указывает символ Т),
иначе выполняются команды 3 и 4
(на это указывает символ Е)
l я команда
2 я команда
З я команда (обратите внимание, что условие GE
противоположно условию LT)
LSRGE.W Rl,#l 4 я команда
Допускается использование меньшеrо числа условно выполняемых команд, но
не менее одной. При этом количество символов «Т» И «Е» в мнемонике команды
IT должно соответствовать числу используемых команд.
При возникновении исключения внутри Iт блока состояние процесса выпол
нения блока будет запоминаться в битовом поле ICI реrистра PSR, значение KOTO
poro сохраняется в стеке. Блаrодаря этому после завершения обработчика исклю
чения и возобновления выполнения Iт блока остальные команды блока будут
выполнены корректно. Если исключение возникнет во время исполнения KOMaH
ды, выполняющейся за несколько тактов (например, команды rрупповой заrруз
ки и сохранения), то выполнение данной команды будет полностью прервано
и запущено повторно после завершения обработки прерывания.
SUBLT.W R2,Rl
LSRLT.W R2,#1
SUBGE.W Rl,R2
4.3.7. Язык ассемблера: команды барьерной
синхронизации
Процессор Cortex M3 поддерживает несколько команд барьерной синхрони
зации. Необходимость в этих командах вызвана постоянно растущей сложно
стью систем памяти процессоров. В ряде случаев, если не использовать команды
барьерной синхронизации, возможно возникновение «rOHOK».
Например, если допускается переключение карты памяти с помошью аппа
paTHoro реrистра, то после записи в этот реrистр вы должны использовать KOMaH
ду DSB. В противном случае, если операция записи в реrистр переключения памя
ти буферирована и выполняется за несколько тактов, а следующая команда сразу
же обращается к переключённой области памяти, то обращение произойдёт с ис
пользованием старой карты памяти. В ряде случаев, если переключение памяти
произойдёт одновременно с обращением к ней, это может вызвать ошибку ДOCTY
па. Использование в данной ситуации команды DSB позволит rарантировать, что
запись в реrистр переключения карты памяти будет завершена до выполнения
следующей команды.
Процессором Cortex M3 поддерживаются три команды барьерной синхрони
зации:
. DMB;
. DSB;
. 1 SB.
82 . rлава 4. Набор команд
Все эти команды описаны в Табл. 4.27.
Таблица 4.27. Команды барьерной синхронизации
Команда Описание
DМВ Барьер памяти данных; обеспечивает завершение всех операций с памятью
до выполнения HOBoro обращения к ней
DSB Барьер синхронизации данных; rарантирует, что все операции с памятью будут
завершены до исполнения следующей команды
ISB Барьер синхронизации команд; очищает конвейер и rарантирует завершение всех
предыдущих команд перед выполнением новых команд
Команды барьерной синхронизации MorYT использоваться в еи проrраммах
посредством вызова соответствующих функций еМSIS совместимой библиоте
ки драйвера устройства:
void DMB(void); // Барьер памяти данных
void DSB(void); // Барьер синхронизации данных
void ISB(void); // Барьер синхронизации команд
Команды DSB и 1 SB MorYT потребоваться в случае самомодифицирующеrося
кода. Предположим, к примеру, что проrрамма изменяет свой собственный код,
и следующая исполняемая команда должна соответствовать новому коду. OДHa
ко, поскольку в процессоре имеется конвейер, в нём может уже находиться старое
содержимое модифицированной ячейки памяти. Использование команды DSB,
а затем 1SB позволит rарантировать, что команда модифицированноrо кода будет
считана в конвейер повторно.
е точки зрения архитектуры, команда 1SB должна при меняться после каждо
ro изменения реrистра eONTROL. В процессоре Cortex M3 это правило не явля
ется cTporo обязательным к выполнению. И всё же, если вы хотите обеспечить пе
рено сим ость cBoero приложения, вы должны обеспечить наличие команды 1SB
после каждоrо изменения реrистра CONTROL.
Команда ОМВ чрезвычайно полезна в мноrопроцессорных системах. Напри
мер, задача, выполняемая отдельным процессором, может использовать для вза
имодействия с друrими задачами разделяемую область памяти. В такой среде по
рядок доступа к разделяемой области памяти может оказаться чрезвычайно важ
ным. Команда DMB может применяться между обращениями к разделяемой памя
ти, обеспечивая необходимую последовательность этих операций.
Более подробно вопрос использования команд барьерной синхронизации
рассмотрен в [2].
4.3.8. Язык ассемблера: операции насыщения
Процессор eortex M3 поддерживает две команды, обеспечивающие выполне
ние операции насыщения для знаковых (SSAT) и беззнаковых (USAT) данных.
Наиболее часто арифметика с насыщением используется при обработке сиr
налов, скажем, при их усилении. При усилении сиrнала всеrда существует Bepo
ятность Toro, что выходной сиrнал выйдет за пределы допустимоrо диапазона.
Если корректировка значений осуществляется простым отбрасыванием неис
4.3. Описание команд · 83
пользуемых старших битов, то в результате переполнения мы получим COBep
шенно искажённый сиrнал (Рис. 4.3).
Без
насыщения
Динамический
диапазон О
Усиление
Со
знаковым
насыщением
о
Рис. 4.3. Операция знаКО8020 наСblщения.
Операция насыщения не предотвращает искажение сиrнала, однако она, по
крайней мере, значительно уменьшает степень этих искажений.
Синтаксис команд SSAT и USAT описан далее, а также в Табл. 4.28.
Таблица 4.28. Команды насыщения
Команда Описание
SSAT. W <Rd>, #<immed>, <Rn>, {,<shift>} Насыщение знаковоrо значения
USAT. W <Rd> , #<immed>, <Rn>, {,<shift>} Насыщение знаковоrо значения в пределах
беззнаковоrо диапазона
Rn входное значение;
shift операция сдвиrа входноrо значения перед выполнением насыщения; необязательная;
может быть #L8L N или #A8R N;
immed позиция бита, при достижении которой производится насыщение;
Rd реrистр приёмник.
Операция влияет не только на содержимое реrистра приёмника, но и на co
стояние флаrа Q реrистра APSR. Этот флаr устанавливается в 1, если при выпол
нении операции произошло насыщение (Табл. 4.29). Флаr Q может быть сброшен
непосредственной записью в реrистр APSR. Например, если необходимо выпол
нить насыщение 32 битноrо значения в пределах 16 битноrо знаковоrо диапазо
на, то можно использовать следующую команду:
SSAT.W R1, #16, RO
84 . fлава 4. Набор команд
Таблица 4.29. Некоторые результаты выполнения операции знаковоrо насыщения
ВХОД (RO) ВЫХОД (Rl) БитQ
ОхООО20000 OxOOOO7FFF Устанавливается
ОхОООО8000 OxOOOO7FFF Устанавливается
OxOOOO7FFF OxOOOO7FFF Не изменяется
ОхОООООООО ОхОООООООО Не изменяется
OxFFFF8000 OxFFFF8000 Не изменяется
OxFFFF7FFF OxFFFF8000 Устанавливается
OxFFFEOOOO OxFFFF8000 Устанавливается
Аналоrично, если необходимо выполнить насыщение 32 битноrо значения
в пределах 16 битноrо беззнаковоrо диапазона, то можно использовать команду:
USAT.W R1, #16, RO
Последняя команда выполняет операцию насыщения в соответствии
с Рис. 4.4. Некоторые выходные значения для этой команды приведены
в Табл. 4.30.
-
Динамический
диапазон
Усиление
о
o
(беззнаковым
насыщением
о
Рис. 4.4. Операция беззнаковО20 наСblщения.
Таблица 4.30. Некоторые результаты выполнения операции беззнаковоrо
насыщения
ВХОД (RO) ВЫХОД (Rl) БитQ
ОхООО20000 OxOOOOFFFF Устанавливается
ОхОООО8000 ОхОООО8000 Не изменяется
OxOOOO7FFF OxOOOO7FFF Не изменяется
ОхОООООООО ОхОООООООО Не изменяется
OxFFFF8000 ОхОООООООО Устанавливается
OxFFFF8001 ОхОООООООО Устанавливается
OxFFFFFFFF ОхОООООООО Устанавливается
Команды насыщения также MorYT использоваться для преобразования типов
данных. В частности, их можно использовать для преобразования 32 битноrо цe
лоrо значения в 16 битное. Однако компиляторы языка Си MorYT оказаться не
в состоянии напрямую использовать эти команды, что потребует использования
встроенных либо ассемблерных функций (или же BCTpoeHHoro ассемблера) для
выполнения преобразования.
4.4. Некоторые полезные команды процессора Cortex M3 · 85
4.4. Некоторые полезные команды процессора
Cortex..M3
в этом разделе мы познакомимся с несколькими полезными командами
Thumb 2, появившимися в архитектурах у6 и у7.
4.4.1. Команды MSR и MRS
Эти две команды обеспечивают доступ к реrистрам специальноrо назначения
процессора Cortex M3. Они имеют следующий синтаксис:
MRS <Rn>, <SReg> ; Пересылка из реrистра специальноrо назначения
MSR <SReg>, <Rn> ; Запись в реrистр специальноrо назначения
rде в качестве <SReg> может использоваться одно из символических имён, пере
численных в Табл. 4.31.
Таблица 4.31. Обозначения реrистров специальноrо назначения для команд MRS
иМSR
Обозначение Описание
IPSR Реrистр состояния прерывания
EPSR Реrистр состояния выполнения проrраммы (читается как О)
APSR Флаrи результата предыдущей операции
IEPSR Объединённые реrистры IPSR и EPSR
IAPSR Объединённые реrистры IPSR и APSR
EAPSR Объединённые реrистры EPSR и APSR
PSR Объединённые реrистры APSR, EPSR и IPSR
MSP Основной указатель стека
PSP Указатель стека процесс а
PRIMASK Реrистр маскирования исключений
BASEPRI Реrистр маскирования низкоприоритетных исключений
BASEPRI MAX Тот же реrистр маскирования низкоприоритетных исключений, но с функцией
условной записи (новый уровень приоритета должен быть выше cTaporo уровня)
FAULTMASK Реrистр маскирования исключений отказов (также запрещает обычные
прерывания)
CONTROL Реrистр управления
Например, для инициализации указателя стека процесса может при меняться
следующий код:
LDR RO,=Ox20008000 ; Новое значение для указателя стека процесса (PSP)
MSR PSP, RO
Обращения ко всем реrистрам специальноrо назначения, за исключением pe
rистра APSR, с помощью команд MSR и MRS допускаются только в привилеrиро
ванном режиме. В противном случае, операция будет проиrнорирована, а воз
вращаемое значение (в случае команды MRS) будет равно нулю.
После изменения содержимоrо реrистра CONTROL рекомендуется вставлять
команду синхронизации ISB, чтобы обеспечить немедленное вступление в силу
сделанных изменений. Правда, при использовании процессора Cortex M3 это
86 · fлава 4. Набор команд
следует делать исключительно из соображений переносимости кода (если ero
предполаrается использовать с друrими процессорами ARM).
4.4.2. Ещё раз об IТ..бпоке
Мы уже вкратце ознакомились с командой IF THEN в подразделе «Язык acceM
блера: условное выполнение с использованием команд IT». В этом подразделе мы
рассмотрим данную команду более детально.
Команда IF THEN (IT) позволяет сделать условно выполняемыми до четырёх
последовательно расположенных команд, образующих Iт блок. Эта команда MO
жет иметь различные форматы, представленные в Табл. 4.32, в которой:
· <х> определяет условие выполнения второй команды блока;
· <у> определяет условие выполнения третьей команды блока;
· < z > определяет условие выполнения четвёртой команды блока;
· <cond> определяет базовое условие для блока команд; первая команда блока,
расположенная после команды IT, выполняется в том случае, если условие
<cond> истинно.
Таблица 4.32. Различные размеры IТ блока
Формат команды
Число команд в блоке (каждый из <Х>, <у> и <z> может быть Примеры
т (THEN), либо Е (ELSE»
Одна условно выполняемая IT <cond> IT EQ
команда instr1<cond> ADDEQ RO, RO, R1
Две условно выполняемые IT<x> <cond> ITE GE
instr1<cond> ADDGE RO, RO, R1
команды instr2<cond или (cond» ADDLT RO, RO, R3
IT<x><y> <cond> ITET GT
Три условно выполняемые instr1<cond> ADDGT RO, RO, R1
команды instr2<cond или (cond» ADDLE RO, RO, R3
instr3<cond или (cond» ADDGT R2, R4, #1
IT<x><y><z> <cond> ITETT NE
Четыре условно выполняемые instr1<cond> ADDNE RO, RO, R1
instr2<cond или (cond» ADDEQ RO, RO, R3
команды instr3<cond или (cond) > ADDNE R2, R4, #1
instr4<cond или (cond» MOVNE R5, R3
Для задания условия <cond> используют такие же аббревиатуры, что и в KO
мандах условных переходов. Если в качестве <cond> задано условие AL, то для
условноrо управления нельзя использовать символ «Е», поскольку в этом случае
он означает, что соответствующая команда никоrда не будет выполнена.
На месте каждоrо из элементов <х>, <у> и <z> может располаrаться символ
«Т» (THEN) или «Е» (ELSE), которые относятся к базовому условию <cond>, тоrда
как для задания <cond> используются традиционные обозначения, такие как EQ,
NE, GT и т.п.
Приведём пример использования команды IT:
if (RO equal Rl) then {
R3 R4 + R5
RЗ = RЗ/2
4.4. Некоторые полезные команды процессора Cortex M3 · 87
else {
R3 = Rб + R7
RЗ = RЗ/2
}
На языке ассемблера данную конструкцию можно записать следующим обра
зом:
СМР RO, R1 Сравниваем RO и R1
ITTEE EQ Если RO = R1, «То» «То» «Иначе» «Иначе»
ADDEQ RЗ, R4, R5 Сложить, если «равно»
ASREQ RЗ, R3, #1 Сдвинуть вправо, если «равно»
ADDNE RЗ, Rб, R7 Сложить, если «не равно»
ASRNE RЗ, RЗ, #1 Сдвинуть вправо, если «не равно»
Команда IT используется также при переносе ассемблерноrо кода с процессо
ра ARM7TDMI на процессор Cortex M3. Ассемблер ARM (входящий, в том числе,
в состав пакета RVMDK компании КеН, которому посвящена rлава 20) при обна
ружении в коде «отдельно стоящей» условно выполняемой команды может aBTO
матически вставить требуемую команду IT (см. при мер в Табл. 4.33). Эта особен
ность ассемблера позволяет, не модифицируя старый код, использовать ero с про
цессором Cortex M3.
Таблица 4.33. Автоматическая вставка команды IT ассемблером ARM
ИСХОДНЫЙ ассемблерный Дизассемблированный КОД из сrенерированноrо ассемблером
КОД объектноI'О файла
смр R1, #2 смр R1, #2
АDDЕО RO, R1, #1 IT EQ
. . . ADDEQ RO, R1, #1
Заметьте, что 16 битные команды обработки данных не влияют на флаrи реrи
стра APSR при их использовании внутри Iт блока. Если вы укажете в условно BЫ
полняемой команде суффикс S, то ассемблер вставит 32 битную версию команды.
4.4.3. Команды SDIV и UDIV
Команды знаковоrо и беззнаковоrо деления имеют следующий синтаксис:
SDIV.W <Rd>, <Rn>, <Rm>
UDIV.W <Rd>, <Rn>, <Rm>
Результат деления Rn/Rm сохраняется в реrистре Rd, например:
LDR RО,=ЗОО ; 300 десятичное
MOV R1, #5
UDIV.W R2, RO, R1
В итоrе мы получим в R2 число 60 (Ох3С).
Если установить бит DIVBYZERO в реrистре управления конфиrурацией
NVIC, то при делении на ноль будет rенерироваться исключение Usage Fault.
В противном случае, при делении на ноль в реrистре Rd будет просто возвра
щаться нулевое значение.
88 . rлава 4. Набор команд
4.4.4. Команды REV, REVH и REVSH
Команда REV изменяет порядок байтов в 32 битном слове, а команда REVH пе
реставляет байты в полусловах. Например, если в реrистре RO содержится значе
ние Ох78563412, то после выполнения команд
REV Rl, RO
REVH R2, RO
содержимое реrистра Rl будет равно Ох78563412, а реrистра R2 Ох34127856. Ko
манды REV и REVH используются, в частности, для изменения формата хранения
данных (с прямым/обратным порядком байтов).
Команда REVSH похожа на команду REV, если не считать Toro, что она пере
ставляет байты только в младшем полуслове, а затем расширяет знак результата.
Например, если в RO содержится Ох33448899, то после выполнения команды
REVSH Rl, RO
содержимое реrистра Rl будет равно OxFFFF9988.
4.4.5. ПерестаНО8ка битов
Команда RBIT изменяет порядок битов в слове данных. Эта команда имеет
следующий синтаксис:
RBIT.W <Rd>, <Rn>
Команда RBIT часто используется для обработки битовых потоков при пере
даче данных. К примеру, если RO равен ОхВ4ЕI0С23 (двоичное значение
1011 0100 1110 0001 0000 1100 0010 0011), то после выполнения команды
RBIT.W RO, Rl
в реrистре Rl окажется значение OxC430872D (двоичное значение
11 00 0100 00 11 0000 1000 О 111 0010 110 1).
4.4.6. Команды SXTB, SXTH, UXTB и UXTH
Четыре команды SXTB, SXTH, UXTB и UXTH используются для расширения oд
HO и двухбайтных значений до слова. Эти команды имеют следующий синтак
сис:
SXTB <Rd>, <Rn>
SXTH <Rd>, <Rn>
UXTB <Rd>, <Rn>
UXTH <Rd>, <Rn>
При помощи команд SXTB/SXTH производится расширение знака значения, ис
пользуя 7 й и 15 й биты содержимоrо Rn соответственно. Команды USTB/UXTH дo
полняют исходное значение нулями до 32 бит.
Например, если RO содержит Ох55АА8765, то:
SXTB Rl, RO Rl = ОхОООООО65
SXTH Rl, RO Rl = OxFFFF8765
UXTB Rl, RO Rl = ОхОООООО65
UXTH Rl, RO Rl = ОхОООО8765
4.4. Некоторые полезные команды процессора Cortex..M3 · 89
4.4.7. Очистка и вставка битовоrо попя
Команда очистки битовоrо поля BFC обнуляет от 1 до 31 расположенных под
ряд битов, начиная с любоrо бита. Команда имеет следующий синтаксис:
BFC.W <Rd>, <#lsb>, <#width>
Например:
LDR RO,=Ox1234FFFF
BFC.W RO, #4, #8
В результате мы получим RO = ОхI234РООР.
Команда вставки битовоrо поля BFI копирует от 1 до 31 бита (#width) из OДHO
ro реrистра в любое место (#lsb) друrоrо реrистра. Эта команда имеет следующий
синтаксис:
BFI.W <Rd>, <Rn>, <#lsb>, <#width>
Например:
LDR RO,=Ox12345678
LDR R1,=Ox3355AACC
BFI.W R1, RO, #8, #16 ; Вставляем RO[15:0] в R1[23:8]
В результате мы получим RO = Ох335678СС.
4.4.8. Команды UBFX и SBFX
Команды UBFX и SBFX используются для извлечения беззнаковоrо и знаково
ro битовоrо поля соответственно. Команды имеют следующий синтаксис:
UBFX.W <Rd>, <Rn>, <#lsb>, <#width>
SBFX.W <Rd>, <Rn>, <#lsb>, <#width>
Команда UBFX извлекает из реrистра битовое поле любоrо размера (#width),
начиная с любоrо бита (определяется значением #lsb), дополняет это значение
нулями до 32 бит и помещает ero в реrистр приёмник. Например:
LDR RO,=Ox5678ABCD
UBFX.W R1, RO, #4, #8
В результате мы получим Rl = ОхООООООВС.
Аналоrично, команда SBFX извлекает из реrистра битовое поле, расширяет
знак полученноrо значения до 32 бит и помещает результат в реrистр приёмник.
Например:
LDR RO,=Ox5678ABCD
SBFX.W R1, RO, #4, #8
В результате мы получим Rl = ОхРРРРРРВС.
4.4.9. Команды LDRD и STRD
Команды LDRD и STRD предназначены для пересылки двух слов данных между
двумя реrистрами и памятью. Команды имеют следующий синтаксис:
LDRD.W <Rxf>, <Rxf2>, [Rn, #+/ offset] {!} Прединдексация
LDRD.W <Rxf>, <Rxf2>, [Rn], #+/ offset ; Постиндексация
STRD.W <Rxf>, <Rxf2>, [Rn, #+/ offset]{!} Прединдексация
STRD.W <Rxf>, <Rxf2>, [Rn], #+/ offset Постиндексация
90 · fлава 4. Набор команд
rде <Rxf> первый реrистр приёмник/реrистр источник, а <Rxf2> второй.
Из за ошибки в ядре Cortex M3 ревизий 0...2 при использовании команды LDRD
в качестве <Rxf> и <Rxf2> нельзя указывать один и тот же реrистр.
В следующем фраrменте выполняется чтение 64 битноrо значения, располо
женноrо по адресу Охl000, в реrистры RO и Rl:
LDR R2,=Oxl000
LDRD.W RO, Rl, [R2] ; В результате RO = memory[Oxl000],
; а Rl = memory[Oxl004]
Точно так же мы можем использовать команду STRD для сохранения 64 бит
Horo значения в памяти. В следующем при мере при меняется адресация с предин
дексацией:
LDR R2,=Oxl000 Базовый адрес
STRD.W RO, Rl, [R2, #Ох20] В результате memory[Oxl020] = RO,
а memory[Oxl024] = Rl
4.4.10. Команды табпичноrо перехода ТВВ и твн
Команды ТВВ и ТВН предназначены для реализации таблиц переходов. KOMaH
да твв использует таблицу с однобайтными значениями смещений, а команда
твн с двухбайтными значениями. Поскольку О й бит счётчика команд всеrда
равен нулю, значение из таблицы перед прибавлением к РС умножается на два.
Ну, а поскольку текущее значение Ре равно адресу текущей команды плюс четы
ре, диапазон переходов для команды ТВВ составляет (2 х 255) + 4 = 514 байт, а для
команды ТВН (2 х 65535) + 4 = 131 074 байт. Обе команды поддерживают пере
ходы только в прямом направлении.
Команда ТВВ имеет следующий синтаксис:
TBB.W [Rn, Rm]
rде Rn адрес начала таблицы, а Rm индекс в таблице. Искомый элемент табли
цы переходов располаrается по адресу Rn + Rm. Выполнение этой команды при
использовании в качестве Rn счётчика команд показано на Рис. 4.5.
РС
Rn = (РС+4)
Rm=N
твв [РС, Rm]
V AL 0[7:0]
VAL 1 [7:0]
l ХОД nporpaMMbl
Rn + Rm
VAL N[7:0]
НОВЫЙ РС = (РС + 4) + 2 х V AL N[7:0]
Рис. 4.5. Выполнение команды ТВВ.
Команда ТВН выполняет аналоrичные операции, за исключением Toro, что
элемент таблицы располаrается по адресу Rn + 2 х Rm, а смещения MorYT иметь
4.4. Некоторые полезные команды процессора Cortex M3 · 91
большие значения. Выполнение команды ТВН при использовании в качестве Rn
счётчика команд показано на Рис. 4.6.
Rm=N
t ХОД nporpaMMbl
РС ТВН [РС, Rm, LSL #1]
Rn = (РС + 4)
VAL 0[15:0]
VAL 1[15:0]
Rn + 2 х Rm
VAL N[15:0]
НОВЫЙ РС = (РС + 4) + 2 х V AL N[15:0]
Рис. 4.6. Выполнение команды ТВН.
Если в командах табличноrо перехода в качестве операнда Rn указывается pe
rистр R15, то из за наличия конвейера значение, используемое при выполнении
команды, будет равно РС + 4. Эти две команды в большей степени ориентирова
ны на использование Си компиляторами для rенерации кода операторов ветвле
ния switch. Поскольку значения, хранящиеся в таблице переходов, задаются OT
носительно текущеrо значения счётчика команд, то ручное кодирование этой Ta
блицы на ассемблере является довольно сложной задачей. Основные трудности
связаны с тем, что на этапе ассемблирования/компиляции подчас невозможно
определить величины смещений, особенно если место перехода находится в дpy
rOM исходном файле. Синтаксические конструкции, используемые для задания
содержимоrо таблиц переходов, зависят от применяемоrо средства разработки.
Так, при использовании ассемблера ARM таблица переходов для команды ТВВ
может быть описана следующим образом:
TBB.W [рс, rO] Во время исполнения этой команды РС равен
; branchtable
branchtable
ОСВ ((destO branchtable)/2)
Поскольку значения смещений 8 битные,
используются директивы ОСВ
ОСВ ((destl branchtable)/2)
ОСВ ((dest2 branchtable)/2)
ОСВ ((dеstЗ branchtable)/2)
destO
Выполняем, если rO = О
destl
Выполняем, если rO = 1
dest2
Выполняем, если rO 2
dеstЗ
; Выполняем, если rO = 3
92 . Тлава 4. Набор команд
При исполнении команды ТВВ текущее значение РС равно адресу, помеченно
му меткой branchtable (из за наличия в процессоре конвейера).
Команда ТВН может использоваться аналоrичным образом:
TBH.W [рс, rO, 181 #1]
branchtable
DCI ((destO branchtable)/2) Поскольку значения смещений 1б битные,
используются директивы DCI
DCI ( (de s t 1 branchtable)/2)
DCI ( (dest2 branchtable)/2)
DCI ((dеstЗ branchtable)/2)
destO
Выполняем, если rO = О
dest1
Выполняем, если rO = 1
dest2
Выполняем, если rO = 2
dеstЗ
Выполняем, если rO = 3
rлдвд 5
СИСТЕМА ПАМЯТИ
5.1. Основные особенности системы памяти
Архитектура памяти, реализованная в процессоре Cortex M3, отличается от
архитектуры, использующейся в традиционных процессорах ARM. Во первых,
процессор Cortex M3 имеет фиксированную карту памяти, которая определяет,
какой шинный интерфейс должен использоваться при обращении к тому или
иному участку памяти. Эта особенность также позволяет процессору оптимизи
ровать операции обращения к различным устройствам.
Ещё одной особенностью системы памяти процессора Cortex M3 является
поддержка доступа к отдельным битам памяти (метод bit band). Это позволяет
выполнять атомарные операции с битами памяти или битами реrистров перифе
рийных устройств. Правда, необходимо заметить, что операции прямоrо доступа
к битам поддерживаются только для определённых областей памяти. Чуть позже
мы рассмотрим данный вопрос более подробно.
Система памяти процессора Cortex M3 также поддерживает пересылку HeBЫ
ровненных данных и операции монопольноrо доступа; эти возможности являют
ся частью архитектуры y7 M. И наконец, процессор Cortex M3 поддерживает па
мять, использующую как прямой, так и обратный порядок хранения байтов.
5.2. Карта памяти
в процессоре Cortex M3 используется фиксированная карта памяти (Рис. 5.1).
Это облеrчает перенос кода между устройствами на базе Cortex M3, выпускаемы
ми различными производителями. Например, компоненты, описанные в преды
дущих rлавах, такие как контроллер прерываний NVIC и модуль защиты памяти
MPU, всеrда будут располаrаться по одним и тем же адресам, независимо от про
изводителя. В то же время используемое распределение карты памяти обеспечи
вает rибкость, достаточную для выделения продукции одних производителей
среди продукции друrих.
94 · [лава 5. Система памяти
Ох EOOFFOOO
OxEOOFEFFF
Ох ЕО042000
ОхЕ0О41000
Ох ЕО040000
Таблица ПЗУ
Внешняя шина
собственных периферийных устройств
ЕТМ
TPIU
OxE003FFFF
Ох EOOOFOOO
Ох ЕОООЕООО
OxEOOOOFFF
Ох ЕОО03000
ОхЕОО02000
ОхЕОО01000
Ох ЕООООООО
Зарезервировано
NVIC
Зарезервировано
FPB
OWТ
ITM
Ox43FFFFFF
Область доступа к битам
Ох42000000
Ox41FFFFFF
Ох40100000
32 Мбайт
31 Мбайт
Ох40000000
Область хранения битов
1 Мбайт
Ох2ЗFFFFFF
Область доступа к битам
Ох 22000000
Ox21FFFFFF
Ох20100000
32 Мбайт
31 Мбайт
Ох 20000000
Область хранения битов
1 Мбайт
OxFFFFFFFF
Определяется
производителем
Шина собственной периферии:
компоненты отладки/внешняя
ОхЕ0100000
OxEOOFFFFF
Ох ЕО040000
OxE003FFFF
Ох ЕООООООО
OxOFFFFFFF
Шина собственной периферии:
внутренняя
Внешние устройства
1 rбайт ОхАООООООО
Ox9FFFFFFF
Внешнее ОЗУ
1 rбайт Ох60000000
Ox5FFFFFFF
Периферийные устройства
0.5 rбайт Ох40000000
Ox3FFFFFFF
СОЗУ
0.5 rбайт Ох20000000
Ox1FFFFFFF
Код
0.5 rбайт ОхОООООООО
Рис. 5.1. Предопределённая карта памяти процессора Cortex M3.
Некоторые участки памяти зарезервированы для использования BCTpoeHHЫ
ми периферийными устройствами, такими как компоненты отладки. Эти устрой
ства располаrаются в одноимённой области памяти. К указанным компонентам
отладки относятся следующие модули:
· модуль коррекции флэш памяти и задания точки останова (РРВ);
· модуль просмотра и трассировки данных (DWT);
· модуль трассировки (ITM);
· модуль встроенной ячейки трассировки (ЕТМ);
· модуль интерфейса порта трассировки (TPIU);
· таблица ПЗУ:
Более детально эти компоненты будут рассмотрены в друrих rлавах, посвя
щённых возможностям отладки.
5.2. Карта памяти . 9S
Процессор Cortex M3 имеет адресное пространство размером 4 rбайт. Про
rpaMMa может располаrаться в области кода, области статическоrо ОЗУ (созу)
или области внешнеrо оз Однако наилучшим местом для размещения про
rpaMMbI является всё же область кода, поскольку в этом случае операции выбор
ки команд и обращения к данным cMorYT выполняться одновременно) используя
различные интерфейсы шин.
Область статическоrо ОЗУ предназначена для подключения внутренней опе
ративной памяти. Обращение к области СОЗУ осуществляется по системной ши
не. В этой области имеется участок размером 32 Мбайт, предназначенный для об
ращения к области с побитовой адресацией (область хранения битов). Каждое
слово внутри указанноrо диапазона соответствует одному биту в I Мбайт обла
сти хранения битов. Все операции записи в область доступа к битам преобразу
ются в атомарные операции вида «чтение модификация запись» в области
хранения битов, воздействующие на состояния отдельных битов физической па
мяти. Обратите внимание, что операции побитовоrо доступа поддерживаются
только для данных, но никак не для команд! Размещая булевы переменные (оди
ночные биты) в области с побитовой адресацией, мы можем «упаковать» несколь
ко переменных в одно слово данных. При этом каждую из этих переменных мож
но будет изменять независимо от друrих, используя область доступа к битам.
В результате экономится память микроконтроллера, поскольку нам не требуется
проrраммно реализовывать операции вида «чтение модификация запись».
Более подробно работа с бит адресуемой памятью будет рассмотрена ниже.
Ещё одна область памяти размером 0.5 rбайт выделена для периферийных
устройств. Как и область статическоrо озу, область периферийных устройств
поддерживает доступ к отдельным битам с использованием метода bit band, а об
ращения к этой области осуществляются по системной шине. Однако размеще
ние исполняемоrо кода в указанной области не допускается. Наличие в области
периферийных устройств секции с побитовой адресацией значительно упрощает
работу с битами реrистров периферийных устройств, облеrчая написание функ
ций для управления данными устройствами.
Две области памяти размером по 1 rбайт выделены для внешнеrо озу и внеш
них периферийных устройств. Различие между этими областями заключается
в том, что из области внешних периферийных устройств не допускается исполне
ние кода проrраммы. Также имеются некоторые различия в стратеrии кэширова
ния.
Последняя распределённая область памяти размером 0.5 rбайт предназначена
для системных компонентов, внешних и внутренних шин встроенных перифе
рийных устройств процессора, а также для периферийных устройств системноrо
уровня, определяемых производителем. При этом шина собственных перифе
рийных устройств (Private Peripheral Bus РРВ) состоит из двух cerMeHToB:
. усовершенствованная высокопроизводительная шина (шина АНВ), предназна
ченная для подключения исключительно внутренних АНВ совместимых пе
риферийных устройств процессора, к которым относятся контроллер NVIC
и модули РРВ, DWT и ITM;
96 · [лава 5. Система памяти
· усовершенствованная шина nериферии (шина АРВ)) предназначенная для под
ключения как внутренних АРВ совместимых модулей, так и внешней (по OT
ношению к процессору Cortex M3) периферии. Процессор Cortex M3 позволя
ет производителям микросхем подключать к данной шине дополнительные
периферийные устройства, поддерживающие спецификацию АРВ.
Контроллер NVIC располаrается в области памяти, называемой простран
ством управления системой (System Control Space SCS), см. Рис. 5.2. Помимо
контроллера NVIC) в этой области располаrаются реrистры управления модулей
SYSTICK и MPU) а также компоненты управления отладкой.
Шина собственных Пространство
периферийных устройств (РВВ) управления
OxEOOOEFFF системой
OxEOOFFFFF
OxFFFFFFFF Внешняя
NVIC, CPUID,
Системный Ох ЕО040000 РРВ SYSTICK,
уровень .. ........ MPU, комп.
OxEOO3FFFF
OxEOOFFFFF .......................... Внутренняя отладки, и т .д.
РРВ
Ох ЕООООООО ОхЕООООООО ОхЕОООЕООО
Рис. 5.2. Пространство управления системой (SCS).
Оставшуюся часть адресноrо пространства производители микросхем MorYT
задействовать по своему усмотрению. Для обращения к данной области памяти
используется интерфейс системной шины) однако исполнение кода из этой обла
сти не допускается.
В процессоре Cortex M3 предусмотрен опциональный модуль защиты памяти
MPU. Наличие или отсутствие указанноrо модуля в конкретном устройстве зави
сит от производителя данноrо микроконтроллера.
Описанное распределение карты памяти процессора можно считать cBoero
рода шаблоном; более подробные карты памяти) в том числе реальное положение
и размеры областей ПЗУ и ОЗУ, а также расположение периферийных устройств
приводятся изrотовителями микросхем в документации на конкретные изделия.
5.3. Атрибуты доступа к памяти
Карта памяти показывает) что именно расположено по тем или иным адресам.
При этом она не только предоставляет информацию, к какому блоку памяти или
устройству производится доступ, но И определяет атрибуты доступа к каждой из
областей памяти. Процессором Cortex M3 используются следующие атрибуты:
· Буферируемая запись в память может производиться из буфера, в то время
как процессор будет выполнять следующую команду.
· Кэшируемая данные, полученные при чтении из памяти, MorYT быть coxpa
нены в кэш памяти. В итоrе при следующем обращении к этим данным их
можно будет считать из кэша, ускоряя тем самым процесс выполнения про
rpaMMbI.
· Исполняемая из этой области памяти процессор может осуществлять BЫ
борку и исполнение кода проrраммы.
5.3. Атрибуты доступа к памяти · 97
. Разделяемая данные в этой области памяти MorYT совместно использовать
ся несколькими контроллерами шины. Система памяти должна обеспечивать
KorepeHTHocTb данных, хранящихся в разделяемой области памяти) для всех
контроллеров шины.
Интерфейсы шин процессора Cortex M3 предоставляют системе памяти ин
формацию о перечисленных атрибутах при каждой пересылке команды или дaH
ных. Значения атрибутов памяти, присущих отдельным областям, MorYT пере
определяться модулем MPU (при ero наличии), если ero конфиrурация отличает
ся от принятой по умолчанию. Несмотря на то что в процессоре Cortex M3 нет ни
кэша, ни контроллера кэш памяти, в микроконтроллер может быть добавлен
блок внешней кэш памяти, характер обращений к которой будет определяться
атрибутами соответствующей области памяти. Более Toro, атрибуты кэш памяти
MorYT также влиять на работу контроллеров встроенной и внешней памяти это
зависит от архитектуры контроллеров памяти, используемых производителями
микросхем.
Ниже перечислены атрибуты доступа к памяти для каждой из областей карты
памяти:
. Область кода (ОхОООООООО.. .0хlРРРРРРР) является исполняемой, а атрибут
кэширования имеет значение «кэшируемая со сквозной записью» (Write
Through WT). Вы также можете размещать в этой области данные. Обраще
ния к данным) расположенным в указанной области, осуществляются по ин
терфейсу шины данных. Операции записи в данную область памяти буфери
зуются.
. Область СОЗУ (Ох20000000.. .Ох3РРРРРРР) предназначена для подключе
ния BCTpoeHHoro ОЗ Операции записи в эту область буферизуются, а атри
бут кэширования имеет значение «кэшируемая С обратной записью и разме
щением записываемых данных» (WB WA). Указанная область является испол
няемой) так что вы можете скопировать в неё код проrраммы и исполнять ero
уже оттуда.
. Область перифериЙНblХ устройств (Ох40000000.. .Ох5РРРРРРР) предназна
чена для размещения периферийных устройств. Обращения к этой области
памяти не кэшируются, и исполнение кода из неё не допускается (в ДOKYMeH
тации ARM неисполняемая память имеет атрибут XN) являющийся сокраще
нием от eXecute Never).
. Область внешнеzо ОЗУ (Ох60000000.. .Ох7РРРРРРР) предназначена для
встроенной или внешней памяти данных. Обращения к указанной области
памяти MorYT кэшироваться (WB WA), из этой области также допускается BЫ
полнение кода.
. Область внешнеzо ОЗУ (Ох80000000.. .Ох9РРРРРРР) предназначена для
встроенной или внешней памяти данных. Обращения к этой области памяти
MorYT кэшироваться (WT), из данной области также допускается выполнение
кода.
. Область внешних устройств (ОхАООООООО...ОхВРРРРРРР) предназначена
для внешних устройств и/или разделяемой памяти) к которой необходимо
98 · fлава 5. Система памяти
обеспечить упорядоченный и небуферизованный доступ. Эта область также
является исполняемой.
· Область внешних устройств (ОхСООООООО.. .0xDFFFFFFF) предназначена
для внешних устройств и/или разделяемой памяти, к которой необходимо
обеспечить упорядоченный и небуферизованный доступ. Область также яв
ляется исполняемой.
· Системная область (ОхЕООООООО.. .ОхРРРРРРРР) предназначена для соб
ственных периферийных устройств процессора, а также для модулей, опреде
ляемых производителем. Исполнение кода из этой области памяти не допу
скается. В диапазоне адресов, выделенных шине РВВ, обеспечивается cTporo
упорядоченный доступ к памяти (некэшируемая и небуферируемая память).
В диапазоне адресов, выделенных для изrотовителей кристаллов, память яв
ляется буферируемой, но некэшируемой.
Замечу, что, начиная с l й ревизии процессора Cortex M3, атрибуты памяти
области кода (кэшируемая и небуферируемая)) транслируемые внешней подси
стеме памяти, задаются аппаратно и не MorYT быть переопределены модулем
MPU. Это касается только подсистем памяти, расположенных вне процессора
(например, кэш памяти 2 ro уровня и некоторых типов контроллеров памяти
с поддержкой кэширования). В процессоре в любом случае имеется внутренний
буфер, который может использоваться при операциях записи в область кода.
5.4. Права доступа к памяти, принятые
по умолчанию
Каждой из областей карты памяти процессора Cortex M3 назначены опреде
лённые права доступа, используемые по умолчанию. Это позволяет предотвра
тить обращение пользовательской проrраммы, работающей на непривилеrиро
ванном уровне, к системным областям памяти, например к реrистрам контролле
ра NVIC. Права доступа, принятые по умолчанию, используются при отсутствии
модуля MPU или же в том случае, если он отключён.
Если модуль MPU присутствует и включён, то возможность доступа со CTOpO
ны пользователя к той или иной области памяти определяется конфиrурацией
модуля.
Права доступа к различным областям памяти, установленные по умолчанию,
указаны в Табл. 5.1.
Таблица 5.1. Права доступа к памяти, установленные по умолчанию
Область памяти Диапазон адресов Доступ из пользовательской проrраммы
Область OxEOIOOOOO.. .ОхРРРРРРРР Полный доступ
изrотовителя
Таблица ПЗУ OxEOOFFOOO.. .OxEOOFFFFF Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
Внешняя шина РРВ ОхЕОО42000.. .OxEOOFEFFF Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
5.5. Операции по6итовО20 доступа . 99
Таблица 5.1. Права доступа к памяти, установленные по умолчанию (продолжение)
Область памяти Диапазон адресов Доступ из пользовательской проrраммы
ЕТМ OxE0041000.. ...OxEOO41FFF Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
TPIU ОхЕОО40000.. .ОхЕОО40РРР Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
Внутренняя шина OxEOOOFOOO.. .OxEOO3FFFF Заблокирован; при попытке обращения
РРВ rенерируется исключение Bus Fault
Заблокирован; при попытке обращения
rенерируется исключение Bus Fault.
NVIC ОхЕОООЕООО.. .ОхЕОООЕРРР Исключение реrистр проrраммноrо
запуска прерывания STIR) доступ
к которому со стороны пользователя может
быть разрешён
РРВ ОхЕООО2000.. ...ОхЕООО3РРР Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
DWT OxEOOOIOOO.. .OxEOOOIFFF Заблокирован; при попытке обращения
rенерируется исключение Bus Fault
Разрешено чтение; запись иrнорируется) за
ITM ОхЕООООООО.. .ОхЕООООРРР исключением операций записи в порты
стимулов при условии) что доступ к ним со
стороны пользователя разрешён
Внешние устройства ОхАООООООО.. .OxDFFFFFFF Полный доступ
Внешнее ОЗУ Ох60000000.. .Ox9FFFFFFF Полный доступ
Периферийные Ох40000000.. .Ох5РРРРРРР Полный доступ
устройства
Статическое ОЗУ Ох20000000.. .Ox3FFFFFFF Полный доступ
Код ОхОООООООО.. .OxlFFFFFFF Полный доступ
Примечание. Если доступ со стороны пользователя заблокирован) то исключение отказа rенерируется
немедленно.
5.5. Операции побитовоrо доступа
Поддержка метода побитовоrо доступа bit band позволяет использовать обыч
ные операции заrрузки/сохранения для обращения (чтение/запись) к отдельным
битам данных. В процессоре Cortex M3 побитовый доступ к памяти поддержива
ется только для двух предопределённых областей памяти, называемых областя
ми хранения битов. Одна из этих областей расположена в I M меrабайте aдpeCHO
ro пространства СО3У, а друrая в 1 м меrабайте адресноrо пространства пери
ферийных устройств. В принципе, эти области можно использовать как обычную
память, однако к ним можно обращаться и посредством специальной области па
мяти, называемой областью доступа к битам (Рис. 5.3). При использовании aдpe
са, расположенноrо в области доступа к битам, младший бит адресуемоrо значе
ния обращается к отдельному биту области хранения битов.
100 . fлава 5. Система памяти
31
24
Биты
16
8
о
Ox200FFFFC
.
Адрес в области :
хранения битов :
.
.
.
Ох20000008
Ох20000004
Ох20000000
Ох22000080
Ох2200002С Ох22000010 Ох22000000
АдреСВО6ласти
доступа к битам
Рис. 5.3. Обращение к области хранения битов посредством области доступа к битам.
Например, для установки 2 ro бита слова данных, расположенноrо по адресу
Ох20000000, вместо трёх команд (чтение значения, установка бита и сохранение
результата), можно использовать Bcero одну команду (Рис. 5.4). Фраrменты ac
семблерноrо кода, соответствующие обоим вариантам, приведены на Рис. 5.5.
Без использования
метода bit band
с использованием
метода bit band
/
Чтение содержимоrо
по адресу Ох20000000
в буфер
Преобразуется
в 2 пересылки
по шине
3апись из буфера
по адресу Ох20000000
с установкой бита 2
Рис. 5.4. Запись в область доступа к битам.
Без использования метода bit band
с использованием метода bit band
LDR RO, Ox20000000
LDR R1, [RO ]
ORR.W Rl, #Ох4
STR R1, [RO]
Задаём адрес
Читаем
Изменяем бит
Сохраняем результат
LDR
MOV
STR
RO, Ox22000008
R1, #1
Rl, [RO]
Задаём адрес
Задаём данные
Пишем
Рис. 5.5. Запись бита с использованием метода bit baпd и без Hezo.
Аналоrичным образом, использование метода bit band может упростить код
проrраммы при необходимости чтения отдельноrо бита памяти. Так, если нам
нужно узнать состояние 2 ro бита слова, расположенноrо по адресу Ох20000000,
мы можем воспользоваться одним из способов, показанных на Рис. 5.6. Фраrмен
ты ассемблерноrо кода, соответствующие обоим способам, приведены на Рис. 5.7.
5.5. Операции побитовО20 доступа · 101
Без использования
метода bit band
с использованием
метода bit band
Преобразуется
в 1 пересылку
по шине
. Чтение содержимоrо
по адресу Ох20000000
и извлечение бита 2
в реrистр
Рис. 5.6. Чтение из области доступа к битам.
Без использования метода bit band
с использованием метода bit band
LDR RO, Ox20000000
LDR Rl, [RO ]
UBFX.W Rl, Rl, #2, #1 ;
3адаём адрес
Читаем
Выделяем бит 2
LDR
LDR
RO, Ox22000008
Rl, [RO ]
Задаём адрес
Читаем
Рис. 5.7. Чтение бита с использованием метода bit baпd и без Hezo.
Метод bit band, реализованный в процессоре Cortex M3, не является чем то
новым. На самом деле, аналоrичная возможность уже более 30 лет имеется
в 8 битных микроконтроллерах, в частности в микроконтроллерах семейства
8051. Хотя в процессоре Cortex M3 и нет специальных команд для манипуляций
с битами, в ero адресном пространстве предусмотрены особые области, обраще
ния к которым автоматически преобразуются в обращения к отдельным битам.
Ещё раз напомню, что при адресации памяти посредством метода bit band ис
пользуются следующие понятия:
. Область хранения битов (bit band region) область памяти, поддерживаю
щая доступ по методу bit band.
. Адрес доступа к биту (bit band alias) обращение по этому адресу вызывает
обращение к области хранения битов (т.е. производится переадресация).
Каждое слово области хранения битов представлено младшими битами
32 слов области доступа к битам. При обращении по адресу, находящемуся в об
ласти доступа к битам, производится переадресация на область хранения битов.
При операциях чтения производится чтение слова, после чеrо искомый бит BЫ
двиrается в младший бит возвращаемоrо значения. При записи значение coxpa
няемоrо бита сдвиrается на заданную позицию, после чеrо выполняется опера
ция «чтение модификация запись».
В адресном пространстве процессора имеется две области памяти, поддержи
вающие побитовую адресацию:
. Ох20000000.. .Ox200FFFFF (созу, 1 Мбайт);
. Ох40000000.. .Ox400FFFFF (периферийные устройства, 1 Мбайт).
Соответствие адресов в области хранения битов, расположенной в адресном
пространстве созу, адресам области доступа к битам указано в Табл. 5.2.
102 · fлава 5. Система памяти
Таблица 5.2. Переназначение адресов области хранения битов на область СО3У
Область хранения битов Область доступа к битам
Ох20000000,бит[0] Ох22000000,бит[0]
Ох20000000, бит [1] Ох22000004,бит [О]
Ох20000000, бит [2] Ох22000008,бит[0]
. . . . . .
Ох20000000, бит [31] Ох2200007С,бит[0]
Ох20000004,бит[0] Ох22000080,бит [О]
. . . . . .
Ох20000004, бит [31] Ох220000РС, бит [О]
. . . . . .
Ох200РРРРС, бит [31] Ox23FFFFFC, бит [О]
Аналоrичным образом, к области с побитовой адресацией, расположенной
в адресном пространстве периферийных устройств, можно обращаться посред
ством соответствующей области доступа к битам, как указано в Табл. 5.3.
Таблица 5.3. Переназначение адресов области хранения битов на область
периферифных устройств
Область хранения битов Область доступа к битам
Ох40000000,бит[0] Ох42000000, бит [О]
Ох40000000, бит [1] Ох42000004,бит [О]
Ох40000000, бит [2] Ох42000008,бит [О]
. . . . . .
Ох40000000, бит [31] Ох4200007С, бит [О]
Ох40000004,бит [О] Ох42000080,бит [О]
. . . . . .
Ох40000004, бит [31] Ох420000РС, бит [О]
. . . о. .
Ox400FFFFC, бит [31] Ox43FFFFFC, бит [О]
Рассмотрим простой при мер:
1. Запишем по адресу Ох20000000 значение Ох3355ААСС.
2. Прочитаем слово с адреса Ох22000008. При этом в действительности будет
выполнено чтение с адреса Ох20000000. Возвращаемое значение равно 1
(2 й бит значения Ох3355ААСС).
3. Запишем ОхО по адресу Ох22000008. Эта операция прео6разуется в операцию
вида «чтение модификация запись» по адресу Ох20000000. Значение
Ох3355ААСС считывается из памяти, 2 й бит сбрасывается и полученное
значение (Ох3355ААС8) записывается обратно по адресу Ох20000000.
4. Теперь выполним чтение с адреса Ох200000. В результате получим число
Ох3355ААС8 (2 й бит сброшен).
При обращении к адресам, расположенным в области доступа к битам, ис
пользуются только младшие (нулевые) биты значений. Кроме Toro, обращения
5.5. Операции пo6umoBozo доступа · 103
к области доступа к битам всеrда должны быть выровнены; в противном случае,
результат операции будет непредсказуем.
5.5.1. Преимущества использования метода bit..band
Итак, что же нам даёт возможность выполнения операций с отдельными бита
ми! В частности, мы можем использовать эти операции для Toro, чтобы орrани
зовать обмен данными с последовательными устройствами при помощи портов
ввода/вывода общеrо назначения (General Purpose Input/Output GPIO). По
скольку обращения к линии данных и линии TaKToBoro сиrнала MorYT быть раз
делены, код проrраммы значительно упрощается.
Битовые операции MorYT также использоваться при орrанизации ветвлений.
Например, если переход должен осуществляться на основании значения одноrо
из битов реrистра состояния периферийноrо устройства, то вместо трёх опера
ций:
. чтение Bcero содержимоrо реrистра;
. маскирование остальных битов;
. сравнение и переход;
вам достаточно выполнить Bcero две операции:
. чтение бита состояния с использованием метода bit band (получаем О или 1);
. сравнение и переход.
Помимо Toro, что метод bit band ускоряет выполнение битовых операций, по
зволяя обойтись меньшим числом команд, он также иrрает важную роль при op
rанизации COBMecTHoro использования каких либо ресурсов несколькими про
цессами. Одним из важнейших достоинств битовых операций с применением Me
тода bit band является их атомарность. Друrими словами, выполнение последова
тельности «чтение модификация запись» не может быть прервано никакими
друrими операциями на шине. В противном случае, скажем, при проrраммной
реализации последовательности «чтение модификация запись», MorYT воз
никнуть определённые проблемы. Предположим, что О й бит обычноrо порта BЫ
вода используется основной проrраммой, а l й бит обработчиком прерывания.
При проrраммной реализации операции «чтение модификация запись» MO
rYT возникать конфликты по данным, как показано на Рис. 5.8.
104 · [лава 5. Система памяти
Без использования метода bit band
Режим обработчика
Режим потока
/ Бит 1 изменяется \
в обработчике
прерывания
t' ,
Обработчик прерывания
Чтение
порта вывода
Запись
в порт вывода
Основная проrрамма
БитО
устанавливается
осн. проrраммой
t' ,
Порт вывода
считывается
в реrистр
t'
Запись Порт вывода
считывается
в порт вывода в реrистр
Бит О Изменения, сделанные
сбрасывается обработчиком преры
осн. проrраммой вания, теряются
Запись
в порт
вывода
Состояние
выходноrо
порта
ОхО1
ОхОЗ
ОхОО
.
Время
Рис. 5.8. Потеря данных при изменении содержuмоzо разделяемой ячейки памяти
обработчиком исключения.
Блаrодаря поддержке процессором Cortex M3 метода bit band можно избе
жать подобных состояний rOHoK, поскольку операции «чтение модификация
запись» реализуются на аппаратном уровне и являются атомарными обе пере
сылки, осуществляемые при выполнении операции, неотделимы друr от друrа
и возникновение прерываний между этими пересылками исключено (Рис. 5.9).
с использованием метода bit band
Режим обработчика
\
Режим поток а
/
Обработчик прерывания
Бит 1 изменяется в обработчике
прерывания посредством записи
в область доступа к битам
Основная проrрамма
Бит О устанавливается основной Запись в порт вывода
проrраммой посредством посредством области
записи в область доступа к битам доступа к битам
Заблокированная операция Iзаблокированная операция I Заблокированная операция
«чтение модиФикация заПИСЬ»f(чтение модификация запись «чтение модификация запись»
( (
Состояние I ОхОО ОхО1 ОхОО ОхО2
порта вывода
.
Время
Рис. 5.9. Предотвращение потери данных блаzодаря использованию метода bit band.
5.5. Операции no6umoBozo доступа. 105
Похожую проблему можно наблюдать в мноrозадачных системах. Так, если
О й бит порта вывода используется процессом А, а l й бит порта процессом В,
то в случае проrраммной реализации операции «чтение модификация за
пись» точно так же может возникнуть конфликт по данным (Рис. 5.10).
Без использования метода bit band
Текущая
задача
Задача А
I Задача В
Задача А
Задача В
I Задача А
Задача В
Бит 1 изменяется
('задачей В,
Чтение Запись
порта вывода в порт вывода
Задача Д Бит О
уаанавливается
задачей Д
(' ,
Порт вывода Запись
считывается
в реrиар в порт вывода
БитО
сбрасывается
(' задачей Д
Порт вывода
считывается
в реrиар
Изменения, сделанные
задачей В, теряются
Соаояние
выходноrо
порта
,
Запись
в порт
вывода
ОхОО
Ох01
ОхОЗ
ОхОО
.
Время
Рис. 5.10. Потеря данных при изменении разными задачами содержиМО20 разделяемой
ячейки памяти.
и точно так же использование метода bit band позволяет обеспечить полную
независимость битовых операций, выполняемых разными задачами. Это rapaH
тирует отсутствие конфликта по данным (Рис. 5.11).
с использованием метода bit band
Текущая
задача
Задача А
Задача В
Задача А
Задача В
Задача А
Задача В
Бит 1 изменяется задачей В
посредавом записи
в облааь доступа к битам
Задача Д
Бит О уаанавливается задачей Д Запись в порт вывода
посредавом записи посредавом облааи
в облааь доступа к битам доступа к битам
Заблокированная операция Iзаблокированная операция I Заблокированная операция
«чтение модификация запись)+«чтение модификация заПИСЬ)t «чтение модификация запись»
t t
Соаояние ОхОО ОхО 1 О 00
порта
вывода
Ох02
.
Время
Рис. 5.11. Предотвращение потери данных бла20даря использованию метода bit band.
106 . [лава 5. Система памяти
Метод bit band может применяться не только для ввода/вывода данных, но
и для хранения и обработки булевых данных в области СОЗ В частности, для
экономии памяти несколько булевых переменных можно «упаковать» В одно сло
во данных. И в то же время, используя область доступа к битам, каждым битом
можно будет оперировать независимо от остальных.
И в заключение пара замечаний для разработчиков систем на кристалле. При
создании устройства, поддерживающеrо побитовый доступ с использованием
метода bit band, адрес области памяти этоrо устройства должен располаrаться
в области хранения битов. При этом необходимо контролировать сиrнал блоки
ровки (HMASTLOCK) от интерфейса шины АНВ, чтобы при выполнении забло
кированных пересылок изменение содержимоrо реrистров устройства, доступ
ных для записи, осуществлялось бы только шиной.
5.5.2. Битовые операции с данными разной
разрядности
При выполнении битовых операций MorYT использоваться не только 4 байт
ные, но также двухбайтные и однобайтные пересылки. Скажем, при обращении
к области доступа к битам с помощью однобайтных команд (LDRB/STRB) итоrовая
пересылка в/из области хранения битов будет также однобайтной. То же спра
ведливо и для двухбайтных пересылок (LDRH/STRH). Тем не менее, даже если раз
мер пересылки, осуществляемой при обращении к области доступа к битам, не
равен слову, адрес всё равно должен быть выровнен на rраницу слова.
5.5.3. Битовые операции в Си..проrраммах
В большинстве компиляторов с языка Си отсутствует поддержка битовых
операций с применением метода bit band. В частности, компиляторы не понима
ют, как к одной и той же ячейке памяти можно обращаться, используя два разных
адреса. Также они не MorYT знать, что при адресации области доступа к битам
в действительности производится обращение только к младшему биту ячейки
памяти. Чтобы воспользоваться в Си проrраммах возможностями, обеспечивае
мы ми методом bit band, можно объявить пару указателей на адрес в области
хранения битов и на соответствующий ему адрес в области доступа к битам. Ha
пример:
#define DEVICE REGO * ((volatile unsigned long *) (Ох40000000))
#define DEVICE REGO BITO * ((volatile unsigned long *) (Ох42000000))
#define DEVICE REGO BITl * ((volatile unsigned long *) (Ох42000004))
DEVICE REGO = ОхАВ; // Обращение к реrистру периферийноrо устройства
// с использованием обычной адресации
DEVICE REGO DEVICE REGO I Ох2; // Установка бита 1 без использования
// метода bit band
DEVICE REGO BITl = Охl; // Установка бита 1 с использованием метода bit band
// (обращение к адресу в области доступа к битам)
5.6. Обращения к невыровненным данным . 107
Можно упростить использование бит адресуемых областей памяти, написав
пару макроопределений. Один из макросов будет вычислять адрес в области дo
ступа к битам на основе адреса слова из области хранения битов и номера бита,
а второй преобразовывать значение адреса ячейки памяти в указатель:
// Вычисляет адрес в области хранения битов, используя адрес
// в бит адресуемой области и номер бита
#define BITBAND(addr,bitnum) ((addr & OxFOOOOOOO) + Ох2000000 +
((addr & OxFFFFF) «5) + (bitnum «2))
// Преобразует адрес в указатель
#define МЕМ ADDR (addr) * ((volatile unsigned long *) (addr))
Перепишем код предыдущеrо примера, используя эти макросы:
#define DEVICE REGO Ох40000000
#define BITBAND(addr,bitnum) ((addr & OxFOOOOOOO) + ОхО2000000 +
((addr & OxFFFFF)«5) + (bitnum«2))
#define МЕМ ADDR (addr) * ((volatile unsigned long *) (addr))
MEM ADDR(DEVICE REGO) = ОхАВ; // Обращение к реrистру периферийноrо устройства
// с использованием обычной адресации
// Установка бита 1 без использования метода bit band
МЕМ ADDR(DEVICE REGO) = МЕМ ADDR(DEVICE REGO) I Ох2;
// Установка бита 1 с использованием метода bit band
MEM ADDR(BITBAND(DEVICE REGO,l)) = Охl;
Обратите внимание, что при использовании метода bit band переменные, раз
мещаемые в бит адресуемой области, должны быть объявлены как volatile.
Компиляторы ведь не знают, что к одним и тем же данным можно обращаться по
двум различным адресам, а применение модификатора volatile позволяет ra
рантировать, что при каждом обращении к такой переменной процессор будет
обращаться непосредственно к ячейке памяти, а не к локальной копии этой пере
менной.
Для поддержки бит адресуемой памяти в компилятор ARM был добавлен HO
вый атрибут для переменных attribute ((bit band)) и новый ключ
командной строки bitband (см. [6]). Пакет ARM RVDS начал поддерживать
эти расширения языка, начиная с версии 4.0, а пакет КеН MDK ARM с версии
3.8. В руководстве по применению компилятора ARM RealView Compiler Tools [7]
вы найдёте дополнительные примеры реализации обращений к бит адресуемой
памяти с использованием макросов.
5.6. Обращения к невыровненным данным
Процессор Cortex M3 поддерживает пересылку невыровненных данных за oд
но обращение к памяти. Как известно, классические процессоры ARM, такие как
ARM7/ARM9/ARMll, поддерживают обращения только к выровненным данным.
Это означает, что при обращении к слову два младших бита адреса должны быть
сброшены в О, а при обращении к полуслову младший бит адреса должен быть
сброшен в о. Например, 32 битное значение может располаrаться по адресу
108 . fлава 5. Система памяти
Охl000 или Охl004, но никак не по адресу Охl00l, Охl002 или Охl003. Аналоrично,
16 битное значение может иметь адрес Охl000 или Охl002, но не Охl00l.
Что же собой представляет невыровненная пересылка? Ответ на этот вопрос
можно получить из Рис. 5.12...5.16. При использовании 32 битной памяти HeBЫ
ровненная пересылка производится при выполнении любой операции чтения/
записи слова, адрес KOToporo не кратен 4 (Рис. 5.12.. .5.14). Точно так же, HeBыpOB
ненной является пересылка полуслова, адрес KOToporo не кратен двум (Рис. 5.15,
5.16).
Байт
3
Байт
2
Байт
1
Байт
О
Адрес N + 4
Адрес N
Невыровненное слово
по адресу N + 1
Рис. 5.12. Невыровненные данные, пример 1.
Байт
3
Байт
2
Байт
1
Байт
О
Адрес N + 4
Адрес N
Невыровненное слово
по адресу N + 2
Рис. 5.13. Невыровненные данные, пример 2.
Байт
3
Байт
2
Байт
1
Байт
О
Адрес N + 4
Адрес N
Невыровненное слово
по адресу N + 3
Рис. 5.14. Невыровненные данные, пример 3.
Байт
3
Байт
2
Байт
1
Байт
О
Адрес N + 4
Адрес N
Невыровненное полуслово
по адресу N + 1
Рис. 5.15. Невыровненные данные, пример 4.
i-< _ __ ilk . !; j
Байт
З
Байт
2
Байт
1
Байт
О
Невыровненное полуслово
по адресу N + 3
Рис. 5.16. Невыровненные данные, пример 5.
Любые однобайтные пересылки в процессоре Cortex M3 являются BыpOBHeH
ными, поскольку минимальная разница между двумя адресами равна одному
байту.
В процессоре Cortex M3 невыровненные пересылки осуществляются обыч
ными командами обращения к памяти, такими как LDR, LDRH, STR и STRH. При
этом имеются некоторые оrраничения:
. невыровненные пересылки не поддерживаются командами rрупповой заrруз
ки/сохранения;
. операции со стеком (команды PUSH/POP) должны быть выровнены;
Адрес N + 4
Адрес N
5.7. Монопольный доступ . 109
. команды монопольноrо доступа, такие как LDREX или STREX, должны обра
щаться только к выровненным данным; в противном случае, будет возникать
исключение Usage Fault;
. невыровненные пересылки не поддерживаются при побитовых операциях
с использованием метода bit band. Если вы всё же попытаетесь так сделать, то
результат будет непредсказуемым.
Любое обращение к невыровненным данным преобразуется интерфейсом ши
ны в последовательность из нескольких выровненных пересылок, причём это
преобразование является абсолютно прозрачным для пользователя. Поскольку
при любом обращении к невыровненным данным в действительности осуществ
ляется несколько пересылок, то для выполнения такой операции требуется боль
шее число тактов, что в ряде случаев может оказаться нежелательным. Следова
тельно, для достижения максимальной производительности лучше всё же BыpaB
нивать данные соответствующим образом.
Кроме Toro, можно сконфиrурировать контроллер NVIC так, чтобы при обра
щении к невыровненным данным возникало исключение. Для этоrо необходимо
установить бит UNALIGN TRP реrистра управления конфиrурацией CCR
(OxEOOOEDI4) в 1. В таком случае при каждой попытке обращения к HeBыpOBHeH
ным данным процессор будет rенерировать исключение Usage Fault. Указанная
возможность используется на этапе разработки и отладки ПО для Toro, чтобы OT
слеживать формирование проrраммой невыровненных пересылок.
5.7. МОНОПОЛЬНЫЙ доступ
Вы моrли заметить, что в наборе команд процессора Cortex M3 отсутствует
команда SWP, которая в традиционных процессорах ARM, таких как ARM7TDMI,
применялась для реализации семафоров. В новом процессоре для этих же целей
используются команды монопольноrо доступа. Впервые поддержка операций
монопольноrо доступа появилась в архитектуре у6 (в частности, в процессоре
ARMI136).
Семафоры обычно используются для управления доступом к разделяемым
ресурсам. Если разделяемый ресурс может обслуживать только одноrо клиента
или процесс, то такой семафор также называется семафором взаимноrо исключе
ния, или мьютексом (от аН2Л. MUTual EXclusion). В таких случаях при использо
вании ресурса одним из процессов данный ресурс блокируется этим процессом
и не может обслуживать друrие процессы до тех пор, пока не будет разблокиро
ван. Для реализации мьютекса требуется одна ячейка памяти, которая задейству
ется в качестве флаrа блокировки, указывающеrо, заблокирован соответствую
щий разделяемый ресурс каким либо процессом или нет. Если процесс или при
ложение хотят задействовать такой ресурс, то они должны сначала проверить ero
состояние. Если ресурс не используется, то процесс или приложение устанавли
вает флаr, показывая, что ресурс теперь заблокирован. В традиционных процес
сорах ARM обращения к флаrу блокировки осуществлялись командой SWP. Эта
команда обеспечивала атомарность операций записи и чтения, что позволяло ис
ключить одновременную блокировку ресурса двумя процессами.
110 . fлава 5. Система памяти
в новых процессорах ARM операции чтения/записи MorYT осуществляться по
разным шинам. Это делает невозможным использование команды SWP для opra
низации aToMapHoro доступа к памяти, поскольку операции чтения и записи при
выполнении блокированной пересылки должны осуществляться по одной и той
же шине. Соответственно, блокированные пересылки заменяются операциями
монопольноrо доступа. Концепция, лежащая в основе таких операций, достаточ
но проста и при этом отличается от концепции команды SWI: обращения к ячей
ке памяти, в которой расположен семафор, допускаются со стороны друrоrо Be
дущеrо шины или друrоrо процесса, выполняемоrо тем же процессором
(Рис. 5.17).
Читаем флаr
блокировки
Монопольное чтение
(например, LDREX)
Флаr уаановлен?
Отказ: флаr блокировки уже уаановлен,
показывая, что запрашиваемый ресурс
используется друrим процессом
или процессором
Да
Уаанавливаем
флаrблокировки
Монопольная запись
(например,SТRЕХ)
Статус операции
монопольной записи
= О (успешна)?
Отказ: к облааи памяти, в которой
располаrается флаr блокировки,
успел обратиться друrой процесс
или процессор
Нет
Успех:флаrблокировки
уаановлен и процессор
может обращаться
к разделяемому ресурсу
Рис. 5.17. Команды монопольноzо доступа и мьютексы.
Чтобы обеспечить корректное выполнение операций монопольноrо доступа
в мноrопроцессорной среде, требуется дополнительный аппаратный модуль, Ha
зываемый монитором монопольноrо доступа. Этот монитор контролирует обра
щения к разделяемым ячейкам памяти и сообщает процессору об успешном BЫ
полнении операций. В интерфейсах шин процессора также предусмотрены дo
полнительные сиrналы управления l ) этим монитором, которые используются
для индикации пересылок, осуществляемых в монопольном режиме.
Если между операциями монопольноrо чтения и монопольной записи к памя
ти обратится друrой ведущий шины, то при попытке процессора выполнить MO
нопольную запись монитор передаст по шине сообщение об отказе в монополь
ном доступе. В итоrе статус выполнения операции монопольной записи окажет
l)Сиrналы монопольноrо доступа имеются в системной шине (сиrналы EXREQS и EXRESPS)
и шине D Code (сиrналы EXREQD и EXRESPD) процессора Cortex M3. Шина I Code,
используемая для выборки команд, не может rенерировать транзакции монопольноrо
доступа.
5.8. Порядок расположения байтов. 111
ся равным 1. В случае неудачной попытки монопольной записи монитор также
блокирует запись по адресу, используемому для монопольноrо доступа.
В процессоре Cortex M3 предусмотрено три команды монопольноrо чтения
LDREX (слово), LDREXB (байт), LDREXH (полуслово) и три команды монопольной
записи STREX (слово), STREXB (байт), STREXH (полуслово). Эти команды имеют
следующий синтаксис:
LDREX <Rxf>, [Rn, #offset]
STREX <Rd>, <Rxf>, [Rn, #offset]
В реrистре Rd возвращается статус выполнения монопольной записи (О
успех, 1 неудача).
При мер использования команд монопольноrо доступа можно найти в fлаве
10. Для вызова команд монопольноrо доступа из проrрамм на языке Си можно за
действовать встроенные функции из СМSIS совместимых библиотек, предостав
ляемых производителями микроконтроллеров: LDREX, LEDEXH,
LDREXB, STREX, STREXH, STREXB. Более подробно эти функции
описаны в Приложении ж.
При осуществлении монопольноrо доступа внутренние буферы записи интер
фейсов шин процессора Cortex M3 не используются, даже если модуль MPU
определяет указанную область памяти как буферируемую. Это rарантирует, что
информация о семафоре, хранящаяся в физической памяти, всеrда будет aKTY
альной и непротиворечивой для разных контроллеров шин. Разработчики си
стем на кристалле, использующие процессор Cortex M3 в мноrопроцессорных
системах, должны обеспечить непротиворечивость данных при осуществлении
пересылок монопольноrо доступа.
5.8. Порядок расположения байтов
Собственно процессор Cortex M3 поддерживает как прямой, так и обратный
порядок байтов. Однако тип памяти, используемый конкретным микроконтрол
лером, зависит и от остальных ero компонентов (шинной инфраструктуры, KOH
троллеров памяти, периферии и т.п.). Не забудьте внимательно изучить справоч
ную документацию на применяемый микроконтроллер, прежде чем приступать
к разработке проrраммноrо обеспечения. В большинстве случаев в микрокон
троллерах с процессором Cortex M3 используется прямой порядок байтов (little
endian). В этом режиме первый байт слова данных располаrается в младшем бай
те 32 битной ячейки памяти (Табл. 5.4).
Таблица 5.4. Процессор Cortex M3) прямой порядок байтов (little endian) данные
в памяти
Адрес Биты 31...24 Биты 23...16 Биты 15...8 Биты 7...0
ОхlООЗ.. .OxlOOO Байт ОхlООЗ Байт OxlOO2 Байт OxlOOl Байт OxlOOO
Oxl007.. .OxlOO4 Байт OxlOO7 Байт OxlOO6 Байт OxlOO5 Байт OxlOO4
. . . Байт 4хN+З Байт 4xN+2 Байт 4xN+l Байт 4xN
112 . fлава 5. Система памяти
Также встречаются микроконтроллеры, использующие обратный порядок
байтов (big endian). В таких микроконтроллерах первый байт слова данных pac
полаrается в старшем байте 32 битной ячейки памяти (Табл. 5.5).
Таблица 5.5. Процессор Cortex M3, обратный порядок байтов (big endian) данные
в памяти
Адрес Биты 31...24 Биты 23...16 Биты 15...8 Биты 7...0
Охl003.. .Охl000 Байт Охl000 Байт Охl00l Байт Охl002 Байт Охl00З
Охl007.. .Охl004 Байт Охl004 Байт Охl005 Байт Охl006 Байт Охl007
. . . Байт 4xN Байт 4xN+l Байт 4xN+2 Байт 4хN+З
в процессоре Cortex M3 по друrому определяется обратный порядок байтов,
нежели в процессоре ARM7. Если в процессоре ARM7TDMI используется формат
с неизменным расположением слов (word invariant big endian), обозначаемый в дo
кументации ARM как BE 32, то в процессоре Cortex M3 формат с неизменным
расположением байтов (byte invariant big endian), обозначаемый в документации
как BE 8 (этот формат поддерживается архитектурами ARM у6 и У7). С точки зре
ния расположения байтов в памяти, эти форматы полностью идентичны отли
чается только использование байтовых трактов шины при пересылке данных
(Табл. 5.6 и 5.7).
Таблица 5.6. Процессор Cortex M3 (обратный порядок с неизменным расположением
байтов, BE 8) данные на шине АНВ
Адрес Биты 31...24 Биты 23...16 Биты 15...8 Биты 7...0
Охl000,слово Биты данных [7:0] Биты данных [15:8] Биты данных [23:16] Биты данных [31:24]
Охl000, Биты данных [7:0] Биты данных [15:8]
полуслово
Охl002, Биты данных [7:0] Биты данных [15:8]
полуслово
Охl000,байт Биты данных [7:0]
Охl00l, байт Биты данных [7:0]
Охl002,байт Биты данных [7:0]
Охl003,байт Биты данных [7:0]
Таблица 5.7. Процессор ARM7TDMI (обратный порядок с неизменным
расположением слов, BE 32) данные на шине АНВ
Адрес Биты 31...24 Биты 23...16 Биты 15...8 Биты 7...0
Охl000,слово Биты данных [7:0] Биты данных [15:8] Биты данных [23: 16] Биты данных [31:24]
Охl000, Биты данных [7:0] Биты данных [15:8]
полуслово
Охl002, Биты данных [7:0] Биты данных [15:8]
полуслово
Охl000,байт Биты данных [7:0]
Охl00l, байт Биты данных [7:0]
Охl002,байт Биты данных [7:0]
Охl003,байт Биты данных [7:0]
5.8. Порядок расположения байтов · 113
Обратите внимание, что при пересылке данных по шине АНВ в режиме BE 8
используются те же байтовые тракты шины, что и в режиме с прямым порядком
байтов. Однако байты данных внутри полуслова или слова располаrаются в об
ратном порядке (Табл. 5.8).
Таблица 5.8. Процессор Cortex M3) прямой порядок байтов данные на шине АНВ
Адрес Биты 31...24 Биты 23...16 Биты 15...8 Биты 7...0
Охl000, Биты данных [31:24] Биты данных [23:16] Биты данных [15:8] Биты данных [7:0]
слово
Охl000, Биты данных [15:8] Биты данных [7:0]
полуслово
Охl002, Биты данных [15:8] Биты данных [7:0]
полуслово
Охl000, Биты данных [7:0]
байт
Охl00l, Биты данных [7:0]
байт
Охl002, Биты данных [7:0]
байт
Охl003, Биты данных [7:0]
байт
в процессоре Cortex M3 формат хранения данных фиксируется в момент BЫ
хода процессора из состояния сброса, после чеrо изменить ero уже нельзя (дина
мическое изменение формата хранения данных не допускается и команда SETEND
не поддерживается). При выборке команд всеrда используется прямой порядок
байтов, так же как и при обращении к данным, расположенным в пространстве
управления системой (скажем, при обращении к модулям NVIC и FPB) и в диапа
зоне адресов внешней шины РРВ (в диапазоне адресов от ОхЕООООООО до
OxEOOFFFFF данные всеrда хранятся в формате с прямым порядком байтов).
Если ваша система на кристалле не поддерживает обратный порядок байтов,
а одно или несколько из используемых периферийных устройств используют
этот формат, то вы можете леrко преобразовать данные из одноrо формата в дpy
rой с помощью специальных команд преобразования данных, имеющихся в про
цессоре Cortex M3. В частности, для подобных преобразований часто использу
ют команды REV и RЕVlб.
rЛАВА б
ОСОБЕННОСТИ РЕАЛИ3АЦИИ
CORTEX..M3
Данная rлава предназначена, rлавным образом, для разработчиков систем на
кристалле (SoC), которые хотели бы использовать процессор СоrtехТМ М3 в своих
проектах. Обычным разработчикам знать тонкости реализации ядра Соrtех ТМ М3,
вообще rоворя, нет никакой необходимости. Однако если вам действительно ин
тересно, как устроен и как работает процессор Cortex M3, то вы сможете почерп
нуть из настоящей rлавы немало полезноrо.
6.1. Конвейер
в процессоре Cortex M3 реализован трёхступенчатый конвейер. Обработка
каждой команды в конвейере осуществляется в три этапа: выборка, декодирова
ние и выполнение (Рис. 6.1).
Команда N
I Выборка Декоди Исполнение
рование
Выборка Декоди Исполнение
рование
Выборка Декоди Исполнение
рование
Выборка Декоди Исполнение
рование
Команда N + 1
Команда N + 2
Команда N + З
Рис. 6.1. Трёхступенчатый конвейер процессора Cortex M3.
KTO TO может возразить, что таких этапов на самом деле четыре, поскольку
есть ещё этап взаимодействия конвейера с интерфейсом шины при обращении
к памяти. Однако выполнение данноrо этапа происходит за пределами процессо
ра, поэтому конвейер всё же считается трёхступенчатым.
Если понаблюдать за процессом выполнения проrраммы, содержащей в OCHOB
ном 16 битные команды, то можно заметить, что выборка команд не всеrда про
исходит на каждом такте. Это связано с тем, что процессор может выбирать до
двух команд за один раз (32 битная шина), так что после выборки одной команды
следующая тоже окажется в процессоре. В такой ситуации интерфейс шины про
цессора может либо попытаться осуществить выборку последующей команды,
либо, если буфер команд полон, перейти в состояние ожидания. Для выполнения
некоторых команд требуется несколько тактов; в этом случае работа конвейера
приостанавливается.
6.1. Конвейер · 115
При выполнении команды ветвления конвейер очищается, после чеrо процес
сор должен будет вновь заполнить ero командами, начиная с Toro адреса, по KOTO
рому был осуществлён переход. Однако процессор Cortex M3 поддерживает He
сколько команд архитектуры y7 M, которые в ряде случаев позволяют заменить
короткие переходы на условно выполняемые команды!).
Из за наличия в процессоре конвейера, а также для обеспечения совместимо
сти проrрамм с набором команд Thumb @ при чтении счётчика команд во время
исполнения команды возвращаемое значение будет равно адресу команды плюс
четыре. Если счётчик команд задействуется для формирования адреса при обра
щении к памяти, то будет использовано значение адреса команды, выровненное
на rраницу слова и увеличенное на четыре. Это смещение постоянно и не зависит
от сочетания 16 битных команд Thumb и 32 битных команд Thumb 2. Такой под
ход rарантирует совместимость обоих наборов команд.
В блоке выборки команд процессора предусмотрен специальный буфер
(Рис. 6.2), который позволяет орrанизовать очередь из предварительно выбран
ных команд. Этот буфер предотвращает останов конвейера при наличии в после
довательности команд 32 битных команд Thumb 2, не выровненных на rраницу
слова. Однако он не является дополнительной ступенью конвейера и, следова
тельно, не увеличивает штраф ветвления.
Байт
Память
команд
N
N+4
N+8
N + Ох(
О
2
3
Невыровненные З2 битные
команды Thumb 2 в памяти
Исполнение
Декодирование
Выборка
Буфер
команд
(ком. (v
Этапы конвейера
Кома нда
Выборка
команды
(ком. (2 и О)
Декодиро
вание
(ком. В)
Исполнение
(ком. Д)
Рис. 6.2. Использование буфера блока выборки команд для более эффективной обработки
32 битных команд.
1) См. разделы [лавы 4, посвящённые команде IF THEN (IT).
116 . rлава б. Особенности реализации Cortex M3
6.2. Подробная бпок..схема
В состав процессора Cortex M3 входит не только процессорное ядро, но и раз
личные компоненты управления системой, а также компоненты поддержки OT
ладки (Рис. 6.3). Все эти компоненты соединены между собой шинами АНВ
и АРВ. Указанные шины являются составной частью усовершенствованной шин
ной архитектуры для микроконтроллеров (Advanced Microcontroller Bus
Architecture АМВА) [4].
ВЫХОД
NMI NVIC СМЗСоrе ЕТМ TPIU трасси
ровки
Преры
вания
Интерфейс OWТ 'ТМ
отладки
SWJ DP/
SW DP
FPB Таблица
ПЗУ
Схема коммутации ДНВ
(внутренний BusMatrix)
Внутренняя шина
собственных периф.
устройств (АНВ)
Мост
ДHB ДPB
Внешняя шина
собственных периф.
устройств (АРВ)
Шина команд Шина данных Системная Шина собственных
(I Code) (D Code) шина периф. устройств (РРВ)
Рис. 6.3. Блок схема процессора Cortex M3.
Обратите внимание, что модули MPU, WIC и ЕТМ являются опциональными
блоками, которые MorYT быть включены в микроконтроллер на этапе ero реали
зации. Некоторые новые компоненты перечислены в Табл. 6.1.
Таблица 6.1. Сокращения и обозначения, использованные в блок схеме
Обозначение Описание
CM3Core Ядро центральноrо процессора Cortex M3
NVIC Контроллер вложенных векторных прерываний
SYSTICK Системный таймер) который может использоваться операционными
системами
WIC Контроллер «пробуждающих» прерываний (опция)
MPU Модуль защиты памяти (опция)
BusMatrix Внутренняя схема коммутации шин АНВ
Мост AHB APB Мост) преобразующий сиrналы шины АНВ в сиrналы шины АРВ
6.2. Подробная блок схема · 117
Таблица 6.1. Сокращения и обозначения, использованные в блок схеме (продолжение)
Обозначение Описание
Интерфейс Интерфейс порта отладки Serial Wire/Serial Wire + JT AG. Связь с интерфейсом
отладки осуществляется по протоколу Serial Wire или по стандартному
SW DP/SWJ DP протоколу JT AG (для SWJ DP)
AHB AP Порт доступа АНВ; преобразует команды от интерфейса SW/SWJ в транзакции
шины АНВ
ЕТМ Встроенная макроячейка трассировки; модуль) обеспечивающий возможность
трассировки команд при отладке (опциональный)
DWT Модуль просмотра и трассировки данных; модуль) реализующий поддержку
точек наблюдения данных при отладке
ITM Модуль трассировки Instrumentation Trace Macrocell
Модуль интерфейса порта трассировки; интерфейсный модуль)
TPIU осуществляющий передачу данных отладки внешнему аппаратному
трассировщику
FPB Модуль коррекции флэш памяти и задания точки останова
Таблица ПЗУ Небольшая таблица) содержащая информацию о конфиrурации процессора
Процессор Cortex M3 предлаrается в виде процессорной подсистемы (Рис. 6.3).
Собственно ядро ЦПУ тесно связано с контроллером прерываний NVIC и раз
личными блоками поддержки отладки:
. CM3Core ядро Cortex M3, содержащее реrистры) АЛУ, тракт данных и ин
терфейс шины.
. NVIC встроенный контроллер прерываний. Число поддерживаемых пре
рываний определяется конкретным изrотовителем микросхем. Контроллер
NVIC тесно связан с ядром ЦПУ и содержит несколько реrистров управления
системой. Этот контроллер поддерживает обработку вложенных прерываний,
что значительно упрощает обработку таких прерываний процессором. Кроме
Toro, контроллер NVIC является контроллером векторных прерываний. Это
означает, что при возникновении прерывания можно сразу же перейти к про
цедуре обработки этоrо прерывания (нет необходимости использовать общий
обработчик для определения типа прерывания).
. SYSTICK системный таймер, представляющий собой обычный вычитаю
щий счётчик, который может использоваться для rенерации прерываний че
рез равные интервалы времени, даже во время нахождения системы в спящем
режиме. Наличие TaKoro таймера значительно упрощает перенос операцион
ных систем на различные микроконтроллеры с процессором Cortex M3, по
скольку исключает необходимость изменения кода, отвечающеrо за поддерж
ку системноrо таймера ОС. Таймер SYSTICK входит в состав контроллера
NVIC.
. WIC модуль, взаимодействующий с контроллером прерываний NVIC и при
этом отделённый от основной схемы процессора. Этот модуль предназначен
для вывода системы из спящеrо режима при появлении прерывания даже
в том случае, если процессор (включая контроллер NVIC) полностью OCTaHOB
118 . Fлава 6. Особенности реализации Cortex M3
лен или отключён. Модуль WIC появился во второй ревизии ядра Cortex M3
и является опциональным.
· МРИ модуль MPU является опциональным. Это означает, что в каких то pe
ализациях процессора Cortex M3 этот модуль может присутствовать,
а в каких то нет. При наличии модуля MPU он может использоваться для за
щиты содержимоrо памяти, например, запрещая запись в определённые обла
сти памяти или предотвращая доступ пользовательских проrрамм к данным
привилеrированных приложений.
· BusMatrix этот модуль является «сердцем» системы внутренних шин про
цессора Cortex M3. Он представляет собой схему коммутации шин АНВ, обе
спечивающую возможность одновременной пересылки данных по различным
шинам при обращении обоих ведущих шины к разным областям памяти. Mo
дуль BusMatrix также осуществляет дополнительное управление передачей
данных, обеспечивая, помимо Bcero прочеrо, буфер записи, а также осущест
вляет поддержку бит ориентированных операций (bit band).
· AHB APB мост между шинами АНВ и АРВ; используется для подключения
различных АРВ устройств, таких как компоненты отладки) к шине BCTpoeH
ных периферийных устройств процессора Cortex M3. Кроме Toro, KOHCTPYK
цИЯ процессора позволяет производителям микросхем подключать дополни
тельные АРВ устройства к внешней шине встроенных периферийных
устройств (РРВ) с помошью этой шины АРВ.
Остальные компоненты, изображённые на блок схеме, предназначены для
поддержки отладки и, как правило, не используются прикладными проrрам
мами:
· SW DP/SWJ DP порт отладки Serial Wire (SW DР)/порт отладки Serial Wire
и JTAG (SWJ DP); работает совместно с портом доступа АНВ (AHB AP), KOTO
рый позволяет внешним отладчикам формировать транзакции на шине АНВ
для управления процессом отладки. В самом процессорном ядре Cortex M3
нет тракта сканирования JTAG; управление большинством отладочных функ
ций осуществляется реrистрами NVIC по шине АНВ. Модуль SWJ DP поддер
живает протоколы Serial Wire и JTAG, тоrда как модуль SW DP поддерживает
только протокол Serial Wire.
· AHB AP модуль AHB AP обеспечивает доступ ко всей памяти процессора
Cortex M3 посредством нескольких реrистров. Этот блок управляется MOДY
лем SW DP/SWJ DP по отладочному интерфейсу общеrо назначения) который
называется портом доступа к средствам отладки (DAP). ДЛЯ выполнения
своих функций внешний аппаратный отладчик должен обращаться к модулю
AHB AP через SW DP/SWJ DP, чтобы rенерировать требуемые транзакции на
шине АНВ.
· БУМ модуль ЕТМ является опциональным компонентом, обеспечивающим
возможность трассировки команд, поэтому в некоторых устройствах на базе
Cortex M3 поддержка трассировки команд в реальном времени может OTCYT
ствовать. Данные трассировки выводятся в порт трассировки через модуль
6.3. Интерфейсы шин 8 процессоре Cortex M3 · 119
TPIU. Реrистры управления ЕТМ отображены на адресное пространство па
мяти процессора и MorYT управляться отладчиком через интерфейс DAP.
. DWT модуль DWT реализует функции точек наблюдения данных. При об
наружении равенства адреса или величины переменной заданному значению
этот модуль может rенерировать события точки наблюдения, используемые
для активации отладчика) rенерации информации о трассировке данных или
для активации модуля ЕТМ.
. IТМ модуль ITM может использоваться двумя способами. Во первых, про
rpaMMHoe обеспечение может напрямую выполнять запись в этот модуль для
вывода информации в порт TPIU. BO BTOpЫX, по событию совпадения от MO
дуля DWT в модуле ITM MorYT rенерироваться пакеты с информацией о Tpac
сировке данных для их вывода в выходной поток.
. TPIU модуль TPIU обеспечивает взаимодействие с внешними аппаратными
устройствами трассировки. Трассировочная информация, являющаяся BHY
тренней для процессора Cortex M3, имеет вид пакетов, передаваемых по yco
вершенствованной шине трассировки (Advanced Trace Bus АТВ), а модуль
TPIU переформатирует данные таким образом, чтобы они моrли быть счита
ны внешним устройством.
. РРВ модуль РРВ используется для реализации функций Flash Patch и зада
ния точки останова. Функция Flash Patch означает) что при обращении цeH
тральноrо процессора по некоторому адресу операция может быть переадре
сована в друrую область памяти) в результате будет выбрано друrое значение.
Также совпадение адреса может быть использовано для rенерации события
точки останова.
. Таблица ПЗУ это небольшая таблица, в которой содержится информация
о распределении памяти для различных системных устройств и компонентов
отладки. Средства отладки используют эту таблицу для определения адресов,
по которым расположены компоненты отладки. В большинстве случаев при
меняется стандартная карта памяти, описанная в [1]. Однако поскольку HeKO
торые компоненты отладки являются опциональными и, кроме Toro, возмож
но использование дополнительных компонентов, отдельные производители
MorYT реализовывать отладочные возможности своих микросхем в COOTBeT
ствии со своими предпочтениями. В этом случае таблица ПЗУ должна быть
скорректирована таким образом, чтобы проrраммные средства отладки cMor
ли определить реальное распределение карты памяти и, соответственно, име
ющиеся в устройстве компоненты отладки.
6.3. Интерфейсы шин в процессоре Cortex M3
Если только вы не занимаетесь разработкой систем на кристалле с использо
ванием процессора Cortex M3, то вряд ли коrда нибудь сможете напрямую ис
пользовать сиrналы интерфейсов шин) описанных в этом разделе. Как правило,
изrотовители микросхем подключают все сиrналы шин к блокам памяти и пери
ферийным устройствам. И лишь в очень редких случаях изrотовители решают
120 · rлава 6. Особенности реализации Cortex M3
соединить системную шину с мостом, позволяющим подключать к устройству
внешние системы шин. Интерфейсы шин процессора Cortex M3 базируются на
протоколах AHB Lite и АРБ, спецификация которых содержится в [4].
6.3.1. Шина I..Code
Шина I Code это 32 битная шина, использующая протокол AHB Lite) KOTO
рая предназначена для выборки команд из памяти в диапазоне адресов от
ОхОООООООО до OxlFFFFFFF. Выборка производится 32 битными словами, даже
в случае 16 битных команд Thumb. Соответственно, во время выполнения про
rpaMMbI цпу может одновременно выбирать до двух команд Thumb.
6.3.2. Шина D..Code
Шина D Code является 32 битной шиной, использующей протокол AHB Lite,
которая предназначена для обращения к данным в диапазоне адресов от
ОхОООООООО до OxlFFFFFFF. Несмотря на то что процессор Cortex M3 поддержи
вает обращения к невыровненным данным) вы не сможете обнаружить таких пе
ресылок на шине, поскольку интерфейс шины в процессорном ядре преобразует
их в выровненные. Соответственно, устройства (такие как память), подключае
мые к этой шине, должны поддерживать только выровненные пересылки соrлас
но протоколу AHB Lite (АМВА 2.0).
6.3.3. Системная шина
Системная шина это 32 битная шина, использующая протокол AHB Lite,
которая предназначена для выборки команд и обращения к данным в диапазоне
адресов от Ох20000000 до OxDFFFFFFF и от ОхЕОI00000 до OxFFFFFFFF. Анало
rично шине D Code, пересылки по системной шине всеrда выравниваются на
rраницу слова.
6.3.4. Внешняя шина РРВ
Внешняя шина собственных периферийных устройств работает по протоколу
АРВ. Эта шина предназначена для обращений к периферийным устройствам
в диапазоне адресов от ОхЕО040000 до OxEOOFFFFF. В связи с тем) что некоторые
области памяти в указанном диапазоне адресов уже используются модулями
TPIU) ЕТМ и таблицей пзу, для подключения дополнительных устройств к этой
шине может задействоваться только участок памяти в диапазоне адресов от
ОхЕО042000 до OxEOOFFOOO. Пересылки по шине РВВ всеrда выравниваются на
rраницу слова.
6.3.5. Шина DAP
Шина DAP это 32 битная шина, поддерживающая расширенную версию
спецификации АРБ. Эта шина предназначена исключительно для подключения
модулей интерфейса отладки, таких как SWJ DP или SW DP. Использовать дaH
ную шину для друrих целей нельзя. Дополнительную информацию об интерфей
се шины DAP можно найти в [лаве 15) а также в [3].
6.4. ДРУ2ие uнтерфейсы процессора Cortex M3 · 121
6.4. Друrие интерфейсы процессора Cortex..M3
ПОМИМО интерфейсов шин) в процессоре Cortex M3 имеется ряд друrих ИН
терфейсов, используемых для разных целей. Сиrналы данных интерфейсов вряд
ли окажутся на выводах микросхемы, поскольку их подключают, большей ча
стью, к различным узлам SoC или же оставляют неподключёнными. Подробная
информация об указанных сиrналах содержится в [1]. Краткое описание HeKOTO
рых из них приведено в Табл. 6.2.
Таблица 6.2. Некоторые сиrналы интерфейсов
fруппасиrналов Назначение
Межпроцессорный Сиrналы синхронизации задач) выполняющихся на разных
обмен (TXEV) RXEV) процессорах
Сиrналы перехода Состояние режима пониженноrо энерrопотребления для системы
в спящий режим
(SLEEPING) SLEEPDEEP) управления питанием
Сиrналы BHYTpeHHero
состояния Состояние прерывания) используются для работы модуля ЕТМ
(ETMINTNUM)
ETMINTSTATE) и для отладки
CURRPRI)
Запрос сброса Выход запроса на сброс от контроллера NVIC
(SYSRESETREQ)
Состояниеблокировки* Показывают) что процессорное ядро перешло в состояние блокировки
и останова (LOCKUP) (из за ошибок при выполнении обработчика исключения Hard Fault
HALTED) или обработчика немаскируемоrо прерывания) или состояние
останова (для отладочных операций)
Формат хранения Задаёт формат хранения мноrобайтных значений (прямой/обратный
данных (ENDIAN) порядок байтов») используемый процессором Cortex M3 после выхода
из состояния сброса
Интерфейс ЕТМ Подключается к модулю ЕТМ для трассировки команд
АТВ представляет собой один из протоколов архитектуры отладки
Интерфейс АТВ модуля CoreSight компании ARM) предназначенный для передачи данных
трассировки. В данном случае этот интерфейс обеспечивает вывод
ITM данных трассировки из модуля ITM процессора Cortex M3)
подключённоrо к модулю TPIU
*Более подробно состояние блокировки рассматривается в [лаве 12.
6.5. Внешняя шина РРВ
Процессор Cortex M3 имеет интерфейс внешней шины РРБ. Данный интер
фейс базируется на протоколе АРБ из спецификации АМБА версии 2.0 (для реви
зий О и 1 процессора Cortex M3) или версии 3.0 (для ревизии 2 процессора). Ши
на РРВ предназначена для подключения системных устройств, не являющихся
разделяемыми ресурсами, таких как компоненты отладки.
Данный интерфейс поддерживает использование СоrеSight совместимых
компонентов отладки. В связи с этим он несколько отличается от интерфейса
обычной шины АРВ тем, что имеет дополнительный сиrнал, называемый
122 · Тлава 6. Особенности реализации Cortex M3
PADDR31, который указывает на источник пересылки. Если указанный сиrна
равен О, значит, пересылка была сrенерирована проrраммой, выполняемой про
цессором. Если этот сиrнал равен 1) значит, пересылка была сrенерирована аппа
ратными средствами отладки. Блаrодаря наличию данноrо сиrнала периферий
ное устройство может быть спроектировано таким образом, чтобы ero Mor задей
ствовать только отладчик или же чтобы при использовании устройства про
rраммными средствами была доступна лишь часть ero функций.
Эта шина не предназначена для обычноrо использования, скажем для под
ключения периферийных устройств общеrо назначения. В принципе, ничто не
мешает разработчику микросхем спроектировать и подключить к данной шине
обычное периферийное устройство. Однако в дальнейшем пользователи TaKoro
устройства MorYT столкнуться с проблемами, связанными с особенностями
управления доступом на привилеrированном уровне, например при проrрамми
ровании устройства на пользовательском уровне или же при отделении устрой
ства от остальных областей памяти посредством MMU.
Внешняя шина РРВ не поддерживает обращения к невыровненным данным.
Поскольку шина содержит 32 линии данных и базируется на протоколе АРВ, при
разработке периферийных устройств, предназначенных для подключения к этой
области памяти, необходимо предусмотреть выравнивание адресов всех реrи
стров устройства на rраницу слова. Кроме Toro, при разработке устройства, допу
скающеrо обращения со стороны проrраммноrо обеспечения, рекомендуется)
чтобы все обращения к данному устройству были 32 битными. При работе с ши
ной РРВ всеrда используется прямой порядок байтов.
6.6. Типичная схема подключения процессора
Из за Toro, что в процессоре Cortex M3 имеется множество интерфейсов шин,
можно леrко запутаться, пытаясь понять, как соединить ero с друrими компонен
тами системы, такими как память или периферийные устройства. В качестве
при мера на Рис. 6.4 приведена блок схема простой системы на базе процессора
Cortex M3.
Поскольку обращения к области памяти Code MorYT осуществляться как по
шине команд (при выборке команд)) так и по шине данных (при обращении к дaH
ным), необходим некий переключатель шин АНВ, называемый BusMatrix 1 ») или
же обычный мультиплексор шины АНВ. При использовании компонента
BusMatrix, входящеrо в состав па кета разработки АМВА 2) (ADK), обращения
к флэш памяти и дополнительному СОЗУ (при ero наличии) MorYT производить
ся по любой шине. В случае одновременноrо обращения обеих шин к одному
и тому же устройству памяти запросы шины данных должны иметь более BЫCO
кий приоритет при этом обеспечивается большая производительность.
1) Компонент BusMatrix, требуемый в данном случае, отличается от одноимённоrо
компонента, входящеrо в состав процессора Cortex M3 (Рис. 6.4). Внутренний BusMatrix
спроектирован специально для использования в процессоре и отличается от стандартноrо
компонента из состава па кета разработки АМБА (АМБА Design Kit ADK).
2)Пакет ADK содержит набор компонентов для поддержки архитектуры АМВА и при меры
rOToBbIx систем, написанные на VHDL/Verilog.
6.6. Типичная схема подключения процессора . 123
Соrtех МЗ
Дополнительные
компоненты
отладки
Шина
команд
Шина
данных
Системная
шина
Внешняя шина собственных
периферйных устройств
Мультиплексор шины
или
ДНВ BusMatrix
Статическое
ОЗУ
Контроллер
внешней
памяти
Устройство
NOl
Устройство
N°2
Мост
ДHB ДPB
Флэш
память
Дополнительное
статическое ОЗУ
(опция)
Внешнее ОЗУ
1/0
UART
Таймер
Рис. 6.4. Блок схема системы на базе процессора Cortex М3.
Компонент BusMatrix позволяет при обращении шин к разным устройствам
памяти (например) при выборке команды из флэш памяти по шине команд с oд
новременным чтением данных из дополнительноrо СО3У по шине данных) пере
сылать данные по обеим шинам одновременно. При использовании мультиплек
сора шины одновременная пересылка данных по обеим шинам будет невозмож
на, однако схема при этом будет иметь меньшие размеры. В обычных микрокон
троллерах с ядром Cortex M3 оперативная память подключается к системной
шине.
Основной блок СО3У должен подключаться через интерфейс системной ши
ны в диапазоне адресов, выделенных под оперативную память. Это даёт возмож
ность обращаться к данным одновременно с выборкой команд. Кроме Toro, такое
подключение СО3У позволяет работать с булевыми типами данных, используя
побитовый доступ по методу bit band.
В некоторых микроконтроллерах может присутствовать внешний интерфейс
памяти. Это требует использования контроллера внешней памяти, ПОСКОЛЬКУ вы
не можете подключать внешние запоминающие устройства напрямую к шине
АНВ. Контроллер внешней памяти может быть подключён к системной шине
процессора. Дополнительные АНВ совместимые устройства также MorYT быть
леrко подключены к системной шине без использования компонента BusMatrix.
Простые периферийные устройства MorYT подключаться к процессору через
мост AHB APB. Это позволяет использовать для обращения к ним более простой
протокол АРВ.
124 . rлава 6. Особенности реализации Cortex M3
Блок схема) приведённая на Рис. 6.4, является Bcero лишь простым примером;
разработчики микросхем MorYT реализовывать и друrие варианты подключения
к шинам процессора. Однако вам это не потребуется единственное) что вам He
обходимо для разработки проrраммноrо обеспечения, это информация о карте
распределения памяти.
Компоненты, изображённые на блок схеме, такие как BusMatrix, мост
AHB APB, контроллер памяти, интерфейс ввода/вывода, таймер и модуль уни
версальноrо асинхронноrо приёмопередатчика (UART), предлаrаются компани
ей ARM, а также друrими компаниями, разрабатываюшими IР блоки. Поскольку
в микроконтроллерах MorYT использоваться периферийные устройства разных
производителей, при разработке проrраммноrо обеспечения необходимо внима
тельно изучить справочную документацию на при меняемый микроконтроллер.
6.7. Виды сброса и сиrналы сброса
в системах с процессором Cortex M3 используются разные виды сброса. HeKO
торые устройства MorYT поддерживать большее число разновидностей сброса по
сравнению с друrими это определяется реализацией схемы сброса микрокон
троллера или SoC (Рис. 6.5). Однако в любой системе имеется, по крайней мере)
три вида сброса, перечисленные в Табл. 6.3.
Таблица 6.3. Виды сброса, имеющиеся в любой системе
Сиrнал сброса
Вид сброса процессора Описание
Cortex M3
Сброс по Сброс) выполняемый при включении питания устройства;
включению PORESETn сбрасывается ядро процессора) периферийные устройства
питания и система отладки.
Активируется при включении устройства
Системный сброс; сбрасывается всё устройство) кроме системы
Сброс отладки) в том числе ядро процессора) контроллер NVIC (за
SYSRESETn исключением реrистров управления отладкой») модуль MPU)
системы периферия. Активируется при включении устройства) а также по
запросу от отладчика через реrистр AIRCR контроллера NVIC
Бит Сброс процессорноrо ядра; сбрасывается весь процессор) кроме
VECTRESET системы отладки) в том числе ядро процессора) контроллер NVIC
Сброс в реrистре (за исключением реrистров управления отладкой) и модуль MPU.
процессора AIRCR Активируется по запросу от отладчика через реrистр AIRCR
контроллера контроллера NVIC этот вид сброса предназначен дЛЯ
NVIC использования отладчиком
Сброс JTAG nTRST Сиrнал сброса от контроллера порта JT AG (только при наличии
интерфейса JT AG)
6.7. Виды сброса и сиzнаЛbl сброса. 125
nTRS
(от JT А
SYSRESETn ' '
.... I :
I 1
са r енератор PORESEТn 1 I
I П роцессорное I
.... ....1 I
I
...... сброса ....1 I
1 ядро I
...... 1 I
I
..... 1 I
Запрос 1 1
L J
сброса Соrtех МЗ
системы 1 1
1 Встроенная I
1 I
1 I
Т . 1 I
Интерфейс . i система отладки I
..... I
G) ..... L J
отладки .....
......
. Опциональная
.
система отладки
Ми кроконтроллер/SоС
Внешний
сиrнал сбро
Рис. 6.5. Внутренние сиzнаЛbl сброса типичноzо микроконтроллера с ядром Cortex M3.
Более подробно сиrналы сброса процессора Cortex M3 описаны в [1]. Все сиr
налы сброса процессора подключаются к схеме сброса внутри микроконтроллера
или SoC. rOToBoe устройство имеет Bcero один или два внешних сиrнала сброса.
rЛАВА 7
ИСКЛЮЧЕНИЯ
7.1. Типы исключений
Архитектура исключений, реализованная в процессоре Cortex M3, поддержи
вает несколько системных исключений и большое число внешних прерываний.
Каждое исключение имеет свой порядковый номер, при этом исключения с HOMe
рами от 1 до 15 являются системными, а с номерами 16 и более соответствуют
входам внешних прерываний. Большинство исключений имеют проrраммируе
мый приоритет и лишь некоторые фиксированный приоритет.
Кристаллы с процессором Cortex M3 MorYT иметь разное количество входов
внешних прерываний (от 1 до 240) и разное число уровней приоритета. Это по
зволяет разработчикам микросхем конфиrурировать исходный код процессора
в соответствии со своими нуждами.
Как уже rоворилось, исключения с номерами от 1 до 15 являются системными
исключениями (исключения с номером О не существует), которые перечислены
в Табл. 7.1. Исключения с номерами 16 и более соответствуют входам внешних
прерываний (Табл. 7.2).
Номер исключения, обрабатываемоrо в данный момент времени, содержится
в реrистре состояния прерывания IPSR процессора, а также в реrистре управле
ния и состояния прерывания ICSR контроллера NVIC (поле VECTACTIVE).
Обратите внимание, что в данной rлаве номера прерываний (скажем, преры
вание NQO) соответствуют номерам входов прерываний контроллера NVIC. В pe
альных микроконтроллерах или системах на кристалле номера входов внешних
прерываний MorYT не соответствовать номерам входов прерываний контролле
ра. Например, несколько первых входов прерываний MorYT быть назначены BHY
тренним периферийным устройствам, а выводы внешних прерываний MorYT
быть подключены к следующей rруппе входов контроллера NVIC. ДЛЯ уточнения
нумерации прерываний необходимо обратиться к документации на конкретное
устройство.
При возникновении разрешённоrо исключения, которое не может быть обра
ботано немедленно (например, в том случае, коrда выполняется процедура обра
ботки прерывания с более высоким приоритетом или установлен реrистр маски
7.1. Типы исключений . 127
рования прерываний), данное исключение будет отложено (это не касается ряда
системных исключений 1 )).
Таблица 7.1. Системные исключения
Номер
исклю Тип исключения Приоритет Описание
чения
1 Reset 3 (Наивысший) Сброс
2 NMI 2 Немаскируемое прерывание (вход внешнеrо
немаскируемоrо прерывания)
3 Hard Fault 1 Любой отказ, если соответствующий
обработчик не разрешён
Отказ системы управления памятью;
4 MemManage Fault Проrраммируемый нарушение правил доступа, заданных модулем
MPU, или обращение по некорректному адресу
Отказ шины; происходит при получении
интерфейсом шины АНВ сиrнала ошибки
от ведомоrо устройства на шине (также
5 Bus Fault Проrраммируемый называется отказом предвыборкu, если ошибка
возникла при выборке команды, или отказом
данных, если ошибка возникла при обращении
к данным)
Ошибка в проrрамме или попытка обращения
6 U sage Fault Проrраммируемый к сопроцессору (процессор Cortex M3
не поддерживает сопроцессор)
7. ..10 Зарезервировано
11 SVCall Проrраммируемый Вызов супервизора
Исключение монитора отладки (точки
12 Debug monitor Проrраммируемый останова, точки наблюдения или внешняя
команда отладки)
13 Зарезервировано
14 PendSV Проrраммируемый Запрос системной службы
15 SYSTICK Проrраммируемый Системный таймер
Таблица 7.2. Внешние прерывания
Номер исключения Тип исключения Приоритет Описание
16 IRQ #0 Проrраммируемый Внешнее прерывание N20
17 IRQ #1 Проrраммируемый Внешнее прерывание N21
. . . . . . . . . . . .
255 IRQ #239 Проrраммируемый Внешнее прерывание N2239
1) В некоторых случаях описанный сценарий нарушается. Если при возникновении отказа
соответствующий обработчик не может быть сразу же запущен из за Toro, что выполняется
обработчик исключения с более высоким приоритетом, то вместо требуемоrо обработчика
отказа возможен запуск обработчика исключения Hard Fault (исключение отказа
с наивысшим приоритетом). Более подробно этот вопрос мы рассмотрим чуть позже, коrда
будем rоворить об исключениях отказов; исчерпывающая же информация, как обычно,
содержится в [2].
128 . Тлава 7. Исключения
Откладывание исключения означает, что запрос на ero обработку будет хранить
ся в специальном реrистре до тех пор, пока не появится возможность обработки
данноrо исключения. Такое поведение отличается от поведения традиционных
процессоров ARM. Ранее компоненты схемы, которые rенерировали запросы
обычноrо/быстроrо (IRQ/FIQ) прерываний, должны были удерживать данный
запрос до начала ero обработки. Теперь же, блаrодаря наличию в контроллере
NVIC реrистров, обеспечивающих работу с отложенными исключениями, воз
никшее прерывание будет обработано даже в том случае, если источник преры
вания снимет свой сиrнал запроса.
7.2. Приоритеты исключений
в процессоре Cortex M3 очерёдность обработки исключений, а также сама
возможность обработки KOHKpeTHoro исключения определяется приоритетом
этоrо исключения. Исключения с более высоким приоритетом (меньшим значе
нием уровня приоритета) MorYT прерывать обработку исключения, имеющеrо
меньший приоритет (большее значение уровня приоритета), т.е. поддерживаются
вложенные исключения/прерывания. Некоторые типы исключений (Reset, NMI
и Hard Fault) имеют фиксированные значения приоритета, которые представле
ны отрицательными числами, отражая тот факт, что данные исключения облада
ют наивысшим приоритетом среди всех остальных. Прочие исключения имеют
проrраммируемые уровни приоритета.
Процессор Cortex M3 поддерживает три фиксированных уровня с наивыс
шим приоритетом и до 256 уровней с проrраммируемым приоритетом (до 128
уровней вложенности). Однако большинство микросхем с ядром Cortex M3 име
ют rораздо меньшее число уровней, например 8, 16, 32 и Т.д. Требуемое число
уровней задаётся разработчиком при проектировании микроконтроллера или
системы на кристалле. Уменьшение числа уровней приоритета осуществляется
отключением соответствующеrо числа младших битов реrистров приоритета.
Например, если для задания уровня приоритета в устройстве используется толь
ко три бита, то формат реrистра приоритета будет таким, как показано на Рис. 7.1.
Реализованы
Бит 7 Бит 6 Бит 5
Рис. 7.1. Pezucmp приоритета, в котором реализовано 3 бита.
Поскольку биты о. . .4 реrистра не реализованы, при их чтении всеrда возвраща
ется ноль, а запись в эти биты иrнорируется. При такой конфиrурации процессора
в нашем распоряжении будут следующие уровни приоритета: ОхОО (наивысший
приоритет), Ох20, Ох40, Ох60, Ох80, ОхАО, ОхСО и ОхЕО (наименьший приоритет).
Аналоrичным образом, при использовании четырёх битов для задания ypOB
ня приоритета формат реrистра приоритета будет соответствовать показанному
на Рис. 7.2.
7.2. Приоритеты исключений . 129
Бит 7 Бит 6 Бит 5 Бит 4
Реализованы
Рис. 7.2. Pezucmp приоритета, в котором реализовано 4 бита.
Чем больше битов реrистров приоритета будет реализовано, тем больше OKa
жется в нашем распоряжении уровней приоритета (Рис. 7.3). Однако увеличение
числа используемых битов реrистров приоритета влечёт за собой увеличение
числа вентилей и, соответственно, потребляемой мощности. Для процессора
Cortex M3 минимальное число реализованных битов реrистров приоритета paB
но трём (8 уровней).
Ох20
Ох40
Ох60
Ох80
ОхАО
ОхСО
ОхЕО
OxFF
Наивысший
приоритет
Реализованные уровни
при использовании
3 бит для задания
приоритета
)( з
)( 2
)( 1
РеаЛИЗ0ванныеуровни
при использовании
4 бит для задания
приоритета
)( з
)( 2
)( 1
О
)( Охl0
)( Ох20
)( ОхЗО
)( Ох40
)( Ох50
)( Ох60
)( Ох70
)( Ох80
)( Ох90
)( ОхАО
)( ОхВО
)( ОхСО
)( ОхОО
)( ОхЕО
)( OxFO
з
2
1
О
О
)( Ох20
)( Ох40
)( Ох60
ПроrрамМИ
руемы,
исключения
)( Ох80
)( ОхАО
)( ОхСО
)( ОхЕО
Наименьший
приоритет
Рис. 3. Возможные уровни приоритета при 3 и 4 6итHЫX pezucmpax приоритета.
Отключение младших, а не старших битов реrистров позволяет упростить пе
ренос проrраммы с одноrо устройства с ядром Cortex M3 на друrое. Очевидно,
130 . [лава 7. Исключения
что при таком подходе проrрамма, написанная для устройства с 4 битными реrи
страми приоритета, нормально запустится на устройстве с 3 битными реrистра
ми приоритета. Если бы вместо младших битов отключались старшие биты, то
при переносе проrраммы с одноrо устройства на друrое моrла бы произойти ин
версия приоритетов. Предположим, что в проrрамме используется прерывание
IRQ #0 с уровнем приоритета Ох05 и прерывание IRQ #1 с уровнем приоритета
Ох03, Т.е. прерывание IRQ #1 имеет более высокий приоритет. Однако при удале
нии 2 ro бита (старшеrо) уровень приоритета прерывания IRQ #0 стал бы равен
ОхОl, в результате чеrо это прерывание получило бы более высокий приоритет,
чем IRQ #1.
Примеры возможных значений уровней приоритета для устройств с 3 , 5
и 8 битными реrистрами приоритета приведены в Табл. 7.3.
Таблица h3. Доступные уровни приоритета для устройств с 3 , 5 и 8 битными
реrистрами приоритета
Устройства Устройства Устройства
Уровень Тип исключения с 3 битными с 5 битными С 8 битными
приоритета реrистрами реrистрами реrистрами
приоритета приоритета приоритета
3 Reset 3 3 3
(наивысший)
2 NMI 2 2 2
1 Hard Fault 1 1 l
Исключения ОхОО, Ох20, о.. ОхОО, Ох08, ... ОхОО, Ох01, Ох02,
О, 1, о.. OxFF с проrраммируемым ОхЕО OxF8 Ох03, ... OxFE,
уровнем приоритета ОхРР
Наиболее внимательные читатели MorYT спросить: если реrистры приоритета
являются 8 битными, то почему поддерживается только 128 уровней вложенно
сти? Это связано с тем, что содержимое 8 битных реrистров делится на две части:
прuоритет zpynnbl и субпрuорuтет.
Разбиение реrистров приоритета исключений, имеющих проrраммируемый
приоритет, определяется полем PRIGROUP реrистра AIRCR контроллера NVIC
(Табл. 7.4). При этом старшая часть реrистра (левые биты) определяет приоритет
rруппы, а младшая (правые биты) субприоритет (Табл. 7.5).
Значение уровня приоритета zpynnbl определяет возможность возникнове
ния прерывания, если в данный момент уже выполняется обработчик друrоrо
прерывания. Значение уровня субпрuорuтета используется только в случае oд
HOBpeMeHHoro возникновения нескольких исключений с одинаковыми значения
ми уровня приоритета rруппы. При этом исключение с более высоким субприо
ритетом (с меньшим значением уровня) будет обработано первым.
Из за zруппuрованuя приоритетов максимальное число битов, которое может
использоваться для задания приоритета rруппы, равно 7, что и даёт нам уже упо
мянутые 128 уровней вложенности. При значении PRIGROUP = 7 все исключения
с проrраммируемым уровнем приоритета будут иметь один и тот же уровень.
В результате ни одно из этих исключений не сможет быть прервано никаким дpy
rим исключением, кроме Hard Fault, NMI и Reset, которые имеют приоритеты 3,
2 и 1 соответственно.
7.2. Приоритеты исключений . 131
Таблица 7.4. Реrистр управления прерываниями и сбросом AIRCR (ОхЕОООЕООС)
Значение
Биты Обозначение Тип после Описание
сброса
Ключ доступа; при записи в реrистр в этом поле
31:16 УЕСТКЕУ R/W должно быть записано значение Ox05FA, иначе
запись будет иrнорирована. При чтении реrистра
в данном поле возвращается значение OxFA50
Отображает формат хранения данных:
1 обратный порядок байтов (BE 8),
15 ENDIANNESS R О прямой порядок байтов;
этот бит может быть изменён только в момент
сброса
10:8 PRIGROUP R/W О Установки rруппирования приоритетов
2 SYSRESETREQ W Формирует запрос на rенерацию сиrнала сброса
Очищает всю активную информацию о состоянии
исключений; обычно используется при отладке
1 VECTCLRACTIVE W или операционной системой для восстановления
после системной ошибки (сброс является более
безопасным методом)
Сбрасывает процессор Cortex M3
О VECTRESET W (за исключением компонентов отладки), однако
не сбрасывает блоки, внешние по отношению
к процессору
Таблица 7.5. Поля приоритета rруппы и субприоритета в реrистрах приоритета
Значение Поле приоритета rруппы Полесубприоритета
PRIGROUP
О Биты [7:1] Бит [О]
1 Биты [7:2] Биты [1:0]
2 Биты [7:3] Биты [2:0]
3 Биты [7:4] Биты [3:0]
4 Биты [7:5] Биты [4:0]
5 Биты [7:6] Биты [5:0]
6 Бит [7] Биты [6:0]
7 Отсутствует Биты [7:0]
При выборе необходимых значений уровня приоритета rруппы и уровня суб
приоритета необходимо учитывать следующее:
. разрядность реrистров приоритета;
. параметры rруппирования приоритетов (значение PRIGROUP).
Так, если разрядность реrистров приоритета равна 3 (доступны биты 7...5),
а в поле PRIGROUP будет записано 5, то в вашем распоряжении окажется 4 ypOB
ня приоритета rруппы (биты 7.. .6), в каждом из которых будет по два уровня суб
приоритета (бит 5).
Уровни приоритета, доступные при такой конфиrурации реrистров приори
тет а (Рис. 7.4), показаны на Рис. 7.5. Если же в поле PRIGROUP записать ОхОl, то
в нашем распоряжении окажется Bcero 8 уровней приоритета rруппы и ни OДHO
132 . [лава 7. Исключения
ro уровня субприоритета (биты 1:0 реrистра, используемые для задания субпри
оритета, всеrда равны О). Формат реrистров приоритета для такой конфиrурации
показан на Рис. 7.6, а возможные уровни приоритета на Рис. 7.7.
Бит7
Бит6
Бит 5
Приоритет rруппы
Субприо
ритет
Рис. 7.4. Определение полей в 3 битном pezucтpe приоритета при PRIGROUP = 5.
Наивысший
приоритет
з
2
1
Ох20
Реализованные уровни
при использовании
3 бит для задания
приоритета
)(
)(
)(
)(
Уровни приоритета
rруппы при
PRIGROUP = 5
)( з
)( 2
)( 1
)(
О
з
2
Уровни субприоритета
1
О
O -
Ох20
)(
)(
)(
Ох20
Ох40 )( Ох40 )( Ох40 )( Ох40
Ох60 )( Ох60 )( Ох60
Проrрамми
руемые
Ох80 исключения )( Ох80 )( Ох80 )( Ох80
ОхАО )( ОхАО )( ОхАО
ОхСО
ОхЕО
OxFF
)(
)(
ОхСО
ОхЕО
)(
ОхСО
ОхСО
)(
)(
ОхЕО
Наименьший
приоритет
Рис. 7.5. Возможные уровни приоритета при 3 битном pezucтpe приоритета и PRIGROUP = 5.
Бит7
Бит6
Бит5
Приоритет rруппы [5:3]
Рис. 7.6. Определение полей в 3 битном pezucтpe приоритета при PRIGROUP = 1.
7.2. Приоритеты исключений · 133
Реализованные уровни
Наивысший при использовании Уровни приоритета
приоритет 3 бит для задания rруппы при
приоритета PRIGROUP = 1
з >( з >( з
2 >( 2 >( 2 Уровни субприоритета
1 >( 1 >( 1
............ >( ...................................... >( ................ . >( О
О О
Ох20 >( Ох20 >( Ох20 . >( Ох20
Ох80
>( Ох40
>( Ох40
.
>( Ох40
Ох40
Ох60
>( Ох60
>( Ох60
.
>( Ох60
>( Ох80
>( Ох80
.
>( Ох80
ОхАО
>( ОхАО
>( ОхАО
.
>( ОхАО
ОхСО
>( ОхСО
>( ОхСО
.
>( ОхСО
ОхЕО
>( ОхЕО
>( ОхЕО
.
>( ОхЕО
OxFF
Наименьший
приоритет
Рис. 7.7. во3можныle уровни приоритета при 3 битном pezucтpe приоритета
и PRIGROUP = 1.
Если в реrистрах приоритета устройства реализованы все 8 бит, то максималь
ное число уровней вложенности, которое может быть использовано в этом
устройстве, будет равно 128 (при PRIGROUP = О). Формат реrистров приоритетов
для данноrо случая приведён на Рис. 7.8.
Бит7 Бит6 Бит5 Бит4 Бит 3 Бит2 Бит 1 БитО
Приоритет rруппы Субприоритет
Рис. 7.8. Определение полей в 8 бuтном pezucтpe приорuтета при PRIGROUP = о.
При одновременном появлении двух прерываний, имеющих одинаковые зна
чения как уровня приоритета rруппы, так и уровня субприоритета, более BЫCO
134 . [лава 7. Исключения
кий приоритет будет иметь прерывание с меньшим порядковым номером (IRQ #0
имеет более высокий приоритет, нежели IRQ #1).
Чтобы не сбить случайно настройки rруппирования приоритетов прерыва
ний, соблюдайте осторожность при записи в реrистр AIRCR. В большинстве слу
чаев после настройки rруппирования приоритетов TporaTb этот реrистр нет ни
какой необходимости, кроме как для rенерации сброса (см. Табл. 7.4).
7.3. Таблица векторов
При возникновении исключения процессору необходимо определить началь
ный адрес обработчика этоrо исключения. Данная информация хранится в Ta
блице векторов, расположенной в памяти процессора. По умолчанию таблица
векторов располаrается, начиная с нулевоrо адреса, а адрес каждоrо вектора
в указанной таблице равен порядковому номеру исключения, умноженному на 4
(Табл. 7.6).
Таблица 7.6. Таблица векторов исключений после включения питания
Адрес Номер исключения Значение (32 битное)
ОхОООООООО Начальное значение MSP
ОхОООООО04 1 Вектор сброса (начальное значение счётчика команд)
ОхОООООО08 2 Стартовый адрес обработчика NMI
ОхОООООООС 3 Стартовый адрес обработчика исключения Hard Fault
.. . .. . Стартовые адреса остальных обработчиков
Поскольку адрес ОхОО должен находиться в области заrрузочноrо кода, он, как
правило, соответствует флэш памяти или ПЗУ, и ero содержимое не может изме
няться во время выполнения проrраммы. Однако таблица векторов может быть
перемещена по друrому адресу в области кода или в области ОЗ В последнем
случае мы получим возможность изменять обработчики исключений в процессе
выполнения проrраммы. Положение таблицы векторов в памяти определяется
реrистром смещения таблицы векторов VTOR контроллера NVIC, который pac
положен по адресу OxEOOOED08. Величина смещения должна быть выровнена на
размер таблицы векторов и приведена к ближайшему большему значению, явля
ющемуся степенью двойки. Например, если в процессоре используется 32 входа
прерываний, то общее число исключений с учётом системных будет равно
32 + 16 = 48. Приводя это значение к значению, являющемуся степенью двойки,
получаем число 64. Умножая результат на 4 (4 байта на вектор), получаем 256
(OxlOO). Таким образом, величина смещения таблицы векторов может быть равна
ОхОО, Охl00, Ох200 и т.д. Описание полей реrистра VTOR приведено в Табл. 7.7.
Таблица 7.7. Реrистр смещения таблицы векторов VTOR (ОхЕОООЕОО8)
Биты Обозначение Тип Значение после Описание
сброса
29 TBLBASE R/W О Таблица расположена в области кода (О) или
в области ОЗУ (1)
28:7 TBLOFF R/W О Смещение таблицы относительно начала
области кода или области ОЗУ
7.4. Входы прерЫ8анuй u отложенная обработка прерЫ8анuй · 135
Если вы хотите динамически менять обработчики исключений, то в начале
секции заrрузчика должны располаrаться, как минимум, следующие элементы:
. начальное значение OCHOBHoro указателя стека;
. вектор сброса;
. вектор NMI;
. вектор исключения Hard Fault.
Это требование связано с тем, что немаскируемое прерывание, как и исключе
ние Hard Fault, может произойти при выполнении кода заrрузчика. Остальные
исключения не cMorYT возникнуть до тех пор, пока не будут разрешены.
После завершения процесса заrрузки вы можете выделить часть области ОЗУ
под таблицу векторов и переместить таблицу на новое место.
7.4. Входы прерываний и отложенная обработка
прерываний
В этом разделе описывается поведение входов IRQ и отложенная обработка
прерываний. Всё, сказанное в данном разделе, справедливо и для входа NMI, за
исключением Toro, что обработка немаскируемоrо прерывания, как правило, за
пускается сразу же после ero возникновения. Откладывание немаскируемоrо
прерывания происходит только в следующих случаях:
. процессор уже выполняет обработчик NMI;
. процессор находится в состоянии останова, вызванноrо командой отладчика;
. процессор находится в состоянии блокировки из за какоrо либо серьёзноrо
системноrо сбоя.
При активации входа прерывания это прерывание откладывается, что озна
чает перевод прерывания в состояние ожидания обработки запроса процессо
ром. Даже если источник снимет запрос прерывания, наличие TaKoro состояния
обеспечит последующий запуск обработчика этоrо прерывания в соответствии
с заданным приоритетом. После запуска обработчика признак отложенноrо пре
рывания снимается автоматически. Данный процесс показан на Рис. 7.9.
Запрос
прерывания
\
Признак I
отложенноrо
прерывания
I
!
/
Режим обработчика
Режим работы
процессора
Режим
потока
Рис. 7.9. Отложенная обработка прерыванuя.
Если же признак отложенноrо прерывания окажется сброшен до Toro, как
процессор при ступит к обработке этоrо прерывания (например, прерывание не
было обслужено сразу после ero возникновения из за установленноrо реrистра
PRIMASK/FAULTMASK, а признак отложенноrо прерывания был сброшен про
rpaMMHo записью в реrистр управления прерыванием контроллера NVIC), то
136 · fлава 7. Исключения
прерывание будет аннулировано (Рис. 7.10). Признак отложенноrо прерывания
хранится в реrистрах контроллера NVIC и доступен для записи, т.е. вы можете
проrраммно как сбросить отложенное прерывание, так и перевести новое преры
вание в состояние ожидания обработки.
Запрос
прерывания
I
Признак
отложенноrо
прерывания
Признак отложенноro прерывания
сброшен nporpaMMHO
Режим работы Режим
процессора потока
Рис. 7.10. Сброс признака отложенноzо прерывания до начала обработки этоzо прерыlания..
Коrда процессор приступает к обработке прерывания, оно становится актив
ным и признак отложенноrо прерывания автоматически сбрасывается (Рис. 7.11).
После Toro как прерывание станет активным, вы не сможете повторно запустить
обработчик этоrо же прерывания до тех пор, пока процедура обработки преры
вания не будет завершена командой возврата из прерывания (также называемой
выходом из исключения, см. [лаву 9). После выполнения данной команды признак
активности прерывания сбрасывается, и прерывание может быть обработано по
вторно, если бит признака отложенноrо прерывания установлен в 1. Прерывание
можно повторно перевести в состояние ожидания непосредственно перед BЫXO
дОМ из процедуры обработки.
Запрос
прерывания
Признак \
отложенноrо
прерывания
Признак
активноrо
прерывания
Режим работы
n роцессора
Запрос прерывания
r сброшен nporpaMMHO
Режим
потока
Режим обработчика
Возврат из прерывания
Рис. 7.11. Перевод прерывания в активное состояние.
Если источник прерывания продолжает удерживать сиrнал запроса прерыва
ния в активном состоянии, то в конце процедуры обработки прерывание будет
отложено повторно, как показано на Рис. 7.12. Именно так ведёт себя классиче
ский процессор ARM7TDMI.
Мноrократная установка и снятие запроса прерывания до момента начала ero
обработки интерпретируется процессором как единственный запрос прерыва
ния (Рис. 7.13). Если запрос прерывания будет снят и на короткое время yCTaHOB
7.4. Входы прерЫ8анuй u отложенная обработка прерЫ8анuй · 137
лен во время выполнения обработчика прерывания, то прерывание будет снова
отложено, как показано на Рис. 7.14.
Запрос
прерывания
\
Признак
отложенноrо
прерывания
Признак
активноrо
прерывания
Режим работы Режим
процессора потока
Запрос прерывания оааётся активным
Возврат из прерывания
Режим обработчика
Повторный вход в прерывание
Рис. 7.12. Удерживание запроса прерыlания..
Запрос
прерывания
Признак
отложенноrо
прерывания
Признак
активноrо
прерывания
Режим работы
процессора
Мноrократная уаановка/ снятие
запроса прерывания перед
входом в обработчик
Режим обработчика
Режим
потока
Рис. 7.13. Мноzократная установка и снятие запроса прерывания.
Запрос
прерывания
\
Признак П
отложенноrо
прерывания
Режим работы Режим
процессора потока
Признак
активноrо
прерывания
Повторная уаановка/снятие
запросапрерывания
П
Повторное откладывание
прерыван ия
I I
u
Режим обработчикёt
80звратиз прерывания
Повторный вход в прерывание
Рис. 7.14. Повторная установка запроса прерывания ВО время выполнения обработчика.
138 · fлава 7. Исключения
Прерывание откладывается даже в том случае, если оно запрещено; при по
следующем разрешении данноrо прерывания оно будет обработано. Поэтому,
прежде чем разрешить какое либо прерывание, никоrда не помешает убедиться
в том, что оно не находится в состоянии ожидания (источник указанноrо преры
вания Mor ранее выставить запрос и установить признак отложенноrо прерыва
ния). При необходимости вы можете перед разрешением прерывания сбросить
этот признак.
7.5. Исключения отказов
Некоторые системные исключения предназначены для обработки отказов.
Процессор Cortex M3 различает следующие виды отказов:
. отказы шины (Bus Fault);
· отказы системы управления памятью (MemManage Fault);
. отказы проrраммы (Usage Fault);
. тяжёлые отказы (Hard Fault).
7.5.1. Отказы шины
Отказы шины возникают при получении сиrнала ошибки во время обмена по
шине АНВ. Это может произойти в следующие моменты:
. во время предварительной выборки команды такой отказ называется oтKa
зом предвыборки (prefetch abort);
. во время обращения к данным такой отказ называется отказом данных
(data abort).
Также отказ шины может возникнуть во время следующих операций:
. при сохранении данных в стеке в начале обработки прерывания такой OT
каз называется ошибкой заzрузки в стек (stacking error);
. при извлечении данных из стека в конце обработки прерывания такой OT
каз называется ошибкой извлечения из стека (unstacking error);
. при чтении адреса вектора прерывания (выборке вектора) во время запуска
ядром процесса обработки прерывания (эта особая ситуация классифициру
ется как тяжёлый отказ).
При возникновении любоrо из этих отказов (за исключением ошибки при BЫ
борке вектора) будет запущен обработчик исключения Bus Fault, при условии, что
он разрешён и на момент возникновения отказа не выполнялась обработка дpy
rих исключений с таким же или более высоким приоритетом. Если обработчик
разрешён, но на момент возникновения отказа процессор был занят обработкой
исключения с более высоким приоритетом, то исключение Bus Fault будет отло
жено. И наконец, если обработчик исключения Bus Fault не разрешён или же если
это исключение возникло во время обработки друrоrо исключения с таким же
или более высоким приоритетом, то будет запущен обработчик исключения Hard
Fault. Если же отказ шины возникнет во время выполнения обработчика Hard
Fault, то процессорное ядро перейдёт в состояние блокировки!).
1) Более подробно состояние блокировки рассматривается в [лаве 12.
7. 5. Исключения отказов . 139
Для разрешения обработчика исключения Bus Fault следует установить бит
BUSFAULTENA реrистра управления и состояния системных обработчиков
SHCSR контроллера NVIC. Если таблица векторов была перемещена в ОЗУ, то пе
ред установкой бита необходимо убедиться, что начальный адрес обработчика
исключения присутствует в таблице.
Как же нам определить причину, по которой процессору пришлось запустить
обработчик исключения Bus Fault? Для этоrо в контроллере NVIC предусмотрено
несколько реrистров состояния отказов (xFSR), одним из которых является pe
rистр состояния отказа шины BFSR. С помощью указанноrо реrистра обработчик
исключения Bus Fault может определить, что послужило причиной возникнове
ния отказа: выборка команды, обращение к данным или же прерывание опера
ции заrрузки в стек/извлечения из стека.
В случае «точноrо» отказа шины адрес команды, вызвавшей ошибку, может
быть определён из значения, сохранённоrо в стеке счётчика команд. Если при
этом установлен бит BFARVALID реrистра BFSR, то дополнительно можно будет
определить адрес памяти, обращение к которому вызвало отказ шины. Значение
данноrо адреса содержится в реrистре адреса отказа шины BFAR контроллера
NVIC. ДЛЯ «неточных» отказов шины подобная информация недоступна, по
скольку на момент получения сообщения об ошибке процессор Mor уже выпол
нить несколько друrих команд.
Реrистр BFSR (Табл. 7.8) является 8 битным реrистром, расположенным по
адресу OxEOOOED29. Также к этому реrистру можно обратиться посредством
32 битной пересылки по адресу OxEOOOED28 (реrистр будет расположен во BTO
140 . fлава 7. Исключения
ром байте слова). Сброс любоrо бита, используемоrо для индикации ошибки,
осуществляется записью в Hero 1.
Таблица 7.8. Реrистр состояния отказа шины BFSR (OxEOOOED29)
Биты Обозначение Тип Значение после Описание
сброса
7 BFARVALID О Индицирует корректность содержимоrо
реrистра BFAR
6:5
4 STKERR R/Wc О Ошибка заrрузки в стек
3 UNSTKERR R/Wc О Ошибка извлечения из стека
2 IMPRECISERR R/Wc О «Неточное» нарушение доступа к данным
1 PRECISERR R/Wc О «Точное» нарушение доступа к данным
О IBUSERR R/Wc О Нарушение доступа к команде
7.5.2. Отказы системы управпения памятью
Отказы системы управления памятью MorYT быть вызваны обращением к па
мяти, конфликтующим с настройкам модуля MPU, или же некорректным обра
щением (например, при попытке выполнить код из области памяти, не имеющей
такой возможности), которое может rенерировать отказ даже в случае OTCYT
ствия модуля MPU.
Наиболее частыми отказами, связанными с модулем MPU, являются:
. обращение к областям памяти, не заданным в настройках модуля MPU;
. запись в области памяти, предназначенные только для чтения;
. обращение на пользовательском уровне к области, допускающей обращение
только на привилеrированном уровне.
При возникновении любой из этих ситуаций будет запущен обработчик ис
ключения MemManage Fault, при условии, что он разрешён. Если отказ системы
управления памятью произойдёт одновременно с возникновением исключения,
имеющеrо более высокий приоритет, то это исключение будет обработано пер
вым, а исключение MemManage Fault будет отложено. Наконец, если обработчик
исключения MemManage Fault не разрешён или же если это исключение возник
ло во время обработки друrоrо исключения с таким же или более высоким прио
ритетом, то будет запущен обработчик исключения Hard Fault. Если же отказ си
стемы управления памятью возникнет во время выполнения обработчика Hard
Fault, то процессорное ядро перейдёт в состояние блокировки.
Перед использованием обработчика исключения MemManage Fault ero необ
ходимо разрешить. Для этоrо нужно установить бит MEMFAULTENA реrистра
SHCSR контроллера NVIC. Если таблица векторов была перемещена в ОЗУ, то пе
ред разрешением обработчика необходимо прописать ero начальный адрес в Ta
блице.
Для определения причины возникновения отказа системы управления па
мятью в контроллере NVIC имеется соответствующий реrистр состояния отказа
MMFSR. Если этот реrистр показывает, что отказ произошёл при нарушении
прав доступа во время обращения к данным (бит DACCVIOL) или к команде (бит
7.5. Исключения отказов . 141
IACCVIOL), то адрес команды, вызвавшей ошибку, может быть определён из зна
чения счётчика команд, сохранённоrо в стеке. Если при этом установлен бит
MMARV ALID реrистра MMFSR, то из реrистра адреса отказа системы управле
ния памятью MMFAR контроллера NVIC можно будет прочитать адрес памяти,
обращение к которому вызвало отказ.
Реrистр MMFSR (Табл. 7.9) является 8 битным реrистром, расположенным по
адресу OxEOOOED28. Также к данному реrистру можно обратиться посредством
32 битной пересылки по тому же адресу; в этом случае реrистр будет расположен
в младшем байте слова. Как и во всех реrистрах xFSR, сброс любоrо бита, исполь
зуемоrо для индикации ошибки, осуществляется записью в Hero 1.
Таблица 7.9. Реrистр состояния отказа системы управления памятью MMFSR
(ОхЕОООЕО28)
Биты Обозначение Тип Значение после Описание
сброса
7 MMARV ALID О Индицирует корректность содержимоrо
реrистра MMAR
6:5
4 MSTKERR R/Wc О Ошибка заrрузки в стек
3 MUNSTKERR R/Wc О Ошибка извлечения из стека
2
1 DACCVIOL R/Wc О Нарушение доступа к данным
О IACCVIOL R/Wc О Нарушение доступа к команде
7.5.3. Отказы nporpaMMbI
Отказы проrраммы MorYT быть вызваны следующими причинами:
. вызов неопределённой команды;
. вызов команды сопроцессора (в процессоре Cortex M3 поддержка сопроцес
сора отсутствует; однако, используя механизм исключений, можно обеспе
чить выполнение проrраммы, скомпилированной для друrоrо процессора
Cortex, посредством проrраммной эмуляции сопроцессора);
. попытка переключения в состояние ARM (проrрамма может использовать
данный механизм для проверки, поддерживает ли выполняющий её процес
сор код ARM; поскольку Cortex M3 не поддерживает состояние ARM, то при
попытке переключения в это состояние произойдёт отказ проrраммы);
. некорректный выход из прерывания (реrистр связи содержит неверное или
некорректное значение);
. обращение к невыровненным данным в командах rрупповой заrрузки или co
хранения.
Установкой определённых битов в реrистрах контроллера NVIC можно обе
спечить rенерацию отказа проrраммы также в следующих ситуациях:
. при делении на ноль;
. при любом невыровненном доступе к памяти.
В случае возникновения отказа проrраммы будет запущен обработчик исклю
чения Usage Fault, при условии, что он разрешён. Если отказ проrраммы произой
142 . Тлава 7. Исключения
дёт одновременно с возникновением исключения, имеющеrо более высокий при
оритет, то исключение Usage Fault будет отложено. Наконец, если обработчик ис
ключения Usage Fault не разрешён или же если это исключение возникло во Bpe
мя обработки друrоrо исключения с таким же или более высоким приоритетом,
то будет запущен обработчик исключения Hard Fault. Если же отказ проrраммы
возникнет во время выполнения обработчика Hard Fault или обработчика NMI,
то процессор перейдёт в состояние блокировки.
Разрешение обработчика исключения Usage Fault осуществляется установкой
бита USGFAULTENA реrистра SHCSR контроллера NVIC. Если таблица векторов
была перемещена в ОЗУ, то перед разрешением обработчика необходимо поме
стить в таблицу ero начальный адрес.
Для определения причины возникновения отказа в контроллере NVIC преду
смотрен соответствующий реrистр состояния отказа проrраммы UFSR. В самом
обработчике адрес команды, вызвавшей отказ, можно определить из значения
счётчика команд, сохранённоrо в стеке.
Реrистр UFSR (Табл. 7.10) занимает 2 байта в памяти и обратиться к нему МОЖ
но посредством 16 битной пересылки по адресу OxEOOOED2A или 32 битной пере
сылки по адресу OxEOOOED28. В последнем случае значение реrистра будет coдep
жаться в старшем полуслове. Как и в остальных реrистрах xFSR, сброс любоrо би
та, используемоrо для индикации ошибки, осуществляется записью в этот бит 1.
Таблица 7.10. Реrистр состояния отказа проrраммы UFSR (OxEOOOED2A)
Значение
Биты Обозначение Тип после Описание
сброса
Попытка выполнения операции деления на ноль
9 DIVBYZERO R/Wc О (может быть установлен только при установленном
бите DIV O TRP)
8 UNALIGNED R/Wc О Отказ HeBbIpoBHeHHoro доступа
7:4
3 NOCP R/Wc О Попытка выполнения команды сопроцессора
2 INVPC R/Wc О Попытка выхода из обработчика исключения
с некорректным значением EXC RETURN
7.5. Исключения отказов · 143
Таблица 7.10. Реrистр состояния отказа nporpaMMbI UFSR (ОхЕОООЕО2А)
(продолжение)
Значение
Биты Обозначение Тип после Описание
сброса
1 INVSTATE R/Wc О Попытка переключения в некорректное состояние
(например) в состояние ARM)
О UNDEFINSTR R/Wc О Попытка выполнения неопределённой команды
7.5.4. Тяжёпые отказы
Исключение Hard Fault может быть вызвано отказом проrраммы, отказом ши
ны или отказом системы управления памятью в том случае, если выполнение об
работчиков указанных системных исключений невозможно. Также тяжёлый OT
каз может быть вызван отказом шины во время выборки вектора (чтения значе
ния из таблицы векторов). Реrистр состояния тяжёлоrо отказа HFSR контроллера
NVIC позволяет определить, был ли вызван данный отказ выборкой вектора. Ec
ли нет, то обработчик исключения Hard Fault должен будет проверить содержи
мое друrих реrистров xFSR для определения причины возникновения отказа.
Биты реrистра HFSR указаны в Табл. 7.11. Как и в прочих реrистрах xFSR,
сброс любоrо бита, используемоrо для индикации ошибки, осуществляется за
писью в Hero 1.
Таблица 7.11. Реrистр состояния тяжёлоrо отказа HFSR (ОхЕОООЕО2С)
Значение
Биты Обозначение Тип после Описание
сброса
31 DEBUGEVT R/Wc О Исключение Hard Fault было вызвано отладочным
событием
Исключение Hard Fault было вызвано отказом шины)
30 FORCED R/Wc О отказом системы управления памятью или отказом
проrраммы
29:2
1 VECTBL R/Wc О Исключение Hard Fault было вызвано ошибкой
выборки вектора
О
7.5.5. Обработка отказов
Если ошибка в проrрамме выявляется на этапе разработки, то мы можем опре
делить причину возникновения данной ошибки, используя реrистры xFSR, после
чеrо исправить её. Наиболее распространённые причины возникновения раз
личных отказов указаны в Приложении Д настоящей книrи. В реальной работа
ющей системе ситуация несколько иная. После определения причины отказа
проrрамма должна решить, что делать дальше. Если система работает под управ..
лением ОС, то проблемные задачи и приложения MorYT просто останавливаться
.1.
144 . fлава 7. Исключения
(выrружаться из памяти). В друrих случаях может потребоваться сброс системы.
Вообще rоворя, требования, касающиеся восстановления после сбоев, определя
ются конкретным приложением. При правильной реализации этой функции из
делие можно сделать более надёжным, однако лучшим выходом всё же будет пре
дотвращение самой возможности возникновения отказов. Итак, существуют сле
дующие методы восстановления после сбоев:
· Сброс. Эту операцию можно выполнить, используя бит SYSRESETREQ реrи
стра управления прерываниями и сбросом ЛIRС контроллера NVIC. В резуль
тате установки указанноrо бита в 1 будет сброшено большинство узлов систе
мы, за исключением компонентов отладки. Если вам не требуется сбрасывать
всю систему, то вы можете сбросить только процессор, используя бит
VECTERSET Toro же реrистра.
· Восстановление. В ряде случаев проблему, вызвавшую исключение отказа,
можно разрешить. Скажем, если причиной отказов являются команды сопро
цессора, то проблему можно устранить, проrраммно эмулируя эти команды.
· Завершение задачи. В системах, использующих ОС, возможно завершение и,
при необходимости, повторный запуск задачи, вызвавшей отказ.
Содержимое реrистров xFSR сохраняется до тех пор, пока они не будут очище
ны проrраммно. После обработки любоrо бита состояния отказа обработчик ис
ключения должен ero сбросить. Если этоrо не сделать, то при повторном вызове
обработчика в случае возникновения друrоrо отказа он может сделать непра
вильный вывод о наличии первоrо отказа и, соответственно, попытается обрабо
тать ero повторно. В реrистрах xFSR используется механизм «сброс посредством
записи» (write to clear), при котором сброс бита осуществляется записью в Hero 1.
Разработчики микроконтроллеров также MorYT включать в свои изделия допол
нительный реrистр состояния отказов AFSR, предназначенный для индикации
прочих отказов. Реализация TaKoro реrистра определяется конструктивными
особенностями KOHKpeTHoro микроконтроллера.
7.6. Вызов супервизора и системных служб
Исключения вызова супервизора (SVCall) и вызова системной службы
(PendSV) предназначены для использования системным проrраммным обеспече
нием, а также операционными системами. Исключение SVCall при меняется для
rенерации вызовов системных функций. Например, вместо Toro, чтобы позво
лить пользовательской проrрамме напрямую обращаться к оборудованию, опе
рационная система может предоставлять доступ к оборудованию посредством
исключения SVCall. То есть, если пользовательской проrрамме необходимо за
действовать некое оборудование, то она, используя команду SVC, rенерирует ис
ключение SVCall, в результате чеrо запускается обработчик данноrо исключения
из состава операционной системы, который и обслуживает запрос пользователь
cKoro приложения. В этом случае обращение к аппаратуре находится под управ
лением ОС, что увеличивает надёжность системы, предотвращая некорректный
доступ пользовательскоrо ПО к оборудованию.
7.6. Вызов супервизора и системных служб · 145
Исключение SVCall также позволяет сделать проrраммное обеспечение более
переносимым, поскольку пользовательской проrрамме не требуется досконально
знать, каким образом осуществляется работа с оборудованием. Она должна
«знать» только идентификатор АРI функции и её параметры; собственно взаимо
действие с оборудованием на аппаратном уровне осуществляется драйверами
устройств (Рис. 7.15).
Привилеrированный код
Непривилеrи
рованный
код
Ядро ос
Аппаратные
средства
Проrрамма
пользователя
Периферия
Операционная система
Рис. 7.15. Исключение SVCall как шлюз для функций ОС.
Как уже rоворилось, rенерация исключения SVCall осуществляется вызовом
команды svc. Данная команда требует параметра в виде константы, посредством
которой осуществляется передача информации в обработчик исключения. Обра
ботчик может извлечь это значение и определить требуемое действие. Например:
svc #ОхЗ ; Вызов SVС ФУНКЦИИ С 10 = З
Можно использовать и традиционный синтаксис указанной команды (без
символа «#»):
SVC ОхЗ ; Вызов SVС ФУНКЦИИ С 10 = 3
В проrраммах на языке Си вызов команды SVC можно сrенерировать, исполь
зуя встроенную функцию svc (при работе в среде RVDS компании ARM или
MDK ARM компании КеН) или же встроенный ассемблер (при работе с друrими
компиляторами).
В обработчике исключения SVCall вы можете определить значение, передан
ное в команде. Для этоrо следует прочитать из стека сохранённое значение счёт
чика команд, после чеrо считать код команды по данному адресу, маскируя He
нужные биты. Если в системе для пользовательских приложений используется
указатель PSP, то вначале вам может потребоваться определить, в каком из стеков
был сохранён счётчик команд. Это можно узнать из значения, находящеrося в pe
rистре связи, при входе в обработчик исключения (более подробно данный BO
прос рассматривается в fлаве 8).
146 . fлава 7. Исключения
Из за приоритетной модели прерываний, реализованной в процессоре
Cortex M3, вы не можете использовать команду SVC внутри обработчика исклю
чения SVCall (поскольку приоритет HOBoro исключения будет таким же, что
и у выполняющеrося в данный момент). Если попытаться так сделать, то будет
сrенерировано исключение Usage Fault. По этой же причине нельзя использовать
команду SVC в обработчике NMI или в обработчике исключения Hard Fault.
Исключение PendSV, как и исключение SVCall, предназначено для использова
ния в ОС. Однако в то время как исключение SVCall, вызванное командой SVC, не
может быть отложено (приложение, вызвавшее SVC, будет ожидать немедленноrо
выполнения требуемой задачи), исключение PendSV может быть отложено. Это
позволяет операционной системе отложить выполнение требуемых операций до
Toro момента, коrда будут завершены друrие важные задачи. Исключение PendSV
rенерируется записью 1 в бит PENDSVSET реrистра ICSR контроллера прерыва
ний.
Типичным использованием исключения PendSV является переключенuе KOH
текста (переключение между задачами). Пусть, к примеру, система имеет две aK
тивных задачи, переключение между которыми может быть инициировано:
· вызовом функции SVC;
· системным таймером (SYSTICK) .
Рассмотрим вариант переключения контекста по сиrналу системноrо таймера
(Рис. 7.16).
Приоритет Переключение Переключение Переключение
контекаа контекаа контекаа
SYSTICK Щ 'oc 'oc
I
I I I I I I I
I I I I I I I
IRQ I I I I I I I
I I I I I I I
I I I I I I I
Режим t I t I t I ,
Задача Д ) Задача В ) Задача Д )
потока
Время
Рис. 7.16. Использование SYSTICK для переключения между двумя задачами.
Если запрос прерывания будет выставлен до возникновения исключения
SYSTICK, то последнее вытеснит обработчик IRQ. При этом операционной систе
ме уже не нужно будет переключать контекст, иначе обработка прерывания будет
приостановлена на некоторое время. В процессоре Cortex M3 также предусмо
трена возможность rенерации исключения Usage Fault при попытке переключе
ния в режим потока при наличии активноrо прерывания (Рис. 7.17).
Чтобы исключить задержки при обработке запросов IRQ, некоторые ОС BЫ
полняют переключение контекста только в том случае, если ни один из обработ
чиков IRQ не выполняется. Однако это может привести к появлению очень боль
ших задержек между переключениями задач, особенно если частота появления
прерываний близка к частоте rенерации исключения SYSTICK.
7.6. Вызов супервизора и системных служб · 147
Исключение Usage Fault:
возврат в режим потока при
наличии активноrо прерывания
Приоритет
Переключение
контекаа
I I
I
I IRQ I
I I I
I I I
t Задача д) 'с
Переключение контекаа
Щ
I I
I
I
I
I
I
Задача В )
I
I
Задача Д )
SYSTICK
IRQ
Режим
потока
Время
Пауза
в обработке IRQ
Рис. 7.17. Проблемы переключения контекста при возникновении IRQ.
Исключение PendSV решает указанную проблему, приостанавливая обработ
ку запроса на переключение контекста на время, необходимое для завершения
всех обработчиков IRQ. Для этоrо исключению PendSV назначается минималь
ный приоритет. Если ОС обнаруживает, что KaKoe TO прерывание находится в aK
тивном состоянии (выполнение обработчика IRQ было прервано исключением
SYSTICK), то она задерживает переключение контекста, откладывая исключение
PendSV. В качестве примера на Рис. 7.18 показан процесс переключения KOHTeK
ста в случае следующей последовательности событий:
1. Задача А выполняет команду SVC для переключения задач (например,
ожидая завершения какоrо либо процесса).
2. ОС получает запрос, выполняет подrотовку к переключению контекста
и rенерирует исключение PendSV.
3. После выхода из обработчика SVCall ЦПУ сразу же запускает обработчик
исключения PendSV, в котором производится переключение контекста.
4. После завершения обработчика исключения PendSV и возврата в режим
потока начинает выполняться задача В.
5. Возникает прерывание и запускается ero обработчик.
6. Во время обработки прерывания происходит исключение SYSTICK (тик ОС).
7. Операционная система выполняет необходимые действия, после чеrо
откладывает исключение PendSV, rотовясь к переключению контекста.
8. При выходе из исключения SYSTICK управление передаётся обратно
в обработчик прерывания.
9. После завершения процедуры обработки прерывания запускается
обработчик исключения PendSV, в котором производится переключение
контекста.
10. После завершения обработчика исключения PendSV и возврата в режим
потока начинает выполняться задача А.
148 · fлава 7. Исключения
Приоритет
SYSТlCK
Преры
вание
SVСи
PendSV
Режим
потока
),
, [4]
,
,
SYSTICK (ОС)
[7]р,
: \[8]
1[6] 'Продолжается
Запускается 15R : выпол ение 15R
р 1[9] 15R завершена
, ,
, , Переключение
I [5] Возникло t конте)ст а в Репd5V
: прерывание
, ,
: \ [1 О]
, ,
Задача В I Задача Д
j l )
SVC (ОС) Переключение
откладывает контекаа
PendSV [2] в PendSV
[1] !
: [З]
,
Задача Д :
Время
Рис. 7.18. Переключение контекста с использованием исключения PeпdSV.
rЛАВА 8
КОНТРОЛЛЕР вложЕнныx
BEKTOPHblX прЕрыАнийй
И УПРАВЛЕНИЕ прЕрыАниямии
8.1. Общие сведения о контроллере прерываний
Контроллер вложенных векторных прерываний (Nested Vectored Interrupt
Controller NVIC) представляет собой один из компонентов процессора
СоrtехТМ М3, тесно связанный с лоrикой ядра процессора. Все реrистры контрол
лера прерываний отображены на адресное пространство процессора. Помимо
реrистров управления обработкой прерываний и соответствующих узлов, KOH
троллер NVIC также содержит реrистры управления системным таймером
SYSTICK и компонентами отладки. В этой rлаве мы познакомимся с узлами KOH
троллера, осуществляющими поддержку обработки прерываний. Модуль защи
ты памяти и узлы, выполняющие управление отладкой, обсуждаются в последу
ющих rлавах.
Контроллер NVIC поддерживает от 1 до 240 входов внешних прерываний,
обычно называемых входами запросов прерываний (IRQ). Точное число поддержи
ваемых прерываний определяется производителями конкретных микросхем на
базе процессора Cortex M3. Кроме Toro, в контроллере NVIC имеется вход HeMa
скируемоrо прерывания (NonMaskable Interrupt NMI). Каким образом он будет
использоваться, тоже определяется производителем микросхемы. В некоторых
устройствах данный вход может быть даже недоступен для внешних сиrналов.
Реrистры контроллера NVIC расположены в пространстве управления систе
мой, начиная с адреса ОхЕОООЕООО. Большинство реrистров управления и состоя
ния прерываний доступны только в привилеrированном режиме, за исключени
ем реrистра проrраммной rенерации прерывания STIR, который может быть
сконфиrурирован для работы в пользовательском режиме. Для обращения к pe
rистрам управления и состояния прерываний MorYT использоваться 1 , 2
и 4 байтные пересылки.
С прерываниями также связаны несколько реrистров маскирования преры
ваний. Эти реrистры относятся к rруппе реrистров специальноrо назначения
и были рассмотрены в [лаве 3. Для обращения к указанным реrистрам предна
значены специальные команды: пересылка содержимоrо реrистра специальноrо
назначения в реrистр общеrо назначения (MRS) и пересылка содержимоrо реrи
стра общеrо назначения в реrистр специальноrо назначения (MSR).
150 . fлава 8. Контроллер вложенных векторных прерываний и управление прерываниями
8.2. Базовые средства конфиrурации
v
прерывании
С каждым входом внешнеrо прерывания связаны несколько реrистров:
. реrистры разрешения и отмены разрешения прерывания;
. реrистры установки и сброса признака отложенноrо прерывания;
. реrистр уровня приоритета прерывания;
. реrистр активноrо состояния прерывания.
Кроме Toro, на процесс обработки прерываний оказывают влияние и друrие
реrистры:
. реrистры маскирования прерываний (PRIMASK, FAULTMASK и BASEPRI);
. реrистр смещения таблицы векторов (VTOR);
. реrистр проrраммной rенерации прерывания (STIR);
. реrистр управления прерываниями и сбросом (AIRCR).
8.2.1. Разрешение и запрещение прерываний
Реrистр разрешения прерывания проrраммируется по двум адресам. Для
установки бита разрешения прерывания необходимо выполнить запись по aдpe
су реrистра NVIC ISER, а для сброса этоrо же бита по адресу реrистра
NVIC ICER. Блаrодаря такому решению разрешение или запрещение KOHKpeTHO
ro прерывания не влияет на состояние битов разрешения остальных прерыва
ний. Реrистры NVIC ISER/NVIC ICER являются 32 битными; каждый бит реrи
стра соответствует одному входу прерывания.
Поскольку в процессоре Cortex M3 может быть больше 32 внешних прерыва
ний, он может иметь несколько реrистров NVIC ISER и NVIC ICER, например
NVIC ISERO, NVIC ISERl и т.д. (Табл. 8.1). Причём, в реrистрах реализуются би
ты разрешения только для существующих прерываний. Соответственно, если
у вас Bcero 32 входа прерываний, то вам будут доступны только реrистры
NVIC ISERO и NVIC ICERO. ДЛЯ обращения к этим реrистрам можно использо
вать 1 , 2 и 4 байтные пересылки. Поскольку первые 16 исключений являются
системными, внешнему прерыванию NQO соответствует исключение с номером 16
(Табл. 8.2).
8.2. Базовые средства конфuzурацuu nрерыванuй · 151
Таблица 8.1. Реrистры разреmения прерываний NVIC ISERx
(ОхЕОООЕI00...0хЕОООЕIIС) и реrистры отмены разреmения
прерываний NVIC ICERx (ОхЕОООЕ180.. .ОхЕОООЕ19С)
Значение
Адрес Реrистр Тип после Описание
сброса
Разрешает внешние прерывания с номерами
от О до 31:
бит [О] прерывание N20 (исключение N 2 16);
бит [1] прерывание N21 (исключение N 2 17);
ОхЕОООЕI00 NVIC ISERO R/W О . . .
бит [31] прерывание N231 (исключение N 2 47).
ДЛЯ установки бита в Hefo необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Разрешает внешние прерывания с номерами
от 32 до 63.
ОхЕОООЕI04 NVIC ISERl R/W О Для установки бита в Hefo необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Разрешает внешние прерывания с номерами
от 64 до 95.
ОхЕОООЕI08 NVIC ISER2 R/W О Для установки бита в Hefo необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
. . .
Отменяет разрешение внешних прерываний
с номерами от О до 31:
бит [О] прерывание N20 (исключение N 2 16);
бит [1] прерывание N21 (исключение N 2 17);
ОхЕОООЕ180 NVIC ICERO R/W О . . .
бит [31] прерывание N231 (исключение N 2 47).
ДЛЯ сброса бита в Hefo необходимо записать 1;
запись О не имеет смысла.
При чтении возвращается текущее состояние
Отменяет разрешение внешних прерываний
с номерами от 32 до 63.
ОхЕОООЕ184 NVIC ICERl R/W О Для сброса бита в Hefo необходимо записать 1;
запись О не имеет смысла.
При чтении возвращается текущее состояние
Отменяет разрешение внешних прерываний
с номерами от 64 до 95.
ОхЕОООЕ188 NVIC ICER2 R/W О Для сброса бита в Hefo необходимо записать 1;
запись О не имеет смысла.
При чтении возвращается текущее состояние
. . .
152 . [лава 8. Контроллер вложенных векторных прерываний и управление прерываниями
Таблица 8.2. Реrистры установки признака отложенноrо прерывания NVIC ISPRx
(ОхЕОООЕ200...0хЕОООЕ21С) и реrистры сброса признака отложенноrо
прерывания NVIC ICPRx (ОхЕОООЕ208.. .ОхЕОООЕ280)
Адрес Реrистр Тип Значение Описание
после сброса
Устанавливает признак отложенноrо
прерывания для внешних прерываний
с номерами от О до 31:
бит [О] прерывание NQO (исключение N Q I6);
ОхЕОООЕ200 NVIC ISPRO R/W О бит [1] прерывание NQl (исключение N Q I7);
. . .
бит [31] прерывание NQ31 (исключение N Q 47).
ДЛЯ установки бита в Hero необходимо
записать 1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Устанавливает признак отложенноrо
прерывания для внешних прерываний
ОхЕОООЕ204 NVIC ISPRl R/W О с номерами от 32 до 63.
Для установки бита в Hero необходимо
записать 1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Устанавливает признак отложенноrо
прерывания для внешних прерываний
ОхЕОООЕ208 NVIC ISPR2 R/W О с номерами от 64 до 95.
Для установки бита в Hero необходимо
записать 1; запись О не имеет смысла.
При чтении возвращается текущее состояние
. . .
Сбрасывает признак отложенноrо
прерывания для внешних прерываний
с номерами от О до 31:
бит [О] прерывание NQO (исключение N Q I6);
ОхЕОООЕ280 NVIC ICPRO R/W О бит [1] прерывание NQl (исключение N Q I7);
. . .
бит [31] прерывание NQ31 (исключение N Q 47).
ДЛЯ сброса бита в Hero необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Сбрасывает признак отложенноrо внешнеrо
прерывания для внешних прерываний
ОхЕОООЕ284 NVIC ICPRl R/W О с номерами от 32 до 63.
Для сброса бита в Hero необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
Сбрасывает признак отложенноrо внешнеrо
прерывания для внешних прерываний
ОхЕОООЕ288 NVIC ICPR2 R/W О с номерами от 64 до 95.
Для сброса бита в Hero необходимо записать
1; запись О не имеет смысла.
При чтении возвращается текущее состояние
. . .
8.2. Базовые средства конфuzурацuu прерыванuй · 153
8.2.2. Установка/сброс признака отпоженноrо
прерывания
Если возникшее прерывание не может быть обработано немедленно (напри
мер, из за выполнения обработчика прерывания с более высоким приоритетом),
то оно будет отложено. Для работы с признаком отложенноrо прерывания пред
назначены реrистры установки признака отложенноrо прерывания (NVIC ISPR)
и реrистры сброса признака отложенноrо прерывания (NVIC ICPR). Аналоrич
но реrистрам разрешения/запрещения прерываний, если в процессоре реализо
вано более 32 входов внешних прерываний, то таких пар реrистров установки
и сброса признака отложенноrо прерывания будет несколько.
Значение признака отложенноrо прерывания может быть изменено про
rpaMMHo, т.е. вы можете как аннулировать ожидающее своей очереди прерыва
ние, используя реrистр NVIC ICPR, так и проrраммно сrенерировать прерыва
ние посредством реrистра NVIC ISPR (см. Табл. 8.2).
8.2.3. Уровни приоритета
Каждому внешнему прерыванию соответствует свой реrистр уровня приори
тета, разрядность KOToporo в зависимости от конкретной реализации процессора
может варьироваться от 3 до 8 бит. Как уже было сказано в предыдущей rлаве, co
держимое этих реrистров может быть разделено на две части (уровень приорите
та rруппы и уровень субприоритета) в соответствии с настройками rруппирова
ния приоритетов. Для обращения к указанным реrистрам можно использовать
1 , 2 и 4 байтные пересылки. Общее число реrистров уровня приоритета зависит
от количества прерываний, реализованных в конкретной микросхеме (Табл. 8.3).
Адреса реrистров уровня приоритета для системных исключений приведены
в Приложении r (Табл. [.19).
Таблица 8.3. Реrистры уровня приоритета прерываний PRI x
(ОхЕОООЕ400.. .OxEOOOE4EF)
Адрес Реrистр Тип Значение после Описание
сброса
ОхЕОООЕ400 PRI О R/W О (8 бит) Уровень приоритета внешнеrо
прерывания N20
OxEOOOE401 PRI l R/W О (8 бит) Уровень приоритета внешнеrо
прерывания N21
. . .
OxEOOOE41F РRI Зl R/W О (8 бит) Уровень приоритета внешнеrо
прерывания N2Зl
. . .
8.2.4. Активное состояние
Каждое внешнее прерывание имеет бит активноrо состояния. Коrда процес
сор начинает выполнение обработчика прерывания, этот бит устанавливается
в 1, а при выходе из прерывания он сбрасывается. Однако во время выполнения
процедуры обработки прерывания может возникнуть прерывание с более BЫCO
154 · fлава 8. Контроллер вложенных векторных прерываний и управление прерываниями
ким приоритетом, которое приостановит выполнение этоrо обработчика. Во Bpe
мя выполнения обработчика более высокоприоритетноrо прерывания первое
прерывание будет продолжать считаться активным. Реrистры активноrо состоя
ния являются 32 битными, однако к ним также можно обращаться посредством
2 или 1 байтных пересылок. Если в конкретной реализации процессора имеется
более 32 внешних прерываний, то таких реrистров будет несколько. Реrистры aK
тивноrо состояния доступны только для чтения (Табл. 8.4).
Таблица 8.4. Реrистры активноrо состояния прерывания NVIC IABRx
(ОхЕОООЕ300.. .ОхЕОООЕ31С)
Адрес Реrистр Тип Значение Описание
после сброса
Признак активности внешних прерываний
с номерами от О до 31:
ОхЕОООЕ300 NVIC IABRO R О бит [О] прерывание NQO;
бит [1] прерывание N Q 1;
. . .
бит [31] прерывание NQ31.
ОхЕОООЕ204 NVIC IABRl R О Признак активности внешних прерываний
с номерами от 32 до 63
. . .
8.2.5. Реrистры PRIMASK и FAULTMASK
Реrистр PRIMASK используется для запрещения всех исключений, кроме He
маскируемоrо прерывания и исключения Hard Fault. В действительности, этот
реrистр изменяет текущий уровень приоритета, делая ero равным нулю (наивыс
ший проrраммируемый уровень). При проrраммировании на языке Си для YCTa
новки и сброса реrистра PRIMASK можно использовать встроенные функции из
состава СМSIS совместимой библиотеки драйвера устройства или же имеющие
ся в компиляторе:
void enable irq(); // Очистить PRIМASK
void disable irq(); // Установить PRIМASK
void sеt РRIМАSК(uiпtЗ2 t priMask); // Записать значение в PRIМASK
uiпtЗ2 t get PRIМASK(void); // Прочитать значение PRIМASK
В проrраммах на ассемблере текущее состояние реrистра PRIMASK можно из
менить, используя команды изменения состояния процессора:
CPSIE 1 ; Очистить PRIМASK (разрешить прерывания)
CPSID 1 ; Установить PRIМASK (запретить прерывания)
Для обращения к этому реrистру также можно использовать команды MRS
и MSR. Например:
MOV RO, #1
MSR PRIМASK, RO Записать 1 в PRIМASK дЛЯ запрещения всех прерываний
и
MOV RO, #0
MSR PRIМASK, RO Записать О в PRIМASK дЛЯ разрешения прерываний
8.2. Базовые средства конфuzурацuu прерыванuй · 155
Реrистр PRIMASK полезен для BpeMeHHoro запрещения всех прерываний на
время выполнения критических задач. При установленном реrистре PRIMASK
любое исключение ошибки будет обрабатываться обработчиком Hard Fault.
Реrистр FAULTMASK по своему назначению аналоrичен реrистру PRIMASK,
за исключением Toro, что он изменяет текущий уровень приоритета на 1, т.е.
блокируется даже исключение Hard Fault. Соответственно, при установленном
реrистре FAULTMASK MorYT обрабатываться только немаскируемые прерыва
ния. Обработчики исключений отказов MorYT использовать данный реrистр для
увеличения cBoero уровня приоритета до значения 1, в результате чеrо они по
лучают некоторые возможности обработчика исключения Hard Fault (более под
робно этот вопрос рассматривается в [лаве 12). При проrраммировании на языке
Си для установки и сброса реrистра FAULTMASK можно использовать функции
СМSIS совместимой библиотеки:
void set FAULTМASK(uint32 t faultMask);
uint32 t get FAULTМASK(void);
Те, кто использует язык ассемблера, MorYT изменять состояние реrистра
FAULTMASK с помощью команд CPS:
CPSIE F ; Очистить FAULTМASK
CPSID F ; Установить FAULTМASK
ДЛЯ обращения к реrистру FAULTMASK также можно использовать команды
MRS и MSR.
При выходе из обработчика исключения (кроме обработчика немаскируемоrо
прерывания) реrистр FAULTMASK очищается автоматически. Ни FAULTMASK,
ни PRIMASK не MorYT быть установлены на пользовательском уровне доступа.
8.2.6. Реrистр BASEPRI
в некоторых случаях вам может потребоваться запретить только те прерыва
ния, приоритет которых меньше HeKoToporo значения. Это можно сделать с по
мощью реrистра BASEPRI для получения требуемоrо результата достаточно
просто записать необходимое значение уровня приоритета в данный реrистр.
К примеру, если вы хотите заблокировать все исключения с уровнем приоритета
не больше Ох60, то достаточно вставить в проrрамму следующие строки:
sеt ВАSЕРRI(ОхБО); // Запрещаем прерывания с приоритетом ОхБО...ОхFF,
// используя функцию CMSIS
Или, на языке ассемблера:
MOV RO, #ОхБО
MSR BASEPRI, RO ; Запрещаем прерывания с приоритетом ОхБО...ОхFF
Вы также можете прочитать содержимое реrистра BASEPRI:
х = get BASEPRI(void); // Читаем значение BASEPRI
ТО же, на языке ассемблера:
MRS RO, BASEPRI
Чтобы отключить маскирование, просто 06нулите реrистр BASEPRI:
set BASEPRI(OxO); // Отключаем маскирование BASEPRI
156 · Тлава 8. Контроллер вложенных векторных прерываний и управление прерываниями
То же на языке ассемблера:
MOV RO, #ОхО
MSR BASEPRI, RO ; Отключаем маскирование BASEPRI
ДЛЯ обращения к реrистру BASEPRI можно также использовать идентифика
тор BASEPRI MAX. В принципе, он обозначает тот же самый реrистр, однако при
использовании этоrо имени операция записи становится условной. (Хотя имена
BASEPRI и BASEPRI MAX относятся к одному реrистру, в машинном коде KO
манды они кодируются разными значениями.) При обращении к реrистру
BASEPRI MAX процессор автоматически сравнивает текущее значение приори
тета с новым и разрешает изменение реrистра только в случае увеличения прио
ритета; уменьшить приоритет таким образом невозможно.
Например, рассмотрим следующий фраrмент:
MOV RO, #ОхБО
MSR BASEPRI МAX, RO
MOV RO, #OxFO
MSR BASEPRI МAX, RO
Запрещаем прерывания с приоритетом ОхБО, Охбl, ... и т.д.
Эта операция записи будет проиrнорирована, поскольку
устанавливаемый приоритет меньше Ох60
MOV RO, #Ох40
MSR BASEPRI МAX, RO Эта операция записи будет выполнена, в результате чеrо
уровень маскирования станет равным Ох40
Для изменения уровня приоритета на более низкий или для полноrо отключе
ния маскирования при обращении к реrистру необходимо использовать имя
BASEPRI. Изменение реrистра BASEPRI/BASEPRI MAX допускается только на
привилеrированном уровне доступа.
Формат реrистра BASEPRI зависит от разрядности реrистров приоритета. Так,
если в реrистрах приоритета реализовано Bcero 3 бита, то реrистр BASEPRI MO
жет содержать только следующие значения: ОхОО, Ох20, Ох40, ..., ОхСО, ОхЕО.
8.2.7. Конфиrурационные реrистры остальных
v
искnючении
Исключения Usage Fault, MemManage Fault и Bus Fault разрешаются реrистром
SHCSR (OxEOOED24). Признаки состоянии ожидания исключений отказов и при
знаки активноrо состояния большинства системных исключений также хранят
ся в этом реrистре (Табл. 8.5).
Таблица 8.5. Реrистр состояния и управления обработчиков системных исключений
SHCSR (OxEOOOED24)
Значение
Биты Обозначение Тип после Описание
сброса
18 USGFAULTENA R/W О Разрешение обработчика исключения Usage Fault
17 BUSFAULTENA R/W О Разрешение обработчика исключения Bus Fault
16 MEMFAULTENA R/W О Разрешение обработчика исключения
MemManage Fault
Исключение SVCall отложено; обработчик
15 SVCALLPENDED R/W О SVCall выполнялся, но был вытеснен
исключением с более высоким приоритетом
8.2. Базовые средства конфиzурации прерываний . 157
Таблица 8.5. Реrистр состояния и управления обработчиков системных исключений
SHCSR (OxEOOOED24) (продолжение)
Значение
Биты Обозначение Тип после Описание
сброса
Исключение Bus Fault отложено; обработчик
14 BUSFAULTPENDED R/W О Bus Fault выполнялся, но был вытеснен
исключением с более высоким приоритетом
Исключение MemManage Fault отложено;
13 MEMFAULTPENDED R/W О обработчик MemManage Fault выполнялся, но
был вытеснен исключением с более высоким
приоритетом
Исключение Usage Fault отложено; обработчик
12 USGFAULTPENDED R/W О Usage Fault выполнялся, но был вытеснен
исключением с более высоким приоритетом
11 SYSTICKACT R/W О Читается как 1, если исключение SYSTICK
активно
10 PENDSVACT R/W О Читается как 1, если исключение PendSV
активно
8 MONITORACT R/W О Читается как 1, если исключение Debug Monitor
активно
7 SVCALLACT R/W О Читается как 1, если исключение SVCall
активно
3 USGFAULTACT R/W О Читается как 1, если исключение Usage Fault
активно
1 BUSFAULTACT R/W О Читается как 1, если исключение Bus Fault
активно
О MEMFAULTACT R/W О Читается как 1, если исключение MemManage
Fault активно
Будьте аккуратны при записи в этот реrистр, не измените случайно биты aK
тивности системных исключений. В противном случае, если вы вдруr сбросите
бит активности системноrо исключения, находящеrося в активном состоянии, то
в момент выхода из обработчика системноrо исключения будет сrенерировано
исключение отказа.
Перевод исключений NMI, SYSTICK и PendSV в состояние ожидания осущест
вляется посредством реrистра ICSR. Мноrие битовые поля данноrо реrистра
предназначены исключительно для отладки. В прикладных проrраммах, как пра
вило, используются только биты, связанные с признаками отложенноrо преры
вания (Табл. 8.6).
Таблица 8.6. Реrистр управления и состояния прерываний ICSR (OxEOOOED04)
Биты . Обозначение Тип Значение Описание
после сброса
31 NMIPENDSET R/W О Исключение NMI отложено
Запись 1 в этот бит переводит исключение
28 PENDSVSET R/W О PendSV в состояние ожидания.
При чтении возвращается текущее состояние
158 . fлава 8. Контроллер вложенных векторных прерываний и управление прерываниями
Таблица 8.6. Реrистр управления и состояния прерываний ICSR (OxEOOOED04)
(продолжение)
Биты Обозначение Тип Значение Описание
после сброса
Запись 1 в этот бит очищает признак
27 PENDSVCLR W О отложенноrо прерывания для исключения
PendSV
Запись 1 в этот бит переводит исключение
26 PENDSTSET R/W О SYSTICK в состояние ожидания.
При чтении возвращается текущее состояние
Запись 1 в этот бит очищает признак
25 PENDSTCLR W О отложенноrо прерывания для исключения
SYSTICK
23 ISRPREEMPT R О Отложенное прерывание станет активным на
следующем шаrе (используется для отладки)
22 ISRPENDING R О Имеется отложенное внешнее прерывание
21:12 VECTPENDING R О Номер отложенноrо исключения
с наибольшим приоритетом
Устанавливается в 1 при выполнении
процессором обработчика исключения;
11 RETTOBASE R О обеспечивает переход процессора в режим
потока после возврата из прерывания при
отсутствии друrих отложенных исключений
9:0 VECTACTIVE R О Номер обрабатываемоrо в данный момент
исключения
8.3. Примеры инициализации прерывания
в большинстве простых приложений проrрамма располаrается в ПЗУ, поэто
му при отсутствии необходимости динамическоrо изменения обработчиков ис
ключений вся таблица векторов может быть размещена в области Code (начиная
с адреса ОхОООООООО). При этом смещение таблицы всеrда будет равно нулю, а BeK
тора прерываний будут располаrаться в ПЗ Соответственно, для настройки лю
боrо из прерываний необходимо выполнить следующее:
1. Задать настройки rруппирования приоритетов (этот этап не обязателен). По
умолчанию в поле PRIGROUP реrистра AIRCR содержится нулевое значе
ние для задания уровня субприоритета используется только О й бит
реrистров уровня приоритета.
2. Задать уровень приоритета прерывания (этот этап также не обязателен). По
умо!учанию все прерывания имеют О й уровень (наивысший приоритет).
3. Разрешить прерывание.
Ниже приведён при мер простой процедуры, выполняющей перечисленные
операции:
NVIC SetPriorityGrouping(5);
NVIC SetPriority(7, ОхСО); // 3адаём дЛЯ IRQ#7 уровень приоритета, равный ОхСО
NVIC EnableIRQ(7);
8.3. Примеры инициализации прерЫ8ания . 159
Кроме Toro, если вы планируете использовать вложенные прерывания, не за
будьте выделить достаточное количество памяти под стек. Поскольку обработчи
ки исключений всеrда используют указатель MSP, размер OCHoBHoro стека должен
быть достаточным для поддержки максимально возможноrо числа вложенных
прерываний.
Если обработчики прерываний должны изменяться в процессе выполнения
проrраммы, то нам придётся переместить таблицу векторов из ПЗУ в ОЗУ
только так мы сможем модифицировать значения векторов прерываний. В pe
зультате процедура инициализации HeMHoro усложнится и нам потребуется:
1. Изменить при необходимости настройки rруппирования приоритетов. По
умолчанию в поле PRIGROUP реrистра AIRCR содержится нулевое значение
(биты [7:1] реrистра уровня приоритета определяют уровень приоритета
rруппы, а бит [О] уровень субприоритета).
2. Скопировать вектора обработчиков исключений Hard Fault, NMI, а также
друrих требуемых исключений в новую таблицу векторов, расположенную
вОЗ
3. Изменить содержимое реrистра смещения таблицы векторов VTOR
(см. Табл. 7.7) так, чтобы он указывал на новую таблицу векторов.
4. Поместить вектор прерывания в новую таблицу.
5. Задать уровень приоритета прерывания.
6. Разрешить прерывание.
Ниже приведён пример подобной процедуры, написанной с использованием
функций из СМSIS совместимой библиотеки драйвера устройства (предполаrа
ется, что начальный адрес новой таблицы векторов задаётся константой
NEW VECTOR TABLE):
// HW REG макрос для преобразования значения адреса в указатель
#define HW REG (addr) (* ((volatile unsigned long *) (addr) ) )
#define NEW VECT TABLE Ох20008000 // Область СОЗУ дЛЯ размещения таблицы векторов
NVIC SetPriorityGrouping(5);
HW REG((NEW VECT TABLE +Ох8)) = HW REG(Ox8); // Копируем вектор NMI
HW REG((NEW VECT TABLE +ОхС)) = HW REG(OxC); // Копируем вектор Hard Fault
SCB >VTOR = NEW VECT TABLE; // Перемещаем таблицу векторов в СОЗУ
HW REG(4*(7+16)) = (unsigned) IRQ7 Handler; // Устанавливаем вектор
NVIC SetPriority(7, ОхСО); // Задаём дЛЯ IRQ#7 уровень приоритета, равный ОхСО
NVIC EnableIRQ(7);
Аналоrичный код на ассемблере может выrлядеть следующим образом:
LDR RO, =OxEOOOEDOC Реrистр AIRCR
LDR Rl, =Ox05FA0500 Поле PRIGROUP = 5 (2/6)
STR Rl, [RO] Задаём rруппирование приоритетов
MOV R4,#8
LDR R5,=(NEW VECT TABLE+8)
Таблица векторов в ПЗУ
160 . [лава 8. Контроллер вложенных векторных прерыванuй и управление прерываниями
LDMIA R4!, {RO R1}
STMIA R5!, {RO Rl}
Считываем вектора исключений NMI и Hard Fault
Копируем вектора в новую таблицу
LDR RO,=OxEOOOED08
LDR R1,=NEW VECT TABLE
STR R1, [RO]
Реrистр VTOR
; Указываем новое положение таблицы векторов
LDR RO,=IRQ7 Handler
LDR R1,=OxEOOOED08
LDR R1, [R1]
АОО R1, R1, # (4 * (7 + 1 б) )
STR RO, [R1]
Получаем стартовый адрес обработчика IRQ#7
Ре:rистр VTOR
Вычисляем адрес вектора обработчика IRQ#7
Устанавливаем вектор IRQ#7
LDR RO,=OxEOOOE400
Начальный адрес блока ре:rистров приоритета
внешних IRQ
MOV R1, #ОхО
S TRB R 1, [R О , # 7 ]
Устанавливаем приоритет IRQ#7, равный ОхО
LDR RO,=OxEOOOE100 Ре:rистр SETEN
MOV R1,#(1«7) Бит разрешения IRQ#7 (1 сдви:rается на 7 бит влево)
STR R1, [RO] Разрешаем прерывание
Если проrрамма должна запускаться на различных устройствах, то она, как
правило, должна уметь определять:
. число прерываний, поддерживаемых устройством;
. разрядность реrистров приоритета.
В процессоре Cortex M3 предусмотрен реrистр типа контроллера прерываний
ICTR, который содержит число rрупп входов прерываний, по 32 входа каждая
(Табл. 8.7). В качестве альтернативы вы можете определить точное число внешних
прерываний, выполняя операцию чтения/записи в реrистры конфиrурации пре
рываний, такие как реrистры разрешения прерываний или реrистры приоритета.
Таблица 8.7. Реrистр типа контроллера прерываний ICTR (ОхЕОООЕОО4)
Биты Обозначение Тип Значение после Описание
сброса
Количество входов прерываний
с шаrом 32:
4:0 INTLINESNUM R О = от 1 до 32;
1 = от 33 до 64;
. . .
Для определения числа реализованных битов реrистров приоритета вы може
те записать OxFF в любой из реrистров, а затем прочитать ero содержимое и по
смотреть число установленных битов. Минимальное число установленных битов
равно трём, в этом случае при чтении реrистра должно возвращаться число ОхЕО.
8.4. Проrраммные прерывания
Проrраммные прерывания MorYT формироваться различными способами.
Первый из этих способов заключается в использовании реrистров NVIC ISPRx;
8.5. Системный таймер SYSTICK · 161
второй в использовании реrистра проrраммной rенерации прерывания STIR
(Табл. 8.8).
Таблица 8.8. Реrистр проrраммной rенерации прерывания STIR (OxEOOOEFOO)
Значение
Биты Обозначение Тип после Описание
сброса
При записи в это поле какоrо либо числа
устанавливается бит признака отложенноrо
8:0 INTID W прерывания для прерывания
с соответствующим номером; так, для
перевода в состояние ожидания прерывания
N20 необходимо записать О
Например, вы можете rенерировать прерывание NQ3 посредством выражения:
NVIC >STIR = 3; /* NVIC >STIR определено в СМSIS совместимой библиотеке
драйвера устройства */
С тем же результатом запись в реrистр NVIC ISPRx можно выполнить, ис
пользуя функцию из СМSIS совместимой библиотеки:
NVIC SetPendingIRQ(3);
Системные исключения (NMI, исключения отказов, PendSV и т.д.) не MorYT
быть отложены с использованием данноrо реrистра. По умолчанию пользова
тельская проrрамма не может выполнять запись в реrистры контроллера NVIC,
однако при необходимости ей можно предоставить доступ к реrистру STIR для
этоrо следует установить бит USERSETMPEND реrистра управления конфиrура
цией CCR (OxEOOOEDI4).
8.5. Системный таймер SYSTICK
Таймер SYSTICK входит в состав контроллера NVIC и может использоваться
для rенерации исключения SYSTICK (исключение N Q I5). Мноrие операционные
системы задействуют отдельный аппаратный таймер, rенерирующий периодиче
ские прерывания. Блаrодаря этим прерываниям ОС может осуществлять управ
ление задачами, например выделять каждой задаче свой временной интервал или
же предотвращать блокирование всей системы какой либо одной задачей. Для
этоrо таймер должен быть способен rенерировать прерывания и, по возможно
сти, должен быть защищён от воздействия со стороны пользовательских задач,
чтобы пользовательский код не Mor влиять на ero работу.
в связи с этим в процессор Cortex M3 был включён простой таймер SYSTICK.
Поскольку данный таймер имеется во всех кристаллах с процессором Cortex M3,
значительно упрощается перенос проrрамм между подобными устройствами.
Этот таймер представляет собой 24 битный вычитающий счётчик, который MO
жет тактироваться как от BHYTpeHHero TaKToBoro сиrнала процессора, так и от
внешнеrо TaKToBoro сиrнала (в [1] этот сиrнал обозначен как STCLK). Поскольку
источник TaKTOBoro сиrнала STCLK определяется разработчиком конкретной
микросхемы, частота данноrо сиrнала в разных устройствах может быть различ
162 · fлава 8. Контроллер вложенных векторных nрерываний и управление nрерываниями
ной. Соответственно, при выборе источника TaKToBoro сиrнала необходимо вни
мательно изучить документацию на используемую микросхему.
Таймер SYSTICK может применяться для rенерации прерываний он имеет
своё исключение и отдельный вектор исключения. Указанный таймер облеrчает
перенос операционных систем и проrраммноrо обеспечения, поскольку во всех
устройствах используется одинаковым образом. Таймер SYSTICK управляется
четырьмя реrистрами, формат которых указан в Табл. 8.9.. .8.12.
Таблица 8.9. РеI'ИСТР управления и состояния системноI'О таймера SYST CSR
(OxEOOOEOIO)
Значение
Биты Обозначение Тип после Описание
сброса
Читается как 1, если с момента предыдущеrо чтения
реrистра счётчик успел досчитать до о;
16 COUNTFLAG R О автоматически сбрасывается в О после чтения
реrистра или при обнулении текущеrо значения
счётчика
2 CLKSOURCE R/W О О внешний тактовый сиrнал (STCLK);
1 тактовый сиrнал процессора
1 разрешает rенерацию прерывания SYSTICK при
1 TICKINT R/W О достижении таймером нулевоrо значения;
О прерывание не rенерируется
О ENABLE R/W О Разрешение таймера SYSTICK
Таблица 8.10. РеI'ИСТР значения перезаI'рУЗКИ системноI'О таймера SYST RVR
(ОхЕОООЕОI4)
Биты Обозначение Тип Значение Описание
после сброса
23:0 RELOAD R/W О Значение, заrружаемое в таймер при
достижении им нулевоrо значения
Таблица 8.11. РеI'ИСТР текущеI'О значения системноI'О таймера SYST CVR
(ОхЕОООЕОI8)
Биты Обозначение Тип Значение Описание
после сброса
При чтении возвращается текущее значение
таймера. При записи в реrистр текущее
23:0 CURRENT R/Wc О значение счётчика обнуляется. Также при
записи сбрасывается бит COUNTFLAG
реrистра SYST CSR
Таблица 8.12. РеI'ИСТР калибровочноI'О значения системноI'О таймера SYST CALIB
(ОхЕОООЕОIС)
Биты Обозначение Тип Значение Описание
после сброса
1 внешний тактовый сиrнал отсутствует
31 NOREF R (сиrнал STCLK недоступен);
О внешний тактовый сиrнал доступен
8.5. Системный таймер SYSTICK · 163
Таблица 8.12. Реrистр калибровочноrо значения системноrо таймера SYST CALIB
(ОхЕОООЕОIС) (продолжение)
Биты Обозначение Тип Значение Описание
после сброса
1 калибровочное значение не соответствует
30 SKEW R 10 MC интервалу;
О калибровочное значение точное
Калибровочное значение для периода 10 мс.
Разработчик кристалла должен подать это
23:0 TENMS R/W О значение (в двоичном коде) на
соответствующие входы процессора. Если при
чтении данноrо поля возвращается О, значит,
калибровочное значение недоступно
Реrистр калибровки SYST CALIB позволяет rенерировать прерывания
SYSTICK с одним и тем же интервалом при работе проrраммы на различных
устройствах с ядром Cortex M3. Для использования этой возможности просто
запишите содержимое поля TENMS в реrистр значения перезаrрузки SYST RVR;
в результате вы получите интервал между прерываниями, равный примерно
10 мс. Для получения друrих интервалов проrрамма должна будет сама рассчи
тать новое значение из калибровочноrо. Однако битовое поле TENMS может
быть реализовано не во всех устройствах с процессором Cortex M3 (в этом случае
на входы калибровочноrо значения подаётся сиrнал низкоrо уровня), поэтому
перед использованием указанной возможности убедитесь в её наличии по ДOKY
ментации производителя.
Вообще rоворя, таймер SYSTICK может использоваться не только как систем
ный таймер для операционных систем. В частности, он может применяться в Ka
честве сиrнальноrо таймера, для измерения временных интервалов, а также для
друrих целей. Обратите внимание, что при останове процессора (во время отлад
ки) таймер SYSTICK тоже останавливается. В зависимости от реализации микро
контроллера таймер SYSTICK также может останавливаться при переходе про
цессора в определённые режимы пониженноrо энерrопотребления.
Инициализацию системноrо таймера рекомендуется выполнять в следующей
последовательности:
1. Запретить таймер SYSTICK, записав О в реrистр управления и состояния
SYST CSR.
2. Записать новое значение перезаrрузки в реrистр SYST RVR.
3. Записать любое значение в реrистр SYST CVR для обнуления текущеrо
значения таймера.
4. Записать в реrистр управления и состояния SYST CSR соответствующее
значение для запуска таймера SYSTICK.
Эта последовательность применима ко всем реализациям процессора
Cortex M3. Более подробно процесс настройки SYSTICK рассматривается в rла
ве 14.
rЛАВА 9
ПРЕРЬIВАНИЯ
9.1. Последовательность обработки
прерываний/исключений
При возникновении исключительной ситуации (исключения) процессор BЫ
полняет следующие операции:
· сохраняет контекст в стеке (заrружает содержимое восьми реrистров в стек);
· осуществляет выборку вектора (считывает адрес обработчика исключитель
ной ситуации из таблицы векторов);
· модифицирует указатель стека, реrистр связи (LR) и счётчик команд (РС).
9.1.1. Сохранение контекста
При возникновении исключительной ситуации содержимое реrистров RO. . .R3,
R12, LR, Ре и PSR сохраняется в стеке. Если в исполняемом коде используется
указатель PSP, то реrистры будут сохранены в стеке процесса, иначе в OCHOB
ном стеке. Обработчики исключительных ситуаций всеrда используют основной
стек, поэтому во вложенных прерываниях будет задействован именно он.
Блок из восьми слов данных, сохраняемых в стеке, обычно называется CTeKO
вым фреймом. До появления 2 й ревизии процессора Cortex M3 стековый фрейм
по умолчанию Mor начинаться с любоrо адреса, KpaTHoro слову. Во второй реви
зии процессора стековый фрейм по умолчанию выравнивается на rраницу двой
Horo слова, однако такое выравнивание можно отключить, сбросив бит
STKALIGN реrистра управления конфиrурацией CCR контроллера NVIC. Такое
выравнивание cTeKoBoro фрейма доступно и в l й ревизии Cortex M3, только ero
надо разрешить, установив бит STKALIGN. Более подробно использование реrи
стра CCR рассматривается в [лаве 12.
Расположение данных внутри cTeKoBoro фрейма исключения показано на
Рис. 9.1, а последовательность заrрузки данных в стек представлена на Рис. 9.2
(предполаrается, что после возникновения исключительной ситуации значение
указателя стека равно N). Из за конвейерноrо характера интерфейса шины АНВ
адрес и данные оказываются сдвинутыми друr относительно друrа на одну CTY
пень конвейера.
9.1. Последовательность обработки nрерываний/исключений . 165
Дополнительное выравнивание указателя
аека не требуется
Адрес
) сох::::=ные
данные
Требуется дополнительное выравнивание
указателя аека
) Свободная
облааь
аека
Новое
положение SP
Адрес
1 Ранее
сохранённые
данные
Не исполь
зуется
Новое
положение SP
Предыдущее
положение SP
Предыдущее
положение SP
Старый указатель аека указывал на ячейку памяти
с адресом, кратным двойному слову
или STКALIGN = О
) Свободная
облааь
аека
Старый указатель аека указывал на ячейку памяти
с адресом, не кратным двойному слову,
и STКALIGN = 1
Рис. 9.1. Стековый фрейм исключения.
Шина данных
Шина адреса
Время
Рис. 9.2. Последовательность сохранения контекста в стеке.
Первыми в стек заrружаются значения РС и PSR это позволяет уже на ca
мом начальном этапе начинать выборку команд (что требует модификации РС)
и изменять содержимое реrистра IPSR. После сохранения указанных реrистров
значение указателя стека корректируется, и в стек заrружаются остальные дaH
ные (см. Рис. 9.1).
Сохранение содержимоrо именно реrистров RO.. .R3, R12, R13, LR, РС и PSR pe
rламентируется соrлашением AAPCS [5], которое определяет эти реrистры как
сохраняемые вызывающей процедурой (caller saved registers). Используемое co
rлашение позволяет описывать обработчики прерываний в виде обычных Си
функций, поскольку реrистры, которые MorYT быть изменены обработчиком ис
ключительной ситуации, в любом случае сохраняются в стеке.
Реrистры общеrо назначения RO.. .R3 и R12 располаrаются в конце cTeKoBoro
фрейма, что облеrчает обращение к ним с использованием адресации относи
тельно SP. Как следствие, с помощью этих реrистров можно леrко орrанизовать
передачу параметров в проrраммные прерывания.
166 . fлава 9. Прерыванuя
9.1.2. Выборка вектора
в то время, пока шина данных «занимается» сохранением реrистров в стек,
шина команд выполняет друrую важную задачу по этой шине производится
выборка вектора (начальноrо адреса обработчика исключительной ситуации) из
таблицы векторов прерываний. Поскольку сохранение контекста и выборка BeK
тора осуществляются разными интерфейсами шин, эти операции MorYT выпол
няться одновременно.
9.1.3. Обновление реrистров
После Toro как будет сохранён контекст проrраммы и выбран вектор из табли
цы векторов, процессор приступит к обработке исключительной ситуации. На
момент входа в обработчик будут изменены следующие реrистры:
· SP во время сохранения контекста указатель стека (MSP или PSP) устанавли
вается на новую позицию. Если процедура обработки исключительной ситуации
обращается к стеку, то она будет использовать основной стек и указатель MSP.
· PSR в реrистр IPSR (младший байт реrистра PSR) заносится номер возник
шеrоисключения.
· РС после выборки вектора ero значение будет заrружено в счётчик команд, в pe
зультате чеrо начнётся выборка команд обработчика исключительной ситуации.
· LR в реrистр связи заносится специальное значение, называемое
EXC RETURNl). Это значение управляет процессом возврата из прерывания
(реально используются только 4 младших бита реrистра). Более подробно об
EXC RETURN будет рассказано в разделе 9.3 данной rлавы.
Помимо рассмотренных реrистров, также изменяются некоторые реrистры
контроллера NVIC. В частности, сбрасывается бит признака отложенноrо преры
вания и устанавливается бит активноrо состояния.
9.2. ВЫХОД И3 исключения
После завершения обработки исключительной ситуации необходимо осуще
ствить выход из обработчика (в некоторых процессорах эта операция называется
возвратом из прерывания) для восстановления исходноrо состояния системы,
что позволит возобновить нормальное выполнение прерванной проrраммы.
Имеется три способа возврата из прерывания; все они используют значение
EXC RETURN, сохраняемое в реrистре LR при входе в обработчик исключения
(Табл.9.1).
Некоторые микропроцессорные архитектуры имеют специальные команды
для возврата из прерывания (например, команда reti в процессоре Intel 8051).
В процессоре Cortex M3 для этой цели применяется обычная команда возврата,
что, при использовании языка Си, позволяет описывать обработчик исключи
тельной ситуации как обыкновенную подпроrрамму.
1) Биты [31:4] значения EXC RETURN всеrда установлены в 1) т.е. это значение имеет вид
ОхРРРРРРРх. Информация для возврата содержится в 4 младших битах. Более подробно
значение EXC RETURN будет рассмотрено ниже в этой rлаве.
9.3. Вложенные прерЫ8анuя . 167
Таблица 9.1. Команды для запуска процесса возврата из прерывания
Команда Описание
возврата
ВХ reg Если значение EXC RETURN всё ещё хранится в реrистре LR) то мы можем
использовать для возврата из прерывания команду ВХ LR
Очень часто содержимое LR сохраняется в стеке после входа в обработчик
РОР {РС} или исключения. В этом случае для заrрузки значения EXC RETURN в счётчик
РОР {... , РС} команд мы можем использовать команду РО Р. В результате процессор выполнит
возврат из прерывания
LDR или LDM Возврат из прерывания также можно выполнить) используя команду LDR/LDM
с РС в качестве реrистра приёмника
При выполнении команды возврата из прерывания производится BOCCTaHOB
ление контекста из стека и изменение реrистров контроллера NVIC (Табл. 9.1):
1. Восстановление контекста из стека восстанавливаются значения
реrистров, помещённые в стек. Также восстанавливается исходное значение
указателя стека.
2. Обновление pezucmpoe NVIC бит активности исключения сбрасывается.
В случае внешнеrо прерывания, если вход этоrо прерывания всё ещё активен,
будет повторно установлен бит признака отложенноrо прерывания, что
приведёт к повторному запуску обработчика прерывания.
9.3. Вложенные прерывания
Поддержка вложенных прерываний встроена непосредственно в процессор
ное ядро Cortex M3 и контроллер NVIC. То есть для использования вложенных
прерываний больше не требуется написание дополнительноrо ассемблерноrо KO
да. Нужно только задать соответствующий уровень приоритета для каждоrо ис
точника прерывания. Во первых, декодирование приоритетов осуществляется
контроллером NVIC автоматически. Так что при обработке какой либо исключи
тельной ситуации все остальные исключения с таким же или меньшим приорите
том блокируются. BO BTOpЫX, аппаратно реализованное сохранение и BOCCTaHOB
ление контекста позволяет обработчикам вложенных прерываний не заботиться
о сохранности данных в реrистрах.
Необходимо помнить только об одном о выделении достаточноrо количе
ства памяти под основной стек при наличии нескольких уровней вложенных
прерываний. Каждый уровень использует восемь слов стека, да ещё и самим об
работчикам исключений может потребоваться стек в итоrе расход стека может
оказаться большим, нежели предполаrалось изначально.
Повторный вход в обработчик исключительной ситуации в процессоре
Cortex M3 не допускается. Поскольку каждому исключению соответствует опре
делённый уровень приоритета, а во время обработки исключительной ситуации
все прерывания с таким же или меньшим приоритетом блокируются, то обрабо
тать это же исключение можно будет только после выхода из текущеrо 06pa60T
чика. В частности, поэтому нельзя выполнить команду SVC в обработчике исклю
чения SVCall при такой попытке будет сrенерирована исключительная ситуа
ция Hard Fault.
168 . fлава 9. Прерыванuя
9.4. «Цепочечная» обработка прерываний
, в процессоре Cortex М3 применены различные решения, позволяющие YMeHЬ
шить задержку обработки прерываний. Первым решением, которое мы paCCMO
трим, является механизм «цепочечной» (tail chaining) обработки прерываний
(Рис. 9.3).
Прерывание N21
п
Прерывание N22
Прерывающее
событие N O l
Процедура обработки Процедура обработки
прерывания N21 прерывания N22
Выход
из прерывания
Соаояние
процессора
Основная nporpaMMa
Сохранение
контекаа
Основная nporpaMMa
I
I
I
I
Режим обработчика I
I
I
Восаановление
контекаа
Режим потока
I
I
I
I
Режим обработчика I
I
I
Режим потока
Рис. 9.3. «Цепочечная» обработка исключений.
Если исключение возникает в тот момент, коrда процессор занят обработкой
исключительной ситуации с таким же или более высоким приоритетом, то оно
переводится в состояние ожидания (откладывается). После завершения текуще
ro обработчика процессор может приступить к обработке отложенноrо прерыва
ния. И вот здесь вместо Toro, чтобы восстанавливать содержимое реrистров из
стека, а затем снова сохранять ero в стеке, процессор, пропуская эти операции,
сразу переходит к обработчику отложенноrо прерывания. В результате значи
тельно уменьшается временной интервал между последовательным выполнени
ем двух обработчиков прерываний.
9.5. «Опоздавшие» исключения
Ещё одним механизмом, увеличивающим эффективность подсистемы обра
ботки прерываний, является поддержка «опоздавших» исключений. Если во Bpe
мя сохранения контекста для обработки какой либо исключительной ситуации
возникнет исключение с более высоким приоритетом, то процессор сначала обра
ботает это «опоздавшее» исключение.
Например, если исключение N21 (меньший приоритет) возникнет на несколько
тактов раньше исключения NQ2 (больший приоритет), то процессор поведёт себя
так, как показано на Рис. 9.4, т.е. после сохранения контекста будет запущен об
работчик исключения NQ2.
9.6. Ещё раз о значении EXC RETURN · 169
Прерывание NOl
(НИЗКИЙ приоритет)
Прерывание N02
(ВЫСОКИЙ приоритет)
Соаояние
процессора
Режим потока
Запуск обработки исключения
Обработчик N 0 2
Шина данных
Шина команд
ОСНОВНОЙ
поток
Выборка команд обработчика
Выборка вектора
Рис. 9.4. Обработка «опоздавшеzо» исключения.
9.6. Ещё раз о значении EXC RETURN
При входе в обработчик исключительной ситуации в реrистр LR заносится
специальное значение, называемое EXe RETURN, старшие 28 бит KOToporo YCTa
новлены в 1. При завершении обработчика это значение заrружается в счётчик
команд, запуская процесс выхода из исключения.
Для выхода из обработчика исключительной ситуации MorYT использоваться
следующие команды:
. POP/LDM;
. LDR с Ре в качестве реrистра приёмника;
. ВХ с любым реrистром в качестве операнда.
Биты [31:4] значения EXC RETURN всеrда установлены в 1, а биты [3:0] coдep
жат информацию, необходимую для выполнения операции возврата (Табл. 9.2).
При входе в обработчик прерывания содержимое LR обновляется автоматиче
ски, так что вручную записывать эти значения не нужно.
Таблица 9.2. Назначение битов EXC RETURN
Биты 31:4 3 2 1 О
Описание охррррррр Режим возврата (по Стек Зарезервировано; Состояние процес
тока/обработчика) возврата должен быть О сора (ARM/Thumb)
Бит О значения EXe RETURN определяет состояние, в котором должен OKa
заться процессор после возврата из обработчика исключения. Поскольку процес
сор eortex M3 поддерживает только состояние Thumb, бит О всеrда должен быть
установлен в 1. Допустимые для процессора Cortex M3 значения EXC RETURN
указаны в Табл. 9.3.
170 . fлава 9. Прерывания
Таблица 9.3. Допустимые значения EXC RETURN дЛЯ Cortex M3
Значение Описание
OxFFFFFFFl Возврат в режим обработчика
OxFFFFFFF9 Возврат в режим потока с использованием OCHoBHoro стека при возврате
OxFFFFFFFD Возврат в режим потока с использованием стека процесса при возврате
Если в режиме потока используется основной стек, то при входе в обработчик
первоrо прерывания в реrистр LR будет записано значение ОхРРРРРРР9, а при BXO
де в обработчики последующих вложенных прерываний ОхРРРРРРРl (Рис. 9.5).
Прерывание NOl (НИЗКИЙ приоритет) I
Прерывание N02 (ВЫСОКИЙ приоритет)
Рабочее
состояние
Процедура обработки
прерывания N02
Выход
из прерывания
Выход
из прерывания
Процедура обработки
прерывания N O l
Основная nporpaMMa
(
ОСНОВНОЙ стек
л
ОСНОВНОЙ стек
...............
I \ (
I Режим I
I обработ I
I I
I чика I
ОСНОВНОЙ стек
л
)
) (
: Режим
Режим потока I обработ
: чика
LR = OxFFFFFFF9
: Режим
I обработчика
:
LR = OxFFFFFFFl
Режим потока
Рис. 9.5. Заzрузка EXC RETURN 8 LR при 8ходе 8 обработчик (8 режиме потока
используется основной стек).
Если в режиме потока используется стек процесса, то содержимое LR будет paB
но OxFFFFFFFD при входе в обработчик первоrо прерывания и ОхРРРРРРРl при BXO
де в обработчики последующих вложенных прерываний, как показано на Рис. 9.6.
Из за используемоrо формата EXC RETURN мы не сможем выполнить воз
врат по адресу из диапазона ОхРРРрррро.. .0хРРРРРРРР. Но, поскольку данные
адреса расположены в неисполняемой области памяти, в этом нет ничеrо страш
Horo.
9.7. Задержка обработки прерЫ8ания . 171
Прерывание N Q l (НИЗКИЙ приоритет) I
Прерывание N Q 2 (ВЫСОКИЙ приоритет)
Рабочее
соаояние
Процедура обработки
прерывания N Q 2
Выход
ИЗ прерывания
Выход
ИЗ прерывания
Процедура обработки
прерывания N Q l
Основная nporpaMMa
(
ОСНОВНОЙ аек
л
ОСНОВНОЙ аек
/"о...
1 (
Режим :
обработ I
I
чика I
ОСНОВНОЙ аек
л
1
1(
: Режим
Режим потока I обработ
I
I чика
LR = OxFFFFFFFD
: Режим
I обработчика
:
LR = OxFFFFFFFl
Режим потока
Рис. 9.6. Заzрузка EXC RETURN 8 LR при 8ходе 8 обработчик (8 режиме потока
используется стек процесса).
9.7. Задержка обработки прерывания
Термин задержка обработки прерЫ8ания (interrupt latency) обозначает интер
вал между появлением запроса прерывания и началом исполнения обработчика
этоrо прерывания. В процессоре Cortex M3 при условии, что память имеет нуле
вую латентность, и учитывая, что архитектура шин позволяет одновременно ocy
ществлять выборку вектора и сохранение контекста проrраммы, минимальная
величина задержки обработки прерывания составляет 12 тактов. Это время yxo
дит на сохранение реrистров в стеке, выборку вектора и выборку первых команд
обработчика прерывания. В то же время указанная величина зависит от наличия
циклов ожидания при обращении к памяти и ряда друrих факторов.
При «цепочечной» обработке прерываний время переход а от одноrо обработ
чика прерывания к друrому может быть уменьшено до 6 тактов, поскольку в этом
случае не требуется выполнять лишние операции сохранения/восстановления
содержимоrо реrистров.
Если процессор исполняет команду, для выполнения которой требуется He
сколько тактов, например команду деления, то выполнение подобной команды
может быть прервано и возобновлено после завершения обработки прерывания.
Это также касается команд заrрузки/сохранения двойных слов LORO/STRD.
ДЛЯ уменьшения задержки обработки исключений процессор Cortex M3 дo
пускает возникновение исключения во время выполнения команд rрупповой за
rрузки и сохранения (LDM/STM). В этом случае при возникновении исключитель
ной ситуации процессор завершит текущее обращение к памяти и запомнит HO
мер следующеrо реrистра в поле ICI реrистра xPSR, который будет сохранён в CTe
ке. После завершения обработчика исключения выполнение команды заrрузки/
восстановления возобновится с Toro места, rде был остановлен процесс пересыл
172 . fлава 9. Прерыванuя
ки. В крайнем случае, если прерванная команда rрупповой заrрузки/сохранения
была условно выполняемой (т.е. входила в состав IТ блока), то её выполнение бу
дет прекращено, а после завершения обработчика прерывания запущено заново.
Это связано с тем, что поле ICI расположено в тех же битах реrистра EPSR, KOTO
рые используются для хранения состояния процесса выполнения команды IT.
Кроме Toro, при наличии незавершённой пересылки по шине, скажем при BЫ
полнении буферированной записи, процессор будет ожидать её завершения. Это
необходимо для Toro, чтобы в случае нештатной ситуации обработчик исключе
ния Bus Fault прервал бы корректный процесс.
Разумеется, прерывание может оказаться блокированным, если процессор
уже занят обработкой исключительной ситуации с таким же или более высоким
приоритетом или если запрос прерывания маскируется реrистром маскирова
ния прерываний. В таких случаях обработка прерывания будет отложена дО MO
мента снятия блокировки.
9.8. Отказы, связанные с прерываниями
Во время обработки исключений MorYT возникать различные отказы. Давайте
познакомимся с ними.
9.8.1. Сохранение контекста
При возникновении отказа шины во время сохранения реrистров в стеке, про
цесс сохранения контекста прерывается и запускается (или откладывается) вы
полнение обработчика исключения Bus Fault. Если это исключение запрещено, то
будет запущен обработчик исключения Hard Fault. В противном случае, если ис
ключение Bus Fault имеет приоритет, который выше приоритета текущеrо исклю
чения, то будет запущен обработчик исключения Bus Fault; если же нет то об
работка этоrо исключения будет отложена до завершения текущеrо обработчика.
Такое состояние, называемое ошибкой заzрузки в стек (stacking error), индициру
ется битом STKERR (бит 4) реrистра состояния отказа шины BFSR (OxEOOOED29).
Если ошибка заrрузки в стек была вызвана конфликтом с настройками MOДY
ля защиты памяти, то будет запущен обработчик исключения MemManage Fault
с одновременной установкой бита MSTKERR (бит 4) реrистра состояния отказа
управления памятью MMFSR (OxEOOOED28). Если исключение MemManage Fault
запрещено, то будет запущен обработчик исключения Hard Fault.
9.8.2. Восстановление контекста
При возникновении отказа шины во время извлечения реrистров из стека
(при возврате из прерывания) процесс восстановления контекста прерывается
и запускается (или откладывается) выполнение обработчика исключения Bus
Fault. Если это исключение запрещено, то будет запущен обработчик исключения
Hard Fault. В противном случае, если приоритет исключения Bus Fault выше при
оритета текущеrо исключения (при наличии вложенных прерываний процессор
к этому моменту уже может начать обработку HOBoro исключения), то будет запу
щен обработчик исключения Bus Fault. Данная ситуация, называемая ошибкой
9.8. Отказы, связанные с nрерыванuямu . 173
извлечения из стека (unstacking error), индицируется битом UNSTKERR (бит 3)
реrистра состояния отказа шины BFSR (OxEOOOED29).
Аналоrично, если ошибка извлечения из стека была вызвана конфликтом с Ha
стройками модуля защиты памяти, то будет запущен обработчик исключения
MemManage Fault с одновременной установкой бита MUNSTKERR (бит 3) реrи
стра состояния отказа системы управления памятью MMFSR (OxEOOOED28). Если
исключение MemManage Fault запрещено, то будет запущен обработчик исклю
чения Hard Fault.
9.8.3. Выборка вектора
Если во время выборки вектора произойдёт отказ шины или отказ системы
управления памятью, то будет запущен обработчик исключения Hard Fault. Эта
ситуация индицируется битом VECTTBL (бит 1) реrистра состояния тяжёлоrо
отказа HFSR (OxEOOOED2C).
9.8.4. Некорректный возврат
Если значение EXC RETURN некорректно или не соответствует состоянию
процессора (скажем, равно OxFFFFFFFl при возврате в режим потока), то будет
сrенерировано исключение Usage Fault. Если данное исключение не разрешено, то
будет запущен обработчик исключения Hard Fault. При возникновении отказа
устанавливается бит INVPC (бит 2) или INVSTATE (бит 1) реrистра UFSR
(OxEOOOED2A), в зависимости от причины отказа.
rлдвд 1 О
проrРАММИРОВАНИЕ CORTEX..M3
10.1. Общие сведения
Для проrраммирования процессора Cortex M3 можно использовать язык ac
семблера, язык Си или любой друrой язык BbIcoKoro уровня, наподобие языка
среды LabVIEW компании National Instruments. Проrраммный код большинства
встраиваемых приложений может быть целиком написан на Си. Разумеется,
встречаются разработчики, предпочитающие проrраммировать исключительно
на ассемблере или же использующие в своих проектах смесь языков Си и acceM
блера. Процесс создания проrраммноrо кода и заrрузки полученных двоичных
образов в конечное устройство в значительной мере определяется используемым
набором инструментов. Хотя это и HeMHoro выходит за рамки данной книrи,
в rлавах 19 и 20 приведены простые примеры использования набора инструмен
тов GNU и среды разработки компании КеН. А в fлаве 21 содержатся базовые CBe
дения о применении среды LabVIEW для проrраммирования устройств с ядром
Cortex M3.
10.2. Типичный процесс разработки ПО
Для разработки приложений под процессор Cortex M3 существует множество
различных проrраммных средств. Однако во всех этих средствах при rенерации
проrраммноrо кода применяются одни и те же принципы. Как минимум, вам по
требуется ассемблер, компилятор с языка Си, компоновщик (редактор связей),
а также утилиты для rенерации двоичноrо файла. Процесс создания проrрамм
с использованием таких решений компании ARM, как RealView Development Suite
(RVDS) или RealView Compiler Tools (RVCT), показан на Рис. 10.1.
Помимо указанных компонентов, в состав па кета RVDS также входит боль
шое число разнообразных утилит, включая интеrрированную среду разработки
(ИСР) и отладчики. Для получения более подробной информации посетите сайт
компании ARM (www.arт.coт).
10.3. Использование языка Си . 175
Си файлы (.с)
D
Объектные файлы (.0)
[J
Ассемблерные
файлы (.5)
D
(компилятор) исполняемои
проrраммы
Сценарий компоновщика (.аю /.elf) fromelf
Распреде q armlink q []
ление (компо
памяти новщик)
Объектные файлы ('V
a D
(ассемблер)
Двоичный образ
проrраммы (.bin)
[]
Дизассембли
рованный
код (.txt)
Рис. 10.1. Создание ПО с использованием средств разработки компании ARM.
10.3. Использование языка Си
Для тех, кто делает первые шаrи в проrраммировании для встраиваемых си
стем, наилучшим выбором для разработки ПО под процессор Cortex M3 будет
язык Си. Проrраммирование на Си для устройств с процессором Cortex M3 Becь
ма облеrчается тем, что подавляющее большинство производителей микрокон
троллеров предоставляют rOToBbIe библиотеки для управления периферийными
устройствами. В дальнейшем разработчик может подключать эти библиотеки
к своим проектам. Поскольку современные компиляторы языка Си rенерируют
очень эффективный код, лучше проrраммировать на Си, чем тратить кучу BpeMe
ни, пытаясь написать сложные подпроrраммы на ассемблере, которые к тому же
подвержены ошибкам и обладают меньшей переносимостью.
В этой rлаве мы сначала рассмотрим процесс создания простой проrраммы на
языке Си. Затем коснёмся некоторых аспектов проrраммирования на языке Си,
включая использование библиотек драйверов устройств и стандарт CMSIS.
По сравнению с языком ассемблера язык Си обеспечивает лучшую переноси
мость проrрамм и облеrчает реализацию сложных операций. Поскольку язык Си
является языком проrраммирования общеrо назначения, в нём отсутствуют
какие либо средства для определения процесса инициализации процессора. Эта
задача решается по разному, в зависимости от используемоrо инструментария.
Для начала лучше Bcero будет ознакомиться с примерами проrрамм. Те, кто
работает в средах разработки на базе компилятора ARM С, таких как RVDS или
MDK ARM, MorYT воспользоваться учебными проrраммами, входящими в co
став пакетов. Для тех же, кто предпочитает компилятор GNU, в fлаве 19 будет
описан процесс создания простой проrраммы в пакете Sourcery G++ компании
CodeSourcery.
176 . Тлава 10. Проzраммuрованuе Cortex M3
10.3.1. Компиляция простой Си..проrраммы в пакете
RVDS
Нормальная проrрамма на языке Си для процессора Cortex M3 содержит, как
минимум, «основную» процедуру и таблицу векторов. Давайте попробуем напи
сать проrрамму, которая включала бы светодиод в миrающем режиме:
#define LED *((volatile unsigned int *) (OxDFFFOOOC))
int main (void)
int 1;
volatile int J;
/* Счётчик циклов для функции задержки */
/* Переменная описана как volatile, чтобы */
/* во время оптимизации компилятор не убрал бы пустые циклы,
формирующие задержки*/
while (1) {
LED = ОхОО;
for (i=0;i<10;i++) {j=O;}
LED = ОхО1;
for (i=0;i<10;i++) {j=O;}
/* Переключаем СИД */
/* Формируем задержку */
/* Переключаем СИД */
/* Формируем задержку */
return О;
}
Назовём этот файл blinky.c. Таблицу векторов мы опишем в отдельном фай
ле, который назовём vectors. с. Помимо таблицы векторов, в данном файле TaK
же будут описаны несколько пустых обработчиков исключений (их можно будет
определить позже при написании KOHKpeTHoro приложения):
typedef void(* const ExecFuncPtr) (void) irq;
extern int main(void);
/*
* Пустые обработчики исключений
*/
irq void NMI Handler(void)
{ while (1); }
irq void HardFault Handler(void)
{ whi le (1); }
irq void SVC Handler(void)
{ while (1); }
irq void DebugMon Handler(void)
{ whi le (1); }
irq void PendSV Handler(void)
{ whi le ( 1); }
irq void SysTick Handler(void)
{ whi le ( 1); }
irq void ExtIntO IRQHandler(void)
{ whi le ( 1); }
irq void ExtInt1 IRQHandler(void)
{ whi le ( 1); }
irq void ExtInt2 IRQHandler(void)
{ while (1); }
irq void ЕхtIпtЗ IRQНапdlеr(vоid)
10.3. Использование языка Си . 177
{ while (1); }
#pragma arm section rodata=»exceptions area»
ExecFuncPtr exception table[] = { /* Таблица векторов */
(ExecFuncPtr)Ox20002000,
(ExecFuncPtr) main,
NMI Handler, /* NMI */
HardFault Handler,
О, /* MemМanage Handler в Соrtех МЗ */
О, /* BusFault Handler в Соrtех МЗ */
О, /* UsageFault Handler в Соrtех МЗ */
О, /* Зарезервировано */
О, /* Зарезервировано */
О, /* Зарезервировано */
О, /* Зарезервировано */
SVC Handler,
О, /* DebugMon Handler в Соrtех МЗ */
О, /* Зарезервировано */
PendSV Handler,
SysTick Handler,
/* Внешние прерывания */
ExtIntO IRQHandler,
ExtInt1 IRQHandler,
ExtInt2 IRQHandler,
ЕхtIпtЗ IRQHandler
} ;
#pragma arm section
При использовании компилятора RVDS для компиляции указанных файлов
можно использовать следующие командные строки:
$> armcc c g w blinky.c o blinky.o
$> armcc c g w vectors.c o vectors.o
Для rенерации образа проrраммы необходима отдельная проrрамма, называ
емая компоновщиком, или линкером. Чтобы сообщить этой проrрамме о распре
делении памяти и разместить таблицу векторов в начале образа, используется
файл сценария компоновщика led.scat, представляющий собой обычный TeKCTO
вый файл:
#define НЕАР BASE Ох20001000
#define STACK BASE Ох20002000
#define НЕАР SIZE ((STACK BASE HEAP BASE) /2)
#define STACK SIZE ((STACK BASE HEAP BASE)/2)
LOAD REGION ОхОООООООО ОхО0200000
{
VECTORS ОхО ОхСО
{
Provided Ьу the user in vectors.c
* (exceptions area)
}
СОDЕ ОхСО FIXED
{
* ( + RO )
178 · Тлава 10. Проzраммuрованuе Cortex M3
DATA Ох20000000 OxOOOlOOOO
{
* (+RW, +Z1)
;; Неар starts at 4КВ and grows upwards
ARМ L1B НЕАР НЕАР BASE ЕМРТУ НЕАР S1ZE
........ ........
{
}
" Stack starts at the end of the 8КВ of RAМ
" And grows downwards for 2КВ
ARМ L1B STACK STACK BASE ЕМРТУ STACK S1ZE
{
}
А командная строка для запуска линкера будет иметь вид:
$> arrnlink scatter led.scat « keep=vectors.o(exceptions area)>>
blinky.o vectors.o o blinky.elf
В результате мы получим образ исполняемой проrраммы blinky.elf. Ис
пользуя утилиту frornelf, мы можем преобразовать ero в двоичный файл, а TaK
же дизассемблировать:
/* Создаём двоичный файл */
$> frornelf bin blinky.elf output blinky.bin
/* Создаём дизассемблированный файл */
$> fromelf c blinky.elf > list.txt
В предыдущих процессорах ARM, поддерживающих два состояния (ARM
и Thumb), код для каждоrо из состояний необходимо было компилировать по OT
дельности. Процессор Cortex M3 всеrда находится в состоянии Thumb, что значи
тельно упрощает управление файлами, входящими в проект.
При разработке приложений на языке Си рекомендуется использовать стек,
выровненный на rраницу двойноrо слова (определяется битом STKALIGN реrи
стра CCR контроллера NVIC). Начиная со 2 й ревизии процессора Cortex M3,
этот бит установлен по умолчанию. При использовании процессора l й ревизии
указанный бит необходимо устанавливать вручную, скажем в самом начале про
rpaMMbI. Более подробно об использовании данноrо бита было рассказано в rла
ве 9.
SCB >CCR = SCB >CCR I Ох200; /* Установили STКAL1GN */
/* SCB >CCR определено в библиотеке драйвера устройства */
Следующие строки выполняют ту же операцию, но уже без использования
СМSIS совместимоrо драйвера устройства:
#define NV1C CCR *((volatile unsigned long *) (OxEOOOED14))
NV1C CCR = NV1C CCR I Ох200; /* Установили STKAL1GN */
Выравнивание стека на rраницу двойноrо слова обеспечивает соответствие
кода проrраммы соrлашениям AAPCS (более подробно об этом будет рассказано
в [лаве 12).
10.3. Использование языка Си . 179
10.3.2. КОМПИЛЯЦИЯ простой Си..проrраммы в па кете
MDK..ARM
Приведённую выше проrрамму можно скомпилировать и в пакете MDK ARM
компании КеН. Необходимо будет только скорректировать формат командной
строки и некоторые определения в файле сценария компоновщика. Так, файл
led. scat должен выrлядеть следующим образом:
#define НЕАР BASE Ох20001000
#define STACK BASE Ох20002000
#define HEAP SIZE ((STACK BASE HEAP BASE) /2)
#define STACK SIZE ((STACK BASE HEAP BASE) /2)
LOAD REGION ОхОООООООО ОхОО200000
{
VECTORS ОхО ОхСО
{
Provided Ьу the user in vectors.c
* (exceptions area)
СОDЕ ОхСО FIXED
{
* ( + RO )
DАТА Ох20000000 ОхОООl0000
{
* (+ RW, + Z 1)
;; Неар starts at 4КВ and grows upwards
Heap Meт HEAP BASE ЕМРТУ HEAP SIZE
{
}
" Stack starts at the end of the 8КВ of RAМ
" And grows downwards for 2КВ
Stack Мет STACK BASE ЕМРТУ STACK SIZE
{
}
А для компиляции проrраммы можно создать пакетный файл DOS, содержа
щий следующие команды:
SET PATH=C:\Keil\ARМ\BIN40\;%PATH%
SET RVCT40INC=C:\Keil\ARМ\RV31\INC
SET RVCT40LIB=C:\Keil\ARМ\RV31\LIB
SET СРИ TYPE=Cortex M3
SET СРИ VENDOR=ARМ
ЗЕТ UV2 TARGET Target 1
SET СРИ CLOCK=OxOOOOOOOO
C:\Keil\ARМ\BIN40\armcc c оз W ч Otime device DLM vectors.c
C:\Keil\ARМ\BIN40\armcc c оз w ч Otime device DLM blinky.c
180 . [лава 10. Проzраммuрованuе Cortex M3
C:\Keil\ARМ\BIN40\armlink device DLM « keep=Startup.o(RESET)>>
« first=Startup.o(RESET)>> scatter led.scat map vectors.o
blinky.o o blinky.elf
C:\Keil\ARМ\BIN40\fromelf bin blinky.elf o blinky.bin
Конечно же, для создания и компиляции проектов rораздо удобнее использо
вать ИСР Vision, нежели командную строку. Для начинающих разработчиков,
собирающихся разрабатывать ПО с использованием среды MDK ARM компании
КеН, предназначена [лава 20 данной книrи.
10.3.3. Отображённые в память реrистры и язык Си
Существуют различные способы для обращения к реrистрам периферийных
устройств, отображённых в память процессора, из проrрамм на языке Си. Проде
монстрируем их на при мере реrистров системноrо таймера (SYSTICK) процессо
ра Cortex M3. Это обычный 24 битный таймер, который имеет Bcero 4 реrистра.
Конкретно функциональные возможности таймера SYSTICK будут рассмотрены
в [лаве 14. В предыдущих при мерах мы уже использовали простейший метод об
ращения к реrистрам, заключающийся в описании каждоrо реrистра как указате
ля. Опишем таким образом и реrистры модуля SYSTICK (Рис. 10.2).
#define SYSTICK aRL (*((volatile unsigned long *)(ОхЕОООЕОl О)))
#define SYSTICK LOAD (*((volatile unsigned long *)(ОхЕОООЕО14)))
#define SYSTICK V AL (*((volatile unsigned long *)(ОхЕОООЕО18)))
#define SYSTICK CALIB (*((volatile unsigned long *)(ОхЕОООЕОl С)))
/* Инициализируем SYSTICK */
SYSTICK LOAD = OxFFFF; // 3адаём значение перезаrрузки
SYSTICK VAL = ОхО; // Сбрасываем текущее значение
SYSTICK aRL = Ох5; // Разрешаем SYSTICK и выбираем такт. сиrнал
CALIB ОхЕОООЕОlС
VALUE ОхЕОООЕО18 Реrистры
таймера
RELOAO ОхЕОООЕО14 SYSTICK
CТRL ОХ ЕОООЕО 1 О
Рис. 10.2. Обращение к pezucmpaM по указателю.
Этот метод можно HeMHoro модифицировать, написав макроопределение,
преобразующее значение адреса реrистра в указатель. В результате текст про
rpaMMbI будет выrлядеть HeMHoro иначе, однако rенерируемый код будет точно
таким же, как и в предыдущей реализации (Рис. 10.3).
#define HW REG(addr) (*((volatile unsigned long *)(addr)))
#define SYSTICK aRL ОхЕОООЕОl0
#define SYSTICK LOAD ОхЕ 000ЕО14
#define SYSTICK V AL ОхЕ 000ЕО18
#define SYSTICK CALIB охЕ ОООЕОl С
/* Инициализируем SYSTICK */
HW REG(SYSTICK LOAD) = OxF FFF; // Задаём значение перезаrрузки
HW REG(SYSTICK VAL) = ОхО; // Сбрасываем текущее значение
HW REG(SYSTICK aRL) = Ох5; // Разрешаем SYSTICK и выбираем
// тактовый сиrнал
CALI8 ОхЕ ОООЕОl С
VALUE ОхЕ ОООЕО18 Реrистры
таймера
RELOAO ОхЕОООЕО14 SYSTICK
CТRL ОхЕ ОООЕОl0
Рис. 10.3. Обращение к pezucmpaM по указателю (альтернативный вариант).
10.3. Использование языка Си . 181
Второй метод заключается в описании всех реrистров периферийноrо устрой
ства в виде структуры с последующим определением указателя на данную CTPYK
туру (Рис. 10.4). Этот метод используется в СМSIS совместимых библиотеках
драйверов устройств.
typedef struct
{
volatile unsigned long CТRL; /* Реrистр управления и состояния SysTick */
volatile unsigned long LOAD; /* Реrистр значения перезаrрузки SysTick */
volatile unsigned long VAL; /* Реrистр текущеrо значения SysTick */
volatile unsigned long CALIB; /* Реrистр калибровочноrо значения SysТick */
} SysTick Type;
SysTick Туре
#define SysTick «SysTick Туре *) ОхЕОООЕО1 О ) /* Структура SysТick */
САВВ
VALUE
RELOAD
CТRL
ОхЕОООЕО1С
ОхЕОООЕО18
ОхЕОООЕО14
ОхЕОООЕО10
Реrистры
таймера
SYSTICK
/* Инициализируем SYSTICK */
SysTick >LOAD = OxFFFF; // 3адаём значение перезаrрузки
SysTick >VAL = ОхО; // Сбрасываем текущее значение
SysTick >CТRL = OxS; / / Разрешаем SYSTICK и выбираем такт. сиrнал
Рис. 10.4. Обращение к pezucmpaM как к полям структуры.
Третий метод тоже основан на использовании структуры, однако базовый
адрес периферийноrо устройства определяется в файле сценария компоновщика
и подставляется в код на этапе компоновки проrраммы (Рис. 10.5).
в Си файле определяем структуру данных как
attribute «zero init)) struct {
volatile unsigned long CТRL; /* Реrистр управления и состояния SysTick */
volatile unsigned long RELOAD; /* Реrистр значения перезаrрузки SysTick */
volatile unsigned long VAL; /* Реrистр текущеrо значения SysTick */
volatile unsigned long CALIB; /* Реrистр калибровочноrо значения SysTick */
} SYSTICK struct;
SYSTICK struct
systick reg.o ( + ZI)
CALI8
VALUE
RELOAD
CТRL
ОхЕОООЕО1С
ОхЕОООЕО18
ОхЕОООЕО14
ОхЕОООЕО10
Реrистры
таймера
SYSTICK
Затем добавляем в файл сценария компоновщика директивы,
размещающие эту структуру по требуемому адресу
LOAD FLдSH О хОООО
{
SYSTICK ОхЕОООЕО10 UNINIT
{
Рис. 10.5. Определение базовоzо адреса периферийноzо устройства в файле сценария
компоновщика.
В последнем случае блок реrистров периферийноrо устройства должен быть
описан в проrрамме как внешний указатель. При этом обращение к конкретным
реrистрам производится так же, как и при использовании BToporo метода.
Первый метод, применение KOToporo показано на Рис. 10.2 и Рис. 10.3, являет
ся самым простым, но в то же время и наименее эффективным по сравнению
с прочими методами, поскольку значения адресов реrистров хранятся в виде KOH
стант. В итоrе увеличивается размер кода проrраммы и может замедлиться её BЫ
полнение, поскольку для считывания значений адресов потребуются дополни
182 . [лава 10. Проzраммuрованuе Cortex M3
тельные обращения к памяти проrрамм. В то же время при использовании толь
ко одноrо реrистра для управления периферийным устройством эффективность
данноrо метода оказывается такой же, как и друrих методов.
Второй метод (использование указателя на структуру) при меняется, пожалуй,
чаще Bcero. Этот метод позволяет обращаться ко всем реrистрам периферийноrо
устройства, используя единственную константу базовый адрес устройства.
Для обращения к конкретным реrистрам в данном случае можно задействовать
режим адресации с непосредственным смещением. Указанный метод применяет
ся в стандарте CMSIS, который будет рассмотрен в следующем разделе.
Третий метод, в котором задействуется файл сценария компоновщика
(Рис. 10.5), по эффективности эквивалентен 2 MY методу, однако обладает rораз
до меньшей переносимостью из за необходимости использования отдельноrо
файла сценария (формат и синтаксис этоrо файла зависят от KOHKpeTHoro cpeд
ства разработки). Применение данноrо метода оправдано в том случае, если вы
разрабатываете библиотеку драйверов для периферийноrо устройства, которое
будет использоваться в разных изделиях и базовый адрес KOToporo в каждом слу
чае становится известным только на этапе компоновки.
10.3.4. Встроенные функции
Использование языка BbIcoKoro уровня, TaKoro как Си, значительно ускоряет
разработку приложений. Однако в ряде случаев возникает потребность в исполь
зовании определённых команд, которые не MorYT быть сrенерированы с помо
щью стандартных конструкций языка. Поэтому в некоторых компиляторах Си
имеются встроенные (intrinsic) функции, позволяющие использовать в проrрам
ме такие команды. Обращение к встроенным функциям производится так же,
как и к обычным пользовательским функциям. В качестве примера в Табл. 10.1
перечислены встроенные функции, поддерживаемые компиляторами ARM.
Таблица 10.1. Встроенные функции, поддерживаемые компиляторами ARM
Команда ассемблера Встроенная функция
CLZ unsigned char clz(unsigned int val)
CLREX void clrex(void)
CPSID 1 void disable irq(void)
CPSIE 1 void enable irq(void)
CPSID F void disable fiq(void)
CPSIE F void enable fiq(void)
LDREX/LDREXB/LDREXH unsigned int ldrex(volatile void *ptr)
LDRT/LDRBT/LDRSBT/LDRHT/LDRSHT unsigned int ldrt(const volatile void *ptr)
NOP void nop(void)
RBIT unsigned int rbit(unsigned int val)
REV unsigned int rev(unsigned int val)
ROR unsigned int ror(unsigned int val, unsigned int shift)
SSAT int ssat(int val, unsigned int sat)
SEV void sev(void)
10.4. Стандарт CMSIS . 183
Таблица 10.1. Встроенные функции, поддерживаемые компиляторами ARM
(продолжение)
Команда ассемблера Встроенная функция
STREX/STREXB/STREXH int strex(unsigned int val, volatile void *ptr)
STRT/STRBT/STRHT void int strt(unsigned int val) const volatile void *ptr)
USAT int usat(unsigned int val) unsigned int sat)
WFE void wfe(void)
WFI void wfi(void)
ВКРТ void breakpoint(int val)
10.3.5. Встроенный и iпliпе..ассемблер
Вместо использования встроенных функций мы можем напрямую вставлять
команды ассемблера в текст проrрамм на Си. Как правило, потребность в этом
возникает при управлении системой на низком уровне или же при необходимо
сти реализации критичной ко времени исполнения процедуры. Большинство
компиляторов языка Си для процессоров ARM позволяют внедрять ассемблер
ный код в текст проrраммы, используя iпliпе ассемблер.
Компилятор ARM позволяет выполнять вставку ассемблерных команд в текст
проrраммы на языке Си. Традиционно для этоrо используется iпliпе ассемблер,
однако iпliпе ассемблер компилятора RealView не поддерживает команды
Thumb 2. Начиная с версии 3.0, в компиляторе появилась поддержка так называ
eMoro BCTpoeHHoro ассемблера, поддерживающеrо команды из набора Thumb 2.
Например, вы можете вставить в свою проrрамму ассемблерную функцию, опи
сав её следующим образом:
asm void SetFaultMask(unsigned int new value)
// Используем ассемблерный код
MSR FAULTМASK, new value // Заносим новое значение в FAULTМASK
ВХ LR // Возвращаемся в вызывающую проrрамму
Подробно встроенный ассемблер компилятора RealView описан в PYKOBOД
стве [6]. Применительно к процессору Cortex M3 встроенный ассемблер полезен
для решения таких задач, как непосредственная манипуляция стеком и реализа
ция критичных ко времени выполнения процедур (кодеки).
10.4. Стандарт CMSIS
10.4.1. Предпосылки появления стандарта CMSIS
На сеrодняшний день микроконтроллеры с процессором Cortex M3 активно
захватывают рынок встраиваемых приложений появляется всё больше и боль
ше устройств, основанных на этом процессоре, а также проrраммноrо 06еспече
ния, поддерживающеrо данные устройства. К концу 2008 rода процессор
Cortex M3 поддерживали уже более пяти компиляторов разных производителей
и более 15 различных встраиваемых ос. Помимо этоrо, на рынке присутствует
184 . Тлава 10. Проzраммuрованuе Cortex M3
множество компаний, предлаrающих собственные проrраммные решения, такие
как кодеки, библиотеки обработки данных, а также различные средства проrрам
мирования и отладки. Стандарт CMSIS (Cortex Microcontroller Software Interface
Standard стандарт проrраммноrо интерфейса микроконтроллеров с ядром
Cortex), разработанный компанией ARM, позволяет пользователям микрокон
троллеров с ядром Cortex M3 извлечь максимальную выrоду из всех этих про
rpaMMHbIx решений и быстро разрабатывать собственные высоконадёжные
встраиваемые приложения (Рис. 10.6).
Проrраммное обеспечение
Библиотека драйверов устройств
Микроконтроллер
Прикладное
ПО
Соrtех МЗ/
Cortex MO/
Cortex M 1
Встраиваемые
ОС
Промежуточное
ПО
Рис. 10.6. Роль CMSIS в разработке встраиваемых приложений.
Разработка стандарта CMSIS, который позволил бы улучшить потребитель
ские свойства и функциональную совместимость проrраммноrо обеспечения
для микроконтроллеров ARM, была начата в 2008 rоду. Этот стандарт нашёл при
менение в библиотеках драйверов, предлаrаемых производителями микрокон
троллеров, обеспечивая стандартизованный проrраммный интерфейс для дo
ступа к функциональным возможностям процессора Cortex M3, а также различ
ные системные функции и функции ввода/вывода. Подобные библиотеки также
поддерживаются компаниями разработчиками ПО, включая разработчиков
встроенных ОС, а также производителей компиляторов.
При создании CMSIS преследовались следующие цели:
. улучшить переносимость и степень повторноrо использования rOToBoro кода;
. предоставить поставщикам проrраммных решений возможность разработки
продуктов, которые моrли бы без всяких проблем работать с библиотеками
различных производителей микроконтроллеров;
. уменьшить время разработки ПО за счёт простоrо и стандартизованноrо про
rpaMMHoro интерфейса;
. обеспечить возможность создания BCTpoeHHoro ПО с использованием различ
ных компиляторов;
. исключить проблемы с совместимостью проrраммных модулей из различных
источников.
Первая версия стандарта CMSIS была представлена на суд общественности
в 4 M квартале 2008 rода и в настоящее время входит в состав библиотек драйве
ров устройств, предлаrаемых различными производителями микроконтролле
ров. Стандарт CMSIS также поддерживает процессорное ядро Cortex MO.
10.4. Стандарт CMSIS · 185
10.4.2. Области стандартизации
Действие стандарта CMSIS распространяется на следующие области:
. Уровень аппаратной абстракции для pezucmpOB процессора Cortex M. Это касается
унифицированных обозначений реrистров контроллера NVIC, блока управления
системой SBC, системноrо таймера SYSTICK, модуля MPU, а также ряда функций
для использования возможностей контроллера NVIC и ядра процессора.
. Унифицированные названия системных исключений. Это позволяет 6пераци
онным системам и промежуточному по использовать системные исключения
без всяких проблем с совместимостью.
. Унифицированная структура заzоловочных файлов. Это облеrчает переход пользо
вателей на новые микроконтроллеры с ядром Cortex и улучшает переносимость по.
. Единообразная инициализация системы. Каждый производитель микрокон
троллеров предоставляет в библиотеке драйверов для своих микроконтролле
ров функцию SystemInit(), выполняющую основные операции по конфиrу
рированию микроконтроллера, такие как инициализация системы тактиро
вания. И опять же, это помоrает новичкам освоить микроконтроллеры
с ядром Cortex M и облеrчает перенос по.
. Стандартные встроенные функции. Встроенные функции, как правило, ис
пользуются для вызова команд процессора, которые не MorYT быть сrенериро
ваны стандартными конструкциями языка си 1 ). При наличии стандартных
встроенных функций значительно увеличиваются возможности повторноrо
использования кода и переносимость по.
. Общие функции для передачи данных. Это набор интерфейсных функций для
типовых коммуникационных интерфейсов, таких как UART, Ethernet и SPI.
Блаrодаря наличию в библиотеках драйверов устройств таких функций улуч
шается переносимость BCTpoeHHoro по и увеличивается возможность по
BTopHoro использования кода. На момент написания книrи данные функции
ещё находились в процессе разработки.
. Унифицированный метод определения тактовой частоты системы. В драй
вере устройства определена rлобальная переменная SystemFrequency, с по
мощью которой встраиваемые ОС MorYT настраивать модуль SYSTICK в COOT
ветствии с тактовой частотой системы.
В стандарте CMSIS определены основные требования к по, обеспечивающие
переносимость и возможность повторноrо использования кода. Производители
микроконтроллеров MorYT включать в библиотеки дополнительные функции для
поддержки своей периферии. Соответственно, использование CMSIS никоим об
разом не оrраничивает возможности встраиваемых устройств.
10.4.3. Структура CMSIS
Собственно стандарт CMSIS описывает несколько взаимосвязанных уровней.
1) Возможности языка Си/Си++ определены в стандарте ISO/IEC 14882, подrотовленном
международной орrанизацией стандартов (ISO) совместно с международной
электротехнической комиссией (IEC).
186 · Fлава 10. Проzраммuрованuе Cortex M3
Core Peripheral Access Layer (уровень доступа к периферии ядра)
· Определения имён, определения адресов, а также вспомоrательные функции
для доступа к реrистрам и периферии ядра процессора.
Middleware Access Layer (уровень доступа промежуmОЧНО20 по)
· Общие методы для обращения к периферийным устройствам для разработчи
ков ПО (в процессе разработки).
· Поддержка коммуникационных интерфейсов, таких как Ethernet, UART и SPI.
· Позволяет переносимому ПО осуществлять обмен данными на любом микро
контроллере с ядром Cortex, поддерживающем требуемый коммуникацион
ный интерфейс.
Device Peripheral Access Level (уровень доступа к периферии устройства,
определяется производителем микроконтроллера)
· Определения имён, определения адресов и вспомоrательные функции для об
ращения к периферийным устройствам.
Access Functions for Peripherals (функции доступа к периферии,
определяются производителем микроконтроллера)
· Опциональные дополнительные функции для работы с периферийными
устройствами.
Место каждоrо из уровней в иерархии CMSIS показано на Рис. 10.7.
мси
Уровень
попЬЗ0
ватепя
RTOS
CMSIS
Рис. 10.7. Структура CMSIS.
10.4. Стандарт CMSIS . 187
10.4.4. Использование стандарта CMSIS
Поскольку стандарт CMSIS, условно rоворя, «внедрён» В библиотеки драйве
ров устройств, то для ero использования в проекте не требуется предпринимать
никаких специальных мер. Для каждоrо микроконтроллера производитель пре
доставляет заrоловочный файл <device>.h, который, в свою очередь, содержит
директивы вставки дополнительных заrоловочных файлов, требуемых библиоте
кой драйвера устройства, в том числе и заrоловочный файл уровня доступа к пе
риферии ядра, разработанный компанией ARM (Рис. 10.8).
О
пр
пе
r ........
core cm3.h
пределения номеров r ........
ерываний и реrиаров core cm3.c
риферийных уаройав \..
/
<device> .h ""'1
system <device>.h
/" ........
r ""'\
r-.. system <device>.c
Файлы со аартовым коде N r-..
\.. ./
\.
\. r ""
Различные варианты aapToBoro Оаальные заrоловочные
ода для разных инарументариев файлы
\..
Уровень доступа
к периферии ядра
Описания вароенных
функций
Сиаемные функции, включая
функцию инициализации
(объявления)
Сиаемные функции, включая
функцию инициализации
(описания)
к
Уровень доступа
к периферии уаройава
и дополнительные функции
доступа
Рис. 10.8. Файлы CMSIS.
Файл core сmЗ. h содержит определения реrистров периферийных
устройств и описания функций доступа к периферии процессора Cortex M3, Ta
кой как контроллер NVIC, реrистры управления системой и реrистры системно
ro таймера SYSTICK. Файл core сmЗ. h также содержит объявления встраивае
мых функций стандарта CMSIS, позволяющих использовать команды процессо
ра, которые не MorYT быть сrенерированы при использовании стандартных KOH
струкций языка. Кроме Toro, этот файл содержит описание функции для вывода
отладочной информации через модуль ITM.
Следует заметить, что имена некоторых встроенных функций CMSIS MorYT
совпасть с именами встроенных функций компилятора, однако функции CMSIS
не зависят от используемоrо компилятора.
Файл core сmЗ. с содержит описания встроенных функций CMSIS, которые
не MorYT быть реализованы в файле core сmЗ. h в виде макроопределений.
Файл system <device>.h содержит объявление, а файл
system <device>.c описание функции Systemlnit(), предназначенной для
инициализации системы (реализация этой функции зависит от KOHKpeTHoro ми
кроконтроллера).
188 · Fлава 10. ПрО2раммuрованuе Cortex M3
в самом файле <device>.h содержатся определения номеров прерываний
и реrистров периферийных устройств KOHKpeTHoro устройства.
Кроме Toro, СМSIS совместимые драйверы устройств также содержат CTapTO
вый код (с таблицей векторов) для всех поддерживаемых компиляторов, а также
СМSIS версии встроенных функций, что позволяет встроенному ПО использо
вать все возможности ядра независимо от применяемоrо компилятора.
Примеры использования стандарта CMSIS можно найти на сайтах производи
телей микроконтроллеров. Подобные примеры также можно найти в самих би
блиотеках драйверов. Кроме Toro, вы можете заrрузить с сайта www.oпarт.coт
пакет CMSIS, содержащий при меры и документацию. В этом же па кете можно
найти документацию на функции общеrо назначения.
Простейший пример использования стандарта CMSIS при разработке соб
cTBeHHoro приложения показан на Рис. 10.9. Чтобы воспользоваться функциями
CMSIS для конфиrурирования прерываний и исключений, необходимо задей
ствовать константы, определённые в файле <device>.h. Значения указанных
констант отличаются от номеров исключений, используемых реrистрами ядра,
например реrистром IPSR. В CMSIS дЛЯ системных исключений используются
отрицательные значения, а для прерываний периферии положительные.
# include "veпdor device. h" / / Например,
// lrnЗs сrnsis.h для микроконтроллеров Texas Instrurnents
// LPC17xx.h для микроконтроллеров NXP
// strnЗ2fl0х.h для микроконтроллеров ST
Унифицированное имя функции
инициализации системы (начиная
с версии 1.30 CMSIS эта функция
вызывается из cтapToBoro кода)
Настройка контроллера NVIC
NVIC SetPrior i ty (UARTl IRQn, ОХО); } peДCТBOM функций доступа к ядру
NVIC EnableIRQ(UARTl IRQn);
Номера прерываний,
... определённые в <device.h>
{
void rnain(void)
Systernlni t () ;
}
void UARTl IRQHandler
Имена обработчиков прерываний
зависят от KOHKpeTHoro устройства
и определяются в файле со стартовым KOДO
void SysTick Handler(void)
Имена обработчиков системных
исключений одинаковы для всех
ми кроконтроллеров семейства Cortex
Рис. 10.9. Прим.ер использования CMSIS.
Чтобы создать переносимое приложение, вы должны использовать для обра
щения к процессору и периферийным устройствам функции доступа к ядру
и функции промежуточноrо ПО соответственно. Это позволит вам перенести
приложения с одноrо микроконтроллера на друrой с минимальными усилиями.
Более подробно СМSIS функции, как общеrо назначения, так и встроенные,
описаны в Приложении ж.
10.4. Стандарт CMSIS . 189
10.4.5. BbIroAa ОТ использования CMSIS
и всё же, что стандарт CMSIS даёт конечному пользователю!
Прежде Bcero, стандарт CMSIS значительно улучшает переносимость и увели
чивает возможность повторноrо использования проrраммноrо кода. Следование
этому стандарту не только облеrчает переход между разными микроконтролле
рами с ядром Cortex M3, но и позволяет ускорить процесс переноса проrраммно
ro обеспечения с процессора Cortex M3 на друrие процессоры линейки Cortex M,
тем самым сокращая время вывода продукта на рынок.
Для разработчиков встраиваемых ОС и промежуточноrо ПО выrода от ис
пользования стандарта CMSIS rораздо существеннее. Применение этоrо CTaHдap
та позволит обеспечить совместимость их продукции с драйверами устройств
для микроконтроллеров самых разных производителей, в том числе и для тех
устройств, которые пока существуют только на бумаrе (Рис. 10.10). Если не ис
пользовать CMSIS, то поставщики ПО должны либо предоставлять небольшую
библиотеку функций для работы с ядром Cortex M3, либо разрабатывать множе
ство конфиrураций для своей продукции, позволяющих ей работать с библиоте
ками от различных производителей микроконтроллеров.
Приложение
Вараиваемая ОС/
промежуточное ПО
Приложение
Вараиваемая 0(/
промежуточное ПО
Библиотека драйверов
от производителя ОС/
промежуточноrо ПО
Библиотека драйверов с использованием
CMSIS от производителя микроконтроллера
Библиотека драйверов
от производителя
микроконтроллера
Периферия
Процессорное
ядро
Периферия
Процессорное
ядро
В отсутствие CMSIS вараиваемые ОС
и промежуточное ПО должны содержать
функции доступа к процессорному ядру
и, возможно, драйверы некоторых
периферийных уаройав
Рис. 10.10. Стандарт CMSIS как средство против дублирования кода.
При наличии CMSIS вараиваемые ОС
и промежуточное ПО MOryт использовать
унифицированные функции доступа к ядру
из библиотеки драйверов
Стандарт CMSIS очень нетребователен к памяти (необходимо менее 1 Кбайт
для всех функций доступа к ядру и несколько байтов ОЗУ). Он также позволяет
избежать дублирования кода драйвера периферии ядра при повторном исполь
зовании кода из друrоrо проекта.
Поскольку стандарт CMSIS поддерживается мноrими разработчиками KOM
пиляторов, для компиляции встраиваемоrо ПО можно использовать самые раз
ные компиляторы. Это позволяет разрабатывать встраиваемые ОС и промежу..
точное ПО, которые были бы независимы как от производителей микроконтрол
леров, так и от производителей средств разработки. До появления стандарта
190 . fлава 10. Проzраммuрованuе Cortex M3
CMSIS в каждом компиляторе были, как правило, свои собственные встроенные
функции, что затрудняло перенос ПО на друrой компилятор.
Поскольку все СМSIS совместимые библиотеки драйверов устройств имеют
одинаковую структуру, значительно облеrчается изучение новых микроконтрол
леров Cortex M3 (проrраммный интерфейс практически не меняется, т.е. нет He
обходимости изучать новый API).
В тестировании стандарта CMSIS принимало участие множество людей; KpO
ме Toro, он совместим с требованиями MISRA 1 ). Всё это позволяет уменьшить за
траты на тестирование ПО, необходимое при разработке собственных функций
работы с ядром или контроллером NVIC.
10.5. Использование ассемблера
Небольшие проекты MorYT быть целиком и полностью описаны на ассемблере.
Однако следует учесть, что для начинающих разработчиков это часто оказывает
ся довольно сложной задачей. Используя ассемблер, вы можете по максимуму
оптимизировать код приложения так, как считаете необходимым; правда, такой
подход чреват увеличением времени разработки, а также появлением различных
ошибок. Кроме Toro, обработка сложных структур данных на языке ассемблера,
так же как и управление библиотеками функций, может оказаться весьма нетри
виальной задачей. И тем не менее, даже при написании приложения на языке Си
может возникнуть необходимость в использовании ассемблера:
· для реализации функций, которые не MorYT быть написаны на Си, например
функций, напрямую манипулирующих содержимым стека или использую
щих специальные команды, которые не MorYT быть получены с помощью CTaH
дартных конструкций языка;
· для написания процедур, критичных ко времени выполнения;
· при оrраниченных объёмах памяти, что требует написания части проrраммы
на ассемблере для получения как можно более компактноrо кода.
10.5.1. Интерфейс между ассемблером и Си
Рано или поздно ассемблерному коду приходится взаимодействовать с про
rраммой, написанной на языке Си:
· при использовании BCTpoeHHoro ассемблера (или, в случае средств GNU,
iпliпе ассемблера) в тексте проrраммы на Си;
· при вызове из проrраммы на Си функции или процедуры, написанной на ac
семблере и реализованной в отдельном файле;
· при вызове из ассемблерной проrраммы процедуры или функции, написан
ной на Си.
При этом необходимо чётко представлять себе, каким образом осуществляет
ся передача параметров в вызываемую функцию и возврат результата её работы
в вызывающую проrрамму. Механизм TaKoro взаимодействия детально описан
в стандарте AAPCS [5].
1) Motor Industry Software Reliability Association Ассоциация по вопросам надёжности
проrраммноrо обеспечения в автомобильной промышленности. Прuмеч. пер.
10.5. Использование ассемблера. 191
в простейших случаях для передачи параметров используются реrистры
RO...R3 процессора, при этом в реrистре RO передаётся l й параметр, в реrистре
Rl 2 й и т.д. Аналоrично, реrистр RO используется для передачи значения, воз
вращаемоrо вызываемой функцией. Реrистры RO.. .R3 и R12 MorYT изменяться
в функции или процедуре, тоrда как содержимое реrистров R4...Rll должно co
храняться при входе в подпроrрамму и восстанавливаться при выходе из неё.
Обычно для этой цели используют стек.
Необходимо отметить, что при меры, имеющиеся в книrе, не в полной мере
следуют рекомендациям стандарта AAPCS это было сделано для Toro, чтобы
облеrчить их понимание. При вызове Си функции из ассемблерной проrраммы
нужно учитывать возможность изменения реrистров RO.. .R3 и R12. Если coдep
жимое этих реrистров потребуется в дальнейшем, то их необходимо сохранить
в стеке перед вызовом функции и восстановить из стека после возврата из неё.
Поскольку в примерах вызываются, rлавным образом, только ассемблерные про
цедуры и функции, которые изменяют лишь некоторые реrистры или же BOCCTa
навливают содержимое реrистров перед возвратом, сохранять реrистры RO.. .R3
и R12 нет необходимости.
10.5.2. Проrраммирование на ассемблере...... первые шаrи
в этой rлаве приводится несколько учебных проrрамм, написанных на acceM
блере. Конечно же, в своей практической деятельности вы в большинстве случа
ев будете проrраммировать на Си. Однако изучая ассемблерные проrраммы,
можно лучше разобраться в том, как использовать процессор Cortex M3. Приве
дённые ниже примеры написаны на ассемблере ARM (armasm) из состава пакета
разработки RVDS. Ассемблер, имеющийся в пакете проrрамм MDK ARM компа
нии КеН, задействует HeMHoro друrие параметры командной строки. При исполь
зовании друrих ассемблеров потребуется изменить соответствующим образом
формат файла и синтаксис команд. Необходимо также отметить, что вам, как
правило, не нужно беспокоиться о создании cTapToBoro кода на ассемблере, по
скольку мноrие средства разработки предоставляют ero уже в rOToBoM виде.
Наша первая проrрамма будет выrлядеть следующим образом:
STACK тор EQU Ох20002000 ; Начальное значение SP (константа)
AREA IHeader Code 1, СОDЕ
DСD STACK тор Вершина стека
DСD Start ; Вектор сброса
ENTRY ; Обозначает точку входа в проrрамму
Start ; Начало основной проrраммы
; Инициализируем реrистры
MOV rO, #10 ; Начальное значение счётчика цикла
MOV r1, #0 ; Начальное значение результата
; Будем вычислять 10 + 9 + 8 +...+ 1
loop
АDD r1, rO
SUBS rO, #1
BNE loop
; Результат
deadloop
R1 = R1 + RO
Декрементируем RO, обновляя фла и (суффикс S)
Если RO не равен О, переходим к метке loop
сложения в R1
192 . Тлава 10. Проzраммuрованuе Cortex M3
в deadloop; Бесконечный цикл
END ; Конец файла
В этой простейшей проrрамме задаётся начальное значение указателя стека
SP, начальное значение счётчика команд РС, после чеrо в цикле выполняются Tpe
буемые вычисления.
При использовании инструментальных средств пакета RealView компании
ARM ассемблирование данной проrраммы можно выполнить с помощью следу
ющей командной строки:
$> armasm cpи соrtех mЗ o testl.o testl.s
Ключ o применяется для указания имени выходноrо объектноrо файла
(testl.o). Для создания образа исполняемой проrраммы (ELF) необходимо ис
пользовать компоновщик, который запускается из командной строки со следую
щими параметрами:
$> armlink rw base Ох20000000 ro base ОхО map o testl.elf testl.o
Параметр ro base определяет начало области, предназначенной только
для чтения (ПЗУ памяти проrрамм); в данном случае эта область начинается
с адреса ОхО. Аналоrично, параметр rw base определяет начальный адрес об
ласти памяти, доступной для чтения и для записи (память данных). Учтите, что
в нашей проrрамме нет данных, которые располаrались бы в ОЗ Ключ rnap
указывает на необходимость rенерации mар файла, который может приrодиться
для изучения распределения памяти в скомпилированном образе.
И в завершение, создадим двоичный образ:
$> fromelf bin output testl.bin testl.elf
Чтобы убедиться в том, что полученный образ соответствует исходному TeK
СТУ, можно сrенерировать файл листинrа, содержащий дизассемблированный
код проrраммы:
$> fromelf c output testl.1ist testl.elf
Если всё прошло нормально, то вы можете заrрузить полученный образ (ELF
или двоичный) в микроконтроллер или симулятор для тестирования проrрам
мы.
10.5.3. ВЫВОД результатов работы nporpaMMbI
Разумеется, rораздо интереснее, если наш микроконтроллер может взаимо
действовать с окружающим миром. Самым простым вариантом TaKoro взаимо
действия является включение/выключение светодиода. Однако этот способ Haxo
дит довольно оrраниченное применение, поскольку ero информативность чрез
вычайно мала. Одним из наиболее широко используемых способов вывода ин
формации является передача текстовых сообщений. При разработке встраивае
мых устройств для этоrо, как правило, при меняется интерфейс UART. ДЛЯ OTO
бражения получаемой информации можно задействовать, например, компьютер
под управлением ОС Windows!) с проrраммой Hyper Terminal, работающей в pe
жиме консоли (Рис. 10.11).
l)Windows и Hyper Terminal являются товарными знаками компании Мiсrоsоft Corporation.
10.5. Использование ассемблера · 193
Ми кроконтроллер
Cortex M3
Преобра
З0ватель
уровней
Проrрамма HyperTerminal
под управлением
ОС Windows
Рис. 10.11. Недороzая тестовая система, в которой используется вывод текстовых
сообщений.
в самом процессоре Cortex M3 нет интерфейса UART, однако соответствую
щие модули имеются в большинстве микроконтроллеров с процессором
Cortex M3. Спецификации данных модулей определяются производителями
конкретных микроконтроллеров, поэтому мы не будем заострять на этом внима
ние. Наш следующий при мер написан в расчёте на то, что в модуле UART исполь
зуемоrо микроконтроллера имеется флаr состояния, показывающий rOToBHoCTb
буфера передачи к заrрузке новых данных. Для подключения микроконтроллера
к компьютеру потребуется также преобразователь уровней, поскольку уровни
напряжений интерфейса RS 232 отличаются от лоrических уровней, имеющихся
на выводах микроконтроллера.
Интерфейс UART далеко не единственное решение для вывода текстовых
сообщений. В процессоре Cortex M3 реализовано несколько механизмов, облеr
чающих вывод отладочных сообщений:
. Seтihostiпg. Механизм полухостинrа (вывод сообщений с помощью функции
printf через отладчик) может быть задействован при помощи реrистра
управления отладкой контроллера NVIC (возможность применения этоrо Me
ханизма зависит от KOHKpeTHoro отладчика и используемой библиотеки). Бо
лее подробно данный вопрос рассматривается в [лаве 15. При использовании
данноrо механизма вы можете задействовать в своей проrрамме стандартную
функцию printf для вывода информации в консоль/стандартный поток BЫ
вода (STDOUT) проrраммы отладчика.
. Iпstruтeпtatioп trace. Если в микроконтроллере с ядром Cortex M3 реализован
специальный порт трассировки, а в вашем распоряжении имеется анализатор
порта трассировки (Trace Port Analyzer ТРА), то вместо модуля UART вы
можете использовать для вывода отладочных сообщений модуль ITM. Порт
трассировки работает rораздо быстрее UART и позволяет реализовать боль
шее число каналов передачи данных.
. Iпstruтeпtatioп trace via Serial Wire Viewer (SVW). В качестве альтернативы
процессор Cortex M3 (l й и последующих ревизий) также поддерживает рабо
ту модуля интерфейса порта трассировки TPIU в режиме SVW. Этот интер
фейс позволяет считывать данные с выхода модуля ITM, используя недороrие
устройства вместо анализаторов порта. Однако модуль TPIU в режиме SVW
имеет оrраниченную полосу пропускания, поэтому данный механизм не
194 · Тлава 10. Проzраммuрованuе Cortex M3
очень rодится в случае больших объёмов данных (скажем, при трассировке
исполняемых команд).
10.5.4. Проrрамма «Hello World»
Прежде чем приступить к написанию проrраммы «Неllо World», мы должны
понять, каким образом производится передача одиночных символов по интер
фейсу UART. Код, выполняющий эту операцию, можно оформить в виде подпро
rpaMMbI, которая, в свою очередь, будет вызываться друrими функциями вывода
сообщений. Тоrда при смене устройства вывода нам потребуется изменить толь
ко эту подпроrрамму, после чеrо все текстовые сообщения можно будет выводить
на друrое устройство. TaKoro рода модификацию кода обычно называют перена
правлением (retargeting).
Ниже приведён код простейшей подпроrраммы для вывода одноrо символа:
UARTO BASE EQU Ох4000СООО
UARTO FLAG EQU UARTO BASE+Ox018
UARTO DАТА EQU UARTO BASE+OxOOO
Putc Подпроrрамма вывода одноrо символа через UART
Вход: RO передаваемый символ
PUSH {Rl,R2, LR} ; Сохраняем реrистры
LDR Rl,=UARTO FLAG
PutcWaitLoop
LDR R2, [Rl] Читаем флаrи состояния
TST R2, #Ох20 Проверяем флаr буфера передачи
BNE PutcWaitLoop ; Если полон, то проверяем снова
LDR Rl,=UARTO DАТА Иначе
STRB RO, [Rl] Заrружаем данные в буфер передачи
РОР {Rl,R2, РС} Возвращаемся
Адреса реrистров и определения битов в данном коде приведены лишь для
примера; вам, скорее Bcero, придётся изменить эти значения в соответствии с ис
пользуемым устройством. Кроме Toro, в некоторых модулях UART может потре
боваться более сложная процедура проверки состояния перед заrрузкой символа
в буфер передачи. Для инициализации модуля UART вызывается отдельная под
проrрамма (UartOInitialize), реализация которой будет зависеть от KOHKpeT
Horo модуля, в связи с чем она не приводится в этой rлаве. При мер инициализа
ции модуля UART для микроконтроллера LM3S811 производства Texas
Instruments, написанный на языке Си, приведён в [лаве 20.
Теперь мы можем использовать нашу подпроrрамму для создания различных
функций, осуществляющих вывод текстовых сообщений:
Puts Подпроrрамма вывода строки через UART
; Вход: RO = адрес начала строки
; Строка должна завершаться нулевым символом
PUSH {RO ,Rl, LR} Сохраняем реrистры
MOV Rl, RO Копируем адрес в Rl, поскольку RO будет
использоваться для передачи символа в Putc
PutsLoop
LDRВ RO, [Rl],#l
CBZ RO, PutsLoopExit
; Читаем один символ и инкрементируем адрес
Если символ нулевой, то выходим из цикла
10.5. Использование ассемблера · 195
Putc
PutsLoop
Выводим символ в UART
Следующий символ
BL
В
PutsLoopExit
РОР {RO, Rl, РС} Возвращаемся
Используя эту подпроrрамму, мы, наконец, можем написать нашу первую
проrрамму «Неllо World»:
STACK ТОР EQU Ох20002000; Константа, содержащая начальное значение SP
UARTO BASE EQU Ох4000СООО
UARTO FLAG EQU UARTO BASE+Ox018
UARTO ОАТА EQU UARTO BASE+OxOOO
AREA I Header Codel, СООЕ
ОСО STACK ТОР Начальное значение указателя стека
ОСО Start ; Вектор сброса
ENTRY
Start ; Начало основной про:rраммы
MOV rO, #0 ; Инициализируем ре:rистры
MOV rl, #0
MOV r2, #0
MOV rЗ, #0
MOV r4, #0
BL UartOInitialize Инициализируем UARTO
LDR rO,=HELLO TXT Заносим в RO адрес начала строки
BL Puts
deadend
В
deadend
;
; Бесконечный цикл
; Подпро:rраммы
;
Puts Подпро:rрамма вывода строки через UART
; Вход: RO = адрес начала строки
; Строка должна завершаться нулевым символом
PUSH {RO ,Rl, LR} Сохраняем ре:rистры
MOV Rl, RO Копируем адрес в Rl, поскольку RO будет
использоваться для передачи символа в Putc
PutsLoop
LDRB RO, [Rl],#l
CBZ RO, PutsLoopExit
BL Putc
В PutsLoop
PutsLoopExit
РОР {RO, Rl, РС}
Читаем один символ и инкрементируем адрес
Если символ нулевой, то выходим из цикла
Выводим символ в UART
Следующий символ
Putc
;
Возвращаемся
; Подпро:rрамма вывода одно:rо символа через UART
; Вход: RO передаваемый символ
PUSH {Rl, R2, LR} ; Сохраняем ре:rистры
LDR Rl,=UARTO FLAG
PutcWaitLoop
LDR
TST
BNE
LDR
R2 , [ Rl ]
R2, #Ох20
PutcWaitLoop
Rl,=UARTO DАТА
Читаем фла:rи состояния
Проверяем фла:r буфера передачи
Если полон, то проверяем снова
Иначе
196 · Тлава 10. Проzраммuрованuе Cortex M3
STR RO, [R1 ]
РОР {R1, R2, РС}
; Заrружаем данные в буфер передачи
; Возвращаемся
;
UartOlnitialize
; Зависит от устройства, здесь не приведено
ВХ LR ; Возвращаемся
;
HELLO ТХТ
ОСВ «Hello world\n»,O ; Строка, завершающаяся нулевым символом
END ; Конец файла
Единственное, что вам осталось сделать, это вставить в проrрамму код под
проrраммы UartOInitialize и откорректировать значения адресов реrистров
UART, расположенные в начале проrраммы.
Также нелишне было бы иметь ряд подпроrрамм для вывода содержимоrо pe
rистров. Эти подпроrраммы MorYT базироваться на уже написанных подпро
rpaMMax Putc и Puts. Первая подпроrрамма предназначена для вывода шестнад
цатеричных значений.
PutHex ; Подпроrрамма вывода содержимоrо реrистра в шестнадцатеричном виде
; Вход: RO = выводимое значение
PUSH {RО RЗ, LR}
MOV RЗ, RO
MOV
BL
MOV
BL
MOV
MOV
PutHexLoop
ROR RЗ, R2
AND RO, RЗ,#ОхF ;
СМР RO, #ОхА
ITE GE
ADDGE RO, #55 Если больше или равно 10, преобразуем в «A» «F»,
ADDLT RO, #48 иначе преобразуем в «0» «9»
BL Putc Выводим один шестнадцатеричный разряд
SUBS R1, #1 Декрементируем счётчик цикла
BNE PutHexLoop Если переданы все 8 шестнадцатеричных разрядов,
РОР {RО RЗ, РС} ; то возвращаемся, иначе обрабатываем следующие 4 бит
Эта подпроrрамма полезна для вывода значений реrистров. Однако иноrда
желательно выводить содержимое реrистров в десятичном виде. Не пуrайтесь,
в процессоре Cortex M3 данная операция реализуется леrко и быстро блаrодаря
наличию команд аппаратноrо умножения и деления. Ещё одна проблема заклю
чается в том, что выходные символы, получаемые в процессе преобразования,
будут располаrаться в обратном порядке. Поэтому нам потребуется промежуточ
ный буфер для хранения указанных символов. После завершения преобразова
ния мы выведем полученную строку при помощи функции Puts. В данном при
мере текстовый буфер размещается в стеке:
RO,#'O'
Putc
RO,#'x'
Putc
R1, #8
R2, #28
Сохраняем входной параметр в RЗ, поскольку RO
используется для передачи параметров в друrие
подпроrраммы
Выводим «Ох»
Инициализируем счётчик цикла
; Задаём смещение
Сдвиrаем значение на 4 бит влево (на 28 бит вправо)
Выделяем младшие 4 бит
Преобразуем в ASCII
10.5. Использование ассемблера · 197
R4 = RO / 10
R1 = R4 * 10
; R2 = RO (R4 * 10) = остаток
Преобразуем в ASCII (R2 должен содержать
от О до 9 )
Кладём АSСII символ в буфер (с прединдексацией)
Заносим в RO результат деления и устанавливаем
флаr Z, если R4 = О
Если RO (R4) уже равно О, значит, больше
; десятичных разрядов нет
MOV RO, RЗ ; Заносим в RO адрес начала буфера
BL Puts Выводим строку, используя подпроrрамму Puts
АОО SP, SP, #12 ; Восстанавливаем указатель стека
РОР {RO R5, РС} Возвращаемся
Блаrодаря различным возможностям, предоставляемым набором команд про
цессора Cortex M3, мы смоrли написать очень компактную процедуру преобра
зования числовых значений в десятичный текстовый формат.
PutDec
PutDecLoop
Подпроrрамма вывода содержимоrо реrистра в десятичном виде
; Вход: RO = выводимое значение
; Поскольку реrистр З2 битный, то максимальное число символов
; в десятичном формате, включая завершающий нулевой символ, равно 11
PUSH {RO R5, LR} ; Сохраняем реrистры
MOV RЗ, SP Копируем указатель стека в RЗ
SUB SP, SP, #12 Резервируем 12 байт под текстовый буфер
MOV R1, #0 Нулевой символ
STRB R1, [RЗ, # 1]! Кладём нулевой символ в конец буфера,
используем операцию пересылки с прединдексацией
MOV R5, #10 Задаём делитель
UDIV R4,
MUL R1 ,
S UB R2 ,
АОО R2,
RO, R5
R4, R5
RO, R1
#48
S TRB R2, [RЗ , # 1] !
MOVS RO, R4
BNE
PutDecLoop
10.5.5. Использование памяти данных
Вернёмся к нашему первому примеру: на этапе компоновки мы указали об
ласть памяти, доступную как для чтения, так и для записи. Как же нам разме
стить в ней данные? Для этоrо в ассемблерном файле необходимо определить об
ласть данных. Взяв за основу пример, приведённый в начале rлавы, мы можем co
хранить данные в памяти данных по адресу Ох20000000 (область СО3У). Располо
жение секции данных определяется ключами командной строки при вызове KOM
поновщика:
STACK ТОР
Start
EQU Ох20002000 ; Константа, содержащая начальное значение SP
AREA I Header Codel, СООЕ
ОСО STACK ТОР Начальное значение SP
ОСО Start ; Вектор сброса
ENTRY
; Начало основной проrраммы
; Инициализируем реrистры
MOV rO, #10 ; Начальное значение счётчика цикла
MOV r1, #0 ; Начальное значение результата
Будем вычислять 10 + 9 + 8 +...+ 1
198 · Тлава 10. Проzраммuрованuе Cortex M3
loop
ADD rl, rO ;
SUBS rO, # 1
BNE loop
LDR rO,==MyDatal
STR rl, [rO]
deadloop
Rl == Rl + RO
Декрементируем RO, обновляя флаrи (суффикс S)
Если RO не равен О, то переходим к метке loop
Результат сложения в Rl
Заrружаем адрес ячейки MyDatal в RO
Сохраняем результат в MyDatal
в deadloop Бесконечный цикл
AREA I Header Datal, DATA
ALIGN 4
DCD О ; Ячейка памяти для хранения результата
DCD О
END ; Конец файла
Компоновщик разместит секцию ОАТА в области перезаписываемой памяти,
поэтому в данном случае переменная MyDatal будет располаrаться по адресу
Ох20000000.
MyDatal
MyData2
10.6. МОНОПОЛЬНЫЙ доступ и семафоры
Команды монопольноrо доступа применяются для реализации семафоров,
в частности семафоров взаимных исключений (мьютексов), позволяющих rapaH
тировать использование какоrо либо ресурса только одной задачей. В качестве
при мера представим себе, что переменная DeviceALocked, расположенная в па
мяти, предназначена для индикации использования устройства А. Если задача
хочет задействовать устройство А, то она должна сначала проверить ero состоя
ние, прочитав переменную DeviceALocked. Если её значение равно нулю, то за
дача может записать в неё 1 для блокирования устройства. После Toro как надоб
ность в устройстве отпадёт, задача может обнулить переменную DeviceALocked,
предоставляя возможность использовать это устройство друrим задачам.
Что произойдёт, если две задачи попытаются одновременно обратиться
к устройству А? В этом случае существует вероятность, что обе задачи, прочитав
переменную, получат нулевое значение. После этоrо обе попытаются записать
в неё 1 для блокирования устройства, и в результате каждая задача будет пребы
вать в полной уверенности, что она имеет исключительный доступ к устройству.
Чтобы описанной ситуации не возникало, используются команды исключитель
Horo доступа. Команда STREX возвращает значение, показывающее, была ли опе
рация сохранения успешной. Если обе задачи одновременно попытаются забло
кировать устройство, то будет возвращена 1 (отказ доступа), и задача будет знать,
что ей необходимо повторить блокирование устройства.
Некоторые базовые сведения о командах монопольноrо доступа приведены
в [лаве 5. Блок схема, отображающая рассмотренную выше ситуацию, приведена
на Рис. 10.12.
Ниже приведена подпроrрамма, выполняющая указанные операции с ис
пользованием функций стандарта CMSIS. Заметьте, что при отказе доступа опе
рация записи данных командой STREX не выполняется, что предотвращает YCTa
новку бита блокировки:
10.6. Монопольный доступ u семафоры · 199
Читаем бит
блокировки
Монопольное чтение
(например, LDREX)
Бит уаановлен?
Уаанавливаем
бит блокировки
Монопольная запись
(например, S TREX)
Неудача. Бит блокировки уже
уаановлен (запрашиваемый ресурс
уже используется друrим процессом
или процессором)
Статус операции
моноп. записи = О
(успех) ?
Неудача. Друrой процесс или процессор
обратился к облааи памяти,
содержащей бит блокировки
Успех. Бит блокировки уаановлен и процессор может
обращаться к разделяемому ресурсу
Рис. 10.12. Использование команд монопОЛЬНО20 доступа для реализации семафоров.
volatile unsigned int DeviceALocked; // Флаr блокировки
int LockDeviceA(void) {
unsigned int status; // Переменная для хранения статуса выполнения STREX
// Читаем флаr блокировки и проверяем ero состояние
if ( LDREXW(&DeviceALocked) = О) {
// Если блокировки нет, то пытаемся установить флаr
status = STREXW(l, &DeviceALocked);
if (status != О) return (1); // Возвращаем «отказ доступа»
else return(O); // Возвращаем «успех»
else {
return(l); // Возвращаем «отказ доступа»
Аналоrичную функцию можно написать и на ассемблере:
LockDeviceA
Простая функция для блокирования устройства А
Возвращаемое значение (RO) : О = «успех», 1 = «отказ
В случае успеха в переменную DeviceALocked заносится
PUSH {R1, R2, LR}
TryToLockDeviceA
LDR R1,=DeviceALocked
LDREX R2, [R1]
СМР R2,#0
BNE LockDeviceAFailed
DeviceAIsNotLocked
MOV RO,#l
STREX R2, RO, [Rl]
СМР R2, #0
BNE LockDeviceAFailed
LockDeviceASucceed
MOV RO,#O
РОР {R1, R2, РС}
доступа»
1
Получаем состояние блокировки
Заблокировано?
Пытаемся записать 1 в DeviceALocked
Монопольная запись
STREX не прошла
Возвращаем «успех»
Возвращаемся
200 · rлава 10. Проzраммuрованuе Cortex M3
LockDeviceAFailed
MOV RO,#l ; Возвращаем «отказ доступа»
РОР {Rl, R2, РС} ; Возвращаемся
Если функция возвращает 1 (отказ в монопольном доступе), то проrрамма
должна выждать некоторое время и повторить попытку позже. В однопроцессор
ных системах наиболее частой причиной отказа в монопольном доступе служит
появление прерывания между командами монопольной заrрузки и монопольно
ro сохранения. Если код выполняется на привилеrированном уровне доступа, то
возникновение такой ситуации можно предотвратить, установив на некоторое
время реrистр маскирования, такой как PRIMASK, это увеличит вероятность
успешноrо блокирования ресурса.
В мноrопроцессорных системах возможна и друrая причина отказа в выпол
нении команды монопольноrо сохранения обращение друrоrо процессора
к той же области памяти. Факт обращения к памяти друrих процессоров опреде
ляется отдельным устройством, которое называется монитором монопольноrо
доступа. Этот монитор отслеживает обращения к памяти со стороны друrих Be
дущих шины между двумя операциями монопольноrо доступа. Однако, посколь
ку в большинстве недороrих микроконтроллеров задействуется только один про
цессор Cortex M3, в таком мониторе нет никакой необходимости.
Используя описанный механизм, мы можем быть твёрдо уверены, что в каж
дый момент времени к конкретному разделяемому ресурсу обращается только
одна задача. Если приложение не может захватить ресурс в течение KaKoro To
времени, оно должно завершить работу с сообщением об ошибке тайм аута. Ta
кая ситуация может возникнуть, если задача, заблокировавшая ресурс, аварийно
завершится, не сбросив признак блокировки. В подобных случаях использование
ресурса конкретныIии задачами должно отслеживаться операционной системой.
Если задача завершилась или была прервана, не сбросив признак блокировки, то
ОС должна будет разблокировать ресурс.
Если процесс начал операцию обращения в монопольном режиме, используя
команду LDREX, а затем обнаружил, что монопольный доступ больше не требует
ся, он может использовать команду CLREX для очистки локальной записи в мони
торе монопольноrо доступа. Эту операцию можно выполнить с помощью функ
цИИ CMSIS:
void CLREX(void);
При проrраммировании на ассемблере просто вставляется команда CLREX:
CLREX
или
CLREX.W
В процессоре Cortex M3 все операции монопольноrо доступа должны выпол
няться последовательно. Если же код, управляющий монопольным доступом, дол
жен работать и на друrих процессорах ARM, то между монопольными пересылка
ми необходимо вставлять команду барьера памяти данных ОМВ, чтобы rарантиро
вать корректный порядок обращений к памяти. При мер использования команд ба
рьерной синхронизации с командами монопольноrо доступа можно найти в разде
ле 14.3, посвящённом коммуникациям в мноrопроцессорных системах.
10.7. Метод bit baпd u семафоры . 201
10.7. Метод bit..band и семафоры
Для реализации семафоров можно также воспользоваться побитовым ДOCTY
пом по методу bit band при условии, что система памяти поддерживает блокиро
ванные пересылки или же к шине памяти подключён только один ведущий. Ис
пользуя метод bit band, мы можем реализовать функционал семафоров на языке
Си, не прибеrая к помощи операций монопольноrо доступа. В данном случае для
управления ресурсами используется переменная (скажем, слово), расположенная
в области хранения битов, каждый бит которой показывает, что соответствую
щий ресурс используется какой то задачей.
Операции записи в область доступа к битам представляют собой блокирован
ные пересылки типа «чтение модификация запись» (смена ведущеrо шины
между пересылками не допускается). Поэтому если каждая задача изменяет толь
ко свой бит, то значения битов блокировки друrих задач не будут искажены даже
в том случае, если две задачи одновременно попытаются выполнить запись по
одному и тому же адресу. В отличие от варианта с использованием команд MOHO
польноrо доступа, возможно кратковременное «блокирование» ресурса OДHOBpe
менно двумя задачами до тех пор, пока одна из них не обнаружит конфликт и не
снимет блокировку (Рис. 10.13).
Переменная блокировки ресурсов
Значение
равно 01
Нет
Каждый бит слова
указывает на использование Задача 3
ресурса конкретной задачей. Задача 2
Один из битов cooTBeT :J ByeT Задача 1
данной задаче Задача О
(например, Задаче 1)
Ресурс уже заблокирован
одной из задач. Повторим
попытку позже
Читаем всё слово, coдep
жащее биты блокировки
Пытаемся заблокировать ресурс установкой
бита [1], используя область доступа к битам
Снова читаем всё слово, чтобы определить,
не был ли ресурс одновременно
заблокирован друrой задачей
Только бит, установленный
данной задачей, равен 1
(значение = Ох2)1
Нет
Друrой бит уже уаановлен,
ресурс был заблокирован
друrой задачей/процессором
Сбрасываем бит блокировки
данной задачи (бит [1]),
используя область
доступа к битам
Ресурс был успешно захвачен
Рис. 10.13. Реализация мьютекса с использованием метода bit baпd.
Использование метода bit band для реализации семафоров будет работать
только в том случае, если все задачи в системе будут изменять свои биты блоки
ровки исключительно посред твом области доступа к битам. Если же любая из
задач изменит ячейку с битами блокировки, используя обычную операцию запи
202 . fлава 10. Проzраммuрованuе Cortex M3
си, то работа семафора может быть нарушена: в случае, если непосредственно пе
ред записью в эту ячейку какой либо задачей будет установлен бит блокировки,
то бит блокировки, установленный ранее друrой задачей, окажется сброшенным.
10.8. Использование команд
извлечения битовоrо поля
и команд табличных переходов
Мы познакомились с командами извлечения беззнаковоrо битовоrо поля
(UBFX) и командами табличноrо перехода (ТВВ/ТВН) в [лаве 4. Эти две команды
MorYT использоваться вместе для реализации очень развитых деревьев перехо
дов. Такие деревья находят широкое применение в приложениях передачи дaH
ных, в которых передаваемые данные MorYT иметь различный смысл в зависимо
сти от заrоловка сообщения. В качестве примера, давайте рассмотрим ассемблер
ную процедуру декодирования дерева решений, изображённоrо на Рис. 10.14.
OecodeA
LOR RO,=A
LOR RO, [RO]
UBFX R1, RO, #6, #2
ТВВ [РС, R1]
BrTable1
ОСВ
ОСВ
ОСВ
ОСВ
OecodeA1
UBFX R1, RO, #3, #2
ТВВ [ РС, R1]
BrTable2
ОСВ
ОСВ
ОСВ
ОСВ
OecodeA2
TST RO, #4
Считываем значение А из памяти
Извлекаем биты [7:6] в R1
((РО BrTable1)/2)
((DecodeA1 BrTable1)/2)
((Р1 BrTable1)/2)
((DecodeA2 BrTable1)/2)
Переходим к РО, если А[7:6] = 00
Переходим к DecodeA1, если А[7:6] = 01
Переходим к Р1, если А[7:6] = 10
Переходим к OecodeA1, если А[7:6]
11
Извлекаем биты [4:3] в R1
((Р2 BrTable2)/2)
((Р3 BrTable2)/2)
((Р4 BrTable2)/2)
((Р4 BrTable2)/2)
Переходим к Р2, если А[4:3] = 00
Переходим к Р3, если А[4:3] = 01
Переходим к Р4, если А[4:3] = 10
Переходим к Р4, если А[4:3] = 11
Проверяем только 1 бит, поэтому команда UBFX
не нужна
BEQ Р5
В Р6
РО Process О
Р1 Process 1
Р2 Process 2
Р3 Process 3
Р4 Process 4
Р5 Process 5
Р6 Process 6
Как видите, мы смоrли реализовать достаточно большое дерево решений с по
мощью весьма компактноrо фраrмента. Если конечные адреса переходов Haxo
10.8. Использование команд извлечения битовоzо поля и команд табличных переходов · 203
ДЯТСЯ на более далёком расстоянии, то некоторые из команд ТВВ необходимо бу
дет заменить на команды ТВН.
Д[7:0]
Переход
кРО
Переход
кР3
Переход
кР4
Переход
кР5
Рис. 10.14. Декодер битовО20 поля: пример использования команд UBFX и ТВВ.
rЛАВА 11
РАБОТА С прЕрыАниями//
ИСКЛЮЧЕНИЯМИ
11.1. Использование прерываний
Наверное, сложно найти такое встраиваемое приложение, в котором вообще
не использовались бы прерывания. В процессоре CortexnI M3 большую часть pa
боты по обслуживанию прерываний выполняет контроллер прерываний NVIC.
В частности, он осуществляет контроль приоритетов прерываний, а также coxpa
нение/восстановление контекста в стеке. Однако, прежде чем вы сможете исполь
зовать прерывания в своей проrрамме, вам необходимо будет выполнить ряд
операций:
· настроить стек;
· настроить таблицу векторов прерываний;
· задать приоритеты прерываний;
· разрешить прерывания.
11.1.1. Конфиrурирование стека
в простых приложениях, как правило, используется один (основной) стек.
При разработке таких приложений необходимо только зарезервировать под стек
область памяти достаточноrо размера и установить указатель MSP на вершину
этой области. Не забудьте: при расчёте требуемоrо размера стека необходимо
учитывать не только степень ero использования проrраммой, но и максимально
возможное число уровней вложенности прерываний.
Каждый уровень вложенности требует, как минимум, восемь слов стека. Kpo
ме Toro, стек может использоваться и самими обработчиками прерываний.
Поскольку в процессоре Cortex M3 реализован «полный» убывающий стек,
указатель стека обычно устанавливают на конец области статическоrо озу, что
бы исключить фраrментацию свободной памяти (Рис. 11.1).
11.1. Использование прерываний . 205
r ,
I I
, I
I I
,
Периферийные
устройства
Начальное
значение
указателя стек.
СОЗУ
Стек
Адрес
в памяти
Данные
} Проrрамма
Рис. 11.1. Прuмер пpocmozo распределения памятu.
Флэш память
в более сложных приложениях, задействующих разные стеки для пользова
тельскоrо кода и ядра системы, размер OCHoBHoro стека должен быть достаточ
ным для поддержки вложенных вызовов обработчиков прерываний, а также для
работы ядра. Размер стека процесса должен быть на восемь слов больше, чем Tpe
буется для работы пользовательскоrо кода. Этот «довесок» обусловлен тем, что
при переходе к обработчику прерывания первоrо уровня контекст пользователь
ской проrраммы сохраняется в стеке процесса.
11.1.2. Настройка табяицы векторов прерываний
в простых приложениях, использующих неизменяемые обработчики преры
ваний, таблица векторов может располаrаться во флэш памяти или в П3 В этом
случае необходимость в какой либо настройке таблицы во время выполнения
проrраммы отсутствует. Однако существуют приложения, в которых обработчи
ки прерываний требуется изменять в зависимости от каких либо условий. В Ta
ком случае вам придётся переместить таблицу векторов в область перезаписыва
емой памяти.
Перед перемещением таблицы векторов необходимо будет скопировать её
часть в то место, rде будет располаrаться новая таблица. Копируются адреса BeK
торов обработчиков отказов, немаскируемоrо прерывания, системных вызовов
и т.п. Если этоrо не сделать, то при возникновении любоrо из указанных исклю
чений после перемещения таблицы процессор выберет неверно е значение адреса
вектора.
После определения требуемых элементов таблицы векторов и перемещения
таблицы на новое место мы можем добавлять в неё новые векторы. В CMSIS
совместимых библиотеках для конфиrурирования векторов таблицы предусмо
трена следующая функция (для обращения к реrистру смещения таблицы BeKTO
ров в данной функции используется операция SCB >VTOR):
206 . fлава 11. Работа с прерыванuямu/uсключенuямu
void SetVector(unsigned int ЕхсрТуре, unsigned int VectorAddress)
{ // Место расположения вектора вычисляется как VTOR + (Exception Type * 4)
*((volatile unsigned int *) (SCB >VTOR + (ЕхсрТуре « 2))) =
VectorAddress I Ох1;
// 1SB вектора устанавливается в 1 (Thumb)
return;
Те, кто предпочитает проrраммировать на ассемблере, MorYT использовать
подпроrрамму, текст которой приведён в следующем при мере:
; Подпроrрамма для задания вектора исключения по ero номеру
; (Для пользовательских прерываний прибавляем 16: IRQ #0 = исключение W16)
SetVector
; Вход: RO = Номер исключения
R1 = Значение адреса вектора
PUSH {R2, 1R}
1DR R2,=OxEOOOED08
1DR R2, [R2 ]
ORR R1, R1, #1
Реrистр смещения таблицы векторов
Устанавливаем 1SB вектора, так как используем
команды Thumb
Заносим вектор по адресу
VectTblOffset + ЕхсрТуре*4
РОР {R2, РС} Возвращаемся
В большинстве случаев устанавливать младший бит вектора в 1 не требуется,
поскольку компилятор или ассемблер должны распознать задаваемое значение
как адрес команды 1humb и установить этот бит автоматически.
STR R1, [R2, RO, 1S1 #2]
11.1.3. Назначение приоритетов прерываний
По умолчанию (после сброса) все исключения с проrраммируемым приорите
том имеют нулевой уровень приоритета. Исключения Hard Fault и NMI имеют
уровни 1 и 2 соответственно. При использовании СМSIS совместимых библи
отек для задания уровня приоритета можно задействовать соответствующую 6и
блиотечную функцию. К примеру, установка приоритета прерывания N Q 4, paBHO
ro ОхСО, производится следующим образом:
NVIC SetPriority(IRQ4 IRQn, ОхС); // Эта функция
// автоматически сдвиrает значение приоритета на число
// битов, реализованных в реrистрах уровня приоритета
Константа IRQ4 IRQn, упомянутая в примере, является идентификатором
прерывания. При вызове функций управления прерываниями стандарта CMSIS
рекомендуется применять идентификаторы, определённые в заrоловочном фай
ле device. h (см. Рис. 10.8), это улучшает читабельность проrраммы и её пере
носимость.
С функцией NVIC Setpriority можно использовать друrую функцию CTaH
дарта CMSIS, которая вычисляет значение уровня приоритета, исходя из значе
ний приоритета rруппы, субприоритета и настроек rруппирования приоритетов:
NVIC SetPriority(IRQ4 IRQn, NVIC EncodePriority(PriorityGroup,
PreemptPriority, SubPriority));
Дополнительная информация об этих функциях приведена в Приложении ж.
11.1. Использование nрерываний . 207
При проrраммировании на ассемблере мы можем облеrчить себе работу, ис
пользуя побайтную адресацию реrистров, например:
; Установка приоритета IRQ #4, paBHoro ОхСО
LDR RO, =ОхЕОООЕ400 Базовый адрес реrистров приоритета внешних прерываний
LDR Rl, =ОхСО ; Уровень приоритета
STRB Rl, [RO, #4] ; Устанавливаем приоритет IRQ #4 (пишем один байт)
В процессоре Cortex M3 разрядность реrистров приоритета прерываний зада
ётся изrотовителем микросхемы. Минимальная разрядность равна трём, а MaK
симальная восьми битам. В СМSIS совместимых драйверах устройств разряд
ность реrистров уровня приоритета определяется константой
NVIC PRIO BITS. Число реализованных битов также можно определить,
записав OxFF в один из реrистров приоритета и прочитав затем ero содержимое.
Описанную процедуру можно реализовать следующим образом:
; Определение разрядности поля приоритета
LDR RO,=OxEOOOE400 Реrистр приоритета внешнеrо прерывания WO
LDR Rl,=OxFF
STRB Rl, [RO]
LDRB Rl, [RO]
RBIT R2, Rl
CLZ Rl, R2
Пишем OxFF (однобайтная запись)
Считываем обратно (например, ОхЕО при трёх битах)
Переставляем биты и сохраняем в R2 (например,
ОхО7000000 при трёх битах)
Считаем число ведущих нулей (например, Ох5
при трёх битах)
MOV R2, #8
SUB R2, R2, Rl
Вычисляем реальную разрядность реrистров приоритета
(например, 8 5 = 3 при трёх битах)
MOV Rl, #ОхО
STRB Rl, [RO] Восстанавливаем значение по умолчанию (ОхО)
Если вы хотите, чтобы ваше приложение было переносимым, рекомендуется
использовать только следующие значения уровней приоритета: ОхОО, Ох20, Ох40,
Ох60, Ох80, ОхАО, ОхСО и ОхЕО. Это пожелание связано с тем, что данные уровни
приоритета имеются в любом устройстве на базе процессора Cortex M3.
Не забывайте также задавать приоритеты системных исключений и обработ
чиков отказов. Если по каким либо причинам некоторые важные прерывания
в приложении должны иметь приоритет, который выше приоритета остальных
системных исключений или обработчиков отказов, то необходимо снизить ypo
вень приоритета последних с тем, чтобы эти обработчики моrли прерываться об
работчиками важных прерываний.
11.1.4. Разрешение прерываний
После настройки таблицы векторов и задания приоритета мы HaKOHeЦ TO MO
жем разрешить требуемое прерывание. Однако перед этим необходимо выпол
нить следующее:
1. Если таблица векторов располаrается в области памяти с буферированием
записи, то возможно потребуется применить команду барьера
синхронизации данных (DSB), чтобы быть уверенными, что содержимое
таблицы векторов полностью обновлено. В большинстве случаев операции
208 . rлава 11. Работа с прерыванuямu/uсключенuямu
записи в память должны завершаться за несколько тактов. Однако если вы
хотите обеспечить переносимость своей проrраммы на друrие процессоры
ARM, то указанная операция сможет rарантировать выборку KoppeKTHoro
значения вектора при возникновении прерывания сразу же после ero
разрешения.
2. Поскольку прерывание уже моrло быть отложено или активировано, перед
разрешением прерывания настоятельно рекомендуется сбрасывать бит
признака отложенноrо прерывания. В частности, запросы прерываний MorYT
случайно rенерироваться из за паразитных импульсов, возникающих при
подаче питания. Кроме Toro, в некоторых периферийных устройствах, таких
как UART, шум на неподключённом входе приёмника может быть ошибочно
принят устройством за данные и вызвать отложенное прерывание. Поэтому
из соображений безопасности рекомендуется проверять признак
отложенноrо прерывания и, при необходимости, сбрасывать ero перед
разрешением прерывания. К тому же существуют такие устройства, которые
MorYT потребовать повторной инициализации в случае, если при их
разрешении признак отложенноrо прерывания уже был установлен.
Для разрешения и запрещения прерываний в контроллере NVIC предусмо
трены отдельные реrистры. Это позволяет разрешать/запрещать отдельные пре
рывания, не затраrивая биты разрешения остальных прерываний. В противном
случае, при использовании проrраммных операций типа «чтение модифика
ция запись» существовала бы вероятность потери изменений, сделанных в pe
rистрах разрешения обработчиками прерываний. Для разрешения прерывания
проrрамма должна определить положение бита, соответствующеrо данному пре
рыванию, в rруппе реrистров NVIC ISERx и записать в этот бит 1. Аналоrичным
образом, для запрещения прерывания необходимо записать 1 в соответствую
щий бит одноrо из реrистров запрещения NVIC ICERx.
Те, кто пользуются СМSIS совместимыми библиотеками, MorYT задействовать
для разрешения/запрещения прерываний функции NVIC EnableIRQ и
NVIC DisableIRQ, например:
NVIC EnableIRQ(UARTl IRQn); // Разрешаем прерывание модуля UARTl
11.2. Обработчики исключений/прерываний . 209
// Значение UART1 IRQn зависит от МК и
// определяется в файле device.h
NVIC DisableIRQ(UART1 IRQn); // Запрещаем прерывание модуля UART1
Более подробно эти функции описаны в Приложении ж.
Те, кто использует ассемблер, MorYT сами написать функции, выполняющие
аналоrичные операции. Так на ассемблере может выrлядеть аналоr функции
NVIC EnableIRQ:
; Подпроrрамма разрешения
EnableIRQ
; Вход:
PU8H
AND.W
MOV
181
AND . W
18R
RO = Номер IRQ
{RO R2, 1R}
R1, RO, #Ox1F
R2 , # 1
R2, R2, R1
R1, RO, #ОхЕО
R1, R1, #3
прерывания по ero номеру
Формируем битовую маску для разрешения прерывания
Маска = (Ох1 « (N & Ox1F))
Вычисляем смещение, если номер прерывания больше 31
Смещение = (N/32)*4 (каждое слово содержит
; биты разрешения для 32 прерываний)
RO,=OxEOOOE100 Адрес реrистра NVIC I8ERO дЛЯ внешних прерываний
; с номерами 31...0
8TR R2, [RO, R1] Пишем маску в соответствующий реrистр NVIC I8ERx
РОР {RO R2, РС} Восстанавливаем реrистры и возвращаемся
А так может выrлядеть аналоr функции NVIC DisableIRQ:
; Подпроrрамма запрещения прерывания по ero номеру
DisableIRQ
; Вход:
PU8H
AND.W
MOV
181
AND . W
18R
1DR
RO = Номер IRQ
{RO R2, 1R}
R1, RO, #Ox1F
R2, #1
R2, R2, R1
R1, RO, #ОхЕО
R1, R1, #3
Формируем битовую маску для разрешения прерывания
Маска = (Ох1 « (N & Ox1F))
Вычисляем смещение, если номер прерывания больше 31
Смещение = (N/32)*4 (каждое слово содержит
биты разрешения для 32 прерываний)
RO,=OxEOOOE180 Адрес реrистра NVIC ICERO дЛЯ внешних прерываний
с номерами 31...0
8TR R2, [RO, R1] Пишем маску в соответствующий реrистр NVIC ICERx
РОР {RO R2, РС} Восстанавливаем реrистры и возвращаемся
Также можно написать аналоrичные подпроrраммы для установки и сброса
битов реrистров признака отложенноrо прерывания.
1DR
11.2. Обработчики искяючений/прерываний
в процессоре Cortex M3 обработчики прерываний MorYT быть полностью Ha
писаны на Си, тоrда как в процессоре ARM7 в большинстве случаев применяют
ся обработчики, написанные на ассемблере, которые rарантируют сохранение
всех необходимых реrистров. А при использовании вложенных прерываний He
06ходимо к ТОМУ же переключать режимы работы процессора во избежание поте
ри информации. В процессоре Cortex M3 ничеrо подобноrо Н,е требуется, что зна
чительно упрощает разработку проrраммноrо обеспечения.
210 . fлава 11. Работа с прерыванuямu/uсключенuямu
На языке Си обработчик прерывания может быть описан следующим обра
зом:
void UARTl Handler(void) {
... // Обработка запроса периферийноrо устройства
return;
Для корректной инициализации содержимоrо таблицы векторов при исполь
зовании СМSIS совместимых библиотек обработчики прерываний должны
иметь имена, определённые изrотовителем микроконтроллера. Эти имена можно
узнать, посмотрев на описание таблицы векторов в файле со стартовым кодом.
В пакете MDK ARM компании КеН, например, этот файл называется
startup <device>. s.
Пользователи компилятора RealView компании ARM или пакета MDK ARM
компании КеН MorYT для удобочитаемости добавлять к объявлению обработчика
ключевое слово irq. Например:
irq void UARTl Handler(void) {
... // Обрабатываем запрос IRQ от периферийноrо устройства
... // Снимаем запрос IRQ
return;
На языке ассемблера простейший обработчик исключения может иметь сле
дующий вид:
irql handler
; Обрабатываем запрос IRQ
; Снимаем запрос IRQ
; Возвращаемся из прерывания
ВХ LR
Необходимость деактивации IRQ в процедуре обработки прерывания опреде
ляется реализацией KOHKpeTHoro периферийноrо устройства. Если устройство
формирует запросы прерываний в виде импульсов, то эта операция не требуется.
Что же касается процессора Cortex M3, то при формировании периферийным
устройством запросов прерываний в виде импульсов контроллер NVIC может
сохранить запрос, установив бит признака отложенноrо прерывания. При входе
в обработчик исключения этот бит автоматически сбрасывается. Данная лоrика
отличается от поведения традиционных процессоров ARM, которые требовали,
чтобы периферийные устройства удерживали запрос до тех пор, пока он не будет
обработан. Это связано с тем, что контроллеры прерываний, разработанные для
предыдущих процессоров ARM, таких как ARM7TDMI, не имели памяти для
хранения признака отложенноrо прерывания.
В тех случаях, коrда периферийное устройство может rенерировать несколько
запросов в течение KopoTKoro промежутка времени, это необходимо учитывать
при деактивации запроса прерывания, чтобы исключить пропуск какоrо либо
запроса.
11.3. Проzраммные прерЫ8анuя · 211
Часто обработчику прерывания помимо реrистров RO.. .R3 и R12 требуются
дополнительные реrистры процессора; их тоже необходимо сохранять. При Ha
писании проrраммы на Си проrраммисту не нужно задумываться об этом, по
скольку В Си функциях все используемые реrистры сохраняются автоматически,
коrда это необходимо. При использовании же ассемблера в обработчиках преры
ваний необходимо предусматривать команды заrрузки в стек и извлечения из
стека для сохранения используемых реrистров из диапазона R4.. .Rll.
В следующем примере сохраняются все реrистры, которые не были помещены
в стек при сохранении контекста. Если какие то из реrистров не используются
в обработчике исключения, то их можно исключить из списка сохраняемых реrи
стров:
irql handler
PUSH {R4 Rll, LR} ; Сохраняем все реrистры, которые не были сохранены
; при помещении контекста в стек
; Обрабатываем запрос прерывания
; Снимаем запрос прерывания в периферийном устройстве (опционально)
РОР {R4 Rll, РС} ; Восстанавливаем реrистры и выходим из обработчика
Поскольку команда РОР является одной из команд, позволяющих осуществить
возврат из прерывания, мы можем объединить в одной команде операцию BOC
становления реrистров с операцией возврата.
В зависимости от конструкции периферийноrо устройства, обработчику пре
рывания от этоrо устройства может потребоваться обратиться к нему для дeaK
тивации запроса прерывания. Если периферийное устройство формирует запрос
прерывания в виде импульса, то сбрасывать указанный запрос в обработчике
прерывания не требуется. В противном случае, обработчик должен сбрасывать
запрос прерывания, чтобы после выхода из обработчика данное прерывание не
было отложено повторно. Ещё раз напомню, что в традиционных процессорах
ARM периферийные устройства должны удерживать запрос до тех пор, пока он
не будет обработан.
Если периферийное устройство rенерирует запросы прерываний в виде им
пульсов, то контроллер NVIC может сохранить запрос, используя признак отло
женноrо прерывания. После перехода процессора к выполнению обработчика ис
ключения бит признака отложенноrо прерывания сбрасывается автоматически.
Естественно, что в этом случае обработчик не должен обращаться к периферий
ному устройству для сброса запроса прерывания.
11.3. Проrраммные прерывания
Прерывания MorYT инициироваться:
. подачей сиrнала на вход внешнеrо прерывания;
. записью в реrистр признака отложенноrо прерывания контроллера NVIC (см.
[лаву 8);
. записью в реrистр проrраммной rенерации прерывания STIR контроллера
NVIC (см. [лаву 8).
212 · rлава 11. Работа с прерыванuямu/uсключенuямu
В большинстве случаев ряд прерываний оказываются незадействованными
и MorYT использоваться в качестве проrраммных прерываний. Проrраммные
прерывания MorYT служить для тех же целей, что и команда вызова супервизора
(SVC), т.е. для доступа к системным службам. Однако по умолчанию пользова
тельские проrраммы не MorYT обращаться к контроллеру NVIC. Обращение к pe
rистру STIR контроллера NVIC допускается только в том случае, если установлен
бит USERSETMPEND реrистра управления конфиrурацией NVIC (см. Табл. [.18
в Приложении [).
в отличие от исключения SVCall, проrраммные прерывания являются «неточ
ными». Друrими словами, обработка проrраммноrо прерывания не обязательно
произойдёт сразу же после ero rенерации, даже при отсутствии блокировки со
стороны реrистров маскирования прерываний или друrих процедур обработки
прерывания. Поэтому если команда, следующая за командой записи в реrистр
STIR, зависит от результата проrраммноrо прерывания, то результат её выполне
ния может оказаться некорректным, поскольку обработка проrраммноrо преры
вания может произойти уже после исполнения команды.
Для решения указанной проблемы можно использовать команду барьерной
синхронизации DSB. Так, пользователи СМSIS совместимых библиотек MorYT
вставить в проrрамму следующие строки:
NVIC SetPendingIRQ(SOFTWARE INTERRUPT NUМEER);
DSB () ;
При использовании ассемблера:
MOV RO, #SOFTWARE INTERRUPT NUMBER
LDR Rl,=OxEOOOEFOO ; Адрес реrистра rенерации проrраммноrо прерывания (STIR)
контроллера NVIC
rенерируем проrраммное прерывание
Барьер синхронизации данных
STR RO, [Rl]
DSB
Однако существует ещё одна возможная проблема. Если установлен реrистр
маскирования прерываний или если проrраммное прерывание rенерируется He
посредственно из обработчика исключения, то существует вероятность Toro, что
проrраммное прерывание вообще не будет выполнено. Соответственно, про
rраммный код, rенерирующий проrраммное прерывание, должен контролиро
вать выполнение данноrо прерывания. Для этой цели можно использовать про
rраммный флаr, устанавливаемый в обработчике проrраммноrо прерывания.
Кстати rоворя, даже сама установка бита USERSETMPEND может привести
к появлению проблем. После установки указанноrо бита пользовательская про
rpaMMa сможет проrраммно rенерировать любое прерывание, кроме системных
исключений. Вследствие этоrо, если в системе используется непроверенный поль
зовательский код, то обработчики исключений должны контролировать допу
стимость возникновения исключений, поскольку они MorYT быть сrенерированы
пользовательской проrраммой. В идеале, если в системе имеются недостаточно
надёжные пользовательские проrраммы, то доступ к системным сервисам дол
жен предоставляться только через исключение SVCall.
11.4. Пример nеремещения таблицы векторов. 213
11.4. Пример перемещения таблицы векторов
в [лаве 7 мы уже rоворили о том, что начальная таблица векторов должна co
держать, как минимум, вектор сброса, вектор немаскируемоrо прерывания и BeK
тор исключения Hard Fault, поскольку оба последних исключения не требуют
какоrо либо разрешения. После запуска проrраммы мы можем при необходимо
сти переместить таблицу векторов в область ОЗУ. Сразу необходимо отметить,
что в большинстве простых приложений этоrо не требуется.
Для перемещения таблицы векторов необходимо выполнить следующие опе
рации:
. Зарезервировать память для новой таблицы векторов. Возможно, вам при
дётся использовать сценарии компоновщика для резервирования участка па
мяти. Адрес таблицы векторов должен быть выровнен на величину, равную
размеру таблицы, который приведён к ближайшему большему значению, яв
ляющемуся степенью двойки.
. Скопировать существующую таблицу на новое место. Перед перемещением
таблицы векторов необходимо убедиться, что новая таблица содержит KOp
ректные значения векторов для всех требуемых исключений, включая NMI,
Hard Fault и все разрешённые исключения.
. Записать новый вектор исключения в новую таблицу векторов, после чеzо вы
полнить запись в pezucmp смещения таблицы векторов VTOR для перемеще
ния таблицы.
Пример проrраммноrо кода, выполняющеrо собственно перемещение табли
цы векторов, был приведён в [лаве 8. В следующем при мере, написанном на ac
семблере, мы продемонстрируем процесс резервирования памяти в начале обла
сти ОЗУ дЛЯ таблицы векторов и нескольких переменных:
STACK TOP EQU Ох20002000 Константа, содержащая начальное значение SP
NVIC SETEN EQU ОхЕОООЕI00 Адрес блока реrистров разрешения прерываний
NVIC VECTTBL EQU ОхЕОООЕD08 Реrистр смещения таблицы векторов
NVIC AIRCR EQU ОхЕОООЕDОС Реrистр управления прерываниями и сбросом
NVIC IRQPRI EQU ОхЕОООЕ400 Реrистр уровня приоритета прерываний
AREA I Header Code 1, СОDЕ
DСD STACK ТОР Начальное значение SP
DСD Start Вектор сброса
DСD Nmi Handler Обработчик NMI
DСD Hf Handler Обработчик Hard Fault
ENTRY
Start ; Начало основной проrраммы
; Инициализируем реrистры
MOV rO, #0 ; Инициализируем реrистры
MOV rl, #0
; Копируем старую таблицу векторов на новое место
LDR rO, =0
LDR rl, =VectorTableBase
LDMIA rO!, {r2 r5} ; Копируем 4 слова
STMIA rl!, {r2 r5}
214 . fлава 11. Работа с прерыванuямu/uсключенuямu
DSB
; Барьер синхронизации данных
; Пишем смещение в реrистр смещения таблицы векторов
1DR rO, =NVIC VECTTB1
1DR r1, =VectorTableBase
STR r1, [rO]
; Конфиrурируем реrистр приоритета
1DR rO, =NVIC AIRCR
1DR r1, =Ox05FA0500 ; PRIGROUP = 5
STR R1, [rO]
; Настраиваем вектор IRQO
MOV rO, #0 IRQ#O
1DR r1, =IrqO Handler
В1 SetupIrqHandler
; Задаём приоритет
1DR rO, =NVIC IRQPRI
1DR rl, =ОхСО Приоритет IRQO
STRВ r1, [rO,#O] Пишем приоритет IRQO со смещением = О
Примечание : l байтная операция
(смещение дЛЯ IRQ1 будет равно 1)
DSB Барьер синхронизации данных. rарантирует завершение операций записи
до разрешения прерываний
MOV rO, #0 ; Выбираем IRQO
В1 EnableIRQ
.
,
; Функции
SetupIrqHandler
; Вход: RO = Номер IRQ
R1 = Обработчик
{RO, R2, 1R}
R2, =NVIC VECTTB1
R2 , [ R2 ]
RO, #16
RO, RO, #2
R2, RO
R1, [R2]
{RO, R2, РС}
PUSH
1DR
1DR
АDD
1S1
АDD
STR
РОР
EnableIRQ
; Вход: RO = Номер IRQ
PUSH {RO R3, 1R}
AND Rl, RO, #OxlF
MOV R2, #1
1S1 R2, R2, Rl
BIC RO, #Ox1F
1SR RO, #3
1DR Rl, =NVIC SETEN
STR R2, [Rl, RO]
РОР {RO R3, РС}
IRQ
Получаем смещение таблицы векторов
Номер исключения = номер IRQ + 16
Умножаем на 4 (размер каждоrо вектора 4 байт)
Находим адрес вектора
Записываем адрес обработчика
Возвращаемся
Извлекаем младшие 5 бит для формирования
битовой маски
Маска в R2
Смещение слова (номер IRQ может быть больше 32)
Устанавливаем бит разрешения
Возвращаемся
11.4. Пример nеремещения таблицы векторов · 215
;
; Обработчики исключений
Hf Handler
ВХ LR
Nmi Handler
Здесь должен быть ваш код
Возвращаемся
ВХ LR
IrqO Handler
; Здесь должен быть ваш код
Возвращаемся
ВХ
LR
Здесь должен быть ваш код
Возвращаемся
;
AREA I Header Datal, DАТА
ALIGN 4
; Перемещённая таблица векторов
VectorTableBase SPACE 256 Размер (в байтах)
VectorTableEnd (256 / 4 = до 64 исключений)
MyDatal DСD О Переменные
MyData2 DСD О
END ; Конец файла
Это довольно длинный пример) поэтому будем рассматривать ero с конца
с определения области данных.
В секции данных (практически в самом конце проrраммы) мы выделяем под
таблицу векторов участок памяти размером 256 байт (SPACE 256). В таблице Ta
Koro размера мы сможем хранить до 64 векторов. При необходимости размер
этой области можно скорректировать. Остальные переменные располаrаются
сразу после таблицы векторов) поэтому адрес переменной MyDatal равен
Ох20000100.
В самом начале приведённоrо кода мы определяем несколько констант. Ис
пользование таких именованных констант вместо непосредственных значений
значительно увеличивает читабельность проrраммы.
Итак) исходная таблица векторов содержит вектора сброса) немаскируемоrо
прерывания и исключения Hard Fault. Приведённый пример предназначен для
иллюстрации процесс а настройки векторов исключений и поэтому не содержит
рабочеrо кода соответствующих обработчиков операции) выполняемые этими
обработчиками) будут зависеть от KOHKpeTHoro приложения. Для возврата из об
работчиков исключений в при мере используется команда перехода с изменением
состояния ВХ LR) однако она может быть заменена любой друrой командой) по
зволяющей выполнить возврат из обработчика (см. Табл. 9.1).
После инициализации реrистров мы копируем вектора обработчиков в новую
таблицу) расположенную в C03 Данная операция выполняется одной командой
rрупповой заrрузки и одной командой rрупповоrо сохранения. Если необходимо
скопировать большее число векторов) то мы можем вставить дополнительные KO
манды rрупповой заrрузки/сохранения и/или увеличить количество слов) пере
сылаемых при выполнении каждой пары этих команд.
После Toro как новая таблица будет rOToBa) мы можем переместить её на новое
место в 03 Чтобы быть уверенными в том) что все операции пересылки BeKTO
ров завершены) мы используем команду синхронизации DSB.
216 . fлава 11. Работа с прерыванuямu/uск:люченuямu
После перемещения таблицы векторов мы должны окончательно сконфиrури
ровать прерывание. Прежде Bcero задать требуемые установки rруппирования
приоритетов (эту операцию необходимо выполнить Bcero один раз в начале про
rpaMMbI). Для настройки прерываний в примере используются две подпроrрам
мы, SetuplrqHandler и EnableIRQ, которые позволяют значительно упростить
этот процесс. Заменив в коде последней подпроrраммы NVIC SETEN на
NVIC CLREN, мы получим ещё одну функцию) DisableIRQ. После настройки об
работчика и задания уровня приоритета прерывания мы HaKOHeЦ TO можем раз
решить ero.
11.5. Использование команды SVC
Команда SVC является общепринятым методом предоставления пользова
тельским приложениям доступа к проrраммному интерфейсу приложения (API)
операционной системы. При этом пользовательские приложения должны «знать»
только то) какие параметры следует передавать ОС (информация о расположе
нии АРI функций в памяти приложениям не требуется).
Команда SVC имеет параметр) представляющий собой 8 битную константу)
значение которой хранится в коде команды. Например:
SVC #3 ; Вызов системноrо сервиса 3
Можно использовать и альтернативный синтаксис (без символа «#»):
SVC 3 ; Вызов системноrо сервиса 3
Обработчик исключения SVCall может извлечь значение этоrо параметра из KO
да команды SVC) определив её адрес по значению счётчика команд) сохранённому
в стеке при входе в обработчик. Для выполнения указанной операции можно ис
пользовать процедуру, блок схема алrоритма которой приведена на Рис. 11.2.
Бит 2 = О
Определяем стек, который
использовал вызывающий процесс,
по значению LR (Бит 2)
Определяем положение
ре в основном стеке
Бит 2 = 1
Определяем положение
ре в стеке процесса
Определяем aд команды SVC
по значению РС, извлекаем
константу из кода команды
Рис. 11.2. Алzоритм извлечения параметра команды svc.
Ниже приведена одна из простейших реализаций данной процедуры:
svc handler
TST LR, #Ох4
ITE EQ
MRSEQ RO, MSP
MRSNE RO, PSP
Проверяем бит 2 значения EXC RETURN в LR
; Если ноль (<<равно»), то был использован
; основной стек, помещаем MSP в RO
; Иначе был использован стек процесса,
11.6. Пример использования команды SVC: функции вывода текстовых сообщений · 217
помещаем PSP в RO
LDR R1, [RO,#24] Читаем из стека сохранённое значение РС
LDRB RO, [R1,# 2] Извлекаем константу из кода команды
; Переданное значение в RO
ВХ LR ; Возвращаемся в вызывающую функцию
Определив значение параметра) обработчик исключения может выполнить
соответствующую системную функцию. Для реализации переходов к требуемым
фраrментам кода удобнее Bcero использовать команды табличноrо перехода твв
и ТВН. Не забывайте только выполнять проверку на соответствие параметра дo
пустимым значениям) чтобы избежать краха системы из за вызова некорректной
системной функции. Впрочем) если вы абсолютно уверены в корректности пере
даваемых значений) то эту проверку можно опустить.
Обратите внимание: передача параметров обработчику исключения SVCall
и возврат результата выполнения обработчика должны осуществляться через
стек. Причины данноrо требования объясняются в следующем подразделе.
Поскольку одна системная служба не может вызвать друrую) используя Mexa
низм исключений) обработчик системных вызовов должен напрямую вызывать
друrие svс функции (скажем) используя команду BL).
11.6. Пример использования команды SVC:
функции вывода текстовых сообщений
Мы уже разрабатывали с вами различные подпроrраммы для вывода инфор
мации. Однако не всеrда имеется возможность вызова подпроrрамм с помощью
команды BL например) если код выполняется на непривилеrированном уровне
доступа) а функции ввода/вывода текстовых сообщений требуют привилеrиро
BaHHoro доступа. В подобных случаях мы можем воспользоваться командой SVC
в качестве точки входа в функции вывода. Например) пользовательская проrрам
ма может задействовать команду SVC с разными параметрами для вызова различ
ных сервисов:
LDR RO,=HELLO TXT
SVC #0 ; Отобразить строку, адрес которой содержится в RO
MOV RO,#'A'
SVC #1 ; Отобразить символ, содержащийся в RO
LDR RО,=ОхС12345б
SVC #2 ; Отобразить шестнадцатеричное значение, содержащееся в RO
MOV RO,#1234
SVC #3 ; Отобразить десятичное значение, содержащееся в RO
Если таблица векторов была перемещена в ОЗУ) то для использования команды
SVC нам необходимо настроить обработчик исключения SVCall. Для этоrо можно
воспользоваться модифицированным вариантом функции SetupIrqHandler из
предыдущеrо раздела. Единственным отличием новой функции будет то) что в Ka
честве входноrо параметра она будет принимать номер исключения) а не номер
прерывания (исключение SVCall имеет номер 11). Заодно оптимизируем код функ
ции) переписав её с использованием 32 битных команд Thumb 2:
218 · Тлава 11. Работа с прерыванuямu/uсключенuямu
SetиpExcpHandler ; Настройка вектора в таблице векторов, перемещённой в ОЗУ
;Вход: RO = Номер исключения
R1 = Обработчик исключения
PUSH {RO, R2, LR}
LDR R2, =NVIC VECTTBL
1DR R2, [R2]
STR.W R1, [R2, RO, 1S1 #2] Сохраняем вектор по адресу [R2+RO«2]
РОР {RO, R2, РС} Возвращаемся
Сам обработчик исключения SVCall мы напишем) взяв за основу код) приве
дённый в конце предыдущеrо раздела. Добавим в Hero команду чтения из стека
параметра системноrо вызова) а также команды переходов к различным систем
ным функциям в зависимости от значения этоrо параметра:
svc handler
TST 1R, #Ох4
ITE EQ
MRSEQ R1, MSP
MRSNE R1, PSP
Получаем смещение таблицы векторов
svc
Проверяем бит 2 значения EXC RETURN в 1R
Если ноль (<<равно»), то был использован
основной стек, помещаем MSP в R1
Иначе был использован стек процесса,
помещаем PSP в R1
1DR RO, [R1,#O] Читаем из стека сохранённое значение RO
1DR R1, [R1,#24] Читаем из стека сохранённое значение РС
1DRB R1, [R1,# 2] Извлекаем константу из кода команды
; Теперь значение константы находится в R1, значение параметра
PUSH {1R} ; Сохраняем 1R в стеке
CBNZ R1, svc handler l
В1 pиts ; Вызываем процедуру pиts
В svc handler end
handler 1
СМР R1, #1
BNE svc handler 2
В1 pиtc
В svc handler end
handler 2
СМР R1, #2
BNE svc handler 3
В1 pиtHex
В svc handler end
handler 3
СМР R1, #3
BNE svc handler 4
BL pиtDec
В svc handler end
handler 4
В error
в RO
Вызываем процедуру pиtc
svc
Вызываем процедуру pиtHex
svc
Вызываем процедуру pиtDec
svc
Некорректный номер системноrо вызова
svc handler end
РОР {РС} ; Возвращаемся
Код обработчика svc handler должен располаrаться рядом с кодом функций
вывода) с тем чтобы эти функции оказались в пределах досяrаемости команд BL.
Заметьте) что для передачи параметров используется не текущее содержимое
реrистров процессора) а их содержимое) сохранённое в стеке. Это сделано специ
11.6. Пример использования команды SVC: функции вывода текстовых сообщений · 219
ально, так как если во время исполнения команды SVC возникнет прерывание
с более высоким приоритетом, то обработчик SVCall будет запущен сразу же по
сле завершения остальных обработчиков (<<цепочечная» обработка). Содержимое
реrистров RO.. .R3 и R12 к этому моменту может отличаться от исходноrо, по
скольку при «цепочечной» обработке прерываний отсутствуют промежуточные
операции восстановления/сохранения контекста. Например:
1. Параметр помещается в реrистр RO.
2. Исполняется команда svc и одновременно с этим возникает более
высокоприоритетное прерывание.
3. Производится сохранение контекста, в результате чеrо содержимое
реrистров RO. . .R3, R12, LR, РС и xPSR оказывается в стеке.
4. Выполняется обработчик прерывания. В процессе выполнения он может
изменять содержимое реrистров RO.. .R3 и R12. Это допускается, поскольку
данные реrистры будут восстановлены при восстановлении контекста.
5. Запускается обработчик исключения SVCall. При входе в обработчик
содержимое реrистров RO. . .R3 и R12 может отличаться от Toro, которое было
на момент выполнения команды svc. Однако корректное значение параметра
содержится в стеке, откуда обработчик ero и берёт.
220 · fлава 11. Работа с прерыванuямu/uсключенuямu
11.7. Использование команды SVC в проrраммах
на языке Си
в большинстве случаев для передачи параметров в SVС функции необходимо
использовать обработчик) написанный на ассемблере. Это связано с тем) что па
раметры передаются через стек) а не через реrистры (см. предыдущий раздел). Ec
ли обработчик исключения SVCall должен быть написан на Си) то для определе
ния адреса) по которому реrистр был сохранён в стеке) и для передачи этоrо зна
чения в обработчик можно использовать простую «обёртку») написанную на ac
семблере. Используя указанную информацию) обработчик сможет впоследствии
извлечь номер системноrо вызова и значения параметров. Если вы работаете
в среде разработки RVDS или MDK ARM) то данную «обёртку» можно написать
с использованием BCTpoeHHoro ассемблера:
// Ассемблерный код «обёртка» для получения начальноrо адреса cTeKoBoro фрейма
// Начальный адрес фрейма помещается в реrистр RO, после чеrо осуществляется
// переход к собственно обработчику SVCall
asm void svc handler wrapper(void)
TST LR, #4
ITE EQ
МRSEQ RO, MSP
МRSNE RO, PSP
В cpp(svc handler)
} // Команда возврата (ВХ LR) в конце этой «обёртки» не нужна, поскольку
// при возврате из svc handler управление будет передано
// на то место, откуда была вызвана команда svc
Основная часть обработчика исключения SVCall может быть реализована
в виде процедуры на языке Си с одним aprYMeHToM (реrистр RO)) в котором пере
даётся стартовый адрес cTeKoBoro фрейма исключения. Это значение использует
ся для выделения номера системноrо сервиса и передачи реальных параметров
исключения (реrистры RO.. .R3):
// Обработчик SVCall, написанный на Си, принимающий в виде параметра начальный
// адрес cTeKoBoro фрейма, который используется в качестве указателя на массив
11.7. Использование команды SVC в npozpaMMax на языке Си · 221
// aprYMeHToB
// svc args[O] RO, svc args[l] = Rl
// svc args[2] = R2 , svс аrgs[З] = RЗ
// svc args[4] = R12, svc args[5] = LR
// svс аrgs[б] = Адрес возврата (сохранённое значение РС)
// svc args[7] = xPSR
void svc handler(unsigned int * svc args)
{
unsigned int svc number;
unsigned int svc rO;
unsigned int svc rl;
unsigned int svc r2;
unsigned int svc rЗ;
svc number = ((char *) svс аrgs[б]) [ 2]; // Memory[(Stacked PC) 2]
svc rO = ((unsigned long) svc args[O]);
svc rl = ((unsigned long) svc args[l]);
svc r2 = ((unsigned long) svc args[2]);
svс rЗ = ((unsigned long) svс аrgs[З]);
printf (<<Номер SVC = %xn», svc number);
printf (<<О й параметр SVC = %x\n», svc rO);
printf (<<l й параметр SVC = %x\n», svc rl);
printf (<<2 й параметр SVC = %x\n», svc r2);
printf (<<З й параметр SVC %x\n», svс rЗ);
return;
Обратите внимание, что супервизор не может возвращать результаты своей
работы в вызывающую функцию так) как это делают обычные Си функции.
Обычные функции имеют тип) отличный от void) например unsigned int
func (), и используют для передачи возвращаемоrо значения оператор return)
который в действительности помещает это значение в реrистр RO. Если при BЫXO
де из обработчика исключения SVСаllзаrрузить возвращаемые значения в любой
из реrистров RO.. .R3) то они будут утеряны при восстановлении контекста. COOT
ветственно) если обработчик должен возвращать какие то результаты в вызыва
ющую проrрамму) то он должен модифицировать непосредственно стековый
фрейм) чтобы эти значения оказались в реrистрах при восстановлении контекста.
При работе в пакетах RVDS компании ARM или MDK ARM компании КеН мы
можем использовать для вызова супервизора ключевое слово компилятора
svc. Например) если нам необходимо передать четыре параметра в SVC
функцию с номером 3) то мы можем объявить такую функцию с именем
call svc 3 как:
void svс(ОхОЗ) саll svс З(unsignеd long svc rO, unsigned long
svc rl, unsigned long svc r2, unsigned long svс rЗ);
Вызывается эта функция так же как и любая друrая:
int main(void)
{
unsigned long рО, рl, р2, рЗ; // Параметры, передаваемые обработчику SVCall
call svc З(рО, рl, р2, рЗ);
// Вызываем SVC З с арrументами рО, рl, р2, рЗ
222 · fлава 11. Работа с прерыванuямu/uсключенuямu
return;
Дополнительную информацию об использовании ключевоrо слова svc
можно найти в руководстве [4].
Поскольку в компиляторе GCC инструментария GNU ключевое слово svc
отсутствует) то при использовании данноrо инструментария для вызова суперви
зора из Си проrрамм нам придётся прибеrнуть к помощи iпliпе ассемблера. Так)
если нам необходимо вызвать функцию супервизора с номером 3) которая имеет
один параметр и возвращает результат в реrистре RO (соrласно спецификации
AAPCS [5] первое значение всеrда передаётся через реrистр RO)) то мы можем ис
пользовать следующий код:
int MyDataIn = Ох12З;
asm volatile (<<mov RO, %O\n»
«svc 3 \n» : «» : «»r» (MyDataIn) );
Приведённый выше код можно разбить на три части) rде входные данные
определяются параметром r (MyDataIn)) а выходные данные отсутствуют (обо
значено как «»):
asm ( ассемблерный код : список выходных параметров : список входных параметров
Друrие при меры использования iпliпе ассемблера при работе с инструмента
рием GNU вы сможете найти в [лаве 19. Для получения детальной информации
о передаче параметров в/от iпliпе ассемблера обратитесь к документации GNU.
rлдвд 12
ПРОДВИНУТЫЕ
проrрАммныE ВО3МОЖНОСТИ
И ПОВЕДЕНИЕ СИСТЕМЫ
12.1. Реализация системы с двумя раздельными
стеками
Одной из наиболее важных особенностей архитектуры ARMv7 M является
возможность отделения стека пользовательскоrо приложения от стека) использу
eMoro привилеrированным кодом) таким как ядро системы. Если в устройстве pe
ализован опциональный модуль защиты памяти (MPU)) то ero можно задейство
вать для Toro) чтобы запретить пользовательским приложениям доступ к стеку
ядра. Это не позволит им нарушить работу ядра) испортив содержимое памяти.
Любая надёжная система на базе процессора Cortex M3) как правило) имеет
следующие характеристики:
. обработчики исключительных ситуаций) использующие основной стек (MSP);
. код ядра) запускаемый с определённой периодичностью в исключении си
cTeMHoro таймера (SYSTICK). Этот код работает на привилеrированном ypOB
не доступа) осуществляя диспетчеризацию задач и управление системой;
. пользовательские приложения) выполняющиеся в виде отдельных потоков
с пользовательским (непривилеrированным) уровнем доступа; эти приложе
ния используют стек процесс а (PSP);
. ядро системы и обработчики исключительных ситуаций) задействующие OCHOB
ной стек) адресуемый указателем MSP; при наличии модуля MPU доступ к этой
области памяти предоставляется только на привилеrированном уровне;
. стек пользовательских приложений) адресуемый указателем PSP.
Возьмём систему с модулем MPU) использующую в качестве системной памя
ти встроенное статическое 03 Мы можем так сконфиrурировать модуль MPU)
что всё СО3У окажется разделено на две области) одна из которых будет доступна
для обращений на пользовательском уровне) а друrая на привилеrированном
уровне (Рис. 12.1). Каждая из областей используется как для хранения данных)
так и для размещения стека. Поскольку в процессоре Cortex M3 при меняется MO
дель полноrо «у6ывающеrо» стека) то перед началом работы каждый указатель
стека должен быть установлен на вершину соответствующей области памяти.
224 · Тлава 12. Продвинутые npozpaMMHble возможности и поведение системы
Начальноезначение
указателя OCHoBHoro стека
Свободный доступ
Привилеrированный
аек
Только
привилеrированный
доступ
Адрес
в памяти
СОЗУ
Привилеrированные
данные
Начальное значение
указателя стека процесс.
Пользовательский стек
Пользовательские данные
Рис. 12.1. Разбиение памяти на две области.
После подачи питания инициализируется только MSP (в процессе сброса в He
ro заносится значение, расположенное по O MY адресу). Для конфиrурирования
отказоустойчивой системы с двумя стеками необходимо выполнить дополни
тельные операции. При написании приложения на ассемблере код инициализа
ции может выrлядеть следующим образом:
; Код начинает выполняться на привилеrированном уровне (он располаrается
; в области памяти, доступной на пользовательском уровне)
BL MpuSetup Задаём области MPU и разрешаем защиту памяти
LDR RO, =PSP TOP ; Устанавливаем PSP на вершину стека процесса
MSR PSP, RO
BL SystickSetup
; Конфиrурируем таймер SYSTICK и ero исключение
для периодическоrо вызова ядра ОС
Конфиrурируем реrистр CONTROL таким образом,
чтобы пользовательская проrрамма использовала PSP
и переключаем текущий уровень доступа на пользовательский
Барьер синхронизации команд
UserApplicati0nStart Теперь мы работаем на пользовательском уровне
доступа
Переходим к выполнению пользовательскоrо кода
Всё это прекрасно работает в случае ассемблера) однако при проrраммирова
нии на Си переключение указателей стека в середине функции или процедуры
может привести к порче локальных переменных) поскольку эти переменные MO
rYT располаrаться в стеке. В руководстве [1] предполаrается использовать проце
дуру обработки какоrо либо исключения (например) SVCall) для вызова ядра
с последующим изменением указателя стека модификацией значения
EXC RETURN (Рис. 12.2).
MOV RO, #ОхЗ
MSR CONTROL, RO
ISB
В
12.1. Реализация системы с двумя раздельными стеками · 225
Привилеrир.
уровень
Режим
обработчика
EXC REТURN
= OxFFFFFFF9
Настраиваем PSP
Инициализация и создаём фрейм
ос пользовательскоrо
стека (РС, xPSR)
Изменяем
EXC RETURN
на OxFFFFFFFD
и возвращаемся
Фрейм пользова
тельскоrо стека
заrружается
в реrистры
Привилеrир.
уровень
Режим потока
l
J
Инициализаци
.........",
Операционная система
ПОЛЬЗ0ват.
уровень
Режим потока
Пользова
тельское
приложение
Рис. 12.2. Инициализация нескольких стеков в простой ос.
в большинстве случаев модификация значения EXC RETURN и переключе
ние стеков осуществляется ядром операционной системы (ОС). После запуска
пользовательскоrо приложения исключение SYSTICK может использоваться для
периодическоrо обращения к ядру ОС, осуществляющему управление системой
и, при необходимости, инициирующему переключение контекста (Рис. 12.3).
Привилеrир.
уровень
Режим
обработчика
EXC REТURN =
= OxFFFFFFFD
Функции ос
управления
системой
rенерация PendSV Сохраняем PSP Возврат
е для приложения NOl из исключения
для поел Аующеrо и формируем в PSP
переключения v Ф v
стековыи реим
контекста для приложения N02
l
v'
SYSTICK
1
v
PendSV
J
'р Й 2
пользователь
CKoro стека
заrружается
в реrистры
Привилеrир.
уровень
Режим потока
l!.eE
реrистров
сохраняется
в стековом
фрейме NOl
Пользова
тельское
приложе
ние N02
ПОЛЬЗ0ват. Пользова
уровень тельское Исключение
Режим потока приложение NOl SYSTICK
Рис. 12.3. Переключение контекста в простой ос.
Обратите внимание, что собственно переключение контекста осуществляется
в низкоприоритетном исключении PendSV, чтобы исключить выполнение дaH
ной операции в середине обработчика прерывания.
Мноrие приложения прекрасно обходятся без ОС, однако и в этом случае ис
пользование отдельных стеков для разных секций проrраммноrо кода позволяет
увеличить надёжность устройства. Для реализации такой системы можно при за
пуске процессора Cortex M3 установить указатель MSP на область стека процес
са. В этом случае будет инициализирован стек процесса, но с использованием
указателя MSP. А перед запуском пользовательскоrо приложения надо будет BЫ
полнить следующий код:
; Код начинает выполняться на привилеrированном уровне,
; MSP указывает на пользовательский стек
MpиSetиp(); // 3адаём области MPU и разрешаем защиту памяти
SystickSetиp(); // Конфиrурируем таймер SYSTICK и ero исключение,
// реализующее функции управления системой
226 · [лава 12. Продвинутые npozpaMMHble возможности и поведение системы
SwitchStackPointer();
// Вызываем ассемблерную подпроrрамму для
// указателей стека
/*; Тело подпроrраммы SwitchStackPointer
PUSH {RO, Rl, LR}
MRS RO, MSP
LDR Rl, MSP TOP
MSR MSP, Rl
MSR PSP, RO
MOV RO, #ОхЗ
MSR CONTROL, RO
переключения
Сохраняем текущий указатель стека
Устанавливаем MSP на друrую область памяти
Сохраняем текущее значение указателя стека в PSP
Переключаемся в пользовательский режим и используем
стек процесса в качестве текущеrо стека
РОР {RO, Rl, РС} Возвращаемся
; Обратно в Си проrрамму */
Теперь мы находимся в пользовательском режиме и используем PSP
Все локальные переменные остались на месте
UserApplicationStart(); // Запускаем приложение в пользовательском режиме
12.2. Выравнивание стека на rраницу двойноrо
слова
в приложениях, написанных с учётом требований стандарта AAPCsl), указа
тель стека при входе в функцию должен быть выровнен на rраницу двойноrо сло
ва. Для этоrо при обработке исключений соответствующим образом корректиру
ются адреса стека, по которым сохраняются реrистры. Чтобы включить эту воз
можность, необходимо установить бит STKALIGN реrистра управления конфи
rурацией CCR контроллера NVIC (см. Табл. f.18 в Приложении r). При использо
вании СМSIS совместимоrо драйвера это можно сделать с помощью выражения:
SCB >CCR SCB >CCR I Ох200;
При проrраммировании на Си без использования CMSIS:
#define NVIC CCR * ((volatile unsigned long *) (OxEOOOED14))
NVIC CCR NVIC CCR I Ох200; /* Устанавливаем бит STKALIGN в NVIC */
Эту операцию можно выполнить и на языке ассемблера:
LDR RO, OxEOOOED14 Заrружаем в RO адрес реrистра CCR
LDR Rl, [RO]
ORR.W Rl, Rl, #Ох200 Устанавливаем бит STКALIGN
STR Rl, [RO] Пишем новое значение в реrистр CCR
Если на момент сохранения контекста при обработке исключительной ситуа
ции бит STKALIGN был установлен, то бит 9 сохранённоrо в стеке реrистра xPSR
(объединённый реrистр состояния проrраммы) показывает, корректировался ли
указатель стека при сохранении контекста. При восстановлении контекста из CTe
ка процессор проверяет состояние 9 ro бита xPSR и соответствующим образом
корректирует значение указателя стека.
1) Соrлашения по вызову процедур для архитектуры ARM (Procedure СаН Standard for ARM
Architecture AAPCS) [5]. Соответствующие рекомендации, касающиеся выравнивания
указателя стека и стандарта AAPCS, были опубликована на сайте компании ARM; см.
http://iпfoceпter.arт.coт/help/topic/coт. arт.doc. ihi0046a/IHI0046A ABI Advisory l.pdf.
12.3. Переход в режим потока с любоzо уровня вложенности · 227
Во избежание повреждения данных, хранящихся в стеке, бит STKALIGN не
следует изменять в обработчике исключений. Это может привести к HeCOOTBeT
ствию значений указателя до и после исключения.
Возможность выравнивания стека появилась в l й ревизии процессора
Cortex M3. Старые устройства, построенные на процессоре ревизии О, такой воз
можности не имеют. Во 2 й ревизии процессора эта возможность разрешена по
умолчанию, тоrда как в l й ревизии её необходимо разрешать проrраммно.
Ещё раз повторю, что выравнивание стека на rраницу двойноrо слова необходи
мо, если ваше приложение должно удовлетворять требованиям стандарта AAPCS.
12.3. Переход в режим потока с любоrо уровня
впоженности
В процессоре Cortex M3 предусмотрена возможность переключения выпол
няющеrося обработчика прерывания с привилеrированноrо уровня на пользова
тельский. Это необходимо в тех случаях, коrда код обработчика прерывания яв
ляется частью пользовательскоrо приложения и не должен иметь привилеrиро
ванных прав доступа к данным. Указанная функция называется «Nonbase 1hread
Enable» и включается установкой бита NONBASETHRDENA реrистра управле
ния конфиrурацией CCR контроллера NVIC.
Для использования данной функции при меняется перенаправление обработ
чика исключительной ситуации. Вектор в таблице векторов указывает на обра
ботчик, выполняющийся на привилеrированном уровне, но размещённый в об
ласти памяти, доступной в пользовательском режиме.
redirect handler
PUSH {LR}
SVC О SVС функция для переключения из привилеrированноrо
режима в пользовательский
BL User IRQ Handler
SVC 1 SVС функция для возврата из пользовательскоrо режима
в привилеrированный
РОР {РС} ; Возвращаемся
Обработчик исключения SVCall состоит из трёх частей:
. в первой части определяется значение параметра, переданноrо в команде SVC;
. во второй части (обработчик системноrо сервиса NQQ) устанавливается бит
NONBASETHRDENA, выравнивается пользовательский стек, корректируется
значение EXC RETURN и выполняется возврат в обработчик (уже на пользо
вательском уровне доступа) с использованием стека процесс а;
228 · fлава 12. Продвинутые npozpaMMHble возможности и поведение системы
· в третьей части (обработчик системноrо сервиса N Q 1) сбрасывается бит
NONBASETHRDENA, восстанавливается значение указателя пользователь
cKoro стека и выполняется возврат в обработчик (на привилеrированном
уровне доступа) с использованием OCHoBHoro стека.
svc handler
TST LR, tOx4
ITE EQ
MRSEQ RO, MSP
MRSNE RO, PSP
LDR R1, [RO, #24]
LDRB RO, [R1, # 2]
CBZ RO, svc service О
СМР RO, t1
BEQ svc service 1
B.W Unknown SVC Request
svc service О Сервис переключения обработчика из привилеrированноrо режима
; в пользовательский
; Корректируем PSP
PSP = PSP Ох20
МRS
SUB
MSR
MOV
RO, PSP
RO, RO, #Ох20
PSP, RO
R1, tOx20
Проверяем бит 2 значения EXC RETURN
Если = О, то
заrружаем корректный указатель стека в RO
Читаем из стека РС
Извлекаем параметр с адреса РС 2
Копируем стековый фрейм из OCHoBHoro стека
в стек процесса
svc service O copy loop
SUBS R1, R1, #4
LDR R2, [ S Р, R1 ]
STR R2, [RO, R1]
СМР R1, #0
BNE svc service O copy loop
STRВ R1, [RO, #Ох1С] ; Сбрасываем в О реrИСТр IPSR, находящийся в стеке
; процесса
LDR RO, =ОхЕОООЕО14 ; Разрешаем функцию «Nonbase thread епаЫе» в CCR
LDR R1, [rO]
ORR R1, #1
STR R1, [rO]
ORR LR, #ОхС ; Меняем LR для возврата в режим потока, используя PSP
ВХ LR
svc service 1 Сервис переключения обработчика из пользовательскоrо режима
в привилеrированный
Изменяем РС в стеке привилеrированноrо режима
так, чтобы при возврате попасть на команду,
#Ох18] расположенную после 2 й команды SVC обработчика
#Ох18] пере направления
Заносим в PSP значение, которое в нём было
до выполнения 1 й команды SVC
MRS RO, PSP
LDR R1, [RO,
STR R1, [SP,
MRS RO, PSP
АОО RO, RO, #Ох20
MSR PSP, RO
LDR RO, =OxEOOOED14 ; Сбрасываем бит NONBASETHRDENA в CCR
LDR R1, [rO]
BIC R1, #1
STR R1, [rO]
12.4. Пара слов о проuзводuтельностu · 229
BIC
LR, #ОхС
Возвращаемся в режим обработчика,
; используя основной стек
ВХ LR
Исключение SVCall используется потому, что реrистр состояния прерывания
(IPSR) может быть изменён только при возврате из обработчика исключительной
ситуации. Разумеется, можно использовать и друrие исключения, например про
rpaMMHo rенерируемые прерывания. Однако этоrо делать не рекомендуется, по
скольку такие прерывания являются «неточными» И MorYT оказаться маскиро
ванными, т.е. существует вероятность задержки выполнения требуемых опера
ций копирования и переключения стека. Последовательность выполнения кода
показана на Рис. 12.4. На этом же рисунке показано изменение указателей стека
и текущеrо приоритета исключений. Моменты ручной корректировки указателя
PSP в обработчике SVCall помечены пунктирными овалами.
Адрес
в памяти
Основной
указатель
аека (MSP)
Указатель
аека n роцесса
(PSP)
Соаояние
процессора
IPSR
Уровень
приоритета
SVC
Прерывание
Привилеrир.
поток
Пользоват.
поток
Активноаь
IRQ
Прерывание SVC о
Возврат
из SVC о
I
I
I
I
I
I
I
I
I
Стеков й фрейм
копи уется
в стек процесса
I
I
I
Возврат Возврат
из SVC 1 из прерывания
I
I
I
I
I
I
SVC 1
I
I
I
I
I
I
I
I
,.., I
, I \
, I \ Руч ая
I
\ : 1 корр кция
" Р9Р
.., I
I
1
,..,
, \
I I \
, I I
\ I ,
'..,
Ручная
коррекция
PSP
I
Поток Обработчик Обработчик Поток Обработчик Обра60тч. Поток
О Номер IRQ 11 (SVC) О 11 (SVC) Номер IRQ О
I
I
I
I
I
I
I
I
I
I
I I
J
I
I
I I I
I .J .J
I I I
I I I
I I I
11\
I
I
I
I
I
I
I
I
I
I
I I I I
i J
I I
I I
I I
i
I I
I I
I I
I I
I
I
I
/
Рис. 12.4. Использование бита NONBASETHRDENA.
12.4. Пара слов о производительности
Чтобы выжать из процессора Cortex M3 максимум возможноrо, нужно учиты
вать некоторые моменты. Во первых, необходимо исключить циклы ожидания при
обращении к памяти. При проектировании микроконтроллера или SoC разработ
чик должен так оптимизировать систему памяти, чтобы обращения к командам
230 · [лава 12. Продвинутые npozpaMMHble возможности и поведение системы
и данным выполнялись за одинаковое время, а также использовать 32 битную па
мять. Карта памяти должна быть такой, чтобы проrраммный код исполнялся бы из
области кода, а большинство обращений к данным шло бы по системной шине. Это
позволит обращаться к данным одновременно с выборкой команд.
BO BTOpЫX, таблица векторов прерываний также должна быть, по возможно
сти, размешена в области кода. Это позволит одновременно выполнять выборку
вектора и сохранение контекста в стеке. При нахождении таблицы векторов
в ОЗУ задержка прерываний может увеличиться на несколько тактов, поскольку
и для выборки вектора, и для сохранения контекста в этом случае будет задей
ствоваться системная шина (если только стек не размещён в области кода, rде ис
пользуется шина D Code).
По возможности избеrайте обращений к невыровненным данным. HeBыpOB
ненные пересылки преобразуются в две и более пересылок по шине ЛИВ), что за
медляет выполнение проrраммы. Так что уделите должное внимание структуре
данных своей проrраммы.
Те, кто пишет проrраммы на ассемблере, MorYT также использовать ряд трю
ков, позволяющих ускорить выполнение определённых операций.
1. Используйте команды доступа к памяти со смещением. Если необходимо
обращаться к различным ячейкам памяти в пределах HeKoToporo диапазона
адресов, то вместо кода
LDR RO, OxEOOOE400
LDR Rl, OxEOC02000
STR Rl, [RO]
LDR RO, OxEOOOE404
LDR Rl, OxEOEOEOEO
STR Rl, [RO]
Устанавливаем приоритет прерываний wз.. .WO
Уровни приоритетов
Устанавливаем приоритет прерываний W7...W4
Уровни приоритетов
можно написать следующее:
LDR RO, =ОхЕОООЕ400 Устанавливаем приоритет
LDR Rl, OxEOC02000 Уровни приоритетов
STR Rl, [RO]
LDR Rl, OxEOEOEOEO
STR Rl, [RO,#4]
прерываний WЗ...WО
Уровни приоритетов
Устанавливаем приоритет прерываний W7. ..W4
Вторая команда сохранения использует смещение относительно первоrо
адреса, уменьшая таким образом число команд.
2. Применяйте для обращения к памяти команды rрупповой заrрузки/
сохранения. Так, используя команду STM, предыдущий при мер можно
переписать следующим образом:
LDR RO, OxEOOOE400 Базовый адрес rруппы реrистров приоритета
LDR Rl, OxEOC02000 Уровни приоритетов прерываний N!З.. . NЮ
LDR R2, =ОхЕОЕОЕОЕО Уровни приоритетов прерываний W7. ..W4
STMIA RO, {Rl, R2}
3. Используйте Iт блоки для замены коротких условных переходов. Поскольку
процессор Cortex М3 имеет конвейер, при выполнении операции перехода
возникает штраф ветвления. Если условный переход применяется для
пропуска нескольких команд, то ero с успехом можно заменить Iт блоком,
что позволит сэкономить несколько тактов.
12.5. Состояние блокировки · 231
4. Если операцию можно выполнить с помощью двух команд Thumb либо
с помощью одной команды Thumb 2, то необходимо использовать последний
вариант, поскольку он обеспечивает меньшее время исполнения при том же
размере кода.
12.5. Состояние блокировки
При возникновении какоrо либо отказа rенерируется соответствующее ис
ключение. Если ещё один отказ произойдёт во время выполнения обработчика
Usage Fault/Bus Fault/MemManage Fault, то будет запущен обработчик исключе
ния Hard Fault. А что будет, если отказ произойдёт внутри обработчика Hard
Fault? В этом случае процессор перейдёт в состояние блокировки (Рис. 12.5).
Приоритет Ошибки, возникающие здесь,
не вызывают блокировки
Ошибки, возникающие здесь,
вызывают блокировку
1/ 2
Ошибки, возникающие здесь,
не вызывают блокировки
0...255
Обработчик Hard Fault
или NMI
Сохранение
контекаа в аеке
Восаановление
контекаа из стека
.
Время
Рис. 12.5. Возникновение состояния блокировки.
12.5.1. Что происходит во время блокировки?
При переходе процессора в состояние блокировки в счётчик команд заrружа
ется значение OxFFFFFFFX, после чеrо процессор продолжает выборку команд
с этоrо адреса. Кроме Toro, активируется выходной сиrнал LOCKUP процессора,
сиrнализируя о данной ситуации. Разработчики устройств MorYT использовать
этот сиrнал для активации схемы сброса системы.
Состояние блокировки может наступить, если:
. отказ возникнет внутри обработчика исключения Hard Fault (двойной отказ);
. отказ возникнет внутри обработчика немаскируемоrо прерывания;
. отказ шины возникнет во время цикла сброса (при выборке начальноrо значе
ния SP или РС).
в случае двойноrо отказа процессорное ядро сохраняет возможность реаrи
рования на немаскируемое прерывание и запуска соответствующеrо обработчи
ка. Однако после завершения обработчика процессор вернётся в состояние бло
232 · fлава 12. Продвинутые npozpaMMHbte возможности и поведение системы
кировки, при этом значение счётчика команд снова станет равным OxFFFFFFFX.
В данном случае происходит блокировка системы с уровнем приоритета, равным
1. При возникновении немаскируемоrо прерывания процессор перейдёт к ero
обработке, поскольку приоритет этоrо прерывания ( 2) больше текущеrо уровня
приоритета ( 1). После завершения обработки NMI и возврата в состояние блоки
ровки текущий уровень приоритета вновь станет равным 1.
Как правило, наилучшим способом выхода из состояния блокировки являет
ся сброс устройства. При подключённом отладчике также можно остановить
процессор, записать в РС друrое значение и продолжить выполнение проrраммы
с HOBoro адреса. Однако в большинстве случаев это может оказаться не лучшим
вариантом, поскольку ряд реrистров, в том числе реrистры системы прерываний,
MorYT потребовать повторной инициализации, прежде чем система сможет Bep
нуться в рабочее состояние.
Вы спросите, почему же мы просто не сбрасываем ядро при возникновении
блокировки? В rотовой системе, возможно, так и придётся делать, однако при
разработке проrраммноrо обеспечения мы прежде Bcero должны выявить источ
ник проблемы. Если мы сразу же сбросим ядро, то мы не сможем понять причи
ну отказа, поскольку реrистры будут сброшены и состояние системы изменится.
В большинстве микроконтроллеров на базе процессора Cortex M3 для сброса
ядра при ero попадании в состояние блокировки можно использовать стороже
вой таймер.
Обратите внимание, что отказ шины во время сохранения контекста при BXO
де в обработчик Hard Fault или обработчик NMI не вызовет перехода в состояние
блокировки, однако исключение Bus Fault всё же будет отложено.
12.5.2. Предотвращение бпокировки
При написании обработчика NMI или Hard Fault необходимо сделать всё воз
можное, чтобы избежать блокировки процессора. К примеру, можно исключить
все необязательные обращения к стеку в обработчике Hard Fault до тех пор, пока
мы не убедимся, что память работает нормально и указатель стека имеет KOp
ректное значение. При разработке сложных систем одной из возможных причин
возникновения отказов шины или отказов системы управления памятью являет
ся порча указателя стека. Если мы поместим в начале обработчика Hard Fault код,
наподобие следующеrо:
hard fault handler
PUSH {R4 R7, LR} Не лучшая идея до тех пор, пока вы не убедитесь
в безопасности работы со стеком!
то при возникновении отказа из за ошибки во время обращения к стеку, мы cpa
зу же перейдём в состояние блокировки. Вообще rоворя, в обработчиках исклю
чений Hard Fault, Bus Fault и MemManage Fault желательно всеrда проверять YKa
затель стека на корректность, прежде чем продолжать работу со стеком. При Ha
писании обработчика NMI мы можем попытаться уменьшить вероятность появ
ления ошибок, вызванных операциями со стеком, используя только реrистры
RO...R3 и R12, которые сохраняются в стеке автоматически.
12.6. Pezucmp FAULTMASK · 233
Одно из основных правил, которому необходимо следовать при написании
обработчиков исключения Hard Fault и немаскируемоrо прерывания, звучит сле
дующим образом: в обработчике следует выполнять только самые необходимые
операции, а для выполнения остальных задач, скажем для вывода сообщений об
ошибках, использовать отдельное исключение (например, PendSV) или про
rpaMMHoe прерывание. Это позволит сделать указанные обработчики небольши
ми по размеру и надёжными.
Не вздумайте вызывать в обработчиках NMI и Hard Fault команду svc. По
скольку приоритет исключения SVCall всеrда меньше приоритетов Hard Fault
и немаскируемоrо прерывания, выполнение команды SVC в этих обработчиках
вызовет блокировку системы. Данное требование может показаться простым, oд
нако при разработке сложных систем, коrда используются функции, описанные
в разных файлах, вы можете случайно, сами Toro не желая, вызвать в обработчи
ке NMI или Hard Fault функцию, содержащую команду svc. Поэтому, прежде чем
приступить к написанию проrраммы, необходимо тщательно продумать реали
зацию обработчика системных вызовов.
12.6. Реrистр FAULTMASK
Реrистр FAULTMASK используется для перевода конфиrурируемых обработ
чиков исключений отказов (Bus Fault, Usage Fault или MemManage Fault) на ypo
вень исключения Hard Fault, не дожидаясь возникновения последнеrо из за pe
альноrо отказа. Это позволяет конфиrурируемым обработчикам исключений OT
казов выступать в роли обработчика Hard Fault. При этом обработчик исключе
ния отказа получает следующие возможности:
1. Маскирование отказов шины установкой бита BFHFNMIGN реrистра
управления конфиrурацией. Данная возможность может использоваться для
тестирования шинной системы без риска возникновения блокировки.
Например, для проверки корректной работы моста.
2. Обход модуля MPU. Данная возможность позволяет обработчику отказа
обращаться к областям памяти, защищённым модулем MPU, не требуя,
таким образом, перепроrраммирования последнеrо для выполнения
нескольких пересылок, предназначенных для исправления ошибки.
Использование реrистра FAULTMASK отличается от использования реrистра
PRIMASK. Последний обычно задействуется в коде, критичном ко времени ис
полнения, однако он не позволяет маскировать отказы шины или обходить YCTa
новки модуля MPU. При установленном реrистре PRIMASK все конфиrурируе
мые обработчики исключительных ситуаций поднимаются на уровень обработ
чика Hard Fault. В то же время реrистр FAULTMASK позволяет конфиrурируе
мым обработчикам исключений отказов разрешать проблемы, связанные с си
стемой памяти, за счёт возможностей, в обычном режиме доступных лишь обра
ботчику исключения Hard Fault. Однако даже при установленном реrистре
FAULTMASK отказы, вызванные такими операциями, как выборка некорректной
команды или использование команды SVC на неверном уровне приоритета, всё
равно MorYT вызвать блокировку процессора.
rЛАВА 1 3
МОДУЛЬ 3АЩИТЫ ПАМЯТИ MPU
13.1. Общие сведения
Архитектура процессора Соrtех М3ТМ предусматривает наличие опционально
ro модуля защиты памяти (Memory Protection Unit MPU). Будучи реализован
ным в микроконтроллере или системе на кристалле, этот модуль осуществляет
защиту памяти, что позволяет повысить надёжность разрабатываемых изделий.
Перед использованием модуля MPU ero необходимо сконфиrурировать и вклю
чить. При отключённом модуле MPU система памяти будет функционировать
так же, как и при ero отсутствии.
Модуль MPU может повысить надёжность встраиваемой системы следующим
образом:
· не позволяя пользовательским приложениям повреждать данные, используе
мые операционной системой;
· разделяя данные между задачами посредством блокирования доступа к дaH
ным любой задачи со стороны остальных задач;
· позволяя назначать областям памяти атрибут «только для чтения» для защи
ты наиболее важных данных;
· обнаруживая неожиданные обращения к памяти (скажем, при порче стека).
Кроме Toro, модуль MPU может использоваться для назначения различным
областям памяти атрибутов доступа, определяющих возможности кэширования
и буферизации.
Для реализации функций защиты памяти модуль MPU разбивает всё aдpec
ное пространство процессора на несколько областей. В общей сложности можно
задать до восьми областей. Помимо этоrо, можно определить «фоновую» карту
памяти, которая будет использоваться по умолчанию на привилеrированном
уровне доступа. Обращения к ячейкам памяти, которые не входят ни в одну из
областей модуля MPU или доступ к которым запрещён параметрами области, BЫ
зовут rенерацию исключения MemManage Fault.
Области MPU MorYT перекрываться. Если ячейка памяти относится к двум об
ластям, то атрибуты доступа к памяти и права доступа, используемые при обра
щении к этой ячейке, будут определяться установками области с наибольшим HO
мером. Так, если адрес пересылки находится в диапазоне адресов, соответствую
щем l й и 4 й областям, то будут использоваться установки 4 й области.
13.2. Pezucтpbl модуля МРИ · 235
13.2. Реrистры модуля MPU
Модуль MPU имеет ряд специальных реrистров. Один из них это реrистр
типа модуля MPU TYPE, который позволяет определить наличие данноrо MOДY
ля в устройстве. Если при чтении поля DREGION возвращается нулевое значе
ние, значит, модуль MPU не реализован (Табл. 13.1).
Таблица 13.1. РеI'ИСТР типа MPU MPU TYPE (OxEOOOED90)
Значение
Биты Обозначение Тип после Описание
сброса
Число областей команд) поддерживаемых данным
23:16 IREGION R О MPU; поскольку в архитектуре ARMv7 M
используется унифицированный модуль MPU)
это поле всеrда содержит О
Число областей) поддерживаемых данным MPU;
15:8 DREGION R О или 8 в процессоре Cortex М3 это значение равно либо О
(MPU отсутствует)) либо 8 (MPU присутствует)
О SEPARATE R О Этот бит всеrда равен О) поскольку используется
унифицированный модуль MPU
Для управления модулем предназначено несколько реrистров. Прежде Bcero,
это реrистр управления модулем MPU CTRL (Табл. 13.2). В данном реrистре pac
положены три управляющих бита. При сбросе в реrистр заносится нулевое значе
ние, что соответствует отключённому модулю MPU. ДЛЯ разрешения работы MO
дуля MPU необходимо задать параметры всех областей MPU, после чеrо YCTaHO
вить бит ENABLE реrистра управления.
Таблица 13.2. РеI'ИСТр управления MPU MPU CTRL (OxEOOOED94)
Биты Обозначение Тип Значение Описание
после сброса
Разрешение доступа к карте памяти
в привилеrированном режиме. При YCTaHOB
ленном бите PRIVDEFENA и включённом модуле
MPU вся карта памяти рассматривается как
2 PRIVDEFENA R/W О «фоновая» область) доступная для привилеrиро
ванных обращений. Если данный бит сброшен) то
«фоновая» область отсутствует) а обращение
к ячейке памяти) не входящей в какую либо
область MPU) вызывает отказ системы
управления памятью
Этот бит разрешает использование модуля MPU
в обработчиках NMI и исключения Hard Fault.
1 HFNMIENA R/W О Если бит сброшен) то при выполнении данных
обработчиков модуль MPU не используется
(блокируется)
о ENABLE R/W О Установка этоrо бита в 1 разрешает работу
модуля MPU
Если не задано ни одной области MPU, то установленный бит PRIVDEFENA по
зволяет привилеrированному коду обращаться к любым ячейкам памяти в преде
236 · rлава 13. Модуль защиты памяти МРИ
лах Bcero адресноrо пространства, в то время как обращения из пользовательскоrо
кода будут блокироваться. Если же имеются сконфиrурированные и разрешённые
области MPU, то их настройки будут иметь более высокий приоритет. В качестве
примера можно рассмотреть две системы с одинаковыми настройками MPU,
в одной из которых бит PRIVDEFENA будет установлен в 1 (правая часть Рис. 13.1).
Установленный бит PRIVDEFENA разрешает в последней системе привилеrиро
ванный доступ к ячейкам памяти, не входящим ни в одну из областей MPU.
о
Рис. 13.1. Влияние бита PRIVDEFENA.
Установка бита разрешения в реrистре управления обычно является послед
ней операцией при настройке модуля MPU. Если не следовать этому правилу, то
в процессе конфиrурирования областей MPU MorYT случайным образом rенери
роваться различные исключения отказов.
Следующим реrистром, используемым для управления модулем MPU, являет
ся реrистр номера области MPU RNR (Табл. 13.3). Перед заданием параметров
каждой из областей в этот реrистр заносится номер конфиrурируемой области.
Таблица 13.3. РеI'ИСТР номера области MPU MPU RNR (OxEOOOED98)
PRIVDEFENA = о
о
...... Доступ
..... запрещён
Права доступа
к области З
переопределяют
настройки
Область 3 ......iI области 2
\..
- '
Область 2 .... П ра ва доступа
..... к области 2
Область 1 ...... I Права доступа
....... I к области 1
...... I Доступ
..... I запрещён
Область О ...... П ра ва доступа
..... к области О
4 rбайт
PRIVDEFENA = 1
Только
......
...... привилеrи
Область 1 рованный
доступ
Права доступа
к области З
переопределяют
настройки
Область 3 iI области 2
r
Область 2 ...... Права доступа I
...... к области 2
Область 1 ...... Права доступа
..... к области 1
...... Только
Область 1 ....... привилеrи
рованный
доступ
Область О .... Права доступа
..... к области О
4 rбайт
Биты Обозна Тип Значение после Описание
чение сброса
3адаёт номер проrраммируемой области. Поскольку
7:0 REGION R/W модуль MPU процессора Cortex M3 поддерживает
Bcero 8 областей) в этом реrистре реализованы
только биты [2:0]
13.2. Pezucтpbl модуля МРИ · 237
Начальный адрес области MPU определяется реrистром базовоrо адреса
MPU RBAR (Табл. 13.4). Используя поля VALID и REGION данноrо реrистра, мы
сможем исключить этап проrраммирования реrистра номера области. Это позво
лит упростить код проrраммы, особенно в том случае, если все параметры MPU
хранятся в проrрамме в виде таблицы.
Таблица 13.4. Реrистр базовоrо адреса области MPU MPU RBAR (OxEOOOED9C)
Значение
Биты Обозначение Тип после Описание
сброса
31:5 ADDR R/W Базовый адрес области
Если бит установлен в 1, то номер области MPU,
проrраммируемой на данном этапе, будет
4 VALID R/W определяться полем REGION этоrо реrистра. Если
бит сброшен в О, то используется область, заданная
реrистром MPU RNR
Это поле используется вместо реrистра номера об
ласти MPU RNR, если бит VALID установлен в 1;
3:0 REGION R/W в противном случае, содержимое данноrо поля иr
норируется. Поскольку модуль MPU процессора
Cortex М3 поддерживает Bcero 8 областей, то это по
ле также иrнорируется, если ero значение больше 7
Для задания параметров области предназначен реrистр атрибутов и размера
области MPU RASR (Табл. 13.5). В частности, размер области MPU определяется
содержимым 5 битноrо поля REGION SIZE этоrо реrистра (Табл. 13.6).
Таблица 13.5. Реrистр атрибутов и размера области MPU MPU RASR (OxEOOOEDAO)
Биты Обозначение Тип Значение Описание
после сброса
31:29 Зарезервировано
Запрет выборки команд (1 = запрещает
28 XN R/W выборку команд из данной области памяти;
при попытке это сделать rенерируется отказ
системы управления памятью)
27 Зарезервировано
26:24 АР R/W Поле прав доступа к данным
23:22 Зарезервировано
21:19 ТЕХ R/W Поле расширения типа
18 S R/W Разделяемая
17 С R/W Кэшируемая
16 В R/W Буферируемая
15:8 SRD R/W Запрет подобластей
7:6 Зарезервировано
5:1 SIZE R/W Размер области MPU
О ENABLE R/W Разрешение области
238 . Тлава 13. Модуль защиты памяти МРИ
Таблица 13.6. Значение поля SIZE реrистра MPU RASR и размер области MPU
Поле SIZE Размер области
ЬООООО Зарезервировано
ЬООООl Зарезервировано
ЬООО10 Зарезервировано
ЬООО11 Зарезервировано
ЬООl00 32 байта
ЬОО101 64 байта
ЬОО110 128 байт
ЬОО 111 256 байт
ЬО1000 512 байт
ЬОl001 1 Кбайт
ЬО1010 2 Кбайт
ЬО1011 4 Кбайт
ЬО1100 8 Кбайт
ЬО1101 16 Кбайт
ЬО1110 32 Кбайт
ЬО1111 64 Кбайт
ыоооо 128 Кбайт
ЫООО1 256 Кбайт
ЫОО10 512 Кбайт
ЫОО11 1 Мбайт
ЫО100 2 Мбайт
ЫО101 4 Мбайт
ЫО110 8 Мбайт
ы1ll11 16 Мбайт
ЫI000 32 Мбайт
Ы1001 64 Мбайт
Ы1010 128 Мбайт
Ы1011 256 Мбайт
Ы1100 512 Мбайт
Ы1101 1 [байт
Ы1110 2 fбайт
Ы1111 4 fбайт
Поле запрета подобластей (биты [15:8] реrистра MPU RASR) используется для
разбиения области MPU на восемь подобластей paBHoro размера с последующим
разрешением или запрещением каждой из них. Если подобласть запрещена и при
этом частично перекрывается друrой подобластью, то используются права ДOCTY
па указанной друrой подобласти. Если подобласть запрещена и не перекрывается
с друrой областью, то обращение к данному участку памяти вызовет исключение
MemManage Fault. Использование подобластей возможно только в том случае, ec
ли размер области превышает 128 байт. Права доступа к области MPU определя
13.2. Pezucтpbl модуля МРИ · 239
ются содержимым битовоrо поля АР (биты [26:24] реrистра MPU RASR) в COOT
ветствии с Табл. 13.7.
Таблица 13.7. Содержимое поля АР и соответствующие права доступа
Значение Привилеrиро Пользователь Описание
АР ванный доступ ский доступ
000 Доступ запрещён Доступ запрещён Доступ запрещён
001 Чтение/запись Доступ запрещён Доступ только на привилеrированном уровне
010 Чтение/запись Только чтение Запись в пользовательской проrрамме
вызовет отказ
011 Чтение/запись Чтение/запись Полный доступ
100 Непредсказуемо Непредсказуемо Непредсказуемо
101 Только чтение Доступ запрещён Только чтение на привилеrированном уровне
110 Только чтение Только чтение Только чтение
111 Только чтение Только чтение Только чтение
Поле XN (бит 28) определяет допустимость выборки команд из данной области
памяти. Если этот бит установлен в 1, то при исполнении любой команды, выбран
ной из указанной области, будет сrенерировано исключение MemManage Fault.
Назначение полей ТЕХ, S, В, с (биты [21:16]) более сложное. Несмотря на то что
процессор Cortex M3 не имеет кэш памяти, он всё же построен по архитектуре
ARMv7 M, которая поддерживает внешнюю кэш память, а также более развитые
системы памяти. Поэтому атрибуты доступа к памяти для конкретной области
MorYT задаваться в соответствии с используемой моделью управления памятью.
В архитектурах у6 и у7 система памяти может иметь два уровня кэш памяти:
внутренний и внешний. Эти уровни MorYT иметь различные политики кэширо
ван ия. Поскольку сам процессор Cortex M3 не имеет контроллера кэш памяти,
различные политики кэширования влияют только на буферирование операций
записи во внутреннем коммутаторе BusMatrix и, возможно, в контроллере памя
ти (Табл. 13.8). Причём, в большинстве микроконтроллеров можно оrраничить
ся Bcero несколькими типами памяти с соответствующими атрибутами
(Рис. 13.2).
Таблица 13.8. Атрибуты памяти в архитектуре ARMv7 M
Совместное
ТЕХ С В Описание использование
области
ЬООО О О CTporo упорядоченная (выполнение и завершение Разделяемая
пересылок производится в проrраммируемом порядке)
ЬООО О 1 Разделяемое устройство (операции записи MorYT Разделяемая
буферироваться)
ЬООО 1 О Внешний и внутренний кэш со сквозной записью; [5]
без размещения записываемых данных
ЬООО 1 1 Внешний и внутренний кэш со сквозной записью; [5]
без размещения записываемых данных
ЬООl О О Внешний и внутренний кэш отключены [5]
ЬООl О 1 Зарезервировано Зарезервировано
240 · Тлава 13. Модуль защиты памяти МРИ
Таблица 13.8. Атрибуты памяти в архитектуре ARMv7 M (продолжение)
Совместное
ТЕХ С В Описание использование
области
ЬО01 1 О Зависит от реализации
ЬО01 1 1 Внешний и внутренний кэш со сквозной записью; [S]
с размещением записываемых данных
Ь010 О О Неразделяемое устройство Неразделяемая
Ь010 О 1 Зарезервировано Зарезервировано
Ь010 1 Х Зарезервировано Зарезервировано
ЫВВ А А Кэшируемая память; ВВ = политика внешнеrо кэша, [S]
АА = политика BHYTpeHHero кэша
Назначение
Тип
памяти
Обычно ИСПОllьзуемые
атрибуты памяти
I Флэш/П3У
' С)
Обычная
память
с)
Нера еляемая,сквознаязапись
( = 1, В = О, ТЕХ = О, S = о
Внутреннее
(ОЗУ
с)
Обычная
память
с)
Разделяемая, сквозная запись
( = 1, В = О, ТЕХ = О, S = 1
Внешнее
(ОЗУ
с)
Обычная
память
с)
Разделяемая, обратная запись
( = 1, В = 1, ТЕХ = О, S = 1
I Периферия
' С)
Память
устройства
с)
Разделяемое устройство
(= О, В = 1, ТЕХ = О, S = 1
Рис. 13.2. Наиболее часто используемые в микроконтроллерах атрибуты памяти.
Если вы используете микроконтроллер с кэш памятью, то вы должны сконфи
rурировать модуль MPU в соответствии с желаемой политикой кэширования
(например, запрет кэширования/кэширование со сквозной записью/кэширова
ние с обратной записью). Если бит ТЕХ[2] установлен в 1, то политика кэширова
ния для внутренней и внешней кэш памяти соответствует Табл. 13.9.
Таблица 13.9. Политика внутреииеrо и виешнеrо кэша при ТЕХ[2] = 1
Биты атрибутов памяти Политика кэширования
(АА и ВВ)
00 Кэширование отключено
01 Обратная запись; размещение записываемых данных
10 Сквозная запись; нет размещения записываемых данных
11 Обратная запись; нет размещения записываемых данных
13.3. Настройка модуля МРИ · 241
Дополнительную информацию о кэш памяти и политиках кэширования мож
но почерпнуть из руководства [2].
13.3. Настройка модуля MPU
На первый взrляд, реrистры модуля MPU MorYT показаться сложными для по
нимания, однако если вы чётко осознаёте, какие именно области памяти нужны
для вашеrо приложения, то использование этих реrистров не вызовет никаких
затруднений. Как правило, необходимы следующие области:
. область проrраммноrо кода для привилеrированных проrрамм, таких как
ядро ОС и обработчики исключений;
. область проrраммноrо кода для пользовательских проrрамм;
. область данных для привилеrированных и пользовательских проrрамм в раз
личных областях памяти (например, данные и стек приложения, расположен
ные в области статическоrо ОЗУ с адресами от Ох20000000 до Ох30000000);
. прочая периферия.
Выделять отдельную область памяти в диапазоне адресов шины собственных
периферийных устройств не обязательно. Модуль MPU автоматически распозна
ёт соответствующие адреса и разрешает привилеrированному коду обращаться
к этой области памяти.
В устройствах с ядром Cortex M3 для большинства областей памяти MorYT
быть заданы следующие атрибуты: ТЕХ = 000, С = 1, В = 1. Системные устройства,
такие как контроллер прерываний NVIC, должны располаrаться в области со
cTporo упорядоченным доступом, а области для периферии должны иметь атри
буты «разделяемые устройства» (ТЕХ = 000, С = О, В = 1). Если же вы хотите, что
бы любые отказы шины в области были «точными», то для неё необходимо будет
использовать атрибуты cTporo упорядоченной памяти (ТЕХ = 000, с = О, В = О),
чтобы запретить буферизацию записи. Однако при этом может снизиться произ
водительность системы.
При использовании СМSIS совместимых драйверов устройств к реrистрам
MPU можно обращаться как к элементам структуры (см. Табл. 13.10). Алrоритм
простейшей процедуры инициализации модуля MPU приведён на Рис. 13.3.
Таблица 13.10. Названия реrистров модуля MPU в стандарте CMSIS
Поле Реrистр модуля MPU Адрес
MPU >TYPE Реrистр типа MPU OxEOOOED90
MPU >CTRL Реrистр управления MPU OxEOOOED94
MPU >RNR Реrистр номера области MPU OxEOOOED98
MPU >RBAR Реrистр баЗОБоrо адреса области MPU OxEOOOED9C
MPU >RASR Реrистр атрибутов и размера области MPU OxEOOOEDAO
MPU >RBAR Al Псевдоним 1 реrистра базовоrо адреса области MPU OxEOOOEDA4
MPU >RBAR A2 Псевдоним 2 реrистра базовоrо адреса области MPU OxEOOOEDAC
MPU >RBAR A3 Псевдоним 3 реrистра базовоrо адреса области MPU OxEOOOEDB4
MPU >RASR Al Псевдоним 1 реrистра атрибутов и размера области OxEOOOEDA8
MPU
242 · Тлава 13. Модуль защиты памяти МРИ
Таблица 13.10. Названия реrистров модуля MPU в стандарте CMSIS (продолжение)
Поле РеI'ИСТр модуля MPU Адрес
MPU >RASR A2 Псевдоним 2 реrистра атрибутов и размера области OxEOOOEDBO
MPU
MPU >RASR A3 Псевдоним 3 реrистра атрибутов и размера области OxEOOOEDB8
MPU
Проверяем реrистр типа
MPU, чтобы убедиться
в наличии модуля и в том,
что он поддержи вает
требуемое число областей
Ошибка
Да
Выключаем MPU
Выбираем область NOO
Операции выбора области
и проrраммирования реrистров 3адаём базовый адрес
кон ф и ryр а ц ии области и конфиrурацию
области
можно объединить
Выбираем область N Q l
3адаём базовый адрес
и конфиrурацию
области
, I
I I
r
I Конфиrурируем I
: остальные :
I области I
Выбираем область NQN
3адаём базовый адрес
и конфиrурацию
области
Включаем модуль MPU
Настройка модуля
MPU завершена
Рис. 13.3. Пример алzорuтма настройки модуля мри.
Если таблица векторов перемещена в ОЗУ, то перед включением модуля MPU
не забудьте поместить в таблицу адрес обработчика исключения MemManage
Fault и разрешить данное исключение, используя реrистр SHCSR. Указанные Me
ры необходимы для запуска этоrо обработчика при нарушении правил, заданных
модулем MPU.
13.3. Настройка модуля МРИ . 243
Предположим, что нам требуется Bcero четыре области памяти. В этом случае
код инициализации модуля MPU (без функций контроля областей и их разреше
ния) может выrлядеть следующим образом:
MPU >RNR = О; // Реrистр номера области MPU
// Выбираем область O
MPU >RBAR = ОхОООООООО; // Реrистр базовоrо адреса области MPU
// Базовый адрес = ОхОООООООО
MPU >RA8R Ox0307002F; // Реrистр атрибутов и размера области
// R/W, ТЕХ=О, 8=1, С=l, В=l, 16 Мбайт, разрешена
// Выбираем область 1
// Базовый адрес = Ох20000000
// R/W, ТЕХ=О, 8=1, С=l, В=l, 64 Мбайт, разрешена
// Выбираем область 2
// Базовый адрес = Ох40000000
// R/W, ТЕХ=О, 8=1, с=о, В=l, 64 Мбайт, разрешена
3; / / Выбираем область N!3
ОхАООООООО; // Базовый адрес = ОхАООООООО
Ох01040027; // Привилеrированное R/W, ТЕХ=О, 8=1, с=о, В=О,
// 1 Мбайт, разрешена
MPU >CTRL = 1; // Реrистр управления MPU включаем модуль MPU
ТО же на языке ассемблера:
LDR RO,=OxEOOOED98 Реrистр номера области
MOV R1,#0 Выбираем область O
8TR R1, [RO]
LDR R1,=OxOOOOOOOO
8TR R1, [RO, #4]
LDR R1,=Ox0307002F
8TR R1, [RO, #8]
MOV R1,#1
8TR R1, [RO]
LDR R1,=Ox20000000
8TR R1, [RO, #4]
LDR R1,=Ox03070033
8TR R1, [RO, #8]
MOV R1,#2
8TR R1, [RO]
LDR R1,=Ox40000000
8TR R1, [RO, #4]
LDR R1,=Ox03050033
8TR R1, [RO, #8]
MOV R1,#3
8TR R1, [RO]
LDR R1,=OxAOOOOOOO
8TR R1, [RO, #4]
LDR R1,=Ox01040027
MPU >RNR =
MPU >RBAR =
MPU >RA8R
MPU >RNR =
MPU >RBAR =
MPU >RA8R =
MPU >RNR =
MPU >RBAR =
MPU >RA8R =
1;
Ох20000000;
Ох03070033;
2;
Ох40000000;
Ох03050033;
STR Rl, [RO, #8]
MOV R1,#1
8TR R1, [RO,# 4]
Базовый адрес = ОхОООООООО
Реrистр базовоrо адреса области
R/W, ТЕХ=О, 8=1, С=l, В=l, 16 Мбайт,
Реrистр атрибутов и размера области
Выбираем область 1
разрешена
Базовый адрес = Ох20000000
Реrистр базовоrо адреса области
R/W, ТЕХ=О, 8=1, С=l, В=l, 64 Мбайт,
Реrистр атрибутов и размера области
Выбираем область 2
разрешена
Базовый адрес = Ох40000000
Реrистр базовоrо адреса области
R/W, ТЕХ=О, 8=1, с=о, В=l, 64 Мбайт,
Реrистр атрибутов и размера области
Выбираем область 3
разрешена
Базовый адрес = ОхАООООООО
Реrистр базовоrо адреса области
Привилеrированное R/W, ТЕХ=О, 8=1, с=о, В=О,
1 Мбайт, разрешена
Реrистр атрибутов и размера области
Включаем модуль MPU
Реrистр управления MPU (OxEOOOE098 4=OxEOOOE094)
244 · Тлава 13. Модуль защиты памяти МРИ
в результате будут определены четыре области MPU:
· Код ОхОООООООО.. .0хООРРРРРР (16 Мбайт), полный доступ, кэшируемая память.
· Данные Ох20000000.. .Ох23РРРРРР (64 Мбайт), полный доступ, кэшируемая
память.
· Периферия Ох40000000.. .Ох43РРРРРР (64 Мбайт), полный доступ, разделяе
мый ресурс.
· Внешние устройства ОхАООООООО.. .0хАООРРРРР (1 Мбайт), привилеrиро
ванный доступ, cTporo упорядоченная память, неисполняемая.
Приведённый выше код можно сократить, объединив операции выбора обла
сти и записи в реrистр базовоrо адреса:
MPU >RBAR = ОхООООО010; // Реrистр базовоrо адреса области MPU
// Базовый адрес = ОхОООООООО, корректен, область WO
MPU >RA8R = ОхОЗ07002F; // Реrистр атрибутов и размера области
// R/W, ТЕХ=О, 8=1, С=l, В=l, 16 Мбайт, разрешена
// Базовый адрес = Ох20000000, корректен, область W1
// R/W, ТЕХ=О, 8=1, С=l, В=l, 64 Мбайт, разрешена
// Базовый адрес = Ох40000000, корректен, область W2
// R/W, ТЕХ=О, 8=1, с=о, В=l, 64 Мбайт, разрешена
// Базовый адрес = ОхАООООООО, корректен, область WЗ
// Привилеrированное R/W, ТЕХ=О, 8=1, с=о, в=о,
// 1 Мбайт, разрешена
MPU >CTRL = 1; // Реrистр управления MPU включаем модуль MPU
Или, на языке ассемблера:
LDR RO,=OxEOOOED9C Реrистр базовоrо адреса области
LDR R1,=Ox00000010 Базовый адрес = ОхОООООООО, корректен, область WO
8TR R1, [RO, #0] Реrистр базовоrо адреса области MPU
LDR R1,=ОхОЗ07002F R/W, ТЕХ=О, 8=1, С=l, В=l, 16 Мбайт, разрешена
8TR R1, [RO, #4] Реrистр атрибутов и размера области MPU
LDR R1,=Ox20000011 Базовый адрес = Ох20000000, корректен, область W1
8TR R1, [RO, #0] Реrистр базовоrо адреса области MPU
LDR R1,=ОхОЗ0700ЗЗ R/W, ТЕХ=О, 8=1, С=l, В=l, 64 Мбайт, разрешена
8TR R1, [RO, #4] Реrистр атрибутов и размера области MPU
LDR R1,=Ox40000012 Базовый адрес = Ох40000000, корректен, область W2
8TR R1, [RO, #0] Реrистр базовоrо адреса области MPU
LDR R1,=ОхОЗ0500ЗЗ R/W, ТЕХ=О, 8=1, с=о, В=l, 64 Мбайт, разрешена
8TR R1, [RO, #4] Реrистр атрибутов и размера области MPU
LDR R1,=ОхАОООО01З Базовый адрес = ОхАООООООО, корректен, область wз
8TR R1, [RO, #0] Реrистр базовоrо адреса области MPU
LDR Rl,=Ox01040027 R/W, ТЕХ=О, 8=1, с=о, в=о, 1 Мбайт, разрешена
8TR Rl, [RO, #4] Реrистр атрибутов и размера области MPU
MOV Rl,#l Включаем модуль MPU
STR Rl, [RO,# 8] Реrистр управления MPU (OxEOOOE09C 8=OxEOOOE094)
Размер кода несколько уменьшился. Однако нет предела совершенству! Для
получения более быстроrо и компактноrо кода можно воспользоваться альтерна
тивными адресами (псевдонимами) реrистров MPU (см. Табл. [.34 в Приложе
нии [), которые позволяют обращаться к реrистрам MPU RBAR и MPU RASR.
Эти псевдонимы образуют непрерывную область размером 8 слов, что даёт воз
можность использовать команды rрупповой заrрузки/сохранения (LDM и STM):
MPU >RBAR =
MPU >RA8R =
MPU >RBAR =
MPU >RA8R =
MPU >RBAR =
MPU >RA8R =
Ох20000011;
ОхОЗ0700ЗЗ;
Ох40000012;
ОхОЗ0500ЗЗ;
ОхАОООО01З;
ОхОl040027;
13.3. Настройка модуля МРИ . 245
LDR RO,=OxEOOOED9C
LDR R1,=MPUconfig
LDMIA R1!, {R2, R3,
8TMIA RO!, {R2, R3,
LDMIA R1!, {R2, R3,
8TMIA RO!, {R2, R3,
В MPUconfigEnd
ALIGN 4 ; Эта директива необходима для KoppeKTHoro размещения
; последующей таблицы (с выравниванием на rраницу слова),
MPUconfig ; чтобы мы моrли использовать команду умножения
DСD ОхООООО010 Базовый адрес = ОхОООООООО, корректен, область WO
DСD Ox0307002F R/W, ТЕХ=О, 8=1, С=l, В=l, 16 Мбайт, разрешена
DСD Ох20000011 Базовый адрес = Ох08000000, корректен, область W1
DСD Ох03070033 R/W, ТЕХ=О, 8=1, С=l, В=l, 64 Мбайт, разрешена
DСD Ох40000012 Базовый адрес = Ох40000000, корректен, область W2
DСD Ох03050033 R/W, ТЕХ=О, 8=1, с=о, В=l, 64 Мбайт, разрешена
DСD ОхАООООО13 Базовый адрес = ОхАООООООО, корректен, область W3
DСD Ох01040027 R/W, ТЕХ=О, 8=1, с=о, В=О, 1 Мбайт, разрешена
MPUconfigEnd
LDR RO,=OxEOOOED94
MOV R1,#1
8TR R1, [RO]
Разумеется, приведённое выше решение приrодно только в том случае, если
вся требуемая информация известна заранее. В противном случае, придётся при
менять более универсальные методы. Один из таких методов заключается в ис
пользовании отдельной подпроrраммы (MpuRegionSetup), настраивающей об
ласть MPU в соответствии с входными параметрами:
void MpuRegion8etup(unsigned int addr, unsigned int region,
unsigned int size, unsigned int ар, unsigned int MemAttrib,
unsigned int srd, unsigned int XN, unsigned int enable)
{ // Процедура настройки области MPU
MPU >RBAR = (addr & OxFFFFFFEO) I (region & OxF) I Ох10;
MPU >RA8R = ((XN & Ох1)«28) I ((ар & Ох7)«24) I
((MemAttrib & Ox3F) «16) I ((srd&OxFF) «8)
((size & Ox1F) «1) I (enable & Ох1);
R4, R5};
R4, R5};
R4, R5};
R4, R5};
Реrистр базовоrо адреса области
Таблица предустановленных параметров
Читаем 4 слова из таблицы
Пишем 4 слова в MPU
Читаем следующие 4 слова из таблицы
Пишем следующие 4 слова в MPU
модуля MPU
Реrистр управления MPU
Включаем модуль MPU
return;
}
void MpuRegionDisable(unsigned int region)
{ // Процедура запрещения неиспользуемой области MPU
MPU >RBAR = (region & OxF) I Ох10;
MPU >RASR = о; // Запрещаем
return;
}
void Mpu8etup(void)
{ // Конфиrурирование модуля MPU
MPU >CTRL = о; // Сначала отключаем MPU
MpuRegion8etup(OxOOOOOOOO, О, Ох17, 3, 7,
MpuRegionSetup(Ox20000000, 1, Ох19, 3, 7,
MpuRegion8etup(Ox40000000, 2, Ох19, 3, 5,
MpuRegion8etup(OxAOOOOOOO, 3, Ох13, 1, 4,
О, О, 1) ; // Область О, 16 Мбайт
О, О, 1) ; // Область 1, 64 Мбайт
О, О, 1) ; // Область 2, 64 Мбайт
О, О, 1) ; // Область 3, 1 Мбайт
246 . Тлава 13. Модуль защиты памяти МРИ
MpuRegionDisable(4); // Запрещаем неиспользуемую область 4
MpuRegionDisable(5); // Запрещаем неиспользуемую область 5
MpuRegionDisable(6); // Запрещаем неиспользуемую область 6
MpuRegionDisable(7); // Запрещаем неиспользуемую область 7
MPU >CTRL 1; // Включаем модуль MPU
return;
в при мере была использована подпроrрамма, запрещающая обращение к He
используемым областям. Это необходимо делать в том случае, если вы не знаете,
как указанные области были сконфиrурированы раньше. Если неиспользуемые
области ранее были разрешены, то их необходимо запретить, чтобы они не влия
ли на новую конфиrурацию модуля MPU.
Разумеется, процедуры настройки модуля MPU можно реализовать и на ac
семблере:
MpuSetup ; Процедура конфиrурирования MPU, в которой несколько раз вызывается
; процедура настройки области
{RO R6, LR}
RO, OxEOOOED94
R1,#0
R1, [RO]
; Область o
RO, OxOOOOOOOO
R1,#OxO
R2,#Ox17
R3,#Ox3
R4,#Ox7
R5,#OxO
R6,#Ox1
MpuRegionSetup
; Область 1
RO, Ox20000000
R1,#Ox1
R2,#Ox19
R3,#Ox3
R4,#Ox7
R5,#OxO
R6,#Ox1
MpuRegionSetup
PUSH
LDR
MOV
STR
LDR
MOV
MOV
MOV
MOV
MOV
MOV
BL
LDR
MOV
MOV
MOV
MOV
MOV
MOV
BL
Реrистр управления MPU
Отключаем модуль MPU
Область
Область
Область
Область
Область
Область
Область
Область
Область
Область
Область
Область
Область
Область
о: базовый адрес ОхОООООООО
о: номер области = О
о: размер Ох17 (16 Мбайт)
о: АР Ох3 (полный доступ)
о: атрибуты = Ох7
о: запрет подобластей О
о: {XN, Enable} 0,1
1: базовый адрес Ох20000000
1: номер области = 1
1: размер = Ох19 (64 Мбайт)
1: АР = Ох3 (полный доступ)
1: атрибуты Ох7
1: запрет подобластей О
1: {XN, Enable} = 0,1
Настраиваем области 2 и 3
; Области 4 7 запрещены
MOV RO,#4
BL MpuRegionDisable
MOV RO,#5
BL MpuRegionDisable
MOV RO,#6
BL MpuRegionDisable
MOV RO,#7
BL MpuRegionDisable
LDR RO, OxEOOOED94 ; Реrистр управления MPU
MOV R1,#1
13.4. Типичный процесс настройки модуля МРИ · 247
5TR R1, [RO]
РОР {RO R6, РС}
MpuRegion5etup
; Подпроrрамма настройка области MPU
Вход RO базовый адрес
R1 номер области
R2 размер
R3 АР (права доступа)
R4 атрибуты памяти ({ТЕХ[2:0],
R5 запрет подобластей
R6 {XN, Enable}
PUSH {RO R1, LR}
BIC RO, RO, #Ox1F
BFI RO, R1, #0, #4
ORR RO, RO, #Ох10
LDR R1,=OxEOOOED9C
5TR RO, [R1]
AND R О , R б ,
UBFX R1, R6,
BFI RO, R1,
BFI RO, R2,
#Ох01
#1, #1
#28, #1
#1 , #5
BFI
BFI
RO, R3, #24, #3
RO, R4, #16, #6
BFI
RO, R5, #8, #8
Включаем модуль MPU
Возвращаемся
5, С, В})
Очищаем неиспользуемые биты адреса
Помещаем номер области в RO[3:0]
Устанавливаем бит корректности
Реrистр базовоrо адреса области MPU
; Задаём базовый адрес
Получаем бит Enable
Получаем бит XN
Кладём XN в RO[28]
Заrружаем размер области (R2[4:0])
в RO[5:1]
Заrружаем права доступа (R3[2:0]) в RO[26:24]
Заrружаем атрибуты памяти (R4[5:0])
в RO[21:16]
Заrружаем биты запрета подобластей (5RD)
в RO[15:8]
Реrистр размера и атрибутов области MPU
Инициализируем реrистр
; Возвращаемся
LDR R1,=OxEOOOEDAO
STR RO, [R1]
РОР {RO R1, РС}
MpuRegionDisable
; Подпроrрамма для запрещения неиспользуемой области
; Вход RO : номер области
PU5H {R1, LR}
AND RO, RO, #OxF
ORR RO, RO, #Ох10
LDR R1,=OxEOOOED9C
STR RO, [R1]
MOV RO, #0
LDR R1,=OxEOOOEDAO Реrистр размера и атрибутов области MPU
5TR RO, [R1] Очищаем реrистр (область запрещена)
РОР {R1, РС} Возвращаемся
В данном примере демонстрируется использование команды вставки битово
ro поля (BFI). Эта команда позволяет значительно упростить операции объедине
ния битовых полей.
Очищаем неиспользуемые биты адреса
Устанавливаем бит корректности
Реrистр базовоrо адреса области MPU
13.4. Типичный процесс настройки модуля MPU
в большинстве приложений модуль MPU используется для Toro, чтобы пре
дотвратить доступ из пользовательских проrрамм к областям кода и данных при
248 · Тлава 13. Модуль защиты памяти МРИ
вилеrированных процессов. Обычно эти функции реализуются встраиваемой
ос. Между переключениями контекста ос изменяет конфиrурацию MPU так,
чтобы пользовательские приложения моrли обращаться к своему коду и данным,
а также к друrим требуемым ресурсам. При написании процедуры конфиrуриро
вания модуля MPU необходимо предусмотреть следующие области:
1. Область кода:
а) привилеrированный код, включая начальную таблицу векторов;
б) пользовательский код.
2. Область созу:
а) привилеrированные данные, включая основной стек;
б) пользовательские данные, включая стек процесса;
в) привилеrированная область доступа к битам;
r) пользовательская область доступа к битам.
3. Периферия:
а) привилеrированная периферия;
б) пользовательская периферия;
в) привилеrированная область доступа к битам в диапазоне адресов
периферийных устройств;
r) пользовательская область доступа к битам в диапазоне адресов
периферийных устройств.
В приведённом выше списке мы обозначили 10 областей это больше, чем под
держивается модулем MPU процессора Cortex M3. Однако привилеrированные
области можно задать, воспользовавшись «фоновой» областью (PRIVDEFENA = 1).
Тоrда нам необходимо будет определить только пять пользовательских областей
MPU и ещё три останутся в запасе. При необходимости незадействованные обла
сти MPU можно использовать для орrанизации дополнительных областей во
внешней памяти для защиты данных, предназначенных только для чтения, или
же для полной блокировки определённоrо участка памяти. Для уменьшения Tpe
буемоrо числа областей MPU некоторые из них можно объединить друr с друrом.
13.4.1. Пример использования запрета подобластей
в ряде случаев нам может потребоваться, чтобы какие то периферийные
устройства были доступны для пользовательских проrрамм, а какие то только
для привилеrированноrо доступа. В результате адресное пространство памяти
периферийных устройств, доступных для пользователя, оказывается фраrменти
ровано. Это можно реализовать одним из следующих способов:
· определить несколько пользовательских областей;
· определить привилеrированные области внутри области пользовательской
периферии;
· запретить подобласти в пользовательской области.
В первых двух случаях очень леrко израсходовать все доступные области MPU.
Используя же возможности запрета подобластей, мы сможем задать права ДOCTY
па к отдельным блокам реrистров периферийных устройств, не расходуя на это
дополнительные области. Применение данноrо метода показано на Рис. 13.4.
13.4. Типичный процесс настройки модуля МРИ · 249
Адресное
пространство
Устройство N27
(доступное пользователю)
Устройство N2б
(только привилеrир. доступ)
"' """"-" ;", ....,.. .
Устройство N25
(только привилеrир. доступ)
Устройство N24
(доступное пользователю)
"":"",,:,,:,,,:,':"',""" ..... ......'............:\..:0..'..'...;:..........'..'...'..........
Устройство N23
(доступное пользователю)
.\..;,..\........... ..,.-, .:. о";:,; ....:: ....\...\.\...;. . .:.....r...::..\.\\...:.:::..::..:.. ,..". ......"'-
Устройство N22
(только привилеrир. доступ)
..,.."',..:.:.,.........."".,:....\..,....:
Устройство N21
(доступное пользователю)
'\'\ ...:,....:.:.."":..:....:.:;...;....:
Устройство N20
(доступное пользователю)
За прет
подобласти
о
Пользовательский
доступ
«Фоновая»
привилеrи
рованная
область
. I
: Привилеrированный:
: доступ I
L _________________
,-----------------------
: Привилеrированный 1
: доступ :
L_______________________
о
Пользовательский
доступ
. .-
о
Пользовательский
доступ
1 Привилеrированный:
: доступ I
. I
L___ _ __ ___ __
о
Пользовательский
доступ
о
Пользовательский
доступ
ОБласть, доступная пользователю,
с заблокированными подобластями
(SRD = Охб4)
Рис. 13.4. Использование запрета подобластей для управления правами доступа
к разделяемым перифериЙНblМ устройствам.
Этот способ работает и с областями памяти. Однако появление блоков, требу
ющих прав доступа, отличных от прав соседних блоков, всё же более вероятно
в области периферийных устройств.
Предположим, что в нашей проrрамме используются области памяти, опи
санные в Табл. 13.11.
Таблица 13.11. Параметры областей памяти из приведённоrо ниже примера
Атрибуты
Адрес Описание Размер Тип памяти Область
(С, В, А, S, MPU
XN)
ОхОООООООО. . . Привилеrированный 16 Кбайт Только чтение С, , А, , «Фоновая»
OxOOO03FFF код
ОхООО04000.. . Пользовательский 16 Кбайт Только чтение С, , А, , Область N20
OxOOO07FFF код
Ох20000000. . . Пользовательские 4 Кбайт Полный доступ С, В, А, , Область N21
Ox20000FFF данные
Ох2000 1 000. . . Привилеrированные 4 Кбайт Привилеrированный С, В, А, , «Фоновая»
Ox20001FFF данные доступ
Ох22000000. . . Пользовательская 128 С, В, А, ,
область доступа Полный доступ Область N22
Ox2201FFFF Кбайт
к битам
250 · Тлава 13. Модуль защиты памяти МРИ
Таблица 13.11. Параметры областей памяти И3 приведённоrо ниже примера
(продолжение)
Атрибуты
Адрес Описание Размер Тип памяти Область
(С, В, А, S, MPU
XN)
Ох22020000.. . Привилеrированная 128 С, В, А, ,
Ox2203FFFF область доступа Кбайт Полный доступ «Фоновая»
к битам
Ох40000000.. . Пользовательская 1 Мбайт Полный доступ , В, , , Область N23
Ox400FFFFF периферия XN
Привилеrированная
Ох40040000. . . периферия в области 128 Привилеrированный , В, , , Закрытая
Ox4005FFFF пользовательских Кбайт XN подобласть
периферийных доступ области N23
устройств
Область доступа
Ох42000000.. . к битам 32 Мбайт Полный доступ , В, , , Область N24
Ox43FFFFFF пользовательской XN
периферии
Область доступа
к битам Закрытая
Ох42800000.. . привилеrированной Привилеrированный , В, , ,
4 Мбайт подобласть
Ox42BFFFFF периферии доступ XN области N24
в пользовательской
области памяти
Ох60000000.. . Внешнее ОЗУ 16 Мбайт Полный доступ С, В, А, , Область N25
Ox60FFFFFF
Контроллер NVIC,
ОхЕООООООО. . . компоненты отладки Привилеrированный
и шина собственных 1 Мбайт , , , , «Фоновая»
OxFOOFFFFF периферийных доступ XN
устройств
Примечание. Символ «А» в столбце атрибутов памяти определяет размещение кэша.
После определения требуемых областей мы можем написать процедуру Ha
стройки модуля MPU. ДЛЯ облеrчения пони мания и последующих изменений KO
да воспользуемся ранее написанной функцией:
void MpuSetup(void)
{ // Настройка модуля МРИ
МРИ >СТRL = о; // Сначала отключаем МРИ
// Параметры: Адрес, Область, Размер, АР, Атрибуты, 8RD, XN, Разрешение
MpuRegionSetup(Ox00004000, О, ОхОD, 3, Ох2, О, О, 1); // Область O
// Ox00004000 Ox00007FFF: пользовательская проrрамма, 16 Кбайт, полный доступ,
// атрибуты = Ох2 (ТЕХ=О, 8=0, С=l, В=О), запрет подобластей = О, XN=O
MpuRegionSetup(Ox20000000, 1, ОхОВ, 3, ОхВ, О, О, 1); // Область 1
// Ox20000000 Ox20000FFF: пользовательские данные, 4 Кбайт, полный доступ,
// атрибуты = ОхВ (ТЕХ=l, 8=0, С=l, В=l), запрет подобластей = О, XN=O
MpuRegion8etup(Ox22000000, 2, Ох10, 3, ОхВ, О, О, 1); // Область 2
// Ox22000000 Ox2201FFFF: пользовательская область доступа к битам, 128 Кбайт,
13.4. Типичный процесс настройки модуля МРИ · 251
// полный доступ, атрибуты = ОхВ (ТЕХ=l, 5=0, С=l, В=l),
// запрет подобластей = О, XN=O
MpuRegion5etup(Ox40000000, 3, Ох13, 3, Ох1,Ох64,0,1); // Область W3
// Ox40000000 Ox400FFFFF: пользовательская периферия, 1 Мбайт, полный доступ,
// атрибуты = Ох1 (ТЕХ=О, 5=0, с=о, В=l), запрет подобластей = Ох64, XN=O
// Примечание: запрет подобластей = Ох64 соrласно Рис. 13.4
MpuRegion5etup(Ox42000000, 4, Ох18, 3, Ох1,Ох64,0,1); // Область W4
// Ox42000000 Ox43FFFFFF: пользовательская область доступа к битам для
// периферии, 32 Мбайт, полный доступ, атрибуты = Ох1 (ТЕХ=О, 8=0, с=о, В=l),
// запрет подобластей = Ох64, XN=O
// Примечание: запрет подобластей = Ох64 соrласно Рис. 13.4
MpuRegion5etup(Ox60000000, 5, Ох17, 3, Ох3, О, О, 1); // Область W5
// Ox60000000 Ox60FFFFFF: внешнее озу, 16 Мбайт, полный доступ,
// атрибуты = Ох3 (ТЕХ=О, 8=0, С=l, В=l), запрет подобластей = О, XN=O
MpuRegionDisable(6); // Запрещаем неиспользуемую область W6
MpuRegionDisable(7); // Запрещаем неиспользуемую область W7
MPU >CTRL = 5; // Включаем MPU, одновременно разрешая привилеrированные
// обращения к «фоновой» области
return;
rЛАВА 14
ПРОЧИЕ ВО3МОЖНОСТИ
ПРОЦЕССОРА CORTEX M3
14.1. Системный таймер SYSTICK
Таймер SYSTICK, входящий в состав контроллера прерываний NVIC, вкратце
был рассмотрен в [лаве 8. Как мы с вами уже знаем, этот таймер представляет co
бой 24 битный вычитающий счётчик. При достижении счётчиком нулевоrо зна
чения в Hero заrружается значение перезаrрузки из реrистра SYST RVR. При
этом счёт прекращается только при сбросе бита разрешения ENABLE реrистра
управления и состояния SYST CSR (Рис. 14.1).
NOREF KE W
31 23
Реrистр калибровочноrо значения
16
ОхЕОООЕО1С
TENMS
О
I SYST CALIB
I SYST CVR
Реrистр текущеrо значения
-
ОхЕОООЕО18
CURRENT
ОхЕОООЕО 14 Реrистр значения перезаrрузки
RELOAD
SYST RVR
ОхЕОООЕО1 О Реrистр управления и состояния
. : -
SYST CSR
COUNTFLAG
ЕпаЫе
TICКlNT
CLKSOURCE
Рис. 14.1. Pezucmpbl таймера SYSTICK в контроллере NVIC.
В процессоре Cortex M3 предусмотрено два источника TaKToBoro сиrнала тай
мера SYSTICK. Одним из них является внутренний reHepaTop процессора (неза
висимый от системноrо TaKToBoro сиrнала HCLK, так что формируемый им сиr
нал не пропадает при отключении системноrо TaKToBoro сиrнала). В качестве
друrоrо источника может выступать внешний источник TaKToBoro сиrнала. Ча
стота этоrо сиrнала должна быть, по меньшей мере, в два раза меньше частоты
сиrнала BHYTpeHHero reHepaTopa, поскольку последний применяется для синхро
низации внешнеrо сиrнала. Возможность использования внешнеrо TaKToBoro
сиrнала определяется разработчиком микросхемы и в некоторых моделях может
отсутствовать. Чтобы определить наличие такой возможности, необходимо про
верить состояние бита 31 реrистра калибровочноrо значения таймера
14.1. Системный таймер SYSTICK · 253
SYST CALIB. Разработчик микросхемы должен подать на этот вывод реrистра
соответствующий уровень.
При изменении значения таймера SYSTICK с О на 1 устанавливается флаr
COUNTFLAG реrистра SYST CSR. Этот флаr сбрасывается при выполнении
одной из следующих операций:
. чтение процессором реrистра SYST CSR;
. очистка счётчика SYSTICK посредством записи любоrо значения в реrистр Te
кущеrо значения таймера SYST CVR.
Счётчик таймера SYSTICK может использоваться для периодической reHepa
ции соответствующеrо исключения. Обычно это требуется операционным систе
мам для реализации функций управления задачами и ресурсами. Чтобы разре
шить rенерацию исключения SYSTICK, необходимо установить бит TICKINT pe
rистра SYST CSR. Кроме Toro, если таблица векторов была перемещена в ОЗУ, то
в неё необходимо будет поместить адрес обработчика исключения SYSTICK. Ha
пример:
* ((volatile unsigned int *) (SCB >VTORt(15«2))) = (unsigned int) SysTick Handler;
На языке ассемблера эту операцию можно реализовать следующим образом:
; Настройка обработчика исключения SYSTICK (необходима только в том случае,
; если таблица векторов размещена в ОЗУ)
MOV RO, #OxF Исключение W15
LDR R1, =SysTick handler Адрес обработчика исключения
LDR R2, =ОхЕОООЕD08 Реrистр смещения таблицы векторов
LDR R2, [R2]
STR R1, [R2, RO, LSL #2] Пишем вектор по адресу VectTblOffsettExcpType*4
При наличии СМSIS совместимоrо драйвера устройства для конфиrурирова
ния таймера SYSTICK можно использовать функцию SysTickConfig. Подробная
информация об этой функции приведена в Приложении Ж. Также к реrистрам
таймера можно обращаться напрямую как к полям структуры:
. SysTick >CTRL (реrистр управления и состояния);
. SysTick >LOAD (реrистр значения перезаrрузки);
. SysTick >VAL (реrистр текущеrо значения);
. SysTick >CALIB (реrистр калибровочноrо значения).
Например, чтобы настроить таймер для rенерации исключения SYSTICK каж
дые 1024 такта процессора, можно использовать следующий код:
SysTick >LOAD = 1023; // Считать от 1023 до О
SysTick >VAL = О; // Сбрасываем текущее значение в О
SysTick >CTRL = Ох7; // Разрешаем работу таймера и rенерацию исключения SYSTICK
// Для тактирования используется тактовый сиrнал процессора
Аналоrичный код, написанный на ассемблере, будет выrлядеть следующим
образом:
; Разрешаем работу таймера SYSTICK и rенерацию соответствующеrо исключения
LDR RO, =ОхЕОООЕ010 Реrистр управления и состояния SYSTICK
MOV R1, #0
STR R1, [RO] Останавливаем счётчик во избежание случайной
rенерации исключения
rенерируем исключение каждые 1024 такта (для получения
LDR R1, =1023
254 · rлава 14. Прочие возможности процессора Cortex M3
такой периодичности счётчик декрементируется с 1023 дО О,
поэтому значение перезаrрузки равно 1023)
Заrружаем значение перезаrрузки в соответствующий реrистр
Заrружаем любое значение в реrистр текущеrо значения
для очистки последнеrо и сброса бита COUNTFLAG
Тактирование системный тактовый сиrнал, прерывание
разрешено, работа таймера разрешена
STR R1, [RO] Запускаем счётчик
В таймере SYSTICK предусмотрен удобный доступ к калибровочной инфор
мации. Процессор Cortex M3 имеет 24 битный вход, на который разработчик ми
кросхемы может выставить значение, соответствующее 10 MC интервалу. Чтобы
получить это значение, необходимо прочитать реrистр калибровочноrо значения
SYST CALIB. Однако функция калибровки может быть не реализована чтобы
убедиться в возможности её использования, обратитесь к документации на ис
пользуемое устройство.
Счётчик SYSTICK также можно задействовать в качестве сиrнальноrо тайме
ра, запускающеrо некоторую задачу по истечении заданноrо времени. Например,
если нам необходимо запустить задачу через 300 тактов, то мы можем описать её
в виде обработчика исключения SYSTICK и запроrраммировать таймер следую
щим образом:
volatile int SysTickFired; // rлобальный проrраммный флаr, индицирующий
// запуск процедуры SysTickAlarm
,
S TR R1, [RO,#4]
STR R1, [RO,#8]
MOV R1, #Ох7
// Опционально: инициализируем обработчик SYSTICK, это необходимо только
// при размещении таблицы векторов в ОЗУ
* ((volatile unsigned int *) (SCB >VTOR+(15«2))) = (unsigned int) SysTickAlarm;
SysTick >CTRL = ОхО; // Запрещаем SysTick
SysTick >LOAD = (300 12); // Задаём значение перезаrрузки минус 12
// (учитываем задержку обработки исключения)
// Сбрасываем текущее значение счётчика
// Сбрасываем проrраммный флаr
// Разрешаем работу таймера, исключение SYSTICK
// и тактирование от системноrо TaKToBoro сиrнала
while (SysTickFired == О); // Ждём установки флаrа обработчиком SYSTICK
Обработчик исключения может быть таким:
void SysTickAlarm(void) // Обработчик исключения SYSTICK
{
SysTick >CTRL = ОхО; // Запрещаем SysTick
// Выполняем требуемые операции
SCB >ICSR = SCB >ICSR & (OxFDFFFFFF); // Очищаем бит отложенноrо прерывания
// для исключения SYSTICK, если оно было
// отложено повторно
SysTickFired++; // Изменяем проrраммный флаr, сообщая
// основной проrрамме о выполнении
// обработчика SYSTICK
SysTick >VAL = о;
SysTickFired = о;
SysTick >CTRL = Ох7;
return;
14.2. Управление электропитанием · 255
Таймер запускается с нулевым значением счётчика, поскольку тот сбрасыва
ется вручную в основной проrрамме. Сразу же после этоrо в счётчик переrружа
ется число 288 (300 12). Мы уменьшаем требуемое число тактов на 12 для Toro,
чтобы учесть время задержки обработки прерывания. Однако если на момент дo
стижения счётчиком нулевоrо значения будет обрабатываться друrое исключе
ние с таким же или более высоким приоритетом, то rенерация исключения
SYSTICK может HeMHoro задержаться.
Заметьте, что корректировать значение перезаrрузки необходимо только при
использовании таймера SYSTICK в качестве таймера с однократным запуском.
В периодическом режиме значение перезаrрузки должно быть равно числу TaK
тов, уменьшенному на единицу.
Поскольку счётчик SYSTICK не останавливается автоматически, мы должны
останавливать ero в обработчике исключения (процедура SysTickAlarrn). Более
Toro, существует вероятность повторноrо откладывания исключения SYSTICK
при задержке ero обработки из за более приоритетных исключений. Поэтому ec
ли исключение SYSTICK используется для однократноrо выполнения некоей за
дачи, то в обработчике также необходимо сбрасывать признак отложенности ис
ключения.
В самом конце обработчика исключения SYSTICK мы изменяем значение
переменной флаrа SysTickFired, чтобы проинформировать основную проrрам
му о выполнении требуемой задачи.
14.2. Управление злектропитанием
14.2.1. Спящие режимы
Одним из инструментов управления электропитанием в процессоре Cortex М3
является наличие спящих режимов. При переводе системы в спящий режим си
стемный тактовый сиrнал может останавливаться, однако независимый TaKTO
вый reHepaTop должен продолжать работать, чтобы обеспечить вывод процессо
ра из спящеrо режима при возникновении прерывания. Поддерживаются следу
ющие спящие режимы:
. Sleep в этом режиме активируется сиrнал SLEEPING процессора;
. Deep Sleep в этом режиме активируется сиrнал SLEEPDEEP процессора.
Для выбора KOHKpeTHoro режима пониженноrо энерrопотребления в реrистре
управления SCR контроллера NVIC предусмотрено битовое поле SLEEPDEEP
(Табл. 14.1). Использование сиrналов SLEEPING и SLEEPDEEP зависит от KOH
кретной реализации микроконтроллера. Возможны даже такие реализации, в KO
торых активация обоих сиrналов будет приводить к одним И тем же результатам.
Перевод в спящий режим осуществляется командами WFI (ожидание преры
вания в спящем режиме) или WFE (ожидание события в спящем режиме). Таким
событием может стать прерывание, ранее возникшее прерывание или же сиrнал
внешнеrо события, поданный в виде импульса на ВХОД RXEV процессора. В са..
мом процессоре предусмотрено «защёлкивание» событий, что позволяет уже
прошедшему событию выводить процессор из спящеrо режима (Рис. 14.2).
256 · Тлава 14. Прочие возможности процессора Cortex M3
Таблица 14.1. Реrистр управления системой SCR (OxEOOOEDIO)
Значение
Биты Обозначение Тип после Описание
сброса
rенерация события при откладывании
прерывания; вывод из спящеrо режима,
4 SEVONPEND R/W О вызванноrо командой WFE, производится при
откладывании HOBoro прерывания, даже если
уровень приоритета этоrо прерывания выше
текущеrо уровня
3 Зарезервировано
2 SLEEPDEEP R/W О Разрешает формирование сиrнала SLEEPDEEP
при переходе в спящий режим
1 SLEEPONEXIT R/W О Включение функции Sleep On Exit
О Зарезервировано
WFI
WFE
SLEEPDEEP = 1?
Защёлка события = 1
Нет Сбросить защёлку
и продолжить выполнение
Перейти в спящий режим Перейти в спящий режим со следующей команды
(SLEEPING ВЫСОКИЙ уров., (SLEEPING ВЫСОКИЙ уров.,
SLEEPDEEP НИЗКИЙ уров.) SLEEPDEEP ВЫСОКИЙ уров.)
Рис. 14.2. Переключение в режим пониженноzо энерzопотре6ления.
При наличии СМSIS совместимоrо драйвера для вызова команд WFI и WFE
можно задействовать встроенные функции WFI () и WFE () COOTBeTCTBeH
но. Для обращения к реrистру управления системой можно использовать Bыpa
жение SCB >SCR.
Что в действительности происходит при переходе процессора в спящий pe
жим, зависит исключительно от реализации микросхемы. Как правило, при этом
прекращается rенерация некоторых тактовых сиrналов, что приводит к YMeHЬ
шению потребления. По желанию разработчика микросхемы для ещё большеrо
сокращения потребления может также отключаться часть узлов микросхемы.
Возможен даже вариант, при котором отключается весь процессор и прекращает
ся rенерация всех тактовых сиrналов. Единственным способом вывода системы
из спящеrо режима в последнем случае является сброс устройства.
Чтобы прерывание моrло вывести процессор из спящеrо режима, вызванноrо
командой WFI, оно должно иметь приоритет, который выше текущеrо уровня
приоритета (при наличии активноrо прерывания) и выше заданноrо реrистром
BASEPRI или реrистрами маскирования (PRIMASK и FAULTMASK). Если преры
вание не может быть обработано из за низкоrо приоритета, то оно не сможет BЫ
вести процессор из спящеrо режима.
14.2. Управление электропитанием · 257
Со спящим режимом, вызванным командой WFE, ситуация несколько друrая.
Если прерывание, возникшее во время спящеrо режима, имеет приоритет ниже
или равный заданному в реrистрах маскирования или BASEPRI и при этом YCTa
новлен бит SEVONPEND, то такое прерывание всё же выведет процессор из спя
щеrо режима. Условия вывода процессора Cortex M3 из режимов пониженноrо
энерrопотребления приведены в Табл. 14.2.
Таблица 14.2. ВЫВОД из режимов пониженноrо потребления
Поведение команды Вывод из спящеrо Запуск обработчика
режима IRQ
WFI
IRQ с BASEPRI
Приоритет IRQ > BASEPRIv Да Да
Приоритет IRQ =< BASEPRI Нет Нет
IRQ с BASEPRI и PRIMASK
Приоритет IRQ > BASEPRI Да Нет
Приоритет IRQ =< BASEPRI Нет Нет
WFE
IRQ с BASEPRI, SEVONPEND = О
Приоритет IRQ > BASEPRI Да Да
Приоритет IRQ =< BASEPRI Нет Нет
IRQ с BASEPRI, SEVONPEND = 1
Приоритет IRQ > BASEPRI Да Да
Приоритет IRQ =< BASEPRI Да Нет
IRQ с BASEPRI и PRIMASK, SEVONPEND = О
Приоритет IRQ > BASEPRI Нет Нет
Приоритет IRQ =< BASEPRI Нет Нет
IRQ с BASEPRI и PRIMASK, SEVONPEND = 1
Приоритет IRQ > BASEPRI Да Нет
Приоритет IRQ =< BASEPRI Да Нет
14.2.2. Функция Sleep..On..Exit
Ещё одной особенностью процессора Cortex M3 является возможность aBTOMa
тическоrо возврата в спящий режим при выходе из процедуры обработки преры
вания. Это позволяет нам постоянно удерживать ядро в спящем режиме, за исклю
чением моментов обработки требуемоrо прерывания. Для использования указан
ной функции необходимо установить бит SLEEPONEXIT реrистра SCR (Рис. 14.3).
Обратите внимание, что если функция Sleep On Exit включена, то процессор
может перейти в спящий режим при возвращении в режим потока из любоrо ис
ключения, даже если команды WFE/WFI не выполнялись. Чтобы процессор пере
ходил В спящий режим CTporo в требуемые моменты времени, устанавливайте
бит SLEEPONEXIT непосредственно перед переводом системы в спящий режим.
258 · Тлава 14. Прочие возможности процессора Cortex M3
WFI/ WFE
Процессор автоматически
возвращяется в спящий
режим
Просыпаемся и запускаем
обработчик прерывания
Выходим из исключения
и возвращаемся в режим
потока
Да
Процессор обнаружил, что
SLEEPONEXIT = 1?
Процессор выходит из спящеrо
режима и продолжает выполнение
проrраммы со следующей команды
Рис. 14.3. Пример использования функции Sleep Oп Exit.
14.2.3. Контроппер WIC
Начиная со 2 й ревизии в процессоре Cortex M3 появился новый опциональ
ный компонент, позволяющий уменьшить энерrопотребления системы. Этот
компонент называется контроллером вывода процессора из спяще20 режима по
прерыванию или, сокращённо, контроллером WIC (Wakeup Interrupt Controller).
Данный контроллер подключается к существующему контроллеру NVIC и ис
пользуется для формирования запроса на пробуждение процессора при возник
новении прерывания.
С точки зрения проrраммы, поведение команд WFE и WFI не изменяется. В KOH
троллере WIC нет реrистров, требующих проrраммирования, поскольку всю He
обходимую информацию он получает от контроллера NVIC. Наличие контролле
ра WIC позволяет отключить все тактовые сиrналы, поступающие на процессор.
При появлении запроса прерывания контроллер WIC может послать запрос на
пробуждение системному контроллеру или модулю управления электропитани
ем PMU (Power Management Unit), расположенным на кристалле, чтобы возобно
вить rенерацию тактовых сиrналов процессора (Рис. 14.4).
14.2. Управление электропитанием · 259
Cortex M3
IRQ
IRQ
NMI
NMI
Модуль
управления
электропитанием
Пробуж
дение
WIC
Статус спящеrо режима
Рис. 14.4. Обнаружение прерываний контроллером WIC при выключенных тактовых
сиzналах процессора.
Наличие контроллера WIC также предоставляет новые возможности в части
уменьшения энерrопотребления устройства при нахождении в спящем режиме.
Использование новейших технолоrий проектирования цифровых устройств по
зволяет нам отключать большинство узлов процессора Cortex M3, оставляя
включёнными только некоторую rруппу лоrических вентилей, хранящих TeKY
щее состояние лоrики. Данная технолоrия называется State Retention Power Gating
(SRPG). При совместном использовании технолоrии SRPG и контроллера WIC
большинство узлов процессора в режиме Deep Sleep может быть отключено
(Рис. 14.5). При нахождении процессора в этом режиме контроллер WIC продол
жает работать и при возникновении прерывания rенерирует запрос на включе
ние системы и восстановление её состояния. Максимальная задержка обработки
прерывания в данном случае зависит от времени, необходимоrо для перевода си
стемы в рабочее состояние. В большинстве случаев эта задержка составляет от 20
до 30 тактов. В режиме обычноrо сна (бит SLEEPDEEP реrистра SCR сброшен в О)
питание процессора не отключается.
Новая функция отключения питания является опцией и может отсутствовать
в некоторых микроконтроллерах. Она требует наличия в кристалле модуля PMU,
который разрабатывается изrотовителем микросхемы. Этот модуль управляет
циклами включения/выключения питания и может потребовать дополнительно
ro проrраммирования перед использованием. Для получения дополнительной
информации следует обратиться к документации на микроконтроллер.
Обратите внимание, что при использовании функции отключения питания
системный таймер SYSTICK останавливается на время нахождения процессора
в режиме Deep Sleep. Кроме Toro, данную функцию нельзя использовать при под
ключённом отладчике, поскольку тот должен периодически обращаться к реrи
страм отладки для контроля состояния процессора.
260 · Тлава 14. Прочие возможности процессора Cortex M3
Статус спящеrо режима
IRQ
NMI
Модуль
управления Пробуж WIC
электропитанием дение
Модуль PMU включает
питание при поступлении
запроса на пробуждение
от контроллера WIC
Контроллер WIC обнаруживает
и удерживает запрос прерывания,
пока процессор отключён
Состояние процессора хранится
в предназначенных для этоrо
триrrерах
Рис. 14.5. Обнаружение прерываний контроллером WIC при использовании процессором
режима SRPG.
14.3. Межпроцессорный обмен
в процессоре Cortex M3 реализован очень простой интерфейс межпроцессор
Horo обмена для передачи событий между процессорами. В процессоре имеется
выходной сиrнал для передачи событий (ТХЕУ) и один входной сиrнал для при
ёма событий (RXEV). В двухпроцессорных системах соответствующие выводы
процессоров MorYT быть соединены так, как показано на Рис. 14.6.
ТXEV
ТXEV
Cortex M3
Cortex M3
RXEV
RXEV
Рис. 14.6. Обмен событиями в двухпроцессорной системе.
Как уже было отмечено в предыдущем разделе 14.2 «Управление электропита
нием», процессор может перейти в спящий режим при выполнении команды WFE
и вернуться в активное состояние при получении внешнеrо события. С помощью
команды SEV один из процессоров может вывести из спящеrо режима друrой,
при этом оба процессора начнут выполнять задачу одновременно (Рис. 14.7).
Пользователи СМSIS совместимоrо драйвера устройства для вызова команды
SEV MorYT задействовать встроенную функцию SEV(). Используя эту функ
цию, мы можем запустить задачу на выполнение одновременно на обоих процес
сорах (возможно, с небольшим временным смещением, зависящим от реализа
ции микросхемы и кода, осуществляющеrо контроль состояния задачи). Число
14.3. Межпроцессорный обмен · 261
Процессор N91
Процессор N92
Выполняет команду WFE
Процессор N Q l
активирует
сиrнал SLEEPING
Переходит в спящий режим
Узнаёт, что процессор 1
находится в спящем режиме
Процессор N Q 2 формирует
импульс TXEV, поступающий
на вход RXEV процессора 1
I
I
I
I
Обнаруживает потребность
в синхронизации задач
а:
I
"
Выполняет команду SEV
Выходит из спящеrо режима
Проверяет состояния задачи
Выполняет задачу
Выполняет задачу
Рис. 14.7. Использование сиzналов событий для синхронизации задач.
процессоров может быть любым, необходимо только, чтобы один из процессоров
выступал в роли ведущеrо, формируя импульс события для остальных.
Необходимо отметить, что причиной выхода процессора из спящеrо режима
MorYT стать и друrие события, например прерывания или события отладки. Поэ
тому, прежде чем приступать к выполнению требуемой задачи, необходимо убе
диться, что пробуждение процессора произошло в результате синхронизации за
дач. В большинстве мноrозадачных систем для корректной синхронизации задач
требуется более сложная система межпроцессорных сообщений, наподобие оче
реди сообщений (mаНЬох), используемой во встраиваемых ос.
Также необходимо отметить, что выполнение команды WFE не всеrда приво
дит к переводу процессора в спящий режим. Поэтому данная команда обычно
помещается внутрь цикла (для уменьшения потребления системы) и сопрово
ждается кодом, который проверяет необходимость выполнения требуемой зада
чи, как показано на Рис. 14.8.
При выполнении команды WFE сначала проверяется состояние локальной за
щёлки события. Если защёлка не установлена, то процессор переходит в спящий
режим. Если же защёлка установлена, то она сбрасывается, и процессор продол
жает выполнение команд, не переходя в спящий режим. Локальная защёлка co
бытия может быть установлена предыдущимИ исключениями, а также командой
SEV. Поэтому если вы выполните команду WFE сразу после команды SEV, то про
цессор не перейдёт в спящий режим, а просто продолжит выполнение проrрам
мы со следующей команды (при этом эащёлка будет сброшена командой WFE).
262 · Тлава 14. Прочие возможности процессора Cortex M3
WFE
Событие
Цикл
ожидания
Проверяем состояние
задач и
Нет
Проснулись из за
синхронизации
задач?
Запускаем задачу
Надо выйти из цикла?
Выходим из цикла
Рис. 14.8. Пример использования команды WFE.
Команду WFE можно при менять для реализации семафора в мноrопроцессорной
системе. В стандартных ситуациях, скажем при реализации семафора взаимноrо
исключения (мьютекса), для управления доступом к разделяемой памяти или пери
ферии обычно используют системный монитор монопольноrо доступа совместно
с командами монопольноrо доступа. При этом процесс, нуждающийся в определён
ном ресурсе, должен вызвать специальную функцию для захвата «блокировки»:
void get lock(volatile int * Lock Variable)
// LDREXW и STREXW встроенные функции CMSIS
// СМSIS совместимой библиотеки драйвера устройства
int status == о;
do {
while ( LDREXW(&Lock Variable)!== О); //
status == STREXW(l, &Lock Variable); //
//
//
//
//
} while (status ,==
DMB () ;
О) ;
Ждём снятия блокировки
Пытаемся установить флаr
блокировки, используя
команду STREX
Повторяем до победноrо конца
Барьер памяти данных
return;
Та же процедура на ассемблере:
get lock Ассемблерная функция для установки флаrа блокировки
LDR rO, ==Lock Variable
MOVS r2, #1
get lock loop
14.3. Межпроцессорный обмен · 263
Ресурс заблокирован, проверяем снова
Пытаемся установить флаr Lock Variable,
используя STREX
СМР rl, #0 Проверяем статус выполнения STREX
BNE get lock loop Неудача, повторяем попытку
DMB Барьер памяти данных
ВХ LR Возвращаемся
С друrой стороны, процесс, использующий ресурс, должен разблокировать
ero, если тот больше не требуется:
void free lock(volatile int * Lock Variable)
{
LDREX
СМР
BNE
STREX
rl,
rl,
get
rl,
[rO]
#0
lock loop
r2, [rO ]
DMB () ;
Lock Variable = О;
return;
// Барьер памяти данных
// Разблокируем
Эту же процедуру можно написать и на ассемблере:
free lock ; Ассемблерная процедура для разблокирования ресурса
LDR rO, =Lock Variable
MOVS rl, #0
DMB Барьер памяти данных
STR rl, [rO] Сбрасываем флаr блокировки
ВХ LR Возвращаемся
Подобная взаимоблокировка ресурса может привести к излишнему потребле
нию во время простоя процессора. Использование команды WFE позволит нам
уменьшить потребление процессора за счёт вывода ero из спящеrо режима толь
ко при освобождении требуемоrо ресурса.
void get lock with WFE(volatile int * Lock Variable)
{
int status = О;
do {
while ( LDREXW(&Lock Variable) 1= О) {
status =
STREXW(l, &Lock Variable);
// Проверяем состояние флаrа
// блокировки
// Если ресурс заблокирован, то
// «засыпаем» до появления события
// Пытаемся установить флаr
// блокировки,
// используя команду STREX
// Повторяем до победноrо конца
// Барьер памяти данных
WFE () ; }
} while (status != О);
DMB () ;
return;
в функции снятия блокировки используется команда SEV, выводящая из спя
щеrо режима друrие процессоры, ожидающие освобождения ресурса.
void free lock(volatile int * Lock Variable)
{
DMB () ;
Lock Variable
// Барьер памяти данных
о; // Снимаем блокировку
264 · rлава 14. Прочие возможности процессора Cortex M3
DSB () ;
SEV () ;
return;
// Обеспечиваем завершение операции записи
// rенерируем событие для пробуждения остальных процессоров
Эти же процедуры MorYT быть написаны на ассемблере:
get lock with WFE ; Ассемблерная функция для установки флаrа блокировки
LDR rO, =Lock Variable
MOVS r2, #1
get lock loop
LDREX r1, [rO]
CBNZ r1, lock is set
STREX r1, r2, [rO]
СМР r1, #0
BNE get lock loop ;
DMB
ВХ LR
lock is set
WFE Ждём события
В get lock loop Просыпаемся, повторяем попытку
free lock with SEV ; Ассемблерная функция для сброса флаrа блокировки
LDR rO, =Lock Variable
MOVS r1, #0
DMB
STR r1, [rO]
DSB
SEV
Если ресурс заблокирован засыпаем
Пытаемся установить флаr Lock Variable,
Проверяем статус выполнения STREX
Неудача, повторяем попытку
Барьер памяти данных
Возвращаемся
используя STREX
Барьер памяти данных
Сбрасываем флаr блокировки
Обеспечиваем завершение операции записи
rенерируем событие для пробуждения остальных
процессоров
ВХ LR Возвращаемся
Использование механизма передачи событий совместно с кодом реализации
семафора позволяет уменьшить потребление процессора при взаимоблокировке
ресурса. Аналоrичные решения MorYT применяться для передачи сообщений
и синхронизации задач.
В большинстве устройств с ядром Cortex M3 используется Bcero один процес
сор, вход RXEV KOToporo либо подтяrивается к НИЗКОМУ уровню, либо подклю
чается к периферийным устройствам, способным rенерировать события.
14.4. Управление сбросом
в процессоре Cortex M3 реализовано два механизма сброса системы. Первый
из них основан на использовании бита SYSRESETREQ реrистра AIRCR контрол
лера NVIC. При установке упомянутоrо бита процессор Cortex M3 формирует за
прос сброса для reHepaTopa сброса системы. Поскольку данный блок не входит
в состав процессора Cortex M3, конкретная реализация этоrо механизма зависит
от разработчика микроконтроллера. Поэтому необходимо внимательно изучить
документацию на применяемое устройство, чтобы определить, какие именно
узлы микроконтроллера сбрасываются при установке указанноrо бита.
При наличии СМSIS совместимоrо драйвера для активации paccMoTpeHHoro
механизма сброса системы можно использовать команду NVIC Sys ternRe set ().
14.4. Управление сбросом · 265
Описание данной функции приведено в Приложении ж. Те же, кто не хочет ис
пользовать стандарт CMSIS, MorYT поступить следующим образом:
* ((volatile unsigned int *) (ОхЕОООЕDОС)) == Ox05FA0004;
// Устанавливаем бит SYSRESETREQ (05FA ключ доступа)
while(l); // Бесконечный цикл, rарантирующий отсутствие выполняемых команд
// после запуска цикла сброса
Проrраммисты, пишущие на ассемблере, для формирования запроса на сброс
системы MorYT использовать следующий код:
LDR RO,==OxEOOOEDOC Адрес реrистра AIRCR контроллера NVIC
LDR Rl,==Ox05FA0004 ; Устанавливаем бит SYSRESETREQ (05FA ключ доступа)
STR Rl, [RO]
deadloop
в deadloop
Бесконечный цикл, rарантирующий отсутствие выполняемых
команд после запуска цикла сброса
Второй механизм управления сбросом основан на использовании бита
VECTRESET Toro же реrистра AIRCR (бит [О]). Установка этоrо бита в 1 вызывает
сброс процессора, за исключением компонентов отладки. Сброс узлов, внешних
по отношению к процессору, не производится. Так, если в SoC имеется модуль
UART, то при установке бита VECTRESET этот модуль, равно как и остальные
внешние периферийные устройства, не будет сброшен. Данный механизм пред
назначен, rлавным образом, для целей отладки, однако может использоваться
и в том случае, если проrрамме необходимо сбросить только процессор, не затра
rивая остальные элементы системы.
На языке Си сброс процессора можно реализовать следующим образом:
* ((volatile unsigned int *) (ОхЕОООЕDОС)) == Ox05FAOOOl;
// Устанавливаем бит VECTRESET (05FA ключ доступа)
while(l); // Бесконечный цикл, rарантирующий отсутствие выполняемых команд
// после запуска цикла сброса
Эту же операцию можно реализовать и на ассемблере:
LDR RO,==OxEOOOEDOC Адрес реrистра AIRCR контроллера NVIC
LDR Rl,==Ox05FAOOOl ; Устанавливаем бит VECTRESET (05FA ключ доступа)
STR Rl, [RO]
deadloop
в deadloop
; Бесконечный цикл, rарантирующий отсутствие выполняемых
; команд после запуска цикла сброса
В общем случае, для выполнения проrраммноrо сброса следует использовать
бит SYSRESETREQ, а не VECTRESET, что позволит одновременно сбросить боль
шинство компонентов системы. В зависимости от реализации микросхемы при
этом MorYT сбрасываться все или только некоторые периферийные устройства,
ядро и схема тактирования, включая блок ФАПЧ (Phase Locked Loop PLL). Бо
лее подробную информацию можно получить из документации на микросхему.
Следует обратить внимание на то, что между установкой бита SYSRESETREQ
и реальным сбросом системы проходит некоторое время, в течение KOToporo про
цессор сохраняет возможность реакции на прерывания. Если для вас это нежела
тельно, то перед rенерацией запроса на сброс необходимо установить реrистр Ma
скирования прерываний (PRIMASK или FAULTMASK).
rЛАВА 15
АРХИТЕКТУРА СИСТЕМЫ ОТЛАДКИ
15.1. Общие сведения о возможностях отладки
Процессор Cortex M3 предоставляет пользователю непревзойденные возмож
ности для отладки кода. По своему характеру все функции отладки можно разде
лить на две rруппы:
1. Инвазивные (с вмешательством в процесс выполнения проrраммы):
CJ останов и пошаrовое выполнение проrраммы;
CJ аппаратные точки останова;
CJ команда точки останова;
CJ точки наблюдения при обращении к конкретному адресу, диапазону aдpe
сов или значению;
CJ доступ к содержимому реrистров (как на чтение, так и на запись);
CJ исключение Debug monitor;
CJ ПЗУ отладка с использованием функции Flash Patch.
2. Неинвазивные:
CJ обращения к памяти (содержимое памяти доступно даже во время работы
ядра);
CJ трассировка команд (посредством опциональноrо модуля ЕТМ);
CJ трассировка данных;
CJ проrраммная трассировка (посредством модуля ITM);
CJ профилирование (посредством модуля DWT).
Ряд компонентов отладки встроены непосредственно в процессор Cortex M3.
Система отладки базируется на архитектуре отладки CoreSight, которая предо
ставляет унифицированные решения для управления процессом отладки, сбора
трассировочной информации и определения конфиrурации системы отладки.
15.2. Обзор архитектуры CoreSight
Архитектура отладки CoreSight охватывает самые разные аспекты отладки,
включая протокол интерфейса отладки, протокол шины отладки, управление
компонентами отладки, средства обеспечения безопасности, интерфейс трасси
ровки данных и т.п. Для ознакомления с данной архитектурой рекомендую обра
15.2. Обзор архитектуры CoreSight · 267
титься К руководству [3]. Компоненты отладки, входящие в состав процессора
Cortex M3, также описаны в соответствующих разделах руководства [1]. В пода
вляющем большинстве случаев эти компоненты используются исключительно
отладочными средствами, но никак не прикладной проrраммой. Однако для луч
шеrо понимания работы системы отладки будет нелишне вкратце ознакомиться
с возможностями этих компонентов.
15.2.1. Отладочный интерфейс процессора
В отличие от традиционных процессоров ARM7/ARM9 система отладки про
цессора Cortex M3 базируется на архитектуре отладки CoreSight. Традиционно
в процессорах ARM дЛЯ обращения к реrистрам процессора и управления интер
фейсом памяти использовался интерфейс JTAG (Joint Test Action Group объе
динённая рабочая rруппа по автоматизации тестирования). В процессоре
Cortex M3 управление лоrикой отладки осуществляется по специальному интер
фейсу, называемому портом доступа к средствам отладки (DAP), к6торый прак
тически идентичен интерфейсу шины АРВ архитектуры АМВА. ДЛЯ управления
интерфейсом DAP служит друrой компонент, преобразующий протоколы обмена
JTAG или Serial Wire (SW) в протокол интерфейса шины DAP.
Поскольку внутренняя шина средств отладки во MHoroM идентична шине
АРВ, к ней можно леrко подключать различные компоненты, получая в результа
те хорошо масштабируемую систему отладки. Кроме Toro, разделение интерфей
са отладки и аппаратных средств управления отладкой обеспечивает полную
прозрачность типа интерфейса, реализованноrо на кристалле. Это позволяет BЫ
полнять одни И те же задачи отладки вне зависимости от типа используемоrо ин
терфейса.
Управление имеющимися функциями отладки процессора Cortex M3 ocy
ществляется контроллером прерываний NVIC и рядом друrих компонентов, Ta
ких как модули РРВ, DWT и ITM. В контроллере NVIC имеется несколько реrи
стров для управления основными отладочными операциями, например OCTaHO
вом и пошаrовым выполнением проrраммы, тоrда как друrие блоки поддержива
ют более продвинутые возможности, такие как точки наблюдения, точки OCTaHO
ва и вывод отладочных сообщений.
15.2.2. Интерфейс хоста отладки
Технолоrия CoreSight поддерживает разные типы интерфейсов для соедине
ния хоста отладки и системы на кристалле. Традиционно для этой цели исполь
зовался интерфейс JTAG. Теперь же, блаrодаря тому, что отладочный интерфейс
процессора был заменён на шинный интерфейс общеrо назначения, мы можем,
подключая различные модули между хостом отладки и интерфейсом отладки
процессора, работать с самыми разными кристаллами, имеющими различные
интерфейсы хоста отладки, не внося изменений в интерфейс отладки процессора.
На сеrодняшний день устройства на базе Cortex M3 поддерживают два раз
личных интерфейса хоста отладки. Первый из них это уже известный нам ин
терфейс JTAG, а второй новый протокол обмена данными, получивший назва
ние Serial Wire (или, сокращённо, SW). В интерфейсе SW число сиrнальных ли
268 · rлава 15. Архитектура системы отладки
ний уменьшено до двух. Компания ARM предлаrает несколько модулей портов
отладки (Debug Port DP), поддерживающих различные протоколы обмена дaH
ными. С одной стороны модуль DP подключается к аппаратному отладчику,
а с друrой к шинному интерфейсу DAP.
15.2.3. Модупи DP, АР и DAP
Соединение внешнеrо аппаратноrо отладчика с интерфейсом отладки процес
сора Cortex M3 показано на Рис. 15.1.
JT AG или
Serial Wire
МикроконтроллеРr
I Соrtех МЗ
I
I
I
I
I
I
I
I
Шина:
SWJ OP ОДР I
или SW OP ДHB ДP
Ядро
Соrtех МЗ
NVIC
Хоет отладки
(ПК)
USB или
Ethernet
I I
I I
I I
I L
I
I
I r '"
I I I
Прочие др I
I I
Отладчик
Память
Рис. 15.1. Подключение хоста отладки к процессору Cortex M3.
Интерфейсный модуль DP, в качестве KOToporo обычно используется порт OT
ладки Serial Wire/JTAG (SWJ DP) либо порт отладки Serial Wire (SW DP), преоб
разует сиrналы отладчика в транзакции 32 битной шины отладки общеrо назна
чения (шина DAP на рисунке). Модуль SWJ DP поддерживает протоколы JTAG
и Serial Wire, а модуль SW DP только Serial Wire. В числе компонентов линей
ки CoreSight, предлаrаемых компанией ARM, также имеется модуль JTAG DP,
поддерживающий только протокол JTAG. Разработчики микросхем MorYT BЫ
брать любой из этих трёх модулей в соответствии со своими предпочтениями.
Адреса на шине DAP являются 32 битными, при этом старшие 8 бит шины aдpe
са используются для выбора KOHKpeTHoro устройства. Соответственно, к шине
DAP может быть подключено до 256 устройств. В самом процессоре задействован
Bcero один адрес, поэтому при необходимости вы можете подключить к шине
DAP ещё 255 модулей порта доступа (АР). То есть теоретически вы можете реали
15.2. Обзор архитектуры CoreSight · 269
зовать на одном кристалле сотни процессоров, использующих единственное под
ключение по интерфейсу JTAG или Serial Wire.
Для подключения к шине DAP в процессоре Cortex M3 используется порт дo
ступа шины АНВ (AHB AP). Это устройство выполняет функции моста, преобра
зуя команды отладчика в транзакции на шине АНВ, которые затем передаются во
внутреннюю систему шин процессора. Такое решение обеспечивает доступ ко
всему адресному пространству процессора, в том числе и к реrистрам управле
ния отладкой контроллера NVIC.
Среди продукции линейки CoreSight имеются модули портов доступа различ
ных типов, в том числе порта доступа шины АНВ (APB AP) и порта доступа ин
терфейса JTAG (JTAG AP). Модуль APB AP может использоваться для формиро
вания транзакций на шине АНВ, а модуль JTAG AP для управления традици
онными интерфейсами на базе протокола JTAG, такими как интерфейс отладки
процессора ARM7.
15.2.4. Интерфейс трассировки
Друrие компоненты архитектуры CoreSight относятся к трассировке. В про
цессоре Cortex M3 MorYT присутствовать следующие источники трассировочной
информации:
. трассировка команд осуществляется модулем ЕТМ;
. трассировка данных осуществляется модулем DWT;
. отладочные сообщения rенерируются модулем ITM, обеспечивающим BЫ
вод сообщений стандартными средствами языка Си, такими как функция
printf(), в rрафическом интерфейсе отладчика.
В процессе трассировки её результаты в виде пакетов данных выставляются
источниками трассировки, такими как модуль ЕТМ, на шину данных трассиров
ки АТВ (Advanced Trace Bus). Если в системе на кристалле имеется несколько ис
точников трассировки (скажем, в случае мноrопроцессорной системы), то потоки
данных с шин А ТВ MorYT быть объединены посредством специальноrо модуля
(в архитектуре CoreSight такой модуль называется АТВ funnel). Сформирован
ный поток данных поступает в модуль интерфейса порта трассировки (TPIU), KO
торый пересылает ero внешнему трассировщику. После Toro как эти данные по
падут в хост отладки (например, ПК), их можно будет разделить обратно на He
сколько потоков.
Несмотря на то что в самом процессоре Cortex M3 имеется несколько источ
ников трассировки, встроенные в Hero компоненты отладки спроектированы Ta
ким образом, что позволяют объединять трассировочные данные без использо
вания дополнительных модулей АТВ funnel. Выходной интерфейс системы Tpac
сировки может напрямую подключаться к модулю TPIU специальноrо исполне
ния, разработанноrо для Cortex M3. Далее трассировочные данные считываются
внешним трассировщиком и пересылаются хосту (как правило, ПК) для анализа.
15.2.5. Характеристики архитектуры CoreSight
Решения на основе архитектуры CoreSight имеют следующие преимущества:
270 · Тлава 15. Архитектура системы отладки
· Содержимое памяти и реrистров периферийных устройств может контроли
роваться даже во время работы процессора.
· Для управления отладочными интерфейсами нескольких процессоров ДOCTa
точно одноrо экземпляра отладчика. Например, при использовании интер
фейса JTAG требуется только один ТАР контроллер, даже при наличии на
кристалле нескольких процессоров.
· Внутренние интерфейсы отладки имеют простую шинную структуру, что обе
спечивает их масштабируемость и простоту реализации дополнительных ло
rических узлов для тестирования друrих блоков кристалла или SoC.
· Для захвата нескольких потоков данных трассировки достаточно одноrо
внешнеrо трассировщика; в хосте отладки эти данные разделяются обратно на
несколько потоков.
Система отладки, используемая в процессоре Cortex M3, несколько отличает
ся от стандартной реализации архитектуры CoreSight:
· Компоненты трассировки разработаны специально для процессора Cortex M3.
Некоторые из АТВ интерфейсов являются 8 битными, тоrда как в архитекту
ре CoreSight везде используются 32 битные шины.
· Система отладки процессора Cortex M3 не поддерживает технолоrию
TrustZone 1 ) .
· Компоненты отладки располаrаются в системной области памяти, тоrда как
в системах со стандартной архитектурой CoreSight для управления компонен
тами отладки используется отдельная шина со своим адресным простран
ством. Пример системы, в которой при меняется традиционная реализация
архитектуры CoreSight, приведён на Рис. 15.2.
Традиционная реализация
системы управления отладкой
на базе архитектуры CoreSight
Интерфейс
хоста отладки SWJ OP Шина ОДР
JT AG или или SW OP
Serial Wire
ДPB
муль типлексор
у CТp BO
отладки
NOl
Ycтp BO
отладки
N02
YCTp BO
отладки
NQЗ
APB AP
Шина АРВ
...........
ДН B AP
Память
JT AG AP
JTAG
JT AG
устройства
Рис. 15.2. Традиционная система отладки на базе технолоzиu CoreSight.
1) Технолоrия TrustZone, разработанная компанией ARM, реализует различные механизмы
защиты для встраиваемых устройств.
15.3. Режимы отладки · 271
в процессоре Cortex M3 все компоненты отладки располаrаются в общем
адресном пространстве (Рис. 15.3).
Система управления отладкой
в процессоре Соrtех МЗ
Ядро
Соrtех МЗ
NVIC
Интерфейс
хоста отладки SWJ OP Шина ОДР
JT AG или или SW OP
Serial Wire
ДHB ДP
OWТ
FPB
ITM
Память
Мост
ДHB ДPB
Внешняя РРВ
АРВ периферия
(через интерфейс РРВ)
TPIU
ЕТМ
Таблица
ПЗУ
Рис. 15.3. Система отладки процессора Cortex M3.
Дополнительную информацию об архитектуре CoreSight можно найти в PYKO
водстве [3].
Несмотря на то что компоненты отладки в процессоре Cortex M3 орrаНИЗ0ва
ны несколько иначе, нежели в обычных системах, задействующих архитектуру
CoreSight, коммуникационные интерфейсы и протоколы, используемые в про
цессоре, полностью совместимы с данной архитектурой. Это позволяет напря
мую подключаться к друrим системам, использующим архитектуру CoreSight.
В частности, в процессоре Cortex M3 MorYT применяться такие компоненты, как
модуль TPIU, модули портов отладки (DP) и блоки системы трассировки, позво
ляя включать ero в мноrоядерную систему отладки.
15.3. Режимы отладки
в процессоре Cortex M3 предусмотрено два режима выполнения отладочных
операций. Первый из них режим останова, при котором процессор полностью
прекращает выполнение проrраммы. Второй режим исключения Debug
monitor, при котором отладочные операции выполняются в обработчике данноrо
исключения. В этом режиме MorYT возникать исключения с более высоким прио
ритетом. Исключение Debug monitor (исключение N Q I2) имеет проrраммируемый
приоритет. Указанное исключение может быть вызвано как различными событи
ями отладки, так и ручной установкой бита признака отложенноrо прерывания.
Характерные особенности обоих режимов:
272 · Тлава 15. Архитектура системы отладки
1. Режим останова:
а исполнение команд останавливается;
а системный таймер SYSTICK останавливается;
а поддерживаются пошаrовые операции;
а при пошаrовом выполнении проrраммы возможно возникновение и обра
ботка прерываний. Внешние прерывания MorYT маскироваться.
2. Режим монитора отладки:
а процессор выполняет обработчик исключения Debug monitor (исключение
NQ 12);
а счётчик таймера SYSTICK продолжает работать;
а новые прерывания MorYT как прерывать, так и не прерывать выполнение
обработчика монитора отладки в зависимости от приоритета исключения
Debug monitor и приоритета HOBoro прерывания;
а если событие отладки возникнет во время обработки прерывания с более
высоким приоритетом, то оно будет пропущено;
а поддерживаются пошаrовые операции;
а содержимое памяти (в частности, стека) может изменяться обработчиком
исключения Debug monitor при сохранении контекста и во время выполне
ния обработчика.
Потребность в мониторе отладки обусловлена существованием таких систем,
в которых останов процессора для выполнения отладочных операций невозмо
жен в принципе. Например, в системе управления автомобильным двиrателем
или контроллере жёсткоrо диска процессор во время отладки должен продол
жать обслуживать запросы прерываний, чтобы обеспечить безопасное выполне
ние требуемых операций и предотвратить повреждение отлаживаемоrо устрой
ства. Используя монитор, отладчик может останавливать и отлаживать процессы
уровня потока и обработчики низкоприоритетных прерываний, не влияя при
этом на работу обработчиков системных исключений и прерываний с более BЫ
сокими приоритетами.
Для перехода в режим останова необходимо установить бит C DEBUGEN pe
rистра DHCSR контроллера NVIC в 1. Проrраммирование этоrо бита может быть
выполнено только по интерфейсу DAP; соответственно, вы не сможете OCTaHO
вить процессор при отсутствии отладчика. После установки бита C DEBUGEN
ядро процессора может быть остановлено установкой бита C HALT Toro же pe
rистра. Данный бит может быть установлен как отладчиком, так и самой отлажи
ваемой проrраммой.
В реrистре DHCSR есть биты, назначение которых зависит от выполняемой
операции. Так, при операциях записи в биты [31:16] реrистра заносится ключ дo
ступа. При чтении же реrистра указанный ключ совсем не нужен, поэтому в CTap
шем полуслове считанноrо значения содержатся биты состояния режима отлад
ки (Табл. 15.1).
15.3. Режимы отладки · 273
Таблица 15.1. Реrистр управления и состояния отладки в режиме останова DHCSR
(OxEOOOEDFO)
Биты Обозначение Тип Значение Описание
после сброса
Ключ доступа к функциям отладки; при записи
31:16 КЕУ W в реrистр эти биты должны содержать значение
OxA05F, в противном случае операция записи не
будет выполнена
25 S RESET ST R Ядро было сброшено или находится в состоянии
сброса. Бит сбрасывается при чтении
24 S RETIRE ST R Команда завершена с момента последнеrо чтения
реrистра. Бит сбрасывается при чтении
19 S LOCKUP R Если бит установлен в 1, то ядро находится
в состоянии блокировки
18 S SLEEP R Если бит установлен в 1, то ядро находится
в спящем режиме
17 S HALT R Если бит установлен в 1, то ядро остановлено
16 S REGRDY R Операция чтения/записи реrистра завершена
15:6 Зарезервировано Зарезервировано
5 C SNAPSTALL R/W 0* Прерывание «зависших» операций обращения
к памяти
4 Зарезервировано Зарезервировано
Маскирование прерываний в спящем режиме;
3 C MASKINTS R/W 0* бит может быть изменён только при
остановленном процессоре
Выполнение одной команды (пошаrовая работа
2 C STEP R/W 0* процессора); действителен только при
установленном бите C DEBUGEN
1 C HALT R/W 0* Останов процессорноrо ядра; действителен
только при установленном бите C DEBUGEN
О C DEBUGEN R/W 0* Разрешение отладки в режиме останова
*Управляющие биты в реrистре DHCSR сбрасываются только при сбросе по включению питания.
При сбросе системы (например, посредством реrистра AIRCR контроллера NVIC) эти биты не
сбрасываются.
Необходимо отметить, что реrистр DHCSR используется исключительно OT
ладчиком. Прикладные проrраммы не должны изменять содержимое этоrо реrи
стра во избежание конфликтов с отладочными средствами.
. Управляющие биты реrистра DHCSR сбрасываются только при сбросе по
включению питания. При сбросе системы (например, посредством реrистра
AIRCR контроллера NVIC) эти биты не сбрасываются. Для отладки в режиме
монитора используется друrой реrистр контроллера NVIC, а именно реrистр
DEMCR (Табл. 15.2). Помимо битов управления монитором отладки, реrистр
DEMCR содержит бит разрешения системы трассировки TRCENA и ряд битов
управления перехватом векторов прерываний YC xxx (последние MorYT ис
пользоваться только при отладке в режиме останова). Если на момент возник
новения какоrо либо отказа (или сброса ядра) был установлен соответствую
274 · Тлава 15. Архитектура системы отладки
щий бит YC xxx, то формируется запрос на останов, в результате KOToporo
процессор будет остановлен сразу же после завершения текущей команды.
· Управляющие биты TRCENA и YC xxx реrистра DEMCR сбрасываются при
сбросе по включению питания. При сбросе системы эти биты не сбрасывают
ся. В то же время биты управления отладкой в режиме монитора сбрасывают
ся в обоих случаях.
Таблица 15.2. Реrистр управления исключением и монитором отладки DEMCR
(OxEOOOEDFC)
Биты Обозначение Тип Значение Описание
после сброса
Разрешение работы системы трассировки; для
24 TRCENA R/W 0* использования модулей DWT, ЕТМ, ITM
и TPIU должен быть установлен в 1
23:20 Зарезервировано Зарезервировано
Указывает на то, что вызов монитора отладки
19 MON REQ R/W О произошёл в результате ручной установки
бита отложенности прерывания, а не
в результате события аппаратноrо отладчика
Выполнение одной команды (пошаrовая
18 MON STEP R/W О работа процессора); действителен только при
установленном бите MON EN
rенерация запроса исключения Debug monitor;
17 MON PEND R/W О процессор приступит к обработке исключения
соrласно ero приоритету
16 MON EN R/W О Разрешение исключения Debug monitor
15:11 Зарезервировано Зарезервировано
10 VC HARDERR R/W 0* Перехват тяжёлых отказов
Перехват ошибок, возникающих при входе
9 VC INTERR R/W 0* в обработчик исключения и при выходе
из Hero
8 VC BUSERR R/W 0* Перехват отказов шины
7 VC STATERR R/W 0* Перехват отказов проrраммы, вызванных
некорректной информацией о состоянии
Перехват отказов проrраммы, вызванных
6 VC CHKERR R/W 0* невыровненным доступом либо делением
на ноль
5 VC NOCPERR R/W 0* Перехват отказов проrраммы, вызванных
попыткой обращения к сопроцессору
4 VC MMERR R/W 0* Перехват отказов системы управления
памятью
3:1 Зарезервировано Зарезервировано
О VC CORERESET R/W 0* Перехват сброса ядра
*Управляющие биты в реrистре DEMCR сбрасываются только при сбросе по включению питания.
При сбросе системы (например, посредством реrистра AIRCR контроллера NVIC) эти биты не
сбрасываются.
15.4. События отладки · 275
15.4. События отладки
Процессор Cortex M3 может перейти в режим отладки (всё равно, в какой
именно) по разным причинам. На Рис. 15.4 показаны события, которые MorYT
вызвать переход процессора в режим останова.
События
отладки
ОСТАНОВ
C DEBUGEN = 1
C DEBUGEN = о
и rнори ровать
C DEBUGEN = 1
Исключение
Debug monitor
Монитор отладки
разрешён
C DEBUGEN
Монитор отладки
запрещён
Исключение
Hard Fault
Рис. 15.4. События отладки в режиме останова.
Внешний запрос отладки формируется путём активации входа EDBGREQ
процессора Cortex M3. Куда именно будет подключён этот вход, зависит от разра
ботчика KOHKpeTHoro микроконтроллера или SoC. Вполне возможны решения,
в которых этот вход будет жёстко подтянут к НИЗКОМУ уровню, т.е. в принципе
не может быть активирован. Однако чаще Bcero он подключается так, чтобы aK
тивироваться при формировании отладочных событий дополнительными KOM
понентами отладки (разработчики микросхем MorYT размещать дополнительные
компоненты в своих SoC). В мноrопроцессорной системе этот сиrнал может акти
вироваться при rенерации отладочных событий друrим процессором.
После завершения отладки нормальное выполнение проrраммы может быть
возобновлено посредством сброса бита C HALT. Аналоrичным образом, при OT
ладке в режиме исключения Debug Monitor для вызова монитора отладки MorYT
использоваться различные события (Рис. 15.5).
276 · rлава 15. Архитектура системы отладки
События
отладки
MON EN = 1 и приоритет
исключения монитора отладки
ниже или равен текущему
приоритету
Обработчик исключения
Debug monitor
откладывается
MON EN = 1 и приоритет
исключения монитора отладки
выше текущеrо приоритета
Запускается обработчик
исключения Debug monitor
ч
MON EN = 1 и приоритет
исключения монитора отладки
выше текущеrо приоритета
Иrнорировать
MON EN = о или приоритет
исключения монитора отладки
ниже или равен текущему
приоритету
Рис. 15.5. Отладочные события для отладки 8 режиме монитора.
Исключение
ошибки
Процесс отладки с использованием монитора несколько отличается от отлад
ки в режиме останова. Это связано с тем, что исключение Debug monitor являет
ся Bcero лишь одним из массы друrих исключений, и на ero обработку влияет Te
кущий приоритет процессора, если последний выполняет обработчик друrоrо
исключения.
После завершения отладки нормальное выполнение проrраммы возобновля
ется при выходе из обработчика исключения.
15.5. Точки останова в процессоре Cortex M3
Одним из наиболее широко используемых средств отладки в большинстве
микроконтроллеров являются точки останова. В процессоре Cortex M3 поддер
живаются два механизма точек останова:
· команда точки останова ВКРТ;
· останов с использованием компараторов адреса модуля РРВ.
Команда вставки точки останова (ВКРТ #immed8) является 16 битной KOMaH
дой Thumb, машинный код которой имеет вид ОхВЕхх. Младшие 8 бит кода опре
деляются значением константы, расположенной после мнемоники команды. При
выполнении этой команды rенерируется событие отладки, которое может быть
использовано для останова ядра процессора (если установлен бит C DBGEN)
15.6. Получение доступа к содержимому pezucmpoB при отладке · 277
или для активации исключения монитора отладки, если последнее разрешено.
Поскольку данное исключение является обычным исключением с изменяемым
приоритетом, то монитор отладки может вызываться либо из основной проrрам
мы, работающей в режиме потока, либо из обработчика исключения с меньшим
приоритетом. Как следствие, если отладка ведётся с использованием монитора,
то команда BRPT не должна вызываться из обработчиков исключений, таких как
немаскируемое прерывание или Hard Fault, а сам монитор отладки в этом случае
может быть запущен только после завершения обработчика исключения.
При возврате из обработчика исключения Debug monitor процессор возвра
щается по адресу команды ВКРТ, а не по следующему адресу, как при возврате из
прочих обработчиков. Это связано с тем, что при нормальном использовании KO
манды ВКРТ она подменяет собой обычную команду. Соответственно, после дo
стижения процессором точки останова и выполнения требуемых отладочных
операций команда ВКРТ заменяется на исходную команду (остальная память
проrрамм не затраrивается).
Если попытаться выполнить команду ВКРТ при сброшенных битах
C DEBUGEN и MON EN, то будет сrенерировано исключение Hard Fault. При
этом будут установлены бит DEBUGEVT реrистра HFSR и бит ВКРТ реrистра
DFSR.
Модуль РРВ может rенерировать события точек останова даже в том случае,
если модификация памяти проrрамм невозможна. Правда, в этом случае ero воз
можности оказываются оrраничены шестью точками останова в области кода
и двумя в области констант. Более подробно модуль РРВ будет рассмотрен
в следующей rлаве.
15.6. Получение доступа к содержимому
реrистров при отладке
в контроллере NVIC предусмотрено два реrистра для поддержки функций OT
ладки. Это реrистр выбора реrистра ядра DCRSR (Табл. 15.3) и реrистр содержи
Moro реrистра ядра DCRDR (Табл. 15.4). Указанные реrистры позволяют отлад
чику обращаться к реrистрам процессора. Учтите, что пересылка содержимоrо
реrистров может осуществляться только при остановленном процессоре.
Чтобы прочитать содержимое какоrо либо реrистра процессора с помощью
этих реrистров, необходимо выполнить следующие операции:
1. Убедиться, что процессор находится в состоянии останова.
2. Записать в реrистр DCRSR значение со сброшенным битом [16] (операция
чтения).
3. Дождаться установки бита S REGRDY реrистра DHCSR (OxEOOOEDFO).
4. Прочитать реrистр DCRDR для получения содержимоrо реrистра.
Для записи в реrистр необходимо выполнить аналоrичные действия:
1. Убедиться, что процессор находится в состоянии останова.
2. Заrрузить значение в реrистр DCRDR.
3. Записать в DCRSR значение с установленным битом 16 (операция записи).
4. Дождаться установки бита S REGRDY реrистра DHCSR (OxEOOOEDFO).
278 · rлава 15. Архитектура системы отладки
Таблица 15.3. Реrистр DCRSR (OxEOOOEDF4)
Биты Обозначение Тип Значение Описание
после сброса
16 REGWnR W Направление передачи данных:
Запись = 1, Чтение = О
15:5 Зарезервировано
Реrистр, к которому производится обращение:
00000 = RO
00001 = Rl
. . .
01111 = R15
10000 = хРSR/флаrи
4:0 REGSEL W 10001 = Основной указатель стека (MSP)
10010 = Указатель стека процесс а (PSP)
10100 = Реrистры специальноrо назначения:
[31:24] CONTROL
[23:16] FAULTMASK
[15:8] BASEPRI
[7:0] PRIMASK
Остальные значения зарезервированы
Таблица 15.4. Реrистр DCRDR (OxEOOOEDF8)
Биты Обозначение Тип Значение Описание
после сброса
31:0 Data R/W Реrистр данных для хранения результата чтения
реrистра или значения, записываемоrо в реrистр
Реrистры DCRDR и DCRSR позволяют пересылать содержимое реrистров
только при отладке в режиме останова. При отладке с использованием монитора
содержимое одних реrистров можно прочитать из стека, а друrих непосред
ственно в обработчике исключения Debug monitor.
Реrистр DCRDR также может применяться для реализации полухостинrа при
наличии соответствующих библиотек функций и поддержки со стороны отлад
чика. Например, при использовании в приложении функции printf собственно
вывод текста, как правило, осуществляется мноrократными вызовами функции
putc (вывод символа). Реализация данной функции может предусматривать co
хранение выводимоrо символа и текущеrо состояния в реrистре DCRDR с после
дующей активацией режима отладки. Отладчик сможет обнаружить останов
ядра и считать этот символ для ero вывода на экран. Однако это решение требует
останова процессора, тоrда как полухостинr средствами модуля ITM не наклады
вает TaKoro оrраничения.
15.7. Прочие отладочные возможности ядра
в контроллере NVIC имеются и друrие возможности, используемые при OT
ладке:
· Внешний си2нал запроса отладки. Контроллер NVIC имеет вход внешнеrо сиr
нала запроса отладки, который позволяет переводить процессор Cortex M3
15.7. Прочие отладочные возможности ядра · 279
в режим отладки при наступлении внешнеrо события. Данная возможность
актуальна в основном для мноrопроцессорных систем. В простых микрокон
троллерах этот вход обычно подтяrивается к НИЗКОМУ уровню.
. Pezucтp DFSR. Поскольку процессор Cortex M3 поддерживает различные co
бытия отладки, в нём предусмотрен специальный реrистр DFSR, с помощью
KOToporo отладчик может определить произошедшее событие.
. Управление сбросом. Во время отладки процессорное ядро можно перезапу
стить с помощью бита VECTRESET или SYSRESETREQ реrистра AIRCR KOH
троллера NVIC (OxEOOOEDOC). Данный реrистр управления сбросом позволя
ет сбрасывать процессор, не затраrивая при этом компоненты отладки, имею
щиеся в системе.
. Маскирование nрерываний. Указанная возможность очень полезна при поша
rовой отладке. В частности, если вам необходимо отладить проrрамму и при
этом вы не хотите попадать в процедуры обработки прерываний, то вы може
те замаскировать запросы прерываний. Для этоrо достаточно установить бит
C MASKINTS реrистра DHCSR (OxEOOOEDFO).
. Прерывание «зависших» nересылок. Если пересылка по шине «зависла» на дли
тельное время, то её можно прервать установкой бита C SNAPSTALL реrи
стра DHCSR (OxEOOOEDFO). Данная возможность может использоваться толь
ко при отладке в режиме останова.
rЛАВА 1 б
КОМПОНЕНТЫ ОТЛАДКИ
16.1. Общие сведения
в составе процессора Cortex M3 имеются различные компоненты, обеспечива
ющие реализацию таких функций, как точки останова, точки наблюдения, KOp
рекция флэш памяти (Flash Patch) и трассировка. Если вы занимаетесь разработ
кой прикладных проrрамм, то вам скорее Bcero никоrда не потребуется детальная
информация об этих компонентах, поскольку они обычно используются исклю
чительно отладочными средствами. В данной rлаве приводятся основные CBeдe
ния обо всех компонентах отладки процессора. Если же вам необходима более
подробная информация об указанных компонентах, обратитесь к руководству [1].
Проrраммирование всех компонентов поддержки трассировки, так же как и MO
дуля FPB, осуществляется по шине собственных периферийных устройств (РРВ)
процессора. В подавляющем большинстве случаев проrраммирование этих компо
нентов производится только средствами отладки. Прикладным проrраммам не pe
комендуется обращаться к компонентам отладки (за исключением реrистров пор
тов стимулов модуля ITM), поскольку это может помешать работе отладчика.
16.1.1. Система трассировки в процессоре Cortex..M3
Система трассировки процессора Cortex M3 базируется на архитектуре Core
Sight. Результаты трассировки rенерируются в виде пакетов данных различноrо раз
мера (имеющих разное число байтов). Компоненты трассировки пересылают эти па
кеты по шине АТВ в модуль TPIU, который форматирует их в соответствии с требу
емым протоколом интерфейса трассировки. После этоrо данные считываются
внешним устройством, таким как анализатор порта трассировки ТРА (Рис. 16.1).
Трассировка
команд
Cortex M3
Процессорное
ядро
Cortex M3
rраница
кристалла
I
I
I
I
I
I
I
I
I
I
Анализатор
порта
трассировки
Хост
отладки
TPIU
Аппаратная и
проrраммная
трассировка
АТВ
I
I
I
Порт!
трассировки
Рис. 16.1. Система трассировки процессора Cortex M3.
16.2. Компоненты трассировки: модуль DWT · 281
В обычных процессорах Cortex M3 может присутствовать до трёх источников
трассировочных данных это модули ЕТМ, ITM и DWT. Заметьте, модуль ITM
является опциональным, поэтому некоторые устройства с процессором Cortex М3
не поддерживают трассировку команд. Во время работы каждому источнику
трассировки присваивается уникальный 7 битный идентификатор (ATID), KOTO
рый пересылается вместе с пакетом данных по шине АТВ. Этот идентификатор
позволяет хосту отладки разделить полученные пакеты на отдельные потоки
данных трассировки.
В отличие от мноrих друrих стандартных компонентов CoreSight, компоненты
отладки процессора Cortex M3 MorYT сами объединять потоки АТВ, тоrда как
в обычных системах CoreSight для объединения пакетов используется отдельный
блок, называемый АТВ fuппel.
Перед использованием системы трассировки необходимо установить бит раз
решения трассировки TRCENA реrистра DEMCR (см. Табл. 15.2 или Табл. f.38
в Приложении [). В противном случае, система трассировки будет отключена. Во
время нормальной работы, не требующей трассировки, сброс бита TRCENA по
зволяет отключить часть лоrических узлов процессора и уменьшить ero потре
бление.
16.2. Компоненты трассировки: модуль DWT
Модуль DWT имеет следующие возможности:
1. Содержит в своём составе четыре компаратора, каждый из которых может
быть сконфиrурирован для реализации:
а) аппаратной точки наблюдения (rенерирует событие точки наблюдения,
переводящее процессор в один из режимов отладки);
б) триrrера ЕТМ (в результате модуль ЕТМ вставляет в поток трассировки
команд триrrер пакет);
в) триrrера события выборки счётчика команд;
r) триrrера события выборки адреса.
Первый компаратор также может использоваться для сравнения
с содержимым счётчика тактов (CYCCNT) вместо сравнения со значением
адреса.
2. Имеет счётчики для подсчёта:
а) числа тактов (CYCCNT);
б) числа «свёрнутых» команд;
в) числа элементов операций заrрузки/сохранения;
r) числа тактов при нахождении в спящем режиме;
д) числа тактов, затраченных на выполнение команды;
е) числа тактов, связанных с накладными расходами на исключение.
3. Позволяет считывать значения РС с заданной периодичностью.
4. Обеспечивает трассировку событий, связанных с исключениями.
При использовании компаратора в качестве аппаратной точки наблюдения
или триrrера ЕТМ он позволяет сравнивать либо адреса данных, либо значения
счётчика команд. При работе в друrом качестве компаратор сравнивает адреса.
282 · Тлава 16. Компоненты отладки
Каждый компаратор имеет три реrистра:
· сомр (реrистр сравнения);
· MASK (реrистр маски);
· FUNCTION (реrистр управления).
Реrистр сомр представляет собой 32 битный реrистр, содержимое KOToporo
сравнивается с адресом данных (или значением счётчика команд или значением
CYCCNT). Реrистр MASK позволяет задавать, какие биты адреса будут иrнори
роваться во время сравнения (Табл. 16.1).
Таблица 16.1. Декодирование содержимоrо реrистров маски модуля DWT
MASK Иrнорируемые биты
О Сравниваются все биты
1 Иrнорируется бит [о]
2 Иrнорируются биты [1:0]
3 Иrнорируются биты [2:0]
. . . . . .
15 Иrнорируются биты [14:0]
Используя реrистр маски, можно отслеживать обращения к данным в диапа
зоне адресов до 32 Кбайт. Однако из за оrраниченноrо объёма FIFО буфера в MO
дулях DWT и ITM отследить большое число пересылок просто нереально, по
скольку это приведёт к переполнению буфера трассировки и утере полученных
данных.
Реrистр FUNCTION определяет режим работы компаратора. Чтобы исклю
чить некорректное поведение компаратора, перед проrраммированием реrистра
FUNCTION в реrистры MASK и СОМР необходимо заrрузить требуемые значе
ния. Если нужно изменить функцию компаратора, то ero сначала следует отклю
чить, очистив реrистр FUNCTION, затем соответствующим образом перепро
rраммировать реrистры MASK и СОМР, после чеrо снова включить.
Остальные счётчики модуля DWT обычно используются для профилирова
ния кода приложения. Их можно запроrраммировать на rенерацию событий
(в виде пакетов данных трассировки) при переполнении. В качестве типичноrо
применения можно указать использование реrистра CYCNT дЛЯ подсчёта числа
тактов, затраченных на выполнение конкретной задачи.
Рис. 16.2. Статистика выполнения npozpaMMbl, собранная с использованием счётчиков
модуля DWT (ИСР f"l Vision компании Keil).
16.3. Компоненты трассировки: модуль ITM · 283
Например, в ИСР tlVision компании КеН эти счётчики MorYT использоваться
для rенерации статистической информации (Рис. 16.2). Данные счётчики запу
скают rенерацию пакетов событий, которые собираются отладчиком с выхода
модуля Serial Wire Viewer (SWV).
16.3. Компоненты трассировки: модуль ITM
Модуль ITM имеет следующие возможности (Рис. 16.3):
. проrрамма может напрямую записывать сообщения в порты стимулов MOДY
ля ITM и выводить их в виде данных трассировки;
. модуль DWT может rенерировать пакеты трассировки и выводить их через
модуль ITM;
. модуль ITM может rенерировать пакеты временных меток, вставляемые в по
ток данных трассировки, что помоrает отладчику вести хронометраж собы
тий.
Проrраммная
трассировка
owт
Внешнее устройство
сбора данных трассировки
(например, RealView Trace)
r енератор
временных
меток
Пакеты
трассировки
от ЕТМ
Рис. 16.3. Объединение пакетов трассировки в модулях ITM и TPIU.
Для вывода данных модуль ITM использует порт трассировки, поэтому если
в микроконтроллере или SoC отсутствует модуль TPIU, то результаты трассиров
ки никак не получится передать за пределы процессора. Из этоrо следует, что
прежде чем задействовать модуль ITM, необходимо убедиться в том, что микро
контроллер или SoC имеют требуемую функциональность. В крайнем случае, ec
ли указанные возможности недоступны, вы можете выводить отладочные сооб
щения, используя полухостинr на основе реrистра отладки контроллера NVIC
(этот метод поддерживается отладчиком RealView Debugger компании ARM) или
же модуль UART.
Чтобы задействовать модуль ITM, необходимо бит TRCENA реrистра DEMCR
установить в 1. В противном случае, модуль ITM будет отключён, а ero реrистры
недоступны.
Кроме Toro, в модуле ITM имеется специальный реrистр блокировки. Перед
проrраммированием модуля в этот реrистр необходимо заrрузить значение
ОхС5АССЕ55 (ключ доступа CoreSight), иначе все операции записи в реrистры MO
дуля ITM будут иrнорироваться.
И наконец, в самом модуле ITM имеется ещё один реrистр управления, OTBe
чающий за разрешение/запрещение отдельных функций модуля. В этом реrистре
284 · fлава 16. Компоненты отладки
также содержится поле А TID, в котором хранится значение идентификатора MO
дуля ITM дЛЯ шины АТВ. Данный идентификатор должен отличаться от иденти
фикаторов остальных источников трассировочных данных, чтобы хост отладки,
получающий пакеты данных трассировки, Mor выделить пакеты от модуля ITM
среди друrих пакетов.
16.3.1. Проrраммная трассировка с испопЬЗ0ванием
модупя ITM
Одной из основных функций модуля ITM является поддержка вывода отла
дочных сообщений (скажем, посредством функции printf). В составе модуля
ITM имеется 32 порта стимулов, в которые различные процессы MorYT выводить
свою информацию. Последующее отделение сообщений различных процессов
друr от друrа осуществляется хостом отладки. Каждый порт может быть разре
шён/запрещён посредством реrистра разрешения трассировки ITM TER, а также
может быть запроrраммирован (rруппами по восемь реrистров) на предоставле
ние пользовательским процессам доступа на запись.
В отличие от вывода текста посредством модуля UART, использование ITM не
вносит большой задержки в работу проrраммы. Внутри модуля ITM имеется
FIFО буфер, так что операции записи выводимых сообщений буферизуются. Co
ответственно, прежде чем писать в буфер, необходимо убедиться в том, что в нём
есть место.
Выводимые сообщения MorYT быть считаны через интерфейс порта трасси
ровки или интерфейс SWV модуля TPIU. При этом вам не потребуется удалять из
финальной версии проrраммы код, осуществляющий вывод отладочных сообще
ний, поскольку при сброшенном бите TRCENA модуль TPIU будет неактивным,
и сообщения в любом случае выводиться не будут. Соответственно, вы можете
включить вывод отладочных сообщений в «живой» системе и, используя реrистр
ITM TER, выбрать интересующие вас порты.
К примеру, в ИСР flVision компании КеН имеется специальный модуль для
сбора и отображения выводимой информации, который называется ITM Viewer
(Рис. 16.4).
value - Ох083,
value - Ох083,
value - Ох083,
value - ОхОВ40
value - ОхОВ40
value - ОхОВ40
value - Ох0840
value - Ох0840
value - Ох0840
value - ОхОВ40
value - ОхОВ3,
value - ОхОВ40
D value - Ох083,
value - Ох0840
value - ОхОВЗF
value - ОхОВ40
value - ОхОВ40
value - ОхОВ40
value - Ох0840
value - Ох0840
value - Ох083,
Рис. 16.4. Окно «ITM Viewer» ВЫ80д сообщений с выхода модуля ITM.
16.4. Компоненты трассировки: модуль ЕТМ · 285
16.3.2. Аппаратная трассировка с использованием
модулей ITM и DWT
Модуль ITM задействуется при выводе пакетов данных аппаратной трассиров
ки. Собственно пакеты rенерируются модулем DWT, а модуль ITM выступает в Ka
честве устройства объединения этих пакетов. Для использования трассировки
средствами модуля DWT необходимо установить бит DWTEN реrистра управления
модуля ITM; остальные настройки модуля DWT выполняются через ero реrистры.
16.3.3. Временные отметки модуля ITM
При поступлении в FIFО буфер модуля ITM очередноrо пакета трассировки MO
дуль может вставлять в поток данных трассировки пакет временной отметки. YKa
занный пакет rенерируется также при переполнении счётчика временных отметок.
Каждый пакет временной отметки содержит время, прошедшее с момента
предыдущеrо события. Используя эти пакеты, трассировщик может определить
время rенерации каждоrо пакета и, таким образом, реконструировать процесс
возникновения отладочных событий.
Объединив возможности трассировки модулей DWT и ITM, мы можем полу
чить MHoro полезной информации. Так, из содержимоrо окна трассировки ис
ключений ИСР Vision мы можем узнать, какие исключения были обработаны
и сколько ушло времени на каждое из них (Рис. 16.5).
2 НМ1 О 08
З HarcFd О 0$
.. MemМ О 0$
5 BusFd О О,
Б U d О 0$
11 SVYI 475 158.236 u8 77500\.1$ 1Ю.7З6 \.1$ 13!861 \.1$ 145-49$ 0(0)21660
12 O on О 0$
14 PendSV О а.
15 SysTick 2576 4 309 ms 1.417 us 93б94us 785 222 us 1a. /'А$ О OOJJ727S
16 EкtlRQ О Q 0$
17 EмtlRQ 1 О 0$
18 EICtfRQ2 О О.
19 ЕICtIRQЗ О о.
20 Е иdRQ 4 О 0$
21 EICtfRQ5 О 08
22 EIItIRQ6 О 0$
2з EкtlRQ 7 О 0$
Рис. 16.5. Окно «Exceptioп Trace» ИСР flVisioп.
16.4. Компоненты трассировки: модуль ЕТМ
Модуль ЕТМ используется для трассировки команд. Данный модуль является
опциональным и может отсутствовать в отдельных устройствах на базе процес
сора Cortex M3. Если модуль ЕТМ включён, то в процессе трассировки он rенери
рует пакеты трассировки команд. В модуле предусмотрен FIFО буфер, облеrчаю
щий захват потока трассировочных данных внешним устройством.
Для уменьшения объёма данных, rенерируемых модулем ЕТМ, он сообщает не
обо всех командах, выполненных процессором. Как правило, модуль выводит
информацию о ходе выполнения проrраммы и значения адресов только в опреде
лённые моменты времени (например, при выполнении переходов). Поскольку
хост отладки имеет копию двоичноrо образа проrраммы, то этих данных ему бу
286 · rлава 16. Компоненты отладки
дет достаточно для Toro, чтобы восстановить последовательность команд, выпол
ненных процессором.
Модуль ЕТМ также взаимодействует с друrими компонентами отладки, таки
ми как модуль DWT. В частности, компаратор модуля DWT может использовать
ся для rенерации запускающих событий в модуле ЕТМ или для управления пу
ском/остановом трассировки.
В отличие от модуля ЕТМ традиционных процессоров ARM, модуль ЕТМ, pe
ализованный в процессоре Cortex M3, не имеет собственных компараторов aдpe
са, так как операции сравнения для модуля ЕТМ может выполнять модуль DWT.
Более Toro, поскольку трассировка данных также осуществляется модулем DWT,
то реализация модуля ЕТМ процессора Cortex M3 довольно сильно отличается
от традиционных решений для друrих процессорных ядер ARM.
Чтобы задействовать модуль ЕТМ в процессоре Cortex M3, необходимо BЫ
полнить следующие операции (этим занимается отладчик):
1. Установить бит TRCENA реrистра DEMCR (см. Табл. 15.2 или Табл. f.38).
2. Разблокировать модуль ЕТМ, чтобы получить возможность записи в ero
реrистры. Для этоrо необходимо в реrистр ETM LOCK ACCESS записать
значение ОхС5АССЕ55.
3. Занести в реrистр идентификатора ATID уникальное значение, которое
позволит хосту отладки отделить пакеты модуля ЕТМ от пакетов из друrих
источников трассировки.
4. Подать на вход разрешения неинвазивной отладки (NIDEN) модуля ЕТМ
сиrнал BbICOKOrO уровня. Реализация этоrо сиrнала зависит от
KOHKpeTHoro устройства. Чтобы получить более подробную информацию,
обратитесь к документации на используемый микроконтроллер.
5. Запроrраммировать реrистры управления модуля ЕТМ на rенерацию
трассировочной информации.
16.5. Компоненты трассировки: модуль TPIU
Модуль TPIU используется для вывода пакетов трассировки, формируемых
модулями ITM, DWT и ЕТМ, во внешнее устройство (например, анализатор пор
та трассировки). Модуль TPIU процессора Cortex M3 поддерживает два режима
вывода информации:
· синхронный режим, использующий параллельную шину данных разряд
ностью до 4 бит;
· SWV режим, использующий однопроводной интерфейс SWVl).
Реальная разрядность порта вывода данных в синхронном режиме может
быть разной. Она зависит от типа корпуса микросхемы, а также от числа сиrналь
ных контактов, которые можно будет задействовать для вывода данных трасси
ровки. Максимальную разрядность порта трассировки, поддерживаемую KOH
кретной микросхемой, можно определить из реrистра TPIU SSPSR модуля TPIU.
Скорость вывода данных также проrраммируется.
1) Доступен только в устройствах с процессором Cortex M3 ревизии 1 и выше.
16.6. Модуль РРВ · 287
в режиме SWV при меняется однобитный последовательный протокол, требу
ющий Bcero один сиrнальный провод. При этом также уменьшается пропускная
способность канала передачи данных трассировки. При объединении SWV
и протокола отладки Serial Wire в качестве выхода SWV может задействоваться
вывод TDO интерфейса JTAG (Рис. 16.6). Это позволяет использовать для сбора
отладочной информации в режиме SWV стандартный JТАG кабель (см., напри
мер, отладчик ULINK 2 компании КеН).
Параллельный
выход
ДЛЯ синхронноrо
режима
ULink2,
ULinkPro или
RealView ICE
TOI
ТСК (SWCLK)
TMS (SWIO)
Serial Wire
JТAG
(SWJ OP)
Соrtех МЗ
Модуль
интерфейса
порта
трассировки
(ТРIU)
Данные, бит 3
Данные, бит 2
Данные, бит 1
Данные, бит 0/
SWV
ULink Pro
или
RealView
Trace
ТОО
SWV
Рис. 16.6. Использование выхода SW
Также SWV может передавать данные на вывод, используемый в синхронном
режиме в качестве одной из линий параллельноrо порта. Для сбора трассировоч
ной информации, независимо от режима работы модуля TPIU, можно задейство
вать внешний анализатор порта трассировки, например RealView Trace компа
нии ARM.
Если необходимо выполнить трассировку команд (с помощью модуля ЕТМ),
то желательно использовать синхронный режим, поскольку он обеспечивает бо
лее высокую пропускную способность. Для простой трассировки данных и Tpac
сировки событий (например, исключений), как правило, достаточно режима
SWV, достоинством KOToporo является меньшее число задействованных выводов.
Для использования модуля TPIU бит TRCENA реrистра DEMCR следует YCTa
новить в 1. Также необходимо запроrраммировать соответствующим образом
реrистр выбора протокола (режима) и реrистры управления разрядностью порта
трассировки (эти операции выполняет ПО трассировки).
16.6. Модуль FPB
Модуль РРВ выполняет следующие функции:
. установка аппаратных точек останова (rенерирует событие точки останова
для перевода процессора в один из режимов отладки);
. подмена команды или константы в области кода значением из области стати
ческоrо 03
16.6.1. Точка останова
Назначение точек останова, в общем то, понять не сложно. Во время отладки
вы можете разместить одну или несколько точек останова по адресам проrраммы
288 · rлава 16. Компоненты отладки
или констант. При выполнении команды или при чтении значения, расположен
Horo по такому адресу, rенерируется событие отладки, которое приводит к OCTa
нову проrраммы (для отладки в режиме останова) или rенерации исключения
Debug monitor (для отладки в режиме монитора). После этоrо вы можете прокон
тролировать содержимое реrистров, памяти, начать пошаrовую отладку про
rpaMMbI и т.д.
16.6.2. Функция Flash Patch
Функция Flash Patch позволяет использовать проrраммируемое ЗУ небольшо
ro объёма для наложения «заплаток» на память проrрамм, доступную только для
чтения. Использование в качестве памяти проrрамм масочноrо или однократно
проrраммируемоrо ПЗУ может значительно снизить стоимость продукции при
массовом производстве. Однако в этом случае замена устройств при обнаруже
нии ошибки в проrрамме может дороrо обойтись производителю. Если же доба
вить в устройство перепроrраммируемую память (флэш или EEPROM) неболь
шоrо объёма, то можно будет ставить «заплатки» на проrрамму, зашитую
в устройстве. Для микроконтроллеров, использующих для хранения проrраммы
флэш память, функция Flash Patch не актуальна, поскольку флэш память допу
скает стирание и повторное проrраммирование.
16.6.3. Компараторы
Модуль РРВ содержит в общей сложности восемь компараторов:
· шесть компараторов команд;
· два компаратора констант.
Любой компаратор в каждый момент времени может использоваться для pea
лизации либо точки останова, либо функции Flash Patch, но не обеих функций
одновременно.
В модуле РРВ имеется реrистр управления функцией Flash Patch, который co
держит бит, разрешающий работу модуля. Кроме Toro, для каждоrо компаратора
предусмотрены отдельные биты разрешения, которые располаrаются в реrистрах
управления компараторами. Для включения компаратора оба бита разрешения
(модуля и компаратора) необходимо установить в 1.
Компараторы MorYT быть запроrраммированы на то, чтобы переназначать
адреса из области кода в область статическоrо ОЗ ДЛЯ использования данной
функции в реrистр REMAP необходимо занести начальный адрес переназначае
мой области памяти. В трёх старших битах этоrо реrистра (биты [31:29]) жёстко
зашито значение ЬООI, что оrраничивает базовый адрес диапазоном
Ох20000000.. .Ох3РРРРР80, который всеrда находится в области ОЗ
При совпадении адреса команды или константы с адресом, заданным в компа
раторе, производится чтение из таблицы, на которую указывает реrистр REMAP
(Рис. 16.7).
16.6. Модуль РРВ · 289
Ох20000000
Адресное
пространство
Переадресация
Новая константа N21
Область
СОЗУ
Новая команда N23
Новая команда N22
Новая команда N21
Базовый адрес
(REMAP)
Ох 20000000
Константа N21
СОМРб
Команда N22
СОМР1
Область
кода
Команда N21
СОМРО
Команда N23
СОМР2
ОхОООООООО
Рис. 16.7. Функция Plash Patch: переназначение операций чтения команд и констант.
Используя функцию переадресации, можно реализовать набор проверок типа
«если то», В которых ориrинальные команда или константа будут подменяться
друrими (даже в том случае, если код проrраммы расположен в ПЗУ или флэш
памяти). В частности, такое решение можно использовать для запуска проrрам
мы или процедуры из ОЗУ, размещая такую «заплатку» В области кода, которая
осуществляла бы переход к проrрамме или процедуре тестирования. Это позво
ляет отлаживать устройства, в которых проrрамма хранится в ПЗУ.
Второй функцией компараторов адреса команд является rенерация точек
останова с запуском одноrо из двух режимов отладки.
290 · Тлава 16. Компоненты отладки
16.7. Порт доступа шины АНВ
Порт доступа усовершенствованной высокопроизводительной шины
(AHB AP) представляет собой мост между модулем интерфейса отладки (SWJ DP
или SW DP) и системой памяти процессора Cortex M3 (Рис. 16.8). В большинстве
операций пересылки данных между хостом отладки и системой с процессором
Cortex M3 используются следующие реrистры модуля AHB AP:
· реrистр слова состояния и управления (CSW);
· реrистр адреса пересылки (Т AR);
· реrистр чтения/записи данных (DRW).
Реrистр CSW позволяет управлять направлением передачи данных (чтение/
запись), размером пересылки, типом пересылки и т.п. Реrистр TAR используется
для указания адреса пересылки, а реrистр DRW предназначен для выполнения
собственно операции пересылки данных (пересылка начинается при обращении
к этому реrистру).
Содержимое реrистра данных DRW в точности соответствует содержимому ши
ны. При выполнении двухбайтных и однобайтных пересылок требуемые данные бу
дут сдвинуты в корректный байтовый тракт проrраммным обеспечением отладчика.
16.8. Таблица ПЗУ. 291
Соrtех МЗ
AHB AP
Периферия
Cortex M3
Хост
отладки
SW J DP
или SW DP
TAR
CSW
ОАТА
Порт ОАР
в Соrtех МЗ
Система
памяти
Рис. 16.8. Подключение порта AHB AP 8 процессоре Cortex M3.
Например, если вы хотите переслать полуслово по адресу Охl002, то вы должны
поместить данные в биты [31:16] реrистра DRW. Модуль AHB AP может форми
ровать невыровненные пересылки, однако результат операции при этом не BЫ
равнивается. Так что проrрамма отладчика должна будет либо сдвинуть данные
самостоятельно, либо разбить одно обращение к невыровненным данным на He
сколько операций.
Остальные реrистры AHB AP обеспечивают дополнительные функциональ
ные возможности. В частности, модуль имеет 4 реrистра, объединённых в банк,
которые в сочетании с функцией автоматическоrо инкрементирования адреса
ускоряют обращения к памяти в некотором диапазоне адресов и выполнение по
следовательных пересылок. В модуле AHB AP также имеется специальный pe
rистр, содержащий адрес таблицы ПЗУ.
В реrистре CSW находится бит Master Туре. Этот бит обычно устанавливается
в 1, rоворя о том, что пересылка, полученная устройством от моста AHB AP, бы
ла запущена отладчиком. Однако отладчик может «симулировать» ядро процес
сора, сбросив указанный бит. В этом случае устройство на шине АНВ будет функ
ционировать так, как если бы к нему обращался процессор. Данная возможность
облеrчает тестирование периферийных устройств с FIFО буфером, которые
в присутствии отладчика MorYT работать иначе, нежели без Hero.
16.8. Таблица ПЭУ
Таблица ПЗУ используется для Toro, чтобы отладчик Mor автоматически обна
ружить компоненты отладки, имеющиеся в устройстве с процессором Cortex M3.
Как уже неоднократно rоворилось, данный процессор является первым процес
сором компании ARM, имеющим архитектуру ARM v7 M. Он содержит предо
пределённую карту памяти и ряд компонентов отладки. Однако в будущих
устройствах семейства Cortex M расположение компонентов отладки в адресном
пространстве может измениться. Это же может произойти в том случае, если раз
работчики микросхемы модифицируют компоненты отладки, используемые по
умолчанию. Для Toro чтобы отладочные средства моrли обнаружить компонен
ты, имеющиеся в системе отладки, и предназначена таблица ПЗУ, которая coдep
жит информацию об адресах контроллера NVIC и модулей отладки.
292 · rлава 16. Компоненты отладки
Таблица ПЗУ располаrается по адресу ОхЕООРРООО. Содержимое данной Ta
блицы позволяет вычислить расположение в памяти системных компонентов
и компонентов отладки. После этоrо отладчик может проверить реrистры иден
тификатора обнаруженных компонентов и определить, какие именно компонен
ты имеются в системе.
Для процессора Cortex M3 первый элемент таблицы ПЗУ (OxEOOFFOOO) дол
жен содержать смещение для реrистров контроллера NVIC. По умолчанию значе
ние первоrо элемента таблицы равно ОхРРРОРО03; установленные биты [1:0] сви
детельствуют о том, что устройство существует и что в таблице имеются и друrие
элементы. Адрес блока реrистров контроллера NVIC может быть вычислен как
OxEOOFFOOO + OxFFFOFOOO = ОхЕОООЕООО.
Содержимое таблицы ПЗУ процессора Cortex M3, принятое по умолчанию,
приведено в Табл. 16.2. Однако в связи с тем, что разработчики микроконтролле
ров MorYT добавлять, исключать или замещать определённые опциональные KOM
поненты отладки друrими СоrеSight совместимыми компонентами, содержимое
таблицы применяемоrо вами микроконтроллера может оказаться друrим.
Таблица 16.2. Содержимое таблицы ПЗУ Cortex M3, ПРИНJlтое по умолчанию
Адрес Значение Обозна Описание
чение
ОхЕООРРООО ОхРРРОРОО3 NVIC Базовый адрес контроллера NVIC (ОхЕОООЕООО)
ОхЕООРРОО4 ОхРРРО2003 DWT Базовый адрес модуля DWT (OxEOOOIOOO)
OxEOOFFOO8 OxFFF03003 FPB Базовый адрес модуля РРВ (ОхЕООО2000)
OxEOOFFOOC OxFFFOIOO3 ITM Базовый адрес модуля ITM (ОхЕООООООО)
OxEOOFFOIO OxFFF41003/ TPIU Базовый адрес модуля TPIU (ОхЕОО40000)
OxFFF41002
OxEOOFFOl4 OxFFF42003/ ЕТМ Базовый адрес модуля ЕТМ (OxEOO41000)
OxFFF42002
OxEOOFF018 О End Маркёр конца таблицы
OxEOOFFFCC Ох! МЕМТУРЕ Признак Toro, что остальные устройства расположены
в этом же адресном пространстве
OxEOOFFFDO О / ОхО4 PID4 Область идентификаторов периферии; зарезервировано
OxEOOFFFD4 О / ОхОО PID5 Область идентификаторов периферии; зарезервировано
OxEOOFFFD8 О / ОхОО PID6 Область идентификаторов периферии; зарезервировано
OxEOOFFFDC О / ОхОО PID7 Область идентификаторов периферии; зарезервировано
OxEOOFFFEO О / ОхС3 PIDO Область идентификаторов периферии; зарезервировано
OxEOOFFFE4 О / ОхВ4 PIDl Область идентификаторов периферии; зарезервировано
OxEOOFFFE8 О / ОхОВ PID2 Область идентификаторов периферии; зарезервировано
OxEOOFFFEC О / ОхОО PID3 Область идентификаторов периферии; зарезервировано
OxEOOFFFFO О / OxOD CIDO Область идентификаторов компонентов;
зарезервировано
OxEOOFFFF4 О / Ох! О CIDl Область идентификаторов компонентов;
зарезервировано
ОхЕООРРРР8 О / ОхО5 CID2 Область идентификаторов компонентов;
зарезервировано
OxEOOFFFFC О / ОхВ! CID3 Область идентификаторов компонентов; зарезервировано
16.8. Таблица ПЗУ · 293
Младшие два бита значения каждоrо элемента используются для указания Ha
личия компонента в системе. В любом устройстве обязательно должны присут
ствовать модули NVIC, DWT и FPB, поэтому два младших бита значений табли
цы, соответствующих этим компонентам, всеrда будут установлены в 1. В то же
время модули TPIU и ЕТМ MorYT быть заменены производителем на друrие KOM
поненты отладки семейства CoreSight.
В старших битах значений таблицы содержатся величины смещений компо
нентов относительно адреса начала таблицы ПЗ Например:
Адрес NVIC = OxEOOFFOOO + OxFFFOFOOO = ОхЕОООЕООО (усечено до 32 бит)
Средства отладки, поддерживающие технолоrию CoreSight, должны уметь
определять адреса компонентов отладки из таблицы ПЗУ. В некоторых устрой
ствах с ядром Cortex M3 MorYT присутствовать друrие компоненты, что приво
дит К появлению новых элементов в таблице ПЗ Используя содержимое табли
цы, отладчик может вычислить базовые адреса всех компонентов отладки. После
этоrо, читая содержимое реrистров идентификаторов указанных компонентов,
отладчик может определить, какие именно компоненты присутствуют в системе
(Рис. 16.9).
Отладчик обнаруживает
подключение AHB AP,
читая реrистры иденти
фикатора модуля
В ДHB ДP
Отлад ч ик q
SWJ DP
17:r,- . }'.."""
f
\,i........:
Отладчик
обнаруживает SWJ DP,
используя протокол
JTAG или Serial Wire
Используя реrистр
базовоrо адреса модуля
AHB AP, отладчик
определяет таблицу ПЗУ
Отладчик перебирает все
элементы таблицы ПЗУ
и считывает значения
идентификаторов
компонентов отладки
После этоrо отладчик
может определить
возможности компо
не нто в отладки, читая
содержимое друrих
реrистров компонентов
NVIC
r-----\ Число точек
у наблюдения
r-----\ Число точек
у останова
ЕТМ
Рис. 16.9. Автоматическое обнаружение компонентов в архитектуре CoreSight.
rЛАВА 17
ПРИСТУПАЯ к РАБОТЕ
С ПРОЦЕССОРОМ CORTEX M3
17.1. Выбор устройства с ядром Cortex M3
Устройства, построенные на базе процессора Cortex M3, отличаются друr от
друrа не только объёмами памяти, имеющимися периферийными устройствами
и быстродействием, но и множеством друrих параметров. Процессор Cortex M3,
предлаrаемый компанией ARM, имеет ряд конфиrурируемых параметров:
· число внешних прерываний;
· число уровней приоритета прерываний (разрядность реrистров уровня прио
ритета);
· наличие или отсутствие модуля защиты памяти MPU;
· наличие или отсутствие модуля трассировки ЕТМ;
· используемый интерфейс отладки (Serial Wire, JTAG или оба).
Очевидно, что выбор KOHKpeTHoro устройства в большинстве проектов опре
деляется функциональными возможностями и параметрами Toro или иноrо мик
роконтроллера. Например:
· Перuферuя. Для мноrих приложений наличие Toro или иноrо периферийноrо
устройства является основным критерием. Большее число периферийных
устройств можно считать достоинством, однако это также влияет на потре
бление микроконтроллера и ero стоимость.
· Память. Микроконтроллеры с ядром Cortex M3 MorYT иметь флэш память
объёмом от нескольких килобайт до нескольких меrабайт. Также немалова
жен объём BHYTpeHHero ОЗУ устройства. Как правило, эти факторы напрямую
влияют на стоимость микроконтроллера.
· Тактовая частота. Процессор Cortex M3 компании ARM может леrко рабо
тать на частоте 100 мrц, даже при ero изrотовлении по 0.18 MKM технолоrии.
Однако производители устройств на базе данноrо процессора MorYT указы
вать меньшие значения максимальной тактовой частоты из за оrраниченноrо
быстродействия используемой памяти.
· Посадочное место. Микроконтроллеры с ядром Cortex M3 MorYT выпускаться
в самых разных корпусах это зависит исключительно от политики произво
дителя. Мноrие устройства имеют корпуса с малым числом выводов, что дела
ет их идеальным выбором при создании недороrих изделий.
17.2. Средства разработки · 295
На сеrодняшний день мноrие производители микроконтроллеров уже актив
но продвиrают свои решения на базе процессора Cortex M3) и ещё ряд произво
дителей намереваются выпустить такие микроконтроллеры в ближайшее время.
Перечислим наиболее заметных иrроков на этом рынке.
Texas Instruments (бывшая Luminary Micro). В семейство Stellaris микрокон
троллеров с ядром Cortex M3 входит более 100 различных устройств) включая
устройства с контроллерами Ethernet 10/100 MAC и РНУ уровней) интерфейсами
USB) CAN) SPI) I 2 C) I 2 S И т.п.
STMicroelectronics. Компания выпускает три линейки микроконтроллеров
с ядром Cortex M3:
. STM32 (Connectivity Line) в рамках этой линейки выпускаются устройства,
имеющие максимальную функциональность и поддержку интерфейсов
USB On The Go (USB OTG)) Ethernet, а также интерфейсов карт памяти.
. STM32L (Low Power) микроконтроллеры данной линейки предназначены
для приложений со сверхнизким потреблением и имеют встроенную под
держку интерфейса ЖКИ.
. STM32 (Value Line) микроконтроллеры для бюджетных приложений.
Toshiba. Микроконтроллеры семейства ТХ03 предназначены для использова
ния в самых разных областях, в том числе в промышленном оборудовании) aBTO
мобильных устройствах и бытовой аппаратуре. Эти микроконтроллеры поддер
живают различные интерфейсы, включая USB) CAN, Ethernet; ряд моделей имеют
в своём составе аналоrовую периферию.
Atmel. Микроконтроллеры семейства SAM3U используют двухбанковую
флэш память) оснащены высокоскоростными интерфейсами High Speed USB)
SPI) SDIO) SSC) имеют интерфейс карт памяти) а также АЦП.
Energy Micro. Микроконтроллеры семейства EFM 32 являются чрезвычайно
энерrоэффективными устройствами с инновационной периферией) которая MO
жет реаrировать на внешние воздействия без участия ЦП Помимо Bcero проче
ro, эти микроконтроллеры имеют интерфейс ЖКИ) модули АЦП/ЦАП) а также
ряд специальных возможностей наподобие поддержки стандарта шифрования
AES.
NXP. Компания выпускает две линейки микроконтроллеров с ядром
Cortex M3 LPC1700 и LPC1300. Первая из них рассчитана на создание BЫCOKO
производительных приложений и обеспечивает поддержку высокоскоростных
коммуникационных интерфейсов) различных методов управления двиrателями,
а также стандартных промышленных интерфейсов, таких как USB, CAN, eS. Ли
нейка LPC1300) наоборот, нацелена на устройства с малым потреблением) а также
на устройства обработки смешанных сиrналов.
17.2. Средства разработки
Для работы с микроконтроллерами на базе процессора Cortex M3 вам потре
буется определённый инструментарий. Обычно в Hero входят следующие компо-
ненты:
296 · rлава 17. Приступая к работе с процессором Cortex M3
· Компилятор и/или ассемблер проrраммное обеспечение для компиляции
ваших проrрамм, написанных на языке Си или на ассемблере. Практически
все компиляторы поставляются вместе с ассемблером.
· Симулятор проrраммное обеспечение, симулирующее исполнение команд;
применяется для отладки проrраммы на первых этапах разработки приложе
ния. Этот компонент необязателен.
· Внутрисхемный эмулятор (/СЕ) или отладчик устройство, позволяющее
подключать хост отладки, в качестве KOToporo обычно выступает персональ
ный компьютер, к разрабатываемому устройству. Может использоваться ин
терфейс JTAG или Serial Wire.
· Отладочная плата печатная плата с установленным на ней микроконтрол
лером.
· Трассировщик опциональный проrраммно аппаратный комплекс для Tpac
сировки команд или считывания выходных данных модулей DWT и ITM
и преобразования их в удобочитаемую форму. Иноrда функции трассировщи
ка встраиваются во внутрисхемный эмулятор.
· Встраиваемая операционная система операционная система (ОС), работа
ющая на микроконтроллере. Этот компонент необязателен существует MHO
жество приложений, не требующих наличия ОС.
17.2.1. Си"компипяторы и отпадчики
в настоящее время на рынке представлено довольно MHoro Си компиляторов
и средств разработки, имеющих поддержку микроконтроллеров с процессором
Cortex M3 (Табл. 17.1).
Таблица 17.1. Некоторые средства разработки с поддержкой процессора Cortex M3
Компания Продукция*'
Пакет разработки RealView Development Suite (RVDS)
ARM и внутрисхемный эмулятор RealView ICE (RVI). Обратите внимание,
(www.arm.com) что старые продукты, такие как ARM Development Suite (ADS)
и Software Development Toolkit (SDT), не поддерживают процессор
Cortex М3
КеН, ап ARM соmрапу Пакет разработки Microcontroller Development Kit (MDK ARM).
(www.keil.com) Внутрисхемные отладчики и трассировщик семейства ULINК1'М
CodeSourcery Пакет разработки SourceryG++, основанный на инструментарии GNU
(www.codesourcery.com) Too1chain (www.codesourcery.com/gnu toolchains/arm/)
Rowley Associates Среда разработки CrossWorks for ARM, основанная на
(www.rowley.co. uk) инструментарии GNU Too1chain
(www.rowley.co.uk/arm/index.htm)
Среда разработки IAR Embedded Workbench for ARM версии 4.40.
IAR Systems Также предлаrается стартовый комплект, в который входит
(www.iar.com) отладочная плата с микроконтроллером LM3S102 (Texas Instruments)
и внутрисхемный отладчик J Link
Lauterbach Проrраммно аппаратные средства для отладки и трассировки
(www.lauterbach.com)
17.2. Средства разработки. 297
Таблица 17.1. Некоторые средства разработки с поддержкой процессора Cortex M3
(продолжение)
Компания Продукция*"
Segger Внутрисхемный отладчик J Link и трассировщик J Trace
(www.segger.com)
Signum Внутрисхемные отладчики JTAGJet и JTAGJet Trace для процессора
(www.signum.com) Cortex M3
Code Red Интеrрированная среда разработки Red Suitе ТМ 2 на базе Eclipse,
(www.code red tech.com) использующая компилятор GCC и отладчик Red Probe с поддержкой
протоколов JT AG и SW
N ational Instrument Модуль LabVIEW Embedded Module for ARM Microcontrol1er
(www.ni.com)
Raisonance Пакет проrрамм RKit ARM на базе компилятора GCC.
(www.raisonance.com) Также имеется отладчик (RLink) и стартовый комплект
(STM32 Primer)
GNU GCC Последние версии компилятора GCC поддерживают процессор
(www.gcc.gnu.org) Cortex М3
*Названия продуктов являются зареrистрированными товарными знаками соответствующих
компаний, указанных в левом столбце таблицы.
Бесплатный компилятор Си/Си++ из набора GCC можно заrрузить с сайта
проекта GNU, а также с сайтов ряда компаний, например CodeSourcery
и Raisonance. Некоторые коммерческие пакеты, такие как пакет MDK ARM KOM
пании КеН, имеют полнофункциональные пробные версии.
17.2.2. Поддержка встраиваемых ОС
Мноrие приложения требуют операционной системы для поддержки MHoro
поточности и управления ресурсами. В настоящее время на рынке предлаrается
множество встраиваемых ОС, некоторые из которых уже портированы на про
цессор Cortex M3 (Табл. 17.2).
Таблица 17.2. Встраиваемые ОС, портированные на процессор Cortex M3
Компания Продукция*"
FreeRTOS (www.freertos.org) FreeRTOS
Express Logic (www.rtos.com) ThreadX(TM) RTOS
Micrium (www.micrium.com) flC/OS II
Mentor Graphics (www.mentor.com) Nucleus/Nucleus Plus
Pumpkin Inc. (www.pumpkininc.com) Salvo RTOS
СМХ Systems (www.cmx.com) CMX RTX
КеН (www.keil.com) ARM RTX
Segger (www.segger.com) emboss
IAR Systems (www.iar.com) IAR PowerPac for ARM
eCosCentric (www.ecoscentric.com, www.ecos.sourceware.org) eCos
Interniche Technologies Inc. (www.nichetask.com) NicheTask
Green Hil1s Software (www.ghs.com) flVelOSity
298 · rлава 17. Приступая к работе с nроцессором Cortex M3
Таблица 17.2. Встраиваемые ОС, портированные на процессор Cortex M3
(продолжение)
Компания Продукция*
Ореп source (www.1inux arm.org/LinuxKerne1/LinuxM3) flCLinux
Quadros System (www.quadros.com) RTXC
ENEA (www.enea.com) OSE Epsilon RTOS
Raisonance (www.stm32circle.com/projects/circleos.php) CircleOS
SCIOPT А (www.sciopta.com) SCIOPTA RTOS
Micro Digital (www.smxrtos.com) SMX RTOS
*Названия продукции являются зареrистрированными товарными знаками соответствующих
компаний, указанных в левом столбце таблицы.
17.3. Различия между процессорами Cortex..M3
ревизий О и 1
в самых первых устройствах использовались процессоры ревизии о. Изделия
на базе процессора Cortex M3 ревизии 1 появились на рынке в первом квартале
2006 rода и на момент опубликования первоrо издания книrи эта ревизия ядра
использовалась во всех новых микроконтроллерах с процессором Cortex M3. Pe
визия 2 процессора появилась в 2008 rоду, а устройства с данным ядром начали
выпускаться в 2009 rоду. Желательно точно знать номер ревизии процессора, pe
ализованной в используемом вами микроконтроллере, поскольку эти ревизии
существенно отличаются друr от друrа.
В ревизии 1 процессора была HeMHoro изменена модель проrраммирования
и добавлены некоторые возможности:
· Начиная с ревизии 1, появилась возможность выравнивания cTeKoBoro фрей
ма обработчика исключения на rраницу двойноrо слова. Для этоrо в реrистр
CCR контроллера NVIC был добавлен бит STKALIGN.
· В редакции rlpl ревизии появился новый реrистр состояния AUXFAULT (оп
циональный).
· В модуль DWT были добавлены новые возможности, включая контроль co
впадения значений данных.
· Поскольку сменился номер ревизии, то было изменено и значение реrистра
идентификатора процессора.
Изменений, незаметных конечным пользователям, было HaMHoro больше:
· Области памяти кода были жёстко назначены следующие атрибуты: кэшируе
мая, выделяемая, небуферируемая и неразделяемая. Это нововведение затро
нуло интерфейсы шин АНВ I Code и D Code, но не интерфейс системной ши
НЫ. Изменения коснулись лишь возможности кэширования и буферизации
памяти, расположенной вне процессора (например, кэш памяти 2 ro уровня
или контроллеров памяти с кэшем). Функционирование BHYTpeHHero буфера
записи процессора не изменилось, поэтому в большинстве микроконтролле
ров данное новшество ни на что не повлияло.
17.3. Различия между процессорами Cortex M3 ревизий О и 1 · 299
. Появилась возможность мультиплексирования шин I Code и D Code. В этом
режиме указанные шины можно было объединять с помощью простоrо муль
типлексора шин (в предыдущем решении использовался компонент BusMatrix
из набора ADK). Это позволило уменьшить общее число лоrических элементов.
. Был добавлен новый выходной порт для подключения к модулю АНВ Trace
Macrocell (НТМ, компонент отладки архитектуры CoreSight от ARM).
. Появилась возможность обращения к компонентам отладки и реrистрам
управления отладкой даже во время системноrо сброса; эти реrистры стали
недоступными только во время сброса по включению питания.
. В модуль TPIU была добавлена поддержка режима работы Serial Wire Viewer
(SWV). Это позволило использовать для сбора трассировочной информации
недороrое оборудование.
. Бит C MASKINTS реrистра DHCSR контроллера NVIC получил возможность
влиять на содержимое поля VECTPENDING реrистра ICSR. Теперь, если при
установке бита C MASKINTS маскировалось отложенное прерывание, то по
ле VECTPENDING обнуляется.
. Модуль интерфейса отладки JTAG DP был заменён на модуль SWJ DP (см.
подраздел 17.3.1). Однако разработчики микроконтроллеров моrли продол
жать использовать модуль JTAG DP, поскольку он остался в линейке продук
ции архитектуры CoreSight.
Поскольку ревизия О процессора не поддерживала выравнивание стека на rpa
ницу двойноrо слова при обработке исключений, то в некоторых средах разра
ботки, в частности в пакете RVDS компании ARM и пакете MDK ARM компании
КеН, были предусмотрены специальные опции для проrраммноrо выравнивания
стека, что обеспечивало совместимость разрабатываемоrо приложения с интер
фейсом EABI. Это моrло оказаться важным при необходимости работы с друrи
ми ЕАВI совместимыми средствами разработки.
Для определения номера ревизии процессора, реализованноrо в микрокон
троллере или SoC, можно воспользоваться реrистром идентификатора ЦПУ
CPUID контроллера NVIC. Зависимость содержимоrо полей указанноrо реrистра
от номера ревизии и номера редакции ядра приведена в Табл. 17.3.
Таблица 17.3. Реrистр идентификатора ЦПУ CPUID (ОхЕОООЕООО)
Implementer Variant Constant Part No Revision
[31:24] [23:20] [19:16] [15:4] [3:0]
Ревизия О Ох41 ОхО OxF ОхС23 ОхО
(rOpO)
Ревизия 1 Ох41 ОхО OxF ОхС23 Охl
(rlpO)
Ревизия 1 Ох41 Охl OxF ОхС23 Охl
(rlpl)
Ревизия 2 Ох41 Ох2 OxF ОхС23 ОхО
(r2pO)
Все компоненты отладки процессора Cortex M3 тоже имеют реrистры идентифи
катора, содержимое которых может быть различным для ревизий О и 1 процессора.
300 · rлава 17. Приступая к работе с процессором Cortex..M3
17.3.1. Ревизия 1 ...... замена модупя JTAG..DP на SWJ..DP
На смену модулю JTAG DP, использовавшемуся в ранних устройствах на базе
процессора Cortex M3, пришёл модуль SWJ DP. Этот модуль обладает функцио
нальностью модулей SW DP и JTAG DP и может автоматически определять ис
пользуемый протокол (Рис. 17.1). При наличии данноrо компонента устройства
с процессором Cortex M3 MorYT поддерживать отладку как по интерфейсу Serial
Wire, так и по интерфейсу JTAG.
Хост
отладки
(ПК)
Микроконтроллер
Соrtех МЗ
SW J OP
Ядро
Соrtех МЗ NVIC
USB или
Ethernet
Интерфейс
JTAG
Serial Wire
Шина,
ОАР,
AHB AP
, ,
I ,
, ,
, I
,
,
,
, ,... ..,
, I ,
L Прочие АР I
L ..J
JTAG или
Serial Wire
J
Отладчик
Память
Рис. 17.1. Модуль SW/ DP /TAG..DP и SW DP «8 одном флаконе».
17.4. Различия между процессорами Cortex..M3
ревизий 1 и 2
в середине 2008 rода компания ARM представила новую ревизию процессора
Cortex M3 ревизию 2 (r2pO). Устройства, использующие данную ревизию про
цессора, начали появляться на рынке в 2009 rоду. В ревизии 2 процессора появи
лись новые возможности, б6льшая часть которых нацелена на уменьшение по
требления и увеличение rибкости процесса отладки. Изменения модели про
rраммирования, заметные конечному пользователю, описаны в следующих под
разделах.
17.4.1. Выравнивание стека на rраницу двойноrо спова
по умолчанию
По умолчанию в новой ревизии включено выравнивание стека на rраницу
двойноrо слова при сохранении контекста (хотя изrотовители микросхем MorYT
и не использовать эту возможность). Такое поведение процессора позволяет
уменьшить объём cTapToBoro кода для большинства приложений, написанных на
Си (устраняется необходимость установки бита STKALIGN в реrистре CCR).
17.4. Различия между процессорами Cortex M3 ревизий 1 и 2 · 301
17.4.2. Допопнитепьный реrистр управпения
в контроллере NVIC появился дополнительный реrистр управления ACR, по
зволяющий более точно управлять функционированием процессора. Например,
для целей отладки можно отключить буферы записи процессора, в результате че
ro отказы шины станут синхронными с командами обращения к памяти (точны
ми). Это позволит леrко определять команду, вызвавшую отказ, по значению
адреса возврата, сохранённому в стеке. Формат реrистра ACR приведён
в Табл. 17.4.
Таблица 17.4. Дополнительный реrистр управлении ACR (ОхЕОООЕОО8)
Биты Обозначение Тип Значение Описание
после сброса
Запрещает «схлопывание» команды 1Т
2 DISFOLD R/W О (предотвращает перекрытие исполнения команды
1Т со следующей командой)
Запрещает использование буфера записи для
1 DISDEFWBUF R/W О карты памяти, используемой по умолчанию (не
влияет на обращения к областям памяти,
определённым в модуле MPU)
Запрещает прерывание команд, выполняющихся
О DISMCYCINT R/W О за несколько тактов, таких как команды
rрупповой заrрузки/сохранения (LDM/STM)
и команды 64 битноrо умножения и деления
17.4.3. Новое значение реrистров идентификации
Были изменены различные реrистры идентификации контроллера NVIC
и компонентов отладки. Так, значение реrистра CPUID контроллера NVIC стало
равным Ох412РС230 (см. Табл. 17.3).
17.4.4. Возможности отпадки
Для облеrчения процесса отладки в ревизии 2 процессора появились следую
щие улучшения:
. При трассировке данных, запускаемой точкой наблюдения в модуле DWT, Te
перь можно выбирать для трассировки отдельно пересылки записи и отдель
но пересылки чтения, что позволяет уменьшить поток трассировочной ин
формации.
. Большая rибкость в реализации функций отладки. Например, можно YMeHЬ
шить число поддерживаемых точек останова и точек наблюдения для YMeHЬ
шения размеров кристалла, снизив тем самым энерrопотребление устройства.
. Улучшенная поддержка отладки мноrопроцессорных устройств. Был добав
лен новый интерфейс, позволяющий одновременно перезапускать и исполь
зовать в пошаrовом режиме несколько процессоров (совершенно прозрачно
для проrраммиста).
302 . rлава 17. Приступая к работе с процессором Cortex M3
17.4.5. Особенности режима пониженноrо
знерrопотребпения
Также были улучшены имеющиеся возможности режима пониженноrо энер
rопотребления (Рис. 17.2). В ревизии 2 появилась возможность задержки MOMeH
та выхода микроконтроллера из спящеrо режима. Это позволяет отключать боль
шее число узлов кристалла; выполнение проrраммы может возобновляться си
стемой управления электропитанием при rQТОВНОСТИ устройства. Такой алrо
ритм работы необходим для микроконтроллеров, в которых имеются узлы, OT
ключающиеся при переходе в спящий режим, поскольку для стабилизации Ha
пряжения питания после ero восстановления может потребоваться некоторое
время.
Выполнение nporpaMMbI
«Сон»
«Пробуждение). Выполнение nporpaMMbI
IRQ
Запрос прерывания ..........1
\
Напряжение
флэш памяти
I
Задержка «пробу.ждения»
Рис. 17.2. Задержанный выход из спящеzо режима (ревизия 2 процессора).
Также в процессор были внедрены новые технолоrии, позволяющие ещё боль
ше снизить потребление микроконтроллера. Предыдущие ревизии процессора
Cortex M3 требовали наличия независимоrо TaKToBoro сиrнала для выхода из
спящеrо режима по прерыванию.
Для устранения данноrо недостатка к процессору был подключён простой
контроллер прерываний. Этот контроллер (WIC) дублирует функции маскиро
вания прерываний контроллера NVIC при нахождении процессора в режиме
Deep Sleep и извещает систему управления электропитанием о необходимости
выхода из спящеrо режима. Наличие указанноrо контроллера позволяет пол
ностью отключить все тактовые сиrналы, поступающие в процессор (Рис. 17.3).
Помимо останова всех тактовых сиrналов, данное решение позволяет отклю
чать б6льшую часть узлов процессора с сохранением ero состояния в специаль
ных лоrических ячейках. При возникновении прерывания контроллер WIC фор
мирует для модуля PMU запрос на включение системы. После подачи питания на
процессор ero предыдущее состояние восстанавливается, и он приступает к об
работке прерывания.
Эти возможности позволяют уменьшить энерrопотребление устройства в спя
щем режиме. Однако их реализация зависит от техпроцесса, по которому было
изrотовлено устройство. То есть описанные возможности MorYT быть доступны
не во всех изделиях, несмотря на использование процессора ревизии 2.
17.5. Чем же хороша ревизия 2 процессора Cortex M3? · 303
IRQ
Пробуж
дение
WIC
NMI
Модуль
управления
электропитанием
Модуль PMU включает
питание при поауплении
запроса на пробуждение
от контроллера WIC
Контроллер WIC обнаруживает
и удерживает запрос прерывания,
пока процессор отключён
Состояние процессора хранится
в предназначенных для этоrо
т иrrе ах
Рис. 17.3. Контроллер WIC (ревизия 2 процессора).
17.5. Чем же хороша ревизия 2 процессора
Cortex..M3?
и всё же, как влияют все эти новые возможности на процесс разработки BCTpa
иваемых устройств?
Во первых, они позволяют уменьшить потребление встраиваемых устройств
и, соответственно, увеличить время работы от батарей. Коrда контроллер WIC
находится в режиме Deep Sleep, активной должна оставаться лишь малая часть
узлов схемы. Кроме Toro, при реализации микроконтроллеров с чрезвычайно
низким энерrопотреблением разработчики MorYT уменьшить площадь кристалла
за счёт сокращения числа доступных точек останова и точек наблюдения.
BO BTOpЫX, новые возможности обеспечивают большую rибкость при отладке
и устранении неполадок. Помимо более развитых функций трассировки данных,
которые MorYT использоваться отладчиком, в нашем распоряжении оказывается
дополнительный реrистр управления. С помощью указанноrо реrистра мы MO
жем отключать буферизацию операций записи, получая в итоrе возможность OT
слеживать ошибочные команды или же запрещать прерывания на время испол
нения команд, выполняющихся за несколько тактов, с тем чтобы все команды
rрупповой заrрузки/сохранения завершались перед обработкой исключения. По
следнее весьма облеrчает анализ содержимоrо памяти. Для мноrопроцессорных
систем ревизия 2 процессора даёт возможность одновременно перезапускать
и отлаживать в пошаrовом режиме несколько ядер.
Кроме Toro, при разработке ревизии 2 процессора были проведены определён
ные работы по оптимизации ядра, которые обеспечили более высокую произво
дительность и лучшие интерфейсные возможности. Это позволяет производите
304 . rлава 17. Прuступая к работе с процессором Cortex M3
лям микроконтроллеров создавать более быстрые устройства на базе процессора
Соrtех МЗ, имеющие более боrатые функциональные возможности. Тем не менее,
проrраммисты встраиваемых систем должны обязательно учитывать следующее:
1. Выравнивание cmeKoBozo фрейма исключения на zраницу двоuноzо слова.
В новой ревизии процессора стековые фреймы исключений по умолчанию
выравниваются на rраницу двойноrо слова. Это может привести
к некорректной работе проrрамм, написанных на ассемблере для
процессоров ревизий О или 1 и использующих стек для передачи параметров
в обработчики исключений. Поэтому обработчики исключений должны
сначала определять, было ли осуществлено выравнивание стека, проверяя
бит 9 сохранённоrо в стеке реrистра PSR. Затем они MorYT определить адреса
данных, помещённых в стек до возникновения исключения. Или же можно
просто сбросить в проrрамме бит STKALIGN в О и получить в результате
такое же поведение стека, как и в предыдущих ревизиях процессора. На
работу приложений, удовлетворяющих требованиям стандарта EABI, т.е.
написанным на языке Си и скомпилированным ЕАВI совместимым
компилятором, это нововведение не влияет.
2. Возможность останова таймера SYSTICK в режиме Deep Sleep. Если
микроконтроллер с процессором Соrtех МЗ допускает отключение
различных узлов в спящем режиме или же обеспечивает останов всех
тактовых сиrналов ядра при переводе ero в режим Deep Sleep, то существует
вероятность Toro, что таймер SYSTICK тоже не будет работать в этом спящем
режиме. В таком случае встраиваемые приложения, использующие ОС,
потребуют наличия внешнеrо (относительно ядра процессора) таймера.
3. Функции отладки и отключения питания. Новые возможности отключения
узлов процессора блокируются при подключении процессора к отладчику.
Это связано с тем, что во время отладочной сессии отладчик должен иметь
возможность обращаться к отладочным реrистрам процессора. При этом
ядро должно сохранять возможность останова или перехода в спящий
режим, однако не должно активировать цикл отключения питания даже
в том случае, если данная функция разрешена. Для проверки работы
функции отключения питания отлаживаемое устройство необходимо
отключить от отладчика.
17.6. Разпичия между процессорами Cortex..M3
и Cortex..MO
Наверняка KTO TO из вас уже слышал о процессоре Cortex MO. Модель про
rраммирования этоrо процессора очень похожа на модель Cortex M3. Однако он
занимает меньшую площадь на кристалле, поддерживает меньшее число команд
и имеет фон неймановскую архитектуру. Процессор Cortex MO был разработан
специально для использования в устройствах со сверхмалым потреблением, rде
число лоrических вентилей является критическим фактором. В минимальной
конфиrурации процессор Соrtех МЗ содержит Bcero 12 000 лоrических вентилей,
lZ6. Различия между процессорами Cortex M3 и Cortex MO · 305
что меньше, чем в большинстве 16 битных процессоров и некоторых топовых
8 битных процессоров. Несмотря на это, процессор Cortex MO обеспечивает про
изводительность 0.9 DМIРS/Мfц, что в два раза превышает производительность
большинства 16 битных микроконтроллеров и почти в 10 раз современных 8 бит
ных микроконтроллеров. Это позволяет rоворить о процессоре Cortex M3 как
о самом энерrоэффективном процессоре для микроконтроллеров общеrо приме
нения.
17.6.1. Модеnь проrраммирования
Между моделями проrраммирования процессоров Cortex M3 и Cortex MO cy
ществует ряд существенных отличий (Рис. 17.4). Так, непривилеrированный ypo
вень доступа имеется только в процессоре Cortex M3. Также в процессоре
Cortex MO отсутствуют реrистры специальноrо назначения FAULTMASK
и BASEPRI.
Проrраммирование
реrистров
управления
Отсутствуют
в Cortex MO
Реrистр
RO
Rl
R2
RЗ
R4
R5
R6
R7
R8
R9
Rl0
Rll
R12
RlЗ (MSP)
R14
R15
Функции
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
Реrистр общеrо назначения
RlЗ (PSP) I Укаэатель OCHoaнoro аека, Укаэатель аека процесса
Реrистр связи (LR)
Счётчик команд (РС)
Функции
Реrистры состояния nporpaMMbl
} Реrистры м скирования
прерывании
Реrистр управления
Per..cтp
I xPSR I
-
I CONTROL I
Реrистры
специальноrо
назначения
Рис. 17.4. Различия 8 моделях проzраммирО8ания Cortex M3 и Cortex MO.
Имеются некоторые различия и в формате реrистров xPSR в процессоре
Cortex MO отсутствуют бит Q в реrистре APSR и битовое поле ICI/IT в реrистре
EPSR. Это связано с тем, что процессор Cortex MO не поддерживает Iт блоки,
а при прерывании команды rрупповой заrрузки/сохранения её выполнение пре
кращается и начинается заново после завершения обработчика прерывания.
17.6.2. Искnючения и контроnnер NVIC
Обработка исключений в процессоре Cortex MO осуществляется так же, как
и в процессоре Cortex M3. Каждому прерыванию и исключению соответствует
свой вектор, а поддержка вложенных исключений осуществляется контроллером
NVIC автоматически. Некоторые из системных исключений процессора
306 · rлава 17. Прuступая к работе с процессором Cortex M3
Cortex M3, а именно исключения Bus Fault, Usage Fault, MemManage Fault и Debug
monitor в процессоре Cortex MO не реализованы. При возникновении системной
ошибки в процессоре Cortex MO всеrда запускается обработчик исключения Hard
Fault. Соответственно, в процессоре Cortex MO отсутствует и ряд реrистров co
стояния ошибок, имеющихся в Cortex M3.
Реrистры приоритета процессора Cortex MO имеют Bcero два бита. COOTBeT
ственно, для прерываний и системных исключений с проrраммируемым приори
тетом доступно Bcero четыре уровня приоритета. Данный процессор не поддержи
вает динамическое изменение приоритетов, поэтому назначение приоритетов пре
рываний и исключений обычно производится в самом начале проrраммы и после
этоrо уже не изменяется. Модель проrраммирования контроллера NVIC процессо
ра Cortex MO во MHoroM схожа с моделью в процессоре Cortex M3. Основное отли
чие состоит в том, что реrистры контроллера допускают только пословное обраще
ние. Поэтому при необходимости изменить приоритет какоrо либо прерывания
придётся считать всё содержимое реrистра, скорректировать уровень приоритета
данноrо прерывания и записать полученное значение обратно. Также в контролле
ре NVIC процессора Cortex MO отсутствуют следующие реrистры:
· Pezucmp смещения таблицы векторов. В процессоре Cortex MO положение Ta
блицы векторов фиксировано. Однако микроконтроллеры MorYT воспользо
ваться функцией отображения памяти для изменения векторов исключений
в процессе работы проrраммы.
· Pezucmp npozpaMMHOzo запуска прерывания. Для проrраммной rенерации исклю
чений используются реrистры установки признака отложенноrо прерывания.
· Pezucmp состояния aKmUBHOZO прерывания.
· Pezucmp типа контроллера прерываний.
17.6.3. Набор команд
Процессор Cortex MO базируется на архитектуре ARMv6 M. Он поддерживает
16 битные команды Thumb@ и ряд 32 битных команд Thumb 2 (переход со ссыл
кой (BL), барьер синхронизации команд (ISB), барьер синхронизации данных
(DSB), барьер памяти данных (DMB), MRS и MSR). Некоторые команды, имеющиеся
в процессоре Cortex M3, процессором Cortex MO не поддерживаются. Например:
· команда IT;
· команды сравнения и перехода (CBZ и CBNZ);
· команды умножения с накоплением (MLA, MLS, SMLAL и UMLAL), а также KOMaH
ды длинноrо умножения с 64 битным результатом (UMULL и SMULL);
· команды аппаратноrо деления (UDIV, SDIV) и насыщения (SSAT, USAT);
· команды табличных переходов (твн и твв);
· команды монопольноrо доступа;
· команды работы с битовыми полями (UBFX, SBFX, BFI и BFC);
· ряд команд обработки данных (CLZ, RRX и RBIT);
· команды заrрузки и сохранения, использующие такие режимы адресации или
комбинации реrистров, которые допускаются только в 32 битных командах;
· команды заrрузки/сохранения на непривилеrированном уровне (LDRT и STRT).
lZ6. Различия между процессорами Cortex M3 и Cortex MO · 307
17.6.4. Особенности системы памяти
Как и в процессоре Cortex M3, карта памяти процессора Cortex MO разделена
на несколько областей (CODE, SRAM, периферия и т.д.). Однако некоторые воз
можности системы памяти процессора Cortex M3 в процессоре Cortex MO OTCYT
ствуют, а именно:
. области с побитовой адресацией;
. обращения к невыровненным данным;
. модуль защиты памяти;
. исключительный доступ.
17.6.5. Возможности отладки
Процессор Cortex MO не содержит никаких модулей поддержки трассировки
(ЕТМ или ITM). В сравнении с Cortex M3 он поддерживает меньшее число точек
останова и точек наблюдения (Табл. 17.5).
Таблица 17.5. Сравнение возможностей отладки
Cortex MO Cortex M3
Точки останова до4 до 8
Точки наблюдения до 2 до4
в большинстве случаев микроконтроллеры с процессором Cortex MO поддер
живают только один протокол отладки (Serial Wire или JTAG), в то время как
устройства с процессором Cortex M3 обычно поддерживают оба указанных про
токола и способны динамически переключаться между ними.
17.6.6. Совместимость
Процессор Cortex MO обратно совместим с процессором Cortex M3. Проrрам
мы, скомпилированные для процессора Cortex MO, MorYT выполняться процес
сором Cortex M3. Однако проrраммы, скомпилированные для Cortex M3, не MO
rYT использоваться с процессором Cortex MO (Рис. 17.5).
Архитектура
АRМvб М
Обратно
совместимы
Архитектура
ARMv7 M
0.9 DМIРs/мrц
Простое портирование/
перекомпиляция
1.25 DМIРs/мrц
Фон неймановская
архитектура
rарвардская
архитектура
Рис. 17.5. Совместимость процессоров Cortex M3 и Cortex MO.
308 · rлава 17. Прuступая к работе с процессором Cortex M3
Из за схожести обоих процессоров большинство проrрамм можно написать
так, что они CMorYT выполняться на любом из процессоров (это обеспечивается
совместимостью карт памяти и периферийных устройств).
Если приложение должно выполняться как на микроконтроллерах с ядром
Cortex M3, так и на микроконтроллерах с ядром Cortex MO, необходимо обратить
внимание на ряд моментов:
1. Обращения к реrистрам контроллера NVIC должны быть исключительно
32 битными или осуществляться с использованием соответствующих
функций СМSIS совместимой библиотеки.
2. Данные должны быть выровнены. Для отслеживания невыровненых
пересылок в процессоре Cortex M3 можно установить бит UNALIGN TRP
реrистра CCR. В процессоре Cortex MO любая попытка обращения
к невыровненным данным вызовет rенерацию исключения Hard Fault.
3. Нельзя использовать метод bit band в связи с тем, что в процессоре Cortex MO
отсутствуют области с побитовой адресацией. В качестве альтернативноrо
решения можно применить условную компиляцию кода, чтобы при
компиляции проrраммы для процессора Cortex MO все операции побитовоrо
доступа заменялись бы эквивалентными проrраммными реализациями.
Совместимость процессоров Cortex M3 и Cortex MO предоставляет MHoro
преимуществ разработчикам встраиваемых устройств. Помимо простоты пере
носа проrраммноrо кода, она также позволяет отлаживать приложения для про
цессора Cortex MO на платформе Cortex M3, которая располаrает более широки
ми отладочными возможностями, в частности поддерживает трассировку KO
манд и событий. Чтобы поведение Cortex M3 стало ещё больше похожим на пове
дение Cortex MO, мы можем, используя дополнительный реrистр управления, за
претить буферизацию записи. Необходимо только учитывать, что время испол
нения некоторых команд в процессорах Cortex M3 и Cortex MO может
различаться.
rЛАВА 18
ПЕРЕНОС ПРИЛОЖЕНИЙ
С ПРОЦЕССОРА ARM7
НА ПРОЦЕССОР CORTEX M3
18.1. Общие сведения
Для большинства разработчиков перенос существующеrо проrраммноrо кода
с одной платформы на друrую является типовой задачей. А в связи с появлением
на рынке устройств с ядром Cortex M3 мноrие разработчики столкнулись с необ
ходимостью переноса кода, написанноrо для процессора ARM7TDMI (далее
в этой rлаве ARM7), на процессор Cortex M3. В данной rлаве обсуждаются He
которые вопросы, касающиеся переноса приложений с процессора ARM7 на про
цессор Cortex M3.
При переносе кода с процессора ARM7 на процессор Cortex M3 необходимо
принимать во внимание следующее:
. особенности системы;
. исходные файлы на языке ассемблера;
. исходные файлы на языке Си;
. оптимизацию.
В общем случае, наибольших изменений требует код низкоrо уровня (драйве
ры аппаратуры, процедуры управления задачами и обработчики исключений).
В то же время для переноса кода собственно приложения, как правило, достаточ
но внесения незначительных изменений и простой перекомпиляции.
18.2. Особенности системы
Системы, построенные на процессоре ARM7, имеют ряд отличий от систем на
базе процессора Cortex M3. В частности, у них различаются карты памяти, систе
мы прерываний, модули MPU, управление системой и режимы работы.
18.2.1. Карта памяти
Прежде Bcero, внесение изменений в исходный код проrраммы при её перено
се с одноrо микроконтроллера на друrой обусловлено различием их карт памяти.
В процессоре ARM7 память и периферийные устройства MorYT располаrаться
практически по любым адресам, тоrда как в процессоре Cortex M3 используется
предопределённая карта памяти. Различия в адресах обычно разрешаются на
310 · rлава 18. Перенос прuложенuй с процессора ARM7 на процессор Cortex M3
этапе компиляции и компоновки. Перенос кода, связанноrо с каким либо пери
ферийным устройством, потребует rораздо б6льших усилий, поскольку модели
проrраммирования данноrо устройства MorYT оказаться совершенно разными.
В этом случае драйвер устройства, скорее Bcero, придётся писать заново.
Мноrие микроконтроллеры с процессором ARM7 поддерживают ремаппиН2
памяти, что позволяет после запуска проrраммы отобразить таблицу векторов
в область статическоrо 03 В процессоре Cortex M3 таблица векторов может
быть перемещена в ОЗУ с помощью одноrо из реrистров контроллера NVIC, т.е.
подобная переадресация уже не требуется. Соответственно, в большинстве
устройств с процессором Cortex M3 возможность переназначения памяти может
отсутствовать.
Формат с обратным порядком байтов, используемый в процессоре ARM7, OT
личается от аналоrичноrо формата в Cortex M3. Чтобы привести проrрамму в co
ответствие с новой системой хранения мноrобайтных значений, достаточно пе
рекомпилировать её исходные файлы (при наличии в проrрамме жёстко задан
ных таблиц соответствия может потребоваться их предварительное преобразо
вание).
В процессоре ARM720T и некоторых более поздних процессорах, таких как
ARM9, предусмотрена возможность размещения таблицы векторов по адресу
ОхРРРРОООО. Эта возможность предназначена для поддержки ОС Windows СЕ
и в процессоре Cortex M3 отсутствует.
18.2.2. Прерывания
Второй причиной необходимости внесения изменений являются различия
между используемыми контроллерами прерываний. Придётся переписать код,
отвечающий за управление контроллером, в частности разрешающий/запрещаю
щий прерывания. Кроме Toro, необходимо будет добавить в этот код строки, OT
вечающие за конфиrурирование уровней приоритета и адресов векторов для раз
личных прерываний.
Также изменяется способ возврата из прерываний. В ассемблерных проrрам
мах это потребует модификации кода возврата из прерывания, а при проrрамми
ровании на языке Си может потребоваться указание дополнительных директив
компилятора.
Операции изменения реrистра текущеrо состояния проrраммы (CPSR), ис
пользуемые в процессоре ARM7 для разрешения и запрещения прерываний, He
обходимо будет заменить на операции изменения реrистров маскирования пре
рываний. Кроме Toro, процессор ARM7TDMI поддерживает повторное разреше
ние прерывания в момент возврата из Hero за счёт восстановления содержимоrо
реrистра CPSR из реrистра SPSR. В процессоре же Cortex M3 используется друrой
механизм: если прерывание было запрещено установкой реrистра PRIMASK во
время выполнения обработчика, то этот реrистр должен быть очищен вручную
перед выходом из обработчика. В противном случае, прерывания останутся за
прещёнными.
В процессоре Cortex M3 определённые реrистры автоматически сохраняются
в стеке при входе в прерывание и восстанавливаются из стека при выходе из пре
18.2. Особенности системы · 311
рывания. Наличие этоrо механизма позволяет уменьшить объём проrраммных
манипуляций со стеком или вообще их исключить. Несколько особняком стоит
быстрое прерывание (PIQ), дЛЯ KOToporo в традиционных процессорах ARM
предусмотрены отдельные реrистры R8. . . Rll, что позволяет обработчику РI Q ис
пользовать данные реrистры, не заботясь о сохранении их содержимоrо в стеке.
Поскольку в процессоре Cortex M3 реrистры R8...Rll не сохраняются автомати
чески, то при переносе обработчика PIQ необходимо либо изменить реrистры,
используемые обработчиком, либо сохранять эти реrистры в стеке самостоя
тельно.
Проrраммный код, предназначенный для поддержки вложенных прерыва
ний, можно спокойно убрать. Контроллер NVIC процессора Cortex M3 имеет
встроенную поддержку вложенных прерываний.
Системные ошибки в рассматриваемых процессорах тоже обрабатываются
HeMHoro по разному. Так, в процессоре Cortex M3 предусмотрены различные pe
rистры состояния отказов, позволяющие локализовать источник TaKoro отказа.
Также в процессоре Cortex M3 определены новые типы отказов, в частности
ошибки сохранения/восстановления из стека, отказы системы управления памя
тью и тяжёлые отказы. Поэтому обработчики отказов придётся переписывать.
18.2.3. Модуль MPU
с точки зрения проrраммиста, модуль MPU является Bcero лишь дополни
тельным блоком системы, который должен быть сконфиrурирован перед исполь
зованием. Микроконтроллеры с процессорами ARM7TDMI/ARM7TDMI S не
имеют TaKoro модуля, поэтому перенос проrраммы на процессор Cortex M3 не
вызовет никаких затруднений с этой стороны. А вот в устройствах с процессором
ARM720T имеется модуль управления памятью (Memory Management Unit
MMU), функциональное назначение KOToporo отличается от назначения модуля
MPU процессора Cortex M3. Если в приложении используется модуль MMU (для
реализации системы виртуальной памяти), то такое приложение не может быть
перенесено на процессор Cortex M3.
18.2.4. Управление системой
Также при переносе проrрамм необходимо обратить внимание на различные
подходы к управлению системой в этих двух процессорах. Так, процессор
Cortex M3 имеет специальные команды для переход а в спящий режим. Кроме TO
ro, системный контроллер процессора Cortex M3 не имеет ничеrо общеrо с KOH
троллером, используемым в устройствах с процессором ARM7. Поэтому код, OT
вечающий за управление системой, придётся писать заново.
18.2.5. Режимы работы
в процессоре ARM7 имеется семь режимов работы, большинство которых бы
ло заменено в процессоре Cortex M3 на различные исключения (Табл. 18.1).
312 · fлава 18. Перенос прuложенuй с процессора ARM7 на процессор Cortex M3
Таблица 18.1. Режимы работы и исключения процессоров ARM7 и Cortex M3
Режимы и исключения ARM7 Режимы и исключения Cortex M3
Supervisor (режим по умолчанию) Привилеrированный уровень, режим потока
Supervisor (проrраммное Привилеrированный уровень, вызов супервизора (SVCall)
прерывание)
Быстрое прерывание (FIQ) Привилеrированный уровень, прерывание
Запрос прерывания (IRQ) Привилеrированный уровень, прерывание
Abort (prefetch) Привилеrированный уровень, исключение Bus Fault
Abort (data) Привилеrированный уровень, исключение Bus Fault
Undefined Привилеrированный уровень, исключение Usage Fault
System Привилеrированный уровень, режим потока
User Пользовательский уровень (непривилеrированный),
режим потока
Быстрое прерывание PIQ, имеющееся в процессоре ARM7, может быть заме
нено на обычное прерывание (IRQ), поскольку процессор Cortex M3 позволяет
любому пр ыванию назначить наивысший приоритет. Соответственно, такое
прерывание будет способно вытеснять друrие исключения, аналоrично прерыва
нию PIQ в процессоре ARM7. Однако из за Toro, что специальные реrистры PIQ
в процессоре ARM7 отличаются от реrистров, сохраняемых в стеке процессором
Cortex M3, вам придётся либо сменить реrистры, используемые в обработчике
PIQ, либо сохранять эти реrистры в стеке самостоятельно.
18.3. ФаЙЛbl с ИСХОДНblМ текстом на ассемблере
Процесс переноса ассемблерных файлов зависит от используемоrо набора KO
манд ARM или Тhиmb.
18.3. Файлы с исходным текстом на ассемблере · 313
18.3.1. Режим Thumb
Если в файле содержится код, предназначенный для работы в режиме Thumb,
то всё замечательно. В большинстве случаев такой файл можно без каких либо
проблем использовать в проrрамме для HOBoro процессора. Необходимо только
проверить ero на наличие команд Thumb, не поддерживаемых процессором
Cortex M3, а именно:
. любых команд, пытающихся переключить процессор в режим ARM;
. команды SWI, которая была заменена на команду SVC (не забудьте скорректи
ровать код, используемый для передачи параметров и возвращаемоrо значе
ния).
И напоследок, убедитесь в том, что при обращении к стеку в проrрамме ис
пользуется только модель полноrо спадающеrо стека. Эта рекомендация объяс
няется тем, что в процессоре ARM7TDMI может быть реализована друrая CTeKO
вая модель (скажем, полный вырастающий стек), хотя это и довольно экзотиче
ская ситуация.
18.3.2. Состояние ARM
Если же в файле содержится код ARM, то задача усложняется. Выделим OCHOB
ные моменты:
. Таблица векторов. В процессоре ARM7 таблица векторов начинается с адреса
ОхОО и содержит команды перехода. В процессоре Cortex M3 таблица coдep
жит начальное значение указателя стека, адрес вектора сброса, вслед за KOTO
рыми располаrаются адреса обработчиков исключений. Из за этих различий
таблицу векторов придётся полностью переписать.
. Инициализация pezucmpoB. В процессоре ARM7 зачастую требуется инициа
лизировать разные реrистры для каждоrо из режимов. Так, в процессоре
ARM7 используются банковые указатели стека (RI3), реrистр связи (RI4) и pe
rистры SPSR. Поскольку процессор Cortex M3 имеет друrую проrраммную
модель, код инициализации реrистров необходимо будет изменить. На самом
деле, он станет rораздо проще, поскольку в нём уже не будет последовательно
ro переключения процессора между различными режимами.
. Переключение режимов работы и состояний. Поскольку режим работы про
цессора Cortex M3 определяется иначе, нежели в процессоре ARM7, то код, ис
пользуемый для переключения режимов, необходимо будет удалить. Это же
касается и кода, применяемоrо для переключения между состояниями ARM
и Thumb.
. Разрешение и запрещение прерываний. В процессоре ARM7 разрешение/запре
щение прерываний осуществляется сбросом/установкой бита 1 реrистра CPSR.
В процессоре Cortex M3 для этих целей используются реrистры маскирова
ния прерываний PRIMASK и FAULTMASK. К тому же, в реrистре xPSR про
цессора Cortex M3 отсутствует бит F, поскольку данный процессор не имеет
входа FIQ.
314 · fлава 18. Перенос прuложенuй с процессора ARM7 на процессор Cortex M3
· Обращения к сопроцессору. В процессоре Cortex M3 отсутствует поддержка co
процессора, поэтому подобные операции не MorYT быть перенесены на новую
платформу.
· Обработчики прерываний и возврат из прерываний. В процессоре ARM7 пер
вая команда обработчика прерываний располаrается в таблице векторов (как
правило, это команда перехода на реальный обработчик). В процессоре
Cortex M3 данный этап уже не требуется. Возврат из прерываний в процессо
ре ARM7 осуществляется ручной корректировкой значения счётчика команд.
В процессоре Cortex M3 скорректированное значение счётчика команд coxpa
няется в стеке, а процесс возврата из прерывания запускается заrрузкой
в счётчик команд значения EXC RETURN. ДЛЯ возврата из прерываний
в процессоре Cortex M3 нельзя использовать такие команды, как MOVS и SUBS.
Всё это требует корректировки обработчиков прерываний, а также кода, ocy
ществляющеrо возврат из прерываний.
· Код поддержки вложенных прерываний. Если в процессоре ARM7 требовалось
использование вложенных прерываний, то обработчик IRQ должен был пере
ключить процессор в режим System, после чеrо повторно разрешить прерыва
ния. В процессоре Cortex M3 ничеrо этоrо не требуется.
· Обработчик FIQ. При переносе обработчика быстроrо прерывания может по
требоваться добавить в Hero команды, сохраняющие содержимое реrистров
R8...Rll в стеке. В процессоре ARM7 эти реrистры являются банковыми, что
позволяет обработчику FIQ не заботиться об их сохранении. В то же время
в процессоре Cortex M3 автоматически сохраняются только реrистры RO.. .R3
и R12, а вот реrистры R8...Rl1 нет.
· Обработчик SWI. Команда SWI заменяется на svc. Однако при портировании
обработчика SWI необходимо будет переписать код, выполняющий извлече
ние параметра команды SWI. Адрес команды svc, вызвавшей прерывание,
можно определить по значению РС, сохранённому в стеке (в процессоре ARM7
значение счётчика команд считывается из реrистра связи).
· Команда SWP. В процессоре Cortex M3 такая команда отсутствует. Если в ис
ходной проrрамме данная команда использовалась для реализации семафо
ров, то её необходимо заменить на команды монопольноrо доступа. ECTe
ственно, при этом придётся переписать код поддержки семафоров. Если же
команда использовалась исключительно для пересылки данных, то её можно
будет заменить несколькими командами обращения к памяти.
· Обращения к pezucтpaM CPSR и SPSR. Реrистр CPSR процессора ARM7 в про
цессоре Cortex M3 был заменён несколькими реrистрами состояния проrрам
мы xPSR, а реrистр SPSR ликвидирован. Если в проrрамме лроизводится
чтение состояния флаrов процессора, то такую команду следует заменить на
команду чтения реrистра APSR. Если обработчику исключения необходимо
узнать содержимое реrистра PSR, которое было до возникновения исключе
ния, то он может прочитать ero из стека, поскольку содержимое реrистров
xPSR автоматически сохраняется в стеке при входе в обработчик. То есть pe
rистр SPSR в процессоре Cortex M3 попросту не нужен.
18.4. Файлы с исходным текстом на Си · 315
. Условное выполнение. В процессоре ARM7 условное выполнение поддержива
ется мноrими командами ARM, в то время как в машинном коде большинства
команд Thumb 2 места для поля условия не предусмотрено. При переносе по
добноrо кода на процессор Cortex M3 ассемблер может автоматически заме
нить эти условно выполняемые команды на конструкции с использованием
Iт блоков. Или же мы можем вручную вставить в проrрамму команды IT
и команды условных переходов для получения условно выполняемоrо кода.
Единственное неудобство, связанное с заменой условно выполняемых команд
на Iт блоки, состоит в возможном увеличении размера кода. А это, в свою оче
редь, может вызвать друrие проблемы (например, адреса, используемые в He
которых операциях заrрузки/сохранения, MorYT оказаться за rраницами диа
пазона, поддерживаемоrо командой).
. Использование значения РС при вычислениях в npozpaMMe. При выполнении
кода ARM процессором ARM7 значение, возвращаемое при чтении РС, равно
адресу команды плюс 8. Это связано с наличием трёхступенчатоrо конвейе
ра при чтении счётчика команд на этапе исполнения он уже дважды успе
вает инкрементироваться (каждый раз на 4 байта). Поскольку процессор
Cortex M3 поддерживает только код Thumb, то разница между считанным
и реальным значением РС будет равна четырём.
. Использование значения pezucтpa R13. В процессоре ARM7 указатель стека
R13 содержит 32 битные значения; в процессоре Cortex M3 младшие 2 бита
указателя стека всеrда сброшены в о. Соответственно, в тех редких случаях,
коrда реrистр R13 используется в качестве реrистра данных, код проrраммы
необходимо будет модифицировать, чтобы исключить потерю младших битов
значений.
Прочий код ARM можно попытаться скомпилировать как код ThumbIThumb 2,
после чеrо просмотреть сообщения ассемблера и определить дальнейшие KoppeK
тировки. Например, некоторые команды обращения к памяти с пред и постин
дексацией, используемые в процессоре ARM7, не поддерживаются процессором
Cortex M3 и должны быть заменены на последовательности команд. В друrих Me
стах проrраммы возможно наличие длинных переходов или больших констант,
которые не MorYT быть скомпилированы в коде Thumb, и поэтому данные KOMaH
ды должны быть вручную заменены на команды Thumb 2.
18.4. Файлы с ИСХОДНЫМ текстом на СИ
Перенос проrрамм, написанных на языке Си, выполняется rораздо проще, чем
перенос ассемблерных проrрамм. В большинстве случаев такую проrрамму дo
статочно просто перекомпилировать для процессора Cortex M3. Тем не менее,
и здесь может возникнуть необходимость ручной корректировки кода:
. Iпliпе ассемблер. В некоторых проrраммах MorYT присутствовать вставки с ис
пользованием iпliпе ассем6лера, которые необходимо будет изменить. Такой
код леrко можно обнаружить по наличию ключевоrо слова aSffi. При ис
пользовании пакета RVDS с компилятором RVCT версии 3.0 и выше inline
ассемблер необходимо заменить на встроенный ассемблер.
316 · fлава 18. Перенос прuложенuй с процессора ARM7 на процессор Cortex M3
· Обработчики прерываний. В Си проrраммах для процессора ARM7 при объ
явлении обработчиков прерываний используется ключевое слово irq.
В процессоре Cortex M3 сохранение реrистров и возврат из прерывания ocy
ществляются иначе, нежели в процессоре ARM7, поэтому ключевое слово
irq может быть придётся убрать из проrраммы (это зависит от использу
eMoro средства разработки). В частности, в средствах разработки компании
ARM (в том числе, в пакете RVDS и компиляторе RVCT) ключевое слово irq
поддерживает процессор Cortex М3. Более Toro, это ключевое слово даже pe
комендуется использовать, чтобы улучшить читаемость кода!
Праrмы Си компилятора ARM наподобие #pragma arm и #pragma thumb He
обходимо будет удалить.
18.5. Скомпилированные объектные файлы
в составе большинства компиляторов Си имеются библиотеки различных
функций и различные варианты cTapToBoro кода, распространяемые в виде пред
варительно скомпилированных объектных файлов. Некоторые из этих файлов
(скажем, стартовый код для традиционных процессоров ARM) не MorYT исполь
зоваться с процессором Cortex M3 из за различий в рабочих режимах и состоя
ниях, поддерживаемых процессорами. При наличии исходноrо кода объектноrо
файла последний можно будет перекомпилировать с помощью набора команд
Тbиmb 2. Для получения дополнительной информации обратитесь к ДOKYMeHTa
ции на используемое средство разработки.
18.6. Оптимизация
После Toro как вам удастся заставить свою проrрамму работать на процессоре
Cortex M3, можно попытаться её улучшить, чтобы увеличить скорость работы
и уменьшить потребность в памяти. Следует обратить внимание на следующие
моменты:
· Использование команд 1humb 2. Если 16 битная команда 1humb пересылает
содержимое одноrо реrистра в друrой с последующим выполнением какой
либо операции над переданным значением, то данную последовательность
операций в большинстве случаев можно заменить одной командой 1humb 2.
При этом может также уменьшиться число тактов, необходимых для выпол
нения операции.
· Использование метода bit band. Если реrистр периферийноrо устройства pac
положен в области памяти с побитовой адресацией, то обращения к битам
управления можно значительно упростить, используя область доступа к би
там.
· Умножение и деление. Процедуры, требующие операций деления, такие как
процедуры преобразования значений в десятичные для отображения их на
дисплее, MorYT быть модифицированы с помощью команд деления Cortex M3.
Для выполнения умножения можно использовать различные варианты KO
манд аппаратноrо умножения.
18.6. Оптимизация . 317
. Непосредственные значения. Некоторые непосредственные значения, которые
невозможно было разместить в коде команды ТЬитЬ, можно леrко закодиро
вать в командах Thumb 2.
. Ветвления. Невозможность выполнения длинных переходов с помощью KO
манд ТЬиmЬ приводила к необходимости использования нескольких команд
перехода. Такие команды можно заменить одной командой Тbиmb 2.
. Двоичные данные. Для экономии памяти несколько булевых переменных (при
нимающих только значения О или 1) можно упаковать в один байт/полуслово/
слово, расположенное в бит адресуемой области. Обращаться к этим перемен
ным можно посредством области доступа к битам.
. Работа с битовыми полями. В процессоре Cortex M3 имеется несколько KO
манд для работы с битовыми полями: извлечение беззнаковоrо битовоrо поля
(UBFX), извлечение битовоrо поля со знаком (SBFX), вставка битовоrо поля
(BFI), очистка битовоrо поля (BFC) и перестановка битов (RBIT). Использова
ние этих команд может упростить реализацию таких операций, как обраще
ния к периферийным устройствам, формирование пакетов данных или обмен
данными по последовательному каналу.
. IТ блоки. Некоторые короткие переходы можно заменить блоком команды IT.
ЭТО позволит нам избежать напрасной траты тактов на очистку конвейера при
выполнении перехода.
. Переключение состояния ARM/7humb. В определённых ситуациях разработ
чикам приходилось разбивать исходный код приложения на несколько фай
лов, после чеrо компилировать одни из этих файлов с использованием набора
ARM, а друrие с использованием набора Thumb. Обычно это делалось для
увеличения плотности кода в тех случаях, коrда производительность была He
критична. Поскольку процессор Cortex M3 поддерживает только набор KO
манд Тbиmb 2, такое разбиение кода больше не требуется. Это позволяет ис
ключить накладные расходы на переключение состояний, что ведёт к YMeHЬ
шению размеров кода и, возможно, уменьшению числа файлов проекта.
rЛАВА 19
РАЗРАБОТКА ПРИЛОЖЕНИЙ
ДЛЯ CORTEX..M3
С ИСПОЛЬЗОВАНИЕМ GNU
19.1. Общие сведения
Мноrие разработчики при создании приложений для микроконтроллеров
с процессорами ARM используют открытый инструментарий GNU, на котором
основан ряд средств разработки для ARM. Набор инструментов GNU, поддержи
вающий процессор Cortex M3, доступен как в виде исходных кодов для последу
ющей компиляции GNU компилятором gcc, так и в виде скомпилированных
и rOToBbIx к использованию исполняемых файлов, которые распространяются
различными компаниями разработчиками проrраммных средств.
Одной из таких компаний, предлаrающей средства разработки для процессо
ров Cortex M3, основанные на инструментарии GNU, является компания
CodeSourcery. Пакет проrрамм Sourcery G++, разработанный компанией, распро
страняется в трёх вариантах:
1. Sourcery G++ Lite: бесплатная версия, которую можно свободно заrрузить
с веб сайта компании (www.codesourcery.coт). Эта версия поддерживает
работу только из командной строки и имеет оrраниченные возможности
отладки.
2. Sourcery G++ Persoпal Editioп наиболее популярная версия пакета,
поскольку имеет небольшую стоимость при достаточно больших
возможностях:
· Интеrрированная среда разработки с интерфейсом на базе пакета Eclipse.
· Поддержка широкоrо спектра микроконтроллеров с процессорами ARM,
включая поддержку CS3 для этих микроконтроллеров (сценарии компонов
щика и конфиrурации средств отладки).
· Поддержка отладочных плат различных производителей, в том числе плат
компаний Texas Instrument с микроконтроллерами Stellaris и STMicroelectronics
с микроконтроллерами STM32.
· Большая подборка примеров проrрамм.
· Встроенная поддержка различных отладочных интерфейсов, в том числе:
(J ARMUSB (встроен в микроконтроллеры Stellaris);
(J Segger J Link;
(J КеН ULINK2.
19.2. Прио6ретение инструментария GNU . 319
. Мастер «Board Builder Wizard», облеrчающий использование неизвестных
плат:
(J клонирование определений платы;
(J изменение распределения памяти;
(J изменение cTapToBoro кода;
(J конфиrурирование отладочных средств.
. Поддержка импорта примеров из библиотеки StellarisWare.
3. Sourcery G++ Professioпal Editioп все возможности варианта Personal Edition
плюс дополнительные библиотеки и неоrраниченная техническая
поддержка.
Все при меры, представленные в этой rлаве, рассчитаны на инструменты из па
кета Sourcery G++ Lite, работающие с командной строкой, поскольку вопросы, Ka
сающиеся использования данноrо режима, актуальны для большинства средств
разработки, основанных на инструментарии GNU. Сразу хочу предупредить, что
в данной rлаве содержатся только самые основные сведения по применению YKa
занных инструментов. Подробную информацию по работе с инструментами
GNU вы можете получить из документации, имеющейся в составе используемоrо
пакета проrрамм, а также из сети Интернет.
Синтаксис ассемблера GNU (as.exe) HeMHoro отличается от синтаксиса ориrи
нальноrо ассемблера ARM. Эти различия касаются объявлений, директив KOM
пилятора, комментариев и прочих элементов языка. Соответственно, чтобы ис
пользовать в среде GNU ассемблерные проrраммы, написанные для пакета RVDS
компании ARM, их необходимо будет откорректировать.
19.2. Приобретение инструментария GNU
Скомпилированный вариант инструментов GNU можно заrрузить по адресу:
www.codesourcery/coт/sgpp/lite/arт. По этому адресу доступно несколько сборок.
Для начала возьмём любую сборку с поддержкой интерфейса ЕАВI и без какой
либо встраиваемой операционной системы. Данный инструментарий доступен
для различных платформ, включая Windows и Linux. При меры, представленные
в этой rлаве, работают в любой из указанных версий.
19.3. Процесс разработки проrраммы
В состав инструментария GNU входят компилятор, ассемблер, редактор свя
зей и ряд дополнительных утилит. Эти инструменты позволяют создавать проек
ты, содержащие одновременно исходные тексты на языках Си и ассемблера
(Рис. 19.1).
При использовании компилятора GCC компоновщик обычно запускается
компилятором по завершении этапа компиляции, что rарантирует передачу KOM
поновщику корректных библиотек и параметров. Если же компоновщик будет
использоваться напрямую) то связывание объектных файлов может оказаться
невозможным. Кроме Toro, без информации со стороны компилятора компонов
щик может сформировать на выходе двоичный образ, не совместимый с интер
фейсом EABI.
320 · Тлава 19. Разработка приложений для Cortex M3 с использованием GNU
ИСХОДНЫЙ КОД на Си (.с)
Id
KO кa I
Структура gcc
памяти (компиляция +
связывание)
Исходный код . . л
на ассемблере (.5) Объектные файлы v U
[]
i/ ДВОИЧНЫЙ
образ
Исполняемый nporpaMMbl
Q б objcopy (.binJ
[]
(ассемблер)
Дизассембли
рованный КОД
(.txt)
Рис. 19.1. Разработка ПО с использованием пакета Sourcery G++.
Существуют версии инструментария GNU дЛЯ самых разных платформ
(Symbian, Linux, ЕАВI и т.д.). Имена проrрамм обычно имеют префикс, определя
емый целевой платформой, для которой предназначена данная версия. Напри
мер, при использовании ЕАВI совместимоrоI) инструментария компилятор Си
(gcc) будет иметь имя arm xxxx eabi gcc. В следующих при мерах мы будем
применять инструменты, поставляемые в составе пакета Sourcery G++. Названия
этих проrрамм указаны в Табл. 19.1.
Таблица 19.1. Имена исполняемых файлов пакета Sourcery G++
Назначение Файл (ЕАВI вариант)
Ассемблер arm none eabi as
Компилятор с языка Си arm none eabi gcc
Компоновщик arm none eabi ld
reHepaTOp двоичных образов arm none eabi objcopy
Дизассемблер arm none eabi objdump
Примечание. Заметьте, имена файлов отличаются от имён, используемых друrими разработчиками
проrраммных средств.
Если исходный код вашеrо проекта написан целиком на ассемблере, то для
связывания объектных файлов компоновщик можно вызвать напрямую
(Рис. 19.2).
1) Стандарт ЕАВI для архитектуры ARM исполняемые файлы должны удовлетворять
данной спецификации, чтобы их можно было использовать с различными наборами
средств разработки.
19.4. Прuмеры . 321
Сценарий
компоновщика
Исходный код
на ассемблере (.5) Объектные файлы (.0)
Q (aZep)Q q
Испonняемый
образ objcopy
(ком новщик) q []
[]
Двоичный
образ
nporpaMMbl
(.bin)
[]
Дизассембли
рованный код
(.txt)
Рис. 19.2. Разработка ПО на ассемблере.
19.4. Примеры
Рассмотрим несколько примеров по использованию инструментария GNU.
19.4.1. Пример 1: первая nporpaMMa
Для начала возьмём простую ассемблерную проrрамму, уже рассмотренную
нами в [лаве 10, которая вычисляет сумму чисел от 1 до 10:
========== exarnple1.s ==========
/* Определяем константы */
.equ STACK TOP, Ох20000800
.text
. syntax unified
.thurnb
.global start
.type start, %function
start:
.word STACK TOP, start
/* Начало основной проrраммы */
start:
rnovs rO, #10
rnovs r1, #0
/* Вычисляем 10+9+8... +1 */
loop:
adds r1, rO
subs rO, #1
bne loop
/* Результат в R1 */
deadloop:
Ь deadloop
.end
..........................................
...............................................................
Конец файла
....................................................................
.................................................................
322 . fлава 19. Разработка приложений для Cortex M3 с использованием GNU
· Директива. word в данном при мере помоrает нам задать начальное значение
указателя стека (Ох20000800) и вектор сброса (start).
· Директива. text указывает на то, что данная секция проrраммы должна быть
ассемблирована.
· Директива. syntax unified указывает на использование унифицированноrо
синтаксиса языка ассемблера.
· Директива. thumb сообщает ассемблеру о том, что в проrрамме используется
набор команд Thumb @. Также для этоrо можно использовать традиционную
директиву .code16.
· Директива .global позволяет сделать метку start видимой в друrих объ
ектных файлах.
· start метка, отмечающая начало проrраммы.
· start отдельная метка, адрес которой содержится в векторе сброса.
· .type start, %function объявляет идентификатор start как функцию.
Это необходимо сделать для всех векторов исключений. В противном случае,
ассемблер сбросит младший значащий бит вектора в О.
· Директива .end отмечает конец проrраммы.
В отличие от ассемблера ARM, в ассемблере GNU метки должны завершаться
символом двоеточия (:). Комментарии помещаются между символами «/*» И «* /»,
а директивы начинаются с символа точки (.).
Обратите внимание на то, что вектор сброса (start) объявлен как функция
(. type start, %function), использующая код Thumb (. thumb). Так было сдела
но для Toro, чтобы установить младший бит вектора сброса в 1 (установленный
младший бит rоворит процессору о том, что выполнение кода начинается в co
стоянии Thumb). Если этоrо не сделать, то процессор попытается переключиться
в режим ARM, что вызовет исключение Hard Fault. Для ассемблирования дaHHO
ro файла наберём в командной строке:
$> arrn none eabi as rnсрu=соrtех rnЗ rnthurnb exarnplel.s o exarnplel.o
В результате будет создан объектный файл examplel.o. Ключи mcpи и
mthumb определяют используемый набор команд. Для компоновки проекта BЫ
зовем линкер ld:
$> arrn none eabi ld Ttext Охо o exarnplel.out exarnplel.o
Далее, сформируем двоичный образ, используя команду obj сору:
$> arrn none eabi objcopy Obinary exarnplel.out exarnplel.bin
Можно проконтролировать получившийся код, дизассемблировав ero с ис
пользованием проrраммы objdump:
$> arrn none eabi objdurnp s exarnplel.out > exarnplel.1ist
В результате выполнения последней проrраммы мы получим файл листинrа,
содержащий что то вроде:
exarnplel.out: file forrnat еlfЗ2 littlеаrrn
Disassernbly of section .text:
00000000 < start>:
о: 20000800 .word Ох20000800
4: 00000009 .word ОхОООООО09
00000008 <start>:
19.4. Примеры · 323
8: 200а rnovs rO, #10
а: 2100 rnovs r1, #0
ОООООООс <loop>:
с: 1809 adds r1, r1, rO
е: 3801 subs rO, #1
10: d1fc Ьпе.п с <loop>
00000012 <deadloop>:
12: e7fe Ь.п 12 <deadloop>
19.4.2. Пример 2: связывание нескольких файлов
Как уже неоднократно rоворилось, мы можем создать несколько объектных
файлов, а затем связать их друr с друrом. Давайте рассмотрим при мер, состоя
щий из двух ассемблерных файлов example2a. s и example2b. s; первый из них
содержит только таблицу векторов, а второй проrраммный код. Для передачи
адресов между файлами используется директива .global:
exarnple2a.s
/* Определяем константы */
.equ STACK TOP, Ох20000800
.syntax unified
.global vectors table
.global start
.global nrni handler
.thurnb
vectors table:
.word STACK TOP, start, nrni handler, ОхОООООООО
.end
Конец файла
exarnple2b.s
/* Основная проrрамма */
.text
. syntax unified
.thurnb
.type start, %function
.type nrni handler, %function
.global start
.global start
.global nrni handler
start:
/* Начало основной проrраммы */
start:
rnovs rO, #10
rnovs r1, #0
/* Вычисляем 10+9+8... +1 */
loop:
adds r1, rO
subs rO, #1
bne loop
/* Результат в R1 */
deadloop:
Ь deadloop
324 · fлава 19. Разработка приложений для Cortex M3 с использованием GNU
/* Пустой обработчик NMI для иллюстрации */
nrni handler:
Ьх lr
.end
========== Конец файла ==========
Для создания двоичноrо образа необходимо выполнить следующие операции:
1. Ассемблируем example2a. s:
$> arrn none eabi as rncpu=cortex rn3 rnthurnb exarnple2a.s o exarnple2a.o
2. Ассемблируем example2b.s:
$> arrn none eabi as rncpu=cortex rn3 rnthurnb exarnple2b.s o exarnple2b.o
3. Связываем объектные файлы в единый образ. Обратите внимание, что
порядок указания объектных файлов в командной строке влияет на их
расположение в исполняемом двоичном образе:
$> arrn none eabi ld Ttext Ох О o exarnple2.out exarnple2a.o exarnple2b.o
4. Формируем двоичный файл:
$> arrn none eabi objcopy Obinary exarnple2.out exarnple2.bin
5. Как и в предыдущем примере, сrенерируем файл листинrа, чтобы убедиться
в корректности финальноrо образа:
$> arrn none eabi objdurnp S exarnple2.out > exarnple2.1ist
При большом числе файлов с исходным кодом процесс компиляции можно
упростить, воспользовавшись UNIХ командой makefile. Отдельные пакеты раз
работки также MorYT иметь встроенные средства для облеrчения процесса KOM
пиляции.
19.4.3. Пример 3: простая nporpaMMa «Hello World»
Чтобы было не так скучно, давайте попробуем написать проrрамму «Неllо
World». (Примечание. В следующем примере отсутствует код инициализации
модуля UART; дЛЯ запуска данноrо примера вы должны добавить собственный
код инициализации UART. Пример инициализации модуля UART на Си приве
дён в [лаве 20.)
========== exarnple3a.s ==========
/* Определяем константы */
.equ STACK TOP, Ох20000800
. syntax unified
.thurnb
.global vectors table
.global start
vectors table:
.word STACK TOP, start
.end
========== Конец файла
========== exarnple3b.s
.text
.syntax unified
.thurnb
.global start
....................
...............................................................
..........................................................................
19.4. Прuмеры · 325
.type start, %function
start:
/* Начало основной проrраммы */
movs rO, #0
movs rl, #0
movs r2, #0
movs rЗ, #0
movs r4, #0
movs r5, #0
ldr rO,=hello
bl puts
movs rO, #Ох4
bl putc
deadloop:
Ь deadloop
hello:
.asciz «Hello\n»
.align
puts: /* Подпроrрамма передачи строки по UART */
/* Вход: rO = Адрес начала строки */
/* Строка должна завершаться нулевым символом */
push {rO, rl, lr} /* Сохраняем реrистры */
mov rl, rO /* Копируем адрес в Rl, поскольку */
/* RO будет использоваться в качестве */
/* входноrо параметра putc */
putsloop:
ldrb.w rO, [rl],#l
/* Читаем один символ и инкрементируем адрес */
cbz rO, putsloopexit /* Если символ NULL, выходим */
bl putc
Ь putsloop
putsloopexit:
рор {rO, rl, рс}
.equ UARTO DATA, Ох4000СООО
.equ UARTO FLAG, Ох4000СО18
putc: /* Подпроrрамма для передачи символа через UART */
/* Вход: RO = передаваемый символ */
push {rl, r2, rЗ, lr} /* Сохраняем реrистры */
LDR rl,=UARTO FLAG
putcwaitloop:
ldr r2, [rl]
tst.W r2, #Ох20
bne putcwaitloop
ldr rl,=UARTO DATA
str rO, [rl]
рор {rl, r2, rЗ, рс} /* Возврат */
.end
/* Возврат */
/* Считываем флаrи */
/* Проверяем состояние буфера передачи */
/* Если полон, то ждём */
/* Иначе заrружаем символ в буфер передачи */
========== Конец файла ==========
В данном примере для определения строки с завершающим нулем мы BOC
пользовались директивой .asciiz. Эта директива эквивалентна директиве
.ascii, определяющей строку, с последующей директивой .byte, определяющей
326 · Тлава 19. Разработка приложений для Cortex M3 с использованием GNU
байт с нулевым значением. Для KoppeKTHoro выравнивания проrраммноrо кода
после определения строки мы разместили директиву .align.
Для компиляции проrраммы, создания двоичноrо образа и дизассемблиро
BaHHoro листинrа можно использовать следующие команды:
$> arrn none eabi as rnсрu=соrtех rnЗ rnthumb ехаrnрlеЗа.s o ехаrnрlеЗа.о
$> arrn none eabi as rnсрu=соrtех rnЗ rnthumb ехаrnрlеЗЬ.s o ехаrnрlеЗЬ.о
$> arrn none eabi ld Ttext ОхО o ехаrnрlеЗ.оut ехаrnрlеЗа.о ехаrnрlеЗЬ.о
$> arrn none eabi objcopy Obinary ехаrnрlеЗ.оut ехаrnрlеЗ.Ьin
$> arrn none eabi objdurnp S ехаrnрlеЗ.оut > ехаrnрlеЗ.list
19.4.4. Пример 4: данные в 03У
Очень часто данные хранятся во встроенном ОЗУ микроконтроллера.
Рассмотрим следующий при мер:
========== exarnple4.s ==========
.equ STACK TOP, Ох20000800
.text
. syntax unified
.thumb
.global start
.type start, %function
start:
.word STACK TOP, start
/* Начало основной проrраммы */
start:
rnovs rO, #10
rnovs r1, #0
/* Вычисляем 10+9+8... +1 */
loop:
adds r1, rO
subs rO, #1
bne loop
/* Результат в R1 */
ldr rO,=Result
str r1, [rO]
deadloop:
Ь deadloop
/* Данные расположены в секции LC (Local Cornmon) */
.lcornm Result 4 /* 4 байтное значение названо Result */
.end
========== Конец файла ==========
Псевдокоманда .lcomrn, использованная в примере, резервирует 4 байта в ceK
ции неинициализированных данных «bss» и помечает эту область меткой
Result. Используя указанный идентификатор, проrрамма может обращаться
к данной области памяти.
Чтобы скомпоновать проrрамму, мы должны сообщить компоновщику о Mec
тоположении ОЗ ДЛЯ этоrо используется ключ Tbss, размещающий секцию
неинициализированных данных по заданному адресу:
$> arrn none eabi as rnсрu=соrtех rnЗ rnthumb exarnple4.s o exarnple4.o
19.4. Примеры · 327
$> arm none eabi ld Ttext ОхО Tbss Ох20000000 o example4.out example4.o
$> arm none eabi objcopy Obinary example4.out example4.bin
$> arm none eabi objdump s example4.out > example4.1ist
19.4.5. Пример 5: nporpaMMa на Си
Одним из основных компонентов инструментария GNU является компиля
тор языка Си. В этом примере мы напишем проrрамму целиком на Си. Помимо
собственно проrраммы, нам ещё потребуется файл сценария компоновщика для
размещения cerMeHToB по соответствующим адресам:
========== example5.c ==========
// Объявляем ФУНКЦИИ
void myputs(char *stringl);
void myputc(char mychar);
int main(void);
void Reset Handler(void);
void NMI Handler(void);
void HardFault Handler(void);
void UartInit(void);
// Объявляем start() в стартовом коде
extern void start(void);
//
void Reset Handler(void)
{
// Вызываем обработчик сброса сsз
start () ;
}
//
// Пустой обработчик
void NMI Handler(void)
{
return;
}
//
// Пустой обработчик
void HardFault Handler(void)
{
return;
}
//
void UartInit(void)
{
/* Здесь должен располаrаться код инициализации UART */
return;
}
//
// Начало основной проrраммы
int main{void}
{
#define NVIC CCR (*((volatile unsigned long *) (ОхЕОООЕО14)))
const char *helloworld = «Hello world\n»;
328 · rлава 19. Разработка приЛDжений для Cortex M3 с использованием GNU
NVIC CCR = NVIC CCR I Ох200; /* Устанавливаем STКALIGN в NVIC */
UartInit();
myputs(helloworld);
while(l);
return(O);
}
//
// Функция вывода строки
void myputs(char *stringl)
{
char mychar;
int j;
j=O;
do {
mychar = stringl[j];
if (mychar!=O) {
myputc(mychar);
j++;
}
while (mychar != О);
return;
}
//
void myputc(char mychar)
{
#define UARTO DАТА (*((volatile unsigned long *) (Ох4000СООО)))
#define UARTO FLAG (*((volatile unsigned long *) (Ox4000C018)))
// Ждём сброса флаrа занятости
while ((UARTO FLAG & Ох20) != О);
// Выводим символ в UART
UARTO DATA = mychar;
return;
========== Конец файла ==========
Эта проrрамма выводит строку «Неllо world» через интерфейс UART. В зави
симости от используемоrо модуля вы должны либо сами написать код ero иници
ализации, либо воспользоваться функциями библиотеки, предоставляемой про
изводителем микроконтроллера.
После выхода процессора из состояния сброса обработчик вызывает функ
цию start, содержащую стартовый код. По завершении начальной инициали
зации стартовый код вызывает функцию та i n ( ). Для поддержки стартовой по
следовательности и таблицы векторов пакет Sourcery G++ использует инфра
структуру CS3 (CodeSourcery Соmmоп Start up Code Sequence). В составе CS3 име
ется предопределённая таблица векторов для процессора Cortex M3, называемая
сsЗ interrupt vector rnicro. Содержимое этой таблицы векторов при
ведено в Табл. 19.2.
19.4. Примеры . 329
Таблица 19.2. Таблица векторов Cortex M3 в CS3
Номер Имя вектора Описание
О cs3 stack Начальное значение указателя
OCHoBHoro стека
1 cs3 reset Вектор сброса
2 cs3 isr nmi Немаскируемое прерывание
3 cs3 isr hard fault Тяжёлый отказ
4 cs3 isr mpu fault Отказ системы управления памятью
5 cs3 isr bus fault Отказ шины
6 cs3 isr usage fault Отказ проrраммы
7.. .10 cs3 isr reserved 7.. .10 Зарезервировано
11 cs3 isr svcall Вызов супервизора
12 cs3 isr debug Исключение монитора отладки
13 cs3 isr reserved 13 Зарезервировано
14 cs3 isr pendsv PendSV
15 cs3 isr systick Системный таймер
16.. .47 cs3 isr external 0.. . cs3 isr external 31 Внешнее прерывание
Соответствие между обработчиками исключений, используемыми в нашей
проrрамме, и данными именами векторов устанавливается сценарием компонов
щика. В этом же файле описывается распределение памяти, включая расположе
ние таблицы векторов. В версиях Personal и Professional пакета поставляются
файлы сценариев для большинства выпускаемых микроконтроллеров с процес
сором Cortex M3. При использовании версии Lite несколько общих файлов cцe
нария можно найти в папке arm none eabi\lib. В данном примере мы воспользу
емся сценарием, полученным модификацией общеrо файла сценария для процес
соров Cortex M (generic m.ld). Содержимое этоrо модифицированноrо файла
сценария приведено в Приложении д.
Для запуска компилятора и компоновщика используется следующая KOMaHД
ная строка:
$> arm none eabi gcc mcpu=cortex m3 mthumb example5.c
T cortexm3.1d o example5.o
Информация о карте памяти передаётся компоновщику на этапе компиля
ции.
Компилятор gcc запустит компоновщик автоматически, так что отдельно ero
вызывать не нужно. В заключение мы можем сrенерировать двоичный образ
и дизассемблированный листинr:
$> arm none eabi objcopy Obinary example5.out example5.bin
$> arm none eabi objdump s example5.out > example5.1ist
Использование обработчика Reset Handler в данном при мере необяза
тельно. Вместо этоrо в сценарии компоновщика можно присвоить вектору
сsЗ reset значение start (адрес входа в стартовую процедуру).
330 · fлава 19. Разработка приложений для Cortex M3 с использованием GNU
19.4.6. Пример 6: перенаправпение вывода
в nporpaMMe на Си
в предыдущем примере мы написали собственную функцию вывода TeKCTO
вых строк, однако в большинстве случаев удобнее пользоваться функциями BЫ
вода из стандартной библиотеки Си. Так, для вывода текста вполне можно ис
пользовать стандартную функцию printf. Для этоrо нам необходимо написать
функцию, которая перенаправляла бы результат работы printf в процедуру BЫ
вода по интерфейсу UART.
Реализация такой функции перенаправления демонстрируется в следующем
примере:
========== example6.c ==========
#include<stdio.h>
// Объявляем ФУНКЦИИ
void myputc(char mychar);
int main(void);
void Reset Handler(void);
void NMI Handler(void);
void HardFault Handler(void);
void Uartlnit(void);
// Объявляем start() в стартовом коде
extern void start(void);
//
void Reset Handler(void)
{
// Вызываем обработчик сброса сsз
start();
}
//
// Пустой обработчик
void NMI Handler(void)
{
return;
}
//
// Пустой обработчик
void HardFault Handler(void)
{
return;
}
//
void Uartlnit(void)
{
/* Здесь должен располаrаться код инициализации UART */
return;
}
//
// Функция перенаправления вывода
int write r(void *reent, int fd, char *ptr, size t len)
19.4. Примеры · 331
size t i;
for (i=O; i<len; i++)
{
myputc(ptr[i]); // Вызываем нашу функцию вывода символа
return len;
}
//
// Начало основной проrраммы
int main(void)
{
#define NVIC CCR (*((volatile unsigned long *) (OxEOOOED14)))
NVIC CCR = NVIC CCR I Ох200; /* Устанавливаем STKALIGN в NVIC */
UartIni t () ;
printf(<<Hello world\n»);
while(l);
return(O);
}
//
// Функция для вывода символа
void myputc(char mychar)
{
#define UARTO DATA (*((volatile unsigned long *) (Ох4000СООО)))
#define UARTO FLAG (*((volatile unsigned long *) (Ox4000C018)))
// Ждём сброса флаrа занятости
while ((UARTO FLAG & Ох20) != О);
// Выводим символ в UART
UARTO DATA = mychar;
return;
========== Конец файла ==========
Перенаправление осуществляется функцией write r, которая вызывает
нашу процедуру вывода символа.
19.4.7. Пример 7: реализация собственной таблицы
векторов
Если вы не используете пакет Sourcery G++, то вам может потребоваться caMO
стоятельно описать таблицу векторов. Это можно сделать следующим образом:
// Определяем таблицу векторов
attribute ((section(<<vectors»)))
void (* const VectorArray[]) (void) = {
(void (*) (void)) ((unsigned long) MainStack + sizeof (МаiпStасk)),
Reset Handler,
NMI Handler,
HardFault Handler
} ;
Стек можно описать в виде массива:
// Резервируем 64 слова памяти для OCHOBHoro стека
static unsigned long МаiпStасk[б4];
332 · rлава 19. Разработка приложений для Cortex M3 с использованием GNU
Поместить таблицу векторов в начало адресноrо пространства процессора
можно с помощью сценария компоновщика. Например:
.text :
CREATE OBJECT SYMBOLS
сsЗ rеgiоп stаrt rоm = .,
*(.сsЗ.rеgiоп hеаd.rоm)
сSЗ iпtеrruрt vесtоr = сsЗ iпtеrruрt vесtоr miсrо;
* (vectors) /* Таблица векторов */
Имя секции (vectors) должно соответствовать имени, использованному при
описании таблицы векторов. В противном случае, таблица окажется располо
женной в друrом месте.
Этот метод может приrодиться даже при наличии инструментария
Sourcery G++; если вам требуется более 32 векторов прерываний, то вы можете
описать дополнительные векторы и поместить их сразу после таблицы векторов
CS3.
19.5. Обращения к реrистрам специапьноrо
назначения
Инструментарий GNU поддерживает обращения к реrистрам специальноrо
назначения. Названия этих реrистров должны записываться строчными буква
ми. Например:
msr control, rl
mrs rl, control
msr apsr, Rl
mrs rO, psr
19.6. Использование неподдерживаемых
команд
Если вы при меняете друrой набор инструментов GNU ARM, то может полу
читься так, что используемый ассемблер не поддерживает необходимую вам KO
манду. В этом случае команду можно будет вставить в проrрамму в виде двоич
Horo кода с помощью директивы . word. Например:
.equ DW MSR CONTROL RO, Ох8814FЗ80
MOV RO, #Охl
.word DW MSR CONTROL RO /* Эта команда переводит процессор в пользовательский
режим */
19.7. Iпliпе ассембпер в компипяторе GCC
Как и Си компилятор компании ARM, компилятор GCC тоже поддерживает
iпliпе ассемблер. Правда, синтаксис несколько отличается:
19.Z Iпliпе ассемблер в компиляторе GCC . 333
asm (<< inst1 ор1, ор2... \n»
« inst2 ор1, ор2... \n»
« inst ор1, ор2... \n»
output operands /* Опция */
input operands /* Опция */
clobbered register list /* Опция */
) ;
Например, простая процедура перевода процессора в спящий режим может
выrлядеть следующим образом:
void Sleep(void)
{ // Переход в спящий режим с помощью команды WFE
asm (
«WFI\n»
) ;
Если в ассемблерном коде должны использоваться входные и выходные пере
менные, то ero можно записать следующим образом:
unsigned int Dataln, DataOut; /* Переменные для параметра и результата */
asm (<<mov rO, %O\n»
«mov r3, #5\n»
«udiv rO, rO, r3\n»
«mov %1, rO\n»
:»=r» (DataOut) : «r» (Dataln) : «се», «r3» );
В этом фраrменте входным параметром является переменная DataIn (пара
метр %0), а возвращаемым значением переменная DataOut (параметр %1). Ac
семблерный код модифицирует реrистр R3 и изменяет флаrи условия СС, в связи
с чем они перечислены в списке затираемых реrистров.
Для дальнейшеrо изучения iпliпе ассемблера рекомендую обратиться к ДOKY
менту «GCC Iпliпe Asseтbly HOWTO» (на анrл. языке), свободно распространяе
мому в сети Интернет.
rЛАВА 2 О
ИСПОЛЬ30ВАНИЕПАКЕТА
REALVIEW MDK..ARM КОМПАНИИ KEIL
20.1. Общие сведения
В настоящее время на рынке представлено множество проrраммных средств
разработки для устройств с процессором Cortex M3. Одним из наиболее попу
лярных па кетов является пакет RealView Microcontroller Development Kit
(RealView MDK ARM), предлаrаемый компанией КеН. В составе этоrо пакета име
ются следующие компоненты:
· Интеrрированная среда разработки (ИСР) J.1Vision.
. Отладчик.
. Симулятор.
· Инструментарий RealView Compilation Tools компании ARM:
CJ компилятор С/С++;
CJ ассемблер;
CJ компоновщик и различные утилиты.
· Операционная система реальноrо времени RTX Real Time Kernel.
· Стартовые коды для различных микроконтроллеров.
· ПО дЛЯ проrраммирования флэш памяти микроконтроллеров.
· Примеры проrрамм.
Для изучения процессора Cortex M3 с помощью пакета RealView MDK ARM
наличие реальной платы с микроконтроллером на базе Cortex M3 необязательно.
В составе ИСР J.1Vision имеется симулятор, позволяющий тестировать простые
проrраммы без отладочной платы.
Бесплатный компакт диск с пробной версией пакета можно заказать на сайте
компании (www.keil.coт). Эта же версия пакета поставляется в составе некоторых
отладочных комплектов от разных производителей микроконтроллеров.
20.2. Приступая к работе в ИСР fJVision
Вместе с пакетом MDK ARM поставляется множество примеров, в том числе
и для микроконтроллеров с ядром Cortex M3 и различных отладочных плат,
предлаrаемых на рынке. Помимо этоrо, с сайта производителя микроконтролле
ра можно заrрузить библиотеки драйверов устройств, в которых тоже имеются
20.2. Прuступая к работе в ИСР flVisioп · 335
примеры проrрамм. При разработке cBoero приложения вы можете взять за OCHO
ву подходящий учебный проект или же создать свой проект с нуля. Данному BO
просу и посвящена настоящая rлава. Все примеры, приведённые в этой rлаве, бы
ли написаны в среде MDK ARM версии 3.80 для микроконтроллера LM3S811
компании Texas Instruments.
После инсталляции пакета MDK ARM вы сможете запустить ИСР JlVision из
меню «Проrраммы». При первом запуске JlVision будет автоматически создан пу
стой проект для традиционноrо процессора ARM. Мы можем закрыть этот про
ект и создать свой, выбрав пункт New Project в меню Project (Рис. 20.1).
New Protect' 'W,orkspece. '"
t p\li!kJnl Project....
gpen Projett i i
"
,
"
Рис. 20.1. Создание HOBOZO проекта.
Создадим для нашеrо проекта новую папку HelloWorld (Рис. 20.2). После это
ro нам нужно будет выбрать целевое устройство. Выберем микроконтроллер
LM3S811 (Рис. 20.3).
HeRoW'orld
Му Recent Documents
D esktop
,, ' .,, ;" Му Documents
.1 Му Computer
.. Local Disk (С:)
СоrtехМЗ
iia BookE xamples
.-
.. DVO Drive (D:)
.. Local Disk (Е:)
(G:)
'1 Му Network P1aces
Рис. 20.2. Выбор папки для размещения проекта.
336 · Тлава 20. Использование пакета RealView MDK ARM компании Кеи
Рис. 20.3. Выбор целевоzо микроконтроллера.
После выбора микроконтроллера появится диалоrовое окно с вопросом об ис
пользовании cTapToBoro кода, принятоrо по умолчанию. Нажмите на кнопку Yes
(Рис. 20.4).
Рис. 20.4. Выбор стандартноzо cmapmoBozo кода.
В результате проделанных манипуляций будет создан проект HelloWorld, co
держащий Bcero один файл Startup.s (Рис. 20.5). Теперь нам нужно создать новый
файл, который будет содержать тело основной проrраммы (Рис. 20.6). Сохраним
этот текстовый файл под именем Неllо.с (Рис. 20.7). Теперь мы можем добавить
созданный файл в проект через контекстное меню, появляющееся при щелчке
правой кнопкой мыши на rруппе Source Group 1 в окне проекта (Рис. 20.8).
20.2. Приступая к работе в ИСР f1-Visioп . 337
fnt l
,{::}, 50uусе Group 1
, hi3 Stattф.s
. Fлgt t (g,8GtOk1 ! t() fta'lclOO 1" T8n9 >..
.' '-';"' ;, \ii\i \i\l.'i.it'P. ' """" "-"":'-";"';"p."':"" " .;i ' 'ir.' ': ' ' '.i ';'''''''' '''';'- \; '''''' 'r- ''''''''-'; .c.', 'i ,;O"-"" "а" "'О-';'._ ';'. .,"'о" ,......-- -yo ..-...;::.,',:.-,',' --.'.:-,:.:..'.:{.<':,i;:{i;': w\-;' '-__-.0';
Рис. 20.5. Созданный проект.
fj;Qpen
CТRL+O
.,.-.
'. '
S«V$ AI
Рис. 20.6. Создание НОБОZО файла с исходным кодом.
338 · Тлава 20. Использование пакета RealView MDK ARM компании Keil
I B Target 1
! з. Source Group 1
! a $
11 ! Q;iBookt ! } Func5or .TempI.
Рис. 20.7. ПрО2рамма «HelloWold».
(YOid)
'tJO r 1 d ! \ n ") ;
R move Group .Source Group l' and its FiIes
IEJ IQClude Dependencies
Рис. 20.8. Добавление файла в проект.
Выберем созданный нами файл Неllо.с, после чеrо закроем окно Add File. Te
перь наш проект содержит два файла (Рис. 20.9).
20.2. Прuступая к работе в ИСР ""Visioп · 339
т arget 1
E}" Source Group 1
;... [!;J startup. s
III!IIIII!!I
IIIIIIII8
include "stdio.h"
main (void)
wor ld! \ n") ;
== P-.egs ! r;QJ BI)ok I t{} Func1ion') 1" Тем
Рис. 20.9. Окно проекта после добавления файла Hello.c.
Для задания настроек проекта следует щёлкнуть правой кнопкой мыши на
имени проекта Target 1 в окне Project Workspace и выбрать пункт Options for
Target 'Target 1'. На вкладке Target появившеrося диалоrовоrо окна мы увидим,
что распределение памяти уже задано средой автоматически (Рис. 20.10). В этом
же окне мы можем задать множество друrих параметров проекта, расположен
ных на соответствующих вкладках.
Рис. 20.10. Диалоzовое окно задания опций проекта.
340 · Тлава 20. Использование пакета RealView MDK ARM компании Keil
Теперь мы можем приступить к компиляции проrраммы. Для этоrо нужно
нажать на соответствующую кнопку панели инструментов (Рис. 20.11) или же
выбрать пункт Build target из KOHTeKcTHoro меню, появляющеrося при щелчке
правой кнопкой мыши на имени проекта в окне Project Workspace.
..i Не 110 VI О'" I (1 JJVj ; 10 п]
. fJe Edt.., e.rojкt ' Qabцg :\ AAsh,. .. . lools svcs.. WI. ' t(eIP
.
...,
.. -- . , . .... >
........ J.!2 ( J.
-J t lllf l '*
'...f.: I Targct 1
вuitd
TltoItl
;:...i с oiЬ с........... Gr 1
.JV'fJI e oup
;" _ Ct.avh.... 1iIt
. r. U41'
:tи НeIo.c
'inClu(
,'int ma:
{
printf
Рис. 20.11. Запуск компиляции.
Сообщение компилятора об успешном завершении процесса компиляции бу
дет выведено в окне Output Window (Рис. 20.12).
L l J Jl
Х Build tarqet I Tarqet 1.
J
compiling Hello.c...
11nking. . .
Progr.. S1ze: Соde-ЗЗО6 RQ-daca-46 RV data.12 ZI data.S96
Bel1oVorld.axt" О Error(s), О Varn1ng(s).
Рис. 20.12. Вывод результата компиляции.
20.3. Вывод сообщения «Неllо World» по интерфейсу UART · 341
20.3. ВЫВОД сообщения «Hello World»
по интерфейсу UART
В нашей проrрамме используется функция printf из стандартной библиоте
ки языка Си. Эта библиотека не располаrает никакой информацией об использу
емом аппаратном обеспечении. Поэтому для вывода текстовых сообщений по
средством реальных устройств, таких как модуль UART микроконтроллера, нам
придётся написать соответствующие процедуры.
Как уже упоминалось ранее в книrе, реализация вывода информации на pe
альные аппаратные средства часто обозначается термином «перенаправление».
Помимо собственно вывода текста, проrраммный код поддержки перенаправле
ния также может содержать функции для обработки ошибок и аварийноrо завер
шения проrраммы. В данном примере мы коснёмся только функций вывода TeK
стовой информации.
Следующая проrрамма выводит сообщение «Неllо World» в модуль UARTO
микроконтроллера LM3S811. Эта проrрамма рассчитана на соответствующую OT
ладочную плату производства Texas Instruments. Источником TaKToBoro сиrнала
служит имеющийся на плате кварцевый резонатор частотой 6 Мfц. Встроенный
модуль PLL микроконтроллера после некоторой настройки формирует из этоrо
сиrнала системный тактовый сиrнал частотой 50 Мfц. Скорость передачи UART
задаётся равной 115 200 бит/с; для приёма информации от UART используется
проrрамма HyperTerminal, работающая на ПК под управлением ОС Windows.
Чтобы перенаправить поток данных, формируемый функцией printf, нам
необходимо реализовать свою функцию fputc. Ниже приведена возможная pea
лизация этой функции, использующая для вывода символов в модуль UART
функцию sendchar.
Файл hello.c
#include «stdio.h»
#pragma import( use no semihosting swi)
struct FILE { int handle; };
FILE stdout;
#define CR ОхОО // Возврат каретки
#define LF ОхОА // Перевод строки
void UartOlnit(void);
void SetClockFreq(void);
int sendchar(int ch);
// При использовании TaKToBoro сиrнала 6 мrц закомментируйте следующую строку
#define CLOCK50MHZ
// Адреса реrистров
#define SYSCTRL RCC
#define SYSCTRL RIS
#define SYSCTRL RCGCl
#define SYSCTRL RCGC2
#define GPIOPA AFSEL
#define UARTO ОАТА
#define UARTO FLAG
#define UARTO IBRD
* ((volatile unsigned long
* ((volatile unsigned long
* ((volatile unsigned long
*((volatile unsigned long
* ((volatile unsigned long
* ((volatile unsigned long
* ((volatile unsigned long
*((volatile unsigned long
*) (Ox400FE060))
*) (О х 4 О О FE О 5 О) )
*) (О х 4 О О FE 1 О 4) )
*) (О х 4 О О FE 1 О 8) )
*) (Ох40004420))
*) (Ох4000СООО) )
*) (Ох4000СО18))
*) (Ох4000СО24))
342 · Тлава 20. Использование пакета RealView MDK ARM компании Keil
#define UARTO FBRD
#define UARTO LCRH
#define UARTO CTRL
#define UARTO RIS
#define NVIC CCR
int main (void)
{ // Простой код для вывода сообщения «Hello World»
NVIC CCR = NVIC CCR I Ох200; // Устанавливаем STКALIGN
SetClockFreq(); // Задаём частоту TaKToBoro сиrнала (50 мrц/6 мrц)
UartOInit(); // Инициализируем UARTO
printf (<<Hello world!\n»);
while (1);
* ( (volatile
* ( (volatile
* ( (volatile
* ( (volatile
* ( (volatile
unsigned
unsigned
unsigned
unsigned
unsigned
long
long
long
long
long
*) (Ох4000С028))
*) (Ох4000С02С))
*) (Ох4000СОЗО))
*) (Ох4000СОЗС))
*) (ОхЕОООЕD14))
}
void SetClockFreq(void)
{
#ifdef CLOCK50MHZ
// Устанавливаем бит BYPASS, сбрасываем биты USRSYSDIV и SYSDIV
SYSCTRL RCC = (SYSCTRL RCC & ОхF8ЗFFFFF) I Ох800 ;
// Сбрасываем биты OSCSRC, PWRDN и OEN
SYSCTRL RCC = (SYSCTRL RCC & OxFFFFCFCF);
// Изменяем SYSDIV, устанавливаем USRSYSDIV и частоту кварца
SYSCTRL RCC = (SYSCTRL RCC & ОхF87FFСЗF) I Ох01СО02СО;
while ((SYSCTRL RIS & Ох40)==0); // Ждём установки бита PLLLRIS
// Сбрасываем бит BYPASS
SYSCTRL RCC = (SYSCTRL RCC & OxFFFFF7FF) ;
#else
// Устанавливаем бит BYPASS, сбрасываем биты USRSYSDIV и SYSDIV
SYSCTRL RCC = (SYSCTRL RCC & ОхF8ЗFFFFF) I Ох800 ;
#endif
return;
}
void UartOInit(void)
{
SYSCTRL RCGC1 =
SYSCTRL RCGC2 =
UARTO CTRL = о;
#ifdef CLOCK50MHZ
UARTO IBRD = 27;
UARTO FBRD = 9;
#else
UARTO IBRD = з;
UARTO FBRD = 17;
#endif
UARTO LCRH =
UARTO CTRL =
GPIOPA AFSEL
return;
SYSCTRL RCGC1 I Охоооз; // Разрешаем тактирование UARTO и UART1
SYSCTRL RCGC2 I ОхОО01; // Разрешаем тактирование PORTA
// Запрещаем UART
// Задаём скорость передачи для тактовой частоты 50 мrц
// Задаём скорость передачи для тактовой частоты 6 мrц
Ох60; // 8 бит, без контроля чётности
ОхЗ01; // Разрешаем приём, передачу и включаем модуль UART
= GPIOPA AFSEL I Охз; // Модуль UARTO использует выводы GPIO
}
/* Вывод символа в UARTO (используется функцией printf) */
int sendchar (int ch)
i f (ch == '\ n ') {
20.4. Тестирование npozpaMMbl · 343
while ((UARTO FLAG & Ох8)); // Если UART занят ждём
UARTO DАТА = CR; // Выводим дополнительный символ CR для KoppeKTHoro
} // отображения на экране
while ((UARTO FLAG & Ох8)); // Если модуль занят ждём
return (UARTO DATA = ch); // Выводим байт
}
/* Перенаправление TeKcTOBoro вывода */
int fputc(int ch, FILE *f) {
return (sendchar(ch));
}
void sys exit(int return code) {
/* 3аrлушка */
label: goto label; /* Бесконечный цикл */
Подпроrрамма SetClockFreq конфиrурирует модуль PLL для формирования
системноrо TaKTOBoro сиrнала частотой 50 Мfц (процесс настройки зависит от
используемоrо устройства). Если константа CLOCK50MHZ не определена, то эта
подпроrрамма устанавливает тактовую частоту, равную 6 Мfц.
Для инициализации модуля UARTO используется подпроrрамма UartOInit.
Настройка модуля заключается в выборе скорости передачи (115 200 бит/с), раз
рядности слова (8 бит) и числа стоп битов (1 стоп бит), а также отключении KOH
троля чётности. Эта же подпроrрамма переключает выводы порта А, используе
мые модулем UARTO, в режим альтернативных функций. Прежде чем можно бу
дет обращаться к модулям GPIO и UART, необходимо включить тактирование
данных модулей. Это осуществляется записью соответствующих значений в pe
rистры SYSCTRL RCGCl и SYSCTRL RCGC2.
Перенаправление осуществляется функцией fputc (это имя зарезервировано
для функции, осуществляющей вывод символов). Данная функция вызывает
функцию sendchar для вывода символа в модуль UART. При обнаружении сим
вола новой строки указанная функция выводит дополнительный символ возвра
та каретки. Это необходимо для KoppeKTHoro отображения текста в окне
HyperTerminal (в противном случае, текст новой строки перезаписывал бы пре
дыдущую строку).
После внесения изменений в файл Неllо.с перекомпилируем проrрамму.
20.4. Тестирование nporpaMMbI
Если У вас уже есть оценочная плата LM3S811, то вы можете проверить работу
проrраммы, заrрузив её во флэш память микроконтроллера и убедившись в Ha
личии сообщения «Неllо World» в окне HyperTerminal. Для заrрузки и проверки
проrраммы необходимо выполнить следующие действия (предполаrается, что
все драйверы, поставлявшиеся вместе с оценочной платой, установлены).
Прежде Bcero, необходимо настроить опции заrрузки во флэш память, BЫ
брав пункт Configure Flash Tools из меню Flash (Рис. 20.13). В появившемся диа
лоrовом окне выберите оценочную плату Luminary Eval Board (Рис. 20.14). Как
видно из рисунка, flVision поддерживает самые разные средства отладки.
tI
344 · rлава 20. Использование пакета RealView MDK ARM компании Кеа
} Hel'oWorld ...Vision3 [С:\СоrtехМЗ\ВооkЕхаПlрlеs\НеllоWоrld\Неllо.с]
i
18
!
I
I
I
j
i
j
j
j
:;:/ / Сlх OSCSRC., Pl"N"'RDN
:SYSCTRL RCC = (SYSCTF
aI
Рис. 20.13. Вызов окна настройки npozpaMMamopa.
. .
. ,'.. . .
DeViCe I 'f ....; 0tIId 1 11mi ( . Aw I UrNtJ DebЦg UtiIIiii ,: '. · '. .' . .
:'.с.. ..',. ":" '., '. ..' .... . ...... :,,: ...., . .,:' .... .', ....... ". ",";: ,', ....... '. ..:...... .',
" '- . .' . " . ' . ' . ' . ' . . .. . .. .. . . . . '. . .. ;.: . F . .JaSh ... . .... ' М . :. .' COInmand . . . . .. .. . .. . . ', .... ......, . . ................. . .... . ..... .':: ':. '. ,.... ' ..;.... . . .... .....' .... '.
r в.v-u . . .. 'е ... . .... . . ...... . ..... .. ..... . .. ... ... .... . .... ' .. ... " '" ..,. ... . ' , . '. .....:.,, ','.. . .... . : ;' . ",",: . i' . ..'!
. ".:" . :. <..... ...'.... .. ....,.:. .... .. .... . .... :". :' . '. . ..... .....
. r.u. Tar&ll!tO . farFlash Pros.r ;> . . ' . '" .. . . . . . . .... . . . . . . .. . .:.. . . "" . . .. . .. .... . ..i.., ... '. . . . . ... . .. . . .. .. . . ... ' . . .. .. ". """ *- 0.' ._' .
i , J t Luminar,y Eval Board Y' . . :. ...... . $.... 1 . ...... .. J .. '.: ,Р . ...Updete:)'> .... . " . '." .......... .
I .....:.! 2:1. ...... . '. ..' '. ", .'--:-..'" .' ......
I ." .... '. ULINKARM Debugger . .' . .1",' , . ..' ". .,' ..... . '" .:'
JnitFJe; ULINK Corte)( D bugger ...;J.7 '"" .,.., ." .... .' .' '. ' . .
Irf.he <'"" ./.......'1
. . Con .. ........'. . ..Iмni . . . t := ' . . < . '..:J. .
,Сortех-МЗ J.LINK . . . .' .........
I !' . .... .. '. ...... .' . ': .... ...:....:... ....... . . ...; .... .,'
i " rяuпl . пdереndеnt :..:....... .' '.. . . '. ........ ..' ...:.... .... ..::.. ............ ..'. ............. . ." , '.' . . .'.:'
I ".' '. '.' ..' .', ..... ..' . '. .' . . . . " . .'. · . '. . . . .' .
1 . . '. . ". . . . . .... . .
.... .... .. .' . .' ......
. . .'. .' .. . . '. .' . '. . .' ' .' . ..' : . . .
.... " ..... . . '. .,' ..... . .'. '. .,.... "
'. .' . . . '. '.'.' . . .' .... .... .... ..... '.' .' . .., . .',. '. . . ....
'. '. . . . :.' . '. .... .'. .... . '. . .... . '.
. . . ' " . / ";с: :; ' >1. ;.' се... .'.:... .
. . . '. ..' .... .
. .' ... . :. .
. . . . . . "
, ".". . .' . '.' '. . '. . ; 'ос . "" ..' ...... . ....... .' .',
. ...." ':'. ....... == .:.. .............:' '.' ,
.,.. . . =к ' . '. ..... . '. . . .;
.' . . .......,..'..',.
[. .' ." ','. . ..... . ..:
,'.' .'
I ...... . . . . :' .' . .
.
Рис. 20.14. Выбор драйвера npozpaMMamopa.
После выбора оценочной платы необходимо щёлкнуть по кнопке Setting, что
бы убедиться в корректности используемых настроек (Рис. 20.15).
20.4. Тестирование npozpaMMbl . 345
Рис. 20.15. Окно 8ыбора nараметр08 проzраММUр08анuя флэш памятu.
Теперь мы можем заrрузить нашу проrрамму в микроконтроллер, выбрав
в меню Flash пункт Download. После завершения проrраммирования в окне
Output Window появится сообщение, показанное на Рис. 20.16. Если между пла
той и HyperTerminal уже была установлена связь, то перед проrраммированием
флэш памяти может потребоваться закрыть проrрамму, отключить USВ кабель
от компьютера и повторно подключить ero.
Lo8.d "с:\,соrtеХИЗ"ВОО)С!Х8nф1е8\\веllО1J'оrld\\ВеllоVоrldllАU И
Conraect1D9= JIode-JТ.tG, Speed-l0000DВz
Progrcmm1ng Попе.
Ver1fy ок.
Рис. 20.16. ВЫ80д сообщенuя об удачном npozpaMMup08aHuu.
346 · Тлава 20. Использование пакета RealView MDK ARM компании Keil
После завершения проrраммирования вы можете запустить HyperTerminal и,
подключив плату к виртуальному СОМ порту (по USB), получить текстовое сооб
щение, переданное проrраммой, выполняющейся в микроконтроллере
(Рис. 20.17).
Рис. 20.17. Сообщение в окне прОёраммы HyperTerminal.
20.5. Использование отладчика
Отладчик в ИСР JlVision поддерживает множество различных аппаратных
средств отладки, в том числе и изделия линейки ULINK (ULINK 2, ULINK PRO
и ULINK ME) компании КеН (Рис. 20.18).
Рис. 20.18. Отладочные средства линейки ULINK.
Среда JlVision поддерживает следующие внутрисхемные отладчики:
· JTAGJet и JTAGJet Trace (компания Signum);
· J Link и J Trace (компания Segger);
20.5. Использование отладчика . 347
. оценочные платы Stellaris (компания Texas Instrument, бывшая Luminary
Micro);
. ST Link (компания STMicroelectronics).
Для отладки нашеrо при мера мы будем использовать отладчик ИСР flVision
в связке с аппаратным отладчиком, входящим в состав оценочной платы Texas
Instruments. Для изменения параметров отладки необходимо щёлкнуть правой
кнопкой мыши на имени проекта Targetl в окне Project Workspace и выбрать из
KOHTeKcTHoro меню пункт Options for Target 'Target 1'. Перейдём на вкладку
Debug и выберем отладчик Luminary Eval Board (Рис. 20.19).
Рис. 20.19. Выбор отладчика.
Если после выбора отладчика нажать на кнопку Settings, то можно увидеть
диалоrовое окно настроек параметров заrрузчика флэш памяти, показанное на
Рис. 20.15. В данном окне вы можете выбрать используемый протокол отладки,
тактовую частоту канала обмена и ряд друrих параметров. При использовании
отладчика ULINK 2/ULINK Pro этих опций будет rораздо больше (Рис. 20.20).
348 · fлава 20. Использование пакета RealView MDK ARM компании Keil
Рис. 20.20. Опции отладчика ULINK 2.
Теперь мы можем начать сессию отладки, выбрав в меню Debug пункт Start/
Stop Debug Session (Рис. 20.21).
Примечание. Если используется виртуальный СОМ порт на базе микросхе
мы FTDI и плата уже осуществляет обмен данными с проrраммой HyperTerminal,
то перед запуском сессии отладки нужно будет закрыть проrрамму, отключить
USВ кабель от ПК и снова подключить ero.
':t:
F11
Cl r 0$ CSR С, Plr1RDN 4nd ОЕ1/
CТRL RCC · (SYSCТRL RCC ,
йиtп S'YSDIV, set иSRS:/S
CТRL RCC - (STSCТRL _RCC ,
lIa.l t ипtil PLt'LRIS 1s set
(SYSCТRL RIS , Ох40)-
Cledr bypdSS
(t
{11
\':: т- : .. )... r: 1. =
,,} '
о
(""'И
.. : 1 . . t
'eY Y n r
Рис. 20.21. Запуск сессии отладки.
После запуска отладчика в ИСР появится окно, отображающее содержимое
реrистров процессора. Открыв окно с дизассемблированным кодом, вы также
можете увидеть адрес текущей команды. Из Рис. 20.22 видно, что выполнение
проrраммы остановилось на метке Reset Handler, соответствующей первой
команде исполняемоrо кода.
20.5. Использование отладчика · 349
Рис. 20.22. Среда отладки в ИСР !lVisioп.
Для установки точки останова в начале функции main можно щёлкнуть пра
вой кнопкой мыши на l й строке кода основной проrраммы и выбрать в KOH
текстном меню пункт Insert/Remove Breakpoint (Рис. 20.23).
Примечание. Чтобы выполнение проrраммы всеrда останавливалось в начале
функции main, можно также задействовать опцию отладчика Run to main().
"":':"#define NVIC CCR
int main (void)
{
;ii I 1: 1 :e: R S t Z Ut:1 XG>L.<L--u----шш-,
::UartOInit () ; 11 In ti cfl Z(\; ,. .,.
: ; t ( ;' eНO wor ld ! \ n') ; 1 . .... . ' . : . ' . : :! "' ______т_____ __щШ__
:;>, ..... } ! ...'Ж:,
:?/ YOid SetC lockFreq (void) ! .
}c".l&S{ I opy
;x "! # ifdef CLOCK50KHZ 1.8 t:a',.';e
,;эQ / / s е t БУР AS S , сl ed,C из RSYS:,
. SYSCTRL RCC == (SYSCTRL RCC i
./ / Сl!: OSCSRC, PWRDN dпct ОЩ
\
SYSCTRL RCC == (SYSCTRL RCC !
// СпЮlgе sysnr,/, set иSRSyj
.' SYSCTRL RCC = (SYSCТRL RCC I
i
.// ТЛlа1. t ипиl 'f'1...LL.RIS 1.5 S
while « SYSCTRL RIS , Ох4й)!
/ I Cl е .;1.1: bypass ! .....,..п"'" .. ..... ..............N.. .
SYSCTRL RCC = (SYSCТRL RCC I ) Run to Cursor line
'#еlзе I
\
j / Set BYPASS, cled,C USRSY.s1
: I . . . . . . : . . : ( . .. . . . : =L RCC = (SYSCТRL RCC i . !
return; i
!е- Enable/Disable Вrеal<poiПt
Select AII
Show Disassembly at ОхООООО256
Set Progr вт Counter
1,I'\. ;-- \{ 1:' '-.,i . Сi(' ),.;(l.е
set:
Go То Line
..!J
..tf'i
Рис. 20.23. Установка/снятие точек останова.
После установки точки останова слева от строки кода появится красный KPy
жок (СМ. СТрОКУ 29 на Рис. 20.23). Теперь мы можем запустить проrрамму на BЫ
полнение, нажав кнопку Run на панели инструментов (Рис. 20.24).
350 · [лава 20. Использование пакета RealView MDK ARM компании Keil
"С.е
АО
А1
А2
RЗ
А4
А5
Ох2ОООО7еО
0МОООООЭеО
0К000CJt)XJ0
(bC(t()OOOCfO)
0ха4420ОО1
0X20tX0X)4
:me.i
Рис. 20.24. Запуск npozpaMMbl на выполнение.
Проrрамма начнёт выполняться и остановится при достижении функции
main (Рис. 20.25). После этоrо мы сможем приступить к пошаrовой отладке CBO
ero приложения (используя соответствующие кнопки панели инструментов),
контролируя работу проrраммы по содержимому реrистров.
] +; . в «1ked
i <t; System ' f
ll-:, ' , c ::-- , п , , . '.J
I!J Fm Вoot<:; i t{} fun". : . ТеТ:1 , ' . I!I
--", '....,...;. .... .,;.,...;.'...;...,.,:.",;,""'...;....; ..... . ............. ,"';'':'''''';'':' -'';;';''''''"'''''''''''''''''' '''';'.... ,,.;'.... :,;............. , - . . > . - - . , . - - . . ... .. .. ... ... . ..' .......... ............ .... . ...' ....... .......... . - ......... ................... -... . . .. , ', , -
.--",.-.-,-., --'-'-"-;-"--'-"-"-,--'.'.-,-,-,,,-,",-,"-",.--,
IC CCR - NVIC CCR I Ох2DО; ;" Sl!:'t STКAI.IGN "';
etClocJtJ'req(); i/ Sеl-ыр c.lock sеtЦng (5()}ffi;;./Ы1Нz)
UartOIn t(); 1/ IL t allZ и tD
prlntt ("Hello world'\n");
il.e (1);
}
014 SetClock1req(yoi4)
{
#l de СLОСК50ВИZ
/1 Set ВYPASS, clea.r иSRSYSlJIV a.пd SYSDN
YSCТRL RCC · (SYSCТRL RCC 'ОxF8зrFFrr) I Dх600 ;
1/ C1L CSCSRC, PWRDlf ёUКi ОЕН
YSCТRL RCC · (SТSCТRL RCC , OxrrrFCrCF);
'/ Cboтge SYSDIV. set 1JSRSYSV:::\/ a11d Crys td.l J.'<1llle
YSCТRL RCC - (SYSCТRL RCC 'охr87FFСЗF) I ОхОlСОD2СО;
Рис. 20.25. Прекращение выполнения npozpaMMbl в точке останова.
20.6. СимуляУор
в составе ИСР Vision имеется симулятор команд, который тоже можно ис
пользовать для отладки приложений. Работа в симуляторе во MHoroM идентична
работе с отладчиком и служит прекрасным подспорьем в изучении процессора
Cortex M3. Чтобы задействовать симулятор, выберите опцию отладки Use
Simulator (Рис. 20.26). Сразу хочу предупредить, что симулятор может оказаться
20.6. Сuмулятор . 351
неспособным симулировать работу определённых периферийных модулей ряда
микроконтроллеров. Поэтому код, работающий с интерфейсом UART, может си
мулироваться некорректно.
Рис. 20.26. Выбор симулятора в качестве отладчика.
Симулятор flVision имеет полную поддержку на уровне устройства различных
микроконтроллеров с ядром Cortex M3. В тех редких случаях, коrда симуляция
Bcero устройства оказывается недоступной, для отладки проrраммы с использо
ванием симулятора может потребоваться корректировка настроек памяти. Это
можно сделать, выбрав в меню Debug пункт Memory Мар (Рис. 20.27).
Например, вам может потребоваться включить в карту памяти диапазон aдpe
сов модуля UART (Рис. 20.28). Если этоrо не сделать, то при попытке обращения
к данному модулю вы получите сообщение об ошибке. Однако в большинстве
случаев все необходимые настройки карты памяти задаются автоматически при
выборе целевоrо микроконтроллера и вручную обычно ничеrо делать не требу
ется.
352 · rлава 20. Использование nакета RealView MDK ARM компании Keil
} HelloWorld JJVisiоп3
EIe .Edt.....YJew !roje(t l l i п
' 1iiI" , \! Start/Stop QebuQ Session CTRl +F5 'f.iJt I
,Е .. ..0& & ЁД....
..:J "
....
&t
r. ! " -М F,U1
!!! ... ... ..................<,. f\} 5tep
! Register "''''1 iP SteQ Over
" Core 1 tp. Step Qut d current Function
.,} Run to ursor line
О
А4 01<000
reakpoints...
R 7 о)(оoQ 1Qsert/Remove Вrеakpoint
А8 O)(ooq
R 9 0)(000 . .
_ &! Disable АВ Breakpoints
R 1 1 ОхООО... КШ АВ Вreakpoirts
-
А13 (SP) 0)(200 Q show Ne Statement
R (1 [1 -: O(,
Rl O. .::.oc'
F;.=' 0'-':0(.
А::: !}-:20С
Fll
Fl0
CTRl+Fll
CTRl+Fl0
CTRl+B
F9
#define NVIC CCR
<int main (void)
I
29 NVIC CCR = NVIC CCR I Ох2 00; /... S е t: S
за SetClockrreq (); // Setz. p .:lock set t.Hj
э1 UartOlnit () ; / / Iп:l t.l.dl1.ze U, 1:.'tO
э2 printf (rrHello world'\n");
'33'while (1);
34.
.3$..Yoid SetC lockrreq (void)
e{
7: # fdef СLОСК50ИНZ
эв // Set BYPASS, .:ledL' USRSYSDrv dlicl S'i:
SYSCTRL RCC = (SYSCTRL RCC & ОхF8ЗFFF
// Сl1:.' OSCSRC, prVRDN dпd ОЕН
SYSCTRL RCC = (SYSCTRL RCC & OxFFFFCF
1/ Chd12ge SYSDr !> s е t '[1SRSYSDI1 7 dl'Et .::
SYSCTRL RCC = (SYSCTRL RCC & OxF87FFC
F5
CТRl +SНIFT +F9
F; 14 tLF; t o: !x!!=!
1=;1') !РС f ,}..оос,
: p':. R o..: 1 С
EnaЫe/Disable Trace Recording
i:f
i ,ti Banked !
! System ! {
i:..' I nternal i
> i J Fllе П Пi ;;...
....._ ......... ....., ..... ",....-.........- :1
ЕхесlЖ Profiling
setup Logic Analyzer. . .
I / J.1.:> ;. , ,,. 1 Р.::'I т Т':;:.. i со '" ": , . _
[х! Load "С: \ \ Cort
! 4, БS \ Hello\ 29 (
! > :
' : r t:: 1{ F сt..,Еdtor( I,;FИе)... . !I; !!!
'-"" ..... ,- .......,... ...................,..--......._ ....._ ....;....:... "'"'........... ..... i. , .:....::.:.: ...: ....... .....,
Adiieaa: I
Мemory'Мap ctatoo
Рис. 20.27. Вызов окна параметров карты памяти.
Рис. 20.28. Настройка карты памяти для симулятора.
20.7. Модификация таблицы векторов · 353
20.7. Модификация таблицы векторов
в предыдущем примере мы использовали таблицу векторов, определённую
в файле со стартовым кодом startup.s. Этот файл содержит таблицу векторов,
а также заранее определённые обработчики сброса, немаскируемоrо прерыва
ния, исключения Hard Fault и обычноrо прерывания. Указанные обработчики He
обходимо переписать в соответствии с требованиями приложения. Например,
если в приложении используется прерывание от периферийноrо устройства, то
необходимо изменить таблицу векторов таким образом, чтобы при возникнове
нии прерывания запускалась бы ваша процедура обработки прерывания.
Используемые по умолчанию обработчики исключений написаны на acceM
блере и находятся в файле startup.s. Однако ничто не мешает реализовать их на
языке Си или же на ассемблере, но в друrом файле. При этом в файле startup.s
необходимо будет использовать директиву ассемблера IMPORT для указания Toro,
что метка начала обработчика исключения определена в друrом файле.
К примеру, если мы хотим добавить обработчики исключений SYSTICK и MO
дуля USART, то мы можем изменить файл startup.s следующим образом
(Рис. 20.29):
. закомментировать соответствующие строки таблицы векторов;
. вставить в проrрамму директивы IMPORT для двух векторов исключений, об
работчики которых будут описаны на языке Си. Это необходимо, если обра
ботчики находятся в друrом Си или ассемблерном файле;
. добавить в таблицу вектора исключений, используя директиву DСD.
DCD
DCD
DCD
DCD
DCD
/псп
IИРОRТ
DCD
DCD
DCD
DCD
DCD
DCD
/DCD
IИРОRТ
DCD
DCD
DCD
DCD
DCD
о
IntDefaultHandler
IntDefaultHandler
О
IntDefaultHandler
IntDefdultHaпdler
SysTickHandler
SузТiсkНаndlеr
IntDefaultHandler
IntDefaultHandler
IntDefaultHandler
IntDefaultHandler
IntDefaultHandler
IntDe:td.ultHdпdler
UartOHandler
UartOHandler
IntDefaultHandler
IntDefaultHandler
IntDefaultHandler
IntDefaultHandler
... Reserved
,.. SVCall Напаlех
;. D bt:lg Moпi t ах Напаl ех
;" Reser J."ed
,. PeпdSV Наllаlех
;" SysT.lck Нdlд.llе,r
,.. архо Po,rt А
,.. ОРХО Po.rt В
,.. архо Po.rt С
/ ЭРХО Poxt D
... архо Po.rt Е
,..lJARTO
,.. UARTl
,.. SSI
,.. Х2С
.: РЮ,.l POaиl t
Рис. 20.29. Вставка векторов прерыванuй в ассем6лерный стартовый код.
При использовании СМSIS совместимых библиотек драйверов устройств Ta
кая корректировка файла startup. s не требуется, если, конечно же, имена обра
ботчиков исключений соответствуют именам функций, указанных в стартовом
коде CMSIS. Применение cTapToBoro кода CMSIS будет продемонстрировано
в следующем примере.
354 · rлава 20. Использование пакета RealView MDK ARM компании Keil
20.8. Прерывания и стандарт CMSIS
в данном примере, реализующем секундомер, используются исключение
SYSTICK и прерывание модуля UARTO. Этот секундомер имеет три состояния,
показанные на Рис. 20.30.
Обнуление
результата
Ожидание
Кнопка нажата
Кнопка нажата
Отсчёт
прекращён
Останов
Пуск
Идет отсчёт
В исключении
SYSTICK
Отображение
результата
Рис. 20.30. Конечный автомат секундомера.
Управление секундомером осуществляется с персональноrо компьютера по
интерфейсу UART. Чтобы упростить код проrраммы, зафиксируем тактовую ча
сто ту на уровне 50 мrц.
Измерение временных интервалов осуществляется таймером SYSTICK, KOTO
рый прерывает выполнение проrраммы каждые 100 мс. Для тактирования тай
мера используется тактовый сиrнал ядра частотой 50 мrц. При каждом запуске
обработчика исключения SYSTICK инкрементируется переменная TickCounter
(если секундомер запущен).
Поскольку передача текстовой информации по интерфейсу UART является
относительно медленным процессом, то управление секундомером производит
ся непосредственно в обработчике исключения, а отображение текста и значений
секундомера осуществляется в основной проrрамме (уровень потока). Для управ
ления пуском, остановом и сбросом секундомера используется простой конеч
ный автомат. Обработка состояний этоrо автомата производится в обработчике
прерывания UART, который запускается по каждому приёму символа.
Давайте создадим новый проект и назовём ero StopWatch. Добавим в Hero файл
stopwatch.c, а также несколько друrих файлов поддержки стандарта CMSIS.
Заменим файл startup.s файлом startup rvmdk.s и поместим в файл
stopwatch.c директиву вставки файла lm3s cmsis.h, как показано на
Рис. 20.31. Также добавим в проект файлы system lm3s.c и core lm3s.c.
Первый из них содержит функцию Systemlnit(), используемую в проrрамме.
Файл core lm3s. с содержит встроенные функции. Несмотря на то что мы не
при меняем ни одной из этих функций, мы всё же включили данный файл в про
ект для полноты картины.
20.8. Прерыванuя u стандарт CMSIS · 355
Е! . Source Group 1
. startup Jvmdk.s
[? [I1 stopwatch. с
'.... g Im3s cmsis.h
:. Q соrе сmз.h
Q stdint.h
Q systemJm3s.h
Q stdio.h
00 systemJm3s.c
ffi [}1J core cm3.c
&f6:,,( # inc 1 ude "1m3 3 CПIВ 1а . h rf
'.,i.s4i;!#include "stdio. h"
.:ei#pragroa import ( use по semihost iщс зvi)
.] Jstruct FILE { int handle; };
. "','FILE stdout;
OxOD 11 Cd dge etи
ОхОА 11 Liпefeed
*% Oid UartOlnit(void);
::': };ivoid 5etC lockfreq (void) ;
.,и oid DisplayT1me (void) ;
.,.........?,!YOid PrintValue (int value);
;\.int зепdсhаr (int сЬ);
%int getkey(void);
t YOid UARTO IRQHandler(void);
':::: @!YOid SysT1Ck Handler(VOid);
'} '<"б
)Щ.:о.,/I Globdl vd.r:i аЫ е$
. ....Yo1ati1e int Curr5tate;
// St
li111nf'l Т; /""1r'("r')ttnt' РУ. I / "r
I! Regs I (tlIB... ! t{} Fun... !.. Те... I
Рис. 20.31. Окно проекта «StopWatch», uспользующеzо CMSIS.
Имена некоторых файлов специфичны для производителя микроконтролле
ров (например, startup rvmdk.s и lm3s cmsis.h). Эти файлы, используе
мые в проекте, можно взять из СМSIS совместимой библиотеки драйвера устрой
ства или непосредственно из пакета файлов поддержки стандарта CMSIS, KOTO
рые можно заrрузить с сайта www.oпarm.com.
Использование стандарта CMSIS упрощает проrрамму s topw а tch. с, посколь
КУ определения реrистров периферийных устройств и некоторые системные
функции содержатся в файлах CMSIS.
stopwatch.c
#include «lmЗs cmsis.h» // Включаемый файл поддержки
#include «stdio.h» // Для функции printf
#pragma import( use по semihosting swi)
struct FILE { int handle; };
FILE stdout;
// Специальные символы для функции вывода текста
#define CR ОхОD // Возврат каретки
#define LF ОхОА // Перевод строки
// Объявления функций
void UartOInit(void);
void SetClockFreq(void);
void DisplayTime(void);
CMSIS
// Инициализация UARTO
// Установка тактовой частоты 50 мrц
// Отображение времени
356 · Тлава 20. Использование пакета RealView MDK ARM компании Keil
int sendchar(int ch)j
int getkey(void)j
void UARTO IRQHandler(void)j
void SysTick Handler(void);
// rлобальные переменные
volatile int CurrState;
volatile unsigned long TickCounter;
volatile int KeyReceived;
volatile int userinput;
// Состояния конечноrо автомата
#define IDLE STATE О
#define RUN STATE 1
#define STOP STATE 2
int main (void)
{
// Вывод символа в UART
// Чтение символа из UART
// Обработчик прерывания UARTO
// Обработчик исключения SysTick
// Состояние конечноrо автомата
// Счётчик секундомера
// Признак нажатия клавиши
// Значение нажатой клавиши
int CurrStateLocal; // Локальная копия текущеrо состояния
Systemlni t () ;
// Инициализация системы часть стандарта CMSIS
// Не требуется при использовании CMSIS v1.ЗО или выше,
// поскольку в этих версиях вызывается из cTapToBoro кода
// Настройка тактовой частоты (50 мrц)
rлобальные переменные
SetClockFreq();
// Инициализируем
CurrState = О;
KeyReceived = о;
// Инициализируем аппаратуру
SCB >CCR = SCB >CCR I Ох200;
UartOlnit();
SysTick Config(499999);
printf (<<Секундомер\п»);
while (1) {
CurrStateLocal = CurrState; // Делаем локальную копию, поскольку
// это значение может быть в любой момент изменено обработчиком UART.
switch (CurrStateLocal) {
case (IDLE STATE):
printf (<<\пНажмите любую клавишу для пуска\п»);
break;
case (RUN STATE) :
printf (<<\пНажмите любую клавишу для останова\п»);
break;
case (STOP STATE):
printf (<<\пНажмите любую клавишу для сброса\п»);
break;
default:
CurrState = IDLE STATEj
break;
} // Конец switch()
while (KeyReceived == О) {
if (CurrStateLocal==RUN STATE) {
DisplayTime () ;
}
}; // Ждём действий пользователя
// Устанавливаем STКALIGN
// Инициализируем UartO
// Инициализируем SysTick (функция CMSIS)
20.8. Прерbl8анuя и стандарт CMSIS · 357
if (CurrStateLocal==STOP STATE) {
TickCounter=O;
DisplayTime(); // Выводим нулевое значение
}
else if (CurrStateLocal==RUN STATE)
DisplayTime(); // Выводим результат
}
if (KeyReceived!=O) KeyReceived=O;
}; // Конец while()
} // Конец функции main()
// Конфиrурирование TaKToBoro сиrнала процессора и UART
void SetClockFreq(void)
{
// Устанавливаем BYPASS, сбрасываем USRSYSDIV и SYSDIV
SYSCTL >RCC = (SYSCTL >RCC & OxF83FFFFF) I Ox8QO ;
// Сбрасываем OSCSRC, PWRDN и OEN
SYSCTL >RCC = (SYSCTL >RCC & OxFFFFCFCF);
// Меняем SYSDIV, задаём значения USRSYSDIV и Crystal
SYSCTL >RCC = (SYSCTL >RCC & OxF87FFC3F) I ОхОlСО02СО;
while ((SYSCTL >RIS & Ох40)==0); // Ждём установки PLLLRIS
// Сбрасываем BYPASS
SYSCTL >RCC = (SYSCTL >RCC & OxFFFFF7FF);
return;
}
// Инициализация UARTO
void UartOInit(void)
{ // Тактовый сиrнал для работы UART
SYSCTL >RCGCl = SYSCTL >RCGCl ОхОО03; // Включаем тактирование UARTO и UARTl
SYSCTL >RCGC2 = SYSCTL >RCGC2 ОхОООl; // Включаем тактирование PORTA
// Настраиваем UART
UARTO >CTL = о; // Отключаем UART
UARTO >IBRD = 27; // Проrраммируем скорость передачи
UARTO >FBRD = 9; // для тактовой частоты 50 мrц
UARTO >LCRH = Ох60; // 8 бит, без контроля чётности
UARTO >CTL = Ох301; // Разрешаем передачу и приём, включаем UART
UARTO >IM = Охl0; // Разрешаем прерывание UART по приёму
GPIOA >AFSEL = GPIOA >AFSEL I Ох3; // Назначаем выводы GPIO модулю UARTO
NVIC EnableIRQ(UARTO IRQn); // Разрешаем прерывание UART в NVIC
// (функция CMSIS)
return;
}
// Обработчик исключения SYSTICK
void SysTick Handler(void) // Имя функции соответствует определённому
// в стандарте CMSIS
if (CurrState==RUN STATE)
TickCounter++;
return;
}
// Обработчик прерывания приёмника UARTO
358 · fлава 20. Использование пакета RealView MDK ARM компании Keil
void UARTO IRQHandler(void) // Имя ФУНКЦИИ объявлено в стартовом коде CMSIS
{
userinput = getkey();
// Ставим флаr приёма символа
KeyReceived++;
// Сбрасываем запрос прерывания UART
UARTO >ICR = Ох10;
// Обрабатываем состояния конечноrо автомата
switch (CurrState) {
case (IDLE STATE) :
CurrState = RUN STATE;
break;
case (RUN STATE) :
CurrState = STOP STATE;
break;
case (STOP STATE) :
CurrState IDLE STATE;
break;
default:
CurrState = IDLE STATE;
break;
// Конец switch()
return;
}
// Выводит значение счётчика времени
void DisplayTime(void)
{
unsigned long TickCounterCopy;
unsigned long TmpValue;
sendchar (CR) ;
TickCounterCopy = TickCounter; // Делаем локальную копию, поскольку значение
// может быть в любой момент изменено в обработчике SYSTICK
TmpValue = TickCounterCopy / 6000; // Минуты
printf (<<%d», TmpValue);
TickCounterCopy = TickCounterCopy (TmpValue * 6000);
TmpValue = TickCounterCopy / 100; // Секунды
sendchar ( , : ' ) ;
printf (<<%d», TmpValue);
TmpValue = TickCounterCopy (TmpValue * 100);
sendchar ( , : ' ) ;
printf (<<%d», TmpValue); // Сотые доли секунды
sendchar(' ');
sendchar(' ');
return;
}
// Выводит символ в UARTO (используется функцией printf)
int sendchar (int ch)
{
if (ch == '\п') {
while ((UARTO >FR & Ох8)); // Если UART занят ждём
20.8. ПрерЫ8анuя и стандарт CMSIS · 359
UARTO >DR = CR;
// ВЫВОДИМ дополнительный символ CR для
// KoppeKTHoro отображения в окне HyperTerminal
}
while ((UARTO >FR & Ох8));
return (UARTO >DR = ch);
// Если UART занят ждём
// Выводим символ
}
// Получение команд пользователя
int getkey (void)
{ // Читаем символ из последовательноrо порта
while (UARTO >FR & Охl0); // Если FIFO приёмника пуст ждём
return (UARTO >DR);
}
// Перенаправляет текстовьм вывод
int fputc(int ch, FILE *f)
{
return (sendchar(ch));
}
void sys exit(int return code)
{
// Заrлушка
label: goto label; // Бесконечный цикл
По сравнению с предыдущим примером «Неllо World» процедура инициали
зации модуля UART HeMHoro изменилась было добавлено разрешение преры
вания по приёму символа. Обратите внимание, что запрос прерывания UART
нужно разрешать как в реrистре маски прерывания модуля UART, так и в KOH
троллере NVIC. ДЛЯ разрешения исключения SYSTICK необходимо запроrрам
мировать только реrистр управления и состояния SYSTICK.
Также в проrрамме появилось несколько новых подпроrрамм, включая обра
ботчики UART и SYSTICK, функцию вывода данных и процедуру инициализа
цИИ SYSTICK. В зависимости от реализации периферийноrо устройства от обра
ботчика может потребоваться ручной сброс запроса прерывания/исключения.
В обработчике UART это осуществляется записью в реrистр сброса прерывания
(UARTO >ICR).
После Toro как проrрамма будет скомпилирована и заrружена в микрокон
троллер, мы сможем убедиться в её работоспособности, подключив плату к ПК
с запущенным приложением HyperTerminal. Результат работы проrраммы пред
ставлен на Рис. 20.32.
360 · fлава 20. Использование пакета RealView MDK ARM компании Keil
Stop Watch
Prcss any kcy to start
Press any key to stop
8:5:5'-
Press any key to clear
0:0:8
Press any key to start
Press anу key to stop
0:2:5
Press any key to clear
0:0:8
Press anу key to start
ress any key to stop
0:8:90
Prp. RnY kp.y tn r.1p.Ar
Рис. 20.32. Результат работы npozpaMMbl StopWatch.
20.9. Перевод существующих припожений
на стандарт CMSIS
Можно довольно леrко переделать любое приложение для процессора
Cortex M3 так, чтобы оно соответствовало стандарту CMSIS. ДЛЯ этоrо необходи
мо сделать следующее:
· Заменить стандартный стартовый код на стартовый код CMSIS, предназна
ченный для целевоrо микроконтроллера.
· Модифицировать проект, включив в Hero файлы CMSIS.
· Модифицировать проrрамму, включив в неё заrоловочный файл CMSIS.
· Заменить определения реrистров соответствующими определениями CTaH
дарта CMSIS.
· Заменить существующие функции работы с периферией процессора на функ
цИИ CMSIS.
· Привести имена обработчиков исключений в соответствии с именами, опре
делёнными в стартовом коде CMSIS.
· По мере возможности заменить процедуры инициализации периферийных
устройств функциями СМSIS совместимой библиотеки драйвера устройства.
Использование стандарта CMSIS позволит сделать приложение более перено
симым (об этом уже rоворилось в [лаве 10).
rЛАВА 21
проrРАММИРОВАНИЕ CORTEX..M3
в LabVIEW
21.1. Общие сведения
Приложения для устройств на базе процессора Cortex M3 можно создавать не
только с помощью различных языков проrраммирования, таких как ассемблер
или Си. Одной из возможных альтернатив является использование rрафической
среды разработки LabVIEW, предлаrаемой компанией National Instruments. Про
rpaMMbI, созданные в этой среде, можно запускать как на персональном компью
тере, так и на микроконтроллерах ARM, включая устройства с ядром Cortex M3.
21.2. 3накомство с LabVIEW
Компания National Instruments предлаrает несколько версий среды LabVIEW,
включая версии для персональных компьютеров, работающих под управлением
Windows или Linux, а также версии для встраиваемых платформ, которые под
держивают самые разные встраиваемые процессоры, включая Cortex M3
и ARM7TDMI.
rрафический язык проrраммирования среды LabVIEW поддерживает все воз
можности, присущие обычным языкам проrраммирования, такие как циклы,
условные операторы и использование различных типов данных. Основным отли
чием работы в среде LabVIEW является то, что проrраммы создаются в виде блок
схем. К примеру, простой цикл для вычисления суммы чисел от 1 до 10 может
быть представлен блоком For Loop (Рис. 21.1).
a y result afterloo is done I
Numeric
. 1.23
IJ2
Рис. 21.1. Простой цикл FOR для сложения чисел от 1 до 10.
362 · fлава 21. Проzраммuрованuе Cortex M3 в LabVIEW
Пересылка данных изображается линиями связи (различным типам данных
соответствуют разные стили линии), а переменные представляются иконками.
К примеру, иконка U32 соответствует беззнаковому 32 битному целому, а иконка
132 32 битному целому со знаком.
Аналоrом функций и подпроrрамм традиционных языков проrраммирова
ния в среде LabVIEW являются модули, называемые виртуальными иHcтpYMeH
тами (VI). Передача данных в УI и вывод данных из них осуществляется через
точки соединения, к которым УI более BbIcoKoro уровня MorYT подключать BXOД
ные и выходные переменные. Для при мера в правой части Рис. 21.2 показана
блок схема VI, который принимает четыре 32 битных значения и возвращает
наибольшее из них. В левой части рисунка этот виртуальный инструмент исполь
зуется для определения наибольшеrо 32 битноrо целоrо значения от четырёх ис
точников: трёх элементов управления типа «ползунок» И одноrо reHepaTopa слу
чайных чисел.
Рис. 21.2. Блоки виртуальных инструментов VI и пoд VI: несколько уровней иерархии.
Среда проrраммирования LabVIEW содержит большое число rOToBbIx к ис
пользованию компонентов, которые весьма облеrчают разработку проrраммы.
Среди них имеются компоненты, реализующие различные функции обработки
данных (такие как функция вычисления абсолютноrо значения abs), функции
обработки сиrналов (фильтры и элементы спектральноrо анализа), а также боль
шое число компонентов для орrанизации ПОЛЬЗ0вательскоrо интерфейса.
21.2.1. Типичные области применения
Попробуем оценить преимущества, которые нам даёт проrраммирование
в среде LabVIEW, по сравнению с традиционным проrраммированием.
Простота использования среда проrраммирования LabVIEW значительно
облеrчает разработку сложных приложений, избавляя от необходимости ДOCKO
нально изучать аппаратное и проrраммное обеспечение. Блаrодаря этому пользо
ватели с самым разным уровнем подrотовки, от студентов до специалистов, MO
rYT разрабатывать свои приложения, не тратя время на изучение архитектуры
21.2. Знакомство с LabVIEW · 363
процессора, а полностью сосредоточившись на разработке алrоритмов и COBep
шенствовании функциональных возможностей устройства.
Наличие библиотеки компонентов orpoMHoe число проrраммных компо
нентов, предоставляемых средой LabVIEW, также облеrчает разработку сложных
приложений в сжатые сроки. Библиотека компонентов содержит сотни MaTeMa
тических функций и функций обработки сиrналов, ускоряющих разработку ал
rоритмов. Приложения, выполняющиеся на микроконтроллерах ARM, MorYT дa
же подключаться к rрафическому интерфейсу пользователя, запущенному на ПК,
что облеrчает управление встраиваемой системой и наблюдение за результатами
её работы.
Поддержка МНО20поточности rрафическая среда проrраммирования по
своей природе параллельна. Она позволяет запускать множество потоков в одно
и то же время. В традиционных же системах проrраммирования неопытному
разработчику потребуется довольно MHoro времени, прежде чем он сможет разо
браться во встраиваемой системе реальноrо времени (RTOS) на уровне, достаточ
ном для создания мноrопоточноrо приложения.
Совместимость с тестовым оборудованием и оборудованием сбора данных
среда проrраммирования LabVIEW предоставляет простые в использовании ин
терфейсные компоненты для связи с оборудованием сбора данных, а также под
держивает большое число интерфейсных плат, которые MorYT при меняться как
для управления промышленным оборудованием, так и для учебных целей.
Среда LabVIEW очень популярна в университетах, лабораториях и различных
нии. Она широко используется в системах сбора данных, для автоматизации Te
стовых систем, для разработки и моделирования алrоритмов, для управления
промышленным оборудованием, а также для создания прототипов встраивае
мых систем.
21.2.2. Что нам нужно, чтобы использовать LabVIEW
иАRМ
Чтобы создавать проrраммы для микроконтроллера на базе процессора
Cortex M3, нам прежде Bcero необходим модуль «LabVIEW Emmbedded Module
for ARM Microcontrollers», в состав KOToporo входит уже знакомый нам пакет
MDK ARM компании КеН. Для начала вы можете приобрести недороrой отладоч
ный комплект (Рис. 21.3), в который входит печатная плата с установленным на
ней микроконтроллером ARM (Cortex M3/ARM7), отладчик ULINK2 от КеН,
а также всё необходимое для разработки ПО (пробная версия пакета MDK ARM
имеется на прилаrаемом компакт диске). Более подробно об этом комплекте мож
но узнать, обратившись на сайт компании National Instruments (www.пi.coт/arт).
Вы можете использовать среду LabVIEW для написания проrрамм под любые
микроконтроллеры с ядрами Cortex M3 и ARM7. Однако в LabVIEW отсутствуют
драйверы периферийных устройств для некоторых микроконтроллеров. В этом
случае вам придёrся написать интерфейсный код на Си и использовать ero в про
екте LabVIEW.
364 · fлава 21. ПрОlраммuрованuе Cortex M3 в LabVIEW
Рис. 21.3. Отладочный комплект LabVIEW для процессора Cortex M3.
21.3. Процесс разработки
Процесс разработки приложения в среде LabVIEW обычно состоит из следую
щих этапов (Рис. 21.4):
· Создание проекта и виртуаЛЬНО20 инструмента. Для создания АRМ проекта
можно воспользоваться мастером. На этом этапе производится настройка цe
левой платформы и драйвера устройства. После создания проекта создаётся
УI (обычно пустой).
· Определение входов и выходов. Это MorYT быть как аппаратные интерфейсы
микроконтроллера, так и пользовательские интерфейсы, запущенные на ПК,
который подключён к системе. В случае аппаратных интерфейсов вам необхо
димо будет определить их входы и выходы в качестве базовых средств ввода/
вывода, прежде чем вы сможете использовать их в своём виртуальном инстру
менте.
· Создание приложения с использованием rрафическоrо проrраммирования.
· Компиляция проекта.
· Симуляция виртуаЛЬНО20 инструмента. Созданный исполняемый образ мож
но передать в среду MDK ARM для проверки работоспособности приложе
ния.
· 3а2рузка в микроконтроллер и тестирование. По умолчанию проrрамма за
rружается в микроконтроллер по завершении компиляции. Вы можете ис
пользовать интерфейс LabVIEW для приостановки, останова или пошаrовоrо
выполнения проrраммы. Вы также можете контролировать значения пере
менных, щёлкая мышкой на соединениях во время исполнения проrраммы.
21.3. Процесс разработки . 365
Симуляция
Рис. 21.4. Пример процесса разработки.
Каждый УI имеет два представления:
. вид передней панели содержит GUI виртуальноrо инструмента;
. вид блок схемы служит рабочей областью для rрафическоrо проrраммиро
вания.
Коrда вы создаёте VI, он по умолчанию имеет пустую переднюю панель. Вы
можете разместить на ней элементы управления и индикации, чтобы определить
входы и выходы системы. Например, для предыдущеrо примера нахождения
наибольшеrо целоrо из трёх источников и случайноrо значения передняя панель
может выrлядеть так, как показано на Рис. 21.5.
Рис. 21.5. Простая передняя панель для VI, показанноzо на Рис. 21.2.
В вашем распоряжении имеется большое число библиотечных элементов
управления и индикации. После добавления требуемых элементов на переднюю
панель они появляются на блок схеме. Далее вы можете изменить их параметры
(например, используемые типы данных) и создать свою rрафическую проrрамму,
объединив эти элементы с различными функциями LabVIEW.
366 . Тлава 21. Проzраммuрованuе Cortex M3 в LabVIEW
21.4. Пример использования среды LabVIEW
21.4.1. Соэдание проекта
В данном подразделе мы создадим простое приложение, которое будет считы
вать аналоrовый сиrнал и отображать ero в виде диаrраммы на ОLЕD дисплее.
Воспользуемся мастером для создания HOBoro проекта: выберем на стартовом
экране среды пункт more, а затем ARM project, как показано на Рис. 21.6. Теперь
мы сможем создать пустой инструмент или воспользоваться существующим.
В данном случае создадим новый VI. После этоrо выберем в качестве целевоrо
устройства отладочную плату LM3S8962 (Рис. 21.7).
crute New .I)esaiptioa.
r: lr l
!GdVl"'I! А:
I ii Btank VI ! i i. [ ! I
i ....." i i \.:.\
,... PoIymorpbic VI Н I11
1 [БЬ From Temptate 11 ! 1I
1 ей Рюject !! i , R . : .\ . , I!I ! : j 111
1 \} Empty РrojЮ !!.1 :1 , j II!
I 8 [:) r!t" from Wимd I1 LJ -u- · ; ! I
! . I1Instrument Driver Рюjedll ' , ! I
I r:"'!r='!. L F:t jl 1 . ' . 1 . 1
IC' ti I! . II!
I = I' " ,
I В хControt 11 !
I [1 !
I '! ...,.1
II T'; . . .> ' \]
Ifr ]Addtf):pr
! I
I I
'.C=: % . I
I % i ' ' ;
. . '"., ... .......
. .L. .. .. . .. . . . . ... .. ... . ._у . .
. .'. ..., .
Рис. 21.6. Создание HOBOZO проекта.
МСВ2ЗОО
МСВ2100
other
Рис. 21.7. Выбор целевоzо устройства.
21.4. Пример использования среды LabVIEW · 367
в результате указанных операций мастер проектов создает спецификацию,
которая позволит запускать этот проект в симуляторе. Нам она не потребуется,
поскольку мы работаем с реальной платой. В конце своей работы мастер сохраня
ет созданный проект и пустой VI.
21.4.2. Определение ВХОДОВ и ВЫХОДОВ
Следующий этап заключается в определении входов и выходов нашеrо прило
жения. В данном случае нам необходимо определить только вход ADCO (OLED
дисплей управляется библиотечными компонентами, поэтому нам не нужно
описывать ero на данном этапе). Для выполнения указанной операции щёлкните
правой кнопкой мыши на цели в окне проекта и выберите в контекстном меню
пункт New > Elemental 1/0 (Рис. 21.8). После этоrо в окне New Elemental 1/0
определите требуемый вход, как показано на Рис. 21.9.
Рис. 21.8. Определение базовоzо элемента ввода/вывода.
368 · rлава 21. Проzраммuрованuе Cortex M3 в LabVIEW
AvaiWtJt.R8Ouкes
$'" Digitallnput
. DigitaI output
Input
дn
Al2
АВ
. PWМ output
fВ DigOt вank Jnput
ftj... Dфl вank Output
.............. .
1"' 1""- , , 1 ', < \, J (i ?'i\t ):,,;; J
" " :..'.."..". .... H ..<.... . Й
. ,'b.S '.,...'::;,:':.., . Х..
- $""",i: ,'
Рис. 21.9. Добавление базовоzо элемента ввода/вывода в проект.
В этом окне имеются и друrие элементы ввода/вывода, такие как кнопки, CBe
тодиоды, входы/выходы общеrо назначения (GPIO) и блоки широтно импульсноrо
модулятора (PWM). Все они MorYT значительно упростить процесс разработки
вашеrо проекта.
21.4.3. Соэдание nporpaMMbI
Теперь мы можем приступить к описанию кода приложения в виде блок
схемы. Среда LabVIEW имеет очень MHoro возможностей, которые просто физи
чески невозможно рассмотреть в одной rлаве. К счастью, вместе со средой по
ставляется подробная документация, а каждый элемент rрафическоrо проrрам
мирования имеет контекстно зависимую подсказку. Чтобы просмотреть доступ
ные компоненты, можно щёлкнуть правой кнопкой мыши в области блок схемы
(Рис. 21.10). Из рисунка видно, в частности, что в катеrории ARM имеется He
сколько элементов управления ОLЕD дисплеями.
21.4. Пример использования среды LabVIEW · 369
, \ ..,;;-- ; :. '11' ''''- '" r\' '"*'rr.. \i 'j'r, , , \ \' " '"' ,
:" . '" '" t.о\.l;'Ф<';" \.... \A .J t. f ", ;,.:;;w-I ' ,.'
\ ''"'' j>1i : ": : 2'," r .. .. , ". "",' \" .." .,"" \"' .. "', ." щ,.... "''"'''"',ц'"..... "
. test.vi
Eile, Edit . .. efO 2PЩt
/,
Рис. 21.10. Доступ к функциям LabVIEW
Помимо элементов управления ОLЕD дисплеями, в этой катеrории также
можно найти базовые элементы ввода/вывода, модули интерфейсов CAN, I 2 C,
SPI, а также функции управления прерываниями.
Проrраммный код нашеrо приложения состоит из двух частей. В левой части
блок схемы будет расположен код, выполняющий следующие операции:
. инициализация ОLЕD дисплея;
. вывод на экран приветствия;
. формирование небольшой задержки;
. очистка экрана;
. вывод в верхнюю часть экрана надписи «Analog Input О».
370 · rлава 21. Проzрам.м.uрованuе Cortex M3 в LabVIEW
Большинство виртуальных инструментов, используемых в этой части про
rpaMMbI, предназначены для оценочной платы LM3S8962 и содержатся в модуле
«LabVIEW Emmbedded Module for ARM Microcontrollers» (Рис. 21.11).
:r:! I
..... -,"" 1': :I
-.:.s I ,,11 ,!
:' "' "' '....''''''' -: f .' "" "': 1
l' "', ..
1IJ1.. .. . Н .. ...... TI !
Рис. 21.11. Блок схема npozpaMMbl осцuллоzрафа.
В правой части блок схемы мы расположим блок цикла While Loop, в KOTO
ром отсчёты берутся с входа ADCO микроконтроллера и отображаются на экране
в виде точки. При достижении координатой Х правоrо края ОLЕD дисплея она
сбрасывается в О.
Вычисленная позиция У также сохраняется в массиве. Этот массив содержит
128 элементов и используется для удаления cTaporo изображения перед рисова
нием новой точки.
21.4.4. Компипяция nporpaMMbI и тестирование
припожения
После завершения разработки проrраммы нужно скомпилировать проrрам
му и проверить её работоспособность. Сначала щёлкните левой кнопкой мыши
на кнопке с изображением стрелки. Если проrрамма содержит ошибки, то изо
бражение сменится на разломанную стрелку, показывая HeroTOBHOCTb проrрам
мы. Щёлкнув на кнопке ещё раз, вы получите отчёт об ошибках, обнаруженных
в проrрамме.
После успешноrо завершения процесса компиляции проrрамма автоматиче
ски заrружается в микроконтроллер и начинает выполняться. В нашем случае
контроллер выводит осциллоrрамму для аналоrовоrо входа, как и было задумано
(Рис. 21.12).
21.5. Как это работает · 371
Рис. 21.12. Прuложенuе LabVIEW, 8blполняющееся на отладочной плате.
21.5. Как зто работает
При компиляции проrраммы среда LabVIEW rенерирует Си код для создан
Horo виртуальноrо инструмента. Полученный код можно впоследствии скомпи
лировать, используя пакет MDK ARM (Рис. 21.13). Для реализации параллельной
работы виртуальных инструментов полученный код использует библиотеку pe
альноrо времени RealView Real Time Library (RL ARM, www.keil.coт/arт/rl arт/).
которая работает совместно с операционной системой RTX Real Time Kernel
(www.keil.coт/arт/rl arт/kerпrl.asp) компании Keil.
372 · [лава 21. Проzраммuрованuе Cortex M3 в LabVIEW
Рис. 21.13. Разработка приложения с использованием LabVIEW и ИСР !lVISION.
Помимо мноrопоточности, ИСпользование библиотеки RL ARM обеспечивает
доступ к множеству драйверов, включая управление таймерами, стек протокола
TCP/IP и стек протокола CAN.
21.6. Дополнительные возможности LabVIEW
· Полухостинz. Среда LabVIEW поддерживает создание rрафических интер
фейсов пользователя, запускаемых на хосте отладки (ПК). Эта возможность
просто незаменима на этапе макетирования системы, поскольку разработка
rрафическоrо интерфейса, работающеrо на микроконтроллере, может OKa
заться весьма СЛОжной задачей. Библиотека LabVIEW содержит различные
элементы пользовательскоrо интерфейса, такие как переключатели, ползунки
и диаrраммы, позволяющие создавать профессиональные интерфейсы Bcero
несколькими щелчками мыши. В рабочем режиме этот интерфейс (GUI) BЫ
полняется на ПК, а данные передаются на работающий микроконтроллер че
рез отладчик с использованием различных протоколов (JTAG, TSP/IP или
Serial). Это позволяет управлять устройством и получать результаты ero рабо
ты в реальном времени.
· Интеzрация кода на Си. Среда LabVIEW допускает вставку Си кода в вирту
альные инструменты. Это часто требуется при создании новых драйверов
устройств и выполнения задач обработки данных, которые не MorYT быть pea
лизованы с помощью имеющихся компонентов LabVIEW.
· Отладка. Среда LabVIEW позволяет отлаживать приложения. Во время симу
ляции или тестирования проекта вы можете использовать среду разработки
УI в качестве отладчика, контролируя значения переменных при останове.
В окне представления УI в виде блок схемы предусмотрены кнопки паузы, по
шаrовоrо выполнения, а также запуска профилирования значений (Рис. 21.14).
21.6. Дополнительные возможности LabVIEW · 373
r . . . .... . .. . . . . ....... . ... . ... . .. .. .. . . . .. .. .. . .. .. . . . . . .. . t . e ..... st:2. . ..... . . . . . ... . vi . 8Iock . .. ...... . .. .. .... . . . . 0 ... . . . . . .. . .. . .. . . . . . ..... . .. . . . .. . ..
1".'..'
1< 1l Фt - .. . .. Юjtct Qper .". '.IoOts Wi '...'. нtfp
l,r - 1.i -- - --..-.I:\ лfi,I -- - - - - _# N. - - - '. - - - - - _т -- - --
1\ . '... .,. .. , ,.,.
I \
11
1>1
!\I
11
I1
I1
11
11
1\;1
1$1
IARМСi -Щ l sc 1
1RfI. .." :' Jst r i 1
1 [1 ;
::1', ,11'.:.1.
,
Debug Controls: Run. Stop. Pause. Stepping control$
I Sm.fI de layl
<\
[j]
I Run continuo uslyl [!II 111
tf:St2. t.. ...
Рис. 21.14. Отладка по блок схеме VI.
Кроме Toro, поскольку в составе ИСР Vision компании КеН имеется свой пол
нофункциональный отладчик, вы можете отлаживать код приложения в нём
(Рис. 21.15).
'" ,; ..:
.tI. 'f): _'GI!'i19
I '_9I'W,t
I ..., .t
4 .. : . . .. . .. : . . . . .. . . . .. . . . .. 1II14,p f ',(
: '\ -М ....<
,." J;>;;;.t
::0.' -М. A
'...':: j; ...
: au. t;
ft\;l
f.Ш
: ' 'iЛ (JriIJ .{
ffJ
. t))
1;.V1(..t. .;.."t , .-"s 1", 1J, }5
"'_t..V'Т -.о-- ..' 11.. i .. ' "O\ . ,.l..J J
,, ....!oМt. i/)'!lMtl':!!»: cH1<1: .. tttltL:
.. (bSb<>II1' i};;Z, Н I
,r...t..f.".. .I1"H.0()9 .",t H4 1'1'l>h......H\, (A:r:a:!)i_ ...tl'!, t.lttht,..1'TP"") s
,
f>j.\.uжrМ . *'t I';..!:itj ,\t't>Ш,"'t;t:.l
I
:U: l' \11'11.".\"'11;" n;,; l00Ю: "' HO) .. 1r .V<::Qf. ,J:'
....ц-. t...t..;- -
len th
I
"....tnH.1AIt>.. 1 i t.,..1\.t Lt\", ....ct, <!
:.' z: ";; 100ft ""ц 4,
,ir "C1.r t
L".,.f....":\1.. f i..,Cr","'l '7.J " !'iz
1.vT{"<)"}, П; (1..;;,. i:. t.iM\;
7!,\t1!l Ц d.V.l' '" 'Ulb!t'J:I J ;
_.."HoII tiцooe,. .t .I>lt I..lkt'" iI t.. .. I
Ь.."'П.t.. ZeZl0.... <!.t 1 W,
-\};'
б'
j
Hd tcp!:
н*tщ,.. .
. \ф.1\t.e8>V.t......f 1 tt 'II\f:' 1.&2:18., tt6de.tlD<!4 . :!. 1"!>i.cl...t.. 't'" !tll!tOl:l:r:1I:cC l' oe W'itlq.C\l
.\OI;i\r...llVlt..OiIJtt; f;&'t"'''; 1.4;f'Or, !1 tll1oН . \ 'b.".;i'*toil:tcQe.tf;i...'...... t..1tt<lr;t.o f:tiltO i
.\<*1';\ 1.*1111'\10 *l<t1 Itttil"f! 1.!\i,ЦП1 tt t\м-1 . :!. Рl\'''(:lщоt...rSNli " tt1t,.:r:a:cd t _ I
't\tto;let М''' "'1'..I!."
Рис. 21.15. Отладка кода, cleHepupo8aHHolo LabVIEW, 8 ИСР flVisioп.
374 · rлава 21. Проzрам.м.uрованuе Cortex M3 в LabVIEW
21.7. Перенос проекта на друrие процессоры ARM
Если вам недостаточно просто запустить приложение на отладочной плате, то
вы можете портировать ero на друrие микроконтроллеры с процессором
Cortex M3 или на микроконтроллеры с друrим процессором компании ARM,
поддерживаемые ядром реальноrо времени RTX Real Time Kernel. Как правило,
перенос приложения состоит из следующих операций:
· Портuрованuе ядра RTX Real Time Kerпel. При использовании устройств
с процессором Cortex M3 данный этап не требуется, поскольку процессор
имеет всё необходимое для поддержки RTX Real Time Kernel. Если же вы соби
раетесь задействовать микроконтроллер с ядром ARM7, то вам придётся BЫ
полнить данную операцию. Хотя может получиться так, что порт ядра RTX
Real Time Kernel для вашеrо микроконтроллера уже имеется в составе пакета
MDK ARM. Чтобы убедиться в этом, следует просмотреть содержимое папки
\Keil\ARM\Startup. Если вы найдёте в данной папке файл RTX Conf*.c для
вашеrо микроконтроллера, значит, ядро ОС уже портировано на Hero.
· Созданuе целu в LabVIEW и реzuстрация инструментария Keil. Этот этап
можно выполнить, создав папку цели вручную.
· Интеzрацuя отладочноzо модуля Real Time Ageпt Module. Вам может потребо
ваться добавить параметры конфиrурации данноrо модуля в файл
RTX config. с.
· Разработка драйверов периферuи и устройств ввода/вывода. На этом этапе
можно использовать редактор Element 1/0 Device Editor среды LabVIEW.
Более подробно процесс переноса приложений описан в руководстве
«LabVIEW Embedded for ARM Portiпg Guide», которое можно заrрузить с сайта
компании National Instruments (httр://zопе.пi.сот/dеvzопе/сdа/tиt/р/id/б994).
ПРИЛОЖЕНИЕ Д
НАБОР КОМАНД CORTEX M3.
СПРАВОЧНЫЙ МАТЕРИАЛ
В этом приложении приведено описание набора команд СоrtехТМ М3, взятое из
руководства пользователя Cortex M3 (данный материал воспроизводится с раз
решения компании ARM). Приложение состоит из нескольких разделов. В двух
первых разделах содержится информация общеrо характера:
. краткое описание набора команд (раздел А.l);
. соrлашения, используемые при описании команд (раздел А.2).
Каждый из последующих разделов посвящён одной функциональной rруппе
команд. Вместе эти разделы содержат описание всех команд, поддерживаемых
процессором Cortex M3:
. команды доступа к памяти (раздел А.3);
. общие команды обработки данных (раздел А.4);
. команды умножения и деления (раздел А.5);
. команды насыщения (раздел А.б);
. команды работы с битовыми полями (раздел А.7);
. команды управления и ветвления (раздел А.8);
. прочие команды (раздел А.9).
А.1. Краткое описание набора команд
В процессоре реализован один из вариантов набора команд ThumЬ Ф . Все под
держиваемые команды перечислены в Табл. A.l.
Таблица A.l. Команды Cortex M3
Мнемоника Операнды Краткое описание Флаrи Подраздел
ADC, ADCS {Rd,} Rn, Ор2 Сложение с переносом N,Z,C,V А.4.1
ADD, ADDS {Rd,} Rn, Ор2 Сложение N,Z,C,V А.4.1
ADD, ADDW {Rd, } Rn, #imm12 Сложение N,Z,C,V А.4.1
ADR Rd, label 3arpY3Ka относительноrо адреса А.З.1
AND, ANDS {Rd,} Rn, Ор2 Лоrическое И N,Z,C А.4.2
ASR, ASRS Rd, Rm, <Rs I #п> Арифметический сдвиr вправо N,Z,C А.4.3
В Label Переход А.В.1
BFC Rd, #lsb, #width Очистка битовоrо поля А.7.1
BFI Rd, Rn, #lsb, #width Вставка битовоrо поля А.7.1
376 · Приложение А. Набор команд Cortex M3. Справочный материал
Таблица А.l. Команды Cortex M3 (продолжение)
Мнемоника Операнды Краткое описание Флаrи Подраздел
BIC, BICS {Rd, } Rn, Ор2 Очистка битов N,Z,C А.4.2
ВКРТ #imm Точка останова А.9.!
BL Label Переход со ссылкой А.В.!
BLX Rm Косвенный переход со ссылкой А.В.!
ВХ Rm Косвенный переход А.В.!
CBNZ Rn, label Сравнение и переход, если А.В.2
результат не равен нулю
CBZ Rn, label Сравнение и переход, если А.В.2
результат равен нулю
CLREX Сброс монопольноrо доступа А.З.9
CLZ Rd, Rm Подсчёт ведущих нулевых битов А.4.4
CMN Rn, Ор2 Сравнение с отрицательным N,Z,C,V A.4.S
операндом
СМР Rn, Ор2 Сравнение N,Z,C,V A.4.S
CPSID iflags Изменение состояния процессора, А.9.2
запрещение прерываний
CPSIE iflags Изменение состояния процессора, А.9.2
разрешение прерываний
DMB Барьер памяти данных А.9.З
DSB Барьер синхронизации данных А.9.4
EOR, EORS {Rd, } Rn, Ор2 Исключающее ИЛИ N,Z,C А.4.2
ISB Барьер синхронизации команд A.9.S
IT Условный блок IF THEN А.В.З
LDM Rn { ! } , reglist 3arpY3Ka нескольких реrистров А.3.б
с постинкрементом
LDMDB, Rn { ! } , reglist 3arpY3Ka нескольких реrистров А.З.б
LDMEA с преддекрементом
LDMFD, Rn { ! } , reglist 3arpY3Ka нескольких реrистров А.3.б
LDMIA с постинкрементом
LDR Rt, [Rn, #offset] 3arpY3Ka слова в реrистр А.3.2
LDRB, LDRBT Rt, [Rn, #offset] 3arpY3Ka байта в реrистр А.3.2
LDRD Rt, Rt2, [Rn, #offset] 3arpY3Ka двух слов в реrистры А.З.2
LDREX Rt, [Rn, #offset] Монопольная заrрузка в реrистр А.3.В
LDREXB Rt, [Rn] Монопольная заrрузка байта А.З.В
в реrистр
LDREXH Rt, [Rn] Монопольная заrрузка полуслова А.З.В
в реrистр
LDRH, LDRHT Rt, [Rn, #offset] 3arpY3Ka полуслова в реrистр А.З.2
LDRSB, Rt, [Rn, #offset] 3arpY3Ka байта со знаком А.3.2
LDRSBT в реrистр
LDRSH, Rt, [Rn, #offset] 3arpY3Ka полуслова со знаком А.З.2
LDRSHT в реrистр
LDRT Rt, [Rn, #offset] 3arpY3Ka слова в реrистр А.З.2
А.l. Краткое описание набора команд . 377
Таблица А.l. Команды Cortex M3 (продолжение)
Мнемоника Операнды Краткое описание Флаrи Подраздел
L8L, L8L8 Rd, Rm, <Rsl#n> Лоrический сдвиr влево N,Z,C А.4.3
L8R, L8R8 Rd, Rm, <Rs I #п> Лоrический сдвиr вправо N,Z,C А.4.3
MLA Rd, Rn, Rm, Ra Умножение со сложением, А.5.1
32 битный результат
MLS Rd, Rn, Rm, Ra Умножение с вычитанием, А.5.1
32 битный результат
MOV, MOVS Rd, Ор2 Пересылка N,Z,C А.4.6
MOVT Rd, #imm16 Пересылка старшеrо полуслова А.4.7
MOVW, MOV Rd, # i mm 16 Пересылка 16 битной константы N,Z,C А.4.6
MRS Rd, spec reg Пересылка из РСН в РОН А.9.6
MSR spec reg, Rm Пересылка из РОН в рсн N,Z,C,V А.9.7
MUL, MULS Rd, Rn, Rm Умножение, 32 битный результат N,Z А.5.1
MVN, MVNS Rd, Ор2 Пересылка с инверсией N,Z,C А.4.6
NOP Нет операции А.9.8
ORN, ORNS {Rd, } Rn, Ор2 Лоrическое ИЛИ с инверсией N,Z,C А.4.2
ORR, ORRS {Rd, } Rn, Ор2 Лоrическое ИЛИ N,Z,C А.4.2
РОР reglist Извлечение реrистра из стека А.3.7
PUSH reglist Заrрузка реrистра в стек А.3.7
RBIT Rd, Rn Перестановкабитов А.4.8
REV Rd, Rn Перестановкабайтовслова А.4.8
REV16 Rd, Rn Перестановка байтов в каждом А.4.8
полуслове
REV8H Rd, Rn Перестановка байтов в младшем А.4.8
полуслове и расширение знака
ROR, RORS Rd, Rm, <Rs I #п> Циклический сдвиr вправо N,Z,C А.4.3
RRX, RRXS Rd, Rm Расширенный циклический сдвиr N,Z,C А.4.3
вправо
R8B, R8BS {Rd, } Rn, Ор2 Обратное вычитание N,Z,C,V А.4.1
SBC, SBCS {Rd, } Rn, Ор2 Вычитание с переносом N,Z,C,V А.4.1
SBFX Rd, Rn, #lsb, #width Извлечение битовоrо поля со знаком А.7.2
8DIV {Rd,} Rn, Rm Знаковое деление А.5.3
SEV rенерация события А.9.9
Знаковое умножение со сложени
SMLAL RdLo, RdHi, Rn, Rm ем (32 х 32 + 64), 64 битный pe А.5.2
зультат
SMULL RdLo, RdHi, Rn, Rm Знаковое умножение (32 х 32), А.5.2
64 битный результат
S8AT Rd, #п, Rm {, shift #s} Знаковое насыщение Q А.6.1
STM Rn { ! } , reglist Сохранение нескольких А.3.6
реrистров с постинкрементом
STMDB, Rn { ! }, reglist Сохранение нескольких А.3.6
STMEA реrистров с преддекрементом
378 · Приложение А. Набор команд Cortex M3. Справочный материал
Таблица А.l. Команды Cortex M3 (продолжение)
Мнемоника Операнды Краткое описание Флаrи Подраздел
STMFD, Rn { ! } , reglist Сохранение нескольких А.3.6
STMIA реrистров с постинкрементом
STR Rt, [Rn, #offset] Сохранение слова из реrистра А.3.2
STRB, STRBT Rt, [Rn, #offset] Сохранение байта из реrистра А.3.2
STRD Rt, Rt2, [Rn, #offset] Сохранение двух слов из А.3.2
реrистров
STREX Rd, Rt, [Rn, #offset] онопольноесохранениереrистра А.3.В
STREXB Rd, Rt, [Rn] онопольноесохранениебайта А.3.В
из реrистра
STREXH Rd, Rt, [Rn] онопольноесохранение А.3.В
полуслова из реrистра
STRH, STRHT Rt, [Rn, #offset] Сохранение полуслова из реrистра А.3.2
STRT Rt, [Rn, #offset] Сохранение слова из реrистра А.3.2
SUB, SUBS {Rd, } Rn, Ор2 Вычитание N,Z,C,V А.4.1
SUB, SUBW {Rd, } Rn, # imm12 Вычитание N,Z,C,V А.4.1
SVC #imm Вызов супервизора А.9.10
SXTB Rd, Rm { , ROR #n} Расширение знака байта А.7.3
SXTH Rd, Rm { , ROR #n} Расширение знака полуслова А.7.3
ТВВ [Rn, Rm] Табличный переход А.В.4
с однобайтными смещениями
ТВН [Rn, Rm, LSL #1] Табличный переход А.В.4
с двухбайтными смещениями
TEQ Rn, Ор2 Проверка на равенство N,Z,C А.4.9
TST Rn, Ор2 Проверка битов N,Z,C А.4.9
UBFX Rd, Rn, #lsb, #width Извлечение беззнаковоrо А.7.2
битовоrо поля
UDIV {Rd, } Rn, Rm Беззнаковое деление А.5.3
Беззнаковое умножение со сложе
UMLAL RdLo, RdH i, Rn, Rm нием (32 х 32 + 64), 64 битный pe А.5.2
зультат
UMULL RdLo, RdHi, Rn, Rm Беззнаковое умножение (32 х 32), А.5.2
64 битный результат
USAT Rd, #n, Rm {, shift #s} Беззнаковое насыщение Q А.6.1
UXTB Rd, Rm {,ROR #n} Дополнение нулями байта А.7.3
UXTH Rd, Rm { , ROR #n} Дополнение нулями полуслова А.7.3
WFE Ожидание события А.9.11
WFI Ожидание прерывания А.9.12
ПримечаНИJl:
1. В уrловых скобках указаны альтернативные формы операнда; в фиrурных скобках указаны
необязательные операнды.
2. В столбце ((Операнды» таблицы приведены не все возможные варианты.
3. Операнд Ор2 ((rибкий» второй операнд, который может быть либо реrистром, либо константой.
4. С большинством команд может использоваться необязательный суффикс условия выполнения.
Для получения более подробной информации обращайтесь непосредственно к описаниям команд.
А.2. Соzлашения, используемые при описании команд · 379
А.2. Соrлашения, используемые при описании
команд
в этом разделе содержится более подробная информация об использовании
команд:
. операнды (подраздел А.2.1);
. оrраничения на использование реrистров РС или SP (подраздел А.2.2);
. «rибкий» второй операнд (подраздел А.2.3);
. операции сдвиrа (подраздел А.2.4);
. выравнивание адреса (подраздел А.2.5);
. адресация относительно РС (подраздел А.2.6);
. условное выполнение (подраздел А.2.7);
. выбор разрядности команды (подраздел А.2.8).
А.2.1. Операнды
Операндом команды может быть реrистр, константа или же друrой параметр,
специфичный для конкретной команды. Команда выполняет требуемые дей
ствия над операндами и во мноrих случаях сохраняет результат в реrистр
приёмник. При наличии в команде TaKoro реrистра он обычно указывается перед
операндами.
В некоторых командах операнды обладают определённой rибкостью в том
смысле, что они MorYT быть как реrистрами, так и константами (см. подраздел
А.2.3 «rибкий» второй операнд»).
А.2.2. Оrраничения на использование реrистров РС
или SP
Мноrие команды имеют оrраничения на использование счётчика команд (РС)
или указателя стека (SP) в качестве операндов или реrистра приёмника. Это бу
дет указано при описании конкретных команд.
примеЧdние
Нулевой бит (бит [О]) любоrо адреса, который заrружается в РС командами ВХ,
BLX, LOM, LOR или РОР, должен быть установлен в 1 для корректной работы про
цессора, поскольку этот бит определяет требуемый набор команд, а процессор
Cortex M3 поддерживает только команды Thumb.
А.2.3. «rибкий» второй операнд
Мноrие команды обработки данных имеют «rибкий» второй операнд. В опи
сании синтаксиса таких команд этот операнд обозначается как Operaпd2.
Второй операнд Operaпd2 может быть:
. константой;
. реrистром снеобязательным сдвиrом (стр, 380).
380 · Приложение А. Набор команд Cortex M3. Справочный материал
Константа
Константа, используемая в качестве Operand2, записывается в виде:
#coпstaпt
rде coпstaпt может быть:
· любой константой, которая может быть получена сдвиrом 8 битноrо значения
влево на произвольное число битов в пределах 32 битноrо слова;
· любой константой вида ОхООХУООХУ;
· любой константой вида ОхХУООХУОО;
· любой константой вида ОхХУХУХУХУ.
примеЧQние
в вышеприведённом описании символы Х и У обозначают шестнадцатерич
ные числа.
В некоторых командах coпstaпt может принимать значения из более широ
Koro диапазона. Это будет указано особо в описании таких команд.
Коrда константа используется в качестве BToporo операнда с командами MOVS,
MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST, то в случае, если значение KOH
станты больше 255 и оно может быть получено сдвиrом 8 битноrо числа, во флаr
переноса заносится значение 31 ro бита константы. Если вторым операндом яв
ляется любая друrая константа, то указанные команды не влияют на состояние
флаrа переноса.
Подстановка команд
При указании константы с недопустимым значением используемый вами ac
семблер может заменить команду на эквивалентную. Например, ассемблер может
подставить вместо команды СМР Rd, #OxFFFFFFFE эквивалентную команду
CMN Rd, #Ох02.
Реrистр с необязатепьным сдвиrом
В этом случае второй операнд записывается в виде:
Rт {, shi ft}
rде
Rm
shift
реrистр, содержащий значение для BToporo операнда.
необязательная операция сдвиrа, выполняемая над содержимым
реrистра Rт. Для указания этой операции может использоваться
одна из следующих мнемоник:
ASR # п Арифметический сдвиr вправо на п битов, 1 п 32
LSL #п Лоrический сдвиr влево на п битов, 1 п 31
LSR #п Лоrический сдвиr вправо на п битов, 1 п 32
ROR #п Циклический сдвиr вправо на п битов, 1 п 31
RRX Расширенный циклический сдвиr вправо на 1 бит
Если мнемоника отсутствует, то сдвиr не выполняется,
эквивалентно LSL #0
А.2. Соzлашения, используемые при описании команд . 381
Если операция сдвиrа отсутствует или задана операция 181 #0, то команда
использует значение, находящееся в реrистре Rm.
При указании операции сдвиrа она выполняется над содержимым реrистра
Rm, а итоrовое 32 битное значение используется в команде. Содержимое реrистра
Rm при этом не изменяется. Некоторые команды при использовании реrистра со
сдвиrом также изменяют состояние флаrа переноса. Более подробно операции
сдвиrа и их влияние на флаr переноса рассматриваются в подразделе А.2.4 «Опе
рации сдвиrа».
А.2.4. Операции сдвиrа
Операции сдвиrа реrистра выполняют сдвиr содержимоrо этоrо реrистра
вправо или влево на заданное число битов (величина сдвиzа). Сдвиr реrистра MO
жет осуществляться:
. непосредственно командами A8R, 18R, 181, ROR и RRX с записью результата
в реrистр приёмник;
. при вычислении Operaпd2 командами, использующими в качестве BToporo
операнда реrистр со сдвиrом (см. подраздел А.2.3 «rибкий» второй операнд»).
Результат операции сдвиrа используется командой.
Допустимые значения величины сдвиrа зависят как от типа сдвиrа, так и от
команды (см. описание конкретных команд или подраздел А.2.3 «rибкий» второй
операнд»). Если величина сдвиrа равна нулю, то сдвиr не осуществляется. Опера
ции сдвиrа реrистра изменяют состояние флаrа переноса, за исключением тех
случаев, коrда величина сдвиrа равна нулю. Далее приводятся описания различ
ных операций сдвиrа и указывается влияние этих операций на флаr переноса.
В данных описаниях Rm обозначает реrистр, содержащий сдвиrаемое число, а п
величину сдвиrа.
Команда ASR
Арифметический сдвиr вправо на п битов перемещает 32 п старших битов
реrистра Rm на п позиций вправо, в 32 п младших битов результата. Исходный
бит [31] реrистра копируется в п старших битов результата (Рис. A.l).
Флаr
переноса
Q
I
I
Рис. А.l. ASR #3.
Операцию ASR #п можно использовать для деления содержимоrо реrистра Rm
на 2 n с окруrлением результата к ближайшему меньшему целому.
В случае команды A8RS или при использовании команды ASR #п во втором
операнде команд MOV8, MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST во флаr
переноса заrружается последний выдвинутый бит реrистра Rm, бит [п I].
382 · Приложение А. Набор команд Cortex M3. Справочный материал
ПримеЧQние
. Если п 32, то во все биты результата помещается значение бита [31] реrистра
Rm.
· Если п 32 и операция влияет на флаr переноса, то в этот флаr заrружается
значение бита [31] реrистра Rm.
Команда LSR
Лоrический сдвиr вправо на п битов перемещает 32 п старших битов реrи
стра Rm на п позиций вправо, в 32 п младших битов результата. Старшие п битов
результата обнуляются (Рис. А.2).
I I I
о о о
5 4 3 2
о
Флаr
переноса
Q
I
I
Рис. А.2. LSR #3.
Операцию LSR #п можно использовать для деления содержимоrо реrистра Rm
на 2 П , если содержимое реrистра рассматривается как целое число без знака.
В случае команды LSRS или при использовании команды LSR #п во втором
операнде команд MOVS, MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST во флаr
переноса заrружается последний выдвинутый бит реrистра Rm, бит [п I].
ПримеЧQние
· Если п 32, то все биты результата сбрасываются в о.
· Если п 33 и операция влияет на флаr переноса, то он сбрасывается в о.
Команда LSL
Лоrический сдвиr влево на п битов перемещает 32 п младших битов реrистра
Rm на п позиций влево, в 32 п старших битов результата. Младшие п битов pe
зультата обнуляются (Рис. А.3).
I
I I
I I
о ю1т
Флаr + + + I I I
переноса
I I I
о о о
ШddJ
Рис. А.3. LSL #3.
Операцию LSL #п можно использовать для умножения содержимоrо реrи
стра Rm на 2 n , если содержимое реrистра рассматривается как целое число без зна
ка или как целое число со знаком, представленное в дополнительном коде. При
переполнении никаких предупреждений не выдаётся.
А.2. Соzлашения, используемые при описании команд · 383
в случае команды 1S1S или при использовании команды 1S1 #п во втором
операнде команд MOVS, MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST во флаr
переноса заrружается последний выдвинутый бит реrистра Rm, бит [32 п]. Эта
операция не влияет на состояние флаrа переноса, если п = о.
примеЧQние
. Если п 32, то все биты результата сбрасываются в о.
. Если п 33 и операция влияет на флаr переноса, то он сбрасывается в о.
Команда ROR
Циклический сдвиr вправо на п битов перемещает 32 п старших битов реrи
стра Rm на п позиций вправо, в 32 п младших битов результата. Одновременно п
младших битов реrистра копируются в п старших битов результата (Рис. А.4).
. . .
Флаr
переноса
Q
I
I
Рис. А.4. ROR #3.
в случае команды RORS или при использовании команды ROR #п во втором
операнде команд MOVS, MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST во флаr
переноса заrружается последний перемещённый бит реrистра Rm, бит [п I].
примеЧQние
. Если п = 32, то результат равен содержимому реrистра Rm. При этом если опе
рация влияет на флаr переноса, то в Hero заrружается значение бита [31] реrи
стра Rm.
. Операция ROR при величине сдвиrа п > 32 эквивалентна операции ROR с вели
чиной сдвиrа, равной п 32.
Команда RRX
Расширенный циклический сдвиr вправо перемещает все биты реrистра Rm на
одну позицию вправо и копирует содержимое флаrа переноса в бит [31] результа
та (Рис. А.5).
Флаr
переноса
qш
_ ..
Рис. А.5. RRX.
в случае команды RRXS или при использовании команды RRX во втором опе
ранде команд MOVS, MVNS, ANDS, ORRS, ORNS, EORS, BICS, TEQ или TST во флаr пере
носа заrружается бит [О] реrистра Rm.
384 · Приложение А. Набор команд Cortex M3. Справочный материал
А.2.5. Выравнивание адресов
Под выровненным доступом понимают операции, в которых чтение и запись
слов, двойных слов и более длинных последовательностей слов осуществляется
по адресам, выровненным на rраницу слова, или же операции, при которых для
обращения к полуслову используется адрес, выровненный на rраницу полуслова.
Обращения к байтам выровнены по определению.
Процессор Cortex M3 поддерживает обращение к невыровненным данным
только для следующих команд:
· LDR, LDRT;
· LDRH, LDRHT;
· LDRSH, LDRSHT;
· STR, STRT;
· STRH, STRHT.
Все остальные команды заrрузки и сохранения при обращении по HeBыpOB
ненному адресу rенерируют исключение Usage Fault, поэтому они должны ис
пользоваться только с выровненными адресами.
Обращения к невыровненным данным, как правило, осуществляются медлен
нее, чем к выровненным. Кроме Toro, некоторые области адресноrо пространства
MorYT не поддерживать обращение по невыровненным адресам. В связи с этим
компания ARM рекомендует всеrда использовать выровненные данные. Для пе
рехвата непреднамеренных обращений по невыровненным адресам использует
ся бит UNALIGN TRP реrистра CCR, разрешающий формирование исключения
Usage Fault для всех обращений по невыровненным адресам.
А.2.6. Адресация относительно РС
Выражение, определяемое относительно значения счётчика команд РС, или,
иначе, метка, является идентификатором, представляющим адрес команды или
константы. В командах это выражение хранится в виде смещения относительно
значения счётчика команд. Ассемблер автоматически вычисляет требуемое CMe
щение, исходя из адреса метки и адреса текущей команды. Если величина смеще
ния получается слишком большой, то ассемблер выдаёт сообщение об ошибке.
примеЧQние
· Для команд В, BL, CBNZ и CBZ значением Ре является адрес команды плюс
4 байта.
· Для большинства прочих команд, использующих метки, значением Ре явля
ется адрес команды плюс 4 байта, при этом бит [1] результата сбрасывается в о
для выравнивания адреса по rранице слова.
· В используемом вами ассемблере для выражений, определяемых относитель
но ре, MorYT использоваться друrие формы записи, скажем метка плюс/минус
число или запись вида [РС, #nurnber].
А.2. Соzлашения, используемые при описании команд · 385
А.2.7. Условное выпопнение
Большинство команд обработки данных MorYT опционально изменять флаrи
условий реrистра состояния прикладной проrраммы APSR в соответствии с pe
зультатом операции. Одни команды влияют на все флаrи, друrие только на He
которые из них. Если команда не влияет на флаr, то ero состояние остаётся неиз
менным. Чтобы узнать, на какие флаrи влияет та или иная команда, обратитесь
к её описанию.
Команда может быть выполнена условно в соответствии со значением флаrов,
изменённых друrой командой, либо сразу же после команды, изменившей флаrи,
либо после нескольких промежуточных команд, не влияющих на состояние фла
rOB условий.
Условное выполнение реализуется командами условноrо перехода либо добав
лением к мнемонике обычных команд суффиксов, определяющих условие выпол
нения команды. Все эти суффиксы перечислены в Табл. А.2. Код условия, опреде
ляемый суффиксом, позволяет процессору проверять соответствие состояния
флаrов заданному условию. Если код условия условно выполняемой команды не
соответствует состоянию флаrов, то команда:
. не выполняется;
. ничеrо не сохраняет в реrистре приёмнике;
. не воздействует ни на какие флаrи;
. не rенерирует никаких исключительных ситуаций.
Таблица А.2. Суффиксы условия выполнения
Суффикс Флаrи Значение
EQ Z=1 Равно
NE Z=O Не равно
е8 или Н8 С=1 Выше или равно (беззнаковое « »)
ее или LO с=о Ниже (беззнаковое «<»)
MI N= 1 Отрицательный результат
PL N=O Положительный результат либо ноль
V8 У=1 Переполнение
ve у=о Нет переполнения
HI С=lиZ=О Выше (беззнаковое «>>»
L8 С = О или Z = 1 Ниже или равно (беззнаковое « »)
GE N=V Больше или равно (знаковое « »)
LT N;tV Меньше (знаковое «<»)
GT Z=ОиN=V Больше (знаковое «>>»
LE Z=lиN;tV Меньше или равно (знаковое « »)
AL Безразлично Всеrда; действие по умолчанию при отсутствии суффикса
Условно выполняемые команды, за исключением команд условных переходов,
должны располаrаться внутри блока команд IF THEN. Дополнительная информа
ция о команде 1Т и оrраничения на её использование приведены в описании этой
команды (см. подраздел А.8.З).
386 · Приложение А. Набор команд Cortex M3. Справочный материал
Если это предусмотрено разработчиком ассемблера, то последний может aB
томатически вставлять команду IT при обнаружении условно выполняемых KO
манд вне Iт блока.
Для сравнения содержимоrо реrистра с нулем и перехода соrласно результату
используйте команды CBZ и CBNZ.
Далее в этом подразделе описываются:
· Флаrи условия
· Суффиксы условия выполнения
Фпаrи усповия
В реrистре APSR содержатся следующие флаrи условия:
N Устанавливается в 1, если результат операции был отрицателен, иначе
сбрасывается в о.
z Устанавливается в 1, если результат операции был равен нулю, иначе
сбрасывается в о.
с Устанавливается в 1, если в результате операции произошёл перенос, ина
че сбрасывается в о.
v Устанавливается в 1, если в результате операции произошло переполне
ние, иначе сбрасывается в о.
Перенос возникает:
· если результат сложения больше или равен 232;
· если результат вычитания положителен или равен нулю;
· в результате работы внутренней схемы циклическоrо сдвиrа при выполнении
команд пересылки данных или команд лоrических операций.
Переполнение возникает, коrда знак результата, содержащийся в бите [31], OT
личается от знака, который получился бы при бесконечно большой точности, Ha
пример:
· если при сложении двух отрицательных чисел получается положительное
число;
· если при сложении двух положительных чисел получается отрицательное
число;
· если при вычитании положительноrо числа из отрицательноrо получается по
ложительное число;
· если при вычитании отрицательноrо числа из положительноrо получается OT
рицательное число.
Операции сравнения полностью эквивалентны командам вычитания (в слу
чае СМР) или сложения (в случае CMN), за исключением Toro, что результат опера
ции не сохраняется. Для получения более подробной информации обратитесь
к описанию команд.
примеЧQние
Большинство команд изменяют флаrи состояния только в том случае, если
в мнемонике команды указан суффикс S (см. описание команд).
А.2. СО2лашения, используемые при описании команд · 387
Суффиксы УСl10ВИЯ ВЫПОl1нения
Команды, допускающие условное выполнение, имеют необязательное поле KO
да условия, определяемоrо двухсимвольным суффиксом {coпd}. Условное BЫ
полнение требует предварительноrо выполнения команды 1Т. Команда, содержа
щая код условия, выполняется только в том случае, если состояние флаrов усло
вий реrистра APSR соответствует заданному условию. Все допустимые суффиксы
условия выполнения приведены в Табл. А.2.
ДЛЯ уменьшения числа команд переходов в коде проrраммы можно использо
вать условное выполнение команды 1Т. Также в Табл. А.2 показана взаимосвязь
между суффиксами условия выполнения и флаrами N, Z, С и у.
В Примере А.l показано использование условно выполняемой команды для
вычисления абсолютноrо значения числа RO == ABS (Rl).
В Примере А.2 показано использование условно выполняемых команд для из
менения реrистра R4 в том случае, если значение RO больше Rl и R2 больше R3.
Пример А.1. АБСОl1ютное значение
MOVS
IT
RSBMI
RO, Rl
MI
RO, Rl, #0
RO Rl, изменяет состояние флаrов
IT пропускает следующую команду, если значение > O
Если значение < О, то RO Rl
Пример А.2. Сравнение и изменение значения
смр RO, Rl Сравниваем RO и Rl
ITT GT IT про пускаем две следующие команды, если условие GT
не выполняется
CMPGT R2, RЗ Если «больше», сравниваем R2 и RЗ, устанавливаем флаrи
MOVGT R4, R5 Если всё ещё «больше», копируем R4 R5
А.2.8. Выбор разрядности команды
Мноrие команды MorYT формировать как 16 , так и 32 битный машинный код
в зависимости от используемых операндов и реrистра приёмника. Для HeKOTO
рых из этих команд можно явно задать разрядность с помощью специальноrо
суффикса. Суффикс . w указывает на необходимость rенерации 32 битноrо кода,
а суффикс . N 16 битноrо кода.
Если ассемблер не сможет сформировать машинный код заданной разрядно
сти, то он выдаст сообщение об ошибке.
примеЧQние
Иноrда явное указание суффикса . W необходимо; например, если операнд яв
ляется меткой или константой, как в случае команд перехода. Эта необходимость
обусловлена тем, что ассемблер может оказаться не в состоянии автоматически
сrенерировать машинный код требуемой разрядности.
При использовании суффикса, определяющеrо разрядность команды, он по
мещается непосредственно после мнемоники команды и суффикса условия BЫ
полнения, при наличии последнеrо. В Примере А.3 показана запись команды
с использованием суффикса разрядности.
388 · Приложение А. Набор команд Cortex M3. Справочный материал
Пример А.3. Явное указание разрядности команды
BCS.W label
ADDS.W RO, RO, Rl
rенерирует З2 битный код даже для KopoTKoro перехода
; rенерирует З2 битный код, даже если та же самая
операция может быть выполнена 16 битной командой
А.3. Команды доступа к памяти
Все поддерживаемые команды доступа к памяти перечислены в Табл. А.3.
Таблица А.3. Команды доступа к памяти
Мнемоника Краткое описание Подраздел
AOR rенерация относительноrо адреса А.З.!. ADR
CLREX Сброс монопольноrо доступа А.3.9. CLREX
LOM {mode} 3аrрузка нескольких реrистров А.3.6. LDM и STM
LOR{type} 3аrрузка реrистра с использованием А.З.2. LDR и STR,
непосредственноrо смещения непосредственное смещение
LOR{type} 3аrрузка реrистра с использованием А.3.З. LDR и STR, реrистровое
смещения в реrистре смещение
LOR{type}T 3аrрузка реrистра в непривилеrированном А.ЗА. LDR и STR,
режиме непривилеrированный доступ
LOR 3аrрузка реrистра с использованием А.З.5. LDR, относительная
относительноrо адреса адресация
LOREX{type} Монопольная заrрузка реrистра А.3.8. LDREX и STREX
РОР Извлечение реrистра из стека А.3.7. PUSH и РОР
PUSH 3аrрузка реrистра в стек А.З.7. PUSH и РОР
STM {mode} Сохранение нескольких реrистров А.3.6. LDM и STM
STR{type} Сохранение реrистра с использованием А.3.2. LDR и STR,
непосредственноrо смещения непосредственное смещение
STR{type} Сохранение реrистра с использованием А.З.3. LDR и STR, реrистровое
смещения в реrистре смещение
STR{type}T Сохранение реrистра А.3.4. LDR и STR,
в непривилеrированном режиме непривилеrированный доступ
STREX{type} Монопольное сохранение реrистра А.3.8. LDREX и STREX
А.3.1. ADR
rенерация относительноrо адреса.
Синтаксис
ADR{coпd} Rd, label
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
Rd
А.3. Команды доступа к памяти · 389
label
выражение, определяемое относительно РС; см. подраздел
А.2.6 «Адресация относительно РС».
Операция
Команда ADR формирует адрес, прибавляя непосредственное значение к зна
чению счётчика команд РС, и сохраняет результат в реrистре приёмнике.
Эта команда упрощает rенерацию переместимоrо кода, поскольку адрес в дaH
ном случае задаётся относительно значения РС. Если команда ADR предназначена
для формирования адреса, используемоrо командами ВХ или BLX, то проrрам
мист должен rарантировать, что бит [О] полученноrо адреса будет установлен в 1.
Значение label должно находиться в пределах от 4095 до +4095 относитель
но адреса в счётчике команд.
примеЧQние
Для использования Bcero диапазона значений смещения или для формирова
ния адресов, не выровненных на rраницу слова, может потребоваться использо
вание суффикса .w (см. подраздел А.2.8 «Выбор разрядности команды»).
Оrраничения
Rd не должен быть SP либо РС.
Флаrи условия
Команда не влияет на состояние флаrов.
Пример
ADR Rl, TextMessage
Заносит в Rl адрес ячейки памяти, обозначенной
меткой TextMessage
А.3.2. LDR и STR, непосредсувенное смещение
Заrрузка и сохранение реrистров с непосредственным смещением и пред или
постиндексацией.
Синтаксис
ор{ type} {cond} Rt, [ Rn {, # о f f s е t} ] Непосредственное смещение
ор{ type} {cond} Rt, [Rn, #offset]! Прединдексация
ор{ type} {cond} Rt, [Rn], #offset Постиндексация
opD { cond} Rt, Rt2, [ Rn {, # о f f s е t} ] Непосредственное смещение, два слова
opD{cond} Rt, Rt2, [Rn, #offset]! Прединдексация, два слова
opD{cond} Rt, Rt2, [Rn], #offset Постиндексация, два слова
rде
ар
операция:
LDR 3arpY3Ka реrистра
STR Сохранение реrистра
390 · Приложение А. Набор команд Cortex M3. Справочный материал
type
тип операнда:
В Беззнаковый байт) при заrрузке дополняется нулями до
32 битноrо значения
SB Знаковый байт) расширяется до 32 битноrо значения
(только LDR)
Н Беззнаковое полуслово) при заrрузке дополняется HY
лями до 32 битноrо значения
SH Знаковое полуслово) расширяется до 32 битноrо значе
ния (только LDR)
Не указан) тип операнда слово
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
заrружаемый или сохраняемый реrистр.
реrистр) содержащий базовый адрес.
смещение относительно Rn. Если смещение не указано, то адрес
равен содержимому Rn.
дополнительный реrистр для заrрузки или сохранения двойных
слов.
cond
Rt
Rn
offset
Rt2
Операция
Команды LDR заrружают один или два реrистра данными из памяти. Команды
STR сохраняют содержимое одноrо или двух реrистров в памяти.
Команды заrрузки и сохранения с непосредственным смещением MorYT ис
пользовать следующие режимы адресации.
Относuтельная адресация
Величина смещения прибавляется или вычитается из адреса) находящеrося
в реrистре Rn. Результат используется в качестве адреса) по которому произво
дится обращение к памяти. Реrистр Rn не изменяется. Синтаксис языка ассембле
ра для этоrо режима адресации имеет вид:
[Rп, #offset]
Адресацuяспредuндексuрованuем
Величина смещения прибавляется или вычитается из адреса) находящеrося
в реrистре Rn. Результат используется в качестве адреса) по которому произво
дится обращение к памяти) и сохраняется в реrистре Rn. Синтаксис языка acceM
блера для этоrо режима имеет вид:
[Rп, #offset]!
Адресацuяспосmuндексuрованuем
Значение) находящееся в реrистре Rп, используется в качестве адреса) по KOTO
рому производится обращение к памяти. После выполнения операции величина
смещения прибавляется или вычитается из этоrо значения и результат сохраня
ется в реrистре Rn. Синтаксис языка ассемблера для данноrо режима имеет вид:
А.3. Команды доступа к: памяти · 391
[Rп], #offset
3аrружаемое или сохраняемое значение может иметь разрядность байт) полу
слово, слово или двойное слово. В командах заrрузки байты и полуслова MorYT
быть как знаковыми) так и беззнаковыми (см. подраздел А.2.5 «Выравнивание
адреса»).
Допустимые значения смещения для всех режимов адресации приведены
в Табл. А.4.
Таблица А.4. Допустимые значения смещения
Тип операнда Непосредственное Прединдексирование Постиндексирование
смещение
Слово, полуслово (со
знаком и без знака), байт 255.. .4095 255.. .255 255.. .255
(со знаком и без знака)
Кратное 4 Кратное 4 в диапазоне Кратное 4 в диапазоне
Двойное слово в диапазоне
1020.. .1020 1020...1020 1020.. .1020
Оrраничения
Для команд заrрузки:
. Rt может быть SP или Ре только в командах заrрузки слова.
. Rt должен отличаться от Rt2.
. Rn должен отличаться от Rt и Rt2 в режимах с пред и постиндексированием.
При использовании Ре в качестве Rt в команде заrрузки двойноrо слова:
. бит [О] заrружаемоrо значения должен быть установлен в 1 для KoppeKTHoro
выполнения команды;
. переход производится по адресу) получаемому сбросом бита [О] заrруженноrо
значения в О;
. если команда условно выполняемая) то она должна быть последней командой
в Iт блоке.
Для команд сохранения:
. Rt может быть SP только в командах сохранения двойноrо слова.
. Rt не должен быть Ре.
. Rn не должен быть Ре.
. Rn должен отличаться от Rt и Rt2 в режимах с пред и постиндексированием.
Фпаrи условий
Команда не влияет на состояние флаrов.
Примеры
STR R2, [R9,#const struc]
Заrружает R8 из памяти по адресу, находящемуся
в RI0
Заrружает (условно) R2 из слова, расположенноrо со
смещением +960 байт относительно адреса,
находящеrося в R5, и увеличивает R5 на 960
; const struc это выражение, результатом KOToporo
LDR R8, [RIO]
LDRNE R2, [R5, #960]!
392 · Прuложенuе А. Набор команд Cortex M3. Справочный материал
;
STRH R3, [R4], #4
.
,
LDRD R8, R9, [R3, #Ох20]
;
является константа из диапазона 0...4095
Сохраняет R3 как полуслово по адресу, находящемуся
в R4, затем увеличивает R4 на 4
Заrружает R8 и R9 из слов, расположенных
со смещениями +32 байта и
+36 байт соответственно
относительно адреса, находящеrося в R3
Сохраняет RO по адресу, находящемуся в R8,
а Rl в слове памяти по адресу,
который на 4 байта больше адреса, находящеrося
в R8, после чеrо уменьшает R8 на 16
STRD RO, Rl, [R8], # 16
А.3.3. LDR и STR, реrИСТрО80е смещение
Заrрузка и сохранение реrистров с реrистровым смещением.
Синтаксис
op{type}{coпd} Rt, [Rп, Rт {, LSL #п}]
rде
ар
операция:
LDR Заrрузка реrистра
STR Сохранение реrистра
тип операнда:
В Беззнаковый байт, при заrрузке дополняется нулями
до 32 битноrо значения
SB Знаковый байт, расширяется до 32 битноrо значения
(только LDR)
Н Беззнаковое полуслово, при заrрузке дополняется HY
лями до 32 битноrо значения
SH Знаковое полуслово, расширяется до 32 битноrо значе
ния (только LDR)
Не указан, тип операнда слово
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
заrружаемый или сохраняемый реrистр.
реrистр, содержащий базовый адрес.
реrистр, содержащий смещение.
необязательный сдвиr, О п 3.
type
caпd
Rt
Rn
Rm
LSL #п
Операция
Команды LDR заrружают один реrистр данными из памяти.
Команды STR сохраняют содержимое одноrо реrистра в памяти.
Адрес памяти для заrрузки или сохранения данных задаётся относительно
базовоrо адреса, находящеrося в реrистре Rп. Величина смещения определяется
А.3. Команды доступа к памяти · 393
содержимым реrистра Rm, которое может быть сдвинуто на 0...3 бита влево по
средством команды L8L.
3аrружаемое или сохраняемое значение может иметь разрядность байт, полу
слово или слово. В командах заrрузки байты и полуслова MorYT быть как знако
выми, так и беззнаковыми (см. подраздел А.2.5 «Выравнивание адреса»).
Оrранмчения
. Rn не должен быть Ре.
. Rm не должен быть SP или РС.
. Rt может быть SP или Ре только в командах заrрузки/сохранения слова.
. Rt может быть Ре только в командах заrрузки слова.
При использовании РС в качестве Rt в команде заrрузки слова:
. бит [о] заrружаемоrо значения должен быть установлен в 1 для KoppeKTHoro
выполнения команды; переход осуществляется по этому адресу, BыpOBHeHHO
му на rраницу полуслова;
. если команда условно выполняемая, то она должна быть последней командой
в Iт блоке.
Флаrм условий
Команда не влияет на состояние флаrов.
Примеры
5TR RO, [R1, R2, 151 #2]
Сохраняет содержимое RO по адресу, равному R5 + R1
Заrружает однобайтное значение с адреса,
paBHoro R5 + 2*R1, выполняет расширение знака
; до размера слова и помещает результат в RO
Сохраняет RO по адресу, равному R1 + 4*R2
5TR RO, [R5, R1]
1DR5B RO, [R5, R1, 151 #1]
А.3.4. LDR и STR, непривилеrированный доступ
3аrрузка и сохранение реrистров на непривилеrированном уровне доступа.
Синтаксис
ор{ type} Т {coпd} Rt, [Rп {, #offset}]
rде
Непосредственное смещение
type
операция:
LDR 3аrрузка реrистра
8TR Сохранение реrистра
тип операнда:
В Беззнаковый байт, при заrрузке дополняется нулями
до 32 битноrо значения
SB Знаковый байт, расширяется до 32 битноrо значения
(только LDR)
ар
394 · Приложение А. Набор команд Cortex M3. Справочный материал
cond
н Беззнаковое полуслово, при заrрузке дополняется HY
лями до 32 битноrо значения
SH Знаковое полуслово, расширяется до 32 битноrо значе
ния (только LDR)
Не указан, тип операнда слово
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
заrружаемый или сохраняемый реrистр.
реrистр, содержащий базовый адрес.
смещение относительно Rn (от О до 255). Если смещение не указа
но, то адрес равен содержимому Rn.
Rt
Rn
offset
Операция
Эти команды выполняют те же операции, что и команды доступа к памяти
с непосредственным смещением (см. подраздел А.3.2 «LDR и STR, непосредствен
ное смещение»). Отличие заключается в том, что эти команды осуществляют об
ращение к памяти исключительно на непривилеrированном уровне, даже в коде,
выполняющемся в привилеrированном режиме.
При использовании в коде, выполняющемся в непривилеrированном режиме,
эти команды полностью идентичны обычным командам доступа к памяти с He
посредственным смещением.
Оrраничения
· Rn не должен быть Ре.
· Rt не должен быть SP или РС.
Фпаrи условий
Команда не влияет на состояние флаrов.
Примеры
STRBTEQ R4, [R7]
Сохраняет (условно) младший значащий байт
содержимоrо R4 по адресу, содержащемуся в R7,
на непривилеrированном уровне
Заrружает в R2 полуслово с адреса, paBHoro R8 + 8,
на непривилеrированном уровне
LDRHT R2, [R2, #8]
А.3.5. LDR, относительная адресация
Заrрузка реrистра из памяти.
Синтаксис
LDR{type} {coпd} Rt, label
LDRD{coпd} Rt, Rt2, label
Заrрузка двух слов
А.3. Команды доступа к памяти · 395
rде
type
coпd
тип операнда:
В Беззнаковый байт, при заrрузке дополняется нулями
до 32 битноrо значения
SB Знаковый байт, расширяется до 32 битноrо значения
(только LDR)
Н Беззнаковое полуслово, при заrрузке дополняется HY
лями до 32 битноrо значения
SH Знаковое полуслово, расширяется до 32 битноrо значе
ния (только LDR)
Не указан, тип операнда слово
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
заrружаемый или сохраняемый реrистр.
дополнительный реrистр для заrрузки двойноrо слова.
выражение, определяемое относительно Ре; см. подраздел
А.2.6 «Адресация относительно Ре».
Rt
Rt2
label
Операция
Команда LDR заrружает в реrистр данные из памяти. Адрес ячейки памяти
определяется меткой (смещением относительно Ре).
Заrружаемое значение может иметь разрядность байт, полуслово или слово.
Байты и полуслова MorYT быть как знаковыми, так и беззнаковыми (см. подраздел
А.2.5 «Выравнивание адреса»).
Значение label должно находиться в допустимом для данной команды диа
пазоне. Допустимые величины смещения label относительно Ре указаны
в Табл. А.5.
Таблица А.5. Допустимые значения смещения
Тип операнда ДиапаЗ0Н значений смещения
Слово, полуслово (со знаком и без знака), 4095.. .+4095
байт (со знаком и без знака)
Двойное слово 1020...+ 1020
примеЧQние
Для использования Bcero диапазона значений смещения может потребовать
ся использование суффикса . W (см. подраздел А.2.8 «Выбор разрядности KOMaH
ды»).
Оrраничения
. Rt может быть SP или РС только в командах заrрузки слова.
. Rt2 не должен быть SP или Ре.
. Rt должен отличаться от Rt2.
396 · Приложение А. Набор команд Cortex M3. Справочный материал
При использовании Ре в качестве Rt в команде заrрузки двойноrо слова:
· бит [О] заrружаемоrо значения должен быть установлен в 1 для KoppeKTHoro
выполнения команды; переход осуществляется по этому адресу, BыpOBHeHHO
му на rраницу полуслова;
· если команда условно выполняемая, то она должна быть последней командой
в Iт блоке.
Флаrи условий
Команда не влияет на состояние флаrов.
Примеры
LDR RO, LookUpTable ;
LDRSB R7, localdata
Заrружает в RO слово, расположенное по адресу,
помеченному меткой LookUpTable
Считывает байт с адреса, помеченноrо меткой
localdata, выполняет расширение знака до размера
слова и помещает результат в R7
А.3.6. LDM и STM
3аrрузка и сохранение нескольких реrистров.
Синтаксис
op{addr тode}{coпd} Rп{!}, reglist
rде
ар
операция:
LOM 3аrрузка нескольких реrистров
STM Сохранение нескольких реrистров
addr тade режим адресации:
IA Инкрементирование адреса после каждоrо обращения
к памяти (режим по умолчанию)
ОБ Декрементирование адреса перед каждым обращением
к памяти
cand
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр, содержащий базовый адрес.
необязательный суффикс обратной записи. При наличии в MHeMO
нике команды символа «!» последний адрес, по которому произ
водилось чтение или запись данных, сохраняется в реrистре Rn.
список из одноrо или нескольких реrистров, заrружаемых из па
мяти или сохраняемых в памяти, заключённый в фиrурные скоб
ки. Может включать в себя диапазоны реrистров. При наличии
в списке более одноrо реrистра или диапазона реrистров элемен
ты списка разделяются запятыми (см. пункт «Примеры» данноrо
подраздела).
Rn
reglist
А.3. Команды доступа к памяти · 397
. LDM и LDMFD являются синонимами LDMIA. Мнемоника LDMFD указывает на
использование данной команды для извлечения данных из «полноrо» убыва
ющеrо стека.
. LDMEA является синонимом LDMDB и указывает на использование данной KO
манды для извлечения данных из «пустоrо» возрастающеrо стека.
. STM и STMEA являются синонимами STMIA. Мнемоника STMEA указывает на
использование данной команды для помещения данных в «пустой» возраста
ющий стек.
. STMFD является синонимом STMDB и указывает на использование данной KO
манды для помещения данных в «полный» убывающий стек.
Операция
Команды LDR заrружают в реrистры, указанные в reglist, слова из памяти,
начиная с адреса, указанноrо в Rл. Команды STM сохраняют содержимое реrи
стров, указанных в reglist, в памяти, начиная с адреса, указанноrо в Rл.
Для команд LDM, LDMIA, LDMFD, STM, STMIA и STMEA адреса ячеек памяти, по
которым производятся обращения, располаrаются в диапазоне от Rл до
Rл + 4 * (л 1) с интервалом в 4 байта, rде л число реrистров в reglist. Обра
щения к памяти производятся в порядке возрастания номеров реrистров, при
этом реrистру с наименьшим номером соответствует самый младший адрес, а pe
rистру с наибольшим номером самый старший адрес. При наличии в MHeMO
нике команды суффикса, разрешающеrо обратную запись, значение Rл + 4 * (л l)
сохраняется в реrистре Rл.
Для команд LDMDB, LDMEA, STMDB и STMFD адреса ячеек памяти, по которым
производятся обращения, располаrаются в диапазоне от Rл до Rл 4 * (л 1) с ин
тер валом в 4 байта, rде л число реrистров в reglist. Обращения к памяти про
изводятся в порядке убывания номеров реrистров, при этом реrистру с наиболь
шим номером соответствует самый старший адрес, а реrистру с наименьшим HO
мером самый младший адрес. При наличии в мнемонике команды суффикса,
разрешающеrо обратную запись, значение Rл 4 * (л 1) сохраняется в реrистре
Rл.
Подобные мнемоники MorYT быть использованы для записи команд PUSH
и РОР; см. подраздел А.3.7 «PUSH и РОР».
Оrраничения
. Rл не должен быть Ре.
. reglist не должен содержать SP.
. Rt должен отличаться от Rt2.
. В любой команде STM reglist не должен содержать Ре.
. в любой команде LDM reglist не должен содержать ре, если в нём содержит
ся LR.
. reglist не должен содержать Rп, если в команде указан суффикс обратной за
писи.
398 · Приложение А. Набор команд Cortex M3. Справочный материал
При наличии РС в reglist команды LDM:
· бит [О] заrружаемоrо значения должен быть установлен в 1 для KoppeKTHoro
выполнения команды; переход осуществляется по этому адресу, BыpOBHeHHO
му на rраницу полуслова;
· если команда условно выполняемая, то она должна быть последней командой
в 1 т блоке.
Флаrи условий
Команда не влияет на состояние флаrов.
Примеры
LOM R8, {RO,R2,R9}
STMOB Rl!, {RЗ Rб,Rll,R12}
LOMIA синоним для LOM
Примерынеправильнойзаписи
STM
LOM
R5 !, {R5 , R4 , R9 }
R2 , {}
Значение, сохраняемое в R5, непредсказуемо
В списке должен находиться хотя бы один реrистр
А.3.7. PUSH и РОР
Заrрузка реrистров в стек и извлечение реrистров из стека (<<полный» убываю
щий стек).
Синтаксис
PUSH{coпd} reglist
POP{coпd} reglist
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
reglist непустой список реrистров, заключённый в фиrурные скобки.
Может включать в себя диапазоны реrистров. При наличии в спи
ске более одноrо реrистра или диапазона реrистров элементы спи
ска разделяются запятыми.
Команды PUSH и РОР являются синонимами для команд STMDB и LDM (или
LDMIA), использующих в качестве реrистра базовоrо адреса реrистр SP и сохраня
ющих в этом реrистре последний адрес. В таких случаях предпочтительно ис
пользовать мнемоники PUSH и РОР.
Операция
Команда PUSH сохраняет содержимое реrистров в стеке, при этом реrистр
с наименьшим номером сохраняется в слове памяти с самым младшим адресом,
а реrистр с наибольшим номером в слове с самым старшим адресом.
Команда РОР заrружает реrистры из стека, при этом реrистр с наименьшим
номером заrружается из слова памяти с самым младшим адресом, а реrистр
с наибольшим HOMepo из слова с самым старшим адресом.
А.3. Команды доступа к памяти · 399
Старшим адресом для команды PUSH является содержимое реrистра SP, YMeHЬ
шенное на 4, а младшим адресом для команды РОР содержимое реrистра SP, т.е.
эти команды реализуют «полный» убывающий стек. После завершения операции
команда PUSH изменяет реrистр SP таким образом, чтобы тот указывал на слово
памяти, в котором был сохранён реrистр с наименьшим номером. Команда РОР
после завершения операции изменяет реrистр SP таким образом, чтобы тот YKa
зывал на слово памяти, расположенное выше Toro слова, из KOToporo был считан
реrистр с наибольшим номером.
Если в списке reglist команды РОР присутствует реrистр Ре, то переход по
соответствующему адресу будет произведён после завершения команды РОР. При
этом бит [О] считанноrо из стека значения заносится в бит Т реrистра APSR. ДЛЯ
корректной работы процессора указанный бит должен быть установлен в 1.
Для получения дополнительной информации см. подраздел А.3.б «LDM
и STM».
Оrраничения
. reglist не должен содержать SP.
. reglist команды PUSH не должен содержать Ре.
. reglist команды РОР не должен содержать РС, если в нём содержится LR.
При наличии Ре в reglist команды РОР:
. бит [О] заrружаемоrо значения должен быть установлен в 1 для KoppeKTHoro
выполнения команды; переход осуществляется по этому адресу, BыpOBHeHHO
му на rраницу полуслова;
. если команда условно выполняемая, то она должна быть последней командой
в Iт блоке.
А.3.8. LDREX и STREX
3аrрузка и сохранение реrистров в режиме монопольноrо доступа.
Синтаксис
LDREX {солd} Rt, [Rл {, #offset}]
STREX {солd} Rd, Rt, [Rл {, #offset}]
LDREXB { солd} Rt, [Rn]
STREXB { солd} Rd, Rt, [Rл]
LDREXH { солd} Rt, [Rл]
SТRЕХН{солd} Rd, Rt, [Rл]
rде
coпd
Rd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник для сохранения возвращённоrо кода состоя
ния.
Rt
заrружаемый или сохраняемый реrистр.
400 · Приложение А. Набор команд Cortex M3. Справочный материал
Rn
offset
реrистр, содержащий базовый адрес.
смещение относительно Rn. Если смещение не указано, то адрес
равен содержимому Rn.
Операция
Команды LDREX, LDREXB и LDREXH заrружают из памяти в реrистр слово, байт
и полуслово соответственно. Команды STREX, STREXB и STREXH пытаются coxpa
нить в памяти слово, байт и полуслово соответственно. Адрес, используемый
в любой команде монопольноrо сохранения данных, должен быть идентичен
адресу в последней выполненной команде монопольной заrрузки. Значение, co
храняемое в памяти командой монопольноrо сохранения, должно иметь такую
же разрядность, что и значение, считанное последней командой монопольной за
rрузки. То есть для осуществления синхронизации команда монопольной заrруз
ки должна всеrда использоваться в паре с аналоrичной командой монопольноrо
сохранения.
При сохранении данных команда монопольноrо сохранения заносит О
в реrистр приёмник. Если попытка сохранения была неудачной, то в реrистр
приёмник заносится 1. Нулевое значение, возвращённое командой сохранения
в реrистре приёмнике, rарантирует, что ни один процесс в системе не сможет по
лучить доступ К использованной ячейке памяти между командами монопольной
заrрузки и монопольноrо сохранения.
Из соображений быстродействия число команд, располаrающихся между KO
мандой монопольной заrрузки и командой монопольноrо сохранения, должно
быть сведено к минимуму.
примеЧQние
Результат выполнения команды монопольноrо сохранения при обращении по
адресу) отличному от использованноrо в предшествующей команде монопольной
заrрузки, будет непредсказуемым.
Оrраничения
· Нельзя использовать Ре.
· Rd не должен быть SP.
· Rt не должен быть SP.
· В командах STREX реrистр Rd должен отличаться от Rt и от Rn.
· Величина offset должна находиться в диапазоне 0...1020 и быть кратной 4.
Флаrи условий
Команда не влияет на состояние флаrов.
Примеры
MOV Rl, #Охl
try
LDREX RO, [LockAddr]
смр RO, #0
ITT EQ
Инициализируем значение для признака блокировки
Читаем признак блокировки
Блокировка снята?
IТ блок для команд STREXEQ и CMPEQ
А.4. Общие команды обработки данных · 401
STREXEQ RO, Rl, [LockAddr]
CMPEQ RO, #0
BNE try
Пробуем поставить блокировку
Успешно?
Нет пробуем снова
Да поставили блокировку
А.3.9. CLREX
Сброс монопольноrо доступа.
Синтаксис
CLREX{coпd}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
После команды CLREX любая последующая команда STREX, STREXB и STREXH
заносит 1 в реrистр приёмник и, соответственно, не осуществляет запись в па
мять. Принудительное блокирование монопольной записи в память может по
требоваться в обработчике исключительной ситуации в том случае, если таковая
возникнет во время операции синхронизации между командой монопольной за
rрузки и соответствующей командой монопольноrо сохранения.
Флаrи условий
Команда не влияет на состояние флаrов.
Примеры
CLREX
А.4. Общие команды обработки данных
Все команды обработки данных перечислены в Табл. А.б.
Таблица А.б. Команды обработки данных
Мнемоника Краткое описание Подраздел
АDС Сложение с переносом A.4.l. ADD, ADC, SUB, SBC и RSB
АDD Сложение А.4.1. ADD, ADC, SUB, SBC и RSB
ADDW Сложение А.4.1. ADD, ADC, SUB, SBC и RSB
AND Лоrическое И А.4.2. AND, ORR, EOR, BIC и ORN
ASR Арифметический сдвиr вправо А.4.3. ASR, LSL, LSR, ROR и RRX
BIC Очистка битов А.4.2. AND, ORR, EOR, BIC и ORN
CLZ Подсчёт ведущих нулевых битов А.4.4. CLZ
CMN Сравнение с отрицательным операндом А.4.5. смр и CMN
СМР Сравнение А.4.5. СМР и CMN
EOR Исключающее ИЛИ А.4.2. AND, ORR, EOR, BIC и ORN
402 · Приложение А. Набор команд Cortex M3. Справочный материал
Таблица А.б. Команды обработки данных (продолжение)
Мнемоника Краткое описание Подраздел
LSL Лоrический сдвиr влево А.4.3. ASR, LSL, LSR, ROR и RRX
LSR Лоrический сдвиr вправо А.4.3. ASR, LSL, LSR, ROR и RRX
MOV Пересылка А.4.6. МОУ и MVN
MOVT Пересылка старшеrо полуслова А.4.? МОУТ
MOVW Пересылка 16 битной константы А.4.6. МОУ и MVN
MVN Пересылка с инверсией А.4.6. МОУ и MVN
ORN Лоrическое ИЛИ с инверсией А.4.2. AND, ORR, EOR, BIC и ORN
ORR Лоrическое ИЛИ А.4.2. AND, ORR, EOR, BIC и ORN
RBIT Перестановкабитов А.4.8. REV, REV16, REVSH и RBIT
REV Перестановкабайтовслова А.4.8. REV, REV16, REVSH и RBIT
REV16 Перестановка байтов в каждом полуслове А.4.8. REV, REV16, REVSH и RBIT
REVSH Перестановка байтов в младшем полуслове А.4.8. REV, REV16, REVSH и RBIT
и расширение знака
ROR Циклический сдвиr вправо А.4.3. ASR, LSL, LSR, ROR и RRX
RRX Расширенный циклический сдвиr вправо А.4.3. ASR, LSL, LSR, ROR и RRX
RSB Обратное вычитание A.4.1. ADD, ADC, SUB, SBC и RSB
SBC Вычитание с переносом A.4.1. ADD, ADC, SUB, SBC и RSB
SUB Вычитание A.4.1. ADD, ADC, SUB, SBC и RSB
SUBW Вычитание A.4.1. ADD, ADC, SUB, SBC и RSB
TEQ Про верка на равенство А.4.9. TST и TEQ
TST Про верка битов А.4.9. TST и TEQ
А.4.1. ADD, ADC, 5UB, 5ВС и R5B
Сложение, сложение с переносом, вычитание, вычитание с переносом и обрат
ное вычитание.
Синтаксис
op{S} {cond} {Rd,} Rn, Operand2
op{cond} {Rd,} Rn, #iтm12
rде
Только команды АОО и SUB
ар
операция:
ADD Сложение
ADC Сложение с переносом
SUB Вычитание
SBC Вычитание с переносом
RSB Обратное вычитание
необязательный суффикс. При наличии в мнемонике команды
суффикса S состояние флаrов условий изменяется в соответствии
S
А.4. Общие команды обработки данных · 403
с результатом операции; см. подраздел А.2.7 «Условное выполне
ние».
imm12
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rn.
реrистр, содержащий первый операнд.
«rибкий» второй операнд; для получения дополнительной инфор
мации обратитесь к подразделу А.2.3 «rибкий» второй операнд».
любое число в диапазоне 9.. .4095.
cond
Rd
Rn
Operand2
Операция
Команда АОО складывает Operand2 или imm12 с содержимым Rn. Команда
АОС складывает Operand2 с содержимым Rn и прибавляет к результату значение
флаrа переноса.
Команда SUB вычитает Operand2 или imm12 из содержимоrо Rn. Команда SBC
вычитает Operand2 из содержимоrо Rn и, если флаr переноса сброшен, уменьша
ет результат на единицу.
Команда RSB вычитает значение, находящееся в Rn, из Operand2. Достоин
ством этой команды является большое число опций, поддерживаемых операн
дом Operand2.
Команды АОС и SBC используются для реализации функций мноrословной
арифметики; см. пункт «При меры мноrословных арифметических операций» дa
лее в этом подразделе.
примеЧQние
Мнемоники ADDW и SUBW эквивалентны мнемоникам АОО и SUB COOTBeTCTBeH
но при использовании в качестве операнда константы imm12.
Оrраничения
. Operand2 не должен быть SP или Ре.
. Rd может быть SP только в командах АОО и SUB со следующими оrраничения
ми:
Q Rn также должен быть SP;
Q любые операции сдвиrа в Operand2 должны быть оrраничены сдвиrом
влево не более чем на 3 бита.
. Rn может быть SP только в командах АОО и SUB.
. Rd может быть Ре только в команде ADD{cond} РС, РС, Rm, причём:
Q использование суффикса S не допускается;
Q Rm не должен быть Ре или SP;
Q если команда условно выполняемая, то она должна быть последней KOMaH
дой в Iт блоке.
404 · Прuложенuе А. Набор команд Cortex M3. Справочный материал
· Rn может быть Ре не только в команде ADD{cond} РС, РС, Rm, но и в друrих
вариантах команд АОО и SUB со следующими оrраничениями:
о использование суффикса S не допускается;
о второй операнд должен быть константой из диапазона о. . .4095.
примеЧQние
· При использовании Ре в операциях сложения и вычитания биты [1:0] реrи
стра РС сбрасываются в 00 перед выполнением операции, выравнивая тем ca
мым базовый адрес на rраницу полуслова.
· При необходимости rенерации адреса команды вы должны скорректировать
значение константы в соответствии со значением Ре. Специалисты компании
ARM рекомендуют вместо команды АОО или SUB с Rn, равным ре, использо
вать команду ADR, поскольку для последней ассемблер автоматически вычис
ляет правильное значение константы.
При использовании Ре в качестве Rd в команде ADD{cond} РС, РС, Rm:
· бит [О] значения, заrружаемоrо в ре, иrнорируется;
· переход производится по адресу, получаемому сбросом бита [О] заrружаемоrо
значения в о.
Фпаrи условия
Если суффикс S указан, то эти команды изменяют состояние флаrов N, Z, С
и V в соответствии с результатом операции.
Примеры
АОО
SUBS
RSB
ADCHI
R2, R1, RЗ
R8, Rб, #240
R4, R4, #1280
R11, RO, RЗ
Устанавливает флаrи в соответствии с результатом
Вычитает содержимое R4 из константы 1280
Сложение выполняется, только если флаr С установлен,
а флаr Z сброшен
Примеры MHorocпoBHbIX арифметических операций
В При мере А.4 показаны две команды, которые выполняют сложение 64 бит
Horo целоrо, находящеrося в реrистрах R2 и R3, с друrим 64 битным целым, Haxo
дящимся в реrистрах RO и Rl, и помещают результат в реrистры R4 и R5.
Мноrословные значения не обязательно должны храниться в последователь
но расположенных реrистрах. В При мере А.5 приводится фраrмент кода, KOTO
рый вычитает одно 96 битное целое, хранящееся в реrистрах R9, Rl и Rll, из дpy
roro, хранящеrося в реrистрах R6, R2 и R8. Результат вычитания сохраняется
в реrистрах R6, R9 и R2.
Пример А.4. Сложение 64..битных чисел
ADDS
АОС
R4, RO, R2
R5, R1, RЗ
Складываем младшие слова
Складываем старшие слова, учитывая перенос
А.4. Общие команды обработки данных · 405
Пример А.5. Вычитание 96..битных чисел
SUBS
SBCS
SBC
R6, R6, R9
R9, R2, Rl
R2, R8, Rll
Вычитаем младшие слова
Вычитаем средние слова, учитывая перенос
Вычитаем старшие слова, учитывая перенос
А.4.2. AND, ORR, EOR, BIC и ORN
Лоrическое И, Лоrическое ИЛИ, Исключающее ИЛИ, очистка битов и Лоrиче
ское ИЛИ с инверсией.
Синтаксис
op{S} {cond} {Rd,} Rn, Operand2
rде
ар
s
операция:
AND Лоrическое И
ORR Лоrическое ИЛИ
EOR Исключающее ИЛИ
BIC Лоrическое И с инверсией или, иначе, очистка битов
ORN Лоrическое ИЛИ с инверсией
необязательный суффикс. При наличии в мнемонике команды
суффикса S состояние флаrов условий изменяется в соответствии
с результатом операции; см. подраздел А.2.7 «Условное выполне
ние».
cand
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rn.
реrистр, содержащий первый операнд.
«rибкий» второй операнд; для получения дополнительной инфор
мации, обратитесь к подразделу А.2.3 «rибкий» второй операнд».
Rd
Rn
Operand2
Операция
Команды AND, EOR и ORR выполняют побитовые операции «И», «ИЛИ» И «Ис
ключающее ИЛИ» соответственно между содержимым Rn и Operand2.
Команда BIC выполняет побитовую операцию «И» между содержимым Rn
и инвертированным значением Operand2.
Команда ORN выполняет побитовую операцию «ИЛИ» между содержимым Rn
и инвертированным значением Operand2.
Оrраничения
Нельзя использовать SP либо Ре.
406 · Приложение А. Набор команд Cortex M3. Справочный материал
Флаrи условия
Если суффикс 8 указан, то эти команды:
· изменяют флаrи N и Z в соответствии с результатом операции;
· MorYT изменять состояние флаrа С при вычислении Operaпd2; см. подраздел
А.2.3 «rибкий» второй операнд»;
· не влияют на состояние флаrа У.
Примеры
AND R9, R2, #OxFFOO
ORREQ R2, RO, R5
ANDS R9, R8, #Ох19
EORS R7, Rll, #Ох18181818
BIC RO, Rl, #ОхаЬ
ORNS R7, Rll, R14, ROR #4
ORNS R7, Rll, R14, ASR #32
А.4.3. ASR, LSL, LSR, ROR и RRX
Арифметический сдвиr вправо, лоrический сдвиr влево, лоrический сдвиr
вправо, циклический сдвиr вправо и расширенный циклический сдвиr вправо.
Синтаксис
op{S}{coпd} Rd, Rт, Rs
op{S}{coпd} Rd, Rт, #п
RRX{S}{coпd} Rd, Rт
rде
ар
операция:
A8R Арифметический сдвиr вправо
L8L Лоrический сдвиr влево
L8R Лоrический сдвиr вправо
ROR Циклический сдвиr вправо
необязательный суффикс. При наличии в мнемонике команды
суффикса 8 состояние флаrов условий изменяется в соответствии
с результатом операции; см. подраздел А.2.7 «Условное выполне
ние».
8
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
реrистр, содержащий сдвиrаемое значение.
реrистр, в котором хранится величина сдвиrа для содержимоrо
Rm. Используется только младший байт реrистра; соответственно,
величина сдвиrа может быть в диапазоне о.. .255.
Rd
Rm
Rs
А.4. Общие команды обработки данных · 407
п
Величина сдвиrа. Диапазон допустимых значений зависит от KO
манды:
A8R от 1 до 32
L8L от О до 31
L8R от 1 до 32
ROR от 1 до 31
примеЧQние
Вместо команды L8L8 Rd, Rm, #0 лучше использовать команду MOV8 Rd, Rm.
Операция
Команды A8R, L8L, L8R и ROR сдвиrают содержимое реrистра Rm влево или
вправо на число битов, определяемое константой пили реrистром Rs. Команда
RRX сдвиrает содержимое реrистра Rm на один бит вправо.
Все рассматриваемые команды сохраняют результат в реrистре Rd, при этом
содержимое реrистра Rm не изменяется. Более подробно действия, выполняемые
отдельными командами сдвиrа, описаны в подр зделе А.2.4 «Операции сдвиrа».
Оrраничения
Нельзя использовать SP либо Ре.
Фпаrи усповия
Если суффикс 8 указан, то:
. эти команды изменяют состояние флаrов N и z;
. во флаr С заносится значение последнеrо выдвинутоrо бита, если величина
сдвиrа не равна нулю; см. подраздел А.2.4 «Операции сдвиrа».
Примеры
RRX
R4, R5
Арифметический сдвиr вправо на 9 бит
Лоrический сдвиr влево на 3 бита с изменением флаrов
Лоrический сдвиr вправо на 6 бит
Циклический сдвиr вправо на число битов, определяемое
младшим битом R6
Расширенный циклический сдвиr вправо
A8R
1818
18R
ROR
R7, R8, #9
Rl, R2, #3
R4, R5, #6
R4, R5, R6
А.4.4. CLZ
Подсчёт ведущих нулевых битов.
Синтаксис
C1Z{coпd} Rd, Rт
rде
coпd
Rd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
408 · Приложение А. Набор команд Cortex M3. Справочный материал
Rm
реrистр операнда.
Операция
Команда CLZ определяет число ведущих нулевых битов в содержимом Rm
и возвращает результат в Rd. Результат равен 32) если ни один бит реrистра Rm не
установлен, и О, если установлен бит [31] реrистра.
Оrраничения
Нельзя использовать SP либо Ре.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
CLZ
CLZNE
R4, R9
R2, RЗ
А.4.5. смр и CMN
Сравнение и сравнение с отрицательным операндом.
Синтаксис
CMP{cond} Rn, Operand2
CМN{cond} Rn, Operand2
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр, содержащий первый операнд.
«rибкий» второй операнд; для получения дополнительной инфор
мации обратитесь к подразделу А.2.3 «rибкий» второй операнд».
Rn
Operand2
Операция
Эти команды выполняют сравнение содержимоrо реrистра Rn со значением
Operand2. Они изменяют флаrи условий в соответствии с результатом cpaBHe
ния, но не сохраняют результат в реrистре.
Команда СМР вычитает Operand2 из содержимоrо реrистра Rm, т.е. выполняет
ту же операцию, что и команда SUBS, но без сохранения результата вычитания.
Команда CMN складывает Operand2 с содержимым реrистра Rm) т.е. выполня
ет ту же операцию, что и команда ADDS, но без сохранения результата сложения.
Оrраничения
· Нельзя использовать ре.
· Operand2 не должен быть SP.
А.4. Общие команды обработки данных · 409
Фпаrи усповия
Эти команды изменяют состояние флаrов N, Z, С и V в соответствии с резуль
татом операции.
Примеры
смр R2, R9
CMN RO, #6400
CMPGT 8Р, R7, 181 #2
А.4.б. МОУ и MVN
Пересылка и пересылка с инверсией.
Синтаксис
MOV{8}{coпd} Rd, Operaпd2
MOV{coпd} Rd, #iттlб
MVN{8}{coпd} Rd, Operaпd2
rде
S необязательный суффикс. При наличии в мнемонике команды
суффикса S состояние флаrов условий изменяется в соответствии
с результатом операции; см. подраздел А.2.7 «Условное выполне
ние».
iттlб
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rп.
«rибкий» второй операнд; для получения дополнительной инфор
мации обратитесь к подразделу А.2.3 «rибкий» второй операнд».
любое число в диапазоне о.. .65535.
coпd
Rd
Operaпd2
Операция
Команда MOV копирует значение Operaпd2 в реrистр Rd. Если вторым операн
дом команды MOV является реrистр со сдвиrом, отличным от LSL #0, то вместо
команд MOV предпочтительней использовать соответствующие команды сдвиrа:
. ASR{S} {cond} Rd, Rm, #п вместо MOV{S} {cond} Rd, Rm, ASR #п.
. LSL{S}{cond} Rd, Rm, #nBMecToMOV{S}{cond} Rd, Rm, LSL #п,еслип О.
. LSR{S}{cond} Rd, Rm, #nBMecToMOV{S}{cond} Rd, Rm, LSR #п.
. ROR{S} {cond} Rd, Rm, #п вместо MOV{S} {cond} Rd, Rm, ROR #п.
. RRX{S}{cond} Rd, RmBMecToMOV{S}{cond} Rd, Rm, RRX.
Помимо этоrо, команда MOV поддерживает дополнительные формы записи
Operaпd2, что позволяет использовать её вместо команд сдвиrа:
. MOV{S} {cond} Rd, Rm, ASR Rs эквивалентна ASR{S} {cond} Rd, Rm, Rs.
. MOV{S}{cond} Rd, Rm, L8L Rs эквивалентна LSL{S}{cond} Rd, Rm, Rs.
410 · Приложение А. Набор команд Cortex M3. Справочный материал
· MOV {S} {cond} Rd, Rm, LSR Rs эквивалентна LSR {S} {cond} Rd, Rm, Rs.
· MOV{S} {cond} Rd, Rm, ROR Rs эквивалентна ROR{S} {cond} Rd, Rm, Rs.
См. подраздел А.4.3 «ASR, LSL, LSR, ROR и RRX».
Команда MVN берёт значение Operaпd2, выполняет над ним побитовую опера
цию «НЕ» и сохраняет результат в реrистре Rd.
примеЧQние
Команда MOVW выполняет ту же операцию, что и команда MOV, однако в каче
стве операнда может использовать только константу iттlб.
Оrраничения
· Нельзя использовать Ре.
· Operaпd2 не должен быть SP.
При использовании Ре в качестве Rd в команде MOV:
· бит [О] значения, заrружаемоrо в ре, иrнорируется;
· переход производится по адресу, получаемому сбросом бита [О] заrружаемоrо
значения в о.
примеЧQние
Несмотря на то что команду MOV можно использовать в качестве команды пе
рехода, компания ARM настоятельно рекомендует использовать для этих целей
команды BL и BLX) чтобы обеспечить переносимость кода между различными Ha
борами команд ARM.
Фпаrи усповия
Если суффикс S указан, то эти команды:
· изменяют флаrи N и Z в соответствии с результатом операции;
· MorYT изменять состояние флаrа С при вычислении Operaпd2; см. подраздел
А.2.3 «rибкий» второй операнд».
· не влияют на состояние флаrа У.
Примеры
MOVS
MOV
MOVS
MOV
MOV
МVNS
Rll, #ОхОООВ
Rl, #OxFA05
RI0, R12
R3, #23
R8, SP
R2, #OxF
Записывает число ОхОООВ в Rll, флаrи изменяются
Записывает число OxFA05 в Rl, флаrи не изменяются
Копирует содержимое R12 в RI0, флаrи изменяются
Записывает число 23 в R3
Сохраняет значение указателя стека в R8
Записывает число OxFFFFFFFO (инвертированное число OxF)
в R2, флаrи изменяются
А.4.7. МОУТ
Пересылка старшеrо полуслова.
Синтаксис
MOVT{coпd} Rd, #iттlб
А.4. Общие команды обработки данных · 411
rде
caпd
iттlб
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rп.
«rибкий» второй операнд; для получения дополнительной инфор
мации, обратитесь к подразделу А.2.3 «rибкий» второй операнд».
любое число в диапазоне О.. .65535.
Rd
Operaпd2
Операция
Команда MOVT заrружает 16 битную константу iттlб в старшее полуслово
(биты [31:16]) реrистра приёмника Rd. Состояние битов Rd [15:0] при этом не из
меняется.
Пара команд MOV и MOVT позволяет заrружать в реrистры произвольные
32 битные константы.
Оrраничения
Rd не должен быть SP или Ре.
Флаrи усповия
Эта команда не влияет на состояние флаrов.
Примеры
MOVT
R3, #OxF123
Заrружает OxF123 в старшее полуслово R3, младшее
полуслово и реrистр APSR не изменяются
А.4.8. REV, REV16, REVSH и RBIT
Перестановка байтов и битов.
Синтаксис
op{cond} Rd, Rn
rде
ар
caпd
операция:
REV Перестановкабайтовслова
RЕVlб Перестановка байтов каждоrо полуслова в отдельности
REVSH Перестановка байтов младшеrо полуслова и расшире
ние знака до 32 бит
RBIT Перестановка битов 32 битноrо слова в обратном по
рядке
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
412 · Приложение А. Набор команд Cortex M3. Справочный материал
Rd
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rn.
реrистр, содержащий операнд.
Rn
Операция
Эти команды предназначены для изменения порядка байтов при хранении
данных:
REV
преобразует 32 битное число с обратным порядком байтов (big
endian) в число с прямым порядком байтов (little endian) или Hao
борот, число с прямым порядком байтов в число с обратным по
рядком.
преобразует 16 битное число с обратным порядком байтов (big
endian) в число с прямым порядком байтов (little endian) или Hao
борот, число с прямым порядком байтов в число с обратным по
рядком.
преобразует:
16 битное число со знаком с обратным порядком байтов в 32 бит
ное число со знаком с прямым порядком байтов;
16 битное число со знаком с прямым порядком байтов в 32 бит
ное число со знаком с обратным порядком байтов.
RЕVlб
REVSH
Оrраничения
Нельзя использовать SP либо РС.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
REV RЗ, R7
REV16 RO, RO
REVSH RO, R5
REVHS RЗ, R7
RBIT R7, R8
Меняет порядок байтов содержимоrо R7 и сохраняет
результат в RЗ
Меняет порядок байтов каждоrо полуслова RO
Меняет порядок байтов 16 битноrо числа со знаком
Переставляет байты при условии «выше или равно»
Изменяет порядок битов содержимоrо R8 и сохраняет
результат в R7
А.4.9. TST и TEQ
Проверка битов и проверка на равенство.
Синтаксис
TST{cond} Rn, Operand2
TEQ{cond} Rn, Operand2
А.4. Общие команды обработки данных · 413
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Rn
Operand2
реrистр, содержащий первый операнд.
«rибкий» второй операнд; для получения дополнительной инфор
мации обратитесь к подразделу А.2.3 «rибкий» второй операнд».
Операция
Эти команды выполняют сравнение содержимоrо реrистра Rn со значением
Operand2. Они изменяют флаrи условий в соответствии с результатом cpaBHe
ния, но не сохраняют результат в реrистре.
Команда TST выполняет побитовую операцию «Лоrическое И» между coдep
жимым Rn и значением Operand2. То есть эта команда аналоrична команде ANDS,
за исключением Toro, что результат операции не сохраняется.
Для проверки состояния отдельноrо бита Rn используют команду TST, второй
операнд которой является константой; в этой константе проверяемый бит YCTa
новлен в 1, а остальные биты сброшены в о.
Команда TEQ выполняет побитовую операцию «Исключающее ИЛИ» между
содержимым Rn и значением Operand2. То есть эта команда аналоrична команде
EORS, за исключением Toro, что результат операции не сохраняется.
Команда TEQ используется для проверки равенства двух значений, не изменяя
при этом флаrов С или У. Кроме Toro, команду TEQ можно использовать для про
верки знака числа. После сравнения флаr N будет равен результату операции
«Исключающее ИЛИ» между знаковыми битами обоих операндов.
Оrраничения
Нельзя использовать SP либо Ре.
Фпаrи усповия
Команды TST и TEQ:
. изменяют флаrи N и Z в соответствии с результатом операции;
. MorYT изменять состояние флаrа С при вычислении Operand2; см. подраздел
А.2.3 «rибкий» второй операнд»;
. не влияют на состояние флаrа У.
Примеры
TEQEQ RI0, R9
Выполняет побитовое «И» между RO и ОхЗF8,
реrистр APSR изменяется, но результат не сохраняется
Проверяет (условно) равенство содержимоrо RI0 и R9,
реrистр APSR изменяется, но результат не сохраняется
TST RO, #ОхЗF8
414 · Приложение А. Набор команд Cortex M3. Справочный материал
А.5. Команды умножения и деления
Команды умножения и деления перечислены в Табл. А.7.
Таблица А.7. Команды умножения и деления
Мнемоника Краткое описание Подраздел
MLA Умножение со сложением) 32 битный результат A.5.l. MUL) MLA и MLS
MLS Умножение с вычитанием) 32 битный результат A.5.l. MUL) MLA и MLS
MUL Умножение) 32 битный результат A.5.l. MUL) MLA и MLS
SDIV Знаковое деление А.5.3. SDIV и UDIV
SMLAL Знаковое умножение со сложением (32 х 32 + 64») А.5.2. UMULL) UMLAL)
64 битный результат SMULL и SMLAL
SMULL Знаковое умножение (32 х 32») 64 битный А.5.2. UMULL) UMLAL)
результат SMULL и SMLAL
UDIV Беззнаковоеделение А.5.3. SDIV и UDIV
UMLAL Беззнаковое умножение со сложением А.5.2. UMULL) UMLAL)
(32 х 32 + 64») 64 битный результат SMULL и SMLAL
UMULL Беззнаковое умножение (32 х 32») 64 битный А.5.2. UMULL) UMLAL)
результат SMULL и SMLAL
А.5.1. MUL, MLA и MLS
Умножение, умножение со сложением и умножение с вычитанием (32 битные
операнды) 32 битный результат).
Синтаксис
MUL{S} {cond} Rd, Rn, Rт Умножение
MLA{cond} Rd, Rn, Rт, Ra Умножение со сложением
MLS { cond} Rd, Rn, Rт, Ra Умножение с вычитанием
rде
S
необязательный суффикс. При наличии в мнемонике команды
суффикса S состояние флаrов условий изменяется в соответствии
с результатом операции; см. подраздел А.2.7 «Условное выполне
ние».
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rn.
реrистры, содержащие перемножаемые значения.
реrистр, содержащий прибавляемое или вычитаемое значение.
Rd
Rn, Rm
Ra
Операция
Команда MUL перемножает содержимое Rn и Rm и помещает 32 младших знача
щих бита результата в реrистр Rd.
А.5. Команды умножения и деления · 415
Команда MLA перемножает содержимое Rn и Rm, прибавляет содержимое Ra
и помещает 32 младших значащих бита результата в реrистр Rd.
Команда MLS перемножает содержимое Rn и Rm, вычитает произведение из co
держимоrо Ra и помещает 32 младших значащих бита результата в реrистр Rd.
Результат выполнения этих команд не зависит от Toro, имели операнды знак
или нет.
Оrраничения
. Нельзя использовать SP либо Ре.
При использовании суффикса S с командой MUL:
. Rd, Rn и Rm должны быть в диапазоне RO. . . R7;
. Rd должен быть тем же реrистром, что и Rm;
. использование суффикса cond не допускается.
Флаrи условия
Если суффикс S указан, то команда MUL:
. изменяет флаrи N и Z в соответствии с результатом операции;
. не влияет на состояние флаrов С и у.
Примеры
MUL
MLA
MULS
MULLT
MLS
RI0, R2, R5
RI0, R2, Rl, R5
RO, R2, R2
R2, R3, R2
R4, R5, Rб, R7
Умножение, RI0 = R2 х R5
Умножение со сложением, RI0 = (R2 х Rl) + R5
Умножение с изменением флаrов, RO = R2 х R2
Умножение (условное), R2 = R3 х R2
Умножение с вычитанием, R4 = R7 (R5 х Rб)
А.5.2. UMULL, UMLAL, SMULL и SMLAL
Знаковое и беззнаковое умножение с опциональным сложением (32 битные
операнды, 64 битный результат).
Синтаксис
op{coпd} RdLo, RdHi, Rп, Rm
rде
ор
операция:
UMULL Беззнаковое длинное умножение
UMLAL Беззнаковое длинное умножение со сложением
SMULL Знаковое длинное умножение
SMLAL Знаковое длинное умножение со сложением
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
RdHi, RdLo реrистры приёмники. Для команд UMLAL и SMLAL в них же xpa
нится значение, прибавляемое к произведению.
cond
Rn, Rm
реrистры, содержащие перемножаемые значения.
416 . Приложение А. Набор команд Cortex M3. Справочный материал
Операция
Команда UMULL интерпретирует содержимое реrистров Rn и Rm как целые чис
ла без знака. Команда перемножает эти числа, помещая 32 младших значащих би
та результата в реrистр RdLo, а 32 старших значащих бита результата в RdHi.
Команда UMLAL интерпретирует содержимое реrистров Rn и Rm как целые чис
ла без знака. Команда перемножает эти числа, прибавляет к 64 битному произве
дению 64 битное число, находящееся в реrистрах RdHi и RdLo, и заносит резуль
тат обратно в реrистры RdHi и RdLo.
Команда SMULL интерпретирует содержимое реrистров Rn и Rm как целые чис
ла со знаком, представленные в дополнительном коде. Команда перемножает эти
числа, помещая 32 младших значащих бита результата в реrистр RdLo, а 32 CTap
ших значащих бита результата в RdHi.
Команда SMLAL интерпретирует содержимое реrистров Rn и Rm как целые чис
ла со знаком, представленные в дополнительном коде. Команда перемножает эти
числа, прибавляет к 64 битному произведению 64 битное число, находящееся
в реrистрах RdHi и RdLo, и заносит результат обратно в реrистры RdHi и RdLo.
Оrраничения
· Нельзя использовать SP либо Ре.
· RdHi и RdLo должны быть разными реrистрами.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
UMULL
SMLAL
RO, R4, R5, Rб
R4, R5, RЗ, R8
Без знака (R4, RO) = R5 х Rб
Со знаком (R5, R4) = (R5, R4) + RЗ х R8
A.S.3. SDIV и UDIV
Знаковое и беззнаковое деление.
Синтаксис
SDIV{cond} {Rd,} Rn, Rm
UDIV{cond} {Rd,} Rn, Rm
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник. Если Rd отсутствует, то реrистром
приёмником является Rn.
реrистр, содержащий делимое.
реrистр, содержащий делитель.
Rd
Rn
Rm
А.б. Команды насыщения . 417
Операция
Команда SDIV выполняет целочисленное деление (со знаком) числа, находяще
rося в Rn, на число, находящееся в Rm, и сохраняет результат в реrистре Rd. Ko
манда UDIV выполняет целочисленное деление (беззнаковое) числа, находящеrо
ся в Rn, на число, находящееся в Rm, и сохраняет результат в реrистре Rd.
Если число, находящееся в Rm, не делится нацело на число, находящееся в Rd,
то результат окруrляется к нулю (дробная часть отбрасывается).
Оrраничения
Нельзя использовать SP либо Ре.
Фl1аrи УСl10ВИЯ
Эта команда не влияет на состояние флаrов.
Примеры
SDIV
UDIV
RO, R2, R4
R8, R8, Rl
; Деление чисел со знаком, RO = R2/R4
Деление чисел без знака, R8 = R8/Rl
А.б. Команды насыщения
в этом разделе описываются команды насыщения (фиксации крайних значе
ний) SSAT и USAT.
А.б.1. SSAT и USAT
Знаковое и беззнаковое насыщение с заданной разрядностью и опциональ
ным сдвиrом перед насыщением.
Синтаксис
op{coпd} Rd, #п, Rт{, shift #s}
rде
ар
cand
операция:
SSAT Насыщение значения со знаком в пределах знаковоrо
диапазона
USAT Насыщение беззнаковоrо значения в пределах беззна
KOBoro диапазона
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
определяет диапазон насыщения:
1 n 32 для команды SSAT
О n 31 для команды USAT
реrистр, содержащий исходное значение.
Rd
n
Rm
418 . Приложение А. Набор команд Cortex M3. Справочный материал
зhift #3
необязательный сдвиr, при меняемый к содержимому Rm перед Ha
сыщением. Допускаются следующие команды сдвиrа:
ASR #3, rде 3 должно находиться в диапазоне 1.. .31
1S1 #3, rде 3 должно находиться в диапазоне О.. .31
Операция
Эти команды выполняют насыщение до знаковоrо или беззнаковоrо п битноrо
значения.
Команда SSAT выполняет заданную операцию сдвиrа, после чеrо фиксирует
полученное значение в пределах знаковоrо диапазона 2п l х 2п l 1. Команда
USAT выполняет заданную операцию сдвиrа, после чеrо фиксирует полученное
значение в пределах беззнаковоrо диапазона О х 2 п 1.
В случае команды SSAT это означает:
· Если фиксируемое значение меньше 2п l, то результат будет равен 2п 1.
· Если фиксируемое значение больше 2п l 1, то результат будет равен 2п l 1.
· В противном случае, результат будет равен фиксируемому значению.
В случае команды USAT это означает:
· Если фиксируемое значение меньше О, то результат будет равен о.
· Если фиксируемое значение больше 2 п 1, то результат будет равен 2 п 1.
· В противном случае, результат будет равен фиксируемому значению.
Если результат операции отличается от фиксируемоrо значения, значит, воз
никло наСblщение. В случае насыщения обе команды устанавливают флаr Q реrи
стра APSR в 1. В противном случае, состояние флаrа Q не изменяется. Для сброса
флаrа Q нужно использовать команду MSR; см. подраздел А.9.7 «MSR». ДЛЯ чтения
состояния флаrа Q можно использовать команду MRS; см. подраздел А.9.6 «MRS».
Оrраничения
· Нельзя использовать SP либо Ре.
Флаrи условия
Эти команды не влияют на состояние флаrов.
В случае насыщения данные команды устанавливают флаr Q в 1.
Примеры
33АТ R7, #16, R7, 131 #4
Выполняет лоrический сдвиr влево
на 4 бита содержимоrо R7,
после чеrо фиксирует ero в пределах
16 битноrо знаковоrо диапазона
и заносит результат обратно в R7
Фиксирует (условно) содержимое R5 в пределах
7 битноrо беззнаковоrо диапазона
и сохраняет ero в RO
U3ATNE RO, #7, R5
А.?: Команды работы с битО8ыми полями · 419
А.7. Команды работы с битовыми полями
Команды, оперирующие наборами смежных битов реrистров (битовыми по
лями), перечислены в Табл. А.8.
Таблица А.В. Команды работы с битовыми полями
Мнемоника Краткое описание Подраздел
BFC Очистка битовоrо поля А.7.1. BFC и BFI
BFI Вставка битовоrо поля А.7.1. BFC и BFI
SBFX Извлечение битовоrо поля со знаком А.7.2. SBFX и UBFX
SXTB Расширение знака байта А.7.3. SXT и UXT
SXTH Расширение знака полуслова А.7.3. SXT и UXT
UBFX Извлечение беззнаковоrо битовоrо поля А.7.2. SBFX и UBFX
UXTB Дополнение нулями байта А.7.3. SXT и UXT
UXTH Дополнение нулями полуслова А.7.3. SXT и UXT
А.7.1. BFC и BFI
Очистка битовоrо поля и вставка битовоrо поля.
Синтаксис
BFC{cond} Rd, #lsb, #width
BFI{cond} Rd, Rn, #lsb, #width
rде
cond
width
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
реrистр источник.
позиция младшеrо значащеrо бита поля. Должна находиться
в диапазоне О.. .31.
размер битовоrо поля. Должен находиться в диапазоне
1.. .32 lsb.
Rd
Rn
lsb
Операция
Команда BFC очищает битовое поле в реrистре. Она сбрасывает width битов
реrистра Rd, начиная с младшеrо бита с номером 1 sb. Остальные биты реrистра
Rd остаются неизменными.
Команда BFI копирует битовое поле из одноrо реrистра в друrой. Эта команда
замещает width битов в реrистре Rd, начиная с младшеrо бита с номером lsb, co
держимым width битов реrистра Rт, начиная с бита [О]. Остальные биты реrи
стра Rd остаются неизменными.
420 · Приложение А. Набор команд Cortex M3. Справочный материал
Оrраничения
Нельзя использовать SP либо Ре.
Фl1аrи УСl10ВИЯ
Эти команды не влияют на состояние флаrов.
Примеры
BFC
BFI
R4, #8, #12
R9, R2, #8, #12
Сбрасываем биты с 8 ro по 19 й (12 бит) реrистра R4
Замещаем биты с 8 ro по 19 й (12 бит) реrистра R9
значениями битов с O ro по 11 й реrистра R2
А.7.2. SBFX и UBFX
Извлечение битовоrо поля со знаком и извлечение битовоrо поля без знака.
Синтаксис
SBFX{coпd} Rd, Rп, #lsb, #width
UBFX{coпd} Rd, Rп, #lsb, #width
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
реrистр источник.
позиция младшеrо значащеrо бита поля. Должна находиться
в диапазоне о.. .31.
размер битовоrо поля. Должен находиться в диапазоне 1...32 lsb.
Rd
Rn
lsb
width
Операция
Команда SBFX извлекает битовое поле из реrистра Rn, расширяет ero до 32 бит
Horo значения и сохраняет результат в реrистре Rd.
Команда UBFX извлекает битовое поле из реrистра Rn, дополняет ero нулями
до 32 битноrо значения и сохраняет результат в реrистре Rd.
Оrраничения
Нельзя использовать SP либо Рс.
Фl1аrи условия
Эти команды не влияют на состояние флаrов.
Примеры
SBFX RO, R1, #20, #4
UBFX R8, R11, # 9 , #10
Берём биты с 20 ro по 2З й (4 бита) из R1, расширяем
до 32 бит и сохраняем результат в RO
Берём биты с 9 ro по 18 й (10 бит) из R11, дополняем
нулями до 32 бит и сохраняем результат в R8
A.Z Команды работы с битовыми полями · 421
А.7.3. SXT и UXT
Расширение знака и дополнение нулями.
Синтаксис
SXT exteпd{coпd} Rd, Rт {, ROR #п}
UXT exteпd{coпd} Rd, Rт {, ROR #п}
rде
exteпd
coпd
разрядность операнда:
В преобразование 8 битноrо значения в 32 битное
Н преобразование 16 битноrо значения в 32 битное
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
реrистр приёмник.
реrистр, содержащий преобразуемое значение.
предварительный сдвиr операнда, допустимы следующие MHeMO
ники:
Rd
Rm
ROR #п
ROR #8
ROR #16
ROR #24
Если ROR
значение из Rm циклически сдвиrается на 8 бит вправо
значение из Rm циклически сдвиrается на 16 бит вправо
значение из Rm циклически сдвиrается на 24 бит вправо
#п не указано, то сдвиr операнда не производится.
Операция
Эти команды выполняют следующие операции:
1. Циклически сдвиrают содержимое Rm на О, 8, 16 или 24 бит вправо.
2. Извлекают биты из полученноrо значения:
а) SXTB извлекает биты [7:0] и расширяет знак до 32 бит;
б) UXTB извлекает биты [7:0] и дополняет нулями до 32 бит;
в) SXTH извлекает биты [15:0] и расширяет знак до 32 бит;
r) UXTH извлекает биты [15:0] и дополняет нулями до 32 бит.
Оrраничения
Нельзя использовать SP либо Ре.
Флаrи условия
Эти команды не влияют на состояние флаrов.
Примеры
SXTH R4, R6, ROR #16 ; Циклически сдвиrает R6 вправо на 16 бит, затем
берёт младшее полуслово, расширяет e o знак
до 32 бит и сохраняет результат в R4
UXTB R3, RI0 ; Берёт младший байт содержимоrо RI0, дополняет нулями
до 32 бит и сохраняет результат в R3
422 · Приложение А. Набор команд Cortex M3. Справочный материал
А.8. Команды ветвления и управления
Команды, оперирующие наборами смежных битов реrистров (битовыми по
лями), перечислены в Табл. А.9.
Таблица А.9. Команды ветвления
Мнемоника Краткое описание Подраздел
В Переход А.В.1. В) BL) ВХ и BLX
В1 Переход со ссылкой А.В.1. В) BL) ВХ и BLX
В1Х Косвенный переход со ссылкой А.В.1. В) BL) ВХ и BLX
ВХ Косвенный переход А.В.1. В) BL) ВХ и BLX
CBNZ Сравнение и переход) если не ноль А.В.2. CBZ и CBNZ
CBZ Сравнение и переход) если ноль А.В.2. CBZ и CBNZ
IT Блок IF THEN А.В.З. IT
твв Табличный переход с однобайтными А.В.4. ТВВ и ТВН
смещениями
твн Табличный переход с двухбайтными А.В.4. ТВВ и ТВН
смещениями
А.8.1. В, BL, ВХ и BLX
Команды перехода.
Синтаксис
B{coпd} label
BL{coпd} label
BX{coпd} Rт
BLX{coпd} Rт
rде
В
BL
ВХ
BLX
coпd
переход (непосредственное смещение).
переход со ссылкой (непосредственное смещение).
косвенный переход (смещение в реrистре).
косвенный переход со ссылкой (смещение в реrистре).
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
выражение, определяемое относительно Ре; см. подраздел
А.2.6 «Адресация относительно РС».
реrистр, содержащий адрес перехода. Бит [О] реrистра Rm должен
быть установлен в 1, однако адрес перехода получается сбросом
этоrо бита в о.
label
Rm
А.8. Команды ветвления и управления · 423
Операция
Все указанные команды выполняют переход к метке label или по адресу, Ha
ходящемуся в реrистре Rm. Кроме Toro:
. команды BL и BLX заносят адрес следующей команды в реrистр LR (реrистр
связи, =RI4);
. команды ВХ и BLX rенерируют исключение Usage Fault, если бит [О] реrистра
Rm равен О.
Команда B{cond} label является единственной условно выполняемой KO
мандой, которая может располаrаться как внутри, так и снаружи Iт блока. Все
остальные команды перехода при условном выполнении должны располаrаться
внутри IТ блока, а при безусловном выполнении снаружи Iт блока. Для полу
чения дополнительной информации обратитесь к подразделу А.8.3 «IT».
Допустимые диапазоны для различных команд перехода указаны в Табл. А.lО.
Таблица А.l0. Диапазоны переходов
Команда Диапазон переходов
В label 16...+16 Мбайт
Bcoпd label (вне Iт блока) 1.. .+1 Мбайт
Bcoпd label (внутри Iт блока) 16...+16 Мбайт
BL{ coпd} label 16...+16 Мбайт
ВХ {coпd} Rm Любое значение в реrистре
BLX {coпd} Rm Любое значение в реrистре
примеЧQние
Для использования Bcero диапазона переходов может потребоваться исполь
зование суффикса .w (см. подраздел А.2.8 «Выбор разрядности команды»).
Оrраничения
. Нельзя использовать Ре в команде BLX.
. Для команд ВХ и BLX бит [О] реrистра Rm должен быть установлен в 1, однако
переход будет осуществляться по адресу, полученному сбросом этоrо бита в О.
. Если любая из этих команд используется внутри Iт блока, то она должна быть
последней командой в блоке.
примеЧQние
Команда Bcoпd это единственная условно выполняемая команда, которая
может вызываться вне Iт блока. Тем не менее, внутри Iт блока она имеет боль
ший диапазон переходов.
Флаrи условия
Эти команды не влияют на состояние флаrов.
Примеры
в
BLE
loopA
ng
Переход к метке loopA
Условный переход к метке ng
424 · Приложение А. Набор команд Cortex M3. Справочный материал
B.W target Переход к метке target в пределах 16 Мбайт
BEQ target Условный переход к метке target
BEQ.W target Условный переход к метке target в пределах 1 Мбайт
BL funC ; Переход со ссылкой (вызов) к функции funC, адрес возврата
запоминается в LR
ВХ LR Возврат из вызванной функции
BXNE RO Условный переход по адресу, находящемуся в RO
BLX RO Переход со ссылкой (вызов) по адресу, находящемуся в RO
А.8.2. CBZ и CBNZ
Сравнение и переход, если ноль/если не ноль.
Синтаксис
CBZ Rп, label
CBNZ Rп, label
rде
Rm
label
реrистр, содержащий операнд.
метка перехода.
Операция
Команды CBZ и CBNZ используются для Toro, чтобы избежать изменения фла
rOB условия, а также для уменьшения объёма кода.
Команда CBZ Rn, label не изменяет флаrов условия, а в остальном эквива
лентна rруппе команд:
СМР Rn, #0
BEQ label
Команда CBNZ Rn, label не изменяет флаrов условия, а в остальном эквива
лентна rруппе команд:
СМР Rn, #0
BNE label
Оrраничения
· Rn должен быть в диапазоне RO.. .R7.
· Адрес назначения должен находиться в диапазоне от 4 до 130 байт после KO
манды.
· Эти команды не должны использоваться внутри Iт блока.
Фпаrи усповия
Эти команды не влияют на состояние флаrов.
Примеры
CBZ
CBNZ
R5, target
RO, target
; Переход вперёд, если R5 равно О
Переход вперёд, если RO не равно О
А.8. Команды ветвления и управления · 425
А.8.3. IT
Условный блок IF THEN.
Синтаксис
IT{x{y{z}}} coпd
rде
х условие выполнения 2 й команды блока.
у условие выполнения 3 й команды блока.
z условие выполнения 4 й команды блока.
coпd условие выполнения l й команды блока.
Для задания условия выполнения 2 й, 3 й и 4 й команды Iт блока может ис
пользоваться одна из следующих мнемоник:
Т «то», применяет к команде условие coпd.
Е «иначе», применяет к команде условие, обратное coпd.
примеЧQние
в качестве условия coпd допускается использование мнемоники AL (условие
«всеrда»). В этом случае все команды в Iт блоке должны быть безусловно выпол
няемыми, а в качестве каждоrо из условий Х, у и z должны быть указаны MHeMO
ники Т (или не указано ничеrо), но не Е.
Операция
Команда IT переводит до 4 последующих команд в режим условноrо выполне
ния. Условия выполнения MorYT быть одинаковыми для всех команд или же He
которые из условий MorYT быть лоrической инверсией друrих. Условно выполня
емые команды, расположенные после команды IT, образуют Iт блок.
Во всех командах Iт блока, включая любые команды перехода, должен быть
указан суффикс условия выполнения {coпd}.
примеЧQние
Используемый вами ассемблер может автоматически вставлять требуемые KO
манды IT при обнаружении в коде условно выполняемых команд. Это можно
уточнить, обратившись к документации на ассемблер.
Команда ВКРТ в Iт блоке выполняется всеrда, независимо от истинности усло
вия её выполнения.
Исключения MorYT возникать как между командой IT и соответствующим IT
блоком, так и внутри caMoro блока. В этом случае процессор переходит к COOTBeT
ствующему обработчику исключения, сохраняя информацию, необходимую для
возврата, в реrистре связи и реrистре PSR, который затем помещается в стек.
Для возврата из обработчика исключения можно использовать любую пред
назначенную для этоrо команду, в таком случае выполнение команд Iт блока бу
дет корректно возобновлено. Это единственная ситуация, при которой команде,
426 · Прuложенuе А. Набор команд Cortex M3. Справочный материал
модифицирующей содержимое РС, разрешается переход на команду внутри IT
блока.
Оrраничения
Следующие команды не MorYT присутствовать в Iт блоке:
. 1T;
· CBZ и CBNZ;
· CPS1D и CPS1E.
Прочие оrраничения, касающиеся использования Iт блоков:
· Команды перехода и прочие команды, изменяющие РС, должны либо распола
rаться вне Iт блока, либо быть последней командой блока. Речь идёт о следу
ющих командах:
CJ ADD РС, РС, Rm;
CJ MOV РС, Rm;
CJ В, BL, ВХ, BLX;
CJ любые команды LDM, LDR или РОР, осуществляющие запись в РС;
CJ твв и ТВН.
· Не допускается переход внутрь 1т блока, кроме как при возврате из обработ
чика исключения.
· Все условно выполняемые команды, за исключением команды В cond, долж
ны находиться внутри 1т блока. Команда В cond может использоваться как
вне Iт блока, так и внутри Hero, однако в последнем случае она имеет больший
диапазон переходов.
· у любой команды 1т блока должен быть указан суффикс условия выполне
ния, который может либо совпадать, либо быть лоrической инверсией усло
вия выполнения остальных команд блока.
примеЧQние
Используемый вами ассемблер может накладывать дополнительные оrрани
чения на использование 1т блока, скажем, запрещать размещение внутри Hero
директив ассемблера.
Фяаrи усяовия
Эта команда не влияет на состояние флаrов.
Примеры
ITTE NE Следующие 3 команды условно выполняемые
ANDNE RO, RO, R1 ANDNE не изменяет флаrи условия
ADDSNE R2, R2, #1 ADDSNE изменяет флаrи условия
MOVEQ R2, RЗ ; Условное копирование
СМР RO, #9 Преобразуем шестнадцатеричное число (O 15) в реrистре RO
в АSСII символ ('O' '9', 'A' 'F')
ITE GT Следующие 2 команды условно выполняемые
ADDGT R1, RO, #55 Преобразуем ОхА > 'А'
ADDLE R1, RO, #48 Преобразуем ОхО > ' О '
IT GT IТ блок с единственной условно выполняемой командой
А.В. Команды ветвления и управления · 427
ADDGT R1, R1, #1 Условно инкрементируем R1
ITTEE EQ Следующие 4 команды условно выполняемые
MOVEQ RO, R1 Условное копирование
ADDEQ R2, R2, #10 Условное сложение
ANDNE RЗ, RЗ, #1 Условное «Лоrическое И»
BNE.W dloop Команда перехода может быть только последней командой
IТ блока
IT NE Следующая команда условно выполняемая
ADD RO, RO, R1 Синтаксическая ошибка: не указан код условия выполнения
А.8.4. ТВВ и твн
Табличный переход с однобайтными/двухбайтными смещениями.
Синтаксис
ТВВ [Rп, Rт]
ТВН [Rп, Rт, 181 #1]
rде
Rn
Rm
реrистр, содержащий адрес таблицы переходов. Если в качестве
Rn используется РС, то адресом таблицы является адрес первоrо
байта после команды ТВВ или ТВН.
индексный реrистр. Этот реrистр содержит индекс элемента Ta
блицы. В таблицах с двухбайтными смещениями корректное зна
чение смещения получается удвоением содержимоrо Rm (опера
ция L8L #1).
Операция
Эти команды выполняют переход в прямом направлении, используя таблицу
однобайтных (ТВВ) или двухбайтных (ТВН) смещений относительно РС. Реrистр
Rn является указателем на таблицу, а Rm индексом элемента таблицы. В KOMaH
де ТВВ величина смещения получается удвоением беззнаковоrо однобайтноrо
значения, извлечённоrо из таблицы. Аналоrично, в команде ТВН величина смеще
ния получается удвоением беззнаковоrо 2 байтноrо значения, извлечённоrо из
таблицы. Переход осуществляется по адресу, отстоящему на полученную величи
ну от адреса байта, следующеrо за командой ТВВ или ТВН.
Оrраничения
. Rn не должен быть SP.
. Rm не должен быть SP либо РС.
. Если любая из этих команд используется внутри Iт блока, то она должна быть
последней командой в блоке.
Фпаrи усповия
Эти команды не влияют на состояние флаrов.
428 · Приложение А. Набор команд Cortex M3. Справочный материал
Примеры
AOR.W RO, BranchTable Byte
ТВВ [RO, R1]
R1 индекс, RO базовый адрес
таблицы пере ходов
Case1
; Далее располаrаются соответствующие команды
Case2
Далее располаrаются соответствующие команды
СаsеЗ
; Далее располаrаются соответствующие команды
BranchTable Byte
ОСВ О
ОСВ ((Case2 Case1)/2)
ОСВ ((СаsеЗ Саsе1)/2)
Вычисление смещения для варианта Case1
Вычисление смещения для варианта Case2
Вычисление смещения для варианта СаsеЗ
ТВН [РС, R1, L8L #1]
R1 индекс, РС используется в качестве
базовоrо адреса таблицы переходов
BranchTable Н
OCI ((CaseA BranchTable H)/2) ;
OCI ((CaseB BranchTable Н)/2)
OCI ((CaseC BranchTable Н)/2)
CaseA
Вычисление смещения для варианта CaseA
Вычисление смещения для варианта CaseB
Вычисление смещения для варианта CaseC
Далее располаrаются соответствующие команды
CaseB
Далее располаrаются соответствующие команды
CaseC
Далее располаrаются соответствующие команды
А.9. Прочие команды
Все остальные команды, поддерживаемые процессором Cortex M3, перечисле
ны в Табл. A.l1.
Таблица А.ll. Прочие команды
Мнемоника Краткое описание Подраздел
ВКРТ Точка останова A.9.1. ВКРТ
CPSID Изменение состояния процессора, запрещение прерываний А.9.2. CPS
CPSIE Изменение состояния процессора, разрешение прерываний А.9.2. CPS
DMB Барьер памяти данных А.9.З. DMB
DSB Барьер синхронизации данных А.9.4. DSB
ISB Барьер синхронизации команд A.9.S. ISB
MRS Пересылка из реrистра специальных функций в реrистр А.9.6. MRS
MSR Пересылка из реrистра в реrистр специальных функций А.9.7. MSR
NOP Нет операции А.9.В. NOP
SEV Послать событие А.9.9. SEV
SVC Вызов супервизора A.9.10. SVC
WFE Ожидание события A.9.11. WFE
WFI Ожидание прерывания A.9.12. WFI
А.9. Прочие команды . 429
А.9.1. ВКРТ
Точка останова.
Синтаксис
ВКРТ #imm
rде
тт
выражение) результатом KOToporo является целое число от О до
255 (8 битное значение).
Операция
Команда ВКРТ переводит процессор в режим отладки. Отладочные средства
MorYT использовать это для считывания информации о состоянии системы при
достижении команды) расположенной по заданному адресу.
Значение imm процессором иrнорируется. При необходимости отладчик MO
жет использовать это значение для сохранения дополнительной информации
о точке останова. Компания ARM не рекомендует использовать с командой ВКРТ
значение ОхАВ для любых целей) за исключением поддержки полухостинrа. Ko
манда ВКРТ может располаrаться внутри Iт блока) однако выполняться она будет
всеrда, независимо от условия) заданноrо в команде IT.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
ВКРТ
#ОхЗ
Точка останова с параметром, равным ОхЗ (отладчик может
извлечь эту константу, определив её положение по значению РС)
примеЧQние
Компания ARM не рекомендует использовать с командой ВКРТ значение ОхАВ
для любых целей) за исключением поддержки полухостинrа.
А.9.2. CPS
Изменение состояния процессора.
Синтаксис
CPSeffect if1ags
rде
effect
iflags
действие) производимое над реrистром специальноrо назначения:
IE очистка реrистра
10 установка реrистра
один или несколько флаrов:
l установка или очистка реrистра PRIMASK
f установка или очистка реrистра FAULTMASK
430 · Приложение А. Набор команд Cortex M3. Справочный материал
Операция
Команда CPS изменяет содержимое реrистров PRIMASK и FAULTMASK.
Оrраничения
· Команда CPS должна вызываться только в привилеrированном режиме. В He
привилеrированном режиме она не выполняет никаких действий.
· Команда CPS не может выполняться условно и) соответственно) не должна ис
пользоваться внутри Iт блока.
Фпаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
CPSIO 1
Запрещает прерывания и конфиrурируемые обработчики отказов
(установка PRlМASK)
Запрещает прерывания и все обработчики отказов (установка FAULTМASK)
Разрешает прерывания и конфиrурируемые обработчики отказов
(очистка PRlМASK)
Разрешает прерывания и все обработчики отказов (очистка FAULTМASK)
CPSIO f
CPSIE 1
CPSIE f
А.9.3. DMB
Барьер памяти данных.
Синтаксис
ОМВ { coпd}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Команда ОМВ используется в качестве барьера памяти данных. Она rарантиру
ет) что все обращения к памяти) явно указанные до вызова команды ОМВ) будут
выполнены до Toro) как начнут выполняться явные обращения к памяти) появля
ющиеся после команды ОМВ. Команда ОМВ не влияет на порядок или выполнение
команд, не обращающихся к памяти.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
ОМВ ; Барьер памяти данных
А.9.4. DSB
Барьер синхронизации данных.
А.9. Прочие команды · 431
Синтаксис
DSB{cond}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Команда DSB используется в качестве специальноrо барьера для синхрониза
ции памяти данных. Команды) располаrающиеся после DSB) не будут выполнять
ся до завершения команды DSB. Команда DSB завершается после Toro) как будут
выполнены все явные обращения к памяти) запущенные перед командой.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
DSB ; Барьер синхронизации данных
A.9.S. ISB
Барьер синхронизации команд.
Синтаксис
ISB {cond}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Команда 1 SB используется в качестве барьера для синхронизации команд.
Она очищает конвейер процессора) в результате чеrо все команды) следующие за
ISB) повторно извлекаются из кэша или памяти после завершения команды ISB.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
ISB ; Барьер синхронизации команд
А.9.б. MRS
Пересылает содержимое реrистра специальноrо наgначения в реrисrр общеrо
назначения.
432 · Приложение А. Набор команд Cortex M3. Справочный материал
Синтаксис
МRS{coпd} Rd, spec reg
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Rd реrистр приёмник.
spec reg любой из следующих реrистров: APSR, IPSR, EPSR, IEPSR, IAPSR,
EAPSR, PSR, MSP, PSP, PRIMASK, BASEPRI, BASEPRI МАХ,
FAULTMASK или CONTROL.
Операция
Команда MRS используется совместно с командой MSR для выполнения опера
ции вида «чтение модификация запись» для изменения содержимоrо реrи
стров xPSR, скажем для сброса флаrа Q.
При переключении между двумя процессами необходимо сохранять состоя
ние заменяемоrо процесса, включая содержимое соответствующих реrистров
xPSR. Аналоrично, необходимо восстанавливать состояние запускаемоrо процес
са. Для выполнения этих операций используют команды MRS (сохранение COCTO
яния) и MSR (восстановление состояния).
примеЧQние
Мнемоника BASEPRI МАХ эквивалентна мнемонике BASEPRI при использо
вании с командой MRS; см. подраздел А.9.7 «MSR».
Оrраничения
Rd не может быть SP либо РС.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
MRS RO, PRIМASK
Сохраняет содержимое PRIМASK в RO
А.9.7. MSR
Пересылает содержимое реrистра общеrо назначения в реrистр специальноrо
назначения.
Синтаксис
MSR{coпd} spec reg, Rd
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Rn
реrистр источник.
А.9. Прочие команды . 433
spec reg любой из следующих реrистров: APSR, IPSR, EPSR, IEPSR, IAPSR,
EAPSR,PSR,MSP,PSP,PRIMASK,BASEPRI,BASEPRI МАХ,
FAULTMASK или CONTROL.
Операция
Доступность реrистров специальноrо назначения определяется режимом pa
боты процессора. В непривилеrированном режиме доступен только реrистр
APSR. В привилеrированном режиме доступны все реrистры специальноrо назна
чения.
В непривилеrированном режиме запись в нереализованные биты или биты,
содержащие состояние выполнения проrраммы, реrистра PSR иrнорируются.
примеЧQние
При указании мнемоники BASEPRI МАХ команда выполняет запись в pe
rистр BASEPRI только в случае, если:
. Rn содержит ненулевое значение и текущее значение BASEPRI равно о;
. Rn содержит ненулевое значение, меньшее текущеrо значения BASEPRI.
СМ. подраздел А.9.6 «MRS».
Оrраничения
Rd не может быть SP либо РС.
Флаrи условия
Эта команда изменяет состояние флаrов, явно указанных в Rn.
Примеры
MRS CONTROL, Rl
Заrружает содержимое Rl в реrистр CONTROL
А.9.8. NOP
Нет операции.
Синтаксис
NOP {coпd}
rде
cond
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Оп рация
Команда NOP не выполняет никаких действий. Команда NOP не всеrда требует
времени для выполнения процессор может убрать её из конвейера раньше, чем
она достиrнет стадии исполнения.
Используйте команду NOP для заполнения памяти проrрамм, например для
размещения последующей команды по 64 битной rранице.
434 · Приложение А. Набор команд Cortex M3. Справочный материал
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
NOP ; Нет операции
А.9.9. SEV
rенерация события.
Синтаксис
SEV { coпd}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Команда SEV rенерирует событие для передачи ero всем процессорам MHoro
процессорной системы. Она также устанавливает в 1 локальную защёлку собы
тия. Более подробно использование команды SEV описано в разделе 14.3 «MHoro
процессорный обмен».
Флаrи условия
Эта команда не влияет на состояние флаrов.
При меры
SEV ; Послать событие
А.9.10. SVC
Вызов супервизора.
Синтаксис
SVC{coпd} #imm
rде
coпd
тт
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
выражение, результатом KOToporo является целое число от О до
255 (8 битное значение).
Операция
Команда SVC rенерирует исключение SVCall.
А.9. Прочие команды · 435
Значение imm процессором иrнорируется. При необходимости, обработчик
исключения может использовать это значение для определения запрашиваемой
службы.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
SVC #ОхЗ2
Вызов супервизора (обработчик SVC может считать значение,
переданное в команде, определив адрес команды по сохранённому
в стеке значению РС)
А.9.11. WFE
Ожидание события.
Синтаксис
WFE{coпd}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Если локальная защёлка события сброшена, то команда WFE приостанавлива
ет работу процессора до наступления любоrо из указанных событий:
. возникновение исключения, не маскированноrо реrистром маскирования ис
ключений или текущим уровнем приоритета;
. перевод исключения в состояние ожидания, если установлен бит SEVONPEND
реrистра SCR;
. запрос на перевод в режим отладки, если она разрешена.
Событие, сrенерированное периферией или друrим процессором мноrопро
цессорной системы с использованием команды SEV.
Если локальная защёлка события установлена в 1, то команда WFE очищает её
и завершается. Для получения информации об использовании команды WFE и pe
rистра события обратитесь к подразделу 14.2.1 «Спящие режимы».
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
WFE ; Ожидание события
А.9.12. WFI
Ожидание прерывания.
436 · Приложение А. Набор команд Cortex M3. Справочный материал
Синтаксис
WFI { coпd}
rде
coпd
необязательный суффикс условия выполнения; см. подраздел
А.2.7 «Условное выполнение».
Операция
Команда WFI приостанавливает работу процессора до наступления любоrо из
указанных событий:
· исключительной ситуации;
· запроса на переход в режим отладки, независимо от Toro, разрешена она или
нет.
Флаrи условия
Эта команда не влияет на состояние флаrов.
Примеры
WFI ; Ожидание прерывания
ПРИ ЛОЖЕ НИ Е Б
16 БИТНЫЕ КОМАНДЫ THUMB
И ВЕРСИИ АрхитЕктуры ARM
Поддержка большинства 16 битных команд Thumb@ реализована в архитек
туре у4Т (ARM7TDMI). Однако некоторые команды появились только в последу
ющих версиях (У5, у6 и У7) архитектуры. Эти команды указаны в Табл. Б.l.
Таблица Б.l. Поддержка 16 битных команд в различных версиях архитектуры ARM
Команда v4T v5 v6 СоrtехТМ М3 (v7 M)
ВКРТ Нет Да Да Да
BLX Нет Да Да Только BLX <reg>
CBZ, CBNZ Нет Нет Нет Да
CPS Нет Нет Да CPSIE <i/f>,CPSID <i/f>
сру Нет Нет Да Да
NOP Нет Нет Нет Да
IT Нет Нет Нет Да
REV (различные формы) Нет Нет Да REV, REVl б, REVSH
SEV Нет Нет Нет Да
SETEND Нет Нет Да Нет
SWI Да Да Да Изменена на SVC
SXTB, SXTH Нет Нет Да Да
UXTB, UXTH Нет Нет Да Да
WFE, WFI Нет Нет Нет Да
ПРИ ЛОЖЕ НИ Е В
ИСКЛЮЧЕНИЯ ПРОЦЕССОРА CORTEX M3
КРАТКАЯ СПРАВКА
Исключения, поддерживаемые процессором Cortex M3, перечислены
в Табл. B.l. В этой же таблице указаны реrистры, используемые для задания ypOB
ня приоритета прерываний и для разрешения данных прерываний.
В.1. Типы исключений и их разрешение
Таблица В.l. Исключения процессора Cortex M3
Тип Приоритет
Наименование (адрес реrистра уровня Разрешение
исключения приоритета)
1 Reset 3 Всеrда разрешено
2 NMI 2 Всеrда разрешено
3 Hard Fault 1 Всеrда разрешено
4 MemManage Проrраммируемый Реrистр SHCSR модуля NVIC
Fault (OxEOOOED18) (OxEOOOED24), бит [16]
5 Bus Fault Проrраммируемый Реrистр SHCSR модуля NVIC
(OxEOOOED19) (OxEOOOED24), бит [17]
6 Usage Fault Проrраммируемый Реrистр SHCSR модуля NVIC
(OxEOOOED1A) (OxEOOOED24), бит [18]
7. ..10
11 SVCall Проrраммируемый Всеrда разрешено
(OxEOOOED1F)
12 Debug monitor Проrраммируемый Реrистр DEMCR модуля NVIC
(OxEOOOED20) (OxEOOOEDFC), бит [16]
13
14 PendSV Проrраммируемый Всеrда разрешено
(OxEOOOED22)
15 SYSTICK Проrраммируемый Реrистр SYST CSR модуля
(OxEOOOED23) SYSTICK (ОхЕОООЕ010), бит [1]
16. ..255 IRQ Проrраммируемый Реrистры NVIC ISERx модуля
(ОхЕОООЕ400.. .ОхЕОООЕ7ЕС) NVIC (ОхЕОООЕ100.. .ОхЕОООЕ17С)
В.2. Содержимое стека после сохранения в нём контекста · 439
8.2. Содержимое стека поспе сохранения в нём
контекста
Таблица В.2. Стековый фрейм исключения
Адрес Данные Порядок эаrруэки в стек
OLD SP (N+З2) 7 (Ранее заrруженные данные)
(N+28) PSR 2
(N+24) РС 1
(N+20) LR 8
(N+ 16) R12 7
(N+12) RЗ 6
(N+8) R2 5
(N+4) R1 4
НОВЫЙ SP (N) 7 RO 3
Примечание. Если используется выравнивание стека по rранице двойноrо слова, а указатель стека на
момент возникновения исключения не был выровнен, то вершина cTeKoBoro фрейма может
располаrаться по адресу ([OLD SP 4] AND OxFFFFFFF8) с соответствующим сдвиrом остальноrо
содержимоrо таблицы на одно слово вниз.
ПРИЛОЖЕНИЕ r
рЕrистры КОНТРОЛЛЕРА NVIC
И БЛОКА УПРАВЛЕНИЯ СИСТЕМОЙ
КРАТКАЯ СПРАВКА
в следующих таблицах (Табл. [.l. ..f.40) содержится описание битов различ
ных реrистров контроллера векторных прерываний NVIC, включая реrистры,
связанные с системным таймером SYSTICK.
Таблица Теl. Реrистр типа контроллера прерываний ICTR (ОхЕОООЕОО4)
Биты Обозначение Тип Значение после Описание
сброса
Количество входов прерываний
с шаrом 32:
4:0 INTLINESNUM R 0= 1...32;
1 = 33. ..64;
. . .
Таблица Те2. Дополнительный реrистр управления ACR (ОхЕОООЕОО8)
Значение
Биты Обозначение Тип после Описание
сброса
Если этот бит установлен, запрещается
перекрытие цикла исполнения Iт блока друrой
2 DISFOLD R/W О командой. Такое перекрытие (называемое IT
foldiпg) является одним из методов оптимизации,
позволяющим ускорить выполнение условно
выполняемых команд
Если этот бит установлен, запрещается
использование внутренних буферов записи
процессора. В результате команда,
1 DISDEFWBUF R/W О расположенная за командой сохранения данных,
не будет запущена до завершения операции
сохранения. Этот бит не влияет на буферы
записи, расположенные вне процессора
(например, в мосте между шинами)
Если этот бит установлен, запрещается
О DISMCYCINT R/W О прерывание команд, выполняющихся
за несколько тактов
Примечание. Реrистр ACR появился во 2 й ревизии процессора Cortex M3.
Приложение r. Pezucmpbl контроллера NVIC и блока управления системой · 441
Таблица Т.З. Реrистр управления и состояния системноrо таймера SYST CSR
(ОхЕОООЕОI0)
Значение
Биты Обозначение Тип после Описание
сброса
Читается как 1, если с момента последнеrо чтения
16 COUNTFLAG R О данноrо реrистра таймер досчитал до о. Этот бит
сбрасывается в О автоматически после чтения или
при обнулении текущеrо значения таймера
2 CLKSOURCE R/W О О внешний тактовый сиrнал (STCLK);
1 тактовый сиrнал процессора
1 разрешить rенерацию прерывания SYSTICK при
1 TICKINT R/W О достижении таймером нулевоrо значения;
О не rенерировать прерывание
О ENABLE R/W О Разрешение таймера SYSTICK
Таблица Т.4. Реrистр значения перезаrрузки системноrо таймера SYST RVR
(охЕОООЕОI4)
Биты Обозначение Тип Значение Описание
после сброса
23:0 RELOAD R/W О Значение, заrружаемое в таймер при
достижении им нулевоrо значения
Таблица Т.5. Реrистр текущеrо значения системноrо таймера SYST CVR (ОхЕОООЕОI8)
Биты Обозначение Тип Значение Описание
после сброса
При чтении возвращается текущее значение
счётчика.
23:0 CURRENT R/Wc О При записи в реrистр счётчик обнуляется; очистка
счётчика также сбрасывает флаr COUNTFLAG
реrистра SYST CSR (см. Табл. [.3)
Таблица Т.б. Реrистр калибровочноrо значения системноrо таймера SYST CALIB
(ОхЕОООЕОIС)
Биты Обозначение Тип Значение Описание
после сброса
1 нет внешнеrо опорноrо сиrнала (сиrнал
31 NOREF R STCLK недоступен);
О внешний тактовый сиrнал доступен
1 калибровочное значение не соответствует
30 SKEW R 10 MC интервалу;
О калибровочное значение точное
Калибровочное значение для периода 10 мс.
Разработчик SoC должен подать это значение
23:0 TENMS R/W О (в двоичном коде) на соответствующие входы
процессора. Если при чтении данноrо поля
возвращается О, значит, калибровочное
значение недоступно
442 · Приложение r. Pezucтpbl контроллера NVIC и блока управления системой
Таблица Те7. Реrистры разреmения внешних прерываний NVIC ISERx
(OxEOOOEIOO.. .OxEOOOEIIC)
Адрес Обозначение Тип Значение Описание
после сброса
Разрешает внешние прерывания
с номерами от О до 31:
ОхЕОООЕ100 NVIC ISERO R/W О бит [О] прерывание N 9 O;
бит [1] прерывание N91;
. . .
бит [31] прерывание N931
ОхЕОООЕ104 NVIC ISER1 R/W О Разрешает внешние прерывания
с номерами от 32 до 63
. . . . . . . . . . . . . . .
Таблица Тев. Реrистры отмены разреmения внешних прерываний NVIC ICERx
(OxEOOOEI80.. .OxEOOOEI9C)
Адрес Обозначение Тип Значение Описание
после сброса
Отменяет разрешение внешних
прерываний с номерами от О до 31:
ОхЕОООЕ180 NVIC ICERO R/W О бит [О] прерывание N9O;
бит [1] прерывание N91;
. . .
бит [31] прерывание N931
ОхЕОООЕ184 NVIC ICER1 R/W О Отменяет разрешение внешних
прерываний с номерами от 32 до 63
. . . . . . . . . . . . . . .
Таблица Те9. Реrистры установки признака отложенноrо прерывания NVIC ISPRx
(ОхЕОООЕ200.. .OxEOOOE2IC)
Адрес Обозначение Тип Значение Описание
после сброса
Устанавливает признак отложенноrо
прерывания для внешних прерываний
с номерами от О до 31:
ОхЕОООЕ200 NVIC ISPRO R/W О бит [О] прерывание N9O;
бит [1] прерывание N91;
. . .
бит [31] прерывание N931
Устанавливает признак отложенноrо
ОхЕОООЕ204 NVIC ISPR1 R/W О прерывания для внешних прерываний
с номерами от 32 до 63
. . . . . . . . . . . . . . .
Приложение r. Pezucmpbl контроллера NVIC и блока управления системой · 443
Таблица Т.l0. Реrистры сброса признака отложенноrо прерывания NVIC ICPRx
(ОхЕОООЕ280.. .ОхЕОООЕ29С)
Адрес Обозначение Тип Значение Описание
после сброса
Сбрасывает признак отложенноrо
прерывания для внешних прерываний
с номерами от О до 31:
ОхЕОООЕ280 NVIC ICPRO R/W О бит [О] прерывание N 2 O;
бит [1] прерывание N21;
. . .
бит [31] прерывание N231
Сбрасывает признак отложенноrо
ОхЕОООЕ284 NVIC ICPR1 R/W О прерывания для внешних прерываний
с номерами от 32 до 63
. . . . . . . . . . . . . . .
Таблица Т.ll. Реrистры активности внешних прерываний NVIC IABRx
(ОхЕОООЕ300. . . ОхЕОООЕ31 С)
Адрес Обозначение Тип Значение Описание
после сброса
Признак активности внешних
прерываний с номерами от О до 31:
ОхЕОООЕ200 NVIC IABRO R О бит [О] прерывание NQO;
бит [1] прерывание N Q 1;
. . .
бит [31] прерывание N231
ОхЕОООЕ204 NVIC IABR1 R О Признак активности внешних
прерываний с номерами от 32 до 63
. . . . . . . . . . . . . . .
Таблица Т.12. Реrистры уровня приоритета внешних прерываний PRI x
(OxEOOOE400...0xEOOOE4EF; адресация в таблице побайтовая)
Адрес Обозначение Тип Значение после Описание
сброса
ОхЕОООЕ400 PRI О R/W О Уровень приоритета внешнеrо
прерывания NQO
ОхЕОООЕ401 PRI l R/W О Уровень приоритета внешнеrо
прерывания NQ1
. . . . . . . . . . . . . . .
ОхЕОООЕ41 F PRI 31 R/W О Уровень приоритета внешнеrо
прерывания NQ31
. . . . . . . . . . . . . . .
444 · Приложение r. Pezucmpbl контроллера NVIC и блока управления системой
Таблица Т.13. Реrистр идентификатора ЦПУ CPUID (OxEOOOEDOO)
Биты Обозначение Тип Значение после сброса Описание
31:24 IMPLEMENTER R Ох41 Код производителя; для
компании ARM = Ох41
23:20 VARIANT R ОхО/Ох1/0х2 Номер версии, определяемый
реализацией
19:16 Constant R ОхР Константа
15:4 PARTNO R ОхС23 Номер изделия
3:0 REVISION R ОхО/Ох1 Ревизия
Таблица Те14. Реrистр управления и состояния прерываний ICSR (OxEOOOED04)
Биты Обозначение Тип Значение Описание
после сброса
31 NMIPENDSET R/W О Немаскируемое прерывание отложено
Запись 1 в этот бит переводит исключение
28 PENDSVSET R/W О PendSV в состояние ожидания.
При чтении возвращается текущее состояние
Запись 1 в этот бит очищает признак
27 PENDSVCLR W О отложенноrо прерывания для исключения
PendSV
Запись 1 в этот бит переводит исключение
26 PENDSTSET R/W О SYSTICK в состояние ожидания.
При чтении возвращается текущее состояние
Запись 1 в этот бит очищает признак
25 PENDSTCLR W О отложенноrо прерывания для исключения
SYSTICK
23 ISRPREEMPT R О Отложенное прерывание станет активным на
следующем шаrе (используется для отладки)
22 ISRPENDING R О Имеется отложенное внешнее прерывание
21:12 VECTPENDING R О Номер отложенноrо исключения с наибольшим
приоритетом
Устанавливается в 1 при выполнении
процессором обработчика исключения;
11 RETTOBASE R О обеспечивает переход процессора в режим потока
после возврата из прерывания при отсутствии
друrих отложенных исключений
8:0 VECTACTIVE R О Номер обрабатываемоrо в данный момент
исключения
Таблица Те15. Реrистр смещения таблицы векторов VTOR (OxEOOOED08)
Биты Обозначение Тип Значение Описание
после сброса
29 TBLBASE R/W Таблица расположена в области кода (О) или
в области ОЗУ (1)
28:7 TBLOFF R/W Смещение таблицы относительно начала
области кода или области ОЗУ
Приложение r. Pezucmpbt конmроллера NVIC и блока управления сисmемой · 445
Таблица Т.16. Реrистр управления прерываниями и сбросом AIRCR (охЕОООЕООС)
Биты Обозначение Тип Значение Описание
после сброса
Ключ доступа; при записи в реrистр в данном
поле должно быть записано значение Ох05РА)
31:16 УЕСТКЕУ R/W иначе запись будет проиrнорирована. При
чтении реrистра в этих битах возвращается
значение ОхРА50
Отображает формат хранения данных:
1 обратный порядок байтов (BE 8))
15 ENDIANNESS R О прямой порядок байтов;
этот бит может быть изменён только
в момент сброса
10:8 PRIGROUP R/W О rруппированиеприоритетов
2 SYSRESETREQ W Формирует запрос rенерации сиrнала сброса
Очищает всю активную информацию
о состоянии исключений; обычно
1 VECTCLRACTIVE W используется при отладке или операционной
системой для восстановления после
системной ошибки (сброс является более
безопасным методом)
Сбрасывает процессор Cortex M3 (за исклю
О VECTRESET W чением компонентов отладки)) однако не
сбрасывает блоки) внешние по отношению
к процессору
Таблица Т.l7. Реrистр управления системой SCR (OxEOOOEDIO)
Биты Обозначение Тип Значение Описание
после сброса
Формирование события при откладывании.
Разрешает пробуждение процессора из
4 SEVONPEND R/W О спящеrо режима командой WFE при появлении
HOBoro отложенноrо прерывания) независимо
от приоритета этоrо прерывания
3 Зарезервировано
2 SLEEPDEEP R/W О Разрешает формирование сиrнала SLEEPDEEP
при переходе в спящий режим
1 SLEEPONEXIT R/W О Включает функцию Sleep on exit
О Зарезервировано
446 · Приложение r. Pezucmpbl конmроллера NVIC и блока управления сисmемой
Таблица r.18. Реrистр управления конфиrурацией CCR (OxEOOOED14)
Значение
Биты Обозначение Тип после Описание
сброса
Включить выравнивание на rраницу двойноrо
слова при сохранении данных в стеке во время
9 STKALIGN R/W О или 1 исключения. В ревизии 1 процессора этот бит
по умолчанию сброшен в О, а в ревизии 2
установлен в 1. В ревизии О процессора такая
возможность отсутствует
Иrнорировать отказы шины при обработке
8 BFHFNMIGN R/W О исключения Hard Fault и немаскируемоrо
прерывания
7:5 Зарезервировано Зарезервировано
4 DIV O TRP R/W О Перехватывать деление на ноль
3 UNALIGN TRP R/W О Перехватывать обращения к невыровненным
данным
2 Зарезервировано Зарезервировано
Разрешить пользовательскому коду выполнять
1 USERSETMPEND R/W О запись в реrистр проrраммной rенерации
прерывания STIR
Разрешить обработчикам исключений
О NONBASETHRDENA R/W О возвращаться в состояние потока на любом
уровне вложенности
Таблица Те19. Реrистры уровня приоритета системных исключений PRI x
(OxEOOOED18...0xEOOOED23; адресация в таблице побайтовая)
Значение
Адрес Обозначение Тип после Описание
сброса
OxEOOOED18 PRI 4 R/W О Уровень приоритета исключения
MemManage Fault
OxEOOOED19 PRI 5 R/W О Уровень приоритета исключения Bus Fault
OxEOOOED1A PRI 6 R/W О Уровень приоритета исключения Usage Fault
OxEOOOEDIB
OxEOOOED1C
OxEOOOED1D
OxEOOOEDIE
OxEOOOED1F PRI 11 R/W О Уровень приоритета исключения SVCall
OxEOOOED20 PRI 12 R/W О Уровень приоритета исключения монитора
отладки
OxEOOOED21
OxEOOOED22 PRI 14 R/W О Уровень приоритета исключения PendSV
OxEOOOED23 PRI lS R/W О Уровень приоритета исключения SYSTICK
Приложение r. Pezucmpbl конmроллера NVIC и блока управления сисmемой · 447
Таблица Т.20. Реrистр управления и состояния обработчиков системных исключений
SHCSR (OxEOOOED24)
Биты Обозначение Тип Значение Описание
после сброса
18 USGFAULTENA R/W О Разрешает исключение Usage Fault
17 BUSFAULTENA R/W О Разрешает исключение Bus Fault
16 MEMFAULTENA R/W О Разрешает исключение MemManage Fault
Исключение SVCall отложено; выполнение
15 SVCALLPENDED R/W О обработчика исключения SVCall было
прервано исключением с более высоким
приоритетом
Исключение Bus Fault отложено;
14 BUSFAULTPENDED R/W О выполнение обработчика исключения Bus
Fault было прервано исключением с более
высоким приоритетом
Исключение MemManage Fault отложено;
13 MEMFAULTPENDED R/W О выполнение обработчика исключения
MemManage Fault было прервано
исключением с более высоким приоритетом
Исключение Usage Fault отложено;
12 USGFAULTPENDED R/W О выполнение обработчика исключения Usage
Fault было пр ер вано исключением с более
высоким приоритетом*
11 SYSTICKACT R/W О Читается как 1, если исключение SYSTICK
активно
10 PENDSVACT R/W О Читается как 1, если исключение PendSV
активно
8 MONITORACT R/W О Читается как 1, если исключение монитора
отладки активно
7 SVCALLACT R/W О Читается как 1, если исключение SVCall
активно
3 USGFAULTACT R/W О Читается как 1, если исключение Usage Fault
активно
1 BUSFAULTACT R/W О Читается как 1, если исключение Bus Fault
активно
О MEMFAULTACT R/W О Читается как 1, если исключение
MemManage Fault активно
*Бит 12 (USGFAULTPENDED) в ревизии О процессора Cortex M3 отсутствует.
448 · Приложение r. Pezucmpbl контроллера NVIC и блока управления системой
Таблица Те21. Реrистр состояния отказа системы управления памятью MMFSR
(ОхЕОООЕО28; размер 1 байт)
Биты Обозначение Тип Значение Описание
после сброса
7 MMARVALID О Индицирует корректность содержимоrо
реrистра MMAR
6:5
4 MSTKERR R/Wc О Ошибка заrрузки в стек
3 MUNSTKERR R/Wc О Ошибка извлечения из стека
2
1 DACCVIOL R/Wc О Нарушение доступа к данным
О IACCVIOL R/Wc О Нарушение доступа к команде
Таблица Те22. Реrистр состояния отказа шины BFSR (ОхЕОООЕО29; размер 1 байт)
Биты Обозначение Тип Значение Описание
после сброса
7 BFARVALID О Индицирует корректность содержимоrо
реrистра BF AR
6:5
4 STKERR R/Wc О Ошибка заrрузки в стек
3 UNSTKERR R/Wc О Ошибка извлечения из стека
2 IMPRECISERR R/Wc О «Неточное» нарушение доступа к данным
1 PRECISERR R/Wc О «Точное» нарушение доступа к данным
О IBUSERR R/Wc О Нарушение доступа к команде
Таблица Те23. Реrистр состояния отказа проrраммы UFSR (ОхЕОООЕО2А;
размер 1 полуслово)
Значение
Биты Обозначение Тип после Описание
сброса
Попытка выполнения операции деления на ноль
9 DIVBYZERO R/Wc О (может быть установлен только при YCTaHO
вленном бите DIV O TRP реrистра CCR)
Ошибка HeBbIpoBHeHHoro доступа (может быть
8 UNALIGNED R/Wc О установлен только при установленном бите
UNALIGN TRP реrистра CCR)
7:4
3 NOCP R/Wc О Попытка выполнения команды сопроцессора
2 INVPC R/Wc О Попытка выхода из обработчика исключения
с некорректным значением EXC RETURN
1 INVSTATE R/Wc О Попытка переключения внекорректное
состояние (например) в состояние ARM)
О UNDEFINSTR R/Wc О Попытка выполнения неопределённой команды
Приложение r. Pezucmpbl контроллера NVIC и блока управления системой · 449
Таблица Т.24. Реrистр состояния тяжёлоrо отказа HFSR (OxEOOOED2C)
Биты Обозначение Тип Значение Описание
после сброса
31 DEBUGEVT R/Wc О Исключение Hard Fault было вызвано событием
отладки
Исключение Hard Fault было вызвано отказом
30 FORCED R/Wc О шины) отказом системы управления памятью
или отказом проrраммы
29:2
1 VECTBL R/Wc О Исключение Hard Fault было вызвано ошибкой
выборки вектора
О
Таблица Те25. Реrистр состояния отказа отладки DFSR (OxEOOOED30)
Биты Обозначение Тип Значение после сброса Описание
4 EXTERNAL R/Wc О Активирован сиrнал EDBGRQ
3 УСАТСН R/Wc О Произведена выборка вектора
2 DWTTRAP R/Wc О Произошло событие совпадения
DWT
1 ВКРТ R/Wc О Выполнена команда ВКРТ
О HALTED R/Wc О Останов запрошен контроллером
NVIC
Таблица Т.26. Реrистр адреса отказа системы управления памятью MMFAR
(OxEOOOED34)
Значение
Биты Обозначение Тип после Описание
сброса
31:0 ADDRESS R Адрес памяти) обращение к которому вызвало
отказ системы управления памятью
Таблица Т.27. Реrистр адреса отказа шины BFAR (OxEOOOED38)
Биты Обозначение Тип Значение Описание
после сброса
31:0 ADDRESS R Адрес памяти) обращение к которому вызвало
отказ шины
Таблица Т.28. Дополнительный реrистр состояния отказа AFSR (OxEOOOED3C)
Биты Обозначение Тип Значение после Описание
сброса
31:0 Определяется R/Wc О Определяется
производителем производителем
450 · Приложение r. Pezucmpbl конmроллера NVIC и блока управления системой
Таблица Те29. Реrистр типа модуля MPU MPU TYPE (ОхЕОООЕО90)
Биты Обозначение Тип Значение Описание
после сброса
Число областей команд, поддерживаемых данным
23:16 IREGION R MPU; поскольку в архитектуре ARMv7 M
используется унифицированный модуль MPU,
это поле всеrда содержит О
15:8 DREGION R Число областей, поддерживаемых данным MPU
О SEPARATE R Этот бит всеrда равен о, поскольку используется
унифицированный модуль MPU
Таблица r.зо. РеI'ИСТР управления MPU MPU CTRL (ОхЕОООЕО94)
Биты Обозначение Тип Значение Описание
после сброса
2 PRIVDEFENA R/W О Разрешение доступа к карте памяти
в привилеrированном режиме
Установленный бит разрешает работу модуля
MPU в обработчиках NMI и исключения Hard
1 HFNMIENA R/W О Fault. Если бит сброшен, то при выполнении этих
обработчиков модуль MPU не используется
(блокируется)
О ENABLE R/W О Установка этоrо бита в 1 разрешает работу модуля
MPU
Таблица r.Зl. РеI'ИСТР номера реI'иона MPU MPU RNR (ОхЕОООЕО98)
Биты Обозначение Тип Значение после Описание
сброса
31:0 REGION R/W О Определяет номер проrраммируемой
области
Таблица r.З2. РеI'ИСТр базовоI'О адреса области MPU MPU RBAR (ОхЕОООЕО9С)
Биты Обозначение Тип Значение Описание
после сброса
31:N ADDR R/W О Базовый адрес области
Если бит установлен в 1, то номер области MPU,
проrраммируемой на данном этапе, будет
4 V ALID R/W О определяться полем REGION этоrо реrистра. Если
бит сброшен в о, то используется область, заданная
реrистром MPU RNR
Если бит V ALID установлен в 1, ТО это поле
3:0 REGION R/W О используется вместо реrистра номера области
MPU RNR; в противном случае, содержимое
данноrо поля иrнорируется
Приложение r. Pezucmpbl конmроллера NVIC и блока управления сисmемой · 451
Таблица Т.ЗЗ. РеI'ИСТР атрибутов и размера области MPU MPU RASR (ОхЕОООЕОАО)
Биты Обозначение Тип Значение после сброса Описание
31:29 Зарезервировано Зарезервировано
28 XN R/W О Исполнение команд
запрещено
27 Зарезервировано Зарезервировано
26:24 АР R/W 000 Поле прав доступа к данным
23:22 Зарезервировано Зарезервировано
21:19 ТЕХ R/W 000 Поле расширения типа
18 S R/W Разделяемая
17 С R/W Кэшируемая
16 В R/W Буферируемая
15:8 SRD R/W ОхОО Запрет подобластей
7:6 Зарезервировано Зарезервировано
5:1 SIZE R/W Размер области MPU
О ENABLE R/W О Разрешение области
Таблица r.З4. РеI'ИСТРЫ псевдонимов реI'ИСТрОВ MPU RBAR/ MPU RASR
(ОхЕОООЕОА4.. .ОхЕОООЕОВ8)
Адрес РеI'ИСТР Описание
OxEOOOEDA4 Псевдоним D9C Псевдоним 1 реrистра MPU RBAR
OxEOOOEDA8 Псевдоним DAO Псевдоним 1 реrистра MPU RASR
OxEOOOEDAC Псевдоним D9C Псевдоним 2 реrистра MPU RBAR
OxEOOOEDBO Псевдоним DAO Псевдоним 2 реrистра MPU RASR
OxEOOOEDB4 Псевдоним D9C Псевдоним 3 реrистра MPU RBAR
OxEOOOEDB8 Псевдоним DAO Псевдоним 3 реrистра MPU RASR
Таблица Т.З5. РеI'ИСТР управления остановом и состояния отладчика DHCSR
(OxEOOOEDFO)
Значение
Биты Обозначение Тип после Описание
сброса
Ключ доступа к функциям отладки; при записи
31:16 КЕУ W в реrистр в этом поле должно быть записано
значение ОхА05Р) иначе запись будет
проиrнорирована
25 S RESET ST R Ядро было сброшено или находится в состоянии
сброса. Бит сбрасывается при чтении
24 S RETIRE ST R Команда завершена с момента последнеrо чтения
реrистра. Бит сбрасывается при чтении
19 S LOCKUP R Если бит установлен в 1) то ядро находится
в состоянии блокировки
18 S SLEEP R Если бит установлен в 1) то ядро находится
в спящем режиме
17 S HALT R Если бит установлен в 1) то ядро остановлено
452 · Приложение r. Pezucmpbl контроллера NVIC и блока управления системой
Таблица r.З5. Реrистр управления остановом и состояния отладчика DHCSR
(OxEOOOEDFO) (продолжение)
Значение
Биты Обозначение Тип после Описание
сброса
16 S REGRDY R Операция чтения/записи реrистра завершена
15:6 Зарезервировано Зарезервировано
5 C SNAPSTALL R/W Прерывание «зависших» операций обращения
к памяти
4 Зарезервировано Зарезервировано
Маскирование прерываний в спящем режиме; бит
3 C MASKINTS R/W может быть изменён только при остановленном
процессоре
Выполнение одной команды (пошаrовая работа
2 C STEP R/W процессора); действителен только при
установленном бите C DEBUGEN
1 C HALT R/W Останов процессорноrо ядра; действителен только
при установленном бите C DEBUGEN
О C DEBUGEN R/W Разрешение отладки в режиме останова
Таблица r.З6. Реrистр выбора реrистра ядра DCRSR (OxEOOOEDF4)
Биты Обозначение Тип Значение после Описание
сброса
16 REGWnR W Направление передачи данных:
Запись = 1, Чтение = О
15:5 Зарезервировано
Реrистр, к которому производится
обращение:
00001 = Rl;
. . .
01111 = R15;
10000 = хРSR/Флаrи;
10001 = MSP;
4:0 REGSEL W 10010 = PSP;
10100 = Реrистры специальноrо
назначения:
[31:24] CONTROL,
[23:16] FAULTMASK,
[15:8] BASEPRI,
[7:0] PRIMASK.
Остальные значения зарезервированы
Таблица r.з7. Реrистр содержимоrо реrистра ядра DCRDR (OxEOOOEDF8)
Биты Обозначение Тип Значение Описание
после сброса
32:0 Data R/W Реrистр данных для хранения результата чтения
реrистра или значения, записываемоrо в реrистр
Приложение r. Pezucmpbl конmроллера NVIC и блока управления сисmемой · 453
Таблица Т.3В. Реrистр управления исключением и монитором отладки DEMCR
(OxEOOOEDFC)
Значение
Биты Обозначение Тип после Описание
сброса
Разрешение работы системы трассировки;
24 TRCENA R/W О должен быть установлен в 1 для использования
модулей DWT) ЕТМ) ITM и TPIU
23:20 Зарезервировано Зарезервировано
Указывает на то) что вызов монитора отладки
19 MON REQ R/W О произошёл в результате ручной установки бита
признака отложенноrо прерывания) а не
в результате события аппаратноrо отладчика
Выполнение одной команды (пошаrовая работа
18 MON STEP R/W О процессора); действителен только при
установленном бите MON EN
rенерация запроса исключения Debug monitor;
17 MON PEND R/W О процессор приступит к обработке исключения
соrласно ero приоритету
16 MON EN R/W О Разрешение исключения Debug monitor
15:11 Зарезервировано Зарезервировано
10 VC HARDERR R/W О Перехват тяжёлых отказов
9 VC INTERR R/W О Перехват отказов) возникающиХ при входе
в обработчик исключения и при выходе из Hero
8 VC BUSERR R/W О Перехват отказов шины
7 VC STATERR R/W О Перехват отказов проrраммы) вызванных
некорректной информацией о состоянии
Перехват отказов проrраммы) вызванных
6 VC CHKERR R/W О обращением к невыровненным данным либо
делением на ноль
5 VC NOCPERR R/W О Перехват отказов проrраммы) вызванных
попыткой обращения к сопроцессору
Перехват ошибок) возникающих при входе
в обработчик исключения и при выходе из Hero
4 VC MMERR R/W О Перехват отказов системы управления
памятью
3:1 Зарезервировано Зарезервировано
О VC CORERESE R/W О Перехватсбросаядра
Таблица Т.39. Реrистр проrраммной rенерации прерывания STIR (OxEOOOEFOO)
Значение
Биты Обозначение Тип после Описание
сброса
При записи в это поле какоrо либо числа
8:0 INTID W устанавливается бит признака отложенноrо
прерывания для прерывания
с соответствующим номером
454 · Приложение r. Pezucmpbl контроллера NVIC и блока управления системой
Таблица r.40. Реrистры идентификатора периферии контроллера NVIC
(OxEOOOEFDO. . .OxEOEFFC)
Адрес Обозна Тип Значение после Описание
чение сброса
OxEOOOEFDO PERIPHID4 R ОхО4 Идентификатор периферийноrо устройства
OxEOOOEFD4 PERIPHID5 R ОхОО Идентификатор периферийноrо устройства
OxEOOOEFD8 PERIPHID6 R ОхОО Идентификатор периферийноrо устройства
OxEOOOEFDC PERIPHID7 R ОхОО Идентификатор периферийноrо устройства
ОхЕОООЕРЕО PERIPHIDO R ОхОО Идентификатор периферийноrо устройства
ОхЕОООЕРЕ4 PERIPHIDl R ОхВО Идентификатор периферийноrо устройства
ОхЕОООЕРЕ8 PERIPHID2 R OxOB/OxlB/Ox2B* Идентификатор периферийноrо устройства
OxEOOOEFEC PERIPHID3 R ОхОО Идентификатор периферийноrо устройства
ОхЕОООЕРРО PCELLIDO R OxOD Идентификатор компонента
OxEOOOEFF4 PCELLIDl R ОхЕО Идентификатор компонента
OxEOOOEFF8 PCELLID2 R ОхО5 Идентификатор компонента
OxEOOOEFFC PCELLIDO R OxBl Идентификатор компонента
*ОхОВ для ревизии О процессора Cortex M3, OxlB для ревизии 1 и Ох2В для ревизии 2.
ПРИЛОЖЕНИЕ Д
РУКОВОДСТВО ПО ЛОКАЛИ3АЦИИ
ОШИБОК В пРоrРАММАХ
ДЛЯ CORTEX M3
Д.1. Общие сведения
Среди различных задач, возникающих при использовании процессора
Cortex M3, чуть ли не на первом месте стоит задача локализации ошибок в случае
некорректной работы проrраммы. К счастью, в процессоре Cortex M3 предусмо
трено несколько реrистров состояния отказов, облеrчающих выполнение указан
ной задачи (Табл. д.!). Причём, к трём из данных реrистров (MMFSR, BFSR
и UFSR) можно обращаться одновременно с помощью команд пересылки 32 бит
ных значений. В таком случае используется специальный комбинированный pe
rистр состояния отказов CFSR (Рис. д.!).
Таблица Д.l. Реrистры состояния отказов процессора Cortex M3
Адрес Реrистр Полное название Размер
OxEOOOED28 MMFSR Реrистр состояния отказа системы управления памятью Байт
OxEOOOED29 BFSR Реrистр состояния отказа шины Байт
OxEOOOED2A UFSR Реrистр состояния отказа проrраммы Полуслово
OxEOOOED2C HFSR Реrистр состояния тяжёлоrо отказа Слово
OxEOOOED30 DFSR Реrистр состояния отказа отладки Слово
OxEOOOED3C AFSR Дополнительный реrистр состояния отказа Слово
Бит 31 16 15 8 7 О
ОхЕОООЕDЗС I AFSR I
ОхЕОООЕDЗО I DFSR I
ОхЕОООЕО2С I HFSR I
ОхЕОООЕО28 11 UFSR 11 BFSR 11 MFSR I С: CFSR
Рис. Д.l. Обращение к pezucmpaM состояния отказов.
456 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
При наличии СМSIS совместимой библиотеки к этим реrистрам можно обра
щаться как к элементам структуры:
· SCB > CFSR реrистр состояния конфиrурируемых отказов;
· SCB > HFSR реrистр состояния тяжёлоrо отказа;
· SCB > DFSR реrистр состояния отказа отладки;
· SCB > AFSR дополнительный реrистр состояния отказа.
Ещё одним источником информации является значение счётчика команд, co
храняемое в стеке. При входе в обработчик исключения отказа содержимое счёт
чика располаrается по адресу [SP+24]. Поскольку в процессоре Cortex M3 имеет
ся два указателя стека, то перед извлечением данноrо значения из стека обработ
чик должен определить используемый указатель.
В случае отказов шины или системы управления памятью вы можете даже
определить адрес, обращение к которому вызвало ошибку. Для отказов системы
управления памятью этот адрес содержится в реrистре MMFAR, а для отказов
шины в реrистре BFAR. Причём, содержимое указанных реrистров можно счи
тать достоверным только в том случае, если установлен бит MMARV ALID (pe
rистр MMFSR) или ВР ARV ALID (реrистр BFSR) соответственно. Реrистры ммр AR
и BFAR физически являются одним и тем же реrистром, поэтому в каждый MO
мент времени только один из них может содержать корректное значение
(Табл. Д.2).
Таблица Д.2. Реrистры адреса отказа процессора Cortex M3
Адрес Реrистр Полное название Размер
OxEOOOED34 MMFAR Реrистр адреса отказа системы управления памятью Слово
OxEOOOED38 BFAR Реrистр адреса отказа шины Слово
При использовании СМSIS совместимых драйверов устройств к реrистрам
адресов отказов можно обращаться аналоrично реrистрам состояния отказов:
· SCB > MMFAR реrистр адреса отказа системы управления памятью;
· SCB > BFAR реrистр адреса отказа шины.
Последним источником информации о причинах ошибки может стать pe
rистр связи (LR). Если отказ был вызван некорректным значением EXC RETURN,
то при входе в обработчик отказа содержимое данноrо реrистра будет таким же,
как и на момент возникновения ошибки. Обнаружив некорректность содержи
Moro LR, проrраммист может использовать данную информацию для определе
ния причин записи в этот реrистр HeBepHoro значения возврата.
Д.2. Обработчики исключений отказов
в большинстве случаев обработчики отказов, используемые при разработке
устройства, довольно сильно отличаются от тех же обработчиков, присутствую
щих в уже работающей системе. На этапе создания проrраммы данные обработ
чики нужны, rлавным образом, для Toro, чтобы извещать проrраммиста о воз
никших проблемах, тоrда как в работающей системе обработчики отказов долж
ны, в первую очередь, заниматься восстановлением работоспособности этой си
стемы. В данном подразделе мы коснёмся только вопроса формирования сообще
Д.2. Обработчики исключений отказов · 457
ний об ошибках, поскольку действия, необходимые для восстановления системы,
очень сильно зависят от назначения и параметров KOHKpeTHoro устройства.
Если проrрамма достаточно сложная, то в самом обработчике отказа никаких
сообщений обычно не выводится. Вместо этоrо содержимое соответствующих
реrистров сохраняется в памяти, а детальный отчёт о возникшей проблеме фор
мируется уже в обработчике исключения SVCall. Такое решение позволяет пре
дотвратить возникновение отказов, которые MorYT вызвать блокировку процес
сора, при отображении или выводе служебной информации. В простых приложе
ниях такие предосторожности, как правило, излишни, и выводом информации
может заниматься сам обработчик отказа.
Д.2.1. ВЫВОД содержимоrо реrистров состояния отказов
Прежде Bcero, обработчик отказа должен передать проrраммисту значение co
ответствующеrо реrистра состояния отказа. Речь идёт о следующих реrистрах:
. UFSR;
. BFSR;
. MMFSR;
. HFSR;
. DFSR;
. AFSR (опция).
Д.2.2. ВЫВОД содержимоrо РС и прочих реrистров,
..
сохраненных в стеке
Чтобы извлечь из стека значение ре, в обработчике отказа может использо
ваться следующий код:
TST LR, #Ох4 Проверяем 2 й бит значения EXC RETURN в реrистре LR
ITTEE EQ Если ноль (равно), то
MRSEQ RO, MSP использовался основной стек, помещаем MSP в RO
LDREQ RO, [RO,#24] Извлекаем старое значение РС из стека
MRSNE RO, PSP Иначе, использовался стек процесса, помещаем PSP в RO
LDRNE RO, [RO,#24] Извлекаем старое значение РС из стека
И всё же большинство проектов для процессора Cortex M3 создаётся на языке
Си. Однако в проrраммах на Си определить местоположение cTeKoBoro фрейма
для последующеrо обращения к нему бывает весьма непросто, что связано с He
возможностью получить стандартными средствами языка значение указателя
стека. Для передачи содержимоrо cTeKoBoro фрейма в обработчик отказа, напи
санный на языке Си, необходимо использовать своеобразную ассемблерную
«надстройку». Эта «надстройка» будет извлекать значение указателя стека и пере
давать ero в функцию, формирующую сообщения об ошибке (Рис. Д.2). Данный
механизм идентичен описанному в fлаве 12. В следующем примере мы продемон
стрируем использование BCTpoeHHoro ассемблера, поддерживаемоrо пакетами
RVDS и MDK ARM.
458 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
Бит 2 = О
Определяем стек, использованный
вызывающим процессом, по
значению реrистра LR (бит [2])
Бит 2 = 1
При сохранении KOHTeK
ста использовался MSP
При сохранении KOHTeK
ста использовался PSP
Извлекаем сохранённое
значение РС из стека
Рис. Д.2. Извлечение из стека исходноzо значения РС.
Сначала напишем ассемблерную «надстройку». Адрес этой «надстройки» дол
жен располаrаться в таблице векторов на месте вектора исключения Hard Fault.
Данная «надстройка» копирует значение используемоrо указателя стека в pe
rистр RO, после чеrо вызывает собственно обработчик, написанный на Си.
// Ассемблерная «надстройка» для обработчика тяжёлоrо отказа
// Определяет адрес cTeKoBoro фрейма и передаёт ero
// как указатель в обработчик исключения
азm void hard fault handler asm(void)
TST LR, #4
ITE EQ
MRSEQ RO, MSP
MRSNE RO, PSP
В cpp(hard fault handler c)
Вторую часть обработчика напишем на Си. Используя переданный указатель,
мы можем считать содержимое реrистров, сохранённых в стеке:
// Обработчик исключения Hard Fault, принимающий
// в качестве входноrо параметра адрес cTeKoBoro фрейма
void hard fault handler c(unsigned int * hardfault args)
{
unsigned int stacked rO;
unsigned int stacked rl;
unsigned int stacked r2;
unsigned int stacked rЗ;
unsigned int stacked r12;
unsigned int stacked lr;
unsigned int stacked pc;
unsigned int stacked psr;
stacked rO
stacked rl
((unsigned long) hardfault args[O]);
((unsigned long) hardfault args[l]);
Д.2. Обработчики исключений отказов · 459
stacked r2 = ((unsigned long) hardfault args[2]);
stacked rЗ = ((unsigned long) hаrdfаult аrgs[З]);
stacked r12 ((unsigned long) hardfault args[4]);
stacked lr ((unsigned long) hardfault args[5]);
stacked pc = ((unsigned long) hardfault args[6]);
stacked psr = ((unsigned long) hardfault args[7]);
printf (<<[Обработчик Hard Fault]\n»);
printf (<<RO = %х\п», stacked rO);
printf (<<Rl = %х\п», stacked rl);
printf (<<R2 = %х\п», stacked r2);
printf (<<RЗ = %х\п», stасkеd rЗ);
printf (<<R12 = %х\п», stacked r12);
printf (<<LR = %х\п», stacked lr);
printf (<<РС = %х\п», stacked pc);
printf (<<PSR = %х\п», stacked psr);
printf (<<BFAR = %х\п», (* ((volatile unsigned long *) (ОхЕОООЕDЗ8))));
printf (<<CFSR = %х\п», (* ((volatile unsigned long *) (ОхЕОООЕD28))));
printf (<<HFSR = %х\п», (* ((volatile unsigned long *) (ОхЕОООЕD2С))));
printf (<<DFSR = %х\п», (* ((volatile unsigned long *) (ОхЕОООЕDЗО))));
printf (<<AFSR = %х\п», (* ((volatile unsigned long *) (ОхЕОООЕDЗС))));
exit(O); // Завершаем работу
return;
Хочу обратить ваше внимание на то, что данный обработчик будет работать
некорректно, если указатель стека указывает на неверную область памяти (Ha
пример, из за переполнения стека). Это касается любоrо кода, написанноrо на Си,
поскольку практически любая функция, написанная на Си, использует стек.
Чтобы облеrчить себе работу по поиску ошибок, можно сrенерировать файл
листинrа с дизассемблированным кодом.
Д.2.3. Чтение реrистра адреса отказа
После сброса бита MMARVALID или BFARVALID содержимое реrистра aдpe
са отказа может оказаться стёртым. Поэтому обращаться к этому реrистру необ
ходимо следующим образом:
1. Прочитать реrистр BFAR/MMAR.
2. Проверить бит BFARVALID/MMARVALID. Если он сброшен, то содержимое
реrистра BFAR/MMAR следует считать недействительным.
3. Сбросить бит BFARVALID/MMARVALID.
Бит корректности содержимоrо реrистра адреса проверяется уже после чте
ния caMoro реrистра это сделано для Toro, чтобы избежать вытеснения текуще
ro обработчика более высокоприоритетным между чтением бита корректности
и собственно реrистра адреса. В противном случае, возможен следующий cцeHa
рий развития событий:
1. Читаем бит BFARVALID/MMARVALID.
460 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
2. Бит корректности установлен, приступаем к чтению реrистра BFAR/MMFAR.
3. Исключение с более высоким приоритетом прерывает выполнение текущеrо
обработчика, в результате чеrо возникает новый отказ и запускается
соответствующий обработчик отказа.
4. Обработчик отказа с более высоким приоритетом сбрасывает бит
BFARV ALID/MMARV ALID, вызывая очистку реrистра BFAR/MMFAR.
5. После возврата в исходный обработчик отказа читается реrистр BFAR/
MMFAR. Но поскольку ero содержимое уже некорректно, мы получаем
неверно е значение адреса отказа.
Таким образом, чтобы rарантировать корректность содержимоrо реrистра
адреса отказа, бит корректности необходимо читать только после чтения реrи
стра адреса.
Д.2.4. Сброс битов состояния отказов
После формирования сообщения об отказе соответствующий бит реrистра
состояния отказа необходимо сбрасывать, чтобы не ввести в заблуждение обра
ботчик исключения при последующем ero запуске. Если бит корректности адреса
не сбросить, то при возникновении очередноrо отказа содержимое реrистра
адреса отказа изменено не будет.
Д.2.5. Прочие вопросы
После входа в обработчик отказа часто возникает необходимость сохранения
содержимоrо реrистра связи. Однако если отказ был вызван ошибкой стека, то
помещение реrистра LR в стек может лишь усуrубить ситуацию. Как мы знаем,
реrистры RO.. .R3 и R12 к этому моменту уже сохранены в стеке, поэтому можем
спокойно скопировать содержимое LR в любой из указанных реrистров.
Д.3. Опредепение причины отказа
На основе полученной информации мы можем выяснить причину HeKoppeKT
ной работы проrраммы. Наиболее распространённые причины возникновения
отказов приведены в Табл. Д.3...Д.7.
Таблица Д.3. Отказы системы управления памятью (реrистр MMFSR)
Бит Возможные причины отказа
MMARVALID Показывает, что в реrистре MMFAR содержится корректное значение адреса,
(бит 7) обращение к которому вызвало отказ
Ошибка произошла во время сохранения контекста в стеке (при входе
MSTKERR в исключение).
(бит 4) 1. Указатель стека повреждён.
2. Размер стека слишком велик, в результате чеrо указатель стека попал
в область, не определённую или запрещённую конфиrурацией модуля MPU.
Ошибка произошла во время восстановления контекста из стека (при выходе из
MUNSTKERR исключения).
(бит 3) 1. Указатель стека был повреждён в обработчике исключения.
2. Конфиrурация модуля MPU была изменена в обработчике исключения.
д.з. Определение причины отказа · 461
Таблица Д.3. Отказы системы управления памятью (реrистр MMFSR) (продолжение)
Бит
DACCVIOL
(бит 1)
IACCVIOL
(бит О)
Возможные причины отказа
Нарушение прав доступа к памяти, заданных конфиrурацией модуля MPU.
Например, попытка пользовательскоrо приложения обратиться к области,
доступной только для привилеrированноrо доступа
1. Нарушение прав доступа к памяти, определённых конфиrурацией модуля
MPU. Например, попытка пользовательскоrо приложения обратиться
к области, доступной только в привилеrированном режиме. Для отыскания
проблемноrо кода можно воспользоваться значением РС, сохранённым
в стеке.
2. Переход в область памяти, не поддерживающую выборку команд.
3. Неверный код возврата из исключения.
4. Некорректное значение элемента таблицы векторов. Как пример, заrрузка
в память исполняемоrо образа для традиционноrо процессора ARM или же
возникновение исключения до инициализации таблицы векторов.
5. Повреждение значения РС, находящеrося в стеке, во время обработки
исключения.
Таблица Д.4. Отказы шины (реrистр BFSR)
Бит
BFARRVALID
(бит 7)
STKERR
(бит 4)
UNSTKERR
(бит 3)
IMPRECISERR
(бит 2)
PRECISERR
(бит 1)
Возможные причины отказа
Показывает, что в реrистре BFAR содержится корректное значение адреса,
обращение к которому вызвало отказ
Ошибка произошла во время сохранения контекста в стеке (при входе
в исключение).
1. Указатель стека повреждён.
2. Размер стека слишком велик, в результате чеrо указатель стека попал
в область, не определённую или запрещённую конфиrурацией модуля MPU.
3. Используется неинициализированный указатель PSP.
Ошибка произошла во время восстановления контекста из стека (при выходе
из исключения). Если при сохранении контекста ошибки не было, то причиной
отказа, скорее Bcero, является повреждение указателя стека во время
выполнения обработчика исключения
Ошибка на шине при обращении к данным. Ошибка может быть вызвана:
1. Обращением к неинициализированному устройству.
2. Обращением в пользовательском режиме к устройству, допускающему
обращение только в привилеrированном режиме.
3. Выполнением пересылки с размером, не поддерживаемым устройством.
Ошибка на шине при обращении к данным. Адрес, обращение к которому
вызвало отказ, может содержаться в реrистре BFAR. Ошибка может быть
вызвана:
1. Обращением к неинициализированному устройству.
2. Обращением в пользовательском режиме к устройству, допускающему
обращение только в привилеrированном режиме.
3. Выполнением пересылки с размером, не поддерживаемым устройством.
462 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
Бит
Таблица Д.4. Отказы шины (реrистр BFSR) (продолжение)
IBUSERR
(бит О)
Возможные причины отказа
1. Переход в недопустимую область памяти; например, вызванный неверным
значением указателя на функцию.
2. Некорректное значение кода возврата из исключения; например, при порче
сохранённоrо в стеке значения EXC RETURN, в результате чеrо возврат из
исключения ошибочно интерпретируется как операция перехода.
3. Некорректное значение элемента таблицы векторов. Как при мер, заrрузка
в память исполняемоrо образа для традиционноrо процессора ARM или же
возникновение исключения до инициализации таблицы векторов.
4. Повреждение значения РС, находящеrося в стеке, во время выполнения
подпроrраммы.
5. Обращение к реrистрам контроллера NVIC или SCB в пользовательском
режиме (непривилеrированное).
Таблица Д.5. Отказы nporpaMMbI (реrистр UFSR)
Бит
DIVBYZERO
(бит 9)
UNALIGNED
(бит 8)
NOCP
(бит 3)
INVPC
(бит 2)
Возможные причины отказа
Произошло деление на ноль при установленном бите DIV O TRP.
Местоположение команды, вызвавшей отказ, можно определить по значению
РС, сохранённому в стеке
Была попытка HeBbIpoBHeHHoro доступа при установленном бите
UNALIGN TRP. Местоположение команды, вызвавшей отказ, можно определить
по значению РС, сохранённому в стеке
Попытка выполнения команды сопроцессора. Местоположение команды,
вызвавшей отказ, можно определить по значению РС, сохранённому в стеке
1. Некорректное значение EXC RETURN во время возврата из исключения.
Например:
а) возврат в режим потока при EXC RETURN = ОхРРРРРРР1;
б) возврат в режим обработчика при EXC RETURN = OxFFFFFFF9.
При этом текущее содержимое реrистра LR соответствует тому, которое было
на момент возврата из исключения, вызвавшеrо отказ.
2. Неверное значение признака активности исключения. Например:
а) возврат из исключения при сброшенном бите признака активности
исключения. Может быть вызвано записью в бит VECTCLTRACTIVE
реrистра AIRCR или сбросом бита признака активности в реrистре
SHCSR контроллера NVIC;
б) возврат из исключения в режим потока при наличии одноrо и более
активных исключений.
3. Повреждение стека, вызвавшее заrрузку HeBepHoro значения в реrистр IPSR.
В данном случае содержимое РС, находящееся в стеке, будет соответствовать
месту, в котором было прервано выполнение основной проrраммы. Для
определения причины отказа лучше Bcero использовать функцию
трассировки исключений модуля DWT.
4. Некорректное для текущей команды значение бита ICI/IT. Данная ошибка
может возникнуть в том случае, если в обработчике прерывания, прервавшеrо
выполнение операции rрупповой заrрузки/сохранения, было изменено
значение РС, находящееся в стеке. Это приведёт к тому, что после возврата из
прерывания бит ICI окажется установленным при выполнении команды, не
использующей биты ICI. То же может произойти из за повреждения
содержимоrо реrистра PSR, наХодящеrося в стеке.
д.з. Определение причины отказа · 463
Таблица Д.5. Отказы nporpaMMbI (реrистр UFSR) (продолжение)
Бит
INVSTATE
(бит 1)
UNDEFINSTR
(бит О)
Возможные причины отказа
1. Заrрузка в счётчик команд адреса перехода со сброшенным младшим битом.
Адрес перехода можно определить по содержимому РС, находящемуся в стеке.
2. Младший бит адреса вектора в таблице векторов сброшен в о. Точку входа
в обработчик исключения можно определить по содержимому РС,
находящемуся в стеке.
3. Повреждение PSR, находящеrося в стеке, во время обработки исключения и,
как результат, попытка переключения ядра процессора в состояние ARM при
возврате в прерванную проrрамму.
1. Попытка выполнения команды, не поддерживаемой процессором Cortex M3.
2. Некорректное/повреждённое содержимое ячейки памяти.
3. Заrрузка на этапе компоновки объектноrо кода ARM. Проверьте настройки
компилятора.
4. Проблема с выравниванием команд. Так, если при работе с инструментарием
GNU после применения директивы .ascii не указать директиву .align, то
последующие команды MorYT оказаться невыровненными (будут расположены
по нечётным адресам).
Таблица Д.б. Тяжёлые отказы (реrистр HFSR)
Бит
DEBUGEVF
(бит 31)
FORCED
(бит 30)
VECTBL
(бит 1)
Возможные причины отказа
Отказ был вызван событием отладки:
1. События точки останова/наблюдения.
2. Выполнение команды ВКРТ при запрещённом исключении монитора отладки
(MON EN = О) и запрещённой отладке в режиме останова (C DEBUGEN = О).
Некоторые компиляторы Си MorYT по умолчанию вставлять в проrрамму код
поддержки полухостинrа, использующий команды ВКРТ.
1. Попытка выполнить команду SVC/BKPT из обработчика SVCall/Debug monitor
или из обработчика друrоrо исключения с таким же или более высоким
приоритетом.
2. Отказ произошёл из за Toro, что соответствующий обработчик запрещён или не
может быть запущен по причине маскирования исключения или же выполнения
обработчика друrоrо исключения с таким же или более высоким приоритетом.
Ошибка выборки вектора. Возможные причины:
1. Отказ шины во время выборки вектора.
2. Некорректные настройки смещения таблицы векторов.
Таблица Д.7. Отказы отладки (реrистр DFSR)
Бит Возможные причины отказа
EXTERNAL (бит 4) Активация сиrнала EDBGRQ
УСАТСН (бит 3) Произошло событие захвата вектора прерывания
DWTTRAP (бит 2) Произошло событие точки наблюдения модуля DWT
1. Была выполнена команда ВКРТ.
2. Модуль РРВ rенерировал событие точки останова.
BRPT (бит 1) В некоторых случаях команды ВКРТ вставляются в итоrовый код стартовой
процедурой при инициализации отладки по методу полухостинrа.
В рабочем коде таких команд быть не должно. Пожалуйста, обратитесь
к документации на используемый вами компилятор
HALTED (бит О) Запрос останова в контроллере NVIC
464 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
Д.4. Прочие возможные проблемы
Прочие проблемы, наиболее часто возникающие при разработке проrрамм
для процессоров с ядром Cortex M3, указаны в Табл. Д.8.
Таблица Д.В. Прочие возможные проблемы
Ситуация
Проrрамма
не запускается
Проrрамма
«падает» после
исполнения
нескольких
команд
Процессор
не переходит
в спящий режим
после
выполнения
команды WFE
Выполнение
проrраммы
неожиданно
останавливается
Неожиданное
поведение
SEVONPEND
Уровень
приоритета
прерывания
работает не так,
как ожидалось
Возможные причины
Возможно, неправильно сконфиrурирована таблица векторов:
1. Таблица расположена по недопустимому адресу.
2. Младшие биты векторов (включая вектор исключения Hard Fault) не
установлены в 1.
3. В таблице используются команды переход а (как в таблице векторов
классических процессоров ARM).
Сrенерируйте листинr с дизассемблированным кодом и удостоверьтесь, что
таблица векторов настроена правильно
Такое поведение проrраммы может быть вызвано некорректными
установками формата хранения данных, некорректной инициализацией
указателя стека (проверьте таблицу векторов) или же использованием
объектной библиотеки для традиционноrо процессора ARM (код ARM
вместо кода Thumb). Функции данных библиотек MorYT вызываться из
cTapToBoro кода. Пожалуйста, проверьте настройки компилятора
и компоновщика и убедитесь, что используются библиотечные файлы Thumb
и Thumb 2
Выполнение команды WFE не всеrда вызывает переход процессора в спящий
режим. Если внутренний реrистр события был установлен до вызова
команды WFE, то она просто очистит этот реrистр и выполнится как NOP.
Поэтому команду WFE рекомендуется вызывать в цикле
Если включена функция Sleep On Exit, то при возврате из обработчика
исключения в режим потока процессор будет переходить в спящий режим
даже при отсутствии команд WFE/WFI
Бит SEVONPEND реrистра SCR разрешает запрещённым прерываниям
выводить процессор из спящеrо режима, вызванноrо командой WFE, но не
WFI. Событие вывода из спящеrо режима rенерируется только в момент
перевода прерывания в состояние ожидания. Если на момент исполнения
команды WFE бит признака отложенноrо прерывания был уже установлен,
то появление HOBoro запроса прерывания не вызовет rенерации указанноrо
события и, соответственно, не выведет процессор из спящеrо режима
В отличие от мноrих друrих процессоров, нулевое значение в процессоре
Cortex М3 соответствует максимально возможному уровню приоритета
исключений с проrраммируемым приоритетом. Чем больше значение уровня
приоритета, тем ниже собственно приоритет.
При проrраммировании реrистров уровня приоритета убедитесь, что вы
заносите значения в реализованные (старшие) биты реrистров.
Большинство микроконтроллеров с ядром Cortex M3 имеют 3 битные
(8 уровней) или 4 битные (16 уровней) реrистры уровня приоритета. При
этом используются старшие биты реrистров. Поэтому если вы попытаетесь
записать в реrистр значения вида ОхО3, ОхО7 и т.п., в нём окажется ноль
Д.4. Прочие возможные проблемы · 465
Таблица Д.В. Прочие возможные проблемы (продолжение)
Ситуация
Выполнение
команды SVC
вызывает
rенерацию
исключения
отказа
Параметры,
передаваемые
в исключение
SVCall,
искажаются
Исключение
SYSTICK
возникает при
сброшенном
бите TICKINT
Интерфейс JTAG
заблокирован
Возможные причины
Процессор Cortex M3 не поддерживает рекурсивную обработку
исключений исключение не может быть обработано до тех пор, пока ero
приоритет не окажется выше текущеrо приоритета. Как следствие, вы не
можете использовать команду SVC в обработчиках исключений SVCall, Hard
Fault и NMI, а также в обработчиках друrих исключений, приоритет которых
выше или равен приоритету исключения SVCall
При передаче параметров в обработчики исключений, скажем SVCall,
значения данных параметров (реrистры RO.. .R3) необходимо извлекать из
cTeKoBoro фрейма, а не из реrистровоrо банка. Это связано с тем, что до входа
в обработчик SVCall может возникнуть друrое исключение, которое будет
обработано первым.
Поскольку обработчики исключений MorYT изменять реrистры RO.. .R3 и R12
(стандарт AAPCS не требует от Си подпроrрамм сохранять содержимое этих
реrистров), то при входе в обработчик SVCall содержимое указанных
реrистров следует считать неопределённым. Соответственно, для корректной
передачи параметров необходимо использовать стек. Это потребует
написания на ассемблере некоторой «надстройки», которая будет определять
значение KoppeKTHoro указателя стека и передавать ero в качестве указателя
в обработчик, написанный на Си. При мер подобноrо кода можно найти
в [лаве 11 настоящей книrи, а также в руководстве по применению AN179,
выпущенному компанией ARM.
Аналоrичные меры предосторожности следует принимать при передаче
данных из обработчика исключения в прерванную проrрамму. Обработчик
должен сохранить передаваемые данные в стековом фрейме. В противном
случае, содержимое реrистров будут перезаписано при восстановлении
контекста
Бит TICKINT реrистра управления и состояния таймера SYSTICK
используется для разрешения и запрещения исключения SYSTICK. Однако
если это исключение уже находится в состоянии ожидания, то сброс бита
TICKINT не предотвратит rенерацию исключения. Чтобы rарантированно
заблокировать rенерацию исключения SYSTICK, необходимо сбросить не
только бит TICKINT, но и соответствующий бит признака отложенноrо
прерывания в реrистре ICSR контроллера NVIC
Во мноrих микроконтроллерах на базе процессора Cortex М3 интерфейс
JT AG выведен на контакты, используемые портами ввода/вывода. Если сразу
же после запуска проrраммы эти выводы конфиrурируются в качестве линий
ввода/вывода, то вы не сможете войти в режим отладки или стереть флэш
память микроконтроллера
466 · Приложение д. Руководство по локализации ошибок в npozpaMMax для Cortex M3
Ситуация
Таблица Д.В. Прочие возможные проблемы (продолжение)
Возникают
неожиданные
прерывания
Проблемы при
использовании
обычных
прерываний
в качестве
проrраммных
Неожиданное
переключение
в состояние
ARM при
выполнении
команд BLX и ВХ
Неожиданное
запрещение
прерываний
Возможные причины
Некоторые микроконтроллеры имеют буфер записи в мосте шины
периферийных устройств. Поэтому возможна следующая ситуация:
обработчик исключения сбрасывает прерывание, выполняя запись
в устройство, производится выход из обработчика, после чеrо этот
обработчик запускается повторно из за Toro, что периферийное устройство
не успело снять запрос прерывания. Данную проблему можно решить
следующим образом:
1. Перед выходом из исключения выполнить в процедуре обработки
прерывания пустую операцию записи в периферийное устройство. Однако
при этом может увеличиться время выполнения обработчика.
2. Сбрасывать прерывание в начале процедуры обработки прерывания,
чтобы к моменту выхода из обработчика оно rарантированно было бы
сброшено. Однако данный способ не сработает, если длительность
обработчика окажется меньше задержки, обусловленной буферированием
записи (это можно определить только опытным путём).
Некоторые проrраммисты пытаются использовать незадействованные типы
исключений, имеющиеся в контроллере NVIC, в качестве проrраммных
прерываний. Однако исключения внешних прерываний, так же как
исключение PendSV, являются «неточными». То есть никто не rарантирует,
что обработчик TaKoro исключения будет запущен сразу же после перевода
этоrо исключения в состояние ожидания. Чтобы удостовериться в запуске
обработчика, можно воспользоваться методом циклическоrо опроса
Если вы используете ассемблер GNU и вызываете функцию, описанную
в друrом файле, то следует убедиться, что данный идентификатор
действительно является именем функции, т.е. объявлен как:
.text
.global имя функции
. type имя функции, %function
В противном случае, вызов функции или переход по указанной метке может
привести к случайному переключению в состояние ARM.
Кроме Toro, при вызове компоновщика необходимо указать ключи
rnсоrtех rnЗ rnthurnb, иначе компоновщик может взять неверную версию
Си библиотеки
В процессорах Cortex M3 и ARM7TDMI по разному реализован возврат из
исключений. В процессоре ARM7TDMI, если прерывание было запрещено
в обработчике, то при возврате из исключения оно снова разрешается за счёт
восстановления содержимоrо реrистра CPSR (бит 1).
В случае же процессора Cortex M3, если вы запретите прерывания,
установив реrистр PRIMASK (используя команду CPSID 1 или функцию
disable irq()), то вам необходимо будет повторно разрешить эти
прерывания до выхода из обработчика. В противном случае, после возврата
из исключения реrистр PRIMASK останется установленным, что вызовет
блокировку всех прерываний
Д.4. Прочие вОЗМОЖНblе проблеМbl · 467
Таблица Д.В. Прочие возможные проблемы (продолжение)
Ситуация
Неожиданные
обращения по
невыровненным
адресам
Возможные причины
Процессор Cortex M3 поддерживает невыровненные пересылки при
выполнении операций заrрузки/сохранения одноrо реrистра. Компиляторы
языка Си, как правило, rенерируют невыровненные пересылки только при
обращении к элементам упакованных структур или при ручном
манипулировании указателями. Поэтому данная проблема большей частью
касается проrраммирования на ассемблере, коrда пользователь может
случайно сформировать невыровненную пересылку, даже не заметив этоrо.
Рассмотрим, к примеру, чтение 32 битноrо реrистра периферийноrо
устройства. При использовании друrих процессоров ARM младшие два бита
адреса будут проиrнорированы (поскольку мост AHB APB принудительно
сбрасывает эти биты в О). Если тот же код будет выполняться процессором
Cortex M3, то невыровненная пересылка будет разбита на несколько
выровненных, а результат операции может оказаться совершенно друrим.
Этот же вопрос может оказаться актуальным при переносе ПО с процессора
Cortex M3 на друrой процессор ARM, не поддерживающий невыровненные
пересылки.
Обнаружить использование проrраммой невыровненных пересылок очень
просто. Для этоrо достаточно установить бит UNALIGN TRP реrистра CCR
контроллера NVIC, после чеrо любая невыровненная пересылка будет
вызывать исключение Usage Fault, что позволит отследить и убрать из
проrраммы все нежелательные обращения по невыровненным адресам
ПРИЛОЖЕНИЕ Е
ПРИМЕР СЦЕНАРИЯ КОМПОНОВЩИКА
ДЛЯ ПАКЕТА SOURCERY G++
КОМПАНИИ CODESOURCERY
Е.1. Сценарий компоновщика для Cortex..M3
Приведённый ниже сценарий компоновщика!), предназначенный для процес
сора СоrtехТМ М3, написан на основе типовоrо сценария, который поставляется
с пакетом разработки Sourcery G++ Lite (файл generic m.ld). Данный сценарий
предполаrает использование cTapToBoro кода и таблицы векторов CS3
(CodeSourcery Соmтоп Start up Code Sequence), т.е. рассчитан на конкретный ин
струментарий. При работе в друrих средах разработки) основанных на Си
компиляторе GNU, следует обращаться к документации и при мерам) входящим
в состав используемоrо пакета.
/* Linker script for generic m
*
* Version:Sourcery G++ Lite 2009ql lбl
* BugURL:https://support.codesourcery.com/GNUToolchain/
*
* Copyright 2007, 2008 CodeSourcery, Inc.
*
* The authors hereby grant permission to use, сору, modify, distribute,
* and license this software and its documentation for any purpose, provided
* that existing copyright notices are retained in all copies and that this
* notice is included verbatim in any distributions. No written agreernent,
* license, or royalty fee is required for any of the authorized uses.
* Modifications to this software rnау Ье copyrighted Ьу their authors
* and need not follow the licensing terrns described here, provided that
* the new terms are clearly indicated оп the first page of each file where
* they apply.
* */
ООТРОТ FORМAT (<<еlfЗ2 littlеаrm», «еlfЗ2 Ьigаrm», «еlfЗ2 littlеаrm»)
ENTRY( start)
SEARCH DIR ( . )
GROUP( lgcc lc lсsЗ lсsЗuпhоstеd lсsЗmiсrо)
MEMORY
{
/* ROM is а readable (r), executable region (х) */
l)Файл cortexm3.1d используется в Примере 5 и Примере 6 из [лавы 19.
Е.l. Сценарий компоновщика для Cortex M3 · 469
rom (rx) : ORIGIN = О, LENGTH = 32k
/* RAМ is а readable
/* executable region
ram (rwx) : ORIGIN =
}
/* These force the linker to search for particular symbols from
* the start of the link process and thus ensure the user's
* overrides are picked ир
*/
EXTERN( cs3 reset generic m)
INCLUDE micro names.inc
EXTERN( cs3 interrupt vector micro)
EXTERN( cs3 start c main cs3 stack cs3 heap end)
(r), writable (w) and
(х)
Ох20000000, LENGTH = lбk
*/
*/
PROVIDE (
PROVIDE (
PROVIDE (
PROVIDE (
cs3 heap start end);
cs3 heap end = cs3 region start ram + cs3 region size ram);
cs3 region num = ( cs3 regions end cs3 regions) / 20);
cs3 stack = cs3 region start ram + cs3 region size ram);
SECTIONS
{
.text :
CREATE OBJECT SYMBOLS
cs3 region start rom
*(.cs3.region head.rom)
ASSERT (. cs3 region start
. ,
rom, «.cs3.region head.rom not permitted»);
/* Vector table */
cs3 interrupt vector = cs3 interrupt vector mlcro;
*(.сsЗ.iпtеrruрt vесtоr) /* vector table */
/* Make sure we pulled in ап interrupt vector. */
ASSERT (. != cs3 interrupt vector micro, «No interrupt vector»);
/* Мар CS3 vector syrnbols to handler names in С */
cs3 reset = Reset Handler;
cs3 isr nmi = NMI Handler;
cs3 isr hard fault = HardFault Handler;
*(.text .text.* .gnu.linkonce.t.*)
*(.plt)
* ( . gnu. warning)
*(.glue 7t) *(.glue 7) *(.vfpll veneer)
*(.ARМ.extab* .gnu.linkonce.armextab.*)
*(.gcc except table)
} >rom
.eh frame hdr : ALIGN (4)
КЕЕР (*(.eh frame hdr))
470 · Приложение Е. Пример сценария компоновщика для пакета Sourcery G++
} >rorn
.eh frarne : ALIGN (4)
{
КЕЕР (*(.eh frarne))
} >rorn
/* .ARМ.exidx is sorted, so has to go in its own output section. */
exidx start = .,
.ARМ.exidx :
*(.ARМ.exidx* .gnu.linkonce.arrnexidx.*)
>rorn
exidx end = .;
.rodata : ALIGN (4)
{
*(.rodata .rodata.* .gnu.linkonce.r.*)
. = ALIGN(4);
КЕЕР (* ( . ini t) )
. = ALIGN(4);
preinit array start = .;
КЕЕР (*(.preinit array))
preinit array end = .,
. = ALIGN(4);
init array start = .,
КЕЕР (*(SORT(.init array.*)))
КЕЕР (*(.init array))
init array end .,
. = ALIGN(4);
КЕЕР (* (.fini))
. = ALIGN(4);
fini array start = .,
КЕЕР (*(.fini array))
КЕ ЕР (* (S О R Т ( . fin i а r r а у . * ) ) )
fini array end = .,
. = ALIGN(Ox4);
КЕЕР (*crtbegin.o(.ctors))
КЕЕР (*(EXCLUDE FILE (*crtend.o) .ctors))
КЕЕР (*(SORT(.ctors.*)))
КЕЕР (*crtend.o(.ctors))
. = ALIGN(Ox4);
КЕЕР (*crtbegin.o(.dtors))
КЕЕР (*(EXCLUDE FILE (*crtend.o) .dtors))
КЕЕР (*(SORT(.dtors.*)))
КЕЕР (*crtend.o(.dtors))
Е.l. Сценарий компоновщика для Cortex M3 · 471
/* Add debug inforrnation
. = ALIGN(4);
rny debug regions = .;
LONG ( сsЗ hеар stаrt)
LONG ( сsЗ hеар епd)
LONG ( сsЗ stack) */
. = ALIGN(4);
сsЗ regions = .,
LONG (О)
LONG ( сsЗ rеgiоп iпit rаrn)
LONG ( сsЗ rеgiоп stаrt rаrn)
LONG ( сsЗ rеgiоп iпit sizе rаrn)
LONG ( сsЗ rеgiоп zеrо sizе rаrn)
сsЗ regions end = .,
. = ALIGN (8);
* ( . rorn)
*(.rorn.b)
etext = .,
>rorn
.data : ALIGN (8)
{
сsЗ region start rarn = .,
data = .;
*(.сsЗ.rеgiоп hеаd.rаrn)
KEEP(*(.jcr))
*(.got.plt) *(.got)
* (. shdata)
*(.data .data.* .gnu.linkonce.d.*)
. = ALIGN (8);
* ( . r аrn )
edata = .;
} >rarn AT>rorn
.bss :
bss = .,
* ( . s hb s s )
*(.bss .bss.* .gnu.linkonce.b.*)
* (СОММОN)
. = ALIGN (8);
* ( . r аrn . Ь )
ebss = .;
end = .;
end = .;
>rarn AT>rorn
сsЗ rеgiоп iпit ram = LOADADDR (.data);
сsЗ rеgiоп iпit sizе rаrn = edata ADDR (.data);
сsЗ rеgiоп zеrо sizе rаrn = end edata;
сsЗ rеgiоп sizе rаrn = LENGTH(rarn);
472 · Приложение Е. Пример сценария компоновщика для пакета Sourcery G++
.stab О (NOLOAD)
.stabstr О (NOLOAD)
/* DWARF debug sections.
* Symbols in the DWARF debugging sections are relative to the beginning
* of the section so we begin thern at о. */
/* DWARF 1 */
.debug
.line
/* GNU DWARF 1
.debug srcinfo
.debug sfnarnes
/* DWARF 1.1 and
.debug aranges
.debug pubnarnes
/* DWARF 2 */
.debug info
.debug abbrev
.debug line
.debug frarne
.debug str
.debug loc
.debug rnacinfo
/* DWARF 2.1 */
.debug ranges О {*(.debug ranges)}
/* SGI/MIPS DWARF 2 extensions */
.debug weaknarnes О *(.debug weaknarnes)
.debug funcnarnes О *(.debug funcnarnes)
.debug typenarnes О *(.debug typenarnes)}
.debug varnarnes О *(.debug varnarnes)}
.note.gnu.arrn.ident О КЕЕР (*(.note.gnu.arrn.ident))
.ARМ.attributes О {КЕЕР (*(.ARМ.attributes)) }
/DISCARD/ : { *(.note.GNU stack)
* ( . s tab) }
* ( . stabstr)
о : { *(.debug) }
о: {*(.line) }
extensions */
о : { *(.debug srcinfo)
О : { *(.debug sfnarnes)
DWARF 2 */
о {*(.debug aranges)}
О {*(.debug pubnarnes)}
о
о
о
о
о
о
о
*(.debug info .gnu.linkonce.wi.*)
*(.debug abbrev) }
* ( . debug line) }
*(.debug frarne) }
* ( . debug str) }
* (. debug loc) }
*(.debug rnacinfo)
ПРИЛОЖЕНИЕ Ж
функции ДОСТУПА К ЯДРУ
СТАНДАРТА CMSIS
Стандарт проrраммноrо интерфейса микроконтроллеров с ядром Соrtех ТМ
(CMSIS) определяет следующие базовые функции:
. функции доступа к периферии ядра;
. встроенные (intrinsic) функции.
В данном приложении приводятся основные сведения об этих функциях. He
которые из функций CMSIS используют стандартные типы данных) определён
ные в файле stdint.h (Табл. ж.!).
Таблица Ж.l. Стандартные типы данных, используемые в функциях CMSIS
Тип Описание
uint32 t 32 битное целое без знака
uint16 t 16 битное целое без знака
uint8 t 8 битное целое без знака
Ж.1. Нумерация исключений и прерываний
Ряд функций CMSIS) работающих с прерываниями) в качестве входноrо пара
метра используют порядковые номера прерываний. Причём) эти номера отлича
ются от номеров реrистров состояния прерываний IPSRx. В стандарте CMSIS
прерывания периферийных устройств нумеруются) начиная с нуля) а для обозна
чения системных исключений используются отрицательные значения.
(Табл. Ж.2).
Таблица Ж.2. Нумерация исключений и прерываний
Номер Номер Имя исключения
преры исключения Исключение (элемент перечисления Имя обработчика
вания в процессоре IRQn Тype) исключения
в CMSIS (IPSR)
Сброс Reset Handler
14 2 NMI NonMaskableInt IRQn NMI Handler
13 3 Hard Fault HardFault Handler
12 4 MemManage MemoryManagement IRQn MemManage Handler
Fault
474 · Приложение ж. Функции доступа к ядру стандарта CMSIS
Таблица Ж.2. Нумерация исключений и прерываний (продолжение)
Номер Номер Имя исключения
преры исключения Исключение (элемент перечисления Имя обработчика
вания в процессоре IRQn Тype) исключения
в CMSIS (IPSR)
11 5 Bus Fault BusFault IRQn BusFault Handler
10 6 Usage Fault UsageFault IRQn U sageF ault Handler
5 11 SVCall SVCall IRQn SVC Handler
4 12 Debug monitor DebugMonitor IRQn DebugMon Handler
2 14 PendSV PendSV IRQn PendSV Handler
1 15 SysTick SysTick IRQn SysTick Handler
Прерывание О <Зависит от <Зависит от микро
О 16 периферийноrо
устройства микроконтроллера> контроллера>
Прерывание 1 <Зависит от <Зависит от микро
1 17 периферийноrо
устройства микроконтроллера> контроллера>
Прерывание 2 <Зависит от <Зависит от микро
2 18 периферийноrо
устройства микроконтроллера> контроллера>
<Зависит от <Зависит от микро
. . . . . . . . .
микроконтроллера> контроллера>
Ж.2. Функции доступа к контроллеру NVIC
Следующие функции позволяют использовать различные возможности KOH
троллера NVIC.
Имя функции void NVIC SetPriorityGrouping(uint32 t PriorityGroup)
Описание Изменяет настройки rруппирования приоритета в контроллере прерываний
NVIC (функция недоступна в процессорах Cortex MO/Ml)
Параметры PriorityGroup значение поля rруппирования приоритетов (PRIGROUP)
Возвращаемое Нет
значение
Имя функции uint32 t NVIC GetPriorityGrouping(void)
Описание Читает настройки rруппирования приоритета из контроллера прерываний
NVIC (функция недоступна в процессорах Cortex MO/M1)
Параметры Нет
Возвращаемое Содержимое поля rруппирования приоритетов (PRIGROUP)
значение
Ж.2. Функции доступа к контроллеру NVIC · 475
Имя функции void NVIC EnableIRQ(IRQn Тype IRQn)
Описание Разрешает прерывание в контроллере NVIC
Параметры IRQn Type IRQn положительный номер прерывания. Системные
исключения (отрицательные значения) не поддерживаются
Возвращаемое Нет
значение
Имя функции void NVIC DisableIRQ(IRQn Type IRQn)
Описание Запрещает прерывание в контроллере NVIC
Параметры IRQn Type IRQn положительный номер прерывания. Системные
исключения (отрицательные значения) не поддерживаются
Возвращаемое Нет
значение
Имя функции uint32 t NVIC GetPendingIRQ(IRQn Type IRQn)
Описание Считывает бит отложенности внешнеrо прерывания
Параметры IRQn Type IRQn номер прерывания. Системные исключения
(отрицательные значения) не поддерживаются
Возвращаемое 1 если прерывание отложено, О в противном случае
значение
Имя функции void NVIC SetPendingIRQ(IRQn Type IRQn)
Описание Устанавливает бит отложенности внешнеrо прерывания
Параметры IRQn Type IRQn номер прерывания. Системные исключения
(отрицательные значения) не поддерживаются
Возвращаемое Нет
значение
Имя функции void NVIC ClearPendingIRQ(IRQn Type IRQn)
Описание Сбрасывает бит отложенности внешнеrо прерывания
Параметры IRQn Type IRQn номер прерывания. Системные исключения
(отрицательные значения) не поддерживаются
Возвращаемое Нет
значение
Имя функции uint32 t NVIC GetActive(IRQn Type IRQn)
Описание Считывает бит активности внешнеrо прерывания
(функция недоступна в процессорах Cortex MO/Ml)
Пара метры IRQn Type IRQn номер прерывания. Системные исключения
(отрицательные значения) не поддерживаются
Возвращаемое 1 если прерывание активно, О в противном случае
значение
476 · Приложение ж. Функции доступа к ядру стандарта CMSIS
Имя функции void NVIC SetPriority(IRQn Тype IRQn, uint32 t priority)
Описание Устанавливает приоритет прерывания или системноrо исключения
с проrраммируемым уровнем приоритета
IRQn Type IRQn номер прерывания.
Параметры uint32 t priority приоритет прерывания. Функция автоматически
сдвиrает полученное значение влево для ero размещения в реализованных
битах реrистра приоритета
Возвращаемое Нет
значение
Имя функции uint32 t NVIC GetPriority(IRQn Тype IRQn)
Описание Считывает приоритет прерывания или системноrо исключения
с проrраммируемым уровнем приоритета
Параметры IRQn Type IRQn номер прерывания
Возвращаемое Приоритет прерывания. Функция автоматически сдвиrает считанное
значение значение вправо, чтобы убрать нереализованные биты реrистра приоритета
Имя функции uint32 t NVIC EncodePriority (uint32 t PriorityGroup, uint32 t
PreemptPriority, uint32 t SubPriority)
Формирует значение приоритета прерывания из значений параметра
rруппирования приоритетов, приоритета rруппы и субприоритета. В случае
Описание конфликта между параметром rруппирования приоритетов и доступными
битами приоритета ( NVIC PRIO BITS) используется минимально
возможное значение параметра rруппирования приоритетов
(функция недоступна в процессорах Cortex MO/Ml)
uint32 t PriorityGroup пара метр rруппирования приоритетов;
Параметры uint32 t PreemptPriority приоритет rруппы (начиная с О);
uint32 t SubPriority субприоритет (начиная с О)
Возвращаемое Приоритет прерывания
значение
Имя функции
void NVIC DecodePriority (uint32 t Priority, uint32 t PriorityGroup,
uint32 t* pPreemptPriority, uint32 t* pSubPriority)
Декодирует приоритет прерывания, извлекая из ero значения приоритет
rруппы и субприоритет с учётом заданноrо значения пара метра
rруппирования приоритетов. В случае конфликта между параметром
rруппирования приоритета и доступными битами приоритета
( NVIC PRIO BITS) используется минимально возможное значение
параметра rруппирования приоритетов (функция недоступна
в процессорах Cortex MO/Ml)
uint32 t Priority приоритет прерывания;
uint32 t PriorityGroup параметр rруппирования приоритетов;
uint32 t PreemptPriority приоритет rруппы (начиная с О);
uint32 t SubPriority субприоритет (начиная с О)
Описание
Параметры
Возвращаемое
значение
Нет
Ж.3. Функции для управления системой и системным таймером · 477
Ж.3. Функции для управления системой
v
и системным таимером
Следующие функции предназначены для конфиrурирования системы.
Имя функции void SystemInit (void)
Описание Инициализирует систему
Параметры Нет
Возвращаемое Нет
значение
Имя функции void SystemCoreClockUpdate(void)
Обновляет значение переменной SysternCoreClock. Эта функция должна
вызываться после каждоrо изменения тактовой частоты процессора.
Описание Данная функция появилась в версии 1.30 стандарта CMSIS. В более ранних
версиях стандарта указанная функция отсутствовала, а для хранения
значения тактовой частоты использовалась rлобальная переменная
SysternFrequency
Пара метры Нет
Возвращаемое Нет
значение
Имя функции void NVIC SystemReset(void)
Описание Инициирует запрос сброса системы
Параметры Нет
Возвращаемое Нет
значение
Имя функции uint32 t SysTick Config(uint32 t ticks)
Инициализирует и запускает таймер SYSTICK, а также разрешает
Описание соответствующее исключение. Функция проrраммирует системный таймер
таким образом, чтобы он rенерировал исключение SYSTICK каждые «ticks»
тактов TaKToBoro сиrнала ядра
Параметры uint32 t ticks число тактов между двумя последовательными
прерываниями
Возвращаемое Нет
значение
478 · Приложение Ж. Функции доступа к ядру стандарта CMSIS
Ж.4. Функции доступа к реrистрам ядра
Следующие функции предназначены для доступа к реrистрам специальных
функций процессора.
Имя функции Описание
uint32 t get MSP (void) Читает значение MSP
void set MSP (uint32 t topOfMainStack) ИзменяетзначениеМSР
uint32 t get PSP (void) Читает значение PSP
void set PSP(uint32 t topOfProcStack) Изменяет значение PSP
uint32 t get BASEPRI (void) Читает значение BASEPRI
void set BASEPRI (uint32 t basePri) ИзменяетзначениеВАSЕРRI
uint32 t get PRIMASK (void) Читает значение PRIMASK
void set PRIMASK (uint32 t priMask) Изменяет значение PRIMASK
uint32 t get FAULTMASK (void) Читает значение FAULTMASK
void set FAULTMASK (uint32 t faultMask) Изменяет значение FAULTMASK
uint32 t get CONTROL (void) Читает значение CONTROL
void set CONTROL (uint32 t control) Изменяет значение CONTROL
Ж.5. Встроенные функции CMSIS
Стандартом CMSIS предусмотрен ряд встроенных функций, предназначен
ных для вызова команд процессора, которые не MorYT быть сrенерированы CTaH
дартным конструкциями языка Си. Функции enable fault irq и
disable fault irq недоступны для процессоров Cortex MO/Ml.
Функции для вызова команд управления системой
Имя функции Команда Описание
void WFI (void) WFI Ожидание прерывания (в спящем режиме)
void WFE (void) WFE Ожидание события (в спящем режиме)
void SEV (void) SEV rенерация события
void enable i rq (void) CPSIE i Разрешение прерываний (очистка
PRIMASK)
void disable irq (void) CPSID i Запрещение прерываний (установка
PRIMASK)
void enable fault irq (void) CPSIE f Разрешение прерываний (очистка
FAULTMASK)
void disable fault irq (void) CPSID f Запрещение прерываний (установка
FAULTMASK)
void NOP (void) NOP Нет операции
void ISB(void) ISB Барьер синхронизации команд
void DSB (void) DSB Барьер синхронизации данных
void ОМВ (void) ОМВ Барьер памяти данных
в следующей таблице приведены функции для вызова команд монопольноrо
доступа к данным. Эти функции недоступны в процессорах Cortex MO/Ml.
Ж.б. Функции вывода отладочных сообщений · 479
Имя функции Команда Описание
uint8 t LDREXB (uint8 t *addr) LDREXB Монопольная заrрузка байта
в реrистр
uintlб t LDRЕХН(uintlб t *addr) LDREXH Монопольная заrрузка
полуслова в реrистр
uint32 t LDREXW(uint32 t *addr) LDREX Монопольная заrрузка слова
в реrистр
Монопольное сохранение
uint32 t STREXB (uint8 t value, байта. Возвращает статус
STREXB
uint8 t *addr) операции записи (успех = О,
отказ = 1)
Монопольное сохранение
uint32 t STREXH (uintlб t value, полуслова. Возвращает статус
STREXH
uint8 t *addr) операции записи (успех = О,
отказ = 1)
Монопольное сохранение
uint32 t STREXW (uint32 t value, слова. Возвращает статус
STREX
uint8 t *addr) операции записи (успех = О,
отказ = 1)
Сброс признака монопольноrо
void CLREX (void) CLREX доступа,установленноrо
операцией монопольноrо
чтения
в следующей таблице приведены функции для вызова специфических команд
обработки данных. Функция RBIT недоступна в процессорах Cortex MO/Ml.
Имя функции Команда Описание
uint32 t REV(uint32 t val ие) REV Изменение порядка байтов в слове
uint32 t RЕVlб (uint32 t value) RЕVlб Изменение порядка байтов в каждом
полуслове
Изменение порядка байтов
uint32 t REVSH(uint32 t value) REVSH в младшем полуслове и расширение
результата до 32 бит
uint32 t RBIT (uint32 t value) RBIT Изменение порядка битов в слове
Ж.б. Функции вывода отладочных сообщений
в стандарте CMSIS также определена одна функция, позволяющая выводить
отладочные сообщения с использованием модуля ITM.
Имя функции uint32 t ITM putchar(uint32 t chr)
Выводит символ через О й канал вывода модуля ITM. При отсутствии
Описание подключённоrо отладчика функция сразу же завершается. Если отладчик
подключён и трассировка разрешена, то функция выводит символ
в интерфейс ITM и ожидает ero передачи
Параметры uint32 t chr передаваемый символ
Возвращаемое Переданный символ chr
значение
ПРИЛОЖЕНИЕ 3
СОЕДИНИТЕЛИ ДЛЯ ПОДКЛЮЧЕНИЯ
ОТЛАДОЧНЫХ СРЕДСТВ
3.1. Общие сведения
в этом приложении рассматриваются несколько разновидностей соедините
лей, наиболее часто применяющихся для подключения отладочных средств.
Большинство средств разработки для процессоров ARM используют, как мини
мум, одну из предложенных цоколёвок. При проектировании печатной платы pe
комендуется использовать стандартную разводку сиrналов отладчика, чтобы из
бежать проблем с ero подключением.
3.2. Универсальный 20 контактный разъём
На новых печатных платах с микроконтроллерами ARM устанавливаются
20 KOHTaKTHыe разъёмы с шаrом выводов 0.05 дюйма (Samtec FTSH 120), исполь
зуемые как для отладки, так и для трассировки.
Примечание. Сиrналы, наименования которых на последующих рисунках
выделены серым цветом, не реализованы в ядре СоrtехТМ М3.
Универсальный 20 контактный разъём поддерживает протоколы отладки
JTAG и Serial Wire (см. Рис. 3.1 и 3.2). При использовании протокола Serial Wire
линия TDO может задействоваться в качестве выхода модуля Serial Wire Viewer
(SWV) для вывода трассировочной информации. На этот разъём также выведен
4 битный порт трассировки, используемый в тех случаях, коrда для передачи
Рис. 3.1. 20 контактный универсальный разъём.
3.3. 10 конmакmНblЙ разъём · 481
1 2
VT ref IЗ D ТМ5/5 WIO
GNO D EI ТС K/5WCLK
GNO IЗ (] TOO/5WO ffRACECTL/EXTa
КЕУ [] ТО IIEXTbINC
GNOOetec t EI [] nRE5E Т
GN OIТgtPwr +Сар IЗ D TRACECLK
GN O/TgtPwr +Сар [] D TRACEOATAO
GNO [] I:J TRACEOATA1
GNO r:J I:J TRACEOATA2
GNO D r:J ТRАСЕОАТАЗ
19 20
Рис. 3.2. Цоколёвка 20 KOHтaKтHOZO унuверсальноzо разъёма.
трассировочных данных требуется канал с повышенной пропускной способ
ностью (например, при включении модуля трассировки ЕТМ).
Соединитель FTSH 120 имеет меньшие размеры, чем традиционные соедини
тели IDC, и рекомендуется для применения в новых разработках. Данный соеди
нитель, в частности, установлен на демонстрационной плате MCBSTM32E компа
нии Keil.
3.3. 10"контактный разъём
Если в устройстве нет модуля ЕТМ, то для подключения отладчика можно ис
пользовать 10 контактный разъём с шаrом 0.05 дюйма, который имеет ещё MeHЬ
шие размеры. Как и 20 контактный универсальный разъём, данный соединитель
поддерживает протоколы JTAG и Serial Wire (Рис. 3.3 и 3.4).
1 2
VТref I:J IЗ ТМ 51 5WI0
GNO D D ТС K/5 WCLK
GNO I:J Е3 ТОО 15WO
КЕУ Е3 TOI
GNOOetect [] D nRE5E Т
9 10
Рис. 3.3. 10 контактНblЙ разъём.
Рис. 3.4. Цоколёвка 10 KoHтaKтHozo
разъёма.
3.4. Традиционный 20 контактный раэъём IDC
Стандартным разъёмом для подключения отладочных средств на отладочных
платах компании ARM является 20 контактный разъём IDC (Рис. 3.5). Этот разъ
482 . Приложение 3. Соединители для подключения отладочных средств
ём поддерживает отладку по протоколам JTAG и Serial Wire (SWIO и SWCLK),
а также вывод данных модуля SWV. Вывод nICEDETECT позволяет отлаживае
мому микроконтроллеру определять подключение отладчика. При отсутствии
отладчика этот вывод «подтянут» К питанию, а при подключении отладчика дaH
ный вывод «подтяrивается» К земле. Эта возможность используется в некоторых
отладочных платах, поддерживающих несколько конфиrураций JTAG. Сиrнал
nSRST является опциональным. Поскольку для сброса системы с процессором
Cortex M3 отладчик может задействовать контроллер NVIC, в микроконтролле
рах этот сиrнал, как правило, не реализуют.
ЗVЗ
nTR5T
ТОI
тм 51 5WIO
те K/5WCLK
RTCK
то O/5WV
NC /пSRSТ
NC
NC
19
1 2
[;] [1
[;] [1
[;] о
о []
о Е1
[] Е1
о []
о о
[] [;]
о о
зvз
GNO
GNO
GNO
GNO
GNO
GNO
GNO
GNO
nlCEOEТECТ
20
Рис. 3.5. Цоколёвка 20 KoHтaKтHozo разъёма IDC.
3.5. Традиционный 32"контактный разъём
MICTOR
При необходимости реализации порта трассировки в некоторых системах на
базе процессоров ARM используется разъём MICTOR (например, для трассиров
ки команд посредством модуля ЕТМ; см. Рис. 3.6). Этот разъём также поддержи
вает протоколы отладки JTAG/SWD. Параллельно разъёму MICTOR может быть
подключён 20 контактный разъём IDC (одновременно используется только один
из них).
Как правило, микроконтроллеры с процессором Cortex M3 имеют шину Tpac
сировки разрядностью Bcero 4 бита, поэтому большинство выводов разъёма,
предназначенных для передачи трассировочной информации, не задействуются.
Разъём MICTOR используется, rлавным образом, со старшими процессорами ce
мейства Cortex (Cortex A8/A9, Cortex R4), а также в мноrопроцессорных системах,
требующих порт трассировки большей разрядности. В этом случае также задей
ствуются и ряд друrих контактов разъёма. Для систем на базе процессора
Cortex M3 рекомендуется использовать универсальный 20 контактный разъём,
позволяющий выполнять отладку и трассировку посредством модуля ЕТМ.
3.5. Традиционный 32 конmакmный разъём MICTOR · 483
1 NC
3 NC
5 GNO
7 Pulldown
9 N C/n SRST
1
11 ТО O/SW V
1З RTCK
15 ТС K/SWCLK
17 TMS/SWIO
19 ТОI
21 nTRST
23 0/TRACEDATA[15J
25 0/TRACEDATA(14]
27 0/TRACEDATAl13!
O/TRACEOATAt 121 37
29
З1 0/TRACEDATAfl1J
33 O/TRACEDATA[lOl
35 0/TRACEDATA[9 ]
З7 0/TRACEDATA[8 ]
1
..........J
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
О О
с..........,
NC
NC
TRACECLK
Pulldown
Pulldown
Pullup (Vref)
VSupply
0/TRACEDATAf71
О /ТRАСЕDАТА[б]
О/ТНАСЕОАТ Al5 J
O/TRACEDAT Af4'1
TRACEOA Т А[3]
TRACEOA Т А[2]
TRACEOA Т А[ 1 ]
О
О
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
З2
З4
З6
38
2
38
О /fRACECTRL
TRACEOA Т А[О]
Рис. 3.6. Цоколёвка 38 KoHmaKmHozo разъёма MICTOR.
ПРИЛОЖЕНИЕ И
СЕМЕЙСТВО МИКРОКОНТРОЛЛЕРОВ
STELLARIS8
Материал предоставлен
компанией «КОМПЭЛ»
и российским представительством
компании «Texas Instruments»
И.l. Прuступая к работе · 485
И.1. Приступая к работе
Разработка продукции
Компания Texas Instruments оказывает разнообразную поддержку разработчикам, блаrодаря которой вы
сможете леrко и быстро выводить свою продукцию на рынок. Компактные, универсальные, с широкими KOM
муникационными возможностями именно так можно охарактеризовать предлаrаемые оценочные наборы,
которые являются недороrим и эффективным решением, позволяющим ознакомиться с нашими микрокон
троллерами и быстро приступить К реализации cBoero проекта (www.ti.com/stellaris evkits).
Оценочный набор Оценочный набор Оценочный набор Оценочный набор
Stellaris LM3S811 Stellaris LM3S1968 Stellaris LM3S2965 Stellaris LM3S3748
JlI'E
Оценочный набор
Stellaris LM3S6965
Оценочный набор
Stellaris LM3S8962
Оценочный набор Оценочный набор
Stellaris LM3S9B92 Stellaris LM3S9B90
Набор
для разработки
Stellaris LM3S9B96
Stellaris DK Оценочный набор Оценочный набор
LM3S9B96 FPGA Stellaris EVALBOT + Stel1aris LM3S9B92
книrа «Micrium ЕУ ALBOT
flC/OS 111»
Набор
для разработки
Stellaris RSID
Набор
для разработки
Stellaris ZigBee
Оценочный набор
Stellaris. LM4F232
Наши наборы референс дизайнов позволяют ускорить создание продукции, поскольку содержат rOToBoe ап
паратное и проrраммное обеспечение) а также всю необходимую документацию, включая файлы проекта
( www.ti.com/stellaris rdkits).
Набор
референс дизайна
интеллектуальноrо
дисплейноrо модуля
Stel1aris одноплатный
компьютер
Набор
референс дизайна
Stellaris для управления
шаrовым двиrателем
Набор
референс дизайна
интеллектуальноrо
дисплейноrо модуля
Stellaris
Набор
референс дизайна
Stellaris для управления
бесщёточным
двиrателем
постоянноrо тока
,\"','
Набор
референс дизайна
интелектуальноrо
дисплейноrо модуля
Stellaris с 3.5 дюймовым
экраном
Набор
референс диза йна
Stellaris для управления
щёточным двиrателем
постоянноrо тока
с интерфейсом CAN
Набор
референс дизайна
Stel1aris
для преобразования
последовательных
протоколов в Ethernet
Набор
референс дизайна
Stellaris для управления
асинхронным
двиrателем
переменноrо тока
486 · Приложение и. Семейство микроконтроллеров Stеllаris Ф
И.2. Семейство микроконтропперов Stellaris@l
Stellaris представляет собой передовое семейство надёжных микроконтроллеров для систем реальноrо Bpe
мени, в основе которых лежат процессоры новой серии Cortex M'" компании ARM.. Удостоенные мноrочис
ленных наrрад 32 битные микроконтроллеры Stellaris это современные мноrофункциональные системы на
кристалле, позволяющие реализовывать мноrозадачные приложения реальноrо времени. Сложные приложе
ния, которые были не по зубам микроконтроллерам предыдущих поколений, теперь можно леrко реализовать
с помощью мощных, экономически выrодных и простых в проrраммировании микроконтроллеров семейства
Stellaris.
Семейство микроконтроллеров Stellaris предназначено для применения в критичных к стоимости приложе
ниях, требующих значительной вычислительной мощности и широких коммуникационных возможностей.
К таким приложениям относятся системы энерrосбережения, системы управления электроприводом, систе
мы мониторинrа (дистанционное управление, пожарная сиrнализация, системы безопасности и т.д.), системы
отопления, вентиляции, кондиционирования воздуха и управления зданием, системы контроля и преобразо
вания энерrии, сетевое оборудование и коммутаторы, системы промышленной автоматики, электронные Kac
совые терминалы, испытательное и измерительное оборудование, медицинские приборы и иrровые устрой
ства.
Семейство Stellaris это микроконтроллеры будущеrо!
Почему выбрана АRМ-архитектура?
· При начальной цене в 1 доллар за микроконтроллер на базе технолоrии ARM семейство Stellaris обеспечива
ет унификацию, которая исключает в дальнейшем модернизацию архитектуры или обновление проrрамм
ных средств.
· «3косистема» проrраммных инструментов и решений от ARM является крупнейшей в мире: каждый rод на рынок встраиваемых систем
поставляется более 5 млрд АRМ-процессоров.
· Архитектура ARM Cortex обеспечивает разработчикам доступ к совместимому по набору команд семейству
микроконтроллеров с ценой от 1 доллара и тактовой частотой до 1 [[ц.
Почему выбрано ядро Cortex-M3?
Cortex М3 версия процессорноrо ядра с набором команд ARMv7, которая имеет следующие особенности:
· набор команд оптимизирован для однотактноrо обращения к флэш памяти;
· детерминированная и быстрая обработка прерываний: время реакции на прерывание равно 12 тактам или
6 тактам при вложенных прерываниях;
· три дежурных режима со стробированием TaKToBoro сиrнала для снижения энерrопотребления;
· однотактное умножение и деление на аппаратном уровне;
· производительность процессора 1.25 DМIРS/М[ц (выше, чем у ARM7 и ARM9);
· дополнительные возможности отладки, включая установку точек останова и флэш коррекцию проrрамм;.
Преимущества по сравнению с приложениями дЛЯ ARM7:
· требуется примерно половина объёма флэш памяти (кодовоrо пространства);
· в 2...4 раза быстрее в приложениях микроконтроллерноrо управления;
· не требуется кода ассемблера.
Почему следует выбирать семейство Stellaris?
Разработанное для важных микроконтроллерных приложений, семейство Stellaris позволяет войти в наибо
лее быстро растущую в отрасли «экосистему» микроконтроллеров с совместимым кодом стоимостью от 1 дол
лара и тактовой частотой до 1 [[ц.
· Простота разработки проrрамм с помощью бесплатноrо набора библиотек StellarisWare.
· Встроенные аналоrовые компараторы и АЦП предоставляют возможности для аппаратной и проrраммной
оптимизации параметров системы.
· Улучшенные коммуникационные возможности, включая контроллеры 10/100 Ethernet МАС/РНУ, USB и USB
OTG, CAN, а также расширенные интерфейсы периферии.
· Оптимизированная по производительности архитектура с быстрыми внутренними шинами и быстродей
ствующей флэш памятью.
· Порты ввода/вывода общеrо назначения микроконтроллера способны rенерировать прерывания, совмести
мы с 5 В и имеют проrраммируемую наrрузочную способность и управляемую скорость нарастания выход
Horo напряжения.
И.2. Семейство микроконтроллеров Stеllаris Ф · 487
Почему следует выбирать решения Texas Instruments?
Разработчики встраиваемых систем, выбравшие решения компании Texas Instruments на базе процессоров
ARM, получают:
. OrpoMHoe множество разнообразных микроконтроллеров, совместимых по набору команд от дешёвых
моделей стоимостью от 1 доллара до высокопроизводительных с тактовой частотой более 1 rrц, входящих
в самые разные семейства, начиная с микроконтроллеров семейства Stellaris и заканчивая микропроцессо
рами семейства Sitara только Texas Instruments способна предложить такой широкий ассортимент изде
лий, совместимых по набору команд.
. Высокую степень интеrрации и лёrкость разработки всех узлов будущеrо устройства блаrодаря использова
нию решений Texas Instruments в области аналоrовой техники, управления электропитанием и обработки
смешанных сиrналов.
. Непревзойдённую поддержку по продажам в любой стране мира и поддержку технических специалистов
Texas Instruments и наших дистрибьюторов.
. Доступ К недороrим и специализированным наборам для проектирования и проrраммному обеспечению, способ
ствующим более быстрому выводу изделий на рынок.
. Бесплатный набор библиотек StellarisWare.
Компания Texas Instruments поставила в общей сложности свыше 6 млрд микроконтроллеров с ядрами
ARM, что составляет почти 25% от продаж АRМ микроконтроллеров по всему миру. Доверьте ваше будущее
лидеру!
Обобщённая структура микроконтроллеров семейства Stellaris
.'
Cor"tex.
Intelllgent Processors Ьу АRМ'
488 · Приложение и. Семейство микроконтроллеров Stеllаris Ф
И.3. Проrраммное обеспечение StellarisWare 8
StellarisWare 8 упрощает разработку nporpaMMHoro обеспечения
При использовании микроконтроллеров Stellaris все части проrраммы, включая обработчики прерываний и
стартовый код, можно писать на языках BbIcoKoro уровня Си/Си++. Чтобы ещё больше упростить процесс соз
дания проrраммы, мы предлаrаем вам пакет StellarisWare., содержащий при меры кода и бесплатные библио
теки для поддержки приложений:
· Stellaris Peripheral Driver Library библиотека
драйверов периферии, содержащая функции
управления и инициализации периферийных
устройств микроконтроллеров Stellaris;
· Stellaris USB Library библиотека USB, позволяю
щая реализовывать приложения с функциями USB
Device, USB Host или USB On The Go (OTG);
· Stellaris Graphic Library rрафическая библиотека;
· Stellaris Boot Loader заrрузчик для проrраммиро
вания в условиях эксплуатации;
· Stellaris In System Programming библиотека
функций для внутрисхемноrо проrраммирования;
· Stellaris Utilities библиотека оптимизированных
часто используемых функций, таких как функции
контроля CRC и вычисления таблиц AES;
· Stellaris IEC 60730 Library библиотека функций
для поддержки требований стандарта IEC 60730
Class В;
· Stellaris IQMath Library библиотека математиче
ских функций, позволяющая ускорить выполнение
операций с плавающей ТОчкой на процессорах
с фиксированной точкой;
· Stellaris Wireless Library библиотека функций для
работы с беспроводными решениями Texas
Instruments;
· Stellaris Open Source Support библиотека под
держки открытых реализаций Ethernet и RTOS;
· Stellaris Code Examples разнообразные примеры
проrраммноrо кода.
Чтобы узнать о последних изменениях в составе пакета StellarisWare, воспользуйтесь ссылкой
www.ti.com/stellaris ware software.
Во мноrих микроконтроллерах семейства Stellaris функции пакета StellarisWare «зашиты» в ПЗУ. Это позво
ляет использовать данные библиотеки для быстрой разработки эффективных и функциональных приложе
ний в тех случаях, коrда весь объём встроенной флэш памяти занят пользовательской проrраммой.
Набор библиотек StellarisWare имеет следующие особенности и преимущества:
· бесплатен для использования с микроконтроллера
ми Stellaris;
· упрощает и ускоряет разработку приложений
может использоваться как для разработки, так и
в качестве примеров;
· позволяет создавать полнофункциональный код,
который леrко поддерживать;
· написан целиком на языке Си, за исключением тех
участков кода, rде это оказалось совершенно невоз
можно. Но даже написанный на Си, этот набор би
блиотек достаточно эффективно использует pecyp
сы памяти и процессора блаrодаря компактности
набора команд Thumb2, поддерживаемоrо ядром
Cortex M3;
· полностью использует все возможности ядра
Cortex M3 по обслуживанию прерываний и не Tpe
бует никаких специфических средств компилятора
или ассемблерных вставок;
· может быть скомпилирован как с включением кода
для контроля ошибок (на этапе разработки прило
жения), так и без TaKoBoro (при создании финаль
ной версии проrраммы);
· доступен как в виде объектных файлов, так и в ис
ходных кодах, Т.е. вы можете использовать библио
теку «как есть» или же адаптировать её под свои
нужды;
· компилируется в пакетах ARM/Keil, IAR, Code
Composer Studio, Code Red, Code Sourcery, а также
средств разработки GNU.
Последнюю версию пакета StellarisWare всеrда
можно найти по адресу www.ti.com/stellarisware.
И.3. Проzраммное обеспечение StеllаrisWаrе Ф . 489
Библиотека драйверов периферии Stellaris Peripheral Driver Library
Библиотека драйверов периферии Stellaris Peripheral Driver Library это бесплатный набор проrрамм для
управления периферией микроконтроллеров семейства Stellaris на базе ядра ARM Cortex M3. Существенно
превосходящая по своим возможностям инструменты конфиrурирования периферии на базе GUI интерфейса
библиотека Stellaris Peripheral Driver Library выполняет как инициализацию, так и управление периферией
в режиме опроса или по прерываниям.
Библиотека Stellaris Peripheral Driver Library обеспечивает поддержку двух моделей проrраммирования:
прямой доступ к реrистрам и проrраммный драйвер. Каждую модель проrраммирования можно использо
вать по желанию разработчика независимо или совместно, в зависимости от требований приложения или
проrраммной среды. Модель прямоrо доступа к реrистрам включает файлы заrоловка для каждоrо микрокон
троллера семейства Stellaris и обеспечивает, в общем случае, более компактный и эффективный код в среде
разработки, которая знакома большинству разработчиков встраиваемоrо проrраммноrо обеспечения, ранее
работавших с 8 и 16 битными микроконтроллерами. Модель проrраммирования с использованием драйве
ров позволяет инженерам проrраммистам не вникать в особенности работы аппаратных средств, таких как
функционирование каждоrо реrистра, битовые поля, их взаимодействие и учёт последовательности работы
периферии, что, как правило, сокращает время разработки приложения.
rрафическая библиотека Stellaris Graphics Library
fрафическая библиотека Stellaris Graphics Library это бесплатный набор базовых функций и специальных
rрафических элементов для создания rрафических пользовательских интерфейсов устройств на базе микро
контроллеров Stellaris, имеющих rрафический дисплей. Библиотека rрафики состоит из трёх основных ypOB
ней функциональности: уровень драйвера дисплея, который используется в приложении; уровень rрафиче
ских примитивов для построения точек, линий, прямоуrольников, окружностей, шрифтов, растровых изо
бражений и текста как в активном буфере дисплея, так и в неотображаемом буфере для предотвращения эф
фекта мерцания, а также уровень специальных rрафических элементов, которые обеспечивают отображение
компонентов пользовательскоrо интерфейса на дисплее (кнопки, ползунки, поля списка и др.) и их взаимодей
ствие с пользователем в конкретном приложении.
6ибпиотека USВ-устройств
Stellaris USB Library
Все микроконтроллеры Stellaris с USВ интерфейсами
проходят тест на функционирование в режиме USB
Device и USB Embedded Host. Библиотека USB
устройств Stellaris USB Library это бесплатный набор
типов данных и функций для создания приложений
с функциональностью USB Device, Host или On the Go
(OTG) дЛЯ систем на базе микроконтроллеров Stellaris.
Предлаrается несколько проrраммных интерфейсов:
от уровня простоrо управления USВ контроллером до
интерфейсов BbIcoKoro уровня, которые осуществляют
АР! поддержку специальных устройств.
Примеры
USB Device
НID клавиатура
НID мышь
CDC Serial
Накопитель
данных
Generic Bulk
Аудиоустройство
Обновление ПО
устройств
Осциллоr а
Предоставляется INF файл Windows для поддерживаемых
классов USB (в предварительно скомпилированной
библиотеке DLL, что экономит в емя аз аботки).
При меры
USB Host
При меры
USB OTG
Накопитель
данных
НID клавиатура
НID мышь
Протокол SRP
(протокол запроса
сессии)
Протокол HNP
(протокол обмена
с хостом)
490 . Приложение и. Семейство микроконтроллеров Stellaris.
Библиотека Stellaris IEC 60730 Library
Стандарт IEC 60730 Class В охватывает большую часть бытовых электроприборов, таких как стиральные/су
шильные машины, холодильники, морозильники, электроплиты. Библиотека Stellaris IEC 60730 Library позво
ляет создавать встраиваемые приложения, удовлетворяющие требованиям по безопасности стандарта
IEC 60730 Class В. Функции этой библиотеки используются совместно с такими аппаратными узлами микро
контроллеров семейства Stellaris, как сторожевые таймеры и прецизионный reHepaTop. Библиотека поддержи
вает требования стандарта IEC 60730 по однократному (в момент запуска) и периодическому тестированию
проrраммы. Поскольку библиотека Stellaris IEC 60730 Library обеспечивает фундаментальную верификацию
основных операций микроконтроллера, она часто используется в приложениях для заводскоrо тестирования
устройств, не попадающих под требования стандарта IEC 60730.
Библиотека Stellaris IQMath Library
Библиотека Stel1aris IQMath Library, предлаrаемая компанией Texas Instruments, представляет собой набор
высоко оптимизированных математических функций для проrраммистов Си/Си++, позволяющий с наимень
шими затратами конвертировать алrоритмы, в которых требуются операции с плавающей точкой, в код, ис
пользующий арифметику с фиксированной точкой. Эти подпроrраммы обычно применяются в приложениях
реальноrо времени с интенсивными вычислениями, rде критична как скорость выполнения проrраммы, так и
высокая точность. Указанные функции выполняются rораздо быстрее своих аналоrов, написанных на CTaH
дартном Си. Библиотека Stellaris IQMath Library также позволяет преодолеть оrраничения, присущие арифме
тике с фиксированной точкой, путём задания проrраммируемоrо динамическоrо диапазона и разрешения.
Библиотеки Stellaris Wireless Library
Блаrодаря своей высокой производительности и коммуникационным возможностям микроконтроллеры ce
мейства Stellaris с ядром ARM Cortex M3, предлаrаемые компанией Texas Instruments, являются идеальным
выбором для использования в самых разных беспроводных приложениях. Микроконтроллеры Stel1aris и бес
проводные решения от Texas Instruments привносят интеллектуальность и расширенную функциональность
в такие приложения, как измерения, домашняя автоматизация и безопасность. Пакет StellarisWare облеrчает
вывод беспроводных приложений на рынок, предоставляя функции для использования протоколов RFID,
Low Power RF, ZigBee и Bluetooth.
Поддержка стандарта CMSIS
Помимо разнообразных библиотек, входящих в состав пакета StellarisWare, компания Texas Instruments также
обеспечивает поддержку стандарта CMSIS, стандартизованноrо уровня аппаратных абстракций для процессо
ров семейства Cortex M. Стандарт CMSIS описывает простые проrраммные интерфейсы с процессором, aдpeco
ванные изrотовителям микросхем и поставщикам промежуточноrо ПО, которые позволяют упростить повтор
ное использование проrраммноrо кода и ускорить вывод новых устройств на рынок.
Примеры кода для микроконтроллеров Stellaris
Все наборы для проектирования и оценочные наборы Stellaris поставляются вместе с обширным набором при
ложен ий, которые представляют собой примеры использования микроконтроллеров Stellaris и набора библио
тек StellarisWare. Каждый набор co
держит приложение для быстроrо
старта, которое специально предна
значено для демонстрации функ
ций, заложенных в оценочную пла
ту. Поскольку приложение для бы
cTporo старта одновременно ис
пользует большую часть периферии
на плате, наборы также поставляют
ся вместе с примерами для работы с
периферией. Эти приложения пред
ставляют собой примеры aBTOHOM
Horo кода для всей периферии, KOTO
рая поддерживается в наборе. При
ложения для быстроrо старта и при
меры для работы с периферией co
держат исходный код и файлы про
екта для поддержки пользователя
при разработке системы. Для всех
проектов примеров прилаrается
техническая документация, в KOTO
рой описывается функциональ
ность каждоrо приложения.
/
, 'яtOf"t,t
И.3. Проzраммное обеспечение StellarisWare. · 491
Поддержка внутрисистемноrо проrраммирования Stellaris
Микроконтроллеры 5tellaris поддерживают различные механизмы внутрисистемноrо проrраммирования.
Все микроконтроллеры семейства 5tellaris поставляются с заrрузчиком, «зашитом» во встроенном ПЗУ, ли
бо записанным во флэш памяти. Это обеспечивает максимальную rибкость при проrраммировании rотовой
продукции. Также мы бесплатно предлаrаем исходный код проrраммы заrрузчика, который позволит обнов
лять ваши устройства в условиях эксплуатации.
Системный заzрузчик Stellar;s в ПЗУ
Большинство микроконтроллеров 5tellaris имеют системный заrрузчик, расположенный во встроенном ПЗ
Этот заrрузчик позволяет проrраммировать флэш память подобных микроконтроллеров (как на производ
стве, так и в условиях эксплуатации) с использованием интерфейса UART, !2С или 551. Блаrодаря широким
возможностям выбора интерфейсов, а также возможности передачи сиrналов при обновлении проrрамм в си
стеме, пользователи получают максимальную rибкость с помощью системноrо заrрузчика 5tellaris.
Системный заzрузчик Stellar;s во флэш-памяти
Для приложений, требующих проrраммирования в условиях эксплуатации, мы также предлаrаем исходный код
бесплатноrо системноrо заrрузчика 5tellaris, который можно поместить в приложении в начале флэш памяти.
Блаrодаря широким возможностям выбора интерфейсов, включающих UART, !2С, 551, U5B Host, U5B Device и
Ethernet, а также возможности передачи сиrналов при обновлении проrрамм в системе, пользователи получают
максимальную rибкость с помощью системноrо заrрузчика 5tellaris. Библиотека драйверов периферии 5tellaris
Peripheral Driver Library включает исходный код и содержит дополнительную информацию, касающуюся систем
Horo заrрузчика 5tellaris, в том числе примеры приложений, в которых используется данный заrрузчик.
. Бесплатная лицензия и бесплатное использование (для пользователей микроконтроллеров 5tellaris).
. Компактный код, который можно разместить в начале флэш памяти, чтобы использовать ero как заrрузчик
приложения.
. Заrрузчик также используется для обновления проrраммноrо обеспечения приложений, работающих на
микроконтроллерах 5tellaris.
. Поддерживаемые интерфейсы: UART (по умолчанию), 1 2 С, 55!, U5B Host (накопитель данных), U5B Device
(DFU) и Ethernet (протокол ВООТР).
Последовательный заzрузчик флэш-памяти Stellar;s
Младшие представители семейства 5tellaris поставляются с предустановленным во флэш память бесплат
ным последовательным заrрузчиком. Данный заrрузчик может использоваться совместно с утилитой LMFlash,
стандартным JT АG отладчиком или же промышленным проrрамматором для заrрузки кода приложения во
флэш память микроконтроллера на производстве.
Последовательный заrрузчик это компактное приложение, которое позволяет проrраммировать флэш
память без использования интерфейса отладчика или проrрамматора. Мы поставляем бесплатную утилиту
для проrраммирования флэш памяти под названием LMFlash, которая может запускаться из командной CTpO
ки или же посредством rрафическоrо интерфейса. Утилита обеспечивает полное использование всех команд
последовательноrо заrрузчика. Для пользователей, создающих собственный проrрамматор флэш памяти, мы
также поставляем простую утилиту заrрузки по интерфейсу UART, которая обеспечивает полное использова
ние всех команд последовательноrо заrрузчика. В руководстве по применению AN01242 при водится исходный
код И информация о последовательном заrрузчике и утилите заrрузки sflash.exe.
. Предустанавливается во флэш память всех микроконтроллеров 5tellaris, не имеющих системноrо заrрузчи
ка в ПЗУ.
. Представляет собой компактную проrрамму, позволяю
щую проrраммировать флэш память без использования
отладчика.
. Поддерживает интерфейсы UART и 55!.
. Имеется бесплатная утилита LMFlash, которая обеспечива
ет выполнение всех команд, поддерживаемых последова
тельным заrрузчиком.
492 · Приложение и. Семейство микроконтроллеров Stеllаris Ф
И.4. Наборы референс"дизаЙНО8 и модули
rибкость при изrотовлении продукции
Мы обеспечиваем rибкость выбора стратеrии вывода продукции на рынок для целоrо спектра приложений.
Инженеры MorYT начать оценку продукции и её разработку с помощью оценочноrо набора Stellaris Evaluation
Kit (www.ti.com/steUaris evkits) или rOToBoro набора референс дизайнов Stellaris Reference Design Kit
(www.ti.com/stellaris rdkits). Разработчики MorYT использовать стандартные, rOToBbIe к работе модули
Stellaris Modules (www.ti.com/stellaris modules) или включить во встраиваемое приложение бесплатное эта
лонное аппаратное и проrраммное обеспечение, созданное с помощью открытых инструментов разработки.
Наши модули позволяют ускорить вывод продукции на рынок блаrодаря rOToBbIM устройствам в удобном
форм факторе и применению эффективноrо проrраммноrо обеспечения. С помощью набора референс
дизайна и модулей, обеспечивающих открытые средства проектирования, можно получить предварительно
собранные блоки или создать свои собственные модули. Пакеты по проектированию печатных плат для каж
доrо модуля, которые можно получить по адресу www.ti.com/steUaris modules. предоставляют пользователю
электрические схемы, перечни комплектующих (ВОМ) и GеrЬеr файлы.
Модуль Stellaris для
преобразования последова
тельных протоколов в Ethernet
Интеллектуальный
дисплейный модуль Stellaris
с питанием через Ethernet
(Power over Ethernet)
,. . .
r.
. .
.. ' .
Модуль Stellaris для Модуль Stellaris для
управления щёточным управления бесщёточным
двиrателем постоянноrо тока двиrателем постоянноrо тока
Интеллектуальный
дисплейный модуль Stellaris
с интерфейсом Ethernet
Интеллектуальный
дисплейный модуль Stellaris
с 3.5 дюймовым экраном
*: .:
. },.
.............,.... . .,
- ' - ...
Модуль Stellaris для
управления шаrовым
двиrателем
Модуль Stellaris для
управления асинхронным
двиrателем переменноrо тока
И.5. Микроконтроллеры реальноzо времени · 493
И.5. Микроконтроллеры реальноrо времени
Мы предлаrаем 30 недороrих полнофункциональных
микроконтроллеров Stel1aris на
базе ARM Cortex M3 с малым
числом выводов в двух вариан
тах корпусов: в 48 BЫBOДHOM
корпусе LFQP и в новом KOM
пактном 48 BЫBOДHOM корпусе
QFN (Табл. И.1) . Серии LM3S100
и LM3S300 прекрасно подходят
для базовых встраиваемых приложений и модерниза
ции 8 и 16 битных систем. Серии LM3S600 и LM3S800
оптимизированы для встраиваемых приложений) в KO
торых требуется реализация алrоритмов управления
повышенной сложности. Все микроконтроллеры
Stellaris обеспечивают высокую производительность и
высокую степень интеrрации) которые предпочтитель
ны для сравнительно недороrих приложений) rде требу
ется реализация сложных алrоритмов управления.
К этим приложениям относятся) например) системы
управления приводом) медицинские приборы, системы
отопления, вентиляции) кондиционирования воздуха и
управления зданием, системы промышленной aBTOMa
тики, электронные системы на транспорте, кассовые
терминалы и иrровые устройства.
Оценочный набор Stellaris LM3S811
. Оценочная плата с 50 мrц микроконтроллером LM3S811.
. ОLЕD дисплей с разрешением 96х16 точек.
. Проrраммируемая пользователем кнопка и светодиод.
. Удобная кнопка сброса (RESET) и светодиодный инди
катор питания.
. Потенциометр с дисковым переключателем на входе
BCTpoeHHoro в кристалл АЦП.
. Последовательный интерфейс внутрисхемной отлад
ки через USB.
. USВ кабель.
. 20 выводной JТАG/SWD кабель.
. Компакт диск, содержащий:
LI оценочную версию сред разработки;
LI полную документацию;
LI руководство по быстрому старту и исходный код;
LI набор библиотек StellarisWare, включая библиотеку
драйверов периферии и примеры исходноrо кода.
. Примеры приложений, демонстрирующие использование
различных операционных систем реальноrо времени)
можно заrрузить на www.ti.com/stellaris lm3s811.
Информациядпязаказаоценочныхнаборов
Коп Описание
EKK Оценочный набор Stellaris LM3S811 дЛЯ КеН RealView
LM3S811 MDK ARM (оrраничение размера кода 32 Кбайт)
EKI Оценочный набор Stellaris LM3S811 дЛЯ IAR Systems Em
LM3S811 bedded Workbench (оrраничение размера кода 32 Кбайт)
EKC Оценочный набор Stellaris LM3S811 дЛЯ CodeSourcery
LM3S811 G++ (30 ДHeBHoe оrраничение)
EKT Оценочный набор Stellaris LM3S811 дЛЯ Code Red Techno
LM3S811 logies Red Suite (оrраничение размера кода 32 Кбайт)
EKS Оценочный набор Stellaris LM3S811 дЛЯ Code Composer
LM3S811 Studio'" от компании Texas Instruments (полная версия с
ПDИВЯЗКОЙ к плате)
Микроконтроллеры Stellaris на базе ARM Cortex M3
серии LM3S1000 сочетают в ce ,'"''
бе расширенные порты ввода/
вывода общеrо назначения и
увеличенный объём BCTpoeH
ной памяти) а также обладают
низким энерrопотреблением)
оптимизированным дЛЯ YCT
ройств С батарейным питани
ем. Микроконтроллеры серии LM3S1000 (Табл. И.2)
предлаrаются в 64 BЫBOДHЫX корпусах LQFP) 100 BЫBO
дных корпусах LQFP или 108 BЫBOДHЫX корпусах BGA и
обеспечивают высокую производительность и высокую
степень интеrрации, которые хорошо подходят для He
дороrих приложений, реализующих сложные алrорит
мы управления. К этим приложениям относятся, напри
мер) системы управления приводом, медицинские при
боры, системы отопления, вентиляциИ, кондициониро
вания воздуха и управления зданием, системы промыш
ленной автоматики, электронные системы на транспор
те, кассовые терминалы и иrровые устройства.
Оценочный набор Stellaris LM3S1968
. Оценочная плата LM3S1968 с приложением для бы
cTporo начала разработки:
LI микроконтроллер Stellaris LM3S1968 256 Кбайт
флэш памяти, 64 Кбайт SRAM, 8 канальный АЦП и
до 52 портов ввода/вывода общеrо назначения;
LI все порты ввода/вывода LM3S1968 выведены на Map
кированные внешние контактные площадки;
CJ поддержка энерrосбереrающеrо спящеrо режима (hibernate);
LI простой запуск: USВ кабель обеспечивает последо
вательную связь, отладку и питание;
LI rрафический ОLЕD дисплей с разрешением 128х64
точек и 16 rрадациями ceporo;
LI пользовательский светодиод) переключатели и
кнопки, электромаrнитный динамик;
LI стандартный 20 контактный JТАG разъём дЛЯ OT
ладки от ARM.
. USB и JТАG кабели.
. Компакт диск, содержащий:
LI оценочную версию сред разработки, полную ДOKY
ментацию, руководство по быстрому старту и исхо
дный код;
LI набор библиотек StellarisWare, включая библиотеку
драйверов периферии и примеры исходноrо кода.
Информациядпязаказаоценочныхнаборов
Коп Описание
EKK Оценочный набор Stellaris LM3S1968 дЛЯ КеН RealView
LM3S1968 MDK ARM (оrраничение размера кода 32 Кбайт)
EKI Оценочный набор Stellaris LM3S1968 дЛЯ IAR Systems
LM3S 1968 Embedded Workbench (оrраничение размера кода 32 Кбайт)
EKC Оценочный набор Stellaris LM3S1968 дЛЯ
LM3S1968 CodeSourcery G++ (30 ДHeBHoe оrраничение)
EKT Оценочный набор Stellaris LM3S1968 дЛЯ Code Red
LM3S1968 Technologies Red Suite (90 ДHeBHoe оrраничение)
EKS Оценочный набор Stellaris LM3S1968 дЛЯ Code Composer
LM3S1968 Studio'" от компании Texas Instruments (полная версия с
ПDИВЯЗКОЙ к плате)
494 . Приложение И. Семейство микроконтроллеров Stеllаris Ф
Таблица И.1. Микроконтроnnеры серий LM3S100/300/600/800
Характеристики
Флэш память, Кбайт
ОЗУ, Кбайт
; Библиотеки в ПЗУ
со
t:: ОМА
SAFERTOS"
Макс.такт.частота,мrц
=
со. Встроенный
t=(
=:: прецизионный reHepaTop
MPU
SysTick (24 битный)
Таймеры общеrо
назначения
Часы реальноrо времени
:! Сторожевой таймер
со.
Модуль тим
)1 Вход защиты тим
5 reHepaTop
i «мёртвоrо»
времени
= Модуль ССР
QЕI каналы
Инте )фейс внешней периферии
.. 10/100 МАС+РНУ
..cu
Е! IEE 1588
= :!
u CANMAC
u'=
= USB О, Н или О
UART
6 = I 2 C
SSIISPI
I 2 S
Модули АЦП
ё КаналыАЦП
tI: tI:
=. Быстродействие
.ё. АЦП (выб/с)
= Встроенный датчик
температуры
Аналоrовые/цифровые
компараторы
Порты ввода/вывода
общ. назнач. (совместимы с 5 В)
Режим эверrосбережения
с резерв. от батареи
LDО стабилизатор напряжения
Рабочая температvра
2/
.....
<=
.....
tn
....,;j
8
2
20
.;
2
.;
1
1/
N
<=
.....
tn
....,;j
8
2
20
.;
2
.;
1
2
1
1
1
<:)
<=
tn
....,;j
16
4
25
.;
.;
3
.;
1
6
2
1
1
.....
<=
tn
....,;j
16
2
20
.;
.;
2
.;
1
2
1
.;
2
1
3
250К 500К
.;
ас
<=
tn
....,;j
16
4
25
.;
.;
3
.;
1
6
2
1
1
1
8
.;
3/ 2/ 1/ 3/
<:)
.....
tn
....,;j
16
4
25
.;
.;
3
.;
1
6
1
.;
6
2
Lt')
.....
tn
....,;j
16
4
25
.;
.;
3
.;
1
2
1
.;
6
2
1
4
\ос
.....
tn
....,;j
16
4
25
.;
.;
3
.;
1
4
1
.;
6
2
1
1
1
4
1"-
.....
tn
('f')
....,;j
16
4
25
.;
.;
3
.;
1
6
1
.;
6
1
6
250К 250К 250К 500К
.;
.;
.;
ас
N
tn
....,;j
16
4
25
.;
.;
3
.;
1
6
2
1
1
1
8
.;
<:)
<=
\ос
tn
('f')
....,;j
32
8
50
.;
.;
3
.;
1
6
2
1
1
1/ 1/ 1/ / 3/ 3/
.....
<=
\ос
tn
....,;j
ас
<=
\ос
tn
....,;j
.;
I/E
.;
I/E
.; .;
I/E I/E
.; .;
I/E I/E
.; .; .; .; .; .;
I/E I/E I/E I/E I/E I/E
32
8
32
8
50
50
.;
.;
3
.;
1
6
1
.;
.;
3
.;
1
.;
6
1
6
2
1
1
2
1
1
1
8
500К
.;
1/
2...18 0...18 8...36 12...33 5...28 3...36 7...32 3...32 3...30 7...28 8...36 0...36 5...28
.;
I/E
Тип корпуса
u о... Z u о... Z о... Z о... Z о... Z о... Z о... Z о... Z о... Z о... Z о... Z о... Z с.. Z
....... .......
O'ty O'Q 0'0' 0'0' 0'0' 0'0' 0'0' 0'0' 0'0' 0'0' 0'0' 0'0' 0'0'
00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
N N
Серийное производство (Р),
опытные образцы (S)
р
р
р
р
р
р
р
р
р
р
р
р
р
И.5. Микроконтроллеры реальноzо времени · 495
с:> м tf") Lt') ос ос с:> ос м Lt') ос ос
м с:> с:> с:> м
\ос \ос \ос \ос \ос \ос \ос \ос ос ос ос ос ос ос ос ос ос
V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J
tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf")
32 32 32 32 32 32 32 32 64 64 64 64 64 64 64 64 64
8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8
50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50
3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
6 6 2 4 6 6 6 6 6 2 6 6 6
1 1 1 1 1 1 1 1 1 1 1 1 1
6 6 6 6 6 6 4 4 6 6 6 6 6 6 6 4 6
1 1 1
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2 4 2 4 2 6 6 8 8 4 2 2 6 6 8
500К 500К 500К 500К 500К 500К 500К 1М 500К 500К 250К 500К 1М 1М 1М
/ / 1/ 1/ 3/ 1/ 1/ / 3/ 3/ 1/ 1/ 1/ 3/ 1/ 1/ /
6...34 4...32 7...34 3...32 0...34 1...30 0...30 9...28 8...36 0...36 5...28 1...32 7...34 0...34 1...30 0...30 7...28
I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E
z z z z z z z z z z z z z z z z z
аа аа аа аа аа аа аа аа аа аа аа аа аа аа аа аа аа
0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000
р р р р р р р р р р р р р р р р р
496 · Приложение и. Семейство микроконтроллеров Stellaris.
Таблица И.2. Микроконтроnnеры серии LM3S1000
Характеристика
Флэш память, Кбайт
ОЗУ, Кбайт
; Библиотеки в ПЗУ
r::: DMA
SAFERTOS"
Макс. такт. частота, мrц
&. Встроенный
t:{
=: прецизионный reHepaTop
MPU
S]1sTick (24 битный)
Таймеры общ. назначения
Часы реальноrо времени
Сторожевой таймер
Модуль тим
= Вход защиты mим
g: reHepaTop «MёpT
; ; Boro» времени
.....
= Модуль ССР
QЕI каналы
Интерфейс внешней периферии
u .... 10/100 МАС+РНУ
..c
3 Е IEE 1588
CANMAC
,=
=.& USB D, НилиО
UART
5 ; I 2 C
SSI/SPI
PS
Модули АЦП
S Каналы АЦП
I:IC I:IC -
: < s Быстродействие
.& ....... АЦП (выб/с)
: Встроенный датчик
температуры
Аналоrовые/цифровые
компараторы
:21
Q..
)1
,=
20
Порты ввода/вывода общ. назнач. ...
(совместимы с 5 В)
Режим энерrосбережения
с резерв. от батареи
LDО стабилизатор напряжения
Рабочая температура
С:> tf") ос
tf") tf")
..... .....
V'J V'J V'J
tf") tf") tf")
.;j .;j .;j
64
16
64
16
С:> м
Lt') \ос
.....
V'J V'J
tf") tf")
.;j .;j
64
16
64
16
64
16
50
4
1
6
1
6
3
1
2
1
2
I
Lt')
\ос
V'J
tf")
.;j
64
16
50
4
1
6
1
8
3
1
2
1
4
I
\ос N
\ос tf")
tf")
V'J V'J
tf") tf")
.;j .;j
64
16
50
4
1
6
1
8
3
1
2
1
4
96
16
50
4
1
8
2
1
3
Lt') 0'1
tf") tf")
V'J V'J
tf") tf")
.;j .;j
96
32
50
3
1
2
1
4
2
1
1
1
2
96
32
50
3
1
6
1
6
1
2
1
2
1
4
м со
tf") С:>
Lt') Lt') \ос
V'J V'J V'J
tf") tf") tf")
.;j .;j .;j
96
64
96 128
64 32
50
4
1
8
3
2
2
ос
с> С:>
\ос \ос
t'.) V'J
tf") tf")
.;j
128
32
50
4
1
6
3
2
1
1
8
500К 500К
128 128
32 32
50
4
1
8
2
2
2
1
8
Q t/')
м м
\ос \ос
V'J t'.)
tf") tf")
.;j .;j
128
32
25
50
25
50
50
50
4
46
I
I
I/E I/E I/E I/E I/E I/E
4
43
4
43
I
29
57
21
46
14
52
25
50
4
1
4
1
23
60
о
33
I
17
52
I/E I/E
3
1
6
1
4
1
4
1
4
1
4
3
1
4
1
2
1
8
4
1
4
1
6
1
6
1
8
1
8
1
2
1
2
1
2
1
2
2
3
1
2
6
3
2
2
3
1
2
3
2
2
3
2
2
1
2
1
8
1
6
500К
2/ 1/ 3/ 3/ 3/ 1/ 1/ 3/ 1/ 1/ 3/ / 2/ / 2/ 3/ 1/
1
2
250К 1М
9 9
41
44 46
1
8
500К 500К 500К 250К 500К 500К 250К 500К
7
52
I
15
9
11
о
58
43
I I
I/E I/E I/E I/E I/E I/E
52
33
I
Тип корпуса
< < < < < < < < < < < < < <
C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J C.:J
З' З' З' З' З' З' З' З' З' З' З' З' З' З' З' З' З'
000000000000000000 о 000000000000000000 000000
зЗзЗзЗзЗзЗзЗ з зЗзЗзЗзЗзЗзЗ \о зЗзЗ
Серийное производство (Р),
опытные образцы (S)
И.5. Микроконтроллеры реальноzо времени · 497
\ос Lt') \ос \ос \ос с:> со со с:> со 0\ \ос \ос \ос \ос
N N tf") tf") tf") Lt') Lt') tf") Lt') \ос \ос
\ос \ос \ос \ос \ос со со со 0\ 0\ 0\ 0\ 0\ \ос 0\ z z N
V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J
tf") V'J
tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf")
128 128 128 128 128 128 128 256 256 256 256 256 256 256 256 256 256 128 128 64 64 32 16
32 32 32 32 32 64 64 32 32 32 64 64 64 64 64 64 64 20 20 12 12 8 6
I
I
50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50
1 1 1 1 1 1 1 1
I
4 4 4 4 4 3 3 4 4 3 4 4 3 4 4 4 4 3 3 3 3 3 3
1 1 1 1 1 1 1 2 2 1 1 1 1 1 1 1 1 2 2 2 2 2 2
4 6 6 6 6 4 8 6 6 6 6 6
1 1 1 1 1 1 3 1 1 1 1 1
I I
4 4 8 8 6 6 2 8 8 6 8 8 4 8 8 4 4 6 6 6 6 6 6
1 1 1 1 2 2 2
2 2 3 3 3 3 1 3 3 2 3 2 2 3 3 3 3 3 3 3 3 3 3
1 1 2 2 1 1 1 2 2 1 2 2 1 2 2 2 2 2 2 2 2 2 2
1 1 2 2 1 2 1 2 2 1 2 2 1 2 2 2 2 2 2 2 2 2 2
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
6 4 4 4 4 4 6 8 8 8 4 8 8 8 8 8 8 8 8 8
500К 500К 500К 500К 1М 500К 1М 1М 1М 500К 1М 1М 1М 1М 1М 1М 1М 1М 1М 1М
I I
/ / 2/ 2/ 1/ 1/ / 2/8 2/8 3/ 2/ 2/ 1/ / 3/ 3/ 3/ 2/8 2/8 2/8 2/8 2/8 2/8
о о 12 12 7 21 1 О О 17 23 17 27 21 7 5 5 О О О О О О
... ... .. . ... ... ... ... .. . ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
33 33 56 56 43 56 33 67 33 56 60 52 56 52 60 52 52 67 33 67 33 33 33
I I
1 1 I/E 1 I/E I/E 1 1 1 I/E I/E I/E I/E I/E I/E I/E 1 1 1 1 1 1 1
< < < < < < < < < <
e,:) e,:) e,:) e,:) e,:) e,:) e,:) e,:) e,:) e,:)
СУ СУ з СУ з з СУ СУ СУ з з з з з з з СУ СУ СУ СУ СУ СУ СУ
,....:j ,....:j ,....:j ,....:j ,....:j ,....:j ,....:j ,....:j ,....:j ,....:j
000 о 000 000 о 000 000 000 000 000 000 000 о о о
\о \о 00 О 00 00 \о О \о 00 00 00 00 00 00 00 о о \о О \о \о \о
р р р р р р s s р р р р р р р р s s s s s s
[а] ШИМ управление ПрИВОДОМ выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления ПРИВОДОМ) имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов) предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны) если не используется какая либо периферия. Подробности см. в технической документации. {с] Промышленный
диапазон (1): 40...+850C) расширенный диапазон (Е): 40...+105°C. [d] lО8 выводной корпус BGA и 64 выводной корпус LQFP
предлаrаются только для промышленноrо диапазона рабочих температур.
498 · Приложенuе И. Семейство микроконтроллеров Stellaris.
И.б. Микроконтроnnеры с интерфейсом Ethernet
Микроконтроллеры Stellaris на базе ARM Cortex M3 серии LM3S6000 сочетают в себе возможность работы
в режиме реальноrо времени, расширенные порты ввода/вывода общеrо назначения и увеличенный объём
встроенной памяти, а также обладают низким энерrопотреблением, оптимизированным для приложений
с резервным питанием от батареи. Микроконтроллеры серии LM3S6000 являются первыми в мире микрокон
троллерами с полностью интеrрированным 10/100 Мбит/с Еthеrпеt решением, совместимым с ARM
архитектурой. Микроконтроллеры серии LM3S6000 (Табл. И.3) содержат не только Ethernet МАС контроллер
(МАС), но и трансивер (РНУ). Кроме Toro, отдельные микроконтроллеры серии LM3S6000 обеспечивают ап
паратную поддержку протокола Precision Time Protocol соrласно IEEE 1588.
Оценочный набор Stellaris LM3S6965 Особенности оценочноrо набора
Ethernet Stellaris LM3S6965 Ethernet
Оценочные наборы Stellaris LM3S6965 обеспечива
ют компактную и универсальную платформу для
оценки микроконтроллеров Stellaris на базе ARM
Cortex M3 с интерфейсом Ethernet. Набор содержит
два примера приложений, демонстрирующих реали
зацию встраиваемоrо веб сервера. [отовое к работе
приложение для быстроrо старта включает в себя
встраиваемый веб сервер, использующий Ethernet
стек Open Source lwIP. Набор также содержит веб
сервер с ОС реальноrо времени FreeRTOS.org nO и
Ethernet cTeK Open Source uIP. Каждая плата имеет
внутрисхемный интерфейс отладки In Circuit Debug
Interface (ICDI), который обеспечивает возможность
аппаратной отладки не только для размещённоrо на
плате микроконтроллера Stellaris, но и для любой
платы на базе контроллеров Cortex М3/М4 от Texas
Instruments. Оценочный набор содержит все кабели,
проrраммное обеспечение и документацию, необхо
димые для быстроrо проектирования и запуска при
ложен ия для микроконтроллеров Stellaris. Кроме TO
ro, примеры приложений, демонстрирующие исполь
зование различных ОС реальноrо времени и KOMMep
ческих Ethernet cTeKoB, можно заrрузить на
www.ti.com/stellaris lm3s6965.
. Оценочная плата LM3S6965.
· Микроконтроллер Stellaris LM3S6965 с интеrриро
ванным 10/100 Мбит!с Еthеrпеt контроллером
(МАС+РНУ).
· Простая установка: USВ кабель обеспечивает по
следовательную связь, отладку и питание.
· [рафический ОLЕD дисплей с разрешением 128х64
точек и 16 rрадациями ceporo.
· Пользовательский светодиод, переключатели и
кнопки.
. Электромаrнитный динамик.
· Все порты ввода/вывода LM3S6965 выведены на
маркированные внешние контактные площадки.
· Стандартный 20 контактный JТАG разъём дЛЯ OT
ладки от ARM.
. Разъём карты MicroSD.
· Убирающийся Еthеrпеt кабель, USВ кабель и JTAG
кабель.
· Приложение для быстроrо старта работает как
с Ethernet, так и без Hero (непосредственная связь
с компьютером).
· Компакт диск, содержащий:
CJ оценочную версию сред проrраммирования;
CJ руководство по быстрому старту и исходный код;
CJ полную документацию;
CJ набор библиотек StellarisWare, включая библиоте
ку драйверов периферии и пример исходноrо KO
да.
Информация для заказа оценочных наборов
Ко Описание
EKK LM3S6965 Оценочный набор Stellaris LM3S6965 Ethernet для КеН RealView MDK ARM (оrраничение размера
ко а 32 Кбайт
Оценочный набор Stellaris LM3S6965 Ethernet дЛЯ IAR Systems Embedded Workbench (оrраничение
азме а ко а 32 Кбайт
О еночный набо Stel1aris LM3S6965 Ethernet ля CodeSourcer G++ зо невное or аничение
Оценочный набор Stellaris LM3S6965 Ethernet для Code Red Technologies Red Suite (90 ДHeBHoe
or аничение
EKS LM3S6965 Оценочный набор Stellaris LM3S6965 дЛЯ Code Composer Studio'" от компании Texas Instruments (полная
ве сия спивязкой К плате
ЕКI LM3S6965
EKC LM3S6965
EKT LM3S6965
И.б. Микроконтроллеры с интерфейсом Etherпet · 499
Таблица И.3. Микроконтроnnеры серии LM3S6000
с:> с:> с:> N N с:> .... ос tf") с:> tf") .... ос ос с:> N Lt')
с:> .... N N tf") tf") .... .... .... tf") tf") tf") Lt') .... .... tf") Lt') u") \ос
.... .... Lt') \ос \ос \ос \ос \ос 0\ 0\ 0\ 0\ 0\ 0\
Характеристика \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос \ос
V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J
tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf")
IФлэш память, Кбайт 64 64 96 96 96 96 128 128 128 128 128 128 128 256 256 256 256 256 256
,.Q !озу, Кбайт 16 16 32 32 32 64 32 32 32 32 32 64 64 64 64 64 64 64 64
t:II: !Библиотеки в пзу
пМА
=
SAFERTOS'"
Макс. такт. частота, Мfц 25 25 25 25 50 50 25 50 50 50 50 50 50 50 50 50 50 50 50
Q Встроенный
с.. Iпрецизионный
1:[
=: lI'eHepaToP
MPU I I
SysTick (24 битный) I I
Таймеры общеrо 3 3 3 3 3 4 4 4 4 3 4 3 4 4 4 4 4 3 4
назначения
Часы реальноrо времени
Сторожевой таймер 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
:! !модуль тим 2 2 6 4 6 6 4 6
с..
QI IВxoд защиты
QI 1 1 1 1 1 1 1 1
,= тим
=
:= Q feHepaTop «MёpT
QI 1:[
I!!:! Q
= = BOrO» времени
Модуль ССР 4 4 4 4 4 6 6 6 6 6 6 4 4 6 6 6 6 4 4
=
ЕI каналы 1 1 1 1 2
!Интерфейс внешней
Iпеои hерии
QI j 10/100 МАС+РНУ I I I
:! е EE 1588
:= :!
,.Q u CAN МАС
5,=
USB D, Н или О
UART 1 1 1 1 2 2 3 3 2 2 2 1 2 3 2 3 3 3 3
I:[ 2C 2 2 2 2
QI :z: 1 1 1 1 1 1 2 1 1 1
5 = SSI/SPI 1 1 1 1 1 1 1 2 2 1 1 1 1 2 2 1 2 1 1
Q
= [2S
Модули АЦП 1 1 1 1 1 1 1 1 1 1 1
t:II: t:II: e Каналы АЦП 2 3 4 8 3 4 4 8 8 3 4
< с:ь Быстродействие 50K 1250К 500К 500К 500К 1М 500К 5001< 1М 500К 1М
-..х АЦП (выб/с)
g i Встроенный датчик
; е rrемпеоатvры I
<= налоrовые/цифровые
1/ 3/ 2/ 2/ 2/ 2/ 3/ 2/ 2/ 1/ 3/ 2/ 2/ 2/ 2/ 3/ 3/ 3/ 2/
!компараторы
lПорты ввода/вывода 10 8 23 12 14 6 5 10 5 15 11 23 5 10 5 7 1 6 О
бщ. назнач. (совместимы ... .. . .. . . .. .. . . .. ... ... ... ... .. . . .. ... ... . .. ... ... . .. ...
t5 В) 30 35 46 34 43 41 46 46 38 41 41 46 41 46 38 38 46 43 42
ежим энерrосбережения
резерв. от батаоеи
tDО стабилизатор I I
lНапряжения
Wабочаятемпеоатvоа I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E I/E
, ft,c / (3 с..<: ёE ft,ёE (3 ёE ft,ёE с..<: ft,(3 ёЭ ,ёЭ
e,:) e,:)
Тип корпуса CI CI CI CI g CI CI CI g
QO QO QO gз QO gз g QO 8 QO QO 8
00 00 00 00 00 00 00 00 O 00 00 З 00 g 00 O
з.... з...... з...... з...... з...... з...... з...... з...... з...... з...... ...... з...... з...... з...... ...... з...... з.... з......
Серийное производство (Р), р р р р р р р р р р р р р р р р р р р
!опытные образцы (S)
[а] ШИМ управление приводом выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления приводом, имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов, предназначенных для портов ввода/вывода 06щеrо назначения; дополнительные
выводы доступны, если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C, расширенный диапазон (Е): 40...+1050C. [d] 108 выводной корпус BGA предлаrается только для
промышленноrо диапазона рабочих температур.
500 · Приложение И. Семейство микроконтроллеров Stellaris.
И.7. Микроконтроллеры с интерфейсом USB
Оценочный набор Stellaris LM3S3748
USB Host/Device
Оценочная плата
Stellaris LM3S3748
демонстрирует клю
чевые особенности
микроконтроллера
LM3S3748, включая
полноскоростной
(12 Мбит/с) контрол
лер USB 2.0 Host/
Device, АЦП и после Оценочный набор Stellaris
довательные интер LM3S3748 USB Host/Device
фейсы. В режиме
USB Device компактный переключатель позволяет выбрать
питание через шину или автономное питание. [отовое к pa
боте приложение для быстроrо старта использует четыре
сиrнала АЦП, образующие два дифференциальных канала,
для реализации проrраммноrо осциллоrрафа с частотой вы
борки 1 Мвыб/с с ЖК дисплеем, демонстрируя BЫCOKOCKO
ростную систему сбора и обработки данных с усовершен
ствованным пользовательским интерфейсом, который раз
работан с помощью rрафической библиотеки StellarisWare
Graphics Library. Приложение для быстроrо старта использу
ет USВ библиотеку StellarisWare USB Library для работы в pe
жимах USB Host и USB Device, записывает растровые изобра
жения сиrналов, отображаемых на дисплее, и СSV данные во
встроенный USВ накопитель и имеет возможность соедине
ния с компьютером для дистанционноrо отображения дан
ных. Плата LM3S3748 также содержит внутрисхемный ин
терфейс отладки In Circuit Debug Interface (lCDI) , который
обеспечивает возможность аппаратной отладки не только
для установленноrо на плате микроконтроллера St llaris, но и
для любой платы на базе микроконтроллера Stellarls. В режи
ме отладочноrо интерфейса встроенный в плату микрокон
троллер блокируется, что позволяет проrраммировать или
осуществлять отладку внешней платы. Примеры приложе
ний, демонстрирующие использование различных ОС pe
альноrо времени и коммерческих коммуникационных CTe
ков, можно заrрузить на www.ti.com/stellaris lm3s3748.
· 50 мrц микроконтроллер Stellaris LM3S3748 со BCTpoeH
ной 128 Кбайт флэш памятью и 64 Кбайт SRAM.
· Приложение для быстроrо старта, реализующее 2 каналь
ный осциллоrраф.
· Поддержка питания через шину или aBToHoMHoro пита
ния через USB.
· Цветной rрафический ЖК дисплей с разрешением
128х128 точек.
· Пользовательский светодиод и навиrационный переклю
чатель.
· 8 OM электромаrнитный динамик с усилителем.
· Разъём карты MicroSD.
· Стандартный 20 контактный JТАG разъём для отладки
от ARM и JT AG/SWD кабель.
· Порты ввода/вывода LM3S3748 выведены на маркирован
ные внешние контактные площадки.
· USВ кабели и измерительные щупы осциллоrрафа, необхо
Димые для работы приложения быстроrо старта.
· USВ накопитель.
· Компакт диск) содержащий:
CJ оценочную версию проrраммных инструментов, пол
ную документацию, руководство по быстрому старту и
исходный код;
CJ набор библиотек StellarisWare, включая библиотеку драй
веров периферии и пример исходноrо кода.
Информация для заказа оценочных наборов
Ко
EKK
LM3S3748
EKI
LM3S3748
EKC
LM3S3748
EKT
LM3S3748
EKS
LM3S3748
Описание
Оценочный набор Stellaris LM3S3748 USB Host/
Device для Keil RealView MDK ARM (оrраничение
азме а ко а 32 Кбайт
Оценочный набор Stellaris LM3S3748 дЛЯ IAR
Systems Embedded Workbench (оrраничение
азме а ко а 32 Кбайт
Оценочный набор Stellaris LM3S3748 дЛЯ
CodeSourcer G++ (30 ДHeBHoe or аничение)
Оценочный набор Stellaris LM3S3748 дЛЯ Code Red
Technolo ies Red Suite (90 ДHeBHoe or аничение)
Оценочный набор Stellaris LM3S3748 дЛЯ Code
Composer Studio'" от компании Texas Instruments
полная ве сия спивязкой К плате
Оценочный набор Stellaris LM3S9B92
Ethernet+CAN
Имея в своём COCTa
ве две платы, на одной
из которых находится
микроконтроллер
LM3S9B92 с интерфей
сами Ethernet+USB
OTG+CAN, а на дpy
rой реализован интер
фейс внутрисхемной
отладки BD ICDI, oцe
ночный набор Stellaris Оценочный набор Stellaris
LM3S9B92 предостав LM3S9B92 Etherпet+CAN
ляет недороrую, KOM
пактную и универсальную платформу для оценки микр
контроллеров Stellaris на базе ARM Cortex M3 с интерфеи
сами Ethernet, USB и CAN. В оценочной плате используется
микроконтроллер LM3S9B92, который позволяет реализо
вывать сложные алrоритмы управления и имеет 8 ШИМ
выходов для обеспечения управления приводом и снабже
ния энерrией и 2 модуля квадратурноrо энкодера (QEI) дЛЯ
подключения импульсных датчиков положения. Кроме TO
ro, микроконтроллер LM3S9B92 способен работать с внеш
ним 16 мrц кварцевым reHepaTopoM, который обеспечива
ет основную тактовую частоту, используемую для непо:
средственноrо тактирования АRМ ядра или внутреннеи
схемы ФАПЧ дЛЯ увеличения частоты TaKToBoro сиrнала
ядра до 80 мrц. Для тактирования Еthеrпеt контроллера
используется 25 мrц кварцевый reHepaTop. Микрокон
троллер LM3S9B92 также имеет встроенный LDO
стабилизатор напряжения, который обеспечивает питание
внутренних цепей.
Информация для заказа оценочных наборов
Ко Описание
EKK Недороrой оценочный набор Stellaris LM3S9B92
LM3S9 B92 ДЛЯ Keil RealView MDK ARM (оrраничение
азме а ко а 32 Кбайт
ЕКI Недороrой оценочный набор Stellaris LM3S9B92
дЛЯ IAR Systems Embedded Workbench
LM3S9B92 or аничение азме а ко а 32 Кбайт
EKC Недороrой оценочный набор Stellaris LM3S9B92
LM3S9B92 дЛЯ CodeSourcer G++ (30 ДHeBHoe or аничение)
Недороrой оценочный набор Stellaris LM3S9B92
EKT дЛЯ Code Red Technologies Red Suite (90 ДHeBHoe
LM3S9B92 or аничение
Оценочный набор Stellaris LM3S9B92 дЛЯ Code
EKS Composer Studio'" от компании Texas Instruments
LM3S9B92 полная ве сия спивязкой К плате
И.7. Микроконтроллеры с интерфейсом USB . 501
Таблица И.4. Микроконтроnnеры с интерфейсом USB
..... 0'1 CIC) 0'1 \ос \ос \ос \ос \ос
..... tf") tt tt N N N N N
Lt') t-.. CIC) ....... z N
Характеристика \ос tf") tf") tf") tf") tf") tf") tf") tf")
V'J V'J V'J V'J V'J V'J
tf") tf") tf") tf") tf") tf") V'J
tf") tf") tf")
Флэm память, Кбайт 128 128 128 128 256 128 64 32 16
,Q ()ЗУ, Кбайт 32 64 64 64 32 20 12 8 6
I:IC
Библиотеки в ПЗУ
DMA
== I
SAFERTOS"
Макс. такт. частота,Мfц 50 50 50 50 50 50 50 50 50
е Встроенный
прецизионный
1=(
reHepaToP
MPU
SvsTick (24 битный) I
Таймеры общеrо 4 4 4 4 3 3 3 3 3
назначения
Часы реальноrо времени I
Сторожевой таймер 1 1 1 1 2 2 2 2 2
:а Модvль тим 8 8
ВХОД защиты
4 4
,= ШИМ
=
:z: е reHepaTop
I=(
I!!:! е
= = «мёртвоrо»
времени
= Модvль ССР 8 8 8 7 6 6 6 6 6
QЕI каналы 1 1
Интерфейс внешней
tnери Ьерии
j 't 10/100 МАС+РНУ
:а Е nEE 1588
:z: :!
,Q v CAN МАС
5,=
t USB D, Нили О О Н Н Н D D D D D
е UART 1 3 2 3 3 3 3 3 3
I=(
:z: [2С 1 2 2 2 2 2 2 2 2
5 =
е SSI/SPI 1 2 2 2 2 2 2 2 2
== I 2 S
Модvли АЦП 1 1 1 1 1 1 1 1 1
tI:: I:IC e Каналы АUП 4 8 8 8 8 8 8 8 8
< Q Быстродействие 500К 500К 1М 1М 1М 1М 1М 1М 1М
- АЦП (выб/с)
е Встроенный датчик
=
:z: температvры
<= Аналоrовые/цифровые
2/ 2/ 2/ 2/ 2/8 2/8 2/8 2/8 2/8
компараторы
Порты ввода/вывода
общ. назнач. (совместимы 0...33 14...61 3...61 0...61 0...33 0...33 0...33 0...33 0...33
с5 В)
Режим энерrосбережения
с резерв. от батареи
LDО стабилизатор
напряжения
Рабочая температvра 1 1 1 1 1 1 1 1 1
Тип корпуса 64LQFP 100LQFP 100LQFP 100LQFP 64LQFP 64LQFP 64LQFP 64LQFP 64LQFP
Серийное производство (Р), Р Р Р Р S S S S S
опытные образцы (S)
[а] ШИМ управление ПРИВОДОМ выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления приводом, имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов, предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны, если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C, расширенный диапазон (Е): 40...+1050c.
502 . Приложение и. Семейство микроконтроллеров Stellaris.
И.8. Микроконтропперы с интерфейсами USB и CAN
Оценочный набор Stellaris LM3S3748 Информация для заказа оценочных наборов
USB Host/Device Ко g::н :ей набор Stellaris LM3S3748 USB Host!
Оценочная плата S3748 Device для КеН RealView MDK ARM (оrраничение
Stellaris LM3S3748 азме а ко а 32 Кбайт
демонстрирует клю EKI ОцеНОЧНЫЙ Ь Н d а d БО d р w Stеll k а ь riS LM h ( 3S3748 дЛЯ IAR
чевые особенности L M 3 S 3748 Systems Ет е е or епс оrраничение
азме а ко а 32 Кбайт
микроконтроллера EKC Оценочный набор Stellaris LM3S3748 дЛЯ
LM3S3748, включая LM3S3748 CodeSourcer G++ (30 ДHeBHoe or аничение)
П ( ОЛН Б ОСКО ) РОСТНОЙ EKT Оценочный набор Stellaris LM3S3748 дЛЯ Code Red
12 М ит/с контрол LM3S3748 Technolo ies Red Suite (90 ДHeBHoe or аничение)
лер USB 2.0 Host! Оценочный набор Stellaris LM3S3748 дЛЯ Code
Device, АЦП и после Оценочный набор Stellaris EKS Composer Studio'" от компании Texas Instruments
довательные интер LM3S3748 USB Host/Device LM3S3748 полная ве сия спивязкой К плате
фейсы. В режиме
USB Device компактный переключатель позволяет выбрать Оценочный набор Stellaris LM3S9B92
питание через шину или автономное питание. [отовое к pa Ethernet+CAN
боте приложение для быстроrо старта использует четыре
сиrнала АЦП, образующие два дифференциальных канала,
для реализации проrраммноrо осциллоrрафа с частотой BЫ
борки 1 Мвыб!с с ЖК дисплеем, демонстрируя BЫCOKOCKO
ростную систему сбора и обработки данных с усов ершен
ствованным пользовательским интерфейсом, который раз
работан с помощью rрафической библиотеки StellarisWare
Graphics Library. Приложение для быстроrо старта использу
ет USВ библиотеку StellarisWare USB Library для работы в pe
жимах USB Host и USB Device, записывает растровые изобра
жения сиrналов, отображаемых на дисплее, и СSV данные во
встроенный USВ накопитель и имеет возможность соедине
ния с компьютером для дистанционноrо отображения дaH
ных. Плата LM3S3748 также содержит внутрисхемный ин
терфейс отладки In Circuit Debug Interface (ICDI), который
обеспечивает возможность аппаратной отладки не только
для установленноrо на плате микроконтроллера Stellaris, но и
для любой платы на базе микроконтроллера Stellaris. В режи
ме отладочноrо интерфейса встроенный в плату микрокон
троллер блокируется, что позволяет проrраммировать или
осуществлять отладку внешней платы. Примеры приложе
ний, демонстрирующие использование различных ОС pe
альноrо времени и коммерческих коммуникационных CTe
ков, можно заrрузить на www.ti.com/stellaris lm3s3748.
. 50 мrц микроконтроллер Stellaris LM3S3748 со BCTpoeH
ной 128 Кбайт флэш памятью и 64 Кбайт SRAM.
. Приложение для быстроrо старта, реализующее 2 каналь
ный осциллоrраф.
. Поддержка питания через шину или aBToHoMHoro пита
ния через USB.
. Цветной rрафический ЖК дисплей с разрешением
128х128 точек.
. Пользовательский светодиод и навиrационный переклю
чатель.
. 8 OM электромаrнитный динамик с усилителем.
. Разъём карты MicroSD.
. Стандартный 20 контактный JТАG разъём для отладки
от ARM и JТАG/SWD кабель.
. Порты ввода/вывода LM3S3748 выведены на маркирован
ные внешние контактные площадки.
. USВ кабели и измерительные щупы осциллоrрафа, необхо
димые для работы приложения быстроrо старта.
. USВ накопитель.
. Компакт диск, содержащий:
CJ оценочную версию сред проrраммирования, полную
документацию, руководство по быстрому старту и исхо
дный код;
CJ набор библиотек StellarisWare, включая библиотеку драй
веров периферии и пример исходноrо кода.
Имея в своём COCTa
ве две платы, на одной
из которых находится
микроконтроллер
LM3S9B92 с интерфей
сами Ethernet+USB
OTG+CAN, а на дpy
rой реализован интер
фейс внутрисхемной
отладки BD ICDI, oцe
ночный набор Stel1aris Оценочный набор Stellaris
LM3S9B92 предостав LM3S9B92 Etherпet+CAN
ляет недороrую, KOM
пактную и универсальную платформу для оценки микро
контроллеров Stellaris на базе ARM Cortex M3 с интерфей
сами Ethernet, USB и CAN. В оценочной плате используется
микроконтроллер LM3S9B92, который позволяет реализо
вывать сложные алrоритмы управления и имеет 8 тим
выходов для обеспечения управления приводом и снабже
ния энерrией и 2 модуля квадратурноrо энкодера (QEI) дЛЯ
подключения импульсных датчиков положения. Кроме TO
ro, микроконтроллер LM3S9B92 способен работать с внеш
ним 16 мrц кварцевым reHepaTopoM, который обеспечива
ет основную тактовую частоту, используемую для непо
средственноrо тактирования АRМ ядра или внутренней
схемы ФАПЧ для увеличения частоты TaKToBoro сиrнала
ядра до 80 мrц. Для тактирования Еthеrnеt контроллера
используется 25 мrц кварцевый reHepaTop. Микрокон
троллер LM3S9B92 также имеет встроенный LDO
стабилизатор напряжения, который обеспечивает питание
внутренних цепей.
Информация для заказа оценочных наборов
Ко Описание
EKK Недороrой оценочный набор Stellaris LM3S9B92
LM3S9B92 дЛЯ Keil RealView MDK:ARM (оrраничение
азме а ко а 32 Кбаит
ЕКI Недороrой оценочный набор Stellaris LM3S9B92
LM3 S 9B92 дЛЯ IAR Systems Embedded Workbenc
or аничение азме а ко а 32 Кбаит
EKC Недороrой оценочный набор Stellaris LM3S9B92
LM3S9B92 дЛЯ CodeSourcer G++ (30 ДHeBHoe or аничение)
ЕКТ Недороrой оценочный набор Stellaris LM3S9B92
LM3S9B92 дЛЯ Code Red Technologies Red Suite (90 ДHeBHoe
or аничение
EKS Оценочный набор Stellaris LM3S9B92 дЛЯ Code
LM S9B92 Composer Studio'" от компа ии Texas Instruments
3 полная ве сия спивязкои К плате
И.В. Микроконтроллеры с интерфейсами USB и CAN · 503
Таблица И.5. Микроконтроnnеры с интерфейсами USB и CAN
м ..-1 М \ос М М 0\ 0\ М М ..-1
tf") Lt') Lt') Lt') \ос tf") tf") tf") t!: t!: Lt') \ос 0\
\ос \ос \ос \ос \ос
Характеристика Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt') Lt')
V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J
tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf") tf")
лэш паМJlТЬ, Кбайт 128 128 128 128 128 128 128 128 128 128 128 128 128
,Q озу, Кбайт 32 32 32 32 32 64 64 64 64 64 64 64 64
I:IC Библиотеки в пзу I I I I I I I I I I I I I
ОМА I I I I I I I I I I I
== I I
SAFERTOS nO
Макс. такт. част.. Мfц 50 80 50 80 50 50 50 50 50 50 50 50 80
с::> Встроенный преци
I I I
1:[ sионный reHeoaToP
=:
MPU I I I I I I I I I I I I I
SvsTick (24 битный) I I I I I I I I I I I I I
Таймеры общеrо 3 4 3 4 3 3 3 4 3 4 3 3 4
назначеНИJl
асыреал.времени I I I I I I I I I I I I I
:а Стооожевойтаймео 1 2 1 2 1 1 1 1 1 1 1 1 2
rr МОIlVЛЬ тим 6 6 6 6 8 6 8
ВХОД защиты
,= 4 4 1 1 4 1 4
= тим
:z: с::>
I:[ [енератор «MёpT
I!!:! с::>
= = I I I I I I I
!.! Iвoro» воемени
= МОIlVЛЬ ССР 5 8 6 8 5 5 3 8 2 5 6 5 8
ЕI каналы 2 1 1 2
Интерфейс внешней I
пеои Ьеоии
i tS 10/100 МАС+РНУ
:а E EE 1588
:Z: :а
v CAN МАС 1 2 1 1 1 1 1 1 1 2 1 1 2
,=
.x. USB О. НилиО Н О О О О Н Н Н Н Н О О О
e UART 2 3 1 3 1 2 1 3 1 2 1 1 3
I:[ r 2 C 2 2 1 2 2 2 2 1 2 1 2
:Z:
6= SSI/SPI 1 2 1 2 1 1 2 2 1 2 1 1 2
с::>
== [2S I I
МОIlVЛИ АIIП 1 2 1 2 1 1 1 1 1 1 1 1 2
I:IC tI:: 5- Каналы АЦП 6 16 6 8 4 6 8 8 8 8 6 4 16
i < Q Быстродействие 500К 1М 500К 1М 500К 500К 500К 500К 500К 1М 500К 500К 1М
- АЦП (вы б/с)
с::> Встроенный датчик
= !. I I I I I I I I I I I I I
= температvоы
<= Аналоrовые/цифро
/ 2/ 16 1/ 2/ 16 / / / 2/ / 2/ 1/ / 3/ 16
вые компаоатооы
Порты ввода/вывода 27...61 12.. .61 27...61 0...61 О.. .33 0...33 0...72
бщ. назнач. (совместимы 1...33 О.. .67 0...33 0...33 О.. .33 1...33
,. 5 В)
Режим энерrосбережеНИJl I I I I .; I I I I I I I
,. резеов. от батаоеи
DО стабилизатор I I I I I I I I I I I I I
наПОJlжеНИJl
РабочаJl темпеоатvоа 1 1 1 1 1 1 1 1 1 1 1 1 1
CI CI CI CI CI CI
CI CI CI CI CI CI CI
Тип корпуса "7 "7
с6 I I с6 6 с6 6 6
о о о о о о
\о ...... \о \о \о \о ...... ...... ...... ...... \о \о ......
Серийное производство р S р S р р р р р р р р s
РУ, опытные обоазuы (S)
504 · Приложение и. Семейство микроконтроллеров Stellaris.
Таблица И.5. Микроконтроnnеры с интерфейсами USB и CAN (продолжение)
.... \ос .... .... \ос .... \ос .... \ос .... \ос \ос \ос
0\ f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I")
0\ 0\ = =.. =.. =.. =.. =:: =::
Характеристика an an an an an an an an an an
VJ VJ VJ VJ VJ VJ VJ VJ VJ VJ VJ
f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I") f'I")
.;j .;j .;j .;j .;j .;j .;j .;j .;j
IФлэm паМJlТЬ Кбайт 256 256 256 128 128 64 64 64 64 256 256 32 16
,Q озу, Кбайт 64 64 96 24 24 24 24 24 24 48 48 12 8
I:IC Библиотеки в пзу ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
РМА ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
==
SAFERTOS"
Макс. такт. част. Mfu 80 80 80 80 80 80 80 80 80 80 80 80 80
е Встроенный преци
Q.. ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
1:[ зионный reHepaTop
=:
MPU ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
SvsTick (24 битный) ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
Таймеры общеrо 4 4 4 3 3 3 3 4 4 4 4 3 3
назначеНИJl
Часы реал. времени ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
:а Сторожевой таймер 2 2 2 2 2 2 2 2 2 2 2 2 2
Q.. !Модvль тим 6 6 8 6 6 6 6 6 6 8 8 6 6
!Вход защиты
)= 4 4 4 4 4 4 4 4 4 4 4 4 4
= tmИМ
:z:e
ё lI'eHepaTop «MёpT
== ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
!.! 8oro» времени
== Модvль ССР 8 8 8 6 6 6 6 8 8 8 8 6 6
>-
ЕI каналы 2 1 2 2 1 2 1 2 1 2 1 1 1
Интерфейс внешней ./ ./
пери J}ерии
10/100 МАС+РНУ
:а е ttEE 1588
:z: :а
,Qv CAN МАС 2 1 2 1 1 1 1 2 1 1 1 1 1
5)=
USB D, Н или О О О О D D D D О О D D D D
e UART 3 3 3 3 3 3 3 3 3 3 3 3 3
I:[ 2С 2 2 2 2 2 2 2 2 2 2
:z: 2 2 2
5 = SSI/SPI 2 2 2 2 2 2 2 2 2 2 2 2 2
е
== 2S ./ ./ I ./
Модvли АПП 2 2 2 2 2 2 2 2 2 2 2 2 2
I:IC I:IC e Каналы АЦП 16 8 16 16 8 16 8 16 8 16 8 8 8
< s Быстродействие 1М 1М 1М 1М 1М 1М 1М 1М 1М 1М 1М 1М 1М
-.,Х '--' АЦП (выб/с)
g i строенный датчик
: е ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
<= rrемператvры
IAналоrовые/цифро 2/16 2/ 16 3/ 16 2/ 16 2/ 16 2/ 16 2/16 2/ 16 2/16 2/ 16 2/ 16 2/ 16 2/16
!Вые компараторы
Порты ввода/вывода
общ. назнач. (совместимы О. ..67 О.. .33 0...72 0...67 0...33 0...67 О.. .33 0...67 О.. .33 О.. .67 0...33 0...33 О.. .33
,. 5 В)
Режим энерrосбережеНИJl ./ ./ ./ ./ I ./ ./ ./ ./ ./ ./ ./
IC резерв. от батареи
ILDО стабилизатор ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./ ./
!наПРJlжеНИJl
абочаJlтемператvра 1 1 1 1 1 1 1 1 1 1 1 1 1
Ifип корпуса CI CI CI CI СУ CI CI CI CI CI а CI а
"7 "7 "7
с6 с6 с6 о о о
з \о О О \о О \о О \о О \о \о \о
ерийноепроизводство(Р), S S S S S S S S S S S S S
пытные образцы (S)
[а] ШИМ управление ПРИВОДОМ выполняется с помощью специальных аппаратных средств (ВЫВОДЫ PWM) или с помощью
функций управления ПРИВОДОМ, имеющихся у таймеров общеrо назначения (ВЫВОДЫ ССР). Подробности см. В технической
документации. [Ь] Минимум число ВЫВОДОВ, предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны, если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C, расширенный диапазон (Е): 40...+105°C.
И.9. Микроконтроллеры с интерфейсом CAN . 505
И.9. Микроконтроллеры с интерфейсом CAN
Микроконтроллеры Stellaris на базе ARM Cortex M3 серии LM3S2000 сочетают
в себе возможность работы в промышленных сетях, расширенные порты ввода/
вывода общеrо назначения и увеличенный объём встроенной памяти, а также об
лада ют низким энерrопотреблением, оптимизированным для приложений с pe
зервным питанием от батареи. Микроконтроллеры серии LM3S2000 (Табл. И.6),
разработанные для приложений с интерфейсом CAN, работают по технолоrии
Bosch CAN 2.0 А/В, которая является «золотым» стандартом для промышленных
сетей, предназначенных для связи на короткие расстояния.
Оценочный набор Stellaris LM3S2965 CAN
Оценочный набор Stellaris LM3S2965 обеспечивает компактную и универсальную платформу оценки микро
контроллеров Stellaris на базе ARM Cortex M3. С помощью двух плат, на одной из которых установлен микро
контроллер LM3S2965 с интерфейсом CAN, а на друrой микроконтроллер LM3S2110 с интерфейсом CAN,
оценочный набор позволяет подrотовить CAN ceTЬ к работе. Приложение для быстроrо старта демонстриру
ет передачу и приём САN пакетов между двумя оценочными платами. Плата LM3S2965 также имеет внутри
схемный интерфейс отладки ICDI, который позволяет осуществлять аппаратную отладку не только для YCTa
новленноrо на плате микроконтроллера Stellaris, но и для любой платы на базе микроконтроллера Stellaris.
Оценочный набор содержит все кабели, проrраммное обеспечение и документацию, необходимые для бы
строй разработки и запуска приложений для микроконтроллеров Stellaris. Кроме Toro, примеры приложений,
демонстрирующие использование различных ОС реальноrо времени и коммерческих CAN cTeKoB, можно за
rрузить на www.ti.com/stellaris lm3s2965.
Особенности оценочноrо набора Stellaris LM3S2965 CAN
. Полностью rотовая к работе сеть CAN с приложением для быстроrо старта, которое обеспечивает CAN ceTЬ
и CAN трафик.
. Оценочная плата LM3S2965 CAN и отдельная плата LM3S2110 CAN Device.
. Микроконтроллеры Stellaris LM3S2965 и LM3S2110, каждый из которых содержит МАС контроллер CAN.
. Простая установка: USВ кабель обеспечивает последовательную связь, отладку и питание.
. rрафический ОLЕD дисплей с разрешением 128х64 точек и 16 rрадациями ceporo.
. Пользовательский светодиод, переключатели и кнопки.
. Электромаrнитный динамик.
. Все порты ввода/вывода LM3S2965 и LM3S2110 выведены на маркированные внешние контактные площадки.
. Стандартный 20 контактный JТАG разъём для отладки от ARM.
. Плоский САN кабель, USВ кабель и JТАG кабель.
. Компакт диск, содержащий:
[J оценочную версию сред разработки;
[J руководство по быстрому старту и исходный код;
[J полную документацию.
Информация дпя заказа оценочных наборов
Ко
EKK LM3S2965
EKI LM3S2965
EKC LM3S2965
EKT LM3S2965
EKS LM3S2965
506 · Приложение И. Семейство микроконтроллеров Stellaris*
ТаблиЦQ И.б. Микроконтроnnеры серии LM3S2000
Q Q'\ \о Q М М ('f') ..... QQ \о
..... ('f') t--. ..... ..... ('f') ('f') Q Q .....
..... ..... м 11') \о \о \о
М М М М М М М М М М
Характеристики (.I:) (.I:) (.I:) (.I:) (.I:) (.I:) (.I:) (.I:) (.I:) (.I:)
('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f')
.....:1 .....:1 ....,;j .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1
IФлэш память, Кбайт 64 64 64 96 96 96 96 128 128 128
.Q озу, Кбайт 16 16 32 32 32 32 64 32 32 16
е-о
tI:: Библиотеки в пзу 1 .;
DMA 1 .;
t::
SAFERTOS'"
Макс. такт. част., Мfц 25 25 50 25 25 50 50 50 50 50
Q Встроенный прецизионный
а..
1:{
=: I"енератор
MPU .; .; .; .; .; .; .; .; .; .;
SvsTick (24 битный) .; .; .; .; .; .; .; .; .; .;
Таймеры общеrо назначения 3 3 3 3 3 3 4 4 4 4
Часы реальноrо времени .; .; .; .; .; .; .; .; .;
:! торожевойтаймер 1 1 1 1 1 1 1 1 1 1
а.. u МОllVЛЬ тим 2 8 2 2 6 6
u
,= = 8ход защиты тим 1 3 1 1 1 1
Е-о4 g feHepaTop «мёртвоrо»
: ; времени .; .; .; .; .; .;
а..
=- l\{ОДVЛЬ ССР 4 6 1 4 4 4 6 8 8
QЕI каналы 1
tинтерФейс внешней периФерии
u j 10/100 МАС+РНУ
:! E EE 1588
= :!
.Q1j CAN МАС 1 1 1 1 1 1 1 1 1 1
5,=
USB D, Н илиО
e- UART 1 2 1 1 2 2 2 3 2 1
I:{e-o I 2 C 1 1 1 1 1 1 2 2 1
u =
6= SSI/SPI 1 1 1 1 1 1 1 2 2
Q
t:: 2S
Е: ОllVЛИ АЦП 1 1 1 1 1 1 1
tI:: tI:: 3- аналы АЦП 4 6 3 3 3 8 6
-< с !Быстродействие АЦП 250К 1М 250К 250К 250К 500К 1М
....х :='I(выб/с)
Q строенный датчик
: .; .; .; .; .; .; .;
= u емператvры
-<= k\налоrовые/цифровые
3/ 3/ / 2/ 2/ 2/ 3/ 2/ 2/ 2/
!компараторы
1П0рты ввода/вывода общ. назнач. 11. ..40 26...56 О. ..33 37...60 20. ..49 5...34 11.. .48 21...60 15...52 1...33
I(совместимы с 5 В)
Режим энерrосбережения с резерв. .; .; .; .; .;
от батареи
LDО стабилизатор напряжения .; .; .; .; .; .; .; .; .; .;
Рабочая температvра I/E I/E I I/E I/E I/E I/E I/E I/E I
< < < < < < <
<
c.:; c.:; c.:; c.:; c.:; Clс.:; c.:; c.:;
Тип корпуса Clj:Q Clj:Q CI Clj:Q Clj:Q Clj:Q j:Q Clj:Q Clj:Q CI
OO OO OO OO OO 000 OO OO
00 00 00 00 00 00 00
...... ...... \о ...... ...... о...... ...... ...... \о
......
ерийное производство (Р), Р Р Р Р Р Р Р Р Р Р
опытные образцы (S)
И.9. Микроконтроллеры с интерфейсом CAN · 507
Q t--. ..... ..... ос) Q Q'\ \с ('f') ..... ос) Q'\ Q'\ ос) Q 11') ('f')
м ('f') 11') t--. t--. ('f') ('f') t--. Q'\ ..... ..... ..... ('f') 11') \с Q'\
\с \с \с \с \с t--. t--. t--. t--. Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ =
М М М М М М М М М М М М М М М М М
V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J V'J
('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f')
.....:1 .....:1 .....:1 .....:1 .....:1 ....,;j .....:1 .....:1 ....,;j .....:1 ....,;j .....:1 .....:1 ....,;j .....:1 ....,;j ....,;j
128 128 128 128 128 128 128 128 128 256 256 256 256 256 256 256 256
32 32 32 32 32 64 64 64 64 64 64 64 64 64 64 64 96
.; .; .; .; .;
.; .; .; .; .;
25 50 50 50 50 50 50 50 80 50 50 50 50 50 50 50 80
.; .;
.; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .;
.; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .;
4 4 4 4 4 3 3 3 4 4 4 4 3 4 4 4 4
.; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .;
1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 2
4 4 2 4 6 8 8 4 6 6 8
1 1 1 2 1 3 4 1 1 1 4
.; .; .; .; .; .; .; .; .; .; .;
6 6 6 2 2 4 6 1 8 8 8 8 4 8 6 6 8
1 1 1 2 1 1 2 2
.; .;
2 1 1 1 1 1 1 1 2 1 1 1 1 2 2 2 2
1 2 3 1 1 1 2 1 3 3 2 2 3 3 3 3 3
1 1 1 1 1 1 2 2 2 2 1 1 1 2 2
1 1 2 1 1 1 1 1 2 2 2 2 1 2 2 2 2
.; .;
1 1 1 1 1 1 2 1 1 1 1 1 2
4 4 4 8 4 6 16 8 8 3 8 4 16
500К 500К 500К 500К 500К 1М 1М 500К 500К 500К 1М 1М 1М
.; .; .; .; .; .; .; .; .; .; .; .;
31 31 11 31 / 2/ 11 / 31 16 21 21 21 3/ 31 31 31 3/16
12. ..52 15.. .46 16...53 3...33 1...33 37...60 20...56 О.. .33 О.. .67 21...60 15.. .52 15.. .52 18...57 12.. .52 10.. .60 3...56 О.. .67
.; .; .; .; .; .; .; .; .; .; .; .; .; .;
.; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .; .;
I/E I/E I/E I I I/E I/E I I I/E I/E I I/E I/E I/E I/E I
< < < < < < < < < <
<
0'j:Q 0'j:Q 0'j:Q с/ о' 0'j:Q 0'j:Q с/ о' 0'j:Q 0'j:Q о' 0'j:Q 0'j:Q 0'j:Q O' о'
OO OO OO OO OO OO OO OO OO OO j:Q
00 00 00 00 00 о 00 00 о 00 00 00 000 о
...... ...... ...... \о \о ...... о...... \о ...... о...... о...... ...... ...... о
...... ...... ...... ......
р р р р р р р р s р р р р р р р s
[а] ШИМ управление ПРИВОДОМ выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления ПРИВОДОМ) имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов) предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны) если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C) расширенный диапазон (Е): 40...+1050c. [d] 108 выводной корпус BGA и 64 выводной корпус LQFP
предлаrаются только для промышленноrо диапазона рабочих температур.
508 · Приложение и. Семейство микроконтроллеров Stellaris*
И.10. Микроконтроллеры с интерфейсами Ethernet и CAN
Микроконтроллеры Stellaris на базе ARM Cortex M3 серии LM3S8000 сочетают в себе возможность работы
в промышленных сетях, расширенные порты ввода/вывода общеrо назначения и увеличенный объём BCTpO
енной памяти, а также обладают низким энерrопотреблением, оптимизированным для приложений с резерв
ным питанием от батареи. Микроконтроллеры серии LM3S8000 являются первыми в мире микроконтролле
рами, сочетающими полностью интеrрированное 10/100 Мбит/с Еthеrnеt решение и сетевую технолоrию
Bosch CAN с АRМ архитектурой. Микроконтроллеры серии LM3S8000 (Табл. И.7) содержат до трёх контрол
леров CAN 2.0 А/В, Ethernet МАС контроллер (МАС) и трансивер (РНУ). Кроме Toro, отдельные микрокон
троллеры серии LM3S8000 обеспечивают аппаратную поддержку протокола Precision Time Protocol соrласно
IEEE 1588.
Оценочный набор Stellaris LM3S8962
Ethernet+CAN
Оценочный набор Stellaris LM3S8962 обеспечивает
компактную и универсальную платформу для оценки
микроконтроллеров Stellaris на базе ARM Cortex M3
с интерфейсами Ethernet и CAN. С помощью двух
плат, на одной из которых содержится микрокон
троллер LM3S8962 с интерфейсами Ethernet и CAN, а
на друrой микроконтроллер LM3S2110 с интерфей
сом CAN, оценочный набор позволяет подrотовить
сеть CAN к работе. Набор содержит также два приме
ра демонстрационноrо приложения встраиваемоrо
веб сервера. [отовое к работе приложение для бы
cTporo старта включает в себя встраиваемый веб
сервер, использующий Ethernet cTeK Ореn Source lwIP,
и демонстрирует передачу и приём САN пакетов
между двумя оценочными платами. Набор также co
держит веб сервер с ОС реальноrо времени
FreeRTOS.org ТII и Ethernet cTeK Ореn Source uIP. Плата
LM3S8962 также имеет внутрисхемный интерфейс OT
ладки ICDI, который позволяет осуществлять аппа
ратную отладку не только для установленноrо на пла
те микроконтроллера Stellaris, но и для любой платы
на базе микроконтроллера Stellaris. Оценочный набор
содержит все кабели, проrраммное обеспечение и дo
кументацию, необходимые для быстрой разработки и
запуска приложений для микроконтроллеров
Stellaris. Кроме Toro, примеры приложений, демон
стрирующие использование различных ОС реально
ro времени и коммерческих стеков Ethernet и CAN,
можно заrрузить на www.ti.com/stellaris lm3s8962.
Информация дпя заказа оценочных наборов
Ко
EKK LM3S8962
EKI LM3S8962
EKC LM3S8962
EKT LM3S8962
EKS LM3S8962
Особенности оценочноrо набора
Stellaris LM3S8962
· Полностью rотовая к работе сеть Ethernet+CAN
с приложением для быстроrо старта, которое OДHO
временно обеспечивает трафик Ethernet и CAN
сети.
· Оценочная плата LM3S8962 Ethernet+CAN и OT
дельная плата LM3S2110 CAN Device.
· Микроконтроллер Stellaris LM3S8962 с полностью
интеrрированным 10/100 Мбит/с Ethernet
(МАС+РНУ) и CAN МАС.
· Микроконтроллер Stellaris LM3S2110 с полностью
интеrрированным CAN МАС.
· Простая установка: USВ кабель обеспечивает по
следовательную связь, отладку и питание.
· [рафический ОLЕD дисплей с разрешением 128х64
точек и 16 rрадациями ceporo.
· Пользовательский светодиод, переключатели и
кнопки.
· Электромаrнитный динамик.
· Все порты ввода/вывода LM3S8962 и LM3S2110 BЫ
ведены на маркированные внешние контактные
площадки.
· Стандартный 20 контактный JТАG разъём дЛЯ OT
ладки от ARM.
· Убирающийся Еthеrnеt кабель, плоский CAN
кабель, USВ кабель и JТАG кабель.
. Компакт диск, содержащий:
[J оценочную версию сред проrраммирования;
[J полную документацию;
[J руководство по быстрому старту и исходный код;
[J набор библиотек StellarisWare, включая библиоте
ку драйверов периферии и пример исходноrо KO
да.
И.l0. Микроконтроллеры с интерфейсами Etherпet и CAN · 509
Таблица И.7. Микроконтроnnеры серии LM3S8000
Q ос) Q Q ('f') ос) Q ('f') ос) N Q .....
('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') \D r-.. r-..
i/') i/') \D r-.. r-.. r-.. Q\ Q\ Q\ Q\ Q\ Q\
ос) ос) QO QO QO ос) ос) ос) ос) ос) ос) ос)
Характеристики (.I:) (.I:) rJ} rJ} (.I:) (.I:) rJ} (.I:) rJ} rJ} rJ} rJ}
('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f')
.....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1
IФлэш память, Кбайт 96 96 128 128 128 128 256 256 256 256 256 256
.Q юзу, Кбайт 64 64 32 64 64 64 64 64 64 64 64 64
е-о
"= Библиотеки в пзу
DMA
t:::
SAFERTOS'"
акс.такт.частота,Мfц 50 50 50 50 50 50 50 50 50 50 50 50
= Встроенный
а.. прецизионный
1:{
=: reHepaToo
MPU .; .; .; .; .; .; .; .; .; .; .; .;
SvsTick (24 битный) .; .; .; .; .; .; .; .; .; .; .; .;
Таймеры общеrо 4 4 4 4 4 4 4 4 4 4 4 4
назначения
!Часы оеальноrо времени .; .; .; .; .; .; .; .; .; .; .; .;
Стооожевойтаймер 1 1 1 1 1 1 1 1 1 1 1 1
:а Мопvль тим 6 6
а..
u ВХОД защиты
u 1 1
)=: тим
=:
Е-4 = = [енератор
u 1:{
I::! =
= = «мёртвоrо» .; .;
времени
= опvль ССР 2 4 2 2 4 6 2 4 6 2 2 6
QЕI каналы 2 2 1
Интерфейс внешней
периt еоии
u i 10/100 МАС+РНУ .; .; .; .; .; .; .; .; .; .; .; .;
:а S EE 1588 .; .; .; .; .; .;
= :а
.Q v CAN МАС 3 1 1 1 1 1 2 1 1 1 3 1
)=:
USB D, Н или О
UART 1 2 2 2 2 3 1 2 3 2 2 1
I:{e-o
u = I 1 C 1 1 1 1 1 1 1 1 2 1 1
5 =:
= SSIISPI 2 1 1 1 1 2 1 1 1 1 2 1
t::: OC 2 S
'i:' Iмопvли АIIП 1 1 1 1 1 1 1
"= "= ё !каналы АIIП 8 4 8 4 8 4 8
-< ё !Быстродействие 1М 500К 500К 1М 1М 500К 1М
...х. IAЦП (выб/с)
g i строенный датчик
;е .; .; .; .; .; .; .;
-<= rrемператvры
IAналоrовые/цифровые / 3/ / / 3/ 1/ / 3/ 3/ 1/ / 1/
Iкомпаратооы
Порты ввода/вывода
общ. назнач. (совместимы 8...35 7...36 10...31 11...32 5...35 4...38 13...34 6...36 3...38 5...42 17...46 4. ..38
с5 В)
Режим энерrосбережения .; .; .; .; .; .; .; .; .; .;
с резерв. от батареи
LDО стабилизатор .; .; .; .; .; .; .; .; .; .; .; .;
напряжения
Рабочая температvра I/E I/E I/E I/E I/E I/E I/E I/E I1E I/E I/E I/E
< < < < < < < < < < < <
Тип корпуса Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q Sj:Q
СОС СОС СОС СОС СОС СОС СОС СОС СОС СОС СОС СОС
се се се се се се се се се се се се
..... ..... ..... ..... ..... ..... .......... ..... ..... ..... ..... ..... ..... ..... ..... .......... ..... ..... .......... ..... .....
Серийное производство (Р), Р Р Р Р Р Р Р Р Р Р Р Р
!опытные обоазцы(S)
[а] ШИМ управление ПрИВОДОМ выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления приводом, имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов, предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны, если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C, расширенный диапазон (Е): 40...+105°C. [d] 108 выводной корпус BGA предлаrается только для
промышленноrо диапазона рабочих температур.
510 · Приложение и. Семейство микроконтроллеров Stellaris*
И.11. Микроконтроллеры с интерфейсами Ethernet, USB и CAN
Микроконтроллеры Stellaris на базе ARM Cortex M3 серии LM3S9000 обеспечивают высокую производительность
и сочетают в себе возможность работы в промышленных сетях и расширенные возможности интерфейсов перифе
рии, а также обладают низким энерrопотреблением, оптимизированным для приложений с резервным питанием от
батареи. Микроконтроллеры серии LM3S9000 являются первыми в мире микроконтроллерами, сочетающими пол
ностью интеrрированное 10/100 Мбит/с Еthеrnеt решение, модуль USB On the Go и сетевую технолоrию Bosch CAN,
совместимую с АRМ архитектурой. Микроконтроллеры серии LM3S9000 (Табл. И.8) содержат до двух контролле
ров CAN 2.0 А/В, Ethernet МАС контроллер (МАС) и трансивер (РНУ), а также полноскоростной модуль USB с функ
циональностью OTG или Host/Device. Все микроконтроллеры серии LM3S9000 содержат два отдельных блока АЦП,
набор библиотек StellarisWare Т1l , записанный в ПЗУ, включая библиотеку драйверов периферии и системный заrруз
чик, криптоrрафические АЕS таблицы, а также схему обнаружения ошибок CRC. Кроме Toro, отдельные микрокон
троллеры серии LM3S9000 также содержат в ПЗУ ядро SafeRTOSТ1I и обеспечивают аппаратную поддержку протоко
ла Precision Time Protocol соrласно IEEE 1588.
Микроконтроллеры серии LM3S9000 также содержат встроенный 16 мrц reHepaTop повышенной точности с воз
можностью проrраммной настройки и второй сторожевой таймер с независимым тактовым reHepaTopoM. Отдель
ные микроконтроллеры серии LM3S9000 также снабжены rибким интерфейсом внешней периферии (EPI), который
представляет собой специально выделенную параллельную шину (до 32 бит) для внешней периферии, которая под
держивает SDRAM, SRАМ/флэш память и связь Machine to Machine (М2М) (со скоростью до 150 Мбайт/с).
Оценочный набор Stellaris LM3S9B92 Ethernet+USB+CAN
С помощью двух плат, на одной из которых содержится микроконтроллер LM3S9B92 с интерфейсами Ethernet,
USB OTG и CAN, а друrая реализует интерфейс внутрисхемной отладки, оценочный набор Stellaris LM3S9B92 обе
спечивает недороrую, компактную и универсальную платформу для оценки микроконтроллеров Stellaris на базе
ARM Cortex M3 с интерфейсами Ethernet, USB и CAN. В оценочной плате используется микроконтроллер LM3S9B92,
который позволяет реализовывать сложные алrоритмы управления и имеет 8 ШИМ выходов для обеспечения
управления приводом и источниками питания и 2 модуля квадратурноrо энкодера (QEI) дЛЯ подключения импульс
ных датчиков положения. Микроконтроллер LM3S9B92 также способен работать с внешним 16 мrц кварцевым re
нератором, обеспечивающим основную тактовую частоту, которая используется для непосредственноrо тактирова
ния АRМ ядра или внутренней схемы ФАПЧ для увеличения частоты TaKToBoro сиrнала ядра до 80 мrц. Для такти
рования Еthеrnеt контроллера используется 25 мrц кварцевый reHepaTop. Микроконтроллер LM3S9B92 также име
ет встроенный LDО стабилизатор напряжения, который обеспечивает питание внутренних цепей.
Информация для заказа
Ко
EKK LM3S9B92
EKI LM3S9B92
EKC LM3S9B92
EKT LM3S9B92
EKS LM3S9B92
Оценочный набор Stellaris LM3S9B90 Еthеrпеt+USВ-ОТG+САN
С помощью двух плат, на одной из которых содержится микроконтроллер LM3S9B90 с интерфейсами Ethernet,
USB OTG и CAN, а друrая реализует интерфейс внутрисхемной отладки, оценочный набор Stellaris LM3S9B90 обе
спечивает недороrую, компактную и универсальную платформу для оценки микроконтроллеров Stellaris на базе
ARM Cortex M3 с интерфейсами Ethernet, USB и CAN. В оценочной плате используется микроконтроллер LM3S9B90,
который имеет модуль Hibernation для эффективноrо снижения энерrопотребления устройства во время увеличен
Horo периода бездействия. Микроконтроллер LM3S9B90 также способен работать с внешним 16 мrц кварцевым re
нератором, обеспечивающим основную тактовую частоту, которая используется для непосредственноrо тактирова
ния АRМ ядра или внутренней схемы ФАПЧ для увеличения частоты TaKToBoro сиrнала ядра до 80 мrц. Для такти
рования Еthеrnеt контроллера используется 25 мrц кварцевый reHepaTop, а для часов реальноrо времени
4.l94304 мrц кварцевый reHepaTop. Микроконтроллер LM3S9B90 также имеет встроенный LDО стабилизатор Ha
пряжения, который обеспечивает питание внутренних цепей.
Информация для заказа
Ко
EKK LM3S9B90
ЕКI LM3S9B90
EKC LM3S9B90
EKT LM3S9B90
EKS LM3S9B90
И.11. Микроконтроллеры с интерфейсами Etherпet, USB и CAN · 511
Особенности оценочноrо набора
. Высокопроизводительный микроконтроллер Stel
laris с встроенной памятью большоrо объёма;
[J 32 битное ядро ARM Cortex M3;
[J 256 Кбайт основная флэш память, 96 Кбайт SRAM;
[J набор библиотек StellarisWare, записанный в ПЗУ.
. 10/100 Мбит/с Еthеrпеt порт с двумя индикаторны
ми светодиодами.
. Полноскоростной порт USB 2.0 OTG.
. Виртуальный последовательный коммуникацион
ный порт.
. Контактные площадки увеличенноrо размера для
портов ввода/вывода общеrо назначения.
Содержимое оценочноrо набора
. Оценочная плата (ЕУВ).
. Плата интерфейса внутрисхемной отладки BD ICDI.
. Кабели:
[J USВ кабель;
[J 10 контактный плоский JТАG кабель;
[J 8 контактный плоский кабель для питания/UАRт.
. Компакт диск, содержащий:
[J полный исходный код, электрическую схему и
rербер файлы для производства печатной платы;
[J набор библиотек StellarisWare, включая библиоте
ку драйверов периферии и пример исходноrо KO
да;
[J набор оценочных средств разработки проrрамм
Horo обеспечения цля Stellaris.
,А
МfSIf08
Микроконтроллер Stellaris LM3S9B96 с SAFERTOS
в ПЗУ
Оценочный набор Stellaris LM3S9B90
Etherпet+USB OTG+CAN
Оценочный набор Stellaris LM3S9B92
Etherпet+USB OTG+CAN
Таблица И.В. Микроконтроnnеры серии
LM3S9000
<::> N t--. <::> N i/') \D t--.
Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ Q'\
t--. t--. Q'\ = = = = .....:1
Характеристики Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ Q'\ Q'\
(.I:) (.I:) (.I:) (.I:) (.I:) (.I:) (.I:) rJ}
('f') ('f') ('f') ('f') ('f') ('f') ('f') ('f')
.....:1 .....:1 .....:1 .....:1 .....:1 .....:1 .....:1
Флэш память Кбайт 128 128 256 256 256 256 256 128
,.Q озу, Кбайт 64 64 64 96 96 96 96 48
е-о
"= Библиотеки в пзу .; .; .; .; I .; .; .;
VMA I I
t::: .; .; .; .; .; .;
SAFERTOS'" 1
Макс. такт. част., Мfц 80 80 80 80 80 80 80 80
= 100
а.. Встроенный преци
1=( .; .; .; I I I .; I
=: зионный reHepaTop
MPU I .; .; .; .; .; .; .;
SvsTick (24 битный) I .; .; .; .; .; .; .;
[аймеры общеrо 4 4 4 4 4 4 4 4
Iназначения
!Часы реальноrо .; I .; I I I .; I
!времени
:! Стою ожевой таймер 2 2 2 2 2 2 2 2
а..
u Мопvль ШИМ 8 6 8 8 8 6
)=: u Вход защиты
4 4 4 4 4 4
Е-о4 =: ШИМ
= =
u [енератор «MёpT
I::! =
= = .; .; .; .; .; I
! Iвoro» времени
= = Iмопvль ССР 8 8 8 8 8 8 8 8
iQЕI каналы 2 2 2 2 2 2
Интерфейс внешней .; .; .; .; .; .;
перисЬерии
u j 10/100 МАС+РНУ .; .; .; .; .; .; I .;
:! r!S EIfEE 1588 .; I .; .;
= :!
,.Q у CAN МАС 2 2 2 2 2 2 2 2
)=:
.x USB О, Н или О О О О О О О О О
e UART 3 3 3 3 3 3 3 3
I=(e-o I 2 C 2 2 2 2 2 2 2
u = 2
6 =: SSIISPI 2 2 2 2 2 2 2 2
=
t::: 2S .; I .; .; .; .; .; I
f: Мопvли АllП 2 2 2 2 2 2 2 2
"= "= e Каналы АllП 16 16 16 16 16 16 16 16
-< <:ь Быстродействие 1М 1М 1М 1М 1М 1М 1М 1М
.. ЦП (выб/с)
g i JJстроенный датчик
: .; .; .; .; .; .; .; .;
-<= температуры
Аналоrовые/цифро 31 31 21 31 31 31 31 21
вые компараторы 16 16 16 16 16 16 16 16
lПорты ввода/вывода О О О О О О О О
!Общ. назнач. (совместимы ... ... ... ... . .. ... ... ...
с5 В) 60 65 60 60 65 65 65 60
Режим энерrосбережения .; .; I .;
с резерв. от батареи
LDО стабилизатор .; I .; .; .; .; .; .;
напряжения
Рабочая температура 1 1 1 1 1 1 1 1
р.. р.. р.. р.. р.. р..
Тип корпуса CI CI CI CI CI CI CI CI
.......:1 .......:1 .......:1 .......:1 .......:1 .......:1 .......:1 .......:1
С С С С С С С С
С С С С З с З З
....... ....... ....... ....... .......
Серийное производство S S S S S S S S
'р)", опытные образцы (S)
[а] ШИМ управление ПРИВОДОМ выполняется с помощью специальных аппаратных средств (выводы PWM) или с помощью
функций управления ПРИВОДОМ, имеющихся у таймеров общеrо назначения (выводы ССР). Подробности см. в технической
документации. [Ь] Минимум число выводов, предназначенных для портов ввода/вывода общеrо назначения; дополнительные
выводы доступны, если не используется какая либо периферия. Подробности см. в технической документации. [с] Промышленный
диапазон (1): 40...+850C, расширенный диапазон (Е): 40...+105°C.
512 · Приложение И. Семейство микроконтроллеров Stellaris*
И.12. Набордпя проектирования на базе
микроконтроллера Stellaris LМ3S9В9б
Набор для проектирования на базе микроконтроллера Stellaris LM3S9B96 (DK LM3S9B96) это полнофункцио
нальный набор для проектирования устройств на базе микроконтроллеров серии LM3S9000. Плата для проектиро
вания LM3S9B96 содержит максимально возможный набор периферии для демонстрации возможностей микрокон
троллеров и обеспечивает максимальную rибкость за счёт применения конфиrурируемых выводов для всех портов
ввода/вывода. Плата для проектирования LM3S9B96 предоставляет платформу для оценки приложений с повышен
ными требованиями к размеру памяти, а также приложений, которые используют новые функциональные возмож
ности микроконтроллеров, например I2S аудио, расширенный интерфейс периферии (EPI) и обмен данными по ин
терфейсам Ethernet, USB OTG и CAN. Целевые области применения включают сетевые системы, rрафические поль
зовательские интерфейсы (GUI) и приложения, использующие человеко машинный интерфейс (HMI). Плата для
проектирования LM3S9B96 является также полезным инструментом для разработки систем с использованием таких
средств, как .NET Micro Framework от Мicrоsоft и Embedded LabView от National Instruments.
[отовое к работе приложение для быстроrо старта способно выбирать устройства периферии платы из набора для
проектирования DK LM3S9B96 с помощью демонстрационноrо меню на сенсорном экране. Возможны различные pe
жимы работы, в том числе демонстрация поддержки USВ мыши; TPTP cepBep для файловой системы, который ocy
ществляет доступ к l Мбайт последовательной флэш памяти; веб сервер, использующий lwIP TCP/IP cTeK; доступ
к карте MicroSD; устройство просмотра изображений JPEG; последовательную командную строку и аудиоплеер. Пла
та для проектирования содержит встроенный внутрисхемный последовательный интерфейс отладки (ICDI), который
поддерживает как JTAG , так и SWD отладку, Стандартный 20 контактный отладочный разъём от ARM поддержива
ет несколько способов отладки. Набор также содержит MHoro примеров приложений и полный исходный код.
Особенности набора для
проектирования Stellaris LM3S9B96
· 3.5 дюймовый цветной rрафический ЖК дисплей:
а ТРТ ЖК модуль с разрешением 320х240 точек;
а резистивный сенсорный интерфейс.
· 80 M[ц микроконтроллер LM3S9B96 с 256 Кбайт флэш
памятью, 96 Кбайт SRAM и интеrрированными интер
фейсами Ethernet МАС+РНУ, USB OTG и CAN.
· 8 Мбайт SDRAM (опционально подключаемая по ин
терфейсу ЕРI плата).
· Конфиrурируемая плата для сиrналов интерфейса
внешней периферии (EPI).
· l Мбайт последовательная флэш память.
· Прецизионный источник опорноrо напряжения 3 В.
· Операционная система SafeRTOS'" в ПЗУ микрокон
троллера.
· Стерео I2S аудиокодек:
а линейный выход;
а выход на rоловные телефоны;
а вход микрофона;
а линейный вход.
· САN интерфейс.
· Разъём 101100 BaseT Ethernet.
· Разъём USB OTG:
а режимы Device, Host и OTG.
· Пользовательский светодиод и кнопка.
· Дисковый потенциометр.
· Разъём карты MicroSD.
· Стандартный 10 контактный JТАG разъём для отлад
ки от ARM.
· Встроенный интерфейс внутрисхемной отладки (ICDI).
· Виртуальный последовательный порт USB.
· Перемычки для удобноrо распределения ресурсов
портов ввода/вывода.
· Поддержка набора библиотек StellarisWare, включая
rрафическую библиотеку и библиотеку драйверов Пе
риферии.
Информация для заказа
Ко
DK LM3S9B96
Содержимое набора для
проектирования Stellaris LM3S9B96
Набор для проектирования Ste//aris DK LM3S9B96 обе
спечивает инженеров средствами, необходимыми для
проектирования прототипа 20товО20 к работе вcтpaи
ваеМО20 приложения и включает в себя следующие KOM
поненты:
· плату для проектирования Stellaris. LM3S9B96 с ЕР!
платой 8 Мбайт SDRAM и конфиrурируемой платой
для сиrналов интерфейса внешней периферии (EPI);
· USВ кабель типа Mini B (длиной около 1 м) для отла
дочных функций;
· USВ кабель с вилкой Micro A и розеткой Std A (для co
единения с флэш накопителем);
· USВ кабель с вилкой Std A и вилкой Micro B (для под
соединения к компьютеру);
· флэш накопитель USB (128 Мбайт);
· 20 проводной приёмный кабель;
· Еthеrпеt кабель;
· карта MicroSD;
· 5 B источник питания с международным адаптером;
· компакт диск с инструментами разработки, ДOKYMeH
тацией и примерами исходноrо кода:
а включает оценочные версии инструментов разработ
ки от КеН, IAR, Code Red Technologies и Code Sourcery.
Набор для проектuрования Ste//aris LM3S9B96
менты от КеН IAR Code Red Technolo ies и CodeSourcer
И.13. Платы расширения набора для проектирования Stellaris LМ3S9В9б · 513
И.13. Платы расширения набора для проектирования
Stellaris LM3S9B96
Плата расширения памяти Stellaris
Flash & SRAM Memory Ех ansion Board
Плата Stel1aris Flash & SRAM
Memory Expansion Board (DK
LM3S9B96 FS8) компании Texas
Instruments представляет co
бой опциональную плату pac
ширения для отладочной пла
ты Stellaris DK LM3S9B96. ДaH
ная плата расширения подключается напрямую к порту
интерфейса внешней периферии (EPI) микроконтролле
ра Stellaris LM3S9B96, предоставляя в распоряжение
пользователя внешнюю флэш память, внешнее ОЗУ и
интерфейс контроллера ЖК дисплея, а также дeMOH
стрируя лёrкость одновременноrо подключения к ми
кроконтроллеру микросхем внешней памяти и различ
ной периферии посредством rибкоrо интерфейса EPI,
сконфиrурированноrо в режиме Host Bus 8 с мульти
плексированием шин адреса/данных. Отладочная плата
DK LM3S9B96 (поставляется отдельно) предоставляет
законченную платформу для ознакомления с возмож
ностями микроконтроллеров Stellaris серии LM3S9000.
Данная плата имеет боrатый набор коммуникационных
интерфейсов, таких как 10/100 Ethernet, CAN, РиН Speed
USB On The Go и 1 2 S. Приложение для быстроrо старта,
демонстрирующее возможности платы расширения, BЫ
водит на 3.5 дюймовый цветной VGА дисплей платы
DK LM3S9B96 JРЕG изображения из ОЗУ и флэш
памяти платы расширения.
Особенности платы Stellaris Flash &
SRAM Memory Expansion Board
. 8 Мбайт флэш памяти.
. 1 Мбайт статическоrо ОЗУ.
. Интерфейс ЖК дисплея, отображённый на адресное
пространство памяти.
. Микросхема EEPROM с интерфейсом еС объёмом
1 Кбит для хранения конфиrурационных параметров.
. Индикатор наличия питания.
Комплект поставки платы Stellaris
Flash & SRAM Memory Expansion Board
Вместе с набором для разработки DK LM3S9B96 плата
расширения Stellaris Flash & SRAM Memory Expansion
Board представляет собой инструментальное средство,
необходимое для разработки и макетирования встраи
ваемых приложений, в которое входит:
. плата расширения памяти Stellaris DK LM3S9B96 FS8;
. пластиковые монтажные стойки.
Информация для заказа
K LM3S9B96 FS8
писание
лата расширения Stellaris Flash &
RAM Memor Ех ansion Board
Плата расширения Stellaris FPGA
Expansion Board
Плата Stellaris FPGA Expansion Board (DK LM3S9B96
FPGA) компании Texas Instruments представляет собой оп
циональную плату расширения для отладочной платы
Stellaris DK LM3S9B961. Данная плата расширения под
ключается напрямую к порту
интерфейса внешней периферии
(EPI) платы Stellarls OK
LM3S9B96, демонстрируя воз
можности микроконтроллера
семейства Stellaris по орrаниза
ции машинно машинноrо
(М2М) параллельноrо интер
фейса с высокой пропускной способностью. Подключив
данную плату расширения к отладочной плате DK
LM3S9B96, пользователи cMorYT воспроизводить на боль
шом 3.5 дюймовом ЖК дисплее отладочной платы видео
изображение, формируемое платой расширения, а также
управлять функциями платы расширения. Пользователи
MorYT исследовать различные возможности порта EPI, за
rружая собственные прошивки в ПЛИС Xilinx Spartan 3Е
платы расширения. Отладочная плата DK LM3S9B96 (по
ставляется отдельно) предоставляет законченную плат
форму для ознакомления с возможностями микрокон
троллеров Stellaris серии LM3S9000. Данная плата имеет
боrатый набор коммуникационных интерфейсов, таких
как 10/100 Ethernet, CAN, Риll Speed USB On 1he Go и es.
Особенности платы Stellaris FPGA
Expansion Board
. ПЛИС Xilinx Spartan 3Е объёмом 100 тыс. вентилей.
. Модуль цветной КМОП VGA (640х480) видеокамеры
с матрицей 1/13 дюйма.
. 1 Мбайт асинхронноrо статическоrо ОЗУ с временем
доступа 10 нс для орrанизации видеобуфер,а.
. Микросхема EEPROM с интерфейсом 1 С объёмом
1 Кбит для хранения конфиrурационных параметров.
. Стандартные разъёмы lх6 и 2х5 для проrраммирова
ния ПЛИС.
. 8 тестовых контактов ПЛИС предоставляют пользова
телю 5 линий ввода и 3 линии ввода/вывода.
. Интерфейс ЕРI работает в режиме GPM D16 A12 на ча
стоте 50 мrц.
. ПО обработки видео имеет следующие возможности:
L] вывод цветноrо видеоизображения с разрешением
QVGA (полноэкранный режим ЖК дисплея платы
DK LM3S9B96);
L] вывод rрафическоrо экранноrо меню поверх видео
изображения;
L] rрафический пользовательский интерфейс на базе вид
жетов, использующий возможности ceHcopHoro экрана;
L] пауза/возобновление воспроизведения с сохранени
ем захваченноrо кадра в формате ВМР на SD KapTY;
L] управление яркостью, насыщенностью и KOHTpaCT
ностью изображения;
L] зеркальное отображение и переворот изображения.
Комплект поставки платы Stellaris
FPGA Expansion Board
Вместе с набором для разработки DK LM3S9B96 плата pac
ширения Stellaris FPGA Expansion Board представляет собой
инструментальное средство, необходимое для разработки и
макетирования встраиваемых приложений, в которое входит:
. плата расширения Stellaris FPGA Expansion Board
с ПЛИС Spartan компании Xilinx;
. цветной VGА видеодатчик компании Omnivision.
Информация для заказа
Код Описание
DK LM3S9B96 FPGA Плата асширения Stellaris FPGA
EXDanslOn Board
514 . Приложение И. Семейство микроконтроллеров Stellaris*
И.14. Плата расширения Stellaris LM3S9B96
Пnата расширения Stellaris LМ3S9В9б ЕМ2 Expansion Board
Плата Stellaris LM3S9B96 ЕМ2 Expansion Board (DK LM3S9B96 EM2) компании Texas Instruments представля
ет собой опциональную плату расширения для отладочной платы Stellaris DK LM3S9B96. Данная плата расши
рения подключается напрямую к порту интерфейса внешней периферии (EPI) платы Stellaris DK LM3S9B96.
Плата расширения ЕМ2 служит переходником между соединителем интерфейса ЕРI отладочной платы и coe
динителем оценочноrо радиочастотноrо модуля (РЧ). Данная плата расширения позволяет на основе набора
Stellaris DK LM3S9B96 разрабатывать беспроводные приложения с использованием различных оценочных РЧ
модулей.
Отладочная плата DK LM3S9B96 (поставляется отдельно) предоставляет законченную платформу для озна
комления с возможностями микроконтроллеров Stellaris серии LM3S9000 и обеспечивает боrатый набор KOM
муникационных интерфейсов) таких как 10/100 Ethernet) CAN) Full Speed USB On The Go и 1 2 S.
Особенности пnаты Stellaris
LМ3S9В9б ЕМ2 Expansion Board
· Два набора соединителей для подключения до двух
оценочных РЧ модулей.
. Микросхема EEPROM с интерфейсом 1 2 С объёмом
1 Кбит для хранения конфиrурационных параме
тров.
· Разъёмы цифровоrо и аналоrовоrо аудиоинтерфей
сов.
. Разъём порта SDIO MODl.
· Тактовый reHepaTop частотой 32 к[ц) подключён
ный К основному разъему ЕМ2 платы расширения.
Информация ДЛЯ заказа
КОД Описание
Плата расширения Stellaris
DK LM3S9B96 EM2 LM3S9B96 ЕМ2 Expansion Board
Плата расширения Stellaris LM3S9B96 ЕМ2 Expaпsioп
Board
Дополнитеnьные наборы дnя проектирования беспроводных приnожений
Чтобы дать вам возможность разрабатывать и макетировать беспроводные встраиваемые приложения) KOM
пания Texas Instruments также создала ряд беспроводных наборов для проектирования. Любой из этих набо
ров) соединённый с друrими компонентами посредством платы расширения Stellaris LM3S9B96 ЕМ2 Expansion
Board) позволяет реализовать рабочий прототип беспроводной сети. Эти наборы для проектирования ориен
тированы на маломощные беспроводные сети и используют единый протокол обмена.
Набор Stеllаris Ф
2.4 GHz SimpliciTI
''? Wireless Kit
(содержит oцe
ночный модуль
СС2500 и плату
расширения DK
LM3S9B96 ЕМ2)
Набор Stеllаris Ф
13.56 MHz RFID
Wireless Kit
(содержит oцe
ночный модуль
TRF7960TB и плату
расширения DK
LM3S9B96 ЕМ2)
Набор Stеllаris Ф
2.4 GHz ZigBee
Wireless Kit
(содержит oцe
ночный модуль
СС2520 и плату
расширения DK
LM3S9B96 ЕМ2)
И.15. Беспроводные наборы Stellaris · S1 S
И.1S. Беспроводные наборы Stellaris
Беспроводные наборы Stellaris ускоряют вывод продукции на рынок
Объединяя производительные и простые в применении микроконтроллеры семейства Stellaris на базе ядра
ARM Cortex М3 с ведущими беспроводными решениями, беспроводные наборы Stellaris позволяют разработ
чикам внедрять в свои устройства поддержку различных беспроводных технолоrий (RFID, Low Power RF и
ZigBee). Каждый из этих наборов, будучи подключённым к отладочной плате DK LM3S9B96, содержит все
проrраммные и аппаратные средства, необходимые для Toro, чтобы быстро приступить к разработке, а прило
жение быстроrо старта, входящее в состав каждоrо набора, позволяет разработчикам менее чем за 10 мин соз
дать работающую беспроводную сеть.
Содержимое набора Stellaris 13.56 MHz RFID Wireless Kit (DK-EM2-7960R)
. Плата расширения Stellaris DK LM3S9B96 EM2 Expansion Board.
. Модуль RFID считывателя TRF7960TB.
. Две бесконтактные CMapT KapTЫ стандарта ISOIIEC 14443А
(MIFAREQO lK).
. Дополнительные RFID метки, поддерживаемые TRF7960TB и
плата расширения Expansion Board.
. Разнообразные примеры ПО, в том числе проrраммы для чтения
RFID KapT MIFARE lК и MIFARE 4К, дЛЯ одновременной работы
с двумя картами, для управления считывателем через последова
тельный порт с использованием командной строки.
. Скоро появится набор библотек, документация и примеры прило
жений стандарта ISO/IEC 14443А с поддержкой дополнительных
протоколов ISO/IEC.
Информация для заказа
Ко Описание
DK EM2 7960R Бесп ОБО НОЙ на60 Stellaris 13.56 MHz RFID Wireless Kit
Содержимое набора Stellaris 2.4 GHz SimpliciTI™ Wireless Kit (DK-EM2-2500S)
. Плата расширения Stellaris DK LM3S9B96 EM2 Expansion Board.
. Оценочный беспроводной модуль СС2500ЕМ.
. Набор eZ430 RF2500.
. Поддержка кросс платформенноrо ПО, включая доступ к про
шивкам для маломощных РЧ решений, предназначенных для ди
апазона менее 1 и до 2.4 rrц.
. Набор библиотек, документация и пример приложения
SimpliciTI N , поддерживающеrо простую сеть с тополоrией «звез
да», а также соединения типа «точка точка».
Stellaris 2.4 GHz Sim liciТI'" Wireless Kit
Содержимое набора Stellaris ZigBee Networking Kit (DK-EM2-2520Z)
. Плата расширения Stellaris DK LM3S9B96 EM2 Expansion Board.
. Оценочный беспроводной модуль СС2520ЕМ.
. Две платы для датчиков с батарейным питанием.
. Два беспроводных оценочных модуля СС2530ЕМ дЛЯ установки
на платы датчиков.
. CC DEBUGGER дЛЯ опциональноrо перепроrраммирования MO
дулей СС2530ЕМ.
. Законченное решение для построения беспроводной системы
стандарта ZigBee с использованием ПО Z Stack тм 2.4.
. Набор библиотек, документация и пример приложения
координатора, поддерживающеrо два конечных устройства, объе
динённых в сеть с тополоrией «звезда») которые передают инфор
мацию о температуре и напряжении.
Информация для заказа
Ко Описание
DK EM2 2520Z Бесп ОБО ной на60
516 . Приложение и. Семейство микроконтроллеров Stellaris.
И.1б. Роботизированные оценочные наборы Stellaris 8
Оценочная плата Stellaris Robotic
Evaluation Board
Оценочная плата Stellaris Robotic Evaluation Board
(ЕУ ALBOT) представляет собой роботизированную плат
форму на базе микроконтроллера Stel1aris LM3S9B92. На
этой плате также установлены различные аналоrовые ком
поненты Texas Instruments для управления приводом, пи
танием и осуществления коммуникационных функций.
Чтобы начать использовать плату EVALBOAT, достаточно
Bcero нескольких минут, требуемых для сборки набора (все
необходимые инструменты входят в состав набора). При
автономной работе питание платы осуществляется от трёх
элементов АА (входят в набор). Плата автоматически пере
ключается на питание от USB при подключении к ПК в Ka
честве USВ устройства или при отладке. Тестовые точки на
плате позволяют наблюдать все основные сиrналы. Два
20 KOHTaKTHЫX соединителя позволяют добавить функции
беспроводной связи, используя стандартные оценочные
беспроводные модули ТI (платы ЕМ). Дополнительные
сиrналы микроконтроллера выведены на контактные пло
щадки рядом с микроконтроллером. Для отладки и про
rраммирования флэш памяти используется встроенный
интерфейс внутрисхемной отладки (IDI), которому для co
единения с ПК требуется только USВ кабель (входит в Ha
бор).
Особенности платы
Ф Роботизированная оценочная плата.
. Механические компоненты, устанавливаемые пользо
вателем.
Ф Микроконтроллер Stellaris LM3S9B92 с 256 Кбайт
флэш памяти, 96 Кбайт ОЗУ, USB OTG, Ethernet
МАС+РНУ и 1 2 S.
. Разъём для карты памяти MicroSD.
. Аудиокодек формата I 2 s с динамиком.
. Разъёмы USB Host и USB Device.
· Еthеrnеt разъём RJ45.
. Яркий ОLЕD дисплей с rолубой подсветкой размером
96х16 точек.
Ф Встроенный интерфейс внутрисхемной отладки (ICDI).
. Питание от батареек (3 элемента АА) или от шины USB.
. Функции для роботизации:
CJ два электромотора постоянноrо тока для передвиже
ния платы;
CJ оптические датчики определяют вращение колёс
с точностью 450;
CJ датчик обнаружения удара о препятствие.
Информация для заказа
Ко
EKB UCOS3 BNDL
EKB UCOS3 EVM
EKB UCOS3 BOOK
Оценочная плата Stellaris Robotic
Evaluation Board в комплекте
с книrой «IIC/05-111: The Real-Time
Kernel» (EKB-UC053-BNDL)
в этот набор входят роботизированная оценочная пла
та Stellaris Robotic Evaluation Board и книrа « C/OS 111:
The Real Time Kernel» ж. Лабросса. В первой части книrи
рассматриваются принципы работы ядра реальноrо Bpe
мени на при мере ОС C/OS 111 разработки компании
Micrium. Во второй части при водятся различные учеб
ные проекты на базе рассмотренной ОС, использующие
боrатые возможности оценочной платы ЕМ ЕУ ALBOT.
Среди учебных проектов имеются:
. Вывод информации на экран платы EM EVALBOr. ДaH
ная проrрамма циклически выводит на ОLЕD дисплей
различные текстовые строки и предназначена для озна
комления с базовой структурой ОС C/OS 111 при её ис
пользовании на плате ЕМ ЕУ ALBOT.
. Использование аудиоподсистемы платы EM EVALBOr.
Данная проrрамма воспроизводит wаv файлы, записан
ные во внутренней флэш памяти микроконтроллера
LM3S9B92.
. Простое управление платой EM EVALBOr. Данная
проrрамма позволяет независимо управлять обоими
двиrателями при помощи пользовательских кнопок,
останавливать двиrатели при срабатывании датчика
столкновения и отслеживать посредством C/Probe
состояние робота: состояние и скорость вращения
двиrателей, состояние датчика столкновения и задей
ствованные ресурсы ЦПУ.
Книrа «IIC/05-111: The Real-Time
Kernel» (Ekb-иС053-ВООК)
В данной книrе рассматривается работа ядра реально
ro времени на примере ОС C/OS III компании Micrium
и платы Stellaris ЕУМ ЕУ ALBOT. Помимо ознакомления
с основными концепциями и принципами работы ядер
реальноrо времени, в книrе также содержатся примеры
cOBMecTHoro использования C/Os 111 и оценочной пла
ты EVM EVALBOT. Эта книrа предназначена для про
фессиональных проrраммистов встраиваемых систем,
консультантов, радиолюбителей и студентов, которые
хотят разобраться, каким образом ядро реальноrо Bpe
мени используется с современными мноrофункцио
нальными микроконтроллерами.
C/OS III компании Micrium
ИIZ Набор референс дuзайна uнтеллектуаЛЬНО20 дuсплеЙНО20 модуля Stellaris. · 517
И.17. Набор референс-дизайна интеппектуапьноrо дис-
плейноrо модупя Stellaris 8 одноппатный компьютер
Набор референс дизайна интеллектуальноrо дисплейноrо модуля Stellaris одноплатный компьютер (IDM SBC)
представляет собой законченный пользовательский интерфейс на базе сенсорной панели с разрешением QVGA дЛЯ
систем управления, автоматики, а также контрольно измерительноrо оборудования и является первым эталонным
проектом с мощным микроконтроллером LM3S9B92. Набор IDM SBC содержит USB и Еthеrnеt модули, SDRAM
объёмом 8 Мбайт, последовательную флэш память объёмом 1 Мбайт, встроенную флэш память объёмом 256 Кбайт
и SRAM объёмом 96 Кбайт. Он позволяет упростить разработку проrраммноrо обеспечения для набора образцов
проектирования с помощью набора библиотек StellarisWare с rрафической библиотекой и инструментами разработ
ки устройств на базе АRМ процессоров от партнёров ARM. SDRAM объёмом 8 Мбайт подключается к микрокон
троллеру LM3S9B92 с помощью шины External Peripheral Interface (EPI).
Модули Stellaris IDM это первые дисплейные модули, в которых используются высокоэффективные и надёжные
микроконтроллеры на базе процессора ARM Cortex M3. Эти модули применяются в контроллерах доступа, системах
безопасности, интеллектуальной бытовой технике, тонких клиентах и в приложениях промышленной автоматики.
Особенности интеппектуапьноrо
дисппейноrо модупя Stellaris .......
одноппатноrо компьютера
. Яркий ЖК дисплей QVGA с сенсорным экраном:
CI 262 тыс. цветов, 3.5 дюймовый дисплей QVGA с раз
решением 320х240 точек;
CI подсветка на белом светодиоде с резистивной ceH
сорной панелью.
. Опции последовательных интерфейсов:
CI USB 2.0 Host;
CI 10/100 Мбит/с Ethernet МАС и РНУ.
. I Мбит/с интерфейс CAN.
. 12С интерфейс для внешней периферии и датчики.
. Последовательный порт UART с сиrналами TTL
уровня.
. Высокопроизводительный 80 мrц микроконтроллер
LM3S9B92:
CI 32 битное ядро ARM Cortex'" M3;
CI 256 Кбайт однотактная флэш память, 96 Кбайт oд
нотактная SRAM.
. Универсальная память на печатной плате:
CI 8 Мбайт SDRAM, подсоединяемая по шине EPI;
CI I Мбайт последовательная флэш память, подсоеди
няемая по шине SPI;
CI разъём карты MicroSD;
CI разъём USB Host для подсоединения внешних HaKO
пителей.
. Источник питания с широким диапазоном входноrо
напряжения 12...40 В (ОС) с вспомоrательным 5 B BЫ
ходом.
. 12S монокодек для высококачественноrо аудио с 0.8 BT
усилителем и внешним 8 OM динамиком.
. Блок винтовых зажимов для подсоединения питания,
а также интерфейсов еС и CAN.
. Компактная печатная плата размером 2х3 дюйма.
. Лёrкая адаптация к приложению:
CI включает все исходные коды, примеры приложений
и файлы проекта;
CI возможно проектирование на базе инструментов от
КеН, IAR, Code Sourcery и Code Red Technologies (с по
мощью оценочноrо набора Stellaris или отладчика си
стемы на базе процессоров ARM Cortex M3);
CI поддержка набора библиотек StellarisWare, включая
rрафическую библиотеку и библиотеку драйверов
периферии;
CJ поставляется вместе с запроrраммированным
в условиях производства иrровым демонстрацион
ным приложением для быстроrо старта;
CI системный Еthеrnеt заrрузчик для обновления набо
ра библиотек.
Содержимоенаборареферен
v
дизаина интеппектуапьноrо
дисппейноrо модупя Stellaris .......
одноппатноrо компьютера
ИнтеллектуаЛЬНЬtй дисплейный модуль Stellaris
одноплатный компьютер (IDM SBC) предлаzается как
полный набор референс дизайна (RDK IDMSBC) и
содержит все необходимые компоненты для быстрой
оценки IDM SBC, включая:
. плату Stel1aris. IDM SBC;
. отладочный адаптер MDL ADA2 из 10 KoHTaKTHoro
разъёма в 20 контактный разъём;
. USB флэш накопитель (128 Мбайт);
. 5 B источник питания с международным адаптером;
. Еthеrnеt кабель;
. 8 OM динамик;
. компакт диск с инструментами разработки, ДOKYMeH
тацией и исходным кодом, включая руководство по
быстрому старту, руководство пользователя, справоч
ное руководство по проrраммному обеспечению, ДOKY
ментацию на плату, спецификацию, электрическую
схему и rербер файлы.
Интеллектуальный дисплейный модуль Stellaris
одноплатный компьютер
Информация для заказа
Коп Описание
Набор референс дизайна
RDK IDM SBC интеллектуальноrо дисплейноrо модуля
Stellaris одноплатноrо компьютера
I (IDM SBC)
518 · Приложение и. Семейство микроконтроллеров Stellaris.
И.18. Набор референс-дизайна интеппектуапьноrо
дисплейноrо модуля Stellaris 8
Набор референс дизайна интеллектуальноrо дисплейноrо модуля Stellaris (RDK IDM) представляет собой закончен
ное решение для проектирования пользовательских rрафических интерфейсов на базе сенсорной панели с подключени
ем по Ethernet. Набор содержит все необходимые аппаратные и проrраммные компоненты для разработки и интеrрации
модуля интеллектуальноrо дисплея в таких приложениях, как системы промышленноrо управления и автоматики, а
также контрольно измерительное оборудование. Используя технолоrию электропитания Power over Ethernet (РоЕ) или
источник питания постоянноrо тока, набор для проектирования на базе модуля интеллектуальноrо дисплея позволяет
создать простое решение на базе интеллектуальноrо терминала, который может задействовать один Еthеrnеt кабель ти
па САТ5 дЛЯ питания и обмена данными по сети. Набор также имеет последовательный интерфейс для простой реали
зации человеко машинноrо интерфейса на базе ceHcopHoro дисплея для встраиваемых управляющих устройств. Набор
RDK IDM первый проект на базе модуля дисплея, в котором при меняется высокоэффективный и надёжный микро
контроллер на базе процессора ARM Cortex M3, что позволяет использовать этот модуль в контроллерах доступа, систе
мах безопасности, интеллектуальной бытовой технике и в приложениях промышленной автоматики.
Особенности набора Содержимое набора
Основу набора референс дизайна интеллектуальноrо дис- Интеллектуальный дисплейный модуль Stellaris
плейноrо модуля Stellaris составляет высокоинтеrрированный представляет собой набор референс дизайна и набор
32-битный микроконтроллер LM3S6918 на базе процессора для проектирования (RDK IDM), а также отдельный
ARM Cortex M3 с модулем 10/100-Мбит/с Ethernet AC и PH . rотовый к работе модуль (модуль MDL IDM с техноло
АRМ-архитектура обеспечивает доступ к самои обширно rией Power over Ethernet или модуль MDL IDM28
в мире «экосистеме» инструментов разработки, приложении, с Еthеrnеt интерфейсом). Референс дизайн и набор для
методов обучения и поддержки, операционных систем и про- проектирования поставляется со всеми средствами,
rpaMMHblx стеков протоколов. Разработка специализированно необходимыми для быстрой оценки и простой адапта
ro проrраммноrо обеспечения для RDK-IDM облеrчается бла
rодаря обширной rрафической библиотеке Stellaris Graphics ции модуля интеллектуальноrо дисплея к ваше у при
Library и инструментам проектирования ARM от проверенных ложению. Он содер ит следую..щие.. компоненты. .
партнёров ARM по проrраммному обеспечению. · интеллектуальныи дисплеиныи модул Stellarls
Особенности набора RDK IDM' (модуль MDL IDM на металлических стоиках); ..
· яркий QVGA ЖК дисплей с сенсорной поверхностью: · 80 мrц МИКРОКОНТРОЛ!lер LM3S9B92 с 256 Кбаит
CJ 16 бит цвет, 2.8 дюймовый дисплей QVGA с разре флэш-памятью, 96 Кбаит SRAM, интеrрированным
шением 240х320 точек; модулем Ethernet МАС+РНУ и интерфейсами USB
CJ подсветка на белом светодиоде с резистивной сен- OTG и CAN;
сорной панелью. . 24- В источник питания с международным адаптером;
· Ethernet и последовательные интерфейсы: . убираемый Ethernet кабель;
CJ 10/100 Мбит/с Ethernet с автоматическим распознаванием . адаптер отладки;
MDII. DIX и светодиодным индикатором трафик/канал; . компакт диск с руководством по быстрому старту,
CJ разъем обеспечивает сиrналы TXD и RXD; руководством пользователя, справочным руковод
CJ сиrналы уровня RS 232... ством по проrраммному обеспечению, исходным
· высокопроизводительныи 50-мrц микроконтроллер кодом спецификацией электрической схемой и
LM3S6918 o встро нной 256-Кбайт флэш памятью и rербер-файлами. '
встроеннои 64 Кбаит SRAM;
· rибкие интерфейсы и блок выводов:
CJ разъём карты MicroSD;
CJ релейный выход;
CJ четыре входа дЛЯ АЦП на блоке выводов;
· rибкие возможности подключения питания:
CJ технолоrия Power over Ethernet (по IEEE 802.заf);
CJ rнездо для питания от источника 24 В (DC), выводы
для подсоединения 5 B питания (DC);
· лёrкая адаптация к при ложен ию:
CJ включает все исходные коды и файлы проекта;
(] включает полные при меры приложений; Набор референс дизайна
CJ проектирование на базе инструментов от КеН, IAR, интеллектуаЛЬНО20
Code Sourcery и Code Red Technologies; дисплеЙНО20 модуля Stellaris
CJ поддержка rрафической библиотеки Stellaris
Graphics Library и библиотеки драйверов периферии
Stellaris Peripheral Driver Library.
Информация дпя заказа
Ко
RDK-IDM
MDL IDM
MDL IDM B
MDL IDM28
MDL IDM28 B
Интеллектуальный
дисплейный модуль
Stellaris
И.19. Набор образца разработки на базе модуля uнтеллектуальноzо дисплея · 519
И.19. Набор референс-дизайна интеппектуапьноrо
дисппейноrо модупя Stellaris 8 с 3.S-дюймовым зкраном
Интеллектуальный дисплейный модуль с 3.5 дюймовым экраном (MDL IDM L35) представляет собой закончен
ный rрафический интерфейс на базе ceHcopHoro QVGА дисплея для таких приложений, как системы промышленно
ro управления и автоматики) а также контрольно измерительное оборудование. Модуль MDL IDM L35 обеспечива
ет возможность обмена данными по последовательному) цифровому и аналоrовому интерфейсу для простой реали
зации человеко машинноrо интерфейса на базе сенсорной панели во встраиваемых устройствах управления. Разра
ботка проrраммноrо обеспечения дЛЯ RDK IDM L35 упрощается блаrодаря обширной rрафической библиотеке и
инструментам разработки АRМ процессоров от партнёров ARM. Модули IDM это первые дисплейные модули)
в которых применяется высокоэффективный и надёжный микроконтроллер на базе процессора ARM Cortex M3) по
зволяющий использовать их в контроллерах доступа) системах безопасности) интеллектуальной бытовой технике и
в устройствах промышленной автоматики.
Особенности набора
МDL IDМ LЗ5 представляет собой пp02paMMиpye
мый модуль со следующими особенностями:
. яркий QVGA ЖК дисплей с сенсорной поверхностью:
(] 262 тыс. цветов, 3.5 дюймовый дисплей QVGA
с разрешением 320х240 точек;
(] подсветка на белом светодиоде с резистивной ceH
сорной панелью;
. последовательные интерфейсы:
(] последовательный порт RS 232 с сиrналами ypOB
ня RS 232;
(] последовательный порт UART с ТТL уровнями
сиrналов;
. высокопроизводительный микроконтроллер
LM3S1958 и большой объём памяти:
(] 50 мrц 32 битный процессор ARM Cortex M3;
(] 256 Кбайт основная флэш память, 64 Кбайт SRAM;
. разъём карты MicroSD;
. напряжение питания 5 В) DС/DС преобразователь, KO
торый формирует напряжение 3.3 В для питания платы;
. лёrкая адаптация к приложению:
(] включает полный исходный код, примеры прило
жений и файлы проекта;
(] проектирование с помощью средств разработки
IDM L35 от КеН, IAR) Code Sourcery и Code Red
Technologies (с помощью оценочноrо набора
Stellaris или отладчика ARM Cortex M3);
(] поддержка rрафической библиотеки Stellaris
Graphics Library и библиотеки драйверов перифе
рии Stellaris Peripheral Driver Library.
Интеллектуальный дисплейный модуль с 3.5 дюймовым
экраном
Информация для заказа
Ко
RDK IDM L35
MDL IDM L35
MDL IDM L35 B
Содержимое набора
Интеллектуальный дисплейный модуль Stellaris
представляет собой набор референс дизайна и набор
для проектирования (RDK IDM L35), а также отдель
ный rотовый к работе модуль (MDL IDM L35).
Референс дизайн и набор для проектирования пo
ставляются со всем необходимым для быстрой oцeH
ки и простой адаптации интеллектуаЛЬНО20 диc
плеЙНО20 модуля к вашему приложению и содержат
следующие компоненты:
. интеллектуальный дисплейный модуль Stellaris
с 3.5 дюймовой сенсорной панелью QVGA (MDL
IDM L35) на металлических стойках;
. последовательный кабель USB TTL дЛЯ питания
платы и соединения с портом UARTO микрокон
троллера LM3S1958;
. адаптер JТАG отладки для соединения lO KoHTaKT
Horo разъёма с мелким шаrом с 20 KOHTaKTHЫM
стандартным разъёмом;
. 24 В источник питания с международным адапте
ром;
. компакт диск с руководством по быстрому старту,
руководством пользователя, справочным PYKOBOД
ством по проrраммному обеспечению) исходным
кодом) спецификацией) электрической схемой и
rербер файлами.
Интеллектуальный дисплейный модуль
с З.5 дюймовым экраном
520 . Приложение и. Семейство микроконтроллеров Stellaris.
И.20. Набор референс-дизайна Stellaris 8 для преобразо-
вания последовательных протоколов в Ethernet
Набор референс дизайна для преобразования последовательных протоколов в Ethernet (RDK S2E) представляет
собой законченное и rOToBoe к реализации решение, которое обеспечивает обмен данными по Ethernet для любых
устройств с последовательным интерфейсом. Набор содержит все необходимые аппаратные и проrраммные компо
ненты для разработки и интеrрации вашеrо проекта по преобразованию последовательных протоколов в Ethernet
в промышленных приложениях. Типичным применением RDK S2E является расширение возможностей действую
щих систем, которые содержат последовательный порт для конфиrурирования или управления. Кроме Toro, новей
шие компьютеры, особенно портативные компьютеры, не всеrда имеют последовательные порты, а связь оrраниче
на длиной кабеля (обычно не более 10 м). Реализация решения Stellaris по преобразованию последовательных прото
колов в Ethernet в устройствах с последовательными интерфейсами даёт множество преимуществ, включая OTCYT
ствие необходимости внесения больших изменений в тополоrию платы или проrраммное обеспечение; возможность
использования сетей, отличных от Ethernet; компактный форм фактор и отсутствие оrраничений на максимальную
длину кабеля при последовательном соединении.
Особенности набора
Набор RDK S2E первое решение для преобразования
последовательных протоколов в Ethernet, в котором ис
пользуется высокоэффективный и надёжный микрокон
троллер на базе процессора ARM Cortex M3. Основу про
екта преобразования последовательных протоколов
в Ethernet составляет высокоинтеrрированный 50 мrц
32 битный микроконтроллер LM3S6432 с процессорным
ядром ARM Cortex М3 и однотактной встроенной флэш
памятью большой ёмкости и SRAM, которых достаточно
для эффективной обработки ceTeBoro трафика. Для MaK
симальной экономии площади микроконтроллер Stellaris
предлаrается в компактном корпусе BGA и содержит ин
теrрированный модуль 10/100 Мбит/с Ethernet МАС и
РНУ. АRМ архитектура обеспечивает доступ к самой ши
рокой в мире «экосистеме» инструментов разработки,
приложений, методов обучения и поддержки, операци
онных систем и проrраммных стеков протоколов.
Особенности модуля RDK S2E:
· микроконтроллер Stellaris LM3S6432 на базе процессора
ARM Cortex M3 в компактном корпусе BGA размером
10хl0 мм, что позволяет уменьшить площадь платы;
. 10/100 Мбит/с порт Ethernet:
CI автоматическая коррекция MDI/MDIX;
CI светодиодный индикатор трафик/канал;
. 2 порта UART с контролем потока RTS/CTS:
CI UARTO имеет уровни RS 232, приёмопередатчик pa
ботает на скорости до 250 Кбит/с;
CI UARTl имеет уровни CMOS/TTL, способен работать
со скоростью 1.5 Мбит/с;
· проrраммное обеспечение:
CI IР конфиrурирование со статическим IР адресом
или ОНСР;
CI Telnet cepBep для доступа к последовательному порту;
CI веб сервер для конфиrурирования модуля;
CI ответчик на UDР запросы для обнаружения устрой
ства;
CI Теlnеt клиент для расширителя последовательноrо
порта на базе Ethernet;
CI SSH cepBep для безопасноrо соединения;
· модуль поддерживает напряжение питания 5 и 3.3 В;
. множество вариантов монтажа, включая поставляе
мый по запросу монтажный кронштейн;
. порт JTAG дЛЯ проrраммирования в условиях произ
водства.
Информация дпя заказа
Ко
RDK S2E
MDL S2E
MDL S2E B
Содержимое набора
Модуль Stellaris для преобразования последователь
ных протоколов в Ethernet представляет собой набор
референс дизайна (RDK S2E) плюс отдельный rотовый
к работе модуль (MDL S2E). Набор референс дизайна
поставляется со всем необходимым для быстрой оценки
и простой адаптации модуля MDL S2E к вашему прило
жению и содержит следующие компоненты:
. модуль Stellaris для преобразования последователь
ных протоколов в Ethernet (MDL S2E);
. плату адаптера RS 232;
. убираемый Еthеrnеt кабель;
. последовательный кабель ОВ9;
. USВ кабель;
. компакт диск с руководством по быстрому старту, py
ководством пользователя, справочным руководством
по проrраммному обеспечению, исходным кодом, спе
цификацией, электрической схемой и rербер файлами.
Набор референс дuзайна Stellaris для преобразования
последовательных протоколов в Etherпet
Модуль Stellaris
для преобразованuя
последовательных
протоколов в Etherпet
И.21. Набор референс дизайна Stellaris* для управления шаzовым двuzателем . 521
И.21. Набор референс-дизайна Stellaris 8 для управления
шаrовым двиrателем
Набор референс дизайна Stellaris для управления шаrовым двиrателем (RDK Stepper) содержит все необходимые аппа
ратные и проrраммные компоненты для проектирования, модернизации и интеrрации современных устройств с шаrо
вым двиrателем. Набор RDK Stepper, блаrодаря вычислительной мощности и rибкости микроконтроллеров Stellaris и ис
пользованию MOSFET и драйверов MOSFET компании Fairchild Semiconductor, позволяет создавать усовершенствован
ные системы управления шаrовым двиrателем, оптимизированные по характеристикам, стоимости и rибкости. Шаrо
вые двиrатели особенно подходят для применения в 2 и 3 oceBЫX ЧПУ типа CNC, сортировочном и калибровочном
оборудовании, специализированных принтерах и сканерах, а также в устройствах промышленной автоматики.
Архитектура проrраммноrо обеспечения набора может быть использована в широком спектре приложений от ми
кромощных устройств до сильноточноrо оборудования. Такая мощная и rибкая архитектура проrраммноrо обеспе
чения, построенная на базе подпроrрамм обработки прерываний с приоритетом, работает эффективно в фоновом
режиме, оставляя значительный резерв ресурсов для системноrо приложения или сетевых заданий.
Особенности набора
Набор RDK Stepper содержит полнофункциональный
микроконтроллер LM3S617, предназначенный для
устройств управления приводом, силовой каскад, выпол
ненный на основе микросхемы драйвера F AN73832 и
MOSFET FDMS3672 компании Fairchild Semiconductor,
шаrовый двиrатель NEMA23, управляющую проrрамму
с rрафическим интерфейсом для Windows, а также сопут
ствующие кабели, исходный код и документацию. Набор
референс дизайна для управления шаrовым двиrателем
позволяет использовать встроенные функции микрокон
троллера Stellaris и вычислительную мощность процес
copHoro ядра ARM Cortex M3 для реализации импульс
Horo (чопперноrо) управления без необходимости приме
нять внешний контроллер шаrовоrо двиrателя или KOM
паратор. rрафическая управляющая проrрамма позволя
ет экспериментировать с различными параметрами при
вода и фиксировать характеристики двиrателя.
Особенности набора референс дизайна RDK Stepper:
. усовершенствованное импульсное (чопперное) управ
ление биполярными шаrовыми двиrателями;
. проrраммное импульсное (чопперное) управление ша
rовыми двиrателями с высоким крутящим моментом
при высокой скорости шаrа;
. режимы быстроrо и медленноrо спада;
. режимы полноrо шаrа, полушаrа, микрошаrа и волны;
. высокая скорость шаrа (до 10000 шаrов/с);
. проrраммируемый ток удержания;
. виртуальный СОМ порт, интеrрированный в USB;
. поддержка внешнеrо отладчика через стандартный
20 контактный разъём от ARM;
. простое подсоединение питания и двиrателя с помо
щью подключаемой контактной колодки;
. системный заrрузчик для обновления микропро
rpaMMHoro обеспечения через последовательный порт.
Содержимое набора
Набор референс дизайна RDK Stepper поставляется
со всеми необходимыми компонентами для оценки cи
стемы управления биполярным ша20вым дви2ателем,
включая:
. rлавную плату управления;
. шаrовый двиrатель NEMA23;
. 24 B источник питания с международным адаптером;
. USВ кабель;
. проrрамму управления с rрафическим интерфейсом
для Windows на компакт диске;
. компакт диск с руководством по быстрому старту, py
ководством пользователя, справочным руководством
по проrраммному обеспечению, исходным кодом, спе
цификацией, электрической схемой и rербер файлами.
Набор референс дизайна Stellaris для управления
ша20вым дви2ателем
Скриншот окна nрО2раммы управления из набора
референс дизайна RDK Stepper для Windows
Информация для заказа
Ко Описание
Набор референс дизайна Stellaris для
п авления шаrовым виrателем
Плата управления шаrовым
виrателем, ин иви альная паковка
MDL Stepper В Плата управления шаrовым
виrателем, r пповая паковка
RDK Stepper
MDL Stepper
522 . Приложение И. Семейство микроконтроллеров Stellaris.
И.22. Набор референс-дизайна Stellaris 8 для управления
бесщёточиым двиrателем постоянноrо тока
Набор референс дизайна Stellaris для управления бесщёточным двиrателем постоянноrо тока (RDK BLDC) с ин
терфейсами Ethernet и CAN содержит все необходимые аппаратные и проrраммные компоненты для проектирова
ния, модернизации и интеrрации приложения на базе бесщёточноrо двиrателя постоянноrо тока в промышленных
сетях. Набор RDK BLDC позволяет использовать вычислительную мощность и rибкость микроконтроллеров
Stellaris и силовые модули компании Fairchild Semiconductor для реализации сложных четырёхквадрантных алrо
ритмов управления 3 фазными бесщёточными двиrателями постоянноrо тока, рассчитанными на напряжение до
36 В. Бесщёточные двиrатели постоянноrо тока особенно хорошо подходят для применения в промышленной aBTO
матике, робототехнике, в электрических инвалидных колясках и движущихся механизмах, насосах и вентиляцион
ных системах, а также в компактных бытовых приборах.
Особенности набора
Набор RDK BLDC содержит полнофункциональный
микроконтроллер Stellaris LM3S8971 с интерфейсами
Ethernet и CAN, 3 фазный бесщёточный двиrатель по
стоянноrо тока, проrрамму управления с rрафическим
интерфейсом для Windows, а также сопутствующие Ka
бели, исходный код и документацию. Набор RDK BLDC
использует встроенные функции управления приводом
и коммуникационные возможности микроконтроллера
Stellaris LM3S8971, а также вычислительную мощность
процессорноrо ядра ARM Cortex M3 для Toro, чтобы
обеспечить оптимальные алrоритмы управления широ
ким спектром бесщёточных двиrателей постоянноrо TO
ка в разнообразных приложениях. Проrрамма управле
ния с rрафическим интерфейсом позволяет подбирать
различные параметры управления и изучать их влияние
на характеристики двиrателя.
Особенности набора RDK BLDC:
. коммуникационные интерфейсы 10/100 Мбит/с
Ethernet и CAN;
. усовершенствованные алrоритмы управления 3 фаз
ными бесщёточными двиrателями постоянноrо тока;
. четырёхквадрантные алrоритмы работы для точноrо
управления двиrателем;
. режимы работы: с датчиком Холла, квадратурный и
без датчика;
. управление 3 фазными бесщёточными двиrателями
постоянноrо тока) рассчитанными на напряжение до
36 В и мощность до 500 Вт;
. набор леrко адаптируется к приложению за счёт исхо
дноrо кода и файлов проекта;
. леrко расширяемое проrраммное обеспечение по
управлению приводом с контролем прерываний;
. резерв ресурсов в 30 MIPS дЛЯ системноrо проrрамм
Horo обеспечения;
. собранная на плате схема торможения;
. вход инкрементноrо импульсноrо датчика положения;
. кнопочный переключатель тестовых режимов;
. светодиодные индикаторы для отображения режимов
питания, функционирования и сбоя;
. поставляемый на заказ управляемый вентилятор для
принудительноrо воздушноrо охлаждения;
. винтовые зажимы для всех кабелей питания и сиrна
лов;
. порт JT AG/SWD дЛЯ отладки проrрамм.
Информация для заказа
Ко
RDK BLDC
MDL BLDC
MDL BLDC B
Содержимое набора
Набор RDK BLDC поставляется со всеми необходи
мыми средствами для оценки систем управления бесщё
точными дви2ателями nостОЯННО20 тока, включая:
. rлавную плату управления;
. 3 фазный бесщёточный двиrатель постоянноrо тока;
. 24 B источник питания;
. убираемый Еthеrnеt кабель;
. адаптер отладки;
. проrрамму управления с rрафическим интерфейсом
для Windows на компакт диске;
. компакт диск с руководством по быстрому старту, py
ководством пользователя, справочным руководством
по проrраммному обеспечению, исходным кодом, спе
цификацией, электрической схемой и rербер файлами.
Набор референс дизайна Stellaris для управления
бесщёточным дви2ателем nостОЯННО20 тока
Вид nрО2раммы управления с 2рафическим
интерфейсом для Windows из набора этаЛОННО20
nроекта RDK BLDC
И.23. Набор образца разработки для управления щётОЧНblМ двиzателем постоянноzо тока · 523
И.23. Набор референс-дизайна Stellaris 8 для управления
..
щеточным двиrатепем постоянноrо тока
с интерфейсом CAN (RDK-BDC24)
Набор референс дизайна Stellaris для управления щёточным двиrателем постоянноrо тока (RDK BDC24) с интер
фейсом CAN позволяет управлять скоростью вращения 12 B и 24 B щёточных двиrателей постоянноrо тока с потре
олением до 40 А и содержит новый управляющий вход, основанный на интерфейсе RS 2З2, который может исполь
зоваться в качестве преобразователя последовательноrо интерфейса в интерфейс CAN. Также модуль RDK BDC24
обеспечивает боrатый набор интерфейсов датчиков, имеет широкие коммуникационные и управляющие возможно
сти. В частности, в модуле предусмотрены входы аналоrовоrо и импульсноrо датчика положения, реализованы BЫ
сокопроизводительные интерфейсы CAN и порт RS 2З2. Модуль использует высокооптимизированное проrрамм
ное обеспечение и содержит мощный З2 битный микроконтроллер Stellaris LМЗS2616, который обеспечивает плав
ную и бесшумную работу двиrателя постоянноrо тока в широком диапазоне скоростей.
На плате модуля MDL ВОС24 присутствуют такие высококачественные аналоrовые компоненты от Texas
Instruments, как приёмопередатчик шины CAN SN65HVDI050, приёмопередатчик интерфейса RS 2З2 МАХЗ221,
DС/DС преобразователь TPS54040, стабилизатор напряжения ТРS7З6ЗЗ и усилитель для резистивноrо датчика тока
INАI9З. Этот модуль рассчитан на использование в самых разных потребительских и промышленных устройствах,
включая системы промышленной автоматики, мобильные роботы, бытовую технику, насосные и вентиляционные
системы, а также электрические инвалидные коляски и движущиеся механизмы.
Особенности набора
Набор MDL BDC поставляется как 20товый к работе
nр02раммно адаптируемый модуль, обладающий следу
ющими особенностями:
. бесшумное управление щёточными двиrателями по
стоянноrо тока (15 к[ц ШИМ);
. три опции реrулирования скорости вращения:
CJ стандартный в отрасли интерфейс R C сервопривода
(ШИМ);
CJ интерфейс CAN;
CJ последовательный интерфейс RS 2З2;
. интерфейс CAN или RS 2З2 дЛЯ управления с обрат
ной связью, управления скоростью, положением или
TOKOBoro управления;
. обмен данными через интерфейс CAN:
CJ возможность полноrо конфиrурирования опций MO
дуля;
CJ мониторинr тока, напряжения, скорости и друrих
параметров в режиме реальноrо времени;
CJ заrрузка микропроrраммноrо обеспечения через ин
терфейсы RS 2З2/САN;
. последовательный обмен данными через интерфейс
RS 2З2:
CJ подключение устройств с интерфейсом RS 2З2 к ши
не CAN;
CJ прямое подключение к последовательному порту ПК
или порту cRIO от National Instruments;
. входы для концевых выключателей прямоrо/обратно
ro хода;
. возможности микропроrраммноrо обеспечения:
CJ полностью конфиrурируемые параметры обратной
связи;
CJ мониторинr сиrналов от всех датчиков в режиме pe
альноrо времени, включая потребляемый двиrате
лем ток, положение ротора, скорость и состояние
концевых выключателей;
. светодиодный индикатор для отображения режимов
работы, направления вращения и сбоев;
. переключатель режимов работы двиrателя TOpMO
жение/движение по инерции;
. вход импульсноrо датчика положения (QEI) и аналоrо
ВЫЙ ВХОД;
. цветные винтовые зажимы для подключения питания;
. лёrкая адаптация к приложению с помощью инстру
ментов Keil, IAR, Code Sourcery, Code Red Technologies
или Texas Instruments (используя оценочный набор
Stellaris или отладчик ARM Соrtех МЗ).
Содержимое набора
Набор Stellaris MDL BDC24 поставляется не только
в виде отдеЛЬН020 20тов020 для nроизводства модуля, но
и как законченный набор референс дизайна (RDK BDC24),
созданный с помощью открытых инструментов. Этот
набор имеет все необходимые компоненты для быстрой
оценки и простой адаптации модуля MDL BDC24 для вa
ше20 nриложения и включает в себя следующие элемен
ты:
. модуль управления двиrателем MDL BDC24;
. щёточный двиrатель постоянноrо тока Mabuchi RS
555РН З255 (5000 об/мин, 12 В, ЗА);
. источник питания с универсальным входом;
. преобразователь последовательноrо интерфейса в ин
терфейс CAN (ОВ9 RJI2);
. два модульных кабеля 6P 6C (длиной 1 и 7 футов);
. терминатор шины CAN (120 Ом);
. адаптер JТАG отладки для соединения 10 KOHTaKTHO
ro разъёма с мелким шаrом с 20 KOHTaKTHЫM CTaHдapT
ным разъёмом;
. компакт диск с документацией, утилитой обновления
микропроrраммноrо обеспечения LM Flash, rрафиче
ской средой BOC COMM дЛЯ управления и отслежи
вания состояния двиrателя, исходным кодом, специ
фикацией, электрической схемой и [ербер файлами.
Набор референс дизайна Stellaris для управления щёточ
ным дви2ателем nостОЯНН020 тока с интерфейсом CAN
Информация дпя заказа
Ко Описание
MDL Модуль Stellaris для управления щёточным
BDC24 двиrателем постоянноrо тока с интерфейсом
CAN RDK BDC24 ин иви альная паковка
MDL Модуль Stellaris для управления щёточным
BDC24 В двиrателем постоянноrо тока с интерфейсом
CAN RDK BDC24, r пповая паковка
Набор референс дизайна Stellaris для
управления щёточным двиrателем
постоянноrо тока с интерФейсом CAN
включает мо ль MDL BDC24
RDK
ВDС24
524 · Приложение И. Семейство микроконтроллеров Stellaris.
И.24. Набор референс дизайна Stellaris 8 для управления
асинхронным зпектродвиrателем переменноrо тока
Набор референс дизайна Stellaris для управления асинхронным электродвиrателем переменноrо тока (RDK ACIM)
содержит все необходимые аппаратные и проrраммные компоненты для разработки) модернизации и интеrрации
современных приложений на базе асинхронных двиrателей переменноrо тока. Набор RDK ACIM позволяет исполь
зовать вычислительную мощность и rибкость микроконтроллеров Stellaris и силовые модули компании Fairchild
Semiconductor для создания усовершенствованных систем на базе электродвиrателя переменноrо тока с реrулируе
мой скоростью вращения) которые обеспечивают высокую производительность) низкую стоимость и rибкость.
Асинхронные двиrатели переменноrо тока особенно хорошо подходят для применения в бытовой технике (холо
дильниках) посудомоечных машинах) стиральных машинах и сушильных аппаратах)) системах управления отопле
нием) вентиляцией и кондиционированием воздуха для жилых помещений и небольших предприятий) а также
в приводах промышленных 3 фазных электродвиrателей.
Архитектура проrраммноrо обеспечения набора непосредственно масштабируема для применения в приложени
ях мощностью менее 1 Л.с. до сотен кВт. Такая мощная и rибкая архитектура проrраммноrо обеспечения) построен
ная на базе подпроrрамм обработки прерываний с приоритетом) работает эффективно в фоновом режиме) оставляя
существенный запас ресурсов для системноrо приложения или сетевых заданий.
Особенности набора
Набор RDK ACIM содержит полнофункциональный микро
контроллер Stellaris LM3S818 дЛЯ устройств управления приво
дом) силовой модуль FSBSI0CH60 от Fairchild Semiconductor)
электродвиrатель переменноrо тока Selni для 3 фазноrо обору
дования) управляющую проrрамму с rрафическим интерфей
сом для Windows) а также сопутствующие кабели) исходный
код проrрамм) электрическую схему) спецификацию и ДOKY
ментацию. Набор RDK ACIM использует встроенные функции
и вычислительную мощность микроконтроллера Stellaris для
реализации современных энерrоэффективных алrоритмов
управления) включая пространственно векторную модуляцию
(SVM). Управляющая проrрамма с rрафическим интерфейсом
позволяет экспериментировать с различными параметрами
привода и фиксировать характеристики двиrателя.
Особенности набора RDK ACIM'
· усовершенствованные алrоритмы управления 3 фаз
ными и однофазными асинхронными двиrателями пе
peMeHHoro тока;
· активная схема торможения;
· активная схема управления бросками тока;
· возможность управления внешним каскадом KoppeK
ции коэффициента мощности;
· возможность изменений линейноrо фильтра) KOHдeH
саторов шины питания и JТАG интерфейса;
· содержит код для основных алrоритмов управления)
в том числе для пространственно векторной модуля
ции и контроля синусоиды;
· точное измерение тока;
· несколько изолированных входов управления) в том числе:
CI виртуальный СОМ порт на базе интеrрированноrо
порта USB;
CI проrрамма под Windows для конфиrурирования)
управления и мониторинrа;
CI последовательный порт с лоrическими уровнями
сиrналов;
CI потенциометр реrулировки скорости и переключа
тель режимов;
CI мониторинr скорости вращения и положения через
вход импульсноrо датчика положения/тахометра;
CI электрически изолированный JТАG порт для отлад
ки проrраммноrо обеспечения;
CI системный заrрузчик для обновления микропро
rpaMMHoro обеспечения через последовательный порт.
Информация для заказа
Ко
RDK ACIM
MDL ACIM
MDL ACIM B
Содержимое набора
Набор RDK ACIM поставляется со всеми необходимыми
компонентами для оценки системы управления на базе acиH
ХрОННО20 электродви2ателя nеремеННО20 тока, включая:
· rлавную управляющую плату с установленным радиа
тором;
· электродвиrатель переменноrо тока для 3 фазноrо дo
машнеrо оборудования (0...20000 об/мин);
· кабели питания;
· USВ кабель;
· проrрамму управления с rрафическим интерфейсом
для Windows на компакт диске;
· компакт диск с руководством по быстрому старту) py
ководством пользователя) справочным руководством
по проrраммному обеспечению) исходным кодом) спе
цификацией) электрической схемой и rербер файлами;
· системный заrрузчик для обновления микропро
rpaMMHoro обеспечения через последовательный порт.
Набор референс дизайна Stellaris для управления
асинхронным электродви2ателем nеремеННО20 тока
. ";:< ,.. ' ", С" .... , " " , ,
Вид nрО2раммы управления с 2рафическим интерфейсом
для Windows из набора референс дизайна RDK ACIM
И.25. Общие сведения о встраиваемых процессорах ТI на базе технолоzии ARM · 525
И.25. Общие сведения о встраиваемых процессорах TI
на базе технопоrии ARM
Компания Т! предлаrает широкий спектр продукции на базе технолоrии ARM, которая предназначена для
разнообразных приложений и обеспечивает оптимальную производительность, энерrопотребление и стои
мость систем. Эти процессоры на базе технолоrии ARM представлены различными линейками продукции
компании Т! (см. Табл. И.9). Более подробная информация приведена на сайте www.ti.com/arm.
Применение устройств компании TI на базе технолоrии ARM
АRМ процессоры предлаrают широкий выбор функций и производительности, что позволяет создавать pe
шения, которые наиболее точно соответствуют предъявляемым к ним требованиям.
Области при.менения для этих устройств:
. системы обработки данных:
LI точки продаж предприятий розничной торrовли (РОS терминалы);
LI портативные компьютеры;
. проводная связь:
LI сетевые системы;
LI широковещательное оборудование;
. потребительская электроника:
LI портативные аудио/видеоплееры;
LI цифровые абонентские ТВ приставки;
LI цифровые фотоаппараты;
LI сетевые устройства;
LI системы управления отоплением, вентиляцией и кондиционированием воздуха;
LI иrровые устройства;
LI планшетные компьютеры;
. автомобильная электроника:
LI информационно развлекательные устройства;
LI системы безопасности и управления;
LI тормозная система и рулевое управление;
LI rибридные автомобили и электромобили;
. промышленные системы:
LI медицинское оборудование;
LI автоматика и приводы;
LI измерительные системы;
LI источники питания;
LI дистанционный контроль;
LI управление системами зданий;
LI системы промышленной автоматики;
LI испытательное и измерительное оборудование;
LI человеко машинный интерфейс (ИМI).
526 · Приложение и. Семейство микроконтроллеров Stellaris'
Таблица Н.9. Продукция компании Т' на базе технопоrии АКМ*
Процессор TI ипу Мfц Операционная система Основная пеDифеDИЯ
Sitara'" АМ1705 ARM9'" 450 Linux, Windows СЕ. RTOS ес. SPI. UART. USB. MMC/SDIO. ЕМАС
Sitara АМ1707 ARM9 450 Linux. Windows СЕ. RTOS ес, SPI. UART. USB MMC/SDIO. ЕМАС
Sitara АМ1802 ARM9 300 Linux. Windows СЕ. RTOS ес. SPI. UART. USB. MMC/SDIO, ЕМАС
Sitara АМ1806 ARM9 450 Linux, Windows СЕ, RTOS ес, SPI, UART, USB, MMC/SDIO
Sitara АМ1808 ARM9 450 Linux, Windows СЕ, RTOS ес, SPI, UART, USB MMC/SDIO, ЕМАС, SATA
Sitara АМ1810 ARM 375 Linux, Windows СЕ, RTOS I 2 C, SPI, UART, USB, MMC/SDIO, ЕМАС, SATA,
PROFIBUS
Sitara АМ3505 ARM Cortex'" A8 600 Linux, Windows СЕ, RTOS, I 2 C, SPI, UART, USB, MMC/SDIO, ЕМАС, CAN
Android
Sitara АМ3517 ARM Cortex A8 600 Linux, Windows СЕ, RTOS, ес, SPI, UART, USB, MMC/SDIO, ЕМАС, CAN
Android
Sitara АМ3703 ARM Cortex A8 1000 Linux, Windows СЕ, RTOS, I 2 C, SPI, UART, USB, MMC/SDIO
Android
Sitara АМ3715 ARM Cortex A8 1000 Linux, Windows СЕ, RTOS, ес, SPI, UART, USB, MMC/SDIO
Android
Sitara АМ3892 ARM Cortex A8 1500 Linux, Windows СЕ, RTOS PCIe, SATA. ЕМАС, UART. USB
Sitara АМ3894 ARM Cortex A8 1500 Linux, Windows СЕ, RTOS PCIe, SATA, Gie:abit ЕМАС, UART USB
OMAP L137 ARM926 + С674х 300 Linux, Windows СЕ, MMC/SD, SDRAM/NAND, ЕМАС, UART, USB
DSP VxWorks 2.0 HS OTG, USB 1.1
OMAP L138 ARM926 + С674х 300 Linux, Windows СЕ, mDDR/DDR2, SDRAM/NAND, SATA, uPP,
DSP VxW orks ЕМАС, USB 2.0 HS OTG, USB 1.1
TMS320C6A8168 С674х+ ARM 1500 Linux, Windows СЕ, RTOS DDR2IDDR3, SRAM/Pseudo SRAM/NAND,
Cortex A8 NOR Flash, SD, SATA, uPP, ЕМАС, USB 2.0 HS
TMS320C6A8167 С674х+ ARM 1500 Linux, Windows СЕ, RTOS DDR2/DDR3, SRAM/Pseudo SRAM/NAND,
Cortex A8 NOR Flash, SD, SATA, uPP, ЕМАС, USB 2.0 HS
TMS320DM355 ARM926 135,216, Linux mDDR/DDR2, USB 2.0 H/OTG
270
TMS320DM335 ARM926 135,216 Linux mDDR/DDR2, USB 2.0 H/OTG
TMS320DM357 ARM926 270 Linux ЕМАС, DDR2, JTAG. USB 2.0 OTG
TMS320DM365 ARM926 216,270, Linux ЕМАС, mDDR/DDR2, HPI, rолосовой кодек,
300 USB 2.0 H/OTG
TMS320DM6467 ARM926 + С64х 594/729, Linux, Windows СЕ ЕМАС, DDR2, USB 2.0, HPI, PCI, АТА
DSP 297/365
TMS320DM6446 ARM926 + С64х 300/600 Linux, Windows СЕ ЕМАС, DDR2, USB 2.0, HPI, АТА, интерфейс
DSP карт памяти
TMS320DM6443 ARM926 + С64х 300/600 Linux, Windows СЕ ЕМАС, DDR2, USB 2.0, HPI, АТА, интерфейс
DSP карт памяти
TMS320DM6441 ARM926 + С64х 256/512 Linux, Windows СЕ ЕМАС, DDR2, USB 2.0, HPI, АТА, интерфейс
DSP карт памяти
FlexRay, CAN, буферированный АЦП, буфери
TMS570LS2x ARM Cortex R4F 160 AUTOSAR, различные рованный SPI, SCI/ LIN, Timer Coprocessor,
встраиваемые RTOS функции самотестирования и контроля ЕСС
дЛЯ критичных к безопасности приложений
Stellaris 8 ARM Cortex M3 20...50 Различные встраиваемые (МК) АЦП, SSI/SPI, UART, I 2 C, модуль
LM3SxOOs RTOS управления двиrателями
Stellaris ARM Cortex M3 25...80 Различные встраиваемые (М К) АЦП, SSI/SPI, UART, ес, модуль
LM3S1000s RTOS управления двиrателями, режим Hibernate
Stel1aris ARM Cortex M3 25...80 Различные встраиваемые (МК) CAN, АЦП, SSI/SPI, UART, I 2 C, модуль
LM3S2000s RTOS управления двиrателями, режим Hibernate
Stellaris Различные встраиваемые (МК) USB 2.0 FS D/H/OTG, АЦП, SSI/SPI,
ARM Cortex M3 50 UART, I 2 C, модуль управления двиrателями,
LM3S3000s RTOS Iрежим Hibernate, StellarisWare 8 в ПЗУ
Stellaris Различные встраиваемые (М К) USB 2.0 FS D/H/OTG, CAN, АЦП, SSIISPI,
ARM Cortex M3 50...80 UAR Т, I 2 C, модуль управления двиrателями,
LM3S5000s RTOS Iрежим Hibernate, StellarisWare 8 в ПЗУ
Stellaris Различные встраиваемые (МК) 10/100 Ethernet МАС+РНУ, АЦП, SSI/SPI,
LM3S6000s ARM Cortex M3 25...50 RTOS UART, I 2 C, модуль управления двиrателями,
I режим Hibernate
Stellaris Различные встраиваемые (МК) 10/100 Ethernet МАС+РНУ, CAN, АЦП,
LM3S8000s ARM Cortex M3 50 RTOS SSI/SPI, UART, I 2 C, модуль управления
I двиrателями, режим Hibernate
(МК) 10/100 Ethernet МАС+РНУ, USB 2.0 FS
Stel1aris ARM Cortex М3 80...100 Различные встраиваемые D/H/OTG, CAN, АЦП, SSI/SPI, UART, ес,
LM3S9000s RTOS модуль управления двиrателями, режим
Hibernate, StellarisWare 8 в ПЗУ
И.26. Высокопроизводительные контроллеры Stellaris ARM Cortex M4F от Texas Iпstrumeпts · 527
И.26. Высокопроизводительные контроллеры Stellaris
ARM Cortex..M4F от Texas Instruments
Компания Texas Instruments представила новое поколение
микроконтроллеров Stellaris на базе ARM Cortex M4
LM4Fx. Микроконтроллеры выполнены по 65 HM технолоrии,
что позволяет достичь хорошеrо соотношения между такими
параметрами, как высокая производительность, малое энер
rопотребление и цена.
Семейство Stellaris ARM Cortex M4, получившее название
Stellaris LM4F, по сути является расширением популярноrо
семейства ARM Cortex M3, включающее дополнительные
DSР подобные инструкции, а также модуль операций с плава
ющей точкой: процессор ARM Cortex M4 поддерживает ши
рокий набор одноцикловых команд умножения с накоплени
ем (МАС), команды централизованноrо управления потоком
данных (SIMD) и арифметические команды «С насыщением», а
также имеет модуль обработки операций с плавающей точкой
(FPU) с одинарной точностью.
Основными областями применения семейства LM4F являются микроконтроллеры общеrо назначения,
USВ контроллеры, контроллеры для промышленной автоматики и управления двиrателями.
Для ускорения процесса разработки проrраммноrо обеспечения Texas Instruments предоставляет бесплат
ное проrраммное обеспечение StellarisWare., поддерживающее все контроллеры семейства LM4F. StellarisWare
представляет собой комплект API, который был специально разработан для контроллеров Stellaris, чтобы ми
нимизировать стоимость разработки проrраммноrо обеспечения и сократить время выхода на рынок. Боль
шинство из АРI интерфейсов встроено в ROM. Также стоит отметить, что всё проrраммное обеспечение Ha
писано на языке С, что облеrчает процесс корректировки и написания собственноrо проrраммноrо кода.
Основные характеристики nepBoro
поколения LM4F
. Ядро ARM Cortex M4F с модулем обработки операций
с плавающей точкой (FPU) с одинарной точностью.
. До 256 Кбайт встроенной флэш памяти и 32 Кбайт ОЗУ.
. 2 Кбайт BCTpoeHHoro EEPROM.
. До двух 12 бит АЦП с 24 входными каналами.
. До двух САN контроллеров.
. Три аналоrовых компаратора.
. Опциональный интерфейс USB 2.0 с поддержкой
режимов Device/Host/OTG.
. Расширенные функции управления двиrателями при
помощи использования до 16 ШИМ контроллеров и
двух интерфейсов квадратурноrо энкодера.
. Большой выбор последовательных интерфейсов:
CJ до 8 модулей UART;
CJ до 6 каналов 12C;
CJ до 4 каналов SPI/SSI.
. Режимы пониженноrо энерrопотребления, в том
числе «спящий режим».
. Корпуса 64 LQFP, 100 LQFP и 144 LQFP.
Основные преимущества
. Новый 12 бит АЦП с частотой выборки 1 Мвыб./с
позволяет достичь точности :tl бит во всём диапа
зоне температур.
. Ядро ARM Cortex M4F со встроенным FPU ускоря
ет выполнение математических операций и упро
щает процесс обработки цифровых сиrналов.
. Первый микроконтроллер ARM Cortex M, выпол
ненный в 65 HM технолоrическом процессе, обеспе
чивает хорошее соотношение между высокой про
изводительностью и малым энерrопотреблением:
CJ время пробуждения менее 500 мкс;
CJ ток В рабочем режиме менее 370 мкА/Мfц;
CJ ток энерrопотребления в ждущем режиме 1.6 мкА.
. Минимальное количество циклов перезаписи
флэш памяти 100000 циклов.
. Широкий диапазон совместимой памяти и вариан
тов корпусов позволяют сделать оптимальный BЫ
бор устройства.
. Обширный выбор периферии на кристалле OTKpЫ
вает возможности применения в различных прило
жениях, включая lD cKaHepbI, микропринтеры,
цифровое питание, управление двиrателями,
управление светодиодным табло, устройства про
мышленной автоматики.
528 · Приложение и. Семейство микроконтроллеров Stellaris.
Быстрый старт с микроконтроппером Stellaris ARM Cortex-M4F
Texas Instruments представляет линейку новых oцe
ночных наборов для микроконтроллеров серии LM4F.
Оценочный набор Stellaris 8 LM4F232 USB+CAN это
компактный и универсальный набор для демонстрации
возможностей микроконтроллера Stellaris LM4F232,
oCHoBaHHoro на ядре ARM8 Cortex'" M4F.
Оценочный набор позволяет показать доступные в
микроконтроллере LM4F232 функции, а именно: KOH
троллер USB 2.0 в режимах OTG/Host/Device, CAN
контроллер, аналоrовые функции и возможности низ
Koro энерrопотребления.
В комплект также входит множество примеров в ис
ходном коде для быстроrо начала проrраммирования в
Си коде.
Оценочный набор включает в себя следующие
компоненты:
· микроконтроллер Stellaris LM4F232HSQD с
2S6 Кбайт внутренней флэш памятью в корпусе
144 LQFP;
· 99 х 64 цветной ОLЕD дисплей, обеспечивающий
функции интерфейса;
· разъём USB Micro AB для макетирования USB
применений;
· слот для карт памяти microSD;
· S MM винтовые клеммы для подключения внешних
датчиков и друrих аналоrовых входов;
· прецизионное опорное напряжение для точноrо
аналоrо цифровоrо преобразования;
· датчик температуры для измерения температуры;
· 3 осевой акселерометр для детектирования поло
жения;
· контрольные точки для всех линий ввода/вывода,
что позволяет леrко анализировать сиrналы при
отладке;
8 пять пользовательских/навиrационных кнопок (в
том числе выбор/пробуждение) для ввода данных
пользователем;
· один пользовательский светодиод;
· 10 контактный JTAG, обеспечивающий CTaHдapT
ный интерфейс для отладки.
Информация дпя заказа
Состав набора
Отладочный набор включает всё необходимое для
разработки и выполнения приложений на микрокон
троллере Stellaris:
· оценочную плату Stellaris EK LM4F232;
· внутрисхемный отладочный интерфейс, реализо
ванный на плате;
· набор кабелей:
CJ кабель USB Mini B для отладки;
CJ USB переходной кабель Micro A B Std A;
CJ кабель USB Micro B USB A;
CJ USB флэш накопитель;
· литиевую батарею з y CR2032;
· СD диск, содержащий:
CJ полную документацию;
CJ StellarisWare 8 библиотеку периферийных драйве
ров и при меры исходноrо кода;
· пакет разработчика Stellaris Firmware с при мерами
исходных кодов;
· приложения для быстроrо старта с исходными KO
дам и;
· Windows приложения для быстроrо старта;
· ознакомительную версию среды разработки од
ну из следующеrо списка:
CJ Keil'" RealView. Microcontroller Development Kit
(MDK ARM);
CJ IAR Embedded Workbench 8 development tools;
CJ CodeSourcery tools development tools;
CJ Code Red Technologies Tools;
CJ Texas Instruments' Code Composer Studio'" IDE.
КОД Описание
EKK LM4F232 Оценочный набор Stellaris LM4F232 для КеН RealView MDK ARM (с оrраничением проrраммноrо кода
32 Кбайт)
EKI LM4F232 Оценочный набор Stellaris LM4F232 для IAR Systems Embedded Workbench 8 (с оrраничением
проrраммноrо кода 32 Кбайт)
EKC LM4F232 Оценочный набор Stellaris LM4F232 для CodeSourcery tools (с оrраничением по времени использования
30 дней)
EKT LM4F232 Оценочный набор Stellaris LM4F232 дЛЯ Code Red Technologies Tools (с оrраничением по времени
использования 90 дней)
EKS LM4F232 Оценочный набор Stellaris LM4F232 дЛЯ Code Composer Studio'" IDE (код ПРивязан к плате)
СПИСОК ЛИТЕРАТУРЬI
1. Cortex M3 Technical Reference Manual (TRM):
может быть заrружен с сайта компании ARM по адресу
http://i nfocen ter. arт. coт/help/topic/coт. arт. doc. ddi033 7g/i ndex. h tт 1.
2. ARMv7 M Architecture Application Level Reference Manual:
может быть заrружен с сайта компании ARM по адресу
www.arт. coт/products/CPUs/ ARM Cortex М3 У7. htтl.
3. CoreSight Technology System Design Guide:
может быть заrружен с сайта компании ARM по адресу
http://infocenter.arт.coт/help/topic/coт. arт.doc.dgiOO 12bIindex. htтl.
4. АМБА Specification:
может быть заrружен с сайта компании ARM по адресу
www.arт. coт/products/solutions/ AMBA Spec. htтl.
s. AAPCS Procedure СаН Standard for the ARM Architecture:
может быть заrружен с сайта компании ARM по адресу
http://i nfocen ter. а rт. со т/help/top ic/co т . arт. doc. ihi 0042c/index. h tт 1.
6. RVCT 4.0 Compilation Tools Compiler User Guide:
может быть заrружен с сайта компании ARM по адресу
http://i п focen ter. arт. со т/help/topic/coт. arт. doc. dui 0205i/index. htтl.
7. ARM Application Note 179: Cortex M3 Embedded Software Development:
может быть заrружен с сайта компании ARM по адресу
http://infocenter.arт.coт/help/topic/coт.arт.doc. daiO 179bIindex. htтl.
8. RVCT 4.0 Compilation Tools Compiler Reference Guide:
может быть заrружен с сайта компании ARM по адресу
http://infocenter.arт. coт/help/topic/coт.arт. doc.dui0348bIindex. htтl.
ПРЕДМЕТНЫЙ УКАЭАТЕnЬ
А
AAPCS (стандарт) 178, 226
взаимодействие ассемблерноrо кода и Си
проrраммы 190
выравнивание стека на rраницу двойноrо
слова 226
ACR (Auxiliary Control Register). СМ. Реrистр
управления, дополнительный
AFSR (Auxiliary Fault Status Register) 144, 449,
455
АНВ (Advanced High performance Bus) 95,
116, 164, 230
AHB AP 118, 269, 290
и режим BE 8 112, 113
и режим BE 32 112
мост AHB APB 118, 123
сиrнал ошибки, причины 139
AIRCR (Application Interrupt and Reset
Control Register) 131, 144, 264, 279, 445
АМВА (Advanced Microcontroller Bus
Architecture) 116, 267
АР (Access Port). СМ. Порт доступа
АРВ (Advanced Peripheral Bus) 96, 116, 120,
267
APB AP 269
APSR (Application Program Status Register) 41,
305,385,386
изменение при выполнении команд 71
и команда MSR 42,69
и традиционные команды Thumb 58
результат знаковоrо насыщения 83
флаrи для условных переходов 76
АТВ (Advanced Trace Bus) 119, 269, 280, 281
А ТВ funnel 269, 281
в
Background region. СМ. Модуль защиты па
мяти (MPU), «фоновая» область
BASEPRI 23, 26, 43, 155
BE 8. СМ. Порядок расположения байтов,
обратный с неизменным расположе
нием байтов
BE 32. СМ. Порядок расположения байтов,
обратный с неизменным расположе
нием слов
BFAR (Bus Fault Address Register) 139, 449,
456
BFSR (Bиs Fault Status Register) 139, 172, 448,
461,462
Big Endian. СМ. Порядок расположения бай
тов, обратный
Bit Band. СМ. Cortex M3, побитовый доступ
Bus Fault. СМ. Отказ шины
BusMatrix 118, 122
с
CFSR (Configurable Fault Status Register) 455
CMSIS (Cortex Microcontroller Software
Interface Standard) 82, 111, 183, 206
встроенные функции 154, 185, 187, 478
выrоды 189
и названия реrистров модуля MPU 241
области стандартизации 185
перенос существующих приложений 360
пример использования 188
структура 185
функции доступа к ядру 473
CONTROL 23, 44
CoreSight (архитектура) 32, 280
общие сведения 266
Cortex A8 13, 15
Cortex MO 304, 478
Cortex M3
атрибуты памяти 96
возможности отладки 266
интерфейсы трассировки 269
интерфейсы шин 27,119
карта памяти 26, 93, 98
команда точки останова 276
команды 33,70,71,72,73,74,85
команды барьерной синхронизации 81
конвейер 114
контроллер NVIC 25
конфиrурация по умолчанию 98
межпроцессорный обмен 260
набор команд 375
обращения к невыровненным данным 107
отказы проrраммы. СМ. Отказ проrраммы
отказы системы управления памятью. СМ.
Отказ системы управления памятью
отказы шины. СМ. Отказ шины
отличия от Cortex MO 304
пересылка данных 66
побитовый доступ 99
в проrраммах на Си 106
и данные разной разрядности 106
и семафоры 201
преимущества 99
поддержка вложенных прерываний 167
поддержка отладки 32
подключение порта доступа шины АНВ
290
Предметный указатель · 531
порядок расположения байтов 111
преимущества 9,28,33,303
прерывания и исключения 30, 47
привилеrированный уровень доступа 24
приложения 18
различия между ревизиями 298
реrистр связи (LR) 40
реrистры 22, 37, 41
режимы отладки 271
режимы работы 24,45,311
сброс, виды и сиrналы 124
система трассировки 280
системный таймер. СМ. SYSTICK
системы отладки 270
спящие режимы 31,35,255,302
стековые операции 49
сценарий компоновщика 468
счётчик команд 40
таблица векторов в CS3 328
типы исключений и их разрешение 438
тяжёлые отказы. СМ. Тяжёлый отказ
указатель стека 37
уровни приоритета исключений 128
функции отладки 267
«цепочечная» обработка прерываний 168
Cortex Microcontroller Software Interface
Standard. СМ. CMSIS
Cortex R4 13, 15
CS3 328, 329
CYCCNT. См. Модуль просмотра и трасси
ровки данных (DWT), CYCCNT
D
DAP (Debug Access Port). СМ. Порт доступа
к средствам отладки
Data abort 138
D Code (шина) 28, 120, 299
DCRDR (Debug Core Register Data Register)
277,278,452
DCRSR (Debug Core Register Selector Register)
277,278,452
DEMCR (Debug Exception and Monitor
Control Register) 273, 274, 453
DFSR (Debug Fault Status Register) 277, 279,
449,463
DHCSR (Debug Halting Control and Status
Register) 272, 273, 451, 452
DP (Debиg Port). СМ. Порт отладки
DWT (Data Watch and Trace unit). СМ. Mo
дуль просмотра и трассировки дaH
ных
Е
EPSR (Execution Program Status Register) 41,
171,305
ЕТМ (Embedded Trace Macrocell). СМ. BCTpO
енная макроячейка трассировки
EXC RETURN. СМ. Исключение, значение
возврата
F
FAULTMASK 23, 26, 43, 154, 233
РРВ (Flash Patch and Breakpoint Unit). СМ.
Модуль коррекции флэш памяти и за
дания точки останова
н
Hard Fault. СМ. Тяжёлый отказ
HFSR (Hard Fault Status Register) 143, 449, 463
1
I Code (шина) 28, 120, 299
Inlinе ассемблер 183, 222, 315, 332
Intrinsic. СМ. Встроенные функции
Intrinsiс функции. СМ. Встроенные функ
ции
IPSR (Interrupt Program Status Register) 41,
165,166,188,229
IRQ. СМ. Запрос прерывания
IT (IF THEN) 80, 171, 425
команды Thumb 2 86
язык ассемблера 80
ITM (Instrumentation Trace Macrocell). СМ.
Макроячейка инструментальной Tpac
сировки
J
JTAG DP (JTAG Debug Port). СМ. Порт OT
ладки JTAG
L
LabVIEW 361
виртуальный инструмент 362, 364, 365,
367,373
возможности 372
области применения 362
перенос на друrие процессоры ARM 373
разработка приложения 364
учебный проект 366
Literal pool 290
Little Endian. СМ. Порядок расположения
байтов, прямой
Lockup. СМ. Блокировка
LR (link register). СМ. Реrистр связи
LR (Link Register). СМ. Реrистр связи
М
MemManage Fault. СМ. Отказ системы
управления памятью
MMFAR (Memory Management Fault Address
Register) 141, 449, 456
MMFSR (Memory Management Fault Status
Register) 140, 172, 448, 460, 461
MPU (Memory Protection Unit). СМ. Модуль
защиты памяти
532 · Предметный указатель
MSP (Main Stack Pointer). СМ. Указатель CTe
ка, основной
MSTKERR (Memory Management Stacking
Error). СМ. Отказ системы управления
памятью, ошибка заrрузки в стек
MUNSTKERR (Memory Management
Unstacking Error). СМ. Отказ системы
управления памятью, ошибка извлече
ния из стека
N
NMI (Nonmaskable Interrupt). СМ. Немаски
руемое прерывание
Nonbase Thread Enable 227,446
NVIC (Nested Vectored Interrupt
Controller). СМ. Контроллер прерыва
ний
р
РС (Program Counter). СМ. Счётчик команд
(РС)
PendSV. СМ. Исключения, PendSV
РРБ (Private Peripheral Бus). СМ. Шина соб
ственных периферийных устройств
АНБ 95
АРБ 96
Prefetch abort 138
PRIMASK 23,26,43, 154,200
PSP (Process Stack Pointer). СМ. Указатель
стека, процесса
Q
Q (флаr) 76, 83, 418
R
RI3/SP. СМ. Указатель стека, R13
Retargeting. СМ. Перенаправление вывода
ROM Table. СМ. Таблица ПЗУ
RXEV 121,255,260
s
Saturation. СМ. Насыщение
SCS (System Control Space). СМ. Контроллер
прерываний (NVIC), пространство
управления системой
Serial Wire 267, 268
Sleep On Exit 257
SP/RI3. СМ. Указатель стека, R13
Stacking error. СМ. Отказ системы управле
ния памятью, ошибка заrрузки
в стек; СМ. Отказ шины, ошибка за
rрузки в стек
STIR (Software Trigger Interrupt Register) 149,
161, 453
STKERR (Stacking Error). СМ. Отказ шины,
ошибка заrрузки в стек
Subregion. СМ. Модуль защиты памяти
(MPU), подобласть
SVC (команда и исключение) 144, 216, 229,
233
в приложениях 216
для вывода информации 217
и команда SWI 145
и Си проrраммы 220
обработчик 227
SW DP (Serial Wire Debug Port). СМ. Порт OT
ладки Serial Wire
SWI (команда) 145, 314
SW] DP (Serial Wire/JTAG Debug Port). СМ.
Порт отладки Serial Wire/]T AG
System Control Space (SCS) 45
SYSTICK
переключение контекста 146
реrистры 162
таймер 117,161,252,304
Т
Tail chaining interrupt. СМ. Cortex M3, «цe
почечная»обработкапрерываний
Timestamp. СМ. Инструментальная макроя
чейка трассировки (ITM), временные
отметки
TPIU (Trace Port Interface Unit). СМ. Модуль
интерфейса порта трассировки
ТХЕУ 121, 260
u
UAL (Unified Assembler Language). СМ. Уни
фицированный язык ассемблера
(UAL)
UFSR (Usage Fault Status Register) 142, 448,
462,463
Unstacking. СМ. Быrрузка из стека
UNSTKERR (Unstacking Error). СМ. Отказ
шины, ошибка извлечения из стека
Untacking error. СМ. Отказ системы управле
ния памятью, ошибка извлечения из
стека; СМ. Отказ шины, ошибка из
влечения из стека
Usage Fault. СМ. Отказ проrраммы
v
Vector catch 273
Virtual Instrument (VI). СМ. LabVIEW, вирту
альный инструмент
VTOR (Vector Table Offset Register) 134, 306,
444
w
WIC (Wakeup Interrupt Controller). СМ. KOH
троллер «пробуждающих» прерыва
ний
х
xPSR 23,42,226,314
Предметный указатель · 5ЗЗ
А
Атрибуты доступа к памяти 96
Б
Барьерная синхронизация 81
Блокировка 231,457
в
Вектор сброса 54
Возврат из прерывания 166, 310, 314
Встроенная макроячейка трассировки (ЕТМ)
32,94,118,269,281,285
Встроенные функции 478
CMSIS. См. CMSIS, встроенные функции
компиляторы 182
Встроенный ассемблер 183, 220, 315, 457
Выборка вектора. См. Таблица векторов, BЫ
борка вектора
Выравнивание стека 226, 300, 304
r
rруппировка приоритетов 130, 132, 133, 153
3
Задержка обработки прерываний 26, 34, 171,
230
Запрос прерывания 30, 149, 210
и
Извлечение из стека
возврат из прерывания 166
и отказ шины 138
Инструментальная макроячейка трассиров
ки (ITM) 119
аппаратная трассировка 285
временные отметки 285
проrраммная трассировка 284
Исключение
вектор 166
выход из исключения 166, 169
значение возврата 166, 169, 173
обновление реrистров 166
обработка 167, 168, 172
обработчик исключения 166,169
сохранение контекста 164, 439
типы исключений 438
Исключения
PendSV 144
и команда SVC 144
переключение контекста 148
SVCall 144
SYSTICK 161, 354
вектор 134
ВЫХОД 136
значение возврата 224
и прерывания 30, 47
и режимы работы ARM7TDMI 311
исключения отказов 138
назначение приоритетов 206
обработка 30,49,143,226
обработчик 353
обработчик исключения 24, 45, 103, 134,
210
реrистры конфиrурации 156
таблица векторов 49, 134
типы исключений 48, 126
уровни приоритета 128
к
Карта памяти 26, 81, 93, 98, 119, 180, 234,
309,351
Конвейер 114, 315
Контроллер прерываний 149
возможности отладки 278
и ядро ЦПУ 117
обращение к реrистрам 208
разрешение и запрещение прерываний 208
реrистр SCR 256, 445
реrистры 440
реrистры модуля SYSTICK 252
реrистры состояния отказов 138
таблица ПЗУ 291
Контроллер прерываний (NVIC)
возможности 25
пространство управления системой (SCS)
96, 149
реrистры SYSTICK 149
Контроллер «пробуждающих» прерываний
(WIC) 32, 117, 258, 302
М
Макроячейка инструментальной трассиров
ки (ITM) 33, 94, 283
интерфейс АТВ 121
Младшие реrистры 37
Модуль защиты памяти (MPU) 11, 15,28,98,
118, 140, 234, 311
настройка 241
подобласть 238,248
реrистры 235
«фоновая» область 235, 248
Модуль интерфейса порта трассировки
(TPIU) 32,94,119,269,280,286
Модуль коррекции флэш памяти и задания
точки останова (РРВ) 33, 94, 119, 277,
280,288
Модуль просмотра и трассировки данных
(DWT) 33, 94, 119, 281
CYCCNT 281
и модуль ЕТМ 286
и модуль ITM 285
Монитор отладки, исключение 32, 271, 276
Монопольный доступ 109
и семафоры 198
534 . Предметный указатель
н
Набор команд 33, 70, 71, 72, 73, 74, 85, 375
Насыщение
команды 82, 83
операция 82
Невыровненные пересылки 107
и шина D Code 120
Немаскируемое прерывание (NMI) 34, 48
двойной отказ 231
и FIQ 312
о
Операции заrрузки/сохранения 99, 171,315,
461,462
Отказ данных (data abort) 127, 138
Отказ предвыборки (prefetch abort) 127, 138
Отказ проrраммы 141, 156, 173
реrистр состояния. СМ. UFSR (Usage Fault
Status Register)
Отказ системы управления памятью 140,
156
ошибка заrрузки в стек 172,460,461
ошибка извлечения из стека 172,460,461
реrистр адреса. СМ. MMFAR (Memory
Management Fault Address Register)
реrистр состояния. СМ. MMFSR (Memory
Management Fault Status Register)
Отказ шины 138,156
ошибка заrрузки в стек 138, 172
ошибка извлечения из стека 138, 172
реrистр адреса. СМ. BFAR (Bus Fault
Address Register)
реrистр состояния. СМ. BFSR (Bus Fault
Status Register)
«точный» и «неточный» 139
п
Переключение контекста 146
в простых ОС 225
пример 148
Перенаправление вывода 330,341,343
Пересылка данных 66
Перехват вектора прерывания 273
Переход
со ссылкой 75
табличный 90, 202
Пользовательский режим 149,227
Порт доступа 268
Порт доступа к средствам отладки (DAP) 32,
118, 120, 267, 268
Порт отладки (DP) 32, 268
Порт отладки JTAG (JTAG DP) 32
Порт отладки Serial Wire/JTAG (SWJ DP) 32,
118, 300
Порт отладки Serial Wire (SW DP) 32
Порядок расположения байтов 111
обратный 112
с неизменным расположением байтов
(Cortex M3) 112
с неизменным расположением слов
(ARM7) 112, 310
прямой 111
Привилеrированный режим 85, 149, 200, 227
Приоритет rруппы 130, 133
Пространство управления системой. СМ.
System Control Space (SCS)
Профилирование (модуль DWT) 281
Пул констант 290
р
Реrистр маскирования прерываний
BASEPRI 43
FAULTMASK 43
PRIMASK 43
Реrистр связи (LR) 169
R14 23, 40
значение 456
команды перехода со ссылкой 75
обновление 166, 169
сохранение 76
сохранение в стеке 164, 165
Реrистр состояния выполнения. СМ. EPSR
(Execution Program Status Register)
Реrистр состояния прерывания. СМ. IPSR
(Interrupt Program Status Register)
Реrистр состояния приложения. СМ. APSR
(Application Program Status Register)
Реrистр специальноrо назначения 23,41,85
APSR. СМ. APSR (Application Program Status
Register)
BASEPRI 23, 26, 43, 155
CONTROL 23, 44
EPSR. СМ. EPSR (Execution Program Status
Register)
FAULTMASK 23, 26, 43, 154, 233
IPSR. СМ. IPSR (Interrupt Program Status
Register)
PRIMASK 23, 26, 43, 154, 200
использование с командами MRS и MSR 85
Реrистр управления. СМ. Реrистр специаль
Horo назначения, CONTROL
Реrистр управления, дополнительный 301,
303
Реrистр управления прерываниями и сбро
сом. СМ. AIRCR (Application Interrupt
and Reset Control Register)
Реrистр управления системой. СМ. Контрол
лер прерываний, реrистр SCR
Реrистры
младшие 37
старшие 37
Реrистры отладки
DCRDR (Debug Core Register Data Register)
277,278,452
DCRSR (Debug Core Register Selector
Register) 277, 278, 452
Предметный указатель · 535
DEMCR (Debug Exception and Monitor
Control Register) 273, 274, 453
DFSR (Debug Fault Status Register) 277, 279,
449
DHCSR (Debug Halting Control and Status
Register) 272, 273, 451, 452
Реrистры состояния проrраммы 41,164
APSR. СМ. APSR (Application Program Status
Register)
EPSR. СМ. EPSR (Execution Program Status
Register)
IPSR. СМ. IPSR (Interrupt Program Status
Register)
PSR 23,42,226,314
битовые поля 42
флаrи 76
с
Сброс
вектор 54,322
как метод восстановления после отказов
144
ручной сброс системы 264
сиrналы 124
управление 279
Семафоры
использование побитовоrо доступа 201
операции монопольноrо доступа 109, 198,
314
Системный таймер. СМ. SYSTICK
Спящие режимы. СМ. Cortex M3, спящие pe
жимы
Старшие реrистры 37
Субприоритет 130
Сценарий компоновщика 468
Сценарий линкера. СМ. Сценарий компо
новщика
Счётчик команд (РС)
R15 23, 40
значение 315
обновление 166
сохранение в стеке 456
т
Таблица векторов 49, 213, 331
выборка вектора 138, 166, 172, 230
и исключения 134
модификация 353
настройка и разрешение прерываний 205
отличия от традиционных процессоров
ARM 313
перемещение таблицы 213
реrистр смещения таблицы. СМ. VTOR
(Vector ТаЫе Offset Register)
ремаппинr 310
Таблица ПЗУ 119, 291
Табличный переход 90, 202
и обработчик SVCall 217
Точка останова 33, 276, 287
и функция Flash Patch 33, 119, 288
установка/снятие 349
Трассировка
аппаратная. СМ. Инструментальная Ma
кроячейка трассировки (ITM), аппа
ратная трассировка
проrраммная. СМ. Инструментальная Ma
кроячейка трассировки (ITM), про
rраммная трассировка
Тяжёлый отказ
предотвращение блокировки 232
реrистр состояния. СМ. HFSR (Hard Fault
Status Register)
уровень приоритета 128
у
Указатель стека 226, 229
R13 (SP) 23, 37
двухстековая модель 52
команды MRS и MSR 54
обновление 166
операции со стеком 49
основной (MSP) 23,38,40,52,53,164,204
процесса(РSР) 23,38,40,53,164
Унифицированный язык ассемблера (UAL)
58
Условное выполнение. СМ. IT (IF THEN)
ц
Цикл сброса 54
ш
Шина
АНБ. СМ. АНБ (Advanced High
performance Бus)
АРБ. СМ. АРБ (Advanced Peripheral Бus)
АТБ. СМ. АТБ (Advanced Trace Бus)
РРБ. СМ. РРБ (Private Peripheral Бus)
Шина собственных периферийных
устройств (РРБ) 28
внешняя шина РРБ 120
Джозеф Ю
Ядро Cortex M3 компании ARM
Полное руководство
rлавный редактор В. М. Халuкеев
Ответственный редактор Т. Е. Брод
Верстальщик А. ю. Анненков
Подписано в печать 15.03.2012. Формат 70хl00/16. Бумаrа офсетная.
rарнитура «Minion Pro». Печать офсетная.
Объем 34,5 п. л. Усл. п. л. 44,7
Тираж 1000 экз. Код CortexM3. Заказ NQ M 355.
Издательский дом «Додэка ХХI»
ОКП 95 3000
105318 Москва, а/я 70
Тел.lфакс: (495) 366 04 56, 365 26 95
E maH: red@dodeca.ru
Отпечатано в полном соответствии с качеством
предоставленноrо электронноrо ориrинал макета
в типоrpафии филиала ОАО «ТАТМЕДИА» «ПИК «Идел Пресс».
420066, r. Казань, ул. Декабристов, 2.
E таН: idelpress@mail.ru