/





Автор: Алексев В.Ф.
Теги: криминология криминалистика автомобили судебная экспертиза автотехническая экспертиза
Год: 1988




Текст
МиНИЛерСТВО юстиции СССР
Всесоюзный научно-исследовательский институт
Для служебного пользования
Экз. к
РЕШЕНИЕ ОТДЕЛЬНЫХ ТИПОВЫХ ЗАДАЧ
СУДЕБНОЙ АВТОТНХНИЧЕСКОЙ ЭКСПЕРТИЗЫ
Москва
1988
Справочное пособие подготовлен
сотрудником ВНИИСЭ Н.И. Кристи
)твегогзенн ш редактор
В.4. Алексеев
© ВНИИ оудебних ь*оперти|», X9UH
expert22 для http://rutracker.org
5
ВВЕДЕНИЕ
Настояло оправочное пособие составлено по результатам
проведенной во ВНИИЗЭ' инвентаризации научных разработок, внед-
ренных в экспертиз практику судебных автотехнических зкс. лртиз
в виде методических пособил и рекомендация. Ьыли учтены розуль-
Tari анализа около дьух тысяч заклочений автотмхничеоклх окспер-
тиз, которые позволили установить перечень задач, формулируемых
в вопросах, или возникавших в процессе проведения экспертного
исследования, а также частоту встречаемости этих задач.
Анализ показал, что частота встречаемости различных задач
находится в весьма широких пределах: некоторие задачи встречает-
ся в каждом четзертом-пятом заключении экспертизы, другие (их
большинство) - ллсь в нескольких из 2 гчеяч заключений, псдвчрг-
иихоя анализу. Наиболее части встречается задачи, связанные о
установлением механизма происисотвия и о технической оценкой
действий водителей.
В нас то яд ее пособие включены способы pei ения только задач,
которые встречается в схспсртнол практике наиболее часто, - за-
дач по определение параметров движения транспортных средств (ТС)
различных обстоятельств, связанных о установлением механизм*
отолкновеигз ТС и механизма наезда на пеоеходов. В больвинлтл;
случаев ревение этих задач требует проведения расчетов по при-
веденным в пособии формулам, основанным на захономерноотях
механики.'
ПЕРЕЧЕНЬ
обозначения основных величин
5 - коэффициент сопротивления качению
5 - коэффициент оопротивления порэмеиенив тел
i - установившееся замедление ТС при Тчрможении
5, - расстояние, преодолеваемое пеоеходоч до моота наеэда
- ооп,новочныя путл ТС
S, - путь торможения ТС о установившимся замедлением до
остановки
путь торможения ТС о установившимся замедлением до удара
(наезда, столкновения)
5г- путь торможения ТС после удара до остановки
длина следа пзл до остановки ТС
длина cj еда юза до удара (наезда, otoxkhiзения)
$ - длина следа юза после удара до остановки
7 - время, необходимое водителю для приведения тормозов в
действие
TJ- остановочное время (о момента начала реакции водителя
до остановки)
- время реакции водителя
tt- время запаздывания срабатывания тормози го привода
время нарастания замедления при экстренном торможении
время снижения з-медленля при растормаживании
время движения заторможена го ТС до оста .ожи
время движения заторможенного ТС до удара
время движения заторможенного ТС после удрра до остановки
V - скорость ТС
У- критические (предельные) эн тения кор и ТС
expert22 для http://rutracker.org
5
- относительная скорость сближения ТС при отЬлкновении
скорость движения переходов
d.e- угод взаимного расположения ТС при столкновении
JL- угол столкновения (угол между направлениями движения
ТС перед столкновением)
У* коэффициент оцепления вин ТС при продольном сколькими
коэффициент оцепления вин ТС при боковом околы.еним
6
ПАВА I. УСТМЮЗлЕНИЕ ПАРАМЕТРОВ ДВДЕ.1ИЯ ТС
1.1. Опреде^эние замедления ТС
Замедление - это падение скоро ги на I с, изиеряэмое в
метрах на секунду в квадрате. Значение замедления ТС необходимо
знать при определении его скорости, тормозного и оотановочного
пути, времени движения в процессе торможения, сил инерции,
дейотвуииих на ТС и находящиеся в ней объекты, и др. Расчетным
путем значение замедления приближенно определяется по оледуодмм
Формулам (при движении ТС на горизонтальном участке).
I.I.I. При движении полноотьп заторможенного ТС о блокиров-
кой холео
(I.I)
1.1,2. При овободном качении ТС по инерции
(1.2)
где
I.I.3. При тормохеню. ТС только задними колесами
• Я A 'fa + 5Л п -п
. /ат 'й(Н) <1Л)
д(- коэффициент учета инерции вращавщихоя незаторможен-
ных колес (ддя мотоциклов, легковых и не грузе них
грузовых автомобилей 1,1, для груженых гру-
зовых - 5, - 1,0);
Cl - расстояние от центра тяжести до оси передних колео, м;
S - расстояние от центра тяжести до ось задних колос, мт
L- база ТС, м;
А, - высота центра тяжести, м.
7
I.I.'i. При торможении ТС только пыедники'колесами
- Al 1L1. м
Коэффициент <5 1,1.
I.I.5, При движении о незаторможенными прицепами (колесом
коляски) знач< нио замедления определяется по оледуоцим фор.улан.
I.I.5.I. При полном торможении тягача (готоцикла)
(1.5)
V дпр О *
& - масса тягача (мотоцикла):
маооа прицепов («оса, приходящаяся на колеоо ко-
ляски
где
' с£^> • 1,1, при движении о
мощоиикла).
При движении без нагрузки
нагрузкой 1,0 •
1.1.5. 2, При торможении тягача (мотоцикла) только вал ними
или только передними колесами
i сГ(б*<5>.) ’ СЬ6)
где у- - замедление, .пределяемс, ooo.'bjtotbohho по формуле
(1.3) к. и ал).
Значения коэффициентов «У, м дани согласно данным, при-
веденным в работе [ I, о. 61 - 65].
1,1.6. Ирл замасливании колесных тормозов [ 3, о. 7 - в]
; г 9j в" , а.?).
-I ' * G
гл» u - leoou, приходящаяся «а колеса, хроме холео о зшас-
ленлмии тормозами:
0- масса, приходящаяся на колеса о затоле лнсци тормо-
зами.
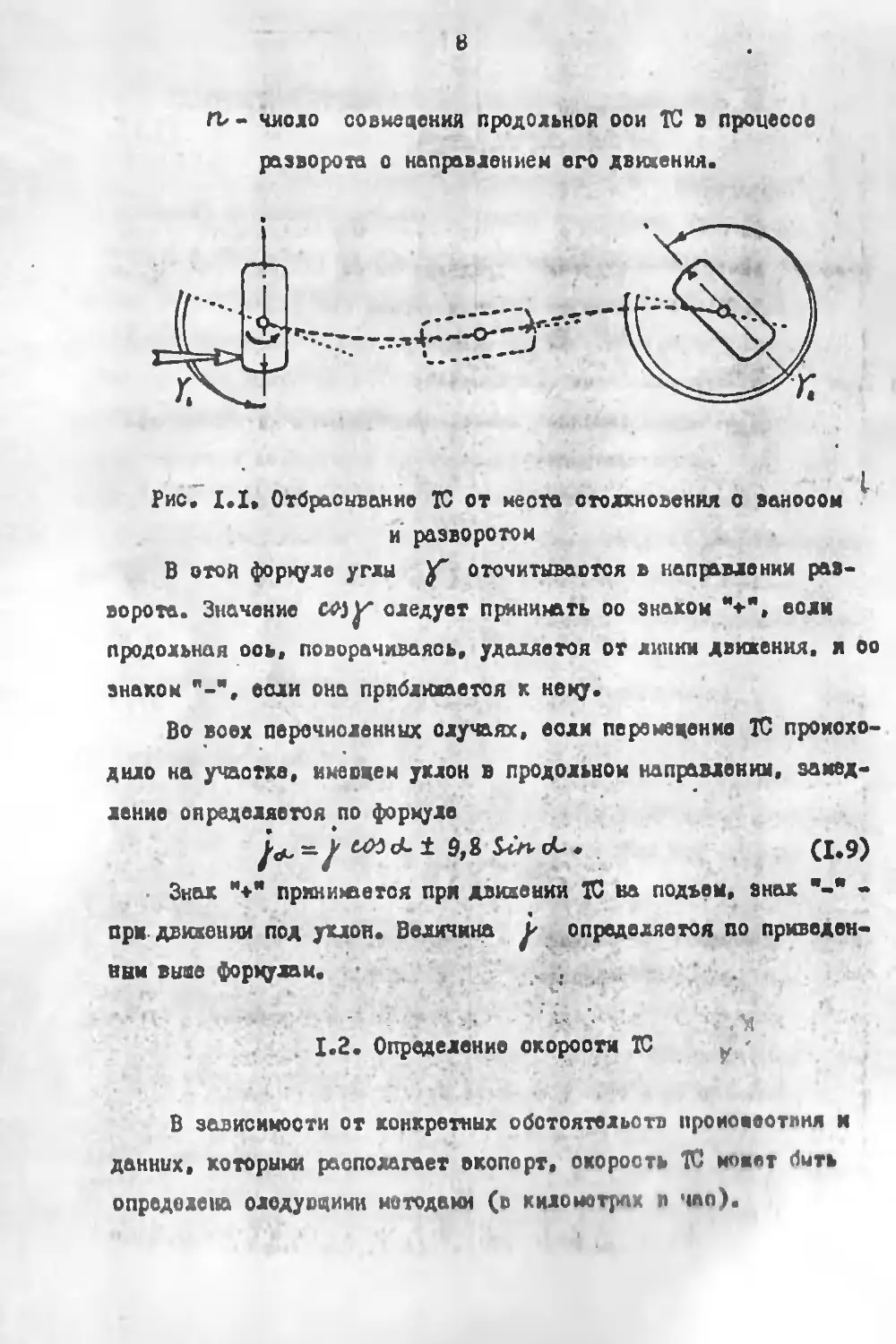
1.1,7. При движении с заносом без тор:лжения (рио. I.I)
; = (1.8)
• 1 Уд У*
гДв Гд“ У1*0* ’аноса ° разворотом в конце перемещения, град:
у] - угол заноса в начале перемещения ТС, град;
expert22 для http://rutracker.org
в
ГЬ - чиоio совмещения продел -ной оои ТС в процессе
разворота о направлением его движения.
Рис. 1.1» Отбрасывание ТС от места столкновения о заносом
и разворотом
В отой форцуле углы отсчитывается в направлении раз-
ворота. Значение следует принимать оо зныом если
продольная ось, поворачиваясь, удаляется от линки движения, и со
знаком если она приближается к нему.
Во всех Парочиоленных случаях, если перемещение ТС происхо-
дило на участке, имеодец уклон в продольной направлении, замед-
ление определяется по форцуле
“M-i 9,8 S^’,oC> (1.9)
Знах "♦* принимютоя прл движении ТС в*, подъем, знак -
при движении под уклон. Л ичина V определяется по приведен-
ным выае форц,ллм.
- ’• .’я
1.2. Определение о..орооти ТС w -
В зависимости от конкретных <ботоятельотв проиожеотпня и
данных, которыми располагает око.г рт, скорость 1U может быть
определена олодувщиин мчтодами (в килоыот|Лл п чпп).
9
1.2.1. При торможении iC до остановки.
1.2.1.1. Пород началом торлжени- - по длине следа аза
волео одной оси SJ i
* /ЛбЗи/(1.10)
1.2.1.2. В лоСоя момент времени - по расстоянии 5 ' ,
вопрос преодоз. >вает ТС о ото го юионта до остановки:
». . (I.II)
1.2.2. При торможении ТС до /дара.
1.2.2.1. Перед начало.! торможения - по длк; олзда tsa до
удара и скорости в момент удара И :
V- 1,1 V,V, (М2)
I.2.2.2. В момент /дара - по формуле, вмтекаанзй но формулы
(1.12): '---------------—
г» \/(V-‘l.i tь• (I.I3)
1.2.3. При продольном центральном столкновении ТС.
I 2.3.1. Пзред столкновением заторми.енкого ТС - по формуле
(I.I2), где У У, - спорость данного ТС в пэмент удара, опре-
деляемая по ооотноиеню тсо ТС . его скорое ги движения
соолз ударл У к скороетг другого ТС - У& :
V,-И*^)У - с;Их. (I.I4)
Скорость V* определяется по формуле (I.II), скорость Vj,—
во форкуле (1.13). или скорости У" и противоположны
во знаку скорости И , в расчетах вх следует прзнзыать со знаком
1.2.4. Прп перекрестном столкновении, когда ТС двигались,
под углом Л-' t скороть перед иачелои торможьягя определяется
ао формуле (1.14), в которое сдорц |Ть У пжо рассчитать по
формуле (рыв. J.2) ‘д’ 4
- w'_ V ’ fin, ) 2 Qi V T , (1.15).
.' * pic oc' d-’
10
для второго ТО - .10 r0?UJ.1U
)/ ' \/ 1 С*» S<>< ё) ।, * ji,t (d- ♦ <£)
7х; 1 ' а. 1б)
где ,*» У* * скороити ТС после удара (..проделнютоя по форму-
ле (1,11), ь которол ьолич.<ча вычислена по Фор»
муле (1.6);
X* - угол отолкно ения;
угли мехду направлонияли движения ТС до ц поел#
столкновения (отсчитываются от поры начального
напраьления).
ГС I гюс/ie
Рио. 1.2. Перемещение ТС при перекрестном столкновении
Значения углов и дох ни соогв-гствоиать направле-
нно дгккення ТС непосредственно после удара. Определение их по
joiu iHony пололенив ТС нохет привести ж оинбке. Следует Бое
угли отсчитывать в ыднои направлении (например, против часовой
отрелкн) и строго соблюдать знахн тригонометрических функция
[ О, о. 2I7.L
1.2.5. При п.'одъихонии ТС после раоюрм j квания [,Т, о. 60 -
Сб].
Скорость пород началом торможения определяется по следу
вза до раоторшжиодния и скорости ТС в момент раоторнажн-
u
запил К !
и/ н.п)
Если после растормаживания ТС продвинулось нажатой до оста-
новки [ 7, с. 60 J, ,
= I, X(j '/л ) ly * < • (I.16)
жено
где
Если после полного растормаживания ТС было вновь затэр*)-
[ Л О. €б], . -----„
<>х (ir '&)/* f ((.19)
к - замедление при свободном качении;
If • время падения замедления при раоторма. ивании (для
гидравлического привода /у 0,3 с, для пневма-
тического - - 1,5 - 2.0 о [I. о. 71
$и ~ расоточние от конца следа оза до останови;
5^- длина следа оза перед остановкой.
1.2.6. При остановке ТС после преодоления учаотков о рав-
оопротйвлениич перемеденш.
1.2.6.1. Перед началом преодоления учаотхов о разнили затра-
ним
та хи кинетической энергии ( Х«,Л» Av )
(1.20)
1.2.6.2. Перед началом торможения при пересечении участков
о разными коэффициентами оцепления
V= <.Х — *5^j Ji (I.2I)
где 5^- перенесения центре тяжеотг ТС между грчнжиаю
участков;
•-Л“ зиаче,1НЯ замедления на ооответствуочих участках.
1.2.7. Прм движении ТС о заносим и разворотом.
I.2.7.I. Перед началом торможения скоро< ть двипвзвгося в
заторможенном состоянии дэ остановки ТС определяется по формуле
(1.10), но вместо величины •£₽ следует принимать перемечение
12
центра тяхеотм J момента начала образования следа до оота-
пЬЪКИ.
1.2.7.2. Перед началом заноса незаторможенного ТС ык> on-
рост* определяется по формуле (I.II). но величина замедления
- по формуле (1.8). Еолм значения углов занооа по длина участ-
ка ре^со различны, то участок следу т разбигь на 2 - 3 участка,
определить для каждого г*з них к скорость по формуле (1.21),
иоклочив первый ее член.
1.2.8. При торнокенмм на участке о бохьяии сопротивлением
движения (на подъеме, глубоком снегу, грцзнол гр/нтопой дороге)
V* К (1.22)
где lt' - время переноса ноги о педали акселератора на п< -
даль тормоза (принимается разным 0,4 )i
jrn - замедленье при свободном качении на участке.
1.2.9. При падении ТС . . озвышенмл ; по пред льноку пере-
меденмо в процессе ладоши $ *
V--Д- > (1.23)
где И - вкэота ладен ня ТС.
1.2.10. Определение соотновенш. скоростей ТС по бледак,
оо .аленным колесом одного к» бокс юй почерхносты другого
[о, о. 83]: 4
. «-2W
где 'i. - рщмуо вращения оледообр^зуваегч участка;
- радиус качен иг оотиивоего следи колеоа;
оС - /гол каклои трос на „ыоте соя к-леса, оставив-
его 1леды.
Зна* в форцуло пряняизетоя в о луча,л, когда траооч про-
ходят о отк"lhcимен икпэ (оставляется п< рднеп стороной колсоа),
знак - о отлюненмм г верх
в
Угол <Z имеет положительное значение, еЬли касательная
и напраоллц» трас.1 на в_ооге радиуса колеса отклоняется от
вертикали назад, и отрицательное - при ее отклонении вперед по
движение ТС £б, с, 85].
1.2.II. Определенно критических эначени.1. скорости, обеоп-
чиваоцих безопасность движения.
1.2.II.I. Допустима скорость на закруглении дороги по усло-
вие оцепления при отсутствии поперечного уклона
уч>=/дая*”', a.2s)
где Л - радиуо поворота центра тяжести ТС.
1.2.П.2. Допустимая скорость на закруглении дороги по
условие сиепшвнпя при наличии поперечного уклона II, о. 202]
V , а.и>
где J - угол поперечного укл< на (имеет положительное зна-
чение при наклона поверхности дороги в сторону
центра поворота и отрицательное - в протиьополож-
иуо сторону).
I.2.II.3. Допустгоея скорость на закруглении д,погч по уоло-
<1и» опрокидывания при отоутстыл пот.речного уклона
^3,5--^', (1.27)
где - коэффициент, учитывавший поперечный :рен подрос-
без
оореннол маооы (для гру.евнх автомобилей о нагруз-
кой и легковых 0,85, для грузовых
нагрузки - ‘ 0,9) /l,. с. I9'J j
В - виринл колеи ТС:
It, - высота центра тяжести.
1.2.II.4. Допустимая скорость на закруглении дороги
условно опрокидывачия при наличии поперечного уклона [1,
200j
по
с. 199 -
J4
I/ -h ff .5 *-^4
1 ' /А.-В/у.Я (1.20)
Знак угла J3 принимается аналогично указанн jy » п,
1.2.11.2.
1.2.II. 5. Скорость ТС, позволяоцая остановиться до места
наезда, если он проиэожел:
до начала торможения:
К,. л (1,29)
в процессе торложекил: ___________
j </» (Г.30)
где 1^- время двю ния препятствия о момента возникно-
вения опасности для движения до наезда:
Т - вре <я, необходимой водителе для приведение тор-
мозив в действие (формула I.43)j
За- расстояние, на котором ТС находилось от места
наезда в иомент возникноьания опаоноотм.
1.2.II.б. Скорость ТС, позволяемая пропустить препятствие
(другое ТС, пеаехода), пересекавлее jopory в поперечном направле-
нии [ч, о. Из), если наезд произошел:
до начала .‘орнохения: .
V« ; (I.3I)
в процессе торможения: i
v-АФ ], ам
Л 3^" расстояние, на которое подвижному препятствье
необходимо а’ыло продвинуться дополнительно,
чтобы выйти за пределы полосы движения ТС.
1,2.11.7. Скорость, Екзволяоцая предотвратить зд на под-
вижное препятствие, появивиеооя из-за ограничявавеего обзор, оотв
объекта: г,
VKf> * 1 > (х,35)
где »7 - мн го рвал между полосой д.чикения ТС и объектом,
ограничивавшим обзорно зть;
- скорость подвижного препятствия, ио которув во-
дителе следовало рассчитывать в конкретном олуч'-е.
1.2.12. Скорость, соответствувлая числу оборотов двигателя:
и=^з”^> «••><)
где - раднуо качения ведуких колео;
Д. - чмо. о оборотов двигателя в ю нуту;
обцее леродах.чное число .‘раномиосыи.
1.3. Определение времени движения ТЗ при прикзненки
торможения
броня преодо-зкия ТС различных участков пути при прымене-
пми водителем торможения может быть определено по npxw иным
ниже формулам (в секундах).
1.3.1. -Вромл движения заторможенного ТС о заданной скорости
до остановки
' (1,35)
1.3.2. Время преодоления расстояния 5 до остановки
(1-зб)
1.3.3. Время движения от заданной точки до остановки:
^О7- a-m
где х. ~ расстояние от1 заданной точки до остановки!
“ расстояние от начала оф’сктнзного Лрможенля
до заданной точки (форму** I.56)j
Sy ~ ПУГЬ торможения ТС при заданной окорооти (фор-
мул 1.45).
1.3.4. Время дв.иения от начала торможения до заданной
ТОЧКИ! g7- ц.зб)
1.3.5. Броня движения ТС на ЭШОДЦрм участие
Z-W- > (ьэ9)
гд a Sr, 5, ~ рас о го я ния, котор-> преодолевало ТС от начала
торможении до начала и конца участка.
1.3.6. Бремя преодолении участка $ о поотолнноа окорчотьз
и пооледупдмн торможением t*bb.(S-Sr)*f'r- 1.3.7. Время пддения скорости от К до И j У'-У" , <•- 1,/.; 1.3.6. Остановочное время (о ионочи начала рсап (1.40) (I.4I) «релния
всдителя ла опаонооть до остановки) а.'й)
где Т - время, нео5ходиж>е иодытелв для приведения
тормозов в действие: (1ЛЭ)
- время реакции водителя [ г] {
время запаздывания срабатывания тормоз-
ного привода (.1;
?э- время нарастания замедления ft J.
1.4. Определение шремецений ТС в процессе торможенмя
Рыотолния. которые преодолеиаэт ТС на различных стадиях
процесса торможения, мохут быть определены по приведенным ниже
формулам (в иьтрох).
expert22 для http://rutracker.org
17
1.4,I. Путь торможения в период нарастания замедления,
ооответотвуоиил установи. вомуоя значения замедления:
(I.**)
1.4.2. Путь торможения до остановки:
(1.45)
$г~л> & > (1.46)
с $т = » (1.47)
•*г ча (1.46)
1.4.3. Остановочная путь ТС:
X=-7jt+^; . (1.49)
л з.’ ’ (1.50)
(I.5I)
1,4.4. Оо'.ановочний путь ТС при больяом сопротивлении
движении (на подмыв, при движении по песчаной или грязной
грунтовой дороге, по снегу), fS’, о. 32] . , «
а-=>
где ' д - замедление до качала торгожоия:
+ (j.53)
кооффиииент сопротивления иач«ню|
7*- время о моменте снятия tioin о педали
акселератора до начала екотренкого
торможения:
1.4,5. Перемежение ТС о начала реагирования водителя на
опасность до удара
(1.54)
(1.55)
1с
Гдч - время реакции водителя (значение следует прикы-
мат. в воз ночных прадедах - от минимально воз-
можного (0.3 о) д| нормативного, ооответотвуеиего
данной дорохноп (кгнчовке).
1.4.6. Путь торможения о начала аффективного тормохенля
до удара при наезде (столкнсзсним):
Sr:^ * (1.56)
S, a.m
1.4.7. Расстояние, на которое должно продвинуться затормо-
женное ТС пооле удара до остановки:
(1.53)
1.4.8. I ремещсние ТС за время падения окорооты от V до V"
СЬ59)
1.4,9. Персмедоние ТС за данный промежуток времени £ .
1.4.9.1. Обцее перемещение (включая перемещение о постоян-
ное скоростью до начала торможения)
• (1.60)
* (I.6I)
I.4.9.2. С момента начала ьффе-тивного тормопенш
1.4.9.3. В процессе тормо.ченкя?
И.6Э>
5 = (i *1 7' 5'^' ’ <!•“>
где /г, tr“ время движения ТС от начала в хоичи дан лого
участка до остановки;
t. - врэмя перемещения ТС на заданном участке.
19
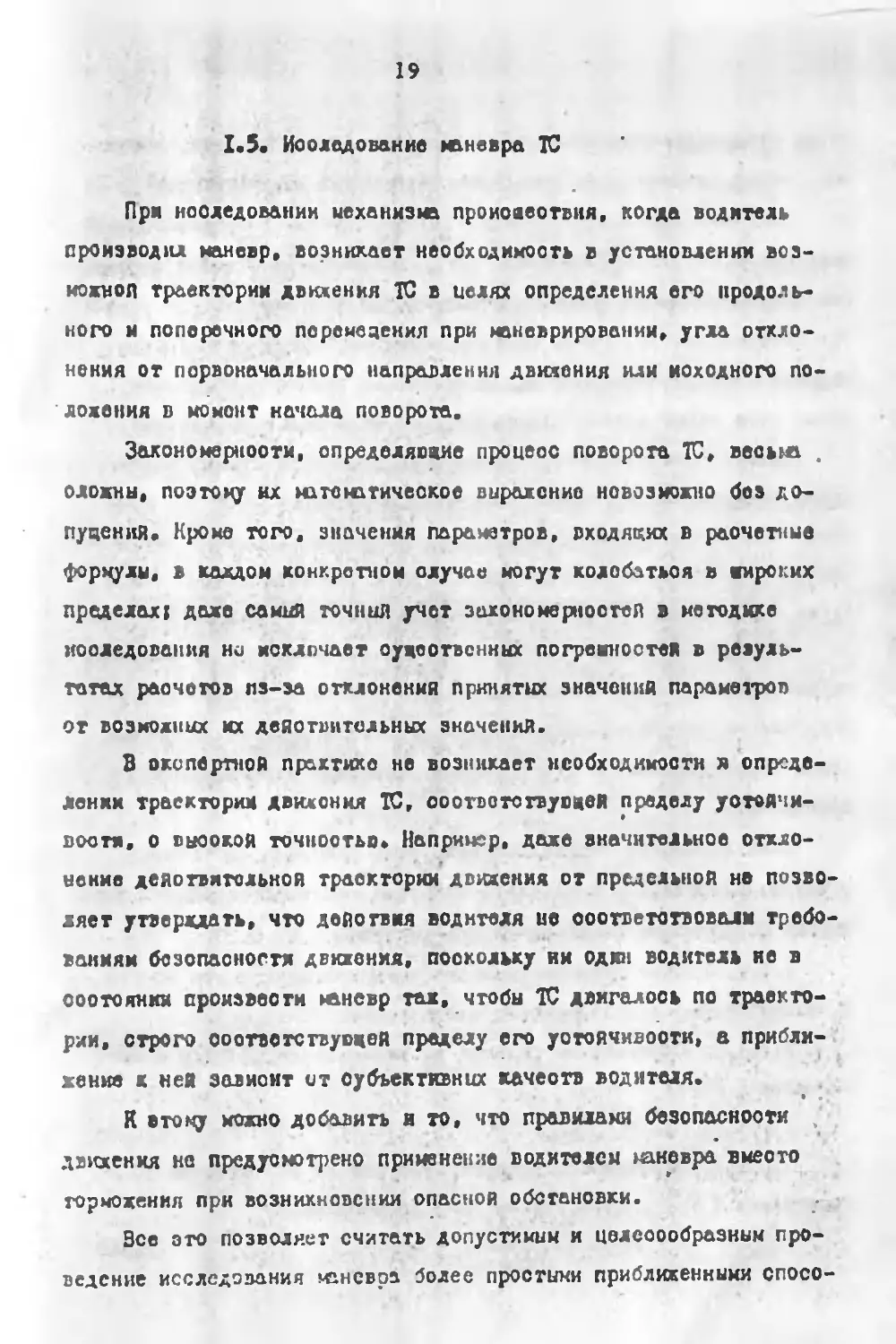
1.5. Иомладование кшевра ТС
Прл исследовании механизма проиэ_вотьия, когда водитель
производил ианир, возникает необходимость в установлении воз-
можное траектории движения ТС в целях определения его продоль-
ного и поперечного перемещения при маневрировании, угла откло-
нения от первоначального направления двихьния или исходного по-
ложения d momc.it качала поворота.
Закономзрнооти, определявшие процесс поворота TJ, весыв .
сложны, поэтому их матемхтичеокое выражение невозможно боь до-
пущения. Кроме того, значения параметров, входящих в расчетные
формул!', в халдом конкретном олучае могут колебаться в мирских
пределах! даже самый точный учет захономеростеп в методкхг
иоо^дования но исклпчает оуцоотвенных погрежноотей в резуль-
татах раочеюв пз-за отклонения принятых значений параметров
от возможных их действительных значений.
В экспертной практике не возникает необходимости я опреде-
лении траектории движения ТС, ооотвототи/вдей пределу устойчи-
вость, о высокой точноотьв. Например, даже значительное откло-
нение действительной траектории движения от предельной на позво-
ляет утверждать, что действия водителя не соответствовали требо-
ваниям безопасности движения, поскольку ии один водитель не в
состоянии произвести лневр таж, чтобы ТС двигалось по траекто-
рии, строго иоотзетсгвуодей пределу его устойчивости, а прибли-
жение к ней зависит о? субъективных качеств водителя.
К этому можно добавить и то, что правилами безопасности
движения не предусмотрено применение водителем маневра вмео.о
торможения при возникновении опасной обстановки.
Все это позволяет считать допустимым и целесообразным про-
ведение исследования шнсвра более простыни приближенными спосо-
2С
бани. Представляется приемлемым для экспертной практики, напри-
мер, метод приближенных расчетов, основанный на условиях;
водитель производит пот рот ТС так, что его передняя наруж-
ная габаритная точка «писывает дугу, касательную к линии перемеды-
ния даннои точки до начала поворота (при этом отсутствует учас-
ток переиецения ТС, когда рулевое колесо остается неподвижным;
водитель поворачивает его до вывода ТС на нужное направление,
после чего также плавно воз^рацает его в исходное положение);
радиус поворота центра тяжести ТС. ооответствуожий радиусу
дуги, описываемой передней наружной габаритной точкой ТС, при-
нимается равным критическому (в деготвнтельноотн радиус поворота
центра тяжсоти ТС достигает критического значения хижь в конпе
дуги, описываемой передней наружной габаритной точкой);
критический радиуо пов >рота определяется исходя из равенст-
ве центробежной силы и силы оцепления колео о поверхноотьв до-
роги или яз равенства инерционного момента и иононта оопротив-
ления опрокидиванкв ТС (по формулам, принятым в вхопертной
практике).
Ниже приведены соответствуядиз этим уоловилл расчетные
формулы, позволяющие определять значения некоторых величин, овя-
занных с процессом движения ТС при повороте Н, с. 87 - 95.1-
I.5.I. Радиуо дуги окружности (края проезжей чаотя дороги
на з&круглонки, криволинейного следа колеса ТС и др.).
I.5.I.I. Определение радиуса по длине хорды (2^) я высоте
сегмента ( /v):
= ' П-65)
1.5.1.2. Определение радиуса поворот по перемемонкя ТС в
продольном (S ) м поперечном ( Л) направлениях;
а • -*17 . (1.66)
ZCI
21
1.5,2. Мзкси»с>льныя родиуо поворота центра гяж зги ТС на
закруглении дороги в пределах раз ревенной для него полооы
(PUO. I.» Sr ,
№} JL Г } (1.6'
где j - наружный радиус закругления разреженной для
движения полосы;
6^ - ширина разрешенной для движения полооы в вред-
ней части, закругления!
- гебариТнал жир ина ТС|
Рио. ХЛ» Предельное расположение полооы движения К на
закр,тлении дорбп
1.5.3» Дллна дуги, охватываиыая угол d- :
f • (1.68)
it
где
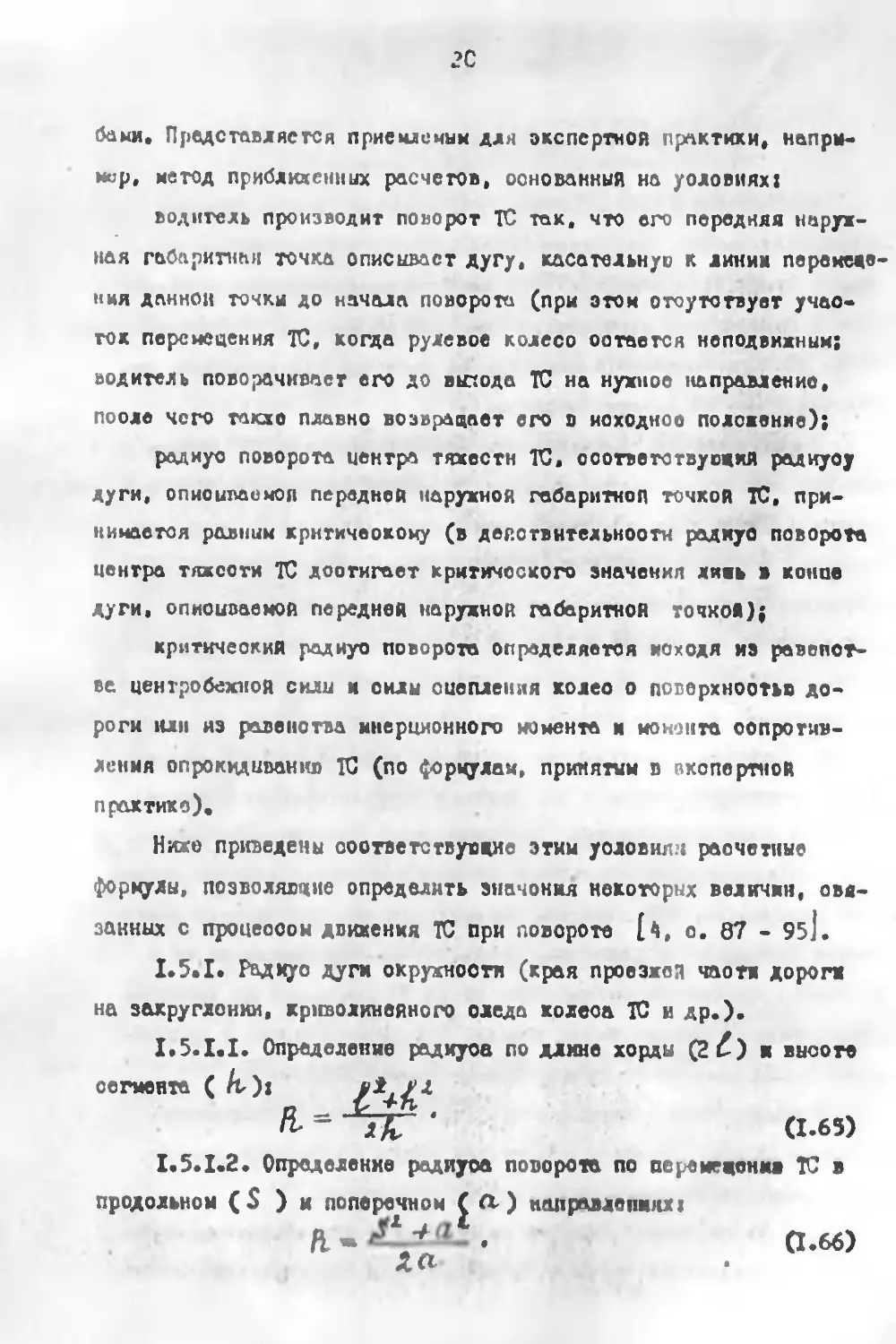
1.5.4. Предельння по оцепление радиуо поворот на дороге
без поперечного уклона t
Я ’ fX.TY7’ ' (1.69)
У* - коэффициент поперечного оцепления кин о дорогой
( / • (0,8 - 0.9) f - при наличии на колесах
тормозной онлы млн силы тяга).
1.5.5. Предельный по олрокддыванш радиус поворота ТС на
дорого боа поперечного уклона
Я 15 8" "ТТЙГ ' (1.70)
где к - высоте центра тяжести ТС:
В - кмрина колеи ТС»
£ - коэффициент, учитываемся поперечный крон подроо-
оорнод наосы (о. 13).
I.5.6.1 Раоотоянне в продольном направлении, необходимое для
зцполнения маневра.
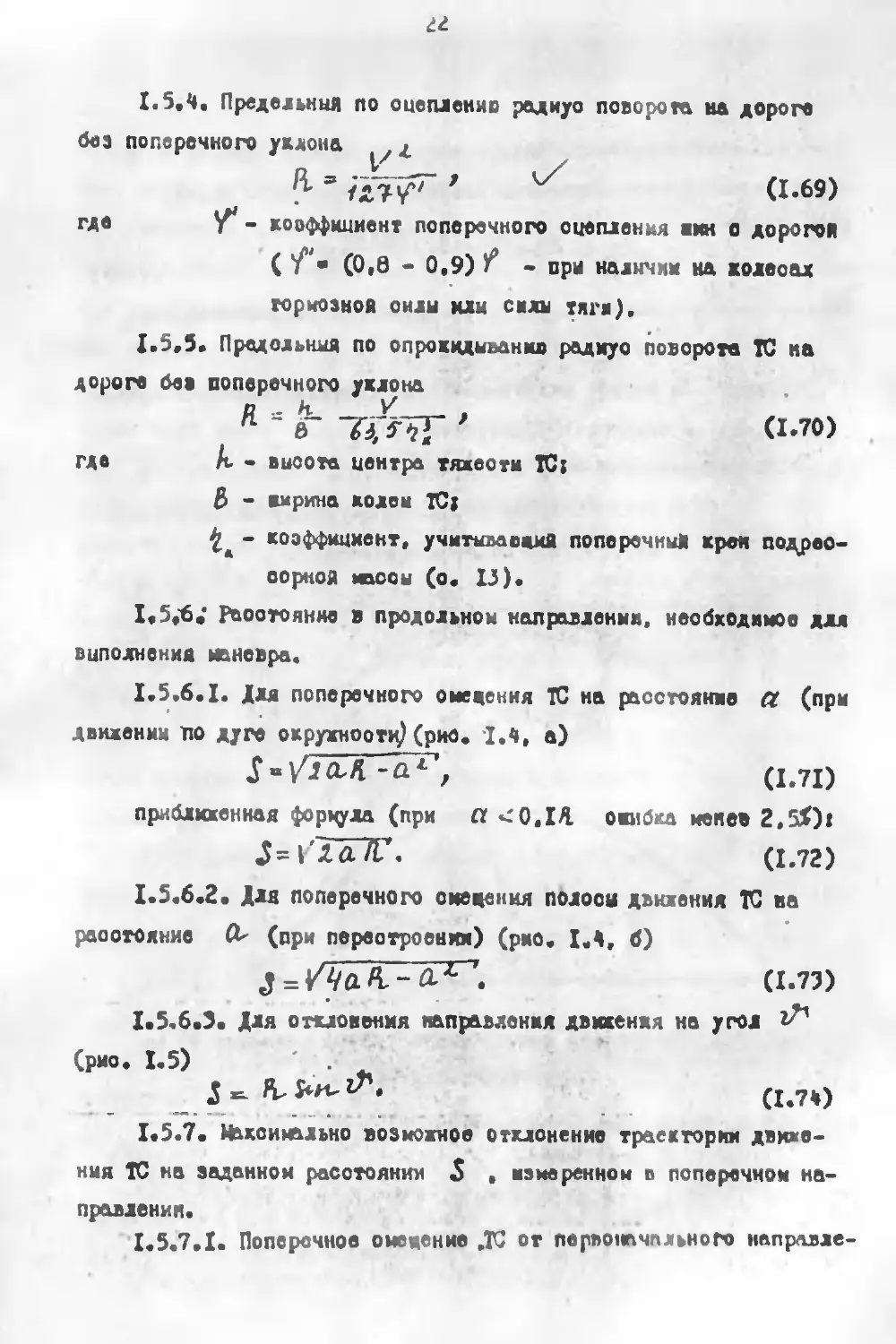
1.5.6.1. Для поперечного омедения ТС на расстояние а (при
движении по дуге окружности) (рис. 1.4, а)
(I.7I)
приближенная формула (при а ^0,14 оиибка иенев 2,5f)i
Л=/Ха7Г. (1.72)
I.5.6.2. 1яя поперечного снедения полосы движения ТС ва
расстояние (Ь- (при переотроении) (рио, 1.4, б)
J (1.73)
I.5.6.3. Для отклонения направления движения на угол
(рио. 1.5) .
Д Я- (1.74)
1.5.7. Максимально возможное отклонение траектории движе-
ния ТС на заданном расстоянии 5 , измеренном в поперечном на-
правлении.
1.5.7.1. Поперечное онемение .ТС от первошчпльного направле-
a, &
Рио.*1.4. П' перечное о не ценив ТС при маневре!
а - При двилс иди по дуге окрухнооти: б - при
перестроении
Рио. 1.5. Опион«аие направления двкконкл.ТС пм маневре
мм (прк двжгесш по дуге) (он,* рио» 1Л» в)*
Л = Л - 0Й - J С', (1.75)
а = (J.76)
1.5.7.2. Поперечное онемение полосы двпенм К при по-
рее троении иа параллвлинув .подооу
а в Z fl - • (1.77)
1.5.7.3. Угол отклонения направления двк :енин ТС
= / (П78)
гч
приближенная формула (при Л -<0,1 Я- Ожиб-а менее I0):
А (1.79)
1.6. Установление ппкчини отклонения напри плен ня
движения ТС
Внезапное откиоление направления движения ТС во многих с я/г
чаях при одит к возникновение проиожеоттип различных тх.ов (гнез-
дам, столкновениям, опрокидывание). Оценка дейотвия водителя,
которым било совершено такое проиопеотвие, завоюет от прьчлны,
вызваьней отклонение направления движения.
Установление причины изменения напрагления двгаонил ТС
нередко представляет значительные трудности: причин ич>нь много,
а признаки, позволявшие пред, лить сонхретнув причину, фюопруот-
оя недостаточно полно. Кроне того, изменение направления движе-
ния ТС могут способствовать различные обстоятельства, не жвля_-
ннеоя дп, прмч ноя. Поэтому при реиении вопроса о причине откло-
нения направления двменяя ТС необходимо исоледосать вое 5отоя-
тельства, которш позволяют мсклочить го, что не имеет отноиенш
к ърычмн< возникновения конкретного промиеотви», выкалит > со-
в.купиооть признаков, определяоикх его причину.
Уста, овление причины отклонения напраьления движения К в
опасном направгшниж может потребовать доследования всего комплек-
са обстоятельств происисо.-зня - ехнического о.от.иння IC, до хлг-
vA обетаюькп, предпеоувовавнея проиоиествие, обстановки на
месте ро..зкеотвия (расположен, я IC и других объектов па месте
происиествжя, распололент и гирактера следов).
Основные причины отклонения дви-нкя ТС в опаонол направ-
лении иох::о Подрааделпть на 5 групп.
1.6.1. Pi,'ворот рулевого колеса водителем:
неосмотрительные поворот ТС. водитель которого не убедился
в безопасности движения;
нерасчетливый поворот в целях выравнивания движения в hj't-
ном направлении (при заносе, резком увода);
резкие поворот для предотвращения наезда на внезапно об. i-
рухенное препятствие;
реький поворот при касательном столкновении в сторону от
места удара;
поворот для предо.ъра. ения столкновения о ТС. водитель ко-
торого не пользовался правок на движение.
Отклонение направления движения ТС при повороте руля про-
исходит в начальный момент по плавней дуге со смещена :м колеи
вадних колео в оторону центра по: рота.
1.6.2. Неправильные приемы управления:
резкое торможение при движении по участку о разным значе-
нием коэффициента оцеогения под правыми и левыми колесами;
эффективное торможение при движении ТС по.закруглений дороги;
резк?й поворот руля, не соответствующий изб.лнно.1 скорое.и
движения;
чрезмерный поворот руля при попытке выйти из голей, о в сни-
женной обочины, или пересечь рельсы под острым углом.
Конкретная причина может быт; установлена нс ооно; аник
исследования Остановки и слотов ва месте происксотвия.
1.6.3. Неблагоприятные дорожные, условия:
разные значения коэффициента сцепления под правыми' лев<-1ми
колесами, что своевременно t-ерад торможением нельзя было обнару-
жить;
малозаметные препятствия г полосе движения ТС. попадающие
под колеса одни, стороны.
expert22 для http://rutracker.org
26
Низкий кооф^.ициент оць.иенил. боковой уклон, неровности
на скользкой дорсге, крутни закругления и др. - обстоятельства,
которые могут способствовать отклонение от нудного направления,
но не является причиной, если водитель мог своевременно оценить
вознш.иув дорожнуо обоздновку.
1.6.4. Н~ноправиооти ТС:
рассоединение тяг в приводах рулевого управления!
заклинивание рулевого механизма;
внезапный от.лз гидроусилителя руля перед совериением
поворота;
повременив подвески переднего левого колеса, когда происхо-
дит его продольной омецение;
разная оффективнооть торможения о пра: оп и левой вороны ТС.
Пэвыаенний лофт рулевого колеса или больное усилие, необхо-
димое для его поворота, неисправность гидроусилителя, заедания
в рулевом механизме могут способствовать отклонение направления
движения ТС, не являясь его причиной, если водитель ynpaaxHJ
ТС в таком состоянии и до проиомеотвия.
1.6.5. Удар при наезде на препятствия во время проиоиео-ивня:
окоцентричннй блокируя ий удар при столкновении или наезде
на неподвижный объект (столб, дер<во и т.п.) - центр тяжести ТС
с мацается вначале в сторону, противоположнуо р‘^положение не . та
удара, но за; ем отклонение направления движения ТС происходит
в направления плоокоотг вращения колес после разворота ТС, вы-
званного ударом:
скользящий удар - центр тяжести ТС 'вначале также смежается
в сторону, противоположнуо расположенно нес и удара; в дальней-
27
ем отклонение происходит в направлении развороти ТС после удара,
который нож возникнуть как в сторону расположен ля места удар,
так и в протнвоположнуо сторону!
касательный удар- - ТС отклоняется в сторону, протхвополож-
иуо р-оположенио моота удара;
удар по колесу ТС, не имевшего гидроусилителя руля, может
вызвать поворот направлявших колео и ооответотвуожеа отклонение
направления движения ТС,
Во всех случаях отклонение направления движения ТС в опас-
ном направлении способствует высокая окорос-ь движеиил.
28
1 jIABA 2. ЭКСПЕРТНОЕ ИССЛЕДОВАНА СТОЛКНОВЕНИЙ ТС
Экспертизы по делам, связанным оо о.слхновеннен ТС, сос-
тавляет около одной трети общего числа судебных автотехничеоких
екопертиэ.
Определение механизма этого вида ДТП по многих случаях
требует проведения сдохнлх исследования и глубокого анализа „оех
установленных обстоятельств (следов на месте проиоиеотвмя, сле-
дов н повреждения на ТС, расположения ТС и других объектов после
проиоиеотвия и др.). Малозначащие на трвый взгляд .физнакн 40-
гут оказаться весьма сусьотвенныни тля репения поставленных во-
просе)' .
Ниже изложены способе речения некоторых, наиболее часто
встречающихся окопераных задач при установлении механизма отолк-
HOBCHI я ши подходы к let ревзнии-
2‘.1, Относительная скорость ТС в момент столкновения
Если и-веотны скорости движения К И и 1^ , угол отклоне-
ния № правления относительной скорое ти данного ТС от его продоль-
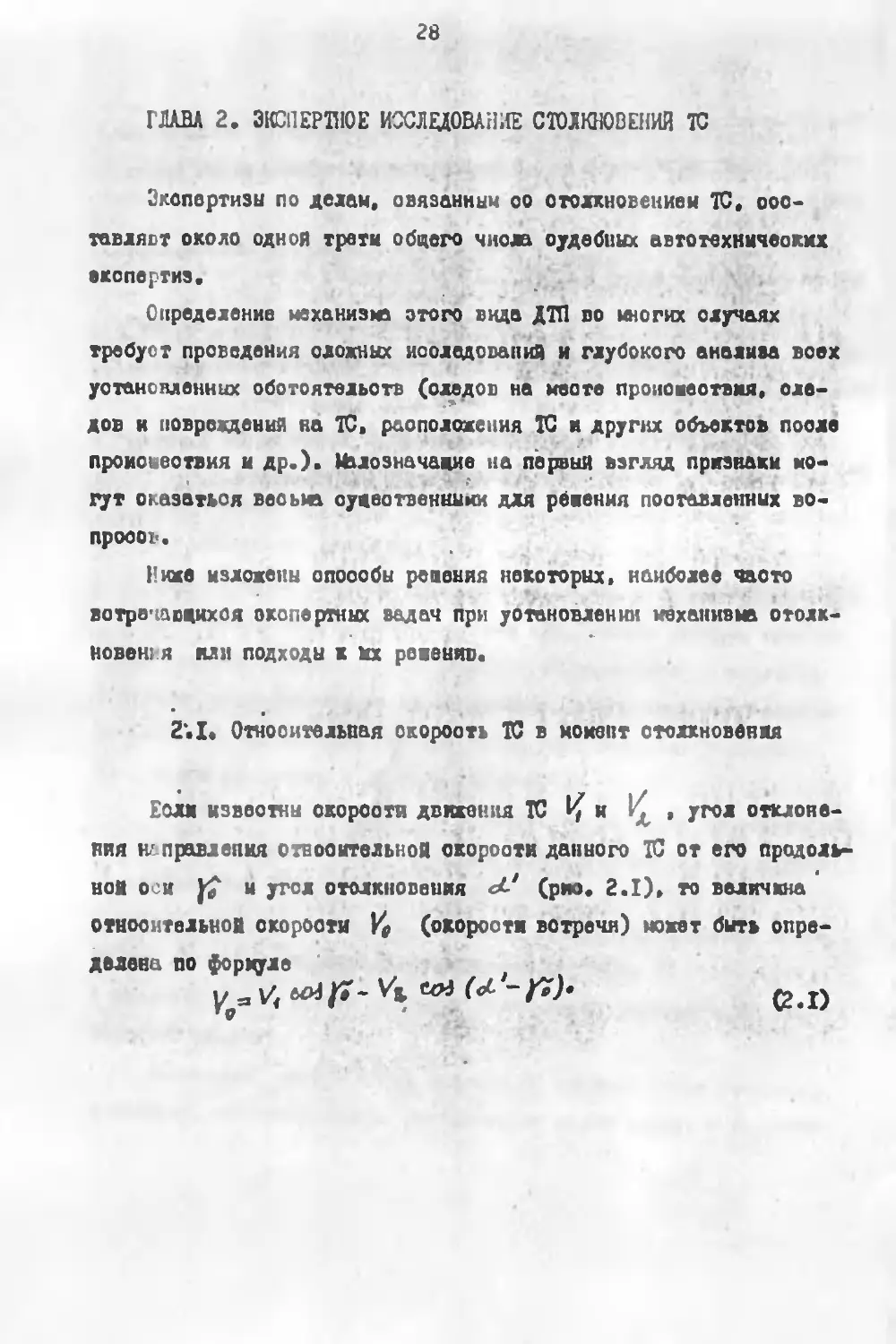
ной оси и угол столкновения d-‘ (рил. 2.1), а*о илличкна
относительной скорости Vg (окороотж встречи) может быть опре-
делена по формуле
у я V, (* "?•)• (2«1)
29
Рио, 2.1. Определение относительной окороиги ТС при
столкновении:
а - 1-гречнон; б - попутном
Направление относительной скорости (угох ) может быть
определено следующими способами:
по первичным трассам, когда в начальный момент процесса
взаичодейотвия (С при столкновении на близких к горизонтальным
поверхностях оставточ трасом. Направление таких трасе сс-падает
С направлением относительной скорости. При измерении угла, у'
в етих случаях следует учитывать изменение расположения оледо-
вооприкишоцел поверхности в процеобе взаимного внедрения ТС;
по последовательно остазлзнлым схлдам контакте, когда
жесткая часть одного ТС оставляет следы на участках другого,
расположенных на разных расстояниях от его продольной оои. Угол
jpe определяется прямой, соединяющей точки контакта;
по первичному направлению внедрения жеотчои части одного
ТС в менее жесткую другого. Напратление внедрения в первичный
момент совпадает с направлением относительной скорости;
расчетным способом, когда известны скорости движения
обоих ТС и V/, и угох столкновения . ТЬнгено угла
определяется по формуле (ом. рио. 2.1)
<г-г>
‘1
При расчетах следует отроге учитыъать знаки тригонометри-
ческих функций. Отсчет всех углов нужно производить в одном
направлении (против часовой стрелки):
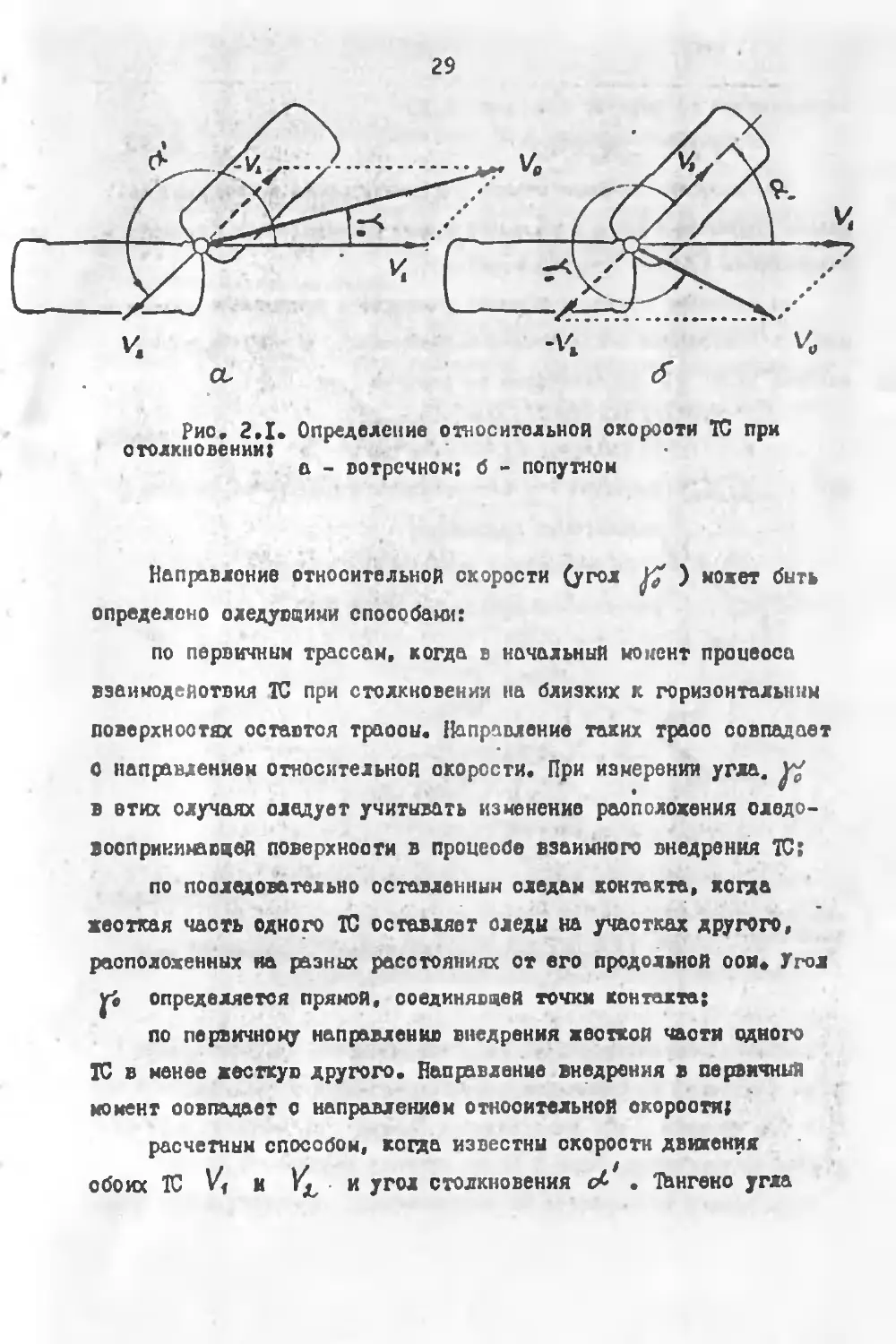
но омеценив контактировавших участков в проиеоос деформа-
ции в продольном и поперечном направлениях. В таких случаях
тангено угла определяется по формуле (рио. 2.2)
и- _
7 Г‘ '7^1, - <2 3)
где сиеавиия контактировавших участков от первона-
чального их положения;
Угды отклонения направления онемения стих
участков от продольных осей ТС.
Рио. 2.2. Определение о.моонтСХьной скорости ТС при
поперечном онемении контактировавших участков
Еолж из-за больной прочности внедрившийся участок одного
JC нс оместнлоя от первоначального' положения ( ^ • О или
0), то угол ft определяется равным Х( либо
i 410°.
я
2.2. Взаимное расположение ТС в момент столкновения
Взаимное расположение ТС в момент столкновения определяется
углом взаимного расположения <£в и расположением на обоих ТС
точек первичного контакта.
Угол <А0 - ото угол между направлением продольной оси
первого ТС и направлением продольной оси второго, отсчитываемый
против часовой стрелки. Его величина может быть определена оле-
дувцим способом (рис. 2.3).
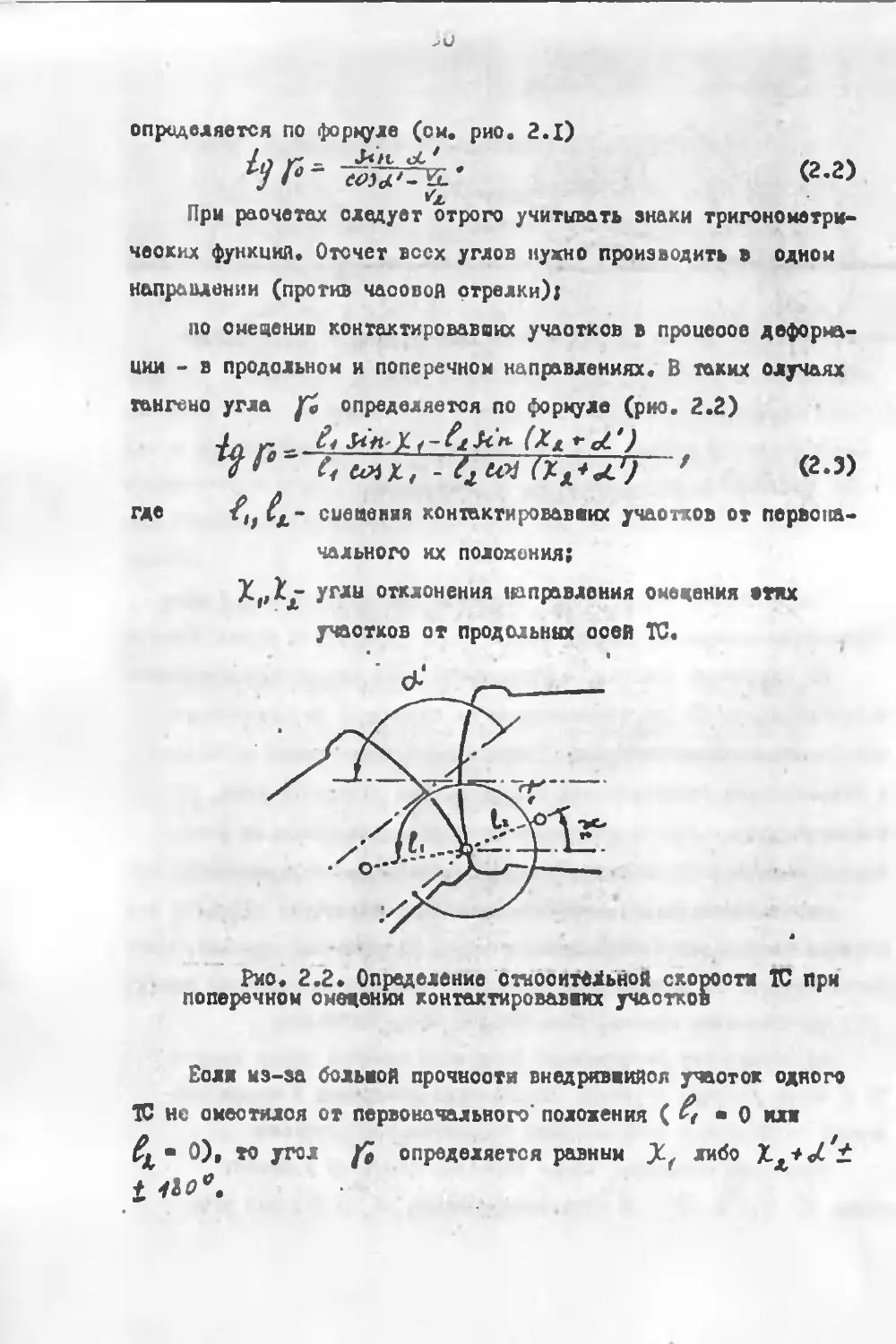
Рис. 2.3. Определений угдх взаимного расположения ТС при
столкновении:
а - путем нопооре* этвонного сопо зтавления повпеж-
дений; б - по тг^ач расположения контихтировивних
участков на >donx столкнуввихоя ТС; в - по углам
отю нения следообразуонего объекта и его
отпечатка
I •
2.2.1. По расположена двух пар контихтировавпх участков
при непосредственной сопоставлении пстрежхений ТС (ои. рио.
2.3. а).
Сначала необходимо выявить нь ТС 2 пара хонтвхтхровавпих
между собой участков, расположенных по zobnoxhooth дальне друг
от друга на жестких (не иы^вихх свободное смешения относитель-
но корпуса ТС) частях. За'.ом установить ТС так, чтоби расстоя-
ние недду контактировавшими у”^сткаии в обеих парах было одина-
ковым, и произвести измерение угла между специально проложенны-
ми линиями (репками) параллельно продольным осям ТС (бортами
или соями передних либо задних колес, если они не были сменены
при столкновении).
2.2.2. По расположение 2 пар контактированлих участков
расчетным способом (см. рис. 2.3, б).
Когда не представляется возможным произ чести непоор дитвен-
ное сопоставление повреждений ТС, необходимо замерить на калдои
ТС угол отклонение от продольной оси прямой, проходящий через
указанные участки. Угол d-o определяется по фирцуле
</.,= (2Л)
где Z-Л" Угдш отклонения прямых, проходящих через учаот-
ки, контактировавшие о ооответствуспимы участ-
ками на другом ТС, отсчитываемые т направз шя
продольных осей также против mi совой стрелки.
2.2.3. По угдам отклонения (ледосбразупиего объекта к его
отпечатка (ом. рио. 2.3, в).
Если Пчеле столкновения на >дном ТС остались четг.ие отпе-
чатки какой-либо части другого ТС (например, фьры, бтиперы,
участков облицовки радиатора, передних громок капота и др.),
угол определяется способом, ана. огичным предадуяецу. Замеряется
угля уклонения от продольных соей плоогоотя оледообразувцв!з
объекта па одном !С ( X, ) и плоскости его отпечатка - па другом
( Хл )» и угол <А0 определяется по той 1а формуле.
При резко эксцентричном ударе и больной глубине взатши го
внедрения в процессе образования. дефор шшй ТС у спевает развер-
55
нуться на некоторый угол Л сС, который приближенно может быть
вычислен по формуле , .
Z4 ~ (2-5)
где D - глубина взаимного внедрения, н;
- угол разгорота ТС после столкновения до оста-
новки, грид:
Ve - относительная скорость сближения ТС в момент
столкновения, км/ч (формула 2.1);
сроднее значение замедления на участке движения
ТС о разворотом пооле столкновения, м/с2 (форму-
ла 1.8);
- пере мечение центра тяз.-оти ТС от места столкно-
вения дм оотин>вки, м.
Если требуетом высокая точность установления угла oto , то
при ого определении приведенными выше способами следует внести
соответствупиую поправку, учитывал изменение угла мс-ду продоль-
ными осями ТС о момента первичного контакта до момента заверше-
ния деформаций.
При столки! вении значительно более легкого ТС с тяжелим
поправка нринимиетоя равной углу • определенному для более
легкого ТС. При развороте ТС поохе столкновения в разных направ-
лениях поправка равна оумме углов Zot, вычисленных для каж-
дого ТС.
Ори развороте однотипных ТС в одном направлении поправку
можно не вносить, так как ока бумет весьма невЕХЧительной (рав-
ной разе этм углов ДЯ ).
Помимо угла d-e взаимное расположение ТС в момент столкно-
вения определяется также точками первичного контакта. Расположе-
ние на ТС точек первичного контакта при отол ;нс вении может быть
5'1
установлено о достаточной точноотьв, если известии скорости
движения ТС. Тогда, определив направление отнооительной скорос-
ти (формула 2.2) и зная конфигурации периметра каждого ТС на
участке контактировАнмя j, > изменения ее в результате деформа-
ций. можно установить положение ТС в момент первичного контакта
(по маоатабной схеме). Для этого н< обходимо омеотить изображе-
ние одного ТС из положения, ооотсетотвуоцего конечному при вза-
имен внедрении, в направлении, обратном направление отнооитель-
ной окорооти до момента выхода его из контакта, о изображением
другого.
2.3. Це< то расположения ТС перед столкновением
Удаление 5/ , на к. тором данное ТС находилось от меота
столкновения в момент, когда другое находилось от этого меота
на заданном расстоянии , определяется по оледуоиим форму-
дан Г о. 20з].
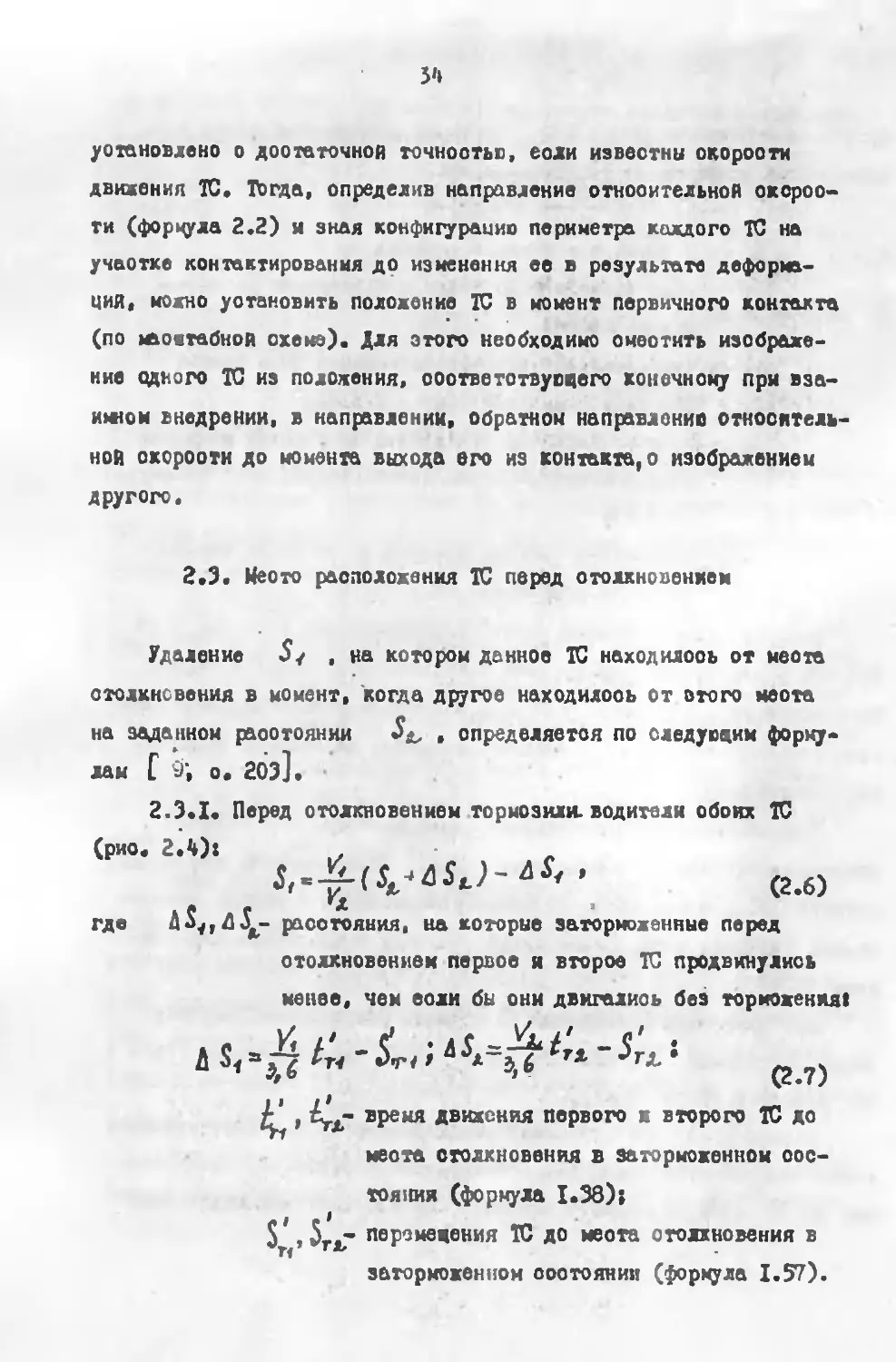
2.3.1. Перед столкновением тормозили, водители обоих ТС
(рио. 2.4):
где расстояния, на которые заторможенные перед
столкновением первое и второе ТС продвинулись
менее, чем если бы они двигались без торможении:
» s< • v‘ ‘ ел>
, L^- время движения первого я второго ТС до
меота отолл.ювения в заторможенном сос-
тояния (формула 1.38);
$', 5..- перо мешения ТС до меота топновения в
заторможенном состоянии (формула 1.57).
35
(первого) ТС-( Л3#® 0):
, Р*>
2.3.3. Перед столкновением не тормозил водитель другого
(второго) ТС ( AS^® 0):
$,.(£ J.-4SJ. е-9>
2.3.4. Перед столкновением водители обоих ТС не тормозили
(д5«- л^-о)к -
5- - ь * ' .
Приведенные вше формулы для определения удаления Si спра-
ведливы для любого вида столкновения (встречного, попутного,
перекрестного).
2.4. Реиение вопроса о технической возможности
предотвратить столкновение
Подход к его решение неодинаков для различных видов атолкно
всний - перекрестного, продольного встречного и продольного
5f>
попутного.
2.4.1. Перекрестное ото-лсновение ТС.
Для решения этого вопроса необходимо определить расстояние
i , о которого при овоеврененнсм торможении водитель мог дать
возмо нооть пересекаоцецу дорогу ТС лиги за пределы полосы дви-
жения данного IC, и боне ставить о расстоянием до неота столкно-
вения в момент возникновения опасности [ о. 243 - 245].
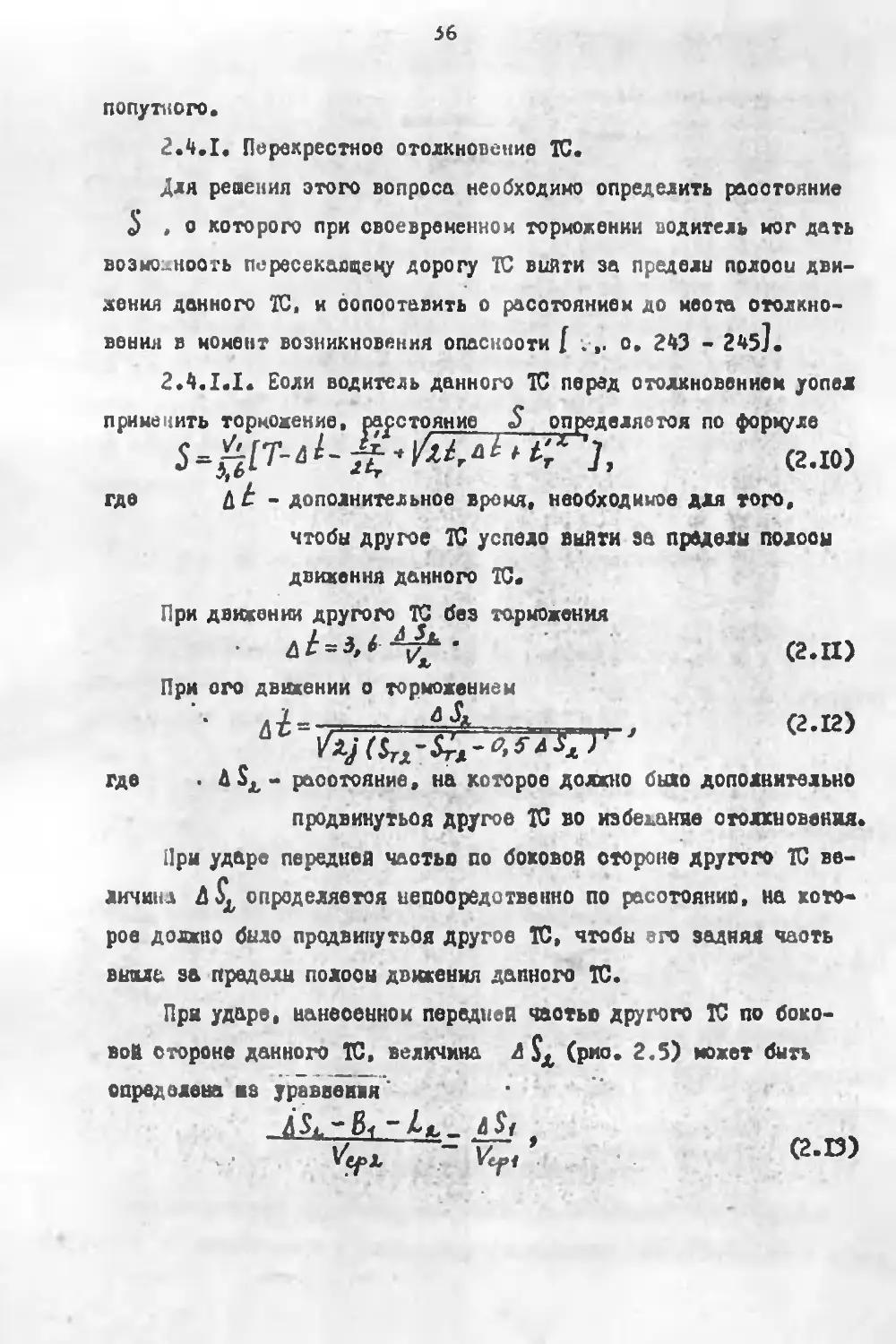
2.4.I.I. Если водитель данного ТС перед о.олкноь. нием jonei
применить торможение, расстояние 5 определяется по фор:гуле
}, (г.ю)
где tit - дополнительное время, необходимое для того,
чтобы другое ТС успело выйти за пределы полосы
движения денного ТС.
При движении «ругогс С без тормомьния
д/ = МЛ^' (2.II)
При сто движении о то;могением
= —(2.12)
где Д - раоотоян! , на которое долги о оыхо дополнительно
продвинуться другое ТС во избе_аняе столкновения.
При ударе негоднее часть» п > боковое стороне другого ТС ве-
личина определяется непосредственно по расстояние, на кото-
рое должно было продвинуться другое ТС, чтобы «го задняя чаоть
вняла за пределы полосы движения данного ТС.
При ударе, нанесенном передней часть» другого ТС по боко-
вой стороне данною ТС, величию Л (рио. 2 5) может быть
определена ив ур >ввепя'
A St, ~ В-f ~ Lt, _ Л Sf
C2.D)
57
где
6( - габаритная аирина данного ТС;
габаритная длина другого ТС;
средние значении скорости движения Т) на участ-
ках и :
(2.14)
к иоменту
ТС за блнж-
ТС (опреде-
- расстояние, на которое продвинулась
)голкновсния передняя часть данного
ноо границу полосы движения другого
ляется по оставленным деформациям).
: i
II
i/i
?ис. . - >. 0. ределение расстояния, на которое необходим
было дополнительно продвинуться 70 во избежание столкновения
(I - положения [0 в момент достижения первым полосы движения
второго; П - по_ожения 10 момент ртолкновения; И - пггонение
второго ТС к моменту достижения первым полосы его движения, при
котором столкновение иокдочахо ;ь) ______
Реяенче уравнения (2.13) целесообразно произвести после
подстановки в него числовых значений юех известных величин
(как квадратное уравнение).
2.4.1.2. Если водитель данного ТС перед столкновением не
тормозил, расстояние $ определяется по форцулс
(2.15)
2.4.1.3. Если другое 10 двигалось со скоростью, намного
меньоей, чем скорооть данного 70, а для выхода за пределы опасной
зоны оно должно било продвинуться но большое расстояние. то при
решении вопроса о техническом возможности у водителя предотвра-
тить столкновение о рльотоянием, позволявшим водителе обнаружить
опасность столкновения, можно сопоставлять оотано: очный путь
данного Ю.
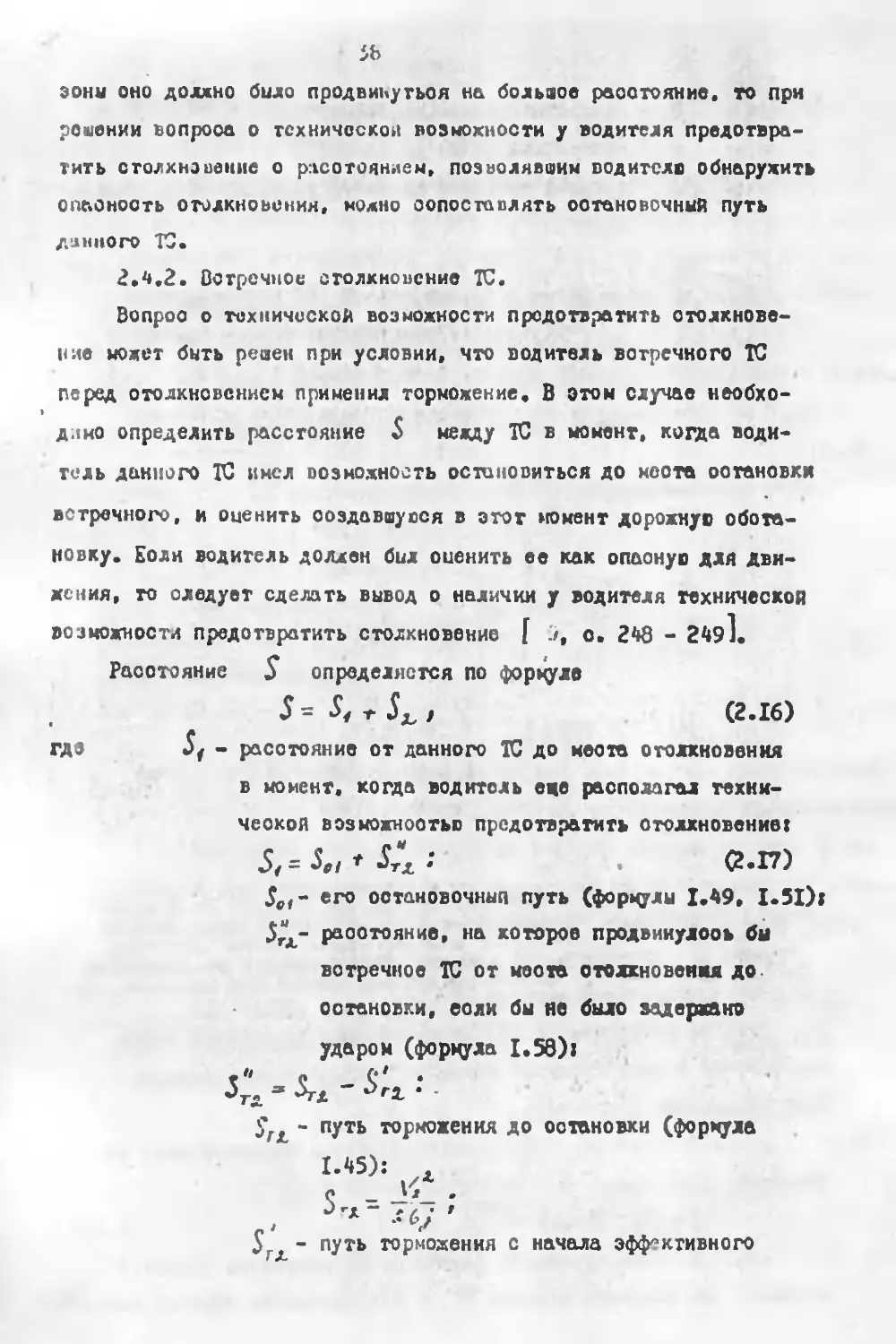
2.4,2. Встречное столкновение ТС.
Вопрос о технической возможности предотвратить столкнове-
ние может быть реиен при условии, что водитель встречного ТС
перед столкновением применил торможение. В этом случае необ^> -
д мо определить расстояние 5 между ТС в момент, когда води-
тель данного ТС имел возможность остановиться до места остановки
встречного, и оценить ооздавшукся в этот момент дорожнуо обста-
новку. Еолн водитель доеден бил оценить ее как опаонуо для дви-
жения, то следует сделать вывод о наличии у водителя технической
возможности предотвратить столкнотение [ о. 248 - 2491.
Расстояние 5 определяется по формуле
гдэ
5 = г Эд, / (2.16)
Sf - расстояние от данного ТС до места -•.олкновения
в момент, когда водитель еце располагал техни-
ческой возможность!) предотвратить отолхновениь:
5/ = • (2.17)
5е(- его остановочный путь (форц^-гы 1.49. I.5I)i
5“л- расстояние, нь которое продвинулось бы
встречное ТС от неон столкновения до.
остановки, если бы не было за .ржано
ударом (формула 1.58):
$rL - путь торможения до остановки (формула
1.45): .
, '"f- it,} •
$гх " ПУТЬ тоРмолени'1 с начала эфф кги зного
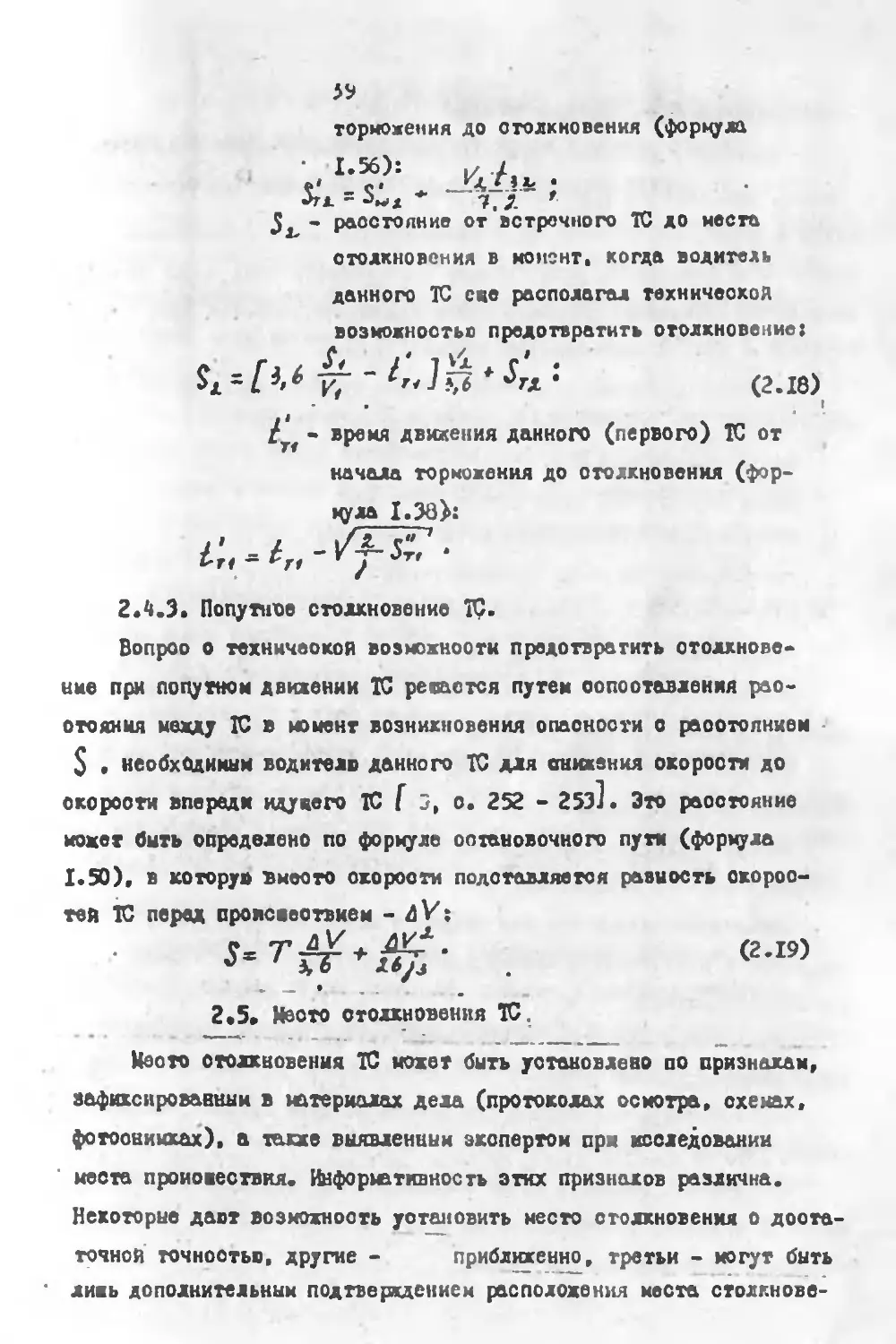
5У
торможения до столкновения (формула
• 1.56): v .1
Л3*;
5^ - расстояние от встречного ТС до места
отолкнивсния в момент, когда водитель
данного ТС еже располагал техничеоко.1
возможностью предотвратить столкновение:
$1-[: (2.18)
£ - вр -мя движения данной (первого) ТС от
начала торможения до столкновения (фор-
цула 1.38):
г -ь -/-£-5;',' •
- ^ri j
2.4.3. Попутное столкновение ТС*
Вопрсо о технической возможности предотвратить отолхнове-
ние при попутной движении ТС ре вас тс я путей сопоставления рас-
стояния между ТС в момент возникновения опасности о расстоянием
$ , необходимым водителе данного ТС для снижендя оирооти до
скорости впереди идужего ТС Г 3, о. 252 - 25з1. Это расстояние
может быть определено по формуле остановочного путы (формула
1.50), г иотору» вместо скорости подставляется ровность скорос-
тей ТС перед пропежеотвием - Л V:
. <гл”
2.5. “сото столкновения ТС.
Место столкновения ТС может быть установлено по признакам,
зафиксированным в материалах дела (протоколах осмотра, схемах,
фотоснимках), а также выявленный экспертом прж гсследовании
места проиожествия. Инфо рутинность этих признаков различна.
Некоторые даст возможность установить место столкновения о доста-
точной .-очноетьп, другие - приближенно, третьи - могут быть
лижь дополнительным подтверждением расположения моста столкнове-
«о
ния, определенного другими путями.
Поскольку признаки, позволяющие установить место столкно-
вения, фиксируются в материалах дела, как правило, недостаточно
четко и точно, вывод эксперта о расположении места столкновения
должен быть основан на исследовании совокупности всех таких при-
знаке в. По отдельному признаху меото отолкновения может быть
определено лишь к сравнительно редких случаях.
Voiiobhuc признаки, о помощью которых устанавливают мест
отолкновения ТС, могут быть подразделены на 5 групп:
оледы перемощения ГС;
следы перемещения гброшснньос объектов;
расположение отделившихся от ТС объектов;
расположенно ТС поел > происшествия;
повреждения ТС, полученные при столкновении.
2.5.1. Следы перемещения .С;
резг.ое отклонение оледа колеса от первоначального ныправ-
пэния (при эксцентричном ударе по ТС или по передноцу колесу);
боковой сдвиг следа юза колеоа (наиболее точно определяет
подоконие ТС при столкновении);
боковой сдвиг незаблокнрованного колоса (токле оледы мало-
заметны и редко фиксируются);
прекращение оледа юза или разрыв в следе юза (возникает
при ударе в результате дополнительной нлгруэхи на колеоо либо
его подбрасывания);
образование следа проскальзывании кс.еса при его ваклхни-
вании де рорнируемы:<и частями;
образование следа колеса при выходе воздуха из вины, повреж-
денной ударом;
оледы колес обоих ТС перед столкновением; определяют поло-
з ение ТС в момент столкновения по месту их пересечения с учетом
_заикногэ расположения при ударе;
41
следы гр >ния деталей ТС о дорожное покрытие при деф. рмаиии
кузова или при разрушении ходовой чаоти в момент удара.
2.5.2. Следи перемещения отброшенных объектов!
тяжёлЛ объектов (отделивц.лхоя от ТС частей, упавших мото-
циклов. велосипедов, груза и др.) в ид< царапин, притертостеЯ
последовательно расположенных выбоин. В начале их образования
они имеет направление к не о ту отделения от ТС (близкое к месту
отолкне в 1ния):
лвдей, выпавших из ТС а момент столкновения (на асфальтовом
покрытии такие одеды малоэаметнр):
мелких объектов (отделившихся от ТС мелких деталей, оокол-
ко«). Такие следы могут быть хорошо «аметны на снегу, грнзи,
песке и т.п.
Определение места оголхнодония по месту переоеченгя направ-
лений таких следов тем точней, чем их больез установлено.
2.5.3. Расположение отделившихся от ТС объектов:
осыпи земли о деформируемых ударом нижних nci ерхноотей ТС.
Осыпь мельчайших частиц остается практически непосредственно
на месте удара. Болес крупные частицы могут смецатьоя по инерции
в направлении движения ТС. Аля болпе точного установления распо-
ложения IC в момент удара необходимо знать, какому ТС принадле-
жит опавиая зьмля;
участка рассеивания частиц лакокрасочных покрытий. Эти
частицы, обладал алой мперцией, опадает в непосредственной
бллзоитм от места столкновения и частично рассеиваются в направ-
лении движения ТС после удара. Возможно их оледенив потоками
воздуха;
участка осколков отекла. Позволяет приближенно судить о
место толхповения. когда юс свободному падение не препятство-
‘>2
вали поверхности, от которих могло происходить риковетирование.
По сирине полосы движения место отолкноьения определяется про-
дольной осьо эллипса рассеивания, в продольной направлении - по
минимальному расстояние 5 , преодолеваемому наиболее и едкими
осколками при свободном падении. ПриСлигсНно ото расстояние рас-
считывается по формуле
S- С , (2.19)
гАв У - скорость ТС в момент разрушения отекла, км/ч}
А. - высота расположения нижней части разру .енного
отекла, м.
При встречном столкновении место удара в продольном направ-
лении приближенно можно определить по расстояние St , от начала
учао.'ка рассеивания осколков при аналогичном характере р-^руьенчя
однотипных стекол по формуле
г . с V 4
" 5 И/“-* (2.20)
• где S - полнив расстояние между дальними границами участ-
ка рассеивания осколков стекол;
расположение нииболыого числе отдогившихоя от ТС при ударе
ооъеитов позволяет судить о чеоте отолкиовендя приближенно, о
учетом возможного их вменения от моота столкновения после удар и
Расположение отдельных крупных частей, как правило, не может
служить признаком для установления места отолгьъвенмя.
2.5.4. Расподо :вние ТС iioojjo проиовеотвии:
расположение обоих ТС после продольного встречного отолкно-
вения на одной стороне проезжей части - признак того, что столк-
новение произошло на стой же отороне проезжей части;
расположение обоих ТС в непосредственной близости от места
столкновения при движении во встречкой в [Правление параллелы.ыии
45
курса ни до столкновения позволяет определить поперечное оме юние
центра Т/П .оти одного из них от места, где был нанесен удар.
Если они не выжли из контакта друг о другом, это омецение ви-
чиоляетоя по формуле
Д 5 - О» " > > ' (2.21)
где ' ЛЛ|Х- расстояния межл/ центрами тяжести ТС в момент
и после столкновения, измеренные в пог.орзчном
направлении, м;
&„G^- массы ТС;
расположение ТС при тех же условиях столкновения, соли
после столкновения они вычли из контакта друг о другом, вместив-
иоь на небольшое (не более 2 - 3 м) расстояние друг от друга.
Поперечное оиешенис центра тяжооти одного из них определяется
по формуле *
(,гг)
где - расстояние между центрами тяжести в момент выхо-
да из контакта друг о другом, м;
°Рв*нив значения замедления ТС ка участке их
отбрасывания после столкновение, ц/о^.
2.5.5. Повреждения ТС, полученные при столкновении:
расположение повреждения ТС от контакта друг о другом дает
возможность определить мх взаимное расположение в момент столк-
новения и уточиатъ место столкновения, воли установлены распо-
ложение в направление движения одного из них в момент столкно-
вения;
направление деформация, определявшее направление удара,
позволяет установить возможное смешение ТС от места столкнове-
ния, и по его расположенно после происшествия уточнить место
expert22 для http://rutracker.org
44
столкновения;
«
характер дефоршиий дает возможность установить угол отолкйс
вения ТС и расчетным путем определить значение интервала между
двигавшимися параллельными курсами ТС перед поворотом одного из
них на полосу другого (исходя из пределы.ого по оцепление радиу-
са поворота). Это позволяет уточнить неото столкновения по шири-
не полосы движения;
расположение повреждении на нижних частях ТС, которыми былй
оставлены трассы на дороге при столкновении, дает возможность
уточнить положение ТС по ширине полосы его движения при образо-
вании этих трасс у меота столкновения [ , о. 230 - 24l],
2.6. К допросу о движении ТС в момент столкновения
Признаки движения ТС в момент нэлкновения возникает, как
правило, при его движении о относительно высокой скороотьв, влияв-
шей на механизм взаимодействия при ударе и перемсц кии после
удара. В таких случаях экспертное исследование позволяет уста-
новить факт д ижония ТС иногда даже по отдельн.му признаку.
Отсутствие явных признаков движения ТС в основном не иокло-
чеет возможности движения о очень налой скоростью. Поэтоцу вывод
о неподвижном состоянии ТС может быть сфорцулирован в категори-
ческой форме лишь в некоторых случаях по доотаточе. эя совокупнос-
ти установленных признаков.
Основные признаки, позволявшие решить данный вопроо, можно
подразделить на 6 групп:
следы колес ТС на меоте 'то/лновения;
другие следы на месте происшествия;
следы и повреждения на ТС;
расположение ТС;
расположение отброшенных при уд< ре объектов;
положение органов управлении ТС и его техническое состояние.
2.6.1. Следы колес на место проиовествия.
Признаки движения ТС:
сдвиг оледов колес ТС, по которому нанесен удар, не соот-
ветствует направленно удара при столкновении;
сдвиг олодов колес ТС, которое нанесло удар, не совпадает
о направленная его движении в но пент удара;
длина тормози го оледа до места ударе, не соответствует
установленной окорооти движения ТС перед торможением;
оледы ТС, которое ньнзоло удар, перед местом столкновения
отклоняется от перзоначольного направления к неоту отолкновения
несмотря на отоутотви > препятствии для движения в прямом направ-
лении (ото соответствует попытке водителя избежать столкновения
о двигаваичоя в поперечном направлении ТС).
Признали *ш~), что ТС могло быть к, пыдви ашя:
более чвтпка отпечатки пр тектора кин в местах контакта
о по: архноотьв дорога там, гае находилось ТС в момент удара
(хорооо . бнаружиз) .тоя на влажнои грунте, снегу, размягченном
асфальте);
резкое окон'мзьие следов вва там, где ТС остановилось перед
столкновением;
оюценм слагав колео оотановявисгооя ТС 1 соответствии о
мапражленазм удара.
2.6.2. 1руг/и следы на месте npoi юиеотвня, овидетельо.-вув-
им о том, что ТС могло находиться в неподвг-ы.ом состоянии.
следы подтекания жидкости на месте, гае был нанесен удар
(не следует путать о разбрызгиванием жидкости при ульре);
пятно от выхлопных газов на мосте, где был нанесен удар!
менывее количество осадков (снега, дождя) на участке, где
находилось ТС в момент столкновения.
2.6.3. Следы и повреждения на ТС.
Признаки движения ТС:
сановно г направление первичных трасс и деформация на ТС.
которым был нанесен удар, не совпадает н_лравлснием его дви-
жения;
основное направление первичных трасс и деформаций на ТС,
по которому был нанесен удар, не совпадает о направлением движе-
ния другого ТС;
отсутствие отпечатков (статических следов) частей одного
ТС на частях другого при перекрестных столкновениях; наличие
горизонтальных трасс, оставленных контактировавшими частями;
расположение по окружности следов и поврвж/ )ний на бокови-
нах покрьсек, диолах колес, колпаках (г.ритертоотей, порезов,
трасс), причиненных в начальный момент столкновения;
наклон следов пины под углом, существенно отличающемся о г
45° на DJCOTJ радиуса колеса, который были оставлены эти слсдч
на боковых частях ТС в момент первичного удара;
отх..онение от горизонтали следов вины на боссовых поверхнос-
тях ТС, которым был нанесен удар, что свидетельствует о вращении
колео;
Признаки того, что ТС могло быть неподвижный:
напрвление перьичных трасо, возникших на обоих ТС при
столкновении, совпадает о направлением дгижения ТС, которым
был нанесон удар;
четкие отпечатки частей одного ТС на частях другого в мес-
тах их первичного контакта;
If
расположение по хорде траоо на боковых частях холео ТС,
по которому был нанесен удар;
расположение следов пин на боковой стороне ТС, которым
был нанесен удар, в горизонтальном направлении,
2.6.4, Расположение ТС после проиоясотвия.
Признаки движения ТО:
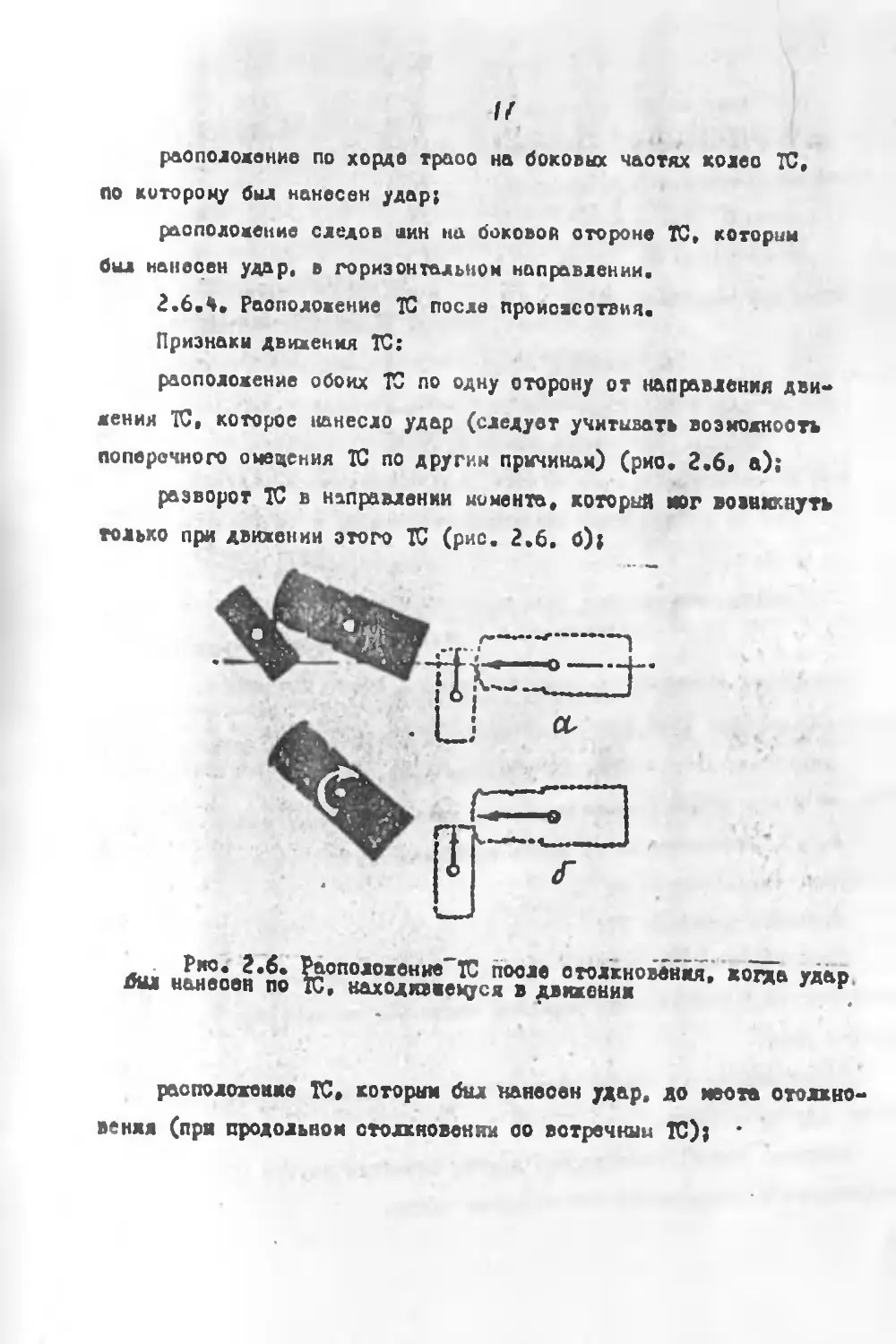
раоположение обоих ТС по одну сторону от направления дви-
жения ТС, которое нанесло удар (следует учитывать возможность
поперечного омецения ТС по другим причинам) (рис. 2,6, а);
разворот ТС в направлении момента, который мог возникнуть
только при движении этого ТС (рис. 2.6, б);
Рио. 2.6. Расположение ТС после столкновения, когда удар
Ои нанесен по ТС, находтакечуся в двкконих Н
расположенно ТС, которым бил нанесен удар, до места отолхно
вения (при продольном столкновении оо встречный ТС);
расположение ТС, которым оыл нанесен удар, на расстоянии
от места >толкновенил, не соответствующем скорости его движения
после столкновения (при движении в заторможенном состоянии).
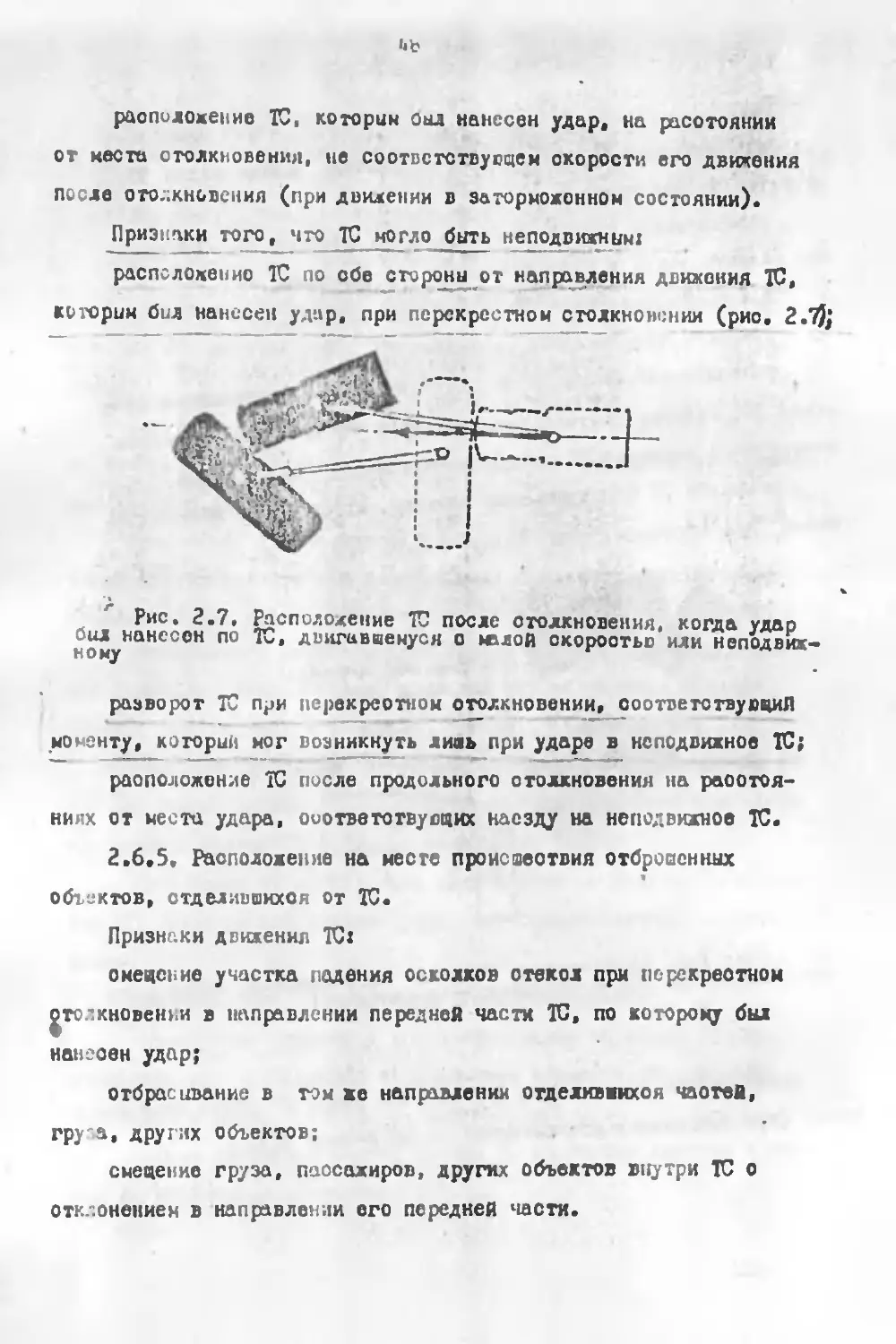
Признаки того, что ТС могло быть неподвижным:
расположение ТС по обе стороны от напрет Ленин движения ТС,
которым бил нанесен удар, при перекрестном столкнонении (рис. 2.7}j
Рис. 2.7, Расположение ТС после столкновения, когда удао
аил нанесен по ТС, диигаввемуся о «лой окороотьо или неподвиж-
Н О MJT
разворот ТС при перекрестном столкновении, с< ответотзуьциЛ
мотенту, который мог возникнуть -ииь при ударе в неподвижное ТС;
расположение ТС после продельного столкновения на расстоя-
ниях от места удара, ое этветотвуоцих наезду на неподвижное ТС.
2.6.5, Расположение на месте происшествия отброшенных
объектов, отделившихся от ТС.
Признаки движения ТС:
смешение участка падения осколков стекол при перекрестном
2 г. кновен. и в направлении передней части ТС, по которому бил
нанесен удар;
отбрасывание в том же направлении отделившихся частей,
гру а, других объектов;
смешение груза, пассажиров, других объектов внутри ТС о
отк онениен в направлении его передней части.
2.6.6* Положение «рханов управления ТС и < го техническое
оООТСЯНИЗ.
Признаки тоге* что ТС могло находиться в движоими!
склоченная передача, ооответствуокая условиям движения!
вклоченное зажигание!
влелочгиное положение рычага ручного тормоза.
Признаки того, чго ТС могло быть неподвижном:
нейтральное положение рычага п.рехжочения передач или его
Положения, не соотвегстъуоаее условиям движения;
наличие клоча зажигания тин, где он от отолхиопения не мог
Лазатвоя, «оли бы в момент столкновения находится в вамке;
в^лоченныя ручнел тормоз;
наличие ньисправноатея, исклечавикх возможность движения
И в момент столоне,еняя.
КзтегоркчеокЕЯ вывод о дэнлении либо неподвлг:ои состоянии
I'1 b моыит столкновения* хак пуовило, должен быть основав нь
| ^улызтах Еоеледсиши юсго комиекоа признаков.
‘.О
ГЛАВА 3. WIEPlYlOE Л&гДОВА}1И£ НАЕЗДА НА ПЕЕХОДА
Экспертизы по делан, связанным о наездами на переходов,
еоотавляог около двух третей общего числа судебных аьготехничео-
хнх экспертиз. Во многих случаях реве ни о вопросов по установлю нив
оост-лгсдьств, определишлих механизм этого вида происшествия, н
представляет большой сложности. Большая часть судебных алготехни-
ческнх экспертиз, назнач иных по данному виду происшествий, может
быть выполнена о поьющьо ЭВМ по разработанным программам для
ндизолее типичных случаев.
Однако иногда ре sc кие вопросов о ры положении ТС и пешеходы
в момент поезда, место наезда, технической возможности предотвра-
щения проиевсотвин к др. требует проведения сложных математичес-
ких расчетов и комплексных исслед -ланий на основе специальных
познаний экспертов - автотехников, трасологов, суд о бн их медиков.
.*<хе приведены некоторые способы решения наиболее часто
встречавшихся экспертных задач, обязанных с установлением
обстоятельств наезда.
в
3.1. Взаимное расположение ТС и пешехода в момент
нас 1да
Расположение пешехода по отновени. к ТС в момент наезда
определяется участком на ТС, которым был нанесен удар, ж направ-
ленном удара по телу.
Взаимное расположение ТС и пешехода устанавлмаа эт в тех
случаях, когда необходимо уточнить место наезда по ширине полосы
движения ТС исходя из расположения вд ТС участка, которым был
нанесен удар, или когда требуется определить действия пешехода
перед наездом (например, направление его движения) исходя из
51
расположения на одцдде и теле пост[пдаваего п.изнакш, евкде-
тсльствуцдих о направлении удара. Адч этого на основании рез/яь»
тагов комплексного изучения следов и повреждений на одежде и
обуви пострадавшего, полученных им телесных повреждения, следов
и повреждения на ТС определяет место на нем, которым шнеоам
удар псаеход^ и ньпраьленис удара по его голу.
Основные признаки моста ТС, которым бил нанесен уд^р по
телу пешехода:
вмятины на облицовке радиатора, крылеях, бампере, стоякзх
гуэова, переднем крае крыаи. боковых частях (при наезде и про-
цессе заноса ТС) и др., не инеоцие следов воздействия твердых
объектов (царапин, забоин)]
повреждение декоративных деталей, стеклоочистителей, антенн
номерных знаков и др.;
разрушение ветровых отокол, световых приборов;
притертости на частхх. которыми был нанесен удар (стертость
пыли, грязи, наслоения);
огпочатки зтруктури ткь.и одежды посградаввего на глидких
поверхностях в местах нанесения уАьра;
отделившиеся от оделды, вещей, тела лострадсваего частицы
(волосы, волокна, крове, содержимое сумок и т.п.).
Основные признаки на одежде и обути пострадавшего, позво-
лявшие устаиолить положени его тела .относительно ТС:
отпечатки выступавших деталей ТС на штериале одежды в
виде наслоений пыли, грязи, смятия материала по конфигурации
детали (отпечатки решетки облицовки радиатора, ободков световых
приборов, декоративных деталей);
поверхныитные порезы материиа одежде осколками стекол фар
(в контуре периметра фары);
expert22 для http: //rutracker. orq
вкрапления мелких, частиц отокол, краски в материал одежды;
повреждения Hire риала од сады в местах расположения оатр-х
выступающих кромок в направлении смещения тела относительно
отнд кромок;
следи воздействия нижних чаотой ТО в виде повреждения
следов гороче-счазочннх мхтеркАлов, пили, грязи на одежде в мес-
тах контактирования;
следи персе-да колесами ТС в виде огпечатксл риоунка про-
тектора хины ни мате, надо оделдд;
следи волочения на одежде в виде наслоения пили, грязи,
образования дугообразных складок, разрывов и протертостей от
перемоцания по поверхности дороги;
следи трения на подоавах, каблуках, образовавшиеся у крал,
в сторону которого произовло омовение;
следи трения, aayct нцч на мотвои ич >скгх деталях подметки,
каблука (подковках, гвоздях).
В ряде случаев некоторые ив перечисленных признаков к мо-
менту производства экспертизы могут отсутствовать. 1ля обеспе-
чения достаточной для ревения поставленных вопросов соьокупниотя
признаков может возникнуть необходимость в проведении комплексных
трасологических и судобно-меднчиноких исследованья.
Некоторые признаки могут быть малозаметными. Ддя выявле-
ний нужно хорово их знать и иметь практические навыки по кх
обнаружение.
<
3 2. Решение вопроса о технической возможности у
водителя предотвратить наезд на невсхожа
Обции поднодои к реаенио этого вопроса при наезде на пеае-
хода, пересскапи-зго полосу движения ТО, является установление
5
возможности у водителя обнаружить опасность в момент, когда он
находился от Не«схода на расстоянии $t • позпод □вен остане*
виться до место, где произошел наезд (при неуверенных доясгв>чх
пешехода), или пропустить его путем с в ос времен но го снижения ско-
рости (при неизменных направлении и скорости движения перехода,
ио замечавеего опасности).
Если в указанный момент водитель мог обнаружите опасность,
то он, следовательно, располагал технический о оэ»во*ностьп пре-
дотвратить наезд, так как должен был принять необходимые меры
для второj если не мог - такой возможности у него но бклэ.
Воэюжны 4 основных варианта дорожной ситуации, предяеотпо-
гаввеи наезду на певохода, перооекаьверо полосу движения ТС.
3.2.1. Начало движения перехода в опасном направлении при
неограниченной видимости и обзорности.
Вопрос о технической возможности предотвратить наезд ревлет-
оя путем сопоставления расстояния Sa от IC до перехода в момент,
когда он начал движение в опасном направлении (формула 1.60), о
расстоянием $< , которое позволяло подите л о предотвратить налед.
Если для продотврадения наезда ТС необходим било остановить,
то ото расстояние принимается равный оста» сьочноку пути
Если же наезд можно било предотвратить путем снижения ско-
рости, давая возможность певегоду выйти »а пределы полосы двихе--
вмя ТС, то расстояние Sf определяйте,. по формулам:
при «езде до начала ториоженмя _________„__
S,*£[r-°’
при ваезде в процессе торножег.и ,---------------&
где 7 - время, иоиОходиыое водителе для приводонкд тор-
мозов в действие (формула 1.43);
расстояние, на которое пешеходу нужно било до-
полнительно при. инуться, чтобы винти иа полосы
д чиония ТС.
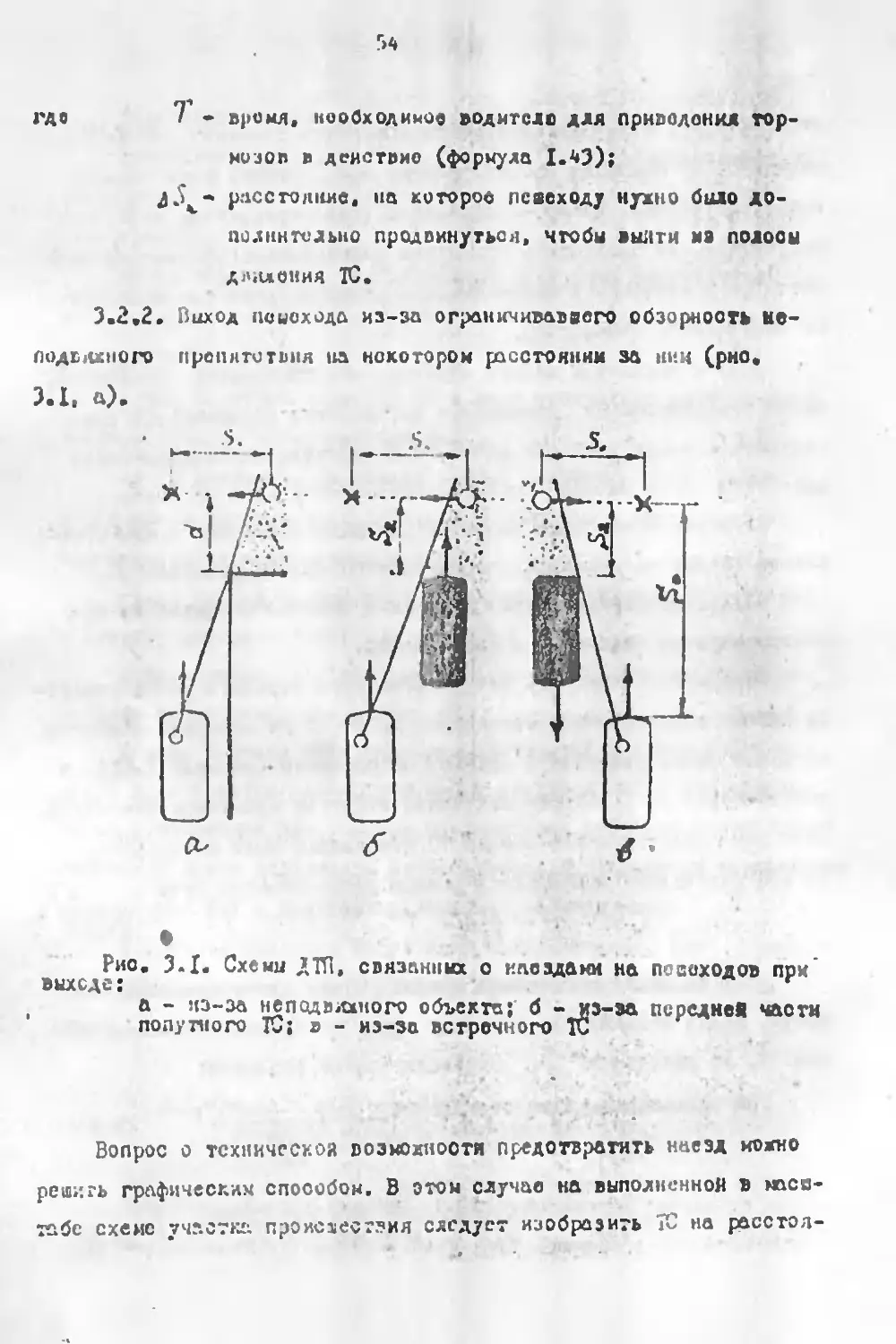
3.2,2. Выход по цех ода из-за огранкчиваввего обзорность не-
подт.иного пропято твил на некотором расстоянии за ним (рсо.
3.1, а).
выход'•'°* 3“^* ЛТП, связанных о наезда ни на повоходов при
а • из-за неподвижного объекте; б -из-за переднее части
попу того ТС; в - из-за встречного ТС
Вопрос о технической возможности предотвратить наезд можно
реш..гь графическим способом. В этом случае на выполненной в масп-
табс схеме участка проислест^ил с-сдует изобразить ТС на расстол-
5t>
нии or Геста, поэволявлом предотвратить наезд ( 5, ), препятст-
вие, огракичивавьео обво^нооть, - на заданном расстоянии от
йс о та наезда и пежехода - на расстоянии от нести наезди, опреде-
ляемой по формуле
t> (3.0
Где t - время преодоления расстояния ТС (форму-
ла 1.40),
Прямая, про: еденная на схеме от места расположения водители
ч*рез прочихнув точку . бзорнос’.и, дает возможность усгино„ить,
находился ди поиехсд в этот момент в поде зрения водителя.
3.2.3. Выход пеоехода из-за попутного ТС.
Подход к рскенио вопроса о технической возкэлносш у води-
теля предотвратить ниезд аналогичен предыдущему, но несколько
у южнязтоя тсн, что на охикз нужно определить положение попут-
И .го ТС, 'раничиваввего обзорность (ок. рио. 3.1, б).
3.2.3.1. Коли попутное ТС двигалось впереди на заданной
дпотенции 1) о такой же оиороотьо, что и ТС, оовервиввее наезд,
to его положение на схеме определяется расстоянием до места
йлгзда 5д : ‘
Ъ-К >
Ь*е ** габаритная длини попузы«го ТС.
В откх случаях необходимо проверить, успсзал ли пвиеход
Выйти за пределы полосы движения попутного ТС, для чего следует
установить расстояние Л St, ua которое продвинулось п путное
1С за время переисненкя перехода от полосы иго движения до места
наезда. Даннов расстояние должно быть песхо..ьхо больно расстоя-
ния, равного D •» •
И, > 0.5)
где i - расстояние, которое преодолел tic пек од от полоты
движения попутного ТС до моста наезда.
Если Л it < , то исходные данные следует уточнить,
так кс* при их нпдхчии механизм ДТП другой: наезд бил бы оовер-
ыон попутним ТС, поскольку пеисход но успевал выйти за пределы
полооы дг ил с имя попутного ТО.
3.2.3.2. Если установлено расстояние , на котором ле-
еход вывел за продолы полосы двичеиня попутного ТС из-за его
передней части, го расстояние от кого до линии движенья ле-
се хода в момент, когда водитель ТС, соверзивжего наезд, еде имел
техничесицги возможность его предотвратить, определяется по фор-
о.6)
где Sц. - расстояние, которое преодолел пожеход о момента,
когда водитель еде имел техничоскуи возможность
предотвратить наезд (формула 3.4);
'IJ - интервал между местом наезда и полосой движения
попутного ТС.
Если место наезда находилось не чсньвем расстоянии от про-
дольной прямой, проходящей через точку .гранмченм„ обзорнооти
на попутном ТС, чем место расположения водителя от этой же пря-
мой, то при дешснии ТС пареддсльними курсами попутное ТС вообще
не ограничивало вцдинооти пешехода.
3.2,4. Выход псзехода из-за встречного ТС.
Расположение пешехода и совсрвиввсго наезд ТС в момент,
«
когда ого водитель еще располагал технической возмолностьв пре-
дотвратить наезд, определяется аналогично изложенному в пп. 3.2.1
и 3.2.2, а расположение взтречн-'го ТС в этот же мо^нт - расотоя-
57
нием Sj( от то задней части до линии /видения пеоехода
’(ом. рио. 3.1, в)» z
• (3,7)
где у - величина, учитизаоиая эитаздывание начала пере-
хода пешеходом ироезхея части после проезда огра-
ничивавшего обзьр.*ость встречного ТС»
у -у»* л Л' ' _ °-8’
с/- расстояние,. на которое продвинулось ТС от днями
движения пе во хода к но не игу начала их порах* да
о расстояния :
Вг - еирина заднее чисти встречного ТС, игрнлчивав-
ее обзорность;
ук- miTcpiea от пеоехода до полосы движения вотрдч-
ного ТС в момент, когда ого задняя чаоть мино-
вала линии движения переходе..
Если 9пач».|ич у*. и iZ но установлены, то можно опреде-
лить дивь предельно возможное расположение встречного ТС (мини-
мальное значение ), приняв условие, что пеаеход в момент
проезда »имо нзго задн-Л частя встречного ТС находился от него
на интервала ул , равной I м, т.е. мшюг. яььому расстояние,
на которое практически может приблизиться намвревгпаяйся перейти
дорогу пеаеход я полось движения пропускаемого им ТС,
3.3. 1‘зото р^сполокенит ТС и переходе. в комеит
по ииник его из-за ограничивавшего обзорность объекта
Необходимости в уотиновленкя мест расположения ТС и пеяе-
хода в ьюмоит появления его из-за ограничивоваего обзорность
объекта возникает, когда такие в троси непосредственно ставятся
' н
на разрешение экспертизы пли для уточнения механиз п происшеот-
ИИ|. В этих случаях вопрос о технической возможное и у водителя
п;.дотв;птить наезд на певслэдо ]>сп>егоя путем сог: отавления
р- зтлянин , на котором I. указанная момент ТС находилось
от моего наезда, с о'тнниьочньч путей (формула 3.1) или роотоя-
ки.м Sf (;ориули 3.2, 3.3). позволялэим повоходу и пяти за пре-
делы полисы движения ТС при своевременном его торь >хонии.
3.3.1. Определение расстояния от совершившего наезд ТС до
ме^та наезда в момент появления пелехсда.
Возможны 3 варианта дорожной обстановки, когда пешеход
появляется из-за ог; пшчивав.его обзорность объекта, - выход пе-
асхода из-за неподвк*.„ого объекта, передней часты i о путного ГС
и задней части встречного. Дли всех 3 вариантов расстояние
от соверзимиого наезд ТС до мота насада макет быть определено
по сдедуь^еп об„ой формуле:
tlT. (3>9)
ВырО-еНЮ! й н б - параметра уравнения второй степени,
за 4ЮЯДИС от мехвниэиз наезда (условий ограничены обзорности,
мечен та начала торн кенич и ого э|>1>сктивноот>:, соотношения ско-
ростей двкксния и д;».), pa злотые для 3 указанных вариантов ло-
ро гной обстановки.
Значения этих параметров ЫО17Т бить получены из уравнений,
определявших условие возможности видеть пешехода, ыходяцего
из-за ограничивавшего обзорность объекта, и условия равенства
времени движения ГС и пешехода о момента появление его в поло
зрения водителя до наезда:
'411 — Jx •
- Л Q.II)
"v. ; v, 'r
59
ГД* расотчнния от лата наезда до ТС, ооверливачго
наезд, до перехода и до 1С, ограничивав«его
обзорность, в момент появления пешехода в пьл*
зрения его водителя;
- расстояние от места соположения водителя до
передней части ТС, которой бил нанесен удар;
04 “ интервал между мостом расположения водителя и
продольной прямой, проходящей через точку огра-
ничения обзорности;
0^ - интервал медд) местом наезда я продольной прямой,
прзхедящей ’ )рез точку ограничения обзорности;
окорю» движения пеисхода, ТС, оовериивисго
наезд, и ТС, ограничивавшего обзорность;
$г - путь торможения оовераившего наезд ТС до места
(исзда;
1+ - время движения ТС до иаеьда я заторможенном сос-
тоянии ;
d - расстоянге от граничиваввего обзорность объекта
до линии движения пеаехода в момент его выхода
за продольную прямую, проходящую черев точку
ограничения обзорности.
Нике приведены расчетные ^орщулы, поэюляожие определить
параметры /ив для 3 указанных вфриангов дорожной обстанов-
ки.
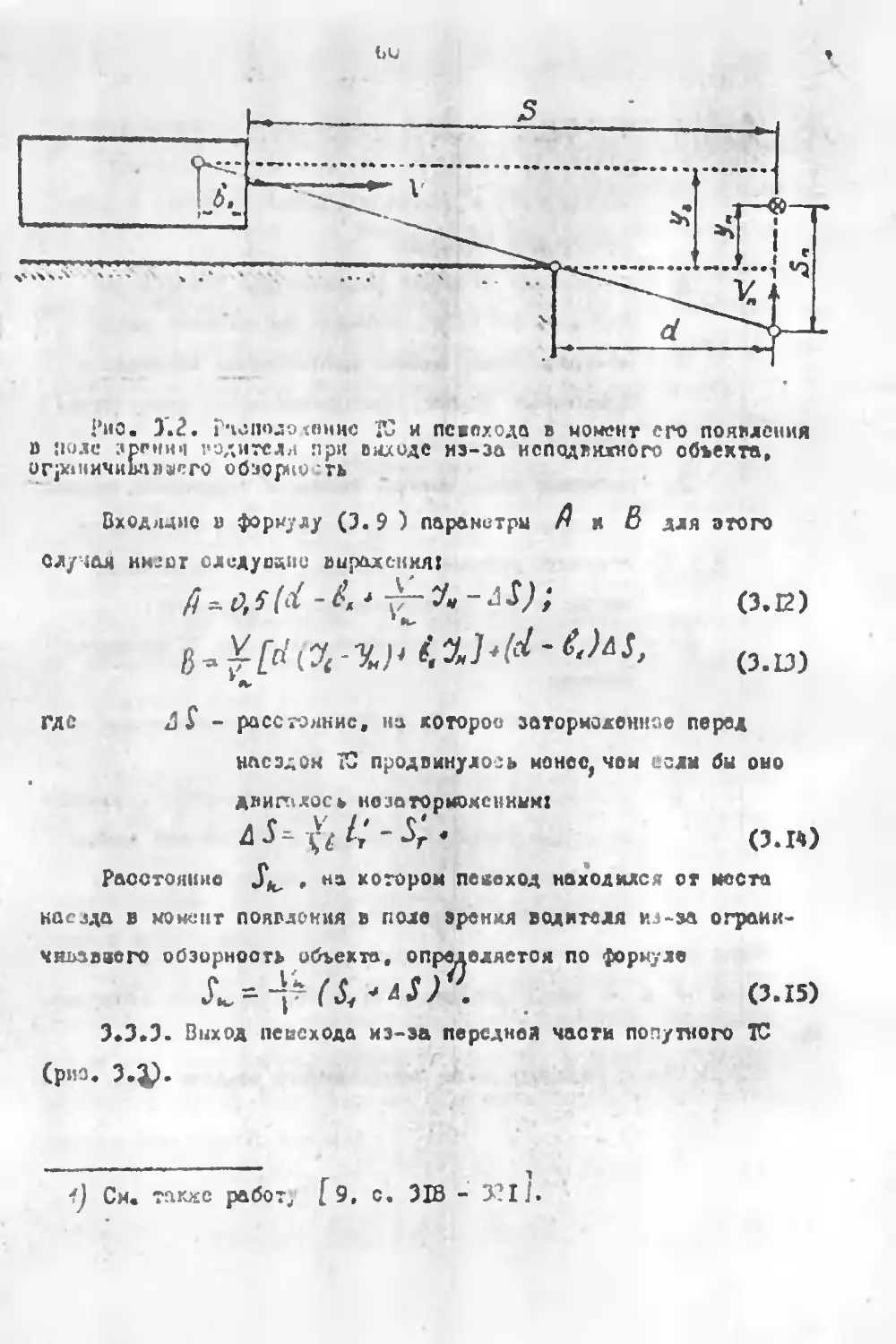
3.3.2* Выход перехода из-за неподвижного объгкта (рис* 3.2)
ьи
Рио. 3.2. Гчсподо«пине ГС и псвеходо в момент его появления
в поле зрении родителя при омлиде из-за неподвижного объекта,
orpeii.HHHWWJjiero обзорность
Входлдис в формулу (3. 9 ) параметры fl к В для этого
ол/<ая ннзот оледуояпо вирахенхл:
fi =. 0,5(d - * —-Л-ЛХ,); (З.Е)
о.и)
где jf - расстояние, на которое заторможенное перед
наездом ГС продвинуло:ь нанес, чем если бы оно
двигалось нозатормохсикым:
(З.В)
Расстояние J\, , не котором переход находился от места
наезда в момент иоявлония в поле зрения водителя из-за ограии-
ч нм в ее го обзорность объекта, определяется пэ формуле
-$(^лЗ) '{ (3.15)
3.3.3. Виход перехода из-за передней части попупюго ТС
(риз. 3.£).
' ' г т
•fj См. также работ, [9, с. 3IB - 3?1].
61
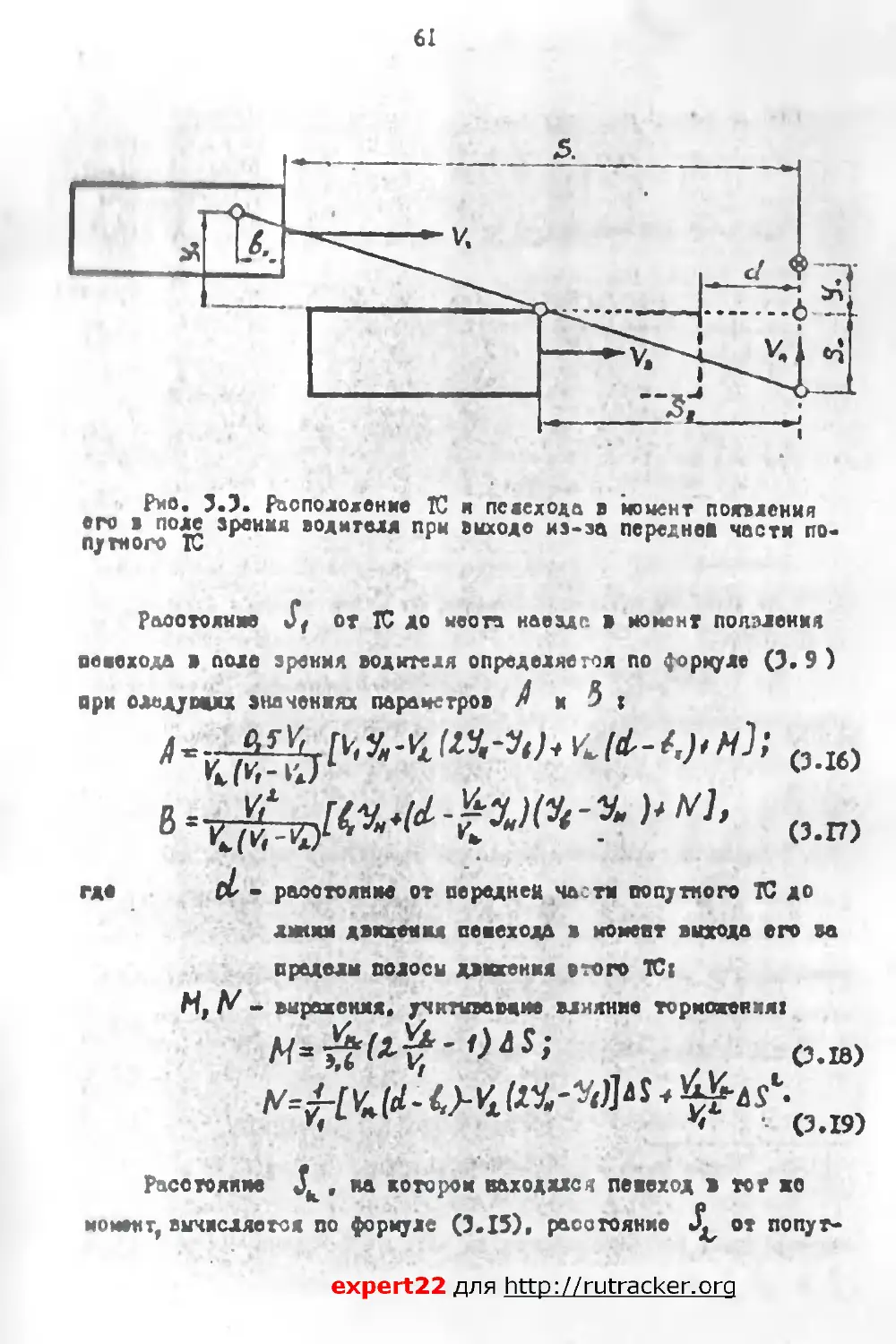
Рио. 3.3. Расположение ТС и перехода в момент появления
его . поле зрении водителе при выходе и* за передне! части по-
путного IC
Рооотояние Jf от ТС до ыеоп наезде в момент к.олэления
плиехода в оме зрения водителя определяется по 4ор>дле (3.9)
ори о ладу паях значениях парами трое / и 3 t
Жом
(э.п,
где (L - р* ос то гнив от иереднес ча.тм попятного ТС до
линии дь^ження пеиехо.-а в иомелт выхода его ва
приделы полосы двптния итого ТСд
М, № - выражения, учг.лгааваие вли.гние тормясен.я!
О-и>
Расстояние Jk , на «втором вахдххея пеиеход в тот хе
м»мент, вычисляется по формуле (3.15), расстояние от поп;т>
expert22 для http://rutracker.org
него ТС до линии дьклсния певе*ода - по формуле
О.20)
При дн,>ении попутного ТС з таков хе огоростьв, как и co-
ne (Силное наезд, расстояние определяется пэ формуле
С - №
1 '
(3.21)
где А/, Л - вир <ения, учитывание ълнлнио торможения:
л/ = Лv v4 -Л Ь% -43'S-
' L И ' v (3.22)
//=^^
(3.23)
Величина определяется по формуле (З.Ь'О. расстояние
S^, , на котором нах од vac я переход от меота наезда, - по форму-
ле (3.15).
Расстояние от ог;»ничнвавзего обзорность ТС до линии
д иония пи дохода в чомент появления ого в поло зрения водителя
ТС, соверянвесго наезд, вичлехяотоя по формуле
3“х - % . (3.24)
В случаях, когда место наезда находилось блиго к полосе
д.’каения попутного ТС, чем место расположения водителя оснорзиэ-
д го наезд ТС (при в проведении расчетов нет необхо-
димости, так кек попутное ТС вообдо не могло ограничивать види-
мости пеаохода.
3.3.4. Выход пеаехода из-за □стоечного ТС (рис. 3.4).
-) См. также работу ( • с. 330 - 332].
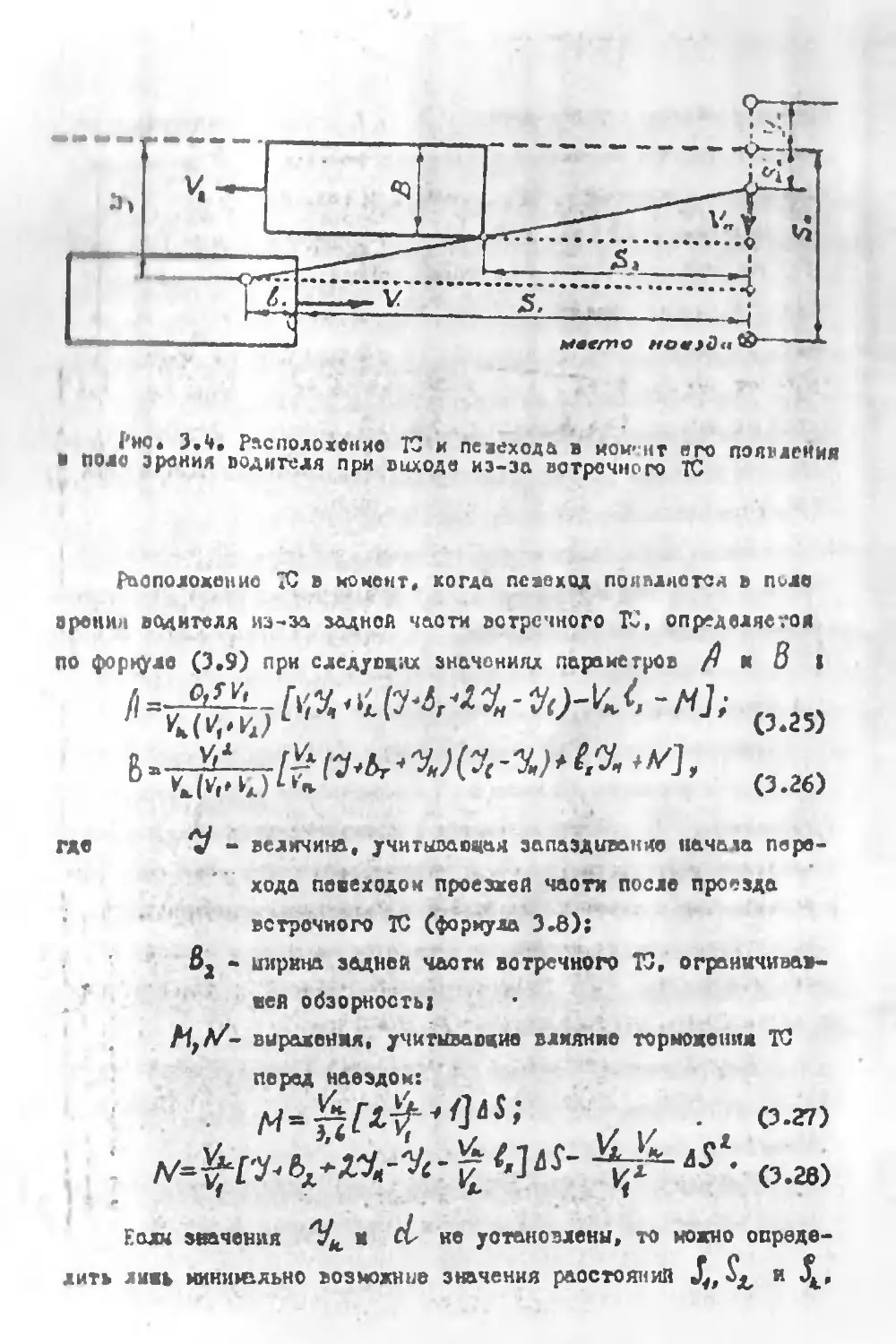
> Расположение ТС и перехода в ном- <т нго
пило зрении водителя при выходе из-за встречного ТС
появления
Рао положение ТС в момент, когда псаеход появляется в пило
арония вадитоля из-за задней части встречного ГС, определяемся
по фор g ла (3.9) при следуодлх значениях пирометров ft я В I
о.г5)
о.гб)
где - величина, учитывавшая запаздывание начала пере-
хода пзвеходом приезжей чаотт после проезда
встречного ТС (формула 3.6);
I 2 - мирит задн< й части встречное ТС, ограничивав-
ей о ззорность;
MfN'~ выражения, учитывавшие влияние торможения ГС
перед наеэдог:
^л3- ом
Геля значения м кв уотаноэленч, то можно опреде-
лить лиц ниниюяьно возможные значения расстояний и X*
приняв условие, что величина • I и, т.е. что пег вход в
момент проезда мимо него задней части встречного ТС находился
от него на интервале 'Ук, ривнем I м (он. с. ;>7).
Величина AS определяется по формуле (3.1<»),
Расстояние JK , на котором находился пеяеход от места
наезда в нвцент появления в п ле зрения водителя из-за задней
чзити встречного ТС, вычисляется по формуле (3,15), расстояние
ч\х от задней части встречного 1С до линии движения пеаехода
в тот хе момент - по формуле (3.7).
3.3.5. При расчетах по определении мест расположения ТС и
перехода необходимо иметь . ьиду следуемоеt
когда наезд на псисхода пронэоиол ие передней, а бог. воя
частью ТЗ на расстоянии от его передней чаотх, то в рас-
четные формулы вместо величины lt следит подотаьлять разность
и для определения расстоянии от передней части IC
до места нас >да вычесть из полученного значения «Ту величину |
влили ио торможения перед каеадои на расстояние St невелико,
если путь торможения до наезда ST менее X - WX полного пути
торможения Sr , соответствующего избранной скорости. Возможное
отклонение результата расчета, проведенного без учета торможения,
в большинство случаев не превышает нескольких процентов. Если
такая по грозность нс оказывает влияния на вывог.1 эксперта, зна-
чение параметра AS можно приниють равным нулю для упрочения
расчетов (при отом параметры Н • N о):
в приведенных расчетах не учнтшдвтоя размеры ?ела человека,
поэтому получаемые значения расстояний 11 Л. несколько
эанижеиы|
при выборе значения интервала Уу между местом располо-
жения водителя и продольной пряхой, проходятся через точку огра-
65
НИМоиил обзорности, следует иметь в виду, что данное расстояние
Ощидолж’тся на участке, где находился водитель в момент появле-
ния । лох ода в поле его зрения, так как к мочен ту наезда возчожио
поперечный сыовдные полосы движения ТС при попытке водителя избы-
вать 1Ио»да путем мано_ра;
большое число входячих в расчетные формулы величин и мате-
штичооких действий способствует возможности получения ошибочно-
го результата. Поэтому целесообразно проведение проверки п лучен-
ного результата графическим путем. Аля этого оледует построить
хочу расположения ТС и певсхода по принятым исходным данным и
результатам расчета и убедиться, что место расположения водителя,
меото появления пешехода в пело зрения водителя и точка ограниче-
ния обзорности находятся на одной прямой;
ыоли в результате проведенных расчетов получено отрицатель-
ное значение расстояния У, , ото может означать, что ТС. из-за
которого ьнхедил пешеход, ьоибае не метало водителе видеть пеше-
хода или в расчетах допудена окмбка, или приняты противоречивые
иоходные данные.
ЭЛ. Меото на_зда на пешехода
Раоположэнме места наезда не. пешехода является одним из
отправных даннгх для исследования этого вида происшествий. Дан-
ные о расположении места наезда в про„и.-ьном направлении позво-
ляют уатансвить, когда произошел наезд - до начала торможения
или в процессе торможения - и на xa.ii е раоотояние продвинулось
ТС в заторможенной состоянии до наезда. Эта необходимо знать
при решение вопроса о технической возможности у водителя пре-
(Отвратить происшествие.
66
Данные о .шсполокении места наезда в продольном направле-
нии щит ио-^мо.Ж'оогь также судить о действиях пешехода - соот-
1>зга»>|0вали ли они требошишпч Правил о переходе лиыь в разре-
Ui.l'nUX пестах.
Особенно большое значение во многих случаях имеют данные о
рис полижи и ,i и иоле ьееалч по идрине сроозхед части дороги, позво-
л unite определить времз, которим располагал водитель для приня-
тии необходимых мор, и мшить вопрос о технической возможности
пр дотпратить наезд.
Основными признаками места наезда на пешехода является
ос-лимиося на дорога следи и расположение отделившихся пр»,
ударе объектов.
Э.ч.1. Следи сдвига обуви на дороге в момент удара. Наиболее
точно определяет место наезда; хоросо заметны на влажном грунте,
грязи, песке, смогу и шлозсметни на асфальте, щебеночном и гра-
bitl. ном покрытии. Эти следы возникают, как правило, на большом
удалении от места расположения других причастных к проиоиествив
объектов, бистро за топ типа птс я н поэтому резко фиксируете1 при
осмотре места проислествия. Когда эксперту предоставлена возмож-
ность осмотра места происшествия непосредственно после ДТП, ему
следует предпринять попытку обнаружить кесто расположения таких
следов.
3.4.2. Следы отброшенного ударом тела пешехода при сколь-
жении его по поверхности дороги. ТЬкжо хорошо видны на грунте,
грязи, песке, снегу и малозаметны на твердых покрытиях, если не
остается следов крови. Пересечение этих следов или их напрагде-
ния со Следами колес ТС указывает на место наезда, когда при
скользящем ударе тело пешехода отбрасывается под углом к направ-
лению дв'кения ТС. По протяженности следов перемещения тела моя-
67
HD определить скорость его движения в начал/ их образования,
ипн кои]>|>иционт чопротигления перемещении тела.
J.4,?. Следи перемещения находивлихая у пострадавшего
вадой, ОПнарукивиотся то..ько на мягкой тли рыхлой поверхности.
||в|>е<'|>-|"нно iianpinxeiiHft нескольких следов между собой либо с
11>«и 1«|»динием следов колес ТС достаточно точно указывает на место
иве «да.
<
J.4.4. Следы колес 10. Позволяет определить расположение
и Та наезда по ширине полосы движения, если на ТС установлено
й которым бид нанесен удар.
Э.4.Э. Учюток осыпавшейся о нижних частей ТС пыли и земли.
Гпополагается в нспооредственюи близости от места наезда. Этот
Признак можно обнаружить лишь в некоторых случаях (сравнительно
редких) при аильном загрязнении нижних частей ТС. на чистой по-
верхности асфальта, при н^ездо ТС о высокой скорости).
3.4.6. Участок рассеивания соколков стекол, находившихог в
ведах лзшехода, сыпучих тел, жидкости, других мелких предметов,
отдалившихся при ударе. По месту расположения таких участков
место наезда можно определить приближенно исходя из условия,
чти оти объекты смекается от места удара по ииериии за время
свободного падения. Расположение от места наезда ближайшей гра-
ницы таких участков, где остаются наиболее мелкие частицы на
место их падения, может быть вычислено по формуле
где V - скорость ТС в момент ударе, км/ч)
11 - высота падения частиц, м.
Место наезда по вирине дороги по этоцу признаку может быть
унтоновлено лишь приближенно - по расположение продольной оси
«лаииса рассеивания осколков.
Sb
Более крупные объекты могут окопаться на значительные рас-
ото-шия по инерции после падения. Поэтому их расположение даже
прибллхснно ни позволяет судить о месте наезда, если не уста-
новлены расстояние, на которое они продвинулись по поверхности
дороги, и Kotр>исиент сопротивления перснсценио.
3,<u7« •'(octo располохсния лобых первых по двиденио ТС отде-
лиьласл и отброшенных при ударе предметов на месте проиооеогвия.
Поз эляет утверждать, что на зд произошел на некотором расстояния
перед ними.
Вероятность отбрасывания веной, находившихся у поисхода
(сумок, обуви, головных уборов и др.), под углом менее 45° (>ех-
сишльиый угол отклонения краев ветровых стекол от поперечного
направления) к направлении движения ТС практически < гсутотвует,
если удар по ним не был касательным, нанесенным боковой сторо-
ной ТС. Это позволяет уточнить по расположенно указанных объектов
и сходов ТС расстояние, на котором могло находиться иоото наезда
перед неотом расположения первых таких объектов.
69
Список литературы
I. БЕКАСОВ В.А. и др. Автотехничеокая экспертиза. - Ч.,
1И7.
2. ГОРДЕЕВА А.К. и др. Применение дифференцированных зна-
чений времени реакции водителя в экспертной практике: Метид.
роком. - М., 1903. •
3. ЕДВАНЬЙ В.И., Е.ЧЕ1Ь№В И.В. О снижении эффективности
торможения при засусливании тормозных колодок // Информ, письмо. -
М|. 1971. - > 55.
* 1. КРИСТИ Н.М. Методические рекомендации по производству
нудвбно-автотехнической экспертизы. - К., 1971.
. . КРИСТИ Н.М., БЕКАСОВ В.А. Методические рекомендации
пи некоторым вопросам производства автотехничеокой экспертизы. -
И.. 1968.
. Проблемы судебной автотехничеокой экспертизы: Сб. науч.тр.
Ш1ИИСЭ. - М.. 1964.
. Пути и средства совервенотвования методик судебных
пиротехнических экспертиз: Сб. науч.тр. ЫИИСЭ. - М., 1975. -
Bun. 13.
> , СУВОРОВ С.Б.. ОСЕПЧУГОВ Е.В. Определение я применение в
экспертной практике параметров торможения автотранспортных
о род отв: Метод, реком. - М., 1963.
. Судебная автотехничеокая экспертиза: Поооб. для
к^п.-автотех^, с:ед., судей. - X., I960.
7b
ОГЛАВЛЕНИЕ
Вводоние ........................................ J
Перечень обозначений основных величин ............ А
Глава I. Установление параметров движения ТС-......ё
I.I. Определение замедления ТС............б
1.2. Определение скорости ТС ........... 8
1.3. Определение времени движения ТС прл
применении торможения .....................
I,1» . Определение поремецения ТС в процессе
торможения ............................... W
1.5. Исследование даневра IC..............19
1.6. Установление причины отклонения
направления движения ТС.............24
Глава 2. Экспертное исследование столкновений ТС ....28
2.1. Относительная скорость ТС в момент
столкновения..............................28
2.2. Взаимное расположение ТС в момент
столкновения ..............................31
2.3. У'сто расположения ТС перед
столкновением.............................34
2.4. Реисние вопроса о технической возмож-
ности предотвратить столкновение ........,35
2.5. Место столкновения ТС ..............39
2.6. К вопросу о движении ТС в момент
столкновения ..............................
Гл’.па 3. Экспертное исследование наезде. на пеиехода 50
3.1. Зззимное расположение ТС и пешехода в
mjhcht наезда ............................50
expert22 для http://rutracker.org
71
3.2. Реионие вопроса о технической возможности
у водителя предотвратить наезд на поде- t
хода..........................................$2
3.3. Место расположения ТС м пеаехода в момент
появления .го из-jo ограничиваввето обзор-
ность объекта...............................-.57
3.4. M-.ro наезда на nt вех од с............. 65
пм «литературы..................««...с...............69
I
I »
expert22 для http://rutracker.org
Св. план, 19и7. поз. ZZ
Николая Михаилович Кристи
реяние OT^EJiLiuX тяговых -шч сулепгой
Авготехнической ЭКСПЕРТИЗЫ
(справочное пособие для окспергоэ-автотехникоь)
Всесоизния научио-иооледоватедьскид институт
судебных экспертиз
II9034 Москва, Кропоткинская наб., д. 15
Редактор Т.И. Гурлей
Корректор Т.Н. Муратова
Подп. в печ. 8.12.87 Форинт 60x90 I/I6 Офоетнол печать
Печ. л. 4,5 Уч.-изд.л. 3,0 Т - 500 экз.
Заказ ____________________________________ Мена 30 к.
Типография Лксуязииы Л/Bf) СССР, Москва
KM3J0
“ JU- чзуха. Jff <*
expert22 для http://rutracker.org