/
















































































Автор: Бутковский А.Г.
Теги: регулирование и управление машинами, процессами радиоэлектроника кибернетика
Год: 1985




Текст
ФАЗОВЫЕ ПОРТРЕТЫЫ УПРАВЛЯЕМЫХ ДИНАМИЧЕСКИХ СИСТЕМ
А.Г. БУТКОВСКИЙ
ФАЗОВЫЕ ПОРТРЕТЫ
УПРАВЛЯЕМЫХ
ДИНАМИЧЕСКИХ СИСТЕМ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
А.Г. БУТКОВСКИЙ
ФАЗОВЫЕ ПОРТРЕТЫ
УПРАВЛЯЕМЫХ
ДИНАМИЧЕСКИХ
СИСТЕМ
МОСКВА "НАУКА”
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 85
Scan AAW
ББК 32-81
Б 93
УДК 62-50
Бутковский А.Г. Фазовые портреты управляемых динамических
систем. — М.: Наука. Главная редакция физико-математической
литературы, 1985. — 136 с. — (Теоретические основы технической
кибернетики).
Излагается новый метод исследования систем управления, отличающийся
большой наглядностью. На основе выведенных уравнений границ интеграль-
ных воронок для дифференциальных включений, описывающих управляе-
мые динамические системы, вводится и изучается понятие фазового портре-
та этой системы, который дает полное качественное представление свойств
системы и позволяет конструктивно решать многие задачи, в том числе управ-
ляемости, финитного и оптимального управления. Прослеживаются связи
теории дифференциальных включений и управляемых динамических систем
с аналитической механикой и теорией сплошных сред.
Для специалистов по управлению, математиков, физиков и инженеров,
занимающихся динамическими системами.
Табл. 1.Ил. 51. Библиогр. 133 назв.
Рецензент
академик В.П. Маслов
1502000000- 130
053 (02)-85
163-85
Б
©Издательство ’’Наука”,
Главная редакция
физико-математической
литературы, 1985
ОГЛАВЛЕНИЕ
Предисловие............................................................. 5
§ 1. Введение........................................................... 7
§ 2. Управляемая динамическая система (УДС)............................ 13
§ 3. Дифференциальные включения. Классы эквивалентностиУДС............. 15
§ 4. Преобразование УДС к единичному вектору фазовой скорости....... 19
§ 5. Индикатриса УДС................................................... 20
§ 6. Степень свободы управления в УДС.................................. 23
§ 7. Гамильтониан УДС как опорная функция.............................. 25
§ 8. Типы конусов допустимых направлений УДС........................... 29
§ 9. Область нестесненных (свободных) траекторий УДС................... 33
§ 10. Принцип включения в пространстве событий.......................... 34
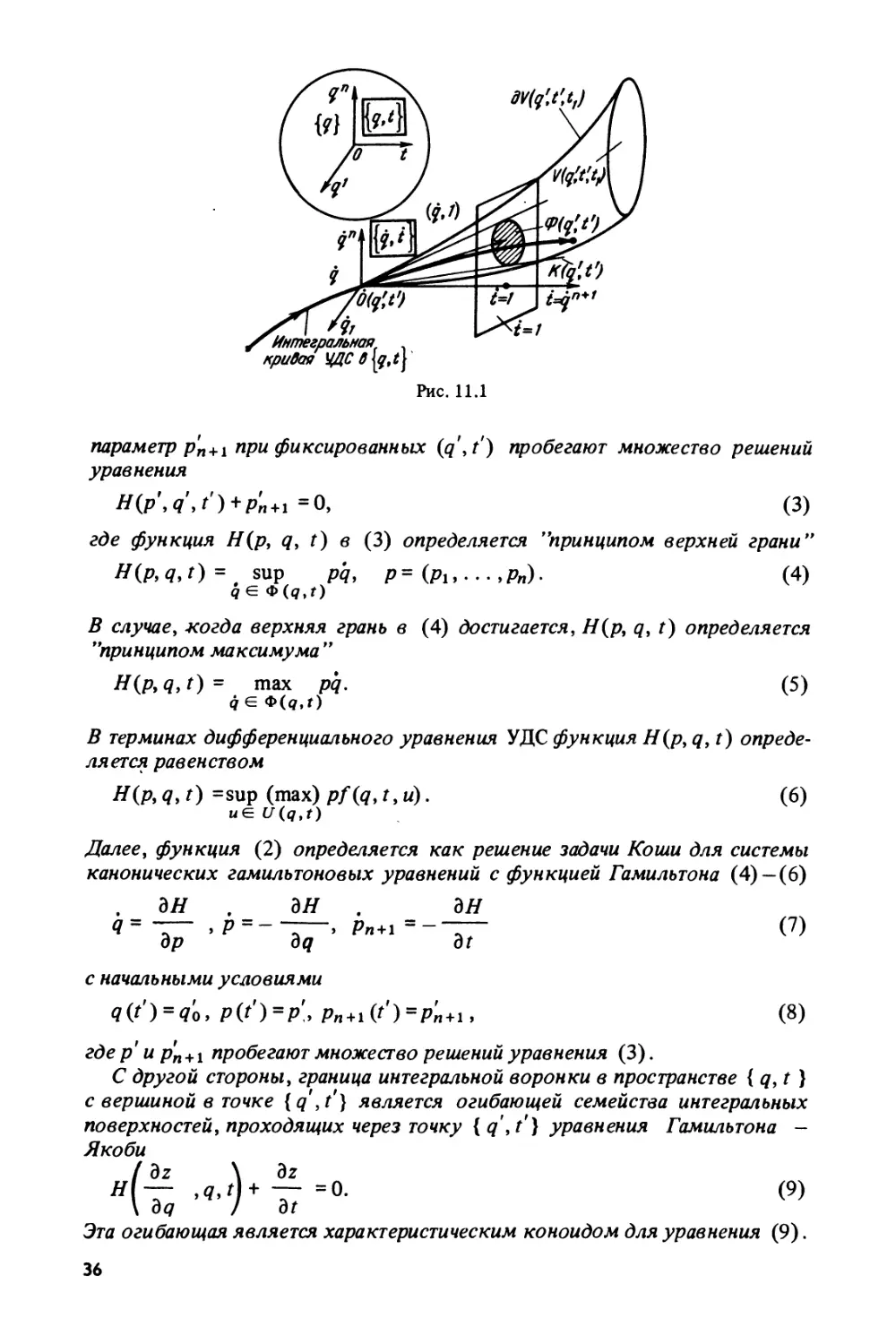
§ 11. Граница интегральной воронки дифференциального включения....... 35
§ 12. Связь границы интегральной воронки с уравнением Гамильтона -
Якоби................................................................... 37
§ 13. Принцип включения для автономных УДС в пространстве состояний.
Ингегрирование УДС...................................................... 40
§14. Граница траекторной воронки УДС................................... 41
§ 15. Геометрическое построение границы траекторной воронки............. 44
§ 16. Уравнения Эйлера - Лагранжа для границы траекторной воронки .... 45
§ 17. Штрихованные границы траекторных воронок. Многообразие перемены
штриховок (МПШ)......................................................... 48
§ 18. Особые многообразия УДС в пространстве состояний.................. 50
§19. Инвариантные многообразия УДС .................................... 54
§ 20. Особые и инвариантные многообразия линейных УДС.................. 60
§21. Область нестесненных траекторий на инвариантных многообразиях ... 65
§ 22. Траекторные воронки на инвариантных многообразиях................. 68
§ 23. Отделяющие гиперповерхности в пространстве состояний.............. 72
§ 24. Допустимые многообразия УДС в пространстве состояний.............. 74
§ 25. Фазовый портрет УДС . . ..............t........................... 75
§ 26. Переносное и относительное движение УДС........................... 77
§ 27. УДС с эллипсоидальной индикатрисой................................ 78
§ 28. УДС и сплошные нелинейные среды. Принцип максимума потока суб-
станции. Оператор Лапласа УДС........................................... 79
§ 29. УДС и финслерова метрика.......................................... 87
§ 30. Оптическая аналогия УДС .......................................... 88
§31. Соответствие между УДС и неуправляемыми механическими си-
стемами ................................................................ 90
3
1*
§32. УДС с фазовыми ограничениями..................................... 99
§33. Особые множества двумерных УДС.................................. 100
§34. Фазовый портрет УДС на двумерных многообразиях................... Ю1
§ 35. Примеры построения фазового портрета двумерных УДС.............. 105
§36. Фазовый портрет двухуровневой квантовомеханической УДС.......... 112
§ 37. Пример декомпозируемой билинейной УДС в трехмерном прост-
ранстве .............................................................. 115
§ 38. Управляемость билинейной УДС общего вида на плоскости........... 118
§ 39. Траекторная воронка в обратном времени.......................... 126
§40. Оптимальное управление.......................................... 128
Список литературы..................................................... 132
ПРЕДИСЛОВИЕ
Эта книга родилась из стремления дать наглядное геометрическое пред-
ставление управляемых динамических систем (УДС), встречающихся в тео-
рии и практике многих научных и технических дисциплин. Основной воп-
рос, который интересовал автора при решении этой задачи, состоял в том,
как использовать фазовое пространство (пространство состояний и, в част-
ности, фазовую плоскость УДС) для как можно более полного описания
таких систем.
В отличии от качественной теории неуправляемых динамических систем
(НДС), имеющей дело с дифференциальными уравнениями, при рассмотре-
нии УДС приходится рассматривать дифференциальные включения, кото-
рые адекватным образом описывают управляемые системы. В связи с этим
у автора возник вопрос: что можно понимать под фазовым портретом
дифференциального включения, или, другими словами, что такое фазовый
портрет УДС? Как надеется автор, в случае двумерных УДС подход к об-
щему решению этого вопроса удалось найти с помощью построения границ
интегральных и траекторных воронок дифференциального включения.
В общем случае понятие границ интегральных и траекторных воронок так-
же играет существенную роль, однако общие фазовые портреты УДС здесь
намного сложнее и разнообразнее. В этом случае предлагается лишь схема
и общая программа исследования, хотя и устанавливаются некоторые об-
щие и частные понятия и факты.
Что касается стиля этой книги, то здесь нужно отметить, что автор ста-
рался найти наименее формальный и по возможности наглядный способ
изложения, подчас не претендующий на абсолютную строгость. Автор от-
дает себе отчет в том, что некоторые приведенные в книге понятия и рас-
суждения, возможно, должны быть детализированы и строго уточнены;
в таких случаях автор вводил в формальный язык обороты типа ’’вообще
говоря”, подчеркивая тем самым, что большая строгость или большая
конкретизация в этом случае, возможно, потребовали бы внесения опре-
деленных корректив в сформулированное высказывание. Такой способ из-
ложения представлялся наиболее целесообразным на данном этапе разви-
тия предлагаемой теории фазового портрета УДС.
Необходимо также отметить, что поскольку к настоящему времени
имеется очень большая литература по качественной теории динамических
систем с управлением, то приведенный в конце книги список литературы
ни в коей мере не носит исчерпывающий или даже достаточно полный
характер.
При работе над этой книгой положительную роль сыграли обсуждения
с моими коллегами в частных беседах и при публичных выступлениях.
5
Всем им я выражаю свою признательность. Особую благодарность я хочу
выразить М.А. Айзерману, М.А. Красносельскому, В.Ф.Кротову, В.П. Масло-
ву, А.Ф. Филиппову, Ф.Л. Черноусько, Ю.Н. Андрееву, Н.А. Бобылеву,
В.М. Хаметову за обсуждение и ценные советы, а также Е.А. Андреевой
и моим сотрудникам Н.Л. Лепе, А.В. Бабичеву и В.И. Финягиной, которые
внесли вклад в решение ряда задач и оказали большую помощь в подго-
товке рукописи. Конечно, все это не снимает с автора полной ответствен-
ности за возможные недостатки книги.
Москва, апрель 1984 г.
А.Г. Бутковский
§ 1. ВВЕДЕНИЕ
С появлением знаменитого трактата Анри Пуанкаре ”0 кривых, опреде-
ляемых дифференциальными уравнениями” понятие фазового портрета
динамической системы стало мощным инструментом локального и глобаль-
ного исследования свойств динамических систем, основой качественной
теории. Трудами академика А.А. Андронова, и его коллег, учеников и по-
следователей фазовый портрет динамической системы превратился в рабо-
чий аппарат анализа и синтеза множества устройств и систем из самых раз-
личных областей физики, техники и других наук. Это стало возможным
благодаря простоте и наглядности (геометричности) фазового портрета,
который содержит в себе не только локальные характерные особенности
системы, но и представляет ее глобально, давая наглядную картину пове-
дения динамической системы в целом.
Для неуправляемой динамической системы (НДС)
<7 =/(?), (1)
где q - и-мерный вектор состояния НДС, ее фазовый портрет есть совокуп-
ность (семейство) фазовых траекторий в ее фазовом пространстве или,
как теперь говорят, в ее пространстве состояний. Эта картина действитель-
но является картиной, на которой можно многое увидеть благодаря тому,
что через каждую точку фазового пространства (пространства состояний)
проходит (по условию теоремы единственности) одна и только одна кривая
(траектория), за исключением лишь отдельных точек и многообразий раз-
мерности меньшей чем п, которые называются соответственно ’’особыми
точками” и ’’особыми многообразиями”. Особенно наглядна и проста эта
картина для двумерных систем (п = 2), которые можно изобразить на
плоскости или ее части, а также на двумерных многообразиях (поверх-
ностях) более сложной конструкции - таких, как сфера, тор и др.
В НДС важную роль играют особые точки и особые решения. В этих
особых множествах нарушаются условия теоремы существования и един-
ственности, в результате чего через особые точки может проходить целое
множество траекторий.
С этой точки зрения для рассматриваемых в этой книге УДС вида
<?=№,*), (2)
где q - л-мерный вектор состояния УДС, и — управление, зависящее от
времени как правило, каждая точка их фазового пространства является
особой. Так, если изображающая точка системы (2) в данный момент
времени находится в какой-то точке q фазового пространства, то в после-
дующие моменты времени она может уже двигаться по любой траектории
7
из целого пучка траекторий, выходящих из q. Фиксация конкретной траек-
тории из этого пучка определяется управлением и, которое мы выбираем
в данный и в последующие моменты времени.
Таким образом, на первый взгляд получается хаос многократно пере-
плетающихся траекторий, не образующий никакой систематической карти-
ны. Дело в том, что в отличие от НДС, для которой в каждой точке q фазо-
вого пространства, как правило, определено единственное направление ско-
рости (касательной к траектории), в УДС с каждой точкой q связан целый
конус, содержащий пучок допустимых направлений скоростей (касатель-
ных к траекториям). Таким образом, в отличие от НДС, которая задается
полем направлений (изоклинами), УДС задается полем конусов допусти-
мых (возможных) направлений скоростей УДС. Такая ситуация эквива-
лентна заданию УДС дифференциальным включением: скорость УДС в дан-
ной точке пространства состояний принадлежит заданному в этой точке
конусу допустимых направлений скоростей. Более того, включение в мно-
жество допустимых траекторий предельных траекторий, соответствующих
так называемым ’’скользящим режимам”, дает возможность иметь дело
с полем выпуклых конусов.
Таким образом, необходимо прежде всего изучить и классифицировать
типы выпуклых конусов. Оказывается, что каждому выпуклому конусу
в «-мерном пространстве с вершиной в начале этого пространства можно
' т
соотнести его тип аг , определяемый индексами т и г, где т - размер-
ность минимального линейного подпространства Lm, целиком вмещающего
конус, а г — максимальное число линейно независимых опорных плоскос-
тей к вершине конуса в Lm. Тем самым, в общем случае для УДС с «-мер-
ным пространством состояний всего может быть (« + 1) (п + 2)/2 различ-
ных типов конусов. Разумеется, для конкретной УДС далеко не все типы
конусов могут иметь место.
Теперь пространство состояний УДС можно разбить на непересекающие-
ся множества, в точках каждого из которых конус имеет один и тот же тип.
Это позволяет на каждом их этих множеств иметь дело с полем однотип-
ны^ конусов, что может существенно упростить задачу изучения характера
допустимых траекторий, лежащих в данном множестве или пересекаю-
щих его.
Сложность задачи изучения характера допустимых траекторий и мно-
жества однотипных конусов зависит от вида этого множества, его размер-
ности и самого типа конусов. Здесь в общем случае встречается большое
разнообразие различных вариантов, подчас требующих весьма скрупулез-
ных и нетривиальных рассмотрений. Некоторые ситуации, по крайней мере
в принципе, поддаются изучению довольно просто: здесь имеются в виду,
например, случаи областей нестесненно (свободных) траекторий УДС,
множеств абсолютного равновесия УДС, множеств с полем телесных за-
остренных конусов. Сложнее изучать случаи, когда имеются инвариантные
многообразия различных размерностей, поскольку это связано с изучением
линейных (дифференциальных) пфаффовых форм, определяемых линей-
ными подпространствами Lm и опорными плоскостями соответствующих
данному типу конусов. Здесь уместно заметить, что хотя изначально данная
УДС может задаваться в линейном «-мерном пространстве, однако возмож-
ное наличие инвариантного многообразия, с которого изображающая точка
8
УДС не может сойти по допустимой траектории ни в прямом, ни в обрат-
ном времени, приводит к необходимости изучения УДС на инвариантных
многообразиях.
Изучение УДС на множествах с постоянным типом конусов можно
назвать ’’локальным изучением”. Однако затем возникает задача ’’глобаль-
ного изучения”, включающая в себя изучение возможности и характера
переходов из одного множества постоянного типа в другое, соседнее с ним.
Картину глобальных связей в УДС можно представить в виде графа, верши-
ны которого представляют собой множества постоянного типа конусов
(или их подмножества), а ребра указывают на возможные переходы изо-
бражающей точки УДС из одного множества в другое.
Описанную здесь картину представления локальных и глобальных
свойств УДС мы будем называть фазовым портретом УДС. В более широ-
ком смысле под фазовым портретом УДС можно понимать всю совокуп-
ность геометрических и аналитических средств и понятий, помогающих
наиболее полно и по возможности геометрично и наглядно представить
локальный и глобальный характер поведения допустимых траекторий УДС.
Отдельные понятия и средства фазового портрета мы будем называть
элементами фазового портрета УДС.
Помимо указанных выше элементов фазового портрета могут оказать-
ся весьма полезными и другие введенные в этой книге понятия, в частности,
понятия ’’отделяющая” и гиперповерхность ’’допустимая” поверхность
в пространстве состояний УДС. Весьма интересным и полезным элементом
фазового портрета является рассмо1ренное в книге понятие ’’границ траек-
торной (интегральной) воронки” дифференциального включения, экви-
валентного уравнению (2). Граница траекторной воронки существует, по
крайней мере, для двумерных УДС (на плоскости и двумерных многооб-
разиях) в областях пространства, не совпадающих с областями нестеснен-
ных (свободных) траекторий. В пространствах большего чем два, числа из-
мерений граница траекторной воронки может не существовать. Граница
траекторной воронки (если она существует) представляет собой боковую
поверхность коноида с вершиной (заострением) в некоторой точке q прост-
ранства состояний УДС. Ни одна из допустимых траекторий, выходящих
из точки q, не может выйти наружу за пределы этого коноида. Чтобы под-
черкнуть невозможность покинуть данный коноид, мы будем наносить
штриховку снаружи коноида. Отметим, что граница траекторной воронки
является частью границы области достижимости из точки q, причем боко-
вой ее частью; ’’основанием” этой конической области служит поверх-
ность Веллмана в задаче быстродействия (для некоторого времени Т> 0).
Замечательным, на наш взгляд, оказалось то, что граница траекторной
(интегральной) воронки дифференциального включения УДС (в случае
ее существования) является не чем иным, как характеристическим ко-
ноидом нелинейного дифференциального уравнения с частными произ-
водными первого порядка с неизвестной скалярной функцией z(q):
( bz \
Н{— , q] = 0. (3)
\dq /
При этом конус допустимых направлений скоростей УДС оказался ко-
9
нусом Монжа этого дифференциального уравнения. Оказалось также,
что функция Н(р, q) в (3), которую мы будем называть гамильтонианом
УДС, является опорной функцией множества допустимых скоростей УДС.
Поскольку уравнению (3) соответствует каноническая система обык-
новенных дифференциальных уравнений порядка 2л, то характеристичес-
кий коноид уравнения (3), а следовательно, и граница траекторной ворон-
ки УДС (2) могут быть построены как семейство решений задачи Коши (а
не краевой задачи!) для канонической системы с вполне определенными,
но специфическими начальными условиями.
Отметим, что вопрос о существовании границ траекторных (интеграль-
ных) воронок тесно связан с вопросом об интегрируемости пфаффовых
дифференциальных уравнений, описывающих тип конусов допустимых
направлений скоростей.
Конечно, далеко не все вопросы, связанные с построением фазового
портрета УДС в целом и отдельных его элементов, решены в этой книге.
По сути дела, автором предлагается лишь некоторая программа исследова-
ний широкого круга задач, связанных с развитием и активизацией геомет-
рических методов и средств представления УДС. Разумеется, здесь не пред-
лагается исключить аналитические и алгебраические методы, которые могут
и должны равноправно дополнять геометрический подход, что хорошо от-
ражает современную тенденцию развития математических методов.
Особенно просто, по крайней мере - принципиально просто, выглядит
фазовый портрет УДС на плоскости (или другом двумерном многообра-
зии) . Действительно, в этом случае мы можем иметь дело лишь с парой
крайних траекторий, проходящих через данную точку плоскости. Грубо
говоря, фазовый портрет любой двумерной УДС можно рассматривать как
наложение друг на друга фазовых портретов соответственно двух НДС.
Таким образом, в отличие от обычной задачи качественной теории, где
изучается фазовый портрет одной НДС, при исследовании двумерной УДС
мы приходим к задаче изучения взаимодействия двух наложенных друг
на друга обычных семейств фазовых траекторий, полученных соответствен-
но от двух независимых НДС вида (1). Ясно, что эта более высокого уров-
ня задача должна опираться на результаты и методы исследования фазовых
портретов НДС.
Как и в обычной качественной теории НДС, исследование УДС начинает-
ся с выделения особых точек и многообразий (на плоскости это — вообще
говоря особые линии). Помимо особых точек, присущих НДС, при иссле-
довании УДС возникают свои особые многообразия. Важную роль здесь
играют многообразия (линии) перемены штриховок. Особые множества
УДС, так же, как и особые множества, присущие фазовым портретам НДС,
играют определяющую роль для выяснения свойств УДС. Замечательно то,
что эти особые множества (так же, как и в случае НДС) не требуют для
своего выделения интегрирований и могут быть получены более простыми,
зачастую - алгебраическими операциями.
Фазовое пространство, и в частности фазовая плоскость, часто использо-
валась и ранее для исследования локальных и глобальных свойств УДС.
В этой связи интересно отметить, что линии и поверхности переключения
в фазовом пространстве оптимальных по быстродействию систем, впервые
построенные Фельдбаумом и Бушау, с точки зрения введенного здесь поня-
10
тия фазового портрета УДС являются не чем иным, как границами траек-
торных воронок, построенных в обратном времени и с вершинами в особых
точках.
Хотя, как отмечалось выше, особые многообразия выявляются отно-
сительно просто (фактически только на основании вида дифференциаль-
ного уравнения), картина возможных движений УДС в окрестности особых
многообразий может быть весьма разнообразной и сложной. При ’’перехо-
де” через эти особые многообразия картина штрихованных границ траек-
торных воронок может существенно меняться. Изучение всех типов этих
изменений и стыковка фазовых портретов различных областей пространст-
ва состояний и должны составить одну из главных задач качественной
теории управляемых систем.
Ясно, что трудности исследования фазового портрета сильно возрастают
с ростом размерности системы, впрочем, так же, как и при исследовании
НДС. Однако можно надеяться на успех при изучении конкретных клас-
сов УДС, например линейных, билинейных, аналитических, линейных по
управлению, линейных по координатам и т.д.
Фазовый портрет УДС, особенно в двумерном случае, может оказаться
весьма полезным, а подчас — дать исчерпывающий ответ при решении мно-
гих основных задач управления: управляемости, финитного управления,
оптимального управления, устойчивости, синтеза при наличии дополнитель-
ных ограничений (скажем, на фазовые координаты). Например, при реше-
нии довольно сложной задачи оптимального управления, когда минимизи-
руется функция от конечной точки фазовой траектории <р(#(Г)), да еще
при наличии фазовых ограничений, очень полезным оказывается наложение
на фазовый портрет поверхностей уровня функции <р(^) и контуров фазо-
вых ограничений. После такого наложения допустимая оптимальная траек-
тория определяется визуально.
Как отмечалось выше, задача сильно усложняется при переходе в трех-
мерное пространство, где необходимо изучать уже взаимодействие беско-
нечного (одномерного континуального) множества семейств траекторий
и полей скоростей. Для системы и-го порядка, вообще говоря, мы должны
изучить множество <*>п~2 семейств таких полей и их взаимодействие друг
с другом. В последние годы эту задачу изучения взаимодействия множест-
ва полей между собой очень интенсивно изучают алгебраическими метода-
ми в адекватных терминах множества однопараметрических групп и алгебр
Ли (или многопараметрических групп и алгебр), соответствующих дан-
ной УДС.
Конечно, во всем объеме эта задача настолько же трудна, а с учетом сде-
ланных выше замечаний - значительно труднее соответствующей задачи
изучения фазового портрета НДС. Но, на наш взгляд, уже сейчас можно
приступить (и отчасти это уже сделано в этой книге и других работах) к
созданию общей теории фазового портрета двумерных УДС на плоскости
и двумерных многообразиях. Также можно надеяться на успех в решении
этой задачи для произвольных (по крайней мере, конечномерных) линей-
ных и билинейных УДС, а также нелинейных УДС, скажем, с линейным
управлением. Можно рассчитывать на относительно быстрый успех в реше-
нии этой задачи для УДС, описываемых гладкими или аналитическими
функциями. Такой подход может дать четкую геометрическую интерпре-
11
тацию в концентрированном виде для многих результатов, полученных
ранее теорети ко-групповыми и алгебраическими методами.
Понятие фазового портрета УДС кажется нам перспективным еще и по
той причине, что построение фазового портрета УДС по крайней мере
принципиально поддается автоматизации с помощью ЭВМ. Эта работа уже
идет, и в этом направлении получены некоторые результаты. Что касается
построения границ интегральных воронок, входящих в фазовый портрет
УДС размерности п > 2, то у нас нет другого способа наглядного их изуче-
ния помимо способов сечения и проекций на подпространство низшей раз-
мерности. Эти операции по построению сечений и проекций также естест-
венно поручить ЭВМ, и здесь открывается широкое поле деятельности.
Далее, интересно также то, что уравнение с частными производными (3)
интерпретируется как уравнение Гамильтона — Якоби для механической
(неуправляемой) системы, которая естественным образом порождается
исходной УДС. В этих терминах штрихованный коноид или штрихованную
границу траекторной воронки соответствующего дифференциального вклю-
чения можно интерпретировать как проекцию лагранжева многообразия
в конфигурационное пространство полученной таким путем механической
системы. При этом оказывается, что граница траекторной воронки, которая
по сути является границей (или ее частью) области достижимости из данной
точки, будет соткана из характеристик и характеристических полос соот-
ветствующего уравнения Гамильтона - Якоби и канонической системы
Гамильтона.
Замечательным, на наш взгляд, является и то, что существует и обратная
связь. Например, каждой неуправляемой механической системе размер-
ности 2л с неоднородным гамильтонианом соответствует вполне определен-
ная управляемая система размерности п + 1, которая породила исходную
механическую систему. Такие связи, после того как они явно прослежены,
могут и не показаться столь удивительными, но дело в том, что, так
или иначе, они дают возможность применить развитый и мощный аппа-
рат исследования неуправляемых систем для исследования управляе-
мых систем. Конечно, весьма полезным оказывается при этом и обрат-
ное влияние. Возможно, что это один из путей, по которому мы мо-
жем прийти к общей теории динамических систем, как неуправляемых,
так и управляемых.
Хочется сказать еще несколько слов о связи фазового портрета УДС
с понятием сплошной среды и процессов, в ней протекающих. Оказы-
вается, что каждой УДС вида (2) можно поставить в соответствие не-
которую сплошную среду, в которой распространяется некое возбужде-
ние, например оптическую среду. Обратно, каждой такой оптической
среде можно поставить в соответствие УДС вида (2). Такое соответ-
ствие естественным образом следует из взаимно однозначного соот-
ветствия между управляемыми и неуправляемыми механическими сис-
темами, о котором было сказано выше.
Другая, может быть, менее очевидная аналогия с процессами в
сплошных средах и системах с распределенными параметрами вытекает
из возможности интерпретировать характеристики исходной управляе-
мой системы вида (2) как материальные соотношения в процессах рас-
пространения субстанции (например, тепла, вещества, энергии). Тем
12
самым управляемой системе вида (2) можно поставить в соответствие
оператор, например оператор Лапласа, описывающий процессы распростра-
нения субстанции в среде. Интересно то, что обычным классическим средам,
в которых, например, распространяется тепло, соответствуют довольно
простые управляемые системы вида (2), и обратно. Более сложным в
определенном смысле системам вида (2) соответствуют и более сложные
сплошные среды со сложными нелинейными свойствами и наличием внут-
ренней активности. Такие сплошные среды обычно создаются искусственно.
Они играют все возрастающую роль в самых различных областях, таких,
например, как создание композиционных материалов, синтез активных рас-
пределенных регуляторов для стабилизации и управления сложными объек-
тами с распределенными параметрами [22—30, 64, 72, 99].
Отметим также связь теории УДС вида (2) с теорией УДС с распределен-
ными параметрами [22-30, 72], которые описываются уравнениями с
частными производными. Эта связь состоит в том, что уравнения УДС (2)
определяют уравнения характеристик (бихарактеристик) соответствующих
уравнений в частных производных. Одна из первых задач теории управле-
ния распределенными системами *) решалась с использованием этой прос-
той идеи [22, 23, 27]. Однако сейчас, спустя более 20 лет, этот подход, к со-
жалению, не получил сколько-нибудь значительного теоретического разви-
тия. Хочется надеяться, что предлагаемый в этой книге метод фазового
портрета послужит стимулом к новым исследованиям в этом направлении
и приведет к новым полезным результатам в области теории и практики
управления, в частности, распределенными объектами.
§ 2. УПРАВЛЯЕМАЯ ДИНАМИЧЕСКАЯ СИСТЕМА (УДС)
Под УДС в этой книге понимается система, которая описывается урав-
нением
4 =f(q, t, и), (1)
где q - вектор-столбец (точка) с координатами ql, ..., qn в «-мерном
пространстве {q}9 которое будем называть пространством состояний УДС,
или фазовым пространством УДС. Как правило, под {q} будем понимать
линейное пространство Rn. Когда пространством состояний УДС (1) ока-
зывается некоторое и-мерное многообразие, его будем обозначать Мп.
УДС (1), конечно, может быть задана априори на некотором многообразии,
например на сфере, торе и т.д. Однако, как мы увидим в дальнейшем
(§ 19), многообразие как пространство состояний УДС (1) может возник-
нуть и апостериори, как результат наличия у УДС (1) некоторого инвари-
антного многообразия Мm, погруженного в R п(т Си). Далее, и - значение
управления, которое принимается из произвольно заданного непустого
множества U, называемого множеством допустимых значений управления.
Иногда и называют параметром управления или управляющим параметром.
Скорость q УДС - вектор-столбец (точка) с координатами q1, ..., q п в
и-мерном аффинном пространстве {q}9 называемом пространством ско-
♦) Имеется в виду задача оптимального управления нагревом материалов в проход-
ных нагревательных устройствах, очень важная в современной практике.
13
ростей УДС или касательным пространством, обозначаемым также Tq{q}.
Начало касательного пространства {q}9 связанного с точкой q9 будем обо-
значать O(q). Величина t — скалярная независимая переменная, отождест-
вляемая с временем, принимающая свои значения из некоторого (возмож-
но, неограниченного) отрезка [r0, G] числовой оси Г. Вектор-функция
f(q,t,u) с координатами У*1, ... >fn считается заданной и определенной
для любых значений своих аргументов из указанных выше множеств.
Заметим, что все дальнейшие утверждения в этой книге, если это не
оговорено особо, будут справедливы и тогда, когда U - U(q, г), (q, г) €
£{q, О, т.е. когда множество U зависит от состояния q и времени t.
Кроме указанных здесь величин будем рассматривать импульс р УДС —
вектор-строку (точку) с координатами ри ..., рп из и-мерного простран-
ства импульсов УДС {р} = Rn (кокасательного пространства), а также
(п + 1)-мерное векторное пространство {q, t} вектор-столбцов (точек) с
координатами q\ .. ., qn9 t, которое будем называть пространством собы-
тий УДС. Состояние q будем также называть изображающей точкой УДС
в пространстве состояний {q}.
Для однозначного определения решения системы (1), т.е. функции q(t),
tQ < г, необходимо задать начальный момент времени г0 и начальное состоя-
ние УДС — точку qQ, которая является состоянием УДС в момент време-
ни t = t0, т.е.
<iM = qo- (2)
Кроме этого, необходимо также определить управление УДС, которое
представляет собой функцию, обозначаемую u(t), принимающую свои
значения из U и определенную на отрезке времени [г0, h ] • Предполагается,
что управление и(г), г0 < t < ц, принадлежит определенному классу функ-
ций Л(г0, h), например, измеримых или кусочно-непрерывных, определен-
ных на том же отрезке времени [г0, ?i] • Такое управление u(t) G A(tQ, /j),
и G U, будем называть допустимым управлением.
Предполагается, что как только заданы некоторое допустимое управле-
ние u(t) и начальное условие (2), уравнение (1) имеет единственное и, по
крайней мере, абсолютно непрерывное решение q(t) на том же отрезке
времени г0 < г < , удовлетворяющее начальном/условию (2), т.е. почти
всюду на [г0, G ] существует единственное q(t) [88]. Для реализации этого
предположения достаточно, например, чтобы:
1) множество допустимых значений U было множеством в R п\
2) компоненты вектора f(q9 tf и) в (1), т.е. функции fl(q,t,u), i =
= 1, . .., п, были непрерывными по совокупности переменных ql,. .., qn,
t, и и непрерывно дифференцируемыми по q1,. . . , q п;
3) класс функций Л(г0, h) был классом кусочно-непрерывных вектор-
функций.
Далее, функцию q(t), tQ < t < /1, которая является решением уравне-
ния (1) при некотором допустимом управлении u(t), tQ <г назовем
допустимым движением УДС, соответствующим управлению u(t). Таким
образом, по определению, каждому допустимому движению q ft), tQ <г <г1}
соответствует по крайней мере одно допустимое управление u(t), t0 < t <
< fi, под действием которого, собственно, и получено это движение q(t).
14
График допустимого движения q(t)9 tQ < t в пространстве событий
{q, t} назовем допустимой интегральной кривой. Проекцию допустимой
кривой q(t)9 tQ < t на пространство состояний {#} назовем допусти-
мой траекторией, направленной от ее начала q(tQ) = qQ к ее концу q(t\) =
= q\, и будем обозначать *7 (<7 о > <71) • Направление вдоль траектории от начала
к ее концу будем называть положительным.
Движение УДС в ее пространстве состояний {q} задается движением ее
изображающей точки вдоль положительного направления траекторий. В свою
очередь, движение изображающей точки q однозначно определяется величи-
ной и направлением вектора скорости q, касательного к траектории в точ-
ке q. Здесь важно сделать оговорку, что, вообще говоря, некоторые из ре-
шений q(t) на отрезке [Го, G] включения (2) могут соответствовать уп-
равлениям гф), не принадлежащим исходному рассматриваемому классу
Л(г0, G) допустимых управлений УДС (1). Что же касается вопроса о един-
ственности решения, то предполагается, что для соответствующих друг
другу f(q, и)9 и GU и Ф(д) два различных решения (О и q2(f) включения
(2) с общей начальной точкой q^ порождают существенно различные управ-
ления Ui (г) им2(0 для УДС (1).
§ 3. ДИФФЕРЕНЦИАЛЬНЫЕ ВКЛЮЧЕНИЯ.
КЛАССЫ ЭКВИВАЛЕНТНОСТИ УДС
Пусть УДС автономна, т.е. ее уравнение имеет вид
q=f(q,u), uEU(q), q^{q}, Г > О, qr(O) = qQ. (1)
Зафиксируем точку q G {q } и заставим и пробегать все множество U(q),
которое, возможно, зависит и от q. Тогда в силу (1) точка q G {q} пробе-
гает некоторое множество Ф(у) в пространстве {q}. Это множество обозначим
f(q, U) и назовем множеством допустимых скоростей УДС. Предполагает-
ся, что множество Ф(^) не пусто и замкнуто. Таким образом, множество
f(q9 U) = Ф(б?) получилось путем отображения множества U в пространст-
во скоростей {q} с помощью функции f (q, и) при фиксированном q G {q}.
Понятие множества допустимых скоростей УДС позволяет заменить
уравнение (1) в описании УДС эквивалентным ему описанием с помощью
дифференциального включения:
q Gf(q, U), или q G Ф(<?). (2)
Решением включения (2) с начальным условием #(0) =qQ назовем абсолют-
но непрерывную вектор-функцию q(t)9 ОСгСТ, такую, что почти всюду
на [0, Т] выполняется включение: точка q(t) принадлежит множеству
7(^(0, С7), т.е.
q(t) Gf(q(t), U)9 или <ф)€Ф(<ф)) а V t G [0, Г]. *). (3)
Решение q(t)9 назовем допустимым движением УДС, описы-
ваемой включением (2). Зная решение q(t) дифференциального включе-
ния (2), можно восстановить то управление u(t) для системы (1), кото-
рое порождает это решение [14,111,112, 120].
*) Символ а V означает ’’почти для всех”
15
Эквивалентность двух форм описания УДС с помощью уравнения
УДС и дифференциального включения УДС состоит в том, что мно-
жество всех допустимых движений УДС (1) и множество допустимых
движений УДС, описанной включением (2), с учетом оговорки совпадают.
Однако, с другой стороны, также очевидно и легко привести примеры
того, что одному и тому же включению (3) могут быть эквивалентны раз-
ные по виду (1) УДС. Таким образом, все уравнения УДС, а вместе с ними
и сами УДС, разбиваются на классы эквивалентности. В один класс попа-
дают все УДС, которые имеют одно и то же включение (2), т.е. одно и то
же множество f(q9 U). Другими словами, каждому множеству f(q9 U)
if™'- " -"W
и)) -л-одсЩ r,{?)
Рис. 3.1
соответствует некоторое ’’укрупненное” множество УДС вида (1). Все сис-
темы вида (1), попавшие в один класс, будем называть эквивалент-
ными УДС.
Следующий шаг укрупнения можно сделать в двух направлениях.
1) Перейти от включения (2) к включению
q G.K(f(q, U)) 9 (4)
где K(f(q, U)) - конус, состоящий из всех лучей, исходящих из точки
O(q).E {q} и имеющих непустое пересечение с f(q9 U), не считая самой точ-
ки O(q) 9 если O(q) G f(q, U). Если f(q9 U) состоит всего лишь из одной
точки O(q), то считаем, что K(f(q9 U)) совпадает с этой точкой. Конус
K(f(q, U)) назовем конусом допустимых направлений скоростей УДС.
2) Перейти от включения (2) к включению
q Gconv/fa, U), (5)
где conv f(q, U) — выпуклая оболочка множества f(q, U).
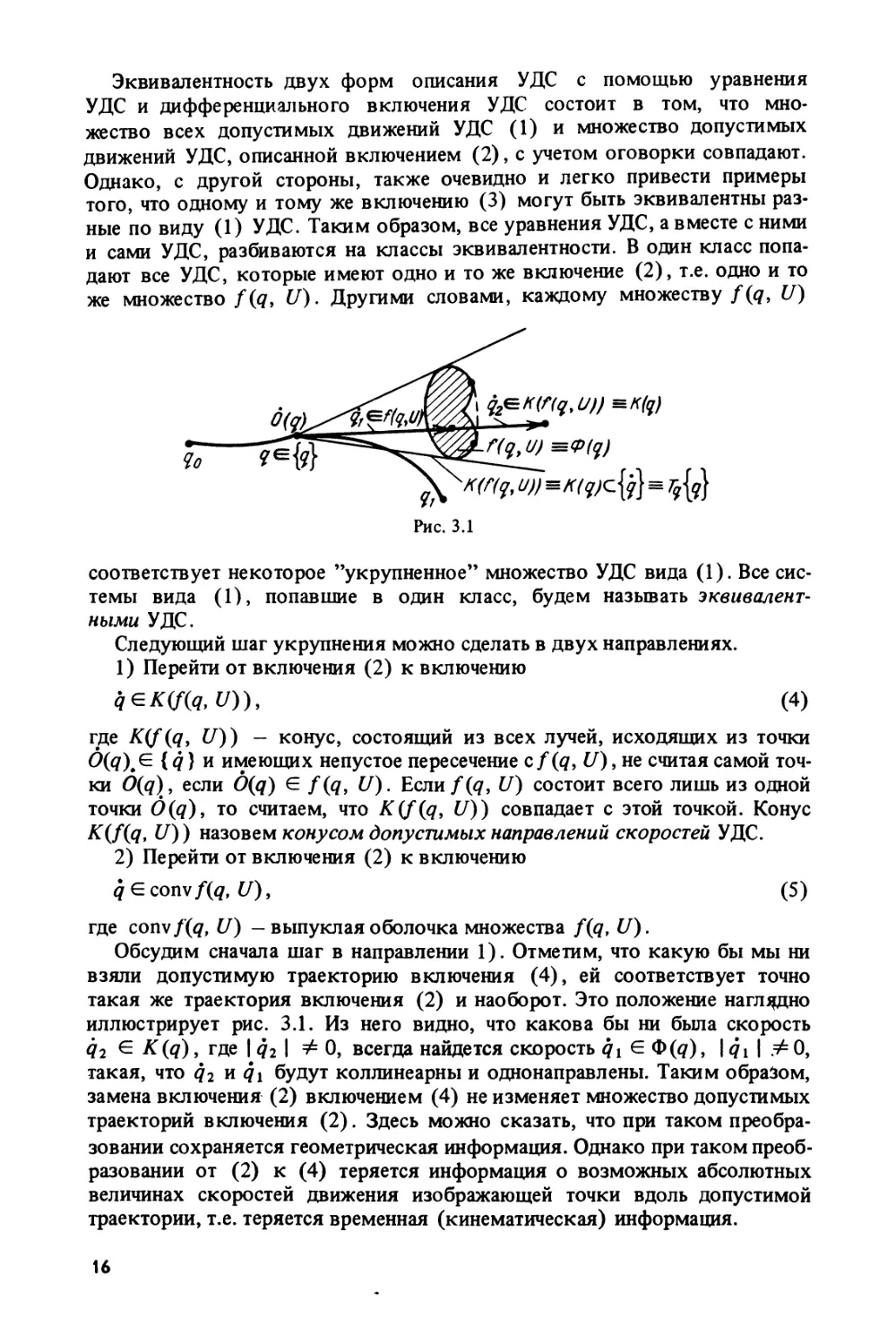
Обсудим сначала шаг в направлении 1). Отметим, что какую бы мы ни
взяли допустимую траекторию включения (4), ей соответствует точно
такая же траектория включения (2) и наоборот. Это положение наглядно
иллюстрирует рис. 3.1. Из него видно, что какова бы ни была скорость
q2 в K(q), где | q2 I ¥= О, всегда найдется скорость qv G Ф(^), 1411^0,
такая, что q2 и 41 будут коллинеарны и однонаправлены. Таким образом,
замена включения (2) включением (4) не изменяет множество допустимых
траекторий включения (2). Здесь можно сказать, что при таком преобра-
зовании сохраняется геометрическая информация. Однако при таком преоб-
разовании от (2) к (4) теряется информация о возможных абсолютных
величинах скоростей движения изображающей точки вдоль допустимой
траектории, т.е. теряется временная (кинематическая) информация.
16
Аналитически переход от (2) к (4) можно осуществить путем введения
дополнительного управления - скалярной функции а (q) > 0. Тогда (4)
будет эквивалентно включению
q£a(q)f(q,U). (6)
После этого в (6) можно избавиться от ot(q) путем изменения масштаба
времени, т.е. введения вместо t нового параметра по формуле:
dr = a(q)dt.
Таким образом, конус U)) задает класс эквивалентных (в ука-
занном выше смысле) между собой УДС (1) и (2). В этот класс попадают
все УДС (1), (2), которые имеют одан и тот же конус допустимых на-
правлений скоростей K(f{q, U)). Системы (1) и (2), эквивалентные в
указанном смысле, будем называть траекторно эквивалентными УДС.
Теперь перейдем к обсуждению шага укрупнения в направлении 2).
Этот шаг более принципиален, чем шаг 1). Исследованию этого шага посвя-
щено много работ (например, [14, 37, 111, 112, 120]). Дело в том, что
включение (5) может содержать такие допустимые траектории, которые
не являются ’’обычными” допустимыми траекториями включения (2) или
исходного уравнения (1). Однако можно показать (см., например, [120]),
что существует такая последовательность допустимых управлений U/(r)
уравнения (1) в классе Л(0, Т) кусочно-непрерывных функций, которая
сама не сходится ни к какой обычной функции, но для которой соответ-
ствующая последовательность движений q( (t) сходится к абсолютно-непре-
рывной функции qit), являющейся решением включения (5). Такие реше-
ния q(t) включения (5) называются обобщенными допустимыми движе-
ниями УДС в пространстве { q, t}, а соответствующие им траектории —
обобщенными допустимыми траекториями УДС в {q}.
Таким образом, с учетом обобщенных допустимых движений включения
(2) и (5) эквивалентны. Ясно, что могут существовать разные УДС вида
(2), входящие в один и тот же класс эквивалентности, определяемый
включением (5). УДС (2) и (5), эквивалентные в этом смысле, будем
называть обобщенно эквивалентными.
Наконец, перейдем к еще более крупному классу эквивалентности - от
включений (4) и (5) к включению*)
q Е conv K(f(q, U)) = К (conv f(q, U)). (7)
Легко видеть [97], что
convК(f(q, U)) = К(convf(q, U)),
т.е. операции овыпукливания и взятия конуса являются перестановочными.
Таким образом, мы пришли к самому крупному (из рассмотренных) клас-
су эквивалентности, характеризуемому множеством /С(conv f (q, £/)), или,
что то же самое, множеством conv К (f(q, U). Этот класс эквивалентности
мы назовем классом эквивалентности по обобщенным траекториям.
*) В самом общем случае для гарантии существования решений включений (4),
(5), (7) переход к ним надо выполнять возможно более аккуратно; для многих
случаев, однако, достаточно ограничиться простым овыпукливанием, как это сделано
здесь.
2. А. Г. Бутковский .
В дальнейшем, если это не оговорено особо, не уменьшая общности, всегда
можно считать множество f(q, U) непустым выпуклым, а соответствую-
щий этому множеству конус также считать выпуклым и обозна-
чать его К(q}.
Наряду с конусом K(q) важную роль в наших рассмотрениях играет
сопряженный (дуальный) к нему конус K(q) (см. ниже рис. 14.1):
K(q)={p^Rn lw<0 Nq^K(q)}. (8)
Проведенное выше последовательное укрупнение классов эквивалентности
схематично показано на рис. 3.2.
е сопи K(f(q, U)) = Л/conv
convf(ytU)
Рис. 3.2
Заметим, что рассмотренное нами понятие класса эквивалентности отве-
чает предъявляемым к этому понятию требованиям: транзитивности, реф-
лексивности, симметричности (3). Заметим еще, что многие задачи, формаль-
но не являющиеся задачами для дифференциального включения, могут быть
сведены [14] к ним (например, задачи для дифференциальных неравенств).
В силу возможности привести каждую неавтономную систему к автоном-
ной (§ 3) за счет введения дополнительной (и + 1)-й координаты qn + l =
= t + t0, все сказанное выше в этом параграфе переносится и на случай не-
автономных систем. Действительно, пусть УДС неавтономна:
q = f(Q, t,u\ и EU(q, г). (9)
Тогда (§3) уравнение (9) может быть представлено в виде
q=Rq,u\ uEU(g), (10)
а соответствующее включение будет иметь вид
^еФй). (11)
Пространство состояний для автономной УДС (10), (И) совпадает с
пространством событий для неавтономной УДС (9), т.е.
{<7.r} = U,<7" + 1 } = {?}. qn + l=t + t0, <7" + 1=r=l.
Поэтому множество Ф(#) в касательном пространстве T^{q } будет плос-
18
ким, оно целиком будет лежать в плоскости qn*{ = i = 1. Отсюда следует,
что содержащий Ф(<?) конус АГ(Ф(<?)) = К (q, t) никогда не будет совпа-
дать со всем пространством Т- {q} ={q}.
Заметим, что, если система (9) все же автономна, то конус K(q, t) в
пространстве {q} = {q, i} на самом деле не зависит от г. В этом случае
рассмотренный выше конус К (q) в пространстве {q} является проекцией
конуса K(q, t) на пространство {q}.
В заключение этого параграфа обратим внимание на тот факт, что, не-
смотря на то, что множество Ф(^) может быть замкнутым, соответствую-
щий ему конус K(q) может оказаться незамкнутым. Этот факт иллюстри-
руется на рис. 3.3. Такие случаи требуют особого рассмотрения. Далее
предполагается, что конус K{q) содержит все свои предельные точки
кроме, быть может, вершины O(q) .
§ 4. ПРЕОБРАЗОВАНИЕ УДС
К ЕДИНИЧНОМУ ВЕКТОРУ ФАЗОВОЙ СКОРОСТИ
В ряде задач исследования УДС нас интересуют только сами траектории
в пространстве {q}, а не закон движения изображающей точки q вдоль
них. Например, это имеет место, когда решаются задачи управляемости.
В этом случае надо только гарантировать существование траектории, связы-
вающей, скажем, две заданные точки; при этом сам закон движения изо-
бражающей точки во времени вдоль траектории нас не всегда интересует.
Разумеется, при этом надо гарантировать конечность времени перехода из
начальной точки в конечную. В этом случае бывает удобно преобразовать
исходную УДС в новую УДС с единичным вектором скорости: |4 I = 1,
и тем самым осуществить ’’разделение переменных”, характеризующих
форму траекторий в {<?}, с одной стороны, и закон движения во времени
вдоль траекторий - с другой.
Исходную УДС
<7 =/(<?, м) (1)
преобразуем следующим образом. Разделим обе части (1) на \f(q, u)|,
предполагая, что для любой точки ц€{ц}ни € U существует число е > О
такое, что \f(q, и) | > е. Тогда получим
= “) (2)
\f(q,u)\dt \f(q,u)\ '
Вместо t введем новую независимую переменную
</т= |/(<7, u)\dt,
о
и переменные (зависимые) q и и будем рассматривать как функции от т:
q = K(r), и = и(т), (4)
19
2*
причем
q-q(t) = K(f\q(0)tu(0))\d0)9 (5)
о
u = u(t) = v(/\f(q(e),u(O))\dO), (6)
о
В результате (2) примет вид:
. f(K (т), у(т))
к(г)= ------------- = <р(к (т), и(т)), и £U, (7)
|/(K(7),U(7))|
где | | = 1.
Обратное к (3) преобразование задается формулами
dr т d0
dt = --------------, или t = f ---------------. (8)
|/(K(7),U(7))I о \f(K(0)fV(O))\
Смысл преобразования (3) состоит в том, что в новой системе (7) траек-
тории { q } совпадают с траекториями исходной системы (1) в том же прост-
ранстве {д} с сохранением направлений движения вдоль траектории. При
этом вектор скорости имеет единичный модуль: | к(т)| = 1. Это преобра-
зование системы (1) к системе (7) очевидно соответствует введению
(переменного) масштаба времени или, как говорят, введению нового па-
раметра 7 вместо t по формулам (3), причем с сохранением направления
движения вдоль траектории (без изменения ориентации траектории).
При рассмотрении временных характеристик исходного уравнения (1)
на основании преобразованной системы (7) необходимо воспользовать-
ся формулами (5), (6), т.е. перейти обратно от 7 к г по формулам (3),
где фигурирует только одна скалярная неотрицательная функция
\f(q, и) | и производится одно интегрирование.
Таким образом, произвольная УДС характеризуется уравнением (7),
где | к 1 = 1, которое описывает формы траекторий в {#}, и одной скаляр-
ной нёотрицательной функцией, описывающей закон движения во вре-
мени изображающей точки вдоль определенной уравнением (7) траекто-
рии. Там, где \f(q, м)|^0, можно считать, что в уравнении (1) | q | =
= 1№, а) 1=1.
Приведенные рассуждения позволяют стандартизировать множество
допустимых скоростей произвольной УДС. Это множество задается ко-
нусом в пространстве {4}, ограниченным единичной сферой в этом
пространстве. Таким образом, все допустимые скорости располагаются
в некотором определенном телесном угле, а концы этих векторов лежат на
единичной сфере. Фактически здесь осуществлена центральная проекция вы-
пуклого множества f(q, U) на единичную сферу в пространстве {q} .
§ 5. ИНДИКАТРИСА УДС
Мы уже отмечали (§3), что в дальнейшем везде в этой книге под мно-
жеством допустимых скоростей УДС Ф(^) или, что то же самое, f(q, U),
будем понимать выпуклое множество. Элементами этого множества яв-
ляются точки касательного пространства Tq {q} = {<?}- При исследовании
20
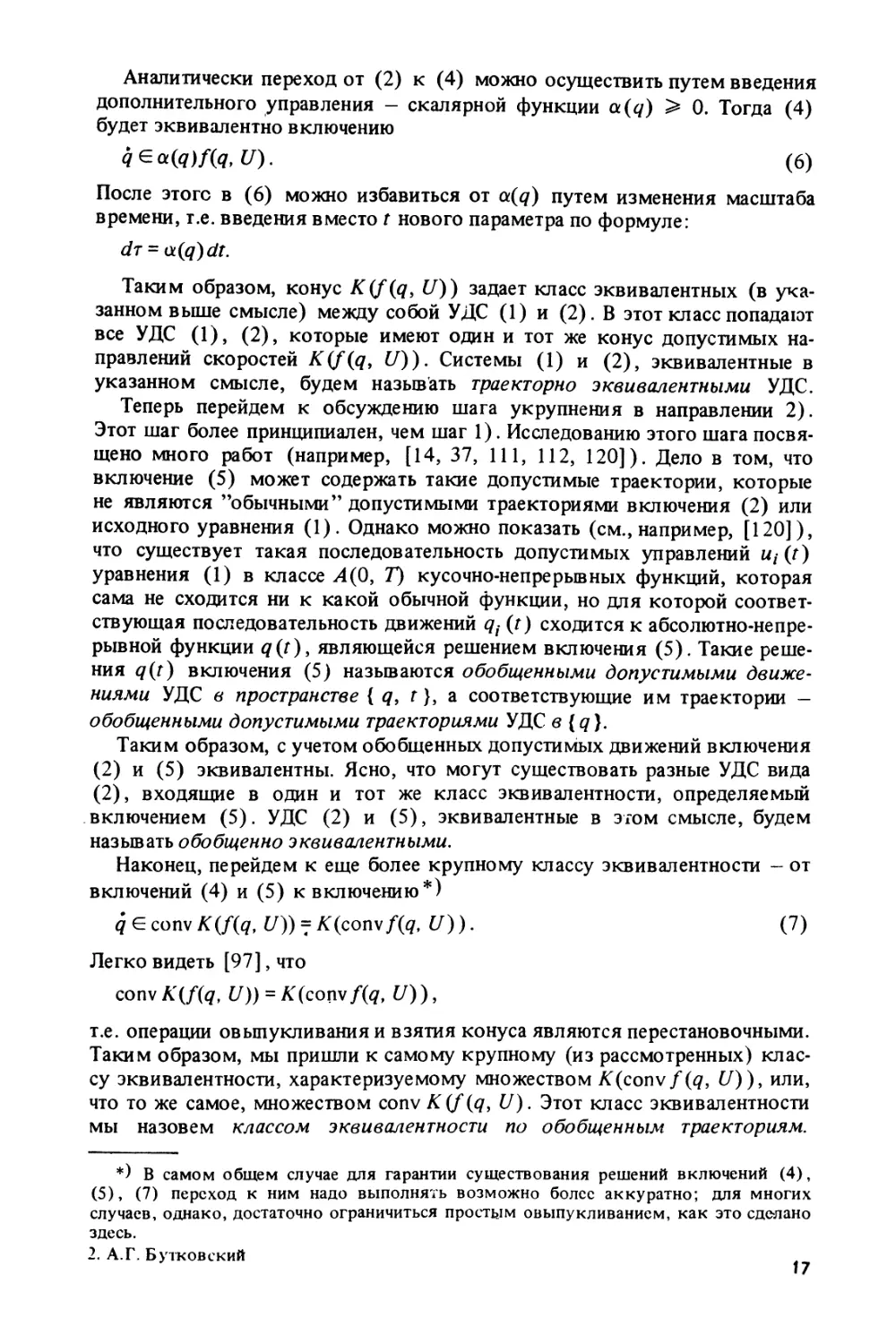
конкретных УДС важным являются свойства множества Ф(^) и соответ-
ствующего ему конуса К(ц). В частности, важна размерность множеств Ф(^)
и К (у) и расположение множества Ф (у) по отношению к началу 6{q} е {qj.
Некоторые случаи расположения этих множеств проиллюстрированы
на рис. 5.1.
Пусть размерность множества Ф(^) есть (ПтФ(^) = т. Если т = п, то
граница ЭФ(<?) — некоторая гиперповерхность в и-мерном пространстве{q}.
Рис. 5.1
Эту гиперповерхность назовем индикатрисой УДС. Пусть уравнение инди-
катрисы имеет вид
огЙ.?) = О, (1)
где q Е {q} играет роль параметра, так как, естественно, эта поверхность
может меняться в зависимости от точки q, около которой она построена.
Будем считать, что область допустимых скоростей Ф(^) определяется
неравенством а(4, <?) < 0.
Далее, если т < п, то минимальная размерность линейного (аффинного)
многообразия, которое целиком содержит множество Ф(<?), также имеет
размерность т. Такое линейное многообразие минимальной размерности
т будем называть минимальным линейным вмещающим многообразием
управлений УДС и обозначать Lm *).
В частности, если Lm, то Lm есть линейное подпространство в
{q}, которое мы обозначим Lm .
Многообразие Lm можно задать различными способами. Зададим, напри-
мер, систему из т + 1 аффинно-независимых векторов Ьо, ..., Ьт.
Здесь bi - bQi .. ., bm — Ьо — линейно-независимы. В этом случае все точ-
ки, принадлежащие Lm и только Lm, представляются в виде
X1(Z>1 - bo) + .. . + Xm(bm - bo) + b0, (2)
или
Xobo + Xibj + . . . + bm , Xq + Xi + . .. + = 1. (3)
Числа Xo, Xi, .. . , X„2 называются барицентрическими координатами в Lm.
Границу ЬФ(у), лежащую вместе с множеством $(q) в Lm, можно описать
с помощью уравнения
а(Хл) = 0, (4)
*) В общей теории Lm называется аффинной оболочкой множества Ф(^) [95],
или несущей плоскостью.
21
где X = (Xi,. .., Xm), и неравенство а(Х, q) < 0 описывает в Lm множест-
во Ф(<?).
Такое описание дает возможность представить вектор q как прямую
сумму векторов q и q" соответственно размерностей т и п - т, т.е.
q = (q, q"). При этом уравнения исходной УДС представляются в виде
системы
(5)
ч'=ЫяЛ), (6)
где управлением является вектор X. Здесь замечательно то, что уравнение
(5) (т.е. (п - т) уравнений) не зависит от управления; уравнение (6) за-
висит от вектора X, размерности т, играющего роль управления; вектор
q имеет размерность также т. При этом новое управление X стеснено лишь
условием о(Х, q) < 0.
Если путем еще одной замены переменных X на д можно добиться того,
чтобы уравнения УДС представлялись в виде
?"=Л(?)=/1 (?',/), (7)
4' = М, (8)
где управление д имеет размерность т и стеснено одним условием
ol(ni qf) < 0, то представление УДС в виде (5), (6) или (7), (8) может
оказаться весьма полезным при исследовании сложной УДС, так как
оно в определенном смысле декомпозирует исходную УДС.
Более того, если оказалось, что функция Л (д', q") не зависит от q'9 то
это означает, что УДС распалась на две независимые системы
4"=Л(<7"), (9)
^=Д, (Ю)
одна из которых, а именно система (9), является неуправляемой дина-
мической подсистемой в том смысле, что в нее вообще не входят ни-
какие управляющие воздействия. В то же время система (10) есть не-
зависимая от (9) УДС со своим пространством состояний {q}, которое
по отношению к исходной УДС с пространством состояний {<?} -{q\q }
является независимым в том смысле, что, очевидно, никакое допустимое
управление д не может вывести q из пространства (qf). К сожалению,
такая декомпозиция происходит, вообще говоря, лишь локально, так как
Lm(q) и, в том числе, размерность т зависят от q. В частном случае, когда
Lm и размерность постоянны и не зависят от q (это может оказаться не та-
ким уж редким случаем, например, для линейных систем), возникает за-
дача об исследовании управляемости УДС (10) в своем пространстве со-
стояний {q}, размерность которого равна т.
Однако в общем случае, когда Lm и т зависят от q, возникает задача
о разбиении исходного пространства {q} на подмножества, на которых
размерность т постоянна.
Итак, в случае, когда dim Ф(<?) = т < и, индикатриса УДС не является
гиперповерхностью, поскольку ее размерность меньше п — 1. Однако если
Lm — подпространство минимальной размерности, целиком вмещающее в
себя Ф(д), то можно говорить об индикатрисе как о гиперповерхности,
22
но уже по отношению к Lm. Поэтому уравнение этой ’’относительной”
гиперповерхности снова можно записать в виде (1), т.е. а(4, q) = 0, однако
в этом случае точки q не свободны и должны принадлежать L т. Уравнение
Lm можно записать в виде системы линейных алгебраических уравнений
относительно q, т.е.
я4 = 0, (11)
где я — т X л-матрица, задающая Lm. Элементы матрицы я, вообще, говоря,
зависят от q (см. также § 8).
Таким образом, в случае dim Ф(<?) = п индикатриса задается одним урав-
нением (1). В случае dim Ф(<?) = т < п индикатриса задается системой
уравнений, состоящей из, вообще говоря, нелинейного уравнения (1) и
линейного уравнения (11) с матрицей размерности т X п.
В § 7 мы рассмотрим альтернативный и очень важный способ описания
индикатрисы, который можно назвать ’’двойственным” по отношению к
рассмотренному здесь: он основан на построении опорной функции мно-
жества f\q, U).
§ 6. СТЕПЕНЬ СВОБОДЫ УПРАВЛЕНИЯ В УДС
Имеет смысл обсудить понятие ’’мощности” управляющих воздействий
данной УДС в зависимости от того, какие ’’степени свободы” приобретает
данная УДС под действием допустимых управлений. Этот вопрос имеет два
аспекта: локальный и глобальный. В локальном смысле речь идет об ок-
рестности точки q того состояния УДС, в котором она находится в данный
момент времени t и может находиться в близкие к t моменты времени.
Глобальный аспект степени свободы (или мощности) управления данной
УДС связан с глобальной картиной управляемости во всем фазовом прост-
ранстве {q} (или его заданной части) УДС и может быть охарактеризован
в терминах глобального фазового портрета УДС, о котором речь пойдет
впереди (§ 25).
Мы попытаемся ввести локальную характеристику мощности управле-
ния УДС, зависящую от точки q G {q}. Интуитивно степень свободы управ-
ления Связывается с понятием ’’гибкости управления”, т.е. с возможностью
менять состояние УДС с разной скоростью и в разных направлениях, вклю-
чая, скажем, изменение направления движения изображающей точки на
обратное.
В принятом нами описании УДС уравнениями (3.1) и включением (3.2)
эта гибкость, очевидно, должна характеризоваться размерностью множест-
ва/^, U), размерностью конуса K(q) и зависеть также от того, принадле-
жит или не принадлежит точка 6(q) множеству
Естественно считать, что гибкость (степень свободы управления) при
данном /(<?, U) будет максимальной, если точка O(q) е rif (q, If), где
riTIf — относительная внутренность множества М [97], т.е. конус K{q)
совпадает с некоторым т-мерным линейным подпространством Lm прост-
ранства скоростей {41 (т<п, п — размерность вектора {4})- Тогда целое
число тп по определению можно считать степенью свободы управления для
данной УДС и записать degf и = т. Это число дает некоторую характеристи-
ку мощности управления или его гибкости.
23
г) . д)
О
K(4)‘L,
. ж)
I_____
“)
~ L'^f(g,Uj tty
з)
O=f(g,U) = K{q)=Lo
Рис. 6.1
На рис. 6.1 при фиксированной размерности dim {q } = 3 показана упоря-
доченная эволюция уменьшения степени свободы управления, начиная с
максимально возможной. Последние два случая на рис. 6.1 соответствуют
случаю полного вырождения управления и превращению УДС в полностью
неуправляемую (в данной точке q) систему); случай (к) на рис. 6.1 соот-
ветствует состоянию покоя (статического равновесия системы).
Каждому случаю такого эволюционного ряда можно приписать (пусть
неоднозначно) некоторую разумную величину степени свободы управле-
ния. Эта характеристика может быть и числовой, и даже векторной. Если
остановиться на числовой характеристике, то для данного п множество
чисел {Р(}, описывающих степень свободы управления, должно образовы-
вать возрастающую (убывающую) конечную последовательность Pq,Pi,...
.. ., рг . Эта последовательность характеризует все возможные качествен-
но различные случаи возможных степеней свободы в УДС данного поряд-
ка п. Например, для случаев рис. 6.1 можно ввести такие числовые харак-
теристики р:
(к) Ро=0;
(и, з, ж) pi = Vi, р2 = 1, рз = 1 + 14 ;
(е, д,г) Рл=2- Й, Р$ = 2, р6 = 2 + Й;
(в, б, а) р7 э 3 — *6, р3 = 3, р9 = 3 + !4
и т.д. Причем последний случай с р = п + J4 соответствует максимальной
гибкости или ’’суперсвободе” (см. ниже § 9 об области нестесненных
(свободных) движений).
В такой записи величины р не являются числами в обычном смысле;
их надо рассматривать как числовые символы, так как надо делать раз-
личия, например, между р3 = 1 + Й и р4 = 2 - Й. Можно, конечно, ввести
24
векторное р; тогда, например, вектора р3 = (1, Vi) и р4 = (2, — Vi) будут
уже в обычном смысле различными и тем самым будут отражать наличие
разных степеней свободы управления и в двух данных УДС.
В более грубой классификации возможных степеней свободы управ-
ления можно не делать различия между случаями (?) и (и), (е) и (д),
(в) и (6). Это следует из того, что означенные пары УДС будут иметь
одинаковый набор допустимых траекторий, по крайней мере, в окрест-
ности точки q. Тогда таблица значений р примет следующий вид:
(к) Ро = 0;
(и, з) р! = ‘/2;
(ж) р2 = 1;
(е, д) Рз = 1 + й = 3/2;
(г) Р4 = 2;
(в, б) р5 = 2 + й = 2Й;
(а) р6 = 3.
Здесь уже величину р можно буквально понимать как число. При
этом целые р = т соответствуют тому, что К (q) совпадает с некоторым
линейным подпространством в { q} размерности т < п.
Такой подход к определению степени свободы управления и связан с
тем, что величина степени свободы управления должна отражать свойст-
во УДС быть управляемой: чем выше степень свободы управления, тем
’’более управляема” УДС; обратно, чем ниже степень свободы управления,
тем ’’менее управляема” УДС, хотя бы в локальном смысле, т.е. в окрест-
ности точки q. Например, в случае, когда dim/(#, U) = п и 6 е ri/(^, U),
мы имеем возможность выводить изображающую точку УДС во всех
направлениях, т.е. придавать вектору q любое направление в пространстве
{q} . Здесь правомерно сказать, что степень свободы управления макси-
мальна и равна п.
Интересно отметить, что степень свободы управления и, вообще говоря,
не связана непосредственно с его размерностью, если и — вектор. Ясно,
что, например, скалярное управление, т.е. одномерное, может иметь раз-
личную степень свободы, зависящую от f (q, U).
§ 7. ГАМИЛЬТОНИАН УДС КАК ОПОРНАЯ ФУНКЦИЯ
Введем функцию Гамильтона УДС, или гамильтониан УДС, по формуле
H(p,q)= sup pq, (1)
q U)
где pq — скалярное произведение векторов р и q в R ”, или, что то же
самое,
H(p,q)= sup Р(р, q, и) = sup pf (q, и), (2)
иGE U uEU
где Р(р, q, и) = pf(q, и). Очевидно, что Н(р, q) есть не что иное, как опор-
ная функция выпуклого множества f(q, U) [97]. Если верхняя грань
25
в (1) и (2) достигается, то вместо нее берется максимум:
H(pt q) = max pq = max pf(q, u). (3)
q Cf(q, U) и e U
Естественно считать Я (0, q) = 0. Функция H(p, q) определена для всех
{р} и q Е { q } . В каждой фиксированной точке q Е { q} для дан-
ного р ¥= 0 у множества f(q, U) существует одна ориентированная опор-
ная плоскость с нормалью р. Уравнение этой плоскости в {q} имеет
вид pq = Н(р, q). Расстояние d от этой плоскости до точки ОС {q} , оче-
видно, равно
(Р \
— .<4 (4)
ip । /
Из определений (1) —(3) видно, что Я(р, q) — положительно однород-
ная первой степени функция от р при каждом фиксированном значении
параметра q Е { q } , т.е.
Я(Хр,^) = ХЯ(р,^) VX>0. (5)
Дифференцируя тождество (5) по Х(р, q — фиксированы) и полагая Х= 1,
получим тождество Эйлера:
ЬН
Р — (р,Я) = Н(р, q), , (6)
Эр
где bHjbp, как обычно, означает вектор градиента функции Я(р, q) по р.
Функция Я(р, q) по аргументу р при каждом фиксированном q яв-
ляется выпуклой функцией, т.е. для любых двух векторов р =Pi и р-р?
выполнено условие:
Н(р\Р\ + P2P2,q)<PiH(Pi,q)+ p2H(p2,q) (7)
при Mi > 0, м2 0, Mi +Мг =1- В силу положительной однородности (5)
условие выпуклости (7)’можно эквивалентным образом записать проще,
а именно:
Я(Р1 +р2, q)<H(plt q)+H(p2, q), (8)
что непосредственно следует из (1) — (3).
Опорная функция Я(р, q) содержит полную информацию о классе
обобщенно эквивалентных УДС, описываемых множеством f(q, U) (§3).
В терминах функции Н(р, q) полностью описываются многие важные
особенности и признаки того или иного свойства соответствующей УДС.
Кроме перечисленных выше свойств Я(р, q), приведем еще некоторые
ее свойства, определяемые характером выпуклого множества /(#, U).
1) Для того, чтобы множество Я(р, q) целиком лежало в некоторой
гиперплоскости с нормалью р, необходимо и достаточно, чтобы [21]
H(p,q) = - Н(-р, q), или Н(р, q) + Н(- р, q) = 0. (9)
Здесь Н(р, q) + Н(— р, q) — расстояние между опорными гиперплоскос-
тями к f(q, U) в направлении р ¥= 0 и - р. Если (9) выполняется, то аф-
финная размерность множества f(q, U) не превосходит п —1. Отсюда,
26
в частности, следует, что /(<7, U) имеет аффинную размерность п, т.е.
является областью, содержащей (абсолютно) внутренние точки, тогда
и только тогда, когда не существует р =# 0 такого, чтобы выполнялись
равенства (9). Это свойство нам понадобится в § 20 для выделения
’’особых многообразий” УДС.
2) Если f (д, U) представляет собой область в {q} , то для того, чтобы
точка 0(g) лежала внутри этой области, т.е. O(q) Е int f(q9 U)9 необхо-
димо и достаточно, чтобы
<7)>0 при VP (10)
или, что то же самое, с учетом однородности по р
min H(p,q)>$. (11)
Ip 1= 1
Это свойство Н(р, q) будет нами в дальнейшем использовано для выде-
ления области нестесненных (свободных) движений УДС (§9).
3) Если равенство (9) в точке q выполняется для двух неколлинеар-
ных векторов Pi и р2, то аффинная размерность f(q9 U) не превосходит
п — 2 и т.д.
4) Если множество f(q9 U) представляется как f(q9 U) ~ f\ (q9 U) +
+ a(q)9 где fi (q9 U) - выпуклое множество и a(q) — постоянный век-
тор (при фиксировании q)9 т.е. имеет место сдвиг, то
Н(р, q) = Ht(p, q)+pa(q), (12)
где Hi (р, q) — опорная функция множества fi (q9 U).
5) Опорная функция точки a(q) есть
H(p,q)=pa(q). (13)
6) Опорная функция Н(р, q) единичной сферы или, точнее, шара I р I <
<r(q)9 r(q) > 0,
H(p,q)=\p\r(q). (14)
7) Если f (q9 U) не представляет собой области в { q }, то также полез-
но иметь необходимые и достаточные условия того, что точка д принадле-
жит относительной внутренности множества f(q9 U)9 т.е. критерий выпол-
нения условия O(q) G ri /(q9 U). Этот критерий имеет вид:
H(p,q)>b9 VpE{p}, р=#0, (15)
за исключением тех р, которые удовлетворяют (9).
Комбинируя приведенные выше свойства, можно высказать еще ряд
полезных условий, выраженных в терминах функции H(pt q)9 гарантирую-
щих свойство соответствующего выпуклого множества.
8)/(д, U) целиком лежит в линейном подпространстве пространства
{q} размерности п - т, полученном пересечением гиперплоскостей, ха-
рактеризуемых ненулевыми векторами pi,.. . , рт , если и только если
выполнены равенства
Н(-ре q)+H(piq) = 0,
Это свойство обобщает свойство 1), приведенное выше в этом параграфе.
27
9) Пусть f(q, U) целиком лежит в подпространстве, характеризуемом
векторами р1?.. ., рт . Тогда О G {q } лежит в относительной внутрен-
ности f (q, U), т.е. О G ri f(q,U), если и только если
Я(р, <?)>0
для всех р Ф 0, за исключением тех р, которые являются линейными
комбинациями Pi,.. ., р,„.
В заключение этого параграфа отметим следующее. В терминах функ-
ции Я(р, q) уравнение УДС записывается в виде
. ЪН
я=—(р,я), (16)
Эр
где параметр р можно рассматривать как новое управление, которое
не стеснено никакими дополнительными к (16) ограничениями и прини-
ЪН
мает произвольные значения из {р }. Отметим, что - (р, q) как функ-
Эр
ция от р при любом фиксированном q G {*7} является положительно
однородной функцией нулевой степени, т.е.
ЪН ЪН
— (ХР><7)= — (Р,<7) VX>0. (17)
Эр Ър
Таким образом, скорость q в новом уравнении УДС (16) не зависит
от величины |р | вектора р, а зависит лишь от его направления р/|р |.
Поэтому без ограничения общности можно рассматривать лишь такие
вектора (управления) р, конец которых лежит на сфере в пространстве
{р} некоторого фиксированного радиуса R, в частности на единичной
сфере.
Уравнение (16) можно записать в виде
ЪН / р
q = — / --- q
Эр \ |р | *
К сожалению, уравнение типа (16) или (18) не всегда разрешается одноз-
начно относительно р (или р/| р | ) при фиксированном q G { q} . В этом
состоит главная отличительная особенность многих часто встечающихся
на практике УДС. Такой случай и порождает, собственно, поверхность
интегральной воронки включения (3.2) и соответствует наиболее слож-
ным УДС.
Разрешимость уравнений (16) и (18) имеет место (т.е. существует обрат-
ная функция р от 4 для всех q в довольно частном случае, хотя и весьма
распространенном и который даже можно назвать классическим с точки
зрения механических систем), когда точка О лежит внутри f(q, U) и
/(?, U) — область в { q}.
Заметим, что после преобразования исходной УДС к виду (16) размер-
ность degf р нового управления, в том смысле, как мы это обсудили в
предыдущем параграфе, остается прежней, так как множество допустимых
скоростей в пространстве {q} осталось прежним, равным f(q, U), т.е.
degf р =degf и.
28
Последнее замечание. Как видно из (2) и (3), для вычисления функции
H(pt q) фактически не нужно производить предварительное овыпукли-
вание множеств Ф(^) или U), если они не выпуклы. Равенства (2),
(3) автоматически определяют функцию Н(р, q) как опорную функцию
выпуклой оболочки множеств Ф(^) или f(q, U). В этом смысле можно
говорить об опорной функции H(pt q) произвольного множества Ф(^)
или f (q, U), определяемой (2), (3) (Н(р, q) можно получить и как опор-
ную функцию выпуклой оболочки Ф(^) и /(^, U). Результат будет тем
же самым).
§ 8. ТИПЫ КОНУСОВ ДОПУСТИМЫХ НАПРАВЛЕНИЙ УДС
Все возможные типы конусов K(q) допустимых направлений УДС
изображены в таблице 8.1. Первая строка таблицы показывает, что в
нульмерном подпространстве L° С {q} может быть только один тип K(q) -
это одна точка, совпадающая с 0 (q). Этот тип обозначим через Oq . Вторая
строка таблицы показывает, что в одномерном подпространстве L1 С {q}
может быть уже два типа конусов K(q). Первый тип K(q) в А1 совпадает
Таблица 8.1.
Возможные типы а конусов К (q)
допустимых направлений скоростей УДС л-го порядка
г = 0 г = 1 г = 2 г = 3 г = п
lq т - 0 ао
Z1 т = 1 al а/ • »
L2 т = 2 г а? h аг
L3 т = 3 а° >0 a’ 1 Чс.
• .
т = п ап 0 ап 2 а1 3 п а п
29
с А1 и обозначается aj. Второй тип K(q) в L i совпадает с подпространст-
вом в L1 и обозначается а\.
Далее, в третьей строке таблицы последовательно располагаются все
типы двумерных конусов K(q), т.е. все возможные конусы, для которых
L2 С {q } служит минимальным вмещающим их подпространством. В
первую клетку этой строки попадают конусы, совпадающие с L2. Этот
тип обозначен а20. Во второй клетке этой строки расположен K(q), сов-
падающий с полупространством в L2. Он обозначен а2. Наконец, в третьей
(последней) клетке этой строки изображен тип конуса с острой верши-
ной, целиком лежащий в L2. Этот тип обозначен а22. Этим исчерпывают-
ся все типы телесных по отношению к L2 конусов. Таким образом, их
три типа: а2,а2, а2. Если первый тип а2 символически изобразить пе-
ресечением двух координатных осей, то переход а2 -+а2 -*а22 соответ-
ствует последовательному удалению (’’отламыванию”) отрицательных по-
луосей.
Аналогично в четвертой строке таблицы последовательно показаны все
возможные типы телесных по отношению к L3 конусов. В первой клет-
ке этой строки изображен тип конуса, совпадающего с L3. Он обозначен
а^. Во второй клетке — тип конуса, совпадающий с полупространством
в L3. Он обозначен а\. Далее идет конус типа двугранного угла, обозначен-
ный а32. И, наконец, в последней клетке опять стоит заостренный телес-
ный по отношению к L3 конус, обозначенный а33. Здесь, как и в преды-
- 3 3 3 3
дущеи строке, переходыя0 -+а2 -+а3 можно рассматривать как после-
довательное удаление’ (’’отламывание”) по одной полуоси при каждом
переходе.
В четвертой, пятой и т.д. строчках таблицы последовательно располо-
жены типы конусов, телесных по отношению к подпространствам Z4,
L5 и т.д.
Последней строкой этой таблицы является (я + 1)-я строка, соответст-
вующая пространству скоростей данной УДС я-го порядка, т.е. Ln = {4} =
= Tq {q}. В последней строке последовательно расположены конуса п + 1
типа: а^9 ..., ап- Тип aQ соответствует тому, что K(q) совпадает с L .
При этом конус типа вмещает в себя п осей, т.е. 2п полуосей. Переход
к каждому следующему типу от предыдущего соответствует удалению
одной полуоси. Последний тип в (я+ 1)-й строке а" соответствует заострен-
ному конусу К(q). В символе этого конуса удалены п полуосей.
Таким образом, общий тип конуса K{q) для УДС я-го порядка имеет
обозначение а™ , где тп — размерность минимального вмещающего K(q)
подпространства L™ С {q}, тп = 0, 1,..., я, а г — число удаленных
(’’отломанных”) полуосей в графическом символе этого типа K(q)9 г =
= 0, 1,..., тп, (г С/п). Индекс (число) г , таким образом, можно назвать
’’дефектом” полуосей. Общее число типов конусов K(q) в рассматри-
ваемой их классификации для УДС я-го порядка равно
1 + 2 + 3 + ... + я + (я + 1) =
(я + 1) (я + 2)
2
30
Таким образом, в каждой строке таблицы, соответствующей Lm,
выстраиваются последовательно все телесные по отношению к Lm типы
конусов: от первого а™, совпадающего со всем L т, до последнего а™ — заост-
ренного. Каждый переход в цепочке переходов в данной строке от дан-
ной клетки к следующей, а™ -» а™ соответствует удале-
нию одной полуоси в исходном изображении а™ в виде системы осей коор-
динат с центром в точке O(q).
Интересно для УДС и-го порядка установить тип сопряженного (дуаль-
ного) конуса К (q), соответствующего конусу К(q) (см. формулу (3.8)),
имеющему данный тип а™. Тип К (q) обозначим а™. Тогда легко видеть,
что справедливо равенство
a™ =a?~m + r, т=0,1,...,и; г = 0,1,..., т. (1)
Система полуосей а™ дополняет систему полуосей а™, до максималь-
ного числа полуосей 2п.
Действительно, число 2т — г полуосей для типа а™, сложенное с чис-
лом 2(п - т + г) — г полуосей для типа а™, дает в сумме 2т — г +
+ [2(п - т + г) —г] = 2п, т.е. число полуосей для а". Легко проверить
также, что а" = агг . Вместо символов а™ и а™ можно непосредственно поль-
зоваться обозначениями К™ (q) и К\п (q) соответственно.
Сформулируем критерий того, что конус К (у) имеет в данной точке
q определенный тип а™.
Критерий определенности типа конуса. Для УДС
п-го порядка конус К(q) CTq{q} = {Q} в фиксированной точке q <^{q}
имеет тип а™ тогда и только тогда, когда выполняются условия: сущест-
вует в точности п - т +г линейно независимых решений
р = тг.(#), i = 1,2,.. ., п - т + г, (2)
уравнения
H(p,q)=V, (3)
из которых в точности п-m решений p = 'nt(q),i = 1,2,... ,п — т9 являют-
ся также решениями системы уравнений
H(p9q)=$9 (4)
Я(-р,?)=0. (5)
Последние г векторов (2) обозначим (<?), j = 1,2,. .., г.
Заметим, что понятие типа а™ конуса К(q) было определено при фик-
сированном q Е {<?} , а поэтому при изменении q тип конуса может из-
меняться. Следовательно, тип конуса а™, вообще говоря, зависит от точки q
и является ее функцией а™ = a(m(q), r(q)). Другими словами, числа m и г
являются функциями q9 т.е. m = m (q), г = г (q).
В связи с этим одной из первых и основных задач теории фазового порт-
рета УДС является задача разбиения всего пространства состояний {#} дан-
ной УДС (или заданной области этого пространства) на непересекающиеся
множества (в частности, это будут области или многообразия меньшего
31
числа измерений), на которых тип конусов поля К(q) не меняется и остает-
ся равным фиксированному значению а™.
Индекс т имеет простой геометрический смысл: он означает минималь-
ную размерность подпространства Lm CTq {q} , которое целиком вмещает
в себя конус К (q). Величину т будем называть размерностью конуса
К™ (q). Очевидно, при т = 0 конус вырождается в точку О (q) пространства
Tq {q} = {q} • Такие точки q назавем точками абсолютного равновесия
УДС. Критерием того, что K(q) = O(q), очевидно, является условие Н(р,
#) = О для всех р и данного q.
Конус К (q) называется телесным, если m = и, т.е. так называются все ко-
нусы K(q), имеющие тип а", где г - любое целое число, меньшее или
равное п.
Конус K(q) называется заостренным, если г =т, т.е. заостренными
называются конусы, имеющие тип а^ .
Из сформулированного выше утверждения (формулы (2)—(5)) выте-
кает, что вектора q, принадлежащие конусу К(q) данного типа a™(q), описы-
ваются системой линейных однородных уравнений
я(?)<7 = 0, (6)
где ir(q) — матрица, состоящая из п — т строк л/ (q), i = 1, . .. , п — т, оп-
ределяемых формулой (2), и, следовательно, имеющая dim л (q) = (п — т) X
X пи rang л (q) = n — nv, и неравенств вида
X 0?) <7 < 0, (7)
где x(q) — матрица, состоящая из г строк Xj(q)> J = 1, .. ., г, и, следова-
тельно, имеющая dimx (q) = r X ли rangх (q) = г-
Систему уравнений (6) можно рассматривать как совокупность п — т
уравнений для п — т линейно независимых гиперплоскостей. Систему
неравенств (7), в свою очередь, можно рассматривать как совокупность г
неравенств, описывающих г линейно независимых полупространств про-
странства Tq{q} = {q}, пересечение которых содержит конус K(q).
Гиперплоскости, определяющие эти г полупространств , являются г линей-
но независимыми опорными гиперплоскостями конуса K(q). Уравнение
/-й опорной гиперплоскости (/ = 1,. .. , г), очевидно, имеет вид
X/ (я) Я = 0, или X/ (?) dq = 0. (8)
Как мы увидим, в дальнейшем (§ 19) система (4), (5) играет важную
роль в исследовании УДС. Эту систему нужно рассмотреть как систему
пфаффовых уравнений (уравнений в дифференциалах)
л(?)^ = 0, (9)
где л(^) dq — соответствующая система /-форм, или пфаффовых форм
[95]. Системой (9) определяются, в частности, инвариантные многообразия
данной УДС.
Заметим, что соотношения (7), (8) можно заменить эквивалентными
соотношениями точно такого же вида, но с тем свойством, что матрица
X (<7) будет ортогональна матрице л (q), т.е.
эт(<7) Хт(<7) =0, (10)
32
т.е. каждая вектор-строка матрицы x(q) ортогональна каждой вектор-
строке матрицы я(^). Множество точек в {<?}, для которых конус K(q)
имеет тип а™, будем обозначать D™.
Пусть K(q) — непрерывное-поле конусов, и пусть тх — максимальное
значение индекса т для данной УДС (тх <п). Тогда множество D™1 в
{q} является открытой областью dim .D™1 = п9 так как в противном слу-
чае существовала бы точка q G Л/11, в любой окрестности которой име-
лись бы точки g Е D™, т< тх. Но тогда скачком исчезала бы, по
крайней мере, одна из строк матрицы тг(^), что невозможно в силу пред-
положенной непрерывности поля K(q).
Вообще, если между собой граничат два множества D™ и D™ с раз-
ными индексами т и т'\ причем т" > т', то граничные точки принадлежат
D™ , т.е. множеству с меньшим т = т . В частности, если т0 — минимальное
значение индекса т для данной УДС, то D™° — замкнутое множество.
Например, (инвариантное) множество абсолютного равновесия УДС всегда
замкнуто.
Если поле конусов K(q) имеет ’’разрывы” (не непрерывно), то следует
выделить множество разрывов. Движение УДС на этих множествах требует
специального изучения.
§ 9. ОБЛАСТЬ НЕСТЕСНЕННЫХ (СВОБОДНЫХ) ТРАЕКТОРИЙ УДС
Пусть в каждой точке q некоторой области PC {q } выпуклое множест-
во f(q, U) также представляет собой некоторую область в пространстве
{q}~Tq {q}t содержащую точку {q} внутри себя. Тогда конус
K(q) совпадает со всем пространством {4} , т.е. имеет тип я". Для того,
чтобы при некотором q множество f[q9 U) действительно представляло
собой область в {q} , содержащую О, необходимо и достаточно, чтобы
опорная функция Н(р, q) этого множества была строго положительна при
всех р=#0 (§7). Последнее утверждение в силу положительной однород-
ности Я(р, q) по р эквивалентно тому, что
min Я(р, (?) > 0. (1)
1р| = 1
Это неравенство выделяет в пространстве состояний {q} некоторую об-
ласть, которую обозначим D. Ясно также, что, если такая область D сущест-
вует, то любые две точки q0 и qi связной части этой области могут быть
соединены произвольной траекторией, целиком лежащей в D и получен-
ной под действием допустимого управления. Естественно такую область D
назвать областью нестесненных (свободных) траекторий УДС. Отметим
попутно, что каждая точка q такой области будет точкой локальной управ-
ляемости.
Таким образом, координаты точек q области D нестесненных (свобод-
ных) траекторий удовлетворяют неравенству
min Н(р, q)= у (?) > 0. (2)
IpI = 1
Множество точек q границы области D будут удовлетворять уравнению
min Н(р, q)=q> (?) = 0. (3)
IpI = 1
3. А.Г. Бутковский
33
Вывести уравнения, которым удовлетворяют точки границы области
нестесненных траекторий, можно и непосредственно из условия O^bf\q,
U), т.е. из условия того, что точка О принадлежит границе области допусти-
мых скоростей (индикатрисе). Пусть уравнение этой границы области
/(^, U) (т.е. индикатрисы) имеет вид
о(4, q) = 0, (4)
где q — параметр. Тогда искомое уравнение имеет вид
о(0,<7)=0. (5)
Рассмотрим простой пример. Пусть УДС описывается уравнениями
41 =аЧг + «1, ?2 = bqi + и2, U= { (щ, u2)l«i + и2 < R} . (6)
Здесь
P(p,q) =apxq2+PxUx + bp2qx+P2U2', _______ (7)
H(p,q) = max P(p,q,u) =apxq2 + bp2q2 +RyJp{ +p2; (8)
ue и
(q) = min H(pf q) = - \Ja2q2 + b2q2 * + R = 0. (9)
IpI = i
Следовательно, искомое уравнение границы области нестесненных траек-
торий D имеет вид
+ b2q2 = R2, (10)
т.е. описывает эллипс.
Этот же результат можно получить и непосредственно. Из (6) имеем
Wi = 4i ~aq2, =q2 -bqt. (11)
В силу ограничений, заданных видом множества U, из (6) получим
o(q,q) s (4i ~aq2)2 + (4 2 -*<7i)2 ~ R2 =0- (12)
Полагая в (12) q = 0, получим ответ, совпадающий с (10).
§ 10. ПРИНЦИП ВКЛЮЧЕНИЯ В ПРОСТРАНСТВЕ СОБЫТИЙ
Рассмотрим простой и очевидный принцип, который бывает полезен
при рассуждениях в решениях различных задач управления. Пусть
t) — конус допустимых направлений, построенный в пространстве { q, t } с
вершиной в точке {q, t) .
Рис. 10.1
34
Принцип включения в пространстве событий. Для того, чтобы некоторая
кривая q=q(t), tQ<t<t1, расположенная в {q, t}, была допустимой
интегральной кривой, необходимо и достаточно, чтобы положительный
луч касательной у+ (q(t)) к q(t) принадлежал конусу допустимых
направлений K(q(t), t) почти во всех точках (q(t),t), (рис. 10.1),т.е.
т+(?(г))ел:(<7(о,г) evre [год,].
§ 11. ГРАНИЦА ИНТЕГРАЛЬНОЙ ВОРОНКИ
ДИФФЕРЕНЦИАЛЬНОГО ВКЛЮЧЕНИЯ
В теории дифференциальных включений вида
4еФ(^,о, (1)
где Ф(р,t) — заданное выпуклое и непустое при каждом q и t множество
в пространстве событий { q,1} , интегральной воронкой с вершиной в точке
(q',t') для дифференциального включения (1) называется совокупность
точек абсолютно непрерывных интегральных кривых q = q (t), t > t' вклю-
чения (1), исходящих из точки (q,t'). Если рассматривать интегральные
кривые на отрезке времени (f, G), то соответственно можно говорить об
отрезке интегральной воронки. Отрезок интегральной воронки с вершиной
(#',/) для дифференциального включения (1) обозначим К(</,/, G).
Мы будем рассматривать тот случай, когда отрезок интегральной воронки
V (q,t', Г1) имеет ’’жесткую” боковую граничную поверхность в виде
коноида с вершиной в точке (q , t').
Мы будем называть боковую границу b V(q', t', ) отрезка интегральной
воронки К(<?',/, G) в окрестности (может быть достаточно малой) точки
(q , t ) жесткой, если она не зависит от . В этом случае обозначение V (q
t', ti) можно заменить обозначением V (q, t'), а Э V(q', t', 11) соответствен-
но обозначением bV(q, t'). Достаточными условиями существования
жесткой интегральной воронки, вообще говоря, являются условие гладкос-
ти поля конусов К (q , t') в окрестности (q, г') и условие заостренности
конусов поля. Случай, когда точка t1) лежит на инвариантном много-
образии, будет рассмотрен в § 22. Здесь же предполагается, что коноид
является телесным в пространстве (q, t) t Этот коноид имеет плоское осно-
вание, являющееся частью плоскости t = (рис. 11.1). В этом слу-
чае можно говорить о границе b V как о боковой поверхности жест-
кой интегральной воронки V(q, tf, /х) и высказать следующее
утверждение.
Граница bV интегральной воронки V(q',t', tx) с вершиной в точке
(q,t) для дифференциального включения (1) описывается параметричес-
ким уравнением
q=q(t,p',p'n^,q,t'), (2)
где (q',t') — фиксированная точка (вершина воронки),a tup- парамет-
ры. Числовой параметр t меняется на отрезке t' < tr, где — достаточ-
но мало, а ненулевые векторный параметр р = (р\,.. ., р'п) и числовой
3*
35
Рис. 11.1
параметр p'n+i при фиксированных (q',t') пробегают множество решений
уравнения
H(p’,q',t')+p'„+i =0, (3)
где функция Н(р, q, t) в (3) определяется ’’принципом верхней грани"
H(p,q,t)= sap pq, p=(Pi.............рп). (4)
q е Ф((М)
В случае, когда верхняя грань в (4) достигается, Н(р, q, г) определяется
"принципом максимума "
H{p,q,t)~ max pq. (5)
q e Ф((М)
В терминах дифференциального уравнения УДС функция Н(р, q, t) опреде-
ляется равенством
Н(р, q, t) =sup (max) pf (q,t,u). (6)
u€U(q,t)
Далее, функция (2) определяется как решение задачи Коши для системы
канонических гамильтоновых уравнений с функцией Гамильтона (4) —(6)
. ЭЯ ЬН . ЬН
>Р = ~~:—> (7)
Ьр bq bt
с начальными условиями
<l(t') = q'o, p(t')=p\, p„ + 1(f)=p;+1, (8)
где р' и рп + 1 пробегают множество решений уравнения (3).
С другой стороны, граница интегральной воронки в пространстве {q,t }
с вершиной в точке {q,t'} является огибающей семейства интегральных
поверхностей, проходящих через точку { q ,t’} уравнения Гамильтона -
Якоби
/ bz \ bz
Н — ,<м)+ — =0. (9)
\ bq / bt
Эта огибающая является характеристическим коноидом для уравнения (9).
36
Таким образом, граница интегральной воронки с вершиной в точке
(q', t') совпадает с характеристическим коноидом уравнения (9) с верши-
ной в той же точке (q,t'). При этом уравнение границы интегральной
воронки (характеристического коноида) можно записать в виде
z(q,t) =0, (10)
где z(q,t) — решение уравнения (9).
Сформулированная теорема наглядно вытекает из геометрической трак-
товки нелинейного дифференциального уравнения (11) с частными произ-
водными 1-го порядка для одной неизвестной скалярной функции z (см.,
например, [104]).
В заключение этого параграфа заметим, что функция pq переменных р
и q и функцию pf (q, t, и) переменных p,q,t ,и справедливо называть функ-
цией Понтрягина (понтрягианом) *) и обозначать
р(Р, я) = РЯ, Р (р, q,t,u)= pf(q, t,u).
Уравнения (7) есть не что иное, как уравнения экстремалей принципа мак-
симума Понтрягина в задаче на экстремум функционала времени для УДС
вида (1) и вида (2.1).
Отметим еще одно важное свойство интегральных воронок для выпук-
лых включений, которое можно назвать ’’свойством вложимости” интег-
ральных воронок. Пусть V(q , t, tx) — интегральная воронка в {q,t} дан-
ного включения q Е &(q, t). Возьмем точку (q", t")& bV(q’, t', ), тогда
V(q", t", ti) C V(q, t', ti). Воронка V (q, t', гД частично ограни-
чивает область достижимости из точки (q, t’) за время t' < t < . Заметим,
что в пространстве событий {q, t) всегда отсутствует область нестеснен-
ных движений (§9), так как в данной постановке задачи исключается
движение в обратном времени, т.е. нельзя попасть из точки (q', t') в точку
(q ), если t < t.
§ 12. СВЯЗЬ ГРАНИЦЫ ИНТЕГРАЛЬНОЙ ВОРОНКИ
С УРАВНЕНИЕМ ГАМИЛЬТОНА - ЯКОБИ
Пусть задано скалярное нелинейное дифференциальное уравнение с
частными производными 1-го порядка вида:
H(p,q,t) +Pn+i =0, (1)
где (q, t) — независимые переменные в пространстве {q, t} , &p=bzf bq,
pn+i =bz/btn z(q9 t) — неизвестная скалярная функция. Рассмотрению
этого уравнения посвящено много замечательных работ (см., например,
[62, 63, 101, 104]). Геометрическая интерпретация этого уравнения сле-
дующая. Зафиксируем в {q, t} какую-нибудь точку (q , t') и отложим
от нее вектор (р, p„+i) = (bzlbq, bz/bt). Этот вектор является нормаль-
ным вектором к плоскости, проходящей, через точку (q^t'), которая
является касательной плоскостью к интегральной поверхности z(q, t) = О,
*) Эта функция впервые рассматривалась при формулировке принципа максиму-
ма Понтрягина [88 ]. Ранее это отмечалось в [110].
37
где z(q, t) — решение уравнения (1). Множество направлений векторов
(р, Pn+i) = (dz/bq, bz/bt), удовлетворяющих уравнению (1) при фикси-
рованном (q',t'), образуют, вообще гворя, поверхность (границу) неко-
торого конуса с вершиной в (q, t). Этот конус мы обозначим через К (qr,
t) и назовем его, как принято, нормальным (полярным) конусом.
Когда направление вектора (р, рп+ i) пробегает границу bK(q', t'), ведо-
мая им касательная плоскость обкатывает поверхность (границу) некото-
рого другого конуса К (q , t'), который в теории уравнений (1) называется
тангенциальным (касательным) конусом, или конусом Монжа. Поверх-
ность bK(q, t') является огибающей поверхностью семейства касательных
плоскостей к поверхностям z(q, t) = 0, проходящим через точку (q, t), т.е.
z(q, t) =0.
При таком определении конуса K(q ,t') он будет двуполостным. Но
так как мы хотим этот конус отождествить с конусом допустимых направ-
лений скоростей в пространстве скоростей {q, 1} , то в соответствии с этим
от конуса К (q , t’) оставим лишь ту полость, которая направлена в положи-
тельном направлении оси t. В дальнейшем под ^(б/', г') будем понимать
именно этот однополостной конус.
В теории уравнений вида (1) решающую роль играют понятия ’’характе-
ристические кривые” и ’’характеристические полосы”, в частности, понятие
’’характеристический коноид”; этот коноид связан своей вершиной с неко-
торой точкой (q , t').
Главная идея, устанавливающая взаимно однозначное соответствие
между уравнениями вида (1), с одной стороны, и УДС (4.1) и дифферен-
циальным включениями вида (4.2) — с другой, состоит в том, что одна
полость конуса Монжа К (q > t) отождествляется с конусом K(q ,t) до-
пустимых направлений скоростей для дифференциального включения
(4.2) или соответствующей УДС. Таким образом, в теории уравнений (1)
встает задача: по данному уравнению (1), т.е. по функции Н(р, q, t), по-
строить соответствующий конус Монжа. Для установления связи уравнения
(1) с УДС возникает обратная задача', задан конус допустиых направлений
K(q, t) (конус Монжа), требуется построить дифференциальное уравнение
(1), т.е. восстановить функцию Н(р, q, t).
Будем решать эту задачу. Итак, пусть задана УДС
q=f(q,t,u), и& U(q,t), (2)
или соответствующее дифференциальное включение
qe ^(q,t)=f(q,t,U(q,t)), (3)
где Ф(</, t) — непустое множество. Зафиксируем точку (q, t), построим
Ф(#, t) и соответствующий конус К(q, t) = сопу(гауФ(#, t)) *). По конусу
K(q, t) построим сопряженный ему конус К (q, t). ^Возьмем вектор (р,
рп+1) ЕЬК (q, t). Тогда по построению конусов К и К будет выполняться
равенство
sup \pf(q,t,u) +pn+l ] =0, (4)
и G U(q,t)
*) Символ гауФ(^,г) обозначает множество всех лучей, исходящих из O(q, t) и
имеющих непустое пересечение с <t>(q, t) (97 ].
38
или, что то же самое,
sup [pf\q,t, u)] +p„+i =0. (5)
мб U(q,t)
Первое слагаемое левой части равенства (5) и представляет собой искомую
функцию
H(p,q,t) = sup pf(q,t,u) = # sup pq. (6)
ue U(q,t) q e ф(д,г)
Действительно, непосредственной проверкой легко убедиться, что конус
Монжа для дифференциального уравнения (1) с функцией Н в виде (6)
как раз и является конусом допустимых направлений K(q, t) систем
(2) и (3).
Для определения характеристического коноида с вершиной в точке
(q', t'), определяемого начальным конусом К(qr, г), или, другими слова-
ми, для определения поверхности интегральной воронки Э V(q , t\ t) необ-
ходимо выписать характеристические канонические уравнения Гамильтона
. дН
q= — (р, q, 0, t > t, (7)
Эр
. эя
р = —— (p.q.t), t>t, <8)
э^
эя
Рп+1 =-----— (p,q,t), t>t, (9)
ot
и решить для них задачу Коши с начальными условиями
q(t')=q', _ (Ю)
(pO'),pn-n(t')) = (p'.p'n+i)e c>K(q', t'). (11)
Условие (11) эквивалентно условию
H(p,q',tf)+pn+1 =0, (12)
что и высказано в утверждении теоремы предыдущего параграфа. Легко
видеть, что вектор (p(t), pn+i (О) будет нормальным к поверхности
воронки.
Отметим также, что на поверхности интегральной воронки выполняются
также условия
pdq+pn+1dt =0. (13)
В частности, если УДС автономна, т.е. правая часть уравнения движения
и дифференциального включения не зависит от времени г, имеем ЭЯ/ dt = 0
иРи+1 = 0. Отсюда в автономном случае получаем, что рп+1 (f) = const.
В теории относительности [115] конус K(q, t) называется световым ко-
пу сом\ он соответствует постоянной скорости света (с = 1). Поверхность
интегральной воронки можно назвать световым коноидом, который соот-
ветствует переменной скорости света, распространяющегося в неоднород-
ной неизотропной среде (например, в поле тяготения; см. также § 30).
39
§ 13. ПРИНЦИП ВКЛЮЧЕНИЯ ДЛЯ АВТОНОМНЫХ УДС
В ПРОСТРАНСТВЕ СОСТОЯНИЙ. ИНТЕГРИРОВАНИЕ УДС
Для автономных УДС принцип включения в пространстве {q, t} можно
редуцировать в фазовое пространство {q} . Возьмем в {q } точку q и для
нее определим в {4} конус K(q), который состоит из всехдучей, исходя-
щих из точки q по направлениям допустимых векторов q G Ф(^).
Принцип включения в фазовом пространстве для автономных систем.
Пусть q — некоторый отрезок кусочно-гладкой кривой без самопересече-
ний в фазовом пространстве {q } с началом в точке qQ и концом в точке q*.
Тогда для того, чтобы данная кривая была допустимой траекторией, необ-
ходимо, чтобы положительный луч касательной у+ (#) к кривой q принад-
лежал конусу допустимых направлений K(q) почти для всех точек кривой
q, т.е.
т+ (?) е к (?) ду?е?. (1)
Необходимость этого принципа очевидна. Кроме того, При достаточно
широком дополнительном предположении этот принцип становится и доста-
точным. Действительно, пусть q — некоторая кривая без самопересечений
в { q } с началом в qQ и концом в qx, причем у+ (q) Е K(q) а V q^ q.
По построению конуса допустимых направлений K(q)f луч у+ (q) имеет
непустое пересечение с множеством Ф(^). Возьмем какую-нибудь точку
(q) этого пересечения. Эта точка выделяет определенную ветвь диффе-
ренциального включения q Е &(q), а именно,
? = ^> (?). (2)
Фактически (q) определяет некоторое управление и Е U в этой точке q.
Предположим, что интеграл времени
\dQ I
t = f TTTi
Чо 1<^(<7)1
имеет смысл и принимает конечное значение. Тогда очевидно, что допол-
нительное предположение о конечности интеграла (3), введенное в принцип
включения, делает этот принцип также и достаточным для того, чтобы кри-
вая q являлась допустимой траекторией. Обычно условие (3) сводится
к тому, чтобы при движении вдоль выбранной кривой q~ не встретилась
точка равновесия дифференциального уравнения (2), из которой невоз-
можно выйти под действием какого-либо допустимого управления. Такая
точка называется точкой абсолютного равновесия. Например, точка (0, 0)
для билинейных систем вида q=Aq+uBq является точкой абсолютного
равновесия.
Высказанный здесь принцип включения, несмотря навею свою тривиаль-
ность, помогает просто проверять заданные траектории на их допустимость.
Здесь уместно провести следующую аналогию. Если нам задана НДС,
описываемая уравнением
<7 =/(<7), ?€ {<?}> (4)
то это уравнение можно рассматривать как поле направлений в простран-
стве {q}. Задача интегрирования этого уравнения состоит в том, чтобы
40
найти кривые (траектории) в {q} , направление касательных к которым
в каждой точке совпадает с направлением поля в этой точке.
Если же нам задана УДС, описываемая уравнением
<7 =/(<7,и)> u&U,q&{q}, (5)
или включением
4 е Ф(q), qe {q} , (6)
то условия (5), (6) можно рассматривать как условия, определяющие
поле конусов K(q) в пространстве {#}. По аналогии с вышесказанным
можно определить задачу интегрирования УДС (5) или включения (6)
как задачу отыскания кривых (траекторий) в {#} , направление касатель-
ных к которым в каждой точке q принадлежит конусу К {q } поля конусов
в этой точке. Другими словами, задача интегрирования УДС (5) или вклю-
чения (6) состоит в определении кривых (траекторий) в {#} , удовлетво-
ряющих принципу включения в пространстве состояний.
Геометрический метод интегрирования НДС (4) (он вытекает непосред-
ственно из самой задачи интегрирования) называется методом изоклин
(см. [119]).
Аналогично для интегрирования (5), (6) можно также предложить
соответствующий геометрический метод. Этот метод состоит в том, что
в {*7} , скажем, в частном случае п = 2 на плоскости или на другом
двумерном многообразии, выбирается достаточно густая сеть фиксирован-
ных точек q, около которых выстраиваются конуса K(q). На чертеже
этот конус К(д) должен быть, естественно, небольшого размера — поряд-
ка размера элементарной ячейки, обусловленной густотой выбранной
сети фиксированных точек q. Внешняя сторона каждого такого конуса
может быть заштрихованной, чтобы ясно видеть полость конуса, опреде-
ляющую допустимые направления. При наличии такого чертежа не состав-
ляет большого труда провести траекторию, удовлетворяющую принципу
включения.
§ 14. ГРАНИЦА ТРАЕКТОРНОЙ ВОРОНКИ УДС
Если УДС автономна, т.е. описывается уравнением
4 =/(?»«), u&U(q), t>0,
или соответствующим включением
#е Ф(#), г>0,
(1)
(2)
где /, Ф и Uне зависят явным образом от времени Г, то имеет смысл гово-
рить о траекторной воронке данной УДС. Отрезком траекторной воронки
V(q', Т) УДС (1) или (2) назовем множество всех допустимых траекторий
УДС (1), выходящих из точки q, по которым изображающая точка УДС
движется в течение времени Т> 0. Точка#' называется вершиной воронки
Однако.в отличие от интегральной воронки V (#', г', ) в пространстве
событий {#, t} , которая никогда (в силу того, что всегда i = 1 > 0) цели-
ком не заполняет окрестность своей вершины (#', г'), траекторная воронка
41
Рис. 14.1
может эту окрестность заполнить. Иными словами, если выпуклый конус
K(q) допустимых направлений скоростей с вершиной в точке q' совпадает
с касательным пространством Tq'{q} в этой точке q', то траекторная
воронка V (q', Т) заполнит целиком окрестность точки q' в пространстве
состояний {q} . В этом случае окрестность точки представляет собой
область нестесненных (свободных) траекторий, о которой шла речь
в § 9.
Интересным и часто встречающимся является тот более сложный случай,
когда выпуклый конус K(q) не совпадает с касательным пространством
Tq' {q} , в котором он построен. Тогда и отрезок траекторной воронки
V(q', Т), по крайней мере, при достаточно малом Т> 0, не будет, вообще
говоря, заполнять окрестность точки q в пространстве состояний {#} *).
Предположим также, что траекторная воронка V(д', Т) телесна. Это озна-
чает, что через q' не проходит никакое инвариантное многообразие
(§§19,22).
Если траекторная воронка V (q, Т)— жесткая (т.е. ее боковая поверх-
ность не меняется при изменении Т в достаточно малом интервале [0, е],
е >0), то по крайней мере, локально воронка V(q', Т) будет иметь жест-
кую боковую поверхность (границу), обозначаемую dV(q). Понятие
жесткой траекторной воронки аналогично понятию жесткой интегральной
воронки, рассмотренному в § 11. Вообще говоря, если поле конусов К(q)
в окрестности q достаточно гладкое, а все конусы этого поля являются
заостренными, то Э V(q') существует.
Такая воронка будет иметь вид коноида с вершиной (точкой зао-
стрения) Bq'; у этого коноида можно выделить боковую граничную
поверхность (или боковую границу воронки) и его основание (рис. 14.1).
Боковая грацичная поверхность и основание этого коноида вместе состав-
ляют в этом случае полную границу отрезка траекторной воронки V(q', Т).
Основание коноида, очевидно, состоит из тех точек q^{q} , в которые
можно попасть из точки q ’ за заданное время Т> 0 с помощью допустимых
управлений в оптимальном по быстродействию процессе.
Напомним (§ 11), что в пространстве (q, t} основание интегральной
воронки всегда было плоским: оно лежит в гиперплоскости t = tx (или
*) Пока что мы исключаем из рассмотрения особые точки и точки локальной дости-
жимости.
42
Г = Тпри t' = 0). Основание траекторной воронки—это, вообще говоря,
не плоская гиперповерхность; ее можно назвать поверхностью Веллмана.
С точки зрения теории управления, траекторная воронка V(q\ Т) пред-
ставляет собой область достижимости из начальной точки q' за время Т.
Существенно то, что нас будет интересовать не основание жесткой ворон-
ки, а ее боковая граница V(q'). Основная задача этого параграфа как раз
и состоит в том, чтобы вывести уравнения боковой границы жесткой
воронки V(q') .
Как и в случае интегральной воронки (§ 11), идея вывода дифферен-
циальных уравнений жесткой границы траекторной воронки может базиро-
ваться на отождествлении конуса К (у) с конусом Монжа соответствующего
скалярного нелинейного уравнения с частными производными первого
порядка. Это уравнение можно вывести и непосредственно, что поясняется
рис. 14.2.
Действительно, пусть уравнение границы воронки имеет вид
2(^ = 0. (3)
Возьмем на bV(qf) произвольную точку q, в которой существует нормаль
р -bzlbq к Э V(q'). Тогда касательная плоскость Tq Э V(q') к поверхности
Э V(q') в точке q будет опорной и касательной для конуса K(q) (рис. 14.2).
Отсюда получаем
Я(р, q) = sup (max)pq = sup(max)p/(^, и) = 0, (4)
q El Ф((?) и E U(q)
где p = dz/dq в точке q.
Таким образом, мы получили искомое уравнение для функции z(q)
в равенстве (3):
/ dz \
Я —,<Л=0. (5)
\&7 /
Отсюда уже следует и параметрическое уравнение границы траекторной
воронки. Действительно, пусть
ЭЯ . ЭЯ
соответствующие (5) канонические уравнения Гамильтона и функции
q = q(t,q’,p'), t>0, (7)
p=p(r, 7', р'), Г>0, (8)
представляют собой решение системы (6) с начальными условиями
?(0,<7',р') = <Д (9)
р(0,/,р') = р', (10)
где точка q' (вершина воронки) фиксирована, а вектор р' пробегает
сопряженный конусK(q’\ т.е. р' пробегает множество решений уравнения
Я(р',?') = 0. (11)
Тогда уравнение (7) представляет собой параметрическое уравнение грани-
цы траекторной воронки с вершиной в точке q’, где t пр' - параметры.
43
Решение (8) дает движение нормаль-
ного к ЭК(д') вектора вдоль ’’обра-
зующей” траектории (7). По известной
терминологии [ 104], воронку V(q')
можно назвать ’’характеристическим ко-
ноидом” уравнения (5)\7или системы (6).
С другой стороны, если известен
полный интеграл уравнения (5)
z=z(<7, с„), (12)
где сь. . . сп — произвольные постоян-
ные, то граница воронки ЭИ(^\ Т)
может быть определена как огибающая
поверхность семейства поверхностей в
пространстве {q}
z(q,c1,... ,<?„) = 0, (13)
проходящих через точку q'.
Заметим еще, что каждой точке
где нет особенностей, ставит-
ся в соответствие нормальр к bV{q'). Таким образом, мы получаем отобра-
жение поверхности ЭК(^') в фазовое пространство{ р, q) гамильтоновой
(неуправляемой) системы (6), которое представляет собой «-мерную
поверхность, называемую ’’конической поверхностью”. На этой поверхнос-
ти, как легко видеть, ограничение формы pdq тождественно равно нулю
[9, стр. 326—332]. На рис. 14.3 представлен отрезок траекторной воронки
в изометрии для УДС 3-го порядка: q1 = q2 ,q2 = q3 ;q3 = и, |м|</=20,
#' = (10,10,10), T= 10.
§ 15. ГЕОМЕТРИЧЕСКОЕ ПОСТРОЕНИЕ
ГРАНИЦЫ ТРАЕКТОРНОЙ ВОРОНКИ
Пусть дана УДС, описываемая уравнением
Q =Ж «), и G U(q), (1)
или соответствующим дифференциальным включением
Q ef(q,U), (2)
где/(^, U) — выпуклое множество в Tq {q} . Возьмем какую-нибудь точку
q' G {q } и построим с вершиной в ней конус K(q') допустимых направлений
скоростей данной УДС (1), (2). Тогда границу (поверхность) траекторной
воронки V(q, Т) с вершиной в точке q’ для Т> 0 (предполагается сущест-
вование этой поверхности как некоторого телесного коноида) можно по-
строить, аппроксимируя ее некоторой ’’ломаной” поверхностью, зависящей
от малого параметра r-T/N, где ТУ—достаточно большое число. В преде-
ле при т-^0 аппроксимирующие поверхности сходятся к истинной по-
верхности V(q, Т).
Без ограничения общности будем считать длины (модули) всех векторов
q равными единице, т.е. | q | = 1 (§5). Выпустим из точки q' всевозмож-
44
ные вектора Tq, принадлежащие поверхности конуса /С(^'), где т >0 -
малое число. Длины этих векторов будут одинаковыми и равными т.
Геометрическое место точек концов этих векторов образует некоторую
линию / на поверхности ЭЛХ#'). С другой стороны, точки концов векторов
rq считаем точками пространства состояний {q } УДС (1), (2).
Во всех точках q”линии /, как линии в {q} , построим конусы K{qn)
(|>ис. 15.1). Получим семейство конусов £(<?”), зависящее от параметра
q’ С {q} . Построим внешнюю огибающую поверхность П' семейства
конусов Поскольку П' — огибающая конусов, то П' будет линей-
Рис. 15.1
чатой поверхностью. Из каждой точки q" проведем вектор Tq> | q I = 1,
который одновременно принадлежит поверхности конуса dV(q”) и линей-
чатой огибающей поверхности П'. Геометрическое место концов векторов
rq снова образует некоторую линию Г в {q }.
В точках Г снова как в вершинах построим новое семейство конусов
K(q'"), зависящее от точки q'” ЕГ как параметра. Опять проведем внеш-
нюю огибающую (линейчатую) поверхность я' этого семейства конусов
*(<),/" £/'<={?} и т.д.
В результате получим ломаную полосчатую поверхность. Каждая полоса
представляет собой линейчатую поверхность. Ширина каждой полосы
имеет порядок г. Полученная таким образом поверхность является аппрок-
симирующей поверхностью искомой поверхности траекторной воронки
V(q', Г). При т -> 0 аппроксимирующая поверхность, вообще говоря,
стремится к V(q', Т). Заметим, что построение полос аппроксимирующей
поверхности траекторной воронки вовсе не обязательно проводить при
нормированных векторах q, т.е. не обязательно считать | q | = 1. Построение
можно проводить, считая длину вектора естественной, т.е. той, которую
определяет индикатриса УДС (1), (2). Ясно, что аналогичным образом
можно проводить построение границ интегральных воронок в пространстве
событий {q, t}.
§ 16. УРАВНЕНИЯ ЭЙЛЕРА - ЛАГРАНЖА
ДЛЯ ГРАНИЦЫ ТРАЕКТОРНОЙ ВОРОНКИ
В § 11 для допустимых траекторий, лежащих на границе траекторной
воронки И(^')в{б7}, выведены канонические уравнения Гамильтона
. ЭЯ . ън
q= — (P,q), Р = ~ —(1)
Эр oq
45
с начальными условиями
?(0) = <?', р(О) = р', (2)
где q' — фиксированная вершина воронки V(q')t ар' — векторный пара-
метр, координаты которого пробегают множество решений уравнения
=0. (3)
Геометрически равенство (3) означает, что вектор р' пробегает поверх-
ность сопряженного конусаК($), т.е.// G ЬК(р'). Уравнением этого конуса
служит уравнение (3). Для УДС, заданной уравнением
q=f(q,u), и е U(q), (4)
или включением
q G f(q, U) (5)
функция Гамильтона H(p,q) определялась равенством:
Я(р, q) = sup (max)p/(#, и) = sup (max) pq. (6)
u G L/(q) q e Ф(<?)
Такой подход к описанию границ траекторных воронок можно назвать
’’гамильтоновым формализмом”. Однако можно применить другой, двойст-
венный по отношению к этому, подход, основанный на непосредственном
рассмотрении поля конусов K(q).
Идея вывода уравнений Лагранжа для допустимых траекторий, образую-
щих границу жесткой траекторной воронки, может быть основана на
геометрическом методе построения границ траекторных воронок, описан-
ном в § 15. Это, по сути дела, аналог метода ломаных Эйлера, с помощью
которого выводятся уравнения экстремалей в вариационном исчислении.
С другой стороны, к выводу искомых уравнений Эйлера можно подойти,
используя канонические уравнения (1) — (3). Пусть £ (4, q) = 0 при фикси-
рованном q^{q} есть уравнение конуса K(q) допустимых направлений
скоростей для УДС (4), (5); для простоты предположим, что функция
L(q, q) достаточное число раз дифференцируема, а конус К(у) заострен
и имеет размерность п. При наличии соответствующей разрешимости и диф-
ференцируемости можно записать следующие соотношения:
bL
Р ~ dq '
. ЭЯ
q Ър
Отсюда
. _ d / bL \
Р dt\bq)
Далее, нетрудно видеть, что
ЭЯ 3Z
bq bq
(7)
(8)
(9)
(Ю)
46
Подставляя (9) и (10) во второе уравнение системы (1), получим искомые
обыкновенные дифференциальные уравнения Эйлера — Лагранжа для гра-
ницы траекторной воронки И(^г):
d /Э£\
— —---------=0. (11)
dt \ bq / bq
В отличие от 2п уравнений 1-го порядка системы (1), уравнения (И)
представляют собой систему п уравнений, каждое из которых является
дифференциальным уравнением 2-го порядка. Начальные условия для q
в (11) остаются теми же, что ив (2), т.е.
<7(0) = <А (12)
Второе начальное условие, для q в (11), необходимое для однозначности
решения системы (11), имеет вид
£(0) = 4', (13)
где координаты вектора q' играют роль параметра, который пробегает
все решения уравнения конуса K(q'):
Z(<?'V)=0. (14)
Геометрически начальное условие (14) означает, что начальный вектор q'
пробегает всю поверхность конуса К(q).
Таким образом, при переходе от гамильтонова формализма при описа-
нии поверхности воронки К(#')к лагранжеву формализму вместо уравне-
ний (1) надо интегрировать уравнения (11).
Рассмотрим простейший пример применения уравнений Лагранжа для
определения вида траекторной воронки. Пусть УДС описывается вектор-
ным уравнением
4=a + u, q<ERn, uEU С {q} = Rn, \и\<г, г > 0, (15)
где вектор а и число г , вообще говоря, зависят от q и | а|>г. Таким
образом, множество концов допустимых скоростей УДС (15) в пространст-
ве { q} представляет собой шар радиуса г с центром в точке а
|?-яЮ, (16)
и, следовательно, индикатриса УДС (15) описывается уравнением
o(qfq) = \q—a | - г = 0. (17)
Легко видеть, что в том же пространстве соответствующий конус K{q)
допустимых направлений скоростей представляет собой круговой конус,
который описывается уравнением
1(4,^) = ^ - у/a2 - г2' \q | = 0, (18)
где функция L (q, q) = aq - у/a2 -г2 | q | является лагранжианом УДС (15).
Если а и г не зависят от q, то уравнение Лагранжа (И) принимает вид
d / bL \ bL d / г------q \
— ( —_ \-----= — (а- у/a2 - г2—— 1 = 0.
dt \ bq } bq dt \ \q \ )
(20)
(21)
Отсюда следует
а - \Ja2 - г2 = с,
141
где с — произвольный постоянный вектор. Из (20) получаем
q а - с
I <7 I \Л2 - г2'
где Ci — произвольный постоянный вектор.
Равенство (21) показывает, что вдоль характеристической линии вектор
q сохраняет постоянное направление. Следовательно, характеристическая
линия в пространстве состояний {q} УДС (15) является прямой. Используя
начальное условие L(qq’) = 0, получим, что характеристический коноид
данной УДС или, что то же самое, траекторная воронка с вершиной в произ-
вольной точке q' пространства состояний представляют собой круговой
конус (частный случай коноида) с вершиной в точке q ' (q} , описывае-
мый уравнением
a(q - q') - \4г2 - г2’ I <7 - <?' 1=0. (22)
Уравнение (22) описывает семейство траекторных воронок УДС (15) в
ее пространстве состояний, причем параметром этого семейства служит
точка q.
Заметим, что в случае | а | <г конус К(#), в собственном смысле этого
слова, не существовал бы. В этом случае конус K(q) совпадал бы со всем
пространством {4}, а все пространство состояний {#} предствляло бы
собой область нестесненных (свободных) траекторий (§9).
§ 17. ШТРИХОВАННЫЕ ГРАНИЦЫ ТРАЕКТОРНЫХ ВОРОНОК.
МНОГООБРАЗИЕ ПЕРЕМЕНЫ ШТРИХОВОК (МПШ)
В этом параграфе мы введем понятие ’’штриховка границ траекторных
воронок”, смысл которого будет ясен из дальнейшего рассмотрения. Речь
будет идти о жестких воронках.
Предположим, что граница ЭV(qГ), по крайней мере локально около
точки q', является двусторонней гиперповерхностью в {q} , а конус
/ГО?)для q€dV(qtT) не лежит целиком в касательной плоскости к
dV(q', Т) в этой точке q. Ту сторону границы bV(qt Т), к которой приле-
гает конус K(q) при q ЕЭ V(q', Т), будем называть внутренней стороной
границы dV(q', Т), а противоположную сторону, естественно, назовем
ее внешней стороной.
На внешнюю сторону границы bV(q', Т) нанесем штриховку. Границу
dV(q't Т) вместе с нанесенной на ней штриховкой будем называть штрихо-
ванной границей траекторной воронки.
Те точки q G Э V(q , Т), для которых конус K(q) целиком лежит в
касательной плоскости Tq д V(q, Г), будем называть особыми точками
границы д V (q1, Т). Множество особых точек на данной границе Э V(q', Т)
будем называть особым многообразием границы данной траекторной
воронки.
Особое многообразие на dV(q',T) является некоторым подмного-
образием самой границы Э V(q', Т). Оно может иметь различную размер-
48
ность: от нулевой (отдельная точка) до полной размерности. Как мы уви-
дим, особые многообразия границ траекторных воронок во многих случаях
играют существенную роль в построении фазового портрета УДС и отра-
жают существенные свойства самой УДС (например, ее управляемость), что
особенно хорошо видно для УДС 2-го порядка.
Смысл штриховки, нанесенной на границу Э V (q\ Т), состоит в том, что
всякая траектория, которая пересекает Э V (q ; Г) в некоторой точке q, где
штриховка определена, с незаштрихованной стороны в заштрихованную
(т.е. пересекает границу воронки изнутри наружу), заведомо является
недопустимой. Это очевидно и потому, что в этом случае не выполняется
принцип включения (§ 13). С другой стороны,всякая допустимая траекто-
рия с необходимостью пересекает границу траекторной воронки только
согласно штриховке (т.е. с внешней стороны во внутреннюю), что также
согласуется с принципом включения.
Заметим, что на основании принципа включения совершенно аналогично
определяется понятие ’’штрихованной поверхности (границы) интегральной
воронки” в пространстве событий {q,t} : движения УДС (допустимые
интегральные кривые) могут происходить только согласно штриховке, но
не наоборот.
Таким образом, в соответствии с только что описанным смыслом штри-
ховки, ее можно определить и на особых участках границ траекторных*
(интегральных) воронок *).
Рассмотрим теперь еще один важный момент, связанный с понятием
штрихованной границы траекторной воронки. Может случиться так, что
граница (гиперповерхность) данной траекторной воронки непрерывно
продолжается за некоторые пределы, но после этого предела штриховка
непрерывно продолженной поверхности изменяется на обратную. Такое
непрерывное продолжение границы траекторной воронки можно опреде-
лить как непрерывное продолжение соответствующего решения z (q)
уравнения Гамильтона — Якоби или. продолжение решений характерис-
тических уравнений Гамильтона (§ 14).
Здесь уместно заметить, что штриховку можно определить для всякого
участка поверхности, опысываемой уравнением z (q) = 0, где z (q) удов-
летворяет уравнению Гамильтона — Якоби для данной УДС, т.е. удовлетво-
ряет уравнению
/ dz \
я ---- ,Q 1=0. (О
\Э<7 /
Теперь дадим определение следующего важного для теории фазового
портрета УДС понятия. Многообразие размерности л —2 на гиперповерх-
ности траекторной воронки, которое разделяет (по крайней мере, локаль-
но) участки этой поверхности с противоположно направленными штрихов-
ками, будем называть многообразием перемены штриховки на данной
границе траекторной воронки. Аналогично такое же разделяющее много-
образие на поверхности z(q) =0, где z (#) удовлетворяет уравнению (2),
*) Мы здесь не будем штриховать инвариантное многообразие УДС по отношению к
вмещающему его пространству.
4. А.Г. Бутковский
49
ностью в пространстве { q }
назовем многообразием перемены штри-
ховки на данной поверхности z (<?) = 0.
Совокупность всех таких мноообразий
для всех траекторных воронок данной
УДС и всех поверхностей z (q) = 0, где
z (q) удовлетворяет (2), назовем мно-
гообразием перемены штриховки УДС
или сокращенно МПШ. Это многообра-
зие, если оно существует и УДС не имеет
инвариантных многообразий (§ 19), име-
ет, вообще говоря, размерность п — 1,
т.е. является некоторой гиперповерх-
состояний данной УДС. Понятие МПШ дает
еще возможность определить пределы продолжимости собственно траекто-
рий воронки V(q') и тем самым оправдать название ’’воронка”*). Можно
сказать, что граница dV(q') данной воронки V(q') с вершиной в точке
q простирается лишь до встречи с МПШ. Такое, уже не локальное, опре-
деление границы траекторной воронки иллюстрируется следующей механи-
ческой или гидромеханической картиной (рис. 17.1). Если представить
себе, что вершина q воронки V(q') является источником жидкости,
втекающей внутрь этой воронки, то частицы жидкости, двигаясь по до-
пустимым траекториям, могут смочить внешнюю сторону этой воронки
(скажем, вновь в окрестности точки q), лишь перелившись через край
(кромку) этой воронки, которой как раз и принадлежит МПШ.
Понятие МПШ играет важную роль в изучении УДС, и поэтому жела-
тельно иметь конструктивные условия его определения. Этот вопрос будет
рассмотрен ниже в § 18.
§ 18. ОСОБЫЕ МНОГООБРАЗИЯ УДС В ПРОСТРАНСТВЕ СОСТОЯНИЙ
В предыдущем параграфе были введены особые многообразия перемены
штриховки на границе жесткой траекторной воронки V{q), Ясно, что для
существования особого многообразия перемены штриховки необходимо,
чтобы существовали такие точки q Е Э V(q), для которых dim X (#).'< п.
Пусть УДС описывается уравнением
<7 =Я<7> и), и6 Ufa), q€{q), t>0, (1)
или включением
q€<t>fa), q€{q), t>0, (2)
где
Ф(<7)=Л<7,£/(<7)). (3)
Как мы знаем (§ 14), если z (q) =0 - уравнение границы Э V (q') траекто-
рной воронки V(qf), то z (q) удовлетворяет уравнению Гамильтона —
*) Вместо обозначения жесткой воронки V (q , Г) мы будем пользоваться как
ранее отмечалось, еще более коротким обозначением V (д').
50
Якоби
/ dz \
Я Г" ^/=0- (4)
\ Эб? /
С другой стороны, если q € д V (qf) — особая точка, то К(ц), а следо-
вательно, и Ф (q) целиком лежат в касательной плоскости к Э V (q) в точке
q. Пусть р = Эz/Эq — нормаль к Э V(q') в точке q. Тогда ’’толщина” мно-
жества &(q) в направлении р = dz/dq равна нулю. Следовательно, по фор-
муле (7.9) имеем
/ dz \ f dz \
Н{---- , q +Я(-------, q )=0.
\dq / \ dq /
Отсюда с учетом (4) получаем систему равенств для точек q Е S:
/ dz \ / dz \
Я — ,И=0, Я- — Л)=0. (5)
\ dq / \ dq /
Интересно рассмотреть условие (5) как систему, вообще говоря, нели-
нейных уравнений с частными производными во всем пространстве состоя-
ний {q}:
dz
H(p,q^^ H(-p,q) = b P=— • (6)
Полученная система уравнения (6) играет важную роль в исследовании
УДС. В частности, как будет видно в § 19, эта система определяет инва-
риантные многообразия УДС. Условия совместности системы (6) определя-
ют некоторые многообразия, которые мы будем называть особыми много-
образиями УДС и обозначать 5. Конечные уравнения S будем записывать в
виде
5(?)=о. (7)
Теория полученной системы (6) уравнений с частными производными
довольно хороню разработана (см., например, [104]). Эта система может
быть сведена к линейной; условия ее совместности выявляются путем
пополнения этой системы до полной системы. Такое пополнение осущест-
вляется систематическим применением операции взятия скобок Пуассона.
Рассмотрим для примера линейную УДС
q=A>q+bu, qERn, uER1, \u\^l, Z>0. (8)
Для системы (8) имеем
H(p,q) = max p(Aq + bu) = pAq + Z \pb I. (9)
lu К/
Система (6) принимает вид
pAq + l\pb I = 0, — pAq + I\pb\ = 0. (10)
Отсюда приходим к линейной системе уравнений с частными производными
dz dz
— Aq=0, -—b = 0. (11)
dq dq
4*
51
Полная, система, соответствующая (11), имеет вид
bz bz bz dz и о
— Aq = 0, — b = 0, — Ab = 0,------------- An~2b = Q. (12)
bq bq bq bq
Эта система содержит n уравнений. Для того, чтобы система (12) имела
нетривиальное решение, необходимо и достаточно, чтобы равнялся нулю
определитель:
s(q) = \Aq, b, АЬ...Ап~2Ь | = 0. (13)
Если определитель (13) оказывается равным нулю тождественно (а это
случается тогда и только тогда, когда вектора Ь,АЬ,... , Ап~2Ь линейно
зависимы), то все точки пространства состояний { q } является особыми, т.е.
5 совпадает с { q } .
Если же вектора Ь,АЬ,. .. ,Ап~ 2 b оказываются линейно независимыми,
то уравнение (13) выделяет многообразие в {<у } размерности п— 1, кото-
рое и будет искомым особым многообразием S. В данном случае особое
многообразие является (и—1)-мерной плоскостью, проходящей через
начало координат О G { q} , т.е. S—линейное подпространство пространства
состояний. Заметим также, что если МПШ (§ 17) дляУДС (8) существует, то
оно описывается уравнением (13). В дальнейшем (§ 19) мы увидим, что
если плоскость (13) оказывается в то же самое время и интегральной
поверхностью системы (1.1) (это случится, если Ап~1 b линейно зависит от
b, АЬ,. .., Ап ~2Ь), то эта плоскость окажется изолированным инвариант-
ным многообразием УДС (8).
Заметим, что если параметры А и b системы (8) таковы, что опреде-
литель (13) тождественно обращается в нуль, то это указывает на сущест-
вование инвариантного многообразия данной УДС (§ 19).
В качестве другого примера можно взять задачу отыскания МПШ для
билинейной УДС:
q=Aq+uBq, q'^R”, uER1, \и\<19 Z>0. (14)
Легко видеть, что система, эквивалентная системе (7), в этом случае имеет
вид
pAq=fl, pBq = Q, р[А, B]q = 0,. .. , (15)
где р= bz/bq и [Л, В] — коммутатор матриц А и В. Соответствующее
условие нетривиальное™ решения системы (15) также имеет вид равенст-
ва нулю определителя и-го порядка:
s(q)= | Aq, Bq, [А, В] q,..., I = 0. (16)
Аналогичные условия для особого многообразия S получаются и для
общей УДС, описываемой уравнениями вида
<7=/о (<?)+ыГ1(<?)> q^R”, иё UCR1, \и\<1. (17)
Уравнения (7) для этой системы принимают вид
P/o(<Z)=O, (18)
pf\ (q) = о,
а особое многообразие S для этой УДС определяется равенством нулю
52
следующего определителя и-го порядка:
s(q)=\fo(ql Л (Л [/№)> Л(<7)],...1 = 0, (19)
где [f0 (q) ,fi (q) ] - скобки Пуассона в ектор-функций/0 (q) и f\ (q).
Таким образом, если уравнения (16), (19) не выполняются тождест-
венно, то этим уравнениям удовлетворяют координаты точек S этих
УДС. Обращение равенства (16) или (19) в тождество говорит о наличии
нетривиального решения соответствующих систем уравнений (15) или
(18) и, следовательно, говорит о наличии инвариантных многообразий,
о которых пойдет речь ниже ( § 19).
В заключение этого параграфа сделаем следующее замечание. Дело в
том, что задача отыскания условий для особых многообразий в смысле
теории оптимального управления, рассмотренная в книге [34], близка
к задаче отыскания особого многообразия 5. Оптимальное управление
понимается в смысле минимизации терминального функционала tp(q (Т))
на траекториях УДС (1). Напомним, что особым многообразием в смысле
оптимального управления называется многообразие в {q}9 на котором мак-
симум функции P(p9q9u) = pf (q9u) по и достигается сразу для всех то-
чек wG си, где со — некоторое подмножество U, состоящее не менее чем
из двух различных элементов.
Однако надо отметить, что задача отыскания многообразия в нашем
смысле несколько уже аналогичной задачи в теории оптимального уп-
равления (как последняя понимается, например, в [34]). Особое мно-
гообразие в теории оптимального управления включает в себя особое
многообразие УДС 5. Дело в том, что (в принятых в данной книге терми-
нах границы траекторной воронки V ($')) точка q G V(q) будет особой
в смысле теории оптимального управления не только тогда, когда K(q)C
CTq Э V (q}, но и тогда, когда касательной плоскости TqbV(q) при-
надлежит лишь некоторая плоская грань конуса K(q) (конус цели-
ком может при этом и не лежать в касательной плоскости TqbV(q)).
При этом точка q не будет особой точкой границы воронки b V (qf) в
указанном выше смысле: в этой точке штриховка однозначно опреде-
лена в силу того, что конус направлен внутрь воронки, и, тем самым, в
точке q имеются допустимые направления скорости q, выводящие изоб-
ражающую точку УДС внутрь воронки под ненулевым углом к плоскости
гчэ Г (</').
Ясно, что для отыскания особых многообразий в смысле теории оп-
тимального управления также можно воспользоваться условиями (7),
если в качестве конуса допустимых направлений рассматривать не весь
конус К (у), а лишь его плоскую грань (или грани, если эта грань не единст-
венная) , которая тоже является конусом (q), соответствующим мно-
жеством со G U, упомянутому выше в этом параграфе.
Наконец заметим, что условие типа (19) требует дальнейшего обоснова-
ния и уточнения. Описание особого многообразия S важно для исследо-
вания структуры фазового портрета в окрестности S и вопросов управляе-
мости УДС. Однако, именно с этой точки зрения смысл условий ’’совмест-
ности” системы (6) на многообразиях меньшей размерности или в от-
дельных точках пространства {q}9 насколько известно автору, в матема-
тике недостаточно выяснен.
53
§ 19. ИНВАРИАНТНЫЕ МНОГООБРАЗИЯ УДС
Инвариантным многообразием М для УДС
<7 ueU(q~), или q еФ(^) = /(^, U), (1)
называется многообразие в пространстве состояний^}, которое обладает
следующим свойством: если в какой-то момент времени t = t' изображаю-
щая точка q(t'} УДС (1) находится внутри многообразия, т.е. q = q(tf) G
GriMC{#}, то q(t)EM для всех t из отрезка [г', f' + e], по крайней
мере, для некоторого числа е> 0. Поскольку речь идет о довольно общих
системах вида (1), то мы вынуждены говорить лишь о локальных опре-
делениях, справедливых, вообще говоря, лишь в достаточно малых ок-
рестностях точки q (t’) и времени г'.
Инвариантное многообразие М размерности тп будем обозначать Мт.
Ясно, что инвариантное многообразие М УДС является в то же время и
особым многообразием S, т.е. MCS. Однако обратное верно не всегда,
хотя это и случается, как показывает пример линейной УДС, рассмот-
ренный в § 20.
Очевидно также, что для того, чтобы некоторое многообразие М, опи-
сываемое уравнением F(q) = 0, было инвариантным для УДС (1), необхо-
димо и достаточно выполнение условия:---f(q,u) =0 тождественно по
Эб?
цЕМниЕ U(q).
Ясно, что все пространство состояний {q} является инвариантным мно-
гообразием УДС (1). И вообще, если УДС с самого начала была по опре-
делению задана на некотором многообразии М (скажем, изучалось управ-
ляемое движение точки на сфере, торе и т.д.), то многообразие М является
пространством состояний и инвариантным по определению.
Интересно найти конструктивные условия (уравнения), описывающие М.
Ясно также, что, вообще говоря, М может быть не единственным и могут
существовать целые семейства инвариантных многообразий М, зависящие
от некоторых числовых параметров. Так, например, если уравнение (1)
имеет интегралы, не зависящие от параметра управления и, вида
Fk(q) = ck = const, fc = l,...,m, (2)
т.е.
---— f(q,u) = 0, k=l,...,m, (3)
bq
для любого u€U(q), то многообразие, описываемое системой (конеч-
ных) уравнений (2), есть инвариантное многообразие М размерности п — т,
зависящее от т параметров сст. Единственное многообразие из
семейства (2) выделяется начальным условием, т.е4 заданием изображаю-
щей точки в некоторый момент времени f':
Fk{q{t')) = G, к=\,...,т. (4)
Очевидно, минимальная размерность инвариантного многообразия М,
проходящего через точку q^M, должна быть равна dim£ (g). Таким об-
разом, возникает задача определения условий для нахождения инвариант-
54
ных многообразий УДС (1). Другими словами, возникает задача определе-
ния функций Fk (</), удовлетворяющих условию (3).
Пользуясь такими же соображениями, как и при выводе (§18) условий
на особое многообразие S (инвариантное многообразие это частный слу-
чай особого многообразия 5), мы получаем, что искомые функции Fk (q)
должны быть не чем иным, как функционально независимыми интеграла-
ми системы уравнений
dz dz
Н(— Л) = 0, //(——— Л) = 0. (4)
oq oq
Таким образом, отыскание инвариантных многообразий сводится к
нахождению всех интегралов системы уравнений (4), как регулярных,
так и особых. Естественно, рассмотрением вопросов интегрирования сис-
темы (4) мы заниматься не будем, так как по этому поводу уже сущест-
вует обширная литература (см., например, [39,62,95,104]). Заметим
только, что интеграл, которому соответствует особое инвариантное мно-
гообразие размерности и — 1, если он существует, получается ’’алгебраи-
ческим” путем, как алгебраическое условие совместности системы (4)
относительно компонент вектора dF/dq. После того, как такое много-
образие выделено, остается проверить, является ли оно интегральным,
что делается без особого труда. Так, например, в § 18 такое многообразие
задавалось формулами (13), (16), (19) для УДС различных типов. Это
многообразие будет интегральным, если функция s(q), фигурирующая в
этих равенствах, удовлетворяет системе (18.7).
Итак, если для данной УДС существует инвариантное многообразие М,
то имеет смысл поставить вопрос об отыскании границ траекторных воро-
нок и области нестесненных (свободных) движений на М. В частности, та-
кая задача возникает сразу же и автоматически, когда УДС с самого начала,
по определению, задана на некотором многообразии (например, на сфере,
торе и т.д.). Вопрос об отыскании области нестесненных (свободных) дви-
жений на М будет рассмотрен ниже, в § 20.
Конечно, если, скажем, инвариантное многообразие в {q}= Rn описывает-
ся уравнениями (2), то, пользуясь этими уравнениями, можно исключить
т переменных из уравнений (1), понизив порядок УДС до п — т. Однако
этот путь может оказаться неприемлемым, поэтому желательно иметь урав-
нения границ траекторных воронок на М непосредственно в терминах УДС
(1) и уравнений (2). Этот вопрос будет рассмотрен в § 21.
В качестве примера наличия у УДС инвариантных многообразий рас-
смотрим билинейную УДС в {q} = R3 (уравнения Блоха) :
q1 - — aq2, q2=aq1-¥uq3, q3 = —uq2, и G U C R, (5)
где a — постоянное Число, и — скалярное управление. Эта система является
частным случаем системы вида
ч =Мч) + иЛ(<?). (6)
Для УДС вида (6) система уравнений (4) имеет вид
dF dF
—/о(<7) = 0, — Л(^) = 0. (7)
55
Эта же система уравнений непосредственно вытекает и из условия (3).
Пополнение этой системы приводит к системе уравнений
3F
— /№) = 0, — Л(?) = 0, — |/о(<7), /1(4)] =0, (8)
bq bq bq
где [/о (<?), fi (q) ] - скобки Пуассона.
Если (6) — билинейная УДС
q=Aq+uBq (9)
где А и В — квадратные постоянные матрицы, то система (8), как легко
видеть, примет вид
bF bF bF
-—Aq=Q, — Bq=0, — [A, B]q = 0,
bq bq bq
(10)
где [A, В] = AB — BA — коммутатор матриц А и В. Для заданной УДС (5)
имеем
А = 0 -а 0 а 0 0 0 0 0 bo и 0 0 0 0 0 1 0-1 0
и, следовательно,
0 0 -а
[А,В} = 0 0 0 (11)
а 0 0
[АВ ] q = {-aq3,0, aql)T. (12)
Условие совместности системы уравнений (10), или, что то же самое,
условие для МПШ, имеет вид
s(q) = \Aq Bq [Л, В] q 1 = 0.
(13)
Вычисляя функцию s (q), получим
«(<?) =
-aq2
aqx
0
-aq2
0
aq1
= 0 Nq&R3
(14)
т.е. уравнение (13). выполняется тождественно. Это говорит о том, что все
точки пространства состояний УДС (5) являются особыми (в смысле § 18)
и имеется инвариантное многообразие этой УДС как следствие наличия
нетривиальных интегралов системы уравнений (10) и, стало быть, наличия
нетривиальных интегралов вида (2), не зависящих от управления и, для
УДС (5).
Таким образом, тождество (14) показывает, что одно из уравнений
системы (10) ’’лишнее”, поскольку оно является алгебраическим следст-
вием остальных двух уравнений этой системы: столбцы Aq,Bq, [Л, В] q
оказались линейно зависимыми при любом q ER?. В то же время любая
пара этих столбцов линейно независима. Поэтому из системы трех урав-
нений (10) можно оставить только систему двух любых уравнений, напри-
56
мер, систему
dF dF
— Л^=0, — Zty = O-. (15)
bq bq
Это будет уже полная система.
В соответствии с общей теорией систем уравнений (15) [51, стр. 67],
поскольку число уравнений т = 2<п = 3, такая система имеет интеграль-
ный базис размерности п — т = 3 — 2 = 1, т.е. имеет один фундаментальный
bF
интеграл (правда, тут надо еще апостериори проверить, что -(q) не
обращается в тождественный нуль ни в какой подобласти {q}=R3). Дейст-
вительно, пользуясь общими приемами интегрирования системы, найдем,
что фундаментальный интеграл имеет вид
Ля) = у К?1 )2+(я2 )2 + (я3 )2 ] > (16)
и dF/dq = (ql,q2, q3)T=^ 0 для любой подобласти {q} = R3. Таким образом,
УДС (5) действительно имеет инвариантные многообразия, обусловленные
наличием интеграла (16). Очевидно, что инвариантное многообразие пред-
ставляет собой сферу
у [(Я1)2+(я2)2 +(<?3)2]=у с2, (17)
произвольного радиуса с > 0 с центром в начале координат пространства
состояний { q } = R3.
♦ Интересно отметить, что в данном примере инвариантные многообра-
зия (концентрические и, следовательно, непере се кающиеся сферы) рас-
слаивают пространство состояний{<?}= R3.
В рассмотренном только что примере билинейной УДС в R3 матрицы
А и В были кососимметрическими. Сейчас мы увидим, что описанные
здесь свойства билинейной УДС справедливы и для билинейной УДС в Rn с
произвольными кососимметрическими матрицами.
Напомним, что в общем случае квадратная матрица А = (а^ ), IJ =
= 1,.. . , п, с действительными числовыми элементами а1- , для которых
выполняется условие
Л+Лт=0 или ау + а< = 0, 4/=1,...,п,
называется кососимметрической. Отсюда с очевидностью следует, что
элементы а1- , стоящие на главной диагонали кососимметрической мат-
рицы, равны нулю, а два элемента, симметричные относительно главной
диагонали, равны по модулю, но противоположны по знаку.
Теорема 1. Коммутатор [А, В] = АВ — В А кососимметрических
матриц А, В - снова кососимметрическая матрица.
Доказательство. Имеем
[Л, В]т = (4F)T -(ВЛ)Т = £ТЛТ -ЛТВТ = ВА -АВ = - [А, В],
что и требовалось доказать.
57
Теорема 2. Квадратичная форма qTAq,ede А - кососимметричес-
кая матрица, тождественно равна нулю, т.е. если А - кососимметрическая
матрица, то для любых значений переменной q^Rn имеем qTAq = 0.
Доказательство. Имеем
Э
— (qTAq) = (A +AT)q =0.
Поэтому qTAq — постоянная, не зависящая от q. Но, очевидно, при q = 0
имеем ^тЛ^=0. Следовательно, б7тЛб?=0, что и требовалось доказать.
Теорема 3. Определитель п-го порядка вида I A xq . .. Anq\ , где-
все Ak, k = 1,..., п - кососимметрические матрицы, тождественно равен
нулю, т.е.
&(q) = \Aiq . ..Anq\ = Q Vq.
Доказательство. Предположим противное, т.е. что существует
^♦¥=0, для которого ¥=0. У этого вектора q* тогда существует ком-
понента q\ ¥=0. Умножим на эту компоненту k-ю строку определителя
Д(#*). Полученный определитель, в силу предположения, также не равен
нулю. Далее, этот новый определитель не изменится (и значит, останется
не нулевым), если к его к-й строке прибавить все остальные строки, умно-
женные соответственно на q\,.. . ,q,qktl>. .. .С другой стороны,
в результате получим новый определитель, в к-й строке которого стоят
соответственно элементы q^A^ q,... ,qTA„q. Но по теореме 2 все эти
элементы, как значения квадратической формы с кососимметрическими
матрицами ... ,Ап, равны нулю. Следовательно, полученный опреде-
литель равен нулю, что противоречит предположению. Для q = 0 очевидно,
что Д(0) =0. Таким образом, Д(^) =0 для любого q, что и требовалось
доказать.
Комбинируя теоремы 1,2,3, теперь уже очевидным образом получаем
следующее утверждение.
Теорема 4. Пусть А и В - кососимметрические матрицы и С ь . ..
..., ст - матрицы, полученные всевозможным, в том числе и многократ-
ным, коммутированием матриц А, В. Тогда определитель, составленный
из любых столбцов вида Aq,Bq9cxq9.. . ,cmq, равен нулю тождествен-
но по q.
Теорема 3 позволяет сделать полезные выводы относительно свойств
билинейной УДС вида
q=Aq+ulBlq^ ...^umBmq, (18)
где А, Вх, .. ., Bm — кососимметрические матрицы. Билинейные системы
такого вида встречаются в практических задачах. Например, такой вид
имеет УДС, описываемая уравнениями Блоха (19.5).
Система уравнений (19.4) для УДС (18) (т.е. система уравнений осо-
бого многообразия 5) будет иметь вид
bF . bF' bF
.— Л<7=0, — Si<7 = 0........ — Bmq=Q. (19)
bq bq bq
Применяя теорему 3 к системе уравнений (19), приходам к важному вы-
воду, что эта система всегда является полной. Это немедленно следует
58
из теоремы 3, так как скобки Пуассона любой пары векторов Aq, Bxq>...
.. ., Bmq, как легко проверить, равны нулю тождественно по q. Поэтому
система (19) будет не только полной,( но и инволютивной, хотя она и не
имеет априори якобиевой формы, к которой, впрочем, ее всегда можно
привести.
УДС вида (18) всегда имеет интеграл вида
Л(<7)=(<7)2 =ci, Ci >0. (20)
В этом легко убедиться, умножая обе части уравнения (1) над и применяя
теорему 3. Таким образом, для этой УДС изображающая точка q всегда
движется по сфере определенного радиуса с центром в начале координат.
Легко убедиться, что и сопряженная к (18) система дифференциальных
уравнений, имеющая вид
р = -(рА + uipBl + ,..^uspBs), (21)
также обладает интегралом
F2(P) = (P2) = c2, с2 >0, (22)
откуда мы видим, что для УДС вида (18) сопряженный импульс р имеет
постоянную длину. Более того, гамильтонова система 2и уравнений (18),
(21) с гамильтонианом
Н(р, q) = pAq +UipBxq + . . . + umpBq
имеет еще один интеграл:
F3 (Р,4)=РЯ-с, (23)
т.е. скалярное произведение радиус-вектора изображающий точки q и им-
пульса р есть величина постоянная. В этом легко убедиться непосредствен-
но. Действительно, умножая (18) на р, а (21) — на q, а затем складывая
полученные уравнения, найдем
W+W=-^-(P9) = 0, (24)
откуда и получается новый интеграл (23). Впрочем, к интегралу (23)
можно прийти, используя теорему Якоби, состоящую в том, что если
Fi (р, q) иГ2 (р, g) - два интеграла гамильтоновой системы (18), (21), то
скобка Пуассона
bFx bF2 3F2
bq bp bp bq
(25)
также является интегралом системы (18), (21). Надо только отметить,
что, к сожалению, этот новый интеграл может получиться или тривиальным,
или алгебраическим следствием интегралов F{ и F2. Однако в данном слу-
чае системы (18), (21) это не так, и мы имеем новый нетривиальный
интеграл
F3 = [(<7)2,(р)2] = 2р<7=с,
который совпадает с (23).
Легко убедиться, что интеграл (23) имеет место для произвольной УДС,
имеющей гамильтониан Я(р, д) однородный, первой степени по р и д.
59
Заметим также, что для УДС (18) новые скобки Пуассона [Fb F3] и
[F2, F3] уже не образуют дополнительных, независимых от FbF2, F.3
интегралов. В этом легко убедиться, производя непосредственнее
вычисления.
В заключение этого параграфа отметим, что в зависимости от вида УДС
вопрос об определении ее инвариантных многообразий может быть изучен
’’двойственным” образом к способу, описанному в этом параграфе
[39, стр. 125], а именно вместо рассмотрения систем уравнений в частных
производных можно исследовать соответствующие пфаффовы уравнения
(формы), определяемые формулами (8.9) [95].
§ 20. ОСОБЫЕ И ИНВАРИАНТНЫЕ МНОГООБРАЗИЯ ЛИНЕЙНЫХ УДС
Рассмотрим подробнее процедуру определения особых и инвариантных
многообразий для линейной УДС. Итак, пусть УДС линейна. Из уравнения
(19.7) получаем систему уравнений
|^4<7=О, ^=0.
bq dq
(1)
В соответствии с общей теорией таких систем уравнений [104] дополним
ее до полной путем образования всевозможных скобок Пуассона Az/- =
= [L j, Lj ], начиная с
L2=^-Aq и Ь2=Ъ4-^Ь. (2)
bq bq v 7
В результате придем к системе однородных линейных уравнений с частны-
ми производными вида
^„ = 0. ^л»=о. ^л-4,-0
bq bq bq bq
(3)
относительно неизвестной функции F(<?).
Необходимое условие совместности этой системы (т.е. условие наличия
нетривиального решения F(q) 0), очевидно, имеет чисто алгебраический
характер и состоит в том, чтобы система (3), как система линейных одно-
родных алгебраических уравнений относительно компонент вектора
bF/bq, имела нетривиальное решение. Это условие, как известно, имеет
вид равенства нулю определителя
s(q)=\Aq b АЬ ... Ап^2Ь | = 0. (4)
Теперь задача сводится к исследованию функции $(<?), т.е. определите-
ля (4) как функции от q Е Rn. Здесь возможны по крайней мере три
основных случая, которые мы и разберем ниже подробнее.
1. Функция s(q) не равна нулю тождественно и не удовлетворяет систе-
ме уравнений (2), если положить
Ffa) = $(?). (5)
В этом случае особое многообразие 5, определяемое уравнением (4), пред-
ставляет собой (и — 1)-мерную гиперплоскость, проходящую через начало
60
координат пространства состояний {<7} = Rn УДС (1). Другими словами,
S’ является (п — 1)-мерным линейным подпространством в {<7}. Но так как
S не является интегральным многообразием системы уравнений (2), то S
является МПШ данной УДС (1).
Ниже в этом параграфе мы покажем, что для УДС (1) этот случай имеет
место тогда и только тогда, когда система векторов b, АЬ, ..., Ап~2Ь,
Ап~* Ь линейно независима (т.е. когда система (1) управляема по
Калману [49]).
Таким образом, линейная УДС (1) не имеет никаких инвариантных мно-
гообразий, и при этом МПШ определяется гиперплоскостью (4) тогда и
только тогда, когда линейная УДС (1) управляема по Калману.
2. Функция s(q) не равна тождественно нулю, но удовлетворяет системе
уравнений (2), если положить F(q) = s(^). В этом случае особое много-
образие S, определяемое уравнением (4), также является (п — 1)-мерным
подпространством в {q} = Rn. Но при этом S уже становится инвариантным
многообразием УДС (1). При этом никаких других, кроме (4), инвариант-
ных многообразий УДС (1) не имеет.
Ниже в этом параграфе мы покажем, что этот случай имеет место тогда
и только тогда, когда система векторов b, АЬ, ...,Ап~2Ь линейно независи-
ма, но вектор Ап~хЬ линейно зависит от этой системы.
Заметим, что, вообще говоря, особое многообразие S, помимо того что
оно является инвариантным многообразием, может оказаться в то же
самое время и МПШ. Однако в силу того, что МПШ одновременно является
инвариантным, не существует допустимой траектории УДС (1), которая
пересекает МПШ. (С такой ситуацией мы имеем дело в примере 5 § 35. На
рис. 35.6 ось q2 является инвариантным многообразием S, ее не может
пересечь никакая допустимая траектория. Однако границы траекторных
воронок с одной стороны от оси q2 непрерывно продолжаются по другую
сторону от оси q2, и на самой оси q2 происходит смена штриховки.)
С другой стороны, легко привести пример УДС, соответствующий рас*
сматриваемому случаю 2, когда S, описываемая уравнением (4), является
инвариантным, но не является МПШ в указанном выше смысле. Такой
случай реализуется, например, для УДС вида
ql = — t?1, q2 = и, />0. (6)
Действительно, как легко видеть, для УДС (6) инвариантное S совпадает
с осью q2. Однако границы траекторных воронок подходят к оси q2 слева
и справа от нее лишь асимптотически, уходя в бесконечность вниз и вверх
вдоль этой оси q2. Поэтому здесь не происходит непрерывной состыковки
никаких двух границ траекторных воронок, расположенных по обе сторо-
ны от оси <72, т.е. многообразия 5. Этот факт и обусловливает то, что в дан-
ном случае инвариантное S не является МПШ.
Наконец рассмотрим случай 3. Функция s{q), т.е. определитель в (4),
оказался равным нулю тождественно. Ясно, что это может случиться тогда
и только тогда, когда система векторов Ь, АЬ, ...,Ап~2Ь линейно зависима.
В этом случае система уравнений (2) имеет линейные фундаментальные
интегралы и соответствующие инвариантные многообразия будут линейны-
61
ми многообразиями, расслаивающими все пространство состояний УДС (1).
Естественно, что этот случай соответствует неуправляемой по Калману
УДС (1). Однако в этом случае неуправляемость УДС (1), по сравнению
со случаем 2, оказывается более ’’глубокой”, если так можно сказать:
пространство состояний будет расслоено на инвариантные линейные много-
образия размерности п - 2 или ниже.
Вернемся теперь к вопросам, поставленным нами в случае 1.
Т е о р е м а. Для того чтобы функция s(q), определенная равенством
в (4), не равнялась тождественно нулю и не удовлетворяла система уравне-
ний (2), необходимо и достаточно, чтобы система векторов Ь, АЬ, ...
..., An~2b, Ап~1Ь была линейно независима (т.е. УДС (1) управляема по
Калману).
Доказательство. Достаточность. Пусть b, АЬ,..., Ап~х b линейно
независимы. Тогда, очевидно, справедливо условие
~^-Ап-гЬ = \Ап~1Ь b АЬ ... Ап~2Ь\Ф(Л. (7)
Это условие показывает, что функция F(q) = s(q) не удовлетворяет по-
следнему уравнению системы (3) для любых q, а тем более для точек мно-
гообразия (4). Следовательно, данное F(q) не удовлетворяет всей системе
уравнений (3), — вместе с ней и системе (2). Отсюда также следует, что
s(q) не тождественно нулевая функция, ибо в противном случае она бы
удовлетворяла системе (2) и (3), что, как мы видели, не имеет места.
Докажем теперь необходимость. Пусть s(q) Ф 0 и s(q) не удовлетворяет
системе уравнений (2), (3) в точках q, удовлетворяющих (4). Покажем, что
тогда Ь, АЬ,..., Ап~1Ь линейно независимы. Предположим противное, т. е.
что Ь, АЬ,..., Ап~ ХЬ линейно зависимы. Если линейно зависимы первые п -1
векторов, Ь, АЬ,..., Ап~2Ь, то s(q) = 0 в силу (4), что противоречит усло-
вию s(q) Ф 0. Следовательно, векторы Ь, АЬ,..., Ап~ 2Ь, действительно, линей-
но независимы. Но может еще случиться, что Ап~[Ь является линейной ком-
бинацией векторов Ь, АЬ,..., Ап~2Ь.
Покажем, что и такого не может быть при данных предположениях.Опять
предположим противное, т.е. что Ап ~ *Ь все-таки является линейной
комбинацией Ь, АЬ,..., Ап~2Ь, т.е. существуют числа д0,Mi,•••> Ми-2 такие,
что выполняется равенство
An~xb = pQb + PiAb + ... + pn-2An~2b- (8)
Но тогда легко показать, что s(q) удовлетворяет системе (2). Действитель-
но, имеем
ds(q) „ у
——Ъ~\АЬ Ь АЬ ...Л"-2* | = 0,
так как в определителе 1-й и 3-й столбцы совпадают. Далее, вычислим.
ds(^) Г 3 и 2
—----Aq = —\Aq b Ab ... An~2b
oq oq
I Aq
= [A b Ab ... An~2b ]Aq = |A2q b Ab ... An 2b |, (9)
62
где [А b АЬ ... Ап 26] означает вектор, к-я компонента которого есть
определитель вида \с b АЬ ... Ап~~2Ь\, у которого первый столбец с
есть к-й столбец матрицы А. Покажем, что последний определить в (9) ра-
вен нулю, если точка q лежит на многообразии 5, т.е. удовлетворяет урав-
нению (4). Действительно, тогда из уравнения (4) поручаем, что сущест-
вует линейная зависимость
XAq + XoZ) + \xAb + ... + Х„_2 An~2b =0, (10)
где по крайней мере одно из чисел X , X 0, ..., X п_2 , вообще говоря, зави-
сящих от q G S, не равно нулю. Умножая обе части равенства (10) слева
на матрицу А , получим
\A2q + Х0Л6 + ... + Х„_2Лл-1/> =0. (11)
Подставляя (8) в (11) , получим, что вектора А2q, Ь, АЬ,..., Ап~2Ь линей-
но зависимы (конечно, если q удовлетворяет (4)). Это и означает, что по-
Эх
следний определитель в (9) равен нулю, а вместе с ним ^—Aq = 0. Таким
oq
образом, предположение о том, что Ап~*Ь линейно зависит от Ь, АЬ, ...
..., Ап~ {Ь, привело к тому, что 5, описываемое уравнением (4), оказалось
инвариантным многообразием, что противоречит условию теоремы. Теоре-
ма полностью доказана.
Нам осталось показать, как было оговорено в пункте 2, что особое мно-
гообразие 5, определяемое нетождественным равенством (4), является
инвариантным тогда и только тогда, когда система векторов
Ь, АЬ, ..., Ап~2Ь линейно независима, а вектор Ап~хЬ линейно зависит от
них. Но данное утверждение является просто несколько другой формули-
ровкой только что доказанной в этом параграфе теоремы.
Отметим теперь, что в случае 2 уравнение (4) инвариантного много-
образия S можно записать в более простом виде
s(q) = \q b Ab ... An~2b | = 0. (12)
Действительно, из (4) в силу линейной зависимости Ап~хЬ от Ь, АЬ, ...
..., Лл-2& легко видеть, что подпространство 5 натянуто на эти вектора. Но
на эти же вектора, как опять же легко видеть, натянуто и подпространство,
описываемое уравнением (12). Таким образом, в случае 2 уравнения (4)
и (12) эквивалентны.
Таким образом, в случае 2 пространство {q} = Rn системы (1) разби-
лось на линейное подпространство размерности (п — 1), определяемое
гиперплоскостью (4) или (2), и ортогональное дополнение - одномерное
пространство, определяемое нормалью п к этой гиперплоскости. Как из-
вестно из общей теории [49], система (1) в этом случае представляется как
прямая сумма (п - 1)-мерной линейной системы, полностью управляемой
в своем подпространстве S, определяемом уравнением (4) или (12), и
неуправляемой (вообще не зависящей от и) одномерной системы в одно-
мерном пространстве, определяемом вектором нормали п к плоскости (4)
или (12). Вектор п в символическом виде можно записать через определи-
63
тель следующим образом:
п = | е b АЬ ... Лп~2Ь |,
где символ е — столбец из символов е , ..., е п, означающих координатные
векторы базиса в {q}. В этом случае можно сказать, что пространство {#}
’’расслоилось”. Слои представляют собой прямые, параллельные вектору п.
Подпространство 5, т.е. гиперплоскость, представляет собой базу этого рас-
слоения, причем слои в данном случае перпендикулярны базе S (рис. 20.1).
Заметим, что при данных условиях имеем равенство
rang || Aq b Ab ... An~2b || = n - 1. (13)
Это равенство обусловило нетождественность равенств (4) и (12). Поэтому
равенства (4) и (12) являются уравнениями особого многообразия размер-
ности не ниже п — 1 и вместе с тем гарантируют его инвариантность.
В данном случае условие (13) послужило также причиной того, что по-
полнение системы (2) будет идти до тех пор, пока не получится максималь-
но возможное число уравнений системы, равное п. Однако если бы неуправ-
ляемость системы (1) была более ’’глубокой”, т.е. скажем, линейно неза-
висимыми были только вектора b, АЬ, ..., Ап~2Ь, а вектора Ап~2Ь,
Ап~1Ь линейно зависели бы от них, то ситуация изменилась бы: появилось
бы инвариантное многообразие S более низкой размерности, а именно —
размерности п — 2, которое уже должно быть описано двумя уравнениями:
F\(q) — 0, F2 (q) = 0. В этом случае пополненная система (2) содержит
уже п — 1 уравнение вида (3) : последнее уравнение
Y~An~2b = 0
можно отбросить, так как оно является линейной комбинацией уравнений
^b=0,...,^An~3b=0. (14)
bq bq
Условие (4) или (12) выполняется тождественно (для любой точки
q G {q} = R”). Это означает, что особым многообразием S является все
пространство {q} = Rn.
Теперь надо непосредственно искать инвариантные многообразия размер-
ности меньшей, чем п — 1. В случае линейной системы (1) это сделать
64
нетрудно. Функции Fx (q) и F2 (q) определяются неоднозначно, хотя инва-
риантное многообразие определяется, естественно, однозначно: оно являет-
ся подпространством, натянутым на линейно независимые вектора
b, АЬ,..., Его можно считать ’’базой расслоения”. Проекция изобра-
жающей точки на это подпространство будет полностью управляемой
в этом подпространстве. Ортогональное дополнение к этому подпростран-
ству будет двумерным. Оно будет натянуто на два линейно независимых
вектора Щ и п2, которые можно определить как два линейно независимых
решения линейной однородной системы
nb = 0, пАЬ = 0,... ,пАп~3Ь = 0. (15)
Такие два решения этой системы существуют, поскольку ранг системы век-
торов b, АЬ, ...,Ап~3Ь и, следовательно, ранг составленной из них матрицы
равен п — 2. Слоями здесь будут плоскости, параллельные этому ортого-
нальному дополнению. Так, например, при п = 3, когда АЬ и А2Ь линейно
зависят от Ь, т.е. оба вектора АЬ пА2Ь коллинеарны Ь, базой будет прямая,
коллинеарная Ь и проходящая через начало координат. Ортогональным до-
полнением будет плоскость, перпендикулярная Ь и проходящая через О.
Множество слоев будет множеством плоскостей, ортогональных Ь
(рис. 20.2)..
§21. ОБЛАСТЬ НЕСТЕСНЕННЫХ ТРАЕКТОРИЙ
НА ИНВАРИАНТНЫХ МНОГООБРАЗИЯХ
Пусть существует инвариантное многообразие М размерности к < и, из
которого изображающая точка q УДС не может выйти под действием допу-
стимого управления. Интересно установить критерий существования откры-
того (во внутренней метрике М) и той же размерности к подмногообразия
D С М, в котором две любые точки q0 GD, qt ED могут быть соединены
допустимым образом произвольной траекторией, целиком лежащей в D.
Такое подмногообразие D С М по аналогии с соответствующим понятием
области нестесненных (свободных) траекторий, рассмотренных в § 9,
назовем областью нестесненных (свободных) траекторий на инвариантном
многообразии М.
Для существования такого многообразия DC М необходимо и достаточ-
но, чтобы конус К (q) совпадал с касательным пространством TqM для всех
точек q Е М. В свою очередь, для выполнения этого условия необходимо и
достаточно, чтобы минимум функции Н(р, q) по всем |р| =1 таким, что
р лежит в TqM, был строго больше нуля для всех qEDCM. Иными слова-
ми, должно выполняться условие:
( q ) = min (Н(р, q): I р I = 1, р G TqM )> 0 N q E D С M. (1)
Здесь TqM — пространство, сопряженное касательному пространству Tq М.
Рассмотрим пример. Пусть УДС описывается уравнениями
q2 = ulql + u2q3, q3--u2q2,
|u1|<Z1, |i?|</2, ^>0, /2>0. (2)
5. А.Г. Бутковский
65
Она имеет инвариантное многообразие - сферу радиуса с > 0, так как сис-
тема (2) имеет первый интеграл
1 2 п 2 о 2
F(t/)=y[(41) +(<72) +(<73) L
Если изображающая точка в какой-то момент времени (например, началь-
ный) оказалась на сфере с определенным радиусом с, то никакое допусти-
мое управление | и11 < I1, | и21 < I2 при любых 71 > 0 и I2 > 0 не может
увести изображающую точку q с этой сферы. *
Покажем, что вся сфера представляет собой многообразие D нестес-
ненных (свободных) траекторий. Действительно, имеем
Р(р, q,u) = -Piulq2 + p2u'ql + p2u2q3 -p3u2q2, (3)
и, следовательно,
H(p,q) = ll \-pxq2 + p2q'\ + l2 \p2q3 -p3q21. (4)
Ортогональное к TqD2 направление определяется единственным вектором
нормали к сфере в точке q:
^=(q1,q2,q3)1 =q. (5)
Из (4) видно, что Н (р, q) — во всяком случае неотрицательная величина.
Она может оказаться равной нулю только тогда, когда I — Р\ q2 + р2 q11 =0
и | р2 q3 — р3 q21 =0 одновременно. Это может случиться, как легко видеть,
лишь тогда, когда р =# 0 коллинеарно q. Но по условию (1) мы имеем р q = 0,
и, следовательно, р не коллинеарно q. Таким образом, (q) > 0 для любой
точки q сферы, что и требовалось доказать.
Таким образом, УДС (2) имеет в качестве инвариантного многообразия
сферу произвольного (но фиксированного) радиуса, которая в то же время
представляет собой многообразие нестесненных (свободных) траекторий.
В заключение этого параграфа уместно отметить, что поскольку боковая
граница траекторной воронки существует не всегда, то возникает задача
изучения характера допустимых траекторий, проходящих через некоторую
точку q в этом случае. Вообще говоря, это довольно трудная задача, если
иметь в виду произвольный тип а™ конусов К (q) в окрестности точки q' .
Здесь мы рассмотрим лишь один, далеко не самый сложный случай такой
ситуации.
Рассмотрим УДС, описываемую уравнением
Я = и1 fi (я) + u2f2 (q), (6)
qGDCR3, |м112|<
где D — некоторая область и q' — внутренняя точка D. В D все конусы
К (q) поля конусов имеют один и тот же тип а0, т.е. являются плоскими
дисками. С помощью кусочно-постоянного управления и (t) можно осу-
ществить последовательное движение вдоль векторов /1 и f2. Если, в част-
66
ности, задать управление и (t) на промежутке времени [0, 4 л/F] в виде
(г) =1 и1 (т) =0
м2(т) = о, те[о,\/7], [ и1 (т) = - 1 .«2(т)=1, те[77,2\/7], ( 1 ю I и1 (г) = 0
[м2(т) = о, те[2>/7?3V7], [ «2 (г) = — 1, те [з \JF, 4 Vrl,
то система под действием данного управления перейдет за время 4 \/Тиз
начальной точки qf в точку q (t) :
= + t +O(t3/2), (8)
где О (t3^2) — бесконечно малая величина порядка t3^2 [90 а].
Рассмотрим теперь движение системы (6) из заданной точки q’ на про-
межутке времени [0,4 + t2 + 4 ] под действием следующего управле-
ния и (7):
и1 (т) = 1 I и1 (т) = 0
w2(r) = 0, tG[0,4], [u2(r)=l, tG[4,4 + 4], (9)
и для г € [4 + 4, 4 +4 +4 Vr7] управление м(г) задано согласно" (7),
где принято t = t3. В результате такого движения начальная точка#' перей-
дет в зависящую от значений 4,4, 4 точку# (4,4,4). Таким образом,
получаем отображение q(t19 4, t3) некоторого множества значений пара-
метров 4,4,4 в пространство состояний УДС.
Обозначая соответственно (г, #') и 0(т, #') решения уравнений
# = /1 (#),#= f2 (#) с начальной точкой #', для отображения # (4,4,4)
получим
<7 (Л, t2, [Л.Л] + О (tl/2) + ф (t2, q')). (10)
Производные решений (т, #') и ^(т, #') по начальным данным при t = 0
имеют вид
— (0,?')=5/, = /,/=1,2,3,
bq' 1 bq' 1
так как (0, #' ) = q , 1^(0, #' ) = #'. Поэтому для матрицы Якоби отобра-
жения #(4,4,4) в точке (4,4,4) = 0 с учетом # (0) = #' имеем
= (Л (<?'),Л (?'), 1/ь/2](<?'))
при 6 = (4,4,4) и 0 = 0. В силу теоремы о непрерывной дифференцируе-
мости решений дифференциальных уравнений по начальным данным яко-
биан отображения является непрерывной функцией точки 0 = (4,4,4)-
Таким образом, если
1Л(^2(?Ш>Л ](<?')!* 0, (П)
5*
67
то отображение q , t2 Дз) имеет максимальный ранг в некоторой окрест-
ности точки 0=0. Согласно теореме о неявной функции [30 а] получаем,
что существует область Dx, содержащая точку 0=0, такая, что отображение
q (в ) является диффеоморфизмом области на некоторую открытую об-
ласть D2, содержащую точку q . Это позволяет сформулировать следующее
утверждение.
Если в точке q* справедливо условие (И), то существует е > 0 такое,
что для любого 5 < е существует h > 0, при котором любая точка# такая,
что|#—#'|< 5, достижима из#' за время
2h (6) + 4h (6) = 6h (6), где lim h (6) = 0.
6-0
Здесь h (8) можно принять за максимум времени движения вдоль траек-
торий полей Л (#) и f2 (#) между точками пересечения этих кривых с гра-
ницей | # — #'| =6 области I # —q\ <8, т.е. h (5) — максимально возмож-
ное время движения вдоль хотя бы одной из интегральных кривых поля
Л (#) или/2 (q), за которое мы не можем выйти за границу области I # - #' I <
< 6. Условие lim h (6) = 0 является следствием диффеоморфности ото-
6-0
бражения #(^, t2i t3). Таким образом, в рассматриваемом случае точка
#' не может быть вершиной жесткой траекторной воронки (ее не существу-
ет), и в зависимости от выполнения условия (11) имеем либо область ло-
кальной управляемости около точки #' , либо через точку #' проходит
двумерное инвариантное многообразие. В случае инвариантного многооб-
разия возле точки будем иметь область нестесненных движений на этом
многообразии.
§ 22. ТРАЕКТОРНЫЕ ВОРОНКИ НА ИНВАРИАНТНЫХ МНОГООБРАЗИЯХ
Пусть УДС
#.=/(<7,а), #е{#}=/?", (1)
имеет ^-мерное инвариантное гладкое многообразие М, описывающееся
уравнениями
Ffe(?) = 0, к = 1,2,... ,п - т. (2)
Это многообразие М естественным образом находится в{#}или, как
говорят, оно вложено в {#} . В каждой точке q^Mимеется касательная
плоскость к М, которая, как уже отмечалось, называется касательным
пространством к Мв точке # и обозначается TqM. Другими словами, можно
сказать, что TqM есть ортогональное дополнение к линейному пространст-
ву, натянутому на вектора dFk/dq, к = 1,2,. .. 9п - ш. Таким образом,
в силу инвариантности М по отношению к УДС (1) имеем
bFk .
----# = 0, к = 1,2,..., п - т, (3)
Э#
для любых допустимых управлений и и #ЕЛГ*\Тем самым, все
♦) Если М имеет край, то предполагается, что # не принадлежит краю.
68
допустимые вектора q лежат в TqM, т.е. q являются касательными вектора-
ми к М в точке q. Заметим, что касательные векторы к М в точке q можно
определить и непосредственно во ’’внутренних” терминах многообразиям,
не предполагая вложимости М в {q } .
Будем предполагать, что точка q' Е Ми ее окрестность в Мне принадле-
жат подмногообразию нестесненных траекторий наМ(§21)и находятся
в относительной внутренности М. Тогда конус K(q') допустимых направле-
ний скоростей УДС (1), целиком лежащий в Tq>M, не будет совпадать
с TjM. Предположим, что в М нет других инвариантных многообразий
УДС меньшей размерности, чем т. В этих условиях траекторная воронка
V(q'), целиком лежащая на М, будет ди-мерной. Траекторная воронка
V(q')*, по крайней мере в окрестности точки q', будет представлять
собой коноид размерности ди, принадлежащий инвариантному многообра-
зию М. Боковая граница этого коноида dV(q'), если она существует, так же,
как и в случае § 14, описывается параметрическими уравнениями
<7=^0, «(0,<7',р') = <7', (4)
где при фиксированном'ЕМпараметрами являются t >0 и р'.
Функция q(t, q р') получается как составляющая решения системы
уравнений Гамильтона
а параметр рг пробегает не весь конус К(<?'), сопряженный к конусу К(qf)
(как в § 14), а лишь его подмножество, определяемое условием
/ ЭГ*\Т
pl------) =0, к = 1,2,... ,д? - т. (6)
X /
Условие (6) можно интерпретировать и по-другому: параметру'должен
пробегать конус Кх (<?'), который является проекцией конуса K(q') на
пространство, сопряженное к Tq>M. Это пространство называется ко-
касательным пространством к М в точке qCM и обозначается
^М.
Аналогично тому, когда УДС (1) вовсе не имело инвариантных многооб-
разий, теперь можно определить штриховку внешней стороны границы
траекторной воронки V(q') СМ, а также особые подмногообразия 5 СМ
(и, следовательно, подмногообразия перемены штриховки) и, возможно,
новые инвариантные подмногообразия Mi СМ.
В заключение этого параграфа обсудим подробнее, каким образом
гамильтонова система (5) допускает сужение на инвариантное многообра-
зие М. При этом для Vq ЕМ областью допустимых значений ковектора р
является кокасательное пространство ТяМк многообразию М в точке q.
Суженный гамильтониан имеет вид:
#) = sup(max)p/(<7, u), qCM, pELM. (7)
uf=u
Это следует из соотношений (3). Действительно, подставляя в (3) значение
*) Траекторная воронка предполагается жесткой (§ 14).
69
q = bH/bp, получаем
bFk ЪН
--- .----= 0, к = 1,..., п - т\ Np\ Nq^M. (8)
bq bp
Это означает, что гамильтониан Н(р, q) для q ЕМ не зависит от составляю-
щей ковектора р, принадлежащей линейному подпространству, натянутому
на ковектора bFk/bq, к = 1,.. ., п - т, т.е.
H(p+pi,q)=H(p,q) Nq^M\Np, Npx^TqM. (9)
Поэтому для построения траекторной воронки V(q'), q'ЕМ, существенна
лишь проекция имульсар(г) в точке q(t) GМ в кокасательное пространство
Tq(t)M. Это обосновывает переход к гамильтоновой системе на М с гамиль-
тонианом, определенным согласно (7).
Проведем построение суженной на М гамильтоновой системы в локаль-
ных координатах на М. Пусть в окрестности произвольной заданной точки
q ЕМ определены координаты х7 , / = 1,..., т, на Л/. Пусть, кроме того,
bFk/bq ¥= 0, к = 1,.. ., п - т, и вектора bFk/bq линейно независимы. Тогда
существует невырожденная в окрестности точки q замена координат:
х7 = х7(^), / = 1,2,..., т,
(10)
Fk=Fk(q), к - ... ,п - т.
При такой замене векторы касательного к Rn пространства преобразуются
по закону
.. Эх7. bFk
x' = — q, Fk^~—4, (И)
bq bq
а ковекторы — по закону
bx> bFk
Pi = *i~ +вк ~T~’ 02)
где я7-, вк — ковекторы из подпространств, сопряженных к подпространст-
вам, содержащим xi,Fk. В новых координатах уравнения исходной УДС
(1) принимают вид
x = f(x, F, и), F = t?(x, Г, м), (13)
где согласно (11)
Эх
f(х, F, и) = — f(q, и), (14)
dF
Т](х, F, и) = — f(q, и). (15)
Э<?
Условие инвариантности многообразия М означает, что
т?(х, 0,м) = 0. (16)
70
В координатах x, F гамильтониан H(p, q) принимает согласно (11), (12) вид
Я(р, q) = sup (max)pf(q, и) =
и е и
7 Ъх’ dFk\
= sup (max) Iff/ -— + & к — Iffa, и) =
ueu \ bq bq /
= sup (max)[n, f7(x, F, u) + 6krik(xt F, u)] = Я2(я, 0, x, F),
uEU
где происходит суммирование по парным индексам. Гамильтоновы уравне-
ния имеют вид
х7 ------ я.
Эя, '
(17)
ьн2
------- , j = 1,... ,т,
Эх7
(18)
= ЪН2
ън2
, =-----г , к = 1,.. ., п - т.
Ъвк ЪРк
Решение этой системы, лежащее в координатном пространстве на много-
образии М, удовлетворяет условию F(t) = 0. Действительно, рассмотрим
решение с произвольной заданной начальной точкой на М\ (р°, #0) =
=(я°, 0о,хо, 0),т.е.qQ EM,pQ G TqQRn. ГамильтонианH2(л, 0, х, F) при
F = 0 имеет согласно (16), (17) вид:
Н2 (я, 0, х, 0) = sup (max) [я.-, £7(х, 0, и)] = Н3 (я, х ).
uEU
(19)
Поэтому
ЪН2
9
=---- {sup (тах)[яу- £7(х, 0, и)]} = 0,
р- о к иЕ U
откуда согласно (18) имеем F(r) = 0. Таким образом, решение гамильтоно-
вой системы (18) с начальной точкой (р°, #0), т.е. qQ G 7И, р° G TqoRn),
удовлетврряет следующей системе:
ЬН2
Hf'
0 = -
(20)
F=0,
n = —
(21)
(22)
(23)
ьн2
Эх
х ------.
Этт
Уравнения (22) — (23) являются гамильтоновыми уравнениями с гамиль-
тонианом, определенным в (19) для УДС
х = $(х, 0, u), u€U, x<ERm. (24)
Иными словами, уравнения (22), (23) являются суженной на многообразие
71
М гамильтоновой системой, а гамильтониан Я3(я, х) является сужением
на М гамильтониана Я(р, #), записанным в локальных координатах наМ
Обозначим проекцию Rn на М как д: Rn -+М. В координатах (х, F) эта
проекция имеет вид д(х, F) = x. Соотвественно TqRn T^q) М.
Согласно уравнениям (20), (21), (22), (23) доказана следующая ,
теорема.
Теорема. Для любой заданной точки qQ€M,p°€ TqQRn и соответст-
вующей точки qQ = qQ ^М, р° = д* од°, решение q(t), p(t) суженной на М
гамильтоновой системы является проекцией решения исходной гамиль-
тоновой системы локально на М, т.е.
Яе(4о)>0: Vq: \q - q0 \<e(q0), q(t)=q(t), p(t) = p*(t)p(t).
Заметим, что согласно уравнению (20), вообще говоря, О (Г) ¥=0. Это
означает, что если в начальный момент времени ковектор импульса
р° G TqQRn, то в последующие- моменты времени ковектор p(t), вообще
говоря, не будет принадлежать Tq(tyM;
§ 23. ОТДЕЛЯЮЩИЕ ГИПЕРПОВЕРХНОСТИ
В ПРОСТРАНСТВЕ СОСТОЯНИЙ
Пусть (см. § 6) УДС, описываемая включением
(1)
однозначно характеризуется непрерывным полем конусов K(q). В некото-
рой области G С {#} могут существовать двусторонние гиперповерхности
R, которые мы назовем отделяющими, обладающие тем свойством, что
если q ^R, то конус К(р) целиком лежит по одну сторону от этой поверх-
ности R. Эту сторону назовем внутренней стороной R. Заштрихуем внеш-
нюю сторону R. Такие штрихованные отделяющие поверхности, если они
существуют, несут определенную информцию о допустимых траекториях
УДС в области G С {q} , что может оказаться весьма полезным при исследо-
вании данной УДС.
Из определения поверхности R следует, что если допустимая траектория
проходит сквозь R трансверсально, то она это может делать только со
стороны штриховки, но не наоборот. Такая штрихованная поверхность
аналогична штрихованной поверхности жесткой траекторной воронки,
которая сама является предельным случаем поверхности R.
Нетрудно найти условие, которому с необходимостью удовлетворяет
поверхность R. Пусть z(q) = 0 — уравнение гладкой отделяющей поверх-
ности R в области (7, и пусть dzfdq — внешняя нормаль к R. Тогда очевид-
но, что должно выполняться неравенство
/ dz \
Я1----,q <0 NqtR, (2)
/
где H{p,q) — гамильтониан УДС (1). Условие (2) можно преобразовать
в равенство. Действительно, из (2) видно, что если такая поверхность R
существует, то существует и некоторая положительная функция i//(^)
72
такая, что выполняется равенство
\dq /
Это и есть уравнение для функции z(q), определяющей уравнение искомой
поверхности R. Заметим, что неравенство (2) эквивалентно включению
bzfbq Gri £(/?), (4)
где K(q) - конус, сопряженный к K(q} (§4).
Уравнение (3) есть обычное, вообще говоря, нелинейное уравнение с
частными производными первого порядка относительно неизвестной функ-
ции z(q), и его решение можно искать известными методами, в частности
методом характеристик, уравнения которых задаются каноническими
уравнениями с функцией Гамильтона
H\p,q)=H(p,q) + ф(ц). (5)
Эти уравнения в данном случае имеют вид
, ЬН1 ЬН
<1= — = — ,
bp Ьр
. ЬН' ЬН Ьф
р =------=------------.
bq bq bq
Уравнения (6) отличаются от характеристических уравнений, описываю-
щих поверхность интегральной воронки, только вторым уравнением (для
импульсов),в которое входит новый член btyfbq =grad Наличие в
(5) такого дополнительного члена, который, по существу, находится
в нашем распоряжении (Ф(<?) — некоторая положительная функция),
может существенно упростить поиск решений уравнений (3) или (6).
Решение уравнения (3) зависит от некоторой положительной функ-
ции Ф(д), и из множества этих решений можно выделить семейство штрихо-
ванных поверхностей R> которое будет нести информацию о допустимых
траекториях во всем пространстве
{q} или в какой-то его области G
(рис.23.1).Так,например, если нам а,,? дЛл
удалось найти хотя бы одну поверх- azQ
ность R такую, которая, во-первых, I | ((J)
вся заштрихована с одной только |<Q
стороны, а во-вторых, делит прост- J47 f f
ранство {q} на две непересекающие- Х-п Хтч /^2*
ся части, то мы делаем вывод о не- ___
управляемости данной УДС.
Пусть, например, УДС имеет вид МПШ (J/£ | J
q =a(q) +b(q, и), u<=U(q), (7) f O'7! Q/f
причем ЛЕ IE g
>max I b(q, u) | + e, /yfe (yt |
" (8) V V E
Vqe{q},e>0. Рис.23.1
73
Условие (8) означает, что конус К(q) при Vq£{q} не совпадает с {q} .
Кроме того, положим, что a (q) — потенциальный вектор, т.е. существует
скалярная функция w(q) такая, что
dw
a(q) = — (в) = grad w(q). (9)
Из условия (8) вытекает, что K(q) при q, принадлежащем поверхности
w(t?) = с, лежит по одну сторону от этой поверхности. Если теперь предпо-
ложить, что поверхность w(<?) = с делит пространство на две непересекаю-
щиеся части (это совсем не редко имеет место на практике), то УДС (7)
является неуправляемой системой. Таким образом, условия (8) и (9)
являются достаточными условиями неуправляемости произвольной УДС.
Кроме отделяющих поверхностей R, рассмотренных выше в этом параг-
рафе, полезно рассмотреть поверхность, которую можно назвать траектор-
ным оврагом (или траекторным клином) дифференциального включения
(1) и соответствующей УДС. Поясним это понятие для случая п-3. Обоб-
щение на случай п > 3 очевидно.
Траекторный овраг УДС (1) для случая п = 3 вводится следующим
образом. Возьмем в {q} произвольную несамопересекающуюся кривую /,
обладающую тем свойством, что если q^l, то кривая I в окрестности
точки q не входит внутрь и не касается конуса К (q). Построим в каж-
дой точке q^l как в вершине характеристический коноид (поверх-
ность жесткой траекторной воронки V(q) с вершиной в q). В результате
получим семейство коноидов V(q), где параметр q£l. Проведем огибаю-
щие поверхности этого семейства. Полученную таким образом поверхность
назовем траекторным оврагом (клином) данной УДС. Линия заострения /
при этом служит дном оврага или острием (кромкой) клина.
Ясно, что траекторный овраг является предельным случаем отделяющей
поверхности R. Уравнение траекторного оврага z(q) = 0 (z(I) = 0) таково,
что z(q) удовлетворяет уравнению (3) при $(q) = 0, т.е. z(q) является
решением того же уравнения, которому удовлетворяет граница траектор-
ной воронки.
§ 24. ДОПУСТИМЫЕ МНОГООБРАЗИЯ УДС
В ПРОСТРАНСТВЕ СОСТОЯНИЙ
Имеет смысл рассмотреть еще один вид многообразий в пространстве
состояний, которые могут также оказаться весьма полезными при изучении
данной УДС.
Многообразие Мт размерности т назовем допустимым многообразием,
если существует такое допустимое управление u(t), Го t < t + е, е > 0,
что изображающая точка q(f), q(to)€Mm, будет принадлежать Мт,т.е.
q(f)GMm при tQ + е, €>0. Если такое допустимое многообразие
Мт существует, то можно рассматривать движение данной УДС только
на Мт и в этом смысле говорить о сужении или ограничении данной УДС
на многообразие Мт.
УДС, суженную на многообразие Мт, можно рассматривать как новую
УДС со своим гамильтонианом Н'(р, q) = sup (max) pq, где при каждом
74
q^Mm верхняя грань (максимум) берется по всем q, принадлежащим
пересечению 7\(Af) и Ф(^) исходной УДС, описываемой включением
Ф(<7).
Другими словами, допустимое многообразие это такое многообразие, по
которому можно двигаться с помощью допустимых управлений. Понятие
допустимого многообразия является своего рода дополнительным поня-
тием к понятию отделяющих многообразий.
Очевидно, что инвариантное многообразие данной УДС будет в то же
время и допустимым многообразием. Однако обратное, разумеется, верно
далеко не всегда. Очевидно также, что допустимая траектория есть допусти-
мое многообразие размерности т = 1.
Для того, чтобы некоторое многообразие Мтбыло допустимым много-
образием, необходимо и достаточно, чтобы касательная гиперплоскость
TqMm имела непустое (отличное от точки O(q)) пересечение с конусом
K(q) допустимых скоростей УДС для всех q ЕМт. Это условие есть обоб-
щение принципа включения в пространстве состояний (§ 13).
Пусть Мт описывается уравнениями:
Fk(q) = 0, к — т. (1)
Тогда для всех q £Мт существует и Е U такое, что выполняются условия
bFK
7—fa)/fa, w) = 0, к=1,...,п-т. (2)
Условие (2) является также достаточным условием того, чтобы многообра-
зие, описываемое уравнениями (1), было допустимым многообразием.
Из (2) следует, что
bFk / bFk \
sup (max)---f(q,u)=H\------, tf)>0, (3)
и & и bq \bq /
а также
bFk / bFk \
inf (min)---f(q, u) = Hl ---, q )> 0. (4)
и e и bq \ dq J
Из условий (3), (4), в свою очередь, вытекает, что для существования
допустимого многообразия необходимо, чтобы существовали такие неотри-
цательное функции \lsi(q) и ф2fa), которые обеспечивают существование
нетривиального (ненулевого) решения системы двух уравнений (вообще
говоря, уже неоднородных) с частными производными относительно
неизвестной функции Ffa):
/ bF \ / bF \
Я —, t7 -^ifa) = °, Н - — ,q -V/2fa) = 0. (5)
\ bq / \ bq /
§ 25. ФАЗОВЫЙ ПОРТРЕТ УДС
В настоящее время для УДС, рассматриваемых в этой книге, по-видимо-
му, трудно дать общее и исчерпывающее определение фазового портрета.
Достаточно полно на данном этапе развития теории это можно сделать
для УДС 2-го порядка, определенных на плоскости или двумерном много-
75
образии (§ 34). В общем случае под фазовым портретом УДС следует
понимать совокупность геометрических и аналитических средств представ-
ления УДС, дающих по возможности наиболее полную, ясную и наглядную
картину описания допустимых траекторий, областей достижимости и
управляемости, а также других характерных особенностей данной УДС.
Средства и понятия геометрического характера мы будем называть элемен-
тами фазового портрета УДС. В число этих средств, по-видимому, целесооб-
разно включить ряд понятий, предложенных в этой книге: гамильтониан
и лагранжиан УДС, типы конусов УДС, траекторные и интегральные ворон-
ки и их штрихованные поверхности, отделяющие поверхности, допустимые
поверхности, особые поверхности перемены штриховок, инвариантные
поверхности и другое. Перечисленные понятия являются примерами
элементов фазового портрета УДС.
В зависимости от задачи, поставленной для данной УДС, конечно может
оказаться, что не все элементы фазового портрета необходимо использо-
вать; здесь возможна избыточность информации.
Один из путей построения фазового портрета УДС состоит в том, что
пространство состояний УДС разбивается на непересекающиеся множества
постоянного типа. Каждое такое множество характеризуется фиксирован-
ным типом аг конуса K(q). Аналитически или геометрически выясняет-
ся форма и границы этих множеств. Множество постоянного типа а™ це-
лесообразно разбить на подмножества в зависимости от характера интег-
рируемости пфаффовых дифференциальных форм, определяемых урав-
нениями (8.8), (8.9). Здесь бывает полезно перейти к двойственному опи-
санию в терминах уравнений с частными производными. Таким путем
выясняется наличие, скажем, инвариантных многообразий, коноидальных
поверхностей жестких траекторий воронок и т.д. Ясно, что в общем слу-
m
чае, даже при постоянном типе аг , задача выяснения характера допус-
тимых траекторий, областей достижимости и т.д. может оказаться весьма
нетривиальной. Правда, с другой стороны, например, для областей, в кото-
рых тип конуса есть т.е. для областей свободных (нестесненных) траек-
торий (§ 9), задача выяснения характера допустимых траекторий очень
проста.
Изучение характера допустимых траекторий и движений УДС на множест-
m
вах постоянного типа аг и их подмножествах можно назвать локальным
изучением УДС. Такое изучение соответствует ’’дифференцированию”
фазового пространства УДС на подмножества с довольно ’’однородной”
структурой.
После локального изучения характера фазового пространства УДС
естественно возникает задача глобального изучения, т.е. своего рода
’’интегрирования” отдельных элементов фазового портрета в цельную
картину. Эту картину можно представить в виде графа. Здесь возникает
задача о выяснении существования и описания допустимых траекторий,
соединяющих точки, принадлежащие соседним множествам постоянного
типа и их подмножествам.
Возможные переходы изображающей точки по допустимым траекториям
между различными множествами и подмножествами можно представить
в виде графа, вершины которого изображают множества и подмножества
76
точек пространства состояний, а ребра изображают возможные переходы.
Граф подобного вида дает возможность представить свойства управля-
емости и достижимости УДС во всем ее пространстве состояний, т.е.
представить фазовый портрет УДС в целом (в большом).
Предложенный здесь путь построения фазового портрета УДС наиболее
полно реализуется для двумерных УДС с пространством состояний в виде
двумерной плоскости или двумерного многообразия ( § § 34—40).
§ 26. ПЕРЕНОСНОЕ И ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ УДС
УДС характеризуется выпуклым множеством f(q, U) в пространстве
скоростей {<?} . Выберем в относительной внутренности ri /(#, U) мно-
жества f(q, U) какую-нибудь точку О (q). Тогда, очевидно, множество
f(q, U) можно представить как сумму (рис. 26.1)
f(q, U) = a(q) + b(q, U), (1)
где a (q) — вектор, не зависящий от и Е U, и b (q, U) — выпуклое мно-
жество, содержащее начало координат O(q) пространства {q}. Множест-
во b(q, U) получается как множество векторов b(q, и) = f(q, и) —a(q),
когда и пробегает все множество U. Вектор a(q) назовем вектором ско-
рости переносного (неуправляемого) движения. Множество b^q, U) назо-
вем множеством допустимых скоростей относительного движения. Тер-
мин ’’относительное” здесь условен, так как b(q, U) зависит от точки
q ’’абсолютного” пространства { q }.
Такое представление произвольного заданного множества f(q, U) может
оказаться весьма полезным при решении конкретных задач [117, 118].
В оптической аналогии УДС (§ 30) такое представление можно интер-
претировать как движущиеся со скоростью a(q) источники, которые,
в свою очередь, в относительном движении дают излучение во все стороны.
Пусть, например, b(q, U) представляет собой и-мерную сферу радиуса
с (q) > 0 с центром в точке О (q). Если с интерпретировать как максималь-
ную возможную скорость распространения возмущения в данной среде
(скорость света или звука), то при |я(#)| < c(q) мы имеем досветовое
(дозвуковое) движение источника и волновые фронты будут иметь вид
вложенных сфер (рис. 26.1, а); при |а(^)| > c(q) имеем сверхсветовое
(сверхзвуковое) движение источника и огибающая волновых фронтов
Рис. 26.1
77
будет коноидом (поверхностью траекторной воронки) (рис. 26.1, б).
Изображенный на рис. 26.1, б характеристический коноид есть не что иное,
как световой коноид (в частности, световой конус) в теории относитель-
ности, рассматриваемый в пространстве событий {q, t} [17, 115]. На-
конец при |а(^)| = c{q) будем иметь граничный случай (рис. 26.1, в).
В данном примере область нестесненных траекторий соответствующей
УДС определяется условием |^(^)| < c(q), а точки границы этой области
удовлетворяют уравнению | a (q) | = с (q),
Интересно рассмотреть нередко встречающийся частный случай такого
разделения движений, когда b(q9 и) или соответственно b(q9 U) не за-
висят от q9 т.е. допустимая скорость управляемого движения не зависит
от положения движущегося источника в пространстве { q}. В этом слу-
чае УДС имеет вид
<7 =</(<?) +и, (2)
где и Е Uи U — некоторое выпуклое множество, содержащее O(q) G { q}
и не зависящее от q. Для УДС (2) соответствующий конус К (q) допусти-
мых направлений не меняет своей формы, а лишь меняет свое положение
в зависимости от q. В этом случае функция Н(р, q) имеет вид
H(p,q) = max (sup)[pa(<7) +рм] -pa(q) + h(p), (3)
н e и
где h (р) - не зависящая от q опорная функция множества U. Каноничес-
кие (характеристические) уравнения принимают вид:
, ЪН ЭЛ
Я = — = a{q) + — (р).
Эр Эр
(4)
ЭЯ Эд
Р= = -Р—(?)•
Э<? oq
Уравнения (4) специфичны тем, что правая часть первого уравнения есть
сумма двух функций, каждая из которых зависит или только от q9 или
только от р, а второе уравнение — линейно по р.
§ 27. УДС С ЭЛЛИПСОИДАЛЬНОЙ ИНДИКАТРИСОЙ
Рассмотрим УДС
q^f(q,U)9 (1)
где выпуклое множество допустимых скоростей f\q9 U) размерности
п в пространстве {q} = Rn является эллипсоидальным выпуклым мно-
жеством. Другими словами, индикаторное множество УДС (1) описывается
неравенством
— qTAq +(а, q) + a< 0, (2)
где А - заданная положительно определенная симметричная матрица раз-
мерности п X п, вообще говоря, зависящая от q\ а и а — заданные вектор
78
и число соответственно, также, возможно, зависящие от q. Нетрудно оп-
ределить опорную функцию или гамильтониан, соотвествующий (2):
Н(р, q) = (2^pA~lpx)V1 + pb, (3)
где j
Ь = -А~\а*, (3 = ~атА~ха* - а. (4)
Отсюда в силу формулы (9.2) можно определить область нестесненных
(свободных) движений, которая определяется неравенством
^(#)= min H(p,q)- min [(20рЛ“1рт)1/2 + pb] >0. (5)
Ip I = i Ip I = i
С другой стороны, непосредственно из (2) видно, что эта область оп-
ределяется условием
а = a(q) > 0. (6)
УДС с областью допустимых скоростей вида (2) интересны и сами по
себе, а также с той точки зрения, что произвольное выпуклое ограничен-
ное множество может быть с определенной степенью точности аппрок-
симировано множеством вида (2). При этом, что интересно, размерность
аппроксимируемого множества может быть меньше п. Например, если
некоторое множество УДС размерности 2 представляет собой отрезок
(т.е. скалярное управление и1 ограничено по модулю: 1м1! <2/), то оно
может быть аппроксиммировано эллипсом на плоскости (м1, и2):
При b ->0 эллипс (7) будет ’’стремиться” к отрезку | u11 <2/.
Такая аппроксимация может быть весьма полезна [117, 118]. Так,
например, если установлена управляемость УДС с ограничением (7) и по-
казано, что при b -> 0 существуют допустимые управления, реализующие
эту управляемость с равномерно ограниченным сверху временем переход-
ного процесса, то и ’’предельная” УДС, которая совпадает с исходной УДС,
также будет, вообще говоря, управляемой.
§ 28. УДС И СПЛОШНЫЕ НЕЛИНЕЙНЫЕ СРЕДЫ.
ПРИНЦИП МАКСИМУМА ПОТОКА СУБСТАНЦИИ.
ОПЕРАТОР ЛАПЛАСА УДС
В этом параграфе мы покажем, что каждой УДС, описываемой вклю-
чением q €f(q,Ui,q€ {£}, можно поставить в соответствие определен-
ную сплошную среду, в которой происходит процесс распространения
некоторой субстанции, например тепла, массы, заряда и т.д. Для опреде-
ленности мы будем рассматривать теплопроводящую стационарную
среду, занимающую и-мерное пространство {q} = Rn. Состояние этой
среды будем задавать функцией распределения температуры z = z(q, t),
qE { q}, t - время. В дальнейшем для краткости будем опускать агру-
мент t в записи функций.
79
Как известно [52], свойства такой среды задаются некоторым опера-
тором A (gradz (#),#), который величине градиента температуры dz jbq =
= grad z (q) ставит в соответствие векторную величину потока, который
мы обозначим к (q):
K(q)=A(gtadz(q), q), q&{q}. (la)
Соотношения типа (la) называются в теории поля материальными соот-
ношениями. В классической теории [52] оператор А обычно является
линейным алгебраическим оператором, связывающим к (q) и grad z (q).
Однако существуют сплошные среды, для которых материальные
соотношения не являются линейными. Такие сплошные среды называются
нелинейными. Нелинейные среды встречаются во многих природных и
и технических объектах. Примером могут служить слоистые среды, актив-
ные среды с отрицательными проводимостями и запасенной энергией и мно-
гие другие виды сплошных сред [30, 64, 72, 99].
Целью этого параграфа, в частности, является конкретизация соотно-
шения (1а), состоящая в том, что связь между величинами к и grad z
задается посредством "принципа максимума потока". Перед тем, как
сформулировать этот принцип окончательно, необходимо ввести некоторые
понятия.
Прежде всего введем в рассмотрение множество Ф(^) точек касатель-
ного пространства Tq{q} . Множество Ф(^) задается при каждом фик-
сированном q Е { q}. Для простоты будем предполагать, что Ф(^) - не-
пустое, ограниченное, замкнутое и строго выпуклое множество. Назовем
его множеством допустимых направлений потока.
Требование строгой выпуклости Ф(^) накладывается здесь для того,
чтобы избежать возможной неоднозначности определения потока /<(#)
из условия принципа максимума потока, формулируемого ниже. Можно
показать, что для наших целей это требование не слишком принципиально
и его можно заменить требованием просто выпуклости Ф(^). Однако
здесь мы этим заниматься не будем. Вектор потока /с(#) будем считать
расположенным в пространстве T\q} и отложенным от точки 6(q).
Если конец ветора к(^) принадлежит Ф(^), то будем писать K(q) Е Ф (?)
или к Е Ф (q).
Принцип максимума потока. Пусть вектор к m (q) удовлетворяет' сле-
дующему условию максимума'.
max [grad z(<?) • к] = grad z(<?) • к (<?) ay/q&{q}, (1)
К е Ф(<?)
или, что тоже самое,
KwO?) = arg max [gradzfa)-*] aVq&{q}. (2)
x G. Ф(</)
Тогда поток K.(q) в точке q Е {q}, вызванный grad z (#), равен
к(^) = а( | gradzfa) | ,q)Km(q), (3)
где а(х, q) — скалярная функция от скалярного неотрицательного ар-
гумента х > 0 при каждой фиксированном q Е {q} , характеризующая
(наряду с множествами &(q)) теплопроводящие свойства данной нелиней-
80
ной сплошной среды. Функцию а назовем модульной функцией данной
сплошной среды. Такова формулировка принципа.
Предложенный здесь способ описания материального соотношения
в нелинейных сплошных средах оправдан тем, что из него, в частности,
вытекают, как легко проверить, обычные материальные соотношения,
характерные для линейных сплошных сред. Например, положим, что Ф(<?)
есть множество, ограниченное гиперповерхностью (индикатрисой) в виде
эллипсоида
(g1)2
ап
(4)
где длины полуосей at, i = 1,. .., п, возможно, зависят от q. Далее, по-
ложим а(х, q) = | х |. Тогда, как легко проверить прямыми вычислениями
на основе формул (1), (2), (3), мы придем к соотношению
К- (q) = [grad Z (<?) • B(q)]т, (5)
где B(q) — диагональная матрица размера и Хи, на диагонали которой
стоят, вообще говоря, различные числа, зависящие от ,..., ап.
Соотношение (5) при неодинаковых хотя бы двух числах из а{,..., ап,
как известно [52], описывает линейную неизотропную по теплопровод-
ности сплошную среду. Если вдобавок хотя бы одно из чисел ai9. .., ап
зависит от q Е {#} , то среда будет и неоднородной. Если же все числа
(или функции от q) aY ,..., ап равны между собой, то среда будет изот-
ропной.
Обсудим подробнее общее соотношение (3). Из (3) видно, что поток
K.(q) нелинейно зависит от grad z (q). Он состоит из двух сомножителей:
векторного кт (q) и скалярного а (| grad z (#)|, q). Векторный сомно-
житель к т (q) обусловливает, если так можно сказать, нелинейную зави-
симость к (q) от grad z (q) по направлению.
Заметим еще, что из (2) с очевидностью следует положительная одно-
родность нулевой степени множителя к т (q) по переменной grad z (q).
Это означает, что умножение величины grad z (q) на число X > 0 в соот-
ношении (2) не меняет значения к т (q). Поэтому, в частности, соотношение
(1) и соответственно (2) можно записать в виде (при (а ¥=()))
gradzfa)
max -------------------к
к е Ф(?) L а(| grad z(</),671)
grad z(q)
— ’ |Ч (6)
[gradz(^) 1
------------------------- к . (7)
______________________________________________________ «(Igradzfa)^) J
Формулы (6) и (7) позволяют интерпретировать вектор к т (q) как по-
ток, вызванный единичным (нормированным) градиентом температуры.
Скалярный множитель а(| grad z (#)| , q) обусловливает нелинейную
зависимость к (q) от grad z (q) по модулям этих векторов. Это выра-
жается в том, что увеличение | grad z (q) | в X раз (X > 0), вообще говоря,
не влечет за собой увеличения | к (q) | в такое же число раз. Исключение
6. А.Г. Бутковский
81
составляет случай, когда л(х, q) при х > 0 изображает пропорциональ-
ную зависимость.
Таким образом, можно сказать, что соотношение (3) представляет
собой ’’разделенную” нелинейную зависимость с двумя множителями,
один из которых ответственен за нелинейность по направлению, а дру-
гой — за нелинейность по модулю.
Может показаться надуманным введение в соотношение (3) модульной
функции а. Однако это не так. Как показывает опыт и теория [30, 64,
99], существуют среды как естественные, так и искусственные, в кото-
рых при неизменности направления grad z (q) увеличение его модуля в
X раз (X > 0) не влечет за собой увеличение | к (q) | в такое же число раз.
Например, существуют среды, в которых электрический ток не пропор-
ционален напряженности электического поля, т.е. нарушается закон Ома ~
линейное материальное соотношение. Наличие такого рода нелинейных эф-
фектов оправдывает введение в соотношение (3) модульной функции а.
Введем функцию Н(р, q) как опорную функцию множества Ф(^) (§ 8) :
H(p,q)= max рк. (8)
к G Ф(д)
Тогда формулы (1), (2), (3) соответственно перепишутся в виде
Я(р, q) = pKm(q), (9)
ЭЯ
к- = arg max Н (р, q) = -— (р, q), (10)
к G Ф(<?) ор
ЪН
K(q) = a( \р l,q)—~(р, q), (11)
Эр
где р = bz(q)lbq = gradz(ty). Формула- (11) описывает нелинейное матери-
альное соотношение в терминах функции Н(р, q).
Легко понять физический смысл функции H(p,q). Действительно, в
силу положительной однородности первой степени функции Н(р, q) (§8)
имеем из (10)
ЭЯ
ркт(<г) = р —(р.<г)=н(р.<г)- (12)
Эр
Но ркт(ц) показывает количество тепла, которое протекает в единицу
времени через площадку единичной площади, проходящей через точку q,
в направлении р = grad z(q) под действием единичного (нормированного)
градиента
р _ grad z(g)
|р| |gradz(?)|
Как показывает формула (12), эта величина в точности равна Н(р, q) при-
р = gradz(^). В этом и состоит смысл функции Н(р, q) (рис. 28.1).
Аналогично из формулы (11) имеем
ЬН
рк(?) = а(|р \,q)p — (р, q) = a(\p\,q)H(p, q). (13)
Эр
82
л_ dz
дд
Касательная 1
к индикатрисе-
рджтмх
= grad z-Нормаль к
изотерме
(градиент)
д точке g
^Линия тока
Индикатриса
Нелинейная среда
Рис. 28.1
Касательная к изотерме
в точке q
Изотерма z(q)=O
Формула (13) показывает величину потока через площадку единичной
площади, проходящей через q, в направлении р = grad z(q) под действием
градиента gradzfa).
Теперь не составляет труда записать выражение для оператора Лапласа
Дг(^) в данной нелинейной сплошной среде, описываемой в терминах
функции Н(р, q) и модульной функции а(|р|, q). Действительно, по
определению имеем:
Az(q) = divK(#). (14)
Подставляя в (14) выражение для потока K(q) по формуле (11),получим
искомое соотношение для оператора Лапласа в данной нелинейной сплош-
ной среде:
ЬН bz(q)
4zfa) = div [а(|р |,<?) — (р, <?)] , р = —-----= gradz(<y). (15)
Эр Э<?
В координатной форме формула (15) име£т вид
« Э Г ЬН
Az(q)= S —г- а(|р |,<7) — (p.q)
к = 1 Э<? L Эр
а в символической операторной форме
ЭЯ
a(IP I-?) —(Р.Ч)
Ьр
р = bzjbq
(16)
п Э
Д = S —Г
fc = i Э<7* .
Э Г ЭЯ
= — а(1р 1,<7) — (P,<l)
bq bp
P = 4-)/bq
(17)
р = b(- )/bq
В терминах оператора Лапласа записываются уравнения теплопровод-
ности относительно неизвестного распределения температуры z. Так, урав-
нение установившегося (статического) распределения температуры име-
ет вид
Az(^) = -6(^-^o), (18)
где дельта-функция b(q — qQ) описывает точечный тепловой источник еди-
ничной мощности, помещенный в точку q0 £ {q}. Уравнение (18) можно
рассматривать как предельный случай при t уравнения нестационарной
6*
83
теплопроводности
dz
у— =&z+g(q), (19)
ot
где 7 — некоторый коэффициент, а функция g(q) описывает распределение
внешних стационарных (не зависящих от времени г) тепловых источников
в {#}. В частности, в случае точечного источника g(q) = b(q - q0). Здесь
уже распределение температуры z = z(q, t) явно зависит от г, и лишь в пре-
деле при t 00 распределение z = z(q), вообще говоря, делается стационар-
ным, не зависящим от времени.
Теперь также не составляет труда установить соответствие между УДС и
нелинейной сплошной средой описанного типа. Действительно, пусть дана
УДС, описываемая уравнением
q=f(q,u), uEU(q), q&{q}, (20)
или включением
«еФ^/^щ?)), (21)
и гамильтониан УДС имеет вид
Н(р, q) = max pf(q, и). (22)
и G U(q)
Отождествим множество <&(q) данной УДС с множеством допустимых
направлений потока сплошной среды. Таким образом, скорость УДС (21)
q отождествляется с вектором кт (2). Соответственно гамильтониан УДС
Н(р, q) отождествляется с опорной функцией множества допустимых на-
правлений потока. Однако при этом у нас остается свобода выбора для дан-
ной УДС (20), (21) модульной функции а. Выбрав для данной УДС ка-
кую-нибудь модульную функцию а, мы тем самым данной УДС (20),
(21) поставим в соответствие оператор Лапласа сплошной среды, опреде-
ляемый формулами (16), (17). В этом и состоит соответствие, по которо-
му данной УДС сопоставляется сплошная среда и ее оператор Лапласа.
Отметим, что свобода выбора модульной функции а при установлении
такого соответствия может оказаться весьма полезной при решении обрат-
ной задачи: данной сплошной среде, заданной некоторым дифференциаль-
ным оператором с частными производными, требуется поставить в соот-
ветствие УДС, описываемую соотношениями (20), (21). Рассмотрим об-
ратную задачу подробнее. Пусть задано дифференциальное выражение
(оператор) \p(d2z/dq2, dz/dq, q), ф — заданная функция от перемен-
ных d2z/dq2, dz/dq, q. Такой оператор может входить в описание процес-
сов в некоторой сплошной среде. Требуется найти УДС, описываемую соот-
ношениями (20), (21), (22) (например, найти функциюН(р, q)), которой
соответствует сплошная среда с оператором Лапласа в виде оператора ф.
Очевидно, что решение обратной задачи сводится к решению функцио-
нального уравнения
d2z dz
<?) = д^)> (22)
dq dq
84
где Az(^) определяется формулой (16) (или (17)). В уравнении (22)
неизвестными являются две функции: Н(р, q) и а(|р|,#). При этом
Я(р,’ q) должна быть положительно однородной функцией первой степени
по р, а функция а — положительной. Если такие решения уравнения (22)
существуют и могут быть определены, то сплошной среде, описываемой
оператором i//, соответствует УДС вида
ЭЯ
Я = — (Р> Я) > (23)
Эр
где вектор р играет роль управления. Ясно, что большая свобода в выборе
модульной функции а при решении функционального уравнения (22) по-
могает находить функцию Н(р, q), удовлетворяющую наложенным на нее
требованиям однородности.
Рассмотрим простой пример решения обратной задачи. Пусть
92z bz \ п b2z
--- — a I— S —;— .
bq2 ' bq ’ / fc = i (Э?*)2
(24)
В данном случае легко видеть, что ф тождественно представляется в виде
bz
Э / bz \ bz _ Г 9z
ф = Az = — I I = div — = div —
bz \ bq / bq Э?
= div
(25)
Из (25) легко производим отождествление искомых функций а(|р |, q),
Н(р, q), обладающих требуемыми свойствами. В результате получаем
решение:
ЭЯ р
a(\p\,q)=\p\, — = —, H(p,q)=\p\. (26)
Эр |р|
Таким образом, искомое уравнение УДС, которой соответствует сплошная
среда с оператором (24), имеет вид
ЭЯ р
Эр I р I
(27)
где р играет роль управления.
Поскольку Н(р, q) - опорная функция выпуклого множества
f(q, U(q)) = <&(q), то легко восстановить и само множество: оно имеет
вид круга радиуса 1 с центром в точке O(q). Поэтому уравнение УДС в
терминах управления и имеет вид
q = и, uEU={u: \и |< 1). (28)
УДС (28) — очень простая: для нее все пространство ее состояний {q} -Rn
является областью нестесненных движений, так как в силу (9.2) имеем
min H(p,q)~ min |р | = 1 >0 Nq^{q}. (29)
Ip I =i Ip I =i
85
В заключение данного параграфа обсудим значение полученных здесь
результатов. Надо отметить, что установление однозначного (взаимно од-
нозначного) соответствия между УДС и процессами в сплошных средах
может оказаться полезным при изучении одного объекта с помощью друго-
го. Скажем, задачи, сформулированные для сплошных сред, могут быть
сформулированы как сооветствующие задачи для УДС, и обратно. Так,
например, задача управляемости УДС может быть решена в терминах теп-
лопроводности. Действительно, пусть данной УДС соответствует сплошная
среда с оператором Лапласа вида (16), (17). Пусть установлено, что
уравнение (18) установившегося процесса теплопроводности имеет реше-
ние z(<?), отличное от нуля при всех q G {<?}. Тогда можно сделать вывод,
что исходная УДС управляема в {q}. Если же в каких-то точках z(q) = О,
то можно сделать вывод, что исходная УДС неуправляема.
Перспективна и обратная задача изучения сплошных сред с помощью
соответствующих УДС. Дело в том, что в последнее время в различных
областях науки и техники приходится иметь дело с весьма сложными
сплошными средами. Сложными оказываются и уравнения (в частных
производных), описывающие процессы в этих средах. Поэтому весьма об-
надеживающей может оказаться возможность переформулировать задачи
для сплошных сред в терминах задачи для соответствующей УДС.
Так как реальные физические сплошные среды занимают пространство
{q} небольшого числа измерений п = 1, 2, 3, то соответствующая УДС
также будет иметь ту же самую небольшую размерность п. Но для УДС
небольшой размерности весьма эффективным методом исследования
может служить метод фазового портрета УДС, рассматриваемый в этой
книге.
Наконец, рассмотрим еще одну возможность сопоставить функции
К(р, #), которая не обязательно является однородной, некоторую сплош-
ную среду с оператором Лапласа Az(t?). Функция К(р, q) может быть ин-
терпретирована как гамильтониан некоторой механической системы. Для
этого поток к(q) отождествляется с ЭК(р, (?)/Эр при p = gradz:
дсК
к(я)= — (grad z(q), q). (30)
Эр
Тогда
3JC
Az(<?) = div к (q) = div, -— (grad z(q), q). (31)
Эр
Отсюда находим
Г Э2JC 32z 92Jf 1
Az(<?) = tr —— (grad z(<?), q} —— + ——- (grad z(q), q) , (32)
L dp2 bq bpbq J
где tr[ • ] — след матрицы, стоящей в квадратных скобках. В частности,
1 _
например, при JC(p, q) = — р получаем классический лапласиан:
86
§ 29. УДС И ФИНСЛЕРОВА МЕТРИКА
Финслерова метрика является обобщением римановой метрики. Римано-
ву метрику можно рассматривать как частный случай финслеровой мет-
рики в том случае, когда ее индикатриса в каждой точке фазового прост-
ранства является невырожденной центральной гиперповерхностью второго
порядка с уравнением [95]
п п
S S g^q^l. (1)
0= 1 а= 1 Р
где коэффициенты вообще говоря, зависят от q. В частности, (1) яв-
ляется уравнением эллипсоида
(£)2 + + (4“)2 =1
а? * “ а2п
(2)
где длины полуосей а, эллипсоида могут зависеть от q. Если квадратичная
форма в (1) является положительно определенной, то все векторы q имеют
определенную длину. Однако не всегда эта форма положительно опреде-
лена. Например, в теории относительности эта форма не является положи-
тельно определенной, что соответствует тому, что конус допустимых ско-
ростей (световой конус) K(q) не совпадает со всем пространством Tq{q}.
Поэтому в этом случае определенную длину имеют только те векторы, ко-
торые принадлежат конусу K(q). В финслеровой геометрии, как правило,
конус K(q) имеет полную размерность, равную п. Для УДС, как мы видели,
размерность этого конуса может быть меньше п,
Финслерова метрика определяется следующим образом [95]. Задается
индикатриса - гиперповерхность в касательном пространстве Tq{q} такая,
что каждый луч, исходящий из точки O(q), пересекает эту гиперповерх-
ность не более, чем в одной точке, и касательная плоскость к ней не прохо-
дит через точку O(q). Далее, пусть q — вектор, заданный в Tq{q}. Проведем
из точки О = O(q) в пространстве Tq{q} луч, коллинеарный вектору ??,
до пересечения с индикатрисой. Этот луч пересекает индикатрису в одной
точке R. Вектор OR, соединяющий точку О с индикатрисой, принимают за
единичный в данном направлении i?. Таким образом, векторы q и OR колли-
неарны, а отношение их модулей | q\/\ OR | называется длиной вектора в
финслеровой метрике. Теперь индикатриса приобретает смысл геометричес-
кого места концов единичных векторов, отложенных от точки О (g) ^Tq{q}.
Заметим, что в финслеровой геометрии индикатриса — это всегда гипер-
поверхность в Tq{q}. Векторы q, не пересекающие индикатрису, считаются
неизмеримыми. При рассмотрении УДС, однако, далеко не всегда индикат-
риса УДС является гиперповерхностью (§ 6), и тем самым, ее далеко не
всегда можно отождествить с индикатрисой финслеровой метрики. Инди-
катриса УДС часто лежит в некотором линейном подпространстве Lm мень-
шего чем п числа измерений тп. Таким образом, чтобы пользоваться метри-
ческими понятиями для УДС с произвольной индикатрисой (§6), необхо-
димо расширить понятия индикатрис финслеровой геометрии, допустив в
качестве таковых ’’относительные” гиперповерхности, лежащие в подпрост-
ранстве Lm С Tq{q} с тп < п.
87
Более того, индикатриса УДС ограничивает выпуклое множество, часто
не содержащее точку O(q) касательного пространства Tq{q}. Поэтому луч,
скажем, коллинеарный данному вектору т?, может пересекать индикатрису
более чем в одной точке. В таком случае имеет смысл говорить о макси-
мальной | г? |/| ORq | и минимальной I т? 1/1 OR\ | длине вектора q
(рис. 29.1). Участок ADиндикатрисы соответствует минимальной длине
вектора q, а участок ВС — максимальной. Этим двум участкам соответ-
ствуют два лагранжиана (или две ветви одного лагранжиана) L° и Л1,
Рис. 29.1
которые можйо поставить в соответствие данной УДС с указанной струк-
турой ее индикатрисы [100]. При этом, если говорить об оптической анало-
гии УДС (§ 30), то L° соответствует минимальной скорости распростра-
нения фронта возбуждения, a L1 — максимально возможной в данной УДС
скорости распространения фронта возбуждения. С такой ситуацией мы
имеем дело, когда индикатриса задается, например, смещенной (п — 1)-мер-
ной сферой (гиперповерхностью) с уравнением
q) = I q - a(q) | - r(q) = 0, | я(?)| > r(q) > 0,
где r(q) — радиус сферы, a(q) — вектор смещения центра сферы от начала
координат пространства Tq{ q}.
Таким образом, траектории УДС в ее пространстве состояний, получен-
ные из канонических уравнений, соответствующих данной УДС, можно рас-
сматривать как геодезические линии, т.е. такие линии, которые имеют
локально минимальную длину между любыми двумя своими точками в
соответствующей финслеровой (в частности, римановой) метрике. Такие
геодезические линии являются траекториями, оптимальными по быстро-
действию.
§ 30. ОПТИЧЕСКАЯ АНАЛОГИЯ УДС
Естественно и просто проводится аналогия между УДС и процессом
распространения возбуждения, например, света в некоторой сплошной
среде. Здесь имеется в виду геометрическая теория возбуждения, в част-
ности, геометрическая оптика [9, 19]. Математическая сторона этой теории
очень четко и вместе с тем кратко изложена в приложении 1 к [35]. Поэто-
му для того, чтобы провести аналогию между процессами, описываемыми
геометрической оптикой, и УДС, нам достаточно сделать лишь следующее
отождествление: индикатрису скоростей возбуждения (света) отождествим
88
с индикатрисой допустимых скоростей данной УДС. После этого оптическая
аналогия УДС становится очевидной и ее можно строить точно так же,
как это сделано в [35].
Здесь мы остановимся только rfa выводе соответствующего лагранжиана
L (4, Q) • Напомним, что в соответствии с принципом Ферма возбуждение
(свет) между двумя точками qo и q^ распространяется по траектории
(лучу) q(t),q(O) =qOiq(T) = qY, в пространстве состояний { q } так, что ин-
теграл действия (оптическая длина пути)
\dq\ т t
/= f —-------- = (L(q,q)dt
Чо v(r),q) о '
(О
достигает своего экстремального (минимального) значения. Здесь
q) - показатель преломления, и(17, q) - абсолютная величина ско-
рости света в точке q в направлении 17. Из сравнения двух интегралов в (1)
с учетом \dq | = | q | dt получаем
I q I
—------- dt = L(q, q)dt.
Следовательно, искомый лагранжиан имеет вид
Если индикатриса УДС задается уравнением (§5)
<>(4, Q) = 0, (3)
то, представляя это уравнение в виде о(| q | ??, q) =0, где 17 = 4/1 4 I ~
единичный вектор в направлении q, а затем разрешая его относительно
I q |, получим
(4 \
-г, . q )• (4)
I Q I /
Таким образом, искомый лагранжиан имеет вид положительной и положи-
тельно однородной 1-й степени по q функции:
141
L(q,q)- ----, (5)
/ Я \
v | -г- , Я I
\М /
где v(4/14l, Я) определяется равенством (4) и играет роль функции
о0(4, Я), а уравнение индикатрисы тогда принимает вид
L(q,q\=\. (6)
Как было отмечено в § 29, если луч, исходящий из O(q) в направле-
нии 17, имеет более чем одну точку пересечения с индикатрисой, то уравне-
ние (3) имеет более одного решения относительно |д|. Поэтому можно
говорить о максимальной скорости возбуждения щ (17, q) в направлении т?
и о минимальной скорости v0(q, q) в том же направлении q. В этом случае
89
можно говорить о быстром и медленном фронтах возбуждения, которым
соответствуют два лагранжиана
141 l4l
L\(Q>q)= —-—;-------г . Zo(<7,<7)= ——:-------; • (7)
I Я \ / Я \
I ГТ-: . Я I «о I т- , Я )
\ l<71 / \ l<71 /
Из (5) также видно, что если т? (или 4) принадлежит конусу К(q) допусти-
мых направлений, то L — определенная конечная величина. Если же 17
(или 4) не принадлежит K(q), то L следует считать неопределенной или
бесконечно большой положительной величиной. Источник света (возбуж-
дения), помещенный в точку q 9 будет освещать лишь те точки пространст-
ва {#}, которые достижимы из точки q' под действием допустимых управ-
лений УДС.
§ 31. СООТВЕТСТВИЕ МЕЖДУ УДС
И НЕУПРАВЛЯЕМЫМИ МЕХАНИЧЕСКИМИ СИСТЕМАМИ
Поскольку существуют хорошо развитые методы исследования неуп-
равляемых гамильтоновых механических систем, то при изучении свойств
УДС может оказаться полезным факт их соответствия некоторым механи-
ческим системам. В частности, весьма полезным при изучении УДС может
оказаться аппарат канонических преобразований, производящих функций
и многие другие мощные методы аналитической механики.
Пусть задана УДС
q=f(q,u\ uGU(q). (1)
Тогда, как мы видели выше (§ 14), ей можно однозначно поставить в со-
ответствие неуправляемую гамильтонову механическую систему с поло-
жительно однородным по р первой степени гамильтонианом вида
Н(р, q) = sup (max) pf(q, и). (2)
u e U(q)
Обратно, если имеется неуправляемая механическая система с выпуклым
положительно однородным первой степени по р гамильтонианом Н(р, q),
то ей можно поставить в соответствие УДС вида
. ън
Я= —(Р'Я), (3)
Эр
где управлением служит параметр р, не стесненный никакими дополнитель-
ными ограничениями. Так как ЪН/др в (3) является однородной функцией
по р нулевой степени, т.е. фактически оно зависит лишь от р/\ р | , то управ-
ление р можно считать меняющимся, например, лишь на сфере: \р | =1.
Отметим, что пространство состояний {#} УДС (1) и (3) теперь стало
конфигурационным (или координатным) пространством по отношению к
неуправляемой механической системе с гамильтонианом (2), и наоборот,
конфигурационное пространство неуправляемой механической системы
с гамильтонианом Н(р, q) является пространством состояний (фазовым
пространством) соответствующей УДС (3). Для УДС (3) пространство
90
управлений (множество допустимых управлений) совпадает с пространст-
вом импульсов {р} той же механической системы. Если мы теперь за-
хотим УДС (3) поставить в соответствие неуправляемую гамильтонову
систему с положительно однородным первой степени гамильтонианом,
то снова придем к заданному гамильтониану Н(р, q). Действительно, соот-
ветствующий УДС (3) положительно однородный первой степени гамиль-
тониан определяется равенством
ЬН
ЭС(тт, q) = sup(max) я-(р, q). (4)
р Эр
Но q = ЬН/Ьр как раз и дает то значение q, на котором дости-
гается верхняя грань (максимум) величины pq. Таким образом, верхняя
грань (или максимум) в (4) достигается при р = я, и следовательно,
ЬН
JC(ir, 4) = 7Г — (л, Ц) ~ Н(ъ, q), что и требовалось показать.
Эр
В дальнейшем два положительно однородных первой степени гамильто-
ниана Нх(р, q) и Н2(р, q) будем называть эквивалентными, если множест-
во точек в {р}, описываемых уравнениями Нх (р, q) = 0 и Н2(р, q) = 0, при
любом q Е {q} являются одновременно или пустыми множествами, или
описывают один и тот же конус K(q). Множество всех эквивалентных меж-
ду собой положительно однородных первой степени гамильтонианов Н(р, q)
образует класс-эквивалентности, задаваемый полем конусов K{q). Здесь
считается, что конус может быть и пустым при некоторых q Е {q}.
Таким образом, если считать, что пустому конусу К (у) сопряжено
пространство {4), то между классами обобщенно траекторной эквивалент-
ности УДС, определяемыми полем конусов K{q) (допускается, что K(q}
совпадает с {q}), и классами эквивалентных между собой положительно
однородных первой степени гамильтонианов H(p,q), характеризуемых
полем конусов K(q) (среди которых могут быть и пустые конусы),
устанавливается взаимно однозначное соответствие:
qeK(q)^K(q) = {p-. H(p,q)<0, V q € {q} .
Указанное взаимно однозначное соответствие фактически является
следствием взаимно однозначного соответствия между конусами K(q) и
K(q), т.е, следствием из равенства K(q) = K(q)означающего инволютив-
ность операции сопряжения выпуклых конусов.
Покажем теперь, как установить соответствие между механической
системой и УДС. Если механическая система с п степенями свободы задана
своим гамильтонианом H(p,q), не являющимся положительно однород-
ной первой степени по р функцией, то проведем операцию ’’однородниза-
ции” по формуле
/ р \
H+i(Po,P,q)= IPo |Я(------, (5)
\ I Ро I /
где р0 - новая координата импульса, которой соответствует новая коорди-
ната состояния qQ. Функцию (5) примем за гамильтониан искомой УДС.
91
(6)
Тогда соответствующая УДС будет иметь порядок п + 1 и описываться
уравнениями
ЬН+1 . Г/Р \ р ЬН / р
Я = ----- =sign(-p0) Я1 ------ , q )- — —( --------г, Я
bp0 L \ I Ро I / Po Эр \ | po I
. ЬН+1 bH / p \
q ------- = — I ------. q 1 •
Эр bp \ | po I /
В УДС (6), (7) управлением служит вектор (р0, р), не стесненный ника-
кими ограничениями. Сопряженная система имеет вид
. эя+,
Ро эТ- ' °’
ЭЯ+1
(7)
(8)
(9)
ЭЯ/ р
Р = - ----- =- । Ро I —I -----г- Я
bq bq \ |ро I
Чтобы система (7), (9) совпадала с каноническими уравнениями исход-
ной механической системы, потребуем, чтобы |р0 I = 1. Тогда выражение
в квадратных скобках в точности совпадает с лагранжианом L(q, q), соот-
ветствующим Н(р, q). Далее, чтобы придать координате qQ смысл механи-
ческого действия, положим р0 = — 1. Тогда (6) превращается в равенство:
q°=L(fl,q). (10)
Из (10) имеем
о(4°.4><7) = 4°-L{q,q) = 0. (11)
Уравнение (11) есть уравнение индикатрисы УДС (п + 1)-го порядка с
вектором состояния (q°, q), которая и ставится в соответствие исходной
механической системе с гамильтонианом Н(р, q) и лагранжианом L(q, q).
Из (10) следует возможность записать УДС в виде нормальной системы
дифференциальных уравнений
'q0=L(u,q), (12)
Я = и, (13)
где управление и = (и1, ..., и") не стеснено никакими ограничениями.
В этом параграфе, на наш взгляд, уместно рассмотреть еще один вопрос,
который в определенном смысле примыкает к задачам о связях между
УДС и неуправляемыми механическими системами, на которые наложены
дополнительные интегрируемые или неинтегрируемые ограничения.
Известно [78], что в ряде случаев (например, когда внешние силы,
действующие на систему, являются потенциальными) уравнения движения
голономной системы с идеальными связями
Я<м) = (ШО) = о,
или со связями в эквивалентной (14) форме
. э/
— =0,
Эг
(14)
(15)
Э/ / ЭЛ \
тг(<7, г) = (я,7(<7. О) = — = Г~ ) ’
Э<? \ bqf /
(16)
92
имеют вид
d / bL \ bL
— ( — )-----“
dt \ bq J bq
(17)
где индекс i здесь и далее в этом параграфе принимает значения от 1 до тп,
а индекс / — от 1 до л, m < п\ q = (g7) обобщенные координаты; q —
обобщенная скорость; я = я(#, t) - матрица размерности тХп, имеющая
полный ранг; L = L(q, q, t) — лагранжиан системы при отсутствии связей;
X — ти-мерный вектор. Предполагается, что существуют и непрерывны все
нужные производные, а начальная точка q(tQ) и начальная скорость q(tQ)
удовлетворяют (14), (15).
Пусть гамильтониан Я(р, q, t) взаимно однозначным образом соответ-
ствует £(4, q, t) посредством преобразования Лежандра. Тогда уравнения
(15), (17) преобразуются к форме, близкой к канонической:
. ЭЯ
<1 = (18)
Эр
ЭЯ
Р = - — (Р, Q, 0 + t). (19)
Э</
Уравнения (18), (19) не точно канонические из-за наличия члена Хя в (19).
Система уравнений (15), (17) или соответственно (18), (19), (15) обра-
зуют полную систему для определения неизвестных функций q(t), X(t) или
P(t), X(r).
Покажем, что существует функция JC = Jt( S6, q, t), где $* = ( 5^) —
новый импульс, которая определяется равенством (условием максиму-
ма по q)
I л. V
q, t) = maxi - L(q, q, t) + S^q | trq + — = 0
\ dr
(20)
и такая, что уравнения движения данной голономной системы представля-
ются в точном каноническом виде
Т7?г(^-')> (21)
• азе
S5 =--------( Я q, t),
d<7
(22)
т.е. J€( q,t) есть точный гамильтониан голономной системы со связями
(14), (15). Покажем, что из справедливости равенств (21), (22) следует
справедливость равенств (15), (18), (19), а следовательно, и равенств (15),
(17). Для этого сначала проведем требуемую максимизацию в формул?
(20). Из условия максимума (20) по q следует, что при фиксированных
q> t существует вектор м = (д,) такой, что функция
- L(q, q, t) + fPq + p
. d/\
trq + - |
, bt /
(22a)
93
имеет экстремум по q, удовлетворяющий условию
Ы _ + 9> + ртт = 0 ъ<1 (23)
или
9* + дя = — . (24)
Если обозначить
р = 9> + дя, (25)
то (24) примет вид
ЭЛ .
Р = —(<7,<М). (26)
В силу предположения об однозначном соответствии между Н и L уравне-
ние (26) можно разрешить относительно q:
. ЪН
— (Р’Ч'Г)- (21)
др
В силу формулы (25) равенство (27) примет вид
ЬН
q= —(^ + piJ.q.t). (28)
Эр
Теперь определим параметр р из условия удовлетворения связи (15),
как требует равенство (20) :
ЬН . ьп
1Гцз(?) — (&> + pn,q,t) + — = 0. (29)
Ьрр bt
Здесь и далее предполагается суммирование по а от 1 до т и по 0 от 1 до
п. Очевидно, что искомое р — функция от 9>, q, t9 т.е. р = д( q, г).
В дальнейшем будем считать, что уравнение (29) однозначно разрешимо
относительно р.
Отметим, что если найденное р = р( 9*> q, t) подставить в (29) и (28),
то уравнение (29) превратится в тождество, а уравнение (28) (в силу уже
тождества (29)) автоматически обеспечивает удовлетворение уравнениям
связей (14), (15) при любых 9>,q, t.
Далее, подставляя (28) в (22а) при р = д( 9>, q, t) получим явное вы-
ражение искомого гамильтониана:
/ ЬН \ ЬН
9>,q,t) = -Ц ---( 9>+ ртт, q, t),q, t)+^---(^ + pir, q, t). (30)
\ bp / bp
Прибавим и вычтем в правой части (30) выражение
ЬН
№ — (&+ px,q,f).
др
94
Тогда (30) примет вид
/ ЭЯ л \
3C(3a,?,r) = -Z( --(3^ + pit,q,t),q, t )+
\ др '
дН дН
+ ( 3й + pit)-(S6 + pit, q, t) - pit -( 5s+ pit, q, t). (31)
dp dp
В силу тождества
/ЭЯ \ ЭЯ
H(p,q,t)=-L\ — (p,q,t),q,t]+p ~—(p,q,t), (32)
\ bp /др
в котором положим р = 5s + pit, от (31) придем к следующему выра-
жению:
(33)
Х( ф q,t)=H(3!>+p( ^>,q,t)tt(q, t),q, t)-
ЬН
-p( &,q, t)it(q, t) --(54+д( 3\q, t)ir(q, t),q, t).
dp
Используя тождество (29), формулу (33) можно записать и в другом виде:
bf
К( 5* q, t) = H( д( 5s, q, t)ir(q, t),q, t) + д( SF>,q, t) — (q, t). (34)
dt
Итак, решение задачи максимизации (20) дается формулами (28) и
(34), где д = д(3&, q, t) определяется из решения уравнения (29). За-
метим, что при отсутствии дополнительных связей (14)-(16), как сле-
дует из (20) и (34), К и Н, естественно, совпадают.
Теперь непосредственным вычислением покажем, что из уравнения (21)
следует уравнение (18), а из уравнения (22) — уравнение (19). Имеем
ЭК Э Г _ Э/1
q =----7 = + <7> 0 + М ---- “
Э5* Э^ [ V 4 ' dt J
ЭЯ Эд ЭЯ Эд Э/
= ( S5 + pn,q,t)+ — it — (^+ pit,q,t)+ — • — =
Эр Эгг Эр dtr dt
ЭЯ Эд df Эд df
= — ( & + Д7Г, q, t) - —77 ’ — + “77 ’ —
Эр 4 ’ дЗ* dt дЗ* дт
дН дН
= — ( ^> + Мя, q, t) - — (р, q, t).
dp dp
(35)
В выкладке (35) использованы последовательно тождество (29) и форму-
ла (25) обратного перехода от нового импульса ёР к исходному р. Таким
образом, из (21) следует (18) .
Осталось показать, что из (22) следует (19). Действительно, в левой
части (22) в силу (25) имеем
л. d . . / ^^2/ • ]
= ~~ (Pj ~~ Ра ~ Pj ~~ Ра ^aj ~ Ра I ~ ~
1 dt 1 \ dqp р dt '
. . / ditaj дн d2fa \
Pi ~ Ра ^aj — Ра ( ~ 7 7 77 I •
1 \ dqp дрр dqjbt /
(36)
95
Здесь последовательно использованы равенства (28) и (16). С другой сто-
роны, в правой части (22) получаем
Э Г Э/ '
dqj dqf L ЭГ J
ЪН Ъ(ратга(3) ЪН Ъ Ы.
~а а а ~ а (Ма —— )
9<fy 9^ Ърр bqt dt
ЪН Г Эда Ътгар 1 ЭЯ Эда dfa Э2/а
bq, L Э<7/ 9^. J Ър& dqj Ъг dtdqf
ЪН Ъра ЪН Ътга/3 ЪН Ъца Ъ/а Э2/а
— — — Ла(? ~ — Ма ' — Да ; •
9<7/ 9<7у Ърр %q, Ъqj Ъг Ъ^)
(37)
Учитывая, что в силу (29)
па&(ЪН/Ър&) =- Э/а/Эг,
мы видим, что в (37) второй и четвертый члены взаимно уничтожаются.
Поэтому (37) принимает вид
ЬН Ьттав дН b2ta
------=-----------ра_______ _д ------------ . (38)
bqj Ьр^ btbqj
Приравнивая (в силу исходного уравнения (22)) друг к другу правые
части равенств (36) и (38), мы получим новое уравнение, в котором
видно, что последние слагаемые в левой и правой части равны между со-
бой (Э2fа/Эqftt = dVa/drdfy), и, следовательно, их можно удалить из
обеих частей уравнения. Тогда уравнение (22) примет вид
. ЬН / Этга,- Ьъав \ ЬН
Pj “ — - + Ра I ~ “ + Pa^aj-
bqf \ bq& bqf ) Ьр^
Для произвольных Tiij{q, t) ’’вихревые” величины в круглых скобках
(39) не равны нулю. Но,в предположении голономности связей (14), (15),
т.е. в предположении справедливости условия (16), они обращаются в нуль
тождественно. Действительно в силу (16) имеем
d^aj _ дЛдр = d fa _ Ь fa _ Q (4Q)
bqf bqf bqp bq& bqf
Учитывая (40), мы видим, что (39) совпадает с (19), если X в этом урав-
нении отождествить с д. Поскольку все приведенные выкладки обратимы
в рамках сделанных предположений и обозначений, то из уравнений (15),
(18), (19) следуют уравнения (21), (22). Таким образом установлена
эквивалентность систем уравнений (14)-(17) или (14), (15), (18), (19)
системе уравнений (21), (22), (20), (34), где X(г)
К исследованию поставленной темы можно подойти и по-другому. Не-
трудно показать, что уравнения (14) —(17) являются уравнениями экстре-
96
малей задачи на условный экстремум функционала
г
JL(4, q, t)dt
О
при наличии связей (14). Действительно, известно [63а], что существует
функция Х(г ) такая, что экстремаль q(t} удовлетворяет уравнению Эйлера
d / Э£ \ Э£
— — I-----------= 0
dt \'bq J bq
и уравнению связей (14), где
£(q, q,t) = £ = L(q, q, г) + v(t)f(q, t).
Подставляя (43) в (42), получим
d
dt bq
d I bL \ bL bf
= — I ----- I-------v(t) — =0,
dt \bq / bq bq
что в точности совпадает с (17).
Если в задаче на условный экстремум функционала (41) связь взять
в форме (15), (16) вместо формы (14), то так же, как известно, сущест-
вует функция v(t) такая, что экстремаль q(t) удовлетворяет уравнению
Эйлера
d / ЭЛ \ Ь£х
— ( —L )----------- =о
dt \ bq / bq
и уравнению связей (15), (16), где Л имеет уже другую форму, отличную
от (43):
Э I Э
— (L(q, q, t) + v(t)f(q, 0) - — [L(q, q, t) + vf(q, r)] =
7 J oq
£i(q, q, t) = L(q, q, t) + va
(41)
(42)
(43)
(44)
(45)
(46)
Однако и здесь, подставляя (46) в (45), мы, естественно, снова приходим
к уравнению (17). Действительно, имеем с учетом (16):
d
dt [ %q
b ‘
d / dL\ . dna0 . d2f d£
dt \ bq / bq^ bq bt bq
b2f t b2f d / bL \ bL bf
— v---- q - v ---= —I------) — — + v —= 0,
bq2 btbq dtxbq / bq bq
что совпадает с (14), если отождествить X с i>.
d / . .
— IL (q, q, t) + va (t) 7Ta/3 q^ + i>a ft) ——
\ ot
ЭД '
L(q,q,t) + va(t) ira0q0 + va(t) =
Э2
(47)
Vi 7. А.Г. Бутковский
97
Из только что изложенного можно еще раз сделать известный вывод,
что принцип экстремального действия сохраняется при наличии голоном-
ных нелинейных связей или ’’неголонбмных”, но интегрируемых [2].
С другой стороны, задачу на экстремум функционала (41) при условии
(15), (16) можно решить с помощью принципа максимума [4]. В соответ-
ствии с ним экстремаль q(t) удовлетворяет следующей гамильтоновой
системе уравнений:
dJC
<? = (48)
ЭЗС л
(49)
где $>, q, t) определяется равенством (7). Таким образом, мы снова
приходим к системе гамильтоновых уравнений (48), (49), в точности сов-
падающих с (8), (9). Однако приведенный в начале вывод этих уравнений
нельзя считать лишним, так как он показывает явную связь старых и.новых
импульсов р и З5 (см. (85)), а также функций Н(р, q, t) и Jf( 5°, q, t)
(см. (34)).
В заключение сделаем некоторые замечания.
1. Из текста, соответствующего формулам (41)—(49), следует извест-
ный вывод, что фундаментальный принцип экстремального действия спра-
ведлив (сохраняется) и в случае наличия голономных нелинейных связей.
2. Можно попытаться перейти от гамильтониана J€( fP 9 q, г), опреде-
ленного формулой (34), к соответствующему лагранжиану <£(#, q, г) с
помощью преобразования Лежандра, например, для того, чтобы записать
уравнения движения системы со связями в виде точного уравнения Эйлера:
d / \
— —------------=о.
dt \ bq / bq
Однако надо помнить, что такой лагранжиан (при фиксированных q и г)
будет определен только для таких q, которые удовлетворяют связи (15).
Это видно из уравнения (21), которое является ’’разрешающим” урав-
нением преобразования Лежандра. Как было показано выше, это уравнение
при фиксированных q и t дает лишь такие q9 которые автоматически удов-
летворяют связям (15) при любом & . Поэтому при q, не удовлетворяю-
щем связи (15), не найдется соответствующего SP • Следовательно, не-
возможно разрешить это уравнение относительно & при произвольном q.
Из этого уравнения как раз и вытекает соответствующая связь (15).
3. Из формулы (39) видно, что если бы второй член (с круглыми скоб-
ками) в правой части этого уравнения образился в нуль без условия (16),
то мы получили бы точные гамильтоновы уравнения с гамильтонианом
(20) или (34) для неголономной системы. Однако этот член в (39),вооб-
ще говоря, в ноль не обращается даже для линейных неголономных связей,
не говоря уже о нелинейных неголономных связях.
Априори неочевидно, существуют или нет точные гамильтоновы урав-
нения (и, тем самым, точный гамильтониан) для неголономных механи-
ческих систем. Было бы интересно получить ответ на этот вопрос.
98
§ 32. УДС С ФАЗОВЫМИ ОГРАНИЧЕНИЯМИ
Метод фазового портрета позволяет конструктивно учитывать наличие
фазовых ограничений, т.е. ограничений, наложенных на состояние УДС.
Геометрически наличие ограничений на состояние означает, что изобра-
жающей точке q данной УДС запрещено находиться в некотором выделен-
ном заданном множестве G пространства состояний {q}. Как правило,
G С {q} задается априори и независимо от основного уравнения УДС:
и), uEU(q). (1)
При наличии ограничения q ё G исследование системы (1) также проводит-
ся с помощью ее фазового портрета, а именно, на фазовый портрет УДС (1),
построенный без учета ограничения q ё G, мы должны наложить еще мно-
жество G. Относительно просто такое исследование проводится для УДС,
заданных на двумерных многообразиях и, в частности, на двумерной плос-
кости. Не совсем тривиальным исследование УДС (1) при ограничении
q ё G будет тогда, когда множество G целиком или частично расположено
вне области нестесненных (свободных) движений данной УДС (1). На
рис. 32.1 изображен типичный случай, когда на фазовый портрет УДС (1),
построенный сначала без учета ограничения q ё G, нанесено множество G
(заштриховано). Для отыскания допустимой траектории (согласно с штри-
ховкой границ траекторных воронок и не пересекающей запрещенное мно-
жество G) необходимо и достаточно отыскать обходной путь от начальной
точки qQ к конечной q^. Такими допустимыми путями на рис. 32.1 являют-
ся q^Eqi или qoFqi. Однако, как хорошо видно из фазового портрета,
если изображающая точка УДС оказалась внутри криволинейного тре-
угольника АВС (т.е. внутри траекторной воронки с вершиной в точке Л),
то она уже не сможет покинуть треугольник АВС ни по какой допустимой
траектории. Произойдет как бы ’’захват” изображающей точки областью
АВС. По аналогии с астрофизикой такую область АВС можно было бы
назвать ’’черной дырой”, ибо в эту область изображающая точка может
только войти, но покинуть ее она не может.
С другой стороны, область BCD обладает противоположным свойством:
изображающая точка q УДС (1) не может войти в эту область, хотя может
ее покинуть. Такую область BCD теперь естественно назвать ’’белой дырой”.
Таким образом, особенность УДС
при наличии ограничений на коор-
динаты состояния состоит в нали- а,
чии областей типа черных и белых ^^пттттттт^^
дыр. При этом естественно возни-
кает задача о построении и описа- J? gx
нии этих областей. Ясно, что на дву- Ж j
мерных многообразиях эта задача X
легко решается геометрическими з У/ чд f В
(графическими) методами. / f
В общем случае,если G не принад- g л Й
лежит области нестесненныхдвиже- -Д_____________
ний, для определения областей ти- 7
па белых и черных дыр нужно Рис. 32.1
’Л 7*
99
решить задачу Коши для уравнений с частными производными: H(bzlbq, q)=
= О, Н(— dz/dq, q) = 0 соответственно. При этом начальным множеством
должны служить определенные подмножества запрещенного множества G.
§ 33. ОСОБЫЕ МНОЖЕСТВА ДВУМЕРНЫХ УДС
Для двумерных УДС особым множеством будет, как правило, линия на
двумерном многообразии (в частности, на плоскости) в пространстве со-
стояний {д} данной УДС. Такая линия, как следует из общего рассмотре-
ния, характеризуется рядом эквивалентных условий:
1) Р(р, q, и) = pf(q, и) не зависит от иЕ U;
ЬР
2) (р, q,u)= 0 тождественно по uG U
ди
3) выполняется равенство
Я(РЛ)+Я(-Р, ^) = 0;
4) с учетом, что H(p,q) = 0, из 3) следует эквивалентная система
равенств:
б?) = 0,
\н(-р, <?) = ();
5) для двумерной системы можно добавить еще одно условие, эквива-
лентное вышеперечисленным: все вектора q = f(q9 и), когда и пробе-
гает U, коллинеарны. ,
Для общей двумерной системы наиболее ’’непосредственным”, если так
можно сказать, условием для особой кривой является условие 4) : оно
просто дает в этом случае определенную систему уравнений, которую с уче-
том однородности можно использовать для исключения из нее вектора
Рис. 34.1
100
р = (pltp2) и получения непосредственной связи между координатами q1
и q2 точки q, лежащей на особой кривой.
Действительно, из (4) имеем систему
H{Pi,pz,q\q2) = Q,
H(-Pi, -p2,ql,q2) = 0.
Так как H(p,q) положительно однородна по р, то без ограничения общно-
сти можно наложить еще одну связь на р. Например, положить |р| = 1.
Исключая из этой системы рх и р2, придем к искомому уравнению особой
линии:
«(<7*.<72) = О.
Наиболее просто особая кривая получается, если УДС имеет вид
Q =fo((l) + ufi(Q\
uEU(q)CRl, qf=R2.
Легко видеть, применяя одно из условий 1) — 5), что особая кривая задает-
ся условием равенства нулю определителя
*(<?) = I ш Ш1 = о.
В частности, для линейной системы q = A q + Ьи, имеем s (q) = | A q b | = 0;
для билинейной системы q = Aq+uBq —соответственно s(q) = \Aq Bq\ = Q.
§ 34. ФАЗОВЫЙ ПОРТРЕТ УДС НА ДВУМЕРНЫХ МНОГООБРАЗИЯХ
Особенно просто фазовый портрет строится для УДС, изображающая точ-
ка которых движется на двумерном многообразии М2: двумерной плоско-
сти, двумерной сфере, торе и т.д.
Для двумерной УДС существует всего 6 типов конусов K(q). На
рис. 34.1а—е они изображены все. Эти 6 типов конусов соответствуют
трем первым строчкам таблицы рис. 8.1.
На рис. 34.1 ,ж изображен пример особой изолированной линии с изобра-
жением всех возможных типов конусов на ней и пяти случаев их располо-
жения относительно особой линии. Уравнения движения такой УДС пред-
ставляют собой систему двух скалярных уравнений
41 = f'(q',q2,u),
.q2 = f2(ql,q2,u),
где значения управления и принадлежат заданному множеству U, которое,
вообще говоря, зависит от точки q = , q2), т.е. U= U(q). Система (1)
эквивалентна дифференциальному включению
q е f(q, и) = Ф(?), (2)‘
где Ф (<?) при каждом фиксированном q G М2 есть выпуклая оболочка ото-
бражения U -> TqM2 (когда и пробегает все множество U(q)). Всю инфор-
мацию об УДС (1), (2) содержит функция Гамильтона Н(р, q) этой систе-
101
мы или, что то же самое, опорная функция множества Ф(<?) :
Я(р, <?)ssup(max)[p1/1(^1,<72> и) +p2f\ql, q2, и)] =
«6 V(q)
= sup(max)p4-
q e Ф(<7 )
Для построения фазового портрета УДС (I) необходимо выделить его
элементы, включая особую линию.
Естественно, что порядок выделения элементов фазового портрета мо-
жет быть произвольным, так как в конечном счете вся полученная здесь
информация отображается на одном рисунке — фазовом портрете. Для
конкретной УДС какие-то элементы ее фазового портрета могут отсутство-
вать: например, может не существовать область нестесненных (свободных)
траекторий или, скажем, отсутствуют точки абсолютного равновесия и т.д.
Заметим, что для некоторых видов УДС выделение элементов ее фазо-
вого портрета может осуществляться непосредственно по виду правой
части ее дифференциального уравнения или включения.
Рассмотрим подробнее некоторые из элементов фазового портрета.
Множество точек q G М2 абсолютного равновесия (покоя) УДС (1)
определяется условием
Ф(<7) = {0}, или |/(<7, м)| = 0, (3)
независимо от и Е U(q). Это определение множества точек абсолютного
равновесия пригодно для УДС произвольной размерности п. Очевидно, что
множество точек абсолютного равновесия УДС будет ее инвариантным
множеством в {q}.
Иногда полезно выделить множество точек q G М2, для которых сущест-
вуют мЕ U(д') такие, что
= 0. (4)
Такое множество назовем множеством относительного равновесия (покоя)
УДС (1). Точки относительного равновесия могут отличаться от точек
абсолютного равновесия. Определение множества относительного равнове-
сия также пригодно для УДС произвольной размерности п. Очевидно, что
множество относительного равновесия УДС включает в себя множество
абсолютного равновесия УДС.
Область D нестесненных (свободных) траекторий УДС (1) (§ 9) выде-
ляется с помощью функций Н(р, q) посредством неравенства
min H(p,q) > 0. (5)
I р I = 1
Это условие равносильно тому, что точка O(q) Е TqM2 лежит внутри Ф (<?)
для любого q G D, или, что то же самое, конус К (q) совпадает с Т^М2. Для
двумерных систем это геометрическое условие проще аналитического усло-
вия (5), так как оно не'требует вычисления по формуле (5).
Особая линия 5, и в частности линия перемены штриховки, определяется
системой уравнений ( § 17)
Я(р,^)=0, H{-p,q) = Q. (6)
102
Исключение р из системы (6) с учетом однородности по р функции Н(р, q)
дает уравнение линии S:
*(<?) = 0. (7)
Существенно подчеркнуть, что (7) дает именно линию в том случае, если
(7) выполняется не тождественно в некоторой области G С {q}. Для линей-
ной системы
q = Aq+bu, uEU(q), (8)
где q = (t?1, б/2) и и — скаляр, особой линией, и в частности линией пере-
мены штриховки, является прямая
s(q)=\Aq Z>| = 0. (9)
Для билинейной системы
q = Aq + и Bq, uEU(q), (10)
где также q = (ql, q2) и и — скаляр, особая линия (в частности, линия
перемены штриховки) задается уравнением
s(q) = \Aq Bq | = 0. (11)
В силу однородности уравнения (11) по q легко видеть, что (11) или
распадается на два уравнения прямых, пересекающихся в точке О, или
описывает единственную точку О.
Для нелинейной системы вида:
<7 =/№)+« Zita). u^U(q), (12)
где q = {q19q2) и и — скаляр, уравнение особой линии, в частности линии
перемены штриховки, имеет вид
*(<?) = = 0- (13)
В равенствах (9), (11) и (13) прямые скобки означают определитель вто-
рого порядка.
В точках q ЕМ2, не принадлежащих множеству абсолютного равновесия
и области нестесненных движений D, конус К (q) замыкается двумя обра-
зующими: левой, которой соответствует управление их (<?), и правой, кото-
рой соответствует управление u2(q). Этим образующим и управлениям
их (q) и и2 (q) соответствуют левая и правая ветви границ траекторной
воронки, исходящей из данной точки q. Уравнение для левой ветви
имеет вид
q=f(q, (8)
а для правой ветви —
q =f.(q. u2(q)) (9)
Если конус К (q) оказался незамкнутым, т.е. левый или правый крайний
луч (или оба вместе) оказались не принадлежащими К (q), то выбираются
соответствующие ненулевые вектор i (<?) и 2 (<?), коллинеарные этим
образующим. Система уравнений для границ траекторных воронок тогда
103
приобретает вид: для левой ветви
<7 = Л О?) 00)
и для правой ветви
<7 = <Р2(<7)- 00
Левую ветвь границы траекторной воронки, описываемую уравнением
(8), заштрихуем слева по ходу положительного времени при движении по
ней; правую ветвь заштрихуем соответственно справа.
Что касается инвариантных линий, то они бывают двух видов: ’’изолиро-
ванные инвариантные линии”, определяемые уравнением (7), или ’’неизо-
лированные инвариантные линии”, заполняющие (расслаивающие) область
в {<7>.
Изолированная инвариантная линия является подмножеством особой ли-
нии (7), на которой с необходимостью реализуются случаи 4, 5, изображен-
ные на рис. 34.1,ж, т.е. K(q) имеет тип а} или а% и касается особой линии.
Проверку возможности для изображающей точки УДС покинуть особую
линию в более высоком порядке, по-видимому, проще всего сделать непо-
средственно по уравнению УДС.
Области, заполненные инвариантными линиями (рис. 34.1,г, д) выде-
ляются как те области пространства состояний {#}, для которых усло-
вие (7) выполняется тождественно, а конус K(q) имеет тип До
или а\.
Совокупность всех указанных выше построений наМ2 образует фазовый
портрет данной УДС.
Основное значение фазового портрета состоит в том, что он позволяет
проводить все возможные допустимые траектории данной УДС, образуе-
мые действием допустимых уравнений и Е U(q). Траектория на фазовом
портрете будет допустимой, если она ’’протыкает” границу траекторной
воронки согласно со штриховкой, т.е. со стороны штриховки. Если конус
K(q) допустимых скоростей замкнут вдоль границы воронки, т.е. две его
образующие также дают допустимое направление скорости, то возможно
движение строго вдоль границ воронок, т.е. сами границы воронок обра-
зуют допустимые траектории.
Таким образом, мы видим, что фактически речь идет об исследовании
двух семейств траекторий: левой и правой, которые описываются соответ-
ственно уравнениями (8), (9) или (10), (11). В принципе уравнения (8),
(9) или (10), (11) можно задать независимо друг от друга и от включения
(2), назвав одно из них уравнением левой границы, а другое — правой.
Таким образом, надо провести исследование двух независимых, наложен-
ных друг на друга семейств траекторий дифференциальных уравнений
<7=Л(<7), 4=/2(?)-
При исследовании двух наложенных друг на друга фазовых портретов
дифференциальных уравнений (12) наряду с известными понятиями осо-
бых точек этих уравнений возникают новые понятия ’’особые множества”,
отражающие свойства соответствующей УДС, о которых говорилось
в § 33.
104
§ 35. ПРИМЕРЫ ПОСТРОЕНИЯ ФАЗОВОГО ПОРТРЕТА
ДВУМЕРНЫХ УДС
Для иллюстрации изложенного в предыдущем параграфе рассмотрим
примеры построения фазовых портретов УДС, когда их пространством
состояний (фазовым пространством) является обычная двумерная
плоскость.
1. Для линейной УДС на плоскости (ql, q2) с уравнениями
ql = q2, q2 =и, | и | < т, ди > О, (1)
точки абсолютного равновесия отсутствуют, точками относительного равно-
весия при и = 0 являются точки оси qx. Также отсутствует область
нестесненных свободных движений. Линия перемены штриховок
описывается здесь уравнением
и, следовательно, представляет собой ось q1. Множество относительного
равновесия также совпадает с осью q1.
Границы траекторных воронок (правая и левая) описываются
уравнениями
qi =q2, q2 =±т, v (3)
где знак ’’плюс” во втором уравнении соответствует одной границе, а ’’ми-
нус” — другой. Разделив первое из уравнений (3) на второе, приходим
к одному уравнению уже непосредственно для границ траекторных воро-
нок на фазовой плоскости (t?1, q2) :
dqi q2
dq2 m
^4нтегрируя (4), получим на плоскости (t?1,^2) семейство парабол;
^* = + —(<72)2 +с, Iс | < оо. (5)
2т
Это семейство границ траекторных воронок УДС (1) вместе со штрихов-
кой изображено на рис. 35.1. Граница отдельной воронки с вершиной в
точке А выделена жирной линией (правая ее ветвь продолжается лишь до
встречи с линией перемены штриховки, т.е. до оси q1).
Фазовый портрет этой системы наглядно показывает, что УДС (1) пол-
ностью управляема, т.е. любые две заданные на плоскости (qi, q2) точки
q0 и qx могут быть соединены допустимой траекторией с конечным време-
нем движения по ней изображающей точки от qQ к qx.
2. Для билинейной УДС на плоскости (qi, q2) с уравнением
qi =q2 +uqi, q2=qi-uq2, |м|<ди, m > 0, (6)
множеством абсолютного равновесия является одна точка О. Заметим, что
вообще для произвольной билинейной системы q = Aq + и Bq точка
8. А.Г. Бутковский
105
О2
Рис. 35.1 Рис. 35.2
q = 0 является точкой абсолютного равновесия. Легко видеть, что точки
относительного равновесия УДС (6), отличные от точки абсолютного рав-
новесия, здесь отсутствуют, так как квадрат модуля вектора
и) |2 = \Aq +uBq |2 = (q2 + uq')2 + (q* -uq2)2 =0 (7)
тогда и только тогда, когда <71 = Ои^2 = О, что совпадает только с точкой
абсолютного равновесия. Если q Ф 0, то не найдется такого и = w(^) , чтобы
выполнялось равенство (7).
Уравнение линии перемены штриховки для УДС (6) имеет вид
$(<?)= Bq\ =
Q2 Q1
q1 -q2
= ~(q2)2~(q1)2 =0.
(8)
Отсюда видно, что линия перемены штриховки здесь отсутствует: она вы-
родилась в одну точку — опять же в точку 0, что совпадает с множеством
абсолютного равновесия.
Поступая как и в предыдущем примере, т.е. полагая и=±тп деля пер-
вое из уравнений (6) на второе, получим уравнение граничных линий траек-
торных воронок для УДС (6) :
dq1 q2 ±mql
dq2 q1 + mq2
Уравнение (9) проинтегрируем в предельном случае при т -+<*>. Тогда
dq1 q2
dq2 q1
Интегрируя (10), полупим, что границами траекторных воронок УДС (6)
при неограниченном т являются гиперболы
q'q2 = с, |с | < со. (11)
Семейство (11) вместе со штриховкой изображено на рис. 35.2. Фазовый
портрет УДС (6) на рис. 35.2 показывает, что данная УДС неуправляема.
(9)
(Ю)
106
Например, очевидно, что не существует ни одной допустимой траектории,
связывающей начальную точку q0, расположенную в квадранте I плоско-
сти (q1, q2), с конечной точкой х, расположенной в квадранте II.
3. Рассмотрим УДС, отличающуюся от (6) лишь знаком при q1 во вто-
ром уравнении, т.е. пусть УДС описывается уравнениями
q1 = q2 +uqx, q2 =—q1 —uq2 (12)
и скалярное управление и — неограниченное. Как и в примере 2, точкой
абсолютного равновесия является единственная точка 0, а точки относи-
тельного равновесия совпадают с точками линий перемены штриховки.
Уравнение линии перемены штриховки имеет вид
s(q)=\Aq Bq\ =
= ~(q2)2 +(q1)2 =0,
(13)
т.е. линиями перемены штриховки являются две пересекающиеся в нуле
прямые, представляющие собой биссектрисы координатных углов
плоскости (q1, q2).
Как и в предыдущем примере, границы траекторных воронок представ-
ляют собой семейство гипербол (11). Фазовый портрет этой системы изо-
бражен на рис. 35.3. В отличие от УДС (6), данная УДС (12) уже является
полностью управляемой (вне начала координат).
Управляемость УДС (12) можно было бы объяснить тем, что в отличие
от УДС неуправляемой (6), для УДС (12) появились невырождающиеся
в одну точку линии перемены штриховок (13). Однако, как мы увидим
в следующем примере, наличие невырожденных линий перемены штрихо-
вок вовсе не необходимо для того, чтобы УДС была полностью управляема.
В примере 4 мы увидим, что там линия перемены штриховки также вы-
рождается в одну точку О — начало координат, но это нисколько не
мешает УДС быть полностью управляемой.
Заметим, что билинейную систему, в которой точка О является точкой
абсолютного равновесия, естественно назвать полностью управляемой,
8*
107
хотя, очевидно, из точки О нельзя выйти изображающей точке и в точку О
нельзя войти за конечное время под действием допустимого управления.
Поэтому управляемость таких систем естественно считать на многообра-
зии (t?1,^2), но без точки q = 0 (’’выколотая” точка начала координат).
4. Билинейная УДС описывается уравнениями
41 = q2 +uql, q2 =— q1 + uq2, (14)
где и — неограниченное скалярное управление. Рассуждая, как в примерах
3 и 4, мы легко установим, что фазовый портрет данной УДС имеет вид,
изображенный на рис. 35.4. Границами траекторных воронок здесь являют-
ся прямые q1 = cq2, | с | <°°, а линия перемены штриховки вырождается
в точку О, Но несмотря на такое вырождение линии перемены штриховки,
УДС будет полностью управляемой в плоскости (tf1,^2) без точки О.
5. Рассмотрим теперь нелинейную УДС на плоскости, описываемую
уравнениями
q1 ^'q'q2, q2 =(ui)2qi. (U)
Множеством абсолютного равновесия «здесь является, прямая q1 = 0, т.е.
ось q2. Множеством относительного равновесия является вся остальная
плоскость (q1, q2) при и = 0.
Выпуклое множество допустимых скоростей f (q, U) этой УДС изобра-
жено штриховкой на рис. 35.5. Оно построено для точек (q^q2), где
q1 Ф 0, q2 Ф 0 (в частности, на рис. 35.5 qx> 0 и q2 > 0). Криволинейная
граница этого множества является параболой с вернщной в точке О (q1, q2).
Отсюда видно, что точка О всегда лежит на границ^ области f (q, U), и,
следовательно, область нестесненных (свободных) движений здесь отсут-
ствует. Замыкание конуса K(q) для точек (ql, q2), где q1 Ф 0 и q2 Ф 0,
представляет собой полуплоскость, ограниченную прямой, параллельной
оси qx. Эта прямая есть касательная к f (q, U), проведенная через точку
O(ql»q2)- Совокупность прямых q2 = с, |с| < °°, будет образовывать
семейство границ траекторных воронок. Фазовый портрет этой системы
изображен на рис. 35.6.
Необходимо отметить, что конус K(q) в соответствии с видом выпукло-
го множества f (q, U) для точек q Ф 0, лежащих на оси qx, вырождается
в луч, который в правой полуплоскости направлен вертикально вверх, а
в левой полуплоскости — вертикально вниз. Это означает, что допустимая
траектория обязана пересекать ось qx только под прямым углом.
Рис. 35.6
108
Далее, структура множества f (q, U) показывает, что движение изобра-
жающей точки строго вдоль границ траекторных воронок (т.е. движение,
параллельное оси q1) невозможно, ибо скорость Q. в этом направлении, как
видно из рис. 35.5, равна нулю. Однако движение под любым (даже сколь
угодно малым) углом к границе в разрешенном направлении уже
возможно.
Наконец из фазового портрета рис. 35.6 видно, что хотя ось#2 и являет-
ся линией перемены штриховки, однако эту линию изображающая точка не
может пересечь за конечное время, ибо, как было сказано выше, ось q2 яв-
ляется множеством абсолютного равновесия, т.е. инвариантным много-
образием.
Таким образом, на этом примере мы видим, что существуют траектории
данной УДС, ведущие, скажем, из правой полуплоскости (q1 > 0) в левую
полуплоскость (q1 < 0) и удовлетворяющие принципу включения в прост-
ранстве состояний (§ 13). Однако все же такая траектория не будет допу-
стимой, ибо не выполняется условие конечности интеграла времени —
условие (13.3).
Итак, УДС (15) является неуправляемой. Все допустимые движения ее
изображающей точки можно описать следующим образом. В правой полу-
плоскости ql > 0 она может двигаться только снизу вверх и в стороны,
исключая движения сверху вниз и горизонтальные движения. При этом
изображающая точка не может попасть на ось q2, а ось q1 она может пере-
секать только под прямым углом. В левой полуплоскости q1 < 0 картина
аналогичная. Изображающая точка может двигаться только сверху вниз
и в стороны, исключая горизонтальные смещения и движения снизу вверх.
При этом ось q1 здесь также можно пересекать только под прямым углом,
а ось q2 для изображающей точки недостижима.
6. Рассмотрим билинейную УДС, уравнения движения которой
имеют вид
q1 =~aq2, q2 =aql +uq3, q3 = ~uq2, \u\<m, (16)
где числа a > 0,m> 0 и и — скаляр. Хотя эта система формально и состоит
из трех уравнений, однако, в силу наличия первого интеграла
Я#)^#1)2 +(<72)2 +(<73)2=Л (17)
где г — произвольная постоянная, изображающая точка УДС (16) будет
двигаться только по двумерной сфере. Интеграл (17) легко вывести, если
умножить 1-е уравнение в (16) на q1,2-е - на #2, 3-е - на q3 и затем сло-
жить почленно все три уравнения. В результате в правой части получится
нуль, а в левой части — полная производная функции F(q) в (17), что и
показывает справедливость (17). Уравнения (16) имеют непосредственный
физический смыл; они описывают движение спина в магнитном поле и
называются уравнения Блоха [30].
Таким образом, в силу (17) эта система имеет инвариантные много-
образия, и движение изображающей точки q УДС (16) происходит на дву-
мерной сфере с центром в точке О, которая описывается уравнением (17).
Постоянная г имеет смысл радиуса этой сферы и определяется начальной
точкой #0.
109
Рис. 35.7
Рис. 35 8
В такой ситуации, когда инвариантным многообразием является сфера
с центром в точке О, удобно перейти к сферическим координатам по
формулам
ql = г sin 6 cos tp, q2 - г sin 0 sin <р, q3 = r cos в,
0<^<2тГ, (18)
Подставляя (18) в (16), придем к двум уравнениям, описывающим исход-
ную УДС:
= а + и ctg О, 0=wsin^. (19)
Видно, что точки абсолютного покоя у данной УДС отсутствуют. Очевидно
также, что отсутствует и область нестесненных траекторий. Линия перемены
штриховки на сфере определяется условием
ctg О
sin
= a sin = 0.
а
О
*(<М) =
Отсюда в силу а > 0 имеем sin^ = 0 и, следовательно, <р = 0 или <р = тт,
что все равно определяет лишь одну линию, а именно, большую окружность
на сфере, лежащую в плоскости (q1, q3).
Границы траекторных воронок на инвариантной сфере определяются
уравнениями (19) при и = + т\
у = а ±т ctg 0, в = ± т sin <р.
(20)
Разделив 1-е уравнение в (20) на 2-е, получим дифференциальное уравне-
ние для семейства границ траекторных воронок:
dtp а ±т ctg $
_ = ------------} (21)
du ± т sm tp
Интегрируя это уравнение с разделяющимися переменными,.получим ко-
нечные уравнения семейства границ траекторных воронок в координатах
(<р, в), г = const:
± cos tp = рв + In | sin 0 | + c, (22)
где постоянный параметр 0 = а/тис - произвольная постоянная.
110
Если фазовый портрет данной УДС представлять на плоскости (<р, 0),
а вернее — на отрезке прямого кругового цилиндра 0<^<2л, О<0
с периметром основания 2п и высотой я, то границы траекторных воронок
системы (20) будут кривыми, описываемыми трансцендентными уравне-
ниями (22).
Однако (указывается проще описать границы траекторных воронок непо-
средственно на самой инвариантной сфере, если заметить, что движение
изображающей точки под действием управления и = ± т есть движение в
плоскости, перпендикулярной вектору (±т, 0, а) по часовой стрелке
(если смотреть из конца этого вектора). Таким образом, границы траектор-
ных воронок УДС (16) представляют собой семейство концентрических
окружностей, расположенных на инвариантной сфере, получающихся
путем сечения этой сферы плоскостями, перпендикулярными векторам
(±т, 0, а). Фазовый портрет этой системы изображен на рис. 35.7, где
показан вид на сферу со стороны оси q1. Вид на сферу со стороны q2
аналогичен. Из рис. 35.7 легко видеть, что УДС (16) является полностью
управляемой на инвариантной сфере. При т -+ 00, т.е. при неограничен-
ном и, границы воронок ’’выпрямляются” и превращаются в одно семей-
ство окружностей, лежащих в плоскости, перпендикулярной оси q1
(рис. 35.8).
7. Рассмотрим систему с двумя управлениями и1 ни2:
q1 = q2 +W1, q2 ^ — q1 +и2, I w1 l<^i, |w2|<^2.
Множество абсолютного равновесия здесь отсутствует, но имеется об-
111
ласть D нестесненных (свободных) траекторий, которая совпадает с мно-
жеством относительного равновесия и представляет собой прямоугольник
с центром в начале координат плоскости (q1, q2) и со сторонами, ориенти-
рованными параллельно осям длины 2^ги 2т2 соответственно. Этот пря-
моугольник (область D) порождает крест (рис. 35.9), который ограничи-.
вает кривые границ воронок. Границы траекторных воронок представ-
ляют собой дуги окружностей соответствующего радиуса, изображенные на
рис. 35.9. Эти траектории действительно представляют собой окружности,
так как данная УДС представляет собой управляемый гармонический
осциллятор. На рисунке изображена одна траекторная воронка с вершиной
в точке А. Воронки с вершинами в других точках строятся аналогично.
§ 36. ФАЗОВЫЙ ПОРТРЕТ
ДВУХУРОВНЕВОЙ КВАНТОВОМЕХАНИЧЕСКОЙ УДС*)
Ряд квантовомеханических объектов представляется как двухуровневая
система, описываемая уравнением [30]
ihq = JCq +u(r)JC1^, (1)
где q — двухмерный комплексный вектор, ЗСи — эрмитовы матрицы,
u(t) — вещественная кусочно-непрерывная числовая функция, h — постоян-
ная Планка. Для этой системы выполняется условие нормировки: |<?| = 1,
соответствующее интерпретации комплексных величин q1 и q2 как ампли-
туд вероятности пребывания объекта в базисном состоянии 11 > и в базис-
ном состоянии 12 > соответственно. Существенной характеристикой со-
стояния объекта в данный момент времени является отношение амплитуд
ql (t)lq2 (t). Отношение амплитуд полностью характеризует отношение
вероятностей нахождения состояния квантовой системы в двух базисных
состояниях 11 > и 12 > и их разность фаз.
Сформулируем соответствующую задачу финитногб управления [23,
24]. Найти кусочно-непрерывное управление u(f) такое, чтобы для некото-
рого конечного Т > 0 и заданных комплексных чисел к0 и Kt решение
q = q(t) системы (1) удовлетворяло условиям
^(Q) =
<?2(о)
<?2(П
(2)
(3)
В качестве начальной точки такого решения можно взять любую точку
<7о)> Д1151 которой справедливо qj /q% — kq. Унитарным преобразова-
нием с матрицей R = Н/у* || систему (1) можно привести к системе с ве-
щественной диагональной матрицей в члене с управлением:
ihq = JCq +и( t (4)
♦) Результаты этого параграфа получены А.В. Бабичевым.
112
где JC = RMR"1, = RM^R"1 —диагональная вещественная матрица,
q = Rq. При этом условия (2), (3) преобразуются в следующие условия:
?Чо) ~ ~2(0) “O’ “0 = Нкр +rj Г2Ко +Г2 ’ ( >
= Ki , Ki ?2(7’) г}к, +r\ = 2^2 (6) r?Ki +rl
Для отношения комплексных амплитуд введем переменные р, ip:
(7)
<72(О
Тогда из уравнений (4) — (6) легко получить для переменных р, сле-
дующие уравнения:
р = (р2 + 1)(д cos + b sin </?), (8)
ф=( р — 4)(^ cos(£- a sin ср) + d + gu(t\
V L ~ (9)
p(0) = Po = 1 *o I, </>(0) = <Po = arg Ko ,
p(T) = p1 =| Ki I, <p(T) = <pl =argKZ1, (10)
где a, b,d,g — некоторые вещественные числа. Можно показать, что спра-
ведливы условия
а Ф О, b Ф 0, g Ф 0, (11)
если для матриц JC и JCi исходной системы (1) справедливо условие
[ JC, ] = JOK\ - Ф 0. (12)
Построим фазовый портрет УДС (8), (9). Положим | u(r) | </. Будем
строить линию границы траекторной воронки, описываемую уравнением
z (р, <р) = 0 на многообразии {р,<р} . Согласно методу построения rpaihm
траекторных воронок, введем функцию Понтрягина для УДС (8), (9):
^(РьРг,Р, w)=Pi(P2 + 1 )(а cos sin )+
К1 \ 1
р-----) (b cos + a sin ф) + d + ugp2.
Р Z J
Для этой фушЛщи
argmaxP(pb р2 ,р, <р,м) = / sign <ЯРг}-
|и|</
Тогда дифференциальное уравнение для функции z (р, <р) имеет вид
Эи Эи Г/ 1 \
— (р2 + 1)(д cos + b sin ср) + — Il p — — ) X
Эр Э(Д\ p /
X ( b cos - a sin <p)+ d +lg sign
(13)
113
или
dz 1 9
— — (p2 + 1) (a cos + b sin <p) +
bp I
dzf i / 1 \
+ — — I p — — )(Z> cos - a sin (/?) + d +
b<pll \ p /
Переходя в (14) к пределу при I получаем уравнение
* bz
— g = 0.
by
bz
~ g =°.
b<p
(14)
(15)
В силу условия (12) и уравнение (15) имеет единственное реше-
ние bz/by = 0.
Будем рассматривать р, у как полярные координаты. Тогда границы
траекторных воронок z (р, <р) = 0 являются, согласно (15), окружностями
с центром в начале координат (рис. 36.1).
Особое множество системы определяется из уравнения:
(р2 +1) {a cos + b sin <р)
1 \
р-----------I (b cos - a sin (/?) + d
Р /
В силу (12) все решения уравнения (16) имеют вид:
= ктт — arctgl—
(16)
(17)
к = 0,± 1,.. .
Штриховку на окружности z (р, у) = 0 легко определить из уравнения
(8). При этом видно, что особое множество системы (8), (9) является
также многообразием перемены штриховки.
Следует отметить, что в условиях (10) значения р0, pt могут быть
равными 0 или 00 При этом не определены соответствующие значения
Уо, . Переход между такими начальной и конечной точками можно осу-
ществить за конечное время с
Рис. 36.1
ограниченным управлением и (Г) . Напри-
мер, такой переход получается, если
двигаться вдоль луча, направленного
под углом ат = ттг + arctg(Z>/tf), rn =
= 0, ± 1,..., с постоянным управле-
нием u(t) = const на [0, Г].
Системы вида (1) часто рассматри-
ваются в физике. При этом, как правило,
управлению и (t) (1) соответствует на-
пряженность быстро осциллирующих
электрического или магнитного полей.
Поэтому интересно рассмотреть воз-
можные сужения метода фазового
портрета на специальные классы до-
пустимых управлений.
114
§ 37. ПРИМЕР ДЕКОМПОЗИРУЕМОЙ БИЛИНЕЙНОЙ УДС
В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ *)
Для некоторых билинейных УДС в трехмерном прострастве иногда
оказывается возможным провести декомпозицию исходной системы
на систему с управлением для двух переменных и дифференциальное
уравнение, не содержащее управления для третьей переменной. При оп-
ределенных условиях исследование управляемости полученной системы
двух уравнений с управлением позволяет сделать вывод об управляемости
исходной билинейной УДС в трехмерном пространстве.Таким методом уда-
ется исследовать управляемость, например, УДС, описываемой уравнением
1
1
О
х, xER3 , \ и |<°°,
где u(t) — кусочно-непрерывное управление, а к и г — действительные
числа.
Можно показать, что при выполнении условия — 2 < г /к < 0 система
управляема в R3 . Производя замену переменных q1 = х1/х3 ,q2 = х2/х3,
можно декомпозировать исходную систему. В результате получается сле-
дующая система двух уравнений с управлением:
ql = aqi + u(t) [fa1)2 + qxq2 + q2 + 1],
q2 =aq2 +u(t)[(q2)2 +q'q2 - q1 + 1],
где a = к - r.
Построим фазовый портрет УДС ( 1). Обозначив
=Ш,
(2)
перепишем (1) в виде
4 =Ш + “Ш-
Для любого р G R2 имеем:
arg maxp[/fa) + w<zfa)J =/ signfagfa)).
I «К!
(3)
(4)
(5)
Функция z fa) в уравнении границы траекторной воронки z fa) = 0, dz/dq =
= р определяется тогда из уравнения ( § 12):
dz
— Ш + i
dz
— ш
dq
= 0,
(6)
или
1 dz
7’^^) +
I dq
dz
— g(q) =0.
(7)
♦) Результаты этого параграфа получены А.В. Бабичевым.
115
Рис. 37.1
Построим фазовый портрет для неограниченного управления u(t). Пе-
реходя в (7) к пределу при / получим уравнение границ траекторных
воронок:
dz dz
— [(q1)2 +<72 + 1] +—2 (Gz2)2 +<71<72 + 1] =0, (8)
d<?i o<72
ИЛИ
-p-jlta1 +<72)^1 -(-1 -<t2) + -T~2 [(<7* +<72)<72-(-l +<71)] =0. . (9)
dq1 dq2
Это — уравнение Хессе. Метод его решения описан в [51, стр. 192]. Введем
однородные координаты
И £2
«2 = ?Г’ <10)
г^1,<72)=?а°,?1л2) (и)
Тогда
d?1 * d£*’ d?2 * d?2
, dz dz df
q T7 +q T~2 =-?0 77o -<12)
dq1 bq1 dr
116
В однородных координатах уравнение (9) принимает вид
(<1+?2)4f _(Г+<2)т? (13)
Характеристическая система дня этого уравнения
i°=|1 + $’;
(14)
Эта система имеет два независимых интеграла:
F1 =$° +I1 -е2, (15)
F2=a°)2+a1)2+(^)2. (16)
Найдем такой интеграл F(F1 ,F2), который при подстановке (10) был бы
функцией только б?1 и q2. В качестве F можно взять функцию
Тогда вследствие (10), (11) уравнение границ траекторных воронок
z (q) = 0 примет вид
to1)2 (^ - 1 ) + (?2)2(с - 1) - 2cq1q2 + 2с#1 - 2cq2 +с - 1 = 0. (18)
Уравнение (1'8) имеет следующие вещественные решения: 1) точка
при с =1/3; 2) эллипс при 1/3 <с< 1/2; 3) парабола при с = 1/2; 4) ги-
пербола при 1/2 < с < 00; 5) прямая при с = °°. При значении с < 1/3 урав-
нение (18) вещественного решения не имеет.
Указанные многообразия являются границами траекторных воронок
системы (1). Они показаны на рис. 37.1, на котором изображен фазовый
портрет УДС, описываемой уравнениями (1).
Установим соответствие между бесконечно удаленными точками фа-
зового портрета системы (1). Это необходимо, поскольку существуют
такие управления u(z), что решения системы (1) уходят на бесконечность
за конечное время. Кривые, определяемые уравнением (18), являются
образцами кривых в пространстве (f0,^1,^), которые определяются
уравнениями F1 = const, F2= const при отображении (10). Поскольку
уравнения F1 = const, F2 = const определяют в трехмерном пространстве
замкнутые кривые (окружности), указанное соответствие между беско-
нечно удаленными точками фазового портрета устанавливается, согласно
(10), следующим образом:
1) отождествляются бесконечно удаленные точки параболы, получае-
мой из (18) (прис= 1/2);
2) отождествляются по две бесконечно удаленные точки, лежащие на
разных ветвях гиперболы (при с> 1/2) и соответствующие одной и той
же асимптоте этой гиперболы;
3) отождествляются бесконечно удаленные точки прямой (при с = «>).
Указанное соответствие на фазовом портрете для параболы, одной из
гипербол и прямой показано на рисунке пунктирными линиями за рамкой
фазового портрета (отождествляемые точки отмечены за рамкой фазово-
го портрета одинаковыми латинскими буквами).
117
Найдем особое множество системы (1). Принадлежащие ему точки
определяются из уравнения
det [/(<?), g(q)] =0. (19)
Подставляя/(g) ng(q) из (2), (3), получаем
afa1)2 +(<72)V - о?1)2 +«71] -a[(ql)2q2 + ql(q2)2 + (<72)2 +q2] =>0,
™ <2°)
/, i у /, i v i
V +V +т) =Т' (21)
Таким образом, особое множество — это окружность радиуса 1/V27 с
центром (1/2,—1/2).
Штриховку на границах траекторных воронок легко определить следую-
щим образом. Для уравнения (8) характеристическая система имеет вид
<7 =£(<?)• (22)
Кривые z (q) =0 являются, как легко видеть, траекториями этой системы.
Поэтому штриховку на границах траекторных воронок z (q) = 0 для систе-
мы (1) можно определить, совместив фазовый портрет системы (22) (т.е.
изображение кривых (18)) и фазовый портрет системы
q = f{q\ (23)
На фазовом портрете УДС (1), изображенном на рис. 37.1, показана допус-
тимая траектория, соединяющая точки qQ и qx и проходящая через бес-
конечно удаленную точку плоскости (б?1, q2).
§ 38. УПРАВЛЯЕМОСТЬ БИЛИНЕЙНОЙ УДС ОБЩЕГО ВИДА
НА ПЛОСКОСТИ *)
В этом параграфе на примере задачи об управляемости для билиней-
ной системы общего вида 2-го порядка мы покажем, как идеи предло-
женного дифференциально-геометрческого метода (метода фазового
портрета) позволяют поддас получить исчерпывающие результаты.
Итак, пусть УДС представляет собой билинейную систему
q=Aq+uBq, qE{q} = R2, , (1)
где А и В — квадратные 2 X 2-матрицы с действительными элементами,
и — скалярное управление, которое будем называть допустимым, если
и = u(t) — кусочно-непрерывная функция со значениями в А1. Уравнения-
ми типа (1) описываются многие физические, физиологические, биоло-
гические процессы. Несмотря на то, что в последнее время появилось
большое число работ, посвященных управляемости как нелинейных, так
и билинейных систем (см., например, .[20,127, 132, 133]),условия управ-
ляемости УДС вида (1) в явном и компактном алгебраическом виде ра-
нее, наскольконам известно, получены не были.
В дальнейшем управляемость будет пониматься в обычном смысле.
Пусть М= R2\ {0}. Систему (1) назовем управляемой, если из произволь-
*) Результаты этого параграфа получены Н.Л. Лепе.
118
Рис. 38.2
Рис. 38 J
ного начального состояния qQEM изображающая точка системы (1) мо-
жет за конечное время Т>0 перейти под действием допустимого управ-
ления w=u(r), 0 < t < Т, в произвольное (Жданное) конечное состоя-
ние #ь
Перед тем, как перейти непосредственно к изложению полученных
результатов, приведем одно свойство билинейных систем вида (1), кото-
рое мы назовем ’’свойством симметрии штриховок” относительно начала
координат.
Свойство симметрии штриховок. Пусть q ЕМ, тогда вектор Bq задает
угол наклона касательной к траектории уравнения
4= Bq, (2)
проходящей через данную точку q. Траектории уравнения (2) в Мявляют-
ся границами траекторных воронок УДС (1). Заметим, что под действием
допустимого управления можно двигаться сколько угодно близко к этой
траектории, причем в обе ее стороны, а в пределе при и->°° можно считать,
что допустимое движение возможно в обоих направлениях вдоль траекто-
рии уравнения (2), т.е. в обе стороны вдоль границы воронки УДС (1).
Направление вектора Aq определяет штриховку этой границы в точке q.
Возьмем теперь точку cq Е М, где с =# 0 — числовая константа. Вектор
cBq параллелен вектору Bq, и, следовательно, траектория уравнения(2),
проходящая через точку cq, имеет такой же угол наклона касательной в
точке**?#, что и траектория, проходящая через точку q. Вектор cAq при
с >(j[ коллинеарен вектору Aq, а при с< 0 антиколлинеарен вектору Aq.
Это означает, что направление штриховки в точке cq при с>0 сов-
падает с направлением штриховки в точке q и изменяется на противополож-
ное при с <0. Такое свойство назовем свойством симметрии штриховок
относительно начала координат.
Поясним сказанное выше на примере. Пусть О — начало координат.
Точки F, О, С, D находятся на одной прямой (рис. 38.1). Пусть через точку
С проведена траектория уравнения (2), на которую нанесена штриховка.
На этом рисунке направление штриховки показано стрелкой. Не проводя
вычислений, а опираясь лишь на свойство симметрии штриховки, можно
определить касательные в точках D и F к траекториям уравнения (2):
они будут параллельны касательной к траектории в точке С. Так как точки
119
С и D находятся на отрезке FD по одну сторону от точки О, то направле-
ние штриховок в этих точках совпадает. Точки С и F находятся по разные
стороны от точки О. Поэтому в них направление штриховок противопо-
ложное.
Другое применение свойства симметрии штриховок заключается в том,
что все свойства управляемой билинейной системы можно качественно
исследовать в пространственной области ограниченных размеров, распро-
странив затем результаты на все пространство R2, Например, пусть известна
штриховка только на одной траектории уравнения (2) (рис. 38.2,а). Ис-
пользовав свойство симметрии штриховок, получаем полностью заштрихо-
ванную картину траекторий уравнения (2) на всей фазовой плоскости
(рис. 38.2,6).
Перейдем теперь к исследованию свойств управляемости УДС (1).
Это исследование проводится отдельно для всех возможных случаев ком-
бинаций двух собственных значений матрицы В, а именно: матрица В
имеет 1) два равных между собой действительных собственных числа;
2) два различных действительных собственных числа; 3) два чисто мни-
мых собственных числа и 4) два сопряженных комплексных собственных
чипа с действительными частями, отличными от нуля. Исследуем последо-
вательно все эти случаи.
1. Матрица В имеет два равных действительных
собственных числа. Оставив временно в стороне случай, когда
В =кЕ, где к — скаляр, а Е - единичная матрица, предположим, что УДС
(1) приведена к виду
y=Aiy +иВ!У, (3)
Г х 11
где = I I — жорданова форма матрицы В и X — ее кратное дейст-
L О X J
вительное собственное число. Для исследования управляемости данной
УДС рассмотрим семейство траекторий уравнения
(4)
Эти траектории являются границами траекторных воронок УДС (3).
Особая точка у = 0 этого уравнения имеет вид узла. Можно показать, что
для билинейной УДС (1) множествами перемены штриховки (МПШ) в
Ммогут быть только прямые линии, если они существуют, и притом числом
не более двух.
Докажем, что УДС (3) может либо иметь две различные, либо не иметь
ни одной прямой линии перемены штриховки. Пусть УДС (3) имеет только
одну прямую перемены штриховки. Эта прямая описывается уравнением
1А1У В1У1 = 0. (5)
Но, с другой стороны, на этой прямой определитель I [>1 х, 2?i]y В1У I об-
ращается в нуль. Это означает, что вектора и В гУ линейно зави-
симы на прямой (5). Отсюда следует, что прямая (5) не может быть
прямой перемены штриховки [127]. Это противоречие и доказывает наше
утверждение.
Далее предположим, что УДС (3) имеет две прямые перемены штри-
ховки. Тогда ее фазовый портрет, если учесть свойство симметрии, будет
120
Рис. 38.3
с точностью до направления штриховки иметь вид, изображенный на
рис. 38.3,л. Здесь важно то, что существует единственная прямая CD, при-
надлежащая семейству границ траекторных воронок, на которой штрихов-
ка определена. Эта прямая делит плоскость на две полуплоскости: верх-
нюю и нижнюю. Такая УДС, как видно из рисунка, является полностью
управляемой.
Действительно, с любой траектории уравнения (3), проходящей в
верхней полуплоскости, можно перейти на любую другую траекторию,
также проходящую в верхней полуплоскости, так как каждая траектория
имеет особую точку, в которой штриховка меняет направление. Это ут-
верждение справделиво и для двух произвольных траекторий (границ
воронок), лежащих в нижней полуплоскости. Поскольку на прямой CD,
принадлежащей семейству траекторий, штриховка определена, возможны
переходы как с верхней полуплоскости в нижнюю, так и наоборот. По-
этому УДС (3) управляема. Заметим, что если на прямой CD штриховка
не определена, то УДС (3) неуправляема.
Пусть теперь система (3) не имеет ни одной линии (прямой) перемены
штриховки. Тогда ее фазовый портрет имеет, с точностью до направле-
ния штриховки, вид, изображенный на рис. 38.3,б.
Здесь управляемость также зависит только от того, определена ли ПГгри-
ховка на прямой CD, принадлежащей семейству траекторий уравнения (3),
или нет. Бели штриховка определена, то система управляема. Действитель-
но, несмотря на то, что с произвольной траектории в верхней полуплос-
кости нельзя попасть непосредственно на произвольную траекторию также
в верхней полуплоскости, все же возможен управляемый переход через
нижнюю полуплоскость. Один из таких переходовшзображен на рис. 38.3,б.
Заметим, что если на прямой CD штриховка не определена, то УДС не-
управляема, так как переход, например, из верхней плоскости в нижнюю
невозможен.
Резюмируя сказанное выше, можно утвержать, что УДС (3) управляема
тогда и только тогда, когда на прямой CD, принадлежащей семейству траек-
торий уравнения (4), определена штриховка.
Выразим это условие управляемости в алгебраическом виде. Если мат-
рица Bi имеет жорданову форму, то прямая, принадлежащая семейству
9. А.Г. Бутковский
121
траекторий уравнения (4), есть прямая у2 = 0. Штриховка на ней не оп-
ределена в том и только в том случае, когда эта прямая принадлежит
семейству траекторий уравнения у = Л1у. Но это возможно лишь при ус-
ловии, что а21 = 0, где а21 — элемент матрицы А х во второй строке и пер-
вом столбце. Это и есть необходимое и достаточное условие управляемос-
ти УДС (3), если матрица В — жорданова.
Предположим теперь, что матрица В — произвольна. Существует не-
вырожденное линейное преобразование R такое, что матрица В j = RBR —
жорданова. Выразив В j через элементы матриц А и В, получим необходи-
мое и достаточное условие управляемости в виде
det [А, В] < 0. (6)
Пусть теперь матрица В имеет вид
ГХ 0 I
В =
. 0 X J
Тогда траектории уравнения (2) образуют ’’дикритический” узел” [87].
Следует сразу отметить, что если семейство траекторий уравнения q =
= Aq содержит хотя бы одну прямую, то система (1) неуправляема. Дейст-
вительно, тогда на этой прямой штриховка не определена. Так как прямая
разбивает фазовую плоскость на две непересекающиеся части, то управ-
ляемый переход изображающей точки между этими частями плоскости
невозможен. Уравнение q=Aq имеет траекторию в виде прямой только
тогда, когда дискриминант 6 характеристического уравнения данной сис-
темы удовлетворяет условию 6 = (tr А) 2 — 4 det А > 0.
Докажем, что необходимое и достаточное условие управляемости имеет
вид
6 = (tr Я2) — 4det Л <0. (7)
Пусть матрица А удовлетворяет условию (7). Тогда особая точка урав-
нения q = Aq имеет вид центра или фокуса. В этом случае каждая траек-
тория уравнения q = Aq пересекает все траектории уравнения q = Bq.
Двигаясь из начальной точки qQ по траекториии уравнения q=Aq,
изображающая точка УДС обязательно пересечет траекторию уравнения
q-Bq, содеражащую конечную точку qx. Далее, перемещаясь по этой
траектории уравнения q-Bq, изображающая точка попадает в конечную
точку qx. Таким образом, если условие (7) выполнено, то УДС (1) управ-
ляема. В противном случае, как это было показано выше, она неуправляема.
2) Матрица В имеет различные действительные
собственные числа. Заменой переменных у = Nq, где N — некото-
рая невырожденная матрица второго порядка, от УДС (1) переходим к
УДС вида
y=Aiy +иВ!у, (8)
— диагональная матрица, Xi, Х2 - различ-
ные действительные собственные числа матрицы.
Управляемость УДС (8) в этом случае была исследована в [128], где
доказано, что УДС (8) управляема тогда и только тогда, когда элементы
122
’ Xj 0 '
0 X,
где At = NAN^,B
матрицы A i удовлетворяют условию
2 а2 1 <0. (9)
Схема доказательства заключалась в следующем. В УДС (8) была сделана
замена переменных
t
v(t) = f и(т)(1т, z = ехр[-иВ] у.
о
Тогда компоненты z2, z2 вектора z удовлетворяют системе уравнений
zi =anz1 + a12z2 ехр(Ди),
z2 = a2izx exp (-Ди) + a22z2,
где = X2 — Xj. Умножая обе части первого уравнения системы (10) на z2,
а второго — на Zj и затем складывая эти уравнения почленно, получим
d (zj z2)
--------- = (#11 +Я22) ZiZ2 + #12^2 exp (Ду) + a21z2 exp(—Ди).
dt
Решая последнее уравнение, получим
(О 22 (t) = ехр(аГ) [zi (0) z2 (0) +
t
+ а12 / exp (-ат + Ди) z2 (т) dr +
о
+ а21 f ехр(—ат — Ди) z\ (т) Jr],
о
где а = tr Ах — след матрицы A i. При этом
а) если а21 и а12 неотрицательны, то zx (г) z2 (г) > 0 для t > 0 и для всех
zi (0) z2 (0) >0, независимо от управления v (t);
б) если а12 и a2i неположительны, то zj (г) z2 (f) > 0 для t < 0 и для
всех Zi (0) z2 (0) > 0, независимо от управления и (О.
Из а) и б) вытекает, в частности, что все множество точек, которое
достижимо из начальной точки, не лежащей на осях координат, совпадает
с квадрантом, содержащим эту начальную точку. Это означает неуправляе-
мость УДС (1). Несколько сложнее доказывается управляемость УДС (8)
в случаеа12а21 < 0 [128].
Покажаем, что условие (9) можно получить с помощью метода фазового
портрета. Например, в случае Х2 < 0 семейство траекторий уравнения
(2) имеет особую точку типа седла. Так как каждая траектория из этого
семейства делит R2 на две несвязанные области, то для управляемости
УДС (8) необходимо, чтобы на каждой такой траектории существовала
точка, в которой штриховка этой траектории меняет направление. Это
означает, что УДС (8) должна иметь две различные прямые линии перемены
штриховкигу2 =^1УХ и у2 =Л:2.у1 такие, что
кхк2 < 0. (11)
Уравнение линий перемены штриховки УДС (8) имеет вид
Х2Я12 (У2)2 + (Х*ап -\ia22) у'у2 - Х^ (у1)2 =0.
9*
123
Рис. 38.4
Так как это уравнение не содержит
« 12
членов, линейных по у , у, то ли-
нией перемены штриховки могут
быть либо две различные прямые,про-
ходящие через начало координат, ли-
бо одна такая прямая. Для выпол-
нения условия (11) по теореме Вие-
та необходимо, чтобы я12#21 < 0.
С другой стороны,если УДС (8) имеет
две' прямые линии перемены штри-
ховки, то она имеет вид, с точностью
до направления штриховки, изобра-
женный на рис. 38.4, откуда видно,
что УДС (8) полностью управляема.
Теперь зададимся вопросом: во
что перейдет неравенство (9), если
в УДС (8) матрица В — не диагональ-
ная? Для ответа на этот вопрос выразим элементы матрицы Л! через эле-
менты матрицы А и N. Напомним, что невырожденная матрица N такова,
что NBN~Y = Bi, где Bi — диагональная матрица. Как известно, матрица
N, приводящая к жордановой форме матрицу В, не единственна, но знак
произведения а 12^21 не зависит от выбора матрицы N и совпадает со зна-
ком выражения
(#11 — #22) (£>22 “ £>11) (#21 £>12 +^12^21) —
— (£>21 #12 — #21£>12)2 + #12 #21 (£>11 — £>22 )2 +
+ £>12 £>21 (#11 — #22 )2 = det [Л, В],
где [Л, В] = АВ — ВА и а'ц, — элементы матриц А и В соответственно.
Таким образом, если матрица В имеет два не равных между собой дейст-
вительных собственных числа, то система (1) управляема тогда и только
тогда, когда
det [Л, 5] <0. (12)
3) Матрица В имеет два чисто мнимых собствен-
ных числа. В этом случае особая точка системы (2) имеет вид центра.
Если у системы (1) нет линий перемены штриховки, то ее фазовый порт-
рет имеет вид рис. 38.5, а. Из этого рисунка видно, что УДС неуправляема,
так как, например, из окрестности особой точки мы не можем попасть
во все остальные точки пространства. Если же у системы (1) существует
хотя бы одна линия перемены штриховки, то с учетом свойства симметрии
штриховки портрет имеет вид (опять же с точностью до направления штри-
ховки), изображенный на рис. 38.5, б. Система, имеющая хотя бы одну
линию (прямую) перемены штриховки, полностью управляема, поскольку
из любой точки множества М возможны управляемые переходы как в
области, прилегающие к особой точке, так и в точки R2, удаленные на
любое расстояние от начала координат. Поэтому для рассматриваемых
матриц В необходимым и достаточным условием управляемости является
существование хотя бы одной линии перемены штриховки.
124
Получим это условие в аналитическом виде. У билинейной системы
уравнение прямых перемены штриховки имеет вид
I Aq Bq\=Q. (13)
Раскрывая выражение (13) и используя тот факт, что матрица В имеет
чисто мнимые собственные числа, т.е. trZ? = 0, получим необходимые и
достаточные условия управляемости:
det [Л, В] + [ПЛ ]2 det Л < 0. (14)
Так как собственные числа матрицы В — чисто мнимые, то detB > 0, и по-
этому необходимым условием управляемости является соотношение
det [Л, В] < 0. (15)
4) Матрица В имеет сопряженные комплексные
собственные числа с действительной частью, от-
личной от нуля. В этом случае особая точка уравнения (2) имеет
вид фокуса. Докажем, что если хотя бы в одной точке пространства R2
штриховка определена, то система (1) управляема.
Действительно, пусть штриховка определена в некоторой точке q’ Ф 0.
Из свойства симметрии штриховок следует, что тогда штриховка определе-
на и во всех точках прямой, проходящей через точки q и 0 (рис. 38.6).
Следовательно, выходя из произвольной точки qQ (она не изображена
на рис. 38.6), мы можем по траектории уравнения (2) добраться до пере-
сечения с прямой OqQ. Так как в этой точке пересечения штриховка опре-
делена, то совершим, согласно штриховке, управляемый переход на спи-
раль, проходящую через конечную точку qx. Далее, двигаясь по этой спира-
ли, можно уже непосредственно попасть в конечную точку qx. Таким обра-
зом, для управляемости (1) в этом случае необходимо и достаточно, чтобы
хотя бы в одной точке пространства была определена штриховка. Это
условие управляемости эквивалентно условию
ВФкА (16)
для любого действительного числа к.
Заметим, что если ввести обозначения х= (а’22 — ап ),у = (Ь'22 — ),
то
det [Л, В] = &2i Ь\2 х2 - {а'и b\2 + &21) *У +
+ ^12^21Т2 —(^12^21 ~ ^21лп) -
Рис. 38.5 Рис. 38.6
125
Рассмотрим выражение (17) как квадратный трехчлен относительно х и
исследуем его знак. Дискриминант этого выражения преобразуется к
виду (Z/12 02i “ ^21 ^i2)2(v2 + 4Z?i2 ). Так как собственные числа мат-
рицы В являются комплексными, то у2 + 4//12621 < 0 и Ъ\2 < 0. Сле-
довательно, выражение (17) неположительно. Если В-кА для какого-то
числа к, то выполняется условие det [Л, В] = 0, и УДС (|) неуправляема.
Однако здесь легко построить пример, в котором det [А, В] = 0 и ВфкА,
а такая система будет управляемой. Если же справедливо строгое нера-
венство det [Л, В] < 0, то УДС (1) управляема.
Итак, в пунктах 1) — 4) этого параграфа были рассмотрены условия
управляемости УДС (1) в зависимости от собственных чисел матрицы В,
Из соотношений (6), (7), (12), (14) —(16) вытекает
Необходимое и достаточное условие управляемости УДС (1).
1) det [Л, 2?] <0, если матрица В имеет действительные собственные
числа и В ФкЕ при любом действительном числе к, где Е — единичная
матрица;
2) [ tr Л ]2 — 4 det Л < 0, если В-кЕ при некотором действительном
числе к\
3) det [Л, 2?] + [tr Л ] 2det2? < 0, если В имеет чисто мнимые собственные
числа;
4) В ФкА для любого действительного числа к, если В имеет комплекс-
ные собственные числа, с действительной частью, не равной нулю.
Наконец из проведенного нами анализа вытекает еще одно полезное
следствие: если det [Л, 2?] > 0, то УДС (1) неуправляема.
§ 39. ТРАЕКТОРНАЯ ВОРОНКА В ОБРАТНОМ ВРЕМЕНИ
Траекторной воронки в обратном времени KJ/f) с вершиной в точке
q Е {q} для УДС
Г/Ы, u^U(q), (1)
назовем воронку V(q’) с вершиной в той же точке q', построенную для
уравнения
4 = _/(^w), uEU(q). '(2)
Идея построения поверхностей переключения в теории оптимального управ-
ления с использованием ’’попятного” движения была предложена А.А. Фельд-
баумом [107,108, 109].
Соответствующее включение для уравнения (2) имеет вид
(3)
Конус К_ (<?) допустимых направлений скоростей для включения (3)
соответственно описывается формулой K_(q ) = -К (qr), где K(q) —
конус допустимых направлений скоростей для УДС (1). Если гамильто-
ниан исходной УДС (1) имеет вид Н(р, q), то гамильтониан УДС (2) будет,
очевидно, иметь вид Н(—р, q). Отметим, что траекторная воронка V(q’)
описывает область достижимости из точки q УДС (1), по крайней мере
при достаточно малом времени движения из q . В сдою очередь, траекторная
126
воронка И_ (д') в обратном времени
ограничивает область управляемости
для точки q исходной системы (1).
Понятие траекторной воронки
К(</) в обратном времени иногда по-
могает конструктивно решить задачу
финитного управления. Пусть требу-
ется для УДС (1) найти допустимую
траекторию, ведущую от начальной
точки qQ в конечную точку qr. Для.
решения этой задачи будем строить
границу траекторной воронки V(qQ)
для УДС (1) в прямом времени, а
для точки qt будем строить гра-
Рис. 39.1
ницу траекторной воронки И_(#1) в обратном времени. Если
две гиперповерхности границ воронок V(qQ) и V_(qi) пересекут-
ся хотя бы в одной точке, то искомое финитное управление существует и
его можно конструктивно найти. Оно будет, разумеется, не единственным,
если общих точек V (д0) и И (qx) будет больше чем одна. Однако эти две
воронки могут и не встретиться непосредственно. Каждая из них при этом
может ’’упираться” в некоторые области, связь между которыми осущест-
вляется с помощью допустимых траекторий. Тогда искомое финитное
управление существует. В противном случае, когда заведомо нет связи
между этими областями с помощью допустимых траекторий, искомое фи-
нитное управление отсутствует.
Заметим, что если фазовый портрет исходной УДС (1) уже построен, то,
очевидно, никаких дополнительных построений границ воронок в обратном
времени делать не надо: их надо только выделить, двигаясь по уже имею-
щимся траекториям, проходящим через конечную точку q19 но уже в
отрицательном направлении течения времени t.
В качестве иллюстрации рассмотрим простейший пример УДС
q1 = q2, q2-и, \u\<m, m>0.
Фазовый портрет этой УДС построен в § 35. На рис. 39.1 проиллюстрирова-
на идея решения задачи финитного управления, основанная на факте встре-
чи прямой и обратной воронки. Для явного обнаружения этого факта в
квадранте I взяты две точки: начальная qQ и конечная q^. Ломаная кривая
Aq0B — граница воронки К(^о), a AqxB — граница воронки V_(qi) в
обратном времени. Эти воронки встречаются в точках А и В. Поэтому
существуют по крайней мере две траектории: и q^Bq^ соединяю-
щие qQ и qi допустимым образом.
В другом случае, если точка qQ останется в квадранте I, а точку qx
мы берем в квадранте И, то воронки V(qq) и непосредственно
не встречаются. Граница воронки V (q0) имеет конец в точке С, а Э V_ )
в точке Е, так как ось ql представляет собой особую линию перемены
штриховки.
Таким образом, в этом случае две воронки V (q0) и V_ (#i) ’’упирают-
ся” в нижнюю полуплоскость q2 < 0. Но в нижней полуплоскости, как
127
легко видеть в данном случае, существуют допустимые траектории. Напри-
мер, траектория CFE, которая не только допустима, но и минимальна по
времени.
В* этом примере, основываясь на методе А.А. Фельдбаума [109, ПО]
построения линии переключения путем ’’попятного” движения, мы легко
находим линию переключения в задаче быстродействия, когда из произ-
вольной точки <7 Е {q} нужно попасть в фиксированную точку q\. Эта
линия переключения йа рис. 39.1 состоит из кусков двух парабол: Dq\
nq\EFG.
§ 40. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
Пусть УДС описывается уравнением
4 =/(?,«)• (О
Кроме этого , на УДС (1) наложены ограничения: на значения управле-
ния U(q) и на фазовые координаты (или состояние) q^G, где U(q)
и G — заданные множества. Задача оптимального управления формулиру-
ется следующим образом. Задана функция J{q) и задана начальная точка
<7(0) =<7о- Требуемся найти такую допустимую траекторию УДС (1), исхо-
дящую из точки qQi чтобы изображающая точка q в некоторый момент
времени Т> 0 доставила минимальное значение функции J(q (Т)).
Особенно просто эта задача решается на плоскости (или двумерном
многообразии), т.е. когда размерность пространства (многообразие)
состояний УДС равна 2. В этом случае достаточно наложить на фазовый
портрет УДС еще и поверхности (линии) уровня функции J(q). Посколь-
ку фазовый портрет УДС сразу дает возможность провести допустимую
траекторию, то из всего множества допустимых траекторий надо выбрать
ту, вдоль которой изображающая точка q достигнет линии уровня с наи-
меньшим (возможным для этой траектории) значением функции J(q).
Фазовый портрет УДС, дополненный наложенными на него линиями
уровня функции J{q), дает полную качественную картину возможных
решений задачи оптимального управления и, кроме того, позволяет полу-
чить и соответствующие количественные характеристики. Фазовый портрет
на плоском многообразии, как будет показано в примере 3 этого парагра-
фа, позволяет подчас решить задачи оптимального управления и более
высокой размерности, чем 2.
Приведем примеры реализации предложенного подхода к решению за-
дач оптимального управления*).
1. Задача оптимального управления состоит в том, чтобы для УДС
41=— ql +и, 0<и<1, (2)
найти такую допустимую траекторию, идущую от к q\9 чтобы функ-
ционал
1
J=fu(t)dt (3)
4)
*) Приведенные ниже примеры предложены и решены Е.А. Андреевой.
128
достиг минимального значения. Введем новую координату
q2 =и, 1. (4)
Тогда получим УДС
q1 = — q* + и, q2 0<и<1, (5)
для которой надо найти траекторию с начальным условием
?1(0) = ^> <?2(0) = 0 (6)
и конечным условием при 7=1
q1 (Г) = <71(1) = <7}> (7)
чтобы функция/ (q2) при#2 = #2(Г) = #2(1) достигла минимума.
Границы траекторных воронок УДС (5), как легко видеть, определя-
ются соотношениями
#2=СЬ q2 = С2-In 11 — q1|, (8)
где Ci и С2 — параметры семейств. Линии уровня функции/(#2) = q2 сов-
падают с первым семейством границ траекторных воронок в (8), т.е.
q2 = Ci. На рис. 40.1 построен фазовый портрет УДС (5) вместе с линиями
уровня минимизируемого функционала. Искомая оптимальная траектория,
соединяющая #0 и Qi> выделена на рисунке.
2. Для УДС вида q1 = и1, | их | < 1, с начальным условием ql (0) = 0 и
конечным условием#1 (Т) =qx (1) -q\ > 0 найти оптимальную траекторию,
минимизирующую функционал
1
/= /[и1 (г)]2 dt.
о
Введя новую переменную #2 = (и1)2, #2 (0) = 0, надо добиться, чтобы вели-
чина#2 (Т) =#2(1) достигла минимума.
Границы траекторных воронок описываются уравнением J#1/^#2 s ± 1.
Интегрируя, получаем два семейства границ: #2 = ql + С15 #2 = -#1 +
+ С2.
На рис. 40.2 изображен фазовый портрет полученной системы, откуда
видно, что искомый минимум равен ординате точки А, а соответствующая
оптимальная траектория есть отрезок ОА.
3. Построить выпуклую фигуру на плоскости, обладающую минималь-
ным (максимальным) периметром с заданными ограничениями на ширину.
Будем описывать фигуру с помощью понятия ширины выпуклой фигуры в
направлении у. Периметр/ определяется соотношением
J- №
О
Выпуклость фигуры характеризуется условием: q1 + q1 = и(<р) > 0, где
и (^) ~ радиус кривизны в направлении <р. Ограничения на ширину qx (^>)
задаются следующим образом: д 0 < q1 (<р) < д i. Если периметр тела мини-
129
Рис. 40.2 Рис. 40.3
мизируется, то граничные условия имеют вид
<7* (0) = <72(я) = Д1, q2(O)=q2(Tt) = O, q2 = q'.
Если периметр тела максимизируется, то задача решается при граничных
условиях q1 (0) = qx (я) = д0 •
Итак, имеем две задачи оптимального управления:
a)J = f q1 (^)^^inf;
о
ql =q2, q2=—qi+u, ^q1 (у)
м(<р)>0, 671(O) = 671(7t)=a1, q2 (0) = q2 (л) = O',
130
я
б) J = fq1 (y)dtp^- sup;
о
ql = q2, q2=—q'+u, 0<</' (<p)<Ai, 0<<£<7T,
m(v?)>0, ql (0) = ql (я)=д0-
Построим семейство границ траекторных воронок. Уравнения семейства
границ воронок имеют вид:
=-£ =0.
dq2 q1 dq2
Интегрируя эти уравнения, получим qx = G, (tf1)2 + (q2)2 =*С2>Лгде G и
С2 — параметры семейств границ траекторных воронок. Линией перемены
штриховки является ось q1, поскольку
s(q)= \Aq b\~q2 = 0.
Тогда для задачи а), учитывая равенство
J= f q‘d<p = f (-q2 + u)dy> = q2(0) —q2(ir) + f ud<p
0 0 0
и граничные условия, видим, что оптимальная фазовая траектория начина-
ется из точки В (рис. 40.3), далее идет по окружности радиуса Si с центром
в точке О до точки С9 затем через точки D и А и снова по окружности
радиуса с центром в точке О возвращается в точку Я
Для задачи б) оптимальная фазовая траектория на фазовом портрете
рис. 40.3 обозначена А В С.
СПИСОК ЛИТЕРАТУРЫ
1. Айзерман М.А. Введение в динамику автоматического регулирования двига-
телей. - М.: Машгиз, 1950.
2. Айзерман М.А., Пятницкий Е.С. Лекции по аналитической механике. - М.:
Наука, 1981.
3. Александров П.С. Введение в общую теорию множеств и функций. - М.:
Госте хтеориздат, 1948.
4. Андреев Ю.Н. Управление конечномерными линейными объективами. - М,:
Наука, 1976.
5. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. - М.: Физматгиз,
1959.
6. Андронов А.А., Леонтович Е.А. , Гордон И.И., Майер А.Г. Качественная теория
динамических систем второго порядка, - М.: Наука, 1966,
7. Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Теория бифуркаций ди-
намических систем на плоскости. - М.: Наука, 1967.
8. Арнольд В.И. Дополнительные главы дифференциальных уравнений. - М.:
Наука, 1972.
9. Арнольд В.И. Математические методы классической механики. - М.: Наука,
1974.
10. Арнольд В.И. Особенности дифференцируемых отображений. - М.: Наука,
1982
11. Веллман Р., Энджел Э. Динамическое программирование и уравнения в частных
производных. - М.: Мир, 1975.
12. Белов В.В., Воробьев £.М. Сборник задач по дополнительным главам математи-
ческой физики. - М.: Высшая школа, 1978.
13. Биркгоф Г. Динамические системы. - М.-Л,: Гостехтеориздат, 1941.
14. Благодатских В.И. Теория дифференциальных включений. - М.: Изд-во МГУ,
1979,ч. 1.
15. Блохинцев Д.И. Пространство и время в микромире. - М.: Наука, 1982.
16. Боголюбов Н.Н., Митропольский Ю.А. Асимптотические методы в теории не-
линейных колебаний. - М.: Наука, 1974.
17. Болотовский Б.М., Столяров С.И. Поля источников излучения в движущихся
средах. Эйнштейновский сборник (1978-1979). - М.: Наука, 1983, с. 197-277.
18. Болтянский В.Г Задача оптимизации. со сменой фазового пространства. —
Дифференциальные уравнения, март 1983, т. XIX, № 3, с. 518—520.
18а. Болтянский В.Г. Метод локальных сечений и опорный принцип. - В кн,: Матема-
тика на службе инженера, - М.: Знание, 1973.
19. Борн М., Вольф Э. Основы оптики. - М,: Наука, 1970,
20. Брокетт Р.У. Алгебры Ли и группы Ли в теории управления. — В сб. ’’Математичес-
кие методы в теории систем”. - М,: Мир, 1979.
21. Буземан Г. Выпуклые поверхности. - М.: Наука, 1964, с. 238.
22. Бутковский А.Г. Теория оптимального управления системами с распределен-
ными параметрами. - М.: Наука, 1965.
23. Бутковский А.Г. Методы управления системами с распределенными пара-
метрами . - М.: Наука, 1975.
24. Бутковский А.Г. Структурная теория распределенных систем. - М.: Наука, 1977.
25. Бутковский А.Г Характеристики систем с распределенными параметрами. -
М.: Наука, 1979.
132
26. Бутковский А.Г. Дифференциально-геометрический метод конструктивного
решения задач управляемости и финитного управления. — Автоматика и телеме-
ханика, 1982, № 1.
27. Бутковский А.Г., Андреев Ю.Н., Малый С.А. Оптимальное управление нагревом
металла. - М.: Металлургия, 1972.
28. Бутковский А.Г., Андреев Ю.Н., Малый С.А. Управление нагревом металла. -
М.: Металлургия, 1981.
29. Бутковский А.Г., Пустыльников Л.М. Теория подвижного управления системами
с распределенными параметрами. - М.: Наука, 1980.
30. Бутковский А.Г, Самойленко Ю.И. Управление квантовомеханическими про-
цессами. - М.: Наука, 1983.
30а. Вольф Дж. Пространства постоянной кривизны. - М.: Мир,’ 1982.
31. Воронов А.А. Основы теории автоматического управления. - М.-Л.: Энергия,
1966.
32. Воронов Л.Л. Устойчивость, управляемость, наблюдаемость. - М.: Наука,
1979.
33. Габасов Р., Кириллова Ф.М. Качественная теория оптимальных процессовк —
М.: Наука, 1971.
34. Габасов Р., Кириллова Ф.М. Особые оптимальные управления, - М.: Наука, 1973.
35. Гельфанд И. М., Фомин С. В. Вариационное исчисление.- М.: Наука, 1961.
36. Годунов С.К Уравнения математической функции. - М.: Наука, 1974.
37. Гурман В.И. Вырожденные задачи оптимального управления. - М.: Наука,
1977.
38. Гурса Э. Курс математического анализа, т. I, II. - М.-Л.: Гостехтеориздат,
1936.
39. Гюнтер Н.М. Интегрирование уравнений первого порядка в частных производ-
ных. - М.-Л.: Гостехтеориздат, 1934.
40. Далецкий Ю.Л., Фомин С.В. Меры и дифференциальные уравнения в бесконечно-
мерных пространствах. - М.: Наука, 1983.
41. Дирак П. Обобщенная гамильтонова механика. — В сб. ’’Вариационные принципы
механики”, под ред. Л.С. Полака. - М.: Физматиздат, М., 1959, стр. 705-722.
42. Дирак П. Принципы квантовой механики. - М.: Наука, 1979.
43. Дубровин Б.А., Новиков С.П, Фоменко А.Т. Современная геометрия. - М.:
Наука, 1979.
44. Дюво Г., Лионе Ж.-Л. Неравенства в механике и физике. - М.: Наука, 1980.
45. Емельянов С.В. Системы автоматического управления с переменной структу-
рой. - М.: Наука, 1967.
46. Ефимов Н.В. Введение в теорию внешних форм. - М.: Наука, 1977.
47. Жевнин А.А., Крищенко А.П. Управляемость нелинейных систем и синтез алго-
ритмов управления. — Доклады АН СССР, 1981, т. 258, № 4.
48. Жуков В.П. Исследование устойчивости одного класса нелинейных систем. — Ав-
томатика и телемеханика, 1980, №11.
49. Заде Л., Дезоер Ч. Теория линейных систем. — М.: Наука, 1978.
50. Загаллер В.А. Теория огибающих, - М.: Наука, 1975.
51. Камке 3. Справочник по дифференциальным уравнениям в частных производных
первого порядка. - М,: Наука, 1966.
52. Карел оу Г., ЕгерД. Теплопроводность твердых тел. - М.: Наука, 1964.
53. Картан Э. Интегральные инварианты. - М.-Л.: Гостехтеориздат, 1940.
54. Ковалев А.М. Нелинейные задачи управления и наблюдения в теории динамичес-
ких систем. - Киев : Наукова Думка, 1980.
55. Красносельский М.А. Векторные поля на плоскости. - М., Физматиздат, 1963.
56. Красносельский М.А. Топологические методы в теории нелинейных .уравне-
ний. - М.: Гостехтеориздат, 1956.
57. Красносельский М.А., Забрейко П.П. Геометрические методы нелинейного
анализа. - М.: Наука, 1975,
5б, Красносельский М.А., Перов А.И., Поволоцкий А.И., Забрейко П.П. Векторные
поля на плоскости. - М.: Наука, 1961.
59. Красносельский М.А. Рутицкий Я.Б. Выпуклые функции и пространства Орли-
ча. - М.: Физматгиз, 1958.
133
60. Красовский Н.Н. Теория управления движением. - М.: Наука, 1968.
61. Красовский Н.Н^ Субботин А.И. Позиционные дифференциальные игры. - М.:
Наука, 1974.
62. КурантР. Уравнения с частными производными. - М.: Мир, 1964.
63. Курант Р., Гильберт Д. Методы математической физики, т. I, II. - М.-Л.:
Гостехтеориздат, 1945.
63а. Лаврентьев М.А., Лю стерни к Л. А. Курс вариационного исчисления. - М.: Гостех-
теориздат, 1950.
64. Ладиков Ю.П. Стабилизация процессов в сплошных средах. - М.: Наука, 1978.
65. Ландау ЛД., Лифшиц Е.М. Механика. - М.: Наука, 1965.
66. Леви-Чивита Т., Амальди Уу Курс теоретической механики, т. II. - М.: ИЛ, 1951.
67. Левченков В.С., Пропой А.И. Об общей теории систем. - М.: Издательство
Всесоюзного научно-исследовательского института системных исследований
(ВНИИСИ), 1978.
68. Лейтман Дж. Введение в теорию оптимального управления. - М.: Наука, 1968.
69. Леонтович М.А. Статистическая физика. - М.: Гостехиздат, 1944.
70. Лере Ж. Лагранжев анализ и квантовая механика. - М.: Мир, 1981.
71. Лич Дж. У. Классическая механика. - М.: ИЛ, 1961.
72. Лурье КА. Оптимальное управление в задачах математической физики. — М.:
Наука, 1975.
73. Мандельштам Л.И. Лекции по колебаниям. - М.: Издательство АН СССР,
1955.
74. Маслов В.П. Операторные методы. - М.: Наука, 1976.
75. Мищенко А.С., Стернин Б.Ю., Шаталов В.Е. Лагранжевы многообразия и метод
канонического оператора. - М.: Наука, 1978.
76. Мищенко Е.Ф. Асимптотическое вычисление периодических решений систем
дифференциальных уравнений. Известия АН СССР (серия математическая),
т. 21, 1957.
7' Моисеев Н.Н. Асимптотические методы в нелинейной механике. - М.: Наука,
1981.
78. Неймарк Ю.И., Фуфаев НА. Динамика неголономных систем. - М.: Наука, 1967.
Нелинейные волны (самоорганизация). Сб. статей. - М.: Наука, 1983.
80. Немыцкий В.В., Степанов В.В. Качественная теория дифференциальных уравне-
ний. -М.-Л.: Гостехтеориздат, 1947.
81. Нетушил А.В. Теория автоматического управления. - М.: Высшая школа, 1983.
82. Павловский Ю.П., Яковенко Г.Н. Группы, допускаемые динамическими систе-
мами. - В сб.: ’’Методы оптимизации и их приложения”. - Новосибирск: Наука,
1982.
83. Петровский И.Г. Лекции по теории обыкновенных дифференциальных уравне-
ний. - М. - Л.: Гостехтеориздат, 1952.
84. Петровский И.Г. Лекции об уравнениях с частными производными. - М».: Физ-
матгиз, 1961.
85. Половинкин Е.С. Элементы теории многозначных отображений. - М.: Изд-во
Московского физико-технического ин-та, 1982.
86. Понтрягин Л.С. О динамических системах, близких к гамильтоновым. - ЖЭТФ,
т.4, 1934.
87. Понтрягин Л.С. Обыкновенные дифференциальные уравнения. - М.: Наука,
1982.
88. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математи-
ческая теория оптимальных процессов. - М.: Физматгиз, 1961.
89. Попов Е.П. Динамика системы автоматического регулирования. - М.: Гостехиз-
дат, 1954.
90. Портер У. Современные основания общей теории систем. - М.: Наука, 1971.
90а. Постников М.М. Лекции по геометрии^ Группы и алгебры Ли. М.: Наука, 1982.
91. Пуанкаре А. О кривых, определяемых дифференциальными уравнениями. -
М. - Л.: Гостехтеориздат, 1947.
92. Пугачев В.С., Казаков ИЕ., Евланов Л.Г. Основы статистической теории автома-
тических систем. - М.: Машиностроение, 1974.
93. Разумихин Б.С. Физические модели и методы теории равновесия в программи-
ровании и экономике. - М.: Наука, 1975.
134
94. Разумихин Б.С. Проблемы аналитической механики и проблема оптимального
управления, ч. I и II. - Автоматика и телемеханика, 1976, № 2, № 3.
95. Рашевский П.К. Геометрическая теория уравнений с частными производными. -
М. - Л.: Гостехтеориздат, 1947.
96. Розоноэр Л.И., Цирлин А.М. Оптимальное управление термодинамическими
процессами, чч. I, II, III. - Автоматика и телемеханика, 1983, № 1, 2, 3.
97. Рокафеллар Р. Выпуклые множества. — М.: Мир, 1973.
98. Рунд X. Дифференциальная геометрия финслеровых пространств. - М.: Наука,
1981.
99. Самойленко Ю.И., Волкович В.Л. Пространственно распределенные приемные
и управляющие системы. - Киев: Техника, 1968.
100. Синг Дж. А. Классическая механика. — М.: Физматгиз, 1963.
101. Смирнов В.И. Курс высшей математики, т. IV. — М. - Л.: Гостехтеориздат, 1951.
102. Степанов В.В. Курс дифференциальных уравнений. - М.: Гостехтеориздат, 1953.
103. Султанов М.А. Исследование процессов управления, описываемых уравнениями
с неопределенными функциональными параметрами. — Автоматика и телемеха-
ника, 1980, № 10.
104. Трикоми Ф. Лекции по уравнениям в частных производных. - М.: ИЛ, 1957.
105. Уткин В.И. Скользящие режимы и их применение в системах с переменной
структурой. - М.: Наука, 1974.
106. Фавар Ж. Курс локальной дифференциальной геометрии. - М.: ИЛ, 1960.
107. Фельдбаум А.А. Электрические системы автоматического регулирования. -
М.: Оборонгиз, 1957.
108. Фельдбаум. А.А. Вычислительные устройства в автоматических системах. - М.:
Физматгиз, 1959.
109. Фельдбаум А.А. Основы теории оптимальных автоматических систем. -Изд. 2-е
- М.: Наука, 1966.
ПО. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управле-
ния. - М.: Наука, 1971.
111. Филиппов. А.Ф. О некоторых вопросах теории оптимального регулирования. -
Вестник МГУ, № 2 (серия математическая), 1959.
112. Филиппов А.Ф. Дифференциальные уравнения с разрывной правой частью. - Ма-
тематический сборник, 1968, т. 51, № 1, с. 99-108.
113. ФицнерЛЛ. Управление координацией движения. - М.: Наука, 1971.
114. ФицнерЛ.Н. Биологические поисковые системы. - М.: Наука, 1977.
115. Фок В.А. Теория пространства, времени и тяготения. - М.: Физматгиз, 1961.
116. Цыпкин Я.З. Основы теории автоматических систем. - М.: Наука, 1977.
117. Черноусько Ф.Л. Оптимальные гарантированные оценки неопределенностей
с помощью эллипсоидов. - Техническая кибернетика, 1980, № 6.
118. Черноусько Ф.Л. Эллипсоидальные оценки области достижимости управляемой
системы. - Прикладная математика и механика, 1981, т. 45, вып. 1.
1Д9. Эльсгольц А.Э. Дифференциальные уравнения. - М.: Гостехтеориздат, 1957.
120. Янг О. Лекции по вариационному исчислению и теории оптимального управле-
ния. - М.: Мир, 1974.
121. Ash М. Nuclear Reactor Kinetics. - New York: Me Graw-Hill, 1965.
121a. Bresis H. Operations maximaux monotones et semi-groupes de contraction dans
les espaces de Hilbert. - Amsterdam: North-Holland, 1973.
122. Butkovskiy A.G. Distributed Control Systems. - New-York: Elsevier, 1969.
123. Butkovskiy A.G. Green’s Functions and Transfer Functions. - Chichester: Ellis Hor-
wood, 1982.
124. Butkovskiy A.G. Some new results in Distributed Control Systems (survey). - 3rd
International Symposium on Distributed Parameter Systems, Toulouse (Frans.), 1982.
125. Butkovskiy A.G. Structural Theory of Distributed Systems. - Chichester: Ellis Hor-
wood, 1983.
125a. Butkovskiy A.G., Pustylnikov L.M. The Mobile control of Distributed Parameter
Systems. - Chichester: Ellis Horwood, 1983.
126. Curtain R.F., Pritchard A.J. Infinite Dimensional Linear Systems Theory. - Berlin -
Heidelberg - New York: Springer-Verlag, 1978, 298 pp.
127. Hunt L.R. Global Controllability of Nonlinear Systems in Two Dimensions. — Math.
Systems Theory, 1980,13, p. 361-376.
135
128. Jurdjevic V., Quinn J.P. Controllability and Stability. - J. Differential Equations,
1978,28, p. 381-389.
129. Lions J.-L. Sur les systemes distributes singuliers. - Los Alamos, 1981.
130. Lions J.-L. Some aspects of the Optimal Control of distributed parameter systems. -
Philadelphia, USA, 1981.
131. Lions J.-L. Some methods in the mathematical analysis of systems and their control. -
INRIA, France, 1981.
132. Rink R.E., Mohler R.R. Completely Controllable Bilinear Systems. - SIAM J. Cont-
rol, 1968, vol. 6, No. 3.
133. Sussman H., Jurdjevic V. Controllability of nonlinear systems. - J. Differential
Equations, 1972,12, p. 95-116.
Анатолий Григорьевич Бутковский
ФАЗОВЫЕ ПОРТРЕТЫ
УПРАВЛЯЕМЫХ
ДИНАМИЧЕСКИХ СИСТЕМ
Серия ’Теоретические основы
технической кибернетики”, № 84
Редактор Д. С. Фурманов
Технический редактор О£. Черняк
Корректоры Т.В. Обод, ЕЛ. Янышева
Набор осуществлен в издательстве
на наборно-печатающих автоматах
ИБ № 12724
Сдано в набор 6.05.85. Подписано к печати 31.07.85
Т-16648. Формат 60 X 90 1/16. Бумага офсетная № 1
Гарнитура Пресс-Роман. Печать офсетная. Усл.печ.л. 8,5
Усл. кр.-отт. 8,75. Уч,-изд.л. 8,95. Тираж 2850 экз.
Тип. зак.755. Цена 1 р. 30 к.
Ордена Трудового Красного Знамени
издательство ’’Наука”
Главная редакция физико-математической литературы
110771 Москва В-71, Ленинский проспект, 15
4-я типография издательства ’’Наука”
630077 г. Новосибирск-77, ул, Станиславского, 25