/





























































































































































































































































































Текст
, Л ТЕУШ .. и. А. СИДОРОВ
В: Л
о‘у>д I •
7JLI.A
01
gZfr&frt
jt.
0Б1ДИЙ КУРС
воздушных винтов
гууз'н КАП
. качестве учебной!
йля авиаЦ'-хЬных етузо
Допущу - mai6uH
j
[%
Чятальяы! зал Я» 1
С
г А.РСТВЕННОЕ
АННОТАЦИЯ
Настоящее учебное пособие рассчитано на сту¬
дентов самолетостроительных и моторостроитель¬
ных факультетов авиационных втузов.
В книге изложены следующие вопросы:
характеристики воздушных винтов и винтомотор¬
ной группы, подбор винта к самолету и краткие
сведения по конструкции и производству винтов.
Редактор ЕЛ В. Латынин
Л 45650. Подп. в печать 30/VI 1943 г. Тираж 3000 экз. Печ. л. 17,5+2 вкл.
Уч.-авт. л. 22,5. Тип. зн. в печ. л. 51 ООО. Цена 10рублей. Зак. №816 ■
16-я типография треста «Полиграфкнига>>, Москва, Трехпрудный, 9.
I*,.
5
7
9
13
17
21
23
24
28
29
31
32
34
37
39
41
43
44
45
48
53
56
57
65
68
72
77
79
81
84
89
3
ОГЛАВЛЕНИЕ
Предисловие
Введение ...
ЧАСТЬ ПЕРВАЯ- Элементарная теория и характеристики
воздушных винтов
Глава 1. Общие сведения о воздушных винтах
1. Описание винта
2_ Винтовые профили
13.' Геометрические характеристики винта
4. Винты фиксированного и изменяемого шага
5. Сводка геометрических характеристик семейства винтов . . .
{А. О семействах и сериях винтов
Б. Геометрические характеристики семейства винтов . . .
Глава II. Элементарная теория воздушного винта
1. План скоростей потока у элемента лопасти
2. Силы, действующие на лопасть
3. Мощность и к. п. д. винта . .
4. Идеализированные винты
5. Теория идеального винта
6. Коэфициент нагрузки на ометаемую винтом площадь и его
связь с к. п. д. винта
7. Давление в струе винта
8. Распределение тяги и мощности вдоль лопасти винта
9. Вращение в струе винта
10- Система частных к. п. д. и полный к. п. д. винта
Глава III. Испытания винтов и их аэродинамические
характеристики
1. Испытания винтов
2. Переход от модели к натуре и условия ^одобия
3. Формулы подобия
4. Аэродинамические характеристики
А. Характеристика одиночного винта
Б. Нормальные характеристики серии винтов
ЧАСТЬ ВТОРАЯ. Работа бинтз с мотором
Глава IV. Характеристики авиационного мотора
1. Внешняя характеристика мотора
2. Высотная характеристика мотора
3. .Построение высотной характеристики мотора с нагнетателем .
4. Скоростной наддув
Глава V. Характеристики винтомоторной группы
1. Назначение характеристик ВМГ
2. Схема построения характеристики ВМГ и ВФШ и схема вы¬
бора винта
3. Высотные характеристики ВМГ
4. Противоречия в выборе ВФШ. Легкий, тяжелый и двухшаго¬
вой винты
5 Характеристика ВМГ с ВИШ-автоматом 93
6. Вычисление статической мощности и тяги 96
7. Характеристики ВМГ по тяге . . 98
S. Оптимальный винт 100
9. Построение характеристики ВМГ с высотным мотором и
ВИШ-автоматом 104
Глава VI. Метод логарифмических диаграмм
1. Общие понятия .106
А. Логарифмическая шкала . . —
Б. Функциональная шкала 107
2. Логарифмическая диаграмма характеристики винта , ... 109
3. Переход от винта-прототипа к заданному 111
4. Решение различных задач но логарифмической диаграмме ... 112
5. Построение характеристики ВМГ 115
ЧАСТЬ ТРЕТЬЯ- Работа винта на самолете
Глава VII. Взаимное влияние (интерференция) винта и самолета
1. Физическая картина 123
2. Определение козфициента торможения скорости г 131
3. Учет влияния винта на самолет (учет обдувки) ■ 134
4. Практическая методика учета взаимного влияния винта и
фюзеляжа . 135
5. Взаимное влияние винта и крыла ... 141
6. Введение поправок на изменение относительных размеров вин¬
та и самолета 146
Глава VIII. Дальнейшие уточнения характеристики ВМГ. Учет
сжимаемости воздуха и скоростного наддува
1. Влияние сжимаемости воздуха на работу винта 148
2. Поправка на сжимаемость воздуха 150
3. Учет скоростного наддува 155
Глава IX. Подбор винта к самолету
1. О расчетных условиях при подборе винта 159
2. Предварительный подбор диаметра и определение расчетной точки 161
3. Уточненный подбор винта 165
4. Пересчет характеристик винтов на другое перекрытие ... 170
5. О подборе винтов к скоростным самолетам 174
6. Соосные винты . . . , 176
ЧАСТЬ ЧЕТВЕРТАЯ- Конструкции и производство воздушных
винтов
Глава X. Обзор конструкций .винтов
1. Винты фиксированного шага (ВФШ) 182
2. Винты изменяемого в полете шага (ВИШ) 183
3. ВИШ с гидравлическим управлением 185
4. ВИШ с электрическим управлением . . 215
5. ВИШ с механическим управлением . . 235
Глава XI. Изготовление воздушных винтов
1. Материалы для воздушных винтов - ... 237
2. Производство воздушных винтов . 244
Приложение 1. Принятые обозначения ... 268
Приложение II'. Обозначения винтовых коэфициентов в разных '*■
странах . 270
Приложение III. Международная стандартная атмосфера 274
Приложение IV. Таблица значений (округленных) п2, л®, п-, nf. . . 275
Приложение V. Таблица значений D2. £>4,£)5, —
Приложение VI. Таблица основных винтов 278
4
ПРЕДИСЛОВИЕ
Настоящее учебное пособие является первым общим курсом воз¬
душных винтов для втузов, издаваемым у нас со времени выхода в
свет в 1934 г. учебника проф. Б. Н. Юрьева «Воздушные винты».
Книга проф. Юрьева, широко охватывающая самые разнообразные
вопросы винтостроения (кроме вихревой теории), сыграла боль¬
шую роль в подготовке авиационных кадров, но к настоящему
времени довольно значительная часть-ее материала, естественно,
устарела.
При составлении настоящего пособия предназначенного для
студентов самолетостроительных и моторостроительных факульте¬
тов, авторы руководствовались программой курса воздушных вин¬
тов ГУУЗ НКАП и практикой преподавания этой дисциплины в по¬
следнее время.
Необходимо остановиться на методической характеристике
отдельных частей курба. Первая часть (главы I—III), содержащая
первоначальные сведения о винтах, теорию идеального пропелле¬
ра, подобие и характеристики винтов, изложена общепринятым
в нашей литературе методом. Вторая часть (главы IV—VI), посвя¬
щенная характеристикам винтомоторной группы, особенно глава V,
являющаяся одной из основных в учебнике, разработана под¬
робно и содержит ряд примеров на всевозможные случаи построе¬
ния характеристик ВМГ. Учащийся должен прежде всего твердо
овладеть техникой расчета и уметь пользоваться характеристиками
винтов и моторов.
Примеры мы старались подобрать по принципу наибольшей
наглядности и постепенно возрастающей трудности, а не по новиз¬
не объектов. Поэтому сначала рассмотрены невысотный мотор
и ВФШ, а затем уж высотный мотор и ВИШ.
Кроме ВФШ и ВИШ-автомата, рассмотрен также вкратце
оптимальный винт с переменным диаметром и редукцией, что дол¬
жно способствовать более глубокому усвоению студентами вопро¬
сов о выгодности того или иного винта и преимуществах одних
винтов перед другими. К каждой главе этой части приложена задача.
Третья часть (главы VII—IX) охватывает обычный комплекс
вопросов о работе винта на самолете (интерференцию и т. д.),
а также учет влияния сжимаемости воздуха и скоростного надду¬
ва. Заканчивается эта часть главой IX, которая является цен¬
тральной в книге, — о подборе винта к самолету. В этой же Главе
дан краткий обзор перспектив и задач, стоящих перед винтострое-
нием в настоящее время.
5
Наконец, четвертая часть посвящена конструкциям и произ¬
водству винтов. По этим вопросам в программе имеются лишь
беглые указания. Но, учитывая абсолютную необходимость озна¬
комления учащихся с современными типами винтов, мы решили
дать в последней части книги специальную главу с систематиче¬
ским обзором конструкций винтов и с описанием отдельных образ¬
цов ВИШ, типичных по принципу устройства механизма измене¬
ния шага, а также краткую главу о производстве винтов. Полагаем,
что эти главы будут полезны как для студента, так и для преподава¬
теля, который сможет воспользоваться по своему выбору готовым
описательным и иллюстративным материалом.
Специальные разделы, относящиеся к проектированию винтов
(вихревая теория, прочность винта и др.), в книге отсутствуют.
Эти вопросы, интересующие специалистов по винтам, подробно из¬
ложены в вышедшей в 1940 г. книге В. П. Ветчинкина и Н. Н. По-
ляхова «Теория и расчет воздушного гребного винта».
В книге не помещены справочные материалы — характеристики
серий винтов, чертежи и#описания конструкций и т. д., кроме
тех образцов, которые понадобились при систематическом изложе¬
нии в качестве примеров. Опущены также вопросы эксплоатации
и винтового оборудования.
Все обозначения даны по последнему стандарту, утвержденному
НКАП.
Книга была написана до войны. Это сказалось на соответствую¬
щем подборе образцов, примеров и задач к теоретическому мате¬
риалу. — 9
Некоторые современные конструкции, а также данные новей¬
ших винтов авторы включили в книгу уже при ее печатании.
Большую помощь оказали нам рецензенты доктор техниче¬
ских наук Г. И. Кузьмин и доктор технических наук профессор
А. Н. Журавченко, давшие ценные указания по улучшению содер¬
жания книги.
В. J1. Теуш
И. А. Сидоров
ВВЕДЕНИЕ
Воздушной винт‘ служит для преобразования работы мотора
в силу тяги путем отбрасывания воздуха в сторону, обратную
полету.
Наряду с крыльями и мотором, винт является третьим основ¬
ным агрегатом самолета, определяющим летные данные последнего.
Любая совершенная форма самолета и самый мощный мотор не
могут, дать надлежащего эффекта при плохо подобранном винте.
С развитием авиации роль винта на самолете все больше возра¬
стает и все больше требований предъявляется к нему. Еще 10—15 лет
назад воздушный винт представлял собой обычно одну неразъ¬
емную деревянную деталь. Новейший же винт изменяемого шага,
без которого было бы невозможно достижение современных ско¬
ростей и потолков, представляет собой весьма сложный механизм
с гидравлическим или электрическим оборудованием и автомати¬
зацией.
В настоящее время имеются винты, у которых лопасти в полете
могут быть повернуты ребром по потоку (так называемое «флюгерное»
положение лопасти), что значительно увеличивает безопасность
полета в случае остановки мотора и улучшает летные данные
самолета при полете на одном Moiope. Имеются, наконец, так назы¬
ваемые реверсивные винты, лопасти которых могут быть повернуты
на обратный шаг и таким образом давать обратную (отрицательную)
тягу, т. е. тормозить скорость самолета, что может быть исполь¬
зовано для уменьшения скорости пикирования, а также для умень¬
шения длины пробега при посадке, для облегчения маневрирования
самолета на земле и особенно гидросамолета на воде. Уменьшение
длины разбега самолета на взлете также достигается подбором
определенных параметров винта.
Наряду с этим увеличение мощности и оборотов современных
моторов и рост скоростей привели к усложнению условий работы
винта. При больших окружных скоростях концов лопастей, часто
превосходящих скорость звука, аэродинамика винта уже не сле¬
дует ранее установленным сравнительно простым законам, а увели¬
чение нагрузки на винт предъявило новые требования к его проч¬
ности, которым не всегда могут удовлетворить деревянные винты.
С усложнением конструкции усложнились и технологические
процессы изготовления винта.
Проблемы, которые таким образом возникают перед винтострое-
нием, разрабатываются и разрешаются в настоящее время парал¬
лельно теоретическим и экспериментальным путями.
7
В инженерной практике приходится иметь дело с двумя основ¬
ными задачами по винтам:
1. Проектирование и постройка нового винта; эту работу на
винтовых заводах ведут инженеры-специалисты. Конструктору
самолета, как правило, проектировать винт не приходится.
2. Подбор винта к самолету из числа испытанных по имеющимся
их характеристикам. Эту задачу, которая является частью аэроди¬
намического расчета самолета, должен уметь решать полностью
каждый конструктор самолета.
Настоящий курс содержит общие и основные сведения о винтах,
методику подбора винта к самолету, обзор конструкций и произ¬
водства винтов.
ЧАСТЬ ПЕРВАЯ
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ И ХАРАКТЕРИСТИКИ
ВОЗДУШНЫХ ВИНТОВ
ГЛАВА I
ОБЩИЕ СВЕДЕНИЯ О ВОЗДУШНЫХ ВИНТАХ
1. Описание винта
Основной рабочей частью воздушного винта является лопасть
(«перо»), переходящая в комлевую часть, или комель. Для кре¬
пления винта на валу мотора служит втулка, на внутренней стороне
О
Фиг. 1. Деревянный винт.
которой имеются продольные пазы. В эти пазы входят шлицы,
имеющиеся на носке коленчатого вала или вала редуктора и передаю-'
щие, таким образом, винту крутящий момент мотора. Втулка
закреплена на валу гайкой.
Простой, неразъемный деревянный винт (фиг. 1) имеет металли¬
ческую втулку (фиг. 2) с двумя фланцами. Втулка прикреплена
к ступице болтами, входящими в отверстия ступицы. Лопасть
деревянного винта часто снабжают защитной металлической (латун¬
ной) оковкой. На современных самолетах деревянные винты при¬
меняют редко.
Металлический винт имеет, как правило, съемные лопасти,
которые крепятся комлевой частью непосредственно к втулке. У корня
лопасти имеются заплечики, воспринимающие центробежные силы
лопасти л
Втулку делают разъемной в плоскости, перпендикулярной к валу,
и после вставки лопастей стягивают обе ее половины хомутами.
Фиг. 2. Втулка деревянного винта.
I втулка;'2—фланец, составляющий одно целое с втулкой; 3—передний
съемный фланец; 4—болты; 5—носок вала; 6—гайка.
Фиг. 3. Металлический винт с поворотными лопастями.
Лопасти можно таким образом закреплять наглухо под любым
углом (фиг. 3).
У винтов с лопастями, поворачивающимися в полете вокруг
своей оси (винты изменяемого шага), лопасти не закрепляются
наглухо, а сцепляются с поворотным механизмом втулки.
Краткое описание конструкций лопастей и втулок дан*
в главе X.
Формы лопастей в плане (фиг. 4) бывают довольно разнооб¬
разны и влияют как на аэродинамику винта, так и особенно на его
Фиг. 4. Формы лопастей винтов в плане.
прочность. Наиболее * распространены овальные формы с плав¬
ным контуром. За последнее время получили распространение
винты с лопастями, имеющими резкое расширение у комлевой
части и почти трапециевидную форму, в плане закругленную
вверху.
В зависимости от числа лопастей винты бывают двухлопастные,
трехлопастные и четырехлопастные. В виде опыта был построен
Фиг. 5. Однолопастный винт «Everel»,
и испытан в полете однолопастный винт (фиг. 5), но точная его
характеристика неизвестна. В настоящее время главным образом
применяют двухлопастные винты для моторов малой и средней
мощности и трехлопастные—для моторов большой .мощности. В связи
с увеличением мощности моторов намечается переход к четырех
лопастным винтам.
В зависимости от положения на самолете винтомоторной группы
винт может быть тянущим, если он, как это в большинстве слу¬
чаев бывает, расположен впереди мотора, и толкающим (фиг. 6),
если он расположен сзади мотора.
Винт называется правым, если он вращается по часовой стрелке
при наблюдении за ним с хвоста самолета, и левым, если он вра¬
щается против часовой стрелки.
Фиг. 7. Диаметр и радиус винта.
Диаметр окружности, описываемой концами лопастей вращаю¬
щегося винта, называется диаметром винта D; радиус винта соот¬
ветственно -тг (фиг. 7). Радиусом г какого-либо сечения назы¬
вается расстояние этого сечения до оси
вращения (фиг. 7). Относительным радиу¬
сом г сечения называют отношение
Г
R
(1)
Фиг. 8. Нерабочая часть
винта.
которое часто выражают в процентах.
Площадь диска описываемого лопастями
винта при вращении, называется площадью,
ометаемой винтом, и обозначается F:
F = (2)
Но рабочая площадь винта будет меньше. В самом деле, тягу
дает только перо лопасти; комлевая же часть тяги не дает, а наобо¬
рот, оказывает некоторое сопротивление (к тому же она частично
закрыта спереди коком, а сзади мотором). Обозначим диаметр нера¬
бочей части винта через do. Она составляет некоторую часть $ диа¬
метра винта:
dv — W- (3)
Тогда нерабочая площадь винта будет равна
~E2D2
а рабочая площадь
jzcl's
4
4
F раб —
-iD2
т^Ч)-
~4
7tD'1
(4)
12
Величина £, которую можно назвать козфициентом нерабочей
части винта, равна в среднем 0,2—0,25, т. е. около четверти диаметра
винта не дает тяги (фиг. 8).
На практике, однако, при различных сравнительных расчетах
условно пользуются величиной полной ометаемой площади F.
2. Винтовые профили
Сечения рабочей части лопасти имеют такие же профили, как и
крылья. Названия отдельных частей и точек профиля даны на фиг. 9.
Фиг. 9. Профиль сечгния лопасти.
Нижняя (рабочая) сторона винтового профиля обычно плоская
или почти плоская с небольшим закруглением у передней кромки.
Фиг. 10. Видоизменение профиля вдоль лопасти.
Хорду, или ширину, профиля обозначают через Ь, а максь
мальную толщину—через с (фиг. 9). Относительной хордой, ил
шириной Ь, называют величину
Ъ="Ь0' V
а относительной толщиной с
- величину
с
ft •
(6)
Ширина и толщина сечений непрерывно изменяются вдоль лопа¬
сти. Максимальная ширина лопасти обычно приходится примерно
на середину лопасти (т. е. на г ^ 0,5), толщина же непрерывно воз¬
растает от конца лопасти к втулке. При переходе в комлевую часть
профиль искажается и переходит обычно в более округленную или
овальную форму (фиг. 10).
13
Задается винтовой профиль в такой же системе координат, как
и профиль крыла. Абсцисса х, выражаемая в частях или процентах
хорды, отсчитывается от носика профиля к его хвостику. Ординаты
верхние и нижние (уви ун), взятые в частях или процентах от макси¬
мальной толщины с, отсчитываются у двояковыпуклых профилей
Фиг. И. Система отсчета ординат профиля: двояковы¬
пуклого (вверху) и плосковыпуклого (внизу).
от внутренней хордьц а у плосковыпуклых—от наружной (фиг. 11).
Кроме того, указываются координаты х0 и у0 центра тяжести сече¬
ния, а также радиусы закругления (кривизны) у носика г HOC и у
хвостика гхв, выраженные в процентах от с.
Наиболее употребительны следующие винтовые профили: амери¬
канский Кларк Y, английский RAF-6 и частично профиль ЦАГИ
ВС-2 (фиг. 12—14). Координаты этих профилей в округленных
(целых) числах даны в табл. 1, 2 и 3.
Ординаты профиля Кларк Y
X в % от
хорды
0
2,5
5
10
20
30
40
50
60
70
СО
О
90
О
О
У» В % ОТ
мальной
шины .
макси-
ТОЛ-
30
55
66
80
06
09,5
98
93
83
68
52
34
0
1
Г нос= 13%
У■ в % от макси¬
мальной тол¬
щины
30
13
8
4
0,8
0
0
0
0
0
0
0
0
гхв=8%
Фиг. 13. Профиль RAF-6.
Таблица 2 '
Ординаты профиля RAF-6
X в % от хорды
2,5
5
10
20
30
40
50
60
70
80
90
100
—
у„ в % от максималь¬
ной толщины . . .
41
59
79
96
100
99
96
87
75
57
37
0
Гяос=12%
У я в % от максималь¬
ной толщины . . .
0
0
0
0
0
0
0
0
0
0
0
0
г*„=9%
Фиг. 14. Профиль ЦАГИ ВС-2.
Таблица 3
Ординаты профиля ВС-2
х в % от
хорды
2,5
5
10
20
,30
40
50
60
70
80
90
У в в % от
мальной
щины .
макси -
тол-
19
30
46
65
73
74
71
63
53
40
24
гявс—8%
ун в % от макси¬
мальной тол¬
щины
12
17
22
26
26
23
21
18
15
13
10
г*в=8%
Профили Кларк Y и RAF-6, кроме основного вида, имеют еще
некоторые широко применяемые модификации, например модифика¬
ции I и II Кларк Y.
Профиль ВС-2 отличается от английского главным образом при¬
поднятым и заостренным носиком. Он применен в серии деревянных
винтов СДВ-1.
С аэродинамической стороны профиль характеризуют кривыми
коэфициента подъемной силы су и кривыми качества ^
по углу атаки а для нескольких максимальных толщин (фиг. 15
и 15а).
15
16
Фиг. 15. Аэродинамические характери- Фиг. 15а. Аэродинамические характеристики вин*
стнкн винтового профиля Кларк Y с раз- тового профиля Кларк Y с различной относитель-
личной относительной толщиной. ной толщиной.
Наконец, для каждого профиля указывается еще ряд данных,
необходимых для расчета прочности и деформаций винта. В табл. 4
приведены в виде образца расчетные данные профиля Кларк Y.
Расчетные данные профиля Кларк Y1
Таблица 4
оси, проходящей через
оси, проходящей через
Ч)
I
4
'О
1. Площадь сечения S = 0,725cb
2. Расстояние ц. т. от хорды у0 = 0,416с
3. Расстояние ц. т. от носика х0 = 0,4426
4. Момент инерции относительно
ц. т. параллельно хорде . . .
5. Момент инерции относительно
ц. т. перпендикулярно хорде
6. Центробежный момент инерции относительно осей х и у
7. Угол оси наименьшей жесткости с хордой:
а) в радианах
б) в гра .усах
8. Момент инерции относительно осей эллипса инерции:
а) наименьший момент ,
б) наибольший момент
9. Расстояние от главной оси инерции до наиболее удален¬
ных волокон:
а) до верхних сжатых волокон
б) до нижних растянутых волокон
10. Модули сопротивления на изгиб относительно главной
оси инерции:
а) для верхних сжатых волокон Wgj = 0,078с*б
б) для нижних растянутых волокон = 0,0„8с3&
1Я = 0,05с2 б
/ = 0,041 сЬ3
1ху = 0,0llc26a
р = 0,027с
9° = 15°,6Jc
h = 0,045с3*
I-п = 0,042с6*
1]2 = 0,58с
t)i = 0,46с
13. Геометрические характеристики винта
В простейшем случае можно представить себе воздушный винт
как вырез из винтовой поверхности (фиг. 16) с некоторым шагом Н.
Такой винт, ввинчиваясь в гайку с нарезкой такого же шага или
как шуруп в твердую среду, пройдет в поступательном направлении
за один оборот расстояние, равное Н. Шаг при этом будет, очевид¬
но, одинаков для всех частей и сечений винта, которые будут описы¬
вать при вращении винтовые линии.
Первоначально как в морском деле, так и в авиации рассматри¬
вали работу винта как простой процесс ввинчивания его в жид¬
кость, и нижней рабочей поверхности винта придавали форму
геометрической винтовой поверхности. Это так называемые винты
постоянного (или радиально-постоянного) шага.
В действительности же условия работы винта в податливой
среде более сложны и форма винтовой поверхности для него невыгод¬
на. В настоящее время винты строятся исключительно перемен¬
ного вдоль лопасти uiara, который обычно возрастает к концу лопа¬
сти. К этим винтам применяется также понятие шага винта, но в
строго определенном условном смысле, о котором будет сказано
ниже.
Очертим около оси винта цилиндр радиуса r<R (фиг. 17)
и нанесем на нем траекторию вырезанного сечения за один обо¬
рот винта, движущегося поступательно в неподатливой среде.
Траектория эта представит собой
1 А. С. Кравец, Характеристики bi здущи
2 Общий курс воздушных винтов
I—винта
И'-'Г.-'-ЦТу
И-Д-ЛЯ--ВСЯ-
1 Нф
ТВШсШ
194
17
I
кой его точки винтовую линию. Высота цилиндра равна шагу
Н для данного сечения. В случае винта постоянного шага высота
такого цилиндра для любого сечения будет, конечно, одинакова.
Разрежем цилиндр по образующей ООг и развернем в прямоуголь¬
ник 00 В А со сторонами 2 тсг и Н. Сечение наше займет некоторое
положение ab, а винтовая траек¬
тория превратится в диагональ ОБ.
Угол АО В наклона сечения
к плоскости вращения называют
углом установки в данном сечении
и обозначают буквой <р.
Очевидно,
Н = 2 тег tg <р
и
Фиг. 16. Воздушный винт как часть
винтовой поверхности.
(7)
(Г)
Из этой формулы видно, что у
винта постоянного шага (#=const)
углы наклона сечений убывают
с увеличением г, т. е. от начала
к концу лопасти. То же происхо¬
дит и у винтов переменного шага,
так как числитель Н хотя и рас¬
тет у них, но относительно мед¬
леннее, чем г.
Винты переменного шага при-
величиной так называемого номи-
относящейся
нято характеризовать условной
нального шага, или номинального угла установки,
к сечению, взятому на 0,75ft. Таким образом каждому винту при¬
писываются определенный шаг и угол установки, обозначаемый
В последнее время на практике принято номинальный шаг отно-
Фиг. 17. Развертка винтовой линии.
сить к сечению, находящемуся на расстоянии 1 м от оси винта).
На фиг. 18 показано примерное изменение вдоль лопасти шага и
угла установки для обоих типов винтов.
Величину Н называют геометрическим шагом винта.
Вследствие податливости воздуха винт за один оборот продви¬
гается на расстояние, меньшее, чем Н. Это расстояние называют
поступью винта На.
18
Очевидно,
На = ——,
<* П _
(8)
где V — поступательная скорость винта в м/сек и
ns — число оборотов в секунду.
Разность между геометрическим шагом и поступью называется
скольжением винта S:
S = H-Ha. (9)
Фиг. 18. Изменение шага Н и угла установки у вдоль лопасти для винтов
радиально-постоянного (H=const) шага (а) и радиально-переменного шага (Ь).
На фиг. 19 показаны эти величины. Угол рк называют кажу¬
щимся углом подхЪда струй, а угол ак — кажущимся углом атаки
(в дальнейшем их величины будут уточнены).
Очевидно,
? = Рн + ак. (10)
V1 Поступь винта не всегда меньше геометрического шага. Если,
например, самолет планирует с достатечно большой скоростью,
Фиг. 19. «Кажущиеся» углы атаки и подхода струй.
а винт вращается на малых оборотах, то может оказаться, что винт-
за время одного оборота продвинется в воздухе на расстояние зна¬
чительно большее, чем его геометрический шаг. При этом лопасть
будет встречать воздушный поток не рабочей, а верхней стороной
(спинкой), и будет давать не тягу, а сопротивление. Скольжение
в этом случае будет отрицательным. Воздушный поток будет вра¬
щать винт, как ветрянку.
2*
19
t
При определенной комбинации скорости и оборотов может также
оказаться, что винт не будет давать ни тяги, ни сопротивления,
а будет только ввинчиваться в воздух, рассекая его. Однако поступь
винта при этом не будет равна геометрическому шагу и угол атаки
не будет равен нулю, как казалось бы. Дело в том, что винтовой
профиль, как и обычный крыловой, дает нулевую подъемную силу
не при нулевом, а при некотором отрицательном угле атаки. Это
будет так называемый режим нулевой тяги. Соответствующую ему
поступь называют динамическим шагом Нй, который бывает на
15—30% больше геометрического шага (фиг. 20).
Скольжение винта отсчитывают иногда не от геометрического,
а от динамического iuaFa и называют динамическим скольжением Sd:
Знак динамического скольжения вполне определенно характе¬
ризует режим работы винта; именно, положительное скольже¬
ние—тяга, отрицательное—сопротивление, нулевое—ни тяга, ни
сопротивление.
Для сравнительных расчетов винтов удобнее пользоваться не абсо¬
лютными величинами шага, поступи и скольжения (в метрах),
а относительными (безразмерными) величинами, взятыми в частях
диаметра:
относительный геометрический шаг
Фиг. 20. Динамический шаг.
(">
(12)
или
(12')
(12")
(для номинального шага (г = 0,75): Ло,75 = 0,75* tg 9);
относительный динамический шаг
(14)
(13)
относительное скольжение
(15)
относительное динамическое скольжение
(16)
Для характеристики кривизны, или крутки лопасти, необходимо
задать углы наклона всех сечений относительно одного из них. Так
как основное сечение берут на 0,75 R, то крутку лопасти задают
в виде кривой зависимости
Разность между углами наклона у конца и у комля лопасти
?7=i— <р„ называют закруткой лопасти.
Мощность винта, точнее, способность винта к поглощению мощно¬
сти, зависит от угла установки лопастей и от их площади. Последняя
величина дается в относительном виде, как отношение суммарной
площади лопастей к площади, ометаемой винтом, и называется
перекрытием винта:
Винтом фиксированного шага (ВФШ) называется винт, лопасти
которого в полете не поворачиваются и не изменяют угла установки
и шага.
Винт, лопасти которого можно поворачивать в полете, меняя
угол установки (шаг), называются винтами изменяемого, или
регулируемого, шага (ВИШ, ВРШ).
К ВФШ относятся следующие типы винтов:
1. Простые винты—деревянные или из пластмассы, реже метал¬
лические,—у которых лопасти и ступица составляют одно целое.
2. Винты с изменяемым на земле углом установки. Они имеют
съемные лопасти, которые при закреплении и затяжке их во втулке
могут быть установлены на любой шаг в зависимости от условий
предстоящего полета, нагрузки самолета и состояния атмосферы.
Они являются значительным шагом вперед по сравнению с про¬
стыми винтами.
К винтам изменяемого шага (не смешивать с винтами переменного
шага вдоль лопасти, см. стр. 17) относятся следующие.
1. Двухшаговые винты, которые могут быть установлены в полете
на два шага: малый и большой.
2. (Винты с принудительным (управляемым) поворотом лопастей,
лопасти которых летчик может повернуть в полете на любой угол
(шаг).
3. ВИШ-автоматы, поддерживающие автоматически заданное
постоянное число оборотов мотора независимо от прибавления или
убавления газа. Достигается это специальным центробежным регу¬
9— То,75 — f(r)-
4. Винты фиксированного и изменяемого шага
лятором. При падении мощности мотора (убавлении газа) меха¬
низм втулки под действием регулятора поворачивает лопасти на
меньший шаг, а при возрастании мощности—увеличивает шаг, уве¬
личивая нагрузку на винт на тех же оборотах.
Таким образом изменение шага у ВИШ-автомата соответствует
изменению оборотов у ВФШ при изменении мощности.
Поворотные механизмы у цтулок ВИШ бывают с механическим,
гидравлическим и электрическим приводами.
Механический привод состоит из системы сцеплений и
передач, идущих от кабины летчика к корням лопастей. Он требует
от летчика значительных усилий и времени для поворота лопастей
и имеет ряд других недостатков. Широкого распространения
в эксплоатации этот привод не получил.
В гидравлических механизмах используется масло из
смазочной системы двигателя. Давление масла, нагнетаемого
специальной помпой, приводит в движение поршневой механизм,
соединенный с лопастью. е
В электрических приводах лопасть поворачивается неболь¬
шим электромотором, который устанавливается впереди втулки
и питается током от аккумуляторов или генераторов самолета.
Описание конструкций и схем наиболее распространенных ВИШ
приведено в главе X.
Основное значение ВИШ заключается, в общих чертах, в следую¬
щем. При взлете самолета, когда скорость его мала, поступь
винта На будет также мала, а угол атаки лопасти (см. фиг. 19)
велик и тем больше, чем больше угол установки у. ВинТ с большим
шагом (большой угол <р) оказывает большое сопротивление вра¬
щению, что не дает возможности мотору развить полные обороты
и мощность для быстрейшего подъема самолета. Кроме того к.п.д.
винта при больших углах <р невысок. Для горизонтального же
полета на большой скорости необходим, наоборот, большой угол
установки «р. Ясно, что винт фиксированного шага не может
удовлетворить этим противоречивым требованиям. Поэтому, в
зависимости от выбора шага у ВФШ, приходится жертвовать
или взлетными качествами, или максимальной скоростью самолета.
Противоречие это уже в значительной мере разрешается примене¬
нием двухшагового винта, который при взлете устанавливается
на малый, а в горизонтальном полетФ—на большой шаг.
ВИШ-автомат с постоянным числом оборотов имеет ряд дополни¬
тельных преимуществ. Мотор может на всех режимах полета поддер¬
живать одни и те же наивыгоднейшие обороты. При этом внимание
летчика освобождается от наблюдения за счетчиком оборотов, так
как он может не опасаться раскрутки мотора и превышения
максимально допустимых оборотов. Диапазон поворота лопастей
современных ВИШ составляет примерно 30—35°. Но имеются и ме¬
ханизмы с круговым поворотом лопастей от 0 до 360°. В частности,
они дают возможность установить лопасть ребром по потоку (во
«флюгерное положение»).
При остановке или аварии мотора в полете обычный винт
продолжает вращаться, как ветрянка, что вызывает дополнитель¬
ное сопротивление и, кроме того, может привести к поломке мо¬
22
тора. Установка же в этом случае винта по потоку, во-первых,
останавливает вращение и, во-вторых, сводит к минимуму сопроти¬
вление винта. Для одномоторных самолетов это также улучшает усло¬
вия планирования и вынужденной посадки при остановке мотора.
Наоборот, при пикировании или при посадке, когда выгодно
уменьшить скорость, лопасти могут быть установлены поперек
потока для увеличения сопротивления.
Наконец, лопасти могут быть установлены в реверсивное поло¬
жение, т. е. на отрицательный угол установки (отрицательный шаг).
Тогда, вращаясь от мотора в прежнем направлении, винт будет
давать обратную (отрицательную) тягу, т. е. не тянуть самолет
в направлении полета, а отталкивать его назад, отбрасывая воздух
вперед. Сопротивление винта движению самолета может при этом
быть настолько большим, что установившаяся скорость вертикаль¬
ного пикирования может быть значительно снижена. Однако
существующие конструкции не дают еще возможности поворачивать
лопасти на реверс достаточно быстро. Поэтому на современных
пикирующих бомбардировщиках реверсивные винты не применя¬
ются, а торможение скорости пикирования достигается другими
средствами. Удобно пользоваться реверсивными винтами при
разворотах гидросамолетов на воде.
v
5. Сводка геометрических характеристик семейства винтов
А. О семействах и сериях винтов
Всякий воздушный винт, который по типу и /форме оказался
достаточно удачным и нашел применение в эксплоатации, можно
строить в нескольких вариантах, именно: разных размеров (диамет¬
ров), с разным числом лопастей и, если это ВФШ, то с разными
шагами. Это дает возможность конструктору самолета при подборе
винта сначала свободно выбрать наиболее подходящий по аэроди¬
намическим качествам тип винта, а затем уже выбрать и заказать
определенный вариант его в зависимости от размеров самолета
мощности мотора и т. д.
Группу винтов одного типа, но отличающихся друг от друга
каким-либо переменным параметром, называют семейством и серией
винтов. На практике эти два понятия обычно не различают,
однако следует рекомендовать придавать каждому из них опреде¬
ленный смысл.
Семейство винтов—это группа винтов, имеющих лопасти задан¬
ной формы (т. е. геометрически подобные), но разное число лопастей,
разные размеры и шаг. ^
Серия винтов—это часть семейства винтов с определенным чис¬
лом лопастей, но разного размера и шага.
Всякий ВИШ представляет собой, очевидно, целую серию вин¬
тов с постоянным диаметром.
Как пример укажем на некоторые серии и семейства винтов,
применяемые или известные в настоящее время.
' Серии деревянных винтов ЦАГИ: СДВ-1 и СДВ-2; се¬
мейства металлических винтов (СМВ) ЦАГИ: СМВ-1, СМВ-2,
СМВ-3, СМВ-4, СМВ-5, СМВ-9, СМВ-ДО, СМВ-11, СМВ-12.
Каждое из этих семейств образует несколько серий в зависимости
от числа лопастей (число это ставится впереди названия семейства).
Так из семейства СМВ-2 получены серии: 2 СМВ-2—серия двух¬
лопастных металлических винтов, 3 СМВ-2—серия трехлопастных
винтов. Семейство СМВ-4 образует серии: 3 СМВ-4—серия трехло¬
пастных винтов; 4 СМВ-4—серия четырехлопастных винтов. Также
образованы новые серии мощных винтов 3 СМВ-11, 3 СМВ-12 и др.
Из иностранных серий применяются: английские NPL (National
Physical Laboratory); немецкие DVL (Deuts:he Versuchsanstalt fur
Luftfahrt)—DVL-3, DVL-6 и др.; американские NACA (National
Advisory Committee for Aeronautics)—ряд серий под номерами
4412, 6101, 6129, 5868 и др., французские Ратье (Ratier).
Большинство этих винтов построено на профилях Кларк Y и
RAF 6 и их модификациях, кроме серий СДВ-1, СДВ-2, имею¬
щих профиль ВС-2, и винтов Ратье, профиль которых отличается
от английского вогнутостью нижней стороны.
Б. Геометрические характеристики семейства винтов
Для того чтобы полностью определить геометрические характе¬
ристики семейства винтов, т. е. форму лопасти, нужно, очевидно,
иметь следующие данные:
1) профили сечений лопасти,
2) распределение относительной ширины (хорды) b вдоль лопасти,
3) распределение относительной толщины с вдоль лопасти,
4) крутку лопасти.
К этому добавляют еще: '
5) распределение относительного шага вдоль лопасти при раз¬
ных углах установки ее.
Обычно на чертеже винта указываются все перечисленные геомет¬
рические параметры.
В виде образца приводим следующие характеристики лопасти
СМВ-2.
1) Лопасть сконструирована с модифицированным профилем
Кларк Y модификации II, показанным на фиг. 21. В табл. 5 даны
его ординаты.
Фиг. 21. Профиль Кларк Y модификации II.
Ординаты профиля Кларк Y модификации II Таблица 5
X в % от хорды
0
2,5
5
,с
20
30
40
50
60
70
80
90
100
Ув в % от с . .
0
27
38
52
68
73
73
68
59
48
35
20
0
у„ в % от с . . .
и
17
21
26
29
27
25
22
18
14
10
6
0
24
2, 3) Кривые изменения Ь и с вдоль лопасти, т. е. в зависи¬
мости от г, показаны на фиг. 22 (в пределах профилированной
части: от г = 0,25 до г = 1).
Фиг. 22. Кривые распределения относительной ширины Ь и тол¬
щины с вдоль радиуса лопасти СМВ-2-
4) Кривая крутки показана на фиг. 23 в виде зависимости
—9*0,75 от г, показывающей, на какой угол повернуто каждое сечение
относительно основного сечения нд 0,75 R. Когда номинальный
угол установки лопасти будет задан, то, прибавляя его значение
к ординатам ш—<Ро,75, можно получить угол наклона <р каждого*
сечения к плоскости вращения.
ч
Закрутку лопасти находим по крайним ординатам:
<Pr=i ~ “г=о,«а= 20° (— 8°) = 28°.
5) Распределение относительного шага
и Н -I
й = tg?
вдоль лопасти при различных номинальных углах установки от 19
до 64° показано на фиг. 24.
Фиг. 24. Распределение относительного шага h вдоль
лопасти СМВ-2 при разных углах установки.
6) Наконец, на фиг. 25 дан чертеж модели винта согласно приня¬
тому способу его изображения. Вверху дан вид лопасти в плане, т. е.
ее проекция на плоскость вращения. На ней, на расстояниях по оси
винта, равных 0,25; 0,35 и т. д. от R, даны в совмещенном виде про¬
фили сечений под соответствующими углами их наклона к плоско¬
сти вращения. На оси, проведенной ниже, написаны величины этих
26
углов и, кроме того, проставлены размеры, по которым можно строить
эти углы. Мы видим, что угол установки данной лопасти
Ф..75 = 7°0Г.
У лопастей, предназначаемых для ВИШ„ у основного сечения
на 0,75R ставят иногда только букву ш, а у остальных сечений—
разности между их углами наклона и <р0>75, т. е. размечают просто
крутку лопасти.
Следует, кстати^ уяснить здесь разницу между лопастью, спроек¬
тированной специально для данного угла установки, например 50°,
и лопастью, предназначенной, скажем, для угла 20° и поставленной
затем на 50° при изменении шага. В последнем случае лопасть будет
025 0,35
''Линия стола 'Низкняя торцебая ''Задняя кромке
кромка
Фиг. 25. Чертеж модели винта СМВ-2.
несомненно в несколько неправильном положении. Ее крутка, рас¬
пределение шага, а также положение комлевой части не будут соот¬
ветствовать нормальным требованиям аэродинамики, и полезная
отдача винта снизится. На фиг. 24, например, видно, что лопасть
СМВ-2 в пределах 30—50° имеет нормальное распределение шага;
при дальнейшем же увеличении, а также и уменьшении угла
установки кривые h принимают необычный, неправильный вид.
Далее, на фиг. 25 даны расстояния г сечений от оси враще¬
ния в миллиметрах и радиус лопасти R, равный 450 мм. Это раз¬
меры модели, испытанной в трубе.
Наконец, внизу помещен боковой вид лопасти, т. е. ее проек¬
ция на плоскость, проходящую через ось вращения и ось лопасти.
Верхний контур (верхняя торцевая кромка)—это проекция кон¬
тура выпуклой части (спинки) лопасти; проекция же передней
\
27
кромки лопасти идет ниже. На нижнем контуре торцевая и ниж¬
няя кромки обычно совпадают.
Ординаты кривых этих контуров даны в миллиметрах для точек,
расположенных, так же как и сечения лопасти, на расстояниях
0,25, 0,35 и т. д. от R.
ИнЬгда к чертежу винта добавляют внизу кривую максималь¬
ных толщин сечений.
ГЛАВА II
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ВОЗДУШНОГО ВИНТА
1. План скоростей потока у элемента лопасти
Основным режимом работы воздушного винта является режим
пропеллера, когда винт имеет поступательное движение в направле¬
нии оси вращения. Кроме того, будем рассматривать режим геликоп¬
тера, когда винт работает, вра¬
щаясь «на месте».
Рассмотрим скорости эле-
у мента лопасти пропеллера,
вращающегося со скоростью
п8 об/сек. Для этого нам нужно
вернуться к фиг. 17, на кото-
и=2пгп$ рой показано продвижение эле¬
мента за один оборот винта.
Фиг. 26. План скоростей потока у эле- Увеличив размеры этого черте-
мента лопасти. жа в ^ раз> получим мас-
■ штабы скоростей (фиг. 26):
окружную U = 2itr/is, поступательную V = Hans и результирующую
WK = ]/ Vs + U2. Индекс «к» означает, что мы здесь имеем дело с
«кажущейся» скоростью.
Скорости, представленные на фиг. 26, можно условно назвать
абсолютными. Э?о—скорости элемента лопасти относительно окру¬
жающего невозмущенного воздуха, который принят за неподвижное
тело (неподвижную систему координат).
Но в струе винта, т. е. там, где в действительности работает
элемент лопасти, картина будет несколько иная. Винт засасывает
и вращает воздух, сообщая ему таким образом некоторую дополни¬
тельную скорость, называемую индуктивной. Поэтому ск#р*сть
элемента лопасти относительно окружающей его воздушной среды
в струе не равна 1УК, и план скоростей в относительном движении
лопасти и воздуха будет отличаться от показанного на фиг. 26.
Исследование и вычисление индуктивной скорости являются одной
из основных задач винтовых теорий.
Так как для математического анализа относительного движения
двух тел безразлично, какое из них принять за неподвижное, то при
рассмотрении относительного' движения винта и струи принимают
для удобства винт (или элемент лопасти) неподвижным, а струю—
набегающей на него с соответствующей поступательной и окружной
скоростями. Тогда истинный многоугольник скоростей воздуха
28
относительно элемента лопасти будет иметь вид, показанный
на фиг. 27. %
Здесь вектор w означает дополнительную, вызванную винтом,
индуктивную скорость подсасывания воздуха в плоскости вращения.
Проекции ее щ и и, на оси U и V
-ок-
и.
будут ее составляющими
ружной и осевой.
Составляющая и, предста¬
вляет собой так называемую
скорость подсасывания, а иг—
это окружная скорость враще¬
ния струи.
Результирующая IV есть ис¬
тинная о. носительяая скорость
воздуха. Точно так же угол а
является истинным углом ата¬
ки и угол Р —истинным углом
подхода струй.
Разность между истинным и кажущимся углами атаки
Да = ак — а ,
называют скосом потока.
На практике в приближенных расчетах часто пользуются ка¬
жущимися величинами вместо истинных и считают IV = j/t/2 + Vs.
В частности, для конца
Фиг. 27. План относительных скоро¬
стей потока у элемента лопасти.
лопасти
U = -кп SD -
rrn*D V
•IT-у- V-
откуда
w=/^~+r=
t.V
I '
или
IV
U~2%rn,
Фиг. 28. План скоростей потока у гели¬
коптера.
Для геликоптера V — 0 и план скоростей будет иметь вид, пока¬
занный на фиг. 28.
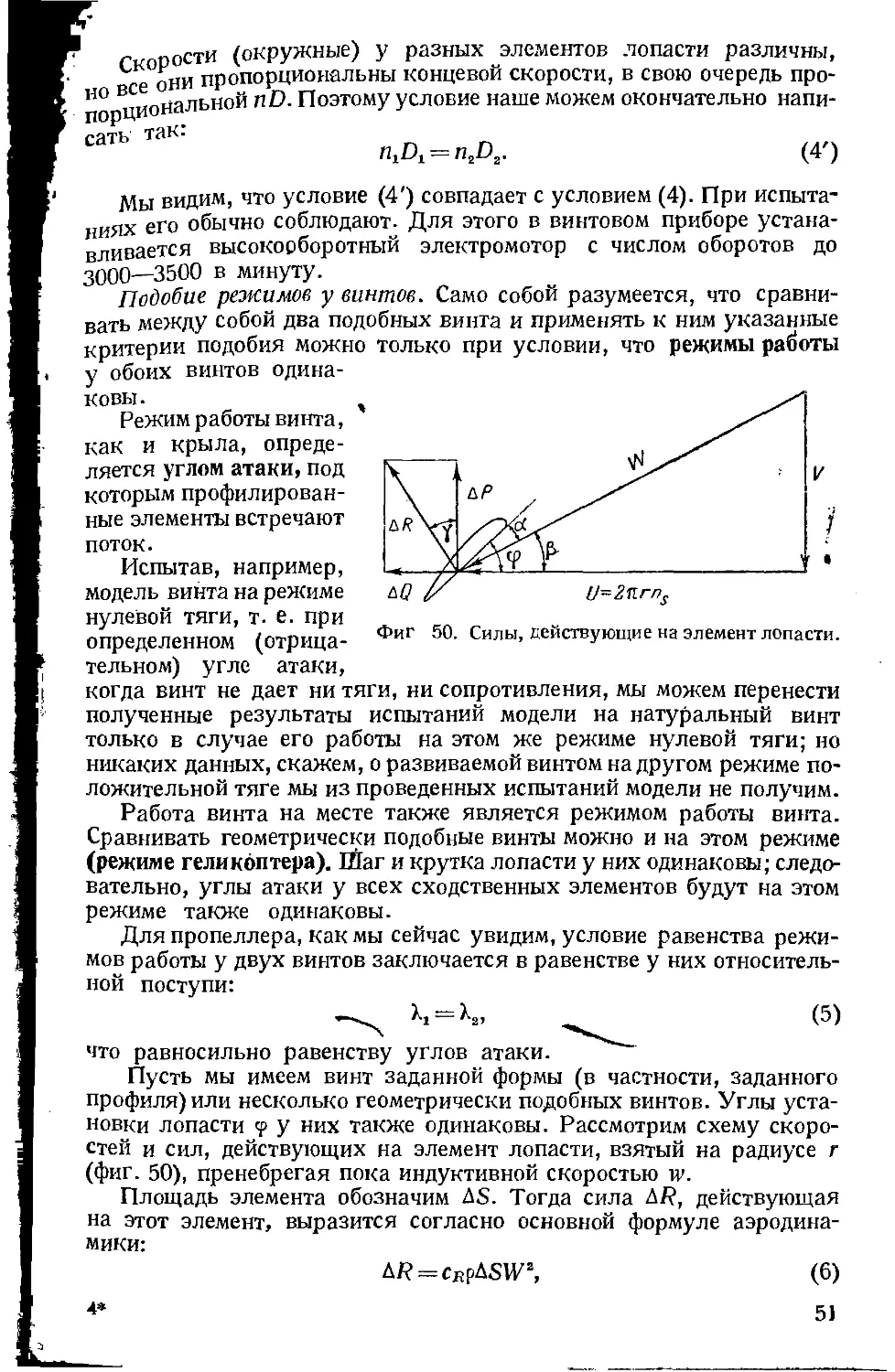
2. Силы, действующие на лопасть
Вырежем из лопасти элемент шириной йт (фиг. 29). На него
будет действовать результирующая аэродинамическая сила AR,
выражаемая согласно общему закону сопротивления:
, г> АС рй^а
ДR = cBAS ,
где cr — соответствующий профилю аэродинамический коэфициент,
зависящий от угла атаки, a AS —площадь взятого элемента.
2-9
Силу AR разложим на две составляющие: окружную ДQ— силу
сопротивления вращению и осевую ДР —силу тяги элемента.
Силы ДР и AQ [не следует смешивать с подъемной силой и
силой лобового сопротивления:
A D ас рй^а
APV ~2~ ,
ДР.
ЛсР^
: c/S ,
которые обычно характеризуют профиль крыла самолета и напра¬
влены по траектории профиля и перпендикулярно к нему.
На фиг. 30 показано разложение ДР по тем и другим осям.
Сила тяги всего винта равна сумме элементарных сил тяги по всем
лопастям:
Р = У]ДР.
30
Сила AQ дает элементарный момент сопротивления
ДМ = AQr.
Момент сил сопротивления для винта будет
М = 2] AQr. "
Это—пара сил, препятствующая вращению винта.
3. Мощность и к. п. д. винта
Мощность винта как вращающегося тела равна произведению
момента сил сопротивления на угловую скорость:
Т = 757У = Мш = М2тгл$5
Выражая мощность в лошадиных силах, из этой формулы получим:
N=f5Mne-
2тг
Мп об/мин.
Мп об/мин.
(2)
'75-60 716,2
Это—мощность на валу мотора, поглощаемая винтом.
Полезная же мощность, отдаваемая винтом на продвижение
еамолета, равна силе тяги, умноженной на скорость полета
TB = PV.
Козфициент полезного действия винта равен отношению его
полезной мощности к мощности, потребляемой им:
PV PV
V т 75дг • (3,
К. п. д. винта сильно зависит от режима работы последнего.
У современных хороших винтов к. п. д. достигает на наивыгодней¬
шем режиме величин порядка 0,85.
Потери винта происходят вследствие:
1) податливости воздуха, вызывающей два вида потерь:
а) на отбрасывание воздуха вдоль оси винта;
б) на закручивание струи позади винта;
2) трения лопастей о воздух;
3) сжимаемости воздуха.
Кроме того, винт, поставленный на самолет, теряет еще часть
мощности, вследствие взаимного влияния винта и самолета.
Этот вопрос будет освещен в главе VII.
31
Зависимость тяги от скорости. Выразим тягу по формуле (3):
Мощность и к. п. д., особенно на больших скоростях, изменяются
в значительно более узких пределах, чем скорость. Поэтому можно
грубо считать тягу почти обратно пропорциональной скорости и, во
всяком случае, считать, что с увеличением скорости тяга падает1.
Мы уже знаем, что при достаточно большой скорости тяга может
прекратиться вовсе и даже превратиться в отрицательную, т. е.
в отталкивание.
4. Идеализированные винты
Работа воздушного винта представляет собой с физико-механи¬
ческой стороны весьма сложное явление, точный математический
анализ которого очень труден и не может считаться завершенным
до настоящего времени. Существует несколько теорий работы винта,
которые в основном могут быть разделены на струйную и вихре¬
вую теории.
Струйная теория рассматривает поток воздуха, проходящий
через ометаемую винтом площадь, как однородную струю, засасы¬
ваемую и отбрасываемую винтом, как насосом.
Вихревая теория, как и при анализе работы крыла, исходит из
циркуляции скоростей вокруг винтового профиля и системы вих¬
рей, сбегающих с лопастей.
Струйная теория дает более или менее близкую к действитель¬
ности картину работы винта и применяется для сравнительных ра¬
счетов и учета влияния различных факторов на работу винта. Про¬
ектирование же и точный расчет винта ведут только по вихревой
теории.
Обычный прием при теоретическом подходе и сложной физиче¬
ской задаче заключается, как известно, в некотором упрощении или
* идеализации явления для облегчения математического анализа его.
Явление исследуют в отвлеченном виде, отбрасывая ряд более или
менее второстепенных факторов, а затем учитывают отдельно влия¬
ние этих факторов путем введения поправок в найденные формулы
и законы.
В теории воздушного винта созданы также отвлеченные схемы
совершенного и идеального винтов.
Совершенным называют винт, не имеющий никаких потерь.
Он ввинчивается в воздух без скольжения, как в твердую гайку.
К. п. д. его равен 1.
Идеальный винт имеет потери, вызываемые податливостью воз¬
духа, который он отбрасывает. Но винт не теряет мощности на за¬
кручивание струи и на трение лопастей о воздух, так как предпола¬
гается, что он работает в идеальной жидкости, лишенной вязкости.
На фиг. 31 показано примерное сравнение кривых тяги по ско¬
рости для совершенного, идеального и действительного винтов. Во
1 На малых скоростях на режиме разбега и взлета может наступить
обратное явление.
32
всех случаях тяга убывает с возрастанием скорости согласно фор-
Теория винта постоянного шага. В виде примера приводим
самую старую из теорий винта, так называемую теорию винта посто¬
янного шага, рассматривающую его работу по наиболее упрощен¬
ной и отвлеченной схеме.
Разрежем винт рядом цилиндров (см. фиг. 17) на элементы и
развернем какое-либо ци
Риг
линдрическое сечение (фиг.
32). Полагая, что трение
воздуха как идеальной
жидкости о поверхность
винта отсутствует, будем
считать полное давление
воздуха dR направленным
перпендикулярно к хорде
элемента. Давление dR
разлагаем на силу тяги
dP и сопротивление dQ.
Треугольник развертки,
очевидно, подобен тре¬
угольнику сил, так что
dQ И
dP 2яг ’
О
’^собери
Гидеплы
\
\
сгЬит
\я
50
V м/се.1'
100
или
Фиг. 31. Сравнение совершенного, идеаль¬
ного и действительного пропеллеров (мощ¬
ность мотора 200 л. с.)
оЬ—потери на отбрасывание воздуха, Ьс—потерт на
трение и на закручивание струи.
Мощность, потребляемая элементом, равна
dT = 2'KrnsdQ = 2^ dP = HnsdP.
Интегрируя по всем элементам винта, получим полную мощность
ь Т = PHns
и тягу
р=
п.Н
2Пг
Фиг. 32. К теории винта постоянного шага.
Эта теория очень сильно
отклоняется от действитель¬
ности. Так, из характеристик
авиационных моторов извест¬
но, что мощность последних
на полном газу можно гру¬
бо считать пропорциональной
оборотам и, следовательно, отношение почти постоянным. Так
как шаг в данном случае также постоянен, то из последней фор¬
мулы следует, что и тяга Р почти не меняется. Между тем из
33
3 Общий курс воздушных ввитое
опыта известно, что тяга,на полной мощности может изменяться
в два раза и более.
Излагаемая ниже теория идеального винта освещает работу
последнего значительно полнее и ближе к действительности.
5. Теория идеального винта
Как уже было сказано, мы полагаем, что идеальный винт
работает в идеальной жидкости без трения. Далее, мы полагаем,
что струя воздуха засасывается равномерно во всех точках оме-
таемого винтом диска с одинаковой скоростью, направленной только
по оси вращения без закручивания.
На фиг. 33 показана схема потока
у идеального геликоптера. На поверх¬
ности сферы достаточно большого (ус¬
ловно бесконечного) радиуса, описанной
около винта, воздух неподвижен (исо=0),
и давление равно атмосферному. С раз¬
ных сторон частицы воздуха направля¬
ются к винту с возрастающей ско¬
ростью o', v”, и"' и проходят через
плоскость вращения F со скоростью
подсасывания iv В действительности
скорости проходящих струек в пло¬
скости F не одинаковы, но скорость г\
можно представить себе как среднюю
для всей струи. За винтом струя не¬
сколько сужается и затем уже уходит
прямой цилиндрической колонной в бес¬
конечность со скоростью отбрасывания
и2, которая, как увидим дальше, вдвое больше скорости подса¬
сывания »!■
Сжатие струи объясняется увеличением скорости потока за винтом
и следует непосредственно из уравнения неразрывности. В даль¬
нейшем мы найдем его численную величину.
Схема потока у идеального пропеллера показана на фиг. 34.
Будем полагать для простоты, что пропеллер вращается на месте,
а поток набегает на него из бесконечности (сечение /) со скоростью V
(скорость полета). В плоскости винта II появится, как и в предыду¬
щем случае, скорость подсасывания vlt а вдали за винтом (сече¬
ние III)—скорость отбрасывания v„. Таким образом в плоскости II
получится суммарная скорость подходящего воздуха
Vt = У+в,;
в плоскости III—скорость уходящего воздуха
V, = V+vt.
Тяга и мощность идеального пропеллера. Силу тяги можно считать
одинаковой у идеального и действительного пропеллеров1. Восполь¬
1 Сила тяги, являющаяся реакцией или давлением отбрасываемого воздуха
на винт, по существу не зависит от допущенной нами идеализации. Мы отвле¬
каемся только от мощности, затрачиваемой действительным винтом на трение
и закручивание струи.
Фиг. 33. Схема потока у иде¬
ального геликоптера.
34
зуемся для ее выражения теоремой о количестве движения.
При установившемся режиме работы винта сила Р постоянна.
Тогда импульс этой силы за 1 секунду будет РЛ—Р.
При относительно небольших давлениях в струе можно воздух
считать несжимаемой жидкостью и массы воздуха, проходящие
в 1 секунду через сечения I, II и III,— равными. Обозначим эту
секундную массу через т. Начальное количество движения ее в сече¬
нии / равно mV, а конечное в сечении III равно mV2. Приращение
количества движения, очевидно, будет т (l/2—V). Тогда, по теореме
о количестве движения:
P = m(V2—У) = то2. (5)
Мощность идеального пропеллера Tt равна произведению силы
на скорость. Так как сила Р от винта приложена непосред¬
ственно к воздуху, движущемуся через плоскость вращения со ско¬
ростью Vj = V + и15 то
Т4 = Р^. (6)
Кроме того,мощность 7\
(как работа силы за 1 сек.)
равна приращению кине¬
тической энергии секунд¬
ной массы воздуха. Началь¬
ная кинетическая энергия
ее в сечении I равна
/72 Vs
2 ’
а конечная в сечении III
равна
mVl _ т (V + г2)*
2 ~ 2
Приращение кинетической энергии секундной массы воздуха
выражается разностью:
Приравнивая это выражение Т% и используя формулу (5), полу¬
чаем:
T^P^K + f). (7)
Теорема Фруда — Финстервальдера. Сравнивая два выражения
для мощности (6) и (7), можем написать:
P(V + V1)=^P(V+^,
откуда
I
Фиг. 34. Схема потока у идеального пропел¬
лера .
т. е. скорость отбрасывания вдвое больше скорости подсасывания.
Это положение и называют теоремой Фруда—Финстервальдера.
Пользуясь этой теоремой, выразим тягу и мощность через пара¬
метры, относящиеся только к плоскости вращения. Секундная масса
воздуха плотности р, проходящего через площадь F со скоростью
Vlt будет:
m — pF V1.
Подставляя это выражение в формулу (5) и заменяя в ней vt через
2uj, согласно формуле (8), получим:
Р = 2 oFVlvl = 2р F (V +1\)
и соответственно из формулы (6):
Т i = 2pFV\vl — 2pF (Т + £>i)2 Vy.
В некоторых случаях удобно пользоваться величиной
Геликоптер
(9)
(10)
а
Фиг. 35. Эпюра скоростей у геликоптера и про¬
пеллера.
pt_ пп
V7! V-t-W! ’ V ;
называемой фактором
подсасывания. При по¬
мощи этой величины
формулы (9) и (10) мо¬
гут быть выражены так:
P=2nFV\a\ (9')
7V=2pfV;a. (Ю')
Формулы для гелико¬
птера. Полагая в пре¬
дыдущих соотношениях
1^=0, получим форму¬
лы для геликоптера.
Теорема Фруда—Финстервальдера непосредственно относится
и к геликоптеру, так как скорость полета V в нее не входит.
Из формул же (9) и (10) получим при V = 0:
P = 2PFvl; (9")
Ti = 2pFv\. (10")
Диаграмма скоростей в струе винта. На фиг. 35 показаны диа¬
граммы скоростей в струе пропеллера и геликоптера. Мы видим
в обоих случаях нарастание скорости перед плоскостью вращения
на величину скорости подсасывания v± и дальнейшее ее нара¬
стание за винтом до вв = Ъ\.
Сжатие струи. Напишем уравнение неразрывности для двух
сечений струи геликоптера: в плоскости вращения и вдали, за винтом:
pFv1 = plFlvs = m,
где F и F,—площади сечений. Полагая попрежнему воздух несжи¬
маемым (р = Pi), получим:
F v„
Fi
2,
36
т е. площадь сечения струи за винтом сжимается в два раза. Диаметр
уменьшается соответственно в |/ 2 раза. Опыт подтверждает этот
результат.
Для пропеллера уравнение неразрывности примет вид:
F (lZ + ьД = FJLV + и,) = F, (V + 2ьч),
откуда
F _ V + 2»j j з
F, V + t\ 1 ^ V + '
Сжатие струи равно единице, т. е. струя вовсе не сжимается при
условии и1=0, которое осуществляется у совершенного пропеллера,
а также у действительного винта при полете на режиме нулевой тяги,
когда поступь винта равна динамическому шагу (глава I, § 3).
По мере приближения режима работы винта к геликоптерному сжатие
струи приближается к 2.
К. п. д. идеального винта. К. п. д. идеального пропеллера обозна¬
чается индексом «а» (аксиальный, или осевой), так как он учитывает
только потери на отбрасывание воздуха вдоль оси вращения:
PV PV v V /10Ч
^ т,- pv, v, v + »,' ' *
Отсюда видно, что источником потерь у идеального винта
является только дополнительная скорость и, струи, вызываемая
винтом; когда ь',=0, tj=1 (совершенный винт).
У геликоптера идеальный к. п. д., очевидно, равен нулю. Так
как полезной работой винта мы считаем продвижение самолета
с некоторой скоростью У, то у геликоптера полезная отдача отсут¬
ствует. К вопросу о к. п. д. геликоптера мы еще вернемся.
6. Коэфициент нагрузки на ометаемую винтом площадь и его
связь с к. п. д. винта
Величину
В== РУ» = gF ^13)
2
называют коэфициентом нагрузки на ометаемую винтом площадь.
Она дает нагрузку на 1 мг тягой, отнесенной к скоростному напору
pV2
f = -2"-
Определив из выражения (13) тягу:
P — BqF= В F, (13')
получаем для нее выражение, аналогичное основным аэродинами¬
ческим формулам для подъемной силы ^y = Cj,~S^ и лобового
сопротивления ^X = — сх S^, причем В играет роль сд или —сх.
37
Согласно формуле (9) можем написать:
в= + чЦ. =4 v+л д.=4 (| + А) а-. (I3-)
~rF
Покажем, что коэфициент В связан непосредственно и с коэфициен-
том сх лобового сопротивления самолета.
Так как
Р — сх — cxqS,
то по формуле (13)
qF ~ х F ~ ’
t S
где к — постоянная величина отношения -р-.
Из этих формул мы видим, как глубоко связан коэфициент В
с параметрами винта и самолета. Кроме того, он связан прямой зави¬
симостью и с к. п. д. винта. В самом деле, из формулы (12) следует:
V* _ V + w, _ . . w, 1
V V ~ 1 ^ V ~ Т)а
и
_ I I
\Г г» *
v
Вставляя эти выражения в формулу (13"), получим:
В = Л =4 ,
ИЛИ
(£)
Решив это квадратное уравнение относительно —, получим:
Ча
I _i + Vi + в
Ъ ~ 2 %
(перед корнем берем знак плюс (+), так как в противном случае полу¬
чим отрицательный к. п. д.), откуда
■'-1Т7ПЧ- ,14)
Фактор подсасывания а (11) также выражается через В. В самом
деле:
1 „ 1 wi ^ i vi ^ „ /1 щ
о 1 у^ у^ — у^ *1а> (15)
откуда, на основании равенства (14), получим:
. 1Л1 + 5-1 /tC4
а — 1 — чпо = *Ь==—I (16)
' у"1 + В + 1 v ’
а также
I + а
■ а
(17)
38
Из формулы (14) мы видим, что с точки зрения теории идеального
пропеллера выгодно уменьшать В и, следовательно, согласно формуле
(13), увеличивать F, т. е., в конечном счете, увеличивать диаметр
винта. Но в действительности значительному увеличению диаметра
препятствуют как размеры самолета, так и увеличение окружных
скоростей концов лопастей, сильно снижающее к.п.д. действитель¬
ного винта.
Таблица 6
Относительная скорость подсасывания и идеальный к. п. д. в зависимости
от В
В
«1
Ча
В
ГЛ
V
V
0,0
0,000
1,00
3,0
0,500
0,67
0,1
0,024
0,975
8,0
1,000
0,50
0,2
0,048
0,95
10,0
1,158
0,46
0,3
0,070
0,93
15,0
1,500
0,40
0,4
0,092
0,92
24,0
2,000
0,33
0,5
0,112
0,90
48,0
3,000
0,25
1,0
0,207
0,82
120,0
5,000
0,17
2,0
0,366
0,73
360,0
9,000
0,10
со.
со
0,00
В табл.
V-,
вания
6 дана зависимость относительной
и 7ia от В при изменении
скорости подсасы-
последнего от нуля до бес¬
конечности.
Значение 6=0 соответствует
работе совершенного винта, а
также режиму нулевой тяги
(Р=0), В=оо —геликоптеру.
На фиг. 36 показана кри¬
вая зависимости /)а от 6 и,
кроме того, дана примерная кри¬
вая к. п. д. '/] действительного
винта.
Сравнивая к. п. д. действи¬
тельного винта с идеальным,
можно сделать вывод, что пер¬
вый к. п. д. меньше второго на
0,15. Наивыгоднейшее значение
6 для действительного винта в
среднем 0,3. При этом
т]а ~ 0,9 -4- 0,95 и т] л 0,75 ~ 0,8.
При дальнейшем уменьшении 6 значения ■») быстро падают.
7. Давление в струе винта
Давление в разных точках сечения струи винта не одинаково.
Но, как и при изучении скоростей, будем брать для каждого сечения
одно среднее значение давления.
Фиг. 36. Зависимость идеального к.п.д.
и примерного действительного к. п. д.
от коэфициента нагрузки на ометаемую
винтом площадь.
39
Рассмотрим снова схему струи идеального пропеллера (фиг. 34).
С физической стороны ясно, что давление непосредственно впереди
плоскости винта должно быть меньше давления позади нее. Иначе
говоря, в плоскости винта должен получиться скачок давления, бла¬
годаря которому собственно и появляется тяга. Поэтому вместо сече¬
ния II рассмотрим отдельно сечение II' непосредственно (бесконечно
близко) впереди винта и II" позади него (фиг. 37). Скорость по¬
тока для них одна и та же: V, = V + v, (при условии равенства
площадей сечений и несжимаемости воздуха).
Давление в сечении II' обозначим рг, а в сечении //" — р2.
В удаленных же сечениях
^2 _ I ^ III давление будет равно
1 _ ^ Ро атмосферному давлению р0.
Напишем уравнение Бер¬
нулли для сечений I и II' и
для сечений III и 1Г.
Для сечений I и II'
V /Ц Ц-Ущ
Po + 9~=Pi + i VI,
I
I
I
I
i——"w
I откуда
Фиг. 37. Скорости и давления в различных р
сечениях струи винта. 2 ' 1 ) ^ Ро>
т. е. давление впереди винта ниже атмосферного.
Для сечений III и 1Г
P* + -^V\ = p% + \V\,
откуда
= Ро + \ (V\ - VI) > р„,
т. е. давление позади винта больше атмосферного.
Определим теперь скачок давления Др:
4P = P3-A = ^-(V“-V2), (18)
а так как Va = V + u2 = V-\-2v„ то, сделав соответствующую под¬
становку, получим:
Ap = 2p»l(V + c1)-2pV1»1. (18')
Скачок давления выражается весьма просто через коэфициент
давления на ометаемую винтом площадь В. Так как по формуле (13”)
в_ (У + Уг)У,
^ 4 \п ,
ТО
/17 I Ч BVS
Подставляя это выражение в формулу (18'), получим:
Д/> = 2р®£ = !£в = 00. (19)
40
Сила тяги равна суммарному давлению на ометаемую площадь F:
P=*bpF=^~(VI-V*). у (20)
Заменяя здесь Др по формулам (18') и (19), получим:
Р = 2р VlVlF = ?~BF = qBF.
Сравнивая эти выражения для силы тяги с формулами (9) и (13'),
мы видим полное совпадение их и убеждаемся в сходимости наших
теоретических востроений при вычислении силы тяги по теореме
количества движения и по скачку давления.
Эпюра скоростей
1
SS»
J
Эпюра давлений
Фиг. 38. Распределение скоростей и давлений в струе винта.
Для геликоптера, полагая V=0, получаем:
А=А-?;
A = A + 3ij-;
ДР = А —А = 2 риах = 4-^, (21)
т. е. скачок давления у геликоптера равен учетверенному скорост¬
ному напору в плоскости винта. При этом возрастание давления
за винтом втрое больше величины падения его впереди винта.
Выразив тягу геликоптера
p = ApF = 2ргф, F
мы снова замечаем совпадение с ранее выведенной формулой (9").
На фиг. 38 показана эпюра давлений в струе винта, сопоставлен¬
ная с эпюрой скоростей.
8. Распределение тяги и мощности вдоль лопасти винта
Формулы, выражающие силу тяги через скачок давления, были
проверены на опыте. Ар определяли, замеряя давления впереди и по¬
зади винта, а силу тяги замеряли непосредственно. При этом оказа¬
лось, что для режима пропеллера формулы дают хорошее совпадение
с опытом, для геликоптера же получилось значительное расхожде¬
ние.
41
Такие опыты выяснили также истинную картину распределения
давления, а следовательно, и тяги вдоль лопасти, т. е. по кольцевым
элементам ометаемого винтом диска (фиг. 39). Так как площадь
кольца равна 2п dr, то, обозначив через 1±р скачок давления в дан¬
ном кольце, мы можем выразить
элементарную тягу элемента:
dP = hp2r,r dr,
где $р—функция г. Переходя к от¬
носительным радиусам, получаем:
rdr = R*-^ = Rii-di,
и следовательно,
dP = kpR^rdr,
или
dp
~7 = t(r).
dr
На фиг. 40 показан типичный
график этой функции, представля¬
ющий собой кривую распределения
тяги вдоль лопасти. Вблизи г=0,
в пределах втулки и нерабочей части винта, приблизительно до г=0,25
мы имеем отрицательную тягу, т. е. сопротивление, затем нара¬
стание ее до максимума около г=0,75 и быстрое падение в конце.
■Фиг. 40. Распределение тяги вдоль Фиг. 41. Распределение мощности
лопасти. вдоль лопасти.
Полную силу тяги, очевидно, получим, определив площадь,
ограниченную этой кривой, так как
P=\d-td?.
■О dr
Аналогичными опытами была найдена и кривая распределения
поглощаемой винтом мощности вдоль лопасти — = /(г) (фиг. 41).
dr
42
9. Вращение в струе винта
Мы уже знаем (§ 1 этой главы), что индуктивная скорость под¬
сасывания воздуха w (фиг. 27) имеет окружную составляющую ut,
являющуюся источником вращения струи за винтом (фиг. 42).
Не следует представ¬
лять себе струю как вра¬
щающееся твердое тело,
внутри которого окруж¬
ные скорости точек про¬
порциональны расстоянию
от оси согласно формуле
U = v>r (фиг. 43). В дей¬
ствительности скорости,
наоборот, возрастают от
поверхности струи к оси
вращения примерно по
гиперболическому закону
(фиг. 44) и только вблизи
оси (в нерабочей части)
убывают. Вращение струи
таким образом напоминает
вращение жидкости во¬
круг вихря.
Теорема для окруж¬
ных скоростей струи ана¬
логична теореме Фруда—
Финстервальдера для осе¬
вых скоростей: скорость
вращения струи непосред¬
ственно за винтом (и”)
вдвое больше скорости вра¬
щения в плоскости винта
щ на том же радиусе г,
т. е. для данного кольце¬
вого элемента струи:
Фиг. 43. Неверное представление об ок¬
ружных скоростях в сечении струи винта.
U,
= 2 Ui.
(22)
Фиг. 44. Истинное распределение окруж¬
ных скоростей в сечении струи винта.
По мере удаления от винта кольцевой элемент сжимается вместе
со всей струей. Скорость вращения кольца, а следовательно, всей
струи возрастает при этом обратно пропорционально радиусу.
Найдем величину потери мощности на вращение кольцевого
элемента. Пусть сопротивление кольца вращению равно dQ, а окруж¬
ная его скорость равна щ. Следовательно, поглощаемая им мощ¬
ность.
dT^=dQut.
Мощность же, затрачиваемая элементом лопасти, имеющим окруж¬
ную скорость U, равна
dT = dQU
43
Величину r_iT._i. (23)
^ йТ U ’
„„/вмента винта идет на закру-
показывающую, какая часть мощности окружных потерь,
чивание струи, называют коэфициен™ ,я иг вдоль радиуса, точное
Ввиду сложности закон р р Д с^го винта затруднительно,
вычисление такого коэфициента для вс^ ну*
Величина его вообще невелика—около /о‘
10. Система частных к. п. д. и по^ны** к* п* Я* винта
„ мощности действительного
Мы уже знаем, что р д ^ учивание струи и на отбра-
винта состоят из потерь на трение, на закр/ и/
сывание воздуха. частных кпд каждый
В соответствии с этим вводятся три ^ ■ д-’ каж£ьш
из которых учитывает только один вид взывающий, какая часть
1) к)т механический . . ■' ./отерь на трение лопастей;
затрачиваемой мощности остается после t V ие
2) ч«-окружной к. п. д., оцениваюв» g Q я
* Л У-ы.
ВаЮПу?ть шин" с“, «°Д S на враще™е 8инта’равна
Т- Х^Гда: „..петом потерянной на тре-
1)Т'(]т — мощность, ост ща (■ ,ие воздуха и полезную
ние) на закручивание струи, отбрасывав }
7Чд,-мощность, идущая на отбр;'«“а>« “«духа и тягу,
т. е на работу винта как идеального; п0лезну10 рлботу
3) Tv]m7)u7;a —мощность, оставшаяся на > ** J
тяги и равная PV. произведению этих трех
Полный к. п. д. винта, очевидно, равен в f
частных к. п. д.:
pv „ (24)
Ч — -у — ЧткЧиЧа •
Возьмем примерные значения коэфицие^тов ДЛЯХ0Р°шеГ0 винта.
vjm = 0,85;^ = 0,98; г)а^°>95-
Т°ГДа т] = 0,85 • 0,98 ■ 0,95 = 7‘//«‘
Кроме этих к. п. д. часто пользуются е111^.?/н^д.1^МпИ!!И^0ВаН
ными коэфициентами: относительным и ^ механического и
Относительный к. п. д. Чо равен произвИ
окружного и оценивает потери на трение и
(25)
Чо*^ ЧтЧш
следовательно,
Ч = ЧоЧа,
„ ИЛИ
V
Ч«,= Г-?
44
1
т. е. относительный к. п. д. равен отношению полного к. п. д. к иде¬
альному. Он характеризует степень отклонения действительного
винта от идеального. Очевидно, мощность, идущая на «идеальную»
работу, равна
7\ = ТЧ..
Индуктивный к. п. д. тд равен произведению окружного и осе¬
вого:
\ = •»№. (27)
Он оценивает потери от индуктивной скорости воздуха w, вызван¬
ной винтом. В самом деле, т]а согласно формуле (12) определяется осе¬
вой составляющей вскорости iv, avj„—ее окружной составляющей и.
Полный к. п. д. будет тогда
= (28)
К. п. д. геликоптера. Выше (в § 4) мы выяснили, что идеальный
к. п. д. геликоптера равен нулю. Это следует из определения
при V = 0. Значит и полный к. п. д., в который т]а входит множи¬
телем, будет также равен нулю.
Такой к. п. д. мы получаем, оценивая геликоптер как пропеллер,
т. е. с точки зрения поступательной скорости, которую он, однако,
не может давать по самому принципу своего применения как аппа¬
рат, создающий только тягу на месте. Следовательно, коэфициенты
71а и т] не характеризуют геликоптер по существу и его к. п. д. нужно
определить иначе.
К. п. д. геликоптера показывает, какая часть затрачиваемой мото¬
ром мощности Т идет на отбрасывание воздуха, как на полезную
работу 7\.
Мы уже знаем, что эту часть показывает относительный к. п. д. tj0:
Те
^1» f
учитывающий потери на трение и на вращение струи, имеющиеся
и у геликоптера. Таким образом полезная отдача последнего харак¬
теризуется только относительным к. п. д. т>в.
ГЛАВА III
ИСПЫТАНИЯ ВИНТОВ И ИХ АЭРОДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
1. Испытания винтов
Цель обычных серийных испытаний винтов—получение аэроди¬
намических характеристик: тяги, мощности и коэфициента полез¬
ного действия винта.
Измеряют при испытаниях собственно только тягу и мощность,
причем тягу замеряют непосредственно, а для определения мощ-
43
ности замеряют реактивный 1 момент винта. Мощность в лошади¬
ных силах вычисляют затем по формуле (2) главы II:
^ 716,2’
а к. п. д.—по формуле (3) главы II:
PV
75 ~ 75N '
Испытания винтов можно производить в аэродинамической трубе
на моделях и в натуру. Натуральные винты можно испытывать и не¬
посредственно на самолете: в полете и на месте.
Испытания винтов в полете имеют естественно то преимущество,
что дают возможность непосредственно получить характеристики
винта в рабочих условиях на самолете и избавляют от целого ряда
теоретических приближений и пересчетов. Однако трудности этого
рода испытаний настолько велики, что по настоящее время они как
Фиг. 45. Определение тяги и момента при работе винта на месте посредством
динамометра' и весов.
метод получения характеристик систематически не проводятся ни¬
где. Дело в том что до сих пор не сконструировано еще достаточно
удобной в эксплоатации динамометрической втулки, служащей для
замера силы тяги и момента в полете. Кроме того, летные испыта¬
ния вследствие своей громоздкости не дают возможности проводить
эксперименты такими большими сериями, как в трубе, где можно
варьировать всевозможные параметры винта: размеры, шаг и т. д.,
а также условия его работы вплоть до таких условий, которые могут
быть вовсе не осуществимы в полете.
В виде примера приведем самый старый и примитивный способ
определения тяги и мощности винта при работе его на месте (фиг. 45).
Самолет привязывают к столбу через динамометр D, который непо¬
средственно показывает силу тяги. Для определения момента одно
колесо самолета ставят на весы и определяют давление на них при
остановленном и при работающем моторе. Разность этих давлений q, <
умноженная на расстояние между колесами /, дает реактивный момент
винта:
Мр = ql.
Однако этот метод недостаточно точен. Поэтому сейчас определяют
тягу и мощность винта испытаниями в аэродинамической трубе.
46
На фиг. 46 показана примерная схема установки винтового при¬
бора в трубе. Мощный вентилятор А создает в трубе поток, соответ¬
ствующий встречному потоку в полете. Винт приводится во вращение
электромотором В в 70 л. с., дающим от 800 до 3500 об/мин. Мотор
Фиг. 46. Схема винтового прибора В-2 в трубе.
А—вентилятор; В—электромотор; С—тяговые весы; V—моментные весы; В—ивм*»
ритель скорости; К—кронштейн; G—противовесы.
имеет очень малый диаметр и заключен в обтекаемый кожух. Вся
установка подвешена так, что имеет две степени свободы: она может
немного перемещаться вдоль оси и поворачиваться вокруг нее на
небольшой угол. Этого достаточно для измерения тяги и момента.
Сила тяги воспринимает¬
ся в точке О растяжками /Г~й
7 и 2; первая идет к весам,
а вторая закреплена не¬
подвижно. Третья растяж¬
ка 3 несет на конце про¬
тивовес, назначение кото¬
рого — давать предвари¬
тельную загрузку весам,
а также натягивать и вы¬
равнивать всю подвеску.
Разложив реакцию си¬
лы тяги Р на направления
7 и 2 (фиг. 47), мы видим,
что натяжение нити 7 рав¬
но Р и, следовательно, ве¬
сы показывают непосред¬
ственно силу тяги винта.
Нить 4 (фиг. 46), име¬
ющая также противовес,
проходит на некотором
расстоянии от мотора и крепится к нему через кронштейн К
длиной I. Если показания моментных весов равны д, то момент
винта будет, очевидно, равен ql.
Для большей изоляции винта электромотор иногда отдаляют от
него и вращение передают посредством длинного вала.
Фиг. 47. Схема сил в точке крепления винто¬
вого прибора
47
Испытания в трубе бывают двух типов:
1) испытания изолированных винтов;
2) испытания винтов, работающих в присутствии самолетного
агрегата: с моделью моторной гон¬
долы, фюзеляжа, крыла или целого
самолета (фиг. 48 и 49).
В первом случае при подборе
испытанного винта к самолету не¬
обходимо теоретически учитывать
изменение его характеристики
вследствие взаимного влияния вин¬
та и самолета. Во втором случае
это влияние входит уже в получен¬
ные характеристики, и подбор
винта значительно облегчается, но
только для условий, совпадающих
с условиями испытаний или очень
близких к ним.
В современных больших тру¬
бах с открытой рабочей частью
производятся испытания в натуру небольших самолетов с работаю¬
щим винтом. Результаты этого вида испытаний являются, конечно,
наиболее ценными.
Фиг. 49. Установка в трубе винтомоторной группы с крылом.
2. Переход от модели к натуре и условия подобия
В трубе испытывают обычно не одиночные винты, а серии
винтов, т. е. один и тот же винт с разными углами установки
лопасти. Так, винт ЗСМВ-2, геометрические характеристики лопасти
Фиг. 48. Установка в трубе винто¬
моторной группы.
48
которого были даны на фиг. 21—25, испытывался в виде модели
винта (D = 90 см) с фюзеляжем при углах установки от 19 до 64°
последовательно через 3 .
Результаты испытаний даются не в виде абсолютных величин
тяги и мощности, а в виде безразмерных коэфициентов этих
величин, что облегчает переход к натуре.
Как известно из экспериментальной аэродинамики, для того
чтобы аэродинамические формулы и коэфициенты, полученные
из испытаний модели, были применимы к натуре, необходимо
соблюдать, во-первых, геометрическое подобие модели и натуры
и во-вторых, динамическое подобие условий их работы.
Геометрическое подобие, разумеется, соблюдают всегда. Модель
винта является всегда точной уменьшенной копией натурального
винта, и все относительные размеры должны у них совпадать.
Динамическое подобие в данном случае заключается в соблюде¬
нии двух основных условий: равенства чисел Рейнольдса (Re)
и чисел Маха (Ма) у модели и натуры.
Число Рейнольдса имеет вид
О)
где W—относительная скорость потока, /—линейный размер и v—ки¬
нематический коэфициент вязкости воздуха, который можно считать
постоянным на данной высоте. В качестве линейного размера для
винтов берут диаметр D. Скорость W является геометрической
суммой U и V (если пренебречь индуктивной скоростью w).
Для геликоптера Р = 0 и WzzU, окружная же скорость про¬
порциональна nD. Поэтому для модели и натуры геликоптера на
данной высоте:
Re, _ n,D|
Re., ruDl
и условие Ret — Re., равносильно требованию:
ntDl = n2Dl. (2)
Это значит, что обороты модели и натурального винта должны
быть обратно пропорциональны квадратам их размеров:
ni (Л "
«2 _ \Х>1 J '
Таким образом при масштабе модели в 1/3 ее обороты (при
2000 об/мин. у натурального винта) должны были бы достигать
18000 в минуту. Помимо технических трудностей получения таких
высоких оборотов, при испытании это вызвало бы полное искаже¬
ние аэродинамической картины обтекания лопастей вследствие
сжимаемости воздуха при больших скоростях.
Опыт, однако, показал, что несоблюдение этого условия дает замет¬
ные погрешности только при значительной разнице размеров модели
и натуры. Обычно же для винтов влияние условия Реийольдса неве¬
лико и им пренебрегают.
4 Общий курс ВОЗДУШНЫХ винтов
49
Число Маха1 учитывает влияние сжимаемости воздуха
имеет вид:
где W—относительная скорость воздуха, а а—скорость звука, завися-
щая от температуры воздуха (а следовательно, и от высоты полета).
При одинаковых атмосферных условиях мы можем свести условия
равенства чисел Маха у модели и натуры к условию равенства линей- '
ных скоростей:
W1==W2. .
Для геликоптера (W^:U), беря скорости у концов лопастей,
получим:
niD^n^, (4)
т. е. обороты должны быть обратно пропорциональны диаметрам вин¬
тов. Это условие противоречит условию (4), но лег,че выполнимо.
Однако тщательные опытные исследования показали, что число Маха
начинает влиять на работу винта только при достижении концами'
лопастей скорости порядка 0,85 скорости звука, т. е. при Ма= 0,85
У современных быстроходных винтов окружные скорости концов
лопастей могут достигать звуковой и даже превосходить ее. Учет
влияния числа Ма в этих случаях будет рассмотрен в главе VIII.
Подобие деформаций. Еще одно условие подобия нужно соблю¬
дать при испытаниях модели—это подобие деформаций. Дело в том,
что вращающийся винт подвергается большой нагрузке от действия
аэродинамических и центробежных сил. Нагрузка эта вызывает соот¬
ветствующие напряжения в материале винта, приводящие к дефор¬
мациям лопастей. Если деформации у модели и натуры не будут
подобны, мы получим у них различие формы и нарушим первое и
основное условие—геометрическое подобие.
Выразить математически условие подобия деформации можно,
исходя из следующих простых соображений. Считая материал лопа¬
стей винта и его модели одинаковым, мы сведем наше условие к усло¬
вию равенства напряжений в сходственных сечениях лопасти:
Ri R%
Si ~ s2 '
де /?л и /?2 — силы, действующие на винты, а
Si и s2 — площади сходственных сечений.
Но аэродинамические силы, действующие на тело, при постоян¬
ной плотности воздуха всегда пропорциональны площади его S и
квадрату скорости. Следовательно, наше условие примет вид:
S.Wj ^ S2W%
S1 S2
Отношения же — сходственных площадей у подобных винтов,
очевидно, одинаковы. Сократив наше равенство, получим:
W\=Wl или W, = W2.
1 Это число называется также числом Бэрстоу (Ва).
. Оно ]
J
(5) '■
50
ости (окружные) у разных элементов лопасти различны,
они пропорциональны концевой скорости, в свою очередь про-
Н° В°иональной nD. Поэтому условие наше можем окончательно напи-
сать тяк«
с ПА = «Д. (4')
Мы видим, что условие (4') совпадает с условием (4). При испыта¬
ниях его обычно соблюдают. Для этого в винтовом приборе устана¬
вливается высокооборотный электромотор с числом оборотов до
3000—3500 в минуту.
Подобие режимов у винтов. Само собой разумеется, что сравни¬
вать между собой два подобных винта и применять к ним указанные
критерии подобия можно только при условии, что режимы работы
у обоих винтов одина¬
ковы.
Режим работы винта,
как и крыла, опреде¬
ляется углом атаки, под
которым профилирован¬
ные элементы встречают
поток.
Испытав, например,
модель винта на режиме
нулевой тяги, т. е. при
определенном (отрица¬
тельном) угле атаки,
когда винт не дает ни тяги, ни сопротивления, мы можем перенести
полученные результаты испытаний модели на натуральный винт
только в случае его работы на этом же режиме нулевой тяги; но
никаких данных, скажем, о развиваемой винтом на другом режиме по¬
ложительной тяге мы из проведенных испытаний модели не получим.
Работа винта на месте также является режимом работы винта.
Сравнивать геометрически подобные винты можно и на этом режиме
(режиме геликоптера). Шаг и крутка лопасти у них одинаковы; следо¬
вательно, углы атаки у всех сходственных элементов будут на этом
режиме также одинаковы.
Для пропеллера, как мы сейчас увидим, условие равенства режи¬
мов работы у двух винтов заключается в равенстве у них относитель¬
ной поступи:
К = _ (5)
что равносильно равенству углов атаки.
Пусть мы имеем винт заданной формы (в частности, заданного
профиля) или несколько геометрически подобных винтов. Углы уста¬
новки лопасти <р у них также одинаковы. Рассмотрим схему скоро¬
стей и сил, действующих на элемент лопасти, взятый на радиусе г
(фиг. 50), пренебрегая пока индуктивной скоростью w.
Площадь элемента обозначим AS. Тогда сила AR, действующая
на этот элемент, выразится согласно основной формуле аэродина¬
мики:
AR = cr?ASW2, (6)
4*
51
где коэфициент cR есть функция угла атаки а: =/(а).
Но а = <р — Р; следовательно, cB=F(<p, р), а так как углы ? для
сходственных сечений у подобных винтов одинаковы (<р = const), то
сп = т
у
Но угол подхода струй р в свою очередь зависит от катетов V и U
треугольника скоростей:
v v
й= 2ягпр *
Выражая г через D: т = кгО, получим: =
т. е. Р = /(Х), и следовательно, Сд = /(Х).
Так как эта зависимость будет для всех элементов лопасти, то мы
получаем следующий важный вывод: два винта будут иметь аэродина¬
мически подобные режимы работы, т. е. равные углы атаки и коэфи-
циенты Сн во всех сечениях при условии:
К = К,
или
const,
nsD
иначе говоря, при условии пропорциональности составляющих
скоростей V и U. Допущенное нами вначале упрощение в виде пре¬
небрежения индуктивной скоростью w не имеет существенного значе¬
ния. Рассматривая более точный план скоростей (фиг. 29) для подоб¬
ных винтов, мы видим, что условие подобия режимов будет заклю¬
чаться в этом случае в подобии четырехугольников UVwW, у кото¬
рых отношения сходственных сторон V и U должны быть равны, т. е.
Ь =
<7, "Us ’
или попрежнему:
X, — Л2;
Относительную поступь X, играющую, таким образом, важнейшую
роль при расчетах винтов, иногда прямо называют режимом
работы винта1.
Установив все условия геометрического и динамического подобия
для винтов, перейдем к выводу формул подобия для конкретного
вычисления тяги и мощности натуральных винтов по результатам
1 Величина Я является нечем иным,'как числом Струхаля (Sh), обеспечи¬
вающим кинематическое подобие двух периодических процессов:
V
Sh = ,— = const.
lrts
Действительно, если (в применении к винтам) в качестве линейного раз¬
мера I взять диаметр, а за величину ns (частоту явления) считать число обо¬
ротов, то получим
V
Sh = —- = Я.
n„D
52
испытаний моделей. Формулы эти должны, очевидно, содержать
fi размерные коэфициенты (аналогичные^ и су для крыла), числен*
ое значение которых определяется испытаниями и которые дают
затем возможность вычислять по формулам аэродинамические силы
/сопротивление, тягу, подъемную силу) для геометрически подобных
винтов любых размеров.
3. Формулы подобия
Вернемся к формуле (6). Так как
W-=~ = —^nsr, a r = k,D,
COS(3 cosp s ’ 1 ’
то
AR r<bf- pASntD2 - C, ?ASntD\ (7)
где в коэфициент Clt кроме постоянных величин, входят величины,
зависящие от X и от угла р, т. е. в конечном счете—только от X.
Суммируя (интегрируя) элементарные силы ДР по всей площади
винта S, найдем:
R^CjSnlD2.
То обстоятельство, что у винта переменного вдоль лопасти шага
в разных сечениях будут различные углы наклона % не отразится
на общем виде этой формулы. В соответствии с величиной <р опреде¬
лится коэфициент Сг в формуле (7) для элемента лопасти. При сумми¬
ровании же эти коэфициенты дадут один постоянный коэфициент С2
для всего винта.
Но площади подобных фигур пропорциональны квадратам линей¬
ных размеров; так, у двух подобных винтов
s2 т •
Поэтому можем написать:
S — k„D*
и окончательно:
R = CprigD1, (8)
где попрежнему
С = /(Х).
Так как ДР и AQ (фиг. 50) являются проекциями ДR на две
оси постоянного направления, именно:
ДР=ДР cos у — ДР const;
ДQ = ДР sin у = ДР const,
то они выразятся точно такими же формулами (7), как ДР. Полная же
сила тяги выразится аналогично формуле (8)
Р = аРн?Р% (9)
где а—абсолютный коэфициент тяги1.
1 Коэфициент а и вводимый дальше коэфициент мощности р не смешивать
с обозначенными теми же буквами углами аир.
53
Подобной же формулой выразится и сила сопротивления Q; в дан¬
ном случае нас интересует момент М этой силы относительно оси вра¬
щения. Из выражения для элементарного момента
AM = t>.Qr = kQk1D
мы видим, что в формулу для полного момента сил сопротивления
войдет добавочная степень D. Следовательно, обозначая абсолютный
коэфициент момента' через у, мы можем написать:
М = урпЮй. (10)
Выразим теперь мощность Т, поглощаемую винтом.
Так как
Т = шМ = 2iznsM,
то, очевидно, в выражение мощности войдет добавочная (по сравне¬
нию с выражением для момента) степень л£:
T = 15N = fcnlD% (11)
где [3—абсолютный коэфициент мощности винта.
Формулы (9), (10) и (11) и коэфициенты а,.(3, у наряду с X играют
основную роль во всех расчетах винтов. Коэфициент полезного дей¬
ствия винта выражается также через эти коэфициенты. В самом деле
PV ap/j§D4V a, V
7J —~ j'r^D’
aA
т. е. 73 = -^ , или
т)Р=аХ. (12)
Коэфициенты а и у связаны также весьма простой зависимостью.
Так как
м=^=т?=г;р'№‘'
то, сравнивая это выражение с формулой (10), находим, что
X=t- (13)
Так же, как коэфициент С формулы (8), коэфициенты а, [3, у,
а следовательно, и •»] являются функциями X при угле установки
лопасти у — const, в общем же случае при изменении угла у—
функциями у и X:
a = /i(<P, *•); P = fAb X); y = f3(y, >■); >0-
Для винта фиксированного шага (у — const) все эти коэфициенты
будут функциями только X:
* F= А (>-); Р = Ш; х = Ш; ч = /.(*)■
Формулы подобия были тщательно проверены опытным путем во
Франции, Германии и Америке и оказались весьма точными. Именно,
было установлено, что аэродинамические коэфициенты можно счи¬
тать однозначными функциями относительной поступи X, которая
таким образом является действительно характеристикой режима
работы винта. При этом, разумеется, должны выполняться и дру-
54
условия подобия: равенство чисел Рейнольдса1 и чисел Маха
подобие деформаций у модели и натуры.
И ДрУг°й ви<^ Ф°РМУЛ подобия. Кроме основных винтовых коэфи-
циентов и, р, х применяются еще производные коэфициенты:
04)
Г = (15)
?;=£-. (16)
Эти коэфициенты весьма полезны при аэродинамическом расчете
самолета, так как позволяют выразить тягу, мощность и момент
не через обороты, а через скорости.
В самом деле, так как
щ.£> ’
то
_ v_
П*~ № ■
Подставив это выражение вместо ns в формулы (9), (10) и (11),
получим: ,
Р = | PD2K2 = a'pDT% (17)
I
T = |-pD3V3 = P'pD2V3, (18)
М = -* pD3K3 = X' pD*V2. (19)
Через винтовые коэфициенты весьма просто выражается и В—
коэфициент нагрузки на ометаемую винтом площадь:
В = —— s=J2^-=-я-= !■«'- (20)
Р_ -Р ^ г-
2 2 4
Коэфициент быстроходности. В Америке и частично в СССР
пользуются еще одним аэродинамическим коэфициентом, носящим
название коэфициента быстроходности. Он определяется следую¬
щим соотношением:
_я_
рг
или, в развернутом виде:
CS—f 75Nn%' (22^
В некоторых случаях им удобнее пользоваться, чем другими
коэфициентами, так как в его выражение не входит D, а входят
N, п и V, т. е. величины, которые обычно задаются при подборе
винта. •
1 Как выше было указано, это требование имеет весьма ограниченный
характер.
55
Рассматривая все приведенные выше соотношения между различ¬
ными коэфициентами и параметрами винта, легко убедиться, что
коэфициенты а, р и X являются основными и полностью характе¬
ризуют винт. Все остальные величины выражаются через них.
Ввиду особой важности выведенных формул выписываем отдельно
основные из них:
аХ = т)Р;
Р — арnlD1, а — ;
Т = 75JV = ppnlD5, $ =
— iL — "ЧР .
а — яг — & »
В' = ~ •
Р яз »
P = a'pD’V2;
T = P'pDsVs;
у л/
v г 75Nni
Я
(D
(И)
(III)
(IV)
• (V)
(VI)
(VII)
(VIII)
ef.p.T)
4. Аэродинамические характеристики
А. Характеристика одиночного винта
Из формул подобия видно, что, для того чтобы иметь возможность
вычислять тягу и мощность данного винта или подобного ему для
любого режима, необходимо
иметь кривые зависимости
абсолютных коэфициентов
винта от X как характери¬
стики режима.
На фиг. 51 показаны ти¬
пичные характеристики оди¬
ночного винта фиксирован¬
ного шага. В таком именно
виде и представляют резуль¬
таты испытаний модели вин¬
та в трубе.
Рассмотрим наиболее ха¬
рактерные тачки кривых
фиг. 51. Значение абсциссы
v
Х = ^-р = 0 соответствует,
очевидно, работе винта на
меЪте, т. е. режиму геликоп¬
тера (V = 0). Коэфициенты а
и р принимают при этом, как правило, максимальные значения и
обозначаются as и ps, или аст и рст (коэфициенты рри «статической»
тяге). К. п. д. равен нулю, так как поступательная скорость отсут-
PV
ствует, и — = 0.
56
С увеличением л (одновременно увеличивается и скорость) коэфи¬
циенты а убывают, а с ними убывает и величина тяги и мощности.
Это находится в соответствии с тем, что мы видели раньше на фиг. 31.
Что касается к. п. д., то он сначала возрастает, достигает максимума
в некоторой оптимальной точке, затем быстро падает.
Другая замечательная точка обозначена Х„. Коэфициент а, а сле¬
довательно, и тяга равны нулю. Это соответствует такому режиму
полета, на котором винт не дает нй тяги, ни сопротивления движению
самолета, а свободно ввинчивается в воздух. Мотор передает при этом
на винт мощность, идущую только на преодоление момента М сил
сопротивления вращению лопасти. Соответствующий коэфициент
мощности обозначен рй. Значение относительной поступи X, оче¬
видно, равно в этом случае относительному динамическому шагу
гг
/гй [формула (13) главы 1]. Эта точка соответствует, как мы
знаем, режиму нулевой тяги. Этот режим можно осуществить при
планировании, поддерживая строго определенные обороты винта
в зависимости от скорости планирования, соблюдая соотношение:
Упланйр ■,
— '(1. ‘
И планир-D
При этом самолет фактически превращается в планер. При даль¬
нейшем увеличении X сначала a, yj, а затем и р переходят
в отрицательную область. Наступает режим Отрицательной тяги
винта, когда винт дает не тягу, а сопротивление.
Сохраняя, например, в предыдущем случае Упланйр и уменьшая
обороты или выключая вовсе мотор, мы, очевидно, увеличиваем X
(X>Xd). В то же время встречный поток станет вращать винт
в прежнем направлении, как ветрянку, вырывая его отрицательную
тягу и сообщая ему Отрицательный крутящий момент1 и отрица¬
тельную мощность (Р<0), идущую на преодоление сопротивления
мотора вращению коленчатого вала. Нулевое же значение р примет
в тот момент, когда мотор будет давать небольшую мощность,
необходимую только для преодоления различных сил трения,
и сопротивления в самом моторе, мощность же его на валу будет
равна нулю и аэродинамический момент от потока будет уравно¬
вешивать момент сил сопротивления.
- Продолжая увеличивать X, мы можем притти к предельному
значению относительной поступи винта, соответствующему оста¬
новленному (специальным тормозом) винту: п = 0; Х = со. Отрица¬
тельная тяга достигает здесь максимальной для данного ВФШ
величины, так как неподвижный винт оказывает большое лобовое
сопротивление всей своей площадью.
Б. Нормальные характеристики серии винтов
На фиг. 51 нанесены кривые а, р и ц по X. Но для характеристики
винта достаточно иметь только две кривые по X, а именно:
1 Крутящий момент М аэродинамических сил, действующих на винт,
называют положительным, когда он препятствует вращению винта (например
в нормальном полете с положительной тягой), и отрицательным, когда он
способствует вращению.
57
»
сс’,'и>) ИЛИ Р и Т„ так как третий коэфициент мы можем всегда
определить по формуле (1). В большинстве случаев приняты так
называемые нормальные = характеристики винта в виде кривых
р по а с отметками
к. п. д. Строятся они
следующим образом.
На диаграмме
фиг. 51 оставляют
только кривую р и за¬
меняют кривую ц ря¬
дом отметок к. п. д.
непосредственно на
кривой р соответ¬
ственно взятым аб¬
сциссам X (фиг. 52).
Из типичной ха¬
рактеристики фиг. 51
мы видим, что мак¬
симум к. п. д. будет
Фиг. 52. Кривая коэфициента мощности ВФШ с от- находиться ближе К
метками к. п. д. правому концу кри-
^ вой р (в данном слу¬
чае, скажем, г1з). Следовательно, по ту и другую сторону от мет¬
ки 7)„ значения к. п. д. будут убывать и можно их разметить,
например, так, чтобы = ■»)*; 't\i = ’ri-. и т- Д-
Фиг. 53. Построение нормальной характеристики серии
из четырех винтов.
Возьмем теперь серию винтов по параметру <р, т. е. один и тот
же^винт, но с разными углами установки лопасти. Характеристика
серии будет иметь вид семейства кривых р=/(X). Предположим,
что [мы испытали в трубе винт при четырех углах установки:
?i> ?з и ?4> получили четыре кривых р = /(>-) (фиг. 53) и нанесли
58
на них метки одинаковых величин ц. Соединяя эти метки, мы
получим кривые равных к. п. д. (пунктирные). На нормальных
диаграммах ьэти^кривые расположены обычно так, как показано
• рп$ Ds "
Фиг. 54. Характеристики серии деревянных винтов ЦАГИ СДВ-1.
на фиг. 53. Две ветви кривой 7j2 соединяются на характеристике
<р17 для которой это значение к. п. д. будет, очевидно, максималь¬
ным. Кривая 7]3 представляет собой уже замкнутую кривую, при-
Фиг. 55. Характеристики серии трехлопастных металлических винтов
ЗСМВ-2 с фюзеляжем.
чем для углов <р2 и <р4 будет максимальным к. п. д. Наконец, для
угла фз к. п. д. будет выше, чем для всех остальных (r;maxmax). Это—
точка абсолютного максимума к. п. д. для всей серии, относящаяся
к одному определенному углу установки лопасти.
59
В виде образцов приводим характеристики нескоЛьких серий вин¬
тов которыми будем пользоваться в следующих главах. На фиг. 54
даны характеристики изолированных деревянных винтов СДВ-1 для
ряда относительных шагов ft. По формуле (12 ) главы I:
ft = 0,75u tg 9, (ft == fto.75).
Определяем угол установки:
Ф = агс tgo;^- =
Зная ft, можно таким образом определить 9. На диаграммах
остальных серий непосредственно указаны углы установки лопа-
стей 90,76. На фиг. 55 приведены характеристики одной из лучших
современных серий (ЗСМВ-2) трехлопастных винтов, испытанных
с моделью фюзеляжа, вид и размеры которой показаны на фигуре.
Геометрические характеристики этих винтов приведены на стр.24—27.
На фиг. 56, 57 и 58 даны характеристики американского двухло¬
пастного винта NACA 5868-9 (профиль Кларк Y), испытанного в ДЕух
комбинациях: с гондолой мотора жидкостного охлаждения и звездо¬
образным мотором воздушного охлаждения.
Кроме этих нормальных диаграмм, приводим характеристики
винта NACA 5868-9 (с мотором жидкостного охлаждения) по коэфи-
циенту быстроходности cs (диаграмма Вейка) в виде кривых
х = / (О Для разных 9 (фиг. 59).
60
ei
Фиг. 57. Характеристики серии'; двухлопастных винтов NACA 5868-9 с гондолой рядного мотора жидкостного охлаждения.
>»
п
со
с
са
а»
с
Н '
о
S
о
со
сз
С-
о
с
о
fct
со
3S
о
t=t
о
t*
к
с
и
0
1
00
со
00 -
ю к
S
<, О)
CJ е*
< 5?
-I
О °
й£
5
CQ X
*>г
3
к
ь
о
та
с
с
*=:
X
К
К
а»
s
См
та
CL
та
X
00
ю
t-
5
в-
62
Пользуясь формулой (VIII), можно Любую нормальную диаграмму
перестроить по коэфициенту cs, и обратно. Значения, к. п. д. даются
Фиг. 59. Характеристики серии двухлопастных винтов 5868-9 с гондолой
рядного мотора жидкостного охлаждения по коэфициенту быстроходности
(диаграмма Вейка).
на диаграммах Вейка (фиг. 59) вверху в виде отдельных кривых
rl = f(Cs) для каждого значения 9.
Фиг. 60. Характеристики по коэфициенту тяги а серии двухлопастных винтов
NACA 5868-9 с гондолой рядного мотора жидкостного охлаждения.
На всех диаграммах наносятся кривые (пунктирные) оптимальных
к. п. д., пересекающие каждую характеристику в точке максималь¬
63
ного к. п. д. для данного шага. На нормальных диаграммах значе¬
ние ■yjmax можно прочитать (непосредственно или путем интерполи¬
рования) на характеристике, а на диаграмме Вейка—по верхним
кривым.
Наконец, на фиг. 60 показан еще один вид характеристик
винта—кривые коэфициента тяги « по X для серии NACA 5868-9
с мотором жидкостного охлаждения.
ЧАСТЬ ВТОРАЯ
РАБОТА ВИНТА С МОТОРОМ
ГЛАВА IV
ХАРАКТЕРИСТИКИ АВИАЦИОННОГО МОТОРА
1. Внешняя характеристика мотора
У авиационного мотора, как у всякого двигателя внутреннего
сгорания, мощность при полностью открытом дросселе зависит от
числа оборотов.
Кривая этой зависимости
N=f(n)
называется внешней характеристикой мотора. Аналитически ее выра¬
жают обычно уравнением
N = спк,
где показатель к принимает различные значения—от 0 до 1,5
и выше—для различных моторов, а также на различных участках
одной и той же характеристики.
Внешнюю 'характеристику мотора получают, испытывая его
на специальном станке. Для того чтобы можно было изменять
нагрузку мотора-, на него устанавливают винт изменяемого шага,
или так называемую мулинетку, состоящую из составных лопастей
в виде лопаток, площади которых можно менять, изменяя тем
самым их сопротивление. В зависимости же от нагрузки мотор
будет давать различные числа оборотов и мощность. Последнюю
определяют через крутящий момент М, по формуле (2) главы II.
Уменьшая непрерывно нагрузку, можно добиться очень боль¬
шого числа оборотов, что в конце концов приведет к порче мото¬
ра от перегрева или поломки. Поэтому каждый мотор имеет свое
максимально-допустимое число оборотов.
Авиационные моторы разделяются на невысотные и высотные.
У невысотных моторов воздух во всасывающую систему посту¬
пает непосредственно из окружающей атмосферы. С подъемом на
высоту их мощность неизменно падает вследствие падения плотно¬
сти наружного воздуха.
Высотные моторы сохраняют свою мощность от земли до неко¬
рой (расчетной) высоты. Они бывают двух типов:
а) моторы с пересжатием, которые на земле могут работать
5 Общий курс воздушных БИНТОВ бэ
'ч
только с прикрытым дросселем, а с открытым—выше некоторой
/расчетной) высоты. Этот тип моторов к настоящему времени устарел.
б) Моторы с нагнетателями, дающими дополнительный наддув
воздуха на всасывании и сохраняющими плотность поступающего
воздуха постоянной до некоторой (расчетной) высоты, ~
Под высотными моторами обычно и подразумевают^; моторы
с нагнетателями.
Различаются следующие величины мощности:
Взлетная мощность на номинальных оборотах при повышен¬
ном наддуве («форсаже»). На этой мощности работа мотора^допу-
Фиг. 61. Внешняя и дросхельная характеристики
мотора М-11.
скается в течение нескольких минут (5—10) и используется, глав¬
ным образом, для взлета.
Номинальная мощность на номинальных оборотах и номиналь¬
ном наддуве. При аэродинамическом расчете самолета под макси¬
мальной мощностью (для Ртах) понимают именно номинальную.
Эксплоатационная мощность, на которой мотор может работать
надежно продолжительное время. Она составляет примерно 0,9 но¬
минальной мощности.
На фиг. 61—64 показаны внешние земные характеристики четы¬
рех моторов. Эти характеристики построены для нулевой стандарт¬
ной высоты (р = 760 мм рт. ст.; / = +15°); если испытания мотора
проводятся при других атмосферных условиях, результаты их пере¬
считываются на стандартную атмосферу.
На фиг. 61 показана внешняя характеристика маломощного невы¬
сотного мотора М-11. На фиг. 62—характеристика мотора с пересжа-
66
м BMW_VI. Здесь даны две кривые—максимальной мощности при
Полностью открытом дросселе и номинальной, допустимой на земле.
1 Njw.
Алс.
100
600
т
£00
200
200.
g/Ibb
сл;
7
с^1
/
г
/
/
/
Ф,
И,
И
lCJ£
л
f
г
1
'
'f
&
700
600
500
400
300
200
Щ
и
!
R
/
/
<\
)
/
Ж/
£/
W
/
Ш 1300 то^ 1500 160017об/мин.
Фиг. 62. Внешняя и дроссельная
характеристики мотора BMW-VI.
1000 1Z00 1400 1600 ' 1600поб/шн.
Фиг. 63. Внешняя и дроссельная харак¬
теристики мотора Райт «Циклоне F-3.
На фиг. 63 и 64—характеристики моторов с приводными центробеж¬
ными нагнетателями (ПЦН), снятые при номинальном наддуве.
При испытаниях мотора на станку нагрузка определяется пло¬
щадью мулинетки. В полете же с неизменным винтом сопротивле¬
ние и нагрузка зависят, оче¬
видно, от угла атаки лопасти
и, следовательно, от характе¬
ристики режима X. Таким обра¬
зом каждой точке внешней ха¬
рактеристики соответствует од¬
но определенное значение X.
Любую мощность, меньшую,
чем показанные на внешней ха¬
рактеристике, можно получить
дросселируя мотор. Предполо¬
жим, что мы начинаем дроссе¬
лировать с какой-нибудь точки
внешней характеристики, со¬
блюдая условие X = const (в дан¬
ном случае, при работе на месте
V = 0 и X = 0). Согласно фор¬
муле (III) (стр. 56):
75tV = ppn!D6.
Так как D= const, на дан¬
ной высоте р = const, а при
X = const будем иметь |3=const,
то зависимость мощности от оборотов примет вид:
N = kns,
где п можно брать в об/мин.
Фиг. 64. Внешняя и дроссельная харак¬
теристики мотора Испано-Сюиза 79-04.
(1)
67
Зависимость эта изобразится графически в виде кубической
параболы. Такие параболы, называемые дроссельными, или винто¬
выми характеристиками, показаны на фиг. 61—64.
Для всяких двух точек, взятых на дроссельной характеристике,
будем иметь:
Очевидно, такие параболы можно- проводить из любой точки
внешней характеристики. Дроссельная характеристика, которая
обычно дается при внешней характеристике, служит только для
указания (в точке пересечения кривых) номинального числа оборотов
и номинальной мощности мотора.
Пользуясь моторными характеристиками, следует иметь в виду,
что большинство моторов имеет редукторы числа оборотов, так что
обороты винта не равны оборотам коленчатого вала мотора; внеш¬
няя же характеристика относится к оборотам мотора.
Редукцией, или числом редукции /р мотора, называют отношение
оборотов винта к оборотам мотора
Редукция задается в виде дроби или отношения, например,
7р=0,6, или 1 : 1,67, или в целых числах 3 : 5.
С поднятием на высоту максимальная мощность невысотного
мотора падает. Закон этого падения достаточно хорошо изучен
путем испытаний многих моторов в барокамерах с низким давле¬
нием, а также в горных местностях и в полете. Оказалось, что для
всех моторов коэфициент падения мощности А, равный отношению
максимальной мощности на данной высоте NH к мощности у земли
Ne при одном и том же числе оборотов, можно считать одинаковым.
Существует несколько формул для коэфициента А. В СССР при¬
нята следующая стандартная формула ЦАГИ:
где рн, р0, Тн, Тй - - соответственно наружные давления и абсолют¬
ные температуры на высоте и у земли. Так как р0 = 760 лш рт. ст.,
Однако поданным испытаний, проведенных фирмой Райт и др.,
мощность падает с высотой несколько медленнее, особенно у высот¬
ных моторов.
В табл. 7 приведены значения коэфициента А по высотам
в стандартной атмосфере по обоим вариантам. Там же приведены
(П
2. Высотная характеристика мотора
А = 5£=1,11 ^ l/^ —0,11 при п = const, (3)
'’о Р о ' 'Я
Т0 = 273°+15° = 288°, то
А = 0,0248 о,ц.
V ТН
(3')
68
Высотные коэфициенты
69
значения относительной плотности
Д = -*-
Ро
и величин д-, которые нам
понадобятся в дальнейшем.
На фиг. 65 показаны кривые A = f(H) также по обоим вариантам.
Такйм образом, если дана земная внешняя характеристика
невысотного мотора (фиг. 66—верхняя кривая), можно построить
и внешние высотные характеристики его. Например для /7=2000 м
нужно, очевидно, умножить несколько ординат N0 земной характе¬
ристики на ^2ооо = 0,781, отложить их на тех же абсциссах
(п = const) и соединить^кривой. Это избудет внешняя характеристика
Л
\
к
\
\\
V
S
N
\
г
\
\
ч
ч
чЧ
1 1
ш
н.
Фиг. 65; Кривые A=f(H)
коэфициента падения мощ¬
ности невысотного мотора
с высотой по стандартной
формуле (3) и по данным
фирмы Райт.
1—по данным фирмы Райт;
S—по формуле (3).
К'л с.
700
600
500
(00
300
Z00
100
Hi
'
I
400°
Л*
1300 то wo woo поб/-
Фиг. 66. Внешние высотные характери¬
стики невысотного мотора.
на высоте 2000 м. Для Н = 4000 м мы должны умножить те”же
ординаты земной характеристики на 0,598, для Н = 6000 м — на 0,446.
На фиг. 66 показаны полученные таким образом внешние высот¬
ные характеристики.
Этот метод применим всегда, когда имеется земная характери¬
стика максимальной мощности, т. е. в основном к невысотным
моторам. У высотных моторов с нагнетателем максимальная мощ¬
ность ^падает по тем же законам. Но дело в том, что характеристик
земной максимальной мощности мы для них не имеем, так как
открывать у них дроссель полностью у земли нельзя.
Для каждого такого мотора имеется определенное допустимое
номинальное давление наддува, обозначаемое рк; например, для
мотора Райт «Циклон» F-3 рк=875 мм рт. ст., для мотора
Испано-Сюиза 79-04 рк=890 мм рт. ст. Нагнетатель может под¬
держивать такой наддув до определенной высоты, называемой рас¬
четной высотой, или границей высотности мотора. На этой высо-
70
те можно уже полностью открыть дроссель, и давление наддува
будет равно номинальному. Выше этой высоты наддув будет падать,
а ниже ее необходимо дросселировать мотор, чтобы наддув не пре-
N АС
700
660
560
460
300
Z00
100
ш
к
р
п~1950оВ/мш.
7850
175,с
/550
т
1000 то 1400 1600 1800 ШЮпоЁ/мин. О то 4000 6000 Нм
Фиг. 67. Внешняя и высотная характеристики мотора Райт «Циклон» F-3
высил номинального. Характеристики, показанные на фиг. 63 и 64
даны при номинальном давлении наддува.
Номинальное давление наддува однако не является предельно¬
допустимым для данного мотора. В некоторых случаях (для уско-
Нлс.\
1800
1000
т
600
400
200
О
-
яН--п/
t
У
У
V
1200 1500 1700 1900 2100 пфии. О 2000 4000 0000 8000 И м
Фиг. 68. Внешняя и высотная характеристики мотора Испано-Сюиза 79-04.
рения взлета или в воздушном бою) допускается кратковременное
форсирование мотора с превышением номинального наддува. Так, для
мотора М-105 номинальное давление наддува 910 мм рт. ст., а на
71
взлетном режиме (режиме форсажа)—950 мм; для мотора М-82
соответственно: 950 и 1140 мм рт. ст.
На фиг. 67 и 68 показаны высотные характеристики (рядом
с внешними) тех же двух моторов в обычно принятом виде для
нескольких *чис ел оборотов. Мы видим, что мощности до границы
высотности возрастают, а затем падают, причем падение это про¬
исходит по тому же закону, что и у невысотного мотора.
Граница высотности (переломнай точка) для разных оборотов
различна: с уменьшением оборотов она понижается. Это объяс¬
няется тем, что обороты приводного нагнетателя пропорциональны
оборотам мотора; следовательно, при уменьшении последних умень¬
шается и наддув, в связи с чем высота, до которой поддерживается
номинальный наддув, будет меньше.
3. Построение высотной характеристики мотора с нагнетателем
Мы уже знаем, что мощность высотного мотора выше границы
высотности падает по тому же закону, что и у невысотного мото¬
ра, поэтому мы можем всегда построить эту часть характеристики.
Нам нужно только знать участки (они всегда прямолинейны)
от земли до расчетной высоты. Имея земную внешнюю характе¬
ристику (фиг. 63 и 64), мы можем нанести начальные точки
(на Н = 0) высотной характеристики на фиг. 67 и 68 (совокупность
этих точек собственно и есть земная характеристика). Далее из¬
вестно, что участки характеристик от земли до границы высотности
для разных оборотов можно считать параллельными (в действи¬
тельности они несколько расходятся вправо),
ъ Остается, следовательно, знать только переломные точки (гра¬
ницы высотности). Мы изложим сейчас способ пересчета границы
высотности с одного числа оборотов на другое. Таким образом
для построения полной высотной характеристики мотора с нагне¬
тателем достаточно иметь его земную характеристику и знать гра¬
ницу высотности для одного числа оборотов.
Для пересчета границы высотности на другое число оборотов
пользуются формулой, выражающей работу адиабатического сжа¬
тия Тад, затрачиваемую на сжатие 1 кг воздуха от давления рв
(наружного) до давления pk (за нагнетателем) при наружной
температуре Тн :
Известно также, что работу Гад приближенно можно считать
пропорциональной квадрату числа оборотов мотора:
где а = const.
Пусть для нагнетателя с давлением наддува рн нам известна гра¬
ница высотности в стандартной атмосфере (т. е. при данных рниГ„)
для оборотов л и требуется определить ее для других оборотов п'.
По формуле (4) вычисляем Lan, затем по формуле (5) находим 1/ад
для п':
(5)
72
Имея La„ при том же значении ph, мы должны снова по формуле (4)
определить новые значения рш и Тн, т. е. новую высоту, которая
и будет искомой границей высотности для п'.
Но формула (4) дает только одно уравнение с неизвестными ри и
Тн- Вторым уравнением будет служить зависимость между р и Т
в стандартной атмосфере, где каждому значению р соответствует
одно определенное значение Т, и наоборот.
от высоты при различных рк.
На практике весь пересчет выполняется весьма просто при помощи
графика (фиг. 69), где дана непосредственная зависимость Lm от вы¬
соты в стандартной атмосфере для различных значений рк (выражен¬
ных в кг/слг). Поэтому графику легко определить Тая для начальных
оборотов и по значению L'an также легко определить новую высоту.
В виде примера построим высотную характеристику мотора
Райт «Циклон» F-3.
Дана внешняя характеристика этого мотора (фиг. 63) и указана
граница высотности для п = 1950 об/мин., равная 2000 м при
N = 700 л. с.
V
73
Отметив на внешней характеристике точки а, Ь, с, d, е для
л = 1950, 1850, 1750, 1650 и 1550, переносим их на график высот¬
ной характеристики (фиг. 70). Точка а' границы высотности для
л = 1950 нам известна. Проводим прямую аа’. Выше границы высот¬
ности мощность для п = 1950 об/мин. падает, как у невысотного
мотора.
Ып.с.
700
600
500
—
N.
700
НС.
а'
-а-
И
bj
г—Ь
— С
р S
—d
500
1400 1600 1800 П об/мин. О 2000 4000Нм
Фиг. 70. Перенос точек внешней характеристики на график
высотной характеристики.
По табл. 7 (данные фирмы): Д,000 = 0,795, Л1000 = 0,622. Очевидно:
0,622
0,795
= 0,782.
Следовательно,
N.
Точно так же
„00 = ли, • 0,782 = 700 • 0,782 ^ 550 л. с.
^6000 _
0,475
•^2000
0,795
■^8000
0,345
•■^2000
0,795
100on
0,242
•4гооо
0,795
0,598;
= 0,433;
откуда
N6000 = 700 • 0,598 «420 л. с.;
Nsooo = 100 • 0,433 300 л. с.;
N10000 = 700-0,305 ^215 л. с.
Так построена кривая а'а'' на фиг. 71. Можно построить эту высот¬
ную характеристику и несколько иначе. Определим земную мощ¬
ность, которую развил бы наш мотор на данных оборотах при пол¬
ностью открытом дросселе. В этом случае его мощность от земли до
2000 м падала бы, как у невысотного мотора. Тогда
N.
N*,
700
: 0,795;
= 880 л. с.
74
Эта ^мощность, которую мотор в действительности не может дать,
называется его эквивалентной мощностью NaKB. Для удобства некото¬
рых расчетов она условно приписывается мотору (точка М на фиг. 71).
Мощности выше границы высотности можно теперь получать просто,
умножая' УУэкв на коэфициенты А по высотам. Высотная характе-
НЛ£.
900
М
600
700
600
500
400
300
200.
то
\N3Kl
у880
/1C.
\
\
\
,
\
\
\
а'
к
-с
-0
~8
S
ч
N
и
1
\1
\
\
2000
4000
6000
8000
ЮОООНм
Фиг. 71. Высотная характеристика для «шах и эквивалент¬
ная мощность у земли.
ристика эквивалентного невысотного мотора изобразится кривой
Ма'а".
Перейдем теперь к другим оборотам.
Для пользования графиком фиг. 69 пересчитаем рк на кг/смг-
Так как 1 кг/см* соответствует 735 мм рт. ст., то для нашего мотора
Рн = 1,2 Кг/См*'
На фиг* 69 находим при pk = 1,2 и Н — 2000 м
Тад = 3300*
75
Тогда:
для п = 1850 об/мин. = 3300 (Щ)" = 2970;
/ 17^0 \2
для л=1750 об/мин. ^аД — 3300 ^ 195Q J =2650;
для п = 1650 об/мин. Lan = 3300 ( Щ )* = 2360;
для п — 1550 об/мин. Lw = 3300 (ущ-)2 = 2080.
2000 поб/мин.
Фиг. 72. Прямолинейные участки
характеристик от земли до границы
высотности для разных оборотов.
Фиг. 73. Внешние высотные харак¬
теристики мотора Райт «Циклон»
F-3 по типу фиг. 66.
Высоты, соответствующие этим значениям £.ад по фиг. 69,
будут: _
1700 м, 1400 м, 1150 м и 800 м.
Проводим до этих высот из точек Ь, с, d, е (см. фиг. 70 и 71),
прямые, параллельные аа' (фиг. 72). Это и буд^ участки высотных
характеристик от земли до границы высотности оЦ ля больших высот
строим характеристики уже по коэфициенту А, как это сделано
для «=1950 об/мин. В результате получаем высотную характе¬
ристику, показанную на фиг. 67.
76
«
Для некоторых расчетов удобнее иметь высотные характеристики
в координатах N, п по типу фиг. 66. Их легко построить из фиг. 67,
беря по кривым правой диаграммы точки, расположенные по верти¬
калям для ряда нужных высот. Так, взяв вертикали Н =1000 м,
2000 м, 4000 м, 6000 м, 8000 м, 10000 м и перенося с кривых
соответствующие точки в систему координат N, п, получим высот¬
ные характеристики мотора Райт «Циклон» в этой системе коорди¬
нат (фиг. 73). Мы видим здесь типичную для высотных моторов
картину: взаимное пересечение характеристик для малых высот.
4. Скоростной наддув
Авиационный мотор может получать наддув не только от нагне¬
тателя, но и от скоростного напора встречного потока воздуха
в полете. Для этой цели всасывающий патрубок карбюратора уста¬
навливают навстречу потоку.
Этот дополнительный ско -
ростной наддув повышает гра¬
ницу высотности, т. е. дает воз¬
можность поддерживать номи¬
нальный наддув ph до большей
высоты. Зато мощность ниже
границы высотности понижает¬
ся, так как вследствие повыше¬
ния наддува приходится больше
дросселировать мотор.
Таким обрйзом обычные ха¬
рактеристики моторов, подоб¬
ные приведенным выше, следует
рассматривать как характери¬
стики их при работе на месте
(на станке), т. е. при У = 0.
В полете же эти характеристи¬
ки изменяются В сторону улуч- фИг. 74. Зависимость приращения вы-
шения. сотности Д/7 от скорости полета при на-
Характерной особенностью личии скоростного наддува,
скоростного наддува является
то, что он зависит от скорости полета1. Один и тот же мотор будет
иметь различную высотность в зависимости от того, на какой само¬
лет он поставлен и какой винт стоит на самолете, так как от этого
и зависит скорость полета. Поэтому точную характеристику мотора
можно иметь, собственно, только тогда, когда расчетная скорость
самолета известна.
Повышение расчетной высоты, или приращение высотности,
А/7 можно определить по специальному графику. Один из таких
графиков зависимости Д/7=/ (V) показан на фиг. 74. Мы видим,
что приращение высотности составляет вообще довольно значи¬
тельную величину: при скорости 400 км/час АН = 500 м, а при
600 км/час Д/7 =1200 м. Такие величины весьма заметно меняют
характеристику мотора, и их необходимо всегда учитывать.
1 Он зависит, кроме того, от формы всасывающего патрубка.
77
Перестроить высотную характеристику мотора можно следующим
упрощенным способом. Мощность на расчётной высоте при сохра¬
нении номинального ph можно считать неизменной. Поэтому пере-
700
600'
500
п
1
йН
ю
• 1/=
■0 (на станке•)
У' ^
~ - “■?
V
\
ч
1/ =
550 км/час
'т
\
ч
N
\
ДИ
= 1000ла
\
ч
ч
\
\
С
\
\
\
|
гооо то
БОООУм
Фиг. 75. Перестроение характеристики мотора с уче¬
том скоростного наддува (л—1950 об/мин.).
ломную точку а можно прямо передвинуть вправо на величину АН
в точку т' (фиг. 75). Приближенно можно считать, что и весь
Фиг. 76. Высотная характеристика мотора с учетом
скоростного наддува для трех скоростей.
прямолинейный участок характеристики ниже границы высотно¬
сти аа' передвинется вправо на ту же величину. Тогда достаточно
перенести начальную точку а в т и провести прямую ктт'.’^Это
78
и будет отрезок новой высотной характеристики. Выше расчетной
высоты мощность падает по общему закону.
Мы видим, что ниже границы высотности имеется некоторая
потеря мощности, а выше—значительный выигрыш.
Иногда к характеристике мотора добавляют заранее несколько
высотных кривых (для максимальных оборотов)" с учетом скорост¬
ного наддува для нескольких скоростей (фиг. 76).
Задача
Данные мотора Испано-Сюиза 79-04: внешняя характеристика
дана на фиг. 64, номинальная мощность у земли при п — 2125 об/мин.
равна 980 л. с., граница высотности при тех же оборотах 2800 м,
мощность 1120л. с.; рк = 890 мм.
Построить высотную характеристику этого мотора, показанную
на фиг. 68, и перестроить ее по типу фиг. 73 для высот: 0 м, 2000 м,
2800 м, 4000 м, 6000 м, 8000 м. Проверить, какой из вариантов
коэфициента А подходит к этому мотору: стандартный или по
данным фирмы Райт.
Добавить высотную характеристику с учетом скоростного
наддува для V=500 KMjnac и V = 700 км/час.
ГЛАВАv
ХАРАКТЕРИСТИКИ ВИНТОМОТОРНОЙ ГРУППЫ
1. Назначение характеристик ВМГ
В предыдущих главах мы рассмотрели отдельно характеристики
винта и характеристики мотора. Теперь перейдем к характеристикам,
винта вместе с мотором, т. е. винтомоторной группы (ВМГ).
Конечной целью при построении характеристик ВМГ является
получение так называемых кривых располагаемой, или полезной
мощности и располагаемой тяги (т. е. мощности или тяги, которые
может дать ВМГ) в функции скорости. Как известно, аэродинами¬
ческий расчет самолета производится по схеме фиг. 77. На диаграмме
строятся кривые располагаемой мощности или тяги ВМГ и кривые
мощности или тяги, потребной для горизонтального полета. Послед¬
ние кривые строятся на основании поляры самолета, которая должна
быть предварительно получена. Уравнения их следующие:
75 /V = ^pSV3 и P = ~cxPSV*.
Эти кривые, являющиеся характеристиками самолета (кривыми
Пено), идут сначала ниже кривых N расп ИЛИ Ррасп- Это значит,
что для горизонтального полета на данных скоростях требуется мень¬
ше мощности (и тяги), чем может дать ВМГ. Избыток мощности
ДIV' = N расп Nпотр
может быть использован для подъема самолета.
Точке пересечения кривых, в которой Npiicn =Nuoni (или Ррасп—
==£потР), соответствует максимальная горизонтальная скорость. Для
79:
еще больших скоростей располагаемая мощность уже недостаточна,
так как она меньше потребной. На таких скоростях самолет может
летать только со снижением, получая дополнительную мощность или
тягу от силы тяжести.
Фиг. 77. Кривые потребных и располагаемых мощностей и тяг для аэро¬
динамического расчета. - -
Графики типа фиг. 77 строят для нескольких высот, так как обе
кривые (располагаемых и потребных величин) зависят от давления
и температуры воздуха, т. е. от высоты,
//v, Ясно, что различные самолеты с од-
ной и той же ВМГ могут иметь раз¬
личные летные характеристики, в част¬
ности различные максимальные скорос¬
ти. И наоборот, один и тог же самолет
с его неизменной кривой Nnотр может
иметь различные летные данные в за¬
висимости от характеристики ВМГ,
установленной на нем. Чем выше идет
кривая Npacn, тем летные качества са¬
молета будут лучше.
Располагаемая мощность ВМГ зави¬
сит от двух факторов: мощности мотора
и к- п. д. винта:
у
Фиг. 78. Кривые располагае¬
мых мощностей для ряда вы¬
сот.
N
расп *
= N■4,
где N—мощность на валу мотора, т. е.
мощность, поглощаемая винтом, а
Npacn—полезная мощность, отдаваемая винтом самолету. Таким об¬
разом мощность мотора еще не определяет полностью летных данных.
Многое зависит от удачного выбора винта с достаточно большим к- п.д.
Так, учебный самолет, отлично летающий с мотором в 100 л. с.,
может и не взлететь вовсе, даже с мотором втрое более мощным, если
поставить на него совершенно не подходящий винт.
80
Вопросы подбора винта к самолету будут подробно рассмотрены
в следующих главах.
После того как винт уже выбран, задана ставится так: даны
характеристика мотора и характеристика винта: требуется построить
кривые N-n=f(V) для ряда высот (фиг. 78).
При этом необходимо иметь в виду, что если мы пользуемся
характеристикой изолированного винта, то мы должны учесть иска¬
жение ее вследствие взаимного влияния винта и самолета. Гораздо
удобнее пользоваться характеристиками винтов, испытанных с моде¬
лью мотора или целого самолета заданного типа, так как в этих ха¬
рактеристиках взаимное влияние уже автоматически учтено.
Так как в аэродинамическом расчете самолета пользуются чаще
методом мощностей, чем методом тяг, мы будем рассматривать в основ¬
ном построение кривых располагаемых мощностей, а не тяг.
2. Схема построения характеристики ВМГ с ВФШ и схема выбора
винта, ~ ^—
Основной метод построения характеристик ВМГ, если задан ВФШ,
заключается в следующем.
Задаются рядом чисел оборотов п, по внешней характеристике
мотора определяют соответствующие значения N и вычисляют для
каждой пары значений п, N величину р:
^ р п|£)5
Далее, по характеристике винта р=/ (X) определяют, интерполи¬
руя, для полученных р значения X и tj. Скорости вычисляют по фор¬
муле
V м/сек = XntD,
а располагаемую мощность получают как произведение Nt\. Затем
строят кривую Ntj по V.
Схема расчета, следовательно, такова:
л, N, Р, X, ij, V, Щ.
Такое построение повторяют для ряда высот.
Если характеристику ВМГ строят по тяге, нужно иметь еще
кривую а = /(Х) для винта ^можно, впрочем, вычислять а пр фор¬
муле а = Тогда порядок вычислений будет такой:
п, N, р, X, а, Р, V-.
В формулах для X и р величина ns имеет размерность об/сек.,
а V—м/сек., на практике же всегда имеют дело с об/мин. и км/час.
Для того чтобы каждый раз не пересчитывать эти величины, следует
сразу же видоизменить указанные формулы так, чтобы п было
в об/мин. и Г в км/час:
й 1ЁК 162 -106—• (1)
Р— /'лХ» — ш p«3Ds » ^ }
•U) D
6 Общий курс воздушных БЕНТОВ 81
в частности, для И — 0, когда р = р0 — -g-;
f30= 1296- 10®^. (2)
... V км/час
Для скорости V м/сек =—jg—:
V км/час 1 п п
3^5 60 ’
ИЛИ
V км/час = 0,06ХлD. (3)
Когда диаметр винта D уже известен, можно, подставив в эти фор¬
мулы его величину, привести их к виду:
С')
р. “С. (2->
V = С3Хп. (3')
Значения л® и D5 можно определять по вспомогательной таблице
(приложение 1).
Пусть нам дан мотор, характеристика которого приведена на
фиг. 66, и известен диаметр винта D = 3,0m. Тогда £>‘ = 243 и по
формуле (2) для Н = О
(3= 1296 • 10‘-х^=533. 10®
г Л® * 243 гР
Действуя указанным методом, задаемся рядом значений п (в диа¬
пазоне для данного мотора), по фиг. 66 берем соответствующие зна¬
чения N и вычисляем [3 (табл. 8).
Таблица 8
Вычисление 3 для точек внешней характеристики мотора
N
D = 3 м; 0 = 533-1О3--Г.
п
1300
1350
1400
1500
1600
1700
N
635
655
675
710
735
760
тР
2107 • 10е
2460 ■ 10е
2744 ■ 10?
33 J5 ■ 10s
4096 • Ю5
4913 ■ 106
Р
0,154
0,142
0,131
0,112
0,0955
0,0825
Винта мы еще не подобрали. Для его подбора обращаемся
к характеристике серии СДВ-1 (фиг. 54). Полученные нами значения 6
находятся в диапазоне от 0,0825 до 0,154. Между тем на фиг. 54 все
значения р меньше 0,1. Следовательно, серия СДВ-1 нам вовсе не под¬
ходит как маломощная.
Берем серию трехлопастных винтов ЗСМВ-2 (фиг. 55). Проведем
на фиг. 55 карандашом две горизонтали {3=0,0825- и [3=0,154; мы
видим, что в полосу между ними попадают отрезки почти всех харак¬
теристик серии и можно, вообще говоря, выбрать из серии винт лю¬
бого шага.
82
рассматривая внимательно эти отрезки, мы видим, что каждому
з них соответствуют различные участки X и согласно формуле (3)—
азличные диапазоны скорости. Этим обстоятельством и обусло¬
вливается дальнейший выбор винта.
Дело в том, что самолет и мотор уже заданы и по лобовому сопро¬
тивлению первого и по мощности второго уже определена макси¬
мальная скорость (и вообще диапазон скоростей) самолета. Следо¬
вательно, мы можем узнать максимальное значение X.
Пусть в нашем случае задана максимальная скорость у земли:
Vmax = 460 км/час при максимальных оборотах нашего мотора
Птах _
Т г да,
1700 об/мин1, (j
по формуле (3)- WjTt
460
Sna* — 0,06 - 1700 • 3
= 1,5.
/км/чаг
Этому режиму соот¬
ветствует р = 0,0825. На
диаграмме (фиг. *55) се¬
рии ЗСМВ-2 точка с ко¬
ординатами Х = 1,5 и
р 0,0825 лежит на ха¬
рактеристике винта с
углом <р = 33°. При
этом т] = 0,75 — величи¬
на к. п. д., вообще не¬
достаточная для режима
l^max-
Положение нашей по¬
лосы на диаграмме го¬
ворит о том, что, пови- *
димому, эта серия рассчитана преимущественно на большие мощ¬
ности.
Обратимся еще к сериям двухлопастных винтов NACA 5868-9
(фиг. 57 и 58). Пусть заданный мотор имеет жидкостное охлаждение.
Тогда мы должны взять соответствующий такому мотору график
(фиг. 57) и нам не придется исправлять характеристику ВМГ на
взаимное влияние винта и самолета (будем полагать размеры нашего
мотора соответствующими размерам модели, с которой производи¬
лись испытания винта).
Точка с координатами Х= 1,5 и (3=0,0825 лежит на характе¬
ристике винта с углом установки <р =35°. Значение г,=0,855. Этот
винт выгоднее всех имеющихся в нашем распоряжении, и на нем
мы окончательно останавливаемся.
Фиг. 79. Характеристика винтомоторной
группы (Н=0).
1 В действительности типичный невысотный мотор заданной здесь мощ¬
ности не может дать такой большой максимальной скорости с реальными
самолетами. Для того чтобы этот мотор мог сообщить самолету скорость
460 км/час, последний должен обладать чрезвычайно малым сопротивлением.
Но для большей наглядности изложения методов построения характеристик
ВМГ удобнее для первых примеров применить невысотный мотор, выбрать
большую расчетную скорость и в соответствии с этим серию винтов. Разумеется,
сущность и метод построения характеристик ВМГ от этого не меняются.
6* v 83
Диаметр винта мы здесь с самого начала считаем заданным.
В главе IX мы рассмотрим подробнее методы подбора винта,
в частности, выбор его диаметра.
Имея теперь характеристику выбранного винта, можем построить
и характеристику ВМГ по указанному выше методу. По имеющимся
значениям р читаем на характеристике винта значения X и 73, затем
вычисляем скорости по формуле (3) при D=3 м
V = 0,06Х/2 • 3 = 0,18Х/2, ,
и наконец, определяем NpaDn=Ny). Результаты расчета для Н=О
даны в табл. 9, а полученная характеристика ВМГ—на фиг. 79.
Таблица 9
Построение характеристики ВМГ для /7 = 0
Угол установки лопастей 9 = 35°
п
1300
1350
1400
1500
1600
1700
N
635
655
675
710
735
760
п3
2197 ■ 10s
2460 • 10s
2744 ■ 103
3375 ■ 106
4096 • 106
4913 • 10s
Р
0,154
0,142
0,131
0,112
1
0,0955
0,0825
Я
0,7
0,9
1,15
1,3
1,42
1,5
Ti
0,5
0,65
0,8
0,843
0,855
0,855
Npacn^T^'i]
318
425
540
600
630
650
V
163
218
290
350
410
460
3. Высотные характеристики ВМГ
Построение высотных характеристик ВМГ можно производить
различными способами. Основные из них—это способ кубических
парабол и способ коэфициента р.
Способ кубических парабол
Мы уже знаем (глава IV), что при X=const (а значит, и p=const)
обычная зависимость мощности от оборотов
принимает для данной высоты (p=const) вид [см. формулу (1)
главы IV]:
N—ktis
и изображается кубической параболой (дроссельная характери¬
стика).
Каждой точке внешней характеристики соответствуют определен¬
ные значения р и X и, следовательно, определенная парабола,
относящаяся притом только к одной высоте. Для каждой высотной
характеристики мотора (фиг. 66) существует своя система парабол!
Можно, однако, преобразовать высотные характеристики мотора
так, что система парабол будет для них одна и та же. В самом деле,
84
умножим
земной п
м и разделим правую часть основного уравнения на величину
плотности воздуха р0:
N==ib^t р0"*£>5 = i№р0п11У,
или
где К и К' от высоты не зависят.
Поэтому, если высотные характеристики мотора^ изобразить не
N • -*
В виде кривых N = f(n), а в виде д == / (гг), то система парабол
будет для всех высот одна и та же.
Разделив ординаты N высотных характеристик на соответствую¬
щие значения Л, взятые из табл. 7, получим условные характери¬
стики, показанные на "фиг. 80.
Там же нанесены и кубические параболы, соответствующие зна¬
чениям X из табл. 9.
Для проведения парабол нет надобности пользоваться их уравне¬
нием и вычислять коэфициент К. Зная одну точку параболы (п, N)
можно построить другую (п, N'), пользуясь соотношением:
НЛ£-
1300 то 1500 1600 1700 поб/мин.*
Фиг. 80. Метод кубических парабол.
или
Так, исходная точка первой параболы: п — 1700; N — 7b0. Беря
абсциссу n' =f= 1600, получим:
1600 V
а для «' = 1500:
w'=’4«)'“52a
Для второй параболы с исходной точкой « = 1600; N—735 имеем:
«' = 1500, N' = 735 (щ*)* = 605;
«' —1400, N' = 735(^|J°y = 490.
Для третьей параболы « = 1500, N=710:
«' —1400, N' = 710(^[g?y = 580.
Для четвертой параболы « = 1400, N=675:
«' = 1300, N' = 675(~y = 542.
Для пятой параболы «=1350, N = 655:
«' = 1300; N' = 655 ({Щу = 585.
По полученным таким ббразом точкам и построены параболы
на фиг. 80.
Таблица 10
Построение высотных характеристик ВМГ методом кубических парабол
*
По диаграмме фиг. 80
А
Ч
0,9
0,65
1,13
0,8
1,3
0,843
1,42
0,855
1,5
0,855
Н = 2000 м
N
д“ 1
610
635
670
700
720
п
1320
1375
1470
1575
1675
Д = 0,822
N д
-д-Лч
325
417
465
490
505
V = 0,18 Ап
215
285
350
402
452
Н = 4000 м
N
Д
—
575
620
650
670
п
—
1325
1435
1540
1630
Д = 0,669
N л
д-Д'О
—
310
350
372
382
V = 0,18 Ап
—
275
340
395
440
Н = 6000 м
N
Д
—
525
555
590
610
Д = 0,538
п
—
1285
1380
1490
1580
N л
-д-Ду)
—
225
252
272
280
V = 0.18.АП
—
267
330
380
428
86
Дальнейший расчет ясен [из табл. 10. Для каждой параболы
>= const, а следовательно, и vj — const. Эти величины выписываем
в первых строках для всех высот. Затем для каждой высоты
пишем снятые с фиг* 80 значения ^ и п в точках пересечения
характеристики с параболой. Далее возвращаемся к действительной
мощности, умножая ^ на Д и сразу же на •»), — это и будет
Наконец, Nr/
л. с.
iVpiicn N /]•
вычисляем
V = 0,06 • ЗХп = 0,18Хп.
Схема расчета:
t-t д > М (\f V .
Полученные харак¬
теристики ВМГ нанесе¬
ны на фиг. 81.
Этот способ интере¬
сен как теоретически на¬
глядный, но на практи¬
ке его мало применяют
из-за некоторой кропот¬
ливости графических
построений.
600
500
400
300
200
100
Способ
коэфициента
ности 3
мощ-
0
Lx
/
rS
фУ*
Kl
/
У
>>
/,
у
/
/
,i
too 200 300 400 1/км/час
Фиг. 81 Высотные характеристики ВМГ.
В предыдущем спо¬
собе мы исходили из од¬
них и тех же. значений
X=const и p=const для
всех высот, спускаясь с одной высоты на другую по параболе, отчего
у нас изменялись значения п. Теперь, наоборот, будем брать одни
и те же значения п для всех высот (т. е. будем спускаться по
вертикалям); X и (3 при этом будут изменяться.
Выясним, как изменяется р по высоте при n=const. На уровне
земли
75N0
fV
а на 'высоте Н
или
ря:
75/Vr.
75 N0A
tp n*D5
- p0«lD5
A 75Na
:A Pon?Ds’
Ph=P,
A
0 Д
(4)
(4')
при
n = const.
87
Эта простая формула позволяет отказаться от непосредствен¬
ного вычисления р для каждой высоты. Значения берутся из.
табл. 7.
Определив значения р, мы снова по Характеристике винта
находим Хил. Мощности NH берем с высотных характеристик (
мотора (фиг. 66) или, в случае невысотного мотора, не строя даже
этих характеристик, вычисляем непосредственно:
NH = ANe.
Таблица 11
Построение высотных характеристик ВМГ по способу коэфкциента р
По табл. 9
п
пг
В.
1 300
635
2 197 • 10s
0,154
1 500
710
3 375 • 10е
0,112
1 700
760
4 913 ■ Ю6
0,0825
Н = 0 (по табл. 9)
А
Ч
Щ
V
0,7
0,5
318
163
1,3
0,843ч
600
350
1,5
0,855
650
- 460
Н = 2000 м
А = 0,781
4=0,95
Л
Ч
N
Щ
V
3
0,146
0,8
0,57
495
182
287
0,107
1,35
0,851
555
472
365
0,785
1,52
0,853
595
507
465
Н = 4000 м
А = 0,598
~ = 0,895
р
я
ч
"W
Ni\
V
0,138
1,05
0,751
380
285
247
0,10
1,38
0,855
425
365
373
0,074
1,53
0,85
455
387
470
И = 6000 м
« ч
А = 0,446
А
-д- = 0,865
р
X
■0
N
Nt]
V
0,133
1,13
0,8
283
225
265
0,097
1,4
0,856
316
270
380
0,0715
1,55
0,847
340
287
475
Затем попрежнему определяем Nt{ и V.
Таким образом схема расчета для всех высот в этом случае
остается такой же, как и при Н= 0. Весь расчет (для трех чисел
оборотов) от Н— 0 до /7=6000 м приведен в табл. 11. Характе¬
ристики получены те же, что на фиг. 81.
Для высотного мотора расчет производится такими же спосо¬
бами. Характеристики ВМГ расположатся внешне так же, как
и характеристики мотора на фиг. 73.
88
г
4. Противоречия в выборе ВФШ. Легкий, тяжелый и двух¬
шаговой винты
В предыдущем примере мы остановились на винте с углом:
установки <р =* 35°, который оказался подходящим к заданному нам.
самолету (Г= 460 км/час у земли).
Исследуем теперь характеристики ВМГ у земли с винтами
меньшего и большего шага. Возьмем винты с углами установки
25, 30, 40 и 45° (фиг. 57). Расчеты приведены в табл. 12, а харак¬
теристики ВМГ — на фиг. 82, где показана также примерная
кривая потребных мощностей для данного самолета. Внимательное
рассмотрение фиг. 82 поможет нам уяснить ряд основных вопросов,
относящихся к подбору винта и эффективности его работы на
самолете.
Таблица 12
Построение характеристик ВМГ для четырех винтов различного шага
<Н- 0)
1
п *
1300
1400
1 500
I 600
1 700
По табл. 8 (
N
635
675
710
735
760
1
3
0,154
0,131
0,112
0,0955
0,0825
Д
_
0,35
0,6
ч
.—.
—
—
0,4
0,7
9 = 25°
т
—
—
—
295
530
V
—
—
—
100
185
д
0,47
0,85
1,05
1,15
ОГуО
ч
—
0,4
0,75
0,835
0,857
¥ = 30
Nv)
—
270
533
615
650
V
—
119
230
302
353
Я
1,53
1,65
*
1,77
1,85
1,93
ч
0,825
0,851
0,85
0,83
0,79
о = 40°
• N1}
525
575
605
610
600
V
360
415
180
535
590
я
2,05
2,18
2,27
2,36
2,45
Л S.0
ч
0,835
0,81
0,78
0,7
0,6
<г = 45
№)
530
545
555
515
455
V
480
550
615
670
750
Винт с углом установки 25° применим только для малых ско¬
ростей. На максимальных оборотах 1700 об/мин. он дает всего
185 км/час (при подъеме на полном газу). Зато на малых взлетных
скоростях, он, несмотря на низкий к. п. д., дает большую мощность
по сравнению с нормальным винтом, имеющим угол установки
9=35°. Благодаря меньшему шагу и меньшему углу атаки лопасти
он оказывает меньшее сопротивление и дает возможность мотору
на одной и той же скорости развить большие обороты и, следова¬
тельно, большую мощность, чем винт с большим шагом. Для боль¬
89
ших скоростей такой винт не годится вовсе, так как требует при
этом оборотов больших, чем птэх мотора. Зато на малых скоростях,
на взлете, он выгоднее, так как ускоряет разбег и взлет самолета.
В этом случае мотор, как говорят, работает на более высокой точке
внешней характеристики, чем при нормальном винте.
Фиг. 82. Сравнение характеристик ВМГ с ВФШ различного шага.
Это винт легкий, или скороподъемный. Его называют также
высотным, так как на большой высоте, у потолка, когда мощность
и обороты мотора падают, легкий винт дает возможность извлечь
из мотора большую* мощность и тем самым повысить потолок са¬
молета.
Легким винтом пользуются во всех случаях, когда нужно об¬
легчить разбег и взлет самолета: при большой нагрузке самолета."*
неблагоприятных условиях взлета, ограниченности площадки и т. д.
Для этого либо специально устанавливают легкий винт, либо, если
имеется винт с изменяемым углом установки лопасти, устанавливают
его на малый шаг. При этом, как видим, приходится жертвовать
максимальной горизонтальной скоростью самолета.
Впрочем, для данного самолета рассматриваемый винт (ф=25°)
оказывается чрезмерно легким. На фиг. 82 нанесена для сопоста¬
вления примерная кривая потребных мощностей для этого самолета.
Мы видим, что кривая располагаемых мощностей винта при <р = 25°
далеко не доходит до кривой Nnотр. Это значит, что в горизонталь¬
ном полете мотор не сможет развить полной мощности ни в одной
точке и, в частности, максимальная горизонтальная скорость (на
дросселированном газу) будет очень низка.
Следующий винт (<р=30°) дает уже большие скорости, но меньшие
мощности на взлетных скоростях. Характеристика ВМГ еще не
доходит до кривой NBOTр.
90
Основной винт (9=35°) как раз дает максимальную горизон¬
тальную скорость на максимальной мощности, так как он по этим
данным и подобран. Винт, рассчитанный на максимальную скорость,
называется скоростным.
Но на взлете такой винт оказывается слишком тяжелым. Тогда,
жертвуя несколько максимальной скоростью, выбирают меньший
угол установки (в данном случае 30—32°) и улучшают взлет само¬
лета. Это—компромиссный винт.
Остальные винты явно чрезмерно тяжелы. При 9=40° харак¬
теристики еще пересекаются, причем Vmax уже меньше, чем для
винта 9=35°, а максимальная мощность не используется. При
45° винт вовсе не пригоден. Взлет при этих углах установки,
очевидно, невозможен.
Мы уяснили, таким образом, основное противоречие, на кото¬
рое неизбежно наталкивается конструктор самолета при выборе
винта фиксированного шага: для взлетных режимов нужен винт
малого шага (легкий), а для скоростных режимов—винт большого
шага (тяжелый).
Причина этого противоречия заключается в том, что лопасть
винта большого шага работает при малых скоростях (малой отно¬
сительной поступи I) на больших углах атаки (см. фиг. 26—28),
оказывает поэтому большое сопротивление, не дает возможности
мотору развить максимальные обороты и мощность и работает
с низким к. п. д. Наоборот, винт малого шага при больших ско¬
ростях работает на слишком малых углах атаки лопасти и не
может поглотить мощности мотора без превышения максимально
допустимых оборотов.
С развитием авиации противоречие это все больше обострялось,
так как все больше увеличивалась разница между взлетными
и максимальными скоростями.
91
Естественный выход из этого положения—применение винтов
изменяемого в полете шага.
Первым решением этого вопроса явилось создание двухшаговых
винтов, которые могут быть установлены при взлете на малый
шаг, а на скоростном режиме—на большой шаг. Так, если в нашем
примере самолет имеет взлетную скорость, скажем, 150—160 км/час,
нам выгодно иметь винт с двумя углами установки: 25 и 35°. Под¬
нявшись при 9 = 25° на небольшую высоту и достигнув скорости ^
185 км/час (максимальная для этого угла установки), переставляем
лопасти на угол 35° и используем, таким образом, преимущества
и легкого и скоростного винта на соответствующих режимах.
Характеристика ВМГ будет представлять собой в этом случае
разрывную кривую, так как будет состоять из двух участков
Фиг. 84. Характеристика двухшагового винта и ВИШ-автомата постоянных
. оборотов.
кривых для ф = 25° и 9 = 35°, скачкообразно переходящих друг
в друга (фиг. 83). Характеристика винта представит собой также
разрывную кривую ABCD (фиг. 84). Точку разрыва поместим при
значении X = 0,6, максимальном для 9 = 25°, когда данный мотор
развивает максимально допустимые обороты (табл. 12).
Двухшаговой винт не дает еще, однако, полного решения про¬
блемы. Он устраняет только противоречие между двумя крайними
режимами: взлета и максимальной скорости. Но указанное проти¬
воречие, хотя и в меньшей степени, существует между любыми
двумя режимами. Если потребовать, чтобы при любой скорости
полета можно было использовать максимальную мощность мотора
при достаточно высоком к. п. д. винта, то такая задача может
быть решена только установкой винта на определенный шаг для
каждой скорости.
Такую возможность предоставляет ВИШ, допускающий уста¬
новку в полете лопастей на любой шаг, от наименьшего до наи¬
большего, и е частности ВИШ-автомат. *
Г I
дбухшогоШ Винт
1 V
и
92
5. Характеристика ВМГ с ВИШ-автоматом
ВИШ-автомат, как мы уже знаем, поддерживает постоянное
заданное число оборотов на всех режимах работы мотора как на пол¬
ном, так и на дросселированном газу. Число оборотов может быть
установлено любое, но мы будем рассматривать здесь только ВИШ,
установленный на число оборотов, Соответствующее Nmax по внешней
характеристике мотора, что будет характеризовать ВМГ с точки
Hr]
л.с.
600
500
400
300
200
О 100 рпп 300 400 Vk/фас
Ф.1Г. 85. Сравнение характеристик ВМГ с ВФШ и ВИШ.
зрения максимума отдаваемой ею мощности (т. е. мощности распола¬
гаемой).
Таким образом из внешней характеристики мы берем только одну
точку. В соответствии с этим построение характеристики ВМГ упро¬
щается.
Так как n=const, TV =const (для данной высоты), той p=const.
На диаграмме характеристик серии винтов проводят горизонталь
для данного значения р, которая пересечет ряд характеристик ВФШ
(по существу ВИШ и является серией винтов фиксированного шага).
КажДая точка пересечения указывает значения \ и ц, а также угол
установки, который при этом примут лопасти ВИШ (этим углом
можно не интересоваться). Затем вычисляют V по формуле (3)
и Npacn=Nri. Схема расчета:
р = const, К], (?), V, N'(\i
В предыдущем примере мы имели JVmax= 760 л. с. при
«=1700 об/мин. Возьмем ВИШ, поддерживающий это число оборо¬
тов, и построим характеристику ВМГ для Н=0.
I Для этой точки по предыдущим таблицам '
;Р = 0,0825 = const.
98
1
3
W
Г /
/
/о
S
У
у
/</$
М
' .
/
Г ^
h
t /
/
/
/
/
р
Pi
/ >
г /
Л
и/
и
/ ■
/
/
ч
>=25£
/
'
4
Проводим на характеристике серии горизонталь MBD, соответ¬
ствующую р = const (фиг. 84) и, задаваясь значениями X, снимаем
ряд значений <р и /]. Расчет приведен в табл. 13.
Таблица 13
Построение характеристики ВМГ с ВИШ - автоматом
п = 1700 об/мин.; N = 760л. с.\ Р = 0,0825
0,3
0,5
0,6
0,7
0,9
Ы
1,3
1,5
23
24
25
25,5
27
29,5
32
35
0,4
0,61
0,7
0,76
0,83
0,855
0,861
0,855
305
465
530
580
630
650
655
650
92
153
185
215
275
337
400
460
На фиг. 85 построена полученная характеристика ВМГ и для
сравнения нанесены характеристики трех ВФШ по фиг. 82. Мы
видим, что ВИШ несравненно выгоднее всех ВФШ, с каждым из ко¬
торых он имеет одну общую точку, соответствующую тому положению,
когда лопасти ВИШ стоят на таком же угле, как у данного ВФШ.
Диапазон углов у ВИШ (табл. 13)—от 23 до 35°, поэтому
он дает на наименьших скоростях еще большую мощность, чем ВФШ
с углом 25°. На максимальной же скорости ВИШ дает ту же
-ВФШ
ВИШ
Фиг. 86. Сравнение максимальных скоростей и потолков
самолетов с ВФШ и ВИШ.
мощность, что и скоростной ВФШ (<р = 35°), специально подобранный
нами для этой скорости.
На других высотах ВИШ дает большие максимальные скорости,
чем ВФШ, так как число оборотов его с подъемом на высоту
не будет снижаться, тогда как при ВФШ число оборотов невысотного
мотора (а у высотного мотора—выше расчетной высоты) неизменно
падает. Потолок также повысится (фиг. 86). Увеличится и скоро¬
подъемность самолета, так как подъем на высоту будет все время
происходить на большей мощности и с более высоким к. п. д.,
чем при ВФШ.
Таким образом ВИШ повышает все летные качества самолета.
С невысотным мотором ВИШ вообще не применяют. Преиму¬
щества ВИШ тем значительнее, чем больше диапазон скоростей
у самолета. Это ясно из приведенного выше анализа основного про-
94
тиворечия и недостатка ВФШ. Высотные же моторы увеличивают ди¬
апазон скоростей, и здесь применение ВИШ дает наибольший эффект.
Для высотного мотора подбирают скоростной ВФШ так, чтобы
он давал максимальную скорость на расчетной высоте, соответствую¬
щей границе высотности мотора. Тогда на этой высоте совпадут
скорости, даваемые ВИШ и
ВФШ- Для других же высот
ВИШ будет выгоднее (фиг. 86).
На фиг. 87показаны кривые
скороподъемности самолета
Vymox=f(H) (V—вертикальная
скорость) при невысотном мо¬
торе. ВИШ дает значительно
большую скороподъемность, чем
тяжелый скоростной ВФШ (ф=
35°), и такую же скороподъем¬
ность у земли, как скороподъ¬
емный ВФШ (<р— 23°), так как
ВИШ на малых скоростях (т. е.
на режиме подъема) сам уста¬
навливается у земли на этот
угол (см. табл. 13). Но на дру¬
гих высотах наивыгоднейший
угол ф для подъема увеличится, и ВИШ опять-таки будет выгоднее.
Вообще, характеристики самолета с ВФШ и ВИШ совпадают
в одной точке, именно той, по которой был выбран угол установки
у ВФШ.
Построение характеристик ВМГ по коэфициенту с8.
Пользоваться характеристиками винта, заданными в функции
коэфициента быстроходности cs, для построения характеристик ВМГ
с ВИШ-автоматом несколько удобнее, чем с ВФШ.
Обратимся к нашему примеру. Расчетные данные те же-. V —
=460 км/час, N=160 л. с., п = \700 об/мин., р=р0 (у земли). Опреде¬
лим расчетное (максимальное) значение cs по формуле (VIII) (стр. 56):
Фиг. 87. Сравнение вертикальных ско¬
ростей при - ВФ111 и ВИШ.
ся = V м/сек
5/ р 460 /~
У 75Nnf 3,6 у ,
0,125
127
1
3650- Ю5
— 2 47
51,7
Кроме того по той же формуле (VIII):
_ А
Cs ~ yf ’
а так как для ВИШ-автомата р = const, то X пропорционально cs:
X = kcs,
где к = У^. Зная диаметр винта, вычисляем расчетное значение X.
В нашем случае (D = 3m), как *мы уже знаем,
^ max ~ 1 >5?
95
Тогда
откуда
и
1,5 = к • 2,47,
*=й=0-608
X = 0,608cs.
Коэфициент пропорциональности мы могли бы вычислить и
как j/р. В самом деле, для наших данных по предыдущему расчету ,
р = 0,0825 и )70,0825 0,608.
Вцзьмем диаграмму характеристик нашего винта в функции cs— i
диаграмму Вейка (фиг. 59). Задаемся'рядом значений с£, вычи¬
сляем X и получаем точки на диаграмме, указывающие угол ш.
По углу <р читаем на верхней диаграмме значения -ц. Затем попреж-
ншу вычисляем V и N-ц. Расчет приведен в табл. 14.
Таблица 14
Построение характеристики ВМГ с ВИШ
по диаграмме Вейка
1
1,5
2
2,47
X
0,608
0,912
1,216
1,5
а
25
28 '
32
35
Т1
0,7
0,835
0,86
0,855
Л/т)
532
655
655
650
V
186
280
372
460
Полученные точки (V, Nvf) характеристики ВМГ, как легко я]
•убедиться, ложатся на полученную уже нами кривую для ВИШ J1
(фиг. 85).
6. Вычисление статической мощности и тяги
|Для аэродинамического расчета самолета представляет большой
интерес изучение работы винтомоторной группы на месте.
На этом режиме Г = 0, а следовательно, Х = 0. Винт работает,
как геликоптер (глава II, § 1).
Нас может интересовать величина статической мощности 7VCT
или тяги Рст, развиваемой ВМГ. Определим для рассматриваемого
примера сначала NCT.
На характеристике винта (фиг. 57) для 9 = 35° при Х = 0 мы имеем
?ст = 0,188. Но для внешней характеристики нашего мотора наиболь¬
шее значение р при наименьших оборотах п = 1300 *будет 0,153
(табл. 8). Нам нужно, очевидно, экстраполировать внешнюю харак¬
теристику влево в сторону меньших оборотов. Точнее всего мы можем
это сделать, построив по табл. 8 кривые 7V=/(p) и п = /(р)
и продолжив их до Р = 0,188 (фиг. 88).
В этой точке
TV'ct = 570 л. с.; пст= 1150 об/мин.
93
Продолженная внешняя характеристика показана на фиг. 89.
Мы получили мощность на валу мотора. Чтобы получить
полезную мощность ВМГ, мы должны умножить NCT на к. п. д.
винта Но полный к. п. д. винта /] для этого режима при отсут-
р
Фиг. 88. Экстраполирование мощности и оборотов в сторону режима работы
на месте.
ствии поступательной скорости равен нулю (глава II, § 9.) Мы уже
знаем, что в этом- случае полезную мощность нужно оценивать
по относительному к. п. д., который нам из характеристики винта
неизвестен. >
Фиг. 89. Экстраполированная внешняя характеристика мотора.
Мы можем только сравнить статические мощности при разных
шагах винта. Так, при <р= 30° мы имеем на* характеристике' винта
(фиг. 57) при X = 0, р = 0,142. По фиг. 88 получаем:
Ncr = 655 л. с. и Пет = 1350 об/мин*
(эти значения как раз содержатся в табл. 8). Мы видим значи¬
тельное увеличение статической мощности и оборотов у более легкого
Общий курс воздушных винтов
97
винта. При дальнейшем облегчении винта получим еще большую
мощность мотора. Беря 9 = 25°, имеем по фиг. 57 рСх =0,108,
откуда (по фиг. 88):
Лфт =715 л. с.; пст —1525 об/мин.
Вполне точную характеристику работы ВМГ на месте получим
по статической тяге, для определения которой не нужно знать к. п. д.
винта. Для этого воспользуемся характеристиками нашей серии
по коэфициенту тяги (фиг. 60).
Для ф — 35° при Х = 0 имеем аст —0,12. Обороты на месте для
этого угла мы уже определили: пст— 1150 об/мин. Тогда
Рст = 0,12 ^(j^y 3* = 44Ь кг.
Для <р = 30° пст = 1350 об/мин., а по фиг. 60 кст = 0.12, тогда
Рст = 0,12 ~ 0^-у З4 = 620 кг.
Наконец, для 9 = 25° пст = 1525 об/мин. и яст = 0,112 и
PCT = 0,112-i (~уз4 = 730 кг.
Величина статической тяги имеет большое значение для взлет¬
ных характеристик самолета.
7. Характеристики ВМГ по тяге
Если аэродинамический расчет производится методом тяг, т. е.
характеристика самолета дается в виде кривой потребной тяги
по скорости, тогда и характеристика ВМГ должна быть представлена
в виде кривой располагаемой тяги: Ррасп = /(Г). Порядок расчета для
ВФШ такой: задаются числами оборотов, по внешней характеристике
определяют N, вычисляют р, по характеристике винта р = /(X)
определяют X, затем по характеристике винта я = /(X) определяют я и
вычисляют'тягу. Скорость вычисляют прежним способом.
Схема расчета:
тг, N, р,' Х, а, Р, Г,
Построим для примера характеристику ВМГ по тяге при #=О
для взятых раньше мотора и винта, начиная от статической тяги
(У — 0), для 9 = 35°, 30е, 25° и для ВИШ. Расчет приведен в табл. 15.
В первые столбцы (для ВФШ) для статической тяги Рст вписы¬
ваем данные из предыдущего параграфа. Затем, чтобы не повторять
вычислений, берем из табл. 9 и 12 значения п, X и V, по фиг. 60 опре¬
деляем и и вычисляем Р по формуле:
Р = a onlD* = х.~.^:31 = 0,00281 ял5.
Для ВИШ задаемся значениями X, углы 9 берем из' табл. 13тили
определяем их непосредственно по фиг. 84 (на горизонтали 3 = 0.0825),
затем по X и 9 находим на фиг. 60 значения а и, наконец, вычисляем
V. = 0,06InD = 0,06 • X - 1700 - 3 = 306Х
и
Р = 0,00281 ял2 = 0,00281 я • 17005 = 8120^
98
полученные характеристики ВМГ показаны на фиг. 90. Мы видим
Рсъ еще раз преимущество винтов малого шага на малых скоростях
^преимущество ВИШ перед любым ВФШ.
И Вопреки общему правилу падения тяги с увеличением скорости
11, § 3, фиг. 31) можем отметить на малых скоростях вначале
небольшое возрастание тяги у некоторых винтов. Это объясняется
слабым падением или даже постоянством а у некоторых винтов при
малых л (фиг. 60).
Таблица 15
Построение характеристик ВМГ по тяге для трех ВФШ и ВИШ
Н =0
■1 - 35°
л
Я
а
Р
V
1 150
0
0,12
445
0
1300
0,7
0,105
500
163
1 500
1,3
0,07
443
350
1700
1,5
0,045
365
460
п
1 350
1500
1700
Я
0
0,85
,1,15
•i=-- 30°
а.
0,12
0,097
0,06
Р
620
612
485
V
0
230
353
о = 25*
1 700
0,6
0,097
790
185
Я
0'
0,3
0,6
0,9
1,1
1,3
1,5
о°
22
23
25
27
29,5
32
35
о.
0,105
0,103
0,097
0,075
0,064
0,052
0,045
р
855
840
790
610
520
425
365
V
0
92
185
275
337
400
460
ВИШ,
и =1700 об/мин.
7*
#9
■»
8. Оптимальный винт
Предыдущий анализ показал, что ВИШ-автомат с постоянным
числом оборотов выгоднее любого ВФШ. Но является ли он наивыгод¬
нейшим?
Рассмотрим фиг. 84, где проведена характеристика ВИШ в виде
горизонтальной прямой MBD для р = 0,082 5 = const. Характеристика
эта пересекает много характеристик ВФШ, но только одну из них
(<р = 33°,5)—в точке ее максимального к. п. д. Иначе говоря, харак¬
теристика ВИШ только в одной точке пересекается с кривой опти¬
мальных к. п. д. KOL, в остальных же точках отходит от нее более
или менее значительно.
Очевидно, наивыгоднейшим винтом будет такой ВИШ, который
при каждом угле поворота дает максимальный для данного угла
к. п. д., т. е. винт, характеристика которого идет непосредственно
по кривой оптимальных к. п. д.
Такой винт назовем оптимальным.
Обратимся снова к мотору BMW-VI. Он должен работать на
высшей точке внешней характеристики: « = 1700 об/мин. = const,
N = 760 л. с. = const. Зададимся рядом значений X по кривой опти¬
мальных к. п. д. нашего винта (фиг. 57 или 84) KOL, снимем
значения Р, <р, ^ и вычислим Npacn = N'»j (табл. 16). Мы видим, что
располагаемые мощности при малых X получились значительно боль¬
шие, чем у ВИШ постоянного числа оборотов (см. табл. 13).
В уравнении
75N = pPn|D5
имеются (для данной высоты) три постоянные величины: N, р и гг,
значит D = /(p). В отличие от винта постоянного числа оборотов
у оптимального винта величина р изменяется вдоль характеристики.
Следовательно, и диаметр будет переменным. Таково новое техни¬
ческое требование, предъявляемое к оптимальному винту.
Винт переменного диаметра не вошел еще в авиационную прак¬
тику, но исследовательская и изобретательская мысль в этом напра¬
влении работает. На фиг. 91 показан один из проектов конструкции
такого винта с выдвижной частью лопасти.
Можно, однако, иметь оптимальный винт и с постоянным диа¬
метром. Тогда с изменением р придется изменять обороты, как это
следует из приведенного уравнения, т. е. п = / (р). Но, поддержа¬
ние максимальной мощности (760 л. с.) возможно только при опреде¬
ленных, номинальных оборотах мотора (1700 о б/мин.). Выход из этого
положения может быть найден только применением переменной
редукции от мотора к винту, которая позволила бы менять обороты
винта, не меняя оборотов мотора. Этот вопрос также находится
в стадии разработки.
Для иллюстрации этих положений построим характеристику
ВМГ с оптимальным винтом в двух вариантах. Подставим в наше
уравнение значения N, р0 и пв:
100
75. 760-4 (!™)’С*.
Расчет оптимального винта Таблица 16
1700 об/мин. = const; N = 760 л. с. — const
— 00 юо
СО — со об ю
^Г© о
ГО Is-
© © ю см
1ПОПЗОЮ
- - .-Г*0
т- © о
03
г~ — © ю
со © со оо ю
- - -©
т-.© ©
СМ ю
Ю ©Is-
«оюоою
- - - -©
1-0<00
см
СМ КО О
© О СМ об ко
я»
. 5 со см ю
г- © — оо см
- • -со
о© ©
ко см ю см со
<00—оосм
- - - -©
© © ©
СЧ? 0CL э- £Г*-
- со
X
з
X
J3
га *-3
so.
Я Ks*
ь ^ с
п .
° «и
«я -5
§с~
ё>
X
о
с
со
СМ СО 00
со - см
— см —
8
со
см
со
см
S3
о
- ©
© "М*
см
КО ©
00
00
см
00 КО
- -3*
© м«
кО — -'tj-
со - —
СМ СО —
00
КО
©
см
ко
Is-
со ©
оЗ со ©
со - —
. со
ко
*■*
со
со
со
КО
S 5
кО
СО 00
00
см
см
©
см
со
ч* 00
© —
- со
©
00
©
Г-
©
КО
со
со со
© Г"
- см
00 со
© Г-
©
я
© см
О ©
- см
с
с
и
II
Д
Я
S
©~
о
8
t-
с
II
?я
3
3
X
<Ю
S
<L>
с,
CL>
с
I
Q
©
©
м*
X
S
.. S
53 *
ЧТ м-
-в* я •_
X © -о
>>© х
п 1> я
—— О) — О)
о- и s
©
° зя
О
о
со £
СП
о
to
” О
со Р
©
г-
со
см —
о ю. §
СО О 2
г-
©
* ©
— © -к
14 ^ §
^ см
©
со
X •
я
ЯГ
X X
>> *
см
кО
©
см
- см
© ^
п
о
о,
X
со
X
3
о»
S
О)
а,
о
с
х
ж
©г
*°8
85§
го II
Q *
Sc с
1р
ко I
И| S ^
fclC *
II >
3
3
X
X
>>
п
сЗ
3
3
о
S
а>
©
с
©
©
II
*м
401
ч
•ткуда
20 5 У 20
D* = j, или D = y f.
% 20
Б табл. 16 приведены значения величины j и D. Мы видим, что,
сохраняя обороты мотора и винта постоянными, мы должны для опти¬
мального винта изменять его диаметр от 3,98 до 2,83 м.
i
.к
Фиг. 91. Два проекта винта переменного диаметра (американский
патент). Лопасть имеет выдвижную часть, насаженную на нарез-
ной винт, управляемый летчиком.
Но при этом мы наталкиваемся на следующее затруднение. Увели¬
чивая диаметр винта, мы увеличиваем скорость концов лопасти
и число Маха (см. главу III, § 2), а это может привести к значитель¬
ному снижению или даже к полной потере полученного выигрыша
в к. п. д. Мы знаем, что результирующая скорость конца лопасти
выражается формулой (1) главы II
В табл. 16 приведены значения V м/сек, yjiJ и Wм/сек. Раз¬
делив W на скорость звука (340 м/сек), получаем числа Маха. Мы
видим, что первые три из них, действительно, слишком велики.
Прибегнем, в таком случае, к переменной редукции. Ограничим
окружную скорость конца лопасти величиной U — 300 м/сек, резуль¬
тирующая скорость W будет тогда порядка 310 м/сек (Ма =0,91),
что для данного винта допустимо1.
Тогда
U = KtisD — 300 м/сек,
или ^
nsD = 95,5,
nD — ЫЪО.
Напишем основное уравнение в таком виде:
752V = Рр (nsD)5D\
1 Подробно о числе Маха см. главу VIII.
102
откуда
D* = -
75N
75 - 760 0,525
P
Определив D, найдем и обороты винта:
5750
пв — ~iT 1
а затем и редукцию—отношение оборотов винта к оборотам мотора:
Пг. ■ Ям-
Фиг. 92. Сравнение характеристик ВМГ с ВФШ, ВИШ
и оптимальным винтом.
Данные приведены в третьем разделе табл. 16. Переменная редук¬
ция понадобилась для первых трех точек. Данные последних четырех
столбцов заимствованы прямо из предыдущего варианта (второй
части таблицы)—без редукции, так как здесь число Маха имеет допу¬
стимую величину и можно обойтись без редукции.
На фиг. 92 показана характеристика ВМГ с оптимальным винтом
(по последнему варианту) и сравнение ее с ранее полученными
характеристиками.
Такова в общих чертах проблема оптимального винта.Решение ее
наталкивается ещ,е на целый ряд затруднений, кроме указанных выше.
Например, для скорости 224 км/час мы получили диаметр винта
5,13 м. Для меньших скоростей можем получить еще большие диа¬
метры. Между тем конструкция, размеры современных самолетов,
высота шасси вообще не допускают установки винтов т^ких боль¬
ших размеров.
103
9. Построение характеристики ВМГ с высотным мотором
и ВИШ-автоматом
В заключение этой главы приведем пример построения земной
и высотных характеристик ВМГ с высотным мотором и винтом
постоянного числа оборотов.
Возьмем мотор Райт «Циклон» F-3 и его характеристику в том
виде, как она дана на фиг. 67 и 73, и винт той же серии 5868-9, кото¬
рой мы пользовались раньше. Но так как этот мотор—звездообраз¬
ный воздушного охлаждения, воспользуемся характеристикой винта
испытанного в присутствии такого именно мотора (фиг. 58).
Расчетные данные таковы: Ртах = 520 км/час на границе высотности
мотора (/7 = 2000 м) при N = 700 л. с. и и = 1950 об/мин. Диаметр
винта = 2,9 м.
Вычислим значение р для этой высоты [см. формулу (4)]:
Для других высот будем определять р, пользуясь соотношением:
Nr\
л. с
600
Н=2000м
500
300
200
/00
ЮО 200 300 ■ № 500 1/км/час
Фиг. 93. Характеристики ВМГ с высотным мото¬
ром и ВИШ.
75 N
75 N
так как Д2000 = 0,8216, то
РгООО
75 ■ 700
2000
Р'
N'A‘
или
ч
Так, у земли: Д = 0, N = 640 л. с. и
Ро = Р.000 0,811С70о40 = 0,0725 • 0;75 = 0,0545.
Для 4000 м N = 545 л. с. Вычислим [34000, пользуясь величи¬
ной ро:
Р4„оо = Ро 07бб8654640 = °’0545 ■1 ’27 = 0,0695
и т. д.
Определим максимальное значение X:
X = — 1 54
0,06- 1950-2,9
Для удобства возьмем ряд значений X от 0,5 до 1,7. Проводим на1
характеристике винта (фиг. 58) горизонтали (3 = const для каждой
высоты и ведем расчет, как с невысотным мотором (табл. 11). Весь
расчет дан в табл. 17, а характеристики ВМГ построены на фиг. 93„
Таблица 17
Построение высотных характеристик ВМГ для высотного мотора
и ВИШ-автомата
п — 1950 об/мин., D = 2,9 м
Я
V
0,5
170
0,9
305
1,3
440
1,7
575
Я = 0
4
N 0,715
0,85
0,875
. 0,825
N = 640
Р = 0,0545
NT)
9
458
545
560
528
Я — 2000
Т]
0,65
0,83
0,871
0,85
N = 700
Р =0,725
Nr,
455
580
610
595
Я = 4000
л
0,67
0,835
0,873
0,84
N =545
Р = 0,0695
Nr]
365
455
475
458
Я = 6000
4
0,68
0,84
0,874
0,84
N = 410
Р = 0,0648
Nr)
278
345
357
345
Я = 8000
Ч
0,7
0,845
0,874
0,84
N = 295
Р = 0,0585
Nt)
206
250
258
245
Я = 10000
Y)
0,72
0,848
0,875
0,825
N =215
177
Р = 0,0542
Ni)
155
182
188
105*
ГЛАВА VI
*С7> ’
<ZZ>
«О *
«гэ -
'СО -
МЕТОД ЛОГАРИФМИЧЕСКИХ ДИАГРАММ
Операции по построению характеристик ВМГ и под¬
бору винта значительно упрощаются, если пользоваться
логарифмическим методом. Его можно применять в том
случае, когда характеристики винта даны в виде лога¬
рифмических диаграмм.
Подобно другим усовершенствованным вычислитель¬
ным методам, например номографии или применению
счетной линейки, этот метод требует некоторого осво¬
ения и навыков, овладев которыми можно значитель¬
но упростить и ускорить расчеты.
1. Общие понятия
А. Логарифмическая щкала
Числовая ось, на которЬй отложены по масштабу
не числа, а их логарифмы, называется лигарифмиче-
I ской шкалой (фиг. 94). Размечается же шкала не лога-
к рифмами, а непосредственно числами, так что рассто-
S яние от начала шкалы до какой-нибудь числовой от-
|> метки (например 5) равно в масштабе логарифму дан-
щ ного числа (lg 5), а не самому числу. Начало шкалы,
•§■ обозначаемое Or (Origine—начало), соответствует не
£ нулю как у натуральной шкалы, а единице, так как
fe Ig 1=0.
^ Такие шкалы имеются на счетной логарифмиче-
S ской линейке. Отличительные их свойства: неравномер-
с ность и периодичность. Разметка, шкалы от 1 до 10
5 повторяется от 10 до 100, от 100 до 1000, от 0,1 до
1 и т. д.
Удобство логарифмических шкал и диаграмм заклю¬
чается в том, что они дают возможность заменять
умножение и деление соответственно сложением и вы¬
читанием, а возведение в степень и извлечение кор¬
ня—умножением и делением, что вытекает из основных
свойств логарифмов. Например, для того чтобы умно¬
жить 5 на 4, мы прибавляем_на логарифмической шка¬
ле к отрезку ОгЪ отрезок Ог4 и попадаем на отметку
20. В действительности мы проделали сложение ло¬
гарифмов:
lg 5 + lg 4 = lg 20.
Точно так же, чтобы возвести 4 в третью степень,
мы должны отрезок Ог4 утроить, т. е. взять его сла¬
гаемым 3 раза, так как
lg 4s = 3 lg 4.
106
Такова именно, как известно, сущность операций на счетной лога¬
рифмической линейке. Перемещение движка при умножении и деле¬
нии есть не что. иное, как сложение и вычитание отрезков-лога¬
рифмов.
Рассмотрим теперь две оси координат х и у, обе размеченные
в логарифмическом масштабе. Графики различных функций будут
иметь в этих осях совсем не тот вид, что в осях натурального мас¬
штаба. Так, например, зависимость у = кх изобразится, как легк*
У
40
30
го
10
8
6
5
4
3
г
Or г 3 4 5 Б 7 8910 Z0 30 40X
Фиг. 95. Логарифмические графики функций вида у—кх.
убедиться, прямой, не проходящей через начало координат, а соглас¬
но соотношению
lgy = lgx+lgft,
прямой, параллельной биссектрисе координатного угла (у = х)
и сдвинутой относительно последней вверх (фиг. 95) на величину
lgft,т. е. на отрезок Огк (ОгЗ и Or 10 на фиг. 93).
Степенные функции, т. е. параболы.вида у=-хк, изображаются
здесь прямыми линиями, исходящими из начала координат, так как
между логарифмами х и у существует линейная зависимость:
lgy = ftlgx.
Прямые будут, очевидно, наклонены к оси х под углом
arctgft. На фиг. 96 показан ряд парабол в логарифмических осях.
Б. Функциональная шкала
Вместо двух осей декартовой системы координат можно для
изображения зависимости двух переменных пользоваться одной
осью, размечая обе ее стороны соответственными значениями обеих
переменных. Такая ось называется функциональной шкалой. На
107
фиг. 97 показана шкала функции у=3х в натуральном и логарифми¬
ческом масштабах. В последнем случае обе шкалы совершенно
Фиг. 96. Графики степенных функций (парабол) в нормальных
и логарифмических координатах. i
одинаковы и только сдвинуты одна относительно другой на отрезок,
равный lg 3. Поставив на логарифмической линейке начало 1 движка
*
й 1 г 3 ' 4 5 6 7 8 9 10 II 12 13 14 15
(■■Г, 1 , I !.. , t —u . i . ^-1—,4-1 L
-1 i i Г-
3 6
12 15 IS 21 ~24 27
Нормальная шкала
1 3 4 5 6 7 8 510
' fi iM n-r-i-f-v
30 33 3S 39
.-r-r-t
42 45
20
-I-
30 40 50 60 601
J 1 1 , I..X..L
200
~n
-I 1 г I ."I t-r-
3 4 5 6 7 Й S Ш
20 30 40 50 60 80 I
Логарифмическая шкала
200 300 40050060P
Фиг. 97. Функциональная шкала у=3х в нормальном и логарифмическом
масштабах.
против деления 3 на неподвижной шкале, получим такую именно
функциональную шкалу: каждому числу х на движке будет соот¬
ветствовать утроенное число Зх на неподвижной шкале.
Функциональная шкала может, конечно, состоять из двух
параллельных осей, не совмещенных в одну прямую. Например,
основная нижняя и верхняя (квадратная) шкалы на счетной ли¬
нейке представляют собой в совокупности функциональную шка¬
лу у = хг (или х = j/y )-
Для того чтобы построить логарифмическую функциональную
шкалу типа у=кх, имея уже разметку для х, достаточно, очевидно,
совместить две соответствующие точки х и у и затем строить для
у, исходя из совмещенной точки, точно такую же шкалу, как
для х в одинаковом масштабе. Например, чтобы построить функ¬
циональную шкалу у = Зх, имея разметку для х (фиг. 97), мы бе¬
рем любую точку х, например х = 2, помечаем под ней у = 3-2 = 6
и, исходя из этой точки, разбиваем шкалу для у такого же масштаба,
как и для х, путем простого копирования.
В этом и состоит сущность удобств, представляемых логариф¬
мическим методом.
2. Логарифмическая диаграмма характеристики винта
Если оси координат к и р разметить в логарифмическом масштабе,
то характеристика винта р=/ (к), построенная в этих координатах
Км
1000
600
600
400
300
гоо
700
0,20
0.08
0,6-
0J
S
\
щ—
|
0.8
И»
\0.7
1 1
?, 0.
3,
4
6
0
8
\0,6
1,0 1,5
Кл.с
1000
600
600
т
300
. гоо
100
0.2 0,3 04 0,6 0.6 1,0 X
30 60
60 80 100
а
гоо 300 Укл/тс 30 40
■
!
(1.6
(11
ь+Н
ь/т!_
\и
81
0,83
с6(В
W
Г0,7
\о.6
Р
010
0J0
0,06
0.06 i
0,04
0,03
от
60 80 100
ь
гоо 300 Vкм/час*
Фиг. 98. Логарифмическая характеристика винта.
с разметками к. п. д., будет иметь вид, внешне не отличающийся
от характеристики в обычных координатах (фиг. 98), и ею можно
пользоваться так же, как обычной. На этой же диаграмме нанесены
деления для V и N, на назначении которых мы остановимся ниже-
Пусть нам заданы как постоянные величины диаметр винта,
обороты его и плотность воздуха:
^0, Н0, р0.
Тогда
КГ D РпРрГСц
0 *f5 • 603
109
и по формуле (3) главы V: '
V0 км, часг= 0,06ХпоЦ,.
Эти формулы можно написать так:
N0 = pA,
V0 = IB,
где А и В—постоянн'ые величины. Это—зависимости вида y — kx,
для которых можно весьма просто построить логарифмическую
функциональную шкалу. Масштабы для N0 и р будут одинаковы,
точно так же и для V0 и X. Шкала для N0 будет только сдвинута отно¬
сительно шкалы Р на отрезок IgA, a В0 относительно а—на отрезок
И В.Проще всего, как мы уже знаем, совместить одну пару
.точек ./Vo и р, иначе говоря, определить одну точку для шкалы
iV0 и. исходя из нее, построить для N0 такую же шкалу, как для р,
затем то же самое сделать и для V„ относительно X.
Эти шкалы будут относиться только к одному винту с началь¬
ными данными D0, п0, р0. Этот винт называют винтом-прототипом.
Выберем для нашего винта-прототипа следующие данные:
п = 1500 об'мин.,
D = 3 м,
Тогда
1
Ро — -£■
1
■ З5 • 1500s
A-J4frw-=6330-’
В = 0,06 • 1500-3 = 270.
Теперь мы можем построить наши функциональные шкалы.
Найдем совмещенные точки. В качестве исходной точки для функ¬
ции N возьмем точку
N=100,
тогда соответствующая точка аргумента 3 будет:
р=6®=°.°158-
Против р =0,0158 наносим деление N~ 100 и от него размечаем
для N шкалу такого же масштаба, как для р.
Аналогично для V полагаем:
тогда
V = 100,
Х =100 = 0 37
270 ’
Против Х=0,37 наносим V =100 и' разбиваем для V такой же
масштаб как для X. Эти разбивки и даны на осях фиг. 98, причем
на фиг. 98, а оси функциональных шкал совмещены, а на фиг. 98, b
они расположены параллельно на противоположных сторонах
110
Таким образом характеристика винта р —f('k) на фиг. 98 пред¬
ставляет собой одновременно кривую N=f(V) для некоего услов¬
ного винта-прототипа определенного диаметра и фиксированного
числа оборотов.
3. Переход от винта-прототипа к заданному
Возьмем на характеристике винта-прототипа в логарифмиче¬
ских координатах (фиг. 99) точку О, которой соответствуют опреде¬
ленные значения X, р, tj. Для винта-прототипа (DB, пв) этой точке
будут соответствовать также определенные значения iV0 и V0, кото¬
рые можно прочитать на осях N и V.
Посмотрим, каковы будут значения N и V, для другого винта
с диаметром D при оборотах п, но при тех же значениях X, р, т;, т. е.
для той же точки О кривой р=/(Х).
Для винта прототипа:
75N0 = Mf$. и V. = 0,06Xn,D„
а для заданного винта:
75 N = и V = 0,06 Хп£> -
Так как р и X в обоих равенствах одни и те же и высота одна и та же
(р=Ро)» то> Деля вторые равенства на первые, получим:
N nsD5
У _ пР
о0£)0
ИЛИ
V = V " -
v 0 п0 DB ■
По этим формулам можно найти N и V для заданного винта.
Пользуясь логарифмической диаграммой, можно легко построить
эти величины. Предположим, что D>D0 и «>«„. Так как
igv=igv.+ig;+igg-,
' D
то, прибавив к абсциссе V0 (точка ОХдва отрезка: О'Р' — lg^
и P'Q' = lg--, получим в точке Q' искомое значение V. А так как
по
lg= lg 7V0ч- 3 lg5 lg g- ,
то, прибавив к ординате N0 (точка О") отрезки 0"Р” = 5 lg ^
и P"Q" = 3 lg —, получим в точке Q" искомое значение N.
пи
111
Из фиг. 99 ясно, что вместо отдельных построений на оси абсцисс
и оси ординат можно строить сразу отрезок ОР под углом arc tg 5
и отрезок PQ под углом arc tg3 к оси абсцисс. Точка Q и даст нам
искомые значения N и V для заданного винта в соответствующих осях
/(значения же X, (3 и т\ определяются и для нового винта точкой О).
Отрезок ОР представляет собой, очевидно, участок параболы
■пятой степени, a PQ—параболы третьей степени. Мы уже знаем,
что эти параболы изображаются в логарифмических координатах
прямыми линиями. Обычно масштаб на оси абсцисс берется вдвое
больший, чем на оси ординат, так что тангенсы углов наклона этих
прямых к оси абсцисс нужно брать ~ и .
Для удобства проводят на диаграмме заранее две прямые DD и пп
с такими наклонами и разбивают на них непосредственно масштабы
диаметров и оборотов (фиг. 100). В произвольно взятых начальных
точках (Or) намечают исходные данные винта-прототипа: п0 (1500)
и D0 (3). Затем разбивают Деления так, что проекции отрезков,
считая от Or на ось абсцисс, равны соответственно lg^- и lg^-, а на
ось ординат —5 lg - и 31g п в масштабе каждой оси. При этом
деления, соответствующие увеличению диаметра и оборотов, должны
и-гти книзу. Причину этого мы выясним ниже.
4. Решение различных задач по логарифмической диаграмме
На логарифмической диаграмме дается связь между всеми вели¬
чинами, входящими в характеристики винта и винтомоторной группы,
с которыми приходится иметь дело при расчетах:
?, р, У}, п, D,N, V.
Одно из преимуществ логарифмических диаграмм заключается
в том, что величины X и р исключаются из расчетов, так как перево¬
дятся в V и N. Поэтому при расчетах приходится находить только
следующие величины:
Ъ A N, V.
Порядок расчета при этом обратен порядку при переходе от
винта-прототипа к заданному (фиг. 99). Приходится, исходя из задан¬
ного винта, находить соответственную точку винта-прототипа,
т. е., зная точку С?'(фиг. 99), находить точку О (для определе¬
ния 9 и /]).
Следовательно, направление суммирования отрезков QP и РО
приходится производить сверху вниз, точнее—в направлении, обрат¬
ном переходу OPQ от винта-прототипа к заданному.
Этим и объясняется направление разметки делений сверху
вниз на наклонных шкалах.
Рассмотрим сначала типичную задачу на подбор винта. Задана
скорость полета V, мощность мотора N и число оборотов п. Тре¬
буется по логарифмической диаграмме подобрать шаг и диаметр
винта.
112
о
° Общий курс воздушных винтов
из
Фиг. 99. Переход от винта прототипа к за- Фиг. 100. Масштабы оборотов и диаметров на до¬
данному. гарифмической диаграмме характеристики винта.
Масштабы осей одинаковы. Тангенсы углов накло¬
на шкал Dun равны соответственно 5 и 3. Решение
задачи 1 на подбор винта (см. стр. 114).
Схема решения показана на фиг. 100. Берем абсциссу V, орди-.
нату N, получаем точку Q. Из этой точки проводим параллельно
оси пп отрезок QP, равный расстоянию от начала Or до отметки
заданных оборотов на той же оси, затем проводим от точки Р
прямую, параллельную DD до пересечения со всеми характеристи¬
ками в точках 01Г 02, Од.
Построение закончено.
Мы видим, что из трех
характеристик наибольший
к. п. д. соответствует сред¬
ней кривой: 7] = 0,8. Оста¬
навливаемся, следователь¬
но, на угле установки <р2.
Величина диаметра дается
отрезком Р02. Отложив этот
отрезок на прямой DD от
начала Or вниз, мы непос¬
редственно прочитаем ве¬
личину диаметра. Задача
решена.
Пользуясь обычными
диаграммами, нам приш¬
лось бы для решения этой задачи вычислить несколько пар зна¬
чений X и р для ряда произвольных значений D и последователь¬
ными пробами найти точку (X, р), которая ложится на характери¬
стику с наивыгоднейшим к. п. д.
Фиг. 101. Вариант решения задачи 1.
Фиг. 102. Схемы решения задач 2—5 на логарифмической диаграмме.
Если заданные обороты и диаметр окажутся меньше п0 и Da
винта-прототипа, схема решения этой задачи будет иметь вид,
показанный на фиг. 101.
^ Логарифмическая диаграмма для ВФШ позволяет решать” сле¬
дующие задачи:
1) дано N, V, п, найти D и tj; ' *
2) дано V, D, п, найти N и tj;
3) дано N, D, п, найти V и т);
4) дано V, N, D, найти лит);
5) дано N, D, т), найти п и V.
114
Схемы решения первой задачи показаны на фиг. 100 и 101,
а решения остальных задач—на фиг. 102. Процесс решения внешне
напоминает сложение векторов.
Перечисленные задачи составлены для ВФШ, т. е. для заданной
характеристики, на которой находится конечная точка «суммы»
отрезков (в задачах 1—4) или начальная точка (задача 5). Но основ¬
ное удобство логарифмической диаграммы заключается как раз
в том, что, имея характеристики серии винтов для выбора наивы¬
годнейшего, мы (в задачах 1—4) можем варьировать искомую вели¬
чину и D, N, V или п, доводя соответствующий ей последний по псъ
рядку суммирования отрезок до той характеристики, где окажется
наибольший к. п д., как мы и поступили при решении задачи 1.
5. Построение характеристики ВМГ
Для построения характеристики ВМГ с ВФШ нам заданы внешняя
характеристика мотора, характеристика и диаметр винта. Задаемся
величиной п, по внешней характеристике определяем N. Требуется
Фиг. ЮЗ. Определение V и tj для одной точки характеристики ВМГ. Мас¬
штаб N вдвое меньше масштаба V. Шкалы Dun проведены под углами
* 5 * 3
arctg ^ и arc tg ^ .
найти Г и т), на который нужно умножить N. Мы имеем, следова¬
тельно, задачу 3. Будем, однако, решать ее не по схеме фиг. 102,
а по другой, более удобной для данного случая.
Пусть нам даны внешняя характеристика мотора и характери¬
стика винта. Последняя показана на фиг. 103. Заметим, что оси
V и N пересекаются не в началах своих логарифмических шкал (т. е.
в точке с координатами 1, 1), а как обычно, в некоторой случайной
8* 115
точке (20, 20), оказавшейся удобной для построений. Это условное
начало обозначено Or’.
Зададимся оборотами п и определим N. Затем возьмем произ¬
вольную точку А на оси V (как бы предполагая, что значение V
нам известно) и построим от нее известные величины: D, п и N.
Если D<D0 и п<По, то построение пойдет по ломаной АВСО.
Величину N (СО) мы находим на оси ординат, отсчитывая ее от
данного на графике начала Or', а не от единицы, так как наша
исходная точка А вместе со всей осью V находится на уровне N = 20
и недостающий отрезок N от 1 до 20, находящийся под осью абс¬
цисс, таким образом, уже учтен самим положением оси V и точки А'
и автоматически прибавляется.
Так как мы взяли случайное значение V, то, как и следовало
ожидать, мы не попали конечной точкой О на характеристику
винта, т. е.) не решили задачи. Поэтому будем двигать лома¬
ную АВСО вправо параллельно самой себе, пока точка О не попа¬
дет на характеристику винта (точка О'). Новое положение лома¬
ной: А'В’С'О’, очевидно, дает решение задачи.
Значение V дается точкой А', а значение /]—точкой О’. Умно¬
жая N на к), мы найдем одну точку характеристики ВМГ.
Как построить полную характеристику ВМГ, теперь уже ясно.
Нужно лишь на звене оборотов ВС нашей ломаной линии отложить не¬
сколько чисел оборотов и от соответствующих точек построить вверх
отрезки мощностей согласно внешней характеристике мотора (фиг.104).
Линия 00' будет логарифмической характеристикой мотора.
Для того чтобы фигуру АВСОО'С' можно было передвигать
по основному графику, ее вычерчивают на кальке (фиг. 105). Для
правильного ориентирования кальки проводят через точку А гори¬
зонталь по оси Г (с проведения этой горизонтали и начинают
построение).
Двигая кальку вправо (фиг. 105), мы будем получать при каж¬
дом совмещении точки М, лежащей на характеристике мотора 00'
и соответствующей некоторой мощности N, с характеристикой
винта (фиг. 105), значение ■»], а по точке А—значение V.
В случае ВИШ-автомата (и=const, N=const), очевидно, доста-
то ню начертить на кальке одну ломаную линию (фиг. 103).
Точка О, передвигаясь по горизонтали и попадая на различные
характеристики серии, будет каждый раз указывать углы <р и г).
Для построения высотных характеристик ВМГ наносят на кальку,
кроме земной 00', еще ряд высотных характеристик мотора (фиг. 106),
но при этом откладывают не истинную мощность на высоте,
N “*
а величину -д-, как это делают по методу кубических парабол,
изложенному в предыдущей главе, и по тем же соображениям,
какие были там указаны (гл. V, § 3). На фиг. 106 показана
готовая шкала интервалов для нанесения высотных характеристик.
Построить эту шкалу можно весьма просто. Нам нужно земную
мощность N умножить на-^-. Для //==2000 м (по табл. 7) -^-=0,95,
А
а для Н = 4000 м -д- =0,895. Если мы совместим начальную точку О
116
1
117
шкалы интервалов с ординатой N— 100 на оси N, то ордината N=95
даст нам искомую точку для 2000 м, а N—89,5—для 4000 м.
Все точки логарифмической земной характеристики мотора сни¬
жаются на Один и тот же интервал > Эта операция эквивалентна
умножению на логарифмической линейке на 0,95 и 0,895.
Если требуется изменить диаметр винта, достаточно переме¬
стить точку А. На фиг. 106 нанесен ряд точек А с горизонталями
для нескольких диаметров. Совмещая любую из этих горизонталей
с осью V, мы можем построить характеристику ВМГ для данного
диаметра.
Заметим, что здесь деления диаметров в сторону увеличения
идут вверх, т. е. обратно делениям на оси пп. Легко убедиться,
что это так и должно
быть, если построить
точки А для двух зна¬
чений/). Таким обра¬
зом при наличии ло¬
гарифмической диаг¬
раммы характеристик
винта нужно строить
характеристику ВМГ
в следующем по рядке.
1. Наложить на
винтовую диаграмму
лист прозрачной бу¬
маги (кальки) и про¬
вести на ней ось ско¬
ростей.
2. Из произволь¬
ной точки А этой оси
провести на кальке
Фиг. 106. Чертеж кальки для построения высотных прямую, параллель-
характеристик ВМГ ддя нескольких диаметров ную шкале DD, И ОТ-
вйнта- ложить на ней отре¬
зок АВ (фиг. 104),
равный в масштабе DD заданному диаметру, считая от начала (Or).
Направление АВ обратно направлению отсчета на шкале DD. Если
заданный диаметр равен /)0, т. е. диаметру винта-прототипа, отме¬
ченному у точки Or (в нашем примере 3м), то отрезок АВ равен
нулю.
Если предстоит делать расчет для нескольких диаметров,
нужно нанести на прямой АВ ряд делений D с горизонталями
(фиг. 106) так, чтобы эти деления шли в порядке, обратном их
расположению на шкале DD диаграммы. Для этого можно совме¬
стить точку В с точкой Or прямой DD, повернув кальку на 180°,
т. е. верхней частью вниз, и в таком положении скопировать де¬
ления D.
3. Совместить точку В с началом (Or) шкалы оборотов пп,
направляя ось скоростей горизонтально, скопировать на кальку
прямую пп вместе с несколькими делениями нужных нам оборотов
(прямая СВС на фиг. 104).
118
О
-гоос
-400С
- SGDC
119
Фиг. 107. Логарифмические характеристики винтов серии СДВ-1.
Рабочая диаграмма в большом масштабе' дана в конце книги.
Ло внешней характеристике мотора определить значения N
.аждого числа оборотов и нанести их на кальку, откладывая
.. от оси п. Величины отрезков для N определяют по оси
шат диаграммы, отсчитывая непосредственно от того нача-
:оторое дано на диаграмме. Соединив полученные точки ОМО',
/чают логарифмическую характеристику мотора (фиг. 105).
5. Для высотных характеристик отложить от прямой СС’
г. 105) вверх не истинные мощности на высоте, а величины —
-г. 106).
6. Взять на оси диаметров А А (фиг. 106) точку А согласно задан-
шу значению диаметра и соответствующую горизонталь, совме-
.гить их с осью V диаграммы и передвигать кальку в горизонталь-
ом направлении по винтовой диаграмме, снимая в точках пересече-
я характеристики мотора с характеристикой винта значения N
а на оси абсцисс—значения V.
В случае ВИШ постоянного числа оборотов достаточно построить
■н отрезок п и один отрезок N (фиг. 103). Точка О будет попадать
различные характеристики винта, указывая уи т].
Табличная запись весьма проста:
Для ВФШ
V, N, Y), N-ц;
Для ВИШ
V, Y], Щ.
Вычислять приходится только произведение TVkj.
Для примера возьмем серию винтов СДВ-1. Нормальная диаграм-
характеристик дана на фиг. 54, а логарифмическая—на фиг. 107.
лберем мотор М-11, характеристика которого дана на фиг. 61.
Таблица 18
Построение характеристик ВМГ логарифмическим методом
Мотор М-11. Винт СДВ-1. 0 = 2,5 м; h = 1,0 (у = 23°)
п
1275
1400
1500
1675
N0
100
108
115
125
Н =0
V
1]
N?i
100
0,72
72
155
0,813
88
. 190
0,82
95
230
0,80
100
Н = 2000 м [
V
п
123
0,78
160
0,816
195
0,82
233
0,795
Л = 0,781 |
N = ANо
Nr,
78
61
85
69
90
74
98
78
Н = 4000 м
V
135
170
200
235
А = 0,598 |
У
N = AN0
Ni)
0,8
60
48
0,82
65
53
0,815
69 ,
56
0,78
75
59
На фиг. 108 дан чертеж для кальки. V
В табл. 18 приведена запись по построению характеристик
дЛЯ# = Ос винтом, имеющим диаметр D=2,5 м и относительный
Л=1,0. По формуле (12”) главы I:
<Р = arc tg = arc tg 0,425 = 23°j J
На фиг. 109 показана полученная характеристика ВМГ
t
Фиг. 109- Характеристики ВМГ для мотора М-11
и винта СДВ-1.
Задача
Построить земные и высотные характеристики ВМГ (мотор
М-11, винт СДВ-1) для нескольких диаметров от 2,4 до 3,2 м
и нескольких шагов винта, а также для ВИШ постоянного числа
■оборотов.
Несколько построений сделать параллельно как обычным, так
и логарифмическим методами для сравнения.
Для логарифмических построений нужно снять диаграмму
фиг. 108 на кальку и воспользоваться логарифмическими характе¬
ристиками винтов СДВ-1, приложенными в конце книги вклейкой.
\
ЧАСТЬ ТРЕТЬЯ
РАБОТА ВИНТА НА САМОЛЕТЕ
ГЛАВА VII
ВЗАИМНОЕ ВЛИЯНИЕ (ИНТЕРФЕРЕНЦИЯ)
ВИНТА И САМОЛЕТА
1. Физическая картина
В аэродинамических трубах испытывают как изолированные
j винты, так и винты, установленные на авиационном моторе или
целом самолете, в модели или в натуру. Под изолированным вин¬
том следует, конечно, понимать винт не абсолютно изолированный
от всякого тела, а работающий в присутствии тела (электромотора),
диаметр которого значительно меньше диаметра винта. В таком
виде была испытана, например, серия СДВ-1. При установке такого
винта на самолете его характеристика изменяется. Появляются
новые аэродинамические силы взаимного влияния винта и само¬
лета, которые необходимо учитывать при подборе винта и построении
характеристик винтомоторной группы. (В предыдущей главе при
построении характеристик ВМГ с винтом СДВ-1 мы взаимное
влияние винта и самолета не учитывали.)
Но при пользовании характеристиками винтов, испытанных
в присутствии мотора или самолета (например, винтов 5868-9, ха¬
рактеристиками которых мы пользовались в главе V), мы не всегда
можем отказаться от учета взаимного влияния винта и самолета.
Дело в том, что на характеристику винта влияют форма и раз¬
меры находящихся за ним тел и прежде всего—мотора. Авиацион¬
ные же моторы можно разделить как по конструкции, так и по форме
на два основных типа: рядные моторы жидкостного охлаждения,
имеющие относительно большую длину и малый мидель и допу¬
скающие аэродинамически выгодное конструирование капота,
и звездообразные моторы воздушного охлаждения, имеющие малую
длину и большой лоб и не допускающие полного капотирования, ввиду
необходимости обдува цилиндров струей винта для охлаждения.
Ясно, что влияния моторов первого и второго типов на работу
винта будут различны. Поэтому, имея, например, характеристику
винта, испытанного с мотором жидкостного охлаждения, мы должны,
в случае установки его на мотор воздушного охлаждения, пере¬
считать его характеристику. Для этого сначала исключают
Фиг. 110. Схема струи винта в присутствии фюзе¬
ляжа (тела вращения).
влияние мотора, с которым винт был испытан, т. е. приводят
винт к изолированному, а затем уже учитывают Jвлияние
нового мотора. Гораздо удобнее, конечно, иметь результаты
испытаний винта с мо¬
торами обоих типов.
Такие характеристи¬
ки имеются, напри¬
мер, для винтов
5868-9 (фиг. 57 и 58).
Наличие же ха¬
рактеристики винта,
испытанного с мото¬
ром заданного типа,
не всегда избавляет
нас от введения по¬
правок, так как относительные размеры заданных мотора и винта мо¬
гут не соответствовать их относительным размерам при испытаниях.
Кроме того, на работу винта различным образом влияет рас¬
положение ВМГ: впереди фюзеляжа (у одномоторных самолетов),
впереди крыла (у многомотор-
г~!'! ных самолетов), над или под
крылом, тянущая или толкаю¬
щая схема. Вообще на работу
винта оказывают влияние все
части и детали самолета, нахо¬
дящиеся в струе винта, вплоть
до хвостового оперения.
Физическая картина взаим¬
ного влияния винта и самолета
в общих чертах такова.
Представим себе отвлеченно
тело достаточной длины, укре¬
пленное позади винта в непо¬
средственной близости от него
и пропускающее сквозь себя
струю винта без искажений.
Так как давление ра непосред¬
ственно за винтом (фиг. 37) на
носовую часть тела больше да¬
вления ре вдали за винтом (гла¬
ва II, § 6), то результирующая
0$ г сила давления R на поверхность
тела будет направлена назад как
Фиг. ill. Линии тока у плоскости винта, сила сопротивления. Но в дей-
-изолированный винт;
винт в присутствии тела.
ствительности, струя, отбрасы¬
ваемая винтом, наталкивается
на препятствие (тело), вследствие чего происходит уменьшение,
или, как говорят, торможение скорости потока и соответственное
увеличение давления вблизи винта. Это значительно увеличивает
отрицательную силу R. Сечение струи уже не будет плавно
сжиматься, а будет иметь вид, показанный на фиг. 110.
124
На фиг. 111 показаны для сравнения струи у изолированного
винта, т. е. в присутствии малого тела, контур которого нанесен
внизу сплошной линией, и в присутствии большого тела, контур
которого показан пунктиром. Деления на обеих осях показывают
доли радиуса. Таким образом скоростное поле потока за винтом
г
Фиг. 112а. Самолет с кольцом Тауненда.
в присутствии тела изменяется и, в частности, теорема Фруда—
Финстервальдера уже не будет верна.
Кроме торможения скорости, которое можно рассматривать
как эффект влияния самолета на винт (Точнее—на струю винта),
Фиг. 1126. Самолет с капотом NACA.
необходимо учитывать еще влияние винта на самолет,, которое
заключается в обдувке некоторых частей самолета струей винта.
Так как скорость в струе (скорость уходящего воздуха V2) больше
скорости полета V, то обдуваемые детали дают дополнительное
сопротивление ДХ.
Таковы две основные силы, к которым сводят взаимное влия¬
ние винта и самолета и величины которых определяют при расчетах.
Влияние обдувки значительно больше влияния торможения, и
ее стараются по возможности уменьшить, главным образом в об¬
125
ласти моторной гондолы (влияние обдувки отдаленных деталей
незначительно). Так, у звездообразных моторов, обдувка которых
особенно велика, этого достигают применением особых обтекате¬
лей: кольца Тауненда (Townend) и обтекателя (капота) NACA.
а—без капота; б—с капотом NACA.
Кольцо Тауненда (фиг. 112а)—это короткий цилиндр или
многогранная призма вокруг мотора. Стенки кольца имеют в
сечении обтекаемый (крыловой) профиль. Капот NACA (фиг. 1126)
представляет собой более длинный цилиндр и является дальнейшим
развитием кольца Тауненда. Несмотря на то, что эти обтекатели
дают дополнительное лобовое сопротивление и увеличение давле¬
ния, они настолько улучшают обдувку путем регулирования потока
(фиг. 113), что уменьшают общее сопротивление моторной гондолы в
некоторых случаях в 4 раза. Затрату мощности на охлаждение,
которая у некапотированных моторов достигает 20—30% мощности
мотора, они сокращают до 2—3%, т. е. в 10 раз.
126
127
Для улучшения обтекания моторов жидкостного охлаждения
применяют удлиненные валы, дающие возможность отдалить винт
от мотора и придать моторной гондоле более выгодную обтекаемую
форму (фиг. 114а и 1146). Кроме того, втулку винта закрывают
спереди обтекателем (коком).
Для того чтобы получить полезную, или эффективную силу
тяги Рэ, сообщаемую винтом самолету, нужно, очевидно, из силы
О 0,2 0,4 0,6 0,8 1,0 V
Фиг. 115. Влияние миделя фюзеляжа на к. п. д. винта.
тяги Р изолированного винта вычесть обе указанные выше силы
сопротивления—от торможения потока и от обдувки:
РЭ = Р —р_дх.
(О
Соответственно снизится и к. п. д. винта. Если к. п. д. изолиро¬
ванного винта [см. формулу (3) главы II]. 1
__ ру
75N »
то эффективный к. п. д.:
(Р-Я-ДХ) V _ PaV
75N
75N
(2)
Для наглядного сравнения т;э и т)из и влияния на к. п. д. различ¬
ных факторов приводим некоторые опытные данные. На фиг. 115
даны кривые к. п. д. по X для изолированного винта и для
того же винта в присутствии фюзеляжей с различными миделями.
В табл. 19 показана зависимость -/]тэх от положения винта в носовой
части фюзеляжа и изменения нерабочей части винта 5 от 0,25 D
до 0,46 D.
128
Таблица 19
Влияние положения винта на фюзеляже на эффективный
к. п. д.
Модель
* Tniiax
*imax 13 % 0T *5 max
изолированного
винта
изолированный
виню
0,727
100
•
0,699
96
0,660
90,8
0,655
90
С
' 0,690
95
0,678
93,2
cdT
i
Направление пошна
0,668
92
Эффективная тяга—это та реальная тяга, которую винт сообщает
самолету вместе с моторной установкой и из которой и следует исхо¬
дить при аэродинамическом расчете самолета. Эффективный к. п. д.
является оценкой полезной отдачи винта при данном самолете
и моторе. ‘
Но конструктора самолета может интересовать оценка полезной
отдачи всей винтомоторной группы как источника тяги. Для этого
нужно рассматривать тягу, которую ВМГ в целом сообщает само-
9 Общий курс воздушных винтов
129
лету без мотора, так называемую чистую тягу. Ее можно, очевидно,
получить, отняв от эффективной тяги лобовое сопротивление мотор¬
ной гондолы:
Рч — Рэ ~~' -^м • (3)
Соответственно чистый к. п. д. равен
р v
-Пч=ш- <4),
Он показывает, какая часть мощности мотора идет на сообщение
тяги самолету как планеру. Им целесообразно пользоваться для
сравнения при подборе к самолету различных ВМГ.
Теоретический учет взаимного влияния винта и самолета весьма
труден, так как физическая картина явления зависит в каждом
отдельном случае от очень многих факторов. Малейшие изменения
в конфигурации винта, мотора и самолета могут резко изменить
характер обтекания- и величину дополнительных сил.
На практике в настоящее время этот учет обычно осуществляют,
вводя два поправочных коэфициента, определяемых теоретическим
или экспериментальным путем1.
Подходят к этому вопросу так. При одной и той же скорости
полета V винт изолированный и винт, работающий на самолете,
дадут различные скорости I/, в плоскости вращения, именно:
у второго винта она будет меньше вследствие торможения. Если же
мы, предположим, что у обоих винтов скорости в плоскости винта
будут Гж, то у винта на самолете скорость полета V должна быть
больше, чем у изолированного винта.
Задачу удобнее ставить именно так, т. е. сравнивать оба винта
при одинаковой скорости Гж.Дело в том, что, именно, от этой скоро¬
сти зависят тяга и мощность в плоскости винта (на валу), следова¬
тельно, оба винта будут иметь одинаковые величины Р, N, а, р в этой
плоскости. Определив тягу для изолированного винта по скорости V,,
мы найдем затем и эффективную тягу для винта на самолете.
Таким обр-—м наша задача заключается в следующем. Дано
(в плоскости винта):
ГЖ = ГЖИЗ,
Р = РИ3.
(Не смешивать тягу в плоскости винта Р с результирующей эффектив¬
ной тягой Рэ!) При этом скорость полета для винта на самолете долж¬
на быть больше, чем для изолированного винта. Обозначим
V~V.a(\+B), г (5)
где s—коэфициент торможения, или коэфициент увлечения ско¬
рости.
Эффективная тяга Р меньше Р:
Рэ = Р~Р-йХ = Р(1-с), (6)
где с—коэфициент обдувки.
1 И- В. Остославский и Д. В. X а Л е з о в, Взаимное влияние
винта и самолета. Труды ЦАГИ, вып. 213.
И. В. Остославский и В. J1. Титов, Аэродинамический расчет
самолетов, ОНТИ, 1938.
130
Вопрос сводится, таким образом, к определению двух поправоч¬
ных коэфициентов е и с.
Для винтовых коэфициентов имеем:
я = а„3>
а так как X пропорционально V, то
х = хИз(1+8)-
Поэтому кривые характеристик винта на самолете будут сдвинуты
вправо в соответствии с увеличением X (фиг. 116).
Л1В
о,к
0,12
0,10
ОМ
ОМ
ОМ
0,02
1
N
Ч
>
ч\
ССг
\
ч
S
V -
Р
\чЧ
I
1
Ч 4
ч1
\
0,5 1,0 j
Фиг. 116. Характеристики винта.
- винт ..на самолете;
изолированный винт*
Выразим теперь эффективный к. п. д. через коэфициенты с и с:
paV я (1 — с) vn3 (1 + е) PVr
или
75IV ~ - 75N 75N
г1э = 'Ч.,3{^ —С) (1 +г).
(9)
Перейдем теперь к анализу коэфициентов е и с и выясним, какие
опытные данные нужны для их определения.
2. Определение коэфициента торможения скорости е
Начнем с выражения силы тяги винта на самолете по теории
идеального пропеллера. Так как коэфициент е учитывает только
торможение скорости, то сопротивление от обдувки мы сейчас- рас¬
сматривать не будем.
Согласно сделанным предположениям, наш винт развивает в своей
плоскости тягу, равную тяге изолированного винта при той же ско¬
рости Vl. По формулам (9) и (9') главы II, тяга изолированного винта
выражается через скорость в плоскости вращения так:
Р = 2pFV1v1 = 2pFVla,
9*
131
где а—«фактор подсасывания» для изолированного винта (индекс
«из» опускаем) [формула (16) главы II]:
Vi V1 + + 1 ’
кроме того [формула (15) главы II],
V
— = 1-а
Vi 1
так как Г)из = Г, и [формула (17) главы II]
Величина Ваз—коэфициент нагрузки на ометаемую винтом пло¬
щадь—выражается по формуле (13) главы II так:
R 2Р
И3 Р^ив
Подставив сюда
р 75Nti
И~ V ’
получим:
150NT)
Г’ <10>
Это выражение для В удобнее, чем формула (13) главы II, так как
расчеты винтов и ВМГ мы ведем преимущественно в мощностях.
Так как на практике чаще оперируют не величиной р, а Д, пре¬
образуем формулу (10):
р = £р0 = Др0=1д
и
8 • 150ЛГт)из
ДГПз ’
ИЛИ '
1200NT)
= . (10')
д *ИЗ
Теперь обратимся к винту, работающему на самолете. Применим
к нему рассуждения § 5 и 6 главы II, не допуская лишь подстановок,
основанных на теореме Фруда—Финстервальдера, так как в данном
случае эта теорема не верна.
Полная сила тяги нашего винтаР—R* равна полному приращению
количества движения секундной массы воздуха тс, считая от скоро¬
сти полета V до скорости уходящего воздуха V2. Аналогично формуле
(5) главы II можем написать:
P — R = тс (V2 — V),
* Сила ДХ относится ие к винту, а к самолету.
132
а так как
/72c = pFV„
то
P — R — pFV, (V.-VO-
На основании многочисленных опытов установлено, что сила
R—результирующая давлений на носовую часть тела—пропорцио¬
нальна силе тяги Р:
R = hP. (12)
Коэфициент пропорциональности
h = p- \ (12')
есть величина среднего по диску винта относительного торможения
скорости. Для данной комбинации винт-самолет h есть величина
постоянная.
Выразим теперь тягу через скачок давления в плоскости винта.
Это будет уже не результирующая тяга P—R, а только тяга в пло¬
скости винта Р, так как мы учитываем здесь только силы, действую¬
щие в этой плоскости. Рассуждая, как в § 7 главы II, получим
[формула (20) главы II]:
Р = Р/ (P2-V2).
В трех уравнениях (9') и (20) главы II и (II) этой главы вели¬
чина Р одна и та же. Подставим ее значение из выражения (9')
главы II в уравнение (11) этой главы и (20) главы II и, заменяя R
по уравнению (12), получим:
29FVla{l-ti) = PFVl(V2-Vl),
4apFV2 = pF(V22-V2).
Производя сокращения и разделив оба уравнения почленно
на V2, получим систему уравнений с двумя неизвестными
и У-:
v, и vr
2a(l — ft) = ^2 —^ ,
Нас интересует только величина р-. Решив эту систему, найдем:
й = гД~“<1-Л)-
i
Так как h—величина малая, можно по формулам приближенных
вычислений допустить:
\ 1 - /г ~ 1 ^ /г‘
Тогда
VVi=l + h-a{l-h).
(П)
133
Кроме того, по формуле (5):
К = Киз(!+е),
(13)
а по формуле (15) главы II
следовательно:
Подставляя это выражение в формулу (13), получим:
(I—с)(1 + е) = 1 + ft —а(1 — ft),
откуда
Согласно формуле (17) главы II получаем окончательно:
где
(14)
D ИЗ
113 vFVl3(MjceK)'
(10)
Итак, для определения коэфициента торможения скорости s нужно
знать величину ft торможения скорости. Эту величину находят
вообще опытным путем, но для нее имеются и приближенные теоре¬
тические формулы.
3. Учет влияния винта на самолет (учет обдувки)
Обратимся теперь к определению коэфициента обдувки с. Если
обозначить через / площадь детали, обдуваемой струей винта, то общее
лобовое сопротивление всех таких деталей при скорости полета V
без учета обдувки винтом будет:
Скорость потока в струе винта больше, чем V. Скорость отбрасыва¬
ния V2 устанавливается довольно близко за винтом,—примерно
на расстоянии, равном3/4 радиуса. Сопротивление деталей, обдувае¬
мых потоком такой скорости, равно
Следовательно, приращение лобового сопротивления от обдувки
будет:
д*=42с*/(^-П-
134
Но согласно уравнению (20) главы II:
2 Р
тогда
Д Х = (15)
Мы видим, что добавочное сопротивление составляет постоянную
часть силы тяги. Поэтому при аэродинамическом расчете самолета
оказалось удобнее включить ДХ не в общее лобовое сопротивление
самолета, а в величину тяги. Выразим теперь эффективную тягу:
рэ=р_я_дх=р-р/1~р^И=р( i-a-^9-
Так как мы предположили
Рэ = Р(1 — С), (6)
то коэфициент обдувки выразится так:
с = 1г + Щ£-' (16)
Эта формула применима для учета обдувКи как отдаленных
деталей, так и длинных частей самолета (фюзеляж с гондолой мотора
жидкостного охлаждения), хотя бы носовая часть их примыкала
непосредственно к винту. Для коротких же деталей, целиком поме¬
щающихся вблизи винта, где скорость потока меньше V2 (например,
цилиндры звездообразного мотора), приближенно считают величину
ДХ вдвое меньшей. Тогда
} 2 + 2 с*
c = h+- —р , (16')
где сумма X/ относится к близким, а £'-к отдаленным и длин¬
ным деталям.
4. Практическая методика учета взаимного влияния винта
и фюзеляжа
Мы получили следующие расчетные формулы для учета взаимного
влияния винта и самолета в случае, когда ВМГ установлена впереди
фюзеляжа:
Г = Гиз(1+е); (5)
* = Хиз(1+е); (8)
■чэ^изО+ <0(1—0; (9)
е = ft уТ+в^3; (14)
15WVtih_
Вав = рFV*a3(M/ceK) ; ^10^
с = /г*+^, (16)
или
I- 2 с*/ + 2 cj
с^П + ^- - . (16')
13)
В этих формулах под площадью F подразумевается рабочая пло¬
щадь винта, равная по формуле (4) главы I:
Fpa6 = ~(l
-п
На фиг. 117, 118 и 119 приведены графики зависимости йср (сред¬
него относительного торможения по ометаемой винтом площади)
Фиг. 117. Среднее торможение скорости потока для самолета
открытого типа с мотором жидкостного охлаждения.
от величины отношения площади миделя фюзеляжа /фЮз к площади F
при различных значениях i—относительной нерабочей части винта—
для трех основных типов моторных установок впереди фюзеляжа.
Фиг. 118. Среднее торможение скорости потока для самолета
закрытого типа со звездообразным мотором.
Эти графики получены опытным путем. Если они почему-либо >не
подходят, можно воспользоваться фиг. 120, где даны кривые сред¬
них, вычисленных теоретически, значений /гср (для тела вращения).
Если имеется характеристика винта, испытанного в присутствии
тела определенной формы, например, мотора водяного охлаждения,
и нужно определить характеристику этого винта с другим телом,
например, с мотором воздушного охлаждения, необходимо совер¬
шить двойной пересчет: исключить влияние первого тела и учесть
136
влияние второго. Для этого вычисляют коэфициенты ев и св взаим¬
ного влияния для условий испытания, затем е и с — для заданных
^ср
0,20
0,10
Фиг. 119. Среднее тормржение скорости потока для само¬
лета истребительного типа со звездообразным мотором.
— с капотом NACA
— — с Ксльцом Тауненда
условий и делают пересчет по следующим формулам, которые полу¬
чаются двукратным применением формул (5) —(9):
Фиг. 120. Среднее торможение скорости потока для моторов, располо¬
женных впереди фюзеляжа (тела вращения), по теоретическим данным.
1_+_S .
1 +4’
(1 - с) (1 + в)
(1 - св) (1 + в.) ■
(17)
(18)
(19)
137
Здесь индексом «в» обозначены коэфициенты винта, относящиеся
к испытанной модели.
Толкающие винты. Поле скоростей у толкающего винта, есте¬
ственно, отличается от поля тянущего винта отсутствием обдуваемых
тел в струе позади винта. Зато струя подходящего воздуха дефор¬
мируется моторной гондолой, на¬
ходящейся впереди винта. И в этом
случае лобовое сопротивление гон¬
долы увеличивается, так как ее
задняя часть (примыкающая к вин¬
ту) находится в области пони¬
женного давления перед винтом
(Р,<Рс см. главу II, § 7).
Экспериментального материала
по толкающим винтам имеется
очень мало и вопросы их расчета
недостаточно разработаны. На
фиг. 121 показаны некоторые ста¬
рые английские данные по к. п. д.
тянущих и толкающих винтов в
присутствии фюзеляжей и мотор¬
ных гондол разных размеров. Мы
видим, что при относительно ма¬
лых диаметрах тела толкающий
винт может быть так же выгоден,
как тянущий, или даже оказаться
выгоднее последнего.
Для учета взаимного влияния
толкающего винта и моторной гон¬
долы пользуются такими же по¬
правочными множителями (1-f-e)
и (1—с), как и для тянущего вин¬
та, определяя е и с по приближен¬
ным эмпирическим формулам, при¬
веденным ниже.
Приближенные формулы для е
и с. Г. И. Кузьмин предложил на
основании обработки ряда опытных данных следующие прибли¬
женные выражения для ей с:
а) для тянущих винтов
Направление полета.'
Фиг. 121. Сравнение тянущих и тол¬
кающих винтов.
фюз
1/ /фюз
V ~F~~ >
2Са?фюз J
б) для толкающих винтов
е — 3
C-3J2-.
Л (с.т/)фюз . Cxf _
2F
(20)
(21)
(22)
(23)
138
Здесь о—площадь эквивалентной плоской пластинки для фюзе¬
ляжа (гондолы): (
0==-Ь28-’ (24)
а сумма Еех/ относится ко всем обдуваемым винтом деталям, кроме
фюзеляжа (гондолы).
Подставив в формулы (20) и (22) выражение (24) для о, получим:
г = 3,9схфЮз(%-3)^ (20')
3
е = 2,3сжгоня(/-^)Г. (22') ■
Наконец, полагая фюзеляж или гондолу телом вращения с диаметром
й, можем написать:
е = 3,9схфюз (-£р)\ (20")
г = 2,ЗсХГОНд(%д-)*. _ (22")
Для учета обдувки Г. И. Кузьмин предлагает еще более упрощен¬
ную формулу: v
% = 7](1—с'), (25)
где
/ с'=(1+е)(-/*- + 0,03). (26)
Эти формулы дают достаточно точные результаты, когда сх или
площадь миделя фюзеляжа (гондолы) невелики. В противном случае
значения коэфициентов е и с оказываются сильно преувеличенными.
Пример. Для иллюстрации изложенного метода возьмем полу¬
ченную нами в предыдущей главе (табл. 18, фиг. 109) характеристику
ВМГ для изолированного винта СДВ-1 с мотором М-11 и исправим
ее на взаимное влияние винта и фюзеляжа.
Исходные данные следующие:
диаметр винта 0 = 2,5 м;
нерабочая часть £ = 0,25;
диаметр мотора М-11 dM= 1,075 м;
площадь миделя фюзеляжа /фЮЗ =1,1 мг;
коэфициент лобового сопротивления мотора сХм = 0,5; то же,
для всех обдуваемых частей, кроме мотора: 2"с^ = 0,36.
Вычисляем:
Fpa6o,= il|5L(i _ 0,25s) = 4,6 м!;
-*F=i&=0,24m
Наш самолет подходит к схеме фиг. 118. При ^ = 0,24 и
£=0,25 находим:
ЛСр = 0,072.
139
Так как в нашем случае расстояние от мотора до винта меньше
3/4 радиуса последнего, обдувка мотора должна быть учтена сум¬
мой 2У формулы (16'): ^
/м=^ - = 0,91 м\
~сжм/м = 1-0,5- 0,91=0,227.
Коэфициент обдуЕки по указанной формуле:
п
XJ Cxf О 997 4- О 3R
= 0,072 + g ’ = 0,072 + 0,127 = 0,2;
1 —с = 0,8.
Остальной расчет сведен в табл. 20. В четырех строках (второй,
третьей, четвертой и пятой) переписаны данные из табл. 18(# = 0).
Величина Виз вычисляется по формуле (10):
150№] 150Nti ДГ*
г> 'ИЗ i 913 1 о 1 Г)П ИЗ
И3 Р^из (м/сек) 1 / Ут1(км/час)'\3 Vsкм/час
8 ’ V 3,6 )
(пользуемся значениями Nt]из и .Уиз из табл. 18).
Рассматривая полученные значения поправочных козфициентов,
видим, что они колеблются в очень узких пределах. Принимая во
внимание приближенный характер всего расчета, можно было бы
ограничиться одной точкой, например Риз = 150 км /час, и получить
средние поправки:
1+е=1,08; (1-с)(1+е) = 0,88.
Таблица 20
Построение характеристики ВМГ с учетом интерференции винта и самолета
С = Л-
2*./+
N
100
108
115
125
К*
100
155
190
230
^из
0,72
0,813
0,82
0,80
Л/?)
'из
72
4 88
95
100
V3„a
О
О
О
373 • 10*
•685 • Ю*
1220 • 10*
Vs
0,72 ■ КГ*
0,236- 10“*
0,139 • КГ*
0,082 • 10“*
ь\„
0,87
0,286
0,168
0,099
Vi + вИЗ
1,37
1,165
1,08
1,01
г
0,099
0,084 ,
0,078
0,073
1 +з
1,099
1,084
1,078
1,073
V
110
168
205
247
(1-с)(1 +Е)
0,88
0,867
0,862
0,86
0,635
0,705
0,707
0,687
N-%
63
76
81
86
140
На фиг. 122 показано сравнение двух характеристик ВМГ: без
учета интерференции (по фиг. 109) и с учетом ее—по табл. 20.
/I!/]лс
Фиг. 122. Характеристики винтомоторной группы.
без учета интерференции винта и самолета;
: с учетом интерференции.
Приближенные формулы (20) и (21) дали бы в этом случае пре¬
увеличенные значения для е и с, так как в нашем случае значе¬
ния сх велики. *
5. Взаимное влияние винта и крыла
Физическая картина взаимодействия винта и крыла значи¬
тельно сложнее, чем в случае винта и фюзеляжа. Если винт рас¬
положен впереди крыла, его струя рассекается крылом на две части,
Направление полета
Фиг. 123. Изменение угла атаки крыла струей винта.
растекающиеся по верхней и нижней поверхностям крыла. Ясно,
что скоростное поле в струе существенно изменяется. Кроме того,
направление струи винта, вообще говоря, не совпадает с напра¬
влением встречного потока (к тому же струя вращается). Суммарный
поток подходит к крылу под некоторым новым углом а+Да (фиг. 123) и
141
1.4
кг
0,8
0.6
0,4
О/
таким образом изменяется угол атаки крыла. Изменяются цир¬
куляция вокруг крыла и его поляра.
Винт может быть расположен и над крылом и под крылом.
Первый случай часто встречается в конструкциях гидросамолетов,
второй—изредка на сухопутных самолетах. В этих случаях взаимо¬
действие винта и крыла можно представить себе в упрощенном
виде по следующей схеме.
Так как циркуляция вокруг крыла и подъемная сила его зави¬
сят от разности скоростей обтекания на верхней и нижней поверх¬
ностях, то следует ожи¬
дать, что винт, работаю¬
щий над крылом, увеличи¬
вая скорости на верхней
поверхности, улучшает по¬
ляру крыла, а винт, рабо¬
тающий под крылом, ухуд¬
шает ее. Опытные данные
подтверждают этот вывод
(фиг. 124). В то же время
для винта, работающего
над крылом, влияние цир¬
куляции сказывается не
в торможении скорости у
винта, а наоборот, в ее по¬
вышении. В действитель¬
ности, однако, в этих слу¬
чаях получается весьма
сложное взаимодействие
вихревых систем винта и
крыла, не поддающееся по¬
ка точному теоретическому
анализу.
Остановимся кратко на
основном случае — распо¬
ложение ВМГ впереди кры¬
ла,—соответствующем об¬
щепринятой в настоящее
время схеме многомоторных самолетов. Отметим прежде всего боль¬
шое влияние, которое оказывает величина выноса винта перед кры¬
лом на к. п. д. винта. Экспериментальным путем установлено, что,
согласуя требования аэродинамики и конструкции, следует считать
наивыгоднейщим расстояние от винта до крыла, равное 0,25 хорды
крыла. Что касается учета интерференции винта и крыла, то наи¬
большую трудность представляет учет изменения поляры крыла
по следующим формулам1. При данном угле атаки
s'
12°
A
/ X \s
*V/
v/y Yd*
y6°f
А/ / 7°
1 \f / L,
1
!/°°
f
т
ОМ 0,04 0.06 от 0J0 Сх
Фиг. 124. Сравнение аоляр изолированного
крыла и крыла с работающим винтом, рас¬
положенным над крылом и под крылом.
где
Су Су -J- Д Су У Сх кр Сх „Р -{- Д С;
х кр,
.0,5^ В ся
(27)
1 Вывод этих формул см. в книгах, указанных в сноске на стр. 130.
142
р
А с
X кр
рВс
X нр'
SoGfl а» В Кр - ь73
S 57,3 2 Аир+1,73
(28)
Здесь су, сх кр — коэфициенты изолированного крыла;
с'у, с'х кР — то же, при работающем винте;
^кр-удлинение крыла;
В —коэфициент нагрузки тягой, вычисляемый в данном слу¬
чае по действительной скорости полета V, а не по VB3, т. е.
В = Вв
Vs
г ИЗ
V2 (1 + £)2
S — площадь крыльев;
Sofia — площадь обдуваемой час- с.
ти крыла; ее принимают равной
произведению хорды крыла bRp Т
на диаметр винта:
So6n ~ bKpDi (i — число’моторов),
с работающим
винтом,
без винта
Фиг. 125. Обдуваемая площадь крыла. Фиг. 126. Поляра самолета без винта
и лри работающем винте.
считая, что обдуваемая часть за каждым винтом представляет со¬
бой прямоугольник (фиг. 125).
Для вычисления Д су и ДсХКр можно пользоваться также сле¬
дующими приближенными формулами *:
Асу= 0,137 С В су + 0,021C В,
Ас* кр = 0,013 В + Схр^-В,
(27')
(28')
где схр — коэфициент профильного сопротивления крыла, а коэ¬
фициент С принимает следующие значения в зависимости от
отношения l[D размаха крыла к диаметру винта:
IjD 6 8 10 12 14 16
„ f 1,3 1,0 0,8 0,67 0,56 0,5 для двухмоторного самолета
\ — 1,9 1,5 1,3 1,1 1,0 для четырехмоторного самолета
1 И. В. Остославский и Н. И. Шарохин. Влияние обдувки
крыла винтами на летные характеристики самолета. Технические отчеты ЦАГИ
№ 9, 1943
143
jrio этим формулам можно, зная поляру изолированного крыла
или самолета без винта, построить поляру в моторном полете
(фиг. 126). Точки, относя¬
щиеся к одинаковым углам
атаки, лежат на второй по¬
ляре правее и выше.
Имея обе поляры, легко
определить увеличение со¬
противления самолета от об¬
дувки крыла:
ДХКр = ^р SV*.
Кроме ДХкр, нужно еще
учесть добавочное сопроти¬
вление АХ' от обдувки дру¬
гих (не несущих) деталей. По
формуле (15):
АХ' = Р .
•Фиг. 127. Два способа учета обдувки кры¬
ла при аэ{ одинамическом расчете самолета.
Учесть сопротивление ДХкр при аэродинамическом расчете
самолета можно двумя формально различными способами;
1) у> есть обдувку крыла в тяге, т. е. вычесть АХкр из Р, что
приведет к соответственному увеличению с, уменьшению т]э и сниже¬
нию кривой располагаемой мощности (характеристики ВМГ); построе-
1ср
0J
i7
0,2 \
0,25~
0.30
0,35
i^V
К
-
0,2 ОД 0,и 0.5 О,Б 0,7
•Фиг. 128. Среднее торможение скорости по¬
тока для нкзкоплана с толстым к рылом и мото¬
ром жидкостного охлаждения впереди крыла.
ние же кривой потребной
мощности вести по основ¬
ной поляре самолета без
винта (фиг. 127, случай 7);
2) учесть обдувку кры¬
ла в поляре, т. е. по¬
строить поляру самолета с
работающим винтом; так
как значения сх увеличат¬
ся, то соответственно уве¬
личатся потребные мощ¬
ности и кривая TVnoip под¬
нимется. ДХкрНе будет вы¬
читаться из тяги, 7]э будет
больше и кривая 7Vpqcn пой¬
дет выше (фиг. 127, слу¬
чай 2).
Результат в обоих случаях будет, очевидно, один и тот же. Точки
пересечения кривых NpacB и Nump (7 и 2) дадут одно и то же
значение Ртах-
Определим коэфициент обдувки по первому варианту расчета:
= Р — R — АХ'—АХГ- = Р — hP — Р 2с,/ _
P-hP
АХ
F
-дх1ф=
= р( 1— /г-2с*/ _^Р^=Р(1_С),
144
откуда
• —- h -L. SO/
ДХ,
кр
(29)
По второму варианту, очевидно,
h -4- ^ Cxf
с = Л + -р— •
(30)
В обоих случаях Е рас¬
пространяется на все де¬
тали, кроме крыльев.
Величина относитель¬
ного торможения ft для
винта, расположенного впе¬
реди крыла, зависит от
суммы _
/м , Скр
У"^ D ’
где /„ — площадь миделя
мотора;
скр — максимальная толщи¬
на крыла в его сечении за
винтом.
Фиг. 129. Среднее торможение скорости пото¬
ка для самолета с толстым крылом и мотором
воздушного охлаждения.
На фиг. 128—130 приведены эмпирические кривые Лср = /
Для типичных комбинаций моторов с крыльями.
Фиг. 130. Среднее торможение скорости потока для самолета типа
ЦАГИ-6 с толстым крылом и мотором жидкостного охлаждения.
Зная с и ft, определяем по общим формулам:
V = V„3(l+s );
e-ftV !+£;
'Чэ = '»]мз(1+е)(1 — С).
Ю Общий курс воздушных винтов
145
Пример. Определим поправочные коэфициенты для учета вза¬
имного влияния винта и крыла по следующим данным.
Самолет—низкоплан с двумя моторами жидкостного охлаждения
в крыльях. Обдувка крыла учтена в поляре самолета. Диаметр
винта £> = 3,2 м, £ = 0,2, площадь миделя моторной гондолы
/ = 0,75 м2, максимальная толщина крыла с„р = 0,72 м. Мощность
одного мотора N = 600 л. с. В расчетной точке: Уиз = 350 км/час,
7]из = 0,82. Согласно сводке лобовых сопротивлений самолета для
частей, попадающих в струю одного винта
2 с*/= 0,42.
Расчет достаточно вести для одного винта. Ометаемая винтом
площадь F при £ = 0,2 будет:
F = ^ (1 — £а) = 3,144 3,28 0,96 = 7,75 мг.
Вычисляем
= = 0,097 + 0,225 = 0,322.
Так как наш самолет подходит к схеме фиг. 128,* определяем
по этому графику:
Л = 0,045.
Дальше:
D _ ттв5 150-600.0,82 nn0oc.
— fFV3B3(MjceK) 0>125 . 7(75(j!y -°’0825’
е = h V1 + В„з = 0,045 • у 1,0825 ^ 0,047;
с = Л + ^ = 0,045 + ^|^ 0,1;
1 +е= 1,047;
(1-с)(1+е) = 0,945.
В частности, в данной расчетной точке будем иметь:
V = 350 • 1,047 = 366 км/час;
т)э = 0,82 . 0,945 = 0,775.
6» Введение поправок на изменение Относительных
размеров винта и самолета
Учет взаимного влияния винта и самолета теоретическим, рас¬
четным путем представляет собой, как мы видели, довольно кро¬
потливую операцию, дающую к тому же лишь приближенные резуль¬
таты. Особенно это относится к случаю взаимодействия винта
и крыла. Поэтому наилучшим путем решения этого вопроса следует
признать продувку в аэродинамической трубе всех выпускаемых
в эксплоатацию винтов и получение их готовых характеристик в
146
пазличных комбинациях с моторами жидкостного и воздушного
охлаждения и с крылом. В таких характеристиках взаимное вли¬
яние винта и самолета учтено.
Однако в тех случаях, когда относительные размеры винта и
обдуваемых частей проектируемого самолета отличаются от отно¬
сительных размеров испытанного винта и модели, изменение взаим¬
ного влияния винта и самолета приходится учитывать по формулам
(17), (18) и (19). Но перерасчет в этом случае представляет собой
уже' менее ответственную операцию и может быть проведен более
упрощенными способами, например по формулам (20)—(26).
Пример. Имеется характеристика винта, испытанного с телом,
вращения при следующих размерах модели:
DB = 2,7лц d$K3= 1 ,07jw, £хфюз^0,3»
Найти коэфициенты для учета интерференции при следующих
заданных размерах:
Z) — 3,2л1; ^фюз 1)1 м.
Обозначая индексом «в» коэфициенты, относящиеся к винту
в условиях испытаний, получаем по формуле (20"):
ев = 3,9 - 0,3 = 0,073,
а по формуле (26), принимая во внимание, что
/фюз ( ^фюз
F D ) ’
получим:
св = (1+ 0,073) • [О,З(^у+0,03] =1,073-0,077 = 0,083.
Соответственно для заданных размеров:
6 = 3,9-0,3 (Ц)3 = 0,047;
с' =(1+0,047) [0,3 Q4)* + 0’03] = 1,047-0,064 = 0,067.
Переводные множители будут:
1 + е _ *>047 „
1 + бв“ 1,073_и,а/Э’
Следовательно:
г—с' 1 -0,067 по
1—с; “1 — 0,083—
V = VB • 0,975;
1 Х = лв-0,975;
‘Чэ = 'Чв • 1,02.
Улучшение к. п. д. произошло по той причине, что диаметр
винта увеличился относительно модели больше, чем диаметр фюзе¬
ляжа, так что и влияние торможенияд обдувки уменьшилось.
Ю* 147
ГЛАВА VIII
ДАЛЬНЕЙШИЕ УТОЧНЕНИЯ ХАРАКТЕРИСТИКИ ВМГ.
УЧЕТ СЖИМАЕМОСТИ ВОЗДУХА И СКОРОСТНОГО НАДДУВА
1. Влияние сжимаемости воздуха на работу винта
Из экспериментальной аэродинамики известно, что при движении
тела в воздухе со скоростью, значительно меньшей скорости звука,
можно рассматривать
v ——=- — 7 воздух как несжимае¬
мую жидкость и при¬
менять соответствую¬
щие формулы. Поток на
некотором расстоянии
от тела искривляется и
затем более или менее
плавно обтекает его
(фиг. 131). Сопротивление тела при данном угле атаки строго про¬
порционально квадрату скорости (сх= const).
При достижении телом скорости, равной или большей скорости
звука, сжимаемость воздуха оказывает уже сильное влияние
на характер обтекания и сопротивление тела. Движение тела
в этом случае сопровождается -так называемой волной Маха
Фиг. 131. Поток обтекающий
’ скоростях.
тело при малых
Фиг. 132. Поток, обтекающий тело
при сверхзвуковых скоростях.
Фиг. 133. Зависимость коэфициен-
та сопротивления от числа Маха.
(фиг. 132), в которой происходит скачок давления. Линии тока
впереди волны имеют вид прямых линий, а обтекание тела начи¬
нается за волной.
Не останавливаясь подробно на описании волны Маха и ее
возникновении1, отметим, что она вызывает увеличение сопроти¬
вления тела. Коэфициенты сх и су при данном угле атаки стано¬
вятся переменными, следовательно, сопротивление и подъемная
сила уже не пропорциональны квадрату скорости. Изменяются
все характеристики профиля. Кроме того, волна Маха является
источником сильного шума.
1 См. Б. Н. Юрьев, Экспериментальная аэродинамика, ч. I.
Как известно из экспериментальной аэродинамики, все эти изме-
а зависят не от абсолютной величины скорости тела W, а от
числа Маха—Берстоу [формула (3) главы III]:
Ма = ~,
а ’
Гпе о—скорость звука.
Опытные данные показали, что небольшие изменения характери-
тик профиля начинаются уже при малых значениях Ма, а резкие
изменения—при значениях
Ма порядка 0,6—0,7 (кри¬
тические значения)в зави¬
симости от профиля. На
фиг. 133 показано пример¬
ное изменение сх в зависи¬
мости от Ма.
Скорость звука не зави¬
сит от давления воздуха
и пропорциональна квад¬
ратному корню из его тем¬
пературы. У земли при
стандартной температуре
/=+15° (7'0= 288°) а =
= 340 м/сек. Следователь¬
но,’при температуре Т:
а = Ш V
«2д\Гт. (1)
В табл. 21 приведены
значения скорости звука
По высотам в стандартной Фиг. 134. К. п. д. винта при различных чис-
атмосфере. лах Маха.
Таблица 21
Скорость звука в стандартной атмисфере
0,20 0,30 0,40 0,50 Л
Н м
0
2 000
4 000
6 000
8000
10000
11 000
и выше
*р О
288
275
262
249
236
223
216,5
а м/сек
340
332
324
316
308
299
295
У винтов число Ма и скорость W определяют для конца лопасти.
Так как другие сечения лопасти имеют меньшие скорости, то для
винтов критическое значение числа Ма, при котором начинается
Резкое снижение к- п. д., довольно высоко—в пределах 0,85—),9\
1 Следует, однако, иметь в виду, что хотя окружная скорость сечений
лопасти ближе к оси вращения уменьшается, но профиль этих сечений толще,
з с увеличением толщины профиля понижается критическое число Маха. Кроме
того, последнее может понизиться и на некоторых невыгодных режимах работы
Винта, когда появляются местные звуковые скорости р обтекании лопасти.
149
Мы знаем (глава III), что одним из условий подобия для винта
является равенство чисел Маха у винта-модели и натуры. Однак!
испытания в трубах винтов при больших числах Ма затруднительны
Поэтому обычные характеристики винтов, которыми мы располагаеу
получены, как правило, при малых числах Ма, при больших ж]
значениях Ма в них нужно вводить поправки, определяемые разли»;
ными способами.
Опыт показал, что число Маха влияет на р и на к. п. д. винта
Но изменения (3 (и мощности) сравнительно невелики, ими обычн^
пренебрегают и ограничиваются лишь поправкой для у-
Для иллюстрации зависимости к. п. д. винта от числа Мах^
на фиг. 134 приведены по испытаниям одного винта кривые ^ = /(Х
при разных значениях Ма. Мы видим, что в пределах Ма =0,45—0,81]
кривые почти не изменяются, при больших же значениях Ма он»)
последовательно и резко снижаются.
2. Поправка на сжимаемость воздуха
Определение числа Ма. Согласно формуле (1) главы II скорость]
конца лопасти:
4%
во
70
60
50
40
■■ 1
MemaJ
/
шчесн
UU
Дера
янныи
W = yv*4-U*
100
zoo
300
Фиг. 136. Примерное падение к. п. д. винта'в за¬
висимости от скорости, развивающейся 'на ' конце
лопасти.
-V' + O)’
Разделив W м[сек на
а, получим число
Маха.
На фиг. 135 при¬
ведена номограмма,
по которой можнс
быстро определить
Ма по скорость
V км/час, X и высоте
полета.
Определение кри
тического числа Ма
ха (Макрит). Крити¬
ческая скорость конца лопасти, с которой начинается ухудшение
к. п. д., для различных винтов имеет разную величину. Она за¬
висит вообще от нескольких параметров винта, но главным обра¬
зом от тблщины конца лопасти. Чем тоньше профиль лопасти, тем
больше МоКрит, т. е. тем выше окружная скорость конца лопасти,
при которой винт может работать без потерь на сжимаемость воз¬
духа. Поэтому основным средством повышения Макрит является
применение тонких профилей для винтов. Атак как металлические
винты допускают по условиям прочности применение более тонких
профилей, чем деревянные, то для многооборотных моторов метал¬
лические винты оказываются выгоднее. На фиг. 136 показано при¬
мерное падение к. п. д. для тех и других винтов в зависимости
от скорости конца лопасти. .
На фиг. 137 приведены результаш исследований грех винтов
с профилями КларкУ и относительной толщиной селений с - ‘
равной 0,06; 0,08 и 0,1. Кри- , ь*
вые показывают относительное '^тт
» зависимости
авнип
ые показывают относил^,,*.
изменение Чтах-в зависимости
от W.
На фиг. 138 приведен рабо-
— ЛППОИВПВиНс
1
w м/сек,
Д. max
laxa у,щах
1ца лопас-
{азличных
1ля конца
винта,
истин-
(2)
тесколь-
[я опре-
дложен-
и авто¬
шин эк-
х дан-
39 при¬
емка за-
от отно-
;ля npq-
1 *
напри-
на ежи¬
ка для
овий:
)час,
)мин.
Профиль — Кларк Y с относительной толщиной у конца лопа¬
сти 7%. Высота полета 4000 м.
Вычисляем
450 I Лее
* ^ ЩнГ'ШТГзЗ' “ ’ ■
* В настоящее время для определения Кц пользуются новыми графиками
ЦАГИ. Методика расчета принципиально не отличается от изложенной ниже.
151
1
с =-T-,
На фиг. 137 приведены результаты исследований трех винтов
профилями Кларк Y и относительной толщиной сечений с
[Вной 0,06; 0,08 и 0,1. Кри-
ie показывают относительное
.менение Tjmах и зависимости
'w.
На фиг. 138 приведен рабо- 0,9 .
Чтш
1,0
. /
500 . 600
1,1 ' 1,(1 0,3 0,8 ,
Фиг. 135. Номограмма для определения числа Маха в зависимости от скорости, относительной поступи и высоты полета.
I/ К-М1час
Мы знаем (глава III), что одним из условий подобия для винте
является равенство чисел Маха у винта-модели и натуры. Одна*
испытания в трубах винтов при больших числах Ма затруднительнь
Поэтому обычные характеристики винтов, которыми мы располагаем
получены, как правило, при малых числах Ма, при больших ж|
значениях Ма в них нужно вводить поправки, определяемые различ
ными способами.
Опыт показал, что число Маха влияет на Р и на к. п. д. винта!
Но изменения Р (и мощности'» мпош..»»-—
пренебрег*
Для и.
на фиг. 13
при разныз
кривые по’
последоват
Определ
конца лош
*]7о
80
70
60
50
40
100 .
Фиг. 136. При
висимости от I
ческая скоро'
к. п. д., для
висит вообще
зом от тблщи
больше MaKV, — j »иица ЛШ1ШИ,
при которой винт может работать без потерь на сжимаемость воз¬
духа. Поэтому основным средством повышения Ма„тт является
применение тонких профилей для винтов. А так как металлические
винты допускают по условиям прочности применение более тонких
профилей, чем деревянные, то для многооборотных моторов метал¬
лические винты оказываются выгоднее. На фиг. 136 показано при¬
мерное падение к. п. д. для тех и других винтов в зависимости
от скорости конца лопасти.
150
j-;a фиг. 137 приведены результаты исследований трех винтов
профилями Кларк Y и относительной толщиной сечений 7 =
„явной 0,06; 0,08 и 0,1. Кри-
ые показывают относительное
Изменение Чта* в зависимости
от IF •
На фиг. 138 приведен рабо¬
чий график Для определения
Мйрт для профилей Кларк Y
и RAF-6 в зависимости от от¬
носительной толщины с конца
лопасти. Мы видим, что тонкий
профиль Кларк Y('c=0,06) име¬
ет очень высокое критическое
число Маха: Л7«криТ=0,95 (W —
= 323 м/сек у земли).
Определение поправочного
коэфициента. При Ма > Макрит
необходимо значение к. п. д. i]B, взятое из характеристики винта,
умножить на поправочный коэфициент Кч<1, чтобы найти истин¬
ный к. п. д.:
Ч = K,,rJB. (2)
Существует несколь¬
ко способов для опре¬
деления Кт), предложен¬
ных .различными авто¬
рами на основании эк¬
спериментальных дан¬
ных. На фиг. 139 при¬
веден график Вейка за¬
висимости Кх от отно-
Мй
шения ■ для npq-
.МОнрит
филя Кларк Y. *
Определим, напри¬
мер, поправку на сжи¬
маемость воздуха для
следующих условий:
D = 3,2 м,
V = 450 км/час,
п = 2200 об/мин.
Профиль — Кларк Y с относительной толщиной у конца лопа¬
сти 7%. Высота полета 4000 м.
Вычисляем
, 450 * лгг
~ 1Ш- 2200 ~3]2 ~ ’
* В настоящее время для определения Ку пользуются новыми графиками
ЦАГИ. Методика расчета принципиально не отличается от изложенной ниже.
Фиг. 138. Зависимость критического числа Маха
от относительной толщины профиля конца ло¬
пасти.
Чдат -
Фиг. 137. Отношение к. п. д. ij'max
к к. п. д. при малых числах Маха Y)mar
в зависимости от скорости конца лопас¬
ти (профиль Кларк Y) для различных
относительных толщин профиля конца
лопасти.
151
По фиг. 135 определяем
Мв= 1,2.
При 7=0,07 согласно фиг. 138
Макрит = 0,925;
Ма 1,2
М<*ц (шт 0-925
= 1,3.
По фиг. 139, интерполируя, находим:Кт,=0,835.
Исправим теперь характеристики ВМГ, построенные нами в главе V
для мотора Райт «Циклон» и ВИШ-автомата (табл. 17, фиг. 93).
Фиг. 139. Поправочный коэфициент для максималь¬
ного к. п. д. при больших числах Маха по Вейку.
Перенесем в табл. 22 данные из табл. 17 для Н=0, 4000 м, 8000 м
и 10 ООО м и определим по номограмме фиг. 135 для каждой точки
число Ма в соответствии с высотой. Для винта 5868-9 находим по
фиг. 56 относительную толщину у конца лопасти с = 0,08.
Профиль лопасти этого винта—Кларк Y. Тогда по фиг. 138
находим:
Л4оВрнт ~ 0,9.
Определяем, далее,
Ма Ма
MflKpBr 0.9
152
и по фиг. 139 поправочный коэфициент Kv На эту величину
умножаем непосредственно располагаемую мощность N-q. Весь
Фиг. 140. Характеристика ВМГ без учета и с учетом сжимаемости воздуха.
расчет приведен в табл. 22\ Исправленные характеристики ВМГ
построены на фиг. 140.
Таблица 22
Исправление характеристик ВМГ по данным табл. 17 на сжимаемость воздуха
МдкрВт = 0.9
1
V
0,5
170
0,9
305
1,3
440
1,7
575
Н = 0
Nq
Ма
Ма
458
1
458
545
0,915
1,015
1
545
560
0,94
1,045
0,99
555
528
0,985
1,093
0,973
513
■^°крит
Kq
NqKq
Nq
365
455
475
458
Ма
—
0,96
0,99
1,035
Ма
Н — 4 ООО м
Мй ^ ^
—
1,065
1,1
1,15
Ky]
1
0,98
0,97
0,94
Nr,Krt
365
445
460
430
153
Л
0,5
0,9
1,3
1.7
V
170
305 ■
440
575
N4
206
250
258
245
Ма
Г- /'
Ма
*
1,01
1,04
1,09
Н = 8 ООО м
•^^крит
1,12
1,16
1,21
1
0,945
0,93
0,905
NrtKri
206
236
240
222
Nii
155
182'
188
177
Ма
Ма
—
1,04
1,07
1,125
Н = 10 000 м
•^акрит
—
1,16
1,19
1,25
1
0,918
0,91
0,885
155
167
171
156
Для быстрого и приближенного определения поправочного
коэфициента можно пользоваться графиком фиг. 141, где дана
кривая средних значений Кг, в прямой зависимости от числа Ма,
Фиг. 141. График для приближенного определения попра¬
вочного коэфициента К
построенная для обычных винтов со средней толщиной профиля
у конца лопасти с = б—8% и критическим числом Маха, рав¬
ным 0,85. •
Необходимо отметить, что применяемые в настоящее время
методы, определения потерь вследствие сжимаемости воздуха
по числу% Маха еще недостаточно удовлетворительны. Так, обна¬
ружено, что потери эти зависят не только от суммарной скорости
W концов лопастей, но и отдельно от осевой скорости ^(входящей
как составляющая в W). При одном и том же значении W потери
возрастают при увеличении V.
154
3. Учет скоростного наддува
Мы знаем (глава IV, § 4), что при наличии скоростного наддува
характеристика мотора изменяется. Граница высотности повы¬
шается при неизменной мощности. Ниже границы высотности мощ¬
ность несколько уменьшается, а выше ее значительно увеличи¬
вается (фиг. 76). Эти изменения необходимо учесть при построении
характеристик ВМГ, для чего нужно иметь характеристики мотора
с учетом скоростного наддува для нескольких (обычно пяти) ско¬
ростей. Такие характеристики мы построили на фиг. 76 для
максимальных оборотов. Этого достаточно для построения харак¬
теристик ВМГ с ВИШ постоянного числа оборотов с учетом
скоростного наддува.
Мощность мотора на
данной высоте при посто¬
янном числе оборотов не
будет постоянна, а будет
функцией V.- На фиг. 142
нанесена кривая N=f(V)
для мотора Райт «Циклон»
(Н=4000 м), построенная
на основании фиг. 76. Для
построения характеристи¬
ки ВМГ с ВИШ нужно в
этом случае начинать рас¬
чет со скоростей. Имея
график фиг. 142, можно
задаваться скоростями,
имеющимися на фиг. 76. Для этих скоростей вычисляют X, а по зна¬
чениям* N вычисляют р. В точке (X, р) на характеристике серии
винтов находят <р и -ц, а затем определяют N-q.
Пример. Перестроить характеристику ВМГ с ВИШ по данным
табл. 17 (мотор Райт «Циклон» F-3, винт двухлопастный серии
5868-9) для одной высоты Н=4000 м с учетом скоростного наддува.
На основании фиг. 76 строим кривую зависимости мощности
мотора от скорости для данной высоты (фиг. 142).
Таблица 23
Построение характеристики ВМГ с ВИШ с учетом скоростного наддува
По табл. 17
V
7.
- 170
0,5
305
0,9
440
1,3
575
1,7
По фиг. 142
N
545
560
580
620
R = N
р 7850
Р
0,0695
0,0715
0,074
0,079
По фиг. 58
0,67
0,83
0,871
0,851
Nq
365
465
505
528
I
155
600
500
с.
*
У
**
без скоростного наддуВа
Со скоростным наддувом
0
200
400
600 У kMjoac
Фиг. 142. Мощность мотора Райт «Циклон»
при максимальных оборотах на высоте 4000 м
в зависимости от скорости.
Фиг. 143. Характеристики серии двухлопастных винтов 5868-9.
MAN—кривая значений р при постоянных оборотах с учетом скоростного наддува.
Значения V и X возьмем те же, что в табл. 17, а N из фиг. 142.
Значения Р вычисляем по формуле:
„ 75N 75N N
Р- -^0;67^у2>95 - 7850'
Характеристики вин'га даны на фиг. 58. Расчет приведен в табл. 23.
Так же как и N, коэфициент р в этом случае не постоянный, а
переменный. Зависимость
его от X изобразится не
горизонтальной прямой, а
кривой MAN (фиг. 143).
На фиг. 144 показана
полученная характеристи¬
ка ВМГ.
При ВФШ построение
характеристики ВМГ с уче¬
том скоростного наддува
довольно сложно. Прихо¬
дится, во-первых, строить
характеристику мотора по
типу фиг. 76 для несколь¬
ких оборотов, и, кроме то¬
го, еще вспомогательный
график со сложной сеткой кривых1. Рекомендуем поэтому пользо¬
ваться следующим приближенным способом- Сначала построить
характеристику ВМГ без учета скоростного наддува (фиг. 145, кри-
AV]
500
400
300
0
Фиг. 145. Построение характеристики ВМГ и ВФШ
с учетом скоростного наддува.
вая ab). Затем построить для максимальных оборотов, как в преды¬
дущем случае для ВИШ, кривую Р=/(Х) на характеристике серии
с учетом скоростного наддува. В точке А (фиг. 143) пересечения
этой^Кривой с характеристикой заданного ВФШ (например ? =30°)
[
л. с.
4
<
/
- без скоростного наддува
Со скоростным наддувом
1 ! 1 1 1
0 ZQQ 400 600 V км/час
Фиг. 144. Характеристика ВМГ с учетом
и без учета скоростного наддува.
1 В. С. П ы ш н о в, Аэродинамика самолета, ч. I.
157
определить >• и у, а затем V. Таким образом получают одну (выс¬
шую) точку характеристики ВМГ с учетом скоростного наддува.
Так как при малых скоростях влияние скоростного наддува незна¬
чительно, то искомую характеристику можно приближенно полу¬
чить, соединив эту высшую точку с началом характеристики ВМГ,
построенной без учета скоростного наддува.
Пример. Построить характеристику ВМГ для ВФШ (9 =30°)
из той же серии и с тем же мотором, что и в предыдущем примере,
Н = 4000 м.
Таблица 24
Предварительное построение характеристики ВМГ с ВФШ
без учета скоростного наддува
о = 30°; D= 2,9 м; Н = 4 000 м
п
1550
1750
1950
N
415
485
545
л8
3724 • 10е
5359 • 10е
7415 ■ 10s
Р = 945 ООО —я
л
0,105
0,0855
0,0695
А
0,9
1,13
1,25
>)
0,77
0,85
0,872
320
412
475
V = 0,174 Ап
243
344
425
/
Строим предварительно характеристику ВМГ без учета скорост¬
ного наддува обычным способом (табл. 24).
Значения N определяем по соответствующей высотной характе¬
ристике мотора (фиг. 67 или 73). Коэфициент Р вычисляем так:
О 75N __ 75N П^ЛАА N
Р „з I пз 945000 3.
РАооо^-зД5 -8°.6®6>^
Значения ^ и >з находим по характеристике винта (фиг. 143 или 58)
а V—по формуле (3) главы V;
V = 0,06 XnD.
,’?На фиг. 145 построена полученная характеристика ВМГ (кри¬
вая ab). Определим теперь одну точку характеристики с учетом ско¬
ростного наддува.. Построив по предыдущему для максимальных
оборотов линию Р (линия МАП) на фиг. 143, по схеме табл. 23, или
хотя бы проведя прямую по двум крайним точкам М и N, находим
точку [Ал ее пересечения с характеристикой нашего ВФШ. В этой
точке
X = 1,21, >з = 0,865.
Вычисляем:
V = 0,06 -1,21 ■ 1950- 2,9 = 410 км/час
и по фиг. 142 находим: IV = 580 л.с., откуда
. Nri = 580 ■ 0,865 = 500 л.с.
sf158
Полученную точку наносим на фиг. 145 (с) и соединяем начало
жней характеристики ВМГ (а) с этой точкой (пунктир).
"^Проводить линию ас можно по прямой, но, повидимому, правиль-
е будет придать ей в нашем случае некоторую вогнутость кверху,.
не как характеристика яй идет по прямой, а влияние скорост¬
ного наддува возрастает с увеличением скорости по параболиче¬
скому закону. Так, на фиг. 144 мы видим, что расхождение
между обеими кривыми нарастает не пропорционально скорости,,
а также по параболическому закону. В этом случае нижняя?
кривая изогнута книзу, а верхняя стремится перейти в прямую.
Задача подбора винта к самолету ставится так. Самолет спроек¬
тирован и мотор к нему выбран; иначе говоря, даны характери¬
стика самолета в виде кривых потребной мощности (Nnoтр) по ско¬
рости для ряда высот и характеристика мотора. Требуется подо¬
брать винт, который дал бы наибольший к. п. д. на заданном
расчетном режиме полета.
Речь идет здесь не о проектировании нового винта (что бывает
иногда необходимо), а именно о подборе винта из числа испытан¬
ных серий по имеющимся их характеристикам. В настоящее время
к услугам конструкторов имеется достаточно много разнообразных
серий винтов, удовлетворяющих самым различным требованиям.
Расчетный режим, по которому подбирается винт, зависит от типа
и назначения самолета. Для самолета малой дальности и высоких
летных качеств типа истребителя расчетным является режим макси¬
мальной скорости на полной мощности мотора. Для тяжелых само¬
летов большой дальности, например тяжелых бомбардировочных
и транспортных самолетов, расчетным будет режим взлета или ре¬
жим горизонтального полета на малой скорости на средних оборо¬
тах, обеспечивающих минимальный расход горючего на километр
пути.
Кроме этих условий, должна быть указана расчетная высота по¬
лета.
Но не только для разных по типу самолетов, даже для одного и
того же самолета расчетные условия полета могут быть различными
в зависимости от задания и характера каждого отдельного полета.
Например, взлет недогруженного самолета с бетонной дорожки
против ветра и взлет перегруженного самолета со случайной, огра¬
ниченной площадки (или гидросамолета с большой волны) предъяв¬
ляют весьма различные требования к ВМГ. Правильный подбор
винта во всех таких случаях может облегчить выполнение летной
задачи, а иногда и вообще сделать ее выполнимой.
Атмосферные условия также влияют на работу винта. Так для
Достижения зимой тех же летных данных, что и летом, винт дол¬
жен быть облегчен. Окончательный подбор винта производят при
летных испытаниях самолета.
ГЛАВА IX
ПОДБОР ВИНТА К САМОЛЕТУ
1. О расчетных условиях при подборе винта
Эти вопросы стоят во всей остроте для винта фиксированного
шага и в значительной степени отпадают при применении винта
изменяемого шага.
В главе V мы рассмотрели уже в общих чертах вопросы под¬
бора винта и выяснили основное различие между винтом большого
шага, обеспечивающим большую горизонтальную скорость, но даю¬
щим недостаточные тягу и мощность на взлете, и винтом малого
шага, выгодным на режиме взлета и подъема, но сильно снижа¬
ющим максимальную скорость (глава V, § 4, фиг. 82 и 90).
Чаще всего винт подбирают, исходя из требования получения
максимальной скорости на расчетной высоте (границе высотности)
мотора при расчетных (номинальных) мощности и оборотах послед¬
него, причем расчетная высота берется с учетом скоростного наддува,
£сли он имеется. Для невысотных моторов расчетной высотой может
служить Н = 0 или какая-либо малая
высота в зависимости от задания.
Для тяжелых бомбардировочных
и транспортных самолетов расчетны¬
ми условиями кроме горизонтальной
скорости являются еще заданные
пределы взлетной дистанции.
Подбор винта включает следующие
задачи:
1) выбор семейства и серии винтов,
2) подбор диаметра,
3) подбор шага (в случае ВФШ) или
диапазона углов установки (для ВИШ),
4) подбор редукции.
Сделать окончательный и вполне точный выбор наивыгодней¬
шего винта можно только после нескольких проб, построив для
нескольких подходящих винтов характеристики винтомоторной
группы.
Пусть нам задана кривая AM потребной мощности самолета
на расчетной высоте (фиг. 146) и требуется подобрать винт для
реЖИМа Ущах-
Зная мощность мотора и задавшись к. п. д. винта (порядка 0,8),
определяют приблизительно ожидаемую максимальную скорость
(точку Л). Зная Ушах, подбирают винт способом, указанным ниже,
определяют его к. п. д., вводят поправки на сжимаемость воздуха
и интерференцию винта и самолета. При этом может измениться
и величина расчетной скорости согласно формуле (5) главы VII:
V=VH3(l+e).
Фиг. 146. Подбор винта путем
построения участков характе¬
ристик ВМГ.
Ясно, что полученные истинные значения V и N-ц могут дать
не исходную точку А, а какую-нибудь другую В или С, лежащую,
вообще говоря, вне кривой AM. Тогда задаются еще одним значе¬
нием V, строят для этого же винта вторую точку В' или С' и получают
таким образом отрезки ВВ', СС’ характеристик ВМГ для отобран¬
ных винтов. Точки А', А" указывают истинные значения Гтах
и дают возможность выбрать наивыгоднейший винт.
160
I-Io в большинстве случаев можно ограничиться подбором винта
по одной точке, оставляя уточнение одного параметра—шага винта—
до летных испытаний.
2. Предварительный подбор диаметра и определение расчетной
точки
Подбор винта производят по расчетным значениям коэфициен¬
тов Ь и р. Если известны величины Vpac4, Npac4, прасч, Нрасч, D,
определяют [формула (14) главы I]:
Беря точку (Храсч, р расч) на диаграммах различных серии, опре¬
деляют угол установки <р и к. п. д. •») и останавливаются на той серии
и том угле <р, которые дают наивысший к. п. д. в данной точке.
Эта простая схема осложняется тем, что диаметр винта нам неиз¬
вестен и подлежит определению. Подбор диаметра как раз и является
важнейшей и решающей операцией при подборе винта. Отсюда
ясно, что подбор винта должен осуществляйся последовательными
приближениями.
При выборе семейства и серии винтов приходится, кроме стремле¬
ния к возможно большему к. п. д., руководствоваться и другими
соображениями: требованиями прочности, веса (выбор материала),
удобства в эксплоатации и т. д. Например, хотя ВИШ дает всегда
более высокую характеристику ВМГ, чем ВФШ, но установка его
на легкий учебный самолет с маломощным мотором невыгодна
вследствие большого веса втулки и большой стоимости при ничтож¬
ном выигрыше в скорости. Далее, понятно, что следует стремиться
выбрать серию винтов, испытанных с мотором или самолетом одно¬
типным с проектируемым, чтобы избежать не всегда точного учета
интерференции. '
Наконец, конструктор должен обычно выбирать из винтов отече¬
ственного производства и при этом считаться с производственными
возможностями промышленности.
Для :ого чтобы определить расчетную точку (1-раСч, Ррасч) по форму¬
лам (1) и (2), необходимо предварительно, хотя бы грубо прибли¬
женно, определить диаметр винта. Это можно сделать по специальным
статистическим формулам, выражающим диаметр через основные
расчетные данные самолета: мощность, число оборотов, скорость
и высоту. Приводим одну из этих формул (она не учитывает влияния
сжимаемости воздуха):
0)
и
\
(2)
где V—скорость в км]час.
Значение коэфициента Ко берут по табл. 25.
(3)
11 Общий курс воздушных винтов
161
Таблица 25
Значения коэфициента Kj> в приближенной формуле для подбора
диаметра винта
Материал винтов
Дерево
Металл
Число лопастей
Тип винта ' —_______
2
4
2
3
Скоростной
98
82
96
89
Скороподъемный
110
92
108
103
Эксплоатационный
104
89
103
99
Пример. Определить диаметр скоростного винта для самолета
с мотором Испано-Сюиза 79-04 (с редуктором). Скорость на расчет¬
ной высоте предполагается 550 км/ час.
Характеристика мотора дана на фиг. 68. Мощность 7V=1120 п. с.
при 2125 об/мин. на расчетной высоте #=2800 м. Пусть редукция
мотора задана—1 : 1,6, или 0, 625 Тогда число оборотов винта:
лв = 2125 • 0,625 = 1330 об/мин.
При скорости 550 км/час скоростной наддув даст приращение
высотности (фиг. 74) ДЯ=1000 м. Следовательно, расчетная высота
будет 3800 м.
Для высоты 4000 м по. табл. 7 Д=0,67. Для мотора такой боль¬
шой мощности, как Испано-Сюиза 79-04, повидимому, нужен метал¬
лический винг, поэтому для Kd берем из табл. 25 соответствующие
значения: 96 и 89. Тогда по формуле (3):
для двухлопастного винта
D = '96 0,67 ■ 55020 133F = 96 ' 0)0362 ~ 3)5 ^
У v л
для трехлопастного
D = 89 j^/"0>67 . 550 . 13302 ~ 89 ‘ ~ 3>2 м’
Этими ориентировочными величинами диаметра можно восполь¬
зоваться для выбора серии.
ВЫЧИСЛИМ Храсч И Ррасч"
для двухлопастного винта
для трехлопастного
7т>,4 сч —
550
2,15.
расч —0,05 • 1330 - 3,2
_ 75 ■ 1120 л л..
Ррасч -— "< ‘ 0,275.
4- ■ 0,67 • 1330s ■ 3,25
о
Будем выбирать из серий, характеристики которых приведены
в этой книге. Так как наш мотор—воздушного охлаждения (двух¬
рядная звезда), берем серию двух-
Яблл лопастных винтов 5868-9, испытан¬
ных с таким мотором (фиг. 58).
Точка с координатами = 1,97,
Р = 0,176 выходит за пределы гра¬
фика. Это значит, что нам нужен
винт большего шага, чем имею¬
щиеся в серии.
Обращаемся к серии трехлопа¬
стных винтов того же семейства
5868-9. (фиг. 147). Точка с коор¬
динатами X = 2,15, р = 0,275 да¬
леко выходит за график. Берем
серию ЗСМВ-2 (фиг. 55). Здесь наша расчетная точка почти по¬
падает на кривую оптимальных к. п. д. и притом недалеко от оп¬
тимальной точки Oimaxmax). Эта серия подходит. Получаем:
-Г) = 0,798; 9 = 47°.
Правда, на фиг. 55 мы имеем характеристики винтов ЗСМВ-2,
испытанных не с мотором воздушного охлаждения, а с фюзеляжем,
Фиг. 148. Минимальное расстояние
от конца лопасти до земли и зазор
между винтом и капотом в мм.
носовая часть которого подходит по форме к мотору водяного охла¬
ждения. Нужно поэтому еще произвести пересчет интерференции
164
и самолета, после чего полученные значения у и <р могут не-
виих о измениться, но серия во всяком случае подойдет к нашим
^счетным условиям.
Однако такой упрощенный подбор винта еще далеко не достаточен.
м ие учли здесь весьма важного фактора—влияния сжимаемости
духа. При более тщательном анализе выбранный нами винт может
казаться менее выгодным, чем другой—с меньшим диаметром,
° возможно и с большим числом лопастей (другой серии).
3 Конструктивные ограничения для диаметра и расположения
винта. При подборе и компоновке винта для самолета конструктор
обязан следовать определенным правилам.
Например, расстояние от конца лопасти до любой части или
детали самолета, лежащей в плоскости вращения винта, должно
быть не меньше 200 мм, расстояние до земли не меньше 250 мм1
(фиг. 148), до воды (для гидросамолетов)—500 мм. Просвет между
винтом и капотом должен быть не меньше 25 мм (фиг. 148). Рас¬
стояние между дисками соседних винтов —не меньше 200 мм.
Плоскость вращения и пространство на 200 мм впереди и позади
нее считается «опасной зоной», в которой не должны размещаться
места для экипажа (фиг. 149). '
Ясно, что ограничения, относящиеся к диаметру, могут в некото¬
рых случаях сделать излишним всякие расчеты по подбору
диаметра и заставить принять максимально допустимый диаметр
как непосредственно заданный.
3. Уточненный подбор винта
Для выяснения эффекта от учета сжимаемости воздуха при
подборе винта рассмотрим еще один пример.
Требуется подобрать скоростной винт к мотору Райт «Циклон» F-3.
Предполагаемая скорость на расчетной высоте V = 400 км/час. Винт
серии 5868-9.
Граница высотности мотора (фиг. 67) # = 2000 м, #= 700 л. с.,
п= 1950 об/мин. Приращение высотности Д# при V = 400 км/час
(фиг. 74) равно 500 м, следовательно, расчетная высота равна
2500 м (Д= 0,78).
Определяем приближенно диаметр металлического винта по фор¬
муле (3):
для двухлопастного винта
D = 96 ]/~ 0,78 - 400 • 19502 = ’ °>027^ = 2>^5 м'>
для трехлопастного
D = 89 • 0,0276 = 2,46 м.
Этими величинами мы воспользуемся только для того, чтобы
наметить предельные значения диаметра для исследования. Начнем
с 0 = 2,4 м и будем увеличивать его значение в зависимости от изме-
1 При большом ходе амортизации шасси расстояние до земли следует брать
300 мм и больше. • f
ч
165
яения к. п. д. Значения X и р будем вычислять по расчетным фор¬
мулам:
400 _3,42 _
0,06- 1950 -D ~ D >
а 75 ■ 700 ■ 603 15,7
Р— 1 D5 *
~ ■ 0,78 • 19504)*
8
Таблица 26
Подбор винта без учета и с учетом сжимаемости воздуха
D
2,4
2,6
2,8
3,0
3,2
3,4
D5
79,6
119
172
243
335
454
1 = ЪА2
D
1,42
1,31
1,22
1,14
1,07
1,0
В £)°
0,197
0,132
0,091
0,0645
0,0468
0,0346
Без учета
Ма
/к=2
4 1к=3
0,71
0,833
0,83
0,853
07854
0,855
0,867
0,851
Ф,873
0,81
0,866
0,8
Ма
0,83
0,88
0,935
0,99
1,05
1,1
С учетом
Ма
Ма
Мйкрит
0,92
1
0,71
0,833
0,98
1
0,83
0,853
1,04
0,99
0,845
0,847
1,1
0,965
0,837
0,822
1,17
0,92
0,803
0,745
1,22
0,885
0,767
0,71
В табл. 26 приведены полученные значения X и р для D от 2,4
до 3,4 м. Далее приведены значения к. п. д. двухлопастного винта
по фиг. 58 и трехлопастного—по фиг. 147 (число лопастей обозначено
через к). На фиг. 150 нанесены полученные значения к. п. д. ввиде
кривой ■>] = /(£)) для обоих винтов. Мы видим, что наивыгоднейшим
оказывается двухлопастный винт с довольно большим диаметром
D--3,2 м (ij = 0,873).
Посмотрим, что получится, если мы введем поправки на сжимае¬
мость воздуха. По номограмме фиг. 135 определяем значения Ма.
Для винта 5868-9 критическое число Маха равно 0,9 (глава VIII,
§2). Вычисляем т по фиг. 137, находим поправочный множитель
Кт) и, наконец, исправленные значения -ц (табл. 26). Нанеся теперь
новые кривые 7) = /(D) (фиг. 151), мы видим уже другую картину.
Высокие к. п. д. двухлопастного винта сильно снизились после
умножения на К„ и наивыгоднейшим оказывается уже трехлопастный
винт диаметром 2,6 м.
По значениям X = 1,31 и р = 0,132 находим на фиг. 147 угол
установки <э = 33°,5 для ВФШ. Для ВИШ это будет ^предельный
(максимальный) угол поворота лопастей.
Если еще внести сюда поправки на взаимное влияние винта
и самолета (например, в случае несоответствия относительных раз¬
меров винта и гондолы в натуре и в модели), то кривые могут
несколько сместиться в вертикальном направлении, но форма их
166
относительное положение их максимумов не могут существенно
измениться.^ ПОд5оре винта следует всегда учитывать сжимаемость
ха (число Маха). Учет этот очень часто указывает на целесо¬
образность уменьшения диа- .. - -
метра и увеличения числа ло¬
пастей винта.
В приведенных примерах
ы Не использовали еще од¬
ного параметра, которым
можем располагать, — это ре¬
дукция. Подбором редукции
можно добиться дальнейшего
повышения к.п.д. винта на
расчетном режиме. Для это¬
го нужно, закончив подбор
винта при одной заданной
редукции (или без редук- Ц‘
ции), в случае недостаточно
удовлетворительных резуль¬
татов в смысле к.п.д., по¬
вторить расчет, задавшись
другой редукцией. Если, на¬
пример, при первом подборе
маемости воздуха, заставляющее
метр винта или увеличивать число
,
М-2
/
/
1
/
/
>
2М 23 2,8 30‘ 3,2
ЗР‘ 3,2 ЗМЛп
Фиг. 150. Зависимость к. п. д. от ди¬
аметра для двух- и трехлопастного вин¬
та без учета сжимаемости воздуха.
сильно сказывается влияние сжи-
значительно уменьшать диа¬
лопастей, следует задаться
меньшим числом редукции
(т. е. уменьшить обороты
винта). Таким образом мож¬
но выбрать наивы годней¬
шую редукцию.
Скороподъемный ч экс-
плоатационный (компромисс¬
ный) винты подбирают та¬
ким же способом, как и ско¬
ростной.
Как общее положение для
режима взлета всегда выгод¬
нее больший диаметр винта,
чем для скоростных режи¬
мов. Особенно сильно сказы¬
вается величина диаметра на
тяге при взлете. Увеличение
диаметра на 5% дает прира¬
щение тяги в среднем на 21%,
а увеличение на 10% повышает тягу на46%. Зато несколько снижает¬
ся (на 2—4%) к. п. д. винта на максимальной скорости, вследствие
увеличения окружных скоростей и числа Маха. Но современные ско¬
ростные самолеты и мощные многооборотные моторы заставляют при
Подборе винта итти в основном по пути ограничения диаметра и уве¬
личения перекрытия винта (увеличения ширины и числа лопастей).
ЗА Лм
Фиг. 151. Зависимость к. п. д. от ди¬
аметра при .учете сжимаемости воздуха.
167
■(
Если диаметр винта известен, то для дальнейших расчетов
(определение шага и к. п. д.) для различных' режимов горизон¬
тального полета удобно пользоваться характеристиками винтов
в виде кривых производного коэфициента тяги а.' [формула (IV),
стр. 56]:
в зависимости от \ (фиг. 152). Эти кривые можно легко получить
из кривых а = /(Х) или р = /(Х) путем небольшого пересчета.
Коэфициент ос' удобен тем, что непосредственно связан с основ¬
ными характеристиками самолета. Напишем уравнение установив¬
шегося горизонтального полета, выражающее равенство сил тяги
и сопротивления:
Р = Х,
168
г
или
ар п\ D* = у CxSpV*;
разделив обе части на рп*/)!, получим:
0.7
as
0,5
0,4
0,3
0,2
0,1
О
%
v ■ - ■
i
22°\
\\
9
«
•
\\
\\ _ 4
.13*0,7-
1у0,75‘-
Л х
1 \
1 \
т
vV
V
^ Я\\
*
X *
1 \
\ ч
TfO,
Г
0,7е
\\
ч-е«Х
/3~
Ч'
\
Ч?
Ч 4
JS4
v-0,75°
о 0,2 о,4 0,6 0,8 7,о i,z ; Ц Ki
■' <ъ0
откуда
р-г)
Фиг. 153. Кривые — в функции Д с отметками к. п. д.
/?
с— JL — а' — —г- "
2D3 Я2 Я® *
(4)
К. п. д. винта можно определять по другим диаграммам. Но удоб¬
нее, конечно, иметь непосредственно на кривых фиг. 152 отметки
к. п. д. Такая диаграмма с линиями равных к. п. д. показана на
фиг. 153. Она дает возможность очень быстро подобрать шаг и К. п. д.
нинта для любого режима горизонтального полета. Зная вес само-
169
лета G и задавшись скоростью V, определяют коэфициент подъемной
силы:
2G
Су ~~ SpV2 ’
затем по поляре самолета находят сх, вычисляют
csS __ pTj
2D3 Я®
и, проведя соответствующую горизонталь на диаграмме типа фиг. 153,
определяют <р и т]. Например, при = 0,13, глы на фиг. 153 нахо¬
дим, интерполируя, что наивыгоднейший угол установки лопастей
равен 26°, так как к. п. д. будет при этом максимальным. Тут
же мы находим значение X, по которому можно определить обороты.
4. Пересчет характеристик винтов на другое перекрытие
При подборе винта может оказаться, что имеющиеся в распо¬
ряжении конструктора серии дают слишком легкие винты, хотя
и обладающие хорошими к. п. д. Иногда вместо того чтобы искать
другие серии, бывает выгоднее заказать винт того же семейства,
но с увеличенным перекрытием. Увеличения же перекрытия можно
добиться, изменяя ширину лопастей, их число или то и другое
одновременно (увеличение диаметра не будем рассматривать, так как
оно должно вообще приводить к потерям в к. п. д.).
Так, в приведенном выше примере подбора винта к мотору
Испано-Сюиза 79-04 выяснилось, что серии двухлопастных и трех¬
лопастных винтов 5868-9 оказались слишком легкими. Для кон¬
структора может оказаться целесообразным заказать трехлопастный
винт этого семейства с уширенными лопастями или четырехлопаст¬
ный винт.
Но нельзя подбирать винт, характеристика которого неизвестна.
Отсюда возникает задача: имея характеристику испытанного винта,
пересчитать ее для винта подобной формы и шага, но с другим пере¬
крытием.
Будем решать задачу в общем виде, полагая, что одновременно
изменяются и ширина и число, лопастей1. Диаметр винта будем
считать неизменным. Сечения лопастей на одинаковых радиусах
у испытанного и нового винта должны иметь геометрически подоб¬
ные профили и равные наклоны (^) к плоскости вращения; таким
образом и номинальный шаг (<р0>76) у обоих винтов должен быть
одинаков.
Перекрытие винта заданного диаметра и формы определяется
произведением kb, где к—число лопастей, а &—ширина лопасти
на определенном радиусе, например 0,75 /?. Если обозначим эти вели¬
чины для испытанного винта через к, Ь, а для пересчитываемого—
через к', Ь', то отношение
1 .Г- И. Кузьмин, Пересчет винта на другое перекрытие, ТВФ, 1928, № 12.
Проф. Б. Н. Ю р ь е в, Воздушные винты, Госмашметиздат, 1934.
170
авно отношению перекрытий винтов, а величина i будет коэфи-
буД^,перехода, или коэфициентом изменения перекрытия.
иИ£Пусть нам задан коэфициент перехода i. Требуется по коэфициен-
р, у испытанного винта определить X', |3', нового винта
ТЗМ пяд'а точек и в результате построить его характеристики а' = / (к')
^ЛВ'=/(?/).
При грубом, приближенном подсчете можно считать, что коэфи-
ентьг а и Р пропорциональны перекрытию при неизменном значе¬
нии Х(Х = Х'). Сравнивая, например, характеристики двухлопаст¬
ных (фиг. 58) и трехлопастных (фиг. 147) винтов 5868-9 с оди¬
наковыми лопастями (г—= 1,5), можно заметить, что при
одинаковых X и одинаковых углах установки ф значения р для
Фиг. 154. Кольцевые элементы винтов.
трехлопастных винтов примерно в 1,5 раза больше, чем для двух¬
лопастных. Неточность такого решения кроется в том, что силы,
действующие на лопасти (как и на крыло), пропорциональны
их площади (перекрытию) только при одинаковых углах атаки.
Но, беря одинаковую относительную поступь (X = X'), мы сравни¬
ваем винты при одинаковых кажущихся углах атаки (глава II,
§ 1, фиг. 26 и 27), равных arctg ^D- Действительные же углы
атаки зависят, кроме поступательной скорости самолета, еще от
индуктивной скорости iv (фиг. 27). Но, очевидно, что чем больше
площадь лопастей, тем больше индуцированная винтом скорость
при тех же оборотах и тем меньше действительный угол атаки.
Скорость iv разлагается, как известно, на две скорости: vx (под¬
сасывания) и HL (вращения струи). При наиболее точном способе
пересчета учитываются обе эти скорости. Мы остановимся здесь
на способе пересчета без учета вращения струи.
Вырежем у обоих винтов на одинаковом радиусе г элементы
одинаковой ширины dr (фиг. 154). Пусть число лопастей первого
винта (слева> равно к, а ширина элемента будет Ь, у второго винта—
соответственно к' и Ь'. Площади элементов лопастей равны dS = b dr
и dS' = b' dr.
171
Рассмотрим скорости этих элементов и действующие на них силы
при одинаковых углах атаки а (фиг. 155). Если обороты обоих винтов
равны (U = U'), то при равных углах атаки должны быть равны
и осевые скорости (скорости подходящего воздуха ■ Vx= V+ и
хотя отдельные слагаемые этих скоростей (V и V', и, и и'), вообще
говоря, не равны. Условие (5) будет условием сходственных режимов
для рассматриваемых винтов.
Фиг. 155. Работа элементов у двух винтов на сходственных режимах.
Так как профили сечений подобны и углы атаки равны, то аэро¬
динамические коэфициенты сил, действующих на i оба элемента,
равны:
Скорости IV также одинаковы, следовательно,
dR' dS' b'dr b'
dR ~ -dS ~ b dr ~ ~b >
т. e. силы пропорциональны ширине элементов.
Переходя к кольцевому элементу (фиг. 154), мы должны умножить
предыдущие выражения на число лопастей к' и к. Тогда отношение
сил будет равно
Силовые многоугольники, очевидно, подобны (углы ф равны).
Следовательно, отношение составляющих сил: тяги dP и сопроти¬
вления dQ для кольцевых элементов будут также равны г: «.
dq^ = dP^_idJP_ .
dQ dP кЬ l' \
а так как сила dQ пропорциональна мощности (при п = const), то
dfi' с/р!
dR = YcR? dSW*,
dR'=±cRpdS'W2
r личина i — одна и та же для всех сходственных элементов обоих
нтов Суммируя элементарные силы вдоль лопастей, получим:
Т'
Деля силы тяги на рifsD* и мощности на pn!Ds, переходим
к винтовым коэфициентам:
т. е. винтовые коэфициенты пропорциональны-перекрытию винта.
Но уравнения (6) справедливы не при X —X', а при условии (5)
введем новую величину — коэфициент скорости по потоку:
Подобно X коэфициент XG пропорционален углу подхода струй р
(по схеме фиг. 155). Условие сходственных режимов может быть
поэтому выражено так:
Х„ = х;. (8)
Нам осталось выразить условие (8) через обычные коэфициенты
X и X'. Найдем соотношение между X и Хя. Так как, исходя из фор¬
мул (12) и (14) главы II: . •
v +
v 2 ’
а по формуле (20) главы III:
или
(6)
8 а
/
В — —
1
Выражая X через Хы, решим уравнение (9) относительно X: 1
, . 2 а
} —‘-а~ IT ’ (,0)
а для нового винта:
со-)
так как Х„ = Ха. Заменяя а' через Ь, получим окончательно:
Таким образом пересчет характеристики винта на другое пере-
к'Ь'
крытие с коэфициентом перехода i — при неизменном угле
установки <р нужно вести в следующем порядке. Взять точку на
характеристиках .мощности и тяги испытанного винта (X, р, rq) и X, а,
вычислить Ха по формуле (9), затем X' по формуле (11), а' и р' по
формулам (6). По значениям X', a', fi' можно построить соответству¬
ющие точки для характеристик нового винта.
Остается еще пересчитать к. п. д. винта. Для старого винта —
по формуле (12) главы III:
для нового:
Очевидно,
или
(12)
По этой формуле и определяют к. п. д. для найденной точки второго
винта.
Сделав пересчет для нескольких точек характеристики при дан¬
ном угле установки <р, можно получить всю характеристику нового
винта (ВФШ), а повторив пересчет для ряда углов <р, можно получить
диаграмму характеристик целой серии винтов с новым перекрытием.
5. О подборе винтов к скоростным самолетам
Конструирование, подбор и компоновка винтов для современных
скоростных самолетов ставят ряд новых задач исследовательского
и конструктивного характера перед работниками как винтострое-
ния, так и самолето- и моторостроения. Винты на скоростях порядка
ООО—700 км/час на высоте 5000—7000 м и при мощности 1200—1800 л. с.
работают на пониженных к- п. д. вследствие больших концевых
скоростей лопастей и все усилия конструкторов и теоретиков на¬
правлены на борьбу за каждый процент повышения к. п. д. Малей¬
шие неточности в проектировании, производстве и компоновке винта
174
иводят к большим потерям. Эти устранимые потери оцениваются
Примерно следующим образом1:
!)■ Неточности в проектировании винта 3— 5%
2) Искажение в производстве формы профиля (утолщение
передней и задней кромок по сравнению с проектом) . 2— 4%
3) Неправильный выбор редукции мотора и диаметра
винта 2—10%
4) Отсутствие обтекателя на втулке 2— 4%
5) Необтекаемая комлевая часть лопасти 3— 6%
уже из этого краткого перечня видно, насколько повышаются
требования по созданию и компоновке винта для скоростного само¬
лета.
В настоящее время в разных странах идет интенсивная работа-
По созданию винтов для скоростей близкого будущего порядка
800 км/час2. Задача заключается в исследовании влияния на к. п. д.
и характеристики винта при больших скоростях различных его
параметров, именно: числа лопастей, геометрической формы лопасти,
диаметра винта и числа оборотов. Влияние геометрической формы
складывается в свою очередь из влияний отдельных ее параметров i
распределения шага вдоль лопасти (или крутки лопасти), ширины
и толщины профиля и формы комлевой части.
Так, по исследованиям ЦАГИ3 оказалось, что разница в к. п. д..
винтов с различной круткой доходит до 5—6%. Наиболее выгод¬
ными для больших скоростей должны быть винты, имеющие крутку,
определяемую разностью углов установки сечений на радиусах
г = 0,45 и г = 0,9, равную примерно 16—18°.
Там же в ЦАГИ в трубе больших скоростей были проведены
сравнительные испытания пяти серий винтовых профилей4. На
большей части диапазона чисел Маха наилучшим оказался профиль
Кларк Y модификации I.
Весьма существенным вопросом является выбор оптимального-
диаметра, ширины и числа лопастей. Для увеличения мощности
винта можно увеличивать диаметр, делая узкие и тонкие лопасти,
работающие при больших углах атаки и больших концевых скоро¬
стях. Но более выгодными и с точки зрения к. п. д. и шума оказы¬
ваются винты, имеющие меньший диаметр, меньший шаг и большую
ширину лопасти, работающей на малых углах атаки5. При этом
значительное уширение лопасти вызывает необходимость в соответ¬
ственном увеличении диаметра комлевой части из соображений
прочности, а следовательно, и увеличения размеров втулки.
1 Данные Д. В. Халезова.
а Воздушный винт как движитель может быть вообще применен до ско¬
ростей полета, близких к звуковым (порядка 1000 км/час). Для достижения
больших скоростей необходима другая двигательная система, например ракет-
ная.
3 Т. А. Батури-на, Влияние распределения шага вдоль лопасти на
характеристики винта, Труды ЦАГИ, вып. 466.
4 Р. Н. Алексеева, Экспериментальные исследования винтовых профилей
при больших скоростях, Труды ЦАГИ, вып. 457.
6 А. Ф е р р и, О проектировании винтов для скоростных самолетов, Сборник
«К вопросу о максимальной скорости самолета», Оборонгиз, 1941.
175
к
Кроме того, на больших скоростях сильно возрастает сопроти¬
вление нерабочей части винта и возникает вопрос о профилировании
комлевой частт
Наивыгоднейшим путем, повидимому, оказывается увеличение
-числа лопастей до четырех, пяти или шести1, так как при этом
отпадают некоторые из указанных вопросов, но возникает новая
задача — создание втулки с механизмом изменения шага для
многолопастного винта.
Таковы в общих чертах вопросы, стоящие перед винтостроением
для скоростных самолетов в настоящее время. В главе V мы
указали еще на два вопроса, ждущих своего разрешения: создание
переменной редукции и винтов переменного диаметра.
Кроме этих направлений, в последнее время большие надежды
в смысле повышения к. п. д. винта возлагаются на применение
соосных винтов. На этом вопросе остановимся подробнее.
6. Соосные винты
Работа одиночного винта, особенно на одномоторном самолете,
сопряжена с двумя отрицательными явлениями: закручиванием струи
и реактивным моментом от винта. Закручивание струи вызывает,
как мы уже знаем (глава II, § 9), снижение к. п. д. винта, учиты¬
ваемое окружным к. п. д. Реактивный же момент, стремящийся
повернуть самолет вокруг продольной оси, вызывает необходимость
в несимметричной установке крыльев и оперения самолета для
сохранения равновесия. Но все же действие реактивного момента
сказывается в весьма заметной несимметричной управляемости
и маневренности одномоторного самолета. Такие эволюции, как
вираж, разворот, бочка выполняются не одинаково легко в обе
стороны. Если направление крена совпадает с направлением вращения
винта, эволюции совершаются более вяло и с большими усилиями,
чем в противоположную сторону.
Одним из способов борьбы с этими явлениями может быть уста¬
новка за винтом (или впереди винта) контрпропеллера, состоящего из
нескольких профилированных лопастей (фиг. 156), поставленных
так, что они раскручивают, спрямляют струю (фиг. 157). Это
повышает к. п. д. винта и одновременно несколько парализует
реактивный момент. В авиации контрпропеллер не получил распро¬
странения. Применяется он для морских судов.
Более радикальным решением вопроса является установка вин¬
тов тандем, т. е. винтов, расположенных один за другим; при этом
винты вращаются в разные стороны, так что задний винт раскручи¬
вает струю переднего винта и общая струя уже не вращается. Такая
комбинация осуществляется иногда у двух- и четырехмоторных
самолетов, когда моторы попарно устанавливаются в тандем (фиг. 158);
при этом задний мотор устанавливается носком вала назад, вслед¬
ствие чего задний винт будет вращаться в направлении, обратном
вращению переднего винта.
Влияние заднего винта на передний незначительно, и передний
винт подбирают обычно, как одиночный. Задний же винт работает
1 Это относится только к очень большим скоростям.
176
i
сложных условиях в струе переднего винта. Он не должен выхо-
в ь за пределы струи, поэтому его диаметр должен быть несколько
Меньше, чем у переднего.
Теоретический расчет и под¬
бор заднего винта затрудни¬
тельны.
Вейк рекомендует следу¬
ющий способ. Подбирают пе¬
редний винт, как одиночный,
по заданной расчетной ско¬
рости Vx и находят для него
а„ Pi> xi’ Чж- Д-^1 подбора зад¬
него винта, работающего в
потоке с другими скоростя¬
ми, берут другие (фиктивные)
расчетные данные, именно
расчетную скорость опреде-
Фиг. 156. Контрпропеллер. Фиг. 157. Схема действия контрпропеллера.
ляют по формуле (индекс «1» относится к переднему винту, ин¬
декс «2» — к заднему):
V% = VX (У0,25+ 1,25+ 0,5) , (13)
а расчетные обороты по формуле:
(14)
где п2 —фактическое число оборотов заднего винта.
* По значениям V2 и «' подбирают задний винт, как одиночный,
руководствуясь графиком испытания серии винтов, и определяют
по этому графику к. п. д. •*]'. Действительный к. п. д. т]2 вычи¬
сляют по формуле:
, Vnl
(15)
В последнее время все больше внимания привлекает к себе ком¬
бинация соосных винтов, устанавливаемых непосредственно друг
12 Общий курс воздушных винтов 177
за другом и работающих от одного мотора («сближенный тандем»).'
Идея соосных винтов появилась еще на заре авиации1. Впервые они
были применены в 1908—1910 гг. русским изобретателем А. Г. Уфим-
цевым, который установил их на построенном им самолете с бирота-
тивным мотором мощностью,
40—50 л. с. (фиг. 159). Ци¬
линдры мотора вместе с од¬
ним винтом вращались в одну
сторону, а вал с установлен¬
ным на нем другим винтом—>
в противоположную сторо¬
ну2.
Только в 1929—1930 гг.
был вторично построен (в
Америке) самолет с бирота-
тивным мотором в 80 л. с. и
соосными винтами, который
дал скорость 224 км]час. Крупнейший эффект соосных винтов
относится к 1934 г., когда гидросамолет Макки Кастольди 72
(фиг. 160), снабженный соосными винтами, установил мировой
рекорд скорости(709, 16 км/час). После 1934 г. известны только отдель-
Фиг. 159. Самолет («сфероплан») А. Г. Уфимцева.
ные случаи применения соосных винтов, например, на истребителе
Коольховен F. К. 55, построенном в Голландии (фиг. 161), и на
истребителе Кертисс YP-36, в Америке, на котором проводились
экспериментальные исследования характеристик соосных винтов.
1 Д. В. X а л е з о в, К вопросу о соосных винтах. Труды ЦАГИ, 1939,
вып. 386.
2 Уфимцев успел провести только наземные испытания своего самолета,
но не совершил ни одного полета, так как через несколько дней после
начала испытаний самолет был разрушен бурей, а построить второй самолет
в условиях того времени изобретатель возможности не имел.
178
Фиг. 158. Схема винтомоторной группы
тандем.
янем также о двух проектах, разработанных во Франции
УПР” —истребителя Пайан Ра-112 и бомбардировщика NC-110.
в 1^,,—ge появление соосных винтов в авиации объясняется,
дной стороны, конструктивными трудностями и, с другой,—
[Фиг. 160. Самолет Макки Кастольди 72. -
отсутствием ясного представления неточных данных о преимуще¬
ствах этих винтов. Экспериментального материала по этому вопросу
почти нет.
Фиг. 161. Самолет Коольховен F. К. 55.
Соосные винты, вращающиеся в разные стороны, могут уничто¬
жить или значительно уменьшить потери на закручивание струи.
Чтобы оценить выигрыш в к. п. д., который при этом получается,
рассмотрим фиг. 162, где показано изменение окружного к. п. д.,
учитывающего эти потери, в зависимости от максимальной скорости
(расчетной для винта), взятой в виде , где а—скорость звука,
12* - ' П9
1
Кривая получена на основании теоретических расчетов. Мы видим
что наибольшее значение т1и (наименьшие окружные потери) имеет
V I
при- -™3*- =0,45, что соответствует максимальной скорости 550 км/час J
у земли и 520 км/час на высоте 5000 м. |
Мы видим также некоторое возрастание потерь при малых скоро- ^
стях и быстрое возрастание их при увеличении ^тах. В крайней точке <
кривой ( ^-™ах = 0,82), соответ-1
ствующей l/max = 945 км/час на 1
высоте 5000 м, окружной к. п. д. I
падает до 0,85. Аналогичная за- j
висимость существует, согласно 1
американским данным, между
к. п. д. винта и его шагом. '
Оптимальный к. п. д. одиноч- jj
ного винта соответствует в сред¬
нем углу установки <р = 30°. 1
Снижение к. п. д. между <р = 30° |
и <р = 45° составляет около 3%
(<р == 45°соответствует примерно
Vрасч = 500—600 км/час). При
дальнейшем увеличении шага
к. п. д. быстро падает.
Отсюда понятен интерес к
соосным винтам, которые долж¬
ны устранить эти потери, воз¬
растающие с ростом скоростей современных самолетов. Помимо
этого, соосные винты по данным ЦАГИ оказываются выгоднее оди¬
ночных и на режиме взлета и тяги на месте.
Таблица 27
Сравнение результатов подбора соосных винтов и одиночного винта
Соосные
винты
Трехлопаст¬
ный одиноч¬
ный винт
Диаметр винта, м
2,8
3,0
К. п. д. на максимальной скорости . . .
0,85
0,843
К. п. д. на режиме подъема (220 км/час)
0,71
0,65
Тяга на месте, кг
980
847
В табл. 27 приведены сравнительные данные по соосным вин¬
там и трехлопастному одиночному винту, подобранным к одному
и тому же самолету по одним и тем же расчетным данным: Ктах=
= 450 км/час на высоте Н= 4000ж при мощности мотора N = 900 л. с.
и оборотах винта п = 1600 об/мин. Мы видим, что и при такой не
очень значительной максимальной скорости соосные винты имеют
весьма заметные преимущества. Одним из важнейших преимуществ
является уменьшение диаметра винта, дающее возможность умень¬
шить высоту и вес шасси, что компенсирует, между прочим, уве-
рости.
180
чение веса конструкции соосных винтов по сравнению с одиноч¬
ными винтами.
Что касается уничтожения реактивного момента, то испытания
монета Кертисс YP-36 полностью подтвердили достоинства соос¬
ных винтов в этом
отношении. Кроме то¬
го значительно улуч¬
шилась боковая ус¬
тойчивость самолета.
Вследствие этого соз¬
далась возможность
выполнять такие эво¬
люции, как вираж и
медленная бочка, в
обе стороны с одина¬
ковыми усилиями и
равномерностью. Ви¬
брации мотора были
менее заметны, а шум
не превышал шума
от обычных винтов.
Применение соос¬
ных винтов дает воз¬
можность констру¬
ировать двухмбтор-
ные самолеты с цен¬
тральным расположе¬
нием обоих моторов в
фюзеляже (фиг. 163).
Для иллюстрации
преимущества такого
расположения были
разработаны два про¬
екта1 одноместного
двухмоторного истре¬
бителя: одного — с
обычным раздельным
положением моторов в крыльях и другого—с центральным распо¬
ложением тех же моторов и с соосными винтами.
В первом варианте полетный вес был равен 3520 кг, скорость
612 км/час, к. п. д. винтов 0,82. Во втором варианте: полетный
вес 3320 кг, скорость 652 км/час, к. п. д. винтов 0,85. Из других
преимуществ последнего варианта следует упомянуть обеспечение
возможности полета с одним остановленным мотором. При этом
остановленный винт можно установить в такое положение, что он
будет действовать в качестве контрпропеллера.
На пути к широкому внедрению соосных винтов стоит еще ряд
Трудностей конструктивного характера, в особенности по примене¬
нию винтов изменяемого шага.
1 Ф. В е й н и г, Соосные воздушные винты противоположного вращения.
Сборник «К вопросу о максимальной скорости самолета», Оборонгиз, 1941.
Фиг. 163. Центральное расположение двух мото¬
ров в фюзеляже.
181
ЧАСТЬ ЧЕТВЕРТАЯ
I
КОНСТРУКЦИИ И ПРОИЗВОДСТВО ВОЗДУШНЫХ
винтов ,
ГЛАВА X
ОБЗОР КОНСТРУКЦИЙ винтов
1. Винты фиксированного шага (ВФШ)
Винты фиксированного шага делают, как мы уже знаем, с двумя,
тремя и четырьмя лопастями • в зависимости от поглощаемой
мощности.
Эти винты изготовляют из дерева и металла цельными или
со вставными лопастями.
Наибольшее распространение имеют винты со вставными лопастя¬
ми, так как такие лопасти можно -легко заменять при повреждении.
Кроме того, ВФШ со вставными лопастями, как это уже указы¬
валось, можно использовать для различных самолетов одного
типа, изменяя только угол установки лопастей. Изменяя же таким
путем и характеристику винта, можно наиболее эффективно исполь¬
зовать один и тот же винт на любом заданном режиме полета
самолета.
Наиболее надежными являются винты с металлическими лопастя¬
ми. Помимо прочности и долговечности службы, они обладают
еще и тем преимуществом, что имеют, как указывалось выше,
тонкие профили, выгодно работающие при больших концевых
окружных скоростях.
Для прочного и жесткого крепления металлической лопасти
во втулке винта в комлевой части лопасти имеются кольцевые
заплечики, а на обеих половинах корпуса втулки—соответствую¬
щие этим заплечикам кольцевые фрезерованные канавки; при стя¬
гивании хомутами обе половины корпуса втулки очень прочно при¬
жимаются к поверхности заплечика и комлевой части (фиг. 3 и 164).
Такое крепление достаточно надежно, и лопасти сохраняют свое
положение во втулке даже при действии больших переменных
усилий, возникающих вследствие вибрации винтомоторной группы.
Заплечики лопасти при вращении винта испытывают очень боль¬
шую нагрузку, поэтому на их расчет, изготовление и обработку
обращают очень серьезное внимание.
182
Самыми распространенными ' В-ФШ являются винты со штампо-
анными дуралюминовыми лопастями.
В Корпус втулки делают из двух половин, изготовленных ковкой
и3 легированной стали.
Собранный винт крепится на нбске вала мотора посредством
калиброванного шлицевого или фланцевого соединения. При шли¬
цевом креплении втулка центрируется на носке при помощи
конусов, находящихся в передней и задней частях втулки, закре¬
пляемых на месте затяжной гайкой.
Лопасти устанавливают на заданный угол по шкале углов, имею¬
щейся на втулке, и по указателю, нанесенному на комлевой части
Фиг. 164. Детали корпуса втулки двухлопастного ВФШ.
лопасти. Более точно и удобно можно устанавливать лопасти
на заданный угол на поверочной или монтажной плите при по¬
мощи угломеров.
Для повертывания лопастей во втулке при установке угла
достаточно ослабить болт хомута.
Если по условиям предстоящего полета необходимо изменить
угол установки лопастей больше чем на 3°, то после изменения угла
установки винт подвергается специальной поверке и балансировке.
В настоящее время ВФШ почти полностью вытеснены из воен¬
ной авиации винтами изменяемого в полете шага (ВИШ), но еще
широко применяются на гражданских самолетах с моторами сред¬
ней и малой мощности.
2. Винты изменяемого в полете шага (ВИШ)
Впервые появившиеся в США около 20 лет назад ВИШ имели
тяжелый, громоздкий и ненадежный механизм для изменения шага
183
винта. Поворот лопастей в них осуществлялся механическим при¬
водом под действием усилия, которое летчик прилагал к рычагу
управления. Такие винты были очень неудобны в эксплоатации
и не имели явных преимуществ перед ВФШ. Потребовалась боль¬
шая работа конструкторов и винтост роите лей для того, чтобы
винты изменяемого в полете шага получили всеобщее признание
и широкое распространение в авиации.
Несмотря на большое разнообразие конструкций и типов ВИШ,
находящихся сейчас в эксплоатации, их можно подразделить на
три основных типа по способу действия и управления механизмом,
изменяющим шаг винта: винты с механическим управлением, винты с
гидравлическим управлением и винты с электрическим управлением.
К винтам с механическим управлением относятся такие винты,
для изменения шага которых используется энергия вращения вала
мотора самолета или же мускульная сила пилота. Несмотря на то.
что такие винты начали применять в авиации значительно ранее
других типов винтов, в настоящее время они применяются редко.
Представителями винтов этого типа являются винты типа Смит,
Гном-Рон, Де-Лаво, Аргус и др.
К винтам с гидравлическим управлением относятся винты, шаг
которых изменяется под действием жидкости (обычно масла из
маслосистемы мотора), подаваемой под давлением в цилиндр гид¬
равлического механизма. Винты с гидравлическим управлением,
главными достоинствами которых являются простота устройства и
надежность в работе, получили наиболее широкое распространение
в авиации. К винтам этого типа относятся винты, выпускаемые
фирмами Гамильтон-Стандарт (США), Ротол (Англия), Эшер-Висс
(Швейцария), Де-Хэвилленд (Англия), Испано-Сюиза (Франция)1,
и винты ВИШ-22, ВИШ-23, АВ-1, ВВ-1, ВИШ-61, АВ-5, ВИШ-105,
выпускаемые в СССР.
В винтах с электрическим управлением изменение шага проис¬
ходит при помощи электрического мотора, питаемого- от источника
электрической энергии имеющегося на самолете.
Как правило, механизмы управления такими винтами очень
сложны. К винтам этого типа относятся винты, выпускаемые фир¬
мами Кертисс (США), Ратье (Франция), VDM (Германия), Ротол,
Фэйри (Англия), Альфа-Ромео (Италия) и другие.
Напомним, что современные винты изменяемого шага могут быть
двухшаговыми и автоматическими (стр. 21).
Регуляторы для ВИШ-автоматов бывают двух типов: центро¬
бежные и электрические. В регуляторах центробежного типа управ¬
ление числом оборотов производится при помощи вращающихся
грузиков и пружины, натяжение которой регулирует летчик. В регу¬
ляторах электрического типа управление числом оборотов происхо¬
дит путем изменения силы, напряжения и направления тока в цепи
управления.
У винтов-автоматов углы установки лопастей винта могут
изменяться в определенном диапазоне (примерно от 9 = 20° до
.1 Фирмы Де-Хэвилленд и Испано-Сюиза выпускают винты типа Гамиль¬
тон-Стандарт.
184
==50°)- У некоторых винтов угол установки лопастей доходит до-
off что дает возможность поставить лопасть в положение, при ко-
оп'ом винт при остановке имеет наименьшее лобовое сопротивление
/установка по потоку—во флюгерное положение).
У некоторых винтов лопасти имеют диапазон поворота 360° и могут
устанавливаться на отрицательный шаг, в реверсивное положение.
Мы рассмотрим здесь типичные конструкции современных ВИШ,
начав обзор с наиболее распространенных винтов с гидравличе¬
ским управлением.
3. ВИШ с гидравлическим управлением
Схемы гидравлических винтов
Основной частью втулки винта изменяемого шага является
цилиндровая группа, состоящая из цилиндра, в который подается
под давлением масло, и поршня. Некоторые винты имеют не¬
подвижный цилиндр и подвижный поршень, другие—наоборот,
неподвижный поршень и подвижный цилиндр. В том и другом
случае подвижная часть (цилиндр или поршень), кинематически
связанная с лопастью, при своем перемещении поворачивает
последнюю в нужную сторону.
У некоторых винтов поворот лопастей в обе стороны про¬
исходит под действием давления масла, которое подается
в соответствующую полость цилиндра с одной или другой
стороны поршня. Это винты так называемой двухсторонней
схемы. Сюда относятся гидравлические винты Ротол и Гидро-
матик (см. Приложение VI в конце книги).
Однако большинство современных ВИШ устроено по прин¬
ципиально более простым односторонним схемам.
Дело в том, что центробежные силы, действующие на лопасть
во время вращения винта, стремятся повернуть ее в сторону
уменьшения угла установки.
В самом деле, рассмотрим сечение лопасти в плоскости,
перпендикулярной ее оси поворота (фиг. 165). На этом сечении
возьмем две материальные точки А и В по обе стороны оси на
равных расстояниях от нее и построим для них векторы центро¬
бежных сил Рпа. Последние будут наклонены к плоскости сечения
под некоторым углом. Проектируя векторы Рцб на плоскость се¬
чения, получим пару сил Рх, стремящуюся уменьшить угол уста¬
новки лопасти, т. е. установить ее в плоскости вращения винта
(по оси XX).
Таким образом можно ограничиться подачей масла под давле-
ниеад только в одну полость цилиндра, для увеличения шага
винта, для уменьшения же шага использовать действие центро¬
бежных сил.
Винты работающие по этому принципу, называются винтами
Обратной схемы. Сюда относятся, например, винты типа ВИШ-61
(см. Приложение VI).
Однако, действие центробежных сил можно использовать и для
поворота лопасти в сторону увеличения шага. Для этого на комле-
вые части лопастей надевают на кронштейнах специальные грузы—
пРотивовесы, которые, стремясь под действием центробежных сил
185
удалиться от оси вращения винта, тем самым поворачивают лопастц.
на больший угол. Внешний вид противовесов показан на фиг. (76^
.Масса их подбирается такой, чтобы действующие на них центров'
бежные силы преодолели эффект цен¬
тробежных сил, действующих не¬
посредственно на лопасть и стрем
щихся уменьшить ее угол установки1*5
- Винты, устроенные по этому принг
ципу, называются винтами прямой
схемы. У них масло также подаете-
только в одну полость цилиндра
для уменьшения шага винта. К эти
винтам относятся ВИШ-105, ВИШ-2
и другие.
Винты односторонних схем—пря*
мой и обратной — называют обычно
гидроинерционными.
Несмотря на то, что обратная
схема является принципиально бо¬
лее простой, она обладает одним су¬
щественным недостатком. В случае '
отказа механизма изменения шага
(например, нарушения подачи масла
для увеличения шага) лопасть сама -
под действием центробежных сил ’
поворачивается на малый шаг вплоть
до предельно малого угла установки
(до упора). Тогда неизбежна рас¬
крутка в полете облегченного винта
сверх максимально допустимых для
мотора оборотов. Для избежания
этого необходимо сильно задроссе-
лировать мотор и лететь на пони¬
женной мощности.
Этот недостаток сказывается осо¬
бенно при пикировании, когда,
вследствие нарастания скорости, не¬
обходимо непрерывное увеличение
шага винта, между тем как центро¬
бежные силы препятствуют этому
и малейшие перебои или запаздыва¬
ние в работе маслосистемы втулки
приводят к раскрутке.
Винты прямой схемы лишены этого недостатка, так как у них
центробежные силы, стремясь увеличить шаг винта, всегда про¬
тиводействуют раскрутке, при выходе же маслосистемы из строя
лопасти устанавливаются на предельно большой угол, что менее
неприятно, чем установка на предельно малый угол у винтов
обратной схемы.
По этой причине прямая схема винтов в настоящее время
в основном предпочитается обратной схеме.
Фиг. 165. Схема действия соста¬
вляющих центра бежных сил лопас¬
ти, поворачивающих л пастьвсто-
L рону уменьшения шага.
186
Двухшаговые вииты с гидравлическим управлением
В начале прошлого десятилетия фирмой Гамильтон-Стандарт
/Hamilton Standard) в США были выпущены в эксплоатацию первые
кземпляры ВИШ с гидравлическим механизмом для изменения
углов поворота лопастей. Это были двухшаговые винты прямой
В полете лопасти устанавливались сами на большой шаг под
действием момента центробежных сил, возникающих при вращении
винта и действующих на
противовесы 9 (фиг. 166),
Установка же на малый
шаг происходила под
давлением масла, под¬
водимого из масляной
системы мотора к гид¬
равлическому механиз¬
му, изменяющему шаг
винта. Диапазон изме¬
нения шага винта в по¬
лете был равен 10°.
Конструкция это-1
го винта показана на
фиг. 166. Лопасти 2 вин¬
та, изготовленные из
дуралюмина, укреплены
в стальной разъемной
втулке 7 при помощи
заплечиков 2а. На за¬
плечики 2а опираются
кольца роликоподшип¬
ников 5. Кольца изго¬
товлены из вольфрами-
стой стали высокой твер¬
дости. При вращении
винта центробежная си¬
ла, развиваемая лопа¬
стью, передается корпу¬
су втулки через эти под¬
шипники. Внутри ком¬
левой части лопасти
имеется конусное отверстие, в которое входит рог крестовины 3.
Крестовина укрепляется на носке вала при помощи шлиц.
Рога крестовины, количество которых соответствует количеству
лопастей, и основание воспринимают изгибающий момент, возни¬
кающий под действием аэродинамических сил.
На внешней торцевой части втулки комля лопасти имеется боль¬
шое количество полукруглых пазов 12. Несколько большее коли¬
чество таких же отверстий имеется на кронштейне 10. В совпада¬
ющие пазы кронштейна и втулки вставлены штифты, вследствие че¬
го кронштейны жестко соединяются с лопастью. Такое устройство
Фиг. 166. Разрез втулки двухшагового двух¬
лопастного винта типа Гамильтон-Стандарт.
1—корпус втулки; 2—лопасть; 2а—заплечики; 3—рог
крестовины; 4—втулка комля; S—упорный роликопод¬
шипник; 6—цилиндр; 7—поршень; 8—вал; 9—противо¬
вес; Ю—кронштейн; 11—болт; 12—полукруглые пазы
и штифты; 13—носок картера; 14—золотник для регу¬
лирования подачи и отвода масла (регулировка ручная).
187
обеспечивает возможность поворота лопастей на заданный угол в
пределах, на которые винт рассчитан. Масло, подаваемое через
коллекторное кольцо и отверстие в носке вала 8, проходит в ци¬
линдр 6 через поршень 7. Цилиндр изготовлен из дуралюмина, пор¬
шень из легированной стали. Под давлением масла подвижный ци¬
линдр б перемещается прямолинейно по неподвижному поршню 7.
В цилиндре б имеется болт 11, конец которого опирается на кольцо.
При движении цилиндра б под действием давления масла впе¬
ред болт 11 перемещается в профилированных канавках, имею¬
щихся в кронштейне 10 и снабженных шарикоподшипниками. Так
как кронштейн 10 жестко связан с лопастью, то при поступа¬
тельном движении цилиндра лопасть получает угловое движение
вокруг своей оси, и шаг винта уменьшается.
Подача масла в гидравлический механизм и отвод масла осу¬
ществляются при помощи ручного распределения (золотника) 14,
установленного на носке картера.
При установке лопастей на большой шаг масло, находящееся
в цилиндре, при помощи золотника отводится из него, и лопасти
винта под действием моментов центробежных сил, развиваемых про¬
тивовесами, устанавливаются в положение большого шага. 1В это
время цилиндр перемещается назад (к мотору) и масло вытесняется
в картер мотора.
Движение цилиндра 6 и поворот лопастей в том и другом напра¬
влениях происходят до тех пор, пока головка болта 11 не упрется
в одну из двух регулировочных гаек, имеющихся на нарезном
стержне, находящемся внутри противовеса 9 в специальной выфре-
зерованной канавке. Гайки расположены на концах нарезного
стержня. Путь, проходимый болтом цилиндра* от хайки, ограни¬
чивающей наименьший шаг винта, до второй гайки, ограничиваю¬
щей наибольший шаг вин^а, соответствует повороту лопастей на 10°.
На фиг. 167 показаны детали узла кронштейна противовеса,
в том числе регулировочные гайки и нарезной регулировочный
стержень. На фиг. 168 показан схематический чертеж узла ло¬
пасти и кронштейна.
Автоматические винты
С 1935 г. в США двухшаговые винты с диапазоном углов пово¬
рота 10° начинают вытесняться новым типом винтов Гамильтон
с автоматической регулировкой шага в диапазоне 10°, а затем
20°. Новые типы винтов завоевали всеобщее признание и в настоя¬
щее время являются самыми распространенными в авиации. Они
производятся в различных странах (фирмами Де-Хэвилленд в
Англии, Испано-Сюиза во Франции и др.).
Гидравлический механизм изменения шага новых винтов в ос¬
новном остался почти таким же, каким он был в двухшаговых
винтах типа Гамильтон-Стандарт.
Автоматическое поддержание постоянного числа оборотов мотора
было достигнуто при помощи центробежного регулятора, автома¬
тически регулирующего обороты мотора.
На фиг. 169 показан общий вид двухлопастного автоматического
винта Гамильтон-Стандарт с гидравлическим управлением. Авто¬
188
фиг. 167. Детали узла кронштейна противовеса винта типа Га-
мильтон-Стандарт.
I—кронштейн; 2—профилированная канавка для болта цилиндра; 3—по¬
лукруглые пазы для соединения с лопастью при помощи штифтов; 4—крыш¬
ка противовеса; 5—противовес; 6—канавка для регулировочного стержня
Bj.raeK;j 7—регулировочный стержень; 8—регулировочные гайки; 9—винты
крепления.
Фиг. 168. Схематический чертеж узла Лопасти
и кронштейна.
А—профилированная канавка кронштейна; Б—коль¬
цо^ В—болт; Г—цилиндр; Д—кронштейн; Е—пазы
и штифты.
матические винты выпускаются различных серий, с двумя и тремя
лопастями, изготовленными из дуралюмина.
Гидравлический механизм изменения шага приводится в дей- ‘
ствие маслом, подаваемым под давлением через полый вал 8 мотора ■
в цилиндр 6. При подаче масла в цилиндр масло, действуя на пор-1
шень 7, перемещает подвижной цилиндр, движение которого через'.
болты 77 и кронштейны 10
передается лопастям 2;
шаг лопастей при этом ■
уменьшается. При прекра- '
щении подачи масла в ци- а
линдр под действием мо- ■
ментов, создаваемых цен- t
тробежными силами массы ]
противовесов 9 лопастей i
масло из цилиндра вытес- ,
няется в картер мотора, j
цилиндр перемещается в i
обратном направлении, j
кронштейны 10 с лопастя¬
ми 2 винта получают угло¬
вое перемещение вокруг
своей оси, и лопасти уста- \
навливаются на большой ■;
шаг. Таким образом винт
работает по прямой схеме. ‘
Схема действия меха¬
низма, изменяющего шаг
винта, остается в основном
одной и той Же для двух-
и трехлопастных винтов.
Для полного представ- ;
Фиг. 169. Автоматический двухлопастный Ления О конструкции и дей-
винт Гамильтон-Стандарт (разрез через СТВИИ механизма Трехло-
втулку). пастного винта приведем ;
1 корпус втулки; 2—лопасть; 3 — рог крестовины; ОПИСЭНИе аВТОМЭТИЧеСКОГО
4—втулка комля; 5 — упорный подшипник; €—ци¬
линдр; 7—поршень; 8 — вал; 9 — противовес; ТрбХ ЛОПАСТНОГО ВИНТА С
10 кронштейн» 11 болт; 12 полукруглые пазы пмяпяопнпм \/гттпр пппппп»
и штифты; 13—носок картера; 14— регулятор по- ДИАПАЗОНОМ^ уГЛОВ ПОВОрО
стоянного числа оборотов; 1о—привод регулятора. та ЛОПЗСТеЙ 20°. ДеЙСТВИв
регулятора постоянного !
числа оборотов будет описано ниже. Рассматрйваемый нами тип винта
снабжен декомпрессором для плавного переключения с минималь¬
ного шага на максимальный.
На фиг. 170 показан схематический разрез втулки такого авто¬
матического винта, а на фиг. 171 и 172—отдельные основные детали
винта. Лопасти 26 винта (фиг. 170), изготовленные из дуралюмина,
закреплены в гнезде стального разъемного корпуса втулки при
помощи заплечиков, которые служат опорой для упорных ролико¬
подшипников, состоящих из стальных колец высокой твердости
29 и 31 и роликов 30, заключенных в латунные сепараторы.
Внутренняя часть лопасти имеет конусное отверстие, в кото-
с натягом запрессовывается стальная втулка комля 28, за-
Р°епленная на лопасти двумя шпильками 19 и винтами 32. Во
Крутреннюю часть стальной втулки 28 запрессовываются тон-
Востенные бронзовые вкладыши 21 и 22. Внутрь конусного отвер¬
стия комля лопасти вставляется заглушка 24, на которой укре-
Фиг. 170. Втулка автоматического винта типа Гамильтон-Стандарт
(разрез).
1—цилиндр; 2—поршень; 3—задняя манжета; 4—передняя манжета; 5—большая
пружина декомпрессора; 6—малая пружина декомпрессора; 7—крышка поршня;
8—крышка цилиндра; 9—уплотняющая алюминиевая прокладка; №—гайка; 11—ре¬
гулировочная шайба; 12—контровое кольцо; 13—шток декомпрессора; 14—регули¬
ровочная втулка; 15—тарелка декомпрессора; 16—штуцер; 17—кожаная манжета;
18—трубка для подачи масла; 19—шпилька для крепления втулки; 20—противовес;
^1 и 22—бронзовые вкладыши; 23—передний конус; 24—заглушка; 25—балансиро¬
вочные грузы (шайбы); 26—лопасть; 27—рог крестовины; 28—стальная втулка;
29—кольцо упорного подшипника; 30—ролики; 31—кольцо упорного подшипника;
32—винт; 33—штифт; 34—кронштейн; 35—кольцо для регулирования зазора между
основанием рога крестовины и фланцем втулки 28; 36—задний конус; 37—центриру¬
ющая текстолитовая бобышка; 38—масленка; 39—болт; 40—медно-асбестовая
прокладка; 41—контровое кольцо; 42—пружинное кольцо.
пляются балансировочные свинцовые грузы (шайбы) 25 и которая
служит также для предотвращения возможности попадания масла в
коническое отверстие внутри комля лопасти при смазке рога крестови¬
ны 27 из масленки 38 через каналы, имеющиеся в крестовине.
Лопасти с запрессованными в них втулками насаживаются
на рога крестовины' 27. Крестовина винта укрепляется на носке
191
вала при помощи шлиц и центрируется на нём передним и заднщ
конусами 23 и 36.
Между фланцем втулки 28 и основанием рога крестовин*
имеется кольцо 35, регулирующее зазор между этими двумя дет^ч
лями. Под кольцом 35 имеются латунные прокладки, назначен^
которых—обеспечить тугую посадку лопасти в корпусе втулки
винта.
Корпус втулки винта центрируется относительно крестовины при
помощи текстолитовой бобышки 37, помещающейся между кресто¬
виной и корпусом.
Фиг. 171. Детали корпуса втулки и крестовины автоматического
винта типа Гамильтон.
1—половины корпуса втулки; 2—крестовина; 3—центрирующие текстолитовые
бобышки.
Каждая из лопастей винта 26 соединена с кронштейном 34, кото¬
рый, в свою очередь, соединен с цилиндром винта 1. Соединение
лопасти с кронштейном производится при помощи заднего кону¬
са 36, полукруглых пазов, имеющихся на фланце втулки комля 28,
и 40 полукруглых отверстий на внутренней стороне кронштейна,
жестко соединенных вставленными в них штифтами 33.
Благодаря такому соединению лопасти с кронштейном послед¬
ний при сборке винта может быть перемещен и установлен на любой
угол в определенном диапазоне.
При помощи такого устройства установка лопасти может быть
осуществлена с точностью до 1°.
На внешней части кронштейна 34 имеется противовес 20 со съем¬
ной крышкой.
Кронштейн имеет два профилированных1 паза, в которые вста¬
вляются сегментные шарикоподшипники.
192
профилированные пазы кронштейна входит болт В цилиндра
/Лиг 168), который во время поступательного движения цилин-
Г ' 7 (фиг. 170) перемещается вместе с кольцом Б (фиг. 168) по
ДРнавкам обоймы сегментного шарикоподшипника.
^Укрепленный на валу мотора неподвижный стальной поршень 2
г,170) служит направляющей для цилиндра 1 при перемещении
го в осевом направлении во время работы гидравлического меха¬
низма и гайкой, закрепляющей винт на носке вала мотора. Для
предотвращения утечки масла из цилиндра поршень имеет кожа¬
ные кманжеты (переднюю и заднюю) 3 и 4, затянутые крышкой
Фиг. 172. Детали автоматического винта типа Гамильтон.
X—цилиндр; 2—поршень; 3—декомпрессор; 4—крышка цилиндра; 5—болт
цилиндра; 6—подшипники-
поршня 7. Спереди цилиндр 7 закрыт крышкой 8, к которой при¬
креплен шток декомпрессора 13, проходящий через неподвижную
крышку поршня 7. На другом конце штока, имеющем утолщение,
свободно посажена тарелка декомпрессора 15, при помощи которой
во время перемещения штока декомпрессора с цилиндром сжимаются
обе пружины декомпрессора 5 и 6. Пружины декомпрессора имеют
разносторонние витки.
Во время перемещения цилиндра пружина сжимается на длину
хода цилиндра. При максимальном перемещении цилиндра, проис¬
ходящем при установке лопасти на минимальный шаг, пружины
сжимаются до тех пор, пока регулировочная втулка 14 не упрется
в крышку поршня 7. Для полного сжатия пружины требуется
усилие около 500 кг. Втулка 14 используется также для уста¬
новки минимального шага при сборке винта путем подбора со¬
ответствующей длины втулки.
13 Общий курс воздушных винтов
193
Для ограничения максимального шага винта служит регулиро¬
вочная шайба 77, которая надевается на шток декомпрессора
между крышкой поршня 7 и крышкой цилиндра 8.
Максимальный шаг винта устанавливается путем подбора регу¬
лировочных шайб различной толщины при сборке винта. Измене¬
ние шага винта происходит по прямой схеме, т. е. шаг винта
увеличивается под действием центробежных сил, действующих на
винт, и уменьшается под действием давления масла.
Подача масла в цилиндр производится из нагнетательной систе¬
мы мотора через шестеренчатую помпу регулятора, повышающую
давление ма$ла до 13—15 кг/см2. Масло подводится к подвижному
цилиндру через трубку 18, находящуюся внутри вала, штуцер 76
и неподвижный поршень 2. При воздействии масла на цилиндр 7
последний перемещается поступательно по поршню 2 в направле¬
нии полета. При перемещении цилиндра 7 вместе с ним переме¬
щается поступательно болт В (фиг. 168), один конец которого
закреплен в теле цилиндра, а другой опирается на кольцо Б, кото¬
рое может перемещаться в двух профилированных канавках А
кронштейна Д по обоймам сегментного шарикоподшипника вме¬
сте с болтом В.
Так как кронштейн 34 (фиг. 170) связан с лопастью 26 при
помощи полукруглых пазов и штифтов 33, то при перемещении
кронштейна 34 лопасть получает угловое перемещение вокруг ее
главной оси, в результате чего шаг винта изменяется (уменьшается).
Шаг винта уменьшается при перемещении цилиндра 7 вперед до
тех пор, пока не прекратится подача масла в цилиндр 7 и не уста¬
новится заданное мотору число оборотов или пока регулировочная
втулка 14 не дойдет до крышки поршня 7 и лопасть не устано¬
вится в положение минимального шага винта.
Как только число оборотов мотора превысит заданное, цилиндр 7
сообщается с картером мотора и давление масла в цилиндре
падает. Под действием моментов центробежных сил, развиваемых
противовесами 20, и под действием пружин декомпрессора 5 и 6
лопасти винта будут поворачиваться в обратном направлении
(в направлении увеличения шага) и вытеснять масло из цилин¬
дра, действуя на кронштейн 34 и болт В (фиг. 168) и заставляя
перемещаться в обратном направлении цилиндр 7 (фиг. 170).
Число оборотов мотора будет падать до тех пор, пока оно не . ста¬
нет равно заданному числу оборотов или же не достигнет наиниз-
шего предела, в том случае, когда винт установится в положение
наибольшего (максимального) шага, при котором регулировочная
шайба 11 дойдет до крышки поршня 7. Как было сказано выше,
регулирование числа оборотов мотора и, следовательно, измене¬
ние шага винта, происходит автоматически при помощи регуля¬
тора постоянных оборотов.
Регулятор постоянного числа оборотов автоматического винта типа
Гамильтон-Стандарт
Регулятор постоянного числа оборотов является самостоятель¬
ным агрегатом винтомоторной группы и приводится в действие от
мотора самолета.
194
На фиг- 173 показан общий вид регулятора постоянного числа
оборотов. Регулятор может быть установлен в любом месте, так
как он связан с винтом только маслопроводом. На фиг. 174 дана
схема действия регулятора при различных режимах работы мо¬
тора. Регулятор состоит из специальной помпы 6, состоящей из
пары шестерен, заключенной в один агрегат с регулятором, зо¬
лотника 4, центробежных грузиков 3, пружины 2, редукционного
клапана 5, рейки 9. I#1,
На фиг. 174Д показа¬
на общая схема действия
регулятора постоянного
числа оборотов при уста¬
новившемся режиме поле¬
та (скорость движения са¬
молета и мощность мотора
практически не изменяют¬
ся); на фиг. 174, Б—схе¬
ма действия регулятора,
когда обороты мотора па¬
дают ниже заданных, и на
фиг. 174, В—схема дей¬
ствия регулятора, когда
обороты мотора увеличи¬
ваются выше заданных.
Масло, направляющее¬
ся в гидравлический ме¬
ханизм, изменяющий шаг
винта, поступает из нагне¬
тательной системы мотора
по каналу 7 в помпу 6.
При проходе через помпу
давление масла повышает¬
ся до 14—15 am. Повы¬
шенное давление масла не¬
обходимо для быстрого из¬
менения угла установки
лопастей винта. При по¬
стоянном числе оборотов (при установившемся режиме полета),
когда не происходит изменения шага винта и, следовательно, нет
расхода масла, масло перепускается чёрез редукционный клапан 5
обратно в помпу. Пружина редукционного клапана отрегулирована
также на давление 14—15 am. Центробежные грузики 3, получая
вращение от мотора, стремятся под действием центробежной силы
разойтись во внешние стороны и поднять золотник 4 вверх, в то
время как пружина < регулятора 2 стремится сдвинуть золотник
вниз. Натяжение этой пружины устанавливает из кабины летчик
посредством перемещения рейки 9.
При установившемся режиме работы сила давления пружины 2
и Центробежные силы грузиков 3 уравновешены. При равновесии
этих сил золотник 4 своим нижним буртиком перекрывает канал, через
который масло подается в цилиндр гидравлического механизма винта.
Фиг. 173. Общий вид регулятора постоян¬
ных оборотов.
Если по каким-либо причинам режим работы мотора станет
изменяться, например, число оборотов мотора станет падать на не¬
большую величину (фиг. 174, Б), центробежные грузики 3 будут
вращаться медленнее, чем при установившемся режиме. Силы,
возникающие при вращении грузиков, будут меньше силы давле¬
ния пружины 2 и вследствие этого золотник 4 под действием избы¬
точной силы пружины 2 будет перемещаться вниз, открывая
доступ маслу, нагнетаемому помпой б, в канал, подводящий масло
к цилиндру винта. Цилиндр винта переместится, благодаря чему
лопасти повернутся на меньший угол установки и число оборотов
мотора станет возрастать. В это время редукционный клапан 5
Фиг. 174. Схема действия регулятора постоянного числа оборотов.
А—положение регулятора при постоянном числе оборотов (установившийся решим полета;
Б—положение регулятора, когда число оборотов мотора имеет тенденцию к понижению;
В—положение регулятора, когда число оборотов мотора имеет тенденцию к повышению;
2—трос управления из Кабины пилота; 2—пружины регулятора; з—центробежные грузики;
4—золотник; 5—редукционный клапан; 6—помпа; 7—канал для подачи масла от мотора;
8—канал для слива масла из регулятора в картер мотора; 9—рейка.
плотно закроет канал, соединенный с картером мотора со стороны
этого клапана.
Как только число оборотов мотора достигнет заданного, золот¬
ник 4 станет в положение, при котором канал 8 перекроется,
угол установки лопастей останется неизменным, и мотор будет ра¬
ботать с постоянным числом оборотов до следующего возмущения.
Если число оборотов мотора будет превышать на небольшую вели¬
чину заданное число оборотов (фиг. 174, В), то под действием
избыточной силы грузиков 3 пружина регулятора 2 сожмется,
золотник 4 переместится вверх и канал 8 будет сообщаться с кар¬
тером мотора. Лопасти винта под действием моментов центробеж¬
ных сил противовесов начнут поворачиваться в направлении уве¬
личения угла установки, вытесняя в картер масло из цилиндра
винта; число оборотов мотора при этом будет падать. Увеличение
угла установки лопастей в полете будет происходить до тех пор,
пока число оборотов мотора не упадет до заданного, установлен¬
ного летчиком путем соответствующего натяжения пружины регу¬
лятора 2 (при перемещении рейки 9).
Существует несколько конструктивных разновидностей центро¬
бежных регуляторов (например, советского производства Р-2, Р-7
и др.), но принцип их действия в основном такой, как он описан
выше.
196
4
197
I
Автоматический винт ВИШ-105
ВИШ-105 является одним из основных винтов советского
производства для мощных моторов. Он предназначен для уста¬
новки на моторы М-105, М-82 и другие моторы мощностью до
2000 л. с. 1
ji Винт работает'по прямой схеме. Диапазон изменения шага винта
30°.
Одним из преимуществ этого винта является расположение цилин¬
дровой группы внутри корпуса, что защищает ее от пуль, устраняет
необходимость бронирования, а также дополнительного отепления
кока винта зимой для предотвращения загустевания масла в ци¬
линдре. у
ВИШ-105 выпускается двух типов: для пушечных моторов с зад¬
ней подводкой масла и для непушечных — с передней подводкой.
Винт выпускается и с деревянными лопастями (ВИ1П-105Д).
Деревянные и металлические (дуралюминовые) лопасти взаимоза¬
меняемы.
Винт работает с регулятором оборотов Р-7.
На фиг. 175 показан разрез винта (пушечный вариант), на
фиг. 176—его втулка и детали.
Корпус втулки состоит из двух половин—передней и задней,
соединенных девятью стяжными болтами, из которых шесть болтов
служат для крепления кока (фиг. 176а). В зависимости от системы
подводки масла (передней или задней) имеются соответствую¬
щие сверления для подвода масла в передней или задней поло¬
вине корпуса втулки.
1QR
Цилиндровая группа состоит из неподвижного поршня 77 (фиг. 175)
и подвижного цилиндра 9, который может перемещаться на поршне
вдоль оси втулки. Для предотвращения утечки масла из полости
цилиндра на поршне и на цилиндре установлены кожаные или рези¬
новые уплотнительные манжеты и, кроме того, на манжету цилиндра
надето пружинное кольцо.
Поворот лопастей осуществляется следующим образом. На на¬
ружной стороне цилиндра имеются три паза, в которые входят
бронзовые сухари 5 (фиг. 1766), сидящие на пальцах стаканов
Фиг. 1766. Детали винта ВИш-105.
1—иередняя половина корпуса; 2—задняя половина корпуса; 3—цилиндр; i—стакан
лопасти; 5—сухарь пальца стакана; 6—лопасть.
лопастей 4. Пальцы находятся на некотором . расстоянии от
оси стаканов; при поступательном перемещении цилиндра вдоль
оси втулки вместе с ним перемещаются пальцы стаканов, в ре¬
зультате чего все лопасти поворачиваются. Поворот лопастей
под действием центробежных сил вызывает перемещение ци¬
линдра.
Дуралюминовая лопасть изготовлена из целой штамповки. На
комле лопасти имеется трапецевидная резьба, которой лопасть ввер¬
тывается в стальной стакан. Для закрепления лопасти в стакане
и для устранения зазора между комлем лопасти и стенками стакана
на верхнюю часть стакана надевается зажимной хомут, несущий
противовес.
Хомут состоит из двух половин, соединенных шарнирным паль¬
цем (фиг. 176а) и стягиваемых стяжным болтом. На кронштейне
противовеса закреплены болтом балансировочные шайбы 8 (фиг. 175),
подбором которых достигается необходимая величина статического
момента противовеса.
199
Автоматический винт ВИШ-61
Автоматический воздушный винт ВИШ-61 (фиг. 177) предна¬
значается для установки на моторы мощностью 1000—1500 л. с.
Это трехлопастный винт левого вращения с диапазоном изме¬
нения угла установки лопастей 35°. Винт выпускается как в
42 П
Фиг? 177. Автоматический винт ВИШ-61 (пушечный).
1—лопасть; 2—втулка комля лопасти; 3—палец втулки 2; 4—упорный роликоподшип¬
ник; 5—двухрядный роликоподшипник; 6—-передняя половина корпуса; 7—задняя поло¬
вина корпуса; 8—муфта поводковая; 9—ушки муфты S; Ю—фиксатор поводковой муф¬
ты; 11—стяжной болт; 12—цилиндр; 13—поршень; 14—малые кожаные манжеты; 15—
большие кожаные манжеты; 16—маслопровод; 17—трубка маслопровода; 1$—гайка за¬
тяжная; 19—чека контрящая; 20—гайка-съемник; 21—гайка цилиндра; 22—передний
копус; 23—задний конус.
пушечном, так и в непушечном вариантах. Механизм изменения
шага—гидроцентробежный. Винт работает по обратной схеме—
поворот лопастей в сторону увеличения шага производится силой
давления масла на поршень цилиндра винта, поворот в сто¬
рону уменьшения шага совершается под действием моментов цен¬
тробежных сил самих лопастей.
Винт состоит из следующих трех основных частей: лопастей,
втулки и цилиндровой группы.
Лопает и—дуралюминовые, штампованные крепятся в стакане
корпуса при помощи буртика, высаженного на комле лопасти, и ро¬
200
ликоподшипника, воспринимающих центробежные усилия, разви¬
вающиеся в лопастях при вращении винта.
В комель лопасти с его торца запрессована втулка с экцен-
трично расположенным пальцем, служащим для поворота ло¬
пасти. На выступ этой втулки насажен двухрядный радиальный
роликоподшипник, позволяющий лопасти вращаться вокруг своей
оси.
Втулка винта состоит из двух половин из хромоникелевой
стали, стянутых болтами. К передней половине корпуса втулки
крепится цилиндровая группа. Задняя половина имеет ступицу со
Ркс. 178. Автоматический винт ВИШ-61 (непушечный).
1—лопасть; 2—втулка комля лопасти; 3—палец втулки; 4—упорный роликоподшипник;.'
5—двухрядный роликоподшипник; 6—передняя половина корпуса; 7—задняя половина
корпуса; 8—муфта поводковая; 9—ушки муфты 5; 10—текстолитовая втулка; 11—ци¬
линдр; 12—гайка цилиндра; 13—поршень; 14—малые кожаные манжеты; 15—большие
кожавые манжеты; 16—направляющая гильза; 17—заглушка, направляющей гильзы;
18—уплотняющая манжета; 19—штуцер; 20—затяжная гайка; 21—контрящая чека;.
22—гайка-съемнцк; 23—передний конус; 24—задний конус-
шлицами, которой втулка насаживается на носок вала мотора.
На ступицу надета поводковая муфта, жестко связанная с поршнем.
При движении поршня муфта скользит по ступице; для предохране¬
ния муфты от провертывания на наружной поверхности ступицы
имеются три продольных паза, по которым скользят бронзовые
сухари, закрепленные на муфте.
Имеющиеся на поводковой муфте ушки сочленены при помощи
сухарей с пальцами торцевых втулок лопастей и при поступатель¬
ном движении муфты вращают лопасти.
Цилиндровая группа состоит из неподвижного дуралю-
минового цилиндра, закрепленного на корпусе втулки при по¬
мощи трех шпилек и специальной зажимной гайки, поршня с ман¬
жетами и маслоподводящей гильзы, служащей также и направля¬
ющей поршня.
Конструкция системы, подводящей масло от носка вала мотора
к цилиндру винта, различна в пушечном и непушечном вариант?
винта.
В пушечном винте (фиг. 177) на полом валу редуктора мотора
при помощи специальной гайки закрепляется маслопровод, пред¬
ставляющий собой составную трубчатую гильзу с кольцевой
полостью для прохода масла и открытой внутренней полостью для
прохода ствола пушки.
В непушечном винте масло от вала мотора поступает к цилиндру
винта по внутренней полости трубчатой гильзы, закрепленной на
носке вала мотора.
Для увеличения шага масло, нагнетаемое шестеренным на¬
сосом регулятора, подается по маслоподводящей системе в цилиндр
и двигает поршень, а вместе с ним и поводковую муфту назад.
Муфта, двигаясь, своими ушками давит на пальцы, закреплен¬
ные в комле лопасти, и этим вращает лопасти.
При уменьшении шага регулятор своим золотником сооб¬
щает маслопровод втулки винта с картером мотора, и поршень,
двигаясь под действием центробежных сил лопастей вперед, вытал¬
кивает масло из полости цилиндра -винта в картер мотора.
Винт работает с регуляторами Р-3 или Р-7, действующими
по принципу описанного выше регулятора.
Автоматический винт Гидроматик (фиг. 179)
Механизм изменения шага винта Гидроматик, показанный на
фиг. 180, состоит из следующих основных деталей: цилиндра 7, поршня
-со сферическим дном и двойными стенками 2, неподвижного внешнего
барабана с профилированными канавками 3, пальцев, снабженных под¬
шипниками 4, и внутреннего поворачивающегося барабана с про¬
филированными канавками и конической шестерней 5.
Винт работает по двухсторонней схеме.
При подаче масла под давлением в цилиндр 7 поршень 2 будет
перемещаться в осевом направлении в зависимости от направления
впуска масла. При поступательном движении поршень 2, связанный
с внешним барабаном 3 посредством пальцев 4, будет поворачи¬
ваться на некоторый угол, определяемый изгибом профилирован¬
ной канавки на барабане 3.
Внутренний барабан 5, связанный с поршнем и с внешним бара¬
баном теми же пальцами 4, при движении поршня повернется на
угол, величина которого равна сумме углов поворота поршня отно¬
сительно неподвижного внешнего барабана и поворота внутреннего
барабана относительно поршня. При повороте барабана 5 кони¬
ческая шестерня, находящаяся на этом барабане и имеющая заце¬
пление с шестерней на комлевой части лопасти, повернет лопасть,
и изменит таким образом шаг винта.
Масло для работы гидравлического механизма, изменяющего -
шаг винта, подается от мотора через пустотелый вал. Чтобы пре¬
дотвратить утечку масла, поршень снабжают специальными уплот¬
нениями. Механизм изменения шага снабжен также уплотнениями,
препятствующими попаданию масла между крестовиной и валом
.мотора, между гнездом корпуса втулки и цилиндром, между стен¬
ками гнезда лопастей и лопастями, между гнездом корпуса и кре¬
стовиной.
ч 202
Для предохранения уплотнения, находящегося между лопастью
и гнездом корпуса втулки, от износа и истирания, а также для
t
Фиг. 179. Общий вид винта Гидроматик.
предохранения комлевой части от напряжений, которые могут
появиться вследствие вибрационных переменных усилий, между
лопастью и уплотнением поставлена прокладка из пластмассы,
Фиг. 180. Детали гидравлического механизма винта Гидроматик.
1—цилиндр; 2—поршень; 3—внешний барабан с профилированными канавками;
4—палец с подшипником; 5—барабан с конической шестерней.
обладающей низким модулем упругости. Эта прокладка служит
также ocHOBaHHeMj для нижнего кольца упорного подшипника
(фиг. 181).
203
Профилированные канавки барабанов, по которым во время по¬
ступательного движения поршня скользят пальцы, имеют различный
наклон на отдельных участ¬
ках винтовой линиипрофиля.
Резко выраженное изме¬
нение наклона винтовой ли¬
нии имеется только в опре¬
деленных точках (фиг. 180 и
182). Наклон винтовой ли¬
нии на любом участке про¬
филированной канавки соот¬
ветствует определенной уста¬
новке шага лопастей.
При нормальной работе
винта давление масла, пода¬
ваемого во внутреннюю часть
вала винта, не превышает оп¬
ределенного предела —14 —
—15 am.
При таком давлении мас¬
ло, действуя на поршень, бу¬
дет перемещать пальцы толь-
Фиг. 181. Крепление лопасти винта Гидро- ко д0 точки перегиба, т. е.
. . мат-ик. на ограниченном участке
1—бакелитовая прокладка; 2—масляное уплот- , r „ J
пение; 3 и S—кольца упорного подшипника; (учаСТОК ВИНТОВОЙ ЛИНИИ,
«—ролики; fi—корпус втулки. ИМеЮЩИЙ бОЛЬШОЙ уГОЛ НЭ-
клона).
Для перехода пальцев через точку перегиба винтовой линии
и для движения по участку винтовой линии с малым углом наклона
Фиг. 182. Схема действия гидравлического механизма винта Гидроматик.
1—центробежный момент; 2—давление масла, подаваемого из мотора; 3—дав¬
ление масла, подаваемого из регулятора.
требуется значительно большее давление масла. Таким образом,
дойдя до точки перегиба винтовой линии, палец остановится и даль¬
нейшего изменения шага винта приданном давлении масла не будет
204
происходить. Лопасти винта установятся в положение большого шага
нормального диапазона.
Благодаря наличию ограничителя лопасти винта не могут ни
прИ каких случайных обстоятельствах установиться на больший
угол, т. е. во флюгерное положение, при котором винтомоторная
группа не была бы в состоянии создать эффективной тяги.
Для перевода лопастей винта в положение наибольшего шага,
т. е. во флюгерное положение, необходимо подать в гидравлический
механизм масло под большим давлением. При повышенном давле¬
нии масла, например 20—25 am, пальцы пройдут через точку
перегиба винтовой линии профилированной канавки и переместятся
в крайнее положение на участке винтовой линии с малым углом
наклона. В это время поршень установится тоже в крайнее поло¬
жение, и лопасти винта будут иметь максимальный шаг, т. е.
установятся во флюгерное положение (под, углом 87°).
Регулирование шага лопастей в винте' типа Гидроматик про¬
исходит под действием трех основных сил:
1) центробежной силы, стремящейся повернуть лопасть на малый
шаг и используемой для уменьшения шага винта;
2) давления масла, подаваемого из масляной системы мотора
при нормальном давлении и действующего на подвижный поршень
в ту же сторону, что и центробежная сила;
3) повышенного давления масла, подаваемого от мотора в гид¬
равлический механизм через регулятор и действующего на поршень,
для получения максимального шага.
На фиг. 182 показана схема действия описанных трех сил,
изменяющих шаг винта.
Таким образом, в нормальном диапазоне углов по¬
ворота лопастей на поршень действует, с одной стороны, давление
масла, подводимого из масляной системы мотора, с другой сто¬
роны—давление масла, нагнетаемого шестеренной помпой регуля¬
тора оборотов.
При переводе лопастей во флюгерное положение и при
выводе лопастей из этого положения, когда мотор не работает,
масло подается в цилиндр под повышенным давлением специаль¬
ной помпой, приводимой в действие электромотором; при этом
направление потока масла к цилиндру регулируется специальным
золотниковым распределителем.
Конструкция регулятора винта Гидроматик в основном подобна
регулятору постоянного числа оборотов автоматического винта
Гамильтон-Стандарт (стр. 194). Регулятор устанавливается на нос¬
ке картера мотора. Вес его 1,8 кг.
На фиг. 183, А показано действие регулятора, когда обороты
винта имеют тенденцию уменьшиться ниже заданных. В таком
положении масло уходит из винта в картер мотора через золот¬
ник регулятора, который перемещается под действием пружины в
наинизшее положение, шаг лопастей винта уменьшается и обороты
винта возрастают. На фиг. 183, В показано действие регулятора,
когда обороты винта имеют тенденцию повыситься выше заданных.
Масло под давлением 14 am подается к поршню гидравлического
механизма помпой регулятора через золотник, поднятый в наивыс¬
205
шее положение под действием центробежных грузиков, сжимающих
пружину. Масло, действуя на поршень, увеличивает шаг лопастей
и, следовательно, уменьшает обороты винта.
На фиг. 183, С показано действие регулятора при установив¬
шемся режиме. В это время центробежная сила грузиков и сила
пружины полностью уравновешиваются, золотник регулятора закры-
Фиг. 183* Схема действия регулятора винта Гидроматик.
Л — при понижении числа оборотов винта; В — при повышении числа оборотов винта;
С — при установившемся режиме работы ВМГ; D — при переводе лопастей во флюгерное
положение и при выводе из него; 1—зажимной винт; 2—зубчатая рейка; 3—регулировоч¬
ный винт для минимального числа оборотов; 4—регулировочный винт для максимального
числа оборотов; 6—трос ручки регулятора числа оборотов из кабины; 6—масло под
высоким давлением; 7—маслопровод к винту; 8—маслопровод от мотора; 9—слив масла;
10—регулировочная пружина; 11—грузики; 12—золотник; 13—помпа; 14—редукционный
клапан; 15—маслопровод от вспомогательной помпы; 16—маслопровод от редукционно¬
го клапана.
вает масло, находящееся в гидравлическом механизме винта,
лопасти сохраняют установившийся шаг и обороты винта остаются
постоянными.
На фиг. 183, D показано действие регулятора, когда лопасти
винта устанавливаются во флюгерное положение или выводятся
из него. Масло под большим давлением нагнетается вспомогатель¬
ной помпой через канал, имеющийся в нижней части регулятора,
действует на пружинный клапан, закрывающий отверстие, через
которое проходит масло из регулятора, и проходит по маслопод¬
водящему каналу к поршню гидравлического механизма и к распре¬
206
делительному золотнику, регулирующему подачу масла к поршню.
При постоянном числе оборотов масло из мотора подается
помпой через канал пустотелого валика, соединенный с золотни¬
ком, и через окна золотника к внешней части поршня.
Масло, проходящее через регулятор, подается через золотник
к внутренней части поршня.
При установке лопастей винта во флюгерное положение движе¬
ние масла от мотора идет по тому же пути и в том же направлении,
как и в предыдущем случае.
Масло под давлением 28 am про¬
ходит через вспомогательный клапан
в нижней части регулятора и подво¬
дится во внутреннюю часть поршня,
так же как и при подаче масла из
регулятора.
. Под действием высокого давления
поршень перемещается до предела,
вытесняя масло низкого давления,
подаваемое из мотора, и лопасти вин¬
та устанавливаются во флюгерное
положение. Время, необходимое для
установки лопастей во флюгерное
положение из положения наимень¬
шего шага, 9—12 сек.
Для вывода лопастей из флюгер¬
ного положения (фиг. 183, D) масло
под давлением около 42 am подается
через вспомогательный клапан в ниж¬
ней части регулятора к распредели¬
тельному золотнику через нормаль¬
ную масляную линию от регулято¬
ра. Когда масло достигает распре¬
делительного золотника, оно дей¬
ствует на плунжер золотника, пе¬
ремещая его вперед и создавая об¬
ратное направление движения ма¬
сляного потока к цилиндру. Масло
высокого давления, попадая в ци¬
линдр, действует на внешнюю часть поршня и перемещает его.
В результате такого,перемещения поршня лопасти поворачиваются
на некоторый угол, при котором винт начинает вращаться, и, таким
образом, число оборотов винта начинает управляться регулятором
постоянного числа оборотов. Во время этой операции масло высо¬
кого давления удаляется в маслосборник мотора.
На фиг 184 показан распределительный золотник. Золотник
плотно укрепляется на валу винта.
Верхняя часть золотника входит в цилиндр. Для предотвращения
утечки масла из цилиндра золотник имеет четыре канавки, в кото¬
рые вставляются уплотнения.
Как было сказано выше, для установки лопастей во флюгерное
положение необходим специальный внешний источник гидравли¬
Фиг. 184. Распределительный зо¬
лотник винта Гидроматик.
Слева—при постоянном числе оборотов
и при установке лопастей во флюгер¬
ное положение;
справа—при выводе лопастей из флю¬
герного положения в нормальный ди¬
апазон углов поворота. £
207
ческого давления, который мог бы подавать в гидравлический меха¬
низм масло под высоким давлением. Таким источником является
помпа высокого давления, приводимая в действие электрическим
мотором, запускаемым пилотом кнопкой, когда это необходимо. Ког¬
да давление масла в линии достигает 28 am, электрическая
цепь размыкается и мотор перестает работать. При выводе лопастей
из флюгерного положения мотор помпы опять включается для
создания давления масла выше 28 am. При подаче масла под таким
давлением к гидравлическому механизму винт возвращается к нор¬
мальному диапазону углов поворота.
Для создания высокого давления масла для винтов с флюгерным
положением лопастей можно использовать гидравлическую систему
самолета. В этом случае потребуется установка гидравлического
аккумулятора.
Винт Гидроматик по весу тяжелее винтов с электрическим
управлением, но установка лопастей винта Гидроматик во флю¬
герное положение происходит быстрее, чем у винтов с электри¬
ческим управлением и не требует дополнительных приспособлений
для ускорения поворота лопастей.
Преимуществом гидравлияеской системы являются ее простота
и надежность работы механизма, изменяющего шаг винта.
Автоматический винт Ротол (Англия)
Фирма Ротол изготовляет винты с гидравлическим и с электри¬
ческим управлением.
Ниже мы приводим описание винтов Ротол с гидравлическим
управлением. Винты работают по двухсторонней схеме.
Автоматические винты Ротол выпускаются с лопастями из маг¬
ниевых сплавов. Для винтов, предназначенных для истребителей,
выпускаются винты и с деревянными лопастями.
На фиг. 185 показано устройство втулки винта Ротол.
Комлевая часть лопастей закрепляется на резьбе в стальном ста¬
кане 7, который в свою очередь крепится в неразъемной стальной
втулке 6. Для предотвращения повреждения сравнительно мягкой
комлевой части электронной лопасти в верхней части сталь¬
ного стакана делается конус, в котором устанавливается специ¬
альная кольцевая прокладка, закрепляемая на месте зажимным
кольцом.
Стальной стакан 7, в котором закреплена лопасть 8, имеет
в верхней части комплект шарикоподшипников 2, состоящий
из четырех больших обойм и одной малой обоймы с шариками ма¬
лого диаметра, находящейся в верхней части стакана.
Подшипники 2 воспринимают нагрузку, возникающую под
действием центробежных сил винта, облегчаю1** поворот лопастей
при изменении шага и передают лопастям крутящий момент мо-
* тора.
Обоймы главных подшипников 2 сконструированы таким образом,
что под действием центробежной силы внутренняя обойма стремит¬
ся сжаться вокруг стакана, в то время как внешняя обойма стре¬
мится увеличиться в диаметре и прижаться к гнезду корпуса
208
%
втулки 6.. Малые обоймы имеют предварительный натяг, что пред¬
отвращает возможность вибрации и расшатывания крепления, когда
центробежные силы очень малы (при малых оборотах мотора).
Благодаря неразъемной втулке 6 и компактности механизма изме¬
нения шага втулка винта имеет сравнительно небольшие размеры
и малое лобовое сопротивление.
Фиг. 185. Устройство втулки автоматического винта
Ротол.
1—конусное кольцо; 2—упорные шарикоподшипники; 3—под¬
вижной цилиндр; 4—неподвижный поршень; б—уплотнение;
6—втулка; 7—маслопроводы к цилиндру; 8—резьба на ком¬
левой части лопасти; 0—палец» связанный с лопастью; Ю—ма¬
слопровод для подачи масла под давлением к задней части
поршня; 11—подшипник; 12—маслопровод для подачи масла
под давлением к передней части поршня; 13—уплотнение;
14—плавающая втулка; 15—маслоканал, сообщающийся с кар¬
тером; 16—эластичное уплотнение; 17—палец для поворота
Механизм изменения шага состоит из неподвижного поршня 4
и подвижного цилиндра 3, помещающегося в центре втулки, на¬
правляющей втулки и пальца 9, жестко связанного с комлевой
частью лопасти. При подаче масла к одной из сторон поршня 4
цилиндр перемещается и поворачивает лопасти винта на определен¬
ный угол.
Масло для работы гидравлического механизма подается от помпы
и регулятора через две трубки, укрепленные в задней части втулки.
5
лопасти.
14 Общий курс воздушных ВИНГОВ
209
Одна из этих трубок 72 служит для подачи масла к передней
части поршня 4, а другая—10 для подачи масла к обратной сто¬
роне его.
Отвод масла из цилиндра 3 к регулятору производится через
полый плунжер 4 (фиг. 186) и вспомогательный клапан 7.
10 11
Фиг. 186. Регулятор с помпой для винтов Ротол (разрез).
Л—-положение плунжера при увеличении шага; Б—положение плунжера
при уменьшении шага; 1—привод регулятора от мотора; 2—шестеренная
помпа; 3—втулка с окнами; 4—плунжер; 5—центробежные грузики регуля¬
тора; 6—зубчатый сектор, сцепляющийся с рейкой для регулирования на¬
тяжения пружины из кабины летчика; 7—вспомогательный клапан; 8—окно
для подачи масла высокого давления к передней стороне поршня; 9—редук¬
ционный клапан; 10—окно для подачи масла высокого давления к задней
стороне поршня; 21—окно для отвода отработанного масла низкого давления
из гидравлического механизма.
Регулятор винта Ротол представляет комбинацию помпы и регу¬
лятора. Разрез его показан на фиг. 186.
Масло из мотора при нормальном давлении подается в корот¬
кий полый валик холостой шестерни помпы 2, внутри которого
имеется редукционый клапан 9. Через клапан масло проходит во
внутреннюю часть корпуса помпы 2.
210
Ведущая шестерня помпы 2 укреплена на сравнительно длин*
ном полом валике, в котором помещается полый плунжер 4 регу¬
лятора с укрепленными на нем центробежными грузиками 5.
При возрастании числа оборотов центробежные грузики 5 регу¬
лятора расходятся в стороны под действием центробежной силыг
плунжер 4, перемещаясь вперед, сжимает коническую пружину,
натяжение которой устанавливает пилот из кабины посредством
зубчатого сектора с рейкой 6.
Перемещаясь вперед, плунжер 4 открывает окно 8 для впуска
масла; масло из помпы нагнетается в цилиндр к передней стороне
поршня (фиг. 185), цилиндр перемещается и винт устанавливается
на больший шаг, что увеличивает нагрузку мотора, вследствие чего
обороты мотора падают. Это будет происходить до тех пор, пока
центробежные силы и сила натяжения пружины не уравновесятся
между собой и плунжер 4 (фиг. 186) не установится в центральное
положение. В это время масло будет находиться по обеим сторо¬
нам поршня.
При падении числа оборотов, когда центробежная сила грузи¬
ков 5 будет очень малой, плунжер 4 закроет линию, по кото¬
рой подавалось масло в цилиндр к передней стороне поршня,
откроет линию 10, подводящую масло к задней стороне поршня.
В это время масло в цилиндре, находящееся в передней стороне
поршня, будет уходить при более низком давлении через окно 11
к вспомогательному клапану 7 регулятора через внутреннюю часть
плунжера 4.
Регулятор и помпа 2 винта Ротол могут быть приспособлены
для винтов правого и левого вращения.
Максимальное давление нагнетаемого помпоймасла—около22 am
Трехлопастный винт Ротол для истребителей
При конструировании винтов для истребителей особое значение
имеет вес винта. Стремление снизить вес винтов, предназначаемых
для истребителей, оборудованных мощными моторами, привело
к созданию облегченных трехлопастных винтов для истребитель¬
ной авиации. Одним из таких винтов является трехлопастный винт
фирмы Ротол, предназначенный для установки на одномоторном
истребителе. Облегчение веса винта достигнуто применением дере¬
вянных лопастей. Винт с деревянными .лопастями весит на 17 кг
меньше винта с электронными лопастями. В соответствии с этим
центробежные усилия, действующие на каждую лопасть, уменьши¬
лись примерно с 50 до 30 т.
На фиг. 187 показана втулка винта Ротол для истребителей
(разрез).
Винт имеет диапазон углов поворота в пределах 35° (вместо 20°
в обычных винтах Ротол). Большой диапазон углов поворота
делает истребитель маневренным на всех режимах полета, вклю¬
чая пикирование.
Винт этого типа снабжен регулятором, обеспечивающим постоян¬
ное число оборотов, и может быть легко превращен в винт с лопас¬
тями, устанавливающимися во флюгерное положение, для чего тре¬
14*
211
буется только установить помпу высокого давления и заменить
цилиндр винта для обеспечения более длинного хода поршня.
В этом случае такой цилиндр называется внешним цилиндром винта-
в обычных винтах фирмы Ротол цилиндр и весь механизм изме¬
нения шага находятся внутри корпуса втулки.
Фиг. 187. Втулка винта Ротол для истребителей (разрез).
1—корпус втулки винта; 2—внутренняя втулка; 3—шлицы вала; 4—гнездо втулки;
ч5—упорные шарикоподшипники; 6—верхний подшипник; 7—стакан; 8—комель ло¬
пасти; 9—-кольцо втулки; 10—основание стакана; 11—палец; 12—затяжная гайка
подшипника; 13—поршень; 14—цилиндр; 16—тяга; 16—шатун; 17—удлиненная
Часть цилиндра; 18—труба с двойными стенками; 19—прокладка; 20—конусное коль¬
цо; 21—каналы для подали масла от регулятора к гидравлическому механизму.
Г Механизм изменения шага этого винта состоит из следующих
основных деталей: неподвижного поршня 13, подвижного цилиндра
14, связанного с пальцем 11 для поворота лопасти 8 через ша¬
тун 16 и тягу 15.
Связь цилиндра с шатуном и тягой регулируется проклад¬
ками 19, вставляемыми между заплечиком тяги и внешней стенкой
цилиндра 14. Конец шатуна со стороны тяги 15 имеет крейцкопф,
движущийся в круглых направляющих, укрепленных в корпусе
втулки.
,212
Масло под давлением из помпы регулятора подается через цен¬
тральный канал 27 и пространство между стенками трубы 18. Масло
подается в цилиндр 14 как по одну, так и по другую сторону пор¬
шня 13. Для этой цели винт снабжен специальным распределителем
(«дистрибутором»).
Винт и регулятор сконструированы таким образом, ,что они
могут быть установлены на моторы как правого, так и левого
вращения.
Регулятор обладает очень большой чувствительностью и может
обеспечить постоянное число оборотов даже при самых малых обо¬
ротах (10—15 об/мин.).
Автоматический винт Эшер-Висс
Конструкция автоматического винта изменяемого шага, разрабо¬
танная швейцарской фирмой Эшер-Висс, имеет ряд особенностей,
отличающих этот винт от других автоматических винтов.
Bfr-.v . З&а , &&&&.. V*. . ,-ш.^ ,-,iy
Фиг. 188. Общий вид винта и втулки Эшер-Висс.
А—лопасти установлены на малый шаг; Б—лопасти во флюгерном положении.
Винт приспособлен к установке лопастей во флюгерное положе¬
ние и на отрицательный шаг (реверсивность действия), имеет авто¬
матическое управление для нормального диапазона углов поворота
и независимое ручное управление, которое пилот может использо¬
вать при любых обстоятельствах.
Кроме этого, винт Эшер-Висс имеет автоматическое стопорное
приспособление для закрепления (фиксирования) лопастей в любом
положении. Благодаря стопорному механизму устраняется воз¬
можность перебоев в работе винта в случае падения давления
масла.
Винт Эшер-Висс имеет втулку, позволяющую устанавливать
пушечный мотор для стрельбы через вал мотора.
На фиг. 188—191 показаны общий вид и отдельные детали винта
Эшер-Висс.
213
Лопасти винта 3 (фиг. 190) укреплены в неразъемной стальной
втулке 7 при помощи резьбы, имеющейся на комле и на внутренней
части стального стакана 2. В
верхней части стакан закре¬
пляется при помощи конусного
кольца 13 и зажимной гайки 12.
Основание стакана опирается
на роликоподшипники 14, вос¬
принимающие на себя центро¬
бежные усилия. Изгибающий
момент воспринимается корпу¬
сом втулки через подшипники 9.
Корпус втулки 1 соединен с ва¬
лом мотора фланцем 77.
Неподвижный поршень 5
укрепляется на трубе 4; в стен¬
ках ее имеются каналы для по¬
дачи масла в цилиндр 6, кото¬
рый может двигаться прямоли¬
нейно под действием давления
масла. Изменение шага лопас-
цилиндра производится при помощи
Фиг. 189. Разборка втулки винта Эшер-
Висс.
ти при осевом
шатуна 7.
перемещении
Фиг. 190. Обший вид втулки винта Эшер-Висс (разрез).
2—корпус втулки винта; 2—стакан; 3—лопасть; 4—труба; 5— поршень; €—цилиндр;
%—шатун; 8—канал для подачи масла; 9—подшипники; 10—регулятор; 11—фланец;
12—зажимная гайка; 13—конусное кольцо; 14—роликоподшипники; 15—рычажок для
управления регулятором.
214
регулятор 10 устанавливается в передней части мотора и упра¬
вляется из кабины посредством рычажка 15.
Изменение шага винта Эшер-Висс производится следующим обра¬
зом: масло из регулятора 10 под повышенным давлением подается
через канал 8 и каналы, имею¬
щиеся в трубе 4, в подвижной
цилиндр 6 механизма, изменяю¬
щего шаг винта, к передней или
задней стороне неподвижного
поршня 5 (в зависимости от
того, в каком направлении дол¬
жен изменяться шаг винта), раз¬
деляющего на две части про¬
странство цилиндра.
Цилиндр 6 соединен с одним
концом шатуна 7. Другой конец
шатуна 7 соединен с лопастью 3.
Благодаря такому устройству
поступательное движение ци¬
линдра 6 превращается в угло¬
вое движение лопасти, в резуль¬
тате которого лопасть поворачи- * „ О D
г г Фиг. 191. Регулятор винта Эшер-Висс.
вается вокруг своей оси и уста- 1 г у
навливается на заданный шаг.
Винты Эшер-Висс изготовляются с дуралюминовыми лопастями,
которые укрепляются во втулке посредством резьбы.
Винты Эшер-Висс устанавливаются на самолетах, оборудованных
мощными моторами.
4. ВИШ с электрическим управлением
Винт Кертисс
Винты, изготовляемые фирмой Кертисс (США), представляют
собой автоматические винты, лопасти которых могут устанавли-
?
Фиг. 192. Детали стальной пустотелой лопасти винта Кертисс.
1—шестерня; 2—лопасть; з—заглушка; 4—подшипники; 5—гайка; 6—шплинт;
7—собранная лопасть.
ватьсяво флюгерное положение. При конструировании современных
винтов фирма учла весь опыт по изготовлению и эксплоатации
винтов с момента выпуска ею первых винтов в 1931 г.
Наиболее характерной особенностью винтов Кертисс является
наличие, наряду с автоматической регулировкой шага, независимого
215
вспомогательного ручного управления, которое позволяет исполь¬
зовать винт Кертисс как винт фиксированного шага при любой
Фиг. 193. Детали дуралюМиновой лопасти винта Кертисс.
1—конусная шайба; 2—подшипники; 3—гайка; 4—лопасть; 5—половинка стакана;
6—хомут; 7—собранная лопасть.
установке угла лопастей внутри нормального диапазона углов
поворота.
Винты Кертисс изготовляются со стальными пустотелыми и дур-
алюминовыми лопастями.
Фиг. 194. Разрез втулки трехлопастного винта Кертисс.
А стальной разъемный стакан; В—втулка; С—кожух редуктора; D—двухступенчатый
планетарный редуктор; Е—коническая шестерня; F—дисковый магнитный тормоз; G—элек¬
тромотор постоянного тока; Н—корпус механизма и контактный агрегат; I—электропро¬
водка к реле.
На фиг. 192 и 193 показаны стальная и дуралюминовая лопасти
и способы их соединения с шестерней механизма, изменяющего
шаг винта.
216
На фиг. 194 показан общий вид собранной втулки трехлопаст¬
ного винта Кертисс, а на фиг. 195 схематически представлены
основные агрегаты втулки и порядок их взаимной связи.
Изменение шага лопастей винта Кертисс производится при
помощи реверсивного электрического мотора G, к которому через
щетки, коллектор и провода подводится ток от электрической бата¬
реи, находящейся на самолете.
При включении электромотора G его вращение передается двух¬
ступенчатому планетарному редуктору D, приводящему во вращение
Фиг. 195. Основные агрегаты винта Кертисс (схема).
1—кожух редуктора; 2—электромотор и редуктор; 3—соединительная закрепляющая втул¬
ка; 4—гайка носка вала винта; 5—уплотнение; 6—пружинящее кольцо; 7—передний конусу
8—шпилька; 9—корпус втулки винта; 10—корпус щеточного механизма; 11—муфта, пред¬
отвращающая возможность вращения соединительной втулки 3; 12—вал винта; 13—носок
картера мотора; 14—задний конус; 15—щеткодержатель; 16—электропроводка управления
винта.
коническую шестерню привода Е. Коническая шестерня имеет заце¬
пление с коническими шестернями, укрепленными на комлевой части
каждой лопасти. В зависимости от угла поворота этой пары кони¬
ческих шестерен происходит поворот лопасти на определенный угол.
На фиг. 196 показаны детали редуктора, тормоз и мотор.
На стороне редуктора, находящейся ближе к втулке винта,
установлены электрические концевые выключатели. Назначение
этих выключателей—ограничивать установку малого и большого
шага в нормальном диапазоне углов поворота л закреплять лопасти
во флюгерном положении. Концевые выключатели функционируют
как при автоматическом, так и при ручном регулировании шага,
но выключатель для флюгерного положения работает лишь тогда,,
когда лопасти действительно находятся во флюгерном положении.
217
Кроме выключателей, на редукторе имеется предельный огра¬
ничитель поворота приводной шестерни редуктора. Назначение
■ограничителя—предотвратить возможность провертывания лопастей
Фиг. 196. Редуктор, электромотор и тормоз винта Кертисс.
1—тормоз; 2—электромотор; 3—передняя часть корпуса редуктора; 4—задняя часть корпуса
редуктора; 5—шестерня ступени высокой скорости редуктора; 6—планетарная шестерня
ступени высокой скорости редуктора; 7—шестерня с внутренним зацеплением ступени высо¬
кой скорости редуктора; 8—шестерня ступени малой скорости редуктора; 9—планетарная
шестерня ступени малой скорости редуктора; %0—шестерня с внутренним зацеплением сту¬
пени малой скорости редуктора.
в случае каких-либо механических повреждений или 'отказа в ра¬
боте предельного электрического выключателя малого шага.
В передней части электромотора имеется магнитный тормоз,
предназначенный для моментальной остановки вращения ротора
Фиг. 197. Общий вид регулятора постоянных оборо¬
тов винта Кертисс.
1—наконечник; 2—корпус; S'—болт; 4—валик; 5—плита; 6—
подшипник; 7 — винт, регулирующий давление пружины;
8—втулка; 9—подшипник; 10—носок вала привода; 11—под¬
шипник; 12—пробка; 13—шпиндель; 14—крышка подшипни¬
ка; 15—тарелка плунжера; 16—корпус регулятора; 17, 18—
плиты; 19—корпус контактного устройства; 20—центробежные
грузики; 21—пружина регулятора.
электромотора в случае перерыва в подаче электрического тока
мотору. Тормоз находится все время в действии, когда шаг винта
не изменяется. Таким образом магнитный тормоз представляет
собой также своеобразный замок, предотвращающий возможность
218
изменения шага винта под влиянием моментов сил, действующих на
лопасть.
Винт Кертисс имеет автоматическое управление, управление
для флюгерного положения лопастей и ручное управление.
Автоматическое управление винта состоит из регулятора, упра¬
вления регулятором в кабине летчика и реле. Ручное управление
и управление для флюгерного положения винта состоят из серии
электрических выключателей и переключателей, находящихся в
кабине пилота.
На фиг. 197 показан общий вид регулятора Кертисс.
Основными деталями регулятора являются центробежные гру¬
зики 20, приводимые в движение от мотора через гибкий вал
и уравновешенные пружиной 27, натяжение которой регулирует
пилот. Пружина приводит в действие трехпозиционный переклю¬
чатель, состоящий из подвижного контакта, двигающегося между
двумя постоянными контактами, имеющими, как и подвижной кон¬
такт, вольфрамовые контактные точки.
Подвижной переключатель контакта удерживается на контакте
повышения оборотов бронзовой пружиной. При таком положении
электрическая цепь повышения оборотов остается замкнутой. Если
валик регулятора имеет недостаточное число оборотов для того,
чтобы центробежная сила грузиков преодолела силу натяжения
пружины, подвижной контакт удерживается в прежнем положении
и цепь повышения оборотов остается замкнутой. Как только обо¬
роты регулятора увеличатся, под действием центробежной силы
грузиков пружина регулятора сожмется и переместит подвижной
контакт, отключив его от контакта повышения оборотов, и цепь
разомкнется. Когда подвижной контакт находится в нейтральном
положении, все электрические цепи управления оборотами винта
остаются разомкнутыми и шаг винта остается неизменным в том
положении, в каком он был в момент разъединения цепи.
Если число оборотов будет повышаться дальше под действием уве¬
личивающейся центробежной силы грузиков, подвижной контакт
переключателя переместится и установится на постоянном кон¬
такте понижения числа оборотов, цепь понижения числа оборотов
замкнется, шаг винта увеличится и число оборотов мотора упадет.
Как только число оборотов понизится, подвижной контакт
переместится в нейтральное положение, цепь разомкнется и шаг
винта останется фиксированным до тех пор, пока вновь не про¬
изойдет изменения оборотов мотора.
Для управления током, питающим электромотор, в цепи нахо¬
дится реле, сила тока цепи которого равна 1Ji ампера.
Вес винта Кертисс диаметром 3,65 м с дуралюминовыми лопа¬
стями 170 кг, винта диаметром 3,5 м со стальными пустотелыми
лопастями—167 кг. Таким образом можно считать, что винты
Кертисс со стальными пустотелыми и дуралюминовыми лопастями
имеют приблизительно равный вес.
Несмотря на то что винты Кертисс с электрическим управле¬
нием сравнительно широко применяются в авиации США, они имеют
ряд очень существенных недостатков. К числу главнейших недо¬
статков винта Кертисс относятся: возможность перебоев в работе
219
электрического механизма и сложность механизма винта. Следует
также отметить, что в винтах такого типа работающие детали
сравнительно быстро изнашиваются вследствие отсутствия постоян¬
ной смазки.
К недостаткам винтов такого типа следует отнести также
и то обстоятельство, что угловая скорость поворота лопастей при
изменении шага очень мала. Для быстрого изменения шага при
установке лопастей во флюгерное положение требуется специаль¬
ное приспособление, ускоряющее угловой поворот лопастей.
Винты Ратье
Винты Ратье (Франция) с электрическим приводом выпускаются
нескольких типов, различающихся между собой способом передачи
К—корпус электромотора; М—электромотор; Ъ—болт корпуса втулки; /—фла¬
нец; v—болт крепления фланца; Л—вал мотора; Р—червяк; jRi, и jRg— чер¬
вячные шестерни первой ступени редуктора; JPj, Р% и Р3—червячные винты второй
ступени редуктора; Ei; Е2 и Ез—гайки с шестеренками; г3 и гз*—подшипники; Ki,
Кг и К3—виты с рейками (третья ступень редуктора); /к—нарезная часть
винта; S3—шестерня лопасти; *з—палец; 113—винт; а—соединительюе кольцо для
синхронного поворота лопастей; Т—стержень; д—направляющая; с—кулачок,
приводящий в действие электрические прерыватели, регулирующие шаг винта.
вращения от электромотора к лопастям, способами-регулирования
изменения шага и схемами управления.
Для поворота лопастей с целью изменения шага винта фирма
Ратье применяет или многоступенчатый червячный механизм, или
220
систему шатунов, или зубчатые рейки, причем преимущество
отдается винтам с червячным механизмом.
При применении червячного механизма освобождается централь- ,
ная часть втулки лопасти для стрельбы через вал мотора. Чер¬
вячные механизмы не ограничивают диапазона углов поворота
* лопастей и преобразуют (с постоянным отношением чисел оборотов)
непрерывное круговое вращение в угловое, в то время как при
Фиг. 199. Сечение хх втулки винта Ратье (см. фиг. 198).
использовании зубчатых реек или шатунов диапазон углов пово¬
рота ограничен.
Червячная передача позволяет также устранить люфт в деталях
передачи и уменьшить их износ.
Для характеристики винтов Ратье приводим описание наиболее
характерных конструкций винтов этой фирмы.
На фиг. 198 и 199 показано сечение механизма втулки винта
Ратье с электрическим управлением и с реечным поворотным
механизмом для мотора Гном-Рон К-14.
Винты этого типа имеют трехступенчатый редуктор. С первой
ступенью редуктора связаны следующие механизмы—электро¬
мотор М, установленный в корпусе К, червяк Р, находящийся
на валу мотора М, и червячные шестерни Р1( Р2 и Р3.
Вторая ступень редуктора состоит из червяков Рг Ра и Р3,
на валу которых укреплены упомянутые выше червячные шестерни
Rlt R2 и Р8, зацепляющиеся с шестеренками^, Ez, Е3,насаженными
на гайки.
221
Третья ступень редуктора состоит из реек К„ К2, К3, на
нарезной части которых посажены гайки £,, Е2, Е3. Зубчатые рейки
Кх, К2 и К3 имеют зацепление с шестернями slt s2 и s3, укреплен-
• ными на комлевой части лопастей винта. Одна из таких шестерен—
шестерня s3 —показана на фиг. 198.
Передняя часть реек закреплена на кольце а, скользящем
вокруг корпуса мотора М и обеспечивающем синхронное угловое
вращение лопастей.
При работе электромотора М его вращение
через трехступенчатый редуктор передается ло¬
пастям, и таким образом происходит изменение
шага винта.
Лопасти крепятся во втулке при помощи
подшипников, в обоймах которых шарики уло¬
жены по винтовой линии. При изменении шага
лопасть повертывается вокруг оси по винтовой
линии.
Винт может устанавливаться на большой
и малый шаг и во флюгерное положение.
Регулировка шага винта производится при
помощи автоматических прерывателей, приво¬
димых в действие кулачком с.
Общий вид винта показан на фиг. 200. Винт
весит 134 кг (втулка 71 кг, лопасти 63 кг).
Угол установки лопастей винта на расстоянии
1 м от оси вращения равен 26°, 58 для малого
шага и 33°, 58 для большого шага. Для пере¬
вода винта с малого шага на большой требуется
10 сек., а для перевода винта с малого шага в
положение наименьшего лобового сопротивле¬
ния—около двух минут. Винты с зубчатыми
рейками имеют тот недостаток, что зубчатые
рейки ограничивают диапазон углов поворота
лопастей и затрудняют установку их на отри¬
цательный шаг, для.чего потребовалась бы очень
длинная рейка, так как диаметр шестерен, свя-
Фиг. 200. Общий вид занных с комлевой частью лопастей, не может
винта Ратье. быть уменьшен вследствие большой нагрузки
на зубья шестерен.
У винтов Ратье для пушечных моторов механизм передачи
движения от электромотора к лопастям представляет также трех¬
ступенчатый редуктор.
В винтах для пушечных моторов используются электромоторы
кольцевого типа.
На фиг. 201 показан механизм втулки винта пушечного мотора.
На фиг. 202 показаны отдельные детали редукционной системы.
Схема действия механизма, изменяющего шаг винта, может
быть представлена следующим образом.
При вращении кольцевого электромотора М (фиг. 201) вместе
с ним вращается шестерня К, зацепляющаяся с шестерней R,
закрепленной на валике червяка У/. Шестерня R и червяк Vi
222
являются ведущим элементом первой ступени редуктора. Червяк VV
имеет зацепление с червячной шестерней Ri, закрепленной
на валике червяка Уц, имеющего зацепление с червячной шестер¬
ней Rn второй ступени редуктора \
Червячная шестерня Ru представляет одно целое с гайкой Ецт
(третья ступень редуктора) и укреплена на упорных шарико¬
подшипниках гиг'.
Фиг. 201. Втулка винта Ратье для мотора-пушки.
М—электромотор;, К—центральная шестерня редуктора; R—шестерня червячного валика
первой ступени редуктора; Rj—червячная шестерня поперечного червячного валика вто¬
рой ступени редуктора; Rjj—червячная шестерня; Vj—червяк первой ступени редуктора;
VII —червяк второй ступепи редуктора; гиг’—шарикоподшипники;Ejjj -гайки с червяч¬
ной шестерней; Tjц—нарезная тяга третьей ступени редуктора; В—шатун; t—палец; С—втул¬
ка; т—пружина; тг—контакты; Р—поршень.
При вращении шестерни Ru вращается гайка Ещ, навернутая
на резьбу, имеющуюся на стержне Тщ, благодаря чему стержень Тш
получает осевое перемещение в том или другом направлении
в зависимости от характера изменения шага винта.
Всего во втулке винта имеется три стержня Тщ. Стержни Тш
соединены с бронзовым поршнем Р, который перемещается вместе
с стержнями Тщ. Втулка поршня С служит направляющей при
движении поршня в осевом направлении.
1 Значки х, хх и ш 'указывают, к какой ступени редукции относится
деталь.
К поршню Р прикреплены шатуны лопастей В, при помощи
которых производится поворот лопастей вокруг их оси при изме¬
нении шага.
При перемещении поршня Р
приводятся в действие контак¬
ты п, при помощи которых про¬
изводится установка малого и
большого шага (на фиг. 201 пока¬
зан один из таких контактов п).
Для того чтобы при измене¬
нии шага винта (вращении ло¬
пасти в гнезде втулки) шатун В
не мог подняться вместе с
пальцем t при движении лопа¬
сти вверх, предусмотрено при¬
способление, состоящее из стерж¬
ня и пружины т, отжимающей
шатун В.
Применяемая в винтах тако¬
го типа система шатунов тре¬
бует очень точного подбора ша¬
тунов и тщательной обработки пальцев комля лопасти (допуск
0,03 мм), для того чтобы обеспечить нормальную и бесперебойную
Фиг. 203. Общий вид втулки винта Ратье с ветрянкой.
работу механизма. Другим не менее важным недостатком шатунного
механизма является ограниченность его применения; например,
224
Фиг. 202. Редуктор.
шатунный механизм не может быть использован для винтов, кото¬
рые должны устанавливаться на отрицательный шаг.
Кроме винтов с кольцевыми электромоторами, фирма Ратье
изготовляет винты для пушечных моторов, управление оборотами
которых производится при помощи ветрянки. Эти винты имеют
трехступенчатый редуктор, схема которого описана выше.
На фиг. 203 показаны механизм и общий вид втулки винта
такого типа. Диаметр винта 2,6 м, ветрянки 0,70 м. Винты
предназначены для установки на одноместный истребитель с мото¬
ром Испано-Сюиза 12 Ydrs. Следует сказать, что распространения
такие винты не получили.
Для самолетов с мощными моторами строятся
винты с электрическим управлением, в которых
изменение шага лопастей производится также
системой шатунов. На фиг. 204 показана схема
изменения шага при помощи шатунного механиз¬
ма. Такие винты устанавливаются на мощных
моторах типа Испано-Сюиза 12 Ydrs. Общий
вид втулки винта показан на фиг. 205. Как
и другие винты, винт Ратье имеет многоступен¬
чатый редуктор. Первая ступень редуктора со¬
стоит из червяка Pj, укрепленного на валу А
электромотора М, и зацепляющихся с ним
червячных шестерен Ri. Вторая ступень редук¬
тора состоит из червяка Уц и червячной шес¬
терни Rn.
Третья ступень редуктора состоит из шес¬
терен Pm, зацепляющихся с внутренней шес¬
терней крышки Сш-
Четвертая ступень редуктора состоит из
снабженного резьбой стержня Tjy и, втулки W
с резьбой.
При включении электромотора его вращение
будет передаваться через многоступенчатый ре¬
дуктор стержню Т/v, который при вращении будет перемещать в
осевом направлении связанную с ним втулку W и поворачивать
лопасти на определенный угол при помощи шатуна В, связанного
со втулкой и пальцем t, расположенным эксцентрично на комлевой
части лопасти.
Винт имеет диаметр 4,1 м и весит 173 кг. На фиг. 206 показан
общий вид винта этого типа. Как видно из приводимой фотогра¬
фии, диаметр втулки очень мал по сравнению с диаметром винта,
благодаря чему лобовое сопротивление втулки относительно не¬
велико. *
Как уже было упомянуто выше, некоторые типы винтов Ратье
с электрическим управлением снабжены червячным механизмом
для передачи лопастям углового вращения. Такие винты, напри¬
мер, устанавливаются на самолеты с моторами Рено 6 Q, мощно¬
стью 220 л. с. На фиг. 207 показан механизм поворота одной ло¬
пасти такого винта, на фиг. 208 показан разрез механизма втулки
этого винта.
тунного механизма
для изменения шага
винта Ратье.
1—редуктор; 2—кулиса;
о—шатун; 4- -комель ло¬
пасти.
15 Общий курс воздушных винтов
225
Механизм изменения шага винта состоит, как и в описанных
выше типах винтов, из многоступенчатого редуктора, с той разницей,
что здесь применяется редуктор червячного типа.
Первоначальным источником движения редукционной системы
является электромотор. Первая ступень редуктора состоит
из червяка Pi, укрепленного на валу мотора и не показанного
Фиг. 205. Втулка винта Ратье для мотора Испано-Сюиза 12 Ydrs.
М—электромотор; А—вал мотора; Pj—червяк первой ступени редуктора; Рщ—шестерня
третьей ступени редуктора; Rj—червячная шестерня первой ступени редуктора; Rjj—чер¬
вячная шестерня второй ступени редуктора; Tjy—нарезной стержень (четвертая ступень
редуктора); Cjjj—барабансвнутренним зацеплением (третья ступень редуктора); В—шатун;
t—палец.
«
на фиг. 207, и червячных шестерен Ri. Вторая ступень редуктора
состоит из червяков Vu и шестерен Рц. Третья ступень редукто¬
ра состоит из червяков Vщ и шестерен, имеющихся на лопас¬
тях Rui-
Для устранения игры червяка Vщ и шестерни Рш валик
червяка соединен с валиком шестерни Rm специальным шарниром,
помещающимся в коробке Т, укрепленной в корпусе при помощи
фланца втулки S и упоров К.
работа многоступенчатого редуктора понятна из
гуры- Скажем несколько слов о механизме, свя¬
занном с электрической системой регулирования
шага-
При вращении мотора червяк и, имеющийся на
наклонном валике, приводит во вращение соответст¬
вующую шестерню г, закрепленную на одном валике
с шестерней р, зацепляющейся с шестерней с. На
шестерне с находятся кулачки к и к', которые
имеют попеременно контакт с роликами g и g'.
При помощи этого устройства, связанного с эле¬
ктрической1 цепью, происходит регулирование шага
(установка на малый и большой углы поворота).
Винты этого типа имеют диаметр 2,1 м. Как и
у всех винтов Ратье, у этого винта металлические
лопасти.
Несмотря на недостатки, присущие электриче¬
ским винтам со щеточным механизмом и коллекто¬
ром, и на сложность управления механизма винтов
Ратье, эти винты все же имели распространение
во французской авиации. Винты для многомоторных
самолетов, выпускаемые в последнее время фирмой
Ратье, снабжены приспособлением для синхрониза¬
ции оборотов моторов и их можно устанавливать во
флюгерное положение и на отрицательный шаг.
Автоматическое поддержание числа оборотов в" винтах Ратье
производится при помощи регуляторов центробежного типа или
ветрянок.
Фиг. 206. Винт
Ратье для мото¬
ра Испано-Сюи¬
за 12 Ydrs.
Фиг. 207. Схема действия механизма для изменения шага лопасти винта Ратье.
Винт VDM (Германия)
Винты VDM (Vereinigte Deutsche Metallwerke) получили в Гер¬
мании очень широкое распространение. Эти винты ставятся на сов¬
ременных германских самолетах.
15*
227
Фиг. 208. Втулка винта Ратье для мотора Рено 6Q (220 л. с.).
М электромотор; —червячная шестерня первой ступени редуктора; —червячная
шестерпя второй ступени редуктора; -Rjji—червячная шестерня лопасти; V ц—червяк второй
ступени редуктора; VиI—черБчк третьей ступени редуктора; S—втулка крепления; К—упор;
Ji—валик; J2—соединение валп'ча; v—червяк; с—шестерня; р— шестерня; к и к’—кулачки
прерывателя; д и д'—ролпкн прерывателя; _2’—корпус подшипника.
228
На фиг. 209 показано устройство втулки винта VDM с элек¬
трическим управлением для пушечного мотора.
Для уяснения действия и работы механизма, /изменяющего шаг
винта, на фиг. 210 показана схема передачи движения от электро¬
мотора к лопастям.
Вращение электромотора винта передается через гибкий вал
щестерне С (фиг. 209), насаженной на конце этого вала. Шестерня
С имеет зацепление с большой кольцевой шестерней G, свободно
вращающейся вместе с шестерней С. С шестерней G жестко свя¬
зана планетарная шестерня Я с 24 широкими зубьями, сцепленная
с укрепленной неподвижно на валу винта шестерней J, имеющей
82 зуба, и с широкой шестерней К, свободно посаженной на вал
винта, рядом с шестерней J■ таким образом шестерня Н перекры¬
вает своими зубьями шестерни J и К- Шестерня К имеет 86 зубьев,
т. е. больше чем шестерня J. Вследствие этого, во время движе¬
ния планетарной шестерни Н по зубьям шестерен J и К, шестерня
К будет вращаться быстрее с некоторым опережением по отноше¬
нию к шестерне J. ^
С противоположной стороны планетарной шестерни Н широкая
шестерня К зацепляется с другой планетарной шестерней L, подоб¬
ной планетарной шестерне И. Эта шестерня также имеет 24 зуба
и свободно вращается на своей оси, не перемещаясь по периферии
шестерни К• Шестерня L укрепляется на жестком основании,
укрепленном на моторе самолета. Зацепляясь одной стороной
с шестерней К, планетарная шестерня L зацепляется противополож¬
ным концом зубьев с зубьями шестерни М, свободно сидящей
на валу винта.
Шестерня М на другом конце имеет шестерню N с 82 зубьями,
зацепляющуюся с небольшой цилиндрической шестерней Р, укре¬
пленной жестко на валу червяка, передающего вращение лопасти
винта на определенный угол через червячную шестерню, укреплен¬
ную на комлевой части лопасти.
Таким образом при вращении шестерни G шаг винта будет все
время изменяться. Если же шестерня G будет неподвижной, пла¬
нетарная шестерня Н, приводимая в движение от вала винта через
шестерню J, жестко укрепленную на валу, будет вращаться вхо¬
лостую на своей собственной оси.
Б это время шестерня N вращается вместе с винтом с одной ско¬
ростью с шестерней J без какого-либо относительного углового
перемещения. При таком положении цилиндрическая шестерня Р
вращается вместе с валом винта и не имеет никакого углового
перемещения относительно шестерни N. Шаг лопасти винта оста¬
ется неизменным.
Винт VDM снабжен антиобледенителем. Для предотвращения
обледенения применяется гликопь, разбрызгиваемый на лопасть
под действием центробежной силы.через трубку s, к которой он
подается из кольца, вращающегося вместе со втулкой.
Электрический мотор для изменения шага винта работает
на токе напряжением 12—24 в. Мощность электромотора 80—120 вт.
Винты VDM снабжаются или регуляторами центробежного
типа или электрическими регуляторами.
229
. Фиг- 209. Втулка ‘винта VDM.
230
Фиг. 210. Схема механизма
изменения шага винта VDM.
Буквенные обозначения те же,
чт.» и на фиг. 209.
Г
*
'I I,
Схема действия регулятора центробежного типа для этого
вИнта принципиально не отличается от описанной выше. Здесь мы
рассмотрим схему электрического регулятора винта VDM (фиг. 211).
действие электрического регулятора основано на изменении силы
^рКа в цепи регулятора. Сила тока в цепи зависит от числа оборо¬
тов генератора, которое в свою очередь находится в прямой зави¬
симости от числа оборотов винта.
На фиг. 211 показаны схема электрического регулятора посто¬
янного числа оборотов винта VDM и взаимодействие различных
элементов, образующих электрические цепи при различных режи¬
мах работы мотора. Каждая цепь, создаваемая взаимодействием
входящих в нее элементов, строго соответствует определенному ре¬
жиму работы винта.
При работе регулятора используются в основном четыре
замкнутых электроцепи.
231
Первая электроцепь используется дляручнойрегулировки
шага винта. Цепь состоит из аккумулятора 13, проводов электро¬
мотора 7—8, проводов предельного выключателя 9—10, через которые
подается ток в обмотку электромотора, соответствующую напра¬
влению вращения, при котором происходит увеличение шага винта,
проводов 20—21, проводов аккумулятора 29, контактов 24—25, замк¬
нутых при помощи мостика 22, электромагнитного выключателя 23,
проводов 26—27 и ручного переключателя 28, которым цепь может
быть замкнута или разомкнута.
Вторая цепь состоит из аккумулятора 13, проводов 8 и 11,
обмотки электромотора, проводов 12—18, предельного электромаг¬
нитного выключателя 32, контактов 33 и 34, провода 35 и контакта 37,
ручного переключателя 30 и провода 29. Эта цепь может быть
разомкнута или замкнута ручным переключателем 30 и использует¬
ся для уменьшения шага винта и, следовательно, для по¬
вышения оборотов.
Третья цепь состоит из элементов, образующих первую цепь,
но с той разницей, что в эту цепь включен электромагнитный
выключатель 32 с мостиком 31 вместо выключателя 23. Ток, прохо¬
дящий через выключатель 32, проходит через контакты 36 и 37
и возвращается через провод 29. Третья цепь используется для
автоматического увеличения шага винта.
Четвертая цепь состоит из элементов, образующих вторую цепь,
с той разницей, что в цепь включен электромагнитный выключа¬
тель 23 вместо ручного переключателя 28. Ток, идущий через
электромагнитный выключатель 23, проходит через мостик 22 и
контакты 40 и 41 к проводу 29.
Четвертая цепь используется для автоматического
уменьшения шага винта.
Из приведенной схемы видно, что изменение шага винта ручным
способом может быть произведено тогда, когда мостики 22 и
31 электромагнитных выключателей 23 и 32 соединены соответствен¬
но с клеммами 24, 25 или 33 и 44. Шаг винта может быть
установлен при помощи этих главных цепей только тогда, когда
мостики 22 и 31 соединены с их соответственными магнитными
контактами 40 и 41 или 36 и 37, и действие пружин 42 и 43
преодолено. Магнитный выключатель 32 приводится в действие
только тогда, когда цепь, проходящая от клеммы 7 через вы¬
ключатели напряжения 53 и 54, т. е. через пружинные мостики,
замкнута. Подобным же образом магнитный выключатель 23 на¬
ходится в работе только тогда, когда создается цепь, идущая от
клеммы 7 к клеммам аккумулятора 29 через пружинный кон¬
такт 44 выключателя напряжения 52, через контакт 48, и пружин¬
ные контакты 49 и 50. Эти выключатели напряжения приводятся
в действие пружинами 51 и 52 и катушками и 54.
Катушки возбуждаются генератором 57, число оборотов и напря¬
жение которого зависят от числа оборотов мотора самолета. Про¬
вода 58,59 или 60, 61, 62 генератора 57 связаны с реостатом 63.
Вспомогательный провод от контакта 50 к катушке 53 прохо¬
дит через пружинный контакт 65 или через контакт 70 обратно
к генератору 57, или же идет обратно к генератору через контакт
232
/
64 и катушку 54 выключателя напряжения, имеющего пружинный
контакт 46. Последняя цепь замыкается только тогда, когда
дроссель мотора 67 открыт доотказа так, что рычаг дросселя 67
посредством упора 68 создает контакт между точками 64 и 65,
преодолевая действие пружины 69.
Если рычаг дросселя 67 переместить немного назад,4* ток
генератора, проходящий через катушку 53, возвращается, и
генератор таким образом будет выключен.
Как показано на схеме, магнитные катушки 53 и 54 соединены
через реостат. Для того чтобы магнитные выключатели стали дей¬
ствовать, преодолев силу пружин 51 и 52, для этого требуется
относительно высокое напряжение и, следовательно, большое число
оборотов мотора.
Таким образом установка регулирующих шаг винта приспосо¬
блений производится на «больших оборотах», т. е. когда дроссель
мотора открыт доотказа. Если число оборотов мотора падает или
если оно не достигнет заданного при помощи реостата 63 числа
оборотов электрическая цепь замкнется и в нее войдут: магнит¬
ный выключатель 23, контакты 44 и 48 и мостик 22, который
в это время поднимется так, что соединит контакты 40 и 41, бла¬
годаря чему цепь электромотора 4 полностью замкнется при помощи
проводов 77, 12, 18, 39.
Вследствие этого шаг винта уменьшится, а число оборотов
возрастет до тех пор, пока контакты 44 и 48 не разомкнутся
в результате действия магнитного выключателя. .В то же самое
время мостик 22 соединит снова контакты 24 и 25, цепь, описанная
выше, прерывается, изменение шага винта прекращается и винт
вращается при заданных оборотах, установленных реостатом 63.
Если по какой-нибудь причине число оборотов винта будет увели¬
чиваться и вследствие этого напряжение тока генератора 57 тоже
будет повышаться, пружинные контакты 44 и 46 замкнутся под
действием тока обмоток выключателей напряжения 53, 54 и цепь,
проходящая через магнитный выключатель 32, замкнется посред¬
ством контактов 45 и 47. Мостик 31 в это время будет поднят
и замкнет контактк 36 и 37, так что при работе электромотора 4,
находящегося в цепи 9, 19, 20, 21, шаг винта увеличится и число
оборотов снизится.
Как будет видно из приводимого ниже описания, при враще¬
нии винта при заданном числе оборотов пружинный контакт 44'
движется между контактами 45 и 48.
Контакт 46 также будет находиться под током. Благодаря
подвижному контакту на реостате 63 может быть установлена
цепь, соответствующая любому числу оборотов винта в полете.
Рычаг дросселя 67 связан с контактами 64, 65 и 70.
Если рычаг дросселя немного перемещается вниз, то кон¬
такты 65 и 70 замыкаются. Выключатель напряжения 54 находится
под током, проходящим через сопротивление 63, в то время. как
выключатель напряжения 53 соединен непосредственно с генера¬
тором без промежуточного сопротивления или только через неболь¬
шое вспомогательное регулирующее сопротивление (если это необ¬
ходимо).
233-
Выключатель напряжения 53 .имеет большую чувствительность
и приводится в действие даже при очень малом напряжении,
соответствующем малому числу оборотов винта. Малые числа обо¬
ротов могут быть установлены только магнитным выключателем 23,
в то время как всякое увеличение числа оборотов может произойти
немедленно, так как ток, проходящий через магнитный выклю¬
чатель 32, должен также пройти через пружинные контакты 46,
47, причем последний контакт приводится в действие только при
большом числе оборотов, соответствующем установке реостата 63.
I Таким образом, число оборотов мотора может изменяться внутри
.широких пределов без введения в действие средств автоматической
регулировки шага винта. Автоматическая регулировка вводится
в действие только тогда, когда число оборотов мотора будет выше
или ниже заданного и установленного предела. Эти пределы могут
быть установлены посредством переменного сопротивления, которое
может быть снабжено соответствующей калиброванной шкалой.
Внутри широкого диапазона оборотов, установленных при помощи
автоматической регулировки, регулирующее шаг винта приспосо¬
бление выключено. Оно приводится в действие только в том случае,
когда допустимое максимальное число оборотов будет превзойдено
или минимальное число оборотов не будет достигнуто. Нормально
эти пределы никогда не превосходятся при изменении числа обо¬
ротов в нормальных условиях полета, исключая случаи пикирую¬
щего полета или применения моторов с нагнетателями.
Описанная выше схема регулировки оборотов мотора имеет
большие преимущества при использовании ее на пикирующих
самолетах.
Во время пикирования сперва снижают число оборотов мотора.
Для того чтобы регулировать заметное увеличение числа оборотов
винта, так как скорость полета при пикировании увеличивается,
необходимо поставить подвижной контакт переменного сопроти¬
вления в соответствующее положение, как показано выше, чтобы, при
отклонении числа оборотов за пределы регулировки, оно все же не
превышало максимально допустимого.
При выходе из пикирования и при наборе высоты возможно
немного увеличить нижний предел числа оборотов. При определенных
условиях полета это может быть также сделано посредством регу¬
лирующего реостата с переменным сопротивлением и соответ¬
ствующих переключателей, которые при установке лопастей в поло¬
жение «крейсерский полет» или «пикирующий полет» замыкают
необходимые контакты цепи.
Ручное управление имеет целый ряд преимуществ при неко¬
торых условиях полета.
Для того чтобы устранить возможность какого-либо неправиль¬
ного включения Цепи и перехода пределов максимальных или мини¬
мальных оборотов, главная цепь магнитного выключателя 23
соединена с ручным выключателем 28. Например, если винт вра¬
щается с определенной скоростью внутри широкого диапазона
оборотов, ручной выключатель 30 устанавливается в положение
малого шага. Цепь, питающая мотор 4, пройдет через контакты 34,
мостик 31 и контакт 33. Число оборотов будет увеличиваться
234
до тех пор, пока пружинные контакты 44 и 46 не приведут в дей¬
ствие магнитный выключатель 32; мостик 31 вследствие этого
поднимется и цепь ручной регулировки разъединится.
Когда переключатель устанавливается в положение большого
шага, число оборотов винта понижают действием контактов 25, 24
н мостика 22, пока пружинный контакт 44 не примет в действие
в соответствии с заданным числом оборотов и магнитный выклю¬
чатель 32 не прервет главной цепи.
i Для универсальности регулятора регулирующее сопротивление
63 может быть заменено несколькими сопротивлениями, соединен¬
ными последовательно или параллельно, в связи с чем количество
выключателей напряжения должно быть также увеличено.
5. ВЙШ с механическим управлением
В ранних типах винтов с механическим управлением регулировка
шага винта производилась через систему рычагов силой летчика.
При этом для изменения шага требовалось и особое внимание
и большие физические усилия летчика, который должен был тратить
значительное время на регулировку шага, отрываясь от управления
самолетом. Для уменьшения усилий винты снабжали тяжелыми
противовесами. Регулировка шага была очень неточной, так как
в рычажной передаче имелись люфты.
Впоследствии появились винты с более гибким и надежным
механическим управлением.
Для поворота лопастей на требуемый угол стали использовать ^
энергию вращения вала мотора.
Так, например, у винтов Смит (США) с механическим упра¬
влением поворот лопастей в полете производится от мотора через
червячную передачу с большим передаточным числом.
В настоящее время имеется несколько различных типов винтов
с механическим управлением, однако эти винты не получили такого
широкого распространения в авиации, как винты с гидравлическим
и электрическим управлением.
Одним из наиболее оригинальных винтов, совершенно отличаю¬
щихся по своей конструкции от всех других винтов с механическим
управлением, является автоматический винт Де-Лаво, показанный
на фиг. 212 и 213. Несмотря на то. что винты этого типа не нашли
широкого применения в авиации, мы все же считаем целесообразным
сказать несколько слов об этой весьма бригинальной конструкции.
Автоматический винт Де-Лаво
Автоматическое регулирование шага винта Де-Лаво осуще¬
ствляется посредством соединенных с комлевой частью лопасти сталь¬
ных упругих стержней, работающих на кручение и укрепленных
во втулке винта.
Стержни расположены под небольшим углом к соответствующим
лопастям, с которыми они соединены.
Регулирование шага винта происходит в результате уравнове¬
шивания моментов аэродинамических и центробежных сил, действую¬
щих на лопасть при вращении винта. 4
235
236
‘ Изменение шага винта Де-Лаво пропорционально силе тяги.
Увеличение угла установки лопастей, оси которых смещены
относительно осей стержней, происходит под действием центробежных
сил, которые тем больше, чем выше обороты, и уменьшаются
с падением оборотов.
Изменение шага обеих лопастей происходит одновременно без
относительного опережения или запоздания, благодаря наличию
уравновешивающего шарнира, показанного на фиг. 213.
Во время изменения шага ось лопасти описывает конус вокруг
оси стержня, как показано на фиг. 213.
Для предотвращения изгиба лопасти и создания крутящего мо¬
мента на втулке лопасти укрепляется приспособление, состоящее
из кулачков и роликов.
Винт Де-Лаво может функционировать и в случае поломки
одной из лопастей. В этом случае уцелевшая лопасть устанавли¬
вается на малый шаг, что позволяет самолету увеличить длину
планирующего спуска.
Винты Де-Лаво устанавливаются на самолетах, оборудованных
моторами малой и средней мощности.
Винты имеют небольшой вес и могут быть приспособлены под
мотор-пушку.
Винт Де-Лаво для мотора мощностью 700 л. с. весит 60 кг при
диаметре 3, 25 м.
ГЛАВА XI
ИЗГОТОВЛЕНИЕ ВОЗДУШНЫХ винтов
1. Материалы для воздушных винтов
Для изготовления воздушных винтов применяются металлы
(сталь, дуралюмин, электрон), дерево и пластмассы. Ниже приве¬
дены характеристики основных материалов, применяемых в винто-
строеиии.
Сталь
Гак как современные воздушные винты в процессе эксплоата-
ции подвергаются очень большим нагрузкам, то для изготовления
наиболее ответственных деталей винтов используют высоколегиро¬
ванные ванадиевые, молибденовые или вольфрамистые стали.
Наиболее нагруженные детали винтов—корпуса втулок, кресто¬
вины, кронштейны, втулки комля, поршни, хомуты и др.—изгото¬
вляются из сталей, следующего химического состава (в процентах):
Марка стали
С
Мп
Si
Сг
V
Мо
N4
Р | S
не более
40ХФА
0,35—
0,45
0,50-
0,80
0,17—
0,37
0,8—
1,1
0,15—
0,25
~' \
0,4
0,03
0.03
40ХНМА
0,35—
0,45
0.40—
0,80
0,17—
0,37
0,60—
0,90
0,15—
0,30
1,25—
1,75
0,03
0,03
237
Основные стальные детали втулки ВИШ делаются из щтампо-
ваных или кованых заготовок. Штамповка этих деталей произво¬
дится под паровыми или воздушными молотами или под мощными
гидравлическими прессами.
На фиг. 214 показаны штамповки половины корпуса и крестовины
трех лопастного винта.
После штамповки и нормализации поковки проходят термиче¬
скую обработку (закалку и отпуск). Некоторые детали подверга-
Фиг. 214. Штамповки половины корпуса втулки и крестовины винта.
ются перед термообработкой предварительной механической обра¬
ботке. После термической обработки детали должны иметь следую¬
щие механические свойства:
Марки стали
Времен¬
ное со¬
проти¬
вление
разрыву
°в
кг! мм2
Предел
текуче¬
сти ое
кг/мм2
Удлине¬
ние 8
%
Сужение
попереч¬
ного
сечения
%
Ударное
сопро¬
тивле¬
ние
кгм/см2
Твер¬
дость
по Бри-
неллю
Нв
не меньше
40ХФЛ
90
75
10
50
9
321—271
40ХНМА
100
85
—
55
10
321—293
Термически обработанные стальные детали не должны иметь
никаких пороков в структуре металла.
При изготовлении полых стальных лопастей винтов пользу¬
ются молибденовыми сталями, допускающими надежную сварку
и обладающими высокими физико-механическими свойствами.
Оценивая легированные стали как материалы для винтостроения,
следует сказать, что они являются единственным и незаменимым
материалом для ответственных деталей втулок винтов.
Несмотря на большие преимущества использования высоко¬
легированных сталей в винтостроении, в настоящее время во всех
238
странах проводятся исследовательские и опытные работы по замене
высоколегированных сталей менее легированными, менее дефицит¬
ными и менее дорогостоящими сталями.
Легкие сплавы
Успех современного винтостроения в значительной степени
связан с развитием производства высокопрочных легких сплавов
на алюминиевой основе—типа дуралюмин.
В настоящее время самыми распространенными в авиации
являются винты с лопастями, изготовленными из легких сплавов
типа дуралюмина.
Обладая удельным весом, составляющим немного' более 1/я от
удельного веса стали, дуралюмин имеет высокую удельную проч¬
ность (отношение временного сопротивления разрыву к удельному
весу). В табл. 29 приведено сравнение физико-механических
свойств поковок из дуралюмина со свойствами других материалов..
Таблица 29
Физйко-механйческйе свойства дуралюмина в сравнения с другими металлами,
применяемыми в вйнтостроений
(образцы взяты из поковок)
| № по пор.
Сплав
Временное сопро¬
тивление разрыву
сБ кг!ммг
5
н
о
О)
ЕГ
>>
О) «
н ^
* 5;
Sc-
а -
С о*
о
ю
яг
3
я*
л Щ
<и Си
>■
Отношение вре¬
менного сопроти¬
вления разрыву
к удельному весу
Отношение пре¬
дела текучести
к удельному весу
Относительное
удлинение
г % ,
Модуль Юнга
Е кг/мм4
Предел усталости
кг/мм2
Твердость по
Бринеллю
ИЩ
1
Дуралюмин .
40
24
2,8
14
8,5
18
7 500
И
100
2
Электро н
А - 855 . .
31
20
1,83
17
10,5
12
4 500
14
65
3
Сталь 40Х НМА
(хромоникель -
молибденовая)
после термо -
обработки . .
100
85
7,8
13
10,9
12
20400
до тер-
мооб-
работ-
ки
39
300.
Дуралюмин имеет модуль упругости, равный приблизительно'
7500 кг/мм1. ,
Низкий модуль упругости дуралюмина заставляет конструк¬
торов увеличивать расчетные сечения деталей, подвергающихся
изгибающим нагрузкам, по сравнению со сталью, но благодаря
низкому модулю упругости дуралюмин хорошо противостоит
вибрационным нагрузкам, действующим на детали винта, так как
материалы с низким модулем упругости обладают большой способ¬
ностью поглощать энергию вибрационных толчков.
При испытании на усталость легкие сплавы выдерживают
свыше 500000000 колебаний без разрушений. Предел устало¬
239
сти штампованного дуралюмина при 500 ООО ООО колебаний
равен ~ 11 кг/мм2.
Высококачественные винты с дуралюминовыми, лопастями при
испытании их на специальных машинах для определения вибра¬
ционной прочности выдерживают около 50000000 циклов.
Дуралюмин обладает хорошей пластичностью в нагретом состоя¬
нии, что позволяет придавать ему самые сложные формы при
нагреве его до 450—470°. Дуралюмин очень хорошо поддается
обработке резанием. Это обстоятельство также имеет очень боль¬
шое значение для серийного производства винтов.
В виктостроении дуралюмин находит применение главным обра¬
зом для изготовления лопастей, хотя этот материал употребляется
Фиг. 215. Штампованные цилиндры винта из легкого сплава.
для изготовления и других деталей винта (цилиндры, крышки
цилиндров, заглушки и т. д.).
На фиг. 215 показаны цилиндры, отштампованные из сплава
на алюминиевой основе.
Лопасти винтов изготовляются или из обычного дуралюмина,
содержащего3,7—4,7% меди,0,4—0,8%марганца, 0,4—0,8% магния,
не больше 0,7% железа, не больше 0,7% кремния (остальное—алю¬
миний), или же из сплава типа 25 S, содержащего 4,5% меди,
0,8% кремния, 0,8% марганца.
Ультралегкие сплавы (электрон)
Стремление уменьшить очень высокие нагрузки на лопасть,
возникающие под действием центробежной силы во время работы
винта на современных самолетах с мощными моторами, заставило
конструкторов искать для лопастей металлы и сплавы, более
легкие по удельному весу, чем Дуралюмин.
Таким материалом оказались ультралегкие сплавы на магние¬
вой основе, которые стали применять несколько лет назад для
изготовления лопастей.
Одним из наиболее подходящих и распространенных ультра¬
легких сплавов, применяемых для изготовления лопастей, является
электрон типа А-855 следующего состава:
240
Марка
А1
Zn
Мп
Mg
AZ-855
8,5
0,5
0,1
Остальное
Физико-механические свойства этого сплава приведены в табл. 29
на стр. 239.
При использовании электрона в качестве материала для изго¬
товления лопастей нагрузка на лопасть, возникающая под действием
центробежных сил при вращении винта, уменьшается на 30%
сравнительно с работающим в таких же условиях винтом с дур-
алюминовыми лопастями.
В настоящее время магниевые сплавы наиболее широко приме¬
няются в качестве материала для изготовления лопастей в Англии
и в Германии.
Несмотря на малый удельный вес, электрон все же не полу¬
чил такого широкого распространения в винтостроении в качестве
материала для лопастей, как дуралюмин.
Основными недостатками, ограничивающими применение электро¬
на, являются большая склонность магниевых сплавов к коррозии
даже в нормальных атмосферных условиях, большая чувствитель¬
ность электрона к механическим или химическим (коррозия) по¬
верхностным повреждениям, очень заметно понижающим сопроти¬
вляемость усталости этого сплава.
По этой причине винты с электронными лопастями устанавливают
главным образом только на самолетах сухопутной авиации, где
атмосферные условия более благоприятны, чем вблизи моря.
В настоящее время научно-исследовательские институты успешно
работают над получением наиболее эффективных средств защиты
магниевых сплавов от коррозии.
Дерево
В винтостроении дерево широко применяют в качестве материала
для лопастей. На первых этапах развития авиации дерево было
единственным материалом для винтов.
Винты, изготовленные из дерева, имеют очень малый вес и хо¬
рошо сопротивляются усталости при вибрационных нагрузках
и не производят такого шума в полете, как винты с металлическими
лопастями.
До тех пор пока в авиации не было мощных моторов и условия
службы винтов были более легкими, а технология металлических
винтов находилась на низком уровне, дерево занимало монопольное
положение среди всех материалов, применяющихся в винтостроении.
В этих условиях дефекты дерева как материала для винтов и не¬
достатки деревянных винтов не имели такого значения, как в
настоящее время, в связи с созданием мощных моторов и ростом
окружных концевых скоростей винтов.
Такие дефекты дерева, как неоднородность, очень низкая проч¬
ность на скалывание и на ударный изгиб, низкая стойкость против
износа, подверженность влиянию атмосферных условий и более
16 общий курс воздушных винтов
241
низкий к. п. д. деревянных винтов по сравнению с металличе¬
скими, понижают ценность дерева как материала для винтостроения.
В настоящее время в военной авиации, имеющей на вооружении
самолеты с мощными моторами, деревянные винты (из необлагоро-
женной древесины) почти полностью вытеснены металлическими.
Деревянные винты еще широко применяют в гражданской и спор¬
тивной авиации на самолетах с моторами малой и средней мощности.
Кроме того специально обработанную древесину в комбинации
с пластмассами широко применяют в качестве материала для
лопастей винтов современных мощных моторов (например в винтах
Шварца, см. стр. 262).
В качестве исходных материалов для деревянных винтов исполь¬
зуются такие породы, как сосна, пихта, бук.
Удельный вес древесины при нормальной влажности колеблется
от 0,5 до 0,8.
Механические свойства древесины очень неоднородны. Так,
например, для некоторых пород дерева временное сопротивление
разрыву вдоль волокон составляет от 450 до 1000 кг/см2, а поперек
волокон—от 300 до 700 кг/см2.
Для склеивания древесины применяют специальный клей. Общим
недостатком клеев являются потеря прочности клеевых швов при
повышении влажности и размокание. За последнее время находят
Физико-механические свойства различных пластмасс и сравнение их с физико-
Удель¬
Временное сопротивление
кг/см2
Материал
ный вес
Т
растяже¬
нию
°в
сжатию
°а
изгибу
Ч
Пластмасса, спрессованная
с асбестом
1,47—2,18
250—350
1 200- 2000
500-1 430
Пластмасса, спрессованная
с древесной пылью ....
1,30—1,50
240—250
1 803—2 550
600—1000
Пластмасса, спрессованная
с текстильными отходами .
1,20—1,40
250-500
1 500—2 200
508—1 400
Пластмасса, спрессованная
с волокнами бумаги ....
1,37—1,40
1007—2053
1 700—2 090
1535—3000
Пластмасса, спрессованная
с волокнами текстильных от¬
ходов
384—1 170
1300—2 210
687-1910
Пластмасса, спрессованная
с волокнами фанеры ....
1,02—1,35
1520—3590
1230—2 100
1760—3540
Пластмасса, спрессованная
с волокнами вулканизиро¬
ванной фибры
1,5
838-892
1080—1 180
1
1 680—1 770
Сосна
0,5
1000
500
800
Дуралюмин
2,8
4 470
13700
9340
Сталь
7,85
12 000
10500
—
широкое применение так называемые холоднополимеризующиеся
• водостойкие клеи из смол, которые обладают очень хорошей склеи¬
вающей способностью. Швы, изготовленные из такого клея, почти
не теряют своей прочности в присутствии воды.
«. Пластмассы
Кроме основных материалов (металлы и дерево), в винтостроении
используются еще и пластмассы, которые пока применяются в ком¬
бинации с древесиной в качестве материала для лопастей (способ
Шварца) и в чистом виде в качестве вспомогательных материалов
(прокладок, уплотнений и т. д.). В табл. 30 приведены физико¬
механические свойства различных пластмасс и сравнение свойств
пластмасс со свойствами других материалов.
В течение последних лет делались различные попытки исполь¬
зовать пластмассы в чистом виде как материал для лопастей, но
до настоящего времени лопасти из пластмасс не нашли широкого
применения. Причиной этому является то, что физико-механические
свойства существующих пластмасс не удовлетворяют требованиям,
которые предъявляют суровые условия службы винта. Пластмассы
как материал для лопастей получили широкое распространение
лишь в комбинации с древесиной, обрабатываемой по специаль¬
ному методу.
Таблица 30
механическими свойствами других материалов, применяемых в винтостроении
Сопро¬
тивление
Модуль
“ я -
Сопро¬
тивление
Сопро¬
тивле¬
Модуль
Коэфи¬
циент
Отношения
удар¬
ному
изгибу
смкг/слР
Юнга Е
кг[см2
перемен¬
ному
изгибу
ние
скручи¬
ванию
кг/см2
сдвига
G,
Кг/млР
линейно¬
го расши¬
рения
10~3
“в
Г
°<г
7
h
Г
Е
Г
3,5—33
70—212 ООО
—
—
—
15—30
2,4
13,6
4,8
1090
5—10
40—100000
255—275
—
—
38—50
3,5
19,6
1,7
770
11—14
40—100 000
—
—
—
20—50
4,2
18,3
11,7
830
54
83—149000
500
320
25000
—
15,0
14,0
20,0
1060
14—57
58—136000
225—270
425
22 000
15—24
8,0
16,0
13,0
973
75—100
200—311000
760
—
—
—
27,0
16,0
26,0
2300
77—90
79—82000
,
__
6,0
7,9
11,3
547
—
110000
—
—
—
—
20,0
10,0
16,0
2 200
—
ч 726000
—
—
— •
—
16,0
49,0
33,0
2 600
—
2100000
—
—
—
—
15,0
13,4
—
2 680
16»
243
Рассматривая вопрос о материалах для винтостроения и их
относительной ценности, следует всегда иметь в виду, что оценка v
свойств материалов зависит и от уровня технологии изготовления
и обработки этих материалов, и от характера требований авиации.
Несколько лет назад основным материалом для изготовления ло¬
пастей было дерево, затем начали применять дерево и сталь; после
того как в технологии легких и ультралегких сплавов были
достигнуты значительные успехи, эти сплавы начали все чаще при¬
менять для изготовления лопастей винтов, и в настоящее время
в этой области они начинают вытеснять все другие материалы.
Известный конструктор винтов Франк Колдуэл (США) оценивает
качества винтов, изготовленных из различных материалов, следую¬
щим образом:
№ по
пор.
Вес
К. п. д.
Легкость
ремонта
Устойчивость
против износа
Шум
1
Дерево
Дуралюмин
Дуралюмин
Сталь
Микарта
2
Микарта
Электрон
Электрон
Дуралюмин
Дерево
3
Электрон
Микарта
Сталь
Микарта
Электрон
4
Дуралюмин
Сталь
Дерево
Электрон
Дуралюмин
5
Сталь
Дерево
Микарта
Дерево
Сталь
2. Производство воздушных винтов
С превращением воздушных винтов в сложные агрегаты винто¬
моторной группы самолета значительно усложнилось производство (
и технология изготовления деталей винта и винта в целом. '
Современный винт состоит из сотен деталей. Геометрические
формы и точность обработки этих деталей требуют применения
квалифицированного труда, первоклассного современного оборудо¬
вания, технически совершенной технологии и надежных, обеспечи¬
вающих высокую точность обработки и высокую производитель¬
ность приспособлений и инструмента.
Современные механические цехи для производства ВИШ имеют
очень разнообразное по типам оборудование, так как обработка
даже одной детали требует наличия нескольких типов специализи¬
рованных станков. Например, для обработки корпуса втулки
винта требуется более десяти типов станков.
Наиболее характерными признаками современных крупных
цехов по производству винтов являются наличие большого парка
станков-автоматов, узко специализированного оборудований много- ,
шпиндельных металлорежущих станков и специализированного
инструмента (фасонные фрезы для обработки сложных поверхно¬
стей и т. д).
Наличие технически современного оборудования позволяет
выпускать винты со взаимозаменяемыми деталями, что предста¬
вляет большие выгоды при эксплоатации винтов (возможность
быстрой замены отдельных поврежденных деталей) и повышает
надежность работы винта, так как такие детали будут иметь
наименьшую неуравновешенность.
244
В результате перехода Tia массовый, поточный выпуск взаимо¬
заменяемых деталей сокращается заметно продолжительность произ¬
водственного цикла изготовления винтов.
Одновременно с внедрением в производство специализированного
оборудования сокращается объем ручных работ и механизируется
большинство операций механической обработки.
Для наглядного представления о производстве винтов и совре¬
менном оборудовании, применяющемся в винтостроении, приводим
описание производства самой крупной и ответственной части
винта—лопасти. Надо иметь в виду, что производство лопастей
является лишь частью технологического процесса производства
винтов (на производство лопастей затрачивается около 10%
времени, потребного на обработку деталей винта и его сборку)
и поэтому подробное и полное описание производства винтов
потребовало бы создания специальной книги.
[Производство дуралюминовых лопастей для ВИШ
(типа Гамильтон-Стандарт)
Первоначальной исходной заготовкой для лопасти является
катаный или прессованный пруток диаметром 145—150 мм (для
лопастей средних размеров). Для придания грубой, предваритель-
Фиг. 216. Ковочные вальцы для прокатки лопастной заготовки.
ной формы для штамповки пруток после нагрева в электропечах
до 450—475° прокатывается на ковочных вальцах (фиг. 216).
После этого заготовка, полученная с ковочных вальцов, вновь
подвергается нагреву для штамповки в штампе. Ввиду того, что
\
245
современное производство штампованных лопастей является массо¬
вым, заводы, штампующие лопасти, оборудуются специальным
станочным парком, который мог бы обеспечить покрытие потреб¬
ностей в штампах и точность обработки штампов.
Вся основная работа по фрезеровке штампов лопастей произ¬
водится обычно на копировально-фрезерных автоматических станках.
Лопасти штампуются на мощных молотах или мощных гидра¬
влических прессах (10000—15000 т) или специальных комбини¬
рованных прессах-молотах, как показано на фиг.. 217.
Фиг. 217. Комбинированный агрегат—пресс-молот
для штамповки лопастей.
После обрезки заусенца, образующегося во время штамповки,
отштампованную лопасть вновь нагревают для высадки комлевой
части и для получения на ней заплечика под обойму подшипника
и для крепления лопасти во втулке.
Перед высадкой комлевой части лопасти на нее надевают два
кольца из вольфрамистой стали, служащие обоймами упорных
подшипников.
Высадка комлевой части производится на горизонтально-ковоч¬
ной машине. Тип такой машины показан на фиг. 218. После вы¬
садки кольца подшипников остаются на комлевой части и уже не
могут быть удалены вследствие образования заплечика на торцевой
246
части комля лопасти. После высадки лопасть подвергается тер¬
мической обработке, заключающейся в нагреве лопасти до 500°
и последующей закалке в воде.
Фиг. 218. Горизонтально-ковочная машина Для высадки комля лопасти.
Г'1 ,Перед запуском отштампованных заготовок лопастей в произ¬
водство от их конца отрезают предусмотренный для механических
испытаний избыток металла. Вырезанные из лопастей образцы
Фиг. 219. Торцовка фланца комля лопасти.
подвергаются механическим испытаниям, а лопасть травят
в щелочных и кислотных растворах для удаления с нее всех
загрязнений и последующего выявления поверхностных дефектов
(трещин, плен, заковов и т. д.).
247
После этого лопасти направляются на механическую обработку.
Технология обработки лопастей может быть различной на каждом
заводе. Мы приводим типовую технологию одного иностранного
завода, производящего автоматические винты типа Гамильтон-
Стандарт (и типа Гидроматик).
Первая операция обработки торца фланца комля лопасти
выполняется на токарном станке (фиг. 219). На этом станке тор-
Фиг. 220. Сверление и расточка глубокого конусного
отверстия в комлевой части лопасти для втулки.
цуется комлевая часть лопасти и сверлится центровочное отверстие
для следующей операции—глубокого сверления и расточки конус¬
ного отверстия в центральной части комля. На фиг. 220 показан
станок, на котором разрабатывается конусное отверстие,
а на фиг. 221—инструмент, применяемый для этой операции.
В настоящее время станки этого типа делают многошпиндель¬
ными и, следовательно, более производительными.
После сверления и расточки конусного отверстия лопасти
передаются на другой токарный станок для чистовой обработки
248
комля. Допуск при обработкефланца на этом станке (по высоте)
составляет 0,05 мм.
Фиг. 221. Инструмент для сверления и расточки комля
лопасти под втулку.
Вслед за этой операцией перо лопасти фрезеруется с обеих сто¬
рон на станке [тип станка Engineering Research Corp. (ERCO)],
Фиг. 222. Станки для фрезеровки пера лопасти (станок ERCO).
показанном на фиг. 222 и 223. На этих станках фрезеруется около
*/4 пера лопасти (по длине от конца).
249
Ввиду того, что фрезеруемая часть лопасти имеет сравнительно
-тонкое сечение и может деформироваться при обработке при давле¬
нии на нее фрезы, станок имеет большое количество пальцев, на
Фиг. 223. Закрепление лопасти на рабочем столе станка ERCO.
I
которые и укладывается лопасть во время фрезеровки. Стол этого
станка имеет продольную, а фрезы—поперечную подачу.
Фиг. 224. Фрезеровка прикомлевой части на станке «Sundstrand».
Остальная прикомлевая часть лопасти обрабатывается на копи¬
ровально-фрезерном автоматическом станке (типа Sundstrand ЗА),
показанном на фиг. 224.
Кромки лопастей обрабатываются одновременно с обеих сторон
на фрезерном станке (тип Sundstrand ЗС), показанном на фиг. 225.
После этой операции проверяют углы лопасти.
250
Углы лопасти измеряются на плите в сечениях лопасти, нахо¬
дящихся на расстоянии 300, 450, 600, 750, 900 и 1050 мм от
оси вращения винта.
Углы плоской стороны лопасти измеряют угломером (фиг. 226).
Затем лопасть проверяют по высотам. Иногда в процессе обработки
.Фиг. 225. Фрезеровка кромок лопасти на станке «Sundstrand».
лопасть приходится править на специальных гидравлических пра¬
вильных прессах (при уводе и смещении осей). На фиг. 227
показан тип гидравлического пресса для правки лопастей.
Фиг. 226. Поверка углов лопасти по шаблону.
После фрезеровки лопасть шлифуют. Шлифовка и полировка
лопастей являются очень трудоемкими и тяжелыми операциями.
Для шлифовки применяют машинки с гибкими валами (варио-
флексы) с абразивными кругами различной зернистости. Для поли¬
ровки применяют специальные круги и пасты. Во время шли¬
фовки профиль и сечения лопастей проверяют шаблонами.
251
Выпуклая часть лопасти (горбушка) подвергается только предва¬
рительной шлифовке с оставлением допусков на балансировку.
После такой шлифовки выпуклую часть лопастей проверяют шаб¬
лоном, как схематически показано на фиг. 228. Зазоры между ло¬
пастью и шаблоном проверяются щупом.
Выпуклую часть лопасти шлифуют на специальном станке, на
котором одновременно лопасть предварительно балансируется.
Такой станок показан на фиг. 229.
а
Фиг. 227. Гидравлический пресс для правки
лопастей.
Перед окончательной шлифовкой выпуклой части лопасти до¬
водят и проверяют калибрами конусное отверстие внутри комля
лопасти. После этого лопасть направляется на окончательную шли¬
фовку и затем подвергается вертикальной балансировке.
Лопасть балансируется по вертикальной и горизонтальной осям
в различных положениях, путем повертывания лопасти. Практиче¬
ски проверку по вертикальной оси делают в четырех положениях,
повертывая лопасть каждый раз на 90°.
Балансировка производится на ножевом эквилибраторе (фиг. 230)
с закладкой свинцового волокна в конусное отверстие комлевой
252
части (фиг. 231) для уравновешивания лопасти в различных поло¬
жениях.
Лопасть балансируют в вертикальном, горизонтальном и в
четырех |угловых положениях лопастей. После балансировки сви-
Фиг. 228. Проверка горбушки лопасти по шаблону .•
нец взвешивается, и если при этом устанавливается, что неурав¬
новешенность лопасти не выходит из нормы, свинец загоняется
внутрь втулки комля лопасти.
Фиг. 229. Приспособление для шлифовки и балансировки лопасти.
С балансировочного станка лопасть направляется на первую по¬
лировку, которая выполняется при помощи машинок с гибкими
валами, снабженных полировальными кругами. Затем лопасть
вновь подвергается балансировке.
После балансировки в лопасти сверлят отверстия для винтов,
закрепляющих втулку внутри комлевой части. Отверстия эти свер¬
253
лят при помощи кондукторов и в специальных приспособлениях
на радиально-сверлильном станке. Вслед за этой операцией поли¬
руется комлевая часть лопасти и ло¬
пасть балансируется. Затем лопасть
окончательно полируется и подвергает¬
ся анодной оксидировке для предохра¬
нения ее от коррозии.
После этого лопасть подвергается
окончательной балансировке. Если при
этом обнаруживается «дисбаланс», во
втулку комля загоняют еще некоторое
количество свинца. Готовые сбаланси¬
рованные лопасти отправляют в сборку.
Методы балансировки винтов
Собранные винты балансируют на но¬
жевом эквилибраторе, показанном на
фиг. 232.
Трехлопастный винт балансируется
в шести положениях. Каждая лопасть
винта последовательно устанавливается
в вертикальном положении концом
кверху. После этого лопасти последо¬
вательно устанавливаются в вертикаль¬
ном положении концом книзу.
При окончательной балансировке винт
может считаться сбалансированным,
если неуравновешенность после заклад¬
ки . свинца составляет, например, не
более 1—2 г; при более совершенных
методах балансировки неуравновешен¬
ность может быть доведена до десятых
долей грамма. Для такой балансировки,
называемой статической балансировкой, применяются различные
типы балансировочных станков и машин.
Фиг. 230. Вертикальная ба
лансировка лопасти.
Фиг. 231. Комлевая часть лопасти со втулкой, заглушкой и подшипником.
Л—втулка комля; В—кольца упорного подшипника; С—высота заплечика с подшипником
(допуск 0,05 jMdM); D—свинец для балансировки; Е и F—винты для закрепления фланца
втулки на комле л
254
На фиг. 233 показан станок' «Olsen». На фиг. 234 показана?
схема балансировки винта на этом станке. Станок имеет то ..преи¬
мущество, что он допускает балансировку винта с коком.
Статическая балансировка винта на станке «Olsen» выполняется
следующим образом: предположим, что нам надо определить неурав¬
новешенность винта А, равную Qr, где Q—вес винта, г—радиус
окружности, в пределах которой находится центр тяжести. Для этого
винт устанавливается на валик В станка.
Балансировочные грузы Р подбира¬
ются в зависимости от типа винтов,
предназначенных для балансировки.
Для определения статической неуравно¬
вешенности пользуются подвижным гру¬
зом q, перемещающимся по линейке,
снабженной шкалой. Равновесие систе¬
мы устанавливается относительно точ¬
ки О призмы.
Необходимым условием равновесия
должно быть равенство моментов, дей¬
ствующих на систему сил:
Q(d+r)-2Pd-q(b + c) = 0,
Q(d — r) — 2Pd — qb = 0.
Решая эти два уравнения относи¬
тельно Qr, находим:
Qd + Qr — 2 Pd — qb — qc = О,
" Qd~Qr — 2Pd—qb = 0.
Следовательно,
Qr=f *.
Точность статической балансировки винтов на современных балан¬
сировочных станках достигает 0,1 граммометра. Если лопасть винта
л винт в целом статически и динамически недостаточно сбаланси¬
рованы относительно какой-либо оси, то при работе винта неуравно¬
вешенная центробежная сила и неуравновешенный момент могут
достичь такой Величины, что произойдет авария винтомоторной
группы и всего самолета в целом.
В связи с этим особое значение приобретает задача выпуска
винтов со взаимозаменяемыми лопастями.
Взаимозаменяемость лопастей возможна только при строгом
соблюдении технологического процесса и введении жесткого кон¬
троля. При выпуске взаимозаменяемых лопастей необходимы спе¬
циальные приспособления и станки, дающие возможность опреде¬
лить самый незначительный по величине «дисбаланс».
* Схемы балансировки составлены работниками одного нашего авиацион¬
ного завода.
255
лят при помощи кондукторов и в специальных приспособлениях
на радиально-сверлильном станке. Вслед за этой операцией поли¬
руется комлевая часть лопасти и ло¬
пасть балансируется. Затем лопасть
окончательно полируется и подвергает¬
ся анодной оксидировке для предохра¬
нения ее от коррозии.
После этого лопасть подвергается
окончательной балансировке. Если при
этом обнаруживается «дисбаланс», во
втулку комля загоняют еще некоторое
количество свинца. Готовые сбаланси¬
рованные лопасти отправляют в сборку.
Методы балансировки винтов
Собранные винты балансируют на но¬
жевом эквилибраторе, показанном на
фиг. 232.
Трехлопастный винт балансируется
в шести положениях. Каждая лопасть
винта последовательно устанавливается
в вертикальном положении концом
кверху. После этого лопасти последо¬
вательно устанавливаются в вертикаль¬
ном положении концом книзу.
При окончательной балансировке винт
может считаться сбалансированным,
если неуравновешенность после заклад¬
ки свинца составляет, например, не
более 1 —2 г; при более совершенных
методах балансировки неуравновешен¬
ность может быть доведена до десятых
долей грамма. Для такой балансировки,
называемой статической балансировкой, применяются различные
типы балансировочных станков и машин.
Ь31,8
Фиг. 230. Вертикальная ба¬
лансировка лопасти.
Фиг. 231. Комлевая часть лопасти со втулкой, заглушкой и подшипником.
А—втулка комля; В—кольца упорного подшипника; С—высота заллечика с подшипником
(допуск 0,05 лл); D—свинец для балансировки; Е и F—винты для закрепления фланца
втулки на комле л ? •
254
s9*S!?
На фиг. 233 показан станок1 «Olsen». На фиг. 234 показана
схема балансировки винта на этом станке. Станок имеет то jipeH-
мущество, что он допускает балансировку винта с коком.
Статическая балансировка винта на станке «Olsen» выполняется
следующим образом: предположим, что нам надо определить неурав¬
новешенность винта А, равную Qr, где Q—вес винта, г—радиус
окружности, в пределах которой находится центр тяжести. Для этого
винт устанавливается на валик В станка.
Балансировочные грузы Р подбира¬
ются в зависимости от типа винтов,
предназначенных для балансировки.
Для определения статической неуравно¬
вешенности пользуются подвижным гру¬
зом q, перемещающимся по линейке,
снабженной шкалой. Равновесие систе¬
мы устанавливается относительно точ¬
ки О призмы.
Необходимым условием равновесия
должно быть равенство моментов, дей¬
ствующих на систему сил:
Q(d+r)-2Pd-q(b + c)=0,
Q(d — r)~ 2'Pd — qb = 0.
Решая эти два уравнения относи¬
тельно Qr, находим:
Qd + Qr — 2 Pd — qb — qc = О,
Qd-Qr-2Pd-qb = 0.
Следовательно,
Qr =
_дс*
2 •
Фиг. 232. Балансировка трех¬
лопастного винта.
Точность статической балансировки винтов на современных балан¬
сировочных станках достигает 0,1 граммометра. Если лопасть винта
и винт в целом статически и динамически недостаточно сбаланси¬
рованы относительно какой-либо оси, то при работе винта неуравно¬
вешенная центробежная сила и неуравновешенный момент могут
достичь такой величины, что произойдет авария винтомоторной
группы и всего самолета в целом.
В связи с этим особое значение приобретает задача выпуска
винтов со взаимозаменяемыми лопастями.
Взаимозаменяемость лопастей возможна только при строгом
соблюдении технологического процесса и введении жесткого кон¬
троля. При выпуске взаимозаменяемых лопастей необходимы спе¬
циальные приспособления и станки, дающие возможность опреде¬
лить самый незначительный по величине «дисбаланс».
* Схемы балансировки составлены работниками одного нашего авиацион¬
ного завода.
255
На заводах, выпускающих винты со взаимозаменяемыми лопа¬
стями, для этих целей пользуются весами «Toledo», балансиров
Фиг. 233. Балансировочный станок «Olsen». *
вочными станками «Gisholt» и другими станками и приспособле¬
ниями.
Г'-
I
I 1
I -4-А
I I
На фиг. 235 показаны весы «Toledo» для балансировки лопасти
винта, а на фиг. 236—схема балансировки лопасти на этих весах.
256
I
На весах измеряются моменты Ра—М1 и Pb=M2 (Р—вес лопасти,
а—расстояние от центра тяжести лопасти до оси ММ, b — расстояние
ст центра тяжести до оси NN; Мх и Л/а—соответствующие моменты).
Фиг. 235. Балансировка лопасти на весах «Toledo».
При пользовании весами «Толедо» сокращается время на окон¬
чательную балансировку лопасти, так как эти весы дают возмож¬
ность подобрать одинаковые лопасти по моментам статической
уравновешенности путем измерения моментов неуравновешенности
относительно большой и малой осей (моменты Ра и РЬ).
17 Общий курс воздушных винтов
257
При балансировке лопастей на станке для статической балан¬
сировки «Гишольт» устанавливают Эталонную лопасть. Все после¬
дующие лопасти, проверяемые на счанке, должны иметь моменты
Фиг. 237. Схема балансировки эталонной лопасти на станке «Gisholt».
Л—балансировка по малой оси; В—балансировка по большой оси.
(Ра и РЬ), равные моментам эталонной лопасти. Для выполнения этой
работы требуется очень точное определение величины моментов
балансировочных грузов станка.
Фиг. 238. Балансировка и доводка лопастей на станках «Gisholt».
На фиг. 237 показана схема балансировки лопасти на станке
«Гишольт», на фиг. 238—балансировка лопастей на этих станках.
Моменты противовеса регулируются по большой и малой осям
с таким расчетом, чтобы сумма! моментов противовеса и эталонной
258
лопасти была равна нулю. Так как при балансировке лопасти на стан¬
ке приходится считаться со степенью точности станка, то в уравне¬
ние моментов вводят еще один член «момент погрешности станка».
Таким образом, это уравнение в общем виде может быть написано
так:
Мц р -j- Мэт -f- Л'Гпогр = о,
где Мпр — момент противовеса;
Мэт —момент эталонной лопасти;
-Мпсгр — момерт погрешности станка.
Все проверенные на станке лопасти должны иметь:
Ра = const и Pb — const.
Ввиду того, что оси /— 1 и II—II не находятся в одной плоско¬
сти, то
Ql = Pk = const,
Qf = Pg = const.
Так как к = е — а и Ql = Pe — Pa, а
Qf = Pb + Pe,
то при Ре = const; Ра = const и Pb = const.
Стальные лопасти
Впервые стальные лопасти для винтов появились в 1918 г. Вначале
стальные лопасти делали сплошными; они были или слишком тяжелы
или же имели очень тонкий профиль, вследствие чего лопасти могли
скручиваться, и при вращении винтов возникало биение. По этой
причине пришлось отказаться от стальных сплошных лопастей
и перейти к изготовлению более выгодных пустотелых стальных
лопастей.
Стальные лопасти современных винтов делают пустотелыми для
облегчения в весе. В качестве материала для стальных лопастей
применяется хромомолибденовая сталь.
В настоящее время существует много способов производства
стальных лопастей, но основными из них являются: 1)способ получе¬
ния лопастей из трубных заготовок и 2) способ изготовления лопа¬
стей из двух заранее сформованных под прессом и сваренных по кром¬
кам половин.
Сущность способа изготовления лопасти из трубной заготовки за¬
ключается в следующем. Для этой цели используется труба, диаметр
которой немного более диаметра комлевой части лопасти. Предва¬
рительно нагретая труба прокатывается на конус в специальных кали¬
брованных валках. Во время прокагки трубы материал распреде¬
ляется таким образом, чтобы сечения конусной трубы были при¬
близительно равны соответственным сечениям готовой лопасти.
После получения конусной заготовки последняя нагревается
вновь и штампуется в специальном штампе под прессом. Для того
чтобы получить лопасть требуемых .сечений и профиля, конусную
трубу перед штамповкой заполняют специальным наполнителем,
в качестве которого могут быть взяты самые различные материалы.
17*
259
После штамповки под прессом конец лопасти заваривается и лопасть
термически обрабатывается. Следующим этапом является механи¬
ческая обработка и доводка лопасти на станках и вручную. Так же,
как и дуралюминовая, стальная лопасть неоднократно баланси¬
руется.
Фирма Кертисс (США), в течение ряда лет выпускающая винты
со стальными лопастями, применяет для лопастей не трубную заго¬
товку, а листовую катаную заготовку.. На фиг. 239 показана заго¬
товка стальной лопасти. Этот способ отличается от практиковавшегося
- ■" ■ . ■ л В
I. •
Фиг. 239. Заготовка для стальной лопасти.
А и Б—отдельные половины заготовки; В—свернутая и сваренная заготовки.
некоторыми иностранными фирмами способа полной сварки лопасти
по всей длине кромок.
Несмотря на кажущуюся простоту этого способа производства
лопастей, технологический процесс изготовления такой лопасти
состоит из 55 отдельных операций.
Первой основной операцией является фрезеровка заготовки,
представляющей плоскую прямоугольную прокатанную плиту для
получения конуса. При окончании фрезеровки заготовка имеет
толщину от 1,5 до 10 мм. После этого прямоугольную заготовку пере¬
менной толщины подают в штамп под гидравлический пресс, где
вырубают две половины —большую, образующую горбушку, ком¬
левую часть лопасти и обе кромки, и малую, образующую плоскую
часть лопасти.
Вырубленные заготовки формуют во втором штампе под мощным
гидравлическим прессом и затем направляют в сварочное отделе¬
ние. Сварка лопастей является одной из самых важных и ответствен¬
ных операций при производстве стальных пустотелых лопастей. Обе
половины лопасти соединяются припомощи атомноводородной сварки.
Сварка ведется в специальных приспособлениях, обеспечивающих
260
сохранение заданной геометрической формы лопасти во всех сече¬
ниях.
Для удаления внутренних напряжений, образовавшихся во время
сварки, лопасть нагревают до 925° С в электрической печи. Отож¬
женная лопасть поступает на предварительную станочную обработку
как комлевой части, так и пера.
Следующей очень важной операцией является термическая обра¬
ботка лопасти. Лопасть нагревают в электропечи при температуре
около 890° С. Нагретые до этой температуры лопасти подвергают
закалке в масле. Во время закалки возможно коробление лопасти
и, следовательно, изменение ее геометрической формы, поэтому при
закалке применяют специальные приспособления и ставят на эту
работу опытных мастеров.
Немедленно после закалки в масле лопасти загружают во вторую
электропечь и подвергают в ней отпуску в течение трех часов йри
температуре 540—600°.
В результате термической обработки материал лопасти приобре¬
тает следующие механические свойства:
Временное сопротивление разрыву до 100 кг/мм%
Предел текучести г* » 85 »
Удлинение 12—15%
Сужен..е поперечного деления 57—62%
Пустотелые лопасти изготовляют таким образом, что центр
тяжести всех сечений находится на прямой, проходящей через ось
лопасти.
Для балансировки пустотелых лопастей во внутреннюю часть
лопасти добавляют металл.
Горизонтальная балансировка производится относительно дру¬
гой лопасти-эталона; вертикальная • балансировка—относительно
специального приспособления, имеющего форму цилиндрической
трубы, масса которой расположена строго концентрически по отно¬
шению к оси трубы. Центр тяжести трубы находится на линии центра
втулки.
Можно считать, что пустотелые стальные лопасти достаточно
балансировать только один раз без последующей балансировки че¬
рез определенные сроки службы при ремонте винта, так как ло¬
пасти имеют большую твердость, благодаря чему они практически
не подвергаются износу во время эксплоатации.
Несмотря на высокие статические механические свойства,
стальные лопасти все же менее распространены, чем дуралю-
миновые.
Следует иметь в виду, что в пустотелых стальных лопастях могут
быть большие внутренние напряжения (особенно в кромках и местах
сварки), вызывающие образование трещин. Для выявления трещин
лопасти необходимо время от времени проверять на приборе для
обнаружения трещин в магнитных металлах, называемом «магно-
флоксом» или «дефектоскопом».
Наиболее распространены винты ео стальными пустотелыми
лопастями в США, хотя и там они не имеют такого распро¬
странения, как винты с дуралюминовыми лопастями.
261
Производство лопастей из пластмассы и древесины
по методу Шварца
За последние годы очень широкое распространение в зарубеж¬
ной авиации получили винты с лопастями из комбинированного
материала—дерева и пластмассы.
Лопасти, изготовленные из такого материала, почти на 50%
легче дуралюминовых лопастей. Кроме того, винты с такими ло¬
пастями имеют очень высокий предел усталости, так как материал
лопастей обладает свойством поглощать энергию вибрационных
толчков, возникающих при вращении винта и часто приводящих
к разрушению материала. ч
Особый интерес представляет возможность изготовления винтов
большого диаметра с такими облегченными лопастями для страто¬
сферных самолетов. -■
Лопасти такого типа первоначально начала выпускать в Герма¬
нии фирма Шварц и К°. Поэтому эти лопасти часто называют «ло¬
пастями типа Шварца».
В настоящее время винты по способу Шварца изготовляются в
Германии, в Англии (Airscrews Limited), в CUIA(ERCO)hb других
странах.
Основную часть шварцевской лопасти (сердцевина) изготовля¬
ют из сосны юти другого легкого дерева и заделывают в ком¬
левой части в прессованную облагороженную древесину, так назы¬
ваемый «компрег»1. Комель из компрега укрепляют в стальном ста¬
кане посредством резьбы. Перо лопасти покрывают толстым, упроч¬
ненным целлюлозно-ацетатным листом. Передняя кромка лопасти
имеет металлическую окантовку.
Таким образом .деревянная сердцевина лопасти хорошо предо¬
хранена от воздействия атмосферных условий и механического по¬
вреждения песком, дождем, морской водой и т. д.
Сосна для сердцевины лопасти перед запуском в производство
высушивается до требуемой влажности (-^ 12%—влажность древе¬
сины при вылеживании на открытом воздухе).
Для того чтобы контролировать содержание влаги в сосне, в
цехах, где обрабатывается древесина, поддерживаются постоянная
температура и влажность.
1 Для изготовления компрега используется шпон толщиной около
3 мм из твердых древесных пород, как например, бук, береза или
клен.
Полоски шпона толщиной 3 мм пропитываются фенол-альдегид-
ной смолой по специальному запатентованному способу.
После этого уложенные одна на другую полоски шпона прес¬
суются под большим давлением в подогреваемом штампе пресса.
После прессовки толщина заготовки уменьшается на половину
первоначальной толщины.
При определенном давлении, температуре и скорости процесса
синтетическая смола вступает в химическое взаимодействие с древе¬
синой, в результате чего получается прессованное дерево, состоящее
из волокон дерева, пропитанных и соединенных бакелитом.
1 Или дельта-древесина.
262
г Удельный вес компрега в два раза больше удельного веса исход¬
ной древесины и составляет приблизительно 1, 3. Имея сравнительно
малый удельный вес, компрег обладает высокой прочностью.
Так как при испытании компрега очень трудно точно определить
временное сопротивление разрыву, основным критерием прочности
компрега служат испытания образцов на излом, как и для всех
других древесных пород, применяющихся в самолетостроении.
Так как на лопасть действуют большие центробежные силы,
нагрузка которых передается на комлевую часть и на ее резьбу,
в этих условиях особое значение приобретает испытание на срез
(на скалывание). Испытания показывают, что компрег имеет сопро-
•А
Б
Фиг. 240. Блок и заготовка лопасти (по патенту Шварца).
тивление срезу в продольном направлении около 2,8 кг)мм". По дан¬
ным фирмы ERCO (США) в настоящее время изготовляются лопасти,
у которых комлевая часть имеет сопротивление срезу до 7,7 кг ммг.
Модуль упругости компрега составляет приблизительно 2100—
2800 кг'мм".
Окончательное оформление заготовки лопасти производится сле¬
дующим образом.
Полоски компрега разрезают на требуемые размеры, наклады¬
вают на древесину и подвергают тепловой обработке. Для увеличе¬
ния прочности прикомлевой части компрег укладывают так, что
в прикомлевой части лопасти образую 1ся длинные стыки компрега
и древесины. В результате этого прочность древесины на этом участке
увеличивается почти в три раза.
Готовый блок содержит несколько комбинированных слоев ком¬
прега и древесины, причем компрег имеется только в комлевой части
и постепенно сходит на-нет в прикомлевой части (фиг. 240).
263
После этой операции комель лопасти обрабатывают на станке,
на нем нарезают резьбу и комель завертывают в стальной'стакан.
Резьба заливается под давлением особым патентованным произ¬
вольно упрочняющимся цементом, не имеющим усадки.
Затем лопасть подвергается механической обработке.
После механической обработки лопасть сверху покрывается тка¬
нью, пропитанной целлюлозно-ацетатной пластмассой. Такое по¬
крытие имеет толщину около 1 мм. После покрытия лопасть подвер¬
гается давлению в течение некоторого времени, в результате чего
пластмасса входит в поры древесины. Затем слой пластмассы разгла¬
живается и покрывается специальной синтетической эмалью.
Для защиты и укрепления ведущей кромки лопасти в нее вста¬
вляют относительно толстую и узкую металлическую полоску, при-
Покрытие из пластмассы
Фиг. 241. Схематический разрез готовой лопасти, изготовленной по
патенту Шварца.
паиваемую к тонкой металлической сетке, закрепленной на лопасти
в слое йластмассы (фиг. 241).
Изготовленные таким образом лопасти обладают высокой проч¬
ностью. По данным фирмы Шварц, винты с такими лопастями могут
работать более 1000 часов.
Несмотря на ряд весьма положительных свойств и высокую со¬
противляемость усталости всей лопасти в целом, на практике обна¬
ружено, что при длительном действии вибрационных усилий во внеш¬
них слоях лопасти, состоящих из пластмассы, образуются много¬
численные поперечные трещины.
Фирмы, изготовляющие винты с комбинированными лопастями
описанного выше типа, ведут большую исследовательскую и экспе¬
риментальную работы по улучшению качества этих винтов.
Винты с такими лопастями изготовляются для моторов любой
мощности. В США выпускаются винты диаметром от 1,8 до 4,8 м.
Заводские испытания винтов
При запуске в серию винтов новой конструкции винты испыты¬
вают на прочность на специальных стендах и в воздухе.
Если в 1918 г. типовое испытание каждой новой конструкции де¬
ревянных винтов длилось около 10 час. при работе винта на моторе
мощностью, превышающей на 50% мощность мотора, для Которого
предназначался винт, то современные типовые конструкции метал¬
лических винтов испытываются на мощных стендах в течение многих
десятков, а иногда и сотен часов. Кроме стендовых испытаний, винт
264
проходит длительные летные испытания в самых суровых условиях:
работы.
В настоящее время стенды для испытания винтов на прочность
оборудуются электромоторами мощностью до 6000—7000 л. с.,
причем некоторые электромоторы дают до 5000 об-мин. Таким обра¬
зом испытания металлических винтов на перегрузку производятся
при избыточной мощности, в несколько раз превышающей номиналь¬
ную мощность мотора, для которого предназначается винт.
Такие мощные установки имеются только в специальных научно-
исследовательских учреждениях. В заводских условиях новые
типовые конструкции винтов испытываются на стенде на моторе,
для которого предназначен винт, и в полете.
Для различных типов винтов в различных^ странах установлены
свои нормы стендовых испытаний. Для ускоренных испытаний вин¬
тов на усталость иногда пользуются специальными машинами, на
которых винты подвергаются действию усиленных вибрационных
нагрузок, хотя эти методы испытаний не дают истинного представле¬
ния о прочности винта.
Новые типы винтов подвергаются тщательным заводским, стен¬
довым и государственным испытаниям. Государственные испытания
проводятся после успешных результатов стендовых и заводских
испытаний. Винт вместе с регулятором испытывается на моторе,
на который он рассчитан. Вначале винт предварительно обкатывается
на моторе. Во время обкатки производится проверка действия меха¬
низма, изменяющего шаг винта, и проверка действия регулятора
постоянного числа сборотов.
После таких предварительных испытаний винт и регулятор раз¬
бирают, и основные трущиеся детали подвергают микрометриче¬
скому обмеру с целью обнаружения дефектов, которые могли воз¬
никнуть или выявиться при предварительных испытаниях.
После такого осмотра и обмера деталей винт собирают, балансиру¬
ют и вместе с регулятором устанавливают на мотор для испытаний.,
В начале испытаний снимают винтовые характеристики без регу¬
лятора и с регулятором.
На основании полученных данных строят кривые дроссельных
характеристик мотора с установленным на нем винтом и кривые мощ¬
ности мотора и расхода горючего.
Характеристики снимаются при различных оборотах мотора.
Следующим этапом испытаний являются длительные испытания
винта, которые проводятся в течение многих десятков, а иногда
и сотен часов.
Во время этого этапа испытаний мотор работает при различных
оборотах, при изменении шага винта от максимального до минималь¬
ного и обратно.
После таких испытаний винт вновь разбирают и тщательно
осматривают, а трущиеся детали подвергают микрометрическому
обмеру. После этого делают вывод о пригодности или непригодности
винта.
Окончательно качества винтов определяют при летных испыта¬
ниях в воздухе и при длительной эксплоатации в самых разнообраз¬
ных условиях службы.
265
Несмотря на достигнутые успехи в винтостроении, в научно-ис¬
следовательских институтах и лабораториях, а также в конструк¬
торских бюро создаются и испытываются новые типы винтов изме¬
няемого шага, наиболее полно отвечающие самым разнообразным
и суровым требованиям современной авиация.
Для высотных (субстратосферных) самолетов создаются новые
типы винтов больших диаметров (6—7 м).
При создании таких винтов особое значение приобретает выбор
материала для лопастей. Материал должен иметь повышенную проч¬
ность при очень малом удельном весе. Над решением проблемы
новых материалов для винтостро-
ения работают научно-технические
центры авиации во всех странах.
Проблема веса винта приобре¬
тает особое значение в связи с тем
обстоятельством, что современные
военные самолеты имеют очень
мощные моторы.
В связи с тем, что увеличение
диаметра винта требует увеличе¬
ния высоты самолета и вносит
ряд неудобств, в последнее время
для тяжелых самолетов с мощны¬
ми моторами сконструированы и
выпущены четырехлопастные вин¬
ты изменяемого шага и соосные
винты.
На фиг. 242 показан четырехлопастный винт изменяемого шага
фирмы Кертисс (США) с электрическим управлением.
Как уже указывалось, попытки использовать соосные винты де¬
лались давно. Однако, несмотря на ряд очевидных преимуществ,
которые имеют соосные винты,-—высокий к-п.д. как на режимах
максимальной скорости, так и на режимах взлета и разбега, почти
полное уничтожение реактивного момента от винта на всех режи¬
мах работы, улучшение условий обтекаемости самолета и возмож¬
ность уменьшения диаметра винтов,—все же соосные винты не по¬
лучили еще широкого распространения.
Причиной этому является сложность такого агрегата, конструи¬
рование которого встречает очень большие трудности. Особенно
трудной задачей для конструктора является создание механизма,
изменяющего шаг соосных винтов.
Кроме того, широкое внедрение соосных винтов в авиацию тор¬
мозится еще и отсутствием достаточных данных по эксплоатации
таких винтов, наличием некоторых неясных вопросов в их теории
и расчете. Над разрешением этих вопросов ведутся работы в авиа¬
ционных научно-исследовательских и экспериментальных учрежде¬
ниях.
Большое значение придается сейчас реверсивным винтам, т. е.
винтам, у которых лопасти могут устанавливаться на отрицательный
266
шаг. Такие винты выпускает ряд фирм (Кертисс, Эшер-Висс, Ратье,
ротол и др.).
Вначале реверсивные винты были предложены для уменьшения
скорости посадки и пробега самолета.
В настоящее время они могут иметь более широкое применение.
Так, например гидросамолеты, снабженные реверсивными винтами,
увеличивают во много раз свою маневренность на воде при любых
комбинациях ветра и течений и могут делать развороты самых малых
радиусов.
Широкое распространение в настоящее время получили винты
под мотор-пушку, обеспечивающие возможность стрельбы через вал
винта. ,
Большой интерес для авиации представляют винты с переменным
диаметром. Успешное разрешение вопросов конструирования и из¬
готовления винтов переменного диаметра означало бы большой шаг
вперед в винтостроении.
Ведущиеся в настоящее время работы по улучшению механизма
изменения шага и управления винта сводятся в основном к созда¬
нию универсального винта изменяемого шага.
Такой универсальный винт должен надежно обеспечить постоян¬
ство режима работы мотора при самых различных эволюциях само¬
лета, включая пикирование под большими углами.
Лопасти универсального винта должны очень быстро перево¬
диться во флюгерное положение, причем этот перевод должен быть
возможным как при вращающемся, так и при полностью остановив¬
шемся моторе. Для винтов, предназначенных для установки на гидро¬
самолеты, желательно, чтобы лопасти винта могли быть устано¬
влены в положение нулевого шага при разогреве мотора.
Кроме того, винт должен иметь устройства, обеспечивающие
синхронизацию режимов работы моторов и винюв на многомоторных
самолетах относительно любого из моторов и винтов, приспособле¬
ния для фиксирования лопастей в любом положении, указатели
шага винта для контроля за его работой и единое управление со всей
винтомоторной группой.
Приложение I
Принятые обозначения
Латинский алфавит *-
Л —коэфициент падения мощности мотора с высотой при по¬
стоянных оборотах
а —скорость звука, м/сек;
а — «фактор подсасывания» (^а = »
В —коэфициент нагрузки на ометаемую винтом площадь
ft —ширина лопасти, м\
ft —относительная ширина лопасти 5
Ва— cv. Ма;
с — максимальная толщина профиля, м;
с — относительная толщина профиля с = у ) >
с — коэфициент обдувки (стр. 135);
Cs — коэфициент быстроходности ^cs = j^r- = V \/~1.
D — диаметр винта, м\
F — ометаемая винтом площадь, м* (^F = -^-^ ;
/ — мидель, м2;
И — высота полета, м;
И — геометрический шаг винта, м;
На — поступь винта, м (jHa = —^ ;
динамический шаг винта, м\
Л—относительный геометрический шаг винта ^ h = ^ ;
Лд—относительный динамический шаг ^ ha=-~^;
h — относительное торможение скорости потока за винтом
(стр. 133);
268
ip —число редукции
к — число лопастей винта;
К, —поправочный коэфициент, учитьюающий влияние сжимае¬
мости воздуха на к. п. д. винта (стр. 151);
Ж —крутящий момент, кгм;
Ма-
-число Маха
N — мощность, л. с.
п — обороты в минуту;
ns— обороты в секунду;
пм — обороты мотора;
лб — обороты винта;
Р —тяга, кг;
р — барометрическое давление, мм рт. ст.;
pk — давление наддува;
Q — сила сопротивления, кг;
<7 —скоростной напор ^ ^ = ;
//—радиус винта, м;
/•—радиус сечения (расстояние сечения лопасти от центра
винта), м;
г — относительный радиус сечения 5
Ре —число Рейнольдса;
S —площадь, л/2;
S — скольжение винта (S = H — На);
Sd — динамическое скольжение (Sd = Hd — На);
s — относительное скольжение;
— относительное динамическое скольжение;
Т —мощность, кгм/сек;
Т° — абсолютная температура воздуха;
U — окружная скорость, Mjcen;
и, —окружная скорость вращения струи;
V — скорость полета, м1сек;
щ —скорость подсасывания (стр. 34);
v2 — скорость отбрасывания (стр. 34);
W — результирующая скорость конца лопасти (VI/= ]/V2 +1/2) •
Греческий алфавит
а —угол атаки;
а—коэфициент тяги (\&= 5
а'— производный коэфициент тяги (V =
Р — угол подхода струй;
Р — коэфициент мощности = 5
269
Р' — производный коэфициент мощности ;
Д —относительная плотность воздуха ^Д=у-^ ;
е —коэфициент торможения скорости (стр. 130);
(PV ч
71 = 75N = 'Чо’Чт’Зи ) — стр. 44;
■>)а —к. п. д. идеального пропеллера (осевой);
г;т — механический к. и. д.
^„ — окружной к- п. д.
^„ — относительный к. п. д. (•/)„ = 'mJ; v
•»]( —индуктивный к. п. д. (тй^л);
т)из — к. п. д. изолированного винта;
■Чэ — эффективный к. п- д. (к. п. д. винта на самолете) —
стр. 128;
т)ч — чистый к. п. д. (стр. 130);
X —относительная поступь винта — ;
S —коэфициент нерабочей части винта;
к?!rPtt
р —массовая плотность воздуха, --~-4 ;
<р—угол установки лопасти;
у — коэфициент момента винта ^ ;
Х' — производный коэфициент момента ^Х'
ш — угловая,.скорость винта («а = 2яп5).
Приложение II
т
Обозначения винтовых коэфициентов в разных странах
Коэфициенты, принятые в СССР, США, Англии и Франции, раз¬
личаются только обозначениями; формулы же, применяемые в этих
странах, однотипны.
В Германии и Италии принято другое строение формул, и коэ¬
фициенты имеют другую величину. В Германии коэфициент тяги
записывается в виде
к = 5 _ 5 = s _ 8 5
s pu2 pu2itD2 p(7uDns)2 7tDa it8 pnfD4 ’
T s IT 2 ' ~T
следовательно,
a = frs^ = 3,87fcs
и
*«=3^7 = 0,258 “■
270
Формула коэфициента мощности, принятого в Германии, имеет
вид
N N - в N
ki =
риа р {r.Dn,f 7iDa т.* pnlD* ’
Т * ~ 2 4“
откуда
Р = *,-£- = 12,18/ci
и
'“=Т5Л8= 0-082?' '
Коэфициент момента определяется выражением
й- 16
й рыа „ D р (itD/7s)2 tcD8 тс* pn|D6 ’
2 * 2 2 8~
следовательно,
y=~kd=i,mke
^=ras=°’5l6X-
Итальянские коэфициенты kt, кр, кт имеют ту же численную
величину, что и немецкие ks, Ict и ka.
( На стр. 272 — 273 дана таблица обозначений и названий винтовых
величин, применяемых в различных странах. ^
271
ю
-J
to
Вспомогательная таблица к приложению 11
Винтовые коэфициенты и формулы
СССР
США и Англия
Франция
Германия
Число оборотов в секунду лв
Revolutions per seconde (г. p. s)n
v Tour/seconde n
Drehzahl je Sekunde n
Тяга Р — ярл| D4
Thrust T = CrpnsD*
Traction T = -.рл2 Z)4
Schraubenschub
S = -J ksrlU^F g
Мощность Т = 75N = Ррл| Z)5
Power P = C/'pn3 Ds
Puissance Pm = y_pn3 D5
Leistung N = k#u%Fs
Момент ZVf = 7pnf£>5
Torque Q = CQpn2 Z)5
Couple С = Cmpn2D5
Drehmoment
M(f = fcrfpu2RFs
Коэфициент тяги
Р
Thrust coefficient
c - T
г рл2 D4
Coefficient de traction
T
T рл2 D4
25
Schubziffer feg = ■— 2pr
Коэфициент мощности
р- 75iV
Р pni Z)5
Power coefficient
с - p—
~ рл3 £>4
Coefficient de puissance
D ♦
V — m
*■ гтъ D*
Leistungszahl ki «= ■
“ ' pUZ’g
Продолжение таблицы к приложению II
0
1
ч
*0
м
ч
В
а
Е
И
СССР
США и Англия
Франция
Германия
Коэфициент момента
Torque coefficient
Coefficient de couple
Drehmomentzahl
M
С - Q
c - c
2M,
7- рл2 Z54
Q ?n2D°
m o/PD5
k,i PU'RFg
Коэфициент быстроходности
Speed-power coefficient
Coefficient d’adaptation
Geschwindigkeitsieistungszahl
C-~VV/ mr
f-vV jfa
Относительная поступь
Advance-diameter ratio
Argument de similitude
Steigungsgrad
>IQ
II
II
II
Коэфициент полезного дей¬
ствия Y] = Я
CT
Efficiency r, = —— J
t p
Rendement т = — v
■/
Wirkungsgrnd
^8 i
ч-
N5
СО
* Примечание. В Англии до последнего времени вместо С7<Ср и писали KTt КР и Kq. Такие обозначения еще
встречаются в литературе.
н
м
О
• 500
1000
1 500
2000
2 500
3 000
3 500
4 000
4 500
5000
5 500
6000
6500
7000
7500
8000
8 500
9000
9 500
10000
10 500
11000
11500
12 000
12500
13 000
13 500
14 000
14 500
15 000
Приложение III
Международная стандартная атмосфера
Т'и
Рв
мм рт. ст.
д=?я
Р»
288,000
760,00
1,0000
284,750
715,99
0,9528
281,500
674,09
0,9074
278,25
634,18
0,8637
275,000
596,23
0,8216
271,750
560,11
0,7811
268,500
525,79
0,7420
265,250
493,19
0,7046
262,000
462,26
0,6686
258,750
432,90
0,6340
255,50
405,09
0,6008
252,250
378,71
0,5689
249,000
353,77
0,5384
246,750
330,18
0,5091
242,500
307,87
0,4810
239,250
286,79
0,4542
236,000
266,89
0,4285
232,750
248,13
0,4040
239,500
230,45
0,3806
226,250 *
213,82
0,3580
223,000
190,16
0,3367
219,750
183,45
0,3147
216,500
169,40
0.2967
216,500
156,56
0,2742
216,500
144,63
0,2533
216,500
133,68
0,2341
216,500
123,65
0,2165
216,500
114,23
0,2001
216,500
105,56
0,1849
216,500
97,51
0,1708
216,500
90,14
0,1579
Приложение IV
Таблица значений (округленных):
л®, л8, п%, п%
п
об/мин.
17®
ля
Л*
об/сек.
л2
ля
1 ООО
1000
10я
1000
10s
16,67
277,8
4630
1 050
1102
10я
1158
10е
17,50
306,2
5360
t 100
1210
10я
1331
10*
18,33
336,1
6 162
1 150
1322
10я
1521
10*
19,17
367,4
7 041
1 200
1440
10я
1728
10*
20,00
400,0
8 000
1 250
1562
10я
1953
10*
20,83
433,7
9 042
1 300
1690
10я
2197
10*
21,67
469,4
10171
1350
1822
10я
2460
10*
22,50
506,2
11391
1400
1960
10я
2744
10*
23,33
544,4
12704
1 450
2102
10я
3049
10*
24,17
584,0
14114
1500
2250
10я
3375
10“
25,00
625,0
15625
1550
2402
10я
3724
10*
25,83
667,4
17 240
1600
2560
10я
4096
10“
26,67
711,1
18963
1 650
2722
10я
4492
10*
27,50
756,2
20800
1 700
2890
10я
4913
10*
28,33
802,8
22750
1 750
3062
10я
5359
10*
29,17
850,7
24 810
1800
3240
10я
5832
10*
30,00
900,0
27000
1 850
3422
10я
6332
10*
30,83
950,7
29310
1 900
3610
10я
6859
10“
31,67
1 002,4
31750
1 950
3802
10я
7415
10“
32,50
1056,2 .
34 330
2000
4000
10я
8000
10“
33,33
1 111,1
37 040
2100
4410
10я
9261
10“
35,00
1 225,0
42 880
2200
4840
10я
10648
10*
36,67
1 344,4
49 300
2300
5290
10я
12167
10*
38,33
1 469,4
56330
2 400
5760
10я
13824
10*
40,00
1600,0
64 000
2 500
6250
10я
15625
10*
41,67
1 736,1
72340
.2 600
6760
10я
17576
щ*
43,33
1 877,8
_81 37Q
2'Ш
7290
10я
*тзш
10*
”45,06"
2 025
91 120
2 800
7840
10я
21952
10*
46,67
2178
10163
2 900
8410
10я
243S9
10“
48,33
2336
И 291
3 000
9000
10я
27000
10*
50,00
2500
12 500
Приложение V
Таблица значений/)2,-—, D1 и Ds
D
D2
:kD2
“4
D*
£>*
1.00
1,0000
0,7854
1,000
1,000
i;o5
1,1025
0,8663
1,216
1,276
1,10
1,2100
0,9503
1,464
1,610
1,15
1.3225
1,039
1,749
2,012
1,20
1,4400
1,131
2,074
2,488
1,25
1,5625
1,228
2,442
3,052
1,30
1,6900
1,327
2,856
3,713
1,35
1,8225
1,432
3,322
4,484
1,40
1,9600
1,539
3,986
5,378
1,45
2,1025
1,652
4,421
6,410
18*
275
Приложение V
D
£>!
'4
D*
Di
1,50
2,2500
1,767
5,062
. 7,594
1,55
2,4025
1,887
5,772
8,946
1,60
2,5600
2,011
6,553
10,49
1,65
2,7225
■2,139
7,412
12,23
1,70
2,8900
2,270
8,352
14,20
1,75
3.0625
2,406
9,379
13,04
1,80
3,2400
2,545
10,49
18,89
1,85
3,4225
2,688
11,71
21,67
1,90
3,6100
2,835
13,03
24,67
1,95
3,8025
2,987
14,46
28,19
2,00
4,0000
3,142
16,00
32,00
2,05
4,2025
3,301
17,66
36,20
2,10
4,4100
3,464
19,45
40,84
2,15
4,6225
3,631
21,37
45,94
2,20
4,8400
3,801
23,43
51,53
2,25
5,0625
3,976
25,63
57,67
2,30
5,2900
4,155
27,99
64,38
2,35
5,5225
4,338
30,50
l 71,67
2,40
5,7600
4,524
33,18
* 79,63
2,45
6,0025
4,715
36,03
88,28
2,50
6.2500
5,909
39,06
97,66
2,55
6,5025
5,107
42,28
107,8
2,60
6,7600
5,309
45,69
118,8
2,65
7,0225
5,516
49,32
130,7
2,70
7,2900
5,725
53,14
143,5
2,75
7,5625
5,939
57,19
157,3
2,80
7,8400
6,157
61,47
171,1
2,85
8,1225
6,379
65,97
188,0
2,90
8,4100
6,605
70,73
205,1
2,95
8,7025
6,835
75,73
223,4
3,00
9,0000
7,068
81,00
243,0
3,05
9,3025
7,306
86,54
264,0
3,10
9,6100
7,548
92,35
" 286,3
3,15
9,225
7,793
98,45
310,1
3,20
10,2400
8,042
104,9
335,5
3,25
10,5625
8,296
111,6
362,6
3,30
10,8900
8,553
118,6
391,3
3,35
11,2225
8,814
125,9
421,9
J 3,40
11,5600
9,079
133,6
454,4
3,45
11,9025
9,348
141,7
488,8
3,50
12,2500
9,621
150,1
525,3
3,55
12,6025
9,898
158,8
563,8
3,60
129,600
10,179
168,0
604,6
3,65
13,3225
10,464
177,5
647,8
3,70
13,6900
10,752
187,4
693,4
3,75
14,0625
11,045
197,7
741,6
3,80
14,4400
11,341
208,5
792,3
3,85
14,8225
11,642
219,7
845,9
3,90
15,2100
11,946
231,3
902,2
3,95
15,6025
12,254
243,4
961 „6
4,00
16,0000
12,566
256,0
1024
4,05
16,4025
12,882
269,1
1090
4,10
16,8100
13,203
282,6
1159
4,15
17,2225
13,526
296,6
1231
4,20
17,6400
13,854
311,2
1307
4,30
i 18,4900
14,522
341,9
1470
276
Приложение V
D
D3
•< 1
«I
D*
Di
4,40
19,3600
15,205
374,8
1649
4,50
20,2500
15,904
410,1
1845
4,60
21,1600
16,619
447,8
2060
4,70
22,0900
17,349
488,1
2294
4,80
23,0400
18,096
530,8
2548
4,90'
24,0100
18,857
576,5
2825
5,00
25,0000
19,635
625,0
3125
5,20
27,0400
21,237
831,1
3802
5,40
29,1600
22,902
850,3
4591
5,60
- 31,3600
24,630
983,5
6507
5,80
33,6400
26,421
1132
6564
6,00
36,0000
28,274
1296
7776
1C
■с
00
Таблица основных винтов
Приложение VI
о.
о
в
Марка винта
К самолету
К мотору
Обороты
мотора
(номи¬
нал),
об/мин
Редук¬
ция
мото¬
ра
Напра¬
вление
враще¬
ния
Диа¬
метр
винта,
м
*!
S
Диапа¬
зон из¬
8
мене¬
II
и
ния
углов
Схема
винта
Шири¬
Тип
на ло¬
регу¬
пасти
лято¬
мзк-
ра
симал ь-
ная, им
Вес
вин¬
та, кг
ВИШ-автоматы гидравлические
1
ВИШ-105В
Ла-5
М-82
2400
11/16
правое
3,1
22°
30®
прямая
Р-7
256
132
2
ВИШ-105СВ
ЛАГГ-3
М-Ю5ПА
2700
2/3
левое
3,0
17»
30®
»
Р-7
260
129
Як-1, Як-7;
М-105ПФ
Як-9
АМ-38
2050
3
ВИШ-105К
Ил-2
АМ-38Ф
0,732
»
3,6
22е
о
О
сч
»
Р-7
292
152
4
ВИШ-105Д-50
(с деревянн.
ЛАГГ-3
Як-1, Як-7
М-105ПА
М-105ПФ
2700
2/3
)>
2,9
19®
30®
»
Р-7
310
119
лопастями)
М-105Р
5
ВИШ-61Б
Пе-2
М-105РА
2700
13/22
»
3,2
22®
35®
обрат¬
ная
Р-3
Р-7
260
141
6
ВИШ-61П
ЛАГГ-3
Як-1, Як-7,
Як-9
М-105ПА
М-105ПФ
2700
2/3
>>
3,0
ю
о
о
35®
»
Р-7
256
136
7
ВИШ-61В
Пе-8
АМ-35А
2500
13/22
»
4,0
28°
30®
)>
Р-7
285
178
8
АВ-5ЛВ-139
Пе-2
М-105РА
2700
13/22
»
3,2
22°
26®
прямая
Р-4
260
155
М-105РФ
Р-7
9
АВ-5Л-158
Ил-2
АМ-38Ф
2050
0,732
»
3,6
19°
20®
обрат¬
ная
Р-7
192
171
10
АВ-5Л-161
Ли-2
М-62ИР
2100
11/16
правое
3,6
22®
26®
>>
Р-7
260
165
11
ВИШ-22Т
Ил-2
АМ-38
2050
0,732
левое
3,4
23®
20®
прямая
Р-7
260
153
12
ВИШ-23
Ил-4
М-88Б
2375
2/3
»
3,25
23®
20®
»
Р-2
226
145
13
АВ-1(2-лопастн.)
И-153
М-62
2100
без ре¬
правое
2,7
18°
30®
»
Р-2
217
73
И-16
М-бЗ
дукции
-
14
ВВ-1(2-лопастн.)
И-153
М-62
2100
»
»
2,9
15®
30®
)>
Р-2
217
73
Продолжение
15
16
го
-а
. (О
Марка винта
Ротол
Гидроматик
К самолету
К мотору
Обороты
мотора
(номи¬
нал),
об! мин
Харрикейн
Норт-Амери-
кен В-25С
Бостон III
Роллс-Ройс
Мерлин-ХХ
Райт-Цик-
лон
2850
2300
Редук¬
ция
мото¬
ра
Напра¬
вление
враще¬
ния
Диа¬
метр
винта,
м
га а |
Ь* Я ^
>, S g
Го £ в II
Диапа¬
зон из-
мене-
нения
углов
0,42
9/16
правое
3,43
левое 3,8
33° 13'
30е
32°30'
Тип
Шири¬
на ло¬
Схема
регу¬
пасти
винта
лято¬
макси¬
ра
маль¬
ная, мм
Вес
вин¬
та, кг
35®
двух¬
типа
сторон¬
няя
Ротол
25®
»
Га¬
и флю¬
миль¬
герное
тон'
положе¬
Стан¬
ние 88®
дарт
313
285
ВИШ-автоматы электромеханические
Двухшаговые винты
20
21
ЕИШ-2
виш-з
СБ
ДБ-3
Типа М-100
М-103
М-85
М-86
М-87А
* Винты Кертисс на данных самолетах не приспособлены к установке лопастей во флюгерное положение.
134
204
17
Кертисс (непу¬
Кертисс «То-
Аллисон
2600
0,5
правое
3,35
26® 30'
•*
О
О
СО
электро¬
элек-
255
160
/
шечный)
магаук»,
«Киттихаук»
V-1710-C15
V-1710-F3R
24°30'
механи¬
ческая
двух¬
сторон¬
тро-
цен-
тро-
беж-
18
Кертисс (пушеч¬
Белл «Эра-
Аллисон—
няя
ный
ный)
кобра» *
V-1710-E4
3000
0,556
»
3,162
21°30'
30°*
» , »
»
248
165
19
VDM
Мессершмитт
Даймлер-
Бенц
2400
без ре¬
дукции
»
2,8—
3,1
25®
360°
» »
»
220
131
2400
2500
2/3
левое
3,25
23°
10®
гидрав-
лич.
прямая
масля¬
ный
кран
226
2400
2370
2/3
3,25
27°30'
10
»
»
236
134
137
Na по пор.
Продолжение
Марка винта
К самолету
К мотору
Обороты
мотора
(номи¬
нал;,
об/мин
Редук¬
Направ¬
Диа¬
ция
ление
метр
мото¬
враще¬
винта,
ра
ния
м
т ? г
Н В *
и
>*so
Ы '
е; м©
о о ~
ъ = II
>■ I»
Дна па-'
зон из-
мене-
нения
углов
Шири¬
Т ип
на ло¬
Схема
регу¬
пасти
винта
лято¬
макси¬
ра
маль¬
ная, мм
Вес
вин¬
та, кг
Винты фахсированного шага
22
23
24
ВИШ-25 (2-ло-
пастн.)
ВД-Г (2-ло-
пастн.)
ВД-11 (2-ло-
пастн.)
И-15
УТИ-4
У-2
ТБ-3
М-25
М-11Д
М-34Р
1950
1700
без ре- правое
дукции
I
То же
2,8
2,35
30°55'
на г—
799,5 мм
20° па
г=720 мм
1850 0,59 1 левое 3,9 26° на
I г=1072ж,и
217.
199
— 265
48
16
(без
втул¬
ки)
120