/


















































































































































































































Автор: Миль М.Л.
Теги: техника средств транспорта авиация самолетостроение проектирование аэродинамика вертолеты
Год: 1966




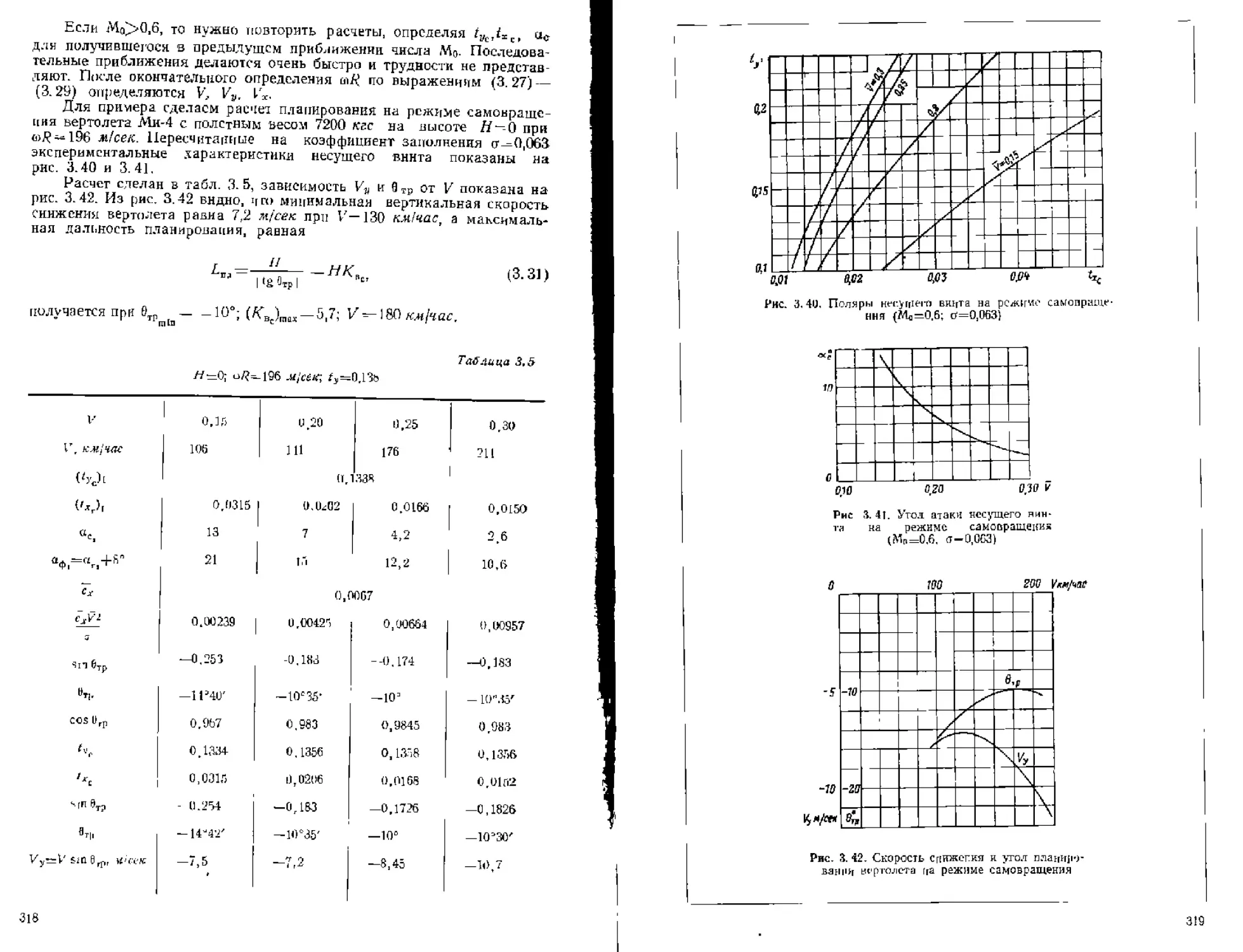
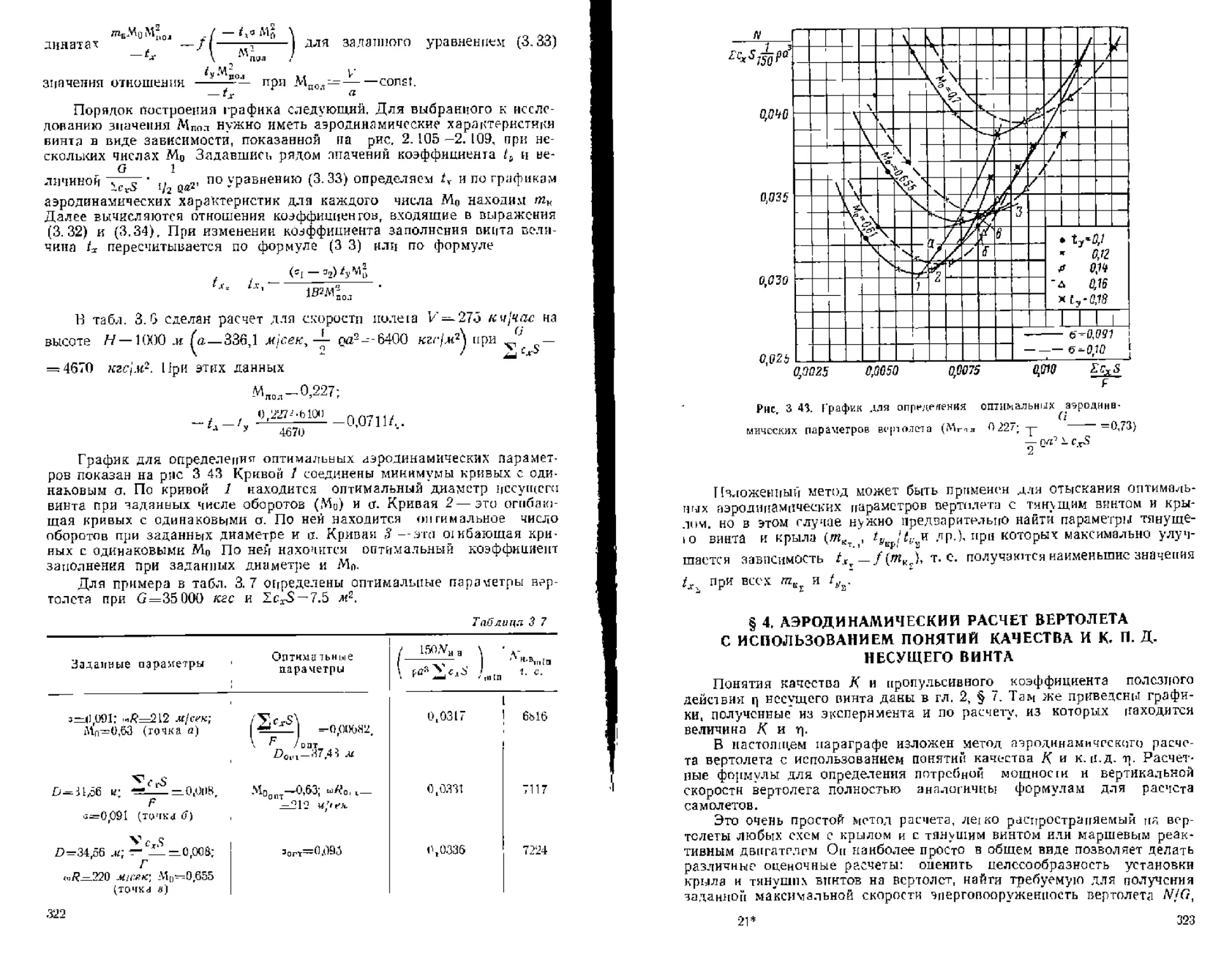
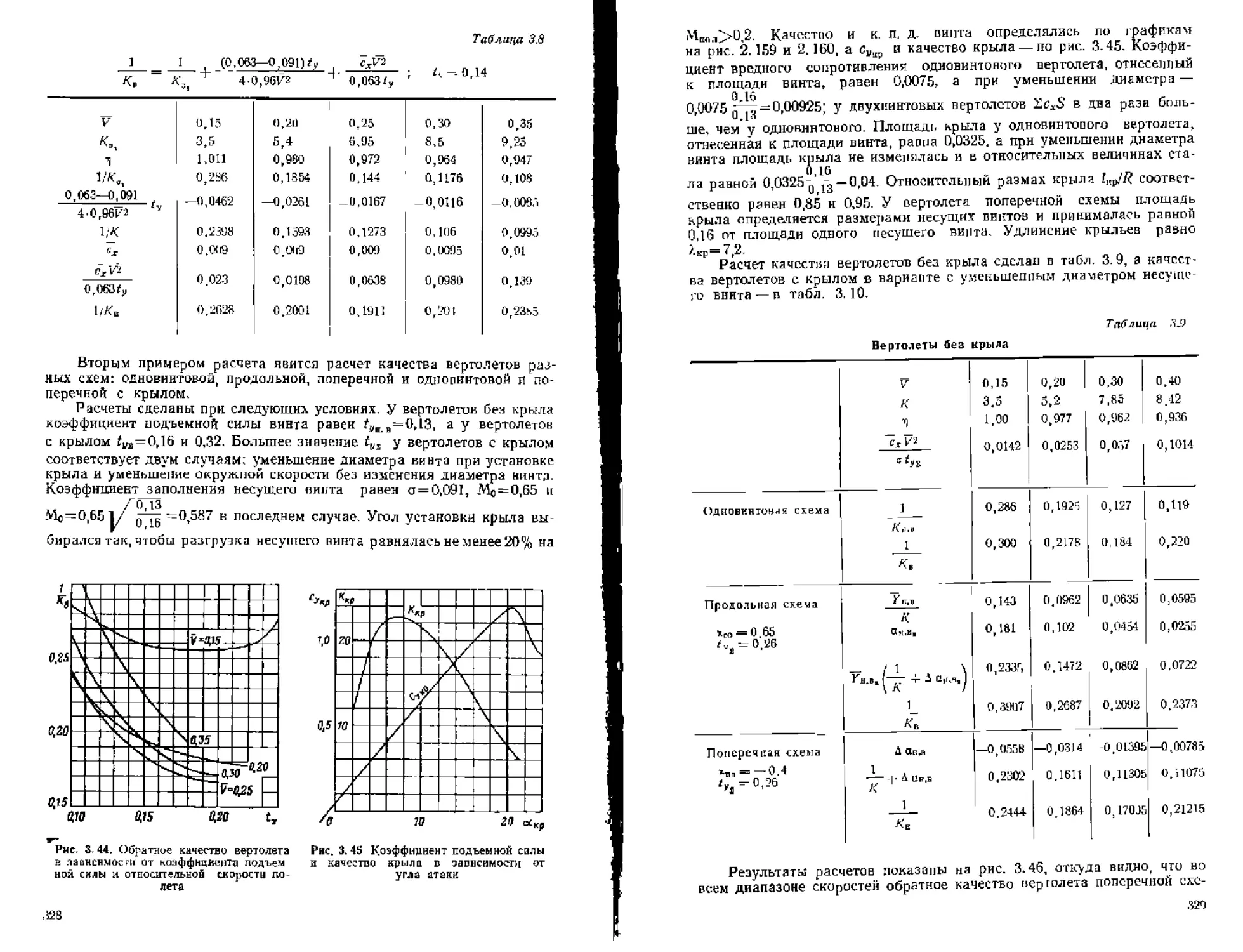
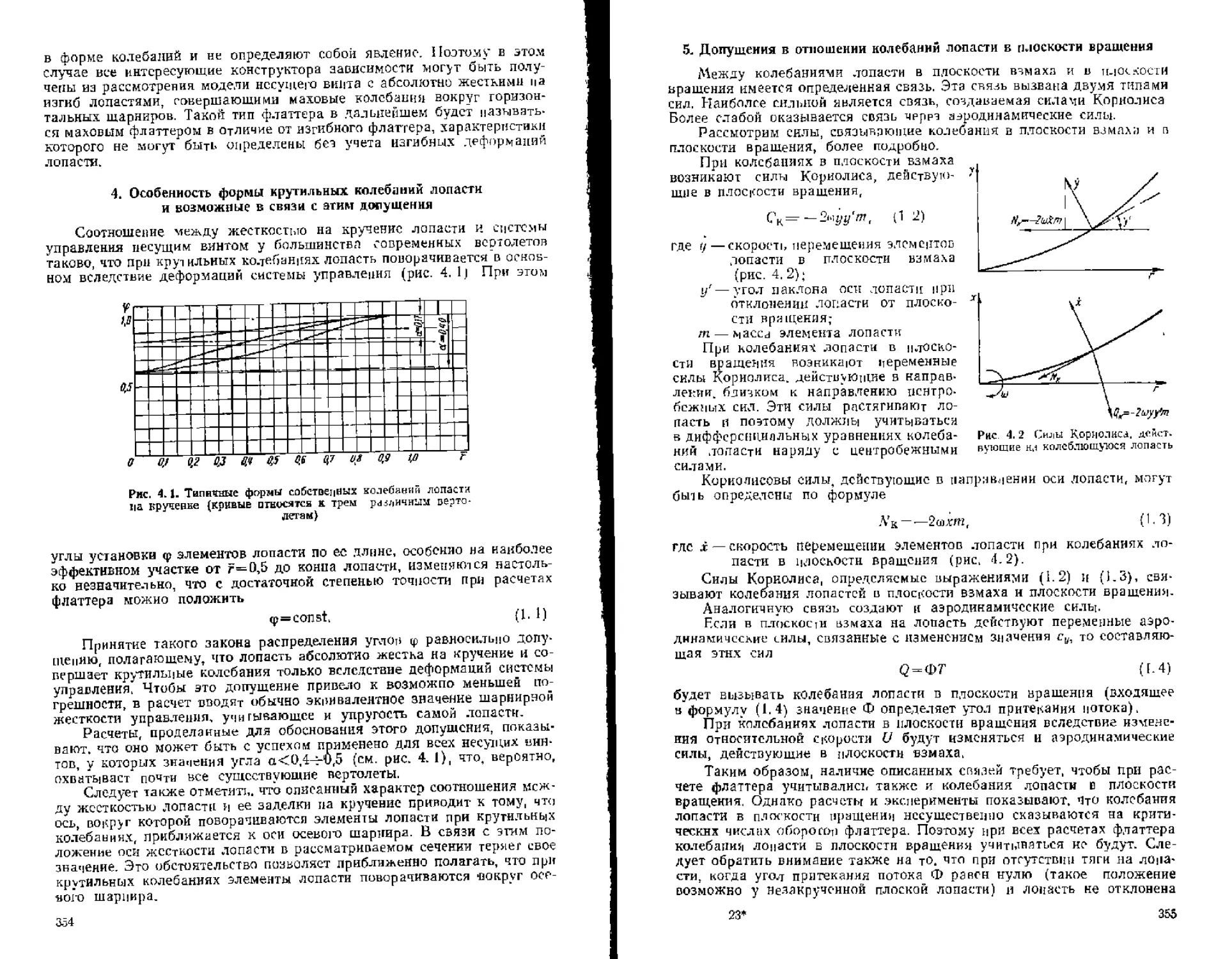
Текст
м.л. миль
А. В. НЕКРАСОВ
А.С. БРАВЕРМАН
Л.Н. ГРОДКО
М.А. ЛЕЙКАНД
Вертолеты
расчет
и проектирование
I
Аэродинамика
Пил редакцией
д ра теки паук М. Л, Миля
г
УДК 629 135 4 533.6001 12
В первой книге освещены пути развития всрто-тетов. османце прян-
ниды их лроектировннвя в место вертолетов свети других средств безаэро-
дромной авиация. Изложены различные теории несущего виига и соответст-
вующие методы определения ею аэродинамических характеристик'
классическая теория несущего винта с шарнирным креплением лопастей
в общем случае криволинейного движения вертолета, импульсная теория
Pen<njenr ь«ии.
тети наук Р. А. Михеев
3-!3 б
ПРЕДИСЛОВИЕ
П настоящей KiiHie обобщен опыт научной работы н практической
конструкторской деятельности инженеров одного из советских коллекти-
вов, работающих над созданием вертолетов.
Двадцать лет назад, когда коллектив только приступил к работе,
все в этой области казалось уже давно открытым и изобретенным.
Те, кому принадлежат первые идеи и проекты создания винтокры-
лых аппаратов Леонардо да Винти, М. В Ломоносов. Н Е. Жуков-
ский, Б Н. Юрьев и другие,— уже давно предложили почти все из су-
ществующих конструктивных схем вертолетов. Конструкторы, ученые
и изобретатели в различных странах построили десятки образцов верто-
летов, успешно поднимавшихся в воздух. Однако нн один из этих аппа-
xiaron еще не был пригоден для практического использования, серийного
производства и регулярной эксплуатации.
Осталась не разрешенной очень трудная задача, требовавшая боль-
шой и кропотливой работы,— задача создания таких вертолетов, кото-
оые могли бы найти практическое применение н повседневной жизни.
Для ее решения мы располагали серьезной научной базой в виде
классических трудов, работ Центрального Аэро- Г ид род и нам и ческою
ннсштута (ЦАГИ) и зарубежных ученых. Однако испытания каждого
нового аппарата ставили перед инженерами конструкторского бюро
новые острые вопросы и им приходилось самим разрабатывать мнение
теоретические проблемы, чтобы найти правильные пути решения кон
кретяых конструкторских задач.
В этой книге ос.нещены основные вопросы теории, расчета и проек-
тирования вертолетов, разрабатывавшиеся в коллективе и поставленные
насущными запросами сто конструкторской деятельности.
То обстоятельство, что части авторов довелось участвовать в прило-
жении классической теории несущего винта к расчету и проектированию
первых автожиров, в первых экспериментальных работах ца моделях
и на натурных несущих винтах я аэродинамических трубах, в разработ-
ке методов аэродинамического расчета вертолетов, а затем в течение
более чем 15 лет в проектировании целого семейсша вертолетов одной
и той же схемы во всех весовых категориях, дает нам возможность осве-
1002 3
гить основные вопросы теории и расчета вертолетов, проверенные прак-
тикой.
Еще в 1948 г. в нашей стране не было ни одного вертолета в экс-
плуатации Сейчас тысячи таких машин, созданных различными конст-
рукторскими коллективами, помогают людям во многих областях ич
жиши и деятельности.
Инженеры и конструкторы, работающие над проектированием или
постройкой вертолетов, летчики и ;етяияи, -туденты авиационных вузов,
запинающиеся или интересующиеся вертолетами, найдут в этой книге
полезные для себя сведения.
Техника, особенно авиационная, быстро устаревает Мы, однако, на-
деемся, что общие методы подхода к созданию нового типа летательных
аппаратов, изложенные в книге, переживут конкретные образцы верто-
летов своего времени.
ЛЕ Миль
Глава 1 кпири первой, § 1 и 2 маем 2 и § 2 главы 3 написаны
М. Л. Милем, глава 4 и § 5 главы 2 — А. В Некрасовым, о-тальные па-
раграфы глав 2 и 3. а также пн. 19—28 § 2 главы 2 - Л. С. Бравер-
маком.
В подготовке рукописи авторам оказали помощь инженеры
Ф. Л. Заржевская, Р. Д. Крсер, Л. Г. Рудницкий.
Много ценных замечаний сделал рецензент Р. А. Михеев.
Этим товарищам авторы выражают глубокую признательность.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Аэродинамические характеристики
г1 угол атаки несущею винта;
п, - угол атака селении напасти,
«р — угол нулевой подъемной силы профили лоцисги.
Да____угол ск°ся потока,
—c'j—тангенс угла никщни кривой подъемной сигь
“а профиля;’
— угол притекания пщоьа с имении лопасти;
Г — циркуляция в сечении -iniiaciH,
М — ЧИСЛО Маха сечеиин лицисъи;
Мо~ среднее по aiHMyiy число Ма\а в концевом сечеции лсластп
Мала полета
— тяга и коэффипжн! 1Ч1ц несущего
винта
$ЯЛ/?- (<чА?)2
H.h —-------- — продольная сила И ксэффицисн!
боковая сила »| «иэффиииепг
боковой СИЛЫ
— крутяшпй момент it кочпфнш ен ।
момента
винта
.V—MOiKHOcib двигателя [несущего впнм к м. 2).
гоэффиищнт подъемной силы несущего винта
— пропульсивная сила и коэффициент нропулызивцон ииы несущею
цинга |fr-------------—
— коэффициенты подъемно," силы и лрофмъного сопротивления се
чсния лопасги (крыла), отнесенные к скоростному наннру qV'2;
— коэффициент KOHiionux потерь
Скорости
<>Л — окружная exopocift,
V —— скорое ль полета вертоюя г.о траектории,
t —торизоисальная, вертикальим. и боковая состав-
лягоиыге скорости полета
v А
I1 — —— j -- ННЛУКТИВНЯЯ скорость.
- oimuHtCтъняя ск^оеть обик^нян элечен'а
ыН
-I—горизон!а.п.пая J; вертикальна» составляющие нг-
' посцтеиннай скорости обтекания цемента лопасги;
X — КОЭ|[ц]!»ПИСП ПООТС-КЛН11Я!
у. — \ирак терпении (коэффицнгп ।)
режима
Геомегрииеские характеристики
-диаметр несущим винта;
радиус не< у икго вилта,
обегаемая иссушим винтом площадь,
радиус CHifhiiH
хорда лопаци
ЧСС.ГО ЛОПЗС |ГН.
ЧИСЛО ЧИН1ОВ,
коэффицпегп .апо.гь.скяь несущего вр-ы./;
и н о шарниров co'itbcvci венно
.ОТЩцНа се-Чеиик |,?'?ф!1Т'7 г “
угол взмаха > гшасти,
лОрффпигшнты \|.1\овО|0 дпЕжепня-
угод yriailOBkll (шаг) ССЧв|;КЯ Л1.П4СГ, Р,ТО J между W|! (Ок, профиля
•гспаста и n.TiM-Kccrhio враиекня);
умы сгк-юиспия автомата перекоса х с ппдееыж — лоэффщпшит
□заимозлпяинг несущих элементов-
сосган.1яюшие изменения ила установки лона(.|И oi носители о n..oi
кости нрашевня за стет стклопенгь лвюматл перекоса;
цшенемне ут.лс мтанъвкн ееч«т лопасти гУ сче, \iipyre-n дефор-
мации ЛО11ВСТ-1
I J ABA 1
ПУТИ РАЗВИТИЯ ВЕРТОЛЕТОВ И ОСНОВНЫЕ
ПРИНЦИПЫ ИХ ПРОЕКТИРОВАНИЯ
(Выбор параметров и схемы)
§ I. РАЗВИТИЕ ВЕРТОЛЕТОСТРОЕНИЯ
Проектирование всегда направлено и будущее. Однако для того
чтобы яснее представить себе ночможности дальнейшего развития вер-
толетов, полезно попытаться понять основные направления их развития
из прошлого опыта. Здесь ингереенл. конечно, не предыстория вертолето-
строснни, о которой мы лишь кратко упомянем, а его история с момента,
когда вертолет как новый тип летательных аппаратов стал уже нриго-
тс-г; для практического использования.
Первые, упоминания об аппарате с вертикальным винтом — геликоп-
1 ере содержатся в записях Леонардо да Винчи, относящихся к 1483 г
Первый этап развития тянется от модели геликоптера, созданной
М В. Ломоносовым в 1754 г. через длинный ряд проектов, моделей
и даже построенных в натуру аппаратов, которым не суждено было
подняться в воздух, до постройки первого в мире вертолета, которому
и 1907 г. удалось оторваться от земли. Этот четырехвинтовой вертолет
построили французские конструкторы Бреге н Рише В 1923 г. п США
на вертолете конструкции Ботезата впервые бы.| поднят в воздух пасса-
жир. На итальянском соосном вертолете Асканио в 1930 г. был усганоп
лен первый мировой рекорд высоты полета вертолета — 18 м.
В России на основе научных работ Н Е. Жуковского, посвященных
геликоптерным винтам, группой eio учеников во главе с Б Н. Юрьевым
в 1911 г. был построен одновинтовой вертолет. В очертаниях этой ма-
шины мы узнаем принципиальную схему наиболее распространенных
сейчас в мире одновинтовых вертолетов. Вернуться к этой работе
Б. II. Юрьеву удалось лишь в 1925 г. В 1932 г. группа инженеров, воз-
главляемая А. М. Черемухиным, построила вертолет ЦАГИ 1-ЭА
(рис. 1.1), который достиг высоты полета 600 .и и продержался в возду-
хе. [8 мин, что было для того времени выдающимся достижением. До-
статочно сказать, что официальный рекорд высоты полета, установлен-
ный спушя 3 года на новом соосном вертолете Бреге, составил
всего 180 м
В это время в развитии вертолетов (геликоптеров) возникла неко
тора» пауза. На передний план выдвинулась новая петвь винтокрылых
аппаратов -автожиры. Идея ;|В|ОЖира, как самолета с вращающимся
крытом (авторотирующим несущим винтом), никогда не теряющим
скорости, возникла у молодого испанского инженера Хуа,iа де ля Сисрва
в цвад.цатых голах. В то время стремительно развивавшиеся за годы
первой мировой войны самолеты, теперь уже оснапгсниые вооружением
и поэтому с большей нагрузкой на площадь крыла, вплотную встрети-
лись с новой тогда проблемой штопора—потерей скорости. Создан,
безопасный и достаточно совершенный автожир оказалось проще, чем
Построить гелнколтер-вертолет. Свободно вращающийся от набегающего
потока несушнй винт исключал необходимость в сложных редукторах
и трансмиссиях. Примененное на автожирах шарнирное крепление лопа-
стей несущего винта ко втулке обеспечило им гораздо большую проч-
ность, а авюжиру устойчивость. Наконец, остановка двигателя переста-
ла быть опасной, как это было v первых геликоптеров: авторотируя,
автожир легко совершал посадку с малой скоростью.
Работая в Аньтпи, Сперва создал несколько конструкций автожггров,
наиболее известным из которых был автожир С-30, находившийся
в серийном производстве. Автожиры строились также в США фирмами
Питкерн н Ксллет и в Советском Союзе в НАГИ конструкторами
И. П. Братухиным. В. А Кузнецовым, Н И. Камовым. Н. К. Скржци-
ским, М. Л Милем п другими
Рис. 1.1. Вертолет НАГИ 1-ЭЛ
Скорость полета советских автожиров в 1937 г достшла 260 кмчас
Автожиры А-7 конструкции И. И. Камова использовались на фронте
в первый год Великой Отечественной войны.
Ьолыпая несущая способность вращающегося винта обеспечивала
автожиру малую длину разбега и пробега Однако для ее дальнейшего
сокращении в конструкции был применен механический привод от чзц
гателя для раскрутки несущего винта перед взлетом В конструкции ан-
глийского автожира С-40 ротор раскручивался перед полетом уже до
таких оборотов, что в момент выключения сцепления с дищателем,
который в поступательном полете вращал тянущий винт, за счет резкогс
увеличения шага аппарат взлетал без разбега. совершая прыжок
в воздух.
Тут уже до вертолета - геликоптера оставался один шаг. И этот шаг
был сделан, кик всегда в технике, пракщчески отновременно в разных
странах Так начался новый современный этан в развитии вертолете,!
Он был начат полетами вертолета FW-6I конструкции профессора
Фокке г 1 ермании (1937 г.), верюлета VS-ЗОО конструкции Сикорске о
в США (1939 г) и вертолета «Омега» конструкции 'И. П. Братухина
в СССР (1940 г,). Для всех л-их трех цертолетоп характерно прииененнс
шарнирного, способного авторотировав, несущего винта, уже освоенного
к тому времени иа автожирах.
Вторая мировая война несколько задержала развитие вертп.|е|Ов.
Они были еш.е непригодны для практического использования, л средства
и возможности для экспериментальных работ были ограничены Зато
после окончания войны (1946 и 1947 гг.) десятки конструкторов и изоб-
ретателей устремились в эту новую и столь обещающую область р.ззви-
тия авиационной техники. За короткое время были созданы буквально
десятки новых конструкций вертолетов. Это было состязанием самых
разнообразных схем и форм, как правило, одно- или двухместных аппа-
ратов, имевших главным образом экспериментальное назначение. Естест-
венным заказчиком этой дорогой и сложной техники были военные
ведомства. Первые вертолеты в разных странах получили назначение
связных и разведывательных военных аппаратов.
В развитии вертолетов, как и во многих других областях техники,
можно четко различить две линии развития — ко размерности машин,
т е. количественную, и почти одновременно возникшую линию развития
качественного совершенствовании летательных аппаратов внутри опре-
деленной размерной или весовой ка1егории. Первая представляет собой
развитие по i рузоподъемностя, а вторая по улучшению летно-тактиче-
ских или экономических характеристик вертолетов.
I. Развитие вертолетов по размерностям
Рассматривая зарубежные вертолеты, можно сказать, чго идея ис-
пользования вертолетов для десантирования морской пехоты с кораблей
определила дальнейшее развитее военного вертолетостроения как транс-
портно-десантного. Высадка на вертолетах S-55 американского десани
в Инчоне во время войны в Корсе (1951 г.) подтвердила такую те i-
денпню.
Размерный ряд транспортно-десантных вертолетов стал определять-
ся габаритами и весом наземных транспортных средств, которыми поль-
зуются войска и которые необходимо было перебрасывать по воздуху
Дело в том. ню обычное вооружение, главным образом артиллерийское,
перевозимое тягачами, по несу близко к весу самих тягачей. Поэтому
грузоподъемность первых транспортных вертолетов в зарубежных ар-
миях составила 1200 -16'00 кге (вес легкого военного автомобили, нс-
по..ьзуемого в качестве тягача и соответствующих орудий). Затем по-
требная грузоподъемность вертолетов увеличилась до 6—8 тс, что
соответствует военной технике, базирующейся на шаси/ автомобиля
грузоподъемностью 3—4 тс. В дальнейшем, например в проектах фирмы
Сикорского, грузоподъемность вертолета достигает 20—25 тс и, наконец.
35—40 тс Такие величины соответствуют весу легких и средних таиьов
пли соответствующих самоходных шагси. Будет ли завершена эти линия
зазвитпя в таком ряде разме.рностей — зависит от постоянно меняющей-
ся поенной доктрины. Артиллерийские системы и большей мере заме-
няются ракетами, поэтому в зарубежной печати мы находим требования
ио перевозке ракет или ракетных систем, которые определяют размеры
вновь создаваемых вертолетов.
Если попытаться выделить главную линию дальнейшего развщия
вертолетов, проследив последовательно создание новых типов машин
в тех немногих конструкторских бюро, которым удалось практически
довести до пригодного к эксплуатация состояния опытные образцы
Н освоить их серийное производство, то окажемся, что этой главной ли-
нией разом । ия было увеличение грузоподъемности вертолетов.
В табл. I. 1 приведены данные, характеризующие развитие грузо-
подъемности одновинтовых вертолетов одной и тон же схемы двух кон-
структорских бюро—вертолетов Ми-I (рис. 1-2), Ми-4 (рис. 1.3),
Ми-6 (рис. 1.4), Ми-10 (рис. 1,5), S-51 (рис. 1.6), S-58 (ри?. 1.7)
и S-64 (рис. 1.8).
Как видно из табл. 1. I, каждый раз грузоподъемность увеличивает-
ся сразу в несколько раз.
Однако нетрудно показль, что увеличение размерности и веса вер-
толетов невозможно без качественного усовершенствования применят-
мых дви| ателсй (уменьшения их неса на единицу мощности и повышения
экономичности, т. е. уменьшения расхода юплива).
Таблица 1.1
Действительно, увеличение полетного веса возможно или за счет
v велнчения диаметра винта, или за счет увеличения установленной мощ-
ности, или за счет этих обоих факторов
G^ Т- (A-r^VOf'-1. (1.1)
Вес двигательной установки пропорционален перкой степени мощ-
ности, а вес аппарата возрастает тишь пропорционально степени две
трети
Рис I 2. Вертолет .Ми-1
Таким образом, вертолет с большей энерговооруженностью будет
иметь относительно больший вес конструкции за счет двигательной
установки.
Аналогично вес лопасти и соответственно ему вес несущей системы
изменяется пропорционально третьей степени диаметра, а в§с вертолета
опять лишь в степени дпе трети. Опять вес несущей системы большего
вертолета окажется относительно более высоким. так. при увеличении
размерностей вертолета должна была бы уменьшаться его шшовая отда-
ча, т. р. отношение полезной нагрузки к полетному весу, если не пред-
полагать вссоиою совершенствования двигателей или конструкции ло-
пастей вертолетов, их редукторов и трансмиссий Известны даже вьщхед-
шие в тридцатых голах печатные труды, доказывавшие бессмысленность
создания геликоптеров с мощностью более 500 л. с., так как увеличение
10
I'
Рис. 1,8. Bcpro.;cr S Й1
мощности не приводило к увеличению полезной нагрузки. Действитель-
но, но техническому уровню того времени вес винтов, редукторов и всего
аппарата в целом увеличивался с повышением мощности быстрее, чем
возрастала подъемная сила.
Однако при создании нового военного и тем более нового вертолета
народнохозяйственного применения конструктор не может мириться
с понижением достигнутого уровня весовой отдачи
Таким образом, «количественное» развитие по размерному рту не-
возможно без качественного и фактически происходит одновременно
с качес| венным развитием техники.
Создание более крупных вертолетов, чем первые двух-, трехместные
образцы, в сравнительно короткие сроки, было возможным, поскольку
удельный вес поршневых двигателей всегда понижался с увеличением
'мощности. Но в 1953 г. после создания 13-тонною вертолета Сикорского
S-56 (рис. 1. 10) с двумя поршневыми двигателями мощностью 2300 л. с
р-шмернып ряд вертолетов ц.т Западе прервался и только в СССР, при
менцв турбовин iовыс двигатели, удалось в 1957 г. создать вертолет Ми-6
с полетным весом 40 тс.
2. Качественное развитие вертолетов
В середине пятидесятых юдов надежность вертолетов стала значи-
тельно выше, следовательно, расширились и возможности их применения
в народном хозяйстве. На первый план выдвинулись вопросы экономики.
Применяются ли вертолеты для геологической разведки, сельскохо-
зяйственных работ или для перевозки пассажиров — определяющую
роль играет стоимость часа эксплуатации вертолета Большую долго
в ней составляет амортизация,т е. пена вертолета, поделенная на срок
ei о службы. Последний определяется ресурсом агрегатов, т. е. их сроком
службы. Проблема повышения усталостной прочности лопастей, валов
и трансмиссий, втулок несущего винта и других агрегатов вертолета
стала первостепенной задачей, занимающей и сейчас конструкторов
вертолетов. В настоящее время ресурс 1000 час уже не является ред-
костью для серийного вертолета и нет основания сомневаться в eio
дальнейшем повышении. При транспортном применении вертолетов
определяющими становятся понятия стоимость тонно-километра перево-
димого груза и стоимость пассажиро-километра. Это есть стоимость часа
зкеплуатацни, поделенная на часовую производительность, т. е на про-
изведение из чеса платной нагрузки на крейсерскую скорость
Поскольку вес конструкции в значительной степени определяет
пену вертолета, становится ясной прямая связь экономичности с весовой
отдачей вертолета Новую роль приобретает н скорость полета.
Так позникает мысль о необходимости создания вертолетов с более
высокими экономическими показателями. Развитие турбовинтовых дви-
гателей со значительно меньшим удельным весом, чем поршневые, по-
солило, сохранив в каждой весовой категории размерности несущих
1-ннгов, получить вертолеты с большей весовой шдачен.
Как правило, при замене поршневых двигателей турбовинтовыми
ироиеходило не только уменьшение относительного веса енловон уста-
ковки, ни и некоторое повышение мощности, что вызывало двойной
эффект, а, кроме того, приводило гг к значительному увеличению крей-
серских скоростей.
На диаграмме (рис. 1.9) можно проследить эти количественные
и качественные линии развития наиболее широко распространенных вер-
толетов трех конструкторских бюро. Имеются в низу одновинтовые вер
полеты конструкции Сикорского (США) и о.тнопннтоные отечественные
вертолеты, а также вертолеты продольной схемы фирмы Плсецкого, впо-
следствии преобразованной в фирму Псртол-Боицг.
Тан, линии развития по размерности па базе поршневых двигателей
(сплошные линии на рис. 1.9) обрываются уже в 1953 г Зато по мере
создания турбовинтовых Двигателей необходимой раз.мерцосп| через
й- 10 лег появляются вертолеты второго поколения (соответствующие
им точки на диаграмме соединены с исходными образцами пунктирной
линией качественного развит ня).
14
Рис. 1.12 Вертолет $-55
1ак вертолеты с поршневыми двигателями 8-55, 8-58 и 8-56 послу-
жили проютипами соответственно ыя турбовинтовых машин 8-61
(рис. 1. И), 8 62 и 8-65 (рис. 1 )2). То же относится к вертолетам про
дольной схемы фирмы Вертол-Боннг V-107 и VB-114 «Чинук» (рис. I. 13)
Рис. 1.14. Вертолст Ми-2
Советские турбовинтовые вертолеты Ми-2 (рис. 1. 14) и Ми-8
(рис. ]. )5) также являются развитием широко известных вертолетов
Ми-1 и Ми-4.
Поражает по сравнению с самолетами необычная долговечность
вертолетов. Почти все нанесенные на диаграмму поршневые вертолеты
(за исключением опытных вертолетов ХН-16 к 8-56) находились а про
Рис. 1.15. Вертолет Ми-8
изводсгве и эксплуатации до появления их второго турбовинтового по
колония, а вертолет Ми-1 скрапил в серийном производстве свое пят-
надцатилетие и приближается к рекордной долговечности самолета Ли-2.
Можно полагать, что и настоящее время установились весовые ка-
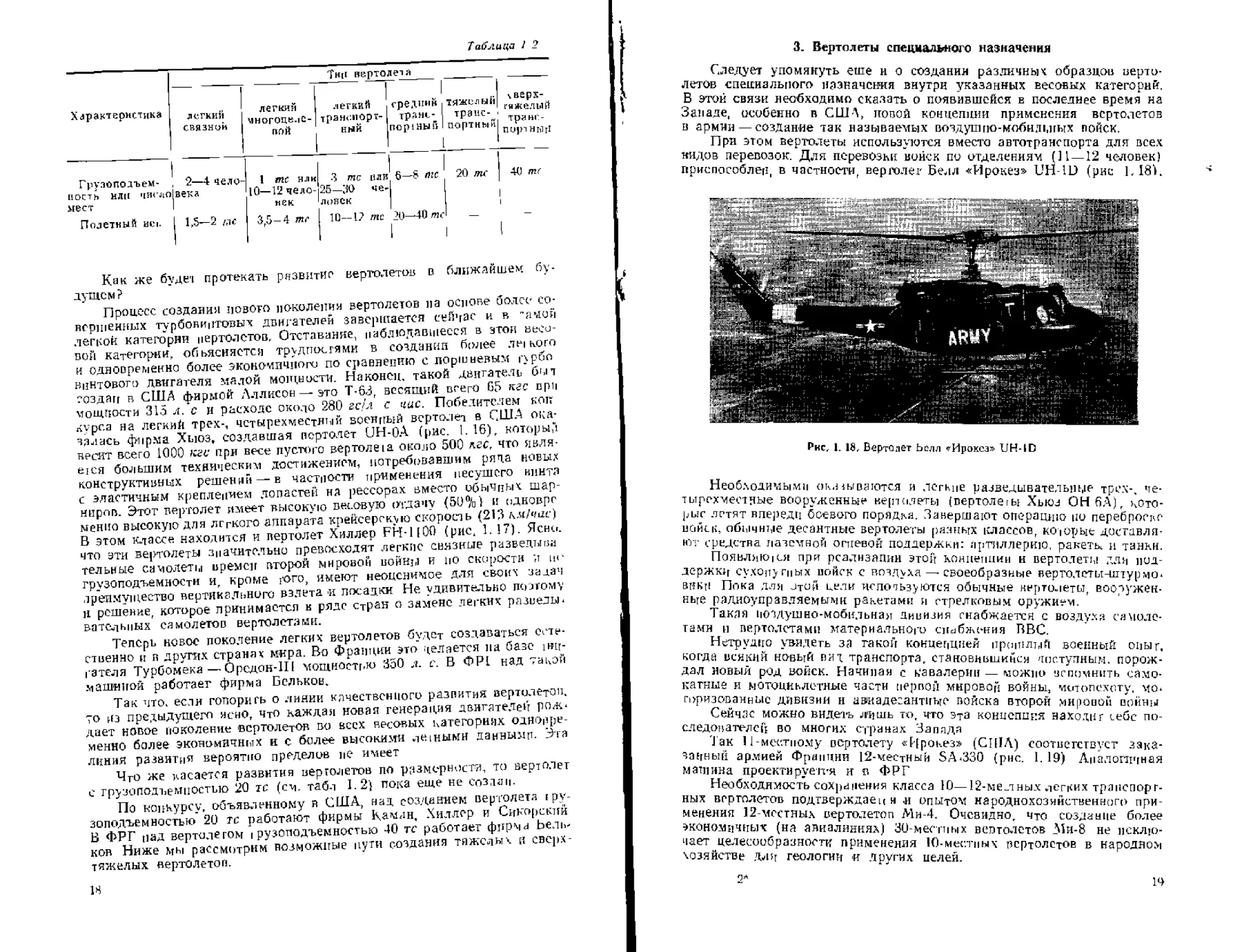
тегории вертолетов, указанные в табл. 1.2.
)6
I'
Таблица 1 2
Характеристика
легкий связной Thii вертолета легкий | легкий [ гредггий , тяжелый} r^e₽®’ многопе.|С-1 транспорт-1 транс- 1 транс-, ' вой ный первый 1 портный! 1 'l1’
20 тс I 40 тг
Груэоподъем- , 2—4 чело- 1 тс вли| 3 тс
пости или чи<ло1века 10—12 чело-|25—;1О
мест I пек 'ловек
Полетный веь | 1,5—2 /,тс
3,5-4 тс 1 10—12
Кик же будет протекать развитие вертолетов в ближайшем бу-
дущем ?
Процесс создания нового поколения вертолетов па ослопе более со-
вершенных турбовинтовых двигателей завершается сей1,ас и в -ямой
легкой категории пертолстов, Отставание, наблюдавшееся в этой весо-
вой категории, обьяснястся трудностями в создании более ли кого
и одновременно более экономичного по сравнению с поршневым прбо
винтового двигателя малой мощности. Наконец, такой двигателе б'л
создан в США фирмой Аллисон — это Т-63, весящий всего G5 кге при
мощности 315 л. с и расходе около 280 гс/л с час. Победителем коп
курса на легкий тр^х-, чстырехместный военный вертолет в США ока-
зались фирма Хыоз, создавшая вертолет UH-0A (рис. 1.16), который
весит всего 1000 кге при весе пустого вертолет около 500 лас, что цвля-
eicfl большим техническим достижением, потребовавшим ряда новых
конструктивных решений — в частности применения несущего винта
с эластичным креплением лопастей на рессорах вместо обычных шар-
ниров. Этот вертолет имеет высокую весовую отдачу (50% 1 и одноврг
менно высокую для лггкого аппарата крейсерскую скорость (213 к-ч/час)
В этом массе находится и вертолет Хиллер FH-1[00 (рис. 1. 17). Ясно,
что эти вертолеты Значительно превосходят легкие связные разведыиа
тельные самолеты времен второй мировой воины и но скорости и и<-
грузоподъемности и, кроме гого, имеют неоценимое для своих задач
преимущество вертикального взлета и посадки Не удивительно шитому
и решение, которое принимается к ряде стран о замене легких разведы-
вательных самолетов вертолетами.
Теперь новое поколение легких вертолетов будет создаваться есте-
ственно и в других странах мира. Во франции это делается на базе ши-
гателя Турбомека—Орсдон-Ш мощностг-к» 350 с. В ФР! над такой
машиной работает фирма Бельков.
Так что. если говорить о линии качественного развития вертолетов,
то из предыдущего ясно, что каждая новая генерация двигателе»? рож-
дает новое поколение вертолетов во всех весовых категориях одновре-
менно более экономичных и с более высокими .ikihhhh данными. Эта
линия развития вероятно пределов не имеет
Что же касается развития вертолетов по размерности, то вертолет
с грузоподъемностью 20 тс (см- табл I. 2) пока еще не создан.
По конкурсу, объявленному я США, над созданием вертолета iру-
зоподъемностью 20 тс работают фирмы Камин. Хиллер и Сикорский
В ФРГ над вертолетом i рузоподъемноегью 40 тс работает фирма Ьель-
ков Ниже мы рассмотрим возможные пути создания тяжелых и сверх-
тяжелых «ертолетов.
18
3. Вертолеты специального назначения
Следует упомянуть еше и о создании различны* образцов верто-
летов специального назначения внутри указанных весовых категорий.
Б этой связи необходимо сказать о появившейся в последнее время на
Западе, особенно в США, новой концепции применения вертолетов
в армии — создание так называемых воздупию-мобилыгых пойск.
При этом вертолеты используются вместо автотранспорта для всех
видов перевозок. Для перевозки войск по отделениям (11 — 12 человек)
приспособлен, в частности, верголех’ Белл «Ирокез» UH-1D (рис 1.181.
Рис. I. 18. ВертОдет Ьслл «Ирокез» UH-ID
Необходимыми ок.нываются и легкие разведывательные трех-, 'те-
тырохместные вооруженные вертолеты (вертолеты Хьюз ОН6А), кото-
рые летят впереди боевого порядка. Завершают операцию по переброске
войск, обычные десантные вертолеты разных классов, которые доставля-
ют средства наземной огневой поддержки: артиллерию. ранеть. и танки.
Появляютоя при реализации этой концепции и вертолеты для под-
держки сухопутных войск с воздуха — своеобразные вертолеты-штурмо-
вики Пока для дтой цели испотьзуются обычные кертолеты, вооружен-
яьге радиоуправляемыми ракетами и стрелковым оружием.
Такая иоздушно-мобильная дивизия снабжается с воздуха самоле-
тами и вертолетами материального снабжения ВВС.
Нетрудно увидеть за такой концепцией прошлый военный опыт,
когда всякий новый вид транспорта, становившийся тоступны.ч. порож-
дал новый род войск. Начиная с кавалерии — можно вспомнить само-
катные и мотоциклетные части первой мировой войны, мотопехоту, мо-
торизованные дивизии н авиадесантные войска второй мировой войны
Сейчас можно видеть лишь то. что эта концепция находит себе по-
следователен во многих странах Запада
Так 11-местному вертолету «Ирокез» (США) соответствует зака-
занный армией Франции 12-местцый SA-330 (рис. 1.19) Аналогичная
матпина проектируется и о ФРГ
Необходимость сохранения класса }0—12-мел ныл' легких транс порт-
ных всртолетсф подтверждаец я и опытом народнохозяйственного при-
менения 12-мсстны.х вертолетоп Ми-4. Очевидно, что создание более
экономичных (на авиалиниях) 30-месгпых веотолетов Ми-8 не исклю-
чает целесообразности применения 10-местных гзсртолстов в народном
хозяйстве дли геологии и других целей.
W
4. Комбинированные вертолеты
с дополнительными движителями — винтокрылы
Большой интерес представляло появление комбинированных верто-
леюв, использующих в поступательном полете тянущие винты, как эю
было ранее у автожиров Таксшы Ротодайн Ферри, сконструированный
Хислопом, и особенно винтокрыл советского конструктора Н. И Камова
На винюкрыле Ка-22 и 1964 г. были установлены мировые рекорды
для аппаратов этого типа: скорости 360 /с.и/чос и грузоподъемности
в 16 гс. Винтокрыл Н, И. Камова спустя 20 лет вновь обратил внимание
вертолетного мира на поперечную схему, разрабатывавшуюся в свое
время с успехом Фокке в Германии и И, П. Братухиным в СССР. Эта
машина вновь напомнила о больших ирснмугцествах поперечной схемы
в дальности полета ч грузоподъемное in при B’wieie с разбегом, которые
она. таит к себе при удачном конструктивном решении.
Ратиигнем комбинир&винных аертолстоп е тялушими ннн1амп ян
ляются вертолеты с дополнительными маршевыми турбореактивными
двигателями, npea.iai эсмые сейчас на Западе для военных целей.
Интересным прототипом вертолета штурмовика является комбини-
рованный вертолет Локхид 1рпс 1.20) Эта двухместная эксперимен-
тальная машина, кроме основного турбовального днигате.дя в 550 л с
приводящего четырех.тоиастный несущий пинт с упругим креплением
лопастей, имеет установленный на небольшом крыле тсроовецтрлятор-
цый дБига1елъ, который позволяет при кратковременном его включении
в no.neie развивать скорость до 426 км/час.
Успешное развитие днукконт)рн1-1Х турбовинтовых двигателей, шо-
беино с 60Ti.mc.ii степенью двухконтуриисги, может привести г будущем
к появлению образцов, имеющих иа крейсерских режимах расходы по-
рядка Сп — 0,5 кг< /кес час. Так как
Д- ^.сг.
то нетрхл.но рассчитать, что в этом случае расход на лошадинз’ю силу
эквивалентного винтового двигателя при коэффициенте полезного дей-
ствия винта 0.75 и скорости полета 150 м/сек еоставц| всего около
200 fcl(л. с час).
Учитывая ешс и малый вес такого двигателя по сравнению с песо»
турбовинтового двигателя с пропеллером, становикя ясным, что при-
менение турбовентиля।орных двигателей такого сипа может стать вы-
годным экономнаескн и на меньших крейсерских скоростях полеi а ц при-
20
вести к созданию комбинированных вертолетик с лополнитс.|1.пым
1яговым двигателем и крылом для пассажирского сообщения между цен-
трами городов с крейсерскими скоростями порядка 350 450 км/час.
Одновременно такого типа вертолеты можно ожидать найдут примене-
ние в военном деле в качестве аппаратов огневой поддержки войск.
Рис. 1.20 Вертолет Локхггд ХН-51А
Анализируя П}ти развития нерюлетов, нельзя обойти вопрос о вер-
тикально взлетающих самолетах. Не оборвется ли с их появлением ли-
ния развития и применения вертолетов, так как это случалось при
освоении вортолеюв с автожирами3
§ 2. ВЕРТОЛЕТ В СРАВНЕНИИ С, ТРАНСПОРТНЫМИ
ВЕРТИКАЛЬНО ВЗЛЕТАЮЩИМИ САМОЛЕТАМИ
И С САМОЛЕТАМИ С КОРОТКИМ РАЗБЕГОМ
Говоря о перспемнвах развития вертолотостроения, необходимо
рассмотреть вопрос о возможности сосуществования вертолета и вер-
шкально взлетяющего самолета. Есть ли у вертолетов будущее3 Вес ли
резервы вертолета исчерпаны3 Может ли он успешно соревноваться
ч вертикально взлетающими самолетами? Не окончится ли тниия их
разщпия. как это произошло с авюжирами, которые с появлением
। 1940 г. первых удачных вертолеюн — геликоптеров прекратили свое
--шестЕование3 Сравнительное исследование вертолетов и вертикально
ы.'.етаюших пли с коротким разбегом самолетов, как предав безаэро-
Ц'омной транспортной авиации, дает возможнойть опыт на эти прин-
ципиальные вопросы
Известно, что в последнее время щал очень актуальным вопрос
' вертикально взлетающих самолетах (в английской транскрипции
VIOL) "ио самолетах с коротким разбегом (в английской гранскрн i-
иин STOL)
Действительно, скорости полета истребителей, досгщаюшие 2300—
3000 км/час. требуют такой высокой энерговооруженности, что для вер-
гикалктого взлета им остается очень немного добавить. Поэтому, судя
V 1 OL - - Vcrii id I take cf Landing, S FOL — Shor, lake о I Land ng
21
по зарубежной литературе, можно полагать, что истребители и истреби-
тели-бомбардировщики будут распиваться в основном, как вертикально
взлетающие самолеты бозаэродромцого применения, Чти же касается
транспортных самолетов, энерговооруженность которых ограничивается
соображениями экономики и просто расхода топлива, то направление
их развития склоняется в сторону' самолетов с коротким разбегом.
Некоторые полагают, что ближайшее развитие вертолетов позволит
решать транспортные задачи на дальности до 600 км лучше, чем это
может быть сделано при помощи вертикально взлетающих или специаль-
ных транспортных самолетов с коротким разбегом.
При исследовании возможного направления развития авиации петь
зя ограничиваться анализом, базирующимся на современном уровне
науки п техники.
Нррменнн такие методы, многие ученые нс раз приходили к оши-
бочным выводам о наличии «пределов» в развитии тех или 'иных летно-
(актнческих данных самолетов или вертолетов именно потому, что не
предусматривали развития параметров, характеризующих весовое и эко-
номическое совершенство двигателей, совершенство конструкции л при
меняемых материалов. Нужно как-то экстраполировать их разци1ие на
ближайшее время
Оставляя такому исследованию место в будущем, оцепим положе-
ние xoiH бы на ближайшее время. Сравним вертолеты с вертикально
взлетающими самолетами и с самолетами с коротким разбеюм, пользу-
ясь данными лучших цз построенных вертолетов и проектируемых или
строящихся самолетов.
1. Тактико-технические требования к вертикально взлетающим
и с коротким разбегом военно-транспортным самолетам Запада
Разработанные в США тактико-технические требования на верти-
кально взлетающий транспортный самолет предусматривают дальность
полета 550—700 км, грузоподъемность 3600 кге или 32 десантника, црей-
Рис. 1.21. Транспортным аг.гло канадский самолет Де-Хенил чг» ' «Ксрибу»
серскую скорость 450—550 км1чис при полетном весе не более 16 000 кгс.
Одновременно требуется очень большая перегоночная дальность —
порядка 4000 км, вероятно рассчитанная на возможность перегонки са-
молетов из США через океан.
Когда рассматриваются транспортные самолеты с коротким раз-
бегом, то на сцену выдвигаются и обычные классические винтовые транс-
пор|ные самолеты, такие, например, как англо-канадский Де-Хепилленд
«Карибу» (рис. 1.21).
Под транспортными самолетами с коротким разбегом следует по-
нимать самолеты, использующие мощность двигателей для уменьшения
скорости отрыва и посадочной скорости .Это полезно и необходимо
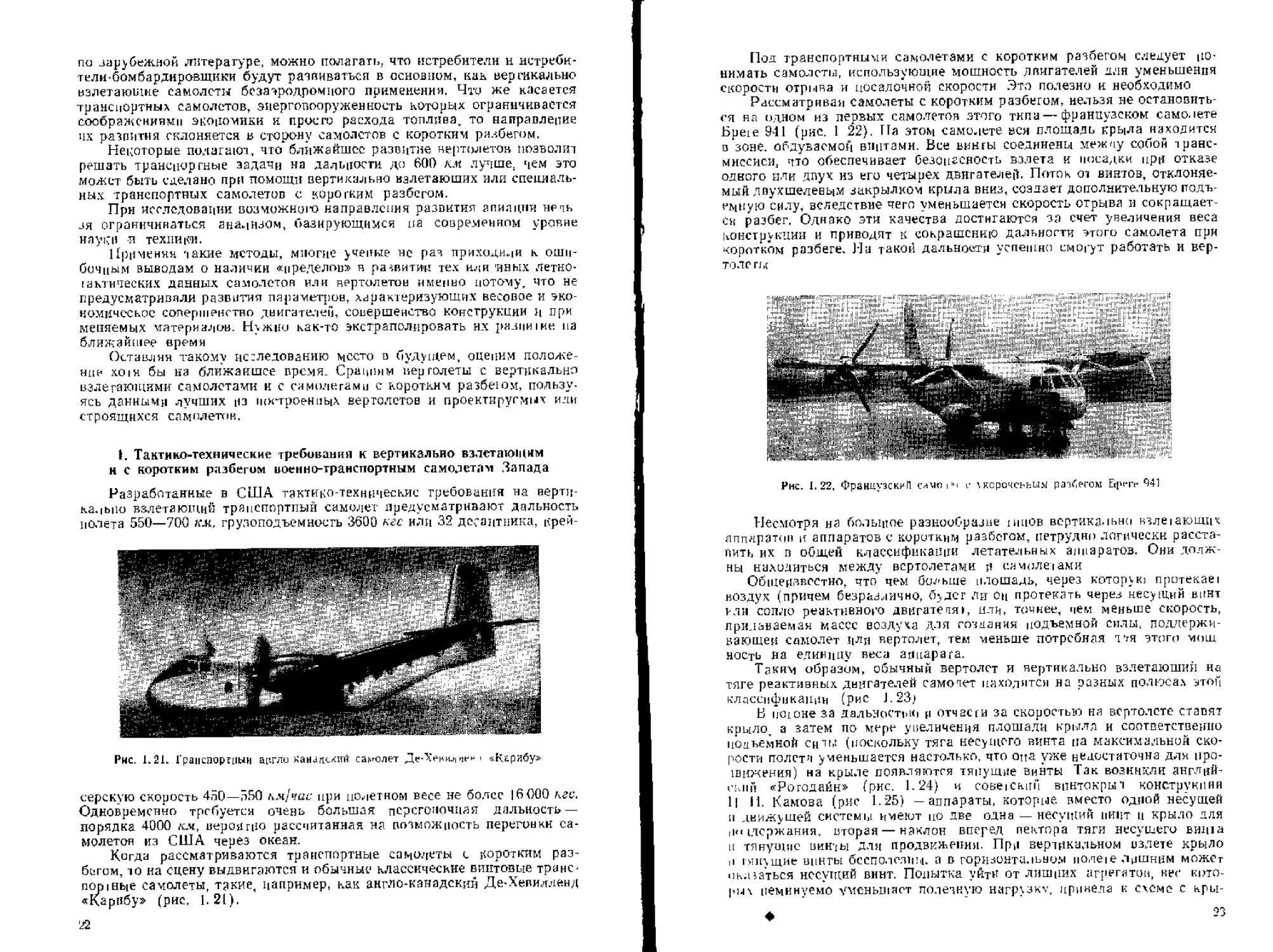
Рассматривая самолеты с коротким разбегом, нельзя не остановить-
ся на одном из первых самолетов этого типа — французском самолете
Бреге 9-11 (рис. 1 22). Па этом самолете вся площадь крыла находится
в зоне, обдуваемой винтами. Все вингы соединены между собой транс-
миссией, что обеспечивает безопасность взлета и посадки при отказе
одного или двух из его четырех двигателей. Поток от винтов, отклоняе-
мый лпухшелевым закрылком крыла вниз, создает дополнительную подъ-
емную силу, вследствие чего уменьшается скорость отрыва и сокращает-
ся разбег. Однако эти качества достигаются за счет увеличения веса
конструкции и приводят к сокращению дальности этого самолета при
коротком разбеге. На такой дальности успешно смогут работать и вер-
толеты
Рис. I. 22. Французски И <ымо । “ । с хкерочеььим разбегом Eipt-rr 941
Несмотря на большое разнообразие пшов вертикально wieiaiouuix
аппаратов и аппаратов с коротким разбегом, нетрудно логически расста-
вить их в общей классификации летательных аппаратов. Они долж-
ны находиться между вертолетами и самолетами
Общеизвестно, что чем больше плошадь, через которую протекав!
воздух (причем безразлично, будет Ли 0ц протекать через несущий винт
тли сопло реактивного двигатепя!, иль, точнее, чем меньше скорость,
придаваемая массе воздуха для создания подъемной силы, поддержи-
вающей самолет или вертолет, тем меньше потребная ття этого мош
ность на единдду веса aauapata.
Таким образом, обычный вертолет и вертикально взлетаюший на
тяге реактивных дннгателей самочет находятся на разных полюсах этой
классификации (рис J.23?
Е погоне за дальностью и отчасти за скоростью на вертолете ставят
крыло, а затем по мере увеличения плошали крыла и соответственно
подъемной сип,: (поскольку тяга несущего винта па максимальной ско-
рости полети уменьшается настолько, что опа уже недостаточна для про-
тяжения) на крыле появляются тянущие винты Так возникли англий-
егпй «Рогодайн» (ркс. 1.24) и cobeiCKirii впнтокрыз конструкции
1| И. Камова (ряс 1.25) —аппараты, которые, вместо одной несущей
п движущей системы имеют но две одна — несущий пиит н крыло для
ii'i ыержания, вторая — наклон вперед вектора тяги несущего виша
и тянущие винты для продвижения. При вертикальном излете крыло
и ищущие винты бесполезны, а в горизонтальном ноле!е лишним может
ок.на’ться несущий винт. Попытка уйти от лишних агрегатов, вес кото-
рых неминуемо уменьшает полезную нагрхзкх', привела к схеме с кры-
23
лом и поворотным несущим винтом (Белл XV-3, рис. I, 26), у которой
несущий винт в горизонтальном полете становится пропеллером, и к
схеме с поворотным крылом, у которой при взлете пропеллеры, повора-
чиваясь вместе с крылом, становятся несущими винтами, как например,
у самолета фирмы Чанс Воут-Райян-Хиллер ХС-142 (рис. 1.27).
Рис. 1.23. Схема классификации аппаратов вертикально; и взлета и аппаратов,
излетающих с разбегом
Если перейти к еще большей, чем у этих аппаратов энерговооружен-
ности, то на реактивном самолете с укороченным разбегом появятся
средства отклонения вниз струи от реактивных двигателей или вспомо-
гательные турбовентиляторные двигатели рапного рода
Схему самолета Бреге 941 (см. рис. 1.22) можно пассмаюинать
как вариант обычного самолета, на котором для повышения коэффици-
ента подъемной силы ислользгется обдувка крыла струей от винтов,
Рис 1,24 ЗиТ|Т0крЬ|Л «Ротодай.ч»
или хак вариант самолета с поворотным крылом, когда тяга винтов
поворачивается нс буквально, а отклоняется вниз с помощью механизи-
рованного крыла.
У показанных на рис 1.23 вертикально взлетающих летательных
аппаратов диаметр винтов (слепа направо) все уменьшается вплоть до
Рис. 1.25. Вин><жрыл конструкции Н И. Качова
Рнс. i.28. Конвертоплан Белл XV 3
реактивного вертикально взлетающего самолета, у которого совсем от
сутствует винт. С уменьшением диаметра винта возрастает мощность
двигателей на единицу птлетного веса от 0.25—0,3 л. с /кге у вертолетов
н до 3—4 л. с (кгс у реактивных самолетов (для самолетов здесь взяты
значения эквивалентной мощности/
Вместе с возрастанием установленной мощности все больше уве-
личивается крейсерская скорость этих аппаратов. Одпако она нс являет-
ся определяющей в задаче <> транспортном самолете на дальности 800 —
1000 км.
1акнм образом, определяется круг вертикально излетающих и с ко-
ротким разбегом транспортных аппаратов, которые следует сравнить,
и дальность полета, на которой они призваны действовать.
Рис. 1.27 Вертикально нз-ieiькячий самолет Чанс Всут Райял
Хиллер ХС-112 с лооорачеаасщи'.гся крыло?!
Какому же из аппаратов этих типов принадлежит будущее в реше-
нии поставленной задачи?
Прежде чем сравни«ь вер голет с его конкурентами по экономичности,
следует рассмотреть вопрос с дальности полета вертолета. Сможет ди
вообще вертолет из-за его теперешней сравнительно «алой дальности
принять участие в этом соревновании?
Мы будем рассматривать н сравнивать ме/K'iy собой лучшие из
построенных пли строящихся вертикально взлетающих и взлетающих
с укороченный разбегом транспортных аппаратов: самолет вертикаль-
ного взлета и посадки с лииоротним крылом типа XC-I42. самолет с уко
роченным разбегом типа Бреге 941. обычный транспортный самолв! тицз
«Карибу» ПС-4, винтокрылы с ТВД типа «Рогодайк» и вертолеты..
2. Пуги увеличения дальности полета вертолетов
Вертолет всегда рассматривали как летательный аппарат малой
дальности Наиботьшей для нормальной "а-тьности пертолета обычно
называлась цифра 400 500 к.и Чтобы рассматривать вертолет как
кон|<урентнпс|1осаб[;ь|й аппарат в этой новой области применения, даль
вость следует почти удвоить, сохранив грузоподъемность Как же по-
высить дальность полета’
26
Обратимся к известной формул? дальности полета
Л^270-^- - ,
(2.1)
где (J — вес лештсльною аппарата (средний за время полета):
0Г — вес топлива;
CyjCjt—аэродинамическое качество летательною аппарата (прини-
мается постоянным);
Cs -удельный расход топлива двигателя;
«- коэффициент, учитывающий потери мощности в трансмиссии,
на охлаждение и др-:
ц—к. и, д. винта.
Из формулы (2.1) видно, что дальность тем больше, чем больше
доля топлива в весе летательного аппарата, чем выше ею аэродинами-
ческое КаЧССТВО М ЭКСНЮМИЧ" _________________________________
пасть двигателя, козффи- ' ' '
цнепты полезного дейстпия
движителя и вспомогатель-
ных устройств.
Формула эта действи-
тельна для любых пета-
(е.тьных аппаратов [яжелее
вовдмха, в том числе и для
самолетов и вертолетов. Ия
нес, л частости, следует,
что дальность полета раз-
личных летательных аппара-
тов при прочих равных усло-
виях не зависит от их
крейсерской скорости.
Можно ди получит на пертолсте дальность, достаточную для сорев-
нования с самолетами с коротким разбегом’
Как видпо из рис. 1.28, произведение из аэродинамического каче-
ства Cylc-g на к. п. д. винта т] для вертолета с нсубцрающимся шасси ниже,
чем для транспортного самолета, почти вдвое Кроме того, расход топ-
лива у вертолета несколько больше, чем у енмолеса. вследствие того,
что характеристики двигателей хуже па меньших высотах и скоростях
полета. Таким образом, получить ранную дальность с самолетами на
вертолете возможно лишь путем увеличения запаса топлива, т. е. ве-
личины Но как при этом сохранить полезную нагрузку1 Ее можно
сохранить, только увеличив взлетный вес, но при этом вертолет переста-
нет взлетать пертикальпо.
А что, если поставить .эти аппараты в равные условия, т е разре-
шить вертолету 'Iу же длину разбега, что и самолету с коротким разбе-
гом, 1. е. 150—200 л или даже меньшую Не сможет ли тогда нертолст
с относительно большим значением cv поднять на малой скорости го-
раздо больший вес, чем самолет, взять больше топлива и тем самым
восполнить свое отставание □ аэродинамическом качестве?
3. Вертолет, взлетающий с разбегом
Как видно из рис. 1.29, где показаны кривые потребной и распо-
лагаемой мощностей транспортного самолета типа «Кирибу» м совре-
менного вертолета, самолет может держаться п воздухе на скорости не
77
ниже 115 км/час. Вертолет же может писеть в воздухе неподвижно.
Если вертолет перетрудись сверх нормального взлетного веса Gn на
15%, то он уже цс сможет висеть, а будет аналогично самолету летв|Ь
без снижения лишь на некоторой скорости, в данном случае на скоро-
сти нс менее аО к.м/чпе. На большей скорости он будет набирать высоту,
а на меньшей — снижаться. Разница здесь в пользу вертолета но
сравнению с самолетом лишь в том, что вертолет полностью сохраняет
управляемость на скоро-
сти, меньцшй своей мини-
мальной, и исключается
опасность срыва потока и
потеря управляемости,
что возможно у само-
лета.
Если рассмотреть
длину разбега, предпола-
гая, что вертолет оторвет-
ся НЯ СКОрОСТИ Vmtm то
при некотором среднем
ускорении У /Длина раз-
бега
(2.2)
на
Таким образом, дли-
разбета тем меньше,
чем меньше минимальная скорость полета (близкая к скорости отрыва ।
и чем больше ускорение.
Мини мильная скорость
1де SKp —площадь крыла;
О —плотность воздуха.
Какими же величинами су располагают самолеты и вертолеты3
Раддитаем, какие значения с„ должен был бы иметь самолет тип,т
«Карибу» при том же весе, что и вертолет, для того чтобы лететь без
снижения на скоростях, меньших минимальной На рпс 1.30 покатаны
подсчитанные по формуле
значения вертолета, О| несенные к плошали крыла .эквивалентного
самолета, которыми может характеризоваться несущая способнстт>
вертолета по сравнению с самолстом. Кривая cv вертолета на рис 1,30
уходит в бесконечность. Это естественно, так как вертолет имеет впит,
который ио существу является ирашающимся крылом е подселенной
к нему мощностью, л способен создавать подъемную at.iv при пулевой
поступательной скц[юС|И всего аппарата. Здесь мы сидим, Ч|0 на скоро-
стях 50—60 км/час располагаемые значения ц, вертолета в несколько
риз больше, чем у самолета типа «Карибу» на скорости 115 км/час,
имеющего хорошо механизированное крыло,
Таким образом, при равной мощности на вертолете при малых ско-
ростях можно поднять больший нес, чем на самолете
Однако больший полетный вес не всегда означает большую полез-
ную нагрузку
При равном относительном весе топлива (около 10%) обычный са-
молет типа «Карибу» имеет дальность LOOT «л, т. е, вдвое большую, чем
вертолет при взлете без раз-
бега.
Самолет Бреге 9-11 с ко-
ротким разбегом (при весе
топлива 12—13% от полетного
веса) имеет вдвое большую
тальность, чем вертолет или
вертикально взлетающий вин-
товой гамоле| ХС-142.
Геди же на вертолетах
тве.цгиггь вес топлива до 20
25% полетною веса, то даль-
ность верюлета можно увели-
чить вдвое и довести до
LOOT дли Эта величина уже
близка к нормальным дально-
стям специально построенных
самолетов с коротким раз-
бегом.
Весовая отдача вертоле-
тов, взлетающих с разбегом
с увеличенным запасом топ.ти-
па становится выше весовой
отдач а сравниваемых самоле-
тов и достигает 41 — 50%. Это
01‘Т ВОЗМОЖНОСТЬ при почти
о Знаковом взлетном носе са-
молета и вертолета получись
равную производительность. Рис ,.зо з«,ц1ч нм,к.ть „ 0- е.о
Например, средний по груэо- Гогги полета
потъемпости транспортный
вертолет так же, как п самолет
типа «Карибу», сможет при да^ьноои 1000 км псрсвошть груз 3.2 тс
Правда, вертолет при этом затратит в 2,5 раза больше топлива. Но
нельзя забывать при этом, что самолету понадобится для взлета вдвое
большая площадка в, что весьма важно, вертолет, израсходовав поло-
вицу юплива. сможет произнести посадку вертикально, а обычный са-
молв| этого сделать ио сможет,
Следует оораинь внимание, что сравниваемые самолеты и верто-
леты имеют практически одинаковую энерговооруженность (0,23—
0,25 л. t..jia:c). Надо иметь в виду, что поршневые двигатели, работающие
на бензине, имеют на малых высотах меньшие расходы топтнвл, чем
гурбовинтовые, так что средний турбовинтовой вертолет оказываещя
в менее выгодных условиях чем самолет «Карибу», имеющий поршневые
двигатели.
Таким образом, предложение использовать разбег на вертолете по-
звг.тит при той >ие полезной нагрузке удвоить его дальность
4. Длина разбега вертолета
Мы уже выразили длину разбега через скорость отрыва и ускоре-
ние. Скорость отрыва, пропорциональная минимальной скорости, на ко-
29
торой вертолет способен держаться в воздухе при перегрузке его на
15% против веса, с которым оц может взлететь без разбега, составляет
нс более 60—70 км.!час. Теперь рассмотрим, какова возможная величина
линейного ускорения, так
как длина разбега обрат-
но пропорциональна уско-
рению. Найдем возмож-
ное начальное ускорение.
Пусть, как установ-
лено, при взлетной мощ-
ности вертолет развивает
|ягу, составляющую линп>
0,85 G (взлетного веса).
Тогда, принимая во вни-
мание некоторый уюл
наклона оси несущею
винта к вертикали ед
(здесь принимается во
внимание и различие в обжатии Стоек н ипевматиков передних и задних
колес), а также отклонение равнодействующей вперед за счет отклоне-
ния автомата перекоса на угол Р.х согласно рис. I. 31 найтсм начальное
юкореиие:
+ (2.4)
Здесь второй чтен правой части учитыпаст тоение колес о томлю
с коэффициентом гренин f. Принимая обычные значения: e,p = 6,5n.
Z),*—10”, -^ = 0,85 и /—0.12 найдем, что j: — 2,2 и',сек2.
Если же принять для самолета относительную тягу винтов па месте
— = 1.6 кгс;*.. с., то при -у _0,25 .1 < /л-гг начальное ускорение сорт л вит
1 е, величину того же порядка, что и у кернинга
Чго же касается ускорения п момент отрыва, ю оно, естественно,
определяется избытком мощности, который у самолета несколько болт,
ше Однако тя|а его винтов с возрастанием скорости падает, в ю время
как тяга несущего винта возрастает, а угол тангажа вертолета во время
разбега может даже возрасти, так как во время разбега можно о.ю-
рнать за шне колеса от земли при тя1 е, существенно мещ.щей, чем взлет-
ный вес, и закончить разбег на переднем колесе.
Из рис. 1.32 ясно, что отношение тяги к весу, при котором задние
колеса могуг отдели1ься от земли, составляет (пренебрегаем трением)
где -Гщяот расстояние от центра тяжести до оси автомата перекоса мри
максимальном отклонении автомата перекоса вперед (здесь
принято, что величиной ~) можно пренебречь по
сравнению с единицей!
При обычных соотношениях это соотве|С|цует отношению тяги к весу
0,8—0,85. На рис. 1 33 наказан вертолет во время разбега с полетным
весом Gma4 = i,l5G.
Точный расчет длины разбега может быть произведен но той же
методике, которая 30 лет назад была предложена автором для расчета
разбега автожира [4].
Рис. 1.32. Сили, jeflCTiiyiouine rra вертолет при рл-
беге на переанем колесе
Праыичесрл приведенные взлеты с разбегом подтвердили, что при
|5%-нои uepeiр'Зке вертолета против максимального веса, с которым
Рис. 1.33. Взлет вертолета .Чн 6 с разбегом
<'ti может BT.ieiCib без разб^а. длина разбег составляет не более 60 —
1о0 я при безветрии
5. Критерий для оценки экономичности различных
транспортных аппаратов
Если сравнивают два транспортных аппарата, то прежде всего
обращают внимание на грузоподъемность Но ведь и скорость перевозки
имеет значение. Действительна, если груз перевозить быстрее, то в еди-
ницу времени можно при меньшей гр\зоподъемносш перевезти больше
грузов на заданную дальность.
Тик появляется известный критерий — часовая производительность
6iPk,p 7г км.'час /К-р — средняя путевая скорость)
Однако какой пеной перевозится груз'3
31
Если оба аппарат имеют одинаковые производительность и даль-
ность и удовлетворительные для выполнения задачи взлетно-посадочные
свойства, какому из них отдать предпочтение?
Для того чтобы ответить на этот вопрос, надо знать, какой ил апиа-
ратоь более экономичен. При военном применении преимущества юго
или иного ле1ателыкно аппарата для решения транспортных задач, вы-
полняемых подчас на значительном удалении от баз снабжения, опре
деляются прежде всего текущими затратами Затраты на постройку
самого аппарата, произведенные в прошлом, уже не имеют большого
значения, онц никак пс скажутся на выполнения оперативного задания.
В таких условиях экономичность деятельного аппарата определяется
главным образом количеством потребляемого топлипа, Подвоз топлива
в этил условиях оказывается узким местом, определяющим возможность
выполнения поставленных задач. Критерий экономичности в таких усло-
виях удобно получить, относя часовую производительность к весу затри,
чнвасмого за то же время юплипа СЛчцг-'
/ ^Г₽1 г'1 й'1
Л.у=т- • (-6)
Ci tic
Так как кн.iumстровыи расход юплпщд
то
(2.8)
Величина имее| размерность длины, коэгому назовем ее экви-
валентной удельной дальностью летательною аппарата Она представ-
ляет собой расстояние, на которое может пролететь данный аппарат
сверх расчетной дальности, если весь транспортируемый груз заменить
топливом Этой величине можно придагь и другой смысл. Ее можно
рассматривать как расстояние, па которое рассматриваемый аппараг
израсходовав одну топим топлива, может перенести одну тонну груза.
Be ж ясно, чю величина Ц у зависит or дальности перевозок так же. как
зависит от нее производительность. Чем дальше летит машина, тем боль
ше ей нужно топлива и тем меньше она может взять трацспортногг.
гот эа при заданном полетном весе (максимальном).
С другой стороны, /.-it есть раХкиа, выраженная в то;гно-кпло.метра.х,
которую данный аппарат может произве-стп, израсходовав одну тсчшу
Т0П,Н1И,1
Обратная L3V величина—1— пре ктавляет собой расход топлива
и тоннах, потребный для совершена гоанспогнп'л^ работы в 1 тс-ки
'ОХ
ИЛЛ —---- ГСгс/гС'КН,
Можно применить еще и друз не критерии, оценивающие экономич-
ность. т г стоимость перевозки одной юнпы-сшлометрл в рублях. В эгггт
критериях могул быть учтены стоимость аппарата |в каыэй-т^ мере она
пропорциональна весу пустою аппарата), ресурс агрегатов, энергоноо-
ружеиггоегь, стоимость эксплуатации и ремонта и т, д.
Но в данной задаче — восипо-зрансйортной критерий L3y Или
1000
— =-Сг напоолее важен, так пак он учитывает не только экономику',
но и вполне реальное и весомое в военных условиях требование обеспе-
чения транспортных средств топливом. Поэтому можно не считаться со
многими другими кртериямй, но не считаться с этим критерием нельзя
32
Значения La,y н Сг для сравниваемых летательных аппаратов мы
дополнили еще данными по исртикально взлетающим реактивным само-
летам, использующим на висении специально установленные подъемные
реактивные двигатели, или взле|.'|ютим на вентиляторах, приводимых
от основных двигателей У таких самолетов расход топлива па режиме
висения составляет настолько большой процент от взлетного веса, что
он обязательно доджеп учитываться при расчете величины CLl поэтому
формула для них приобретает вид
б?£ = Сдгл+С/внс, (2.9)
_ 1000 О,
где С£ -———!---------расход топлива в горизонтальном полете;
г'п Огр-£
(?£вис=:1000^с,с -расход топлива на режиме Висения.
G £
Для самолета, взлетающего с помощью установленных в крыльях
вентиляторов, приводимых во вращение расположенными по их перифе-
рии турбинами, были приняты данные, близкие к опубликованным для
строящегося в США экспериментального самолета Райан Х-16.
В расчетах не учитывалось, что установка подъемных двигателей
ухудшает аэродинамическое качество вертикально излетающего само-
лета. Было принято, что при дальностях более 1000 юл вертикально взле-
тающие самолеты указанных двух тиной с маршевым ТРД производи!
колет на расчехной высоте с максимальным аэродинамическим качест-
вом. а при уменьшении дальности полета от 1000 до 50 км рабочая вы-
<сна полета соответственно снижается и уменьшение аэродинамического
качества приводит к некоторому увеличению расхода топлива. Время
висения /вяг было принято 0 мин (3 мин на взлете и 3 мин на посадке).
В табл 1,3 приведены рассчитанные нами данные для аппаратов
р.тичной дальности полета при различных видах взлета.
Таблица 1.3
Дли сравнения экономичности транспортных перевозок приводятся
|Ц1|Н(‘|1'Ия ьг. для отечественного автомобиля ЗИЛ-151, причем принято.
что земной путь между двумя пунктами удлиняется по сравнению с воз-
душным в 1,5 раза.
На рн* 1.34 показаны для различных вертикально взлетающих
аппаратов значения Ci, в зависимости от дальности налета. Величина
дальности полета L при расчете С,_ определялась с учетом уменьшения
километровых расходов топлива при облегчении летательного аппарата
лометровым расходом и весом аппарата, необходимо величину дально-
сти, рассчиганную но приводившимся выше формулам, где километро-
вый расход принят постоянным и соответствующим взлетному весу, по-
править на величину
где GT= ——отношение веса топлива к взлетому весу летательного
° аппарата.
Для вертикально взлетающих самолетов, самолеюв с большим рас-
ходом топлива на висении учитывалось уменьшение полетного веса за
счет выработки топлива на этом режиме, а также в горизонтальном
полете, На рис. 1.35 прицелен график поправочных коэффициентов Кь
в зависимости от значений 5?.
Для летательных аппаратов, взлетающих с разбегом, значения ве-
личины CL при разных дальностях полета приводятся на рис. 1,36.
Из него видпо также, как можно повысить экономичность транспортных
перевозок при заданной дальности за счет применения разбега. Чем
больше длина разбега, тем больше взлетный вес летательного аппарата,
а следовательно, и транспортируемый груз,
Таковы результаты исследования затрат топлива на перевозку одниГг
тонны-километра нэ различных видах транспорта.
Что же касается стоимости эксплуатации самолетов и вертолетов,
которая определяется, конечно, не только стоимостью топлива, но и ре-
сурсом и начальной стоимостью аппарата, то и здесь следмет иметь
34
Рис. 1.36. Зависимость С,, от длины разбега при разных дальностях
полета
в виду, что более высокая энерговооруженность вертикально взлетаю-
щих самолетов, чем вертолетов, и наличие на некоторых из них транс-
миссии в значительной мере уравнивает гс и другие Что же касается
безопасности в случае отказа двигателей на взлете или посадке, то тут
все преимущества на стороне вертолетов, ибо об авторотации на винтах
на самолете с поворотным крылом не следует и говорить, а отказ дви-
гателей (нехватка топлива) на посадке n:i самолете типа Бреге 911 из-за
того, что крыло прекращает обдуваться винтами, может привести
к срыву потока и неуправляемому падению Кроме того, на этих маши-
нах всегда будет оставаться трудность в обеспечении управляемости на
режиме малых скоростей.
Дальнейшее уменьшение удельного веся и расхода топлива раз-
вивающихся трубовинтовых двигателей повысит весовую отдачу вер-
толетов. Заметное унеличсние ресурса лопастей несущих винтов, редук-
торов н трансмиссий, происходящее в последнее время, уравняе! стои-
мость аммортизании самолетов и вертолетов, и тогда вертолет войдет
полноправно в воздушную транспортную систему на самом массовом ее
участке.
6. Возможности увеличения максимальной скорости полета
Если скорость полета вертикально взле|ающих аппаратов и взле-
тающих с коротким разбегом все же считать важным лстцо-тактическнм
требованием, то возможности винтокрылых аппаратов я направлении
увеличения скорости далеко не исчерпаны.
Приравнивая потребную для горизонтального полета мощность
и располагаемую мощность сцлопой установки, можно подучить связь
между максимальной скоростью и энерговооруженностью летательного
аппарата:
(2.10)
где N — мощность двигателей;
G —полетный вес летательного аппарата.
Из формулы (2 10) следует, что максимальная скорость прямо про-
порциональна энерговооруженности N/(J летательного аппарата.
На рис. 1.37 приведены для различных летательных аппаратов кри-
вые погребной энерговооруженности в зависимости от скорости полета.
Кривые для тяжелых винтокрылых аппаратов показывают, чю для уве-
личения скорости полета свыше 300—320 км/час необходимо, кроме
несущего винта, устанавливать на вертолет второй несущий элемент —
крыло, а для достижения скоростей свыше 370 км/час следует уста-
навливать еще и тяцушис винты, i. е. переходить к винтокрылу Таким
образом, если поставлена задача достижения возможно большей ско-
рости любой ценой, то можно решить, какой схемой вертикально изле-
тающего аппарата следует воспользоваться при различных максималь-
ных скоростях полета. Однако нельзя забывать, что переход от верто-
лета к винтокрылу связан с потерями в грузоподъемности, удорожанием
конструкции и др Даже при энерговооруженности 0,45 ж с /мгс, которую
можно реально обеспечить в настоящее время иа винтокрылом аппара-
те, переход от вертолета к винтокрылу не даст выигрыша и скорости
больше чем в 30—40 км/час.
1 рафик погребной энерговооруяченнос)ц, наконец, наглядно пока-
зывает. сколь сильно отличаются энерюкооруженностй построенных вер.
Рис. 1 37, Зависимость энерговооруженности летательных аппаратов
от скорости полета
локально взлетающих самолетов и винтокрылых аппаратов. При равной
энерговооруженности винтокрылый аппарат по скорости немного усту-
пает винтовому вертикально взлетающему самолету с малой дальностью
полета.
§ 3. ОСНОВНЫЕ ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ
1. Выбор мощности двигателей и диаметра несущего винта
Конструктору вертолета чаще всего задана грузоподъемность. Зная
требуемую скорость, он оценивает потребную энерговооруженность. За-
давшись современным процентом полезной весовой отдачи, определим
порядок полетного веса, а с.|едова'/ельно, я величину устанавливаемой
мощности. Это позволяет, выбрав число двигателей, в зависимости от
назначения вертолета (легкая военная машина —один двигатель, пасса-
жирская— не менсе двух и т п.), подобра!ь цз существующих или на-
ходящихся в разработке двигателей наиболее подходящие.
Здесь чаще веет оказывается, что буквального совпадения мощно-
сти возможных комбинаций двигателей с желаемой не получается.
В этом случае приходится как-то корректировать параметры проекти-
руемого вертолета, выбрав наиболее подходящую комбинацию из суще-
ствующих двигателей Т1осле этого основной задачей, стоящей перед кон-
структором аппарата, оказывается выбор диаметра несущего винта под
конкретную двигательную упаковку.
Как выбрать нагрузку на омстЭ^мую площадь?
На статистики известно, что нагрузка на площадь стремительно
paciei с увеличением полетного веса и изменяется в пределах 52 —
50 кге/ж’ по мерс возрастания веса от самых легки1: до самых тяжелых
Бертолетов.
37
Нагрузка на площадь несущего винта в зависимости от веса ме-
няется даже в большей степени, чем нагрузка на площадь крыла само-
лета. Это тем более примечательно, что \ самолета с увеличением на-
грузки есть возможность допустить увеличение длины разбега, а для
вертолетов длина разбега должна всегда оставаться равной кулю,
Вес несущего винта растет примерно пропорционально кубу его диа-
метра. Но ведь одновременно при той же мощности пропорционально
степени дне трети с увеличением диаметра растет и грузоподъемность
вертолета в целом. А летные данные такие как потолок, скороподъем-
ность, дальность и скорость снижении на авторотации при увеличении
диаметра, а значит и уменьшении нагрузки па ометаемую площадь,
обязательно улучшаются
Вычислить параметры оптимальней конструкции практически не
удается — слишком mhoio противоречивых соображений должен взве-
сить конструктор. Ответ на этот понрос должен включать также поиски
в прошлом, в анализе развития вертолетов но размерному ряду.
Как создавать следующий. больший по полетному весу вертолет?
Ясно, что прежде всею нужно увеличить установленную мощность.
Однако в какой степени? Сохраняя энерговооруженность (из соображе-
ний экономичности) и тогда по необходимости увеличивая диаметр вин-
та так, чтобы осталась прежняя нагрузка на ометаемую площадь, или
повышая энер|овооруженность, и тогда имея возможность из условий
вертикачьного взлета повысить нагрузку па ометаемую площадь, полу-
чить сравнительно меньший диаметр шипа?
Лучшее решение даст тот вариант, который будет иметь меньший вес
конструкции, т. е. обеспечит большую долю полезной нагрузки.
Найдем изменение весовой отдачи вертолета при уветияениц его
размерности при различных соотношениях на!фузки на мощность и на-
грузки на ометаемую площадь.
Рассмотрим случай, когда новый, больший по размерам, вертолет
создается ио той же схеме, что и предыдущий.
Полагая тягу на месте (без учета влияния земли) равной весу, по-
лучаем по формуле Н. Е, Жуковского
Т-0 — (33,25;»1Л7£>)'’\ 13.1)
где £—коэффициент, меньший единицы, характеризующий механиче-
ские потери мощности в трансмиссии, на охлаждение и уравно-
вешивание реактивного момента,
ц—к п. д. несущего винта, представляющий собой отношение по-
лезной мощности, необходимой на поддержание аппарата в воз-
духе на режиме висения к затраченной.
Напишем выражение для взлетного веса вертолета в виде
\-kIfN-\G^G, (3.2)
1де Gng — полезная нагрузка вертолета;
Gun — вес ненесущих элементов конструкции,
G — взлетный вес вертолета;
Лтр — эмпирический коэффициент, представляющий отношение
веса двигателя и трансмиссии к мощности двигателя;
Gae — относительный вес несущей системы (несущий винт со в гул-
кой и автоматом перекоса) по отношению к весу вертолета.
38
Изменение весовой отдачи при увеличении диаметра несущего винта.
Попытаемся определить весовую отдачу большего по весу вер-
толета. отличающегося от исходного диаметром винта:
боалея,, G'~G""~*Tr>jV —(3.3)
G G
Предполагая, что при этом энерговооруженность N/G остается не-
изменной, из формулы (3.1) при неизменном значении £т] находим
GJ2=constA’£)
или
77 (/^7-сош‘- р-4)
Откуда следует, что и нагрузка па ометаемую площадь, т. е вели-
чина
также должна оставаться неизменной.
При увеличении диаметра несущего винта, если размеры лопастей
изменяются подобно и их число сохраняется неизменным, вес несущей
снегемы увеличивается пропорционально кубу отношения диаметров
винтов:
(3.51
Следовательно.
Здесь индексы 1 и 2 относятся к исходному и рассматриваемому
вертолетам соответственно (^2>^|)-
Однако при увеличении нагрузки р па ометаемую несущим вннюм
площадь приходится во избежание срыяа потока па максимальной ско-
рости увеличивать заполнение (главным образом путем увеличения
числа лопастей, так как относительное увеличение хорды оказывается
менее выгодным и вызывает большее увеличение веса в связи с необхо-
димостью установки увеличенных балансиров, требуемых для исключе-
ния флаггера,!.
В этом случае при сохранении диаметра и окружной скорости ло-
кагтей вес несущей < иетемы увеличивается пропорционально р, т е.
<з.7)
ИЛИ
(3.8)
Подставив это выражение в формулу (3.3), получим
-°.- (3.9)
\ О /2
Коэффициент &тР является супимой относительных весов двигателя
и трансмиссии:
' Л-- 0’0)
39
Первое слагаемое остается без изменения (оно характеризует весовое
качество современного двигателя), а второе увеличивается пропорцио-
нально увеличению диаметра пиита.
Действительно, если принять, что вес трансмиссии пропорционален
величине передаваемого ею крутящего момента Л1К, то получим
При сохранении постоянной окружной скорости (<j/? = const)
«I . £>2
Откуда
При неизменной нагрузке на ометаемую площадь из формулы (3. 4)
следует, что
где
т=из)Ог
Тогда, учитывая также, что
ff, _
G2
—'] К™. (3.14)
можно (3.9) преобразовать так:
О......-1-о„-Д (%)-|б., +v(-Tr)] (3'15)
-
G Ctv
Приняв для исходного варианта; (^=0,25. -^=0.2; — 0,4;
(7н,с=0,18; ^-=-0,28 и подставив их п формулу (3.15), получим для
него (при О2=ОХ)
(-С"4;Е=Д_) ^0,402;
Оволезв = 0,694-0,292/^. (3.161
О] куда ясно, что величина весовой отдачи большего вертолета с уве.
.течением т монотонно убывает (рис. 1.38).
Отношение полезной нагрузки вертолетов можно представить в виде-
тгЙ1к")- (3-,7)
40
Из формул (3.15) и (3. 1”) следует, что носгрожь больший вертолет
при сохранении прежней нагрузки на ометаемую площадь н той же, чю
и исходный вертолет, энерговооруженности с большим (или хотя бы
прежним) коэффициентом весовой отдачи невозможно, хотя абсолютное
значение полезной нагрузки вначале и растет (рис, 1.40),
Изменение весовой отдачи при увеличении энерговооруженности
без изменения диаметра несущего винта. Рассмотрим теперь случай,
когда при увеличении полетного веса диаметр винта остается без измене-
ния, а увеличивается мощность двигателей, т. е. возрастают энерговоору-
женность верюлета и нагрузка на ометаемую площадь
Рис. 1.38. Зависимость весовой отдачи
от масштаба т увеличения веса при
p=eonst
Рис. 1,39 Зависимость весовоЛ tn.
дачи иг чигш-аба т увеличения веса
при D=const
Из формулы (3. I)
должна в этом случае
следует, что
возрастать по закону
энерговооруженность вертолета
[3.18)
Как следует из формулы (3.8), относительный все несущей сие ге-
мы остается постоянным. При сохранении постоянным отношения веса
двигателя к его мощности относительный вес двигателя увеличится про-
порционально У" т
(3.19)
Также изменится и относительный вес трансмиссии =(^) т|3-20)
Тогда выражение для коэффициента весовой отдачи примет вид
1 Dw-0„-[4+^.]tS-. (3.21)
Подставил численные значения, будем иметь
6П0ле,в—0,57-0.17 ]/ т.
Отношение полезной на|рузьи к весу вертолета изменяется анало-
гично предыдущему случаю (см. put 1.39), т. е. монотонно убывает.
Как видим (см. рис. 1.40), при увеличении мощности и сохранении
диаметра полезная нагрузка увеличивается быстрее, чем при увеличе-
нии диаметра, но при сохранении энерговооруженности,
11
Теперь, очевидно, что выбор нагрузки на ометаемую площадь зави-
сит от вссопых качеств конкретных двигателей, которыми может распо-
лагать конструктор для решения поставленной задачи — поднять задан-
ную полезную нагрузку. Очевидно, что чем относительно легче двигатель
по сравнению с осуществленным прототипом, тем большая нагрузка
на площадь окажется иыгоднои, тем
меньше будет диаметр винта.
Отсюда малые нагрузки на 1 м2
па первых самолетах и вертолетах.
При маломощных и тяжелых дви-
гателях того времени с большой
нагрузкой на площадь эти аппараты
не могли бы вообще летать.
Таким образам, конструктор
или исследователь, желающий за-
глянуть в будущее, должен принять
какой-то закон уменьшения удель-
ного веса двигателей, яесушнх вин-
тов, непесущих элементов конструк-
ции (за счет применения нопых ма-
териалов и увеличения действующих
напряжений в конструкции), если
не иметь в виду появление новых
принципов работы двигателя, и
только тогда можно будет сделать
прогнозы о возможности создания
еще больших по грузоподъемности
или более совершенных по экономичности (весовая отдача, дальность
полета) летательных аппаратов.
Естественно было бы ожидать резкого повышения весовой отдачи,
если вернуться к маленьким вертолетам на базе уровней удельных ве-
сов двигателей и несущих винтов, достигнутых при создании тяжелых
Бертолетов 60-х юдов.
Действительно, сравнение последних вертолетов с ТВД, одной ве-
совой категории с вертолетами Ми-1 и Ми-4 показывает, что их весовая
отдача увеличилась практически вдвое.
2. Анализ многовннтовых схем
Рано или поздно перед конструктором встанет вопрос о целесооб-
разности дальнейшею увеличения диаметра несущего винта и необхо-
димости перехода на двух- или многовинтовую схему.
Освоение в серийном производстве еще одной размерности лопа-
стей требует очень больших капитальных вложений па создание новых
металлургических станов, прессов и другого дорогостоящего оборудова-
ния, связанного с окончательной обработкой лонжерона и сборкой лопа-
сти. Поэтому создание новых лопастей представляет в какой-то мере
общегосударственную задачу. В -ю же время прекращение производст-
ва какого-либо типа серийно изготавливаемых лопастей невозможно,
так как существующий парк вертолетов является постоянным потребите-
лем лопастей из-за того, что их ресурс, как правило, в несколько раз
меньше срока службы вертолета. Следовательно, при освоении новой
конструкции лоаас1и цриходизся вводить новые производственные мощ-
ности, а не использовать уже имеющиеся.
Поэтому, создай самый большой серийный несущий винт, есте-
ственно обратиться к вопросу о том, в каком варианте его целесооб-
разно мультиплицировать. Вопрос о схеме, таким образом, приобретает
конкретность: удваивать или утраивав приходится даже не несущие
42
винты, а по существу, винтомоторные установки, т. е. несущие винты
вместе с редукторами и двигателями.
Комбинаций, по существу, не так много- двухвинтовые (продольная
и поперечная схемы) и трехвнптовыо вертолеты. Громоздкую четырех-
винтовую схему можно не рассматривать, |ак как упомянутые выше
схемы могут обеспечить наибольшую потребную грузоподъемность 40 —
50 тс. Можно рассмотреть и вопрос о сравнении с этими схемами одно-
винтового вертолета, спроектированного под аналогичное задание.
Продольная схема. Поскольку индуктивные скорости изолированно
взятых переднего и заднего винтов одинаковы, то индуктивная скорость
системы будет отличаться лишь на вели- < |
чину средней скорости взаимоиндукции -- }
”.г=у >3 / A
где J1, — индуктивная скорость в плоско- Г |й Г >
сти винта, \ А ' /
у коэффициент индукции \, |
Ч'О|Да дополнительная индуктивная д I
мощность системы или заднего винта
, Рис. 1 41. К onpo'uc.'iCHi'Hj пере-
дЛ’ =— /.v.G. (3.23) ьрыткя несущих цингой
‘ 2 1
Если оба винта легкат в очной горизонтальной плоскости я не имею*
перекрытия, то х=2, при —0,2 (рис. 1.41) мы имеем уже х= 1.35.
Однако мы должны считаться с тем, что индуктивные скорости рас
пределены по диску неравномерно и. следовательно, средние скорости
больше и как бы соответствуют другому эффективному удлинению, т е
меньшему диаметру или, что то же, большей нагрузке р на несущую
поверхность. Поэтому примем выражение для средней скорости взаимо-
индукции, сцнесенной ко псему аппарату
nwP = 0.75-Uj = 0,75 (3.24)
Тома скороподъемность вертолета про.дочытой схемы можно выра-
зить через скороподъемность одновинтового вертолета
, (3.2-э)
где Г’;1'- скороподъемность вертолета продольной схемы;
Vb — .кораподъемкость одновинтового вертолета;
А — относ-нтелытая плотность воздуха.
Так. если у вертолета Ми-4 с лопастями смешанной конструкции
вертикальная скорость в режиме набора высоты при скорости полета
около 100 км/час составляет 3,6 м/сек, то у вертолета продольной схемы
(рис. 1.42) с двумя такими же силовыми установками вертикальная
скорость уменьшится па величину
дГ’"Р.= 1/у—=3^-=-2,25 тт/сек;
I. е. скороподъемность вертолета продольной схемы составит 1,35 м/сек.
Следовательно, летные характеристики вертолета продольной схе-
мы существенно отличаются от летных характеристик исходного одно-
винтового вертолета, с которого взяты силовые установки
43
Скороподъемность определяется поперечным размахом вертолета,
мощностью его двигателей и взлетным весом венюлета, заданным кон-
структору. Можно сказать, что если заданы эти'параметры, то опреде-
лена и максимально возможная скороподъемность независимо от схемы
проектируемого вертолета и типа его двигательной установки.
Кроме мощности, затрачиваемой на подъем вега, есть еще и за-
?}Эты мощнощи на механические, профильные и индуктивные потери,
аким образом, если взлетный вес вертоле|а продольной схемы вдвое
больше веса одновинтового вертолета, то для сохранения величины
Рис. 1.42. Вертолет Як 24
скороподъемности мощность двухдвигатольного вертолета должна быть
больше удвоенной мощности па величину
Если же просто удвоить мощность составного вертолета, то скоро-
подъемность его уменьшится, как было указано выше Особенно не-
выгодно такое сдваивание было бы для тяжелых вертолетов с большой
нагрузкой на площадь; так, при значениях /> —40 хге/.и2 и И=40 М[сек
потеря скороподъемности Al/Jp на высоте 7/=3000 м по сравнению
с исходным одновинтовым вертолетом составит 4 ячеек, т. е, такой вер-
толет не сможет летать, сели Гу<4,5— 5,0 м/сек.
Сравнительные данные дпух отечественных вертолетов Мм-4 и Як-24,
выполненных по разным схемам, но имеющих одинаковые двигатели и
несущие системы (на вертолете Як-24 они удвоены), показывают, что
у вертолета продольной схемы у земли вертикальная скорость на
2,6 .м/сек ниже, чем у одновинтового вертолета, а н,т высотах 1000—
2000 м потеря вертикальной скорости достигает 3—3,5 м/сек. В два раза
у вертолета продольной схемы снизился и практический гкролох.
На рис. 1.43 показано изменение распределения кругяших момен-
тов по валам несущих винтов, замеренное в полете на одном из верто-
летов продольной схемы. При ц-0,14-0,25 задний винт потребляет мощ-
ность примерно вдвое большую, чем передний
Такая неравномерность в загрузке заднего и переднего редуктора н
несущих винтов существенно снижает ресурс агрегатов заднего винта
нли требует создания более мощного и ипкелого редуктор? Использо-
панис в качестве заднего редуктора вертолета продольной схемы глав-
ного редуктора исходного одновинтового вертолета невозможно
Большие индуктивные потери, обус топленные взаимным влиянием
вцнтов на вертолете продольной схемы, достигающие 20—25% мошно-
стн на крейсерском режиме полета, существенно снижают его эффектив-
ность по сравнению с одновинтовым вертолетом, у которого затраты
мощности на привод -хвосто-
вою винта в горизонталь-
ном полете незначительны
Поперечная схема. Ута
схема является другим ре-
шением старого вопрос»-
как строить «мост», соеди-
няющий несущие винты?
В чем же зиключае|СЯ раз-
личие между поперечным
и продольным «мостами»?
С точки зрения взаим-
ного влияния па режиме ви-
сения нет никаких принци-
пиальных отличий в работе
несущих винтов вертолетов
обеих схем. Однако потери
от обдчвки крыла на верто-
лете поперечной схемы мо-
гут быть больше, чем от
обдувки фюзеляжа на вер-
толете продольной схемы,
Поэтому характеристики
вертикального взлета для
поперечной схемы с крылом
получаются более низкими.
Однако при поступательном
полете за счет уменьшения
индуктивного сопротивления («размах» поперечного вертолета вдвое
больше, чем у исходного одновинтовогс^ скороподъемность вертолета
поперечной схемы возрастет на величину
4С,=
по сравнению с исходным одновинтовым цертилстом
Можно показать, что между весовой Отдачей вертолета поперечной
двухвинтовой схемы н одновинтового вертолета имеется следующая за-
висимость:
где %„ =— -------коэффлц.юнт, учитывающий затраты мощности на
хвостовом винте одновинтового вертолета; принимаем
его равцым 0,09;
Д^'кр
1Т =-------коэффициент, учитывающий потери тя|и за счет об-
дувки крыла; он может быть принят равным 0,07;
Gi.p—Gia
а------------коэффициент, учитывающий изменение веса при пс-
реходе от одновинтового вертолета к двухвинтовому
поперечной схемы.
Мы считаем, что вес крыла составляет 12% от веса одновинтового
вертолета, а хвостовая трансмиссия с винтом—10%.
Приведенная формула показывает, что па вертолете поперечной схе-
мы, сделанном из двух вертолетов одновинтовых, нельзя достигнуть
такой весовой отдачи, какую имеет одновинтовой вертолет.
45
Если проектировать верголет поперечной схемы заново, то, вероят-
но, его можно сделать гораздо лучше, потому что конструктор попереч-
ного вертолета не примет такую нагрузку ла квадратный метр, какую
взял конструктор одновинтового вертолета. Он сделает ее большей
и вертолет получится компактнее. С другой стороны, при проектировании
заново вертолета продольной схемы сстсстпогшо выбрать меньшую на-
грузку на площадь и более высокую энерговооруженность, что обычно
и делается.
Следует иметь в виду, что при проектировании вертолета попереч-
ной схемы надо располагать средс1вом «рейдировать» частоту собст-
венных колебаний крыла с двш ательными установками и винтами как
в вертикальной, так и в горизонтальной плоскостях, так как эга схема
имеет множество возможных форм колебаний, частоты которых могут
попасть в резонанс с частотами, возбуждаемыми несущим нинзом Кре-
ме того, при мощных, а следовательно, и достаточно >яжелых двигатель-
ных установках, расположенных ла концах крыльев, вертолет попереч-
ной схемы почти обязательно будет иметь форму колебаний с частотой,
близкой или даже меньшей числа оборотов несущего винта, при которой
несущие винты будут колебаться с горизонтальными перемещениями.
Это обстоятельство создает опаснощь возникновения колебании типа
«земной резонанс» не только на земле, но н в воздухе. Поэтому перед
конструктором, решившим проектировать вертолет поперечной схемы,
встает нелегкая задача сделать крыло возможно меньшим по плошадя,
легким и одновременно жестким на нзгпб и кручение.
Однако, несмотря на некоторые трудности, связанные с проектиро-
ванием вертолетов поперечной схемы, и недостатки продольной схемы,
еше не раз конструкторы вынуждены будут к ним обращаться, как
к средству увеличения грузоподъемности. Это может объясняться за-
труднениями, возникающими при создании несущих винтов и редукторов
сверхтяжслых одновинтовых вертолетов
О выборе схемы. Анализ показывает, 41 о, переходя кверзолегам про-
дольной или поперечной схемы с удвоением винтокрылых установок,
невозможно удвишь полезную нагрузку, поднимаемую одновинтовым
вертолетом. Если эгого и удается добиться, то только иеной большого
проигрыша и таких ле1но-гехцичесмтх данных как взлетно-посадочные
свойства, скороподъемность, динамический потолок и д. Таким обра-
зом, переход от одновинтовою вертолета к многовиитовым должен про-
исходить с увеличением энерговооруженности.
Однако в значительной мере иа выбор схемы могут влиять такие
факторы, как назначение нертолета и предьянляемые к нему тактик»
технические или летно-эксплуатаииопиые требования. Часто конструк-
тор предпочитает остановигься на той схеме, но которой у него больше
данных н опыта, если прочие условия позволяют выбрать несколько,
примерно равноценных схем. Иногда следует решиться отдать предпо-
чтение ранее применявшейся конструктором схеме, даже при наличии
у другой схемы некоторых преимуществ.
Для подтверждения этого можно привести такой пример Платная
нагрузка вертолета при нормальной дальности составляет около 15%
полетного веса В зависимости от уровня конструирования при выполне-
нии задания вес вертолета может оказаться на 5% больше или мень-
ше. Тогда окажется, что при одинаковом взлетном весе хороший верто-
лет поднимет платный 1 руз весом 25%, а неудачно сконструированный
вертолет 15% от веса машины. Таким образом, второй вертолет по гру-
зоподъемности будщ значительно хуже первого. Это следует учитывать,
с одной стороны, при решении вопроса о вцборесхсмы вертолета,а, с дру-
гой стороны, при опенке рациональности тин или иной схемы на основа-
нии сравнительного анализа данных уже осуществленных конструкций.
ГЛАВА 2
АЭРОДИНАМИКА НЕСУЩЕГО ВИНТА
§ 1. РАЗВИТИЕ ТЕОРИИ НЕСУЩЕГО ВИНТА
И МЕТОДОВ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ
ЕГО ХАРАКТЕРИСТИК
Идея применения пинта иметто крыла в качестве несущей системы
возникла в 1923 г. Испанский инженер Хуан де ля Снерва после того,
как сконструированный им самолет разбился, попав в штопор из-за
потери скорости, решил создать самоирашагощуюся несущую систему,
крылья-лопасти которой не теряют скорости при любой малой и даже
пулевой поступательной скорости движения аппарата.
Поставленный им в 1924 г в лаборатории Куадро-Венгос в Мадриде
эксперимент, показавший неправдоподобно высокие «качения аэродина-
мического качества авторотирующего винта, как несущей системы, вы-
звал теоретическое исследование аэродинамики авторе тирующего пинта,
проведенное в Англии Глаузртом о 1926 г. и развитое в 1928 г. Локком
для случая шарнирно закрепленных лопастей.
Так и в дальнейшем эксперимент порождает теорию, а стремление
приблизить результаты теории к практике рождает новые эксперименты,
более глубоко вскрывающие физическую природу явлений, что, d свою
очередь, ведет к новому углублению и развитию теории. Лишь в един-
стве теории и практики возможно описать развитие аэродинамики не-
сущего винта до нынешнего ее состояния. Итак, в 1928 г появилась тео-
рия Глауэрта- Локка. Как известно, в эюй теории величины тяга Т.
продольной силы Д и крутящего момента М„ опоеделяклся как функции
кинематического параметра
угла установки лопасти винта ср и коэффициента протекания
___ V sin с —v
представляющего отношение скорости протекающего через диск воздуха
к окружной скорости ali (рис. 2.1) Следовательно, коэффициенты мо
мента и сил woryi быть выражены так;
14'1: 1
Ст-} II.I)
=/('4 J
-17
По теореме о количестве движения (см § 3)
У (1,2)
Определив отсюда ийдукт»вну>о скорость о
/ ___ С-’т-рп/ё^Л_____СтшЯ . । 2i
2Qn/?5’." 4ел/е‘<а у^ц2+4 /V2--
и подгтявив это выражение в формулу для ?.,
' - l‘tg«—
4 У |1Л— Гл
можно получить выражение для угла атаки annapaia
цга = 2_ +--------5Г=-. (1.4)
[Л 1 4|X PZ;^5+ ’
Для расчета аэродинамических характеристик автожира Локк пред-
ложил находись неизвестное значение величины ). из условия авторо-
Рис. 2 1. Ccci ав-"яющце скорости протекания воздуха
через диск несущего впита
танин, т- е. выражение для крутящего момента на валу несущего винта
приравнивалось нулю:
^—/(o.X.lil-O. (1.5)
Поскольку угол установки лилясги <р и характеристика режима р
были заданными иелнчннами. значение А определялось из квадратного
уравнения (2.47), представляющего выражение (1.5) в развернутом
виде. Для данного значения гкорости вращения ак, скорости полета V.
угла установки ф и известного л по (I 4) находился единственно воз-
можный угол атаки ангожира а, при котором происходила установив
шаяся авторотация При этом из уравнения (см. § 2)
+ О (1.6)
определялось значение коэффициента тяги и из соответствующего урав-
нения значение коэффициента продольной силы и, таким образом, сга-
48
носилась известной поляра свободно авторотирующего несущего винта
в функции угла атаки Эта поляра аналогично поляре крыла могла быть
использована в аэродинамическом расчете автожира. Такой метод
опубликовал в 1931 г- И. П. Братухин [I |].
R 1934 г. автор* п своей работе [4], исследуя раскрутку несущего
впита автожира во время разбега, определил из уравнений (1.4), (1.5)
и (1.6) неизвестные значения тяги л крутящего момента, задавая зна-
чения утла атаки а, утла установки лопасти ср я исходные значения
окружной скорости it скорости полета, т. е. ц, что позволило расчитатъ
аэродинамические характеристики для случаен неустановившегося .дви-
жения. При этом был предложен следующий метод определения коэф-
фициента протекания Л.
Подставив выражение (1.6) в формулу' (I 4), получим многочлен
четвертой степени как относительно л, так и относительно р, поэтому
определить из него зная р, или наоборот, практически трудно, так
как каждый раз пришлось бы решать уравнение четвертой степени. Изу-
чение зависимости Z от ;; при заданных а и <₽ показывает, что за исклю-
чением небольшого участка отрицательных К около ji=0 кривая >. = Цр.)
представляет с большой степенью точности прямую линию. Уравнение
семейства этих прямых при разных а « <р имеет вид
(1-7)
Формула (1. 7) дает зависимость 1. от ц, а, <р и п и. воспользовав-
шись сю, можно вычислить по указанным выше формулам коэффициенты
]япи и крутящего момента. Таким образом становится возможен расчет
аэродинамических характеристик несущего винта автожира и на любом
««установившемся режиме работы, когда возникающий на нем or воз-
действия воздушного потока в зависимости от угла атаки и величины
|л крутящий момент раскручивает его или тормозит
Осталось еще найти метод приложения этой (разработанной
Глауэртом и Локком для автожира) теории к расчету' аэродинамических
характеристик геликоптера —вертолета, т. е. определить их п том слу-
чае, когда винт вращается принудительно от двигателя Такой метод был
предложен автором совместно с П Ц. Ярошенко в 1945 г. [9].
Для определения потребного для полета на заданном режиме кру-
тяшего момента естественно обратиться к той же упомянутой выше
системе уравнений. Здесь удобным представилось задать величину коэф-
фициента тяги t. так как тяга винта легко определяется, если предполо-
жить приближенно, что тяга на установившемся режиме горизонтального
полета равна весу вертолета.
Принимая заданные значения числа оборотов и определив I из вы-
ражения
t=------~ (1-8)
ar.Ria-
2
можно найти величину К из уравнения (1. 6), а затем по (2. 47) крутя-
щий момент, а также по (1.4) угол атаки вертолета а, который соответ-
сшует этому режиму-
Еще до того как начался еппременлыц этап в развитии вертолетов,
практика автожиростроеняя потребовала решения некоторых задач
устойчивости и в ряде стран обратились к задаче определения демпфи-
рования. создаваемого шарнирным несущим винтом при колебаниях
аппарата. В результате анализа летных происшествий с аптожирами
• Здесь и далее в § 1 автор — М. Л Миль.
1002
49
возникла необходимость в изучении махового движения лопастей и изы-
скании способов сохранения режима авторотации в тех случаях, когда
аппарат совершает фигуры высшего пилотажа. Так появилась теория
несущего пинта с шарнирным креплением лопастей при криволинейном
движении, разработанная автором в 1939 г. и представляющая собой
более общий случай, чем теория Глауэрта—Локка, написанная для
установившегося прямолинейного движении.
Наконец в 1940 г. Л. Н. Михайлов разраоотал метод эквивалентного
несущего винта, укрощающий приложение теории Локка к винту, сиаб
женному автоматом перокоса [15].
Применение этих методов к аэродинамическомj расчету как совет-
ских автожиров в период с (931 по 1940 г, гак и вертолетов Ми-1 и Ми-4
в 1947—[952 гг. показало вполне удовлетворительную сходимость рас-
четных характеристик с характеристиками по летным испытаниям. По
скольку эти первые автожиры и вертолеты летали со сравнительно
малыми скоростями и соответственно малыми значениями ц, неточности
теории, определявшиеся принятыми Глпуэртом и Локком допущениями
о малости этого параметра, были несущественными. Однако впереди
стояли более сложные задачи — создание более мощных и более скоро-
стных пертолетов, поэтому требовалось постоянное совершенствование
теории.
В теории Глауэрта — Локка, как известно, был принят целый ряд
допущений (в том числе и о равномерном распределении индуктивных
скоростей) с той целью, главным образом, чтобы сделать возможным
интегрирование уравнений а конечном виде. Так cv сечения выражался
как линейная функция угла атаки cu — ama, а сгГ принимался, как неко-
торая средняя независимая от угла атаки величина. Неточно определя-
лись силы, действующие на профиль, на том участке диска, где лопасти
при поступательном полете обтекаются с задней кромки (при малых ц
эта область невелика). Не учитывалась также радиальная составляю-
щая результирующей скорости в направлении лопасти. Сама лопасть
предполагалась прямолинейной, плоской (иезакручепной) и имеющей
постоянную хорду.
В течение 1932—1943 гг. целый ряд исследователей—Унтлей и Бей.
ли в СП1А, Хохенэмзер и Зиссицг я Германия н другие --уточняли
эту теорию тем, что находили методы, позволяющие проинтегрировать
уравнения в конечном виде, отказавшись от многих принятых ранее до
пуще.ний. Вводилось понятие об эффективном радиусе лопасти, мень-
шем, чем фактический, для учета концевых потерь Коэффициенты сь
и представлялись, как более сложные функции угла этаки и т д
Наиболее существенным усовершенствованием классической теории
в послевоенные годы явилось приложение к расчету махового движения
и аэродинамических сил методов численного интегрирования. Это сде-
лало возможным использовать для определения с„ и сх сечения п функ-
ции угла атаки непосредственно экспериментальные характеристики
профилей, взятые для нужного значения чисел Рейнольдса и числа Маха,
и таким образом учесть также влияние сжимаемости.
В дальнейшем в расчеты оказалось возможным ввести не только
исходную геометрическую форму допасти, но и ес деформации как от
изгиба в плоскости (ягт; и плоскости вращения, так и, что особенно
важно, от кручения.
Однако использование такой трудоемкой методики для практиче-
ских расчетов оказалось возможным только с появлением электронных
вычислительных машин. Таким образом iuai за шагом был разработан
современный метод расчета несущего пиита, излагаемый в настоящей
книге на основе работ, проделанных А. С. Браверманом и М Н. Ти-
щенко.
50
Но и после всех этих уточнений оставалось в силе довольно грубое
допущение о равномерном распределении индуктивных скоростей по
диску несущего винта, что не только приводило к неточности в опреде-
лении индуктивных потерь мощности, но и к ошибкам в определении
истинных углов атаки отдельных сечений лопасти и отсюда к ошибкам
в профильной мощности, тяге и продольной силе.
Таким образом, дальнейшего уточнения теории следовало ожидать
от развития вихревой теории, единственно способной определить распре-
деление индуктивных скоростей в зависимости от действующих на каж-
дом данном элементе лопасти сил.
Рис. 2.2. Распределение индуктивных скоростей на
режиме висения
Однако для создания такой теории нужно было глубже проник-
нуть в физическую картину явления. И тут опять пришлось прибегнуть
к эксперименту.’
Проведенные в 1946 г. автором совместно с М. К. Сперанским экс-
периментальные исследования обтекания несущего винта в аэродинами-
ческой трубе, а затем снятие поля индуктивных скоростей ясно показали,
что ннхревап система, широко известная для винта, работающего
на режиме осевого обтекания, и представляющая Для случая постоян-
ной вдоль лопасти циркуляции (r=const) центральный вихрь с конце-
выми пкхрями, сбегающими с концов лопастей, уже на малых значениях
)i преобразуется в систему, похожую нл П-обраэную систему вихрей,
характерную для крыла. В свою очередь, полученное из эксперимента
распределение индумизных скоростей (рис. 2.2, 2.3 и 2.4) вполне
подтвердило возможность приближенного представления поля индуктив-
ных скоростей, предложенного Кюспером и Глауэртом в виде воронки
па режиме висения (рис. 2.3) н в виде цилиндра, срезанного наклонной
плоскостью, на режиме поступательно! о полета (рис. 2.6). Такая форма
ноля могла быть использована для уточнения теории Глауэрта —Локка,
не прибегая к вихревой теории. Эти экспериментальные факты породили
последовательный ряд теоретических работ, которые исходили как из
приближенной вихревой картины ll-образных вихрей, пригодной для
описания режимов на средних и больших скоростях полета, так и раз-
Рис, 2.3 Распределение индуктивных скоростей в поступательном
полете (ц=0^)
личных более обших теорий, рассматривающих систему иихрсй, сбегаю-
щих с каждого элемента лопасти.
Надо сказать, что еще до появления этих дкзпериментальпых дан-
ных Г И. Майкопар рассмотрел вихревую теорию несущего винта, пред-
положив, что вихревой цилиндр скошен в направлении полета, что по-
Рис 2.4. Пространственная модель поля индуктивных скоро
стеё несущего В'1нта
служило потом основанием для целого ряда более или менее точных
работ в этой области.
В дальнейшем наибольшие успехи в разработке вихревой теории
в СССР принадлежат Л. С. Вильдгрубе, а позднее В. Э. Баскину.
52
Во всех этих теориях для определения угла атаки ссчсния лопасти
приходилось, помимо известных кинематических параметров а, р, и <р.
находить также вертикальную составляющую индуктивной скорости у.
как результат действия и данной точке всех вихрей, находящихся в об-
ласти, окружающей винт. Индуктивные
скорости находятся по формуле Био и Са
вера как функции величины циркуляции
в ССЧСН1Ц’ лопасти:
2 J
Отсюда ясно, что поскольку индуктив-
ная сксрость, определяющая угол атаки
ссчсния, есть функция циркуляции, а пос-
ледняя, в спою очередь, может быт,, опреде-
лена через с,,, являющийся функцией угла
атаки сеченця. в который входит игпуктни
идя скорость, — все такие задачи сводятся
к весьма сложным уравнениям и моптбыть
решенн только приближенными методами
Li в частности методами последовательных приближении. Обычна на-
чальные значения находится в предположении постоянства в распре-
делении индуктивной скорости но диску, а затем расчет повторяется,
причем индуктивные скорости находятся уже но вихревой теории. Инте-
гральное значение коэффициента тягл сравнивается с заданным и про-
водится расчет последующего приближения.
Не останавливаясь здесь на рассмотрении сущности различных вих-
ревых теории, которые в частности отличаются предположением о ко-
нечности или бесконечности числа лопастей, и методов*р,течет,з индук-
тивной скорости (см. гл. 2, § 5), оценим их общее значение и роль
в уточнении расчетов летных характеристик одновинтового вертолета.
Илистость вращения
Рис. 2.6. Линейное распределение индуктивных
скоростей
Рассмемрим максимальное значение ошибки в определении индук-
тивной мощности, исходя из предположенья о равномерном и воронко-
образном распределении индуктивной скорости. Сравним затем индук-
тивные мощности пинта при условии постоянства тяги для случая рав-
номерного распределения индуктивных скоростей по диску и поправки
па ворогу.
Воронкообразное распределение индуктивной скорОС|Ц цредпавим
по закону треугольника (рис. 2 5)
где х, — индуктивная скорость иа радиусе г лопасти.
По теореме о количестве движения элементарная iara
dT=Q2nr2f;.
Интегрируя от 0 до R, получим
Г=сл/?2О2,
где —индуктивная скорость в концевом сечении лопасти
Для случая равномерного распределения индуктивных скоростей
тяга
Г, - $2л/?2ъ\
Приравнивая '1\ и Т, получаем
2n/?2QiA
откуда
%с = <2.
Следовательно,
V,— т' — = и — Т 2
' * Л Я
Индуктивная мощность определяется из следующих формул'
dN„3 =dT v =4nQU2rdr;
R
Л'mu — 4лср^г.
О
Подставив в последнюю формулу значение о,-- kr, получим выраже-
ние для мощности в случае распределения индуктивных скоростей по
закону треугольника:
'V"T- W”---,=2,26n«’si'".
Эта мощность больше, чем мощность Л’„нл в случае равномерного
распределения скоростей в 1,13 раза, так как
•Унядт1, _ 2 эбяЯуз ] ]3
.Уива 2n/?20v»
Таким образом, воронкообразное распределение индуктивной ско-
рости увеличивает индуктивные потери примерно на 13%. Следова|ель-
но, различие в относительном к п. д. составит около 10% Эти значи-
тельная величина и естественно поэтому, что для расчета тяги и мощ-
ности винта на режиме висения пользуются методами импульсной или
вихревой теории, которые позволяют учесть дополнительную потерю
мощности, возникающую за счет неравномерного распределения ипдуи
тивной скорости по диску,
В приближенном расчете можно индукшвные потери, вычисленные
по формуле
,УШ1Д=7Ч
увеличить приблизительно на 13с/у.
На режиме висения затрачиваемая мощность является суммой ин-
дуктивной и профильной мощностей, причем первая из них составляет
75% от суммарной потребной мощности. На режиме крейсерской ско-
рости индуктивная мощность составляет лишь 20—30%, а на режиме
максимальной скорости — примерно 10%. Таким образам, при больших
54
скоростях полета максимальное уточнение и погребной мощности за
счег учета неравномерности распределения индуктивных скоростей мо-
жет составить лишь 1—2% в мощности и не более 1% и скорости полета.
Естественно, принимая (аналогично эффективному удлинению са-
молета) эффективный радиус винта несколько меньшим, чем дейст-
вительный, мы можем внести опытную поправку в аэродинамический
расчет, сделанный по теории, предполагающей постоянное распределе-
ние индуктивной скорости. Эта поправка может иметь значение особенно
при определении скороподъемности и потолка для сильно нагруженных
винтов.
Таким образом, ясно, что для расчета летных данных значительно
более сложные расчеты аэродинамических характеристик винта по вих-
ревой теории не являются необходимыми
Уточнение в углах атаки сечений, даваемое вихревой теорией, ста-
новится необходимым только при расчете напряжений, возникающих в
лопасти, особенно на режимах малых скоростей, где аэродинамические
силы, возбуждающие колебания лопасти по второму и более высоким
тонам, являются, и действительности, результатом встречи лопасти
? вихревым полем. [1о теориям, предпола!аюшим ь = сопь1 эти напряже-
ния вообще оказываются практически равными нулю.
Надо полагать, что уточнение поля скоростей может иметь значение
при определении граничных режимов, на которых начинается срыв по-
тока. Однако для этоп цели может оказаться достаточным уточнение
лишь картины распределения индуктивной скорости в виде продольного
перекоса, что приведет к изменению махового движения (&;1 и некото-
рому перераспределению углов атаки
Вместе с тем представление о распределении индуктивной скецмхти
в виде воронки (рис. 2.5) я особенно учет ее нарастания спереди назад
(рис. 2 б) существенно изменяет маховое движение, особенна Ь., и бо-
ковую силу 5‘, эго учитывалось разными авторами.
1, Классификация теорий несущего винта
Из изложенного ясно, что принципиально различны только две
теории реального несущего винта. Обе они базируются на рассмотрении
сил, действующих ца элементе лопасти. Такой подход по отношению
к винг} вертолета впервые применил Н Е. Жуковский fl] еще в работе
и влиянии ветра на тягу винта вертолета
В первой из этих теорий распределение индуктивных скоростей по
чиеку задается заранее независимо от действующих на элементы лопа-
сти сил. Среднее ее значение может быть определено ни геореме о коли-
честве движения.
Во второй теории индуктивные скорости у каждого элемента лопа-
стей являются функциями сил, действующих на всех лопастях, являю-
щихся в свою очередь функцией этих индуктивных скоростей и опре
леляю-гя обычно <<о формуете Био и Савара
Первую мы будем называть классической теорией,—к ней отцо
сится теория Глауэрта Локка и ее последующее развитие,-• вторую
мы будем называть вихревой теорией
Классическая теория мыслима с интегрированием в конечном виде—
аихревая теория предполагает только численные методы решении.
Следует рассматривать еще импульсную теорию идеального винта,
которая может быть исполыопяна при развитии энергетических методов
аэродинамического расчета и при интерпретации результатов экспери-
ментального определения аэродинамических характеристик несущего
винта.
Если в настоящее время развитие классической теории в своих чис-
ленных методах с использованием счетных машин практически близится
к споему Завершению, то для вихревой теории мы epic можем назвать
стоящие на очереди задачи- Так, в большинстве вихревых теорий при-
нимается при расчете циркуляции величина си как линейная функция
утла атаки, в io время как ее можно уточнить. Вихревая система для
упрощения считается плоской или пространственной, но линейной Э|0
упрощение также в дальнейшем может быть преодолено.
Таким образом, вихревая теория, унаследовавшая все уточнения,
внесенные при развитии численных методов расчета по классической
теории, по существу становится наиболее точной теорией В ее развитии
можно и не пользоваться предположением о стационарности обтека-
ния сечений лопасти и уточнять поляру сечения, используя эксперимен-
тальные данные о влиянии центробежных сил на явления, протекающие
в пограничном слое.
Исходя из этой классификации, мы ц будем вести дальнейшее изло-
жение теории несущего винта.
2. Развитие экспериментальных методов
Параллельно с описанными направлениями п развитии |еирии про-
должают развиваться и экспериментальные методы определения аэро-
динамических характеристик несущего винга.
После первых эксперименюв в Мадриде в тридцатых годах во мно-
гих странах обратились к эксперименту с несущим пиитом в аэроди-
намических трубах. Эксперименты, методика которых была разработана
в ЦЛГИ В. Г. Петруниным, проводились. (1931 —1936 гг-) на моделях
авторотирующих винтов диаметром 1,2 л с (амсром трех компонентов
сиды и крутящего момента, л также с записью махового движения ло-
nacien.
В экспериментальной технике бгчло достигнуто большое совершен-
ство. Возможно было, в частости, получать поляру фюзеляжа п при-
сутствии работающего винта. Высшим достижением в этих экспери-
ментах был поставленный В. Г. Петруниным замер махового движения
на втулке авторотирующего несущего вита, вращающегося в потоке
аэродинамической трубы вокруг вектора доступа|елыюи скорости,
позволивший оценить демпфирование винта на режиме полета гдца
«бочки» (см. § 2).
Однако, очень скоро стало ясным, что малые числа Рейнольдса при
обтекании сечения лопасти настолько искажают поляру профиля на
мотели по сраккепию с натурой, что о прямом использовании этих ре-
зультатов не могло быть и речи.
В J944 гО.;у в ЦАГИ автор совместно с И Ф. Морозовым поставил
эксперименты на винте /9 =2,3 м уже не только на режиме авторотации,
а и па вертолетных режимах
Экспериментальный прибор для модели винта дизме1ром 2,5 .и
представлен на рис. 2. 7. Испытания на нем были впервые представлены
в координатах б, = дли |i==-const и (—const (см. рис. 2.8).
где 6~—. Проведенные для трех типов лопастей различной формы
П закрутки они позволили судить о пропульсивных свойствах винтов
Но ыавный смысл этих экспериментов заключался в возможности оце-
нить степень совершенства |еориц при сравнении их с расчыами-
В то время как наши первые вертолеты были достаточно точно рас-
считаны по классической теории изложенной в § 2, «сртолст Мк-6
с турбовинтовыми двигателями мощностью в II 00D л. е. переходил уже
в такую область скоростей полета, а следовательно и значений р (бо-
ссе 0,4) и чресл Маха, где теория Глауэрi;i- Локка давала значитель-
ные ошибки. Готовясь к этому, в П6ГЙ была построена ватерная верто-
летная установка, на косорой автором совместно с М К. Сперанским
56
были определены характеристики несущих винтов диаметром 14,5 м
в большой аэродинамической трубе. Тогда возникла и задача пересчета
экспериментальных данных, полученных для конкретного впита, на дру-
гой коэффициент заполнения, другие значения числа Маха. Эти расче-
ты налагаются в § 6
Рнс 2.7. Прибор Ел.> inисганпя моделей иесущьх нгнюи
В связи о необходимостью уточнения |сорстц'>ескцх методов расиста
аэродинамических нгирузок на элемент лопасти в последние годы по-
ставлена серия экспериментов, результаты которых позволили датя
о- f-4'Л"? -луи/тега&'Агглиют»
-*-т =г?/Л6 - кпкггг
легэ вин’а (эксперимент га модели)
более детальное обънн ецре картины обтекания профиля лопасти в ре-
альных условиях рабе 1Ы несущего Винга. В этом плане очень интересные
данные могут бьиь получены путем измерения распределения давлений
по хорде лопасти в полете. Интегрируя эпюры распределения этих дав
лений, можно получить действительные аэродинамические нагрузки,
действующие на профиль в полете и изменяющиеся по азимуту несущего
винта. Проводя такие эксперименты на моделях. В. Э Баскин
и А. С. Дьяченко обнаружили, что при проходе лопасти в районе пихря.
стекающего с концов впереди идущих лопастей, возникает резкий
всплеск нагрузок на лопасти.
Несомненно, что дальнейшее развитие вертолстостроения в направ-
лении увеличения скоростей полета потребует проведения новых экспе-
риментов и создания установок для экспериментального определения
аэродинамических характеристик на еще больших значениях ц при
соблюдении подобия по числам Маха и Рейнольдса.
§ 2. КЛАССИЧЕСКАЯ ТЕОРИЯ НЕСУЩЕГО ВИНТА
С ШАРНИРНЫМ КРЕПЛЕНИЕМ ЛОПАСТЕЙ. ОБЩИЙ СЛУЧАЙ.
КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ
Теория несущего винта при прямолинейном движении вертолета
или автожира разработана Глауэртом и Локком. Она описана в много-
численной литературе- см. [36], [37], [2], [1 Г и [23]. Излагаемая ниже тео-
рия является развитием теории Глауэрта—Локка на более общий слу-
чай, когда вертолет находится в криволинейном движении н. следова-
тельно, ось несущего винта имеет в пространстве вращательное движе-
ние. Такое .движение имеет место при ус1ановившемся криволинейном
движении аппарата, например при пираже. а |акже при колебаниях от-
носительно продольной или поперечной оси, вызванных управлением или
внешними причинами.
ТЕОРИЯ НЕСУЩЕГО ВИНТА ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ
Здесь приняты все сделанные Локком в общей теории допущения,
а именно, индуктивная скорость при отсутствии поворачивания оси винта
считается равномерно распределенной по диску несущего винта. Изме-
нение в законе распределения ее по диску, сделанное нами, относится
лишь к наложенному эффекту крашения всею аппарата, т. е. исходная
картина остается той же, что и у Локка.
Точно так же приняты допущения о линейности cy=f(a.) и о допу-
стимости замены коэффициента сх некоторой средней и одинаковой для
всех сечений лопасти величиной сХ1, .
Вводим учет концевых потерь, т. е. считаем, что на некотором кон-
цевом участке лопасти подъемная сила не развивается, а силы сопро-
тивления так же, как инерционные, действуют но -всему радиусу Метод
получения выражений для сил и моментов здесь аналогичен методу
Локка и потому мы не будем повторять выводов основных выражений,
останавливаясь лишь на выражениях, изменяющихся при рассмотрении
криволинейного движения
Особую роль здесь играют силы инерции Кориолиса, возникающие
при вращении несущего винта. Рассмотрение этих сил проводится наи-
более подробно.
Результаты, которые мы приведем, содержат основные зависимости
теории Глауэрта Локка при прямолинейном движении и. кроме того,
позволяют ответить на следующие вопросы:
а) каково маховое движение лопастей при криволинейном .сниже-
нии всего аппарата.
б) как изменяется положение аэродинамический равнодействующей
в случае вращения всего аппарата в каком-либо направлении (например,
влево или вправо), существует ли тенденция ускорить илн замедлить это
вращение;
58
в) какие особенности имеет режим самовращения несущего винта
при наличии вращения.
Наряду с исследованием этих вопросов нами рассмотрено также
влияние схемы втулки, профиля и центровки лопасти на поведение
несущего винта с точки зрения устойчивости и безопасности аппарата.
Полученные результаты являются общими для всякого несущего
винта с шарнирным креплением .кишетей будь то винт автожира или
вертолета.
Помимо ответа на приведенные выше попроси, имеющие самостоя-
тельный интерес, результаты анализа дают некоторые необходимые
материалы для изучения управляемости и динамической устойчивости
названных аппаратов
1. Система координат и физическая схема явления
Система координат. Явление рассма1ривается в системе координат,
связанной с аппаратом (рис. 2.9). Это правая система (для правого
вращения несущего пинга), в которой ось г направлена вдоль оси вра-
щения винта, а ось к назад по направлению скорости центра тяжести
машины. Угловое положение лопасти ф отсчитывается от оси х.
Физическая схема явления. Будем рассматривать несущий винт, ко-
торый вращается в пространстве вместе с аппаратом с постоянной
угловой скоростью и сохраняет при этом постоянный yi од а1аки с траек-
торией движения.
Рис. 2.1П. Схема скоростей
Hccyhicro винта на вираже
Рис 2.9 Система коор^г
Такое вращение имеет место, например, па нираже.
Нас интересует, каким образом мы чолжны учитывать радиус вра-
щения аппарата
Рассмотрим .тля этап» вертолет, совершающий вираж радиуса е
с большим утлом кренз укр, близким к 90е.
Схема скоростей в плоскости симметрии аппарата, в данном случае
финкой к плоскости виража, изображена на рис. 2.10.
Относительную скорость потока на расстоянии г от центра несущего
винта можно разложить ня две составляющие, скорость йр, направлен-
ную по касательной к траектории центра втулки несущего винта (это
и есть то, что мы называем скоростью виража), и скорость Qr, направ-
ленную перпендикулярна к плоскости винта.
При этом мы пренебрегаем расстоянием от центра втулки несущего
винта до центра тяжести вертолета сравнительно с радиусом кривизны
траектории.
59
Если мы теперь перенесем центр вращения аппарата в центр втулки
несущего винта, то, помимо указанных скоростей, должны будем учесть
дополнительные центробежные силы, действующие на лопасти.
Как известно, в случае установившегося виража без скольжения
равнодействующая центробежной силы н силы тяжести лежит в плоско-
сти симметрии аппарата.
Такам образом, эти силы, пропорциональные й2п, можно paccM^i-
ривать как увеличение собственного веса лопасти. Это увеличение есть,
очевидно, перегрузка п.
Выражение для угла конусности содержит член, учитывающий
вес лопасти:
м"=-д5г' <21)
где Srnr — статический момент веса лопасти относительно горизонталь-
ного шарнира.
Для виража будем иметь соответственно
AV-7^' <2-2>
'Г.Ша1в
Известно, что при вираже обороты несущего винта увеличиваются.
Если ив = о|1-'г^, что, приблизительно, имеет место на режиме самовра-
щения то, подставляя юг в выражение (2.2). получим
да0 = Ла,1и, (2.3)
т. е. при установившемся криволинейном движении несущего винта без
скольжения уменьшение угла конусности за счет веса лопастей сохра-
няется неизменным независимо от перегрузки.
В обычном случае Лап составляет пс более 0,3°, и мы можем либо
пренебрегать этой величиной, либо учитывать се независимо, как это
и делается в теории при прямолинейном движении. Поэтому в дальней-
шем нами будет рассмотрена следующая слема: несущий винт движется
при постоянном угле атаки и совершает вращательное движение отно-
сительно оси. проходящей через его центр.
2. Инерционные силы, действующие на лопасть
При криволинейном движении вертолета лопасть несущего винта
совершает в пространстве четыре вращательных движения,
Она вращается вокруг оси втулки Ог с угловой скоростью <о, вместе
с осью Oz вращается в пространстве со скоростью й, имеющей компо-
ненты и и, наконец, колеблется относительно осей горизонтального
и вертикального шарниров, составляя угол Р=/(тр) с плоскостью, пер-
пендикулярной к осн втулки, и угол относительно своего сред-
него положения.
Движением лопасти относительно вертикального шарнира мы будем
в дальнейшем пренебрегать ввиду сто относительной малости.
Рассмотрим элементарные инерционные силы, действующие на ло-
пасть при вращении несущего винта. Центробежная сила
сШ.-=т^гйг (2.4)
перпендикулярна оси несущего винта п направлена по радиусу.
60
Центробех<ные силы, возникающие при вращении с угловыми скоро-
стями fix и
dljs —mtyrsiatiilr,
dZ/9 —mQ2 г cos tbdr. j
(2.5)
Эти силы также лежат в плоскости вращения и соответственно пер-
пендикулярны к векторам fix и
Сила инерции взмаха, перпендикулярная лопасти
., <*г3 .
dJ — m—-г dr.
ria
(2- 6)
Силы инерции Кориолиса от вращений о, Q* и перпендикуляр-
ные плоскости вращения:
dKi = —2m2j.»rcos’pi/r;
dKQy — — 2m2ywr sin ф dr.
(2.7)
Силы инерции Кориолиса, возникающие при взмахе лопасти, т. е.
при вращении с угловой скоростью £2:
— компонент в плоскости вращения
j^-rdr;
dK'^----2mQr-^rdr,
(2-8)
— компонент, перпендикулярный к плоскости вращения
dK'^x= —2fft2J.B-^-rsin^dr;
dK&y— — г rosy dr.
(2.9)
Силы инерции Кориолиса за счет движения взмаха и вращения
с угловой скоростью (I)
dKf*— —2rctcB ~-r dr
(2.10)
лежат в плоскости вращения и перпендикулярны к лопасти.
Схема инерционных сил, возникающих при криволинейном движе-
нии, изображена на рис 2. 11. СидысЩ, dJ, dK"'Sx н dK'iS нс показаны.
Рассматривая маховое движение лопасти относительно горизонталь-
ного шарнира, будем учитывать лишь силы по выражениям (2. 4), (2. 6)
и (2.7), так как силами dK‘fe (2.9) высшего порядка малости по
сравнению с силами инерции взмаха или с силами dKs, а центробеж-
ными силами от вращений fix и QM (2.5) по сравнению с основной
центробежной силой (2. 4) можно пренебречь; отношение ) практиче-
ски не бывает больше, чем 0,01.
61
При рассмотрении равновесия относительно оси вращения н выра-
жении для крутящего момента эти центробежные силы (2. 5) принимают-
ся во внимание.
Рис. 2. 12. К определению махо
вого движения винта
Помимо ниоршюпных сил, на элемент лопасти действуют и аэро-
динамические силы.
Желая нагляднее выявить действие инерционных сил, а также про-
верить, правильно ли составленные ниже общие уравнения описывают
явление, сначала упростим задачу.
Исключим совершенно аэродина-
мику и рассмотрим движение шар-
нирно прикрепленных к втулке лопа-
стей, вращающихся по инерции в пу-
стоте, в то время когда ось вращения
их поворачивается.
Движение шарнирно прикреплен-
ных вращающихся по инерции стерж-
ней во время поворачивания втулки.
Рассмотрим общий случай втулки,
горизонтальные шарниры которой рас-
положены на не.котором расстоянии
A.Itr от оси вращения.
Пусть мы имеем несущий винт,
• вращаюшийся вокруг оси z с угловой
скоростью ц> (рис, 2. 12).
Ось вращения z поворачивается назад с постоянной угловой ско-
ростью Qy н в некоторый момент времени отклонена на угол d or на-
чального положения z0- Принимая за плоскость отсчета плоскость, пер-
пендикулярную к оси z, и полагая уюл б малым, напишем с помошью
выражений (2. 4). (2.6) и (2. 7) выражения для моментов действующих
сил относительно оси горизонтального шарнира.
Момент сил инерции взмаха (положительный момент стремится под-
нять лопасть вверх)
.•И,—
U2
Так как у современных вертолетов отношение -г^' обычно нс бывает
более 0,02, можем принять
f mr dr ~ j* mr dr <= 5Г щ, (2.12)
а интегралом, содержащим пренебречь, TOiaa
Обозначив
получим
(2.U)
Момент центробежных сил
я
---—Г,,ш)</Л= —/г шш2Гя! -0- (2.1-5)
6
Здесь полагаем угол р малым и считаем, что вектор угловой ско-
рости ф направлен по оси вращения z.
Момент сил инерции Кориолиса
R
/ИК2= — 2Jm2y»sin^r(r- Zrш)(/г— — 2/глД‘у<1Ц1 — i)siii^. (2.16)
Приравнивая сумму ясех моментов нулю, получим уравнение дви-
жения лопасти:
Л.и^(1-2<>+Л.и-,?(1-=)--2Л.Л"(1 -'hw-
Поделим ею на (1—е)2, roija, пренебрегая t? и полагая ш— d-^-.
получим окончательно
—2 — (l + ilslnt. (2.17)
Найдем частное решение этого уравнения. Положив Р —.Vsinxp
и подставив в уравнение, получим
,3— - —^-(1 -Нмцф.
Общее решение этого уравнения будет
5—Дсоь1/1-| ei-j-2? sin ]/1-НФ--(1—s)sinO, (2.18)
63
Подставляй начальные значения /= — ; ['=0; —_0. определим
2 di>
значения Д и К:
22у .---- л
Д —----(.1 —:) cos V 1 —s — .
22. _____я
Л----.
Подставляя эти значения в уравнение (2. 18) и полагая i|:i—ф—;у-
(здесь -ift — угол, отсчитываемый от положения, в котором дах<>дится ло-
пасть в начальный момент, при 2=0), получим окончательно:
2U,,---------
— (COS | 1-Hft—co?'ft)(l —:), (2,20)
ги
Отсюда нетрудно получить и решение р для случая пересекающихся
с осью несущего винта шарниров (1та! = е.=0)
Раскроем неопределенность по правилу Лопиталн:
(2.19)
Так как вращение предполагается равномерным, то. представив
1р,=С1)/, найдем
2/
6 = =
ft.
(2.2[)
а, заменяя •рг=ф——, получим окончательно
а,
Р—----ft СО5'Д»? COS ft
(2.22)
Этот же результат может быть получен и непосредственным реше-
нием дифференциального уравнения (2. (7), в котором положено е—0.
Из выражения (2. 22) следует, что в случае втулки с пересекающи-
мися шарнирами при отклонении оси винта назад на угол б лопасть от-
клонится в обратном направлено на тог же угол.
Это значит, что допасти сохраняют неизменной плоскость концов
лопастей в пространстве, в то время как втулка несущего винта повора-
чивается.
Результат правильный и физически понятный.
Решение для р показано графически на рис. 2, |3 в случае совме-
щенных (8=0) н разнесенных шарниров (для е-0,2*) при — =0,01.
Кривые были построены по уравнениям (2-20) и (2,22).
Как видно из рис 2. 13. и течение некоторого промежутка времени
движение лопастей почти совпадает, т е. положение их в пространстве
не меняется, затем лопасть на втулке с разнесенными шарнирами начи-
* Такое большое чначепие г принято, чтобы сделать график более наглядным.
Практически е не превышает 0.02.
1002
65
пает медленно следовать за осью пращения, т. е. плоскость вращения
лопасти приближается к плоскости вращения втулки, причем Происходит
и некоторый сдвиг по фазе.
В эти время, однако, угол поворота втулки уже настолько велик,
что дальнейший анализ не имеет смысла как потому, что лопасти физи-
чески упрутся в свои ограничители на втулке, так и потому, что развитая
выше теория справедлива лишь для малых б.
Таким образом, при рассмотрении коротких колебаний несущий
винт с небольшим разносом шарниров практически эквивалентен несу-
щему винту с иересекаюшимиея шарнирами, т, е. сохраняет неизменным
свое положение в пространстве.
Рис. 2 14. Схема скоростей у ч.1е-
Мента лопасти
Рис. 2 15. Изменение поли i-«ipoMei1
при вращении винта
В дальнейшем анализе мы будем пренебрегать разносом шарниров
полагая е=0 Мы имеем к этому тем больше оснований, что аэродинами-
ческие силы (как будет показано ниже) увлекают плоскость вращения
лопастей за движенцем втулки и между ними и инерционными силами,
стремящимися сохранить неизменным положение несущего винта в про-
странстве, устанавливается равновесие, так что плоскость врзшения
все же следует за движением втулки с некоторым отставанием.
3. Аэродинамические силы, действующие на лопасть
Мы будем полагать, что аэродинамические силы, действующие на
элемент лопасти, лежат в плоскости, перпендикулярной осн лопасти,
п зависят лишь от компонента скорости, лежащего в этой плоскости.
Координатные осп, лежащие в плоскости, перпендикулярной к оси
лопасти, расположены так, что ось Ох параллельна плоскости вращения,
а ось Оу, ей перпендикулярная, лежит в плоскости, содержащей ось не-
суще: о винта.
Разложим скорость, действующую на элемент лопасти, на компо-
ненты Ux и Uy (рнс, 2. 14). Они равны:
U х—ги> — sin 4*; (2.23)
(J — — [x/^w3cos'i-}-L!yrсоз<l> —Qysin-li. (2.24)
' dl ' 3 ‘
Здесь уравнение (2 23) то же, что и при прямолинейном движении.
Что касается уравнения (2. 24). то в нем добавлены лишь два последних
плена, учитывающих влияние нр.чщательного движения оси. Учет этих
членов даст изменение ноля скоростей у винта, которое получается ана-
логичным изображенному на рис. 2. 15.
Принимай во внимание новью значения и С-\, мо:ут быть получе-
ны все элементарные силы на лопасти не-ущего винта.
66
Как получено Локком, элементарнее аэродинамические силы и мо-
менты выражаются через компоненты скоростей у элемента следующим
образом:
d'!' = bQa-v(<={?" ; (2.25'i
dM —-у bQfc^U;.- a.U^rdr; (2.26)
dfi — — sin>p- (5dT cos 'p; |2.27)
Its----—'cos - 'f rfr sin f. 12. »I
Рис. 2. Ц>. Силы, действующие на элемент
лопасти
4. Уравнение моментов относительно горизонтального шарнира
Уравнение моментов относительно горизонтального шарнира можс-i
быть па писано так (см. схему на рис. 2,16):
R д R
— mr^dr — j ^nzu.'2rzdr — ^2nz2yi4Sinor-'^г —
6 j j'
R HR R
--j 2те2хш cosir2 i/r+ \dTr— f mgrdr--0. (2.29)
о j Л
Проинтегрировав, получим
HR
~k, % -1,^+
Перейдем от дифференцирования no t к дифференцированию по у,
di
полагая -Д--=<>:
л
rfft __ ДЗ . al$ _ 42£ „
dt ~' d/2 — ^2
и перепишем уравнение моментов, поделив его на /г ао>2:
br Q
JtV'I 3 = - I dTr~ 2--sin<p — 2^cos|— . (2. 30)
ay- 'г.т*"2 J <’J <» /r.mw2 '
Выпишем, пользуясь уравнениями (2,23) и (2.24), выражения для
С72 и 6\<7у, входящие и уравнение (2.25) для dT-.
</;=^гЗт2 4-2.о2/?гГ5Н1^ + р2/?2^5п12<1; . (2.31)
67
UxUy—lJiPRr — —w2 — fyu>2/?/-cos0 — 2/ьг2я(пф-к
-] Xp.<u3/^2siii^— ^-fxutfrsjn 5 — Pp.V^s з1пфсозф —
— 2^uu/?r sin2 ф 4~ 2ywr2c<is i - QyupJ^rsin^cosd. (2.32)
Момент от тяги
BR BR
J dl'r —j- boa* (•-</ \-UJJy) rdr= ? | - -^ Я3?:» sjn ф 4-
0 0
, 52 2 , , , - В1 x № B-' , , 3* a, . . ।
+T'^sm24- 3- X-у —-T?;xc<M--4- sm.H
, 32 . . . 32 ,. , . . 34 rf8
+ у Xp sin i - — Sin •{, cos ф — — -X. p sin ф —
31 2, „ , 34 Uy № 2y x
------;isin24>4-—------соьф-[------- ;i sin Фсоз о J. (2.33)
3 u> 4 ш .3 to /
Подставим выражение (2.33) в уравнение (2,30) и положим у =
= • ------, зогда получим окончательно:
2/р.ш
</28 , rfa /3J 31цsinOx ,. /, 1 вз . . ,,,, . . л,\
-Г7-77 У —+ ~^---------W 1 +~т ¥!>«« +Biw-sra2f)=
/ф2 </ф 4 3 / \ 3 ’
(В$ . В’ Сх . , , 32 . . , 2Х . , , ,
=Y[ —7 -x-sin^+—Xusini--------- — p.siir4-[-
\ 3 4 ы 2 3 u>
Bi 2y 3» Су 1 В* 2 .
-1- --- COSi-l---------USlu2-i — —o4-—B3^. SLII-j I
4 ш 1 3 to 2 4 3
-I эи2зш2ф\-2 —siri’b. .2 — cosФ — —-—. (2.34^
П 2 ’l V « f ‘ /rulci2 ‘
Частное решение дифференциального уравнения (2. 31) можно пред-
ставить в виде ряда
'5 — ац —atcoso i>, sinrp_c,cos 20—&2sln 2ф ...
Извсст1ю из решений, полученных при сохранении в выражении ₽
только пяти членов, а также из эксперимента, что п обычном случае
(й--=0) вторые гармоники угля 0 малы по срапнспцю с первыми.
Для получения большей наглядности и простоты выводов (сохраняя
принципиально правильную картину) отбрасываем при решении задачи
вторые гармоники в выражении для |J, т. е. принимаем JJ в виде.
£=ос— ах сО5ф — й( 5]Пф. (2.35)
Найдем производные и и подставим их в уравнение (2.34).
Отбрасывая члены, содержащие функции двойных vmou, полечим:
-[6,¥2L(B2+4i‘‘hT‘w 4- я'(Л,+г‘4~-
68
гак как выражение (2.36) есть тождество, то приравняем коэффи-
циенты при sinф, созф и свободном плене, откуда и найдем коэффициен-
ты махового движения.
Свободный член
(2. 37)
Коэффициент при э!пф:
ВФ,
- - В3^
откуда
, SCV V 1
Г-1)-—------:--(2.38)
‘ Гп(к1___.> )
Коэффициент при созф:
'в*-
откуда
82,
(л2
(2. 39)
Для условий прямолинейного движения получим.
(2. 40)
Мо ----J-
Тогда уравнения (2.37), (2,38) и 39) можно переписать так:
5»Sr 1
<2„=а — V-—и.
(2.41)
82,
Я2 -
Мы рассматривали часики решение уравнения (2.31). Исследова-
ния общего решения этого уравнения, характеризующего собственные
колебания лопасти, показывают, что лопасть устойчива и, будучи вы-
ведена из своей нормальной для данною режима траектории, возвра-
щается к ней с сильным затуханием в течение одного-двух оборотов не-
сущего винта.
69
Это значит, что н ноное маховое движение лопастей, описываемое
формулами (2.41), вызванное наличием у1ловой скорости вращения
машины, установится сравнительно быстро (через один оборот винта).
Полученные выражения справедливы для несущих винтов с больши-
ми у. Выражение (2.41) показывает, что под влиянием угловой скорости
конус лопастей поворачивается вместе с валом, отставая от него на
постоянный угол Дсц, а также отклоняется и перпендикулярном направ-
лении. Таким образом, илоскощь этого новою наклона смещена по фазе
относительно плоскости поворота оси несущего винта.
Этот сдвиг Дф в случае продольного вращения характеризуется от-
ношением
1ИДР - 1.
|Де Д6| и Aaj определяются по формулам (2.41).
С помощью формул (2 41) можно составить таблицу (см табл. 2 1),
показывающую направление запала конуса под влиянием угловой ско-
рости.
Отклонение конуса в случае сложною движения несущего винта
(например, вперед и вправо) легко получить по формулам (2.41). Так,
для частного случая у—8 и Q, = Q,. получим табл. 2 2.
Таблица 2.1
Таблица 2 2
Как вращается
ось несущего
винта
К,7к наклоняется
нес»щего кингя
Как нвго-
няется
Крепит1 я влево
Пикиртег и крепится ,
вправо
Пнкнргет и кренггкя i
плево
Kd6pHf4 f < гг кренится
вправо
Й‘а6ргг|г}с. ii крепится
влево |
11азад
Вправо
Вперед
Отклонение конуса при вращении легко определить, помня, что оц
отклоняется п сторону, обратную вращению (в плоскости вращения)
и, кроме того, отклоняется в перпендикулярном направлении, обратном
направлению жироскопической реакции (правый жироскоп при наклоне
назад отклоняется вправо, а дополнительный наклон конуса происходит
влево).
5. Физическое объяснение полученного результата
Формулы (2. 41) показывают, чю в ответ па вращение ос;: несущего
винта в какую-либо сторону ось конуса в этом направлении отстает (пло-
скость концов лопастей отклоняется ощосительно оси вала в обратную
сторону) и, кроме того, наклоняется в направлении, перпендикулярном
вращению
Нетрудно видеть, чю наклон в сторону вызывается аэродинамиче-
скими, а отставание инерционными силами.
Рассмотрим для примера случай ц—0: В-1.
70
Пусть мы вращаем винт назад; Q?>0: йх=0. Тогда согласно
уравнению (2,24)
U,=Х£Ю _ г cos -i + 2,r cos -> — U^-\- дС\,,
где O', —ость поражение О, при о — 0.
Угол атаки сечений передней лопасти (i|'=.i) уменьшится, полагая
k—eoiibt, на
46'у 2у
а угол aiaiqi селений лопасти, стоящей по потоку, увеличится на вели-
чину
2..
ДЦГ2 = —-
Под влиянием возникшего ир» этом изменения моментов аэродина-
мических сил будет изменяться маховое движенце лопастей, пока нс
установится новое равновесие моментов и соответствующее ему маховое
движение. При этим, как это следует из условия пулевого шарнирного
момента, углы атаки сечений лопасти должны получить прежнюю вели-
чину, соответствующую прямолинейному движению (так как никаких
новых сил не появилось, а скорости остались неизменными).
Это осуществляется в том случае, когда действительная ось враще-
ния конуса, омстаемого лопастями, отклонится влево на тот же угол Да
(огь наклоняется вправо для уменьшения угла атаки лопает, идущей
впереди в случае обычного стационарного полета).
Действительно формула для (2.39) в этом случае дает
6'-~6-ГГ
т. с. завал конуса вправо, имевшая место в арнмоляй^Иком полете,
уменьшается на указанную величину.
Теперь рассмотрим эффект инерционных сил Дополнительная сила,
действуюшая при нрашении, есть сила от ускорения Кориолиса. Ее Мо-
мент согласно выражению (2.7);
!>
Л},( = — f sjnO<7/-= —
т. е. при вращении несущего винта назад на лопасть, идущую вперед
(ip— действует момент А1к=—27гшй«ь>, стремящийся опустить ло-
пасть вниз.
Этот новый момент изменяет маховое движение лопастей. Равнове-
сие устанавливается тогда, когда вследствие этого махового движения
углы атаки сечений лопасти, находящейся в переднем положении, уве-
личатся настолько. что дополнительный аэродинамический момент урав-
новесит момент сил Кориолиса.
Увеличение углов атаки лопасти в положении ф= — достигается,
когда действительная ось вращения конуса, описываемого лопастями,
отклоняется вперед (в условиях прямолинейного полета ось наклонена
назад, причем у лопасти, идущей вперед, углы атаки уменьшаются).
Действительно, формула (2.38) для й! дает:
т. е. пр» вращении винта назад конус следует за осью винта с некоторым
82у
отставанием, будучи отклоненным от нее вперед на угол —.
6. Уравнение крутящего момента
Элементарный момент от аэродинамических сил может быть напи-
сан в зидс выражения (2,26):
rf/Mk— — a„yU J. 1 у — a^lJ-^rdr,
Здесь положительным моментом считается тормозящий. Помимо
этих сил, за счет вращения оси винта в пространстве в плоскости вра-
щения появляются дополнительные инерционные силы (2.5), (2.8)
и (2.10).
Выражения b\L'v и U3 при крииолииейном княжении могут быть
: помощью выражений (2. 23) и (2. 24) представлены в следующем виде:
.гу— — 2 jiao.A'r^in3 ф — 2уаг2 sin О -j-
_|_ Йу№ cos ф -f- sin ф соя О; (2.42)
и^и^+^у-,
bl/? — — 2лг sin ф + — уг cos о;
д(7~, = — 22,ш)./?Г51пФ4-2 — 2 <i>r2sln о —{—
Ду
20ажсоц/?г sin ф cos ф — 22/Ж/?г cos ф—
— 2 Qytn^COS-Ji — 2p2?ci>;j./?rcos2-p —
--22л.2уг1ч1пфсо?ф Q’r’siii’ ф | fi,/J cos'Jо. (2. -1.3)
Тогда, преобразуя выражение t/Mh. и добавляя моменты от инерци-
онных сил согласпо выражениям (2.5), (2.8) и (2. 10), получим:
dM^-dM^ + ^d.M^,
где
Дс?Л1.. — Ai/AL -j-Arf/W
х каэр 1 ки*>ерп.
—^—bQa^U^y + bU^rdr —
-с т [ - 22у sin ф - 22х cos ф—(S® - Q’)slnфcos ф -
_2(i^.t(>ir2rfr- (2.44)
л J
J (2-«)
72
Полагая — а, созф — ^sin6 и подставив в уравнение (2.44)
выражения U^Uy и д£/у из (2.42) и (2.43), получим согласно (2.45):
/Ик—.4/( -|- — /’QS- j [a&y«|i/?r2siii-’^-[-o2Jiar3s1n.p--
о
- - ?2y<ora cos с — =2y«>u/?r2 sin ф cos ф--22х<о).А'г2 sin ф —
— 2a12xw>r3sin29 [-2&12x<er3sinOcos^ — 2 (<г0 — <гт cos ip —
— Ь, sin о) 2xa>ji/?r2 sin фcos ф — 22, «Д/?г2 cos О -|-
— 2e12,w4sjn о cos 4 — 2£12,<ог8 cos2 о -f-
2 (ait — <2[ cos о — bx Sin9)2yw[i/?r2 cos2o-(-22x.2yr3siii9cos р —
— 2jr’siij26—2^/-3(.osJ9]rfr-| Sa^yCDsln2^ —
6
-J- 2i?l2,tu sin 0 cos -p 4- (2J — ^л> sin 0 cos ф—
— 2(a0 — a, cosф — b[ sin ф)(й( sin o — bx coso)^3]/-2dr.
Момент от z„ лопаете?! за один оборот
'“‘а |’'и1"й
г2?з й B-t 2,
да? в-i ,2X,J in
“(—))+
/2л 2V
“Гг.Л.ш"'Д—*i- *‘°1)- (2.46)
Здесь Mi!(.T— момент от аэродинамических сил, полученный в теории
длн прямолинейного движспия:
Ч<„-mK(T 2 z„bQ^ = mK^-^-^^yFR-
В2 6; i S2 \ он 1
— Ya;;i'” ’ (Д5 1 2~^') (2,47J
Запишем выражение для тк с помощью выражений (2.46) « (2.47):
[‘ST*1 + ~ тfi-“Тх'“
8 (s‘+yf!) ~°а
“3
7. Тяга несущего винта н угол атаки
Тяга несущего винта
2» BR т- BR
T-g рб J 1бво_(=£/; + ^Лу,Уг.
5 о со
Подставляя значения Ux и Uy tn выражений (2. 23) и (2.24) и инте-
грируя, получим:
Т-—>]. (2.49)
Полагая
7 ^-ioQ.T/?4a>'- — fa (2.49')
найдем
/-“-в[т"т(в'+т'‘’)—”'-4 ^я”
Как видим, выражение для коэффициента тяги несколько измени-
лось, одиако, полагая — —0. полудим то же выражение, чго и для
случая прямолинейного движения. Формулу для угла атаки получим,
определяя индуктивную скорость, из выражения
T-WVqV'v. (2.51)
где I" -результирующая скорость,
V” = (I/ sin п — г)- — l/^cos'^a (2.521
Подставляя вместо Т и V их выражения и помня, что
Vrsina—t- К cos a
а=----- ; u =--------,
01/? ш/?
получим
lga = ~^----~ ,2.531
(< 4^. У >2 —
1. е. прежнее выражение для угла атаки, в котором лишь t имеет повое
значение. Если написать его в развернутом виде, то получим
Согласно выражению (2.28) элементарная боковая сила
dS = ' — cosy — (it/Esinf.
Можно представить dS в виде
dS—dS+bdS,
где dS —элементарная боковая сила для случая прямолинейно! о дви-
жения;
&dS------^^-cosi —?Д4/Г51п'3, (2.55)
В выражении (2. л5) можно заменить • таг< 1<як инер-
ционные силы при суммировании по сл-лопастям дадут нуль. В этом
легко убедиться с помощью выражения (2.44):
Тогда, пользуясь выражениями (2 44), (2 42; и (2.43), получим:
-----—₽ cos'p = т- Ь$а„ [^jWu.A’rsin-'ipcos'p '
-у- -S^^sin-pcosp — ^2yt,>r2cos26 — u>p./?rsin ф cos2 о —
4- 2Sji-A^rsIn9 cos о—Sdjfiyur2 sin-o cos 4—
— sin ф cos'-p — 2(яи — a, coso —6;sino)2_rwp/?rsinjco«2 0 —
— 22ywk/?rcos2'b— 2c1!i2ynr2 sin Осо?2 o —
— ZbftyW- cos3o-!-2(c0 — <i[ cos 9 — b, 51Пф)2у<ь(1/?гса?3'у —
— DQj.Qy/-- sin и cos2 i— Qj-r2 =In2p rose 2’rJ(.as3tp] dr. (2, 56)
Полагая
dT = dT^ — д dT -—di c[ 4- -L-bQaJJ^L'y dr, (2.57)
найдем с помощью выражения (2,42)
ЗД dT sin ф =.- — bca~ (alj — al cos 6 — b, sin p)(— 2rwu/?rs i n3 p —
— Qru>r2c;ln2 p — 23мг2 siitpcos 'P — 'lywpA’rsin2 pcos’p). (2. 58)
Боковую силу несущего винта можно представить п виде'
S=-Sct+4S,
где
(• С i.dMK
,> z„ I I каэр
д5 - - - I I cosOi/rrf'p —
J J r ‘
0 0
—I' [’Зд</Г51тгй4/лг/д. (2.59)
Подставив в уравнение (2.59) выражения (2 56) и (2 58) и проин-
тегрировав, получим
Подставляй вместо S„ его значение
S„ - [= (у-+ -7 я' :‘‘) +
+т(й’^1 2 М2®' ?)+
(2.61)
получим окончательно
^МВ,.+ ^Ь^_Я1.)т
. и, В-2/tfofl О . х | 2, В'(ЧВ . , , 7 \1 ,,, с.,х
+тт(т-т ‘-О+ттСт+^т*); ,2'и
9. Продольная сила
Согласно уравнению (2.27) элементарная продольная сила
dH — biii'tf — ydl' cos О.
Полагая
dH=dHK1-\-ikdH,
найдем
AtfAiK
\dH-------^sinb-'-irfT'cos'y. (2.63)
Аналогично выражению (2. 56)
д ЛМЬаэ1) j [
------— sjriO = — ЬцЯ,- г2х<иа/?г Sill1-; i ^2хи)Г251П21| —
--?2 «ir'sindcosi — »2y<n|i/?rsin"?cos p '-22/'A^rsin2 y —
- - la [-Д-Ч1Г2 sinso -|- 2b^jar" sii 1- -jCOso -
— 2(яу —a, cos'p— b, sin 1>)Уд<»;л^г'1пг1| cos ] —
— SSyO'/^rsiH'/COsO-f 2a|2yUjr:sin2Ocosi—2i(2 ч>г-sincos'o—
— 2(л0- а, соьФ — 6, siii']() simp cos2 i> —
— 2 sin-cosy — 2>r2sin3'p — 2|гг sin СОь'- б] dr. (2.61)
Аналогично выражению (2. 58)
6д dTcosi= — («0 — a, coso — bt sin 6){ — 2xi‘>;i/?rsjii2 ycos-p —
— Qjtar sin о cos ii — Ly>r2 cos'- p -j- 2уС1>ц/?гsine cos2 ip). (2.65)
Обозначим так же, как и в случае подсчета боковой силы,
Н^«сг4--Д«;
2» BR 2* ЯР
Д/У-—J -----------— sin|drd-j j ( piflTcosiptf/-d'p. (2.661
76
Подставляя сюда выражения (2.61), (2.65) и проинтегрировав, по-
лучим
г, 1 <.„’>, Г 2г ВЯ/ЧК ... 1 \
7Т Тт'-1 о,1>) -
2 I <> 2 \ d о /
~4’4г4М-
Выражение для продольной силы в случае прямолинейного движения
имеет вид:
«и = у 7, W-“2“. ~ ?'ч*+•?“!
4«А+т*..
б 4 4 4 |
Суммируя выражения (2.67) и (2.68), получим окончательно
1 4 Г г«ср В? Сз В®
//=-абл^й. --------р —iMfi-p — — 4-
2 24«. 2 dO
:-м-
44444 <2-™
10. Учет изменения в законе распределения индуктивной скорости,
происходящего при криволинейном движении
При криполинейном движении благодаря наличию новых сил, сил
инерции Кориолиса, моменты от которых уравновешиваются (при шар-
нирном креплении) перераспределением аэродинамических сил, должно
произойти изменение как в величине, так и в характере распределения
индуктивных скоростей по диску несущего винта.
Естественно, что если углы атаки сечений лопасти в данном угло-
вом положении при криволинейном движении не изменятся по сравне-
нию с существовавшими при прямолинейном диижении. то и силы и вы-
зываемые ими индуктивные скорости также не изменятся.
Пусть несущий винт вращается назад (S2y>0), угол атаки сечения
лопасти при ц=0, В=1
Uy X/ft" — лвд, sin ip + гиб, соя2>rcos-J.
«г =?Т,Т = 'Р-|---------------------- "•
Подставляя сюда выражения щ и bt. полученные из выражений
(2. 38) п (2- 39), полагая р=0, В = 1 и S2x=0, т. е.
82у
а,= —— ; Ь,=-----,
получим
, X/? 8Ц,
а,=о-|-------з1Пф.
Углы атаки в переднем и заднем положении (тр =0, т|>=л), как мы
это уже показали выше, при ?.=cnnst це изменяются, т. е. кинематиче-
ское изменение скорости по диску (£2vrcosip) благодаря соответствую-
щему изменению махоного движения не меняет углов атаки лопастей
77
Сказанное выше действаiельно и для Представленные на
рис. 2.23 кривые изменения утла атаки сечения лопасти по азимуту при
прямолинейном движении и в случае вращения оси в продольном на-
правлении также показывают, что на азимутах if —0 и ф=л углы атаки
практически пе меняются*.
Изменение в углах атаки в рассматриваемом примере произойдет
справа и слева ог этого положения, причем максимум изменения по-
лучится при тр=п и -ф = 'л, что соответствует азимуту максимального
значения сил инерции Кориолиса.
Таким образом, можно полагать, что па прежний закон распреде-
ления сил и индуктивных скоростей по диску наложатся аэродинамиче-
ские силы, уравновешивающие моменты от сил инерции Кориолиса,
и вызываемые ими скорости. Эти силы имею г максимум в плоскости,
перпендикулярной к направлению вращения, и, следовательно, поле ин-
дуктивных скоростей будет перекошено в этом же направлении.
Вертикальные компоненты сил Кориолиса выражаются согласно
(2. 7) следующим образом:
К — -- J 2/я2?<юг 2Srui2Ju)Sin^;
= 2т2уигcos jj dr ~ — ‘2Sr cos 9,
(2.70)
Эти силы распределены по радиусу линейно и являются периоди-
ческими. ’
Можно полагать, что уравновешивающие их в каждом угловом по-
ложении аэродинамические силы и вызываемые ими индуктивные ско-
рости имеют тот же закон изменения как по азимуту, так и по радиусу
лопасти. Тогда индуктивная скорощь в случае криволинейного движе-
ния может быть выражена в виде
— sini-J-^—- созФ.
R f 1 ‘ R Y
(2, 71)
Положительной здесь считается скорость, направленная вниз Обо-
значим:
v, ЛЧ1.
Ру Mj т
Рл = ^=С М
(2. 72)
Здесь [A’aJ И абсолютные значения сил Корнилися п тех угло-
вых положениях, где они максимальны. При подсчете ф,- предполага-
лось, что эта скорость постоянна по радиусу. Полагая дополнительную
индуктивную скорость линейной функцией радиуса, мы должны из у:ло-
* Разница в углах атаки сечения при if=27l)° □ случае врашеши
направлении (см рис. 2.22) происходит за счет изменения X.
в топеречнэм
вия равенства количества движения ввести некоторый множи|ель С
п выражениях для рх я pv. При С= А
З^Г.О^Л
Ру = ~,----------
~п~
35г,шгл
— оддЯ’/
(2. 73)
Подставляя вместо сч и v2 их значения из выражений (2.72), по-
лечим
+ Т’уЧ slrl + Р№ ~R cos 'Р-
Выразим среднюю индуктивную скорость через величину тяги. Со-
гласно закону количества движения
Здесь V' — равнодействующая скорость, определяемая из уравнения
(2.52). Подставляя выражения для Т н V из выражений (2.49) и (2.52),
получим
Обозначим
Тогда компонент скорости Uv у элемента лопасти получит вид
U'—-pykjrwsini—-г —
’ ’ dt
— |А^ювсое^-|-ЙуГСО5'р —S^rsin-j. (.2.76)
К выражению USUV, полученному для v — const, добавляго|ся члены
------------------/^rVsfn i— pyA.|L.>57?/-|isin2| —
— p^rWcosy— ?]□•!<coso, (2. 77)
Выражение для тяги винта получит вид
2- AJ?
Т—~ ( + +
о о
что даст в выражении для коэффициента I добавочный член
ei
В выражении момента от тяги получим добавку
вк Bff
д’ \^dTr—L bQa„ \ Uxti.’Ujdr—
£ u
— — - jOv'-TSinO-! & pAC0S^y
Подставляя и уравнение (2. 30) выражение для момента тяги (с этой
добавкой), получим следующие выражения коэффициентов махового дви-
жения с учетом переменного закона распределения индуктивной ско-
рости:
(2.79)
' й2^В2-1-—
Выведем теперь формулу крутящего момента в случае переменного
закона распределения индуктивной скорости.
Найдем выражение для U2 Обозначим
С' у — С у -[ Д U у;
^’U}~ — Pyk/rtsino — д^г^созо,
(2.81)
где U„ берется по выражению (2.24), т. е. без учета переменной индук-
тивной скорости.
Тогда
trf-Uy ! 2//уДТ/у Д'(Л =
~U2y — 2>.р/.1ш2А?г Sin __ ty.pj cos i —
-1-2 — pXcuV sin i-|-2 — /> '..i№r2cos i —
1 <гф 1 • 1 йф ' r 1
+ 2^y).l|Mo2/^r sin o cos ip + 2f!p_r)-iP^'iA?rcos2'l — 2Qi,<j:p/./2sin'lcosO-L
• |-2Qxupyklr5sin2i|/—22ywp^./3cos2-p — sin ф cos
-J-/^л3ш3г2 sln: 2руу?хХ-и>2г2 sin Ф cosO 4-/rk3o2r' cos2 6. (2.82)
Выражение для dM, следующее:
dMb = (crP^:j ~ - a, U'y)r dr.
Мы можем представить его в виде
Д'^\СГ,) —
- <з. (О'2 -Y^U^’Uy iY/p] г dr
или
dMK = dMK--^’ d.\\,
где
h.'dMK^= ’ ('Qfl, (-?A'L;.rt/,+2L’zA'L?j, —a'L72)rdr. (2.83)
SO
Подставляя сюда необходимые выражения из (2.77) и (2.82) и ин-
тегрируя, получим
2г ОЯ
Д'.-Ик=^- i | д'<7.Икг7| = -1-глйр/?4и>2с. [у-»руХ](х + ^-а1Ру>.14-
0 п
Bi zfi 2, x I
-тО-Л-v^)] (2-84)
или, полагая w^ = ?nt-[ д'тк, получим для &'тк выражение
i ‘W-,) +
(2.85)
Определив теперь с помощью уравнений (2. 73) и (2.75) выражения
для ₽хМ и pyXj, полагая ), малым по сравнению с р (что справедливо
при |1>0,15):
I = ЗУг.ш <1 .
? 1 2nQ/?4 И «> ’
S Sr, щ гл Йу
1 2 рлЯ* и to
Как видно, добавки к выражениям коэффициентов махового дви-
жения и к выражению крутящего момента не зависят от X.
Выражения (2. 86) показывают, что чем меньше р, тем больше влия-
ние искажения в распределении индуктивной скорости. Это становится
понятным, если вспомнить, что чем меньше поступательная скорость,
тем больше должна быть индуктивная скорость, вызываемая аэродинами-
ческой силой той же величины. То обстоятельство, что величины
if ptfa не зависят от л, значительно облегчает расчет коэффициентов
махового движения и сил от переменной индуктивной скорости. Расчет
в этом случае производится так же, как для постоянной индуктивной
скорости, только ао, at и подсчитываются по формулам (2.78), (2. 79)
и (2. 80), а выражение, для /пп— по формуле (2.48), причем к получен-
ному значению прибавляется Д'лч1Ь подсчитываемое по выражению
(2. 85).
(2.86)
АНАЛИЗ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
II. Маховое движение лопастей
Для иллюстрации изложенной работы были проделаны различные
расчеты пиита при криволинейном движении.
Расчетные данные:
— диаметр несущего винта О=Н4 м;
— коэффициент заполнения а—0,065;
— статический момент лопасти относительно оси горизонтального
шарнира 8г.ш = 142 кге-м;
— угол установки лопасти <р=3’, = 5,7.
Все расчеты проведены для режима самовращения.
На рис, 2. 17 показано изменение коэффициентов махового движе-
ния, подсчитанных для постоянного значения ц=0,3 при разных значе-
ния
ниях отношения — (вращение в поперечном направлении). Из рис. 2, 17
видно, что при вращении влево возрастает, а С; уменьшается,
т. е. описываемый лопастями конус отклоняется вправо и вперед. При
вращении вправо — имеем соответственно уменьшение Ь\ и уве-
личение cb что свидетельствует об отклонении конуса влево и назад.
Угол конусности а<з немного возрастает при вращении влево, а при вра-
щении вправо падает.
Учет изменения в распределении индуктивной скорости приводит
Рис. 2 17. Коэффициенты махового
ДВИЖ<'И пя
(и-0.3)
npil сопереч-
ном вращении аппарата
Кривая i>i, подсчитанная при переменной индуктивной скорости, на-
несена на рис 2.17 пунктиром. Изменениями а0 н аг за счет переменной
индуктивной скорости практически можно пренебречь
На рис. 2. 17 изображена также кривая значений pmin=ao—
— V<z‘-- bf, которая показывает резкое уменьшение 3mfri при вэащеишг
как плево, так н вправо. Это значит. Нго запас счеса лопасти до нижнего
ограничителя сильно уменьшается. Лопастн проходят тем ниже, чем
больше угловая скорость крена и чем меньше значение у.
На рис. 2. 18 приведены те же кривые для случая вращения аппа-
рата в продольном направлении. В соответствии с изложенным выгис
при вращении на пикирование Я[ возрастает. а 6, уменьшается, т о.
плоскость концов лопастей заваливается назад и илепо, а при враще-
нии на кабрирование — вперед и впрапо Кривая показывает,
что вращение на нос вызывает наибольшее уменьшение P.mn. т е. лона-
сти проходят очень низко от плоскости вращения, а вращение па кабри-
рование в этом смысле наиболее благоприятно.
Рис. 2. )7 и 2. 18 относятся к annapaiaM, у которых управление осу-
ществляется не посредством автомата перекоса (например, при помощи
элеронов и рулей, отклонением втулки у автожиров с непосредственным
управлением). Ив рис. 2. 17 и 2.18 видно, что у |аких аппаратов при
Ркс. 2.18. Коэффициенты махового движении прч про-
дольном вращении аппарата (н~0.3)
криволинейном движении, н?,пример при резком крене или входе в пи-
кирование, изменение fimin может оказаться гораздо больше, чем его
изменение па всем диапазоне скоростей аппарата в прямолинейном
полете. Это должно учитываться при выборе положения нижнего огра-
ничителя махового движения лопасти. На вертолете же летчик, отклоняя
автомат перекоса, уменьшает отклонения конуса лопастей при криво-
линейном движении, и, таким образом, запасы угла до нижнего ограни-
чителя но уменьшаются так сильно.
42. Влияние криволинейного движения на самовращение винта
При аэродинамическом ра 'чете винта на режиме самовращения дли
определения Л используется соотношение (2.48), которое дает возмож-
ность, полагал D и зная ф, р, и £2У, нлнги } Однако практически
это квадратное уравнение после подстановки значений aL, а, и i, стано-
вится очень |ромоздким. Для определения значения л удобнее, построив
график зависимости тк от л, снять с графика значение X, обращающее
н нуль тк. При построении графика т* коэффициенты «0, о, и th следует
определять из уравнений (2 37), (2.38) и (2. 39i
83
На рис. 2. 19 приведены значения угла атаки винта и коэффициента
тяги I, полученные для постоянного значения ц=0,3 при различных
угловых скоростях вращения аппарата.
Рис, 2.19. Изменение угла атаки н коэффициента тяги несущего винта
в зависимости от угловой скорости вращения аппарата при по-
стоянном (1=03
Из ркс. 2.19 видно, что для сохранения постоянного значения ц при
постоянной скорости полета при наличии угловой скорости необходимо
менять величину угла атаки и тем больше, чем больше угловая скорость.
При вращении аппарата влево для сохранения постоянного значения ц
нужно увеличить угол атаки
по сравнению с его значе-
нием при прямолинейном
движении, а при вращении
вправо угол атаки нужно
умсныпип,. Физически это
объясняется тем, что при
вращении влево диск несу-
щего винта наклоняется впе-
ред (помимо наклона впра-
во) и тем уменьшает угол
между скоростью и плоско-
стью вращения концов ло-
пастей в пространстве При
вращении вправо имеет ме-
сто обратное явление. Мож-
но полагать, что для сохра-
нения постоянного значе-
ния р. необходимо, чтобы
при любой угловой скоро-
сти Q угол между скоростью
Рис. 2 20 Угол атаки несущего винта на ре- цОТОка И ПЛОСКОСТЬЮ вра-
жнмс самовращения щення концов лопастей
оставался неизменным,
На рис. 2. 20 приведены значения углов атаки в зависимости от
р, полученные при различных угловых скоростях «ращения всего лета-
тельного аппарата. Здесь видно, что если вращение оси начнется и будет
84
Происходить при постоянном у1ле атаки (т. е. угле между скоростью и
плоскостью, перпендикулярной к оси винта), то установившееся самовра-
щение наступит лишь на новом, отличном от прежнего значения р.
Таким образом, при вращении аппарата влево при постоянном yi ле ата-
ки р. будет возрастать, а при вращении вправо — падать.
Если мы, помимо угла атаки, будем сохранять постоянной и ско-
рость полета, то это значит, что при вращении влево обороты несущего
винта будут падать, а при вращении вправо увеличиваться.
Для иллюстрации этого явления на рис 2.21 приведены обороты
несущего винта, сохраняющего углы атаки ц= + '1,5С, 2,8°; 1,5° (ро —0,25;
0.30; 0,35 при прямолинейном движении), в зависимости от скорости
вращения в поперечном на-
правлении.
Обороты при прямоли-
нейном полете приняты
«о = 200 об/мин. Обороты
при наличии вращения «а
получаются из следующих
соображений:
Рис. 2.21. Обороты несущего ьпига ла режи-
2Г
самовращении в зависимоо-н от —
Значение ни опреде-
ляется по рис. 2.20 на пере-
сечении ординаты и= cons'-
с кривой a=f(p.) для соот-
ветствующей угловой ско-
рости.
Вследствие отмеченного выше эффекта увеличения угла атаки, не-
обходимого дли сохранения устансшившегося самовращения при данном
р, в случае вращения всего аппарата влево появляет-я опасность выпа-
дения несущего винта из режима самовращения на больших скоростях
полета.
Если вертолет начнет резко вращаться плево при большом ц, а угол
атаки его останется неизменным, то обороты винта очень быстро упадут
и |i возрастет еще больше. Это усугубляется тем обстоятельством, что
сам по себе наклон равнодействующей винта вперед, возникающий при
вращении аппарата влево, вььчывает. помимо воли летчики, пикирующий
момент, стремящийся еще уменьшить у|ОЛ атаки. Последнее обстоятель-
ство, увеличивающее резкость падения оборотов при вращении аппара-
та, заключается в увеличении углов атаки |Ю сечениям лопастей, что
вызывает срыв и резкие увеличение сопротивления.
На рис. 2.22 н 2.23 показаны изменения углов атаки, вычисленных
для сечений г=0,5 при ц = 0.3 для случая стационарного полета и для
различных направлений вращении аппарата Как видно, особенно релко
возрастает величина углов атаки по сечениям при вращении вертолета
влево и на ное. Это происходит потому, ч-о в данных случаях для урав-
новешивания момента сил инерции Кориолиса требуется увеличение
углов атаки в угловых положениях лопасти ф=270” и ф —180\ где углы
атаки сечений уже велики.
Учет переменной индуктивной скорости во всех случаях увеличит
изменен1? yr iob атаки по ячимугу
85
По испытаниям о аэродинамической трубе отсеков лопастей с дву-
мя профилями, из которых профиль № 1 имеет более высокие значения
и аар, чем профиль № 2, на рис. 2. 24 построены кривые запаса
самовращения (см, [И]):
a — rtQ — arc tg — —/(а —ft0).
Су
,ле ис — у,ол атаки, при котором у профиля Су = 0, Из рисунка видно,
что в случае <р = 3° диапазон углов атаки, при которых на элементе ло-
пасти создается ускоряющий момент, простирается для профиля № 2 от
<i7=4lJ до аг=15', а для профиля № I он несравненно шире, дости-
гая 30°.
Кривые запаса самоврагцекЕГЯ лопастей
В случае профиля № 2 при вращении аппарата влево с отношением
~ =0,05 при р, —0,3, даже на сечении г = 0,5, на значительном участке
диска будет создаваться тормозящий момент Для сохранения авторо-
тации на данном ц потребуется еще больший угол атаки винта; при со-
хранении угла атаки будут падать обороты винта и значигельио возра-
стает маховое движение,
Таким образом, мы приходим к выводу, что постоянное (согласно
рис. 2, 21) падение оборотов винта при вращении вертолета влево и воз-
растание их при вращении вправо будет происходить лишь до некоторого
_ Qj-
небольшого значения - , величина которого определяется исключитель-
но аэродинамическими харакгеристиками лопастей. При больших зна-
чениях в результате срыва потока падение оборотов несущего винтя
при вращении влево произойдет более резко, вплоть л,о выналевпя из
авторотации, а при вращении вправо обороты перестанут возрастать и
при больших значениях — начнут падать,
Таким образом, на несущем винте, имеющем лопасти с профилем
большого запаса самовращения, можно допустить безопасно гораздо
большую угловую скорость, чем на пинте с плохим профилем лопастей,
S7
13. Поведение равнодействующей аэродинамических сил
при криволинейном движении вертолета
Согласно общим соображениям равнодействующая в случае криво-
линейного движения вертолета отклоняется так же, как отклоняется
описываемый лопастями в пространстве кону:. Таким образом, равно-
действующая отстает в сторону, обратную вращению, а также откло-
няется в перпендикулярном направлении на величины, пропорциональ-
&
ные отношению —-
о
Отставание равнодействующей вызывает относительно центра тя-
жести аппарата момент, противодействующий вращению Это демпфи-
рующий момент, который тем больше, чем больше угловая скорость вра-
щения аппарата.
Наклон равнодействующей в перпендикулярном направлении в слу-
чае бокового вращения вызывает изменение угла атаки, а с случае пре-
дольного вращения — наклон аппарата вправо или влево.
Рис. 2.26. Боковой наклон равнодействующей
в зависимости от скорости вращения в попереч-
ном направлении
На рис. 2.25 показано изменение величины у , характеризующей
угол наклона равнодействующей в боковой плоскости, в зависимости от
угловой скорости крена — (при ц = 0,3).
г ы
Формула для боковой силы при прямолинейном движении не дает
значений S, близких к натуре (за счет плохой сходимости расчетных
коэффициентов махового движения е действительными), однако, измене-
ние боковой силы в зависимости от угловой скорости формулой (2. G2)
дается правильно.
Наклон кривой у—= близок к наклону кривой 1^ = /^-
Это обстоятельство может быть использовано для целей приближенного
подсчета демпфирующих сил и моментов винта по величине изменения
коэффициентов махового движения.
88
Величину компонента демпфирующего момента, действующего
в плоскости угловой скорости аппарата, можно легко определить по
формуле
М^ТЬу.
где у—расстояние между центром втулки и центром тяжести аппа-
рата;
6 — угол отставания равнодействующей при вращении
Согласно выражениям (2.80) и (2.86) для ц>0,2 можно принять
в«']_ 1 _к„
Л ч г ««<,
Здесь Ki — коэффициент, учитывающий изменение коэффициента
протекания ). при вращении аппарата. Коэффициент Лд можно опреде-
лить из эксперимента Если нет экспериментальных чанных, можно при-
нять /<[ = !.
Интенсивность противодействия, выражаемая наклоном кривой S/T
п зависимости от QJ<,i, после увеличения этого отношения сверх некото-
рой величины может начать падать за счет срыва потока в сечениях
лопасти.
В результате описанного выше явления падения оборотов, а следо-
вательно, и тяги на режиме самовращения при вращении аппарата вле-
во (с винтом правого вращения) получается, что демпфирование, а зна-
чит и управляемость аппарата при вращении влево меньше, чем при
вращении вправо.
Применение хорошего несущего профиля лопасти настолько раздви-
гает допустимый диапазон углов атаки сечении лопасти, что при пра-
вильной компоновке вертолета критическая величина угловой скорости
вращения вертолета вообще нс может быть получена в эксплуатации.
ВЛИЯНИЕ ПАРАМЕТРОВ НЕСУЩЕГО ВИНТА И СХЕМЫ ВТУЛКИ НА МАХОВОЕ
ДВИЖЕНИЕ И ДЕМПФИРОВАНИЕ НЕСУШГГО ВИНТА
На маховое движение лопастей и отклонение равнодействующей
при криволинейном движении вертолета влияют характеристики самого
винта, изменяющие ого аэродинамику в этих условиях.
Ниже рассматривается влияние на маховое движение и демпфиро-
вание несущего винта моментных характеристик профиля лопасти, ее
поперечной центровки и схемы втулки.
Рассматривается втулка с компенсатором взмаха, имеющая кине-
матическую зависимость угла установки лопасти от угла взмаха такого
рода, что с увеличением угла взмаха угол установки лопасти умень-
шается.
14. Несушнй винг с профилем, имеющим переменный центр давления
До сих пор мы рассматривали несущий uuhi с лопастями, имеющими
профиль постоянного центра давления и ось жесткости, совпадающую
с центром давления. Рассмотрим теперь пиит с лопастями, имеющими
переменный центр давления.
• Вспоминая об изменениях в распределение углов атаки сечений ло-
пастей но азимуту, происходящих при криволинейном движении, стано-
вится ясным, что если коэффициент момента относительно оси жест-
кости лопасти ст зависит от угла атаки сечения, то аэродинамический
момент, закручивающий лонаыь, будет изменяться в зависимости ог ее
углового положения. Эта в результате закрутки лопасти вызовет измене-
ние махового щпжепчя и положения равнодействующей Предположим.
89
что ось желкости расположена сзади оси фокусов и профиль при аг = 0
имеет момент на пикирование (сто<0), т. е. при увеличении аг центр
давления сечения лопасти перемещается вперед и пикируюшии момент
ст убывает,
Рассмотрим для примера случай вращения аппарата влево.
Характер изменения углов атаки сечений лопасти при вращении
влево изображен на рис. 2. 22. На лопасти, находящейся в переднем по-
ложении (ip=n), углы атаки уменьшаются почти до нуля, а на лопасти,
находящейся сзади (ф=0), значительно возрастают. Поэтому лопасть,
находящаяся впереди, закручивается на пикирование, т. е. уменьшает
угол установки, а лопасть, находящаяся п заднем положении, почти не
закручивается (скорость Ux в обоих положениях одинакова).
Для выравнивания углов атаки у этих лопастей из условия пуле-
вого шарнирною момента конус лопастей, а следовательно, и равнодей-
ствующая должны отклониться влево. Этот дополнительный наклон
равнодействующей влево, происходящий при вращении влево, умень-
шает сопротивление несущего винта вращению аппарата, его демпфи-
рование, а при больших угловых скоростях может вызвать затягивание
вертолета в крен. Этот же эффект вызывает давление на ручке управ-
ления, направленное в сторону крена.
Из изложенного выше видно, что если ось жесткости лопасти рас-
положена впереди оси фокусов, т. с. d— <0, демпфирующий момент
da
несущего винта, сопротивляющийся вращению аппарата, увеличивается,
13. Влияние центровки лопасти
Если принять, что центр тяжести сечения лопасти расположен на
некотором расстоянии от фокуса профиля (положительное — на-
зад), то при вращательном движении оси винта на лопастях возникает
пара сил, образуемая силами Кориолиса и аэродинамическими силами.
Это показано схематически на рис. 2,26,
Выражение момента, скручивающего лопасть (положительный .мо-
мент закручивает лопасть на увеличение угла), будет иметь вид
я
$0
Подставляя вместо dK к dKuy их выражение из /2 7), получим
Мл — f 2£фл1 (2/0 sin 9 + 2/11 cos ф) г dr.
Как видим, момент изменяется периодически.
Угол закручивания лопасти в предположении постоянных погонной
массы, величины и постоянной жесткости на кручение определим
по формуле
°звкр
Полагая, что линейно закрученная лопасть эквивалентна лопасти
с постоянным вдоль нее углом установки, равным углу установки пер*
вой на сечении г=0>75/?, найдем
?а«р075я
Д1 М*’ 2
=0,61-----ш2
GIB
Получим дополнительное периодическое изменение угла установки
где
iVssVjCOS'p-f VjSifll,
и oj 01 р
Периодическое изменение угла установки приведет к изменению на-
клона конуса при вращении.
Коэффициенты махового движения примут вид (для постоянной ин.
дуктивной скорости):
(2.87)
Если центр тяжести лежит позади фокуса (£ф>0, /1>0), происхо-
дит дополнительный наклон конуса, а следовательно, и равнодействую-
щей в сторону вращения аппарата. Если же центр тяжести находится
впереди фокуса, то дополнительный наклон увеличивает демпфирующий
вращение момент.
Углы закручивания \ч и V[ легко определить, если имеется расчет
динамической закрутки лопасти в прямолинейном полете и известен
91
угол закрутки vp [6]. Соотношение между этими углами определяется
формулами
(2.88)
16. Несущий винт с компенсатором пзмаха
Рассмотрим теперь несущий винт, лопасти которого изменяют шаг ф
е зависимости от угла взмаха р, Существует много способов осуществ-
ления такой кинематики, На рис, 2, 27 показан один из свособов изме-
нения шага в зависимости от угла взмаха ₽ (повернутый горизонтальный
шарпнв). где ф изменяется по закону:
*г=Л —
Угол взмаха ₽ в этом случае есть угол между осью лопасти и плос-
костью вращения. Не желая усложнять результата, рассмотрим случай
ц —0. Изменение махового движения, полученное для режимов с ц = 0.
полностью распространимо и на случай р>0.
Пусть аппарат наклоняется в пространстве с постоянной уиювой
скоростью, имеющей компоненты Йх и
шарнира.
Рис. 2 27. Схема лопасти с повернутым шарниром
Компоненты скорости у элемента ловасти получат вид
S- + 2/C0S4 - a^sino.
Полагая <р«6о—MS°i> составим аналогично изложенному выше
уравнение моментов относительно iгоризонтального шарнира при В=1;
V 2» V 2, 2, 2.
— cos;p— —-sin 0 — 2 —^in х —2 —cos J. (2. 89)
4-------------------4 и ‘ w ’ ш
Частное решение этого уравнения имеет прежний вид
$ — ац— а, созФ— sin 6,
а коэффициенты ряда имеют значения:
Выражения (2.90) показывают, что при повернутом шарнире от-
клонение конуса, описываемого лопастями, а следовательно, и равнодей-
ствующей происходит с меньшим сдвигом по фазе, чем в случае обыч-
ной втулки. Условие отсутствия сдвига по фазе заключается в том, что
ври поперечном вращении не должно происходить изменения продоль-
ного наклона равнодействующей, т. е, при — =0 ат =0 и, наоборот, при
— =0 должно быть й[ = 0. Это условие выполняется при
(2-91)
В зависимости от значения у получаются величины щ, указанные
в табл 2.3.
Интересно, что условие отсутствия
сдвига сЬазы 1g 0,-= - дает в то же
время п величину демпфирования (от-
ставания равнодействующей) такую
же, как и у несущего винта без ком-
пенсатора взмаха Так, например, для
продольного вращения имеем величи
ны, указанные в табл. 2. 4.
Нетрудно видеть, что отсутствие сдвига по фазе при поперечном
вращении с постоянным углом атаки обеспечивает сохранение ц на ре-
жиме самовращения, т, е. не происходит падения оборотов винта, а вме-
сте с тем н эффективности управления при вращении.
Таблица 2.4
МАХОВОЕ ДВИЖЕНИЕ НЕСУЩЕГО ВИНТА ПРИ КРИВОЛИНЕЙНОМ
ДВИЖЕНИИ ОСИ ВИНТА С ПЕРЕМЕННОЙ угловой скоростью
Ниже получены формулы для определения коэффициентов махового
движения лопастей при равноускоренном наклоне и при гармоническом
колебании оси винта Для простоты рассматривается случай, когда
93
Показано, что при обоих законах изменения угловой скорости оси винта
коэффициенты махового движения я, следовательно, продольная и боко-
вая силы винта изменяются на такую же неличипу, пропорциональную
угловой скорости, как и в случае равномерного вращения оси винта.
Кроме того, появляются члены, зависящие от углового ускорения оси
винта.
17. Равноускоренное вращение оси винта
Рассмотрим вначале случай пращекия оси пиита на кабрирование
с переменной угловой скоростью*
(2.92)
Заменим t—— и положим k = — . Тогда можем записать
Qy=A-i. (2.93)
Составим выражение для сил и их моментов относительно горизон-
тального шарнира.
Скорости в сеченин лопасти, полагая у —const, ц = 0, Йу=Аф, Йх—О
н И—1, могут быть получены из формул (2. 23) и (2.24):
£/х—гш, 1
м 1 (2- 94)
toifl + Ap-cos р — г '
у 1 r r dt J
Тогда момент от тяг и
я
=-^-^'-(т+т-Ьт+*сю?)' (2-95>
Момент от силы инерции Кориолиса
_ИК----2/,.ш/г^шз1и.р. (2.96)
Сила инерции вращательного ускорения
dj'i =in —- г cos Ф dr,
dt r
где
dt dt
Момент этой силы
R
Mj = f /«£•> cos or5 dr = /, A.i>cosi. (2.97)
Уравнение моментов относительно горизонтального шарнира после
сокращения на /гш-ю7 получит вид
(2.99)
MaciHoe решение этого уравнения имеет вид
3=п0 — п,фсоьф Z'fjsiny CjCOs^ r/jSino.
94
Найдем производные от ₽ по 6:
—T=a.isincb — a, cos о — fr,<licosO- b} sin о-}-с, sjni —rf, созф;
Йф ‘ ' 1 ' ‘ '
^-=а.фсоз Ф-г 2а, sin о 4-ft.osjn j — 26. coso-] с2 cos у-j-d, sin о.
Йф2 ' ' ' * '
Подставим эти значения в левую часть уравнения (2.98)
-i- арЬ sin !]> — 6j<i> cos ф 2-(2а, —^-6; —j-c, ^sjn о—
4- — cosi — 2 — l,sln6-}- — -Л-фсой<1>— (2.100)
« ш 4 о 1 ^г.ш0^
Так как уравнение (2. 100) есть тождество, то, приравнивая коэф-
фициенты при подобных членах, получим следующую систему уравнений
для определения коэффициентов ряда
Из уравнений (2,101) получим
(2.Ю1)
(2.102)
(2.103)
(2.104)
(2.105)
(2.106)
Таким образом, решение для р может быть записано в следую-
щем виде:
Мт+Т)+т^
Аф . , . А /. 64\ , 12 k . , , ,Л_.
—2-S|BO-|-(1--1со$ф---sin£, (2.107)
Нетрудно видеть, что величина — не что иное, как отношение мгно-
венной угловой скорости $2=&ф к скорости <о. Таким образом, коэффи-
циенты при первых членах в уравнении (2. 107) аналогичны полученным
ранее при Qj = const:
95
Члены, содержащие sin ф. в выражении для (5 получаются от влия-
ния инерционных сил, возникающих в результате неравномерного вра-
щения, При вращении назад силы инерции стремятся поднять лопасть,
находящуюся в заднем положении, вследствие чего изменяется маховое
движение, и углы атаки па ней из условий равновесия уменьшаются
При этом происходит наклон оси конуса влево.
До сих пор рассматривалось чапное решение уравнения (2.98), ха-
рактеризующее вынужденные колебания лопасти. Рассмотрим теперь
общее решение уравнения (2. 98) без правой части, т. е. уравнение
Полатая в частном случае у=8, найдем решение в виде
(2.108)
Общее решение уравнения (2,98) получится:
, 8ftJ. , , ftd> . , 12ft , ...
4- — созФ 4 -±- sinO-----sIdo, (2,109)
yu w Yw
Значения коэффициентов Ci и С? найдем из начальных условий
ф=0; 0^0; р1 —0:
Как видно из уравнения (2 108) члены, содержащие С, и С?, чрез-
вычайно быстро затухают; так через один оборот (ф=2л) величина воз-
мущения уменьшается в десятки раз: е~+ = е-2,:^0,002, фе-*--0,012,
Таким образом, мы вправе рассматривать только частное решение
(2.107), пренебрегая собственными колебаниями лопасти, что подтверж-
дается и экспериментом,
Сравнение с экспериментом показало, что в условиях работы на ме-
сте распределение индуктивной скорости по диску имеет существенное
влияние на маховое движение; уточненные формулы для коэффициентов
махового движения приведены в работе [8].
Для винта с компенсатором взмаха маховое движение винта опре-
деляется по формулам:
—Й-у— <2'111)
1 + т2”' l+yls«i
г‘=-4(4+,Чгт4< <2'112’
') *'(’-<2'114)
Рассматривая выражения (2, 112) и (2, ИЗ) для щ и Ct, сравнивая
их ' полученными ранее выражениями (2, 103) и (2. 104) для винта без
компенсатора взмаха, можно отметить, что отставание конуса, а следо-
вательно, и равнодействующей в направлении, обратном вращению,
практически одинаково, а наклон в перпендикулярном направлении
уменьшается.
18. Гармоническое колебание оси винта
Рассмотрим теперь случай, когда ось винта совершает гармониче-
ское колебание и пространстве с угловой скоростью
2.,^Asii.v/ = .4sni рй,
где р— —; V —частота колебаний аппарата.
Так как затухание собственных колебаний винтокрылых аппаратов
невелико, гармонический закон описывает колебания аппарата, близкие
к действительным. Получим вновь выражения моментов сил относитель-
но оси горизонтального шарнира. Скорости в сечении лопасти,
ио-прежнему м^О, В = 1, равны
г», j
£/у_ЛЦ>#-[ .4 S;fl;70rC0.5'j —г . j
Момент от тягц
полагая
<2.116)
С--117)
(2.118)
в виде
(2. Н9)
Момент от силы инерции Кориолиса
я
Л1К— 2 j mA sjn — 2/г.шмА2Гп pisln о.
Cl
Момент от силы инерции врашательною ускорения
С ^у
Л1ув = I т--А г cos 'jrdr—J! .Apiucos //pcosO.
J dt
•3
Уравнение моментов после сокращения на/г л запишется
4- — ~ “ ‘•jn /*р sin >li 4- — — sin nlcos 0 ;
cfiii2 4 di/ ", 1 4 и
Решение этого уравнения (полагая, что собственным движением
лопасти согласно предыдущему можно пренебречь) найдем в виде
?=са —a’) cos (_рЬ~ф) — t'i мп (рз —л) —at cos(^ + y) — 1).
Подставляя это решение в уравнение движения лопасти, найдем
значения коэффициентов
4г1-0 (z7- —2а>
а: А ------------- ---------.
-2д)2
7 1002 у:
—(Р2 - 2р)
-jj- (P~ I)2- (P"‘~ 2p)=
A 1’ + (Рг + 2/’)
+ । 2p)"
(p-
^-(P + ^ + (P2
Пренебрегая степенями р больше первой (так как р не превосходит
Q,03—0,04) и выражая sid(/m|>±i|:) и cos(рф±ф) через произведения
вида sin росозф, cosp^skpji, cos/ю-cosy, sin po-sin>. получим:
Вспоминая, что
PA
cos P4-=--f
asy
найдем, что маховое движение в случае гармонического колебания оси
винта в пространстве может быть представлено в виде
co-. b
Л,
dt
Sin
(2.120)
Таким образом, продольный наклон конуса винта при
в продольной плоскости составляет
8 , / 64 . . \ 1
вращении
а наклон в сторону
<п
(2.122)
Эти выражения по величине членов, пропорциональных угловой
скорости вада винта, совпадают с полученными ранее для равномерного
и равномерно ускоренного вращения и, таким образом, могут быть
использованы в обШСМ случае движения вертолета для определения сил
и моментов несущего винта, демпфирующих движение вертолета.
Для винта с компенсатором взмаха формулы (2. 121). (2. 122) изме-
няются так же, как формулы (2. 102) — (2. 106).
ОСОБЕННОСТИ АЭРОДИНАМИКИ НЕСУЩЕГО ВИНТА,
ОПРЕДЕЛЯЕМЫЕ ШАРНИРНЫМ КРЕПЛЕНИЕМ ЛОПАСТЕЙ
Шарнирное крепление лопастей оказывает существенное влияние
на аэродинамику несущего винта, поэтому понимание роли и физиче-
ского смысла махового движения поможет питателю лучше изучить
особенности аэродинамики винта, Эти вопросы излагаются ниже. Кроме
того, дается простои наглядный вывод формул для расчета коэффици-
ентов махового движения.
19. Физическим смысл махового движения лопастей
Уравнение махового движения лопасги п установившемся прямо-
линейном полете может быть представлено г. виде
V
., ;г - -15 = — "‘г.ш
(2.123)
где
тгш—
$r?I1 массовый статический момент лопасти относительно горизонталь-
ного шарнира
Как показано выше [ем. выражение (2.33)]. выражение дня со-
держит угол взмаха 0 и угловую скорость — , следовательно, маховое
движение относительно горизонтального шарнира .демпфируется аэро-
динамическими силами.
Из-за большого аэродинамического демпфирования (при линеари-
зации уравнения, т. е. в предположении средний за оборот
коэффициент при в уравнении (2 34) равен —1,7) собст-
венные колебания лопасти быстро затухают и маховог движение лопасти
является вынужденным колебанием под действием момента тяги. Так
как собственная частота лопасти близка к числу оборотов несущего винта
(средний за оборот коэффициент при 0 п уравнении (2.31) равен 1), то
наибольшую амплитуду колебания лопасть имеет при изменении момен-
та тяги е частотой оборотов несущего винта, т. с. по первой гармонике.
Соотношение между амплитудами второй гармоники махового дви-
жения и момента тяги приблизительно в 10 раэ меньше, чем у цервой
гармоники. Поэтому, несмотря на то, что амплитуда второй гармоники
момента тяги велика, все-таки маховое движение лопасти происходит
в основном по первой гармонике
Таким образом, основная часть махового движения лопасти описы-
вается уравнением
Поде гасим выражение (2. 124) в уравнение махапого
(2. 123). Левая часть уравнения оказывается равной аа:
движения
Уравнение махового движения принимает вид
—— т
(2. 126)
Из ныражет[ия (2 125) следует, что в каждом сечении лопасти сум-
ма инерционной силы махового движения и нормальной к оси лоцасти
99
tf=270°
Рис 2.25. Распределение тя;и по радиусу допа
сти при одинаковой величине момента тяги отно
ситслчно горизовтального шарнира
составляющей центробежной силы пропорциональна ад и является по
стоянной величиной, не изменяющейся при вращении лопасти, хотя угол
взмаха лопасти изменяется. Это значит, что первая гармоника момента
инерционных сил относи-
тельно горизонтального шар-
нира равна нулю. Поэтому,
как видно из выражения
(2. 1261, момент тяги лопа-
сти относительно горизон-
тального шарнира должен
быть одинаковым на всех
азимутах В этом заклю-
чается основная особенность
несущего винта с горизон-
тальными шарнирами и фи-
зический смысл махового
движения лопасти по пер-
вой гармонике: лопасть дви-
жется вокруг горизонтального шарнира гак, что в результате вызван-
ного маховым движением перераспределения но лопасти аэродинами-
ческих сил момент тяги относительно юризонтального шарнира не из-
меняется на всех азимутах.
20. Перераспределение аэродинамических сил
по диску несущего винта нз-за махового движения
Равенство величины момента тяги лопасти относительно горизон-
тального шарнира на всех азимутах не приводит к тому, что тяга ло-
пасти, вычисленная только с учетом первых гармоник махового движе-
ния, одинакова на всех азимутах, так как распределение тяги по радиусу
изменяется от азимута к азимуту (рис. 2.28). Однако благодаря махо-
вому движению у несущего винта с шарнирным креплением лопасти
первая гармоника изменения тяги лопасти очень сильно уменьшается.
Тяга лопасти зависит от махового движения в основном от того, что
при маховом движении у элементов лопасти возникает дополнительная
нормальная к оси лопасти * относительная скорость воздуха, изменяю-
щая истинный угол атаки элемента. Изменения, которые вносит маховое
движение по первой гармонике в распределение истинных углов атаки
по диску несущего винта, весьма значительны. Например, у элемента
лопасти, находящегося на азимуте ф=90°, дополнительная вертикальная
скорость воздуха а у этого же элемента на азимуте
S—270° она такая же по величине, но противоположно направлена,
днако из-за разности горизонтальных составляющих относительной
скорости воздуха истинный угол атаки элемента незначительно умень-
шается на ф = 90° и гораздо больше увеличивается на ^ = 270°. Этим
объясняется местное увеличение истинных углов атаки сечений лопасти
в районе д|> = 270,:> и возникновение срыва потока при больших скоростях
полста у винта с шарнирным креплением лопастей (рис 2.29).
Выше мы определили относительную вертикальную скорость возду-
ха на азимутах ij,' = 90o и -ф=270°. Она равнялась соответственно —а^ш
и «кы. Эти выражения имеют простое объяснение.
На рис. 2.30 показан несущий винт, у которого лопасти имеют раз-
ные углы взмаха на азимутах i|i = 0° и ф = 180“, т. е. ось конуса лопастей
отклонена назад (а^О). При этом максимальную вертикальную ско-
рость по абсолютной величине лопасти имеют при прохождении азимч-
* Ниже для нрляпотм нормальную к сси lomrin скорость будем кдзыиагь «вер
тйкальной» cxopoc-hnt.
топ if = 90° и if'=270e, так как здесь за одинаковый промежуток времени
Л1= — лопасть перемешается но вертикали на наибольшую величину
(р>п). На азимутах if=0: и ip = 180° вертикальная скорость лопастей
равна пулю.
Таким образом оказывается, что изменение вертикальной скорости
и, следовательно, истинною унта атаки и тяги лопасти на азимуте ip и
р-27(У
tv из-за махового движения юластей
азимуте
быстро
сообразить, как изменится маховое движение несущего винта, если г.о
каким-либо причинам у лопастей появится циклическое изменение истин-
ных углов атаки или дополнительный момент относительно горизонталь-
ных шарниров.
Так, например, если вследствие кручения лоцасги или по друюй
причине углы атаки сечений максимально увеличились на азимуте 1р
и максимально уменьшились на азимуте if + n то устанавливается такое
дополнительное маховое движение лопастей, при котором они занимают
наиниэшее положение на азпмме
ip— и, взмахивая вверх, \ мен к
шают истинные углы атаки до
величины, при которой условие
постоянства момента тяги «гно-
ецтельно горизонтального шар-
нира на всех азимутах соблюда-
лось Наивысшее положение ло-
пастей па азимуте 4’+ — , дллее
они опускаются, восстанавливая
уменьшившиеся углы атаки. Вме-
сте с изменением махового дви-
жения оо первой гармонике из-
меняются силы Н 11 5
(рис. 2 31):
д//=ГдЗя>п
Рис. 2.30 Перемещение сечения лгчисгн
С1ТН1Ч птедь-ю плоскоста вращения при
иращепии лопасти
— д5=Гл?со~-!<.
Выше было показано, что, несмотря па большую первую гармони-
ку у скорости U. первая гармоника изменения гяги лодасти по азимуту
Ю1
относительно невелика, так как она существенно уменьшается благодаря
маховому движению. Вгорая гармоника тлги лопасти больше, а третья
меньше, чем верная гармоника.
Вторая гармоника тяга лопасти вызывает маховое движение лопа-
сти по второй гармонике
ДЗ—02cos2i—£2siu2-[<, (2.127)
которое уравновешивается моментом инерционных сил
Дб\=/ ш>о-(За2со?20 |-36asinSo)
I j
(2.128)
и создает некоторое, менее значительное, чем первая гармоника, пере-
распределение аэродинамических сил лопасти по азимуту.
Болес высокие гармоники _
махового движения очень ।
малы и практически не сказы- ’ 2
ваютсп на аэродинамике ло- _
пасти. —
Иллюстрацией к сказан- —
ному относительно махового °.10 —
движения и изменении аэро- —
динамических сил лопасти по 3
азимуту являются графики, _
показанные на рис. 2.32 и _
2.33. Они получены по рае- f"
чету приближенно, в прочло- -4
ложеинн о равномерном рас- А
пределенли индуктивной ско- —
рости по диску несущего вин- ,
та и без учета упругих коле-
баний лопасти, ВЛИЯЮЩИХ на Рис. 2.33. Изменение угловой скорости взма
величину ВЫСОКИХ гармоник \я, \-ла атаки сечения на г=0,973 и тяги
махового движения и тяги ло- ' лопасти по азимуту
пасти.
Расчет произведен для следующих исходных данных:
показаны кинематические характеристики махового
На графиках
Г, rff!
движения в, ,
тяга
и момент тяги допасти тг.ш, а также
угол атнкн сечения аг на г=0,97<х
Из этого примера, а также из табл. 2.11 видно, что, начиная со вто-
рой гармоники, резко убывают коэффициенты махового движения, а на-
чиная с третьей гармоники,--коэффициенты разложения тяги лопасти
Поэтому угол и угловая скорость взмаха, угол атаки сечения лопасти
изменяются в основном по первой гармонике, т. е. с частотой оборотов
винта. Вторая гармоника заметна в угловом ускорении лопасти, а тягл
лопасти и се момент относительно горизонтального шарнира изменяются
в осиопном по второй гармонике.
21. Приближенный вывод формул для коэффициентов
махового движения
На основании свойств махового движения лопасти, описанных в п. 19
настоящего параграфа, приближенно выведем выражения для определе-
ния коэффициентов махового движения и Ь], полученные выше в п. 4.
юз
Для простаты примем В=1 и не будем учитывать малые члены порядка
ц2, так что получим выражения с точностью до р
Исходя нз условия постоянстпа момента тяги на всех азимутах, бу-
дем приравнивать друг другу моменты тяги на азимутах, отличающихся
на 180". Такой метод позволит нам с большой наглядностью вьгннигь
механизм выравнивания момента тяги с помощью махового движения
при разных условиях обтекания лопасти па азимутах, отличающихся
на 180°.
Угол наклона оси конуса несущего пинта назад а, определится из
рассмотрения азимутов ф=90° и ф=270'\ угол наклона оси конуса
вбок в сторону лопасти «идущей вперед» (Ф=90’1,— из азимутов ф—0'?
и ф-]80°.
Источником разных условий работы лопастей на азимутах 90° и 270°
является наложение па вращательное движение несущего линта посту-
пательной скорости полета. На азимуте ф=9Цэ скорости складываются,
а на азимуте ф = 270в— вычитаются. Поэтому коэффициент аг равен
нулю при работе несущего винта на месте и увеличивается при увели
(I' соч а \
или ц= ------——J..
На азимуте ф=9О" относительная скорость воздуха в плоскости вра-
щения равна Здесь, в области больших скоростей, в ре-
зультате запала оси конуса несущего винтя назад лопасть поднимается,
уменьшая вертикальную составляющую относительной скорости возду-
ха —<2if), что уменьшает истинные углы атаки сечений.
На азимуте ф=270° скорость к плоскости прощения мала, по верти-
кальная скорость и истинные углы атаки сечений увеличиваются:
Ux=(&R(r—ц); С7э = соЯ(Л-| Я|Г).
Составим выражения для элементарного момента тй!И, возьмем
интеграл от него от г — 0 до г = 1 на обоих азимутах гг. приравнивая друг
Другу результаты, найдем выражение для qs Можно также приравнять
нулю момент от разности тяг на азимутах = и ф — 180е.
— I1*-11 (2.1291
s, J L\ rfr Л-9и '<?г J
где
— (*?-) --Г^ + ^У-Иг !*)('•“ <v);
.1Х X dr Д=до-
J- ^Гл-х-а/).
aco \ dr Д ?7C-
Отсюда найдем
a -2^-1?--,.}. (2.130)
Из-за различия скорости набегающего потока на азимутах ф=90’
и ф = 270° а, изменяется даже при одинаковом изменении угла атаки
или вертикальной скорости у лопасти на этих азимутах. Так, например,
при увеличении угла атаки несущего винта у сечений лопастей на ази-
мутах ф — 90° и ф=270° появляются равные вертикальные скорости.
Чтобы приращения моментов тяги лопастей ня этих азимутах были
одинаковыми, углы атаки сечений на азимуте ф»90° должны дополни-
тельно уменьшится, а на азимуте ф=270°— увеличиться. Очевидно это
произойдет при увеличении о5.
Это важное свойство несущего винта с шарнирным креплением ло-
пастей. при увеличении угла атаки вертолета из-за увеличения о; уве-
личивается продольная сила Н и появляется дестабилизирующий мо-
104
мент относительно центра тяжести вертолета, вызывающий еще большее
увеличение угла атаки; вертолет статически неустойчив по углу атаки.
Следует отметить, что а, не зависит от инерционных характеристик
лопастей, так как выравнивает аэродинамическую «асимметрию»
в работе несущего винта.
Наличие угла конусности является причиной разности вертикальных
скоростей Ь\ воздуха относительно лопасти на азимутах ф = 0° и ф=180'
(рис. 2.34).
У лопасти, находящейся в переднем положении (ф=180‘). скорость
воздуха направлена снизу вверх; л
лопасть при прохождении аэим
За вторую половину оборота ,то-
пает!, опускается, чем увелпчп-
вает истиппыс углы атаки Та-
ким образом, ом, конуса несу-
щего винта завалена вбок, в сто-
рону лопасти. «идущей зперсл»
(Ф = 90°).
Выведем выражение для
коэффициента Ь>. Составляющие
скорости обтекания сечений .то-
ля хменыпснмя истинного угла атаки
стой 90 270' поднимается пвгрх
&Uf = ~Vdg j
Рис 2.34. Изменение скорости из за
-,'r.ia конусности Оо
пасти равны:
— на азимуте ф —О
ч>/?г; Uy — — pOf,)-.
- па азимуте ф==180в
Us—uiRr: (>.
Приравнивая друг Другу моменты тягп Лотасги на зп.л азпм^гах-.
получим
Ь, — aafl. (2.131)
Коэффициент Ьг вырс.внкваез аэротиньмичевкую «асимметрию»,
вызванную наличием До Так как Оо зависит от массовой харамернсг»-
ки лопасти у, то и также зависит от у.
22. Влияние неравномерности поля индуктивных скоростей
на маховое движение
Теперь определим, как изменяются коэффициенты махового дви-
жения а, и &| в случае, когда у сечений возникает дополнительная вер-
щкальная скорость н на лопасть действует дополнительный периодиче-
ский момент относительно горизонтального шарнира.
дО’у — - (.' cos Ф — {..Asin р; (2.132)
Д.И— — Jljcoso— Л/2зГпО. <2.133)
Единственным моментом, который уюжет уравновесить дополни-
тельные моменты по первой тормонике. вызванные изменением верти-
кальной скорости и моментом ДМ, является момент тяги лопасти.
Погонная тяга лопасти получает приращение благодаря измене-
1гиго коэффициентов махового движения на величин), Лаг и \bs. В этом
случае уравнение махового движения имеет вид-
”1та! + - М2^Ьт1. (2.134)
В соответствии с (2.134) можно рассмотреть следующие равенства:
dt
или, выразив ^^в виде
dr
(2.140)
(2.141)
Физический смысл уравнения (2. 141) очевиден, момент относительно
горизонтального шарнира, изменяющийся по первой гармонике, уравно-
вешивается моментом or первой гармоники тяги*.
В дальнейшем будем пользоваться равенством (2.139) и соответст-
венно равенством (2.142):
106
причем будем определять только приращения коэффициентов махового
движения.
Рассмотрим азимуты ф = 90° и ф = 2“0“ (рис. 2.35):
а» Wr/i-so
Рис. 2.35 К выводу выражения для Д/ц
Из равенства (2. 139) получим
да,= 4 ^U^dr-i,-------—- If,.
(2.143)
Теперь рассмотрим азимуты ф = 0 и ф = 180а (рил 2.36)-
— -(46/ -77,) г;
4^ ^-Uv-417;
’>йг/4| 1ч'
-’-lif—) -4(44 ] = 2А6,Р-Su,r.
I \dr A=i8c- I 1
Ич равенства (2 142) получим
a£.^4f U,r2dr-------J--.M,.
J У4.Ш»2
(2.144)
Используя выражения (2.143) и (2.144), выведем формулы для
определения приращения коэффициентов махового движении при учете
107
неравномерности распределения индуктивной скорости по диску несуще-
го винта.
В качестве первого приближения распределение индуктивной скоро-
сти может быть описано уравнением (см. рис. 2. 6)
^)=’i>-[-arcoS'j. (2.145)
Так как положительное управление дополнительной вертикальной
скорости kUy снизу вверх, а индуктивной скорости — сверху впит, то при
сопоставлении (2. 145) и (2. 132) найдем
Подставив (2. 146) d (2. 143) и (2. 144), получим искомые выра-
жения-
Д^—0; ।
д^_4а Jr3dr = a. | (2-147)
Таким образом, завал оси конуса несущею винта назад не изме-
няется, а вбок- увеличивается ня угол, численно равный приращению
относительной индуктивной скорости на конце лопасти в переднем и
заднем положениях. Если принять, что а = гГ*_ т. е. индуктивная скорости
в передней части диска равна пулю, а в задней — удпоенному среднем}
значению, то
(2.148)
и суммарное значение завала оси конуса назад
1|=тЛ+l2-149)
Продольный перекос поля индук|ивной скорости влияет также на
величину продольной и боковой силы несущего винта. Приведем форму-
лы для определения Лиз:
Л — ах ~- Xu?—-L kaT-|--л (а‘и — я)) —
-лг+т;(л I <г1а»
• Величина а в зависимости от режима по-'к-'-а *ч,>ье1 Hint, ипрсделею по чаге
рчя.таи. данным о [25].
ФН4 - 2 )-
-Мт-Н-т’(т+д-т,“‘')г (2-151)
Формулы (2. 149) - - (2.151) можно применять при р>0,1 ч-0,05. По
2 3”, где показан график ф в зависимости от р, на участ-
ь~
этому на рис.
ке от |i-0 до ц = 0,1 дана пунк-
тирная кривая, проведенная
приближенно через (очки ц —О,
в которой & ,= 0, и р —0,1
С помощью выражений
(2,143) и (2.144) можно так-
же получить приближенные
выражения для определения
приращения коэффициентов
махового движения пртг кри-
волинейном движении перто-
КЗ
0,1 Р
Рис 2. 87, Изчепенке Ь> по р.
лета, выведенные в п. 4,
МЕТОД РАСЧЕТА АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВИНТА
В СЛУЧАЕ, КОГДА ШАГ ЛОПАСТИ ИЗМЕНЯЕТСЯ ПО АЗИМУТУ
23, Теория эквивалентного несущего винта
Ниже будет показано, что вннт. у которого шаг лопастей изменяет-
ся циклически по первой гармонике
?—'?г,—cos'll —<fj sin <i> (2.152)
при аэродинамическом расчете может рассматриваться как винт с по-
стоянным шагом, равным <ро, ио с другим углом атаки. На этом основа-
на методика определения аэродинамических характеристик несущего
пинта с переменным по азимуту шагом названа теорией эквивалентного
несущего винта.
Теория эквивалентного винта объясняет, как изменяются характе-
ристики винта при отклонении автомата перекоса Формулы для расчета
<рг и ци в зависимости от угла отклонения автомата перекоса и кинема-
тических характеристик втулки несущего винта даны в пп. 25—28. При
изложении материала были использованы труды [151, [14].
Сначала рассмотрим вопрос формально.
Подставив (2. 152) в уравнение махового движения и сохраняя для
простоты только первые гармоники, после преобразований получим
ф-^ф.С+Лтфь ф^-Цф:*». ффЧ-фф-
~фф 1 -I ф ф] “s <•+[ ф‘й+ф^--ф X
хф-фф- д-S - ф7.Р’ ]si»9 = 0. (2,153)
Ниже в пп. 23 и 24 r формулах будут встречаться только составляю-
щие шага фо, ф| и и поэтому для простоты мы индекс «0» у фо опустим
109
Из выражения (2. 153) получаются следующие формулы для коэф-
фициентов махового движения-
flo=i,[7'+ 4’°(1 (2.154)
Очевидно, что если сделать подстановку ля — /.—ср.р, то выражения
(2. 154) — (2. 156) можно переписать в виде-
+ (! + !*")]: (2.157)
—У.—4 я) (2. 1.5S)
1-4 Р ' 3 '
», —-—-- - ад+?|- (2-1591
Сопоставляя эти формулы с формулами (2. -10) для пинта с постоян-
ным шаром, нетрудно заметить, что а$ и первые слагаемые выражений
для а, и Ь, совпадают при условии, что оба впита имеют равные ц, ср,
а X у винта с постоянным шагом равняется А®. В дальнейшем будем обо-
значать все величины, относящиеся к винту с постоянным шагом, пндек
сом
Совпадение формул дает возможность определять коэффициенты
махового движения впит с. переменным шагом по формулам для коэф-
фициентов махового движения винг.ч с постоянным шагом, добавляя
cpi и ср,-.
“о —%; (2.16(1)
a] = a1;i — (2.161)
6,-*,, + ?!. (2-162)
При этом должны соблюдаться условия эквивалентности пинта с пе-
ременным шагом винту с постоянным шагом:
Г-И,; (2. 163)
;.-ё,и = Х,; (2.164)
9-т9. (2.165)
Теперь убедимся, что удовлетворяются следующие соотношения.'
СЛ--гД-и.5ть_6',э; (2.166)
(о, ~ ?) “ <7>- “< \ (2-1
или _
— (=, СО5 ф-I-'Ш4«)СГ=ДС;У. (2.1б8)
ПО
В самом деле, исходя из выражений (2. 160) — (2. 165), представим
обе части равенства (2.168) в развернутом виде:
— = СОЯ i 1 ср, Sill О)(Г-!-[1 sill ф);
д/_/у = д). — г sin ф — д£>, cos ф)—cos ф-|-Ма! cos2 о
| и.Д^( srnocosf—CjJA—г ( — sin ф—--Lcos ф) —
— ср^соз’ф-^рзгпфсозф—(с, гая у4- ?, я|пф)(г-| jisiu^).
Очевидно, что равенство (2.168) справедливо.
Непосредственно из формулы (2. 168) сле-iyci, что
U-, Uy by
Or—Ф4-—= T1—^ + -^г-+У ='Ч- (2.169}
Таким образом, углы атаки во всех сечениях лопастей у пиита с пе-
ременным шагом и у эквивалентного ему винта с постоянным шагом
равны.
Так же можно показать, что
; (2.170)
dr \dr }a
(2.171)
/ = (2.172)
Выражения (2. 168) —(2. 170) показывают, что уменьшение пли уве-
личение погонной тяги, которое имеет место из-за изменения шага лопа-
сти на данном азимуте, при расчете по теории —Эквивалентного винта
получается за счет уменьшения или увеличения Utl на этом же азимуте.
При равенстве коэффициентов тяги имеет место равенство относи-
тельных индуктивных скоростей
4В2/ц2+к2 "
(2.178)
откуда из выражений (2.163) и (2.164) следует
(2 174)
Представим выражение для —^-ввиде (см выражение (3.56):
(2.175)
Используя соотношения (2. 168) и (2 170), найдем:
— (?т cosO-f-Cj sin i); (2,176)
<7е —Фг, —^(©, cos sin Ф); (2.177)
'c 'u V 0
Так |>аь у пинга с горизонтальными шарнирами величина интеграла
rdi- постоянна на всех азимутах, то интеграл по ф равен нулю.
6
Следовательно, средняя за оборот величина коэффициентов крутящего
момента винтов одинакова:
тк = т^. (2.178)
Однако на равных азимутах значения ^L, qu и та, дтя обоих вин-
тов не равны двуг другу и винты имеют разную переменную часть мало
вого движения вокруг вертикального шарнира
Теперь получим формулы для определения коэффициентов Л и s вин-
та с переменным шагом по соответствующим коэффициентам винта
с постоянным шагом: йэ и з8. На основании выражений (2, 161), (2. 162),
(2 171) и (2.177) получим
— — ^д{!со$6-|-д^^51п6— X
X [(э cos| —д, sin '1) СО1- Ф- (c^os^-i-tf! sin 0) sin ф] — —а,; (2.179)
дз¥ = — ^}Д%1пф д<7и cos 9 = /^^. (2,180)
Следовательно.
Дй — -!&:
h-hs-Q-, (2.181)
3=3, + /^. (2.182)
Наконец, найдем соотвошение коэффициентов сил в скоростных
осях. Из выражений (2.172), (2.174) и (2.181) следует, что
; (2.183)
t,^,ia , к— /Заэ Л9 + 78да-|-ДЛ = ^э4-г8^1—Mi —zx₽- (2.184)
Выражения (2, 183) п (2. 184) показывают, что у винта с разными cpt.
<р, при одинаковых ц, Ло, ф получаются одинаковые /9 и t,. Следователь-
но. при равных |1. tv, tx винт с циклическим изменением шага и винт
с постоянным шагом имеют равные <₽, Хэ, <ц,, но разные а. Эта особен-
ность шарнирного несущего винта проявляется в том. что при равных
112
г п tx (при равных весе, скорости и высоте полета), по при разных ф!
(разные центровки или углы установки стабилизатора) вертолет имеет
разные углы атаки и углы тангажа. Это показано на рис. 2. 38: винт с
постоянным шагом и винт с переменным шагом при ранных р., tv, име-
ют равные ат, но разные а, гледовэтельно, вертолет с отклоненным
интоматом перекоса па том же режиме полета занимает новое положе-
ние в пространстве
Плоскость' вращвниг
винта с порешенным
па ujunumi/ инном
Ппесхостпь бпащекий Винта
с постомньни шипи и
пласкпеть зх&ившнттнш
Винта при
Рис, 2.38. Углы тангажа вертгнегя ня <>т.нцм ре-
жиме полете при разных отк.|<>нгниях яксиматл
и vpCKOi -а
Ва/кным следствием равенств (2. 178), (2. 183) и (2. 184) является
возможность определения при аэродинамическом расчете взаимозави-
симости коэффициентов ц, tv. tx, тк, не ншересуясь, имеет ли винт или
ас имеет циклическое изменение шага по азимуту, так как при любых
Ci и ф! коэффициенты iv, tx, тк не изменяются. Это свойство винта зна-
чительно упрощает аэродинамический расчет вертолета.
Полученные выше формулы теории эквивалентного нинта не изме-
нились бы, если бы мы их выводили, не inc-ходя из уравнения (2. 153).
а без допущения о равномерности поля индуктивных скоростей, без от-
брасывания высших гармоник махового движения и без других допуще-
нии. Следовательно, и в этих случаях
ного винта остаются справедливыми,
движения и нагрузки, действующие на
лопасть в плоскости тяги, у винта
с изменяющимся по первой гармонике
гпагом и у винта с постоянным шагом
при соблюдении условий .эквивалент-
ности режимов (2 163) —(2 165) оди-
наковы.
Теория эквивалентного винта не
применима при большом разносе го-
ризонтальных шарниров, так .как oiho-
сительно нотой плоскости Отсчета,
т. е. озносительнп плоскости эквива-
пересчеты по теории эквивалент-
Высшне гармоники махового
Рис. 2.3U. Перемещение А? горнзоц
тальных шарниров относительно
и юс mil iii чхнииалы11 кого нчн-и
леншою винта, лопасти имеют допол-
нительное перемещение Дх (рис. 2.39) вместе с горизонтальными шар-
нирами, чю при расчете несущего пинта относительно плоскости
вращения не имеет места и не учитывается в расчетных формулах.
Отметим, наконец, что у винта с постоянным по азимуту шагом все
безразмерные характеристики определяются при задании трех величин
(ц, А, <р или любых других трех величин), а у винта с переменным ио
1002
113
азимуту шагом для определения безразмерных характеристик в связан-
ных осях нужно знать пять величин (р, Л, <р, фь фг или другие пять)
Итак, показано, что расчет винта с переменным по азимуту' шагом
может быть заменен более простым расчетом винта с постоянным шагом
при условии эквивалентности режимов полета (2. 163)—(2. 165) с после-
дующим пересчетом по выведенным выше формулам.
Последовательность расчета.
— по известным для винта с переменным шагом величинам р, />,
ср, <p(, ф, находим Ця, Аа, фа;
определяем ооэ, &, lJt s3. tV3,
— по формулам пересчета находим о0, Д|,
Рис, 2.40. Перестроение аэродинамй'геекйл-
’.зракгерксгик
для винта с переменном по азимуту шагом
Часто теория эквивалентного винта используется при определении
аэродинамических характеристик винта по графикам Если графики
построены для винта с постоянным шагом, то для ницта с переменным
шагом они изменяются так, как показано на рис. 2.40. На графиках ио
утлу атаки при tf = const (верхние графики) кривые I сдвинутся экви-
дистантно на Aa=cpt, а каждая точка кривых h слипнется на Aa=<r,
вправо и на ДА=- /<рг вниз. На графиках по шагу винта при a-const
(нижние графики) меняется оцифровка углов атаки (для ср(=#=О каждая
кривая соответствует большему ня <р, углу атаки), а кривые fl. кроме
того, смещаются на ДЛ=— /фр Графики m,t, tu, ix. Оо. а также высших
гармоник махового движения а,,, Ь>, <,п=2, 3..-) видоизменяются ана-
логично графикам г. а графики s, a,. bf -аналогично графикам h.
На графиках аэродинамических характеристик в скоростных осях
(график справа на рис. 2.40) для винта с ^[“О нужно поменять оциф-
ровку углов атаки.
Теперь получим формулы, связывающие характеристики винта с пе-
ременным по азимуту шагом я эквивалентного ему винта с постоянным
шагом, исходя из геометрических соотношений.
На рис. 2.41 показан вид винта сбоку и сечения двух лопастей, на-
хо.тяпсихся на азимутах 90 и 27(Г. Если провести плоскость, повернутую
вокруг осей лопастей на угол Дф.'_$сл =--ф1 к плоскости вращения, io
относительно повернутой плоскости шаг лопастей одинаков и равен
Среднему значению шага за оборот Эта плоскость является плоскостью
114
эквивалентного винта. Угол атаки эквивалентного винта 03 = 0—4,!
Если cpiT^O, то аналогичная картина получается при виде па винт с ази-
мута ф=В, т. е. плоскость эквивалентного винта повернута к плоскости
вращения на угол <pf в боковой плоскости вертолета.
Таким образом очевидно, что для впита с изменяющимся цикли-
чески по первой гармонике шагом может быть выбрана другая плоскость
Рис. 2.41. К о 1рсдслец|1ю положения
иого винта
огстета, относительно которой шаг винта не изменяется. Поэтому от-
носительно новой плоскости отсчета можно определить силы, момспц,!
и маховое движение пинга ио формулам, выведенным для винта с по-
стоянным шагом. При этом надо учесть, что новая плоскости отсчета
имеет другой угол атаци, а результаты расчета относятся к связанным
с ней осям и должны быть пересчитаны в оси, сляпанные с плоскостью
пращения пинга. В этом заключается геометрический смысл выведенных
выше формул.
Рис 2 42. Составляющие скорости н элементарной силы
в сечении лопасти э разных плоскостях отсета
Положение аэродинамической силы винта относительно вектора
скорости полета не зависит от выбора штос кости отсчета, поэтому се со-
ставляющие на скоростные оси. т. е подъемная и пропульсивная силы
равны [см. выражения (2 183) и (2.184);
Теперь проследим, какие получаются изменения в расчете элемен-
тарных сил сечения лопасти при переходе к новой плоскости отсчета.
Ня рис 2.42 показано сечение лопасти на азимуте ф. Сечение имеет угол
установки <рф относительно плоскости вращения и угол установки <р от-
носительно плоскости экпивалентиого винта. Угол атаки сечения
лопасти, т. е. угол между хордой лопасти и вектором суммарной относи-
тельной скорости обтекания течения И, не зависит ог выбора плоскости
отсчета 1см. выражение (2. 1Ь9)]. Соотношения между составляющими V
при малой величине Аср равны [см. выражения (2.166) и (2, 168)]
Г#sь „-ht'xAij. или -А<рГл
Как отмечалось выше, последнее выражение показывает, что умень
шение или увеличение погонной нагрузки сечения, получающеесн из за
изменения шага лопасти пи данном ’азимуте, у эквивалентного вита
Рис. 2.43. К определению разтосш на азимутах i|:— 0°
и 1Ю° 9
с постоянным шагом получается за счет уменьшения или увеличения U;i
на этом же азимуте.
Проследим, из-за чего получается изменение Uv на характерных
азимутах 1|-=0 и 903. На азимуте i|> = 0 f/, и L/^3 равны:
<ч
<J, ?.) -г.-г(7Т) -
5 V /9
Из рис. 2.43 видно, что но 9—0 при переходе к другой плоскости от-
счеза ? изменяется на такую же величину, что и а, следовательно.
и-Ь=аэ--|%. Значит^ 1\ - г[-^- -(‘fj") I-
_ ' 8 [ dii \ <A|z /9J
Если Да=--у1 соаф, to плоскость эквивалентною винта наклонена
и бок относительно плоскости вращения на угол ?t. из-за чего
Таким образом, при изменении шага лопасти на азимуте ij> = 0 па
—Фг переход при расчете к эквивалентной плоскости приводит к умень-
шению Uy из-за уменьшения скорости взмаха относительно плоскости
эквивалентного винта на величину, рапную <pir
Если Дф=—?,5111ф, 10 ' —(——'l И д£,?— Д-р— о.
зф X df )s r
На азимуте ф—90“ И. равны:
°-
и,
US
Если Дс= —о. r.o.sO, io па о=90* =(-‘$ = и ДЬ'=Д«—0.
' ’ ' d'-t \ «ty А
Если Де — —в, sin к 'Ю а—а,='о,, — п
<*} \ <?| /9
д^у — |л^ 4-г?, — ?,(/ | (*)— .
Следовательно, когда шаг лопасти уменьшается на азимуте if —90',
переход к плоскости эквивалентного винта дает такое же уменьшение
аэродинамической силы в результате того, что из-за уменьше-
нии угла атаки у эквивалентного винта н увеличения скорости взмаха
относительно эквивалентного винта.
В соответствии с рис. 2 42 формулы пересчета погонных нагрузок
н сечении лопасти будут'
lit __________________________dt
/ rf<7 \ _|7 dt \ „
тгоШ.+щАЛ'
Таким образом, все формулы теории эквивалентного ииита являют-
ся по существу лишь формулами пересчета из одной системы осей
и другую.
24. Вывод формул для несущего яинта
с горизонтальными шарнирами, как для виита без шарниров.
Условия эквивалентности шарнирного и жесткою винтов
В теории Глауэрта — Локка при выводе формул для коэффициен-
тов сил, крутяшега момента и маховою движении угол взмаха лопасти
и направление сил в пространстве отсчитываются от плоскосш, относи-
тельно которой угол установки лопасти при вращении остается цосюяп-
ным. Таковой, очевидно, является плоскость эквивалентного несущею
винта.
В этом пункте дается вывод формул для коэффициентов сил и кру-
1ящего момента несущею винта с тем отличием, что шарнирный пинт
рассматривается как жесткий относительно оси конуса, описываемого
лопастями При этом мы принимаем за плоскость отсчета не плоскость
эквивалентного виита, а плоскость концов лопастей. Относительно этой
плоскости угол установки толасти изменяется при вращении, но маховое
движение отсутствует, пс.тедствие чего выражение для нормальной
к плоскосш отсчета составляющей скорости обтекания лопасти упро-
щается. Так как Uv входит в выражения для элементарных сил более
сложно, чем угол установки, то формулы для козффипиентоп сил и кру-
тящего момента в плоскости концов получились более простыми.
Этот метод дает единые формулы, применимые для расчета винта
как с постоянным, так и с переменным относительно плоскости ираще-
ння углом установки.
Иногда в аэродинамические расчеты, и особенно часто в расчеты
устойчивости, вводят приближенные выражения для продольной я боко-
вой сил несущего винта:
S = r&j.
,2. 185)
• Ня рис 2 43 покачаны псремеия-ння лонатти Д.’ относительна плоскости враше
ния п плоскости эквивалентного винта та время половины оборота лопасти, очевидно,
ЧТ° dt'
Очевидно, эти выражения справедливы, если силы, направленные
параллельно плоскости концов лоцастев, равны нулю, т. е. равнодейст-
вующая всех аэродинамических сил перпендикулярна к плоскости
концов.
Полученные выражения для коэффициентов сил, параллельных
плоскости концов лопастей, являются добавками, уточняющими форму-
лы (2. 185).
Отметим, наконец, что мы выводим формулы, сохраняя допущения
теории Глауэрта — Локка. Маховое движение лопастей может быть учте-
но только с точностью до первой гармоники. Для винта с бесконечно
тяжелым;, лопастями (ao = b| = s=0. коэффициенты высших гармоник
махового движения также равны нулю) такие формулы выведены Лок-
ком [37].
Перейдем к выводу формул,
Рис, 2.44, Компоненты скорости обтекания лопасти
Компонентами скоростей обтекания лопасти в плоскости, нормаль-
ной к ее оси (рис. 2.44, нлоспость Л'), являются: компонент, параллель-
ный плоскости концов лопастей
Ux к) =r»t>z--rlz cos(a-i-<21)si;f^=s <2.
и компонент, нормальный к Ь’х ,
t/y а- V sii^a-J-aJ—-и — V’cos(a + ui)C(i'Ls;in<2c =
— aou cosO)-_- — a,j*cos^) — (2.187)
где 1
'Чн=А + ‘Л11; (2-188)
/.(к; характеризует скорость протекания воздмха сквозь плоскость концов
лопастей.
Сначала рассмотрим винт с постоянным по азимуту шагом. В сече-
нии, нормальном к оси лопасти, находящейся на азимуте ф, угол между
плоскостью вращения и плоскостью копцов лопастей равен £ =
’-у
= а|51Пф—Ь[С03ф (рис. 2.45). Поэтому связь между величинами, отно-
сящимися к плоскости вращения и плоскости концов, в соответствии
с рис. 2.46 следующая:
i—& т — = - nlsin'a4-&. cos^: (2.189)
*+ у
(2-190)
118
, ь} сояф):
2 ’Лю — Т':
Qm~ Q —У? г =Q—7’(alstn6—^cus^.),
(2.191)
(2.192)
(2. 193)
Рис, 2 45 К определению у>.н установки допаси 'чцосите.тьно
)|4Г111КОС7И КОНЦОВ ЛО||ЭСТеГс
Выражения ,чля коэффициентов аэродинамических сил элемента ло-
пасти в плоскости N имеют обычней ввд (см. рис 2, 45):
—<су cos Ф tKI -|-глр sin Ф(К))6'л
( » =(cincos Ч-м -е, sin Ф(К,М/А2 * cxpU^-a^ (^Ujj +t72 ).
\ lir /1К| (!к'
Опустив промежуточные выкладки, прниедем конечные формулы:
— a0p.rcos -j~ Aaop.-'binfcJi—- co- 2?J; (2. 195)
^г\.,~с-Лгг!
— (2[И*ЛР r— a«?(lly\x^)sin>!»-|-a. (2uJ.v(,.,fla-J-^K)cnur)cos^ —
-j- — a^a^K^i2 sin 20— p" (cxp -j-a,»^)cos 2&, (2. 196)
где
— среднее по диску значение слр.
119
Для определении нужна воспользоваться формулой (2.193):
1=Ш.<2'1971
Подславнв по уравнению )2.189) в выражение для " ВЬ1‘
полнив интегрирование, получим
‘Ы=<к. 1 + |- f')]-
(2. 198)
Так как в действительности лопасти винта имеют горизонтальные
шарниры, то выполняется условие махового движения
о
откуда находим:
Перейдем к выводу выражении для коэффициентов продольной и
боковой сил, параллельных плоскости концов лопастей.
Элементарные продольная и боковая силы равны:
<"203’
J20
Полстапнв в эти уравнения выражения (2. 195), (2. 196) и проинтег-
рировав элементарные силы по радиусу лопасти и по азимутам, получим
следующие выражения для коэффициентов средних за оборот сил'
S{B)~ — v {“л [ /— ®(K](aftp - (2.206)
С учетом этих выражении коэффициенты продольной н боковой сил
несущего винта равны
А_й1к)_/а1; (2.207)
s—SiK-^tb{. (2.2081
Расчеты показывают, что использование приближенных формул
12. 185} приводит к ошибке в определении h, рапной 10—30% (всегда
в сторону уменьшения, причем большая цифра относи гея к малым
коэффициентам тяги £). Производные от коэффициента h по ц, а, <р мо-
гут определяться по выражению (2. 185). Определение коэффициента х
и его производных по выражению (2. 186) дает результат, сильно отли-
чающийся от расчетам по формуле (2, 2081 Формула (2. 208), как и фор-
мула (2,61) теории Глауэрта—Локка, при равномерном распределении
индуктивной скорости лишь приближенно определяет s, но расчеты по
формуле (2.208) ближе к экспериментальным данным, чем расчеты по
формуле (2. 185).
Расчеты локязмлзют, что величина коэффициента л на режиме
самовращения близка к нулю и составляет лишь малую долю от величи-
ны произведения tb[. При средних значениях (режимы горизонталь-
ного полета) величина 5 меньше, чем ib^ и ориентировочно можно счи-
тать s—-- tbt. На режимах максимальной мощности величины s равна
или превышает tbi.
Коэффициент крутящего момента несушего винта опречеляеiси по
выражению.
0 и
Так как выражение (2.209) предусматривает интегрирование по о в
пределах от 0 до 2л, то все гармоники пыряжения для(-^?-) при ин-
те! рированип исчезну,, Поэтому в выражение (2.2()9) достаточно под-
ставить только среднюю часть :
(%),,кд-2 -Ч/+ [4-
Подставии (2.210) в (2.209) и выполнив интегрирование, получим
-Т'Чр0 ! (2-2И)
121
Покажем, чго тк^т№1{к]. В самом деле, используя выражение
(2. 197), найдем ти:
" Jrff ,f К 2 )„,+К'),./”'5,п-* с“«]-
j* (й( sin О— bx cos Ф) tty f • dt_- rdr. [2.212)
о 6
И.ч уравнения махового движения лопасти относительно горизонталь,
кого шарнира известно, что выражение для момента тяги лопасти
не содержит первые гармоники ф, следовательно, интеграл
по ф равен нулю. Таким образом, коэффициент среднего за оборот кру-
тящего момента тв определяется по выражению (2 211) (мгновенные
значения тКф не равны друг другу, т. е. Ик1к)^тЯ|).
Убедиться в равенстве выражений для mv, (2.211) и (2.48) можно
также, взяв их разность;
тк - т* (Ь1 = [ y а, + A- -
И- I
Выражения, заключенные в скобки, равны нулю, так как они пред-
ставляют собой формулы (2. 201) н (2. 202) для определения коэффицие!!-
тов махового движения Ц[ и bf. Следовательно, доказало, что
Подъемная и пропульсивная силы пиита не зависят ог того, как вы-
числены составляющие равнодействующей силы винга в связанных осях;
огиисите.|Ы|О плоскости вращения или относительно плоскости конпов
лопастей. Они равны (считая созя, — !, sintz^a,):
ty —/(мС05(а—aL) —sin (a -\-at) = i cos a —Л sin n —ty; (2.213)
ty =<(,,) sln(a-| a()-|-A(l.; cos (a l-o,) — i sina-J-Л co^a —ty. (2.214)
Полученные в этом пункте формулы более просты, чем в теории
Глауэрта — Локка Они интересны также и тем, что позволяют просле-
лить, как и из-за каких факторов видоизменяются формулы для расчета
жесткого несущего винта (простейший случай) к формулам шарнирного
винта, Изменение формул происходит по следующим причинам:
1 Изменение учла атаки винта из-за отклонения плоскости враще-
ния жесткого винта на угол aj. В формулы для жесткого пиита иместп >,
входит \|<,=Х + а,ц:
«00 =------
5(к) =- 0;
122
2 . Циклическое изменение шага винта относительно отклоненной
плоскости вращения жесткого винта:
?оо (к| cos i - =j [к) sin
С учетом циклического изменения шага формулы для жесткого
пиита принимают вид
где Tj,* — Яр — — £*1 й случае, когда шаг лопасти нс изменяется
относительно плоскости вращения.
Отметим, что при расчете жесткого винта с переменным по азимуту
шагом нельзя использовать новую плоскость отсчета, относительно ко-
торой шаг постоянен, т. е. теорию эквивалентного винта. Это получается
потому, что лопасти при вращении не находятся в новой плоскости
отсчета, а выходят из нее, т. е. совершают относительно нес маховое
движение, и теория жесткого винта для новой плоскости отсчета не-
справедлива,
3 Угол конусности у жесткого enHia создаст и поступательном по-
лете циклическое изменение составляющей Uv скорости обтекания сече-
нии (см. рис. 2.34); AL'V = —paDcosi|:. Кроме того, из-за наличия }глз
конусности тЯ1« лопасти проектируется на плоскость концов, дополняя
силы Йцо н sw- Эти факторы приводят к дальнейшему усложнению
формул, они принимают вид, совпадающий прн ио.тетаиовках <PilK/-
и фт 1=Д| с выражениями (2.198), (2.205), (2. 206) и (2, 211).
<н- (2’2171
Х^+уЦ)] V—41 + !"2)- <2.21S>
123
4 . Переход от плоскости концов лопастей к плоскости вращения по
выражениям
h — А(к,4-/а,:
S=S(K) !
(2.219)
При использовании выражении (2. )5)— (2.218) для pacneia винта
с горизонтальными шарнирами по условию махового движения (2. I99j
до Тггм и Ф1{к) раины:
__-Iuqm.
V 2 1 (2.220>
11 i-Tu
Теперь рассмотрим bhhi с переменным ио азимуту шагом.
Выражения (2.215) — (2.218) без каких-либо изменений применимы
н для расчета винта с переменным по азимуту шагом
В этом случае условия равенства углов установки относительно
плоскости концов лопастей:
i ?|-
(2.221)
fin..-J
причем ф, и До. как и ранее, определяются в соответствии с уело
вием нулевого момента в горизонтальном шарнире ио выражениям
12.220). В выражения (2.220) вместо члена >.(«.'—<Pi И удобно подсту-
пить }.
Таким образом, расчег винта с переменным по азимуту ша.’о-i вы-
полняется по формулам, выведенным в настоящем пункте,’которые от-
личаются лишь тем. Что а, и Ь, ио равны гр[1К),а находя гои цз вы
раження (2.221) после определении ф;.к> и cptfK)!
Углы ф, (к) и ф|(к1должны быть равны углам между плоскостью кон-
цов лоиасрей и плоскостью, относительно которой шаг винта г.осгоипеп,
т е плоскостью эквивалентного винта. Следовательно,
(2.222)
124
Таким образом, не плодя понятие эквивалентного винта, мы колу-
чили выражения (2.220) и (2.221), фактически связавшие величины,
относящиеся к плоскости коанов лопастей, с соответствующими им вели-
чинами эквивалентного винта.
Из формул, выведенных в настоящем пункте, следуют условия
эквивалентности винта с горизонтальными шарнирами и без них. винты
эквивалентны, если их утлы атаки отличаются на величину, равную щ,
и винт без горизонтальных шарниров 'имеет угол конусности и состав-
ляющие циклического изменения шага, определяемые формулами
(2.220) или (2.22)).
При этом предполагается, что горизонтальные шарниры располо-
жены на оси вращения винта или вблизи нсс и влиянием вторых и выс-
ших гармоник махового движения на аэродинамические характеристики
винта можно пренебречь.
Геометрический смысл условии эквивалентности пиитов заклю-
чается в том, что при выполнении этих условий положение лопастей
обоих винтов относительно вектора скорости набегающего потока и ил
У[лы установки на всех лзимуох одинаковы. Очевидно, что в этом слу-
чае у винта без горизонтальных шарниров момент тяги лопасти отно-
сительно оси вращения винта равен нулю.
Если у вертолета с винтом без горизонтальных шарниров для ба-
лансировки продольных н поперечных моментов циклическое изменение
шага винта таково, что уравнения (2.220) не удовлетворяются, то аэро-
динамические характеристики винта отличаются от характеристик винта
с горизонтальными шарнирами. Например, создавая поперечный момент
(штем бокового смешения центра тяжести вертолета в сторону лопасти,
идущей вперед (i|; = 90°), можно уменьшить углы атаки сечений лопасти
на азимуте ф-270° .и, таким образом, отдалить срыв потока у винта без
горизонтальных шарниров.
25. Общие выражения для определения составляющих
изменения шага лопасти фо. ф| и ф
В пп 23 и 24 изложен метод расчета аэродинамических характер!!
стик несущего винта с циклически изменяющимся по цервой гармонике
шагом .iciiacrcii
е—Со -ZyCOsO — V, shio. [2.223)
Выведем формулы для определения составляющих изменения шага
лопасти фо, <Pi и фц
Шаг лопастей, устанавливаемый органами управления вертОлегл -
управленцем общим шагом несущего винта и наклоном автомата пере-
коса,— представим в виде
б—V 9(sinф — 9»соьф. (2.224)
Считаем, что конструкция и принцип действия автомат перекоса
читателю изпестны (см, например, [12]).
Шаг лопасти вертолетов обычно дополнительно изменяется при ма-
ховом движении лопасти, что достигается благодаря особому располо-
жению рычагов поворота лопасти н горизонтальных шарниров. Втулки
несущих винтов такой конструкции называются втулками с «компенса-
тором взмаха». Рассмотрим несколько схем втулок с компенсатором
взмаха карданную и бескарданную, отличающиеся управлением пово-
рота лопасти вокруг осевого шарнира, а также втулки со смещенным и
с повернутым горизонтальным шарниром (рис. 2.47).
125
126
В первой схеме (а) рычаг попорота лопасти не участвует в движе-
нии лопасти относительно вертикального шарнира, а в остальных
участвует. В третьей схеме (я) горизонтальный шарнир расположен так,
чтобы на режимах горизонтального полета ось лопасти были близка
к перпендикуляру к оси горизонтального шарнира и проходили посе-
редине между его подшипниками.
В этих схемах зависимость между углом установки и углом взмаха
лопасти осуществляется путем смещения шаровой опоры рычага лопа-
сти А с оси горизонтальною шарнира (ит^О). В четвертой схеме втуд
ии (г) зависимость между шагом и углом пзмаха достигается цз-зп
поворота оси горизонтального шарнира.
На всех схемах лопасть показана в отклоненном вокруг вертикаль-
ного шарнира положении на угол Со-£ср. Угол взмаха лопасти р нахо-
дится в плоскости, перпендикулярной плоскости вращения и прохотящей
через ось лопасти. Так как угол с» мал, то в первых трех схемах угол
поворота вокруг горизонтального шарнира будем считать равным углу
взмаха лопасти- Ргш— —1—— Р, а в четвертой схеме
cosc0
Вывод формул сделаем в такой последовательности. Сначала опре-
делим, как изменилен бы шаг лопасти, если бы осевой шарнир был
заклиненным и шаровая опора рычага поворота лопасти А отсоединена
от тяги автомата перекоса. Это изменение шага лопасти, происходящее
без поворота лопасти в осевом шарнире, называют «кинематическим
изменением шага» Обозначим его Афкин.
Затем определим, на какую величину поворачивается лопасть в осе-
вом шарнире из-за того, что точка /1 соединена тягой с автоматом пере
коса и не может перемешаться при маховом движении. Это изменение
шага обозначим Дфош. Общее изменение шага A<p,; равно сумме
^фк,|П II Аф0.Ш-
Дв|, Д-?клк । У-5 а
(2.226)
Кинематическое изменение шага лопасти при маховом движении
происходит из-за того, что ось лопасти не перпендикулярна к оси гори-
зонтального итарйира. Его происхождение ясно из рис. 2.48. Точка В,
принадлежащая передней кромке лопасти, при взмахе лопасти переме-
щается относительно плоскости вращения иа большую величину, чем
точка В', принадлежащая задней кромке. Следовательно, лопасть из-
меняет угол относительно плоскости вращения:
i? b Sin fq gr,m
(2.227)
Происхождение Дфкии иллюстрируется также чертежом, показанным
1Н| рис. 2 49
Очевидно, что когда горизонтальный шарнир поворачивается вместо
с лопастью при маховом движении лопасти относительно вертикального
шарнира (втулки вертолетов Сикорского, рис, 2.50), кинематическое из-
менение шага отсутствует. Оно также практически отсутствует в схеме,
показанной на рис, 2.47.Д (втулки вертолетов Миля), так как иа ре-
жимах горизонтального полета
(2. 228)
127
В схеме втулки с повернутым горизонтальным шарниром (схема г
иа рис. 2.47, такая схема без вертикального шарнира применяется
иногда для хвостовых винтов одновинтовых вертолетов)
Аг»,-- Лв(“,- г0). (2.229)
Теперь найдем А<рпш. Если бы точка Л на рис. 2.47 не была связана
ппой с автоматом перекоса, то при нзмахе лопасти она переместилась
бы относительно плоскости вращения на величину Дх = пр для карданной
втулки и Д’? — [я+ (/в.ы—п)с; —/-1C3JP?дСс]р для бескарданной втул-
Рис 2.49. Кинематические тис-
нение тага лопасти
Рис. 2.50. Схема втул-
ки нертолстос Сикор
ки. Так как точка А такое перемещение иметь не может, то лопасть при
взмахе поворачивается вокруг осевого шарнира на величину
ат. ш = - 4" =4; ?--*” Р Р- 23°>
для карданной втулки я
- г1,)?--(Ч»|- г„)Ь (2.231)
для бескардаяной втулки.
У втулки со сметенным горизонтальным шарниром
Д?О.Ш - -1tg з, -Чс0 -ги,1] ? « - 1g ’А (2. 232')
У' втулки с повернутым шарниром Афа.щ=0.
Таким образом, суммарное изменение шага лопасти при ее маковом
движении равно:
— для карданной втулки
A?, = A=.„H-AT..u=(-t8«i + l?r»ls~-l'S’i-cn) ?: (2.233)
— дтя бескарданной втулка и в гулки :о смещенным шарниром
4ft- (2.234)
_для втедки с повернутым шарниром*
----tg (°1 - сп) ?=• - (.tg =, -Со)?- (2- 235)
Зависимость шага от угла р в общем виде выражается формулой
Д^=-^. (2.236)
где £ —коэффициент компенсатора взмаха.
Величина k. определяется из выражений (2 233)- (2.2351.
Выведенные нами выражения для /г не учитывают дополнительных
изменении угла установки, выданных, например, наклоном 1яг автом.ч-
га перекоса, я др. Поэтому величина k должна быть подкорректирована
В П. 16 ДЛЯ ПрОсГОТЫ ПРИНЯТО Си-0, Дфк-filgOl,
12S
замерами на изготовленной втулке или ее модели. Она определяется
как частная производная А= при среднем шаге лопасти и угле
отклонения лопасти относительно вертикального шарнира, рапном Со.
Для дальнейших выкладок величину Л удобно Представить в пиле
тангенса некоторого угла S:
Л—tg5.
(2.237)
Шаг лопасти ранен сумме углов 6, устанавливаемого органами
управления, н Лфи-
= (i0 — 8( sin ф—62 cos ф — Л?.
(2.238)
Подставив в уравнение (2.238)
первой гармоники, получим
выражение для р с точностью до
<f —(fl3 _^a0)_(Dl — Z^Jsin^ —
— (йг —ftajcosip. (2.239)
Сравнивая его с выраже-
нием (2,223), найдем:
?е^60--Лла.
— в2 — Аа,, (2.2401
6| — ЬЬХ.
учет on
чпщгы Срч/нч: м clwam
улдугор крутка va
"де/рорчисо -
банная
лопасть
НеЗбСРОр^а-
роВг.чная
Рис 2.51. Шаг пинга я крутка лопасти
с учетом средней аа оборот упругой крутки
Напомним, что при расчетах по теории Глауэрта—Локка шзг ло-
пасти отсчитывается от угла нулевой подъемной силы профиля:
?лл.вр- «o = 0q ——
(2.2409
У винта с компенсатором взмаха теорией эквивалентного винта не
учитывается изменение шага лопасти по гармоникам, выше первой, по-
лучающееся из-за высших гармоник махового движения лопасти. Учет
высших гармоник изменения шага может быть сделан по специально
выведенным формулам.
Это же относится к средней по попасти упругой крутке по высшим
гармоникам, а также к высшим гармоникам изменения шага из-за упру-
гости автомата перекоса. Среднюю по лопасти упругую крутку по первой
гармонике vlcp и м1ср следует ввести в выражения для ф, и tpi. Среднюю
за оборот крутку v0 нужно разделить на среднюю по лопасти крутку vUcp
и на переменную по радиусу лопасти крутку vo—vqcp; первая вводится
в выражение для фл, а вторая добавляется к геометрической крутке ло-
пасти Аф (рис. 2.51).
Осреднение упругой крутки лопасти (она может быть найдена из
летных испытаний илн по расчету; оценку величины крутки можно сде-
9 1002 129
лать по величине шарнирного момента лопасти) производится по фор-
мулам:
I vtjr^dr L
%,— А-------------- 3 Vt>rldr~\=l>7 •
)' far $
V. =3 f v,r2iir v,_
'cp $ 1 V-0.7
С учетом упругой крутки лопасти выражения (2,240) принима-
ют вид:
?о — °а~ ^o + votp; (2- %4'2)
7t_0, — fe<2j+vlc ; (2.243)
^ = 3,-^-] v,cp. (2.244)
Воспользовавшись выражениями (2,161) и (2.162), получим
e—6s—.ka, -|- fee. 4- V, • V, — 6,— kb, — fec.-pV, .
Разрешая Эту систему относительно cpi и <р, найдем:
26. Определение коэффициентов махового движения винта
с компенсатором взмаха
После подстановки выражении (2.245), (2.246) в выражения
(2 161), (2.162) получим формулы для коэффнциеН|Ов махового Сни-
жения а, н bi'.
*2
Av,<
1 I й2
12.247)
b. —ka.. л. I л». vir0 1 *vi
ь+ ь । ,---2-----
1 -I 1 4- Ы т 1 +
Первые слагаемые правой части выражений (2,247) и (2.248) опре-
деляют коэффициенты махового движения несущего винта, имеющего
компенсатор взмаха, при неотклопепном автомате перекоса (52=Э1 —0
и без учета упругой крутки Для упрощения формул обозначим их
a, -t-ltir
--------г2; (2.249)
(2,248)
(2.250)
130
Наличие в кинематической схеме втулки компенсатора взмаха силь-
но влияет на коэффициенты махового движения несущего винта. Прн
увеличении k наклон оси конуса несущего винта в сторону лопасти,
идущей вперед (ф=9(Р), by уменьшается. При k--^- имеем 51 = 0.
«I,
а при дальнейшем увеличении k Cj становится отрицательным, т. е. ось
конуса наклоняется в сторону лопасти, «идущей попятно» (ф = 270°).
Наклон оси конуса несущего винта назад а, при увеличении А изме-
няется по-разному. При малой величине коэффициента компенсатора
взмаха —*1 ось конуса несущего винта наклонена еще в сторону
\ а1э/
лопасти, идущей вперед, и угол установки лопасти па азимуте ф=90°
увеличился (Дгрк=—fe0), а на азимуте ф = 270° уменьшился. Поэтому
коэффициент а, увеличивается. При fe = 9- 5; = 0 и угол установки на
%
азимутах ф—90° и ф‘==27СГ не изменяется. Поэтому а,=ау • При даль-
нейшем увеличении k угол становится отрицательным и угол установ-
ки на азимуте ф = 90° уменьшается, а на азимуте i|?=-270° увеличивается.
Поэтому коэффициент а< уменьшается.
У вертолетов одновинтовой схемы у хвостового винта нет автомата
перекоса, следовательно, маховое движение лопастей определяется ве-
личинами aQ, a,, Si (упругая крутка у хвостовых винтов мала).
Максимальный угол взмаха лопасти в этом случае равен
(2.251)
Выражения (2, 249) — (2. 231) показывают, что компенсатор взмаха
уменьшает величину переменной части махокого движения Др* ц изме-
няет азимут, на котором угол взмаха имеет экстремальную величину
6, т т
~ первое, и второе может 'иметь значение для вертолета
одновинтовой схемы: первое уменьшает переменные нагрузки на лопа-
сти хвостового винта, а второе — изменяет зазор между лопастями хво-
стового винта и хвостовой балкой.
У вертолетов поперечной схемы зазор между лопастями и фюзеля-
жем оцределяе|Ся в основном величиной Ь\. Целесообразно кинемати-
ческую схему автомата перекоса выбрать так, чтобы отклонение автома-
та перекоса нс влияло на величину (обычно автоматом пере-
коса осуществляется только управление вертолетом по курсу, т- е. из-
менение Oj), Следовательно, у вертолетов поперечной схемы без учета
упругости автомата перекоса и лопастей &i = 5t и тгри выборе величины
компенсатора взмаха нужно учитывать, ига в зависимости от направ-
ления Вращения винтов величина 5; должнах>Ь|Ть большей или меньшей.
У вертолетов соосной схемы зазор между лопастями верхнего и ниж-
него винтов зависит от величины Ь\ (из-за взаимовлияния винтов усло-
вия работы верхнего и нижнего винтов нс одинаковы, поэтому на зазор
также влияет разность коэффициентов tzj винтов). Как видно из рис.2.52
зазор
* Р. А, Михеев определил, -по Др уменьшается немного меньше, чем
о / 14-й2 раз, так как хвощовые винты с k — О и k^O должны рассма[ринаться прн
одинаковом угле атаки, и а0 вннта с меньше, чем а0 винта с А—0, из за этого
при разной тяге у первого д1а больше, чем у второго.
131
Очевидно, что для увеличения зазора нужно выбирать величину
коэффициента компенсатора взмаха так, чтобы 5[ ~51нимВ —0.
Рне, 2.52. К определению зазо-
ра между винтами у нертолетон
соосной схемы
Величина у вертолетов одно-
винтовой и продольной схем и величи-
на д, у вертолетов всех схем опреде-
ляются балансировкой вертолета. Лет-
чик, отклоняя ручку управления и воз-
действуя на Д| и Ь. устанавлн-
* УЦР У&Р
вает такие fl[r bt, h и s, чтобы верто-
лет находился в равновесии. Однако
при требуемом значении ut или bt ве-
личины а1упр и й1упр зависят or и
S), следовательно, компенсатор взма-
ха влияет на отклонение органон
управления вертолетом в полете,
т. е. па его «балансировочные кри-
вые».
27. Определение составляющих изменения шага лопасти q?j
в <р t при отклонении автомата перекоса
Вторые слагаемые правой части выражений (2.245) и (2.246) опре-
деляют приращения составляющих циклического изменения шага, а так-
же коэффициентов махового движения несущего винта с компенсатором
взмаха при отклонении автомата перекоса. Они представляют собой
изменение положения конуса лопастей и направления сил и моментов
относительно вала винта при отклонении органов управления вертолета
Обозначим их oi и о, или а< и &,
увр Т1УПР >°Р Уп₽
== — 9, 4- до,
t, — — а, —--------------——
Т1У'Ф У11? ] 4 £2
(2.252)
(2.253)
Установим связь между углами наклона автомата перекоса и вели-
чиной углов 81 и 8 s-
На рис. 2.53 изображена схема втулки и автомата перекоса при
виде сверху по валу несущего винта. Расположение горизонтальных шар-
ниров не показано, так как оно не повлияет на паши выводы (от него
зависит лишь выражение >1Я Л). Отрезки АА' --проекция наклоненных
тяг автомата перекоса; точка А — сочленение тяги с рычагом поворота
лопасти, точка А'—сочленение тяги с автоматом перекоса.
Лопасти несущего винта показаны в положениях, в которых
Дф>лтр= 02(ф= 180’) н А<руЬр=01 (ф = 270°), при этом втулка и автомат пе-
рекоса оказались повернутыми к Продольной оси вертолета соответст-
венно на углы фят—181/ [-Со и фг,т=27(Г-(-со,
Углы поворота автомата перекоса будем обозначать буквами у. и rj,
причем х — поворот, вызывающий отклонение конуса лопа’стей и основ-
ном в продольной плоскости вертолета, a и —в поперечной плоскости.
Пусть автомат перекоса отклонится на угол х относительно оси 00'.
проходящей под углом Дфувр к поперечной плоскости вертолета.
132
Считая, что вертикальные перемещения точек
(5Л-5Л>), найдем:
9s 1 = —х -slit (а1Х — Д^>ЯР— c0)^D2x;
Я и Д'
равны
»Г> = -«у-п «К (>„ - Л*,., -««)= -£>>’
(2.254)
Аналогичные выражения получаются при отклонении автомата пе-
рекоса относительно оси 00" на угол г)
(2,255)
0tnl —sin(c|t — £4упр — cu)=D;TV
Определим приращения коэффициентов махового движения несу-
щего винта при отклонении автомата перекоса па углы и и q, подставив
найденные соотношения в выражения (2.252) и (2.253).
(z) COS (а,; — Afrytip—Ср) + А81П(ац — Afrynp— Ср) __
1 УПр 1Л 1-1-«2
_ z COS Р, cos (0]1 _ Дбупр - с0 - 3); (2.256)
u'y’p= (2.257)
&\np=x ^-cosSsin^i,— фупр-С|)-В); (2.258)
* ?₽ = л ^7 COi й cos 1Л l - Дфувр - - '") (2- Ж9)
Обычно углы выбираются так-, что со$(<эи — д^пр —cQ—8)>
sin (5|Г — ДфуПр — с0— ?>), поэтому отклонение автомата перекоса на угол х
133
вызывает, главным образом, изменение коэффициента aj. а отклонение
ла угол ц- bi. Величина произведения cos6cos(o-|j—Дфуттр—Со -6),
зависящая от кинематической схемы втулки, является соотношением
между продольным наклоном оси конуса несущего винта и утлом х. Его
обозначают D(:
D' = тг 8 1 ~ ~ г" ~ 8)' Р-260)
Произведение ^-cos osin(3|1 — дф,,пР—с0 — S) характеризует наклон
оси конуса несущего винта в боковом направлении. Его обозначают D2:
D, cos г,-8). (2. 261)
Величина коэффициентов D, и Dz может быть уточнена замерами
на изготовленной втулке или на ее модели. Для этого лопасти уста-
навливают в азимутальное положение, показанное на рис. 2. 53, и по-
ворачивают их относительно горизонтального шарнира на угол р = рср =
= а0- Отклонив автомат перекоса на угол х, замеряют приращения углов
установки, т. е. углы 62 и 9,.
Величины О,, О2, D, и D2 находятся из выражений:
!У _ _ 1_ 63 + й91
2 " J +кг х I -f-*2 '
Величина k также находится по замерам (см. п. 25).
Таким образом
<2-262>
+ (2.263)
Конструкторы вертолетов часто осуществляют кинематику автома-
та перекоса, при которой D2=0. Это делается для того, чтобы при
продольном отклонении ручки управления, вызывающем наклон автома-
та перекоса на угол х, изменялся только коэффициент я,, т. е , чтобы
равнодействующая аэродинамических сил отклонялась строго в про-
дольной плоскости вертолета. При этом возникает момент относительно
центра тяжести вертолета, действующий также в продольной плоскости
вертолета. Однако движение вертолетов настолько взаимосвязано по
всем направлениям, что строго придерживаться условия совпадения на-
правлений дейстиия момента и отклонения ручки управления нет
смысла.
У вертолетов поперечной и соосной схем, У которых цредьявляются
специальные требования к величине коэффициент D2 должен быть
равным нулю, чтобы th нс изменялся при продольном отклонении авто-
мата перекоса вперед или назад.
134
Из выражения (2.261) видно, что _О2=0т когда
А^яР = ’ц - В-
(2.264)
Если в кинематической схеме втулки и автомата перекоса crjj—Со—
—йт^О, то плоскость наклона оси конуса не совпадает с плоскостью
наклона автомата перекоса, она опережает плоскость наклона автомата
перекоса на угол
(2.2651
Объясним происхождение угла опережения, положив для простоты,
что коэффициент компенсатора взмаха равен нулю (6 = 0). В этом слу-
чае циклическое изменение угла установки происходит только из-за на-
клона автомата перекоса.
На рис. 2 54 изображена
лопасть в положении, в кото-
ром ее угол установки имеет
максимальное значение, так
как точка /Г тяги, соединяю-
щей рычаг поворота лопасти
с автоматом перекоса, нахо-
дится в плоскости наклона
автомата перекоса. Плоскость
наклона оси конуса перпенди-
кулярна такому положению
лопасти. Из ряс. 2.54 видно,
что £=<тц—Со. Угол ± отли-
чается от нуля, потому что ме-
ханизм изменения шага кон-
Рис. 2.34. Положение лопасти в момент мак-
симальнгио изменения шага (втулка без ком.
пенсатора взмаха)
структивно выполнен так, что
для максимального 'изменения
шага лопасти на некотором
азимуте if автомат перекоса
должен бЫ|Ь отклонен на ази-
муте, отличающемся на угол 9СГ—<тц+<ч. Если оцт^со, то плоскость на-
клона автомата перекоса нс совпадает с плоскостью наклона оси конуса.
Когда б^ъО, циклическое изменение угла установки происходит
не только непосредственно из-за отклонения автомата перекоса, но
и из-за того, что вызванное отклонением автомата перекоса изменение
махового движения в свою очередь также изменяет угол установки
лопасти. При этом азимут максимального суммарного изменения угла
установки отстает на угол 6 = агс tg& от азимута максимального измене-
ния угла установки непосредственно из-за наклона автомата перекоса.
Поэтому при 6^=0 усол опережения определяется по выражению
(2 265).
Для того чтобы плоскость наклона оси конуса совладала с продоль-
ной или с поперечной плоскостью вертолета (так называемое «независи-
мое» управление), оси наклона автомата перекоса 00' и 00" должны
быть повернуты к продольной и поперечной плоскостям вертолета на
УГОЛ Афуттр — £.
Из выражения (2.260) следует, что при «независимом» управлении
коэффициент
д1 _^Дс0ЧЙ,
(2.266)
135
Если у втулки при Са = О тяга автомата перекоса вертикальна, то
1 case,,'
(2,267)
(2,268)
28. Последовательность аэродинамического расчета винта
с переменным по азимуту шагом
Итак, выражения для составляющих циклического изменения шага
записываются в виде
ё,; (2.269)
?1 = "'ср=-
(2.270)
В дальнейшем для
Рис. 2 55. разложение-
я1упр и ь'упр на скором-
ные оск при полете верто-
лета со скольжением
краткости последние слагаемые выражений
(2.269), (2.270) опустим.
Теперь получим выражения для опре-
деления коэффициентов h и
Л = й, — /uj — fta -[- tkb2 1 (Dp — D2h) —
-ЛМ+Чу. t2.271)
s — s, -tka-— t(Dp\-\-D2*)—-
=s. tka,-' tb . (2.27'2)
!jnp
Коэффициенты махового движения
винта:
а, = а^ ; Dp — D2t\- (2.273)
(2.274)
При полете вертолета co скольжением
выражения (2,269) — (2,274) должны быть
подправлены. Так, например (рис. 2.55):
—(£>1z-£>2H)cosB:k—(О,п-| Z>2x)stneCK; (2.27,,)
bx —7, —(Din + О2*) cos ₽clt + (£>!« — -ЗД sin РеК’ (2.276)
так как наклон оси конуса и аэродинамической силы, создаваемый от-
клонением автомата перекоса, определяется в осях, связанных с вер-
толетом, независимо от направления вектора скорости. Углы ах, щ, 5i
так же, как и силы Н и 5,— это углы и силы в осях, связанных с направ-
лением вектора скорости.
Если представить йэ и $э через составляющие, расположенные
в плоскости концов лопастей [выражения (2,207) и (2.208)], то получим
Л — -Ha, = Л(к) 4-га, -[-* (£\* - (2, 277)
s=5(K)+^|—S(K>+^|-Н (Oyn I Р2«). (2.278)
136
Выражения (2.269) и (2. 270) показывают, что у пинта с компенса-
тором взмаха <pi и tpi зависят не только от углов отклонения автомата
перекоса, но и от коэффициентов махового движения эквивалентного
винта. Это значительно усложняет расчет пинта с компенсатором взма-
ха, так как для определения исходных данных для расчета эквивалент-
ного винта Хэ, <р, р нужно знать коэффициенты а,э, 4»1з, ао, Однако,
когда заданы любые пять величин, характеризчющие режим работы
винта с переменным но азимуту шагом, всегда можно выбрать последо-
вательность расчета (иногда предварительно задаваясь несколькими
значениями или гр и строя вспомогательные графики), при которой
будут найдены все коэффициенты сил, моментов и махового движения
винта.
Рассмотрим одни пример. При заданных I (тяга несущего винта
приближенно равна весу вертолета), р, 0о, v., т| порядок аэродинамиче-
ского расчета винта может быть следующим. Задаваясь различными
значениями К, по выражению, полученному из формул (2.157)*
и (2 242)
найдем (jo, а затем по выражению (2.50) —t3 — i.
Найдя подбором или графически те значения 7., и <fo, при которых t
равно заданному значению, по формулам (2 40) найдем а6, aia и Ь1з
Затсм_по формулам (2.240), (2.230), (2.269) и (2.270) определима), 5,.
<р, и ф). Теперь есть все данные для расчета характеристик эквивалент-
ного винта н их пересчета в оси винга с переменным по азимуту шагом.
Для определения h, s л тк можно также воспользоваться формулами,
выведенными в п. 24, найдя в последовательности, описанной выше,
Ф’(к), Фим и по формулам (2.222).
Аэродинамический расчет и расчет балансировки вертолета выпол-
няются в такой последовательности
Как показано в п, 23 настоящего параграфа, аэродинамические ха-
рактеристики винта в скоростной системе координат — т») при
постоянных значениях ц и Мо — не зависят от ф, и ф(, поэтому аэроди-
намический расчет может выполняться по характеристикам винта с по-
стоянным шагом: й= =/(г„ тв ) для этих же значений ц (ji=F) и Ми.
В результате аэродинамического расчета находим коэффициенты tX3
и tvt', при любой величине <pi и ф; на данном режиме полета харак-
теристики эквивалентного винта не изменятся и будут соответствовать
найденным ц, и Таким образом, в результате аэродинами-
* Напомнил, что в формулы пп. 3—24 входит ср3
стогн опущен,
Индекс «0» у <р там .для про-
137
ческого расчета находятся псе характеристики эквивалентного нинта.
Затем вычисляются %=фа-|-йаа> аТ1 и по выражениям (2. 271), (2.272)
или (2 277), (2.278) составляющие Л и s, нс зависящие от
и б, .Из условия балансировки вертолета, т. е. из условия равенства
нулю продольного и поперечного моментов, находятся Qiynp и Ь1л,р
после чего вычисляются х, гр fli, bi, h и s.
§ 3. ИМПУЛЬСНАЯ ТЕОРИЯ НЕСУЩЕГО ВИНТА
В импульсной теории несущего винта аэродинамические силы
и мощность, потребляемая несущим винтом, находятся п результате
применения общих теорем механики к потоку, обтекающему
несущий винт.
Эта теория используется при приближенных расчетах, в которых
индуктивная и профильная мощности винта определяются с применени-
ем упрощающих предполо-
жений, либо по щранее вы-
численным графикам. При
этом отпадает необходимость
в определении в каждом сече-
нии лопает» углов атаки и эле-
ментарных аэродинамических
сил, чем объясняется простота
расчетных формул.
В импульсной теории опре-
деляются составляющие аэро-
динамических сил нинта, на-
правленные по скорости по-
лета (сила сопротивления) и
нормально к ней (подъемная
сила), что делает эту теорию
удобной для использования
при аэродинамическом расчете
вертолета,
нинта воздухом
1. Теория идеального несущего
пинта вертолета
При создании подъемной
силы и силы сопротивления
(или пропульсивной силы) не-
сущий винт отбрасывает вниз
н вперед (или назад) некото-
рую массу воздуха.
Глауэрт предположил, что
несущий винг воздействует на
массу воздуха, притекающую
через площадь круга, расположенного нормально к набегающему на не-
сущий винт потоку. Диаметр круга равен диаметру несущего вннта
(рис, 2. 56). Это предположение сделано на оснопанин тою, что и у про-
пеллера и у крыла с равномерным распределением индуктивных скоро-
стей выбираются такие же границы потока. Для пропеллера это оче-
видно, так как граница потока определяется площадью, ометаемой
лопастями; для крыла возможность выбора такой границы потока
обосновывается вихревой теорией. Разработанные в последнее время
вихревые теории несущего винта с достаточной точностью подтверж-
дая
лают правильность принятой Глауэртом гипотезы о массе воздуха, уча-
ствующей в создании аэродинамических сил несущего винта.
В теории идеального несущего винта [21] предполагается, что воздух
протекает с одинаковой по всей площади круга скоростью: струя воз-
духа не смешивается с окружающим воздухом, следовательно, предпо-
лагается, что воздух — невязкая жидкость. Кроме того, предполагается,
что профильные потерн мощности и закручивание струи отсутствуют.
Модель потока воздуха и составляющие его скоростей в трех сече-
ниях — далеко перед винтом (сечение 0—0), по оси винта (сечение/—1)
и далеко за вингом (сечение 2—2)— показаны па рис. 2. 56. Индуктивная
скорость, соответствующая подъемной силе несущего винта У, обозна-
чена вектором 'ju. а индуктивная скорость, соответствующая силе сопро-
тивления несущего винта А,—вектором пх (^1|К, ох|]Х), скорость не-
возмущенного потока — V. Все векторы показаны направленными поло-
жительно, индексы соответствуют номеру сечения.
Ия теоремы о количестве движения следуют соотношения:
X^m(V — V2)—j
где m — секундная масса воздуха, протекающего через сечения 0—0,
1—1 цли 2—2.
Изменение кинетической энергии секундной массы воздуха
E-E2-E^^m(Vi tf-V’). (3.2)
Приравнивая выражение (3.2) к выражению энергии, сообщенной
винтом воздуху в единицу времени —
+ —'«.чИ, (3.3)
получим
V'o _ гф, — VZ2=2(^!tiJ1 — ^Л''+‘»х,Фх1).
Проделал преобразования, приведем это выражение к виду
откуда видно, что в рассматриваемом потоке выполняются условия
vn,—тр (3-4)
I!
= (3.5)
Эти соотношении показывают, что индуктивные скорости в плос-
кости винта вдвое меньше индуктивных скоростей далеко за винтом.
Мощность, подводимая к идеальному несущему винту, расходуется
только на создание кинетической ЭЕтергии потока, следовательно, она
равна ей. Воспользуемся выражением (3.3):
75JV-— Гт>ь -X (V - vx,\ (3.6)
Секундная масса воздуха т равна произведению массовой плот-
ности да секундный объем воздуха:
m—ffV', (3.7)
где V’ — равнодейсгвуюшая скоростей V, vv и ия •
0.6)
139
Для учета так называемых концевых потерь несущего винта приме-
няется следующий прием. При расчете сил и индуктивных скоростей
вводится масса воздуха, протекающая через эффективную площадь
— меньшую, чем площадь; сметаемая лопастями. Обычно для
режимов поступательного полета принимается В2=0,94-~0,96 [эффек-
тивный радиус пинта /?»— BR— (0,97—0,98)/?]. Мощность вычисляется по
массе воздуха, протекающей через фактическую площадь. Поэтому на
основании выражений (3.1). (3.4)—(3.8) с учетом концевых потерь
получим;
r= 2/FCFct,, ]/r(V'-?f,)S-’^,: (3,9)
X=2B7qFvx, K(v/-^,)2+ (3.10)
(3.ii)
Перейдем к безразмерным величинам — коэффициентам сил, момен-
та (мощности) и скорости:
Cy=4B:!v;,V'=4B2vv У (У-v^-i-v;; (3. 12)
Cx = 4B2vxV‘ = 4B2vxyr(V — ^1"+^; (3.13)
—-Ь- [Сгту — Cx (V— ¥x)]. (3.14)
Рис. 2.57. Разложение равнодейст-
вующей аэродинамических сил несу-
щего винтя ira скоростные и связан-
ные оса
В этих выражениях мы опустили индексы, так как в дальнейшем
будем рассматривать скорости только в сечении 1—1 н для простоты не
будем отмечать их индексом.
Выражения (3.12) — (3.14) описывают общий случай, когда какая-
либо аэродинамическая систе-
ма создает подъемную силу,
силу сопротивления (или про-
пульсивную силу) и потреб-
ляет или отдает мощность.
Поэтому они справедливы так-
же для пропеллера и для
крыла. Для пропеллера в вы-
ражения (3.12) — (3.14) нуж-
но подставить Су = с»6, = 0, а для
крыла, которое пе вносит мощ-
ность двигателя в поток, mK = G
(для крыла обычно принимают
vy<V).
В теории несущего винта
обычно используются вели-
чины в связанных с- винтом
координатах Ст, Сп, р, X и др.
. . . . несущего винта, получим соотно-
шения между коэффициентами сил и скоростей в разных системах коор-
динат (рис, 2.57 и 2.58):
C‘r = Cj.cosa-i (7xsina;
z't — Vy cos asin a;
CH=Cxcos a — Cystiia:
угол атаки
(3. 15)
13.16)
(3-17)
14G
Фй=г1хсоза —TiySlna; (3.18)
V72_(Vcosa — Sinn — ^)1=ц2_|_).г; (3,19)
P — V cosa - -d4; (3.20)
X=lZsina — vr (3.21)
Подставляя в формулы (3.15) и (3.17) выражения (3.12) и (3.13),
получим формулы для коэффициентов Ст и Сн:
Сг —4tf^,VV+P; (3.22)
С„ = 4В^д]/>+^; (3.23)
"‘=^(сл+с«г‘~с->г)^{сгг41+(Ж1’ с*т'): (3'24)
/як —~'п^"(^А (3.25)
Перейдем к рассмотрению скоростного многоугольника несущего
винта и выведем ряд дополнительных зависимостей, облегчающих ра-
счет характеристик несущего винта.
Рис. 2.58 Скоростной многоугольник несуще) г> чннта
Скоростной и силовой многоугольники показаны на рис. 2.58 и 2, 59.
На последнем в дополнение к рис. 2.58 показан вектор равнодействую-
щей индуктивных скоростей
и г-„
и отмечены углы и б:
t—угол между скоростью непозмутенного потока (скоростью по-
лета) и равнодействующей скоростей в районе несущею вин-
та, £>0 при Сг>0;
6 — угол между нормалью к скорости невозмутенного потока
и равнодействующей аэродинамических сил несущего винта.
Так как С% [[ и, то угол между векторами xi? и и также равен 8.
Углы £ и б и скорость полета V полностью определяют скоростной
многоугольник, Чтобы определить скоростной многоугольник через
141
векторы в связанной системе координат, необходимо знать еще одну ве-
личину, например, угол атаки несущего винта а.
Выпишем основные соотношения между силами и скоростями в ско-
ростном многоугольнике:
(3. 26)
(3.27}
(3. 28)
(3. 29)
(3.30)
Рис. 2. 59. Скоростной ыногоугогышк- несущего винта
Используя эти соотношения, формулы (3. 12) — (3 14) можно запи-
сать в другом виде:
C7=4B‘v,V'^4BV-- «М°а% : (3.31)
COS-!(C—t) '
Сх — Crtgo; (3.32)
“к--jr '.Cri3-Cx [V~
х(тЛ-------с,»)—v>t3(C—а). (3.33)
( I-— vx Су/ £Р n-V
Выражения (3.31) — (3.33) интересны тем, что в них две независи-
мые переменные Сид связывают коэффициенты CY, Сх и «1» при лю-
бом значении V, что является следствием подобия скоростных много-
Cjz Сх
угольников на режимах, на которых равны отношения -,3-,
142
шффес
143
Задавшись рядом значений углов С и можно найти отношения
^2 • -Jr и построить график, связывающий их.
При Ст = 0 (£ = 0) выражения (3.31) — (3.33) не применимы, и для
построения графика используются формулы (3.13) и (3. 14), преобразо-
ванные к виду.
(3.34)
(3.35)
Такие графики (рис. 2. 60 и 2. 61) удобны для решения задач аэро-
динамического расчета.
Рис. 2.61. Взаичочявисииость коэффициентов подъемной силы, пропульсивной силы.
и крутящего момента идеального винта I —
Для определения величин, входящих и скоростной многоугольник
несущего винта, нужно знать, кроме V, утлы £ и S. Угол £ с достаточ-
ной точностью определяется по графикам (см. рис. 2.60 и 2.61), а угол
д — по Ст и Сх: 6=arctg ,
J44
При малых 1й{. (большая V, малый Су) выражения (3-31) —
(3 33) упрощаются. Действительно:
CY= 4^VK; |
СХ=С/; (3.36)
Подставляя первые два равенства в третье, получим
'-(СуУ". - CKV8)==-^----------------Lr?. (3.37)
к В2 4 r к > 4S1V £2 х
При малых углах атаки
тк=“ —(Сг17; - СЛ7)^— [CTv--CxV)^-^---------~CXV. (3.38)
к £2 \ Г X 1 ai Т Т XI 4S4l/ ff2 х '
В таком виде выражение для гни обычно используется при аэроди-
намическом расчете вертолета па режимах полета с И<;•(},]5.
Для расчета режимов полна с большим (при малой Г), которые
не охвэтыиамттся графиками, показанными на рис 2 60 и 2.61, нужно
воспользоваться уравнениями (3 12) — (3.14). Подставив в уравне-
ние (3. 13)
13.39)
и выполнив преобразования, получим
(«))--(V -v-a9- (3.10)
Это выражение позволяет построить графики аэродинамических ха-
рактеристик несущего винта Cx-/(mK) для любых выбранных значе-
ний V и Су задаваясь vx, находим С\, затем Гу и по выражению (3. 14)
лги (.знак С\ совпадает со знаком fx).
Для расчета характеристик идеального винта можно также восполь-
зоваться следующими ныражениязиг
СЛ — 4В-и V — 4В!и\ ((/ -и stti (д cosS)2 —
=4В-к|/ I/-—к). i.3.41)
Преобразуем (3.41) к виду
1 = -?"Г —-------1=/^тп8-------- " _ (3.42)
_£* Ср / Ср / Ср Л Ср | 4
4Я2 [_ 4Я2 р 4В' \ у W у 4В® /J
откуда очевидно, что может быть построен график зависимости м —
= — £=- от V— }______ и б Такой график, взятый из работы [2],
V S V «
показан на рис, 2 62. На нем пунктиром нанесены приближенные кри-
вые, по которым может быть сделан расчет на режимах пахревого
кольца пртт б = ] 60° и о=+9Оь, для них теория идеального пссутисго
випта не справедлива.
Определенно индуктивной скорости несущего винта представляет
самостоятельный интерес.
1U02
145
Когда известны углы £ м 6, отношение индуктивной скорос|И к ско-
рости полета онределяст'я ио выражениям, полученным из уравнений
(3.26) и (3.27)-
tg
c^=t>ytg2.
------; (3- 43)
— + tg з
(3. И)
Если известен угол атаки несущего винта, то но выражениям (3. 16'
и (3 18) могут быть найдены скорости vt и с.,,.
На режиме Cz = v~^-0 с,, определяется ио выражению:
~ В этих случаях для проекты
ис. 2.62. Индуктивная jMjpocrb и индуктивная скорость обозначена
в зависимости от V и 6 буквой и без индекса.
2. Вывод выражения для коэффициента крутящего момента
- реального винта
Выше были получены выражения (3.14) и (3.37) для определения
коэффициента крутящего момента идеального винта, когда несущий винт
рассматривался как активный диск, воздействующий на обтекающий ею
воздух. Эти выражения интересны тем, что тк представлен как яппая
функция от коэффициентов подъемной и пропульсивной сил Сг и
146
В тэком же виде выражение для ть может быть выведено н для реаль-
ного винта. Этот вывод принадлежит Л. С. Вильдгрубе. Полученное
выражение справедливо при неравномерном распределении индуктив-
ных скоростей по диску несущего винта н учитывает силы профильного
сопротивления лопастей.
Как известно из классической теории (§ 2 и 4), составляющие без-
размерной скорости обтекания сечений лопасти (при А-щ—О, cos [3—1)
равны:
Uх. — г+Й СОЗ И Sin ф; (3.30)
‘^-= V мп a v -- V со- a sin pcos 3 - г —. (3.51)
ш/? ' tfO
Составляющие аэродинамических ерл, расположенных в плоскости,
перпендикулярной пои лопасти, выражаются уравнениями
dt — {cyc<y-& । GpSiri (3.52)
dq - - {схр cos Ф — г у sjTt Ф) U^bdr. (3. 53)
• Подставив в уравнения (3 52) и (3.53) выражения
С/, г]
Sin Ф -.=-и cos Ф = ~ ,
(. и
получим
dt ~(ryLx I cxJJy}Uhdr, (3.54)
dq={cxpJ.-c)Uy)lJbd''r. (3.55)
Разрешив уравнение (3 54) О1носительно cj/bdr
и подставив его н уравнение (3 55;, получим
^-di^c^^-bdr- (3.56)
Элементарный ьрутящнй момент несущего винта
Откуда после подстановки dq на уравнения (3. 56) и г из уравнения
(3.50) получим
dm^CxpLFbdr — dlUy—dqV cos a sin 4. (3.5R)
Дл5[ дальнейших преобразований выражения (3.58) использ^'ем вы-
ражение (3.51) « выражения для элементарной продольной и пропуль-
сивнои сил:
dk=dqsinty- dt siTt^cosy;
dt t — dk cos a -)- d t s I n a.
(3. 59)
(3.60)
147
В результате получим:
tfmK = crj)6'sMr-F dtv-\-dtr -—- — divsin i-}-d
:=cx.U3bdr - div dtr — — di V sin a —
' di?
-dhV cos a — cxJJ3bdr -\-dtv-\-dlr —di до-
Cos a —
— sin гЛг
(3.61)
выполним интегрирование элементарных крутящих моментов по
площади несущего винта:
77zk. = dmK = ^cxpblj3drd^~ dtv [ jj d/г V'jd|j dit.
OO So 0 0 00 ° 0
(3. 62)
Уравнение маховою движения лопаете» имеет вид:
р7'г^Л.""г(5
следовательно. \dir
пропорционален
сумме
city
</"Р~
const. Поэтому
и* 21 2я 2п 2«
— coiisl = + *- ?2| — const?! —t3'63)
так как 3 и при ^=0 и у — 2л имеют одинаковое значение (такой
вывод выражения (3.63) дан В. Э. Баскиным).
Таким образом, выражение для mh может быть представлено
в виде
mk = J f Cj^lFbdrd’P -f- d^ f div - - txV.
(3. 64)
Для простаты мы вывели выражение для гщ:, исходя из выражении
(3. 50) п (3.51) для Гх и Uy. Волсе точные выражения, учитывающие со-
ставляющую ИНДУКТИВНОЙ СКОРОСТИ Vh
Ux—r _|_(V'cos о - - yft)sin<]>; (3. 65)
U..-^ V sitift — (V cos a—x’ajsin ScoS'i —F —-, (3. 66)
дают в результате анало|ичных выкладок следующее выражение
для тв:
j \difvv — dixvx)—ixV. (3.67)
148
Первый интеграл в выражении (3 67) содержит силы профильного со-
противления, а второй — индуктивного. Соответственно обозначим их:
о г.
Для идеального несущего винта, у коюрото с1П=0 и индуктивнье
скорости распределены равномерно, нз уравнения (3.67) при прибли-
женном учете концевых потерь получаем
’'Л1
или, умножив обе части равенства на коэффициент заполнения,
-Cjtl17 -oJJ. (3.68)
Выражение (3 68) совпадает с полученным в теории идеального
винта выражением (3 И).
Отмстим, что в выражении дли тк, употребляемом при расчетах
в классической теории, член, учитывающий профильное сопротивление
юпастей, не совпадает с получившимся выше, а в соответствии с выра-
жениями (3. 55) п (3. 57) равен
<„= f (
6 Q
Несовпадение этих выражений объясняется тем, что силы профячь
HOto сопротивления входят не только в выражение для — , но п в вы-
<гг
ражение для —= , следовательно, н в tx и г„ н если vMHTbtBaerca с,-, при
dr
ьаких-то фиксированных значениях учла а>аки а и шатл <р винта (т- е.
истинного утла атаки сечения — так делается при расчетах по класси-
ческой теории), то изменяются и (на величину та_), и /. р
А при расчете тк по формуле (3.67) член /тгПр определяет приращение
»i, прн условии сохранении одинакопых значений и tv, чю, очевидно,
для винтов с разными с1Р имеет место при разных а и <р
Так как больший интерес представляет сравнение винтов с разным
профильным сопротивлением лопастей при одинаковых tx и 1Ь, то опенка
профильных потерь винта производится по величине гпщ,. вычисленной
при углах атаки и шагах винтов, соответствующих одинаковой величине
коэффициентов tx и iv.
Из рассуждений, приведенных выше, ясно, что для перехода ог
идеального винта, имеющего некоторые tv и /_г, к реальному винте с та-
кими же l,j и 1Х профильные потери следует определять по выражению
ДЛЯ Щдр.
Из выражения (3.67) также следует, что влияние неравномерное,!!
распределения индуктивной скорости ,ю диску несущего винта при дан-
ных tv и tx непосредственно определяется величиной тпинд. Кроме того,
форма распределения индуктивной скорости влияет на углы атаки сече
нпй лопасти и. следовательно, на величину т^р
149
Угол взмаха лопастей из-за равенства нулю интеграла (3.63) не-
посредственно в коэффициент та не входит, Однако, маховое движение
влияет на распределение схр, dt, о по диску винта, следовательно, на ве-
личину /Пдр И /Пияд-
3. Профильные потери несущего винта
Как показано выше, при заданных значениях коэффициентов tu и fc
профильные потери несущею винта определяются по выражению
\cxfi’zb drtty.
(3. 69)
С учетом радиальной составляющей скорости обтекания лопасти
(см, рис, 2.91) профильные потерн определяются по выражению
«пг — f f l/2cos2<i со>2уУ!'2 b dr
(3.70)
Выражением (3.70) следует пользоваться при малых значениях Мо
и 1и. т. е. в случаях, когда коэффициент сгр определяется в основном си-
лами зрения. При больших М<, и lv, когда у несущего винта появляются
области срыва потока и увеличения волнового сопротивления, профиль-
ное сопротивление сечений определяется нормальной к оси лопасти со-
ставляющей скорости потока I.1 н для вычисления m-ф следует пользо-
ваться выражением (3.69).
Для расчета тцр должно быть известно распределение по диску
несущего винта коэффициента профильного сопротивления стр н ско-
рости обтекания сечепнб лопасти (7. Поэтому вычисление является
весьма трудоемкой задачей и практически может быть выполнено лишь
при использовании быстродействующих вычислительных машин.
На рис. 2. 63—2. 70 показаны графики в зависимости от коэф-
1рицив11'гов ly, lXl Г, Мо= — для винг.ч с прямоугольными лопастями
с коэффициентом .заполнения о — 0,091. Лопасти винта (П вариант
в табл. 2 10) имеют линейную t еометрическую крутку А<р = 7г'. Профиль
лопасти: в комле ди r=O,85 NACA230 с относительной толщиной
с=-12%. на конце скоростной профиль с относительной толщиной
с=9%. Коэффициент схр, полученный при продувке модели, увеличивал-
ся на Дсгр—0,002 и относится к винту, имеющему повышенное профиль-
ное сопротивление из-за худшего качества изготовления Аэродинамиче-
ские характеристики профилей приведены в § 4, п, 3.
Расчет производился пи формуле (3.69), При этом предиола;алось.
что индуктивная скорость постоянна iiO диску несущего винта и опре-
делялась по формуле (3.46).
Метод расчета и остальные допущения оппсапы в § 4, ип 2 и 4.
Из графиков видно, что при числах Мо = 0,6-:-0,7 величина силь-
но ЗАВИСИТ от /j, t! tx.
ISO
несущего
(V 0.2; M«=0.G; ff-0.091)
пиита
Рис. 2.6В. Коэффициент профильной
мощност,( нс.лшего винта (.12—0.1
Мо = 0,6; а=0,09|)
152
Рис 2.69. Коэффициент профильной мпщпо-
(1и несущего винта (V=0,3, Мь=0,7, гт
-0,091)
'53
При Мц^ОДЗ /Ппр мало зависит от 1Х и немного возрастает при увели-
чении tv.
Рис. 2.70, Коэффициент профильной мощности не-
сущего пинта (,У=С4; Ма— 0,7; 17=-0,091)
Материалы для определения /Ппр для лопастей с другими геометри
четкими характеристиками приведены ниже в пп, 4—В
4. Некоторые соображения по выбору формы и профиля лопасти
Мощность, затрачиваемая на преодоление профильных потерь несу
щего винта, составляет большую долю в суммарной потребной мот
ностц вертолета. Как показано ня рис. 3.62, на преодоление профиль-
ного сопротивления лопастей при горизонтальном полете расходуется
около 50% потребной мощности.
Так как индуктивные потери составляют меныпую долю потерь, чем
профильные, то можно считать, что выводы о влиянии геометрических
хараюерлстак лопасти на профильные потери относятся и к суммарной
мощности несущего нинта, особенно цц больших скоростях полета, где
индуктивные скорости малы, а индуктивные потери не превышают 12 —
15% от суммарной мощности
На рис. 2.71—2.74 иокаланы сравнительные графики коэффициент,)
профильною сопротивления /Ппр для эцптоп с пятью вариантами ло-
пастей’
I вариант — трапециевидная закрученная лопасть со скорой сным
профилем на конце;
11 вариант — прямоугольная .закрученная лопасть со скоростным
профилем ня конце (винт, описанный выше);
III вариант — прямоугольная закрученная лпнасть с профилем
NAC.A 23012.
[V вариант- прямоугольная закрученная лопасть с симметричным
профилем NACA 0012;
V вариант—трапециевидная плоская лопасть со скоростным про.
филсм на конце,
Подробная характеристика всех вариантов лопастей дана
и табл, 2 10
Сравнение лопицей сделаем при среднем и болпитом коэффициен-
те подъемной силы на двух значениях V — 0,2, 0,4.
154
Сравнение показывает, что при малом числе Мо-^0,5 трапецие-
видная закрученная лопасть при всех значениях пропульсивной силы
имеет приблизительно на 8% меньшие профильные потери мощности,
чем прямоугольная закрученная. Так как при горизонтальном полете
на преодоление профильного сопротивления лопастей расходуется около
’/2 потребной мощности, то уменьшение /«пр на 8% приводит к уменьше-
нию коэффициента потребной мощности /п« на 4%.
Поэтому для легких вертолетов, у которых Мо мало и Fmas«0,3,
лучшей формой лопасти в плане является трапециевидная.
Плоская лоьасть на режиме самовращения не отличаемся от закру-
ченной, цо становится значительно хуже закрученной на вертолетных
режимах, особенно на больших F. he можно применять для вертолета
юлько при малых и средних значениях и М0<0,6.
При изменении профиля лопает на малых окружных скоростях
mL(. изменяется в пределах 6—12%. Симметричный профиль немного
лучше несимметричного; на F=0,2 мспьшпе потерн имеет лопасть с тон-
ким скоростным профилем па конце,
Следует отметить, что влияние качешва изготовления профиля на
ч!ц;_ может оказаться ббльшим, чем влияние типа профиля. Дл1пр при
различных профилях составляет около 0,0002 (макпнмллщеаи разкниа
при больших tu не более 0.0004), в то время как из-за отличий в типе
конструкции и качестве изготовления лопасти коэффиииещ профильного
сопротивления сечений лопасти может огличвть.я па большую веянии-
Рис, 2 72. Коэффициент профильной мощности несущих нинтоа с лопасть-
мп разной формы (У-0,2, М0--О7, о =0,011)
Рис. 2,73, Коэффициент профильной мощности несущ.i\ кичтол
с лопастями разной формы (V' = 0,4; М» = 0,6; <г=0.Ш i
ну, доходящую до 0,003—0,004 (см. § 4, п. 8), что дает разницу в про-
фильных потерях в соответствии с выражением (3.71)
+30,3’) = 0,001.
Прн большом числе Мо (Mj—0,7; 230—238 xi/cex) приме-
нение скоростною профиля на конце лопасти резко уменьшает профиль-
ные потери.
Уменьшение /Пщз составляет 0,0016 при 7=0,2 и 0,004 при 7=0,4
Это снижает т^р на 40—45%, а суммарную потребную мощность соот-
ветственно на 20 и 25%.
На вертолетных режимах полета (/x<0i на mnv сильно влияет
геометрическая кру;ка лопасти. Плоская лопаем не применима на
вертолетных режимах, а на режиме самовращения ее профильное сопро-
iявление не отличается от сопротивления закрученной лопасти
Трапециевидная лопасть лучше прямоугольной на режимах само-
вращения и малой пропульсивной силы, На вертолетных режимах, где
углы атаки коцпезых сечений у трапециевидной лопасти больше, разни-
ца в тпр уменьшается и при больших tx прямоуюльная лопасть стано-
вится лучше.
При среднем числе Мс (Мо-0,6, 0^=197—204 м/сек) начи-
нают проявляться особенности кривых отмеченные при М0 = 0,7
(з большей мере при 7=0,4). лучшими становятся закрученные лопасти
со скоростным профилем на конце, плоская лопасть на вертолетных
режимах значительно хуже закрученной.
Сопоставление прямоугольной и трапециевидной! лопастей при Мо—-
=0,С—0,7 показывает, что на 7 = 0,4, а также на 7=0.2 при больших f-j
преимущество у первой, а при средних и малых tv на 0 = 0,2—у ipane-
циевндной В общем для тяжелых и средних вертолетов предпочтитель-
нее прямоугольная лопасть, а для винтокрылов, у которых на больших V
благодаря установке крыла и тянущего винта коэффициенты 1и и k не-
сущего винта малы, целесообразно устанавливать трапециевидные
лопасти
На Г —0,4 даже со скоростным профилем на конце лопасти профиль-
ные потери весьма велики: т~$ в два раза больше, чем при Мо = О,4—0,6.
Для оценки возможности уменьшения тар на рис. 2.75 и 2.76 показаны
графики и!пр для лопастей ] и II вариантов, а также для прямоугольной
лопасти с увеличенной геометрической круткой (VI вариант), расши-
ряющейся лопасти (г] = 0,5; VII вариант) и для прямоугольной лопает
с увеличенной до 7=0,75 частью со скоростным профилем (VIII ва-
риант). Из рис. 2.75 м 2.76 видно, что при горизонтальном полете и
особенно на режиме самовращения лучшей остается трапециевидная
лопасть. При больших шаченидх lv лучшей лопастью является лопасть
с увеличенной круткой, которая уменьшает тщ на I'—0.2 на 20% (m„rI1
на 10%), я на Г=(?,4 на 10% (ткгв ,1г 5%) Следовательно, применение
лопасти с увеличенной круткой увеличит динамический потолок верто-
лета, а также тягу на месте и статический потолок 1см. рис. 2 171),
незначительно увеличит максимальную скорость, но увеличит скорость
снижения на режиме самоврашения. Увеличение части лопасти, занятой
скоростным профилем, немного уменьшило
Препятствием для применения лопастей с. увеличенной геометриче-
ской круткой является увеличение динамических напряжений в лонже-
роне лопасти, а для лопастей с увеличенной частью со скоростным про
филем — возрастание шарнирных моментов.
Расширяющаяся лопасть становится лучше прямоугольной только
при очень больших значениях коэффициента пропульсивной зилы tx.
Сопоставление графиков тщ, при Мо=0,6 и Л% = 0 7 «оказывает, что
у винта с взятым нами скоростным профилем на конце при всех вариак-
iax лопастей избежать резкого увеличения профильных потерь при
Ми =0,7 не удается
Метод использования графиков Щщ для винтов с подобными лопа-
стями, но с другим коэффициентом заполнения описан в § 6.
5. Приближенное определение профильных потерь несущего винта
Наиболее достоверно может быть определен по графикам, под-
считанным для каждого конкретного винта. Г.сли таких расчетов нет,
то по данным рис 2.63—2.74 может быть сделлеп «оиближенная
оценка тщ.
При малых числах Мо для определения 1ПЩ, может быть использо-
вана приближенная формула (3.72), полученная в предположении о по-
стоянстве коэффициента 'Др "° исе.х сечен,гях лопастей.
Винодом формулу (3.72). Для прямоугольной лопасти 6-^o,,st =
= 1,0 Приняв
получим
лгпр = j с?ф e^^bitr — c^
где сх —среднее значение
Тайлнца 2.5
коэффициента ггр по диску несущею винта.
Для трапециевидных лопастей /ппр
меньше, чем для прямоугольных Это учи-
тывается коэффициентом Р. заданным в за-
висимости ог сужения лопасти зу (рис. 2.77)
в табл 2.5.
Для учета влияния радиальной состав-
ляющей скорости обтекания лопасти
158
Рис, 2.76. Коэффищк
вычисляется по формуле (3.70). Приближенная опенка показывает [25],
[36], что для учета этой составляющей в выражении (3.71) коэффициент
при V2 должен быть изменен с 3 на 5.
Таким образом, окончательная формула для определения
имеет вид'
<з'72>
Средний ПО диску коэффициент профильного сопротивления С1рср
определяется в зависимости от среднего пи диску коэффициента подъ-
Ось вращение Яинта
Рис 2.77. К определению сужения лопасги
емкой силы си ; последний находится по формуле (3. 74}, вмвод которой
дается ниже:
Подставив
и выполнив интегрирование, получим
г-т*«.йяЯ*^т(1+т,я)-
- = (3.731
Выразив У через безразмерный коэффициент Су или tv, найдем
Определив Cj , ио поляре профиля в сечении г—0,7 найдем ciPco.
Учет формы лопасги в плане коэффициентом Р и определение Сжиср
в зависимости от c-j, предложены Л. С. Вилыирубс.
6. Влияние сжитземпаи воздуха на профильные потери несущего винта
При средних и больших числах Мо (для применяемых обычно про-
филей прн Мс>0,55—0,6, г е пр» <,)/?> 185—200 м/сек) к'Ид,, вычислен-
ному по формуле (3 72), нужно добавить слагаемое Ллгга., учитывающее
прнращенце профильной мощности из-за увеличения коэффициентов
1С0
профильного сопротивления сечений, обтекаемых с повышенными числа-
ми М, Таким образом,
(3. 75)
Коэффициент приращения профильной мощности ДщС1В должен
быть определен с учетом действительного распределения углов атаки
сечении лопасти по диску несущего пинта, так как прирост профильного
сопротивления из-за увеличения числа Мс происходит в общем случае во
всех сечениях лопасти, На рис. 2.78 и 2.79 показаны взятые у М.Н.Ти-
щенко графики изменения коэффициента профильной мощности лопасти
и зависимости от ос азимутального положения в плоскости вращении.
Из рцс. 2.78 видно, что при небольшой скорости полета (И=0,2), но
при большом коэффици-
енте тяги при увеличении
числа Мо профильная
мощность лопастей воз-
растает на всех азимутах.
Прн больших скоростях
полета (см. рис, 2.79)
прирост профильной мощ-
ности происходит н ос-
новном на азимутах 30—
150’.
Графики Д/Псж для
винта II варианта пока-
заны на рис. 2.80—2.84.
Величина ДглГ)В опреде-
ляется как разность между коэффициентом профильной мощности
на рассматриваемом числе Мо и Мо—0,4 при одинаковых значениях
коэффициентов V, tp, tx:
Дтесж(М0) =«вр(М„}- m„t (Мо =-0,1). (3.76)
Из рис. 2. 80—2, 84 тледует, что Дл1са1 является функцией не толь-
ко Р, числа Мо, но и коэффициентов tu и tx. Коэффициенты tv и t- осо-
бенно сильно влияют при малых V, когда в соответствии с рис. 2. 78
приращение та? происходит на всех азимутах. При увеличении Г
приращение mup происходит в основном в районе tp—90° (см. рис. 2. 79),
где углы атаки сечений близки к нулю независимо от величины iv
Поэтому па К=0,4 и р'=0,5 влияние ip и 1Х на величину Дщся; незна-
чительно.
Из рис. 2. 80—2. 84 видно, что при больших Ма, F и 4 Дтм пелики.
Особенно сильно увеличивается Дгпсл при Мп>0,55—0,6. При около-
ср.ывны.х 4 на V~0,13 п V — 0,2 Д/иС;к имеет большую величину уже при
М0>0„5.
Чтобы увеличение потребной мощности вертолета из-за влияния
сжимаемости не превосходило 15—18%, винт П варианта должен приме-
няться прн М0=О,7 на F<0,3, а при №=О,65 ка К<0,4. Например, при
Мо=0,7, Р=0,3, tv-~0,15 и 4 ——0,0075 приращение профильной мощ-
ности Лт.сч;=0,СЮ1б, что составляет 18% от тИгг. При Мо~0,65, V=0,4,
4=0,13 и 4Г„ =—0,0133 приращение профильной мощности
ДстС1ц^0,002, что составляет ]6% от <nKrn-
Так как па больших V прирост /пирч происходит, н основном, на
азимутах, близких к 90°, то возрастание Д'иС;К на больших 7 непосред-
ственно связано с соотношением между числом М концевого сеченая
лопасти на ф=90г, равным 1Чсал+Мо=1№О + V), и критическим чис-
1002
161
Рис
Рис. 2.80 Приращение коэффициента профильной мощности несущего винта
in за сжимаемости воздуха
J62
Рис. 2 81. Прнращегас коэффициента профиль-
ной мощности несущего канта из-за сжимае-
мости воздуха
163
I
Рис, 2.82. Приращение коэффициента профизь-
ной мощности несущего вннтз из-за сжимаемости
воздуха
164
ой о,) 0,6 oi vB
Рис. 2.83. Прирашепае коэффициента
профильной мощности несущего винта
ил-ин сжимаемости воидсча
165
Рис 2.84.
профильпой
Приращение коэффициент?
мощности несущего винта
сжимаемости воздуха
ццецте пропульсивной силы
0.5 ________ 0.5____________________Q7 5f,
166
лом д! профиля сечения. Mhp определяется при а=0, гак как е конце
выл сечениях на ф = 90° иг--0.
Приведенные данные показывают, что увеличение потребной мощ-
ности из-за влияния сжимаемости на 15—18% имеет место, когда
пол 1 М(.=0,91, т е. Мпол-Нно на 0,1
ори а — 0 (гм рис. 2 99), Когда Мпо
гребной мощности составляет •-'-30%.
сжимаемости практически отсут-
ствует. Этими соотношениями меж-
ду Мо. Мци.т и Мкр профиля лопасги
можно пользоваться при выборе Мо
тля вертолета с большими скоро-
стями полета
больше МКр скоростного профиля
с -|-Мо*- Мкр 0,] 5, увеличение по-
Когда Мпол+Мо^Мцр, влияние
Рис. 2.88 Приращение коэффициен-
тов профильной мощности in-зи сжи-
маемости воздуха у нннтон с лопастя-
ми разной форум
В связи с тем. что при увеличении числа Мо для сохранения одина-
кового значения коэффициентов 1У и 1-с усол атаки несушето винта дол-
жен быть бсмее отрицательным, па рнс. 2. 85 и 2. 86 приведены графики
приращения угла атаки несущего винта:
Att.JMo'l _ а(М0)~ а(Мо=О,4). (3.77)
11а Г- 0,15—0,3 графики ле построены, так как при всех и tr
величина Дас-» не превосходит 1°.
На рис. 2.87 п 2.88 показаны сравнительные графики Атсж для
винтов с лопастями (Г, If], V вариантов. Расчеты показали, что на ве-
личину Дгпсж сильно влияют тип профиля (зго видно из сравнения II
п Iff вариантов) и геометрическая крутка лопасти (V вариант — плоская
лопасть). Форма лопасти в плане сказывается лишь при больших tv, где
v трапепиевидных лопастей, у которых срыв потока начинается раньше,
Д/Пс* больше, чем у прямоугольных. Форма лопасти в плаце играет
малую роль при больших из-за того, что, как будет показано в § 4
п. 7, при изменении формы в плане меняются углы атаки сечений глав-
ным образом на азимутах ij:—250—340°, где на досрывных режимах
профильные потери невелики.
Сравнение лопастей с взятым нами для расчетов скоростным про-
филем на конпе (11 вариант) и без пего (Ш вариант) покдлыпает, что
при М0>0,6—0,625 нужно устанавливать на конпе лопасти скоростной
профиль.
Графики и Даги; должны быть подсчитаны для каждого кон-
кретного винта. Однако, если таких расчетов нет, то но данным
рис. 2. 80—2. 88 может быть сделана приближенная оценка Д/псл.
167
Графики на рис. 2.80—2.88 предназначены также для учета влия-
ния числа Ма на аэродинамические характеристики несущею пинта
в случаях, когда характеристики винта, определенные экспериментально
при малых числах М©, должны быть использованы при больших числах
Мо. Кроме того, они могут быть использованы при аэродинамических
расчетах, чтобы избежать интерполяции по числу Мо, если расчетные
значения чисел Мо не совпадают с теми, для которых построены графики
аэродинамических характеристик.
Для использования графиков, показанных на рис. 2.80—2.83, для
винтов с подобными лопастями, но с другим коэффициентом заполнения,
нужно пересчитать коэффициент G на а=0,091 (§ б).
7. Индуктивные потерн реального несущего винта
В предположении о постоянной величине индуктивной скорости по
всему диску несущего винта можно найти коэффициент крутящего мо-
мента с помощью графиков, показанных ла рис. 2.60 п 2.G1. Зависи-
мость между отношениями CT/B2V2, CxiB2V2, mjV2, выведенная в тео-
рии идеального винта, остается справедливой в случае, когда эти отпо
шения определяются по полным силам Y и X, взятым с учетом профиль-
ного сопротивления, так как силы профильного сопротивления также
создают индуктивные скорости, и поэтому скоростные многоугольники и
все зависимости, рассмотренные в ц. I. остаются в силе К цанденному
таким образом тк нужно прибавить профильные потери.
Следовательно:
= ТД т.р, (3.78)
где
^Р»_Х(СКД+ СЛ.-СШ)-
Слагаемое в выражении для /йк, содержащее произведение аэроди-
намической силы на индуктивную скорость Свй. называют индуктивны-
ми потерями винта.
При расчете индуктивных потерь вводится поправка для учета не-
равномерное™ распределения индуктивных скоростей ио диску несу-
щего винта. - -Л
Как следует из выражения (3.67), индуктивные потери реального
несущего винга определяются по формуле
wHhi=.уd^f diRn — J d'j,J"—d-ф'о). (3. 79)
о V OU
Однако для расчета обычных для вертолетов режимов, кем да ty>tx.
применяется приближенное выражение
щим—(3-80)
Сначала, так же как в теории идеального пипта. определим тИ,а
с допущением о постоянной величине индуктивной скорости по всему
диску несущего винта. При этом допущении и приближенном учете кон-
цевых потерь выражение для т,шд принимает простейший вид:
Ст в
т„,, =—~ di \ div — — - tv.
BIU в., J , ' 3,
(3.81)
168
Для режимов полета с Г>0.15 после подстановки выражения
(3.48) для v получим:
4В*И
(3.82)
Покажем, что выражение (3.82) справедливо не только в предполо-
жении о постоянной величине индуктивной скорости по всему диску не-
сущего пинта, но и в случае, когда нндукгшшая скорость распределена
по закону
v (r,'j)=v-- аг cos f.
(3.83)
ije а — постоянная величина.
Согласно уравнению (3.83) индуктивная скорость имеет минималь-
ную величину в передней части диска несущего винта (ф—л, г = 1)
и увеличивается линейно в направлении скорости потока В направлении,
перпендикулярном к скорости потока, индуктивная скорость не изме-
няется. Таким образом, форма эпюры индуктивных скоростей — цилиндр,
срезанный плоскостью, повернутой к плоскости вращения вийта вокруг
осп, перпендикулярной направлению движения (см. рис. 2.6): угол по-
ворота характеризуется величиной а; ё — средняя по диску индуктивная
скорость определяется но выражению (3 4G) иди (3.48).
Эпюра индуктивных скоростей, описываемая уравнением (3.83),
бтизка по характеру к эпюре средних по времени индуктивных скоро-
стей. найденной из эксперимента (см. рпс. 2,3).
Подставим выражение (3.831 в уравнение (3.80) и найдем
21 I __ _ 1 2- 1 _
п?Я|1Д — (J dt (и-[-от cos о) =с f d'{j J dt--a f cos’}rf’i j' dtr,
v о й 6 d u
Интеграл, содержащийся в первом слагаемом, равен коэффициен-
ту тяги несущего пинта Интеграл по радиусу, содержащийся во втором
слагаемом, для винта с горизонтальными шарнирами пропорционален
сумме (см. п. 2) —const. С точностью до первых 13рмоникхма-
ла . .
хового движения сумма —|-
не зависящая от
азимутального
следопателыю, dtr
&
положения лопасти.
величина.
Поэтому
Таким образом, для распределения индуктивных скоростей по
уравнению (З.аЗ) индуктивные потери также определяются по формуле
(3.81). Расчеты, выполненные по вихревой теории для -винта с беско-
нечным числом лопастей, показывают, что из-за отличий в эпюре
индуктивных скоростей от уравнения (3.83) индуктивные потерн
винта с закрученными лопастями приблизительно на 5% больше.. При-
няв В^О.92. индуктивные потери несущего винта на режимах полета
с к>0,15 определяем по выражению
^--0,285
(3. 84)
’69
На режимах полота, с малыми V находится_ по выражению
(3 85), причем и определяется в зависимости от Ся, Г и б по графику
яа рис. 2.62:
^°’5ЙС'^. О- 85)
еде, как и в выражении (3.84), 1,05—коэффициент, учитывающий уве-
личение индуктивных потер(,.
Зависимость й от V может быть уточнена по летным испытаниям
Определив из летных испытаний для ряда скоростей горизонтального
полета потребную мощность несущего пинта и вычислив вредное согтро
тивленпе вертолета, найдем Сугп , СА-га (см. гл. 3, § 1, и. 2). Си. ниг11
П татем F и й по выражениям
1,96
т/
У 4В2
(3.86)
(3.87)
Полученный из летных испытаний вертолета Ми-1 график и = ;(Г)
показан на рис. 2.89.
Испытания проводились па разной высоте полета от виита до по-
верхности аэродрома А. При полете вблизи земли на величину т» влияет
«воздушная подушка». На графике нанесены значения и в зоне влияния
- т *
«воздушной подушин» при разной величине п-----— .
График « на рис 2 89 получен для малых скоростей горизонтально-
го полета, когда б = бгп:^О. Однако им приближенно можно воспользо-
ваться для значений б в пределах от +5® до —20°. Расчеты, сделанные
по графику и, приведенному на рис. 2.62, покапли, что вместо опре-
делении произведения uCr2 можно вычислять произведение. иСу\Су —
==(7дсо8',), определяя и для ?. = 0 и V —1,96-у- :
(3.881
Таким образом, при расчете .характеристик несущего нинта на малых
скоростях полей /аа,и определяется по выражению'
m,n,^(j,56nCy\
Выражение (3.89) может быть использовано как для расчета по
требцой для горизонтального полета мощности несущего винта на малых
скоростях полета, так и для определения пропульсивной силы несущего
винта при расчете взлетной дистанции вертолета или тягового усилия
вертолета-буксировщика. Эти расчеты существенно упрощаются от
того, что для определения коэффициента скорости Г достаточно зиять
Су, а не Сд.
График средней для системы виягок (с учетом взаимовлияния) ин-
дуктивной скорости и для вертолета продольной схемы Як-24 показан
на рис. 2. 90 Па рис. 2.90 нанесена также кривая й г, для вертолета Ми-4
иде влияния земли. Этим графиком можно приближенно пользоваться
для определения и всех вертолетов одновинтовой схемы и вертолетов
170
продольной i хемы с превышением винтов ук (см. рис 3.8), близким
к Ук=0,057, как у Як-24.
Ориентируясь на эти кривые, можно найти и для вертолетов про-
дольной схемы с другими у, а также для вертолетов поперечной схемы,
определив н на больших скоростях полета (F^O,I5) ио формуле (3.87)
из данных аэродинамического расчета. Такая кривая показана на
рис. 2.90 для вертолета поперечной схемы с 1.оэффцциентом пзанмоин-
дукпнн Хпп----0,4.
Рис. 2 89. Инпуктгвцая скорись и н зависимости от
V я ft (по летным испытания'! зерто.пета МиЛ)
Интересно отметить, что па малых Г у вертолета продольной схемы
из за взаимовлияния винтов коэффициент индуктивной скорости больше,
чем на режиме висения. Следовательно, у него потребная мощность при
малых скоростях полета больше, чем на режиме висеция.
Таким образом, вертолет продольной схемы имеет плохие летные
характеристики на малых скоростях полета (при разгоне, разбеге по
земле при взлете по-самолстному, на режиме буксировки); они суще-
стнеяно хуже, чем у вертолетов одновинтовой и поперечной схем.
Так как и. зависит от отношения , которое прямо пропорцио-
нально отношению —нагрузка на 1 м2 площади нес\ щего винта.
7? — -^-), TU скорость полета по-разному влияет на потребную мощ.
ность у вертолетов с разными р. Поэтому у вертолета с большим р
ветер меньше понижает потребную мощность или увеличивает макси-
мальную тягу винта на режиме висения,
Рис, 2.90. Индуктивная скорость и в зависимости от
» *
Итак, для расчета коэффициента крутящего момента несущего вин-
та. создающего подъемную и пропульсивную силы с коэффициентами tv,
tx н обдуваемого потоком с безразмерной скоростью 700,15, можно вос-
пользоваться следующим выражением:
= ^--0,285-^-1,04^17. <3.90)
Часто из-за условности учета концевых потерь в слагаемом — SXP
коэффициент В- опускают и выражение (3.90) принимает следую
111ИЙ вид:
та-гспрН 0,285-*— -/,Й. (3.91)
Коэффициент тяпр определяется, как указано в пп. 3—6 настоящего
параграфа.
172
8. Определение угла атаки и шага несущего винта
Импульсная теория не даст никаких данных об угле атаки несущего
винта. Определение утла атаки несущего винта а и его характеристик
в связанной с винтом системе координат (силы Т. Л) необходимо для
вычисления шага пиита, уточнения величины вредного сопротивления
ненесущих частей вертолета и главным образом для определения уело
вий равновесия моментов вертолета относительно центра тяжести (ба-
лансировки) и его устойчивости.
Очевидно, что когда на каком-то режиме работы несущего винта
создаются силы с коэффициентами CY и Сх. то этому режиму обяза-
тельно соответствуют определенные нами средние по диску безразмер-
ные индуктивные скорости ву и г-т. Однако угол атаки несущего винта
на этом режиме может быть разным, он зависит от того, каков несущий
винт (шарнирный или жесткий), от формы лопасти и т. п. Для опре-
деления угла атаки несущего вицта нужно привлечь классическую
теорию, причем найденная величина угла атаки зависит от того, какие
допущения содержит эта теория.
Обратимся к определению угла атаки и шага несущего винта.
Каждой точке кривых шпр (см. рис. 2. 63—2. 74) соответствует опре-
деленный угол атаки несущего винта. На этих кривых размечены углы
атаки и таким образом при определении по рис. 2. 63—2. 74 может
быть найден угол атаки винта. Угол установки винта находится по гра
фнкам /у—f(a. 60, Г) (см. рис. 2. 1)5 и 2.116) или по формуле (2.50)
•‘еории Глауэрта —Локка (§ 3), причем ц и л определяются по выраже-
ниям (3.20), (3.21).
Если коэффициент профильной мощности определяется не по гра-
фикам, показанным на рис. 2.63—2.74, а по выражению (3. 72), то -
угол атаки эквивалентного пинта (см. § 2) — вычисляется по прибли-
женной формуле (3. 95). Эта формула получена на оснонаиии следующих
соотношений:
tx—/sinаэ^/гБcosаэ /аа фйэ. (3.92)
Приняв Л, из выражения (3.92) найдем
%— у-%. (3.93)
Коэффициент махового движения ai9 можно выразить приближен-
ной зависимостью <3.94), полученной из формул теории Глауэртч—
Локка:
<з-9Ф>
После преобразования выражений (3.93) и (3.94) получим формулу
для определения Оэ:
Ф., 4»’г)]- <3'9О)
При больших числах Мо для 1^0,4 приращение угла атаки нахо-
дится по графикам, показанным на рис. 2 85 и 2.86.
После определения ая находятся ц. X, гр и другие данные.
Определив ц, по формулам (3 15) и (3.17) можно найти коэф-
фициенты силы тяги и продольной силы винта
173
§ 4. КЛАССИЧЕСКАЯ ТЕОРИЯ НЕСУЩЕГО ВИНТА.
МЕТОД ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
При расчете аэродинамических характеристик несущего винга на
режимах с большими Г, Мо и ty многие допущения теории 1 лауэрта —
Локка приводят к существенным ошибкам. Для применяющихся обычно
компоновок винтов большими следует считать F5--0,3—0,35; Ма>0.55—
0.6 и близкий к по условию срыва потока.
При расчете таких режимов нужно в первую очередь отказаться
от принятой в теории Глауэрта—Годна аппроксимации характеристик'
профиля: cv—a^a, ц = схрср. еде а„ и р — постоянные величины
во всех точках диска, ле зависящие от угла атаки аг н числа М у сечения
лопасти.
Достаточно точно выразить аналитически зависимость ср и cJP от
виМ практически невозможно. Поэтому в уточненных методах расчета
в каждой точке сметаемого диска находятся угол атаки и число М,
а затем си и схр определяются по графикам характеристик профиля.
Для расчета распределения углов атаки нужно знать угол взмаха
лопасти р, но его можно определить, лишь зная момент тяги относи-
тельно горизонтального шарнира Одпало последний может быть пай-
леи. когда распределение утлон атаки известно, Поэтому расчет
может быть построен либо на основе определения последовательными
приближениями коэффициентов махового движения по первым двум-
, _ d'i
трем гармоникам, либо на основе определения р и — численным
интегрированием уравнения махового движения; пторой метод расчета,
получивший большое распространение, описывается ниже.
Практическое использование столь трудоемкого метода расчета воз-
можно только при применении быстродействующих вычислительных
цифровых машин. При этом становится возможным отказаться от при-
нимавшихся ранее допуигеяий, использованных для прсододедкя мате-
матических трудностей. Неизбежными допущениями являются лишь те,
которые обусловлены нашим незнанием отдельных вопросов на совре-
менном уровне аэродинамики несущего винта К таким допущениям
относятся:
— определение су ц схр сечений без у'Юта углов скольжения (рав-
ных и изменений в (ioi раничном слое из-за действий центробежных
сил, возникающих при вращении лопасти; cv и сХР сечепий определяют-
ся по аэродинамическим характеристикам профиля, полученным в плос-
копараллельном потоке;
— пренебрежение влиянием нестаннонарности обтекании сечений
лопасти, совершающей сложное движение, на аэродинамические харак-
теристики профиля;
— пренебрежение влиянием фюзеляжа и втулки на аэродинамику
несущего випта и другие.
Метод расчета позволяет учесть (в пределах указанных выше допу-
щений) индивидуальные особенности профилей лопасги и выбирать
профиль на основе количественных данных, а но качественных сообра-
жений. как это делалось ранее.
Расчет аэродинамических характеристик может выполняться вме-
сте с расчетом деформаций лопасти и с учетом распределения индук-
тивных скоростей, вызнанных вихревой системой произвольной формы;
объем расиега зависит ог требований к точности расчета, а также от
возможности вычислительной машины: от объема памяти и скорости
счета.
1. Формулы для расчета сил и моментов несущего винта
Сначала выведем формулы для определения составляющих отно-
сительной скорости обтекания сечении лопасти. Они отличаются от
формул, выведенных в § 2. тем, что в них учитывается разнос горизон-
тальных шарниров и углы fi в Ф не считаются малыми углами.
Составляющая Ux (рис. 2.9), а и б) направлена перпендикулярно
к оси лопасти и расположена в плоскости, параллельной плоскости вра-
щения (расположена в плоскости вращения, кшда угол взмаха лопасти
относительно горизонтального шарнира равен нулю) Как видно
из рис. 2.91, Ux складывается из проекции скорости цолега, рав.
пой Исова.мпф, и окружной скорости сечения и[(г—(rm)cos ₽+/г.щГ’
L'x—ш [('' — ;г.ш) с’оз ? U1 с‘>ч а ч1п ? (4.1)
Переходя к относительным величинам, получим
ия-~-it— T^jcos? --Гг.щ-1-Vсо* a sin * —
—(r-X.m)cos? 44.»+tistno, (4.2)
me
Vх COS Ct i / , । ».
C—--------—<= Vх coso. (4 3)
u/?
Строго говоря, с учетом торможения потока в районе несущего
винта, равного индуктивной скорости щ,, скорость потока в плоскости
вращения равна Vcosn—о». Поэтому безрэлмерлый коэффициент ц
должен определяться по выражению (3.20), Это нс вносит усложнений.
175
если расчет делается при заданном р, а безразмерная скорость полета
Г определяется из выражения (3.20), когда гд уже известно Если же
расчет делается при заданной V, то для упрощения будем определять р
по приближенному выражению (4-3).
В этой главе мы не будем рассматривать маховое движение ло-
пасти относительно вертикального шарнира. Переменная часть угла от-
клонения лопасти вокруг вертикального шарнира пренебрежимо мала
и можно считать, что все лопасти повернулись вокруг вертикального
шарнира на одинаковый угол |Рр=Со- Поэтому при некотором азиму-
тальном положении лопасти ф втулка несущего винта повернута на
угол ip + ca к проекции скорости полета н на угол ф + со—Рек к продоль-
ной оси вертолета, если вертолет летит со скольжением (рис. 2.92).
Рис. 2.92. К определению положения лопа-
сти, втулки и продольно/)
оси вертолета
относительно направления полета
Составляющая U, (см. рис. 2.91, а и в), направленная вдоль оси
лопасти, равна:
Ut № IZ cos a coswco’ В. (4.4»
Она определяет угол скольжения в обтекании сечений лопасти
Составляющая направлена перпендикулярно коси лопасти н рас-
положена в плоскости взмаха лопасти (она параллельна оси вала,
когда угол взмаха лопасти равен нулю).
Как видно из рис. 2. 91, в, L'v складывается из следующих скоростей
— проекции скоростей, направленных перпендикулярно к плоско-
сти вращения несущего винта Vsin a—vt\
— проекции составляющей скорости полета ^созпсозф;
— окружной скорости махового движения (г — Z ) — .
' ' di
Сумма этих скоростей равна:
(/у-=(У slna —v)cos S— V сох а соя sin fl — (г—!г_ш) (4.
где о -составляющая индуктивной скорости, перпендикулярная пло-
скости вращения (vt в § 3).
Заменив дифференцирование по времени дифференцированием по
углу поворота лопасти (ф=ш^) и переходя к относительным величинам,
получим
—-(V’sina— в) cos £ — V cos a cos in 8 —
- (r - 4.n,) ~ = > (r. cos ft — JI- cos ф 5in ft _(r—Tr^ . (4.6)
176
Здесь коэффициент протекания X(r, if) при неравномерном распределе-
нии индуктивной скорости ранен:
).(г,0)—Vsino -f(r, 6)=lZsInu -[и — Ди(г,ф)]-=
прицсм
-X | Д'о(М),
(4.7)
(4.7')
где v и (г. ?)—соответственно средняя и переменная части безраз-
мерной индуктивной скорости;
л- средний по диску коэффициент протекания.
Геометрическая сумма составляющих Ux и (Д, равна относительной
скорости обтекания сечения лопасти в плоскости, нормальной к оси
лопасти:
(4.8)
махового движения лопасти, которые определяются из уравнения махо-
вого движения,
Без укрощающих предположений, сделанных в § 2, уравнение махо-
вого движения имеет вид.
^+(Л..с« 8 - ‘r .S, „)Л|0
-4
(4.9)
или в безразмерном виде
.ax(«l-'"Wnilf=liiL, .«*>-
‘ I ) a- r'
где
—1—-i cos p — - siii|< = — m.- — ,
df2 ' \ i,, / «- /’г.щ"2
(4.10)
mrn,_=i dr^ -T^dr'
(4.11)
Для расчета обычных для вертолета режимов полета можно при-
нять допущение о малой величине угла 0, Тогда уравнение махового
движения упрощается1
(4.12)
Для определения угла атаки сечения лопасти Ur рассмотрим чер-
теж (рис. 2.93) ца плоскости, перпендикулярной к оси лопасти (вид
по стрелке С на рис, 2.91).
12 1002
177
Рис. 2.93. Скорости паэро-
нинамическсе силы элемен-
та лопасти
Из рис. 2. 93 видно, что сечение лопасти, повернутое под углом ф
к плоскости вращения (tp -шаг лопасти в рассматриваемом сечении),
обтекается воздухом с относительной скорос(ью U, направленной под
углом Ф к плоскости вращения. Угол ата
ки сечения лопасти ранен:
аг— (4,13)
Ф —arc tg ~~ ; (4.14)
аг — ф —аге tg —?T-orcig =^~. (4.151
Шаг лопасти в рассматриваемом
сечении зависит. от общего шага
винта Оо, равного шагу лопасти в се-
чении 7—0,7 при р~0 и при отсут-
ствии циклического изменения шага ло-
пасти, от угла закрутки Дер сечения относи
тельно сечения г-0,7; От угла взмаха лопа-
сти при наличии компенсатора взмаха и от циклического изменения
шага лопасти Сумма этих слагаемых равна;
у =6.,+ д? — k'?~ 5; sin 1 — В, cos — У (v„cosHy — no). i I. 16)
vic 0( и 5г—составляющие циклического изменения шага лопасти лрп
отклонении автомата перекоса;
v„ и ёл — составляющие упругой крутки лопасти.
Погонные аэродинамические силы в сечении г определяются по коэф
фиипентам си и сг для профили рассматриваемого сечения, взятым в за-
висимости от аг. Гак как при определении аг индуктивная скорость в се-
чении была учтена, то коэффициенты си и сх берутся для профиля пры
бесконечном удлинении.
Числа М и Re в сечении равны.
Поскольку числа Re у вертолетов достаточно велики, то для упро-
щения коэффициевты и схг, сечений считаются зависящими только от
(цела М в сечении. Поэтому аэродинамические характеристики профиля
для каждого числа М берутся при числе Re, соответствующем данному
числу М и средним хорде и высоте полета;
^e=(v) й°-гМ- (4,19)
Погонные подъемная сила и сила сопротивления сечения равны
_^-QU!bey-, 0.20)
1^_=±-еП’-’Ьслр, 0.21)
178
а их составляющие, направленные по осям, связанным с несущим вин-
том,—сила тяги dT и сила сопротивления вращению dQ —равны:
——созФ+^^аШФ; (4.22)
dr dr 1 ar 1
^-^^Я-собФ --!^£*151пФ. (4.23)
dr dr dr '
Подставив в (4.22) и (4.23) выражения ДЛЯ созф и 5,пф по фор-
мулам (4.24) н (4.25)
cos<I>=^-; (4.24)
$1пФ^у (4.25)
И выражения для \уС~ “° Ф°Рк,Улам получки
14.26)
С1-27)
или в относительных величинах
^=—(CyC^ejD^Cb-, (4.28)
^=(гх/7х-е/7у)(71 (4.29)
Погонный момент сопротивления вращению лопасти или крутящий
момент сечения определяется по формуле (в относительных величинах)
(4- эч
Проинтегрировав погонные нагрузки по радиусу лопасти, получим
выражения для определения сил и крутящего момента лопасти. Так кая
эти величины зависят от положения лопасти в плоскости вращения (ее
азимутального положения ip), то они отмечены индексом ip:
2,-j (4.31)
С4-32)
и.,--) ^К'-ЫпКит..,!*. (4.33)
Сила таги лопасти направлена под углом (3 к оси несущего винта.
Ее проехпин на ось винта и на плоскость вращения равны t^cosp
и i <, sin р.
12* 179
Спроектировав силы лопасти, расположенные в плоскости враще-
ния, на продольную и поперечную оси винта, найдем продольную и по-
перечную силы лопасти (рис. 2.94):
hs, — — i4 sin рсо= |+<7ф81п|: (4.34)
$4 —- —/^sin sin); дфСОЬ'р. (4.35)
Составляющая /tcos₽ создает продольный и боковой моменты
аэродинамических сил тгм и т.гд./’
}пг^ = — /„COS COS <{j; (1.361
И'Л4, =-/;<--os₽7ruisM. (4.37)
Рис. 2 94. К определению коэффициента:) про-
дольной и поперечной сил лопасти
Чюбы определить силы и моменты одной лопасти в размерном
виде, нужно умножить безразмерные коэффициенты соответственно на
—---— И —--— FR.
гл 2 za 2
Мгновенное значение сил и моментов винта может быть найдено
суммированием сил и моментов всех лопастей я выбранный момент
времени (одна лопасть находится под углом ф, вторая — под углом
ф+—, третья — под углом ф+2 — и т. д.).
Z, 2,
Средние за оборот силы и моменты, создаваемые лопастью, равны
интегралу по ф от выражений (4,31) — (4.37), разделенному на 2л.
Умножив результат на число лопастей, найдем средние за оборот силы
и моменты несущего пинта.
В безразмерном виде средние за оборот силы и моменты аэроди-
намических сил определяются по выражениям:
2я
/~^- J/^cos pity; (4.38)
й= — (4.39)
2л J
о
180
(4-41)
— j* ---------------р+ c°s 8 cos -J) cZ-p; (4.42)
ft ' 0
Zre 2ч
m,, — j —£~lr и [ cos (i sin') d'li. (4.43)
о if
Через горизонтальный шарнир на втулку винта передается сила,
равная сумме инерционных сил махового движения сечений лопасти
Рис. 2.95. К происхождению момента несущего винта,
создаваемого инерционными силами махочпго лвиже-
(рис. 2.95). Ее проекция, направленная параллельно оси вала несу-
щего винта
R
-----[ "‘^-(r-l.Jcxfdr----------(4.44)
J J at*------------------------a(--
создает продольный и боковой моменты несущего винта
.4 — *— f — J., ! cosoi/o-— —S. ta2L (cos з cos4i tZp, (4.45)
zj 2л J >4 ‘•Ul ' ' 2л г’“ г-\’ rftp’ 1 ' 1
f лл»51”?'*? -ms?dtt< )4-46>
J 2Л J / 2r. J it 4.4
0 0
которые должны быть просуммированы с моментами аэродинамических
сил [см. формулы (4.42) и (4.43)].
Отмстим, что подынтегральные выражения (4.42), (4.43), (4.4,т)
и (4,46) содержат sinили cosif, из-за чего моменты создаются пер-
выми гармониками силы тяги н инерционных сил. Поэтому моменты
инерционной силы больше по величине, чем моменты аэродинамической
силы, так как первая гармоника t-i, благодаря маховому движению лопа-
сти невелика.
1Ы
Коэффициенты подъемной силы н силы сопротивления несущего
винта определяются пересчетом из связанной системы осей в ско-
ростную
— f со? a — fl sin cz: (4.47)
tj--1 sin a + 4 cos a. (4.48)
2. Метод расчета
Исходными данными для расчета являются безразмерные характе-
ристики винта- геометрические -Характеристики лопасти (изменение
крутки Atp, относительных хорд Б и профилей по длине лопасти), ко-
эффициент заполнения винта о. аэродинамические характеристики про-
филей, вынос горизонтальных шарниров 2Г.Ш, массовая и весовая харак-
1 у gSr.ni \ ,.
герметики лопасти I—— и —), коэффициент компенсаюра
взмаха k.
Режим работы пинта задастся следующими безразмерными данны-
ми: углом атаки винта а. коэффициентами скорости и подъемной силы
Г, t„. числом Мп. отклонением органов управления х, ц (или углами
9 > И Ъ г).
Последовательность расчета такова. В перлом приближении зада-
емся величиной и распределением индуктивной скорости v н шагом
винта (jp Индуктивная скорость может быть взята по выражению
(3.4b) ri.nr гю экспериментальным данным. Шаг винта определяется
либо по теории 1дауьрта—Локка с пересчетам по выражению (2.242),
либо цм можно задаться произвольно (например, 93 = fB).
Выбираем азимут, с которого начнем расчет, ь0 н начальные значе-
ния и Р' (для краткости обозначим: у — Обычно бе-
\ rf-p d№ /
рется 0 или ^ = 270’; 60 и '< можно определить по теории Глау-
Эрта —,1окка, либо принять = —0 (что практически нс удлиняет рас-
чет, так как собственные колебания лопасти Очень быстро затухают).
На начальном азимуте вычисляем ц, Z, Сх, С\, U, <р, пг, М на всех
радиусах и по графикам аэродинамических характеристик профилей
inpeie.iacM cv и cxv Затем определяем—, т:ш и из уравнения махового
dr
движения (4.10) находим PJ. По ft-’, ?0 и численным интегрирова-
нием находим р и р/ на следующем азимуте и в такой же последова-
тельности продолжаем расчет на других азимутах.
В методе расчета, составленном и запрограммированном №. Н. Ти-
щенко, интегрирование уравнения махового движения лопасти по азиму-
ту выполняется по методу Эйлера с пересчетом. Но значениям
на азимуте i|:,- находятся предварительные значении р'+, и pi+l на
азимуте по выражениям
в;,1ц,-₽;+₽:д.^
+ — 2 А?.
где Дф=|/_1 -tp,.
142
Затем но выражению (4.10) вычисляется предварительное значение
коэффициента момента тяги относительно горизонтального шарнира
Далее, предполагая, что, во-первых, на участке между азимутами
и ; происходит равноускоренное движение со средним ускорением
фй-S+i,,,.), » ЧТО,
<<10 "О («...Л-1., »
из выражения
во-вторых, ft+i можно
ft+I, из системы уравнений
методом итерации находим окончательные значения ft + i и ft i- Затем,
зная 6,+1 и ft_,. вычисляем окончательные значения mr.rir, и и+ь
Расчеты показали, что прн таком методе интегрирование может
выполняться с интервалом Дф=12°,
Интегрирование погонных нагрузок по радиусу, а также сил и мо-
ментов лопасти по азимуту производится по методу трапеций. На-
пример:
-1 +(+Ш^';
<- ^2
J-1
Здесь k — число сечений лопасти (гц=1. й— комлепоо сечение),
а п— число расчетных азимутов.
По описанной методике просчитываются один или дпа оборота не-
сущего винта и производится сравнение значений 0' и fl с теми, которые
были на этом азимуте при предыдущем обороте, Полученное значе-
ние tu сравнивается с заданным. Р.слн нет совпадения этих величин
с требуемой точностью, то по разности —^1а,ан уточняется зна-
чение 6о и рассчитывается еще один оборот несущего пинта.
Расчет считается .законченным, когда с требуемой точностью ty
равен задагщцму, а 0 и 0' на последнем и предыдущем оборотах совпа-
дают
В результате расчета определяются средние за оборот силы и мо-
менты, распределение углов атаки сечений, коэффициент тяги и угол
взмаха лопасти, представленные в виде рядов Фурье с точностью до
пяти членов:
У (<,со$л6-|-г, ящяф); (4.49)
5
V ^,с°«й-|-/>лзй/й). (4,50)
В расчетах, результаты которых будут приведены ниже в пп. 4--7,
учитывалась только средняя по диску индуктивная скорость, определяе-
ма
мая по выражению (3,46') • Лопасть считалась абсолютна жесткой на
изгиб и кручение.
Интервал интегрирования был равен 12’, число расчетных радиусов —
12, точность, с которой требовалось совпадение t?, и f! равнялась:
|ДМта11=0.002; |дГ1ш,к=0.002; ^1^ = 0,002.
1 ,, ill da _
На конце лопасти и -^-вычислялись при cw=0 и с^р, соответ-
ствующем cs = 0. В сечениях г<0,975 расчет делался без каких-либо
поправок для учета концевых потерь.
Время расчета одного режима полета на вычислительной машине,
выполняющей 20 000 операций в секунду, составляет 40 75 сек.
3. Аэродинамические характеристики профилей,
применяемых для лопастей несущих винтов
Ниже приведены аэродинамические характеристики профилей
NACA 230, NACA 00, а также скоростного профиля, пригодного для
установки на конце лопастей вертолета. Первые два профиля взнты
при относительной толщине 12%, а последний — 9%.
Аэродинамические характеристики профилей получены из мате-
риалов испытании модели прямоугольного крыла в аэродинамической
трубе с пересчетом на бесконечное удлинение и на натурные числа
Re, взятые для каждого М по выражению (4.19):
4ojM = 2O-lO'M.
Аэродинамические характеристики профилей в диапазоне углов
атаки от - 2 до 15° и чисел М от 0,3 до 0,9 приведены в табл. 2. б—2.8.
Профиль NACA 23012
Таблица 2 6
\а’ .м -2 !.» 3.3 7 । 9 11 12.6 IV. г.
О.з -0,085 0,205 0,46 0,81 1 035 1.21 1,365 1,525
У, 4 —0,10 0,20 0.415 0,80 1 01 1,20 1,33 1.42 1,42
0,5 - 0.085 0,225 0,185 0,85 1,0 1 185 1.24 1,25 1,245
0,6 —0,085 0.225 0,485 0,843 0 94 1.0 1.03 1,046 1,05
0.7 —0 085 1) 245 0,505 0,715 0 765 0,337 0,87 0,91 0,915
0.8 -0,065 0,285 0 43 0..V6 0,625 0,675 0,715 0,76 0,77
0,85 —0,061 0,185 0,30 0,135 0,490 — — —
0.9 —0,075 0,09 0,22 — — — — — -
0,3 0,008 0 008 0,010 0,015 0,018 0,022 0,П29 0,04,5 0,05
0,4 0.003 0,098 0,010 0,015 0,023 О.ОЗГ/ 0,043 0,07 0 074
».= 0,008 о.ооя 0,010 0,019 0,031 0,0575 0,0835 0,1'21 0,130
'1 6 0,008 0,002 0,0135 0,0065 0,У75г 0,128 0,167 0.218 0,230
«,7 0,009 0,013 0,02'5 0,09 0,138 0,181 0.213 0,254 0,262
0,8 0,0125 0 03 0,067 0,130 0,177 0,121 0 253 0,294 0,304
0,8,5 0,028 0,049 0,080 0,141 0,185 — — —
0.9 0,069 0,08 0 1075 - - - -
164
Профиль NACA 0012
Таблица 2.7
X -2 1 3,5 7 9 11 12.5 14.5 15
0,3 —0,185 0,085 0,32 0,645 0,835 1,02 1,155 1,34 1.39
0,4 —0,18 0,095 0.335 0,665 0,85 1,035 1,175 1,25 1,25
0.5 —0,215 0,10 0,355 0,71 0,915 1,08 1,1 1.1 1.1
0,6 —0,215 0,11 0,37,5 0,75 0,91 0,94 0,95 0,96 0,965
0Л —0,235 0,11 0,395 0,735 0,81 0,84 0,860 0,863 0,865
0,8 -0,245 0,135 0.40 0 57 0,05 0,72 0,765 0 765 0 75
0,85 -0,1!) 0,095 0,29 0,50 0,01 0,71 — —
0,9 -0,08 0,02 0,14 0,40 0,56 0,70 - — -
0,3 0,0005 0,007 0,009 0,0125 0.0165 0,021 0,0240 0,029 0,034
0.4 0,0095 0,007 0,009 0,0125 0,0185 0,021 0.0245 0,061 0,080
0,5 0.0095 0,007 0,009 0.013 0,0185 о.озг 0,051 0,106 0.126
0,6 0,010 0,007 0,0105 0,021 0.039 0,074 0,1095 0,171 0.186
с-гр 0,7 0,010 0,0085 0.0185 0,061 0,0955 0 133 0,1675 0,211 0,221
0.8 0.0245 0,0)6 0,046 0,095 0,131 0,1675 0,195 0.2285 0,236
0.&5 0,0415 0,036 0,061 6,1065 0,141 0,180 — — —
0.9 0,069 0,069 0,0795 0,118 0,149 0,187 — —
Скоростной профиль
Таблица 2. Я
м\ -2 1.0 a.s 7 ° 11 12.5 | 14,5 15
О.з —0.065 0,235 0,485 0.835 1,035 1 , )Л 1,165 1 115 >,
0,4 - 0,065 0,23 0,185 О.ВЗЗ 1,035 1,)О 1 (Я 1,06 1,05
0,5 -0,065 0.245 0,50 0,86 1.015 1,015 1.0 0,99 0,99
0,0 —0,065 0,26 0,53 0,90 0,98 0,96 0,965 0,96 0,96
0,7 -0,07 0,30 0,60 0,96 0,96 0,935 0,9'35 0,95 0,9Г>
0,8 —0,07 0,36 0,63 0,Ы 0,87 0,87 0,89 0,935 0 915
0,8.5 -0,12 0,825 0,55 0,77 0 86 0,86 —
0,9 - 0,1(15 0,175 0,46 0.815 - - — — —
0.3 0,008 0,007 0,009 0.011 0,012 0,0245 0,065 0,12 0.133
0.4 0,008 0,007 0,009 0,011 0,012 11,055 (1,0970 0.142 0,15
0,5 0,008 0,007 0.0095 0,0125 0 046 0,093 0,13 0,1705 0,1885
0,6 0,008 0.007 0,010 0,02.') 0.060 0,110 0.1475 0,195 0,205
0,7 0,008 0,0075 0,015 0,061 0,10 0,143 0,175 0.195 0,221
0,8 0,0125 0,012 (1.037 0,092 0,128 0,165 0,191 0,2)23 0,2415
0,85 0,021 0,026 0,053 о.п 0,15 0,19 —
0,9 0,044 0,04 0,069 0,131 -- —
185
При расчетах, результаты которых приведены ниже, при М<0,3
брались характеристики профили для М=0,3, а при Л1>0,9 коэффициен-
ты cv н сар определялись линейной экстраполяцией по М=0,85 и
—0,9, Когда угол атаки сечений лопасти изменяется в пределах 72—
180° н —7-=—180°, характеристики всех профилей определялись неза-
висимо от числа М по табл 2,9, При углах атаки от 15 до 72° и от —2
до —7° делалась линейная интерполяция между соответствующими
значениями с„ и с1Р,
Таблица 2.9
а” 72 105 171) 1 _ 1711 -105 —85 -70 -•
0,35 —«,.33 - 0.62 0,7? 0,2. —0 2 —0,32 —0,62
‘лр 1,1 1.1 0,01 1 0,1,1 1 ,08 1,08 0,87 0,04
На рис. 2.96 и 2.97 показаны графики коэффициентов си и схр
в зависимости от а при трех значениях числа М.
Для выбора профиля на небольшом участке лопасти (например,
на концевом участке) графики аэродинамических характеристик профи-
лей в зависимости ог угла атаки более характерны, чем поляры про-
филей, так как Угол этаки рассматриваемого сечения лопасти в малой
степени зависит от св_этого сечения, а определяется, главным образом,
режимом полета (fy, Г, а) и формой лопасти. Следовательно, при изме-
нении профиля угол атаки сечения не изменяется (имеется в виду, что
ас профилей отличаются не более, чем на 1 —1,5"). Для выбора профиля
для лопасти в целом более характерными являются поляры профилей
или графики аэродинамических характеристик профилен, построенные
л зависимости о, я—ао
На рис, 2 98 и 2 99 построены графики гаь₽ и а* в зависимости от
числа М (акр — критический угол атаки, при котором начинается умець
шение или прекращается роет су сечения; ; а* — угол атаки,
при котором начинается резкое увеличение схр из-за срыва потока или
из-за волнового сопротивления). Так как число М сечения лопасти
приближенно равно:
М=»МоСГя=Мо(г + F sin ф) —г Мо-гМпол simp,
то графики на рис. 2 98 и 2.99 показывают, при каком а и зависимости
от сочетания МПал, Мо, г, у сечения лопасти начинается рост про-
фильного сопротивления и появляются срыпиые. явления. Эти графики
будут использованы в п. 8
Из графиков на рис. 2 96 и 2.97 видно, что при М—0,3 профиль
\'АС'\ 23012 имеет 1,53, п то время как более тонкий скоростной
профиль имеет c>/mls= Ы8 при аьр= 11’, У последнего при а>|0,5® на-
чинается интенсивный рост схр Профиль NACA 0012 имеет cvmix = ^’4-
При М = 0,6ч-0,7 и средних углах атаки характеристики профилен
близки друг к другу, а при М = 0,9 преимущества имеет скоростной
профиль: у нею наименьшее схр при малых углах атаки и нормальное
протекание зависимости cv от а
Результаты расчетов профильных потерь пингов с различными про-
филями описаны в § 3, п, 4: при малых числах Мо винт с симметричным
профилем NACA 0012 и в' некоторых случаях винт с топким скоростным
профилем на конце лопастей имеют на несколько процентов' меньщие
профильные потери, чем v другими профилями, а при больших Мо явные
преимущества имеет винт со скоростным профилем на конце лопасти.
186
Рис 2.96, Коэффициент подъемной силы ран.
пых профилей
Рис 2.97, Коэффициент профильного сопротивления разных
профилей
187
Допустимое по условиям срыва потока максимальное значение
коэффициента подъемной силы (см. п. 7) у пипта с профилем
NACA 23012 на 0,01—0,02 больше, чем у винта со скоростным профи-
лем на копце лопастей.
В аэродинамические характеристики профилей должны вводиться
поправки для учета качества изготовления и конструктивных особояао-
стей лопастей. На профильное сопротивление, а также па величину
Рис. 2 98 Критический угол
агака профилей п зависимости
от числа М
И1ИХ частей, особенно у носка профиля (антиобледенительная система,
заклепки), негерметичность в стыках отсеков лопасти, местные цеплав-
ныс отступления от теоретического профиля сечеиий.
На основании опыта расчетов рекомендуем увеличивать значения
Схр профиля, полученные при продувке модели, на Дстр, равные:
— для лопастей с носком в виде сплошного металлического, пласти-
кового, деревянною лонжерона и с жесткими хвостиками — 0,0н-0,001:
— для лопастей, состоящих из отдельных отсеков, с металлической
обшивкой и нервюрами — 0,00154- 0,0025.
— для лопастей с фанерной или полотняной обшивкой — 0.00254-
0,005.
То или иное значение &сгр из указанного интервала выбирается
в зависимости от качества изготовления лопастей.
4. Распределение нэроднплмических сил по диску несущего винта
В расчетах, результаты которых описаны п пп. 4—7, учитывалась
только средняя по диску индуктивная скорость; шчкшмая этим, ошибка
в суммарные, средние за оборот характеристики винта при больших и
средних значениях И невелика. Лопасть считалась абсолютно жесткой
на изгиб и кручение. Расчеты показывают, что гтзгибные деформации
практически не влияют на средние за оборот аэродинамические харак-
теристики винта, а крутильные деформации, если лопасть недостаточно
жестка, оказывают заметное влияние Заранее заданные крутильные
деформации могут бьць уч।ены подстановкой в выражение (4. 1Ь).
188
Профи.1
189
Расчеты выполнялись для посьми вариантов геометрических ха-
рактеристик лопастей, приведенных в табл. 2. 1(], при следующих исход-
ных данных: о 0,091; Л=0 и 0,4, — =0,9 и 1,2;, Zrm = fij=02=0.
а.
В этом пункте рассматривается распределение аэродинамических
сил по диску несущего винта. Предположение о постоянстве индуктив-
ной скорости и отсутствии деформаций у лопастей приводит к погрешно-
стям при расчете распределенных но диску несущего винта сил, поэтому
материалы, содержащиеся и настоящем пункте, приближенны.
Рассмотрим винты с лопастями I и II вариантов на двух режима?:
полета перполета: режим, близкий к горизонтальному полету, и режим,
близкий к самовращению несущего винта; оба режима взяты при равных
коэффициентах подъемной силы ls = 0,16, безразмерной скорости У=0,3
и числе Мо=О,6. Результаты расчета винтов па этих режимах помеше-
ны в табл. 2. 11,
Таблица. 2 ! I
= 0,16; И = 0,3; Мо = 0.6
Горизонтальный полет
ноирящение
Характс- Прямо} гольная лупа сП, Трапециевидная Прямоугольная лопасть Трапецие- видная лопасть
Л=0 *=0,4 *=0 *=0 й=0 Г-1.,4 *=0
а’ -9,4 -9,4 -9,4 —10,3 1.4 1.4
k —0,0610 -0,06|03 -0,0610 —0,065 —0,0018 -0,0048 —0.0048
fir 7,820 9,957 8,0320 8,45 3.576 5,62 3.5,50
It —0 01)95 —0,0101 —0,00795 —0,01 0,0168 0,0172 0,0180
тк 0,00849 О 008698 0,00796 0,0086 0,000475 0,000.367 —0,000'5
h 0,0108 0,0162 0,018|" 0,0186 0,0129 0,01327 0,0140
Й/' 0,0.997 0,09667 0 9949 0,0958 О,'О926 0,09247 0,0877
<2, 0,0973 0,09535 0,108 0 J096 0,06938 0,07165 0,0772
0,0398 0,003355 0,040В 0,0405 0,0367 0,00857 0,0368
й2 0,0069 0.006МЗ 0.0078 0,0076 0,00559 0,00515 0.0062
tlj - 0 0025 —0,09.3146 -0 0024 —0,00276 —0,00203 -0.00269 -0,0012
‘’i 0,0004 -0,000548 0,0005 0,000628 0,0003 0,000457 0,0003
О.4ЮО15 — 0,0002637 0,00027 0,000177 0,00014 0,000)7.5 0,0003
г. -0,0059 0,003116 —0,0062 —0,00623 —0,0053 -0,0054 -0,0058
г, 0,0219 0,11249 0,0233 0,0227 0,0289 0.0285 0,0312
0,0309 0,03466 0,0-377 0,0364 0,0249 0,0267 0.0300
i2 -0,0143 —0,00963 —0,0149 —0.0167 —0,0120 —0,0153 —0,0138
ts 0.0062 0,0062 0,0078 0.00859 0,00427 0.00623 0,0051
‘з 0,003.3 0,0089 0,0035 0,00407 0,00318 0,00317 0,0049
190
Из табл. 2,11 видно, что при горизонтальном полете маховое дви-
жение лопасти больше, чем при самовращении, и что у трапециевидной
лопасти оно больше, чем у прямоугольной Сравнение характеристик
винтов с прямоугольными и трапециевидными лопастями показывает,
что прн равных a. ty, V у внятэ с трапециевидными лопастями большие
Йо, Л, ah и меньший по абсолютной величине коэффицие1гг пропуль-
сивной силы tx, при равных tx, tVi V (см, столбец прн а = —10,3е) винт
с трапециевидными лопастями имеег| более отрицательный угол атаки,
и разница в величинах ftu, h, a-, &i еще более возрастает. Это является
причиной изменения балансировочных характеристик вертолета при за-
мене трапециевидных лопастей прямоугольными (например, уменьшение
Рис, 2.ЮТ. Углы атаки сечений в зависимости от радиуса ло.
паств
оп.лонепия автомата перекоса вперед происходит из-за уменьшения
продольно;! силы Н и коэффициента а.).
Па рис. 2,100 показаны i рафики изменения углов атаки у пинта
е irpHMOyiольными лопастями по радиусу лопасти на четырех азимутах:
0. 90, 180 и 270°. Сплошные линии относятся к горизонтальному nmerv,
а пунктирные-- к режиму самовращения.
При горизонтальном полете в комле лопастей на ф=0 и 270' углы
атаки отрицательные, На жиммте ф=0, где угол взмаха мал, вертикаль-
ная составляющая скплости, рапная приблизительно 17(ц | р)—ц =
— V((z + ao—aj—v (рис. 2 101), нелика и направлена сверху вниз, из-за
чего па атом азимуте в комле угол атаки мал или О1р»пиателен На ази-
муте комли находятся вблизи зоны обратной обдувки и обду-
ваются глади и сверху Поэтому они имеют большие отрицательные
зглы атаки
В средних л концевых сечениях лопасти на углы атаки сильно
влияет окружная скорос'<ъ махоиосо движении. Она увеличивает углы
атаки на азимутах 270 и 0° где лопасть церемещае|ея сверху вниз, и
уменьшает их на азимутах 90 и 180'. Геометрическая кругка лопасти
1У1
плоекзетъ
Вращении
Рис. 2 10( Сосгандяютаи (коростек воздуха,
нормальная к от лопасти, на азимутах 1р*«0
и 1|) = |80°
уменьшает нарастание углов атаки к концу лопасти на азимутах 270
и О” и cine более уменьшает их ня азимутах 90 и 180°. Па конце лопасти
на азимуте 90J углы атаки
отрицательны.
На режиме самовраще-
ния угол атаки несущего вин-
та положителен, из-за чего
в комлях лопастей утлы атаки
сечиний имеют большую поло-
жительную величину. На кон-
цах лопасти угол атаки сече-
ний меньше, чем при горизон-
тальном полете, так как ца ре-
жиме самовращения винт
имеет малый шаг и меньшее
маховое движение.
цо всему диску несущего вин-
та с закрученными прямоугольными лопастями иллюстрируется графи-
ком на рис. 2.102 (горизонтальный полет). Заштрихованная окруж-
ность на этом рисунке — область обратной обдувкц, по границам кото-
рой угол атаки сечений близок к ±90°. Штриховкой выделены также
области с отрицательными углами атаки сечений.
углов атаки сечений
иис
Прямоугольная лопает
Е вариант, aW, 4е
Рис. 2.102. Распределение углов агзки по диску несу
щего зинта (горнзоптсльцый полет;
На рис. 2.102 видно, что в зоне, ограниченной азимутами 270—300°
и относительными радиусами 0,7—1,0, углы атаки имеют максимальную
величину (для незакрученных лопастей углы атаки максимальны па
г= 1,0). Это область, в которой при увеличении f« и Г происходит срыв
потока, заметно сказывающийся па работе несущего винта в целом.
192
На режиме самовращения область срыва расположена в мшлеъой ча-
сти лопасти на азимутах 200—300“.
Расчеты показывают, что максимальные углы атаки трапециевид-
ной лопасти существенно больше, чем у прямоугольной. У винга с ком-
пенсатором взмаха максимальные углы атаки на 4> = 27О° немного
уменьшаются
Погонная тяга распределяется по радиусу и азимуту крайне не-
равномерно (см. риг. 2.28), что является причиной возникновения боль-
ших переменных изгибающих моментов у лопасти. Из табл. 2.11 сле-
дует, что у винта с трапециевидными лопастями и у винта с компенса-
тором взмаха переменная часть тяги увеличивается, Большая четвертая
гармоника у впита с компенсатором взмаха. Эти особенности винтов сле-
дует учитывать при оценке вертикальных вибраций вертолетов, Вели-
Рис, 2.103. Коэффициент крутящего момента ло-
пасти в зависимости от азимута норики-тальяый
полет)
Рис. 2.104. Ускоряющий мо-
мент в сечении лопасти
dQ=dX pcc4Xcos Ф—
- ЙУсеч sin Ф<0
чина перснакнад части ж» заьчеит от х,А}щу;те.рпетий.й режима работъ,
винта н (или F): чем больше ц, тем переменная часть больше Коэффи-
циент перпой гармоники тяги при со$ф—G очень мал, следовательно,
прд малом разносе горизонтальных шарниров аэродинамический
момент несущего винта относительно поперечной оси т!л [выражение
(4.43)] можно не учитывать.
Коэффициент крутящего момента лопасти mKti очень сильно изме-
няется но азимуту (рис. 2.103). На азимутах, где углы атаки сечений
увеличиваются (1Г1 и IV квадранты), резко уменьшается. На ре-
жиме самовращения в 1(1 и IV квадрантах тм отрицательны. Это объ-
ясняется тем, что на этих азимутах сечения лопасти имеют большие
положительные углы лоитекацця Ф. цз-за чего проекция подъемной
гиды сечения лопасти направлена вперед и создает ускоряющий момент
(рис, 2. 104). Таким образом, очевидно, что при поступательном полете
на режиме самовращения с I и П квадрантах создаются тормозящие
моменты, а в III л IV — ускоряющие моменты (при вертикальном сни-
жении вертолета на режиме самовращения тормозящие моменты соз-
даются концевыми сечениями лопасти, а ускоряющие — комлевыми).
Следует отметить, что очень большая по величине переменная часть
крутящего момента создает у винта с обычным выносом вертикальных
шарниров (Гвш<0,05) маленькое (в пределах 1°) маховое движение
относительно вертикальных шарниров, так как собственная частота ко-
лебания лопасти приблизительно в четыре рта меньше числа оборо-
тов несущего винта, т. е. частоты изменения щВс.
U 1002 193
Выше, в § 2, отмечалось, что при равных lu. tr и V т1( не з&впсш.
а изменение л?к₽по азимуту зависитот амплитуды циклического измене
ннн шага лопасти. Действительно, как видно из рис. 2. ЮЗ, у винта
с ьомпенсатором взмаха отличается по величине и фазе,
о. Аэродинамические характеристики несущего винта
Аэродинамические характеристики несущего винта представим
на графиках в виде зависимости ix—/(тк) с параметрами 1У. и при
Mnn.T=const (или P=const), Mn = const. Эти графики удобны для опре-
деления коэффициентов г1г п,, и угла а|аки а по известным при аэро-
динамическом расчесе значениям Мепл, Г, .Ми, >у.
Рис. 2.105, Аэродинамические характеристики несущего пиша {Мо,.,-’
= 0,0975, V'=O.|5. ч/—0,65; <т=Ю,П91)
1акие графики для винта с прямоугольными закрученкьгхг|г лопа-
стями со скоростным профилем на конце (11 вариант лопастей) показа-
ны для Мо — 0,65 на рис, 2.105—2.109.
Из графиков видно, что зависимость коэффициента пропульсивной
силы гг от коэффициента крутящего момеитя практически Прямоли-
нейно. за исключением околоерывных значений ty при отрицательных
где интенсивность нарастания mlt увеличивается из-за роста профиль-
ных потерь. В этих случаях кривые с разными tv становятся не экви-
дистантными. Интервал между кривыми увеличивается при увеличе-
нии t:j. что также объясняется ростом профильных потерь при увели-
чении
141
Кривые, соответствующие очень малым значениям коэффициентов
подъемной силы (^<0,1—0,08), подходят вплотлу|О или пересекаются
с кривыми, соответствующими большим значениям 1у. Это значит, что
уменьшение коэффициента тяги несущего винта (например, при уста-
новке крыла на вертолете) до Z„^0,08 и менее нецелесообразно, так
как при этом не увеличивается пропульсивная сила виита. Загиб вверх
кривых с малыми при уменьшении цОьа<ывзет, что при малых
несущий винт не имеет режима самовращения.
Рис. 2.106. Азродинамнческке характеристики ннчшеч: n;i:ir |Мпо-,=
=0,13- V = t)2; Mn-D.GP, <J-0.09l.i
Преимуществами описанных графиков являются простой вид кри-
зых. легкость интерполяции при изменении коэффициент;) г,„ возмож-
ность использования для разных коэффициентов заполнения (см, § 6|.
По этим графикам для расчета ба.танспровкн и устойчивости
можно определить коэффициенты г и ri по формулам пересчета 13 15),
< 3.1/),
Для определения шага несущего винт,) при аэродинамическом
><гсчете служат зависимости fii=/(/Hb) с параметром tv цри Г—const,
Mr,—const или tu — fM с параметром 0,; при l’—const, Mo —curst
I рафики зависимости показаны на рис. 2. Ц5 и 2 LIG
Аэродинамические хараюеристики bhhjob с лопастями другой фор-
мы нами не приводятся, так как при принятом допущении о том. что
независимо от формы лопасти индуктивная скорость распределена рав-
номерно по диску несущего винга, рачпкца в коэффициенте при
13*
uiiihi,ix iv, V, Mo полностью определяется разницей в '«up Поэтому
все выводы о влиянии формы лопасти, полученные при рассмотрении
графиков пгпр н п, 3 § 3, не изменятся,
U. Аэродинамические характеристики несущего винта
на режиме самовращения
График» характеристик несущего впита Л варианта на режиме
самовращения— цоляры 1„ = /<А ), качество винта /<с, щат Qnc и уюл
.паки щ. —показаны на рис, 2.110—2.ПЗ.
Из графиков видно, что качество у несущего винта меньше, чем
у крыла (подробнее о качестве пикта см. § 7 гл. 2). При малых р
самовращение винта происходит па больших положительных углах ата
ки При увеличении числа оборотов несущего винта (числа Мо) качест-
во винта уменьшается, шаг также уменьшается, а у|ол атаки увели-
чивается.
Известно, что режим самовращения несущего винта возможен при
отсутствии поступательной скорости и при любой малой скорости по-
лета, Поэтому минимально допустимая скорость автожира иди верто-
лета при отказе двигателей определяется нс срывом потока с крыла,
потерей управляемости и штопором, как у самолета, а допустимой вер-
тикальной скоростью снижения. При вертикальном снижении несущий
винт развивает примерно такую же силу сопротивления как пластинка
1,28) с площадью, равной омстаемой площади винта, и вертикаль-
ная скорости снижения автожира
/т-
У автожиров р было малым н они имели при вертикальном сниже-
нии небольшую скорость.
/V?
I1
198
Рис. 2.113. Угол атаки несущего винта на режиме сановрашення (о=0,091)
Из рис. 2.104 видно, что ускоряющий (отрицательный) момеш на
режиме самовращения создается проекцией подъемной силы, следова-
тельно, при малой подъемной силе винта режим самовращения не воз-
можен. На рис. 2.114 дай график минимального коэффициента подъем-
ной силы на режиме самовращения }mtn, являющегося либо грани-
цей самовращения, либо таким значением tv, при котором режим само-
вращения получается при очень больших углах атаки и отрицательных
шагах.
Рис. 2.114 Минимальный коэффициент подъемной
гиль: на режиме самовращения
У вертолета с большим крылом па режиме самовращения значи-
тельно уменьшается подъемная сила несуще|-о винта, и, так как вант
нс может иметь очень малый коэффициент то самовращение проис-
ходит с меньшим, чем на вертолетных режимах, числом оборотов.
Для оценки влияния геометрических характеристик лопасти ни ре-
жим самовращения вертолета приведем следующие данные.
На наивыгоднейшей скорости планирования (Г=0,2) при Мо=0,7
у вертолета с винтом без скоростного профиля на койне, лопасти вер-
тикальная скорость снижения увеличивается на 1,7 м/сек и угол на-
клона траектории QTp —на 2°, шаг должен бьпь на 0,5" меньше.
Угол атаки увеличивается на 1.8°, а тангаж сохраняется (У0 = Аа +
ФЛчги~0)-
При Мо=О,С ухудшение характеристик самовращения в 2 3 разг
меньше.
Переход к трапсцисвитным лопастям уменьшает вертикальную ско-
рость снижении на 0,65 м/сек и угол наклона траектории на 0.8г.
7. Граница допустимых режимов полета вертолета
(граница срыва потока)
Как показано в п. 4, у несущего винта с горизонтальными шарни-
рами имеются облает с большими углами атаки сечений лопасти.
Па вертолетных режимах полета (горизонтальный полот, набор вы-
соты) они расположены на концевой части лопасти на азимутах 270 -
300°, а па режиме самовращения — в комлевой части лопасти на ази
мутах 200—300’.
При увеличении коэффициента подъемной силы у несущего вин-
та появляется зона закрнтнческих углов атаки.
Кроме того, на диске виггта имеются зоны повышенных и закрп|И-
ческих углов атаки в местах, где лопасть проходит вблизи вихрей, со-
шедших с предыдущих лопастей. Здесь лопасть попадает в область
больших местных направленных вверх индуктивных скоростей, вызы-
вающих увеличение углов атаки отдельных сечений.
200
Когда зоны эакритичсских углов атаки становятся большими, ха-
рактеристики несущего винти мметио изменяются: зависимость tv от
шага и угля атаки винта становится нелинейной, увеличиваются коэф-
фициенты махового движения, продольной и боковой сил, профильное
сопротивление винта.
Гранина допустимых по условиям срыва потока режимов опреде-
ляется величиной коэффициента подъемной силы винта fB, характери-
зующего средний уровень углов атаки сечений, коэффициента скоро-
сти К, характеризующего степень неравномерности распределения углов
атаки сечений по диску винта, угла атаки винта, определяющего харак-
тер распределения углов атаки сечений, а также формой лопасти и
ерывными характеристиками ее профиля _
1-1з выражений для коэффициентов iv и I’
— Qi (wtf)- Г
uR
очевидно, что при уменьшении числа оборотов несущего винта, увели-
чении скорости и высоты полета коэффициенты tv и Г возрастают, и
у вертолета появляется возможность попасть на срывной режим поле-
та. Явления, связанные со срывом потока с лопастей несущего винта,
быстро прекращаются при уменьшении шага и увеличении числа оборо
тон несущею винта н уменьшении скорости полета.
Глубокое проникновение в зону срыва потока иногда кончается
катастрофой вертолета. Одна из пажвейших задач выбора параметров
вертолета при проектировании и определении его летных характери-
стик— обеспечить отсутствие срыва потока на всех разрешенных режи-
мах полота На вертолетах из-за возможности попадания в зону срыва
потока ограничиваются максимальные скорости и высота полета, пе по
пускается уменьшение оборотов несущего нинта ниже установленною
предела. Чтобы избежать срыва потока на больших скоростях полета,
для уменьшения подъемной силы несущего винта на вертолетах уста-
навливают крыло.
Летные испытания показывают, что срыв потока проявляется п уве-
личении напряжений и лопастях ц их шарнирных моментов, п возраста-
нии вибрации вертолета, в разбалансировке перголета, в ухудшении
управляемости. Следовательно, проявления срыва потока разнообразны
и сложны для определения границы срыва но расчету. Летный экспе-
римент и испытания пиктов в аэродинамической трубе до настоящего
времени дают еше недостаточно данных для установления общей гра-
ницы срыва потоки. Поэтому ниже даны граничные значения коэффи-
циентов пон.емпой силы - —полученные по расчету.
Расчетные графики допустимых значений коэффициентов тяги даны
в литературе [20] ц [24]. В первой работе граничным режимом полета
является тот режим, на котором средний ко лопасти коэффициент по п,-
емной силы на азимчте т|) = 270° становится равным максима типомV
коэффициешу подъемной силы профиля • Во второй работе кргг<е
рием срыва потока на вертолетных режимах полета является равенство
угла атаки на конце лопасти на азимуте ф = 27СГ- некоторому критичс
скому значению пкр=12с’ — на режиме, соответствующем началу
срывцых явлений, и акр = 16" — ца предельном для полета режиме с боль
шой зоной срыва.
Недостатком обоих методов является то, что неизвестно, как вы-
брать су ах или сыр для лопасти с набором профилен Кроме юю, стс-
пень неравномерности распределения углов атаки_по диску несущего
винта зависит от V, н при на больших V зона повышенных
углов атаки занимает меньшую часть диска, чем на малых 7. Поэтому
появление закритических углов атаки на больших V меньше сказывается
на изменении характеристик несущего винта, чем на малых 7; в методе,
изложенном в труде [24], это не учитывается,
В построенных ниже границах срыва принято, что допустимой ве-
личиной коэффициента tv является то значение, при котором начинает-
ся изменение характера зависимости tv от угла атаки и шага несущего
винта. Такие границы построены для винтов с различными геометриче-
скими характеристиками на основе расчетов по методу, изложенному
Рис. 2.115. Изменение коэффициента ty в зависи-
мости от утла атаки и шага несущего нита (7-0.2;
Ме=0,7)
На рис. 2. 115 и 2 [16 показаны графики зависимости коэффициен-
та от угла атаки п шага несущего винта с лопастями II варианта при
коэффициенте компенсатора взмаха fe=0,4, Из рис. 2.115 видно, что на
Г—0,2 при достижении некоторого значения рост практически
прекращается. Коэффициент ty имеет предельное значение, выше ко-
торого он не можез оьгть при любых а и Йо- Таким образом, из-за того,
что па малых V срыв распространяется сразу на большую зону, проис-
ходит резкое изменение .характеристик. Так как начало отхода кривой
от линейного участка выражено не явно, то на у=0,2 за принимаем
значение t„ меньше максимального на величину, cocmierciByromvio
Да = 2° (Л(^0,01).
На У = 0 за Г,;Р принята максимально возможная величина tu (§ 8),
На больших у (см. рис. 2.116} при некотором значении t„ увеличе-
ние tv но и резко замедляется. Значение tv. при котором кривая откло-
няется от линейного закона на Да — 0,5°, принято за Л, .
Из рис. 2 115 и 2,116 видно, что вгличи!|а tv при лапггых V и Мо
мало зависит от угла атаки несущего винта
202
На рис. 2,117 и 2.118 показаны графики зависимости коэффициен-
тов продольной и боковой сил h, s, махового движения ai, Ь;, крутящего
момента ms и профильной мощности т^р от угла атаки винта. Эти коэф-
фициенты также претерпевают изменение при ty- : силы несущего
винта и маховое движение лопастей увеличиваются палая и п сторону
лопасти, идущей вперед (ф’-90в), коэффициент профильной мощности
резко возрастает, Также интенсивно возрастает переменная часть тяги
пицта: вторая и более высокие гармоники.
Таким образом, на Т\>0 tVK меньше максимально возможных зна-
чений tv, но можно считать, что при tv=tu начинаются описанные
выше явления, связанные со срывом потока.
График зависимости от 7 н Ми показан на рис. 2.119. Очевид-
но, чю величина i# сильно уменьшается при увеличении V. При ма-
лых и средних V t,,. уменьшается при увеличении Мо. а при больших V
влияние Мо незначительно
Рис И. П9. Зависимость от У ц М» (прячо-
угольныи
На рис. 2. 120 и 2. 121 показаны графики 1^кр для лопастей с раз-
шчпыми геометрическими характеристиками. Наибольшее значение
имеет винт с прямоугольными лопастями с профилем NACA230 (111 ва-
риант) Такой же вннг со скоростным профилем гш конце (II вариан,}
имеет на 0,01—0 02 меньшие значения £и . Увеличение геометрической
кругли лопасти увеличивает <„ приблизительно на 0,01 (IV вариант)
Наименьшую величину фхр имеет винт с трапециевидными лопастями
(I вариант).
Графики приближенны, получены по расчету, но они позволяют
конструктору вертолета до проведения специальных летных испытаний
вертолета определить границу безопасных скоростей полета. Лесные
испытания показывают, чги можно получить немного большую величину
?у, чем расчетные значения . Это объясняется тем, что принятые
2114-
Рнс 2.121. Заннсимость от V oiiiitoo с лопастя-
ми ратной формы (Мо=0,7)
нами Л, меньше максимально возможных значений /у, а также тем, что
п расчетах не учитывались факторы, повышающие 4'х профиля-, влия-
ние центробежных сил на пограничный слой и нестационарное^ обте-
кания лопастей несущего винта.
8. Распределение профильных потерь по диску несущего винта.
Зависимость профильных потерь от аэродинамических характеристик
профилей лопасти
В п. 3 § 3 мы рассматривали графики коэффициентов профиль-
ных потерь несущего винта. Сейчас проследим, как влияют аэродина-
мические характеристики профиля лопасти, окружная скорость и форма
допасти на распределение профильных потерь по диску несущего вин-
за н на их суммарную величину.
Потребная мощность несущего винта, отнесенная к полетнемм лесу,
пропорциональна ткМ„ [см. выражение (5. 16} цз гл. 3]:
где
^CO|,StlOTKM°‘
<5:CrMu
(4.51)
mkM?=con5t2 ; тП|1М’.
(4.52)
Таким образом, потребную мощность вертолета при заданных
•Mll04l, Н, Р-=-р . с, — определяет величина ягпрМо, яычисценная
при соответствующих заданным величинам значениях СРМ2 и Сд-М/.
Например, вертолет имеет нагрузку на L лс2 ометаемой винтом цдоща
ди р = 35 кге/л2 и коэффициент вредного сопротивления сг=0,0075;
расчетный (рабочий) режим полета 7=275 км/час на высоте Н —
= 1000 м. При этих условиях безразмерные коэффициенты вертолета
равны:
СУМ1= -А-^-0,00545;
|;2уа2
=0,227;
СхМ^=с>^0., —0,00039.
Мы приводим результаты расчетов, относящиеся к концевому те-
чению лопастей г = 0,975. На рис. 2, 122 показаны графики изменения
углов атаки концевого сечения прямоугольной лопасти Ш паризит.
п=0,091) по азимуту, построенные в зависимости от числа М сечения при
трех значениях окружной скорости (Ма). Из графиков видно, что сече-
ние имеет большие yuiu атаки при малых числах М и малые отрица-
тельные углы атаки при больших числах М, С помощью этих графиков
легко определить расположение областей срыва потока и повышенного
профильного сопротивления. Для этого нужно для профили рассматри-
ваемого сечения нанести кривые и1ф и а * (см. рис. 2.98 и 2 99} на
графики рис. 2,122. Мы видим, что при скоростном профиле и Ма=0 7
(w£=235 м/сек, 7=0,325, (., = 0.1228) максимальные углы атаки деве
лики (на 1,5° меньше критических значений), но ия азимутах ф = 35 =
140° имеет место глубокое проникновение в область повышенных сх:„
При Мо = О,655 lwS = 220 м/сек, 7=0,347, iv=0,14) максимальные углы
атаки близки к критическим и имеются две зоны повышенного профиль-
ного сопротивления: на азимутах -ф—55=120° и на азимутах ф = ^70ч-
0° прн a—10--.-5’ и М=0,4(=0,62. При Мо=О,6| (<bR— 205 м/сек
7=0.373, (v = 0,I6l) концевое сечение на азимутах ф=250 = 3,50'’ пронн-
206
Рис 2.12J Профильные потери в конце-
вом ссчсни|| лопасти в зависимости от
икимугальхого положения лопасти
Т(И>« •'НЯчнниит окружной скорости
Щ?то нмпта (Ма‘)
ПР»
песу-
2И7
каег в зону срыва потока и в зону повышенного профильного сопротив-
ления, Увеличения профильных потерь при больших числах М на азиму-
те if-90: ист
Допустимость углубления концевого сечения в область срыва пото-
ка с точки зрения поведения винта в целом характеризуется графиком
па рис. 2.119. В соответствии с этим графиком режим полета с Мо = 0,61
допустим.
Как показано выше, потребная мощность вертолета и профильные
потери винта определяются величиной ШпрМ^, которая для рассматри-
ваемого сечения равна
J-6 (4.53)
<1г 2Л J r ztt J
Па рис. 2. 123 показаны графики произведения cxptAJ по азимуту.
Интеграл (1.53) равен (табл. 2. |2):
Таблица 2.12
Мо | 0,7 0,655 0,61
dm,.. —Мо б г ' । 0,0073 0,0058 0,0056
Следовательно, наибольшие профильные потери в рассматривае-
мом ссчспии получаются при Мо—0,7, а наименьшие -при Мо—0,61.
При Мо=О,655 профильные потери немного больше, чем при Мд —0,61,-
на отсутствуют местные срывныс явления.
Теперь предположим, что мы поменяли бы профиль в этом сечении.
Его углы атаки изменились бы пемнпго, а области срыва и повышенных
профильных потерь могут существенно измениться. На рис. 2. 122 нане-
сены также кривые а,[р и а* для профиля NACA 23012. Очевидно. при
всех Мо сечение ие имело бы областей срыва, но имело бы па азимутах
ф = 280п-0ч-170° большую область повышенных профильных потерь
Особенно велики потери на ф = 90=, где число М больше МНр на 0,]—0,2
Так как ar<ahp на всех ф, то у винта с этим профилем можно было бы
уменьшить число оборотов.
Таким образом, график на рис. 2.122 показывает, какова наиболее
желательная зависимость аКР и а* от числа М у профиля для рассмат-
риваемого ссчсния на одном из расчетных режимов полета.
Например, профильные потери винта уменьшились бы, если бы
профиль имел МНр=0,9 на а=0 при сохранении а* = 7,5ч-5,5° на М =
= 0,5->0.6. Тогда иаивыгоднейшие обороты винта соответствовали бы
М(-,= (),7. Высокое значение М|51 при а-О имеет тонкий симметричный
скоростной профиль, но на М—0,5ч-0,6 у него низкие значения а".
Профиль, имеющий Мкр—0,8 на aSO и а* = 14-т-7с, на М = 0,4-ь0,6
подошел бы для рассматриваемого режима полета при Мо—0,61. Такие
характеристики имеет сильно вогнутый профиль с небольшой относи-
тельной толщиной, однако его применение значительно увеличило бы
кручение лопастей и нагрузки на органы управления вертолетом.
При выборе профиля надо учит-ьншц,, что на других режимах по-
лета зависимость а. = /(М) будет другой. Так, на рис, 2.124 показан
1рафикдля режима, С1ипкетС|Вуюшего полету вблизи динамического
потолка: М„ОЛ-0.|22; СуМ’-О.ОЮЗ, СхМ* =—0,00012, Ма = 0,7.
Из рис. 2. 124 видно, что на этом режиме профильные потери Очень
велики В соответствии с рис. 2 119 этот режим находится на |раципе
208
срыва. На режиме висения у земли с меньшей окружной скоростью рас-
сматриваемое сечение имеет af = 2,7Q, М=0,65.
Выбором формы лопасти можно в некоторой степени воздейство-
вать на изменение углов атаки концевого сечения лопасти по азимуту
и добиться лучшего сочетания зависимости ar=f(M) с характеристика-
Рнс. 2.124. Угол атаки концевого ссчеиил лопасти н зави-
симости пт числа М
••ги профиля. Для примера на рис. 2. 125 показан график пг—f(M) для
концевого сечения лопастей I (трапециевидная), II (прямоугольная).
V! (прямоугольная с увеличенной краткой) и V1I (расширяющаяся) ва-
риантов при IV=O,I2, tx= — 0,013, 7=0,4, Мо=0,7-
Из рис. 2.125 видно,_что трапециевидная лопасть, у которой умень-
Ркс. 2.125. Угол атаки концевого сечения лопасти в зависимости
от числа М у винтов с лопастями ранной формы
по|ерь, имеет, однако, наибольшие углы атаки при М = 0,4-е-0,7. Расши-
ряющаяся лопасть при этих числах М имеет углы атаки на 1° меныиие,
чем прямоугольна я лопасть. Лопасть с увеличенной круткой на всех
азимутах имеет на 1,7° меньшие углы а гаки, чем другие варианты ло-
пастей.
1002
209
Для количественной опенки влияния изменения формы и профили
лопасти должен быть вычислен интеграл (4.53).
Из сказанного ясно, что распределение по азимуту лро|]|ильных
потерь в каждом сечении лопасти зависит от режима полета, окружной
скорости п профиля лопасти. Наибольшее вггимаггие должно быть уде-
Рнг. 2.128. Распределение’ прпфнльянх потерь по
лено выбору профиля в концевых сечениях лопасти, где получаются
наибольшие профильные потери. Для иллюстрации на рис. 2. 126 пока-
зано распределение профильных потерь по радиусу лопасти II варианта
при МПОл=01227, №[1=0,655 на четырех азимутах, а также распределе-
ние средних по окружности профильных потерь по радиусу лопасти.
По рис. 2.126 можно определить, что около 35% гфофильпых потерь
относится к концевому участку лопасти от т= [,□ до г = 0.9.
§ 5. ВИХРЕВАЯ ТЕОРИЯ НЕСУЩЕГО ВИНТА
1. Задачи, стоящие перед вихревой теорией
Главной задачей вихревой теории несущего винта является опреде-
ление аэродинамических нагрузок на лопасти с учетом неравномерного
поли ипдук| нвных скоростей.
Решение этой задачи позволяет:
[. Уточнить аэродинамические характеристики несущего винта.
Эти уточнения имеют меньшее значение для одновинтового вертолета н
большее для мпогопнптовых вертолетов, где взаимное индуктивное
влияние оказывается очень сильным и существенно сказывается на их
летных характеристиках.
210
2. Определить как постоянные, так и переменные аэродинамиче-
ские нагрузки на лопасть и по этим нагрузкам рассчитать колебания
лопасти и ее деформации. Вез учета неравномерного поля индуктивных
скоростей определение переменных аэродинамических нагрузок па ло-
пасть на ряде режимов полета оказывается -весьма неточным, Поэтому
вихревая теория несущего винта должна входить как составная часть
в расчет колебаний лопасти и определения в ней переменных напряже-
ний. т. с. в расчет лопасти на прочность.
Только при помоши вихревой теории оказывается возможным объ-
яснить такие явления, как резкое возрастание переменных нагрузок ца
.fOffjcjb ц вибраций вертолета на режимах малых скоростей и появле-
ние зон местных срывов потока на средних и больших скоростях
полета
На режимах малых скоростей поле индуктивных скоростей ока-
зыиаегси особенно неравномерным. Это приводит к возникновению
значительных переменных аэродинамических сил, действующих на ло-
пасти- Лопасти начинают колебаться с повышенными амплитудами
В них возникают значительные переменные напряжения. Переменные
силы, приходящие ог лопастей на втулку, приводят к повышенным виб-
рациям всего вертолета. Объяснение этого явления возможно ,олько
с помощью вихревой теории.
На больших и средних скоростях полета наб.подае|ся явление, ко-
торое можно назвать индуктивным срывом потока. Это явление возни-
кает вследствие больших индуктивных скоростей, возникающих в райо-
не вихрей, сходящих с концов лопастей. Когда последующие лонасги
проходят вад этими вихрями, на них возникают значительные всплески
аэродинамических Hai-рузок, а на некоторых режимах даже и срыв по-
гона. Это явление частично описано п работе [17] и под| верждается
летными экспериментами.
Не менее важной задачей вихревой теории является также опреде-
ление поля индуктивных скоростей, вызываемых винтом в потоке, обте-
кающем вертолет и его отдельные части в полете.
Характер обтекания крыльев вертолета, его фюзеляжа и стабили-
затора в значительной мере определяется полем скоростей, индуцируе-
мых несущим пингом. Возникновение индуктивных скоростей приводит
к дополнительным скосам потока и изменению истинных углов атаки
несущих элементов, а следовательно, и сил, действующих на все внеш-
ние поверхности частей вертолета Поэтому для изучения их обтекания
необходимо определение индуктивных скоростей в самых различных
точках пространства, окружающего вертолет.
Так, вихревая теория позволяет определить индуктивные скосы
в районе крыла вертолета и его стабилизатора, а следовательно, и дей-
ствующие на них аэродинамические силы. Поэтому опа входит также
составной частью в расчеты аэродинамических характеристик, балан-
сировки вертолета, хараьтериС|ИЦ его устойчивости и управляемости,
в которых эти силы играют существенную роль.
Можно назвать ц другие явления, для расчета которых использует-
ся вихревая теория. Достаточно подробное описание всех этих явлений
возможно только в специальных работах. Поэтому в этом параграфе
будет дано лишь краткое изложение наиболее важн!>гх элементов вих-
ревой теории без подробных обоснований.
2. Теоретические схемы, применяемые в вихревой теории
несущего кннта с конечным числом лопастей
В вихревой теории несущий вицт заменяется системой из присоеди-
ненных и свободных вихрей. Эта система может быть представлена
в виде вихревой пелены, покрытой вихрями П-образной формы (см
14*
211
рис. 2 128). Отрезки этих вихрей, расположенные на лопасти, назы-
ваются присоединенными вихрями. В зависимости от целей расчета
могут быть применены схемы, в которых лопасть заменяется либо при-
соединенным несущим вихрем (схема несущей линии), либо присоеди-
ненным вихревым слоем (схема несущей вихревой поверхности).
Во втором случае (рис. 2.127) лопасть заменяется системой присоеди-
Рис 2 127. Обтекание профиля лопасти в схеме
несущей вихревой поверхности
ненаых вихрей, распределенных по хорде лопасти с некоторой интен-
сивностью Тирис, такой, что
(5.1)
где Г—циркуляция скорости по контуру, охватывающему сечение
лопасти (рис. 2.128);
Уприс — погонная циркуляция присоединенных вихрей, распределен-
ных по хорде профиля.
Схема несущей вихревой поверхности более точно отражает физи-
ческую картину обтекания лопасти, во оказывается более сложной при
расчете. Поэтому часто для упрощения расчета несущая вихревая по-
Рнс. 2.128 Схема образования вихревой пелены при обте-
кании лопаси!
верхность заменяется несущей вихревой линией. При определении
индуктивных скоростей на достаточном удалении от лопасти это упро-
щение не приводит к существенным погрешностям в результатах и
поэтому часто применяется в расчетах. Определение же индуктивных
скоростей вблизи лопасти приходится производить по схеме несущей
яихревой поверхности.
При работе несущего винта условия обтекания лопасти па различ-
ных радиусах оказываются неодинаковыми. Поэтому величина цирку-
212
ляции присоединенных вихрей изменяется по радиусу лопасти. Измене-
ние циркуляции сопровождается образованием так называемых про-
дольных вихрей (см. рис. 2.128). Продольные вихри оказываются про-
должением присоединенных вихрей, расположенных на лопасти, и об-
разуют простирающиеся в бесконечность хвосты П-образных вихрей.
Интенсивность продольных вихрей должка равняться изменению
циркуляции присоединенных вихрей по радиусу лопасти:
где упрод— погонная интенсивность продольных вихрей;
Г—суммарная циркуляция присоединенных вихрей.
Если циркуляция присоединенного вихря изменяется по времени,
то с лопасти стекают также и поперечные вихри. Циркуляция попереч-
ных вихрей равна изменению циркуляции присоединенных вихрей по
времени:
дГ
di '
где yt — циркуляция поперечных вихрей, сошедших с лопасти в едини-
цу времени.
Погонная интенсивность поперечных вихрей может быть определе-
на так:
(5.4)
где U- -нормальная к оси лопасти составляющая относительной ско-
рости обтекания.
Поперечные вихри, так же как и присоединенные, оказываются
частью П-образных вихрей и но краям сливаются с продольными вих-
рями. Вследствие этой) циркуляция продольных вихрей оказывается
переменной но их длине и изменяется на величину циркуляции вливаю
щихся ® них поперечных вихрей.
В условиях осевого обтекзпип несущего винта циркуляция скоро-
сти в сечении лопастц Г остается постоянной по времени. Поэтому с ло-
пасти стекает вихревая пелена, состоящая только из продольных вих-
рей. Причем их интенсивность оказывается постоянной по длине сво
бедного вихря.
3. Форма свободных вихрей
В условиях полета стекающие с лопасти свободные вихри уносятся
от несущего нинта со скоростью, равной относительной скорости потока
протекающего через винт. Эти скорости, вообще говори, различны в раз
личных точках этого потока. Поэтому стекающие с лопастей свободные
вихри уносятся от винта с различными скоростями. В результате за
несущим винтом остается весьма сложная вихревая система, которая
к тому же непрерывно деформируется вследствие взаимного влияиня
вихрей друг на Друга. На некотором расстоянии от несущего пиита
вихревая пелена начинает сворачиваться л окончательно теряет свою
первоначальную форму.
Учет деформаций системы свободных вихрей представляет собой
чрезвычайно сложную задачу. Поэтому п теоретических методах расче-
та попытки учета этих деформаций еще не нашли достаючного распро-
странения. Обычно большинством авторов вводится допущение о том,
что свободная вихревая пелена уносится от несущего винта с постоян-
ен
ной скоростью, равной средней скорости протекании потока через несу-
щий винт.
Составляющие этой скорости цо осям координат, отнесенные
к окружной скорости конца лопасти со/?, обычно принимаются равными
g и Лоер (Лоер — средняя скорость протекания потока вдоль оси несуще-
го винта, отнесенная к a>R).
Средняя скорость протекания Лоср определяется по известной
формуле:
При таком допущении свободные вихри располагаются по скошен-
ной винтовой поверхности. Причем продольные свободные вихри рас-
пола|аются по скошенным винтовым линиям, а поперечные по радиаль-
ным образующим этой винтовой поверхности. Поэтому применительно
к несущему винчу вертолета, лучше разделять свободные вихри на
винтовые н радиальные, а не на продольные и поперечные, как эго де-
лается в теории крыла,
Все свободные вихри, стекающие с лопастей, оказываются внутри
наклонной цилиндрической поверхности, опирающемся сверху на окруж-
ность несущего винта. Система вихрей, заключенная внутри этой по-
верхности, называется обычно вихревом колонной или вихревым
цилиндром.
Составим уравнение линии, по которой располагаются свободные
вихри, сошедшие с лопасти на произвольном радиусе q, Эта линия
совпадает со следом, оставляемым лопастью в потоке, проходящем
через несущий винт. Если пренебречь отклонением лопасти от плоско-
сти вращения, то координаты этой линии (см., например, координаты
топки Л на рпс. 2. 130) могут быть записаны следующим образом:
где -со<Э<>0;
х = — ссоз jr/?(Ро — z>):
Z-= —QSinS;
Р = —'оср^Оо &),
(5.5)
()<q< А*:
о0 азимут лопасти в рассматриваемый момент времени:
в азимут лопасти в тот (трпщедгпий моменг времени. когда с нее
стекал вихрь.
Все приведенные ниже выкладки буду г основаны только на такой
форме свободных вихрей. Уточнения, вносимые мчегом их теформяц-ии
рассматриваться не будут.
4. Определение индуктивных скоростей по формуле Био и Савара
Если форма свободных вихрей известна, то для определения индук-
тивных скоростей может быть использована формоля Био" и Савара.
Эта формула позволяет определить элементарную скорость dv, индуци-
рованную в точке Л1 элементом вихря длиной dS (рис. 2. 129). В век-
торной форме эта формула может быть записана в виде
где dv~ вектор элементарной индуктивной скорости, вызываемой в точ-
ке М элементом вихря длиной dS\
Г—циркуляция вихря;
dS— вектор элемента вихря;
211
I- вектор, идущий от точки А1, в которой вычисляется индуктив-
ная скорость, до точки расположения элемента вихря tJS-,
—расстояние от точки М до элсмешз вихря dS.
Направление вектора dv перпендикулярно плоскости, образуемой
векторами jiS и I-
Для определения 1гндук1ивиой скорости от всего вихри выражение
(5 6) следует проинтегрировать по его длине:
(5. 7J
Взяв такие интегралы по длине всех вихрей как расположенных на
лопасти, так и сходящих с несущего винта, можно получить полную
индуктивную скорость в любой точке пространства вокруг вертолета
5, Применение формулы Био и Савара для построения
вихревой теории несущего винта
Формула (5. 7) может быть положена в основу вихревой теории
несущего вцнтэ. Для этого нужно определить индуктивные скосы по-
тока в плоскости несущего винта и учесть их при определении истинных
углов атаки сечений лопасти. После этого нагрузки на лопасть могут
быть определены по форм}*лам типа
(5.8)
где значение су взято по продувкам профиля для угла атаки, подсчи-
танного с учетом индуктивного скоса.
Дли определения индуктивного скоса потока на лопасти несущего
пинта достаточно вычислить только осевой (паоаллельный оси несуще-
го вивта) компонент индуктивной скорости vd. Тогда угол индуктивного
скоса потока может быть приближенно определен по формуле
(8.9)
где Aat — изменение угла атаки элемента лопасти за счет индуктивного
скоса потока.
215
По правилам векторного исчисления проекции произведения векто-
ров dSxl на ось у может быть вычислена следующим образом.
(Лх7)у=^Л-«Л, (.5.10
гд? iiSx и dS2 — проекции вектора dS, а 1Х и 1г~проекции вектора I па
оси х и г; направление осей х н г показано на рис. 2.130.
Рис. 2.130. Схема для вычисления осевых сосгац^нхз-
щих индуктивных скоростей
Соответственно осевой компонент индуктивной скорости може!
быть получен по формуле, аналогичной (5.7):
Обычно индуктивные скорости представляют в виде суммы трех
составляющих:
— ФПРИГ ®веиг 4'^рад> ('’•
где Рпрлс — индуктивная скорость от присоединенных вихрей;
Рвивт — индуктивная скорость от винтовых вихрей:
црад— индуктивная скорость от радиальных вихрей.
Составим общие формулы для вычисления осевых составляющих
индуктивных скоростей, не ограничиваясь только случаем у = 0 (у —
координата точки, в которой вычисляется индуктивная скорость).
216
6. Осевая составляющая индуктивном скорости
от присоединенных вихрей
Присоединенные вихри имеют циркуляцию, равную ГЛ., и распола-
гаются вдоль лопастей несущего винта. Индексом N здесь обозначен
порядковый номер лопасти несущего винта. Будем считать, что У—О,
1, 2,..., —1, где лл — число лопастей в несущем пинте (см. рис. 2. 130).
Входящие в формулу (3. Ц) значения dSv и dSz для присоединен
них вихрей равны:
— docos^, | }
где фу — азимут лопасти с номером Л.
Подставив выражения (5.13) в формулу (5 II) и взяв интеграл
(5 11) по длине всех лопастей несущего винта, получим
Л=г^-1 я
*пРнс= 2 (5.14)
,v_o i
4л
iun?,v-icOs*.
Входящие в Кн значения Zr, lL и I определяются по формулам.
1Х = Г COS ф- QCOSijv,
Zz^rSinC— QSln фд,,
(5. lol
где г — радиус оьружггости, приходящей через точку, в которой вычис-
ляется индуктивная скорость, а
— ~N- (5.161
Здесь фо — азимут лопасти е номером У=Г).
Подставив значения 1Х и tz в формулу для Кх. получим:
7. Осевая составляющая индуктивной скорости
от винтовых (продольных) вихрей
При определении индуктивных скоростей от винтовых вихрей сле-
дует просуммировать скорости, индуцируемые пихрями, сходящими
с различных радиусов лопасти. Так же как при определении скоростей
от присоединенных пихрей, нужно определить суммарные скорости,
индуцируемые оихрямя, сошедшими со всех лопастей несущего линза
Чтобы воспользоваться для этого формулой (3. If), вихревую пе-
лену удобно разделить на полоски, объединяющие вихри, сошедшие
с участка лопасти длиной dp. Тогда циркуляция вихрей, заключенных
в этой полоске, в соответствии е выражением (5.2) оказывается рав-
- v ,
нои -- ап.
v
Для определения значений dSx и dSz продифференцируем выраже-
ния (5.5). Тогда (см. рис. 2.130):
(^tUdx=-(csinf 1 5Д7)
(dSs)JHil,= -dz pcos&df*. J
217
Воепользованшись формулой (5. 11), полупим
2,-1 R 4Л
]a^L«dodi'-
л _о ц а. »
£w=T-[-^-ecos»-|- -‘г (esinS-! и/?}
4л [ TJ /3
(5.18}
Входящие в Лл значения 1Х. и I определяются по формулам (см
рис 2.130):
/7л~г cos О —ц cos 9,
1г - rsini- QSln 9,
(5.19)
Значение Нх, представляющее собой расстояние по нормали к пло-
скости вращения от винта до точки вихревой пелены (см. рис. 2. 130),
может быть выражено через азимуг вихревой пелены £1 по формуле
^5—
(5-20)
где Л?-0, 1, 2, .... ?л 1
8. Осевая составляющая индуктивной скорости
от радиальных (поперечных) вихрей
Циркуляция радиальных вихрей, сошедших с лопасти в единицу
времени, равна------~-aL В вихревом следе эти вихри располагаются
по радиальным образующим Поэтому
14/SJpiI= -T/ecosl>, ]
(Л?г\,.д—-def=in&. i
Применяя тот же подход, что и выше, получим
2,-1 W о
2j (.5.22)
д’_0 и I——
। де
д/л,=-!-|_—-^2. 3;пЭ -|--^-cos9 ].
Входящие в значения 1Х, 1г и I определяются но формулам
(5. 19).
Интегрирование no t в формуле (5. 22} можно заменить 'интегриро-
ванием по fb, имея в виду, что f’-ip.v + wl. Тогда
г.-. -1 * *,у .
f i5-23’
218
Входящие в выражения (5. 14}, (5.18) и (5.23) функции Кх,
и /Ил,- будем в дальнейшем называть коэффициентами индукции эле-
мента нихря dS в точке с координатами г, ф и у.
9. Интегро-дифференциальное уравнение вихревой теории несущего винта
Для определения аэродинамической нагрузки на профиль лопасти
индуктивный скос посоха следует Определить от всех свободных вихрей
и присоединенных вихрей всех лопастей, за исключением рассматри-
ваемой, так как этот вихрь участвует в образовании подъемцой силы.
выражаемой формулой Н. Е. Жуковского.
T — qUT. (5.24)
Другими словами, скос потока от присоединенных вихрей на лопа-
сти с порядковым номером N-0 следует определять, оычисляя индук-
тивную скорость оПрис по формуле, отличающейся от (5. 14} тем, что
член с -V—О отсутствует:
А' -х , — 1 д
"Лрче- C^-A'ftrrfQ. (0.25)
Л'-1 о
Приравняем между собой подъемные силы, определенные по фор-
мулам (5 8} и (5.24). Получим
г~ С с,IV. (5.26)
Если ограничу |Ьея режимами полета, на которых можно положить,
что =с’ а и (7 —(7г и представить угол атаки а в виде
a = 4>0-Hov <5-27.’
(где <1'о — угол притецани)| потока к профилю лопасти, который был бы
при отсутствии индуктивного скоса потока Да,,), 3 Асм, выразить в соот-
ветствии с выражением (5. 9). то формулу {5.26) можно записать в сле-
дующем виде.
Л=— dbUAA (5.28)
У у х от 2 « > v
Подсгзвив сюда значение vy, определенное па формулам (5. 12),
(5 14), (5.18} и (5 23),и учтя уточнение (5. 25), можно прийти к интегро-
дифференциальному уравнению, аналогичному основному инте|т>о-диф-
ференцнальному уравнению теории крыла конечного размаха [28]:
R
NKNdQ-~
Л 1 о
: -1Я R Л
SJ .1’ -2,Г J . (S.29)
А=0 0 &—w Л'_С, 0 fr— -w J
г- . г, _ -Г, пГХ пГу
Следует отметить,что входящие сюда функции иж,ф0,Гд-, -—,
Ку, LK, А1а- представляют собой функции радиуса и азимута лопасти.
Причем функция Фо зависит также от махового движения лопасти, ко-
торое в свою очередь является функцией аэродинамических нагрузок,
а следовательно, и значений Гх. Поэтому интегро-дифферснцяальное
219
уравнение (5.29) нужно решать вместе с уравнением махового движе-
ния лопасти.
Предложить какой-то общий метод решения этого уравнения не
представляется возможным. В каждом отдельном случае в зависимости
от способа определения индуктивных скоростей применяется свои, наи-
более подходящий к данному случаю, метод решения. В качестве при-
мера может быть указан метод, изложенный в § 8 гл. 1 книги второй.
Иногда для решения используется метод последовательных при-
ближений, заключающийся в том, чго вначале индуктивная скорость
vv полагается постоянной по диску винта и вычисляется Л в первом
приближении. Затем вычисляются члены, стоящие в выражении (5.29)
в квадратных скобках и находится новое значение Го и таким образом
процесс продолжается до тех пор, пока решение нс сойдется
Следует однако иметь в виду, Ч|» сходимость такого метода обес-
печивается только в отдельных частных случаях и поэтому каждый
раз специально должна проверяться.
Имея и виду такой или иной метод последовательных приближений
или полагая возможным ограничиться только первым приближением,
многие авторы даюг в своих работах только метод вычисления индук-
тивных скоростей по величинам циркуляции Г, предполагая их задан-
ными (см., например, [16] и[22]). Часто поэтому в понятие вихревой тео-
рии вводится только операция определения индуктивных скоростей по
шданным значениям Г.
10. О постоянстве циркуляции свободных вихрей вдоль прямых,
параллельных оси наклонного вихревого цилиндра,
и возможных в связи с этим упрощениях
Выше, в п. 2, уже отмечалось, что циркуляция винтовых вихрей цо
их длине оказывается переменной из-за того, что они сливаются с ра-
диальными вихрями. Поэтому при вычислении интеграла (5. 18) следует
найти зависимость =f( U). Аналогично при вычислении цнге1 рала
rfe
(5.23) следует иметь в виду, что изменяется по длине вихревой пе-
лены вместе с переменной (1 Это обстоятельство усложняет вычисление
интегралов (5.18) и (5 23). Поэтому при их вычислении очень удобно
а г дг дГ у
восполыкншп.си тем, что и —— оказываются постоянными вто.и
</|> 08
прямых, параллельных образующим вихреиого цилиндра.
Действительно, при установившемся обтекании несущего пиита
с определенного радиуса каждой лопасти на азимуте тр будут сходить
вихри одиЕ<аковой иеетснсивности Эти вихри будут уноситься ог несу-
щего винта но прямой, параллельной оси вихреоой колонны. Поэтому
на любом расстоянии от винта и точке вихревой пелены с азимутом
0=ф и радиусом у —г интенсивность винтовых ее радиальных вихрей
оказывается одинаковой.
Для дальнейших выкладок важно отметить, что всякая прямая, про
ходящая ппутри вихревой колонны и параллельная ее оси, пересекает
вихревую пелену в точках
«.-(з. -8 Г»)>„,«, (5.30)
где n = 0, 1, 2,..., оо;
О — азимут несущего винга, ОЕСЧИТЫваемын только в диапаище от
О до 2п;
— азимут той лопасти, для которой разность (фу—0) имеет наи-
меньшее положительное значение.
220
Из структуры формул (5.18) и (5.23) следует, что для определе-
ния индуктивной скорости в какой-либо точке пространства необходимо
вначале проинтегрировать по всей вихревой пелене функцию, пред-
ставляющую собой произведение интенсивности элемента этой вихревой
пелены на коэффициенты индукции Ln и Мк, а затем просуммировать ре-
зультаты, полученные от вихревой пелены каждой лопасти несущего
винта в отдельности.
Однако при этом не обязательно интегрирование вести вдоль вихрей,
составляющих вихревую пелену. Можно вначале просуммировать про
изведеиия из интенсивности элемента вихревой пелены на коэффициенты
индукций Lf, и ЛК- вдоль прямых, параллельных оси пихрепой колонны
При этом, ввиду того что интенсивность вихрей вдоль этих прямых
постоянна, эта операция сведется к суммированию только коэффициен-
тов индукции. Поэтому элементарные состапляющие индуктивной ско-
рости от этих вихрей смогут быть представлены в виде
(5.31)
где Ft— циркуляция присоединенного вихря в момент, когда лопасть
находится на азимуте !); = (►.
Проинтегрировав эти выражения по всему диску несущего винта,
получим формулы для определения осевых составляющих индуктин-
иых скоростей в виде
(5.32)
На основе этих формул может быть построен метол расчета, при-
менимый на практике. Впервые этот метод был применен М. Н. Тишенко.
Следует отметить, что при практическом использовании этого метода
обьем счетных операций вес равно оказывается очень большим.
Так, если для вычисления интегралов (5.32) окружность несущего
винта разделить по азимуту на г<|> участков, а лопасть на zr участков по
радиусу, то для вычисления поля осевых составляющих индуктивных
скоростей только в плоскости несущего винта, вычисление подынтеграль-
ных функций в выражениях (5. 32) придется произвести (г<.зг)2 раз
Если принять д+=72 (Д-ф=5"), а г,= 30, то величина (z±zT)2 будет
равна приблизительно 4,5- 10s. Поэтому этот метод может быть эффек-
тивно применен только на вычислительных машинах со скоростью счета,
существенно большей 20 000 операций в секунду.
11. Особенности применения схемы несущей линии
и несущей вихревой поверхности
Выше уже отмечалось, чю схема несущей вихревой линии позво-
ляет получить удовлетворительные результаты, если индуктивные ско-
рости вычисляются на достаточном удалении пт лопасти. Но для опре-
деления аэродинамических нагрузок по формуле (5.8) оказывается не-
22]
обходимым вычислить индуктивные скорости на попасти, т. е. там, где
но схеме расчета расположен присоединенный вихрь
Если применяется схема несущей линии, то при вычислениях по
мере приближения к несущему вихрю индуктивные скорости начинают
возрастать и на самом вихре обращаются в бесконечность. Это проис-
ходит в двух случаях:
]. Если обтекание лопасти нестационарно и в вихревом следе об-
рияуЮ|СЯ радиальные (поперечные) пихри.
2. Если сходящие с лопает винтовые (продольные) вихри обра-
зуют с осью лопасти угол, отличный от л/2, что всегда имеет место при
косом обтекании несущего винта, так как лопасти обтекаются со екпл|,-
жецием
Следиваге.тьно, индуктивные скорости на несущем вихре не будут
обращаться в бесконечность только при осевом обтекании несущего
Ы|1п’а.
Перечисленные трудности можно обойти, если пренебречь влияни-
ем ралиалццых вихрей и скольжением лопасти, Такой подход весьма
распространен на практике и может применяться в тех случаях, когда
это допустимо по характеру решаемой задачи. Однако он делает ее ре-
шение весьма приближенным, что нс, всегда устраивает исследователя
От этого недостатка свободен метод рнечега с примененном схемы
несущей вихревой поверхности. Поэтому при расчете индуктивных ско-
ростей в районе лопасти можно пользоваться приемами, основанными
на замене лопасти схемой вихревои поверхности, как это делается в ieo-
рии нестационарного обтекания крыла [30]. Однако при этом задача
об определении индуктивных скоростей становится еше более сложной
Поэтому такой подход при расчете несущего нинта не нашел еще до-
статочно широкого практического применения, хотя работа в этом на-
правлении ведется [19].
Для практических целей можно применить прием, при когором
стекающие с лопасти свободные вихря разделяются па пихри, непосред-
ственно примыкающие к лопасти, и вихри, удаленные от лопасти. После
этого индуктивные скорости от вихрен, удаленных от лопасти, опреде-
лять но схеме несущей вихревой липни, а для расчета скоростей от вих-
рей, примыкающих к лопасти, составить методику, основанную на схеме
несущей вихрепой пещерхностн.
12, Разделение вихрей на примыкающие к лопасти и отдаленные.
Применение «гипотезы стационарности»
Для облегчения анализа влияния различных элементов вихревой
пелены на величину аэродинамической нагрулкн на лопасть оказывается
удобным разделить свободные вихри на два класса [17]. К первому
классу отнести вихри, примыкающие непосредственно к задней кромке
рассматриваемой лона г i п и сошедшие с нее за время поворота по ази-
муту па некоторый небольшой угол Дх|’ (Д1]? = 20-е30о). Такие вихри на-
зывают примыкающими (к данной лопасти), а вызываемые ими нндук-
1Нвнын скорости—собственными. Ко второму классу относятся все
остальные свободные вихря. Эти вихри называю! Отдаленными, а вы-
зываемые ими скорости -внешними индуктивными скоростями.
Такое деление связано с тем, что сошедшие с лопасти вихри оказы-
вают заметное влинпие иа аэродинамическую нагрузку па лопасть толь-
ко пока они расположены на достаточно близком расстоянии от нее.
При удалении вихрей иа 20—30® по азимуту несущего винта их влияние
пропадает, но проявляется снопа, когда лопасть сделает полный оборот
и вновь приблизится к этим вихрям. При этом лопасть встречает на
своем пути нс только спои вихри, но и вихри, сошедшие со всех остяль-
ных лопастей несущего винта, Все эти вихри обычно объединяются
общим понятием отдаленных вихрей.
В некоторых случаях при расчете оказывается удобным опреде-
лись отдельно поле скоростей, вызываемое только отдаленными вихря-
ми, и рассматривать обтекание лопасти, движущейся в этом нсраино-
мериом поле. При таком подходе обтекание допасти оказывается по-
хожим па обтекание крыла самолета, летящего в условиях неспокойного
воздуха. Так же как и для крыла самолета, при расчете переменных
аэродинамических нагрузок на лопасть может быть учтено влияние сво-
бодных вихрей, непосредственно примыкающих к допасти, а може,
быть применена и так называемая «гипотеза стационарности». По этой
гипотезе предполагается, что при нестационарном обтекании профиля
на него действуют такие же нагрузки, как если бы возникшая в рас
сматривасмый момент времени картина обтекания оставалась неизмен-
ной сколь угодно долгое время При использовании «гипотезы стацио-
нарности» влияние примыкающих к лопасти свободных вихрей не
учитывается.
Таким образом, картина обтекания лоиасги .может быть представ-
лена в следующем виде при вращении несущею випга ^опасть ветре
Чает неравномерное пояс внешних индуктивных скоростей, вызванное
воздействием псей вихревой системы несущего винта, за исключением
только вихрей, непосредственна примыкающих к лопасти. Под дейст-
вием этого поля скоростей углы агаки сечений лопасти непрерывно из-
меняются, и на лопасть начинают действовать переменные аэродина-
мические нагрузки, вызванные неравномерностью этого поля. Па вели-
чину переменных аэродинамических нагрузок оказывают нлияние
также примыкающие к лопасти свободные вихри, стекающие с нее при
изменении циркуляции. Влияние примыкающих вихрей имеет тот же
характер, что и при нестационарном обтекании крыла самолета конеч-
ного размаха.
13. Мгновенные и средние индуктивные скорости и возникновение
переменных аэродинамических нагрузок на лопасть
Расчет индуктивных скоростей по теоретическим схемам с конеч-
ным числом лопастей даст возможность определить истинную (мгновен-
ную) индуктивную скорость в любой точке пространства около верго
лета. Истинные индуктивные скорости оказываются величинами пере-
менными, пульсирующими во времени с частотой проходящих мимо рас-
сматриваемой точки вихрей. Можно выделить постоянную по времени
(среднюю) и переменную составляющие индуктивных скоростей.
Если рассматривать фиксированную точку в пространстве, связан-
ном с вертолетом, вблизи его несущего винта, то переменные цо време-
ни индуктивные скорости в этой точке будут вызываться как присоеди-
ненными, так и свободными вихрями. Но если сравнить их значения, то
можно заметать, что наибольшими по величине оказываются перемен-
ные индуктивные скорости оу присоединенных и свободных, примыкаю-
щих к лопасти, вихрей- Эти индуктивные скорости пульсируют с. часто-
той проходящих мимо рассматриваемой точки .юнастей несущего
винта. Появление этих скоростей связано прежде всего с образованием
аэродинамических сил на лопасти и наблюдается и в ,ом случае, когда
нагрузка на лопасть сохраняется неизменной во времени, например на
режиме висения. Поле скоростей, вызываемое этими вихрями, в этом
случае вращается вместе с лопастью.
Нечто похожее возникает и при косом обтекании несущего винта
в поступательном полете, И здесь можно выделить определенную состав
ляюшую поли скоростей, которая, вращаясь вмесге с .юпзетыо, це воз
22.1
буждает на ней переменных аэродинамических нагрузок Для расчета
же этих нагрузок нужно знать, как изменяются индуктивные скорости
не н фиксированной точке поверхности, ометаемой несущим пиитом, а
в точке, вращающейся вместе с лопастью.
При таком подходе основным возбудителем переменных аэродина-
мических сил на лопасть оказывается неравномерность поля внешних
индуктивных скоростей, вызванного отдаленными от лопасти вихрпми
Поэтому в первом приближении можно исключить из рассмотрения
поле скоростей, вызванное вихрями, непосредственно прилегающими
к лопасти, и интересоваться только полем внешних индуктивных ско-
ростей.
14. Особенности поля внешних индуктивных скоростей
Если рассматривать внешнее поле индуктивных скоростей, вызван-
ное только отдаленными от лопасти вихрями, то можно утверждать, что
их переменная час;ь в фиксированной толке пространства, связанного
с вертолетом, окажется тем меньше, чем гуще эти вихри расположены.
Увеличение густоты вихрей происходит в частности с уменьшением
поступательной скорости полета вертолета. Она также возрастает с уве-
личением угла атаки несущего пинта, когда уменьшается средняя ско-
Рии 2.131. Вид н плане ни in-
стему вихрей. стекающий
с конца лопастей на режиме
ц—0,0.о
рость протекания потока через винт и вихревая пелена недостаточно
быстро относится от плоскости, ометаемой лопастями. Такая ситуация
возникает в частности на режимах торможения вертолета перед зави-
санием. В качестве примера на рис. 2.131 показан вид в плане на систе-
му вихрей, стекающих только с концов лопастей на режиме полета
с ц = 0.1)5. Приведенная на этом рисунке картина япляется неполной,
гак |<ак на ней показаны to.ii.ko свободные винтовые вихри, сошедшие
с конпов лопастей, и не показаны вихри, сошедшие со всех других ра-
диусов лопасти. Не показаны также радиальные вихри. Однако даже
по этой картине можно составить представление о том. насколько тесно
расположены вихри на режимах малых скоростей.
Переменная часть внешних индуктивных скоростей уменьшается
также с увеличением числа лопастей в несущем винте. В пределе для
винта с бесконечным числом лопастей переменная часть индуктивной
скорости становится равной нулю.
Для расчета поля внешних индуктивных’ скоростей может быть
использована схема несущего винга с бесконечным числом бесконечно
224.
узких лопастей Эта схема ласт тем более точные результаты, чем гуще
система свободных пихрей у несущего винта на рассматриваемом режи-
ме полета.
При переходе от несущего винта к схеме с бесконечным числом ло-
пастей местный эффект от непосредственно примыкающих к лопасти
вихрей настолько сильно ослабляется, что приближенно можно считать,
что эта схема не учитывает влияние примыкающих вихрей, и, следова-
тельно, определенное по jteft поле тем ближе к полю внешних индук-
тивных скоростей, чем гуще расположены свободные вихри. Таким
образом, непосредственное применение этой схемы для определения
переменных аэродинамических нагрузок на лопасть равносильно ис-
пользованию «гипотезы стационарности».
Схемой с бесконечным числом лопастей можно также пользоваться
во всех случаях, когда достаточно определить только среднюю по вре-
мени часть индуктивной скорости. Применение такой схемы приводит
к очень существенным упрощениям задачи и устраняет многие трудно-
сти. возникающие при использовании схемы с конечным числом лопа-
стей. В частности, одним цз преимуществ этой схемы является то, что
индуктивные скорости нигде нс обращаются в бесконечность.
При определении скосов потока на крыле и стабилизаторе верто-
лета. когда обычно интересуются только постоянной частью нагрузок,
схема с бесконечным числом лопастей может применяться на всех ре-
жимах полета и дает при этом вполне удовлетворительные результаты.
То же. вероятно, можно отнести и к определению взаимовлияния винтов,
если расчетчика интересуют только их интегральные характеристики.
16. Вихревая теория несущего винта с бесконечным числом лопастей
Вихревая теория несущего винта с бесконечным числом лопастей
разработана дастаточно подробно. Решению этой задачи посвятили
свои работы Г. И. Майкопар. А. И. Слуцкий. Л. С- Вплъдгрубе,
А II. Проскуряков, В. Э. Баскин, Ван Шц-цунь и другие авторы. Каж-
1яя из них доводила эту теорию до нее большего совершенства.
В процессе отработки иихрепой теории вцнта с бесконечным числом
лопастей было предложено много методов, использовавших некоторые
дополнительные допущения, а именно:
1. Допущение о том. чцо вихревая целена, стекающая с несущего
винта, плоская. Это допущение легло а оспину работ Л. С. Вильдгрубе
и И О. Мельна. Оно существенно упрощает расчеты Поэтому такой
подход, доведенный в работах Л. С. Вильдгрубе до фирмы, удобной для
практического применения, имеет широкое распространение.
2. В ряде работ предполагалось, что индуктивные скорости могут
быть с достаточной точностью определены с учетом только постоянной
части циркуляции присоединенного вихря или с добавлением одной или
двух первых гармоник этой циркуляции.
В последнее время появились работы В. Э. Баскина [16] и Ван
Ши-цуня [22], авторы которых сумели отказаться от этих дополнитель-
ных допущении и довели метод такого расчета до состояния, вполне
удобного для практического применения. Поэтому ниже будет приведена
изложение только этих двух методов.
ВИХРЕВАЯ ТЕОРИЯ ВАН ШИ.ЦУНЯ
Вихревая теории несущего кинта Ван Ши-цуня достаточно подроб-
но изложена в работе автора [22]. Поэтому здесь будут повторены толь-
ко основные результаты.
16. Схема несущего винта
Во всех вихревых теориях, рассматривающих нинт с бесконечным
числом лопастей, предполагается, что поверхность, сметаемая винтом,
ши
225
покрыта непрерывно распределенными радиальными присоединенными
вихрями с циркуляцией, переменной но его радиусу и азимуту. Поверх-
ность, ометаемая винтом, считается плоской. Угол конусности лопастей
не учитывается.
Циркуляция присоединенных вихрей, расположенных вдоль ра-
диуса, в секторе винта с углом ДО полагается равной
Деврис —
где Г — циркуляция скорости в сечении лопасти на рассматриваемом
радиусе и азимуте несущего винга;
гл — число лопастей в несущем винте.
Далее полагается, что с рассматриваемого элемента несущего вин-
та сходит винтовой (продольный) свободный вихрь с циркуляцией
(5-33>
Вследствие того, что циркуляция присоединенного вихря меняется
с изменением азимутального положения лопасти, с рассматриваемою
элемента стекают также радиальные (поперечные) вихри с циркуляцией
<5'34’
Форма поверхности, по которой располагаются свободные вихри,
представляется и виде скошенной винтовой поверхности, такой же, как
и в вихревой теории винта с конечным числом лопастей. Только теперь
вихревой цилиндр оказывается сплошь заполненным свободными вих-
рями, а не отдельными слоями отдаленных друг от Друга вихрей, как
это было в теории с конечным числом лопастей.
17. Определение индуктивных скоростей
Для нахождения индуктивных скоростей от свободных и присоеди-
ненных вихрей'используется формула Ьио и Савара (5. б). Причем, как
уже отмечалось выше, для определения полных индуктивных скоро-
стей нужно просуммировать все элементарные индуктивные скорости,
полученные от отдельных элементов всех вихрей, составляющих вих-
ревую систему. Для этого нужно выполнить интегрирование в форме
(5.7). В работе Ван Ши-цуня показывается, что для этого нет необ-
ходимости вести интегрирование вдоль скошенных винтовых линий, по
которым расположены свободные вихри, сошедшие с лопасти. Куда
проще интегрировать вдоль прямых, параллельных оси наклонного вих-
ревого цилиндра (4В на рис. 2. 129), так как вдоль этих прямых вихри
имеют одинаковую интенсивность. Такой способ был применен ранее
И. О. Мельцем для случая плоской вихревой системы.
Таким образом, при вычислении индуктивных скоростей для схемы
винта с бесконечным числом лопастей оказывается возможным приме-
нить интегрирование вдоль прямых, параллельных оси вихревого ци-
линдра, а не суммирование отдельных дискретных величин, как это
имело место в схеме с конечным числом лопастей (см. п. 10).
Используя это обстоятельство, Ван Ши-цуню удалось вычислить ука-
занные интегралы и получить достаточно простые формулы для опреде-
ления всех составляющих индуктивной скорости.
18. Расчетные формулы для определения индуктивной скорости
Индуктивные скорости в работе [22] представляются в виде суммы
скоростей трех родов:
« = %дс -Г%ииг ! «рад. (5-35)
226
где полная индуктивная скорость;
^-индуктивная скорость от присоединенных вихрей;
т8т —индуктивная скорость от винтовых (продольных) свободных вих-
рей;
•о — индуктивная скорость От радиальных (поперечных) свободных вих-
рей.
Все составляющие индуктивные скоростей, входящие в формулу
(5, 35), отнесены к окружной скорости конца лопасти го/?.
Наибольший интерес для практики представляют осевые состав-
ляющие (параллельные оси несущего винта) индуктивной скорости.
Если ставится задача о расчете нагрузок на лопасти несущего винта,
то необходимо определить осевые составляющие индуктивной скорости
только в его плоскости.
Приведем расчетные формулы для определения осевых составляю-
щих только в плоскости виита. Формулы для других составляющих,
определяемых и вне этой плоскосли, можно найти в работе [22].
Осевые составляющие индуктивной скорости от присоединенных
вихрей определяются по формуле
<5'зб>
_ __ 6 0
где Г — циркуляция н сечении лопасти, отнесенная к
(5.37)
Осевые составляющие индуктивной скорости от винтовых и ради-
альных вихрей определяются по формулам:
^Вит =
(5.38)
[cos tt/j + sin V2]
Здесь
sin в —r sin ф) ]/нг + ’-2ср
+fiT(pcosа — геев 40
(- sees a -t- r cos 4) у/ ii2 + ).2 cp —“(1
72|/.“2+~'-ocp 4 — 7 cos
I — Ke2+r2 - - 2q r cos (8- — Ф).
Для входящих в формулы (5.35) и (5.38) переменных
следующие обозначения:
q -- относительный радиус сечения лопасти, с которого
вихрь,
(5.39)
(5,40)
приняты
стекает
15*
227
г — относительный радиус несущего винта, на котором определяет-
ся индуктивная скорость,-
О — азимут несущего винта, с которого стекает вихрь:
ф— азимут, на котором определяется индуктивная скорость.
Формулы (5 35), (5.36), (5.38) и (5.39) позволяют определить ин-
дуктивные скорости, если известна циркуляция Г(6, о) на всех аэимугах
О и радиусах лопасти.
Следует отмстить, что в вихревой теории вицта с бесконечным чис-
лом лопастей определяются обычно полные индуктивные скорости,
включая и те составляющие от присоединенных вихрей, которые участ-
вуют в образовании подъемной силы лэ лодасти.
19. Применение и оценка возможностей вихревой теории Ван Ши-цуня
При практическом применении вихревой теории П.ти Ши-пуня, так
же как и в ряде других схем, распределение циркуляции Г по длине
допасти представляется обычно в виде ступенчатой линии, покатанной
на рис. 2 132. Причем величина — принимается приближенно
dy
равной;
Рнс 2 132. Принимаемое о расчете распреде-
ление циркуляции по .пине допасти
(5.41)
где ДГр—разность цирку-
ляций на двух
соседних участ-
ках лопасти.
Такой подход равноси-
лен замене вихревой целены
рядом дискретных вихрей.
Вследствие этого в местах
схода этих дискретных вих-
рей с лопасти индуктивная
скорость стремится к беско-
нечности Для того чтобы
от этого избавиться, индук-
тивные скорости следует вычислять по середине участка с постоянной
циркуляцией.
При определении производной циркуляции по азимуту лопасти
окружность несущего винта также разделяется на конечное число
ИГ .
участков и производная у принимается приближенно равнои-
й8
(5-42)
Таким образом, для численного определения интегралов, входящих
а формулы (5.36) и (5.38), должны быть вначале Определены значения
Г(, &Г} и ДГ|, число которых Л' будет равно:
(S.43)
где гг — число участков по радиусу, на которое разбита лопасть;
Дц,-— шаг по азимуту лопасти, ня протяжении которого циркуля-
ция считается постоянной.
Если принять z=30, а то для определения индуктивных
скоростей потребуется 2160 значений Г?, АГf и &ГС (всего 64Й0 значе-
ний). Для определения индуктивных скоростей во всех 2160 точках
228
несущего винта операции, необходимые для определения подынтеграль-
ных выражений в формулах (л. 36) и (л 36), придется повторить
(2160)2 раз. Нетрудно убедиться, что на это уйдег столько времени, что
практически применить такой метод окажется затруднительным даже на
машинах с достаточно большой скоростью счета. Поэтому практическое
применение теории Ван Ши-цуня в таком виде возможно только при
весьма ограниченном числе участков, взятых по радиусу и азимуту ,ю-
пасти. На машинах со скоростью счета 20 000 операций и секунду расчет
может быть выполнен при примерно следующих условиях: гт= 10-? 12;
Дф=Ю-5-12°.
Этот недостаток пропадает, если циркуляцию Г и индуктивные
скорости разложить в ряд Фурье по гармоникам и ограничиться уче-
том только некоторого числа низших гармоник, необходимых для вы-
полнения расчета с удовлетворительной точностью. Обычно дли прак-
тических целей бывает достаточно ограничиться первыми шестью-во-
семью гармониками. Такой метод применен и теории В. Э. Баскина (16).
ВИХРЕВАЯ ТЕОРИЯ В, Э. БАСКИНА
Теория В. Э. Баскина была ограниченно опубликована в 1955 г.,
а затем изложена автором в докладе [16], который не был издан и вслед-
ствие этого теория В. Э Баскина недостаточно хороню известна среди
специалистов, интересующихся этим вопросом. Поэтому она будет
изложена здесь достаточно подробно, но с некоторыми упрощениями,
которых нет у автора.
20. Схема обтекания несущего винта
Вихревую систему, приведенную на рис. 2. 128 и состоящую из при-
соединенных и свободных винтовых и радиальных вихрей, можно пред-
ставить в несколько ином виде. Можно считать, что при работе
несущего винта с лопасти непрерывно стекают бесконечно малые по
размерам замкнутые элементарные вихревые кольца с постоянной
по контуру кольца циркуляцией, равной циркуляции присоединенного
вихря Г в сечении лопастя, в тот момент времени, когда с нее сошел
кольцевой вихрь (ряс. 2. 133).
Поскольку циркуляция присоединенного вихря меняется по радиу-
су и г.зимуту допасти, то и стскаюшне с ное кольцевые вихри будут
229
иметь различную циркуляцию в разных точках вихревой пелены, Сле-
довательно, свободную' вихревую пелену можно считать состоящей из
непрерывно распределенных бесконечно малых кольцевых вихрей с раз-
личной циркуляцией Г.
Из гидродинамики (см, (31.], стр. 266) ‘известно, что индуктивные
скорости от кольцевого вихревого контура с циркуляцией Г будут та-
кими же, как и от слоя диполей, покрывающих натянутую на этот кон-
тур поверхность с интенсивностью на единицу площади
D=—F (5.44)
и ориентированных по нормали к этой поверхности, Здесь знаки выбра-
ны исходя из того, что положительными считаются циркуляция, вызы-
вающая подъемную силу на лопасти, и диполи, вектор которых дает по-
Рис. 2, 134. К определению ин-
дуктивных скоростей от колонны
диполей
ложителъную проекцию на ось у
(рис. 2. 134).
Следовательно, сходящую с ло-
пастей свободную вихревую пелену
можно заменить поверхностью, по-
крытой слоем диполей.
При переходе к винту с бес-
конечным числом лопастей это ра-
венство несколько изменится. За
винтом с бесконечным числом лопа-
стей вихревая пелена заполняет
весь объем, ограниченный скошен-
ной цилиндрической поверхностью,
касательной к окружности несущего
винта. Такая вихревая система, как
уже говорилось, называется вихре-
вой колонной. Эту колонну можно
представить заполненной не вих-
рями. а диполями. Для того чтобы
определить интенсивность распреде-
ления диполей в колонне, вырежем
из нее слой высотой rfH, заполняемый вихрями за время dt. За это время
со всех радиусов лопасти сходят кольцевые вихри с контуром, ограничи-
вающим площадь,
dF = UdtdQ. (5,45)
Этот контур можно заменить диполями с интенсивностью D=—Г.
При переходе к бесконечному числу лопастей распределим эти диполи
по всей окружности несущего винта радиуса г с интенсивностью
D=-^—Udt.
(5. 46)
Если циркуляцию Г выразить через погонную аэродинамическую
нагрузку из формулы (5.24), то
Входящую в это выражение величину dt можно определить как
(J.43)
где Vv — средняя скорость протекания потока через несущий -винт.
1',р = й>^?Лосг<
230
Введем понятие об относительной аэродинамической нагрузке та-
кой, что
Т=- —
(5.49)
тогда
(5. .50)
Таким образом, задача сводится к определению поля индуктивных
скоростей, вызываемых, скошенной колонной диполей, интенсивность
которых в слое толщиной dH определяется по формуле (5.50).
21. Определение индуктивных скоростей от колонны диполей
Из рис. 2.134 видно, что плоскость каждого из элементарных коль-
цевых вихрей, стекающих с лопасти, наклонена под некоторым углом Ф
к плоскости вращения несущего винта:
(.5,51)
Соответственно под этим же углом к плоскости вращения наклоне-
ны и оси двнолей, заменяющих в схеме В. Э. Баскина элементарные
кольцевые внхри.
В дальнейшем не будем учитывать этот угол, а будем полагать, что
оси всех диполей направлены перпендикулярно плоскости несущего
винта. В работе {16] при выводе основных соотношений это упрощение
не используется, по показывается, что при вычислении осевой состав-
ляющей индуктивной скорости оно вполне допустимо.
Для определения индуктивных скоростей рассмотрим течение, вы-
зываемое диполями, заполняющими элемент вихревого цилиндра высо-
той, равной d/7 (см. рис. 2,136),
Просуммировав индуктивные скорости, вызываемые всеми элемен-
тами вихревой колонны, можно получить полную индуктивную скорость.
22. Течение жидкости, вызываемое диском, покрытым диполями
Течение жидкости, вызываемое диском, покрытым диполями, мо-
жет быть определено как решение уравнения Лапласа с некоторыми
граничными условиями, которые будут рас-
смотрены ниже. “•
Уравнение Лапласа в цилиндрических ко-
ординатах (рис. 2.135) может быть записано
в виде;
. д-f , I до ._________1 _ г)2? Q
<ta2 йо2 0 62 ’
(5.52)
где ® — потенциал скоростей.
Потенциал скоростей может быть
жен в ряде Фурье. Тогда
разло-
T = V (?mcosrn& + ?msin m&).
(5:53)
Рие. 2.135, К определе-
нию потенциала скоро-
стей по уравнению Лап-
Подставив выражение (5-53) в уравнение (5.52), получим уравне-
ние для определения коэффициентов при синусах и косинусах, входя-
щих в выражение (5.53):
I 1 дут =0
<z«2 <№ “ е дс С? Y"
(5.54)
231
Решение уравнения (5.54) будем искать в виде
?т-гх*“х(е). (5.53)
Подставив выражение (5.55) в уравнение (5.54), получим
L (й+-^ 7.' (е)+- ^-) 7 W--0. (5.36)
Это уравнение может быть приведено к каноническому виду, если
положить
Общее решение этого уравнения может быть записано в виде
1(с)-Л7„(в)^В7_®). _ (5.58)
Функция Zm(p) стремится к бесконечности при р-»0 Поэтому, если
ограничиться конечным значением потенциала, то
9„ = Ле1“.7_(4|>). (5.59)
Если использовать условие, что при u-*oo, срт—0. то решение
уравнения (5.54) может быть записано так:
(5.60)
где й>-0.
Функция <рт будет решением уравнения (5.54) при любом значении
k-ki. Следовательно, решением уравнения (5.54) будет также сумма
?m^2V-4‘°^OI(*ie) (5.61)
и интеграл
»»=) Л(*)г-»7„(4в)<<Л, (5.62)
о
где Я (А) — произвольная функция, определяемая из граничных
условий.
23. Граничные условия
Из гидродинамики известно (см. [31], стр. 82), что потенциал скоро-
стей по обе стороны поверхности, покрытой диполями, связан с цлогно-
стью этих диполей соотношением
О-=ф2—ф1л (5.63)
где D — плотность диполей на единицу поверхности, причем поло-
жительное направление оси диполя совпадает с осью и;
фг и ф2 — потенциалы скоростей по обе стороны поверхности, по-
крытой диполями (рис. 2.136).
Течение жидкости по обе стороны диска, покрытого диполями, на-
ходится в ранных условиях. Поэтому можно положить
<р2 = —ф1=ф- (5.64)
Тогда значение потенциала на границе диска со стороны, где и>0,
может быть определено как
(5.65)
232
Граничные условия для течения, вызванного диском, покрытым
диполями С плотностью D, определяются по уравнению (5.65). когда
(></<?. При q>₽ в плоскости диска потенциал везде равен нулю (<р —0).
Интенсивность диполей, покрывающих диск, можно представить
в виде ряда:
D (Q,b}-= ^[D„(Q)cosmb | Ля(р)ч1пяг»|.
(5.66)
Тогда, используя граничное условие (5.65) для определения произ-
вольной функции Л(А) в выражении (5. 62), можно решение уравнения
неразрывности (5.52) записать в виде
Ч--------
icosmft ' T)m(Q)sjn m&| Jm (fte)QtfcjrfA.
Вывод этого выражения дан в курсе [31].
24. Преобразование выражения (5,67) к осям несущего винта.
Применение теоремы сложения цилиндрических функций
Выражение (5.67) записано в цилиндрических координатах
с осью и, проходящей через центр диска толщиной dH. вырезанного из
колонны диполей (см. рис. 2. 136), Для того чтобы преобразовать это
выражение к координатам, связанным с. несущим винтом, можно вос-
233
пользоваться теоремой сложения цилиндрических функций [34]. Из этой
теоремы следует, что
cosm&J„(Ae)=(- 1Г
з1пи»Уя(Ащ)—-(-1)л’ V Je(ftr)J„+m(AZ)sinno.
(5.68)
Потенциал скоростей от слоя диполей разложим в ряд Фурье'
Тогда, используя выражения (5. 68) и (5. 69) и приравняв коэффи-
циенты при cos гаф и sin лф с одинаковыми п в выражении (5.67), по-
лучим:
2 (-1Г р- " Л 4 <" х
лт—О О
Я _
Тя^Т 2(-1г f
х Jz5ffl (е)4(^е)е^е-
(5.70)
25. Определение полного потенциала скоростей от всей колонны диполей
Для определения составляющих полного потенциала скоростей,
представленвого в виде
Ф = У (Фдсозп64-Ф„81ппф), (5.71)
выражения (5- 70) нужно проинтегрировать по всей колонне диполей
(см. рис. 2. 136).
Для этого предварительно нужно выписать значения Дт(о)
и Дп(о)-
Отметим, что внутри вихревой колонны интенсивность диполей
так же, как к интенсивность вихрей, постоянна вдоль прямых, парал-
лельных оси колонны. Поэтому интенсивность диполей £>(g, О) в лю-
бом слое, вырезанном нэ вихревой колонны, будет равна интенсивности
диполей, стекающих с несущего винта в точке, где г=е и ф=О.
234
Если относительную аэродинамическую нагрузку Р [см. формулу
(5.50)] представить в виде
Р = V(P^COSmi) — Рт31П7Пф),
(5.72)
то можно записать
£>«(ё)=
А, (ё)—
—Lc.^1
4 v V, е
_2_c«d(Ds/?2_L
(5.73)
Положив
и=Я4-1/,1
Z=^W|
(5.74)
и подставил выражении (5.73) в уравнения (5.70), проинтегрируем
полученные выражения по Н. Нетрудно заметить, что для выполнения
этой операции необходимо определить значение интеграла
ДН}=$е~*чя+т(^н)<1Н.
(5.75)
Обращаясь к справочнику [34] [стр. 721, формула (6.611. 1)]. получим
JS’'4dT/’’
(5.76)
(5.77)
(5.78)
Здесь p-m + n. причем формула (5.76) справедлива только в том
случае, если р>0. Поэтому, когда т+л<0, формула (5. 76) принима-
ет вид
(5.79)
где р= — (т-\-п).
Введем новую переменную
z=kR. (5.80)
235
Тогда, используя (5.76) и (5.80), можно выписать выражения для
составляющих потенциала скоростей от всей колонны диполей:
фя^4'^3"’7?2 1)'яЛатЛ+'Ях
X J J^zr)dz \ Pm^)Ja(^)d^
Фл =---
X f e~!vJ„(zr) dz\ Pm(Q)Jfflp0)^o.
(5. 81>
Здесь все линейные размеры отесены к радиусу несущего винта R*
в том числе и у [у=-^-).
26. Определение индуктивных скоростей
Как уже отмечалось, будем определять только осевые составляю-
щие индуктивных скоростей. Для этого нужно взять производную от
потенциала скоростей по у. _Из выражения (5.81) видно, что от у за-
висит только один член е-гу.Поэтому операция дифференцировании
приведет к выражениям, отличным от (5.81) лишь знаком и компонен-
той г.
Прежде чем выписать окончательные формулы для определения
индуктивных скоростей, представим их в виде ряда Фурье:
У(кл<-озл^4-А,зн1лО).
(о. 82)
Здесь все составляющие индуктивных скоростей отнесены к конце
пой скорости лопасти &R. При определении составляющих индуктивных
скоростей, записанных в форме (5.82), следует выполнить следующие
операции:
1 \
“Л \ Оу оу / ’
_1 г »ГЯ _ <)Ф_Я \
“Л йу ду )
р.83)
Исключением является определение %о, которое пычисляетсн так'
й>/? г>у
р.84)
236
В результате действий, предусмотренных в выражениях (5.83)
и (5.84), получим:
\ -- 4с?л"2(^1)"ттх
Xfe “ J,(zr)zdz\P^}JJzs.}dt-
Хр ‘•J^ryzdz^P^J^fdt)'
О о
(о. 85)
(5. 86)
Xfe zV,[zr)Z£/zJ‘/Jffl(W)/„(zc)(/Q.
о о
В этих выражениях предполагается, что п>т. Поэтому в соответ
етвии с выражением (5.79), когда п<.т, вместо хл~т следует вычис
ЛЯТЬ (—Ijw-^m-n.
При выполнении операций с выражениями (5.83) следует иметь
в виду, что
J Л(2Т)— (-l/yjzr).
Для вычисления интегралов, входящих в выражения (5.85)
и (5.86), могут быть предложены различные способы. Один из таких
Способов будет приведен в § 8 гл 1 книги второй, где будет рассмотрен
метод расчета упругих колебаний лопасти с учетом переменного поля
индуктивных скоростей.
Следует отметить, что в некоторых частных случаях интегралы,
входящие в уравнения (5.85) и (5. 86), могут быть вычислены аналити-
чески (см. п. 6 § 8 гл. [ книги второй).
Вихревая теория В- Э. Баскина позволяет получить результаты до-
статочно быстро, если □ распоряжении расчетчика имеется машина со
скоростью счета не менее 20 000 операций в секунду. При такой ско-
рости расчет может быть выполнен примерно за 20 мин. Поэтому, если
ставится задача об определении средних индуктивных скоростей с точ-
ностью до высоких гармоник и не может быть использовано допущение
о том. что вихревая пелена плоская, то паилучшим методом определе-
ния индуктивных скоростей оказывается вихревая теория В. Э. Баскина.
§ 6. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК НЕСУЩЕГО ВИНТА
Наиболее достоверными методами определения аэродинамических
характеристик несущего винта являются летные испытания вертолета
с изучаемым винтом или другим подобным винтом, который можно
рассматривать как модель изучаемого винта, а также испытания в аэро-
динамической трубе натурных пиитов или крупноразмерных моделей
В настоящем параграфе приводятся некоторые результаты летных
испытаний и экспериментов в аэродинамической трубе и дается крат-
237
кое описание методики испытаний. Испытания проводили в научно-
исследовательских институтах М. К. Сперанский, А. И. Акимов
и другие.
1. Летные испытания для определения
аэродинамических характеристик вертолета
Аэродинамические характеристики пертолета а скоростной системе
координат (рис. 2. 105—2 109), т. е. и том виде, в котором они исполь-
зуются при аэродинамическом расчете, могут быть получены из летиых
испытаний.
Выбирая скорос)Ь полета, число оборотов несущего винта, полетный
пес и высоту полета, можно получить при летных испытаниях постоян-
ные значения чисел Мплп, Мо и коэффициента тяги вертолета t,° (ниже
р и Т—давление и температура воздуха):
Ма =— = constj ;
a Y Т
-----CTCS1’T°, •
—_p«2M0«F •
так как у е°2 = v(°'379 Т") И 1'Т)’=™Ь.
Выполняя при этих условиях различные режимы полета с разной
мощностью двигателя—планирования с различной скоростью сниже-
ния, горизонтальный полет и набор высоты с различной вертикальной
скоростью,—можно получить достаточное число точек аэродинамической
характеристики вертолета в виде зависимости для постоян-
ных значений V. tv Mq. На режиме самовращения несущего винта
получаем точку с /пк«0 (рис, 2. 137). Точка /Xg=0 соответствует режи-
му горизонтального полета, так как в ней пропульсивная сила несущего
винта уравновешивается вредным сопротивлением вертолета. Планиро-
вание вертолета соответствует промежуточным режимам. Режимы
/^<0 —набор высоты я в точке, где мощность двигателя максимальна
(т„—Я1к ), получается режим максимальной скороподъемности для
данной скорости полета.
В результате испытаний определяем аэродинамические характери-
стики вертолета, отличающиеся от характеристик несущего винта тем,
что в них учитывается аэродинамика ненесущих частей вертолета.
Таким образом, летные испытания для определения аэродинамиче.
ских характеристик вертолета заключаются н полетах «по зубцам», при
которых выполняются режимы планирования, набора высоты и гори-
зонтального полета при постоянных значениях VlV?, п1УТ, - . Кро-
ме этих величин, измеряются вертикальная скорость yv. наклон плос-
кости вращения винта к горизонту (угол тангажа вертолета) О. состав-
ляющие циклического ' изменения юага <рь <р, [клн утлы отклонения
автомата перекоса х, т) н коэффициенты махового движения), угол уста-
новки лопастей 9о и крутящий момент несущего виита Л1К Крутящий
момент измеряется с помощью тензодатчиков, наклеенных на вал несу-
щего винта или стержни подредукторной рамы,
?Р8
Аэродинамические характеристики вертолета определяются по вы-
ражениям, вывод, которых дан в § 1 гл. 3:
CJ cos 6тр (7
1.6.1)
G. = - : (6.2)
-у e(“R)2^
-к------. (6.3)
—- q (uRytRaF
Угол наклона траектории
к горизонту
• arcsin —.
(6.4)
Угол атаки несущего вин-
та и эквивалентный угол ата-
ки находятся по формулам
(рис. 2.138)-
а — & - \9;
(6.5)
а, —а — ®z =а-j-Dpc — О2т; (6. 6)
где Dj'— ZXq—отклонение эквивалентной плоскости вращения несущего
винта от конструктивной плоскости вращения при на-
клоне автомата перекоса;
kb1~ дополнительное отклонение эквивалентной плоскости
вращения несущего винта при наличии компенсатора
взмаха.
ЭкПиПолвитиая плоскость
Прощения
Рис. 2.138. К определению утла атаки ц и эквива-
лентного угла атаки а» в полете
плоскость
При методически правильном проведении испытаний средняя квад,
ратнчная погрешность в определении составляет 0,5%, а в опреде-
лении тп~ 3,5%.
Результаты летных испытаний вертолета Ми-1 показаны на
рис. 2.139. Вертолет имел трехлопастной несущий винт с трапециевид-
ными закрученными лопастями, 0—14,3 о “0,0504, лопасти с фанер-
239
ной общинной, за исключением комлевой часги (г<0,59), где хвостовая
часть профиля обшита полотном.
Аэродинамические характеристики несущего пинта получаююя пу
тем вычитания от коэффициентов сил вертолета коэффициентов сил.
создаваемых ненесушими элементами. По аналогии с выражением
(1.3) из главы 3 коэффициенты сит пасущего пинта равны
(6.7)
(6. S)
Коэффициенты и с. пертолета Ми-1 определялись при испыта-
ниях нагарного фюзеляжа и аэродинамической трубе. Коэффициент
подъемной силы фюзеляжа rv очень мал и им в выражении (6.7) мож-
но пренебречь.
240
Следует иметь п виду, что аэродинамические характеристики вин-
та, полученные из летных испытаний, учитывают взаимовлияние несу-
щих и пспесущих элементов вертолета, что повышает неннтх'ть этих ма-
териалов.
2. Испытания р. аэродинамической трубе для определения
аэродинамических характеристик несущего винта
Для определения аэродинамических характерис1ик натурных несу-
щих винтов вертолетов в аэродинамической трубе в ЦАГИ имеются
спепиальные установки, позволяющие испытывать двух-, трех- и четы-
рехлоластные винты диаметром до 15,5 м.
Первая установка для испытаний натурных питов с двигателем
мощностью 575 : с создана иод руководством М. Л. Миля на базе
вертолета Ми-). Ня рис. 2.140 показан вид установки, расположенной
на верхнем строении аэродинамических весов трубы. Установка имеет
специальную демпферную подвеску, обеспечивающую допустимый уро-
вень колебаний на весах трубы при запуске, раскрутив и рабочих обо-
ротах несущего винта,
Аэродинамические силы и моменты несущего винта в осях аэроди-
намической трубы определяются как разность между показаниями ве-
сов трубы при работающей установке и с установкой без несущего вин-
та и втулки (или с иеерашающейся втулкой). Полученные таким обра-
зом силы и моменты включают в себя взаимовлияние несущего винта
с фюзеляжем установки и влияние втулки несущего винта. В некоторых
случаях вводятся поправки, учитывающие влияние несущего винта на
силы, создаваемые фюзеляжем установки. В таких случаях, а также при
измерении тензовесами, расположенными у втулки, характеристики
несущего винта включают в себя только влияние фюзеляжа на винт и
влияние втулки винта.
На рис 2. 14)—2 145 покащны полученные из испытаний аэродина-
мические характеристики несущего винта вертолета Ми-I, имеющего
металлические лопасти прямоугольной форма в плане. Геометрические
характеристики допасти показаны иа рпс. 2.146: профиль лопасти
NACA 230, число лопастей ?л-3, диаметр D- 14,5 л, коэффициент за-
1002
241
Рис 2.143. Аэродинамк
веские характеристики
несущего винта (Мво.т =
«0,1; V=0,2; М,= 0,5.
о=0,0525; эксперимент)
полнения cf=0,0525, массовая характеристика лопасти у = 4,5, компенса-
тор взмаха А=0,56.
Эксперимент обработан так, что аэродинамические характеристики
включают в себя влияние втулки пинта и взаимовлияние с фюзеляжем
.установки; это значит, что при аэродинамическом расчете вертолета
нужно учитывать вредное сопротив-
ление вертолета без втулки винта.
В настоящей 'книге использо-
ваны экспериментальные материа-
лы, относящиеся только к аэродина-
мическому расчету вертолета. По-
этому графики аэродинамических
характеристик даны для составляю-
щих сил в скоростной системе коор-
Рнс. 2.145. Аэродинамические характе-
ристики несущею пинта (Мпол“0,15;
V—0.3, М»=0,Г>; (Т--0.0525; экспери-
Рис. 2.146. Геометрические характе-
ристики лопает»
динат iy и tx. Коэффициенты сил t и h могут быть получены по форму-
лам пересчета (3.15) и (3.17).
Углы атаки несущего винта, нанесенные на рис. 2.142—2.145, со-
ответствуют нулевому отклонению автомата перекоса. Для сокращения
объема книги графики tv=f(at во, F) или ^=/(лгк. Do, 7), служащие
для определения шага несущего вицга, не приведены.
МЕТОДЫ ПЕРЕСЧЕТА АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
НЕСУЩЕГО ВИНТА
Приведенные ниже формулы пересчета дают возможность исполь-
зовать экспериментальные данные, относящиеся к какому-то конкрет-
ному винту, для определения аэродинамических характеристик других
винтов, близких по безразмерным геометрическим характеристикам
к испытанному винту’. Например, экспериментальные графики аэродина-
мических характеристик, показанные на рис. 2. 142—2. 145, с помощью
формул пересчета могут быть применены для определения характери-
стик винтов с другими коэффициентами заполнения, если винты имеют
лопасти прямоугольной формы, крутку 5—9° и профиль, близкий к про-
филю NACA 230. С меньшей степенью точности характеристики можно
распространить и на другие винты.
Использование формул пересчета позволяет значительно сократить
число графиков аэродинамических характеристик винтов, требуемых
для расчетов вертолетов.
244
3. Пересчет аэродинамических характеристик
при другом коэффициенте заполнения несущего винта
Сравним два несущих винта, лопасти которых имеют одинаковые
распределения углов закрутки и относительной хорды h =— по радиусу;
*0.7
винты имеют либо разное число лопастей, либо разную хорду 6q,?.
т. е. разный коэффициент заполнения. Величина массовор’[ характери-
стики лопасти у очень мало плияет на характеристики винта, поэтому
разницей в у можно пренебречь, но для строгости рассуждений примем,
что у обоих винтов одинакова.
При равномерном распределении индуктивной скорости по диску
несущего винта у _?гих винтов маховое движение лопастей и все безраз-
мерные коэффициенты в связанной системе координат —г, ft, т1; п дру-
гие — одинаковы, если винты имеют равные значения характеристики
режима полета и, общего шага и относительной скорости воздуха, нор-
мальной к плоскости вращения винта
pa — V.
(6.9)
В этом легко убедиться по формулам теории Глауэрта - Локка
(§ 2). из которых видно, что выражения для всех безразмерных коэффи-
циентов содержат четыре величины' ц, ф и у. Эти величины пол-
ностью определяют кинематку несущего винта и при их равенстве
скоростные многоугольники в каждом сечении винтов подобны, а истин-
ные углы атаки, cv я стр равны.
При известных ц, Z и t угол атаки несущего винта определяется по
выражению
lga=-
1 4Я<ч/|х2-гл2
(6.10)
Следовательно, при равных безразмерных коэффициентах, но раз-
ных коэффициентах заполнения углы атаки несущих винтов отличают-
ся; винт с большим коэффициентом заполнения, т. с. с большей безраз-
мерной индуктивной скоростью, при равных t имеет при той же вели-
чине К больший, более положительный угол атаки. Рис. 2. 147 иллюст-
рирует равенство нормальной (Vain a—и параллельной плоско-
сти винта (Vcosa=u<£>/?) составляющих скорости воздуха при разных
средних индуктивных скоростях v и разных углах атаки несущего винта а,
245
Обозначив индексами «I» и «2» величины, относящиеся к винтам
с коэффициентами заполнения сп и oj, напишем выражение для разно-
сти углов атаки обоих винтов
tg а, — tg а2' —~ —
или приближенно для (j.^-0,15, когда
' (6.11)
Разность углов атаки выражается как произведение разности коэф-
фициентов заполнения на отношение . Следовательно, при рав-
ных f и [I разность углов атаки пропорциональна разности ст.
Итак, при равных ц и ф все характеристики рассматриваемых вин-
тов в связанных осях одинаковы, если винты имеют углы атаки, отли-
чающиеся на величину Да, определяемую выражением (6. 11). Для пе-
рехода к характеристикам в скоростной системе координат восполь-
зуемся формулами пересчета из одной системы в другую. Учитывая, что
разность углов атаки винтов Да мала, получим
Рнс. 2. 148. Перестроение за-
висимости fx—Дл!») при из-
менении коэффициента запол-
нения винта
Выпишем окончательные формулы
пересчета аэродинамических характери-
стик несущих винтов с разными коэффи-
циентами заполнения:
Из формул (6. 12) видно, что при пересчете характеристик величина
коэффициентов V, ty и mv сохраняется, a tx и а изменяются на постоян-
ную для данных tu и V величину. Значит перестроение аэродинамиче-
ских характеристик несущего винта, представленных в виде зависи-
мости ?г=^(тк) при 7=const и ^=const, сводится к смещению каждой
кривой вдоль оси ординат на величину ДС=Дст (!1ЙС- 2.148).
Практически перестроение характеристик можно не выполнять,
а делать аэродинамический расчет вертолета по аэродинамическим ха-
рактеристикам подобного несущего винта с другим коэффициентом
заполнения, учитывая /\1Х. Например, при расчете вертолета с коэффи-
циентом заполнения ст2 по аэродинамическим характеристикам винта
с коэффициентом заполнения ст, потребный коэффициент крутящего мо-
мента (тк ,)2 и потребная мощность А‘г.с определяются в такой по-
следовательности:
а) определяем
*з
б) для использования характеристик ииита с в] находим
4/W
в) по характеристикам винта с Ст1 определяем т,. _ «ь с₽ь
г) находим (mHr п) , <1ГПг, ©г.п и по1реб|1ую мощность вертолета:
. — т,
1 Д2р2 '
Выведенные выше формулы получены для несущих винтов с равно-
мерным распределением индуктивной скорости по диску. Для винтов
с бесконечным числом лопастей и неравномерным распределением
индуктивной скорости все рассуждения и формулы пересчета не изме-
нились бы, если б в каждой точке диска индуктивные скорости винтов
с разными коэффициентами заполнения отличались па одинаковую
величину, равную УДа. В действительности изменение коэффициента
заполнения влияет также и на переменную часть индуктивной скорости,
г. е. эпюры индуктивных скоростей отличаются не на одинаковую вели-
чину. Однако, поскольку ведется пересчет средних за оборот характе-
ристик /у, и шк, которые п основном определяются средней частью
индуктипной скорости, формулы пересчета (6. 12) могут применяться
с досгаточной надежностью.
Предлагаемый метод пересчета аэродинамических характеристик
несущих винтов подобен аналогичному методу для воздушных винтов
самолетов. Он также основан на определении режимов, на которых
кинематические характеристики винтов с разными коэффициентами
заполнения одинаковы. Отличие состоит в том, что для воздушных вин-
тов с разными п подбираются разные скорости полета (разные ?ч.в),
а для несущих винтов, у которых кинематика определяется не только
нормальной составляющей скорости, но н составляющей скорости
в плоскости вращения, скорость полета сохраняется, а подбираются раз-
ные углы атаки.
4. Пересчет аэродинамических характеристик при изменении
минимального коэффициента профильного сопротивления
сечений лопасти с,,,
Когда лопасти отличаются по величине минимального коэффициен-
та профильного сопротивления — разное качество изготовления профи-
247
ля (§ 4, п. 3), разные профили, отличающиеся в основном с1Р(,— можно
применять следующие формулы пересчета аэродинамических характе-
ристик винтов.
Приращения коэффициентов крутящего момента и продольной
силы согласно георил Глауэрта— Локка будут равны
"(i-b2); (6.13)
ДА —** р, ^6.14)
где
Остальные коэффициенты в
связанной системе координат не из-
меняются. Коэффициент тс прира-
сгет на величину, равную прибли-
женно Д/г. Таким образом, формулы
пересчета будут:
r, = Vr;
S-^1'
-г-мяр (1 + 1/а);
Изменение характеристик несущего винта при пересчете иллюстри-
руется рис. 2.149.
Пересчет можно также Произвести и при условии постоянства ве-
личины tx:
Ps—7^
При этом условии приращение крущщего момента будет равно
|с«.выражение (3.71)]
д/цк = д/ппр=-^- -|-372)
и соответственно
”‘ч=тК1 -|- -у Дсх/1 + 317J- (6.16)
По аналогии с выражением (3.72) вместо выражения (6. loi по-
лучим
+-J- ~Ы-)Л 16.17)
Используя выражения (6. 16) или (6. 17), из точки i на рис 2 149
придем в точку 3.
Нестрогое™ формулы пересчета заключается в том. что она, верно
учитывая влияние приращения схр, не учитывает того, что в точках /
и 3 углы атаки несущих винтов не равны друг другу (а| = ад аэ<аз)-
248
Следовательно, па этих режимах разное распределение истинных углов
атаки сечений и поэтому разные индуктивные и профильные мощности
при одинаковых полярах профиля. Но методы пересчета приближенны,
так что указанная неточность практического значения не имеет.
Если поляры профилей отличаются не только величиной схр . но и
по форме, то предлагаемая методика нс справедлива, Поэтому она не
может быть применена к пересчету аэродинамических характеристик
на другие числа Re и Мо. В этих случаях величина Л«1В должна опре-
деляться с учетом действительных значений а, и схр в каждой точке
лиска несущего винта.
5. Пересчет аэродинамических характеристик при изменении
окружной скорости несущего винта (числа Мв)
В § 3 на рис. 2.80—2.88 приведены графики приращения коэффи-
циента крутящего момента при числах Мо, больших 0,4. Графики пока-
зывают, что при умеренных значениях коэффициентов тяги ежцмае
мость воздуха оказывает заметное влияние на величину ти при чис-
лах Мо, больших 0,55—0,6. Поэтому при изменении числа Мо за этими
пределами (а при околосрывцых значениях tv при меньших Мо) в аэро-
динамические характеристики несущего вицта должны вноситься по-
правки. Поправки определяются по графикам на рис 2.80—2.88 как
разность значений Дтсш при рассматриваемых числах Мо.
Например, если эксперимент проводился при числе Мс, равном М0!,
а экспериментальные данные используются при числе М„, равном М02,
то к найденному по экспериментальным графикам значению Я1к
—/Ик(Р, ty, tx, Мо ) нужно прибавить
8тсж=дтсж(М02)-Д»гсж(Ма1), (6.18)
причем Дя1сж определяются при соответствующих числах Мо и при тех
же значениях v, tv, tx.
Таким образом,
1,.1„ Ч,,) + »•„ (6.19)
На й>0,3 при изменении числа Мо нужно вводи; ь поправку н угол
атаки несущего винта и соответственно в шаг лопастей. Эти поправки
вносятся аналогично:
! 8ас,; (6.20)
Чж—Д«сж(^. гг k, Ч2)-ЛСсж(^, Мо,)- (6А<)
Шаг лопасти определяется в зависимости от К, tv и а по графикам
ty — f^a, 0о. у) в Предположении, что эта зависимость не изменяется
ПО числу Мд.
6. Пересчет угла атаки и шага винта при изменении наклона автомата
перекоса, компенсатора взмаха и массовой характеристики лопасти
Как показано в § 2, при изменении наклона автомата перекоса и
компенсатора взмаха коэффициенты t„ гЛ п /ни не изменятся, если экви-
валентный угол атаки винта аэ—a- ty останется прежним. Следова-
тельно, пересчет характеристик винта сводится к отысканию нового
угла атаки винта ио выражению
u2 —G3 I —“l-(?|)l+(?l)2. (6.22)
249
где ф) определяется по формуле
о, — — D.*4-D,r\ — k ——,
. 1 । । г1 ] 42
Коэффициенты <х> и &1в находятся по известным Oj и с помощью
выражений (2.273), (2.274), (2.249) и (2. 250). Шаг винта пересчитыва-
ется до формуле
+ (6.23)
При изменении величины — можно считать, что коэффициенты Оз
и &j , входящие в выражения (6.22) и (6.23), изменятся прямо пропор-
ционально отношению нового ц старого значений — , i. е.
№<•<)>
При сравнении экспериментальных данных между собой или с ра-
счетными данными нужно также учитывать влияние втулки несущего
винта так, как это сделано в приведенных ниже примерах.
7. Примеры использования формул пересчета
Сравнение расчетных аэродинамических характеристик с экспери-
ментальными. Расчетные аэродинамические характеристики винта
с прямоугольными лопастями <т=0,0525 получены по методике, изло-
женной в § 4. Единственное отличие между расчетом и экспериментом,
которое должно быть учтено при сравнении — это влияние втулки вин-
ia на экспериментальные характеристики. Принимая cVrt=0,0015, для
приведения расчета к условиям эксперимента нужно к расчетной про-
пульсивной силе винта добавить приращение
или в безразмерном виде
д^„=г-.Л- (б-24)
Таким образом, экспериментальные кривые будем сравнивать с ве-
ли чиной
tr~ ^раеч+^^ат-
= , е.01)1Лу,= —0 028672.
»₽а« 1 0,0525 -^расм
На рис. 2.150 нанесены экспериментальные кривые и пересчитан-
ные расчетные кривые (l't) на Р=0,3. Как видно из рисунка, на режи-
мах моторного полета (G--0,01^-—0,02) разница в незначитель-
на. а на режиме самовращения значения tx отличаются на 5—15%.
1 мецыпих Г сходимость экспериментальных и расчетных кривых
лучше.
Сравнение экспериментальных аэродинамических характеристик
между собой. Используя экспериментальные аэродинамические характе-
250
ристики винта с трапециевидными лопастями, имевшими профиль
NACA 230, фанерную обшивку, а=0,0865 и Мо—0,4, по формулам пе-
ресчета получим характеристики винта с прямоугольными металличе-
скими лопастями с профилем NACA 230, а=0,0525 и Мо=0,5 и сравним
их с полученными из эксперимента характеристиками, показанными на
рис. 2.141-2.145.
Рис. 2-150, Сравнение экспериментальных и ра-
счетных аэродинамических характеристик винта
<МВо.,=0(15; V=Q,3: Мв=0,5; 0=0,0525)
Разница н коэффициенте заполнения учитывается по формуле (6. 12)
1 (0,0525 0,0865)-^- =
-tx (в=о.ик>--0,009^- .
Разницу в профильной мощности винтов с учетом отличия формы
лопастей в плане найдем по следующим выражениям:
miP(B-.i>.052s; “-^-(l-| 5Р2)Р7;
п, „J.»,,, +sv'‘)P-l ^bv^p-
(6.25)
Приняв для трапециевидной лопасти Р=0,92. схр — 0,009 и в соот-
ветствии с рекомендациями, данными в § 4, п. 3, Дсхр =0,0025, найдем
Д7ппр=^|^^0,92+И(0,92-1)р1+5Й)--0,0004(1+5У2).
25]
Для того чтобы пересчет характеристик делать только по одному
из коэффициентов, а именно — по tr при /nK=const, пересчитаем Д/Лщ.
а Д/х
(6.26)
Разница в числах Мо учитывается по выражениям (6. 19), Дяг.-ж
определяются по графикам на рис, 2.80—2.88.
Рис 2.151. Сравнение экспериментальных н пересчитан-
ных аэродинамических характеристик виита (Мп,>л =
=-0,15; У=0,3, Мо=О,5; а=0,0525)
При разнице в коэффициентах заполнения сопротивление втулки
тает разное приращение коэффициента
Для пересчет,1 характеристик нужно из коэффициента пропуль-
сивной силы пересчитываемого эксперимента (в,) вычесть ) в при-
бавив
,6-27)
Так как при обработке эксперимента с трапециевидными лопастя-
ми сопротипление неврашающейся втулки было исключено, то примем
252
для учета вращения втулки сЖпт = 0,00075, Поэтому пересчет на влияние
втулки выполняется по выражению
. , / 0.00С75 0,0015\т7о
tjt (a=0,032S) — lx Г» O.OS651 — I---!-----} И =
’ 1 ' ' \ 0,0865 0,0525?
= /х (0-4.0865] “i" 0,02V2.
Таким образом, окончательное выражение для пересчета коэффи-
циента is имеет вид:
^(»=0,С525) =^(»-0,0865; —0,009 —
_ 0,0004 ] + 5t” 4-0,02 V24- .
Для сравнения на рис. 2. 151 показаны характеристики, полученные
нз эксперимента и пересчитанные (fx), В основном совпадение кривых
удовлетворительное.
§ 7. КАЧЕСТВО И ПРОПУЛЬСИВНЫЙ КОЭФФИЦИЕНТ
ПОЛЕЗНОГО ДЕЙСТВИЯ НЕСУЩЕГО ВИНТА
Несущий винт вертолета создает подъемную силу и является одно-
временно движителем вертолета. Поэтому естественно характеризовать
его несущие и пропульсивные свойства аналогично тому, как крыло
характеризуется качеством Акр. а тянущий винт — коэффициентом по-
лезного действия г)т.в. Эти понятия позволяют выяснить степень совер-
шенства несущего винга как средстна для создания подъемной и про-
пульсивной сил, быстро выполнить в общем виде приближенные расчеты
потребной мощности одновинтового вертолета, вертолета с крылом и
тянущими винтами, многовинтового вертолета и найти режим макси-
мального качества (максимальной дальности). Зная качество и к, П.Д.,
можно непосредственно оценить целесообразность установки на верто-
лет крыла и тянущих винтов, определить, какую часть составляет вред-
ное сопротивление в общем сопротивлении верюлети н на сколько
уменьшится потребная мощность при уменьшении вредного сопротивле-
ния, найти рациональное распределение мощности между тянущими
винтами и несущим ниитом.
Определение качества несущего винта на режиме самозращенпя
производится так же, как для крыла Понятием качества несущего вин-
та широко пользовались при аэродинамических расчетах автожиров.
Качество винта вместе с коэффициентом, который мы будем называть
пропульсивным коэффициентом полезного действия, можно применить
и для расчетов вертолета, что будет показано ниже.
В отличие от самолета, где крыло и воздушный пинт—разные
агрегаты и и т]т.в могут рассматриваться независимо друг от друга,
у вертолета качество несущего винта К и к. п.д. г] взаимосвязаны,
и эффективность несущего винта на каком-либо режиме определяется
величиной произведения Кг|,
Предварительно остановимся на понятиях качества и к. п. д., встре-
чающихся в отдельных работах но аэродинамике вертолета (К. Хохе
немзер и другие авторы).
253
1. Качество и коэффициент полезного действия несущего винта,
предложенные К. Хохенемзером
Качество несущего винта может быть определена в предположений,
что фактическая пропульсивная сила винта (—X) есть разность между
отношением и каким-го условным сопротивлением несущего вини
Х7СЯ^——-^усл^ , откуда определяется условное сопротивление
несущего винта: .
Соответственно качество несущего Винта
75^
Отношение ----
мощность без потерь преобразовывалась
как фактическая пропульсивная
ЧГО ВСе ПОтерИ ОТНОСЯТСЯ К Хуса- -- .... _____, . ..г
ставляется как некоторый механизм, создающий силы Y н Хус>|; подводи-
мая к нему мощность создает боа потерь пропульсивную силу, равную—
так что суммарная (фактическая) пропульсивная сила равна
было бы равно пропульсивной силе, если бы вся
в пропульсивную силу. Так
сила равна -5— Хугл, то, очевидно,
Таким образом, несущий винт пред-
Условное сопротивление несущего винта сравнимо с сопротивле-
нием крыла плюс потерн мощности тянущего винга, т. е,
причем суммарная пропульсивная сила системы „крыло-[-тянущий вицг“
ТёАГтв
равна - — Хуил .
В качестве второго варианта предлагается считать, что подъемная
сила несущего винта создастся без потерь (без силы сопротивления),
а все потери относятся к созданию пропульсивной силы. Несущий винт
представляется как некоторый механизм, создающий подъемную силу Y,
а подводимая к нему мощность перерабатывается в пропульсив-
ную силу
у _7~>,Ут|
Отсюда следует:
/ик
(7.2)
254
Очевидно, что к. п.д. ц нужно сравнивать не с ч™, а с разностью
г|т.в---, так как тяга винта минус сопротивление крыла ранна:
Описание обоих вариантов представления характеристик несущего
винта показывает, что оба они искусственны и сравнимы лишь с ком-
бинированными характеристиками крыла и тянущего винта .Это отри-
цательная сторона предложенных понятии Их положительной стороной
является то, чго характеристики описываются лишь одной величиной:
либо качеством, либо коэффициентом полезного действия.
Поггятвя качества несущего винта (или к. п.д.), рассмотренные
выше, удобны для расчетов, так как связывают скорость полета V и вес
вертолета G (или пролульсивпую силу) с потребной мощностью, Дейст-
вительно, положив в 'Выражении (7.1) G — Y и QBpe—-У, получим
А'г,.=^(у+О.р). 17.3)
Однако удобством использопапия при расчетах и при определении
оптимальных параметров исчерпывается смысл применения этих поня-
тий. Предлагаемые ками ниже понятия тпкже упрощают расчеты и.
кроме того, сохраняя смысл н значение аналогичных понятий для само-
летов, облегчают исследование комбинированных винтокрылых аппа-
ратов.
2. Определение качества и пропульсивного к. п. д. несущего винта
Пусть несущий нинт работает на режиме «а» (рис. 2. J52) с про-
пульсивной силой Ув. потребляя мощность ,Va Для увеличения пронмль-
сииной силы до Де при сохранении
подъемной силы У нужно наклонить
вперед несущий випт и увеличить мощ-
ность до Na- Коэффициент полезного
действия несущего винта как движи-
теля при переходе от режима «а» к ре-
жиму «б» определяется как отноше-
ние прирашения мощности несущего
винтя как движителя —ДХУ к прира-
щению мощности, подводимой к несу-
щему винту:
(G,.
75ДЛ' ткд--тик
;?.4)
Если бы мы для увелнчепия про-
пульсивной силы несущего винта
установили тянущий винт и подали
на него мощность, равную по величине
здал бы силу тяги
Рис. 2.152. К определению понятий
качесгпп я к. и д. несущего винта
разности Уд- Nn = NN, то он со-
7.5^^^
(7.5)
Сравнение этого выражения с выражением (7.4) показывает, что
прирашенне пропульсивной силы несущего винта —ДУ характеризуется
255
его пропульсивным к, п.д, т) так же, как тяга тянущего винта харакге-
ризуется к.п.д. тянущего винта цт.в-
На аппарате с несущим винтом, установленным для создания подъ-
емной силы, мощность может подаваться либо на несущий пинг (верто-
лет: A'T,j,-O, /Va>-jVftl см рис. 2.152), либо гга тянуший винг (автожир:
Л'и.в—0, ArTI=A'c). либо распределяться между первым (Лц.в—Лга)
и вторым ('VTS —Ле—М»), Сопоставление ц с t]T,E показывает, какой из
этих вариантой лучший, т. е., целесообразно ли устанавливать тянущий
винт для увеличения пропульсивной силы аппарата или выгсщиее всю
мощность передав на несущий винт: если ц>т]тэ, то |Ас| > |Ха|+/Vn-
Точнее q нужно сравнивать с т}т.и у5 ^отношение — учитывает раз-
-и=4- +
к' Лс ? 75N
Рис. 2.153, Модель, представляющая несущий
вин1 в виде двух элементов — несущего и дви-
жущего
ницу и потерях мощности, передаваемой на несущий винт и на тяну-
щий винт).
Таким образом, чтобы получить для несущего винта, являющегося
и несущим органом, и движителем, коэффициент, аналогичный к. п.д.
тянущего винта, нужно рас-
сматривать приращениепро-
пульсивной силы (или силы
сопротивления) несущего
винта при подведении к
нему мощности. Поэтому мы
определили пропульсивный
к. ц. д. несущего винта как
отношение приращений
полезной и затраченной ра-
боты, хотя такое отношение
фактически не является
коэффициентом полезного
действия, а только выполняет его роль у аппаратов с несущим
винтом.
Для определения пропульсивного к. п. д. по формуле (7,4) нужно
выбрать какой-то режим за исходный (выбрать точку «а»). Сопротив-
ление несущего винта на этом режиме ла определяет его качество.
Целесообразно принять за исходный режим — режим самовраще-
ния (точка «с» на рис. 2,152). На этом режиме к несущему винту не
подводится мощность и он. создавая подъемную силу, создает, как
крыло, силу сопротипления.
Таким образам, работу несущего вцнта можно интерпретировать
так: подъемная сила создастся несущим винтом на режиме самовраще-
ния без затраты мощности двигателя, как у крыла, а на режимах с пода-
чей мощности несущий винт создает пропульсивную силу, преодолеваю-
щую частично (при или с избытком (при АГ>УИ) сопротивленце
пиита па режиме самовращения. Пропульсивный к. п. д, характеризует
потери мощности несущего винта при переходе на режим движителя
Несущий винт заменяется моделью, показанной па рис. 2. 153, для кото-
рой в соответствии со сказанным выше выражения для ц и К имеют вид
(7.6)
(" 7)
В выражениях (7 6), (7.7) и ниже индекс «с» показывает, что
отмеченная величина берется на режиме самовращения,
При горизонтальном полете пропульсивная сила винта равна суле-
ме сопротивления несущего винта tXc н вредного сопротивления верто-
256
лета 1Л- п = ^--x — • Следовательно, пропульсивный к.п.д. и каче-
ство верюлега при горизонтальном полете равны:
(7.8)
(7.9)
(7.Ю)
Отметим, что величина (/хс—/»г л) представляет собой коэффициент
\ сдобной пропульсивной силы несущего винта при горизонталь-
ном полене, в она равна коэффициенту сопротивления, преодолеваемого
тянущим винтом автожира или верто-
лета, у которого при горизонтальном х , я
полете несущий винт работает на ре- ^’,1^. ’ 6 'c‘s'
жиме самовращения. tx ; =coist
V-CMSt M0sconst
Рис. 2. [54. Определение
Рис. 2.156. К оценке целесообразно-
сти установки rwHJ'irl.c'i'o нинта на
вертолет
В выражениях (7 7), (/, 9) и (7, Ю) К « К* те же, что применя-
лись при расчетах автожиров.
Использование понятий качества и пропульсивного к.п.д. для
расчетов очень удобно при линейной зависимости tx от тк. В атом слу-
, Л
чае величина р не зависит от гга1; или гх. так как отношение — равно
тангенсу угла наклона прямых is=f(mK) (рис. 2.154).
Вместо совокупности графиков (см рис. 2.103—2.109). построен-
ных для нескольких V, аэродинамические характеристики могут быть
представлены диумн графиками—К и >] в зависимости о? t„ и 7 (см.
рис. 2.158), е помощью которых па выражениям (7.7) и (7j5) опреде-
ляется tx при известных iv, V, tnK или тк при известных tu, v. i.v.
При нелинейной .зависимости /с от тк, когда р чвщ/сит аг лгк,
использование К и р при расчетах не дает существенных преимуществ.
В этом случае представляет интерес определение пропульсивного к. п.д.
17 1002
цо углу наклона касательной к кривой ^х=)‘(т1!) в рассматриваемой
точке
(7. Ш
Сравнение с
5т й
—позволяет определить, может ли быть уве-
личена пропульсивная сила аппарата При уставовке. тянущего винта.
Пусть в точке „а“ (рис. 2.155' i|, = г)т в -™. Очевидно, что если тк<^тк
то Л1 , и установка тянущего вита нецелесообразна. Если не-
сущий винт р.чбенаег на режиме с mrt бблыиим тв , то установка тяну-
щего пиита может увеличить пропульсивную силу, причем наибольший
выигрыш будет в случае, когда на несущий винт передай |Ся мощность.
При нелинейной зависи-
мости tx от тк для прибли-
женных расчетов с исполь-
гованнем понятия качества
П к п д. целесообразно за-
менить нелинейную зависи-
мость 1Х от тк линейной.
Такая аппроксимация де-
лается на участке кривых
от а-—20°, а при 1'=0,15
иногда от а---15° (точка F
на рис. 2. 136) до того мц-
нихтальногГ) значения /пь
(точка Н на рис 2. 156), при
котором наибольшее откло-
нение тк от точных значе-
_ нпй не превышает 3%
щ,;с. при tx--0,1 Г3 (приблизительно режим горизонтального полета
вертолетов).
Величина л и К. определяемая по аппроксимирующему отрезку HF,
вычисляется по формулам
(7.12)
(7.13)
К.п.д., определенный по углу и.нсаона линеаризированной зависи-
мости 2I=f(/rtit). нужно рассматрива ib как пропульсивный к. п. д. в срет-
цем для кривой.
3. Качество и к. п. д. несущего винта,
найденные по экспериментальным данным
Графики аэродинамических характеристик несущего винта в виде
зависимости tx=HmK), полученные из экспериментов и натурной аэро-
динамической трубе, приведены в § 6 на рис. 2 142—2 115. Они отно-
сятся ц трсхдопастноиу металлическому винту с прямоугольными закру-
ченными лопастями. о=0.0525, и включают в себя сопротивление втулки
винта. Из этих графиков по выражениям (7.6), (7.7) определены
зависимости К и г] от tv, показанные на рис. 2.157 и 2 158.
258
Для объяснения характера протекании кривых К рассмотрим при-
ближенные выражения для К. Согласно энергетическому методу расче-
та (§ 3)
«Ч —\^ + ^прс; (7.14)
17,1Л)
(7.]6)
Рост качества при увеличении V объясняется уменьшением индук-
тивного it профильного сопротивления с ростом V. При средних значе-
Рис. 2.157. Качество несущего нн«та
ПО чкепернмептальным данным
{Мл—0,5, а=0.0.525>
ниях tv качество мало зависит от
так как индуктивная часть обрат-
ного качества увеличивается с ро-
стом tv, а профильная уменьшается
(до наступления срыва потока).
При малых качество уменьшается
Рис 2,158. К. П. а. несущего нинта
по экспериментальным данным
(Мо=0,0; tr—0,0525)
Максимальная величина качества несущего винта зависит от Р, Мо,
а, качества изготовления лопастей, геометрических характеристик лопа-
стей. В экспериментах из-за малой величины VmflI не пайлено макси-
мальное значение качества. Наибольшее из полученных значений
/Cmaz“9,/ 1|рИ F= 0,3, /у —0,1/.
По величине качество несущего винта меньше качества крыла. Эю
объясняется тем, что несущий винт имеет большие, чем крыло самолета,
профильные потери, так как при равной скорости полета сечения лопа-
сти обтекаются с юраздо большей скоростью U. При псотклоценной
механизации профильное сопротивление крыла в 2—2,7 раза мепыпе,
чем у несущего винта. При отклонении механизации профильное со-
противление крыла значительно возрастает и приближается к профиль-
ному согтротаалению несутето пинта.
По индуктивному сопротиплснию несущий винт и крыло близки
друг к другу (при /Кр=^ и при равномерном распределении индуктив-
ной скорости индуктивное сопротивление одинаково).
259
Уменьшение качества на малых Г неизбежно и для несущего винта,
и для крыла из-за увеличения индуктивного сопротивления. Однако
у крыла такого малого качества, как у несущего винта, не бывает, так
как крыло не может иметь такой высокий с9, как несущий винт при
И-^0,15 [см. выражение (4.37), глава 3].
Пропульсивный к п.д. несущего винта изменяется в пределах ог
0,99 до 0,9. Кривые т} пересекаются между собой и в некоторых случаях
имеется большой разброс точек. Дело в том. что точно определить ве-
личину п трудно, так как разброс экспериментальных гочек на графи-
ках tx—|(/пк) создает некоторую неопределенность в угле наклона
прямых, что заметно (в пределах 3—5%) сказывается на величине т]
Неточность в определении тр а также Л показывает, что при
представлении характеристик несущею винтя в виде несущего и движу-
щего элементов невозможно с большой точностью оценить их отдельно.
Однако это не значит, что расчеты, выполненные с использованием К
и г), имеют низкую точность, так как при определении щк по формуле
ошибки в определении i) и К компенсируются.
Из рис. 2.158 видно, что даже учитывая низкую точность определе-
ния к.и д. несущего винта, он больше, чем к.п.д. тянушего винта. Так
как ц определяется как отношение приращений полезной и затра-
ченной работы, то он не должен быть обязательно меньше 1,0. Поясним
это. Подставим в выражение (7.6) выражение для мощности несущего
винта, взятое из энергетического метода расчета
75ЛГ = 75ЛГИР + 75.УН11Д- ,W. (7.18)
Тогда выражение (7.6) принимает вид
ц = -____-______---------------------719)
1 (Xc-A')V + 75(WHRJ-,Vliaic}-k75^np—Л^)
Из выражения (7. 19) ясно, что если бы индуктивная и профильная
мощности несудссго винта, зависящие в основном от подъемной силы,
при изменении пропульсивной Силы не изменялись, то пропульсивный
к. п. д. был бы равен 1,0. В действительности разности Л'щщ и Л’ир
малы, так как мы рассматриваем изменение пропульсивной силы при
постоянных подъемной силе и скорости полета, т. с. при приблизительно
одинаковых средних значениях индуктивной скорости и истинных углов
атаки сечений лопасти. Можно показать, что при одинаковой пропуль-
сивной силе эти разности соответственно меньше, чем индуктивная и
профильная мощности тянущего винта, из-за чего Т]>пт.в-
Итак, рассматривая несущие и пропульсивные свойства несущего
винта, мы определили, что основная часть потерь мощности и Vup
на режиме самовращения) относится к потерям энергии, свя инным
с созданием подъемной силы, что определяет низкое качество несуще-
го винта.
Пропульсивный к. п.д. несущего винта отличается от 1,0 из-за не-
большой по величине разности индуктивных и профильных потерь на
режимах с подачей мощности па вит и па режиме самовращения; он
выше, чем к. п.д. тянущего пинта (пропеллера).
250
Следует иметь и виду, что значения К и 1], записимость которых от
показана на рис 2 157 и 2 158, справедливы для режимов, находя-
щихся в пределах, в которых проведены эксперименты. Это значит, что
mr. вычисленный по выражению (7.17), найде1| правильно, если он не
больше максимальных величин т,„ до которых проведены эксперимен-
тальные кривые (ягь . = 0.01—0,013).
4. Качество и к. п. д. несущего винта, найденные по расчетным графикам
Качество и к.и д. несущего винта с прямоугольными закрученными
лопастями (И вариант п табл 2 10), <г~=0,091, определялись по графи-
кам аэродинамических характеристик, полученным ио расчету. В слу-
чаях, когда зависимость tK~f(m«) нелинейна, К я л находились по
формулам (7. 12) и (7. 13). Графики К и р показаны на рис. 2. 159
и 2.100.
Рис. 2 159. Качество кссусчею ашгта |расчет, г,=0,091)
Качество несущего ииюа Г1ри Мо>0,6 начинает уменьшаться, осо-
бенно «а больших Р; при Мо—0,7 на 7=0.3 К уменьшилось на 1,5, а на
Р=0.-1 ла 3.5. При Л1з=0,7 качество на 7=0,3 больше, чем па 7=0,4,
и максимальная величава качества равна приблизительно 7,5
К.п.д. несущего винта при Мп—0,6—0,7 на средних и малых зна-
чениях tj имеет большую величину (более 0,95). На околосрывных 6,
к. п д. начинает резко падать, однако он не уменьшается при =
менее 0,75 0,85.
Значения К и р, полученные в результате линеаризации кривых
—f(rnK), справедливы в определенных пределах. Верхним пределом при-
менимости графиков Л'кривляются значения отношения
приведенные в табл. 2. 13.
Если полученное и результате расчета отношение меньше дан-
ного в табд, 2.13. то расчет не будет отличаться более, чем на 3% or
261
расчета, сделанного по графикам аэродинамических характеристик.
Кроме того, отмстим, что значения-^. , данные в табл. 2 13, соответст-
вуют режимам полета с а = —20° (иногда —15° на F = 0,15).
Нижним пределом применимости графиков, показанных на
рис, 2. 159 и 2, 160, является режим самовращения или моторного плани-
рования. Точнее, расчеты на режиме самовращения выполнять по
графикам А\, показанным на рис. 2. 41, так как значения К, найденные
по линеаризированным кривым, могут немного отличаться от Кс
Сравнение качества и к, и. д. винтов, имеющих лопасти с различными
геометрическими характеристиками, показывает, что при Ма^0,4-=-0,5
профиль лопасти в пределах нескольких процентов влияет на величи-
ну Л(, а т] от профиля лопасти почти не зависит. Это значит, что винты
с разными профилями потребляют отличающуюся на AV мощность,
причем &N не зависит от того, на каком режиме работает винт с боль-
ри;й или малой пропульсивной силой (на режиме планирования или на-
бора высоты),
С трапепиевндными лопастями (1 вариант лопастей в табл. 2 10)
К на 0,5 (при Г=О,2)—1,5 (при Г—0,4) выше, а т] на 0,01 (при
«=0,2) —0,03 (при F=0,4) ниже, чем с прямоугольными. Это значит, что
наибольшее уменьшение потребляемой мощности у винта с трапецие-
видными лопастями получается при малых пропульсивных силах. При
262
больших пропульсивных силах винт с прямоугольными лопастями,
имеющий больший т), может оказаться лучше.
На Mi)—0,7 сравнительные трафики К и q показаны на рис. 2. 161 —
2 164. Из этих графиков видно, что у винта без скоростного профиля на
конце льпястн (варианты Ш, IV) К на 0,7 (при F=0,2) —1,7 (при 7 =
= и,ч) меньше, чем у винта со ско-
ростным профилем. С трапециевид-
ными лопастями К на 0,5—1.0 выше,
а г] на 0,02—0,08 соответственно
ниже, чем с прямоугольными лопа-
стями.
СТ 5,12 ДМ 8.16 0.18 t,
Put. 2. 161. Качество несущих giill-
тов с -топастячи разной формы (7=
-=0,2, Мо-0.7)
Рис 2.162. К, п.д. несущих пик-
тов с лопастями разной формы
(7=0.2; Mq=0,7)
У винта с лопастями с увеличенной
[VI вариант) и с расширяющимися к концу
на 7=0.4 качество на 0,5—0,7 ниже.
геометрической круткой
лопастями (V££ вариант)
а к и. д. на 0,05—0,15 выше Очень высо-
кое значение т| у пинта с увеличенной
круткой является следствием существен-
ного уменьшения профильных потерь
при увеличении пропульсивной силы
пинта (см. рис 2 73, 2.76).
Рис. 2. 163 Качество несу-
щих винтов с лопастями
разной формы (7=0 1;
AV-0.7)
Рис. 2.164, К. п.д несущих
н1цгтов с- лопастями ратной
формы (7 fl,4; Ala-fl,"!
5. Пересчет качества н к. п, д. при изменении параметров винта
В соответствии с формулами, выведенными в § 6. качество несу-
щего нннта при изменении коэффициента заполнения и коэффициента
профильной мощности пересчитывается по выражению
(7.20)
2G3
Изменение коэффициента профильной мощности должно учиты-
вать изменение схр, профиля (или Дся7, из-за розницы в качестве изго-
товления лопастей) и изменение tnw от волнового сопротивления:
5рт)Р+гЯгж. (Т.21)
Пропульсивный к. п. д. от разницы в а и Дсхп не зависит. Величина
бтсж зависит от 4, поэтому ц также зависит от tx. Однако для просто-
ты т| можно не пересчитывать, а в выражение (7-2!) лодгтавлигь
при среднем значении /т.
6. Общие замечания о качестве и к. в. д. несущего винта
На рис. 2.165—2.167 показаны обобщенные графики К и т|, кото-
рые могут бьпь использованы для прикцдочных расчстоп. На рис 2 165
показан трафик К для ст—0,091.
справедливый для средних Л
больших /у. При малых (^«^0,11
Д'на 0,2 (при 7=0,15) -1,5 (при
Рис 2.166. Обобщенней гра-
фик к и д, несущего винта
(М.,<О.б)
7=0,4) меньше. На рис. 2. 166 показан графику, применимый для всех
ty при Мо<-'0,55. При Мо>0,55 к. п. д. нужно поправлять па велищ1ну Дт|.
данную в зависимости от /э, Л1а, 7 на рис. 2. 167-
Итак, как видно из рис. 2. 165—2. 167. качество пища ниже качесг-
нл крыла, а пропульсивный к. и. д винта выше, чем х. п.Д- тянущего
винта. Это объясняется тем.что
основная пасть потерь мощно-
сти относится к потерям, свя-
занным с созданием подъемной
силы, а пропульсивный к. п. д.
отличается от единицы из-за
небольшой по величине разно-
сти индуктивных и профиль-
ных потерь на режимах
с подачей мощности на
вият И на режиме саноира-
щения
Тахям образом, оче-
видно, что установка кры-
Рис. 2.1в7. Поиряиха к к. п. д. «сссшегс вин- ла, имеющего качество выше,
та н чаппснмости от t(. ЛЬ-, v чем качество несущего вицта.
повышает качество несущей
системы вертолета. Установка тянущего винта, имеющего к. п. д. ниже
пропульснвно|о к. п. д. несущего пинта, приводит к некоторому увели-
чению потребной мощности. Потому тянущцй винт на вертолете мп-
26*
жег быть полезным в случаях, когда разгрузка несущего винта крылом
или запас располагаемой мощности делают отношение —больше,
чем ирнпедсно в табл. 2. 13, так как тогда отрицательный угол атаки
несущего пинта становится больше 20° (что нежелательно по конструк-
тивным соображегжям, увеличивается диапазон углов тангажа верто-
лета, его вредное сопротивление). Кроме того, ври болыпцх —значе-
ния г) могут стать меньше »]т.в. Тянущий винт или другой движитель
может оказаться необходимым для реализации большого избытка мощ-
ности (ориентировочно & >0,35), когда у вертолета получается Fmaj>
>0,45—0.5.
Количественно изменение потребной мощности вертолета при уста-
новке крыла и тянущего винта невелико. Такая опенка будет сделана
в § 4 гл. 3.
§ 8. РАСЧЕТ ХАРАКТЕРИСТИК
НЕСУЩЕГО ВИНТА ИА РЕЖИМАХ ВИСЕНИЯ
И ВЕРТИКАЛЬНОГО ПОДЪЕМА
(импульсная теория воздушных винтов)
Теория несущего винта на режимах висения и вертикального подъ-
ема подробно изложена в литературе по аэродинамике вертолетов и воз-
душных винтов. В настоящем параграфе мы приведем некочорые ма-
териалы, относящиеся к расчету несущих винтоп при применяемых
в настоящее Время окружных скоростях.
Расчеты выполнялись по импульсной теории несущего пинта. Эта
теория выбрана потому, что она позволяет ввести в расчет не линеари-
зированные аэродинамические характеристики профиля, а фактическую
зависимость си и схр от а и М, полученную из продувок профиля.
1. Краткое изложение импульсной теории воздушных винтов
Па рис. 2. 168 изображен скоростной многоугольник в сечении ло-
пасти на относительном радиусе г на режиме вертикального набора вы-
соты Результирующая скорость потока и сечении лопасти D' представ-
диет сумму векторов скорости полета 1\, окружной скорости ыг
и индуктивной скорости м. Так лак векюр результирующей аэродина-
мической силы сечения <18. направлен в сторону, иротвноппложную век-
тор} количества движения, то вектор индуктивной скорости и парад
делен <//?.
265
Массовый секундный расход воздуха, протекающего через кольце-
вое сечение на радиусе г шириной dr равен
dm=fflzrdr\Vx |. (8.11
где Vj — вертикальная составляющая скорости IJ.
Применив к кольцу теорему импульсов и используя теорему удвое-
ния индуктивной скорости далеко за пиитом, получим уравнение
'2dtnu—z3dR, (8.2)
где zndR~ равнодействующая элементарных аэротииамических см.
создаваемых всеми лопастями иа радиусе г.
Подставляя выражение (8.1) в уравнение. (8.2) и выражая
dR через коэффиииенг силы Сясоч- получим уравнение
4ле ] V',1 urdr = z„cSci:i(![^-bdr. (8.31
Уравнение (8.8) можно представить в виде
(8-4'
Это уравнение определяет соотношение между скоростью воздуха
и коэффициентом аэродинамической силы в сечении лопасти (т,тк назы-
ваемое «уравнение связи»)-
Уравнение i8.4) справедливо при струйном течении потока сквозь
диск випта, к в области «вихревого кольца» оно неприменимо
Выразив скорости, входящие в уравнение (8.4), через тригономет-
рические функции углов скоростного многоугольника, можно записать
уравнение (8 4| в тригонометрическом виде.
sin fj-sin(fo —ф
cos(po- 1 +ц,р) — ~Sr
где p — угол нрпгекания потока.
Величины рЯр и равны.
unp —arctg—Р;
Cj>
?u=arc tg
(8. 5)
(S-б)
^8.7)
В левой и правой частях уравнений при данном г известной вели-
чиной является ₽о: |i. От. цпр — неизвестны. Однако, если задаться ае,
то по хараьтсристиье профиля можно натйн рар и й , а по выраже-
нию (8 8) — fl:
'i = a,~о — аг —(% — ku0 ] Дт). I.8.8)
Задача состоит в определении пг, при коюром удовлетворяется
уравнение (8.5). Это значение гх,- находится последовательными прибли-
жениями. Одновременно с определением ar находятся 0, Цпр и сЯкч.
26t>
Погонные нагрузки в плоскости тяги и в плоскости вращения и по-
гонный крутяший момент определяются по следующим формулам-
sie"b; (8 Э>
% sin (И|1р _ J)slgn г,: 18.10!
«^=FJa (8.11)
dr dr
Коэффициенты тяги и мощности несущего винта определяются чис-
ленным интегрированием выражений (8.9) и (8,11).
Для приближенного учета концевых потерь погонные нагрузки
и плоскости гиги интегрируются ие до конца лопасти (г=1), а до
г — В, причем согласно [2]
0—1 — 4 '"- = 1 -Д-W. (8.12)
Выражение (8.12) можно применять при гл>3, ирн zn = 2 конце
вые потери должны учитываться более тонкими методами
Угол конусности и коэффициент профильной мощности находятся
по выражениям
(8 13)
йк,1 dr
mnii=-(‘^./7sdr. (Я. 14»
2. Результаты расчета характеристик несущею винта
Аэродинамические характеристики ne<\nicro винта с прямо^гозь-
ными закрученными лопастями со скоростным профилем на конце
(11 вариант в табл. 2. 10) для коэффициентов .заполнения несущего
винта 0=0,0525: 0,069; 0,091; 0.11 (соответственно число лопастей 2Д=3,
4; 5; 6), & = 0,4, — =1,28* и для двух значений Мс показаны на
рис. 2. 169 и 2, 170. Такие графики используются при поверочном аэро-
динамическом расчете вертолета для определения тяги несущего пин-
та на режиме висения, когда известны мощность, высота полета
и параметры ницта Г, о, <о/?. Последовательность расчета такова Вы-
числив т„ и Мо:
mt =-----75Л'------—-----(8.13)
Mn = —, (8.16)
a
по графикам находим коэффициент тяги t ц определяем тягу винта
Т= * рда =/•/. (8.17)
• _1.тя дру их значений Ану шаг книга должен быть пересчитан по фо)м,'.1е
<6. 23)
267
Влияние геометрических характеристик лопасти иллюстрируется
графиком на рис. 2.171, откуда видно, чго трапециевидная лопасть
1.1 вариант) и прямоугольная лопасть с увеличенной круткой (VI вари-
ант) при (=0,12—0,15 потребляют на 3—4% меньшую мощность, чем
прямоугольная лопасть с умеренной круткой (II вариант). Таким обра-
зом, увеличение геометрической крутки лопасти улучшает характеристи-
ки В1[пта па режиме висения и при поступательном полете (за исклю-
чением режима самовращения).
На рис. 2, 172 показано распределение по радиусу осевого д и тан-
генсиального w компонентов индуктивной скорости. Протекание
гн w по г имеет различный характер для лопастей рассмогренных форм.
У прямоугольной лопасти с геометрической круткой 7° (II ва-
риант) v возрастает от комля к концу лопасти, у трапециевидной за-
крученной лопасти и у прямоугольной с повышенной круткой распре-
деление v в концевой части лопасти близко к равномерному, благодари
чему у этих лопастей меньшие индуктивные потери. Как видно из
рис, 2. 172, скорость закручивания потока а? у несущего пиша вертолета
на порядок меньше осевой индуктивной скорости v.
У прямоугольных лопастей утлы атаки сечений or (рис, 2. 173) убы-
вают к концу лопасти, максимальные углы атаки у сечений на г=0,3 —
0,5, Трапециевидная закрученная лопасть имеет более равномерное рас-
пределение а, на внешней половине лопасти, такое распределение
углов атаки приводит к более раннему, чем у прямоугольной лопасти,
достижению критических углов атаки н к резкому росту схр на эффек-
тивной части лопасти.
268
Рис. 2.170. Аэродинамические характеристики несущего
пиита на режиме висения (*)0 =0,7)
Рис, 2.171. Аэродинамические характеристики
несущих пиитон с лопастями разной формы
на режиме ннсения (<у=0,091. Мс—0.7)
269
На рис. 2 174 показана зависимость профильной мощности от
коэффициента тяги t и числа Мо для лопасти II варианта. Как видно из
1 рафика, влияние сжимаемости воздуха становится значительным при
г>0,15. График на рис. 2. 175 показывает влияние геометрических ха-
рактеристик лопасти па профильную мощность. При Мо = О.7 основное
влияние оказывает профиль лопасти (111 вариант —лопасть без ско-
ростного профиля на конце), форма лопасти влияет меньше. Увеличение
геометрической крутки лопасти (VI вариант) снижает профильные по-
терн лопасти при больших t.
Для определения влияния сжимаемости воздуха на рис. 2 176
Рис 2.172. Распределение ПО
радиусу осевого и п тангенсиаль-
ного ш компонентов индуктивной
скорости (/=0,15;
Рис. 2.173. Распределение по
радиусу углов атаки ссчс-
ежммаемостн позволяют сделать пересчет характеристик несущего винта
на другие числа Мо, а также используются при приближенном расчете
характеристик несущего пиита, когда определяется но формуле
(8.28). Из рис. 2.17" видно, что для рассматриваемых ггрофилей при
Ми>0,6 лопасть без скоростного профиля имеет существенно боль-
шее приращение mvr,i чем лопасть со скоростным профилем на конце.
Максимально допустимые из-за срыва потока с лопастей несущего
винта значения коэффициентов тяги fK₽ (см. § 4, п. 7) определялись на
режиме висения по графику зависимости коэффициента тяги от шага
пинта fto. Эта зависимость линейна до некоторого значения t, после чего
линейность нарушается: прирост I при увеличении 0<| уменьшается, за-
тем f достигает максимума —который при построении границы
срыва (рис. 2.119—2.121) принят за
На рис. 2, 178 показан график ^тах в зависимости от Мо- Из графика
видно, что на режиме висения ?шах значительно уменьшается при уве-
личении Мо. У трапециевидной лопасти (тнх меньше, чем у прямоуголь-
ной. Увеличение геометрической крутки лопасги увеличивает /швх.
Лопасть без скоростного профиля па конпе имеет большее /шах, однако
при увеличении Мо разница в (Шат сокращается.
Согласно импульсной теории и при приближенном учете концевых
потерь коэффициент заполнения на распределение углов атаки по ра-
диусу и па величину коэффициентов глпр, Дтсж, tmax не влияет, шхэтомэ-
графики на рис. 2. 173—2.178. построенные для <т=0,091. справедливы
для всех о.
27U
Рис. 2 174 Зависимость коэффициента про-
фильной мощности от коэффициента тлги i
и числа ,4)
Рнс. 2. Г75. Зависимость коэффк
циента Профильной мощности от ко
эффициспта тяги t д.|Я винтов С ло
пастями ратной формы (Мо*"О7)
Рис. 2,176. Приращение коэффициента профильной
мощности ищущего винта из-за сжимаемости воз-
духа
271
Рис. 2.177. Приращение коэффициента
лрофилыгоЯ мищности из-за слимасыости
воздуха для винтом с лопастями разной
формы
3. Приближенный метод определения зависимости тк от t
Для вертикальных режимов полета вертолета можно получить вы-
ражение для ть, аналогичное выражению (3.67), выведенному в § 3
для полета с горизонтальной составляющей скорости:
/як —j (dtvdqui!) -j-у^рйб'3 dr — tVf. (8.18)
о и
В этом выражении при наборе высоты Vz1/<0-
Введя обозначения для слагаемых, являющихся коэффициентами
индуктивных и профильных потерь несущего винта,
т>ш« — j d/v-\-dqw; (8.19)
/пар=- j’c,pWsdr, (8. 23)
о
представим выражение для тк в виде:
тнил+тпр-#7,. (8.21)
Выведем приближенные выражения для составляющих т* на ре-
жиме висения.
Для определения т11НД предположим сначала, что индуктивная ско-
рость v распределена равномерно по радиусу лопасти, а ш—0.
Умножив левую и правую части выражения (8.4) на cos (рпр— Р)
и использовав соотношение (8.9), получим
8?27rfr=JCr. (8.22)
Среднюю по диску индуктивную скорость г?ср найдем после инте-
(рирования выражения (8.22) по радиусу лопасти от г=0 до г —В1.
W.23)
Согласно уравнениям (8.22) и (8.23) при постоянной индуктив-
ной скорости элементарный коэффициент тяги распределен линейно по
радиусу лопасти и равен
(8,24)
следовательно,
(<<СГ=^!2- (8.25)
ивж J а .) Т ЕРа 2В*
О о
Для учета неравномерности распределения осевой индуктивной ско-
рости v и слагаемого dqw (потери мощности от закручивания потока,
протекающего через винт) в формулу (8.25) вводится коэффициент ф-
(8.26)
Коэффициент Ф зависит от формы лопасти в плане и геометриче-
ской крутки, от коэффициента заполнения, а также от коэффициента
тяги. Расчеты показали, что можно принять следующие осредненные
значения Ф: для прямоугольной лопасти с круткой 5—9° Ф = 1,05, а с
18 1002 273
круткой 12—15° Ф —1,03. Для трапециевидной лопасти с сужением ц—3
и круткой _5—9° Ф=1,03. Коэффициент концевых потерь В ття винтов
с cr--0,052o-j-0,11 можно вринигь равным 09б
Таким образом, для прямоугольной лопасти с геометрической крут-
кой 5—9° mLnjt определяется по формуле:
w„HI-0,56 (8.27)
Коэффициент профильных потерь несущего винта тщ, наиболее
достоверно определяется по графикам Мп) (см. рис 2 17-1
и 2.1/5), иодсчшанным для винта с близкими геометрическими харак-
теристиками. Если таких графиков пет, то находшея по формуле
Ряс. 2.179. График прирашепия хоэф-
фяинепта крутило момента пкпта
при наборе рыготы
от,р — —^'р дот,.,.. (3.281
Первое слагаемое опреде-
ляет профильные потери при ма-
лых числах Мо, второе слагаемое
учитывает приращение коэффи-
циента профильных потерь из-за
волнового («противления.Опенка
Ряс. 2.180. График приращения
шжи пиита при наборе ныюты
Д»«г» может быть сделана с комошью графиков, показанных пи
рис. 2. 176 и 2 177.
Средний по лопасти коэффициент профильного сопрр,ивления Cv,cp
определяется по поляре профиля в сечении г=0,7 для среднего коэф-
фициента подьсмпрй силы cv :
(8,291
Коэффициент Р. зависящий от формы лопасти, ее коэффициента
заполнении я коэффициента t, может быть приближенно принят равным
для прямоугольной лопасти единице, а для трапециевидной лопасти
с сужением ц =3 р-=0,91 (см. табл. 2 5)
При вертикальном наборе высоты и.чи снижении изменяется вели-
чина индуктивной скорости пинта и, следовательно, ттд. Поэтому для
определения_т» при нельзя к гпк на режиме висения прибавить
слагаемое гкф без учета изменения тЫ|Ш. Для использования при при-
ближенных расчетах попроси график приращения коэффициента
крутящего момента винта при наборе высоты АтИа>1 в зависимости от Г„
и I. Этот график, показанный на рис. 2.179, получен по результатам
расчетов, выполненных по импульсной теории График приращения
шага Двц при наборе высоты покати на рис 2. 180
Приближенные выражения для определения \гпаед и ДА0 можно
получить, исходя из следующих соображении При наборе высоты с не-
большими К, согласно импульсной теории 12] средняя индуктивная ско-
рость равна (напомним, то при принятом нами правиле знаков Гт<0
при наборе высоты)
- т+-г |/i+т Ф+
Следовательно, при наборе высоты ти и fia изменяются на величину
w>i.1,lliaQ-w^4,<. tVy~ zV у=—Z
- ?’-= -0,715V,
С <и.г)С1, ггр 2 0.7 У
ИЛИ
Дб1’- _41 7а.
Вычисленный по приближенной формуле пенною меньше, чем
на рис 2 179.
Таким образом, окоцчагельное выражение для приближенного опре-
деления коэффициента крутяшего момента вита в зависимости ог ко-
эффициента тяги и относительной вертикальной скорости имеет вид
У—*-Р-|-дтсл-' Дт„аб. (8.301
4. Пересчет аэродинамических характеристик при изменении
коэффициента заполнения несущего винта
Для определения аэродинамических характеристик несущего винта
на режиме висения можно воспользоваться методом пересчета характе-
ристик Его следует применять, когда имеются достоверные характери-
стики другого винта, близкого но относительным геометрическим харак-
теристикам.
Метол пересчета характеристик па режимах полета с поступатель-
ной скоростью, изложенный в § 6, построен на определении такого угла
атаки винта, при котором у винта с другим а во всех сечениях лопасти
сохраняются скоростные многоугольники, углы атаки сечений и элемен-
тарные силы, т. с. имеет место подобие режимов. При висении у винтов
с разными о- нет подобных режимов, поэтому метод пересчета .харак-
теристик основывается на предположении о том, что при одинаковом
коэффициенте тяги I коэффициент индуктивной мощности в соответст-
вии с формулой (8.25) пропорционален а коэффициент профиль-
ной мощности одинаков.
Таким образом, если известен коэффициент крутящего момента
винта с заполнением <тг — тк , то для винта с заполнением <т2 коэффи-
циент тк для того же значения коэффициента тяги определяется по
формуле:
(j;)’]/ v+"'.fl =
-ф" т-.- (8'311
Значения тпр и В находятся цо выражениям (8.28) ц (8.12).
18* 275
При одиааконом значении I у винтов с разными а должен был,
практически одинаковый угол атаки сечений лопасти, следовательно,
шаг винта изменится на величину Дбо. пропорциональную разности сред-
них индуктивных скоростей.
Получим формулу для определения Д(»о:
s в
/2_
СЧ>. (8.32)
Таким образам, таг виита с коэффициентом заполнения oj равен
(8.33)
5. Определение оптимальных аэродинамических параметров несущего
винта с учетом зависимости характеристик от числа М»
Для выбора оптимальных параметров несущего винта удобно ис-
пол(>зовать формулу (8.34), связывающую силу тяги винта, его диа-
метр и потребляемую мощность
Г = (33,261-'М|0ОЛ’)!". (8.34)
В выражение (8.34) входит относительный к. п д несущего виита
г)0, характеризующий соотношение между мощностью идеального винта
и фактической мощностью, потребляемой винтом *:
cf2 /3 Vs
п,—(8.35)
ь ,V 2тч '
Очевидно, что при заданных N, D и А (т. е. высоте полета) наи-
большая тяга несущего винта достигается при максимальном значении
г|0, поэтому конструктор стремится приблизиться к максимальному f|0.
Обычно графики г|о строятся в зависимости от I и (т для значения Мо,
соответствующего средней из предполагаемых величин окружных ско-
ростей винта (рис. 2. 181). По этому графику выбирают расчетную точку
п. е. значения t, о) с достаточно большим на- Выбрать расчетную точку
можно произвольно, независимо от диаметра несущего винта, так как
считается допустимым неточное совпадение получившегося при выбран-
ных t, tj, D значения Me с тем. для которого построен график t]o-
Для более точного расчета (с учетом влияния Me па гр) исполь-
зование графиков о), построенных для разных Мо, оказывается
неудобным, так как произвольно .выбрать па этих графиках расчетную
[Очку нельзя. В самом деле, уравнение (8. 15) можно представить
в виде
(8.36)
Члчт F '
следовательно, При заданных М D, Н произведение /пкоМд должно
иметь определенную величину и на каждой кривой гю, соответствующей
определенным п. Мс, уравнению (8.36) удовлетворяет лишь одна точка
(одно тк и соответственно одно /). На рис. 2. £81 нанесены две штрихо-
вые кривые для двух значений произведенья в1коМ®: меньшая величина
276
п1коА1§ относится к большему диаметру несущего вита. Эти кривые
показывают, что при заданных диаметре винта и Мо можно выбрать
лишь максимум tjo на пунктирной кривой а реализовать большие гна-
чения г)о невозможно. При увеличении диаметра винта (нижняя пунк-
тирная Кривая) максимально возможные значения т|и еше меньше и из
графика не пидно, увеличится ли тяга винта, определяемая произведе-
нием Г|оР. Поэтому графики тю. построенные в зависимости от I, а, Мо
(илц перестроенные в зависимости от OTkcMJ, а, Мо), для выбора опти-
мальных параметрон несущего винта не пригодны, особенно если варьи.
рустся диаметр виита.
Найдем более удобную форму графиков для выбора оптимальных
параметров винта с учетом зависимости характеристик от числа Мо.
Для этого используем выражения (8.36) и (8.37); последнее полу
чено из уравнений (8.15) и (8.17):
(8.37)
Можно показать, что отношение -------,
«кМ0
уравнения (8.37), пропорционально (т)аД)2/3.
стоящее в правой части
,г______ г.--г—-........ ч.,_ , . Действительно, из урав-
нения (8.36) определим диаметр несущего винта Р:
const у jV
D =
75А
в произведение т)о£>.'
г. (tc)'- const
Ло Г -----------------i
(ика)'
— const
Из этого выражения так же, как из формулы (8 37), очевидно,
что при заданных N и Н максимальная тяга несущею винта TmOi до-
стигается при таких параметрах вита, при которых—-имеет макси-
мум. Лоз тому для отыскания оптимальных параметров вшцэ нужно
построить Графики зависимости отношения —
симости показаны при a=const на рис. 2. 182
рис. 2. 183
Наибольшие значения - лежат
рг„М0
от тхпЩ. Эти зави-
и при Mc=cot)si на
на огибающих этих
Из рис 2 182 и 2.183 пидно, что при >аданных D (г. е. w,,<tMq=
— const) н а существует оптимальное значение Мо, а при заданных
D и <в/? существует <тОгт- Если же задан только D, ю из таких же гра-
фиков для ряда значений а и Мс следует, что тяга винта растет при
увеличении а и уменьшении u>R (в диапазоне больших п, чем показаны
ни рис 2 183. пожег оказаться, чю когда задан только D, также суще-
ствуют оопт и Мо ). Увеличение диаметра винта соответствует умень-
шению лльаМц н это. как видно из графиков, приводит к увеличению
пни пинта, особенно при уменьшении <т и М9
Вблизи оптимальных значений а и Мо все кривые лежаг близко друг
к лругу, м поэтому отход от оптимальных значений незначительно изме-
няет тягу винта. Так, например, из рис 2. 182 видно, что при гПкяМ$ —
= 0,0003 и с —0,091 ( ^-\ -19,1 при МОпг_ „ ^>0,55 и tonT~0,21, а при
'^ir'^O'niax
увеличении числа оборотов несущего винта на 10%, т е. при Мс — 0,6
278
Для тчста изменения uoiepb на хвостовой пинг при изменении па-
раметров несущего нинта у одновинтовых пертолетов графики должны
быть построены в виде зависимости
---;---( _--- ОТ т.з,Мо(1+С1 т„а\
<*,,(! г 1
где коэффициент
с
-2Ч- «-Г
Коэффнциеш Азат, учитывающий затенение хвостового цинга хвосто-
пой балкон, принимается равным 1,03—1,00.
АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ ВЕРТОЛЕТА
§ 1. ОСНОВНЫЕ УРАВНЕНИЯ АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
ВЕРТОЛЕТА
1. Содержание аэродинамического расчета вертолета
Задачей аэродинамического расчета вертолета является расчет
установившихся прямолинейных режимов полета в вертикальной пло-
скости с целью определения мощности двигателя, расходов топлива,
углов атаки, углов установки и других характеристик несущего винта
при полете с различными скоростями на всех возможных высотах по-
лета. Эти данные позволяют Определить вертикальные скорости,
дальность и продолжительность при различных условиях полета,
а также являются необходимым материалом для рассмотрения условий
равновесия моментов (балансировки и устойчивости вертолета)
и расчетов ва прочность.
Наибольший интерес представляет определение летных данных вер
толета, т. е. предельных режимов полета: максимальных и минимальных
скоростей горизонтального полета на всех высотах, потолка, наиболь-
ших скороподъемности и дальности, наименьших мощности горизонталь-
ного полета и вертикальной скорости снижения при отказе двигателей
2. Уравнения движения вертолета
Летные данные вертолета определяются в результате решения
уравнений установившегося прямолинейного движения вертолета в вер-
тикальной плоскости.
Уравнения, выражающие равенство нулю суммы сил, направлен-
ных по траектории полета и по нормали к ней, как видно из рис, 3. 1,
имеют вид:
t/sIn0Tp^ QBt>=
G cos 6lf(—К.
(1.1)
(1.2)
где X и У — компоненты равнодействующей аэродинамических сил не-
сущего винта, направленные по скорости полета и по нор-
мали к ней; когда л<0, несущий винт создает пропульсив-
ную силу, когда Х>0, несущий винт создаст силу сопро-
тивления;
Qbp— лобовое сопротивление кекесущих частей вертолета;
0тр — угол наклона траектории вертолета к горизонтальной пло-
скости.
280
Из рис. 3. ] и уравнений (1.1), (1.2) следует, что на режимах горизон-
тального иодета подъемная сила несущего винта уравновеши-
вает вес вертолета, а пропульсивная сила — его лобовое сопротивление.
На режимах полета по наклонной траектории пропульсивная сила несу-
щего вицта уравновешивает лобовое сопротивление плюс сопротивление
движению, образованное составляющей веса, направленной по траек-
тории, G sto 0 тр-
Для определения мощности двигателей на различных режимах по-
лета и отыскания режимон, на которых должна быть использована мак-
симальная мощность двигателей, к уравнениям движения должно быть
добавлено уравнение, выражающее условие глотаемой несущим винтом ЛДв. и мощности на вал несущего винта Лгн в Лг|. Длн приведения уравнений (1.)) — (1.3) отнесем силы к произведению — o(^R)2oF, а равенства мощности, по- двигателей, передаваемой (1.3) к безразмерной форме мощность— к — q{(hR)3<jF-
(7 „ - V2 51иетр+г^= — Q(o>R)2Gf ° (1.4)
—------со* в><>—0 • 5)
—(1.S)
уеИ)3’/’
Уравнение (1.4) может быть представлено в виде
= -М (1-7)
В уравнении (1 8) и ниже индексом «т.н» обозначены величины,
относящиеся к режиму горизонтального полета.
281
Заданными величинами ирг аэродинамическом расчете являются-
полетный вес вертолета G,
— геометрические характеристики несущего винта (крутка, форма
и плане), коэффициент заполнения с и радиус Л;
— окружная скорость несущего винта <cJ?;
— плотность воздуха у и скорость .звука а на расчетных высотах
полета,
коэффициент лобопого сопротивления цецесущих частей верто-
лета Ст= .
— характеристики двигателя- мощность и часовен расход
топлива (7.,ас = (71 V, Hl,
коэффициент исцользоианин мощности двигателя |
При горизонтальном iiojjeie 0) число заданных величин ока-
зывается доста1Очным, чтобы цо выражению (1. 5| определить коэф-
фициент подъемной силы несущего винта Задача расчета режимов
горичоцтальпого полсти вертолета сводится к определению по выраже-
нии! (1.7) пи разных скоростях V потребного коэффициента пропуль-
сивной ги..ы н отысканию по аэродинамическим характеристики^
несущею винт при известных Mo, 1а и tx значения mlt и опре-
юлению по формуле (1 6) Л'г.п
11а предельных режимах негорнзонтально! о голео известно
тк (5' = А'тзч иа режиме набора высоты и М = 0 на режиме самовраще-
ния). задача сводится к определению по аэродинамическим характери-
стикам несущего цинга иа разных скоростях полета при известных Ма
ц тк значений tv и ty, удовлетворяющих уравнения (1 5) и (1 7); одно-
временно находится угол наклона траектории втр.
3. Различные методы определения аэродинамических характеристик
несущего винта и методы аэродинамического расчета
Как показано в и. 2, яри аэродинамическом расчете должны быть
известны аэродинамические характеристики несущего вцгта, а именно
взаимосвязь четырех безразмерных коэффициентов несущего винта 7,
t„. tдля диапазона чисел Ми, соответствующею числу оборотов
и высотам полета вертолета.
В некоторых методах аэродинамического расчета характеристики
несущего винтя определяются по приближенной теории с целью полу-
чения простых формул, позволяющих сразу вычислить летные данные
вертолета. Из-за приближенности таких методов расчета ojjij о настоя-
щее время применяются редко
Для повышения точности аэродинамических расчетов целесообразно
разделить задачи определения аэродинамических характеристик несу-
щего винта и определения летных данных вертолета При тиком подходе
аэродинамические характеристики несущего винта можно найти зара-
нее и представлю их на специальных графиках Это освобождает от не-
обходимости вводить какие-либо упрощения н расчет аэродинамических
характеристик несущего винта, Й методе Миля — Ярошенко, изложен-
ном в § 2, принят следующий вид трафиков; угол наклона равнодейст-
вующей аэродинамических сил винта к нормали к траектории полета б.
коэффициент крутящего момента и усол атаки а строятся в зависи-
мости от шага вля ряда значений коэффициента тяги t и характери-
стики режима иолета ;i (см рис 3 1л).
При дальнейшем развитии меюда Миля—Ярошенко был предложен
более удобный вид графиков- зависимость коэффициента пропульсивной
<-цлы_пицта СТ от гп,_ д.тя ряда значений коэффициента подъемной силы 1:,
при 1' —caiisl и Mo—const. Иа графики наносятся также кривые достоян-
282
пыл значений угл<щ агаки несущего пиита, с помощью которых находят-
ся последние (уюл атаки нужно знагь д.гя уточнения педичицы вред-
ного сопротивления вертолета и при расчете вертолета с крылом или
-ру тих комбинированных аппаратов).
Графики аэродинамических характеристик несущего винта могут
бЫ|Ь найдены экспериментально или построены по любой теории нес\-
щего пинта; методы определения аэродинамических характеристик из-
ложены б § 2, 4, 5, 6 гл 2.
Метод аэродинамического расчета, к котором используются графики
аэропннамических характеристик несущею винта, изложен в наиболее
общем виде в § 3.
В § 7 гл. 2 показано, что аэродинамические характеристики ис
сущего винта могут быть определены с помощью понятий качества
н прицс-тЫ-ивного коэффициента полезного действия несущего пинта
Метод аэродинамическою распета, построенный на применении этил
понкгцй. описан в § 4.
Во многих методах аэродинамического расчета используется выве-
тонное в § 3 гл. 2 выражение
Это очень простые, но приближенные методы распета Один из та-
ких методов расчета описан в § 5.
4. Расчет комбинированных и многовинтовых аппаратов
Для аэродинамического расчета комбинированных и мноцови новых
аппаратов но методам, описанным в § 2 и 3, строятся графики суммар-
ных коэффициентов несущей и движущей системы комбинированного
аппарата, (или б3) в зависимости от т,,3 при t,JS —const. Суммар-
ные коэффициенты находятся экспериментально, либо могут быт» полу
репы расчетым путем по известным аэродинамическим характерна тикам
изолированных элементов яессщей системы аппарата. Расчетные фор-
мулы ДЛЯ Определения суммарных коэффициентов приведены ниже для
некоторых частных- случаев
Эти формулы применяются также при аэродинамическом расчете
по методам, описанным в § 4 и 5, в которых нужно знать распределение
иодьемной силы между отдельными эле.ментлми несущей системы аппа-
рата. Один из возможных способов определения распределения пптт,-
емной силы между винтами и крылом изложен в § 4. Лри этом исполь-
зуются приведенные ниже формулы для определения суммарных коэф-
фициентов несущей системы аппарата.
Одновинтовой вертолет с крылом. Суммарные коэффициенты
1Ут. т.. определяются цо следующим выражениям (рис. 3.2)'
zy. = (A™sAaJIB — r^sinAo, в) , — X
X («’’у* со*?дмкр -г, sTn
-= COi АО» S — 'у sin йи|:.в) —X I
Х(Сд. со^да ’ с.. чи да. г), |
кр ' кр 1
(1.9)
2 S3
или приближенно
аакр).
Из рис. 3.2 видно, что угол между плоскостью вращения виита
и скоростью полета (или скоростью невозмущепного потока) —назовем
его углом атаки вертолета ив—равен:
аь^а+Даня.
Угол атаки крыла связан с углом атаки винта соотношением
ОкР— “в — Дикр 1 Ёи₽ Давр Т Чр' (1-10)
В этих выражениях обозначены:
/ / тк, а, су .с* , ивР — характеристики изолированных несущего
\р кр
винта и крыла;
АиЯ11--средний угол скоса потока в районе несу-
щего винта, индуцированный крылом;
—средний уюл скоса потока в районе кры-
ла, индуцированный несущим винтом;
Векторами V' и 1Г" па рис. 3.2 обозначены скорости потока у не-
сущего винта и у крыла. Считая, что скорость полета много больше
дополнительных вертикальных скоростей взаимовлияния Av, скорости
Порядок определения суммарных коэффициентов при известных
SHp и f»P следующий:
— для выбранных F, Мо и задаемся сР(ф и находим по первому
выражению (1.9')
— по характеристике крыла сРкр =/(аьт) находим адр;
— находим углы скоса Лаив и Дцвр (см. ниже п. а):
— i;o выражению (1.10) определяем угол атаки несущего винта
и по характеристикам изолированного винта находим Ъ и тк‘, отметим,
что в выражение (1.10) входит угол атаки плоскости вращения, который
цри <; -АО Отличается от эквивалентного угла атаки (см гл. 2. § 2);
— вычисляем
— выполнив такие расчеты для нескольких значений t находим
зависимость txi от тк для данных значений F, Мо и /УЕ Такие же расче-
ты выполняются для ряда значений /,, , V, Мо и строятся графики аэро-
динамических характеристик несущей chctcmi>i аппарата
Очевидно, что если необходимо учесть подъемную силу фклсляжа
(венесущих частей) вертолета или изменение его сопротивления в зави-
симости от углов атаки, в такой же последовательности могут быть
определены характеристики несущей системы вместе с фюзеляжем вер-
толета.
Вертолет с тянущими винтами. Добавки к суммарным коэффициен-
там несущей системы выражаются следующими формулами, очевидны-
ми ин рис, 3 3 (взаимовлиянием тянущих винтов с другими элементами
системы пренебрегаем):
Д t, ——Р'~-----------siri (а + е, в) я» 0,
— pg (u/?)2 л/Р
д/х = ----------------cos (а-|- ет.в) « —j-----——
£>з (а>Н)2 Л/Р -у QO («Я)2 «ХР
75.\тз“
ДЩ, = — --------*Ь!—.
1
— Q? (м/?)3 Л/Р
(1.12)
В этих выражениях Ртв и -VT.B —тяга и мощность тянущего винта,
связанные соотношением 75N, — -— ,
Пт.в
При установке на вертолет маршевого реактивного двигателя с тя-
гой. равной Pta> ify н Afx, определяются также по выражениям (1,12),
а Дгпк-О.
285
Двухвинтовой вертолет поперечной схемы с крылом. Для siuio вср-
голета определяются по следующим выражениям-
'%-М.
f<l..p = a + Aal,u-^ui;1>H-\|l-
U. 13)
В омичке от выражений (t.9/ здесь ДаМР. и Ла,^ — суммарные
yr.’ir.t скоса, вызванные как взаимовлиянием виптои, так и пзаимовлия-
«нем винтов с крылом.
Рис. 3.4. С.м1|К|<-ги, углы атаки и си.’Ы у вертолета
продольной схемы
Порядок расчета суммарных коэффициентов такой же, как для
о.тновингового вертолета.
При наличии тниущих пиитов к выражениям (1.13) добавляются
выражения (1. 12).
Двухвинтовой вертолет продольной схемы. Пренебрегая скосом
потока в районе переднего винта, вызнанным пятним винтом, можно по-
дучить следующие соотношения (рис. 3 4):
/ va — Ч; ~ (fv,cos Да"-“. * - 4 ’’’ Аа„.Ва) =s -г .
' г„ — \ — (Л ,cos Дан в-4-/,,, sin Д«и.0,)~ h, ;
+ (Ч — »Д
lzi = Vz2.
13 этик выражениях обозначены:
Диаз, - средпий угод скоса потока в районе заднего винта, иидуциропаи-
нын передним винтом;
Д£н в -эффективный угол заклинения заднего винта относительно не
реднего винта (с. учетом разницы в отклонении автоматов пере
коса винтов).
(1.15)
2HG
Индексом «1» обозначены характеристики переднего винта, а ип
дексом «2» — заднего
Летные данные вертолета продольной схемы могут быть найдены
однозначно только когда известны условия совместной работы перед-
него и заднего зинтоп Обычно таким условием является соотношение
между силами тяги винтов, определяемое продольной балансировкой
пертотета Зная это соотношение для выбранных 7, Ми и I, цо верному
уравнению (1. 1-1), находим 1j и ts. Задавшись си и вычислив Аа1|В..
шределяем аа. По характеристикам изолированного винта, зная 7, М«.
и а, находим Л и обоих ництов Далее вычисляем и <7iKc и
строим графики аэродинамических характеристик несущей системы
5. Коэффициенты индукции у двухвинтовых вертолетов
и у вертолетов с крылом
Определение подъемной силы и силы сопротивления системы
несущих элементов это очень сложная задача, для решения коюрой
индуктивная скорость и погонные нагрузки в каждом сечении несущих
элементов должны находиться с учетом воздействия всех нихреи. вхо-
дящих в систему. При использовании быстродействующих вычислитель-
ных машин решение такой задачи в некоторых случаях возможно
Однако обычно при аэродинамическом расчете ограннчиниются
определением осреднению углоп скоса иоюка Дп у каждого из эдемеп
тов несущей системы. Как показано в р. 4, мглы скоса позволяют найти
проекции сил всех элементов несущей системы на направление движе-
ния и на нормаль к нему
Из уравнений (1.9) —(t. 13) видно, что когда Да>0 (т. с когда
вертикальная составляющая индуктивной скорости, вызванной другими
элементами несущей системы, До направлена сверху вниз}, го ста
сопротивления аппарата увеличивается на величину УЛа, а когда Аа<0
сопротивление аппарата уменьшается.
Угол скоса у 1-го элемента несущей системы, индуцированный л-м
элементом, определяется ио выражению
где Дс, — вертикальная составляющая индуктивной скорости, создава
емок гг-м элементом в месте расположения г-го элемента, осрсднснная по
плогцади «-го элемента, Aot пропорциональна средней индуктивной ско-
рости в плоскости вращения п-то элемента:
Коэффициент пропорциональности назынастся коэффициентом
индукции. Он зависит от взаимного расположения и размеров i-iu н л-т
элементов несущей системы.
Напомним, как распределяется индуктивная скорость крыла (или
несущего винта) в пространстве. В точках, расположенных за крылом,
индуктивная скорость увеличивается, довольно быстро достигая удвоен-
ной величины (рис. З.о). У несущего винта увеличение индуктивной
скорости происходит в пределах диска винта (рис 2.3).
В точках перед крылом индуктивная скорость практически равна
нулю. В точках над или под вихревой пеленой (точки 1, 2, 2', 3, 3‘ на
рис. 3 5) она убывает В поперечном сечении индуктивная скороегп
крыла с эллиптическим законом распределения циркуляции имеет вид.
287
Рис 3.8. Распределение индуктивной скорости вдоль размаха
крыла г при разном расстоянии от вихревой пелены у
288
пока'laritibiH ла рис. 3.6: о пределах размаха крыла или винта
——- <1,0) индуктивная скорость направлена вниз, а на пери-
ферии (z .> 1,0) направлена вверх.
Перейдем к определению величины коэффициентов индукции.
Коэффициенты взаимоиндукции зависят от скорости полета (Г) и
упа атаки винтов; приведенные нами значения х являются осреднении-
ми по Г, приближенными, применимыми для всех режимов полета
с Г>.0,15.
Рис. 3.7. Коэффициент взаимо-
индукции винтов у вертолетов по
перечной схемы
Рис. 3.8
индукции
0CI102
ет индуктивное сопротивление системы. Величина коэффициентов взаи-
моиндукции Хин взята нами ц> мгиги Б, Н, Юрьева [2] с поправками,
учитывающими то, что ипджцшпые сщэрости на азимуте ф=90° боль-
ше, чем на азимуте ф=27б°. Поэтому коэффициенты взаимоиндукции
зависят от направления вращения винтов: когда азимут ф = 905 нахо-
дится между винтами, они примерно на 25% больше средпих значений,
полученных в работе [2], а при другом направлении вращения примерно
на 25% меньше
График Хди в зависимости ог расстояния между осями пиитов z = —
показан на рис. 3.7. Очевидно, что нзиныголпейшее расстояние между
винтами, при котором получается наименьшее индуктивное сопротив-
ление при п0С1Упа|ельном полете, равно z--1,6
Если бг.т у вертолетов соосной схемы отсутствовало превыше-
ние винтов, то коэффициент взаимоиндукции хс0 был бы, очевидно, ра-
вен единице (Ав — пср). При превышении очного винта над другим ин-
дуктивная скорость в плоскости второго пипта уменьшается (Дг.'<оСр),
следовательно, хГп<1. График хсп в зависимости от превышения винтов
у = взятый из работы [2]. показан на рис. 3.8.
19 ИЮ2
289
Согласно общей теории индукции средняя индуктивная скорость
системы несущих элементов не зависит от их выноса в направлении
скорости полета, следовательно, у вертолета продольной схемы
средняя величина дополнительной индуктивной скорости Ди такая же,
как у вертолета соосной схемы (при равных у). Так как задний пинт
не влияет на расположенный спереди винт, то xhj, ="0, а у заднего
винта, расположенного за передним винтом, Да = 2Доср, следовательно,
Хн.я =2х* . Таким образом, коэффициенты взаимоиндукции у вертоле-
тов продольной схемы опреде-
ляются также по рис. 3.8.
С позиций общей теория ин-
дукции уменьшение ин-
дуктивного сопротивления у
вертолетов поперечной схемы
(хпп<0) и увеличение индук-
тивного сопротивления у вер-
толетов продольной и соосной
схем (хСо>0) обьясняется сле-
дующим образом. Известно,
что индуктивное сопротивление
системы несущих элементов
прямо пропорционально квад-
рату подъемной силы и обрат-
но пропорционально массе
воздуха, участвующей в со<-
дании подъемной силы, или
эффективному сечению струи
воздуха (см. рис. 2.56). В иде-
альном случае (равномерное
распределение индуктивной
скорости по всему- размаху)
эффективное сечение струи
воздуха равно окружности,
диаметр которой равен разма-
ху несущей системы.
Эффективное сечение струн Fe у вертолетов поперечной и продоль-
ной схем показано на рис, 3 9. Из этого рисунка видно, что у вертоле-
тов поперечной схемы Fe больше площади двух винтов (хпп<0); при
£^>2 появляется эффект щели и F? уменьшается. В продольной схеме
без превышения винтов ((/ = 0) эффективное сечение струи такое же, как
v одного винта (xP0=t), а при наличии превышения Fe увеличивается
(xeo<t).
Теперь рассмотрим взаимовлияние винта и крыла у вертолетов
одновинтовой и продольной схем (рис. 3. 10 и 3. 11). Очевидно, когда
крыло у одновинтовой схемы расположено очень близко от пиита
(^=0) и размах винта и крыла равны друг Другу (Г|,Р— ~₽ =2,0). то
KBp~xB.a=s 1,0. При увеличении Г1(Р из-за того, что вне винта индуктивная
скорость направлена вверх, осредненная по размаху крыла индуктив-
ная скорость несущего винта уменьшается (хир<1,0). а осредненная
по площади несущего винта индуктивная скорость крыла изменяется
мало. Соответственно при уменьшении <1<Р х,.р изменяется мало, а хип
уменьшается. При Гкр<1,0. когда крыло находится под малоэффектив-
ными сечениями лопасти, хкр уменьшается. Графики на рис. 3. 10 и 3 tt
справедливы для вертолета продольной схемы, однако их надо брать
* В гл I в выражении (3.22] %”2*с,
290
с учетом продольного смещения винюн и крыла друг относительно дру-
га: у элементов, расположенных сзади, х удваивается, а у элементов,
расположенных спереди,— х уменьшается до нуля.
\ вертолета поперечной схемы при □ычнелении х будем рассматри-
вать один из вариантов. При 1=2,0 половина крыла находится под
винтом, а половина — вне винта (рис. 3.12 и 3. 13), поэтому- хкр и хвп
меньше 0,5 (они равнялись бы 0,5, если бы вне диска винта или размаха
крыла индуктивная скорость равнялась нулю, а в их пределах она рас-
пределялась бы равномерно). При уменьшении z вес большие части
с^=>-НрЫЛО
'^•бинт
Числовые значения хкр и данные на графиках (рис. 3.10—
3. 13), получены при ,у =0. Уменьшение х при можно определять по
графику хг<,-/(?/) на рис 3 8, т е.
(1.18)
Итак, в соответствии с выражениями (1.Ю/ и (|.1“) углы скоса
потока определяются по формуле
(1.19)
Угол скоса, вызванный крылом у несущего винта, может бын, так-
же найден но выражению
(1.20)
291
Рис. 3 II. Коэффициент индукции крыла у нин|а у ьнртолетоа
одновинтовой н продольной схем
-крыло
"-г" - бант
Рис. 3 13 Коэффициент индукции
крыла у пиц1а у нсрю.иои попереч-
ной схемы
схемы
292
§ 2. АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ ВЕРТОЛЕТА
ПО МЕТОДУ МИЛЯ—ЯРОШЕНКО
Будем рассматривать установившиеся режимы прямолинейного
движения вертолета с небольшими углами наклона траектории к го-
ризонту.
Полагая приближенно тягу несущего пиита равной весу и считая
обороты винта заданными, найдем, что полег должен совершаться всегда
при постоянном коэффициенте тяги t. Изменить при .этом величину про-
екция равнодействующей на направление движения можно лишь изме-
нив угол атаки, причем одновременно для сохранения равновесия сил
по вертикали необходимо изменять и шаг винта, а следовательно,
и мощность, передаваемую на винт-
Излагаемый ниже метод расчета вертолета предполагает для каж-
дого возможного значения шага винта известными аэродинамические
характеристики винта (тяга, продольная сила и крутящий момент).
1. Уравнения движения и принцип расчета
На рис. 3. 14 показаны силы, действующие ня нертолет при прямо-
линейном установившемся движении
подъем Горизонтальный полет
.илы, лейст бающие на вертолет прячо-ипгейном устано-
вившемся дни хенвв
Уравнения движения вертолета могут быгь написаны в виде
0; I р
R cos?, — G со»6тр—0. J
Угол между направлением равнодействующей и нормалью к тра-
ектории
в^а-j-arclg-y-—а ; aretg-y-. (2.2)
Будем в дальнейшем полагать, что углы в и 0тр малы. Кроме того,
из-за малости налетных режимах будем полагать равнодействующую
силу винта рапной тяге (К = Т). Тогда уравнения (2.1) перепишутся
в виде
7-S-;-C75v, + Qe₽-_O. 1
293
Рис. 3.15. Аэродинамические характеристи-
ки несущего винта (ц =0,15- f- 0,13, а -
=0,065)
Рис. 3.16. Потребные и pacnojcai аемыс харэктс
ристики вертолета
Потребный для горизонтального полета угол наклона равнодейст-
вмощен вперед 3r.u найдем из уравнений (2.3), полагая 611( = 0:
Sr.„---^4)
Угол наклона траектории для любого заданного режима опреде-
лится тогда из выражений (2.3):
—Йг „)— -дй. (2.5)
Задача сосгоиг, таким образом, в том, чтобы определить возможные
ин каждого данного режима углы наклона равнодействующей б.
На рис. 3. 15 показана зависимость угла 6, угла атаки а и величины
лоэффидигнта крутящего момента виита /Пк. связанных условием по-
стоянства коэффициента тяги i. от угла установки шага лопасти <р при
определенном режиме полета р. Чем больше угол установки <р, тем более
огрица1ельный угол атаки а должен быть придан всему вертолету для
'do. чтобы сохранить равновесие сил по вертикали, и тем больше будет
угол наклона равнодействующей вперед. Из графиков на рис. 3. 15 вид-
но, что большие углы установки требуют также и большего крутящего
момента, т. с. большей затраты мощности. Отсюда ясно, что, определив
величину крутящего момента, исходя, например, из полной мощности
двигателя, можно (как показано на рис. 3.15) получить и максималь-
ныи (располагаемый) для данного режима угол установки лопасти
Ч’раси, я следовательно, и соответствующие ему величины угла наклона
равнодействующей йрасп и угла атаки прасп. Наоборот, задавая величи-
ну’ б, например, из условия горизонтального полета по формуле (2.4),
найдем необходимый в Этом случае уюл установки лопастей <р, козффи-
циент крутящего момента тк и угол атаки несущего винта а.
На рис. 3. 16 показаны найденные таким образом величины брЛСп
п 01 4 в функпии ц. Графики на рис. 3. 16 и представляют собой искон-
ные графики для расчета, с помощью которых могут быть определены
все необходимые летные данные. Точка пересечения крнных определяет
(2.6)
Вертикальные скорости в функции ц или V могут быть найдены по
формуле
~ ™,Р. (2- 7)
причем величина 9тр = —ДЗ берется из графика ка рис. 3. 16.
2. Определение аэродинамических характеристик
несущего винта
Необходимые для расчета величины mt!, 3, а в зависимости от угла
установки лопасти <р и при заданном значении коэффициента тяги t
такие, напримгр, как на рис. 3.15, могут быть определены из экспери-
мента или по теории.
В некоторых пределах близкие к действительности результаты дает
теория Глауэрта — Локка (§ 2. гл. 2). Эта пределы ограничены опреде-
ленным режимом ц, а также величиной коэффициента тяги t. характе-
ризующего значение среднего рабочего коэффициента подъемной силы
сечения лопасти су ц определяющего, следовательно, допустимость сде-
ланных в теории предположений о линейной зависимости су от угла
295
атаки и о возможности принятая среднего, не зависящего от угла атаки
сечения, значения коэффициента профильного сопротивления cTPi,—
=const. г
При аэродинамическом расчете вертолета удобно найти коэффици-
ент протекания Л, используя выражение (2.50) для коэффициента тяги
(см, гл. 2). Для этого воспользуемся вторым уравнением системы (2. 3),
вырв/клюшпм условие, что при всяком прямолинейном движении тяга
несущего оин]а приближенно равна весу аппарата Таким образом, ко-
рне. 3. 17 Вспомогательны'? графики ллч расчета
характеристик легущего винта (ц=0 1)
эффициент тяги при полете вертолета с заданным числом оборотов ня
всех прямолинейных режимах постоянен и величина его определяется
иа условия T—G. Тогда ?. при заданных значениях ц н ср определится
из уравнения-
— -т(— В-г~). (2.8>
а^В" т \ 3 В / '
Если теперь подставить значение А в выражения для h (2 F>8).
ти (2.47) и а (2. £>3) гл. 2 и построить зависимость их ог ср (см.
рис. 3 J5), то каждая точка этих кривых будет соотвегсгволать одному
из иозуожных режимов прямолинейного полета,
/Тля облешения расчетов составлены графики величин
в функции г, причем ср является параметром.
29б
На рис 3.17—3. 20 показаны эти графики, построенные в пред-
положении. что коэффициент концевых потерь В = 1, массоная харак-
теристика лопасти у-5. С изменением высоты полета у меняется прямо
Рис. 3 18. Вспомогательные । рафики для расчета
характеристик лссупц'ю винта i|i=0,i5)
пропорционально изменению плотности воздуха. Вследствие изменения
у будут меняться и тк, однако изменения этих величин для чнзче-
267
Величины mK и — представляют собой составляющие коэффициен-
тов крутящего момента и продольной силы, определяемые только подъ-
емной силой и индуктивным сопротивлением лопастей; составляющие
Рис. 'J.W. Вспомогательные трафики для расчета
характеристик несущего винта (p.=O,j)
этих коэффициентов, Определяемые профильным сопротивлением сече-
ний. не. входят в выражения (2.9). Для значений ц в пределах от 0,1
до 0,3 и обычной отделки поверхности профили удовлетворительные ре-
зультаты дает значение ciPcp = 0,012.
3. Расчет летных данных
Аэродинамическому расчету обычно предшествует выбор основных
параметров. Будем полагать диаметр винта заданным.
Получение лучших летных данных на вертикальных режимах гре-
бует наименьших нагрузок на ометаемую площадь, поэтому диаметр
винта выбирается наибольшим из возможных по конструктапцым и весо-
вым соображениям. Значение коэффициента заполнения а также в зна-
чительной мере ограничено конструктивными соображениями.
Величина нагрузки на лопасть t, определяющая рабочий с,( сече-
ния, зависят, таким образом, в значительной степени от числа оборотов
винта Мы рекомендуем поэтому для рационального выбора числа обо-
ротов задаться тремя — четырьмя значениями угловой скорости винта
и произвести для них полный расчет.
Что касается располагаемой мощности, передаваемой иа винт, то
и случае двух- или миоговинюаой схемы следует учесть к. п. д. транс
миссии и потери на охлаждение, а в случае одновинтовой—еше и за-
трату мощности на привод хвостового нинта П качестве первого при-
ближения эта мощность может быть найдена для режима висения
и принята неизменной в поступательном полете, что даст меимцис зна-
298
ченип летных данных п поступательном полете, чем можно ожидать
в действительности.
Последовательность расчета такопа. Задавшись рядом значений и,
получим ряд значении f; затем для заданных значений ц и ср определим
угол атаки винта а и коэффициенты h и тк. По формуле (2.2) опреде-
ляются соответствующие значения 5.
НаГ|дсп[|ые величины о « т„ представляем в функции ср в виде гра-
фиков, аналогичных графикам на рис 3 15, каждый из соторых построен
для определенного значения ц. Затем, откладывая на осн ординат зна-
чения коэффициента располагаемого крутящего момента
находим соответственные значения располагаемых б?й-;и, аиш,
Далее определяем потребные для горизонтального полета значения бГ41,
«гп, Фг.п и -’Ик, „ и строим график по ц (см. рис. 3. 16) так, как это изло-
жено выше.
Мощность, потребная для горизонтального полета, Л™ находится
по величине коэффициента крутящего момента тКг1 с помощью выра-
жения (2. 10).
Определив по формуле (2.7) значения в зависимости от V’.
строят 1рафики, показанные на рис. 3.21. По этим графикам находятся
значении 1/уП]ах 'и Vfflax и скорости наиныгоднейшего набора У„ Для
каждой высоты полета и числа оборотов винта. Данные, соответствую-
щие другим высотам, могут быть определены, подобно изложенному,
причем графики, показанные па рис 3 15, должны быть построены
для значений fa. соответствующих определенной высот1-1, исходя из соот-
ношения
Для получения лстных данных вертолета по высотам можно вос-
пользоваться, однако, и следующим приемом, не требующим построе-
ния графиков, показанных t:a рис. 3. 16. Переход, па другую высоту
299
характеризуется изменением q. Графики останутся без изменения, если
будет сохранено значение коэффициента тяги. Так как
°_______.
с (ь'/С) 2
Ю для постоянства / необходимо сохранять равенство .
Отсюда определим значение (ои, при котором I и, следовательно, все
Рис. 3.22. График летных данных вертолета
{«=240 об.'кин)
другие коэффициенты останутся неизменными Кривая бгп=/(р) на
рис. 3 16 останется такой же, так как сопротивление Qap зависит от gw2,
а это произведение с высотой не меняется. Коэффициент располагаемого
крутящего момента надо рассчитать для мощности на высоте с. учетом
новою значения угловой скорости. Гели мощность на высоте А« =
=.4.V0, io
Рис. 3.23. Шаг несущего пинта па
режиме самовращения
Рис. 3 24. Число оборо об иессшего пиша ня
режиме самовращения
принимая д.|Я каждой высоты лн^ло^-- . Подобные расчеты необхо-
димо проделать ио крайней мере для трех значений оборотов ваша.
31)0
Снимая затем с графиков значения Vv и Итят по высотам для задан-
ных оборотов, строим график, показанный на рис. 3.22, по которому
можно определить потолок (динамический), а также изменение Vmax по
высотам при заданных оборотах,
Расчеты для другого веса можно проделать так же, как и для другой
высоты, т. е. сохраняй графики, показанные на рис. 3, 15, и изменяя
лишь значение и в соответствии с изменением веса.
Из условия т,( = 0 найдутся углы установки ср для режима самовра-
щения. Построив графики (рис. 3 23) зависимости от числа оборотов
винта пе для каждого значения и. можем найти обороты винта на ре-
жиме самовращения в функции скорости полета и для любого постоян-
ного значения цд. На рис. 3.24 построены зависимости »с — )(V) для
различных высот полета.
4. Пределы применимости метода
Изложенный метод позволяет проанализировать влияние много-
численных параметрон, определяющих режим полета вертолета. Между
тем степень точности проделанного этим методом расчета летных дан-
ных полцос(Ь|0 определятся тем, в какой мере теория, положенная
з основу расчета аэродинамики несущего винта, дает близкие к дейст-
вительности рез>^1ьтаты.
На режимах ц в пределах иг 0.1 до 0,3 и при коэффициентах тяги,
меньших, чем максимально допустимые, учлы атаки сечения лежат
в диапазоне, для которого справедливы сделанные в теории допущения
(cv^axar-. с-сРа-сот{).
При больших значениях р и, в особенности при больших углах
установки лопасти, в очень большой области ометаемии нлошади углы
атаки сечений иреносходят критические и происходит срыв потока.
Элементарный анализ указывает на то, что теория на этих режимах
дает меньшие значения продольной силы, и особенно крутящего момен-
та, чем в действительности, а также дзет ошибки в угле атаки. Таким
обра <ом, результаты расчета по изложенному месоду должны давать
у вел|«че< гцьго значения максимальной скорости, если она определяется
в области р>0,3. Предположение о равномерном распределении индук-
тивных скоростей несправедливо на малых ц(ц<0,15). В действитель-
ности на этих режимах за счет неравномерного распределения индук-
тивных скоростей индуктивные потери больше, и поэтому' расчет даст
большие значения скороподъемности апкарата-
Ошнбин эти невелики (порядка Ю%) для вертолетов с малой на-
грузкой на сметаемую площадь, но резко возрастают с росши вели-
чины -, т. с. с ростом отношпельной доли индуктивных потерь.
Увеличение точности расчета летных данных может быть дошигную
уточнением теории или использованием данных, полученных из экспе-
римент.-! п аэродинамических трубах.
§ 3, ОБЩИЙ МЕТОД АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
ВИНТОКРЫЛЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В этом ме<оде расчета, как и в методе Миля—Ярошенко, сначала
строятся на специальных (рафиках аэродинамические характеристики
несущего винта. Строится зависимость коэффициента пропульсивной силы
tx от коэффициента крутящего момента тп для постоянных значений
коэффициентов t„, (или Г), Mq (см. рис. 2. 142—2.145). Для расче-
та вертолета с комбинированной несущей системой строятся такие же
графики для суммарных коэффициентов, расчетные форму-лы для опре-
301
деления суммарных коэффициентов выведены в § 1, п. 4 Таким образом,
этот истод расчета охватывает все типы винтовых летательных аппа-
ратов.
При Определении летных данных, т. е. при решении уравнений дви-
жения не делается никаких упрощающих допущении и точность расчета
определяется точностью трафиков аэродинамических характеристик не-
сущей системы и правильностью оценки вредного сопротивления верто-
лета н потерь мощности двигателя. Принимается лишь одно допущение
о том, что расчет летных данных можно сделать отдельно от расчета
балансировки при некотором среднем (для данной центровки вертолета)
значении отклонения автомата перекоса Ящ. Это приводит к неточности
а определении угла атаки фюзеляжа и крыла, м поэтому при большой
разнице между х и хСр для вертолета с болящим крылом (5кр/^^>0,05—
0,07) это допущение несправедливо.
Недостатком этого метода расчета является относительно большая
трудоемкость. Поэтому он относится к методам окончательного аэроди-
намического расчета. Однако, когда графики аэродинамических харак-
теристик несущей системы -имеются, трудоемкость расчета летных дан-
ных неиелика, н этот метод может применяться и для предварительных
расчетов.
При расчете строятся вспомогательные графики, пригодные для
всех аппаратов с подобными несущими системами и равными коэффици-
ентами вредного сопротивления. С помощью этих графиков, построенных
один раз, можно очень быстро выполнить многочисленные аэродинами-
ческие расчеты вариантов аппарата при проектировании, а также рас-
четы при различных условиях применения вертолета (изменении по-
летного веса, числа оборотов винта, атмосферных условий).
1. Построение вспомогательных графиков для определений
летных данных вертолета
В этом пункте изложена методика построения вспомогательных
графиков для расчета летных данных вертолета. Строго говоря, эти
графики, построенные для вертолета с определенной несущей системой
и определенной зависимостью сх от a$, применимы только для этого
вертолета или для других вертолетов с подобными несущими системами
и одинаковыми зависимостями сх от ац. Однако они с достаточной сте-
пенью точности применимы для всех вертолетов такой же схемы, имею-
щих одинаковые значения <т. с^(4_о( и других безразмерных характе-
ристик (например, «11Т, 5Кр у вертолета с крылом) и число Мо не более
0,55—0,6, когчп форма лопаезн не сильно влияет на аэродинамические
характеристики винт?.. Поэтому при Мо<£0,55—0,6 вспомогательные
графики универсальны. Характеризуя вредное сопротивление вертолета
только его величиной при ггф—0, мы предполагаем, что прира-
щение сх при изменении сц можно считать одинаковым для вертолетоп
одной схемы. Подъемной силой нснесущих элементов мы пренебрегаем
Для вертолетов, у которых диапазон изменения числа Мс невелик
(полег производится при постоянных оборотах несущего винта, динами-
ческий потолок це более 5000—6000 •«•) и максимальное число Мо не
более 0,6—0,65. вспомогательные графики строятся для среднего зна-
чения числа Мо Для вертолетов с большими числами Мо определение
летных данных при среднем значении числа Мо приводит к заметным
ошибкам, из-за чего вспомогательные графики теряют свою универсаль-
ность н их можно применять только для одного значения Mfl,
Метод использования графиков для определения летных данных
вертолета изложен в п. 2.
302
Вспомогательные графики для определения потребной мощно-
сти вертолета. При горизонтальном псисте винтокрылого аппарата
(Лтг,^0) уравнения движения (1.6) и (1.7) принимают вид
(3.1)
>/5Q«n№ (u/?)2
В выражениях (3. () и (3.2) индекс «2» обозначает, что коэффи-
циенты tv и 1Х являются суммарными коэффициентами несущей систе-
мы вертолета.
Если характеристики несущей системы вычислялись с учетом сх вер-
толета, то в первом уравнении сх принимается равным нулю.
В дальнейшем индекс <2» будем опускать. Для простоты изложе-
ния будем говорить о несущем винте взамен несущей системы и о вер-
толете взамен винтокрылого аппарата. Геометрические характеристики
несущих винтов будем характеризовать коэффициентом заполнения о.
И,з уравнения (3. 1) следует, что для заданного значения Г у верто-
летов с подобными несущими винтами (равными о) и равными коэффи-
циентами лобового сопротивления коэффициент t~ имеет одинаковую
величину Поскольку аэродинамические характеристики несущего вип-
га, т- е. взаимосвязь величин tv, tx, т„, Г, Мс известны (см. рис. 2.142—
2.145), мы можем построить вспомогательные графики, справедливые
при всех условиях полета данного вертолета и для всех вертолетов
с равными <т, сх и Мд, по которым для любого значения ?у в зависимости
от V можно найти потребный для горизонтального полета коэффициент
крутящего момента т,, .угол атаки о™ и угол установки несущего
винта 0OfJI.
Порядок построения вспомогательных графиков для расчета режи-
мов горизонтального полета опишем на примере, сделанном для верто-
лета Ми-4 с прямоугольными металлическими лопастями (о—0,063,
jx(a_0) = 0-009 с учетом втулки несущего винта или г, (3=9) = 0,0075
без нее). Расчет сделан по экспериментальным аэродинамическим ха-
рактеристикам несущего винта с прямоугольными металлическими лона
стами. о = 0,0525. При исполпзовании этих характеристик для винта
Ми-4 применяются формулы пересчета (см. § 6 гл. 2). В данном случае
пересчет нужно сделать из-за отличшй винтов по коэффициенту запол-
нения и учесть разницу з числе Мд. В профиле и качестве изготовления
лопастей отличий нет, массовая характеристика лопасти и компенсатор
взмаха практически одинаковы. Вредное сопротивление вертолета берет-
ся без втулки несущего винта (влияние втулки учтено в эксперименталь-
ных характеристиках несущего винта).
Таким образом, пересчет характеристик нинта производится по
формулам:
(3.3)
4)
(3.3)
(3.6)
где тГ1, «I, чгЯ11 б0—характеристики испытанного винта.
.5'13
Коэффициенты и углы без индекса относятся к винту Ми-4.
Коэффициент вредного сопротивления вертолета Ми-4, входящие
к выражение (3.1), определялся ло кривой «х—полученной из
натурных испытаний вертолета без несущего винта в аэродинамической
трубе (рис. 3.25). Если на аэродинамических харакгериептках нинта
указан угол а гики а при нулевом отклонении автомата перекоса, тп
упм атаки фюзеляжа связан с углом атаки несущего винта приближен-
ным соотношением (рис 3. 26):
% -а 4 4,-0^. (3.7)
Здесь t-ф—угол заклипсния оси фюзеляжа к плоскости вращения,
а В|Хгр разница в углах атаки винта при -л=/-0 и х = 0, Для вертолета
<Чи-1 бф = 5г, а величина принята равной —3".
Выражения (3 3)—(3.7) используются в такой последовательно-
сти, Для выбранных значений 4 и И задаемся утлом атаки несущего
винта о и находим йф, сх и 4ГП- Определив по выражениям (3 3) и (3,4)
4, н ai. по графику аэродинамических характеристик проверяем, соот-
ветствуют ли значения 4 и а, друг другу. Если пет, то задаемся новым
значением а и снова находим 4 и at- Практически подбор значения a
производится очень быстро. После определения окончательного значе-
ния 4 но графикам аэродинамических характеристик находим тк
я Оэ , а 6/Пгж находится по формуле (6.18) из [Л. 2 с помощью графиков
на рис, 2 80—2 88 (при этом снова по формуле 13. 3) находится лпичснис
tj:, соответствующее^ ^0,091, для которого построены графики: Лт^ж):
, =f | -t , (№1~<WH
х> ' 1 4£В'/2 t “Г 1.0.9Ы-'2
Расчет сделан в табл 3.1.
На режиме висения т-л определялся также по экспериментальной
кривой (рис. 2.141) с пересчетом на п —0,063 по формулам:
304
/,=0,14; 5=0,063; Л(о=О,6
Таблица 3.1
V 0,15 0.20 0,25 0,30
а’ —3,5 -5,25 -8,0 —11,0
аФ 4,5 2,75 0 —3
Сх 0,007 0,0072 0,0077 0,0081
/х —0,0025 -0,00457 —0,00765 -0,01155
!-•)<? -0,00239 —0,00134 —0,00080 —0,0006
4B2V3
/, —0,00469 --0,00591 —0,00851 -0,01215
(«1 —®)<У — 0,9В —0,55 —0,35 -0,25
4Д2К2
а, —4,5 —5,8 -8,35 —11.25
тк, 0,0(65 0,00545 0,00645 0,00875
7,6 7,9 9,0 10,2
6пгсж 0,00008 0,0001 0,00015 0,0002
'Ч.п 0,00558 0,00555 0.0066 0,0089с
Проделав аналогичные расчеты для большого диапазона tv, строим
универсальные вспомогательные графики для определения характери-
стик горизонтального полета вертолетов с а-0.063, ёх(а=о) = 0,0075 (без
втулки несущего винта), М;-—0,6. Эти графики показаны на рис.
3.27—3. 29.
Некоторое упрощение в использовании вспомогательного (рафика
тКгп, показанного на рис. 3.27, при переходе от физических величин
к безразмерным и наоборот дает построение графика, у которого по оси
ЛЧ,С
ординат откладывается не тк ц, а величина-----=— , связанная с физи-
ческими величинами, более простым, чем (1.6), соотношением:
75?/rnj
Ga>R
(3.9)
Такой график показан на рис. 3.30.
На рис 3 27—3. 30 кривые проведены до значений V, допустимых
по условию срыва потока с лопастей несущего винта (см. ркс. 2.120 и
2.121). Кривые, соответствующие („=0,24, получены экстраполяцией
экспериментальных графиков.
При больших числах Мо, когда влияние сжимаемости велико
и вспомогательные графики становятся применимыми только для того
значения Мо, для которого они построены, для вертолетов с ТВД целе'
сообразно построить график для определения Мга в приведенных пара-
20 1002 30,5
Рис. 3.27. Всги>м1;1а-гнлъ(|ый график иля
Q 0,05 ЦЮ 0.15 0,20 Q25 Й
Рис. 3 28 Bcn:>MGMie.4SHPtii
график Для расчета режимов
горизонтального полета угол
установки винта (при 0.-55.
у_4г85) к заижичости or
V и t; (.Ч? = 0.С а=0,б63;
fx(c-=o’ без втулки не-
vsmero винта)
Рис. 3.29. Вспомогательный график для расчета режимов
имущего элита).
метрах: Л’1'.ипр=/(Kip) с параметром (Зщ, при Mo=-const (<а1Ц1 = const).
Приведенные параметры определяются до формулам:
ХМХ\,„у ]/-^-=0014^;
1''яг=^ 20,1 J'7‘0 -^=сопяиМаил-соп51,М0Г;
(7,.? = G-^—^^0,379 ^)аЛ(20,1
(З.Ю)
Так кик у ТВД /Упр определяет приведенный часовой расход топ-
лива G.t£Clip = <л„с — |/ у , то для вертолетов с ТВД могут быть по-
без втулки несущего кюиа)
строены вспомогательные < рафики для определения Ом„ и отноопель-
ного километрового расхода топлива ^Г|' ——
Oi,i>
Вспомогательный график для определения динамического потолка
вертолета. По минимумам кривых потребных коэффициентов крутящего
момента (ломаная кривая на рис, 3. 27, обозначенная Ff) может бцтьпо-
строен график (щ|Г.я )т,г,"^(/4> Этот график, показанный на рис. 3.31,
служит для определения минимальной потребной мощности на любоЛ
высоте пилета (при любом (,,) и дтя отыскания теоретического динами-
ческого потолка вергодеса Н1М1 . т с. высоты, на которой располагае-
мая мощность равна минимальной погребной мощности. График может
быть также исиоллсящн для определении высоты, до которой возможен
307
Рнс 3 3t, Коэффициент минимальной по-
требной мощности вертолета в яявисимостн
От (Мо—0,6; ff=0.053.ex{s_0) =0.0079
без втулки несущего винта)
горизонтальный полет при отказе части двигателей у многодвигатель-
цого вертолета,
Вспомогательный график для определения максимальной скороподъ-
емности. Для расчета режимов полета вертолета, при которых угол
наклона траектории 0тр не равен нулю, необходимо решить уравнения
(1.6) и (1.7) относительно 0тр, определив величину тк по располагае-
мой мощности двигателя в случае режима наивыгоднейшего набора вы-
соты и положив тк = 0 в случае планирования на режиме самовращения
несущего винта, Эта задача решается либо с допущением о малой величи-
не угла 0Т5 (cosflTp—I), либо последовательными приближениями; удоб-
нее, однако, построить универсальный вспомогательный график.
Сначала определим ско-
рость полета, при которой вер-
тикальная скорость макси-
мальна. т. е. скорость наивы-
годнейшего набора высо-
ты Уп- Расчеты покатывают,
что у вертолета скорость „аи-
выгоднейшего набора высоты
практически совпадает со ско-
ростью горизонтального поле-
та, на которой потребная мощ-
ность минимальна. Это объяс-
няется тем, что избыток мощ-
ности на валу несущего винта,
используемый па набор высо-
ты, па этом режиме максима-
лен (так как располагаемая
мощность па валу несущего
винта почти tifc зависит от ско-
рости полета), а пропульсив-
ный к. п. д. винта (см. § 7,
гл, 2), т. е. эффективность пре-
вращения избытка мощности на валу несущего винта в избыток пропуль-
сивной мощности, создающий вертикальную скорость, очень слабо зави-
сит от скорости полета (за исключением околосрывных режимов). Поэ-
тому скорость наивыгоднейшего набора высоты для всех значений t„
находится на рис. 3. 27 по кривой, соединяющей минимумы потребных
коэффициентов крутящего момента.
Очевидно, что_для всех значений tv режим наиныгодпейшего набо-
ра соответствует 7—0,154-0,2.
Поэтому вспомогательный график для определения вертикальных
скоростей вертолета строится для дпух значений V: 7-=6,15 и 7—0,2;
для промежуточных значений вертикальная скорость может быть опре-
делена интерполяцией. Вспомогательный t рафик строится в следующем
порядке:
— задаемся несколькими значениями 91Р (как положительными,
так и отрицательными);
— по уравнению (1.6) находим fXa, причем с* определяется в за-
висимости от а$:
Q(
(3.11)
— задаемся рядом значений и находим
— по графику аэродинамических характеристик несущего винта по
и определяем для всех значений /и:
308
— определяем Дт» (см. рис. 3.32):
1.3.13)
— определяем вертикальный компонент скорости полета
и/?
(3.U)
— строим график Р^ДДгЛк) с параметром 1У: такой график пока-
коэффициента мощности при полете по
наклонной траектории
зан на рис. 3.33.
Отмстим, что из-за линейности
аэродинамических характеристик
несущего винта и из-за того, что при
изменении л кривые tx смещаются
эквидистантно, вспомогательный
график, показанный на рис. 3.33,
применим для расчета вертолетов
с „цобыми и ст (при числах Мо не
более 0,6).
Если график построен для боль-
ших отрицательных значений Дтк.
то может быть определена верти-
кальная скорость снижения верто-
лета при планировании на режиме
самовращения при заданной окруж-
ной скорости несущего винта.
Для определения статического потолка вертолета и скороподъем-
ности при вертикальном наборе высоты используется график, показан-
ный на рис. 3.34, являющийся перестроенным графиком аэродинамиче-
ских характеристик винта при V — 0.
2. Определение летных данных вертолета
Порядок определения летных данных вертолета по вспомогатель-
ным графикам следующий.
Выбираем расчетные высоты полета н вычисляем иа каждой высо-
те коэффициент подъемной силы при горизонтальном полете и коэффи-
циент располагаемой мощности несущего винта:
, G 16tr 1 , 1 . 1Г.
— во/7 (ш^)3
(3.16)
Расчетные высоты полета выбираются с интервалом WOO—1500 л.
В число расчетных высот должны -входить граница высотности и дру-
гие узловые точки высотной характеристики двигателя.
Потребные для горизонтального полета вертолета коэффициент
крутящего момента тЬг и, угол-атаки a14i и угол установки 0Ог „для
расчетных 1и находятся интерполяцией по вспомогательным рафикам
на рис. 3.27—3.30.
Максимальные и минимальные скорости полета определяются
по точкам пересечения кривых mlir п и тцрасп. Для этого специальный
график m„r п иэткрасп можно нс строить, а найти Fmai и Fmm интерполя-
те
Рис. Я, 34. Коэффициент крутящего момента п за-
висимости от I и V., при i/—О (Мо—0,6; о-=0.С(й|
310
иней непосредственно на рис. 3. 27—3. 30. Если кривые тк и тв
при больших V не пересекаются (на грающе срыва т„г п<тКр1С1]\ то
па этой имеете максимальная скорость полета ограничивается не распо-
лапаемой мощностью двшателя, а срывом потока,
Максимальные вертикальные скорости набора высоты определяются
по вспомогательному графику на рис. 3.33 Для этого на всех расчет-
ных высотах полета по рис. 3.27 находятся Гп и (/nJir с)т)[ц вычисляются
и, определив по графику на рис. 3.33 Vu, находим
l\na,==V='1"/?- (3.18)
Для примера найдсм максимальные и минимальные скорости, ско-
рости наивыгоднейшего набора высоты и максимальные вертикальные
скорости иерго.тета Мл-4, имеющего лолетиый вес Сг = 7200 кес, й>Я =
= 196 м/сек, ^—10,5 .и. Все расчеты сделаны в табл. 3.2, результаты
расчетов показаны на рис. 3.35.
Рис. 3.35 Летные характеристики пертолетя
311
Практический и теоретический динамические потолки могут быть
найдены из рис. 3. 35: первый — это высота, на которой 1^,^ =0,5 л1/се«,
BTOpoif — высота, па которой 1'»гаи=0. По рис. 3.35 экстраполяцией
можно определить, что у вертолета Ми-4 потолки равны: 7/^-6400 м
и Ядияг = 6550 м. Эти данные можно найти и без построения графика
, а с помощью графика, показанного па рис. 3.31. Для этого па
рис. 3.31 по данным табл. 3.2 наносятся кривые ткра(.а и wIpaci,—
‘yh х (1.51 , ,
----- =тк?асп—h ~ в зависимости от („ (пропульсивный к. п- Л. вин-
та г) определяется по графикам § 7 гл. 2). Значения l,h при которых эти
0=0,063; cI'S-o)= 0,0075 без втулки несущего
винта)
кривые пересекаются с кривой (mK,..1I)inin, соответствуют теоретическо-
му и практическому динамическим потолкам. Такие построения выпол-
нены па рис. 3 36, откуда находим, что на практическом динамическом
потолке /й = 0,268, а на теоретическом динамическом потолке ^=.0,274
Определив по выражению (3. 19) относительную плотность воздуха
А = -^-. (3.19)
по таблице стандартной атмосферы или «о (формуле
_20-//(«•«]
-20-гЯ1ки] ’
найлсм потолки. В нашем примере получилось:
ii^STS-[,'S15' "•"-6400 “ ” 1.-S^°’505’//--,=6's0 j'’
0,208 U,274 ‘
- что совпадает с полученными выще значениями.
312
Статический потолок вертолета и скороподъемность при вертикаль*
ном наборе высоты находятся по вспомогательному графику, построен-
ному на рис. 3.34, для чего на него наносится кривая тк^-ИУ.
Статический потолок вертолета определяется на максимальном ре-
жиме работы двнгятел}/' так как обычно транспортные вертолеты не
предназначаются для продолжительного висения и. как правило, кратко-
временно зависают при взлете и посадке низко над площадкой в зоне
влияния воздушной подушка
Для примера определим статический потолок и вертикальную ско-
роиодьемноегь вертолета на взлетной мощности при ш/?=212 м/еех. Ра-
счеты, сделанные с помощью графика, показанного па рис. 3.34.
приведены в табл. 3.3.
Таблица 3.3
Н, м 0 7.30 1000 1500 1860
h 0,1175 0,126 0,13 0,136 11,141
•V-"ns.i' Г’ 1700 1720 1685 1600 1560
0.8
0.00784 0,(10854 0,00858 0,008.17 0,0086.3
V у 0,001 0.002 —0,0005 — —
°,-' 0.4 -0,1 —
t 0.119 0.128.3 0.120 0.129 0.130
7,.,а», К21 7287 7320 7170 6820 0631»
Но пересечению кривой с кривой тк при V'=0 паходим
t соответствующий статическому цото.тку, и статический потолок:
Д,—0 128; Д=-0-^—0,917; //„=890 м.
v ’ (1.128 "
Для более полного изучения данных вертолета на режиме висения
должен быть построен [рафик максимальной тяги несущего винта в за-
висимости от высоты полета, причем он строится для различных темпе-
ратурных условий 1яз без учета и с учетом влияния земли (последнее
требуется для оценки возможности взлета и посадки вертолета в горной
местности). Расчет (табл. 3.3) выполняется с помощью графика на
рис. 3.31 по кривой для Уг/ = 0. mlt определяется по располагаемой мощ-
ности двигателя, по графику находится t, затем вычисляется максималь-
ная тяга несущего винта TmSr- График Тшях для вертолета Ми-4 н.э
взлетной мощности дпигателя показан на рис. 3.37. Учет влияния зем-
ли ив тягу несущего вянта производится с помощью коэффициента Kh.
зависящего для данною несущего винта от относительного расстояния
до земли Тяга с учетом влияния земли Ts равна:
Л ~КкТ.
(3.20)
На рис. 3.37 Та определена при висении вертолет на расстоянии
2 л от земной поверхности, когда К„~ 1,12; такое расстояние позволяет
вертолету размера Ми-4 вертикально взлететь и перейти в поступатель-
ный полет без касания земли (касание может произойти при разгоне,
когда летчик наклоняет вертолет и он немного снижается).
313
Наибольшая дальность горизошалыюго полета ir.nmai и наибольшая
продолжительность горизонтального нолеia Tr.Uin.dX определяются по вы-
ражениям:
М;
(3.21)
(3.22)
В Э|их выражениях обозначены:
О л —вес топлива, расходуемый при горизонтальном полете вертолета;
бчас —часовой расход топлива при горизонтальном полете вертолета;
у — километровый расход топлива при горизонтальном полете
вертолета:
(3.23)
Для определения минимального километрового расхода топлива,
минимального часового расхода топлива, экономической и крейсерской
скорости noaeia строится график часового и километрового расхода
топлива в зависимости от скорости полета. Для построения графика
с помощью рис. 3.27 или 3.30 находится потребная для горизонтально-
го полета мощность двигателя, а по характеристикам двигателя часо-
вой расход топлива,
Предварительно должны быть установлены обороты несущего вин-
ia на крейсерском и экономическом режимах- Обычно они равны мини-
мально допустимым оборотам, выбранным конструктором вертолета
по условиям безопасности полета и конструктивным соображениям; оки
должны сочетаться с крейсерским режимом двигателя. Для вертолета
Ми-4 окружная скорость несущего винта на крейсерском и экономиче-
ском режимах равна со/?—180 м'сек. Расчет графика, показанного на
рле. 3.38, произведен в табл. 3 4 для среднего полетного веса G,P«G —
— Ст=-б900 кгс.
•314
Таблица 3-4
Рис. 3.38. Часовой и километровый расходы топ-
лива вертолета
Из графика следует, чго минимальные километровый и часовой
расходы топлива и соо।ветствующие им крейсерская к экономическая
скорости полета равны.
, . л К2С 1 7 ч , <> ЛМ
<?га[0—1.16-— при V,lP —149- — :
G„1C , — 163 — при И9Ь—125 — .
-‘=т'ч час Ь” 3- час
Нормальный запас топлива у вертолета Ми-4 составляет ООО кг/..
Из этого запаса нужно вычесть расход топлива на запуск и опробова-
ние двигателя на земле, на руление перед излетом, на контрольное
висение, набор высоты, снижение и посадку, а также вычесть аэронави-
гационный запас топлива. Невырабагываемый остаток топлива вклю-
чается в вес пустого вертолета и не учитывается при определении
запаса топлива.
При определении перечисленных выше расходов топлива прини-
маем, что опробование двигателя происходит на малом газе п течение
5 мин, руление — при мощности д»Н| aie.'in0,3номцнала п течение 2 мин
(дистанция 0,3—0,5 км), контрольное висение и посадка —на взлетной
мощности в течение 2—3 мин, набор высоты — иа наивыгоднейшей ско-
рости па номинальной мощности, снцжгпив на наивыгоднеишей
скорости с 1^—4—5 м/сек при мощности 0.3—0,5 номинала. Для транс-
портных вертолетов аэронавигационный запас принимается равным >5%
от общего запаса топлива
Для вертолета Ми-4 при полете на дальность па высоте 1000 м
сумма всех затрат топлива вместе с аэронавигационным запасом со-
315
ставляет WO—115 кгс, т. с. около 15—2О7о от общего запаса топлива.
Путь и время полета при наборе высоты и снижении соответственно
равны 20 км н 0,2 час.
Таким образом, у вертолета Ми-4 на горизонтальный полет расхо-
дуется 600—115=485 кгс топлива, и максимальные дальность и продол-
, 48!» 485
жительность полета вертолета ^г.пг1а1 — —р =418 ки, тг,Пгаа1 = — ~
s=3 час. а технические дальность н продолжительность Д„„ —
=418 + 20 — 438 кч, тга111—3,2 час.
При предположении, что удельный расход топлива не зависит от
мощности двигателя, и коэффициент использования мощности не зави-
сит от скорости полета, ре-
жимы, соответствующие макси-
мальной дальности и продол-
жительности полета, могут
быть определены непосредст-
венно по графикам на рис.
3.27 так, как показано на рис.
3 39
Обычно наиеыгодвейшне
обороты на крейсерском и эко-
номическом режимах оказы-
ваются ниже выбранных кон-
структором вертолета оборо-
тов. Но если необходимо опре-
делить наивыгоднейшие обо-
роты, то расчет Л'г,п и G4ac г „
Рис. 3 39. К определению крейсерской и эко- производится для нескольких
комической скоростей полета значении со/? И выбираются
оптимальные обороты, При
предположении, что удельный расход топлива не зависит от мощности
и оборотов двигателя, а коэффициент использования мощности не за-
висит от скорости полета, максимальная дальность и продолжительность
полета могут быть определены по следующим выражениям:
-к«1;
(3-24)
Скорости полета и соответствующие им обороты несущего винта
(или V и iy), при которых —(2= н минимальны, могут быть най-
hv $
дены по графикам этих величин, построенных с помощью графиков,
показанных на рис. 3.27.
г~. 1
Отмстим, что величина 1 '—=? равна произведению качества вер-
/ W
полета на пропульсивный коэффициент полезного действия несущею
еинта Л’вн1 [см. выражение (7.10) из гл. 2], следовательно,
270Ст
L-n=
316
Минимальная вертикальная скорость снижения вертолета при пла-
нировании на режиме самовращения с заданной окружной скоростью
несущего виита определяется по вспомогательному графику, показан-
ному на рис. 3. 33. Для этого по пыражекию (3.2) вычисляется и при
Дт;!=— )min и Гп по рис. 3.33 находится 7S| а затем Гу — 7р(о£.
Однако, обычно на режиме самовращения определяются вертикаль-
ные скорости снижения во всем диапазоне скоростей полета как при
постоянных оборотах несущего винта, так и при постоянном шаге 6 о
Для решения этих задач используются графики характеристик несу-
щего винта на режиме самовращения, показанные на рис. 2.110 [при
необходимости эти характеристики также должны быть пересчитаны по
формулам (3,3) — (3.6)].
При постоянных оборотах несущего винта расчет делается методом
последовательных приближений. В качестве первого приближения при-
нимаем cos 6ГГ, =0,97 и, вычислив по выражению (1.5) (£у для ряда
Г по графикам характеристик виита определяем (<х b. ас,, аф1, с,, и за-
тем из уравнений движения вертолета находим угол бт?1
_ Р2
(^с),+ <г —
- tge-r^------------- (3.26)
(^c)l
После повторения расчетов до совпадения величин угла (1тр нахо-
дим скорость полета по траектории и ее вертикальную н горизонтальную
составляющие
Г=ТМ; (3.27)
Vry-VzsinOf„; (3.28)
V'J_=V'cos ^р. (3.29)
Отметим, что —tg6Tp равен обратному качеству вертолета при пла.
нмровании на режиме самовращения:
(3,30)
При расчете режима самоврашения с выбранным утлом установки
несущего винта (обычно 0ос —3—5°) для ряда и по графикам характери-
стик винта определяем £хс, Ос. Затем находим 0тр, и Мо по вы-
ражениям:
Если число Мо меньше 0,6, то решение считается справедливым,
так как в этом случае влиянием числа Мо на характеристики винта мож-
но пренебречь.
317
Если Мс£>0,6, та нужно повторить расчеты, определяя (Ус,{Хс> u<?
для получившегося в предыдущем приближении числа Мо. Последова-
тельные приближения делаются очень быстро и трудности не представ-
ляют. После окончательного определения cnAJ по выражениям (3.27)—
(3.29) определяются V, Vv. !•».
Для примера сделаем расчет планирования на режиме самовраще-
ния вертолета Ми-4 с полстным весом 7200 кге на высоте Н~-0 при
<i>R^T96 м!сек. Пересчитанные на коэффициент заполнения <т^0,063
экспериментальные характеристики несущего винта показаны на
рис. 3.40 и 3. 41.
Расчет сделан в табл. 3-5, зависимость V-H и втр от V показана на
рис. 3.42. Из рис. 3.42 видно, чп> минимальная вертикальная скорость
снижения вертолета равна 7,2 Mice*. при V—130 кж/час, а максималь-
ная дальность планирования, равная
//
I *8 ^тр I
-^Вс,
(3.31)
получается при 0ТР (----10’; — V ^180 км/час.
/i-О; о/?=-196 м/сек; Г,=0.13в
Таблица 3.5
318
Рис. 3.40. Поляры Her.yniero винта на режиме самопраще-
ння (Ма~-0,6; сг=0,063)
3. Графики для определения оптимальных аэродинамических
параметров вертолета
Описанный метод аэродинамического расчета и трафики характе-
ристик несущего винта, используемые в нем, удобны для поверочного
расчета вертолета, когда его параметры известны, так как имеется до-
статочно данных для определения коэффициентов tVf , tx при расчете
режимов горизонтального полета и коэффициента при расчете
режимов набора высоты.
При проектировании вертолета предварительный вариант парамет-
ров выбирается по опыту предыдущих образцов, исходя из применяе-
мых величин окружной скорости, коэффициента тяги, нагрузки на 1 м-
площади несущего винта н др. Затем параметры вертолета должны
уточняться. Для изучения влияния параметров на летные данные верто-
лета удобно построить специальные графики. Такие графики нужны
также при исследовании максимальных возможностей вертолетов
в улучшении летных данных.
Расчеты по выбору аэродинамических параметров следует сопро-
вождать весовыми расчетами и рассматривать изменение параметров
в ограниченном диапазоне, в котором вертолет имеет достаточную по-
лезную нагрузку.
В этом пункте описан график, применимый в случае, когда отыски-
ваются параметры несущего винта, при которых получается минималь-
ная потребная мощность (минимальные часовые и километровые рас-
ходы топлива) при заданных весе, 2c*S, скорости и высоте полета.
По этому графику можно найти оптимальные диаметр, коэффициент
заполнения и окружную скорость винта.
Преобразуем уравнения для расчета режимов горизонтального по-
лета так, чтобы во всех уравнениях наименьшее число искомых пара-
метров связывало безразмерные коэффициенты с заданными величи-
нами. Уравнения (3.1) и (3.2) могут быть приведены к виду:
(3.32)
Аналогично преобразуем уравнение для определения потребной
мощности
(3.34)
Отметим, что величины Мо, Мпол, -у-, ' пропорциональны при-
веденным параметрам вертолета: «„р, 14^, вщ, .
Очевидно, что потребная мощность будет минимальной при минн-
тк.м0 м’ .
мумс отношения ----- ----. Чтобы найти его, строим график в коор-
320
0,0092 0,00706 I 0,00824 1 0.00942 I 0,0106
1002
л1вМцМр01 ./ —i4° Mft \
дннатах —//------------1 для заданного уравнением (3.33)
\ •" пил
значения отношения —-—-°— пря Мп0.— —--------const.
— tx ' а
Порядок построения графика следующий, Для выбранного к иссле-
дованию значения Мпол нужно иметь аэродинамические характеристики
винта в виде зависимости, показанной па рис. 2.105 -2.109, при не-
скольких числах Мо Задавшись рядом значений коэффициента I, н ве-
ст 1
личиной 'с 5 ‘ 0<г2’ по уравнению (3.33) определяем и по графикам
аэродинамических характеристик для каждого числа Мо находим mv
Далее вычисляются отношения коэффициентов, входящие в выражения
(3.32) и (3,34). При изменении коэффициента заполнения винта вели-
чина ix пересчитывается по формуле (3 3) илц по формуле
(г, — зг)/5Л12
х' 1вг.м;ол •
13 табл. 3. б сделан расчет для скорости nu.ieia V —273 tevftac на
высоте Н — 1(Х)0 м (а—336,1 MiceK,-^- га2--6400 кге/ж2^ при $_
==4670 «гс/.и2. При этих данных
Млол —0,227;
-/_/ _0,07Ц/..
А ’ 4670
График для определения оптимальных аэродинамических парамет-
ров показан на ряс 3 43 Кривой / соединены минимумы кривых с оди-
наковым а. По кривой 1 находится оптимальный диаметр несущего
винта при заданных числе оборотов (Ми) и <г. Кривая 2—это огибаю-
щая кривых с одинаковыми а. По ней находится оптимальное число
оборотов при заданных диаметре и а. Кривая 3 --эта огибающая кри-
вых с одинаковыми Mq По ней находится оптимальный коэффициент
заполнения при заданных диаметре и Мп.
Для примера в табл. 3.7 определены оптимальные параметры вер-
толета при 6=35000 кге и Sc^S —7.5 м2.
Таблица 3 7
Заданные параметры Оптнма тьн in е параметры ( i.w, в L. Л'4'"
з=и),091: -£=212 мр-тк; AVi=0,63 (точка а) ** _ =о,ах)«2. 0,0317 6Ы6
£=11,56 и; —<'rS.-0,<)[iB. а=0,091 (точка б) -ЧПт~°’&3; =212 чреь. 0,0331 7117
V с ?
£>=34,56 м; — — - 0,008; <»/?=220 Mictv, 41(^0.655 1 (точка aj | зогт=0,09о 0,0336 7224
.322
Рис, 3 43. График для определения оптнмальних зэродинв-
мичсских параметров вертолета (Мг,« 0 22"; у -----------=0,73)
Изложенный метод может быть применен для отыскания оптималь-
ных аэродипамйческих параметров вертолета с тянущим винтом и кры-
лом. но в этом случае нужно предварительно найти параметры тянуще-
ю винта и крыла (тКт , при которых максимально улуч-
шается зависимость т. с. получаются наименьшие значения
при всех mKi и /Уа,
§ 4. АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ ВЕРТОЛЕТА
С ИСПОЛЬЗОВАНИЕМ ПОНЯТИЙ КАЧЕСТВА И К. П. Д.
НЕСУЩЕГО ВИНТА
Понятия качества К н пропульсивного коэффициента полезного
действия q несущего винта даны в гл. 2, § 7. Там же приведены графи-
ки, полученные из эксперимента и по расчету, из которых находится
величина К и г|.
В настоящем параграфе изложен метод аэродинамического расче-
та вертолета с использованием понятна качества К и к. п.д. Расчет-
ные формулы для определения потребной мощноин и вертикальной
скорости вертолета полностью аналогичны формулам для расчета
самолетов.
Это очень простой метод расчета, леыю распространяемый пя вер-
толеты любых схем с крылом и с тянущим винтом или маршевым реак-
тивным двигателем Он наиболее просто в общем виде позволяет делать
различные оценочные расчеты: оценить целесообразность установки
крыла и тянушпх винтов на вертолет, найти требуемую для получения
заданной максимальной скорости энерговооруженность вертолета NjCt,
21* 323
определить, насколько уменьшится потребная мощность при уменьше-
нии вредного сопротивления вертолета.
Так как качество и к. п. д. описывают аэродинамические характери-
стики несущего винта приближенно, то этот метод расчета относится
к приближенным методам аэродинамического расчета.
1. Качество вертолета
Качество вертолета иа режиме горизонтального полета определяе,-
ся по выражению (7.9) из гл. 2
При расчетах удобнее пользоваться обратной величиной, т. е. об-
ратным качеством вертолета:
(4.2)
Перейдя к размерным величинам — Y—G и QBp,— получим
(4-3)
где вредное сопротивление вертолета
Q.P--(1.4)
При использовании формул пересчета для определения качества
несущего винта с отличающимися параметрами (см. гл. 2, § 7, п. 6)
качество вертолета находится по выражению
J__J_ I <с —э1Уу | Qap 4 5.
Ка К *1’ 4W2 + tyV + О ‘ '
2. Качество мпоговинтовых к комбинированных аппаратов
В общем случае обратное качество аппарата
где и сумма подъемных сил и сил сопротивления движе-
нию всех несущих элементоп вертолета.
Составим выражения для 2У и 2Х для двух типов вертолетов.
Одновинтовой вертолет с крылом. Подъемная сила несущей системы
вертолета состоит из суммы подъемных сил несущего винта и крыла
2г-Ув.в : Гкг,. (4.7)
Представим 2^ в виде (^и.в "I ^ч>).
обозначив: Рн.„ и
324
При горизонтальном полете
(•1.8)
(4.9)
Сила сопротивления движению складывается из сил сопротивления
изолированных винта и крыла и проекций подъемных сил винта и кры-
ла на направление движения (см. рис, 3. И)
+ I ^я.8Лак.в + ^крДи>:р- (4.10)
где даВ1В и дак1, — осреднснные углы скоса потока у винта и крыла.
Подставив выражения (4.8) и (4.10) в уравнение (4.6), получим
F“’’^hb(4 ' ----ЬДакр)л— (4-11)
Ла 'Л / \Л кр /и
Углы скоса потока определяются, как описано в § I, по выражениям
Двухвинтовой вертолет с крылом. Проделав аналогичные выкладки,
найдем
4 даЧ4~}М^+йаЧ+М^+лМ+% ’
(4.13)
где индексами «]» и «2» обозначены величины, относящиеся к каж-
дому из винтов.
Суммарные углы скоса, вызванные другими двумя элементами не-
сущей системы вертолета, равны:
^ + 0,26..^,
Даа.а1^хп.а,-^4-0,26х2
ДаК[]— 0,26%, +0,26%,
(4.14)
У вертолета поперечной схемы оба винта находятся в равных усло-
виях (ясе величины с индексами <|» и <2» равны друг другу), а у.1 =
=К2=япп. Поэтому для вертолета поперечной схемы получаются сле-
дующие выражения:
2F,.,-l-FB₽; (4.15)
325
(4.16)
У вертолета продольной схемы с крылом, расположенным между
пинтами, передний винт оказывается практически пне влияния заднего
винта и крыла, а крыло - - вне влияния заднего впита. Однако коэффи-
циенты индукции х. для заднего винта и для крыла должны быть
удвоены
(4.18)
Суммарная потребная мощность винтов у вертолета продольной
схемы мало зависит от соотношения подъемных сил винтов. Это объ-
ясняется тем, что в соответствии с общей теорией индуктввного сопро-
тивления оно не зависит От распределения подъемной силы между
отдельными элементами несущей системы, а профильная мощность вин-
тов не сильно зависит от подъемных сил винтов (на режимах, ие близ-
ких к срывпым) Поэтому для определения суммарной погребной мощ-
ности двух винтов можно положить У[ = У2- Действительно, по условиям
балансировки вертолета подъемные силы обоих винтов близки друг
к другу. _ _
Положив в выражениях (4.13) и (4.14) УН.В| — у„ а„ — ун в
и Кл-Кг — К, получим, что величина Яв может определяться по выра-
жениям (4.16) и (4.17), причем коэффициенты индукции берутся без
удвоения. Физический смысл этого выражения заключается в том, что
для определения суммарной мощности можно два винта заменить
одним с удвоенной подъемной силой, расположенным между винтами.
Скос потока у этого винта равен полусумме скосов ) переднего и зад-
него винтов, т. е. он равен половине скоса у заднего винта
Порядок расчета качества вертолета следующий. При поверочном
аэродинамическом расчете вертолета полетный вес, диаметр, коэффи-
циент заполнения и число оборотов несущего винта, коэффициент вред-
ного сопротивления известны. Задавшись скоростью и высотой полета,
можно пайти следующие безразмерные коэффициенты:
f»s=——;
—-Qlf (w/T)2
по которым из графиков, приведенных в § 7 гл. 2, находим качество
несущего винта. Затем, вычислив ио выражению (4.5) QBJJ. опреде-
лим К».
326
При расчете качества комбинированных аппаратов нужно знать
распределение подъемной-силы_ между отдельными элеменоми несу-
щей системы, т. е. УН.В| Fubj, ^’кп- Для оценочных расчетов можно за-
даться на каком-либо режиме полета У1СР и сРяр, имея в виду, что они
могут быть получены при соответствующем выборе угла установки и
площади крыла. Затем по выражениям (4 8) и (4 9) находим Уап.
в и по характеристикам винта и крыла определяем К, Ккр. Подсчитав
по выражениям (4 17) углы скоса, находим Дя.
Когда геометрические характеристики н угол установки крыла за-
даны, для определения подъемной силы винтов и крыла при горизон-
тальном полете можно воспользоваться следующим методом.
Угол тангажа двухвинтового вертолета, измеряемый от плоскости
вращения винта (переднего винта для вертолета продольной схемы),
определяется по следующему выражению:
-Г Дн.в \Л|ср / 2
Уравнение (4 19) получено из условия равенства нулю суммы про-
екций всех сил на направление скорости полета в предположении, что
угол 0=ав-о1 мал, Т,-T2l Hi — H2=Hll + TDi-l<, ttss»0.35VT. УПВ = Т
Аи.в=7'«+Я: ; e„.R)+Wl4-/i'2-f-QBP + ArKp®=iSX=.O.
По углу тангажа вертодеи можно найти угол атаки крыла
Чр = а-гм — Дикр, (4.20)
где г,кр — угол установки крыла относительно плоскости вращения
винта.
При известных V, tus. —— , /кр. ——, екр, £„ Ва, D^t, (получение же-
лаемой величины обеспечивается подбором угла установки стабили-
затора) яо формулам (4.19) и (4.20), а также (4.9), (4.14) и (4.15)
последовательными приближениями находим все величины, входящие
в эти формулы: аь..,. &, ct , У\Р1 Ква. Рекомендуем следующий
порядок расчета:
— задавшись avn. находим си г ук .
кр> “пр, Кр, '\кр,
— по формуле (4.15) определяем 2КЯЬ1 а затем 1Вп дакр;
— находим О и по формуле (4.20) а11р второго приближения.
Всего приходится делать два-три приближения. Таким образом на-
ходим все величины для подсчета Ля.
Для примера в табл. 3.8 сделан расчет обратного качества верто-
лета Ми-4. Исходные данные вертолета приведены в § 3. Качество и
к. п д несущего винта определялись по графикам на рис. 2.159 и 2.160
с пересчетом на разницу в коэффициенте заполнения. Разницей в про-
филях лопасти при Мо = 0,6 можно пренебречь.
Результаты расчета для всего диапазона tu показаны на
рис. 3.44, где видно, что обратное качество вертолета минимально при
Р=0,25-г0,3 и коэффициенте подъемной силы, близком к максимально
допустимому по срыву потока.
Максимальная величина качества Квгоах =6,0. На малых Г
обратное качество вертолета возрастает из-за уменьшения качепва не-
сущего винта, а на больших V — из-за увеличения сопротивления вер-
толета-
527
Таблица 3.8
J 1 (0,063—0,091)^ cxV2
К, " Л‘ + 4-0,96V2 *' 0,0631,
V 0,15 0.20 0,25 0,30 0 35
3,5 5,4 6.95 8.5 9,25
1.011 0,980 0,972 0,964 0,947
1/Кя 0,286 0,1854 0,144 0,1176 0,108
0,063—0,091 0 0462 -0,0261 -0,0167 -0,0116 —0,0085
4.0.96Г2 1у
0.2398 0.1593 0,1273 0,106 0.0995
сх 0.01(9 0.0Н9 0,009 0,0095 0.01
СгЙ 0 023 0,0108 0,0638 0,0980 0 139
0,0631,
1/К. 0.2628 0.2001 0,1911 0,201 0,23ь5
Вторым примером распета явится расчет качества вертолетов раз-
ных схем: одновинтовой, продольной, поперечной и одиооинтовой и по-
перечной с крылом.
Расчеты сделаны при следующих условиях. У вертолетов без крыла
коэффициент подъемной силы винта равен («Н1=0,13, а у вертолетон
с крылом /и=0,16 и 0,32. Большее значение ivs у вертолетов с крылом
соответствует двум случаям; уменьшение диаметра винта при установке
крыла и уменьшение окружной скорости без изменения диаметра нинт,т
Коэффициент заполнения несущего винта равен о = 0,091, М$=0,65 и
Рис. 3.45 Коэффициент подъемной силы
и качество крыла в зависимости от
угла атаки
Mtm.i>0,2. Качсстпо и к. п, д. винта определялись по графикам
на рис. 2. 159 и 2.160, а сУкр и качество крыла —по рнс. 3.45- Коэффи-
циент вредного сопротивления одновинтового вертолета, отнесенный
к площади винта, равен 0,0075, а при уменьшении диаметра —
0.16
0,0075 ^^ = 0,00925; у двухвинтовых вертолетов XcxS в два раза боль-
ше, чем у одновинтового. Площадь крыла у одновинтового вертолета,
отнесенная к площади винта, равна 0,0325. а йрн уменьшении диаметра
винта площадь крыла не изменялась и в относительных величинах ста-
0,16
ла равной О,О325-0 ^—0,04. Относительный размах крыла lnJ>/R соответ-
ственно ранен 0,85 и 0,95. У вертолета поперечной схемы площадь
крыла определяется размерами несущих винтов и принималась равной
0,16 от площади одного несущего винта. Удлинение крыльев равно
лкр= 7,2-
Расчет качсстнн вертолетов без крыла сделав в табл. 3.9, а качест-
ва вертолетов с крылом в варианте с уменьшенным диаметром несуще-
го ввита — в табл. 3.10.
Таблица 3J>
Вертолеты без крыла
Г 0,J5 0,20 0,30 0.40
к 3.5 5,2 7,85 8 42
1,00 0,977 0,962 0,936
стУ? ain 0,0142 0,0253 0,0.’,7 0,1014
Одновинтовяя схема J 0,286 0,1925 0,127 0,119
A*,i <о
Л-. 0,300 0,2178 0,184 0,220
Продольная схема 0,143 0.0962 0,0635 0,0595
*ео = 0.65 <vs = 0.26 a,t. в. 0,181 0,102 0,0454 0,0255
Кн.в, 0.233Г, 0.1472 0,0862 0,0722
kb 0,39(17 0,2687 0.2092 0.2373
Поперечная схема a cisj —0,0558 —0,0314 -0.01395 -0,00785
*„„-=-0.4 -0,26 —-I-Aur.b 0.2302 0.1611 0,11305 0.11075
-±- 0.2444 0.1864 0,17035 0,21215
Результаты расчетов показаны на рис. 3.46, откуда видно, что во
всем диапазоне скоростей обратное качество вертолета поперечной схе-
0,0156 0,011 I 0,0117 | 0,0156 | 0,0166
mw имеет ыеныпую величину, а продольной схемы — большую величину
Максимальное качество равно: 6 у вертолета поперечной схемы на
Г~0,27: 5,5 у вертолета одновинтовой схемы на Г=0,29; 4,8 у верто-
лета продольной схемы на К=0,3. На Мпол = 0,26 (Й=0,4) качество
вертолетов соответственно равно; 4,7; 4,55 и 4,23.
Крыло, разгружающее несущий вннт на больших скоростях полета
иа 20—30%, изменяет качество вертолета следующим образом. Если
при установке крыла был уменьшен диаметр винта, то качество верто-
лета увеличивается очень мало (кривая /). Если диаметр винта не
уменьшался, а уменьшалось его число оборотов (кривая /7), то макси-
мальное качество вертолета увеличивается на 0,5—0,9 (на 10—15%),
Рис. 3.46. Обратное качество вертолс
тов различных схем без крила и с кры-
лом в зависимости от Мпоп
обозначения:
а иа максимальных скоростях (Мщ>л = 0,26) увеличивается на 0,4 (при-
мерно на 9%). Расчеты показали, что если при установке крыла пара-
метры винта не изменяются, и поэтому винт на больших скоростях
имеет очень низкий коэффициент тши, то установка крыла не приводит
к уменьшению потребной мощности.
Следует отметить, что увеличение коэффициента тяги /i£ у верто-
лета с крылом приводит к уменьшению его динамического потолка. Это
происходит из-за того, что на паивыгоднейщей скорости набора высо-
ты — I и^«0,2—крыло незначительно разгружает несущий винт, и iv при-
обретаем максимально допустимое по срыву потока значение на меньшей
высоте. Кроме того, при большом tvs может быть срыв потока с несу-
щего Rffrrra при малых скоростях полета, когда еще. мал. Для
уменьшения на этих высотах может быть выгодным увеличение
числа оборотов винта на 5—8%.
Из табл- 3.10 следует, что качество крыла с учетом скоса потока
несущим ВИНТОмГ—~ = гД«кр) уменьшается при большой скорости
полета на несколько единиц, а при малой скорости еше больше. Созда-
вая скос потока у несущего винта, крыло немного уменьшает его каче-
ство. Этим объясняется малое изменение качества вертолета при
установке крыла.
331
На вертолете без тянущего винта крыло с фиксированным углом
установки имеет максимальный угол атаки аьт, при горизонтальном ко-
лете на Р'=0,2-^0,15. На меньших Й он уменьшается из-за увеличения
скоса потока несущим винтом, на больших — из-за увеличения углов
Рис. 3 <17. Относительная подъемная си-
ла крыла у вертолетов различных схем
одновинтовая схема). А если крыло имеет большую площадь и малые
ыьт (поперечная схема), то на больших скоростях с„кр резко уменьшает-
ся и подъемная сила становится меньше, чем на средних скоростях
Таким образом, на вертолетах без тянущего винта или другого дви-
жителя крыло должно иметь малую площадь и большие акр, либо
механизацию для управления величиной Сцкр.
На режиме набора высоты угол атаки крыла уменьшается, а на
планировании увеличивается. При фиксированном угле установки
крыла на режиме самовращения неизбежен срыв потока с крыла, кото-
рый может быть допущен при небольшой подъемной силе крыла (при
небольшой площади крыла, при уменьшении с^р путем механизации
крыла).
3. Определение летных данных вертолета
Когда известны качество вертолета и к. п. д. несущею винта, погреб-
ная мощность вертолета определяется по выражению (см. § 7 гл 2).
дг -__Ov [«-«Лдс! _ 1__ (4 29)
270$ Кац ' 1
Порядок расчета качества вертолетов разных схем описан в и. 2.
Так же по графикам, приведенным в § ) гл. 2, определяется к.п.Д.
332
винта. Следовательно, задаваясь скоростью и высотой полета, можно
построить график потребной мощности вертолета. На режиме онсения
потребная мощность определяется по аэродинамическим характеристи-
кам несущее винта на режиме висения; при условии T = G ца всех вы-
сотах полета вычисляется .Vrn.
Максимальная и минимальная скорости полета определяются по
точкам пересечения кривых потребной и располагаемой мощностей
На всех высотах полета нужно найти максимально допустимую по усло-
виям срыва потока скорость Удпп,' если УДЛ0, то скорость полета
вертолета ограничивается величиной Удоп
Располагая кривыми потребной мощности и зная характеристики
двигателя по расходу топлива, можно найти часовые и километровые
расходы топлива вертолета в зависимости от скорости полета (см
рис. 3.38) и определить, как описано в § 3, максимальные дальность н
продолжительность полета, крейсерскую и экономическую скорости
Полета.
Когда вертолет летит по наклонной траектории, пропульсивная
сила несущего виита должна уравновешивать проекцию веса вертолета
на направление движения, которая равна GsinOTp или С~у(см
рис. 3 1). Поэтому выражение для мощности двигателя примет вид
Из выражения (4.23) следует, что максимальная скороподъемность
вертолета определяется по формуле
С.., (4.24>
Паивыгоднейшая скорость набора высоты и минимальная потребная
мощность Л7 находятся из графика потребных мощностей. Опре-
делив lzy,iisi па всех высотах и построив график Vr графи-
чески находим динамический потолок вертолета (см. рис. 3.35).
По выражению (4.24) при Л‘раеЕ-=0 определяется минимальная
скорость снижения вертолета на режиме самовращения несущего вин-
та (1\с)ш1д
Для определения углов атаки а и углов установки 6 о несущего вин-
та нужно подсчитать коэффициент пропульсивной силы винта
<?пГ-| <7^-
tx =------------- (4.25)
— е« («Я)2/7
и зная 'у и tx. но графикам (см. рис 2.63—2.70 и 2. 105—2. 109) или по
формуле (3.95), приведенной в § 3 гл. 2, найти а и За.
Для примера сделаем аэродинамический расчет вертолета Ми-4
с прямоугольными металлическими лопастями. График качества верто-
лета дан на рис. 3 44. График потребных и располагаемых мощностей
на шести высотах полета показан на рис 3.48.
При Г=0 VrD определяется по выражению:
(4 26)
755 t 1 ’
где Н1,: находится по графику, показанному на рис. 3.34, при Fv = 0.
333
331
Максимальные вертикальные скорости набора высоты и минималь-
ные скорости снижения на режиме самовращения вычислены
в табл. 3. 11.
Определение остальных летных данных производится с помощью
графика на рис. 3.48.
Сравнение МГлъ вычисленной по вспомогательному графику на
рис. 3.27, с .VriI, найденной по качеству ц к.п.д. вертолета, показывает
удовлетворительное совпадение; V,(Ilias также близки по величине.
1 аблица 3. / /
Па рис. 3.49 показан график потребной мощности, отнесенной к Ga,
для персолетов разных схем. График вычислен с помошью графика кэ-
Nt. ,!
чества верюлстои, данною на рис. 3.46. Отношение определяется
ио формулам:
—г^— [4.27)
сл: тэгя-.п
при поступательном полете и
(4.23)
Cta 7л; i
'ПиМо
на режиме висения.
Коэффицнент использования мощности | принимался равным 0.93
для двухвинтовых вертолетов, а для одновинтового вертолета с-—0.88
при И.>0,15 и g=D,83 при V=0. Ла режиме висения крыло вертолета
обдувается несущим винтом и создает отрицательную подъемную силу,
поэтому при V=0 коэффициент подъемной силы винта увеличивался цы
2% у одновинтового вертолета с крылом и на 8% у вертолета попереч-
ной схемы с крылом; величина, найденная по формуле (4.28), соответ-
ственно увеличивалась.
Из графика видно, что из-за разницы ; на режиме нисения отноше-
ние iV/G у двухвинтовых вертолетов меньше, чем у одновинтовых.
Наибольшая величина 'NfG у вертолетов с крылом и с уменьшен-
ным диаметром несущего винта, наименьшая — г крылом и с уменьшен-
ным числом оборотов винта у одновинтового вертолета, а у вертолета
поперечной схемы - без крыла.
Таким образом, для обеспечения возможности висения рассмотрен-
ные вертолеты должны иметь разную мощность двигателя на 1 кас
полетного веса. Соответственно они будут иметь разные лесные данные
при поступательном полете. В табл. 3.12 приведены некоторые летные
характеристики вертолетов, полученные в нишей примере на высоте
полета 77-0 при следующих характеристиках двигателя: NUJn — NaBc.
N г.ои=0 ajя; Nкр — 0,7 Nп.?л
Максимальная вертикальная скорость вертолета определялась по
формуле
У, ах—75Ет]«
Ga /
(4.29)
При -Vpam—0 определялась минимальная скорость снижения на ре-
жиме самовращения (lz„c)mfn
Таблица 3.12
Схема верюлета * •Vr,nu.|n
Л'ь,,
Поперечная 0,253 301 0 0,4.56
Одцоиннтивая 0,284 304 0 0,527
Продольная 0,253 280 0(47,7) 0,604
Поперечная скры- лоы и уменьшен- ный диаметром 0,306 332 0 0,350
Поперечная с кры- лом и уменьшен- ной окружной скоростью 0,271 321 0 0,348
Одновинтовая < крылом и умень- шенным диямет- 0,317 325 0 0,465
Одновинтовая с крылом и умень- шенной окружной скоростью 0,281 317 0 0,448
л-аз/ж VH ““«д । mJcck Ь. * Gt
6,6 - 7,66 246 0,127
5,76 — 9,38 244 0,144
2,61 -11,65 185 0.169
10,03 - 7,21 280 0,134
9,02 — 6,24 275 0,121
7,59 — 9,17 268 0,145
7,06 — 7,89 261 0.133
—----) у вертолетов одинаково
Ga /виг
Поперечная 0,264 306. 0 0,439 7,]9 — 7,66 252 0,129
Одяовнптовая 0,264 292 29,4 0,568 4,67 — 9,38 230 0,141
Продольная 0,264 287 (( 0,607 3,20 —11,65 20,3 0,160
Поперечная с кры- лом и уменьшен- JibiM диаметром 0,264 310 28,2 0,413 7.64 — 7,21 258 0,126
Поперечна» с кры- лом и уменьшен- ной окружной скорость 10 0.264 317 8,6 0,357 8,01 - 6,24 272 0,119
Одновинтовая с крылом н умень- шенным диаист- 0,264 300 47,7 0,555 4,88 - 9,17 233 0,138
Одвонивтовая с крылом и умень- шенной окруж- ной скоростью 0,264 309 23,3 0,477 6,16 — 7,89 2,’11 0,129
330
Зайас топлива, требующийся для полета на заданную дальность
при крейсерской мощности двигателя, находился но формуле
Коэффициент 1.1 введен Для учета аэронавигационною запаса и
расхода топлива тга переходных режимах для высоты /7 = 0.
вычислялся для L=500 км при Сг~0,32 кгс/л с. час
Из табл. 3.12 видно, что при равных условиях на режиме висения
№.,з“Мп,е) вертолет продольной схемы имеет при поступательном
полете наихудигие летные данные- дьачжельно меньшие скороподъем-
ность и крейсерскую скорость, больший запас топлива, большую ско-
рость снижения тга режиме самовращения н —’ Пт1° =0,69, т. е. продол-
желне горизонтального полета возможно при отказе только одного дви-
гателя из трех.
Для улучшения летных характеристик вертолет продольной схемы
должен иметь более мощный двигатель. Vn.w>V»nr.
Вертолет поперечной схемы имеет паилучщие летные данные.
Качественная разница в летных данных вертолетов разных схем
в поступательном полете сохраняется и в случае, когда вертолеты
имеют равную располагаемую мощность на единицу веса (см. вторую
часть табл. 3.12). а также если учесть, что вертолеты разных схем
имеют при одинаковой грузоподъемности немного отличающийся полет-
ный вес. При равной располагаемой мощности па единицу веса у одно-
винтового и двухвинтовых вертолетов первый способен висеть только на
воздушной подушке, а вне воздушной подушки его минимальная
скорость равна примерно 30 км/час.
При установке крыла на одновинтовой вертолет в целях уменьше-
ния диаметра пиита на 11%, но с увеличением мощности двигателя так-
же на 11% для обеспечения возможности висеть вне влияния воздушной
полушки летные характеристики вертолета в поступательном полете
улучшаются: максимальная и крейсерская скорости увеличиваются на
20 км/час, скороподъемность—примерно на 2 м/сек. Без увеличения
мощности двигателя характеристики вертолета на режиме висения
ухудшаются, а п поступательном полете они изменяются незначительно:
максимальная и крейсерская скорости увеличиваются на 5—8 км/час.
а относительный запас топлива уменьшается на 3%. При установке
крыла без уменьшения диаметра винта, а с уменьшением его окружной
скорости лстные характеристики вертолета улучшаются и на режиме
висения, и в поступательном полете; максимальная « косйссрская ско-
рости увеличиваются на 15—20 км/час, относительный запас топлива
уменьшается на 8—9%.
Как отмечалось выше, динамический потолок вертолета с крылом
уменьшается.
4. Расчет вертолета с тянущим винтом
При расчете вертолета с тянущим винтом (реактивным двигателем),
развивающим тягу Ртв, сопротивление вертолета следует уменьшить на
величину Рта. т. с. сопротивление равно — —Рт.в.
Тянущий винт потребляет мощность, определяемую но выражению
22 1002
337
Поэтому потребная мощность вертолета с тянущим винтом равна
^ro=^rBB4-.VTB = -^ (— -!-Q80 -PtbV------------------------ (4.32)
r.o МТ т.в 27О5пкк ' ^s-₽ Т-ВЛ ^0;тв1^.в ’
или
(4-33>
При расчетах по выражениям (4.32) или (4.33) нужно задаваться
величиной Рт.в или <VT в; при этом следует иметь в виду, что при устано-
вившемся горизонтальном полете сопротивление вертолета нс может
быть отрицательным, следовательно, должно удовлетворяться условие
<2. щ .£!£.. (4.34)
п • к 1 г, '
Соответственно на режиме набора высоты или снижения это усло-
вие принимает пнд
(4. 3.5)
Такой дополнительный член в формулах для А'г.п, как в выражении
(4.33), получается при установке тянущих винтов на вертолеты любой
схемы.
Определение летных данных вертолета с тянущим винтом произво-
дится в той же последовательности, что и без тянущих винтов.
Сделаем оценку, насколько может измениться потребная мощность
и максимальная скороподъемность при установке тянущего винта на
вертолет,
При Мо=О,6О и средних значениях tv на больших скоростях поле(а
(И®--0,35) к. п.д. т| несущего винта можно считать ранным 0,87
Приняв для двухвинтового вертолета |=0,91 и для тянущего винта
rirs~0,78, sra = 0,97, найдем величину, заключенную в круглые скобки
в выражении (4.33): °.05-
Если |янущий винт полнощью Преодолспает сопротивление верто-
лета, т. е.
то увеличение по^ебной мощности составляет 5%, а если оц преодоле-
вает сопротивление только наполовину, то увеличение погребной мощ-
ности составляет 2,5%. Следовательно, потери невелики.
При Мо=0.7 и F-0,35—0,4, когда т)=»0,85д-0,8, при установке тя-
нущего винта может быть выигрыш в потребной мощности на I—3%.
_ На режиме максимальной скороподъемности при Ма — 0,6~-0.7;
V — 0,2 и средних значениях tv к. п.д. можно считать равным не менее
т] = 0,87. Следовательно, если утастся получить на режиме максималь-
ной скороподъемности очень высокое значение к. и, д. тянущего винга
(Лт и = 0,78), то величина в круглых скобках в выражении (4.33j равна
- 0,05. У вертолета поперечной схемы на режиме максимальном скоро-
подъемности на создание вертикальной скорости расходуется более по-
ловины располагаемой мощности вертолета- Следовательно, при подаче
всей мощности на тянущий винт суммарная тяга вертолета уменьшится
на 5%, а избыток тяги, используемый на набор высоты, уменьшится ни
10%. Потеря скороподъемности составит около I Mfci-K.. При т]=0,9,
Лт.в —0,7 и при подаче половины располагаемой мощности на тянущие
винты потеря скороподъемности составит 20% цли приблизительно
338
2 л/сек. Общие соображения о том, когда установка тянущего винта
илн другого движителя па вертолет целесообразна или необходима,
приведены в конде § 7 гл. 2.
5. Сравнение вертолета с самолетом
При одинаковом полетном весе у вертолета и самолета примерно
выполняется соотношение: £>=£кр, что определяется конструктивной
целесообразностью размеров крыльев и несущих винтов. Сопоставление
параметров самолетов и вертолетов ((оказывает, что крыло имеет в 7—
9 раз большее удлинение и во столько же раз большую нагрузку на 1 м2
площади. Следовательно, ("Tj-) —( —) -—const. Это значит, что
\ 'к? /сам \ Л
самолет и вертолет имеют приблизительно ранное индуктивное соиро-
Рис. 3.50. Сравнение произведения качества ап-
парата на к. п, д. х-самолета н v вертолета
(4.37)
При условии ZJ = LI([) безразмерные коэффициенты самолет и вер-
толета связаны соотношением
/уз
— -(73 •
Для сравнения приняты следующие данные вертолета н самолета,
У вертолета а = 0,091; /„=0,15 ёт=0,0075 У самолета качество крыла
взято лэ материалов продувки крыла современного нескоростного
транспортного самолета. Испытывалось прямоугольное крыло, имею-
щее предкрылок и двухщелсвой закрылок. Удлинение крыла лл₽ = 9.
Коэффициент вредного сопротивления с.Тс4М самолета, отнесенный к пло-
шали крыла, принят равным 0,025 (ScTS самолета примерно в два раза
меньше, чему вертолета: —^я“ — <чеа1| °'^25 — 0,0036, а У
вертолета с, —0,0075).
Дл(( выбранных значении в табл. 3. 13 найдены сУ(.р , Ккр, Л\аи,
КсймЛт». Для jrit.x же значений сй определены V вертолета, К, р, Хв
и КаП- Так как вертолет имеет дополнительные потери мощности дви-
гателя, то вычислено произведение Kbt|s при — 0.88 для одновицтопого
вертолета с хвостовым винтом. По данным обл 3. 13 построен график
на рис. 3. 50.
339
Таблица 3. 13
Прелкрнлок Перс Прижат Вы- дви- нут
Щель Открыта От- крыта
О ГКЛОНСНИС закрылка 0 0 0 । 0 20 2 0,2.32 8,63 ",8 5,46 6,62 4» 2,4 0,417 5,77 5,44 3,8 4,62 50 0,451 5,6 5,.36 4,35 50
кУкр <^кр н Ккр |! Ксы га Лг в 0,4 0,8 1,2 1,45 0,0185 0,0439 0,087.3 1 0,11'5 2,87 0,582 4,93 4,72 3,31 4,02
21.6 18,2,5 13,7.7 9,2 11,6 10,6.5 12,35 10,2 7,15 8,67
6,44 7,82 8,12 9,86 7,45 9,05
(V. =|',7) 85)
Вертолет 1 К Л К» 4 5 0,479 0,34 9,3 0,87.5 4,43 0,277 8,2 0,915 6,03 4,85 0,252 0,93 5,77 4,72 0,214 5,9 0,965 6.1 4,33 0,196 5,12 0.97Г 4,66 4,00 0,19 4,19 0.98 4,5 3,88 0,179 1,0
Сравнение величины качества крыла и несущего винта показывает,
что и рассмотренном примере крыло без механизации имеет на всех гУв1
в 2—1,7 раза большее качество, чем несущий винт. Крыло с меха-
низацией при св— 2,0 (при гаком cf минимальная скорость полета
соответствует Vra|ll—0,214) имеет на 46в5 большее качество, а при
(с^ 2,87 (V’mlo—0.18) качество крыла только на 10 ’6 больше ка-
чества несущего винтя.
Из табл. 3. 13 и пне. 3.50 следует, что максимальная величина
•KravT|TB при т]та —0.7 в 1,75 раза больше, чем КвЛъ Во столько же раз
километровый расход топлива самолета меньше километрового расхода
вертолета (при равных удельных расходах двигателя). Скорость, соот-
ветствующая максимумам произведения качества аппарата на к. п д.,
у самолета в 1,2 раза больше (фактически самолет летают на даль-
ность при большей скорости и при качестве, меньше максимального).
При сравнении вертолета и самолета на равных скоростях полета
оказывается, что на скоростях, которые самолет может получить без
использования механизации крыла (Т^0,3—0.25). (Кт|)Сам н 1.5—2раза
больше, чем (Кц?)®- На И>0,43 у вертолета начинается срыв потока
с лопастей несущего пиита. Па малых скоростях полета, которые само-
лет получает с использованием мошной механизации, пз-за большого
профильного сопротивления крыла (Лт])еам меньше, чем (Kii*)b- Таким
образом, использовать такой самолет для продолжительных полетов па
малых скоростях, доступных для него, аэродинамически мепее целесо-
образно. чем вертолет.
.340
Из табл, 3. 13 видно, что при равном полотном весе и Р = £к₽
минимальная скорость самолета, определяемая величиной (с,,кр)шах=:
=2,87. соответствует V — 0,18, Такому V' может соответствовать малая
скорость полета только в том случае, если самолет имеет малую нагрузку
на площадь крыла. Минимальная скорость вертолета определяется рас-
полагаемой мощностью двигателя и обычно равна нулю, а при перегруз-
ке вертолета не превосходит величины, соответствующей V = 0,05
6. Мощность переднего и заднего винтов у вертолета продольной схемы
В л. 2 выведено выражение для определения качества вертолета и
суммарной потребной мощности обоих винтов. Однако задний пинт
обычно потребляет существенно большую мощность, чем передний
(в 1,5 раза и более). Выведем выражение для определения мощности,
потребляемой каждым винтом отдельно.
Сначала найдем пролульег^чые силы винтов. Они не одинаковы,
так как винты могут иметь pt-зные подъемные силы и имеют разные
углы атаки.
Согласно выражению (4. 8) соотношение между щ и uj равно
«2—а, —да„.а, + д5„.Вэ,
причем ДаВг2 определяется по выражению (4.14) с учетом (4.18),
Исходя из приближенного выражения для Х:Х=У(«—а,), найдем:
Х2аУг(аг ]-с3,,)=--р2 Г,(а: 4-^)4-
-7- №.□,)— ~г АГ,—Г,(деи.Вэ— дан.В1). (4.38)
Из условия равновесия сил, действующих по направлению движе-
ния (рис 3.4), получаем следующее равенство:
А", | А\4-Ггдаив,4-<?„—0. (4.39)
В выражении (4.39) под Qsp для вертолета г крылом и тянущим
винтом следует понимать сумму Qnp4"-^xp—УкрДнкг —
Из уравнений (4.38) и (4.39) найдем
*1 =--------------------(4-40>
i_-£l ц.2-2-
X".----------T^QapH--------ДГ” А£н.в, ^2Дп1т.еа. (4-41)
Из уравнений (4.40) и (4.41) видно, что развал винтов па угол
Депв8 перераспределяет пропульсивные силы винтов, олипя этим на
мощность, потребляемую винтами, Из-за скоса потока у заднего винта
его пропульсивная сила больше (более отрицательная) на величину
УаАан.во. При на передний и задний винты приводится не рав-
ная доля вредного сопротивления.
341
Подставляя Xi и Хз п выражение для расчета потребной мощности
ДГГП (4.42)
’ 27ОТ)Л\^1 ЭТчЦя) 6/
полхчпм
,4ЛЗ)
A'-.-27W-------------------------V *-. +7" И. 44)
2/W)2f| Л-2 । , _ 2. ° j , *2 I
Нетрудно убедиться, что если слож|Ш> выражения, заключенные
в скобки в уравнениях (4.43) и (4.44', то сумма совпадет с выраже-
нием (4.13) для случая вертолета продольной схемы. Угол развала
винтов Деп»9 и отношение-^- при = на суммарную мощность вер-
толета не влияют. При У। = Уа и Леи в3== ^йн.н2 мощности обоих винтов
одинаковы Следует, однако, отметить, что при е-т«э>0 продольная
устойчивость вертолета ухудшается.
7. Об уборке шасси на вертолетах
Известно, что вертолеты имеют примерно в два раза большое вред-
ное сопротивление, чем самолеты.
Эю объясняется специфичной формой вертолета, наличием кабана
и большой птулки у несущего винта, хвостовой балки с высоко располо-
женным рулении винтом, а также требованиями по возможности вы-
полнения ногрузочно-разгру ючных работ на режиме висения, безаэро-
дромного обслуживания. Поэтому у вертолета часто снаружи устанав-
ливаются различные грузоподъемные устройства, множество поручней,
лючков, сдвижные диери. блистеры ит, д. С другой стороны, меньшая
чем у самолета весовая отдача требует очень осторожного подхода
к мероприятиям. уменьшающая вредное сопротивление, но утяжеляю-
щим конструкцию.
Ниже приведена оценка целесообразности установки убирающегося
шасси на вертолете с точки зрения его грузоподьемности.
Уборка шасси уменьшает вредное сопротивление вертолета иа 20—
25%. Па рис. 3. 51 показан график о [Ношения при двух значениях сж:
0.0075 и на 25% меньше—0,0056. На графике отмечена неличина
ЛС» п „
——«0,/ ------------. Очевидно, что при уборке шасси крсиссрская ско-
рость вертолета увеличится с lzKp~253 км/час (Мпо.-т = 0,207) до VRD =
=269 км/час (Маол=0,22), т. е. иа 6% На эту же величину уменьшится
цотребный запас топлива при сохранении дальности полета, Если мы
сохраним крейсерскую скорость полета, то потребная мощность умень-
шится на 9% ^’=0,000555 •нмеето 0,000605). Так как удельный расход
топлива турбовинтовых двигателей сильно увеличипается при уменьше-
нии мощности двигателя, то, как показывают расчеты, изменение мощ-
ности aaei приблизительно в 1,5 раза меньшее изменение расхода топ-
лива. Следовательно, мы приходим к той же цифре: потребный запас
топлива уменьшается на 6%.
342
Теперь можно подсчитать, какое утяжеление конструкции вертоле-
та, получающееся из-за уборки шасси, компенсируется уменьшением
запаса топлива. Так, утяжеление конструкции на 1% от взлетного веса
будет скомпенсировало при запасе топлива, равном 17% от взлетного
веса, т. е. = 0,17, так как 6% от 17% составляет 1%. Утяжеление
конструкции на 1,5% будет скомпенсировано при 0,25.
Нормальный запас топлива у современных турбовинтовых вертоле-
тов составляет около 15% от взлетного веса, а максимальный 20—25%-
Очекидно, чго установка убирающегося шасси на современных вертоле-
тах целесообразна, если утяжеление конструкции не превысит 1 —1,5%
от взлетного веса. При этом, однако, при полетах е меньшим запасом
топлива максимальная грузоподъемность вертолета уменьшится.
Рис. 3 51. Отношение Nr.„fGa перголста
при дн%х этмченвях коэффициента вречного
СОПрОТИВГ.еНиЯ В ЗавПСНМОССИ ОТ Миг, д
Уменьшение запаса топлива па 5% и такое же увеличение крейсер-
ской скорости приведет к удешевлению перевозок на вертолетах, что
также должно приниматься во внимание конструктором при решении
вопроса об уборке шасси.
Следует отметать, что па самолетах, имеющих более высокое каче-
ство несущей системы, уменьшение вредного сопротивления приводит
к большему уменьшению расхода топлива^Кроме того, самолеты имеют
большие относительные запасы топлива GT, поэтому уборка шасси на
самолетах стала целесообразной при меньшей, чем в настоящее время
v вертолетов, крейсерской скорости.
§ 5. АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ ВЕРТОЛЕТА
ПО МЕТОДУ МОЩНОСТЕЙ
В аэродинамическом расчете 'вертолета по методу MOHWocieii
используется условие баланса мощностей При устзаонившемся по-
лете вертолета: мощность, подводимая к несущему винту, равна сумме
всех потерь мощности. Таким образом, определив все потери мощно-
сти—профильные, индуктивные, на преодоление вредного сопротивле-
ния яекееущих частей и составляющей or веса вертолета при Наборе
высоты,— находится мощность, которую необходимо подвести к несуще-
му винту
формулы для определения коэффициента крутящего момента не-
сущего винта, выведенные в § 3 гл. 2г выражают условие баланса мощ-
ностей. Там же даны формулы и трафики для вычисления профильных
и индуктивных потерь мощности у несущего винта.
.'143
Обычно все потери мощности для упрощения расистов опреде-
ляются приближенно, поэтому аэродинамический расчет вертолета по
методу мощностей является приближенным методом.
1. Определение потребной мощности при горизонтальном полете
вертолета
Потребная мощность вертолета равна сумме профильных и индук-
тивных потерь на несущем книге и потерь на преодоление вредного со-
противления ненесущих частей нертолета
л'г.п^л'лр [-Л'иич-ЬЛ'вр. (5.1)
Коэффициент профильных потерь мощности ;ппр определяется по
специальным графикам, либо по приближенной формуле (3.75) из гл. 2:
,,1пг—1 5У;) Р-|-дтСд. (5.2)
В размерном виде профильные потери несущею винта подсчиты-
ваются по формуле
у(5-3)
где | — коэффициент использования мощности двигателя.
Коэффициент индуктивных потерь мощности определяется по фор-
муле (3.83) из гл. 2
стинд^-- —0,285-^-. (5.4)
«hi 4ii4 ГР 4
а е размерном виде индуктивные потери несущего винта
1 — ---------—= — _5—. <5.s>
н " 75? 2 1|В" 4 ' 16-75ЛМ РДО-’ 3300 v
Индуктивные потери можно тзкже представить как произведение
силы индуктивного сопротивления несущего впита на скорость полета
или как произведение подъемной силы винта па средний угол скоса по-
тока в плоскости винта и на скорость полета
Средний угод скоса потока в плоскости винта определяется сред-
ней индуктивной скоростью винта
Очевидно, что из выражений (5 6) и (о. 8) также получается фор-
мула (5.5).
Из формулы (5.5) следует, чго индуктивные потери мощности пря-
мо пропорциональны квадрату полетною веса, отнесенного к эффектив-
ному линейному размеру BD (линейный размер, т- е. размах несущей
системы определяет объем протекающего сквозь пинг воздуха). Индук-
тивные потери обратно пропорциональны скорости полета и плотности
воздуха.
344
Следовательно, при увеличении веса вертолета без пропорциональ-
ного увеличения диаметра винта индуктивные потери увеличиваются
по квадратичной зависимости. При сохранении нагрузки на единицу
ометаемой винтом площади р—— индуктивные потери прямо пропор-
V
пиональны полетному весу и отношение "ат не изменяется. Но так как
при увеличении тоннажа вертолета р увеличивается (для уменьшения
оросительного веса несущего винга), то отношение ' у тяжелых вер-
толетов больше, чем у легких
У мяоговннтовых вертолетов индуктивные потерн мощности опре-
деляются как сумма произведений вида (3.6), витых для всех элемен-
тов несущей системы:
л,'“~7д2ъг1'л“- (5'9)
В выражении (5.9) углы скоса Ди равны сумме всех углов скоса
у каждого элемента несущей системы- угла скоса от самоиндукции,
определяемого по выражению (5 8), и углов скоса от взаимовлияния *,
выражении дли которых приведены в § I и 4.
Для примера развернем формулу (5 9) для вертолета продольной
схемы, использовав выражения (4. 14) и (4.18) для угла скоса от взаи-
моиндукции:
Да, — —;
1 2РВ^цУп
,а ____^2 . . о,
1 2PB-qV2 “ cu 2fB^V^ ‘
Подставив Ля| и Да2 в выражение для /Уинд, получим
д' =______—___ (/;-• КаЦ-2» К К Л
ика 75WB->SV5 1 1 1 - 1 со 1
Если винты не имеют превышении, к» в соответствии с графиком
Хов на рис. 3.8 Хсо—1, и
дг _______* ,r г 1*р <Г-_
а'1Л 75<2В^В ' 1 1 J' 75лВ-1£ VW '
Выражение для А'тп показывает, что при хсо—1 NVKA не зависит
от распределения веса вертолета между передним и задним винтами,
а определяется только суммой подъемных сил У|4-У.= G. Смешение не-
сущих лгемея го» вдоль направления полета не влияет на величину Л':,яд,
из-за чею выражения для VI14Z у вертолетов одновинтовой! и продольной
<хем совпадают-
Однако следует иметь в виду, что у двухвинтового вертолета про-
дольной схемы полетный вес равен тяге двух винтов и при одинаковой
нагрузке на омстаемую винтом площадь р отношение G/D в два раза
больше, чем у одновинтового вертолета. Поэтому, как уже было указано
в гл. 1, Л'иид У вертолета продольной схемы в четыре раза больше, чем
у одновинтового, а отношение —~ в два раза больше. Этим объясняет-
ся, почему у вертолета продольной схемы худщис летные, данные при
* У слагаемых, содержащих vr.?u скоса
мать Ф/5’=1
клаимов.гияннг.
можно приси
34о
горизонтальном полете и заметнее ухудшаются летные характеристики
при увеличении полетного веса.
Если то Лги-----------------------
10 ' ад 75лЯ4$ vllD2 2
У вертолета поперечной схемы вместе с увеличением полетного
веса увеличивается эффективный поперечный размер, т. е. размах сн-
стемы, что находит свое выражение в том, що г.шг<0. При Хцц-О
(винты разнесены далеко друг от друга) -Л\ил у вертолета поперечной
схемы такое же, как у одновинтового, а при Ипп<0 отношение -V|“'it-
у первого меньше.
Потери на преодоление вредного сопротивления ненесушнх частей
вертолета определ;|Ю|СЯ по формуле
или в безразмерном виде
ж,
- i/зд __ узд
75: 1200$
(5.10)
(5.12)
При расчете вертолета с крылом будем относить сопротивление
крыла к вредному сопротивлению вертолета, т. е.
2 ^5]0р+((\ф'тс!,'крДо1.Р)'5'кр- (5.13)
где —коэффициент вредного сопротивления изолированного крыла;
дакр—угол скоса потока у крыла от влияния несущих винтов,
Влияние крыла на пинты должно учитываться при определении
суммарных углов скоса потока у несущих винтов для расчета Мтщ по
выражению (5.9).
Итак, потребная мощность двигателя вертолета в соответствии
с формулами (5.1), (5.3), (5.5) и (5.10) равна
N =jV I 1 02 I у Эд 1-Г)
г.п °₽ + ззоо '12005 й- 1 • '
Если вертолет имеет движитель, то баланс, мощности выражается
в виде:
Аэродинамический расчет вертолета может выполняться в безраз-
мерном виде. При этом коэффициент потребного крутящего момента
определяется в соответствии с формулами (5 4) ц (5. 11) по выражению
mxt.n~тор + °’285 “р- ~ hг „У - (5- Iй)
В качестве безразмерной формы расчета, удобной, например, для
Сравнительных расчетов, можно определять отношение—г,°. которое
при использовании метода мощностей равно:
mK
(о. 16)
где
---г—; (5.17)
"WMi (3.18)
ЧОСНцО]
(5-19)
При заданных р= сл=^—, высоте и скорости полета величи-
на произведений fysM2 я /х „аМ?, не. меняется при изменении пира-
метров винта <о/? и о. Следовательно, при изучении влияния параметров
винта на величину потребной мощности вертолета формулы (5.16) и
(5.18) обращаются в зависимости вида
-ln=const,mk. аМ?-
Ga 1 Кг-“ °’
т^.ааМй~= Cynsti -Г^ор^о.
В качестве примера аэродинамического расчета цо методу мощно-
стей определим потребную мощность вертолета Ми-4. Данные верто-
лета приведены -в § 3, Расчет выполнен по формуле (5.14) п табл. 3. 14
Профильные потери для простоты находились по графикам па
рис. 2. 63—2. 66 с использованием формулы (6.10) из гл. 2 для пересчета
ix; разницей в профилях лопасти при Мо~(1,6 можно пренебречь
Таблица 3.14
(7=7200 кге; а =0,063; «/?.-= 195 Mlceit; 5 = D.84;
Г = 346 з<2; МовОД ^-0,138—-; Л'пр = 163-103 «„pi;
,Vep_ юю улй;
-VB111 = 9000 ;
ц = щур м; 1у =0,152; Д = 0,907
1' 0,1.1 0,20 0,25 0,30
км/час 106 141 176 212
м/сек 29,4 39,2 49 58,8
а4 4,3 2,75 0 —3
Сл 0,(Х)88 0,0089 0,0092 0,0096
3 04 3,08 ,3,18 .3,32
Ж г ,с —0,00314 • О,С0505 -0,00915 —0,0137
’=о.ол: 0,0016 —0,00135 —0,0063 —0,0117
fft„p 0,00280 0,00306 0,0034 0,0037
Л оу 420 4оЛ 500 .*4б
Л’ин. 338 253 203 168
Кв? 70 165 340 611)
А’г.Ц 828 868 1Ю 1323
2. Определение летных данных вертолета
По формулам, приведенным в п. 1, находится зависимость потреб-
ной мощности от скорости полета. Затем определяются максимальная
н минимальная скорости, максимальные дальность и продолжительность
полета, крейсерская н экономическая скорости но методике, описан-
ной в § 3.
При наборе высоты пропульсивная сила несущего винта увеличи-
вается на величину, равную проекции веса вертолета на направление
движения GsinOjp. Следовательно, мощность двигателя вертолета уве-
личивается на величину
(5.20)
и суммарная мощность двигателя равна
.V -Л'„, - Л-„„ - ( ,V„ + Л',1а(. (.3.21)
A’uafi представляет собой изменение потенциальной энергии верто-
лета при изменении им высоты полета,
Составляющие Упр, NIUI4 и .VFp при наборе высоты и при горизон-
тальном полете немного отличаются по величине. Однако для прибли-
женных расчетов этим можно пренебречь, и при таком допущении фор-
мулу (5.21) мо/КНО представить в виде
Л’_.Ч..--.Ч,„-Л'.-^О2,. (5.2?)
Очевидно, что максимальная вертикальная скорость вертолета
V, (3.23)
члиа q '
Несовпадение формул (5.23) и (4,24) объясняется допущением
о равенстве Л'щщ и при горизонтальном полете и при наборе высо-
ты. Болес правильный результат дает формула (4.24). На высотах
полета, где коэффициент подъемной омы несущего винта меньше мак-
симально допустимого по срыву потока значения, можно принять в со-
ответствии с графиками на рис. 2. 156 п 2. 16” среднюю величину про-
пульсивного к. п д. равной 0,95 и определять V’ira„no формуле:
J.... Q
На больших высотах полета на режиме набора высоты, где tu~tyKf,
Vym„ следует определять но формуле (4.24).
3. Соотношение между Лщ,, и Nxp
при горизонтальном полете одновинтового вертолета
Представляет интерес рассмотреть, каково соотношение между
отдельными составляющими потребной мощности вертолета. Так как
параметры вертолета, определяющие Лдр, У^ и У1р, зависят от полет-
ного веса вертолета, приведем данные для вертолетов разных весовых
категорий.
Вертолеты разных весовых категорий имеют наибольшую весовую
отдачу при разной нагрузке на 1 м2 сметаемой плошади р и соответст-
венно имеют раэпые окружные скорости и коэффициент заполнения, так
как ограниченный по величине срывом потока коэффициент подъемной
силы tv должен находиться в пределах 0,23—0,27 на динамическом по-
толке и 0,13—0,17 у земли. Примем, что характерными параметрами для
3-18
ле: кого вертолета с полетным весом до G = 3000 кгс являются: Мо=0,55,
о = 0,05; для среднего G=7000—14 000 кгс — Мо = О,6, о^0,07; для тя-
желого — Мо-=О,65—0,7, 0 = 0,09.
Величина ScxS вертолета, отнесенная к полетному весу, при увели-
чении веса уменьшается благодаря относительному уменьшению габа-
ритов вертолета (так называемый «масштабный эффеы»), Однако
Рве. 3.52. Величина Nrn/G и соотношение между составляю-
щими потребной MniniiocTH у вертолетов разных всссвых кате
с ростом G у вертолета увеличивается р, и коэффициент вредного сопро-
тивления. отнесенный к площади винта, ст — р, для вертолетов раз-
ных весовых кахеюрий изменяется мяло. Примем его равным 0.0085
для легкого и среднего вертолетов и 0,0075 для тяжелого вертолета
Для расчетов при У=#0 воспользуемся формулами (5.4), (5 11),
(5.12) и 15. 16). Коэффициент г«пр находится из графиков на рис. 2, 63—
2.70 в зависимости от кочффицценгов и tr. При V=0 использованы
выражение {8.27) и |рафик на рис. 2 174
Результаты расчета показаны на рис 3.52. Из-за возрастания р,
о, Мо у тяжелых вертолетов величина на режиме нпсепля намного
больше, чем у легких.
349
При поступательном колете выражение (5. 16) может быть напи-
сано в виде
V </ / ГПс Мо п Т vS 1 1 \
ТГ=^|'-Х - . (5.^)
, Л^иол у
По этому выражению можно определить, что на больших скоростях
полета, несмотря на возрастание р и Мц, у тяжелых вертолетов всличи-
А'гп -С,$
на — меньше, чем у легких, из-за уменьшения отношения—т—
Если располагаемая мощность вертолетов равна потребной на ре-
жиме висения, то средняя величина максимальных скоростей вертолетов-
разных весовых категорий равна 210 км/час- (Мдил-0,17), 260 ки/час
(МПо.1=0,21), 310 км/час (МПОл=0,2о).
Из графика видно, что профильные потери мощности в процент-
ном отношении к мошности горизонтального полета составляют 22—27%
при V =0, 50% на средних скоростях полета и на l'mir — '15% у легких
и средних вертолетов, а у тяжелых 55% и более Напомним, что гра-
фики mnp на рис 2.63 2.70 относятся к винту со средним качеством
изготовления лопастей, и схр профиля увеличивался на Acv;>=0.002.
Индуктивные потери мощности составляют 73—78% па режиме ви-
сения, 40% на средних скоростях полета и уменьшаются до 13% на
максимальной скорости.
Потери па вредное сопротивление составляют 15—10% на средних
скоростях полета и 40—.35% на максимальной скорости.
Таким образом оказалось, что хотя вертолеты разных весовых ка-
тегорий имеют разный диапазон скоростей, разные нагрузки на 1 .«7
ометаемой площади, окружную скорость и относительное вредное со-
противление, потери мощности в долях от потребной мощности у них
распределяются на соответственных скоростях практически одинаконо.
Данные, приведенные выше, позволяют ориситиропочно оценить,
насколько изменится потребная мощность вертолета при внесении тех
или иных изменений в конструкцию вертолета. Например, при улучше-
нии отделки лопасти ее профильное сопротивление может уменьшиться
па 20%, следовательно, потребная мощность вертолета уменьшится на
средних и больших скоростях полета на 10%. На режиме висения по-
требная мощность уменьшится на 5%, что также очень существенно,
так как при этом на такую же величину увеличивается относительный
2
к. п. д винта, а максимальная тяга винта увеличится на — • 5 = 3,3%
(коэффициент — получается в соответствии с формулой (8.34) гл.
При изменении формы лопасти можно в пределах нескольких про-
центов изменить индуктивные потери винта. Очевидно, что это сущест-
венно скажется на максимальной тяге винта на режиме висения и прак-
тически не изменит потребную мощность на больших скоростях полета.
Изменение формы лопасти при больших Мо значительно изменяет также
профильные потери винта (см. § 3 гл. 2).
Уменьшение нредного сопротивления вертолета на 25% приводит
к уменьшению потребной мощности ка 3% на средних скоростях полета
и примерно на 10% вблизи максимальной скорости; это дает увеличение
максимальной скорости на 15—20 км/час.
ФЛАТТЕР НЕСУЩЕГО ВИНТА
Явление флаттера несущего винта постоянно сопутствует развитию
псртолетостроелия. Известно очень много случаен возникновения флат-
тера на опытных вертолетах, во время их первого опробования па зем-
ле или в процессе летных испытаний. Наблюдались случаи появления
флаттера и при массовой эксплуатации вертолетов, уже прошедших все
этапы испытаний. Причиной ряда тяжелых летных происшествий явился
флаттер несущего винта.
Наибольшее число случаев фланера наблюдалось в то время,
когда это явление еше не было достаточно изучено н его исследованию
не уделялось необходимого внимания. К настоящему времени флаттер
изучен достаточно подробно, и есть все возможности для полного ис-
ключения случаев его появленн t. Однако конструктор вертолета вынуж-
ден непрерывно следить за сохранением параметров несуще^ винта
н выдерживать кх в пределах, обеспечивающих необходимый запас до
наступления флаттера. А эти параме!ры непрерывно изменяются вместе
со всевозможными конструктивными и технологическими изменениями,
вносимыми как и процессе проектирования и заводских испытаний вер-
толета, так и при его серийном производстве. Их изменение продолжает-
ся и в процессе эксплуатации вертолета. Это происходит вследствие
различных причин. Наиболее распространенным случаем является
ухудшение центровки отдельных лопасгей как из-за проникновения
влаги внутрь конструкции лопасти, так и в результате ее утяжеления
при ремонте.
Опыт показывает, что стоит только несколько ослабить внимание
к контролю параметров несущего винта, как явление флаттера немед-
ленно дает о себе знать. Такое положение объясняется прежде всего
том, что конструктор стремится до минимума уменьшить запас до на-
ступления флаттера, так как затраты, выраженные в увеличении веса
конструкции несущего винта, как правило, пропорциональны величине
этого запаса. Его увеличение требует соответствующего увеличения веса
лопасти или веса конструктивных элементов системы управления
винтом
В результате при наиболее экономичном проектировании верголета
его параметры сохраняются на уровне, отстояшем от границ флаттера
на минимально необходимую величину. Их небольшое изменение, вы-
званное какой-либо непредвиденной причиной, может привести к появ-
лению флаттера. Параметры лопасти сохраняются все время рядом
с границей флаттера.
Это обстоятельство привело к необходимости принятия надежных
мер сохранения флаттсрцых характеристик несущего винта п пределах,
обеспечивающих определенные запасы до наступления флаттера, кото-
рые, как правило, строго нормируются Эти меры должны действовать
как в процессе производства, так и при эксплуатации вертолета. В до-
полнение к ним в качестве завершающей контрольной операции каж-
дый вертолет подвергается специальным наземным испытаниям для
проверки на флаттер. Опыт массовой эксплуатации вертолетов под-
твердил надежность такой системы контроля. Можно считать, что в на-
стоящее время созданы условия, исключающие возможность лстных
происшествий из-за флаттера. И действительно случаи непредвиденного
возникновения флаттера почти полностью прекратились.
Достижению нынешнего благополучного состояния с флаттером
предшествовало очень много важных теоретических и эксперименталь-
ных и сел ел о в а ни и
Большой вклад в разработку теории флаттера внесли П. М Риз,
Л. Н. Гродно, П Л Ильичев, М.С Галкин, А. И. Пожалостип, Ф. Л.Зар-
жевская. М. Э. Липская, В. М. Ичеткин н многие друтие инженеры
Известны также многие работы зарубежных авторов (см. работы
[39] д[42]).
Очень пажные для развития теории результаты получены при лет-
ных исследованиях флаттера, поставленных С. Б. Бреном и А А. Доку-
чаевым и выполненных летчиком В. В. Бипицким
Целый ряд очень полезных результатов получен Л С. Поповым,
Б. А. Кирштейном, Н. В. Лебедевым, Б. Б. Мартыновым и при испыта-
ниях динамически подобных моделей.
Все эти работы привели к созданию достаточно ясных и четких
представлений о явлении флаттера, позволяющих создавать новые ло-
пасти сразу с необходимым запасом по параметрам без дополнительных
переделок после испытаний, как эго часто было раньше. Но для этого
необходимо в процессе проектирования лопасти выполнить целый ком-
плекс достаточно трудоемких расчетов. Изложению методики этих рас-
четов главным образом и будет посвящена эта глава.
При написании эюй главы значительную помощь автору оказала
Ф. Л. Заржсвская. за чю автор приносит ей большую благодарность
§ 1. ОСНОВНЫЕ ДОПУЩЕНИЯ И ОСОБЕННОСТИ ПОДХОДА
К РАСЧЕТУ ФЛАТТЕРА
1. Нзгибно-крутнльныс колебания лопасти.
Возможные случаи потерн устойчивости
Теории фланера несущего винта строится на основе рассмотрения
изгибно-крутильных колебаний лопастей при их вращении в воздушной
среде.
При решении задачи об изгибно-крутильных колебаниях лопастей
в поздухс конструктора интересует прежде всего два качественно раз-
личных вопроса. Первый из них сводится к опретслснпю установивших-
ся изгибно-крутильных колебаний лопает, имеющих место на всех
режимах полета вертолета. Эта задача требует создания специальных
методов расчета, являющихся дальнейшим развитием методов расчета
вынужденных колебаний лопасти, и должна, в частости, ответить на во-
прос о влиянии крутильных деформаций лопасти на ее л л ибные колеба-
ния п соответственно Hd пеличину переменных напряжений от изгиба то-
пает Втопой вопрос связан с определением устойчивости движения
лопасти. Обычно чисго и «гиблые колебания лопастей устойчивы. Потеря
их устойчивости может наблюдаться только на срывных режимах
При рассмотрении изгибно-кру।ильных колебаний оказывается, что
при определенных параметрах несущего винта наблюдается потеря устой-
чинос ги движения лопастей, ирннаднщ.чя к явлениям флаттера или ди-
вергенции. флаттером называется явление, при котором лопасти йены-
352
тывают колебательную неустойчивость, а дивергенцией — явление
апериодической неустойчивости движения лопасти, Наиболее распро-
страненным из этих двух явлений на практике оказывается флаттер не-
сущего винта. Поэтому при рассмотрении изгибно-крутильных колеба-
ний лопасти конструктора больше всего интересуют условия возникно-
вения флаттера.
2. О влиянии заделки лопасти на втулке и возможности
теоретического исследования флаттера одной изолированной лопасти
Результаты расчета флаттера в большой степени зависят от кон-
структивной схемы несущего винта и прежде всего от условий заделки
лопасти в комле, т. е. от конструкции втулки и системы управления вин-
том Особенности заделки лопасти влияют на граничные условия зада-
чи, а следовательно, и на расчетные формулы для определения пара-
метрон флаттера.
Ниже при изложении методики расчета флаттера будет рассматри-
ваться наиболее распространенный тип несущего пища с индивидуаль-
ным шарнирным креплением каждой лопасти ко втулке, с системой
управления через авюмат перекоса. Для винтов с жесткой и карданной
заделкой лопасти на втулке или с другим типом управления подход
к расчету флаттера останется гаким жв. Однако условия, при которых
возникает флаттер, могут очень сильно измениться.
Большое влияние на флаттер оказывает конструкция системы
управления углом установки лопасти и прежде всего конструкция ав-
томата перекоса. Автомат перекоса связывает между собой колебания
различных лопастей несущего винта. Поэтому, когда эта связь оказы-
вается достаточно сильной, а это, как правило, имеет место на реаль-
ных вертолетах, нельзя исследовать флаттер одной изолированной ло-
пасти. Приходится рассматривать флаттер всею несущего винта
в целом.
Во всех случаях на практике наблюдается только флаттер всего
винта в целом, когда каждая следующая лопасть несущего винта с ка-
ким-то запаздыванием повторяет движение предыдущей. Флаттер одной
лопасти никогда не отмечался.
Однако во многих случаях исследование флаттера несущего вннта
в целом может быть сведено к расчету колебаний одной изолированной
лопасти. Поэтому расчет флаттера изолированной лопасти очень часто
дает достаточно исчерпывающий отпет и часто на практике этим резуль-
татом можно н ограничиться. Но при этом очень важно правильно за-
дать жесткость управления изолированной лопасти. Этот вопрос будет
более подробно рассмотрев в § 4.
3. Различные типы флаттера, отличающиеся по формам колебаний
лопасти. Маховый и изгибный флаттер
Вопрос об определении условий возникновения флаттера решается
обычно при помощи дифференциальных уравнений изгибно-крутльных
колебаний лопасти (см. § 6). Эти уравнения позволяют получить пара-
метры различных типов флаттера, отличающихся формами колебаний
лопасти. Критические числа оборотов н другие параметры флаттера,
получаемые из решения этих уравнений, оказываются весьма сложными
функциями от исходных параметров несущего винта. Поэтому анализ
этих зависимостей удобно начать с наиболее простою частного случая.
Дело в том, что наиболее распространенным на практике является
флаттер, при котором колебания лопасти в плоскости взмаха происходят
в основном с формой нулевого тона собственных колебаний лопастн.
Деформации изгиба лопасти при этом носят лишь характер примеси
23 1002
ЗрЗ
в форме колебаний и не определяют собой явление. Поэтому в этом
случае все интересующие конструктора зависимости могут быть полу-
чены из рассмотрения модели несущего винта с абсолютно жесткими па
изгиб лопастями, совершающими маховые колебания вокруг горизон-
тальных шарниров. Тахой тип флаттера в дальнейшем будет называть-
ся маховым флаттером в отличие от изгибного флаттера, характеристики
которого не могут быть определены без учета нагибных деформаций
лопасти.
4. Особенность формы крутильных гамебникЯ лсигаеги
и возможные в связи с этим допущения
Соотношение между жесткостью на кручение лопасти и системы
управления несущим винтом у большинства современных вертолетов
таково, что при крут ильных колебаниях лопасть поворачивается в основ-
ном вследствие деформаций системы управления (рис. 4. 1) При этом
па кручение (кривые агносятсв к трем pdличным верто-
летам}
углы установки <р элементов лопасти по ес длине, особенно на наиболее
эффективном участке от г=0,5 до конца лопасти, изменяются настоль-
ко незначительно, что с достаточной степенью точности при расчетах
флаттера можно положить
<p=const, (1, 1)
Принятие такого закона распределения углов ip равносильно допу-
щению, полагающему, что лопасть абсолютно жестка на кручение и со-
вершает крутильные колебания только вследствие деформаций системы
управления. Чтобы это допущение привело к возможно меньшей по-
грешности, в расчет сводят обычно эквивалентное значение шарнирной
жесткости управления, учитывающее и упругость самой лопасти.
Расчеты, проделанные для обоснования этого допущения, показы-
вают. что оно может быть с успехам применено для всех несущих вин-
тов, у которых значения угла а<0,4-?'0,5 (см. рис. 4. 1), что, вероятно,
охватывает почти все существующие вертолеты.
Следует также отметить, что описанный характер соотношения меж-
ду жесткостью лопасти и ее заделки па кручение приводит к тому, что
ось, вокруг которой поворачиваются элементы лопасти при крутильных
колебаниях, приближается к оси осевого шарнира. В связи с этим по-
ложение оси жесткости лопасти в рассматриваемом сечении геряег свое
значение. Это обстоятельство позволяет приближенно полагать, что при
крутильных колебаниях элементы лспасти поворачиваются -вокруг осе-
вого шарнира.
354
5. Допущения в отношении колебаний лопасти в плоскости вращения
Между колебаниями лопасти в плоскости взмаха и в плоскости
вращения имеется определенная связь. Эта связь вызвана двумя типами
сил, Наиболее сильной является связь, создаваемая силами Кориолиса
Более слабой оказывается связь через аэродинамические силы.
Рассмотрим силы, связывающие колебания в плоскости взмаха и в
плоскости вращения, более подробно.
При колебаниях в плоскости взмаха
возникают силы Кориолиса, действую-
щие в плоскости вращения,
С'к —
(1 2)
где у—скорость перемещения элементов
допасги в плоскости взмаха
(рис. 4.2);
у' — угол наклона оси лопасти при
отклонении лопасти от плоско-
сти вращения;
т. — масса элемента лопасти
При колебаниях лопасти в плоско-
сти вращения возникают переменные
силы Кориолиса, действующие в направ-
лении. близком к направлению центро-
бежных сил. Эти силы растягивают ло-
пасть и поэтому должны учитываться
в дифференциальных уравнениях колеба-
ний допасти наряду с центробежными
вуюшие н,< колеблющуюся лопасть
силами.
Кориолисовы силы, действующие в направлении оси лопасти, могул
быть определены по формуле
Л'к~—2<дхт,
(’.3)
где х — скорость перемещении элементов лопасти при колебаниях ло-
пасти в плоскости вращения (рис. 4.2).
Силы Кориолиса, определяемые выражениями (1.2) и (1.3), свя-
зывают колебания лопастей в плоскости взмаха и плоскости вращения.
Аналогичную связь создают и аэродинамические силы.
Ясли в плоскости нзмаха на лопасть действуют переменные аэро-
динамические силы, связанные с изменением значения су, то составляю-
щая этих сил
С = Ф7' ([.4)
будет вызывать колебания лопасти в плоскости вращения (плодящее
в формулу (1.4) значение Ф определяет угол притекания потока).
При колебаниях лопасти в плоскости вращения вследствие измене-
ния относительной скорости U будут изменяться и аэродинамические
силы, действующие в плоскости взмаха.
Таким образом, наличие описанных связей требует, чтобы при рас-
чете флаттера учитывались также и колебания лопасти в плоскости
вращения. Однако расчеты и эксперименты показывают. Что колебания
лопасти в плоскости вращения несущественно сказываются на крити-
ческих числах оборосоп флаттера. Поэтому при всех расчетах флаттера
катебания лопасти в плоскости вращения учитываться ио будут. Сле-
дует обратить внимание также на то. что при отсутствии тяги па лопа-
сти, когда угод притекания потока Ф равен нулю (такое положение
возможно у неяакручеиной плоской лопасти) и лопасть не отклонена
23*
355
от плоскости вращения и, следовательно, у'=0, члени связи, определяе-
мые формулами (1.2) и (1-4), пропадают. Таким образом, в этом
случае связь между колебаниями п указанных плоскостям отсутствует.
6. Определение аэродинамических сил, действующих
па колеблющийся профиль
Возникновение расходящихся колебаний при флаттере вызывается
аэродинамическими силами, действующими на профиль лопасти. По-
этому очень важно, на какой основе определяются эти аэродинамические
силы.
При выполнении практических расчетов флаттера широкое распро-
странение имеет метод определения аэродинамических сил, основанный
на «гипотезе стационарности». По этой гипотезе предполагается, что
при колебаниях профиля на него действуют такие же нагрузки, как
если бы возникшая в рассматриваемый момент времени картна об-
текания оставалась бы неизменной но времени. Применение «гипотезы
стационарности» для расчета флаттера несущего винта вертолета дает
вполне удовлетворительные результаты, которые хорошо согласуются
с экспериментом. Поэтому в дальнейшем все изложение будет нестись
ha основе результатов, полученных с использованием «гипотезы стаци-
онарности». Уточнения, которые могут быть сделаны при учете песта-
ционарности обтекания, здесь рассматриваться це будут.
Применение «гипотезы стационарности» приводит к следующим
общеизвестным формулам (см. например [29], [32] и [331) для определе-
ния аэродинамических нагрузок, действующих на колеблющийся про-
филь единичной длины;
(1.5)
где Т — hoi окнам аэродинамическая сила, действующая на колеблю-
щийся профиль в направлении, перпендикулярном к относи-
тельной скорости обтекания (/:
да а9р — погонный крутящий момент аэродинамических сил, действую-
щий относительно оси, проходящей на расстоянии Хп от перед-
ней кромки профиля,
ф —угол установки профиля лопасти в рассматриваемом сечении;
(/ — скорость перемещения элементов лопасти в плоскости взмаха;
Хо — расстояние от передней кромки профиля .до оси жесткости, т. е.
до той точки, относительно которой поворачиваются элементы
лопасти при приложении к ней крутящего момента;
Оф — расстояние от фокуса профиля до оси жесткости лопасти; в не-
которых формулах ниже [см. (2.13) и (5.2)] будет также
использовано обозначение oj,= _Оф .
Формулы (1.5) получены для плоско-параллельного потока. Поэто-
му их использование для определения нагрузок на лопасть вертолета
является приближенным и в этом смысле, так как обтекание лопасти
довольно сильно отличается от плоско-параллельного.
356
Применительно к лопасти вертолета формулы (1.5) удобно нс
сколько преобразовать, введя некоторые дополнительные упрощения и
уточнения. Относительная скорость обтекания профиля if может быть
приближенно положена равной ее составляющей, параллельной плоско-
сти вращения несущего винта Ux. Следует учесть также, что другая со-
ставляющая этой скорости If, направленная перпендикулярно скорости
1)х, отличается От у на величину скорости потока воздуха, протекающего
через несущий пинт, Поэтому для лопасти вертолета эти формулы при-
меняются обычно в следующем виде:
(1.6)
Последний член в первом уравнении выражений (1.5) и (1.6), как
правило, слабо влияет на результаты расчетов. Поэтому без сущесгнев-
пых погрешностей им можно пренебречь.
При расчете флаттера в условиях осевого отекания несущего вин-
та на режиме висения или при работе винта в наземных условиях
аэродинамические нагрузки мо-
гут определяться на основе ли-
нейной зависимости аэродина-
мических коэффициентов от
угла атаки. Это допущение
также заложено в формулах
(1.5) и (1.6). Однако в усло-
виях поступательного полета,
особенно на режимах, близких
к срывным, это предположение
становится весьма неточным.
Поэтому ниже в § 7 будет рас-
смотрен метол, позволяющий
Отказаться 1>т этого предполо-
жения. Уючиенные формулы
дл5| расчета аэродинамических
нагрузок в этом случае будут
приведены в том же параграфе.
Рис, 4 3. Зависимость положения фокуса
от числа М для н,ик(»и.|я NACA 230
Очень сильное влияние на аэродинамические характеристики про-
филя оказывает, как известно, число М. Для расчета флаттера не-
сущего винта вертолета особенно важно, что число М оказывает очень
существенное влияние На положение фокуса профиля, которое, как
будет ниже показано, очень сильно сказывается на критических числах
оборотов фланера. Поэтому п расчетах для каждого радиуса допасти
следует принимать то положение фокуса, которое соответствует мест-
ному значению числа М на этом радиусе, На рис. 4.3 приведена при-
мерная зависимости положения фокуса от числа М для профиля
NACA 230
При расчете флаттера в поступательном полете следует учитывать,
что местное число М изменяется по азимуту несущего пинта. Это в свою
очередь приводит к колебаниям иоложеняя фокуса профиля в продол-
жение каждого оборота лопасти. В приближенных расчетах эгнм обстоя-
тельством можно пренебречь.
При использовании метода расчета, изложенного в § 7, колебания
фокуса по азимуту могут быть без труда учтены, что япляется одним
из важных преимуществ этого метода
357
§ 2. МАХОВЫЙ ФЛАТТЕР ИЗОЛИРОВАННОЙ ЛОПАСТИ
НА РЕЖИМЕ ОСЕВОГО ОБТЕКАНИЯ НЕСУЩЕГО ВИНТА
1. Модель лопасти
Параметры махового флаттера достаточно надежно могут быть
определены ил расчета, основанного на следующих допущениях:
1. Лопасть абсолютно жестка на изгиб и колеблется в плоскости
взмаха, как твердое тело, вследствие поворота вокруг горизонтального
шарнира.
2. Лопасть абсолютно жестка и на кручение и совершает крутиль-
ные колебания, поворачиваясь, как твердое тело, вокруг осевого шар-
нира втулки вследствие деформации системы управления, наличия
автомата перекоса и компенсатора взмаха.
Эти допущения приводят к возможности расчета модели лопасти
с двумя степенями свободы, определяемыми переменными р и ф
(рис. 4.4). Такая модель обычно называется полужссткой.
2. Вывод дифференциальных уравнении флаттера
В этом параграфе дается вывод дифференциальных уравнений
флаттера для модели одной изолированной лопасти. Ниже в § 4 будет
показано, что во многих случаях теоретическое исследование флаттера
несущего нинта в целом может быть сведено к рассмотрению флаттера
одной изолированной лопасти. Поэтому целесообразно вначале оцепить
влияние различных факторов на флаттер изолированной лопасти, а в
дальнейшем в § 4 определить только, каким образом и в каких случаях
эти результаты можно распространить на несущий винт в целом.
Составим дифференциальные уравнения крутильно-маховых коле-
баний изолированной лопасти. Эти уравнения могут быть получены из
условия равенства нулю суммы моментов всех сил, действующих иа
лопасть при ее колебаниях относительно горизонтального и осевого
шарниров втулки. Как обычно, буде.м рассматривать малые колебания,
когда члены второго порядка относительно малых перемещений лопа-
сти можно отбросить.
Чтобы излишне не усложнять уравнения, положим, что расстояние
от оси вращения до горизонтального шарнира равно нулю (го = О).
Тогда условие равновесия моментов всех сил относительно горизонталь-
ного шарнира может быть записано так:
я R R
j т (гЗ— за) rdr-\-«? J rdr Тrdr, (2.1)
358
где р—угол поворота лопасти относительно горизонтального шарнира:
<р — угол поворота лопасти относительно осеного шарнира;
т -поюнная масса элемента лопасги;
о - расстояние от оси осевого шарнира до центра тяжести элемента
лопасти;
Г—погонная аэродинамическая нагрузка, определяемая по урав-
нению (1.6).
Входящие в левую часть уравнения (2.1) интегралы могут быть вы-
ражены через моменты инерции лопасти относительно горизонтального
шарнира Дш и центробежный момент инерции лопасти Др:
^<ir, |
,, ! (2-2>
Ч..-J тг=лг-
Если ввести эти обозначения в уравнение (2. 1) и отнести все члены
зюго уравнения к /г.ш, то оно может быть переписано в виде
8 о>!р—тrdr. (2.3)
Для режима осевого обтекания несущего винта входящие в урав-
нение (1.6) скорости можно положить равными
где >. — относительная скорость протекания потока через несущий винт.
Подставив выражения (2.4) в уравнения (1.(5), а затем (1-6)
я 12. 3), получим
ё— zZna>|4 —— 1 — и-у0 J t>).?drt (-<>)
о
здесь уо- массовая характеристика жесткой допасти [см. формулы
(2.14)].
Значения коэффициентов Ь#, с,г, dIt и будут даны ниже [см.
формулы (2. 14)].
Момент внешних сил, относительно осевого шарнира, нагружающий
систему управления утлом установки лопасти, может быть записан так.
-'М^р= -(? НМ/о-и-Н?-*’?)^.а-^тР-
R R
4 “-2 J /„А?, еОм^г + J №„вг/г. (2.6)
« о
где момент инерции лопасти относительно осевого шарнира;
7т — погонный момент инерции лопасти относительно той
же оси;
®?аэр— лоюнный момент аэродинамических сил относительно осе-
вого шарнира; этот момент определяется по формхлам
(1-6);
.'ИТ[1—момент от сил тревия в осевом шарнире втулки.
359
Момент, действующий на систему управления, ЛГущ,, может быть
выражен через жесткость и деформации системы управления-
М-уцр=с-упру, (2.7)
где у — угол поворота лопасти относительно осевого шарнира вследст-
вие деформаций системы управления;
Cjnp — жесткость системы управления.
Для тою чтобы значение у выразгнь через угол устанопкн сечений
лопасти, положим
У=0- I У. (2.8)
где 0 угол установки сечений лопасти, задаваемый системой управ-
ления;
и — компенсатор взмаха
Угол 6 определяется из выражения
— 5У— 6, sin-ф — 62cos’l>, (2.9)
где 6о — угол установки лопасти в комле при ₽=0:
IJ1H02 — утлы циклического управления автоматом переноса
Из формулы (2.8) следует, что
у = с. (2.10)
Подставив у в формулу (2.7), а затем (2.7) в (2 6) и отнеся все
члены уравнения (2.6) к моменту инерции лопасти огносительно осе-
ного шарнира !а пт, получим
?+(Ap-|-U)S)?-r^1(i'T-U)2c) -НЛ’-1 7оГ1> —
й к
! '‘if 11)
О U
Здесь р№ — частота собственных колебаний на кручение абсолютно
жесткой лопасти на податливом управлении;
|Л1')
Подставив в уравнение (2. ]1) значение 2J?asp из (1.6) и взяв по-
лученное таким образом уравнение совместно с (2 5), получим систему
дифференциальных уравнений иэгибно-крутильных колебаний жесткой
лопасти:
+ + 1 ftPy?=e:3Yo J b&dr,
[ ^/4-
о
ff ~
- ,JJ- --vQ j Ь^фгйг.
360
Входящие в уравнения (2. 13) коэффициенты можно определить по
следующим формулам:
(2.14)
Коэффициенты (2. 14), входящие и дифференциальные уравнения,
полностью определяют поведение лопасти при колебаниях. В отношении
этих коэффициентов следует сделать некоторые замечания.
Коэффициент демпфирования маховых колебаний лопасти d,i опре-
деляется только аэродинамическими силами, так как момент енл тре-
ния в горизонтальном шарнире относительно невелик. В коэффициент
демпфирования крутильных колебаний лопает d22, кроме аэродинами-
ческого демпфирования, входит весьма существенная добавка за счет
трения в осевом шарнире. Более подробно о влиянии трения в осевом
шарнире будет сказано в § 3 этой главы.
Входящий в ураппсиня коэффициент dl2 мал и несущественен для
окончательных результатов расчета. Поэтому в практических расчетах
им можно пренебречь.
36J
Если отношение моментов инерции in=-^, то можно пренеб-
речь также коэффициентом с12. При этом система уравнений (2.13) еще
более упросппся.
Важно отметить, что влияние расположения центров тяжести эле-
ментов лопасти будет проявляться в расчете только при изменении ко-
эффициента
c2i _ —~—j mrsdr. (2.15)
3. Частное решение дифференциальных уравнений
Нетрудно убедиться, что выражения
Р‘=а,, —<7, со$'.Ь —bin ф,
ф*___90 —cos •]> —<=, sin '{j
являются частным решением системы дифференциальных уравнений
(2. 13) и определяют невозмущеццое движение лопасти. Причем, если
тарелка автомата перекоса установлена в нейтральное положение
и §f=r?2— о то частным решением тех же уравнений являются выра-
жения
?‘=М (2.17)
9 —<го- I
4. Дифференциальные уравнения возмущенного движения
Подставим в уравнения (2.13)
где ри и <рв — углы отклонения лопасти от положения, соответствующего
сс иевозмущенному движению.
Тогда, имея в виду, что р* и <р * являются частным решением урав-
нений (2. 13). получим систему дифференциальных уравнений возму-
щенного движения лопаете:
?+^22й>2?4-(Ркр+^2ш2)'г+^1н l-da«a + (x^p+r2lw'J)B— о.
(2. 19)
В этих уравнениях индекс при переменных р и <р, означающий, что
эти переменные относятся только к возмущенному движению, для про-
стоты опущен.
5. Запись дифференциальных уравнений в матричной форме
Дифференциальные уравнении (2.19) удобно записать в матрич-
ной форме в следующем виде:
СХ 4-Ш2Д)Л=0.
Здесь С—матрица инерции'
(2.20)
362
.D—матрица демпфирования:
\<У21 d2„ /
.А ма;рица жесткостей;
л-Г U
К />«?/
В — матрица центробежных и аэродинамических сил:
в Д' м.
\^21 ^22 /
где in —С21.
Х~ вектор функция:
6. Решение дифференциальных уравнений колебаний лопасти
Положив в системе уравнений (2.19)
P = SU^; )
9-?о^‘, J
получим характеристическое уравнение следующего сида:
X4-] 4t®X34-(B^-j-S2)!2-, — Пуо2—0.
Здесь для упрощения выкладок значения Л ц ы отнесены к
собственных крутильных колебаний лопасти ркр, т. е.
/’кр
Лр
Коэффициенты, входящие в характеристическое уравнение
имеют следующий вид:
(2.21)
(2.22)
тастоте
(2.23)
(2 22),
(2.24)
С. —----- , 1^2^ Т- ^11^22— — C22i/jn),
1—ioc2i
Cl-----------j-(^П
1 —ZOC2I
Р; =---------~л~ [Ь21 i’jjCjj),
1—20^!
363
Рассмотрим характер поведения корней характеристического урав-
нения (2.22) при различных параметрах несущего винта.
В большей части диапазона чисел оборотов, представляющих прак-
тический интерес, движение лопасти определяется двумя парами корней.
\ ~ ?|=УА и —Чг^Рг-
(2.25)
На рис. 4.5 и 4.6 показана зависимость действительной и мнимой
части этих корней от числа оборотов несущего винта и центровки ло-
пасти. На обоих графиках ио оси абсцисс отложены числа оборотов,
несущего винта п, отнесенные к частоте собственных колебаний лопасти
эта величина положительна, возникают
времени амплитудой.
на кручение ркр, выраженной
в колебаниях в минут}:
/г—л/ркр.
Значения п совпадают по
величине со значениями отно-
сительной угловой скорости
Ц>-•'(Рц ,,
где рКр выражено в рад]Сек.
11оэтому в дальнейшем обо-
значения п и о будут употреб-
ляться на равных правах
Корни характеристическо-
го уравнения определяют за-
кон, которому подчиняется
движение лопасти после того,
как какое-либо внешнее воз-
действие (на праьпше это мо-
жет быть, например, порыв
ветра) выведет лопасть из ио.
ложения равновесия. При этом
значение действительной части
корня g определяет скорость,
с которой изменяется ампли-
туда возникших колебании,
а мнимая часть р — их ча-
стоту. Отрицательной действи-
тельной части корня соответ-
ствуют затухающие колебания
лопасти. В том случае, когда
колебания с нарастающей по
Первая пара Я.;, показанная на рис. 4.5 и 4.6 пунктирными кри-
выми, определяет движение, в котором преобладающим является от-
клоцепие_ лопасти относительно горизонтального шарнира. Вторая лара
корней Ан, показанная сплошными кривыми, определяет движение со
значительным поворотом лопасти относительно осевого шарнира, про-
исходящим за счет деформаций проводки управлении.
Наибольший интерес представляет это второе движение, гак кац
при некоторых центровках лопасти действительная часть корня дг пере-
ходит в область положительных'Значений (см. рис. 4.6), что соответст-
(без знака минус).
•364
вует колебаниям с нарастающей амплитудой, которые и именуются
флаттером,
Значения чисел оборотов несущего винта, при которых gs— 0, обыч-
но называю г критическим числом оборотов флаттера.
Когда 92<0, лопасть совершает затухающие колебания. При этом
значение определяет величину сил, демпфирующих колебания лопа-
сти, и является мерой их устойчивости. Из рис. 4 6 следует, что демп-
чепий коэффициента с21
фируюшие силы начинают уменьшаться задолго до критических чисел
оборотов флаттера. Эю уменьшение наблюдается даже в тех случаях,
когда флаттер не может возникнуть ни при каких числах оборотов не-
сущего винта, ио гапас по центровке лопасти недостаточно велик. Сни-
жение аэродинамического демпфирования, а следовательно, н устойчи-
вости колебаний лопасти весьма нежелательно и может проявиться от-
рицательным образом на характеристиках управляемости вертолета.
Особенности поведения первой пары корней 1-т будут рассмотрены
ниже в п. 8,
7. Определение критических чисел оборотов флаттера
Для определения критических чисел оборотов флаттера можег
быть получено аналитическое выражение, если в характеристическом
уравнении положить
<«> 0)1 (2 23)
— Чфл- ’
365
Тогда характерисгическое сравнение (2.22) приведется к ииквад-
ратному уравнению:
й*л _ 2L 4. + -М - 0, (2.27)
где
из которого можно определить критические числа оборотов флаттера
(2,29)
Частота колебания при флаттере определяется цз выражегигя
- V & • РЭД
8. Дивергенция лопасти
При рассмотрении графиков на рис. 4. 6 обращает иа себя внима-
ние поведение первой пары корней л?.
Начиная с некоторых чисел оборотов несущего винта, мнимая часть
этой пары пропадает и появляются два вещественных корня. Наличие
вещественных корней свидетельствует об апериодическом движении
лопает,
При дальнейшем увеличении числа оборотов один из этих корней
л?,переходит в область положительных значений, что характеризует по-
явление на этих числах оборотов апериодической неустойчивости, на-
зываемой дивергенцией Лопасти.
Значение числа оборотов несущего винта, при котором Х71 —0, на-
зывается критическим числом оборотов дивергенции и может быть
определено по формуле
Обычно критические числа оборотов дивергенции оказываются вы-
ше критических чисел оборотов флаттера и максимальных чисел оборо-
тов несущего винта. Однако в ряде особых случаев дивергенция лопасти
оказывается определяющим фактором. Так, например, возможность
возникновения дивергенции не позволяет использовать отрицательные
значения компенсатора взмаха. При х—О возможность возникновения
дивергенции оказывается уже вполне реальной, а При малых отрица-
тельных значениях х лопасть становится апериодически неустойчивой.
Это обстоятельство обязательно должно учитываться при проектирова-
нии втулки несущего винта, особенно в тех случаях, когда отклонение
лопасти относительно вертикального шарнира кинематически приводит
к снижению значений х ниже нуля.
9. Параметры, характеризующие центровку лопасти
(эффективная центровка лопасти)
Для оценки лоиас»и с топки зрения полможности возникновения
флаттера удобно ввести ряд понятий, характеризующих расположение
центров тяжести элементов лопасти по ее длине, Величину
-V (2.32)
называют центровкой лопасти в данном сечении.
366
Если центровка сечений постоянна по длине лопасти, то значение
входящего в уравнения коэффициента сц будет прямым образом свя-
зано с величиной этой центровки. Фла1терные характеристики лопасти
в этом случае можно характеризовать значением центровки ее сечений.
Практически, однако, центровки сечений лопасти ио длине всегда
различны Поэтому ее флаттерные характеристики удобно оценивать
при помощи так иазынасмой эффективной пситровки.
Эффемивная центровка рассматриваемой лопасти определяется,
как центровка некоторой эквивалентной лопасти с одинаковым располо-
жением центров тяжести по длине и имеющей ту же величину коэффи-
циента С2, Форму в плане и распределение погонных масс по длине
эквивалентной лопасти удобно принять совпадающими с рассматривае-
хщй лопастью. В этом случае эффективная центровка рассматриваемой
лопасти может быть определена по выражению
( mbr dr
(2.33)
Для лопастей, у которых ось осевого шарнира находится на по-
счоянном з процентах к хорде расстоянии от передней кромки £о=-у—
= const, эффективную центровку лопасти удобно характеризовать зна-
чением центровки .эквивалентной лопасти отиосигельно се передней
«ромки
(2.3-1)
Так как расположение осн осевого шарнира слабо сказывается на
значениях критических чисел оборотов флаттера, то эффективную цен-
тровку удобно отсчитывать от передней кромки и и тех случаях, когда
условие——const не соблюдается. В этом случае эффективная центров-
ка может быть определена по выражению
(2.35)
Эффективная центровка готовых лопастей может быть определена
только путем разрезки лопасти и экспериментального определения цен-
тровок се отдельных отсеков.
10. Зависимость критических чисел оборотов флаттера от центровки
лопасти и значения коэффициента компенсатора взмаха
Для иллюстрации влияния различных параметров на критические
числа оборотов флаттера на рис. 4.7. 4.8 и 4.9 приведены результаты
расчетов, выполненные по формуле (2.29). Кривые даны для различ-
ных значений коэффициента компенсатора взмаха х и для трех значении
положения оси осевого шарнира хо при неизменном положении фокуса
профиля.
Из графиков видно, что смещение центров тяжести к передней
кромке, так же как и уменьшение компенсатора взмаха, улучшает
флаттерцые характеристики лопасти, а смещение центров тяжести к зад-
ней кромке и увеличение компенсатора взмаха приводит к уменьшению
критических чисел оборотов флаттера. Эти результаты качественно
совпадают с данными экспериментов.
367
эффек'1
368
Сравнение результатов расчетов, проведенных для трех разданных
положений оси осевого шарнира, показывает, что влияние этого пара-
метра на критические числа
обороюв флаттера несрав-
ненно слабое влияния цент-
ровки .лопасти. Следова-
тельно, критческие чиста
оборотов флаттера зависят
в основном от взаимного
расположения центров тя-
жести элементов лопасти и
фокуса профиля Поэтому
смещение фокуса профиля
ио хорде так же эффек-
тивно, как и смещение цент-
ровки лопасти.
11. Компоновка лопасти
Приведенные зависимо-
сти критических чисел обо-
ротов’ от центровки позво-
ляют сделать необходимые
едя практики выводы в от-
ношении компоновки лопа-
сти Из проделанных расче-
тов следует, что лучшим
средством улучшения флат-
терных характеристик лопа-
сти является максимально
возможное по конструктив-
ным условиям перемещение к перстней кромки ее центров тяжести и
применение аэродинамических профилей, которые на рабочих режимах
полета имеют возможно более заднее расположение фокусов. Эта мера
даст положительный эффект даже в том случае, когда для создания
Рис 4.10. Компоновка лопасти со смешенной к передней
кромке осью осевого шарнира и лонжерона
передней центровки используется перемещение к передней кромке лон-
жерона лопасти вместе с осью осевого шарнира, которая часто в кон-
струкции связана с осыо лонжерона. Примером такого решении являет-
ся компоновка лопасти, показанная на рис 4. 10.
‘24 1002 369
Следует, однако иметь в виду, что утверждение об отиоентелыю
слабом влиянии положения оси осевого шарнира на флаттерные харак-
lepKCTHKH по сравнению с центровкой лопасти справедливо только в том
случае, когда изменение этих параметров одного порядка. Практиче-
НИс. 4.11. Компоновка лопасти с повернутой осью осевого
шарнира
ски изменение положения осевого шарнира может быть произведено
в значительно более широких пределах, чем смещение центровки лопа-
сти. Поэтому оно должно также рассматриваться как одно из средств
влияния на флаттерные характеристики лопасти.
В качестве примера, где изменение положения осевого шарнира
использовано как средство улучшения флаттериых характеристик, мо-
жет служит!, лопасть, компоновка которой показана на рис. 4.11.
12. Влияние жесткости управления
Очень важным параметром, сильно влияющим на критические
числа оборотов флаттера, является величина частоты собственных коле
банки лопасти на кручение ркр. В рассмотренной здесь идеализирован
ной схеме лопасти величина этой частоты полностью определяется шар-
нирной жесткостью системы управления углом установки несущего пинта
Супр Практически, однако, на величину этой частоты оказывают влияние
также и крутильные деформации самой лопасти. Поэтому для учета
крутильной жес/костн лопасти предполагается при расчетах но изло-
женной здесь приближенной методике использовать значение ркр, под.
считанное с учетом деформации как системы управления, т.чк и лопасти.
Из дифференциальных уравнений колебаний лопасти (2 19j видно,
чю критические числи оборотов флаттера ц частота колебаний при
флаттере прямо пропорциональны величины pFp Поэтому во всех ра-
систах, результаты которых представлены на приведенных выше графи-
ках, критические числа оборотов флаттера отнесены к ркр и характери-
зуются относительными величинами.
(2.36)
13. Условия отсутствия флаттера
Характер зависимости критических чисел оборотов флаттера от раз-
личных параметров показывает, что создание необходимых флагтерных
характеристик может быть достигнуто не обязательно путем изменения
одновременно всех параметров. Создание необходимых характеристик
возможно при выполнении только одного из двух следующих условий.
370
Первое условие — это создание достаточно высокой крутильной же-
сткости лопасти и ее заделки на системе управления такой, чго
^1ята>
(2.37)
Здесь «та-? —максимально возможное число оборотов несущего вин-
та, Достаточным оказывается, чтобы й, = 4ч-5.
При выполнении условия (2,37) пет необходимости н обеспечении
какой-либо определенной поперечной центровки лопасти. Она может
быть произвольной. Вве-
дение в конструкцию ка-
ких-либо специальных
противовесов не тре-
буется,
Второе условие —
это создание достаточно
передней центровки ло-
пасти такой, что
(2.38)
Здесь хщт - некото-
рая предельная центров-
ка лопасти, при которой
флаттер невозможен ка-
кой бы малой ни была,
скажем, крутильная жест-
кость заделки лопасти на
управлении.
На рис. 4.12 пока-
зано расчетное значение
предельной центровки хПр
и заносимости от значе-
ния компенсатора взмлхц
и положения осн осевого
шарнира fa. Эга цент-
ровки деляг всю область
параметров на две зоны, в
и —лопасти несущих винтов, у кото-
рых наблюдался флоттед
одной из которых флаттер не может возник-
нуть даже при очень малой жесткости управления.
Имеющаяся статистика по натурным испытаниям иа фланер
несущих вннтоп с лопастями, эффективная центровка которых после ис-
пытаний определялась путем разрезки, удовлетворительно согласуется
с описардой границей (см. рис. 4.12).
Оцыг показывает, что практически легче выполнить только одно
из указанных условий.
14. Механизм возникновения сил, возбуждающих флаттер
Методы расчета, сводящиеся к определению параметров флаттера,
оставляют без объяснения механизм воздействия аэродинамических сил,
приводящим к возникновению расходящихся колебаний. Подробное
рассмотрение характера действующих при флаттере аэродинамических
сил не приносит ничего нового для изучения флаттера. Однако в неко-
торых случаях оно способствует более углубленному пониманию этого
явления
Рассмотрим ту же модель лопасти, которая была описана в п. 1
этого параграфа Для упрощения задачи ограничимся частным случаем,
когда фокус совмещен с осью осевого шарнира и <Гф=О. Можно также
371
пренебречь не имеющей существенного значения зависимостью силы
Т от Тогда аэродинамические силы, действующие на профиль, можно
представить п следующем виде-
T=^c^bU^- (2.39)
(2.40)
где а—угол атаки элемента лопасти
Момент аэродинамических сил Т, действующий относительно гори-
зонтального шарнира, может быть записан тар:
= a cos pt.
Ч.ш-Ап. (2.41)
где
р
^ = -у |‘br*dr. (2.12)
Предположим, что ло-
пасть совершает колебания
относительно горизонталь-
ного шарнира но закону
(2.43)
При такой задней на-
чало отсчета времени при-
нимается с того момента,
когда 0 = 0.
Вначале рассмотрим
случай, когда лопасть не
совершает крутильных колебаний. Угол установки ее элементов будем
считать равным нулю и неизменным во времени При этом угол атаки
элементов лопасти будет изменяться по зикону (рис. 4. 13)
(2.44)
(2. 45)
По гакому же закону будет изменяться и момент аэродинамических
сил относительно горизонтального шарнира
-•ИГ1Д—3f со= pt. (2. 46)
Причем знак Л1 п соответствии с выражением (2 41) будет совпа-
дать со знаком а
Если «<0, как это имеет место в рассматриваемом случае, то мо-
мент относительно горизонтальною щарнпра действует всегда против
угловой скорости колебаний лопасти 0 (см рис. 4 13) и совершает отри-
цательную работу на перемещениях лопасти.
Величина этой работы за период колебаний может быть подсчитана
по формуле
Д — [ Wr dt = f /ЙН0/, соь2 pt dt = л%/Й. *2- 47)
b 6
_ 2л ,
где Г ------период колебании лопасти.
Знак работы Л совладает со знаком который п спою очередь со-
впадает си .эпиком а. В рассматриваемом случае ^<0.
Эго означает, что обтекающий лопасти ноток воздуха поглощает
работу, затрачиваемую на поддержание колебаний лопасти. Таким об-
разом, при наличии аэродинамических сил лопасть будет совершагь
колебания с постоянной амплитудой р0 только в том случае, ес,ги к ней
будет подводиться энергия извне, равная величине подсчитанной работы
по формуле (2.47). В противном случае кинетическая энер|НЯ лопасти
будет уменьшаться, а вместе с ней и амплитуда колебании Pd, и колеба-
ния затухнут.
Иная картина может возникнуть при наличии крутильных колеба-
ний лОкастн. Крутильные колебания лопасти возникают вследствие де-
формаций системы управления и кинематической связи черен компен-
сатор взмаха. Деформации системы управления иочникаюс от аэроди-
намических и инерционных сил, Действующих па лопасть при ее махо-
вых колебаниях.
Центробежные л инерционные силы, возникающие при маховых
полебаииях лопасти, создают момент относительно осевого шарнира
из-за наличия плеча между центрами тяжести элементов лопасти и этой
осью
лг№Р — — <Р? — «>2) Со J' dr 51п pi. (2. 48)
Аэродинамические силы создают момент на плече между фокусом
профиля и осью осевого шарнира Оф
=----2 f dr С03 Р* ’ 49)
5
При этот момент равен нулю. Поэтому вследствие маховых
колебаний на лопасть будет действовать только момент /Ппне₽. Под дей-
ствием этого момента деформируется система управления углом уста
нивки допасти и лопасть начинает совершагь крутильные колебания
Однако фаза крутильных колебании не будет совпадать с фазон
маховых колебаний Смещение фазы крутильных колебаний нызывае)СЯ
действующими в системе демпфирующими силами, направленными про-
тив скорости колебаний. Эти силы вызываются силами аэродинамиче-
ского демпфирования, определенными по формуле (2.40), и моментом
трения, действующим в осевом шарнире лопасти. Направление смеше-
ния фазы крутильных колебаний зависит от знака внешнего момента
mu„fp.
Закин, цо которому лопасть совершает крутильные колебания
(ряс. 4.14), может быть записан так:
f —fco?p/ j -isinp/. (2. .50)
При этом предполагается, ч|О начальный угол упаковки элементов
лопасти равен пулю
Угол атаки в этом случае будет измени1ься по закону
u = acos pt -Lasinpf, (2,51)
где
о ~ г — % 1 ;
а -?•
Появление синусоидальной составляющей в законе изменения угла
атаки a, a BMecie с иен и синусоидальной составляющей момента ог-
373
иосительно горизонтального шарнира не влияет на энергетический об-
мен. возникающий при колебаниях лопасти Действительно, если рас-
смотреть, какую работу совершает синусоидальная составляющая мо-
мента М на перемещениях лопасти относительно горизонтального шар-
нира, то окажется, что она равна нулю:
A = J М sin pt р$0 cos pi <Jt =0.
(2,52)
Что касается косинусоидальной составляющей угла атаки а, то, как
следует из формулы (2. 51), ее величина в большой степени будет за
висеть от знака и вели-
колсбапий лопасти
чины ф.
Когда Ф<0, работа,
поглощаемая обтекаю-
щим лопасть потоком воз-
духа, увеличивается, а
следовательно, и возра-
стает скорость затухания
свободных колебаний ло-
пасти. Таким образом,
при ф<0 устойчивость ма-
ховых колебаний лопасти
повышается. При ф>0
работа, поглощаемая об-
текающим лопасть пото-
ком, уменьшается и при
Мо
(2,53)
она становится равной
кулю, а при
(2.54)
косинусоидальная составляющая момента относительно горизонтального
шарнира оказывается направленной по угловой скорости маховых коле-
баний р. Это приводит к «раскачиванию» допасти. Кинетическая энергия
колебаний лонасги начинает возрастать, что влечет за собой и рост
амплитуды ее колебаний Такой вид колебаний с нарастающей амплиту-
дой и называется флаттером.
Таким образом, возникновение флаттера связано с величиной и зна-
ком составляющей крутильных колебаний ср.
Рассмотрим, как изменяется величина ф под действием внешнею
момента, изменяющегося по синусоидальному закону в соответствии
с (2.48). На рис. 4.15 показана зависимость ф и ф от частоты колеба-
ний р внешнего момента Как обычно, при колебаниях вблизи
резонанса растет в первую очередь составляющая <р, находящаяся
в фазе под 9U° к внешним силам, а составляющая колебаний, совпадаю-
щая по фазе с внешними силами, при резонансе меняет свой знак,
приходя через нуль.
Итак, значение <р увеличивается особенно заметно при приближе-
нии к резонансу с частотой собственных колебаний лопасти на круче-
ние Поэтому флаттер происходит всегда с частотой, близкой к частоте
кручения, но несколько меньшей этой частоты. Обычно частота флатте-
ра составляет около 0,8 р^.
Из сказанного следует, чго флаттер возникает вследствие следую-
щих причин. Крутящий момент от инерционных сил, действующих при
маховых колебаниях лопасти, приводит к появлению крутильных коле-
баний лопасти. При этом крутильные колебания со сдвигом фазы на 90°
по отношению к маховым колебаниям возрастают особенно сильно при
частотах, близких к частоте собственных колебаний лопасти на круче-
ние. Эта составляющая крутильных колебаний приводит- к возбуждению
Рис. 4.15. Изменение составляющих крутильных
колебании (J ц от чистоты КолеСапнй лопасти
маховых колебаний лопасти. Когда это вдабуждедяе (первый члаз фор-
мулы 12 55)] оказывается сильнее сил, демпфирующих маховые колеба
нчя (второй член формулы (2.55), возникает флаттер.
По выражению для коентгусондальной составляющей угла атаки
(2.55)
можно проследить также и влияние числа оборотов несущего винта иа
флаттер. Действительно второй член этой формулы бистро уменьшает-
ся с увеличением числа оборотов несущего винта, в то время как ср не
сильно зависит от числа оборотов, так как внешний крутящий момент
/Пинто определяется в основном частотой колебаний (см. выражение
(2.'58)]. поскольку при флаттере р2 обычно во—8раз больше ы2. Изме-
нение ср по числу оборотов несущего винта связано а основном с ростом
аэродинамической демпфирования, с увеличением о>.
Таким образом, если проследить, как изменяются входящие в фор-
мулу (2.55) величины по числу оборотов несущего винта, то окажется,
чю при каком-то значении со косинусоидальная составляющая угла
375
атаки и изменит свой знак и станет положительной. Это приведет
к появлению флаттера, начиная только с каких-то определенных оборо-
тов несущего винта. Сдвиг центровки лопасти назад приводит к росту
абсолютной величины /nIIfctp (2.49), а следовательно, и к увеличению ip.
При этом, как следует из формулы (2.55). флаттер возникает при меш.
UIHX со.
Таким же образом можно было бы проследить и влияние различ-
ных ipynjx парамеции на критические обороты флаттера. Однако
в этом пет необходимости, гак как это было уже проделано достаточно
ПОДробНО 1<ЫШС.
§ 3. УЧЕТ СИЛ ТРЕНИЯ ПРИ ФЛАТТЕРЕ
1. О характере действия сил трения при флаттере
Возникновение флаттера приводит к появлению колебательных
движений в шарнирах В1улки несущего винта н шарнирах системы
управления Поэтому действующие в этих шарнирах силы трения ока
зываюг существенное влияние на критические числа оборотов и харак-
тер развития флаттера Ос-
новное значение при этом
имеет трение в нагружен-
ном центробежной силон
осевом шарнире допасти, по
сравнению с которым тре-
нием по всех остальных
ЛАЛ/
Рис. 4. 16 Запись момента трении в осевом шар- шарнирах можно прене-
игре при крутильных колебаниях лопасти бречь
Эксперименты покаты-
вают, что силы, действую-
щие в осевом шарнире, близки по своему характеру к силам сухого
Кулоцова трения (рис. 4. 16) Введение в расчет этих сил додаст задачу
о флаттере сущесгвенно нелинейной Поэюму в упрощенных расчетах
естественно применить любой пт иозможньгх способов линеаризации сил
трения. Более точное решение этой задачи без такой линеаризации бу сет
приведено в § 7 этой главы
Как известно, линеаризация сил трения привотит к завиенмосш
нооффипиента демпфирования от амплитуды колебаний. При этом изме-
няется описываемый на основании расчета характер развития флаттера
по мере нарастания его амплитуды, приближаясь к тому, чти цаблю
дается при экспериментах на вертолетах. Э1И результаты позволяют
объясни сь целый ряд особенное сен развития флаттера при на турных
экепсримен1ах. Возможность толкования этих особенностей значигель
но облегчает проведение испытаний.
2. Линеаризация сил трения
Применим энергетический способ лиисаризапии сил трения. Для
этого вместо момента трепня, действующего п осевом шарнире лопасти,
наедем некоторый эквипалентный момент, величина которое пропор-
циональна скорости угловых перемещении лопасти
(3.1)
Величину коэффициента утр определим из уелорйя равенств работ,
произведенных за период колебаний моментом сил трения,
•Л~4Л1р^
13. 2)
376
и эквив,?ле»1ны,м моментом, величина которого пропорциональна скоро-
сти колебаний,
Л...-И'.,Рф.Тф,,. (3,3)
где AfTp — постоянный по величине момент <нл трения, действующих
в осевом шарнире; всегда против скорости относительных пе-
ремещений;
ффЛ — амплитуда крутильных колебаний лопасти о осевом шарнире
при флапере,
Рфл - частота колебаний лопасти при флаттере.
.Момент сил трения, действующий н осевом шарнире, можно счи-
тать пропорциональным со2, так как его величина опрсделяе|ся в основ-
ном центробежной силой
/Wip = aip<a-. (3.41
В ряде случаев, однако, эта зависимость нарушается вследствие
следующих обстоятельств:
I. Подшипник- установлен со значительной предварительной затяж-
кой. В этом случае нагрузка, действующая на подшипник, определяется
не только центробежной силой, но и предварительной затяжкой.
\ 2 Конструкция сальников такова, что они дают значительный по
величине момент трения, не зависящий от величины действующей цент-
робежной силы.
3, Применение о подшипнике слишком густой смазки создает зна-
чительный дополнительный момент, связанный с возникновением вязко-
го трения. Появление существенных по величине сил низкого трения
часто наблюдается при низких отрицательных температурах наружного
воздуха.
Все лти обстоятельства оказывают влияние на критические кисли
оборотов флаттера, но не вносят каких-либо принципиальных особенно-
стей в картину явления. Поэтому н последующем изложении за основу
будет приниматься выражение (3.4).
Коэффициент u-ty. входящий п уравнение (3.4), определяется из
выражения
«1Г, /лЛ.в< (3.51
где S’u.h —статический момент лопасти относительно осп вращения.
г„ — радиус упорного подшипника.
f _ коэффициент трения в подшипнике.
.Значения коэффициентов трения [ обычно весьма стабильны и со-
ставляют около 0,003 для шариковых и 0,006 для роликовых подшип-
ников.
Приравняв уравнения (3 2) и (3.3), получим выражение для опре-
деления коэффициента у1р:
При таком способе линеаризации учет сил трения приводит к изме-
нению в исходных уравнениях (2 [(?) только коэффициента d22, стояще-
го при перной производной угла поворота лопасти в шарнире, который
получает некоторую добавку dTp.
При рассмотрении махового флаттера с жесткой на кручение ло-
пастью эта добавка может быть определена по формуле
(3.7)
3. Определение критических чисел оборотов флаттера с учетом трения
Полученная выше формула (3.7), определяющая величину добавки
от сил трения к одному из коэффициентов уравнений колебаний лопа-
сти di2, отличается очень важной особенностью. Эта добавка зависит от
амплитуды колебаний лопасти н осевом шарнире при флаттере фф-г.
Слсдовагельно, и критиче-
Рис. 4.17. Зависимость критических чисел оборо-
тов флаттера от амплитуды колебаний 1рфЛ
ские числа оборотов, при
которых теоретически ам-
плитуда колебаний остается
по времени постоянной, ока-
зываются зависящими от
амплитуды флаттсриык ко-
лебаний.
На рис. 4. 17 приведена
такая зависимость для трех
значений центровки лопа-
сти, полученная при расчете
махового флаттера. По оси
абсцисс на этой фигуре от-
ложена амплитуда угловых
колебаний лопасти в осевом
шарнире ерфл. я по оси орди-
нат критические числа обо-
ротов флаттера, отнесенные
к частоте собственных коле-
баний лопасти на круче-
ние Пфл-
Приведенные кривые
определяют амплитуду ко-
лебательного режима, яв-
ляющегося границей между
колебаниями с нарастаю-
щей амплитудой и затухаю-
щими колебаниями.
Практически это означает, что для возникновения флагтера необ-
ходим какой-то первоначальный толчок, приводящий к отклонению
лопасти от положения равновесия на угол, определяемый этими кривы-
ми и именуемый обычно порогом возбуждения.
Если такого толчка не будет, флаттер вообще не возникнет ни при
каких числах оборотов несущего винта.
Для сравнения на рис. 4. 17 показаны критические числа оборотов
для случая, когда момент трепня и осевом шарнире /Итр=0.
4. Влияние принудительного движения в осевом шарнире
Совсем другая картина возникновения флаттера наблюдается в том
случае, когда в осевом шарнире втулки существует принудительное
движение, вызванное наклоном тарелки автомата перекоса или вынуж-
денными маховыми колебаниями лопастей, возникающими в полете при
косом обтекании несущего винта. В этом случае при возникновении
флаттера колебания в осевом шарнире происходят по сложному зако-
ну, состоящему из двух колебательных движений с разными частотами.
На рис. 4.18 в качестве примера показан вид этого движения, на-
блюдающийся при флаттере в условиях наземных испытаний, когда
в осевом шарнире существует принудительное движение, вызванное
378
наклоном тарелки автомата перекоса (кривая фщ>) и движение, вызван-
ное флаттером (<рфЯ)-
На этом рисунке для удобства дальнейших рассуждений отложены
не перемещения, а скорости колебаний в осевом шарнире.
Работа сил трения, действующих в осевом шарнире, может быть
определена по выражению
Af - f (3.8)
□
где момент сил трения Л1тр направлен всегда против скорости угловых
перемещений лопасти <р.
шарнире
Если скорость угловою движение ф представляет собой сумму двух
колебательных движении
7—гпр^^фл- (3.9)
то и работу сил трення можно также предъявить состоящей из двух
работ, на каждом аз этих неимений
^гр=/^ир Афл. (З.Ю)
А». - J А„Ъ.Д'-
Здесь момент сил трения по-прежнему направлен против скорости
суммарного движения <р,
Наличие в осевом шарнире одновременно двух колебательных дви-
жений с различной частотой всегда приводит к появлению участков
времен1|. в течение которых сила трения совпадает по направлению со
скоргст|,к> одного из движений, совершая при этом положительную ра-
боту На рис. 4. J8 участки плопсади, соответствующие положительной
работе сил трения на перемещениях одного из составляющих движений
с частотой рфЛ, заштрихованы. В результате обшая величина работы
сил трения за период колебаний на перемещениях каждого из состав-
ляющих движений уменьшается по сравнению со случаем, когда сопут-
ствующего движения нет. В применении к нашему случаю это означает,
что работа, идущая на демпфирование колебаний флаттера, сильно
падает 1)з-за того, что значительная доля сил трения расходуется лрину-
379
дательным движением. Эю падение может быть охарактеризовано
специальным коэффициентом, который представляет собой отношение
(3.11)
где ДфЛ — работа сил трения за период колебаний на перемещениях
интересующего вас составляющего движения, вызванного
флаттером;
/1ту — рабою сил трения па этот же период, когда сопутетпуюшес
прннуди|ельное двиятспис отсутствует.
На рис. 4.19 приведена зависимость коэффициента ,ТфЛ от отноше-
ния амплитудных значений скоростей составляющих колебательных
При интересующих нас величинах1,5-^2,5 коэффициент ЛфЛ
практически не зависит от отношения этих частоь
Если значение коэффициента у1Р определить в этом случае так же.
как это было сделано выше ич условия равенства работ [см. формулу
приве-
флап ера при различных амплитудах колебательного днижеиия лопасти
в осевом шарнире <рпр. подсчитанные с счетом этой нелинейной зависи-
мости применительно к маховому флаттеру. Расчет проде лан только для
одного значения центровки лопасти и различных амплитуд принудитель-
ного движения в осевом шарнире фор.
Кривые, приведенные на рис. 4.20, позволяют сделать целый ряд
интересных выводов.
Прежде всего из этих кривых следует, что при наличии принуди-
тельного движения в осевом шарнире при некоторых числах оборотов
несущего винта обязательно возникает флаттер и его появление не
обусловлено действием какой-либо внешней причины в виде какого то
первоначального толчка. При этом число оборотов, при которых он на-
чинается, тем меньше, чем больше амплитуда принудительного движе-
ния в осевом шарнире <рир. Это обстоятельство приводит к зависимости
ЗДО
критических чисел оборотов флаттера в полете от всех параметров
режима полета, которые определяют амплитуду <pnj, и прежде всего от
балансировки вертолета и скорости полета. При наземных испытаниях
ого приводит к зависимости кршических чисел оборотов от положения
ручки управления.
Второй важной особенностью флаттера, вытекающей из кривых
(см. рис. 1.20), является появление двух различных типов флаттера, от-
личающихся характером нарастания амплитуды колебаний при измене-
нии числа оборотов несущего пинта.
При увеличении числа оборотов до значений, соответствующих
тачкам а>, аг н.сз, появляекя флаттер, амплитуда которого плавно
увеличивается при увели-
чении числа оборотов не-
сущего винта. Если после
возникновения таких ко-
лебаний, которые име-
нуются обычно «мягким
флаттером», число обо-
[)<1тГ)н несущего винта не
будет изменяться, то их
амплитуда останется по-
стоянной сколь угодно
долгое время.
Колебания такого
вида неоднократно на-
блюдались при наземных
и летных исследованиях
флатгера на верюлете
Уменьшение числа оборо-
тов несущего винта после
возникновения «м?п кого
фланера» приводит к прекращению колебаний при тех же числах обо-
ротов. при которых начался флаттер.
Прн увеличении чисел оборотов несущего винта до значений, опре-
деляемых точками 6| и h2t появляются колебания, амплитуда которых
нарастает по .времени без увеличения числа оборотов несущего винта
Такой вид колебаний называется «жестким флаттером».
Предельные значения амплитуд колебаний, которые могут при эюц
быть получены, определяются, вероятно, нелинейным характером в из-
менении аэродинамических сил по углу атаки Эта ветвь кривой на
рис. 4.20 показана ориентировочно пунктиром.
При позникпешепии «жесткого флаттера» во время наземных испы-
таний па вертолете рост колебании лопастей во избежание аварии
удаекм прекратить только резким уменьшением числа оборотов несу-
щею винта. Появление таких колебаний в полете может привести
к весьма серьезным последствиям.
Снижение числа оборотов несущего винта после возникновения
«жесткого флаттера» приводит к прекращению колебаний при числе
оборотов, cooiBeiCieyющих точке г;, которые, как правило, меньше зна-
чений, соо । ьетствующих точкам а{ и «а.
Таким образом, для прекращения «жесткого флаттера» числа обо-
ротов несущего винта должны быть уменьшены до значений меньших,
чем те, при которых флаттер начался.
При малых амплитудах принудительного движения в oveui>M шарни-
ре возникновение «жесткого флаттера» возможно только после какого-
то первоначального толчка так же, как в случае, когда принудительное
движение отсутствует.
381
Наиболее вероятными числами оборотов начала «жесткого флатте-
ра» при этом следует считать обороты, соответствующие точке tii, так
как в этом случае величина необходимого толчка минимальна.
При расчете критических чисел оборотов начала флаттера, соотпет-
швующих точкам ai, аг и а3 на рис. 4.20 в формуле (3. 12), могут быть
сделаны значительные упрощения.
Как следует из рис. 4.19, когда — -<0,5, значение коэффициент
_ У гр
Дф_, может быть определено по формуле:
(3.13)
Если частота принудительного движения р,ц, = ты (т порядок гар
моники этого движения по отношению к числу оборотов несун.с-о вин-
та). то можно записать
* фл Афл^фл’
V'Bp = m“anp-
В этом случае выражение (3. 12) примег следующий пид:
. 2^
Значение эквивалентного момента трения при этом пропорциональ-
но скорости угловых перемещений и не зависит от амплитуды флагтер-
ных колебаний ффЛ:
(.3.15)
Другими словами, момент трения, действующий п осевом шарнире
при наличии в этом шарнире принудительного движения воздействует
на малые колебания лопасти так же, как и линейный демпфер, момент
которого пропорционален скорости относительных перемещений. Этот
вывод относится ле только к осевому шприиру лопасги, а является об-
щим для всех механизмов с трением.
Из рис, 4. 20 также следует, что трение в осевом шарнире, даже при
наличии принудительного движения, повышает критические числа обо-
ротов флаттера по сравнению со случаем, когда Л4тр = 0, и является
с этой точки зрения полезным фактором. Поэтому для улучшения флат-
терннх характеристик несущего винта возможно применение фрикцион-
ных демпферов в осевых шарнирах. Конечно, применение таких демпфе-
ров возможно только тогда, когда вертолет имеет достаточно мощное и
падежное бустерное управление.
§ 4. ФЛАТТЕР НЕСУЩЕГО ВИНТА С УЧЕТОМ СВЯЗИ
КОЛЕБАНИЙ ЛОПАСТЕЙ ЧЕРЕЗ АВТОМАТ ПЕРЕКОСА
1. Формы флаттера несущего винта,
наблюдаемые при экспериментах на вертолетах
Выще уже отмечалось, что при возникновении флаттера на верто-
лете развиваются колебания всех лопастей несущего винта. Их колоба
кия начинаются одновременно, несмотря на то, что параметры отдель-
ных лопастей, составляющих несущий винт, как правило, оказываются
несколько различными. Следовательно, одновременное возникновение
флаттера не может быть объяснено совпадением критических чисел обо-
ротов отдельных лопастей. Кроме того, почти при всех эксперимент
382
на вертолетах отмечается, что колебания всех лопастей строго синхро-
низированы таким образом, что каждая следующая лопасть повторяет
движение предыдущей с некоторым запаздыванием по времени Амп.ти
!гуды колебаний различных
жопастей нарастают одно-
временно так, что их вели-
чины на разных лопастях
оказываются примерно оди-
наковыми. Флаттер одной
отдельной лопасти несущего
винта на вертолете практи-
чески никогда не наблю-
дался.
Такой характер колеба-
ний при флаттере объяс-
няется прежде всего связан-
ностью отдельных лопастей
несущего винта через авто-
мат перекоса (рис. 4.21).
Формы колебаний несу-
щего винта, при которых
каждая следующая лопасть
повторяет движение преды-
дущей с некоторым запазды-
ванием по времени, назы-
ваются обычно цикличе-
Рис. 4. 21. Сх«?ма вгулли несущщи пакта
сними формами колебаний Такие формы колебаний очень часто встре-
чаются при рассмотрении колебаний несущего винта вертолета. Поэтому
они должны быть рассмотрены более подробно.
2. Аналитическое выражение для циклических форм колебании
несущего винта
Для циклических форм флаттера, отличающихся тем, что каждая
следующая лопасть повторяет движение предыдущей, может быть со-
ставлено аналитическое выражение, определяющее закон изменения
параметров движения лопасти по времени.
Если зафиксировать начало отсчета времени так, чтобы при НО
ру=а—0. го это выражение может быть записано следующим образом'
&=iV/' siiiipi—
(4. В
где рк —угол взмаха .V-ой лопасти;
0о—угол, определяющий величину отклонения лощащей при на-
чале отсчета времени. когда г = 0,
q—показатель степени, определяющий скорость изменения ам
плитуды колебаний по времени;
р -частота колебаний при флаттере,
Д-ф^г— смещение фазы колебаний у двух последовательно раеполо
женных лопастей.
Выражение (4.1) используется для определения движения лопа-
стей с порядковыми номерами N = 0, 1, 2,...,гл—] (гл — число лоиа-
стен в несущем винте).
Для лопасти с номером Аг-=г.1 закон изменения переменных должен
совпадать с законом движения лопасти, имеющей номер /V—0. Исходя
383
из этого положения, фаза смешения Дф1И должна быть кратна азиму-
тальному углу между лопастями, г. е.
(4.2)
При критических числах оборотов флаттера, когда 4'=0, колебания
всех лопастей происходит с постоянной и одинаковой амплитудой, но
с различными фазами колебаний. Аналитическое выражение для закона
изменения переменных при критических числах оборотов флаттера мо
жст быть получено, если подставить выражение (4,2) в (4 1) и поло-
жить q — Q;
гл'— ?о - -Vm - <4-
Из выражения (4.3) следует, что распределение фаз колебаний по
лопастям При циклических формах может быть различным в зависимо-
сти от величины т. Величина т называется порядком формы колебаний
и может изменяться от т = б до /п=гл—L При m=z.t форма колебаний
несущего Винта, как это следует из выражения (4.3), будет совпадать
с формой, имеющей порядок т— 0, Аналогично и для «1>2л все формы
колебаний будут повторяться. Таким образом, у всякою несущего пинга
может быть а., различных форм колебаний, соответствующих различ-
ным порядкам т, изменяющимся от т=0 до tn— г,—1.
Выражения (4. J) и (4.3), лыписаппые выше для определения форм
колебания несущего винтп, были составлены применительно только
к переменной [jn- Но таким же образом изменяются и все, остальные
параметры, характеризующие движение лопасти. Однако между ними и
переменной fiv обычно возникает некоторая фаза колебаний. Поэтому
во многих случаях в дальнейшем оказывается удобным представить за-
кон изменении переменных в комплексной форме. Применительно к пе-
ременкой [jv это может быть записано так:
₽»-?«< ,4.4)
где
X— q^ip.
Следует отметить, что при поступательном полете вертолета ло-
пасть совершает вынужденные колебания также по циклическим фор-
мам, так как в полете каждая следующая лопасть повторяет движение
предыдущей. Однако н отличие от колебаний при флаттере вынужден-
ные колебания лопасти в полети строго синхронизированы по оборотам
несущего пипта так, что каждой тармоникс колебаний с порядком т
соответствует форма колебаний, имеющая тот же порядок:
),=5, ап »(.< _ S . (4.5)
Здесь т соответствует порядку гармоники вынужденных коле-
баний.
3. Циклические формы колебаний в конкретных случаях
и нагрузки на управление
Разделение колебании но циклическим формам оказывается удоб-
ным п связи с тем, что при каж-доГ] такой форме колебаний нагружают-
ся только определенные цепи управления несущим винтом. Поэтому
критические числа оборотов флаттера определяются жесткостью той
деци управления, которая шоружена при рассматриваемой форме ко
дебаний. Практический интерес представляют только те формы коде
384
баний несущего винта, которым соответствует наименьшая жесткость
управления, а следовательно н самые низкие критические числа оборо-
тов флаттера.
Рассмотрим, как выглядят циклические формы колебаний при
флаттере в конкретном случае, например, для четырехлопастного несу-
щего винта
При форме колебаний нулевого порядка (т —0) все четыре лопа-
сти колеблются с одинаковыми фазами и нагружают только управление
общим шагом. Флаттер такой формы называвши синфазным флатте-
ром. Присоединенная к осевому шарниру жесткость управления, а сле-
довательно, и критические числа оборотов синфазного флаттера зави-
сят только от жесткости цепи
управления общим шагом.
Форма колебаний первого по-
рядка (и-1) так же, как и треть-
его (т = 3), представляет наиболь-
ший интерес, так как ей па верто-
летах обычно соответствуют наи-
меньшие жесткости управления,
а следовательно, и самые низкие
значения критических чисел оборо-
тов флаттера. Колебания по этим
формам характеризуются тем, что
к тарелке автомата перекоса при-
кладывается только момент, нагру-
жающий цели поперечного и про-
дольного управления. Рис 4.22. Положение осп конуса г.ри
Противоположные лопасти цр.ч противофазном флаттере
формах первого и третьего порядка
колеблются и протипофазнх. Поэтому эта форма флаттера называется
обычно противофазным флаттером.
Угол конусности несущего винта при противофазных формах флат-
тера не меняется. Поэтому движения лопастей при этих формах удобно
характеризовать движением оси конуса (рис, 4.22). При колебаниях
по форме первого порятка конус несущего винта наклоняется отно-
сительно первоначальной оси на угол [) н вращается вокруг нее с угло-
вой скоростью р1=р<ъз—а> против вращения несущего винта.
При форме третьего порядка меняются как направление, так и ве
личина этой угловой скорости; Рз ——а.
Частота колебаний переменных усилий в невращающихся частях
системы управления так же, как и частота вибраций фюзеляжа при
флаттере, совпадает по величине с угловой скоростью вращения осн
конуса, в чем и заключается основное различие между этими формами.
Если бы динамическая жесткость пспращающихся частей управле-
ния не зависела от частоты приходящих к ней усилий, то значения кри-
тических чисел оборотов флаттера, соответствующие формам первого
И третьего порядка, были бы одинаковыми. Однако при всех экспери-
ментальных исследованиях флаттера обычно отмечаются колебания
только с одной из этих форм, чаще с формой тре|Ьего порядка (т — 3).
В ряде случаев, в особенности тогда, когда в систему управления вклю-
чены инерционные демпферы, при флаттере наблюдается форма колеба-
ний первого порядка (т = 1). Эго объясняется тем, что динамическая
жесткость невращающейся части проводки управления в силу инер-
ционности, которой обладают входящие в нее детали, зависит от чи-
стоты колебаний, Следовательно, и шарнирные жесткости управления,
соответствующие формам перпого и третьего порядка иа вертолете,
несколько различаются по величине. Соответственно оказываются раз-
25 1002
385
тичнымл и критические числа оборотов флаттера. Эти соображения
будут еще дополнены в п. 6 §
При колебаниях по форме второго порядка (м=2) противополож-
ные лопасти в каждой парь имеют одинаковою фазу, а фазы этих нар
Отличаются на половину периода. Силы, приходящие на управление,
при колебаниях по этой форме замыкаются на тарелке автомата пере-
коса, жесткость которой в основном и опрёделяст шарнирную жесткость
управления для этого случая. Так как эта жесткость обычно доста-
точно высока, то и возможность возникновения флаттера с этой формой,
которая обычно называется тарелочной формой флаттера, к пределах
рабочих чисел оборотов несущего винта маловероятна.
Кривые (рис. 4.23), построенные на основании выражения (4. 3>,
позволяют судить о характере распределения фаз по лопастям при всех
этих формах для четырсхлопастного несущего винта.
4. Дифференциальные уравнения флаттера несущего винта с учетом
связи колебаний лопастей через автомат перекоса
От каждой лопасти несущего винта при колебаниях приходит мо-
мент, действующий на систему управления углом установки лопасти.
Величина этого момента, взятая относительно оси осевого шарнира
втулки, может быть записана н соответствии с формулами Г2 19) как
-/omky-r^J.r ^’21"2т№("'|Г5Л ~ £,2|u,'Kvl. (4.6)
где .V=0, [, 2, . ., 1 — порядковый номер лопасти
Здесь использованы все те же обозначения, которые были приме-
нены в § 2 при выводе дифференциальных уравнений махового флат-
тера изолированной лопасти на режиме осевого обтекания несущего
винта, Топько теперь число уразненнй увеличилось в гп о;н, т, е. во
столько рач, сколько лопаем ей в несущем винте.
386
Если колебания отдельных лопастей в несущем винте никак нс свя-
заны и каждая лопасть закреплена ла втулке совершенно изолиро-
ванно, то, положив в выражении (4.6)
•Hyjp — t‘jnp(-rjv+ (4.71
при дем к уравнениям, совпадающим с уравнениями (2. 19)
Но 1Экие конструкции несущих винтов обычно на вертолетах ис
встречаются.
Обычно вследствие взаимных влияний упругий угол поворота каж-
дой лопасти в осевом шарнире
(4.8)
связан с деформациями отельных цепей управления несущим впитом,
которые и свою очередь определяются совокупностью сил, приходящих
от всех лопастей несущего винта.
Для обычней системы управления несущим винтом эта связь мо-
жет бьпь представлена п пиде
Ул Уо.шп-Ух-п1^1-V^os.j‘An’ , у'Д’, (4.9)
। де как и раньше .V=0, 1,2,..., гл—[.
Здесь уоШ — угол попорота лопасти вследствие деформаций цепи управ-
ления общим шагом:
Y. й у* амплитудные значения углов закрутки лопасти вследст-
вие деформаций цепей поперечного и продольного управ-
лений соо^етствснпо;
Угс'—)ГОл поворота Л’-ий лопасти несущего винта вследствие
деформации тарелки автомата перекоса под действием
только тех сил, которые полностью уравновешены на та-
релке; предполагается, что если все внешние силы уравно-
вешиваются на таре.н-re автомата перекоса, то ее деформа-
ции подчиняются условию
VyOVl—Q. (4. JO)
л
фу)’’—азиму[ Л’-ой лопасти, отсчитываемый or плоскости продольного
управления по поводку тарелки автомата перекоса (см.
рис. 4.21); Э|0г азимут связан с азимутом лопасгп выражением
+ (4.11)
;де вп—угол выноса поводка втулки несущего винта;
зфуип—угол опережения управления;
J — угол отставания лопасти при ее повороте вокруг вертикального
иарнира; на рис. 4.21 лопасти показаны в положении, когда
; = 0;
.J/0*-! ^v—
Если несущий винт имеет три или меньшее число лопастей, то ве-
личину у£' следует положить равной нулю, так как в этом случае не
существует такой комбинации сил, которая бы моща полностью урав-
новеситься на тарелке автомата перекоса.
При чегыре.хлопастном несущем пакте все значения ру', равны цо
модулю, т. с. при .V-0, [, 2, 3
I ykn1! =consi. (4. 12)
587
При большем числе лопастей это равенство не соблюдается
Если ввести понятая о жесткости различных цепей управления,
приведенных к осевому шарниру лопасти, то величину шарнирного мо-
мента, действующего на лопасть от управления, можно будет выразить
через эти жесткости и деформации соответствующих проводок управ-
ления:
Л^-цр = С0.шУ0.ш-^ CjYj. sin 4”Сгуг COS^'n -[-Сд.пУал1, (4.13)
где Со ж. с,, с, и Сап — приведенные к осевому шарниру лопасти жест-
кости цепей управления общим шагом, попереч-
ного и продольного управлений и тарелки
автомата перекоса соответственно.
Форма записи выражения (4. 13) предполагает, что жесткость сл.л
ооасгся постоянной независимо от вида комбинаций сил, замкнутых на
|Эрслке автомата перекоса.
Значения приведенных к осевому шарниру деформаций различных
цепей управления можно выразить через углы поворота отдельных ло-
пастей ух, если представить выражения (4. 9) как систему уравнений
относительно неизвестных у0.ш. Ух, Уг и ¥л.п- Решение системы (4.9)
дает следующие выражения для деформаций отдельных цепей управ-
ления:
При
Ь-43''л’8|П^'«’'
Л
y»=-/-2yaCos^>‘
4
(4.14)
Для четырсхлоластного несущего винта у^’1 может быть определе-
но по формуле
—-*-c°snAr2 Y^cos лЛг, (4.15)
л
При числе лопастей гл>4 определяется по выражению:
y1"i=4 2 Ms-^Ar_2VvTOS“v,L'v-
ст_? ’’ tf
Подставив выражения (4.14) и (4.16) в уравнение (4.13), полу-
чим выражение для шарнирного момента от управления для лопасти
t порядковым номером Л’.-
«ж с. ш у ч.1 с-sin с? 2т-’ sl° +
--2, 2Ti',ras®-1 +
m—гл—2 •
V си 2_VL'v' (4-17>
m- 2 Л'
388
Подставив выражение (4.17) в уравнение (4.61 и рассматривая
это уравнение имеете с первым уравнением (2.19), получим систему
дифференциальных уравнений связанных колебаний .гацаетей несуще-
го винта на режиме осевого обтекания:
+ *Л^-С^„^(зд+.?Д,)+
+ ^Х^г)й11й.+ 18)
- -Д p:™sc,2(t-v^‘:w<'“,+:''“’+
m-г..,-2
+ г р’ - 5 V(4v 1 У?*)СО5^Г ;V==0’
где
Система уравнений (4.18) является системой обыкновенных диф-
ференциальных уравнений относительно неизвестных функций и <pv
с периодическими коаффигшентамп, изменяющимися по времени вместе
с переменной
'^д? = 1-г‘— Л'Д°л- (4.20)
5. Преобразование уравнений (4.18) в частных случаях,
когда циклические формы являются решением
дифференциальных уравнении флаттера несущего винта
Проверим, являются ли циклические формы колебаний решен ie.M
дифференциальных уравнении флаттера несущего винта (4 18), запи-
санных с учетом связи мивду колебаниями лопастей через автомат пе-
рекоса.
В общем случае связь между переменными величинами при цик-
лических формах колебаний несущего винта может быть представлена
с виде
= | (1.21)
-N=y I
384
где ftj и а, — углы поворота лопасти с порядковым номером <V=0 отно-
сительно горизонтального и осевого шарниров, являющиеся
пепзвестц|чми функциями времени;
—фазовый угол, характеризующий форму колебаний с по-
2л рядком т.
Подставив выражения (4.21) в дифференциальные уравнения
<4.18) н, последовательно меняя значения т от нуля до ?л -1, обнару-
жим, что циклические формы колебаний является решением уравнений
(•1, 18) только для значений т — 0 (синфазный флаттер) и г—2>т>'2
(тарелочная форма флаттера), При этих значениях дифференциальные
'равнения (4.18) преобразуются в уравнения, точно совпадающие
с уравнениями флаттера изолированной лопасти (2.19). Только вхо-
дящее во второе уравнение системы (2 19) значение частоты собст-
венных колебаний лопасти на кручение станопится ранным
Px.v — Ротп (4 22)
при синфазном флаттере (т=0) и
(4.23)
при тарелочном флаттере (гл—2>щ$;2). когда все силы, приходящие
от лопастей, замыкаются на тарелке автомата перекоса, и цепи попереч.
ного и нродо ibnocci управлений и цепь управления общим шагом не
и 3i р\ жают.
Одновременно оказывается, что циклические формы колебаний при
щ-1 и tn-z,,—1 являются решением дифференциальных уравнений
(4 181 только в одном частном случае, когда сх — сг В этом
частном случае дифференциальные уравнения (4. [8) преобразовывают-
ся к уравнениям, совпадающим с (2.19) для изолированной лопасгн
Только значение в этом случае должно быть положено равным.
Р^-Рх-Рг- (4.24)
Таким образом, фланер несущею влита в целом может быть рас-
смотрен па модели изолированной лопасти, имеющей жес!кость задел
ки, равную приведенным жесткостям цепей управления общим шагом
Се.ш, циклического управления сх-=с, и тарелки автомата перекоса Сп,
ВЗЯ1ЫМ порознь.
6. Флаттер несущего винта при различной жесткости цепей
продольного н поперечного управлений
Для решения дифференциальных уравнений (1. 18) в случае, когда
можно применить следующий прием. Введем новые переменные:
(4.2.5)
А
390
Умножил все члены уравнений (4.18) последовательно на siin|r<*’
н на cosi|>*^> и просуммировав их ио Д', получим систему обыкновенных
дифференциальных уравнений относительно новых переменных следую-
щего вида:
— 2и>т]р — +
4-ш2(&и -(y)U 2cuu>nf — rf|S»%=0,
т)0+f/цо.Пс, Ь 21<0 -гrf, ju)2^ — -|- —
•? — -L-((il,* — 1)ш’--у/2]— 2м)т^—"'г
— С.Д-; ^21,иГ1е - ^2|">2,П? =0.
TJ +с'г;0Пе-г[(^5"~ — /7г]'Ъ+2<О*?~Г
— Г21Т|?-г^2|<^+/7р<’Ф Т 0.
(4.26)
Система уравнений (4.26) может быть решена обычным меюдом,
применяемым для решения системы дифференциальных уравнений с по-
стоянными коэффициентами.
Подобный метод приведения задачи к системе уравнении е посто-
янными коэффициентами был применен Coleman'oM и Б. Я- Жеребцовым
при исследовании земного псзонаяса вертолетов.
Можно показать, что» переменные (4.25) могут быть выражены
через переменные, предложенные А, П. Проскуряковым для исследо-
вания устойчивости вертолета.
В своих работах А. П Проскуряков выражал угод поворота лопа
ст относительно горизонтального шарнира в виде
(4.27)
9л —W) т (t) cos (/) sin ол.
Если умножить выражение (4.27) поочередно па созфл и sin4>
и просуммировать по А, то окажется, что
а,(/)—J- У&уСОБфл.
(4. 28)
т. е. переменные at(f) и по существу совпадают с церемонными Т|р
не-
применение описанного выше приема для решения уравнении
флаттера вертолета при сх^сг н было предложено Л Н. Гродно.
Для получения практических результатов он был применен также
« В. Л Ильичевым.
§ 5. МАХОВЫЙ ФЛАТТЕР НЕСУЩЕГО ВИНТА
В ПОСТУПАТЕЛЬНОМ ПОЛЕТЕ
1. Предварительные замечания
Эксперименты, проведенные на различных вертолетах, показывают,
что в поступательном полете флаттер может возникнуть раньше, чем
в условиях осевого обтекания несущего винта, например, при его опро-
бовании на земле. Поэтому определение критических чисел оборотов
391
Йлаттера в полете представляет значительный практический интерес,
ричем основной вопрос, который требует при этом разрешения, за-
ключается в том, насколько критические числа оборотов флаттера в по-
лете ниже, чем на земле,
Возникает и целый ряд друтих важных практических вопросов На-
пример, какой запас по параметру до флаттера в условиях цалемцой
проверки должен быть обеспечен с тем, чтобы возможность возникно-
вения флаттера в полете была исключена.
Псе эти вопросы могут быть удовлетворены, если имеется возмож-
ность выполнить расчет флаттера в поступательном полете, позволяю-
щий определить п частности и зависимость критических чисел оборотов
от скорости полета.
Между тем, при расчете флаттера в полете возникают значитель-
ные трудности. Эти трудности связаны прежде всего с существенным
усложнением дифференциальных уравнений, описывающих колебания
лопасти. Поэтому при рассмотрении этого вопроса с них и следует
начать.
2. Дифференциальные уравнения колебаний лопасти
в поступательном полете
Дифференциальные уравнения крутияьно-махопых колебаний допа-
сти п поступательном полете составляются таким же образом, как это
было выполнено для режима с осевым обтеканием несущего випт.ч.
Только значения относительных скоростей потока, обтекающего про-
филь, должны быть вычислены с учетом добавки от поступательной спо-
рости.. Эти скорости могут быть записаны и виде
Ux—uiR (г 4 sin о),
try—®7?/л —г —jlcos ф
(о.1)
Подставив выражения (5. [) в уравнения (1.6), а затем (1.6) •
в уравнения (2.3) и (2.11), получим дифференциальные уравнения ко
лебании допасти в поступательном полете:
р | 51пф)'ир-j-^1-j-pt’jсозф +-y-p.26*|sin2'^и?р-!-
+ с12? + (^12^2sinO)u>9[sinф —
---^-р!6[{(1— cos2i)juJo=<i)2yl3 J АгХ(г-' psinOJoir,
+ БШф)*"?-]-1| b22 4- yP^sin ф— -i- ^'-(1
— cos24jw2 + ^p|tp-; r2|3-[ (c/21 _и&1251Пф)«)₽-]-
-? (I&2, - cosФ- у-[I2sin 2ф]4-z/^j p- fio-!
— rM -ш2 — I &V(r ] [*Sin<p)<7r.
Zoun J '0 J
о 0
30 >
Здесь коэффициенты Cis. Csi. ^12. ^21, ^22, &I2, &S1, f>2S те ЧТО и в
формулах (2.14), кроме того, введены следующие дополнительные ко-
эффициенты:
(5.3)
Предполагая, что частное решение [5'• Иф' уравнений (5 2) най-
дено, положим, как и раньше (см. § 2, п, 4),
Р=Р*+Р,;
ф-ф*-Гфв,
где Ри и фи — углы отклонения лопасти от положения, соответсгвуюЩс
го ос установившемуся движению, определяемому част-
ным решением.
Подставив эти выражения в уравнения (5.2). получим дифферен-
циальные уравнения возмущенного движения лопасти в поступательном
полете:
?+(dn '^ц8*11'?) 1в?+(1 ‘I cos ^ + -5- Н2*{* Siu2<j)o»s^-f-
I <?|2? + (^2 — M;2siuO)ax?4-
4-[*12 siI'?—-1 lJ? 3o)j<i>2==0,
© ! (^22+ 1Ч/2З ^_НИ>81г|,|''|_ (5.4)
1 — cos2o)pi>- + p?p p^sin^H-)-
— [[*21 — |*W2COS - V ^^2 Siri 2'?] ,,|Э + *XpJ Г; -= 0-
Здесь индексы при переменных рв ц отпадающие, что они отно-
сятся к возмущенному движению, дтя простоты опушены.
3. Решение дифференциальных уравнений
Уравнения (о. 4) представляют собой систему дифференциальных
уравнений с периодическими коэффициентами. Решение такой системы
может быть записано в виде
f
где функции 7? и Г»— определяют содержание гармонических со-
ставляющих колебаний лопаС|И при флаттере
Эти функции могут быть записаны в ваде
Л=2(Г?«СОЗЛ'? I ^sin«9);
Т. =- (?«cos пф -f- с, s fn tv'j),
где н=[. 2, 3, ... — постоянные коэффициенты, определяющие порядок
соответствующих гармоник
Определение критических чисел оборотов флаттера в этом случае
может быть осуществлено, ес.щ выражения (5 5) с учетом выражений
(5.6) подставить в дифференциальные уравнения (5,4) и приравнять
между собой коэффициенты при одноименных гармонических состав-
ляющих. В результате этой операции обргпуется система алгебраиче-
ских уравнений относительно неизвестных коэффициентов 0о. фо, ₽«, рп,
Ф« и Фи. Для решения ЭТОЙ системы должны быть определены корни
характеристического уравнения, порядок которо/о оказывается завися-
щим от числа гармонических составляющих ц, удерживаемых в ре-
шении.
Решение уравнений (5.4) с учетом гармоник очень усложняет
расчет и в то же время при реально используемых значениях [i<0,4 не
вносит в результаты расчета достаточно серьезных уточнений. Поэтому
в практических расчетах обычно используется либо приближенный
метод без учета гармонических составляющих, либо метод расчета
с численным интегрированием уравнений движения лопасти по времени
Один из вариантов такого метода будет изложен в § 7 этой главы
4. Определение критических чисел оборотов флаттера
без учета гармонических составляющих движения лопасти
Ьсли пренебречь влиянием гармонических составляющих на
критические числа оборогоп, то расчет флаттера п поступательном по-
лете оказывается не сложнее, чем в условиях осевою обтекания несу-
щего вкнга, Приближенное решение, не учитывающее влияния гар-
монических составляющих, может быть получено, если в дифференци-
альных уравнениях (5.4) опустить периодические коэффициенты*
При этом учет поступательной скорости полета будет сведен к введению
в уравнения (1.6) постоянной части функций, зависящих от С^. Для
лого достаточно положить
* Этот Mi тот выл предюАгн В Д Ильичевым
394
Тогда система дифференциальных уравнений возмушенпси о дви-
жения может быть записана следующим образом:
>-r^ii"’r? + *“2? + cia9+,ii2U)4'1 *12 (1-] ^?=0, j
| (°'8)
>U
где Ь’
*12
Sb==2-
Для прямоу i ольной в плаце лопасти коэффициент 6*5 можно при-
ближенно считать равным —2. Коэффициент b’t, мал по величине и не
оказывает существенного влияния на результаты.
Уравнения (а. 8) отличаются от уравнений (2. 19) для режима
с осевым обтеканием несущего винта только членами типа (1— —ц26'5)>
Эго позволяет определять критические числа оборотов флаттера в по-
ступательном полете по формуле (2 27), но в выражениях некоторых
коэффициентов (2 24), нходяшнх в эту формулу, появится дополни-
тельный член типа (J— -*2):
С,—пФтт[''=-+‘/"1'а (’ Э “
г 1 I \ 1 (0,9)
^ЧЧ^-Ч'-Ж'
Таким образом, ссди пренебречь гармоническими составляющи-
ми движения лопасти, то задача об определении критических чисел обо-
ротов флаттера в поступательном полете может быть сведена к реше-
нию системы дифференциальных уравнений (5 8) с посеянными ко-
эффициентами.
5. Влияние скорости полета на критические числа оборотов флаттера
Влияние скорости полета, определяемое членом (1—“И^д) н ураа-
нениях (5.8), оказывается весьма слабым, На рис. 4.24 приведены за-
висимости критических чисел оборотов по скорости полсти, опреде-
ляемой значением щ для трех различных значений пентрочки лопастч-
395
Из графиков ((:м. рис. 4 24) следует, что критические числа оборо-
юв флаттера снижаются примерно на 5—10% с увеличением скорости
полета до значений ц = 0.25ч-0,3.
При экспериментах, проводимых па вертолетах, влияние скорости
оказывается несколько более сильным, Это может быть объяснено влия-
нием следующих факторов.
Выше, в § 3, была показано, что для малых котебаний лопасти при
флаттере осевой шарнир с фрикционным трением может рассматривать-
ся как линейный демпфер, эффективность которого тем ниже, чем
больше зтдоьая скорость относительных перемещений в этом шарнире
при вынужденных колебаниях
лопасти. Поэтому критические
числа оборотов флаттера в по-
лете уменьшаются с ростом отно-
сительных перемещений в осевом
шарнире, а следовательно, и со
скоростью полета, так как со
скоростью Относительные пере-
мещения обычно возрастают. От-
сюда следует, что на флаттер
могут влиять нее факторы, от ко-
торых зависит балансировка вер-
толета, так как ею определяется
амплитуда колебаний в осевом
шарнире по первой гармонике
и числу оборотов несущего винта.
Весьма сильное влияние мо-
гул оказать также перемещения
лопасти п осевом шарнире, происходящие с гармониками выше первой.
Эти гармонические составляющие имеют обычно меньшие по величине
амплитуды перемещений, но существенные значения угловой скорости,
•по приводит к значительному падению эффективности демпфирующего
действия сухого трения в осевом шарнире лопасти.
Таким образом, во многих случаях сильное снижение критических
чисел оборотов ф-гатзера в поступательном полете объясняется умень
шепнем демпфирующего действии i рения в осевом шарнире.
Не менее важным фактором, способным оказать существенное
влияние на критические числа оборотов флаттера, является изменение
аэродинамических характеристик профиля лопасти в связи с цмеющп
ми место в условиях поступательного побега иОлебацИ>.Мй Значения
числа М. Как уже говорилось выще, при изменении числа М в диапазо-
не от 0.5 до 6,9 очень сильно меняются аэродинамические характери-
стики п, что особенно важно для флаттера, очень сильно смещается
положение фокуса профиля.
Учесть перечисленные факторы достаточно точно позволяет только
,. етод с использованием численного интегрирования дифференциаль.гых
равнений движения лопасти п» времени (ьм § 7).
§ б. РАСЧЕТ ФЛАТТЕРА С УЧЕТОМ ИЗГИБА
И КРУЧЕНИЯ ЛОПАСТИ
1. Изгиб н кручение лопасти при флаттере
Выше отмечалось, что в подавляющем большинсве случаев в фор-
ме колебаний лопасти в плоскости взмаха при фланере Преобладаю-
щими оказываются колебания лопасти, как’твердого тела. Эти колсбэ-
пия лопасть совершает, поворачиваясь вокруг горизонтального шарни-
ра Крутильные колебания лопасти происходят в основном вследствие
да
ее попорота вокруг осевого шарнира. В этом шарнире лопасть повора-
чивается из-за кинематическою воздействия автомата перекоса и ком-
пенсатора взмаха и деформаций проводки управления. Изгибине и кру-
тильные деформации самой лопасти, как правило, не оказывают зна-
чительного слияния ра критические числа оборотов флаттера. Тем не
менее, цзгпбныс и крутильные деформации лопасти при флаттере этою
вида обычно весьма существенны. Они приводят хотя и к меньшим пе-
ремещениям элементов лопасти по сравнению с перемещениями при ко-
лебаниях лопасти как твердого тела, но эти перемещения того же по-
рядка. Поэтому деформации самой лопасти никак нельзя считаю прене-
брежимо малыми и синеем ими ие интересоваться.
В отдельных случаях изгибные деформация лопасти возрастают
и начинают существенно изъять на критические числа оборотов флат-
тера. Особенно важным оказывается учет изгиба лопасти при опреде-
лении влияния сосредоточенных балансиров, устанавливаемых на ло
пасть, в частности, и для устранения флаттера.
Известны также отдельные случаи, когда лопасть при флаттере
совершает цыибные колебания, в которых содержание маховой формы
очень мало. Следует оговориться, что такие случаи очень редки. Однако
для реактивных вертолетов с двигателями на копнах лопастей такой
флаттер, называемый обычно «иэгкбным флаттером», представляем
серьезную опасность. Рассмотрению этого типа флаттера будет спе-
циально посвящен п. 8 эюго параграфа.
Что касте гея крутильных колебаний лопасти при флаттере, то. i.'an
уже говорилось, их влиянием можно пренебречь, когда коэффициент
о<0,4д-0,5 (см. § I п. 1). В остальных случаях, и в особенности, когда
система управлении утлом установки лопасти имеет относительно очень
большую жесткость, пренебрегать кручением лопасти нельзя. Это лю
жет привести к очень большой ошибке.
Однако большинство реально построенных вертолетов имеет коэф-
фициент а<0,4. Поэтому ниже вп. 6 этого параграфа будет специально
рассмотрен флаттер с учетом изгиба, ио без учета крутильных деформа-
ций лопацги. Такой подход приводит к существенному упрощению диф-
ференциальных уравнений.
2. Определение крутящих моментов от сил, изгибающих лопасть
При расчете крутильных деформаций лопасти очень важно, каким
способом определяются крутящие моменты от сил, изгибающих ло-
пасть. Если лопасть изогнулась в плоскости взмаха, то сила Q, прило-
женная к лопасти в плоскости вращения, создает крутящий момент па
плече Др относительно сечения на радиусе г, лежащего ближе к ее
комлю (рис. 4.25). Аналогично при изгибе лопасти о плоскости вра-
щения такой же кру|ящий момент на плече Дх создает сила Т, дейст-
вующая в плоскости взмаха
При расисте крутящих моментов от сил, изгибающих лопасть, важ-
но ие упустить, что составляющие центробежных сил. разгружающие
лопасть при ее изгибе, также участвуют в создании крутящих моментов.
Если подсчитать только крутящий момент от внешних сил, изгибаю-
щих лопасть, ю ой окажется па много больше действительного крутя-
щего момента так-же, как момент только от внешних сцл. изгибающих
лопасть, оказывается во много раз больше изгибающего момента в се-
чении лопасти.
Рассмотрим элемент лопасти длиной dr, изогнутый в двух взаимо-
перпендикулярных плоскостях (рис. 4.26). Приравняв нулю сумму мо-
ментов всех внешних сил относительно касательной и осн лопасти
397
i; сечении на радиксе г и отбросив члены более высоких порядков мало-
сти относительно dr, получим
Если для простоты предположить, что плоскости наибольшей и наи-
меньшей жесткости лопасти совпадают с плоскостями вращения и взма-
ха, то. положив
получим
(6.3)
(6.4)
(6.5)
где /х и 1у~ упругие моменты инерции сечения лопасти при изгибе
в плоскости вращения н в плоскости взмаха.
Формула (6.5) была впервые предложена для расчетов лопасти
В. Н. Новаком.
Из рассмотрения этой формулы прежде всею следует, что погон-
ный крутящий момент—от сил. изгибающих лопасть, всегда равен
'Jr
HV41O если
1,-1,, (6.6)
т. е. в том елччае. если жесткость лопасти в плоскости вращения и в
ичоскости взмаха одинакова.
Кроме того, в силу малости изгибающих моментов Л!* и Mv (вслед-
ствие разгрузки центробежными силами эти моменты в 8—12 раз меньше
моментов от действующих на лопасть внешних сил) погонный крутящий
ПЛТкр
момент ---- оказывается весьма малым во всех случаях даже тогда,
or
когда Этот вывод оказывается очень важным и из него вытекает
общий подход к расчету крутящих моментов и крутильных деформации
лопасти, заключающийся в следующем.
В каждом сечения допасги следует определить крутящий момент
относительно оси жесткости лопасти в рассматриваемом сечении от сил
действующих только в этом сечении. Затем эти местные крутящие мо-
менты следует просуммировать по длине лопасти. Отсюда в частности
следует, что плечи сил, вызывающих крутящие моменты по лопасти,
нужно оставлять неизменными, независимо от того, изогнута или не
пзогнпа лопасть.
скостях
Применительно к расчету флаттера из
погонный крутящий момент по лопасти от
вычислять по формуле
д,,.
—=u)2mraz/',
этого вывода следует, иго
центробежных сил следует
(6.7)
а не по часто применяемым форелям типа
(6.8)
(6 9)
сцраведлипым только для лопасти с бесконечно большой жесткостью
в плоскости вращения
3. Дифференциальные уравнения нзгибно-крутильных колебаний лопаете
Изгибпо-крутильпче колебания лопасти в пустоте рассмотрены
в § 5 гл, 1 книги второй. При исследонании изгиб^о-крутильных когщ.
йаннй о воздухе нужно дополнительно учесть аэродинамические силы,
Используя дифференциальное уравнение изгибных (1.9) и крутильных
399
(3.6) колебаний лопасти (см. гл. 1 книги второй) и дополнив их инер-
ционными членами связи и аэродинамическими силами, выраженными
по формулам (1.6) настоящей главы, получим систему дифференциаль-
ных уравнений изтибно-крутильных колебаний лопасти в воздухе.
ту-{ - ma» —
- ['"’ + (Tt - U» 1=0:
/„? - (<77?']'4--I- i-
— 4 * x9y'»—6ryJ->»2mar/ — m*y^0.
(6. 10)
Эти уравнения записаны в форме, относящейся только к возмущен-
ному движению лопасти. Частное решение, описывающее иенозмущенное
установившееся движение лопасти, здесь не рассматривается.
В уравнениях (6. 10) применены следующие обозначения:
у — перемещение элемента лопасти в плоскости взмаха при возму-
щенном движении лопасти,
Ф- угол поворота элемента лопасти и том же движении;
т погонная масса элемента лопасти;
/т—погонный момент инерции элемента лопасти относительно осп
осевого шарнира;
GT — жесткость лопасти на кручение;
Д'—центробежная сила в сечении лопасти:
₽
Л’=-го5 С mrdr-.
а- расстояние от центра тяжести сечения до оси осевого шарнира,
положительным считается направление от оси осевого шарнира
к задней кромке лопасти;
Оф — расстояние от фокуса профиля до оси осевого шарнира.
Штрихом отмечено дифференцирование но радиусу лопасти, а точ-
кой— по времени.
Для решения этой системы уравнений удобно вместо переменной ср.
определяющей полный угол поворота элемента лопасти в возмущенном
движении, перейти к переменной т5, представляющей собой только упру-
1ий угол поворота лопасти « связанной с ф при помощи соотношения
где t/j - угол поворота лопасти в горизонтальном шпрпире;
и — компенсатор взмаха.
Подставим выражение для угла ф в дифферевпиальпые уравнения
изпибпо-крутильных колебаний лопасти (6. 10). Это даст возможность
400
переписать их в форме более удобной для дальнейших преобра-
зований
ту-г[Е1у"}‘ [Л'./Г т Д1зхг>о +
_ г;е»* [04ь
— mrt- ? — 0-b-xo^b'& 6yj = O;
((. n)
ус;^°ф[6”й+руE'yj -iu^msr/ —
- nt’y i„ty0 - *>-!,№ - -^- C^'^o -
-2. c;Oto, [(.<„; (JL -.0.
При налипни горизонтальной скорости полета вертолета относитель-
ная скорость потока, обтекающего профиль, будет периодической функ
цией времени и радиуса. Приближенно эту скорость можно положить
рапной скорости Ux-
Lrf=u,r—lzsinw/, (6,12)
Поэтому уравнения (6. II) представляют собой систему дифференциаль-
ных уравнений в частных производных с периодически меняющимися по
времени коэффициентами.
Когда скорость полета вертолета V равна нулю, периодические ко
эффициепты системы (6. II) становятся посюянкыми. не зависящими
от времени величинами.
Для рассматриваемого типа несущих винтов система (6.11) имеет
следующие граничные условия:
/И0-[Е//]э=х(А1л + МтД (6,13)
Ч,Н^П-ст11Л-Л1тг,,
где Л10 из1ибающнй момент в комле лопасти;
Д1Л — крутящий момепт и комле лопасти;
Л1тр — момент от сил трения в осевом шарнире втулки;
cjup— жесткость системьнуправлсния;
8,.—угол поворота комля лопасти за счет деформаций системы
управления.
4. Решение дифференциальных уравнений
Решение системы дифференциальных уравнений (6. II) можно по-
лучить, применив метод Б Г. Галердина. Положим
s~£W-
' (6.14)
k
где у'>' и в1"’ — формы собственных изгибпых и крутильных колебаний
лопасги в пустоте;
t>j и yft —коэффициенты изгибиых и крутильных деформаций ло-
пасти ПО J-му И31ИбнОМу и А-му крутильному тону соб-
ственных колебаний.
26 1002
401
Коэффициенты 6; и уй представляют собой некоторые функции вре-
мени. Поскольку уравнения (6. ] I) представляют собой днфферспцяаль
ные уравнения с периодическими коэффициентами, то коэффициенты б,
и уд должны быть функциями времени типа
^ = ^'(1-1-7), (6.15)
г ic функция Т определяет со,держание гармонических колебаний при
флаттере.
Если, как и раньше в § 5, п 4, ислагь решение с точностью, ограни-
ченной только основной частотой и влиянием гармонических со-
ставляющих пренебречь, то в уравнениях (611) можно опустить перио-
дические коэффициенты.
Применяя к этой упрощенной системе уравнений метод D. Г. Галер-
кипа, получим систему обыкновенных дифференциальных уравнений от-
носительно переменных б>- н ук. В матричной форме эта система можю
быть записана, как и раньше (§ 2 п. 5), в виде уравнения
CA'+OuX + fA-ч?Н)Х^О. (6.16)
Здесь переменная X — есть вектор-функция с проекциями 6, и у., т. е.
а А, В, С и D — есть прямоугольные матрицы порядка г, где z — сумма
числа изгибных и крутильных тонов, учитываемых в расчете.
Полагая в уравнении (6. 16) Х=ХцСу-‘, получим систему алгебраи-
ческих уравнений вида
/9ша-п-4 — <>?В\Х'„ =_0. (6.18)
Приравняем определитель этой системы пулю Полученное таким
образом алгебраическое уравнение относительно неизвестного парамет-
ра ?. является характеристическим уравнением системы (6.16). Корни
этого уравнения полностью характеризуют движение лопасти, описанное
системой (6.11).
Для определения границ флаттера следует положить в характери-
стическом уравнении Х = :р и найти соответствующие значения со и р. Эти
значения будут определять параметры границы зон флаттера.
Анализ результатов, полученных из расчетов, показываем что п об
тем случае каждому сочетанию крутильного и изрибного тона колеба-
ний лопаств может соответствовать .топа неустойчивости с колебания-
ми, имеющими форму, в которой преобладает содержание тонов этого
сочетания. Однако при реально используемых параметрах лопасти да-
леко не каждом}' сочетанию топов соответствует зона флаттера. Таким
образом, число зон флаттера оказывается всегда меньше числа сочета-
ний изгибных и крутил),пых тонов, но никогда не может быть больше
числа этих сочетаний.
Для практических целей очень важным обстоятельством оказываю»
ся прямая зависимость критических чисел оборотов флаттера от часто-
1Ы собственных колебаний входящего в рассматриваемое сочетание кру-
тильного тона лопасти. Поэтому наиболее низкие значения критических
402
чисел оборотов флаттера дают сочетания, включающие в себя только
первый тон колебаний лопасти на кручение. Все остальные сочетания,
основанные на более высоких ьрутнлъпых тонах лопасти, приыического
интереса не представляют. так как соответствующие этим зонам крити-
ческие числа оборотов флаттера оказываются всегда выше интересую
шей нас рабочей области.
Все формы флаттера, соответствующие сочетаниям различных нз-
гибных тонов лопасти с первым топом колебаний лопасти на крученче,
будем называть главными формами флаттера. В дальнейшем нас будут
интересовать только главные формы колебаний, так как эти формы флат
тера имеют наиболее низкие критические числа оборотов и поэтому
только они могут встретиться на практике.
5, Расчет флаттера с учетом трех степеней свободы
В качестве иллюстрации к изложенному выше методу рассмотрим
более подробно расчетные формулы для случая, когда форма колеба-
ний при флапере представляется в виде комбинации нулевого г и пер-
вого у нагибных и первого крутильного тонов.
Входящие в уравнение (6. 16) матрицы будут в этом случае третьего
порядка, а вектор-функция X будет иметь только три проекции:
(6.19)
Коэффициенты матриц Л, В,СчО как и выше отнесем к значениям
коэффициентов /гш, L; и Д, стоящих при старшей производной перемен-
ных:
—j mytyr.
Выпишем выражения для коэффициентов матриц:
а) матрица инерции С:
(6.20)
(6.21)
26*
4113
те
(6.21)
б) ма1рица коэффициентов демпфирования D-.
(6. 2*)
-Л у -^— f b3r& dr х ft’d.
26 Z, J u r
(6. 23)
7F е Т?"1 1 b3r*dr~*^M
*dl =
404
ггтМтЧ")'^'
1 о
Г[ ihr s‘‘lr+^Л1,1 (г ~Т°)rs</r
здесь [см. формулу (3.14)];
Л £| ffipnp
в) матрица жесткостей А:
/О О О\
4=( О а,2 О .
\О Ос„/
J?
<W5+
\—
ЛЗЯ - Ро
(6. 23)
(6.24)
(6. 2.5)
Здесь ро( частота собственных колебаний изгиба первого тона невра-
щающейся лопасти;
г) матрица центробежных и аэродинамических жесткостей Й:
!-^с’ух'1„ \ 6a,hr2&dr• I--1- I^R2 (tetfidr
(6.26)
(6.27)
+J тесгЗ&йг + »?вря&</л1,
J hudr
^2-_^f=^[ffiry^r I J-^7?2 f^dr
^ = ^+4"^° 77^ f p^rfr : l^2R2 \ t>y<!r
(6.27)
R R
здесь k— 2_ j p2 Jmra>; где ?=/.
0 r
Характеристическое уравнение для этого случая будет иметь следую-
щий вид:
лМр-рАМ, | \ЦВ^- , ар ; ?’»(^С, -|-CJ +'? (^£>, +ю2Р2 _]_£),)-
-J ) ш2С.. + £р+«>Н.,>+’г+ш2А., —Л‘Д-0 (6.28)
Здесь
А ~ Г11'-’u Т + L12^ О’
Д[ =ftt|S0-]-r,,5,-]_(У|37?04-!’|./r'i -d^Tf,-\
5t — *nS0 -[ ^11^1+^11^2+^13^0 + ^13^1“c)a^s +
+ ^|2^~о+^12Т', +£)+;>:
а2=с11Л3 | ct3A?a-| c-is73;
C.-^S.+AA^Cu^ + ^-iAA-^ >
+ ^12’/ l+^I2-|f2-4'C'12^4;
C2 = ^ll53 + cllSE+</|a/?3+rl3/?s-
I +i‘S4^-(?llS5 + &l.5/?2 + rf13Z1') + <?I3/?,; +
+ ^12^~2 + d 12^4 + й l^~s',
^s=+i‘Sa ' pСцЗ- — ^13/|?2 + ^1зА.>5+нз<г?7 +
+ 6i+\++?7’5+£’l97’7;
^s = cu^a<
£'1 = 6iiS1 + r/llSb + 6ls/?J dd^T6'.
^2~ ^11^5 + +l-S ++з^.5—dy jA*7 + ^12^5+^ 2^~7\
+i — ^u-Sg-J-fe^A'g — Z’isT'g:
Л18/<Н b12T^
(6.29)
где
So — с43г83 — с23сз2;
S| — Сп2^зз4 ГЯ3^22 — С1!^31 ~ С22^1^
+ Йаз^и+^22^83 — ^ac3j “ b-rf 23"“ ^lAs-
S3=; OiKjCgj 4- o-i3C32;
S4~623c/al-|-63id5-2 b^ct^- ^зг^а-
^5 = 022^33-7 **33^221
Sg— ^22^33— ^52^32’
S"7=a3J’a}4
^S—^2ai3'
Ro = С2)Г 35 ^зг^зь
Ri=Cild3i-\-c27dr>l C!2^3l r3l^?2'
/?2~i2lCbo-|-^3j' 214*^21^32—^22Г.31~ ^ЦС21 }\\
-<2S2«3i:
#4=" lhidi2-^-bad2t- Ь”Лл, b3yd,2'.
Rb------аЛм:
Re bitbg2—
/?7=----«2S^3>
7"o = < 23Cj) г21сзз;
Rk—r2^3. 4 Ля^В" C2^3S — С3^'уР'
1^ — b^Cfi 1-^.11C2j4_^23^31 - ^2lC31 '^33r21
T$— — <JGC2h
У4-— 628^314 ^31^21 — ^2^33 — Wni
7’5;= - actin',
7д —&?3Л,?{ 'bul’a'
T-;-= —аяЬц
(6.30)
Корни характеристического уравнения (6.28) могут бить определе-
ны при помощи любой стандартной программы, имеющейся на вычисли-
тельных цифровых машинах всех твпов. Такая программа может вклю-
чать в себя и операцию вычисления коэффициентов характеристического
уравнения прямо по коэффициентам уравнения (6- 16). В этом случае
можно не пользоваться формулами (6.29),
Значения угловой скорости «, соответствующие границам флаттера,
могут быть получены и непосредственно, если в характеристическом
уравнении (6.28) положить }.= ip и приравнять нулю действительную
и мнимую части уравнения отдельно.
Полученные таким образом уравнения будут иметь следующий вид'
Р)^Р6АЧ~ — /?3> -J- ^2 ([(1*/>, -l-mSDjjJ-Dg) —
-^(^Fi+^i-V^-O; (6.31)
Z,^ ^=.^4— /?2(^С, Cs)4-w<£, j (6.32)
Если из уравнения Ls(<s), р)~0 определить р=/(ш) и подставить
в уравнение L|(w, р)=0, то точки пересечения полученной кривой
Л1(о))=0 с осью абсцисс будут соответствовать границам флаттера.
107
6. Расчет флаттера с тремя степенями свободы
без учета кручения лопасти
Все приведенные выше формулы значительно упрощаются, если
предположить, что лопасть несущего винта абсолютно жестка па кру-
чение Выше уже отмечалось, что это предположение вполне законно
.для тех несущих винтов, у которых жесткость лопасти на кручение зна-
чительно выше жесткости системы управления углом установки лопа-
сти. В этом случае при крутильных колебаниях элементы лопасти пово-
рачиваются в основном вследствие деформаций системы управления
и в меньшей степени вследствие деформаций самой лопасти.
Учет изменения угла поворота лопасти по длине приводит к очень
малому изменению некоторых коэффициентов уравнения (6. 18) [см.
(6 21), (6 23) и (0 27)). Это обьягииетси тем, что величины HHieipa-
лов, входящих в выражения этих коэффициентов, определяются
в основном концом лопасти, на котором действую! большие аэродина-
мические силы, а изменение угла поворота 0 на протяжении только кон-
ца лопасти незначительно. Поэтому предположение о постоянстве углов
поворота поперечных сечений лопасти по сс длине во многих случаях
не приводит к существенным погрешностям. В то же время это пред-
положение значительно упрощает все выкладки, так как Ф=1 и нет
необходимости разделять угол поворота каждого сечения лопасти на
О и v.y'a.
Дифференциальные уравнении движения для этого случая могут
быть записаны следующим образом:
/о ш” + и,~1 <1 га? + Л пр (? х(/о) + *'^тр +
। (т*'-тз^)£/г~
— a? J mny’dr—Q.
(6.33)
Переменная ср здесь представляет собой полный угол поворота ло-
пасти относительна осевого шарнира как вследствие деформаций управ-
ления, так и в результате, кинематического действия компенсатора
взмаха.
Решение этой системы уравнений так же, как и системы (6. 10), мо
жет быть получено с помощью метода Б. Г. Галеркина, если положить
?—?0.
где ср»--функция только времени и не зависит от радиуса лопасти.
Выпишем расчетные формулы для случая, когда форма колебаний
в плоскости взмаха представляется при помощи только нулевого г и пер-
вого у юнов собственных колебаний лопасти В этом случае коэффициен-
те
ты матриц, входящие в уравнение вида (6, 161. могут быть определены
по следующим выражениям-
a) Maipnua инерционных коэффициентов С:
(6.34)
(6.35)
(6.36)
(6.37)
41)9
410
Характеристическое уравнение для этого случая будет иметь тот же
вид, что и и предыдущем случае [см. (6.28}]:
кЛ.А0 4- 4- (^ В, -н Вг) 4 Лэш (ш2С, -4 Cjj 4-12 (и>«£\ 4- <»’P2+£>3) -
4-ku>(W<£14-co2Fs4-F3V| <1>?5,4-53)=0. (6,42)
Здесь:
Лс- -Cii-Sq-!*с.2^~0’
B^b^ + d^-^S^dJ^ +
C, -ftuSi 4-<^ц524 cu-^4 "Г'^и^'а
<72-=<’/ц5з —HpSj j-^ia^s I ^tsT's-f-^rs^s’
/-»1 — ^|1$2'| <41^4 ~]-,:лЛ4_ *^1’^4•* 'L '"is^'a'
ZA— |5'll53"l"^ll^'sH-<rii,5’7-l'l^;34?5H ^12^3" 1 rK^"z>'
E3 ~ i^8 — c
E{ — ^11544_<^11‘5’з4_Д,13^С I
Ez~ ^ц554" rfii-5? ~b <^18^7+^i27’s4_(^i27'7-
(6. 43»
где
5q =с2;СДз £23^82!
S[ —^^djs'-Cxjdt^ — c^gdjn — cfld7-,;
•^2=^ас’зз4_ Ьззсп — dKd^—d^d^ ЬцС32—b^c--ri',
* 5j —a?le33'ha33C22 — a23c32',
$4 = ^2s^33 4” ^33*^22— ^23^32 —^32^1з>
vSj = <7j2<^3 4^ 4^33^22 — a2S^32'
5б=^щЙзз— b^Xi-
• S'? — Я52^33 4-4*83^72 — a23^32;
• Sg — °22Д.!3’
4?q 4"siC32:
(?1 — Carf32 4 ^32^21 —
/?2 — 62lC3'j 4~ bjzC'il 4-fl'.il4o 'Лз^зр
/?3-=я21сэа:
/(4— ^21^317 ^32^21 — ^a^l,
/?e==aarf32 —422^30
^Ц — ^цЬз2’
Rj — diib^
16. 44»
41!
'о— ^21^13'
7" i с-цс1п —
Zc=rf23d2| ^21>ГИ ^W;|-------------<^>I^3>‘
/ 3------аЛсЭЗ — a33C2<'>
7 t — bS3cl3I- t>j1d33 — b3^i._.:;
T& a28^31 a51^33— avf^J\,
Л) —
T 7 - ^2)^X3 — aA3^21i
7 g = — a5ls3..
1,6.44)
Величины критических угловых скоростей для данного случая опре-
деляются путем совместного решения двух уравнений, полученных из
(6. 42), если положить Л—ip, как н а случае упругой на кручение лопасти.
7. Результаты расчетов
Для нллюшрации влияния жесткости лопасти на изгиб на рис. 4 27
приведена зависимость критических чисел оборотов флаттера от хит для
лопасти с постоянной по длине погонной массой и центровкой Кривые
Рис. 4.27. Зависимость критических чисел оборо-
тов флаттера от жесткости лопасти ца изгиб
приведены для двух значений изгнбной жесткости лопасти. Величины
жесткости характеризуются значениями частоты собственных колебании
изгиба первого тона нсвращаюшейся лопасти роь Рассмотрены лопасти
с обычной величиной жесткости на изгиб, когда рп, /риу=0.3 (сплошная
кривая) и случай, когда Ро1/рвр=3,О, что соответствует очень жесткой
лоцаетн (пунктирная кривая).
412
Содержание изгиба в форме колебаний лопасти при флаттере может
быть оценено по отношениям di/do, приведенным для рядя точек па том
же графике. Величина б|/б> равна отношению прогиба конца лопасти
при изгибе по форме первого тона к перемещению ее конца при колеба-
ниях лопасти как твердого тела (форма пулевого тона).
Иа приведенных данных следует, что для лопасти с постоянной по-
гонной массой и центровкой по длине учет изгкбных деформаций пл
псовому тону не сильно уточняет результаты расчета
8. Изгибный флаттер
Приведенные выше результаты нельзя распространить на все коц-
стрккдии лопастей несущих винтов В отдельных случаях при флаттере
наблюдаются колебания с преимущественным содержанием изгиба ло-
пает» Такой вид флаттера Принято называть нагибным флаттером.
При И31йбном флаттере лопасть колеблется в плоскости взмаха
с формой, близкой к какому-нибудь одному тону собственных колебаний
лопасти па изгиб, и закручивается по форме, близкой к форме первою
тона собственных колебаний на кручение.. Как уже отмечалось, теоре-
тически нозможен флаттер и с формами следующих тонов собственных
колебаний лопасти на кручение. Однако критические числа оборотов
такого флаттера оказываются в несколько раз выше максимальных чи-
сел оборотов несущего винта
Рассмотренный раньше маховый флаггер может рассматриваться
как частный случай изгибного флаттера, при котором лопасть колеблется
г,с форме, близкой к форме пулевого тона собственных колебаний ло-
пасти в плоскости взмаха,
Каждому топу изгибных колебаний лопасти может соответствовать
своя зона флаттера, колебания и которой характеризуются Определен-
ными параметрами, присущими только данной зоне. Колебания лопасти
по различным формам флаттера могут происходить в достаточной сте-
пени независимо. Практически первой обнаруживается та форма флат-
тера, которая имеет самые низкие критические числа оборотов. Чаше
псего такой формой оказывается маховая форма флаттера. Однако
можно указать ряд особых случаев, когда критические числа оборотов
какой-либо изгибной формы флаттера оказываются ниже критических
чисел оборотов маховой формы.
В качестве примера рассмотрим флаттер лопасти с [рузом на конце.
*^тог случай представляет значительный практический интерес для ре-
акпгвных вертолетов с двигателем на конце лопасти *.
На рис. 4 28 показано изменение действительной и мнимой части
корней характеристического уравнения (6.42) по числу оборотов несу-
щего вцптя. Корни характсонстическою уравнения (б. 42) вычислены
для лопасти с грузом на конце, примерно равным веге самой
лопасти 1
Ил рис. 4. 28 видно/что в этом случае наблюдаются дне зоны флат-
тера. причем зона флаттера, появляющаяся по числу оборотов несуще-
го винта первой, отличается формой колебаний с повышенным содер-
жанием изгиба лопасти Поэтому эта зона называется обычно зоной
нагибного флаттера
* Прицеленные |Десь (в ггн 7 и 8| результаты расчет.,в гкючеиы В А) Пчел-
(.ИНЫМ
413
Можно проследить, как при постепенном увеличении груза на конце
.юиасгн из зоны махового флаттера начинает выделяться зона с формой
колебаний, в которой содержание изги^® нарастает по мере увеличения
концевого груза. При некоторых величинах груза эти зоны могут раз-
делиться па две различные зоны флаттера.
Па рис, 4.29 показана зона флаттера при относительно малой вели-
чине ipyaa на конце, равной примерно одной питой веса лопасти. При
Рис- 4.28 Изменение лейе^итечьной н мнимой
этом характерная форма зоны махового флаттера искажается и из нее
начинает выделяться втирая зона.
На рис 4 30 и 4.31 показаны зоны флаттера для лопасти с грузом
на конце, равным 42% веса лопасти — ^-42^ и примерно равным
/ ^'р '
весу лопасти ----1,1 В последнем случае зона флаттера разделяет-
ся па две различные зоны махового и изыбного флаттера.
На рис. 4.29, 4.30 и 4. 31
приведены значения д =
каракгерн-
го
зуюшие форму колебаний при флаттере и величины р, представляющие-
собой отношения частоты флаттера к чзелу оборотов несущего винта:
414
Рис 4.30 Зоны флаттера при гр«е на коицс лопасти отнесенном
л" secy w ~~ ^0,42
Интересно, что содержание маховой формы колебаний при изгиб-
ном флаттере остается во веет случаях достаточно большим, в то время
как содержание изгиба в форме махового флаттера и некоторых слу-
чаях может почти полностью отсутствовать
Особое внимание следует обратить па то. что у лопастей с грузом
i<a конце критические числа оборотов нагибного флаттера оказываются
значительно ниже критических чисел оборотов маховою флаттера,
а также иа слабую зависимость критических чисел оборотов от центров-
ки лопасти. Это обстоятельство существенно усложняет задачу создания
лопасieii реактивных вертолетов.
9. Приближенный способ определения формы
изгибных колебаний при флаттере
Если в первом уравнении системы (6.33) отбросить члены, демпфи-
рующие колебания лопасти, и малый член mtnp, то можно это уравнение
записать в виде
ту±[Е1у'\'- [Л^Т- (6.45)
Положив приближенно U ~<ог, представим решение в виде
f~si'W. 1 (B.4G)
^=^зг31П/2фл/. J
г тс рф.т—частота колебаний при флаттере.
Расчеты изгибного флаттера показывают, что частота рфл может
быть приближенно положена равной частоте собственных колебаний
лопасти на кручение, т. с, рфЛ 2гР«р-
Положим, что
!.,=2W’. (<Ч7>
J
где fij —коэффициенты деформаций,
у^'—форма /-го тона собственных колебаний лопасти.
Подстав ав выражение (6.47) в уравнение (6.45) и применив к нему
метод Б. Г. Галеркина, получим выражения для определения коэффици-
ентов деформаций
12. \'iAl (6.48)
/ Р) V
Здесь ( “ / \ “ /
-4 ! 1 п (6.49)
2 (6.50)
где mJ' (6.51)
и называемы эквивалентной массой лопасти при ее колебаниях по форме
у-1 о тона;
У) — массовая характеристика лопасти при колебаниях по тем же
тонам;
Р; — частота ;-го топа собственных колебаний лопасти на изгиб; для
нулевого тона можно положить Pj ==<!>.
Из выражения (6.48) следует, что содержание того или иного тона
изгибных колебаний в форме флаттера зависит в первую очередь от двух
параметров: от соотношения частоты флаттера и частоты собственных
колебаний соответствующего тона и от величины интеграла Aj,
Так, например, содержание маховой формы колебаний (/ = 0}
в форме флаттера тем меньше, чем выше «гармоника» флаттера, т. с.
отошепне частоты флаттера к числу оборотов несущего винта. При этом
следует заметить, что поскольку До всегда больше нуля, т. е.
b^dr^^-
-о махопан форма всегда будет присутствовав в форме колебаний при
флаттере. Этот вывод весьма важен и из него, в частности следует, что
пасти расчет флаттера с любой формой колебаний, по без учета маховой
формы было бы неверно.
Содержание формы первого тона собственных колебаний на изгиб
возрастает цо мере сближения частот собственных колебаний на изгиб
р. и частоты флаттера ₽фл, близкой к частот собственных колебаний
лопасти на крхчение.
Однако при этом очень существенна величина интеграла 4-..-
= J bPy^’tlr-
о
Вычисление этого интеграла показывает, что для огромного боль-
шинства лопастей этот интеграл близок к Йулю и, следовательно, содер-
1002
417
данис формы первого тона собственных колебаний в форме колебаний
с частотой р,11Л весьма мало. Этим обстоятельством и объясняется отно-
сительно редкое появление изгибцого флаттера.
Совеем другая картина позникает при установке па конце лопает
сосредоточенных грузов. Узел формы первого тона при этом смещается
к концу лопасти и абсолютное значение интеграла А} начинает расти
Соответственно увеличивается содержание первого тона в форме коле
баций с частотой Рья.
Приняв приближенно, что форма колебаний при флаттере mo>k«i
быть иычнелена в виде (6. 47), где коэффициенты подсчитываются цо
формулам (6 48), можно ссд-тавить упрошенную мстодикх расчета из-
гибисто флаттера
§ 7. ОБЩИЙ МЕТОД РАСЧЕТА ФЛАТТЕРА И ИЗГЙБНЫХ
НАПРЯЖЕНИЙ В ЛОПАСТИ НЕСУЩЕГО ВИНТА В ПОЛЕТЕ
1. Метод расчета и его возможности
Все нзлогкенные пы;«е методы расчета флаттера были основаны на
применении ряда допущений, от которых во многих случаях желательно
было бы отказаться К этим допущениям относя ,ся следующие:
1. При расчете аэродинамических сил не учитывалась нелинейная
зависимость аэродинамических коэффициентов от угла атаки профиля
Учет этой зависимости может оказать существенное влияние как и.ч кри-
тические числа оборотов, так и особенно на характер нарастания ампли-
:уды колебаний при флаттере
2. При расчете аэродинамических сил п условиях поступательно] о
полета сжимаемость потока учитывалась введением только осредненных
и<э азимуту несущего вннга значений с* и В условиях постгпвтелъ-
цого полета этц величины периодически изменяются по азимуту несу
щего винта, что может оказать весьма существенное влияние на крити-
ческие числа оборотов флаттера.
3 Учет сил трения в осевом шарнире, которые как известно, ока-
зывают очень сильное влияние на критические числа оборотов флаттера,
производился весьма приближенно путем линеаризации этих сил.
В этом параграфе будет приведен метод расчета изгибио-крутилг.чых
колебаний лопасти вертолета в полете, который позволяет отказаться
от перечисленных допущений. Этот метод дает возможность определить
действующие в лопасти изгибные напряжения, когда флаттер пинта ui-
сугствуег и колебания лопастей носят устойчивый характер Если ня
рассматриваемом режиме работы несущего винта возможен флаттер,
то расчет по этом) методу позволит определить процесс расходящихся
колебаний ./одасти и тем самым исследовать явление фтаттера.
Метод расчета основан на приближенном решении дифференциаль-
ных уравнений колебаний лоцаети. При этом для определения формы
деформаций лопасти в какой-то момент времени используется мегол
Б Г Галеркина, а для определения всего процесса движения допасти нс
времени — мегод численного интегрирования дифференциальных \равие
ниц. Метод Б. Г. Галеркина позволяет преобразовать систему дифферен
ниальиых уравнений в частных производных к системе обыьновенных
дифференциальных уравнений и численное интегрирование пэмменшь
для решения уже этой преобразованной системы уравнений,
В применении к расчету напряжений метод позволяет учесть кру-
тильные деформации лопасти при расчете изгибных напряжений в пло-
скости взмаха. В полете под действием постоянных и переменных внеш-
них сил лопасть Вертолета закручивается на некоторый угол -6-, перемен-
41&
иый по времени и различный пл длине лопасти Крутильные деформации
лопасти изменяют углы атаки ее сечений, что в свою очередь приводит
к появлению дополнительных постоянных и переменных аэродикамиче
ских сил. Эти дополнительные силы должны учитываться при расчете
напряжений изгиба лопасти. В противном случае нельзя грейзовать хо-
рошего совпадения расчетных и экспериментальных данных.
В применении к расчету флаттера предлаюемый метод практически
се очень удобен, так как не позволяет определить в точном числовом
виде параметры, характеризующие границу флаттера. Установить гра
ницу флаттс-ра можно только ориентировочно путем визуального анали-
за кр'Ивых, описывающих движение лопасти при параметрах, близких
К этой I ранние; соответственно нельзя с требуемой точностью определить
и запасы до флаттера по параметрам, по которым на практике дается
сценка несущею винта с точки зрения его безопасности. Описываемый
метод по сути дела позволяет только определить, имев! ли место флат-
iep на рассматриваемом режиме iioneia или пет, н описать процесс его
разви imh.
Тем не менее, этот метод имеет целый ряд очень важных преиму-
ществ по сравнению с методами, оперирующими с корнями характери-
стического ураииеиия и рассматриваюшиМ'Н, как правило, флаттер толь-
ко в линейной постановке. Трудно представить себе другой метод,
который бы позволил так. полно и точно учесть все нелинейные зави-
симости как в величинах аэродинамических сил, так и при определении
сил трепня, ьак это позволяет сделать метод с применением численного
интегрирования уравнений по времени. Учет же этих завнсцыоыей имеет
очень большое значение при расчете флаттера. Поэтому его целесооб-
разно применять при выполнении контрольных, проверочных расчеши
после определения параметров флаттера с помощью корней характери
егического уравнения
Очень важных; для практики является и го, что этот метод без осо-
бых усложнений расчета позволяет учесть упругую связь между- лопа-
стями через автомат перекоса, даже при различных жесткостях продоль-
ною и поперечного управлений Беа учета згой связи расчет крутильных
информаций лопасти цс может претендовать па хорошую точность
2. Основные допущения и предположения
Для составления дифференциальных уравнений движения лопасти
рассмотрим обычный тип несущего винта с индивидуальным шарнирным
креп пением каждой лопасти ко втулке и с управлением через автомат
перекоса При определении углов закрутки лопастей вследствие дефор-
мации системы управления будем считать, что жесткости ценен продоль-
ного и поперечного управлений различны. Будем учитывать деформации
всех ценен управления как циклического, так и управления общим ша-
гом, включая и деформации тарелки автомата перекоса, что необходимо
в тех случаях, когда внешние еп.ты. приходящие от лопастей несущею
яинтн, намыкаются на тарелке. .
Движение отдельной лопасти несущего виЬта будем считать состоя-
щим из маховых п изгибных колебаний п плоскости тяги и круШдьцых
колебаний как вследствие деформации лопасти и системы управления,
так и и результате кинематическою действия автомата перекоса и ком-
пенсатора взмаха Колебания донасги в плоскости вращения, как
И выше, учитын.чть не будем
В отношении конструкции лопасти используем следующие цредпо
.Чоженяя. Будем считать, что ось жесткости лопасти прямолинейна и сов
падает с осью осевого шарнира. Плоскос-п, наименьшей жесткости до
пасти будем считать совпадающей с ^плоскостью взмаха, т. с
с плоскостью, приходящей череп ось вращения несущего винта и пер
410
пендикуляряой к оси горизонтального шарнира. В згой плоскости и будут
определяться изгибине деформации лопасти.
Лопасть несущего винга будем рассматривать как балку с непре-
рывно распределенными но ее длине параметрами,
3. Дифференциальные уравнения
С учетом перечисленных предположений дифференциальные уряв
цепня колебаний лопасти могут быть записаны п следующем виде:
my-r[I-/ti"\" — \i\'t/]' — ]
где у—перемещение точек упругой осн лопасти относгпельно плоско
сти вращения несущего винта:
<р—угол между хордой профиля и плоскостью вращения несущего
винта;
tn— погонная масса лопасти;
Im — погонный момент инерции лопасги относительно ее оси жест-
кости,-
EI— жесткость лопасти на изгиб;
СТнр — жесткость лопасти на кручение;
о - - расстояние от оси жесткости лопасти до центров тяжести ее эле-
ментов; положительным считается смещение центра тяжести
к задней кромке лопасти;
ю — угловая скорость вращения несущего винта;
г — расстояние от оси вращения до рассматриваемого элемента ло-
пасти ,
/у — центробежная сила в сечении лопасти:
/У = ш2 mrdr,
Т — погонная аэродинамическая нагрузка в плоскости взмаха;
еэр — погонный аэродинамический крутящий момент, действующий
относительно оси жесткости.
Методика определения аэродинамических нагрузок будет описана
ниже в и. 6.
Точками в уравнениях (7,1) обозначено дифференцирование по
времени, штрихами—по радиусу лопасти. При дифференцировании
функции <р но радиусу це следует вводить в значение <р' геометрическую
крутку' лопасти, полагая, что <р'’='б?, где $— упругий угол закрутки .то-
пасти.
4. Граничные условия задачи
Для рассматриваемого здесь типа несущих винтов граничные усло-
вия в комле лопасти могут быть записаны п виде
тв!/0^(7.2)
-11л=[е7'М1-р']0 = гзкву — А1тР, I
где —изгибающий момент в комле лопасти;
Л1а— внешний крутящий момент относительно оси осевого шар-
нира от сил, действующих на лопасть; положительным
считается момент на кабрирование;
х—компенсатор взмаха;
420
ms— масса вертолета без лопастей,
V [£/(/'']□ — сумма сил, приходящих на втулку вертолета, от всех лопа-
ет- сгей несущего винта (индексом Л’ отмечен порядковый но-
мер лопасти);
.11г₽—момент от сил трения, действующий на лопасть в осевом
шарнире со стороны втулки несущею винта; положитель-
ным считается момент на кабрирование;
с,„в- эквивалентная жесткость системы управления, приведен-
ная к осевому шарниру втулки; методика определения этой
жесткости будет дана в п. 5;
у — угол поворота комля лопасти в осевом шарнире втулки
вследствие деформаций системы управления.
При составлении этих граничных условий трение учитывалось только
в нагруженном центробежной силой осевом шарнире втулки. Грецией
в других шарнирах втулки и системы управления обычно можно пре-
небречь.
С достаточной степенью точност второе граничное условие (/ 2)
можно заменить условием
Л - 0. i7. 3)
5. Определение эквивалентной жесткости системы управления
Для использования третьего граничного условия необходимо опре-
делить значение эквивалентной жесткости системы управлений сЙКв Зна-
чение этой жесткости может быть определено, если известны углы за-
крутки у/г всех гл лопастей несушего винта в осевых шарнирах стужи.
Угол попорота iV-oft лопасти несущего пинта у# связан с деформа-
циями отдельных целей управления формулами, которые уже приводи-
лись раньше [см. выражение (4. 9)];
^N = sjl! фв.п -| YICOS'|'«.n,-| Уап1' (Т.П
где Л'~0, 1, 2. 3,..., zt — 3.
Решение системы (7. 4) дает следующие выражения для входящих
в нее неизвестных уа,.„, УЛ. ¥г и
Уо.ш“- ~ Y.C ,
(г. 51
= V.,cosS>.
= ь-'и.-и.йй’ -v»©.
Величину шарнирною момента, действующего на лопасть от \npan
ления, можно выразить через жесткости н деформации соответствующих
проводок управления
•М, .ц,- То.Ло.ш-i — C^COS^n1— С^у'Л'. {7.6}
где с<з.ш, tx. С: и ^аи — приведенные к осевому шарниру лопасти жестко
ети цепей управления общим шагом поперечного
и продольного управлений и тарелки автомата пе-
рекоса соответственнее
Ьсли иредс|ави(ь величину шарнирного момента ог управления
ь виде
(7.7)
то эквивалентная жесткость управления может быть определена цо
формуле
+ ros-Й’(7.8)
где ломиткэ черточкой означает, что данная величина крутки отнесена
к значению y.v-
6. Определение аэродинамических сил
Для решения системы дифференциальных уравнений (7. 1) пеобхо
димо определить входящие в уравнения аэродинамические си ты и крутя-
щие моменты.
Известно, что при обтекании профиля дорасш в иОдею углы a^iKH
се сечении MOiyr меняйся в очень широких пределах вплоть до того,
![О на попятно идущей лопасти ее комлевая часть обтекается со стороны
задней кромки На некоторых режимах на конце лопасти впзпикаюг
условия срыва потока. На больших скоростях полета « при значитель-
ных окружных скоростях вращения несущего винта существенное влия-
ние из величину аэродинамических сил оказывает эффект сжимаемости
потока. Поэтому определение аэродинамических сил, действующих на
лопасть вертолета, должно производиться с учетом нелинейной зависи-
мости аэродинамических коэффициентов от угла атаки а и числа М. Со-
ответственно и выражения для определения аэродинамических сил
должны быть записаны с учетом возможности широкого изменения уг-
лов атаки В го же время может быть использовано обычно применяемое
предположение о малости перемещений у и углов поворота сечений лопа-
сти Поэтому для определения аэродинамических сил могут быть ис-
пользованы следующие выражения:
Г—~Qb(cyL, crL’)l')U — :H)b^ b—x^L'r,
™..Р \T+-Ll!l,(mJiU-- ’ Йу.', (7.9>
где су н г,— аэродинамические коэффициенты подъемной си ш н енчь.
сопротивленца,
/яг — коэффициент крутящего момента профиля; cv, сх ц т:
определяются по результатам продувок в зависимости
от утла атаки сечения а и числа М;
£> плотность воззуха;
Ь- хорда лопасти в рассматриваемом сечении,
х3 — расстояние от переписи кромки до оси жесткости ло-
пасти,
t/д и С’у— взаимно перпендикулярные составляющие относитель-
ной скорости потока. лежащие в плоскости, нормальной
к упругой оси лопасти; причем Ux параллельна плоско
сти вращения несущего винта, a Uv перпендикулярна Ux\
И — суммарная величина относительной скорости потока,
обтекающего профиль в плоскости, нормальной к упру-
юй оси лопасти
Величина относительной скорости 6’ может бить определена через
ес состав (яющие
й'-]/И-[ Ul (7.10)
где
Сгл — <*г — V соя ав sin 0л; (7.11]
If z=<afi> у V cos аЕ cos флз. (7.12)
Здесь toll — концевая скорость вращения лопасти;
V— скорость полета верюлета,
аа- угол атаки несущего винта в осях вала, г. е угол между
направлением скорости полета и плоскостью вращения не-
сущего винта;
ifn — азимут лопасти.
J3—у'—угол наклона упругой оси лопасти в плоскости ьзмаха;
л — скорость протекания через несущий иинт, отнесенная
к окружной скорости лопасти на конце i«/?; направление >.
совпадает с осью вала несущего впита; положительным /
считается, когда поток протекает через несущий вит снизу
вверх.
Относительная скороси. протекания определяется цо формуле
(7-13)
где
I cos щ
— ~ •
с’инл — индуктивная часть скорощи протекания, также отнесенная
к aR.
Индуктивная скорость у1ВД — есть недичина переменней по площади,
(-.метаемой несущим винтом, и по времени.
11а ряде режимов полета переменная часть индуктивной скорости
настолько возрастает, что это приводит к возникновению значительных
переменных напряжений в лоцасги (см. § 8 гл. 1 киши второй). Длч
определения напряжений н допасти с учетом переменного поля индук-
тивных скоростей должен применяться метод расчета, включающий
п себя л методику расчета 'Индуктивных скоростей. Если ограничиться
учетом только постоянной части индуктивной скорости, то ее значение
можно определить по формуле
(7.14)
где л Хоер — постоянные по азимуту и средние по радиусу лопасти
части индуктивной скорости п скорости протекания;
Ci — коэффициент тя( и несущего влита-
Здесь Тцв— тяга несущего винта;
Г — площадь несущего винта.
Угол атаки сечений лопает. необходимый для определении аэроди-
намических коэффициентов, может быть подсчитан так-
и •? | (7.16)
где ср — угол установки профили лоцастц-*
423
Ф — угол притекания потока:
Ф—arctB (7.17)
Угол установки <р есть величина переменная но радиусу лопасти
и ло времени. Она состоит иэ .двух частей:
?—П-г^. (7.18)
где г, — угод попорота лицастк в осевом шарнире вследствие кинемати-
ческого действия автомата перекоса и компенсатора взмаха;
этот уго, 1 включает п себя также и геометрическую крутку ло-
пасти;
•О — угол упругой закрутки лопасти; у । ол i} определяется в резуль-
тате решения системы дифференциальных уравнений (7. I).
Угол ц определяется по выражению.
т>- М- A?riS« Ын %, - 0,cos |д _х%. (7.19)
Здесь Н —угол установки некоторого взщого за начали отсчета сеченцч
лопасти при 0; этот угол обычно называется углом уста-
новки «ио указателю», гак как его значение в ряде с.п чаев
выводится на приборную доску лещика;
А<Ргром - геометрическая крутка лопасти;
Ь । и Й2 — углы циклического управления углом установки .топасгИ- вы
зывг.смые наклоном тарелки автомата перекоса,
/Ь— угол поворота лопасти в горизонтальном шарнире
Число М, также необходимое для определения аэродинамически.',
коэфф пинен iob, вычисляете^ по формуле:
М-—. (7.20)
а-.ь
|де duu — скорость звука.
Таким образом, уравнения (7. L) вместе с уравнением (7,9) состав-
ляют систему дифференциальных уравнений в частных производных
с коэффициентами, представляющими собой сложные нелинейные функ-
ции переменных.
7. Метод решения дифференциальных уравнений
Наиболее удобным для практического ислользоиацця при сущест-
вующем уровне развития вычислительной техники методом решения
уравнений (7, 1) является метод расчета с помощью численного инте-
грирования уравнений движения лопает по времени, в котором дефор-
мации допасли определяются по методу Б. Г. Галеркпна В тон поста
новке задачи, которая была здесь принята, этот метод позволяет полу
чить и наиболее точные результаты
При определении изгпбных деформаций лопасти естественно пред-
ставить решение при помощи функций, являющихся формами собствен-
ных колебаний шарпнрно закрепленной лопасти в пустоте. В них уже
нашли свое отражение особенности в распределении жесткостных и мас-
совых характеристик по длине лопасти (раиичиые условия задачд.
Положим
s
где у‘г' — форма /-го тона собственных изтибцых колебаний лопасти,
— коэффициенты деформаций лопасти по /-му тону.
424
При определении крутильных деформаций возникают некоторые
трудности, связанные с тем, что деформации проводки управления су-
щественно меняются в зависимости от направления момента трения
н осевом шарнире и сил, приходящих на автомат перекоса со стороны
всех лопастей несущего винта. В зависимости or условий воздействия
этих факторов изменяется соо1иошенце между закруткой комля лопа-
сти и всех ее сечений по длине. Чтобы это учесть, п расчет приходится
ввести некоторую дополнительную переменную.
Рассмотрим этот вопрос подробнее. Для определения крутильных
деформаций по методу Б. Г. Галсркина так же, как и при определении
изгибпых деформаций, естественно использовать формы собственных
крутильных колебаний допасти в пустоте. При этом могут быть исполь-
зованы различные системы собственных функций, отличающиеся гра-
ничными условиями в заделке лопасти в комле.
Наиболее простым окащвается решение уравнений (7. 1), если за-
крутку лопасти задать прд помощи форм собственных крутильных коле-
баний, определенных дли лопасти, представленной в виде стержня
с фиксированным значением крутильной жесткости в заделке
(рис. 4.32,о). Такой способ решения является весьма распро-
страненным из практике. Однако при этом задача по сути дела све-
дется к расисту колебаний 'изолированной допасти, так как применение
указанных форм исключает возможность учета упругой связи между
лопдс|ями через автомат перекоса, Не может быть при этом в полной
мере учтеди и действие момента трения в осеп0м шарнире втулки Дей-
ствительно упругая закрутка комля лопасти определяется величинами
моментов Мудр', действующими на систему управления, а величина этих
моментов при известных моментах, приходящих от лопасти Л1^, кроме
то.и, зависит от направления и величины момента трения:
Поэтому закрутка комля лопасти, а следовательно, и соотношение меж-
ду закруткой есех сечешцй по длине лопасти сн5)3аны с величиной мо-
мента трения. Этот эффект не может быть учтен, если указанное соот-
ношение в закрутках зафиксировано прибитыми в расчете формами
iso.icflaif Hfi.
Из сказанного следует, что в применении к реальным вертолетам
такой мето-i расчета следует считать неверным Он может быть приме-
чен только в отдельных, редко встречающихся на практике, частцы\
случаях.
Для учета связи между лопастями через яв[О.мат перекоса и дей-
ствия момента трения в осевом шарнире можно было бы применить си-
стему функций, представляющих собой формы собственных крутильных
колебаний лопасти, представленной в виде свободного незакрепленного
в комле стержня (ем. рис. 4.32,6). Однако из-за несоответствия гранич-
ных условий применение таких функций может привести к решению, ко-
торое может рассматриваться только как приближенное. И в самом деле
полученные таким образом формы крутильных деформаций будут сущее । -
венно отличаться от действительных Э«-ч>тличне особенно резко будет
проявляться в закрутке комлевых участков лопасти там, уде у свободного
стержня эпюра крутящего момента снижается к пулю.
Все эти соображения приводят к необходимости применить к насто-
ящей задаче неортогональную систему функций, показанную на
рис. 4 32, б. При этом закрутка лоцаети может быть представлена в виде
• 2 (7.23)
1 де k = 1, 2 ...
42)
Здесь уо—уюл закрутки лопасти вследствие деформации системы
управления;
й'^* — взаимно ортогональные формы собственных крутильных ко-
лебаний жестко заделанной в комле лопасти,
уА — искомые коэффициенты крутильных деформаций лопасти.
Таким образом, закрутка лопасти представляется системой ортого-
нальных функций к которой добавлена неортогональная к этой си-
стеме функция
Выражение (7.23) можно записать в ничс
где k-0, 1, 2.
Такой вид представления закрутки лопасти создаст некоторые
осложнения в расчете, связанные с неортогональносп.ю функций i)f
Тем нс меисс, для учета всех перечисленных очень важных факторов
приходится идти на эти усложнения
8. Преобразование дифференциальных уравнений а частных производных
к обыкновенным дифференциальным уравнениям
Представив решение системы дифференциальных уравнений (7.1)
в виде (7.21) и (7.24), применим к ней метод Ь. Г. Галеркина Для
этого дважды продифференцируем выражения (7.21) я (7.24) и под-
ставим их вместе с чих вторыми производными в уравнения (7.1).
Вторые производные ог выражений (7.21) и (7 24) будут иметь сле-
ду ющий вид:
==.^2v.»‘"
(7.25)
427
Умножим первое уравнение (7.1) поочередно на у1^, а второе на
О'4' и проинтегрируем все члены но радиусу лопасти. При интегрирова-
нии должны учитываться граничные условия (7.2). Эта операция пре-
образует систему дифференциальных уравнений в частных производных
к системе обыкновенных дифференциальных уравнения относительно
новых переменных б; и ув.
Для практических целен очень важно, какое количество переменных
Л, и ук использовать в расчете. Опыт показывает, что достаточно полный
ответ может быть получен, если представить изтибные деформации при
помощи пеовых четырех тонов собственных колебаний лопасти, а кру-
тильные— при помощи двух или в крайнем случае трех токов. Таким
образом получается, что задача об изгибно-крутильных колебаниях ло-
пасти вертолета может быть решена с применением во всяком случае
семи независимых переменных. Этим количеством переменных мы
и 01 раничимся при дальнейших выкладках
Полученную в результате применения метода Б. Г Галеркина систе-
му обыкновенных дифференциальных уравнений выпишем в форме
таблицы (см. табл. 4.1).
Все уравнения этой системы представляют собой сумму произведе-
ний некоторых постоянных коэффициентов на неизвестные функции б;
и и их вторые производные. При этом коэффициенты, относящиеся
к одному уравнению, занимают л табл. 4. 1 одну строку, Известные по-
стоянные коэффициент, не меняющиеся в продолжении расчета, выпи-
саны и клетках таблицы.
Независимые переменные б, и ук и их вторые производные, входя-
щие одновременно во все уравнения системы, вынесены по вертикали
в специальную строку, помешенную и верхней части табл. 4 1. Правые
части уравнений вынесены в отдельный столбец, помещенный рядом
с таблицей постоянных коэффициентов.
Коэффициенты „тепой части уравнений системы (см. табл. 4, I) опре-
деляются после расчета форм и частот собственных колебаний лопасти
на изгиб и на кручение, Как уже было сказано выше, при расчете кру-
тильных частот рассмшривастся жестко закрепленная в комле лопасть
При этом ряд коэффициентов определяется непосредственно в про-
цессе этого расчета. К ним относятся прежде всего частоты собственных
ио.эебйняй вращающейся лопасти ня изгиб Р, и па кручение vK, а также
коэффициент, в которые входят массовые характсришвки лопасти
Л,-j
Я
П-рД»1"1!-'*.
(7.26)
По окончании расчета форм и частот определяются коэффициенты,
в которые входят одновременно даццые, полученные в результате расче-
та лопасти и на изгиб ц на кручение Это следующие коэффициенты:
я
k,} - j’
о ?
к
+ х^ j" mai/Wiii’,
428
atj = j>y j
',-wj2 I p<‘> f mor'p'dr ['#>> |'ииг?'"г/г
I
1 <7.27)
I
Второй, третий.н четвертый члены в этих выражениях имеют mh.ivjo
величину по сравнению с первым н ими можно пренебречь Когда
i^j в силу ортогональности функций y(i>& уи> первые члены выраже-
ний (7, 27) пропадают и коэффициенты А.-j н щ-, можно приближенно по-
лагать равными нулю, т. е,
После этого определяются коэффициенты связи, величина которых
зависит главным образом от центровки лопасти.
При J — i
” , J (7.281
^.~Ы= — f mor^^Wr. ।
б J
Члены правой части системы уравнений (см. табл. 4.1) определяют-
ся по следующим выражениям:
Л, _ ( 7у<'Л—+
□
я
и J
Зл.чь /# = 0o7K^p^fMJ«'rfr.
Определяющими величину коэффициентов .4, и б„ являются первые
члены выражений (7,29). Последующие члены этих выражений ма гы
и их можно нс принимать во внимание,
₽, Определение величины ыомеита трения в осевом шарнире втулки
В пронггте численного Интегрирования уравнений (табл, 4.1) ве-
личина MOMcinii трении может бьць определена по значениям крутиль-
ных деформаций лопасти, определяющих внешний крутящий момент
в осевом Шарнире и цо напраплению вращения лопасти в этом шарнире.
При этом hr ni'iHiiy момента трепня следует определять различным спо-
собом п .шин-нмос t и от того, что больше по абсолютной величине: внеш
ннй крутящий момент п осевом шарнире Л/ш пли максимально возмож
иый момент iprinin Мц..
429
Внешний крутяший момент в осевом шарнире определяется по фор-
муле
Л<„ = Л|_- -M,n„-2v. (7.30)
к
где k— 0, 1, 2, 3....
Здесь .И, -шарнирный момент от сил, действующих на лопасть;
I/. пр — с11(Ву0 момент относительно осевого шарнира, приходящий
от системы управления; в соответствии с этой записью
тан же. каки в формулах 17 6), (7 7) и (7 22), положи-
тельным считается момент от управления, денствзюшии
па пикирование;
Л?!)**— величина шарнирного момента при ^формациях лонисти
по форме /г-го юна собственных колебаний лопает
на кручение.
Рассматриваются формы собственных колебаний каким-либо образом
нормированные, например, величиной -1. При этом положим. что
.и;” - - г,,.,.
Величина максимально возможною момента трения Л!"”4 опреде-
ляется обычно экспериментально в лаборатории. Если известен коэффи-
циент трепня в подшипнике /. то эта величина может быть определена
по формуле
Д1,7'^/№гп,
где Ng - центробежная сила, действующая па подшипник осевою шар-
нира;
Ат — радиус этого подшипника.
Если |Л(Ш|< М™ . то .Итп— —3fri|. При этом лопасть п осепом
шарнире не проворачивается и у0 — ег>=^- Это условие, позволяет опре-
делить сразу у0 и
Если ] /Йш > I Л1““*!, то
Л!тр^-,И™ ь-огда />0; ]
•tfTP—когда ?<0- I
(7.31)
10. Порядок выполнения расчета
Система дифференциальных уравнений (ext табл 4. I) записана
здесь в такой форме, что ее решение удобно выполнить путем численною
интегрирования по времени. При этом в процессе этого ицтж ркрованнн
будут п<меня1ься н основном правые части уравнений. Все. коэффици-
енты деной части уравнений ошаются в продолжении расчета неизмен-
ными, за исключением коэффициента c0|iD, величина которого пересчи-
тывается при каждом шаге интегрирования.
Численное решение системы (см табл. 4. I) и является основной
частью изложенного здесь метода расчета иэгнбпо-крушльцых кОлебз-
г]ИЙ лопасти.
Расчет колебаний допасти по этому методу Производится в |ЯкоС!
последовательности'
1. Выполняется расчет форм и частот собственных колебаний ло-
пасти в пустоте Для расчета по изложенной методике необходимо опре-
делить первые четыре тона изгибных колебаний лопасти, включая и так
называемый пулевой тон колебаний лопасти, кап твердого тела, и пер-
вые два тоца крутильных колебаний жестко заделанной в комле
лопасти. По полученным таким образом формам колебаний определяют-
4.10
'и цосюянные коэффициенты системы дифференциальных уравнений
(см. 1абл 4 1). В процессе численною интегрирования уравнений все
эти коэффициенты остаются неизменными, за исключением коэффициен-
та cJL.u, определение которого описано в п. 5,
2. Выбираются параметры режима no.ieia q. g>, р., цп. 0с. 0, и fj2,
на котором необходимо произвести расчет изгибно-крутнльных коле-
баний.
Обычно эти параметры беруюя из аэродинамического расчета несу-
щего винта н расчета балансировочных характеристик вертолета.
Но может быть применен и другой более гстсстаепиый способ Можно
приведенный здесь метод расчета путем добавления ряда простых опе-
раций использовать также и как метод аэродинамического расчета и
расчета балансировок При этом значения ав и Qq могут быть получены
я* расчета, если заданы необходимые для выполнения режиме нолем
значения тяги и пропульсивной силы несущего пиита, а углы и
есЛ[] определены, необходимые для балансироики вертолета моменты на
втулке
3. В начальный момент времени, который обычно связывается
с азимутом фл=0, задаются произвольные значения переменных и па
первых производных д<» у^. б: и у>. Для учета связи между лоп&стячп
через авюмат перекоса зги значения задаются тля всех гл лопастей нт
сущею винта.
4 Определяются необходимые для расчет аэродинамических сил
величины:
I
?-П — 2 ! (7.32)
£ *
1 !
где значение ч определяется путем дифференцирования выраже-
ния (7. 19):
Т,_ _uiQ,cos4y-!-‘A sill 7Л —хё0. (7.33)
Здесь 6j=
i
5. По формулам (7. 10). (7.11) и (7. 12) определяются скорость об-
текании профиля и ее составляющие, а по формуле (7.16) углы атаки
(ечений. По формуле (7.20) определяются также числа М.
6. По полярам профиля, которые заложены в вычислительную ма-
шину вместе с исходными данными, определяемся значения сх, су и ш,.
После этого по формулам (7 9) 1|С1ДСЧИТЫваЮ|ч;я погонные аэродинами-
ческие силы Т н крутящие моменты ® аэр-
7. Цо известным значениям I и ® а8ц определяются и члены ,4( ц /?(1.
входящие в правую часть дифференциальных уравнений (см. табл. 4. f)
Я. Для определения значения <?8НВ необходимо знать значения закру-
ток лоннети п осевом шарнире у^' для всех ал лопастей несущего винта.
В этом случае с.цВ определяется по методике, изложенной в п. 5.
9. Определяется значение н знак момента трения в осевом шарнире
М,9 (см к, 9).
После этого псе коэффициенты уравнений (см, табл 4 1) окаш-
ваю|сн определенными и можно приступить к их решению.
+31
10. Система уравнений (см. табл. 4 |) позволяет определить все
значения 6., и ук, если на рассматриваемом азимуте фл известны fy, у;,
и правые части уравнении А. и Вь. Это обстоятельство позволяет ее
использовать в программе расчета п виде некоторого оператора вида
(7.311
Воспользовавшись этнм оператором, определим значения Л; ц уч,
для начального момента времени.
11. Переход к следующему моменту времени может быть о<ушест-
влен при номоши множества различных способов численного интегри-
рования дифференциальных уравнений.
Хорошие результаты дает система формул, при которой переход от
момента времени t к моменту времени (+Д/ осуществляется путем двух
просчетов. Эту систему формул проиллюстрируем на примере определе-
ния значений переменной б;- Индекс, относящийся к номеру тона, для
простоты опустим.
Первый просчет:
д/g,-[--I. д/2^.
-Д1 — —д/',,;
?!+д/ = ZJ (Sf-f-az, ¥i+az, '?/ + 4/)'
Определение бср:
Ч = ^'"-. <7.351
Повторный просчет:
+ у ДГ-5С„;
3|'+д1 = -Н Д£ \Р;
¥1+^1, <р<+а/).
Значения 8’+lz. ?.?i д(| полученные в результате повторного
пересчета, считаются окончательными для момента времени / + д/.
Операции, аналогичные выражению (7-35), производятся и над
коэффициентами крутильных деформаций. Точно таким же образом осу-
ществляется переход и к следующему моменту времени.
Может быть предложен и более простой способ численного интег-
рирования. Об этом подробнее будет сказано в книге второй.
12. Для хода распета важно, какой вопрос исследуется. Если опре-
деляется возможность возцикнпнения флаттера несущего винта, то про-
цесс численного интегрирования необходимо пеои параллельно для
всех лопастей несущего пинта и в каждый момент времени определять
значение сзвв. Расчетом величины сэ1ш осуществляется учст связи между
лопастями через автомат перекоса. Если вопрос об исследовании флат-
тера не ставится, а только определяются напряжения в лопасти, то
задача значительно упрощается. В этом случае в расчет можно ввести
допущение о том, что все лопасти несущего винта повторяют движение
рассматриваемой лопасти и процесс численного интегрирования выпол-
нять только для ОДНОЙ лопасти.
432
При определении сакв в этом случае предполагается, что
о.зв>
где азимут лопасти с номером .V—0, движение которой опре-
деляется н расчете-
/ 2nV\
Уо('Ч°’ --1—! — коэффицяеиг деформации лопасти с номером .¥=0 йена
рассматриваемом азимуте а на азимуте (ф*,0*— —
уЛ^°')--коэффициент деформации лопасти с номером Аг, когда ло-
пасть с номером ¥-=0 находится на азимуте
13. При определении напряжений процесс численного интегрирова-
ния выполняется на протяжении нескольких оборотов несущего пинта,
поьа все значения б, и у-ь в двух последовательно просчитанных оборо-
тах ие будут различаться меньше, чем заданная точность расчета. Это
будет свидетельствовать о том, что процесс сошелся. После этого изгиб-
ные напряжения на каждом азимуте могут быть определены по
формуле
ai —(7.37)
где <j(j1 — напряжения при изгибе лопасти по нормированной форме
собственных колебании /-го тона,
Дальнейшая обработка полученных результатов может быть вы-
полнена в любом виде в зависимости от цели расчета. Обычно практи-
куется определение амплитуды напряжений и разложение процесса
изменении напряжений по азимуту на гармоники.
14, При исследовании флаттера оценка результатов может быть
произведена после изучения всего процесса изменения коэффициентов
деформаций на протяжении нескольких оборотов нссушего винта. Прак-
тически эго цо очень удобно, так как дли этого приходится выполнить
очень большую графическую работу по построению зависимостей б; =
—Дф) и у^Дф). 1ем не мгнсс, эти неудобства оправдываются теми
преимуществами, которые имеет этот метод расчета.
Изложенный здесь метод расиста отличается значительной трудо-
емкостью, однако из практики работы в конструкторском бюро следует,
что при использовании современных электронно-вычислительных цифро-
вых машин такой метод наилучшим образом удовлетворяет noipe6no-
едям, возникающим при конструировании и доводке лопастей и позво-
ляет внести дополнительные уточнения в результаты расчета, основан-
ного на анализе корней характеристического уравнения.
§ 8. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ФЛАТТЕРА
I. Испытания на флаттер на земле
Особенности конструкции вертолета позволяют проводить испыта-
ния его несущего пинта на флагтер в безопасных условиях, когда вер-
толет находиюя на земле. Это выгодно отличает вертолет от самолета.
Н.гн-мные испытания на флаттер проводятся с различными целя-
ми, Часто эти цели чисто исследовательские. Во многих случаях оказы-
вается необходимым проверить или уточнить в натурных условиях
влияние различных параметрон на характеристики флаттера, оценить
OCOdenirnciH развития и прекрашения флаттера и, наконец, просто
уточним, о1,1щц.иые моменты в методике проведения таких испытаний.
28 1DW
433
Но все же в подавляющем большинстве случаев эти испытания про-
водятся в целях контроля. В последнее время уже стало правилом, Ч|О
каждый опытный вертолет перед началом летных испытаний обязатель-
но проходит испытания на флаттер. В этих испытаниях устанавливают-
ся фактические запасы до флаттера. Если они оказываются слишком
большими, то конс|руктор может их снизить, например уменьшив вес
противовеса в лопасти и т»м самым облегчив ее. При недостаточных
запасах оказывается необходимым проводить какие-то конструктивные
изменения л затем снова проверять их испытаниями.
Окончательно установленные запасы до флаттера на опытном вер-
толете служат в дальнейшем критериями для оценки .характеристик
других вертолетов । ой же конструкции, изготавливаемых на серийном
заводе и находящихся в эксплуатации.
Обычно при создании нопого вертолета оказывается возможным
ограничиться только наземными испытаниями и никаких дополнитель-
ных летных испытаний не проводить. В исключительных случаях
в прошлом приходилось проводить и летные испытания. Как правило,
такой необходимости нет.
Испытания на флаттер на земле обычно проводятся следующим
образом.
Вертолет пришвартовывается па специальной площадке так, чтобы
при возникновении флаттера и возможной при этом поломке каких-
либо его частей вертолет не повалился бы на бок. Падение иерюлета,
как известно, приводит к удару лопастями о землю и к почти полной
поломке вертолета. В отдельных случаях при этом mOivt пострадать и
люди. Обычно никаких неприятностей такого рода при наземных испы-
таниях на флаттер не бывает, по экспериментатор всегда должен быть
готов к наихудшему исходу.
Чтобы начать испытания, несущий винт следует раскрутить до наи-
больших чисел оборотов, при которых флаттер еще наверняка не воз-
никнет. Затем число оборотов постепенно увеличивается. Обычно это
увеличение производится ступенчато на некоторую величину Ди таким
образом, что ni — n1 [ Ал. Здесь п;—начальное значение числа оборо-
тов, а П2 — их новое значение. Величина Дп принимается обычно
равной приблизительно 2% от рабочего числа оборотов несущего
винта.
П|)н новом чреде оборотов ns несушки винт выдерживается некото-
рое время (обычно 1—2 лшн), чтобы колебания могли развиться до за-
метных величин и если флаттер не возникает, то число оборотов вновь
увеличивается на величину Ап и так до тех пор, пока не будет получен
флаттер,
Испытания на флаттер очень сильно упрощаются, если для того
чтобы вызвать флаттер, не нужно создавать каких-либо начальных воз-
мущений, как это требуется при жестком флаттере с порогом возбуж-
дения (см. § 3 пп. 3 и 4). Поэтому при проведении испытаний следует
стремиться к созданию условий для возникновения мягкого флаттера.
Такие условия обычно возникают, если создать достаточно большое
принудительное движение в осевом шарнире. Для этого ручка управле-
ния. а вместе с ней и автомат перекоса отклоняются вперед на макси-
мально возможную величину. Обычно эта величина ограничивается тем,
что липастн начинают ударять по упорам вертикального ограничителя
свеса.
При создании принудительною движения в осевом шарнире флат-
тер по числу оборотов несущего влйта возникает раньше. Поэтому от-
клонение ручки управления является, кроме того, как бы мерой, Прово-
цирующей флаттер. В связи с этим при проведении испытаний на флат-
тер поступают обычно следующим образом- Увеличение числа оборотов
431
несущего винта на величину Л/i производится при нейтральном поло-
жении автомата перекоса, а затем ручка управления отклоняется впе-
рен и выдерживание режима производится уже с отклоненной ручкой.
Если флаттер не возник, ручка управления возвращается в нейтральное
положение и вновь производится увеличение числа оборотов несущего
винта и т, д. до возникновения флаттера
При появлении флаттера, если колебания быстро нарастают, необ-
ходимо прежде всего резко уменьшить мощность двигателя с тем, что-
бы число оборотов несущего пинга быстро упало. Дополнительным
средством прекращения флапера служит перевод ручки управления
в нейтральное положение.
При испытаниях на флаттер очень важно достигнуть максимально
возможных чисел оборотов несущего винта, Чтобы эти обороты не огра-
ничивались мощностью двигателя, несущий винт обычно облегчается-
уменьшается угол установки лопастей Эксперименты показывают, что
общий угол установки лопастей слабо сказывается на критических чис-
лах оборотов флащера и поэюму eiо можно было бы беспрепятственно
уменьшить. Однако здесь имеется определенное ограничение Чем мень-
ше угол установки несущего винта, тем раньше лопасти начинают
ударять по упорам при отклонения ручки управления. Кроме того,
очень сильное облегчение несущего винта оказывается неоправданным,
так как максимальные числа оборотов при проведении испытаний огра-
ничиваются уже не мощностью, а прочностью двигателя. Поэтому при
испытаниях угол установки лопастей выбирается наибольшим, но таким,
чтобы при отклонении ручки управления лопасти не ударялись об упо-
ры н б то же время, чтобы мощности двигателя хватило для достиже-
ния максимально возможных чисел оборотов, допустимых по его проч-
ности
Проведение испытаний на флаттер в наземных условиях очевидно
возможно только в том случае, если характеристики несущего винта та-
ковы. что фланер в этих условиях должен возникнуть. На вертолетах,
пригодных к эксплуатации, флаттера в наземных условиях быть не мо-
жет. Поэтому для проведения наземных испытаний на флаттер пара-
метры несущего винта должны быть как-то испорчены. Наиболее просто
обычно осуществляется ухудшение центровки лопаети. Оно может быть
достигнуто, если к задней кромке лопасти прикрепить небольшие по
величине грузы Иногда для смещения центровки поверхность лопасти,
лежащая ближе к задней кромке, окрашивается или обмазывается ка-
ким-либо материалом, вес KOiOpOio смещает центровку лопасти назнд.
Возможно также введение каких-либо упругих элементов в цепь
управления. Таким образом, для проведения испытаний на фланер па-
раметра несущего вкнта прежде всего должны быть изменены так, что-
бы воппикповеняе флаттера было возможным.
При проведении испытаний должна быть обязательно предусмот-
рена возможность выполнения записей различных параметров с тем,
чтобы можно было точно определить критические числа оборотов, часто-
ту. форму колебаний и при каком отклонении ручки управления флат-
тер начался.
Без определения этих параметров невозможно дать достаточно точ-
ную оценку запаса до флаттерн и укапать, какие п£|раметрЫ следует
изменить в первую очередь для увеличения этого запаса.
При проведении испытаний начало флаттера обнаруживается лет-
чиком по нарушению конуса лопастей и росту вибраций фюзеляжа. При
об|И1ц1М1)М управлении также и по колебаниям ручки управления. Одна-
ко вег -мн показатели оказываются заметными достаточно четко тогда,
когда -iMiiJiinу.Ит| колебаний достигают очень больших величин и про-
Bf/lriWr иеныгпияй становигея небезопасным. Поэтому желательно
,‘Ю
•135
испытания на флаттер прекращать раньше, не давая колебаниям доста-
точно развиться. В этом случае летчик легко может спутать флаттер
с обычно имеющейся несоконусностью лопастей. Этому способствуют и
внбрапии, которые, как правило, возникают при таких испытаниях из-за
ветра и неотрегулированности несущего винта.
В этом случае о возникновении флаттера можно судить только по
записям различных величин, характеризующих колебания. При этом дли
определения начала флаттера я его параметров очень важно, какие за-
писи при испытаниях производятся. Оказывается, что при записи махо-
вого движения лопасти в шарнирах вгулки определить начало флаттера
не всегда легко, так как флаттерньге колебания в этих шарнирах при-
водят лишь к искажению записи махового движения, вызванного откло-
нением ручки управления.
Это положение проиллюстрировано на рис. 4.33 и 4.34, где приве-
дена запись движения лопасти в горизонтальном шзрнире (угол р),
причем на рис. 4.33 приведена запись при слабом, а на рис. 4.34 при
более сильном флаттере. Как следует из рис. 4. 33, определение начала
флаттера с малыми амплитудами по записи угла р было бы затрудни-
тельно. То же можно сказать и в отношении записи шарнирного момен-
та Мп.
Наиболее четко начало флаттера проявляется в записи усилий в не-
вращаюшихся цепях управления. Ila осциллограммах (см. рис. 4.33 и
4. 34) приведена запись усилий в продольном управлении Рвр0Ц’ Опре-
делить начало флаттера ио этим записям очень легко.
Следует отметить, что на рис. 4.33 и 4.34 приведены записи про-
тивофазное флаттера с порядком /и = 3 па четырехлопастном несущем
винте. Поэтому частота переменных усилий в продольном управлении
подчиняется соотношению:
Л’про.^/’фя-Ь^ф,. (8.1)
где
ДфЛ?^330 KOAjMUH;
«ф,£г184 об/MUH;
/•’npo.^l4 кол/нин.
Когда ручка управления отклонена от нейтрального положения
даже на не очень большую величину хр, частота колебаний лопасти при
флаттере ДфЛ никак не может бЫ|Ь определена по записи угла р (см.
рис. 4.33 и 4.34), но легко может быть вычислена по выражению (8. 1),
так как значение чистоты Дпред легко определяется цо оецнллограммам.
Ссли после возникновения флаттера ручку управления убрать
в нейтральное положение, то маховое движение, пызпанное наклоном
тарелки автомата перекоса, прекращается, и движение в горизонталь-
ном шарнире остается только за счет флаттера (см. рис. 4.34). В этом
случае частота флаттера может быть определена и по записи угла р.
При испытаниях, записи которых приведены на рис. 4.33 и
рис. 4.34, флаттер вызывался увеличением числа оборотов несущего
винта и отклонением ручки управления на величину хр.
В первом случае (см. рис. 4 33) число оборотов было доведено до
значения ЛфЛ-= 184 об/мин, и при возникновении слабого флаттера он
был прекращен только путем уменьшения числа оборотов несущего впи-
та. Положение ручки управления хр фактически не менялось.
Во втором случае (см. рис, 4.34) число оборотов было увеличено
несколько сильнее — до п=186 об/мин и поэтому возник более энергич-
ный флаттер. В начале без изменения числа оборотов ручка управления
436
ся лопасти р, положения ручки у
I
137
быта возвращена в нейтрал].ное положение и poci колебаний прекра-
тился. после чего число оборотов было снижено и флаттер пропал
Следует отметить, что записи, приведенные на ряс 4.33 и 4.34, со-
ответствуют довольно вялому флаттеру с весьма медленно нарастаю-
щей амплитудой- Такой флаттер наблюдается не всегда, часто ампли-
туда колебаний нарастает значительно быстрее и выполнение описан-
ных выше манипуляций с ручкой управления npocio невозможно,
В качестве примера такого бурно развивающегося флаттера пд
рис. 4. 35 приведена осциллограмма записи движения лопастей вокруг
горизонтального шарнира для друюго вертолета с трехлопастным несу-
щим винтом. Для прекращения флаттера на нтом вертолете оказывалось
необходимым очень быстро сбрасывать число оборотов несущего вит а.
Форма колебаний флаттера, запись которого прилвтеца на рис 4.35,
синфазная, а это значит. Что при колебаниях нагружается цепь управ-
ления общим шагом Поэтому представляет интерес запись колебаний
ползуна тарелки автомата перекоса, приведенная на рис. 4.36 Эта
запись сделана самописцем СВ-11
Приведенные па рис. 4.33—4 36 записи даны только в качестве
примера и ни в какой степени не исчерпывают всех возможных типов
флаттера, наблюдаемых на вертолетах. А эти типы мигут отличаться
формами колебании лопасти, распределением фаз колебаний по лопа-
стям (различные значения т), различными частотами, разной скоростью
и характером (мягкий и жесткий флаттер) нарастания колебаний
и множеством других особенности. Все эти особенности приходится
\Читывать при проведении испытаний на флаттер f опенке полученных
записей
2. Испытания на флаттер в полете
Проведение испытаний на флаттер в полете оказывалось необходи-
мым в связи с |вм, что при массовой эксплуатации вертолетов были
отмечены отдельные случаи появления флаттера в полете, в то время
как по имевшимся тогда представлениям он не должен был возникнуть.
Испытания были проведены и показали, что критические числа обо-
ротов флаттера в полете значительно ниже, чем при испытаниях
на земле.
Соотношение между критическими числами оборотов в полете и
на земле было получено и стало ясным, какие должны быть обеспечены
характеристики, проверяемые при испытаниях на земле, чтобы в полете
флаттер не мог возникнуть, Эти выводы могут быть использованы
и при создании новых вертолетов и нет никакой необходимости в про-
ведении испытаний на флаттер в полете каждого типа вертолетов. Сле-
дует иметь в виду, что испытания с возбуждением флаттера в полете
ЯВЛЯЮ1СЯ чрезвычайно опасными испытаниями. Такие испытания могут
ставиться только в случае крайней необходимости и их проведение
должно бы|ь организовано е максимальной безопасностью для
экипажа,
Прежде всего перед испытаниями исследователь должен получи it
данные, говорящие о том, что в полете флаттер развивается не бурно
и есть все возможности для его прекращения. Такие данные могут
быть, если при летных испытаниях или при эксплуа!аиии на каком-либо
вертолете рассматриваемого типа непреднамеренно возникал флаттер
Такие случаи иногда происходят вследствие какой-либо эксплуатацион-
ной ошибки, например, если на каком-нибудь вертолете несущий винт
будет раскручен до чисел оборотов на много превышающих максималь-
но допустимые
Косвенным показателем того, насколько бурно развивается флат-
тер. могут быть наземные испытания Опыт показывает, что скорость
438
нарастания колебаний на земле и в полете определяется в какой-то мере
общими параметрами. Поэтому в некоторых случаях можно основы-
ваться на данных наземных испытаний.
Единственной надежной мерой, которая может быть применена
в полете для прекращения флаттера, является резкое снижение чисел
оборотов нссущето винта. Поэтому
Колебания при флаттере
раженных биений (см. рис.
для того чтобы надежно прекра-
тить флаттер, необходимо иметь
большой избыток чисел оборотов на
режиме, где начинается флаттер,
по сравнению с минимальным чис-
лом оборотов, на котором возмо-
жен полет. При испытаниях летчик
должен вызывать флаттер увеличе-
нием числа оборотов против нор-
мального и прекращать его резким
снижением оборотов до минималь-
но возможных для продолжения
полета.
Все соображения, высказанные
в отношении проведения записей
при наземных испытаниях, сохра-
няются н для испытания в полете.
Следует однако отметить одну осо-
бенность колебаний при флаттере
в полете, отличающую эти колеба-
ния от наблюдаемых при испыта-
ниях на земле.
При испытаниях нз земле при-
нудительное маховое движение в
шарнирах, вызванное наклоном та-
релки автомата перекоса, происхо-
дит почти исключительно с часто-
той первой гармоники к числу обо-
ротов несущего винта. В полете ма-
ховое движение содержит и вторую
и более высокие гармоники. Поэтому
колебапия лопасти при маховом
флаттере, возникающие обычно с
частотами, близкими ко второй
гармонике, но. как правило, не рав-
ными ей, приводят к биениям меж-
ду второй гармоникой махового
движения и колебаниями флаттера,
Поэтому флаттер в полете часто
воспринимается как биения.
В качестве примера на рис
4.37 приведена запись флаттера
в полете на режиме, где маховое
движение в осях вала состоит почти
исключительно из второй гармо-
ники (см, рис 4.37,6). Такое поло-
жение объясняется тем, что закли-
нение вала выбрано таким, чтобы па
крейсерском режиме полета исклю-
чить колебания по пернойгармонике.
на этом режиме носят характер явно вы-
4.37, а)
440
Во всем остальном, если не считать более низких критических чисел
оборотои, флаттер п полете не отличается от того, как он наблюдается
на земле.
3. Сравнение расчета н эксперимента
в условиях осевого обтекания несущего винта
При сравнении расчета и эксперимента очень важно, какие
исходные параметры несущего виита заложены в расчет; как
определена центровка лопасти, жесткость системы управления и величи-
на трения D осевом шарнире втулки; насколько надежно известно по-
ложение фокуса профиля. Ошибки в определении исходных
данных, естественно, ска-
жутся на точности опре-
деления параметров флат-
тера. Поэтому при срав-
нении расчета и экспери-
мента ошибки п опреде-
лении исходных парамет-
ров желательно исклю-
чить. Для этого эти па-
раметры должны быть
проверены эксперимен-
тально. Центровка дол-
жна быть определена
взвешиванием отдельных
отсеков лопасти, полу-
ченных в результате ее
разрезки.
Что касается опреде-
ления жесткости управ-
ления, то здесь должен
быть применен специаль-
Рис. 4.38. Сравнение экспериментальных и рас-
четных ннаненнй частоты ьолебиний и критиче
ских чисел оборотов фличтера
ный метод измерения ди-
намической жесткости,
о котором более подробно
будет сказано в п. 6. При-
менение других методов, как правило, приводит к всякого рода недо-
разумениям и заблуждениям и поэтому должно быть отвергнуто.
Для контроля положения фокуса профиля желательно произвести
продувку отсека натурной лопасти в аэродинамическом 1рубе. В этом
случае можно будет считать, что отклонения в аэродинамических харак-
теристиках, связанные с погрешностями при конструктивном выполне-
нии профиля лопасти и с его деформациями в работе, в какой-то мерс
уточнены
На рис. 4.38 приведены результаты сравнения расчета и эксперн
мента для вертолета Ми-4. Сплошной кривой показана теоретически по-
лученная зависимость критических чисел оборотов флаттера от эффек-
тивной центровки лопасти. Точками отмечены результаты эксперимен-
тов. Точка 1 с самой передней центровкой лопасти соответствует макси
мальиым числам оборотов, которые можно получить, используя двигатель
вертолета. Флаттер при этом получен не был. Тогда на закрылки лопа-
стей были прикреплены грузы весом 0,46 кге н эксперимент был повторен.
Флаттер при этом также нс был получен (точка 2).
При установке на закрылки лопастей грузов весом 0,86 и 1,3 кге
был получен флаттер при числе оборотов несущего виита п—187 об1мин
и л = 173 об/мин соответственно (точки 3 в 4 на рис. 4.38).
29 1002
441
Частота колебаний лопастей при фланере отмечена на этом же
графике точками о н 6, которые следует сравнивать с теоретически
определенными значениями частот, показанными пунктирной кривой
После окончания экспериментов лопасти разрезались на отсеки и
определялась их эффективная центровка, которая и чафик<ировннз на
графике, показанном па рис. 4.38. Динамическая жесткость системы
управления была определена ни этом же. вертолете. Величина трения
в осевом шарнире, отличающаяся высокой стабильностью, была измере-
на в лаборатории на другой втулке аналогичной конструкции
Приведенные данные свидетельствуют о хорошем (с точностью .до
половины процента хорды в значении эффективной центровки) совпа-
дении расчета и эксперимента. Отметим, что такое хорошее совпадение
наблюдалось и во всех остальных экспериментах, проведенных ца дру-
гих вертолетах. Ото создаст уверенность в надежности результатов,
получаемых из расчета, и в справедливости исходных допущений, в том
числе и в допустимости определения аэродинамических сил по форму-
лам, основанным на «гипотезе стационарности».
Следует добавить, что расчет флаттера относится к весьма редкому
при расчетах несущего винта случаю, когда ипблюдается такое хорошее
совпадение с экспериментом. И это связано, вероятно, прежде всего
с тем, что весьма существенные неточности в определении величин аэро-
динамических сил не сильно сказываются на окончательных результа-
гах расчета, на критических числах оборотов фланера
4. Сравнение расчета н эксперимента в полете
Сравнение расчета и эксперимента в полете не отличается таким
хорошим совпадением, как это имело место при аналогичном сравнении
Рис. 4.39. Сравнение экспериментальных D полете, но без грузов на за-
получены в испытаниях, поставленных С. Б. Бреном и А. Л Докучаевым
и выполненных летчиком В. В. Внницкнм.
Как видно из этого рисунка, различие между экспериментом в по-
лете и испытаниями на земле значительно больше, чем получается по
расчету. Причина несовпадения может обьясняться тем, что и расчетах
амплитуда принудительного движения п осевом шарнире принималась
на земле и в полете одинаковой, т. е. предполагалось, что при испыта-
ниях на земле в результате отклонения ручки управления амплитуда
умовых скоростей колебаний лопасти в осевом шарнире такая же, как
в полете вследствие обычного маховою движения. ]]ри атом нс учиты-
валось, что в полете вследствие различных вибраций и колебаний
с гармониками высоких порядков эффективность демпфирования коле-
баний вследствие трения в осевом шарнире чожег упасть сильнее. Это
предположение обычно ныскатыпается для объяснения более резкого
падения критических чисел оборотов флаттера в полете но сравнению
с расчетом.
5. Проверка на флаттер
Выше уже отмечалось, что для надежного исключения возможности
возникновения флаттера и условиях эксплуатации несущий bhhi верто
лета должен обладать вполне определенным запасом до фланера.
Этот .запас должен контролироваться на шмле н при снижении его
величины ниже какого-то нормированною значения вертолет не должен
допускаться к полетам. При таком подходе требуемый тапас до флат-
тера, проверяемый на земле, должен учитываю снижение критических
чисел оборотов, наблюдаемое п полете, возможность ухудшения флзт-
терных характеристик вследствие проникновения влаги внутрь .топясги
и других причин и обеспечивать необходимую устойчивость колебаний
лопастей при максимальном израсходоваиин этого запаса.
Идея проверки аа флаттер впервые были высказана М Л. Милем,
который предложил возбуждать колебания несущего винта от эксцен-
трика. установленного в системе циклического управления, и измерять
запас устойчивост но величине амплитуды полученных резонансных
колебаний, которая должна быть тем больше, чем меньше запас-до
флаттера. Такие эксперимент! были проведены и дали интересные ре-
зультаты.
На рис. 4 40 показана полученная в этих экспериментах завнеи
мость амплитуды шарнирного момента ог частоты возбуждения эксцен-
трика для различного числи оборотов несущею винта. Из рисунка
видно, что чем выше число оборотов iiecvtucro винта, а следовательно,
и чем б.тиже до флаттера, тем больше амплитуда шарнирного момента
Такая же зависимость получается и по центровке лопасти. В ходе экспе-
риментов па верточете Ми-4 с четырехлопзетным иссушим винтом было
обнаружено возникновение двух форм резонансных колебаний с часто-
тами 01=Ргкг_г'п и ра=рэка —п (Роне — частота возбуждения от эксцен-
трика), что хорошо согласуется с теоретическими ^представлениями,
изложенными в § 4. Эксперименты подтвердили возможность примене-
ния описанного способа для проверки запася устойчивости несущего
винта.
Однако в дальнейшем был разработан более простой способ про
верки необходимого запаса по центровке лопасти. Этот способ пред-
усматривает проверку вертолета на земле с лопастями, центровка ко-
торых смешена назад ня определенную, заранее нормированную
величину Центровка смещаетен при помощи специальных грузов, уста-
навливаемых при проверке на задних кромках лопастей. Если при уве-
личении числа оборотов до заданной максимальной величины флаттер
не ’возникает, ю грузы снимаются н вертолет допускается к эксплуа-
тации.
29*
443
Первоначально величина груза выбирается на основании расчетов,
я в дальнейшем корректируется па различным экспериментам и опыту
эксплуатации. Обычно устанавливаются две величины требуемых запа-
сов. При выпуске вертолета с завода устанавливается увеличенный
Нис. 4.40. Зависимость амплитуды шарнирного момен-
та ог частоты колебаний эксцентрика
запас, который может быть частично израсходован в процессе эксплуа-
тации. Поэтому в ряде случаев проверка па флаттер вводится и в экс-
плуатации, по при этом требуемый запас устанавливается меньшим.
Сведение проверки на флаттер оказалось очень полезным меро-
приятием, после чего случаи появления флаттера в эксплуатации пол-
ностью прекратились.
6. Экспериментальное определение жесткости системы управления
Выше уже отмечалось, что критические числа оборотов флаттера
сильно зависит от величины жесткости системы управления. Прибли-
женно можно полагать, чю критические числа оборотов флаттера пря-
мо пропорциональны } с)иР. Отсюда ясно, что для успешного выполне-
ния расчета очень важно позможно точнее определить жесткость
управления. Как же определить величину этой жесткости? При выпол-
нении первых расчетов иа флаттер жесткость управления часто подсчи-
тывалась теоретически путем суммирования расчетных жесткостей всех
деталей, входящих в цепь управления. Первые же измерения згой жест-
кости показали, что расчетные значения оказываются па много выше
экспериментальных. Поэтому от расчета жесткости управления сразу
пришлось отказаться.
Однако вопрос о том, как определить жсдтьос|Ь управления экспе-
риментально, тоже оказался нелегким. Вначале жесткость управления
определялась статически, т. е. по наклону зависимости величины дефор-
маций ог внешней нагрузки. Но при таком способе было не ясно, как
же учитывать люфгы, имеющиеся в системе управления, силы трения и,
наконец, инерционность деталей, входящих в эту систему. Поэюму был
применен так называемый динамический метод определения жесткости
управления, при котором внешние силы, приходящие на управление со
стороны лопастей, прикладывались динамически с частотой, равной или
444
близкой к частоте флаттера. При таком методе измерения жесткость
управления оказалась в 2—2,5 раза ниже, чем при статическом методе.
Естественно, что результаты, полученные при статическом методе
измерения, применять при выполнении расчетов флаттера нельзя.
Как же наиболее просто определить динамическую жесткость си-
стемы управления? Нами для этой цели применялся следующий метод.
На вертолете с нввращающимся несущим винтом вместо лопастей
устанавливались специальные грузы, моменты инерции которых отно-
сительно осевого шарнира равны моментам инерции снятых лопастей
Если измерить частоты собственных колебаний этой системы, то они
полностью определят величины соответствующей шарнирной жесткости
управления. Эти жесткости могут бьпь очевидно вычислены по формуле
(8.2)
где р— одна из частот собственных колебаний этой системы, кото-
рую следует считать эквивалентной несущему пинту с абсо-
лютно жесткими па кручение лопастями;
с>пр—шарнирная жесткость управления, соответствующая той
форме колебаний, для которой определена частота р.
Определение необходимых значений чистое собственных колебаний
может быть произведено обычным методом вынужденных колебаний
с возбуждением от вибратора пли эксцентрика.
Так как одинаковой жесткости цепей поперечного и продольною
управления иа вертолете обычно не бывает, то нагружению этих цепей
будут соответствовать два различных по величине значения частоты
собственных колебаний [см. формулы (4 19)].
Приведем звачсния частот, соответствующих нагружению различ-
ных цепей управления, получевные на вертолете Ми-4 с невращающим-
ся иссушим винтом:
рл=400-е-420 колонн:
7^—440-*-400 кол1мин;
р0 ^=-590 ; 620 кол]мин;
pt О = 920ы-940 кол) мин.
Примененные здесь обозначения тс же, что и в формулах (4. 19).
Возникает вопрос, не зависит ли измеренная таким образом жест-
кое |Ь управления от амплитуды внешних сил, действующих на систему
управления. Для проверки этого были проведены эксперименты с мак-
симально допустимыми по условиям прочности величинами действую-
щих на управление шарнирных моментов, примерно такими же, которые
действуют на максимальной скорости полета, и с моментами в десжь
раз меньшими. Существенного различия в значении полученных частот
обнаружено не было.
Динамическая жесткость управления может зависеть от частоты
действующих п проводке управления усилий Если изменить моменты
инерции грузов, устанавливаемых вместо лопастей, и измерить новые
частоты собственных колебаний системы, то можно будет проследить,
как изменяются жесткости управления при изменении частоты колеба-
ний. На рис. 4 41 показаны результаты таких измерений. По оси
абсцисс здесь отложена частота собственных колебаний системы управ-
ления, изменяющаяся в зависимости от величины момента инерции гру-
зов, а по оси ординат — динамическая жесткость, выраженная через
соответствующую частоту собственных колебаний в соответствии с фор-
мулами (4.19)'.
Н,т рис. 4.41 указаны ориентировочные значения частот перемен-
ные усилии, действующих в невра
иого н продольного управлений при
Рис 4.41. Заинсамость жесткости цепей
упран.|спия ог частоты колебаний
щихся частях проводки попереч-
флаттере с формами перною
izn=]) и третьего порядка
(т = 3). Приведенные резуль-
таты иллюстрируют высказан-
ное выше предположение (см.
и. 3 § 4| о том, чти величина
жесткости управления может
зависеть от'частоты действую-
щих в ней усилий.
На рис 4.41 для сравнения
приведены также значения ста-
тической жесткости управле-
ния, полученные по наклону
зависимости деформаций уп-
равления от величины дейст-
вующих сил.
Описанный здесь динами-
ческий метод определения
жесткости управлении доста-
точно широко проверен и мо-
жет быть рекомендован для
практического применения.
7. Эксперименты на динамически подобных моделях
При проведении экспериментов на HaiypHbix вертолетах исследова-
тель обычна встречается со многими трудностями, связанными с необ-
ходимостью прежде всего соблюдать требования безопасности, так как
натурные эксперименты проводят, как правило, летчик или механик,
находящиеся в вертолете. Это иакладыиявт н.шестые ограничения, осо-
бенно при проведении испытаний на фланер в полете, те по соображе-
ниям осторожности флаттер вызывается, как правило, всего один раз
на каком-нибудь одном режиме или в кранцем случае 3—4 раза, но нс
белее. Получить какие-либо зависимости по параметру не представляет-
ся возможным.
Кроме того, возникают ограничения в возможности исследования
различных режимов полета, связанные с характеристиками того верто-
лета, на котором проводится эксперимент- Почти всегда исследователя
интересует запас до флаттера по числу оборотов. Но максимальное
число оборотов, достигаемое при экспериментах, ограничивается воз-
можностями двигателя Также ограничена и максимальная скорость
полета Поэтому у исследователя естественно появляется стремление
к проведению экспериментов на динамически подобных моделях в аэро-
динамических трубах. Такие эксперименты позволяют получип, в неко-
торых случаях интересные результаты. Однако их широкое применение
ограничивается рядом существенных недостатков. Чтобы оценить необ-
ходимость проведения таких экспериментов в каждом отдельном случае,
остановимся более подробно на основных принципах, положенных
в основу моделирования.
При создании уменьшенной модели несущего винта необходимо
прежде всего соблюсти геометрическое подобие по внешних формах ло-
пасти и характерных линейных размерах лопасти н втулки несущего
винта. Имеются и виду линейные размеры, определяющие форму лопа-
сти н плане, распределение профилей п угол их установки по’ длине
лопасти, ее компоновочные размеры, определяющие, например, положе-
ние осн осевого шарнира по длине лопасти, относительное расположс-
446
ние других шарниров втулки и многие другие размеры. Затем необхо-
димо, чтобы все соотношения между аэродинамическими, инерционны-
ми н упругими силами оставались бы неизменными. В этом случае
невникающие на лопасти модели переменные аэродинамические нагруз-
ки приведут к тем же относительным деформациям, что и ла модели-
руемой лопасти.
Рассмотрим это более подробно на примере изгибных колебаний
лопасти в плоскости взмаха. Л1ожно показать, что изгибине деформа-
ции допасти по какому-либо тону собственных колебаний определяются
коэффициентами деформации, вычисляемыми но формуле (см. книга
вторая)
(8.3)
где р; — частота /-го тона собственных колебании изгиба лопасти;
у —массовая характеристика лпнаши при колебаниях по /-му юну
[см. формулу (7.55) гл. 1 книги второй]:
и, — безразмерный коэффициент, характеризующий величину ра-
боты аэродинамических сил на перемещениях лопасти при де-
формациях по /-му тону
a, h>ytndr. (8.5)
S
Посмотрим, как изменится величина относительного коэффициента
ижибных деформаций лопасти 6(?* при подобном изменении всех ес гео-
метрических размеров.
Соотношение между аэродинамическими и инерционными парамет-
рами лопасти определяйся величинами массовых характеристик лопа-
сти у,. Если вес геометрические размеры лопасти изменить в одно и то
же число раз, а именно в Kl раз. то, как следует из формулы (8.4),
массовые характеристики лопасти не изменятся.
Однако из формулы (8.3) видно, что для сохранения подобия в из-
гибвых деформациях необходимо еще сохранение соотношения между
частшами собственных колебаний р; и угловой скоростью вращения
несущего винта со Это требование равносильно сохранению неизмен-
ным числа Струхаля.
i8.6)
где р— час-roia колебаний;
IJ скорость потока.
Частота собственных колебаний р; определяется по формуле.
₽;=. r:i(syrir+у .V 0/Prirj . (8.7)
При подобном изменении всех геометрических размеров лопаем
величина упругого момента инерции ее сечения / изменится раз.
В этом случае, как HeipyjHO увидеть из формулы (8 7), величина ча-
стоты собственных колебаний левращающейся лопасти ро,- изменится
в К.1. раз. Следовательно, соотношение между этой чащотой и угловой
117
скоростью вращения останется неизменным, если угловая скорость
будет изменена н такое же число раз.
Таким образом, для сохранения подобия в аэродинамических, инер-
ционных и упругих садах необходимо все геометрические размеры
лопасти изменить в одно и то же число раз (AV) w сохранить неизме-
ненными окружные скорости лопасти. Такие динамически подобные мо-
тели называют еще махолодобными моделями, так как во всех сечениях
лопасти сохраняется подобие по числу М.
Требование об изменении всех геометрических размеров в одно и
то же число раз легче всего осуществить, если конструкцию лопасти
сохранить без изменений. Поэтому создание таких моделей фактически
сводится к созданию конструктивно подобных моделей, Эго очень труд-
ная задача, требующая разрешения многих очень сложных технических
вопросов и организации по сути дела специального производства мало-
размерных конструкций. При их изготовлении нужна достаточно высо-
кая точность. Большие трудности возникают также при создании
шарниров втулки. Надо сказать, что такие модели оказываются также
весьма напряженными по условиям прочности и не позволяют сущест-
венно расширить режимы, на которых производятся исследования, ио
сравнению с исследованиями на натурных вертолетах.
При уменьшении геометрических размеров лопасти соотношение
между собственным весом лопасти и ее аэродинамическими и упругими
характеристиками падает в К./. раз. Это приводит к уменьшению влия-
ния весовых параметров лопасти по сравнению с тем, что имеет место
на натурном вертолете. В частности в KL раз уменьшится относитель-
ный свес лопасти при неврашаюшемся несущем винте. Лопасть «па
глаз» становится как бы жестче. Но это нарушение подобия отмечается
только тогда, когда винт не вращается При вращении винта влияние
сил веса вообще ничтожно. Поэтому нарушение их подобия практически
не сказывается на поведении лопастей.
Трудности создания махоподобных и конструктивно подобных ло-
пастей привели к весьма слабому их распространению. Чаще создают-
ся динамически подобные лопасти с нарушением подобия по числу М.
Окружные скорости лопасги на модели уменьшаются по сравнению
с натурой в какое-то число раз. При этом для сохранения соотношения
между частотами собственных колебаний лопастей и угловой ско-
ростью вращения ш жесткости лопасти уменьшаются не в К\ раз. как
это требуется геометрическим подобием, а в большее число рат. чаще
всего в раз. В этом случае необходимое соотношение между часто-
тами собственных колебаний р, и угловой скоростью достигается при
окружных скоростях, и }' Kl меньших, чем на натурном вертолете
Результаты испытаний на таких моделях могут быть в полной море
перенесены на натуру, вероятно, только, когда число М<0,4 (см.
рис. 4.3). Когда число М =0,54-0,9, результаты испытаний таких моде-
лей могут быть использованы только для качественных оценок. В связи
с этим немахооодобные модели используются для практических полей
в весьма ограниченном объеме.
ЛИТЕРАТУРА
I Ж у к о н с к н й Н. F Опыт теоретического определения эффекта ветра, jvto
•него в плоскости геликоптерного винта (1909). Собр соч 1937 т VI стр 68 соба
соч. 1949, т. IV, стр. 388. .hi
2. Юрьев Б. 11. Аэродинамический расчет вертолетов, Оборонена, 1956.
3. Юрьев Б. Н. Исследование летных свойств i еликоптеров Труды ВВИЛ
им, Жуъчзн1хо;о, яыщ 49, JS39.
4 Миль М. Л. О разбеге автожира, «Техники воздушною ф.югя>, 1934, № о
5 Миль М. Л. Балансировка н устойчивость автожира, «Техника воздушного
флота», 1934 № 10.
6 Миль М. Л. О динамическом накручивании лопасти ротора автожира н поле
те, «Техника воздушного флота», 1937, К’ 2.
7. Миль М. Л. Аэродинамика ротора автожира при криволинейном движении.
«Техника воздушного флота», |939, № I
8. Миль М. Л. Аэродинамика несущего винта с шарнирным креплением лопа
:тей при криволинейном движении. Труды ЦАГИ, № 465, 19-10
Text von dei Zentrale der Wissenschaithchen Benclife (ZWB) uhersetzt-
.Mil ,M. L. Aerodynamik der Tragsehrjtiber be, krunimiger Bewegung (rusaisch) ZAH)
Bericht 465/1940.
Mil M. L. Ihe Aerodynamics of the Luting .Airscrew with Hinged Blades in
Curvilinear Flight. Trans, jnst. Aerodynamics Moscow, No. 465 1940. ft. T. P._Trans-
ресчет геликоптера
вертолетов. Оборон-
9. Миль М Л, Ярошенко В Н. Аэродинамический
1Т"хникя воздушного флота», |946. № II
19 Миль М. Л. Вертолеты, Ичд-ии «Знание». 1957
1| Братухин И. П Автожиры, Госмашметиздат. 1934
12. Братухин И. П Проектирование и конструкции
•1:3. |956.
13. Проскуряков А. П. Влияние нестационарности потока на аэродинамику
лопасти автожира. 1руды ЦАГИ, № 460, 1939
|4. Проскуряков А. П Аэродинамический расчет несущего винта с перемен
<ijm но азимуту углом установки лопастей, «Труды ЛИИ. .V» 16, 1946
|5 Михайлов А Н, Теория ротора автожира с переменным углом установки
-Техника воздушного флота», 1940. № 3.
16 Баскин В Э Индуктивный скорости воздушного винта, обдуваемого под
углом к его осн. Доклад на Всесоюзном съезде по теоретической и прикладной меха
.нике. Москва, I960.
Исследование течения воздуха и нагрузок ня лопасти шипа вертолета в горизонталь-
сом полете Инженерный журнал, т ill, вып 3. АН СССР. |963
18. Маикопар Г. И. Приложение вихревой теории винта. Труды ЦАРИ,
№ о!3. 1947.
19 Май ко пар Г. И. Вихревая теория несущего ванта Сборник работ по тео-
рии воздушных винтов, Ы1И ЦАГИ, 1958.
20. Виль'и ру бе Л. С. Определение летных характеристик геликоптера на
и.гх режимах и высотах и выбор его параметрон при проектировании «Техника воз-
L’I. |>р и в > р ми к А. С. Теория идеального несущего виита вертолета, ИАН СССР,
<Ir.iioH'iriti' технических наук, «Механика п машиностроение», 1959. № 2.
22 В пн III и-цунь, Обобщенная вихреная теория несущего винта. Вопросы
||ч)><>,1>| и и м и к ii iirniiii'ro винта вертолетов, Оборонена. 1961.
2'4 Дк>р> пл В Ф Аэродинамика, т IV, Оборонгиз. 1939.
449
24. Гессе у и Мейерс. Аэродииамика вертолета. Обороипп, 1954.
25. Пейп fl. Р Динамика и аэродинамика вертолета, Оборонгиз. 1963.
26, Тиняков Г. А Пилотирование вертолета, Воениздаг, |У00.
27 Изаксон А М. Советское всртолетостроенрс, Оборонгиз, 1954
28 Г с, л у б е в В. В. Лекции ио теории крыл», изд во технико-теоретнчсскои ли-
тературы. I94S.
29. Келдыи> .М В. | рдродинамнческий вывод формулы Раутиера, Технические
заметки № 52, нъга 2. ЦАГИ, 1935.
3U. Некрасов А. И. Теория крыла в нестационарном потоке, АН СССР. J947
31. ЛамГ> Г. I идролииаыика. ОГИЗ - Гостехнядвт, 1947
32, Гроссман Е. П. Курс вибраций частей сачо.тста. Оборонгиз, 19-10
33. Риз П _М., Ножалостин А. И Вибрации и динамическая прочность воа
душныч винтов. Труды ЦАГИ № 609, 1947.
34. рыжик И. М., Грддшгейн М. С. Табллщ/ интегралов, схем, ря.пов и
прои1всдений, ГИТТЛ, j95 i
35 Ватсон Г Н. Теория бесселевых функций. ИЛ. 1919.
.1G. Glauert JI. A. General Theory of the Auiogiro. R&M, № 1)11. Nov. 1426
37. Lock. Further Development of the Auto gno Theory. R&M. № 11'27.
38. J а с о b Shapiro. Principles ol Helicopter Engineentig, Temple Press
Limited, Howling Green Lane. London, E. С. I,
39. Coleman R. P. A preliminary Theoretical Mudy of Helicopter Blade
Hutter Involving Dependence upon Coning Angle and Pitch Setting. Report Nara
N 403, 1946.
40, Miller R. H. and L 11 i я C. W. .Blade Vibration and Flutter*. J. Aitl.
S<>c. 1, 19—38 (Jnlv. 1956).
41, D a righ nd а у H. Du W г )d 1 F. and Gates C., Juvcstigation of Heli-
eupiei Blade Flutter and Load Amplification Problems*. JAS Preprint No. 705,
January 14X57; Journal of the American Helicopter Society, Vol. 2, No. 3, July 1957.
42. Hooper M. S.. ,The Theoretical Approach in Same Rotor Blade Flut-
ter and Forced Vibrations Pioblems*. JirurnaJ of the Helicopter Association
of Great Britain, Vol- 12, 1958.
ОГЛАВЛЕНИЕ
Пре,7«<-.1г'вио . .
Осноипис обозначении
Глава 1. Пуги развития вертолетов и основные принципы их проектировании .
5 I Развитие вертолеим-Троспия . . . ...............
I. Развитие вертолетов по размериосгям...........................
2. Качественное развитие вертолетов.............- ............
3. Вертолеты специального назначения . .........................
4. Комбинированные вертолеты с дополнию-пдыми деижитетями —
..................................................................
§ 2. Вертолет и сравнении с транспортными нергикзлыю взлетающими са-
молетами и с самолетами с коротким разбегом . .........
I. Тактико-технические rpc-Gooairnfl к вертикально взлегаютвм н с ко
foTKHM разбегом вовнно-трапспортнам самолетам Запала . .
1ути увеличения дальности полета вертолетов ...................
3 Вертолет, взлетающий с разбегом.................................
4. Длина разбега вертолета................ .......................
3. Критерий для оценки экономичности различных грацслортных аппа
ратов ................................................ -..........
К Воаможнос1И увеличения максимальной скорости полета.............
§ 3. Основные принципы проектирования............ ....................
1. Выбор мощности двигателей и диаметра несущего книга............
2. Анализ многовин юных схем......................................
SISSI
(лава 'J Аэродинамика несущего винта....................................
§ j Развитие теории несущего винта и методов экспериментального опреде-
ления его характеристик................................................
1 Классификация теорий несущего винта..........................
2 . Развитие экспериментальных методов .... ..............
£ I? Классическая теория иесицил,- впита с дмрни'щыи яре ,ле;,ием .шла.
стен. Общин случай. Криволинейное движение . ...............
Теория несущего винта при криволинейном движении..................
1 Система координат и физическая схема явлении...............
2. Инерционные силы. действующие на лопасть....................
3. Аэродинамические силы, действующие на лопагть.................
4. Уравнение моментов относительно горизонтального шарнира ....
5. Физическое обьясяенке полученного резс.тьта<« -........... .
6. Уравнение крутящего момента ................................
7. Тяга несущего винта и ущ| атаки...............................
8 Боновая сила . ...............................................
аэродинамических сил при криво
Кг Учет изменения в законе расггредслепия индуктивной скорости, про-
исходящего при криволинейном движеоии.................................
Aija-iin латъчеииых результатов ..... ..........................
11. Мпховое движение лопастей........................................
12. Илимпие криволинейного движения на самовращение Вирта . . .
).' ! 1|опелеицс равнодействующей -—— ..........-........ - •• ---
линейно.',] движении вертолета
Плининг napiiMi-троз несущего пинга и схемы втулки на махкнос гщиженпе
и димпфироиаинс несущего нища...........................................
11 lliiaiiu/i Ulin' < профилем имеющим переменный центр давления
4с1
Стр
90
92
15. Влияние центровки лопасти..................................
16. Несущий винт с комиенсятороч взмаха........................
Маховое дикжение несущею яиита при криволинейном движении оси вин-
та с переменной угловой скоростью...........................
17. Равноускоренное вращение оси винта ........................
|8, Гармоническое колебание оси винта . ........................
Особенности гнролнкамикн несущего винта, определяемые шарнирным
креплением лопастей . .....................................
19 Физический смысл махового движения лопастей ................
20. Перераспределение аэродинамических сил по диску несущею пинта
из-за махового движения..................................... .
21. приближенный вывод фоомул для коэффициентов махового дви
жспия . , . ............................... .....
22 Влияние неравномерности доля индуктивных скоростей ни маховое
движение....................................................
Л1е"од расчета аэродинамических характеристик винта в случае когда шаг
лопает изменяется по азимуту......................................
23. Теория зквива.тевтнои, несущего винта . . ..............
24. Вывод формул для несущего винта с горизонтальными шарнирами,
как для винта без шарниров. Условия эквивалентности шарнирного н
жесткого винтов.............................. ..................
2Г> Обшне выражения для определении составляющих изменения шага
лопасти Фо, ф! и 9 i • ..............................
28. Определение коэффициентов махового движении винта с компенса-
тором взмаха ... ............................. . . _ • • .
27. Определение составляющих изменения шага лопасти ф1 и Vi при от
клонении автомата перекоса . . . .....................
2S. Послевовательность аэродинамического расчета винта с перемен-
ным по азимуту шагом............................................
§ 3 Импульсная теория несущего пинга................................
I. Теория идеального метущего винта вертолета.................
2. Вывод ныражения для коэффициента крутящего момента реального
винта................ ..........................................
3. Профильные потери несущею Винта ... ....... ...
4 Некоторые соображения по выбору формы и профили лопасти . .
5 Приближенное определение профильных потерь несущего винта
6. Влияние сжимаемости воздуха на профильные потери несущего внн"з
7 Иияу'кгниные потери реального несущего пинта................
8. Определение ума атаки и шага несущего винта...................
§ ! Классическая теория несущего винта. Метод численного иятегрнрованн’
1 Формулы для расчета сил и моментов несущего винта...........
2 Метод расчета........................................
3 Аэродинамические характеристики профилей, применяемых дня ло
пастей несущих винтов....................... ..................
4 . Распределение аэродинамических с вл по диску несущего вяига - .
5 Аэродинамические характеристики несущего винта.............
6 . Аэродинамические характеристики несущего вннга па режиме само
сращения . ....................................................
7 . Гранина допустимых режимов полета вертолета (граница срыва
потока! ... . ........................... .........
8 . Распределение профильных потерь но диску несущего винта. Зави
снчость профильных потерь от аэродинамических характеристик про-
филей лопзетн........................... ................ . •
§ 5 Вихревая теория несущего винта.................... .............
1 Задачи, стоящие перед вихревой теорией .... ......
2 . Теоретические схемы, применяемые в нихревой Теории несущего вин
та с консчпым числом лопастей , . ........................
3 Форма свободных вихрей ....................................
•I. Определение индуктивных скоростей по форму.те Био и Савара . .
5. Применение формулы Био и Савара для построении вихревой теории
несущего винта .
6. Осевая составляющая
вихрей ........................................................
7. Осевая составляющая индуктивной скорости от винюных (продоль-
ных) вихрей ................................................ -
8. Осевая составляющая индуктивной скорости от радиальных (попе-
речных) вияреЙ ................................................
94
100
103
109
130
132
136
146
150
154
158
160
132
184
188
194
197
200
2uf>
210
217
Индуктивной скорости 01- присоединишь!'
452
219
9. Интегро-дифференциальное уравнение иихревон теории несущего
винта................................... ..........................
10. О постоянстве циркуляции свободных вихрей вдоль |ряыых, парал-
лельных оси наклонного вихревого цилиндра, и возможных в связи
<• этим упрощениях ................................................
II Особенности применения схемы несущей линии и несущей вихрииой
поверхности ....... ................................
12 Ривднлеяие вихрен на примыкающие к допасти и отдаленные. При-
менение «1ипопезы стационарности»..................................
]3. Мгновенные и средние индуктивные скорости и возникновение гере-
мспиых атродинамггчсских нагрузок на лопасть ......................
14. Особенности поли внешних индуктивных скоростей...............
13. Вихревая теория несущего винта с бесконечным числом лопастей
Вихревая теория Ван Ши-чуня..........................................
16. Схема несущего винта . ...........................
17. Определение индуктивных скоростей............................
18. Расчетные формулы для определения тгпдукгиииой скорости . .
19. Применение и оценка возможностей вияреной теории Вац Ши дуля
Вихревая теория В. Э Баскина..................................
20. Схема обтекания несущего винта...............................
21. Определение индуктивных скоростей <ы колонны диполей.........
22 Течение жидкости. вызываемое диском, покрытым диполями
23 Граничные условия ...........................................
24. Преобразование выражения (5.67) к осям несущего винта. Примене-
ние теоремы сложении цилиндрических функций . ............
25. Определение полного потенциала скоростей от всей кшюнны диполей
26 Определение индуктивных скоростей....................... ......
§ 6 Экспериментальное определение аэродинамических характеристик несу-
щего ннита ......................................... ................
I. Летные испытания для опригеления аэродинамических характеристик
иертолета.................. .....................................
2 Испытания в аэродинамической трубе для определения аэродинамн
ческих характеристик несущего винти...........................
Методы пересчета аэродинамических характеристик несущего нипта . . .
3. Пересчет аэродинамических характеристик при другом коэффициен-
те заполнения несущего винтя . . .....................
4. Пересчет аэродинамических характеристик при изменении мнникаль
него коэффициента профильного t опротпвлепия сечений лонигти с1Рс
5. Пересчет аэродинамических характеристик при изменении окружной
скорости несущего винта (числа Мс) ...............................
6 Пересчет угля атаки и шага винта при изменении наклона автомата
перекоса, компенсатора измаха и массовой характеристики лопасти
7. Примеры исло-|ьзоиааи>| формул пересчета.....................
§ 7 Качество и пропульсивный коэффициент полезного действии несущего
винта ...............................................................
1 Качсегио н коэффициент i о.чганого деисгэня несущего винта. |гред.н>-
ж₽нцые К. Хохенемэером . ................................
2 Определение качества и пропульевннгнп к.п.д. несущего винта . .
3. Качество и к.п.д. несущего винта, найденные по эксперименталь-
ным данным....................... . . ........................
4. Качество ~ ’ ................
графикам ......................................................
5. Пересчет качества и к. п, д. при изменении параметрон пинга - .
6. Общие замечаияя о качестве и к.п.д. несущего винта...........
$ 8 Расчет характеристик несущего винта на режимах висении и вертикаль
пого подъема (Импульсная теория воздушных винтов).....................
1 Краткое наложение импульсной теории воздушных нннтов ....
2. Результаты расчета характеристик нвеушего винта..............
3. Приближенный метод определения зависимости т, от i..........
I Пересчет аэродинамических характеристик при изменении яоэффи
ииента заполпеттия несуще! и нннта...............................
•’npeae.ie.iHC оптимальных аэродинамических параметров несуще)
b.iiiTa с учетом зависимости характеристик от числа Мо ....
.ш I Лтродниамическнй расчет вертолета ... ....
I I >’ ||'>н|1ые уравнения аэродинамического расчета вевто.тета......
I ! г, |<-|тж:>ние аэродинамического расчета вертолета ..........
222
223
225
226
229
231
234
236
237
238
241
244
245
219
251
несущего винга, найденные по расчетным
267
273
250
453
280
2. Уриянения движения вертолета .... . . .....
3. Различные методы определевня аэродивамическнх характеристик не-
сущего внвта и методы аэродинамического расчета....................
4 Расчет к<1мбинирляаниых и М1гоговиггтовых аппаратов...........
5. Коэффициенты индукции \ двухвинтовых вертолетов и у вертолетов
с крылом . .... ...................................
§ 2 Лзродинаии'кгкнй расчет вертолета пи методу Миля Ярошенко . .
I Уравнения движения и принцип расчета..........................
2 Определение аэродинамических характеристик несущего винта . . .
3 . Расчет летных данных . ...............................
4 . Пределы применимости метода ..................................
S3 Общий чепод аяро (ниамиггеского расчета вин гокрылых лттатсльпых
аппаратов . . ............................................
1 Построение нсиомотательиых графиков для определения летных дин
пых вертолета.....................................................
2. Определение летных данных нертолрта . . ....................
3. Графики для определения оптимальных а,ртигинямических парамет-
ров вертолета .......................................
§ 4 Азродииамический расчет вертолета с пс“о.|ьчс1нянинм tiO-.ihthP качес-ва
и к. п. д. несущего винта . . . . ............
). Качество вертолета.......... .......................
2. Качество чносовинтовых и комбинированных виларя.нк
3 Определение летных данных вертолета...........................
4. Расчет вертолета с тярушим винтом.........................
5 Сравнение вертолета с самолетом . ............
6. Мощность переднего и заднего винтов у вертолета продольной схемы
7. Об уборке Шасси ла нертолетах...............................
§ 5. Алродинамический расчет вертолета по методу мошцос-elj . .
I . Определение потребной мощности при горизоитальном полете вгрто
2 Определение летных данных вертолета.............................
3 Соотношение между Л'пр. и tVsp при горизонтальном полете
281
2S8
.302
309
•320
324
342
343
<48
одновинтового вертолета
2. Выицн дифференциальных уравнений флаттера .............
3 Частное решение дифференциальных уравнений...........
4. Дифференциальные уравнения возмущённого движения . . .
3. Запись дифференциальных уравнения в матричной форме .
б Решение дифференциальных уравнений колебаний лопасти . .
7. Определение критических чисел оборотов флаттера ....
8. Дивергенция попасти..................................
9 Параметры, характсричугошио Петровку лопасти гзффектипнаи
ровка лопасти) ... . ..........................
362
363
М*>
366
|П Заннсим<к-гь Критических чисе.| оГ>ор|>ГОн флаттера <>г 1СИТ|ЮкКИ
пасти и значения коэффициента компенсатора нчмахя................
I I Компоновка лопасти .... ........... ...............
12 Влияние жесткости управления . . . . . ...
13. Условия отсутствия флаттера .................................
14. Механизм возникновения сил, возбуждающих флаттер.............
Учет сил тремя при флаттере.....................................
454
2 Линеаризация сил трения . ................ ...............
Определение критических чисел оборотов флаттера с учетом трения
4. Влияние принудительного движения к осевом шарнире ...
§ 4. Флаттер несущего винта с учетом связи колебаний лопастей через авто
мат перекоса ........................................... ...........
] Формы флаттера несущего винт, наблюдаемые ори экспериментих на
вертолетах . ............. . . .............................
2 . Аналитическое чиражение чля цик-тичес-ких форм колебании несущей,
випта.......................................................•
3 Циклические формы колебаний в конкретных случаях и нагрузки на
управление ... .... ..........................
4 Днффсрсиинальньц. уравнения флаттера несущего ннгга с yneiOxi
свч.аи колебаний лопастей черт автомат перекоси.................
б Преобразование уравнений (4 14$) j частных случаях, когда цикличе-
ские фирмы являются решен нем дифференциальных уравнений ijiia,.
тера несущего вн((та . . ................................
6 . Флаггер'цесушего пиита при различной жесткости Lenefr продольной:
и поперечного управлений . . ... .... ................
§ 5 Маковый флаттер несущего пинта в поступательном полете ..... .
|. Предварительные замечания........................ ...............
2. Дифференциальные уравнения колебании лопасти о доступа гельном
3. Решение дифференциальных Урннн(ниГ1.........................
4. Определение критических чисел обороток флаттера без учета
гармонических составляющих движения лопасти . ............
Г) Влияние скорости полета па критические числа оборотов флаттера
t> 6 Расчет флаттера с учетом изгиба и крушения лопасти..............
I. Из, иб и кручение лопасти при флаттере . .................
? Определение крутящих моменгов m сил, изгибающих лопасть . .
3. Дифференциальные уравнения изгибно-крути.чиных колебаний лопасти
4. Решение дифференциальных уравнений...........................
и. Расчет флаттера с учетом трех степенен енободы...............
Ь. Расчет флаттера с гречи степенями свободы без ьчета кручепия
лопасти . . . ..........................'...........
7. Результаты расчетов . ................................... .
8. Изгнбвыи флаттер ...... .....................
9. Приближенный способ определении формы п ,гяб1гьгх колебании при
Jb4
.189
394
397
$9’1
401
403
408
412
113
§ 7 Общий метод расчета флаттера и изгибных напряжений в лииа-
. in несущего винта в полете ..... ..........
I Метод расчета и его возможности ............
2 Оскониые допущения и iipCTUio.-ioAeHHii...................
3 Дифференциальные уравнения . . ...........................
I, Граничные условия задачи.......... ..........................
5 Определение экннвалентной жесткости ежчемы управления .....
Ь. Определение аэродинамических сил . . .....................
7. Метод решении дифференциальных уравнений ................. .
8 Преобразование дифференциальных уравнений в частных произвол
них к обыкновенный дифференциальным уравнениям..................
9. Определение величины момента трения в сеевом шарццре втулки .
|0 Порядок выполнения расчета.......................
§ 8 Экспериментальные исследования фланера...............
I. Испытания на флаттер на земле. .................
2. Испытания да флаттер в полете...................
3. Сравнение расчета и эксперимента в условиях осевого
сущего нинга . . . ...........................
1 Сравнение расчета и эксперимента в ноле с- .....
Пронертга на флаттер ..................................
о Чкснерики-птяльпое определение жесткости системы х ц>
7 Эксперименты на динамически подобных моделях ’. .
обтекания не
пиления
116
119
420
421
422
424
126
43U
4J8
442
444
446
445)
Михаил •DiQHTt.etUH Миль, Андрей Владил'ирааич H.-bjui.-Ofi.
l.iekca'i'ip Са «1>йл1,ни<1 Браеер-наь, ‘lee HaipaPswt Грсдк-о
ВГРТОЛЕТЫ
первач
ЛэрОД1И-Т1 Ч им
: Нла-м11 .. кий резак н.п I
Техн редактор М С.
I J'OSr Подгислро п Л'чап. 1,ТП 1%', г V’icih.
Фирчаг c'obini 7i>z. Г л*1 ч > — 14 23 буя. л.— 39сд л
□еда 2 р 11 к Tiii>;i/K 4W4) як?. Гем. план. 1965 г Л» 395
Мо. коневая "цнография № 8 Главполйграф||рокга
Комитета ио печати при Сонете Министров СССР
Хохловский пер , 7.
Замеченные опечаи-н
Должно ГпЛТ5
i
I
!
2fi снизу । винтокрылых
| ППНТС.'ПТОРНЫК
I •'(Я<.е) в /щ(с)
llXice.ieDiii функции перво-
12.нерхт Hn pUC 1 IS' О.ГМО29 0,00ii;75 (п) 0,000175 0.1ЮП29
r> CBVpXV впрнтщтое графики'. Jn14| HUITUQ графики Д/Пе!,: ' -’I
111 CBtpxv- vJiiuCb ПОЛ biK. 4,27 Прнсо.'Линеннаи 1 Приведенная $авис'.|м-|Сть критических] Зависимость критических чисел оборотим ф (аттера।чисс.1 оборотов флаттера ot necTiATii -| 'Пасти на|от центровки ,юпасти s.ir изгиб, лк}?, значении еи изгибио)