/





















































































































































































































































































































































































Текст
ЛХЕВЛЛНОВ
КОНТРОЛЬ
ДИНАМИЧЕСКИХ
СИСТЕМ
ТЕОРЕТИЧЕСКИЕ
ОСНОВЫ
ТЕХНИЧЕСКОЙ
КИБЕРНЕТИКИ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1 9 7 Я
Л. Г. ЕВЛАНОВ
КОНТРОЛЬ
ДИНАМИЧЕСКИХ
СИСТЕМ
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1979
6ф 6.5
Е 17
УДК 62-50
Контроль динамических систем. Евланов Л. Г.—
2-е изд., перераб. и доп.— М.: Наука. Главная редак-
ция физико-математической литературы, 1979, 432 с.
В книге изложены основы теории контроля слож-
ных динамических систем: движущихся объектов, ав-
томатических комплексов, радиоэлектронных и элект-
ромеханических приборов и других устройств.
Основное содержание теории составляют: построе-
ние математических моделей объектов контроля, син-
тез оптимальных алгоритмов измерения, прогнозиро-
вания и принятия решений и определение характерис-
тик системы контроля. Объекты контроля’ рассматри-
ваются как системы со случайными параметрами,
поэтому изложение материала основывается на статис-
тической теории систем автоматического управления.
Применения теории иллюстрируются примерами.
Книга предназначена для инженеров, научных ра-
ботников, аспирантов и студентов, специализирующих-
ся в области исследования и разработки систем авто-
матического контроля.
Илл. 58, библ. 114.
EhSmoVl20 1Ж79' 1502010000
©Главная редакция
физико-математической
литературы
издательства «Наука», 1979.
с изменениями
ОГЛАВЛЕНИЕ
Предисловие ............................................ 8
Г л а в а '1. Динамические системы......................11
§ 1.1. Основные понятия............................ 11
§ 1.2. Классификация систем -........................14
§ 1.3. Входные сигналы...............................18
§ 1.4. Характеристики сигналов.......................21
§ 1.5. Уравнения систем..............................30
§ 1.6. Характеристики линейных систем................32
§ 1.7. Характеристики нелинейных систем .... 38
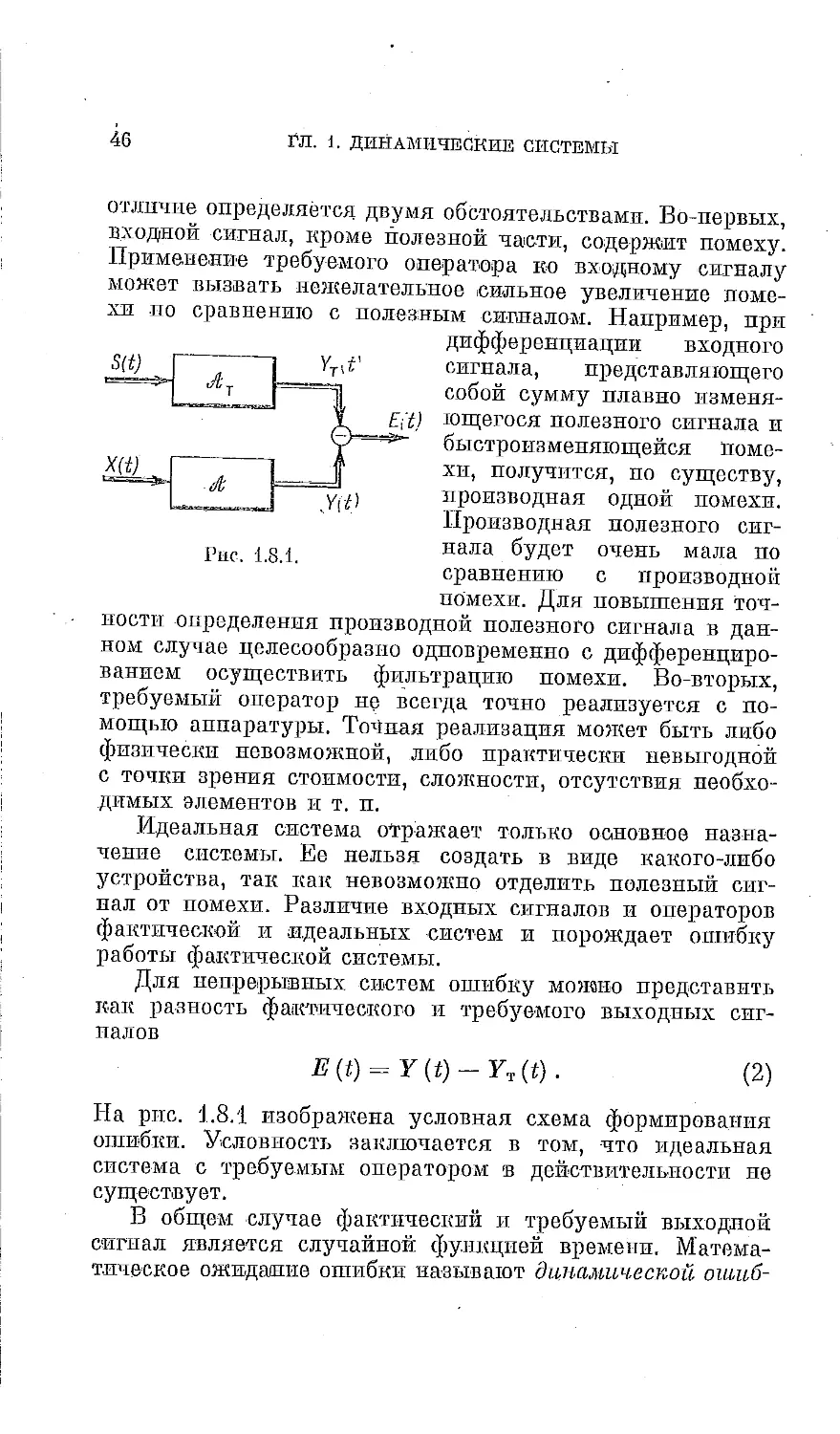
§ 1.8. Качество систем ..............................44
§ 1.9. Показатели качества...........................48
Глава 2. Концепции контроля.............................52
§ 2.1. Задачи контроля...............................52
§ 2.2. Принципы контроля.............................55
§ 2.3. Структура систем контроля.....................63
§ 2.4. Характеристики систем контроля................66
§ 2.5. Синтез характеристик контроля.................68
§ 2.6. Организация Контроля..........................70
Глава 3. Методы анализа систем..........................73
§ 3.4. Постановка задачи анализа.....................73
§ 3.2. Метод весовых функций.........................77
§ 3.3. Метод уравнений моментов......................84
§ 3.4. Метод частотных характеристик.................90
§ 3.5. Метод статистической линеаризации .... 99
§ 3.6. Метод статистических испытаний...............106
Глава 4. Методы синтеза систем.........................112
§ 4.1. Постановка задачи синтеза...................112
§ 4.2. Оценка качества решений.....................119
§ 4.3. Алгоритм распознавания сигналов .... 124
§ 4.4. Качество распознавания сигналов.............129
§ 4.5. Двухальтернативное распознавание .... 131
§ 4.6. Оптимальное выделение сигналов..............140
§ 4.7. Выделение сигналов по критерию минимума сред-
него квадрата ошибки.............................. 144
§ 4.8. Апостериорная плотность вероятности . . . 149
§ 4.9. Аддитивно-мультипликативная помеха . . . 154
§ 4.10. Оценка параметров линейного сигнала . . . 164
6
ОГЛАВЛЕНИЕ
Глава 5. Модели объектов контроля . ..... 172
§ 5.1. Типы моделей . . ......................172
§ 5.2. Аналитическая модель.........................176
§ 5.3. Методы построения моделей ...... 179
§ 5.4. Модели для линейных систем...................181
§ 5.5. Модели для нелинейных систем .' . . . . 185
§ 5.6. Применение градиентного случайного поиска 189
§ 5.7. Применение неградиентного случайного поиска . 192
Глава 6. Гарантийные допуски § 6.1 Принципы назначения допусков . . . § 6.2 Двухпараметрическая модель . . . . § 6.3 Алгоритм определения допусков § 6.4. Ошибки при контроле по допускам . § 6.5. Допуски на линейные формы параметров . . 196 . . 196 . . 201 . . 204 . . 212 . . 218
Глава 7. Измерение . . 221
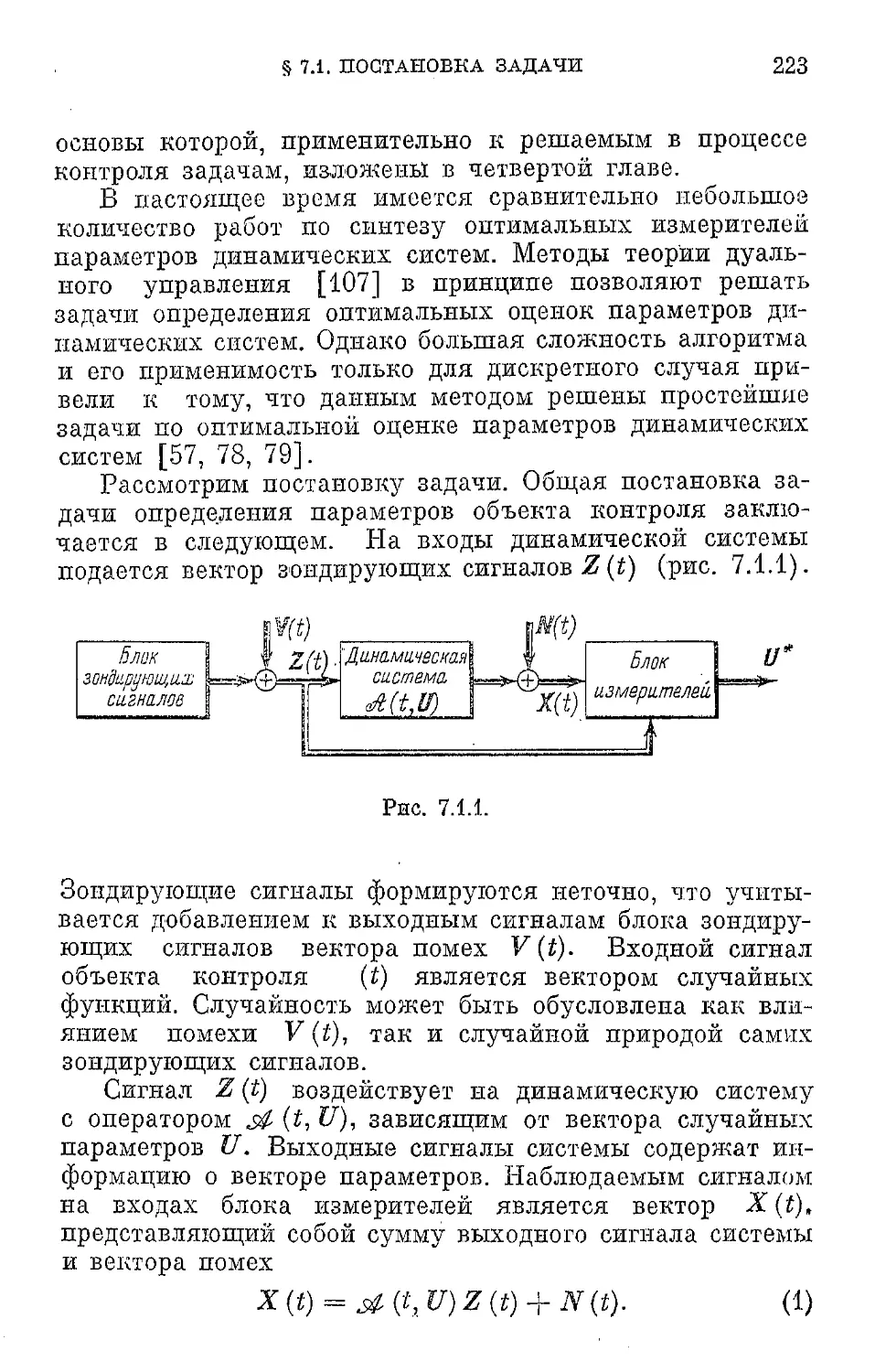
§ 7.1. Постановка задачи , 221
§ 7.2. Модели сигналов . 225
§ 7.3. Измерение параметра. I „ , 230
§ 7.4. Измерение параметра. II . t 235
§ 7.5. Измерение параметра. III . . 243
§ 7.6. Измерение параметра. IV . . 249
§ 7.7. Измерение параметра. V . . 252
§ 7.8. Синтез зондирующего сигнала .... . . 255
§ 7.9. Помеха в зондирующем сигнале . . 260
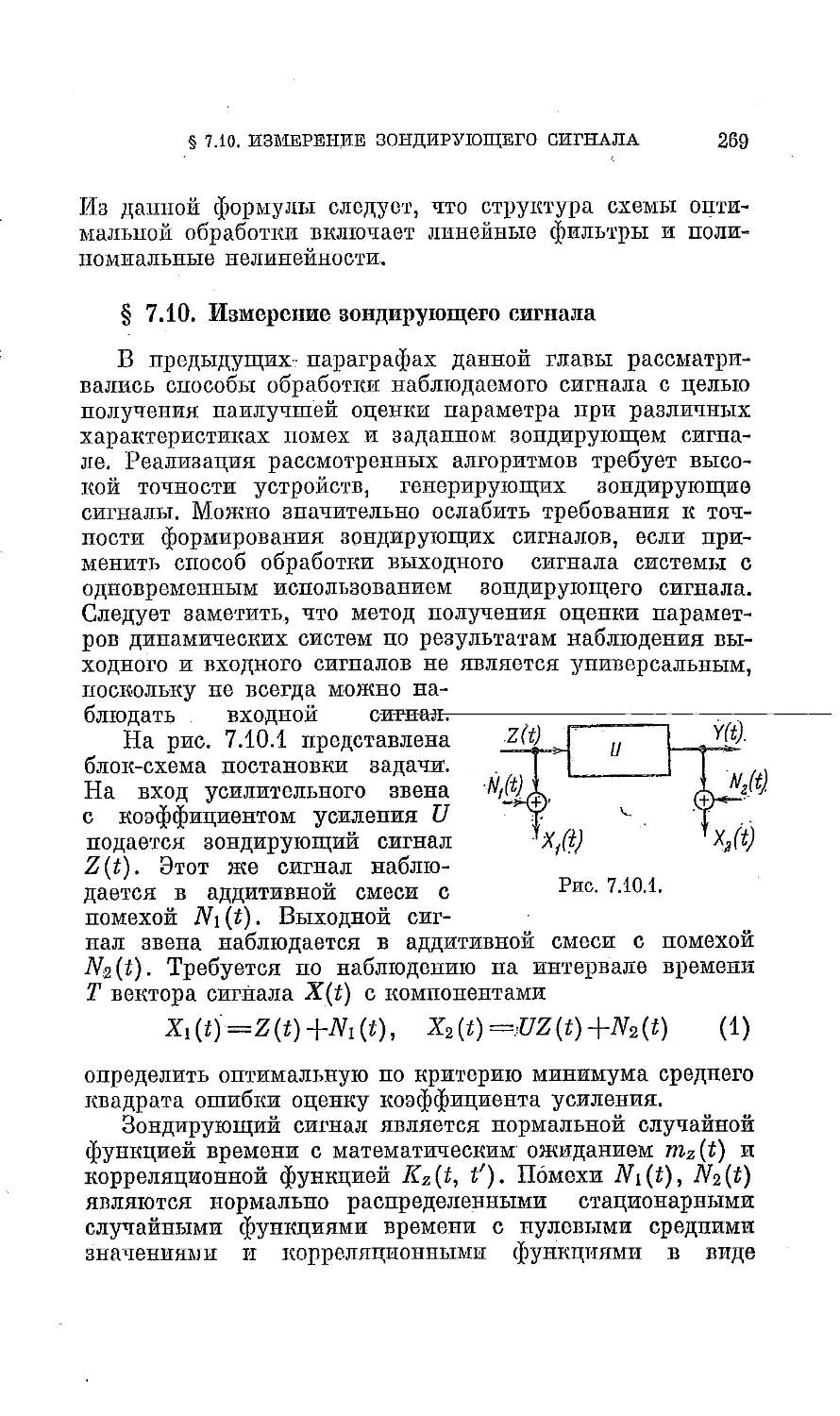
§ 7.10. Измерение зондирующего сигнала . . . 269
§ 7.11. Линейный инерционный объект . . 275
§ 7.12. Измерение параметров системы . . 285
§ 7.13. Измерение показателя качества . . 298
§ 7.14. Точность измерения показателя качества . . . 301
Глава 8. Прогнозирование . . 306
§ 8.1. Постановка задачи . . 306
§ 8.2. Модели изменения параметров . . 310
§ 8.3. Прогнозирование параметров . . . . . . 316
§ 8.4. Рекуррентное прогнозирование параметров . . 325
§ 8.5. Прогнозирование показателей качества . . 329
Глава 9. Принятие решений........................335
§ 9.1. Схемы принятия решений . .............335
§ 9.2. Однопараметрический объект........... 337
§ 9.3. Контрольные допуски ...................343
§ 9.4. Вероятности ошибок.....................346
§ 9.5. Многопараметрический объект ...........356
§ 9.6. Вероятности ошибок контроля............366
Глава 10. Синтез характеристик контроля..........376
§ 10.1. Эффективность контроля................376
§ 10.2. Достоверность контроля................379
§ 10.3, Точность контроля ......... 386
ОГЛАВЛЕНИЕ 7
§ 10.4. Значимость параметров.................... 393
§ 10.5. Объем контроля.............................402
Приложения............................................407
1. Свойства 6-функции.............................407
2. Характеристики элементарных звеньев . . . .. 409
3. Характеристики нелинейностей...................411
4. Таблица интегралов 1п..........................415
5. Таблица функции Ф(ж)...........................417
6. Таблица функции Ф'(ж)..........................419
7. Список основных обозначений....................421
Литература.......................................... 423
Предметный указатель . ................... . . 429
ПРЕДИСЛОВИЕ
Последние три десятилетия характеризуются бурным
развитием сложных автоматических систем обработки
информации и управления. Особенностью функциониро-
вания этих систем является быстрое изменение состоя-
ния во времени, при котором существенно сказываются
их динамические свойства, поэтому данные системы от-
носят к классу динамических систем.
Разработка, внедрение и эксплуатация динамических
систем потребовали создания новых систем контроля как
средства для получения информации о техническом со-
стоянии объектов, степени совершенства процессов про-
ектирования, производства и эксплуатации и принятия
на этой основе соответствующих решений. Системы кон-
троля должны обеспечивать создание обратной связи в
управлении процессами создания и эксплуатации техни-
ки. Именно этим обстоятельством объясняется бурное
развитие систем контроля, происходящее параллельно с
развитием автоматических систем. В настоящее время
контроль динамических систем является широкой об-
ластью деятельности, в которой работают большие кол-
лективы специалистов.
Системы контроля сами являются сложными динами-
ческими системами. Поэтому их создание потребовало
разработки теоретической базы. С начала семидесятых
годов непрерывно возрастает поток научных исследова-
ний в области систем контроля. На первом этапе в ос-
новном разрабатывались методы анализа систем конт-
роля и вопросы аппаратурной реализации отдельных
устройств. В последующем стали развиваться методы
синтеза характеристик и алгоритмов работы систем кон-
троля. Эти исследования создали предпосылки для фор-
мирования теории контроля.
В первом издании настоящей книги, опубликованном
в 1972 г. [52], автор предпринял попытку изложить
ПРЕДИСЛОВИЕ
9
основы теории контроля динамических систем. Главное
содержание этой теории составляет синтез оптимальных
характеристик и алгоритмов работы систем контроля.
Синтез базируется на использовании вероятностных ме-
тодов, которые широко применяются для расчетов авто-
матических систем, что обеспечивает единый методоло-
гический подход при совместном проектировании объек-
тов и систем контроля.
Практическое применение теории при разработке си-
стем контроля за прошедшие годы подтвердило правиль-
ность и эффективность ее основных положений, позволи-
ло накопить фактический материал и на этой основе
провести обобщение и развитие теории, уточнить и мето-
дически отработать ее изложение. Все это побудило ав-
тора к подготовке второго издания книги.
Во втором издании переработано и дополнено изло-
жение теории контроля динамических систем при сохра-
нении общей методологической основы первого издания.
Содержание данной книги составляют: концепция конт-
роля динамических систем, методы анализа и синтеза
систем, модели объектов контроля, синтез оптимальных
алгоритмов измерения и прогнозирования параметров и
показателей качества, синтез оптимальных правил при-
нятия решений о состоянии объекта контроля и синтез
характеристик систем контроля.
В первой главе рассмотрены основные понятия и ха-
рактеристики динамических систем. Во второй главе из-
ложена концепция контроля, включающая задачи, прин-
ципы и организацию контроля, общую структуру и ха-
рактеристики систем контроля и постановку задачи
синтеза. В третьей и четвертой главах изложены соот-
ветственно методы вероятностного анализа и синтеза оп-
тимальных динамических систем. В пятой главе рассмот-
рены типы моделей объектов контроля и методы их по-
строения. В шестой главе изложены принцип и методика
определения гарантийных допусков на параметры из ус-
ловия удовлетворения допуска на обобщенный показа-
тель качества объекта контроля. Седьмая глава посвя-
щена постановке и решению задачи синтеза оптималь-
ных измерителей параметров и показателей качества
при различных характеристиках помех и ошибок изме-
рения, получены конкретные оптимальные алгоритмы
10
ПРЕДИСЛОВИЕ
измерения и приведены потенциальные оценки точности
измерения. В восьмой главе изложены вопросы синтеза
оптимального прогнозирования параметров и показате-
лей качества, получены интегральные и рекуррентные
алгоритмы прогнозирования и потенциальные оценки
точности. В девятой главе синтезированы оптимальные
правила решения о состоянии однопараметрического и
многопараметрического объектов и получены формулы и
графики для потенциальных вероятностей ошибочных
решений. В десятой главе приведена методика синтеза
основных характеристик систем контроля. В приложе-
нии даны вспомогательные материалы, используе-
мые в книге.
По сравнению с первым изданием частично измене-
на структура книги за счет перестановки и объединения
некоторых глав. Полностью переработаны и дополнены
новым материалом четвертая, восьмая, девятая и деся-
тая главы. Существенно переработаны и дополнены вто-
рая, пятая и седьмая главы. Материал первой, третьей
и шестой глав изменен незначительно.
Книга предназначена для инженеров, научных работ-
ников, аспирантов и студентов, специализирующихся в
области исследования и разработки систем автоматиче-
ского контроля.
Автор
ГЛАВА 1
ДИНАМИЧЕСКИЕ СИСТЕМЫ
§ 1.1. Основные понятия
В инженерной практике мы непрерывно сталкиваемся
с задачами расчета различного рода технических уст-
ройств: механических, акустических, электронных, радио-
технических, оптических и т. п. Эти расчеты необходимы
для обоснования параметров конструкции при проекти-
ровании, выбора технологических режимов при производ-
стве и назначении рациональных условий эксплуатации
устройств.
Выполнение каких-либо расчетов возможно, если име-
ется математическое описание (модель) функциониро-
вания реального устройства.. Конечно, при всяком теоре-
тическом исследовании реальной физической системы не-
возможно в модели отразить все свойства системы.
В противном случае модель просто превратится в оригинал.
Поэтому при построении математических моделей необ-
ходима идеализация, упрощение физических явлений
с цепью выделения главных, интересующих нас свойств.
Функционирование технических устройств можно рас-
сматривать как реакцию на входные возмущения и на-
чальные условия. Например, для механических систем
входными возмущениями являются силы и моменты; для
радиотехнических и электронных систем — токи и напря-
жения. Характер реакции определяется инерцией уст-
ройств и конечной скоростью протекания процессов, т. е.
динамическими свойствами. Динамические свойства про-
являются при движении механических элементов, изме-
нении токов и индуктивностях, перемещении среды в
различных камалах и т. п. Инерция и конечная скорость
протекания процессов играют отрицательную роль, если
задачей устройства является точное воспроизведение
внешнего полезного возмущения. Наоборот, эти свойства
играют положительную роль при действии внешних ме-
шающих воздействий, ослабляя влияние этих факторов
на выходную реакцию. Зная характер полезных и вред-
12
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
ных возмущений, можно правильно выбрать динамиче-
ские свойства устройства с целью получения заданной
среднему времени жизни носителей заряда, a D, — ди-
выходпЬй реакции.
На рис. 1.1.1 показано схематическое изображение
устройства, входного возмущения и выходной реакции.
Двойные линии на рисунке
Возмущение Г~’ ; Реакция означают, ЧТО входное возму-
Устройство ——»- щение и выходную реакцию
следует рассматривать как
Рис. 1.1.1. векторы, в общем случае, с
различным числом компо-
нент. Рисунок отображает принцип функционирования
устройств — преобразование возмущений.
Математической моделью устройств, отражающей
свойства преобразования возмущений, является динами-
ческая система. Это понятие будет широко использоваться
в дальнейшем, часто с опусканием, для краткости, слова
«динамическая».
Автоматическая система является частным случаем
динамической системы. Эта частность характеризуется
подчеркиванием в автоматической системе обратных свя-
зей. В динамической системе могут быть произвольные
обратные связи, однако это не подчеркивается, поскольку
целью их рассмотрения является не построение управле-
ния, а изучение динамических свойств.
Для построения динамической системы формализуем
схему, изображенную на рис. 1.1.1. Входные возмущения
будем называть входными сигналами и обозначать их
совокупность через вектор X (I). Реакции системы будем
называть выходными сигналами к обозначать их множе-
ство через вектор Y (£). Полезным входным возмущени-
ям соответствуют полезные сигналы, которые обознача-
ются через вектор >5 (t), а мешающим входным возму-
щениям— помехи-, обозначение: вектор N (t) . Точки
приложения входных сигналов назовем входами системы.
Точки наблюдения выходных сигналов назовем выходами
системы.
Преобразование возмущений устройством соответству-
ет преобразованию сигналов динамической системой.
’’ Закон, устанавливающий соответствие между входным
и выходным сигналами, называют оператором динами-
§1.1. ОСНОВНЫЕ ПОНЯТИЯ
[13
и в результате выход-
Рис. 1.1.2.
оператора — числа, оп-
математических дейст-
ческой системы. Оператор системы — это математическое
описание работы реального устройства. Запись вида
У(«) = ^Х(О (1)
означает, что входной сигнал X (£) подвергается преоб-
разованию оператором системы
ной сигнал системы равен У \t).
На рис. 1.1.2 формула (1) изоб-
ражена в виде структурной
схемы.
Различают структуру опера-
тора, т. е. последовательность
математических действий над
входными сигналами, и параметры
ределяющие пропорциональность
вий. Параметры оператора могут быть детерминированны-
ми или случайными.
Детерминированная модель параметров оператора ис-
пользуется для описания известных динамических
свойств системы. В этом случае оператор может выра-
жать различные операции: дифференцирование, интегри-
рование, решение алгебраических, дифференциальных,
интегральных, разностных и других функциональных
уравнений, совокупность логических операций и т. п.
Оператор динамической системы может иметь слу-
чайные параметры. Данная модель оператора использу-
ется при описании устройств с учетом производственных
и эксплуатационных разбросов параметрор, анализе ра-
боты прецизионных измерителей в условиях действия
вибраций, исследовании маятниковых приборов при уско-
ренных движениях точки подвеса и т. п. Факт наличия
в операторе случайных параметров будем отмечать вве-
дением в оператор аргумента U: (U) , где U — век-
тор случайных параметров. Случайный разброс парамет-
ров оператора приводит к неопределенности динамиче-
ских свойств системы. Описание этих свойств может быть
произведено лишь в вероятностном смысле. Для этого
необходимо знать вероятностные характеристики вектора
параметров оператора.
Оператор является достаточно общей характеристи-
кой произвольной динамической системы. Выбор конкрет-
ной формы оператора для описания свойств физического
14 ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
устройства определяется условиями задачи и принятым
методом ее решения.
При рассмотрении динамических систем движение
считается обратимым, т. е. если система из одного состо-
яния переместилась в другое, то возможно и обратное
перемещение. При движении системы в обратном направ-
лении входы и выходы меняются своими ролями, а свой-
ства системы описываются обратным оператором, кото-
рый мы будем обозначать введением дополнительного
индекса «—1» у оператора: Выходной сигнал обрат-
ной системы выражается через входной сигнал соотно-
шением
X (t) - (i). (2)
Последовательное применение прямого и обратного
операторов к некоторому сигналу дает тождественное
преобразование, не изменяющее этот сигнал. Этот факт
описывается введением единичного оператора I:
= I. (3)
В динамических системах возможны движения, кото-
рые представляют как бы зеркальные отображения друг
друга. Такие движения описываются прямым и сопря-
женным S&* операторами. Реакция сопряженной системы
равна реакции прямой системы, если для прямой системы
поменять местами моменты времени приложения возму-
щений и наблюдения сигналов.
Динамические свойства системы, имеющей несколько
входов и выходов, описываются матричным оператором,
элементы которого определяют связь между соответству-
ющими входами и выходами.
§ 1.2. Классификация систем
Классификация динамических систем производится в
зависимости от характерных особенностей входов и вы-
ходов, сигналов и свойств оператора. Ценность классифи-
кации состоит в разделении систем на определенные
классы с общими особенностями, знание которых позво-
ляет быстрее выбрать наиболее эффективный метод ис-
следования систем данного класса.
§ 1.2. КЛАССИФИКАЦИЯ СИСТЕМ
15
Динамические системы, имеющие один вход и один
выход, называют одномерными. Системы, имеющие не-
сколько входов и выходов, называют многомерными. Мно-
гомерные системы могут иметь один вход и несколько
выходов или несколько входов и один выход. Разделение
систем на одномерные и многомерные часто является
условным и определяется задачей исследования. Напри-
мер, если в многомерной системе необходимо определить
изменение сигнала на одном из выходов системы за счет
какого-то одного входного сигнала, то данную систему
можно рассматривать как одномерную.
Системы, у которых входы представляются как точ-
ки, называют сосредоточенными. Динамические систе-
мы, у которых входы непрерывно распределены вдоль
линии или поверхности, называют распределенными си-
стемами. Примером распределенной системы может слу-
жить нагревательное устройство, взаимодействующее с
окружающей средой по всей своей поверхности.
Динамические системы называются непрерывными,
если входные и выходные сигналы имеют 'непрерывное
множество значений по величине и времени. Если сигна-
лы поступают только в некоторые моменты времени или
имеют конечное число значений по величине, то такие
системы называют дискретными. Системы, дискретные
во времени, называют также импульсными. Примерами
дискретных систем, имеющих конечное число значений
выходного сигнала, являются системы обнаружения и
распознавания сигналов.
Динамические системы называют линейными, если
выполняется принцип суперпозиции. Если этот принцип
для системы несправедлив, то система называется нели-
нейной.
Сущность принципа суперпозиции заключается в том,
что линейной комбинации произвольных входных сигна-
лов ставится в соответствие та же линейная комбинация
на выходе. Математически принцип суперпозиции запи-
сывается в виде {90]
Ъсмц, (1)
U=1 J i=i
где С, — произвольные числа, Xi(t) — произвольные функ-
16
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
ции времени. Соотношение (1) справедливо для любого п.
В случае бесконечно большого п принцип суперпози-
ции может быть представлен в интегральной форме
= [ C(X)^tX(t, X)dk, (2)
'л J л
где Л — область интегрирования, а индекс t у оператора
означает, что именно по этой переменной применяется
оператор.
Необходимым и достаточным условием выполнения
принципа суперпозиции является удовлетворение следу-
ющих равенств:
{Xi (£) +Х2 (0 } (£) +^2 (0,
^CX(t)‘=C^X(t). (3)
Из этих равенств методом индукции можно показать
справедливость принципа суперпозиции для любого чис-
ла слагаемых.
Оператор, подчиняющийся принципу суперпозиции,
называется линейным оператором. Оператор, для которо-
го принцип суперпозиции не выполняется, называется
нелинейным оператором.
Принцип суперпозиции является непосредственно ра-
бочим инструментом, позволяющим определять свойства
линейности или нелинейности динамической системы.
Для этого достаточно проверить, выполняются ли условия
(3) для конкретной системы или нет. Так, например, диф-
ференцирование и интегрирование представляют собой
линейные операторы. Тригонометрические и степенные
функции являются примерами нелинейных зависимостей.
Действительно, любая тригонометрическая или степенная
функция суммы двух слагаемых не есть сумма функций
каждого слагаемого в отдельности. Изменение масштаба
аргументов этих функций приводит к непропорциональ-
ному изменению масштаба самих функций. Таким обра-
зом, соотношения (3) для тригонометрических и степен-
ных функций несправедливы.
Представление реального устройства в виде линейной
динамической системы играет большую роль при иссле-
довании. Это объясняется тем, что для линейных систем
созданы общие весьма эффективные методы анализа и
синтеза. Поэтому, если возможно с достаточной точ-
§ 1.2. КЛАССИФИКАЦИЯ СИСТЕМ
17
иостью описать свойства реальной системы с помощью
линейной модели, всегда необходимо к этому стремиться.
Системы называют стационарными, если их динами-
ческие свойства не изменяются с течением времени. Если
так'ое изменение имеет место, то системы называют не-
стационарными. Нестационарно сть — это изменчивость
динамических свойств системы во времени.
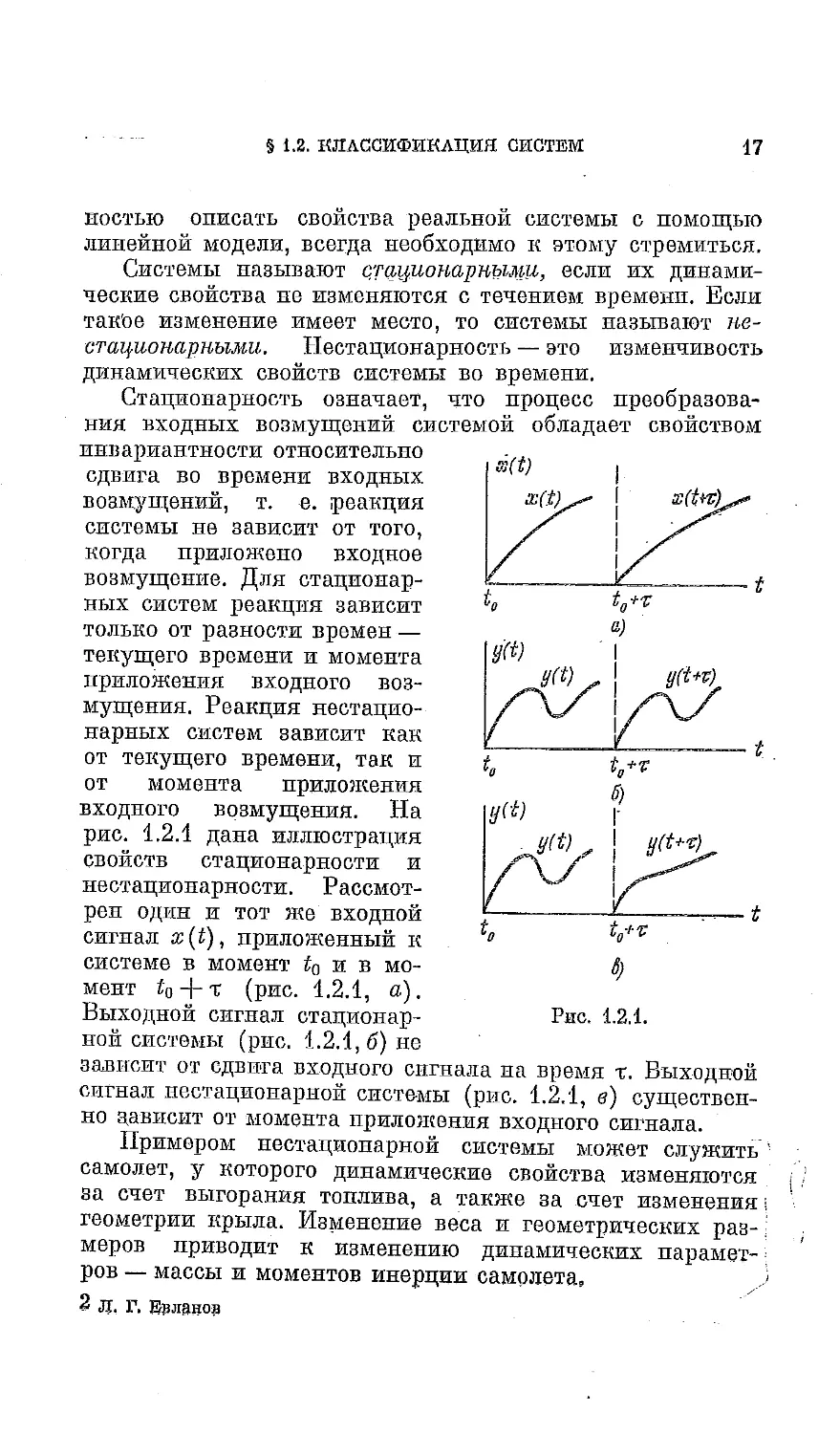
Стационарность означает, что процесс преобразова-
ния входных возмущений системой обладает свойством
инвариантности относительно
сдвига во времени входных
возмущений, т. е. реакция
системы не зависит от того,
когда приложено входное
возмущение. Для стационар-
ных систем реакция зависит
только от разности времен —
текущего времени и момента
приложения входного воз-
мущения. Реакция нестацио-
нарных систем зависит как
от текущего времени, так и
от момента приложения
входного возмущения. На
рис. 1.2.1 дана иллюстрация
свойств стационарности и
нестационарности. Рассмот-
рен один и тот же входной
сигнал х (i), приложенный к
системе в момент t0 и в мо-
мент io + т (рис. 1.2.1, а).
Выходной сигнал стационар-
ной системы (рис. 1.2.1, б) не
Ф
Рис. 1.2.1.
зависит от сдвига входного сигнала на время т. Выходной
сигнал нестационарной системы (рис. 1.2.1, в) существен-
но зависит от момента приложения входного сигнала.
Примером нестационарной системы может служить
самолет, у которого динамические свойства изменяются
за счет выгорания топлива, а также за счет изменения i
геометрии крыла. Изменение веса и геометрических раз-
меров приводит к изменению динамических парамет-
ров — массы и моментов инерции самолета,
2 JI. Г. Евланор
18
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Рассмотренная классификация динамических систем
основана на 'различных признаках и свойствах. Поэтому
линейные системы могут быть как стационарными, так и
нестационарными; одномерными или многомерными; не-
прерывными или дискретными. Аналогичное утвержде-
ние справедливо и для нелинейных систем.
§ 1.3. Входные сигналы
Характерной особенностью работы сложных динами-
ческих систем является использование предельных режи-
мов. Максимальные или минимальные значения скоро-
стей и ускорений, . температур и давлений, токов и
напряжений, времени работы и уровней полезных вход-
ных сигналов — таков далеко не полный перечень усло-
вий, при которых роль случайных факторов становится
все более заметной и существенной. Отсюда следует, что
общей моделью входных сигналов, описывающих дейст-
вие различных возмущений, является случайная функ-
ция. В частном случае, когда роль случайных факторов
становится пренебрежимо малой, входные сигналы можно
рассматривать как детерминированные (неслучайные)
функции.
Все разнообразие входных сигналов можно разделись
на полезные сигналы и помехи. Полезные сигналы —
это такие сигналы, преобразование которых является за-
дачей динамической системы. Помехи — это мешающие
сигналы. Из данных определений следует условность
разделения на полезные сигналы и помехи. В зависимо-
сти от решаемой задачи одни и те же сигналы могут
рассматриваться как полезные или как помехи.
Причинами помех могут служить как внешние, так и
внутренние явления. Так, например, для летательного
аппарата внешней помехой является турбулентность ат-
мосферы. Для радиоприемного устройства помеха во вход-
ном сигнале обусловлена условиями распространения и
отражения электромагнитных сигналов. Источниками
внутренних помех являются флуктуации носителей за-
ряда в элементах электронных схем (лампах, сопротив-
лениях и т. п.), трение в механических соединениях и
на границах различных сред. Влияние помех проявляется
в возникновении случайных сил и моментов в механиче-
§ 1.3. ВХОДНЫЕ СИГНАЛЫ
19
ских системах и случайных токов и напряжений в элек-
тронных системах.
На примере движения летательного аппарата в тур-
булентной атмосфере можно наглядно показать услов-
ность понятия помехи и полезного сигнала. G точки зре-
ния общего движения летательного аппарата или пасса-
жира влияние турбулентности атмосферы рассматрива-
ется как помеха. G точки зрения системы стабилизации
движения летательного аппарата турбулентность атмо-
сферы рассматривается как полезный сигнал, на который
система стабилизации должна выработать компенсирую-
щий сигнал в виде поворота рулей. Отклонение рулей
создает моменты, парирующие моменты от турбулентно-
сти атмосферы. G точки зрения системы стабилизации
помехами будут являться всевозможные ошибки измере-
ния фактического положения летательного аппарата.
Входной сигнал динамической системы в общем слу-
чае представляет собой некоторую комбинацию полезного
сигнала и помехи. Математически это записывают следу-
ющим образом:
X(i) = cp(S(f), 7V(f)), (1)
где cp(«)—нелинейная функция полезного сигнала S(t.)
и помехи N(t), X(t) —входной сигнал системы.
Наиболее часто встречаются аддитивная, мультипли-
кативная и смешанная комбинации сигнала и помехи.
При аддитивной комбинации полезный сигнал и помеха
складываются:
X(t)=S(t)+N(t). (2)
Аддитивность сигналов обусловлена независимостью ис-
точников сигнала и помехи. Мультипликативная комби-
нация означает перемножение полезного сигнала и
помехи:
ад =s(t)Z(t), (3)
где Z(t) —мультипликативная помеха. Мультипликация
сигналов возникает при прохождении полезного сигнала
через флуктуирующую среду. Смешанная комбинация
сигнала и помехи включает аддитивную и мультиплика-
9Ж
20
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
тивную помехи:
X(f) ,= S(t)Z(t) +N(t),
X(t) i= S(t)[lZ(t)]-[-N(t). (4)
Возможны также и более сложные комбинации сигнала
и помех, однако они встречаются весьма редко.
Полезный сигнал в общем случае — это случайная
функция времени, имеющая регулярную и нерегулярную
части:
S (t, U) = ср (U, t) + № (t). (5)
Нерегулярная часть полезного сигнала S° (t) есть
случайная функция времени с нулевым средним значени-
ем. Регулярная часть полезного сигнала ф (U, t) пред-
ставляет собой нелинейную функцию известной структу-
ры и вектора случайных параметров U. Во многих прак-
тических задачах регулярная часть полезного сигнала
может быть представлена в виде
п
ф(£М = 2 Ur<?r(t), (6)
)=1
где cpr (t) — известные функции времени, Ur — случайные
величины с определенным законом распределения веро-
ятности. В частном случае при фг (Z) = Г"1 получаем
полиномиальную модель регулярной части полезного си-
гнала. Такого рода модели используются, например, при
описании на ограниченном интервале времени изменения
элементов движения летательного аппарата.
В радиоприемных устройствах регулярная часть по-
лезного сигнала представляется как модулированное ко-
лебание
Ф (U, t) = U± sin (U2t + Us) sin U^t, (7)
где параметры сигнала Ut являются случайными величи-
нами, характеризующими возможный разброс амплиту-
ды, фазы и частоты сигнала.
Помеха, так же как и полезный сигнал, является слу-
чайной функцией времени и может иметь ненулевое ма-
тематическое ожидание. Например, измерительные трак-
ты аппаратуры контроля кроме случайной ошибки могут
иметь систематическую ошибку, которая и будет матема-
§ 1.4. ХАРАКТЕРИСТИКИ СИГНАЛОВ
21
тическим ожиданием. Помеха может содержать регуляр-
ную и нерегулярную части. Примером, иллюстрирующим
возможность появления регулярной части помехи, может
служить случайное постоянное смещение нуля изме-
рителя.
§ 1.4. Характеристики сигналов
Случайные полезные сигналы и помехи могут быть
охарактеризованы лишь в вероятностном смысле. Детер-
минированные сигналы непосредственно определяются
формой и параметрами.
Полное описание регулярной части полезного сигнала
или помехи дается законом распределения вероятности
вектора случайных параметров. Полное описание нерегу- ’
лярной части полезного сигнала или помехи производит-
ся с помощью функционала распределения вероятности.
Функционал распределения вероятности нормального I
случайного процесса зависит от математического ожида-Л
ния и корреляционной функции процесса. Поэтому веро-
ятностное описание этого процесса полностью определя-
ется первыми двумя моментами.
Как известно, наблюдаемые нами макроскопические
явления, например, флуктуации сил и моментов, токов и
напряжений, являются следствиями многочисленных
микроскопических явлений. Это значит, что вероятност-
ные характеристики макроскопических явлений можно
получить, рассматривая совокупность отдельных актов
взаимодействия частиц вещества.
Достаточно общей моделью этих актов взаимодейст-
вия является наложение независимых элементарных им-
пульсов, имеющих случайные параметры (амплитуду,
фазу и длительность) и возникающих в случайные рав-
номерно распределенные моменты времени. Если среднее
число импульсов в единицу времени (интенсивность по-
явления импульсов) мало и имеет порядок единицы, то
закон распределения вероятности макроскопической ве-
личины, представляющей суммарный результат действия
импульсов, значительно отличается от нормального.
Примерами таких случайных процессов могут служить
атмосферные помехи, помехи зажигания, помехи от
всплесков излучения Солнца, подводные шумы от срав-
22
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
нительно больших неоднородностей дна и среды и чело-
веческая речь [80, 81].
Если интенсивность появления импульсов в единицу
времени составляет 10 4- 104, то закон распределения ве-
роятности близок к нормальному, Примерами таких слу-
чайных процессов являются сильные ионосферные поме-
хи, помехи от осадков, шумы моря.
Наконец, если интенсивность появления импульсов
имеет порядок более 104, то закон распределения вероят-
ности суммарного события является нормальным. Приме-
рами случайных процессов, относящихся к данному клас-
су, могут служить тепловой и дробовой шумы, фотонные
шумы, турбулентность атмосферы, флуктуации радиоло-
кационного сигнала, шумы фотоумножителя и т. п.
В дальнейшем мы ограничимся рассмотрением лишь
случайных процессов, закон распределения вероятности
которых является либо нормальным, либо близок к нему.
Как известно, нормальный закон полностью характеризу-
ется математическим ожиданием и корреляционной
функцией. Поэтому в качестве характеристик некоторых
конкретных случайных процессов, рассматриваемых да-
лее, мы будем считать математическое ожидание и корре-
ляционную функцию или соответствующую ей спектраль-
ную плотность.
Тепловой шум. Этот шум обусловлен случайными дви-
жениями электронов в кристаллической решетке веще-
ства. Математическое ожидание шума равно нулю, а
спектральная плотность напряжения на концах сопро-
тивления R имеет вид [19]
где h — 6,62-10“34 дж- сек — постоянная Планка, к —
= 1,38-10“23 дж град~1 — постоянная Больцмана, Т —
абсолютная температура проводника, R — сопротивление
проводника, / — частота.
При Т = 295°К и / < 1012 гц отношение ИЦкТ —
== 1,63 • 10-13/ значительно меньше единицы. Поэтому
показательную функцию в знаменателе спектральной
плотности можно разложить в ряд и ограничиться толь-
ко линейным членом ehllKF tv 1 + hf/kT. Подставляя это
выражение в формулу (1) и выполняя несложные преоб-
§ 1.4. ХАРАКТЕРИСТИКИ СИГНАЛОВ
23
разования, получаем
Su(j)=4kTR, / < 1012 aif. (2)'
Таким образом, в полосе частот от нуля до 1012 гц
спектральная плотность’ теплового шума постоянна. Это
означает, что в данной полосе частот тепловой шум мож-
но рассматривать как «белый» и считать корреляцион-
ную функцию 6-функцией
К(т) =Г«6(т), (3)
где Г„ — интенсивность шума, равная Ги = 8лкТК. При
температуре Т = 295°К и сопротивлений R — 106 ом
интенсивность теплового шума равна Гц—1,27Х
ХЮ-13 в2-сек.
Дробовой шум. Этот шум есть проявление дискретно-
сти носителей электрического заряда в электронных
лампах. Поток электронов, излучаемых нагретым като-
дом лампы, непрерывно изменяет свою плотность за счет
флуктуаций температуры катода и напряженности поля
между электродами лампы. При среднем токе 20 ма и
анодном напряжении 200 в интенсивность импульсов
тока составляет 108, поэтому закон распределения веро-
ятности дробового шума является нормальным. Матема-
тическое ожидание дробового шума равно нулю. Для
плоского диода в режиме насыщения спектральная плот-
ность дробового шума, проявляющегося в виде флуктуа-
ций тока, имеет вид [36, 81]
Si(^
8е1
(“4“
[(coin)2 + 2 (1 —cos (£>ta — atn sin coin)],
(4)
где e — заряд электрона, I — среднее значение тока, про-
текающего через диод, ta — время пролета электроном
участка катод — анод. Корреляционная функция дробово-
го шума, соответствующая спектральной плотности (4),
имеет вид
(т) =
Ле1/[ 3 |т| |т(3\
34п \ 2in 2f3 /
0t
| т К in,
| т | > in.
(5)
Время пролета электроном расстояния катод — анод
составляет in ~ 10~9 сек, поэтому при / С 106 произведе-
24
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
ние 2л/£п 1. Рассматривая предел выражения (4) при
2щ/Х->-0, получаем следующую формулу спектральной
плотности дробового шума, справедливую для f 106 гц
(формула Шоттки):
5<(/)=2feL (6)
Постоянство спектральной плотности в определенном ди-
апазоне частот позволяет трактовать дробовой шум в
этом диапазоне как «белый» шум. Корреляционная функ-
ция, соответствующая спектральной плотности (6), име-
ет вид 6-функции с интенсивностью Г, = 4ле/. При сред-
нем токе I — 20 ма интенсивность дробового шума равна
Г1 = 4,02-1О-20 а2-сек. На сопротивлении в 106 ом флук-
туации тока дробового шума создадут случайные изме-
нения напряжения с интенсивностью Ги = 4,02Х
Х10~8 в2-сек. Сравнивая эту величину с интенсивностью
теплового шума, можно констатировать, что дробовой
шум дает существенно большие флуктуации.
Шум мерцания («фликкер — эффект»). Шум мерцания
проявляется в электронных лампах в виде медленных
флуктуаций тока, вследствие изменения эмиссии на боль-
ших участках поверхности катода. Уровень мерцания
ламп с оксидным катодом значительно больше, чем в
лампах с металлической нитью накаливания. Спект-
ральная плотность тока шумов мерцания по эксперимен-
тальным данным имеет вид [19]
St (/) = , (7)
Г
где к — коэффициент пропорциональности, а к, 2, та 1,
I — средний ток через лампу.
Шум мерцания, как это следует из формулы (7), име-
ет большую интенсивность на низких частотах. Следует
заметить, что эта формула является эмпирической и не
отражает физическую сущность явлений на частотах,
близких к нулю.
Генераторно-рекомбинационный шум. Этот шум опре-
деляется флуктуациями числа носителей тока при яв-
лениях генерации и рекомбинации в полупроводниках.
По своему существу этот шум напоминает дробовой шум
в лампах. Спектральная плотность тока генераторно-ре-
§ 1.4. ХАРАКТЕРИСТИКИ СИГНАЛОВ
25
комбинационного шума в полупроводниках, близких к
чистым, имеет вид [20]
D.a 1
= (8)
1' ' л аг + со31 ' '
где а = 1ДЖ — величина, обратно, пропорциональная
среднему времени жизни носителей заряда, a D{— ди-
сперсия тока, определяемая формулой
D = 4я/а (ь + В2 поРо (а\
1 (Ь«о+Ро)2(«о + ?о) ‘ { )
В этой формуле I — средний ток, Ъ — р.п/р,Р— коэффици-
ент подвижности, представляющий собой отношение
скоростей перемещения электронов и дырок, по — среднее
число электронов, р0 — среднее число дырок.
Для чистых полупроводников ио — Ро, поэтому форму-
ла для дисперсии (9) упрощается и принимает вид
(Ю)
,6о
Корреляционная функция тока генераторно-рекомби-
национного шума в соответствии с формулой (8) равна
Й)(т)=Дг“1’1. (11)
Среднее время жизни носителей в полупроводниках
составляет tm = 10-8 сек. Для значений частот, удовлет-
воряющих условию 10“8ю <С 1, генераторно-рекомбинаци-
онный шум можно рассматривать как «белый» шум.
Фединг. Этим термином называют флуктуации ампли-
туды принимаемого радиолокационного сигнала, обуслов-
ленные возмущениями атмосферы и изменениями условий
отражения сигнала от различных поверхностей. Основ-
ную роль в возникновении фединга играет последний
фактор. Если отражающая поверхность имеет сложную
конфигурацию и случайным образом изменяет свою ори-
ентацию в пространстве, то отраженный от нее сигнал
будет иметь случайную амплитуду. Эта амплитуда есть
модуль векторного сигнала, представляющего собой ре-
зультат наложения сигналов от элементарных площадок
отражающей поверхности.
Влияние фединга обычно учитывается в виде случай-
ного изменения угловой ошибки слежения радиолокатора.
26
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
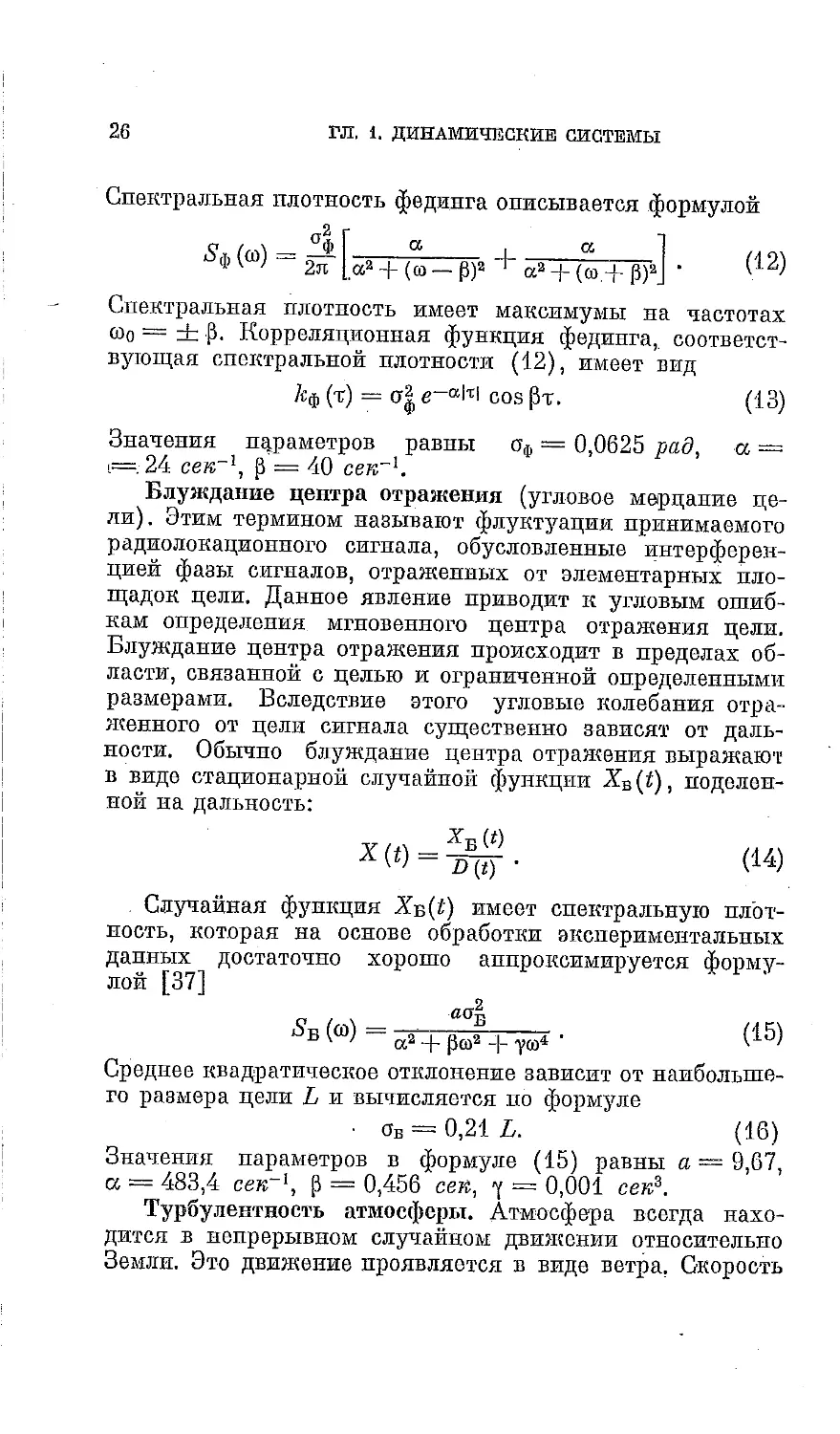
Спектральная плотность фединга описывается формулой
(®) =
а2 г
иФ а , а
2п [а2 + (® — ₽)2 ‘ а'2 (ш.+ р)2
(12)
Спектральная плотность имеет максимумы на частотах
соо = ± ₽• Корреляционная функция фединга, соответст-
вующая спектральной плотности (12), имеет вид
7«ф (т) = о| cos рт. (13)
Значения параметров равны оф — 0,0825 рад, а =
I—. 24 cere-1, [3 = 40 сек-1.
Блуждание центра отражения (угловое мерцание це-
ли). Этим термином называют флуктуации принимаемого
радиолокационного сигнала, обусловленные интерферен-
цией фазы сигналов, отраженных от элементарных пло-
щадок цели. Данное явление приводит к угловым ошиб-
кам определения мгновенного центра отражения цели.
Блуждание центра отражения происходит в пределах об-
ласти, связанной с целью и ограниченной определенными
размерами. Вследствие этого угловые колебания отра-
женного от цели сигнала существенно зависят от даль-
ности. Обычно блуждание центра отражения выражают
в виде стационарной случайной функции XB(t), поделен-
ной на дальность:
Х(‘) = т$- (14)
Случайная функция Хб(7) имеет спектральную плот-
ность, которая на основе обработки экспериментальных
данных достаточно хорошо аппроксимируется форму-
лой [37]
5В (со) = „-г-д- Ft—г (15)
° ' ' а2 + р<в2 + у<о4 к '
Среднее квадратическое отклонение зависит от наибольше-
го размера цели L и вычисляется по формуле
Ов = 0,21 L. (16)
Значения параметров в формуле (15) равны а — 9,67,
а — 483,4 сек-1, [3 = 0,456 сек, у = 0,001 сек3.
Турбулентность атмосферы. Атмосфера всегда нахо-
дится в непрерывном случайном движении относительно
Земли. Это движение проявляется в виде ветра, Скорость
§ 1.4. ХАРАКТЕРИСТИКИ СИГНАЛОВ
27
ветра W является случайной функцией времени и коор-
динат точки пространства R : W = W (R,t')- Скорость
ветра представляют в виде суммы двух составляющих:
постоянной и переменной. Постоянная составляющая
скорости ветра понимается в том смысле, что за время
движения летательного аппарата она мало изменяется по
направлению и по величине. Модуль постоянной состав-
ляющей скорости ветра обычно рассматривается как слу-
чайная величина. Экспериментальные данные показыва-
ют, что эта величина достаточно хорошо описывается
законом распределения вероятности Рэлея. Плотность ве-
роятности величины постоянной составляющей скорости
ветра имеет вид
_ W2
№ = (17)
В этой формуле среднее квадратическое отклонение
величины постоянной составляющей скорости ветра о за-
висит от высоты над земной поверхностью. В приземном
слое атмосферы среднее квадратическое отклонение ап-
проксимируется следующей зависимостью [38]:
где WHt — математическое ожидание скорости ветра на
некоторой опорной высоте Hi, Н — текущая высота поле-
та, п — показатель степени, величину которого рекомен-
дуется выбирать в пределах 0,154-0,20. При опорной вы-
соте Н\ = 10 м рекомендуется принимать Wn, = 3-4-
4- 4 мсек-1.
Переменная составляющая скорости ветра W° (R, t)
характеризует турбулентное движение атмосферы, выра-
жающееся в хаотическом случайном перемещении возду-
ха. По масштабам различают три вида турбулентного
движения: крупномасштабный, инерционный и вязкий.
Крупномасштабная турбулентность обусловлена наруше-
нием равновесного состояния атмосферы за счет нерав-
номерного нагревания Солнцем. Это движение носит
асимметричный характер вследствие влияния поверхно-
сти Земли и ее вращения. Турбулентность в инерционном
масштабе определяется передачей энергии от крупномас-
штабного движения и носит изотропный характер. Пре-
28
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
дельные величины вихрей в этом диапазоне имеют поря-
док несколько сотен метров. Турбулентность в вязком
масштабе также носит изотропный характер и охватыва-
ет наиболее высокие частоты движения воздуха. Размеры
вихрей в этом диапазоне составляют несколько санти-
метров.
При статистическом описании турбулентности обычно
принимаются гипотезы о неизменности поля скоростей по
отношению к летательному аппарату (гипотеза «заморо-
женности» Тейлора) и об однородности и изотропности в
вероятностном смысле поля скоростей. В соответствии с
первой гипотезой считается, что вследствие большой
скорости полета летательного аппарата время, в течение
которого он проходит интервал корреляций турбулент-
ного движения, очень мало. Поэтому за это время мгно-
венное значение поля скоростей практически не изменя-
ется, оно остается как бы застывшим, замороженным.
На основании этой гипотезы вероятностные характери-
стики турбулентности, полученные как функции коорди-
нат для одного момента времени, можно использовать
для любого момента времени.
Вторая гипотеза об односторонности и изотропности
позволяет ограничиться при статистическом описании
лишь одной корреляционной функцией проекции вектора
скорости ветра на направление, соединяющее две точки
пространства: кг(г). Вследствие изотропности эта корре-
ляционная функция зависит лишь от модуля расстояния
между двумя точками т. Корреляционная функция проек-
ций вектора скорости ветра на нормаль к этому на-
правлению кп(г) связана с корреляционной функцией
кг(г) соотношением, полученным в общей теории турбу-
лентности [17]:
4 дк (г)
= + (19)
Аналитические выражения для корреляционных функ-
ций, полученные аппроксимацией экспериментальных
данных, имеют следующий вид:
_ hl 1П'
= ж Mr) = ~ sl’V п> (2°)
\ п/
где aw— дисперсия скорости ветра, Lr, Ln — продольный
§ 1.4. ХАРАКТЕРИСТИКИ СИГНАЛОВ
29
и поперечный масштабы турбулентности соответственно.
Масштабы турбулентности характеризуют длины интер-
валов, на которых сохраняются корреляционные связи.
Эти масштабы определяются как интегралы
. °° . °°
\kT(r)dr} Ln = ±-\kn(r)dr. (21)
aW о aw о
Между масштабами турбулентности имеется соотношение
Lr = 2Ln. Нетрудно проверить, что соотношение (19) для
формул (20) выполняется.
Для перехода от корреляционных функций составля-
ющих скорости ветра, зависящих от координат, к корре-
ляционным функциям, зависящим от времени, следует
пользоваться соотношением, вытекающим из гипотезы
замороженности поля скоростей
г ~ vx, (22)
где v — скорость полета летательного аппарата. Подстав-
ляя в формулы (20) значение г, получаем
-~-ki
кт W = Г , кп (т) = ог^ (i _ _Z_ |.х Q е п . (23)
Корреляционным функциям (20) соответствуют спек-
тральные плотности, аргументом которых является про-
странственная угловая частота Q:
1 + 3(йй„)2
^Й) = ^7ГТ(^Ж (24)
Корреляционным функциям (23) соответствуют спект-
ральные плотности временной угловой частоты, равной
со — £2о,
sr (й) =____. S (Ы) = bfk. J-i3
’ k ' ЛУ [1 + (Ю/,Г)2/У2]’ nv [1 + (oLn)2/y2p •
(25)
Рассмотренные экспериментальные корреляционные
функции и спектральные плотности достаточно хорошо
описывают характеристики турбулентности в инерцион-
ном интервале и значительно хуже в крупномасштабном
30
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
и вязком интервалах. Несмотря на это простота анали-
тических выражений этих функций служит веским осно-
ванием для широкого использования их в практических
расчетах. В расчетах обычно принимают Ьг— 200 4-300 м,
ow — 2 4- 3 мсек-1 — для ясной погоды, — 8 4-
4-12 Л4С6К"1 — для кучевых облаков и Ow = 184-
4- 25 мсек-1 — для грозовых условий [38].
§ 1.5. Уравнения систем
Как уже отмечалось, оператор динамической системы
может быть представлен в форме дифференциальных, раз-
ностных, интегральных и других функциональных урав-
нений. В большинстве случаев первоначальное описание
работы реальных устройств производится именно в фор-
ме уравнений. Это объясняется тем, что составление
уравнений основывается на использовании общих зако-
нов, например, закона сохранения количества движения
в механике, законов Ома и Кирхгофа в электротехни-
ке и т. д.
Широкий класс непрерывных многомерных нелиней-
ных динамических систем может быть описан нелиней-
ным векторным дифференциальным уравнением следую-
щего вида:
У = <р(У,.4) + В(4)Х(4), (1)
где <р(У,4) — нелинейная вектор-функция вектора пере-
менных У и времени t, X (4) — вектор входного сигнала.
Размерность векторов X (t) и У (4) определяет количе-
ство входов и выходов системы соответственно. Уравне-
ние (1) определяет нестационарную систему, если функ-
ция <р (У, 4) зависит от времени явно, а не через перемен-
ную У- Если эта функция не зависит явно от времени
и матрица В также не зависит от времени, то данное
уравнение описывает стационарную нелинейную систему.
В частном случае, когда вектор-функция линейна,
<р (У, 4) = А (4) У, где A (f) — матрица коэффициентов, за-
висящих от времени, уравнение (1) становится линейным
и принимает вид
У = Л(4)У + В(4)Х(4). (2)
Вследствие зависимости матрицы коэффициентов от врс-
§ 1.5. УРАВНЕНИЯ СИСТЕМ
31
мени данное уравнение описывает нестационарную си-
стему. Действительно, в различные моменты времени ди-
намические свойства системы (2), определяемые матрицей
коэффициентов, различны, поэтому и реакция этой систе-
мы на входное возмущение будет зависеть от момента
его приложения. Если матрица коэффициентов не зависит
от времени, то уравнение (2) описывает многомерную
стационарную линейную систему.
В практических задачах часто необходимо составить
дифференциальное уравнение, связывающее какой-либо
определенный вход и один выход линейной системы.
В этом случае удобно воспользоваться следующей формой
уравнения:
(3)
1=0 1=0
В этом уравнении X (£) — входной сивнал на интересую-
щем нас входе, Y(£) —выходной сигнал, bt(t) —
коэффициенты, зависящие от времени. Уравнение (3)
можно получить из системы уравнений (2), если отбро-
сить не рассматриваемые входные сигналы и исключить
все выходные переменные, кроме переменной, соответ-
ствующей Y. Линейность систем, описываемых уравне-
ниями (2) и (3), можно проверить, применяя принцип
суперпозиции.
Не все динамические системы можно описать в форме
дифференциальных уравнений. Например, систему с чи-
стым запаздыванием, описываемую функциональным со-
отношением
К(г)=Х(«-т), (4)
где т — время чистого запаздывания, можно адекватно
описать системой дифференциальных уравнений беско-
нечного порядка. Естественно, что с практической точки
зрения такое описание бесполезно. Заметим, что система
с чистым запаздыванием является линейной, в чем мож-
но убедиться, применяя принцип суперпозиции. Пример
системы с чистым запаздыванием показывает, что диф-
ференциальные уравнения не являются универсальным
математическим аппаратом, позволяющим представить
любую форму оператора системы.
32
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Оператор системы может быть представлен в форме
линейного интегрального уравнения
т
aY (t) —% J К (f, т) У (?) йт = X (f), (5)
о
где функция X(t) и ядро K(t, т) являются заданными,
a Y (i) подлежит определению. При фиксированном зна-
чении Т уравнение (5) образует класс фредгольмовских
уравнений; при Т = t это уравнение определяет класс
вольтерровских уравнений. При а = 0, % — — 1 данное
уравнение является линейным интегральным уравнением
первого рода. Если X (t) — 0, а = 1 и X неизвестно, то
получаем однородное линейное интегральное уравнение
второго рода. Наконец при а — 1 и известном А получа-
ем неоднородное интегральное уравнение второго рода.
Параметр % есть собственное значение интегрального
уравнения [71].
§ 1.6. Характеристики линейных систем
Линейные динамические системы, кроме дифферен-
циальных, интегральных и других уравнений, могут быть
описаны некоторыми функциями, которые имеют общее
название характеристик линейных систем. К таким ха-
рактеристикам относятся весовая функция, передаточная
функция и частотная характеристика.
Общая идея определения этих характеристик основа-
на на применении принципа суперпозиции. Разложим
входной сигнал линейной системы на элементарные функ-
ции, обладающие тем свойством, что при прохождении
через систему они не изменяют своей формы, а изменя-
ют только параметры. На основании принципа суперпо-
зиции выходной сигнал системы будет суммой реакций
на каждый элементарный сигнал. Очевидно, что если бу-
дет известна реакция системы на элементарный сигнал,
то задача определения выходного сигнала сводится к
суммированию всех реакций. Возможность построения
выходного сигнала путем суммирования реакций системы
на элементарные сигналы говорит о том, что в качестве
характеристики линейной системы можно рассматривать
реакцию системы на элементарный сигнал [90].
§ 1.0. ХАРАКТЕРИСТИКИ ЛИНЕЙНЫХ СИСТЕМ
33
Примем за элементарный сигнал 6-функцию (им-
пульсная функция), которую можно рассматривать как
бесконечно узкий импульс с бесконечной амплитудой и
площадью, равной единице. Свойства 6-функции приве-
дены в приложении 1. Произвольную функцию X(t) на
бесконечном интервале изменения аргумента можно
представить в виде разложения на элементарные ИМ’
пульсы:
Х(£) = J 6 (t - т) X (т) dx. (1)
-—оо
Справедливость этой формулы непосредственно следует
из свойств 6-функции (см. приложение 1).
Рассмотрим линейную одномерную систему, на вход
которой поступает сигнал X(t), представленный разло-
жением (1). Выходной сигнал системы есть результат
преобразования входного сигнала оператором системы
Y(t)=^tX(t). (2)
Подставляя значение входного сигнала (1) и учитывая
возможность перестановки последовательности действий
интегрирования и линейного преобразования получаем
Y (t) = J (t — т) X (т) dx. (3)
— оо
Данная формула есть математическое выражение выска-
занного выше утверждения о том, что, зная реакцию си-
стемы на элементарный сигнал, можно вычислить выход-
ной сигнал.
Реакция системы на 6-функцию есть весовая или им-
пульсная переходная функция системы и обозначается
через g(t,x),
g(t, т) = M(t — xj. (4)
Используя это выражение, запишем связь между входным
и выходным сигналами в следующей форме:
оо
У(*) = J gMX^dx. (5)
.— оо
Весовая функция является общей характеристикой
произвольной линейной системы. Поэтому выражение (5)
34
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
есть наиболее полное представление оператора линейной
системы в виде интегрального оператора. Весовая функ-
ция зависит от двух аргументов, один из которых — т
есть момент приложения 6-функции ко входу системы,
а второй — t — текущий момент наблюдения выходной ре-
акции системы. Название «весовая функция» объясняет-
ся тем, что влияние ординат входного сигнала, приложен-
ных в моменты т, на выходную реакцию системы опреде-
ляется умножением этих ординат (формула (5)) на
переменные коэффициенты g(t, т), зависящие от мо-
ментов времени t и т, т. е. каждой ординате входного
сигнала приписывается свой вес в общей реакции
системы.
На основании принципа причинности реакция систе-
мы может возникнуть только после приложения возму-
щения. Система не может иметь реакцию в данный мо-
мент на возмущение, которое будет воздействовать в
будущем. Отсюда следует, что весовая функция должна
равняться нулю при значении аргумента т, большем,
чем С.
g(t, т) = 0 при т > t. (6)
Условие (6), которое называют условием физической воз-
можности существования системы, можно записать так-
же с помощью умножения весовой функции на единич-
ную функцию 1 (£ — т), равную единице при t > т, по-
ловине при t = T и нулю при t < т; l(t — r)g(t, т).
Множитель в виде единичной функции при весовой
функции всегда следует учитывать при различных пре-
образованиях. Например, в формуле (5) при написании
весовой функции можно опустить единичную функцию,
уменьшив при этом верхний предел до значения t. Если
система начинает работать в некоторый момент t0, то
данную формулу связи между входным и выходным сиг-
налами можно представить в виде
i
У (i) = S(t, т) Х(т) dr. (7)
to
Весовая функция обратной системы устанавливает
связь между поменявшимися своими ролями входным и
§ 1.6. ХАРАКТЕРИСТИКИ ЛИНЕЙНЫХ СИСТЕМ
35
Выходным сигналами
1_
X (t) = j g-1 (t, т) У (т) dx.
io
(8)
Весовая функция сопряженной системы g* (/, т) по-
лучается из весовой функции прямой системы сменой ме-
стами аргументов
g*(t, T)=g(-r, t).
(9)
Весовая функция g(i, т) представляет собой поверх-
ность. Весовая функция сопряжен-
ной системы в области i < т яв-
ляется зеркальным отображением
поверхности g'(t, т) относительно
плоскости i=r (рис. 1.6.1). Соп-
ряженная система является физи-
чески невозможной системой. Ее
весовую функцию можно полу-
чить, опираясь на свойство зер-
кальности отображения весовой
функции прямой системы, что и
используется при анализе [90].
gttM
. i-r
Рис. 1.6.1.
t
Весовая функция стационарной системы зависит толь-
ко от разности аргументов
№(&)=g(i-T), £ = *-т. (10)
Весовые функции элементарных звеньев приведены в при-
ложении 2.
Полной характеристикой многомерной линейной си-
стемы является матрица весовых функций G(t, т), опре-
деляющая совокупность реакций системы на возмущение
в виде 6-функции на каждом из ее входов. Для много-
мерной системы связь между векторами входного и вы-
ходного сигналов дается соотношением
t
Y(f) = [ G (£, т) X (т) cfr. (11)
io
Обратная связь устанавливается обратной матрицей ве-
совых функций G-1 (£, т). Сопряженная матрица весовых
функций определяется транспонированием элементов и
3*
36
ГЛ, 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
перестановкой в них местами аргументов t и т прямой
матрицы
G*(t, t)=G'(t, t). . (12)
Примем за элементарный сигнал гармоническую
функцию. При достаточно общих условиях произвольную
стационарную функцию можно представить интегралом
Фурье
X (/) = J С (ta>) eiwid(£), (13)
*—оо
где C(tco) — спектр функции X(t), равный
л 00
С(ЙО)=^ J X(£)e-«dt (14)
—ОО
Выходной сигнал системы равен
Y (t) = s&tX (£) = J C(i®)^teia)<cZ©. (15)
•—oo
Частотной характеристикой системы называется отно-
сительная реакция системы на гармонический сигнал
о/ Piai
<^==-jsr- (16)
Используя это определение, представим выходной синнал
следующей формулой:
Y (£) = J Ф (fro) С (ia) eia,da. (17)
— СО
В данной формуле частотная характеристика определяет
свойства системы, а функция С(йо)е1в< описывает вход-
ной сигнал, представленный в виде разложения на гар-
монические составляющие формулой (14).
Реакция системы на гармоническое колебание единич-
ной амплитуды равна произведению частотной характе-
ристики на гармоническое колебание
s£teia‘ — Ф(ад)е<ш(,
(18)
§ 1.6. ХАРАКТЕРИСТИКИ ЛИНЕЙНЫХ СИСТЕМ
37
Представим частотную характеристику в виде произ-
ведения модуля на показательную функцию
ф(гш) = И((о)е1ф, (19)
где И (со)—амплитудно-частотная характеристика систе-
мы, а аргумент ср представляет собой фазочастотную ха-
рактеристику, равную
<р — arg Ф (йо). (20)
Подставляя выражение частотной характеристики (19) в
формулу (18), получаем
^ге<т1~И (со) е’(ш1+ф). (21)
Из данного соотношения следует, что при прохождении
гармонического колебания через линейную стационарную
систему его амплитуда усиливается в й(со) раз, а фаза
сдвигается на величину ср.
Обратная система описывается обратной частотной
характеристикой, равной
Ф-1 (ico) = а-Д-г-. (22)
Частотная характеристика сопряженной системы есть
комплексно сопряженная функция
Ф* (йо) = Ф (—йо). (23)
Для многомерных систем частотная характеристика
является матрицей. Обратная частотная характеристика
описывается обратной матрицей, сопряженная система —
комплексно сопряженной транспонированной матрицей
ф*(йо) = Ф'(—йо). (24)
Частотные характеристики элементарных звеньев приве-
дены в приложении 2.
Обобщением частотной характеристики является пе-
редаточная функция, которая определяется как относи-
тельная реакция системы на показательную функцию
Показатель з является комплексным числом. В частном
случае, когда это число имеет только мнимую часть,
38
ГЛ. I. ДИНАМИЧЕСКИЕ СИСТЕМЫ
передаточная функция превращается в частотную харак-
теристику.
Связь между входным и выходным сигналами как
фупциями времени дается следующими выражениями:
= f ^)Ф(М)Л,
(26)
С (s) = j X (р) e~sidt.
о
Первая формула есть обратное преобразование Лапласа
от изображения выходного сигнала. Вторая формула есть
преобразование Лапласа от входного сигнала. Интегриро-
вание в первом интеграле производится в комплексной
плоскости s = o + /co по прямой параллельной мнимой
оси, проходящей через точку з = о. Эта точка выбирается
так, чтобы все полюсы и нули комплексной величины
изображения выходного сигнала были расположены левее
данной прямой.
Удобство применения передаточных функций заклю-
чается в том, что изображение по Лапласу производной
является произведением комплексного переменного з на
изображение самой величины. Отсюда следует, что пере-
даточную функцию можно одновременно рассматривать
как операторную связь между входным и выходным сиг-
налами. Чтобы подчеркнуть этот факт, в качестве аргу-
мента передаточной функции вместо з используют сим-
вол дифференцирования р = d/dt. Таким образом, Ф (р)
есть операторная запись передаточной функции.
Передаточные функции элементарных звеньев даны в
приложении 2.
§ 1.7. Характеристики нелинейных систем
В настоящее время широкое распространение получил
метод представления нелинейных систем в виде совокуп-
ности линейных инерционных звеньев и нелинейных без-
инерционных звеньев, часто называемых просто нелиней-
ностями. Очевидно, что при таком представлении описа-
ние системы будет полным, если помимо характеристик
линейных звеньев определить характеристики нелиней-
ностей,
S 1.7. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХ СИСТЕМ
30
Характеристикой безынерционного нелинейного звена
является нелинейная функция, устанавливающая связь
между .входным и выходным сигналами;
Y(t) = <р(Х(7)); (1)
Часто функция, кроме аргумента, зависит еще от пара-
метра, например, -зависимость, называемая оператором
Немъщкого [71], имеет вид
У(0 = cp(X(t), t). (2)
Встречающиеся в реальных устройствах, нелинейности
описываются ограниченным числом характеристик.
На -рис. 1. 7. 1 показаны примеры гладких нелинейностей
(а, б) и кусочно-линейных {в, г, д, е). Характеристики б
и д являются четными, т. е. ср (ж) — ср. (—х), а характери-
стики а, в, г, е — нечетными. Характеристика е является
D)
Ряс. 1.7.1.
е)
неоднозначной, а остальные — однозначными. Характе-
ристики в, г, д, е описывают существенные нелинейности,
называемые так вследствие того, что они являются не-
дифференцируемыми в обычном смысле функциями. Не-
линейности называются симметричными, если их харак-
теристики не изменяются при зеркальном отображении
40
ГЛ, 1, ДИНАМИЧЕСКИЕ.СИСТЕМЫ
(поворот вокруг оси абсцисс на 180” и далее поворот вок-
руг оси ординат иа 180°). Характеристики а, в, г, е на
рис. 1. 7.1 являются симметричными, а характеристики
б, д — несимметричными.
Описание нелинейных систем может быть осуществ-
лено с помощью нелинейных интегральных операторов
или дифференциальных уравнений, включающих нели-
нейные функции. Например, последовательное соедине-
ние нелинейности с характеристикой <р(ж) и линейного
звена с весовой функцией g(t, т) описывается оператором
типа Гаммсрштейна [71]
Y (t) = jg(#1T)(p(X(T))dT. (3)
о
Более общим описанием последовательного соединения
нелинейностей и линейных звеньев является выражение
вида
Y(t)= i ^iq>i(X(£)h (4)
i=i
где 6^; — линейные операторы. Нелинейные системы,
представляемые данным соотношением, носят название
систем, приводимых к линейным [89].
Непосредственное использование нелинейных харак-
теристик в форме (1) или (2) при исследовании динами-
ческих систем носит ограниченный характер. Практиче-
ски это имеет место при рассмотрении задач прохожде-
ния детерминированных сигналов через систему или ана-
лизе прохождения случайных сигналов методом статисти-
ческих испытаний (метод Монте-Карло). Применение
метода статистических испытаний для задач анализа и
тем более задач синтеза требует очень большого объема
вычислений. В связи с этим в инженерной практике по-
лучили широкое распространение методы исследования не-
линейных систем, основанные на линеаризации нелиней-
ных функций.
Общим методом линеаризации является метод стати-
стической линеаризации. Сущность статистической лине-
аризации заключается в замене нелинейного безынерци-
онного звена эквивалентным в вероятностном смысле ли-
нейным звеном.
§ 1.7, ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХ СИСТЕМ
41
Представим выходной сигнал нелинейного элемента
вместо формулы (1) следующей приближенной зависи-
мостью:
Y(t)= cPo+/ciX°(i). (5)'
В этом выражении фо, Zq—• параметры статистической ли-
неаризации, — центрированное значение входного
сигнала. Найдем значения параметров статистической ли-
неаризации, обеспечивающие минимум среднего квадра-
та ошибки отклонения приближенной зависимости (5) от
истинной зависимости (1). Запишем средний квадрат
ошибки (в виде
I- а = М[(У —ф0— W)2], (6)'
где М — оператор математического ожидания. Дифферен-
цируя величину а частным образом по фо и к\ и прирав-
нивая производные 'нулю, получаем два уравнения
. ф0- ту= О, -М [УХ°] + /С1ДХ= 0. (7)’
Отсюда определяем фо и к и
Фо = ту, Zq=4-M[yX0], ' (8)
X
где Dx — дисперсия входного сигнала, ту — математиче-
ское ожидание выходного сигнала нелинейного звена.
Если известна плотность вероятности входного сигна-
ла нелинейного звена /(ж), то параметры статистической
линеаризации в соответствии с (8) вычисляются по соот-
ношениям
оо оо
Фо — I ф (ж) f (ж) dx} к± = -р- 1 Ф (ж) (ж —- znj / (ж) clx.
J х J
•—оо — оо
(9)
Данные формулы показывают, что параметры стати-
стической линеаризации зависят от параметров нелиней-
ности и вероятностных характеристик входного сигнала
нелинейного звена. Вычисление одномерной плотности
вероятности входного сигнала нелинейности представля-
ет собой весьма сложную задачу для динамических сис-
тем, не имеющих обратных связей. При наличии обрат-
ных связей такое вычисление часто просто 'невыполнимо.
Кроме того, если в замкнутых системах осуществлено
42
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
вычисление плотности вероятности, то тем самым полу-
чено решение 'задачи вероятностного исследования, и ста-
тистическая линеаризация как способ упрощения задачи
вообще теряет смысл. Таким образом, возникает принци-
пиальная трудность применения метода статистической
линеаризации, обусловленная необходимостью знать од-
номерный закон распределения вероятности сигнала на
входе в нелинейное звено.
В настоящее время для вычисления параметров стати-
стической линеаризации нелинейностей динамических си-
стем с обратными связями принимается гипотеза о нор-
мальности закона распределения вероятности входного
сигнала нелинейного звена. Эта гипотеза достаточно хо-
рошо согласуется с экспериментальными данными, если
в замкнутой системе нелинейному звену предшествует
линейное инерционное звено. Выходной сигнал линейно-
го инерционного звена нормализуется, т. е. независимо
от закона распределения вероятности входного сигнала
близок к нормальному. Нормализация тем лучше, чем
больше постоянная времени звена по сравнению с вре-
менем корреляции случайного входного сигнала.
Принимая пипотезу о нормализации сигнала на входе
в нелинейное звено, необходимо в формулы (9) подста-
вить выражение нормальной плотности вероятности. В ре-
зультате этой подстановки параметры статистической ли-
неаризации будут вычисляться по формулам
<Ро = п4^т= f Ф<Л')ехр
]/2^ J
к1 =------1=. С ф (х)(х—т..} exp (
‘ --ОО
dx. (11)
Сравнивая выражения (10) и (11), нетрудно заметить,
что коэффициент ki есть производная величины сро по ма-
тематическому ожиданию входного сигнала,
Параметры статистической линеаризации, вычисляе-
мые по формулам (10), (11), являются функциями ма-
§ 1.7. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХ СИСТЕМ 43
тематического ожидания и дисперсии входного сигнала
и параметров нелинейности. Следовательно, статистиче-
ская линеаризация дает линейную связь между входом и
выходом только при постоянных значениях первого и вто-
рого моментов входного сигнала. Если моменты входного
сигнала изменяются, то изменяются и параметры линей-
ной зависимости (постоянная составляющая и крутизна
характеристики). Такой своеобразный подход к линеари-
зации нелинейных зависимостей, разработанный практи-
чески одновременно в работах И. Е. Казакова [60] и
Р. *К. Бутона [15] в 1954 г., позволяет сохранить харак-
терные эффекты, имеющие место в нелинейных системах.
Метод статистической линеаризации в настоящее вре-
мя находит широкое применение в инженерной практике
для расчета сложных нелинейных динамических систем.
Для типовых нелинейностей, часто встречающихся в си-
стемах, параметры статистической линеаризации вычис-
лены и приведены в приложении 3.
Статистическая линеаризация включает как частный
случай обычную линеаризацию функций (разложение в
ряд Тейлора и сохранение в нем только линейного чле-
на) . При обычной линеаризации истинная кривая заме-
няется касательной в некоторой точке, принятой за центр
разложения в ряд Тейлора. Обычно за точку разложения
принимают математическое ожидание входного сигнала.
При этом входной сигнал становится неслучайным, и его
одномерная плотность вероятности есть б-функция:
/(ж)=6(ж— тх). Чтобы получить параметры обычной
линеаризации из общих формул (9), необходимо подста-
вить в них в качестве плотности вероятности 6-функцию.
В результате получаем следующие выражения:
оо
сро = J ср (т) <5 (ж — m,x) dx = ф (mJ , = ср' (тх) . (13)
—оо
Используя эти значения запишем линеаризованное
обычным образом представление выходного сигнала
У = Ф (т,х) + ф' (пъх) (X — тх). (14)
Статистическая линеаризация включает как частный
случай гармоническую линеаризацию. Чтобы получить из
параметров статистической линеаризации параметры гар-
44
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
ионической линеаризации, необходимо считать входной
сигнал тармайическим с постоянной амплитудой и часто-
той и случайной равномерно распределенной в интервале
О 4- 2л фазой. Тогда x(t) = a sin (a>th) = asini|), где
а — амплитуда сигнала, i[> — случайная фаза с распреде-
лением f($)— 1/2л. Используя общие формулы (9), по-
лучаем следующие выражения для параметров гармониче-
ской линеаризации:
2Л 2Л
1 р 1 г
Ф* = х—| ср (a sin яр) tZip, q = — I ф («sin ф) sinibchb. (15)
b о
Для симметричной однозначной нелинейности гармо-
нически линеаризованный сигнал представляется соотно-
шением
У = ф* + 4х (t) • (16)
Детальное изложение основ гармонической линеариза-
ции и примеров вычисления параметров ср*, q для часто
встречающихся нелинейностей дано в [59, 88].
Для динамических систем, содержащих многомерные
нелинейности, можно применить многомерную статисти-
ческую линеаризацию. Одномерная формула (5) в мно-
гомерном случае принимает вид
Y («) = Фо (тх, 6Х) + К± (тх, 0К) Х° (t), (17)
где ф0 (ига, 0Х) —вектор-функция, а К± (тх, 0J — матрица
параметров статистической линеаризации, зависящие от
вектора математического ожидания тх и матрицы корре-
ляционных моментов 0Х вектора входного сигнала мно-
гомерной нелинейности.
§ 1.8. Качество систем
Понятие качества динамических систем является од-
ним из важнейших в инженерной практике. Введение
этого понятия позволяет поставить задачу о количествен-
ном измерении свойств системы. Количественная оценка
изучаемого явления или предмета является необходимым
условием научного исследования.
Понятие качества системы должно содержать описа-
ние свойств, характеризующих успешность решения по-
§ 1.8. КАЧЕСТВО СИСТЕМ
45
ставленных задач в определенных условиях. Такими
свойствами являются эффективность, надежность, точ-
ность, стоимость и т. п.
Для количественной оценки качества систем вводят
показатели качества. Показатель качества — это число,
характеризующее в принятой системе единиц свойства
системы. Вычисление показателей качества позволяет
сравнивать различные динамические системы и опреде-
лять, какая система является лучшей по сравнению с
другими системами. Оценка качества систем составляет
содержание задачи анализа динамических систем.
Система, для которой показатель качества принимает
экстремальное значение, называется оптимальной. Опти-
мальная система — это наилучшая в смысле данного пока-
зателя из всех возможных систем данного класса. Опре-
деление оптимальных систем составляет задачу синтеза
динамических систем.
Принципиальное различие между задачами анализа и
синтеза заключается в том, что при анализе определяют-
ся показатели качества известной системы, в то время
как при синтезе определяется сама система, обеспечива-
ющая наилучшие значения показателей качества. В по-
нятие известной системы вкладывается значение харак-
теристик (детерминированных или в общем случае ве-
роятностных) системы и входных сигналов.
Оценка качества системы начинается с определения
ошибки. Ошибка системы — это отклонение ее выходного
сигнала Y (£) от выходного сигнала Ут (i) идеальной
системы, абсолютно точно осуществляющей требуемое
преобразование полезного сигнала. Требуемое преобразо-
вание, которое мы будем описывать оператором .5^т, ха-
рактеризует функциональное назначение системы. Напри-
мер, если система предназначена для сложения за полез-
ным сигналом, то требуемый оператор является единич-
ным оператором, не изменяющим этот сигнал. Если си-
стема является измерителем скорости, то требуемый опе-
ратор) есть оператор дифференцирования. Требуемый
выходной сигнал связан со входным полезным сигналом
соотношением
Y^t) = . (1)
Реальная динамическая система описывается операто-
ром, который отличается от требуемого оператора. Это
46
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
отличие определяется двумя обстоятельствами. Во-первых,
входной сигнал, кроме полезной части, содержит помеху.
Применение требуемого оператора ко входному сигналу
может вызвать нежелательное сильное увеличение поме-
хи по сравнению с полезным сигналом.
Например, при
дифференциации входного
сигнала, представляющего
собой сумму плавно изменя-
ющегося полезного сигнала и
быстроизменяющейся Поме-
хи, получится, по существу,
производная одной помехи.
Производная полезного сиг-
нала будет очень мала по
сравнению с производной
помехи. Для повышения точ-
ности определения производной полезного сигнала в дан-
ном случае целесообразно одновременно с дифференциро-
ванием осуществить фильтрацию помехи. Во-вторых,
требуемый оператор не всегда точно реализуется с по-
мощью аппаратуры. Точная реализация может быть либо
физически невозможной, либо практически невыгодной
с точки зрения стоимости, сложности, отсутствия необхо-
димых элементов и т. п.
Идеальная система отражает только основное назна-
чение системы. Ее нельзя создать в виде какого-либо
устройства, так как невозможно отделить полезный сиг-
нал от помехи. Различие входных сигналов и операторов
фактической и идеальных систем и порождает ошибку
работы фактической системы.
Для непрерывных систем ошибку можно представить
как разность фактического и требуемого выходных сиг-
налов
Е (0 = Y (1) - Ут (£) .
(2)
На рис. 1.8.1 изображена условная схема формирования
ошибки. Условность заключается в том, что идеальная
система с требуемым оператором в действительности не
существует.
В общем случае фактический и требуемый выходной
сигнал является случайной функцией времени. Матема-
тическое ожидаггие ошибки называют динамической ошиб-
§ 1.8. КАЧЕСТВО СИСТЕМ
47
кой и обозначают через тЕ (i). Центрированное значение
ошибки
Г(г) = ЯЦ)-'«и(*) (3)
называют случайной ошибкой системы.
Для дискретных систем с конечным числом значений
выходного сигнала ошибка работы заключается в том, что
номер значения сигнала фактической системы не совпа-
дает с номером выходного сигнала идеальной системы.
Аналогично обстоит дело с ошибками системы обнаруже-
ния. Для этих систем ошибки имеют специальное .назва-
ние. Если требуемый сигнал соответствует решению о на-
личии полезного сигнала в наблюдаемом входном сигна-
ле, а фактический сигнал соответствует решению об
отсутствии полезного сигнала, то данная ошибка называ-
ется пропуском сигнала. Если, наоборот, полезного сиг-
нала -нет, а фактический сигнал соответствует реше-
нию о его наличии, то такая ошибка называется лож-
ной тревогой.
Всякое отклонение выходного сигнала от требуемого
сигнала вызывает потери в качестве, которые оценива-
ются функцией потерь — I (У, Ут), зависящей от выход-
ных сигналов реальной и идеальной систем. Математиче-
ское ожидание функции потерь есть средние потери пли
средний риск:
7? = М [/(У, Ут)] , (4)
где М — оператор математического ожидания.
Показатель качества динамических систем в виде
среднего риска является весьма общим и включает раз-
личные частные показатели при соответствующем выборе
функций потерь. В следующем параграфе будут приведе-
ны различные примеры построения частных показателей
качества на основе показателя среднего риска.
Характерной особенностью задачи оценки качества
технических устройств является необходимость учета раз-
личных свойств, определяющих успешность работы, удоб-
ство эксплуатации и затраты на производство и содержа-
ние. В связи с этим понятие качества системы является,
как правило, многогранным, включающие различные
свойства. Отсюда следует, что качество системы в доста-
точно полной мере может быть отражено не одним, а со-
вокупностыо показателей качества.
48 ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Использование ряда показателей приводит к необхо-
димости установления какой-то взаимосвязи между ними.
Какому показателю качества отдать предпочтение и в ка-
кой степени? Одним из наиболее развитых путей реше-
ния задан анализа и синтеза динамических систем при
наличии нескольких показателей качества является ис-
пользование какого-то одного показателя как основного и
учет остальных показателей как ограничений. Например,
системы могут сравниваться по показателю точности при
условии, что показатели надежности, стоимости и т. п.
находятся в допустимых пределах. Часто сравнение и
оптимизация динамических систем производится по по-
казателю стоимости при условии, что остальные показа-
тели качества соответствуют допустимым пределам.
§ 1.9. Показатели качества
Средний риск является достаточно общим показате-
лем качества систем. При различных конкретных фор-
мах задания функции потерь средний риск вырождается
в частные показатели качества. Рассмотрим наиболее ча-
сто встречающиеся в практических задачах показатели
качества [55].
Средний квадрат ошибки. Этот показатель можно по-
лучить из среднего риска при выборе функции потерь в
виде
Z (У, Ут) = (У — Ут)'(У — Ут), (1)
где штрих у первой скобки означает операцию транспо-
нирования. Подставляя эту функцию потерь в формулу
среднего риска (1. 8. 4)
Й = М[1(Г,УТ)], (2)
получаем средний квадрат ошибки
а = М [(У - Ут)' (У — Ут)] = М [Е'Е]. (3)
Часто удобно записывать средний квадрат ошибки (3)
через операцию следа матрицы
а = SpM [(У - Ут) (У - Ут)'], (4)
где SpM [(У — Ут) (У — Ут)'] — след матрицы матема-
тических ожиданий квадрата ошибки. Если сделать в (4)
§ 1.9. ПОКАЗАТЕЛИ КАЧЕСТВА
49
замену переменных
E = Y — YT, E = E° + mEt (5)
где тЕ — вектор математического ожидания ошибки, Е° —
вектор центрированного значения ошибки, то средний
квадрат ошибки можно выразить через математическое
ожидание и корреляционную матрицу ошибки
a = SpM[(tf° + ms)(tf0 + »^)']. (6)
Раскрывая круглые скобки, применяя операцию мате-
матического ожидания и вводя корреляционную матрицу
ошибки КЕ= М[-Е°7?0/], получаем
а = Sp КЕ + Sp тЕт'Е. (7)
В скалярной форме это выражение имеет вид
а — 5 DEi + 2 тЕ:ч (8)
г=1 г=1 г
где DEv mEi~ дисперсии и математические ожидания со-
ставляющих вектора ошибки.
Для одномерного случая средний квадрат ошибки есть
математическое ожидание квадрата ошибки
a = М [(У - Ут)2] = М [Я2]. (9)
Соотношение (9) для одномерного случая принимает вид
a = De -|- m2,, (10)
где De— дисперсия ошибки. Дисперсию скалярной ошиб-
ки Е = У — Ут можно выразить через дисперсии выход-
ных сигналов реальной и идеальной систем
ВЕ = -ф —2КУУт, (И)
где Куу?—корреляционный момент связи выходных сиг-
налов реальной и идеальной системы. В частном случае,
когда эти сигналы некоррелированы, корреляционный мо-
мент связи равен нулю.
4 д, г. Евланов ____ . . ______ ...
50
ГЛ. 1. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Обобщенный средний квадрат ошибки. При выборе
функции потерь в виде
ЦУ,УТ) = (У-УГ)'С(У-УТ), (12)
где G — матрица с неотрицательными элементами, сред-
ний риск (2) превращается в обобщенный средний квад-
рат ошибки:
а = М[(У-Ут)'С(У-Ут)]. (13)
С помощью операции следа обобщенный средний квадрат
ошибки можно представить в виде
а = Sp G М [(У - Ут) (У - Ут)'] . (14)
Матрица G вводится для приписывания весов составля-
ющим вектора ошибки. В частном случае G = 1, где I —
единичная матрица, обобщенный средний квадрат ошибки
превращается в обычный квадрат ошибки.
Вероятность выхода ошибки из заданного интервала.
Пусть задан интервал [—а, -}-а] и функция потерь пред-
ставлена в виде индикатора дополнения к отрезку [—а,
,+а]
а,
а.
(15)
Средний риск при данной функции потерь представляет
собой вероятность выхода ошибки из интервала [—а, -фа]
Р{|У-Ут|>а} = М[г(У,Ут)]. (16)
Если функцию потерь, задать в виде индикатора отрезка
[—а, +«], то средний риск будет вероятностью попадания
ошибки в этот отрезок.
При нормальном законе распределения вероятности
ошибки показатель качества (16) выражается через мате-
матическое ожидание и дисперсию ошибки (одномерный
случай)
где Ов — среднее квадратическое отклонение ошибки, а
X __ р
Ф(ж) = -Д=Ге 2dt.
о
§ 1.9. ПОКАЗАТЕЛИ КАЧЕСТВА
Вероятность ошибочного решения. Для систем распозна-
вания образов выходные сигналы фактической и идеальной
систем можно рассматривать как номера соответствую-
щих гипотез. Если номер гипотезы фактической системы
не соответствует номеру гипотезы идеальной системы, то
имеет место ошибка. Каждому возможному исходу можно
приписать потери в виде чисел li} при У = /, Ут = I. Если
правильным решениям приписывать нулевые потери, а не-
правильным решениям — единичные потери, то функция
потерь превращается в индикатор множества значений
ошибки
Z(y,yT) = P0
при Y =У= Ут,
при У = Ут.
(18)
Средний риск при данной функции потерь есть условная
вероятность принятия системой распознавания ошибочно-
го решения.
Показатель накопления ущерба. При выборе экспонен-
циальной функции потерь
Z(y,rT) = l_e-(I'-Wr-rT) (19)
средний риск превращается в показатель накопления
ущерба
Р = 1 - М[У(у-к')' , (20)
где G — матрица с неотрицательными элементами.
Приведенные примеры частных показателей качества
не исчерпывают возможностей показателя среднего риска.
Рассмотрение примеров показателей качества дает воз-
можность утверждать, что их вычисление требует знания
вероятностных характеристик выходных сигналов реаль-
ной и идеальной систем. В свою очередь, эти сигналы яв-
ляются результатами преобразования операторами систем
входных сигналов. Поэтому вычисление показателей каче-
ства основывается па характеристиках входных сигналов
и операторов реальной и идеальной динамических систем.
4’
ГЛАВА 2
КОНЦЕПЦИИ КОНТРОЛЯ
§ 2.1. Задачи контроля
Концепции контроля — это система взглядов, идей и
принципов, определяющих общую методологию контроля.
Основное содержание методологии составляют ответы на
вопросы что, как и когда контролировать. Рассмотрим кон-
цепции контроля, раскрывающие ответы на эти вопросы.
В процессе проектирования различных устройств кон-
структор синтезирует характеристики, обеспечивающие
достижение заданных значений показателей качества. Со-
вокупность показателей качества определяет способность
устройства выполнять свои функции и, следовательно, ха-
рактеризует обобщенное состояние устройства. Любые
характеристики устройства можно с достаточной для прак-
тики точностью представить конечным множеством пара-
метров. Поэтому показатели качества определяются набо-
ром параметров, и достижение заданных значений
показателей качества осуществляется выбором значений’
параметров.
В процессе создания устройств, вследствие отклонения
действительных технологических режимов от требуемых,
не удается точно реализовать расчетные значения пара-
метров. По множеству устройств параметры можно рас-
сматривать как случайные величины. Поскольку показа-
тели качества являются функциями параметров, то сле-
довательно, они также имеют разброс на множестве уст-
ройств и должны рассматриваться как случайные
величины.
В процессе эксплуатации происходит старение и износ
элементов устройства, которые выражаются в медленном
изменении во времени параметров (дрейф параметров).
Это изменение параметров может привести к уменьшению
запасов прочности устройства и при больших механиче-
ских или электрических перегрузках вызвать выход из
строя отдельных элементов и, следовательно, всего уст-
ройства в целом. Медленный дрейф параметров и их
§ 2.1. ЗАДАЧИ КОНТРОЛЯ
53
скачкообразное изменение при отказах элементов приво-
дят соответственно к дрейфу или скачкообразному изме-
нению показателей качества во времени. Отсюда следу-
ет, что показатели качества должны рассматриваться на
больших интервалах времени эксплуатации как случай-
ные функции времени. В фиксированные моменты вре-
мени, а также на небольших временных интервалах зна-
чение случайной функции есть случайная величина.
Таким образом, априорной моделью любого устройства
как объекта контроля, отражающей его состояние, явля-
ется вектор, компонентами которого являются показатели
качества, рассматриваемые в зависимости от решаемых
задач как случайные величины или как случайные функ-
ции времени.
Случайный разброс показателей качества приводит к
неопределенности в выполнении устройством своих функ-
ций. Уменьшение этой неопределенности достигается из-
мерением параметров и вычислением показателей качест-
ва. Следовательно, первой задачей контроля является по-
лучение информации о фактическом состоянии устройства.
На основании полученной в результате измерения ин-
формации решается вторая задача контроля — принятие
решения о годности или негодности конкретного устрой-
ства для выполнения определенных функций. В случае,
если принимается решение о негодности устройства, то
возникает третья задача контроля — диагностика неис-
правностей. На основании результатов диагностики реша-
ется четвертая задача — принятие решений о необходи-
мости регулировки, отправке в ремонт или списании дан-
ного устройства.
Накопление информации о результатах контроля мно-
гих объектов, а также многократного контроля одного
объекта позволяет произвести статистическую обработку
и получить вероятностные характеристики параметров и
показателей качества как случайных функций времени.
На основе этих вероятностных характеристик можно
решать задачи прогнозирования технического состоя-
ния объектов, определения влияния условий эксплуата-
ции и конструкции на качество функционирования объек-
та. Решение перечисленных задач позволяет принимать
обоснованные решения о способах подготовки, примене-
ния, хранения и проверки объектов, совершенствовании
54
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
расчетных схем и конструкции, замене материалов, из-
менении технологических режимов и заводского контро-
ля и т. п.
Рассмотрение задач контроля показывает, что его про-
ведение необходимо для получения информации, исполь-
зуемой для управления процессами производства. и эк-
сплуатации. Эта информация обеспечивает организацию
обратной связи в управлении качеством и эффективностью
производства и эксплуатации. Отсюда следует, что отка-
заться в принципе от контроля нельзя, так как это будет
означать утрату информации и, следовательно, потерю
управления. Можно лишь прекращать контроль на опре-
деленные промежутки времени, в течение которых с до-
статочной достоверностью можно использовать данные, на-
копленные в предшествующие моменты времени, и гаран-
тировать нормальную работу устройств. Контроль есть
наша «плата» за получение информации, необходимой для
принятия решений, обеспечивающих эффективное управ-
ление процессами эксплуатации и производства техники.
Обобщая изложенное, перечислим основные задачи
контроля:
— определение технического состояния объектов в те-
кущий момент времени;
— прогнозирование технического состояния в буду-
щий момент времени;
— принятие решения о пригодности объекта выпол-
нять свои функции в настоящий и будущий моменты
времени;
— определение места и причин неисправностей;
— получение исходных данных для анализа влияния
условий эксплуатации, конструкции п технологии произ-
водства на качество функционирования объектов.
Рассмотренные задачи решаются системами контроля
с различной степенью полноты. Простейшие системы кон-
троля решают только задачи измерения размеров дета-
лей и их отбраковки. Системы контроля сложных дина-
мических систем выполняют все перечисленные задачи и,
следовательно, выполняют функции информационно-из-
мерительных и восстановительных систем [62].
При ручном и автоматизированном контроле решают-
ся одни и те же задачи. Автоматизация контроля пресле-
дует цель' не изменения функций контроля, а повышения
§ 2,2. ПРИНЦИПЫ КОНТРОЛЯ
55
его качества и эффективности за счет увеличения точ-
ности измерений, достоверности решений и уменьшения
трудозатрат на его проведение.
о
§ 2.2. Принципы контроля
Решение задач оценки технического состояния и при-
нятия решения о годности объекта контроля выполнять
свои функции может осуществляться различными спосо-
бами. Содержание этих способов основывается на прин-
ципах контроля.
Способность объекта контроля выполнять свои функ-
ции определяется набором показателей, качества. Эти по-
казатели являются функционалами от выходных сигна-
лов объекта. В свою очередь выходные сигналы опреде-
ляются динамическими характеристиками объекта и его
входными сигналами. Динамические характеристики объ-
екта с достаточной для практики точностью могут быть
описаны конечным набором параметров. Входные сигна-
лы также могут быть описаны совокупностью парамет-
ров. Поэтому выходные сигналы, а следовательно, и его
показатели качества являются функциями параметров
объекта и параметров, характеризующих входные сигналы.
Вектор параметров объекта контроля полностью харак-
теризует его реакцию на входные сигналы. Поэтому век-
тор параметров определяет техническое состояние объек-
та контроля. Из данного утверждения не следует, что
параметры объекта можно выбрать без всякой связи с
показателями качества. Наоборот, значения параметров
определяются из условия максимизации (минимизации)
показателей качества. Следует отметить, что показатели
качества зависят не только от параметров объекта, но и
от его входных сигналов. Вследствие этого, для получения
зависимости показателей качества только от параметров
объекта необходимо зафиксировать параметры входных
сигналов. Это означает, что фиксируются условия рабо-
ты объекта, или, другими словами, режим работы.
При выбранном фиксированном режиме работы объек-
та его техническое состояние полностью определяется
вектором параметров и, соответственно, значениями пока-
зателей качества, функционально связанными с парамет-
рами объекта. Осуществляя измерение параметров в про-
56 ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
цессе контроля, можно по известной функциональной за-
висимости вычислить показатели качества объекта. Из-
мерение параметров и вычисление показателей качества
производится с ошибками. Поэтому реально при контро-
ле можно получить не истинные значения показателей
качества, а их оценки.
Оценка показателя качества характеризует техничес-
кое состояние системы только па выбранном, фиксирован-
ном режиме контроля, отражающем определенный диапа-
зон условий работы системы. Поэтому вопрос о выборе
режимов контроля является одним из наиболее важных.
Естественно, что с точки зрения полноты контроля же-
лательно осуществлять проверку системы на большом ко-
личестве режимов. Однако такой подход требует больших
временных и материальных затрат. Поэтому стараются
ограничиться одним или, в отдельных случаях, небольшим
количеством режимов. Контроль системы на двух или
более режимах применяется лишь в случае изменения
структуры динамической системы при переходе с одного
режима на другой. Если структура системы и ее парамет-
ры остаются неизменными, то для контроля, как правило,
используется только один режим.
Существуют два подхода к выбору режима контроля.
Один из них предполагает назначение наиболее «тяже-
лого» режима, другой — наиболее вероятного. Практика
создания систем контроля показывает, что выбор наибо-
лее вероятного режима работы динамической системы яв-
ляется более предпочтительным.
Реализация режима работы объекта контроля дости-
гается приведением его в определенное начальное состо-
яние и. подачей на входы зондирующих сигналов. Реак-
ция объекта контроля на зондирующие сигналы выра-
жается в виде выходных сигналов, которые могут наблю-
даться в различных точках объекта. Эти наблюдаемые
сигналы являются входными сигналами для измерителей
аппаратуры контроля.
Методика измерения параметров базируется на
применении статистической теории оптимальных систем.
Использование этой теории позволяет синтезировать
структуру и параметры измерителей, оптимальных в
смысле точности. Для применения этой теории необходи-
мо в качестве априорных данных иметь вероятностные
§ 2.2. ПРИНЦИПЫ КОНТРОЛЯ
57
характеристики наблюдаемых сигналов и помех. Эти ха-
рактеристики определяются экспериментальными исследо-
ваниями объектов контроля. Одним из важных выводов
теории оптимальных систем является утверждение о це-
лесообразности измерения постоянных величин. При этом
накопление информации в процессе измерения происхо-
дит наиболее быстро. Вот почему на практике, как пра-
вило, измерению подвергаются именно параметры объек-
та контроля.
Задачу диагностики целесообразно решать одновремен-
но с оценкой показателей качества. Полнота диагностики
зависит от поставленных целей и во многих практических
случаях ограничивается определением состояния отдель-
ных блоков или узлов, которые могут быть быстро заме-
нены исправными. Естественно, что решение дополни-
тельной задачи диагностики приводит к необходимости
увеличения объема контролируемых параметров. Теоре-
тические и экспериментальные данные показывают, что
количество параметров, определяющих с достаточно вы-
сокой достоверностью показатели качества, невелико, и
основную массу контролируемых параметров составляют
диагностические.
Специфика решения задачи диагностики определяется
требованием ответить на вопрос, вышел такой-то блок или
узел из строя или нет. Естественно, что при этом нет
необходимости точно определять допуски на диагности-
ческие параметры. Статистические данные для существу-
ющих образцов техники показывают, что поля допусков
диагностических параметров во много раз превосходят
разброс этих параметров при нормальном функциониро-
вании системы. В связи с этим, задача определения до-
пусков на диагностические параметры решается обычно
достаточно приближенно.
Измерение диагностических параметров с точки зре-
ния вычисления показателя качества дает избыточную
информацию. Поэтому, строго говоря, эти параметры нет
необходимости включать в функциональную зависимость
показателя качества от параметров. Однако часто все же
эта группа параметров входит в формулу вычисления
показателя качества. Обычно зависимость показателя ка-
чества от диагностических параметров строится по прип-
ципу «да»;—«нет». Если все диагностические параметры
58
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
находятся в своих допусках, то показатель качества не
зависит от этих параметров и определяется значениями
существенных параметров. Если хотя' бы один диагности-
ческий параметр вышел из поля допуска, то показатель
качества принимается равным нулю. Использование ука-
занной процедуры вычисления показателя качества как
функции диагностических параметров объясняется тре-
бованием прекращать контроль при выходе из строя ка-
кого-либо блока или узла с целью предотвращения воз-
можных аварийных ситуаций при контроле.
В результате измерения параметров и вычисления по-
казателей качества можно двумя способами принимать ре-
шения о годности объекта контроля выполнять свои функ-
ции. В первом из них решение принимается на основе
сравнения вычисленных значений показателей каче-
ства с допусками на иих. При этом реализуется принцип
контроля по показателям качества. Во втором способе
решение принимается на основе сравнения значений па-
раметров объекта с допусками на параметры. В этом слу-
чае реализуется принцип контроля по параметрам.
Оба перечисленных способа контроля связаны между
собой, поскольку допуски на параметры определяются из
условия обеспечения заданных -допусков на показатели
качества. На первый взгляд кажется, что в силу указан-
ной связи оба способа принятия решений эквивалентны.
Однако в действительности они существенно различны
как с точки зрения правильности принятия решения, так
и с точки зрения практического использования результа-
тов контроля. Детальный анализ этого различия будет
проведен далее в этом параграфе, после рассмотрения
еще одного принципа контроля.
Характерные особенности имеет контроль технического
состояния очень ответственных или дорогостоящих систем
непосредственно перед их применением. Цель этого кон-
троля более узкая — установление пригодности системы
к выполнению поставленной задачи без решения задачи
диагностики. В этом случае определение показателей ка-
чества может производиться не по измеренным парамет-
рам, а непосредственно по сравнению выходных сигналов
реальной и идеальной систем, т. е. по сигналу ошибки.
Для реализации данного принципа контроля необходимо
иметь модель идеальной системы, вырабатывающей тре-
§ 2.2, ПРИНЦИПЫ КОНТРОЛЯ
59
буемый выходной сигнал. Применение данного принципа
существенно ускоряет во времени процесс контроля и
требует в большинстве случаев более простой аппарату-
ры. Получаемый выигрыш во времени и сложности ап-
паратуры обусловлен значительным уменьшением объе-
ма информации о техническом состоянии системы, полу-
чаемой при контроле.
Рассмотрим преимущества и недостатки принципов
контроля по показателям качества и по параметрам. При
контроле по параметрам возникают методические ошибки
в принятии решений, обусловленные невозможностью оп-
ределения допусков на каждый параметр, обеспечиваю-
щих выполнение допусков на показатели качества. В ка-
честве примера рассмотрим один показатель качества, на
который задан допуск снизу. Приравнивая показатель
качества как функцию параметров допуску, получим
уравнение замкнутой гиперповерхности в пространстве
параметров. Для того чтобы определить допуски иа каж-
дый параметр в отдельности исходя из допуска на пока-
затель качества, необходимо, чтобы гиперповерхность
представляла собой поверхность гиперпараллелепипеда с
гранями, параллельными осям координат параметров. Оче-
видно, что это возможно только в очень частных случаях.
В связи с этим назначение допусков на каждый параметр
может быть осуществлено независимо от других парамет-
ров только с нарушением допуска на показатель качества
либо в сторону уменьшения, либо в сторону увеличения
фактического допуска, иа показатель качества. Очевидно,
что принятие решения о годности объекта путем сравне-
ния параметров с допусками, не согласованными с до-
пусками на показатель качества, будет приводить г? по-
явлению ошибочных решений. Более подробно ошибки
в принятии решений при контроле по параметрам рас-
сматриваются в шестой главе. Таким образом, вследствие
невозможности точного согласования допусков на пара-
метры с допусками на показатели качества, контроль по
параметрам сопровождается дополнительными методиче-
скими ошибками по сравнению с контролем по показате-
лям качества.
Контроль по показателям качества позволяет решать
ряд задач, недоступных для контроля по параметрам. Пе-
речислим некоторые из них.
60
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
Одной из важных задач является прогнозирование
технического состояния систем. При использовании кон-
троля по параметрам осуществить прогнозирование прак-
тически очень трудно. Количество параметров в сложных
динамических системах составляет десятки и сотни еди-
ниц. Статистическое пропнозирование каждого параметра
тр.ебует больших затрат на обработку наблюдаемых дан-
ных. Кроме того, предсказание о выходе какого-нибудь
параметра за поле допуска через определенное время и
принятие на этой основе решения о негодности системы
является слишком жестким условием. Контроль по пока-
зателю качества дает возможность сравнительно просто
решать задачу прогнозирования по результатам накопле-
ния данных контроля.
Применение показателей качества для оценки состо-
яния систем позволяет производить сравнительную оцен-
ку технического состояния разных типов устройств, пред-
назначенных для решения одинаковых задач. Параметры
таких систем могут быть различными. Поэтому осущест-
вить сравнительную оценку только по значениям пара-
метров часто не представляется возможным. Использова-
ние единой меры технического состояния систем дает
возможность определить влияние конструкции системы и
условий ее эксплуатации на качество выполнения постав-
л.енных задач.
Оценка технического состояния систем по показателям
качества открывает широкие возможности для автома-
тизации процесса управления сложными комплексами с
учетом фактического состояния различных устройств, вхо-
дящих в комплекс.
Использование показателей качества для оценки тех-
нического состояния систем дает принципиальную воз-
можность принятия более гибких решений в различных
условиях. Дело в том, что установление допустимых уров-
ней показателей качества является условным, справедли-
вым лишь для определенных ситуаций. При изменении
условий допустимый уровень показателя качества изме-
няется. Например, пусть определен допуск на вероят-
ность выполнения поставленной задачи, равный 0,7. Эта
цифра основывается на учете экономических факторов в
определенных условиях. При изменении условий может
оказаться целесообразным снизить этот допуск и, следо-
§ 2.2. ПРИНЦИПЫ КОНТРОЛЯ
61
вательно, может быть принято решение о применении си-
стемы при вероятности, меньшей 0,7.
Наличие оценок показателей качества позволяет про-
сто принять правильное решение в новой ситуации. Если
же использовать информацию только о параметрах си-
стемы, то принять правильное решение о возможной спо-
собности устройства выполнять свои функции при вы-
ходе параметров из поля допуска может только техниче-
ский специалист высокой квалификации, хорошо знающий
влияние каждого параметра на работоспособность систе-
мы. Знание оценок показателя качества позволяет при-
нять решение о применении устройства человеку сравни-
тельно невысокой технической квалификации. Это объяс-
няется тем, что показатели качества непосредственно
отражают целевое назначение системы, тогда как пара-
метры несут эту информацию в весьма закодированной
форме.
Другими словами, если имеется оценка показателя
качества и она выходит за допустимые значения, то че-
ловек может принять решение о применении данной не-
достаточно качественной системы, если этого требуют об-
стоятельства. При этом имеется вполне определенная
уверенность в достижении поставленной цели.
Применение показателей качества для оценки техни-
ческого состояния систем эквивалентно введению систе-
мы единиц измерения с непрерывной шкалой. Это более
точный способ оценки, поэтому он и обладает большими
возможностями по сравнению с методом оценки по пара-
метрам.,
Возможность вычисления показателей качества позво-
ляет с несколько иных позиций подойти к вычислению
показателей надежности. Как известно, надежность опре-
деляется как способность системы оставаться работоспо-
собной в течение определенного времени. В этом опре-
делении смысл понятия работоспособности является до-
статочно расплывчатым. Конкретно работоспособность
можно определить как условие нахождения показателя
качества в допустимых пределах. Такая конкретизация
сразу позволяет рассматривать показатель надежности как
доверительную вероятность нахождения показателя каче-
ства в допустимых пределах в течение заданного време-
ни [48].
62
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
В настоящее время надежность технических устройств
оценивается путем умножения показателя качества си-
стемы. на вероятность безотказной работы. Такая рас-
четная схема очень проста, но недостаточно корректна,
поскольку сам показатель качества непосредственно за-
висит от характеристик системы. Вероятность безотказ-
ной работы вычисляется на основе весьма грубой модели
системы, не учитывающей внутренние взаимосвязи в схе-
ме устройства. Этим обстоятельством объясняется прак-
тическая невозможность использования существующего
расчетного аппарата теории надежности для решения об-
ратной задачи — установления требований к параметрам
системы, исходя из заданной ее надежности. Расчет на-
дежности в принятой в настоящее время форме позволя-
ет лишь оценить возможную работоспособность устройств
по имеющимся статистическим данным об отказах эле-
ментов [39, 113, 114].
Рассмотрение показателя качества как случайной ве-
личины, зависящей от параметров системы, позволяет
еще на этапе проектирования сформулировать требования
к характеристикам параметров и оценивать надежность
системы как вероятность нахождения показателя качес’г-
ва в допустимых пределах. При таком определении ве-
роятность безотказной работы системы в начальный мо-
мент времени не равна единице, а определяется разбро-
сом показателя качества. С увеличением времени вероят-
ность безотказной работы уменьшается.
Следует заметить, что необходимость введения обоб-
щенных показателей технического состояния систем по-
нимается многими специалистами достаточно давно. Из-
вестны примеры построения таких показателей в виде
«индекса совпадения» [7]. Этот показатель несколько ис-
кусствен, но отражает качество работы системы и позво-
ляет осуществлять прогнозирование в виде вычисления
«индекса дрейфа» [7].
Изложенное показывает, что применение принципа
контроля по показателям качества позволяет успешно ре-
шать две проблемы. Одна из них связана с методологией
построения систем контроля. Все основные характеристи-
ки аппаратуры контроля определяются на основе досто-
верности получения оценки показателя качества. Вторая
проблема — принципиальная возможность принятия бо-
§ 2.3. СТРУКТУРА СИСТЕМ КОНТРОЛЯ ' 63
лее гибких решений на основе получения оценки пока-
зателя качества. В этом состоят преимущества примене-
ния рассмотренного принципа контроля [52].
§ 2.3. Структура систем контроля
Структура систем контроля определяется задачами
контроля и находит свое выражение в функциональной
схеме. Основными задачами контроля являются: оценка
состояния объекта, принятие решения о годности или не-
годности объекта контроля выполнять свое назначение,
получение исходных данных для централизованной обра-
ботки информации и восстановление неисправностей. Спо-
собы решения перечисленных задач находят свое отра-
жение в программе контроля.
Перед началом контроля в систему контроля вводится
информация о типе контролируемого объекта, режиме и
условиях контроля. В современных системах контроля
сложных динамических систем программа контроля реа-
лизуется в виде команд цифровой вычислительной маши-
ны, подаваемых на исполнительные устройства и на уп-
равление . работой самой вычислительной машины
(рис. 2.3.1) [4, 70, 87, 103].
После соединения объекта контроля с аппаратурой си-
стемы контроля и включения режима контроля по кома-
ндам с блока программы контроля, управляющее уст-
ройство включает блок зондирующих сигналов и одновре-
менно подготавливает к работе объект контроля. Блок
зондирующих сигналов воспроизводит входные сигналы
объекта контроля, имитирующие условия его работы в
выбранном режиме. Выходные реакции объекта контроля
измеряются измерителями, составляющими блок измери-
телей. Алгоритм работы блока измерителей определяется
программой контроля и реализуется с помощью управля-
ющего устройства.
Сигналы измерителей подвергаются обработке. Эта об-
работка необходима для повышения точности измерения
и преобразования сигналов к стандартной форме. Блок
зондирующих сигналов наряду с полезными сигналами
может создавать помехи, полностью избавиться от ко-
торых в силу физических условий работы пет возмож-
ности. Объект контроля в процессе своей работы также
информация
Рис. 2.3.1.
s 2.3. СТРУКТУРА СИСТЕМ КОНТРОЛЯ
65
может генерировать помехи. Если еще учесть собственные
шумы и ошибки измерителей, то становится ясным, что
входные и выходные сигналы объекта контроля и изме-
рителей представляют собой случайные функции време-
ни, включающие полезные сигналь! и помехи. Полезные
сигналы в общем случае также могут быть случайными
функциями времени. Характерной особенностью сигналов
на входе измерителей является смешанная комбинация
полезных сигналов и помех, содержащая мультипликатив-
ные и аддитивные комбинации. Наличие помех и ошибок
измерения приводит к необходимости фильтрации сиг-
налов в блоке обработки.
Преобразование сигналов к стандартной форме может
включать приведениие сигналов к форме напряжения по-
стоянного тока с одним диапазоном измерения. Преоб-
разование сигналов осуществляется также для получения
дискретной последовательности с целью согласования из-
мерителей с цифровой вычислительной машиной.
Преобразованные силналы поступают в ЦВМ, где про-
изводится вычисление оценок параметров и показателей
качества объекта контроля. Оценки параметров и показа-
телей качества, а также допуски на эти величины посту-
пают на схему принятия решений. Схема выдает команды
на повторение всей или части программы контроля, вклю-
чение исполнительных устройств восстановления (регули-
ровка параметров, включение резервных элементов
и т. п.) и включение работы блока выходных устройств.
Блок выходных устройств дает информацию о годности
системы выполнять свои функции, характере и месте име-
ющейся неисправности и значения параметров и показа-
телей качества. Форма представления информации обыч-
но дублируется на световом табло и на перфокарте (пер-
фоленте, магнитной ленте и т. п.) . Работа блока выходных
устройств координируется программой контроля.
Информация о допусках на параметры и показатели
качества хранится в устройстве памяти ЦВМ. Управле-
ние этим устройством осуществляется по программе кон-
троля.
Вычисление значений параметров и показателей каче-
ства по наблюдаемым сигналам, реализация логической
схемы принятия решений, устройства памяти и програм-
мы контроля обычно осуществляются с помощью цифро-
66
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
вой вычислительной машины. Данная машина, наряду
с входными устройствами блока обработки сигналов и
блока выходных устройств, составляет универсальную
часть системы контроля, используемую при контроле раз-
личных объектов. Блоки зондирующих сигналов, измери-
телей, управляющие устройства и исполнительные уст-
ройства восстановления составляют смешную аппаратуру,
которую можно менять при контроле различных типов
систем.
§ 2.4. Характеристики систем контроля
Как следует из предыдущего параграфа, системы кон-
троля динамических систем сами являются весьма слож-
ными системами, включающими различную аппаратуру.
Сложность систем контроля обусловливает многочислен-
ность характеристик, отражающих различные свойства
этой аппаратуры. Основными характеристиками систем
контроля являются:
— эффективность контроля;
— достоверность контроля;
— точность контроля;
— производительность контроля;
— ресурс (общее время работы);
— стоимость контроля;
— объем контроля;
— количество и характер зондирующих сигналов,
— количество и характер наблюдаемых сигналов;
— содержание и форма представления результатов
контроля;
— режим работы системы контроля;
— возможность автоматической регулировки парамет-
ров;
— источники питания;
— - вес и габариты;
— транспортабельность;
— количество и квалификация обслуживающего пер-
сонала.
Эффективность, достоверность, точность, производи-
тельность, ресурс, стоимость и объем контроля, а также
количество обслуживающего персонала являются основ-
ными показателями качества системы контроля.
§ 2,4. ХАРАКТЕРИСТИКИ СИСТЕМ КОНТРОЛЯ
67
Эффективность контроля является мерой целесообраз-
ности применения контроля, т. е. мерой ценности инфор-
мации, добываемой при контроле. Эффективность контро-
ля зависит от достоверности контроля, производительно-
сти, ресурса, а также от стоимости затрат на создание
средств контроля и его проведения.
Достоверность контроля есть мера определенности ре-
зультатов контроля. Любая система контроля работает
с ошибками, кроме того, контролю подвергаются только
пасть параметров объекта контроля. Поэтому получаемая
в результате контроля информация содержит неопреде-
ленность. Достоверность контроля зависит от точности
измерения и объема контроля.
Точность контроля есть характеристика работы изме-
рительных трактов аппаратуры контроля. Обычно точ-
ность характеризуется средним квадратом ошибки изме-
рения или, при отсутствии систематических ошибок,—
средним квадратическим отклонением ошибки измерения.
Будем называть систему абсолютно точной, если ошибки
измерения равны нулю. При наличии ошибок измерения
и оптимальном способе обработки наблюдаемых сигналов
система контроля будет обладать потенциальной точ-
ностью. Потенциальная точность — это предельно дости-
жимая точность. Дальнейшее повышение точности изме-
рения невозможно ввиду наличия случайных помех, оши-
бок измерения и конечного времени измерения. Реальная
точность контроля будет всегда несколько ниже, чем по-
тенциальная точность, вследствие ошибок реализации
схем оптимальных измерителей, а в ряде случаев и эко-
номической нецелесообразности такой реализации.
Производительность контроля определяется временем,
затрачиваемым на проверку одного изделия. В это время
входит время подготовки аппаратуры контроля к работе,
время подготовки объекта контроля и, наконец, время
проведения контроля.
Стоимость контроля оценивается в рублях и содержит
две составляющие; одна определяет стоимость производ-
ства системы контроля, а вторая — стоимость всех зат-
рат на проведение контроля в течение всего времени ра-
боты системы.
Объем контроля является очень важной технической
характеристикой аппаратуры, по многом определяющей
5*.
68
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
основные параметры системы контроля. Объем контро-
ля — это количество и перечень параметров, подлежащих
контролю. При определении объема следует исходить из
условия получения необходимой достоверности контроля
и определенной глубины диагностики объекта контроля.
Количество и характер зондирующих и наблюдаемых
сигналов определяется объемом контроля и конструкцией
объекта контроля.
' Результаты контроля должны содержать решение о
годности или негодности объекта контроля выполнять
свои функции, числовые значения показателей качества
и контролируемых параметров. Результаты контроля мо-
гут быть представлены в визуальной форме (светяще-
еся табло) и продублированы в форме перфокарты или
перфоленты.
Режимы работы системы контроля могут быть: ручным,
полуавтоматическим и автоматическим. В программе кон-
троля могут быть предусмотрены: повторное измерение
ряда параметров, самоконтроль и другие режимы [4,
63, 105].
Система контроля может иметь не только функции
датчика информации, но и восстановительные функции.
Например, возможна регулировка измеряемых парамет-
ров, подключение резервных элементов или блоков и т. п.
Источники питания, вес, габариты, транспортабель-
ность, количество и квалификация обслуживающего пер-
сонала являются эксплуатационными характеристиками
системы контроля. Выбор этих характеристик зависит от
схемы организации службы эксплуатации вообще и служ-
бы контроля в частности, от конструкции и целевого
назначения объектов контроля и т. п.
В последней главе рассматривается задача определе-
ния основных характеристик систем контроля и установ-
ление функциональной связи между эффективностью кон-
троля и другими характеристиками системы контроля.
§ 2,5. Синтез характеристик контроля
Процесс проектирования системы контроля начинает-
ся с решения задачи синтеза основных характеристик,
удовлетворяющих требованиям технического задания на
разработку, Сущность задачи синтеза составляет опреде-
§ 2.5. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
69
ление характеристик схем принятия решений и измери-
тельных трактов. Основным критерием для получения оп-
тимальных характеристик контроля является достовер-
ность контроля.
Для решения задачи синтеза характеристик контроля
необходимо иметь математическую модель объекта конт-
роля. Поэтому задаче синтеза предшествует построение
модели объекта контроля. Математическая модель объек-
та контроля описывает функциональную связь между по-
казателями качества объекта контроля и его параметра-
ми и устанавливает определение годности системы вы-
полнять свое назначение. Определение годности системы
заключается в назначении допусков на показатели качест-
ва и соответственно на параметры системы. Построение
моделей объектов контроля подробно рассматривается в
пятой главе.
Используя модель объекта контроля, можно опреде-
лить объем контроля, риски изготовителя и заказчика по
параметрам и требуемую точность измерения параметров
из условия допустимой достоверности контроля. Получив
эти характеристики, можно осуществить синтез оптималь-
ных алгоритмов схем принятия решений «годен» —
«не годен» и измерителей параметров.
Определение допустимой точности измерения па-
раметров позволяет решить задачу о назначении конт-
рольных допусков на эти параметры, обеспечивающих
получение заданных вероятностей ошибочных решений.
Для решения задачи синтеза характеристик контроля
необходимо в качестве априорных данных знать структу-
ру и параметры объекта контроля, возможные точки на-
блюдения выходных сигналов, точки подачи входных зон-
дирующих сигналов, структуру наблюдаемых сигналов,
вероятностные характеристики измеряемых параметров и
помех. Перечень априорных данных показывает, что оп-
ределение характеристик контроля возможно лишь после
формирования структуры, значений параметров и кон-
структивной проработки объекта контроля. Это, конечно,
не означает, что определение характеристик контроля не
оказывает никакого влияния на процесс проектирования
и разработки динамических систем. Влияние это сказы-
вается в требованиях контролепригодности, предъявляе-
мых к динамическим системам.
70
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
В результате решения задачи синтеза устанавливается
функциональная связь между достоверностью контроля,
рисками заказчика и изготовителя, контрольными до-
пусками, способом обработки наблюдаемых сигналов с
целью получения оценок параметров и принятия реше-
ний «годен»—«не годен», временем измерения парамет-
ров и т. п.
Объект контроля при синтезе характеристик контроля
рассматривается как динамическая система со случайны-
ми параметрами, вероятностные характеристики которых
известны. При измерении параметров имеют место слу-
чайные ошибки, обусловленные действием помех в зонди-
рующих и наблюдаемых сигналах и собственными шума-
ми измерителей. В связи с этим задача синтеза характе-
ристик контроля должна рассматриваться как вероятно-
стная задача. Теоретической базой для решения этой
задачи принята статистическая теория оптимальных си-
стем, основы которой в необходимом объеме изложены в
четвертой главе.
Изложение материала в последующих главах книги
построено в соответствии с последовательностью решения
задачи синтеза характеристик контроля.
§ 2.6. Организация контроля
При рассмотрении вопросов организации контроля ди-
намических систем следует исходить из того, что конт-
роль является одной из функций службы эксплуатации.
Поэтому организация контроля органически вытекает из
задачи и структуры службы эксплуатации. Контроль дает
также информацию для корректировки процесса произ-
водства, поэтому при решении вопросов организации
контроля необходимо иметь в виду и эту сторону дела.
К организации контроля можно отнести следующие
вопросы:
— схема обслуживания;
— стратегия контроля;
— штатное расписание обслуживающего персонала и
их функциональные обязанности;
— оборудование системы контроля;
— схема централизованной обработки результатов
контроля; - -
§ 2.6 ОРГАНИЗАЦИЯ КОНТРОЛЯ
71
— порядок проверки и ремонта аппаратуры конт-
роля.
Возможны следующие три схемы обслуживания.
В первой из них системы контроля легко транспортабель-
ны и обслуживают поочередно объекты контроля путем
перемещения от объекта к объекту. В другой схеме, на-
оборот, системы контроля неподвижны, а объекты кон-
троля транспортируются к месту расположения аппара-
туры контроля. Возможен и третий вариант, когда и си-
стемы контроля, и объекты контроля не перемещаются,
а связь между ними обеспечивается по радиолиниям или
проводным линиям. В этом плане известна идея создания
единого в масштабе целого государства (США) центра
по обработке результатов контроля и принятия решений
о годности техники выполнять определенные функции [7].
Под стратегией контроля понимают полноту проверки
партии изделий и периодичность контроля. Возможен
сплошной или выборочный контроль. Принятие той или
иной схемы и определение объема выборочного контроля
зависит от рода и важности задач, выполняемых объек-
тами контроля, и экономических соображений.
Периодичность контроля определяется характеристи-
ками объектов контроля. Период между двумя проверка-
ми зависит от степени достоверности прогнозирования
технического состояния объектов контроля, что, в свою
очередь, определяется стабильностью вероятностных ха-
рактеристик случайных параметров устройства и време-
нем накопления данных об этих характеристиках. При
стабильности вероятностных характеристик параметров
по мере накопления данных в процессе контроля досто-
верность прогноза будет увеличиваться. Это значит, что
при фиксированной достоверности прогноза увеличива-
ется интервал между очередными проверками с течением
времени эксплуатации объектов контроля. Если вероят-
ностные характеристики параметров изменяются быст-
рее, чем производится накопление данных о них, то ин-
тервал между контролем будет сокращаться.
Штатное расписание службы контроля должно обес-
печивать нормальный процесс подготовки и проведения
контроля. Квалификация и численность персонала опре-
деляются контролепригодностью объекта контроля и со-
вершенством аппаратуры контроля. Поэтому одной из
72
ГЛ. 2. КОНЦЕПЦИИ КОНТРОЛЯ
важнейших задан в процессе разработки требований к
контролепригодности объектов является учет возможных
временных потерь и трудозатрат при подготовке уст-
ройств к контролю и его проведению. Требования к ква-
лификации персонала службы контроля существенно за-
висят от степени автоматизации процесса контроля.
Оборудование системьт контроля включает контроль-
но-измерительную аппаратуру, источники питания (элек-
троэнергия, воздух и т. п.) и транспортные средства.
Производительность контроля определяется, с одной
стороны, потребностями службы эксплуатации и, с дру-
гой стороны, экономическими факторами. В связи с этим
одностороннее стремление во что бы то ни стало повы-
шать производительность не является обоснованным, по-
скольку это ведет к резкому повышению стоимости си-
стемы контроля. Существует оптимальная производитель-
ность контроля, дающая наибольший экономический
эффект.
Важное значение для организации службы информа-
ции имеет централизованная обработка данных резуль-
татов контроля. Обработку данных, как правило, целе-
сообразно проводить на универсальных ЦВМ. Для обес-
печения удобства связи между ЦВМ и системами конт-
роля результаты контроля необходимо фиксировать с по-
мощью каких-либо носителей информации (перфокарт,
перфолент, магнитных лент и т. п.). Организация цент-
рализованной обработки данных должна предусматривать:
порядок и форму представления результатов контроля в
центр обработки, алгоритмы и сроки обработки данных,
форму, адресаты и порядок доставки обобщенных данных
статистической обработки.
В организацию контроля входят вопросы периодичес-
кой проверки, регулировки и ремонта аппаратуры конт-
роля. Порядок этих проверок определяется общими поло-
жениями метрологической службы государства и особен-
ностями конструкции и применения систем контроля.
Рациональная организация службы контроля являет-
ся предметом самостоятельного научного исследования.
Это исследование должно проводиться с целью построения
оптимальной с точки зрения экономики организации кон-
троля при обязательном условии выполнения целей
контроля.
ГЛАВА 3
МЕТОДЫ АНАЛИЗА СИСТЕМ
§ 3.1. Постановка задачи анализа
Задача анализа любой динамической системы заклю-
чается в изучении ее свойств в различных условиях ра-
боты. Постановка задачи анализа всегда начинается с
формулировки совокупности показателей качества, коли-
чественно оценивающих исследуемые свойства. Вторым
этапом постановки задачи анализа является определение
операторов фактической и идеальной систем. В процессе
этого определения должна быть произведена четкая фор-
мулировка функционального назначения системы и по-
нятия ошибки. Третьим и последним этапом постановки
задачи является задание условий работы системы, под
которыми понимаются начальные условия и входные сиг-
налы системы.
Исходной информацией для решения задачи анализа
являются вероятностные характеристики операторов
фактической и идеальной систем, начальных условий и
входных сигналов. Если операторы являются детермини-
рованными, то достаточно знать лишь вероятностные
характеристики начальных условий и входных сигналов.
Под вероятностными характеристиками в общем случае
имеются в виду законы распределения вероятности.
Целью анализа является получение и исследование
зависимости показателей качества от характеристик си-
стемы и входных сигналов. На основе этого исследования
принимаются решения об улучшении свойств системы
при данных условиях применения или об определении
диапазона условий применения при данных свойствах
системы. В обоих случаях критерием для принятия ре-
шений является удовлетворение показателей качества
заданным значениям.
Вычисление показателей качества обычно произво-
дится в два этапа. Вначале вычисляются вероятностные
характеристики выходных сигналов фактической и иде-
альной систем но известным характеристикам операто-
74
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
ров и входных сигналов, а затем непосредственно опре-
деляются значения показателей качества. Первый этап
является более сложным и трудоемким, чем второй.
В общем случае для вычисления показателей качества
необходимо определить закон распределения вероятности
выходных сигналов фактической и идеальной систем.
Задача вычисления закона распределения вероятности
выходных сигналов является чрезвычайно сложной. В на-
стоящее время эта задача решается только для некото-
рых частных случаев. Это объясняется как отсутствием
самих методов решения, так и недостаточными возмож-
ностями вычислительной техники.
Ряд показателей качества, широко применяющихся в
инженерной практике, можно с достаточной точностью
выразить через первые и вторые моменты ошибки систе-
мы. При допущении о нормальности закона распределе-
ния вероятности ошибки все четные моменты ошибки
и вероятность выхода ошибки из заданного интервала
могут быть представлены как функции математического
ожидания и дисперсии ошибки.
Рассматривая ошибку системы как разность Е
— Y — Ут, нетрудно вычислить математическое ожида-
ние и дисперсию ошибки
тпЕ — ту (4) — mVT (4) ,; (1)
De (4) = Dy (4) ф- ОУт (t) - 2еОт (4) ,: (2)
где mv (4) ,mUre(t) —математические ожидания, a Dv(t),
DyT(t) —дисперсии выходных сигналов фактической и
идеальной систем, Qyy^ (4) — корреляционный момент
этих сигналов в момент времени 4. Как следует из этих
формул, моменты ошибки вычисляются через первые и
вторые моменты выходных переменных. Таким образом,
для показателей качества, зависящих от моментов ошиб-
ки, задача анализа, по существу, сводится к вычислению
первых двух моментов выходных сигналов фактической
и идеальной систем.
Методы вычисления первых двух моментов выходных
переменных, рассматриваемых как случайные функции
времени, составляют содержание корреляционного ана-
лиза динамических систем. Общая схема приближенного
§ 3.1. ПОСТАНОВКА ЗАДАЧИ АНАЛИЗА
75
решения задачи определения моментов в рамках корре-
ляционного анализа заключается в следующем [91].
Пусть задан детерминированный оператор «я£4, опи-
сывающий некоторую совокупность линейных инерцион-
ных и нелинейных безынерционных преобразований.
Вектор выходного сигнала системы связан с вектором
входного сигнала соотношением
У(4) = ^,Х(4). (3)
Известны вектор математического ожидания mx(t) и
матрица корреляционных функций Кх (4, t') входного
сигнала. Требуется определить вектор математического
ожидания my(t) и матрицу корреляционных функций
Ку (t, t') выходного сигнала.
Для решения поставленной задачи в настоящее вре-
мя широко применяется метод статистической линеари-
зации. Этот метод является приближенным, однако для
весьма широкого класса динамических систем он дает
результаты, хорошо согласующиеся с экспериментальны-
ми данными. Выполнив статистическую линеаризацию
безынерционных нелинейностей, мы получаем функцио-
нальную зависимость параметров линеаризации от ма-
тематических ожиданий и дисперсий входных сигналов
нелинейных элементов. Эти входные сигналы, в свою
очередь, являются выходными сигналами других звеньев
системы. Поэтому в результате статистической линеари-
зации оператор динамической системы будет зависеть от
вектора математического ожидания и матрицы корреля-
ционных моментов выходного векторного сигнала. За-
пишем эти моменты в качестве аргументов оператора
Y (*) = (mv, Qy) X (4), (4)
где (ту, By) — статистически линеаризованный опера-
тор.
Для вычисления вектора математического ожидания
выходного сигнала применим к обеим частям выражения
(4) оператор математического ожидания. Имея в виду,
что после статистической линеаризации оператор систе-
мы стал линейным, мы можем осуществить перестанов-
ку последовательности применения оператора Вд)
и оператора математического ожидания. В результате
76
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
получаем
ту (t) = (ту, Qy) тх (t). (5)
По данному соотношению непосредственно нельзя вы-
числить вектор математического ожидания выходного
сигнала вследствие того, что неизвестна матрица бу.
Для определения этой матрицы вычислим матрицу
корреляционных функций выходного сигнала, которая
по определению равна
Ку (t, Д) - М [I70 (/) У0' (Д)]. (6)
Центрированные . значения вектора Y (2) и транспони-
рованного вектора Yf (t) получим вычитанием из соот-
ношения (4) выражения (5) и транспонированием по-
лученной разности
У°(Ц= (mv, Qy) Х° (£), У0' (Д) = Х°'(Д) (ту, 0у), (7)
где (ту, (Ц) — статистически линеаризованный транс-
понированный оператор, действующий на случайную
функцию X0' (tr) по переменной t'.
Подставляя выражения (7) в формулу (6) и приме-
няя оператор математического ожидания, получаем
Ку (t, Д) = ^t (my, 0У) Кх (t, t') (my, ey) . (8)
При одинаковых значениях аргументов t = t' матри-
ца корреляционных функций превращается в матрицу
корреляционных моментов бу (£) переменных в один и
тот же момент времени
ву (£) = Ку (t, t). (9)
Диагональные члены матрицы 6v(t) составляют диспер-
сии вектора выходного сигнала. Таким образом, мат-
рица дисперсий будет известной, если вычислена матри-
ца корреляционных моментов бу (i).
Совместное решение уравнений (5), (8) при исполь-
зовании дополнительного соотношения (9) дает полное
решение задачи определения вектора математического
ожидания и матрицы корреляционных функций выход-
ного сигнала.
В частном случае линейных систем отпадает необ-
ходимость применения статистической линеаризации.
Поэтому оператор системы не зависит от вектора мате-
§ 3.2. МЕТОД ВЕСОВЫХ ФУНКЦИЙ
77
магического ожидания и матрицы дисперсий выходного
сигнала. В результате уравнения (5) и (8) становятся
независимыми и принимают вид
ту (t) = j&tmx (f) , (10)
Ky(t, О = ^tKx (t, f) <£v. (11)
В следующих параграфах рассматриваются различные
методы анализа линейных и нелинейных систем, кото-
рые характеризуются конкретным заданием оператора
системы.
§ 3.2. Метод весовых функций
Рассмотрим класс линейных нестационарных дина-
мических систем, полное описание которых дается опе-
ратором в форме линейного интегрального преобразова-
ния с матрицей весовых функций G (£, т) . Векторы вход-
ного и выходного сигналов связаны соотношением
t
Y(t)= J Gf (i, т)Х (t) dx. (1)
to
Используя общие формулы линейного преобразования
математического ожидания (3.1.10) и матрицы корреля-
ционных функций (3.1.11), запишем явные выражения
для частного случая задания оператора системы в виде
весовой функции
t
ту (i) = J G (f, т) mx (t) dx, (2)
to
tt'
Ky (t, t1) = J J G (t, x)Kx(r, x’) G' (f, x') dx dx'. (3)
to to
Матрица корреляционных моментов переменных, вклю-
чающая в качестве диагональных членов дисперсии, по-
лучается из формулы (3) при t = t'-.
t t
0y (0 — j" [ & (t, t) Kx (t, x') G' (i, t') dx dx'. (4)
to to
Приведенные формулы позволяют решать задачи оп-
ределения показателей качества линейных нестационар-
13 ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
ных систем в рамках корреляционного анализа. Для
вычисления по данным формулам необходимо иметь яв-
ные выражения для матрицы весовых функций. Если ли-
нейная нестационарная система описывается векторным
дифференциальным уравнением вида (1.5.2), то матри-
ца весовых функций определяется как частный интеграл
системы при входном сигнале в виде б-функции:
= A (t) G (t,_ т) + В (4) 6 (4 — т),. G (т, т) = О, (5)
где 6(4 — т)—6-функция, приложенная в момент t = т.
Решение системы (5) эквивалентно решению однородной
системы с определенными начальными условиями
= A(t)G (t,x), G (т, т) = В (т) . (6)
Возможность замены б-функции в правой части эквива-
лентными начальными условиями доказывается интегри-
рованием обеих частей уравнения (5) по 4 в интервале,
охватывающем точку т и стремящемся к нулю.
Решая уравнение (6) при различных значениях па-
раметра т, что практически достигается сдвигом време-
ни t в матрице коэффициентов А (4), получаем функцию
двух аргументов G (4, т) , непрерывную по 4 и дискретную
по т. В соответствии с формулами (2), (3), (4) удобнее
иметь весовые функции, непрерывные по т и дискретные
по 4. Для получения матрицы весовых функций, непре-
рывных по второму аргументу, следует решать сопряжен-
ное к (6) уравнение
^^=-G^t,^A'(t)x G* (t, t) = В (t) t (7)
где G* (4, т) — матрица, сопряженная к матрице весовых
функций. В соответствии с (1.6.12) <?*(4, т) =4?/(т, 4).
Интегрирование уравнения (7) производится при различ-
ных значениях 4. В результате матрица весовых функций
получается непрерывной по т и дискретной по 4. В ряде
задач необходимо знать матрицу весовых функций только
для одного момента времени 4. Нетрудно видеть, что при-
менение сопряженной системы (7) дает в этом случае
большой выигрыш, так как требуется всего лишь одно
интегрирование данного уравнения. Использование урав-
§ 3.2. МЕТОД ВЕСОВЫХ ФУНКЦИЙ
79
нения (6) при этих условиях приводит к многократному
интегрированию при различных значениях т и построе-
нию непрерывной зависимости по точкам т для заданного
значения времени t.
При вычислении матрицы весовых функций с помощью
цифровых вычислительных машин удобно использовать
уравнение (7), в котором необходимо иметь транспони-
рованную матрицу коэффициентов А' (/) . Интегрирова-
ние данного уравнения производится по т в интервале
от т = t до т = 0, т. е. в обратном направлении.
При вычислении на аналоговых вычислительных ма-
шинах исходная система уравнений (6) обычно пред-
ставляется в виде структурной схемы набора. Построе-
ние сопряженной системы уравнений (7) в данном слу-
чае удобнее производить с помощью структурного пре-
образования. Для структурного построения сопряженной
системы, представленной в виде совокупности интегра-
торов, дифференциаторов и переменных коэффициентов,
используются следующие правила:
1. Направление всех связей изменяется на обратное.
2. Интеграторы, дифференциаторы и переменные ко-
эффициенты сохраняют свои функции.
3. Точки разветвления заменяются сумматорами,
а сумматоры — точками разветвления.
4. Интегрирование производится по переменной, рав-
ной з — t — т.
Применение новой переменной для уравнения (7)'
приводит к физически возможной системе, что и обес-
печивает возможность применения аналоговых вычисли-
тельных машин. Более детальное описание техники вы-
числения весовых функций можно найти в {75, 101].
Пример 1. Рассмотрим пример применения метода весовых
функций для анализа качества системы, изображенной на
рис. 3.2.1. Качество данной системы оценивается двумя показа-
телями: средним квадратом ошибки измерения скорости входного
полезного сигнала и средним квадратом ошибки слежения, при-
чем основным показателем является первый показатель, а вто-
рой— вспомогательным. Необходимость использования второго
показателя объясняется тем, что система, обладающая хорошим
качеством в отношении измерения скорости, может быть совер-
шенно неудовлетворенной как следящая система. Существую-
щие в реальных системах ограничения, например, по углу поля
зрения, могут при больших ошибках слежения привести к срыву
процесса слежения.
80
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
Рассмотрим вначале работу системы как измерителя скоро-
сти. Оператор данной системы в форме дифференциального урав-
нения имеет вид
TY + Y = kX(t), (8)
где Т = Н!к\, к = Н. Функциональным назначением системы яв-
ляется дифференцирование полезного сигнала с масштабом к.
Поэтому оператор идеальной системы есть производная с коэф-
фициентом усиления к. Выходной
сигнал идеальной системы имеет
вид
Рис. 3.2.1.
yT = fcS'(t). (9)
Ошибкой системы является разность
Е = У — Ут.
Входной сигнал Х(£) представ-
ляет собой сумму полезного сигнала
S(f) = а + bt+ cP, (10)
где а, Ъ, с — постоянные известные
числа, и помехи с нулевым математическим ожиданием
и корреляционной функцией
/ся(тг) =DNe~aM.
(11)
Вычислим математические ожидания выходных сигналов.
Оператор реальной системы, описываемый уравнением (8), мож-
но представить как последовательное соединение дифференци-
рующего и апериодического звеньев. Используя весовые функции
этих звеньев (приложение 2), вычисляем весовую функцию по-
следовательного соединения, которая равна
* к
J р 6 (i т) yrg ®
g(f,-r)= 0
т
при т < t,
(12)
По формуле (2) вычисляем математическое ожидание выходного
сигнала при to = 0:
, (t—С
к-----~
и) — е
(а Ьт + ст2) du =
I _1\ ка . *
= к(Ь — 2сГ)М — в И + т+ 2kct. (13)
Весовая функция требуемого оператора равна
ffr (£, т) = /с6(4 —т).
(14)
§ 3.2, МЕТОД ВЕСОВЫХ ФУНКЦИЙ
81
Вычисляя математическое ожидание требуемого сигнала, полу-
чаем
*
туг (г) = /с J б (t — т) (<г + Ъх + ст2) dx = к (b + 2ct). (15)
Г О
Математическое ожидание ошибки вычисляется как разность
выражений (13) и (15). В результате имеем
/ _£\ ь 1
/ гр \ fCCl гр
тЕ (£) = — 2скТ 11 — е 1 I + у- е . (16)
Вычислим дисперсию ошибки. Поскольку в данном примере
требуемый сигнал является неслучайным, то его дисперсия DyT
н взаимный корреляционный момент 0уут равны нулю. Поэтому
Db = Dv,
— j^e 1 je X^dxdx'. (17)
Выполняя вычисления интегралов, получим
п . . «Г 2аТ 1 -у]
de^~ т2 [1 + вТ“1-(аТ)*е +1 — аТе ]’
Средний квадрат ошибки измерения скорости есть сумма
квадрата соотношения (16) и выражения (18):
г ! , 112
I । т1 I KCt’ гр I
КЕ = — 2скТ ^1 — е т J -|- уГ е г -J-
аТ 2аТ ( 1 -у]
' Т2 [1 + о.Т ~ 1 — (аТ)2 е т1-аТе ]‘
Данная формула позволяет вычислить средний квадрат ошибки
для любого момента времени. При t > iT имеет место устано-
вившийся режим слежения, и формула (19) упрощается:
k2D
ар (со) = 4с2№ +______
Е (П-аГ)?1
Подставляя значения параметров к = Н, Т = Н/к^ получаем
4с2Я4 2 HDNa
(21)
Анализ этой формулы показывает, что средний квадрат ошиб-
ки измерения производной полезного сигнала имеет минимум
6 Л. Г, Евланов
82
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
по коэффициенту 7с ь По параметру Я минимум величины «в
достигается при Я = 0.
Рассмотрим теперь качество данной системы как следящей
системы. За выходной сигнал системы принимаем Z(t). Ошибкой
системы является разность
Et (t) = Z(t) — а — bt — ct2. (22)
"Уравнение, связывающее входной X(t) и выходной Z(t) сигна-
лы, и соответствующая весовая функция равны
Я . к.
j^Z + Z = X{t), gl(t,T) = ^e н , r<t. (23)
Выполняя вычисление математического ожидания и дисперсии
ошибки, получаем
-~t И! 2сН\( 2сН
mEi(t) = -ae - Д1 - е ) t, (24)
kiDN Г аН I аН\ -^t]
В установившемся режиме средний квадрат ошибки слежения
равен
Н2 Г , { Н\12 DNkr
“я/00)- /с2 p + 2c^t — fcJj +А1_|_аЯ- (26)
Из формулы следует, что средний квадрат ошибки слежения име-
ет минимум по к ] и по Я. Выбор оптимальных значений пара-
метров й] и Я должен производиться одновременно по соотно-
шениям (21) и (26) из условия, чтобы величины ав(°°) и аЕ(оэ)
были не более заданных значений.
Пример 2. Динамическая система описывается дифференци-
альным уравнением второго порядка
Y + fogy = N (t), (27)
где coo — собственная частота. Я (t)—помеха, являющаяся гаус-
совским случайным процессом с нулевым математическим ожи-
данием и корреляционной функцией вида
kN (г> т') = t'lw (28)
Начальные значения координаты и ее производной равны нулю.
Определим дисперсии координаты и ее производной.
Представим уравнение (27) в виде
У2 = —ф^ + Я^). (29)
Матрица весовых функций этой системы определяется уравне-
§ 3.2. МЕТОД ВЕСОВЫХ ФУНКЦИЙ
83
наем (6), которое в данном случае
(*> т) gi2(t, т)
?21(*’Т) Й22(г>Т)
О
имеет вид
1
«цМ g12(l, т).
~®0
gu(r,
, (30)
т) = £22 (т, т) = '1, £12 (т, т) =
при начальных условиях
— gzi (т, т) = 0. Решая матричное уравнение (30), получаем
1
cosm0(/.— т) — зш<ов(1 — т)
соо sin соо (t — т) cos соо (1 — т)
Вычисляя матрицу под интегралом в формуле (4), получаем
G(t, т)Кх(т, x')G'(t, т') =
= (т, V) g12 (t, -г) g12 (t, т')
kN^’ т') £«s(f> т) g12 (г, т')
Подставляя значения функций
лы для дисперсий координаты,
го момента связи между ними
D * *
Oil (i) = “У" J J e—“1т—т'| sjn И() у. — gjn Шо dxcli',
° 0 0
t t
022 (0 = jDjy e—“It-t'| cos M|) у _ cos Ш() dvh',
0 0
O12 (0 = O21 (t) =
t t
~ —H f f e—“It-t'I gin coo (1 — t) cos co0 (t — t') dtdx'.
«0 J J
0 0
Вычисляя интегралы, получаем
Mn a .
—---------— sm cooi cos <o0i —
2 J’ co2 “0
~at (a sin a>0t-f-a>0 cos <o0£) ~
G (t, Т) =
(31)
^у(т, т') g12 (t, т) g22(t, т')
kN(i;, т') g2i(t, т')
в матрицу (32), запишем форму-
ее производной и корреляционно-
• (32)
(33)
(34)
(35)
eu(i)=______________
ы2(“2 + ^)
a2sin2(B0<—<o2cos2a>0i 2a>oe'
a2 + co2
, (36)
DN
; + ®o
a2 cos2 cooJ—co2 sin2 coof
a2 + ®o
Ой2 (0 —
a2
ai — ,
а
— sin 2<Bni —
“о 0
“о
2ссв
--------" 2 (—а COS <jl)q£ —G)q sin COgi) J (37)
X + C00
6*
84
г л. з. Методы анализа систем
a 2<x(o0
— sin2a,,Z — —z--------3 + sin con7 cos a>nt - ,L
<°0 0 a2 + ш2 0 0
[2acofl cos co0i + (a,2 — и2
a2 + co2
(38)
При t — 0 би = 022 — 012 = 0. При t 4/a экспоненциальные
члены в формулах (36), (37) , (38) близки к нулю.
§ 3.3. Метод уравнений моментов
Сущность метода уравнений моментов заключается в
составлении дифференциальных уравнений относительно
моментов выходных переменных по известным диффе-
ренциальным уравнениям динамической системы. Дан-
ный метод позволяет производить вероятностный анализ
линейных нестационарных систем.
Пусть линейная динамическая система описывается
векторным дифференциальным уравнением
Y = AY + BX(t), У (0) = Уо, (1)
где А, В — матрицы коэффициентов, в общем случае
зависящие от времени. Применяя операцию математиче-
ского ожидания к обеим частям уравнения, получаем
уравнение относительно математического ожидания вы-
ходного вектора
ту = Ату + Втх (7), ту (0) = тй, (2)
где — математическое ожидание входного сигна-
ла, тй — математическое ожидание вектора начальных
условий.
Вычитая из уравнения (1) уравнение (2), получаем
соотношение для центрированных векторов
У° = ЛУ° у ВХй (7), У0 (0) = У». (3)
Составим уравнение для матрицы корреляционных мо-
ментов выходного сигнала. Для этого умножим уравне-
ние (3) справа на транспонированный вектор У0'. В ре-
§ 3.3. МЕТОД УРАВНЕНИЙ МОМЕНТОВ
85
зультате получаем
уоуо' = Л¥°уо' + ВХ°уо'. (4)
Далее, запишем уравнение (3) для транспонированных
векторов
Y°' = Y°'A' + Х0'В'. (5)
Умножим это уравнение слева на вектор У0. В резуль-
тате получаем
yoyo' = y°Y°'A' + Y°X°'B'. (6)
Складывая левые и правые части уравнений (4) и (6)
и учитывая, что в левой части полученной суммы обра-
зуется производная от произведения векторов У0 У0’,,;
запишем
А уоуо' = ЛУ°УО' + Y°Y°'A' 4- BX°Y°' + Y°X°'B'. (7)
Применим к обеим частям уравнения оператор ма-
тематического ожидания. Вводя обозначение корреляци-
онной матрицы
0 = М [У°У0'] , (8)
запишем уравнение
0 = до QA' + ВМ [Х°У0'] 4- М [У°У°'] В'. (9)
Вычислим математические ожидания в правой части
данного уравнения для случая, когда входной вектор яв-
ляется белым шумом с матрицей корреляционных функ-
ций:
Kx(t, t') = T6(t- f).,. (10)
где Г — матрица интенсивностей. Используя соотноше-
ние (3.2.1), заменим в выражении математического ожи-
дания выходной вектор через входной:
М[У°Х°'] = М [ G (t, т) В (т) Х° (т) (£) йт =
_о
г 1
= jG(i,T)B(T)r6(f-t)cZT=G(f, f)B(f)T = -|-В(/)Г.
о
(И)
86
ГЛ. 3, МЕТОДЫ АНАЛИЗА СИСТЕМ
Аналогично
t
М X°(t) X0!(t)B'(t)G' (t,x)dx = -
о
- t
J Xй (t) А0' (т) B' (t) G! (t, t) dx
_o
= J Г8 (t - т) B' (t) G' (t, t) dx = ГВ' (t) G' (t,t) =
о
(12)
В формулах (11), (12) учтено, что при одинаковых зна-
чениях аргументов матрица весовых функций системы
есть единичная матрица с коэффициентом 1/2, появля-
ющимся вследствие того, что функция в точке разрыва
первого рода равна полусумме значений:
G(t,f) = ~~I. (13)
Учитывая формулы (11), (12), запишем окончатель-
ное выражение для уравнения относительно матрицы
корреляционных моментов. Одновременно запишем на-
чальные условия для этого уравнения, которые получены
умножением вектора начальных условий справа на тран-
спонированный вектор и осреднением:
0 = AQ + 04' + ВТВ', 0(0) =0О. (14)
В скалярной форме это уравнение имеет вид
— S [®iAj + ®ikajkl + 2л yklfiitfiih- (15)
fc=l k,h=l
Матрица 0 симметрична: 0 =. 0', поэтому общее число
скалярных уравнений равно п(п-}-1)/2, где п — поря-
док исходной системы дифференциальных уравнений си-
стемы.
В установившемся режиме необходимо в уравнениях
(2), (14) положить равными нулю производные момен-
тов ту = 0,0 = 0. В результате получаем алгебраиче-
ские уравнения для математического ожидания и корре-
§ 3.3. МЕТОД УРАВНЕНИЙ МОМЕНТОВ
87
ляционной матрицы вектора переменных
Ату + Втх = 0, Ав + вА' + ВГВ' = 0. (16)
Уравнение для корреляционной матрицы (14) полу-
чено для случая, когда входной сигнал является белым
шумом. Если входной сигнал является стационарной
случайной функцией с дробно-рациональной спектраль-
ной плотностью, то, как известно, всегда его можно
представить как результат прохождения белого шума
через некоторую систему, называемую формирующим
фильтром [90].'Формирующий фильтр может быть опи-
сан дифференциальным уравнением. Рассматривая урав-
нение исходной динамической системы совместно с урав-
нением формирующего фильтра как описание общей
системы, мы приходим к разобранному выше случаю,
когда на входе имеется белый шум. Учитывая, что по-
лучаемые экспериментально спектральные плотности
сигналов в большинстве встречающихся случаев могут
быть аппроксимированы дробно-рациональными спект-
ральными плотностями, можно сделать вывод, что огра-
ничение, свойственное методу уравнений моментов, не
является слишком сильным.
Пример 1. Динамическая система описывается уравнением пер-
вого порядка
TY+Y = X(t), (17)
где входной сигнал является суммой полезного сигнала S(t) =
— а + bt и помехи 7V(t)
X(t) +N(t). (18)
Полезный сигнал содержит известные параметры а, Ь, а помеха
A7(t) является нормально распределенным белым шумом с ну-
левым математическим ожиданием и интенсивностью Г. Началь-
ное значение переменной Y является случайной величиной с ма-
тематическим ожиданием т0 и дисперсией Do. Требуемым выход-
ным сигналом является полезный сигнал Ут = 5,(4). Определим
второй начальный момент ошибки.
В соответствии с уравнением (2) математическое ожидание
выходного сигнала определяется следующим уравнением:
Тту + ту = S(t), ту(0) = т0. (19)
Решая это уравнение, получаем
—У { ——\
(20)
88
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
В установившемся режиме имеем
my(t) = а + b(t — Т). (21)
Центрируя уравнение (17), получаем уравнение
Гуо +уо = 7V(i). (22)
Используя общее уравнение для корреляционных моментов (14),
для данного примера имеем следующее уравйение для дисперсии
выходного сигнала:
2 Г
0 = —у0 + у3, 0(0) = Do. (23)
Интегрируя это уравнение, получаем дисперсию выходного сиг-
нала
Г
e(t) = _Doe Т+2т- (24)
Математическое ожидание ошибки при »г^т = а + Ы равно
пгЕ (4) = (ш() — а + ЪТ) е т — ЪТ. (25)
В данном случае дисперсия требуемого сигнала и взаимный
корреляционный момент выходного и требуемого выходного сиг-
налов равны нулю. Поэтому дисперсия ошибки равна дисперсии
выходного сигнала DE = 0(1).
Второй начальный момент ошибки равен
_2t
а,Е = Ъ2Т2 + (inQ — а + ЪТ)2е т —
Г
— 2ЪТ (т0 — а + ЪТ) е Т ,Г DQe т + gy.
В установившемся режиме средний квадрат ошибки постоянен
и равен
аЕ = № + Г/2Т. (26)
Пример 2. Динамическая система описывается уравнением
У + 2|сооУ + wgy = X (4). (27)
Приведем это уравнение к системе двух уравнений. Введем обо-
значения У] = У, У а = У. Тогда из (27) получаем
У1 = У2,
\ , (28)
у^-г^Уг-й^ + х^).
Пусть заданы случайные начальные условия У10> Уго с ма-
тематическими ожиданиями mio, гцо и дисперсиями Й1о, Р?а.
§ 3.3. МЕТОД УРАВНЕНИЙ МОМЕНТОВ
89
Входной сигнал X(t) имеет постоянное математическое ожидание
тх и корреляционную функцию кх (т) — Гб (т).
В соответствии с уравнением (2) имеем для данного приме-
ра следующие уравнения для математических ожиданий коорди-
наты и ее производной:
т2 = — 2g«Qm2 — 4- тх, т2 (0) = «?20.
Для составления уравнений относительно корреляционных мо-
ментов вычислим коэффициенты, составляющие матрицу А. Для
второго порядка уравнение (1) имеет вид
У1 — ацУ1 + «12У2 + + 612X2, Yi (0) = Рю,
(30)
У2 — «21У 1 + «2214 ~Ь 621X1 622X2, Уг(0) = У20.
Сравнивая коэффициенты при переменных в системах уравне-
ний (28) и (30), получаем значения параметров аи = 6ц =
— 612 = 621 = 0, Я12 = &22 = 1, «21— — а2а= ~‘ ИсПОЛЬЗуЯ
эти коффициенты, запишем уравнения для корреляционных мо-
ментов:
6ц = 2012, 0ц(О) = ^о>
®12 = ^22 “о®!! 2^юо012' Ojh (0) = 0, (31)
022 = 2 йц012 — 4gwo022 + Г, 022 (0) = D20.
Решая эту систему уравнений последовательно относительно
0ц, 012, 622, получаем уравнения
'ёи + OgcOoOjj + 4ш2 (1 + 2g2) 0И + 8gco20H = 2Г,
012 + 6g®0e’12 + 4ш2 (1 + 2g2) 012 + 8g^012 = 0, (32)
'022 + 6gco0022 + 4®2 (1 + 2g2) 022 + 8gco^022 = 2ю^Г.
Решение этих уравнений при g < 1 имеет колебательно-затуха-
ющий характер. При увеличении времени корреляционные момен-
ты стремятся к установившимся значениям
0ц (°°) = r/4gct>3, 012(оо) = О, о22 (оо) = r/4gco0. (33)
Равенство нулю взаимного корреляционного момента • 0i2 после
окончания переходного процесса означает, что координата и ее
производная колебательного звена в установившемся режиме не-
коррелированы между собой. При g = 0 решение имеет неустой-
чиво-колебательный характер.
90
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
§ 3.4. Метод частотных характеристик
Данный метод применяется для анализа линейных
стационарных систем в установившемся режиме. Под
установившимся режимом понимается такое движение
системы, при котором влияние начальных условий явля-
ется пренебрежимо малым. Моменты выходных перемен-
ных линейной стационарной системы в установившемся
режиме могут быть определены с помощью весовых
функций. Однако значительно проще это можно сделать,
применяя частотные характеристики.
Вычислим математическое ожидание вектора выход-
ных переменных линейной системы для установившего-
ся режима. Общая формула определения математическо-
го ожидания с использованием матрицы весовых функ-
ций (3.2.2)
mv (t) = J G (£, т) тх (т) dx (1)
io
может быть упрощена, если учесть свойства стационар-
ности G (£,т) = W (t — т) и установившегося режима
/о== —
t
mv (0 = J IP (I ~ г) тх (г) (2)
-00
Сделаем замену переменных t — т =. £, соответственно
изменятся пределы: при x=.t Ё, = 0, а при -п—.—<х>
gi= oo. В результате получаем
= (3)
о
Разложим вектор математического ожидания входно-
го сигнала в ряд Тейлора с центром в точке t:
т=0
Подставляя в формулу (3), получаем
= (5)
т=0
§ 3.4. МЕТОД ЧАСТОТНЫХ ХАРАКТЕРИСТИК
91
где Мг — матрица моментов весовой функции, равная
= (6)
о
Матрица моментов весовой функции может быть
представлена через матрицу передаточных функций.
Учитывая, что передаточная функция есть преобразова-
ние Лапласа весовой функции
Ф(р) = (7)
6
дифференцированием по р и приравниванием р =. О не-
трудно убедиться, что r-й момент матрицы весовой функ-
ции равен
Мг = (- 1ДФ«(0). (8)
Действительно,
Мо = Ф(О) =
° со (9)
<1= —Ф'(0) = JwWdg,
о
Таким образом, математическое ожидание выходного
сигнала линейной системы в установившемся режиме
равно
°° 4
ф(г)(°)^)^- <10>
г=0
Проводя аналогичные выкладки для математическо-
го ожидания требуемого выходного сигнала, получаем
т=0
где Ф(^ (0) — r-я производная требуемой матрицы пере-
даточных функций при нулевом значении аргумента,
(0 —г-я производная математического ожидания
полезного сигнала.
Подставляя математические ожидания выходных сиг-
налов реальной и идеальной „систем в формулу (3.1.Q,
92
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
получаем
тЕ &=24 [ф(г) (°) - ф(? (°) m(S W] • <12)
Г=0
В частном случае, когда математическое ожидание по-
мехи равно нулю и входной сигнал представляет собой
аддитивную комбинацию полезного сигнала и помехи,
имеем (£) = т<£ (£) . Поэтому формулу (12) мож-
но записать в следующем виде:
оо
(13)
?’=1
где матрица Сг, равная
[ф(^ (°) — (°)] , (14)
называется матрицей коэффициентов ошибок.
Формула ('13) представляет математическое ожида-
ние ошибки в виде разложения по производным матема-
тического ожидания полезного сигнала. Обычно доста-
точно ограничиться в сумме формулы (13) тремя члена-
ми. В соответствии с физическим смыслом первых трех
членов математического ожидания ошибки коэффициен-
ты ошибок имеют специальные названия. Матрицу
Со = Ф (0) — Фт (0) называют матрицей коэффициентов
статических ошибок или матрицей коэффициентов оши-
бок по положению. Матрицу Сх = Ф'(0) — Ф'т(0) на-
зывают матрицей коэффициентов ошибок по скорости.
Матрицу С2 = 0,5[Ф" (0) — Ф" (0)] называют матрицей
коэффициентов ошибок по ускорению.
Свойства динамических систем по отношению к
ошибкам по положению, скорости, ускорению и высшим
составляющим характеризуются введением понятия аста-
тизма. Стационарная система называется астатической
1-го порядка, если ошибка по положению равна нулю,
а по скорости ошибки не равны нулю. Астатизм 1-го по-
рядка достигается следующим условием: Со = 0, Сх^=0.
Стационарная система называется астатической 2-го по-
рядка, если ошибки по скорости и по положению равны
нулю, а ошибки по ускорению не равны нулю. Астатизм
2-го порядка имеет место при условии Сй—~ С^О^С^^О.
§ 3.4. МЕТОД ЧАСТОТНЫХ ХАРАКТЕРИСТИК 93
В общем случае система называется астатиче-
ской l-го порядка, если включительно до (Z— 1)-го по-
рядка ошибки равны нулю, а ошибки l-то порядка не
равны нулю. Это достигается при условии Ст = 0 (г =
= 0,1,
Получим формулы для вычисления дисперсии векто-
ра выходных переменных стационарной динамической
системы в установившемся режиме. Вектор входного
сигнала считается стационарной случайной функцией
времени.
Для любой векторной стационарной случайной функ-
ции времени справедливо спектральное представление
[89]
Х°(£) = J е{“гУ(ю)с/ю, (15)
—оо
где V (а)— векторный случайный спектр, который яв-
ляется белым шумом по отношению к частоте со. Для
спектра, в силу свойства белого шума, имеет место со-
отношение
М [У (со)' V* (о/)] = 8Х (со) б (со - со'), (16)
где звездочка у второго сомножителя означает, комплекс-
но сопряженный и транспонированный вектор, 8Х (со) —
матрица спектральной плотности центрированного век-
тора X°(t), б(’) —6-функция.
Вектор выходного сигнала произвольной линейной
системы определяется выражением
оо
У0 (Z) = s£tX° (t) = [ ^е*“4У((0)с?(0. (17)
— оо
По определению матрицы частотной характеристики
(1.6.18) имеем
= Ф (ico) eitoi. (18)
Поэтому
Y° G) = j* ® (Zco)eim< У (®) (19)
—-со
Матрица корреляционных моментов вектора по опре-
делению равна математическому ожиданию произведе-
94
ГЛ. 3, МЕТОДЫ АНАЛИЗА СИСТЕМ
ния комплексно сопряженных центрированных векто-
ров. Составляя выражение для этой матрицы по отно-
шению к выходному сигналу и учитывая спектральное
представление (17), получаем
0 = J [ Ф (tco)M [V (со) V* (со')]Ф* (^®л) ei(co—“,)fcZco da'.
-—00 —оо
(20)
Используя свойство случайного спектра (16) и приме-
няя правило интегрирования б-функции (приложение 1),
из (20) получаем
0= J Ф(гю)х9х(ю)Ф*(г<в)й(0. (21)
оо
Диагональные члены матрицы корреляционных момен-
тов являются дисперсиями компонент выходного вектор-
ного сигнала
=. 0н. (22)
Если динамическая система представляет собой безы-
нерционный усилитель с единичным коэффициентом
усиления, то Ф (ice) = I, где I — единичная матрица.
В этом случае матрица спектральной плотности выход-
ного сигнала равна матрице спектральной плотности
входного сигнала Sx (со) = Sv (со). Поэтому из формулы
(21) получаем соотношение
0= j Sy(a)da. (23)
—— ОО
Сравнивая это выражение с формулой (21), получа-
ем следующую связь между матрицами спектральных
плотностей входного и выходного векторного сигналов:
8у (со) = Ф (йо) 8Х (со) Ф* (ico). (24)
Для одномерных систем формулы (21), (24) прини-
мают вид
Dv = J 5ж(со)|Ф(ш) |Чсо, (25)
—оо
^(®) = |Ф(ш,)|25я((0). (26)
Квадрат модуля частотной характеристики определен в
соответствии с. равенством. |Ф.£йо).| 2 ~Ф£йв) Ф*£1со).
§ 3.4. МЕТОД ЧАСТОТНЫХ ХАРАКТЕРИСТИК
95
Вычисление интегралов (21), (25,) сводится к преоб-
разованию подынтегрального выражения к определенной
форме и использованию формул интегралов, приведен-
ных в приложении 4. В примере, приведенном в конце
параграфа, показывается применение этих формул.
Если входной сигнал одномерной системы представ-
ляет собой белый шум, то спектральная плотность вход-
ного сигнала постоянна: Sx(a) =.So, и интеграл (25)
принимает вид
Dv == б’оДсОдф, (2/)
где величина ДсоЭф называется эффективной полосой про-
пускания системы и равна !
-Дсоафф = j |Ф(г®)|Ш. (28)
Эффективная полоса пропускания может быть опре-
делена экспериментально. Для ее вычисления необходи-
мо снять амплитудно-частотную характеристику динами-
ческой системы, построить график квадрата амплитудно-
частотной характеристики и определить площадь под
этим графиком. В соответствии с формулой (28) это и
будет эффективная полоса пропускания.
Если входной сигнал одномерной системы не являет-
ся белым шумом, то дисперсия выходного сигнала вы-
числяется путем определения площади под графиком
произведения функций S (со,) А2 (со), где Л(со) —
;= | Ф (гео) | — амплитудно-частотная характеристика си-
стемы.
Пример 1. Динамическая система описывается уравнением
7'У + У = kX(t), (29)
где Т — H/ki, k = Н. Входной сигнал X(t) есть сумма полезного
сигнала S(t) = mx(t) = а + bt + ct2 и помехи 2V(£):
X{t) =a + bt+ ct2 + N(t). (30)
Помеха имеет нулевое математическое ожидание и спектральную
плотность вида
О,д
SN (со) = -т . (31)
л (а2 <о2)
Требуемым выходным сигналом является производная полезного
сигнала, умноженная на масштабный множитель к : УТ = Л5.
96
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
Для вычисления математического ожидания ошибки рассмат-
риваемой одномерной стационарной системы в установившемся
режиме воспользуемся формулами (13), (14). Вычисляя производ-
ные полезного сигнала, имеем
ms — а -|- bt -I- cl2', m's = Ъ + 2ct, m's — 2с, т'Е = 0. (32)
Имея в виду, что
Ф,-(Р) = *А (33)
1 v J-Р
вычислим коэффициенты ошибок. Производные передаточных
функций равны
Ф(0)=0, Ф(1) (0) :-= к, Ф(2) (0) = — 2W,
Фт(0)--=0, Ф)/’ (0) - к, Ф<,2>(0)==0. ( 4)
Коэффициенты ошибок по формуле (14) равны
= 0, С2 = 0, С3 = — кТ. (35)
Остальные коэффициенты нет смысла вычислять, поскольку — 0
при г 5г 3. Подставляя значения (32), (35) в формулу (13)» на-
ходим математическое ожидание ошибки
тЕ = —2ксТ, (36)
что, естественно, совпадает с формулой (3.2.16) при значении
i = оо, характеризующем установившийся режим.
Дисперсия ошибки в силу неустойчивости полезного сигнала
равна дисперсии выходного сигнала. Применяя формулу (25), по-
лучаем для данного примера
D
DE = DtJ=-
— 00
В приложении 4 даны значения интегралов вида
f ____________М________________<йо. (37)
л J I 1 Т (ico)|2(a2 + со2)
" 2л J hn (ico) hn (—йо)
где
gn (М = ьо (М2”~2 + (И2"-'1 -I-- • -+А-1, {39)
hn (ico) Яо (йо)п -|- (йо)""-1 ап.
Представим подынтегральное выражение (37) в форме (38), имея
в виду, что, в соответствии со значением знаменателя в (37),
п = 2,
|iC0|2 = Ю2 = -(ЙО)2, (40)
§ 3.4. МЕТОД ЧАСТОТНЫХ ХАРАКТЕРИСТИК
97
11 + г<в?’|2(а2 + со2) = [(1 + гсоУ) (а + гы)] [(1 — гео?) (а — гео)] =
= [а + гео (1 + аГ) + (гео)2Г] [а — гев(1 + аТ) + (—ia)2T]. (41)
Сравнивая выражения (41), (40) с общими выражениями (39),
получаем значения когффициентов полиномов при п — 2
&о = —1, 61 = 0, а0 = Т, й1 = 1 + аТ, as = а. (42)
По таблице интегралов приложения 4 находим
Подставляя значения коэффициентов и преобразовывая, получаем
, 1
(44)
2 ' 2Т (1 + аТ)'
Подставим это выражение в формулу дпсперсии (37). Учитывая,
что Рв = 2Р1у7с2/2а, получаем
л _ DNak2
Е 2’ (1 + аГ)’
Подставляя значения параметров к = /7, Т = Щк^ получаем
окончательно
(45)
(46)
(47)
Е ki + аН’
Средний квадрат ошибки системы равен
„ __ ЬсН'1 , DNak\H
Е к* kj + аН
Пример 2. Рассмотрим анализ динамической системы, струк-
турная схема которой изображена на рис. 3.4.1. Входные сигна-
лы jVi(J), 7V2(7) являются гауссовскими случайными функциями с
Рис. 3.4.1.
пулевыми математическими ожиданиями и корреляционными
функциями соответственно
(т) = Р1е~а|т|, к2 (т) = Гб (т). (48)
Определим дисперсии выходного сигнала У и его производном
в установившемся режиме.
' Л. Г. Евланов
98
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
Матрица частотных характеристик системы имеет вид
Ф(г«)®;:£j||> (49)
где
Фо (i o') =----------------, (50)
°' Г (io)2+ (14- kk^J to+ кк± ' 7
®11(ico) = fcfc1(l + i(oT1), Ф12(1О) = 7«, ,51)
Ф21 (го) = ккг (1 + ioTj) го, Ф22 (го) = /его.
Матрица сопряженной частотной характеристики имеет вид
Фл (го) = Фд (го)
Фи
Ф'12
_ *
Ф21
Ф22
(52)
Матрица спектральных плотностей входного вектора сигналов
имеет вид
5(о) =
5ц (со)
0 II
5з2 (со) |г
(53)
где спектральные плотности 5ц(о), +’(о) есть преобразование
Фурье корреляционных функций (48)
D,a 1
5ц (о) = а2 522(о)=5о« (54)
Для вычисления матрицы корреляционных моментов рассмат-
риваемой системы воспользуемся общей формулой (21). Перемно-
жая матрицу спектральной плотности и матрицу сопряженной
частотной характеристики и далее умножая матрицу частотной
характеристики на полученное произведение, получаем следую-
щую матрицу подынтегрального выражения в формуле (21):
Я=|Ф0(га>)|2
I Ф11 + | Ф12 (2^22
Ф21Ф11^11 Ф22Ф1-2^22
Ф11Ф2 11 "Г ®12®22^22
|Ф21|25П+]Ф22|2522 ‘
(55)
Подставляя значения частотных характеристик и спектраль-
ных плотностей и осуществляя интегрирование диагональных
элементов матрицы (55) по частоте, получаем следующие значе-
ния дисперсий координаты и скорости:
kk^Dx [1 + аТ + ккгТ (1 +
011 = к2к2Т1 (1 -I- czTj) + а (1 + аТ) + kkt [1 + аТ1 (2 + аГ)] +
ztSnk2
+________2______, (56)
кк^ + кк.^
§ 3.5. МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
99
k2k2iaDi [1 4- аТ + ккр (1 + aTj)]
'22 = k2k\Tv (1 + aTj) + a (1 + «?) + к\ [1 + аТ\ (2 + аГ)]
nSnk2
------9------(57)
Т (1 + к1ЧТг)
Дисперсии координаты 0 ц и ее производной 022 имеют минимум
по коэффициенту к\.
§ 3.5, Метод статистической линеаризации
Данный метод применяется для анализа нелинейных
систем, содержащих существенные нелинейности. Суть
метода заключается в статистической линеаризации су-
щественных нелинейностей и применении методов ана-
лиза линейных систем [60].
Пусть динамическая система представлена в виде со-
вокупности линейных инерционных звеньев и нелиней-
ных безынерционных элементов. Свойства системы опи-
шем дифференциальным уравнением
Y = Ф (У, t) + В (£) X (0, Y (0) = Уо, (1)
где У — вектор выходных переменных, Уо — вектор слу-
чайных начальных условий, ф (У, £) — вектор существен-
но нелинейных функций, X (t) — вектор входных пере-
менных. Будем считать входной вектор гауссовским бе-
лым шумом с математическим ожиданием mx{t) и мат-
рицей интенсивности Г.
Выполняя статистическую линеаризацию нелинейной
вектор-функции, получаем
Ф (У, t) = фо (in, 0, t) + К (in, 0, t)Y°, (2)
где фо (т, 0, £) — вектор, К (т, 0, t) — матрица парамет-
ров статистической линеаризации, зависящая от векто-
ра математического ожидания т и матрицы корреляци-
онных моментов 0 входных сигналов в нелинейные эле-
менты.
Подставляя выражение (2) в уравнение (1), получа-
ем дифференциальное уравнение, линейное относительно
центрированного вектора переменных
У = фо (т, Q,t) + K (т, 0, £) У» + В (i) У0 (i),
У(О) = Уо. (3)
7*
100
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
Применим к уравнению (3) и начальным условиям опе-
рацию математического ожидания. В результате полу-
чаем
т = <ро (»В 0» t) + В (t) тх (4), от(О)==ото, (4)
где т0 — математическое ожидание вектора случайных
начальных условий.
Уравнение относительно математического ожидания
вектора переменных нельзя проинтегрировать, поскольку
неизвестна матрица корреляционных моментов 0. Для
получения уравнения относительно этой матрицы приме-
ним метод уравнений моментов, изложенный в § 3.3.
Выполняя центрирование уравнения (3), получаем
Y° = K(m,8, t)Y°-Y В (t) Х° (t), уо(О) = Го°- (5)
Сравнивая это уравнение с уравнением (3.3.3), замеча-
ем, что они отличаются только матрицей коэффициен-
тов: вместо матрицы А в данном уравнении стоит мат-
рица параметров статистической линеаризации К (т, 0,4).
Поэтому, не повторяя всех выкладок, выполненных в
§ 3.3, запишем уравнение (3.3.14) относительно матри-
цы корреляционных моментов, заменив в ней матрицу
коэффициентов А па матрицу К(т, 0, 4),
0 = К(от,0, 4)0-|-0Х/(от,0, 4) + ВГВ', 0(0) =0О. (6)
Решая совместно нелинейные дифференциальные
уравнения (4) и (6), получаем вектор т и матрицу 0.
Для установившегося режима стационарной нелиней-
ной системы определение вектора математического ожи-
дания и матрицы корреляционных моментов можно уп-
ростить, полагая в (4) т — 0, а в (6) 0 = 0. В резуль-
тате получаем систему нелинейных алгебраических урав-
нений относительно первых двух моментов выходных
переменных системы
ф0 (от, 0) 4- Втх = 0, (7)
К (т, 0) 0 + 0К' (т, 0) + ВГВ' = 0. (8)
Совместное применение статистической линеаризации
и метода интегрирования уравнений моментов, впервые
опубликованное в [2], весьма удобно с практической точ-
§ 3.5. МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
101
ки зрения, поскольку позволяет рационально использо-
вать вычислительную технику.
Для анализа точности стационарных нелинейных си-
стем в установившемся режиме можно воспользоваться
также совместным применением статистической линеа-
ризации и частотных характеристик системы. После про-
ведения статистической линеаризации нелинейных эле-
ментов матрица частотных характеристик многомерной
системы будет зависеть от параметров статистической
линеаризации, которые в свою очередь являются функ-
циями математических ожиданий и корреляционных мо-
ментов входных переменных нелинейных элементов. По-
этому расчетные формулы вычисления вектора матема-
тического ожидания ошибки (3.4.13), (3.4.14) и матри-
цы корреляционных моментов (3.4.21) следует скоррек-
тировать, показав явную зависимость матрицы коэффи-
циентов ошибок и матрицы частотных характеристик от
вектора математического ожидания и матрицы корреля-
ционных моментов переменных системы:
ОО
тЕ (£) = 5 Cr (т, 0) (£), (9)
Z=1
Сг(т, 0) = —[Ф^) (иг, 0, 0) - Ф(тг) (иг, 0, 0)], (10)
0= j ф (т, 0, [а) Sx (®) Ф* (т, 0, гю) da. (11)
—оо
Из данных формул следует, что вектор математиче-
ского ожидания и матрицу корреляционных моментов
можно вычислить только путем совместного решения по-
лучаемых нелинейных алгебраических уравнений. Обыч-
но это выполняется методом последовательных прибли-
жений.
Пример 1. Динамическая система описывается уравнением
TY+Y = k(X—U), (12)
'—I при Y < — d,
U = 0 при | Y | < d, (13)
I при Y > d,
где d — ширина зоны нечувствительности реле. Входной сигнал
X(t-) является гауссовским белым шумом с нулевым математиче-
ским ожиданием и интенсивностью Г.
102
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
Определим среднее квадратическое отклонение переменной Y.
Проведем статистическую линеаризацию характеристики реле.
В соответствии с нелинейностью 5 (приложение 3) находим
I 1/2 2а2
u=^vV JY-
Исключая из (12), (14) переменную U, получаем одно уравениие
/ _ _£\
• I I 1 Г 2 2а2 J
TY +^1 +-у-е *Jy = X(t). (15)
В данном случае нелинейность симметричная, поэтому математи-
ческое ожидание выходной переменной равно нулю. Таким обра-
зом, уравнение .(15) следует рассматривать как центрированное
уравнение. Делением на Т приведем уравнение (15) к виду (5),
причем матрица К(пг, 0) в этом случае содержит только один эле-
мент, равный
/ _
1 I I 1 Г 2 2а2 I
fc11(o, 0) = -F^1 + —-е v), (16)
где 0 = 0*.
Для установившегося режима дисперсия выходной перемен-
ной определяется уравнением (8), которое для данного примера
принимает вид
2^М°’ сту) = Г/Г2- (17)
Подставляя значение величины Ап из (16) и преобразовывая,
получаем трансцендентное уравнение относительно оу:
d2
9 , ,, /~~2 2<т2 Г
+ ле У = 2Т- <18)
Если зона нечувствительности равна бесконечности ($=оо),
что соответствует размыканию обратной связи, то получаем
из (18)
оУоо = 1/г72Т. (19)
Если зона нечувствительности равна нулю (J = 0), то получаем
квадратное уравнение относительно величины оУ} решая которое,
имеем
^, = -^(-1+1/1+^!-'). (20)
v° 1/2л:\ ' Ат)
Очевидно, что в промежуточных случаях, когда 0 < d < оо, зна-
чения среднего квадратического отклонения лежат в интервале
§ 3.5. МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
103
ст,, < о„ < <т„ . При очень большой интенсивности помехи п
vo у Voo 1 иУо
« Т/Г/2Г.
Пример 2. Рассмотрим стационарную нелинейную систему,
структурная схема которой изображена на рис. 3.5.1. Определим
для установившегося режима спект-
ральную плотность и дисперсию вы-
ходной переменной. На входе си-
стемы имеется случайный сигнал
X(t), представляющий собой белый
шум с нулевым математическим
ожиданием и интенсивностью Г [54].
Поскольку в данном примере
математическое ожидание входного
сигнала равно нулю и нелиней-
ность — идеальное реле — симмёт-
Рис. 3.5.1.
рична, то математическое ожидание
выходного сигнала также равно нулю. Заменим реле линейной
характеристикой. В соответствие с таблицей параметров стати-
стической линеаризации идеального реле имеем с учетом условия
ту = 0 (приложение 3)
Фо = О,
741=-JU,
/2л <зу
(21)
где I — величина полки реле, оу — среднее квадратическое откло-
нение выходного сигнала, являющегося одновременно входным
для нелинейного элемента.
После проведения линеаризации передаточная функция си-
стемы от входа X к выходу У имеет вид
Ф (р, с ) =----—-----------f—----------------. (22)
Т0Т2р3 + 2T0TPz + ТоР + fcfcj! (Oj/)
Передаточная функция зависит через коэффициент от средне-
го квадратического отклонения выходного сигнала, что и отраже-
но в написанной формуле введением аргумента av.
Вычислим дисперсию выходной переменной по формуле
(3.4.25). Подставляя в (3.4.25) частотную характеристику, получа-
емую из (22) заменой р = гео, и спектральную плотность Sx — Г/2л.
и выполняя интегрирование с применением формул приложе-
ния 4, получаем
7с2Г
" - - - - -
(23)
Решая уравнения (21), (23) совместно, определяем и коэффи-
циент к п,
kTl (1 + у)
. 2Т°
А11 ~ AT(l + v)’
(24)
104
ГЛ. 3, МЕТОДЫ АНАЛИЗА СИСТЕМ
где v — параметр, характеризующий интенсивность входного воз-
мущения и равный
Гл
2Tlz‘
(25)
Спектральная плотность выходного сигнала вычисляется по
формуле (3.4.26). Подставляя в частотную характеристику значе-
ние коэффициента Ац и вычисляя квадрат модуля, получаем
kzlzT3v
следующее выражение для спектральной плотности выходного
сигнала:
. . kzlzT3v (2б\
8у (“) =----;-----------------ТГТ?-----------4---1' (26'
л2Г^(юТ)6 + 2 (шГ)4 + (шГ)2+
График спектральной плотности б'-.Дм) при различных значениях
параметра V представлен на рис. 3.5.2. Спектральная плотность
имеет максимум на частоте
1
0, v>7.
(27)
§ 3.5. МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
105
Величина максимума спектральной плотности равна
с '=_____________274Ш______________
т> „ 9171 — v Z25 + V.3/2 54 Г
ZItJo[l + v + T-(1 + v)2]
(28)
При увеличении интенсивности помехи (v—>оо) максимум
спектральной плотности смещается в область более низких час-
тот, а величина максимума сначала уменьшается, а потом воз-
растает. При v > 7 максимум спектральной плотности соответ-
ствует нулевой частоте. При уменьшении интенсивности помехи
(v -> 0) максимум спектральной плотности смещается вправо.
При отсутствии возмущения (v = 0) спектральная плотность
превращается в 6-функцию в точке ш = i/T. В этом можно убе-
диться, вычисляя предел выражений (26), (27), (28) при v->0.
Вычисляя неопределенность, получаем
^2j2y2 г / jx / 1 \ 1
lim^Jco) = t) + S + I' (29)
Вырождение спектральной плотности в 6-функцию на частоте
(о = 1/71 означает, что в системе при отсутствии случайного воз-
мущения существуют автоколебания с этой частотой. Чтобы убе-
диться в этом, достаточно применить метод гармонической ли-
неаризации.
Выполняя гармоническую линеаризацию нелинейной характе-
ристики, запишем частотную характеристику системы в виде
к
ф (iсо) = ----5---5------------5------------- , (30)
Т0Т2 (ico)3 + 2TQ Т (ia>)2 + Taia + ккг
где кг — коэффициент гармонической линеаризации идеального
реле, равный
Ла
(31)
Здесь а — амплитуда сигнала. В соответствии с методом гармо-
нической линеаризации приравниваем нулю действительную и
мнимую части характеристического уравнения и получаем два
уравнения относительно частоты и амплитуды автоколебаний
— ТоТ2®3 + TQa> = 0, — гТо?®2 + к — = 0. (32)
Решая эти уравнения, получаем
1 2к1Т
Ы = Т' а = пТа '
(33)
Подставим значение амплитуды в коэффициент гармонической ли-
106
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
неаризацнп. В результате имеем
fer = -^- (34)
h-J.
Сравнивая это выражение с коэффициентом статистической лине-
аризации кц при v — 0 (24), убеждаемся, что они равны. Это
подтверждает высказанное ранее утверждение о том, что гармо-
ническая линеаризация есть частный слуха it статистической ли-
неаризации.
Приравняем коэффициенты статистической и гармонической
линеаризации в форме (21), (34), и определим пз полученного со-
отношения амплитуду автоколебаний через среднее квадратическое
отклонение. Это выражение
4<7y
а = ' , — (35)
Т/2л v
отличается от формулы а = y2ov, связывающей амплитуду со
средним квадратическим отклонением сигнала. Различие объяс-
няется погрешностью метода статистической линеаризации, обу-
словленной допущением о нормальности закона распределения
сигнала на входе в нелинейный элемент. В данном случае закон
распределения есть суперпозиция нормального и арксинусного за-
конов распределения. Ошибка в относительных единицах состав-
ляет 13%. Присутствие на входе случайного сигнала приводит
к размытию спектральной плотности выходного сигнала.
§ 3.6. Метод статистических испытаний
Рассмотренные в предыдущих параграфах методы
анализа динамических систем в ряде случаев не могут
быть использованы на практике. Причиной тому являет-
ся, во-первых, ограниченность методов и, во-вторых, боль-
шой объем вычислений. Так, например, изложенные ме-
тоды не позволяют определить закон распределения ве-
роятности переменных системы. При анализе некоторых
нелинейных систем метод статистической линеаризации
дает низкую точность, а при наличии большого количе-
ства нелинейностей резко возрастает объем расчетов.
В ряде случаев динамические системы могут быть пред-
ставлены в виде комплекса реальной аппаратуры, мате-
матическое описание которого в силу тех или иных при-
чин не осуществлено. В перечисленных случаях анализ
работы системы при случайных возмущениях не может
быть произведен изложенными выше методами. Наконец,
непосредственно применяя приближенные методы иссле-
дования, необходимо оценивать точность получаемых ре-
зультатов, т. е. степень приближения вычисленных ве-
§ 3.6. МЕТОД СТАТИСТИЧЕСКИХ ИСПЫТАНИЙ
107
роятиостных характеристик к истинным значениям этих
характеристик.
Ограниченность применения приближенных методов
исследования и необходимость проверки точности полу-
чаемых результатов заставляет изучать работу систем
непосредственно в условиях действия случайных воз-
мущений.
Метод исследования поведения систем в реальных ус-
ловиях или в лабораторных условиях, эквивалентных ре-
альным, или поведения моделей (математических или
физических) при многократных повторениях опытов на-
зывается методом статистических испытаний. Этот метод
называют также методом Монте-Карло. Многократно по-
вторяя опыты и наблюдая выходные переменные системы,
можно провести статистическую обработку наблюдаемых
данных и получить необходимые вероятностные харак-
теристики.
Типичным примером применения метода статистиче-
ских испытаний является испытание готовых образцов
систем. Однако этот способ определения вероятностных
характеристик систем, определяющих качество их рабо-
ты, невыгоден с экономической точки зрения и поэтому
применяется в ограниченном масштабе. В настоящее вре-
мя . широко применяется метод статистических испыта-
ний не для реальных систем, а для их динамических мо-
делей. Для этого необходимо описать работу системы
уравнениями и, используя вычислительные машины,
многократно повторять решение уравнений, имитируя
действие случайных возмущений путем подачи случай-
ных функций времени на входы системы уравнений.
Многократное интегрирование уравнений со случайными
входными функциями позволяет получить реализации
выходных случайных функций — переменных системы.
Статистическая обработка этих реализаций, которая мо-
жет быть выполнена также на вычислительных маши-
нах, позволяет получить любые вероятностные характе-
ристики выходных переменных.
Наряду с чисто математическим моделированием си-
стем применяется смешанное физическое и математиче-
ское моделирование. В этом случае работа систем ча-
стично описывается уравнениями, и частично использу-
ется реальная аппаратура. Как и при чисто математиче-
108
ГЛ. 3. МЕТОДЫ АНАЛИЗА СИСТЕМ
ском моделировании, многократно повторяя опыты и
производя статистическую обработку получаемых реали-
заций переменных, можно получить необходимые веро-
ятностные характеристики.
Определим формулы, по которым можно вычислить
математическое ожидание и дисперсию какой-либо вы-
ходной переменной и, кроме того, оценить точность и
надежность вычисления моментов в зависимости от чис-
ла проводимых испытаний (опытов).
Пусть на вход системы в каждом r-м испытании
(опыте) подается реализация xr(t) случайной функции
X(i). В результате испытания па выходе системы, опи-
сываемой некоторым оператором, наблюдается реализа-
ция z/r(i) случайной функции У (0- На основании п
испытаний можно получить оценки ту (t) и Dy (f) мате-
матического ожидания mv(f) и дисперсии Dv(t) соответ-
ственно. Оценки математического ожидания и дисперсии
выражаются известными формулами теории вероятно-
стей [23]:
. п
(1)
оо
DV (0 = [уг ® ~
Г=1
Оценки математического ожидания и дисперсии яв-
ляются случайными величинами. Точность приближения
оценок к истинным значениям можно оценить средними
квадратическими отклонениями. Из теории вероятностей
известны формулы [23]
D [ту (*)] = D \DV (i)] = -^1. (2)
Истинное значение дисперсии в этих формулах неиз-
вестно, поэтому для вычисления дисперсий оценок по
этим формулам заменяют дисперсию ее оценкой Dy.
Удобно рассматривать в качестве характеристик оценок
не абсолютные, а относительные средние квадратические
§ 3.6. МЕТОД СТАТИСТИЧЕСКИХ ИСПЫТАНИИ
109
отклонения, зависящие
только от числа испытаний:
X = 1_ °Dv - ]/ 2
Оу Уп’ Dy У II—i-
(3)
Более полной характеристикой точности оценок мо-
гут служить вероятности попаданий их значений в за-
данные интервалы (доверительные вероятности). При
большом числе испытаний обычно законы распределения
оценок близки к нормальному, поэтому доверительные
вероятности можно вычислить по формулам
a,i = P(\my(t) — my(i)| < ei) = 2Ф [-Y (4)
I umw /
\ У J
a2 = .P(|D;(i)-Z)y(i)|<e2)=20f-^-\ (5)
\ V J
1 Г ——
где Ф (ж) = — I е 2 di. Таблица этой функции дана
У2я J
о
в приложении 5. Величины 2ei, 2е2 являются доверитель-
ными интервалами, cci, сс2 — доверительными вероят-
ностями.
Заменяя в формулах (4), (5) средние квадратические
отклонения оценок значениями, полученными из (3),
и вводя относительные интервалы
61 8п
Vf = —, V2- = ——,
av (0 Dy (t)’
(6)
запишем формулы для доверительных вероятностей в
следующем виде:
И! = 2Ф (vi/й), а2 =2Ф^2 У(7)
Относительные доверительные интервалы 2-vi, 2т2 оп-
ределяют точность полученных оценок, а доверительные
вероятности а\, а2 — надежность оценок. В табл. 3.6.1
приведены значения числа испытаний п для получения
оценки математического ожидания в зависимости от до-
верительной вероятности и относительной точности vj.
110
ГЛ. 3. МЕТОДЫ АЦАЛИЗА СИСТЕМ
В табл. 3.6.2 приведены значения требуемого числа
испытаний п для получения оценки дисперсии в зависи-
мости от доверительной вероятности ссг и относительной
ТОЧНОСТИ V2-
По этим таблицам можно оценить необходимое чис-
ло испытаний для получения заданных относительных
Таблица 3.6.1
ОС 1 0,20 0,15 0,10 0,05 0,01
0,6 18 31 70 281 7 000
0,7 27 47 108 431 10 800
0,8 41 73 164 651 16 400
0,9 68 121 272 1090 27 200
доверительных интервалов и доверительных вероят-
ностей.
Как следует из таблиц, с увеличением потребной
точности и надежности получения оценок число испыта-
Таблица 3.6.2
\ V2 0,15 0,10 0,05 0,01
«2 0,20
0,6 37 63 141 563 14 000
0,7 55 95 217 863 21 600
0,8 83 147 239 1300 32 800
0,9 137 243 545 2180 54 400
ний растет очень быстро. Поэтому для получения доста-
точно точных и надежных результатов в методе стати-
стических испытаний необходимо производить большое
количество испытаний. Это является одним из недостат-
ков данного метода.
§ 3.6. МЕТОД СТАТИСТИЧЕСКИХ ИСПЫТАНИЙ
111
Другим недостатком метода статистических испыта-
ний является необходимость создания реализаций слу-
чайных функций с заданными вероятностными характе-
ристиками. Реализации случайной функции получают с
помощью генератора. Такой генератор может быть реа-
лизован в виде устройства, использующего определенный
физический процесс, или математический в виде ал-
горитма. С помощью алгоритма вырабатывается случай-
ная последовательность чисел, обладающая необходимы-
ми вероятными характеристиками. Из данной случайной
последовательности формируется случайный процесс. Ис-
пользование физического генератора случайных функций
характерно при анализе динамических систем на анало-
говых вычислительных машинах, а также при физиче-
ском моделировании реальной аппаратуры. Применение
алгоритмов для выработки реализаций случайных функ-
ций характерно при анализе динамических систем на
цифровых вычислительных машинах.
Из рассмотрения метода статистических испытаний
следует, что данный метод не имеет принципиальных ог-
раничений и применим для анализа любых линейных и
нелинейных стационарных и нестационарных, дискрет-
ных и непрерывных систем, заданных как уравнениями,
так и в виде реальной аппаратуры. Для применения ме-
тода статистических испытаний требуется только воз-
можность многократного повторения опытов при одина-
ковых условиях и наблюдаемость выходных переменных
системы. Особенностью метода статистических испыта-
ний является увеличение точности результатов анализа
с увеличением числа опытов. Это обстоятельство и дает
возможность использовать этот метод для оценки точно-
сти других приближенных методов анализа.
ГЛАВА 4
МЕТОДЫ СИНТЕЗА СИСТЕМ
§ 4.1. Постановка задачи синтеза
Общей моделью технических устройств нами приня-
та динамическая система. Процесс функционирования
технических устройств отображается в динамических си-
стемах как преобразование сигналов. В связи с этим за-
дача синтеза может быть сформулирована как построе-
ние оптимального в некотором смысле способа преобра-
зования (обработки) сигналов. Другими словами, задача
синтеза заключается в определении оператора системы,
обеспечивающего наилучшие значения показателя
качества.
Структура и параметры оптимального оператора за-
висят от принятого показателя оптимальности^ вероят-
ностных характеристик входных сигналов и времени на-
блюдения этих сигналов. Показатель оптимальности и
время наблюдения выбираются в процессе постановки
задачи синтеза и связаны с назначением и условиями
работы системы. Вероятностные характеристики входных
сигналов должны быть известны априори, до решения
задачи синтеза. Таким образом, оптимальный оператор
определяется, по существу, априорными сведениями о
назначении системы и характеристиках сигналов.
Решение задачи синтеза и определение оптимального
оператора позволяет вычислить показатель качества оп-
тимальной системы. Этот показатель характеризует по-
тенциальные (предельные) возможности обработки сиг-
налов в данных условиях. Вычисление потенциальных
оценок качества оптимальных систем является большим
достижением теории синтеза, позволяющим на первом
этапе проектирования определить практическую целесо-
образность реализации поставленной задачи. Если ока-
жется, например, что показатель качества оптимальной
системы не удовлетворяет предъявляемым требованиям,
то дальнейшие этапы создания устройства становятся
бессмысленными при данных условиях, и необходимо
§ 4.1. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА
113
искать новые физические принципы получения входных
сигналов, обладающих приемлемыми характеристиками.
Таким образом, еще на первом этапе проектирования
теория оптимальных систем позволяет правильно вы-
брать пути решения поставленной задачи.
Если показатель качества оптимальной системы удов-
летворяет предъявляемым требованиям, то начинается
второй этап проектирования, заключающийся в реализа-
ции оптимального оператора в виде вычислительной ма-
шины или в виде некоторого устройства (радиоэлектрон-
ного, электромеханического, акустического и т. п.). Рас-
смотрение возможности реализации полученного опти-
мального оператора в виде алгоритма вычисления на вы-
числительной машине или в виде некоторого устройства
требует учета дополнительных факторов, характеризую-
щих, например, потребное время вычисления, объем
«памяти» машины, наличие определенных элементов и
сложности их производства, квалификации людей, стои-
мости и т. п. Эти факторы отражаются путем введения
дополнительных показателей качества, учитывающих
экономические и технические возможности реализации
полученного оптимального оператора. Во многих случаях
оказывается, что оптимальный по основному показателю
качества оператор не удовлетворяет другим показателям.
Поэтому конструктору приходится корректировать ре-
зультаты синтеза, создавая систему, несколько отлича-
ющуюся от оптимальной по основному показателю. Ча-
сто эта коррекция заключается в изменении структуры
оптимального оператора. В связи с этим возникает зада-
ча оптимизации параметров в заданной структуре.
Оптимизация параметров в заданной структуре опе-
ратора представляет собой частный случай синтеза оп-
тимальных систем. Эта задача является характерной для
современного состояния инженерных расчетов при про-
ектировании технических устройств.
При обработке сигналов различают распознавание и
выделение сигналов. Выделение сигналов заключается в
определении формы или параметров полезного сигнала
или формировании некоторой функции от полезного сиг-
нала. Измерение параметров системы при контроле яв-
ляется характерным примером выделения сигналов. Рас-
познавание сигналов — это определение принадлежности
8 л. Г, Евланов
114
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
сигналов к некоторому классу. Частным случаем распоз-
навания является обнаружение сигналов, сущность кото-
рого составляет принятие решения о наличии или отсут-
ствии полезного сигнала в наблюдаемом сигнале. При-
менительно к системам контроля задача распознавания
встречается, например, при принятии решения о нахож-
дении измеряемого при контроле параметра в поле до-
пуска.
Наиболее полной моделью входных полезных сигна-
лов и помех в динамических системах является случай-
ная функция времени. Поэтому задача синтеза систем
должна формироваться как вероятностная. Исходной ин-
формацией, необходимой для решения задачи синтеза,
являются статистические характеристики входных полез-
ных сигналов и помех. Необходимая полнота этой ин-
формации (законы распределения, математические ожи-
дания, корреляционные функции, моменты высших по-
рядков) определяется выбираемым методом синтеза.
К исходной информации относится также время наблю-
дения входного сигнала. Это время, с одной стороны,
определяется качеством оптимальной системы, а с дру-
гой стороны, допустимым временем работы системы.
Общий метод вероятностного синтеза динамических
систем основан на теории статистических решений, раз-
работанной А. Вальдом [18]. В этой теории задача син-
теза рассматривается как опредеиеиие правила решения,
обеспечивающего экстремум показателя качества. Прави-
ло решения есть математическое описание работы опти-
мальной системы.
При решении задачи синтеза основной операцией
является вычисление апостериорной плотности вероят-
ности наблюдаемых данных. Существуют два подхода к
вычислению апостериорной плотности вероятности: ин-
тегральный и дифференциальный. В интегральном под-
ходе апостериорная плотность вероятности строится на
основе функционалов распределения вероятности наблю-
даемых сигналов. Фундаментальные результаты в этом
направлении получены в работах В. С. Пугачева [89],
Д. Миддлтона [81], А. А. Фельдбаума {'107].
Дифференциальный подход, развитый в работах
Р. Л. Стратоновича [104], основан на теории условных
марковских процессов. Апостериорная плотность вероят-
§ 4.1. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА
115
пости вычисляется в этом подходе путем решения сто-
хастического дифференциального уравнения в частных
производных.
В соответствии с принятым подходом в построении
апостериорной плотности вероятности оператор системы
выражается либо в интегральной форме, либо в форме
дифференциальных уравнений. Конечно, оба подхода при
одинаковых условиях дают эквивалентные операторы.
В данной книге принят интегральный способ построения
оптимального оператора.
Для синтеза оптимальной динамической системы ме-
тодами теории статистических решений необходимо:
— определить входной сигнал и условия его наблю-
дения;
— определить функциональное назначение оптималь-
ной системы;
— выбрать показатель качества системы;
— найти правило решения, которому должна следо-
вать система из условия экстремума выбранного показа-
теля качества;
— определить качество оптимальной 'системы.
Первые три пункта составляют содержание постанов-
ки задачи синтеза, а последние два пункта — непосред-
ственно саму процедуру и результаты синтеза. Рассмот-
рим подробнее постановку задачи синтеза.
Определить входной сигнал —• это значит описать его
структуру и вероятностные характеристики. В соответст-
вии с результатами § 1.3 наблюдаемый входной сигнал
X (Z) представляет собой некоторую комбинацию (смесь)
полезного сигнала S'(t) и помехи N (Z):
X(f)=q)(,S(O,^(i)).
Множество входных сигналов принадлежит пространству
входных сигналов: X (£) е V.
Полезный сигнал S (t) может быть детерминирован-
ным, структурно-детерминированным или случайным.
Структурно-детерминированный сигнал имеет известную
форму и зависит от вектора случайных параметров
U : S (U, t). Полное вероятностное описание структур-
но-детерминированного сигнала дается плотностью веро-
ятности вектора параметров h (и). Случайный полезный
сигнал полностью описывается функционалом распреде-
8*
116
ГЛ, 4, МЕТОДЫ СИНТЕЗА СИСТЕМ
лепил вероятности H{S (t)}. Во многих случаях полез-
ный случайный сигнал можно приближенно представить
конечномерным вектором случайных величин. Это мож-
но сделать двумя способами. В первом из них фиксиру-
ются значения аргумента ti, £2, • •tn, тогда совокупность
значений полезного сигнала в этих точках S(tn)
образует конечномерный вектор. Во втором способе по-
лезный сигнал представляется каноническим разложени-
ем, в результате чего случайная функция времени опи-
сывается конечным числом некоррелированных случайных
величин и известных функций времени [89]. Веро-
ятностное описание случайного полезного сигнала, пред-
ставляемого конечномерным вектором S, дается плот-
ностью вероятности fe(s).
Все множество сигналов S принадлежит пространст-
ву полезных сигналов Q: S е Q.
Вероятностное описание наблюдаемого сигнала X (I)
в случае представления полезного сигнала и помехи ко-
нечномерными векторами случайных величин удобно оп-
ределить плотностью вероятности полезного сигнала /г(в)
и условной плотностью вероятности наблюдаемого сиг-
нала при фиксированном значении полезного сигнала:
/ (ж | s)-
Определение условий наблюдения входного сигнала
включает решение вопросов о непрерывности или диск-
ретности наблюдения и его продолжительности. Если на-
блюдение непрерывно, то должно быть определено вре-
мя наблюдения Т. Если наблюдение дискретно, то необ-
ходимо определить число наблюдений п.
Определение функционального назначения синтези-
руемой системы с формальной точки зрения означает
введение требуемого выходного сигнала или требуемого
решения, Ут. Это решение является идеальным в том
смысле, что оно является безошибочным. Для систем
распознавания сигналов идеальное решение есть номер
истинного класса, к которому принадлежит входной сиг-
нал: Ут= I. Для систем выделения требуемое решение
есть результат требуемого преобразования полезного
сигнала: Ут = <5 (£), где — оператор требуемого
преобразования. Множество требуемых решений Ут при-
надлежит пространству требуемых решений Г т : Ут е
<= Гт.
§ 4.1. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА
117
Наличие помехи в наблюдаемом сигнале и конечность,
процесса наблюдения (время или число наблюдений)
приводят к тому, что фактическое решение Y (выходной
сигнал), системы отличается от требуемого решения. Для
систем распознавания сигналов фактическое решение
есть номер класса: Y,= /, который в общем случае мо-
жет не совпадать с истинным номером: Ут = г. Для си-
стем выделения сигналов фактическое решение есть
результат преобразования наблюдаемого сигнала некото-
рым оператором 6$, вообще говоря, отличающимся от
требуемого оператора ^т- Множество фактических реше-
ний Y принадлежит пространству решений Г: Y е Г.
Процесс принятия решений можно рассматривать
как преобразование точек пространства входного сигна-
ла в точки пространства решений. В общем случае это
преобразование является случайным, или, как говорят,
рандомизированным. Это означает, что система, прини-
мающая решение, представляет собой случайный меха-
низм, вырабатывающий для каждого фиксированного
входного сигнала различные решения с определенным
распределением вероятности. Подобного рода случайные
механизмы могут в ряде случаев в среднем работать
лучше, чем детерминированные механизмы. При детер-
минированном характере преобразования каждой точке
пространства входных сигналов ставится в однозначное
соответствие точка пространства решений.
Полной характеристикой преобразования точек про-
странства входных сигналов в точки пространства реше-
ний является правило решений. Правило решения явля-
ется математическим описанием системы принятия ре-
шений. В общем случае рандомизированного процесса
принятия решений правило решения может быть оха-
рактеризовано условным законом распределения вероят-
ности решения при фиксированном значении входного
сигнала. Если решение (выходной сигнал) можно пред-
ставить как конечномерный случайный вектор, то пра-
вило решения полностью характеризуется условной
плотностью вероятности решения при фиксированном
значении входного сигнала.
Идеальное (требуемое) рандомизированное правило
решения описывается условной плотностью вероятности
Чт(уА8)- Фактическое рандомизированное правило реше-
118
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
ния описывается условной плотностью вероятности
у(г/|ж). Если правило решения является нерандомизиро-
ванным, то условные плотности вероятности 'Yt(zZtIs),
у(д|ж) превращаются в 6-функции. Подробнее об этом
будет сказано далее при отдельном рассмотрении про-
цедур оптимизации систем распознавания и выделения
сигналов.
Процесс принятия решений представляет собой ста-
тистический вывод, основанный на наблюдаемых дан-
ных. Поэтому при принятии решений возможны ошибки.
Наличие ошибок приводит к определенным потерям.
Кроме того, процесс наблюдения требует затрат ресур-
сов и, следовательно, связан с потерями. Для формаль-
ной оценки потерь в процессе принятия решений вво-
дится функция потерь Z(K, Ут). Учет потерь, связанных
с ошибками и с расходованием ресурсов на наблюдение,
возможен путем выделения двух составляющих функций
потерь
l(Y, Ут) =?1(У, Ут) -Ьг2(У, Ут).
Функция Zi(y, Ут) учитывает потери, связанные с
ошибками принятия решений. Конкретные выражения
для этой функции приведены в § 1.9.
Функция Z2(K, Ут) учитывает потери на наблюдение
и называется функцией стоимости. Конкретными приме-
рами функции потерь Z2 являются
п Т
Первое из этих выражений соответствует случаю разной
стоимости Ci каждого Z-ro дискретного наблюдения. При
одинаковых стоимостях наблюдений функция потерь Z2
определяется вторым выражением. Третье и четвер-
тое выражения соответствуют случаю непрерывно-
го наблюдения.
Приведенные примеры функций стоимости являются
достаточно простыми. В общем случае при дискретном
наблюдении функция стоимости зависит от номеров слу-
чайных величин, выбираемых для наблюдений, от фак-
тически наблюденных их значений, а также от шагов,
из которых состояло наблюдение. Поэтому функцию сто-
имости можно представить в виде Z2 (ж, ki, k2, .. ., kn).
§ 4.2. ОЦЕНКА КАЧЕСТВА РЕШЕНИЙ
119
Эта запись означает, что испытание проведено за п ша-
гов и i-й шаг испытания состоит в наблюдении входных
случайных величин ж3- для всех / е А,-.
Для оценки качества решений необходимо ввести ка-
кой-либо показатель. Одним из весьма общих показате-
лей является средний риск, представляющий собой ма-
тематическое ожидание функции потерь
Д = МЩУ,УТ)].
Определенно оптимального правила решения произ-
водится из условия минимума среднего риска
R* = mill R (у),
уег
где у — правило решения, R* — средний риск оптималь-
ной системы.
§ 4.2. Оценка качества решений
Оценка качества решений может быть построена на
основе использования показателя среднего риска, пред-
ставляющего собой средние потери:
Я = МЩГЛ)]. (1)
Рассмотрим случай дискретного наблюдения данных
и дискретного представления решений, когда перемен-
ные X, Y, S, Ут являются конечномерными вектора-
ми. Тогда формулу (1) можно записать в развернутой
форме
R = f f И' I {у, Ут) V (ж, з, г/.г, у) dsdxdy'dy^ (2)
Й У г гт
где v (х, s, ут, у) — совместная плотность вероятности
векторов X, S, Ут, Y. На основании теоремй умноже-
ния вероятностей [23] совместную плотность вероятно-
сти четырех переменных можно записать через услов-
ные плотности вероятности
1’(ж, з, ут, у) = ц(г/т |ж,з)и (у|ж, з, г/т) . (3)
Учитывая, что выходной сигнал идеальной системы за-
висит только от полезного сигнала, а выходной сигнал
реальной системы зависит только от наблюдаемого сиг-
120
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
нала, условные плотности вероятности ц (у? I s), ® (у | ж,-
з, ут) выразим через правила решения
р.(^т|ж, s') = УгСУтИ , го(ф, 8, ут) = ?(#!«). (4)
Заменим выражение Д (ж) f (s | ж) на основании из-
вестного в теории вероятностей соотношения
Д(ж)/(з|ж) = h (s') f (x\s) • (5)
Используя выражения (4), (5), запишем формулу
среднего риска (2) в следующем виде:
= П И (s) № I I s) 'V (У I ®) dsdxdydy?.
Я У г гт
(6)
Данная формула позволяет вычислить средний риск при
условии, что известно априорное распределение вероят-
ности полезного сигнала h (з). Если это распределение
вероятности неизвестно, то для оценки качества реше-
ний можно использовать условный риск р (s), представ-
ляющий собой условное математическое ожидание функ-
ции потерь при фиксированном значении полезного сиг-
нала:
р(з) = М[ЦУ,Ут)|8]. (7)
Развернутая запись условного риска имеет вид
Р («) = [ f [ I (th У J f(x\s) Ь | s) у (у | ж) dxdydy^ (8)
УГГ,
Очевидно, что средний риск есть математическое ожида-
ние условного риска
R = М [р (s)] = р (s) h (s) ds. (9)
n
Средний риск и условный риск могут быть использо-
ваны для оценки качества правил решения. При извест-
ном априорном распределении вероятности полезного
сигнала естественно считать, что если средний риск не-
которой системы принятия решений меньше, чем у дру-
§ 4.2, ОЦЕНКА КАЧЕСТВА РЕШЕНИЙ
121
гой, то правило решения первой системы лучше, чем у
второй, т. е. если
R(h, <R(h, (10)
то правило решения 71 предпочтительнее правила реше-
ния 72. Если распределение вероятности полезного сиг-
нала неизвестно, то естественно принять, что правило
решения 71 лучше правила решения 72, если выполня-
ется неравенство для условных рисков
sup р (з, Vi) <sup р (s, у2). (11)
8 S
Правило решения 71 равномерно лучше правила ре-
шения 72, если р (s, Yi) р (з, у2)для всех seQ и р (з, Yi) <
< р (s, Ya)хотя бы для одного sgQ.
Правила решения 71, 72 называются эквивалентными,
если р (з, Yi) = Р (s, Ya) для всех sgQ.
Класс правил решения D называется полным, если
для любого не принадлежащего D правила 7 в D най-
дется равномерно лучшее правило 7Р.
Класс Dq называется минимальным полным классом,
если Dq не содержит полного подкласса, т. е. если ни-
какой собственный подкласс из Dq не является полным.
Если минимальный полный класс существует, то он дол-
жен совпадать с классом всех допустимых решающих
правил.
Правила решения 71, 72 называются 8-эквивалентны-
ми (е > 0), если | р (s, Yi) — Р (s, Y2) I е Для всех s е Й,
Правило решения 71 называется допустимым, или
приемлемым, если не существует другого правила 72,
которое равномерно лучше правила 71, т. е. если не су-
ществует 72, удовлетворяющего условиям р (s, Ya)
=Ср (s> Yi) Для всех seQ и р (s, Y2) < Р (з, Yi) хотя бы
для одного «ей. Приемлемое правило не обязательно
является равномерно лучшим по сравнению с любым
другим правилом, т. е. другим правилам могут соответ-
ствовать при частном значении сигнала меньшие риски.
Важно, что они не могут быть лучше при всех значеь
ниях se Q.
Перечисленные определения устанавливают виды пра-
вил решения, сформулированные с помощью понятия
условного риска. Кроме перечисленных видов правил
решений, большой интерес представляют оптимальные
122
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
правила решения. Их определение также можно сформу-
лировать через Понятия среднего и условного рисков.
Правило решения 7* называется байесовым, если
А (й, у*) — inf R (h, -у), (12)
т
где h = h(s) — априорное распределение вероятности по-
лезного сигнала.
Правило решения ум называется минимаксным, если
sup р (з, -у*) = inf sup р (8, у) . (13)
Бейесово и минимаксное правила решения, как это
следует из определений, являются наилучшими (опти-
мальными) решениями в смысле минимизации соответ-
ствующих рисков. Бейесово правило решения строится
с учетом использования априорной информации о зако-
не распределения вероятности полезного сигнала. Мини-
максное правило решения строится при неизвестной ап-
риорной информации о вероятностном распределении по-
лезного сигнала и поэтому рассчитывается на наихудщий
случай (верхняя грань по полезному сигналу). Оче-
видно, что бейесово правило решения не хуже мини-
максного -правила решения, поскольку первое основано
на использовании более полной априорной информации,
чем второе. В этой связи введем определение наименее
благоприятного априорного распределения вероятности
полезного сигнала.
Априорное распределение вероятности полезного сиг-
нала h0 (s) называется наименее благоприятным, если
справедливо неравенство
inf R (h0, -у) inf R (h, у). (14)
т т
Важный! для практики является вопрос о существова-
нии и единственности оптимальных правил решения. От-
вет на этот вопрос дается рядом утверждений. Прежде
чем сформулировать эти утверждения, укажем на допу-
щения, для которых справедливы утверждения [18].
1. Пространство входных сигналов V содержит толь-
ко дискретные или абсолютно непрерывные случайные
последовательности.
2. Функция потерь Z2 (zZi У-ё) является ограниченной
функцией своих аргументов.
§ 4.2. ОЦЕНКА КАЧЕСТВА РЕШЕНИЙ
123
3. Пространство решений Г компактно в смысле мет-
рики
d (Ui, у2) = sup | lr (уъ у2) — ?! (у2, ут) |.
Ут
4. Функция стоимости ?2 неотрицательна и ограничена.
5. Класс правил решения D — выпуклый и замкну-
тый.
Для реальных задач приведенные условия не очень
обременительны. Например, условие ограниченности
функции потерь для случая {у, у У) = (у—утУ (у — Ут)
не выполняется. Однако на практике всегда можно ука-
зать конечный замкнутый интервал, в котором находят-
ся переменные у, у?, так что при этом условие ограни-
ченности для функции потерь будет выполнено.
При сформулированных условиях имеют место сле-
дующие утверждения, доказательство которых имеется
•В [18].
1. Задача выбора решения, если ее рассматривать
как игру двух участников с нулевой суммой, является
строго определенной:
sup inf R (h, у) = inf sup R (h,y) .
h ? V h
2. Для любого априорного' распределения вероятности
7г-(з) существует бейесово правило решения у*, такое,
что
й (h, у*) = inf R (h, у).
3. Существует минимаксное правило решения уМ)
такое, что
sup р (з, у*) = inf sup р (з, у) .
«у 4 у s
4. Любое минимаксное правило решения является
бейесовым для наименее благоприятного распределения
вероятности полезного сигнала..
5. Существует наименее благоприятное априорное
распределение вероятности полезного сигнала.
6. Класс всех бейесовых правил решения полон.
7. Бейесово правило решений, которому соответству-
ет постоянное значение условного риска как функция
124
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
полезного сигнала, является минимаксным правилом ре-
шения.
8. Если бейесово правило решения единственно, то
оно приемлемо.
Утверждение 4 определяет минимаксное правило ре-
шения как частный случай бейесова класса правил ре-
шения. ..Наряду с перечисленными утверждениями важ-
ное значение имеет теорема Ходжеса — Лемана об уст-
ранении рандомизации [74].
9. Если пространство решений Г есть действительная
линия и функция потерь Z(y, ут) выпукла по у при лю-
бом ут, то для любого правила решения у существует
нерандомизированное правило решения ун, которому со-
ответствует средний риск R(h, ун) *^R(h, у). Утвержде-
ние 9 показывает, что при сформулированных условиях
всегда существует детерминированное (нерандомизиро-
ванное) правило решения, поэтому у (у|ж) можно пред-
ставить в виде б-функции.
§ 4.3. Алгоритм распознавания сигналов
Пусть имеется конечное число N гипотез "(альтерна-
тив) . Построим бейесову процедуру проверки гипотез
по апостериорным данным. Общее выражение для сред-
него риска имеет вид
R = f f f I (у, Ут) (*) / (а? [ s) ут (ут | s) ? (у | х) dxdsdydy^.
Y й Г Гт
(1)
Представим плотность вероятности требуемого решения
в виде
?т (Ут | 8) — — . (2)
Требуемая система в качестве решения выдает номер
истинной гипотезы, поэтому ее выходной сигнал есть но-
мер гипотезы: Ут = i (г = 1, Д[)'. Безусловная плотность
вероятности выходного сигнала требуемой системы есть
сумма б- функций с весами р, — априорными вероятно-
§ 4.3. АЛГОРИТМ РАСПОЗНАВАНИЯ СИГНАЛОВ
125
стями гипотез. Следовательно,
IШ = 3 (Уг ~ 0 • (3)
г=1
Условная плотность вероятности полезного сигнала
>S равна % (з | г/т) = % (s | г) . Таким образом,
, н
Тт (у? I «) = Г(7) 2 ?iS Х
i~l
ИЛИ
N
?т(?т|в)= 2 т (* I *)6 (г/т — 0,- (5)
г=1
где р (i | з) — условная вероятность принятия i-й гипоте-
зы при условии наблюдения полезного сигнала. Эта ве-
роятность равна
, п.Х (s I i)
(6)
Плотность вероятности у {у | з), описывающая реше-
ние реальной системы, может быть представлена выра-
жением
Т(г/И= 2 Т(7|ж)3(г/ — у), (7)
j=i
где р (J | х) — условная вероятность принять у-ю гипоте-
зу при наблюдении сигнала®.
Функцию потерь рассмотрим в виде простой функции
потерь ___
I (У, Ут) = kj (b 7 = 1» Ю > (8)
где 1ц — стоимости потерь, когда требуемое (идеальное)
решение есть i-я гипотеза, а реальное решение есть у-я
гипотеза.
Подставляя (4), (7), (8) в формулу среднего риска
(1) и преобразуя ее, получаем
N
7? = С f f f .2 f (®|s) p (у» 6 (z/T —
У й г гт г,^~1
— i)8(y — j) dsdxdydy?. (9)
126
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
, Учитывая фильтрующее свойство 6-функции, имеем
с с N
R = ) ) У, 1цР A (s I j) f (х I s) p (j I x) dsdx. (10)
й V i,l=l
Введем обозначение для условного риска у-й гипоте-
зы при наблюдении реализации входного сигнала х:
N
(х) = 2 1цРЮ (л I 0> (11)
1=1
где условная плотность вероятности входного сигнала
при фиксированной i-й гипотезе равна
ср (х | i) = j f (х | s) К (s | i) ds. (12)
я
Тогда средний риск выражается формулой
п N
R= \ 2iri№ p(j\x)dx. (13)
и 1=1
Для получения бейесовой процедуры принятия гипо-
тез необходимо найти такое решение для реальной си-
стемы, которое обеспечивает нижнюю грань среднего
риска. Условные вероятности р (j | ж) характеризуют ре-
шение реальной системы. Очевидно, что сумма этих ве-
роятностей по всем гипотезам должна равняться едини-
це, поскольку все гипотезы должны образовывать пол-
ную группу событий:
St(7|^) = 1- (14)
1=1
Таким образом, отыскание нижней грани среднего
риска должно производиться путем выбора чисел р (j | х)
при условии удовлетворения равенства (14):
N
7?* = inf 7?, 2Я/|®) = 1- (15)
р(11*) 1=1
Значение 7?* и есть бейесов риск для задачи проверки
гипотез.
§ 4.3. АЛГОРИТМ РАСПОЗНАВАНИЯ СИГНАЛОВ
127
Выберем условные
Положим
р (Ус | а?) = 1,
PU\») =0
вероятности следующим образом.
если гк(.х) < г3(ж),
(*=^7, / = 17W- (16)
При таком выборе величин р (] | х) из всей суммы под
интегралом остается только один наименьший член, что
и обеспечивает нижнюю грань среднего риска.
Выбор р (j | х) в виде (16) означает, что реальная
система должна принять решение номер к с вероят-
ностью 1, если величина условного риска тк(х) при фик-
сированном х меньше всех остальных величин rj(&).
На основании этого, правило решения для бейесовой си-
стемы проверки гипотез может быть записано в виде
Y* — к, если rk(x)<rj(x) (к, j =1}N, k^=j), (17)
где У* — выходной сигнал бейесовой системы.
Содержательное определение правила решения (17)
следующее: принимается к-я гипотеза, если условный
риск для этой гипотезы "меньше, чем условные риски для
всех других гипотез.
Заметим, что полученное правило решения оптималь-
ной системы является нерандомизированным. Действи-
тельно, выбор к-й гипотезы осуществляется с вероят-
ностью единицы. Если задать некоторые значения
р(/|ж),не равные нулю при выполнении дополнительно-
го условия (14), то в этом случае правило решения было
бы рандомизированным, т. е. гипотезы выбирались бы с
вероятностями р (j | х) (j = 1, N). Это означает, что не-
обходимо иметь случайный механизм выбора гипотез с
вероятностями р (j | х). Нетрудно проверить, что при этом
нижняя грань среднего риска будет больше, чем в слу-
чае оптимальной системы.
Условные риски неотрицательны: (ж) 0, поэтому
вместо сравнения этих величин можно сравнивать лю-
бые монотонные функции от них: %(г<). Тем самым су-
ществует бесчисленное множество форм представления
правила решения, общий вид которых можно записать
в виде
Y* = k, если %(rft) <%(г3). (18)
Многообразие форм выражения правила решения
128
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
объясняется тем, что оно представляет собой процедуру
сравнения типа «больше — меньше». Возможность выбо-
ра формы представления правила решения играет поло-
жительную роль при решении практических задач. Дей-
ствительно, это обстоятельство можно использовать для
упрощения правила решения с точки зрения его реали-
зации в автоматической системе проверки гипотез.
Подставляя значения условных рисков из (11), по-
лучаем вместо (17) следующее правило решения:
N N
У* = к, если Wi<P(®|0 < 2 ^jPi<p(a?|i) (19)
4=1 4=1
(к #= j, к, j = 1 Л).
Плотность вероятности <ф (ж | z) определяется фурмулой
(12), в которой условная плотность вероятности /(ж|з)
характеризует процедуру измерения полезного сигнала,
а условная плотность вероятности к (s | z) описывает
свойства классов гипотез в терминах полезного сигнала.
Если поделить обе части неравенства в (19) на не-
отрицательную функцию А (ж) и использовать соотноше-
ние для апостериорных вероятностей гипотез
* Р;Ч> I 0 / ----ч
Рг (ж) = -< z=l,< (20)
/1_(ж)
то правило решения можно записать в виде
W N г,
У* = к, если 2 kkPi (а) < 2 hiPi (х) (21)
4=1 4=1
(k^f, к, j = lJV).
В частном случае, когда правильным решениям при-
писываются нулевые потери, а неправильным решени-
ям — единичные потери, т. е. выбирают функции потерь
в виде
1ц = 1 — бу, (22)
где бу — символ Кронекера, равный нулю при г ¥= / и
единице при i — j, неравенство в (21) принимает вид
N * * N *
2 Pi (ж) — pk (х) < 2 Pi (х) —Pi (х)- (23)
4=1 4 = 1
Сокращая одинаковые суммы в обеих частях неравен-
ства и изменяя его знак па обратный при умножении
§ 4.4. КАЧЕСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ
129
на —1, запишем правило решения в виде
Y* = к, если Рй(ж) > р; (ж) (k^j, к, j= 1,N). (24)
Из данного выражения следует, что при нуль-единичных
стоимостях оптимальное правило заключается в том, что
выбирается такая гипотеза, для которой апостериорная
вероятность является наибольшей.
§ 4.4. Качество распознавания сигналов
Средний риск произвольной системы проверки гипо-
тез определяется формулой
' й = f 2 r^x)p(j\x)dx. (1)
V j=l
Средний риск бейесовой системы проверки гипотез
определяется следующей формулой:
R* = J inf rj (ж) dx. (2)
У 3
Формула (2) следует из того, что нижняя грань средне-
го риска по величинам р (j | х) определяется выбором
р (к | х) =1, р (j | ж) = 0 (к =^= j, к, j = 1,7V), если rk (х) <
' ' N
<rj(x) при дополнительном условии 2 Р (j Iх) = !•
1=1
Следовательно, из всей суммы по j выбирается только
один минимальный член. Операция выбора наименьшего
члена из суммы по ; и представлена в (2).
Определим через 7} область значений наблюдаемого
сигнала ж, в котором достигается минимальное значение
условного риска у-й гипотезы: 7, = {ж :г} (ж) = mini}.
j
Тогда формулу (2) можно записать в виде
j гДж)йж. (3)
1=1 V,
Учитывая выражение для условного риска (4.3.11), за-
метим, что значение интеграла по области 7, от функции
<р (ж | i) есть условная вероятность принять решение но-
мер у реальной системой, тогда как идеальная система
9 Л. Г. Евланов . • , , _
130
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
приняла решение номер г. Следовательно, условная ве-
роятность решения равна
Pin = 0 = f <р(ж|г)йж (i,7 = l,TV). (4)
vi
Используя это соотношение, запишем следующее выра-
жение для среднего риска оптимальной процедуры про-
верки гипотез:
N N
R* = S kjPiP (i 10=2 lijPi&i- <5)
i,j=l i,j=l
Из данной формулы следует, что средний риск опти-
мальной системы определяется стоимостями потерь на
решения 1ц, априорными вероятностями гипотез р4 и апо-
стериорными условными вероятностями принятия гипо-
тез
С учетом стоимости потерь на наблюдение средний
риск оптимальной системы равен
N
R* = 2 liiPitii + М [h к) 1, (6)
ij=l
где х— наблюденная выборка, к — вектор п шагов ис-
пытаний; на каждом &~м (i = 1, п) шаге наблюдают-
ся случайные величины х} для всех / е к{.
В частном случае, когда стоимости потерь равны
1ц — 1 — бц, средний риск оптимальной системы равен
N
я*= 2Ъ(й+Ми2(ж,АН (7)
i,j=l
где штрих у суммы означает, что в ней отсутствуют чле-
ны при i = j. Учитывая, что полная сумма равна едини-
це, представим средний риск более простой с точки
зрения процедуры вычисления формулой
W
Я* = 1- 2Рг₽и+ M[Z20,7с)Ь (8)
i = l
где рн — условные вероятности правильных решений.
§ 4.3. АЛГОРИТМ РАСПОЗНАВАНИЯ СИГНАЛОВ
127
Выберем условные
Положим
р (Ус | а?) = 1,
PU\») =0
вероятности следующим образом.
если гк(.х) < г3(ж),
(*=^7, / = 17W- (16)
При таком выборе величин р (] | х) из всей суммы под
интегралом остается только один наименьший член, что
и обеспечивает нижнюю грань среднего риска.
Выбор р (j | х) в виде (16) означает, что реальная
система должна принять решение номер к с вероят-
ностью 1, если величина условного риска тк(х) при фик-
сированном х меньше всех остальных величин rj(&).
На основании этого, правило решения для бейесовой си-
стемы проверки гипотез может быть записано в виде
Y* — к, если rk(x)<rj(x) (к, j =1}N, k^=j), (17)
где У* — выходной сигнал бейесовой системы.
Содержательное определение правила решения (17)
следующее: принимается к-я гипотеза, если условный
риск для этой гипотезы "меньше, чем условные риски для
всех других гипотез.
Заметим, что полученное правило решения оптималь-
ной системы является нерандомизированным. Действи-
тельно, выбор к-й гипотезы осуществляется с вероят-
ностью единицы. Если задать некоторые значения
р(/|ж),не равные нулю при выполнении дополнительно-
го условия (14), то в этом случае правило решения было
бы рандомизированным, т. е. гипотезы выбирались бы с
вероятностями р (j | х) (j = 1, N). Это означает, что не-
обходимо иметь случайный механизм выбора гипотез с
вероятностями р (j | х). Нетрудно проверить, что при этом
нижняя грань среднего риска будет больше, чем в слу-
чае оптимальной системы.
Условные риски неотрицательны: (ж) 0, поэтому
вместо сравнения этих величин можно сравнивать лю-
бые монотонные функции от них: %(г<). Тем самым су-
ществует бесчисленное множество форм представления
правила решения, общий вид которых можно записать
в виде
Y* = k, если %(rft) <%(г3). (18)
Многообразие форм выражения правила решения
128
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
объясняется тем, что оно представляет собой процедуру
сравнения типа «больше — меньше». Возможность выбо-
ра формы представления правила решения играет поло-
жительную роль при решении практических задач. Дей-
ствительно, это обстоятельство можно использовать для
упрощения правила решения с точки зрения его реали-
зации в автоматической системе проверки гипотез.
Подставляя значения условных рисков из (11), по-
лучаем вместо (17) следующее правило решения:
N N
У* = к, если Wi<P(®|0 < 2 ^jPi<p(a?|i) (19)
4=1 4=1
(к #= j, к, j = 1 Л).
Плотность вероятности <ф (ж | z) определяется фурмулой
(12), в которой условная плотность вероятности /(ж|з)
характеризует процедуру измерения полезного сигнала,
а условная плотность вероятности к (s | z) описывает
свойства классов гипотез в терминах полезного сигнала.
Если поделить обе части неравенства в (19) на не-
отрицательную функцию А (ж) и использовать соотноше-
ние для апостериорных вероятностей гипотез
* Р;Ч> I 0 / ----ч
Рг (ж) = -< z=l,< (20)
/1_(ж)
то правило решения можно записать в виде
W N г,
У* = к, если 2 kkPi (а) < 2 hiPi (х) (21)
4=1 4=1
(k^f, к, j = lJV).
В частном случае, когда правильным решениям при-
писываются нулевые потери, а неправильным решени-
ям — единичные потери, т. е. выбирают функции потерь
в виде
1ц = 1 — бу, (22)
где бу — символ Кронекера, равный нулю при г ¥= / и
единице при i — j, неравенство в (21) принимает вид
N * * N *
2 Pi (ж) — pk (х) < 2 Pi (х) —Pi (х)- (23)
4=1 4 = 1
Сокращая одинаковые суммы в обеих частях неравен-
ства и изменяя его знак па обратный при умножении
§ 4.4. КАЧЕСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ
129
на —1, запишем правило решения в виде
Y* = к, если Рй(ж) > р; (ж) (k^j, к, j= 1,N). (24)
Из данного выражения следует, что при нуль-единичных
стоимостях оптимальное правило заключается в том, что
выбирается такая гипотеза, для которой апостериорная
вероятность является наибольшей.
§ 4.4. Качество распознавания сигналов
Средний риск произвольной системы проверки гипо-
тез определяется формулой
' й = f 2 r^x)p(j\x)dx. (1)
V j=l
Средний риск бейесовой системы проверки гипотез
определяется следующей формулой:
R* = J inf rj (ж) dx. (2)
У 3
Формула (2) следует из того, что нижняя грань средне-
го риска по величинам р (j | х) определяется выбором
р (к | х) =1, р (j | ж) = 0 (к =^= j, к, j = 1,7V), если rk (х) <
' ' N
<rj(x) при дополнительном условии 2 Р (j Iх) = !•
1=1
Следовательно, из всей суммы по j выбирается только
один минимальный член. Операция выбора наименьшего
члена из суммы по ; и представлена в (2).
Определим через 7} область значений наблюдаемого
сигнала ж, в котором достигается минимальное значение
условного риска у-й гипотезы: 7, = {ж :г} (ж) = mini}.
j
Тогда формулу (2) можно записать в виде
j гДж)йж. (3)
1=1 V,
Учитывая выражение для условного риска (4.3.11), за-
метим, что значение интеграла по области 7, от функции
<р (ж | i) есть условная вероятность принять решение но-
мер у реальной системой, тогда как идеальная система
9 Л. Г. Евланов . • , , _
130
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
приняла решение номер г. Следовательно, условная ве-
роятность решения равна
Pin = 0 = f <р(ж|г)йж (i,7 = l,TV). (4)
vi
Используя это соотношение, запишем следующее выра-
жение для среднего риска оптимальной процедуры про-
верки гипотез:
N N
R* = S kjPiP (i 10=2 lijPi&i- <5)
i,j=l i,j=l
Из данной формулы следует, что средний риск опти-
мальной системы определяется стоимостями потерь на
решения 1ц, априорными вероятностями гипотез р4 и апо-
стериорными условными вероятностями принятия гипо-
тез
С учетом стоимости потерь на наблюдение средний
риск оптимальной системы равен
N
R* = 2 liiPitii + М [h к) 1, (6)
ij=l
где х— наблюденная выборка, к — вектор п шагов ис-
пытаний; на каждом &~м (i = 1, п) шаге наблюдают-
ся случайные величины х} для всех / е к{.
В частном случае, когда стоимости потерь равны
1ц — 1 — бц, средний риск оптимальной системы равен
N
я*= 2Ъ(й+Ми2(ж,АН (7)
i,j=l
где штрих у суммы означает, что в ней отсутствуют чле-
ны при i = j. Учитывая, что полная сумма равна едини-
це, представим средний риск более простой с точки
зрения процедуры вычисления формулой
W
Я* = 1- 2Рг₽и+ M[Z20,7с)Ь (8)
i = l
где рн — условные вероятности правильных решений.
§ 4.5. ДВУХАЛЬТЕРНАТИВНОЕ РАСПОЗНАВАНИЕ
131
Средний риск требуемой (идеальной) системы можно
получить из формулы (5), если положить
= \~1: (9)
(О, i^=j.
При этом средний риск требуемой системы, в которой
отсутствуют ошибки, равен
N
R? = S liiPi- " (10)
г=1
Если 1ц =1 — б/j, то 1ц = 0, и средний риск требуемой
системы проверки гипотез равен нулю.
§ 4,5. Двухальтернативное распознавание
Двухальтернативное распознавание является пястным
случаем многоальтернативного. Поэтому можно восполь-
зоваться всеми предыдущими результатами, положив
N =. 2. Правило решения
N
N
Y* =к, если 2 WiT («| г) < 2 kiPEP («] 0, (1)
г=1 г=1
при N = 2 принимает вид
У* = 1, если ?iiPi(p(5c|l)-|-fciP2<pC®|2)<:
< г12Р1ф(®|1) + WM®|2). (2)
При Y* = 2 знак неравенства изменяется на обратный.
Преобразуем выражение (2) к виду
У* = 1, если
P1G12 — И1)ф(«|1)>Р2(^1 — ЫСР(Ж|2). (3)
Разделим обе части неравенства на положительные
величины р{ и 112— hi. Последняя разность положитель-
на вследствие предположения о том, что потери при не-
правильных решениях больше, чем при правильных.
В результате деления получаем
У* = 1, если Л (ж) > П,
У* = 22 если Л (ж) П,
9*
132
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
где введены обозначения для отношения правдоподобия
и обобщенного порога
Если ввести апостериорные вероятности
р.® (х I г)
2) > (7)
то правило решения можно представить в следующем
виде:
У* = 1, если р* (ж) > р* (ж) ^а1 ~ *22 ,
1 ‘12 — ‘11
_ О _ .Z21-Z32 (8)
У* = 2, если р (ж) «С д>* (ж) ~.
Равенство отношения правдоподобия порогу
Л(ж) = П
определяет границу классов в пространстве наблюдаемо-
го сигнала. Если х есть скаляр, то действительная ось ж
разбивается на две подобласти.
Задача обнаружения является частным случаем двух-
альтернативного распознавания. В качестве первой ги-
потезы рассматривается случай наличия полезного сиг-
нала в наблюдаемом сигнале, а в качестве второй гипо-
тезы наличие только помехи в наблюдаемом сигнале.
Пусть Ут =. 1 — решение идеальной системы о нали-
чии полезного сигнала, тогда возможны два события:
первое У* = 1, т. е. оптимальная система принимает
правильное решение, и второе У* = 0 — оптимальная
система принимает ошибочное решение. Правильное ре-
шение при Ут = 1 называют правильным обнаружением.
Это сложное событие, состоящее в одновременном вы-
полнении двух событий Ут = 1, У* = 1. Ошибочное ре-
шение называют пропуском сигнала. Это также сложное
событие, состоящее из событий: Ут = 1, У* = 0.
Если идеальная система принимает решение Ут = 0, то
возможно правильное решение У* = 0. Событие Ут = 0,
§ 4.5. ДВУХАЛЬТЕРНАТИВНОЕ РАСПОЗНАВАНИЕ
133
У* = 0 называют правильным необнаружением. Возмож-
но также ошибочное решение Ут = 0, У* = 1, которое
называют ложной тревогой.
События правильного обнаружения и пропуска сиг-
нала образуют полную группу. Аналогично события пра-
вильного необнаружения и ложной тревоги также обра-
зуют полную группу
(У* = 1, (У* = 0,
V — 1 < V — о <
1 Т — 1 |у* _ Q 1 Т 'J ]у$ _ |
Применительно к задачам контроля ошибочное реше-
ние — пропуск сигнала соответствует решению о годно-
сти объекта контроля, тогда как в действительности он
является негодным. Ошибочное решение — ложная тре-
вога соответствует решению о негодности объекта конт-
роля, тогда как в действительности он является годным.
Оценку качества двухальтернативного решения про-
ведем по величине среднего риска. Общая формула име-
ет вид
н
R — 2 (9)
ij=l
где Рл = р (j | i) — условная вероятность принять реше-
ние /, если идеальная система приняла решение I. При
N = 2 получаем
R — 111Р1Р11 "Ь Z12P1P12 + Z21P2P2I + ^22^2^22. (Ю)
Поскольку возможны всего две гипотезы, то введем
обозначения
Pi = P, P2=i — P = q. (11)
Кроме того, справедливы соотношения для условных
вероятностей
Р1Х‘=- 1 — $21, $22=1— $12. (12)
Подставляя выражения (11), (12) в формулу (10),
представим средний риск в виде
R = Ro + (^12 — Р$21 + (^21 — ^22 ) ff$ 12, (13)
где априорный средний риск 7?0 равен
Ro &’ li ip + faq. (14)
134
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Используя выражение для порога (6), запишем сред-
ний риск для оптимальной системы в следующем виде:
R* = R0 + р (llz - Zu) [₽J2 + Пру , (15)
где Ргр Р12 —вероятности ошибок для оптимальной си-
стемы. \
При произвольном пороге П средний риск для неопти-
мальной системы двухальтернативного распознавания
имеет вид
Я—:Ro + p(li2—hi) [$21 4- ПР12], (16)
где Р21, Р12 — вероятности ошибочных решений неоптп-
мальной системы распознавания.
Представим выражение для среднего риска R* в виде
<17)
12'
Отсюда
(18)
В частном случае hi ~: I22'— О, l\2 — hi — 1 средний
риск равен вероятности ошибочного решения
7?* = рРУ+(7Р;2. (19)
Для задачи обнаружения вероятность пропуска сиг-
нала принято обозначать через р, а вероятность ложной
тревоги через <а. Очевидно, что
₽* = р2Р = (20)
-Заметим, что вероятность пропуска и ложной тревоги
есть условные вероятности
р* = Р{У* = 0|Ут= 1}; а* = Р{У* = 1]Ут = 0}.
(21)
Используя обозначения (20), средний риск для опти-
мальной системы обнаружения при hi — I22 = 0, I12 =
— hi — 1 представим как полную вероятность ошибоч-
ного решения
R*=p$* + qa*. (22)
§ 4.5. ДВУХАЛЬТЕРНАТИВНОЕ РАСПОЗНАВАНИЕ
135
Условные вероятности ошибок 0*2, р21 Для оптималь-
ной системы вычисляются следующим образом:
оо п
0J2=J<o(A|2)^A, 0*! = Jco(A|l)dA, (23)
П —оо
где ю (Л | i) (ii= 1, 2) —условная плотность вероятности
отношения правдоподобия при истинной гипотезе i, П —
значение порога.
Из общего бейесова правила двухальтернативного
распознавания образов можно получить различные част-
ные правила. Исторически ряд частных правил распозна-
вания появился раньше, чем было сформулировано вбщее
бейесово правило. Поэтому они излагались изолированно
друг от друга. В настоящее время целесообразно с мето-
дической точки зрения не выводить каждое частное пра-
вило самостоятельно, а получать его из общего бейесова
правила.
Правило Зигерта— Котельникова (правило идеаль-
ного наблюдателя). Данное правило соответствует кри-
терию минимума -полной вероятности ошибочного ре-
шения
В* = min R, R = 4- (24)
п
Сравнение выражения среднего риска с общим выраже-
нием (15) показывает, что для правила Зигерта — Ко-
тельникова Zu = I22 = 0, 112 =• ^21 = 1. Следовательно,
правило Зигерта — Котельникова имеет вид (4), где зна-
чение порога равно
IL—.q/p. (25)
Бейесов риск для правила Зигерта — Котельникова
имеет вид
^=^ + ^2,. (26)
где значения условных вероятностей ошибок вычисляют-
ся по формулам (23).
Правило максимума апостериорной вероятности. Это
правило соответствует выбору такой гипотезы, апостери-
орная вероятность для которой максимальна:
Y =к, если p*h (ж) > р*. (ж) (к =^= у, к, j = 1,2). (27)
136
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
В соответствии с общим бейесовым правилом решения,
выраженным через апостериорные вероятности (8), пра-
вило максимума апостериорной вероятности является
частным случаем общего правила при 1ц = 1ц = О,
£12 ; £21 == 1.
Подставляя выражение для апостериорной вероятно-
сти (7) в (27) и сокращая на /Дж), получаем правило
решения, оптимальное по критерию максимума апосте-
риорной вероятности, полностью совпадающее с прави-
лом Зигерта — Котельникова.
Средний риск для правила максимума апостериорной
вероятности равен
я* = pVu + (28)
Таким образом, правило Зигерта — Котельникова, со-
ответствующее критерию минимума полной вероятности
ошибочного решения, соответствует правилу, при котором
максимизируется апостериорная вероятность. Справед-
ливо и обратное утверждение.
Правило максимального правдоподобия. Это правило
является частным случаем правила максимума апосте-
риорной вероятности при равенстве априорных вероят-
ностей гипотез р = q. Следовательно, данное правило от-
личается от общего бейесова правила значением порога:
П =. 1. Правило имеет вид
Y* = 1, если Л (х) > 1,
(29)
Y* = 2, если Л(я) С 1.
Правило максимального правдоподобия целесообразно
применять в случае отсутствия информации об априор-
ных вероятностях гипотез.
Средний риск для правила максимального правдопо-
добия равен
в* - 4 (PJ. + К») • <3°)
Правило Неймана — Пирсона. Данное правило со-
ответствует критерию минимума вероятности ошибочно-
го решения при дополнительном условии задания услов-
ной вероятности Р12 (или [З21)
Я* = min (р₽21 + ffP12)a Р12 = ₽о- (31)
п
§ 4.5. ДВУХЛЛЬТЕРНАТИВНОЕ РАСПОЗНАВАНИЕ
137
Пользуясь методом множителей Лагранжа, составим но-
вый функционал
R* = min (р0214- д₽12 + %₽12), (32)
п
где X — множитель Лагранжа. Представим выражение
бейесова риска в виде
7?* == min
п
T’Psl + S' ~Р12
(33)
Сравнивая это выражение с общей формулой (15), по-
лучаем
Zu - hz = 0, 112 = 1, Z2i = 1 + — •
Следовательно, правило Неймана — Пирсона отличается
от общего бейесова решения только значением порога,
равного
п = _9_fn-A_A = (34)
Р \ Q I Р
Заметим, что значение порога нет необходимости вы-
числять по формуле (34) через априорные вероятности
гипотез и параметр Л. Удобнее это сделать, используя
дополнительное условие Р12 == ₽о. Раскрывая значение ус-
ловной вероятности ошибки [З12 (23), получаем следую-
щее уравнение для определения искомого порога:
0О = Jto(A|2)cZA.
п
(35)
Вычисление порога П по данному уравнению не тре-
бует знания априорных вероятностей р, q, определение
которых во многих случаях весьма затруднено. Условная
плотность вероятности и (Л | 2) в (35) определяется ве-
роятностными свойствами входного сигнала, поэтому вы-
числение порога по этой формуле требует задания усло-
вной вероятности ошибки ро- В отличие от априорных
вероятностей гипотез, эту вероятность обычно легко на-
значить, исходя из физической сущности решаемой за-
дачи. В этом заключается преимущество правила Ней-
мана — Пирсона. Бейесов средний риск для правила Ней-
мана — Пирсона равен
Я* = р(₽*1 + Прй), (36)
где порог П определяется из соотношения (35).
138
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Правило минимакса. Если априорные вероятности не-
известны, то рассмотренные выше правила решения, за
исключением правил максимального правдоподобия и
Неймана — Пирсона, применить нельзя. В этих случаях
можно использовать правило минимакса. Это правило оп-
ределяется из условия максимизации бейесова среднего
риска по априорной вероятности р, поскольку вторая ап-
риорная вероятность выражается через р: q = 1 — р.
Итак, минимаксное правило определяется из условия
Я* = шах 7?* = шах [7?0 + р (Z12 - Zu) (0** + П0*2)] . (37)
Для определения максимума продифференцируем вы-
ражение по р, учитывая зависимость величин условных
вероятностей ошибок и порога от р,
-ft)(«,+/> ^ + nf>;2+i>s₽;2 +
+ РП^). (38)
Учитывая соотношение (18) <7021 =—Пй0*2сократим по-
добные членыpdf>'2i j dp и рПй0*2 ] dp. В результате по-
лучаем
+ft. - ft) [к, + р;2 (п+р . (за)
Вычисляя производные априорного риска и порога, по-
лучаем
§ = 3j[yZii+^(l-Jp)] = Z11-Z2a, (40)
(41)
Подставляя значения производных в формулу (39), по-
лучаем
^ = ^-^ + (^-^(0*!-^) . (42)
Приравнивая производную среднего бейесова риска
нулю, получаем уравнение относительно искомого зна-
§ 4.5. ДВУХАЛЬТЕРНАТИВНОЕ РАСПОЗНАВАНИЕ
139
Ленин априорной вероятности
*11 - ht + (*12 - *11) (₽21 - 2ВД = 0, (43)
где зависимость условных вероятностей ошибок от ро,
дающего минимаксное правило решения, имеет вид
1—Ро тл
Ро 00
₽21(Ро) = ”[ ®(A|l)dA, |3*2(а)= J ®(A|2)dA.
—-ОО рг
В частном случае, когда *п —. *22=0, *12 = *21 = 1,
получаем К — 1, и уравнение относительно р0 принима-
ет вид
^(Ро)=₽:2(Ро). (45)
Таким образом, в данном частном случае минимаксное
правило решения соответствует равенству условных ве-
роятностей ошибочных решений.
Решив уравнение (43), получим значение р0, и следо-
вательно, определится порог для минимаксного правила
решения, равный
__ 1 Ро *21 *22
м п 7 __ 7
Ро *12 Ь11
(46)
Таким образом, минимаксное правило решения отли-
чается от общего бейесова правила только значением
порога.
Средний риск для минимаксного правила решения
определяется подстановкой р = ро в формулу (37.)
Н*и = R0 (Ро) + Ро (*12 - *11) [Р21 (Ро) + П (Ро) ₽*2 (Ро)] . (47)
Из уравнения (43) найдем p2i (ро) и подставим в (47).
Тогда средний минимаксный риск будет иметь вид
**М = *22 + (*21 *22) Р12 (Ро) • (48)
Если из уравнения (43) найти значение Р]2 (р0) и под-
ставить в общую формулу (37), то средний минимаксный
риск можно представить в другой форме:
А* = *22 + Ро (-Ц^ (*11 ~ *22) + (*12 - *11) ₽*21 (Ро) • (49)
140
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
В частном случае 1ц = I22 = 0, Z12 =.' ^21 = 1 форму-
лы для минимаксного среднего риска (48), (49) прини-
мают вид
л>₽;2(?9) = р;1(а). (so)
Анализ рассмотренных частных правил решения по-
казывает, что все они отличаются от общего бейесова
правила решения только значением порога.
§ 4.6. Оптимальное выделение сигналов
Рассмотрим способ получения бейесовой процедуры
выделения сигналов. Средний риск системы выделения
равен
7? (Д, у) =
= J J J J I {у, Ут) h (в) f (х I з) ут (z/T I s) у {у I х) ds dx dy dy.,.
Й vrrT
(1)
Будем полагать, что функция I (у, у г) выпукла и диффе-
ренцируема по уыут и требуемое преобразование носит
детерминированный характер, т. е.
Y(#T|s) = 6(?/т — sv(s)), (2)
где зт (з) — требуемое преобразование полезного сигна-
ла. Тогда средний риск равен
7? (А, у) = J J р St (s) / (ж I s) Т (.У I ж) ds dx dy. (3)
Й vr
На основании теоремы Ходжеса — Лемана для рас-
сматриваемых условий существует нерандомизированное
правийо решения у* такое, что
7?(й, 4*) ^R(h, 4), (4)
следовательно,
V* (У I ®) = 6 (у — У* (®)) • (5)
Подставляя (5) в формулу среднего риска (3), получаем
R (h, У*) = f J I (У*, зт (з)) А(з) / (х | s) ds dx. (6)
b V
По условию выходной сигнал оптимальной системы У*
должен обеспечивать нижнюю грань среднего риска. По-
§ 4.6. ОПТИМАЛЬНОЕ ВЫДЕЛЕНИЕ СИГНАЛОВ
141
скольку средний риск — непрерывная функция У*, то
его вариация по У* равна
8R = j J VyU (У*, sT (s)) h (s) f (х | s),ds dx8Y*, (7)
£2 V
где vyj, —операция градиента по У*. Приравнивая зна-
чение вариации нулю и применяя основную лемму вари-
ационного исчисления, получаем
J Vy*1(Y*, st(s)) h(s') f(x | s) cis = 0. (8)
0
Данное уравнение определяет оптимальный алгоритм вы-
деления требуемого сигнала.
Средний риск бейесовой системы выделения сигнала
равен
R* = М [ I (У*, 8Т (з))], (9)
где зт (з) — требуемое преобразование полезного сигна-
ла, У* — выходной сигнал бейесовой системы выде-
ления.
Бейесова процедура выделения сигналов обладает не-
которыми общими свойствами, знание которых позволя-
ет упростить нахождение оптимальных алгоритмов и ус-
тановить соответствие между алгоритмами оптимальной
обработки, полученными по различным критериям опти-
мальности [89].
1. Если функция потерь Z(E) — четная и дифферен-
цируемая функция ошибки Е'=;У*— S, условная плот-
ность вероятности имеет вид /*(з|ж)=/*(з— g(x)) и
является четной функцией аргумента z = s — g(x), то
оптимальная оценка требуемого сигнала равна
Y*= g(x). (10)
Для доказательства высказанного утверждения заме-
ним произведение плотностей в выражении (8), пользу-
ясь равенством
А(з)/(ж | з) = /1(ж)/*(з | ж). (11)
Следовательно,
f VyU (У* - 8) /х (ж) /* (з - g (ж)) ds = 0. (12)
b
142
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Сокращая на fi (х), предполагая выполнение равенства
F*=ig-(a;)) производя замену переменных g(x)—s = z
и учитывая, что ds =. —dz, Vr*= VZ; получаем
J Vj(z)/*(z)^z = 0. (13)
Данное соотношение тождественно выполняется, по-
скольку функция VzZ(z) является нечетной, a /*(z) —
четной; их произведение дает нечетную функцию. Как
известно, интеграл от нечетной функции в симметрич-
ных пределах равен нулю, что и подтверждает справед-
ливость указанного свойства при Q =. (—оо, -|-оо).
2. Если функция потерь — четная, неотрицательная,
строго возрастающая функция модуля ошибки Z(E),
Е = У*— а у*(5|ж) — унимодальная и четная, то
оптимальная по критерию минимума среднего квад-
рата ошибки оценка полезного сигнала линейна относи-
тельно наблюдаемого сигнала и эквивалентна оценкам
по различным критериям оптимальности, получаемым
минимизацией среднего риска при различных функциях
потерь, удовлетворяющих сформулированным условиям.
Это свойство устанавливает соответствие между опти-
мальными алгоритмами, полученными по различным кри-
териям оптимальности. При сформулированных условиях
множество частных критериев оптимальности, которые
могут быть получены из критерия минимума среднего
риска, дают те же самые алгоритмы обработки, что и
критерий минимума среднего квадрата ошибки. Получе-
ние алгоритмов обработки по критерию минимума сред-
него квадрата ошибки значительно проще, чем по другим
критериям. Установив тождественность различных кри-
териев при сформулированных условиях, можно упрос-
тить процедуру получения оптимальных алгоритмов. На-
пример, оптимальная оценка сигнала по критерию мак-
симума вероятности попадания ошибки в заданный ин-
тервал тахП(|У— 6'| < а) при указанных условиях
на апостериорную плотность вероятности /*(з j х) соот-
ветствует оптимальной оценке по критерию минимума
среднего квадрата ошибки.
3. Бейесова оценка сигнала по критерию минимума
среднего квадрата ошибки инвариантна относительно
группы линейных преобразований сигнала.
i § 4.6. ОПТИМАЛЬНОЕ ВЫДЕЛЕНИЕ СИГНАЛОВ ИЗ
Пусть задала группа линейных преобразований сиг-
нала 5
= AS + В, (14)
где А — матрица, В — вектор коэффициентов преобра-
зований. Оптимальная по критерию минимума среднего
квадрата ошибки оценка сигнала есть условное среднее
= М [5J X] = М [AS + В| X] = А М [51 Х] + В, (15)
но М [Х | X] = У*, следовательно,
У^ = ИУ; + 5. (16)
Таким образом, бейесова оценка линейного преобра-
зования есть линейное преобразование бейесовой оценки.
4. Если функция потерь квадратичная, плотность
вероятности представима в виде f (х | s) = /да (х — s) , где
(х — з) — плотность , вероятности помехи, а априорная
плотность вероятности сигнала равномерна, то бейесова
оценка является минимаксной, а равномерное распреде-
ление полезного сигнала наиболее неблагоприятным.
Для доказательства этого свойства воспользуемся ус-
ловием независимости условного риска р (s, К*) при ми-
нимаксной оценке сигнала от полезного сигнала s. Ус-
ловный риск при квадратичной функции потерь равен
р(з, У*) = [У* (х) — syCi [У* (х) — 8] / (ж| s) dx. (17)
v
Учитывая, что / (х | 8) = /да (х—s), и вводя новую пере-
менную z — x — s, получаем
р (s. У*) =
= f [У* (z + 8) - 8\'С, [У* (Z ф-s) — 8] /да (z) dz. (18)
h
Но оптимальная оценка при квадратичной функции по-
терь, как это следует из свойства 3, инвариантна относи-
тельно операции сдвига: Y* (z ф- s) — У* (z) ф- 8, поэтому
условный риск равен .
р (У*) - [ У*' (z) C1Y* (Z) /да (z) dz. (19)
Vi
Как следует из полученного выражения, условный риск
не зависит от 8, и в соответствии с утверждением 7 § 4.2
оптимальная оценка сигнала является минимаксной.
144
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
§ 4.7. Выделение сигналов по критерию минимума
среднего квадрата ошибки
Показатель качества выделения сигналов в виде сред-
него квадрата ошибки является частным случаем сред-
него риска. Полагая в формуле среднего риска
R = М [l(Y, Ут)] (1)
функцию потерь Ц (Y, Ут) квадратичной, а функцию сто-
имости h (Y, Ут) пропорциональной времени наблюдения
Z(y,yT) = (y-yT)/<71(y-yT)4-e27’, (2)
получаем обобщенный средний квадрат ошибки с учетом
стоимости наблюдения
а = М[(У-Ут)/С1(У-Ут) + С2Л- (3)
В формулах (2), (3) Ci— матрица коэффициентов по-
терь, С2 — коэффиицент стоимости, штрих у круглой скоб-
ки означает операцию транспонирования.
Требуемый сигнал Ут представляет собой требуемое
значение полезного сигнала, получаемое путем действия
требуемого оператора на полезный сигнал
Ут = 5т(5) = ^А (4)
где — оператор требуемого преобразования.
Если в формуле (3) положить Cj = I, С%— 0, где I—
единичная матрица, то обобщенный средний квадрат
ошибки превращается в обычный средний квадрат
ошибки.
В соответствии с результатами § 4.6 оптимальная
процедура выделения требуемого сигнала определяется
приравниванием нулю первой вариации среднего риска
по выходному сигналу. Вычисляя градиент от функции
потерь по У при У = У* и Ут =5Т (5)
Лу/(К,Ут)|г^ = -2Ci(Y*-S^S)) (5)
и подставляя его значение в уравнение (4.6.8), получаем
-2C'J(y*-ST’(s))7j(s)/(o;|s)ds = O1 (6)
s
§ 4.7. КРИТЕРИЙ МИНИМУМА СРЕДНЕГО КВАДРАТА ОШИБКИ 145
или, после несложного преобразования,
J 5Т (s) h (s) f (x | s) ds = Y* \ h (s) f (x | s) ds. (7)
в a
Отсюда получаем
У* = J S.r (s) f* (s |ж) ds, (8)
я
где /* (s | x) — апостериорная плотность вероятности
полезного сигнала при условии наблюдения реализации
х, равная
t* (s | х) = - р й(я)/(ж,я)-.
I h (s) / (х [ s) ds
fl
Если сигнал структурно детерминирован и зависит от
вектора случайных параметров U, то оптимальная оцен-
ка этого вектора по критерию минимума среднего квад-
рата ошибки определяется из (8) заменой s=u1Y* = U*
Q = Qu:
U* = f S^(u)f*(u\x)du, (10)
где — область существования вектора параметров.
Как следует из формул (8), (10), оптимальная по
критерию минимума среднего квадрата ошибки оценка
требуемого сигнала есть условное математическое ожи-
дание требуемого сигнала при фиксированном значении
наблюдаемого сигнала
У* = М [б'т (5) | ж], (И)
где ST (5) — известная функция полезного сигнала или
его параметров: 8т(и). В частном случае, когда требует-
ся получить оценку самого сигнала, то
У* = МЬ$|ж]. (12)
При экстраполяции сигнала на время т оптимальная
оценка равна
У* = М [Я (£ + т) | ®]. (13)
Выделение сигналов по критерию минимума среднего
10 Л, Г, Евланов . - - - .
146
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
квадрата ошибки широко применяется в практических
задачах. Это обусловлено возможностью получения явно-
го выражения оптимальной оценки (см. формулы (8),
(10)). Как правило, во многих случаях удается также
раскрыть квадратуры и получить аналитические зависи-
мости оценки от наблюдаемого сигнала, что дает воз-
можность полностью представить структуру алгоритма
обработки наблюдаемого сигнала. Структурное представ-
ление алгоритма значительно облегчает его реализацию.
Вычислим средний риск и средний квадрат ошибки
оптимальной системы выделения требуемого полезного
сигнала в предположении нулевой стоимости (Са— 0) и
дискретного наблюдения. Средний риск равен
R* = М J (Y*-ST (s) УСХ (У* - ST (s)) /* (s ] ж) ds. (14)
я
Раскроем круглые скобки; в результате получаем
R* = М - С Si CiY*f* (s \x)ds —
( й
- У*'С1 J STf* (s \x)ds+ f si C1SJ* (s I x) ds\. (15)
si si j
Но апостериорное среднее требуемого сигнала есть опти-
мальная оценка
У* = f ST (s) /* (s | x)ds, (16)
я
поэтому из (15) получаем
R* = М (У*'С1У* - 2У*'С'1У* + [ S'TCxS^{s\x)ds\,
I я I
или, после приведения подобных членов,
Я* = мК (s | х) ds—Y*'CiY*\. (17)
Оператор математического ожидания применяется по пе-
ременной X. Меняя местами оператор интегрирования
§ 4.7. КРИТЕРИЙ МИНИМУМА СРЕДНЕГО КВАДРАТА ОШИБКИ [4?
и математического ожидания в первом слагаемом (17),
получаем
Мж[/* (s| ж) ] = J/* (в|ж)Л (ж) dx = h(s). (18)
V
Следовательно,
Я* = [ S^CiSJi (s) ds - М [У*'^У*], (19)
й
или, если записать значение первого интеграла в виде
математического ожидания,
7?* = М - М [У*'С!У*]. (20)
Как следует из данной формулы, средний риск есть
разность априорного и апостериорного обобщенных сред-
них квадратов требуемого и фактического выходного сиг-
налов, взвешенных коэффициентами потерь. Наиболее
четко это видно в одномерном случае, когда С\ и <S'T—
скаляры. В этом случае средний риск равен
R* = GM [^(5)] -^[У*2]. (21)
В случае оценки самого сигнала имеем
K* = CiM[S2] -CiMty*2]. (22)
Для многомерного случая удобно представить средний
риск в несколько иной форме. Учитывая тождество
М е= tr М [С^Х] = tг С1М [SA], (23)
где tr Л — след матрицы А (сумма диагональных эле-
ментов матрицы), получаем
К* = tr М [CjSX] - tr М [С'1У*У*']. (24)
В частном случае диагональной матрицы Сг с одина-
ковыми элементами С формула (24) принимает вид
R* = Ctr{M[5X]-M [У*У*']Ь (25)
Математические ожидания в (25) можно представить в
10*
148
Гл. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
следующей форме:
М [STST] = т5п,т5т 4- К$т,
М [У*У*'] = BiysMy* + Ку»,
где т8т, туг — математические ожидания требуемого и
выходного сигналов, ХЯф) Ку»—корреляционные мат-
рицы этих сигналов.
Вычислим математическое ожидание оптимальной
оценки
пгу» — М [ У * ] = М J ST (s) f* (s I x) ds —
a
= j" [ ST (s) /* (s I ж) fi (x) ds dx = JsT (s) h (s) ds = ms . (27)
vii n T
Отсюда следует, что оптимальная по критерию минимума
среднего квадрата ошибки оценка является несме-
щенной.
Учитывая (27) и подставляя выражения (26) в фор-
мулу (25), получаем
В* = Ctr (Ksv — Ху). (28)
Разность корреляционных матриц требуемого сигнала
KSt и оценки Ку» равна апостериорной корреляционной
матрице или корреляционной матрице ошибок
K* = KSrs-Ky». (29)
Покажем справедливость данного соотношения для опти-
мальной процедуры выделения. По определению
К* = М [ (У°* -St) (у°* — s°)z ],
kSt=m[s°s?'L Ху* = м [У°*у*°']. (30)
Подставим соотношения (30) в (29) и раскроем круглые
скобки в X*. В результате приведения подобных членов
и сокращения получаем
2М [У°*уо*'] = М [5°У0*] + М [y°*S!T]. (31)
§ 4.8. АПОСТЕРИОРНАЯ ПЛОТНОСТЬ ВЕРОЯТНОСТИ
149
Вычислим математические ожидания в правой части
полученного соотношения
М [А?уо*'] = М^М[£ЗДУО*'}==М[УО*УО*'],
М[У°*5°'] = Мж{У°* М[< |ж]] =М[у°* у»*']. (32)
Подстановка соотношений (32) в формулу (31) доказы-
вает справедливость равенства (29).
Используя (29), средний риск оптимальной системы
(28) можно представить в более компактной форме
R* = CinK*. (33)
Средний квадрат ошибки следует из (33) при С = 1.
В одномерном случае матрица К* равна дисперсии
ошибки (апостериорная дисперсия) К* = D*, и средний
риск и квадрат ошибки равны
R* = CD*, a*i=. D*. (34)
§ 4.8. Апостериорная плотность вероятности
Как следует из предыдущих параграфов, для получе-
ния оптимальных алгоритмов необходимо уметь вычис-
лять апостериорную плотность вероятности полезного
сигнала. Эта плотность вероятности выражается через
априорную плотность вероятности и условную плотность
вероятности наблюдаемого сигнала при фиксированном
полезном сигнале следующей формулой:
/с I -г} = - / (ж I(-П
‘ ' J h (s) / (ж | s) ds ' '
Априорная плотность вероятности 7i(s) известна, по-
этому основу вычисления апостериорной плотности веро-
ятности составляет определение условной плотности ве-
роятности Is). Эта функция зависит от характера
комбинации полезного сигнала и помехи и их вероятно-
стных характеристик.
Вычислим апостериорную плотность вероятности для
следующих условий. Наблюдается на интервале [О, Г]
150
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
m-мерная векторная функция
X(t) =w(t, U, N(t)), (2)
где х () — нелинейная иг-мерная векторная функция,
U — Z-мерный вектор случайных параметров, характери-
зующих полезную информацию, N (i) — g-мерный век-
тор помех. Функция и (•) при фиксированном векторе
случайных параметров U — и есть гауссовский случай-
ный процесс, характеризующийся вектором условного
математического ожидания условной матрицей
корреляционных функций Кх (t, t', и) [47] .
Вначале рассмотрим дискретное наблюдение. Пусть
на интервале наблюдения фиксируются в моменты вре-
мени t{ значения ординат векторной случайной функции
X (tj). Если на интервале наблюдения фиксируются d
точек, то совокупность векторов X , X (i2), ..., X (td)
образуют md-мерный вектор случайных величин. Этот
вектор по условию, наложенному на нелинейную функ-
цию х (•), имеет условный нормальный закон распреде-
ления вероятности. Поэтому плотность вероятности век-
тора входного сигнала при U = и имеет вид
/ (ж | и) = — i -------X
V(2n)md\Kx (к) |
X exp — ~ (ж — тх (и))' К—1 (и) (х — тх (n))j , (3)
где тх (и), Кх(и) — условное математическое ожидание
и корреляционная матрица входного сигнала. Матрица
(и) блочного типа:
= • I • L:! :
(4)
Элементами матрицы (4) являются матрицы, образован-
ные из элементов K^(th, th,u), где k, h — 1, d. В фор-
муле (3) (Кх{и) |—определитель матрицы Кх(и), К~1(и)—
обратная матрица.
§ 4.8. АПОСТЕРИОРНАЯ ПЛОТНОСТЬ ВЕРОЯТНОСТИ
151
Раскроем скалярное произведение векторов в пока-
зателе экспоненты формулы (3):
(ж — тх (и))' КХ1 (и) (х — тх (и)) =
= x'K-ix — 2x'K-lmx + m'xK~lmx. (5)
Это равенство справедливо в силу действительности и
самосопряженности корреляционной матрицы Вве-
дем обозначения
g(u) = Kxl(u)mx(u), Р(и)=К^(и). (6)
Умножая обе части этих равенств слева на матрицу
Кх, получаем
Kx(u)g(u) = тх(и), Kx(u)F (и) = I, (7)
где I — единичная матрица.
Используя обозначения (6), перепишем формулу ус-
ловной плотности вероятности вектора входного сигнала
в следующем виде:
/ (ж | а) = exp f—A x’Fx-^g'x — у g'mx] .
K(2«)md \кх(и) | I 2 2 J
(8)
Апостериорная плотность вероятности вектора слу-
чайных параметров (1) после замены s = и, подстановки
условной плотности вероятности (8) и несложных пре-
образований равна
/* (»|«) =
= ехр | — yr x'F (и) х + g'(u) (х — ~ тх (в)')] , (9)
где к — нормирующий множитель, равный
к = f exp 1-4- x'Fx + ё' — 4- du
J у D (и) I. 2 \ z /J
—1
a D (и) = |КХ (а) [.
(Ю)
Рассмотрим теперь непрерывное наблюдение. Для
этого перейдем к пределу, увеличивая количество дис-
152
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
кретных точек отсчета входного сигнала до бесконечно-
сти путем уменьшения расстояния между ними без изме-
нения общего интервала наблюдения [0, Т]. В результа-
те предельного перехода тй-мерный вектор входного сиг-
нала переходит в m-мерную функцию X(t). Скалярные
произведения векторов в показателях экспонент в фор-
мулах (9), (10) принимают в непрерывном случае сле-
дующий вид:
Т у
x'Fx = J j х' (i) F (i, г, и) х (т) dt dx,
о о
(И)
I 1
ё (а? — ~2-тх
1 1
х (т)-----g- тх (т,и) dx. (12)
В результате предельного перехода формула апосте-
риорной плотности вероятности вектора случайных па-
раметров принимает вид
/* (п | х) = exp {W (Т, п)} , (13)
Г (II)
где
т т
W (Т, и) = — -|- J Jх' (£) F (t, т, и) х (т) dt dx ф-
о о
Нормирующий множитель к равен
—1
^=ехр{Ж(Т,«)}^
(15)
Весовые функции F (£, т,» ), g (rt») определяются
уравнениями (7), которые в результате предельного
перехода к непрерывному времени наблюдения прини-
мают вид интегральных уравнений
т
^Kx(t,x,u) g(r,u) dx = mx(t, u) , (16)
о
§ 4.8. АПОСТЕРИОРНАЯ ПЛОТНОСТЬ ВЕРОЯТНОСТИ
153
т
= (17)
о ’
где I — единичная матрица, 6(4 — т) — 5-функция.
Вычисление определителя D (и) в дискретном случае
можно осуществить методом собственных значений [81].
Матрица Кх в силу свойств корреляционных моментов
всегда может быть диагонализирована линейным преоб-
разованием [89]
Р~1КХР = Л,- (18)
где Р — матрица собственных векторов Кх, А — матрица
собственных значений, являющаяся диагональной матри-
цей. Определитель матрицы Кх равен определителю
произведения P~iKxP и, следовательно, определителю
матрицы собственных значений
7П оо
D (и) = | Л (и) | = П П («)i (19)
i. 1=1 fe=i
где %® — k-ё собственное число i/-ro элемента блочной
матрицы Кх.
В случае непрерывного наблюдения величины ik («)
являются собственными числами ядра матричного инте-
грального уравнения
т
J Кх (£, g, и) Р (g, Т1») dl = АР («г т, в) t (20)
о
где Р(4, т, и)—матрица собственных функций ядра
Кроме метода собственных значений, вычисление оп-
ределителя D (и) может быть определено по методу
следа [81].
Подводя итоги рассмотрения вопросов вычисления
апостериорной плотности вероятности вектора парамет-
ров, перечислим последовательность действий в случае
непрерывного времени наблюдения. Решением интеграль-
ных уравнений (16), (17) определяются вектор g (т, и)
и матрица Р (4, т, и) весовых функций. Решением ин-
тегрального уравнения (20) определяются матрицы соб-
ственных функций и собственных значений. По формуле
(19) вычисляется определитель D (а). Далее но формуле
154
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
(14) определяется явный вид функции W(T,u), и ин-
тегрированием вычисляется нормирующий множитель
(15). Априорная плотность вероятности 7i(w) должна
быть известна.
В заключение запишем алгоритм вычисления апосте-
риорной плотности вероятности в скалярной форме:
т Т
.2 J К*. (t, т, и) gj (т, и) dx = mxi (£, и), (21)
J=ig
т Т
2 [^(^^»)ъи^т,»)^ = бгьб(«-т), (22)
т Т
3 ( А?. (*. ») т) <R> = Pikv (t, т)
5=1 J
(i, к — 1, m, v = 1, oo), (23)
т т
i i xt (t) Xj (t) Ftj (t, T, u) dt dx -|-
i.j=i 0 0
и'(г.и)=-4 2
«I (l> “) C) — ф “и “)
dx,
(24)
m co
D (и) = П П ^iji (u),
i,j~i 1=1
-1
(25)
(26)
(27)
k= J -^-e^{W{T1U)}du (
^(М|Ж) = ^^ехр {P7(7»}.
§ 4.9. Аддитивно-мультипликативная помеха
Рассмотрим алгоритм вычисления апостериорной плот-
ности вероятности для частного случая аддитивно-муль-
типликативной помехи. Входной сигнал представим в
виде [50]
X(t) = S(t1U)[I + Z(t)] + N(t')i (1)
§ 4.9. АДДИТИВНО-МУЛЬТИПЛИКАТИВНАЯ ПОМЕХА
155
где S(t, U) —матрица полезного сигнала, элементы
которой зависят от вектора случайных параметров, I —
единичный вектор, Z (i) — мультипликативная помеха,
TV (i) — аддитивная помеха. Правая часть в (1) конкре-
тизирует общую форму нелинейной функции %(•) для
частного случая аддитивно-мультипликативной помехи.
При фиксированном векторе параметров U = и X(t)
является гауссовским случайным процессом.
Вычислим условное математическое ожидание и ус-
ловную матрицу корреляционных функций входного сиг-
нала при U = и. Применяя операцию условного среднего
к (1), получаем
mx(t, и) = S (t, и) [7 + mz(t) ] + (2)
где —математические ожидания векторов
мультипликативной и аддитивной помех соответственно.
Вычитая из (1) выражение (2), умножая разность справа
на транспонированное значение такой же разности и
применяя операции условного среднего к полученному
произведению, находим
Ks «т, и) = М [X°[(t) X0' (т) ] =
— Ks (t, т, и) + KN (i, т) -{-2KSn (£, т, и), (3)
где приняты обозначения
Ks (t, т, и) = S (t, и) Kz(t, т) S' (т, и), (4)
KSN (t, т, и) = KZN (£, т) S'(t, и). (5)
Здесь KZn (t, т) — матрица взаимных корреляционных
Функций аддитивной и мультипликативной помех,
—матрицы корреляционных функций
мультипликативной и аддитивной помех соответственно-
Штрих означает операцию транспонирования.
Апостериорная плотность вероятности вектора пара-
метров при аддитивно-мультипликативной помехе и дис-
кретном наблюдении определяется общим алгоритмом
(4.8.7), (4.8.9), (4.8.10). Конкретизируем этот алгоритм
с учетом специфики аддитивно-мультипликативной по-
мехи. Умножим числитель и знаменатель (нормирующий
множитель /с) в формуле (4.8.9) на множитель
ехр {х'К^х/2 ), не зависящий от вектора случайных пара-
метров. Тогда вместо матрицы F весовых функций
156
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
можно образовать матрицу связанную с матрицей F
формулой
Т = Kn1 - F. (6)
Подставляя значение матрицы F — Кх\ получаем
W = K^-[Ks + Kn + 2Ksn]-\ (7)
Умножая справа на матрицу Кх= К3KN-}-2KaN,
имеем
WKX = L, (8)
где введено обозначение
Ь = + (9)
Умножая слева это соотношение на KN, получаем
уравнение, определяющее матрицу L:
КцЬ = Кд -}-2KSN. (10)
Определитель D (и) в данном случае можно привести
к другому виду. Для этого достаточно в дискретном ва-
рианте поделить числитель и знаменатель (нормирующий
множитель к) апостериорной плотности вероятности
(4.8.9) на величину | , не зависящую от вектора
случайных параметров. В результате преобразования
получаем
Z)(M) = |Kn1||Kx| = |Z4-Kn1(Ks + 2Ksn)| = |/ + L|,
(И)
где I —единичная матрица. Матрица L, как это следует
из (9), действительная и симметричная, поэтому ее
можно диагонализировать при помощи линейного преоб-
разования. После диагонализации определитель D (и)
вычисляется по формуле
5(»)=ПШ1 + ^(“))- <12)
i,j=l k=i
где (и) — собственные числа блочной матрицы L.
Таким образом, алгоритм вычисления апостериорной
плотности вероятности определяется уравнениями (8),
§ 4.9. АДДИТИВНО-МУЛЬИПЛИКАТИВНАЯ ПОМЕХА
157
(10), (11), (4.8.9) и формулами
f* (Ц|Ж) = ^^ехр {ТУ (а)},
W (и) = ^-х'^х + g'\x-±-mx (и)
(13)
(14)
(15)
h (и)
VwT
- -и
exp {W (и) }du .
При переходе к непрерывному времени матрицы ве-
совых функций Ч*' (i, т, u), L (£, т, и) определяются инте-
гральными уравнениями, вытекающими из соотношений
(8), (10) соответственно:
^(?,т,и)Кж(«Л,и)^ = L(i,T,u), (16)
6
f KN |) L (g, т, и) d£ = Ks (t, t, u) + 2Ksn (t, r, u). (17)
6
Функция W(T, n) принимает вид
т т
W (Т, и) = у J J х' (t) Т (t, г, и) х (г) dt dx +
(18)
Определитель D (и) для непрерывного времени наблю-
дения переходит в определитель Фредгольма
П(п) =
m оо
JJ JJ (1 + ^ijk (w) ),
i,j=l А=1
(19)
где ^ц/Ди)—собственные числа матричного ядра L(t,x.
и) линейного интегрального уравнения
т
= AP(t,x). (20)
о
Здесь Р (t, т) — матрица собственных функций ядра
158
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Определитель Фредгольма может быть вычислен так-
же по следующим формулам:
1 т
D (и) = ехр — J J | Q (т, т, и) | сП tZg ,
о о
{т _
— J [ Q (т, и) [ du
о
(21)
(22)
где Q(t, т, и) —резольвента функции L(t, т, и), опре-
деляемая уравнением
т
J Q (t, и) L (В, т,и) d^ + Q (t, т, и) = L (t, т, и). (23)
о
Функция Q (т, и) есть резольвента функции L (t, т, и) и
вычисляется из уравнения
J Q (£, s, и) L (£, т, и) -|- Q (t, %,и) = L (t, т, и) (24)
о
при t = т. Заметим, что резольвента Q(t, т, и) связана
с весовой функцией Т (t, т, и) соотношением
Q(t,t,u) = '’F(f,T,w)XjV(#,T). (25)
Это нетрудно показать, например, для дискретного слу-
чая. Действительно, прибавляя к правой и левой частям
соотношения (10) матрицу К^, получаем
KhL + — Кх.
Подставляя значение Кх из этого уравнения в уравнение
(8), получаем
WKNL + WKN = L. (26)
Отсюда непосредственно следует, что функции Q =
и L суть резольвенты по отношению друг к другу.
Таким образом, апостериорная плотность вероятности
для непрерывного наблюдения определяется формулой
(13), в которой функция W(T,u) вычисляется по фор-
муле (20). Весовые функции вычисляются решением
интегральных уравнений (16), (17), а определитель
Фредгольма — по формулам (19) или (21), (22) с допол-
§ 4.9. АДДИТИВНО-МУЛЬТИПЛИКАТИВНАЯ ПОМЕХА
163
Подставляя значения весовых функций (45), (53) в формулу (18)
и, далее, полученное выражение в показатель экспоненты форму-
лы (13), а также подставляя определитель Фредгольма (47) в (13),
получаем выражение для апостериорной плотности вероятности
случайной амплитуды. Анализ полученного весьма сложного вы-
ражения показывает, что апостериорная плотность вероятности
не является нормальной [46].
В частном случае действия только аддитивной помехи Dz = О,
следовательно, весовая функция i|>(t, т, и), определяемая форму-
лой (45), равна нулю: ф(г. т, и) = 0. Весовая функция g(r, и)
в соответствии с формулой (53) (у = а) равна
и
g (т, и) = р-. (54)
Определитель Фредгольма (47) при Dz = 0, и следовательно,
а — 7, равен О (и) =1. Подставляя значения у(т, и), т, и)
и D (и) в формулу (13), получаем
Т
Если априорная плотность вероятности параметра является
нормальной
1 ( (и — ,п/)2)
h {М) = |/'2л7Г еХР ( )’ (56)
где 7?ги, — априорное математическое ожидание и дисперсия
случайной величины U, то апостериорная плотность вероятности,
как нетрудно убедиться простыми преобразованиями, также явля-
ется нормальной и равной
1 ( (и___17*)2)
/*(#|l)=7^expr~2F-)- . <57)
где D*— апостериорная дисперсия случайного параметра U,
равная
О DT
D* = T+^ - = (58)
В этих (формулах параметр v есть отношение сигнал — шум.
Величина С7* в (57) есть апостериорное математическое ожи-
дание случайной величины U и определяется (формулой
Т
U* = 2V + -4-1 f х (т) йт, (59)
1 + v 1+vTJ ' '
о
11*
164
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
§ 4,10. Оценка параметров линейного сигнала
Рассмотрим часто встречающуюся на практике задачу
оценки параметров линейного сигнала по критерию ми-
нимума среднего квадрата ошибки. Полезный сигнал
представим в форме
S(t,U) = S(t)U, (1)
где S (£) — матрица известных функций времени, U —
вектор случайных параметров. Вычислим апостериорную
плотность вероятности вектора параметров, полагая, что
помеха аддитивна, имеет нормальный закон распределе-
ния вероятности с математическим ожиданием mN(t) и
корреляционной матрицей KN (£, т) . Помеха независима
от параметров. Наблюдение входного сигнала ведется не-
прерывно на интервале [0, 71].
Условное математическое ожидание входного сигнала
при U — и имеет вид
тх (*>») =s (О «+ mN W , . (2)
где mN (t) — математическое ожидание помехи. Весовая
функция g (т, и) определяется интегральным уравнением
(4.9.30), решение которого можно формально представить
в виде
т
g (т, и) = [ (т, В) тх (I, и) <R. ‘ (3)
о
Справедливость данного выражения нетрудно проверить
путем умножения обеих частей равенства слева на мат-
рицу корреляционной функции помехи KN (т, t) и инте-
грирования в интервале [0, 71]. В соответствии с извест-
ным равенством [89]
т
= (4)
о
следует справедливость формулы (3).
Подставляя в (3) значение условного математического
ожидания, получаем
g (т, и) = j К-1 (т, 5 (I) Udl + f К-1 (т, £) mN (|) %. (5)
о fl
g 4.10. ОЦЕНКА ПАРАМЕТРОВ ЛИНЕЙНОГО СИГНАЛА 165
Транспонированное значение вектора весовых функций
равно т
g' ©, и) = и' J У (5) (т, g) dl + f m'N © K-1 (т2 g) dg.
о b
W
Здесь учтено, что обратная матрица корреляционных
функций помехи является симметрической.
Введем обозначения
g'o W = J s' © К„1 (т, g) dl ~g' (т) = J mN © Kn1 (t, g) dl
о 6
(7)
и выразим весовую функцию через функции g0 и g
g' (т, и) = и'go (т) + ~g' (т). (8)
Весовые функции gQ и g определяются следующими ин-
тегральными уравнениями:
J g'o (т) Kn ©= 8' © , j g' © т) (t)
о о
(S)'
Подставляя вектор весовых функций (8) в формулу
апостериорной плотности вероятности (4.9.33), получаем
(Ю)
(11)
Q = j (т)ж(т)йт— у (т) mN (т) dt — -j-J S' (т) g (т) dx,
0 0 о
(12)
С = J g' (т) S (т) dx = J J 8' © (т, g) 8 (т) drdg. (13)
0 0 0
exp luQ-----2~u Cu\ ,
*
где приняты следующие обозначения:
-1
— ^urCu\ du
ti I
т
т
т
16G
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Оптимальная оценка вектора параметров по критерию
минимума среднего квадрата ошибки есть условное
среднее
U* — J н/*(и | х) du. (14)
*—оо
Подставляя значение апостериорной плотности вероятно-
сти (10), получаем
17* = к J uh (и) exp ^u'Q--и'Си] du. (15)
*~ОО
Рассмотрим частные случаи.
^Помеха имеет нулевое среднее mN = 0. В этом слу-
чае g (т) = 0 и вектор Q вычисляется по более простой
формуле
т
Q = ро W х W dx- (16)
о
2. Априорные распределение вероятности вектора па-
раметров является нормальным и имеет плотность веро-
ятности
h (и) = 1 - ехр (--~(и — т)'К~1 {и — т)] , (17)
К (2л)11 к | I 1 Г
где I — размерность вектора параметров, т — вектор
математического ожидания, К— априорная корреляцион-
ная матрица параметров.
Подставляя выражение (17) в апостериорную плот-
ность вероятности, получаем после сокращения на по-
стоянные множители
f* (и I ж) = - ыР&'В-и'Аа}---
J ехр{и'В — u'Aujdu
— ОО
где введены обозначения
В = Q (х) + K-im,
Д = -|-(С + К-1).
(18)
(19)
§ 4.10. ОЦЕНКА ПАРАМЕТРОВ ЛИНЕЙНОГО СИГНАЛА
167
1/ ехр (А- В'А^В], (20)
Г UI I2 Г
Интеграл кратности I в знаменателе (18) вычисляется
аналитически и равен
СО
ехр {w'Z?— и'Au} du —
где I — размерность вектора и.
Подставляя (20) в (18) и преобразуя выражение длй
апостериорной плотности вероятности, получаем следую-
щую формулу:
/* (к | х) =—£=: ехр [- (« - (и - Г*)1.
V (2л)!| К* I I z )
(21)
В этой формуле К* — апостериорная корреляционная
матрица вектора случайных параметров, равная
К* = K(I + М)-1 = (К-1 + С)~\ (22)
где I — единичная матрица, М — матрица отношений
сигнал — шум, равная
т
М = КС = К J g' (т) S (т) dr. (23)
о
Используя (7), представим матрицу отношений сигнал —
шум (23) в виде
т т
М = (24)
о о
В формуле (21) U* — апостериорное математическое
ожидание вектора случайных параметров, равное
U* = К* (K~lm + Q (ж)), (25)
или
U* = (I 4- М}~1т + (I + М)~'КС) (ж), (26)
где Q (ж) определяется формулой (12).
Рассмотрим частный случай помехи в виде белого
шума с характеристиками: mN =0, KN (т, В) = (т — £),
где Гд, — интенсивность белого шума, связанная с уров-
нем спектральной плотности <S’U соотношением = 2빑
168
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
Обратная корреляционная матрица помехи равна
^1(тД) = Г-1б(т-^). (27)
Подставляя4 в (24), получаем матрицу отношений сиг-
нал — шум
М = К j S' (т) (т) dx. (28)
о
Весовые функции ga, g, определяемые формулами (7), в
данном случае равны
/о(т) = 5'(т)Г^11 ?(т) = 0. (29)
Функционал равен
т т
Q (а) = j g'o (?) х (т) dx = J S' (т) Г^1 х (т) dx. (30)
о о
Подставляя значение Q из (30) в (26), получаем апосте-
риорное среднее ~----------
т
U* - (I + M)~hn + (7 + М) ~lK J S' (т) Г-1 х (т) dx. (31)
о
Апостериорная корреляционная матрица вектора слу-
чайных параметров после подстановки матрицы М из (28)
в формулу (22) принимает вид
/ т \-1
К* = К 1 + К J S' (т) Г-15 (г) dx . (32)
\ о J
Таким образом, в рассматриваемой задаче апостериор-
ная плотность вероятности вектора параметров представ-
ляет собой нормальный закон с математическим ожида-
нием U* и корреляционной матрицей К* В силу того,
что оценка U* в (14) есть апостериорное среднее,
практически отпала необходимость вычисления интеграла
(14), так как достаточно было представить апостериор-
ную плотность вероятности в обычной форме нормального
закона и тем самым определить математическое
ожидание.
Формулы (25), (22), (24), (12) или (26), (24), (12)
для общего случая и (31) для случая помехи в виде
§ 4.10. ОЦЕНКА ПАРАМЕТРОВ ЛИНЕЙНОГО СИГНАЛА
169
белого шума определяют алгоритм получения оптималь-
ной оценки вектора параметров линейного сигнала по
критерию минимума среднего квадрата ошибки. Потен-
циальная точность получения оценки определяется фор-
мулами (22), (24) для общего случая и (32) для случая
помехи в виде белого шума.
Пример 1. Построить алгоритм оценки случайной величины для
следующих условий. Непрерывно на интервале [0, 7] наблюда-
ется сигнал
X(t) = S(t)U + N(t),
где S (t) — известная функция времени, U — случайная величина
с нормальным законом распределения вероятности, математиче-
ским ожиданием т и дисперсией D, N(t) — гауссовский белый
шум с ты — 0 и К я (т, t) = Гм6 (т — g).
В соответствии с формулой (31) алгоритм получения оценки
параметра U равен
Т
1 + т 1 + v.)
о
где отношение сигнал — шум равно
8* (т) </т.
Апостериорная дисперсия оценки равна (см. формулу (22))
D*----
и “l-j-v*
В частном случае 8 (т) =1 имеем
т
тп 'V1 1 Р
U* = Г+л^ + 1~+‘ Т J </т’
о
где отношение сигнал — шум теперь равно
Проведем анализ алгоритма. Первый член в формулах для
оценки случайной величины представляет собой априорные дан-
ные, а второй — апостериорные данные о случайной величине U.
Эти члены взвешиваются коэффициентами 1/(1 + Vi) и Vi/(1 + Vi),
зависящими от отношения сигнал — шум. Если величина т, бес-
конечно велика, то априорные данные не используются при обра-
ботке, а имеют значение только апостериорные данные. Наоборот,
170
ГЛ. 4. МЕТОДЫ СИНТЕЗА СИСТЕМ
если Vi = 0, то используются только априорные данные. Величи-
на отношения сигнал — шум определяется дисперсией случайной
величины, временем наблюдения и интенсивностью помехи. Зна-
чение vj = оо может быть достигнуто при конечных Т и Г» за
счет принятия условия бесконечности дисперсии случайной ве-
личины. При этом формула для оценки принимает вид
т
U* = A J х (т) dx.
0
Апостериорная дисперсия при D = оо равна
.Т’
Бесконечность дисперсии с физической точки зрения можно объ-
яснить как полное отсутствие априорных сведений о случайной
величине. Получаемый при этом алгоритм соответствует критерию
наименьших квадратов ошибки. Таким образом, метод наименьших
квадратов есть частный случай бейесовой процедуры получения
оценок параметров. Нетрудно показать, что апостериор-
ная дисперсия при бейесовой процедуре не превосходит апосте-
риорной дисперсии, получаемой по методу наименьших квадра-
тов D* g; О**. Действительно, отношение апостериорных диспер-
сий не превосходит единицы
А_ = —J при 0 «С v. С 00 •
D*« 1 + Vj 1
Таким образом, использование априорных данных в процессе из-
мерения может только повысить точность получения оценки па-
раметра, причем наиболее эффективно использование априорных
данных при малом значении отношения сигнал — шум.
Пример 2. Построить алгоритм оценки случайной величины
при наблюдении сигнала
X(t) = S(t)U + N,
где S(t), U имеют те же характеристики, что и в первом приме-
ре, а /V случайная величина с нулевым средним и дисперсией
Dn. Производится п дискретных отсчетов входного сигнала. Алго-
ритм обработки имеет вид
U* = ГТ~ + ГГ' 2 S (Ti) ж (Ti)’
где отношение сигнал — шум равно
i==l
§ 4.10. ОЦЕНКА ПАРАМЕТРОВ ЛИНЕЙНОГО СИГНАЛА
171
В частном случае 5=1 имеем
. п
т . "Vi 1 v
£7* = j—;-------------Ь------— • — / а; ЛгД,
1 + vi 14- v; п ' г>
1 1=1
Dn 1
vi = Dj D^ = DT+T1-
При D — оо и S = 1 полупаем алгоритм, оптимальный по методу
наименьших квадратов:
п
1=1
— А
П
Если учитывать стоимость наблюдений, полагая ее пропорцио-
нальной числу наблюдений, то средний риск будет равен
Л* = CJ)* + С2п,
где Ci, С2 — коэффициенты пропорциональности.
Поскольку апостериорная дисперсия является функцией чис-
ла наблюдений, то можно провести дальнейшую минимизацию
среднего риска по числу наблюдений. Подставляя D*, получаем
C.D
^=—^ + С2п.
1 + л-
Дифференцируя средний риск по п и приравнивая нулю произ-
водную, получаем следующее уравнение относительно п:
С2
Dn 2
-с d2
~OiD~
Решая это уравнение, имеем оптимальное число наблюдений
га,
An
ТУ
Подставляя это выражение в средний риск, получаем мини-
мальный средний риск, равный
R* = 2y-O^p^-C2DNID.
При D = оо получаем
Rd=№ = 2
ГЛАВА 5
МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
§ 5.1. Типы моделей
Для решения задай оценки технического состояния н
синтеза характеристик систем контроля необходимо иметь
Математическую модель объектов контроля. Эта модель
используется для определения допусков па параметры по
заданным допускам на показатели качества, синтеза оп-
тимальных алгоритмов измерения и прогнозирования
показателей качества, синтеза оптимальных процедур
принятия решений, определения объема и перечня конт-
ролируемых параметров и решения других задач. Пере-
численные задачи составляют основное содержание теории
контроля динамических систем, поэтому математическая
модель объекта контроля является важным элементом
этой теории.
Построение модели начинается с определения вход-
ных и выходных переменных, зависимость между кото-
рыми и должна описываться моделью объекта контроля.
Выходные переменные объекта контроля должны опре-
делять его техническое состояние. В соответствии с прин-
ципами контроля, изложенными во второй главе,
величинами, характеризующими способность объекта
выполнять свои функции, являются показатели качества,
поэтому эти показатели должны рассматриваться как
выходные переменные модели, описывающие состояние
объекта контроля. Полной характеристикой объекта как
динамической системы является его оператор. При конт-
роле предполагается, что структура оператора является
известной, а неопределенность связана с незнанием зна-
чений параметров оператора. В связи с этим в качестве
входных переменных модели объекта контроля принима-
ются параметры оператора. Таким образом, модель объек-
та контроля должна описывать зависимость между пока-
зателями качества, характеризующими состояние объекта,
и его параметрами.
§ 5.1. ТИПЫ МОДЕЛЕЙ
173
Вообще говоря, зависимость между показателями ка-
чества и параметрами динамической системы определяется
дифференциальными, интегральными и другими функ-
циональными уравнениями, описывающими работу систе-
мы. Однако это описание обычно является очень слож-
ным и громоздким, и практически его нельзя использо-
вать в качестве модели системы как объекта контроля.
Как правило, уравнения работы динамической систе-
мы связывают входные и выходные сигналы при фикси-,
рованных параметрах. С точки зрения контроля, как уже
отмечалось, удобнее в качестве модели иметь зависимость
показателей качества от параметров при фиксированных
входных сигналах системы. Для случайных входных
сигналов системы понятие фиксированности означает
фиксированность вероятностных характеристик сигналов,
и тем самым определяется класс реализаций сигналов.
Фиксация входных сигналов, в число которых включают-
ся и начальные условия, означает определение режима
работы и соответственно контроля динамической системы.
Выбор определенного режима функционирования си-
стемы для осуществления процесса контроля позволяет
значительно упростить построение модели объекта, сведя
ее к классу статических зависимостей. Действительно,
при фиксированном режиме показатели качества являют-
ся функциями параметров, и с геометрической точки
зрения их можно рассматривать как поверхности в про-
странстве параметров. Пусть, например, имеется один
обобщенный показатель качества, зависящий от парамет-
ров системы. Эту зависимость можно трактовать как
гиперповерхность в пространстве параметров. В опреде-
ленном диапазоне изменения параметров истинную ги-
перповерхность можно аппроксимировать некоторой до-
статочно простой аналитической зависимостью, и следо-
вательно, значительно упростить форму модели объекта
контроля.
Для рассмотрения характерных зависимостей показа-
телей качества от параметров и соответственно типов
моделей объектов контроля целесообразно все множество
параметров разделить на две группы. К первой группе
относят параметры, влияние которых на показатель ка-
чества характеризуется принципом «да — нет». В опре-
деленных диапазонах изменения параметры этой группы
174
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
не оказывают влияния на показатель качества. При вы-
ходе значений параметров из этих диапазонов происхо-
дит скачкообразное изменение показателя качества, так
что объект контроля становится неработоспособным.
К числу параметров первой группы относятся параметры
безопасности работы, цепей включения и выключения
и т. п. Зависимость показателя качества от параметров
первой группы может быть описана, например, в виде
произведения единичных функций, аргументами которых
являются отклонения параметров от границ своих до-
пусков.
Ко второй группе относят параметры, влияние кото-
рых на показатель качества характеризуется непрерыв-
.иостыо, т. е. малые изменения значений параметров
приводят к небольшим изменениям показателей качества.
Вторая группа параметров включает коэффициенты уси-
ления, демпфирования, постоянные времени и запаздыва-
ния и другие величины, характеризующие динамические
свойства системы.
Правильно выбранный показатель качества как функ-
ция параметров второй группы должен иметь экстремаль-
ное значение. Экстремуму показателя качества соответ-
ствуют номинальные значения параметров второй группы.
Поэтому всякое отклонение параметров этой группы от
своих номинальных значений приводит к ухудшению
значения показателя качества. Простейшей формой зави-
симости, описывающей наличие экстремальной точки,
является поверхность второго порядка. Эта поверхность
может быть использована для аппроксимации с опреде-
ленной точностью зависимости показателя качества от
параметров второй группы.
Рассмотренные зависимости показателей качества от
параметров первой и второй групп определяют аналити-
ческий тип модели объекта контроля. Аналитичность
понимается в том смысле, что значение показателей каче-
ства может быть вычислено в данной модели по значе-
ниям параметров. Аналитическая модель дает количе-
ственную связь показателей качества с параметрами.
Эта количественная зависимость дает большую информа-
цию при контроле, которую можно использовать не толь-
ко для принятия решения о годности объекта, но и для
анализа влияния условий храпения и эксплуатации на
§ 5.1, ТИЛЫ МОДЕЛЕЙ.
175
свойства объекта контроля, а также для диагностики
неисправностей.
Кроме аналитической модели, для описания объекта
контроля может быть использована логическая модель.
Эта модель определяет качественную форму зависимости
показателей качества от параметров. В логической модели
все параметры могут принимать только два значения:
«годен», что условно обозначается 1, и «не годен», для
обозначения которого используется 0. Сочетание всех
параметров, имеющих значение 1, соответствует работо-
способному (исправному) состоянию объекта. Неисправ-
ное состояние объекта характеризуется множеством зна-
чений параметров, в котором хотя бы один параметр
принял значение 0. Таким образом, состояние объекта
контроля в целом также описывается булевой переменной,
принимающей значения 1 при работоспособном объекте и
0 при неработоспособном. Такое описание достаточно с
точки зрения принятия решения о работоспособности
объекта. В случае, когда одновременно с оценкой работо-
способности объекта должна осуществляться диагности-
ка, т. е. определение места и причин неисправностей,
необходимо рассматривать детально все возможные неис-
правные состояния системы.
Логическая модель объекта контроля позволяет ре-
шать некоторые задачи синтеза системы контроля и ди-
агностики, а именно:
— осуществлять выбор минимального числа признаков
для определения работоспособности объекта;
— определять минимальное число признаков для
выявления каждого неисправного состояния объекта.
В работах [13, 64, 99, 100, 111] изложены методы
анализа логических моделей контроля для решения ука-
занных задач, основанные на применении алгебры
логики.
Основным недостатком логической модели является
резкое увеличение числа состояний с ростом сложности
системы. Поэтому для сложных систем, включающих
большое число параметров, вычисления становятся очень
громоздкими, и приходится представлять объект в виде
некоторых обобщенных блоков. Кроме того, логическая
модель в силу качественной связи показателей качества
с параметрами не может дать полной информации о влия-
176
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
иди условий эксплуатации и хранения на качество функ-
ционирования объекта контроля.
Время проведения конкретного контроля состояния
того или иного объекта весьма мало по сравнению, на-
пример, с ресурсом работы. За это время влияние дрейфа
параметров вследствие процессов старения или износа
на измерение параметров пренебрежимо мало. Поэтому
при контроле технического состояния считается, что па-
раметры объекта являются постоянными, но неизвестными
величинами. До контроля известна априорная информа-
ция о параметрах, например, о диапазоне возможного
разброса. Кроме того, как правило, уже имеются стати-
стические данные о разбросе параметров по предыдущим
измерениям этих же или аналогичных объектов контроля.
В связи с этим в качестве модели параметров при контро-
ле рассматривается модель случайной величины, априор-
ный закон распределения которой известен. Использова-
ние такой априорной информации позволяет улучшить
качество измерения при одинаковых условиях со случаем,
когда такая априорная информация не используется.
Во многих случаях необходимо произвести оценку тех-
нического состояния объекта в будущем. Для этого по
результатам ряда измерений параметров в прошлом необ-
ходимо прогнозировать значения параметров. Время про-
гнозирования уже может составлять существенную часть
от общего ресурса работы, и влияние дрейфа параметров
становится большим. В этих условиях параметры необ-
ходимо рассматривать как случайные функции времени.
В связи с изложенным при рассмотрении задачи синтеза
характеристик оптимальных измерителей и определении
гарантийных допусков параметры считаются случайными
величинами, а при решении задачи прогнозирования мо-
делью параметров являются случайные функции.
§ 5.2. Аналитическая модель
В соответствии с разделением параметров на две груп-
пы полную зависимость показателя качества от парамет-
ров представим в виде произведения
Р7(С7) = ТУ1(Г71)Р72(Г2), (1)
где W — показатель качества, U —вектор параметров
§ 5.2. АНАЛИТИЧЕСКАЯ МОДЕЛЬ
177
объекта, Wi(?7i) —составляющая показателя, зависящая
от параметров первой группы —составляю-
щая показателя качества, зависящая от параметров вто-
рой группы U2.
Зависимость показателя качества от параметров первой
группы можно записать в виде произведения характери-
стических функций полей допусков параметров
W\(tfi) = f[Wi), ' (2)
i=l
где d — количество параметров первой группы, (Ut) —
характеристические функции отрезков, равные
к (Ui) = 1 (уi- Д< О) - 1 ( Ui - Д(2>) . (3)
В этом выражении А?)—левая граница допуска i-ro па-
раметра, А^2) — правая граница допуска i-ro параметра,
1 (ж) — единичная функция, определяемая соотношением
1 (ж) =
О,
£
2
х < О,
х = О,
х > 0.
(4)
Рис. 5.2.1.
График функции (3) представлен на рис. 5.2.1. Как сле-
дует из рисунка, функция l^Uj) представляет собой ха-
рактеристическую функцию поля
допуска, т. е. если значение i-ro
параметра принадлежит полю до-
пуска, то функция равна
единице, если же значение i-ro
параметра выходит за поле до-
пуска, то характеристическая
функция li(Ui') равна нулю.
Зависимость (2) есть формальная запись логической
схемы «И», при которой, если хотя бы один параметр
находится вне поля допуска, значение функции Wi (Ui),
а следовательно, и показатель качества равны нулю. Если
все параметры находятся внутри своих полей допусков,
то функция РУх (££) = 1. В этом случае показатель каче-
ства в соответствии с формулой (1) определяется функ-
цией W2(172).
12 ц. г. Евланов
178
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
Функциональная зависимость показателя качества от
параметров второй группы может быть описана различ-
ными соотношениями. Одной из наиболее простых ап-
проксимирующих зависимостей является полиномиальная
функция
W2 (V2) = wo + B'V2 + V'2CV2>- (5)
где Wo — значение показателя качества при поминальных
значениях параметров, В —вектор коэффициентов, С—
матрица коэффициентов, Уг— центрированное значение
вектора параметров второй группы, равное
V2 = U2 - т21. (6)
где т2 — математическое ожидание вектора параметров
второй группы.
Построение аппроксимирующей зависимости (5) зак-
лючается в определении вектора В и матрицы С коэф-
фициентов, таких, что гиперповерхность второго порядка
,(5) будет содержать экстремальную точку и наипучшим,
в некотором смысле, образом описывать реальную связь
показателя качества с параметрами.
Другой формой аппроксимирующей зависимости по-
казателя качества от параметров второй группы является
экспоненциальная функция
w2 (У2) = Wo ехр{ГУ2 + У'<?У2]. (7)
где F — вектор, a Q —матрица коэффициентов, Wo —
значение показателя качества при номинальных значе-
ниях параметров.
Зависимость (7) может давать большую точность ап-
проксимации в широком диапазоне изменения парамет-
ров, чем зависимость (5). Например, если показатель
качества является вероятностью выполнения задачи, то
зависимость (5) при широком диапазоне изменения пара-
метров может давать отрицательные значения показате-
ля качества, что неприемлемо по содержанию понятия
вероятности. В этом случае зависимость (7) обеспечива-
ет неотрицательность показателя качества.
§ 5.3. МЕТОДЫ ПОСТРОЕНИЯ МОДЕЛЕЙ
179
§ 5.3. Методы построения моделей
Для построения аналитической модели объекта
контроля необходимо определить допуски на парамет-
ры первой группы и коэффициенты аппроксимирую-
щих зависимостей для параметров второй группы. Оп-
ределение допусков на параметры первой группы обыч-
но производится достаточно приближенно, поскольку
фактическое рассеивание параметров этой группы ма-
ло по сравнению с полем допуска. В связи с этим в даль-
нейшем более подробно будем рассматривать методы
определения коэффициентов аппроксимирующих зави-
симостей показателей качества от параметров второй
группы.
Различают следующие методы аппроксимации:
— аппроксимация в точке;
— аппроксимация в ряде точек;
— аппроксимация в области.
При аппроксимации в точке истинная и прибли-
женная функции совпадают точно только в одной вы-
бранной точке. Аппроксимация в ряде точек преду-
сматривает совпадение функций в нескольких, опреде-
ленным образом выбранных, точках (узлах). При
аппроксимации в области истинная и приближенная за-
висимости в определенном диапазоне (области) изме-
нения аргумента отличаются на некоторую величину.
Эта величина может быть неодинаковой для различных
точек области. Возможна аппроксимация, при которой
приближенная зависимость отличается от истинной в
некоторой области значений аргумента не более чем на
фиксированную величину.
Аппроксимацию в точке можно построить, напри-
мер, путем разложения функции W2 (V2) в многомерный
ряд Тейлора по параметрам. За точку разложения це-
лесообразно выбрать номинальное значение вектора па-
раметров. Нетрудно видеть, что аппроксимация (5.2.5)
может рассматриваться как многомерный ряд Тейлора
с точностью до членов второго порядка, если положить
W0 = W2(m2), B = VW2, C=|VVW2, (1)
di
гдеЖ2(т2)— значение показателя качества при номи-
нальных значениях параметров, V — вектор частных
180
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
производных по параметрам с компонентами у = (<9/^!,
d/dV2, ..., d/dVi), w' —матрица вторых производ-
ных: VVZ — IId2ldVtdVj\\. Вектор В и матрица С име-
ют в качестве элементов первые и вторые производные,
вычисляемые в точке разложения У =0:
B^\\dW2ldVil С=0,5||с)2РУ2/5У^УД|.
Таким образам, аппроксимирующая функция (5.2.5)
может считаться построенной, если вычислены частные
производные от показателя качества по параметрам и
значение самого показателя в точке, соответствующей
поминальным значениям параметров.
Аппроксимация в точке вида (5.2.7) также может
быть построена, если известны первые и вторые про-
изводные от показателя эффективности по параметрам
в точке, соответствующей номиналам параметров. По-
кажем это; деля выражение (5.2.7) на Wq и логариф-
мируя, получаем
In(ТУ2АУ0) = У/Уг Уз^Уг- (2)
Дифференцируя это выражение по параметрам и по-
лагая приращения параметров равными нулю получаем
VPK2 = F. (3)
С учетом (1) имеем
Дифференцируя (2) дважды по параметрам и,пола-
гая У2 = 0, получаем
-L VV'W2 - А (V1У2) (VW2)' = 2Q. (5)
vv 0 Wq
Учитывая формулы (1), получаем связь между коэф-
фициентами аппроксимирующих формул (5.2.5) и (5.2.7):
<2 =4-С------ЦВВ'. (6)
Wo 2W2 v 7
Точность аппроксимации реальной поверхности ги-
перповерхностью. второго порядка в одной точке, соот-
ветствующей номинальным значениям параметров, су-
щественно зависит от вида поверхности и величины
§ 5.4. МОДЕЛИ ДЛЯ ЛИНЕЙНЫХ СИСТЕМ
181
отклонения параметров. В настоящее время для пост-
роения .такого рода аппроксимаций широко применя-
ются методы теории чувствительности, позволяющие
вычислять частные производные от показателей качест-
ва по параметрам. В последующих параграфах излага-
ются методы вычисления производных с помощью ве-
совых функций, частотных характеристик и уравнений
моментов. Рассматривается также способ определения
частных производных, основанный на применении ме-
тода статистических испытаний.
Более точную аппроксимацию реальной поверхно-
сти Ws. гиперповерхностью второго порядка можно по-
лучить путем определения коэффициентов, обеспечива-
ющих точное совпадение поверхностей в ряде точек —
узлах. Методы построения таких аппроксимаций мож-
но найти в ряде работ, например в [112]. Основным
недостатком такого метода является большой объем вы-
числений.
Аппроксимация в области заключается в определе-
нии таких коэффициентов формул (5.2.5), (5.2.7), ко-
торые обеспечивают наименьшее отклонение реальной
и аппроксимирующей поверхностей в определенной об-
ласти изменения параметров. Возможен и другой кри-
терий точности аппроксимаций — отклонение между по-
верхностями не должно превышать определенной вели-
чины в заданной области изменения параметров. Заме-
тим, что при аппроксимации в области обе поверхности
могут, вообще говоря, не совпадать ни в одной точке
заданной области изменения параметров.
В последующих параграфах рассматриваются кон-
кретные методы аппроксимации в точке и в области.
§ 5.4. Модели для линейных систем
Если динамическая система является линейной, то
для определения коэффициентов моделей объектов
контроля (5.2.5) или (5.2.7) могут быть применены
методы анализа линейных систем, описанные в треть-
ей главе [44]. При аппроксимации в точке мо-
дель (5.2.5) можно рассматривать как разложение в
ряд Тейлора до второго порядка относительно вектора
математических ожиданий параметров.
182
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
Пусть линейная нестационарная система описыва-
ется уравнением
У = A(t,U)Y + Q(t,U)X(t). (1)
Показателем качества этой системы является средний
риск'
И72(П) = М[/(У(П),УТ)]! (2)
где М — оператор математического ожидания, I (У (Z7)f
Ут) — функция потерь, У (1Г) — вектор фазовых коор-
динат линейной системы, зависящий от вектора пара-
метров, Ут — требуемый вектор , фазовых координат
системы.
В соответствии с формулами (5.3.1) вектор В и
матрица С коэффициентов модели (5.2.5) определяют-
ся формулами
В = VW2, C = 0,5vvW2>: (3)
где V — оператор градиента по вектору параметров,
a w' — оператор двойного дифференцирования по
параметрам. Применяя оператор дифференцирования к
формуле (2), получаем
УЖ2 = ||ЭЖ2/5С72|| = М
2d 0Yh 9Ui
h=l h г
s
U=m
(4)
V V' W2=|| d^W^/dUidUj ||=
n
n
11, /1=1
d2Yk
dU MJ
52Z aYk dYh
dYhdYh'dUi ‘dUj
71,/i=l
U=m
i (5)
где M — оператор математического ожидания.
Первые и вторые производные фазовых координат
системы (1) по параметрам можно выразить через
производные от весовой функции системы,. Используя
соотношение для линейных систем
y(f) =
о
где G т, U) — матрица весовых функций линейной си-
§ 5Л, МОДЕЛИ ДЛЯ ЛИНЕЙНЫХ СИСТЕМ
183
стемы (1), и дифференцируя это соотношение по пара-
метрам, получаем j
Vy(i) = _fVG(i,T,r)X(T)JT, (6)
о
t
VV/y(i) = J VV'G(J,t, G)X(t)cZt, (7)
о
где
VY(t) = \\dYkidUi\\, NN'Y^^wd^/dUidUjl (8)
Производные от весовых функций по параметрам
можно определить из уравнения для весовой функции,
получаемого из уравнения (1) путем замены вектора,
фазовых координат па весовую функцию, отбрасывания
входного сигнала и введения соответствующего началь-
ного условия (см. первую главу)
dG (%Ги~ U), G(x,x,U)=Q. (9)
Дифференцируя это уравнение и начальное условие
по параметрам, получаем
~ = АН + V4G, VG (т, т, U) = V*?, (10)
где введено обозначение для градиента весовой функ-
ции по параметрам Н = VG (t, х, U):
~NH=ANH+2\AH+WAG, VV'Gfr, т, G)=VV'(?. (11)
Уравнения (10), (11) дают точные значения про-
изводных. Интегрирование этих уравнений производит-
ся совместно с уравнением (9) при номинальных зна-
чениях параметров U = т.
Метод вычисления весовых функций динамических
систем хорошо разработан [90], поэтому его исполйзов
вание для определения производных по параметрам не
вызывает принципиальных трудностей. Основным недо-
статком метода является громоздкость уравнений. Так,
если количество параметров равно q, то для вычисле-
ния первых и вторых частных производных от матри-
цы весовых функций по параметрам необходимо иите-
184
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
грировать N = [1 + q(q -ф 3)/2]п2 уравнений, где п —
порядок исходной системы.
Для стационарных линейных систем в установив-
шемся режиме для определения коэффициентов модели
объекта контроля вместо метода весовых функций це-
лесообразно использовать метод частотных характери-
стик [44]. Проиллюстрируем применение частотных ха-
рактеристик для одномерной системы, показателем ка-
чества которой является средний квадрат ошибки:
йе = пг® -ф De, (12)
где тЕ— математическое ожидание ошибки Е = У — Ут,
Ее—дисперсия ошибки. Показатель качества (12) яв-
ляется частным случаем среднего риска при выборе
квадратичной функции потерь I (У, Ут)= (У — Ут)2-
Математическое ожидание ошибки и дисперсия
ошибки определяются формулами (3.4.12), (3.1.2),
(3.4.25):
тЕ =2-1 [ф« (О, W) (i) - Ф<г) (0) (t) ], (13)
г=О '
De^Dv-\-DVt-2QVVv, (14)
Dv — j | Ф (iro, и) |25ж (®) d<o, (15)
—оо
где Ф«(0,И), Ф^(0) — т-е производные частотных ха-
рактеристик реальной и требуемой систем, (£)т
(£) — r-е производные математических ожиданий
входного и выходного полезного сигналов, DVij, —дис-
персия требуемого сигнала, 9Wt —корреляционный мо-
мент выходных сигналов реальной и требуемой систем,
5ж(ю)—спектральная плотность входного сигнала.
В соответствии с формулами (3) коэффициенты мо-
дели определяются дифференцированием показателя
качества (12). Дифференцируя (12), получаем
Vas = 2m.EVmE + VOe, (16)
VV/ftE=2V7nE(VmE)z -ф 2mEWmE + WW (17)
Производные от математического ожидания и диспер-
§ 5.5. МОДЕЛИ ДЛЯ НЕЛИНЕЙНЫХ СИСТЕМ'
185
сии ошибки получим дифференцированием формул
(13)-(15):°
АтЕ = 2 7Г v ф(г)(°1 “)m*’ (18)
VDB = VZ)1/-2Vew (19)
VV'mE = 2 7Г VV/Q(1) (°i “)(0.. (20)
1=о
V V 'de = vv4 - 2vv'0WtS (21)
V Dy = j [ V Ф (z®) Ф (- z®) +
+Ф (zffl) V Ф (- z®) ] Sx (®) da, (22)
V V'A, = J [V¥'Ф (z®) Ф (- z®) + V Ф (z®) (¥Ф(— z®))' +
00
+ V Ф (- zra) (V Ф (z®) У + Ф (йо)УУ'Ф (- iffl) ] Ss (®) da-
(23)
При дифференцировании принималось, что требуемый
сигнал и, следовательно, все связанные с ним характе-
ристики не зависят от вектора параметров системы.
Вычисление производных от частотных характери-
стик по параметрам можно осуществить непосредст-
венно, если система не очень сложна и частотные ха-
рактеристики заданы в аналитической форме.
§ 5.5. Модели для нелинейных систем
Во многих случаях показатель качества можно пред-
ставить как функцию моментов фазовых координат си-
стемы. Поэтому частные производные от показателя ка-
чества по параметрам можно выразить через частные
производные от моментов. Пусть динамическая систе-
ма описывается нелинейным уравнением
У = Ф(УЛ^)+<2(^)Х(*). (1)
Применим статистическую линеаризацию нелинейной
186
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
функции <р и составим уравнения для моментов
m=^m,t,u) + Q(t,u)mx(t')i (2)
0 — К (т, 0А и) 0 ф- QK1 (т, 0, и) -ф Q и) TQ’ (f, и) * (3)
где ф0 — вектор, К — матрица коэффициентов стати-
стической линеаризации, зависящие от вектора случай-
ных параметров системы, Г — матрица интенсивностей
белого шума X (£),
Для вычисления частных производных от моментов
по параметрам в точке U = т можно применить два
способа [45]. Один из них заключается в непосредст-
венном дифференцировании уравнений (2), (3) по пара-
метрам, а второй состоит в применении метода конечных
разностей. Рассмотрим первый способ. Дифференцируя
уравнения (2), (3) и принимая U = т, получаем
А¥и1 = Уф0 + ¥<?Ига(г), (4)
4-VO = KV0 + V0KZ +
at
+ VK0 + 0VIC + V^r<2z + (JrvCP, (5)
4wzm = vv4 + vv/<2/n;c(i) , . (6)
~ VVz0 = KVVz0 + VVz7f0 + (VX)zV0 + VO(VA')' +
+ vv'(>r(r + v<?r (v<?z)z +(v<?)Tv<?z + qvwq', (7)
Недостатком этого способа является громоздкость
уравнений. Уравнения для моментов (2), (3) имеют
порядок N = п -|- п (и + 1)/2, где п — порядок уравне-
ния (1). При дифференцировании по параметрам по-
рядок уравнений возрастает пропорционально числу
производных.
Вычисление частных производных от показателя ка-
чества по параметрам, необходимых для определения
коэффициентов модели объекта контроля, можно осу-
ществить методом статистических испытаний. В этом
случае производные вычисляются приближенно как от-
ношения приращений показателя качества. Пусть
показатель качества выражается через параметры
§ 5.5. МОДЕЛИ ДЛЯ НЕЛИНЕЙНЫХ СИСТЕМ
187
формулой
W = W0 + B'V + V'CV. (8)
Дадим какому-либо i-му параметру некоторое при-
ращение Vt — hi, а остальные параметры будем счи-
тать равными номинальным значениям, т. е. У, = О,
I к. Тогда из формулы (8) следует
W (гщ + = Wo + Bihi 4- СцЦ. (9)
Дадим теперь этому же параметру отрицательное
приращение Vf = — hit а остальные параметры также
будем считать равными номинальным значениям.
В результате показатель качества, представляемый фор-
мулой (8), примет вид
W (mi — hi) = Wo — -|- Сц№. (10)
Составим отношение разности выражений (9) и (10)
к удвоенному отношению приращения i-ro параметра.
В результате получим приближенное выражение для
коэффициентов Bi как производной от показателя ка-
чества по i-му параметру
!dW\ W(m. + h.)-W(m.-h.)
Б‘ ~ (»у)„ =—---------------------(11)
Аналогичными выкладками можно показать, что
вторые и смешанные производные от (Показателя качества
по параметрам, т. е. элементы матрицы Сц, при поминаль-
ных значениях параметров определяются формулами
Си = = 7? [W (nli + + w ~ 2W»L
’ (12)
(i92W \ 4
dU.9UJm = 2h7h~. (mi + hi’ —
— W (mt + ht, mj — hj)-W (m^ + hj) + W (m} — /гД] .
(13)
В последней формуле запись двух аргументов означает,
что одновременно даются приращения с соответствую-
щими знаками сразу по двум параметрам: i-му и /-му.
Величина Wo в (10) есть значение показателя качества
при номинальных значениях параметров.
188
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
Выбор величины приращения параметров 7г; имеет
существенное значение для точности вычисления част-
ных производных. При малых приращениях точность
вычисления мала из-за ошибок, связанных с дискрет-
ностью счета. При больших приращениях точность
уменьшается вследствие нарушения условий примене-
ния метода конечных разностей для нелинейных функ-
ций. В современной литературе большинство авторов
предлагает в качестве приращения выбирать среднее
квадратическое отклонение параметров. По-видимому,
более правильно выбирать приращение равным
hi — км, (14)’
где кг — энтропийный коэффициент, представляющий
собой отношение энтропийной погрешности к среднему
квадратическому отклонению параметра [85]. Величи-
на энтропийного коэффициента зависит от закона рас-
пределения вероятности параметра. Для равномерного
закона распределения вероятности к = 1,73; для нор-
мального закона к = 2,07,
Вычисление производных по формулам (11) — (13)
методом статистических испытаний сводится к следую-
щему. Пусть имеется возможность вычислять реализа-
ции выходных сигналов реальной и идеальной систем с
помощью уравнений системы или реальной аппаратуры.
Тогда можно определять реализации значений функции
потерь I (У, Ут) • На множестве реализаций можно вычис-
лить оценку среднего значения функции потерь, кото-
рая и будет представлять оценку показателя качества!
W = М[7(У, Ут)]. Данную процедуру вычислений можно
выполнить для всех номинальных значений параметров,
для приращений по каждому параметру с положитель-
ным и отрицательным знаками и для случая совместного
приращения всех пар параметров с положительными и
отрицательными знаками. В результате этих вычислений
будут получены все исходные данные для применения
формул (11) — (13). Таким образом, .многократно приме-
няя метод статистических испытаний при приращениях
параметров, можно определить коэффициенты модели
объекта контроля (8).
Недостатком изложенного метода построения модели
является большое число испытаний. Если, например,
§ 5.6. ГРАДИЕНТНЫЙ СЛУЧАЙНЫЙ ПОИСК
189
принять число испытаний п и количество параметров
равным д, то для определения всех коэффициентов мо-
дели (8) необходимо провести
7V=="[1 + 2!7 + (?^2n] (15)
опытов. При п = 50 и q= 10 TV — 5550. Преимущест-
вом метода статистических испытаний является возмож-
ность его применения для любых динамических систем.
§ 5.6. Применение градиентного случайного поиска
Рассмотренные в предыдущих параграфах методы
определения частных производных от показателя каче-
ства по параметрам дают возможность построить ап-
проксимирующую поверхность, совпадающую с истин-
ной только в одной точке — в точке вычисления произ-
водных. Более точным способом аппроксимации являет-
ся построение поверхности, отличающейся от истинной
так, что некоторая мера отклонения принимает экстре-
мальное значение. Этот способ соответствует аппрокси-
мации в некоторой области значений параметров.
Пусть W (U) — истинная зависимость показателя ка-
чества от параметров, a W (U, Т) — аппроксимирующая
зависимость, в которой необходимо так определить век-
тор параметров Т , чтобы некоторая мера ошибки при-
нимала экстремальное значение. Например, в качестве
такой меры может быть выбран средний квадрат ошибки
у = М (И) - W (И, Т)]2М min. (1)
т
Минимум данного выражения достигается выбором оп-
тимального значения вектора параметров То. В выраже-
нии (1) М — оператор математического ожидания.
В современной литературе разработано много мето-
дов, позволяющих весьма эффективно решить поставлен-
ную задачу [95, 110], В данном параграфе будет рас-
смотрен лишь метод градиентного случайного поиска.
При градиентном методе скорость изменения вектора
параметров пропорциональна вектору градиента
т -ж (2)
190
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
где А — скалярная величина,VI — вектор градиента с
компонентами dJ/dT\, dJ/dTz, ..dJ]dTn. Вектор гради-
ента определим непосредственным дифференцированием
выражения (1):
VJ = — 2М{[Ж(Г7) -W(U,T)\ &W(U,T)}. (3)
В этой формуле VP7 (СД2’) - градиент функции по век-
тору Т.
Процедура вычисления значений вектора Ts обеспе-
чивающего минимум функционала (1), иллюстрируется
Рис. 5.6.1.
рис. 5.6.1. Случайный механизм вырабатывает реализа-
ции вектора параметров U с заданным законом распре-
деления вероятности /(и). Для каждой реализации век-
тора параметров U = и вычисляются числа W (и) и W(a, Т)
и компоненты вектора градиента уТУ (и, Т). Далее
составляется разность_W (а) — W (и, Т), которая умно-
жается на вектор АЖ (и, Т). Многократное повторение
этой процедуры для различных реализаций случайного
вектора U позволяет вычислить среднее значение (опе-
ратор математического ожидания). В результате опреде-
ляется градиент функционала J (формула (3)). Умно-
жение этого градиента на множитель А и интегрирова-
ние по времени дает значение вектора параметров Т.
Для осуществления этого процесса вычислений необ-
ходимо знать закон распределения вероятности случай-
ного вектора параметров / (и), алгоритмы вычисления
показателя качества ИДцД аппроксимирующую функ-
§ 5.6. ГРАДИЕНТНЫЙ СЛУЧАЙНЫЙ ПОИСК
191
цию W (и, Т), градиент этой функции VW7 (и,?1) и началь-
ное значение вектора параметров Т (0).
Из схемы на рис. 5.6.1 видно, что вычисление про-
исходит с обратной связью, вследствие чего обеспечива-
ется сходимость вектора параметров Т к значению То,
обеспечивающему минимум функционала (1), В точке
минимума вектор градиента обращается в пуль,
и процесс поиска вектора То закапчивается.
Проиллюстрируем общую процедуру вычисления ко-
эффициентов аппроксимирующей зависимости на приме-
ре использования поверхности второго порядка (5.2.5).
Вектор коэффициентов Т аппроксимирующей форму-
лы (5.2.5) включает в качестве компонент вектор В и
матрицу С: (В, С). Формуле (2) в данном случае соот-
ветствуют выражения
= Chh = K^~ (4)
Соответственно вектор градиента (3) имеет вид
™=-2M{[W(U)-W(UlB,C)]Vh} , (5)
fl
S~ = - 2М {[W (£7) - W (U, В, С)] Vh VJ х (6)
где V = U — m и
W (U, В, С) = Ж0+ВТ + V'CV. (7)
Вектор градиента Q в данном случае равен
Вычисление величины W (Ц) производится для каж-
дой реализации вектора параметров по уравнениям, опи-
сывающим работу динамической системы.
Недостатками рассмотренного метода построения ап-
проксимирующей функции являются неопределенность в
выборе коэффициента пропорциональности X и достаточ-
но большой объем вычислений. Выбор коэффициента %
определяется, с одной стороны, скоростью сходимости, и,
с другой,—устойчивостью процесса сходимости. Следует
заметить, что возможно обобщение изложенного метода,
192
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
например, вместо одного коэффициента может быть ис-
пользована матрица коэффициентов Л. В ряде случаев
это ускоряет процесс сходимости, хотя, строго говоря,
такая процедура уже не соответствует методу гради-
ента [110].
§ 5.7. Применение неградиентного случайного поиска
Для построения аппроксимирующей функции многих
переменных, отличающейся от истинной функции на ве-
личину не более чем е в определенной области измене-
ния аргументов, может быть применен метод негради-
ентного случайного поиска, предложенный в [31, 32].
Сущность метода заключается в следующем. Необходи-
мо построить аппроксимирующую гиперповерхность пу-
тем выбора вектора параметров Т, обеспечивающего вы-
полнение неравенства
|H7(j7) ~W(U, T)|<s, (1)
где W (U) — истинная гиперповерхность, е — заданное
число, W (U,T) — аппроксимирующая гиперповерхность.
Производится статистический эксперимент, состоящий в
вычислении чисел W(U), W(U, Т) по реализации случай-
ных векторов U и Т. Для всех тех реализаций, для кото-
рых выполняется неравенство (1), строится апостериорная
оценка вектора Т* и производится вычисление некото-
рых показателей окончания процесса сходимости.
Апостериорная оценка вектора Т* используется для
коррекции характеристик механизма выдачи реализаций
данного вектора. В результате образуется обратная
связь, и процесс поиска значений параметров начинает
сходиться к некоторому значению вектора То. Текущее
значение вектора Т формируется по формуле
Т = т* 4- Г*ТХ, (2)
где т* — апостериорное математическое ожидание век-
тора У, Г* — апостериорная матрица, получаемая из
уравнения
К* = М [Г*7\ (Г*7\)'] = Г^Г*', (3)
где К* — апостериорная корреляционная матрица век-
тора Т.
§ 5.7. НЕГРАДИЕНТНЫЙ СЛУЧАЙНЫЙ ПОИСК
193
В соотношениях (2), (3) Тг есть случайный век-
тор, принимаемый за исходное множество значений при
формировании апостериорного вектора Т*. Если выбрать
в качестве вектора Тг последовательность некоррелиро-
ванных случайных величин с единичной дисперсией, то
матрица корреляционных моментов этого вектора будет
единичной: Кк = I. При этом уравнение (3) существен-
но упрощается и принимает вид
к* = Г*г*'. (4)
Данное уравнение относительно матрицы Г* можно
упростить, если наложить дополнительное условие. По-
требуем, чтобы матрица Г* была треугольной [28].
Тогда произведение матриц Г*Г*. дает симметричную
матрицу, и ее элементы весьма просто выражаются ре-
куррентно через элементы матрицы К*:
=
721 = 77^ ’
у99 — 1 / ^11 ^22 ~~ *12 ,
Если в апостериорной корреляционной матрице X* вы-
числяются только диагональные члены, т. е. апостериор-
ные дисперсии, то уравнение (4) принимает вид
Г* = о*, (6)
где о* — диагональная матрица средних квадратических
отклонений.
Апостериорные моменты вектора Т— математиче-
ское ожидание т* и корреляционную матрицу К* —
можно вычислить по известным формулам [23]:
11=1
1 V
(5)
(7)
~ т*) ’
%гз п — 1 1 ik
k=l
где Tik — i-я компонента вектора Т в А-м опыте. Можно
использовать более точные формулы статистической тео-
рии оптимальных систем. Так, для апостериорного мате-
матического ожидания i-й компоненты вектора Т имеет
13 л. Г. Евланов
194
ГЛ. 5. МОДЕЛИ ОБЪЕКТОВ КОНТРОЛЯ
место формула
тм Vi
пГ. = т-Л- + ТТ~
г 1 + 1 + V
. п
- У Tih,
п
й=1
Vi =
(8)
где mOi — априорное математическое ожидание z-й ком-
поненты вектора Т, Vi —отношение сигнал — шум, зави-
сящее от количества опытов п. При числе опытов, рав-
ном пулю, апостериорное среднее равно априорному
Рис. 5.7.1.
среднему посколько щ = 0. С увеличением числа опы-
тов V, -> сю и удельный вес априорных данных (первый
член в (8)) убывает по гиперболическому закону. Одно-
временно возрастает удельный вес апостериорных дан-
ных (второй член в (8)), и при v, = оо формула (8)
переходит в первое соотношение (7). Параметр v, есть
отношение дисперсии t-го параметра D> к дисперсии
ошибки Dn, которую можно оценить из априорных
данных.
За момент окончания поиска оценки вектора пара-
метров Т* аппроксимирующей зависимости можно при-
нять момент, когда скорость сходимости параметров ста-
новится пренебрежимо малой. После окончания процес-
са сходимости за искомую оценку вектора параметров
Т*, обеспечивающего выполнение неравенства (1), при-
нимается апостериорное математическое ожидание
Т* = т*. (9)
§ 5.7. НЕ ГРАДИЕНТНЫЙ СЛУЧАЙНЫЙ ПОИСК
195
Блок-схема алгоритма вычисления вектора парамет-
ров аппроксимирующей функции приведена на рис. 5.7.1.
Нижняя часть схемы показывает формирование нера-
венства (1). Если для конкретной реализации векторов
U и Т оно удовлетворяется, то в блок вычисления апо-
стериорных данных вектора иг* и матрицы Г* посту-
пает реализация вектора Т через схему «да — нет»..
Если неравенство не удовлетворяется, то реализация)
вектора Т* не попадает на' схему вычисления. Реализа-,»
ция вектора U и опорного вектора параметров Т± гене-
рируются случайными механизмами. При этом данные
векторы имеют определенные законы распределения ве-
роятностей/ (в) и /х (Т) . Вычисленное значение матрицы
Г* поступает в блок матричного перемножения, где умно-
жается на вектор Тг. Полученное произведение сумми-
руется с вектором апостериорного математического ожи-
дания т*. В результате получается апостериорное зна-
чение вектора параметров Т, которое используется для
вычисления величины W (U, Т).
Закон распределения вероятности /х (Т) обычно вы-
бирается либо нормальным, либо равномерным. Закон
распределения вектора параметров / (и) принимается та-
ким, каким он соответствует реальному закону. При за-
дании априорных данных т0 и Кг следует руковод-
ствоваться физическими соображениями о значении этих
характеристик. В частности, дисперсии параметров не-
обходимо выбирать большими, чтобы обеспечить воз-
можность попадания значений вектора Т в области, где
выполняется неравенство (1). При этом процесс сходи-
мости будет происходить вначале весьма медленно. По
мере накопления значений параметров, удовлетворяю-
щих выполнению неравенства, и их статистической об-
работки значения Т будут концентрироваться в нужной
области, и процесс сходимости будет ускоряться.
Исходными данными для начала процесса вычисле-
ний являются законы распределения , началь-
ные значения вектора т0 и матрицы К± Выходной
информацией блок-схемы является значение апостериор-
ного среднего вектора параметров т* — Т* в момент
окончания процесса сходимости. Это значение и исполь-
зуется для построения аппроксимирующей гиперповерх-
ности W
13*
ГЛАВА 6
ГАРАНТИЙНЫЕ ДОПУСКИ
§ 6.1. Принципы назначения допусков
Техническое состояние объекта контроля определя-
ется значением обобщенного показателя качества W или
вектора параметров U. Очевидно, что не всякие значе-
ния показателя качества или параметров соответствуют
требованиям, предъявляемым к нормальному функцио-
нированию объекта контроля. Поэтому, для того чтобы
принимать решение о способности объекта контроля вы-
полнять свое назначение, необходимо определить об-
ласть значений показателя качества и параметров, ко-
торая соответствует понятию работоспособности. Выде-
ление области работоспособности приводит к тому, что
вместо бесчисленного множества состояний объект конт-
роля может находиться только в двух возможных со-
стояниях: «годен» или «не годен». Пусть, например,
обобщенный показатель качества является вероятностью
выполнения задачи, и область работоспособности опреде-
лена отрезком числовой оси [Нт, 1]. Тогда, если
> WT, то объект признается годным, а если W •< WT,
то он считается негодным.
Во многих случаях оказывается целесообразным вы-
делить в области работоспособности подобласти, харак-
теризующие, так сказать, «сортность» объекта, т. е. оп-
ределяющие различное качество функционирования. На-
пример, если W — вероятность выполнения поставлен-
ной задачи, то объект контроля относится к первой ка-
тегории в случае W > W} и ко второй категории —
в случае Wi >• W > WT, где Wi > WT.
Области, характеризующие работоспособность или
категорийность объекта контроля, полностью определя-
ются своими границами — допусками. Допуски, опреде-
ляемые в предположении абсолютной точности измере-
ния параметров или показателя качества, называют га-
рантийными допусками. В действительности всегда име-
§ 6.1. ПРИНЦИПЫ НАЗНАЧЕНИЯ ДОПУСКОВ
197
ют место ошибки измерения. Допуски, определяемые с
учетом фактической точности измерения, называют
контрольными допусками. В данной главе рассматрива-
ются только гарантийные допуски. Определение конт-
рольных допусков на параметры производится в вось-
мой главе.
Определение допусков на показатели качества, пол-
ностью характеризующие область работоспособности, яв-
ляется сложной задачей, при решении которой необхо-
димо учитывать целевые и экономические факторы. При
этом объект контроля должен рассматриваться как эле-
мент более общей по иерархии системы. Следует под-
черкнуть, что назначение оптимальных допусков на по-
казатели качества существенно зависит от условий при-
менения и эксплуатации объекта контроля. Принятие
предположений об этих условиях позволяет определить
допуски по критерию минимума затрат. Отсюда следу-
ет, что при других условиях применения и эксплуатации
объекта контроля допуски на показатели уже не будут
оптимальными.
В данной главе задача определения допусков на по-
казатели качества не рассматривается, а предполагает-
ся, что они уже заданы. Ставится задача — определить
допуски на параметры, согласованные с допусками на
показатель качества. Понятие «согласованные» будет
разъяснено далее.
За обобщенный показатель качества системы примем
вероятность выполнения поставленной задачи. Пусть, за-
дан допуск снизу на этот показатель, разделяющий об-
ласть значений показателя на области работоспособно-
сти и неработоспособности: W > И7Т — годен, W <“
< Wt — не годен. Поставим задачу определить допуски
на параметры, обеспечивающие выполнение условия «го-
ден». Решение подобной задачи необходимо как для
проектирования системы, так и для решения задач
контроля. В настоящее время в подавляющем большин-
стве случаев принятие решения о годности системы вы-
полнять свои функции осуществляется в процессе конт-
роля путем сравнения измеренных значений параметров
с допусками. Очевидно, что правильное назначение до-
пусков на параметры играет при дайной схеме оценки
технического состояния большую роль, -
198
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
Зависимость показателя качества от параметров пред-
ставляет собой, в общем случае, нелинейную функцию
многих переменных. Каждой допустимой области -значе-
ний показателя качества соответствует • допустимая об-
ласть значений параметров. Эта последняя может иметь
весьма сложную конфигурацию. Нахождение допусков
на параметры по заданному допуску на показатель ка-
чества заключается в определении гиперповерхности,
ограничивающей область допустимых значений пара-
метров. Точное построение этой гиперповерхности явля-
ется исключительно сложной задачей, практически раз-
решимой только для простейших систем, содержащих
очень небольшое число параметров. В современной тех-
нической литературе имеется много работ в которых
строятся области допустимых значений параметров
(обычно двух) для ряда фиксированных значений пока-
зателя качества. Разработаны методы расчета границ до-
пустимых значений параметров с применением вычисли-
тельных машин [25, 72, 77, 92]. Эти методы предпола-
гают наличие явной функциональной зависимости пока-
зателя качества от параметров.
Построение области допустимых значений парамет-
ров не позволяет назначить допуск на каждый параметр
в отдельности. Все параметры оказываются связанными
между собой.- Допуск на каждый параметр отдельно
можно определить только в частном случае, когда об-’
ласть допустимых 'значений параметров представляет со-
бой гиперпараллелепипед с гранями, параллельными
осям координат параметров.
Для решения ряда практических задач, связанных с
производством и контролем, целесообразно назначение
допусков на каждый параметр в отдельности. В связи с
изложенным в общем случае это можно сделать только
приближенно, заменив фактическую область допустимых
значений параметров гиперпараллелепипедом. Существу-
ет ряд способов решения этой задачи.
В современной литературе методы определения до-
пусков на параметры по заданным допускам на показа-
тели качества излагаются на базе теории чувствительно-
сти [6, 9, 10, 16, 26, 27, 35]. В этой теории связь меж-
ду малыми отклонениями параметров й приращением
показателя качества считается линейной. Если количе-
§ 6.1. ПРИНЦИПЫ НАЗНАЧЕНИЯ ДОПУСКОВ
199
ство параметров невелико, то задача определения допу-
сков решается методом последовательных приближений,
поскольку при линейной зависимости показателя каче-
ства от параметров невозможно однозначное решение за-
дачи назначения допусков.
Для обеспечения однозначного решения задачи оп-
ределения допусков рядом авторов предлагались спосо-
бы построения функций от' параметров, обладающих
экстремальной точкой. Как правило, это осуществляется
путем построения зависимости стоимости от отклонения
параметров. В этом случае определение допусков сво-
дится к решению задачи на относительный экстремум,
Примеры введения различных функций стоимости мож-
но найти в [12, 22, 82, 108]. Обзор методов определе-
ния допусков приведен в [65].
Ниже излагается принцип определения допусков на
параметры, основанный на гипотезе существования эк-
стремума показателя качества. Правильно выбранный
показатель качества всегда обладает экстремальной точ-
кой в пространстве параметров. Это обстоятельство и
позволяет получить однозначное решение задачи о допу-
сках на параметры при заданном допуске на показатель
качества.
Рассмотрим геометрическую трактовку задачи о до-
пусках на параметры. Показатель качества при фикси-
рованном режиме работы системы является функцией
параметров. Эту функцию можно рассматривать как ги-
перповерхность в пространстве параметров. Характер-
ной особенностью этой гиперповерхности является
наличие экстремальной точки. Установление допуска на
показатель качества с геометрической точки зрения
означает задание гиперплоскости, параллельной гиперпло-
скости параметров. Сечение гиперповерхности W (U)
гиперплоскостью И7? = const-дает замкнутую поверхность,
определяемую уравнением
WT = W (V) . (1)
Задача вычисления допусков на параметры может в
этом случае трактоваться как построение описанного к
гиперповерхности (1) гиперпараллелепипеда с плоскостя-
ми, параллельными осями координат параметров. Пе-
ресечение граней описанного гиперпараллелепипеда с
200
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
осями координат параметров и дает допуски на па-
раметры.
Между замкнутой гиперповерхностью (1) и описан-
ным гиперпараллелепипедом имеются определенные об>-
ласти. Попадание значений параметров в эти области
хотя и удовлетворяет выбранным допускам (значения
параметров лежат внутри гиперпараллелипеда), но не
удовлетворяет условию W > WT (значения параметров
лежат вне гиперповерхности (1)). Следовательно, ука-
занные области образуют «дефект» в допусках на пара-
метры, определяющий риск заказчика. Риск изготовите-
ля за счет данного фактора равен нулю.
В связи с этим, можно построить не описанный ги-
перпараллелепипед, а вписанный. При этом риск заказ-
чика от данного фактора будет равен нулю, а риск из-
готовителя максимален. Из данных рассуждений следу-
ет, что можно поставить задачу построения такого ги-
перпараллелепипеда, который обеспечивает минималь-
ную вероятность ошибки принятия решений. Возможно
также введение дополнительных условий, например —
риск заказчика задан. Различные постановки задач на
построение параллелепипеда и методы их решения даны
в [1, 34].
Решение задачи о допусках на параметры, основан-
ное на использовании соотношения (1), существенно за-
висит от вида функциональной зависимости W(V), При-
менение аппроксимирующих функций значительно об-
легчает ход решения задачи. В частности, для случая
аппроксимации истинной зависимости показателя каче-
ства от параметров поверхностью второго порядка зада-
ча решается весьма просто.,
В результате применения данной схемы расчета оп-
ределяются допуски на обобщенные параметры, по от-
ношению к которым показатель качества имеет экстре-
мум. Дальнейшим этапом является определение допу-
сков на параметры элементов, от которых зависят обоб-
щенные параметры. На этом этапе не всегда существует
экстремальная зависимость обобщенного параметра от
значений параметров элементов. Поэтому необходимо
применять уже упоминавшиеся методы определения до-
пусков с учетом стоимости.
§ 6.2. ДВУХПАРАМЕТРИЧЕСКАЯ МОДЕЛЬ
201
§ 6.2. Двухпараметрическая модель
Для наглядного представления о методе определения
допусков на параметры на основе построения описанно-
го параллелепипеда с гранями, параллельными осям
координат, рассмотрим вначале простейший случай на-
личия только двух параметров. Используем следующую
аппроксимацию:
2 2
w = w0 + s BiVi + s CijViVj. (1)
1=1 1,1=1
Пусть требуемое значение показателя качества рав-
но Wi. Приравнивая W — Wv, получаем функцию двух
параметров, которую запишем в виде
2 2
в (У1, vz) = w0 - wT 4- s BiVi + 3 CijViVj = 0. (2)
1=1 1,1=1
Правильно выбранный показатель качества имеет
экстремальное значение в пространстве параметров. Это
означает, что соотношение (1) есть уравнение эллипти-
ческого параболоида. Сечение эллиптического парабо-
лоида плоскостью, параллельной плоскости параметров,
дает эллипс, уравнение которого представлено соотноше-
нием (2). Данный эллипс можно назвать эллипсом ка-
чества, поскольку нахождение параметров внутри этого
эллипса обеспечивает качество работы системы не хуже
заданного.
Рассматривая параметр Pi как функцию парамет-
ра У2, найдем производную dVJdVz и приравняем ее
нулю. Эта производная равна
дР
1 __ дУ2 /о\
dV2 9F
dVt
Дифференцируя соотношение (2), учитывая, что знаме-
натель в (3) не обращается в бесконечность, и приравни-
вая производную нулю, получаем уравнение прямой,
проходящей через точки экстремумов (рис. 6.2.1)
Ва + 2С1271 + 2С'2272 = 0, (4);
где принято, что Сдг = С^.
202
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
Отсюда находим V2 и подставляем в уравнение (2)
(5)
^=“’2гГ2^ + 2СЛ-
После подстановки получаем квадратное уравнение от-
Рис. 6.2.1.
Рис. 6.2.2.
носительно ординат точек экстремумов на плоскости па-
раметров (рис. 6.2.1) , <
712^1 + ТцА1 + Yio = 0. (6)
Решая это уравнение, получаем допуски на параметр Vi
Д(1,2) = (1}
1 2Т1а ’
где .
», — I ’ __ 2*2. », — П ______ П £12
112 — ‘-'11 Yu — nl zT-i
оаз О22
в2
Т„ = И'.-И',-гА. (8)
Для определения допусков на параметр Vs необходи-
мо продифференцировать выражение (2) частным обра-
зом по Vi, приравнять производную нулю, найти из
данного уравнения параметр V2 и подставить в соотно-
§ 6.2. ДВУХПАРАМЕТРИЧЕСКАЯ МОДЕЛЬ
203
шение (2). В результате будет получено квадратное
уравнение относительно допусков на параметр ре-
шая которое, получаем
, = , (9)
где
?22 = ^22 7j~’ -®2
°11 с-и
В2
y^w0-wT-^~- (Ю)
Анализируя результаты решения, приходим к выво-
ду, что алгоритм определения допусков включает опера-
ции решения линейных алгебраических уравнений и ре-
шение квадратных уравнений. Соотношения (7), (9)
определяют уравнение описанного прямоугольника,
представленного на рис. 6.2.2. На этом рисунке область
дефекта допусков заштрихована. На рис. 6.2.3 показана
пространственная схема определения допусков.
204
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
§ 6.3. Алгоритм определения допусков
Рассмотрим общий случай определения допусков на
произвольное конечное число параметров из условия
обеспечения заданного значения показателя качества.
Аппроксимирующие зависимости показателя эффектив-
ности от параметров в виде
W = Wo + B'V + V'CV, (1)
W = exp {F'V + V'QV} (2)
идентичны с точки зрения назначения допусков. В этом
нетрудно убедиться, если прологарифмировать второе
выражение. Тогда из сравнения с первой формулой сле-
дует, что вместо величин W и Wo нужно рассматривать
их логарифмы. В связи с этим, все дальнейшие рассуж-
дения будут относится только к первой форме аппрок-
симации (1). Соотношение (1) в скалярной форме име-
ет вид
W = w0 + 2 BWi + 2 CiiViVi- (3)
j=i j.j=i
Пусть требуемое значение показателя качества равно
W = WT. Тогда выражение
W0-WT + 2 ^i+ s (4)
i=l i,j=l
есть неявная форма уравнения гиперэллипсоида размер-
ности I в пространстве параметров. Этот гиперэллипсо-
ид можно называть гиперэллипсоидом качества, по-
скольку нахождение параметров внутри этого эллипсои-
да обеспечивает требуемое качество работы системы.
Определение допусков на параметры с геометрической
точки зрения можно рассматривать как построение опи-
санного гиперпараллелепипеда, плоскости которого па-
раллельны осям параметров.
Определим допуски на А-й параметр. Для этого про-
дифференцируем выражение (4) по v-му параметру.
В результате получаем уравнение гиперплоскости
М2£ CviVi = Q (v = 1,2,...,/с-1^4-1,...J),
§ 6.3. АЛГОРИТМ ОПРЕДЕЛЕНИЯ ДОПУСКОВ
205
где учтено, что Сц = C3i. Система уравнений (5) позволя-
ет определить значения параметров (i = 1, 2, ...
..., к — 1, к + 1, ..., I) как функцию параметра Vk. Запи-
шем эту систему в развернутой форме, поделив на 2 и пе-
ренося члены CvhVk, Вч в правую часть:
Сц¥\ + С 12^2 + • + +
+ C'lA+i^A+i + • • • + CuVi = —y7?i — С mVh,
^21^1 4~ С 22^2 + • • • + C2h— 1Ка-1 +
+ C2/1+i7fe+i + • • + С 21V i = — у — C2kVkt
Ck—llV 1 4“ Cft—12^2 4~ • + Ch—l h— iVh—1 +
-bCk-i + • • • + Ck—uVi — —^h—1 — Ck-tkVk, (6)
Cfe+iiFi + C/l+12V2 +... + Cfc+i k—iVfi—i +
+ Gi+i л+i^H-i + • • + Ck+nVi = —— Ck+ihVkt
CuV 1 + C12V2 + • • • + Сц,,—iVk_ 1 4-
+ Gh-iVk+i +... Ц- c nVi = —^-Bi — CihVh.
Введем следующие обозначения: Ckk — матрица с
элементами Ctj, у которой отсутствуют к-я строка и к-it
столбец, Vk — вектор размерности I — 1, у которого от-
сутствует к-я компонента, Вк — вектор с отсутствующей
к-я компонентой, Lh —• к-я столбец матрицы С без к-я
строки. Используя указанные обозначения, перепишем
систему уравнений (6) в матричной форме
ChhVh = _ - VhLh, (7)
где Vh — к-я компонента вектора V. Решение этого урав-
нения имеет вид
Vh = — 4 Скк~'уВк — VbC^L11, (8)
20S
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
где Ckh 1 — матрица, обратная к матрице С/гЛ, так что
С-лй^-1 = /_
Представим выражение (4) в следующем виде:
И7 о - WT + BhVh + Bk'.Vh + Vk'CkkVk +
+ С№У1 + 2VkLk’Vk = 0, (9)
где Bk, Vh, Chh — компоненты соответствующих векторов
и матриц, a Bk,Chk, /Л—векторы и матрицы без 7с-х
компонент. Подставим в (9) значение вектора Vh из
(8). В результате несложных преобразований получаем
квадратное уравнение относительно допусков на /с-й
параметр
+ ЧкАг +.Тло = 0- (Ю)
Решая это квадратное уравнение, получаем
(11)
где
Тао = Жо - Жт - 4 Вк’Скк~1Вк3
4 (12)
Тй1 = Вк- ^Вк'Сьь-'В\
Ъ2 = Chh -
Формулы (И), (12) полностью определяют алгоритм
вычисления допусков на параметры, обеспечивающих за-
данное значение показателя качества. Как следует из
формул, алгоритм включает операции обращения матри-
цы Ckh, произведения матриц, умножение чисел и из-
влечение квадратного корня. Таким образом, допуски на
параметры вычисляются на основе обычных алгебраиче-
ских операций с действительными числами. Полный объ-
ем вычислений допусков на все I параметров включает
7-кратное повторение вычислений по приведенным выше
формулам.
В частном случае, когда В = 0, Сц = 0 при
Lk = 0, соотношение (4) является уравнением гипершара
§ 6.3. АЛГОРИТМ ОПРЕДЕЛЕНИЯ ДОПУСКОВ
207
размерности I. Тогда коэффициенты равны
= Chk, чм = 0, уй0 = Wo — Wv.
Допуски на параметры определяются формулой
Т---
д(,112) =
4,-^0
G'kk
Если Сц 0 при i то формула для допусков
мает вид
(13)’
(14)
прини-
A(fe’2) =
(15)
С — Lk'СЫ1~~1 Lh'
Пример 1. Рассмотрим динамическую систему, структурная
схема которой изображена на рис. 6.3.1. Передаточная функция си-
стемы равна
Ф (р) = !Г2р2 + 2&Гр + Г
где Т = Ут//с, | = О,5(7ст) —i/>2, к — ktkz. Входной сигнал системы
представляет собой сумму полезного сигнала У = at и помехи
(16)
Рис. 6.3.1.
7V(i). Помеха является белым шумом с интенсивностью rw и ну-
левым средним значением. Система предназначена для выделения
полезного сигнала. Показателем качества данной следящей систе-
мы считаем средний квадрат ошибки.
Используя метод частотных характеристик, изложенный в § 3.4,
вычислим математическое ожидание ошибки. В соответствии с
формулой (3.4.12) имеем
1 ,
тЕ=2 н [ф(,,) (0) “ (0)] w • ('17>
г=0
В данном случае
Ф(0) = 1, Ф'(О) = -2£Г, Фт(0) = 1, ®;(0) = 0,
(7) = at, m'g (f) — a, m"s (i) = 0.
208
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
Подставляя эти соотношения в формулу (17), полунаем
тв = — 2а%Т = — а/к. (18)
По формуле (3.4.25) определяем дисперсию
n =D С ___________d&___________ fcrW Н9)
Е у 2л J | Г2 (fo)2 + 2^’0) + 112 2 ’
—оо
Средний квадрат ошибки есть функция параметра к
а2 ,
«Е = (20)
к2 2
Оптимальное значение коэффициента усиления системы кй, обеспе-
чивающее минимум среднего квадрата ошибки, определяется диф-
ференцированием среднего квадрата ошибки по коэффициенту уси-
ления и приравниванием производной нулю. Выполняя эти опера-
ции, получаем оптимальное значение коэффициента усиления
(22)
Минимальное значение среднего квадрата ошибки вычисляет*
ся подстановкой оптимального коэффициента усиления в форму-
лу (20) _______________________________
amin =
(22)
Если задать допустимое значение ат > amin, то соотношение
(20) дает уравнение относительно допусков на коэффициент уси-
ления
_в2 ,
(23)
или
к3 4- ~ = 0.
rN rw
Исследование дискриминанта этого уравнения, равного
D = ^- 1
-
1б<4'
27а2Г^]’
(24)
(25)
показывает, что он меньше нуля. В этом нетрудно убедиться, если
подставить вместо ат его наименьшее значение (22). При этом
D 0, но так как ат > <xmin, то, следовательно, В < 0. Отсю-
да следует, что уравнение имеет три действительных различных
5 6.3. АЛГОРИТМ ОПРЕДЕЛЕНИЯ ДОПУСКОВ
209
корня. Решая уравнение (24), получаем три корня
ф' 2а_
2”Ч'+я^
12_2гЦ60"-Л) + ^,
fc3 = 2rcos (б0° + /) + ^,
\ о / и! n
где „ „
2ат 27a2r^
г = ЗГ? созф = -1+-^-.
(26)
(27)
«mln ПО
Один из корней является отрицательным и поэтому должен быть
отброшен.
Рассмотрим численный пример при следующих данных: а =
= 0,872-10-1 рад сек~1, ат = 7 рад2,
Глг=4-10~6 рад2 сек. Вычисляя к0 и
формулам (21), (22), получаем
ка = 19,68 сек-1,
amin = 5,9-10-5 рад2. (28)
зависимости среднего квадрата
от коэффициента усиления
График
ошибки
представлен на рис. 6.3.2 (кривая I).
Вычисляя по формулам (26), (27)
значения корней, получаем
ki=— 9,25, к2— 31,02, к3= 13,30.
(29)
Первый корень отбрасываем, а второй
и Третий корни образуют допуски на
коэффициент усиления системы, обеспечивающие значение средне-
го квадрата ошибки слежения не более 7 • 10~5 рад2. Допуски
показаны на рис. 6.3.2 пунктиром.
Представим средний квадрат ошибки разложением
а — c4o-f-Si(& — к3) -j- Са (к — к3)2, (30)
где Bi = (da/dk)h„, Сн = (д2а,1дк2) /10. Используя формулу (23),
вычисляем коэффициенты Bi и Сц
в _ , 5k с
L.3 + 2 ’ Gil - jA-
ко о
(31)
Подставляя значение к0 из (21), получаем
14 л1 Г. Евланов
210
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
При указанных выше числовых значениях параметров аппрокси-
мирующая зависимость среднего квадрата ошибки от коэффициен-
та усиления имеет вид
а = 5,9 • 10~5 + 1,53 • 10~7 (/с - 7с0)2. (33)
График этой зависимости представлен на рис. 6.3.2 кривой 11.
В соответствии с формулой (6.3.14) допуск на коэффициент
усиления вычисляется по формуле
д(1,2) = ± -j Гат~ио
V С11
Подстановка чисел и вычисления дают
к2 = к0 + Д(1) = 19,68 -j- 8,46 = 28,14,
к. = к„ — Д(2) = 19,68 — 8,46 = 11,22.
<J и ' ' '
(34)
(35)
Сравнивая эти значения допусков с точными значениями (29), име-
ем следующие, относительные ошибки в определении допусков при
аппроксимации формулой (33):
яь ___ 31,02 — 28,14___g зо/
82---------31^02-------9,3'°’
6fe3=^~l^-2 = 15,6%. (36)
Учитывая, что точность исходных данных имеет порядок (10--
4-15) %, можно констатировать, что аппроксимирующая зави-
симость (33) дает удовлетворительную точность вычисления до-
пусков.
Пример 2. Система представляет собой апериодическое звено
с коэффициентом усиления к и постоянной времени Т. На вход
поступает сигнал, представляющий собой сумму полезного сигнала
S = Z7, + U2t (37)
и помехи 7V(7) с нулевым средним и спектральной плотностью
Da
5ff(“)= я^ф-со2)' (38)
Величины Hi, [72 являются случайными, имеют нулевые средние,
дисперсии D\, D2 и не корродированы с помехой.
Система предназначена для выделения полезного сигнала с
единичным коэффициентом усиления: Ут = S (t).
Определить допуски на параметры к и Т из условия задания
определенного значения показателя качества фильтрации, в ка-
честве которого принимается среднее значение дисперсии ошибки
на интервале работы системы Тр.
Дисперсия ошибки в установившемся режиме равна
De (О = (к - 1)2Р1 + [(й -1) t -f- кТ]2 D2 -Г . (39)
§ 6.3. АЛГОРИТМ ОПРЕДЕЛЕНИЯ ДОПУСКОВ
211
Г
DE = (k— I)2 Dy + (fc — I)2 _£+ k2T2 4-7c (7c—1) TT
I <□
Выполняя осреднение дисперсии на интервале [О, Гр], получаем
D 4-
2 +Ц-аГ
(40)
Как следует пз данной формулы, дисперсия ошибки зависит от
коэффициента усиления квадратично и более сложно от постоян-
ной времени.
Представим дисперсию ошибки как функцию величин к v Т
поверхностью второго порядка
Ыко, то) + В^1 + В2?2 + №1 + 2С12У^2 + С22У2, (41)
где Vi = к — 7с0, Vz — T — Ta, к0, То — оптимальные значения па-
раметров,
( TlD? D
В1 =2(^1+ 3 + ^0-^2 + 1 zp ато J
/ Т12Л \
-2 P1 + -V "W’
\ о /
о I Da \
Ву = к2 2ГП_О„ — T^Dy —-----у 4 7с,,ТО„,
2 U 0 2 р 2 (14 )2/ 0 Р 2*
T2D п
С11 = D, + -£2 + T2D2 + TQTJ>2 + , (42)
О ± “C4J q
р ____ ь2
и22 — ^0
— . JLZIA
77 n -J- Q
2'(14аГ0)3
С.у=2кп 2TnDy — TDy—----------------5 + ТО,,
lzi U U 2 Р 2 Р И
Для определения допусков на параметры Vi, V2 необходимо
задаться допустимым значением дисперсии ошибки DE и вос-
пользоваться формулами (6.2.6), (6.2.9).
Рассмотрим числовой пример при следующих данных: 2’р =
= 12 сек, а = 100 сек~1, Di — 10D, D2 = D, D — 10~3 в2. При этих
данных оптимальные значения параметров равны к0 = 1,0224,
То 0,224 сек. Дисперсия ошибки при оптимальных значениях па-
раметров равна De (Тсо, Го) — 1,5 10~4 в2.
При оптимальных значениях параметров коэффициенты В\ —
= В2 = 0 в (41). Коэффициенты Сц, Ci2, С22, вычисленные по фор-
мулам (42), равны Сц = 0,0587 в2, С12 = 0, С22 = 1,86-Ю-3 в2 сек“2.
Сравнение коэффициентов Сц и С22 показывает, что влияние ко-
эффициента усиления системы на дисперсию ошибки значительно
больше, чем постоянной времени. Задаваясь значением допустимой
14*
212
ГЛ. 6, ГАРАНТИЙНЫЕ ДОПУСКИ
дисперсии ошибки DE = 1,8-10—4 в2 по формулам (6.2.6), (6.2.9),
получаем допуски на коэффициент услиения и постоянную вре-
мени Д«>2) = ± 0,0226, Д»-2> = + 0,126 сек. При DE = 1,6-10~4в2
допуски на параметры равны Д^1,2^ = + 0,013, Д^1,2^ = ± 0,073 сек.
§ 6.4. Ошибки при контроле по допускам
Как следует из предыдущих параграфов, принцип на-
значения допусков на параметры заключается в постро-
ении гиперпараллелепипеда с гранями, параллельными
осям параметров, и описывающего гиперэллипсоид каче-
ства. Между гиперэллипсоидом качества и описанным
гиперпараллелепипедом существуют области значений па-
раметров, для которых имеет место риск заказчика.
Действительно, вследствие того, что эти. области находят-
ся внутри гиперпараллелепипеда, все параметры нахо-
дятся внутри своих полей допусков. G другой стороны,
эти области лежат вне гиперэллипсоида качества и, сле-
довательно, имеет место соотношение W <WT, т. е. по
обобщенному показателю качества должно быть принято
решение «не годен». Если принятие решения о способ-
ности системы выполнять свое назначение осуществляет-
ся только на основе сравнения параметров с допусками,
то будет иметь место риск заказчика.
Риск заказчика в данном случае есть вероятность по-
падания параметров в область между гиперпараллелепи-
педом и гиперэллипсоидом качества
р = Р(Уе=Д)-Р(Уе=й)} (1)
где [3 — риск заказчика, Р (У е А) — вероятность попада-
ния вектора параметров в гиперпараллелепипед допусков
А, Р(У efi) — вероятность попадания параметров в
гиперэллипсоид качества И. При известной плотности
вероятности параметров риск заказчика можно вычислить
по формуле
₽ = \f(v)dv-\f(v)dv. (2)
д h
Наиболее часто имеет место случай некоррелирован-
ности и нормального распределения вероятности пара-
§ 6.4. ОШИБКИ ПРИ КОНТРОЛЕ ПО ДОПУСКАМ
213
метров. Плотность вероятности вектора параметров при
этом имеет вид
/ (») = у/1- ехр (-------- v'D-1 г] ;г (3)
у (2л)г | U | I 2 )
где I — число параметров, D — диагональная матрица
дисперсий. Вероятность попадания параметров в гипер-
параллелепипед допусков при распределении (3) равна
Р (V <= А) = 1 — f exp f-—~ v'D^v] dv. (4)
Г(2л)г|Л|] I 2 J
Выполняя интегрирование, получаем
(5)
где А(Л\ А(.2)— допуски на i-й параметр, вычисляемые
по формулам (6.3.11), (6.3.12).
Вероятность попадания вектора параметров в гипер-
эллипсоид качества при плотности вероятности (3) вы-
числяется по формуле
P(Vefl) =
1
/(2л)11 Л |
J ехР
Wo+B'®+t>'Co<WT
---в'В-1»] dv. (6)
I
Область интегрирования в данном интеграле представля-
ет собой объем гиперэллипсоида качества.
Интеграл (6) можно представить в другой форме:
^тах
Р (У 6= й ) = J / (ш) dw, (7)
г/
где /(ш) —плотность вероятности показателя качества,
WT — допустимое значение показателя качества, ТУШах—
максимальное значение показателя качества.
Для определения плотности вероятности показа-
теля качества вычислим вначале характеристическую
функцию.
214
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
По определению характеристическая функция равна
<р (Л) =
и» С -------—ехр ( — -^-v'D^v-^-i^WQ-^B'v+v'Cv)} dvs
Д |/ (2я)г | D | I J J
(8)
где интеграл понимается как Z-кратный по всем парамет-
рам. Представим интеграл (8) в виде
“ l-ij.c) « ~
Ф (X) — —- - - - - е’МУ» Ге ' ' dv.
V(2n)l\D\ J
(9)
Данный интеграл вычисляется аналитически и равен
Ф(Х) =
— / г-7-----------г е х 7
У(2л)‘1/) 1 |/ jА д-i-ас]
(Ю)
Выполняя преобразования, представим характеристиче-
скую функцию показателя качества в виде
. UWo—5-VB' (D- 1-1мЛ
Ф(Х)= е 2 (2 '
Vll — 2iXCDl
(И)
Имеет место разложение [81]
]/[ I — 2ikCD | = ехр
°° пт—1 ]
,т=1 ।
справедливое для всех |Х|, меньших обратной величины
наибольшего собственного значения матрицы СИ. В (12)
tr CD — след произведения матриц. Если ограничиться
в этом разложении членами не выше второго порядка и,
кроме того, принять В=0, то характеристическая функ-
ция показателя качества будет описывать нормальный
закон. Выполняя обратное преобразование Фурье от ха-
§ G.4. ОШИБКИ ПРИ КОНТРОЛЕ ПО ДОПУСКАМ
215
рактеристической функции, получаем в этом частном
случае плотность вероятности
/ (и>) = -• —.
(w—m-[y)2
2DW
(13)
где
mw = W0 + tTCD, Dw = 2te(CD)\ (14)
Выражение (13) следует уточнить введением условия
f(w) = О при w > ЖпЯт. т. е. фактически необходимо
брать усеченный нормальный закон. Плотность вероят-
ности при этом имеет вид
/ М =
к ( ('" — mw)2}
—===. exp — „п—-1,
У 2nDw ( 2DW j
р,
Ш<Жтах,
мл (15)
W > Wmax.
Нормирующий коэффициент к определяется из условия
^тах
f(w)dw = l. (16)
—оо
Производя вычисления, получаем
Подставляя значение к в (14) и далее плотность ве-
роятности в формулу (7), выполняя интегрирование,
получаем
л /^тах “ "М л / Ж ~ тиА
Ф ( aw ) \ °w /
Р(Гей) = -Ц-------Ут----------(18)
1 . _ / ^max mW\
-o’ + Ф -Z----
л \aW
Данная формула справедлива при В = 0, что означает с
физической точки зрения совпадение точки экстремума
показателя качества с началом координат параметров.
216
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
Выполнение этого условия достигается предварительным
нахождением топки экстремума в' пространстве парамет-
ров и представлением реальной поверхности W(V") ап-
проксимирующей зависимостью путем разложения в ряд
Тейлора относительно экстремальной точки.
При В у^О для вычисления вероятности попадания
вектора параметров в гиперэллипсоид качества можно
воспользоваться формулами (7), (13), (15), в которых
дисперсию показателя качества вместо формулы (14)
следует определять по следующему выражению:
Dw = lrB2D + 2tr (CD)2.
(19)
Таким образом, риск заказчика, возникающий в слу-
чае принятия решения «годен» при сравнении парамет-
ров с допусками, вычисляется по формуле
В частном случае, когда В = 0, Сц — 0 (г =/=./), риск
заказчика определяется следующим выражением, получа-
емым подстановкой значений допусков из (6.3.14), мате-
матического ожидания и дисперсии показателя качества
из (14):
§ 6.4. ОШИБКИ ПРИ КОНТРОЛЕ ПО ДОПУСКАМ
217
Если точка разложения является одновременно экстре-
мальной точкой, то H7max = Wo и формула для риска за-
казчика принимает вид
ciiDi р
( tr CD I ф (Wt~W0~t'e CD
\2tr(CD)2O \ 2tr(CD)2
1-ф(_ЬСМ “
2 1^2 tr (CD)2у
Рассмотрим частный случай наличия только двух па-
раметров. Вероятность попадания параметров в поле
допуска определяется формулой (5), в которой следует
положить 1 = 2. Вероятность попадания параметров в
эллипс качества вычисляется по формуле (6), которая
имеет вид
2 2
wo+ 2 вт+ 2 CijVlVj<Wv
( л 2 v21
х ехр “т2^НУ1^2-
I 4=1 4 J
Представим интеграл в виде
(23)
(24)
ОО h, .
P(FGfi)= f dVA^—exp
«У I/ 1 А
—оо hi
dv2,
где
1 г
= 2с22 [— (В2 -|- 2С12У1) —
- /(В2 -|- 2C12*O - 4С22 Оо + В1Щ - W,e + Снк2)],
^-2 = 2022 [— 2Ci2Pi) +
(25)
+ ]S(B2 + 2C12pd2 - 4С22 Оо + В1Щ - Т7т+ С^)]-
(26)
218
ГЛ. 6. ГАРАНТИЙНЫЕ ДОПУСКИ
Интегрируя по г2> получаем
Р (V е 2) =
1
|/^ 2n<jj
lh9 (vA \ th, (у,) \ 1
Ф -Ф ^1- (27)
°2 ) у C*2 ) J
Данный интеграл можно вычислить только численно.
Если распределение вероятности параметров сосредо-
точено, в основном, в гиперэллипсоиде качества, то риск
заказчика вследствие контроля и принятия решения «го-
ден» по сравнению параметров с допусками очень мал
и можно считать, что практически он равен нулю. Это
означает, что принятие решения «годен» при нахождении
параметров в поле допуска эквивалентно принятию ре-
шения «годен» при условии, что показатель качества
объекта контроля не меньше заданного значения. Если же
параметры имеют большой разброс, то целесообразно с
точки зрения устранения риска заказчика принимать
окончательное решение «годен» только по показателю
качества. При этом сравнение параметров с допусками
используется лишь для получения информации о разбро-
се параметров. Принятие решения «годен» в случае W
WT дает при абсолютно точном измерении параметров
нулевой риск заказчика.
Приведенные рассуждения о появлении риска заказ-
чика при принятии решения «годен» в случае нахожде-
ния параметров в поле допуска основаны только на учете
априорных данных и совсем не затрагивают процесс из-
мерения параметров. При измерении параметров в про-
цессе контроля имеют место ошибки, которые приводят
к появлению рисков заказчика и изготовителя. Рассмот-
рение этих вопросов проводится в следующих главах.
§ 6.5. Допуски на линейные формы параметров
Рассмотренный выше метод определения допусков на
параметры, обеспечивающих значение показателя каче-
ства не менее заданной величины, дает дефекты тем
больше, чем больше Z-мерный эллипсоид отличается от
сферы и чем больше он развернут своими осями по отно-
§ 6.5. ДОПУСКИ НА ЛИНЕЙНЫЕ ФОРМЫ ПАРАМЕТРОВ 219
шению к осям параметров. В этом случае области между
Z-мерным эллипсоидом и описывающим гиперпараллеле-
пипедом становятся весьма большими. Поэтому сущест-
вует значительная вероятность попадания значений пара-
метров в эти области и, следовательно, велика возмож-
ность получения большого риска заказчика.
Для уменьшения указанного дефекта необходимо по-
вернуть гиперэллипсоид так, чтобы его главные оси были
параллельны осям координат. В этом случае области
между гиперэллипсоидом и описывающим гиперпаралле-
лепипедом будут минимальны.
Как известно, поворот осей гиперэллипсоида может
быть реализован линейным преобразованием переменных.
После преобразования координат можно определить до-
пуски на новые переменные. Эти новые переменные бу-
дут представлять собой линейные формы параметров ди-
намической системы. Таким образом, в данном случае
назначение допусков возможно только на линейные фор-
мы параметров, а не на сами параметры.
Естественно, что реализация контроля по допускам
на линейные формы параметров существенно усложня-
ется. Необходимо измерять параметры и составлять ли-
нейные комбинации каждого параметра от других пара-
метров и сравнивать с допусками.
Проведем необходимые выкладки для получения ал-
горитма вычисления допусков на линейные формы пара-
метров. Поворот осей гиперэллипсоида эквивалентен
приведению квадратичной формы V'CV к сумме квад-
ратов. Так как матрица С симметрична и имеет дей-
ствительные элементы, то всегда можно найти такую мат-
рицу Q, которая при помощи преобразования
Q~iCQ = A!=|IW| (1)
диагонализирует матрицу С, где А,( — собственные числа
матрицы С, определяемые решением характеристическо-
го уравнения
|'C-U] = 0. ’ (2)
Преобразуем с помощью матрицы Q переменные
V — QZ. Тогда квадратичная форма V'CV принимает
ВИД
V'CV = (QZ)'CQZ. (3)
220
ГЛ. 6. ГАРАНТИЙНЫЕ ЗАПУСКИ
Поскольку преобразование QZ является ортогональным
и осуществляется в евклидовом пространстве, то выпол-
няются равенства Q~1 = Q', = Q- Учитывая, что
(QZ)' = Z'Q', перепишем (3) в виде
V'CV = Z'Q~lCQZ ZKZ. (4)
Но матрица Л является диагональной, поэтому правая
часть написанного равенства есть сумма квадратов.
В результате линейного преобразования переменных
зависимость показателя качества от новых переменных
имеет вид
W = Wq + B'QZ + Z'AZ. (5)
Если теперь в алгоритме определения допусков, приве-
денном в предыдущем параграфе, заменить вектор В' на
произведение B'Q, а матрицу С диагональной матрицей
Л, то формулы (6.3.11), (6.3.12) будут определять допу-
ски на линейные формы параметров Z = Q~1V.
ГЛАВА 7
ИЗМЕРЕНИЕ
§ 7.1. Постановка задачи
Исходной информацией для принятия решения о год-
ности объекта контроля выполнять свое назначение яв-
ляются измеренные значения параметров (оценки пара-
метров). При параметрическом контроле принятие реше-
ния осуществляется путем непосредственного сравнения
оценок параметров с допусками. При контроле по пока-
зателям качества необходимо предварительно по измерен-
ным параметрам определить оценки показателей качест-
ва, затем принять решение на основе сравнения этих
оценок с допусками. В обоих случаях необходимо иметь
оценки параметров, поэтому в данной главе вначале рас-
сматривается задача синтеза оптимальных алгоритмов
получения оценок параметров, а затем задача синтеза
оптимальных алгоритмов получения оценок показателей
качества.
Проблема измерения показателей качества и парамет-
ров имеет два аспекта. Первый аспект можно назвать
информационным, а второй конструктивным. С информа-
ционной точки зрения задача измерения рассматривает-
ся как абстрактная задача преобразования сигналов с
целью получения оценок параметров и показателей каче-
ства динамической системы. В конструктивном аспекте
рассматриваются вопросы рациональной реализации из-
мерителей с точки зрения габаритов, веса, надежности,
стоимости и т. п. В данной книге рассматривается лишь
информационный подход к проблеме измерения.
Измерение параметров динамических систем произво-
дится по наблюдению входных и выходных сигналов си-
стемы. Для получения выходных сигналов необходимо
привести систему в рабочее состояние. Для этого на вхо-
ды системы должны быть поданы возмущающие сигналы,
или, как их еще называют, зондирующие сигналы (тест-
222
ГЛ. 7. ИЗМЕРЕНИЕ
сигналы), имитирующие реальные условия работы. Кро-
ме того, должны быть определены соответствующие на-
чальные условия, характеризующие начальное состояние
системы. Выбор характеристик зондирующих сигналов и
начальных условий определяется режимом контроля и
является первой задачей в проблеме измерения парамет-
ров динамических систем.
Второй задачей при измерении параметров является
выбор характеристик измерителя, под которыми в общем
случае понимаются структура и параметры оператора
измерителя. Определение оператора измерителя должно
производиться с учетом случайных возмущений, действу-
ющих как. в динамических системах, так и в зондирую-
щих сигналах и в самих измерителях. Характерной осо-
бенностью измерения параметров является наличие в на-
блюдаемом сигнале как аддитивных, так и мультиплика-
тивных возмущений.
Третьей задачей при измерении является выбор наи-
лучших в некотором смысле точек измерения. Один и тот
же параметр в системе часто можно измерить, наблюдая
выходные сигналы в различных точках. Поэтому возни-
кает задача отбора точек измерения. Эта особенность
учитывается при решении задачи синтеза путем рассмо-
трения многомерного оптимального измерителя. Как из-
вестно из теории оптимальных систем [89], возможность
повышения точности измерения зависит от количества
источников информации об измеряемых параметрах. По-
этому увеличение количества точек измерения будет по-
вышать точность измерения параметров. Проанализировав
роль того или иного наблюдаемого сигнала на повышение
точности измерения, можно отобрать наиболее информа-
тивные из них. Это достигается вычислением характери-
стик потенциальной точности измерения многомерной
оптимальной системы.
Выбор зондирующих сигналов, точек измерения и оп-
ределение оператора измерителя составляют комплекс-
ную задачу синтеза измерителя. Естественно поставить
вопрос о синтезе оптимального измерителя, обеспечиваю-
щего при заданных условиях наилучшее в некотором
смысле измерение параметров динамической системы.
Теоретической базой для синтеза оптимальных измерите-
лей является статистическая теория оптимальных систем.
§ 7.1. ПОСТАНОВКА ЗАДАЧИ
223
основы которой, применительно к решаемым в процессе
контроля задачам, изложены в четвертой главе.
В настоящее время имеется сравнительно небольшое
количество работ по синтезу оптимальных измерителей
параметров динамических систем. Методы теории дуаль-
ного управления [107] в принципе позволяют решать
задачи определения оптимальных оценок параметров ди-
намических систем. Однако большая сложность алгоритма
и его применимость только для дискретного случая при-
вели к тому, что данным методом решены простейшие
задачи по оптимальной оценке параметров динамических
систем [57, 78, 79].
Рассмотрим постановку задачи. Общая постановка за-
дачи определения параметров объекта контроля заклю-
чается в следующем. На входы динамической системы
подается вектор зондирующих сигналов Z(t) (рис. 7.1.1).
Рис. 7.1.1.
Зондирующие сигналы формируются неточно, что учиты-
вается добавлением к выходным сигналам блока зондиру-
ющих сигналов вектора помех V (t). Входной сигнал
объекта контроля (4) является вектором случайных
функций. Случайность может быть обусловлена как вли-
янием помехи V (4), так и случайной природой самих
зондирующих сигналов.
Сигнал Z (4) воздействует на динамическую систему
с оператором st- (t, U), зависящим от вектора случайных
параметров U. Выходные сигналы системы содержат ин-
формацию о векторе параметров. Наблюдаемым сигналом
на входах блока измерителей является вектор X (t),
представляющий собой сумму выходного сигнала системы
и вектора помех
Х(4) = ^(4,J/)Z(4) + 2V(4). (1)
224
ГЛ. 7. ИЗМЕРЕНИЕ
Таким образом, наблюдаемая вектор-функция X(t) пред-
ставляет собой нелинейную комбинацию вектора парамет-
ров U и помех N (t), V (t).
Выбрав критерий оптимальности получения оценки
вектора случайных параметров, можно сформулировать
задачу синтеза оператора блока измерителей. Если харак-
теристики случайного вектора Z(t) известны (в детер-
минированном или вероятностном смысле), то решение
задачи синтеза дает структуру и параметры блока изме-
рителей и потенциальную точность его работы в виде
значения показателя оптимальности.
В результате вычисления потенциальной точности из-
мерения можно проанализировать ее зависимость от на-
блюдаемых сигналов. Задаваясь допустимой точностью
измерения, можно выбрать наиболее информативные
входные сигналы, дающие значительный вклад в повы-
шение точности оценок параметров, и отбросить все не-
существенные входы. Тем самым решается задача опре-
деления минимального числа наблюдаемых сигналов.
Если рассматривать вектор входного сигнала Z(t)
как неизвестный, то решение задачи синтеза идет при
неопределенных характеристиках этого сигнала. В ре-
зультате оптимальный оператор блока измерителей и по-
казатель оптимальности являются функциями этих
характеристик. Выполняя дальнейшую минимизацию
(максимизацию) выбранного показателя оптимальности,
можно определить наилучшие характеристики вектора
входного сигнала динамической системы, обеспечивающие
абсолютный экстремум критерия оптимальности. Таким
образом решается задача синтеза характеристик зонди-
рующего сигнала.
Решение задачи синтеза оператора блока измерителей
и определение его потенциальной точности служит осно-
вой для формулировки требований к точности задания
зондирующих сигналов, выбору точек их приложения, вы-
бору точек наблюдения выходных сигналов системы, уров-
ню шумов, необходимого времени наблюдения сигналов
(или количеству отсчетов в дискретном варианте), а так-
же для непосредственной реализации алгоритмов обработ-
ки наблюдаемых сигналов.
При построении реальных измерителей их структура
и параметры могут отличаться от оптимальных схем,
§ 7.2. МОДЕЛИ СИГНАЛОВ
225
вследствие необходимости учета многих факторов, не рас-
сматриваемых при постановке задач в теории оптималь-
ных систем (стоимость, надежность, наличие требуемых
элементов и т. п.). Однако возможность сравнения ха-
рактеристик реальных схем с оптимальными характери-
стиками дает прочную основу для сознательного и объ-
ективного изменения этих характеристик с целью наи-
лучшего приближения их к оптимальным.
Возможны два подхода к измерению параметров ди-
намической системы. В первом подходе измерение каж-
дого параметра производится независимо от других пара-
метров. Этот подход в настоящее время наиболее распро-
странен в системах контроля. Во втором подходе измере-
ние всех параметров производится во взаимосвязи по
одному или небольшому числу наблюдаемых выходных
сигналов динамической системы. Алгоритмы измерения
независимых параметров значительно проще, чем алго-
ритмы измерения, применяемые для комплексной оценки
параметров системы как единого целого. Однако реализа-
ция процедур независимого измерения параметров требу-
ет большего количества зондирующих сигналов и соот-
ветствующей аппаратуры. Поэтому второй подход,
несмотря на высокие требования, предъявляемые к ха-
рактеристикам вычислительного устройства, является
перспективным для систем контроля динамических
объектов. Алгоритмы комплексной оптимальной оценки
параметров объекта рассматриваются в § 7.13.
В данной главе использованы некоторые результаты,
полученные Б. И. Доценко.
§ 7.2. Модели сигналов
Для решения задачи синтеза характеристик измерите-
лей параметров необходимы априорные данные о вероят-
ностных характеристиках сигналов, наблюдаемых в точ-
ках контроля. Получение таких данных производится
экспериментальным путем. Естественно, что постановка
эксперимента возможна, если объект контроля существует
в виде конкретного устройства. В связи с этим возникает
определенная трудность при решении задачи совместного
проектирования объекта контроля и системы контроля.
Для построения системы контроля нужны характеристи-
15 Л. Г. Евланов
226
ГЛ. 7. ИЗМЕРЕНИЕ
ки реально функционирующего устройства. Однако эта
трудность обычно не имеет решающего значения для
проектирования системы контроля, поскольку, как пра-
вило, имеются уже созданные прототипы устройств. Кро-
ме того, устройства состоят из одних и тех же типовых
элементов и узлов. Поэтому исследование характеристик
выходных сигналов составных элементов динамических
систем дает достаточно надежные априорные данные о
возможных характеристиках сигналов в контролируемых
точках вновь создаваемых систем.
Таким образом, если объект контроля еще не создан
и производится одновременное проектирование его с си-
стемой контроля, то в качестве характеристик наблюдае-
мых контрольных сигналов должны использоваться имею-
щиеся данные по аналогичным образцам устройств, а
также отдельных узлов и элементов. После аппаратур-
ной реализации объекта контроля экспериментальным
путем производится уточнение характеристик сигналов,
фактически наблюдаемых в точках контроля.
Уверенность в достаточно надежной априорной инфор-
мации о характеристиках сигналов основывается на том,
что при формулировке требований к контролепригодности
объекта контроля определяются ограничения на характе-
ристики сигналов: значения номиналов, характер сигна-
лов, уровни шумов и т. п. Требования контролепригод-
ности входят составной частью в общие технические тре-
бования, предъявляемые к проектируемому устройству.
Какие же вероятностные характеристики сигналов
нужны для синтеза измерителей сигналов? Прежде всего
нужно знать структуру наблюдаемого сигнала, т. е. вид
сигнала и комбинацию полезной составляющей с помеха-
ми. В соответствии с принятой в данной книге концеп-
цией контроля вся полезная информация о техниче-
ском состоянии объекта контроля заключена в измеря-
емых параметрах.
По множеству устройств параметры можно рассмат-
ривать кай случайные величины. При измерении пара-
метров в конкретном объекте в качестве априорных дан-
ных об этих параметрах следует рассматривать вероят-
ностные характристики. Полной вероятностной характе-
ристикой случайной величины, как известно, является
закон распределения вероятности.
§ 7.2. МОДЕЛИ СИГНАЛОВ 227
Многочисленные экспериментальные данные показы-
вают, что закон распределения вероятности контролируе-
мых параметров в подавляющем большинстве случаев
является нормальным. Поскольку нормальный закон
распределения случайной величины полностью опреде-
ляется математическим ожиданием и дисперсией, то
экспериментальное определение вероятностных характе-
ристик измеряемых параметров сводится к получению
этих двух моментов. Как правило, математическое ожида-
ние контролируемых параметров совпадает с номиналь-
ным значением. Поэтому достаточно надежными априор-
ными данными о средних значениях измеряемых пара-
метров является знание номинальных величин.
В нормально спроектированном устройстве разброс
параметров сравнительно невелик, так что среднее квад-
ратическое отклонение параметров обычно составляет
пять — десять процентов от номинального значения. Если
отсутствует возможность получения экспериментальных
данных о дисперсиях измеряемых параметров, то можно
в качестве предварительных данных использовать ука-
занное соотношение:
о — (0,05 4- 0,10)т, (1)’
где о — среднее квадратическое отклонение, т — номи-
нальное значение параметра.
Помехи в объектах контроля имеют место либо вслед-
ствие того, что входной сигнал содержит помеху и эта
помеха вместе с полезным сигналом проходит через си-
стему, либо вследствие генерирования собственных шу-
мов в электронных, механических, акустических, газовых
и других устройствах системы. В сложных системах
обычно указанные причины сочетаются, т. е. имеют место
как внешние, так и внутренние помехи. Характерной
особенностью внешних помех в устройствах является с
точки зрения контроля их мультипликативность, т. е.
перемножение с измеряемым параметром.
Наряду с помехами объекта контроля необходимо
учитывать собственные шумы измерителей, которые всег-
да будут иметь место при реализации измерителя в ре-
альной аппаратуре. Эти шумы следует представлять в
виде входных помех в синтезируемый измеритель.
15*
228
ГЛ, 7. ИЗМЕРЕНИЕ
Закон распределения вероятности помех объектов
контроля и измерителей обычно является нормальным.
Полное описание нормального случайного процесса дает-
ся математическим ожиданием и корреляционной функ-
цией. Поэтому целью экспериментального изучения ха-
рактеристик помех являются именно эти моменты.
Собственные шумы измерителей обычно представляют
собой стационарный случайный процесс с нулевым мате-
матическим ожиданием и постоянной спектральной плот-
ностью в полосе пропускания измерителя. Поэтому соб-
ственные шумы измерителей считают белыми шумами.
В процессе эксперимента определяется единственный па-
раметр корреляционной функции белого шума — интен-
сивность Г.
Помехи в выходных сигналах объекта контроля обыч-
но представляют собой стационарные или квазистацио-
нарные случайные процессы с нулевыми математически-
ми ожиданиями. Квазистационарность (как бы стацио-
нарность) часто обусловлена наличием автоколебатель-
ных режимов в следящих системах. На рис. 7.2.1—7.2.4
показаны примеры реализации случайных функций, опи-
сывающих помехи в точках измерения параметров.
Рис. 7.2.1.
Рис. 7.2.2.
Большое разнообразие объектов контроля и контро-
лируемых параметров приводит к мысли, что характери-
стики наблюдаемых сигналов очень различны. Поэтому
необходимо синтезировать характеристики оптимальных
§ 7.2, МОДЕЛИ СИГНАЛОВ
229
измерителей для каждого параметра в отдельности. Учи-
тывая большое количество контролируемых параметров
в сложных динамических системах, можно ожидать весь-
ма трудоемкой работы по решению задачи синтеза. Одна-
ко исследования показывают, что, несмотря на большое
разнообразие контролируемых параметров, характеристи-
ки помех можно объединить в небольшое число групп.
Рис. 7.2.4.
Разбиение на группы производится по виду корреляцион-
ных функций помех.
В § 1.6 рассматривались типовые помехи в электрон-
ных и механических системах. Там же приведены корре-
ляционные функции помех. Учитывая характеристики
рассмотренных помех, а также некоторые другие типовые
случаи, встречающиеся в объектах контроля, совокуп-
ность встречающихся помех представим следующими
корреляционными функциями:
7с (т) ' = Гб(т), (2)'
к (%) = DNe~aM, (3)
й (т)’ = Рлё’“,т| cos ₽т, (4)'
230
ГЛ, 7. ИЗМЕРЕНИЕ
к (т) — Z>Ne““lT| + Н cos Рг, (5)
А(т) ~ Н cos fh‘, (6)
к (ъ) = Dwe~Kl'tl + [Я1 cos рт + Я2] cos ут, (7)
/с(т) ~ D^e-a|tl[cos Рт + j-sinplx]]. (8)
В дополнение к написанным корреляционным функ-
циям следует иметь в виду нулевую группу /с(т) — 0.
Этот случай соответствует пренебрежению помехами.
Возможность описания различных помех небольшим
конечным числом корреляционных функций значительно
упрощает решение задачи синтеза измерителей парамет-
ров. Если помехи относятся к одной группе, то для изме-
рения различных параметров может использоваться одна
и та же структура оптимального измерителя, различие
будет заключаться лишь в параметрах измерителя.
Методы экспериментального определения корреляци-
онных функций по наблюдаемым реализациям случайных
сигналов и построение аппроксимирующих аналитических
выражений подробно рассмотрены в современной литера-
туре, к которой и отсылается читатель [23, 83, 96, 102].
§ 7.3. Измерение параметра. I
Модель наблюдаемого сигнала принимается в виде
X(t) = C7s(£)-f-7V(£), (1)
где U — неизвестный параметр, оценку которого необхо-
димо получить, s(t)—известная функция времени,
N(t) — помеха. Параметр рассматривается как случайная
величина с нормальным законом распределения вероят-
ности, математическим ожиданием т и дисперсией D.
Помеха N(t) является гауссовским случайным процес-
сом и имеет следующую структуру:
N(f) =Ni+N2(t), (2)
где Ni — случайная величина, характеризующая смеще-
ние нуля измерителя, TV2(i) —случайная функция време-
ни, описывающая собственные шумы измерителя. Слу-
чайная величина Ni имеет нормальный закон распреде-
ления вероятности с математическим ожиданием т\ и
§ 7.3. ИЗМЕРЕНИЕ ПАРАМЕТРА. I
231
дисперсией Di. Случайная функция TVs (О имеет нулевое
математическое ожидание, корреляционную функцию
/с2(т) =Г6(т) и независима от случайной величины Ni.
Корреляционная фукция помехи N(t) имеет вид
Кя (о, т) = Di + Гб (о - т). (3)
Требуется синтезировать алгоритм обработки наблю-
даемого на интервале времени [0, 7’] входного сигнала
Х(£) для получения оптимальной по критерию минимума
среднего квадрата ошибки оценки параметра U.
Для рассматриваемых условий задачи оптимальная
оценка параметра определяется формулой (4.10.25), ко-
торая для данного одномерного случая принимает вид
— 1 4- CD 1 + CD ® «
где Q = Jg0(r, T)(a; — mN) dx 4- s J g(T} x)dx, (5) 0 0
т
С =s^ge(T}x)dx. (6)
о
Весовые функции go(T, т) и g(T, т) определяются реше-
нием линейных интегральных уравнений
т т
|£о(Л °) kn (°.,Л) da = s, a) KN(a.,x) da — mN.
о о
(?)
Подставляя корреляционную функцию (3) в уравнения
(7), получаем
+ rg0 (Д, т) = з, РД+Г£(Л t)==W. (8)
Отсюда получаем
(Л т) = g(T, т) = (9)
Величины 1 и X есть интегралы от весовых функций g0
и g соответственно. Для определения этих величин под-
ставим выражения (9) в интегральные уравнения (7).
232
ГЛ. 7. ИЗМЕРЕНИЕ
В результате имеем тождества
TD1 + s - s, D1
(Ю)
Решая эти соотношения относительно величин X и А,
полуннбм
чТ ~ т^тТ
h = Г + = Г + DjT' (^
Подставляя значения величин в формулы (9), запи-
шем окончательные выражения для весовых функций
«г ~ т,-
g'o г+ ЩТ 1 (г “ т) 1 1 (21 “ т) > (12)
где 1(Т—т) — единичная функция.
Подставим весовые функции в формулы (5), (6). Пос-
ле интегрирования и несложных преобразований полу-
чаем
т „
„ [• sn'hT riT
Q = Г + D±T j х ~ Г-н\т1 С Г + D±T •
о
Используя полученные выражения для коэффициен-
тов Q и С, представим оптимальную оценку коэффициен-
та усиления (4) в следующем виде:
т
тт„. m I 1 С / \ J mNV /л,\
U* — i-----h 7~i---х(%) dr — ; . —, (14)
1 + "V 1 1-f-v «Т J ' ' (1 + v) s 1 к '
о
где параметр v есть отношение сигнал — шум, равный
D^s2 ,.
v—
Точность определения оценки характеризуется апо-
стериорной дисперсией (4.10.22)
D* = D
1 -}- v
(16)
При отсутствии ошибок и помех Г = D\ = 0 отношение
сигнал — шум равно бесконечности, апостериорная ди-
сперсия равна нулю, а оптимальная оценка параметра —
§ 7.3. ИЗМЕРЕНИЕ ПАРАМЕТРА. I
233
истинному значению этой величины. Действительно, из
(14) имеем
И* = - [UsT 4- mNT] = U. (17)
Если отсутствует смещение нуля измерителя, то
Di = 0 и отношение сигнал — шум принимает вид
Интересно отметить, что при увеличении времени наблю-
дения входного сигнала отношение сигнал — шум в (18)
неограниченно возрастает, тогда как в формуле (15) это
отношение стремится к пределу
lim v = ^. (19)
Г->оо
Следовательно, в случае смещения нуля измерителя не-
ограниченное наблюдение входного сигнала не позволяет
получить точность большую, чем точность, характеризу-
емая предельной дисперсией
= (20)
? + Я1
Дальнейшее увеличение точности возможно только за
счет повышения мощности зондирующего сигнала. При
бесконечной дисперсии измеряемого параметра и беско-
нечном времени наблюдения апостериорная дисперсия
параметра равна
°:=4- <2i)
Анализируя формулу (14), можно сделать заключе-
ние о том, что обработка наблюдаемого сигнала с целью
получения оценки параметра заключается в интегриро-
вании сигнала в течение времени Т и сложении получен-
ного результата с некоторой постоянной величиной
гТ
U* = А Д- В j' х (т) dx, (22)
6
234
ГЛ. 7. ИЗМЕРЕНИЕ
где
= 1 + v ~ (1 + v) s’ В =(l + v) sT’
Постоянная величина А может быть реализована уста-
новкой начального условия на интеграторе. Это началь-
ное условие отражает априорные данные об измеряемом
сигнале.
Покажем, что если поставить задачу оценки центри-
рованного значения коэффициента усиления, то началь-
ные условия на интеграторе будут нулевые, т. е. 4 = 0.
Оптимальная оценка центрированного коэффициента
усиления равна
V* = ц* - т, (23)
где т — априорное математическое ожидание коэффици-
ента усиления. Подставляя значение оптимальной оценки
из (14), получаем
т
У* = — т л~- \т Н——) -Ь —у—f я (т) (24)
1 + v\ 1 s ) 1 1 -f-vsT j ' ' ' '
о
Первый член можно ввести под знак интеграла, тогда
т
V* = f — ms~ тк\ dr. (25)
о
Очевидно, что под знаком интеграла стоит центрирован-
ное значение входного сигнала, поскольку тх ~ ms -j- mN.
Таким образом, оптимальная оценка центрированного
значения параметра определяется интегрированием в
течение времени наблюдения центрированного входного
сигнала
т
У* = В J х° (т) dr. (26)
о
Таким образом, предварительное центрирование вход-
ного сигнала, реализуемое вычитанием из него математи-
ческого ожидания, упрощает процедуру получения опти-
мальной оценки. Если постоянный первый член в форму-
§ 7.4. ИЗМЕРЕНИЕ ПАРАМЕТРА. II
235
ле (22) формируется путем задания начального условия
на интегратор, то это требует определенного времени.
В то же время вычитание среднего значения из наблю-
даемого сигнала производится безынерционно.
§ 7.4. Измерение параметра. II
Рассматривается модель входого сигнала в виде
X(i) =ys + 2V(i), (1)
где V — истинное значение центрированного относительно
математического ожидания параметра, $ — постоянная
величина, N(t) —помеха. Параметр V имеет нормальный
закон распределения вероятности, нулевое среднее и ди-
сперсию D. Помеха содержит две компоненты
N(t) =M(t)+W). (2)
Первая составляющая представляет собой помеху, гене-
рируемую объектом контроля, а вторая описывает собст-
венные шумы измерителя. Будем считать, что собствен-
ные шумы измерителя представляют собой белый шум
с интенсивностью Г. Корреляционная функция помехи
объекта контроля имеет вид
Й1(т) =DNe~aM. (3)
Корреляционная функция суммарной помехи, при усло-
вии некоррелированности ее составляющих, определяется
формулой
=Dwe-»'T| + r6(T)\ (4)
Требуется определить оптимальную оценку по крите-
рию минимума среднего квадрата ошибки. Наблюдение
входного сигнала производится на конечном интервале
времени Т.
Оптимальная оценка параметра в рассматриваемой
постановке задачи дается формулой (4.10.26) при m ~ 0.
В этой формуле Q (ж) и М являются скалярами и в соот-
ветствии с выражениями (4.10.12) и (4.10.23) равны
т
= J g0 (Т, т) х (т) dxx М
о
т
= Ds J g0 (Tt т) dx. (5)
о
236
ГЛ. 7. ИЗМЕРЕНИЙ
(6)
Весовая функция go(T, т) определяется решением инте-
грального уравнения
т
J go (Л т) К-N (^ г) dx = s.
о
Подставляя’ значение корреляционной функции из (4),
получаем
т
dn f е-оЧт-'И g0 (Т, ст) do + Гйо (Т7, т) = s.
о (7)
Для решения этого уравнения применим к обеим
частям дифференциальный оператор по переменной т:
А^^~ -а2. (8)
Вычислим результат действия оператора иа. экспоненту
/ d2 \
/ —~ — а2 ) е—а|т-а| =
I d2 \
= — 0C2j [1 (ст — т) е—“(а—Т) _J_ 1 (у — g—а(т—a)J . (0)
Единичные функции появились в данном выражении как
следствие раскрытия модуля в показателе экспоненты.
Дифференцируя выражение в квадратных скобках как
произведение функций и учитывая, что производная
единичной функции есть 6-функция, получаем
( j-g — а2) а| = — 2а6 (т — ст) .
Таким образом, применение дифференциального опе-
ратора к уравнению (7) дает следующее соотношение:
——2------(Т1 т)
' (Ю)
- 2DN agQ (Г, т) + Г
= — за2.
(11)
Приводя подобные члены, представим уравнение в следу-
ющей форме:
d2g. (Г, т) о
<’J-72g0(^T) = --^a2,
где у,2— а2 + 2DNa,/T.
(12)
§ 7.4. ИЗМЕРЕНИЕ ПАРАМЕТРА. II
237
Общее решение данного уравнения имеет вид
g0 (Т, т) = [1 + + %2е-П]. (13)
Неизвестные постоянные Xi, Х2 определяются
кой решения (13) в интегральное уравнение
подстановки весовой функции и вычисления
получаем
Deaf's 2 — е
подстанов-
(7). После
интеграла
Гу2
ат _ а(Т—т) л /„Tr _ р—ат (?—а)Т4-ат__Д’с\
О I Л I U G 1 U Р | 1
"I ---i-------“Г----- I ~г
а---------------------------------\ у 4- а-у — а ]
[е—ат _ е—тг е-(?+а)Т+а-с _ е-тг\1
Хо I-------------------------;-- -4-
\Т — « /1
+ ^(l + Xie7T + V-VT)_s, (14)
у
Рассматривая это уравнение как тождество, прирав-
нивая коэффициенты при постоянной
функциях е-ат,
2Дл'ка ct.2 .
Г? у2 ’
составляющей и
ек\ е-тт, е'(т, получаем пять уравнений
Х2 \ = 1 =1
у — а а’ у—а у ~г а а ’’
2DNa 2DNa
Г (у2 —а2) U’ Г (у2 - а2)
Нетрудно показать, что первое, четвертое и пятое урав-
нения выполняются тождественно. Из второго и третьего
уравнений находим неизвестные
___________2Дк6 YT_______ 2V — _______________________
1 Г [(?+ «) — (у — а) е-тГ]’ Лз Г[(у+а) — (у — сс.) е—
(16)
Из данных формул следует, что
Xi = X2eiir. (17)
Весовая функция go (Л т) при использовании (17)
равна
а2?
(Тг т) = [1 + %а (е-n + е-да-г))]. (18)
238
ГЛ. 7. ИЗМЕРЕНИЕ
Весовая функция при т .= О и т =- Т имеет одно и то же
значение, равное
ga {тх 0) = ga (Т, Т) = 1-1 + МП- e-vr)]. (19)
Гу
Весовая функция имеет минимум по второму аргументу.
Дифференцируя (18) по аргументу т и приравнивая про-
изводную нулю, получаем уравнение относительно абс-
циссы то точки минимума
- М (е“По ~ = 0. (20)
Решая это уравнение, получаем
то = Т/2. (21)
Значение весовой функции в точке минимума равно
МЛ Г/2) = ^Н + 2М И- (22)
Гу
Подставляя значения коэффициентов Q и М из (5) в
формулу (4.10.26), получаем выражение для оптималь-
ной оценки параметра
т
V* =-----------------Г ga т) жо (Т) dXi
1 4- -Ds J g^T, т) йто
0
где весовая функция определяется формулой (18).
Точность получения оценки определяется формулой
(4.10.22)
fl, = Drh- <24>
Вычисляя по формулам (5), (18) значение коэффициента
М, получаем следующую формулу для апостериорной
дисперсии:
= (25)
где отношение сигнал — шум равно
Da^T Г1 4Р№(1-е^г)
Гу2 L + ГуТ [(? + а) (У — а) в~?г]
(26)
§ 7.4. ИЗМЕРЕНИЕ ПАРАМЕТРА. II
239
Реализация алгоритма получения оптимальной оцен-
ки по формуле (23) встречает определенные технические
трудности, которые, прежде всего, связаны с воспроиз-
ведением весовой функции. Получение весовой функции
путем решения диффе-
ренциального уравне-
ния (12), вследствие
неустойчивости этого
уравнения, технически
невыполнимо на анало-
говых вычислительных
машинах и потребует
очень высокой точности
решения на цифровых
машинах. В связи с этим
целесообразно поставить
вопрос о построении
приближенного алгорит-
ма получения оценки.
Этот алгоритм должен
быть субоптимальным,
т. е. близким к оптимальному в смысле точности,
и, одновременно, простым в технической реализации.
Идея построения субоптимального алгоритма получе-
ния оценки вытекает из анализа графиков весовой функ-
Рис. 7.4.1.
С физической точки зрения
на замене реальной помехи
мом.
ции, представленных на
рис. 7.4.1, 7.4.2 и вычис-
ленных при значениях па-
раметров, приведенных в
примере данного парагра-
фа. Заменим весовую функ-
цию на интервале наблю-
дения постоянной величи-
ной. Замена выполняется
из условия равенства пло-
щадей под графиком весо-
вой функции и графиком
ее среднего значения на
интервале наблюдения.
такая замена эквивалент-
эквивалентным белым шу-
240
ГЛ. 7. ИЗМЕРЕНИЕ
Введем среднее значение весовой функции по формуле
т
ёср = 5г = jr J g0 (Л T) (27)
о
где Гэ — эквивалентная интенсивность белого шума, ко-
торая по формуле (27) равна
Подставляя значение весовой функции и производя вы-
числение, получаем
______as
£°р -
1 , 4Д„(1-е ?г)
Г'рГ [(? + а) — (? — а) е~тГ]
(29)
Используя среднее значение весовой функции, запи-
шем алгоритм получения оптимальной оценки (23) в виде
т
V* — DSc^s С
1 + %^
(30)
Вместо среднего значения можно подставить эквивалент-
ную интенсивность белого шума. Тогда формула опти-
мальной оценки принимает вид
т
V* = 4 f я0 (т) d't, (31)
1 + v„ sT J v ' ’• ' J
0
где эквивалентное отношение сигнал — шум равно
т
DT г, С
va = -р- = Ds\
8 о
(32)
Как следует из формулы (31), замена весовой функ-
ции средним значением дает алгоритм, соответствующий
алгоритму при помехе в виде белого шума.
Оценим точность получения оценки параметра в слу-
чае субоптимального алгоритма. Дисперсия субоптималь-
§ 7.4. ИЗМЕРЕНИЕ ПАРАМЕТРА. И
241
ной оценки параметра равна
D** = М [(V - У*)2] = М [У2] - 2М [УУ*]-|-М [У*2]. (33)
Подставляя значение оценки и применяя операцию ма-
тематического ожидания, получаем
n ( v_r v„2DNr г л >]
£>**=—^-5 1 + -V- + 1 - (1-е-“т) . (34)
(l + va)a( Л1/ ?га L аТ JJ
Сравнительная оценка точности оптимальной и суб-
оптимальной оценок параметра может быть произведена
по величине
(Л** \
^-1)-100%. (35)
Отличие дисперсии оценки в субоптимальной системе от
дисперсии оценки в оптимальной системе невелико, по-
этому относительная ошибка обычно не превышает
10 4-15%.
Пример. Рассмотрим численный пример получения оптималь-
ной оценки параметра при следующих значениях исходных дан-
ных: а =7 сек-1, s = 1, Г—5-10-4 в2 сек, DK = 2,75-10-3 в2,
D = 8,1 -10—3 в2. На рис. 7.4.1 приведены графики оптимальной ве-
совой функции для трех значений времени наблюдения Т— 0,5 сек,
Т = 1,0 сек, Т — 2,0 сек. На рис. 7.4.2 приведены графики весовой
функции для двух значений дисперсии помехи и Т = 1 сек.
Среднее значение весовой функции при Т = 1 сек и принятых
выше остальных параметрах, вычисленное по формуле (29), рав-
но gcp= 8,56-102. Эквивалентная интенсивность белого шума при
этом составляет r0 = l,17-lO-3 в2 сек. Эквивалентное отношение
сигнал —шум равно уэ= D2’gcp= 6,94.
Субоптимальная оценка определяется формулой
1
V* = 0,41 • j" я0 (т) йт (36)
о
Отношение сигнал — шум для оптимальной схемы обработки сиг-
нала, вычисленное по формуле (26), равно v = 7,75.
Точность оптимальной оценки определяется апостериорной
дисперсией (25). Величина этой дисперсии для рассматриваемых
значений параметров равна D*= 0,925-Ю-3 в2. Это значит, что в
результате измерения параметра его априорная дисперсия умень-
шилась в 8 раз.
На рис. 7.4.3—7.4.5 показаны графики зависимости апостери-
орной дисперсии от времени наблюдения Т, дисперсии и па-
раметра а.
16 Л. Г, Евланов
242
ГЛ. 7. ИЗМЕРЕНИЕ
Рис. 7.4.5.
§ 7.5. ИЗМЕРЕНИЕ ПАРАМЕТРА. Ill
243
Вычислим апостериорную дисперсию субоптимальной оценки
(36). В соответствии с формулой (34) имеем О**= 1,02 Лб-8 в2.
Сравнение с апостериорной дисперсией оптимальной оценки пока-
зывает, что при субоптимальной оценке параметра по формуле (36)
имеет место потеря в точности. Относительное ухудшение точнос-
ти в единицах дисперсии, вычисленное по формуле (35), равно
10,3%. Таким образом, субоптимальный алгоритм (36), легко реа-
лизуемый с помощью технических устройств, обеспечивает точ-
ность определения оценки, весьма близкую к потенциальной точ-
ности.
§ 7.5. Измерение параметра. III
Рассмотрим задачу синтеза характеристик измерителя
параметра, наблюдаемого с аддитивной гауссовской по-
мехой
Х(0-17 + 27(0- (1)
Параметр U является нормально распределенной случай-
ной величиной с математическим ожиданием т и диспер-
сией D. Помеха 7V(t) имеет математическое ожидание и
корреляционную функцию
/+ (т) = DNe~aM + A cos [Зт + Гб (т). (2)
Определим алгоритм получения оптимальной оценки
параметра по критерию минимума среднего квадрата
ошибки. В соответствии с изложенным в § 7.3 целесооб-
разно предварительно процентрировать наблюдаемый сиг-
нал. Вычитая из (1) математическое ожидание входного
сигнала, получаем
X°(t) = V + N°(t). (3)
Оптимальная оценка центрированного значения пара-
метра дается формулой (4.10.26)
где . .
т т
М = -° J go (Т., т) dx( Q(x) = J" g0(T,,x) x° (r) dx. (5)
о b
Весовая функция определяется решением интеграль-
ного уравнения
г
J KN (х, о) gQ (Т1 о) da = 1. (6)
о
16*
244
ГЛ. 7. ИЗМЕРЕНИЕ
Подставляя значение корреляционной функции помехи,
получаем
т
Dn J e_al'v-°l g0 (Т, о) ds + cos (Зт 4-
о
4-%2 sin (Зт + Tg0 (71,, т) = 1, (7)
где введены обозначения
т т
A,j — A j" g0(T, о) cos (3<j ds, A.3=A j" g„ (Т, о) sin(3odo. (8)
b b
Применяя к уравнению (7) дифференциальный опе-
ратор с?2/йт2 — а2, получаем следующее дифференциаль-
ное уравнение относительно весовой функции:
d2go ₽а + «2п а । л • о \ а2 /пч
== ~^~ (А,1со8рт4-А3зшрт)-Т, (9)
где 72 = а2 + 2DKair. Общее решение этого уравнения
имеет вид
g0(T, т) = VVT +V-VT +
rv2 ft2 _L (v,2
+ r7~ + (10)
Для определения неизвестных параметров Xi, А,2, А3Д4
необходимо подставить выражение (10) в интегральное
уравнение (7) и рассматривать его как тождество. Кро-
ме того, весовую функцию (10) необходимо подставить
в формулы (8). В результате получим систему алгебраи-
ческих уравнений относительно коэффициентов Ац Аа,
Аз, А4.
После подстановки весовой функции в уравнение (7)
и вычисления интеграла получаем
ЗаеМТ-т) етт-от е-а(Т-т)-] , [2ae-V(T-t)
' ~ “ ^+ТJ+ L~^7~'
е-Т(Т+т) . -а(Т-г)| Dn л
t-------- _i_ _£L [9 — e~m — е~“<г—d] —
a 4 Y a-f’iyJ
(рЧа2)!)^
T2(₽2 + y2)
[e-a(T-i:)([3sin (3Z7 — a cos PZ) + 2 a cos Pt —
§ 7.5, ИЗМЕРЕНИЕ ПАРАМЕТРА. Ill
245
-ае-«Я- -2^-2-J2asinp1;-(asinPT+
г ф +т )
+ р cos рТ)е^а<г‘-1;) — Ре&“'г]-|- Ах cos Рт4-А2 sin Рт +
а2 1
+ Х3Ге^т + Х4Ге“-'','с + -j — -р (%i cos Рт +%2 sin рт) = 1. (11)
7 1
Подстановка весовой функции в формулы (8) дает
соотношения
(Т cos PT + р sin рт - Te-VT) +
Р + Г
, ^4 го • о т , vT ат\ г И«2 sin ВТ
+ ^+7 №sm $т+ уе cos + т?~Г" “
(р2 + а2)Sin 2£Г\ (р2-|- a2) sin2 рт,
Г2(р2 + у2) \2 + 4р } г2 (р2+?2) 2Р
^2 = (Т sin № + Р cos РГ + ₽е~?Г) +
+ prq^2 (Ре?т - У sin рт - р cos PT) + ~ (1 - cos рТ) -
ЛХ1 (р2 a2) sin2pT Л%2 (Р2 -I- а2) ! Т sin2P7\ ,,.
Г2(р2 + ?2)2р Г2 (р2 + ?2) \ -4Р }
Из соотношений (И), (12) получаем систему четы-
рех линейных алгебраических уравнений относительно
коэффициентов %i, А,з, %4, которую представим в мат-
ричной форме
СЛ. = Н. (13)
Матрица С имеет следующие компоненты:
„ _ _ PN (Р sin РГ — os cos РГ) _ PN
11 ~ г2 (р2 ?2j 1 I3 “ у — а'
PN («sin рГ + pcos РГ) _ PN
12 г2(р2 + у2) ’ 14 «-Ч-?’
Р„ос /)МВ
х-i _ _____N______ ft __ ________
21 Г2(ра + ?ау 22 Г2(р24-?2)«
246
ГЛ. 7. ИЗМЕРЕНИЕ
г______N р _ N
23 а + у ’ 24 у — а ’
С - — Г-14 А + J- sin 2₽7V
31 [ Г2(Р2 + ?2Д 2 + 4Р ;j’-
Z7 _____Я (ра + a.2) sinapr
33 ~ Г2 (Р2 + V2) 2Р ’
Р _ А (у cos Р71 — Р sin РГ) — Ауе~уТ
33 “ Р2 + т2
Р ___А [р sin рУ — у cos РГ + уеА’г]
31 ~ Р2+у2
с = _ А (Р2 + к2) sin2Pr
41 Г2 (р2 ?2) 2р !
с _ Гл , л(р2 + аа) / Т sin2Prf
42 [1фГ2(р2 + ?2)Г 2 4р /р
^43 = -R2-A ч. [т sin рт — ₽ COS рг + Ре-тТ],
Р +т
с44 = -g-” [PevT _ ? sin ру _ р cos ру].
(14)
Вектор Н имеет компоненты
77 — К°1У и — IT — — 4«а sin РТ
Д1 y2 i 'На у2 ?2Р
Лга2
#4 = -^(cosP2’-1). (15)
у р
Оптимальную оценку параметра можно записать в
виде
т
= гк т----------- f ^0 (^ *) (16)
j g0 (т, т) dx
о
где отношение сигнал — шум равно
т
v = D^ga (Т, т) dx. (17)
о
§ 7.5. ИЗМЕРЕНИЕ ПАРАМЕТРА. Ill
247
Точность оценки определяется апостериорной дис-
персией
= (18)
В данном случае также можно заменить весовую
функцию постоянным значением на интервале наблюде-
ния. Среднее значение весовой функции находится из ус-
ловия
т
£сР = 4-ро(М^ = т;- (19)
о
При использовании среднего значения весовой функции
оптимальная оценка вычисляется по формуле
т
(2°)
о
где
v3 = ~ = DTgcv. (21)
э
В случае дискретного наблюдения входного сигнала
оптимальная оценка параметра вычисляется по формуле
<22>
1=1
где весовые коэффициенты определяются решением си-
стемы алгебраических уравнений
г=1
(23)
Здесь п — число дискретных значений наблюдаемого сиг-
нала, Kij ~ элементы матрицы корреляционных момен-
тов помехи. Отношение сигнал — шум при дискретном
наблюдении равно
(24)
1=1
248
ГЛ. 7. ИЗМЕРЕНИЕ
Пример. При значении параметров D — 0,3 в2, DN = 0,1 в2,
а = 0,5 сев"1, (5 = 0 сек-1, 4 = 0,1 в2, Г = 1,5• 10~3 в2 сек, Т =
= 1 сек график весовой функции go(T, т) имеет вид, изображен-
ный на рис. 7.5.1. Как следует из рисунка, весовая функция сим-
метрична относительно половины интервала наблюдения.
Среднее значение весовой функции при интервале наблюдения
Г = 1 сек равно gCp= 13,3. На рис. 7.5.2 показан график апостерп-
орной дисперсии, вычисленный для тех же значений параметров
входного сигнала. Из графика следует, что апостериорная диспер-
сия с увеличением времени наблюдения стремится к установивше-
муся значению, не равному нулю.
§ 7,6, ИЗМЕРЕНИЕ ПАРАМЕТРА. IV
249
Эквивалентное отношение сигнал —шум равно va= 4,6. Ал-
горитм определения оценки при Т = 1 сек имеет вид
1
7* = 0,82 J ш(| (т) йт. (25)
о
Точность получения субоптимальной оценки равна D** = 0,0536 в2.
В результате измерения априорная дисперсия параметра уменьши-
лась в DjD**= 5,6 раз.
§ 7.6. Измерение параметра. IV
Рассмотрим случай оценки параметра, наблюдаемого
при единичном зондирующем сигнале в аддитивной сме-
си с помехой, имеющей корреляционную функцию вида
= DNe~aM + Hi cos + H2 cos рт cos ут + Гб (т). (1)
Как и раньше, оптимальная оценка центрированного па-
раметра по критерию минимума среднего квадрата ошиб-
ки дается выражением
т
= (2)
о
где отношение сигнал — шум равно
т
V = -° J й'о (у, т)
о
(3)
Весовая функция определяется первым уравнением
(4.10.9), которое после подстановки корреляционной
функции (1) имеет вид
т
Dn J e-al-t-al gQ (74 a) da 4- cos рт ф- X2 sin Рт ф-
0
4~ A3 cos (P ф- у) т ф- A4 sin (P 4- у) т 4- A5 cos (p — у) т ф-
+ Ae sin (P — у) т ф- rg-0 (Г, t) = 1, (4)
250
ГЛ. 7. ИЗМЕРЕНИЕ
где введены обозначения
г
Xi = Hi J g0 (Т, о) cos Р<и7сц
о
т
Х2 = Hi J g0 (Тг о) sin РоШ,
о
Н р
j go о) cos (Р 4- 7) odo£
о
Н г &$
кь = ~\ g0 (Т, о) sin (Р 4- у) odot
I
о
Н р
h = j go (Tt о) cos (P — у) odo%
о
T
p
?V0 = j go (T, a) sin (P — y) odo.
о
Применяя к уравнению (4) дифференциальный опе-
ратор d2jdx2 — а?, получаем дифференциальное уравне-
ние относительно весовой (функции
й2£0 7 2„ _ “2 , ра4-а\ R ,
^2 go р "I- р COS РТ 4"
4- Р р-а sin Рт 4- [(Р 4- у)2 4- a2] cos (Р 4- у) т 4-
+ у [(₽+т)а+а2] sin (P4-y)t4- [(р—y)2+a2]cos(P—у)т 4-
%
+ КР — Y)2 4- ос2] sin (Р — у) Tf (6)
где параметр к2 = %2 4~ 2Z?Na/r.
Общий интеграл уравнения (6) равен
go (Т, т) =
а2
= p.je’1'1 4- ц2е—,!Х 4-2 — [%х cos рт — Х2 sin Рт] —
Г/с
— h2 [%3 cos (Р 4- у) т 4- %4 sin (Р 4- у) т] —
— hs [Хб cos (Р — у) т 4- A.e sin (Р — у) т], (7)
§ 7.6. ИЗМЕРЕНИЕ ПАРАМЕТРА. IV
251
где
_ р2+аа
1 Г(р2 + /С2)’
(p^ + Va) + a2
2 r[(p + 7)2 + fcT
_ (р_?)2+(х2
3 г[(р—т)а-ь&аГ
(8)
Подставляя выражение весовой функции (7) в ин-
тегральное уравнение (4) и соотношения (5), получаем
систему из 8 линейных алгебраических уравнений отно-
сительно неизвестных параметров Ц1, Цг, М ^2, Кз,
%5| ^6-
В частном случае, когда DN — Н2 О, весовая' функ-
ция оптимальной системы равна
g0(T, т) = ^- [1 — XjCos Pt — %2sinp-r] . (9)
Постоянные величины и Л,2 определяются линейными
алгебраическими уравнениями
Н, = ~р~ sin Вт л / Т . sin2BT\ X, ~1 Р ^2 ' 4р ) ~ 4jj- (1— cos 2^7)j х (Ю)
Л __ ^2 — "Г- 1 — COSPt мт 1 1— 8411 1 р -р (1 С0й2рГ) 4р у] • (И)
Отношение сигнал — шум в этом частном случае равно
DT.. Г, , 1 ,, о,™ л sinpr'
v =-^2-р-(1-cospZ) — %!—. (12)
Пример. График весовой функции частного вида (9) при зна-
чениях параметров #1=0,1 е2, р = 8 сек-1, Г = 5-10-4 в2 сек,
7 = 1 сек, Т = 2 сек приведен на рис. 7.6.1. Из графика следует,
что можно приближенно представить весовую функцию средним
значением.
При значениях параметров корреляционной функции (1)
1>х = 0,188 в2, а = 18 сек-1, Н\ — 0,032 в2, (3 = 47 сек-1, Т = 1 сек,
Нг= 0,0138 в2, "f = 4,2 сек-1, D = 0,09 в2, Г = 5 • 10-4 в2 сек среднее
значение весовой функции равно gap— 41,4. Эквивалентное отно-
шение сигнал — шум v3= DTgcp при указанных параметрах равно
Va = 3,73. Субоптимальный алгоритм получения центрированного
значения параметра имеет вид
1
7* = 0,79 J а’0 (т) dx. (13)
0
252
ГЛ. 7. ИЗМЕРЕНИЕ
Точность получения субоптимальной оценки равна
D** = О 7-i- = 0,019. (14)
X I Vg
Отношение апостериорной к априорной дисперсии параметра
составляет D**/D — 0,211. Таким образом, среднее квадратическое
отклонение параметра после измерения уменьшается в 2,18 раза.
§ 7.7. Измерение параметра. V
Рассмотрим задачу построения оптимального по кри-
терию минимума среднего квадрата ошибки алгоритма
оценки параметра при единичном зондирующем сигнале.
Параметр наблюдается в аддитивной смеси с помехой,
имеющей корреляционную функцию следующего вида:
Kn (т) = + Гб (т). (1)
Центрированная оценка параметра дается формулой
т
У* = ^ (2)
о
где отношение сигнал — шум равно
т
v = (3)
§ 7.7. ИЗМЕРЕНИЕ ПАРАМЕТРА. V
253
Весовая функция определяется интегральным урав-
нением. (4.10.9), которое после подстановки в него кор-
реляционной функции (1) принимает вид
т т
BN1 [ go (Z> °) al da + РЛг2 j’ g0 (T, a) e~Pit-al do +
о 6
+ ГЫЛ0 = 1. (4)
Применяя к этому уравнению дифференциальный
оператор d4/dr4—(<x2+P2)d2/dT2 + a2p2, получаем следую-
щее дифференциальное уравнение относительно весовой
функции:
где
%2 = + a^2) + . (6)
Общий интеграл уравнения (5) имеет вид
а2й2
go (Т, т) = Xie_feT %2ейт -}- %3 cos hx + Х4 sin hx -j-
Хк
(7)
где
<8>
Подставляя выражение весовой функции в интегральное
уравнение (4), вычисляя интегралы и рассматривая это
соотношение как тождество, получаем систему четырех
линейных алгебраических уравнений относительно пара-
метров Xi, А.2, Хз, В матричной форме эта система име-
ет вид
АЛ = В. (9)
Матрица А и вектор В имеют следующие компоненты:
Dn ehT DN e~hT
254
ГЛ. 7. ИЗМЕРЕНИЕ
«13 =
«14 =
«22 =
DNi (a cos hT — h sin hT)
a2 + h2 ’’
Dn (a. sin hT -f- h cos hT) DN
— qqq* ' ’ a2i = ~
DNt „ _ DNa
a-k' 23 a2 + Л2 J
«33 =
«34 —
«41 =
«43 =
DN/T _Dn^
P —/с ’ 32 — p + fc ’
DNJ$e,oshT— h sin hT) (Щ)
Dn* (P sin hT + h cos hT)
P2 + ft2 ’
— Dni n == — Dni
p + к ’ 42 p — fc’
P2 + /12’ ®44 p2+fe2’
«₽2£,W1 A _ a32j9y,
2 1 ^2------2- >
X X
a2pDW2 Л _ a2p2)jv3
x2 ’ °4 ~ •
Апостериорная дисперсия оценки определяется формулой
Р* = 79-±--. (-И)
1 + -V '
Пример. Рассмотрим численный пример при следующих зна-
чениях параметров а = 8 сев-1, р = 1,4 сев-1, D — 0,01 в2,
= 0,0107 в2, = 0,0033 в2, Г = 0,001 в2 сев. Графики весо-
вой функции при данных параметрах и времени наблюдения
Т — 0,5; 1,0; 2,0 сев представлены на рис. 7.7.1. Из графиков сле-
дует, что с небольшой погрешностью весовую функцию на интер-
вале наблюдения можно представить средним значением
Г
-1 С
^ср = 2Г J ёй{Т, x)dx. (12)
0
§ 7.8. СИНТЕЗ ЗОНДИРУЮЩЕГО СИГНАЛА
255
Для времени наблюдения Т = 1 сек среднее значение весовой
функции равно gcp = 900. Отношение сигнал — шум при этом рав-
Рис. 7.7.1.
но v3 = Z?7’gOp= 9. Субоптимальная оценка определяется формулой
1
7* = 0,9 J (т) dx. (13)
0
Точность получения субоптимальной оценки равна D**= 10-3 в2.
Апостериорная дисперсия по сравнению с априорной уменьшилась
на порядок.
§ 7.8. Синтез зондирующего сигнала
Как уже отмечалось, применение теории оптимальных
систем позволяет выбрать наилучшую форму зондирую-
щего сигнала. Для этого необходимо решать задачу
синтеза характеристик измерителя при неопределенной
форме входного сигнала. Получив выражение для апосте-
риорной дисперсии оценки параметра, необходимо варь-
ированием зондирующего сигнала получить минимум
дисперсии.
Минимум апостериорной дисперсии по зондирующему
сигналу соответствует максимуму отношения сигнал —
шум. Это утверждение непосредственно следует из фор-
мулы для дисперсии
D* = D .-4—. (1)
1 + V 4 '
256
ГЛ. 7. ИЗМЕРЕНИЕ
Для одномерного случая и аддитивной помехи выражение
для отношения сигнал — шум имеет вид
т
v = D j g0 (Т, т) з (т) dr, (2)
6
где весовая функция определяется решением линейного
интегрального уравнения
'г
[go (Г, a) KN(<y, т) do = 8 (г). (3)
о
Решение интегрального уравнения (3) формально можно
записать в виде
т
go (Т, т) = КД1 (а, г) 8 (о) da. (4)
о
Подставляя это выражение весовой функции в (2), по-
лучаем следующую формулу для отношения сигнал —
шум, выраженную через характеристики помехи и зонди-
рующий сигнал:
т т
•v — D [ [ А’Д1 (и, т)'з’(ст) з (т) dadr. (5)
6 6
Обратная корреляционная функция помехи определя-
ется решением следующего линейного интегрального
уравнения:
т
[ = (6)
о
Из этого уравнения следует, что обратная корреляцион-
ная функция зависит только от вероятностных характе-
ристик помехи в наблюдаемом сигнале.
Определение формы зопдиругогцего сигнала произво-
дится из условия максимума выражения (5)
т т
D | [ К к1 (ст, т) з (ст) 8 (т) dadr. max (7)
i) а
при дополнительном ограничении па величину сингала
з(т)Са, (8)
§ 7.8. СИНТЕЗ ЗОНДИРУЮЩЕГО СИГНАЛА
257
где а — некоторая константа, зависящая от характеристик
используемой при контроле аппаратуры. Например, в слу-
чае применения аналоговых вычислительных элементов
стандартная величина ограничения составляет
100 или 50 в.
Условия (7), (8) для определения формы зондирую-
щего сигнала приводят к необходимости применения
принципа максимума Иоптрягипа.
Важен случай, когда дополнительное ограничение
накладывается не па величину сигнала, а па энергию,
передаваемую зондирующим сигналом за время наблю-
дения. Это ограничение записывается в виде
т
з2 (т) dx = const. (9)
b
Нахождение максимума отношения сигпал — шум при
дополнительном условии (9) представляет собой задачу
па условный экстремум, которая может решаться обыч-
ными методами вариационного исчисления. Вводя мно-
житель Лаграпжа ц, составим функционал
г т
J = D g0 (Т, т) з (т) dx — г] з2 (т) dx. (1'0)
о о
Проварьируем это выражение по Зондирующему сигналу,
причем, учитывая, что весовая функция в первом сла-
гаемом также зависит от зондирующего сигнала через
уравнение (3), необходимо вычислять вариацию и от ве-
совой функции. Первая вариация функционала (10)
имеет вид
т
8J = D f [6g0 (71, т) з (т) + go (Л т) бз (т) ] dx -
о
г
— 2ц з (т) бз (т) dx. (11)
б
Используя уравнение (3), найдем вариацию зондирую-
щего сигнала
т
6з(т) = j 6go (T, d) К^’ Х) do. (12)
о
17 л. Г. Евлапов
258
ГЛ. 7. ИЗМЕРЕНИЕ
Подставим это выражение в первую вариацию функцио-
нала. После преобразований Представим этот функционал
в следующем виде:
г f
6J = D 6g0 (Т, т) s (т) +
о I
Т А
+ j KN (о, т) (о) — 77-s (a)j сМ dx. (13)
. Условия экстремума функционала (10) соответствуют
равенству нулю его первой вариации. Приравнивая со-
отношение (13) нулю и используя основную лемму ва-
риационного исчисления, получаем следующее уравнение
относительно зондирующего сигнала:
т т
S (т) + j KN (ст, т) g,} (Т, о) do — KN (о, т) S (ст) da = 0.
о о
(U)
Второй член в данном уравнении на основании (3) равен
зондирующему сигналу. Поэтому после подстановки и
приведения подобных членов получаем
т
J/fjy (ст, т) s(ct) t/ст = s(t) (О^т^Г). (15)
о
Уравнение (15) есть однородное интегральное урав-
нение Фредгольма второго рода. Оно имеет решения при
условии, если множитель Лагранжа равен ц = t.iD, где
К — собственные числа, а зондирующий сигнал превра-
щается в z-ю собственную функцию ядра уравнения (15).
Эти функции образуют полную ортогональную совокуп-
ность функций а,-.
Сравнивая уравнение (15) с уравнением (3), опреде-
ляем весовую функцию
£в(7\т) = Мт)А (16)
т. е. весовая функция есть отношение собственных функ-
ций к собственным числам ядра уравнения (3) или (15).
§ 7.8. СИНТЕЗ ЗОНДИРУЮЩЕГО СИГНАЛА
259
Максимальная величина отношения сигнал — шум вы-
числяется по формуле (2), в которую нужно подставить
(16) и учесть, что оптимальный зондирующий сигнал
принадлежит к совокупности собственных функций.
В результате экстремальное значение величины сигнал —
шум равно т
(17)
1 о
Для рациональных ядер Кк(|т — а|) собственные
числа уменьшаются при увеличении номера г. Поэтому
отношение сигнал — шум (17) можно сделать как угодно
большим. С физической точки зрения это объясняется
тем, что с увеличением номера собственного числа цент-
ральная частота зондирующего сигнала смещается в об-
ласть более высоких частот, где уровень спектральной
плотности помехи уменьшается. Теоретически следует
выбрать бесконечно большую частоту. При этом отноше-
ние сигнал — шум будет равно бесконечности. Однако в
реальных условиях всегда существуют ограничения по
максимальной частоте. Поэтому неограниченное увели-
чение частоты сигнала невозможно. Таким образом, и в
данной задаче возникает необходимость ввода ограни-
чений.
Пример 1. Пусть помеха является белым шумом с интенсив-
ностью Г. Тогда Км(т, о)==Г6(т— п). Обратной по отношению к
6-функции функцией также является 6-фупкция: 6-1(т— о) —
= б(т —о). Это нетрудно проверить по уравнению (6). Обратной
величиной для константы является дробь с единичным числителем
и константой в знаменателе. Таким образом, для данного случая
имеем
Ей1 ("О о) = "р 6 (т ~ ст)- И8)
Подставляя это выражение в формулу отношения сигнал — шум
(5), и испцльзуя свцйствц 6-функции, подучарм
т
V = | (т) dx. (10>)
Л о
Максимум даннргц выражения пц при додрлнитрльном фъ
р.аричевщи (8) достигается при
Д'?) = «• (?Р)
260
ГЛ. 7, ИЗМЕРЕНИЕ
Следовательно, наилучшей формой зондирующего сигнала для рас-
сматриваемой задачи является постоянный максимальный сигнал.
Такой зондирующий сигнал дает наименьшую апостериорную дис-
персию оценки коэффициента усиления. Полученный результат с
физической точки зрения очевиден.
Пример 2. Помеха имеет корреляционную функцию вида
Kn(t, о) = DKe~a[x~a]. Обратной корреляционной функцией, удов-
летворяющей уравнению (6), является следующая функция:
1 Г tfl
= — 2а5 | й (г — oj — а26 (т ™ о) . (21)
Подставляя это выражение в формулу (5) и используя свойства
6-функции, получаем отношение сигнал — шум в виде
т
DC
v = 2ар ' j [a2s2 (т) — « (т) s (т)] dx. (22)
0
В первой постановке задачи максимизации отношения сигнал—
шум необходимо определить экстремум выражения (22) по зонди-
рующему сигналу при ограничении (8). Во второй постановке ре-
шение на форму зондирующего сигнала дается формулой (17), где
собственные числа для рассматриваемой корреляционной функции
вычисляются по формуле [89]:
Здесь qt являются положительными корнями уравнения
tg aTqt = - ——g. (24)
1 "г
Собственные функции ядра с корреляционной функцией данного
примера выражаются формулой
S{(T) = ^e (25)
где ____
?$ = «?; = «1/1-^. (26)
§ 7.9. Помеха в зондирующем сигнале
Рассмотрим задачу синтеза алгоритма получения
оценки параметра при наблюдении сигнала
. X(f)=E7[l+.Z(t)]. + ^(f), (1)
где U — случайный параметр, Z (£) — мультипликативная
прмеха в зондирующем сигнале, Лф) — аддитивная по-
§ 7.0. ПОМЕХА В ЗОНДИРУЮЩЕМ СИГНАЛЕ
261
меха. Помехи являются гауссовскими случайными функ-
циями времени с математическими ожиданиями mz(t),
mN(t) и корреляционными функциями Kz(t, t'), Kn(t, t').
Требуется получить оптимальную по критерию мини-
мума среднего квадрата ошибки оценку параметра.
Алгоритм решения поставленной задачи изложен в
§ 4.9 и проиллюстрирован примером. Пример решен для
следующих условий: mz = mN —. 0, Kz (t, t'),=Dze'~ait~t'if.
KN(t, i/)=rs(f—t'). Априорный закон распределения
вероятности параметра является нормальным. Этот алго-
ритм имеет вид
ОО
U* — J uf* (и | ж) du,
—оо
где апостериорная плотность вероятности вычисляется по
следующим соотношениям:
/*(и|Ж) = ^^ехр{Ж(Г,и)}. (3)
Весовые функции равны
т т
W (Т, и) = у J J Т (£, т] и) х (т)
о о
dtdx +
т
о
Г mv (т, и) 1
?(т,п) ж(т)-----------dr, (4)
<5 J
Ч' (*, т, и) =
au?-Dz
Г2у
X
у [ (у+<х) + (-у —а) е ?ТП Су+«) ev(r г)-|-(у — а) в Ч
[ (у + а)2еуТ — (у — а)2е-7Т]
g(T,u) =
__ аи [(у<z)-j- (y—а) J-(-у2—
Гу2 j . (?+ «)!+[(? ~
(5)
262
ГЛ. 7. ИЗМЕРЕНИЕ
Определитель Фредгольма равен
+ (7)
где у2 = а2 + 2ап27)г/Г.
Анализ выражения для апостериорной плотности ве-
роятности показывает, что она не соответствует нормаль-
ному Закону. Более того, зависимость плотности вероят-
ности от параметра и очень сложна, и вычислить интег-
рал (2) для получения оптимальной оценки коэффициента
усиления не представляется возможным. Следовательно,
не может быть получена явная структура измерителя.
В [3, 8] предложен способ приближенного определе-
ния оптимальных систем, основанный на аппроксимации
апостериорной плотности вероятности нормальным зако-
ном вблизи оптимальной оценки параметра. Этот прием,
справедливый при высокой точности получения оценки
в оптимальной системе, может быть применен и в дан-
ном случае.
В [50] предложен другой способ приближенного ре-
шения, сущность которого состоит в разложении апосте-
риорной плотности вероятности в ряд Тейлора по дис-
персии мультипликативной помехи. Во многих случаях
дисперсия мультипликативной помехи значительно мень-
ше дисперсии аддитивной помехи, поэтому при разложе-
нии в ряд достаточно ограничиться небольшим числом
членов. Способ разложения апостериорной плотности
вероятности в ряд по дисперсии мультипликативной по-
мехи особенно эффективен при линейной зависимости
полезного сигнала от параметров. Применение этого
приближенного способа дает решение задачи синтеза
оптимальных систем в классе систем, приводимых к ли-
нейным : [89].
Представим апостериорную плотность вероятности
рддом
-t Л. I \
Вычислим первые два члена ряда. Для этого выпишем
алгоритм получения апостериорной плотности,. пользуясь
результатами | 4.9 применитедьно к одвдадердчму слуг
§ 7.9. ПОМЕХА В ЗОНДИРУЮЩЕМ СИГНАЛЕ
263
лаю. Показатель экспоненты в плотности вероятности
вычисляется по формуле (4). Весовые функции опреде-
ляются решением интегральных уравнений
т
J Кх (t1 %, и) ф (g, т, и) = I (t, т, и), (9)
О
т
J KN %) I (g, т, и) ell = Ks (t, и) + 2K8N{tl т2 и)! (10)
о
и) g(U) с^ = тх^и), (11)
о
где условные корреляционные функции равны
K-8(t, g, u) = uzKz(t, g), (12)
Ksx(t, g, u)=uKg,N{t, g). (13)
Определитель Фредгольма вычисляется по формуле
D (и) = ехр
— J Q (тл т, и) dx ч
(14)
где весовая функция определяется решением интеграль-
ного уравнения
J Q (^ g, и) I (gt т, u)d^ + Q (I, т, и) = I (t, x1 и), (15)
о
Первый член ряда (8) соответствует нулевому значе-
нию дисперсии мультипликативной помехи. При этом
условные корреляционные функции Ks(t, g, и) =
= Ksti(t, g, и) = 0, поскольку они пропорциональны дис-
персии ьгультипиикативной помехи. Равенство нулю этих
корреляционных функций приводит к следующим соот-
ношениям, вытекающим из выражений (9), (10), (14),
(15):
l(t, т, и) = ф(£, т, и)= Q(t, т)= 0, Z)(u)=l. (16)
Весовая функция g(x, п) в этом случае вместо урав-
нения (11) определяется следующим интегральным
264
ГЛ. 7. ИЗМЕРЕНИЕ
уравнением:
т
(^ и) dl = mx(t1u). (17)
о
Таким образом, первый член ряда (8) соответствует
случаю действия только аддитивной помехи. Апостериор-
ная плотность вероятности вычисляется по формуле
(4.9.33).
Вычислим производную апостериорной плотности ве-
роятности по дисперсии мультипликативной помехи в
точке, соответствующей нулевому значению этой диспер-
сии. Выполняя дифференцирование формулы (3), полу-
чаем
^ = /* (и|Ж10)
8W 8D
dDz 2dDz
f / 8W
J /*(“1^0)^
>— oo
du
• (18)
_ Dz=°
Дифференцируя формулу (4), получаем
т т
8W 1 Г fSW, т, и) , ,,,, ,
dDz ~ 2 J J 8DZ х х +
о о
т
, С де(х, и) Г , . 7»я(т,и) 1
+ J 8D~ Г W------------------2----] dX- <19>
О
Производные весовых функций определяются дифферен-
цированием интегральных уравнений. Учитывая, что
дКх (т, и, и, 0) _ aKs dKSN
8D7 8D7 "г Z 8D„1
Li L
(20)
получаем
J (^ £) 91)g(|’zT’M) dl = 8Ut'dX^’ °\ (21)
0
§ 7.9. ПОМЕХА В ЗОНДИРУЮЩЕМ СИГНАЛЕ
265
b»(U) & = М*‘^"'0> <22)
и z Z
о
Г £>м> 0) dg и, 0) 1 ,s п
----дР s & и’ 0) + Kn ' db <^=°.
J z z
о
(23)
Дифференцируя определитель Фредгольма (14) и учиты-
вая (16), получаем
дР
дР
р а«2(т,т,и)
J apz dT-
о
(24)
Производную от весовой функции получаем дифференци-
рованием уравнения (15). С учетом (16) получаем
9Q (т, т, и, 0) _ 91 (т, т, и, 0)
дР^ ~' дР^ '
(25)
По аналогичной схеме вычисляются и другие члены
ряда (8). Для случая, когда полезный сигнал зависит от
параметра линейно, плотность вероятности при нулевой
дисперсии мультипликативной помехе является нормаль-
ной, а производные (drWVdZ)z)o, (dTD/dDz)0 — полинома-
ми от случайных параметров. В этих условиях интеграл
(2), определяющий оптимальную оценку параметра, вы-
числяется в явном виде и представляет собой функцию
от апостериорных моментов высших порядков. Исполь-
зуя свойство нормального апостериорного закона распре-
деления вероятности при нулевой дисперсии мультипли-
кативной помехи, можно выразить высшие моменты через
апостериорные моменты первого и второго порядков.
Апостериорный момент первого порядка при нулевой
дисперсии мультипликативной помехи есть линейный
функционал от наблюдаемого сигнала. Поэтому структу-
ра оптимальной системы обработки сигнала будет иметь
вид последовательного соединения линейных фильтров
и полиномиальных нелинейностей, т. е. принадлежать к
классу систем, приводимых к линейным.
266
ГЛ. 7. ИЗМЕРЕНИЕ
Пользуясь изложенным выше методом, решим задачу
оптимальной оценки параметра, сформулированную в
начале данного параграфа.
Подставляя значение корреляционной функции в урав-
нение (17), получаем
g(r, u) = -£. (26)
Показатель экспоненты апостериорной плотности вероят-
ности (3) при нулевой дисперсии мультипликативной
помехи равен
т
W (Т, и) = ~ [ х (т) dx - (27)
о
Так как определитель Фредгольма равен единице, а ап-
риорная плотность вероятности является нормальной, то
первый член ряда (8) имеет вид
г (и 1 х’ 0) = VW ехр г ~ 20- ; р (28>
где апостериорное среднее и дисперсия равны
т
mi = гр? + гЬ г Р W dx' (29)
о
v = (30)
Вычислим второй член ряда (8). Подставляя в (20)
значения корреляционных функций и вычисляя произ-
водные, получаем
ЭК (г, а, и, 0)
- яп------- = и2е-^~°\. (31)
Из уравнения (22) определяем производную весовой
функции
ai {t,x, и, 0) = e_alt_T|. (32)
Z
Подставляя это значение в уравнение (21), получаем
§ 7.9. ПОМЕХА В ЗОНДИРУЮЩЕМ СИГНАЛЕ 267
производную от весовой функции i|>(£, т, и, 0)
Эф(7 т, и, 0) = г1* (33)
aDz р2 4 '
Из соотношения (25) следует
QQ (т, т, и, 0) _ и2,
dDz ~ V34'
Наконец, из уравнения (23) определяем производную
весовой функции S’ (т,. и, 0)
dDZ Г2 J
о
= "^[2“е"ат(1~е~а7’)ь (35)
Производная функции W(T, и) равна
Sy- = a4u4 -|- aaus ф- а2и2, (36)
где коэффициенты определяются следующими формулами:
a4 = ^f2a2’-(1 + e“aT)2b- (37)
т
я8 = - [[2-е-^(1 + е-^)]а;(т)йт, (38)
al J
о
т т
аг = J J е~“K-tl х (Z) х (т) dt dr. (39)
о о
Производная определителя Фредгольма в соответствии
с формулами (24) равна
dD _ и2Т
dD7 — Г2 •
Составим разность производных функций W (Т, и} и оп-
ределителя Фредгольма
~ 2dD-z а*и + а^и + Г* + ^-а) и • (41)
268
ГЛ. 7. ИЗМЕРЕНИЕ
Подставляя это значение в формулу (18) и выполняя
вычисления, получаем первую производную плотности
вероятности
= f (и | х, 0) pp? -ф asus 4- laz + =-2) г? —
где т^, т^, mz — апостериорные начальные моменты чет-
вертого, третьего и второго порядка.
Оптимальная оценка параметра с учетом первых двух
членов ряда (8) равна
ОО оо
= j uf* (и | х, 0) du + Dz J 0) du. (43)
Подставляя значение плотности вероятности (28) и ее
производной (42) в эту формулу и интегрируя, получаем
U == т^ -j- Dz -ф Й3Ш4 -ф ^2 + ^2^ — CL/JU/JUi —
— й3т.з7П1 — ^а2 + ^2) j- (44)
Для нормального апостериорного закона распределе-
ния вероятности параметра высшие начальные моменты
выражаются через первые и вторые моменты:
иг2 = иг!2 -ф т3 = mf3 -ф 3miD\
ml = ЗО*2 -ф бт^Р* 4- (45)
ml — 15otiO*2 4- lOm^P* 4-
где апостериорный момент первого порядка выра-
жается формулой (29), а апостериорная дисперсия —
формулами (30).
Используя формулы (45), представим оптимальную
оценку коэффициента усиления в следующем виде:
U* = ml -ф DZD* [4fl4mi (ЗР* -ф mj2) -ф
/ 2\ / 71 \
-ф 3as (р* -ф 7«i ) 4" 2 г «2 4" т-5
(46)
§ 7.10. ИЗМЕРЕНИЕ ЗОНДИРУЮЩЕГО СИГНАЛА 269
Из данной формулы следует, что структура схемы опти-
мальной обработки включает линейные фильтры и поли-
номиальные нелинейности.
§ 7.10. Измерение зондирующего сигнала
В предыдущих параграфах данной главы рассматри-
вались способы обработки наблюдаемого сигнала с целью
получения наилучшей оценки параметра при различных
характеристиках помех и заданном зондирующем сигна-
ле. Реализация рассмотренных алгоритмов требует высо-
кой точности устройств, генерирующих зондирующие
сигналы. Можно значительно ослабить требования к точ-
ности формирования зондирующих сигналов, если при-
менить способ обработки выходного сигнала системы с
одновременным использованием зондирующего сигнала.
Следует заметить, что метод получения оценки парамет-
ров динамических систем по результатам наблюдения вы-
ходного и входного сигналов не является универсальным,
поскольку не всегда можно на-
блюдать входной сигиал-
На рис. 7.10.1 представлена
блок-схема постановки задачи.
На вход усилительного звена
с коэффициентом усиления U
подается зондирующий сигнал
Z(t). Этот же сигнал наблю-
дается в аддитивной смеси с
помехой 2Vi(i). Выходной сиг-
нал звена наблюдается в аддитивной смеси с помехой
N% (Z). Требуется по наблюдению на интервале времени
Т вектора сигнала X(t) с компонентами
Рис. 7.10.1.
X\(t)==Z(t')-\-Ni{t'), X2(t)-UZ(t)+N2(t) (1)
определить оптимальную по критерию минимума среднего
квадрата ошибки оценку коэффициента усиления.
Зондирующий сигнал является нормальной случайной
санкцией времени с математическим ожиданием mz(t) и
корреляционной функцией Kz(t, t'). Помехи Лг(О
являются нормально распределенными стационарными
случайными функциями времени с нулевыми средними
значениями и корреляционными функциями в виде
270
ГЛ. 7. ИЗМЕРЕНИЕ
6-функций
#i(£, t')=rv8(t—t'), K2(t, £')=r26(£-t'). (.2)
Коэффициент усиления представляется как случайная
величина с нормальным законом распределения вероят-
ности, математическим ожиданием т и дисперсией D.
Оптимальная оценка коэффициента усиления есть
апостериорное среднее
ОО
U* = uf* (и | ж) du. (3)
Построим апостериорную плотность вероятности парамет-
ра при фиксировании реализации вектора входного сиг-
нала. В соответствии с формулой Бейеса
h (и) <р (ж | и)
J h (it) <р (ж | и) die
— 00
При фиксировании параметра U распределение вероят-
ности вектора X в соответствии с формулами (1) явля-
ется нормальным. Поэтому
(Г,(5)
j" h (и) ехр {W (Т, it)} du
где
Т т
W (Т, и) — — ~ J j* х' (£) 0 (£, т) х (т) dt dx +
о о
т
+ J £ (Т, г) х (т) — тх (т, и)
о
dx.
(6)
Матрица 0(£, т) и вектор весовых функций g (Т, х, и)
определяются системой линейных интегральных урав-
нений
т
[ Кх (ti ст, и) 0 (ст, т, и) de == I6(t т), (7)
о
т
j Кх (t, ст, и) g (Т, ст, и) de =s~ mx (t, и). (8)
о
§7.10. ИЗМЕРЕНИЕ ЗОНДИРУЮЩЕГО СИГНАЛА
271
Матрица условных корреляционных функций входного
вектора при фиксированном параметре имеет вид
Х,(>,а,и) = Гг<''°, + Х1(‘'” f2'’’’* • (9)
' |«7rz(i, a) ЛГ2(|, o) + Xs(<. о)
Подставляя матрицу корреляционных функций в урав-
нения (7), (8) и учитывая характеристики (2), получа-
ем следующую систему уравнений:
т
f Kz (i,o) 0И (щ t) do + Г^п (t, т) +
О
т
4- и [ Kz (£, о) 021 (от, т) do = 6 (i — т), (10)
о
т т
и J Kz(t, o') 0п (о, т) do + и2 [ Kz (i, о) 021 (о, т) do 4-
о о
4~ Г2021 (£, т) = О, (11)
г
f Kz (t, о) 012 (о, т) do + 1\012 (£, т) +
о
т
-ф и j* Kz (£, о) 022 (о, т) do = 0, (12)
о
г т
и\ Kz (t, о) 01а(о, т) do 4- и2 Kz (i, о) 022 (o', т) do 4-
6 6
+ r2022(i, r) = 6 (t-T), (13)
т
[ Kz (t, v) gi (й) do 4- (t) 4-
b
т
•4- и [ Kz (t, о) gz (o) do = mz, (14)
b
т т
и f Kz (t, o) (o) do 4- u2 J Kz (i, o) g2 (a) do 4-
b . о
+ r2g2(r) = umz, (15)
Данная система уравнений легко решается, если зон-
дирующий сигнал Является белым шумом, так что
272
ГЛ. 7. ИЗМЕРЕНИЕ
Kz{t, о) — rz6(7 —а). Система интегральных уравнений
превращается в этом случае в системы линейных алгеб-
раических уравнений
(Г2 + ГО 0И -|- иГгОг! — 6 (t — т),
пГ20ц 4~ (м2Гг -f- Г2) 021 — О,
(Tz 4- Г1)012 + иГг022 = О,
пГ2012 4~ (м2Гг ~Г ГгУОга == '6 (t — т),
(Гг + Г1) g\ + uTzg2 — mz,
uTzgi -f- (w2rz 4- r2)g2 = umz.
Решая эти системы уравнений, получаем значения
вых функций
л , ч Г„ + гЛг2
, -2 -ч ,
3(4—т), 012(4, t) = 021(4, t),
(18)
(19)
z
иГ_
021 (4, г) =--7------НЦ-------- 6 (i — т),
r1(r2 + H2rz)4-r2rz k >'
Г 4- Г
022 (t, Tt) =-7--Ц----Г--------б (4 — т),
Г„»г„
Si (т, t) = —------------------1 (T - t),
’• > -Г Л.2Л +r \ + r r
4/ Z Z/
wn„V.
^-1-------1(T-t).
Г2) + Г2ГХ
(16)
(17)
весо-
(21)
<2®
^(M =
Анализ полученных зависимостей показывает, что под-
становка весовых функций в соотношения (6), (5) при-
водит к получению ненормальной апостериорной плот-
ности вероятности измеряемого параметра. Нормальный
апостериорный закон распределения коэффициента уси-
ления получается в двух частных случаях: либо Г! = О,
либо Tz = 0. В первом случае получаем
Г }
0ц (4j Т)'= —r-r- g 3 (Z — т), 013 (t, т) = — ~ 6 (t — Т),.
i 2 z х 2 ^2)
022 (41 т) = р 3 (4 — т), 021 (4, т) = 012 (4, т),
2
£а(^т) = 0. (23)
z
§ 7.10. ИЗМЕРЕНИЕ ЗОНДИРУЮЩЕГО СИГНАЛА 273
Во втором случае (Гг — 0) из (18)’—(21,)' получаем
0п (i, т) = р- 6 (f — т), 012 (£, т) = 0,
1 (24)
02a(f, Т) = ~ 6 (i — т), 021 (7, т) = О,
i2
т„ ит„
ёЛТ,^ = -/‘ЦТ-х), g2(T,x) = ^l(T-x). (25)
Подставляя соотношения (22), (23) в формулы (6), (5),
(3) и выполняя вычисления, получаем следующую фор-
мулу для оптимальной оценки коэффициента усиления:
т
D Г
m + р (?) х2 (?) dx
U* = --------°—-----------. (26)
D С ,
1 + р- 1 я?1 (т) dx
1 2 J
0
Поскольку в данном случае (Г1 = 0) Xi (т) =z(t) , то
формула (26) выражает принцип корреляционной обра-
ботки связанных сигналов. Эту формулу запишем в виде
т
D С
m -|- р- I х (т) z (?) dx
12 J
U* =---------2_-----------. (27)
1 + р- z2 (?) dx
2 0
При отсутствии помех Г2 = Г2 = 0, з(т)=щ2(т), по-
лучаем точное значение измеряемого параметра
т
11J rnz И)
U* = -- и. (28)
j1 (т) dx
о
В случае постоянного зондирующего сигнала из (27)
18 л. Г, Евланов
274
ГЛ. 7. ИЗМЕРЕНИЕ
получаем
т
д С
т + f" mz I ж2 (т) dx
(29)
В формуле (27) зондирующий сигнал произволен.
Вследствие возможности абсолютно точного наблюдения
этого сигнала (Г1 = 0) форма зондирующего сигнала не
имеет значения. Поэтому алгоритм (27) нечувствителен
к точности задания зондирующего сигнала. В формулу
(29) можно вставлять фактическое постоянное значение
зондирующего сигнала, измеряемое в процессе контроля.
Точность получения оценки при этом не зависит от точ-
ности задания зондирующего сигнала.
Рассмотрим второй частный случай, когда помех в
зондирующем сигнале нет, но его наблюдение, так же как
и выходного сигнала, производится на фоне аддитивных
гауссовских белых шумов. Используя соотношения (24),
(25), (5), (6), (3), получаем выражение для оптималь-
ной оценки коэффициента усиления, в точности совпада-
ющее с формулой (29). Последняя получена для анало-
гичных условий.
Из общей формулы (27) можно получить частный
случай, соответствующий обработке наблюдаемого сиг-
нала по методу наименьших квадратов. Для этого сле-
дует положить D == оо. Тогда
т
f ж2 (т) г (т) dx
и* = 2-^--------
J г2 (т) dx
0
(30)
При дискретном способе получения входных сигналов
алгоритм обработки (27) принимает вид
2 к__л
(31)
§7.11. ЛИНЕЙНЫЙ ИНЕРЦИОННЫЙ ОБЪЕКТ
275
Можно показать, что в случае, Когда Г1=0, a
и K2(t, t') произвольны, оптимальная оценка дается фор-
мулой
т т
m 4- D J [ (t, т) z (г) ® (т) dt <7т
И* =----------------------------------t (32)
1 -|- D J J (t, т) z (<) z (т) dt dx
О О
где К.2~] (t> г) — обратная корреляционная функция. При
помехе ЛГг(С в виде белого шума с интенсивностью Гг
данная формула аналогична формуле (27).
Точность получения оптимальной оценки при Гг = О
вычисляется достаточно просто и равна
(33)
14- v’ ' ’
где отношение сигнал — шум определяется формулой
т
v = J т* (т) dx. (34)
о
§ 7.11. Линейный инерционный объект
Рассмотрим теперь более сложный случай, когда не-
обходимо получить оценку коэффициента усиления ли-
нейного инерционного объекта. Пусть линейная система
описывается оператором U.$4-, где U есть коэффициент
усиления. На вход системы подается зондирующий сиг-
нал Z(i). Наблюдается двумерный вектор сигнала с ком-
понентами
X^^Z^ + N^t),
X2(t)^U^tZ(t) + N2^,
где N2(t) —гауссовские случайные функции вре-
мени с нулевыми математическими ожиданиями и кор-
реляционными функциями в виде 6-функций;
Ki(t, t') = K2(t, = (2)
Случайные функции 7Vi(t), N2(t) описывают помехи в
зондирующем и выходном сигналах, а также собствен-
ные шумы измерителей.
18*
276
ГЛ. 7. ИЗМЕРЕНИЕ
Коэффициент усиления рассматривается как случай-
ная величина с нормальным законом распределения ве-
роятности, математическим ожиданием т и дисперсией D.
Если ввести обозначение то для по-
лучения оптимального по критерию минимума среднего
квадрата ошибки алгоритма оценки коэффициента усиле-
ния можно воспользоваться результатами предыдущего
параграфа. Оптимальная оценка коэффициента усиления
определяется формулами (7.10.3), (7.10.5), (7.10.6) и
интегральными уравнениями (7.10.7), (7.10.8). Матрица
условных корреляционных функций и вектор условного
математического ожидания наблюдаемого сигнала при
фиксированном параметре имеют вид
Kz (t, о) + zq (t, о) u&tKz (t, о)
us&tK (t, о) u\rt,s£K(t, ст) |- (z, <т) *
(3)
m'x(t, и) = \\mz (£) u2^tmz(t)\\. (4)
Система интегральных уравнений относительно весо-
вых функций 0(7, т, и) и g(7, т, и) после подстановки в
уравнения (7.10.7), (7.10.8) соотношений (2), (3), (4)
принимает вид
т
f Kz (t, о) Qu (o', т) do + (7, т) +
о
Т
+ и J ст)021(ст, т) do = 6(7 — т), (5)
о
т
и f s^tKz (7, ст) 0n (стг т) do +
о
т
+ г? s&iS&aKz (7, ст) 031 (о, т) do ф- Г2021 (7, т) = 0, (6)
о
т
J Kz (7, ст) 012 (ст, т) do + Г Аг (Z, -г) +
о
т
+ и^ tKz (Z, ст) 022 (стг т) do = 0л (7)
о
§ 7.11. ЛИНЕЙНЫЙ ИНЕРЦИОННЫЙ ОБЪЕКТ
277
т
и J s^tKz (t, о) 012 (ст, т) do +
о
т
+ и2 J sMuh (t, ст) 022 (С, т) do + Г2022 т) = 6(i — т),
f Kz (t, ст) gi (о) do 4- Tig (т) +
b
т
4-u[ iKz (t,o)gz(a) ,fZff = mz, (9)
b
т
U J sdt'Kz (t, й) gi (й) do +
0
T
+ “2 J .^t^-oKz (t, ct) gz (ct) do + r2g2 CO = u^tmz. (10)
о
Данные две системы линейных интегральных уравне-
ний легко решаются, если зондирующий сигнал явля-
ется белым шумом. Подставляя в (5) — (10) выражение
корреляционной функции Kz(t, й) = Гй5(£— о), получа-
ем две системы уравнений
(Ги + гомг, т) + иг2^021(г, т) = б(^-т), (11)'
Н.ГгЛ^г0ц (Z, т) + К2М,.<021 (/, т) -f- Г2021 (Z, т) = 0, (12)
(Г2 + Г!)012(Л т) + иГ2^022(Л т) = 0, (13)
urz^(012(i, т) + н2Гг^г^г022(Л т)-Н
|+Г2022(г, т) = й(г-т), (14)
(rz + r1)g1(T) + urz^tg2(T)=7nz(T), (15)
uTzs&tgi СО + Uzrz^g2 (t) + r2g2 (т) = u^,xmz (т). (16)
В частном случае, когда Tz — 0, получаем следую-
щие выражения для компонент матрицы 0 и вектора g
011 (О 0 = S (t - Т), 021 = 012 = 0,
11
022 (0 т) = г«(« - О. (17)
1 2
278
ГЛ. 7. ИЗМЕРЕНИЕ
т„ (х) ustjnv(x}
^(Т^-^ЦТ-х), g2(T,x) = -^^- l(T-x).
1 1 1 2
(18)
Подставляя значения найденных функций в формулы
апостериорной плотности вероятности (7.10.6), (7.10.5)
и вычисляя интеграл (7.10.3), получаем следующее вы-
ражение для оценки коэффициента усиления:
т
d е
т + р— 1 (т) ] ® (т) dx
U* --------°—--------------(19)
D С
1 + — I (т)]2йт
о
Данное выражение можно представить в другом ви-
де, если линейный оператор записать в виде линейного
интегрального оператора с весовой функцией w(t, т),
соответствующей единичному значению коэффициента
усиления:
Точность получения оценки определяется апостериор-
ной дисперсией
D* = D
1
1 + v’-
где отношение сигнал — шум v равно
(т, £) mz (£) d&
2
dx.
Центрированное значение оценки коэффициента опре-
деляется вычитанием цз левой и правой частей равенства
§ 7.11. ЛИНЕЙНЫЙ ИНЕРЦИОННЫЙ ОБЪЕКТ
279
(20) математического ожидания коэффициента. Выпол-
няя эту операцию, получаем следующую формулу:
т X
V* = г2 (Г+т)' J J mz - тТП" <23>
о о
Рассмотрим примеры различных систем.
Пример 1. Усилительное звено w(t— £,) = 6(т— £). Оптималь-
ная оценка (23) после подстановки вместо весовой функции б-
функции и вычислений принимает вид
т
= Г „tz (т)(т) ch _ 1п _(24)
2 (1 -f- V) J 1 Г •
0
Отношение сигнал — шум равно
т
DC,
v = р- I mz(x)dx. (25)
2 0
При дополнительном ограничении на максимальное значение зон-
дирующего сигнала mz(r)^ а максимум отношения сигнал — шум
достигается в случае, если зондирующий сигнал постоянен и ра-
вен и/ = а. В этом случае
Г2
Оптимальная оценка центрированного значения коэффициента
при постоянном зондирующем сигнале равна
т
У* = । ' f ж° (27)
аТ (1 + v) J
0
(т-Е)/
Пример 2. Инерционное звено w (т—£) = е 1 [Тр где Т\—
постоянная времени звена. Вычислим вначале отношение сиг-
нал — шум. Подставляя значение весовой функции в формулу (22),
получаем
v =
mz (g) dg dx.
(28)
При условии ограничения величины зондирующего сигнала
mz (В) « максимальное значение отношения сигнал — шум дости-
280
ГЛ. 7. ИЗМЕРЕНИЕ
' гается при постоянном и максимальном значении сигнала
mz = а. (29)
Подставляя (29) в формулу (28) и выполняя вычисления, получаем
[ _Z\ т ( -W'
Т — 2гД1 — е Т1/ + уЛ1 —е Г1
Даа
v = —
2
(30)
При Т <с Т\ отношение сигнал — шум с точностью до членов треть-
его порядка разложения экспонент в ряд Тейлора равно
Дя2Г3
3ra?f
(31)
При Т Т\ экспоненциальные члены в (30) затухают, и отноше-
ние сигнал — шум приближенно равно
Da^T
(32)
Сравнивая (31) и (32), можно сделать заключение, что поскольку
У3/(37'|) <1, а величина Т в (32) может быть значительно боль-
ше единицы, то отношение сигнал — шум (32) существенно боль-
ше отношения сигнал — шум в (31).
Таким образом, получен важный результат. Точность получе-
ния оценки коэффициента усиления тем выше, чем больше время
наблюдения сигнала постоянной времени инерционного звена. Этот
теоретический результат объясняет хорошо известный практиче-
ский способ измерения коэффициента усиления динамических си-
стем в установившемся режиме, после окончания времени пере-
ходного процесса, т. е. при Т Т,. Другими словами, измерение
коэффициента усиления должно производиться на интервале вре-
мени, значительно превосходящем время переходного процесса.
При Т Ti и mz= а оптимальная оценка коэффициента уси-
ления инерционного звена равна
Da
V*---------
v -га(1 + ^)
Г т т _ Т
х (т) dt — j" е Ti х (т) dr — amT
-0 0
(33)
Нетрудно видеть, что второй член при времени наблюдения, зна-
чительно большем постоянной времени системы, дает очень малый
вклад. Поэтому пренебрегая этим членом, получаем
Г
у,=(гдаР’(т)Л- (М)
о
В этой формуле введено центрированное значение входного сигна-
ла, равное я°(т)== х(т) —-amT.
§ 7.11. ЛИНЕЙНЫЙ ИНЕРЦИОННЫЙ ОБЪЕКТ
281
9
Сравнивая формулу (34) с выражением (27), убеждаемся, что
измерение коэффициента усиления инерционного звена в устано-
вившемся режиме дает не только выигрыш в точности оценки, но
и более простой алгоритм обработки наблюдаемого сигнала, не от-
личающегося от алгоритма обработки в случае безынерционного
усилителя.
Пример 3. Интегрирующее звено ю(т—£) = 1(т—£). Отно-
шение сигнал — шум (22) при mz = а и весовой функции интегри-
рующего звена равно
Da2T3
v зг2
(35)
Оптимальная оценка центрированного коэффициента усиления ин-
тегрирующего звена равна
у* -
Зу
(1 + у) аТ3
С Тл
I та (т) dx — am -g~
-о
(36)
Если зондирующий сигнал не постоянен, а изменяется, напри-
мер, по закону синуса (£) =sincog, то отношение сигнал —шум
составляет величину
D 73 2 1 \
у = —2 I у т - - sin wT + sin 2иГ j. (37)
Если частота и время наблюдения выбраны так, что аТ—л7с, 7с = 0,
1, 2, ..., то отношение сигнал — шум равно
3DT ЗРТ3
2Г2ю2 = 2Га(л?с)а‘
(38)
Сравнивая эту формулу с выражением (35), убеждаемся, что вели-
чина отношения сигнал — шум при синусоидальном зондирующем
сигнале меньше, чем при постоянном сигнале.
Оптимальная оценка коэффициента усиления при гармониче-
ском сигнале равна при <лТ — пк
D
TZ*-----------
V -(1 + у)Г2
г т
1 С ЗтТ
— (1 — cos шт) ® (т)йт —
- о
(39)
Как следует из формул (36), (39) для получения оптимальной
оценки коэффициента усиления необходимо генерировать либо ли-
нейный сигнал, либо гармонический сигнал, и далее умножать его
на наблюдаемый сигнал. Это обстоятельство затрудняет реализацию
алгоритмов, и практически в данной форме они не используются.
При очень большом отношении сигнал —шум, когда можно прак-
282
ГЛ. 7. ИЗМЕРЕНИЕ
тически пренебречь помехой, из (36) следует
т
3 f ,
Tz* = j xUadx — m = V, (40)
о
что показывает эффективность алгоритма (38).
Пример 4. Дифференцирующее звено w(x — §) = б(т — £). От-
ношение сигнал —шум в данном случае выражается «формулой
Т
D С -9
v = рт I (т) dx, (41)
о
Оптимальная оценка коэффициента усиления равна
т
DC- v
= г7(1~ v) J mz (т) * (т) с1х ~ m Г+V (42)
о
Если в качестве зондирующего сигнала подавать линейно из-
меняющийся сигнал mz = т, то отношение сигнал — шум будет
равно
а оптимальная оценка принимает вид
т
V* = £ J ж° (т) dt, (44)
о
где а°(т) — центрированное значение наблюдаемого сигнала.
Пример 5. Звено запаздывания w (т — |) = б (т — g — h), где
h — время запаздывания. Отношение сигнал — шум равно
т
v = р- J (т — h) dx. (45)
0
Оптимальная оценка коэффициента усиления вычисляется в дан-
ном случае по формуле
т
DC у
V* = г'(Г'+~) I mz <т — /г)х — m Г+V (4G)
о
Если зондирующий сигнал постоянен и равен m z (т) = 1 (т), то,
как нетрудно определить, интервал наблюдения эффективно ис-
пользуется, если он начинается не с нуля, а сдвинут на время за-
§ 7.11. ЛИНЕЙНЫЙ ИНЕРЦИОННЫЙ ОБЪЕКТ
283
паздыванпя h. При этом
D (Т — h)
v =----j;---
п оптимальная оценка равна ’
V* ~ 1 4- v (Т — h) J х°
л
(47)
(48)
В случае гармонического зондирующего сигнала mz (т) =sin сот
отношение сигнал — шум равно
т
D С •>
v = р- I sin*1 (шт — ш/() с/т. (49)
Х2 J
о
Полагая, что время наблюдения и частота выбраны так, что
га 7’ = л/с, вычисление отношения сигнал — шум дает
DaT Dnk „ ,
v = —= — (/« = 0,1,2,..,,»), .(50)
где /с — число иолупериодов гармонического сигнала.
Оптимальная оценка коэффициента усиления при гармониче-
ском зондирующем сигнале определяется формулой
т
2v 0 л
V* = ц— v) j Sin (шт — ah) а>° (т) йт. (51)
о
Пример 6. Линейная стационарная система с весовой функцией
п _ (Т—%)
ге(т — I) = 2 ^ге • Отношение сигнал — шум для оценки
i=l
коэффициента системы при постоянном и единичном зондирующем
сигнале, вычисленное по формуле (22), равно
Рассмотрим предельные случаи. При Т- <g Т{ из (52) следует, с точ-
ностью др члепдв третьего порядка разложения экспоненты в ряд
Трилора, ’ " .
1) v, у3
284
ГЛ. 7, ИЗМЕРЕНИЕ
Из этой формулы, в частности, можно сделать вывод, что при
уменьшении времени наблюдения отношение сигнал — шум стре-
мится к нулю.
В случае, если время наблюдения значительно больше любой
из постоянных времени системы 2’ > 2';, отношение сигнал—шум
равно
D п DT ( п V
= г; 2 =т- 2• (54)
i,j=i \i=l /
Соотношение (63) получено для случая Т Т,, поэтому оно
меньше, чем отношение сигнал — шум в (54). Отсюда следует вы-
вод о большей эффективности измерения коэффициента усиления
в установившемся режиме. Данный вывод является обобщением
результатов, полученных в примере 2 для инерционного звена.
Оптимальная оценка коэффициента усиления при постоянном
единичном зондирующемся сигнале определяется формулой
Для установившегося режима можно повторить рассуждения, при-
веденные во втором примере данного параграфа о малой значимо-
сти второго члена в подынтегральном выражении, если Т Т{. По-
этому алгоритм (55) можно упростить до следующего соотношения:
D -Д f v
У* = (ТП)1Г2 2 J Х (T) “ m Г+V (5°)
г=1 о
В частности, для колебательного звена с характеристическим
уравнением
Г2р2 + 2^ор+ 1 = 0
величины Т{ и Т2 в формуле отношения сигнал — шум (54)
(57)
равны
(58)
где То — постоянная времени, a g—коэффициент затухания коле-
бательного звена.
Коэффициенты %i, К2 в формуле (54) определяются из усло-
вия, чтобы выражение
т ______-г
w(T-g) = 2vie Tl + %2e Tz (59)
было весовой функцией колебательного звена. Это условие со-
ответствует заданию нулевого начального значения на координату
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
285
и начального значения 1/7 q на производную
Х1 + %2=0, —2 = — у~ — у-.
2 0
Решая эту систему уравнений, получаем
— 1 1
%1=у2/А AY ^А AY
T2) /0\Ti Tz)
Подставляя значения величин Ti и 7'2 из (58), получаем
1 . 1
(60)
(61)
2Т0]/е,2-1 %2 2Го]А2-1’
Вычислим значение суммы, стоящей в .формуле отношения сиг-
нал — шум (54) для случая колебательного звена:
2 л л
У , т =______ -1___________ . ________ -- 1____________= !
Й г 1 2]А2~1
(63)
Таким образом, отношение сигнал — шум для рассматриваемо-
го случая колебательного звена равно
DT
v = -p-. (64)
Х2
Оптимальная оценка коэффициента усиления равна
т
V* = {“ро j 2° (т) йт, (65)
о »
где время наблюдения выбирается значительно большим постоян-
ной времени колебательного звена Т 3> То.
§ 7.12. Измерение параметров системы
В предыдущих параграфах были рассмотрены вопросы
синтеза оптимальных алгоритмов измерения одного пара-
метра при различных характеристиках наблюдаемого
сигнала. В современных системах контроля в большинстве
случаев измерение параметров производится изолирован-
но друт от друга, т. е. каждый параметр измеряется
индивидуально. Такой подход упрощает алгоритмы изме-
рения, но требует ддя сложных диндмичрских систем
286
ГЛ. 7. ИЗМЕРЕНИЕ
большого количества трактов и последовательной проце-
дуры измерения.
Непрерывное расширение функций динамических си-
стем и повышение их эффективности связано с ус-
ложнением систем, что объективно .приводит к уве-
личению числа контролируемых параметров. Это, в свою
очередь, при использовании индивидуального принципа
измерения параметров приводит к увеличению числа
измерительных трактов, времени измерения, возрастанию
веса и габаритов системы контроля.
Перспективным является принцип измерения парамет-
ров сложных динамических систем, основанный на при-
ведении всей системы в рабочее состояние, наблюдении
небольшого числа выходных сигналов и их обработке с
целью получения вектора оценок параметров. При таком
подходе уменьшается количество измерительных трактов,
но усложняются алгоритмы обработки. Реализация этих
алгоритмов предъявляет высокие требования к быстро-
действию и объему оперативной памяти вычислительной
машины системы контроля. Несомненно, что развитие
вычислительной техники создает реальные предпосылки
для применения данного принципа измерения параметров
в системах контроля.
Задача измерения параметров динамических систем
по наблюдаемым сигналам является частным случаем
задачи идентификации. Действительно, в данном случае
известна структура системы, и идентификации подлежат
лишь параметры системы. Поэтому методы, развитые в
теории идентификации, могут с успехом применяться для
измерения параметров при контроле [29, 93, 94].
Известные способы измерения параметров динамиче-
ских систем можно разделить на эвристические и опти-
мальные. Название эвристические в определенной степени
условно и связано с тем, что способы предложены, апро-
бированы, но не исследованы с точки зрения определен-
ных критериев оптимальности. Возможно, что они явля-
Д)тсц в ^екр.трррм смысле оптимальными или субопти-
мальными. К эвристическим способам можно отнести
способ ортогональных фильтров [52, 94] и способ под-
слеживаюгцей модели [42, 43, 61, 76]. Оптимальные
способы измерения параметров рассматривались с пози-
ции теории рт {диетических решений [1Q8, 57, 78, 79, 55]-
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
287
В данном параграфе рассматривается задана построе-
ния оптимального алгоритма оценки параметров, реали-
зующего принцип подслеживающей модели. В качестве
априорной информации о динамической системе исполь-
зуется знание структуры системы и вероятностные харак-
теристики параметров [53].
Динамическая система описывается нелинейным урав-
нением
y = <p(J,y,J7) + B(4',t7)Z(i), У(О) = Уо, (1)
где У — n-мерный вектор фазовых координат, ф(£, У, U)—
нелинейная вектор-функция размерности п, завися-
щая от времени, фазовых координат и d-мерного вектора
случайных параметров U, В (i, U) — матрица п X п
коэффициентов, - Z (t) — п-мерный вектор входного сиг-
нала, Уо — n-мерный вектор случайных начальных
условий.
По известной структуре системы строится модель
Ум = <p(t, УМгм) Ум(О) = Ум0. (2)
Вычитая из уравнения (2) уравнение (1), получаем
дифференциальное уравнение относительно разности фа-
зовых координат А У = Ум — У
ДУ = <Р (t, Ум, и) - ф (t, У, U) +
+ [В (t, и)-в (t, Г) ] Z (О, АУ (0) = АУ0. (3)
Предполагая дифференцируемость вектор-функции ф
по фазовым координатам и параметрам и матрицы В по
параметрам, представим их линейными отрезками ряда
Тейлора. Разложение по параметрам произведем относи-
тельно оптимальных оценок этих параметров U*. Раз-
ложение по фазовым координатам выполним относитель-
но. фазовых координат модели
Ф (*, У, И) - <р (i, ум, U*) + V<p (i, Ум, U*) (Ум - У) +
+ vu<p(i,yM, п*ж-п*)г
ф (Z, Ум, и) = ф (i, Ум, И*) + ?иф («, УМ,.П*) (и -17*),
(4)
В (£, U) = В (t, и*) +Уив (£, U*) (U - и*),
в (г, и) = в и*) + vub (t, и*) (и - и*),
238
ГЛ. 7. ИЗМЕРЕНИЕ
где
v<p (t, Ум, и*) = || d(Pi (t, Y, U*)/dYK]-1 Ум= YII,
Vu<p (t, Ум, U*) = I, dtp* (i, Ум, U)/dUk | U -- U* ||,
vuB (i, u*) = || dBi5 (t,' U}/duK I и = jy* ||.
Подставляя разложения (4) в уравнение (3), получаем
АУ = УфАУ + С (и - АУ(0)=У01 (5)
где введены обозначения
с = Уиф (£, Ум, U*) + УиВ (t, U*) z (t),
Y^Yq^Y^U*). (6)
В выражениях (5), (6) АУ—вектор размерности п,
u—U— вектор размерности d, Уф — матрица п X п,
Уиф — матрица d X и, VиВ — тензор размерности d X
X (п X «), матрица d X п,
Оц ^12
С = ^21 ^22
^П1 Х2
где
сц = dqildUj + 2 (dBujdu^z^t)
k=i
С Id
C2d
I
Cnd
= Tjn. i = ii d)-
Если фазовые координаты модели известны как функ-
ции времени, то уравнение (5) является линейным не-
стационарным дифференциальным уравнением относи-
тельно разности фазовых координат модели и системы.
Вследствие использования только линейных членов раз-
ложения в ряд Тейлора (см. (4)), уравнение (5) при-
ближенно описывает процесс изменения разности фазо-
вых координат во времени. Точность отражения процесса
изменения разности координат возрастает при небольшом
отклонении параметров модели от параметров системы и
соответственно при малом отклонении оценки параметров
от истинных значений. Повышения точности уравнения
(5) можно достигнуть за счет управления моделью, вы-
ражающегося в том, что параметры модели будут прибли-
жаться к параметрам системы.
§ 7,12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
289
Таким образом, задачу оценки параметров системы
при использовании подслеживающей модели можно трак-
товать как задачу отыскания управления моделью и с
целью приведения разности координат ДУ к нулю.
В установившемся режиме при равенстве нулю разности
координат вектор параметров модели — управление и —
будет равен вектору параметров системы.
Разность фазовых координат ДУ можно наблюдать.
Учитывая возможные помехи, наблюдаемый сигнал пред-
ставим в виде
X(t) = ДУ 4- N(t), (7)
где У (i)—помеха, представляющая собой белый шум
с нулевым средним и интенсивностью Г. Управление и
необходимо определить как функционал наблюдаемого
сигнала.
В уравнении (5) содержится неизвестный вектор па-
раметров системы U. Этот вектор можно рассматривать
как дополнительный вектор фазовых координат. Для этого
представим расширенную систему уравнениями
ДУ = V(₽ДУ - CU + Си, ДУ (0) = ДУ01
(8)
U=0, U(0) — U.
Естественно поставить задачу об оптимальном управ-
лении подслеживающей моделью. За критерий оптималь-
ности примем минимум оставшихся условных средних
потерь [55]
[T 1
J = min М [ДГСДУ + (и - иуН(и-1Г)] dt] | х (т) L (9)
и IJ |
где М — оператор математического ожидания, G, Н —
положительно определенные симметричные матрицы,
х (т) — реализация наблюдаемого сигнала на интервале
те[0, £].
Приведем систему уравнений (8) к стандартному виду
W = AW +Lu, W (0) = 1У0, (10)
где W — (AYz U) — вектор размерности п d, ЬгА —
19 Л. Г, Евлаиов
290
ГЛ. 7. ИЗМЕРЕНИЕ
матрицы (тг + d) X (^ + d), состоящие из блоков
... та|, ,. .£.!.£. .
0 : 0 I 0:0
(И)
В соответствии с расширением вектора фазовых коорди-
нат критерий оптимальности (9) представим в виде
= minM
и
(т
J [W'QW + и'Ни — 2u'FW] ей] | ж’(т)
ь
где -наблюдаемый сигнал х (т) равен
ж(т) = W(t) + N(t), те=[0}Д].
(12)
(13)
Матрицы Q, F, R имеют размерность (п + d) (п + d) и
содержат блоки
Q —
G : 0
0 : И
F =
0 : Н
o'fo’
(14)
где G — матрица п X Н — матрица • d X d, I — единич-
ная п X п матрица.
Для получения оптимального по критерию (12) управ-
ления системой (10) применим метод динамического
программирования. Функция Веллмана имеет вид (12).
Применяя стандартные процедуры для вывода уравнения,
определяющего функцию Веллмана [5], получаем следу-
ющее уравнение в частных производных:
— = min + tr DQ + и'Ни - 2urFW* -j-
+ (AW* + LuY + 4- tr ГDRT~lRD----d2/- - 1) ,
: \ I / gy/* 2 dW*dW* J j
(15)
где W* — апостериорное математическое ожидание век-
тора координат, D — матрица апостериорных корреляции
онных моментов координат, Г — матрица интенсивностей
белого шума N(if).
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
291
Апостериорные моменты координат системы (10) оп-
ределяются уравнениями
J7* = ЛЖ* + Lu + DtfT-i (ж - ЯТК*), W* (0) = иг0,
(16)
ГЛ = AD' + DA' -D'R'V-i RD, D (0) = Do,
(17)
где m0— вектор априорного математического ожидания
координат, Ро — матрица априорных корреляционных
моментов координат системы (10).
Для определения минимума правой части уравнения
(15) продифференцируем выражение в фигурной скобке
(15) по и и приравняем производную нулю. В резуль-
тате получаем уравнение относительно »0> из которого
получаем оптимальное управление
йо = H-WW* - 4 я-1 и . (18)
Решение для функции Веллмана, удовлетворяющее
уравнению (15), имеет вид
J = W*’ (19)
где матрица К (1) определяется уравнением
-k = Q + А'К 4- К'А - K'LH~lL'K + K’LH-^F +
+ F'H~iL'K - F'H-W; K(T) = Q. (20)
Дифференцируя выражение (19) no W* и подставляя
значение производной в формулу (18), получаем опти-
мальное управление системой (10)
иа = H-iFW* - H-iL'KW*. (21)
Как и следовало ожидать, оптимальное управление явля-
ется линейной функцией, оптимальной по критерию ми-
нимума среднего квадрата ошибки оценки вектора коор-
динат системы.
От общего выражения для оптимального управления
(21) перейдем к первоначальным переменным. Используя
матрицы (11), (14) и учитывая, что W* = (АУ*, U*),-
19*
292
ГЛ, 7. ИЗМЕРЕНИЕ
получаем
О i Н
6 s О
= U*.
я-w = я-i
&Y*
U*
(22)
Для вычисления второго слагаемого в формуле (21) пред-
ставим матричный коэффициент усиления К в виде
блочной матрицы
я = ||511^а
Г£1 1^22
(23)
где Ки — матрица га X га, Я12 — матрица га X Я21 —
матрица d X га, К22— матрица d X d. Уравнение (20)
запишем в конкретном виде, используя блочные матрицы
%!! ^12
К^1 ^22
|| G ! °
|| 0 1 Я
<P'Kn j ср'Я13
^11Ф ' Кцс
^ЧаФ: ^12^
К^СН-^С'К^ ] КнСН-1С'К12
K,12CH~iC'Kli i K'12CH~lC'Ki2
0
0 \Ki2C
II 0
4- ....
llcHu
о
с'"к^
0 i о
о” I я
(24)
Приравнивая в обеих частях уравнения блоки, получаем
следующие четыре уравнения:
— К11=С4-уч,,Я11+Яцуф—КцСН~1СКц, Кц (Т) = 0,
~Ki2= у<р'К12-КпСН-^СК12, Ki2(T) = 0,
= k21= k;2v<p - к\2сн^с'кп, к21 (г)=о,
- k22= K'i2CH-ic'KiZt к22 (Г)=о.
(25)
Второе и третье уравнение при нулевых граничных ус-
ловиях дают решение К12 = К21 = 0. Следовательно,
и четвертое уравнение дает решение К22 = 0 Таким
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
293
образом, блочная матрица К имеет вид
II о i О
(26)
Вычисляя второе слагаемое в формуле (21), получаем
H-^L'KW^^H-WKaAY*. (27)
Таким образом, оптимальное управление (21) опреде-
ляется формулой
м0 = Г* _ Н-ЧУКцкУ*. (28)
Содержательный смысл этой формулы состоит в том, что
оптимальное управление строится как разность оценки
вектора параметров системы и оценки разности фазовых
координат модели и системы. Если разность фазовых
координат равна нулю, то оптимальное управление равно
оценке параметров системы.
Уравнения (16), (17) для апостериорных моментов
системы (10) после перехода к первоначальным перемен-
ным принимают следующий вид:
ДУ* = уфДУ*-С£/*+Сп+1>пГ-1(ж-ДУ*), ДУ*(0) = 0,
/7*= Р'12Г-1(ж- ДУ*), E7*(0)=mu,.
(29)
Оц = УфОп + Оц\Ч>' — CD'i2 — Dl2C — ВнГ-1#!!,
0ц (0) = 7)ду0,
012 = — CDzz — 2>цГ—Ш12, Oj2 (0) = 0,
i>21 = 7?21V4)/ — 7>22С,/ — О'^Г-Юц, Z>21 (0) = 0,
i>22 = - D'12r-wl2, Z>22 (0) = Du, (30)
где -Ojj (i, 1 — 1, 2) — блоки матрицы О, имеющие сле-
дующую размерность: —матрица О12— матри-
ца п X d, О21 — матрица d X и, Т?22 — матрица d X d.
Подставляя в первое уравнение (29) оптимальное
управление (28), получаем
ДЁ* = (уф - Н-^С'Кц - А1Г-1) ДУ* +
+ ДУ*(0) = 0. (31)
294
ГЛ. 7. ИЗМЕРЕНИЕ
Это уравнение описывает динамику изменения оптималь-
ной оценки разности фазовых координат модели и
системы.
Оптимальное управление (28) непосредственно исполь-
зуется для управления моделью (2). Подставляя (28) в
(2), получаем уравнение по долеживающей модели с оп-
тимальным управлением
Ум = Ч> (t, Тм, U* - H-WK^bY*) +
+ В (t, U* - H-iC'KiiAY*) Z (t). (32)
В начальный момент времени АК* (0) = 0, aU* (0) = ти,
поэтому управление моделью начинается при априорных
математических ожиданиях параметров системы.
Пример 1. Рассмотрим пример построения подытоживающей
модели для системы, описываемой уравнением
y = Z(i)Z7, У(4))=У0. (33)
Модель описывается уравнением
Ум=2(«)и, Уы(0)=УмО. (34)
В уравнениях (33), (34) Z (<) — известный зондирующий сигнал,
U — случайный параметр системы, имеющий нормальный закон
распределения вероятности, математическое ожидание ти и дис-
персию Du, и; — управление, которое является параметром моде-
ли, Уо, Уыо — начальные условия системы и модели.
Разность выходных сигналов модели и системы ДУ = Ум — У
определяется уравнением
ДУ = Zit)(u — U), ДУ(0)=ДУо. (35)
Поставим задачу определить оптимальное управление по кри-
терию
J = min М
и
’Т
§ [еду2 + н (и — с/)2] dr) ] ® (т)
л
(36)
при условии наблюдения на интервале т s [0, t] сигнала
Х(т) =ДУ(т) +ДГ(т), (37)
где N[x) —гауссовский белый шум с нулевым средним и интенсив-
ностью Г. В соответствии с изложенным алгоритмом проведем не-
обходимые вычисления.
В данном случае ср = О, В = U, поэтому Уф = 0, Уиф = 0,
УцВ = 1 и, следовательно, С — Z(t), Матрицы G и Н являются
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
295
скалярами. В соответствии с уравнениями (25) имеем
^ц(2,) = 0.
(38)
Уравнения для апостериорных моментов (29), (30) в данном слу-
чае принимают вид
Оц ДУ* = — CU + С И-У —2 (а; — ДУ*), АУ* (0) = 0,
Я* = ^2 (а;-ДУ*), U* (0) = ти, (39)
д2 Йи = -22(4)Я12-^, A(0)=^aY().
i)12 = -Z(4)D22-£l^L2j Д12(0) = 0, (40)
ь "22 ~ "р-’ д22(0) = Лу
Оптимальное управление (28) принимает в этом примере еле-
дующее выражение:
Мо = Г7*_у)дГнДУ*. (41)
Интегрируя уравнение (38), получаем
К (*) - [ехР (Г - -У
11 z(0 [exp{2Z(t) VG/H(T — 4)} + if
(42)
При t = T Кц(Т)= 0. При Т = оо Лп(оо) = ^GHIZ. Стационарное
значение К.п при Т = оо достигается сразу при t = 0. При конеч-
ном Т стационарное значение Кц достигается приближенно при
4 < Г — (2/Z (4)) УЯ/ff. При стационарном значении Кн оптималь-
ное управление (41) равно
“о = г7*- ’К|ДГ*- (43)
Подставляя управление (43) в уравнения (39), получаем
ДУ* + + j/~ ДУ * = а; (4),
U* = -22 (а: — ДУ*).
(44)
Эти уравнения определяют динамику работы подслеживающей
модели.
296
ГЛ. 7. ИЗМЕРЕНИЕ
Используя формулу (43), уравнение модели (34) запишем в
виде _
У = Я (7) И* — Z (7) 1/ £ ДУ*. (45)
' л
Пример 2. Рассмотрим задачу оценки параметров инерцион-
ного звена с помощью подслеживающей модели. Уравнения систе-
мы и модели имеют вид
Y=.-UiY+U2Z(t), YN= — niY№ + u^(t),
У(О)=Уо, Ум(О) = Уыо,
где Ui, U2 — параметры системы, представляющие собой случай-
ные нормально распределенные величины с математическими ожи-
даниями mi, 7«2 и дисперсиями Di, D2- Z(t) —известный зондирую-
щий сигнал; щ, из — управления модели.
В данном случае п= 1, d = 2, <р = — U,Y, В = П2,уф= —П1.
Матрица С (6) в данном примере есть вектр-строка С= (— Ум,
2(7)). Вектор разности параметров равен
„ “1 ~ и1
В соответствии с общей формой уравнения для разности фазовых
координат (5) имеем
ДУ = - U*t&Y - Уи (М1 -UJ+Z (7) (и2 - UI), ДУ (0) = ДУ0.
Определим оптимальные управления щ, и2 по критерию
1Г
J [<?ДУ2 + (i4± — Ut)2 + Я2 (и2 — Z72)2] dt] | х (т)
при наблюдении сигнала
Х(т) = ДУ(т) + Я(т), те [0,7],
где N(r) —гауссовский белый шум с нулевым средним и интен-
сивностью Г. Величины (?, Hi, Н2 являются положительными по-
стоянными.
Уравнения для апостериорных математических ожиданий (29)
в данном случае имеют вид
ду* = - И* ДУ* + УМП* - Z (7) U*2 - УЛ + Z (7) и2 +
D..
+ -11 (® — ДУ*), ДУ* (0) = о,
^1 = 4-Р121 - ДУ*)> и\ (°) = те1>
'^2 = 4 Д122 - ДУ*)> и2 (°) = W2-
§ 7.12. ИЗМЕРЕНИЕ ПАРАМЕТРОВ СИСТЕМЫ
297
Уравнения для апостериорных корреляционных моментов (30),
когда в данном случае Иц — скаляр, D ]2 — вектор-строка 1X2,
Dsi — вектор-столбец 2X1, П22 — матрица 2X2, имеет вид
п2
= - 2U\Dn + 2УмО121 - 2Z (t) Р122 - ^1,
11^121 II _ _ || -°211^1 || _!| — °22НУм + ^22122|| _ £11 ||^121 ||
. ||-^1221| 11^212^111 || ~ -°2221УМ + D2222Z || Г Р122 ||
^2211^2212_____1 Л121 £)121'D122
^2221-^2222|| Г II Di2iDi22 D^22 II
Уравнение для коэффициента усиления Кц (25) имеет вид
- = G - 2^н - + gj-
Оптимальное управление (28) определяется формулой
“о —
lt 011|
м021|
IC,
T2k^y*
Подставляя оптимальные управления в уравнение для оценки раз-
ности фазовых координат, получаем
ДУ* +
D..
ДУ* = _1А X (i).
В установившемся режиме коэффициент усиления Кц равен
Подставляя установившееся значение в уравнение для оценки раз-
ности координат модели и системы, получаем
При G = Ifi= Н2= 1 это уравнение принимает вид
ДУ* + ^2 + у2+22Д ДУ* = х (f).
298
ГЛ. 7. ИЗМЕРЕНИЕ
Уравнение модели после подстановки в нее оптимальных уп-
равлений принимает вид
(К., 22 (t} \
Ум = - ВД' + z w -1 у* + -дМ ДУ*.
'1 А '
Подставляя установившееся значение коэффициента Кц, получаем
ду*.
При С = Я1= Н2= 1 уравнение модели принимает вид
= - иX + W + № - V^ + W] ДУ:
§ 7ЛЗ. Измерение показателя качества
Измерение показателей качества может быть произве-
дено только косвенно, путем вычисления с использова-
нием зависимости от параметров. Эта зависимость опре-
деляется моделью объекта контроля. Поставим задачу
Определения алгоритма вычисления оптимальной оценки
показателя качества по известной функциональной зави-
симости от параметров (модели объекта контроля) и оп-
тимальных -оценок параметров. Если критерием оптималь-
ности оценки показателя качества является минимум
среднего квадрата ошибки, то оптимальная оценка есть
апостериорное математическое ожидание
И7* = ю/* (ц? | х) dw, (1)
—ОО
где х—вектор наблюдаемых сигналов.
Показатель качества есть функция параметров систе-
мы. Поэтому вместо выражения (1) можно записать
ОО
W* = j w (и) /* (и | х) du, (2)
— оо
где и — вектор параметров системы, /* (и | х) — апостери-
орная плотность вероятности параметров, а интеграл в
(2) понимается как Z-кратный по всем параметрам.
Для дальнейших вычислений примем зависимость
показателя качества от параметров в форме (5.3.2),
§ 7.13. ИЗМЕРЕНИЕ показателя качества
298
(5.3.3), (5.3.5)
W = W1(V1)W2(V2), (3)
W1 (У1) = II k (Vi). W2 (У2) = Wo + B'V2 +V'2 CV2,
i==i
(4)
где V = U — m.
Принимая, что параметры первой и второй групп
независимы между собой, подставляя значение показателя
качества (3) в формулу (1) и производя вычисления,
получаем
ж* = wl (5)
где d
W\ = П f /1(р^/*(р{|ж)^,
1=1 J
(6)
w;= J [W0^B'v2 + v'2Cv2]^(v2\x)dv2.
Вычислим оптимальную оценку первого сомножителя
Wp В формуле (6) /.(н,) есть функции, равные едини-
це, если параметры находятся в поле допуска, и нулю,
если параметры выходят за поле допуска. Поэтому при
независимых параметрах интегралы в (6) есть произведе-
ние апостериорных вероятностей попадания параметров
в поле допуска
d
Wl = II р* (х), (7)
1=1
где
д(?)
21 г
Р|(®) = J f*(Vi]x)dVi. (8)
При высокой точности измерения апостериорная плот-
ность вероятности параметров очень близка к нормаль-
ному закону с математическими ожиданиями V*. и дис-
персиями D*
j* (yi | ж) =
1
exp
2Di
(9)
300
ГЛ. 7. ИЗМЕРЕНИЕ
Подставляя это выражение в (6) и вычисляя интеграл,
получаем оптимальную оценку первого сомножителя
= ф(д^-y;)-o(A<v-y.) - (ю)
где введены относительные допуски и относительные
оценки параметров
Формула (10) определяет зависимость оптимальной оцен-
ки первого сомножителя показателя качества от опти-
мальных оценок параметров первой группы. Величины
Vi есть измеренные оценки параметров первой группы.
При большой точности измерения оценок параметров,
когда Д(1|2)^4, функции Pi (Vi) стремятся к характери-
стическим функциям полей допусков, т. е.
1, ИеЛ;,
’ г °
о,
(12)
Следовательно, если параметры первой группы находятся
внутри полей допусков, величина W i равна единице.
Если хотя бы один параметр первой группы выходит из
своего поля допуска, то эта величина равна нулю. Учи-
тывая, что допуски на параметры первой группы значи-
тельно превосходят фактическое рассеивание параметров,
можно сделать вывод, что для получения оптимальной
оценки величины Wi практически достаточно измерить
параметры и сравнить их с допусками. Далее результат
сравнения поступает на схему совпадения. Если все па-
раметры первой группы находятся внутри полей допус-
ков, то = 1 и, следовательно, показатель качества
равен величине второго сомножителя W* = ТУ*. Если
хотя бы один параметр первой группы выходит из поля
допуска, то W’ = 0 и, следовательно, показатель качества
также равен нулю.
Вычисление оптимальной оценки величины ТУ2 по
формуле (6) дает следующий результат:
Wl^Wo + B'V^ + V^'CV^ + tvCK*, (13)
§ 7.14. ТОЧНОСТЬ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ КАЧЕСТВА 301
где V* — вектор оптимальных по критерию минимума
среднего квадрата ошибки оценок параметров второй
группы, К* — апостериорная матрица корреляционных
моментов параметров, tr СК*-—след произведения мат-
риц СК*.
Общая формула для оптимальной по критерию мини-
мума среднего квадрата ошибки оценки показателя
качества имеет вид
d
ТУ* = П Pi (7г*) [ Т70 + B'V* + V*'CV* + tr СК*] , (14)
i=i
где апостериорные вероятности pi (7$) вычисляются по
формуле (10).
§ 7.14. Точность измерения показателя качества
Полученное в предыдущем параграфе выражение для
оптимальной оценки показателя качества определяет
случайную величину, разброс которой зависит от ошибок
измерения параметров. Точность оценки показателя ка-
чества будем определять апостериорной дисперсией. Для
дальнейшего необходимо выразить дисперсию показателя
качества через апостериорные дисперсии измеряемых
параметров.
Апостериорная дисперсия показателя качества выра-
жается формулой (4.7.29), которая в данном случае
имеет влд
D*w = М [(W - Р7*)2] = М [W2] - М [Р7*2] . (1)
Квадраты априорного и апостериорного значений пока-
зателей качества выражаются через квадраты сомножи-
телей
Р72 = ифУг, W*2 = W*ZW*2. (2)
Учитывая независимость параметров первой и второй
групп, операцию математического ожидания применяем
к каждому сомножителю
М [ТУ2] = М [ТУ?] М [УКЦ] , М [Ж*21 = М |Ж*2] М [УК*2].
(3)
302
ГЛ. 7. ИЗМЕРЕНИЕ
Проведем вычисление математических ожиданий ап-
риорного и апостериорного значений величины Wi.
В соответствии с представлением (5.2.2) априорное ма-
тематическое ожидание равно
d
мИ] = Пм[/?(^)]- (4)
i=l
Функции 1( есть характеристические функции поля до-
пуска, поэтому их квадраты равны также характеристи-
ческим функциям. Математическое ожидание характе-
ристической функции равно вероятности попадания
параметра в поле допуска. Следовательно, из (4) по-
лучаем
№
d .t d
м[Н]=П I = . (5)
i=l (!) i=l
а i
где f(Vi) — априорная плотность вероятности i-ro пара-
метра, pt — априорная вероятность попадания i-ro пара-
' метра первой группы в попе допуска.
Апостериорное значение величины Wi определяется
формулами (7.13.7), (7.13.10). Поэтому математическое
ожидание этой величины вычисляется по формуле
d d со
M[w*2] = п М [Х'2| = П j Р- «) /(*4)dvb
—оо
где / (у{)—плотность вероятности оценки i-ro парамет-
ра, а величина р* равна:
р?2 = [ф(Аф_у;)-ф(Л(Р-7Г)]2. (7)
Вычислим математические ожидания априорной и
апостериорной величины второго сомножителя показателя
качества. Используя аппроксимирующую формулу (5.2.5),
имеем
Wl = Wfi -j- B'VV'B + V'CVV'CV -j- 2WaB'V +
+ 2W0V'CV + 2B'VV'CV. (8)
Применяя операцию математического ожидания, учиты-
вая нормальный закон распределения параметров, в со-
§ 7.14. ТОЧНОСТЬ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ КАЧЕСТВА 303
ответствии с которым
М [B'VV'B] = В'КВ, М [V] = О, М [VV'CV] = О,
М [V'CVV'CV] = (tr СК)2 + 2 tr (СК)2, (9)
получаем
М [W%]= W$ + В'КВ + (tr СК)2 4- 2 tr (СК)2 4- 2W0 tr СК.
(Ю)
В данном выражении К— матрица априорных корреля-
ционных моментов, составляющих вектора параметров
второй группы, tr СК—след произведения матриц СК.
Апостериорное значение величины W2 определяется
формулой (7.13.13). Возводя это выражение в квадрат,
получаем
ТУ*2 = Wo 4- B'V*V*B 4- v*'cv*v*'cv* 4-
4- (tr СК*)2 4- 2ТУ0В'У* + 2 W0V*'CV* 4- 2ТУ0 tr СК* 4-
4- 2B’V*V*CV* 4- 2B'V* tr CK* 4- 2V*'CV* tr CK*. (11)
При вычислении операции математического ожидания
необходимо учитывать, чтоМ [У*] = 0, М [У*У* СУ*]== 0.
Вводя обозначение К = М [У*У* ] и применяя операцию
математического ожидания к (11), получаем
м рУ*2] = W% 4- В'КВ 4- (tr СК)2 4- 2 tr (СК)2 4-
4- (tr СК*)2 4- 2 ТУ0 tr СК 4- 2ТУ0 tr СК* 4- 2 tr СК tr СК*.
(12)
Матрица корреляционных моментов оценок . парамет-
ров К связана с априорной К и апостериорной К*
матрицами корреляционных моментов формулой
К = К-К*. (13)
Подставляя это соотношение в формулу (12) и выполняя
преобразования, представим средний квадрат оценки
показателя качества в виде
м [ТУ*2] = Wo 4- В'КВ - В'К*В 4- (tr СК)2 +2Wo tr СК+
W2tx(CK)2-^vCKCK*+ 2U(CK*)2. (14)
304
ГЛ. 7. ИЗМЕРЕНИЕ
Сравнивая это выражение с формулой (10), можно за-
писать средний квадрат оценки величины W2 через
средний квадрат априорного значения
М [и^2] = ДО [jy|] _ В'К*В - 4 tr СКСК* + 2 tr (<Ж*)2.
(15)
Формулы (1), (3), (5), (6), (7), (10), (15) опреде-
ляют алгоритм вычисления апостериорной дисперсии
показателя качества.
Рассмотрим частные случаи. Если контроль осуще-
ствляется только путем сравнения оценок параметров с
допусками, то следует считать, что все параметры отно-
сятся к первой группе. Апостериорная - дисперсия
показателя качества в этом случае вычисляется по фор-
муле
d <г
(16)
При абсолютно точном измерении параметров имеет
место равенство
М[р?2]=рг, (17)
поэтому апостериорная дисперсия, вычисляемая по фор-
муле (16), равна нулю.
Если все контролируемые параметры относятся ко
второй группе, то апостериорная дисперсия показателя
качества равна
D'w = М И - М [ТУ*2] . (18)
Подставляя значение второго слагаемого из формулы
(15), получаем 1
Dw = В'К*В + 4 tr СКСК* - 2 tr (СК*)2. (19)
В частном случае, когда параметры и их оценки некор-
релированы, матрицы корреляционных моментов превра-
щаются в диагональные с элементами в виде дисперсий.
При этом формула (19) упрощается и принимает вид
D*w = В2 В* + iD'&D* - 2 D*C2D*, (20)
§ 7.14. ТОЧНОСТЬ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ КАЧЕСТВА 305
где D—вектор априорных дисперсий параметров, D* —
вектор апостериорных значений параметров, С2 — матри-
ца коэффициентов с квадратами величин составляющих.
В скалярной форме выражение (20) имеет вид
Dw = 2 B^D* + 42 ClfD.D- - 2 2 C^D*. (21)
i=l i,j=l ij=l
При абсолютной точности измерения параметров их
апостериорные дисперсии равны нулю, D* = 0, поэтому
апостериорная дисперсия показателя качества также
равна нулю.
20 л. Г. Евланов
ГЛАВА 8
ПРОГНОЗИРОВАНИЕ
§ 8.1. Постановка задачи
Функционирование систем контроля позволяет не
только определять годность объектов выполнять свое
назначение, но и систематически получать информацию
об изменении показателей качества и параметров во вре-
мени при различных условиях эксплуатации. Накопление
этой информации позволяет решать практические задачи
пр прогнозированию технического состояния отдельных
объектов и их партий, определению степени совершенства
конструкции и технологии производства техники, оценке
влияния условий эксплуатации на свойства объекта
и т. п.
Эффективное использование информации от систем
контроля требует создания информационной системы, ко-
торая должна обеспечивать сбор, обработку, хранение и
распределение информации. Информационная система
является составной частью системы управления процес-
сами производства и эксплуатации техники.
Разработка информационной системы включает опре-
деление потоков информации от источников до потреби-
телей, каналов передачи информации и пунктов обработ-
ки, реализующих потоки информации. Формирование
потоков информации в свою очередь основывается на оп-
ределении возможных решений потребителей и необхо-
димой для них формой и содержанием информации. Зная
исходную форму и содержание информации, получаемой
от систем контроля и требуемой для потребителей, можно
определить алгоритмы обработки. Потоки и каналы ин-
формации характеризуются объемом, скоростью прохож-
дения, пропускной способностью и достоверностью.
Пункты обработки характеризуются алгоритмами, точ-
ностью и достоверностью результатов обработки.
Создание информационной системы имеет смысл, если
получаемая от нее информация обеспечивает совершен-
§ 8.1. ПОСТАНОВКА ЗАДАЧИ
307
ствование процессов производства и эксплуатации и оку-
паются затраты на ее разработку и эксплуатацию.
Сбор, обработка и доставка информации потребите-
лям требует определенных затрат времени. Кроме того,
принятие решений на основе полученной информации и
их реализация также связаны с потерей времени. Все это
может привести к запаздыванию и, следовательно, к по-
тере эффективности принимаемых решений. Для умень-
шения временного запаздывания можно в определенной
степени повысить скорость прохождения информации в
системе. Однако более радикальным является прогнози-
рование информации на основе обработки наблюдаемых
данных.
Изложенное показывает, что прогнозирование техни-
ческого состояния объектов контроля и другой информа-
ции, получаемой в результате обработки данных от систем
контроля, компенсирует запаздывание информации и-
тем самым повышает эффективность управления процес-
сами производства и эксплуатации. В частности, прогно-
зирование состояния объектов контроля позволяет ра-
ционально спланировать проведение регламентных работ,
ремонт и замену техники, уточнить объемы и сроки конт-
роля объектов, спланировать применение техники в раз-
личных условиях работы и т. п. Важное значение про-
гнозирования в процессе контроля привело к выделению
его в особый вид контроля, который получил название
прогнозирующий контроль [70, 98]. За последние годы
резко повысилась интенсивность научных исследований
в области прогнозирующего контроля [70, 98, 21, 52].
Следует отметить, что прогнозирующий контроль от-
личается от обычного текущего контроля работоспособ-
ности только тем, что принятие решений о годности
производится для будущего момента времени. По резуль-
татам наблюдения сигналов на определенном промежутке
времени производится экстраполяция значений парамет-
ров на будущий момент времени и соответственно вы-
числяется будущее значение показателя качества. Алго-
ритмы принятия решений при прогнозирующем контроле
те же самые, что и для текущего контроля. Прогнозиру-
ющий контроль переходит в текущий контроль при ну-
левом времени экстраполяции. Это обстоятельство
позволяет рассматривать прогнозирующий контроль как
20*
308
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
более общий, частным случаем которого является теку-
щий контроль работоспособности.
На основании изложенного постановка задачи построе-
ния прогнозирующего контроля сводится к стандартной
задаче экстраполяции векторного случайного процесса по
результатам его наблюдения на некотором интервале
времени [89]. В качестве векторного случайного процесса
можно рассматривать совокупность показателей качества,
если принятие решения о годности объекта производится
путем их сравнения с допусками, или множество пара-
метров, если осуществляется контроль по параметрам.
Для определенности в дальнейшем будем рассматривать
последний случай. Случайность изменения вектора пара-
метров, естественно, приводит к решению задачи прогно-
зирования вероятностными методами. Применение так
называемых аналитических методов прогнозирования
[84], когда изменение параметров рассматривается как
детерминированный процесс, является грубым приближе-
нием к действительности и обычно дает удовлетворитель-
ные результаты при небольших интервалах экстрапо-
ляции.
При формальной постановке задачи прогнозирования
следует рассматривать два случая. В первом из них, на-
зываемым интегральным, необходимо определить оператор
прогнозирования Gi из условия экстремума выбранного
критерия оптимальности, применение которого ко всему
множеству наблюдаемых сигналов {X (^)) (2 = 1, и)
дает значение оценки вектора параметров в будущий
момент времени tn -f- т:
U*(tn^T) = Gl{X(ti)} (i = I^h (1)
где т — время прогнозирования, (J* (tn 4- т) — оценка
вектора параметров в будущий момент времени.
Во втором случае, называемом рекуррентным, необхо-
димо определить оператор прогнозирования G% из условия
экстремума критерия оптимальности, применение которо-
го осуществляется только к последнему наблюдению
X (tn) и оценке вектора параметров, полученной на
предшествующем шаге 1п-Г.
U* (tn + г) = G2 {X (t^ U* 4- т)}.
(2)
§ 8.1. ПОСТАНОВКА ЗАДАЧИ
309
Рекуррентный оператор рационально применять, если
прогнозирование осуществляется на скользящем интер-
вале времени т, т. е. после каждого последующего на-
блюдения производится прогноз на время т. Эта рацио-
нальность заключается в том, что необходимо для расче-
тов хранить в памяти только значение вектора
U* (in-i + т) и последнего наблюдения Х(£п). Если век-
тор параметров имеет размерность к, то это значит, что
при рекуррентном прогнозировании необходимо запоми-
нать 2к чисел. При интегральном алгоритме прогнозиро-
вания необходимо иметь в памяти кп чисел, поскольку
при обработке используются все предшествующие п
наблюдений /с-мериых векторов. Интегральный способ
прогнозирования целесообразно применять для однократ-
ного осуществления прогноза. Если производится прогно-
зирование состояния индивидуальных объектов контроля,
то в системе контроля более рационально применять
рекуррентный способ, поскольку он требует меньшего
объема памяти ЭВМ. Прогнозирование в информационной
системе может осуществляться и интегральным способом,
так как проигрыш в объеме памяти в этом случае не
очень существен в силу использования более мощных
ЭВМ, чем в системах контроля.
В данной главе, определяются операторы прогнозиро-
вания 64 и Сг, оптимальные по критерию минимума
среднего квадрата ошибки
£)* = min М {[17* (in + г) —
G
-U(tn + r)Y[U*(tn + T;)-U(tn + ^]}l (3)
где М — оператор математического ожидания, U (tn +
+ т)— истинное значение вектора параметров в прогно-
зируемый момент времени. Минимизация осуществляется
путем выбора оператора Gi или Gz-
Для решения поставленной задачи прогнозирования
необходима априорная информация в виде вероятностных
характеристик вектора параметров, рассматриваемого
как случайная функция времени. Рассмотрение модели
изменения параметров во времени и определение веро-
ятностных характеристик производится в следующем
параграфе.
310
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
§ 8.2. Модели изменения параметров
При хранении и эксплуатации устройств параметры
изменяются во времени. Процесс изменения параметров
содержит медленную составляющую — дрейф параметров
и скачкообразные отклонения. Дрейф параметров обус-
ловлен старением. Под этим термином понимают совокуп-
ность физико-химических процессов коррозии, диффузии
вещества, усталостной деформации, механического изно-
са и т. п., приводящих к необратимым изменениям
свойств элементов и конструкции устройства. Скачкооб-
разные отклонения параметров вызываются различного
рода поломками, обрывами, замыканиями, заклинивания-
ми и т. п., которые в свою очередь обусловлены конст-
руктивными и технологическими дефектами устройства
и эксплуатационными перегрузками. Дрейф параметров
Может способствовать возникновении) скачков парамет-
ров, например, накопление усталостных деформаций в
конструкции уменьшает пределы ее прочности. Поэтому
скачкообразные изменения параметров в определенной
мере связаны с дрейфом параметров [30].
Многочисленность факторов, вызывающих изменение
параметров устройств, заставляет рассматривать это из-
менение как случайный процесс. Экспериментальные
данные показывают, что дрейф параметров является
нестационарным случайным процессом. Характерной' осо-
бенностью этого процесса является большое время кор-
реляции, превосходящее время ресурса того или иного
элемента или устройства в целом. На рис. 8.2.1—8.2.3
показаны реализации случайного дрейфа трех парамет-
ров. По осям абсцисс отложено время в месяцах. По осям
ординат — значения параметров. Аналогичные примеры
реализаций процесса дрейфа параметров приводятся и
в других источниках [21, 98]. Непосредственно из ха-
рактера кривых следует, что дрейф параметров описыва-
ется плавными функциями и время корреляции изменения
параметров меньше интервала наблюдения реализаций.
Подходящей математической моделью дрейфа пара-
метров является полиномиальная зависимость от времени
со случайными величинами
Л+1
U, = 2 (1)
h=i
§ 8.2,. МОДЕЛИ ИЗМЕНЕНИЯ ПАРАМЕТРОВ
311
Рис. 8.2.1.
312
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
sW ‘ 77
Рис. 8.2.2.
§ 8.2. МОДЕЛИ ИЗМЕНЕНИЯ ПАРАМЕТРОВ
313
и3,мка.
Рис. 8.2.3.
314
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
где i — номер параметра, h -j- 1 — порядок полинома,
Uih — случайные коэффициенты, характеризующие: Un —
начальное значение, Ui2— скорость изменения, U& — ус-
корение и т. д. Как правило, достаточно ограничиться
вторым порядком полинома. Оценка влияния члена треть-
его порядка показывает, что, например, для резисторов,
конденсаторов, транзисторов на всем интервале наблю-
дения выполняется условие 10~3- U^t2 Unt3 < 10~2-Vat2
[98], что обосновывает возможность пренебрежения
третьим порядком полинома. Опуская номер параметра,
можно записать модельную зависимость параметра от
времени в виде
U = U, + U2t + Z73i2. (2)
Для решения задач прогнозирования при небольшом
времени прогноза можно упростить зависимость (2),
сохрани® только линейный член и представить ее в виде
U=Ui + U2t. (3)
Полное описание моделей дрейфа параметров вклю-
чает, кроме зависимости (2) или (1), совместный закон
распределения вероятности коэффициентов полинома —
случайных величин Uk. Отдельные исследования, выпол-
ненные в течение ряда лет, а также обстоятельный ста-
тистический анализ закона распределения вероятности
параметров, приведенный в [98], дают обоснованный вы-
вод о том, что совместный закон распределения вероят-
ности коэффициентов полинома аппроксимируется нор-
мальным законом с уровнем значимости 0,05. Анализ
корреляционных связей между коэффициентами полинома
показывает, что связь между первым и вторым и первым
и третьим коэффициентами слабая, так что коэффициенты
корреляции между этими величинами не превышают по
абсолютной величине 0,5. Статистическая связь между
вторым и третьим коэффициентом сильная: коэффициент
корреляции между этими величинами отрицательный и
по модулю лежит в пределах 0,8 — 1,0. Это означает, что
при положительной скорости дрейфа его ускорение отри-
цательно и наоборот. Данная зависимость отражает воз-
действие некоторых стабилизирующих факторов, препят-
ствующих интенсивному развитию процесса дрейфа.
§8.2. МОДЕЛИ ИЗМЕНЕНИЯ ПАРАМЕТРОВ
315
Таким образом, плотность вероятности коэффициентов
полинома представляется в виде
1 (“}=т/йтex₽ М _ га)' к"‘<в _ Ч (4)
где вектор математических ожиданий и матрица корре-
ляционных моментов имеют вид
т„ к К„ к
1 11 12 13
т = 1П2 , К = #21 #22 #23 (5)
т к , К К
3 31 32 33
В соответствии с замечанием о слабой связи первого
коэффициента со вторым и третьим коэффициентами
можно положить в матрице корреляционных моментов
#12 = Кп = К13 = #31 = 0.
Скачкообразные изменения параметров в большинстве
случаев приводят к отказу устройства. Моделью, описы-
вающей скачки параметров, может служить случайный
процесс, в котором появление скачков происходит в слу-
чайные моменты времени, а значение параметров после
скачка является случайной величиной. Для полного по-
строения этой модели необходимо знать законы распре-
деления вероятности моментов появления скачков и
значений параметров. В силу замечания о связи скачков
параметров с их дрейфом, высказанного в начале этого
параграфа, параметры законов распределения вероятности
скачков должны зависеть от вероятностных характеристик
дрейфа параметров. Эти зависимости в настоящее время
не исследованы, поэтому достаточно полно и точно отра-
зить в моделях изменения параметров связь между дрей-
фом и скачками параметров не представляется возмож-
ным. Обычно ограничиваются следующей упрощенной
моделью скачков. Закон распределения вероятности мо-
ментов времени появления скачков принимается пуассо-
новским, а значение параметра после скачка считается
известным. Тогда математическое ожидание некоторого
параметра можно записать в виде
U(t) = е~м (U, + U2t + U3tz) + (1 - е~м) а, (6)
где е м — вероятность того, что скачка за время t не бу-
дет, (1—e"”) — вероятность хотя бы одного скачка за
31В
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
время t, а — значение параметра после скачка, полином
в круглой скобке есть значение параметра до скачка.
Рассмотренные модели описывают изменение пара-
метров, которое фактически не может быть наблюдаемо в
чистом виде. Реальное измерение параметров всегда свя-
зано с тем, что вместе с истинным значением наблюда-
ются помехи и имеют место ошибки измерения. Поэтому
модель наблюдаемого значения параметра должна отра-
жать этот факт. Наиболее часто встречается аддитивная
смесь истинного значения и ошибки наблюдения. В ре-
зультате наблюдаемое значение параметра представляется
в виде
X(t) =U(t)N(t), (7)
где N(t) —ошибка наблюдения, Z7(i) —истинное значе-
ние параметра, определяемое зависимостью (1) или в
частных случаях формулами (2) или (3).
§ 8.3. Прогнозирование параметров
Ползшим оптимальный по критерию минимума сред-
него квадрата ошибки алгоритм прогнозирования пара-
метров для следующих условий. В дискретные моменты
времени tf (i = 1, п) наблюдается сигнал
ВД = СЛ + U& +Uztl + Nfr). '(!)’
Случайные коэффициенты полинома имеют нормальный
закон распределения вероятности (8.2.4), (8.2.5). Случай-
ные ошибки наблюдения 2V(4<) независимы в различные
моменты времени, имеют нормальный закон распределе-
ния вероятности, нулевые математические ожидания и
одинаковую дисперсию DN\
, ( w?)
/N(A^)=ACXpL q. (2)
у 2nDN I ^un]
При рассмотренных условиях апостериорное распре-
деление вероятности параметра при любом значении вре-
мени является нормальным, и наилучшей оценкой пара-
метра по критерию минимума среднего квадрата ошибки
является апостериорное математическое ожидание (см.
§ 4.7). Поскольку параметр линейно зависит от коэффи-
§ 8.3. ПРОГНОЗИРОВАНИЕ ПАРАМЕТРОВ
317
циентов полинома, то апостериорное математическое
ожидание параметра есть линейная форма апостериорных
математических ожиданий коэффициентов
Ut = U\ + U*2t + U*3tz, (3)
где звездочка у величин означает, что это — оптимальные
по критерию минимума среднего квадрата ошибки оценки
коэффициентов. Зависимость (3) справедлива для любого
момента времени, в том числе и для прогнозирующего
момента t + т. Поэтому будущая оценка параметра опре-
деляется формулой
Ut+x = U14- («+ т) + П3* (t + т)2. (4)
Точность прогнозирования параметра определяется
апостериорной дисперсией (дисперсией ошибки прогно-
зирования)
D*t+x = D\ + D2 (t + т)2 +-D*3 (t + t)4 + 2K*l2 (« + t) +
+ 2Z^3(f + T)2 + 2Z23(i + T)3, (5)
где (i =1,3) — апостериорные дисперсии случайных
коэффициентов полинома, Кц (I, ] = 1, 3), Кц = Кц —
апостериорные корреляционные моменты коэффициентов
полинома.
Из формулы (4) следует, что для прогнозирования
параметров необходимо иметь алгоритм вычисления оце-
нок коэффициентов полинома по наблюдаемым данным.
Получим этот алгоритм. Представим совокупность наблю-
даемых данных {Х(7,)} (i = 1, п) в виде вектора
х = SU + N, (6)
где V = || U-i U2 UB || — вектор-строка коэффициентов
полинома, а векторы X, N и матрица S равны
318
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
1 ti ti о о ... О
1 t2 tl 0 0 ... О
(7)
1 tn tn о О ... О
Для рассмотренных выше условий, алгоритм получе-
ния оптимальной оценки вектора коэффициентов поли-
нома имеет вид (см. § 4.10)
U* = (КС + I)-1 т + (КС + I)-1 KQ, (8)
где т, К — вектор математического ожидания и матрица
корреляционных моментов (8.2.5), I — единичная мат-
рица, а матрица С и вектор Q равны
С = S'K^S, Q = S'Kn1X. (9)
В этих формулах К^1— обратная матрица корреляцион-
ных моментов ошибок наблюдения. На основании сде-
ланного допущения о независимости ошибок наблюдения
между собой в различные моменты времени и одинаковой
дисперсии матрица корреляционных моментов ошибок
равна Kn = D^I, где I — единичная матрица. Следова-
тельно, К^1 — IlC>N и формулы (9) принимают вид
С = Q=~S'X. (10)
UN
Используя формулы (8.2.5), (10), вычислим матрицу
Н = КС -|- I в (8). В результате получаем
Я =
1 + тц
V21
V31
V12
1 + V22
V32
(11)
где отношения сигнал — шум равны
(п п \
Огп 4- 2 h. 4- 2 t?i
71=1 /1=1 J
Via - -g- 2 4 + ^13 2 $ + 2 $
N \ A=1 fe=i • fc=l
§ 8.3. ПРОГНОЗИРОВАНИЕ ПАРАМЕТРОВ
319
(12)
Вычисляя обратную матрицу Н-1 из уравнения Н~Ч1 = I,
получаем следующие значения компонент этой мат-
рицы:
^11 = | | [ ^23^32 4” (1 4" ^22) (1 4- ^Зз)]>
^12 = | jfj" I— V12 (1 4“ ^33) 4- 'V32'V13],
^Гз1 = -[4q-[ — v12v23 + v13 (1 4- v22)],
= ТйТ[ “ V21 + Чзз-)+ V31V3s]’
^22 — j V13V31 4- (1 4- vll) (1 4“ v3s)L (13)
^23 = j j IV21V13 V23 (1 4" 'Vll)],
^31 = j д j' [ V21V32 V31 (1 4" V22)],
320
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
^32 [V31V12 v32 (1 +'V11)L
^зз1 = -j-gj- [(1 + VU) (1 + V22) — V12Val].
Модуль матрицы H равен
| Н | = (1 + vu) (1 + vaa) (1 + v33) + v12v23v31 + v13v21v32 —
— ^i3v31 (1 + v22) — v32v2s (1 + vu) — v21v12 (1 + v33). (14)
Умножая матрицу Я-1 = (КС + I)-1 иа вектор ап-
риорных математических ожиданий коэффициентов
полинома, получаем первый член в формуле (8)
F = Н~1т =
+ ^2т2 + ft131?n3
h21lml+ h22m2 + h23lm3
fe3ilmi + 7l32lm2 + ft33lm3
(15)
(17)
Множитель при векторе Q во втором члене формулы
(8) есть матрица апостериорных корреляционных
моментов
Я* = (КС + Г)~1К. (16)
Выполняя перемножение матрицы Я-1 на матрицу К,
получаем матрицу апостериорных корреляционных
моментов
<1 K*i2
Х* = К’21 К*22 Kl, ,
*31 *32 *3*3
где
Кц = hiiKn + + h^K^i,
Ki2 — hiiKu hxz K22 Ч- K$2i
Я13 — hliKi.3 ^12^23 + ^13^33,
Я21 — й’г/Яц -Ь А22^Я21 + й.231Яз1,
К22 — h21 Ki2 4“ ^22 K22 + ^1231Кз2,
Я23 = h2\Ki3 ^22^23 4- ^гЗ^ЗЗг
Я31 = Кц hs2K2i + Кзх,
(18)
§ 8.3. ПРОГНОЗИРОВАНИЕ ПАРАМЕТРОВ
321
^32 = hsi1Ki2 + ^32^22 + ^331Кз2,
&зз — + кз21Каз + ^зз^зз-
Значения компонент вектора Q (10) получаем умно-
жением матрицы S' на вектор X,
<?‘-^2Х‘' ^=7^2 ХЛ" <?»=Т^2Х‘!‘'
А=1 А=1 h=l
(19)
Перемножая матрицу К* и вектор Q, получаем вто-
рой член в формуле (8)
K*Q =
К*^ +K*2Q2 +
KliQi+^Q2 + K^Q3
K31Q1 + R32Q2 + K'33Q3
(20)
Это выражение можно записать в виде линейной формы
наблюдаемого сигнала
K*Q = АХ = 2 AihXh, (21)
ь=1
где
з
3=1
Таким образом, оптимальная оценка i-ro коэффициен-
та полинома на основании формул (8), (15), (21) опре-
деляется следующей формулой:
U* =Fi+^ AikXk (i = V). (23)
A=i
Коэффициенты F{ и Aik зависят от числа наблюдений п,
априорных вероятностных характеристик полезного сиг-
нала mt, KSj (i, 7 = 1,3) и дисперсии ошибки наблюде-
ния Dn.
Точность вычисления оценок коэффициентов полинома
по формуле (23) определяется апостериорными диспер-
сиями
D*i=K*ih D*2 = K*Z!a Dl = K*33, (24)
которые вычисляются по формулам (18), (13), (12).
21 л. Г. Евлаиов
322
ГЛ. S. ПРОГНОЗИРОВАНИЕ
Рассмотрим частные случай алгоритма Прогнозирова-
ния;
1. Ошибки измерения и априорная информация о зна-
чениях коэффициентов полинома отсутствуют (pN = О,
тга< == Кц = 0; г, у = 1, 3). Измерение производится Через
одинаковые интервалы времени, так, Что tlL — кТ. В этом
случае потребное число измерений равно трем (га —3).
Меньшее число измерений не дает возможности вычис-
лить коэффициенты, а большее — дает избыточную ин-
формацию, не уточняющую значения коэффициентов.______
В рассмотренном случае формула (23) при i = 1, 3
принимает вид
//j = ЗХ{ - ЗХ2 + Х3,
/72' = -4Х1 + 4Х2-4-хз,.
Us = Xi - 2Х2 + Х3.
Данные соотношения соответствуют аналитическому про-
гнозированию [84].
2. Изменение параметра во времени аппроксимиру-
ется линейной зависимостью (тгаз = K3j = Ki3 .=. 0). Из-
мерение производится через равные интервалы времени
(ifft ==A:7’). Коэффициенты линейной зависимости некор-
релированы между собой (Л42 — 7<2i = 0). В этом
частном случае элементы матрицы Н в соответствии с
формулами (12) принимают вид
D,n
v-и = -д—
D.T
V12 =-дГ-
(25)
d9t
V21 = -д—
dn Ъ=1
2 к’ V22 =
k=l
Р2Г2 ”
fe=l
(26)
Элементы обратной матрицы
ламп (13), равны
Йц =
Я-1, определяемые
форму-
z,-i —
"12 —
2,-1 _ ~V21
^21 - |.Я| »'
1 + V11
Л.221 —
(27)
1 V22
IЯ1
V12
|Я|’
| Я | = (1 -f- Vh) (1 + V22) — vi2v2i.
§ 8.3. ПРОГНОЗИРОВАНИЕ ПАРАМЕТРОВ
323
Компоненты вектора F (15) равны
Pi = TFF [ + ~ 'V12Zn'21’
^2 = "[яГ ( + “'’11) нг2 —^21т11-
(28)
По формулам (18)
ционные моменты
П* _ 1 + v22 Г)
Di - ~nrrDi'
вычисляем апостериорные
корреля-
К12----- -^21 =
Д*_1 + Н1 П
- | jf| L>2-
Составляющие вектора K*Q=AX равны
2 K1iQi (Х) = | н \D2n Di
2 л. Г)
3=1 Й=1
71 v. D Т п
VI у М2
Zt ll \H\Dn
k=.l
h=i
(l + W
\h\dn
V21
|яТ
Du
(29)
л»
(30)
п
Суммируя компоненты векторов F и K*Q (28), (30),
получаем формулы для оптимальных оценок коэффици-
ентов линейной зависимости
гт* --- (! V22) ( I 'Hl v \
Ui----ПЛ~ 1 + ~2л “
\ 11=1 )
*^12 ( w—ч \
- wP+jowS ’ <31>
\ 11=1 }
i¥rh+^i4+
\ 11=1. )
(Ц-чч,) ( 2v9. Л, \
+ ; /й2 + , I1,, У kXk .
I ЯI I П («+ 1) ‘ 11 I
' ' ’ \ к=1 J
Точность вычисления оценок коэффициентов (31)
определяется апостериорными дисперсиями D^, D% пр
формулам (29), ’ • ’ ' ’ ’’
324
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
(32)
/i=i
При большом объеме выборки (большое п) формулы
(3'1) упрощаются и принимают вид
’ ' /1=1
k—1 h—i
Апостериорные дисперсии при большом п вычисляются
по следующим формулам:
* 4Dn *
£•1 = —, D2=~^. (оЗ)
Прогнозируемое на время т значение параметра при
линейной аппроксимации вычисляется по формуле
+ = + + (34)
где • коэффициенты Ui, определяются формула-
ми (31).
Апостериорная дисперсия параметра при линейной
аппроксимации и независимости коэффициентов опреде-
ляется формулой
D* = D*i+D*2(t + tf. (35)
Общая последовательность применения описанного
алгоритма следующая.
1. Вычисляются величины Уц (i, j — 1, 3) по форму-
лам (12), в которых используются априорные данные DN,
K,j и ift (i, 7 = 1, 3, к — 1, ri).
2. Вычисляются величины /iij1 (i, / = 1, 3) по форму-
лам (13).
3. Вычисляется вектор F по соотношению (15).
4. Вычисляются компоненты матрицы апостериорных
Корреляционных моментов по формулам (18).
5. Вычисляются коэффициенты Aih (г = 1, 3, к .=. 1, га)
по формуле (22).
6. вычисляются оптимальные оценки коэффициентов
полинома Ui (i= 1, 3.) по формуле (23),
S 8.4. РЕКУРРЕНТНОЕ ПРОГНОЗИРОВАНИЕ ПАРАМЕТРОВ 325
7. Определяется прогнозирующее значение оценки
параметра по формуле (4).
8. Определяется точность прогнозирования по фор-
муле (5).
Реализация данного алгоритма практически осуще-
ствима только с помощью вычислительной машины.
§ 8.4. Рекуррентное прогнозирование параметров
Как и в предыдущем параграфе, рассматривается за-
дача прогнозирования параметров, изменение во времени
которых описывается полиномом второго порядка со слу-
чайными коэффициентами. В рекуррентном алгоритме
вычисление оценок коэффициентов полинома производит-
ся на каждом шаге измерения наблюдаемого сигнала; при
этом в качестве априорной информации используются
оценки коэффициентов, полученные на предыдущем ша-
ге, а в качестве апостериорной информации используется
последнее измерение наблюдаемого сигнала. Информация
о всех предшествующих измерениях компактно представ-
ляется в оценках коэффициентов полинома, поэтому на
каждом шаге измерения необходимо запоминать для пос-
ледующего вычисления только полученные на последнем
шаге оценки коэффициентов. Таким образом, реализация
рекуррентного алгоритма требует значительно меньшего
объема памяти вычислительной машины, чем для реали-
зации алгоритма, описанного в предыдущем параграфе.
Получим рекуррентный алгоритм оценки коэффици-
ентов полинома при следующих предположениях:
1. Критерием оптимальности является минимум сред-
него квадрата ошибки.
2. В дискретные моменты времени наблюдается адди-
тивная смесь полезного сигнала U'S и ошибки измере-
ния, например, для п-го момента времени
Х(п) = U'S(n) + N(n), (1)
где штрих означает операцию транспонирования, а век-
торы U и 8 (п) равны
'и1
у2
>а
8(п)='
(2)
326
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
3. Коэффициенты полинома при нулевом моменте
времени распределены нормально с вектором математи-
ческого ожидания т = (т^, т2, та) и матрицей корре-
ляционных моментов ^0 = 11^(0)11^7 = 1,3).
4. Ошибки измерения в различные моменты времени
независимы между собой и с коэффициентами полинома,
имеют один и тот же нормальный закон распределения
вероятности с нулевым математическим ожиданием и
одинаковой для всех моментов времени дисперсией D,v.
Получим вначале рекуррентное соотношение для ус-
ловных плотностей вероятности вектора коэффициентов
полинома' при фиксированных значениях векторов Хп и
Хп+1 наблюдаемого сигнала. Вектор Хп имеет составля-
ющие в виде набора измерений сигнала: Zn=(X(0),
У(1), ..Х(п)'). Аналогично Уп+1=(Х(0), Х(1), ...
..., Х(?г4-1)). Условную плотность вероятности вектора
коэффициентов при фиксированном значении вектора Хп
наблюдений сигнала можно по формуле Бейеса записать
в виде
где w (хп | и) — условная плотность вероятности вектора
хп наблюдений входного сигнала при фиксированном
значении вектора коэффициентов, 7г (в) — априорная
плотность вероятности вектора коэффициентов для ну-
левого момента времени, ср (жп) — плотность вероятности
наблюдаемого вектора сигнала.
Для п + 1 количества наблюдений условная плотность
вероятности вектора коэффициентов полинома записыва-
ется аналогично (3)
w (аж ., I гг) h (и)
(4)
В соответствии с допущением о независимости оши-
бок измерения условную плотность вероятности вектора
измерений с п + 1 компонентами можно выразить как
произведение условных плотностей вероятности измеряе-
мого в каждый момент времени сигнала
ш (а?п+1| в) =
п+1
== Ц ip (ж (7с) |в) = гр (гвй (в) zp (ж (re1) Jb). (5,)
S 8.4. Рекуррентное прогнозирование параметров 327
Определим из (3) w (а?н | й) и подставим в (5), в резуль-
тате получим
, I - Ч Ч> (Жп) W (« + 1) I И) / (» I Жп)
w (жп+11 и) = (6)
Подставляя ш (хп+1| и.) в (4) И сокращая иа h (и), полу-
чаем. рекуррентное соотношение между условными плот-
ностями вероятности вектора коэффициентов при фикси-
рованном значении п и п + 1 измерений входного сигнала
Ф (х ) Г’
/ (в|«,г+1) = —-^Wz (« ф- 1) | и)/(в| хп). (7)
Ч5 (Хп+1)}
В полученной формуле отношение безусловных плот-
ностей вероятности векторов наблюдений можно опреде-
лить, воспользовавшись условием нормировки
ОО
j 1 (и I ®n+i) du =
ь—СО
оо
ф (х f
= J гг?(ж(га + 1)1»)/(и|с»п)^г = 1. (8)
.— оо
Определяя отсюда отношение плотностей вероятности и
подставляя его в формулу (7), получаем окончательное
рекуррентное соотношение
, / . . (Ж (71 + 1) | И) / (II | а? )
/ («| жп+1) = —------------------. (9)
J w (а (п ф- 1) | и) f (и ] a?n) da
При фиксированном значении вектора коэффициентов
распределение вероятности наблюдаемого сигнала опре-
деляется законом распределения вероятности ошибки,
поскольку в соответствии с (1) X (п) — U'S (п) = N (и).
Используя предположение о нормальном законе распре-
деления вероятности ошибки, представим условную плот-
ность вероятности w(x(n ф- 1) | и) в следующей форме:
+ <10)
Условное распределение вероятности коэффициентов
полинома при фиксированном значении вектора из п иа-
328
Гл. 8. ПРОГНОЗИРОВАНИЕ
блюдений входного сигнала является нормальным. Это
утверждение следует из того, что априорное распределе-
ние вероятности коэффициентов является нормальным и
аддитивная ошибка наблюдения также имеет нормальное
распределение вероятности. Следовательно,
/ (»I »п) = * ехр [— у (и — U*nY Кп1 (и — Un)].
K(2n)3|ffn| I 2 J
(Н)
Перемножая выражения (10), (11) и подставляя по-
лученное произведение в (9), представим условную
плотность вероятности в виде
ехр |1 и'Аи -|- и'.в|
/ (и I ®n+i) = ~-------------------“ч (12)
j ехр |— у и'Ап 4- и'в] du
— 00
где ~ • •
А =. К«1 + = S (п 4- 1) S' (п 4-1), В = K~lUn 4-
+ ^ж(«4-1)5(тг + 1). (13)
Оптимальная по критерию минимума среднего квад-
рата ошибки оценка вектора коэффициентов полинома
есть апостериорное математическое ожидание. Для вы-
числения этого математического ожидания умножим
апостериорную плотность вероятности (12) на вектор
коэффициентов и проинтегрируем по всем трем коэффи-
циентам в бесконечных пределах. В результате получаем
ОО
м J и ехр|—£ и'Ап 4- п'в] du
U*n+i= J uf (и I a?n+1) du = ----------------------.
J exp {— -у и'Au + и'в] du
e—ОО
(14)
Вычисляя интегралы и используя обозначения (13),
получаем следующее рекуррентное соотношение для оп-
тимальной по критерию минимума среднего квадрата
§ 8.5. ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА 329
ошибки оценки вектора коэффициентов полинома
tCl-i = \Кп1 +~-S {n + 1) S' (ц 4- I)]"1 Гк~Ж +
L J L
4-S (и 4-1) я: (н 4-1)]- (15)
Эту формулу можно представить в следующем виде:
Uп-|-1 = Fn_|_i?7n 4- (?п+1ж (п 4" 1)>; (16)
где
Fn+1 = [l4-^^(^4-D-S'(« + l) , (17)
L
Qn+1 = Fn+l^S(n+l). (18)
Матрица S (n 4- 1) S' (n 4- 1) в формулах (15), (17),
(18) имеет вид j
1 fn+l
S (n 4-1) S' (ji 4- 1) = Wi <+i <+1 (19)
4и-|-1 ги-|-1 Zn-|-1
Точность вычисления оценки вектора коэффициентов
полинома на (пф1)-м шаге характеризуется матрицей
корреляционных моментов
Кп+1 = Fn+1Kn. (20)
Как следует из этой формулы, корреляционная матрица
на (t?4"1)-m шаге вычисляется рекуррентным образом
по корреляционной матрице предшествующего п-го шага
и не зависит от наблюдаемого сигнала, поэтому данную
матрицу можно вычислить заранее для любого шага.
Рассмотренная рекуррентная процедура прогнозиро-
вания параметров по существу основана на использова-
нии теории условных марковских процессов [104, 109].
§ 8.5. Прогнозирование показателей качества
Прогнозирование показателей качества дает информа-
цию о степени пригодности объекта выполнять свое
назначение в будущем. На основании этой информации
осуществляется планирование процесса эксплуатации
объекта..
330
ГЛ. 8. ПРОГНОЗИРОВАНИЙ
В зависимости от подучаемой при контроле информа-
ции прогнозирование показателей качества может осущест-
ствляться двумя способами. Если в процессе контроля не-
посредственно вычисляются оценки показателей качества,
то рационально применить первый способ прогнозирования.
Этот способ состоит в том, что показатели качества рас-
сматриваются как функции времени не косвенно через
параметры, а непосредственно. В этом случае зависимость
показателей качества от времени можно представить не-
которой функцией, например, полиномом со случайными
коэффициентами, и по результатам наблюдения оценок
показателей качества вычислять оценки коэффициентов
полинома. После получения оценок коэффициентов по-
линома прогнозирование осуществляется путем увеличе-
ния времени на интервал прогноза. Таким образом, пер-
вый способ прогнозирования совершенно аналогичен
прогнозированию параметров.
Если в процессе контроля показатели качества не
вычисляются, а принятие решения о годности объекта
производится путем сравнения значений параметров с
допусками, то для прогнозирования показателей качества
может быть применен только второй способ. Сущность
этого способа заключается в том, что вначале осуще-
ствляется прогнозирование параметров, а далее по их
прогнозируемым оценкам вычисляются будущие значения
показателей качества.
Сравнение двух способов прогнозирования показыва-
ет, что первый из них является значительно менее тру-
доемким, поскольку не требует прогнозирования всех
параметров, от которых зависят показатели качества
объекта. В связи с этим, как уже отмечалось при рас-
смотрении принципов контроля, вычисление показателей
качества по измеренным значениям параметров в про-
цессе контроля способствует практической реализации
прогнозирования технического состояния объектов конт-
роля.
Сказанное не исключает необходимости прогнози-
рования некоторых важнейших параметров объекта
с целью получения информации об изменении характе-
ристик в зависимости от условий эксплуатации или хра-
нения. Эта информация может быть использована как
для корректировки самого процесса эксплуатации (уело-
§ 8.5. ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА 331
вий хранения), так и для совершенствования конструк-
ции и технологии производства объектов.
Рассмотрим постановку задачи прогнозирования на
примере одного показателя качества при первом способе.
Функциональную зависимость показателя качества от
времени представим полиномом второго порядка со слу-
чайными коэффициентами
Wt = Wr + Ш + W2, (1)
где Wi, W2, W3 — случайные величины. Если справедли-
вы предположения о случайных коэффициентах полино-
ма (1), ошибке измерения показателя качества и крите-
рии оптимальности оценки прогноза, сформулированные
в предыдущих параграфах для параметров, то наилучшая
по критерию минимума среднего квадрата ошибки оцен-
ка прогнозируемого значения показателя качества опре-
деляется формулой
ТЕн-с = Wi + W*2 (t + т) + W*3 (i + т)2, (2)
где TFi (i = 1,3) — оптимальные оценки коэффициентов
полинома, определяемые путем обработки измеряемых
значений показателя качества.
Точность получения оценки показателя качества ха-
рактеризуется апостериорной дисперсией
D*w = Di + D2 (t + т)2 + D*3 (t + t)4 + 2£i2 (t + t) +
+ 2Z£?3 (i + t)2 + 2Z<;3 + t)3, (3)
где Di (i = 1, 3) — апостериорные дисперсии коэффи-
циентов полинома, Кц (i, 7 = 1, 3) — апостериорные
корреляционные моменты - случайных коэффициентов
полинома.
Вычисление оптимальных оценок коэффициентов и
характеристик их точности в формулах (2), (3) произво-
дится по алгоритмам § 8.3 или § 8.4.
Рассмотрим второй способ прогнозирования показа-
телей качества, когда вычисление оценок этих показате-
лей при контроле не производится. В этом случае
прогнозируются значения параметров, а показатели ка-
чества в будущий момент вычисляются по функциональ-
ной зависимости от параметров.
332
ГЛ. 8. ПРОГНОЗИРОВАНИЕ
Пусть зависимость одного показателя качества от
параметров имеет вид
J
d
Wi = П It (Vi), W2 = Wo + B'V + V'CV, (4)
i=i
где V — U— m— вектор отклонения параметров от век-
тора математического ожидания, Wo, В, С — соответ-
ственно число, вектор и матрица известных коэффициен-
тов модели объекта контроля, li(Vf) —характеристическая
функция полей допусков параметров первой группы.
Каждая компонента вектора параметров является функ-
цией времени
V^Vii + Vvt + Viot2. (5)
Прогнозируемая оценка i-ro параметра имеет вид
Vi(t+^ = Vii+Vi2(t + r) + Vi3(t + rf. (6)
Оптимальная оценка показателя качества (4) равна
W* = W*iW2, (7)
Wi = п Pi W2 = Жо+В'У*+V*'CV*+tr ск\
i-1
где Pi (Fj) — апостериорная вероятность попадания
оценок параметров первой группы в поле допуска. Под-
ставляя в формулы (7) прогнозируемые оценки парамет-
ров (6), получаем оценку показателя качества в будущий
момент времени:
а
Wt+. = Wl(t+x)l Жц<+т) = п р*
i=i (8)
Т^2(!+г) = I'Ko -|- В Ур+т) + ^(*i+T)CV(i-|-T) + tr CK(t+T).
Точность получения оценки показателя качества в
будущий момент’ времени может быть охарактеризована
апостериорной дисперсией
^w(i + T) = M[Ty?]M[wi]-M[jyr2]M[T722], (9)
d d
м^ЫЬь сю)
i=l i=l
§ 8.S. ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА 333
= wl 4- В'КВ + (trCK)2 + 2tr (СК)2 + (11)
М [VF§2] =
= М [Wi] - B'Kt+zB - ЬЪСКСК*+т + 2tr (ск;+г)2л (12)
где К*±т; — апостериорная корреляционная матрица век-
тора параметров, вычисленная для прогнозируемого
момента времени, К — априорная корреляционная матри-
ца, Pi — априорные вероятности попадания параметров
первой группы в поле-допуска.
Оценку целесообразности применения объекта конт-
роля в прогнозируемый момент времени можно произве-
сти путем вычисления вероятности того, что показатель
качества в будущий момент времени будет не меньше
требуемого значения. Эта вероятность вычисляется по
формуле
1
р[ж;+т>жт}=j
wT
(13)
где —оценка показателя качества, f(w*) — плот-
ность вероятности этой оценки. Для объектов, эффектив-
ность функционирования которых оценивается по
вероятности выполнения поставленной задачи, можно
предложить следующую аппроксимацию плотности веро-
ятности:
1 (t + ’» = + + х
X охр(-|108(1-»'‘^-,п(, + ,1)1’}, (14)
где математическое ожидание и дисперсия равны
m (t 4- т) = М [log (1 - W* (t + т))],;
D (t + т) = М [(log (1 - Ж* (#+ т))-м (*+т))я].
(15)
В этих формулах W* (t + т) — прогнозируемая оценка
показателя качества.
ГЛ. 8. ПРОГНОЗИРОВАНИЙ
3§4
Подставляя плотность вероятности (14) в (13), по-
лучаем
P{W* (* + т)>ТУт} =
1
_ 1 Г 1 [log(l—»*(г+т)—т(£+т))]а1
J Й=^+Й)ехр г
(16)
Эта формула учитывает как внезапные, так и постепенные
отказы. Если интенсивность внезапных отказов беско-
нечно большая, то параметры первой группы находятся
вне своих полей допусков и, следовательно, W i(i + т) =
= 0. Поскольку эта оценка входит сомножителем в об-
щую оценку показателя качества (см. (8)), то и
Ж*(£ + т) = 0. Отсюда следует, что при этом математи-
ческое ожидание и дисперсия, определяемые формулами
(15), также равны нулю. В этом случае плотность веро-
ятности (14) вырождается в 6-функцию, принимающую
бесконечное значение в точке w* — 0:
/(^(i + т)) =6(ш*).
Поскольку интервал интегрирования в интеграле (13) не
включает точку zr* = 0, то, следовательно, он равен
нулю, т. е. вероятность того, что объект будет способен
выполнять свое назначение в будущий момент времени,
равна пулю.
ГЛАВА 9
ПРИНЯТИЕ РЕШЕНИЙ
§ 9.1. Схемы принятия решений
В соответствии с принципами контроля, изложенными
во второй главе, можно построить схемы принятия реше-
ний о работоспособности объекта. Каждая схема приня-
тия решений определяется моделью объекта контроля.
Реализация схемы контроля заключается в построении
правила решения, связывающего конкретное решение с
наблюдаемыми данными. Рассмотрим схемы принятия
решения при различных моделях описания объекта
контроля.
Простейшей моделью объекта контроля является од-
нопараметрическая модель, в которой объект описыва-
ется одним параметром. На параметр определен гаран-
тийный допуск, характеризуемый границами [Ai, Аг].
Объект считается работоспособным, если параметр нахо-
дится внутри поля гарантийного допуска, и неработоспо-
собным в противном случае. За показатель качества
однопараметрического объекта можно принять характе-
ристическую функцию гарантийного поля допуска
W = I (И) =
И при U е [Дц А2],
(О при’ U [Ах, А2].
(1)
Идеальное правило решения для данной модели объек-
та контроля может быть записано в виде
Ут = 1, если W = 1 или U е [Aj, Д2],
Ут = 2, если W = 0 или U [Ai, Аг],
где Ут = 1— идеальное решение — объект годен, Ут = 2—
идеальное решение — объект не годен.
Таким образом, идеальная схема принятия решения
при однопараметрйческом объекте сойтоит в измерении
параметра и сравнении его с полем гарантированного до-
пуска. Если параметр в поле допуска, то объект работе-
336
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
способен, если параметр вне поля допуска, то объект не
работоспособен.
Многопараметрический объект, описываемый совокуп-
ностью независимых параметров, для которых определены
гарантийные допуски, является следующей по сложности
моделью объекта контроля. Объект считается работоспо-
собным, если все параметры находятся в пределах своих
допусков, и неработоспособным, если хотя бы один пара-
метр не принадлежит своему полю допуска. За обобщен-
ный показатель качества такого объекта можно принять
(величину, вычисляемую как произведение характеристи-
ческих функций полей допусков всех параметров:
(3)
г=1
где N — общее количество параметров объекта, а функции
определяются соотношением
w.) = |‘ 41 (i = rW). (4)
(О при и г ф [Д1, Аг]
Идеальное правило решения для многопараметриче-
ского объекта с независимыми параметрами можно за-
писать в виде
Ут = 1, если W = 1,
(о)
Ут = 2, если W = 0.
Схема принятия решений заключается в измерении
параметров и сравнении их с границами своих полей до-
пусков. Если хотя бы один параметр не принадлежит
своему полю допуска, то ТУ = 0 и принимается решение
о неработоспособности объекта, в противном случае при-
нимается решение о его работоспособности.
Следующей по сложности моделью объекта контроля
является многопараметрическая модель с двумя группами
параметров. В первой группе параметры независимы, а во
второй группе параметры взаимосвязаны функцией ка-
чества. За обобщенный показатель качества такого объ-
екта можно принять следующую функцию параметров:
(6)
§ 9.2. ОДНОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
337
где Uj — вектор параметров первой группы, 7Д — вектор
параметров второй группы, W\ (U\), —функции,
определяемые выражениями
ИМСЛ^ПМ^н), (7)
1=1
W2(U2) = Wo+B'V2^V'2CV2, V2 = u2~m. (8)
На обобщенный показатель качества определен допуск
снизу (сверху). Объект считается работоспособным, если
TP>'Aw, и неработоспособным, если W < Aw. Идеаль-
ное правило решения имеет вид
Ут = 1, если W >'Ату,
Ут = 2, если W < Aw.
Схема принятия решения в этом случае заключается в
измерении параметров, вычислении
полученного значения показателя качества с порогом Aw.
Решение о работоспособности объекта принимается, если
W Aw, и о неработоспособности, если W < Aw.
Рассмотренные идеальные правила решения могут
быть реализованы при абсолютной точности измерения
параметров. Фактически при измерении параметров всег-
да имеют место ошибки, что приводит к принятию оши-
бочных решений. Для уменьшения вероятности ошибоч-
ных решений необходимо синтезировать оптимальное
правило решения. Этой задаче и посвящена настоящая
глава. Синтез оптимального правила решения осущест-
вляется совместно с оптимизацией процедуры измерения
параметров.
§ 9.2. Однопараметрический объект
Рассмотрим задачу синтеза оптимального правила ре-
шения для объекта контроля, определяемого одним пара-
метром. В данной задаче возможны только две гипотезы:
1-я — параметр в поле допуска и, следовательно, объект
работоспособеп, и 2-я — параметр вне поля допуска и,
следовательно, объект неработоспособен. Поэтому для
синтеза правила решения воспользуемся результатами
22 л. Г. Евлапов
338
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
§ 4.5, в котором изложен алгоритм синтеза оптимальной
системы двухальтернативного принятия решения.
Для критерия минимума вероятности ошибочного ре-
шения, как это следует из §. 4.5, оптимальное правило
решения имеет вид
У* = 1, если С Pi (ж) р*2 (ж), ...
У' = 2, если Cpi (ж) < р2 (х)>
где Pi (ж) — апостериорная вероятность нахождения па-
раметра в поле допуска, р2 (ж) — апостериорная вероят-
ность нахождения параметра вне поля допуска, С — па-
раметр, определяемый стоимостями потерь
q *12 — hi
*21 — ^22
(2)
В этой формуле Zu, Z22—стоимости потерь при правиль-
ных решениях, Z12, стоимости потерь при ошибочных
решениях. Индексы у стоимостей потерь обозначают
сложные события: 11— объект годен и принимается ре-
шение о его годности, 22 — объект негоден и принимается
решение о его негодности, 12 — объект годен, а прини-
мается решение о его негодности, 21 — объект негоден,
а принимается решение о его годности.
Гипотезы о работоспособности и неработоспособности
объекта составляют полную группу событий, поэтому
Р*2 (ж) = 1 - pl (ж). (3)
Используя это соотношение, оптимальное правило реше-
ния (1) можно представить в виде
У* = 1, если Л(ж)^=1,
У* = 2, если Л(ж) <1,
где Л (ж) — отношение правдоподобия, равное
. . . СР*1
Л = 1-------*W (5
1 — Pi (®)
В правиле решения (4), (5) аргументом апостериорных
вероятностей является наблюдаемый сигнал ж(£). Сдела-
ем предположение, что наблюдаемый сигнал представля-
§ 9.2. ОДНОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
339
ет собой аддитивную смесь параметра и помехи. Предпо-
ложим также, что параметр и помехи независимы и име-
ют нормальные законы распределения вероятности. При
этих предположениях апостериорная плотность вероят-
ности параметра является нормальной с математическим
ожиданием U* (ж) и дисперсией D*
.... / , \ 1 Г . (и—,Р,
f (м 1 = 7^ ехР [- • (6)
Апостериорное математическое ожидание U* (ж) явля-
ется линейным функционалом наблюдаемого сигнала.
Конкретное выражение этого функционала определяется
вероятностными характеристиками параметра и помехи
и условиями наблюдения сигнала. Многочисленные при-
меры построения функционала U* (ж) рассмотрены в
седьмой главе. Поскольку апостериорная плотность ве-
роятности (6) зависит от наблюдаемого сигнала через
функционал U*(ж), то для дальнейшего удобно записы-
вать эту зависимость в явном виде /*(и | ж) — f*(u | {/*).
Апостериорная вероятность нахождения параметра в
поле допуска [Ai, Аг] определяется интегралом от апо-
стериорной плотности вероятности
Да
Pi(U*) = J f* (u\U*) du. (7)
Ai
Подставляя апостериорную плотность вероятности (6)
в (7) и выполняя интегрирование, получаем
= Ф(Д2-Й*) -0(^-7*) , (8)
где введены относительные допуски и относительная
оценка параметра
— А, — Д„ ---------------- ГТ* ... ,___
А1 = -^г А2 = -^,. ^ = 7*’ (9)
Функция Ф(г) в (8) определяется формулой
z I2
= (10)
о
Таблица этой функции приведена в приложении 5.
22*
340
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
Используя соотношение для апостериорной вероятно-
сти (8), отношение правдоподобия (5) запишем в сле-
дующем виде:
Д (Т7*'\ — Г Ф (^2 У*) ® /ЧП
---Т
Для дальнейшего удобно рассматривать отклонение
параметра от априорного математического ожйдания
V* = U*— m и соответственно допуски отсчитывать так-
же от априорного математического ожидания параметра.
При этом целесообразно
ввести коэффициент асим-
метрии поля допуска к,
изменяющийся от нуля
до единицы. При пол-
ностью симметричном от-
носительно априорного
математического ожида-
ния параметра поле до-
и равен единице. Переход
от абсолютных значений параметра и допусков к отно-
сительным величинам иллюстрируется на рис. 9.2.1.
В результате перехода к центрированным величинам от-
ношение правдоподобия принимает вид
i--------—I-------
йД m
Рис. 9.2.1.
М.
пуска коэффициент
А (У*) =
Ф (м — F*) + Ф (А + У*)
1 — Ф (М - У*) — Ф (Д + У*) ’
(12)
где /сА = А2—/п, А = тп —Ац А = A/о*, У* — У*/о*.
Вместо сравнения отношения правдоподобия в форме
\(12) с единицей можно сравнивать величину
2(У*) ,= Ф(АА — У*) + Ф(А-|-7*) (13)
<с величиной 1/(1 + С). Эквивалентность этих процедур
/нетрудно установить по соотношению (12) делением на
числитель.
Проанализируем характер зависимости Z(V*) от сво-
его аргумента. На рис. 9.2.2 показаны графики функции
Z(V*) при различных значениях относительного гаран-
тийного допуска А и к = 1. На рис. 9.2.3 показаны гра-
фики этой функции при коэффициенте асимметрии поля
допуска к = 0,8. Из графиков следует, что функция
§ 9.2. ОДНОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
341
Z(y*) неотрицательна, имеет один максимум и при
V*—> + оо стремится к нулю. На основании этих графи-
ков можно сделать дывод„ что правило решения
У* = 1, если ,
У* = 2, если Z (У*) < ,
1 4 7 1 + G
(14)
можно существенно упростить, отказавшись от вычисле-
ния величины 2(У*) по формуле (13), и перейти к не-
посредственному сравнению измеряемой в процессе конт-
роля оценки параметра с некоторыми новыми контроль-
ными допусками. Возможность такого перехода для на-
глядности покажем для частного случая равенства нулю
стоимостей правильных решений Zii = Z22=-0 и единич-
ной стоимости ошибочных решений Zi2.= Z2i = l. В этом
случае C—i и, следовательно, величина порога, с кото-
рым сравнивается Z(V*), равна 0,5. Условию равенства
2(У*) —0,5 соответствует на рис. 9.2.2, 9.2.3 прямая ли-
ния, параллельная оси абсцисс. Пересечение этой прямой
с функцией Z(y*) происходит в двух точках. Проекция
этих точек на ось абсцисс выделяет на этой оси отрезок
ГТ* Т*1 г
[Д1, Аз]» попадание оценки в который соответствует ре-
шению о годности объекта. Действительно, условию
Z(y*) > 0,5 соответствует на оси У* отрезок [5±, Аг],
а условию Z(y*) < 0,5 соответствует вся остальная часть
342
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
оси У*. На основании изложенного, правило решения
(14) может быть заменено эквивалентным правилом
Y* = 1, если 7* е[д], До] ,
- г_ _ ; 15)
Y* = 2, если V* ф [Д1, Д^] .
Оптимальное правило решения (15) можно записать
в абсолютных величинах
У* = 1, если 77* е= [AL ДП ,
Y* = 2, если £7* [Дi, Аг]
тдр Д1( Дг —контрольные допуски на параметр. Правило
решения (16) широко применяется в существующих си-
стемах контроля.
Правило решения (16) эквивалентно правилу реше-
ния (14), однако оно значительно проще для реализации
в системах контроля. Для построения правила решения
(16) необходимо определить только контрольные допуски
Д1, Дг- Методика определения контрольных допусков рас-
сматривается в следующем параграфе.
Правило решения (14) и эквивалентное ему правило
(16) получены по критерию минимума вероятности оши-
бочного решения. Как следует из § 4.5, такой же вид
имеет правило решения, полученное по любому критерию,
являющемуся частным случаем критерия минимума сред-
него риска. При этом будет изменяться только значение
порога. Часто на практике используется критерий Ней-
мана— Пирсона [6], при котором минимизируется веро-
ятность ошибочного решения при дополнительном усло-
вии задания риска принятия решения «годен», тогда как
в действительности объект негоден. Оптимальное по это-
му критерию правило решения имеет вид
У* = 1, если 17* е [Д1, Дз] ,
У* = 2, если 77* ф [AJ, Да] ,.
(17)
где контрольные допуски Д1, Да отличаются от конт-
рольных допусков Д1, Дг- Методика определения допус-
ков Д j, Дг рассматривается в § 9.4.
§ 9.3. КОНТРОЛЬНЫЕ ДОПУСКИ
343
Подводя итоги- рассмотрению оптимального правила
решения для одиопараметрического объекта, следует от-
метить, что это правило соответствует широко применяе-
мому на практике правилу решения, заключающегося в
сравнении оценки параметра с допусками. Однако опти-
мальное правило решения точно определяет контрольные
допуски, с которыми должна сравниваться оценка па-
раметра. _ ' ,
§ 9.3. Контрольные допуски
Измерение параметров производится с ошибками, поэ-
тому вместо гарантийных допусков необходимо исполь-
зовать контрольные допуски. Определение контрольных
допусков осуществляется из условия приравнивания от-
ношения правдоподобия порогу. Общее уравнение для
контрольных допусков следует из правила решения
(9.2.14) при замене оценки У* на контрольный допуск А*
Z(A*) = r^, (1)
где _ _ _ _
Z(A*) — Ф (/сА — А*) + Ф (А + А*). (2)
Из графиков на рис. 9.2.2, 9.2.3 видно, что для част-
ного случая, когда 1 и 1/(1 + С) = 0,5, точек пере-
сечения функции 2(У*) с прямой 2=0,5 две. Другими
словами, уравнение (1) имеет два корня Aj, Аг, которые
п являются контрольными допусками [52].
Уравнение (1) показывает, что контрольные допуски
зависят от стоимостей потерь (параметр С), гарантийного
допуска А и коэффициента асимметрии поля допуска к.
Проанализируем решения уравнения (1) для частного
случая, когда С = 1 и поэтому 1/(1 + С) ~ 0,5.
Функция 2(У*) = Ф(/сА — У*) -|-Ф (А-|-У*) стре-
мится к нулю при У*->- ± оо и имеет один максимум.
Абсцисса максимума определяется дифференцированием
по У* и приравниванием производной нулю. Выполняя
дифференцирование функции 2(У*), получаем
(йД-V*)^ (А+й*)3
'dZ 1 2 , , 1 2
— ---— —у.— в -Н с
dV* у 2л Y 2л
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
344
Равенство экспонент означает равенство их аргументов,
поэтому из (3) получаем
(/сД —У*)2=(Д+ V*)2. (4)
Преобразовывая и решая это уравнение, найдем значение
абсциссы точки максимума
Vo = Д (5)
Из формулы следует, что при к < 1 абсцисса точки сме-
щается в область отрицательных значений. В частном
случае симметричного поля допуска (к = 1) абсцисса
точки максимума равна нулю. Значение величины точки
максимума определяется подстановкой выражения (5) в
формулу (2)
£.,« = 2ф(Ц±^)- <6>
При коэффициенте асимметрии, меньшем единицы, вели-
чина максимума меньше, чем в_формуле (6).
Для пересечения кривой Z(V*) с прямой Z — 0,5 не-
обходимо, чтобы Zma5J^ 0,5. Интересно отметить, что пре-
дельный случай /шах= 0,5, когда происходит только ка-
сание кривых, соответствует случаю стягивания поля
контрольного допуска в одну точку. Используя соотноше-
ние (6) для величины максимума, найдем предельное
выражение для относительного допуска
2Ф = 0,5. (7)
\ ы j
Пользуясь таблицей для функции Ф (ж) (приложение 5),
решаем это уравнение относительно аргумента и по-
лучаем
А (^-1} = 0,6744. (8)
Учитывая выражение для относительного допуска Д —
= Д/о*, получаем
Д 1,3488
о* й-f-l ’
В частном случае симметрии допусков к =- 1 и.
^= 0,6744., (40).
§ 9.3. КОНТРОЛЬНЫЕ ДОПУСКИ
345
Как известно [23], такое соотношение имеет место, если
абсолютный допуск равен вероятному отклонению
А = Е*.
(11)
Таким образом, если абсолютный допуск меньше апо-
стериорного вероятного отклонения, то контрольный до-
пуск равен нулю.
Для решения практических задач определения конт-
рольных допусков необходимо решить уравнение (1) и
построить зависимость контрольных допусков от относи-
тельного допуска и коэф-
фициента асимметрии. Ана- 4
лиз уравнения Z(V*) =0,5 J*
показывает, что при
А %+ < 0,6744] (12)
2
контрольные допуски равны
нулю. При
0,6744 (13)
О
контрольные допуски возра-
стают. При к\= 1 контроль-
ный допуск стремится к
асимптоте — биссектрисе ко-
ординатного угла. -2
На рис. 9.3.1 представле-
ны графики для определе-
ния относительных конт-
рольных допусков как функ-
ций относительных гаран- -4
тийных допусков при раз- ।
личных значениях коэффи- ‘ Рис. 9.3.1.
циента асимметрии. Этигра- _
фики вычислены путем решения уравнения Z(A*) =0,5.
Аналогичным образом можно вычислить графики зави-
симости относительных контрольных допусков от гаран-
тийных допусков и коэффициента асимметрии для обще-
го уравнения (1) при различных значениях параметра С
[(коэффициента стоимостей).
346
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
Гарантийные допуски задаются из условий определён
ния области работоспособности объекта и не могут быть
изменены. Отсюда следует важный практический вывод
о том, что контрольные допуски однозначно определяют-
ся только точностью измерения (апостериорной диспер-
сией) и стоимостями потерь (параметр С). В литературе
по системам контроля встречаются утверждения, что по-
вышения достоверности принятия решения можно до-
стигнуть либо повышением точности измерения, либо су-
жением контрольных допусков (см., например, [33]).
Это утверждение для оптимальных систем принятия ре-
шения неверно, поскольку, как уже было сказано, сами
контрольные допуски определяются точностью измере-
ния, поэтому повышение достоверности контроля возмож-
но только за счет повышения точности измерения. Про-
извольное уменьшение контрольных допусков при фикси-
рованной точности измерения будет приводить к умень-
шению риска заказчика и увеличению риска изготовите-
ля. В целом это приведет к увеличению вероятности
ошибочного решения, поскольку риск изготовителя будет
расти быстрее, чем уменьшение риска заказчика. Это
утверждение основано на анализе вероятностей ошибоч-
ных решений, проводимом в следующем параграфе.
§ 9.4. Вероятности ошибок
Принятие решения о работоспособности однопарамет-
рического объекта сопровождается ошибками, обуслов-
ленными конечной точностью измерения. Возможны два
рода ошибок. Ошибка первого рода есть принятие реше-
ния о неработоспособности объекта, тогда как в действи-
тельности он является работоспособным. Эта ошибка
является сложным случайным событием, заключающим-
ся в одновременном выполнении двух событий: истинное
значение параметра находится в поле гарантийного до-
пуска, а оценка параметра не принадлежит полю конт-
рольного допуска
U<=k, U*(£№, (1)
где А — поле гарантийного допуска, U — истинное зна-
чение параметра, А* — поле контрольного допуска, U* —
оценка параметра.
§ 9.4. ВЕРОЯТНОСТИ ОШИБОК
347
Характеристикой ошибки первого рода является ве-
роятность события (1)
a* =P{U*(£b*, U(=&}. (2J
Вероятность ошибки первого рода носит название риска
изготовителя. Звездочка у вероятности а* означает, что
эта вероятность вычисляется для оптимального правила
решения.
Ошибка второго рода есть принятие решения о рабо-
тоспособности объекта, тогда как в действительности оп
неработоспособен. Эта ошибка есть случайное событие,
заключающееся в одновременном выполнении двух собы-
тий: истинное значение параметра находится вне поля
гарантийного допуска, а оценка параметра лежпт в поле
контрольного допуска
U&k, (7*е=А*. (3)
Характеристикой ошибки второго рода является ве-
роятность события (3)
= А*, С7^Д}, (4)
которая называется риском заказчика.
Наряду с ошибками имеют место правильные - реше-
ния. Правильное решение о работоспособности объекта
есть случайное событие
U^A. (5)'
Вероятность этого события равна
A*, FeA). (&)
Правильное решение о неработоспособности объекта
есть случайное событие
77* А*, 77ф4А, (7)
вероятность которого равна
§ = P{U*g&*, П^А],
348
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИИ
Вероятности правильных и ошибочных решений пол-
ностью характеризуют качество работы системы приня-
тия решений. События (1), (3), (5), (7) образуют пол-
ную группу, поэтому сумма вероятностей этих событий
равна единице
а* + + у* + б* = 1. (9J
Сумма вероятностей а* и [Г|: дает полную вероятность
ошибочного решения
Рош = «* + Р*. (10)
Сумма вероятностей 7* и б* дает полную вероятность
правильных решений
/4 = Y* + 6*. (И)
Используя плотности вероятности распределения
истинного значения параметра и его оценки, вероятности
ошибочных и правильных решений можно записать в ви-
де интегральных выражений
а* = j" du J /* (и | и*) ср (и*) du* 4-
At —00
00
4- [ f* (и I«*) Ф (u*) du*
4
A *
^2 ~ A*
p* = C du* j /* (u I и*) ф (u*) du Ц-
% —00
A
00
+ J f* (и I и*) ф (w*) du
^2
Д2 Л2
= J J f* (u] и*) ф (u*) du*dUf
(12)
, (13)
(14)
§ 9.4. ВЕРОЯТНОСТИ ОШИБОК
349
В этих формулах f* (и | и*) — апостериорная плотность
вероятности параметра, при условии, что оценка и* —
= и*(ж) фиксирована, ср (и*) — безусловная плотность
вероятности оценки параметра.
Интеграл от апостериорной плотности вероятности по
истинному значению параметра в пределах гарантийного
поля допуска есть вероятность попадания параметра
в это поле допуска при фиксированном значении оценки
А 2
р* (и*) = j /* (и | и*) du. (16)
Д1
Соответственно
Д1 ОО
1—p*(u*) = J /* (u| u*) du -|- J /* (и |u*) du. (17)
8—00 Д2
Используя эти соотношения, формулы (12) — (15)
запишем в виде
оо
а* = С р* (и*) гр (и*) du* ф- J р* (и*)\р (и*) du*f (18)
Д*
[1 — р* (и*) ] <р (и*) dzz%
(19)
350
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
= j /?* (и*) ср (и*) du*,
(20)
— р* (и*)] ср (u*)du* [1 — р* (и*)] ср (и.*) du*.
(21)
Из этих формул следуют очевидные соотношения
ОО
а* <р* — J p'-t- (и*} ф (и*} Ди*, (22)
--00
00
р* Ц- 6* = f [1 — ;j* (w*)] cp(u*)dw* = 1 —(а*-| у*). (23)
— 00
Апостериорная плотность вероятности f*[u ] и*) при
аддитивной комбинации параметра и помехи и нормаль-
ных законах распределения вероятности является нор-
мальной:
<24>
где и* — оптимальная по критерию минимума среднего
квадрата ошибки оценка параметра, D* — апостериорная
дисперсия параметра. При сформулированных условиях
оптимальная оценка и* (х) является линейным функци-
оналом от наблюдаемого сигнала. Поэтому безусловная
плотность вероятности оценки параметра также является
нормальной и имеет вид
Ф (“*) = ~7 ~— ехР (“ о \ >’ (25)
У2л (D — D?) [ 3 (D — >
где т — априорное математическое ожидание параметра,
D — априорная дисперсия параметра.
При нормальной плотности вероятности /*(п | и.*),
вычисление по формуле (16) приводит к следующему
выражению:
^(^)==ф(^!\ ф(Д1^)г (26.)
§ 9.4. ВЕРОЯТНОСТИ ОШИБОК
351
где о* = ]/Р* — апостериорное среднее квадратическое
отклонение, а функция Ф (•) определяется формулой
(9.2.10).
Проанализируем предельные соотношения для веро-
ятностей правильных и ошибочных решений. При отсут-
ствии контроля (нет измерения) апостериорная диспер-
сия равна априорной дисперсии параметра D* — D, по-
этому плотность вероятности оценки (25) превращается
в 6-функцию
lim ср (и*) = 6 (и* — т) . (27)
d*->d
Подставляя 6-функцию в формулы (18) —(21),предпола-
гая, что математическое ожидание параметра находится
в поле контрольного допуска, и учитывая свойства 6-
функции, получаем
= 6* = 0, £*..=. 1-р(т), ч* = р(т), (28)'
где р(т) = р — априорная вероятность попадания, пара-
метра в поле гарантийного допуска
р (т) = Ф j - Ф • (29)
Вероятности а* и 6* равны нулю вследствие того, что
6-функция равна нулю в пределах интегрирования. Риск
заказчика [3* при отсутствии контроля равен априорной
вероятности выхода параметра из поля гарантийного до-
пуска
Р* = q = 1 _ ф + Ф • (30)
Величина у* при отсутствии контроля есть априрная ве-
роятность попадания параметра в поле гарантийного по-
ля допуска
У* = Р = ф - Ф (31)
При абсолютной точности измерения параметра его
апостериорная дисперсия равна нулю: D* = 0. В этом
случае апостериорная плотность вероятности (24) пре-
вращается в 6-функцию
lim /* (и | и*) — 6 (и — и*). (32)
D*-»0
Подставляя 6-функцпю (32) в формулы (12) —(15), ис-
352
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИИ
пользуя свойства этой функции (приложение 1) и пред-
полагая, что оценка параметра лежит в поле контроль-
ного допуска, получаем
а* = р* =. б* = 0, 7* = 1. (33)
Если оценка параметра лежит вне поля контрольного
допуска, то вероятности правильных и ошибочных реше-
ний равны
а* = р* — у* = 0, 6* = 1. (34)
Вероятности ошибочных решений при изменении
апостериорной дисперсии от априорной дисперсии (нет
контроля) до нуля (абсолютно точное измерение) из-
меняются соответственно: риск изготовителя от нуля
до нуля, риск заказчика от априорной вероятности вы-
хода параметра за поле допуска до нуля.
Вычисление вероятностей ошибочных и правильных
решений по формулам .(18) — (21) при использовании
соотношений (25), (26) может быть произведено толь-
ко численно. При небольшой требуемой точности вы-
числений можно воспользоваться представлением дву-
мерных интегралов от произведения нормальных зако-
нов через функции Оуэна [24, 40, 41, 87]. Если точ-
ность расчета вероятностей требуется высокой (не ме-
нее 1-10-5), то для расчета целесообразно использовать
ЭВМ.
Вероятности ошибочных решений являются функ-
циями отношения сигнал — шум, относительного поля
гарантийного допуска и коэффициента асимметрии это-
го поля допуска. Покажем это. Апостериорная диспер-
сия параметра при его аддитивной смеси с помехой и
их нормальном законе распределения вероятности оп-
ределяется формулой
(35)
1 + v’ ' '
где v — отношение сигнал — шум.. Конкретные выра-
жения для отношения сигнал — шум приведены в седь-
мой главе для различных характеристик помехи. Под-
ставляя выражения (25), (26) в формулы (18), (19) и
вводя замену переменных Ai = т — А, _Дг•=_&&+ т,
А* = т — А*^ А* = /сА* т, и* = о(z -j-m), т^.т/о,
§ 9.4. ВЕРОЯТНОСТИ ОШИБОК
353
Л — Д/о, До — к*/в, с* — о]/'! + v, запишем вероятности
ошибок в следующем виде:
____до
«* = ]/[ [ф СК1+v (М — ж)) +
— ОО
____________<1±^
+ Ф (]/1 + v (Д + я))] е 2v dx 4-
оо
J [Ф(]/1 + v(M - ж)) +
feA0
-
+ Ф(]А + v(A + ж))]е Zv dx, (36)
____лдо
( [1 - Ф(Г1+^ ОД - *)) -
—-*
до
________________________ (1+У)кг
— Ф (]/1 + v (Д + я))] в 2v dx. (37)
Из этих _ формул непосредственно видно, что а* =
- = a*(v, Д, к), ₽*.= (3* (v,“&, к).
Процедура вычисления вероятностей ошибок заклю-
чается в следующем. По характеристикам сигнала и
помехи и времени наблюдения вычисляется отношение
сигнал — шум v и по формуле (35) апостериорная ди-
сперсия. Далее по известному коэффициенту асиммет-
рии к и отношению Д/о* решением _уравнения (9.3.1)
определяется контрольный допуск Д* = Д*/о*. Опре-
деляется величина До =Д*/о = Д*/]/1 + v , входящая в
пределы интегрирования формул (36), (37). Вычисля-
ются интегралы вероятностей ошибок по заданным в ка-
честве исходных данных величинам v, к, До. На
рис. 9.4.1, 9.4.2 приведены графики вероятностей оши-
бок как функции отношения сигнал — шум, вычислен-
ные для различных относительных гарантийных допу-
сков и единичного коэффициента асимметрии к = 1.
Как следует из графиков, риск заказчика монотонно убы-
23 л. г. Евланов
354
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
вдет с возрастанием точности измерения параметра (уве-
личением отношения сигнал — шум), а риск изготовите-
ля с увеличением точности измерения вначале возра-
стает, достигая максимума, а затем убывает.
При использовании критерия Неймана — Пирсона
определение контрольных допусков в правиле решения
(9,2.17) производится из условия задания риска за-
казчика. Уравнение для определения контрольных до-
пусков следует в этом случае из соотношения (37),
в котором искомым неизвестным является допуск До,.
§ 9.4. ВЕРОЯТНОСТИ ОШИБОК
355
а величина $* = ₽о является 'заданной:
____ лд о
f [1-Ф(ГТТИ*А-*))-
r^, *
А О
— Ф (]/1 + v(A + ж))] exp Ц^-^ж2} йж. (38).i
Пример. Построим оптимальное правило принятия решения о
годности однопараметрического объекта. Наблюдается параметр в
аддитивной комбинации с помехой
X(t) = U + N(t). (39)
Параметр и помеха независимы и нормально распределены. Пара-
метр имеет априорное математическое ожидание т и априорную
дисперсию D. Помеха является белым шумом с нулевым средним
и интенсивностью Г. Наблюдение сигнала осуществляется на ин-
тервале [О, 7]. Объект считается работоспособным, если U е [Л i,
Аг]. Критерием оптимальности правила принятия решения принят
минимум вероятности ошибочного решения: miapOm=min(a*-|-p*).
Для рассмотренных условий оптимальное правило решения
имеет вид'
V" 1, если E/”g[Aj, А”],
У* = 2, если [Ар Аз]. (40)
Оптимальная оценка параметра вычисляется по формуле
Т
’ ; т 1 I (‘
U*=T+v + T+vZ J (41)
о
где отношение сигнал — шум равно
Контрольные допуски Ар Аг в (^0) определяются решением
уравнения (9.3.1), в котором С = 1,
®(кК- 7*)+ Ф(Л+ 7*)= 0,5. (43)
В этом уравнении А = А/a*, 7*= У*/н, А = т — Дь 7* = U — т,
кЛ = А2 — т. Апостериорное среднее квадратическое отклонение
выражается через отношение сигнал — шум и априорное значение
формулой i
°*=й=гт ' (44)
23*
356
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИИ
Рассмотрим следующие числовые данные т — 30 в, Д1= 28 в,
Д2= 32 в, а = 1 в, Т — 1 сек, Г = 0,33 в2 сек, k = 1. Для этих дан-
ных гарантийный допуск равен Д = m — At = 30 — 28 = 2 в. От-
ношение сигнал — шум v = 1 1/0,33 = 3. Апостериорное среднее
квадратическое отклонение по формуле (44) равно о*= о/2 = 0,5 в.
Относительный гарантийный _допуск равен Д = Д/о*= 4. Решая
(43) при Д — к, получаем Д* = 4. Отсюда Дц = Д / /1 4- v =
= 4/У1 + 3 = 2 в. По графикам на рис. 9.4.1, 9.4.2 определяем
вероятности ошибок при v = 3, Д = Д/о = 2/1=2 и к = 1.
Риск изготовителя равен а* = 0,006, риск заказчика — 0* =
= 0,03. Полная вероятность ошибочного решения дош=а*+0* =
= 0,036.
§ 9.5. Многопараметрический объект
В данном параграфе рассматривается задача синте-
за оптимального правила решения для многопараметри-
ческого объекта. Возможны различные модели опи-
сания многопараметрического объекта. Первой и про-
стейшей моделью является совокупность независимых
параметров, для каждого из которых определен гаран-
тийный допуск. Если все параметры находятся в поле
гарантийных допусков, то объект считается работоспо-
собным. Если хотя бы один из параметров вышел из
поля допуска, то объект признается неработоспособ-
ным. За обобщенный показатель качества принимается
произведение характеристических функций полей га-
рантийных допусков параметров
и^=П^(^). (1)
1=1
Второй моделью многопараметрического объекта яв-
ляется совокупность независимых параметров с двумя
группами параметров. Первая группа параметров ха-
рактеризуется обобщенным показателем вида (1),
а вторая описывается полиномом второго порядка
ТЕ2 = ТЕо + B'V2 + V'zCVz, (2)
где Е2 = U2 — m2 — вектор центрированных значений
параметров второй группы, В — вектор, С — матрица из-
вестных коэффициентов. Показателем качества объекта
§ 9,5. МНОГОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
357
контроля в этой модели является произведение
w^w^u^wau.), (3)
где
d
Wi («71) = П k (Un). (4)
i—1
Здесь d — число параметров, принадлежащих к первой
группе.
Рассмотрим задачу синтеза оптимального правила
решения для первой модели, в которой показателем ка-
чества является произведение характеристических
функций полей гарантийных допусков параметров (1).
За критерий оптимальности примем минимум среднего
риска.
При принятии решения возможны две гипотезы:
объект работоспособен и объект неработоспособен. По-
этому двухальтернативное правило решения, оптималь-
ное по критерию минимума среднего риска, в соответ-
ствии с результатами § 4.5 имеет вид
У* -т= 1, если
Y* = 2, если
ОР(Т¥1 = 1|ж)
Р (Ц\ = о | ж) ’
СР (W, = 11 ж) ,
Р (И\ = 0 | ж) '
(5)
где P(Wi = 1 |ж) —вероятность работоспособности объ-
екта при условии наблюдения сигнала х, Р(Wi = 0|ж) —
вероятность неработоспособности объекта при условии
наблюдения сигнала х. События Wi = 1 и Wi — 0 обра-
зуют полную группу, поэтому
P(Wi = 0|ж) — l-P(Wi = 1|ж) (6)
и правило решения (5)
щему виду:
У* = 1, если
У* = 2, если
можно преобразовать к следую-
(7)
Величина С зависит от стоимостей потерь и определяет-
ся формулой (9.2.2). При 1ц = Z22 = О, Zi.2 = h\ — 1 ве-
личина С — 1.
358
ГЛ. 9. ПРИНЯТИЕ-РЕШЕНИЙ
Событие W\ — 1— объект работоспособен, происхо-
дит, если все параметры находятся в пределах своих
гарантийных допусков. Поэтому условную вероятность
P(W — 11 х) можно вычислить по формуле
Р (Wi = 11 ж) = Р (ui е [Ai,; А|], i~ О | «) =
N &r2 N
= П Hi W /* (“г Гжг) <^ui = П Р* fat), (8)
i=l < 1=1
Д1
где Pi (xi) — апостериорная вероятность нахождения
i-ro параметра в поле гарантийного допуска при ус-
ловии наблюдения сигнала х{. В формуле произведение
появилось вследствие предположения о независимости
параметров.
Используя соотношение (8), правило решения (7J
запишем в виде
тт ' Г
У* = 1, если IT Р* (ж) 7-Т-7.Г
ши^1+с,
N v
У* = 2, если П р\ < т-лГс-
“ 1=1 I
Вычислим оптимальную по критерию минимума средне-
го квадрата ошибки оценку показателя качества W\.
Как известно, эта оценка является апостериорным сред-
ним •
W*i = J wif* (Wi | х) dWi =
— оо
N оо TV .
= Ц С Zi (Ui) f* (щ 1 x) dui = Ц p* (x) . (10)
i=i i=i
Сравнивая это выражение с (8), убеждаемся, что
P(Wi = l\x) = Wi(x). (11)
На основании полученного соотношения правило реше-
ния можно записать в виде
У* = 1, если Wi (х)
’ ' ' 1 -4- С
* 1 (12>
Y* = 2, если Wi (х) <
' 1 "г о
§ 9.5. МНОГОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
359
При условии наблюдения аддитивной смеси парамет-
ра и помехи и нормальных законах распределения ве-
роятности апостериорная плотность вероятности также
является нормальной и определяется формулой (9,2.6).
Соответственно апостериорная вероятность (®г)=_Рг(П*)
определяется в этом случае для каждого параметра
формулой (9.2.8)
рЖ) = ф(д1-йЭ-ф(д1-й:) (i = ijv),
(13)
где Ui — оптимальная по критерию минимума средне-
го квадрата ошибки оценка параметра
Ti
л m. D- р
и\ = Т+Ч + тт^ J {Ti’ T) Xi (т) dx- (14)
0
В этой формуле mt, D{ — априорные значения математи-
ческого ожидайия и дисперсии i-ro параметра, — от-
ношение сигнал — шум, gt{Tf, т) — весовая функция,
методы определения которой изложены в § 4.8 и проил-
люстрированы на примерах в гл. 7. Функция Ф (•) в
(13) определяется формулой (9.2.10).
Подставляя в (9) выражение для апостериорной ве-
роятности (13), получаем
У* = 1, если fl [ Ф - U-) - Ф (AI - U-)] > t
У* = 2, если П [Ф № - и?) - Ф(А1 - И-)] < •
(15)
Напомним, что черта над переменными означает от-
носительные величины Аг = Аа/сг?, Al=Aj/cTi, Ui^Ui/a^
где Oi —апостериорное среднее квадратическое отклоне-
ние, равное О; = Ojj/1 4- Vj.
360
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИИ
Правило решения (15) можно упростить,
его к виду
. У* = 1, если Ui е [Ар, А2г]
У* = 2, если Z7- ф [А?, Д2*] ,
приведя
(16)
где Ар, Др — контрольные допуски для г-го парамет-
ра. Эти допуски определяются решением уравнения
N _ - _ 4
П [ф(Ai - АЭ - Ф (Ai - АГ)] == jrpe • (17)
Как следует из этого уравнения, контрольные допуски
на параметры являются взаимозависимыми. При равен-
ство относительных гарантийных допусков А2 = Аг, Ai=
= Ai можно определить контрольные допуски незави-
симо для каждого параметра, воспользовавшись допол-
нительным условием равенства вероятностей попадания
истинных значений параметров в гарантийные допуски.
В этом случае контрольные допуски на каждый пара-
метр будут одинаковы, и их можно вычислить из урав-
нения
Ф (Д2 - Д*) - Ф (Ai - Л*) = N/ 1—(18)
V 1 + С
В этом уравнении параметр С > 0, поэтому с увели-
чением количества контролируемых параметров N пра-
вая часть уравнения (18) увеличивается. Как следует из
рис. 9.2.2, увеличение порога (приближение прямой па-
раллельной оси абсцисс к единице) приводит к сужению
контрольного поля допуска. Так, например, при С = 1,
N — 4 пороговым значением в (18) является величина
вероятности попадания истинного значения параметра в
поле гарантийного допуска, равная 0,843, тогда как при
одном параметре (TV = 1) эта вероятность равна 0,5
Это объясняется тем, что при четырех независимых па-
раметрах для получения вероятности «объект годен»,
равной 0,5 необходимо, чтобы вероятность принятия ре-
шения «годен» по каждому параметру была равной 0,843.
Тогда 0,8434 — 0,5. Таким образом, для многопарамет-
рического объекта на каждый параметр накладываются
§ 9.5. МНОГОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ
361
более жесткие условия с точки зрения контрольных, до-
пусков, чем в однопараметрическом объекте.
Заметим, что необходимым условием превышения
произведения апостериорных вероятностей величины по-
рога (9) является превышение каждой вероятностью ве-
личины этого порога. Это следует из того, что для всех ве-
роятностей 0 pi 1. Отсюда следует, что, если хотя
бы одна апостериорная вероятность меньше величины
порога, то объект неработоспособен.
Рассмотрим построение оптимального правила реше-
ния многопараметрического объекта, описание которо-
го дается моделью (2). Для критерия минимума средне-
го риска оптимальное правило решения в случае, если
W2 рассматривается как вероятность выполнения объек-
том своих функций, имеет вид
1, если
СР (W2 > WT | х)
i-P(W2>WT\ x)
Y* — 2, если
CP (W2 > tV,,, | x)
l~P(W2>WT[x)
(19)
где Hzt — допуск снизу на показатель качества W2. Пра-
вило решения (19) несложным преобразованием приво-
дится к более простому виду
Y* = 1, если P(W2> BZTla:)>T±-,
' 1 1 -}— о
7 (2°)
У* = 2, если Р (W2 > WT | х) < с-
Апостериорную вероятность Р(И72 > можно
вычислить через апостериорную плотность вероятности
Р (W2 > WT | ж) = $ f* (ш21 ж) dw2. (21)
WT
При достаточно высокой точности измерения оценки по-
казателя качества апостериорная плотность вероятности
близка к усеченному нормальному закону с условными
362
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
математическими ожиданием W2 (х) и дисперсией
Г (^2 | ж) =
О2-И^)2|
2D w Г
О, при zp2 <0, w2 > 1.
0<ш2<1,
(22)
к
г.~ ехр
/2^
В этом выражении к — множитель, определяемый из
условия нормировки плотности вероятности. Вычисляя
интеграл от плотности вероятности в пределах от нуля
до единицы и приравнивая результат интегрирования
единице, получаем уравнение для определения порми-
рующего множителя. В результате проведения вычисле-
ний получаем
Подставляя апостериорную плотность вероятности (22),
(23) в формулу (21) и выполняя интегрирование, полу-
чаем вероятность
P(W2>^=—---------------------Ж-
ф _____i 4. ф _£
\ J \aw'
Подставляя это выражение в правило решения (20) и
выполняя несложные преобразования, приведем это пра-
вило решения к виду
У* = 1, если F (Ж) > 0,
/ (25)
У = 2, если F (W2) <0,
где
Правило решения (25) можно существенно упростить.
§ 9.5. МНОГОПАРАМЕТРИЧЕСКИЙ ОБЪЕКТ 363
приведя его к виду
У* = 1, если ТУ^ТУ^,
Т7-* Л TTZ* _ TTZ* (27)
У = 2, если ТУ2 < Wi,
где ТУт — контрольный допуск, определяемый из урав-
нения
С
1 + С
ТО
= 0.
(28)
- Ф
\ <7w /
- ф
Данное уравнение имеет один корень, который и явля-
ется контрольным допуском снизу на показатель каче-
ства. На рис. 9.5.1 приведены графики функции У(ТУг)
при различных значениях среднего квадратического от-
клонения и гарантийном допуске ТУт = 0,8. Из
графиков следует, что приону >0,1 контрольный до-
пуск возрастает: ТУт > 0,8.
Рис. 9.5.1.
Во всех предыдущих формулах этого параграфа оп-
тимальная оценка показателя качества ТУ2 онределяет-
ся формулами (7.13.13), (7.14.19).
Рассмотрим теперь случай, когда многопараметриче-
ский объект описывается моделью (3)'. Оптимальное
364
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
правило решения имеет вид
У* = 1, если Р (ТУ > ТУт | х) >
1 + G (29)
У* = 2, если Р (ТУ > ТУт I х) < -г^.
Вероятность превышения показателя качества порога
вследствие независимости составляющих ТУ1 и ТУ2 есть
произведение
P(W>Wr\x) ==JP(W7i = 1|ж)Р(ТУ2>ТУт|а;). (30)
Это выражение следует из того, что событие W =.
= W1W2 > ТУт эквивалентно двум независимым собы-
тиям ТУ1 — 1 и ТУ2 > ТУт, поскольку величина ТУ1 мо-
жет принимать значения 1 или 0.
Вероятность Р(ТУ| = Т|ж) определяется форму-
лой (11),а вероятность P(W2 > ТУт|ж) — формулой (24).
Используя указанные формулы и произведение (30),
представим оптимальное правило решения (29) в виде
fwT-w* ф 1 * 1 — ф 1 У* = 1, если W'i--™’ - >*- /1 — /w;\ Ф —5—~ И- ® рг ' aw2 ' V CTw2' — (-W—W* Ф -Ф У* 2, если ТУ; - V 1 — W"\ w* \ Ф —-F Ф -r Выполняя несложные преобразования, правило решения к эквивалентному виду - -> 1 1 + С’ . (31) — <-• 1 "МУС' приведем это
У* = 1, если Q (W'i, ТУ2) > 0,
Y* = 2, если Q(W't, W*2) < 0,
(32)
§ 9.5. МНОГОПЛРАМЕТРИЧЕСКИЙ ОБЪЕКТ
365
где функция Q (ТУц W2) равна
Q kh W*2) = (ту; - ф (i-Л) -
\ 1 ! \ °V7S >
-ту!ф
/жт-ж*\
\ /
1
1 + G
Ф
(33)
Если приравнять пулю функцию (33), то из урав-
нения
Q (Wl ТУг) = О
(34)
можно определить зависимость Wi = <р (ТУ2) или W2 —
= х(ТУ1).. Эти зависимости являются кривыми, разде-
ляющими плоскость ТУ 1, ТУ г на области, соответствую-
щие принятию решений о работоспособности и нерабо-
тоспособности объекта контроля.
В данном параграфе рассматривались оптимальные
правила решения, когда объект контроля описывается
одним показателем качества. Покажем, что в случае
многих показателей качества можно использовать ре-
зультаты, полученные для модели (1). Пусть объект
контроля характеризуется набором независимых показа-
телей качества Wi, W2, ..., Wm. Каждый из показате-
лей качества характеризует различные свойства объек-
та. Для каждого показателя качества определена об-
ласть допустимых значений, характеризуемая полем до-
пуска,
(35)
Тогда в качестве обобщенного показателя качества объ-
екта можно принять произведение характеристических
функций полей гарантийных допусков показателей ка-
чества
т
г—1
(36)
где
h (Wi)
1, если a^Wi^b,
.0, если Wi < a, Wi > b.
(37)
366
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
Получение оптимального правила решения для объ-
екта, описываемого моделью (36), проводится точно так
же, как и для модели (1), с заменой соответствующих
обозначений.
§ 9.6. Вероятности ошибок контроля
Оптимальные правила решения о состоянии многопа-
раметрического объекта, полученные в предыдущем па-
раграфе, обеспечивают минимальные вероятности оши-
бок. Выведем расчетные формулы для вычисления веро-
ятностей ошибок многопараметрйческого объекта, выра-
зив их через вероятности ошибок принятия решений по
параметрам.
Принятие решения о состоянии многопараметриче-
ского объекта, описываемого обобщенным показателем
качества W, является выбором одной из двух альтерна-
тив: объект работоспособен и объект неработоспособен.
Решение принимается не по истинному значению пока-
зателя качества, которое неизвестно, а по его оценке W*,.
отличающейся вследствие ошибок измерения от истин-
ного -значения W. Возможны четыре события, образую-
щие полную группу событий.
Событие — принятие решения о неработоспособности
объекта, тогда как в действительности он работоспосо-
бен. Вероятность этого события (риск изготовителя)
равна
a =P{W>WT, И/'Л'<Ж*}, (1)
где W — истинное значение показателя качества, W* —
оценка показателя качества, WT — гарантийный допуск
снизу на показатель качества, И7? — контрольный до-
пуск снизу на показатель качества.
Событие — принятие решения о работоспособности
объекта, тогда как в действительности он неработоспо-
собен. Вероятность этого события (риск заказчика)
равна
|3* = Р(И/<ЖТ, W*^W*]. (2)
Событие — принятие решения о работоспособности
объекта, тогда как в действительности он также работо-1
§ 9.6. ВЕРОЯТНОСТИ ОШИБОК КОНТРОЛЯ
367
способен. Вероятность этого события равна
у* = P{W^=WT,W*^WZ]. (3)
Событие — принятие решения о неработоспособности
объекта, который в действительности неработоспособен.
Вероятность этого события равна
6* = Р{Ж < WTr W* < Wli. (4)
Поскольку события образуют полную группу, то сум-
ма их вероятностей равна единице
а* + р* + 7* + 6* = 1. (5)
Риск изготовителя и риск заказника характеризуют
ошибочные решения. Сумма этих вероятностей есть пол-
ная вероятность ошибочного решения
Рош = а* + ₽*. (6)
Вероятности у* и .6* харатеризуют правильные реше-
ния, их сумма есть полная вероятность правильного ре-
шения
Р5Р = Т* + S*. (7)
Для вычисления вероятностей правильных и ошибоч-
ных решений необходимо знать апостериорную плот-
ность вероятности показателя качества f*(w\w*) и безу-
словную плотность вероятности оценки показателя ка-
чества ср (ip*). Используя эти плотности вероятности со-
бытий, можно вычислить ,
1
а* = J dw J /* (w | ip*) ср (ip*) dw's, (8)
wT о
р* = J dw j f! (w | w*) cp (ip*) dip*, (9)
0 w;
i i
у* = J dw J f (w | ip*) cp (ip*) dip*, (10)
ту*
368
ГЛ'.' а. ПРИНЯТИЕ РЕШЕНИЙ
TVT
6* = J dw J /* (w [ w*) <р (w*) dw*. (11)
о о
Представляет интерес выразить вероятности правиль-
ных и ошибочных решений по показателю качества че-
рез соответствующие вероятности событий по парамет-
рам. Для этого необходимо конкретизировать тип моде-
ли многопараметрического объекта. Рассмотрим случай,
когда многопараметрический объект описывается сле-
дующей зависимостью показателя качества от парамет-
ров:
N
W = П h (щ), (12)
i=i
где N— количество параметров, Z,(u()—характеристиче-
ские функции полей гарантийных допусков параметров.
Риск изготовителя (8) можно записать в следующей
форме:
*
WT
а* = [ р* (u>*) ср (w*) div*, (13)
о
где р*(м>*)—апостериорная вероятность попадания по-
казателя качества в поле гарантийного допуска, равная
1
р* (w*) = f f* (w | и,*) dw.
WT
(14) '
При зависимости показателя качества от параметров,
определяемой формулой (12), апостериорная вероят-
ность (14) может быть вычислена как функция оценок
параметров. Действительно, событию попадания показа-
теля качества в поле гарантийного допуска соответствуй
ет попадание всех параметров в свои поля гарантийных
допусков. Поэтому
N
р* (И=>Пр* (щ),
1—1
(15)
§ а.6. ВЕРОЯТНОСТИ ОШИБОК контроля
369
где pi (14) — апостериорная вероятность нахождений
i-ro параметра в поле своего гарантийного допуска,
щ. — оптимальная оценка i-ro параметра.
При переходе от показателя качества к параметрам
с учетом соотношения (12) Следует отметить, что риск
изготовителя возникает, если хотя бы одна оценка како-
го-либо параметра будет находиться вне поля своего
контрольного допуска. При условии нахождения всех
параметров в поле гарантийных допусков возможны для
каждой оценки два события: оценка вне поля контроль-
ного допуска или оценка в поле контрольного допуска.
Вероятность нахождения оценки i-ro параметра вне по-
ля контрольного допуска равна риску изготовителя по
этому i-му параметру
дЧ
1 00
а* = J Pi (щ) фг (щ) Лщ J Pi (щ) (pt (iii) dui. (16)
д*г
Вероятность нахождения оценки i-ro параметра в поле
своего контрольного допуска есть вероятность правиль-
ного решения «годен» по этому параметру
д*,
Pi (ui) q)i (и-) du*.
(17)
Таким образом, полная вероятность значения оцен-
ки i-ro параметра есть сумма
(18)
Поскольку все параметры независимы, то полная веро-
ятность значения оценок всех параметров равна произ-
ведению
N
п (а* + Yi) (19)
i=l
Для определения риска изготовителя многопарамет-
рического объекта, описываемого моделью (12), необхо-
димо из (19) вычесть вероятность нахождения всех оце-
нок в поле контрольного допуска, т. е. вероятность пра-
24 Л. г. Евланов
370
ГЛ. Я. ПРИНЯТИЕ РЕШЕНИЙ
вйльного решения «годен». Эта вероятность равна
2V
N 2
(20)
1
Вычитая йз ('10) величину (20), получаем риск изгото-
вителя
# . ... N
а* = П (21)
i=i i=i
Эта формула определяет вероятность того, что все истин-
ные значения параметров находятся в гарантийных до-
пусках и хотя бы одна оценка параметра находится вне
поля контрольного допуска. Риск изготовителя многопа-
раметрического объекта выражен через риски изготови-
телей и- вероятности правильных решений «годен» по
параметрам.
Получим выражение для риска заказчика многопара-
метрического объекта. Риск заказчика, возникает, когда
все оценки параметров ’находятся в поле контрольного
допуска и хотя бы для одного параметра истинное зна-
чение находится вне поля гарантийного допуска. Для
каждого i-ro параметра вероятность того, что его оцен-
ка — в поле контрольного допуска, а истинное значение
находится вне поля гарантийного допуска или в поле
гарантийного допуска, равна
(22)
Для N независимых параметров вероятность того, что
оценка показателя качества находится в поле контроль-
ного допуска, а истинное . значение показателя качест-
ва — вне поля гарантийного допуска или в поле гаран-
тийного допуска, равна
N
₽*+т* = п(р:+?э. (23)
1=1
Отсюда, учитывая соотношение (20), получаем риск за-
казчика для многопараметрического объекта
N , . N .
₽* = П(0{ +?1)-Пт<- (24)
§ 9.6. ВЕРОЯТНОСТИ ОШИБОК КОНТРОЛЯ
371
Эта формула определяет вероятность того, что оценки
всех параметров находятся в поле контрольного допуска
и хотя бы для одного параметра истинное значение на-
ходится вне поля гарантийного допуска.
Вероятность правильного решения «объект неработо-
способен» можно определить из соотношения (5) и фор-
мул (20), (21), (24)
N N w'
6*=i-tt(а:+т:)-д(р:+т:).|-д(25)
i=l i=l г=1
При отсутствии контроля а; — 6j = 0, р) = 1 —pi,.
Ti — Pi (см. (9.4.28)), поэтому
N N
Т* = П Pit а* = 0, р* — 1 — JJ pif 6* = 0. (26)
i=l i=l
При абсолютной точности измерения параметров и ус-
ловии нахождения оценок параметров в пределах конт-
рольных допусков ai = Pi = 6i = О, Yi — 1 (9.4.34). От-
сюда получаем значения вероятностей для показателя
качества
у* = 1, а* = 0, р* = 0, 6* = 0. (27)
При абсолютной точности измерения и условии нахож-
дения оценок параметров вне контрольных допусков
»i = Pi = Ti = 9, ^i = 1,.поэтому для многопараметри-
ческого объекта имеем
у* = 0, ос* = 0, р* = 0, 5* = 1. (28J
Получим выражения для вероятностей правильных и
ошибочных решений многопараметрического объекта,
описываемого моделью (9.5.2):
W2 = W0 + B'V2 + V2CV2, V2=U2-m2. (29)
Вероятности ошибочных и правильных решений полу-
чим из общих формул (8) — (11), положив в них
1
Р* (^z) = J /* 1 г^г) dw2l (30)
24»
372
ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
где P*(wz) — апостериорная вероятность попадания по-
казателя качества W2. в поле гарантийного допуска. Ис-
пользуя соотношение (30), запишем вероятности оши-
бочных и правильных решений (8) — (11) в следующем
виде:
а* = J р* (ш2) ср (шг) dwl, 0 (31)
1 Р* = j [1 ~ p*(w2)]q(wz) dw'2, w* т (32)
1 * = j рф ф (w*) W4 т w* т (33)
6* = ( [1 — Р* (^2)] ф (^2) div2. (34)
о
При независимых параметрах и нормальном законе
их распределения апостериорная плотность вероятности
показателя качества (29) представляет собой обобщен-
ный закон ^-распределения. При количестве парамет-
ров, большем 10, обобщенный закон ^-распределения
хорошо аппроксимируется нормальным законом [69].
Учитывая, что областью определения величины W2 явля-
ется отрезок [0, 1], аппроксимируем апостериорную плот-
ность вероятности усеченным нормальным законом
7с „„„ (“’2 —
1 Ло п* 6ХР 2Р* [’ if /ПК\
у 2nDw ^uw (Зо)
0, W2 < 0, W2 > If
где Dy? — апостериорная дисперсия, к — нормирующий
адножитель, равный
(36)
§ 9.6. ВЕРОЯТНОСТИ ОШИБОК КОНТРОЛЯ
373
Величина W'z есть апостериорное математическое
ожидание, равное (7.13,13)
W*2 = Wo + B'V* + V*'CV* + tr CD*, (37)
где D*— вектор апостериорных дисперсий параметров.
Апостериорная дисперсия определяется форму-
лой (7.14.20)
Dw = B2'D* + 4D'C2D* - 2D*C2D*f (38)
где D — вектор априорных дисперсий параметров, С2 =
= СС — квадрат матрицы С.
Используя плотность вероятности (35), вычислим
апостериорную вероятность (30)
(39)
Плотность вероятности ср (ща) также можно пред-
ставить в виде усеченного нормального закона
ср (и?г) =
______^1_______ ( (W2~ww)2 ] о С w* <Г 1
= ]/2n(Z)w — Р^) 1 2 (Pw — Dw} j
0, iwg < 0, Wz > 1,
где /ci — нормирующий множитель, равный
Возможность представления плотности вероятности
формулой (40) определяется тем, что при числе пара-
метров, большем 10, оценка W* (37) хорошо аппрокси-
374 ГЛ. 9. ПРИНЯТИЕ РЕШЕНИЙ
мируется нормальным законом со средним значением
mw = М [1УЙ] = ТУ0 + tr CD (42)
и дисперсией
Dw -= Dw — I)w. (43)
Формула (42)' получена применением оператора мате-
матического ожидания к оценке
М [ТУЦ = Wo + tr CD* + В'М [У *] + tr CM [V*V*']. (44)
Учитывая, чтоМ [V*] = О, М [У*У* ] = D — D*, где D—
диагональная матрица априорных дисперсий парамет-
ров, D* — диагональная матрица апостериорных дис-
персий параметров, получаем
М [ТУ2] = Wo + tr CD* + tr C (D - D*)=jy0+tr CD. (45)
Дисперсия оценки ТУг, определяемая формулой (43)',
получена следующим образом. Дисперсия есть разность
Dw2 = М [ту22]— (М [ж1] )2. (46)
Квадрат математического ожидания в соответствии
с (42) или (44) равен квадрату априорного математиче-
ского ожидания
(М(ТУ2*])2 = ?п^. (47)
Средний квадрат оценки в соответствии с форму-
лой (7.14.15), равен
М [ТУ22] =М [Wl] - В'К* В - 4 tr СКСК* + 2 tr (СК*)2.
(АН)
Подставляя это выражение в формулу (46) и учитывая,
что М [ТУЦ — Mw = DWf а также считая параметры не-
коррелированными, так что К* = D*, получаем
р w? = Dw^ -B'D*B - 4 tr CDCP* + 2 tr (CD*)2. (49)
§ 9.6. ВЕРОЯТНОСТИ ОШИБОК КОНТРОЛЯ
375
Но последние три слагаемых в этой формуле есть апо-
стериорная дисперсия (см. (7.14.19)), поэтому
Dw — Dw — Dw‘
(50)
Используя выражения для апостериорной вероятно-
сти (39) и плотности вероятности (40), можно вычис-
лить вероятности принятия решений (31) — (34). Это
вычисление можно выполнить только численно. В резуль-
тате вычисления вероятности принятия решений будут
являться функциями величины Wo, вектора В, матри-
цы С, отношений сигнал — шум по всем параметрам
и гарантийного допуска WT.
ГЛАВА 10
СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
§ 10.1. Эффективность контроля
Эффективность контроля есть мера целесообразности
применения контроля. Как уже отмечалось во второй
главе, применение контроля позволяет улучшить апри-
орные данные и, следовательно, уменьшить вероятности
ошибочных решений. Принятие ошибочных решений
сопровождается потерями, которые можно выразить в
форме стоимости. Если контроль уменьшает вероятность
ошибочных решений, то очевидно уменьшаются и поте-
ри на эти решения. С другой стороны, применение конт-
роля требует определенных затрат на обеспечение конт-
ролепригодности систем, а также разработки, произ-
водства и эксплуатации систем контроля. Таким обра-
зом, с одной стороны, контроль приносит выигрыш,
с другой — убытки. Очевидно, что контроль становится
целесообразным, если выигрыш от его применения пре-
вышает убытки.
Для количественной оценки эффективности примене-
ния контроля необходимо выбрать некоторый показа-
тель, который должен отвечать требованиям достаточно
полного учета основных факторов, простоты вычислений
и нормировки, т. е. должен быть относительной величи-
ной. Современные системы контроля являются сложны-
ми автоматическими системами. Поэтому для оценки эф-
фективности их применения можно использовать общие
показатели качества, применяемые для сложных систем
[22, 106, 113]. В ряде работ [7, 14, 56, 68, 67, 66, 33]
предлагаются показатели эффективности, специально
сконструированные применительно к задаче контроля.
Ниже излагается подход к оценке эффективности си-
стем контроля, предложенный В. П. Шевченко.
За показатель эффективности контроля примем отно-
сительную величину затрат
Э = (1)
§ 10.1. ЭФФЕКТИВНОСТЬ КОНТРОЛЯ
377
где Э — Эффективность контроля, С* — стоимость затрат
па контроль, С — стоимость потерь на ошибочные реше-
ния при отсутствии контроля. Величина С* состоит из
двух составляющих
С* = Ci + Cl (2)
где Ct — стоимость потерь на ошибочные решения при
использовании контроля, С 2 — затраты на проведение
контроля. Подставляя (2) в (1), получаем
5 = 1 -V-7T
Если принять, что затраты при ошибочных решениях
пропорциональны вероятностям ошибочных решений, то
отношение стоимостей есть отношение вероятностей
ошибок
^1 __ Ррщ
G Рота
(4)
где Рош — апостериорная вероятность принятия ошибоч-
ных решений, рош — априорная вероятность ошибочных
решений. Формула (4) справедлива, если стоимость по-
терь на риск заказчика и риск изготовителя одинакова.
Если же стоимости потерь разные, то отношение стои-
мостей СilC выражается более полной формулой
С Рош *
где К = Са/Са — if Рош = Р, Poux = а +Р • Коэффициен-
ты Са, Ср, определяют масштаб затрат на риски изгото-
вителя и заказчика соответственно.
Подставляя (5) в (3) и учитывая, что 1 — Рош/рош
ость достоверность контроля D, выразим эффективность
контроля в следующем виде:
*
Т’ош
В случае полного и абсолютного точного измерения пара-;
метров «*.=. О, /7 = 1, следовательно, эффективность.
(6)
378
ГЛ. 10, СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
контроля определяется отношением дополнительных за-
трат на контроль С2 к потерям на ошибочные реше-
ния по априорным данным
г*
3 = 1-^. (7)
Затраты на контроль включают:
С21 — стоимость проектирования и изготовления од-
ного комплекта средств контроля;
С22 — стоимость эксплуатации одного комплекта
средств контроля;
С23 — стоимость проведения контроля.
Один комплект средств контроля может проконтро-
лировать п — ПИ объектов, где П — производительность,
R — ресурс. Следовательно, если имется партия из N из-
делий, для их контроля необходимо иметь N/n систем
контроля.
Таким образом, затраты Сг равны
. (С21 + С22 + <723)1У
С2=------“тьк—1—'
Стоимость С, связанная с принятием ошибочных ре-
шений по априорным данным, равна стоимости одного
изделия Со, умноженной на количество изделий в пар-'
тии и на априорный риск заказчика
С = C0N$. (9)
Подставляя значения стоимостей в (6), сокращая
на N и учитывая, что рош = р, получаем
д _ тт _ 1 _ ^ai °22 Саз^ СЮ)
Данная формула позволяет оценить эффективность при-
менения контроля. Если эффективность контроля ста-
новится отрицательной, это означает, что контроль не
эффективен, он дает убыток, и поэтому нет смысла его
применять. Величина эффективности контроля показы-
вает удельный вес прибыли, получаемой при контроле.
Из формулы (10) следует, что контроль невыгоден при
малом риске заказчика р и малой производительности
и ресурсе,
§ 10.2. ДОСТОВЕРНОСТЬ КОНТРОЛЯ
379
Пример. Определить эффективность применения контроля при
следующих данных: Д = 0,95, X = О, р = 0,1, IIR = 103, C2i=20 Со,
С22— 10 Со, С23= 0,01 Со. Подставляя значения величин в формулу
(10), получаем
20 + 10 + 0,01
д = 0,95 —------!-----Ч-2- = 0,65.
’ 0,1-103
При HR = 5 102 и прежних значениях остальных данных получаем
30,01
Э =0,95 —= 0,35.
В случае идеального контроля Д = 1, поэтому для двух рассмот-
ренных случаев получаем соответственно Э — 0,70, Э — 0,40. Если
отношение потерь от рисков изготовителя и зачазчика составляет
Л = — 0,5, то при а* = 0,04 и значении параметров, приведенных
в начале примера, получаем увеличение эффективности контроля
Э = 0,95 + 0,2 — 0,3 = 0,85. Число 0,85 показывает, что применение
контроля дает сохранение или, точнее, возвращение 85% потерь по
сравнению с идеальной системой контроля, которая возвращает все
потери (3 = 1). Реальная система контроля требует затрат, рав-
ных 15% от общих потерь, на принятие ошибочных решений.
§ 10.2. Достоверность контроля
Достоверность контроля есть мера определенности ре-
шений, принимаемых при контроле. В соответствии с
принятой концепцией контроля решение принимается на
основе результатов сравнения показателя качества с до-
пусками. Показатель качества вычисляется по измерен-
ным значениям параметров. Поэтому достоверность конт-
роля есть достоверность принятия решений по показате-
лю качества. Если показателей качества несколько, то
достоверность контроля определяется как мера опреде-
ленности решений по всем показателям качества.
Наряду с достоверностью по показателю качества рас-
сматривают понятие достоверности по параметру. Это —
достоверность принятия решений по данному конкрет-
ному параметру. Достоверность по показателю качества
выражается через достоверности по параметрам.
Достоверность контроля зависит от точности измере-
ния параметров и от объема контроля. При полном объ-
еме контроля, когда контролируются все параметры объ-
екта, достоверность контроля определяется точностью
измерения. При абсолютно точном измерении достовер-
ность зависит от объема контроля.
380
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
В зависимости от степени точности измерения пара-
метров можно ввести следующие градации достоверности
контроля. Методической достоверностью контроля будем
называть достоверность при абсолютно точном измерении
параметров. Методическая достоверность зависит от пол-
ноты объема контроля. Потенциальной достоверностью
контроля будем называть достоверность при оптимальной
(по какому-нибудь критерию) точности измерения пара-
метров. Потенциальная достоверность контроля зависит
от объема контроля и потенциальной точности измерения
параметров. Реальной достоверностью контроля, или
просто достоверностью контроля, будем называть факти-
ческую достоверность, полученную в конкретной системе
контроля. При одинаковом объеме контроля методическая
достоверность контроля больше потенциальной и реаль-
ной достоверностей.
Достоверность контроля является основной характе-
ристикой системы контроля, оценивающей качество по-
лучаемой информации. Поэтому при выборе количествен-
ной меры достоверности контроля, который может быть
сделан различными способами, необходимо руководство-
ваться следующими соображениями. Достоверность конт-
роля должна функционально зависеть от объема и точ-
ности измерения параметров, легко вычисляться и позво-
лять достаточно просто решать обратную задачу — опре-
делять объем контроля и необходимую точность измере-
ния параметров по заданной достоверности контроля.
Перечисленным требованиям удовлетворяет ряд чис-
ловых характеристик. Поскольку качество решений при
контроле оценивается вероятностями ошибок, то следует
построить достоверность контроля как функцию вероят-
ностей ошибок.
Абсолютную достоверность контроля, следуя Б. Б. Ду-
наеву, определим как вероятность принятия правильного
решения:
#=i-pU (1)
где Рош — апостериорная вероятность ошибочных реше-
ний при контроле, равная сумме апостериорных рисков
изготовителя и заказчика:
Рош = а + Р . (.2
§ 10.2. ДОСТОВЕРНОСТЬ КОНТРОЛЯ
381
До проведения контроля апостериорная вероятность ошиб-
ки равна априорному риску заказчика рот — [3, поэтому
априорная достоверность контроля равна вероятности по-
падания показателя качества в свое поле допуска
д!==1_р = р. (3)'
Эффект контроля заключается в том, что величина
априорной достоверности увеличивается от значения р
до величины 1 — рОш.
Для решения задач выбора необходимого объема конт-
роля и потребной точности измерения параметров более
удобно изменить шкалу отсчета достоверности контроля,
положив, что до контроля достоверность равна нулю,
а при абсолютно точном и полном контроле достовер-
ность равна единице. Такая шкала изменения достовер-
ности имеет место для относительной достоверности конт-
роля, определяемой формулой [49]:
(4)
"ош
До контроля апостериорная вероятность ошибочных
решений равна априорной вероятности и достоверность
контроля равна нулю. При абсолютно точном и полном
контроле апостериорная вероятность ошибочных решений
равна нулю, поэтому достоверность контроля равна еди-
нице.
Формула относительной достоверности контроля (4)
является достаточно универсальной и включает ряд част-
ных показателей.
Кроме рассмотренных характеристик достоверности
контроля, применяются и другие показатели. Например,
условные вероятности правильных решений при контроле
работоспособных и неработоспособных объектов [58, 86].
Условная вероятность правильного решения есть досто-
верность результата «годен»
flv = P{W^WT\W*^W*]. (5)
Эта вероятность может быть выражена через вероятно-
сти правильных и ошибочных решений
JT e = у*
/г f+ ₽* '
382
ГЛ. 10. СИ®ЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
Условная вероятность «не гоДей» при условии, что
йрйняТо решение «не годен», есть достоверность резуль-
тата «не годен»:
Д5 = P{W < Ж|Ж*.< Жт}.
(7)
Эта достоверность выражается через вероятности пра-
вильных и ошибочных решений формулой
Р {ТУ < ТУт, ТУ* < Р7*] 6*
Р [ТУ* < ТУ*} ~5* + а*’
(8)
Приведенные формулы абсолютной и относительной
достоверностей в равной степени могут быть использова-
ны для определения достоверности по показателю качест-
ва и достоверности по параметрам. Различие заключа-
ется лишь в вычислении вероятностей ошибочных ре-
шений.
Получим формулу для абсолютной достоверности
контроля, выраженную через вероятности правильных и
ошибочных решений по параметрам, для многопараметри-
ческого объекта, описываемого моделью (9.5.'1). При атом
будем рассматривать случай неполного контроля. Пусть
h — число контролируемых параметров первой группы,
d — число параметров первой группы, d—h — число не-
контролируемых параметров первой группы. Достовер-
ность контроля выражается формулой (1). Запишем
формулы (9.6.21), (9.6.24) с учетом контролируемых и
неконтролируемых параметров
h d
п a-ш: п w
i~i г=1 г=А-|-1
h h d
г=п(р?+?*)-1ь: п рр
1=1 1=1 i=H-l
(Ю)
Подставляя эти соотношения в формулу (1), получаем
h dh
4=i-ii(«:+тП п р<-п(й+й +
1=1 1=Л+1 1=1
h d
+2ib; п рр dD
1=1 1=/н-1
§ 10.2. ДОСТОВЕРНОСТЬ КОНТРОЛЯ
383
Полученное соотношение позволяет проанализировать
зависимость достоверности контроля многопараметриче-
ского объекта от вероятностей правильных и ошибочных
решений по параметрам и от полноты контроля. Если
при измерении уменьшается априорная неопределенность,
то достоверность контроля (11) является монотонно воз-
растающей функцией количества контролируемых пара-
метров.
Формула для методической достоверности контроля
следует из (11) при абсолютной точности измерения.
В соответствии с результатами § 9.6, если истинные зна-
чения параметров находятся в пределах своих допусков
и точность измерения абсолютная, то сц = Pi = = О,
Vi =1. Следовательно, методическая достоверность конт-
роля равна
Д = 1- П Pi-i + 2 П Рг ~ П Pi- (12)
Если количество контролируемых параметров равно ну-
лю (й. = 0), то методическая достоверность контроля
равна
d
д = П^.
г=1
(13)
Если контролируются все параметры, то методическая
достоверность контроля равна единице. Это следует из
общей формулы (11) и из формулы (12), если принять
формально
d
П Pi = l-
i=d+l
(14)
В частном случае равенство вероятностей правильных
п ошибочных решений для всех параметров формула (11)
принимает вид
Д = 1 — (а* + v*)hpd_ft — (р* + y*)h + (15)
где а*, Р*, 7* — вероятности решений по параметру.
Методическую достоверность контроля при одинако-
вых вероятностях правильных и ошибочных решений
384
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
получим из (15) при а* = [J* = 0, 4* = 1:
Д = 1 - pd~h - 1 + 2pd~h = pd~h. (16)
При отсутствии контроля (7» = 0) из (16) имеем Д = pd.
При полном объеме контроля (h=d) из (16) получаем
Д=*1.
Абсолютную достоверность контроля можно выразить
через вероятности решений по параметрам и для полной
модели многопараметрического объекта, описываемой со-
отношениями (9.5.1) — (9.5.2), (9.5.3). Однако получаемая
при этом зависимость весьма сложна и может быть исполь-
зована только для подсчета достоверности контроля по
вероятностям правильных и ошибочных решений по па-
раметрам.
Для решения задач синтеза основных характеристик
контроля целесообразно построить такую зависимость
достоверности контроля объекта от характеристик пара-
метров, которая позволяла бы достаточно просто опреде-
лять наиболее информативные параметры и назначать
требуемую точность их измерения. G этой целью удобно
использовать формулу для относительной достоверности
контроля (4), заменив в пей априорную и апостериор-
ную вероятности ошибочных решений соответствующими
средними квадратическими отклонениями
Д = (17)
где — апостериорное среднее квадратическое отклоне-
ние показателя качества.
Это соотношение достаточно точно отражает зависи-
мость (4) вследствие того, что отношение средних квад-
ратических отклонений мало, и практически следует
рассматривать область вблизи нуля. В этой области фор-
мула очень хорошо аппроксимирует истинную зависи-
мость достоверности контроля от отношения средних
квадратических отклонений.
Достоверность контроля, определяемая формулой (17)
нормирована и изменяется от нуля до единицы, поскольку
апостериорная дисперсия изменяется от априорной дис-
персии (нет контроля) до нуля (абсолютно точный и
цодный контроль), Формула (17) вследствие своей про с-
§ 10.2. ДОСТОВЕРНОСТЬ КОНТРОЛЯ
385
тоты очень удобна для практических расчетов и решения
задачи синтеза характеристик контроля. Достоверность
по параметру также определяется формулой (17), в ко-
торой следует заменить среднее квадратическое отклоне-
ние показателя качества на среднее квадратическое от-
клонение параметра.
К формуле достоверности контроля (17) можно прий-
ти и с других позиций, если определить достоверность
контроля в виде так называемой эффективности измере-
ний [11]
Н Н Н’ 1 ’
где I — количество информации, получаемой при контро-
ле, Н — априорная энтропия показателя качества, Я* —
апостериорная энтропия показателя качества. Достовер-
ность в виде (18), как мера определенности контроля,
предлагалась И. М. Синдеевым.
Априорная энтропия показателя качества определя-
ется формулой [23]
Н ==' — М [log/(w)Aw], (19)
где f(w)— плотность вероятности показателя качества,
Aw — интервал неопределенности, М — оператор мате-
матического ожидания. Апостериорная энтропия отлича-
ется от выражения (19) только заменой априорной плот-
ности вероятности показателя качества соответствующей
апостериорной плотностью вероятности.
В случае нормального закона распределения показа-
теля качества энтропии равны
И = log (Й Я = log fe 2?te) • (2°)
Подставляя значение энтропий в формулу (18), полу-
чаем
(21)
25 л, Г. Евланов
380
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
Формулу (21) можно упростить, заменив отношение
логарифмов отношением аргументов. В результате полу-
чаем приближенную формулу для достоверности контроля
А
д = (22)
Эта формула соответствует выражению (17) .
Для дальнейших расчетов будет использоваться до-
стоверность контроля, определяемая формулой (17).
§ 10.3. Точность контроля
Точность контроля определяет достоверность контро-
ля и зависит от вероятностных характеристик сигналов
и времени их наблюдения. Точность получения оценки
показателя качества будем характеризовать апостериор-
ной дисперсией. Важным обстоятельством является учет
в апостериорной дисперсии показателя качества некон-
тролируемых параметров своими априорными дисперсия-
ми. Априорные дисперсии характеризуют точность не-
контролируемых параметров. При таком подходе апосте-
риорная дисперсия показателя качества учитывает как
точность измерения контролируемых параметров, так и
полноту контроля.
При абсолютной точности измерения контролируемых
параметров апостериорная дисперсия показателя каче-
ства зависит только от априорных дисперсий неконтро-
лируемых параметров. Такую дисперсию будем называть
методической дисперсией показателя качества. При опти-
мальной по точности процедуре измерения параметров
точность получения оценки показателя качества характе-
ризуется потенциальной дисперсией. Реализация опти-
мальных измерителей без потери точности невозможна,
поэтому фактически оценка показателя качества всегда
хуже, чем потенциальная оценка, и характеризуется
реальной, или фактической, дисперсией.
В соответствии с результатами § 5.2 все параметры
объекта контроля могут быть разделены на две группы.
Показатель качества зависит от параметров первой груп-
пы по принципу «да — нет», т. е. если параметры этой
группы находятся в поле допуска, то показатель качест-
ва максимален, если вне поля допуска — показатель ка-
§ 10.3. ТОЧНОСТЬ КОНТРОЛЯ
387
чества обращается в нуль. Зависимость показателя ка-
чества от параметров второй группы непрерывная, и в
пространстве параметров этой группы существует экстре-
мальная точка.
Используем аппроксимацию зависимости показателя
качества от параметров в форме (5.2.1), (5.2.2), (5.2.5)
W (V) = Ж!(У1)
(1)
где
d
WWi)=nW), (2)
i=l
w^wj = w0 + w + wtv. (3)
Априорная дисперсия показателя качества определя-
ется формулой
Dw = М [W2] - т^г,- (4)
где mw — математическое ожидание показателя качест-
ва, равное
d
mw = М [Wd М [W2] = П Pi [Wo + tr СК]. (5)
i=i
Математическое ожидание квадрата показателя качества
в соответствии с формулами (7.14.3), (7.14.5), (7.14.10)
равно
М [РУ2] =
d
= П Pi [РУо +В'КВ+(Сг CK)2+2tr (Ctf)2+2W0 tr СК]. (6)
i=l
Подставляя соотношения (5), (6) в формулу (4), полу-
чаем
d
Dw = П Pi [W02 + В'КВ + (tr СК)2 + 2tr (СК)2+
1=1
d
+2W0 tr CK.] —П Pi [.W02 +2W0 tr CK+(tr CK)2]. (7)
i=l
Апостериорная дисперсия показателя качества опре-
деляется формулой
7)^ = М[РУ2] -MjW*2]. (8)
25*
388
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
Для вычисления этой дисперсии будем учитывать, что не
все параметры первой и второй группы контролируются.
Введем обозначения: I — общее число параметров объекта
контроля, h — число контролируемых параметров первой
группы, d — число параметров первой группы, d—h —
число неконтролируемых параметров первой группы,
т—d — число контролируемых параметров второй груп-
пы, I—m — число неконтролируемых параметров второй
группы. После разбиения параметров первой и второй
групп на контролируемые и неконтролируемые выраже-
ния (2), (3) принимают вид
h d
И71(Г1) = П/Н^) П /ч(Гг), (9)
i=l i=!i+l
m I m
jy2(v2) = nzfl+ 2 s В^+ 2
i=d-|-l
I m I
+ 2 2 2 m. (io)
l,j=m+l i=d+l j=m-|-l
Оптимальные оценки сомножителей показателя ка-
чества определяются применением в выражениях (9),
(10) операции апостериорного математического ожидания
к контролируемым параметрам и операции априорного
математического ожидания к неконтролируемым пара-
метрам. Выполняя эти процедуры, получаем
h d
X Х) = П л* X) П Рг, (И)
i=l г=7Н-1
in m
и4(у*2) = ж0 + 2 2 сувХ +
i=d+l i,j=d-\-l
m I
+ 2 + 2 CiiKii. (12)
i,J=d+l l,j=m-pi
Для дальнейшего удобно записать последнее соотно-
шение в матричной форме
X =W0+B'V*m_d + V^_dCV^d + tr CK^d + tr CK^m.
(13)
Индексы в данной формуле указывают размерность век-
торов и матриц.
§ 10.3. 'ТОЧНОСТЬ КОНТРОЛЯ
389
Вычислим средний квадрат апостериорного значения
первого сомножителя показателя качества. Возводя (11)
в квадрат и применяя операцию безусловного математи-
ческого ожидания, получаем
м Ж | = П М X П р1, (14)
L J i=i L J
где pt — апрпорнап вероятность попадания параметра в
поле допуска, а.Рг —апостериорная вероятность попада-
ния параметра в поле допуска, равная при нормальном
апостериорном законе распределения вероятности следую-
щему выражению:
Х(У1) = ф№-Т:) + ф(а4 + уЛ , (15)
где к — коэффициент асимметрии поля допуска, А; =
= kilo*— относительный допуск, = ViIgi — относитель-
ная оценка i-ro параметра.
Возведем в квадрат выражение для второго сомножи-
теля (13). В результате получаем
Wf = 1Уо + B'V^dV*m_dB + v^_dcrm_dv^dcv^d +
+ (tr CK*m_d}2 + (tr CKt-my + 2W0B'V*m_d +
+ 2W0V^-dCVZ-d + 2P70 tr ClC-d + 2Ж0 tr CK^ +
+ 2B'V^-dY*m_dCV*m-d + 2B'I<_dtr CK*m_d +
+ 2B'V*n—d tr CK^m + 2V*m_dCV*m_d tr CK*m~d 4-
+ 2V*n-dCV*™-<i tr CKl~™ + 2 tr CKm—dtr CKl-^- (16)
Применяя операцию математического ожидания и учи-
тывая соотношения, вытекающие из нормального закона
распределения вероятности оценки:
М[У;]-о, м [B'K_dy;'_dcy;_d] = о,
М [v^dCV^-dV^_dCV^-d] = (tr CKm^d)2+2 tr (CKm^
К К:\
390
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
получаем
М [ТУ*2] = ТУ2 + B’Km_dB - В'К^В + (tr (7Km_d)2 +
+ 2 tr (CKm_d)2 - 4 tr CKm_dCK^_d + 2 tr (CK«_d) +
-|- 2 ТУ(| tr CKm-d -f- (tr CKi—m)2 4* 2tr CKm—d tr CKi—m. (17)
Формулы (8), (6), (14), (16), (17) определяют ал-
горитм вычисления апостериорной дисперсии показателя
качества. Проанализируем полученный алгоритм.
Пусть параметры объекта образуют только первую
группу. Тогда апостериорная дисперсия показателя ка-
чества равна
D*Wl = М [ТУ?] - М [ТУ*2] . (18)
Подставляя слагаемые из формул (2), (14), получаем
d h d
fw, = П pI - П м Ь;21 п.р?- (19)
i=l 1=1 L J г=ЛЦ-1
Если ни один параметр первой группы не контролиру-
ется, то 1г — 0 и апостериорная дисперсия равна произ-
ведению априорных вероятностей попадания параметров
в поле допуска
d
Avt = II.Pi" (20)
г==1
При полном объеме контроля параметров первой груп-
пы h—d, поэтому из формулы (19) следует
d d
Dwt = П Pi - Ц М [у>!2] . (21)
1=1 i=i L 1
В случае абсолютно точного контроля параметров
апостериорные вероятности р\ превращаются в характе-
ристические функции попей допусков параметров
1,.
.0,
У? е А,
V- ф А.
(22)
Квадрат апостериорной вероятности как степень характе-
ристической функции равен самой характеристической
§ 10.3. ТОЧНОСТЬ КОНТРОЛЯ
391
функции, а математическое ожидание характеристической
функции поля допуска есть вероятность попадания в
поле допуска. Таким образом, математическое ожидание
квадрата апостериорной вероятности попадания в поле
допуска при абсолютной точности измерения равно апри-
орной вероятности
М [р*?] = Pi ПРИ Di = °- (23)
Следовательно, при абсолютно точном измерении конт-
ролируемых параметров апостериорная дисперсия пока-
зателя качества (19) равна
d h d
= П рЬ (24)
i=i i—1
Если все вероятности одинаковы, то апостериорная
дисперсия равна
Dw^'p^-p^. (25)
При полном (h=d) и абсолютно точном контроле апосте-
риорная дисперсия равна нулю (см. формулы (21), (25)).
В. частном случае одного параметра апостериорная
дисперсия равна
D*w*=\'Р- М[/Л2] . (26)
При абсолютно точном контроле апостериорная диспер-
сия равна нулю, поскольку имеется один параметр, т. е.
объем контроля полный.
Пусть показатель качества зависит только от парамет-
ров второй группы (10). Апостериорная дисперсия пока-
зателя качества в этом случае равна
Dw. - М И21 . (27)
• t J ь.
Подставляя выражения (6), (17) в это соотношение,
получаем
Dw. —
= + B'Kfi + (tr CKty -j- 2 tr (СКг)2 + 2JEo tr CKt -
“ Wl - B'KmB + B'K*mB - (tr CK^my - 2 tr (CKmy -
392
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
- (tr CKnY 4 UCKmCK”m - 2tr (С’/С)2 -
- 2W0tr CKt - 2tr fKTOtr CKt-m. (28)
В этой формуле по сравнению с использованным выра-
жением (17) положено d = 0 и введен индекс I в фор-
мулу (6). Преобразовывая выражение (28), представим
апостериорную дисперсию в форме
Dw2 = В'К1тВ + В'КтВ + (tr СКгу + 2tr (CKtf +
4- 4tr СКтСКт — 2tr CKmUCK— (tr С7^_т)2 —
- 2tr (CKm)2 - (tr CKmY - 2tr (CC)2. (29)
При полном объеме контроля т—l, и формула при-
нимает частный вид (7.14.19)
D= В'К*В +'4trCKtCKi - 2tr (CK'i)2. (30)
При абсолютной точности измерения параметров всо
апостериорные корреляционные моменты равны нулю,
и формула (29) принимает вид
Dw*~
= В'К^В +(tr СКу + 2tr (C7Q2 - 24г СКт1т СК^т -
- (tr СК^ту - 2tr (СКту - (tr СКту. (31)
В случае полного объема контроля т=1, поэтому из
формулы (31) следует, что апостериорная дисперсия по-
казателя качества равна нулю.
Формула (31) определяет методическую точность из-
мерения второго сомножителя показателя качества. По-
скольку апостериорные дисперсии параметров меньше
априорных дисперсий (только в этом случае имеет смысл
измерение), то методическая апостериорная дисперсия
(31) является убывающей функцией количества контро-
лируемых параметров.
Если параметры второй группы некоррелированы меж-
ду собой, то матрица корреляционных моментов пара-
метров превращается в диагональную матрицу диспер-
сий. Используя равенства, справедливые для этого част-
ного случая,
В'КВ = B*'D = 2 BlDif (tr СК)2= (2 Си пЛ2,
i V i /
§ 10.4. ЗНАЧИМОСТЬ ПАРАМЕТРОВ
393
1г(СК)2=2^«адг ^CK=^CuDit (32)
М г
tr СКСК! =2 CliDiD^
запишем формулу (29) в скалярной форме ‘ .
I т I
Dw. = 2 BlDi + 2В?О* + 2 CaCjjDiDj +
i=jii4-l 1=1 1,2=1
I m
+ 2 2 C^jDiDj + 42 CtjDiDj —
i,j=i 1,2=1
Г m I I m
—2'2 CuDi 2 C^Dj- 2 CnCjjDiD^ 2 С1^~
1=1 j=m+i i,j=m+l 1,2=1
- 2 CuC^DiDj 2 2 CljD-D-. (33)
1,2=1 1,2=1
После преобразования эта формула может быть пред-
ставлена в более простом виде
Dw.- 2 Bi»i +
i=m-bl
т т т
+ 2 BZiD- +42 CljDiD* - 2 2 C^DiD- +
i—1 M=1 i,j=i
I ml
+ 2 2 ФД + 4 2 2 С?ед- (34)
i,2’=m+l i=l 2'=nH-l
Если ни один параметр не контролируется, то апосте-
риорная дисперсия превращается в априорную. Полагая
в (29) т = 0, получаем
DW1 = В'К(В + 2tr (СК^. (35)
§ 10.4. Значимость параметров
Для решения ряда задач проектирования устройств
и их систем контроля необходимо знать влияние каждого
параметра на изменение показателя качества. Определе-
ние степени влияния параметров на показатель качества
позволит сформулировать понятие значимости или су-
щественности параметров |['51]. ____
394
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
Значимость параметров будем оценивать Но следую-
щим трем факторам:
— влияние единичного значения параметра на пока-
затель качества;
— разброс параметра;
— точность измерения параметра.
Именно все три фактора в совокупности определяют
влияние того или иного параметра на показатель качест-
ва. Неучет какого-либо из этих факторов может привести
к неправильной с точки зрения контроля оценке значи-
мости параметров. Например, единичное значение пара-
метра слабо влияет на показатель качества, т. е. прира-
щение параметра не приводит к большим изменениям
показателя качества. Однако дисперсия параметра ' (по
множеству однотипных устройств) велика. Следовательно,
по множеству систем этот параметр оказывает большое
влияние на качество работы динамических систем. Сточ-
ки зрения контроля этот параметр следует признать
существенным и контролировать его в процессе эксплуа-
тации. Предположим далее, что при организации процес-
са измерения данного параметра не удается получить
приемлемую точность оценки параметра. Низкая точ-
ность измерения приводит к малой достоверности по
параметру, поэтому возникает вопрос о целесообразности
контроля данного параметра. Если процесс измерения
не приводит к уменьшению неопределенности значения
параметра, существовавшей до измерения, то такое из-
мерение теряет смысл. Таким образом, с точки зрения
всех трех факторов, параметр, о котором шла речь в рас-
сматриваемом примере, не является значимым.
Количественную оценку значимости параметров будем
производить с помощью коэффициентов значимости.
С практической точки зрения удобно выбрать коэффици-
ент значимости нормированной величиной, например,
в диапазоне [0,1]. Вычислив для каждого параметра
коэффициент значимости, можно построить упорядочен-
ную последовательность параметров. Под номером первым
в этой последовательности будет располагаться параметр
с наибольшим коэффициентом значимости. Под номером
вторым — параметр, у которого коэффициент значимости
является вторым по величине и т. д. Таким образом,
упорядоченная последовательность параметров характе-
§ 10.4. ЗНАЧИМОСТЬ ПАРАМЕТРОВ
395
ризуется рядом коэффициентов значимости, располо-
женных в порядке убывания своих величин.
Определим коэффициент значимости 7с-го параметра
как достоверность контроля показателя качества при
контроле только одного этого параметра
kh = Дк = 1 - —(к = 1, 2, .. .Л 0, (1)
где awi~ апостериорное среднее квадратическое отклоне-
ние показателя качества при измерении только одного
к-то параметра.
В соответствии с тем, что достоверность контроля
может быть методической, потенциальной или фактиче-
ской, коэффициент значимости также может принимать
все эти градации. Коэффициент методической значимости,
например, определяет роль параметра при абсолютной
точности его измерения. Формулы для коэффициентов
потенциальной и методической значимости параметров
нетрудно получить из общих формул достоверности
контроля и апостериорной дисперсии показателя качест-
ва, выведенных в предыдущих двух параграфах.
Пусть /с-й параметр принадлежит к первой группе.
Тогда положим 7a=il, m=d, что означает измерение
только одного /с-го параметра в первой группе, а все ос-
тальные параметры первой и второй групп не контроли-
руются.
Апостериорная дисперсия показателя качества
(10.3.8) в этом случае равна
Dwh= м[ж!] {м[риП —м [тл211- (2)
Средний квадрат первого сомножителя показателя ка-
чества равен
d
МИ1=П^ = Ттиг (3)
i=l
где Pwx — вероятность попадания первого сомножителя
показателя качества в поле допуска. Средний квадрат
оценки первого сомножителя, в соответствии с принятым
условием о контроле &-гр параметра в данной группе цо
396
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
формуле (10.3.14), равен
о л
мИ = мИП'Я . (4)
т=1
Штрих у знака произведения означает, что отсутствует
fc-й сомножитель. Эту формулу можно записать в другом
виде:
М [Ш!2] = М [pfe2] Pwjpl- (5)
Подставляя значения величин (3), (5) в формулу (2),
получаем
MFw21f М[<Н1| /т
DWh — М jpW1----------§----. (6)
I -Pfe
Вычислим априорную дисперсию показателя качест-
ва по формуле
Dw = М [WjWl] - (М lWiW2])2. (7)
Учитывая независимость параметров первой и второй
групп, получаем
Dw = М [Ж?] М [ЖЦ - (М [Wi])2(М [Т721)2. (8)
Первые
жаготся
сомножители в первом и втором слагаемом
формулами
м[ж|] = М
с!
П ii(Vi)
i=l
d
= П Pi = PWtf
i=l
выра-
(9)
d
(M [W)2 = n pl = PWV (10)
i=l
Второй сомножитель во втором слагаемом формулы (8)
равен
(М [Ж2])2 = (Жо + trCKz_d)2 =
= Wo + 2WaUCK^d + (trCK^dy. (11)
Средний квадрат второго сомножителя показателя качест-
ва определяется выражением
мЖ] = wg + +
.....+ + 2tr (СКг_й)2 + (12)
§ 10.4 ЗНАЧИМОСТЬ ПАРАМЕТРОВ
397
Отношение дисперсий показателя качества (6), (7)
Dw М[ТУ22]-7>^(М[^2])2 • (М
Подставляя это выражение в формулу (1), получаем
выражение для коэффициента потенциальной значимости
к-ro параметра, принадлежащего к первой группе:
= _ 1/
c,l~ v 1-/Мм[ж21)7мМ'
(14)
Рассмотрим частные случаи. При абсолютной точно-
сти измерения А-го параметра М [щ* ] = Рь, поэтому из
формулы (14) следует формула для коэффициента мето-
дической значимости к-т параметра
7 л 1 /" 'L — PwJPh
11,л~ У i-pW1(M[w2i)7^M'
Если все параметры объекта контроля образуют только
первую группу, то их коэффициенты значимости вычис-
ляются по формуле
В частном случае одного параметра в первой группе
pw1=P/i,a совершенно очевидно, что коэффициент значи-
мости этого одного параметра должен быть равен еди-
нице, что и следует из формулы (16). Если все парамет-
ры не измеряются, то коэффициенты их значимости рав-
ны пулю. «
Пусть к-й. параметр относится ко второй группе. Полу-
чим расчетную формулу для коэффициента значимости
этого параметра. Апостериорная дисперсия показателя ка-
чества при контроле Л-го параметра второй группы равна
Dwh = М [Ж2] [М [wl] _ М [p^j} (17)
Величина первого сомножителя в этом выражении опре-
деляется формулой (3), а первое слагаемое второго сом-»
398
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
ножителя вычисляется по формуле (12). Второе слагае-
мое в фигурной скобке формулы (17) вычислим с ис-
пользованием формулы (10.3.17). Для одного контроли-
руемого параметра эта формула принимает следующий
вид:
М = Ж02 + BlDh - BiPl + (trCK^O2 +
+ 2ClhDl - + 2Cto2 + 2WotrCK;_d +
+ C2^2 + 2CkMvCKt^. (18)
Преобразуем это выражение к следующей форме:
М И,2] = W20 + B2k (D/t - D*h) + 2C2hk (Dk - Dky +
+ C2hhD2k + (trCK^-i)2 + 2W0UCK^a +
+ 2ChhDhUCl^d-l- (19)
Отношение дисперсий показателя качества при конт-
роле одного параметра второй группы равно
д^_ M[w2J-M[w*2]
D™ M^J-^JM^])2, J
В числителе этой формулы стоит апостериорная диспер-
сия второго сомножителя показателя качества для слу-
чая контроля только одного параметра. Выражение для
числителя следует из общей формулы (10.3.29), в которой
нужно положить m=d~|-1. Выполняя это, получаем
bfr2h = + B2D*k + (trC/^-,)2 -Ь
+ 2tr (CKt_ay - 2Cft7AtrCKz_^i - -
- (tr^Ki-^i)2 - 2ClKD2 - C2khD2^ 2ClhDl2. (21)
Преобразуем это выражение к виду
Dfr2k = B'Kt-^B + B2hD*h - 2C2hh (Dk ~ - C2hhD2h +
4- (trCK^)2 + 2tr (СКг_й)2 - 2C!lMrCKl-d^1 -
- (tvCK^iy. (22)
Формулы (20), (22), (12), (11) определяют алгоритм
вычисления отнощедия дисперсии. Подставляя это отвд-
§ 10.4. ЗНАЧИМОСТЬ ПАРАМЕТРОВ
399
шение в формулу коэффициента Значимости, получаем
, _ . _ i Л__________Jw2fe
tk~ ~V М |>f] - (М [W2])2
</0 = ^ + 1, tZ + 2, .... I). (23)
Рассмотрим частные случаи. Пусть все параметры об-
разуют только вторую группу. Тогда Pwt = 1 и в знамена-
теле формулы (23) стоит априорная дисперсия второго
сомножителя показателя качества, равная
DW2 = В'К^В + 2tr (СКг_й)2. (24)
Формула для коэффициентов значимости Параметров
второй группы принимает вид
к’1 1 у В'К^В-у 21т (СК^)2'
Коэффициенты методической значимости параметров
второй группы получаются из формулы (25), если вместо
апостериорной дисперсии (22) поставить следующее вы-
ражение (Аг = 0 в (22)):
D*W2k = B'Ki-^B - ЗСМ + (trC#;_d)2 +
+ 2tr (СК^)2 - 2ChkDktvCKl_d_i - (IrCK^i)2. (26)
На практике часто встречается случай некоррелиро-
ванности измеряемых параметров. В этом случае апосте-
риорная дисперсия (22) принимает следующее выраже-
ние, которое мы представим в скалярной форме:
Bw2k = 2 B^Di -|- BkDh 4- —
i=d+l
-2C^2 + 2 X фШ J X ClDkDj, (27)
i,3=d-l 1 j=d+l
где штрих у сумм означает отсутствие в них членов при
г, ]'—к. Соответственно формула для априорной диспер-
сии в этих условиях равна
i i
Dw2 = S' BjDi + 2 2 (28)
400
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
Формулу (27) для апостериорной дисперсии можно
представить в виде
= DW2 - Bl (Dk - + 2ClhD*k {2Dh - D*h) +
i i i
+ 2 2' C^DiD] + 4 X - 2 2 ClDiDj. (29)
l>j=d+l j=d+i ij=d+l
Упрощая это выражение, приведем его к виду
D*w2k = DW2 - Bl (Dh - D*h) - 2Clh (Dk - D^. (30)
Подставляя выражение (30) в формулу (25), полу-
чаем следующее соотношение для коэффициента значи-
мости параметров второй группы:
s.-i-i/riSESpO1. (31)
Коэффициент методической значимости получаем из (31),
полагая Dh—Qx
Если произвольно перенумеровать параметры объекта
контроля и вычислить коэффициенты значимости, то
можно построить график, наглядно иллюстрирующий роль
каждого параметра. График имеет вид «частокола» (см.
рис. 10.4.1). После вычисления коэффициентов значи-
мости всех параметров можно осуществить их перенуме-
рацию с целью получения упорядоченной последователь-
ности параметров. Перенумерация производится в соот-
ветствии с условием
> к2 > к3 > ... > ki, (33)
т. е. коэффициенты значимости параметров, составляю-
щих упорядоченную последовательность, образуют моно-
тонно убывающую последовательность. График упорядо-
ченной последовательности представлен на рис. 10.4.2.
Характерной особенностью введенных коэффициентов
значимости параметров является построение их по прин-
ципу уменьшения неопределенности в оценке состояния
объекта контроля. Чем больше коэффициент значимости
§ 10.4. ЗНАЧИМОСТЬ ПАРАМЕТРОВ
401
данного параметра, тем больший вклад в уменьшение
неопределенности дает контроль этого параметра, или,
иными словами, чем больше коэффициент значимости
4
1,0
————————।—।—।—i—I-----------
О 1 1 3 4 5 6 7 ... I
Рис. 40.4.2.
параметра, тем большее приращение достоверности конт-
роля дает измерение этого параметра. Заметим, что сум-
ма коэффициентов значимости всех параметров не равна
единице, хотя эти коэффициенты и являются нормиро-
ванными величинами, изменяющимися от нуля до еди-
ницы.
Анализ формул для коэффициентов значимости пара-
метров показывает, что вычисление по этим формулам
402
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
возможно, если имеется математическая модель объекта
контроля, т. е. построена функциональная зависимость
показателя качества от параметров и определены их веро-
ятностные характеристики.
В следующем параграфе упорядоченная последова-
тельность параметров используется для определения
объема контроля, обеспечивающего заданную достовер-
ность.
Наряду с определением значимости одного параметра
можно ввести коэффициенты значимости любой совокуп-
ности параметров. Коэффициент значимости группы, со-
стоящей из А-го, v-ro, ..., ц-го параметров, определяется
формулой (1), в которой апостериорное среднее квадра-
тическое отклонение показателя качества вычисляется
при условии измерения только /с-го, v-ro, ..., ц-го пара-
метров.
§ 10.5. Объем контроля
Под объемом контроля, понимают перечень парамет-
ров, подлежащих контролю. Объем контроля является
важнейшей характеристикой, во многом определяющей
структуру и состав аппаратуры системы контроля.
Формирование объема контроля должно производить-
ся с учетом следующих требований:
— обеспечение заданной достоверности оценки тех-
нического состояния и принятия решения о годности
объекта контроля выполнять свои функции;
— обеспечение .заданной полноты диагностики техни-
ческого состояния объекта контроля;
— затраты на проведение контроля не должны пре-
вышать стоимости выигрыша, получаемого от контроля.
Достоверность контроля есть монотонно возрастающая
функция числа контролируемых параметров; поэтому
всякое увеличение объема контроля приводит к повыше-
нию достоверности, которая асимптотически стремится
к единице. Асимптотический характер поведения досто-
верности контроля при большом числе контролируемых
параметров приводит к слишком большим материальным
и временным затратам для достижения достаточно боль-
ших значений достоверности контроля. Чтобы незначи-
тельно повысить достоверность контроля, требуется резко
§ 10.5. ОБЪЕМ КОНТРОЛЯ
403
увеличить объем контроля. В связи с этим увеличивают-
ся затраты на контроль, и он становится неэффектив-
ным. Потери на контроль превышают тот выигрыш, ко-
торый он дает. Следовательно, заданная достоверность
контроля связана с затратами на контроль.
Выбор диагностических параметров играет большую
роль, так как исследования показывают, что процент от
общего объема контроля, приходящийся на обеспечение
требований заданной глубины диагностики, в современ-
ных системах очень высок и достигает в ряде случа-
ев 50%.
Как уже отмечалось, столь высокий процент диагно-
стических параметров в сложных динамических системах
обусловлен, с одной стороны, необходимостью предупреж-
дения аварийных ситуаций, а с другой — потребностями
получения информации о надежности работы отдельных
элементов, узлов и блоков. Эта информация обеспечивает
обратную связь по дальнейшему совершенствованию про-
цесса производства систем и разработки вновь создавае-
мых устройств.
Процедура определения объема контроля в настоя-
щее время еще полностью математически не формализо-
вана, т. е. нет определенного формального алгоритма,
обеспечивающего получения перечня параметров, удов-
летворяющих приведенным выше требованиям. Это объ-
ясняется, в основном, достаточно большой сложностью
самой задачи, глубоко затрагивающей экономическую
оценку затрат и [прибыли от применения контроля.
В настоящее время процесс определения объема конт-
роля включает как эвристические методы, базирующиеся
на коллективном опыте специалистов, так и формализо-
ванные методы. 'Можно выделить три последовательных
этапа в процедуре назначения объема контроля. На пер-
вом этапе изучается структурная схема динамической
системы и предварительно назначаются существенные и
диагностические контролируемые параметры. Первый
этап является существенно неформальным и должен вы-
полняться наиболее квалифицированными специалистами.
От знаний и опыта этих специалистов сильно зависит
объем работы на последующих этапах. Это объясняется
тем, что предварительное назначение объема контроля
производится чисто качественно. Поэтому большое зна-
26*
404
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
чспио в правильности выбора контролируемых параметров
на данном этапе играет опыт. Вследствие возможных
ошибок объем контроля на данном этапе всегда завы-
шен.
На втором этапе производятся распеты, уточняющие
предварительно назначенный объем контроля. Расчеты
заключаются в построении модели объекта контроля,
вычислении коэффициентов значимости и построении
упорядоченной последовательности параметров. Упоря-
доченная последовательность параметров вначале всегда
строится как методическая, т. е. в предположении абсо-
лютной точности измерения параметров.
По методической упорядоченной последовательности
параметров строится график достоверности контроля как
функции количества контролируемых параметров. Гра-
фик строится следующим образом. Вначале вычисляется
достоверность показателя качества при контроле первого
в методической Последовательности параметра. Эта досто-
верность совпадает с коэффициентом методической зна-
чимости первого параметра. Далее вычисляется досто-
верность показателя качества при контроле первого и
второго параметров одновременно. Далее вычисляется
Рис. 10.5.1.
достоверность при одновременном контроле первого, вто-
рого и третьего параметров и т. д. Наконец, последней
вычисляется достоверность оценки показателя качества
при одновременном контроле всех отобранных на первом
этапе параметров. По результатам расчетов строится
график, пример которого представлен на рис, 10.5.1.
§ 10.5. ОБЪЕМ КОНТРОЛЯ
405
Асимптотичность кривой достоверности контроля опре-
деляется тем, что при упорядоченной последовательности
параметров каждый последующий номер параметра вно-
сит все меньший вклад в повышение достоверности конт-
роля. При контроле всех параметров методическая до-
стоверность контроля равна единице.
Определение объема контроля производится путем
проведения прямой Дт, соответствующей требуемому
значению достоверности контроля. Пересечение этой пря-
мой с кривой Д,Дк) дает методический объем контроля.
На рис. 10.5.1 точка пересечения соответствует седьмому
номеру. Следовательно, контроль первых семи парамет-
ров обеспечивает получение методической достоверности
не менее величины Дт.
На третьем этапе производится дальнейшая коррек-
тировка объема контроля с учетом точности, методик
измерения параметров и общей циклограммы контроля.
На данном этапе строится потенциальная Д* и фактиче-
ская Д достоверности контроля как функции числа изме-
ряемых параметров. Эти кривые проходят ниже кривой
Рис. 10.5.2.
методической достоверности контроля, поэтому потреб-
ный объем контроля для обеспечения заданной досто-
верности контроля возрастает. На рис. 10.5.2 для примера
показаны графики всех трех достоверностей контроля и
потребные объемы контроля.
Следует заметить, что учет возможностей измерения
и реализация рациональной циклограммы контроля ипог-
да вносят существенные коррективы. Некоторые парамет-
406
ГЛ. 10. СИНТЕЗ ХАРАКТЕРИСТИК КОНТРОЛЯ
ры, имеющие достаточно высокие коэффициенты значи-
мости, могут быть исключены из объема контроля в свя-
зи с большими временными и материальными затратами
на их измерение. Обеспечение требуемой достоверности
контроля в этом случае достигается включением ряда
параметров с не очень высокими коэффициентами зна-
чимости.
Важно помнить, что большое влияние на повышение
Достоверности контроля при фиксированном объеме конт-
роля или даже его уменьшении имеет разброс парамет-
ров. Уменьшение априорных дисперсий параметров при
заданной достоверности контроля эквивалентно уменьше-
нию потребного объема контроля. Уменьшение диспер-
сий параметров связано с повышением качества материа-
лов и улучшением технологии производства. Это естест-
венно связано с дополнительными затратами. Анализ
экономических факторов, влияющих на выигрыш и зат-
раты при контроле и повышение надежности систем,
позволяет получить оптимальное решение задачи.
1. Свойства 8-функции
ПРИЛОЖЕНИЯ
Импульсная 6-функция определяется равенством
ОО
6 (т) х (т) dt = х (0) ,
(1)
где х (т) — любая непрерывная функция. Из определения непо-
средственно следует, что 6(т) =0 при г^Ои 6(0) = оо. Кроме
того, при .'с(т) = 1 из (1) получаем важное следствие
(2)
Импульсная 6-функция относится к классу обобщенных фун-
кций. Ее можно получить как предел последовательности обыч-
ных функций 6 „(г)
lim С 6П (т) ® (т) rft == »(0),
>00 J
(3)
В качестве 6п(т) можно рассмотреть, например, функцию прямо-
угольного импульса, имеющего единичную площадь при неогра-
ниченном уменьшении длительности импульса. Условие посто-
янства площади импульса приводит к увеличению амплитуды
импульса обратно пропорционально длительности импульса. По-
следовательностью функций, сходящихся к 6-функций при
п -э- оо, является также следующее выражение:'
П 2
^(т)=we
(4)
Нетрудно видеть, что при п2 = I/O, где D — дисперсия, формула
(4) описывает плотность вероятности нормально распределенной
случайной величины с дисперсией D. Следовательно, при неогра-
ниченном уменьшении дисперсии нормально распределенной слу-
408
ПРИЛОЖЕНИЙ
чайной величины ее плотность вероятности стремится к 6-функ-
ции.
Для определения правил действия с обобщенными функция-
ми нет необходимости рассматривать предельные переходы в
последовательностях, а можно воспользоваться результатами,
полученными в теории обобщенных функций.
Применительно к 6-функцип эти правила сводятся к сле-
дующим:
1. Импульсная 6-функция бесконечно дифференцируема.
2. Производная гг-то порядка определяется равенством
J 6<п) (т) ж (т) й-г = (— I)’1 J 6 (т) ^(п) (т) йт - (0). (5)
—оо —оо
3. Сдвигом 6-функции на величину t называется функция,
определяемая формулой
ОО оо
6 (т — 4) ® (т) dx = [ 6 (т) х (т + 4) dx = х (4) , (6)
—оо -Х>
4. Пусть — линейный оператор в конечномерном прост-
ранстве, тогда полагают
оо оо
J 6 ( ',)-х) х (т) dx = J 6 (т) к т) dx, (7)
—оо --00
где |^|—определитель преобразования, — оператор обрат-
ного преобразования. В частном случае, когда S'l- = к = const,
получаем
оо 00
С 1 С / Т \ 1
6 (кх) х (т) dx = pj J 6 (т) х I-j- I dx = х (0) , (8)
— оо —ОО
Из этой формулы следует свойство четности 6-функцнп, т. е.
6(т)=6(-т). (9)
5. Импульсная 6-функция есть производная единичной функ-
ции
с г 0 при т < О,
j 6 (g) dg = 1 (т) = 1/2 при т = 0, (10)
—00 I 1 при х > 0.
Дифференцируя эту формулу, получаем
6 (х) = 1' (т), (И)
2. Характеристики элементарных звеньев
Наименование звена Уравнение
Усилительное у = кх
Запаздывающее y(t) = x(t — Ь) t
' Интегрирующее y(t) = j" x{x)dx 0
Дифференцирующее У = x
Апериодическое Ту + У = kx
Форсирующее первого порядка у = Tx + x
Неустойчивое апериодическое Ty — y = kx
Колебательное T2y + 2T%y + 1 = kx
Форсирующее второго порядка у — T2x -j- + x
Резонансное T2y+y = kx
Неустойчивое колебательное T2y -2T&J + у = kx
Передаточная функция
к е~л?
1 Р Р к Тр + 1 Тр + 1 к Тр — 1
к TV + 2Т%р + 1
2V +27^+1 к TV + 1 к TV — ZT^p + i
i. ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ
Наименование звена Амплитудная частотная харак- теристика
Усилительное к
Запаздывающее 1
Интегрирующее 1
(0
Дифференцирующее G)
Апериодическое к
УТ2а>2 +1
Форсирующее первого yrw +1
порядка
Неустойчивое апериодиче- ское
Т/Т2а>2 +1
к
Колебательное
у (1 —'Ро2)2 + 4T2l2a2
Форсирующее второго У(1 — Z2co2)2 + 4T2g26)2
порядка
к
Резонансное |1-Гсо2|
(Неустойчивое колебатель- к
I ное У(1 — Т2<£>2)2 + 4Т212а>2
Фазовая частотная характеристика | Весовая функция
0 —has л 2 л 2 — arctg а>Т arctg соГ arctg со? — л . 2ZEco — arctg — ь— „ ° 1—Z2co2 arctg—— а 1 _ Z2CO2 / 1 0 при и < у 1 1 1 л при со > у 2Zgco arctg-х _ уш2- k8(t — т) 6(f — Т — h) l(t —т) 6 (t — т) С—Т — р т . т е Т& (i — т) -j-б (£ + т) t— т - е г Т к /р т У1 — е х . (г —т) Д/1 — X sin Т2б (J — т) +2Т£б («— т) + + 6(t — t) к 1 гр SIH р (t т) 7 g(r-T) к у — / 1 в X т V1 — (1 — т) , X sin т У 1 — §2
ПРИЛОЖЕНИЯ
3. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНОСТЕЙ
411
3. Характеристики нелинейностей
Обозначения:
<ро — статистическая характеристика нелинейного . элемента,
ко — статистический коэффициент усиления математическо-
го ожидания,
ki — статистический коэффициент усиления флуктуаций,
т а
mi=-f > а1 = ~Т’
dt.
Нелинейность 1.
Нелинейность 2.
Рис. П.З.2.
— I,
I {х + d)
h — d ’
О,
Цх — d)
h — d ’
I,
— h x — d
] a? I < d,
d x h,
x^ h,
412
ПРИЛОЖЕНИЯ
Нелинейность 3.
у S:c\
ка = $ах
к1 = 3Sax
Нелинейность 4.
Рис. П.3.4.
у =1 sgn X,
ах У 2л
1. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНОСТЕЙ
413
Нелинейность 5.
3
Нелинейность 6.
Рис. П.3.6.
1 /v+mi \ 2 ___1_ /v—mt \ 2’
2 \ J ' 2 ( а, )
Нелинейность 7.
3
1 sgn(a; — d), х >0,
Z sgn (к -,L d), к < 0,
414
Приложения
Нелинейность 8.
У = Sx\
9 Г . /
Фо = 5а“ 1 + _±-
к[ = 2Smx.
Нелинейность 9.
Нелинейность 10.
4. ТАБЛИЦА ИНТЕГРАЛОВ
415
4. Таблица интегралов 1п
I____£_
п~2л
Г______
J hn(ia)hn(—iw)
—оо
где
hn (До) = я0 (im) п + ffii (i<o) п~1 + .. . + ап,
#n(fto) = 6о(до)2п—2 + 61 (ico)2п~4 . -j- bn_ 1,
причем все корпи hn (ico) лежат в левой полуплоскости.
I _ Ьо -Ъ 4- 0 1 Л 2 япа,Ь„ — «2^0 4-agbi———— Ц- 3
гядЯ! 3 2ао (аоа3 а1а2)
ЯлЬо
6g (— + а2аз) а0аЗЪ 1 + я0а1^2 *" —— (а0аЗ а1а2)
Г/ _ __________________________________________ 4
2«0 (а0«| 4- - а^з)
М5 = б0 (— ЯОЯ4Я5 + aial + а2а5 — а2аЗад +
4- Ogbj («ga4 а2аб) + я0^2 (я0Я5 Я1Я4) + я0^3 (я1°2 Я0аз) +
4- <^L (аоа| 4- ф4 — аоа1“5 ~ а1а2аз)>
а5
Аб = а0а5 ~ 2<г0в1а4а5~стОа2яЗя5+ «о°За4+ а1а4“Ь aia2a5~ а1а2аЗа4<
I -
° 2а0А0
М6 = 60 (аоа4а| — а0«3я5«6 — atal + 2а1а2а5а6 + а1аЗа4а6 —
— а1а^а5 — а|а^ — а2аза6 + а2аЗа11а5Г+ а0&1 (а2аб ~~ а1а5а6 +
+ аЗав ~ аЗакаъ) + ао&2 (а1а4а5 — аоа5 ~ а1аЗйб) + а0Ь3 (°0аЗа5 +
4- а^вд — 4- «о&4 (а0° 1а5 — я0®3 ~ а1ак + а1а2аз) +
416
ПРИНОШЕНИЯ
+ — (й0а5 + й0а1ЛЗй6 2я0й1а4®5 - яоа2«3й5 + а0аЗй4 “
°'6
2 ( 2 9 । 9 \
““ —Г" i” —— »
лв = ф| + Заоа1а3а5а6 — 2aoW;! — 0^^ — agafag 4-
4- a0a|a4<z5 4" ®i«o — 2a^a2asag — а^а3а^ав 4~ aia4a5 +
4- alalal + “la2“3a6 — alrt2a3ft4“5-
Общая формула
I {~ 1)W+1 Nn
П ~ 2Й.О ' Dn ’
где Dn — определитель n-го порядка, элементы которого равны
dmr = aim-r, as = 0 (S < 0, S > 0), Nn — определитель, полу-
ченный из Dn заменой элементов первого столбца величинами
6о, 61, Ь^, ..bn-i-
X _ ts ’
5. Таблица функции Ф(х) = —!=. Се 2 dt
]<2ir J
О
к Ф(х) X Ф(х) X Ф(®) К Ф(к)
0,00 0,0000 0,31 0,1217 0,62 0,2324 0,93 0,3238
0,01 0,0040 0,32 0,1255 0,63 0,2357 0,94 0,3264
0,02 0,0080 0,33 0,1293 0,64 0,2389 0,95 0,3289
0,03 0,0120 0,34 0,1331 0,65 0,2422 0,96 0,3315
0,04 0,0160 0,35 0,1368 0,66 0,2454 0,97 0,3340
0,05 0,0199 0,36 0,1406 0,67 0,2486 0,98 0,3365
0,06 0,0239 0,37 0,1443 0,68 0,2517 0,99 0,3389
0,07 0,0279 0,38 0,1480 0,69 0,2549 1,00 0,3413
0,08 0,0319 0,39 0,1517 0,70 0,2580 1,01 0,3437
0,09 0,0359 0,40 0,1554 0,71 0,2611 1,02 0,3461
0,10 0,0398 0,41 0,1591 0,72 0,2642 1,03 0,3485
0,11 0,0438 0,42 0,1628 0,73 0,2673 1,04 0,3508
0,12 0,0478 0,43 0,1664 0,74 0,2703 1,05 0,3531
0,13 0,0517 0,44 0,1700 0,75 0,2734 1,06 0,3554
0,14 0,05'57 0,45 0,1736 0,76 0,2764 1,07 0,3577
0,15 0,0596 0,46 0,1772 0,77 0,2794 1,08 0,3599
0,16 0,0636 0,47 0,1808 0,78 0,2823 1,09 0,3621
0,17 0,0675 0,48 0,1844 0,79 0,2852 1,10 0,3643
0,18 0,0714 0,49 0,1879 0,80 0,2881 1,11 0,3665
0,19 0,0753 0,50 0,1915 0,81 0,2910 1,12 0,3686
0,20 0,0793 0,51 0,1950 0,82 0,2939 1,13 0,3708
0,21 0,0832 0,52 0,1985 0,83 0,2967 1,14 0,3729
0,22 0,0871 0,53 0,2019 0,84 0,2995 1,15 0,3749
0,23 0,0910 0,54 0,2054 0,85 0,3023 1,16 0,3770
0,24 0,0948 0,55 0,2088 0,86 0,3051 1,17 0,3790
0,25 0,0987 0,56 0,2123 0,87 0,3078 1,18 0,3810
0,26 0,1026 0,57 0,2157 0,88 0,3106 1,19 0,3830
0,27 0,1064 0,58 0,2190 0,89 0,3133 1,20 0,3849
0,28 0,1103 0,59 0,2224 0,90 0,3159 1,21 0,3869
0,29 0,1141 0,60 0,2257 0,91 0,3186 1,22 0,3888
0,30 0,1179 0,61 0,2291 0,92 0,3212 1,23 0,3907
27 л. г. Евланов
Продолжение
X Ф(х) X Ф(К) ОС Ф(х) X Ф(Х)
1,24 0,3925 1,57 0,4418 1,90 0,4713 2,48 0,4934
1,25 0,3944 1,58 0,4429 1,91 0,4719 2,50 0,4938
1,26 0,3962 1,59 0,4441 1,92 0,4726 2,52 0,4941
1,27 0,3980 1,60 0,4452 1,93 0,4732 2,54 0,4945
1,28 0,3997 1,61 0,4463 1,94 0,4738 2,56 0,4948
1,29 0,4015 1,62 0,4474 1,95 0,4744 2,58 0,4951
1,30 0,4032 1,63 0,4484 1,96 0,4750 2,60 0,4953
1,31 0,4049 1,64 0,4495 1,97 0,4756 2,62 0,4956
1,32 0,4066 1,65 0,4505 1 98 0,4761 2,64 0,4959
1,33 0,4082 1,66 0,4515 1,99 0,4767 2,66 0,4961
1,34 0,4099 1,67 0,4525 2,00 0,4772 2,68 0,4963
1,35 0,4115 1,68 0,4535 2,02 0,4783 2,70 0,4965
1,36 0,4131 1,69 0,4545 2,04 0,4793 2,72 0,4967
1,37 0,4147 1,70 0,4554 2,06 0,4803 2,74 0,4969
1,38 0,4162 1,71 0,4564 2,08 0,4812 2,76 0,4971
1,39 0,4177 1,72 0,4573 2,10 0,4821 2,78 0,4973
1,40 0,4192 1,73 0,4582 2,12 0,4830 2,80 0,4974
1,41 0,4207 1,74 0,4591 2,14 0,4838 2,82 0,4976
1,42 0,4222 1,75 0,4599 2,16 0,4846 2,84 0,4977
1,43 0,4236 1,76 0,4608 2,18 0,4854 2,86 0,4979
1,44 0,4251 1,77 0,4616 2,20 0,4861 2,88 0,4980
1,45 0,4265 1,78 0,4625 2,22 0,4868 2,90 0,4981
1,46 0,4279 1,79 0,4633 2,24 0,4875 2,92 0,4982
1,47 0,4292 1,80 0,4641 2,26 0,4881 2,94 0,4984
1,48 0,4306 1,81 0,4649 2,28 0,4887 2,96 0,4985
1,49 0,4319 1,82 0,4656 2,30 0,4893 2,98 0,4986
1,5.0 0,4332 1,83 0,4664 2,32 0,4898 3,00 0,49865
1,51 0,4345 1,84 0,4671 2,34 0,4904 3,20 0,49931
1,52 0,4357 1,85 0,4678 2,36 0,4909 3,40 0,49966
1,53 0,4370 1,86 0,4686 2,38 0,4913 3,60 0,499841
1,54 0,4382 1,87 0,4693 2,40 0,4918 3,80 0,499928
1,55 0,4394 1,88 0,4699 2,42 0,4922 4,00 0,499968
1,56 0,4406 1,89 0,4706 2,44 2,46 0,4927 0,4931 4,50 5,00 0,499997 0,49999997
й. ТАБЛИЦА ФУНКЦИИ Ф'(ж)
419
хг
6. Таблица функции Ф' (ж) = —£= е
~у 2<л>
JC Ф7.-С) X Ф'М X Ф'(х) - X Ф'(ас)
0,01 0,3989 0,31 0,3802 0,61 0,3312 0,91 0,2637
0,02 0,3989 0,32 0,3790 0,62 0,3292 0,92 0,2613
0,03 0,3988 0,33 0,3778 0,63 0,3271 0,93 0,2589
0,04 0,3986 0,34 0,3765 0,64 0,3251 0,94 0,2565
0,05 0,3984 0,35 0,3752 0,65 0,3230 0,95 0,2541
0,06 0,3982 0,36 0,3739 0,66 0,3209 0,96 0,2516
0,07 0,3980 0,37 0,3726 0,67 0,3187 0,97 0,2492
0,08 0,3977 0,38 0,3712 0,68 0,3166 0,98 0,2468
0,09 0,3973 0,39 0,3697 0,69 0,3144 0,99 0,2444
0,10 0,3970 0,40 0,3683 .0,70 0,3123 1,00 0,2420
0,11 0,3965 0,41 0,3668 0,71 0,3101 1,01 0,2396
0,12 0,3961 0,42 0,3653 0,72 0,3079 1,02 0,2371
0,13 0,3956 0,43 0,3637 0,73 0,3056 1,03 0,2347
0,14 0,3951 0,44 0,3621 0,74 0,3033 1,04 0,2323
0,15 0,3945 0,45 0,3605 0,75 0,3011 1,05 0,2299
0,16 0,3939 0,46 0,3589 0,76 0,2989 1,06 0,2275
0,17 0,3932 0,47 0,3572 0,77 0,2966 1,07 0,2251
0,18 0,3925 0,48 0,3555 0,78 0,2943 1,08 0,2227
0,19 0,3918 0,49 0,3538 0,79 0,2920 1,09 0,2203
0,20 0,3910 0,50 0,3521 0,80 0,2897 1,10 0,2179
0,21 0,3902 0,51 0,3503 0,81 0,2874 1,11 0,2155
0,22 0,3894 0,52 0,3485 0,82 0,2850 1,12 0,2131
0,23 0,3885 0,53 0,3467 0,83 0,2827 1,13 0,2107
0,24 0,3876 0,54 0,3448 0,84 0,2803 1,14 0,2083
0,25 0,3867 0,55 0,3429 0,85 0,2780 1,15 0,2059
0,26 0,3857 0,56 0,3410 0,86 0,2756 1,16 0,2036
0,27 0,3847 0,57 0,3391 0,87 0,2732 1,17 0,2012
0,28 0,3836 0,58 0,3372 0,88 0,2709 1,18 0,1989
0,29 0,3825 0,59 0,3352 0,89 0,2685 1,19 0,1965
0,30 0,3814 0,60 __0,3332 0,90 0,2661 1,20 0,1942
27*
420
G. ТАБЛИЦА ФУНКЦИИ Ф'(.у)
Продолжение
X Ф'(к) ic Ф'(х) X Ф'(х) X Ф'(ж)
1,21 0,1919 1,53 0,1238 1,85 0,0721 2,34 0,0258 '
1,22 0,1895 1,54 0,1219 1,86 0,0707 2,36 0,0246
1,23 0,1872 1,55 0,1200 1,87 0,0694 2,38 0,0235
1,24 0,1849 1,56 0,1182 1,88 0,0681 2,40 0,0224
1,25 0,1826 1,57 0,1163 1,89 0,0669 2,42 0,0213
1,26 0,1804 1,58 0,1145 1,90 0,0656. 2,44 0,0203
1,27 0,1781 1,59 0,1127 1,91 0,0644 2,46 0,0194
1,28 0,1758 1,60 0,1109 1,92 0,0632 2,48 0,0184
1,29 0,1736 1,61 0,1092 1,93 0,0620 2,50 0,0175
1,30 0,1714 1,62 0,1074 1,94 0,0608 2,52 0,0167
1,31 0,1691 1,63 0,1057 . 1,95 0,0596 2,54 0,0158
1,32 0,1669 1,64 0,1040 1,96 0,0584 2,56 0,0151
1,33 0,1647 1,65 0,1023 1,97 0,0573 2,58 0,0143
1,34 0,1626 1,66 0,1006 1,98 0,0562 2,60 0,0136
1,35 0,1604 1,67 0,0989 1,99 0,0551 2,62 0,0129
1,36 0,1582 1,68 0,0973 2,00 0,0540 2,64 0,0122
1,37 0,1561 1,69 0,0957 2,02 0,0519 2,66 0,0116
1,38 0,1539 1,70 0,0941 2,04 0,0498 2,68 0,0110
1,39 0,1518 1,71 0,0925 2,06 0,0478 2,70 0,0104
1,40 0,1497 1,72 0,0909 2,08 0,0459 2,74 0,0093
1,41 0,1476 1,73 0,0893 2,10 0,0440 2,78 0,0084
1,42 0,1456 1,74 0,0878 2,12 0,0422 2,82 0,0075
1,43 0,1435 1,75 0,0863 2,14 Q,0404 2,86 0,0067
1,44 0,1415 1,76 0,0848 2,16 0,0387 2,90 0,0060
1,45 0,1394 1,77 0,0833 2,18 0,0371 2,94 0,0053
1,46 0,1374 1,78 0,0818 2,20 0,0355 2,98 0,0047
1,47 .0,1354 1,79 0,0804 2,22 0,0339 3,00 0,0044
1,48 0,1334 1,80 0,0790 2,24 0,0325 3,20 0,0024
1,49 0,1315 1,81 0,0775 2,26 0,0310 3,40 0,0012
1,50 0,1295 1,82 0,0761 2,28 0,0297 3,60 0,0006
1,51 0,1276 1,83 0,0748 2,30 0,0283 - 3,80 0,0003
1,52 0,1257 1,84 0,0734 2,32 0,0270 4,00 0,0001
7. СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
421
7. Список основных обозначений
X (4) — входной сигнал;
У (4) —выходной сигнал;
8{t) — полезный сигнал;
N(t) — аддитивная помеха;
Z(t) — мультипликативная помеха;
Ут (4) — требуемый выходной сигнал;
mS (О — математическое ожидание полезного сигнала;
>8'°(4)— центрированное значение полезного сигнала;
Е (t) — ошибка системы;
тЕ(4) — математическое ожидание ошибки;
<р(») — нелинейная функция;
U — вектор случайных параметров;
$4- — оператор системы;
— требуемый оператор системы;
— обратный оператор;
$4* — сопряженный оператор;
I — единичный оператор;
М— оператор математического ожидания;
R — средний риск;
г (у, х) —условный риск;
4 (у, 4/т) —функция потерь;
f(x) —плотность вероятности вектора X{t)\
ах — второй начальный момент переменной X (/);
Dx — дисперсия величины X(t);
Ох — среднее квадратическое отклонение;
Kx(t, 4') —матрица корреляционных функций вектора X (4);
^х(т) —матрица корреляционных функций стационарной вектор-
ной функции;
Ох (4) — матрица корреляционных моментов вектора X (4);
Sх(со) —матрица спектральных плотностей;
Г — матрица интенсивностей белых шумов;
А, В, С, — матрицы коэффициентов;
G (4, т) — матрица весовых функций;
G* (4, т) — сопряженная матрица весовых функций;
Ф (р) — матрица передаточных’ функций. При р — ie> — матрица ча-
стотных характеристик;
Со, Ci, С2, ... — коэффициенты ошибок;
Фо — статистическая функция нелинейного элемента;
ki — коэффициент усиления по случайной составляющей;
Лсоэф — эффективная полоса пропускания системы;
У* — оценка выходного сигнала;
Z7* — оценка параметра;
В..— апостериорная дисперсия вектора X (4);
К* — апостериорная корреляционная матрица;
/(и-/®)-—апостериорная плотность вероятности вектора парамет-
ров, при условии наблюдения входного сигнала;
It, — коэффициенты потерь;
Pfe (ж) ~ апостериорная вероятность /с-го события;
В (и) -^определитель Фредгольма;
422
?. СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
V — отношение сигнал — шум;
Д* — средний риск оптимальной системы;
Т — время наблюдения;
V — центрированный вектор параметров;
А(1> —левая граница допуска;
Д(2) — правая граница допуска;
Д(1)) д<2) —относительные границы допусков;
к — коэффициент несимметрпи поля допуска;
W — показатель качества;
Wt, Wg—-функции показателя качества от параметров первой и
второй групп;
Wr —требуемое значение показателя качества;
V — оператор градиента;
а — риск изготовителя;
Р — риск заказчика;
7 — вероятность правильного решения «годен»;
6 — вероятность правильного решения «не годен»;
а* — апостериорный риск изготовителя;
Р* — апостериорный риск заказчика;
— апостериорная вероятность ошибочного решения;
Л — отношение правдоподобия;
— апостериорная дисперсия показателя качества;
Э — эффективность контроля;
Д — достоверность контроля;
Дм — методическая достоверность контроля;
П — производительность системы контроля;
kv — коэффициент значимости к-то параметра.
ЛИТЕРАТУРА
1. Абрамов О. В., Здор В, В., Супоня А. А. Допуски и
номиналы систем управления.— М.: Наука, 1976.
2. Александров В. М.> В атков А. М., Старове-
ров А. Н., Щукин Б. А. Исследование точности нелиней-
ных нестационарных систем при помощи метода статисти-
ческой линеаризации.— Автоматика и телемеханика, 1965,
№ 3.
3. Архангельский В. А. Приближенный метод определе-
ния оптимальной системы.— Известия АН СССР, ОТН, Энер-
гетика и автоматика, 1961, № 1.
4. Балашов В. П. (ред.). Автоматизация радиоизмерений.—
М.: Сов. радио. 1966.
5. В а т к о в А. М. и др. Методы оптимизации в статистиче-
ских задачах управления. М.: Машиностроение, 1974.
6. В е л я е в Ю. К., Ушаков И. А. Оптимальные границы
для контрольных допусков.— В кн.: О надежности сложных
технических систем. М.: Сов. радио, 1966.
7. В о д н е р В. А. (ред.) Автоматическая проверка оборудова-
ния самолетов и ракет.— М.: ИЛ, 1962.
8. Большаков И. А., Репин В. Г. Вопросы нелинейной
фильтрации. I. Случай одного параметра.— Автоматика и
телемеханика, 1961, № 4.
9. Б о р о д а ч е в Н. А. Обоснование методики расчета допу-
сков и ошибок кинематических цепей.— Изд-во АН СССР,
ч. I, 1943, ч. II, 1946.
10. Бражников В. А. Методика расчета допусков.— М.: Обо-
ронгиз, 1941.
11. Бриллюэн Л. Наука и теория информации.—М.: Физ-
матгиз, 1960.
12. В р у д н и к С. С., К у с о в И. Ф., Таран В. А. Машинный
метод оптимизации допусков на параметры устройства при
условии обеспечения заданной надежности и минимизации
стоимости производства и эксплуатации.— Приборостроение.
1965, № 4.
13. Б руле Дж. Д. и др. (Brule J. D., Johnson R. A., Kletsky Е. J.)
Diagnosis of equipment failures.— IRE, Trans. PRGC, 1960, v. 9,
№ 1.
14. Бурцев В. К., Свечаpник Д. В. О надежности и эф-
фективности систем автоматического контроля и регулиро-
вания.— Приборостроение, 1963, № 6.
15. Бутон Р. К. (Booton R. С.) Nonlinear control systems with
random inputs. IRE, Trans., 1954, v. CT-1.
424
ЛИТЕРАТУРА
16. Быковский М. Л. Основы динамической точности элек-
трических и механических цепей.— Изд-во АН СССР, 1958.
17. Бэтчелор Д. Теория однородной турбулетности,—М.: ИЛ,
1955.
18. Вальд A. (Wald A.) Statistical decision function.— N. Y., 1950.
19. В ан -дер -Зил А. Флуктуации в радиотехнике и физике.—
М.: Госэнергоиздат, 1958.
20. Ван-дер-Зил А. Флуктуационные явления в полупровод-
никах.— М.: ИЛ, 1961.
21. Васильев Б. В. Прогнозирование надежности и эффек-
тивности радиоэлектронных устройств. М.: Сов. радио, 1971.
22. Васильев Б. В., Козлов Б. А., Ткаченко Л. Г. На-
дежность и эффективность радиоэлектронных устройств,—
М.: Сов. радио, 1964.
23. Вентц ель В. С. Теория вероятностей, изд. 4-е.— М.: Физ-
матгиз, 1969.
24. Вигман Б. А., Дунаев Б. Б. Определение точности до-
пусковых контрольно-измерительных устройств.— Измери-
тельная техника, 1963, № 1.
25. Волков В. М., Курилин Б. И. К решению некоторых
прикладных задач оптимизации сложных радиоэлектронных
систем.— Труды семинара по математическому моделирова-
нию и теории электрических цепей, изд-во АН УССР, 1967,
вып. 4.
26. Воллернер И. Ф. Выбор допустимых отклонений пара-
метров радиотехнических узлов аппаратуры.— Радиотехни-
ка, 1956, № 11.
27. Воробьев Ю. А. Допуски на изделия из пластмасс.— Из-
вестия вузов, Машиностроение, 1961, № 3.
28. Гантмахер Ф. Р. Теория матриц.— М.: Наука, 1967.
29. Гельфандбейн Я. А. Методы кибернетической диагно-
стики динамических систем.— Рига: Зинатне, 1967.
30. Г е р ц б а х И. Б., К о р д о н с к и й X. Б. Модели отказов.—
М.: Сов. радио, 1966.
31. Гладков Д. И. Статистический поиск при обучении авто-
матических систем.— В кн.: Проблемы статистической оп-
тимизации, Рига: Зинатне, 1968.
32. Гладков Д. И. Неградиентные методы случайного поиска.
Доклад на 5-м Всесоюзном семинаре по статистическим про-
блемам оптимизации.— Ташкент, 1968.
33. Гнедов Г. М., Росенбаули О. Б., Шумов Ю. А.
Проектирование систем контроля ракет.— М.: Машинострое-
ние, 1975.
34. Г о р е л о в а Г. В., Здор В. В., С в е ч а р н и к Д. В. Метод
оптимума номинала и его применение.— М.: Энергия, 1970.
35. Гусев В. П., Фомин А. Ф. Расчет электрических допусков
радиоэлектронной аппаратуры.—М.: Сов. радио, 1963.
36. Давенпорт В. В., Рут В. Л. Введение в теорию случай-
ных сигналов и шумов.— М.: ИЛ, 1960.
37. Делано Р. Теория мерцания цели и угловые ошибки при
радиолокационном сопровождении.— Вопросы радиолокаци-
онной техники, 1954, К» 1,
ЛИТЕРАТУРА
425
38. Доброленский Ю. П. Динамика полета в неспокойной
атмосфере.— М.: Машиностроение, 1969.
39. Дружинин Г. В. Надежность устройств автоматики.—
М.: Энергия, 1964.
40. Дунаев Б. Б., Виги ан Б. А. Обеспечение гарантируемо-
го допуска и определение допустимых систематических оши-
бок измерения.—Киев, Изд. общества «Знание», УССР,
1965, лекция 32.
41. Дунаев Б. Б. Определение неидентичности допусковых из-
мерителей. Киев, Изд. общества «Знание», УССР, 1965,
лекция 33.
42. Е в л а н о в Л. Г. Самонастраивающаяся система с поиском
градиента методом вспомогательного оператора.— Изв. АН
СССР, Техническая кибернетика, 1963, № 1.
43. Е в л а н о в Л. Г. Исследование точности самонастраиваю-
щихся систем с поиском градиента методом вспомогатель-
ного оператора,— В кн.: Самонастраивающиеся системы.—
М.: Наука, 1965.
44. Е в л а и о в Л. Г. Оценка точности линейных систем со случай-
ными параметрами.— Автоматика и телемеханика, 1967, № 3.
45. Е в л а н о в Л. Г. Приближенный метод оценки точности не-
линейных систем, содержащих случайные параметры.— Ав-
томатика и телемеханика, 1967, № 10.
46. Е в л а н о в Л. Г. Определение оптимальных систем при не-
линейной комбинации полезного сигнала и помех.— Изв.
АН СССР, Техническая кибернетика, 1967, № 2.
47. Е в л а н о в Л. Г. Определение многомерных оптимальных
систем при нелинейной комбинации полезного сигнала и по-
мех.— Изв. АН СССР, Техническая кибернетика, 1967, № 3.
48. Е в л а и о в Л. Г. Оценка эффективности динамических си-
стем, содержащих случайные параметры.— Автоматика и те-
лемеханика, 1967, К» 4.
49. Е в л а н о в Л. Г. Достоверность систем контроля парамет-
ров. Доклад на 1-м Всесоюзном симпозиуме по статистиче-
ским методам в технической кибернетике.— Москва, 1967.
50. Е в л а н о в Л. Г. Синтез оптимальных систем при аддитив-
но-мультипликативных помехах. Доклад на 2-м Всесоюзном
совещании по статистическим методам в технической кибер-
нетике.— Ташкент, 1971.
51. Е в л а н о в Л. Г. Метод синтеза характеристик систем кон-
троля динамических систем.— Изв. АН СССР, Техническая
кибернетика, 1971, № 2.
52. Евланов Л. Г. Контроль динамических систем.— М.: На-
ука, 1972.
53. Е в л а и о в Л. Г. Синтез оптимальной подслеживающей мо-
дели. Доклад на VII Всесоюзном совещании по проблемам
управления.— Минск, 1977.
54. Евланов Л. Г., Казаков И. Е. Статистическое исследо-
вание нелинейных автоколебательных систем в установив-
шихся режимах,— Автоматика и телемеханика, 1969, № 12.
55. Евланов Л. Г., Константинов В. М. Системы со
случайными параметрами.— М.: Наука, 1976.
426
ЛИТЕРАТУРА
56. Еремин Г. В., Ефимов Ю. А., Федоров О. Н. Влия-
ние погрешностей контроля на его эффективность.— Изме-
рительная техника, 1968, № 12.
57. Живоглядов В. П., Маслов Е. П. Об одной задаче
оценки существенных параметров объектов.— Изв. АН СССР,
Техническая кибернетика, 1964. № 1.
58. Ж о л к о в е р Т. Д., Перов В. И. Количественные оценки
достоверности результатов контроля.— Автоматический кон-
троль и методы электрических измерений. Труды VI кон-
ференции, Новосибирск: Наука, 1966.
59. К а з а к о в И. Е. Статистические методы проектирования
систем управления.— М.: Машиностроение, 1969.
60. К а з а к о в И. Е., Доступов Б. Г. Статистическая дина-
мика нелинейных автоматических систем, М.: Физматгиз,
1962.
61. К а з а к о в И. Е., Евланов Л. Г. К теории самонастраи-
вающихся систем с поиском градиента методом вспомога-
тельного оператора. Доклад на II конгрессе ИФАК.— Ба-
зель, 1963.
62. К а р а н д е е в К. Б. Измерительные информационные си-
стемы и автоматика.— Вестник АН СССР, 1961, № 10.
63. К а р а н д е е в К. Б. (ред.) Электрические методы автома-
тического контроля.— М.: Энергия, 1965.
64. К а р и б с к и й В. В. Анализ систем для целей контроля
работоспособности и диагностики неисправностей.— Авто-
матика и телемеханика, 1964, № 7.
65. Карпюк Б. В., Малинин В. В, Определение погрешно-
стей выходных характеристик и допусков параметров эле-
ментов измерительных систем.—Автометрия, 1967, № 1.
66. К а с а т к и и А. С. Эффективность автоматизированных си-
стем контроля.—М.: Энергия, 1975.
67. К а с а т к и н А. С., К о м е н д а Э. И. Статистическая опти-
мизация аппаратуры контроля.— М.: Энергия, 1970.
68. Касаткин А. С., Кузьмин И. В. Оценка эффективности
автоматизированных систем контроля.— М.: Энергия, 1967.
69. Крамер Г. Математические методы статистики.— М.: ИЛ,
х—ч 1948.
Г 70.)Кудрицкий В. Д„ Синица М. А., Чинаев П. И.
' Автоматизация контроля радиоэлектронной аппаратуры.—
М.: Сов. радио, 1977.
71. Куликовский Р. Оптимальные и адаптивные процессы
в системах автоматического регулирования.— М.: Наука,
1967.
72. Курилин Б. И. К определению допусков элементов по
заданным допускам выходных характеристик контрольно-из-
мерительных систем.— Автометрия, 1969, № 4.
73. Л е б е д е в М. Д. Состояние и развитие автоматических си-
стем контроля.— М.: Энергия, 1968.
74. Леман Л. Проверка статистических гипотез.— М.: Нау-
ка, 1964.
75. Л э н и н г Д. X., Б э т т и н Р. Г. Случайные процессы в за-
дачах автоматического управления. М.: ИЛ, 1958.
ЛИТЕРАТУРА
427
76. Марголис М., Л е о и д е с К. (Margolis М., Leondes G. Т.)
A parameter tracking servo for control systems.— IRE, Trans.,
1959, v. AC-4, № 2.
77. M а с л о в А. Я., Татарский В. Ю. Повышение надеж-
ности радиоэлектронной аппаратуры.— М.: Сов. радио, 1972.
78. Маслов Е. П. Применение теории статистических решений
к задачам оцепим параметров объекта.— Автоматика и те-
лемеханика. 1963. № 10.
79. М а с л о в Е. П. Оценка параметров марковских систем.—
Автоматика и телемеханика, 1964, № 1.
80. Миддлтон Д. (Middleton D.) On the theory of random
noise. Phenomenological modesl I, II — J. Appl. Phys., 191, v. 22.
81. Миддлтон Д. Введение в статистическую теорию связи,—
М.: Сов. радио, 1961, т. I; 1962, т. II.
82. М и х а й л о в А. В. Эксплуатационные допуски и надеж-
ность в радиоэлектронной аппаратуре. М.: Сов. радио, 1970.
83. М и р с к и й Г. Я. -Аппаратурное определение характеристик
случайных процессов.— М.: Энергия, 1967.
84. Мозгалевский А. В., Гаскаров Д. В., Глазу-
нов Л. П., Ерастов В. Д. Автоматический поиск неисп-
равностей.— М.: Машиностроение, 1967.
85. Н о в и ц к и й П. В. Основы информационной теории изме-
рительных устройств.— М.: Энергия, 1968.
86. П е р о в В. И., Жолковер Т. Д. Способы оценки и не-
которые пути повышения достоверности результатов авто-
матического контроля.— Автоматический контроль и мето-
ды электрических измерений. Труды V конференции, Ново-
сибирск: Наука, 1966.
87. П о и о м а р е в Н. Н. (ред.) Автоматическая аппаратура кон-
троля радиоэлектронного оборудования.— М.: Сов. ридо,
1975.
88. П о п о в Е. П., П а лью в И. П. Приближенные методы ис-
следования нелинейных автоматических систем.— М.: Физ-
матгиз, 1960.
89. П у г а ч е в В. С. Теория случайных функций и ее примене-
ние к задачам автоматического управления, изд. 3-е,— М.:
Физматгиз, 1963.
90. П у г а ч е в В. С. (ред.), Основы автоматического управле-
ния, изд. 3-е,— М.: Наука, 1974.
91. Пугачев В. С., Казаков И. Е., Евланов Л. Г. Основы
статистической теории автоматических систем.—М.: Маши-
ностроение, 1974.
92. Пухов Г. Е. Методы анализа и синтеза квазианалоговых
электронных цепей.— Киев: Наукова думка, 1967.
93. Райом ан Н. С. Что такое идентификация.— М.: Наука,
1970.
94. Райбман Н. С., Чадеев В. М. Адаптивные модели в си-
стемах управления.— М.: Сов. радио, 1966.
95. Р а с т р и г и н Л. А. Случайный поиск в задачах оптими-
зации многопараметрических систем.— Рига: Зинатне, 1965.
96. Романенко А. Ф., Се р г е е в Г. А. Вопросы прикладного
анализа случайных процессов.—• М.: Сов, радио, 1968.
428
ЛИТЕРАТУРА
97. Сергеев Г. А., Романенко А. Ф. Принципы построения
ортогональных фильтров, используемых в вычислительных
устройствах непрерывного типа,—В кн.: Современная циф-
ровая автоматика и вычислительная техника, II, 1962.
98. Силин В. Б., ЗаковряшинА. И. Автоматическое прог-
нозирование состояния аппаратуры управления и наблюде-
ния— М.: Энергия, 1973.
99. Синдеев И. М. К вопросу о синтезе логических схем для
поиска неисправностей и контроля состояния сложных си-
стем.— Изв. АН СССР, Техническая кибернетика, 1983, № 2.
100. С о г о м о н я н Е. С. Контроль работоспособности и поиск
неисправностей в функционально связанных системах.— Ав-
томатика и телемеханика, 1964, № 6.
101. Солодов А. В. Линейные' системы автоматического управ-
ления с переменными параметрами.— М.: Физматгиз, 1962.
102. Солодовников В. В., Матвеев П. С. и др. Вычисли-
тельная техника в применении к статистическим исследо-
ваниям в автоматике.— М.: Маппчгз, 1963.
103. Сомик В. В., Коньков Н. Г. Автомат проверяет самолет
и ракету.— М.: Воениздат, 1967.
104. Стратонович Р. Л. Условные марковские процессы и их
применение к теории оптимального управления.— М.: Изд-во
МГУ, 1966.
105. Темников Ф. Е. Автоматический контроль,—М.: Manirn:i,
1969.
106. Ушаков И. А., Коненков 10. К. Оценка эффективности
функционирования сложных ветвящихся систем с учетом на-
дежности.— В кн.: Кибернетику — на службу коммунизму,
М.: Энергия, 1964, т. 2.
107. Фельдбаум А. А. Основы теории оптимальных автома-
тических систем.— М.: Наука, 1966.
108. Фиаловский Л. (Fjalowszki L.) Optyczne tolerance wykonaw-
cze.— Pomiary Automatyka Kontrola, 1965, № 3.
109. Хазен Э. M. Методы оптимальных статистических реше-
ний и задачи оптимального управления.— М.: Сов. радио,
1968.
110. Цыпкин Я. 3. Адаптация и обучение в автоматических
системах.— М.: Наука, 1968.
111. Чегис И. А., Яблонский С. В. Логические способы
контроля работы электрических схем,— Труды математиче-
ского института им. Стеклова, 1958.
112. Чернецкий В. И. Анализ точности нелинейных систем
управления.—М.: Машиностроение, 1968.
ИЗ. Щишонок Н. А., Репкин В. Ф., Барвинский Л. Л.
Основы теории надежности.— М.: Сов. радио, 1964.
114. Шор Я. Б. Статистические методы анализа п контроля ка-
чества и надежности.— М.: Сов. радио, 1962.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аддитивность сигналов 19
Алгоритм прогнозирования инте-
гральный 308
---рекуррентный 308, 325
Анализ динамических систем 45
----- корреляционный 74
Аппроксимация в области 179, 181
— в ряде точек 179, 181
— в точке 179
Астатизм 92
Блуждание центра отражения 26
Больцмана постоянная 22
Вероятность выхода ошибки из за-
данного интервала 50
— доверительная 109
— ошибки решения 51
Вход системы 12
Выделение сигналов ИЗ
Выход системы 12
Гиперэллипсоид качества 204
Гипотеза «замороженности» Тейло-
ра 28
Диагностика неисправностей 53, 57
Дисперсия апостериорная показа-
теля качества методическая 386
—-- ----потенциальная 386
Допуски 196
— гарантийные 196
— контрольные 197, 343
Достоверность контроля 67, 379
•--абсолютная 381, 382.
----- методическая 380, 383
--- относительная 381
— — потенциальная 380
--- реальная 380
Дрейф параметров 52, 310
Задача анализа 45, 73
— оптимизации параметров 113
— синтеза 45, 68, 69, 112
Затраты на контроль 378
Звено линейное инерционное 38
— нелинейное безынерционное 38,
39
Значимость параметров 393, 394
Идентификация 286
Качество системы 44, 45
Квадрат ошибки средний 48
------обобщенный 50
Класс правил решения полный 121
— ---минимальный 121
Комбинация полезного сигнала и
помехи аддитивная 19
— —-----мультипликативная 19
----------смешанная 19
Контроль по параметрам 58
— по показателям качества 58
— по сигналу ошибки 58
— прогнозирующий 307
Концепции контроля 52
Коэффициент ассиметрии поля до-
пуска 340
— значимости 394, 395
Коэффициенты ошибок 92
--по положению 92
--—по скорости 92
----по ускорению 92
—* — статических 92
Критерий Неймана — Пирсона 342,
354
Линеаризация гармоническая 43, 44
— статистическая 40—44
Матрица весовых функций 35
— коэффициентов ошибок 92
— по положению 92
--— по скорости 92
— — •— по ускорению 92
- — статических 92
Мерцание цели угловое 26
Метод весовых функций 77
— градиентного случайного поиска
189
— Монте-Карло 40, 107
— неградиентного случайного по-
иска -192 - - ; -
430
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Метод статистических испытаний
40, 107
— статистической линеаризации 40,
75, 99
•— уравнений моментов 84
— частотных характеристик 90
Модель объекта контроля 69, 172
-----аналитическая 174, 176
---— логическая 175
Монте-Карло метод 40, 107
Мультипликация сигналов 19
Надежность 61, 62
Нелинейность 38, 39
— таацкаа 39
— кусочно-линейная 39
— симметричная 39
— существенная 39
Немыцкого оператор 39
Необнаружение правильное 133
Нестационарность системы 16, 17
Нормализация сигнала 42
Обнаружение сигнала 114, 132
--- правильное 132
Обработка сигналов 113
Обратимость движения системы
13
Объем контроля 67, 68, 402
Оператор 12
— единичный 14
— линейный 16
— нелинейный 16
• — Немыцкого 39
— обратный 13
— сопряженный 14
Оптимизация параметров ИЗ
Организация контроля 70
Отношение правдоподобия 338
Ошибка системы 45
------ динамическая 46, 47
---случайная 47
Параметры оператора 13
Периодичность контроля 71
Планка постоянная 22
Показатель качества 45, 48, 62
— накопления ущерба 51
—- эффективности контроля 376
Полоса пропускания системы эф-
фективная 95
Помеха 12, 18, 19, 20
Постоянная Больцмана 22
— Планка 22
Потери средние 47
Правила решения экивалентные 121
---е-эквивалентные 121
Правило решения 117
— — бейесово 122
------ допустимое 121
— — Зигерта — Котельникова 135
Правило решения максимального
правдоподобия 136
— решения максимума апостериор-
ной вероятности 135
------ минимаксное 122, 138
Неймана — Пирсона 136
---- нерандомизированное 117
•---приемлемое 121
----равномерно лучшее 121
---- рандомизированное идеальное
117
—-----фактическое 117
Преобразование рандомизированное
117
Принцип суперпозиции 15, 16, 32
Принципы контроля 55
Прогнозирование аналитическое 322
Производительность контроля 67, 72
Пропуск сигнала 47, 132
Работоспособность системы 61
Распознавание сигналов 113
Распределение вероятности полез-
ного сигнала наименее благопри-
ятное 122
Режим работы объекта контроля 55,
56, 68
Результаты контроля 68
Решение требуемое 116
Риск заказчика 200, 347, 366
— изготовителя 200, 347, 366
— средний 47, 48, 119
— условный 120
Сигнал входной 12
— выходной 12
----требуемый 116
— зондирующий 221
— полезный 12, 18—20
----детерминированный 115
----случайный 115
----структурно-детерминирован-
ный 115
Система автоматическая 12
— динамическая 12
— — дискретная 15
— — импульсная 15
---- линейная 15
----многомерная 14
---- нелинейная 15
-----, приводимая к линейной 40
— — непрерывная 15
----нестационарная 16, 17
----- одномерная 14
---- оптимальная 45
---- распределенная 15
•---сопряженная 14, 35
•---сосредоточенная 15
----стационарная 16, 17
—------ астатическая 92, 93
— информационная 306
— контроля абсолютно точная 67
— обнаружения 15
— распознавания сигналов 15
Стационарность системы 16, 17
Стоимость контроля 67
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
431
Стратегия контроля 71 Структура оператора системы 13 Суперпозиции принцип 16, 16, 32 Существенность параметров 393 Схема обслуживания системы конт- роля 71 Тейлора гипотеза «замороженнос- ти» 28 Теорема Ходжеса — Лемана 124, 140 Теория дуального управления 223 >— статистических- решений 114 Тест-сигнал 221, 222 Точность контроля 67, 386 потенциальная 67 реальная 67 Тревога ложная 47, 133 Турбулентность атмосферы 26 Условие физической возможности существования системы 34 Фединг 25 Фильтр формирующий 87 Фликкер-эффект 24 Формула Шоттки 24 Функция весовая 32—35 — обратной системы 34, 35 сопряженной системы 35 »—— стационарной системы 35 Функция импульсная 33 — передаточная 32, 37 — переходная весовая 33 — — импульсная 33 — потерь 47, 118 — стоимости 118 Характеристика нелинейности неод- нозначная 39 нечетная 39 однозначная 39 — — четная 39 — частотная линейной системы 32, 36 — — обратной системы 37 • сопряженной системы 37 Характеристики линейных систем 32 Шоттки формула 24 Шум генераторно-рекомбинацион- ный 24 — дробовой 23 — мерцания 24 = тепловой 22 Эллипс качества 201 Энтропия априорная показателя ка- чества 385 Эффективность измерений 385 — контроля 67, 376