/









































Текст
Федеральное агентство морского и речного транспорта
Федеральное государственное образовательное учреждение
высшего профессионального образования
ГОСУДАРСТВЕННАЯ МОРСКАЯ АКАДЕМИЯ
имени адмирала С.О. МАКАРОВА
КАФЕДРА ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И АСЭУ
Г.А. Попов
СИСТЕМЫ УПРАВЛЕНИЯ
СУДОВЫМИ ДИЗЕЛЯМИ
Тексты лекций
Изд. 2-е, испр. и доп.
Санкт-Петербург
Издательство ГМА Им. адм. С.О. Макарова
2008
УДК 621.431.74
П 58
Попов, Г.А.
П58 Системы управления судовыми дизелями: Тексты лекций. - Изд. 2-е, испр. и
доп. - СПб.: Изд-во ГМА им. адм. С.О. Макарова, 2008. - 80 с.
Рассматриваются свойства судового дизеля как объекта управления и регули-
рования, а также система управления дизелем: принципы построения и функцио-
нирования, элементарный состав и характеристики.
Предназначено для курсантов 5-го курса судомеханического факультета при
изучении дисциплины «Автоматизированные системы управления судовыми
энергетическими установками» по специальности 180403 «Эксплуатация судовых
энергетических установок».
Рекомендовано к изданию на заседании кафедры двигателей внутреннего
сгорания и АСЭУ. Протокол № 8 от 05 февраля 2008 г.
Рецензент:
Петухов В.А., д-р техн, наук., проф. (ГМА им. адм.С.О. Макарова).
© ГМА им. адм. С.О. Макарова, 2008
© Попов Г.А., 2008 >
Введение
Главный судовой двигатель является одним из наиболее ответственных
механизмов судовой энергетической установки, определяющих ее надеж-
ность и живучесть судна в целом.
Для обеспечения безотказной работы главного дизеля обслуживающий
персонал должен иметь достаточный уровень знаний в области судовой
энергетики.
В курсе «Системы управления судовыми дизелями» рассматриваются:
- свойства саморегулирования, область рабочих режимов, условия ус-
тойчивой работы главных судовых дизелей как объектов управления и регу-
лирования частоты вращения;
- особенности переходных процессов и установившихся режимов (по
тепловым напряжениям и механическим нагрузкам) в зависимости от состава
технических средств, включенных в систему управления - всережимный
регулятор частоты вращения; механизм, устанавливающий пусковую топли-
воподачу; механизм защиты двигателя от «перегрузки» и др.;
- структура, функции, элементный состав систем дистанционного авто-
матизированного управления главного судового дизеля, а также особенности
управления установками с ВРШ и свойства систем автоматического регули-
рования частоты вращения дизель-генераторов, работающих в параллель.
В связи с совершенствованием технических средств систем автоматики
(переход от релейных систем к микропроцессорным) изменился принцип
формирования систем автоматического управления. На смену поэлементно-
му принципу построения системы для реализации требуемого алгоритма
управления пришел программный принцип. Продолжается совершенствова-
ние конструкции и объекта управления - дизеля, о чем свидетельствует при-
менение аккумуляторного принципа топливоподачи, позволяющего отка-
заться от общих для всех цилиндров двигателя распредвала и рейки топлив-
ных насосов. Это дает возможность перейти к автономному по цилиндрам
управлению топливоподачей, и, следовательно, повысить качественные
показатели процесса управления.
Поскольку последнее издание текстов лекции по системам управления
судовыми дизелями было осуществлено в 70-е гг. XX в., а вышедшие в тече-
ние последних лет учебные пособия по автоматизации СЭУ не содержат
большей части приводимого в данной работе материала, предлагаемое изда-
ние является актуальным для подготовки механиков, управляющих судовым
дизелем.
3
Список принятых условных сокращений
БЛ - блок логики;
БПВ ~ баллон пускового воздуха;
ВПУ - валоповоротное устройство;
ВР - воздухораспределитель;
ВРЧВ - всережимный регулятор частоты вращения;
ВРШ - винт регулируемого шага;
ГД - главный двигатель;
ГПК - главный пусковой клапан;
ГТН - газотурбонагнетатель;
ДАУ - дистанционное автоматизированное управление;
ДПУ - дистанционный пост управления;
ДУ - дистанционное управление;
ЗБТ - золотник блокировки топливоподачи;
ЗК - запорный клапан;
КБП - клапан блокировки пуска;
КПД - коэффициент полезного действия;
КУП - клапан управления пуском;
МБПТ - механизм блокировки пуска и топливоподачи;
МТ - машинный телеграф;
МПУ - местный пост управления;
МРЧ - механический регулятор частоты;
PH - регулятор нагрузки;
РО - распределительные органы;
РП - рукоятка пуска;
РПС - реверсивно-пусковая система;
РР - рукоятка реверса;
РТ - рукоятка топливоподачи;
РТН - рейка топливных насосов;
РЧВ - регулятор частоты вращения;
СБК - суммирующий блокировочный клапан;
СО - сервомотор остановки;
ТНВД - топливный насос высокого давления;
ЦПУ - центральный пост управления;
ЭРЧ - электронный регулятор частоты;
ЭУ - элементы усиления.
4
1. ГЛАВНЫЙ ДВИГАТЕЛЬ КАК ОБЪЕКТ
УПРАВЛЕНИЯ
1.1. Функции и структура системы управления
Процесс управления главным двигателем (ГД) включает следующие
операции: реверс (задание направления вращения), пуск, изменение ре-
жима, остановку двигателя.
Системы управления, как правило, предусматривают возможность
управления с одного из трех постов. Основным является дистанционный
пост управления (ДПУ) на ходовом мостике (в рулевой рубке), с которого
вахтенный штурман (помощник капитана) осуществляет управление ГД.
При отказе системы управления с мостика, управление осуществляется
с центрального поста управления (ЦПУ) вахтенным механиком, полу-
чающим команды с мостика по машинному телеграфу (МТ). Двигатель
может также управляться с местного поста управления (МПУ), размещен-
ного непосредственно на двигателе, которое считается аварийным в связи
с отказом всей системы дистанционного управления.
Базовой по своему функциональному использованию является ревер-
сивно-пусковая система (РПС), состоящая из механизмов самого двигате-
ля и функционирующая при управлении со всех постов управления. От-
каз в работе ее элементов является неисправностью самого двигателя.
РПС предусматривает на МПУ, как правило, три органа управле-
ния: рукоятки реверса, пуска и топливоподачи (задания режима). ГД
обычно оборудован всережимным регулятором частоты вращения
(ВРЧВ). Поэтому на МПУ может быть предусмотрен отдельный орган
(рукоятка, маховик, кнопки) задания режима через ВРЧВ по частоте
вращения.
Функция остановки (отключения топлива) осуществляется рукояткой
топливоподачи, но также может выполняться и рукояткой реверса. Дуб-
лирование связано с ответственностью операции остановки двигателя при
возникновении неисправности во время его работы (для предотвращения
аварии работающего неисправного двигателя).
Управление из ЦПУ является дистанционным управлением (ДУ)
и так же, как и с МПУ, осуществляется тремя рукоятками: реверса, пуска,
задания режима по частоте вращения (через ВРЧВ). В качестве резервно-
го может быть предусмотрена возможность задания режима фиксирован-
5
ной топливоподачей (при неисправности ВРЧВ). Остановка обычно осу-
ществляется рукояткой реверса, при установке ее в положение «Стоп».
Управление с мостика осуществляется с помощью системы дистан-
ционного автоматизированного управления (ДАУ) одной рукояткой, со-
вмещенной с рукояткой МТ. Последняя в процессе управления может
перемещаться из любого исходного в любое требуемое положение с лю-
бой скоростью, без выдержки в промежуточных положениях. Необходи-
мая последовательность операций процесса управления осуществляется
средствами автоматики системы ДАУ.
Дистанционное управление из ЦПУ и штатное управление с местного
поста на двигателе реализуются, как правило, на пневмо- и гидромехани-
ческой элементной базе, механизмы которой скомпонованы по цепям
управления реверсом, пуском, изменением режима, остановкой.
Современные системы ДАУ имеют микропроцессорную элементную
базу. Блок логики (БЛ) системы, размещаемый в ЦПУ, реализует алго-
ритм управления в соответствии с командами, поступающими с мостика,
и сигналами, поступающими от датчиков обратных связей на двигателе.
Команды, поступающие из системы ДАУ, исполняются механизмами
функциональных цепей реверса, пуска, изменения режима, остановки ДУ
и штатной системы двигателя.
Применение в современных установках автономных воздуходувок,
в дополнение к штатным газотурбонагнетателям (ГТН), а также топлив-
ных систем аккумуляторного типа, позволяет улучшить показатели каче-
ства работы дизеля на переходных и установившихся режимах.
Автономные воздуходувки обеспечивают нормальное воздухоснаб-
жение дизеля на пусковых режимах и в зоне малых частот вращения (на
самом малом и малом ходу судна).
При аккумуляторной топливоподаче могут отсутствовать общие для
всех ТНВД распредвал и рейка топливных насосов. В этом случае воз-
можно автономное по цилиндрам управление топливоподачей, что осо-
бенно важно на переходных режимах.
1.2. Штатная система управления
Структуру, взаимосвязь и конструктивное исполнение базовой систе-
мы управления ГД рассмотрим на примере РПС двигателя «Зульцер».
6
Цепи управления РПС взаимозависимы. Необходимая последова-
тельность их функционирования обеспечивается механизмами блокиров-
ки системы.
В процессе управления ГД действуют следующие блокировки:
- при реверсе распределительных органов (РО) заблокированы цепи
пуска и топливоподачи;
- в двигателях с раздельным пуском заблокирована топливоподача
при пуске и контрпуске;
- в двигателях со смешанным пуском топливоподача блокируется
только при контрпуске;
- предусматривается блокировка реверса при включенной топливо-
подаче;
- блокируется пуск двигателя при включенном валоповоротном уст-
ройстве (ВПУ).
Таким образом, цепи управления работают в последовательности: ре-
верс - пуск - топливоподача, т.е. по окончании действия каждой предше-
ствующей цепи дается разрешение (т.е. снимается блокировка) на начало
работы элементов следующей.
Перечисленные блокировки выполняют функции автоматической за-
щиты двигателя от случайных неправильных действий механика в про-
цессе управления двигателем.
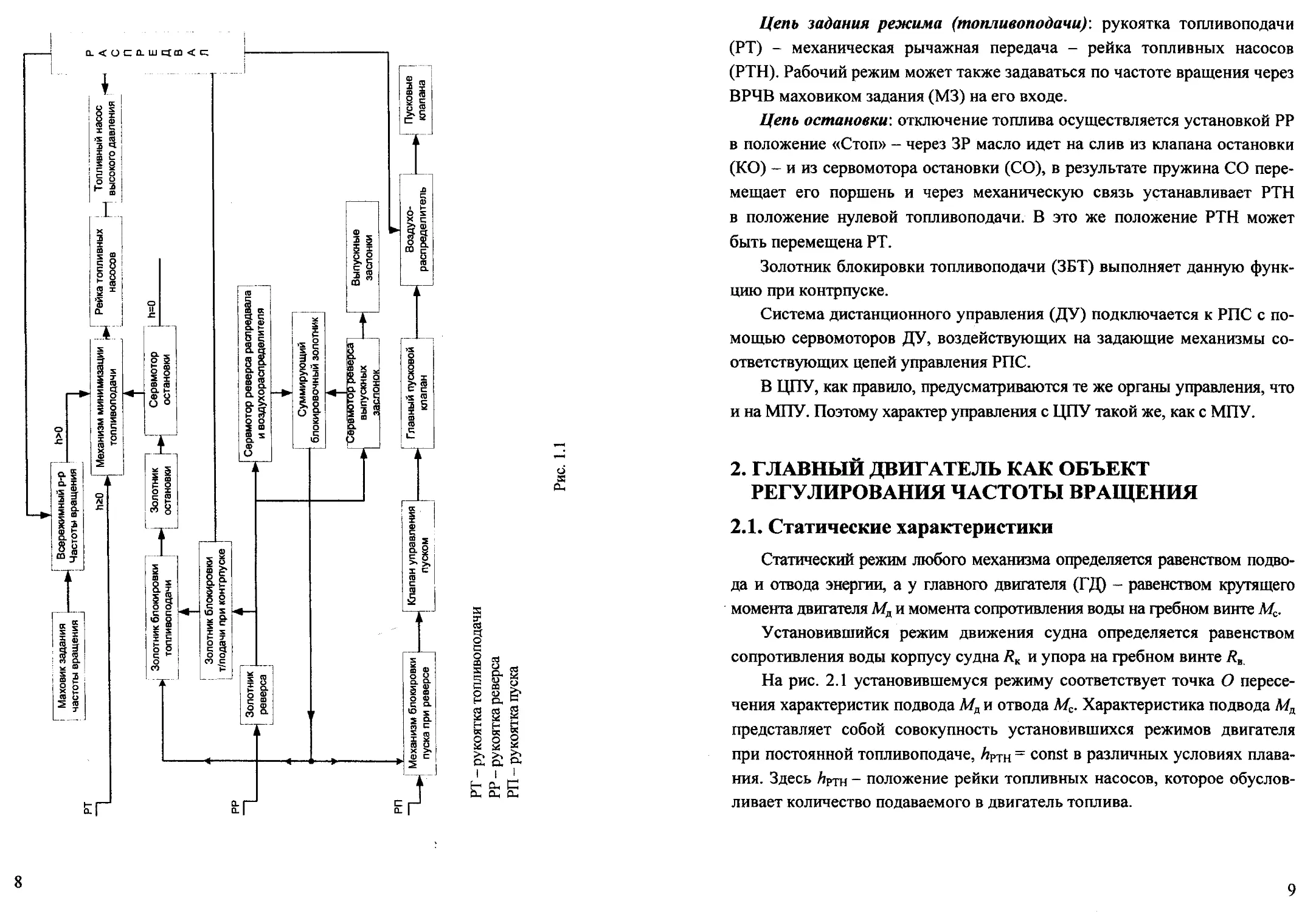
РПС двигателя «Зульцер типа РД имеет следующие механизмы
(рис. 1.1).
Цепь реверса: рукоятка реверса (РР) - золотник реверса (ЗР) - серво-
мотор реверса (СМ1) распредвала (РВ) и воздухораспределителя (ВР) и
сервомотор реверса (СМ2) выпускных заслонок (ВЗ) - суммирующий
блокировочный клапан (СБК), контролирующий окончание реверса СМ1
и СМ2 - механизм блокировки пуска и топливоподачи (МБПТ) до завер-
шения реверса распредорганов (РО).
Цепь пуска: рукоятка пуска (РП) - клапан управления пуском
(КУП) - главный пусковой клапан (ГПК) - воздухораспределитель (ВР) -
пусковые клапаны (ПК) на крышках цилиндров. К МПУ воздух подво-
дится из баллона пускового воздуха (БПВ) через запорный клапан (ЗК) на
баллоне и через клапан блокировки пуска (КБП), при включенном вало-
поворотном устройстве.
7
г i эиа
8
Цепь задания режима (топливоподачи)*. рукоятка топливоподачи
(РТ) - механическая рычажная передача - рейка топливных насосов
(РТН). Рабочий режим может также задаваться по частоте вращения через
ВРЧВ маховиком задания (М3) на его входе.
Цепь остановки*, отключение топлива осуществляется установкой РР
в положение «Стоп» - через ЗР масло идет на слив из клапана остановки
(КО) - и из сервомотора остановки (СО), в результате пружина СО пере-
мещает его поршень и через механическую связь устанавливает РТН
в положение нулевой топливоподачи. В это же положение РТН может
быть перемещена РТ.
Золотник блокировки топливоподачи (ЗБТ) выполняет данную функ-
цию при контрпуске.
Система дистанционного управления (ДУ) подключается к РПС с по-
мощью сервомоторов ДУ, воздействующих на задающие механизмы со-
ответствующих цепей управления РПС.
В ЦПУ, как правило, предусматриваются те же органы управления, что
и на МПУ. Поэтому характер управления с ЦПУ такой же, как с МПУ.
2. ГЛАВНЫЙ ДВИГАТЕЛЬ КАК ОБЪЕКТ
РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ
2.1. Статические характеристики
Статический режим любого механизма определяется равенством подво-
да и отвода энергии, а у главного двигателя (ГД) - равенством крутящего
момента двигателя Л/д и момента сопротивления воды на гребном винте Мс.
Установившийся режим движения судна определяется равенством
сопротивления воды корпусу судна 7?к и упора на гребном винте 7?в
На рис. 2.1 установившемуся режиму соответствует точка О пересе-
чения характеристик подвода Мд и отвода Л/с. Характеристика подвода Л/д
представляет собой совокупность установившихся режимов двигателя
при постоянной топливоподаче, йРТН = const в различных условиях плава-
ния. Здесь Лртн “ положение рейки топливных насосов, которое обуслов-
ливает количество подаваемого в двигатель топлива.
9
Характеристика отвода Л1с (винтовая) представляет совокупность ус-
тановившихся режимов двигателя (от самого малого до полного хода) при
неизменных условиях плавания.
Рис. 2.1
Характеристики главного дизельного двигателя - нелинейные. Нели-
нейность характеристик является показателем того, что качество рабочего
процесса двигателя и свойства всего пропульсивного комплекса различны
на разных режимах, в частности, по такому показателю, как КПД, и они
тем значительнее, чем больше нелинейность.
С максимальным КПД установка обычно работает на основном номи-
нальном режиме. Для транспортного судна это режим полного хода в пол-
ном грузу, которому соответствует верхняя точка расчетной винтовой
характеристики, представляющей совокупность установившихся режимов
главного двигателя при движении судна в полном грузу по глубокой,
спокойной, чистой ото льда воде. Как правило, эксплуатационный пол-
ный ход принимается по нагрузке на 10 - 15 % меньше расчетного. Одна-
ко малая нелинейность верхнего участка винтовой характеристики свиде-
тельствует о том, что качество рабочего процесса двигателя и свойства
пропульсивного комплекса изменяются незначительно. При этом частота
вращения вала двигателя - гребного винта, и, следовательно, скорость суд-
на уменьшаются незначительно, а снижение нагрузки двигателя на основ-
ном режиме на 10 15 % существенно увеличивает его моторесурс.
10
Большая нелинейность нижнего участка винтовой характеристики
свидетельствует о значительном ухудшении свойств, в том числе КПД,
главного двигателя и всего пропульсивного комплекса. Но ввиду кратко-
временности маневровых режимов с малыми расходами топлива, кото-
рым соответствует этот участок винтовой характеристики, в большинстве
установок сохраняется традиционная комплектация, позволяющая сохра-
нить их простоту и надежность.
Однако проблемы работы на маневровых режимах и в зоне малых
частот в определенной мере решаются с применением ВРШ, автономных
воздуходувок, аккумуляторной топливоподачи и пр.
При утяжелении условий (лед, мелководье, встречный ветер, а также
при перекладке руля и др.) винтовая характеристика смещается влево
от расчетной винтовой характеристики, в связи с уменьшением частоты
вращения. При неполной загрузке судна она располагается правее рас-
четной винтовой характеристики.
Различный угол наклона нижнего и верхнего участков винтовой
характеристики свидетельствует о том, что в области малых частот даже
незначительные изменения нагрузки вызывают существенные изменения
частоты вращения, а в области высоких частот, т.е. вблизи номинальной
частоты, зависимость между нагрузкой и частотой имеет противополож-
ный характер.
2.2. Свойство саморегулирования
Главный судовой двигатель является объектом, обладающим свойст-
вом саморегулирования. Так, при нарушении равенства подвода и отвода
энергии начинается переходный процесс, в результате которого вновь
наступает равенство подвода и отвода энергии, т.е. объект самостоятель-
но, без применения регулятора, приходит к установившемуся режиму.
Для движущихся объектов свойство саморегулирования определяется
взаимной зависимостью между скоростью движения и величиной сопротив-
ления движению внешней среды, т.е. взаимосвязью между величиной отвода
энергии и параметром, характеризующим режим работы установки.
При движении судна сопротивление воды корпусу судна и вращению
гребного винта зависит от скорости судна и частоты вращения винта.
В переходном процессе у объекта, обладающего свойством саморегули-
11
рования, нагрузка (отвод энергии) всегда изменяется в сторону сближе-
ния по величине с подводом энергии. В результате вновь наступает уста-
новившийся режим, при котором отвод уравнивается с подводом.
Свойство саморегулирования главного судового двигателя рассмот-
рено на рис. 2.2. В качестве исходного принят установившийся режим
движения судна по чистой (от льда) воде, которому на винтовой характе-
ристике /соответствует точка /. Рассмотрена ситуация, связанная с изме-
нением условий плавания, при которой резко изменяется сопротивление
движению судна в связи с его заходом в лед. Вследствие увеличения со-
противления движению судна, винтовая характеристика смещается влево
в положение IL Если предположить, что изменение сопротивления про-
изошло резко (мгновенно), т.е. частота вращения гребного винта при этом
не успела измениться, то в данном случае режим резко сместится вверх
в точку 2 вместе с винтовой характеристикой. Возникшее при вхождении
в лед дополнительное сопротивление характеризуется величиной ЛЛ/С.
Под его воздействием начинается снижение частоты вращения гребного
винта по винтовой характеристике, соответствующей новым условиям
плавания (движения во льду). В связи с дополнительным сопротивлением
движению судна и снижением частоты вращения гребного винта начина-
ется снижение скорости судна. Однако вместе с этим снижается и сопро-
тивление его движению, характеризуемое величиной сопротивления на
гребном винте ЛЛ/С. Переходный процесс, происходящий под воздействи-
ем избыточного момента сопротивления, продолжается до тех пор, пока
этот момент не станет равным нулю. В данном случае вновь наступает
равенство подвода и отвода энергии, режим движения стабилизируется в
точке 3 (при условии, что подвод энергии Л/д не изменялся, т.е. топливо-
подача в двигателе оставалась постоянной). Аналогично проходит пере-
ходный процесс при выходе судна из льда на чистую воду.
Если также исходить из условия скачкообразного изменения сопро-
тивления, режим смещается из исходной точки 3 на винтовой характери-
стике 11 в точку 2' на винтовой характеристике /, соответствующей дви-
жению судна по чистой воде. Под действием возникшего при этом избы-
точного крутящего момента двигателя ДЛ/д скорость судна начинает воз-
растать. Однако при этом увеличивается и величина сопротивления его
движению, характеризуемая Мс. Переходный процесс продолжается до
12
уравнивания моментов Л/д= Л/с. При этом скорость судна стабилизируется
так же, как и рабочий режим главного двигателя.
При исследовании свойства саморегулирования были определены его
признаки, как при аналитическом, так и при графическом представлении
объекта. При графическом описании главного судового дизеля (рис. 2.3)
наличие свойства саморегулирования характеризуется положительным
знаком разности тангенсов углов наклона касательных к характеристикам
отвода и подвода энергии в точке установившегося режима:
tgp-tga>0.
Следовательно, можно сделать вывод: если участок характеристик,
находящихся справа от точки исследуемого режима, расположен таким
образом, что характеристика подвода находится в IV квадранте, а отвода ~
в I квадранте координатного поля, то объект обладает свойством саморе-
гулирования, так как из положительного тангенса вычитается отрица-
тельный, что определяет положительный результат разности тангенсов.
13
Mi
Рис. 2.3
23. Область рабочих режимов двигателя
Реальные условия плавания могут изменяться в широком диапазоне,
существенно отклоняясь от номинального и других режимов расчетной
винтовой характеристики. Однако при этом существуют двоякого рода
ограничения:
- естественные, определяемые конструктивными параметрами судна,
его пропульсивной установкой и возможными изменениями условий пла-
вания;
- специально предусмотренные в установке ограничительные устрой-
ства для защиты двигателя от выхода на неблагоприятные и аварийные
режимы.
Область рабочих режимов двигателя, связанная с изменениями внеш-
них условий, ограничивается винтовыми характеристиками: наиболее
тяжелой и легкой.
В качестве наиболее тяжелой может быть принята швартовная харак-
теристика, соответствующая работе двигателя при неподвижном судне:
во время швартовных испытаний и в условиях, когда судно застряло во
льдах или село на мель. В качестве легкой принимается?винтовая харак-
14
теристика порожнего судна. Область рабочих режимов между указанны-
ми характеристиками является областью возможных рабочих режимов
главного двигателя (рис. 2.4).
Рис. 2.4
Область рабочих режимов, ограниченная характеристиками специ-
альных ограничительных устройств, является областью допустимых ре-
жимов главного двигателя. Эти ограничения осуществляются по следую-
щим параметрам:
- максимально-допустимая топливоподача (Амакс) - защита от пере-
грузки;
- максимально-допустимая частота вращения (имин) - защита от раз-
носа;
- минимально-допустимая топливоподача - защита от самопроиз-
вольной остановки двигателя (Амин);
- минимально-допустимая частота вращения (лмин), а также защита
от самопроизвольной остановки двигателя;
- обеспечение нормального соотношения между топливоподачей
и частотой вращения (Лртн - и), а также топливоподачей и количеством
воздуха, подаваемого в двигатель (йртн ~Рв)-
15
3. ДИНАМИЧЕСКИЕ СВОЙСТВА ДИЗЕЛЯ
Динамические свойства дизеля определяются силами инерции, т.е.
массой деталей двигателя, находящихся в движении, и величиной изме-
нения скорости движения, т.е. ускорения, положительного при увеличе-
нии скорости и отрицательного при торможении, а также объемами емко-
стей, через которые поступает рабочая среда.
Механизмы двигателя, определяющие в основном его динамические
свойства, представлены на рис. 3.1. Под наименованием «Двигатель»
представлены движущиеся детали двигателя (их масса или приведенный
момент инерции): поршни, шатуны, коленчатый вал и прочие детали,
кинематически с ним связанные, в том числе гребной вал, гребной винт,
а также массы воды, приводимые в движение лопастями гребного винта.
Рабочей средой дизеля являются топливо, воздух, выхлопные газы.
Небольшие емкости трубопроводов и механизмов, через которые топливо
подается в цилиндры двигателя (ТНВД, трубопроводы высокого давле-
ния, форсунки), позволяют пренебречь временными характеристиками
канала топливоподачи.
Большие объемы трубопроводов выхлопных газов (коллектор вы-
хлопных газов) и воздуха (воздушный ресивер) в совокупности со связы-
вающим их газотурбонагнетателем (ГТН) приводят к значительным вре-
менным запаздываниям в процессе изменения количества подаваемого
16
в цилиндры воздуха и вследствие этого - к существенным нарушениям
соответствия «топливо - воздух» на маневровых режимах.
3.1. Уравнение динамики двигателя
Уравнение динамики двигателя представлено в виде:
at
гдеЛ/д= M^(h, ря,п)-,
Мс- Мс (и, с);
7Д- приведенный момент инерции двигателя.
В относительных величинах уравнение динамики двигателя можно
представить следующим образом:
Гд ф + Zip АрФв
где Гд- постоянная времени двигателя;
я(ф) - абсолютная и относительная частота вращения;
Z - коэффициент саморегулирования (фактор устойчивости);
Л(ц) - абсолютная и относительная величина топливоподачи;
Рв(фв) - абсолютная и относительная величина давления продувочно-
го воздуха;
с(Х) - абсолютная и относительная величина внешних воздействий;
kfa кр, кс - коэффициенты, значения которых определяются конструк-
тивными параметрами механизмов двигателя.
Одноемкостное звено - «Двигатель», описываемый дифференциаль-
ным уравнением первого порядка, имеет экспоненциальную динамиче-
скую характеристику, т.е. монотонный переходный процесс.
3.2. Уравнение коллектора
Уравнение динамики коллектора может быть представлено в сле-
дующем виде:
, ^!_ = Г -Г
**кг „ ^гд
dt
Огд Сгд(/?, рг),
С?п ^гг (Рг> як);
17
Тг фг + Z^r £/j|x £гфг,
где 7кг - приведенный момент инерции газов в коллекторе;
Gr;i и - количество газов, поступающее в коллектор из цилиндров
двигателя, и поступающее на турбину ГТН из коллектора;
/?г(фг) - абсолютная и относительная величина давления газов в кол-
лекторе;
Тг - постоянная времени коллектора;
Zr - коэффициент саморегулирования;
иг(фг) - абсолютная и относительная величина частоты вращения
компрессора (ГТН);
kh и кт - коэффициенты, определяемые конструктивными параметра-
ми механизмов.
Переходный процесс в одноемкостном коллекторе - монотонный,
экспоненциальный.
33. Уравнение ГТН (турбокомпрессора)
Уравнение динамики турбокомпрессора может быть представлено
в виде:
7кф-=М-М;
dt
Л/т ~~ ик),
Л/к — Л/к (ик, рв)?
-Г< Фк + ^кфк ~ Mr ^рфр,
где 7К - приведенный момент инерции турбокомпрессора;
Л/т и МК “ момент турбины и компрессора;
ТК - постоянная времени турбокомпрессора;
ZK - коэффициент саморегулирования турбокомпрессора.
Переходный процесс турбокомпрессора как одноемкостного звена,
описываемого дифференциальным уравнением 1-го порядка, как и пре-
дыдущих звеньев, носит монотонный (экспоненциальный) характер.
18
3.4. Уравнение воздушного ресивера
Уравнение динамики воздушного ресивера представлено в виде:
7
"в '-Г в к ^вд?
dt
Gm = G
вк(«к> Рв);
ОВд ”” ^Вд(рВ) И),
ТВ Фв + ^вфв ““ ^кФк ~
где «7В - приведенный момент инерции воздуха в ресивере;
С7ВК и бвд - количество воздуха, поступившего из компрессора в ре-
сивер и из ресивера в двигатель;
Тв - постоянная времени ресивера;
ZB - коэффициент саморегулирования ресивера;
кк и кп - коэффициенты, определяемые конструктивными парамет-
рами механизмов.
Таким образом, двигатель, в соответствии с принятой схемой, со-
держит четыре одноемкостных элемента. Поэтому он представляет со-
бой
4-емкостное звено, описываемое дифференциальным уравнением 4-го
порядка.
Переходный процесс в 4-емкостном объекте может быть как моно-
тонным, так и колебательным, в зависимости от значений постоянных
времени отдельных одноемкостных звеньев. Несмотря на то, что в изда-
нии не рассматривается динамика пуска дизеля и на рис. 3.1 не показа-
ны трубопроводы и механизмы пусковой системы: главный пусковой
клапан, воздухораспределитель, пусковые клапаны, канал пуска также
может быть представлен одноемкостным звеном.
4. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ.
ОГРАНИЧЕНИЕ ТОПЛИВОПОДАЧИ
Главный судовой дизельный двигатель, обладая свойством саморе-
гулирования, длительное время эксплуатировался без использования
всережимного регулятора частоты вращения (ВРЧВ). Однако свойство
саморегулирования главного судового двигателя не является абсолют-
19
ным. В области низких частот вращения дизель теряет это свойство.
Частота вращения самого малого хода граничит между областью само-
регулирования, т.е. областью рабочих режимов главного двигателя от
самого малого до полного хода, и областью, в которой это свойство от-
сутствует, т.е. работа двигателя становится неустойчивой и он может
останавливаться самопроизвольно. При этом граница между областями
смещается при изменении теплового состояния двигателя и других фак-
торов.
Потеря свойства саморегулирования определяется, в частности, тем,
что при малой частоте вращения ухудшается распыл топлива. При ма-
лой топливоподаче, соответственно, уменьшается тепловыделение, при
этом отвод тепла через стенки втулки при малой скорости хода поршня
оказывается значительным. В результате снижения температуры воз-
душного заряда в камере сжатия до значения ниже температуры само-
воспламенения топлива оно перестает воспламеняться, и двигатель
глохнет.
На рис. 4.1 рассматривается взаимодействие моментов (А/Ди Мс) при
скачкообразном возрастании нагрузки (при вхождении судна в лед) и
при работе двигателя в зоне низкой частоты вращения. Возникший при
этом избыточный момент сопротивления начинает снижать частоту
вращения двигателя. Однако разность Мд и Мс в этом случае не умень-
шается, а продолжает возрастать. В результате происходит самопроиз-
вольная остановка двигателя.
При неавтоматизированном управлении механик при работе на ре-
жиме самого малого хода, в случае снижения частоты вращения (на-
пример, при перекладке руля) увеличивает топливоподачу, предотвра-
щая тем самым самопроизвольную остановку двигателя.
При автоматизированном управлении главным двигателем, т.е. при-
менении системы ДАУ, для обеспечения устойчивой работы дизеля был
установлен регулятор частоты вращения. Так как время работы двигате-
ля на неустойчивом режиме самого малого хода - незначительно, глав-
ный двигатель был оборудован всережимным регулятором частоты
вращения, обеспечивающим поддержание заданной частоты вращения
во всем диапазоне его рабочих режимов.
20
Рис. 4.1
Однако применение всережимного регулятора наряду с обеспечением
устойчивости ухудшило качество работы двигателя на маневровых режи-
мах и в тяжелых условиях плавания (в связи с нарушением соответствия
топлива с воздухом). Поэтому в ВРЧВ, устанавливаемом на главный дви-
гатель, был встроен механизм ограничения топливоподачи (защиты от «пе-
регрузки») на маневровых режимах и в тяжелых условиях плавания.
Назначением механизма защиты от «перегрузки» является обеспече-
ние соответствия между частотой вращения и топливоподачей в эксплуа-
тационных ситуациях, вызывающих нарушение их нормального соотно-
шения, а именно при пуске двигателя, разгоне судна, перекладке руля,
встречном ветре, плавании на мелководье и во льдах, на волнении и т.д.
Механизм устанавливает предел максимальной топливоподачи, допусти-
мой для каждой конкретной частоты вращения. При изменении частоты
вращения механизм, соответственно, изменяет этот предел (рис. 4.2). Это
свойство даст возможность использовать данный механизм для выполне-
ния важной функции - установки пусковой топливоподачи. Механизм
функционирует в двух вариантах, устанавливая предел топливоподачи в
зависимости либо от заданной на входе ВРЧВ частоты вращения, либо от
фактической частоты вращения вала двигателя.
21
Рис. 4.2
5. СПОСОБЫ УПРАВЛЕНИЯ ГЛАВНЫМ
ДВИГАТЕЛЕМ
5.L Принципы классификации
Требуемый режим задается главному судовому двигателю одним
из двух способов:
- фиксированной топливоподачей, величина которой обеспечивает
этот режим;
- по частоте вращения, если двигатель оборудован всережимным ре-
гулятором частоты вращения, через который задается требуемый режим.
Однако фактический режим соответствует заданию только в нор-
мальных (расчетных) условиях плавания. При отклонении условий пла-
вания от расчетных данное соответствие нарушается. При этом величина
отклонения зависит от способа задания режима. Применение на главном
двигателе ВРНВ позволило повысить точность соответствия фактическо-
го и заданного режимов, однако существенно обострило другую пробле-
22
му - значительно возросла «перегрузка» двигателя на динамичных режи-
мах: при пуске двигателя, при разгоне судна, в штормовых условиях,
а также в тяжелых условиях плавания (тяжелый лед). Для решения этой
проблемы пришлось установить на главном двигателе дополнительные
устройства - механизмы защиты от перегрузки. Так конструктивно воз-
ник комбинированный способ управления главного двигателя, который
преимущественно и применяется в настоящее время.
Итак, в случае изменения внешних условий;
- при первом способе управления (режим задан фиксированной топ-
ливоподачей Л = const) изменяется частота вращения п = var;
- при втором способе (на двигателе установлен ВРЧВ, и режим задан
по частоте nz = const) регулятор изменяет топливоподачу h = var;
- при комбинированном управлении (на двигателе установлены
ВРЧВ и механизм защиты от перегрузки, а режим задан по частоте вра-
щения п3 = const): при нормальных условиях плавания и при небольшом
утяжелении внешних условий управление осуществляется вторым спосо-
бом (работает ВРЧВ); при значительном утяжелении условий механизм
защиты переключает установку на первый способ управления (отключает
ВРЧВ).
Рассмотрим особенности работы главного двигателя в переходных
режимах при каждом способе управления в трех эксплуатационных си-
туациях:
- изменяются внешние условия при неизменном задании режима;
- выполняется маневровая операция в связи с подачей команды на
изменение режима;
- осуществляется пуск двигателя.
5.2. Первый способ управления
Требуемый режим задается фиксированной топливоподачей h = const.
Изменение внешних условий (рис. 5.1).
23
Рис. 5.1
На рисунке приводятся винтовые характеристики: 1 - расчетная (нор-
мальная), II - тяжелая, III - легкая, характеристики штатных задаваемых
режимов: самого малого хода - Лсм, малого - Лм, среднего - Лс, полного - hn.
В качестве исходного принимается режим малого хода - точка 0. При
утяжелении условий плавания режим двигателя смещается по характери-
стике фиксированной топливоподачи заданного режима вместе с винто-
вой характеристикой в точку 7, при облегчении - в точку 2. Таким обра-
зом, на изменение нагрузки двигатель реагирует изменением частоты
вращения, а судно - изменением скорости, т.е. действует принцип само-
регулирования установки.
Осуществление маневровой операции, связанной с переводом уста-
новки с исходного режима «малого хода» (точка 0) на «средний ход»
(рис. 5.2). Исходя из предположения, что изменение топливоподачи
(в соответствии с поданной командой) осуществляется резко (скачком),
режимная точка резко вместе с характеристикой топливоподачи (й) сме-
щается в точку 7, т.е. частота вращения при этом не успевает измениться.
При новой топливоподаче частота вращения быстро (в течение не-
скольких секунд) увеличивается до режима, которому соответствует точ-
ка 2. На этом режиме имеет место максимальное рассогласование между
частотой вращения гребного винта и скоростью судна, которая в связи
с инерционностью корпуса судна только с этого момента начинает изме-
няться. Данный режим воспринимается двигателем как работа на утяже-
ленной винтовой характеристике 77. По мере разгона судна величина не-
24
соответствия уменьшается, и режимная точка вместе с винтовой характе-
ристикой движется вправо до стабилизации частоты вращения винта
и скорости судна на расчетной винтовой характеристике в точке 3, соответ-
ствующей нормальным условиям, в которых выполнялся маневр. Анало-
гично выполняется маневр перевода установки с режима «среднего хода»
на «малый ход» при изменении режима в последовательности 3 - 1'~ 2*-0.
Рис. 5.2
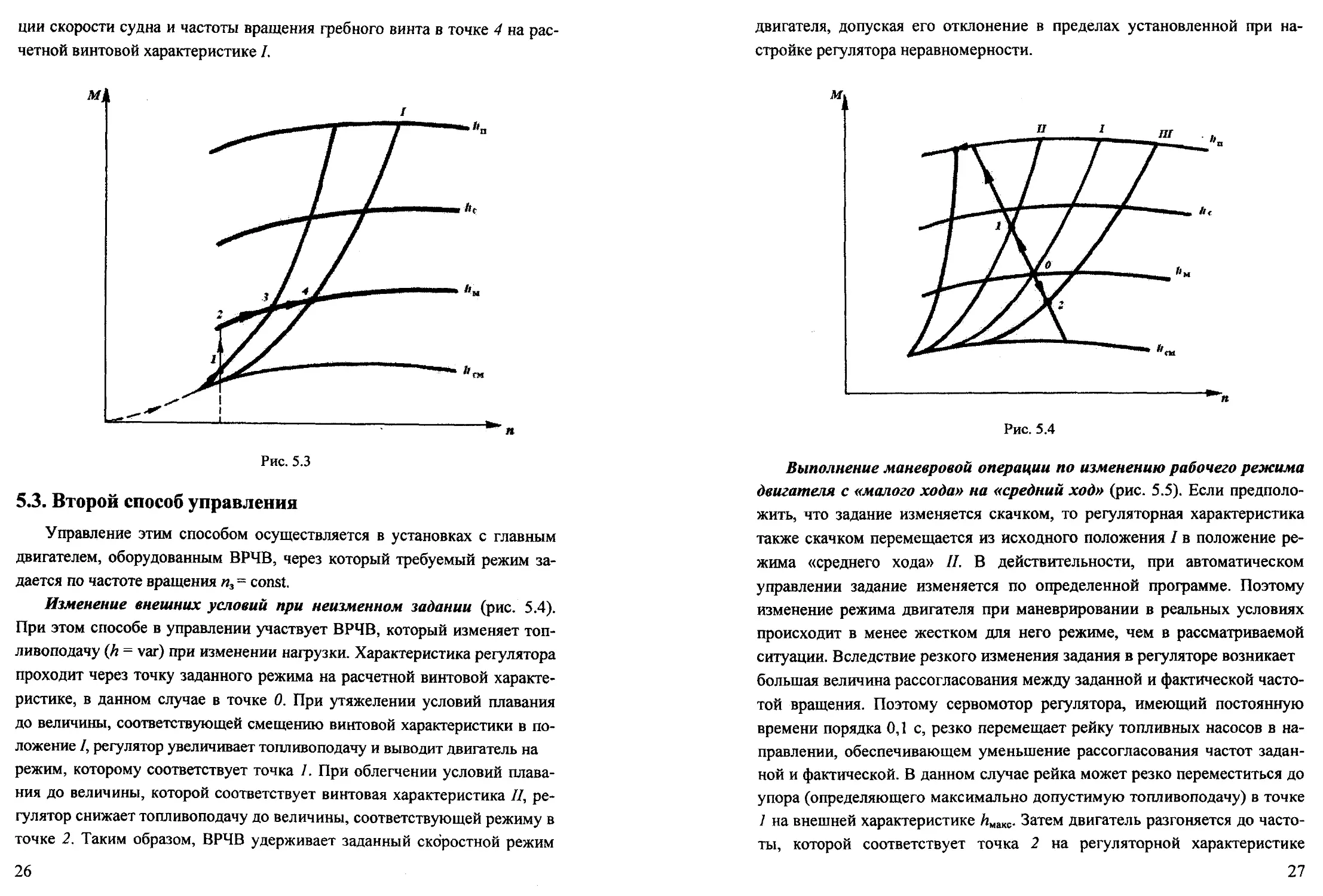
Пуск главного двигателя (рис. 5.3). Рассматривается пусковая ситуа-
ция при отходе судна от причала, т.е. по швартовной характеристике не-
подвижного судна. Тип пуска - раздельный. Поэтому на участке 0-1
швартовной характеристики происходит раскручивание двигателя пуско-
вым воздухом. Точка 1 соответствует достижению пусковой частоты
вращения ип, при которой отключается воздух и включается пусковая
топливоподача Ап, в данном случае равная топливоподаче «малого хода».
Включение ее производится резко, скачком. Поэтому режим скачком, без
изменения частоты вращения, переходит из точки 1 в точку 2. Далее
по характеристике пусковой топливоподачи частота вращения быстро
увеличивается до величины, которой соответствует точка 3 на швартов-
ной характеристике. Судно, неподвижное в связи с большой инерционно-
стью, только с этого момента начинает двигаться. По мере его разгона
увеличивается и частота вращения, до завершения разгона и стабилиза-
25
ции скорости судна и частоты вращения гребного винта в точке 4 на рас-
четной винтовой характеристике L
Рис. 5.3
5.3. Второй способ управления
Управление этим способом осуществляется в установках с главным
двигателем, оборудованным ВРЧВ, через который требуемый режим за-
дается по частоте вращения п3 = const.
Изменение внешних условий при неизменном задании (рис. 5.4).
При этом способе в управлении участвует ВРЧВ, который изменяет топ-
ливоподачу (h = var) при изменении нагрузки. Характеристика регулятора
проходит через точку заданного режима на расчетной винтовой характе-
ристике, в данном случае в точке 0. При утяжелении условий плавания
до величины, соответствующей смещению винтовой характеристики в по-
ложение /, регулятор увеличивает топливоподачу и выводит двигатель на
режим, которому соответствует точка 7. При облегчении условий плава-
ния до величины, которой соответствует винтовая характеристика II, ре-
гулятор снижает топливоподачу до величины, соответствующей режиму в
точке 2. Таким образом, ВРЧВ удерживает заданный скоростной режим
26
двигателя, допуская его отклонение в пределах установленной при на-
стройке регулятора неравномерности.
Рис. 5.4
Выполнение маневровой операции по изменению рабочего режима
двигателя с «малого хода» на «средний ход» (рис. 5.5). Если предполо-
жить, что задание изменяется скачком, то регуляторная характеристика
также скачком перемещается из исходного положения 1 в положение ре-
жима «среднего хода» II. В действительности, при автоматическом
управлении задание изменяется по определенной программе. Поэтому
изменение режима двигателя при маневрировании в реальных условиях
происходит в менее жестком для него режиме, чем в рассматриваемой
ситуации. Вследствие резкого изменения задания в регуляторе возникает
большая величина рассогласования между заданной и фактической часто-
той вращения. Поэтому сервомотор регулятора, имеющий постоянную
времени порядка 0,1 с, резко перемещает рейку топливных насосов в на-
правлении, обеспечивающем уменьшение рассогласования частот задан-
ной и фактической. В данном случае рейка может резко переместиться до
упора (определяющего максимально допустимую топливоподачу) в точке
7 на внешней характеристике /2макс. Затем двигатель разгоняется до часто-
ты, которой соответствует точка 2 на регуляторной характеристике
27
(по характеристике максимальной топливоподачи) и далее по регулятор-
ной характеристике (когда начинается снижение завышенной в началь-
ный момент переходного процесса топливоподачи) - до режима в точке 3
на винтовой характеристике /Д соответствующей максимальному (при
выполнении данного маневра) рассогласованию скорости судна и частоты
вращения винта. С этого момента начинается увеличение скорости судна
с режима «малого хода» до стабилизации режима на «среднем ходу»,
которому соответствует точка 4 расчетной винтовой характеристики.
Рис. 5.5
Аналогично происходит переходный процесс при изменении режи-
ма установки со «среднего хода» на «малый ход» в последовательности:
4 - Г - 2f - 3f - ft При этом точка 1' находится на характеристике мини-
мально допустимой топливоподачи hMtm> определяемой ограничителем
перемещения рейки. Точка 3' находится на винтовой характеристике 1П,
соответствующей максимальному рассогласованию скорости судна и час-
тоты вращения винта при выполнении данного маневра, и служит нача-
лом изменения скорости судна.
Пуск двигателя (рис. 5.6). На регуляторе при пуске выставляется
пусковое задание по частоте вращения, т.е. режим «малого хода». На уча-
стке 0-1 происходит раскручивание двигателя пусковым воздухом. При
28
достижении пусковой частоты вращения ип отключается подача пусково-
го воздуха и включается топливо. Однако, поскольку в регуляторе значе-
ния заданной (пусковое задание) и фактической частот существенно раз-
личаются, сервомотор регулятора резко увеличивает топливоподачу, воз-
можно, до максимального значения (в точке 2) на внешней характеристи-
ке. Далее двигатель разгоняется по внешней (точка 3) и регуляторной ха-
рактеристике до выхода на режим, находящийся на швартовной характе-
ристике (точка 4). Далее начинается движение судна до стабилизации на
заданном режиме в точке 5.
Рис. 5.6
Если при пуске штурманом задается режим, отличающийся от пуско-
вого (которому соответствует, как правило, режим «малого хода»), то по
окончании пуска - достижении пусковой частоты вращения, при которой
отключается пусковой воздух, происходит изменение задания на регуля-
торе с пускового на режим по частоте, заданный при пуске штурманом.
5.4. Комбинированный способ управления
Этот способ управления главного двигателя связан с применением
на двигателе устройств защиты его от «перегрузки», которая возникает
во время маневровых операций и при плавании в тяжелых (ледовых)
условиях в результате работы ВРЧВ на этих режимах. Так как основным
29
«источником» перегрузки двигателя является ВРЧВ, устройства защиты
(при механическом конструктивном исполнении) были встроены в ВРЧВ
таким образом, чтобы отключать его при перегрузке двигателя. Защита
осуществляется путем ограничения или снижения топливоподачи при
нарушении соотношений:
топливо - частота вращения (h - п)\
топливо - воздух (Л - рв).
Изменение внешних условий в сторону утяжеления (рис. 5.7).
Кроме характеристик двигателя и регулятора, на рисунке присутствует
ограничительная характеристика (й - л). До тех пор, пока утяжеление от-
носительно невелико, т.е. «перегрузки» нет, управление осуществляется
вторым способом. ВРЧВ увеличивает топливоподачу до установленной
предельной для данного в точке 0 задания по частоте. На режиме в точке
1 исчерпана установленная при настройке зона нечувствительности меха-
низма защиты, т.е. двигатель вышел на границу зоны перегрузки. С этого
момента, в случае дальнейшего утяжеления условий плавания, топливо-
подачей управляет механизм защиты, лишив этой функции ВРЧВ.
Рис. 5.7
Если механизм защиты работает по принципу сравнения топливопо-
дачи с заданной частотой вращения h - n3i то он будет удерживать топли-
воподачу постоянной, соответствующей неизменной исходной заданной
частоте л0з. В условиях, которым соответствует винтовая характеристика
30
Ill, двигатель выйдет на режим в точке 2. Если механизм работает
по принципу сравнения топливоподачи с фактической частотой вращения
h - «ф, то он будет снижать топливоподачу по мере падения частоты,
обеспечивая тем самым их соответствие, и выведет двигатель по винто-
вой характеристике III на режим в точке 3'.
Подача команды на изменение режима двигателя с «малого хода»
на «средний ход» (рис. 5.8). При скачкообразном изменении задания
на ВРЧВ регуляторная характеристика также скачком перемещается
из положения I в положение 1L В результате возникшего на измерителе
регулятора значительного рассогласования заданной и фактической час-
тоты вращения сервомотор регулятора резко, практически скачком, уве-
личивает топливоподачу, но не до внешней характеристики, что имело
место при управлении вторым способом, а до ограничения, установлен-
ного механизмом защиты для вновь заданной частоты «среднего хода»,
на режим, которому соответствует точка I. Далее происходит разгон дви-
гателя. При этом режимная точка смещается в положение 2 и затем в по-
ложение 3, когда регулятор будет снижать завышенную для заданного
режима топливоподачу с точки 3 на винтовой характеристике, соответст-
вующей максимальному рассогласованию между скоростью судна и час-
тотой вращения винта. Начинается разгон судна до его выхода на устано-
вившийся режим среднего хода в точке 4 на расчетной винтовой характе-
ристике.
31
Пуск двигателя. При пуске участок 0-1 (рис. 5.9) соответствует
раскручиванию двигателя пусковым воздухом. При достижении пусковой
частоты вращения «п в точке / отключается пусковой воздух и включает-
ся пусковая топливоподача, соответствующая частоте пускового задания
на ВРЧВ и устанавливаемая механизмом защиты в соответствии с его
настройкой. После броска рейки сервомотором регулятора на пусковую
топливоподачу (в точку 2) двигатель разгоняется до режима, соответст-
вующего выходу на швартовную характеристику (точка 5). С этого мо-
мента движение судна сначала происходит при постоянной топливопо-
даче, а начиная с режима, которому соответствует точка 4, управление
топливоподачей переходит к ВРЧВ, который снижает топливоподачу,
так как она была избыточной для заданного режима до выхода судна
на установившийся режим «малого хода» в точке 5 расчетной винтовой
характеристики.
Таким образом, как установившиеся режимы, так и переходные про-
цессы существенно зависят от способа управления. Это очевидно при
сравнении режимов главных двигателей, управляемых разными способа-
ми в одной и той же эксплуатационной ситуации (рис. 5.10). В качестве
исходного принят режим «малого хода» - нулевая точка на расчетной
32
винтовой характеристике /. Новый тяжелый режим представлен характе-
ристикой II.
При управлении первым способом режим двигателя сместится в точ-
ку 7; вторым способом - в точку 2; комбинированным - в точку 3 (при
контроле заданной частоты вращения и3)5 в точку 3' (при контроле факти-
ческой частоты вращения).
Сравнительный анализ показывает, что чем больше отклонение усло-
вий плавания от расчетных, тем более существенным является различие
режимов двигателя. Самый тяжелый режим - при управлении вторым
способом (точка 2), наиболее легкий - при управлении комбинированным
способом (точка 3 ).
Рис. 5.10
6. ДИСТАНЦИОННОЕ АВТОМАТИЗИРОВАННОЕ
УПРАВЛЕНИЕ
6.1. Функции системы ДАУ
Системами ДАУ предусматриваются, как правило, следующие основ-
ные функции.
1. Управление осуществляется по одной из двух программ: маневро-
вой (нормальной) или аварийной (экстренной). Основной является манев-
ровая программа. Аварийная включается только в аварийной для судна
ситуации (опасность столкновения, навала, посадки на грунт), т.е. когда
требуется быстрое исполнение маневра, в связи с чем в двигателе возни-
кают повышенные, опасные для него напряжения.
Возможно также применение третьей программы - разогрева (замед-
ленной), которая предусматривает более длительный, чем по маневровой
программе, процесс перевода ГД с исходного на ходовой режим.
2. Выполняются штатные блокировочные функции, реализуемые
РПС.
3. Установка пускового задания по частоте вращения на входе ВРЧВ.
4. Установка пускового ограничения топливоподачи (максимально
допустимой в период пуска).
5. Медленное проворачивание перед пуском, если после остановки
двигатель не работал, например, в течение получаса.
6. Отсечка (прекращение подачи) пускового воздуха при достижении
пусковой частоты вращения (по сигналу от датчика частоты вращения).
7. Отсечка пускового воздуха по истечении установленного времени
длительности при затяжном пуске, т.е. когда не достигнута пусковая час-
тота вращения (по сигналу от реле времени пуска).
8. Повторные автоматические попытки пуска в случае самопроиз-
вольной остановки двигателя после отсечки пускового воздуха при дос-
тижении пусковой частоты вращения. Обычно предусматриваются три
попытки пуска. Сигнал на повторные попытки поступает от реле отсчета
попыток пуска.
9. Переключение с пускового задания на режим с мостика и отключе-
ние пускового ограничения топливоподачи при достижении пусковой
частоты вращения.
10. Вывод двигателя на заданный режим по программе разгона двига-
теля (обычно аппроксимирует экспоненциальную характеристику).
11. При наличии зоны критической (резонансной) частоты вращения
предусматривается быстрое прохождение зоны.
12. Предусматривается запрет работы двигателя в критической зоне,
если заданный режим совпал с критической частотой. Двигатель выво-
дится на режим на границе зоны и удерживается на нем до тех пор, пока
задание не будет изменено.
34
13. Требуемый режим задается по частоте вращения, т.е. задание
поступает на вход ВРЧВ.
14, Предусматривается защита двигателя от «перегрузки» при плава-
нии в тяжелых условиях, например, ледовых.
15. Предусматривается защита от самопроизвольной остановки дви-
гателя при работе на режиме «самого малого хода». Защита обеспечива-
ется устройствами, осуществляющими ограничение по минимальной за-
даваемой частоте вращения и минимальной топливоподаче.
Автоматизированное управление в случае возникновения аварийных
ситуаций предусматривает две кнопки: «Аварийная остановка» и «Ава-
рийная работа».
Аварийная программа, в отличие от нормальной, предусматривает:
- ускоренный вывод двигателя на заданный режим;
- повышенное пусковое задание по частоте вращения;
- повышенную пусковую топливоподачу;
- повышенную пусковую частоту вращения (частоту отсечки пуско-
вого воздуха);
- отключение защиты двигателя.
При автоматических повторных попытках пуска также автоматически
увеличиваются уставки вышеперечисленных пусковых параметров.
6.2. Структура системы ДАУ
Система ДАУ ГД предусматривает на мостике один основной орган
управления - рукоятку, совмещенную с машинным телеграфом. Рукоятка
воздействует, как правило, на следующие командные элементы системы:
задатчики направления вращения вала («вперед» и «назад») и соответст-
вующий заданному режиму задатчик частоты вращения. Команды от за-
датчиков поступают в блок логики (БЛ).
Предусматриваются также два органа управления аварийного назна-
чения:
- кнопка «Аварийная остановка» - для остановки двигателя, если при
подаче команды «Стоп» штатная система управления не останавливает
двигатель;
- кнопка «Аварийная работа» - для переключения на «Аварийную
программу» управления в аварийной для судна ситуации.
35
Из БЛ командные сигналы поступают в цепи, реализующие основные
операции процесса управления: реверса (вперед, назад), пуска, изменения
режима, остановки. Сигналы из БЛ вначале поступают на элементы уси-
ления (от низкого уровня, соответствующего функционированию в БЛ,
до силового уровня), далее - на электропневматические преобразователи
(электромагнитные клапаны и преобразователи других типов), затем -
на элементы (клапаны) переключения постов управления ДПУ (на мости-
ке) - ЦПУ, далее - на штатные механизмы реверсивно-пусковой системы
двигателя.
Кроме командных сигналов с мостика в блок логики также поступают
сигналы датчиков обратных связей, установленных на двигателе. Тем
самым обеспечивается необходимая последовательность выдачи сигналов
в силовые цепи в соответствии с алгоритмом управления.
Типовые сигналы обратных связей:
- о положении распредорганов: вперед, назад (сигнал о завершении
реверса РО);
- о положении рейки топливных насосов: топливо включено -
выключено (РТН в нулевом положении, команда «Стоп» выполнена);
- о фактическом направлении вращения вала: вперед - назад (при не-
соответствии заданного и фактического направления вращения подача
топлива должна быть запрещена);
- пусковая частота вращения достигнута, это значит, что должна быть
подана команда на отключение пускового воздуха.
Тип регулятора частоты вращения определяет схему его подключения
к системе управления и двигателю. На рис. 6.1 приведена схема подклю-
чения механического регулятора частоты (МРЧ), на рис. 6.2 - электрон-
ного регулятора частоты (ЭРЧ). Включение ДАУ осуществляется пере-
ключателем постов управления ДПУ (мостик) - ЦПУ на панели ЦПУ.
При этом питание подается в систему ДАУ, и элементы переключения
в цепях управления подключают выходные каналы системы ДАУ к соот-
ветствующим каналам штатной системы управления.
36
Рис. 6.1
37
(N
4D
0ч
кис.
38
6.3. Алгоритм управления
II Алгоритм - система операций, применяемых по строго определен-
ным правилам, которые после последовательного их выполнения при-
водят к решению поставленной задачи.
Алгоритм автоматизированного управления главного двигателя (ГД)
реализуется элементами цепей реверса, пуска, изменения режима и оста-
нова системы ДАУ. Пуску и работе двигателя предшествуют операции
по приведению установки в состояние готовности к работе, а именно
включаются насосы смазки, охлаждения, топлива, включается подогрева-
тель тяжелого топлива, открывается запорный клапан на баллоне пуско-
вого воздуха, отключается валоповоротное устройство и пр.
Системой ДАУ при включении устанавливается пусковое задание
по частоте вращения на входе ВРЧВ и проверяется положение РТН (перед
пуском рейка должна быть в нулевом положении, т.е. топливо отключено).
Элементами защиты и блокировки (запрета) системы ДАУ осуществ-
ляется контроль готовности ГД к работе при наличии нормального давле-
ния в системах смазки, охлаждения, топлива, пускового воздуха, необхо-
димой температуры и прочих параметров.
Подготовка установки к работе завершается выполнением следующих
процедур:
- проверкой исправности машинного телеграфа;
- проверкой системы ДАУ при передаче автоматизированного управ-
ления ГД на дистанционный пост управления на мостике.
Далее рассматривается алгоритм пуска, являющийся составной ча-
стью алгоритма управления.
Алгоритм пуска
Алгоритм пуска ГД при перемещении рукоятки управления (рукоятки
МТ) из положения «Стоп», например, в положение «Самый малый впе-
ред» предусматривает указанную далее последовательность операций.
1. Проверка (контроль) готовности установки к работе в соответствии
с перечнем параметров, контролируемых системой защиты ГД.
2. От задатчика, связанного с РУ, команда поступает в блок логики
(БЛ) системы ДАУ.
39
3. Из БЛ командный сигнал поступает в цепь реверса РО на элементы
усиления и преобразования.
4. Силовой сигнал поступает в сервомотор реверса, который вводит
в действие механизмы реверса РО штатной реверсивно-пусковой системы
двигателя.
5. От датчика реверса распредорганов сигнал о завершении реверса
РО поступает в БЛ.
6. При соответствии заданного направления пуска двигателя и поло-
жения его РО из БЛ командный сигнал поступает на элементы усиления
(ЭУ) цепи пуска, т.е. дается команда на начало пуска двигателя.
7. От ЭУ управляющее воздействие (управляющий воздух) поступает
на открытие главного пускового клапана (ГПК).
8. При открытии ГПК пусковой воздух поступает к воздухораспреде-
лителю (ВР), от ГПК и ВР - к пусковым клапанам (ПК) на крышках ци-
линдров и далее - в цилиндры двигателя.
9. В двигателях со смешанным типом пуска из БЛ одновременно по-
дается команда на подачу пускового воздуха и на включение топлива.
10. В соответствии с пусковым заданием на входе ВРЧВ, механизм
пусковой топливоподачи устанавливает РТН в соответствующее пуску
положение.
11. Одновременно с подачей команды на пуск включается реле вре-
мени (РВр), настройкой которого определяется максимальная продолжи-
тельность пуска при затянувшемся пуске.
12. Включается реле отсчета автоматических попыток пуска.
13. С началом вращения вала двигателя на воздухе от датчика часто-
ты вращения (ДЧВ) в БЛ поступает сигнал, пропорциональный частоте
вращения. При достижении пусковой частоты вращения из БЛ одновре-
менно поступают команды:
- в цепь пуска - на отсечку пускового воздуха,
- в цепь задания скоростного режима - на переключатель с задатчика
пускового задания (на входе ВРЧВ) на задатчик рабочего режима на мостике.
14. При различии пускового и рабочего заданий после переключения
с пускового на задатчик частоты с мостика начинается изменение ко-
мандного сигнала на входе ВРЧВ (по программе изменения режимов,
предусмотренной системой ДАУ).
40
15. Если при пуске обороты вала не достигают пусковой частоты враще-
ния, то пуск прекращается по сигналу реле времени, настроенного на макси-
мально допустимую продолжительность пуска. При этом включается сигнал
«Пуск не состоялся», и дальнейшая работа ДАУ блокируется.
16. Если при пуске двигателя достигается пусковая частота вращения,
но после отключения пускового воздуха двигатель глохнет, то по сигналу
реле отсчета попыток пуска (реле повторных попыток пуска) осуществ-
ляются две автоматические повторные попытки пуска. При повторных
попытках пуска может предусматриваться автоматическое повышение
пусковых уставок: пусковой частоты вращения, пускового задания
по частоте на входе ВРЧВ, пусковой топливоподачи. Если все попытки
пуска оказались неудачными, то включается сигнал «Пуск не состоялся»,
и дальнейшая работа ДАУ блокируется.
17. При отключении пускового воздуха одновременно происходит
переключение с пускового на заданный с мостика режим.
18. В системах управления двигателями с раздельным пуском могут
предусматриваться дополнительные реле времени для задержки исполне-
ния отдельных команд. В цепи управления пусковым воздухом реле вре-
мени задерживает закрытие ГПК при достижении пусковой частоты,
но в то же время топливоподача включается без задержки. Таким обра-
зом, вводится краткий период смешанного пуска.
19. Реле времени в цепи задания частоты вращения при достижении
пусковой частоты задерживает переключение на рабочий (заданный
с мостика) режим.
20. Пуск двигателя в процессе реверса при движении судна и наличии
значительного турбинного момента на гребном винте начинается с контр-
пускового режима, при котором в начальный период пуска воздух, посту-
пающий в цилиндры двигателя, выполняет тормозную функцию. Только
после остановки коленчатого вала начинается его вращение в требуемом
направлении, т.е. обычный пуск двигателя. Ситуация с контрпуском кон-
тролируется определителем направления вращения, который блокирует
топливоподачу, если фактическое направление вращения коленвала не сов-
падает с заданным.
41
Аварийный пуск (пуск по аварийной программе) отличается в основ-
ном повышенными уставками пусковых параметров, состав которых не-
одинаков в различных системах управления:
- задаваемая пусковая частота вращения (на входе ВРЧВ);
- фактическая частота вращения отсечки пускового воздуха;
- пусковая топливоподача.
В установках с автономной воздуходувкой (АВ) при подаче команды
на пуск двигателя одновременно с подачей пускового воздуха включается
АВ, отключающаяся в следующих случаях:
- либо при достижении определенной частоты вращения;
- либо при достижении частоты вращения, при которой производи-
тельность турбонагнетателя достигает нормального уровня.
В двигателях с аккумуляторной системой топливоподачи предусмат-
ривается возможность автономного по цилиндрам управления топливо-
подачей при пусках и регулирование на рабочих режимах.
6.4. Параметры настройки системы ДАУ
Параметрами настройки системы ДАУ являются:
- пусковое задание по частоте вращения на входе в ВРЧВ;
- длительность удержания пускового задания при раздельном пуске;
- пусковое ограничение топливоподачи;
- пусковая частота вращения;
- длительность пуска при затянувшемся пуске (когда не достигается
пусковая частота);
- время запаздывания отсечки пускового воздуха при раздельном
пуске;
- частота вращения контрпуска (частота начала контрпуска);
- максимальная задаваемая частота вращения;
- максимально допустимая топливоподача;
- минимальная задаваемая частота вращения;
- минимально допустимая топливоподача;
~ программное время вывода двигателя на режим от самого малого
до полного хода - по каждой из программ управления;
- настройка параметров защиты двигателя от перегрузки (соответст-
вие частоты вращения - топлива и воздуха - топлива).:
42
6.5. Характеристики маневровых режимов
Система ДАУ должна обеспечивать надежный пуск (контрпуск) дви-
гателя - торможение, раскручивание воздухом и перевод на топливо при
нормальных условиях маневрирования: за минимальное время, при ми-
нимальном расходе пускового воздуха, при оптимальных значениях ме-
ханических и тепловых напряжений в двигателе (напряжения в переход-
ных процессах не должны быть больше напряжений при работе на номи-
нальном режиме). При этом должен быть исключен заброс газов в пуско-
вую воздушную магистраль и другие отклонения от условий нормального
реверса и пуска.
При аварийном маневрировании минимальное время маневрирования
является определяющим, все остальные факторы должны быть подчине-
ньгему.
Маневровые свойства комплекса в значительной мере определяются
пусковыми и реверсивными свойствами двигателя.
Основными показателями качества пуска и реверса являются:
- число оборотов контрпуска;
- число оборотов отсечки пускового воздуха;
- величина пусковой топливоподачи.
Первый показатель определяет длительность реверса двигателя на ходу
судна, а следовательно, и выбег судна при его торможении двигателем;
второй - д лительность пуска и расход пускового воздуха; третий - тепловую
и механическую напряженность двигателя при пуске и переходе на топливо,
в первую очередь, при первых вспышках топлива.
Характеристики пуска
Пуск (с контрпуском) включает следующие этапы:
- торможение двигателя контрвоздухом;
- раскручивание его воздухом;
- организация пусковой топливоподачи;
- вывод двигателя на устойчивую работу на топливе.
На каждом этапе должны обеспечиваться условия переходного про-
цесса, которые, как правило, характеризуются экстремальными значе-
ниями ряда параметров.
Рассмотрим каждый из них подробнее.
43
Длительность пуска. Общее время пуска складывается
из следующих элементов переходного процесса (рис. 6.3):
tn = t%c + tpp + ^зп + ten +
где (цс - время передачи сигнала дистанционной связью системы ДАУ;
/РР - время реверса распредорганов двигателя;
Гзп ~ время запаздывания пуска;
/Вп “ время пуска;
гт - время разгона на топливе (до выхода двигателя на режим устой-
чивой работы на топливе).
Рис. 6.3
Следует иметь в виду, что
*ВП + = /(Л/с 9 Рпв),
где Л/с - момент сопротивления на винте;
Рпв - давление пускового воздуха.
Расход пускового воздуха. На рис. 6.4 приведена за-
висимость расхода пускового воздуха (в литрах на литр объема цилиндра
двигателя) от его давления. Как видно из рисунка, расход воздуха умень-
шается с 10 л/л при 30 бар до 2 л/л при 10 бар при автоматизированном
управлении. При ручном управлении расход воздуха несколько ниже.
Повышенный расход воздуха при автоматизированном управлении объ-
44
ясняется жесткой уставкой отсечки пускового воздуха, рассчитанной для
наиболее тяжелых условий пуска, которые при обычном маневрировании
случаются довольно редко. Для уменьшения расхода пускового воздуха
рекомендуется производить пуск из одного баллона с давлением воздуха
15-20 бар. В другом резервном баллоне поддерживается давление воз-
духа 25 - 30 бар.
Топливоподача при пуске. Величина пусковой топли-
воподачи устанавливается из условия надежного перевода дизеля на топ-
ливо при сохранении рабочих параметров двигателя, определяющих его
механическую и тепловую напряженность, в допустимых пределах:
<7пт ~ M;)j
М = /(Кс,Яс,рр),
где - температура двигателя;
Мс ~ момент сопротивления на винте;
Кс и Яс - скорость и осадка судна;
рр - угол поворота руля;
<7пт = (0>4 +
где qH - топливоподача на номинальном режиме двигателя (0,4 - устанав-
ливается при нормальном пуске; 0,6 - при аварийном (тяжелом) пуске).
45
Механическая напряженность при пуске характеризуется следующи-
ми параметрами двигателя: рг,
х=
Рс
&Р
Дф *
В качестве типовых можно принять рс - 90 - 120 бар;
Ар
р: = 130- 150 бар; —
Аф
= 1,5-11 бар/град.
Характеристики реверса
Система ДАУ дизеля с прямой передачей на винт фиксированного
шага должна обеспечивать быстрое реверсирование дизеля. Однако ре-
версивные свойства комплекса в основном зависят от свойств объектов
управления (дизеля и судна) и условий маневрирования (рис. 6.5).
Рис. 6.5
При малой скорости судна реверс не представляет трудностей. Одна-
ко на среднем и тем более на полном ходу для реверса дизеля требуется
значительное время, которое зависит от водоизмещения судна и его ско-
рости.
Для эффективного торможения необходимо, чтобы Мг + Мс > Мв.
Для раскручивания двигателя воздухом необходимо, чтобы
Л/Дв >МС + Мв.
46
Характеристики изменения режима
Изменение режима осуществляется по одной из программ разгона.
Программой называется последовательность операций определен-
ной длительности, выполняемых с некоторой скоростью через установ-
ленные интервалы времени.
Программное изменение скорости двигателя обеспечивает его вывод
на заданный режим за минимальное время при сохранении тепловой на-
пряженности двигателя в допустимых пределах. При ручном обслужива-
нии механик управляет двигателем в соответствии с инструкцией по об-
служиванию и опытом работы. Большинство современных систем ДАУ
предусматривает только программный разгон двигателя. Снижение ско-
ростного режима производится с максимальной скоростью, часто в сле-
дящем режиме. Разгон обычно осуществляется по одной из трех про-
грамм: нормальной (маневровой), замедленной (ходовой) и экстренной
(аварийной).
Типовая схема программного управления предусматривает:
- разгон двигателя в диапазоне от О,3пн до 0,7ин только по одной (нор-
мальной) программе приблизительно за 30 с или в следящем режиме, т.е. за
5 - 10 с. Этот участок обычно относят к нормальной программе разгона,
так как именно в указанном диапазоне задаются режимы двигателя при
обычном маневрировании, выполняемом по нормальной программе;
- разгон двигателя по различным программам. Эти программы разгона
(нормальная, замедленная, аварийная) вводятся, как правило, только в диа-
пазоне от 0,7 пн ДО 1,0 пн-
Аварийная программа осуществляется путем сохранения на участке от
0,7 ин до 1,0 ин той же скорости, которая была на предыдущем участке, т.е.
до 0,7 пн.
Нормалъная программа осуществляется путем уменьшения скорости
разгона на участке - 0,7 пп - 1,0 ин по сравнению со скоростью разгона
на предыдущем участке - до 0,7 ин.
Замедленная программа осуществляется путем введения в нормальную
программу на участке от 0,7 ин до 1,0 пн временных пауз, длительность ко-
торых регулируется.
Таким образом, весь диапазон скоростных режимов двигателя может
быть разделен на три зоны (рис. 6.6):
47
Рис. 6.6
I зона - от 0 до О,3лн (до 0s25 4- 0,35 пн) - является зоной пуска, т.е.
раскручивания двигателя на воздухе. Время прохождения этой зоны
определяется длительностью пуска и составляет 1 4- 3 с;
II зона - 0,3 ин - 0,7ин - является зоной маневрирования, зоной бы-
строго разгона или, как было отмечено выше, зоной одной (нормальной)
программы. Время ее прохождения - 30 с или в режиме слежения 3 4- 6 с;
III зона - от 0,7 лн до 1,0 пн - является зоной регулируемого про-
граммного разгона длительностью:
- по аварийной программе - 30 4- 90 с;
- по нормальной программе - 10 4- 404 мин;
- по замедленной программе - от 18 мин до 2 ч, т.е. время разгона,
реализуемое в разных системах, различается значительно.
6.6. Типовые механизмы системы управления
Базовым устройством системы ДАУ является электронный блок ло-
гики (БЛ), обеспечивающий функционирование системы в соответствии
с алгоритмом управления с учетом свойств командных элементов-задат-
чиков, датчиков обратных связей, исполнительных механизмов-
сервомоторов. Далее приводятся типовые механизмы систем управления.
48
Пневмозадатчик
Уравнение пневмозадатчика (рис. 6.7) может быть записано в виде
(7пр+ 1) ц-U,
где Тп = —----; р = — - оператор дифференцирования;
Pnzfaftj dt
£ и ц ~ относительные величины перемещения штока пневмозадатчи-
ка и изменения давления в его выходной камере, определяемые по фор-
мулам:
где индексом «О» обозначены переменные на исходном режиме;
рп иру- давление воздуха перед пневмозадатчиком и за ним.
k - .В -
аРу« ’ V
где цв - коэффициент расхода;
Т и R - соответственно температура и постоянная воздуха;
V ~ объем выходной камеры пневмозадатчика;
5С + - (dI - dl)
V ' V н *
а — --------------5
С1+С2
где 5С - площадь сильфона пневмозадатчика;
da и dz - диаметры клапанов наполнения и стравливания;
С] и с? - жесткость пружин пневмозадатчика;
ь=-^—.
q + с2
Характер изменения давления в выпускной камере пневмозадатчика
почти не зависит от протяженности и емкости воздушной магистрали за
ним. Постоянной времени пневмозадатчика можно пренебречь, так как
она на порядок меньше постоянной времени трубопровода, при значи-
тельной его длине за пневмозадатчиком.
49
С>
Рис. 6.7
При этом уравнение динамики пневмозадатчика примет вид
И =
т.е. пневмозадатчик рассматривается как простое безынерционное звено.
Сельсины
А. Сельсины, работающие в трансформа-
торном режиме. Входным параметром датчика является раз-
ность угловых положений роторов сельсина-датчика (СД) и сельсина-
приемника (СП), выходным параметром - напряжение, наводимое в ста-
торной обмотке СП.
50
Зависимость выходного напряжения от угла рассогласования поло-
жения роторов может быть представлена в виде
«9с= ^сдХсд,
где 19с и хсд - относительные величины изменения выходного напряже-
ния U вых и угла рассогласования роторов 0.
Эти величины определяются по формулам:
Acos 0
Хсд~------—; 0 = Р-а.
cos0q
.
С и.
вых0
При работе сельсинов в трансформаторном режиме ротор СП зафик-
сирован, т.е. Р = const, изменяется только положение ротора СД, т.е.
а = var. При малых углах а можно считать 1/вых пропорциональным а.
Тогда
COS 0Q
кед - UT—-----
^ВЫХо
где Ur при нулевом рассогласовании 0 рассчитывается по формуле
U —
Т
где Апэ - коэффициент пропорциональности ЭДС;
Ет - эффективное значение ЭДС, наводимое в обмотке при а = 0;
Яоб _ сопротивление каждой фазовой обмотки ротора.
Б. Сельсины, работающие в индикаторном
режиме. Входным параметром системы является разность углового
положения роторов 0, выходным может быть принято угловое отклонение
ротора СП р либо синхронизирующий момент Мсинх, обеспечивающий
синхронное вращение ротора СП и ротора СД. Этот режим обычно при-
меняется в машинном телеграфе и поэтому здесь не рассматривается.
Потенциометрический датчик
Входным параметром потенциометра является перемещение движка
Х„, выходным - напряжение на его выходных клеммах. При точном опи-
сании датчика напряжение на выходе зависит от перемещения движка
51
нелинейно. Однако, если сопротивление нагрузки превышает сопротив-
ление потенциометра в 10 - 100 раз, то он может считаться линейным
звеном, так как максимальное отклонение от линейного закона не превы-
шает 1,5 %. В автоматических системах обеспечить указанное различие
в величинах сопротивления потенциометра и нагрузки обычно не пред-
ставляет труда. Поэтому потенциометр может описываться как безынер-
ционное звено:
где <9П и i'n - относительные величины изменения и перемещения движка
потенциометра, которые могут быть определены следующим образом:
<9П = АЧ»ь« ; ^ = ; кп = ,
^ВЫХо хп0 ^ВЫХ 0
где 17 вх - напряжение питания потенциометра;
I п - длина потенциометра.
В системах ДАУ используются также двухтактные потенциометры,
в которых знак выходного напряжения изменяется при изменении знака
входного сигнала.
Тахогенератор
Входным параметром является угловая скорость вала, выходным -
напряжение. При подборе конструктивных параметров тахогенератора (в
частности, обмотки якоря, компенсационной обмотки и сопротивления
шунта) необходимо, чтобы зависимость напряжения от числа оборотов
была линейной. Поэтому динамика тахогенератора может быть описана
уравнением
^ТГ ~ ^ТГ фтг?
где и фтг - относительные величины отклонения напряжения и оборо-
тов тахогенератора, рассчитываемые следующим образом:
^2 выхо
52
где с - конструктивная постоянная тахогенератора;
t/B — напряжение на обмотке возбуждения;
Шв
“,= V
где (вв и R3 - число витков и сопротивление возбуждения;
а - 1 + *я . D = D +
2 " мГ ’
где /?я; Ян; /?к; - сопротивления якоря нагрузки, компенсационной
и шунтирующей обмоток.
Электронный усилитель
Полупроводниковый триод может рассматриваться как безынерцион-
ное звено. В этом случае он описывается уравнением
^эу ~ ^эу *^эу BXJ
где i93y и 19^ ю - относительные величины напряжения на входе и выхо-
де усилителя.
£зу при наибольшем усилении (/?н = оо; = 0) определяется по формуле
гг-г3 ^вх„
fc3ymax=-:—;
г6 ^вых0
RH; Rq, гг; г& гз - сопротивления нагрузки, входной цепи, генератор-
ное, базы и эмиттера;
значение к^ =100- для точечных триодов и к^ = 2000 - для пло-
ских триодов.
Реле
В качестве входного и выходного параметров электромагнитного реле
обычно принимается напряжение. При необходимости могут быть приня-
ты и другие величины, например, на входе - сила тока, на выходе - пере-
мещение якоря.
Электромагнитное реле (как и реле других типов), ввиду быстродей-
ствия протекающих в нем процессов, может рассматриваться как элемент,
состоящий из двух звеньев: звена чистого запаздывания и безынерцион-
ного нелинейного (релейного) звена.
53
Часто временем срабатывания и отпускания реле пренебрегают ввиду
его малости по сравнению с длительностью переходных процессов в дру-
гих элементах автоматической системы (для электромагнитного реле
время срабатывания составляет 1 - 200 мс). В этом случае уравнение ди-
намики реле будет иметь вид
sign i9р вх?
где 19р и 19р вх - относительные величины изменения напряжения на вы-
ходе и входе реле;
Ар ~ ю -ИО6 - для электромагнитных реле.
Клапаны
Значительную группу элементов ДАУ, выполняющих роль усилите-
лей и преобразователей, составляют клапаны различных типов с пневмо-,
гидро- и электроприводами, устанавливаемые в пневматических и гид-
равлических магистралях. Они составляют значительную часть элементов
цепи управления топливоподачей и являются, как правило, основными
элементами в цепях управления пуском и реверсом.
В качестве входного параметра обычно принимается давление в
управляющей полости клапана с пневмо- и гидроприводами и напряже-
ние в электромагнитном клапане; в качестве выходного - перемещение
клапана либо давление в магистрали за клапаном.
А. Пневматический клапан.В общем случае пневмати-
ческий клапан может быть представлен как апериодическое звено II по-
рядка. При этом его динамика может быть описана уравнением
wK ZK ~ * Як ~ с?к — Кк,
где ZK и тк - перемещение и масса клапана;
ру - давление в управляющей полости клапана;
SK - площадь управляющего поршня клапана;
Як-сила трения;
GK - нагрузка, обычно определяемая давлением воздуха на клапан;
Кк - сжатие пружины.
Сила трения определяется в виде следующей функции:
/?к ZK = ск Z + N sign ZK,
т.е. как суммы вязкого и сухого трения.
54
Сжатие пружины определяется следующим образом:
Кк ~ Кк + cKnZ ,
к к0 КП ’
где к Ко - предварительное сжатие пружины;
с — жесткость пружины.
Иногда силами инерции wKZK , трения /?к и нагрузки GK можно пре-
небречь ввиду их малости по сравнению с давлением ру. В этом случае
клапан рассматривается как безынерционное звено.
Обычно характеристики клапана подбираются таким образом, чтобы
можно было обеспечить его максимальное быстродействие. В этом случае
клапан может рассматриваться как релейное звено:
<9K = £KsignpK,
где i9K и цк — относительные величины перемещения клапана и измене-
ния давления в его управляющей полости, определяемые следующими
уравнениями:
Если в качестве выходного параметра рассматривать давление в ма-
гистрали за клапаном, то уравнение динамики примет вид
цк = kK sign цк.
Б. Электромагнитный клапан. В качестве входного
параметра в нем принимается сила, создаваемая электромагнитом FM,
=f(iy, X).
Причем, ввиду малости влияния х, величина FM может быть определе-
на из уравнения
~ MKj ty ’
где kMKi - коэффициент пропорциональности.
Сила тока, в свою очередь, зависит от входного напряжения. Эта за-
висимость определяется уравнением
(^mkF + ~ k МК2 ‘^ВХ ,
55
где Тмк , к мк .
IX IX
В результате сила, создаваемая магнитом, будет определяться по
формуле
= . Дм? и
T„Kp+\
гДе*хк=*мк, -*мк2-
Электродвигатель переменного тока
Входной параметр - управляющее напряжение Ц, выходной - ско-
рость или угол поворота вала двигателя. Уравнение динамики двигателя:
(ТэяР + Офэд k эд $эд1 ^эд2
где Фэд и $эд ~ относительные величины изменения скорости и управ-
ляющего напряжения, определяемые следующим образом:
ДО Q ДС7 .
ФэД=—; 5 эд—
Uy
J о
Т •
” 2^с1+М2и1'
2M4Uq UyB .
S 2RpR2cT +M2U% О0 ’
2^
эя2 2RpI^&r + M2Ul Qo ’
где Rc и Яр - сопротивления статора и ротора;
Л/= шпсос/Ям ~ коэффициент магнитной индукции.
От угловой скорости при необходимости легко можно перейти к углу
поворота вала а = Q.
56
WO
ссУ0 ’
Пневматический сервомотор
В сервомоторе одностороннего действия в качестве входного пара-
метра может быть принято давление в цилиндре сервомотора, выходного
- перемещение его поршня. Уравнение динамики сервомотора, без учета
сил инерции, может быть записано в виде
(Тсрр+ l)a = Acpv,
где а и v - относительные величины перемещения поршня и изменения
давления в сервомоторе, определяемые следующим образом:
Ау Др
a= v= =2~;
Уо Ра
ср 5 Ср
Сс
где св - коэффициент вязкого трения;
сл - жесткость пружины.
7. УПРАВЛЕНИЕ УСТАНОВКОЙ С ВРШ
7.1. Способы управления
В установках с ВРШ предусматриваются, как правило, два способа
управления (рис. 7.1): комбинаторный режим и режим управления при
постоянной (номинальной) частоте вращения.
При комбинаторном режиме управления изменение ходового режима
судна осуществляется одновременным изменением шага винта и частоты
вращения двигателя. При управлении в режиме постоянной частоты вра-
щения скорость судна задается только шагом винта.
Каждый из способов управления имеет свои достоинства и недостат-
ки. При управлении в режиме постоянной частоты вращения возможно
применение валогенератора, но при этом нельзя обеспечить оптимизацию
работы установки при работе на различных режимах. При комбинаторном
управлении создается противоположная ситуация: возможна оптимизация
работы установки, но валогенератор должен быть отключен.
57
Применение ВРШ существенно расширяет по сравнению с ВФШ об-
ласть рабочих режимов главного двигателя (рис. 7.2). Диапазон возмож-
ного смещения винтовых характеристик при изменении шага винта зна-
чительно превышает диапазон их смещения, вызываемого изменением
внешних условий, а также изменением загрузки судна, состояния корпуса
и пропульсивной установки. Поэтому изменения режимов в нежелатель-
ном направлении, вызванные этими факторами, как правило, могут быть
скомпенсированы изменением шага и частоты вращения винта.
Возможность задания требуемого режима с помощью двух независи-
мых параметров: шага и частоты вращения винта, существенно расширя-
ет возможности пропульсивной установки, так как изменением этих па-
раметров могут быть обеспечены работа двигателя по любой винтовой,
регулярной и ограничительной характеристике и сохранение оптимально-
го режима при изменении внешних условий.
58
Таким образом, ВРШ позволяет эффективно решать задачи обеспече-
ния экономичности работы СЭУ. Экономичность установки в основном
определяется КПД винта. При постоянной скорости судна по мере увели-
чения шага винта и уменьшения частоты вращения повышается КПД
пропульсивной установки, достигая наибольшего значения при конструк-
тивном шаге вблизи ограничительной характеристики. Таким образом,
наиболее экономичные и предельно допустимые режимы, как правило,
весьма близки друг к другу. Это свойство облегчает поиск оптимальных
режимов, но даже небольшое отклонение в сторону утяжеления условий
плавания выводит установку на границу предельно допустимых режимов
(рис. 7.3).
Следует отметить, что КПД винта и пропульсивный КПД возрастают
при увеличении скорости судна, а также, как отмечено выше, при посто-
янной скорости судна, увеличении шага и одновременном уменьшении
частоты вращения винта.
59
Рис. 7.3
7.2. Регулирование нагрузки
Условия и режимы работы главного двигателя в установках с ВРШ
и ВФШ существенно различаются организацией защиты двигателя от пере-
грузки. В установках с ВРШ эта задача решается с помощью регулятора
нагрузки (PH). При этом PH работает совместно с регулятором частоты
вращения (РЧВ). Схема их подключения к двигателю и ВРШ представле-
на на рис. 7.4.
Основное различие в работе механизмов защиты от перегрузки за-
ключается в следующем:
- в установках с ВФШ ограничивается подача топлива (ограничение
осуществляется со стороны подвода энергии к объекту).
60
- в установках с ВРШ регулятор нагрузки уменьшает шаг винта (ог-
раничение осуществляется со стороны потребителя - отвода энергии).
Заданный
Заданная частота
вращения
Рис. 7.4
При этом в первом случае ограничение реализуется механизмом защи-
ты, как правило, встроенным в регулятор частоты вращения и не имеющим
инерционных звеньев (таковыми являются только элементы самого регуля-
тора частоты).
Во втором случае регулятор нагрузки работает одновременно с РЧВ
или вслед за ним, если в PH предусматривается запаздывание включения
при возникновении перегрузки. В PH фирмы «KaMeWa» предусматрива-
ется запаздывание включения регулятора. На рис. 7.5 приводятся харак-
теристики электронного PH фирмы «KaMeWa».
61
62
Настройка регулятора осуществляется по следующим параметрам.
- Нечувствительность регулятора (обычно устанавливается 1,5 % пе-
регрузки).
- Время запаздывания включения регулятора (см. рис. 7.5) при воз-
никновении перегрузки, оно автоматически изменяется в зависимости от
величины перегрузки. При незначительном превышении зоны нечувстви-
тельности PH включается с запаздыванием 15 с. Таким образом, при
кратковременной и небольшой перегрузке на волнении PH не включается,
при перегрузке 20 % и более сервомотор PH включается без запаздыва-
ния.
- Скорость коррекции шага винта, она также автоматически регули-
руется и зависит от величины перегрузки (см. рис. 7.5). Скорость увели-
чивается при увеличении перегрузки и имеет максимальное значение при
перегрузке 20 % и более. Скорость действия корректирующего сервомо-
тора импульсного типа регулируется одновременным изменением дли-
тельности импульсов включения 7\ сервомотора и длительности пауз
между включениями. При незначительном превышении - 1,5 % пере-
грузки - длительность включения составляет Т\ ~ 0,1 с, а пауза между
включениями - Го - 1,5 с; при перегрузке около 20 % соотношение обрат-
ное; при перегрузке 20 % и более коррекция осуществляется непрерывно
(Ti = оо; То = 0), т.е. с максимальной скоростью (ys = шах). Диапазон, в ко-
тором может работать PH, будет использован полностью при достижении
поршнем корректирующего сервомотора крайнего положения. На рис. 7.6
заштрихованной зоной представлена область рабочих режимов, опреде-
ляемых PH при перегрузке.
На рис. 7.7 рассмотрена эксплуатационная ситуация, связанная с утя-
желением условий плавания при движении во льду. Точка 1 соответству-
ет исходному режиму работы при движении судна по открытой воде
со скоростью хода, при положении рукоятки МТ на делении '’4,5". Точка 2
соответствует вхождению судна в лед, при этом винтовая характеристика
смещается из положения /Л/D в положение H2/D. РЧВ, реагируя на паде-
ние частоты вращения в связи с утяжелением условий плавания, увеличи-
вает топливоподачу, переводя двигатель на режим, которому соответст-
вует точка 2. Так как этот режим еще находится в зоне нечувствительно-
сти PH, последний не вступает в действие.
63
Рис. 7.6
Точка 3 соответствует вхождению в тяжелый лед, при этом винтовая
характеристика смещается в положение H3ID, адекватное выходу двига-
теля на ограничительную характеристику PH. Перевод двигателя с режи-
ма, соответствующего точке 7, на режим в точке 3 был осуществлен РЧВ.
При этом топливоподача увеличилась на величину ДЛ^з, а частота
вращения, вследствие неравномерности работы регулятора, снизилась на
величину Ап.
64
НФ
Рис. 7.7
65
При дальнейшем утяжелении условий плавания в работу вступает PH,
защищая двигатель от перегрузки. Точка 4 соответствует вхождению
судна в более тяжелый лед, при этом винтовая характеристика, опреде-
ляемая внешними условиями, сдвигается дальше влево. Однако PH, реа-
гируя на это возмущение, уменьшает шаг винта, смещая тем самым так
называемую «шаговую» винтовую характеристику (определяемую шагом
винта) на такую же величину в противоположном направлении - вправо.
В результате суммарная нагрузка на винте, фактически воспринимаемая
двигателем, остается неизменной.
Точка 5 соответствует движению судна в еще более тяжелом льду.
Однако PH при увеличении сопротивления движению уменьшает на со-
ответствующую величину шаг винта, сохраняя тем самым нагрузку дви-
гателя неизменной. Таким образом, во всем диапазоне работы PH частота
вращения двигателя и топливоподача остаются постоянными. Изменение
внешних условий от точки 3 до точки 5 соответствует полному ходу кор-
ректирующего сервомотора, т.е. полному диапазону работы PH. Так как
на дальнейшее утяжеление условий плавания PH не будет реагировать,
рабочие режимы, а, следовательно, нагрузку двигателя вновь будет опре-
делять РЧВ.
Следует иметь в виду, что PH реагирует на возмущения с запаздыва-
нием, а РЧВ - без запаздывания. Поэтому первым вступает в действие
при возникновении возмущения РЧВ, а затем PH. Таким образом, PH и
РЧВ работают совместно в зоне работы PH. Вне этой зоны работает толь-
ко РЧВ.
8. ХАРАКТЕРИСТИКИ САР ЧАСТОТЫ ВРАЩЕНИЯ
ДИЗЕЛЬ-ГЕНЕРАТОРОВ
Условия работы дизеля в дизель-генераторной установке по основ-
ным показателям близки к работе главного двигателя в пропульсивной
установке с ВРШ, в которой, как правило, имеется валогенератор и, таким
образом, она совмещает функции главной установки и источника энергии
в судовой электростанции.
Особенности дизеля в дизель-генераторной установке:
- отсутствие системы реверса, т.е. двигатель - нереверсивный;
66
- пуск двигателя осуществляется в режиме холостого хода, т.е. без
нагрузки;
- двигатель под нагрузкой работает на режиме постоянной, номи-
нальной частоты вращения;
- дизель работает, обычно, в параллель с другим дизелем или группой
дизелей.
Эти показатели характерны и для установок с ВРШ.
Пусковая характеристика дизеля дизель-генераторной установки
представлена на рис. 8.1. Участок пусковой характеристики 0 - 1 соответ-
ствует раскручиванию вала двигателя пусковым воздухом до пусковой
частоты вращения пп. В точке 1 отключается пусковой воздух и включа-
ется топливо, т.е. в данном случае пуск осуществляется по раздельному
принципу.
Участок 7-2 соответствует установке в точке 2 пусковой величины
топливоподачи, при которой двигатель начинает работать на топливе.
67
На участке 2-3 частота быстро увеличивается до заданной при пуске
частоты холостого хода мхх.
На участке 3-4 происходит снижение топливоподачи регулятором
частоты с пусковой до величины, соответствующей режиму холостого
хода, на котором пускался двигатель (при пуске генератор не подключен
к судовой сети).
Участок 4-5 соответствует выводу дизеля на режим номинальной
частоты вращения путем повышения задания по частоте на регуляторе
частоты двигателя.
Выводом двигателя на режим номинальной частоты вращения в точке
5 осуществляется процесс синхронизации вводимого в работу двигателя с
работающим нагруженным двигателем (рис. 8.2). При синхронизации не
следует добиваться точного согласования частот двигателей. Целесооб-
разно, чтобы перед подключением к сети генератора вводимого в работу
двигателя, его частота несколько превышала частоту работающего под
нагрузкой двигателя. В этом случае при подключении генератора к сети
вводимый в работу двигатель возьмет на себя часть нагрузки электро-
станции и тем самым будет предотвращена возможность ввода генерато-
ра в режим электродвигателя в момент его подключения к сети.
Рис. 8.2
68
Нагрузка электростанции останется распределенной между двигате-
лями неравномерно в связи с различным заданием по частоте на регуля-
торах частоты обоих двигателей (см. рис. 8.2). Регуляторные характери-
стики не совмещены. При условии одинаковой неравномерности обоих
регуляторов их регуляторные характеристики должны быть совмещены,
т.е. должны иметь одинаковые задания по частоте. В этом случае любую
текущую нагрузку электростанции двигатели будут делить поровну. Та-
ким образом, равномерное распределение нагрузки между двигателями
одинаковой номинальной мощности обеспечивается одинаковой настрой-
кой регуляторов частоты по неравномерности и одинаковым заданием по
частоте вращения (рис. 8.3).
Рис. 8.3
При различной настройке регуляторов по неравномерности будет на-
блюдаться неравномерное распределение нагрузки между двигателями
(рис. 8.4). При этом с изменением нагрузки электростанции разница в
принятой двигателями нагрузке также будет изменяться.
69
Рис. 8.4
Постоянная величина, на которую различается нагрузка двигателей
при различной нагрузке электростанции, будет наблюдаться при одина-
ковой неравномерности и различном задании по частоте (рис, 8.5).
70
Следует иметь в виду, что причиной неравномерного распределения
нагрузки могут быть в числе прочих состояние топливной аппаратуры и
регулятора частоты и пр. Перераспределение нагрузки между двигателя-
ми (при вводе двигателя под нагрузку, выводе двигателя из-под нагрузки
для последующей его остановки, при выравнивании нагрузок двигателей)
осуществляется изменением задания по частоте одного из двигателей или
обоих двигателей одновременно (если требуется сохранить фактическую
частоту неизменной во время выполнения операции по перераспределе-
нию нагрузки двигателей).
При совместной работе двигателей различной номинальной мощно-
сти нагрузка распределяется между ними пропорционально их номиналь-
ной мощности (рис. 8.6).
Рис. 8.6
9. НАДЕЖНОСТЬ И ДИАГНОСТИКА
ГЛАВНОГО ДВИГАТЕЛЯ
Надежность, т.е. возможность длительной безаварийной работы, осо-
бенно важны для главного судового дизеля, так как на большинстве мор-
ских транспортных судов отказ главного двигателя в штормовых услови-
ях является одной из основных причин гибели судов.
71
Необходимая надежность судового дизеля на стадии разработки
обеспечивается простотой конструкций, минимизацией количества узлов
и деталей, применением наиболее рационального материала его деталей.
В условиях эксплуатации обеспечение безаварийной работы возложе-
но на средства автоматики.
Системы автоматического регулирования предназначены для под-
держания рабочих режимов по основным параметрам на уровне, обеспе-
чивающем длительную безотказную работу дизеля.
Системы контроля информируют обслуживающий персонал о значе-
ниях рабочих параметров в данный момент, в том числе системы аварий-
но-предупредительной сигнализации, об их выходе за установленные
нормальные пределы.
Системы защиты при значительном и опасном отклонении рабочих
параметров от нормы автоматически включают резервный (дублирую-
щий) механизм и отключают (выводят из работы) неисправный механизм,
предотвращая тем самым его аварию.
Важная роль в обеспечении безаварийной работы дизеля отводится
диагностике его состояния. В настоящее время диагностируются в основ-
ном конструктивные параметры при выполнении профилактических ра-
бот, разборке и ремонте дизеля. Применение средств автоматики позво-
ляет контролировать и диагностировать техническое состояние механиз-
мов без их разборки, непрерывно во время работы в течение всего перио-
да их эксплуатации.
Система достаточно высокого уровня технической диагностики вы-
полняет следующие операции:
- с заданной периодичностью вносит в память значения диагности-
руемых параметров;
- осуществляет их анализ (обработку) по заданной программе;
- в случае тенденции их изменения, отличной от нормального изме-
нения в процессе эксплуатации, выдает обслуживающему персоналу ин-
формацию о необходимости принятия каких-либо мер (хотя конструктив-
ные и рабочие параметры на момент подачи информации находятся в
пределах нормы);
- при отказе в работе механизма выдает информацию о наиболее ве-
роятном источнике отказа, т.е. сообщает адресацию уЗла или детали, не-
72
исправность которых стала причиной отказа. Такая же адресация дается и
при обнаружении опасной тенденции в изменении диагностируемых па-
раметров.
Однако системы технической диагностики судовых дизелей пока не
нашли широкого применения. Это связано с большими техническими
трудностями создания эффективной системы диагностики.
Проблемы диагностики технических средств обусловлены следую-
щими обстоятельствами.
1. Для обеспечения достаточно полной информированности о состоя-
нии объекта диагностики необходима установка большого количества
датчиков.
2. Для получения наиболее достоверной информации требуется, как
правило, глубокое внедрение датчика в конструкцию механизма, что мо-
жет снижать его надежность.
3. Датчики системы, в первую очередь, необходимо устанавливать в
тех узлах и деталях, отказы в которых наиболее вероятны, а это обычно
наиболее нагруженные детали механизма, работающие в условиях боль-
шого перепада температур, изменяющихся с большой скоростью, т.е. в
условиях больших тепловых напряжений, при больших механических
нагрузках, вибрации и пр. Датчики в этом случае подвергаются таким же
воздействиям, что снижает их надежность.
4. Датчики должны измерять очень малые изменения контролируе-
мых параметров, т.е. иметь высокую точность измерения. Только в этом
случае может быть обнаружена тенденция возможного нарушения нор-
мального состояния детали или рабочего режима, хотя неисправности как
таковой еще нет. Определенную трудность представляет обеспечение
надежной и точной передачи слабого сигнала (при очень малом измене-
нии контролируемого параметра от датчика в блок его обработки).
5. В связи с вышеуказанными особенностями по установке необходи-
мых датчиков состояние узлов и деталей объекта диагностики в значи-
тельной мере оценивается по косвенным показателям. При такой форме
получения информации невозможно с достаточной точностью определить
причину нарушения рабочего режима или отказа, т.е. дать достоверную
адресацию неисправной детали.
73
6. Проблемы, связанные с получением достаточно полной и точной
информации о состоянии механизма, затрудняют выбор наиболее эффек-
тивного метода диагностики.
7. Одной из основных задач, решаемых при разработке систем, явля-
ется определение состава узлов и механизмов главного двигателя. Состав
обычно определяется исходя из опыта оценки их состояния при выполне-
нии профилактических работ и частоты отказов. Для обоснования выбора
может быть использован сравнительный анализ ресурсных характеристик
путем использования коэффициента вариации ресурса. Приоритетными
являются узлы, имеющие большее значение коэффициента вариации ре-
сурса.
Техническое состояние дизеля, в первую очередь, определяется со-
стоянием деталей цилиндропоршневой группы и коленчатого вала:
- диаметрального зазора между поршнем и втулкой;
- бокового зазора между первым поршневым кольцом и канавкой
поршня;
— зазора в замке первого поршневого кольца;
- зазора в головном и мотылевом подшипниках;
- теплового зазора в клапанах.
Для получения информации по перечисленным структурным пара-
метрам преимущественное применение получили такие методы техниче-
ского диагностирования, как виброакустический, термодинамический,
электромагнитный. При этом параметрами диагностирования являются:
- амплитуда виброимпульса в области звуковых и ультразвуковых
частот;
- температура детали или рабочей среды;
- параметр индуктивного датчика (например, при измерении зазора).
Помимо перечисленных структурных диагностических параметров
важную информацию о состоянии дизеля несут параметры рабочего про-
цесса - давление и температура воздуха и газа в цилиндрах двигателя
на протяжении всего рабочего цикла. Объектом диагностирования явля-
ется также система управления главного двигателя в двух режимах: стоя-
ночном, когда двигатель не работает и осуществляется проверка готовно-
сти системы управления к работе, и ходовом рабочем режиме установки.
74
При диагностировании системы ДАУ в стояночном режиме к системе
управления должна подключаться модель двигателя для подачи от объек-
та управления в систему ДАУ сигналов обратных связей, необходимых
для ее нормального функционирования (о завершении реверса распредор-
ганов, о начале вращения коленвала в заданном направлении, о достиже-
нии пусковой частоты вращения). При тестовой проверке системы управ-
ления на ходовом режиме также может использоваться модель объекта,
что позволяет в процессе диагностирования сохранить заданный ходовой
режим двигателя.
На маневровых режимах диагностирование системы управления осуще-
ствляется в обычном режиме установки (без включения модели объекта).
В связи со сложностью задачи, решаемой технической диагностикой
(предупреждение обслуживающего персонала о незначительных измене-
ниях значений контролируемых параметров и возможной неисправности
механизма), разработаны различные методы диагностирования. Каждый
из них имеет определенные достоинства и недостатки. Типовым принци-
пом многих методов является получение требуемой информации о со-
стоянии детали (узла, механизма) путем сравнения текущих значений
диагностируемых параметров с эталонными. Эталон обычно представлен
в виде модели объекта диагностирования. Диагностированию системы
управления в рабочем режиме установки предшествует контроль в пред-
пусковом состоянии, т.е. готовность к пуску.
Диагностирование систем управления осуществляется преимущест-
венно тестовыми методами.
75
Библиографический список
Бусыгин В.П., Попов ГА. Обучение на тренажерах систем ДАУ. - М.:
В/О «Мортехинформреклама», 1986.
Горелкин В. И. Реверсирование судовых автоматизированных дизелей.
-Л.: Транспорт, 1984.
Исаков Л.И., Кутьин Л.И. Комплексная автоматизация судовых ди-
зельных и газотурбинных установок. - Л.: Судостроение, 1984.
Камкин С.В., Возницкий И.В., Шмелев В.П. Эксплуатация судовых ди-
зелей. - М.: Транспорт, 1990.
Канне А.Б., Скобцов Е.А. Реверсивные устройства судовых дизелей. -
Л.: Судостроение, 1965.
Крутов В. И. Автоматическое регулирование и управление двигателей
внутреннего сгорания. - М.: Машиностроение, 1989.
Кузьмин Р.В., Карпович В.А. Пуск и реверс судовых дизелей. - М.:
Транспорт, 1965.
Ланчуковский В.И., Козьминых А.В. Автоматизированные системы
управления судовыми дизельными и газотурбинными установками. - М.:
Транспорт, 1990.
Никитин Е.А. и др. Диагностирование дизелей. - М.: Машинострое-
ние, 1987.
Овсянников М.К., Петухов В.А. Судовые автоматизированные энерге-
тические установки. - М.: Транспорт, 1989.
Петров В.А., Попов ГА., Савин Е.В. Эксплуатация автоматизирован-
ных судовых дизельных установок. - М.: Транспорт, 1972.
Пинский Ф.И., Пинский ГФ. Адаптивные системы управления дизе-
лей. -М.: Изд. МГОУ, 1995.
Попов ГА. Дистанционное управление главными судовыми дизелями.
- Л.: Судостроение, 1968.
Попов ГА. Системы дистанционного автоматизированного управле-
ния (ДАУ) двигателями. - М.: Рекламинформбюро ММФ, 1976.
Попов ГА. Системы дистанционного управления установками с ВРШ.
- М.: В/О «Мортехинформреклама», 1994.
Самсонов Л.А., Боричев А.В. Основы автоматики. Объекты регулиро-
вания: Конспект лекций. - СПб.: ГМА им. адм. С.О. Макарова, 2002.
Семенов А.Г Штатные системы управления главных судовых дизе-
лей. - Л.: ЛВИМУ, 1990.
76
Сыромятников В.Ф, Наладка автоматики судовых энергетических ус-
тановок: Справ. - Л.: Судостроение, 1989.
Тимофеев Ю.К. Система дистанционного автоматизированного
управления главного двигателя судов типа «Новгород». - М.: В/О «Мор-
техинформреклама», 1992.
Толшин В.И.. Сизых В.А. Автоматизация судовых энергетических ус-
тановок. - М.: РКонсульт, 2003.
Чеблаков ЮЛ. Автоматизированное управление судовыми дизелями.
- М.: Транспорт, 1980.
Щелгачев Р.В. Реверсивные системы судовых малооборотных дизе-
лей. -Л.: Судостроение, 1966.
77
ОГЛАВЛЕНИЕ
Введение............................................................ 3
Список принятых условных сокращений................................. 4
1. Главный двигатель как объект управления.......................... 5
1.1. Функции и структура системы управления......................... 5
1.2. Штатная система управления........................... ........ 6
2. Главный двигатель как объект регулирования частоты
вращения............................................................ 9
2.1. Статические характеристики..................................... 9
2.2. Свойство саморегулирования.................................. 11
2.3. Область рабочих режимов двигателя............................. 14
3. Динамические свойства дизеля................................... 16
3.1. Уравнение динамики двигателя.................................. 17
3.2. Уравнение коллектора.......................................... 17
3.3. Уравнение ГТН (турбокомпрессора).............................. 18
3.4. Уравнение воздушного ресивера................................. 19
4. Регулирование частоты вращения. Ограничение
топливоподачи...................................................... 19
5. Способы управления главным двигателем.......................... 22
5.1. Принципы классификации........................................ 22
5.2. Первый способ управления.................................... 23
5.3. Второй способ управления...................................... 26
5.4. Комбинированный способ управления............................. 29
6. Дистанционное автоматизированное управление.................... 33
6.1. Функции системы ДАУ........................................... 33
6.2. Структура системы ДАУ......................................... 35
6.3. Алгоритм управления........................................... 39
6.4. Параметры настройки системы ДАУ............................... 42
6.5. Характеристики маневровых режимов............................. 43
6.6. Типовые механизмы системы управления.......................... 48
7. Управление установкой с ВРШ.................................... 57
7.1. Способы управления............................................ 57
7.2. Регулирование нагрузки....................................... 60
8. Характеристики САР частоты вращения дизель-генераторов....... 66
9. Надежность и диагностика главного двигателя.................... 71
Библиографический список........................................ 76
78
Федеральное государственное образовательное учреждение
высшего профессионального образования
ГОСУДАРСТВЕННАЯ МОРСКАЯ АКАДЕМИЯ
имени адмирала СО. Макарова
Предлагаем Вашему вниманию
издания ГМА им. адм. С.О. Макарова,
вышедшие в 2006 - 2007 гг.
Курсантам и студентам
Судомеханического факультета
1. Никитин А.М. Управление технической эксплуатацией судов: Учебник. -
СПб.: Изд-во Политехи, ун-та, 2006. - 360 с.
2. Прудова О. Г. Судостроительные материалы для постройки и ремонта
корпуса судна: Учеб, пособие. - СПб.: ГМА, 2006. - 64 с.
3. Емельянов П.С. Судовые эхнергетические установки: Тексты лекций. -
СПб., ГМА, 2006. - 171 с.
4. Темерев В.В. Проектирование силового кулачкового контроллера: Метод,
указания к курсовой работе по дисциплине «Механика». - СПб., ГМА,
2006.-60 с.
5. Подготовка к работе, пуск и обслуживание судовой электростанции:
Метод, указания к тренажерному практикуму / Сост. А.Е. Пилецкий. СПб.;
ГМА, 2006.-28 с.
6. Емельянов П.С. Конструкции основных элементов судовых
энергетических установок: Учеб, пособие. — СПб.: Изд-во ГМА им. адм.
С.О. Макарова, 2007. - 44 с.
7. Зорин Ю.А. Материаловедение и технология конструкционных
материалов: Основные термины и определения: Учебный
терминологический словарь. - СПб.: Изд-во ГМА им. адм. С.О. Макарова,
2007.-80 с.
8. Учебно-терминологический словарь технических международных
терминов, используемых при изучении курса «Сопротивление материалов /
Сост. О.А. Коршакова. - СПб.: Изд-во ГМА им. адм. С.О. Макарова,
2007. - 20 с.
9. Ладин Н.А. Основы теории холодильных машин: Учеб, пособие. - СПб.:
Изд-во ГМА им. адм. С.О. Макарова, 2007. - 48 с.
10. Международный кодекс по управлению безопасностью (МКУБ) в части
технического обслуживания и ремонта судна и оборудования: Метод, указ,
к практ. занятиям по курсу «Техническое обеспечение безопасности судов»
/ Сост.: В.С. Гаврилов, А.М. Никитин. - СПб.: Изд-во ГМА им. адм. С.О.
Макарова, 2007. - 24 с.
11. Зубчатые редукторы: особенности конструкции, контроль параметров
зацепления: Метод, указ, к лаб. работам по дисц. «Детали машин и основы
конструирования» / Сост. С.Н. Голубев. — СПб.: Изд-во ГМА им. адм. С.О.
Макарова, 2007. - 40 с.
79