/













Текст
ВНУТРЕННЕЕ ТРЕНИЕ
ПРИ КОЛЕБАНИЯХ
Я. Г. ПАНОВКО
ВНУТРЕННЕЕ ТРЕНИЕ
ПРИ КОЛЕБАНИЯХ
УПРУГИХ СИСТЕМ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1960
ОГЛАВЛЕНИЕ
Предисловие 6
Введение 9
Глава I. Колебания упруго-вязких систем 18
§ 1. Колебания систем с одной степенью свободы 18
1.1. Вступительные замечания A8). 1.2. Свободные
колебания A8). 1.3. Действие гармонической возмущающей
силы B2). 1.4. Действие полигармонической
возмущающей силы B7). 1.5. Замкнутая форма решения при
действии произвольной периодической возмущающей
силы C2). 1.6. Действие возмущающей силы, заданной
законом «прямоугольного синуса» C5). 1.7. Действие
периодических двухсторонних импульсов C7). 1.8.
Заключительное замечание D0).
§ 2. Колебания систем с распределенными параметрами . . 41
2.1. Вступительные замечания D1). 2.2. Свободные
продольные колебания D1). 2.3. Свободные крутильные
колебания D7). 2.4. Свободные изгибные колебания D9).
2.5. Вынужденные продольные колебания E3). 2.6.
Вынужденные крутильные колебания E9). 2.7. Вынужденные
изгибные колебания F1).
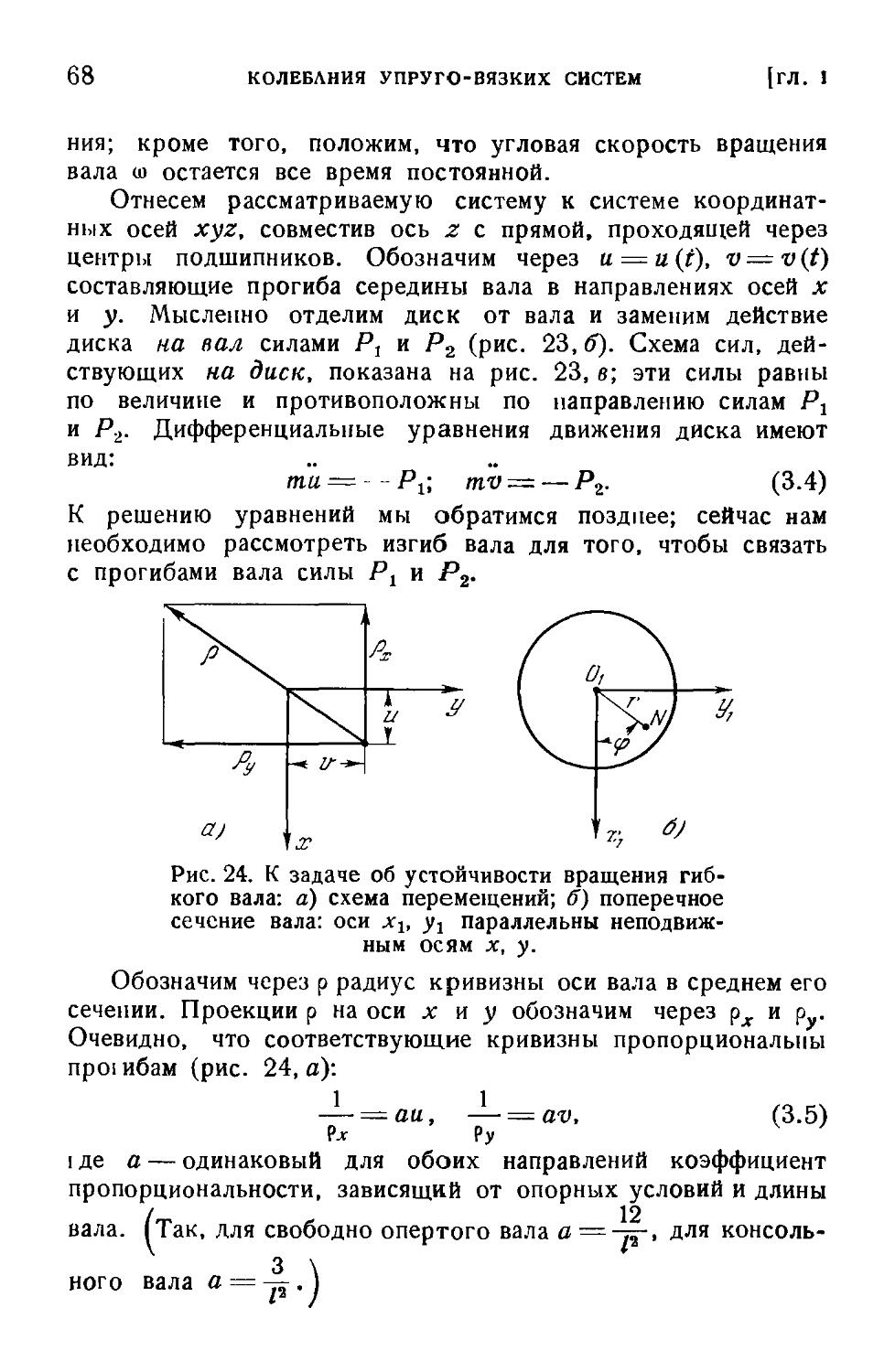
§ 3. Особенности вращения валов, вызванные гистерезисом 63
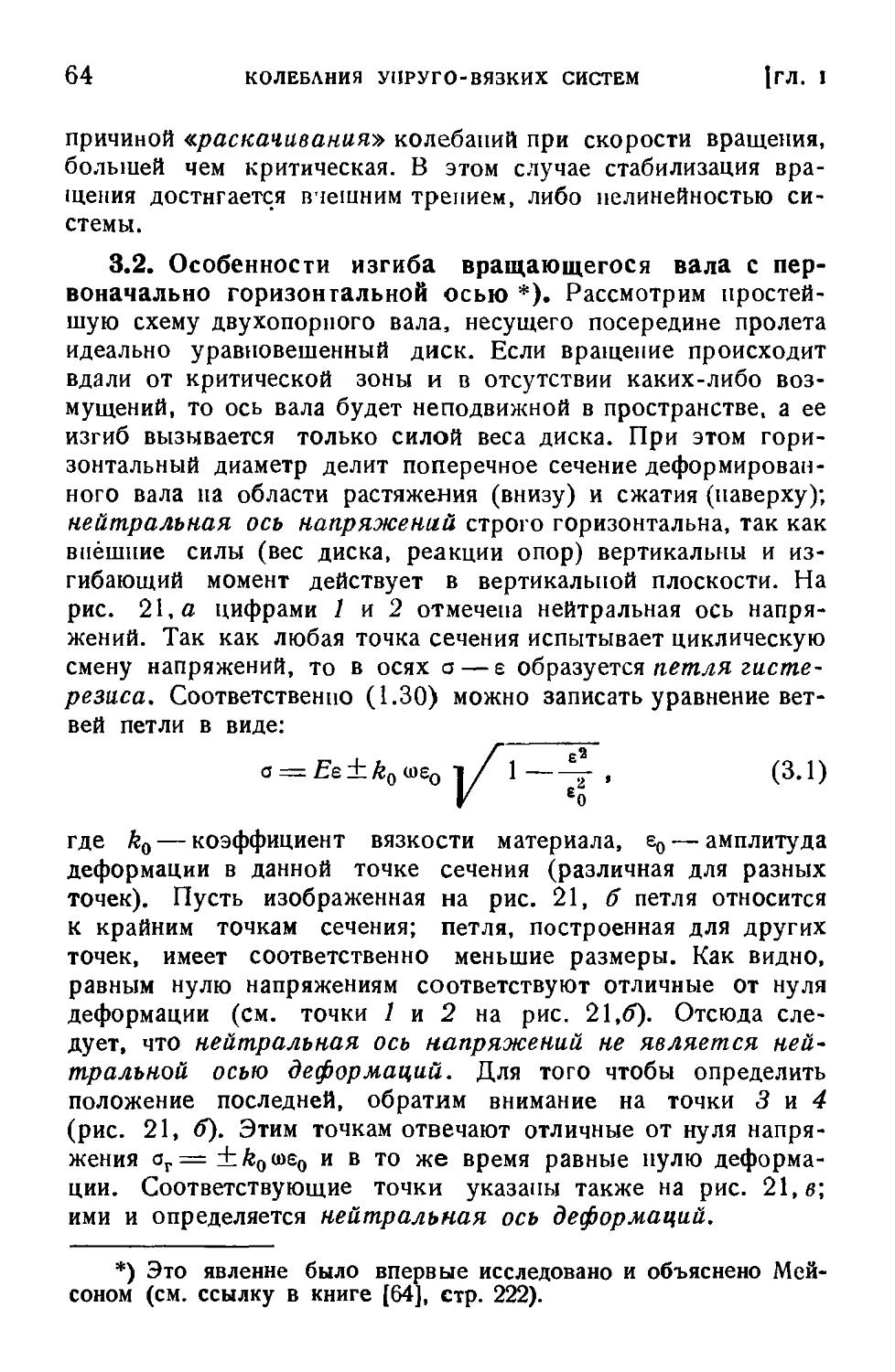
3.1. Вступительные замечания F3). 3.2. Особенности
изгиба вращающегося вала с первоначально горизонтальной
осью F4). 3.3. Неустойчивость вращения гибкого вала
в закритической области F7).
§ 4. Применение условной упруго-вязкой схемы 73
4.1. Вступительные замечания G3). 4.2. Определение
амплитуды вынужденных колебаний G5). 4.3. Приложение
способа Бокка к анализу устойчивости вращения вала
(решение Ф. М. Диментберга) G8). 4.4. Способ А. П.
Филиппова (80).
1*
4
ОГЛАВЛЕНИЕ
Глава II. Прямые способы оценки влияния внутреннего
трения в материале 83
§ 5. Площадь и форма петли гистерезиса 83
5.1. Вступительные замечания (83). 5.2. Опытные данные
и варианты описания площади петли гистерезиса (83).
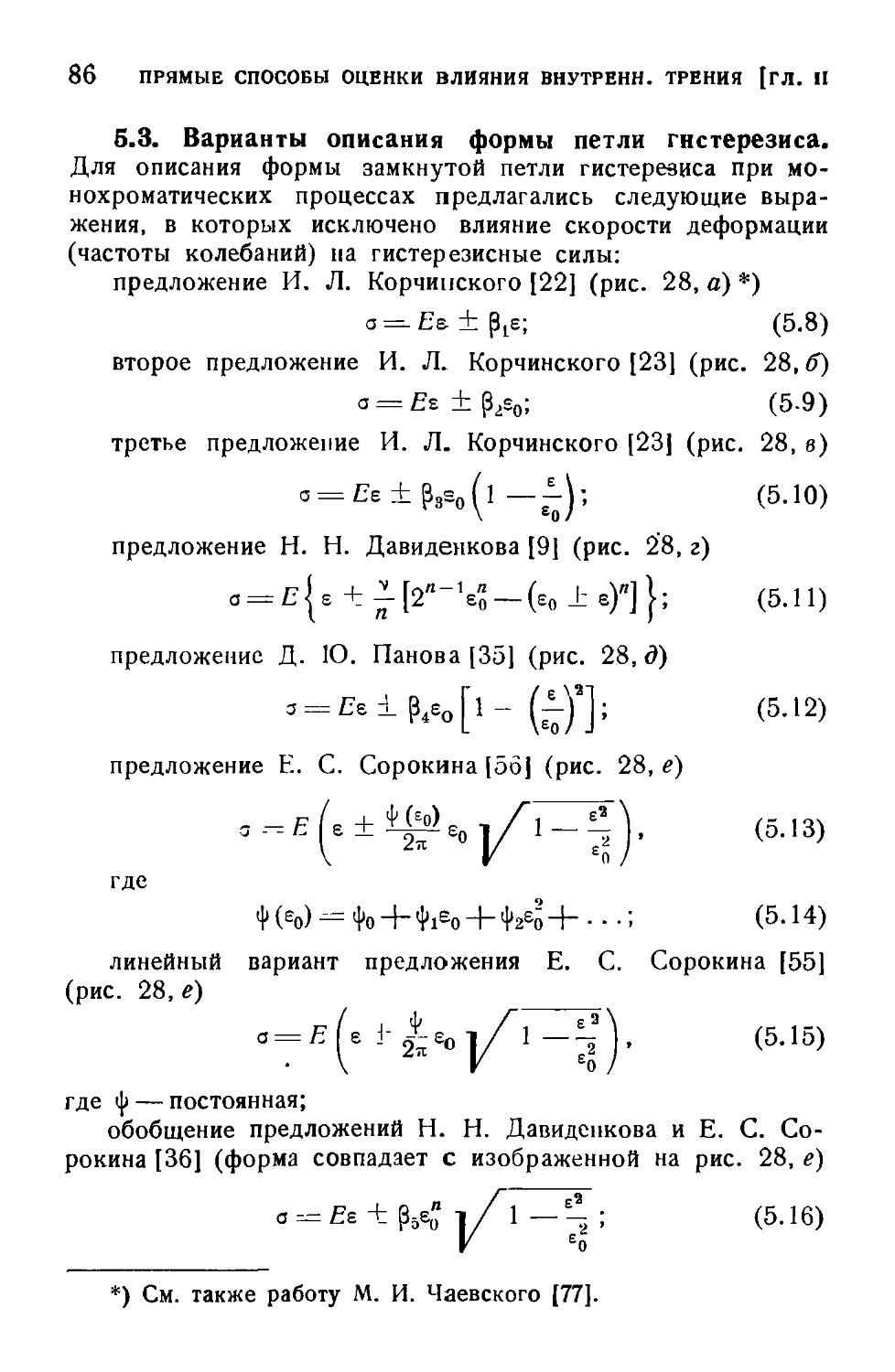
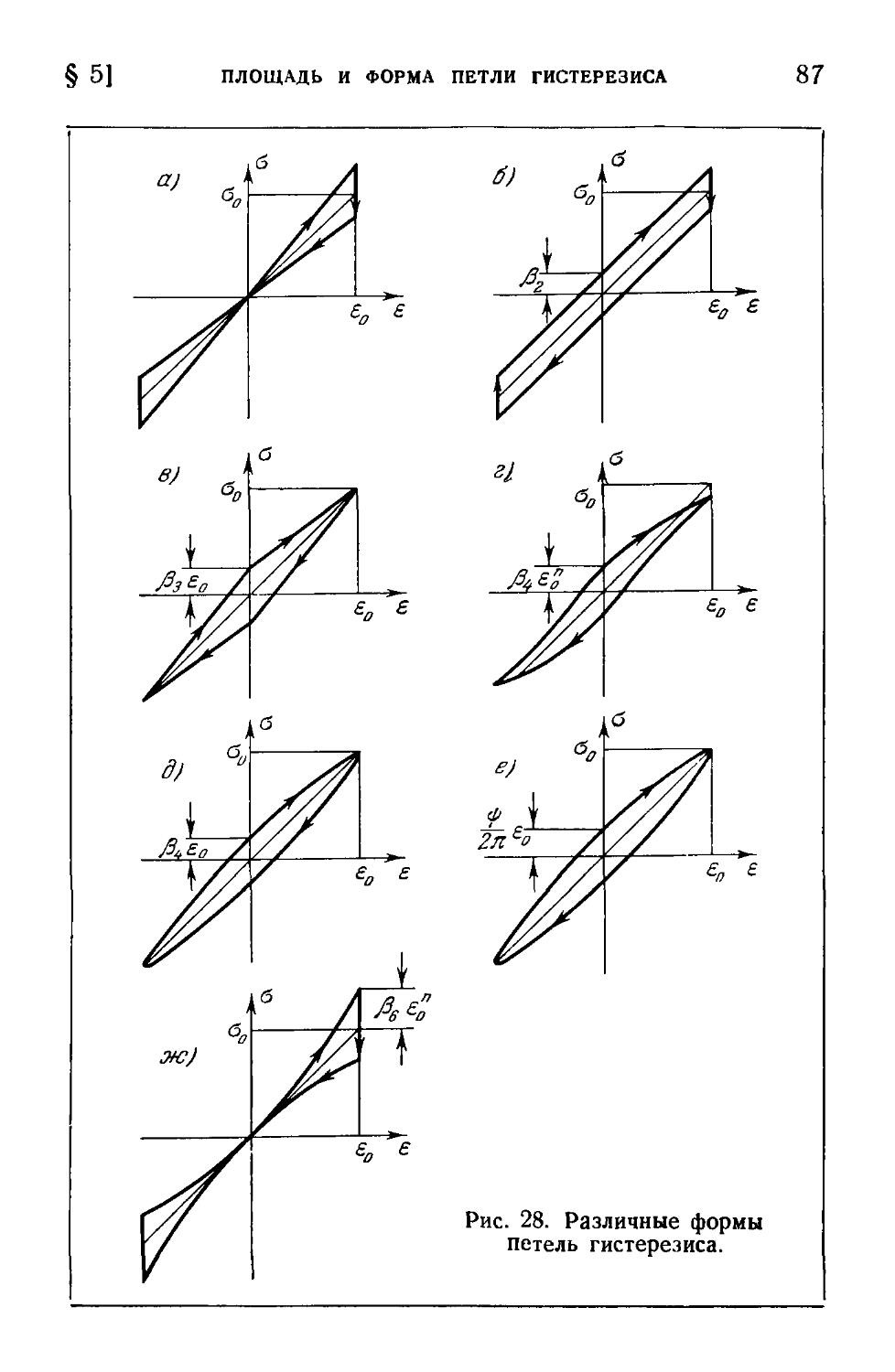
5.3. Варианты описания формы петли гистерезиса (86).
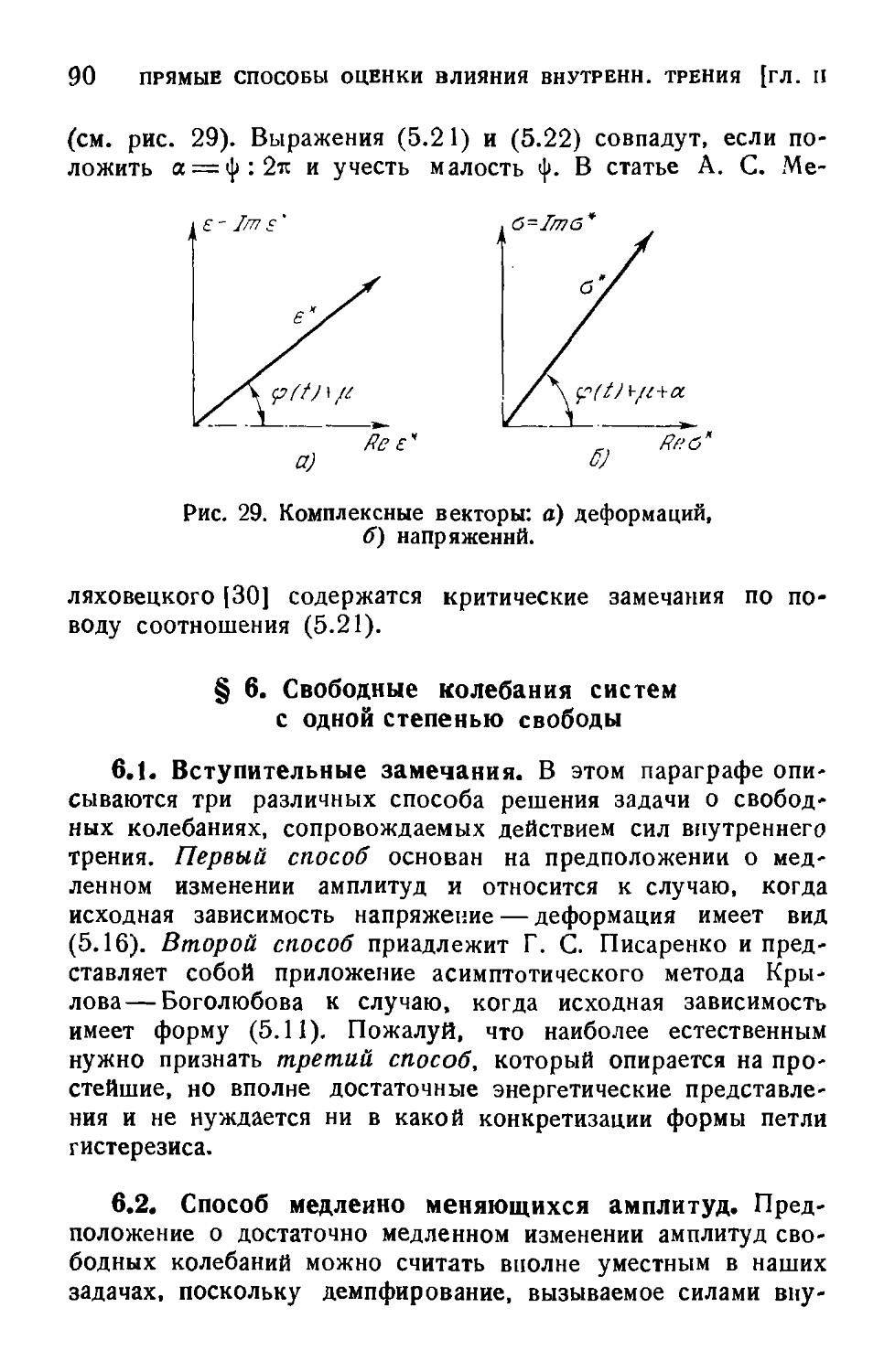
§ 6. Свободные колебания системы с одной степенью
свободы 90
6.1. Вступительные замечания (90). 6.2. Способ медленно
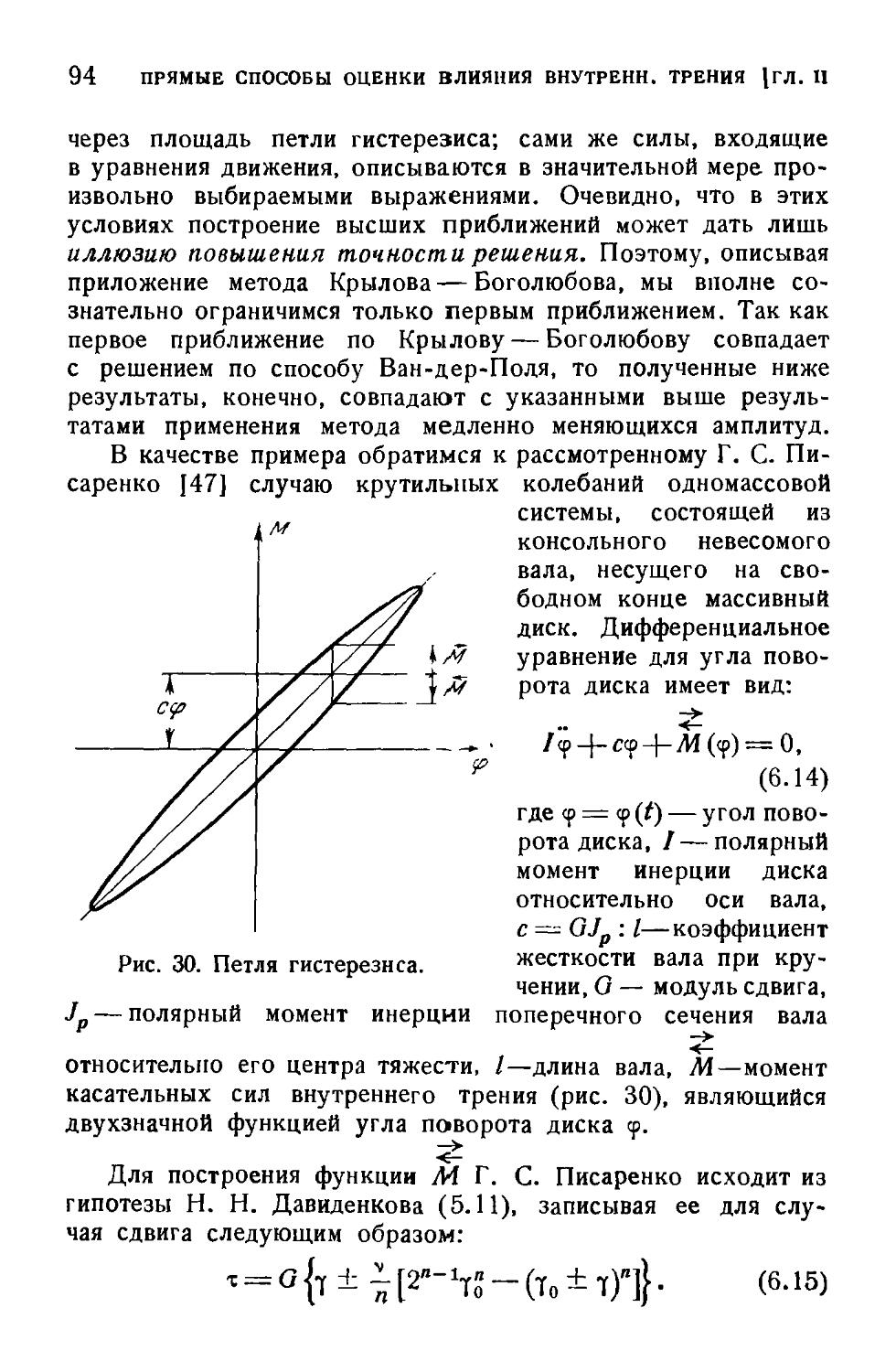
меняющихся амплитуд (90). 6.3. Способ Г. С. Писа-
ренко (93). 6.4. Энергетический способ построения
огибающей A00). 6.5. Использование энергетического
способа для определения вида функции VF (А) A03).
§ 7. Вынужденные колебания систем с одной степенью
свободы 105
7.1. Вступительные замечания A05). 7.2. Применение
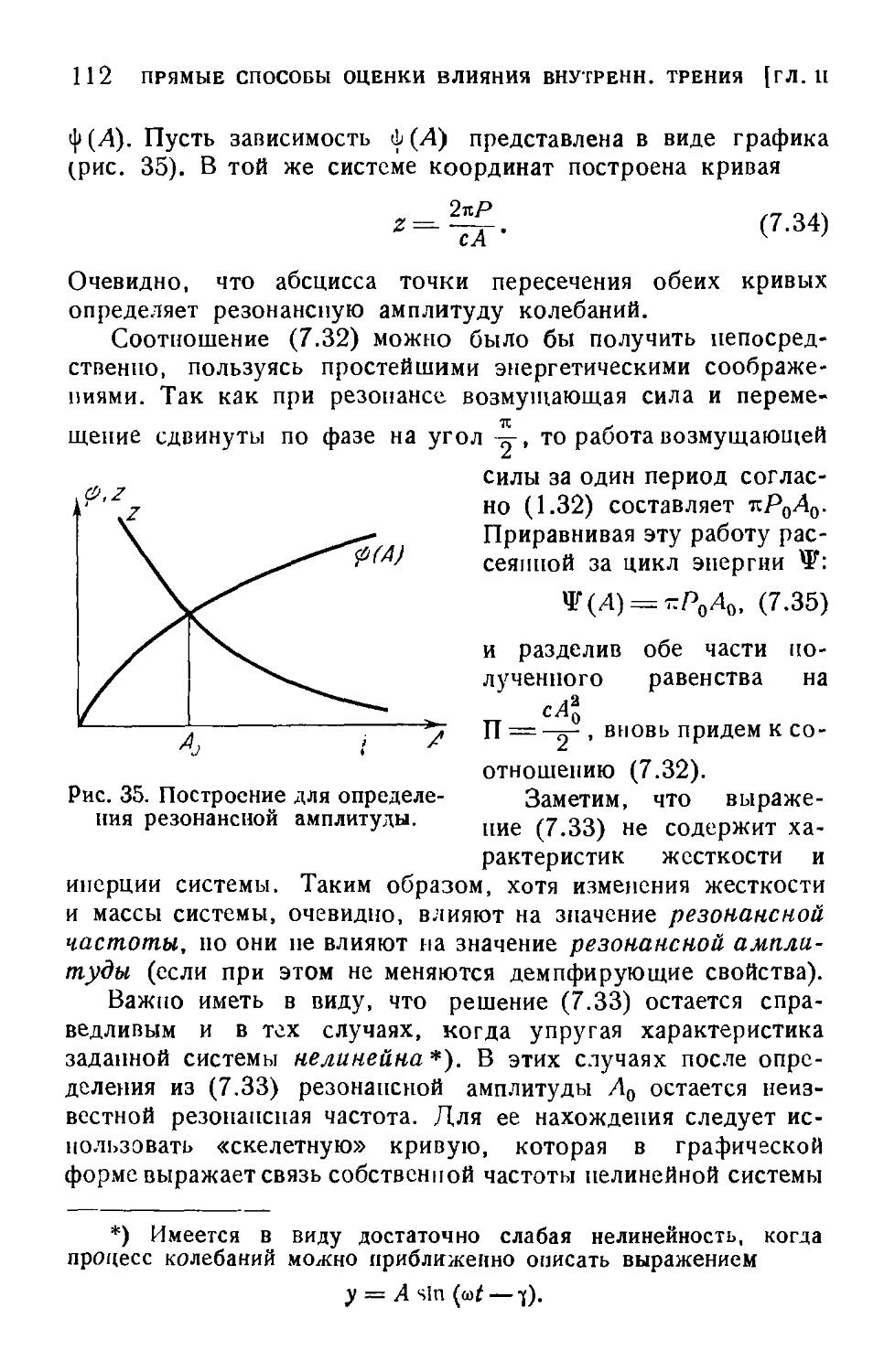
обобщенной гипотезы Е. С. Сорокина A05). 7.3.
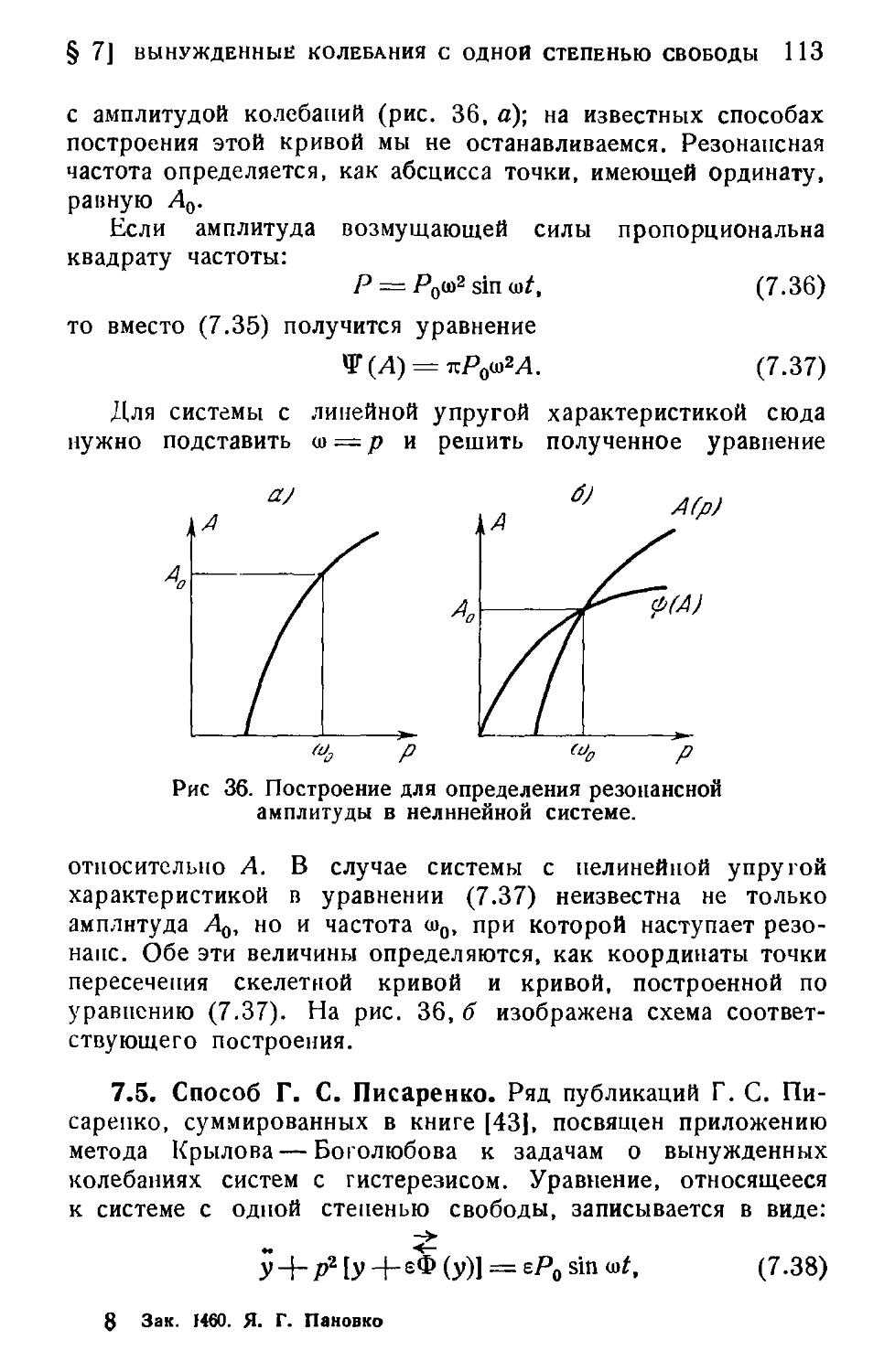
Тригонометрическая форма решения A07). 7.4. Определение
резонансных амплитуд в системах с линейными и
нелинейными упругими характеристиками A11). 7.5. Способ
Г. С. Писаренко A13).
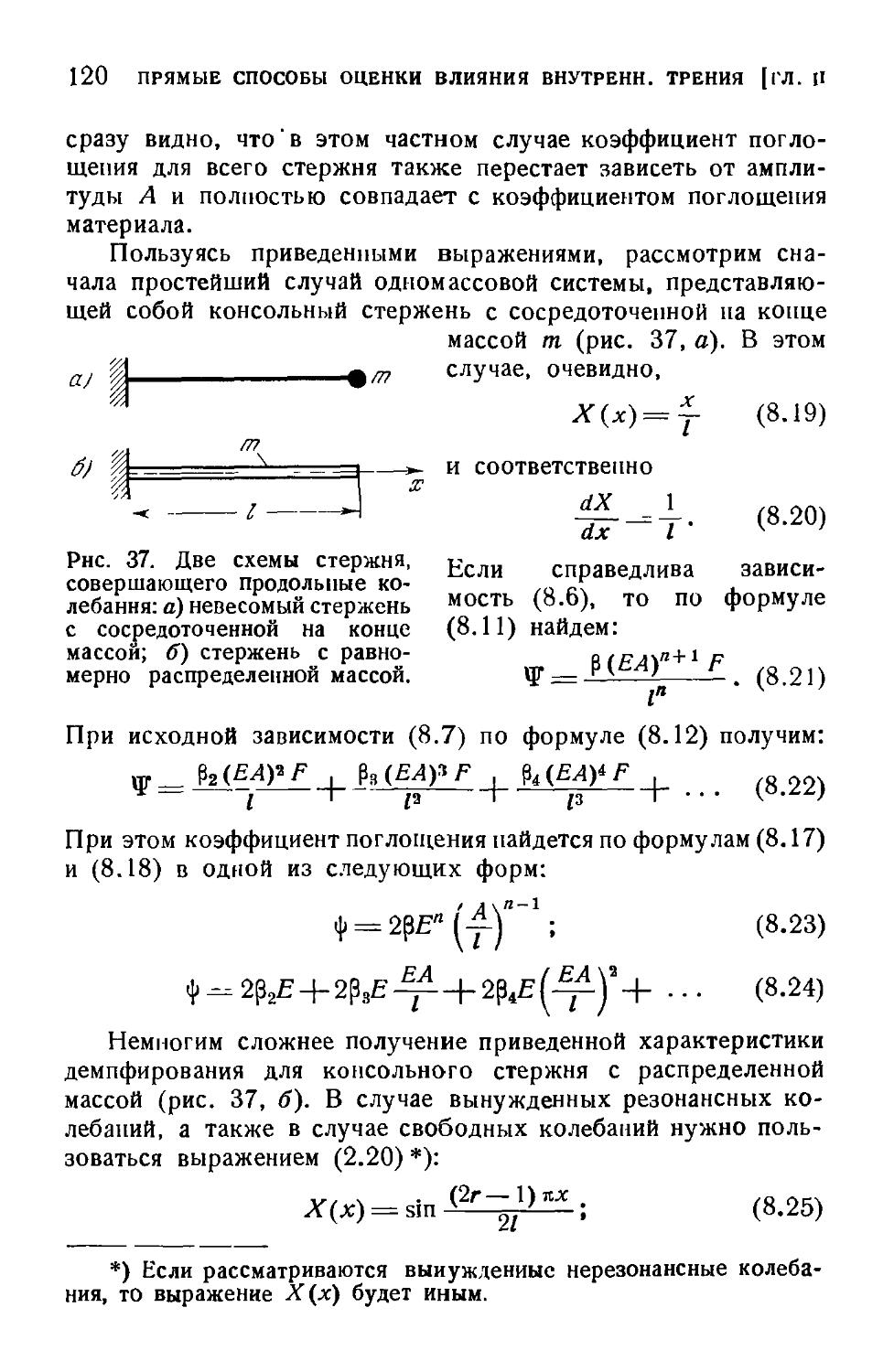
§ 8. Колебания систем с распределенными параметрами . . 114
8.1. Вступительные замечания A14). 8.2. Приведенная
характеристика демпфирования при продольных
колебаниях A16). 8.3. Приведенная характеристика
демпфирования при крутильных колебаниях A22). 8.4.
Приведенная характеристика демпфирования при изгибных
колебаниях A25). 8.5. Определение характеристик
демпфирования материала по опытной виброграмме свободных
затухающих колебаний A28).
Глава Ш. Внутреннее трение в сочленениях 130
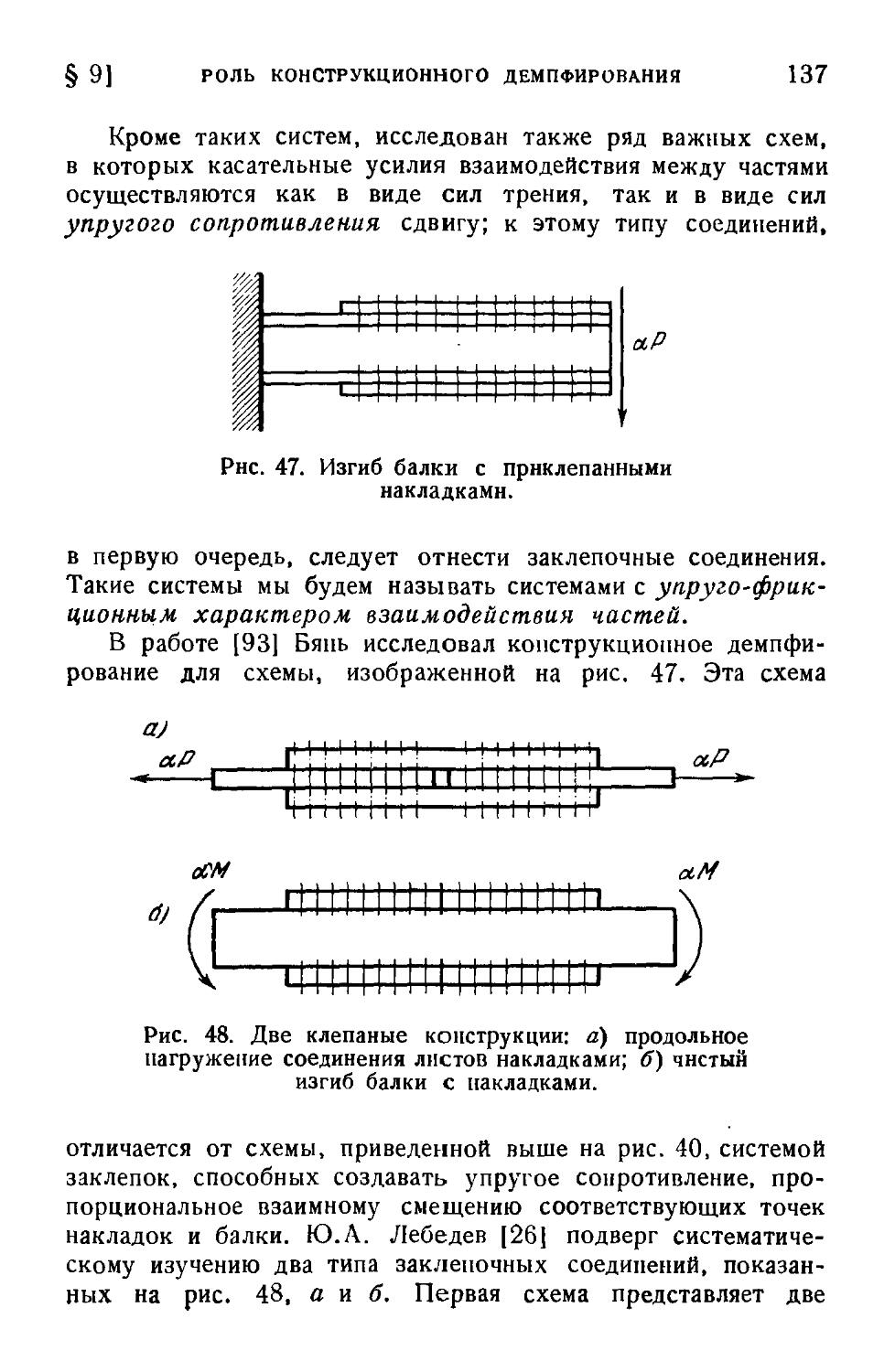
§ 9. Роль конструкционного демпфирования 130
9.1. Постановка вопроса A30). 9.2. Краткий обзор
литературы A31). 9.3. Характеристика дальнейшего
изложения A38).
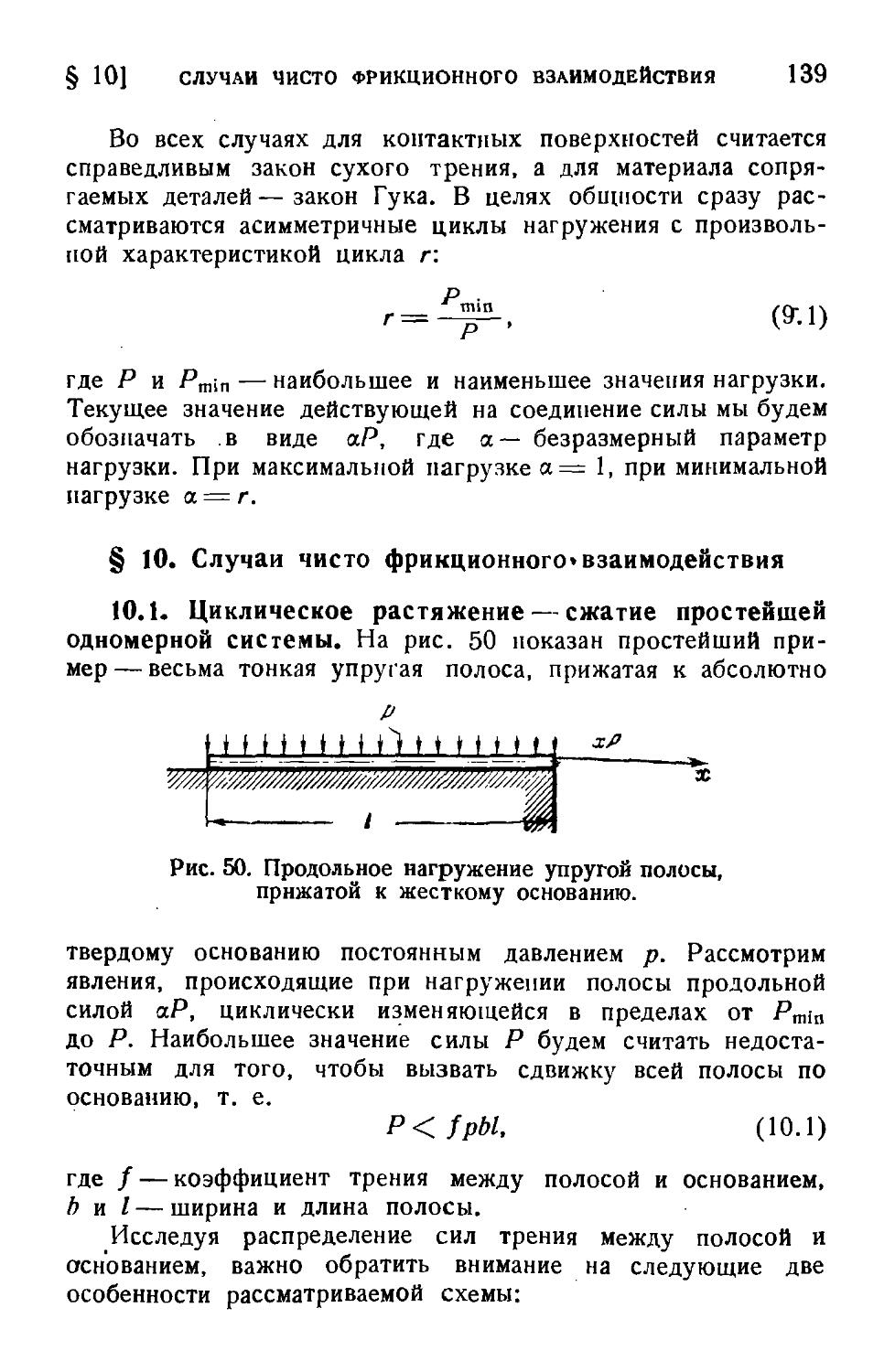
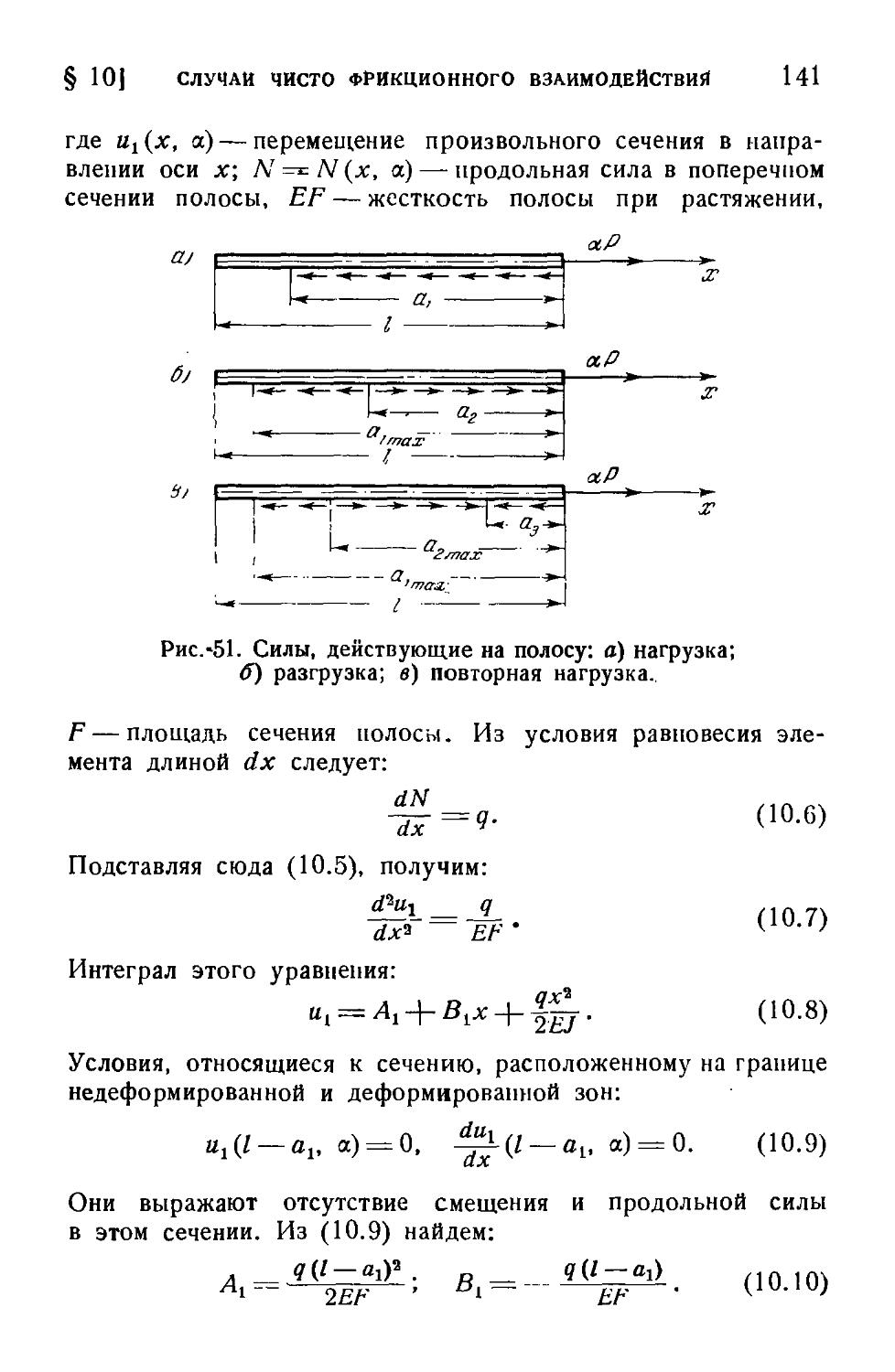
§ 10. Случаи чисто фрикционного взаимодействия .... 139
10.1. Циклическое растяжение—сжатие простейшей
одномерной системы A39). 10.2. Циклическое нагружение прес-
ОГЛАВЛЕНИЕ
сового соединения A46). 10.3. Циклическое нагружение
составной балки (поперечный изгиб) A48). 10.4.
Циклическое нагружение валки с накладками (чистый
изгиб A53). 10.5. Циклическое нагружение прямоугольной
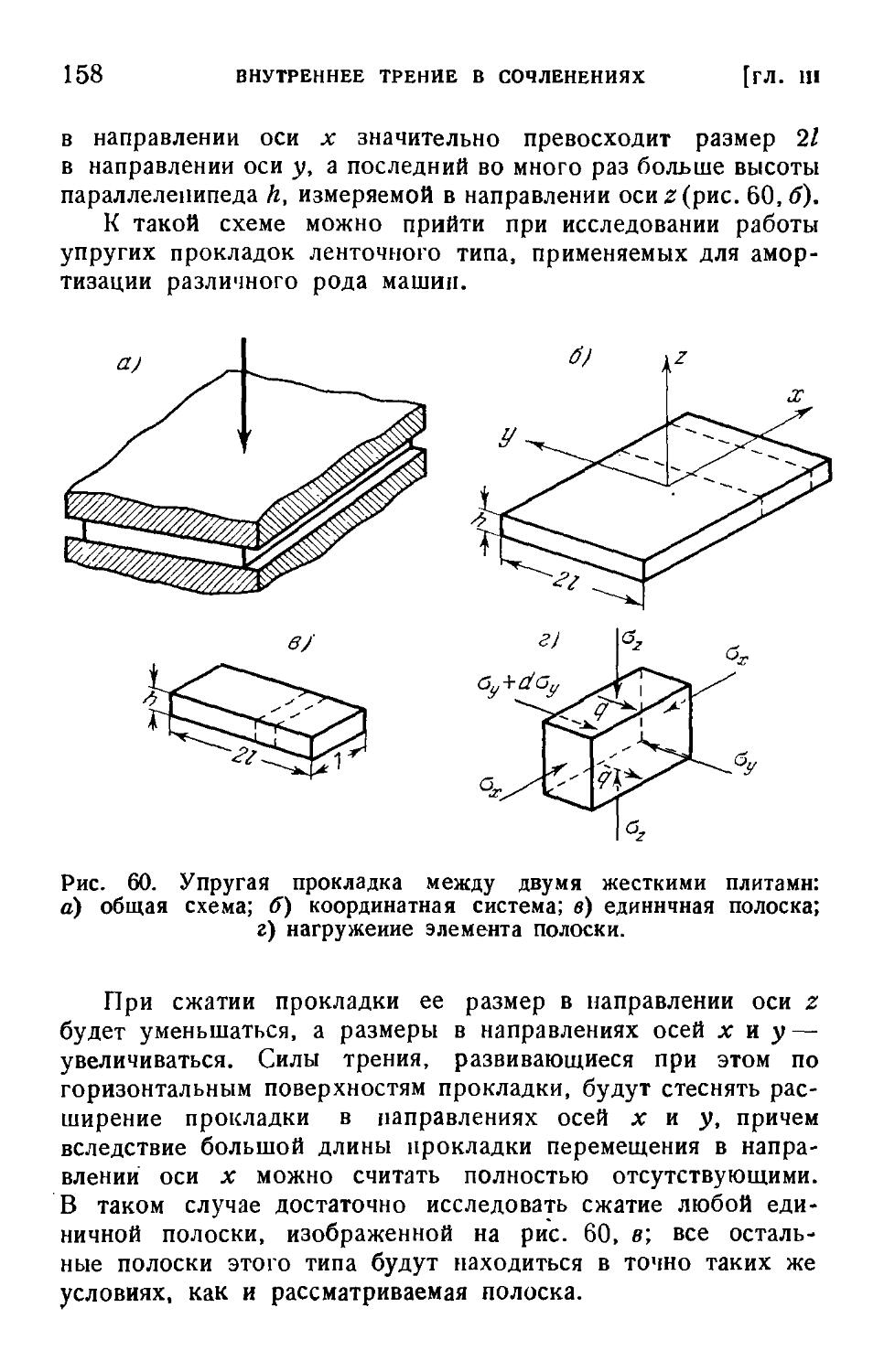
упругой прокладки A57). 10.6. Циклическое нагружение
круглой упругой прокладки A64). 10.7. Циклическое
нагружение упрощенной схемы дисковой муфты A(:8).
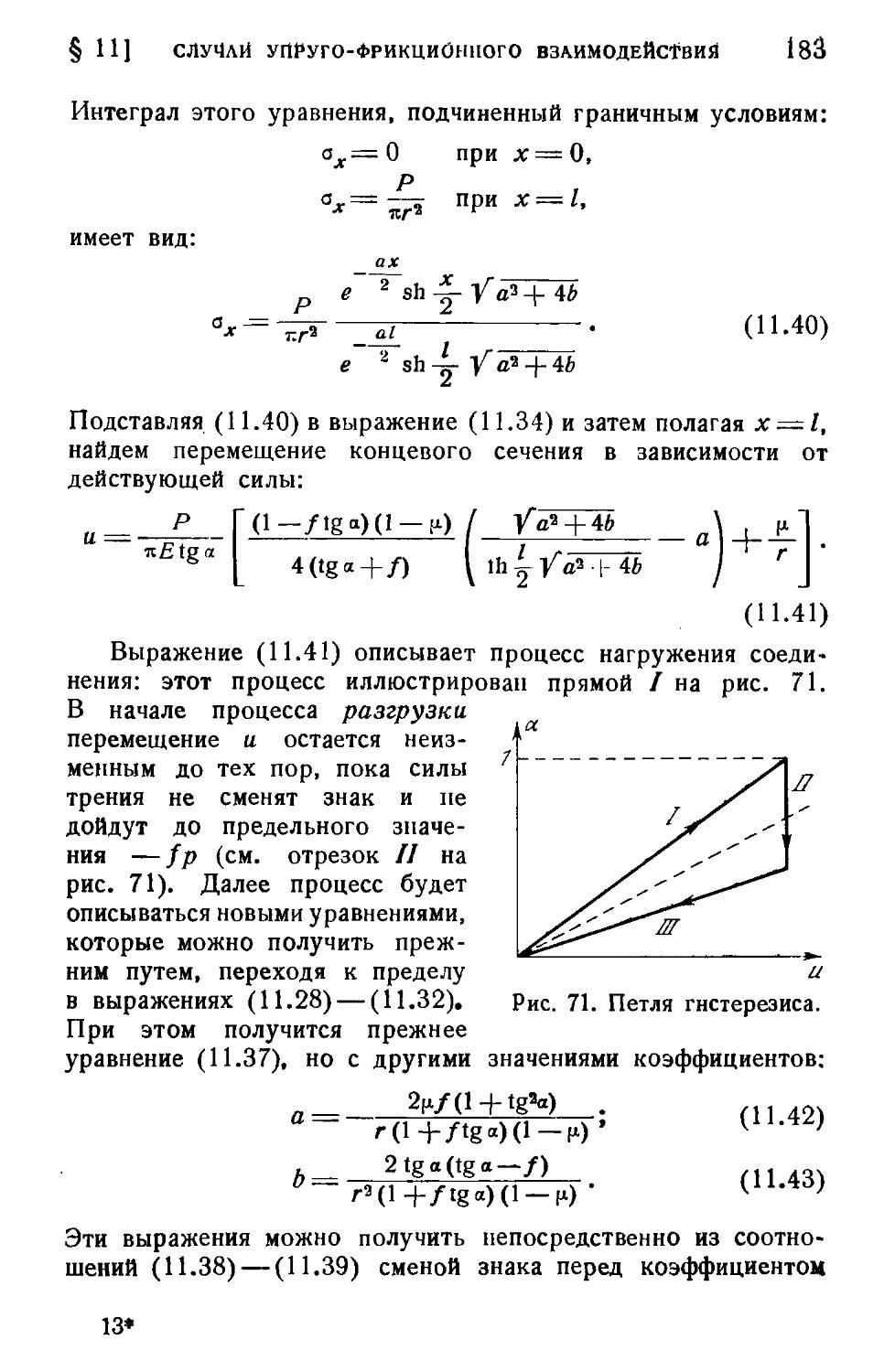
§ 11. Случаи упруго-фрикционного взаимодействия . . . .
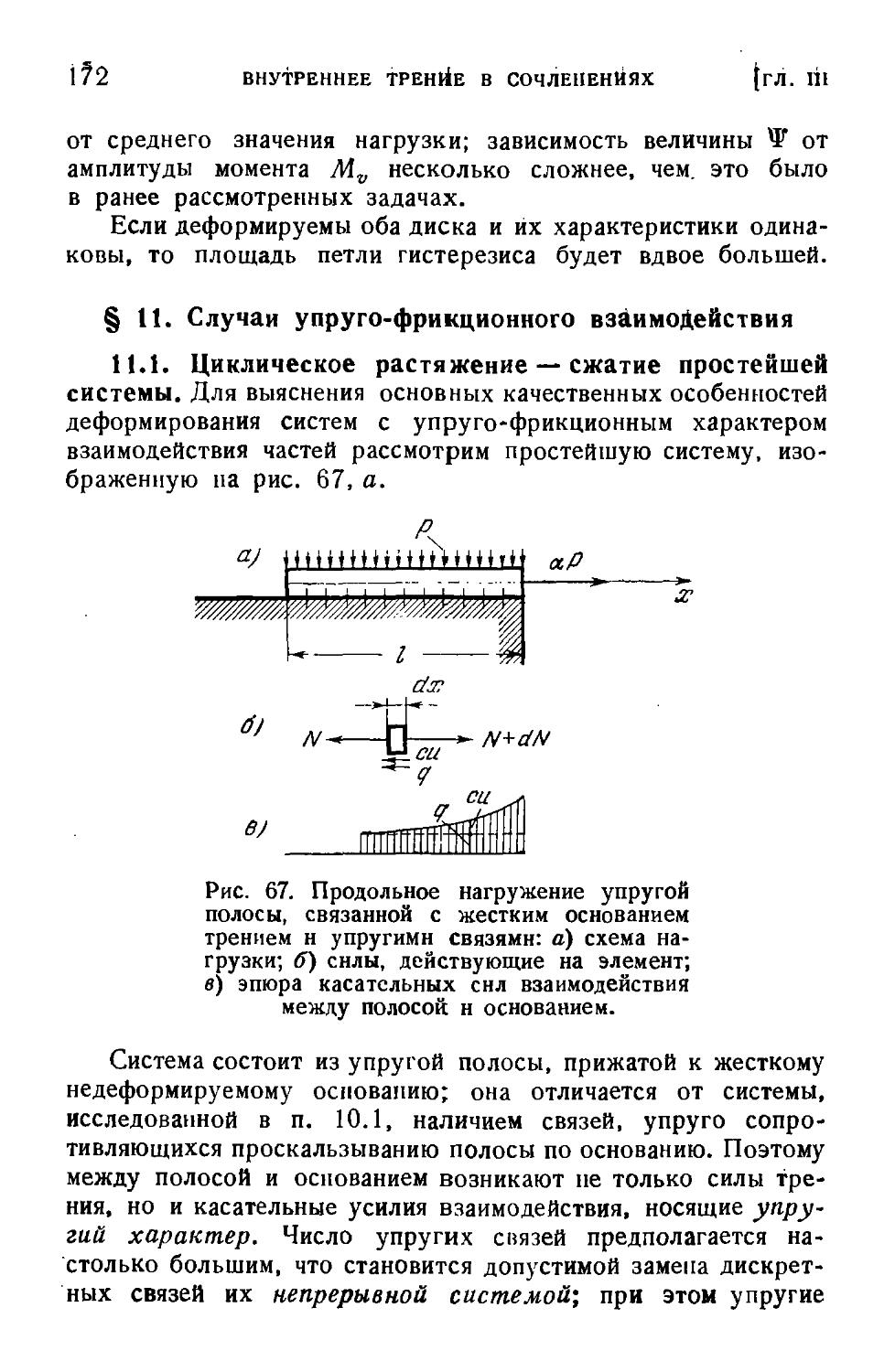
11.1. Циклическое растяжение — сжатие простейшей
системы A72). 11.2. Циклическое нагружение заклепочного
соединения A77). 11.3. Циклическое нагружение балки
с накладками (чистый изгиб) A78). 11.4. Циклическое
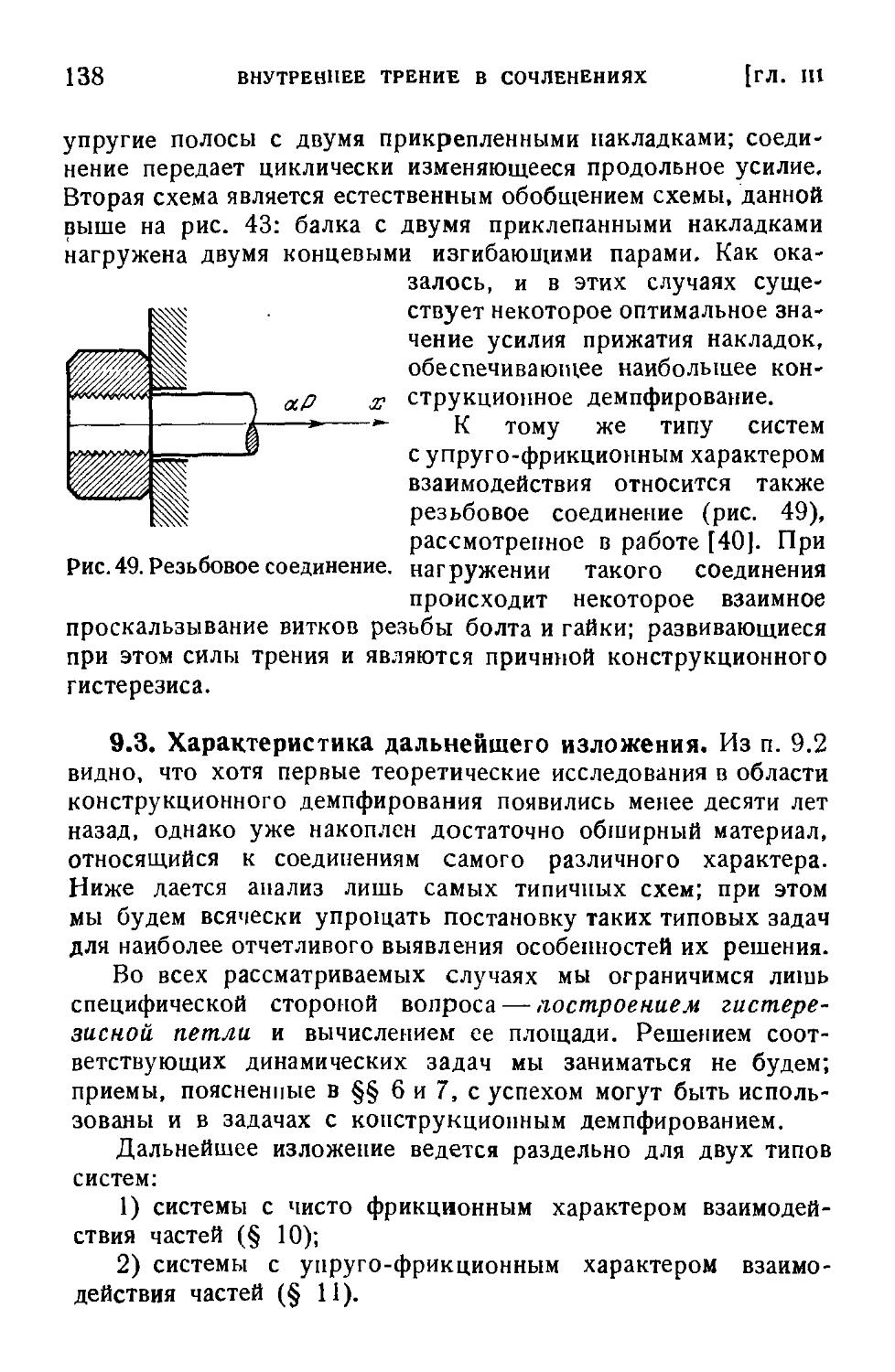
нагружение резьбового соединения A78).
Литература
Предметный указатель
ПРЕДИСЛОВИЕ
Среди различных причин затухания колебаний
механических систем одной из важнейших является рассеяние
энергии внутри самой колебательной системы (внутреннее трение
в материале и трение в сочленениях). Достоверные оценки
влияния внутреннего трения важны при решении множества
разнообразных задач, особенно для систем, при эксплуатации
которых возможны резонансные режимы.
Настоящая книга посвящена проблеме учета внутреннего
трения в динамических расчетах механических систем. Книга
носит обзорный характер и по своему замыслу должна дать
связное изложение различных способов аналитического
описания законов внутреннего трения, а также приемов решения
соответствующих дифференциальных уравнений.
Нужно признать, что, несмотря на успехи, достигнутые
при изучении природы внутреннего трения в материале,
механизм этого сложного явления до сих пор остается
недостаточно выясненным. Однако накопленный к настоящему
времени экспериментальный материал позволяет сформулировать
вполне определенные феноменологические представления,
в сущности достаточные для решения конкретных технических
задач. Поэтому, имея в виду в основном читателя-инженера,
а не читателя-физика, мы в своем изложении отказались от
какого-либо углубления в специфические процессы,
обусловливающие внутреннее трение в материале, но стремились
к возможно более ясному освещению основных
закономерностей, которые вытекают из опытных фактов.
Соответственно имеющемуся экспериментальному
материалу целесообразно в качестве исходного для динамических
расчетов положения принять независимость сил
внутреннего неупругого сопротивления от скорости деформации
(т. е. от частоты колебательного процесса). Опытные данные
ПРЕДИСЛОВИЕ
7
подтверждают справедливость этой рабочей гипотезы в широком
диапазоне частот и амплитуд напряжений.
Однако читателя не должно удивить, что в первой главе
рассматриваются колебания систем с вязким сопротивлением.
Анализ этой, можно сказать, классической расчетной схемы
необходим даже в свете отмеченных выше экспериментальных
подтверждений положения о независимости сил внутреннего
трения от скорости деформации. Дело в том, что
надлежащим образом осуществленная эквивалентная линеаризация
позволяет привести реальные системы с внутренним трением
к системам с вязким сопротивлением (при обычно
выполняющихся условиях достаточно слабого демпфирования).
Вторая глава посвящена различным прямым способам
решения задач о колебаниях систем с внутренним трением
в материале. Эти способы позволяют вычислить
соответствующие характеристики колебательных процессов без обращения
к упруго-вязкой модели. В последнее время появилось
большое число работ, посвященных различным прямым способам;
становится все более острой необходимость в объективном
сопоставлении их возможностей и особенностей.
Темой третьей главы служит проблема
конструкционного демпфирования, т. е. демпфирования, связанного с
потерями на трение в так называемых неподвижных
соединениях (прессовых, заклепочных, шлицевых, резьбовых и т. п.).
Систематическое изучение этой проблемы начато сравнительно
недавно, хотя по своей практической важности она, пожалуй,
существеннее проблемы внутреннего трения в материале.
В отличие от задач демпфирования в подвижных
соединениях (в подшипниках, направляющих и т. п.), когда
естественно игнорировать деформируемость элементов
кинематической пары, решение задач о конструкционном демпфировании
требует одновременного учета как сил трения по контактным
поверхностям, так и деформаций сочлененных элементов.
Практически достаточно точная теория конструкционного
демпфирования может быть построена на основе простейших
физических представлений о свойствах материала (закон Гука)
и о фрикционных свойствах контактных поверхностей (закон
сухого трения). С помощью этих представлений удается
построить расчетным путем петлю гистерезиса; как и в задачах
о колебаниях систем с внутренним трением в материале, вид
и площадь петли конструкционного гистерезиса не зависят
8
ПРЕДИСЛОВИЕ
от скорости процесса циклического деформирования. Это
обстоятельство освобождает от необходимости разработки
каких-либо специальных приемов решения соответствующих
дифференциальных уравнений и позволяет непосредственно
пользоваться способами, эффективность которых установлена
при решении задач о колебаниях систем с внутренним трением
в материале. По указанной причине в третьей главе
рассматривается только специфическое содержание проблемы
конструкционного демпфирования — построение петли гистерезиса
для различных типов соединений.
В список литературы включены лишь источники, наиболее
близко связанные с текстом; соответственно сказанному ранее,
работы, относящиеся к физике процессов трения внутри
материала, в списке почти вовсе не представлены.
Автор испытывает чувство глубокой благодарности к
Г. Ю. Джанелидзе за ценные советы, сделанные им при
обсуждении содержания книги, и И. Б. Варгсру за ряд
полезных замечаний, высказанных при ознакомлении с рукописью.
ВВЕДЕНИЕ
При постановке задач механики деформируемых тел
зачастую допустима замена последних идеально упругими
моделями. Таковы, например, статические задачи о кагру-
жении тел при столь малых напряжениях и температурах,
когда пластические и вязкие эффекты пренебрежимо малы.
К тому же кругу относятся и некоторые задачи теории
упругих колебаний: определение собственных частот и
нормальных форм колебаний, определение амплитуд вынужденных
колебаний в удалении от резонанса и др. В этих случаях
характеристика поведения материала при малых деформациях
принимается в виде закона Гука, а при больших деформациях
принимаются нелинейные зависимости, устанавливающие,
однако, взаимно однозначное соответствие между деформациями
и напряжениями. Соответственно и механическая система
в целом трактуется как вполне упругая.
Однако такая «чисто упругая» постановка далеко не
универсальна. Существует большое число динамических задач,
при решении которых нельзя игнорировать различные
сопротивления неупругого характера. Последние можно разделить
на две группы:
1. Внешние сопротивления: трение в опорах систем; аэро-
или гидродинамическое сопротивление среды; сопротивление,
создаваемое специально вводимыми в систему демпферами.
2. Внутренние сопротивления: внутреннее трение в
материале; трение в так называемых неподвижных соединениях
(заклепочных, прессовых, шлицевых, резьбовых и т. д.) *).
Сопротивления указанного вида неизбежно сопровождают
всякий процесс деформирования реальных механических
систем. Игнорируя неупругие сопротивления, мы лишаемся
*) Трение в сочленениях можно отнести и к группе внешних
сопротивлений; все зависит от того, рассматривается ли вся система
в целом или отдельная деталь.
10
ВВЕДЕНИЕ
возможности объяснить многие реально наблюдаемые явления;
так, в интересующей нас области колебаний наглядным
простым примером явлений этого типа может служить затухание
свободных колебаний. Учет неупругих сопротивлений
приобретает также первостепенное значение при определении амплитуд
вынужденных колебаний в резонансной зоне, для оценки
устойчивости вращения роторов при скоростях, больших
критической, и в ряде других задач динамики деформируемых тел.
Относительная важность сопротивлений указанных двух
групп неодинакова и, в конце концов, зависит от
конкретного конструктивного облика данного механического объекта.
В некоторых случаях преимущественное значение имеют
внешние сопротивления (в особенности если имеются специально
введенные в систему демпферы того или иного типа). Однако
в очень большом числе других случаев доминирующую роль
играют внутренние сопротивления. Так, на колебания
системы лопатки — диск турбины существенное влияние
оказывает внутреннее трение в материале и особенно трение
в замках крепления турбинных лопаток; резонансные
колебания судовых корпусов и авиационных конструкций в
значительной степени ограничиваются демпфирующим действием
трения в заклепочных соединениях; динамические свойства
клепаных мостовых строений зависят от состояния
заклепочных соединений в узлах и их способности к рассеянию энергии.
В указанных технических задачах внутреннее трение
играет роль демпфирующего фактора, благоприятно
влияющего на характер колебательного процесса. При этом
естественно стремиться к всемерному усилению этого влияния.
Существуют, однако, случаи, когда внутреннее трение
становится нежелательным. К таким случаям относится,
например, вращение роторов при угловой скорости, превосходящей
критическую. Сначала экспериментально, а затем и
теоретически было установлено, что внутреннее трение в материале
или в сочленениях частей вращающегося ротора может
послужить причиной возникновения опасных колебаний,
непосредственно угрожающих прочности конструкции. В этом
случае внутреннее трение перестает оказывать демпфирующее
действие и должно быть по возможности уменьшено.
Очевидно, что решение различных задач о колебаниях
систем с внутренним трением требует отчетливых
представлений о закономерностях, описывающих соответствующие не-
ВВЕДЕНИЕ
11
упругие сопротивления. Эти экспериментально устанавливаемые
закономерности неизбежно приходится затем описывать таким
образом, чтобы облегчить последующее решение
соответствующих дифференциальных уравнений.
Остановимся прежде всего на различных вариантах
аналитического описания сил внутреннего трения в материале.
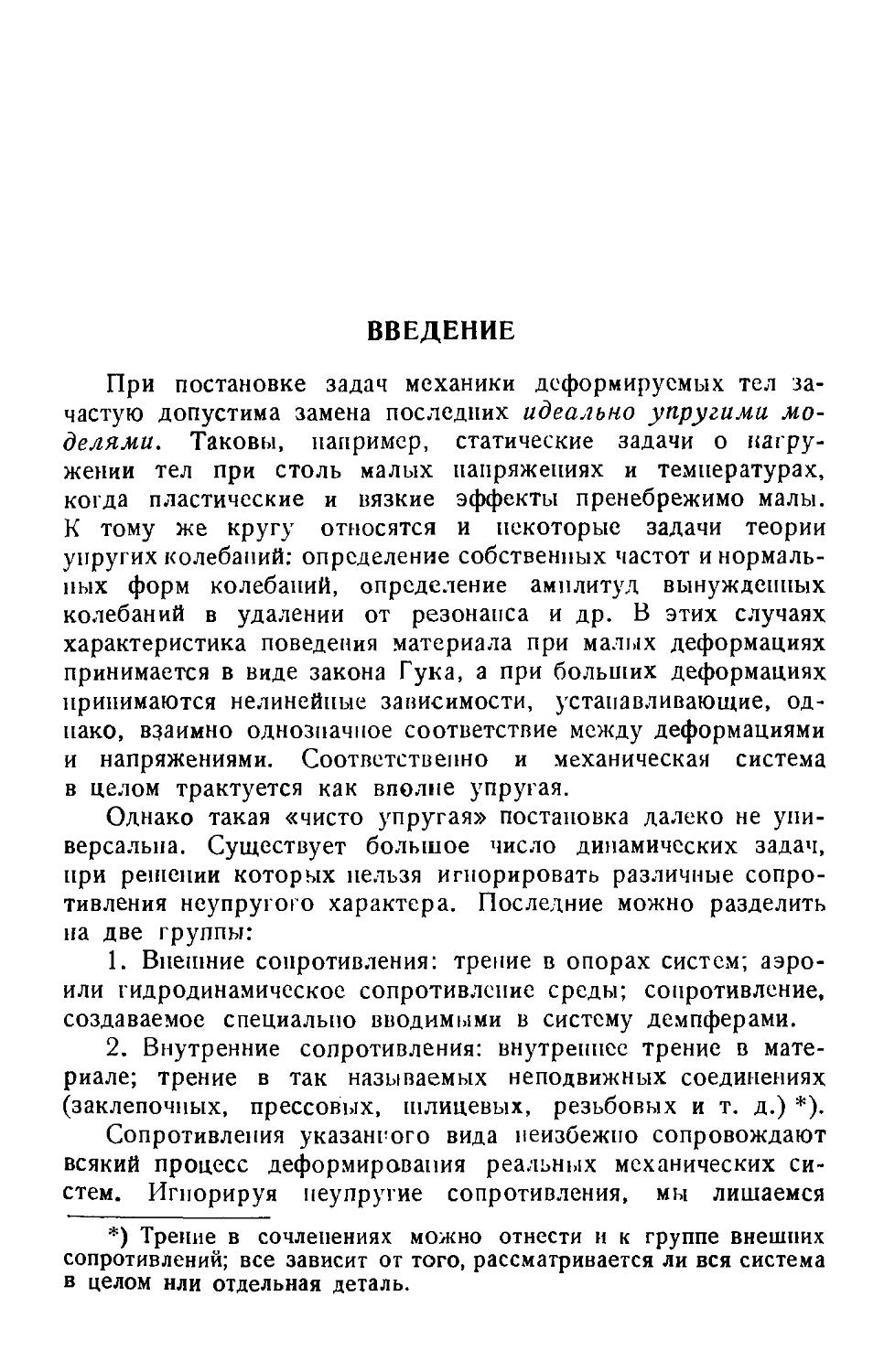
Руководствуясь главным образом соображениями простоты
дифференциальных уравнений движения, Фохт [98] приписал
силам внутреннего трения вязкий характер. Согласно Фохту,
напряжения и деформации в простейшем случае одноосного
напряженного состояния связаны зависимостью
a = fs-f-fe0g, @.1)
где a -— напряжение, е ¦— деформация, t — время,
Е — модуль упругости, k0 — постоянная.
Эта зависимость является обобщением закона
Гука
a = Ее @.2)
на случай, когда развитие упругих напряжений,
описываемых соотношением @.2), одновременно
сопровождается развитием вязких напряжений, рис j
Непредставленных вторым членом правой части дельупруго-
выражения @.1); поэтому постоянную k0 есте- вязкого тела
ственно назвать коэффициентом вязкости Фохта.
материала. Аналогичная зависимость для
приведенной упруго-вязкой системы с одной степенью свободы
имеет вид:
N = cy + k§, @.3)
где N- обобщенная сила, у— обобщенная координата, с—-
приведенный коэффициент жесткости, k — приведенный
коэффициент вязкости.
На рис. 1 показана модель упруго-вязкого тела Фохта,
состоящая из параллельно соединенных между собой упругого
и вязкого элементов. Схема Фохта лучше отображает
свойства реальных тел, чем идеально упругая схема. Действительно,
при циклическом деформировании модель Фохта
обнаруживает различие линий нагрузки — разгрузки в осях N — у. Это
явление, присущее процессам деформирования реальных тел,
У/>Л////»/»/»/»1
12
ВВЕДЕНИЕ
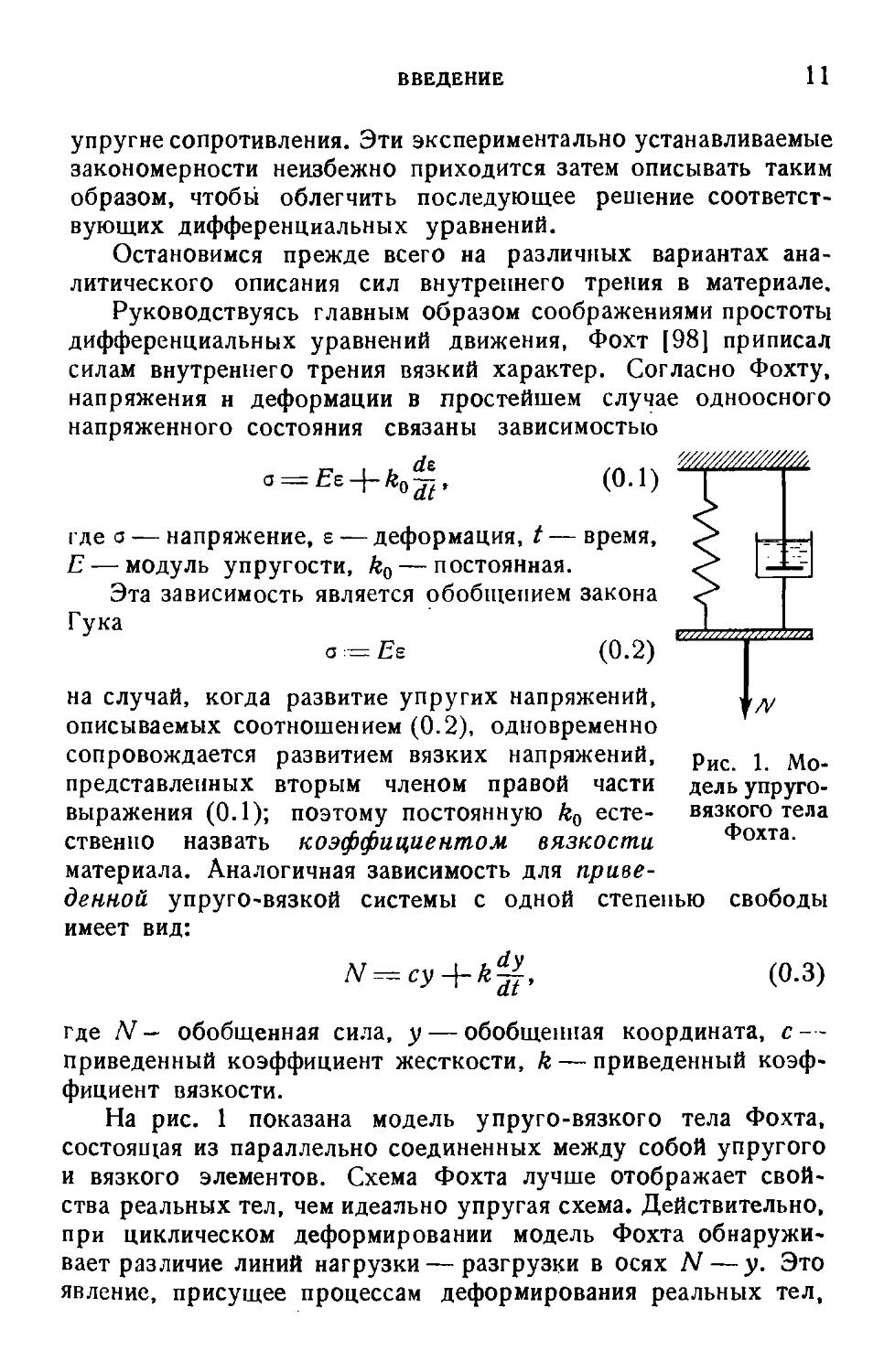
называется гистерезисом и иллюстрировано на рис. 2.
Площадь, ограниченная кривыми нагрузки и разгрузки (петлей
гистерезиса), выражает энергию,
"^ которая рассеивается за один цикл
^р деформирования; указанная энер-
у// гия равна работе, совершаемой
у" / внешней силой за цикл.
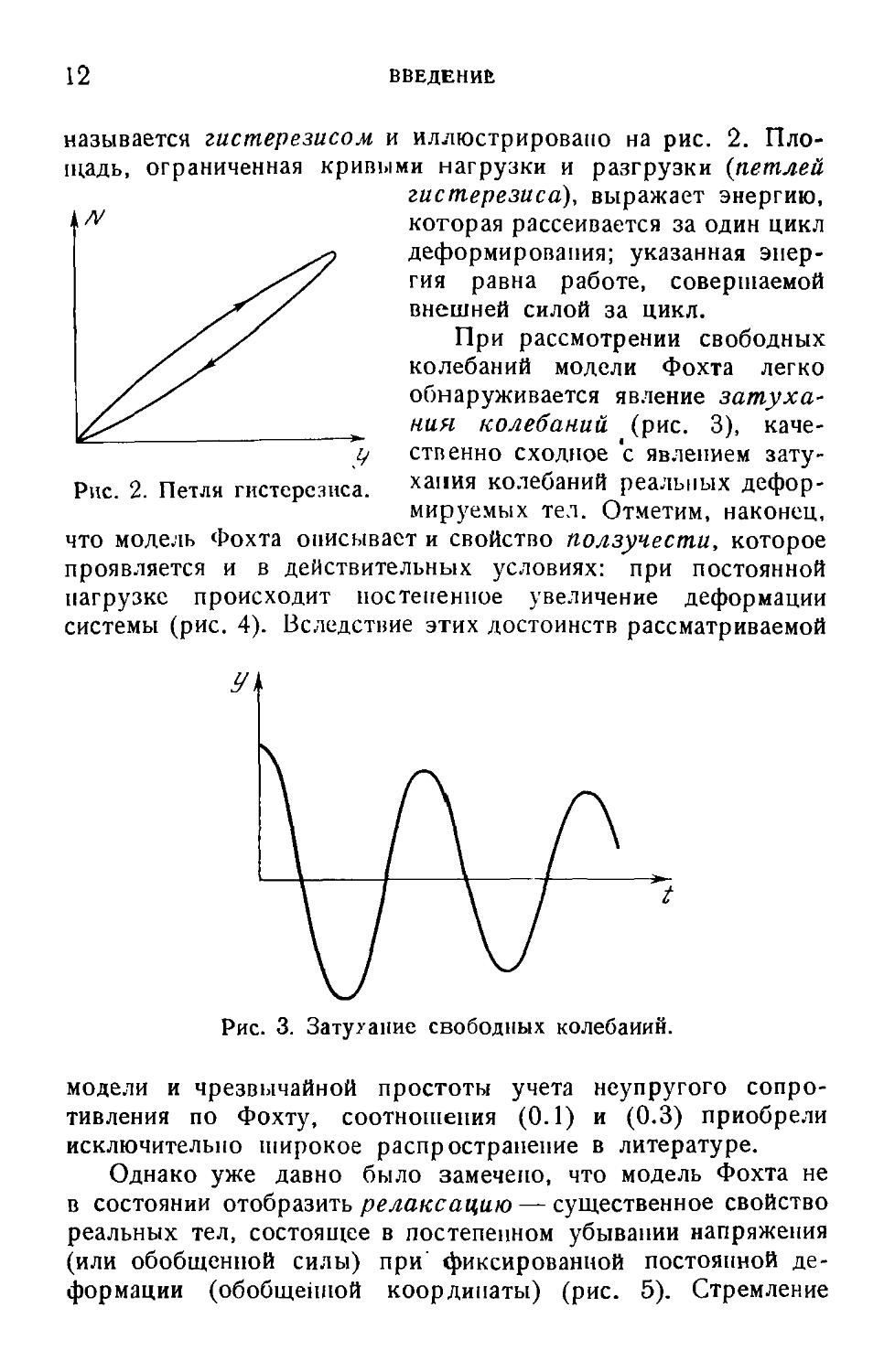
у/ / При рассмотрении свободных
/у* колебаний модели Фохта легко
/у' обнаруживается явление затуха-
sC^^ нин колебаний (рис. 3), каче-
fy ственно сходное с явлением зату-
Рис. 2. Петля гистерезиса. ха,1ИЯ колебаний реальных
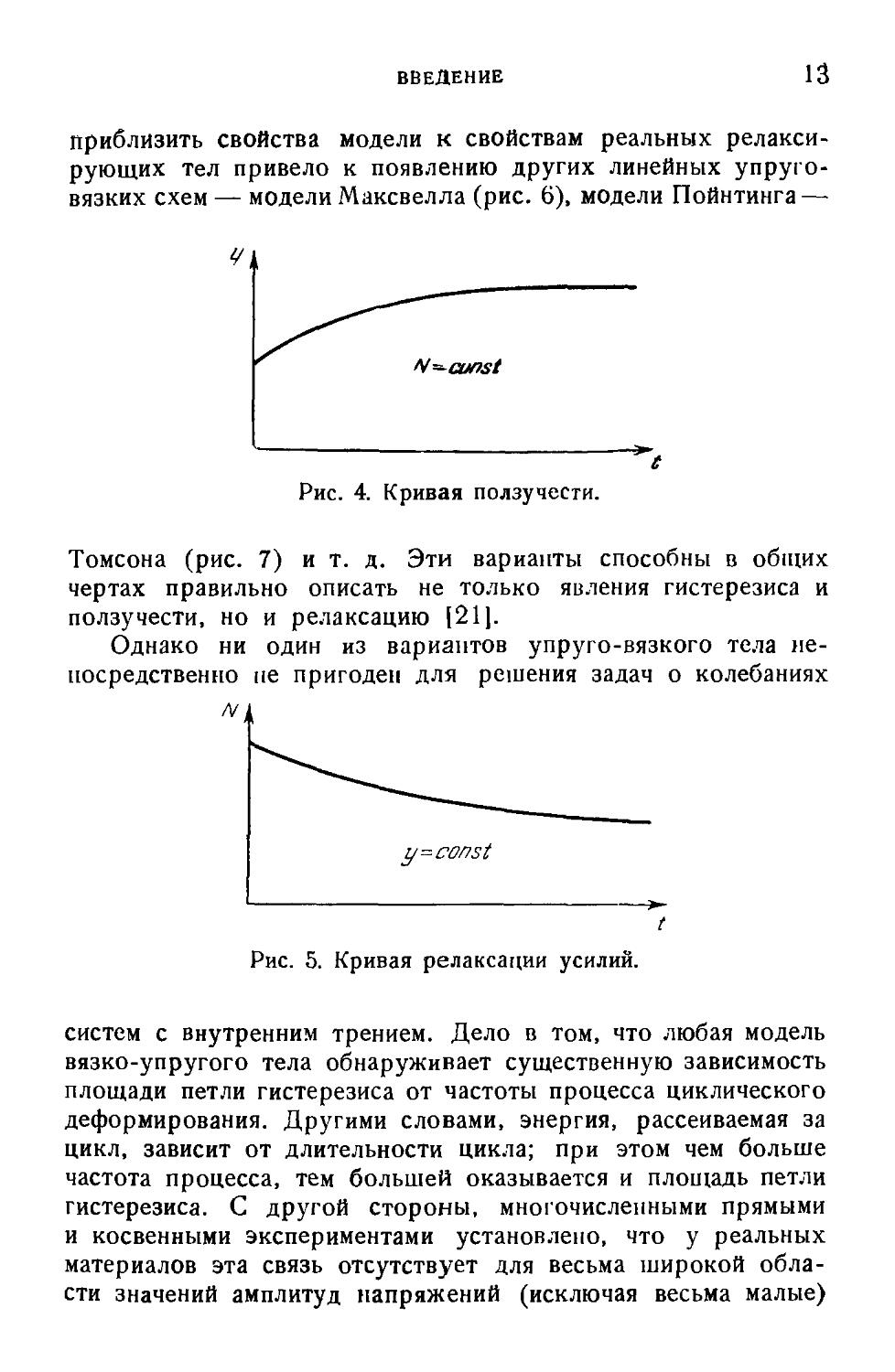
деформируемых тел. Отметим, наконец,
что модель Фохта описывает и свойство ползучести, которое
проявляется и в действительных условиях: при постоянной
нагрузке происходит постепенное увеличение деформации
системы (рис. 4). Вследствие этих достоинств рассматриваемой
t
Рис. 3. Затухание свободных колебаний.
модели и чрезвычайной простоты учета неупругого
сопротивления по Фохту, соотношения @.1) и @.3) приобрели
исключительно широкое распространение в литературе.
Однако уже давно было замечено, что модель Фохта не
в состоянии отобразить релаксацию — существенное свойство
реальных тел, состоящее в постепенном убывании напряжения
(или обобщенной силы) при фиксированной постоянной
деформации (обобщенной координаты) (рис. 5). Стремление
ВВЕДЕНИЕ
13
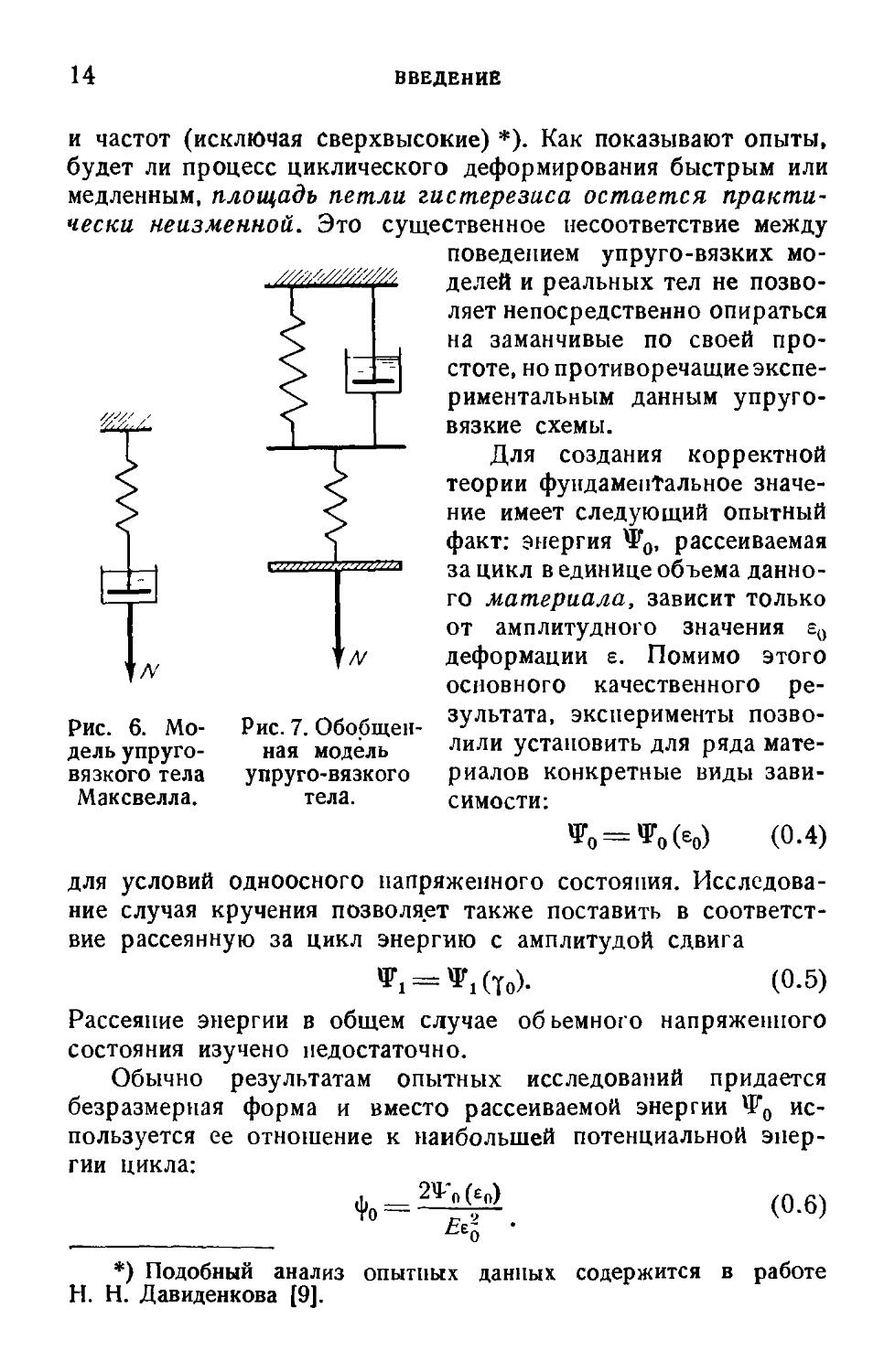
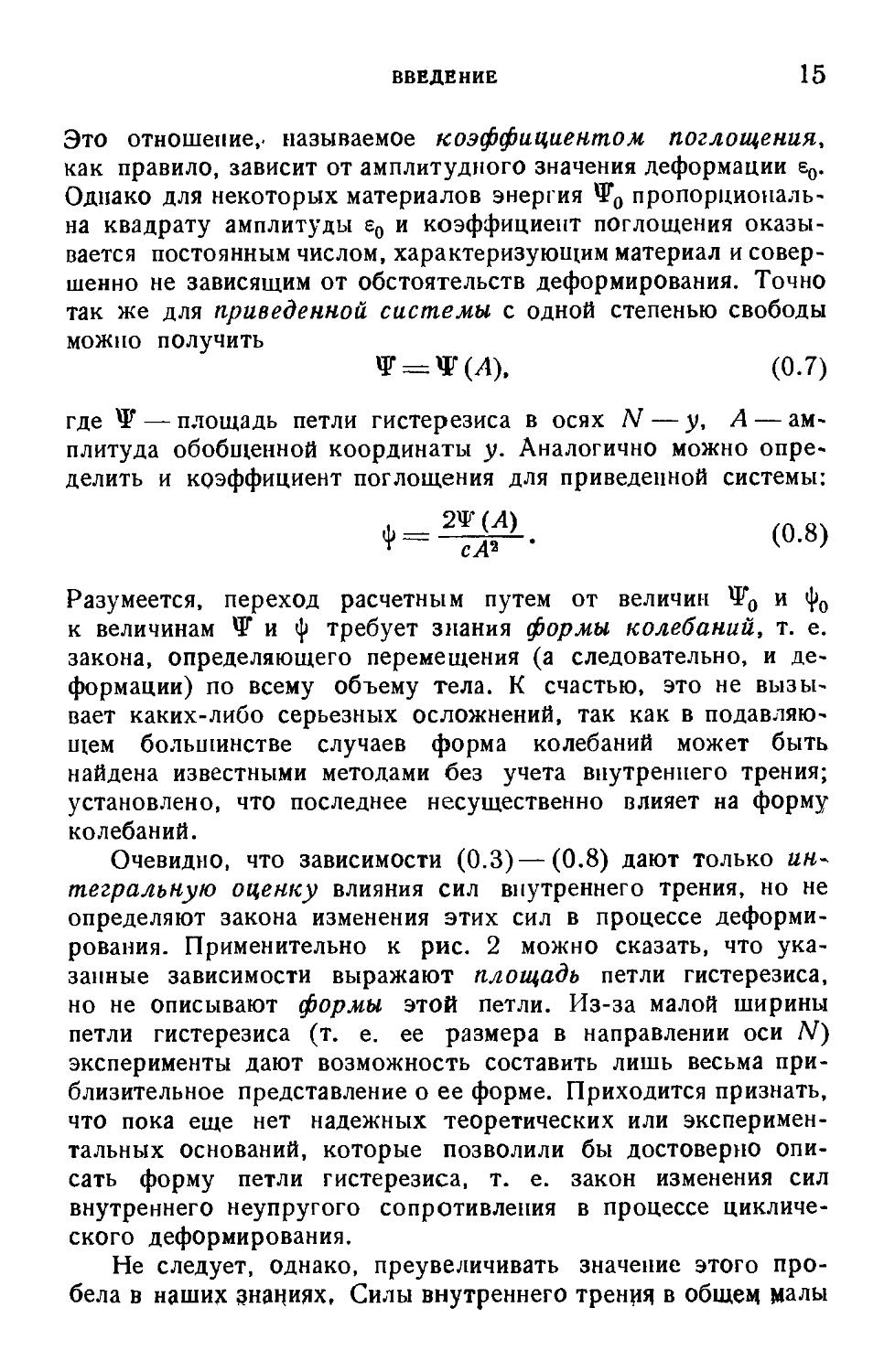
приблизить свойства модели к свойствам реальных релакси-
рующих тел привело к появлению других линейных упруго-
вязких схем — модели Максвелла (рис. 6), модели Пойнтинга —
V
N~cunst
Рис. 4. Кривая ползучести.
Томсона (рис. 7) и т. д. Эти варианты способны в общих
чертах правильно описать не только явления гистерезиса и
ползучести, но и релаксацию [21].
Однако ни один из вариантов упруго-вязкого тела
непосредственно не пригоден для решения задач о колебаниях
у=const
Рис. 5. Кривая релаксации усилий.
систем с внутренним трением. Дело в том, что любая модель
вязко-упругого тела обнаруживает существенную зависимость
площади петли гистерезиса от частоты процесса циклического
деформирования. Другими словами, энергия, рассеиваемая за
цикл, зависит от длительности цикла; при этом чем больше
частота процесса, тем большей оказывается и площадь петли
гистерезиса. С другой стороны, многочисленными прямыми
и косвенными экспериментами установлено, что у реальных
материалов эта связь отсутствует для весьма широкой
области значений амплитуд напряжений (исключая весьма малые)
14
ВВЕДЕНИЕ
__ ,_
и частот (исключая сверхвысокие) *). Как показывают опыты,
будет ли процесс циклического деформирования быстрым или
медленным, площадь петли гистерезиса остается
практически неизменной. Это существенное несоответствие между
поведением упруго-вязких
моделей и реальных тел не
позволяет непосредственно опираться
на заманчивые по своей
простоте, но противоречащие
экспериментальным данным упруго-
вязкие схемы.
Для создания корректной
теории фундаментальное
значение имеет следующий опытный
факт: энергия ч70, рассеиваемая
за цикл в единице объема
данного материала, зависит только
от амплитудного значения е0
Л'
Рис. 6.
Модель упруго-
вязкого тела
Максвелла.
/V
Рис. 7.
Обобщенная модель
упруго-вязкого
тела.
деформации е. Помимо этого
основного качественного
результата, эксперименты
позволили установить для ряда
материалов конкретные виды
зависимости:
*о = *о(во) @-4)
для условий одноосного напряженного состояния.
Исследование случая кручения позволяет также поставить в
соответствие рассеянную за цикл энергию с амплитудой сдвига
^1 = ^1 (То)- @-5)
Рассеяние энергии в общем случае обьемного напряженного
состояния изучено недостаточно.
Обычно результатам опытных исследований придается
безразмерная форма и вместо рассеиваемой энергии W0
используется ее отношение к наибольшей потенциальной
энергии цикла:
4\> =
2*"«(«п)
Е4
@.6)
*) Подобный анализ опытных данных содержится в работе
Н. Н. Давиденкова [9].
ВВЕДЕНИЕ
15
Это отношение,, называемое коэффициентом поглощения,
как правило, зависит от амплитудного значения деформации е0.
Однако для некоторых материалов энергия ЧГ0
пропорциональна квадрату амплитуды s0 и коэффициент поглощения
оказывается постоянным числом, характеризующим материал и
совершенно не зависящим от обстоятельств деформирования. Точно
так же для приведенной системы с одной степенью свободы
можно получить
ч? = >Р(Л), @.7)
где ЧГ — площадь петли гистерезиса в осях N — у, А —
амплитуда обобщенной координаты у. Аналогично можно
определить и коэффициент поглощения для приведенной системы:
Разумеется, переход расчетным путем от величин ч?0 и ф0
к величинам 47 и <|> требует знания формы колебаний, т. е.
закона, определяющего перемещения (а следовательно, и
деформации) по всему объему тела. К счастью, это не
вызывает каких-либо серьезных осложнений, так как в
подавляющем большинстве случаев форма колебаний может быть
найдена известными методами без учета внутреннего трения;
установлено, что последнее несущественно влияет на форму
колебаний.
Очевидно, что зависимости @.3)—@.8) дают только им-
тегральную оценку влияния сил внутреннего трения, но не
определяют закона изменения этих сил в процессе
деформирования. Применительно к рис. 2 можно сказать, что
указанные зависимости выражают площадь петли гистерезиса,
но не описывают формы этой петли. Из-за малой ширины
петли гистерезиса (т. е. ее размера в направлении оси N)
эксперименты дают возможность составить лишь весьма
приблизительное представление о ее форме. Приходится признать,
что пока еще нет надежных теоретических или
экспериментальных оснований, которые позволили бы достоверно
описать форму петли гистерезиса, т. е. закон изменения сил
внутреннего неупругого сопротивления в процессе
циклического деформирования.
Не следует, однако, преувеличивать значение этого
пробела в наших знаниях. Силы внутреннего трения в общем, малы
16
ВВЕДЕНИЕ
сравнительно с силами упругости, и поэтому физически ясно,
что влияние внутреннего трения на колебательные процессы
решающим образом определяется именно площадью петли
гистерезиса, а не подробностями ее формы. Этот общепризнанный
факт привел к появлению ряда различных конкурирующих
предложений, по-разному описывающих форму петли
гистерезиса. Будучи в значительной мере произвольными, эти
предложения физически почти одинаково достоверны (или,
может быть лучше сказать, одинаково недостоверны). В то
же время различные варианты описания формы петли
гистерезиса приводят к дифференциальным ^уравнениям, далеко не
эквивалентным в отношении трудностей их решения. Поэтому
разумно отдать предпочтение такому выбору формы петли,
который приводит к наиболее простым решениям; как будет
показано ниже, в этом смысле лучшей оказывается
эллиптическая форма петли, предложенная Е. С. Сорокиным [55].
Можно, однако, вообще обойтись без конкретизации
формы петли, если воспользоваться энергетическим способом
решения. Один из вариантов этого способа предполагает
использование условной упруго-вязкой схемы, которая
эквивалентна в отношении поглощающих свойств заданной
системе с внутренним трением; требование энергетической
эквивалентности приводит к некоторому фиктивному
коэффициенту вязкости, который зависит от частоты колебаний.
Использованию такого очевидно формального способа не могут
препятствовать приведенные выше соображения о
несоответствии поведения реального материала поведению
упруго-вязкой модели; применение условной схемы представляет собой
лишь расчетный прием, который, кстати сказать, хорошо
зарекомендовал себя в других задачах о колебаниях дисси-
пативных систем. Таким образом, при надлежащем подходе
упруго-вязкая модель все же может оказаться полезной для
решения задач о колебаниях систем с внутренним трением.
Описанный вариант решения не является единственным;
известны также приемы прямого использования энергетических
соображений, не опирающихся на представление об
эквивалентной упруго-вязкой схеме.
Обратимся теперь к вопросу о рассеянии энергии в так
называемых неподвижных соединениях (прессовых,
заклепочных, шлицевых и т. п.). Экспериментально установлено, что
во многих случаях потери на трение в сочленениях значи-
ВВЕДЕНИЕ
17
тельно превосходят потери на внутреннее трение в материале;
этим и объясняется тот повышенный интерес к проблеме
конструкционного демпфирования, который замечается
в последнее время. Очень важно, что количественные оценки
конструкционного демпфирования поддаются в известной
мере сознательному регулированию. Так, несколько изменив
контактное давление между частями системы, конструктор
может в несколько раз изменить характеристики
демпфирования. Забегая несколько вперед, укажем, что, увеличив
контактное давление, мы в одних случаях получим возрастание
демпфирования, а в дру(их—ei о уменьшение. Поэтому
приемы «управления» конструкционным демпфированием далеко
не самоочевидны; для их формулировки необходимо
предварительно изучить во всех подробностях процессы местно1 о
проскальзывания по контактным поверхностям.
Силы трения, развивающиеся по этим поверхностям,
совершают работу лишь в том случае, когда происходит
местное проскальзывание одного из элементов соединения по
другому. Для оценки демпфирующих свойств такого
сочленения необходимо отказаться и от представления элементов
в виде абсолютных твердых тел. Деформируемость элементов
является существенным свойством, и лишь ее признание
открывает пути к корректному решению. Наиболее
естественные и в то же время простейшие физические представления
о свойствах материала (закон Гука) и о фрикционных
свойствах поверхностей соприкосновения (закон сухого трения)
позволяют сравнитель?ю просто получить петлю гистерезиса
расчетным путем. Экспериментальные исследования хорошо
подтвердили допустимость таких расчетных предпосылок.
Как оказалось, имеется известное качественное совпадение
характеристик внутреннею трения в материале и в
сочленениях: площадь и вид петли гистерезиса практически не
зависят от скорости процесса циклического деформирования;
площадь петли гистерезиса пропорциональна некоторой
степени . амплитуды нагрузки и в ряде случаев не зависит от
среднего значения нагрузки. Поэтому эффективные способы
решения задач о колебаниях систем с внутренним трением
в материале остаются столь же эффективными и при
решении задач о колебаниях с трением в сочленениях.
ГЛАВА I
КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ
§ 1. Колебания систем с одной степенью свободы
1.1. Вступительные замечания. Настоящий параграф
посвящен наиболее простым расчетным объектам — системам
с одной степенью свободы. Приемы приведения реальных
механических систем к указанной расчетной схеме хорошо
известны; на этих приемах мы останавливаться не будем и
всюду предположим, что тем или иным путем определены
характеристики расчетной схемы: приведенная масса т,
приведенный коэффициент жесткости с и приведенный
коэффициент вязкости k. Рассмотрение сначала свободных, а затем
и вынужденных колебаний такой расчетной модели позволит
установить если не все, то по крайней мере многие важные
основные закономерности колебательных процессов в
системах с вязким сопротивлением.
1.2. Свободные колебания. Уравнение свободных
колебаний упруго-вязкой системы (рис. 1) соответственно
принятому закону ее деформирования @,3) имеет вид:
-"-*%—&¦ ('•¦>
где т — приведенная масса. Вводя обозначения:
2я = -?. F^ = ~, A.2)
mm '
запишем уравнение A.1) в виде:
'$ + 2п$+?у = 0. A.3)
Здесь, как известно, р1 есть квадрат собственной частоты
колебаний системы при отсутствии вязкого сопротивления.
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
19
При не слишком значительном вязком сопротивлении, когда
п < р (только этот случай и представляет для нас интерес),
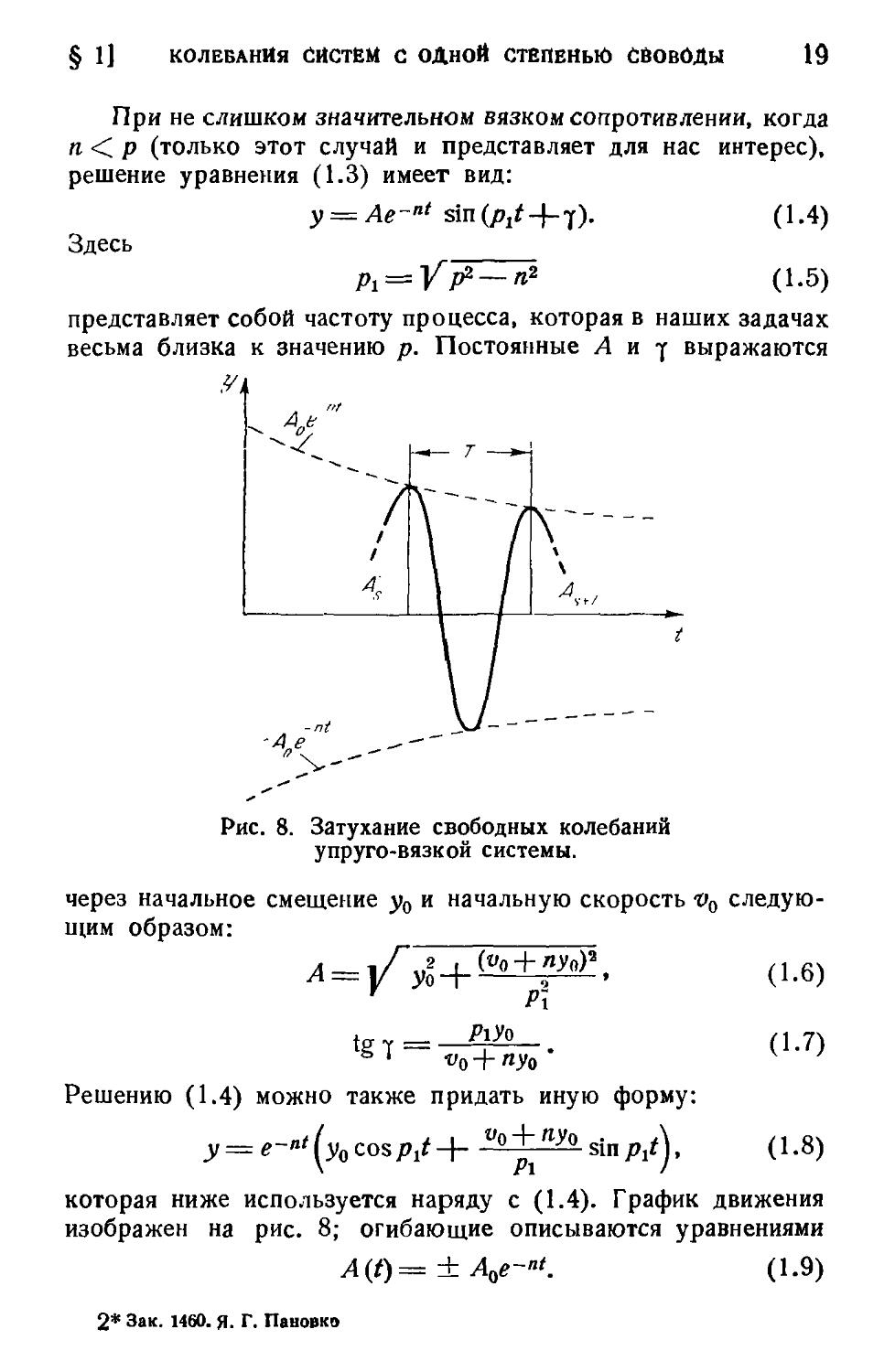
решение уравнения A.3) имеет вид:
y = Ae~nt sin(/7^-f-T). A.4)
Здесь
A = VV-«2 A.5)
представляет собой частоту процесса, которая в наших задачах
весьма близка к значению р. Постоянные Д и f выражаются
-Ае
Ч--
Рис. 8. Затухание свободных колебаний
упруго-вязкой системы.
через начальное смещение у0 и начальную скорость v0
следующим образом:
-/"¦
..2 ( (Щ + ПУо)*
Уо —I 5 '
Pi
6 I tr0 + яуо *
Решению A.4) можно также придать иную форму:
_у = <?-"'(у0 cos/>!*-
Ур + пуо
Pi
sin
/>i*).
A.6)
A.7)
A.8)
которая ниже используется наряду с A.4). График движения
изображен на рис. 8; огибающие описываются уравнениями
A(t)=±A0e-nt. A.9)
2* Зак. 1460. Я. Г. Пановко
20 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [гЛ. 1
Рассмотрим моменты, для которых
sin(A/+-T)=l. A.10)
В эти моменты перемещения у (т. е. амплитуды колебаний)
равны:
Л! = Л0е "', А, =-Д0е-"('¦-•-Л As n = A0e-"^+sT),
где
T = 2-:Pi A.11)
есть период колебаний, ti — время, соответствующее первому
наибольшему отклонению Ах. Как видно, отношение двух
соседних амплитуд остается все время постоянным:
т. е. последовательность амплитуд образует геометрическую
прогрессию. Произведение пТ определяет темп затухания
колебательною процесса и называется логарифмическим
декрементом колебаний:
8 = я7^ In-.-*—, A.12)
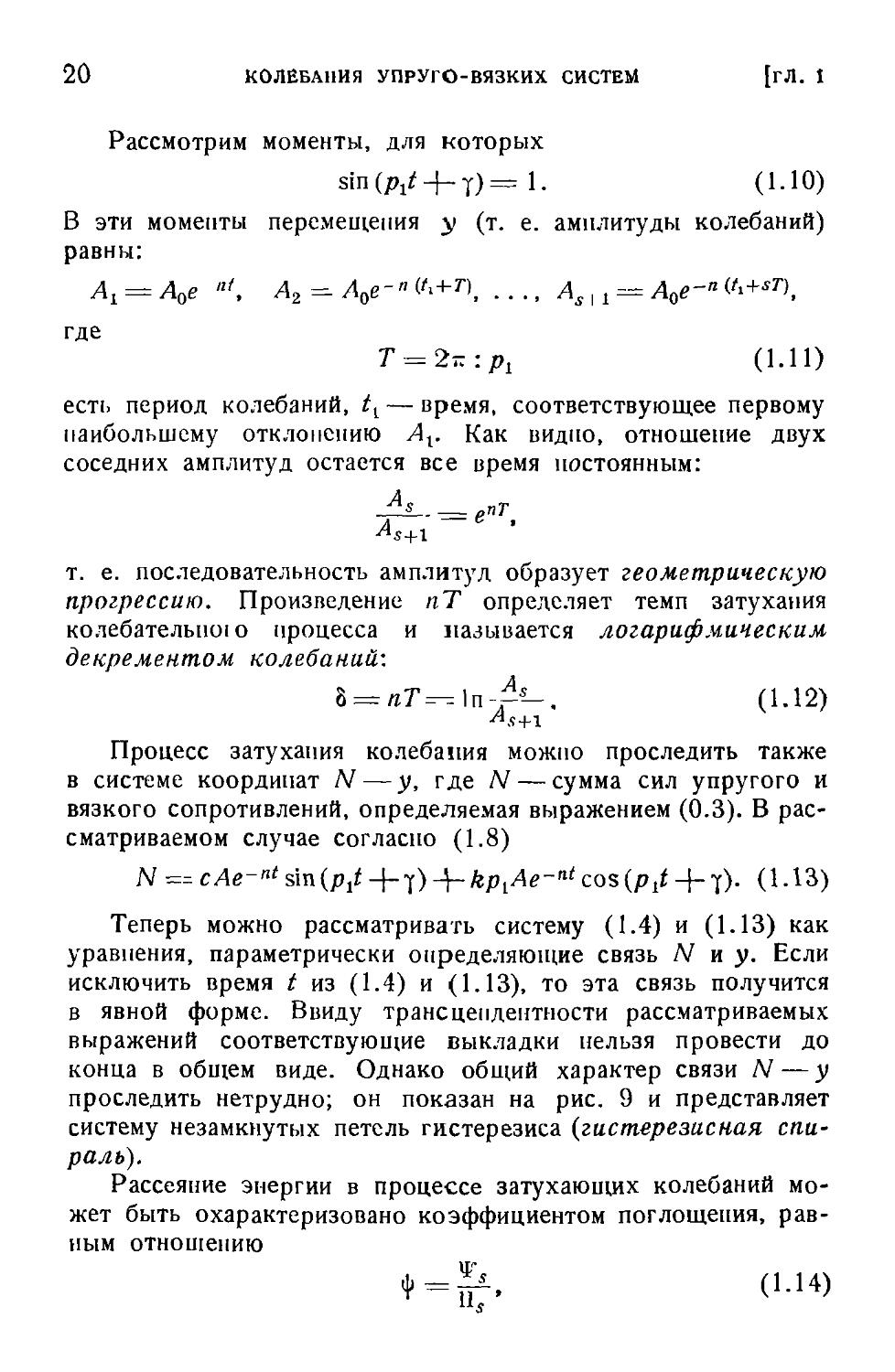
Процесс затухания колебания можно проследить также
в системе координат N — у, где N — сумма сил упругого и
вязкого сопротивлений, определяемая выражением @.3). В
рассматриваемом случае согласно A.8)
N ~ сАе- sinO^ -j-T) ¦+¦ kplAe~nt cos {p,t -+-7). AЛЗ)
Теперь можно рассматривать систему A.4) и A.13) как
уравнения, параметрически определяющие связь N и у. Если
исключить время t из A.4) и A.13), то эта связь получится
в явной форме. Ввиду трансцендентности рассматриваемых
выражений соответствующие выкладки нельзя провести до
конца в общем виде. Однако общий характер связи N—у
проследить нетрудно; он показан на рис. 9 и представляет
систему незамкнутых петель гистерезиса (гистерезисная
спираль).
Рассеяние энергии в процессе затухающих колебаний
может быть охарактеризовано коэффициентом поглощения,
равным отношению
¦ = ?. AЛ4)
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 21
1де Ws — рассеиваемая за 5-й цикл энергия, П^-потенциальная
энергия в начале s-ro цикла при отклонении As. Так как
сА2
", = -/¦ A-15)
и, соответственно,
то коэффициент поглощения равен
Ъ=^~~ЗП-= 1 -~-1- в, A.16)
К А\
и не зависит от номера цикла s, т. е. остается постоянным
Рис. 9. Гистерезисная спираль при затухающих
колебаниях.
при всех амплитудах колебаний. При малых значениях пТ
можно принять:
е~2пТ^ 1 — 2я 7,
так что для ф приближенно получится:
ф^2яТ=28. A.17)
Этот же результат получится, если определить коэффициент
поглощения ф как отношение рассеиваемой за цикл энергии
22 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ (ГЛ. !
к потенциальной энергии в конце цикла:
ЦТ Д2 ^2
Ф =—*-=- s „ s+1 = e2nT — 1 ^ 2пТ. A.18)
И А2
Отсюда видно, что при л^алыд; значениях логарифмического
декремента колебаний оказывается несущественным, с каким
значением потенциальной энергии сопоставляется рассеиваемая
энергия.
Понятие коэффициента поглощения возникло в связи
с чисто гармоническими незатухающими процессами. Поэтому
уместно им пользоваться, если движение по своему характеру
близко к незатухающим гармоническим колебаниям: в этих
случаях, как было показано, формулы A.17) и A.18) дают
практически совпадающие результаты.
При сильном затухании, когда такое совпадение
отсутствует (эти случаи для нас особенной важности не
представляют), можно попросту отказаться от самого понятия
«коэффициент поглощения» и характеризовать затухание
только логарифмическим декрементом. Стремясь все же
придать универсальность понятию коэффициента поглощения,
Е. С. Сорокин [57] дал своеобразное определение величины ф
в виде
о
здесь ч7*— интенсивность изменения энергии, W*dt —
изменение энергии за бесконечно малый промежуток времени,
U — текущее значение энергии системы. Это определение
справедливо для любого затухания и освобождает от
необходимости предполагать малость величины пТ.
1.3. Действие гармонической возмущающей силы.
Классическим случаем вынужденных колебаний является
случай действия возмущающей силы
/>(*)= Р0 sin arf. A.19)
Уравнение колебаний вместо A.5) примет вид:
у + 2пу-\-?у = -%-яп«*. A.20)
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 23
Общее решение этого уравнения:
у ,-- е »' (у0 cos Plt + ^±Ш sin pyt) +
-j- Ae~ntlпьт~1~ш cos "^ sin /?t^ -|— sin 4 cos pj) -{- A sin(wt— y).
Первое слагаемое соответствует A.8) и выражает свободные
затухающие колебания, определяемые начальными условиями;
с течением времени это слагаемое исчезает. Второе слагаемое
описывает вынужденные колебания, происходящие с
собственной частотой. При возрастании времени t эти колебания также
исчезают. Стационарные незатухающие колебания
описываются третьим слагаемым:
y~Asin(iat — т), A.21)
причем их амплитуда определяется формулой
/1 = Р° , A.22)
а сдвиг фазы — формулой
р
Из решения A.21) видно, что гармоническая возмущающая
сила, имеющая частоту ш, как бы подчиняет систему своему
темпу изменения и вызывает колебания той же частоты;
однако перемещения несколько отстают от силы, что
определяется фазовым углом ¦(. Как видно из формулы A.23),
запаздывание колебаний зависит от отношения частот ш : р.
При малых значениях этого отношения сдвиг фаз невелик.
При резонансе, когда ш = р, сдвиг фаз составляет -^, т. е.
в те моменты, когда сила максимальна, перемещение равно
нулю. При высокочастотной возмущающей силе, когда
отношение to : p велико, сдвиг фаз приближается к значению те,
т. е. максимум силы достигается в те моменты, которым
соответствует минимум перемещения.
Выражение для амплитуды колебаний A.22) часто
записывают в виде:
A = ww A.24)
24 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
где уст = Р0:с—перемещение, которое вызывается
статически приложенной силой Р0, а величина
{«¦ =
/М
4ш2я2
A.25)
показывает, во сколько раз амплитуда вынужденных
колебаний А больше соответствующего статического
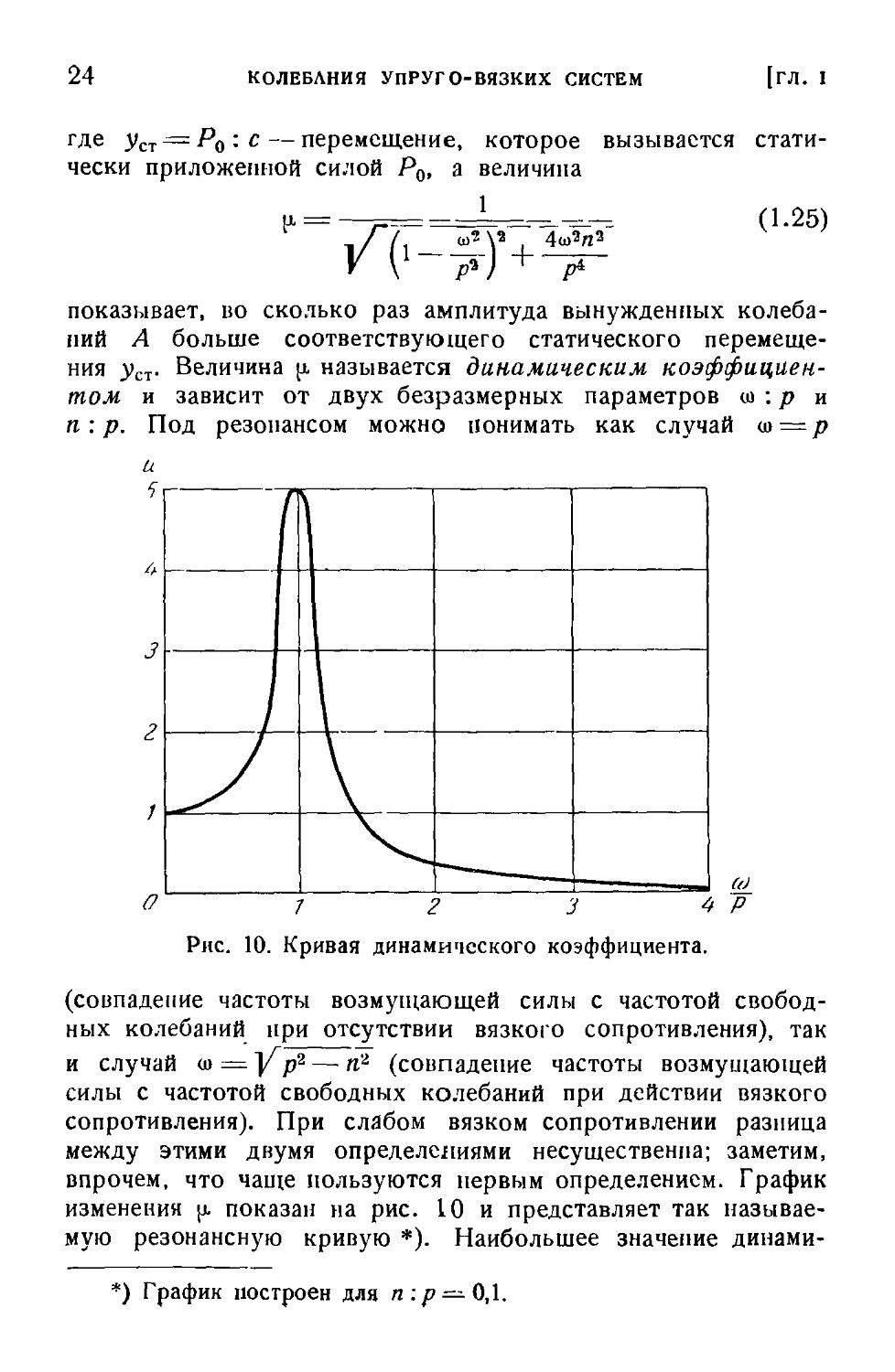
перемещения уст. Величина [л называется динамическим
коэффициентом и зависит от двух безразмерных параметров w : p и
п: р. Под резонансом можно понимать как случай т = р
О 7 Z 3 4 Р
Рис. 10. Кривая динамического коэффициента.
(совпадение частоты возмущающей силы с частотой
свободных колебаний при отсутствии вязкого сопротивления), так
и случай to = у рг — п2 (совпадение частоты возмущающей
силы с частотой свободных колебаний при действии вязкого
сопротивления). При слабом вязком сопротивлении разница
между этими двумя определениями несущественна; заметим,
впрочем, что чаще пользуются первым определением. График
изменения ja показан на рис. 10 и представляет так
называемую резонансную кривую *). Наибольшее значение динами-
*) График построен для л:/? — 0,1.
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 25
ческого коэффициента не соответствует ни одному из
указанных выше определений резонанса и достигается при
промежуточной абсциссе
t-V
1 _ 2^!_
Это наибольшее значение равно
Р
*/>--?'
A.26)
Из A.26) видно, что при тех малых отношениях п : р,
которые нас могут интересовать, максимум [л имеет место
приблизительно при ш:р=\ и составляет
iw«?- (L27)
При резонансе у——, и установившиеся резонансные
колебания согласно A.21) и A.22) описываются выражением
Ро Р j. Л> ш /
у = • к-- cos cor = -~— cos ш;
J с 2л с 2л
или, заменив 2п = k : т, получим:
y = --§-cosurf. A.28)
Обратимся к построению петли гистерезиса для общего
случая, когда ш Ф р. Сумма сил упругого и вязкого
сопротивлений @.3) согласно A.21) равна
N = сА sin (cor' — у)-j- ЫA cos (<o? — у); A.29)
исключив время t из A.21) и A.29), получим:
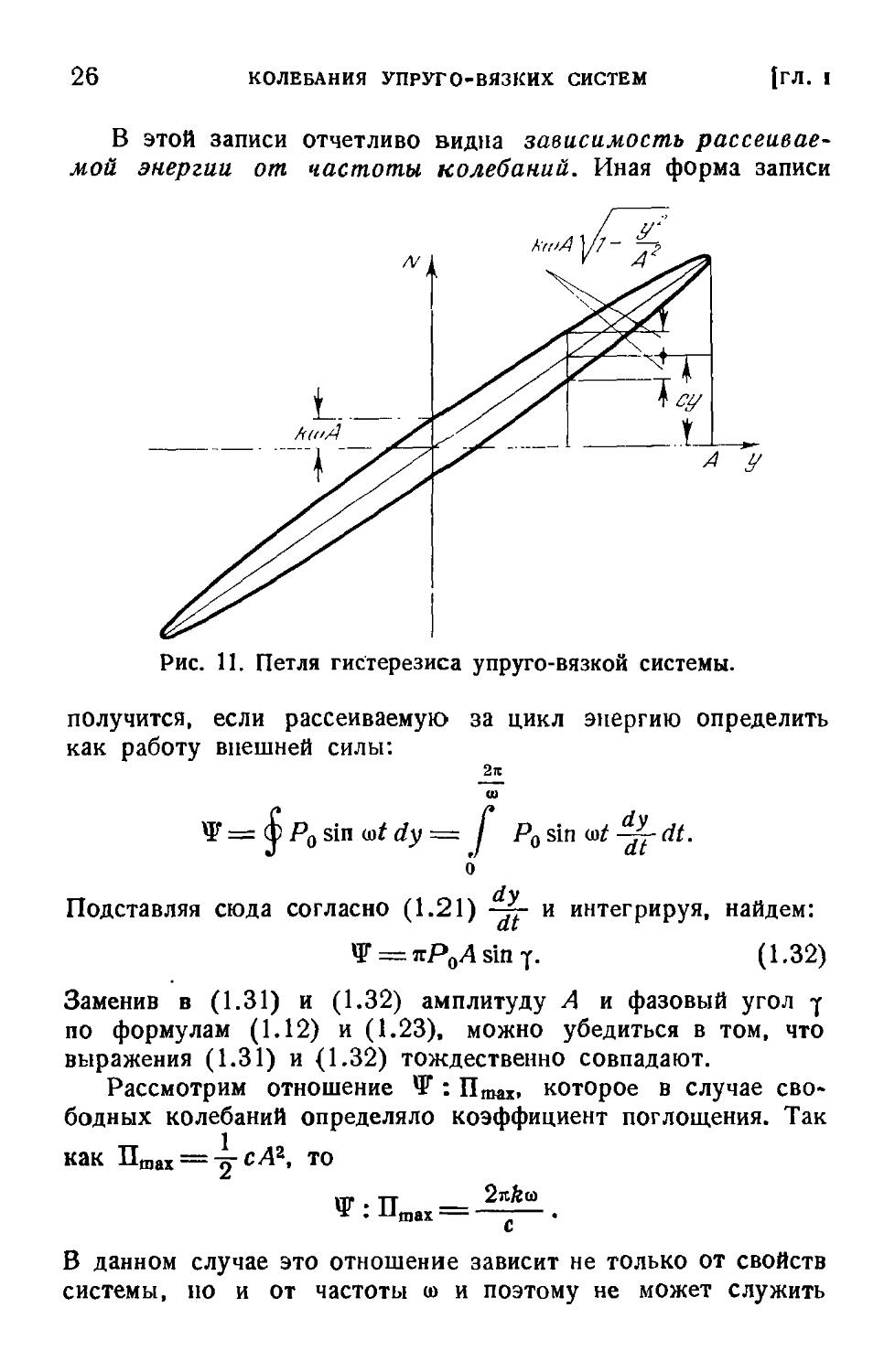
N = cy± ЫАу 1 — -J-. A.30)
Петля гистерезиса имеет форму эллипса и показана на
рис. 11. Полуоси эллипса, измеренные в направлениях
координатных осей, составляют А и ku>A. Соответственно этому
площадь петли гистерезиса равна
W=nkwA-. A.31)
26 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
В этой записи отчетливо видна зависимость
рассеиваемой энергии от частоты колебаний. Иная форма записи
/ни/]
"т
Л #
Рис. 11. Петля гистерезиса упруго-вязкой системы.
получится, если рассеиваемую за цикл энергию определить
как работу внешней силы:
2тс
ш
W = <р P0 sin «of dy = J P0 sin at ^dt.
6
dv
Подставляя сюда согласно A.21) -jr и интегрируя, найдем:
4F = iiP0Asln"i.
A.32)
Заменив в A.31) и A.32) амплитуду А и фазовый угол -j
по формулам A.12) и A.23), можно убедиться в том, что
выражения A.31) и A.32) тождественно совпадают.
Рассмотрим отношение ч?: Пши. которое в случае
свободных колебаний определяло коэффициент поглощения. Так
как Птах = -g- сАг, то
т, тт ZJtfto)
* • Wmax •
В данном случае это отношение зависит не только от свойств
системы, но и от частоты о> и поэтому не может служить
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 27
удобной объективной характеристикой поглощающих свойств
системы. При резонансе, когда ш = р, получим:
ЧГ:Пив = ^- = ^ = 2«7'0. A.33)
с. р
где Т0 — период свободных колебаний системы, определенный
в предположении, что затухания нет. Поскольку величины
Т0 и Т весьма близки друг к другу, этот результат
практически совпадает с коэффициентом поглощения, данным
выражением A.17). Следовательно, отношение ч7:11тах может
и при вынужденных колебаниях сохранить прежний смысл
коэффициента поглощения; однако это требует вести
вычисления только для условий резонанса.
Если подставить = "<Г_ в формулу A.22), то
получится следующее выражение:
А1-Я'Ч±т)'
A.34)
Эта формула верна при любых частотах, но следует иметь
в виду, что величина ф определяется выражением A.33),
т. е., вообще говоря, не представляет собой отношения
ЧР: Птах при любом режиме колебаний.
Анализ вынужденных колебаний нельзя ограничить только
рассмотренным случаем чисто гармонической возмущающей
силы. Практический интерес представляют случаи
периодического, но негармонического действия нагрузки; эти случаи
рассмотрены в пунктах 1.4—1.7.
1.4. Действие полигармонической возмущающей силы.
Если на систему действует периодическая возмущающая сила,
то можно разложить ее в ряд Фурье:
оо
Я@ = Я0+2^81п(а)Л-8,).
s = l
где Р0 — постоянная составляющая, Ps, u>s и bs — амплитуда,
частота и начальная фаза s-й гармоники. Постоянная
составляющая Р0 вызовет некоторое постоянное отклонение системы
28 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
и не повлияет на колебательный процесс. Если обозначить
естественный период возмущающей силы через Т, то ш = -=-
представит частоту низшей гармоники, а частоты следующих
гармоник определятся формулой
Wj = s«o (s= 1, 2, 3, ...).
Таким образом, задача сводится к исследованию действия
возмущающей силы:
Я@ =2 Pssin (wt + K)- (L35)
Уравнение движения системы имеет вид:
on
у -Н 2яу + р^ = -L 2] Я, sin (s«tf 4- 8S). A -36)
.5 = 1
Вследствие линейности системы можно воспользоваться
принципом наложения, т. е. определить движения, вызываемые
каждой из гармоник, входящих в сумму A.35), а затем
сложить результаты. Идя по этому пути, получим следующее
решение уравнения A.36) (здесь и ниже речь идет, конечно,
только о стационарной части колебательного процесса):
оо
у = 2 Д, sin (*»* 4А—г,)- A.37)
s = l
Здесь As — амплитуда s-Pi гармоники движения, определяемая
согласно A.22) формулой
—^— A.38)
/Н53
р*
Отсюда видно, что резонанс наступает при совпадении любой
из частот su> с собственной частотой системы р, т. е. при
выполнении любого из условий
(разумеется, никакого резонанса не наступит, если so> = р,
но Ps — Q, т. е. когда возмущающая сила не содержит
гармоники s-ro порядка). Каждая гармоника движения «отстает»
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 29
от соответствующей гармоники силы на свое особенное
значение фазы fs, определяемое соответственно A.23) формулой
Для построения петли гистерезиса необходимо, как и прежде,
составить выражение полной силы сопротивления:
со
N -= су + ky> = с 2 Лsin О^ + 85 — Is) +
5 = 1
оо
+ b2^ms(sa)< + u5-Ts), A.41)
и затем рассматривать систему A.37) A.41) как
параметрическую форму уравнения петли гистерезиса (параметром
служит время t).
Рассмотрим для иллюстрации случай действия силы
Р = .Pj Sin a>t -|- Я3 bin 3<<
причем
/>1=ЗЯ3; <о:^-1, 2л:/> = 0,1.
Как видно, в рассматриваемом случае имеет место резонанс первой
гармоники По формуле A.38) находим амплитуды:
At = 10а; Л3 = 0,04а,
где
а «= />! • с.
Очевидно, что первая резонансная гармоника движения имеет
здесь решающее значение; поэтому при построении петли
гистерезиса вторая гармоника окажется почти неощутимой и движение
практически содержит только одну гармонику, т. е. является
монохроматическим:
у — 10a sin («>t— -=-) — — 10a cos u>^
(согласно формуле A 40) сдвиг фазы равен ¦=-). Тогда
N = — Юса (cos Ы — 0,1 sin mt).
Из последних двух уравнений нетрудно исключить время t; это
даст подобное A.30) уравнение эллиптической петли гистерезиса
(см. выше рис. 11):
30 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ.
Ч*з
Sh
^n
»
>Ni
"*
^
>\l
\* ^
I
i
?
\ 1
1
1
1
*s
4«S
^
^
"^
\-
0 / ^«^
1
^1
-^
<\
Чг"
_^
^
1
1
<\l
V-
1
0
?
J
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 31
Рассмотрим теперь второй резонансный режим, сохранив все
условия предыдущего примера, но изменив значение частоты таким
образом, что о>:р = -х-. Тогда по формуле A.38)
Аг = 1,12а; А3 = 3,33а
и по формуле A.40)
7i = 0,037; 1з=1.57.
В данном случае амплитуды обеих гармоник соизмеримы и для
описания движения необходимо записать полное выражение A.37):
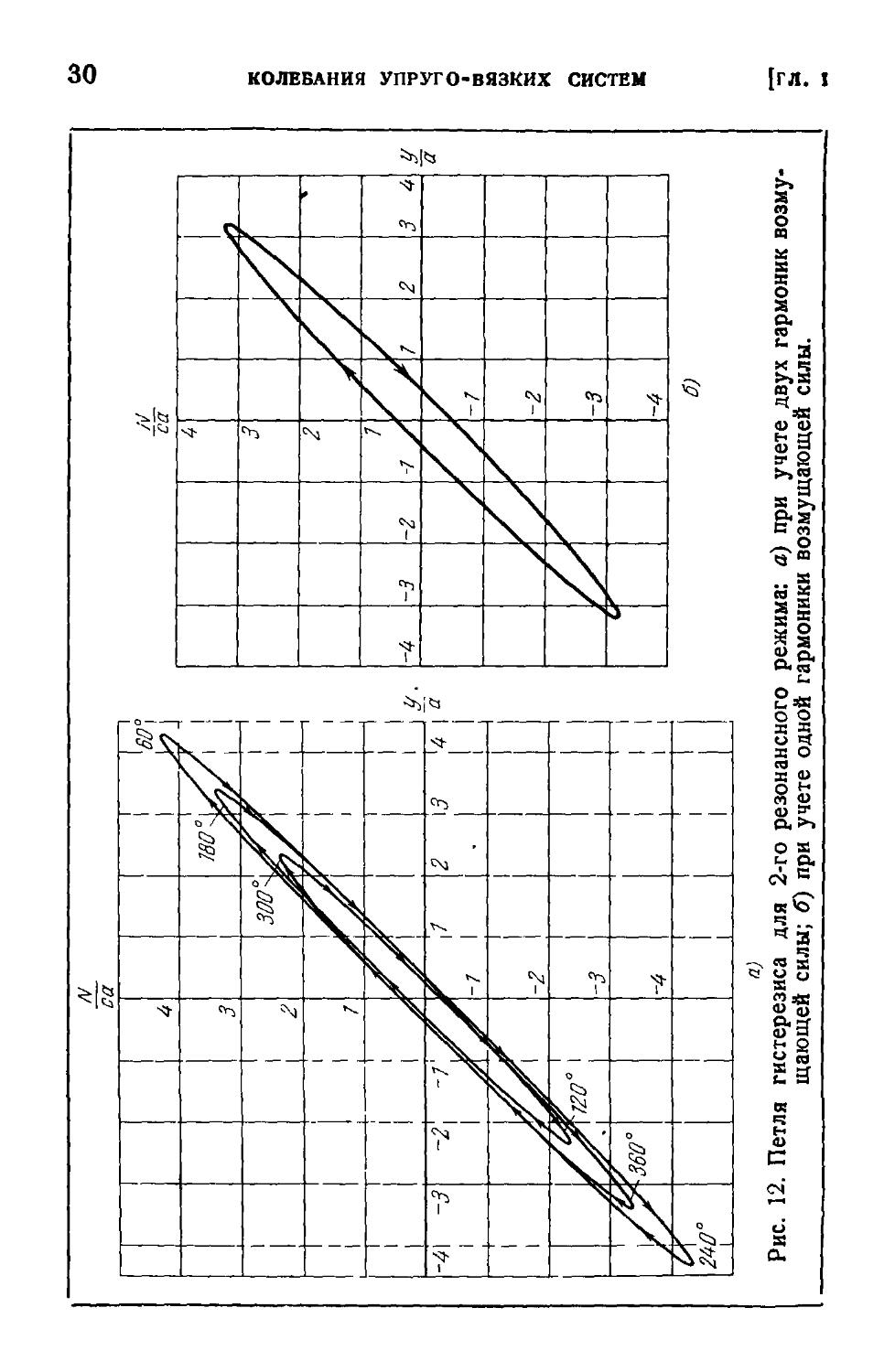
у = а [1,12 sin И — 0,037) — 3,33 cos 3«>t].
Согласно A.41) получим:
N = са {[1,12 sin (*tf — 0,037) — 3,33 cos 5<at] +
-f [0,04 cos (<ot — 0,037) -f 0,33 sin ЗЫ]}.
Для построения петли гистерезиса следует исключить из последних
двух уравнений время t. Так как сделать это в явной форме не
удается ввиду трансцендентности уравнений, то приходится
задаваться рядом значений <at и вычислять соответствующие значения у
и N. Результаты этих вычислений даны на рис. 12, в; как видно,
в данном случае петля гистерезиса имеет форму более сложную,
чем в предыдущем примере.
Если бы мы в выражениях у и N опустили первую гармонику,
то получили бы чисто эллиптическую петлю, изображенную на
рис. 12,6". Разница в формах петель очевидна. Тем не менее можно
убедиться в том, что эта разница для демпфирования несущественна.
Действительно, для случая, показанного на рис. 12, а, имеем:
ЧГ = / (ЗР8 sin mt + Р8 sin 3<of) ydt- 10,12 -~ .
о
Для второго случая (рис. 12, б) получим:
р?
P„stn3urf.y<tt= 10-—i
Отсюда можно сделать вывод, что при оценке демпфирующих
свойств системы достаточно учесть только резонирующую
гармонику (если, конечно, амплитуды нерезонирующих составляющих не
слишком велики).
32 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
1.5. Замкнутая форма решения при действии
произвольной периодической возмущающей силы. Решение A.37),
относящееся к случаю произвольной периодической
возмущающей силы, не всегда удобно, так как соответствующие
ряды могут сходиться недостаточно быстро. Поэтому во
многих случаях следует отдать предпочтение способу,
описанному в книге Л. Г. Лойцянского и А. И. Лурье [29],
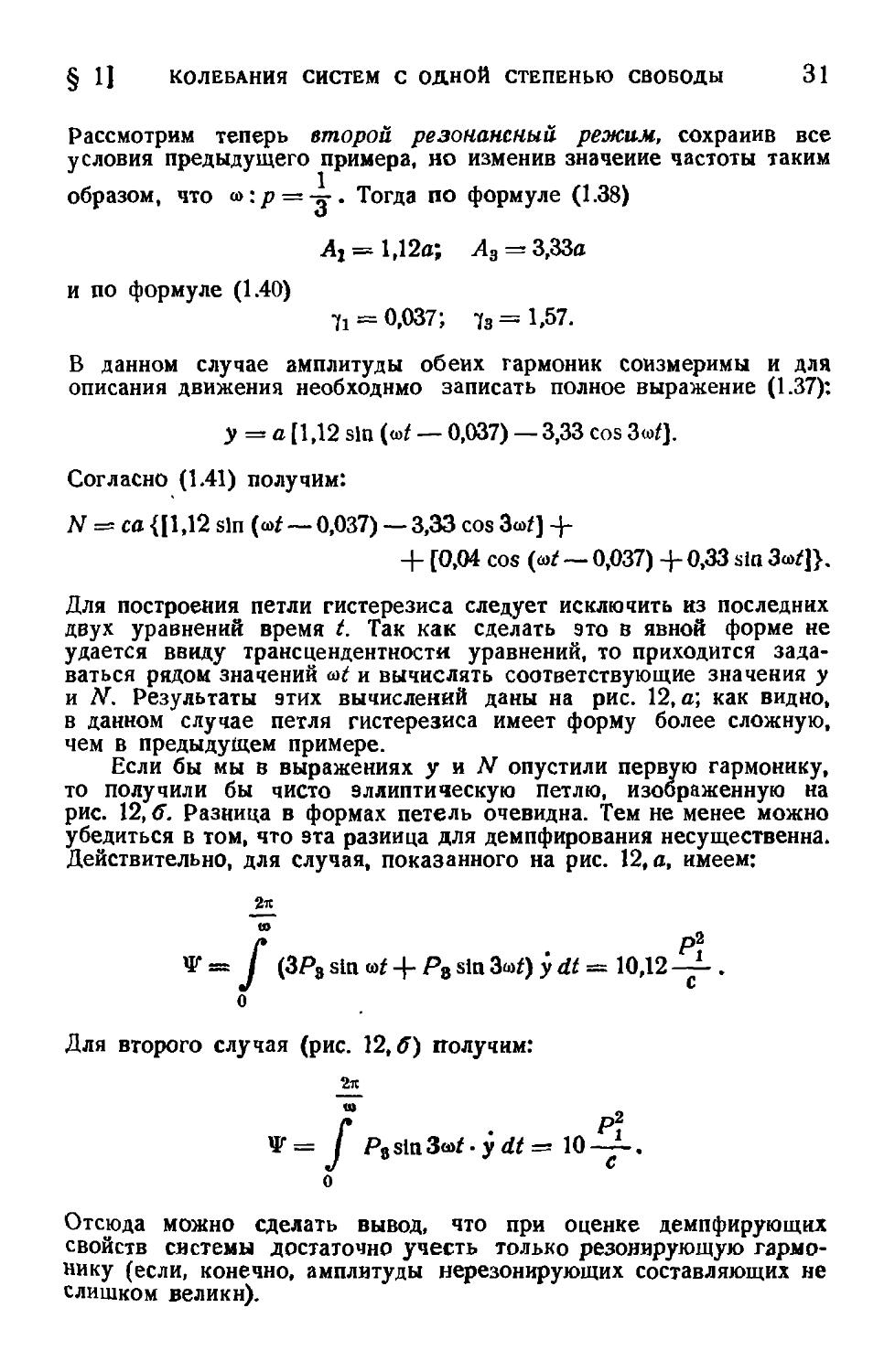
Рис. 13. Периодическая возмущающая сила
P(t+T)-P(t).
дающему решение в виде квадратур. Согласно этому
способу, для установившегося периодического процесса
c-nt
У
тр1
\е„т с binP\V+T) — S cos Pi(t+T) ,
L 1— 2enT cos ргТ + einT
. S cos p^ — С sin Pitt |
1— 2e"T cos ptT-\-егпТ
t
-\- f P (x) en* sin px (t — x) rfx]. A.42)
Здесь T—период возмущающей силы, так что
P{t + T) = P{t)
(см. рис. 13),
С—/ P(x)e/lTcos/?1xrfx,
о
г
S= Г P(x)enxsinp1xdx.
A.43)
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 33
Величина х представляет собой переменную интегрирования,
меняющуюся в выражении A.42) в пределах @, t) и в
выражениях A.43) — в пределах @, 7). Решение A.42)
описывает движение в пределах одного периода, т. е.
в промежутке (О, 7). Этого достаточно, так как вследствие
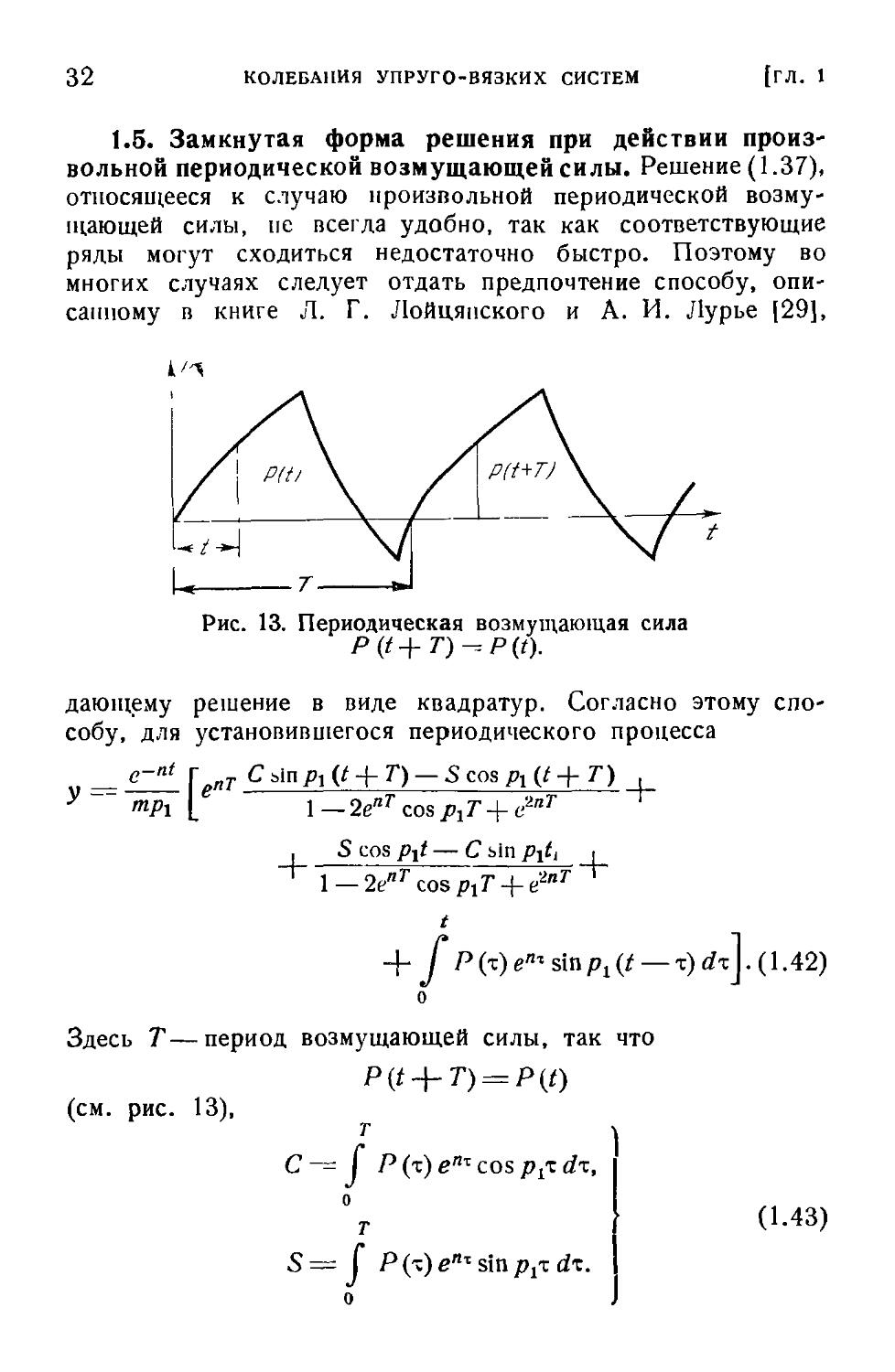
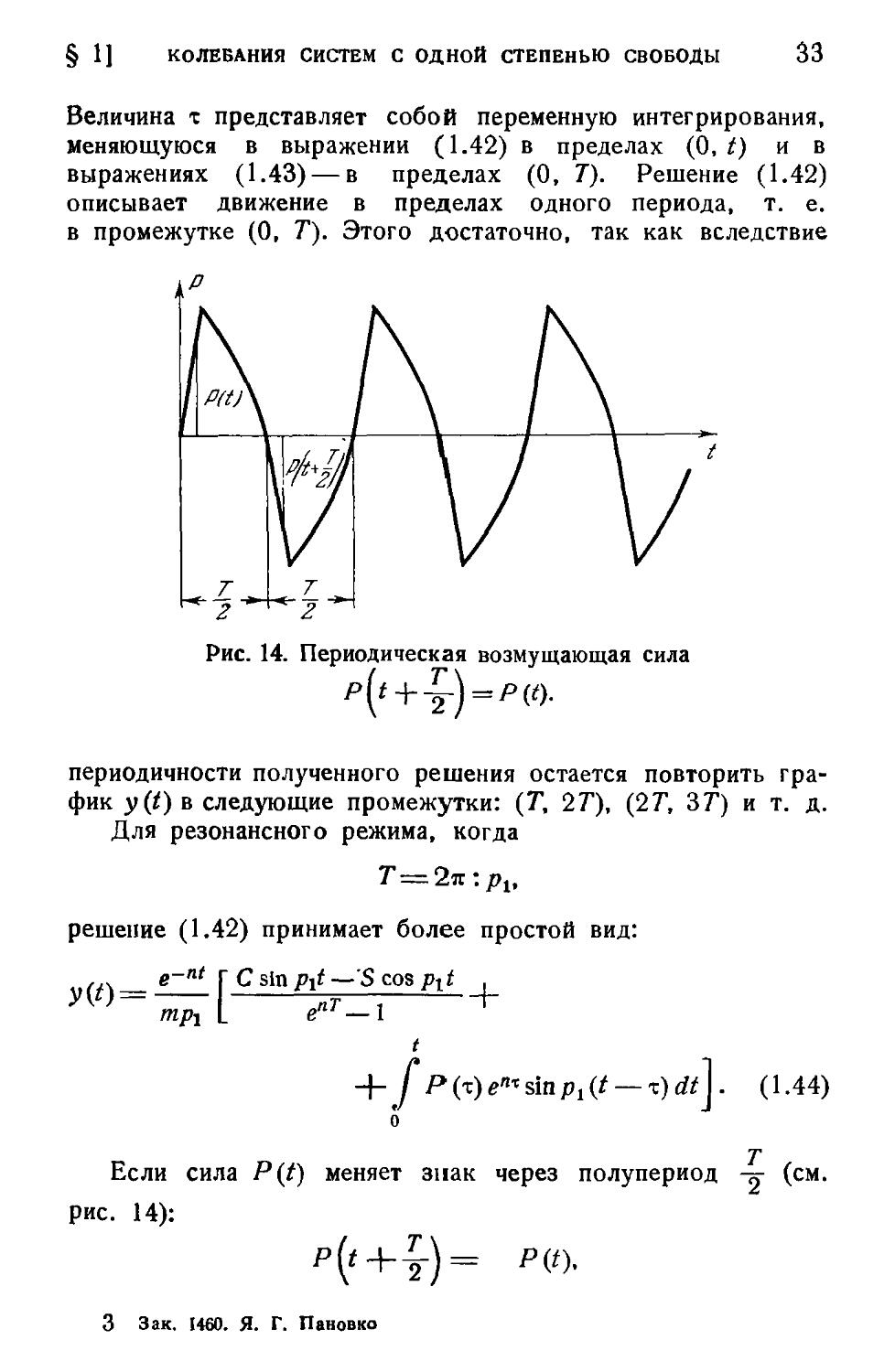
Рис. 14. Периодическая возмущающая сила
периодичности полученного решения остается повторить
график y(t)B следующие промежутки: (Г, 27), B7", 37) и т. д.
Для резонансного режима, когда
Т=2п:рх,
решение A.42) принимает более простой вид:
e~ni Г С sin р^ — S cos pit .
y(t)--
mpi
<?T-\
4- J P (x) en* sin Pi (t — x) dt\. A.44)
Если сила P(t) меняет знак через полупериод -^ (см.
рис. 14):
3 Зак. 1460. Я. Г. Пановко
34 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
то и координата у также меняет знак через полуперйод:
у ('+!-) =-у@.
В этих случаях достаточно разыскать решение для
промежутка времени @, -н-); после этого график функции у (О
нужно повторить со сменой знака в следующем
полупериоде 1-я-, Т\. Для соседнего периода (Г, 2Т) нужно
полностью повторить график, построенный для первого периода
(О, Т), и т. д. Решение для первого полупериода имеет вид,
подобный A.42):
[пТ
е 2 cos Pi (t + -А + cos р^ —
Г —
— Ci J^e 2 sin рх {t + ~) + sin pit
y(t)--
mPi
nT
)
причем
4- f P (т)еп* sin p^t — x)dt\, A.45)
о J
Ct= f P(t)e™cosp^dz,
Sl= Г P (t) e"x sin p{z dx.
A.46)
Решение A.45) упрощается в случае резонанса, когда период
возмущающей силы Т равен периоду свободных колебаний
2к:Л:
у@=
-л/
mpi
\t
пТ
(Sj cos pxt — Cj sin p^) -J-
A.47)
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 35
1.6. Действие возмущающей силы, заданной законом
«прямоугольного синуса». Рассмотрим действие
возмущающей силы:
P(t) = P0 при 0<f<-J,
т \ A-48)
P(f) = -P0 при ±.<t<T
(рис. 15, а).
Ограничиваясь случаем резонанса, когда Т= —, находим
по формулам A.46):
Теперь согласно A.47)
У^) = ~й
Г1 ^~^ж{со*Plt + рsln PA
L 1-е
Ро_ Г. 2е-"'
A.49)
Здесь, как говорилось, t меняется в пределах первого
полупериода, когда Р(г)>0; в следующем полупериоде, когда
Я@<0, знак y(t) следует сменить на обратный. График
движения для случая 2ге:р = 0,1 изображен на рис. .15, б
и весьма сходен с графиком монохроматического колебания.
Т
Перемещение у в моменты г = 0 и t=-~ согласно A.49)
равно
пТ пТ
,№> —?-!±^ ,ф--?.!±^. (..50,
1-е 2 1-е 2
Работа силы Я за первый полупериод
пТ
2PJ 1+g 2
1—/
P.[,(f)-,«,]=^i±ii. <ш>
3*
36
КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
S
т
2
Т
2
а)
t
J/ Уг
72
в
4
О
-4
-в ,
Ч?
1
1
/
'
2
~
\ 7
в)
Рис. 15. Действие возмущающей силы типа
«прямоугольный синус»: а) закон изменения
силы; б) закон движения системы.
§ 1] КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 37
Работа силы Р за второй полупериод равна тому же.
Поэтому общая работа силы Р за период, равная рассеиваемой
энергии, будет
пТ
4^5 1+е 2
пгр"-
1-е 2
Ч^^^Чт- A-52)
Наибольшая потенциальная энергия соответствует моментам
Т
t = Q и -S-, когда отклонения максимальны, и составляет:
A.53)
Разделив A.52) на A.53), найдем коэффициент поглощения
пТ
* =Ъ1-'
Y Umax _^L •
l+e 2
При малых значениях пТ имеем
_пт ПТ пт_
1-е 2 ^~; 1 + е 2 яь2.
Коэффициент поглощения равен
^ = 2пТ, A.54)
как и в предыдущих случаях.
Это совпадение легко объяснить следующим образом.
Если рассматриваемую возмущающую силу разложить в ряд
Фурье, то в наших условиях резонирующей окажется первая
гармоника; остальные гармоники, как и в приведенном в 1.4
примере, практически не повлияют на рассеяние энергии.
Следовательно, обнаруженное нами движение системы
практически совпадает с монохроматическим движением,
вызываемым первой гармоникой разложения силы в ряд Фурье.
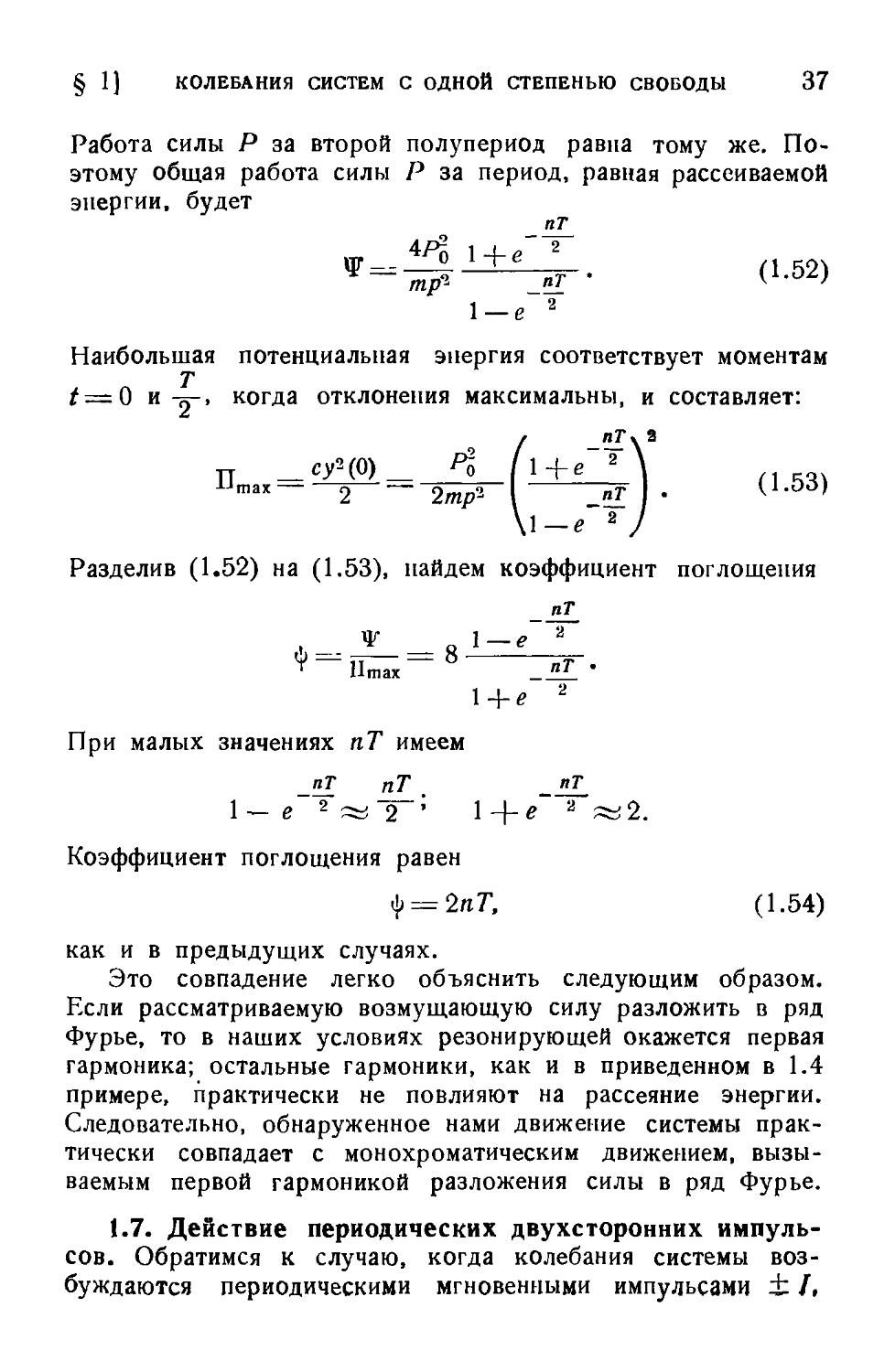
1.7. Действие периодических двухсторонних
импульсов. Обратимся к случаю, когда колебания системы
возбуждаются периодическими мгновенными импульсами ± /,
38
КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ {ГЛ. 1
!/Л
б;
г
2
Т
ч —
Рис. 16. Действие кратковременных импульсов:
а) закон приложения импульсов; б) закон
движения системы.
§ 1]
КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
39
поочередно прикладываемыми в мгновения 0, -к-, Т, ...
Для того чтобы воспользоваться решениями A.45) или A.47),
рассмотрим сначала действие силы Р, заданной в
промежутке (О, Т) следующим образом:
P(f) = + P0 @<*<Д*),
P(t) = -P0 i~<t<^-\-Aty
P(t)==0 (? + U<t<T)
(см. рис. 16, а). По формулам A.46) находим:
A.55)
At
Ct= I PQenxcosplxdx^i(P0enlLt cos^-A^)АЛ
о
A/
St = J* P0enx sin p^ dx яа (/Vя" sin pt Af) A/,
о
Перейдем теперь к пределу, положив Д?->0, Я0->-со,
Р0М->1. Тогда
Преобразуем интеграл, входящий в A.44):
t
Г Р (х) <?Ях sin />! (* — т) dt =
о
t t
= sin pyt i P (t) enx cos pp dx— cospj; Г P(x)enxsin ptxdx.
о о
В нашем случае второе слагаемое при предельном переходе
исчезает и записанное выражение принимает вид:
t
у Р (т) еПх sin pY {t — т) dx — / sin pj.
40
КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ
[ГЛ. I
В резонансном случае согласно A.47) имеем:
... /e-ntbinpit .. ссч
УЮ = 7 Чтл- (L56)
,(.-/*)"
тр^
Соответственно скорость меняется по закону
v{t)='e-nt{-nsinPlt-Vp^Plt) ^ A5?)
mpi\\ — e 2)
График функции A.56) показан на рис. 16, б; построение
относится к случаю 2и: р = 0,1. причем по оси ординат
отложены отношения у к наибольшему перемещению,
вызываемому приложением однократного импульса:
уц = Г: mpv
Как видно из чертежа, и в данном случае движение носит
почти чисто монохроматический характер. Впрочем, это
следует и из рассмотрения выражения A.56), если учесть, что
множитель e~nt за один полупериод ичменяется незначительно.
Для оценки рассеяния энергии сопоставим кинетическую
энергию в начале полупериода
/от^@) _ 1 / /
2т | _лг
1-е 2
2
и энергию в конце полупериода
о-пТ
Нт)
Itn I _nT
а-е 2
Разделив разность этих величин на первую из них, найдем:
^=1—е-2пТ^2пТ,
что, как видно, совпадает с прежним значением коэффициента
поглощения.
1.8. Заключительное замечание. Из рассмотрения
результатов, полученных в 1.4—1.7, можно сделать следующий
важный вывод. Если одна из гармоник данной периодической
возмущающей силы является резонансной, то оценки демпфи-
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 41
рования практически совпадают с тем, что получилось бы
в условиях действия только этой одной гармоники.
Важность этого заключения не умаляется тем, что оно относится
только к резонансному случаю, так как демпфирование
колебаний существенно лишь в резонансных зонах.
§ 2. Колебания систем с распределенными параметрами
2.1. Вступительные замечания. В этом параграфе
рассматриваются свободные и вынужденные колебания систем
с распределенными параметрами, т. е. таких систем,
инерционные, упругие и вязкие свойства которых распределены
непрерывным образом по всему объему. Для установления
общих закономерностей, характерных для таких систем,
достаточно рассмотреть колебания простейших систем с
распределенными параметрами. Поэтому ниже исследуются только
продольные, крутильные и изгибные колебания
призматических стержней; при этом используется гипотеза плоских
сечений и другие обычные в подобных случаях упрощения:
пренебрежение поперечным движением частиц при
продольных колебаниях, пренебрежение сдвигами и инерцией
вращения при изгибных колебаниях.
В задачах о продольных и изгибных колебаниях для
нормальных напряжений принимается закон Фохта
0 = Ee-+-ft0-J. B.1)
В задаче о крутильных колебаниях для касательных
напряжений принимается соответствующая редакция этого закона
Т==0Т_)_А1|1 B.2)
(G — модуль сдвига, *у — сдвиг* т — касательное напряжение,
kl— коэффициент вязкости).
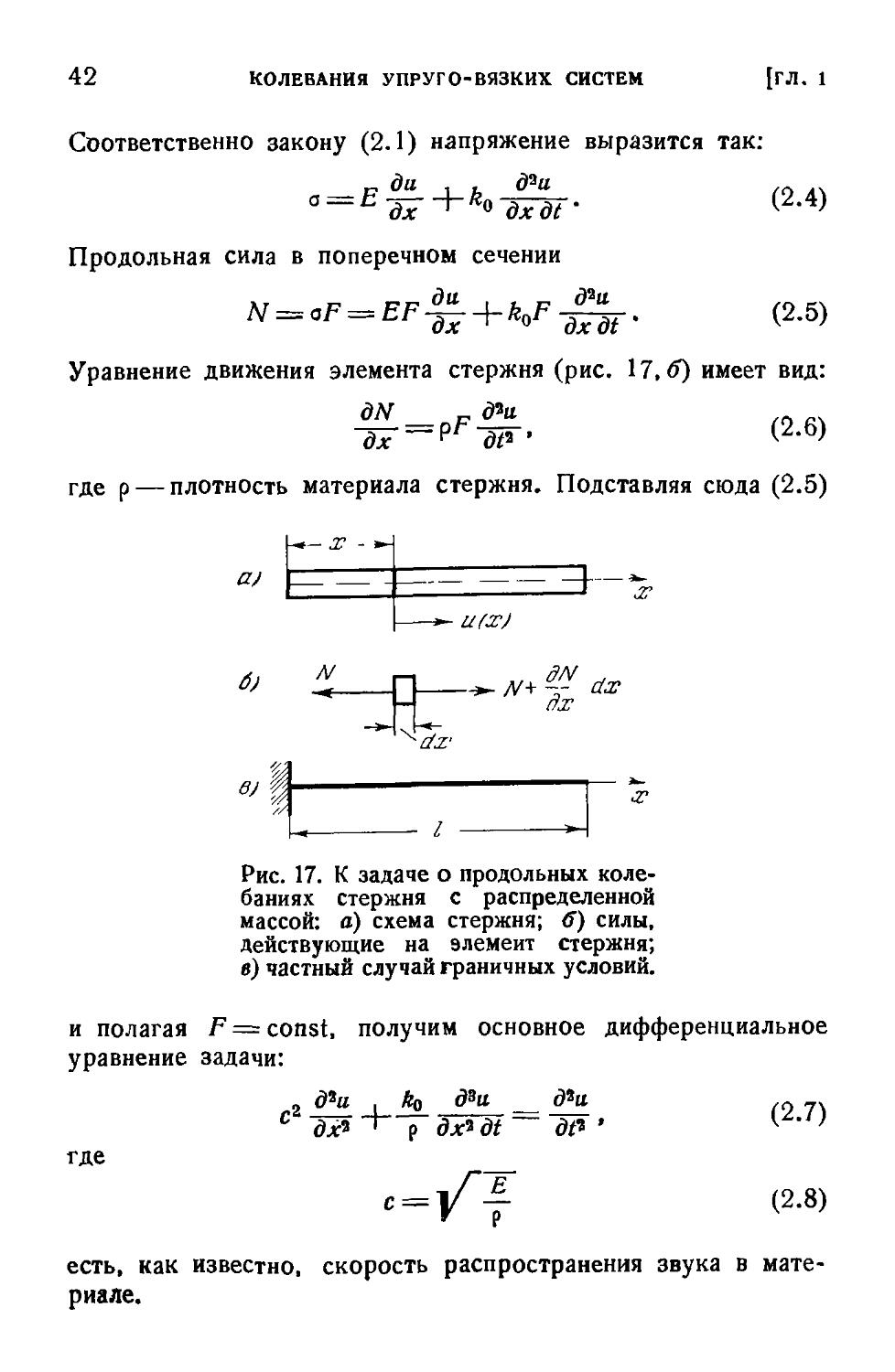
2.2. Свободные продольные колебания. При анализе
свободных продольных колебаний призматического стержня
с прямолинейной осью будем исходить-из схемы,
показанной на рис. 17, а. Обозначив через и = и(х, t) перемещение
вдоль оси х произвольного поперечного сечения, получим
следующее выражение для относительного удлинения:
.= ¦?. B-3)
42 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Соответственно закону B.1) напряжение выразится так:
° = Е1й+ко-§Ш- B-4)
Продольная сила в поперечном сечении
Уравнение движения элемента стержня (рис. 17,6") имеет вид:
3N „ д*и
-W^^-W B-6)
где р — плотность материала стержня. Подставляя сюда B.5)
I—*-'
aj | J Ц.— *.
UfXj
пх
"Jt
«"й
¦г
Рис. 17. К задаче о продольных
колебаниях стержня с распределенной
массой: а) схема стержня; б) силы,
действующие на элемент стержня;
в) частный случай граничных условий.
и полагая F = const, получим основное дифференциальное
уравнение задачи:
- в*а ¦ кр д*>и _ д*и
дх* ^ р dx*dt ~ dfl ' V-'>
где
f B-8)
,=/:
есть, как известно, скорость распространения звука в
материале.
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 43
Следуя способу Фурье, ищем решение уравнения B.7)
в виде:
со
«=2*r(*)S,@. B.9)
где Хг(х)— функции только координаты х, a Sr(t) —
функции только времени t. При этом каждый член ряда должен
удовлетворять граничным условиям задачи, а вся сумма —
также начальным условиям. Подставляя <2.9) в B.7) и
требуя, чтобы равенство удовлетворялось для любого
номера г, получим:
c*X?ST ¦+- — x"rSr = XrSr B.10)
Здесь и всюду ниже штрихи обозначают дифференцирование
по координате х, а точки — дифференцирование по времени t.
Разделив B.10) на произведение Xr (Sr -\-~-SA,
приходим к равенству
у" '<?
С2^= %—. BЛ1)
левая часть которого может зависеть только от координаты х,
а правая часть — только от времени t. Для тождественного
выполнения равенства B.11) необходимо, чтобы обе части
были равны одной и той же постоянной, которую мы
обозначим через —р2г. Отсюда следуют два уравнения:
jrr+-%-X, = 0. B.12)
S, + ^j-/#,+/&, = <). B.13)
Первое из этих двух уравнений вовсе не зависит от
коэффициента вязкости k0 и, в частности, остается таким же
в случае идеально упругой системы, когда fc0 = 0. Интеграл
уравнения B.12):
Xr = Arsin?f-\-Brcos?^-. B.14)
Соотношение между постоянными Ат и Вт, а также
значение постоянной рт можно найти из граничных условий.
44 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Пусть, например, левый конец стержня закреплен \и (О, t) = 0],
а правый конец стержня свободен (N (I, t) = 0] (рис. 17, в).
Согласно B.5) и B.9) эти условия приводятся к виду:
Xr @) = 0; Xr(l) = 0. B.15)
В^ случае обоих свободных концов граничные условия
принимают вид:
Л^@)=0; ЛГг'(/) = 0. B.16)
В случае, когда оба конца стержня закреплены, граничные
условия будут следующими:
ЛГ,@) = 0; ХГA) = 0. B.17)
Возвращаясь для примера к случаю граничных условий.
B.15), имеем из B.14):
Вг = 0; cos^- = 0. B.18)
Второе из равенств B.18) определяет бесконечный спектр
значений р/.
Рг = ^-^ (г=-1. 2. ...)• B.19)
Соответственно этому выражение B.14) принимает вид:
А^ап^-Ц™ B.20)
(постоянной АТ можно приписать любое значение; проще
всего положить Аг= 1).
В случаях, когда граничные условия имеют вид B.16)
и B.17), вместо B.19) получим:
р,=гт- (г=1, 2' •••)- B-21)
и соответственно выражение B.14) примет вид:
Xr = cos^-, B.22)
Xr=sLa^-. B.23)
Выражения B.20), B.22), B.23) называются
фундаментальными функциями соответствующих задач. Важно отметить.
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЁННЫМИ ПАРАМЕТРАМИ 45
что фундаментальные функции каждой задачи совершенно
не зависят от вязких свойств стержня и образуют
ортогональную систему, т. е.
i
fXm(x)Xn(x)dx = 0, B.24)
о
если тфп.
Возвратимся теперь к уравнению B.13), описывающему,
очевидно, процесс затухающих колебаний; его интеграл
имеет вид:
Sr = e~n* (С, sin рЧ + Dr cos p*t); B.25)
здесь
«, = %-, B-26)
Выражение B.26) определяет темп затухания, а выражение
B.27) — частоту колебаний.
Таким образом, полное решение уравнения задачи имеет
вид:
оо
и= 2*,e-V (С,sinp*t-+-Drcosp*t). B.28)
Постоянные СТ и Dr всегда можно найти по заданным
начальным условиям. Пусть начальные смещения и начальные
скорости всех сечений стержня заданы следующим образом:
e(*.0) = /i(*); ^{x, Q) = f2(x), B.29)
где /1 (х) и /2 (х) — известные функции. Тогда при t = О
согласно B.28) и B.29) имеем:
со
Л (*) = 2 (СгРГ - Drnr) Xr (х).
46 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Умножая обе части этих равенств на Хт(х) и интегрируя
в пределах всей длины стержня, получим:
* i
Dr f X2r (x) dx = ff1 (*) Xr (x) dx,
о
i
(CTp*r - DTnr) f X? (x) dx = ff2 (x) X, (x) dx.
. B.30)
Соответственно условию ортогональности фундаментальных
функций B.24) все остальные слагаемые, входящие в левые
части этих равенств, обращаются в нуль. Теперь из B.30)
нетрудно найти Сг и DT для любого номера г.
Рассматривая выражение B.28), заметим, что каждый его
член описывает затухающие колебания, если рг есть
действительное число. Из B.27) видно, что это имеет место
лишь для нескольких начальных значений г, пока
выполняется неравенство
-Ц?<1. B.31)
При достаточно больших значениях г неравенство B.31)
нарушается и величина р* становится мнимой. При этом
соответствующие члены общего решения B.28) уже не
будут описывать затухающих колебаний, но будут представлять
апериодическое затухающее движение. Другими словами,
колебания в обычном смысле слова выражает только
некоторая конечная часть суммы B.28).
Заметим, что искусственным выбором начальных
условий можно обеспечить монохроматичность процесса
колебаний. Пусть, например, fl(x) = Xl(x), /2t3,... (jc) = 0, т. е.
в начальный момент заданы смещения, точно соответствующие
первой фундаментальной функции. Из B.30) получим:
С1 = -%, С2 = С3=...=0; D,= \, D2 = D3=...=0;
Pi
следовательно, в последующем процессе осуществляются
только колебания у — Х^х) S1(t); это значит, что заданная
вначале форма fi(x) = Xi(x) устойчива и без всяких
искажений сохраняется в течение всего колебательного процесса,
лишь ее масштаб непрерывно меняется с течением времени.
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 47
Важно помнить, что согласно B.12) эта форма является
фундаментальной функцией соответствующей задачи без вязкого
сопротивления; поэтому можно сказать, что формы
свободных затухающих колебаний совпадают с формами
свободных незатухающих колебаний.
Как будет показано в следующих двух пунктах, эти
важные качественные заключения относятся не только к
случаю продольных колебаний, но и к случаям крутильных и
изгибных колебаний,
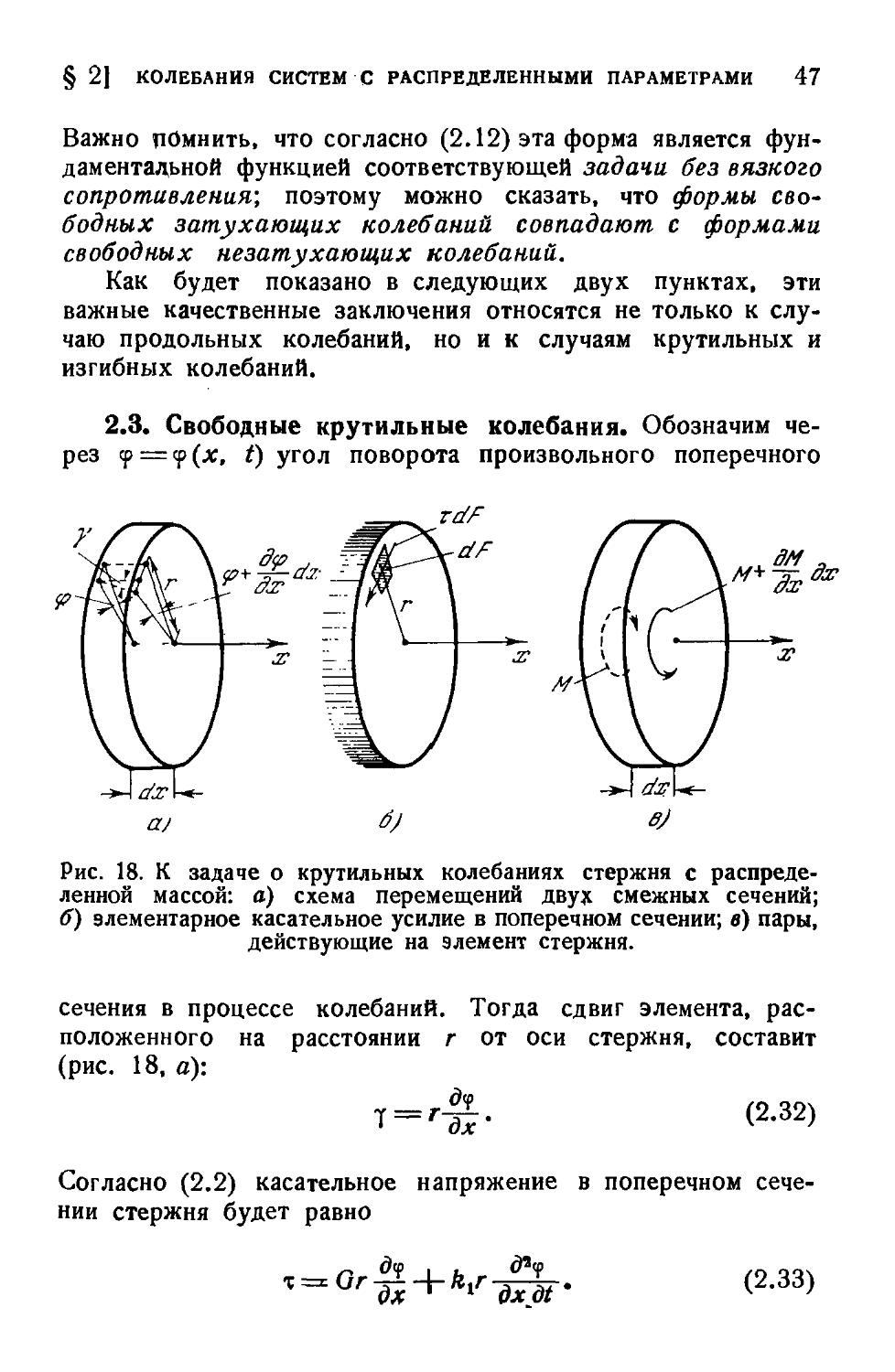
2.3. Свободные крутильные колебания. Обозначим
через <р = <р (лг. f) угол поворота произвольного поперечного
»>%**
Рис. 18. К задаче о крутильных колебаниях стержня с
распределенной массой: а) схема перемещений двух смежных сечении;
б) элементарное касательное усилие в поперечном сечении; в) пары,
действующие на элемент стержня.
сечения в процессе колебаний. Тогда сдвиг элемента,
расположенного на расстоянии г от оси стержня, составит
(рис. 18, с):
д<р
дх
B.32)
Согласно B.2) касательное напряжение в поперечном
сечении стержня будет равно
'-<*5+vA-
B.33)
48 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. !
Момент элементарнбго касательного усилия xrdF
относительно центра тяжести сечения составит
(<*¦&+*'*¦¦&-)'<''
(рис. 18, б). Следовательно, полный крутящий момент
равняется
М
где
= f*rdF = QJ,*L + kvr,?$f. B.34)
= fr2dF=^~ B.35)
V
есть полярный момент инерции круглого поперечного сечения
радиуса R. Обозначив через М крутящий момент (рис. 18, а),
запишем уравнение движения элемента стержня:
(M+yLdx)-M = pJp%?dx. B.36)
Здесь pJpdx — момент инерции массы элемента относительно
оси стержня. Из B.36) получаем:
-w = pJp-m- <2-37>
или, учитывая выражение B.34):
,2 j*L\ *i d3f - - dif (О чяч
ci -дх*"+" р djfidt ~ dt* • ^'00)
где
*i = ]/"?• B-39)
Уравнение B.38), в сущности, совпадает с уравнением задачи
о продольных колебаниях B.7). Поэтому, разыскивая
решение в виде, подобном B.9):
GO
<p=2*,(*)sr@. B-4°)
/¦¦=1
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 49
сразу по аналогии с B.12) и B.13) получаем уравнения,
определяющие функции Хг(х) и Sr(t):
2
X;+-%Xr = Q, B.41)
с1
Sr -4- !± p2rSr+P2rSr = 0. B.42)
Решение уравнения B.41) подобно решению B.14):
Xr = Arsln-&±~i-Bcos-&±-. B.43)
Для свободного конца стержня М = 0 и соответственно B.34)
должно быть
х'г = о.
Для закрепленного конца стержня <р = 0, так что
Таким образом, аналогия со случаем продольных колебаний
относится не только к уравнению, но и к граничным
условиям. Поэтому все соотношения B.19) —B.31) предыдущего
пункта сохранят свою силу, если заменить и на ср, с на cv
k0 на ft1# Остаются справедливыми и заключения,
сформулированные в конце пункта 2.2.
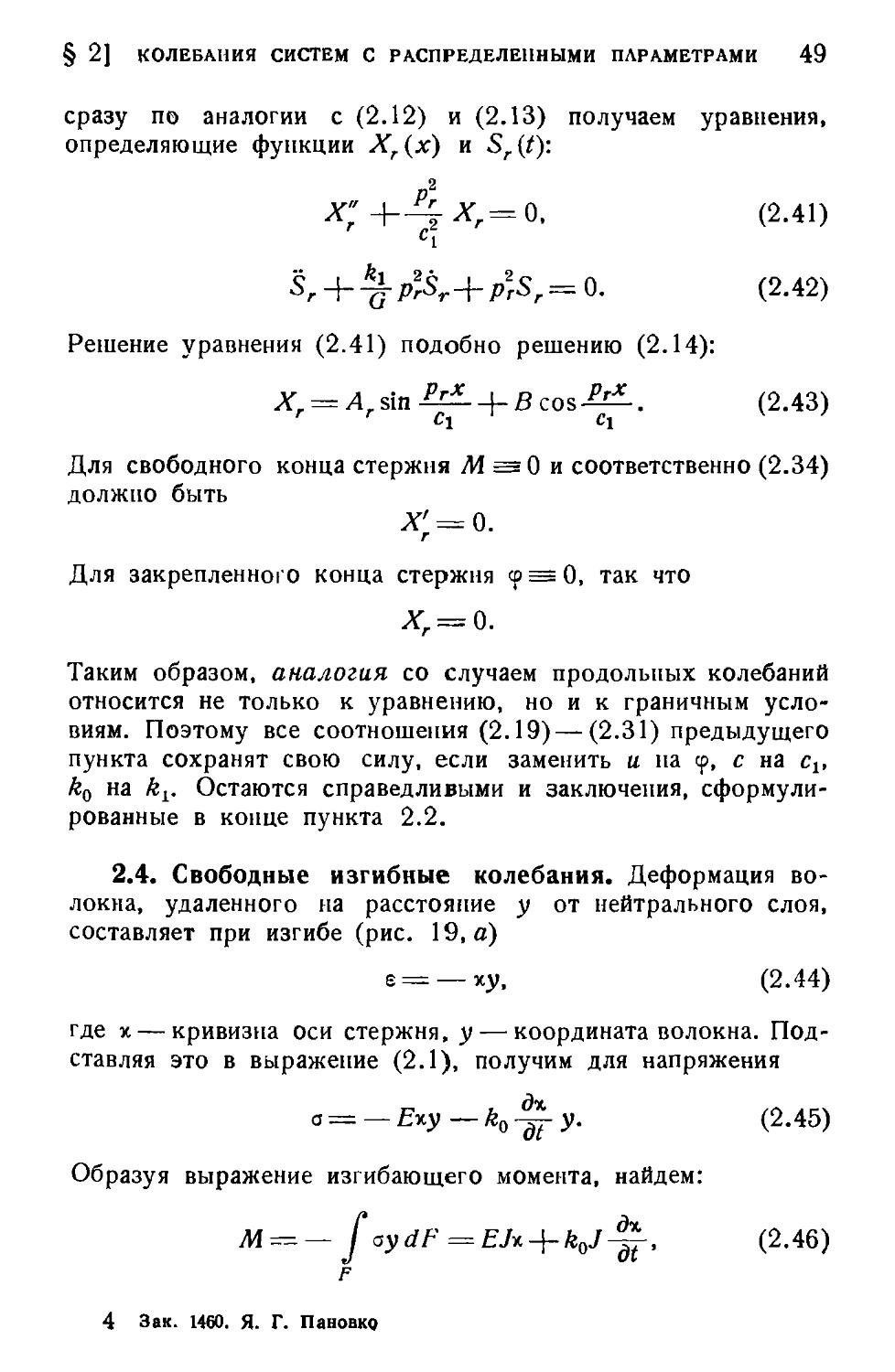
2.4. Свободные изгибные колебания. Деформация
волокна, удаленного на расстояние у от нейтрального слоя,
составляет при изгибе (рис. 19, а)
е = —ху, B.44)
где ч — кривизна оси стержня, у— координата волокна.
Подставляя это в выражение B.1), получим для напряжения
a=—E%y—k0-^-y. B.45)
Образуя выражение изгибающего момента, найдем:
M = —faydF=EJ*-\-k0J-^; B.46)
F
4 Зак. 1460. Я. Г. Пановко
50 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ {ГЛ. I
где У= Г y2dF—~ момент инерции поперечного сечения
F
стержня относительно нейтральной оси.
а/
Рис. 19. К задаче об упругих колебаниях стержня
с распределенной массой: а) схема деформации
элемента стержня; б) силы, действующие на элемент
стержня.
Уравнение движения элемента стержня (рис. 19, б):
д*М „ ST-v .„ ._.
¦р^-ягг. B-47)
где v = v(x, t) — прогиб текущего сечения. Подставляя
в B.47) выражение B.46) и имея в виду, что при малых
прогибах K-za-fi-f, найдем:
EJ дЧ, , k»J A, + ** 0ш B.48)
?F дх* ' PF dx*dt n dfl
Поступая, как и в предыдущих случаях, ищем решение
уравнения B.48) в виде:
«=2*,(*)S,@ (r=l. 2. ...)• . B.49)
Подставляя B.49) в B.48), придем к следующему
уравнению:
^гХ? (S,+ "! Sr) + XrSr = 0. B.50)
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 51
Разделив его на произведение Xr (Sr -j- -—- Sr}, получим:
IV
Sr
Sr+^Sr
B.51)
Так как левая часть этого равенства не зависит от времени t,
а правая часть — от координаты х, то для тождественного
выполнения равенства необходимо, чтобы обе части равнялись
одной и той же постоянной. Обозначая эту постоянную
через —р*г, приходим к уравнениям:
X?
ь).хт--
0,
k»Pr А , 2С
¦—g-Sr+PrS,--
В уравнении B.52) обозначено
.4 ?F 2
br=^jPr
B.52)
B.53)
B.54)
Как и в предыдущих двух случаях, рассмотренных в
пунктах 2.2 и 2.3, запись первого из уравнений, определяющего
фундаментальные функции и собственные числа рг,
совершенно не зависит от вязких свойств системы. Интеграл этого
уравнения запишем в форме:
X, (х) = ArYir (х) + BrY2r (x)+CrY3r (x) + DrYtr (x), B.55)
где Ar, Br, Cr и Dr — постоянные, а выражения
1
Ylr = -^ (ch brx + cos brx).
Yzr — у (sh brx -b sin br *)•
Y3r = -к- (ch brx — cos br x).
Ytr = -к- (sh brx — sin brx)
B.56)
определяют собой функции А. Н. Крылова, которые
связаны между собой дифференциальными соотношениями:
V — ] V' ¦
у^=т/
Згу
Yt. — т— Yir',
зг-
у*г---=т;у'1г-
B.57)
4*
52 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Соотношения между постоянными Ar, Br, Cr, Dr и
собственные числа рг определяются граничными условиями (по
два на каждом из концов стержня). Свободному концу
стержня соответствует отсутствие изгибающего момента,
пропорционального v", и поперечной силы, пропорциональной v'".
Это приводит к граничным условиям:
Хг = 0; Л?' = 0. B.58)
На шарнирно опертом конце стержня равны нулю прогиб г>
и изгибающий момент, пропорциональный v"; следовательно,
Хг=-0; А? = 0. B.59)
В случае закрепленного конца равны нулю прогиб v и угол
поворота v'; таким образом, граничные условия имеют вид:
Х, = 0; х'г = 0. B.60)
Рассмотрим для примера шарнирно опертую балку и
применим условия B.59) к обоим ее концам. Для левого
конца имеем согласно B.55), B.56) и.B.57):
Хг @) = Аг = 0; Х"г @) = b\Cr = 0.
Следовательно, Аг — Сг=0, и выражение фундаментальной
функции B.55) принимает вид:
Xr=BrY2r + DrYir. B.61)
Тогда для правого конца получим:
X(l) =\Br (sh brl + sin brl) -\-^Dr (sh brl — sin brl) = 0,
X" (I) = b2r f-i- Dr(sh brl-\-sin brl)-\- i B,(sh brl— sin b,l)]=0.
B.62)
Эта система однородна относительно Вг и Dr; для того
чтобы эти величины не были одновременно равны нулю,
необходимо, чтобы равнялся нулю определитель:
sh brl -\- sin bTl sh bTl — sin brl
sh bTl — sin brl sh brl-\- sin brl " '
или
sh brl • sin brl = 0.
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 53
Так как sh brl Ф О, то
sin ?/ = (). B.63)
Отсюда следуют значения
Учитывая выражение B.54), получим:
Рг=-ргУ JJT- B-64)
Чтобы построить выражение фундаментальной функции B.61),
заметим, что любое из уравнений B.62) дает при учете B.63)
Dr=-Br. B.65)
Подставляя B.65) в B.61), получим (опуская
несущественный постоянный множитель Вг):
Хг — sin Ьтх = sin —р-. B.66)
Совершенно тем же путем можно получить выражение
фундаментальных функций и собственных чисел для других
вариантов опорных устройств. Ввиду того, что выкладки не
содержат характеристик вязкого сопротивления, можно во
всех этих случаях непосредственно пользоваться данными,
приводимыми в книТах и справочниках по теории упругих
колебаний.
Дифференциальное уравнение B.53) для функции S(t)
полностью совпадает с уравнениями B.13) и B.42). Ясно
поэтому, что и в рассматриваемом случае сохраняются все
качественные заключения, данные в конце 2.2 относительно
характера движения стержня.
2.5. Вынужденные продольные колебания. Исследуя
здесь и в следующих двух пунктах вынужденные колебания,
мы не будем рассматривать самый общий случай произвольно
заданной возмущающей нагрузки и ограничимся достаточно
характерным случаем действия гармонической нагрузки
q (x, t) = q0 (x) sin tot, B.67)
амплитудные значения которой д'оОО являются произвольно
заданной функцией координаты х. Очевидно, что общий
54 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
случай периодической возмущающей нагрузки при помощи
разложения в ряд Фурье может быть сведен к серии случаев
нагружения по закону B.67).
Уравнение вынужденных колебаний получим, введя в
уравнение B.7) возмущающую нагрузку:
EF~d^ + k°F dx*dt —PF-W = — go(л:) sm arf" B'68)
Решение этого уравнения будем искать в виде суммы
со
и(х, 0=2-*, (*) S, (О. B.69)
г = 1
где Хг (х) — фундаментальные функции соответствующей
однородной задачи о свободных колебаниях того же стержня,
Sr (t) — искомая функция времени. Прежде чем подставить
B.69) в B.68), предварительно выразим q0(x) в виде:
со
%(*)= 2 *,*,(*). B.70)
/¦=i
т. е. разложим заданную нагрузку в ряд по
фундаментальным функциям задачи о свободных колебаниях. Для того
чтобы определить hr, умножим обе части равенства B.70)
на Хг{х) и проинтегрируем его по всей длине / стержня.
Благодаря свойству ортогональности фундаментальных
функций B.24), в правой части сохранится только одно
слагаемое, и мы получим:
i i
j q0 (х) Хт (х) dx = hrf Х\ (х) их.
о о
Отсюда находим:
i
q0 (х) Хт (х) dx
hr=^—i . B.71)
fxl(jc)dx
о
Величины hT определяются конкретным законом изменения
амплитуд нагрузки <70(х). В частности, выражение B.71)
можно использовать и в тех случаях, когда нагрузка носит
;¦
о
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 55
сосредоточенный характер. Пусть, например, нагрузка задана
в виде сосредоточенной силы Ра sin wt, приложенной в
сечении х = а стержня. Тогда после предельного перехода
найдем из B.71):
РдХг(а) B.72)
/
X\{x)dx
о
В случаях, когда закон изменения д0(х) по длине стержня
следует одной из фундаментальных функций Хт(х), из B.71)
получим, согласно свойству ортогональности
фундаментальных функций, А1 = А2= ... =hm_x = hmbi= ... = 0;
hm ф 0; при этом в разложении B.70) сохранится только
одно слагаемое.
Таким образом, в любом случае рассматриваемая
функция g(x, t) имеет вид разложения
д(х, /).-
2 *,*,(*)]
sin at. B.73)
Подставляя теперь разложения B.69) и B.73) в уравнение
B.68), придем к уравнениям
c2x"rSr + -^ x"rST + -Мг- sin wt = XrSr B.74)
Каждое из этих уравнений допускает разделение переменных
и может быть записано в виде:
c2iC = ^тИ*..
Хг с I *i
Sr+^S;
3t
Вспоминая рассуждения, которые были приведены выше
в связи с равенством B.11), учтем, что каждая из частей
записанного здесь равенства постоянна. Обозначив эту
постоянную через — рР, получим для функции Хг(х) прежнее
уравнение B.12), а для функции Sr(t) уравнение
Sr+p^Sr+p^j^sinut. B.75)
Обратим внимание на коэффициент при втором члене левой
части этого уравнения. По своему смыслу этот коэффициент
56 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
определяет рассеяние энергии; важно заметить, что в
отличие от соответствующей задачи для системы с одной
степенью свободы он зависит от собственной частоты рг.
Поэтому для старших номеров г следует ожидать большего
демпфирования, чем для младших. Стационарная часть
решения уравнения B.75) имеет вид:
Sl.= Arsin(u>f — fr). B.76)
где подобно A.22) и A.23)
Лг= К =, B.77)
^/(-fL^
kQu>p\
Окончательно решение B.68) принимает вид:
оо
и (х, 0=2 АгХг{х) sin (о)/ — Тг). B.79)
г = 1
Роль, которую играют отдельные слагаемые в этом общем
решении, определяется коэффициентами АТ, данными
выражением B.77). Если ввести функции
Yi (х) = 2 лг cos Тг * хт (*).
/•=1
У2 (х) =- — 2 АГ Sln Тг • Хт (*)•
то выражению B.79) можно придать вид:
и (х, t) = Yt (х) sin wt -|- Y2 (х) cos wt.
Так как в общем случае функции Yx{x) и Y(х)
непропорциональны друг другу, то сдвиг фазы колебаний (по
отношению к колебаниям возмущающей силы) неодинаков по
длине стержня и зависит от местоположения сечения.
Поэтому закон, которому следуют смещения сечений по длине
стержня, будет различным для разных моментов времени.
Исключением является упомянутый выше частный случай,
когда изменение заданной нагрузки %(х) по длине стержня
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 57
следует одной из фундаментальных функций. Пусть,
например, такой функцией является функция Хт(х); тогда
вместо B.79) получится:
и (х, t) = Ат sin (со* — Тж) Хт (х).
В данном случае сдвиг фазы постоянен по всей длине стержня
и в течение всего процесса колебаний сохраняется одна и
та же форма смещений, описываемая той же функцией А',,, (л:).
Вернемся теперь к выражению B.77), определяющему
амплитуды АТ. Легко видеть, что при рт > <о знаменатель
этого выражения возрастает с увеличением номера г;
соответственно происходит убывание коэффициентов Аг Это
значит, что высшие гармоники имеют тем меньшее значение,
чем больше номер гармоники (при условии, что рг > <а).
Если значение частоты о> возмущающей силы совпадает
с значением одной из собственных частот рг, то
соответствующий коэффициент Аг приобретает значение
Аг= *:*¦ ; B.80)
?rk0p°
отсюда непосредственно видно, что резонансу с высшими
собственными частотами, как правило, отвечают меньшие
резонансные амплитуды *).
В сказанном можно видеть основания для утверждений,
широко используемых в практических расчетах:
1. Наибалее опасны случаи совпадения частоты со с одной
из «младших» частот рг; при достаточно больших
значениях рг случаи совпадения ш — рг не представляют особой
опасности.
2. В случаях резонанса с одной из «младших»
собственных частот рг амплитуда соответствующего члена ряда
B.79) оказывается настолько большой, что остальные члены
ряда можно считать отсутствующими. Тогда приближенно
получается выражение
и (х, t) = — АТХТ {х) cos a>t. B.81)
Отсюда становится ясным и происхождение так называемого
правила Видлера [64], гласящего, что при резонансе форма
*) Разумеется, здесь речь идет лишь об общей тенденции,
так как очевидное значение имеет и распределение величин hr,
зависящих от вида функции qn(x).
58 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
колебаний совпадает с соответствующей формой
свободных колебаний.
Как видно, это утверждение строго верно лишь в случаях,
когда изменение возмущающей нагрузки по длине стержня
следует одной из фундаментальных функций.
Определим теперь энергию, рассеиваемую за один период
в условиях резонанса. При этом ограничимся учетом лишь
той работы, которая совершается внешней нагрузкой q0 (x) sin a>t
на перемещениях, описываемых резонансным членом решения,
данным в выражении B.81):
i т
V=ff ta,(*)stamfl ?±dtdx =
о; о
i т
— / I 1Чо(х) sin «tf] • [ЛГХГ (х) (о sin iot] dt dx =
о о
I
= nArfq0(x)Xr(x)dx. B.82)
о
Для определения наибольшей потенциальной энергии
рассмотрим состояние наибольшей деформации стержня, когда
согласно B.81)
и^АгХ^х);
при этом деформации
е = 17 = АгХг(х)
и потенциальная энергия составляет:
i
TImia = f~dV = ^.f[x'r(x)fdx. B.83)
V О
Составляя отношение величин, данных выражениями B.82) и
B.83), получим коэффициент поглощения:
J Чо(х)Хт{х)<1х
, 2я о
Е?АГ '
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 59
Подставляя сюда выражения Ат из B.80) и hr из B.71),
окончательно найдем:
1
2*k0p3r9f[Xr(x)]*dx
фг = _° . B.84)
E*f[x'r(x)fdx
о
Любопытно, что этот результат совершенно не зависит от
закона распределения нагрузки q0(x) по длине стержня.
Остановимся на случае, «когда левый конец стержня
закреплен, а правый конец свободен; согласно B.19) и B.20)
получим:
Фг^Н^Л. B-85)
т. е. с увеличением номера г, определяющего резонансную
частоту, коэффициент поглощения возрастает. Заметим, что
результат B.85) остается справедливым и при других
граничных условиях. В этом можно убедиться, если
определять фг непосредственно из уравнения B.75), используя при
этом известное выражение ф = 2пТ. В данном случае вместо In
следует принять выражение коэффициента при 5 в
уравнении B.75); поэтому вновь получим:
Важно заметить, что коэффициент поглощения зависит
от номера собственной частоты, с которой резонирует
возмущающая нагрузка; чем больше этот нонер, тем больше
и коэффициент поглощения. Этот результат согласуется с
замечаниями, сделанными выше.
Все полученные здесь качественные заключения относятся
не только к рассмотренному случаю продольных колебаний;
ниже, в пунктах 2.6 и 2.7, мы убедимся, что они сохраняют
свое значение и в случае крутильных и изгибных колебаний.
2.6. Вынужденные крутильные колебания. Как и в
предыдущем пункте, ограничимся рассмотрением случая
действия гармонической нагрузки в виде распределенных по
60 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ 1гЛ. I
длине стержня крутящих моментов
т(х, t) = га0 (л:) sin atf, B.86)
полагая, что амплитудные значения крутящих моментов т0(х)
являются произвольно заданной функцией координаты х.
Введя в уравнение B.38) возмущающую нагрузку B.86),
получим уравнение вынужденных колебаний
GJpU + k>JPdi%F-PJPlS- = --m°s[a{oL <2-87>
Так как это уравнение совершенно аналогично уравнению
B.68) задачи о вынужденных продольных колебаниях, то,
не повторяя выкладок, можно сразу записать окончательные
результаты:
со
" B.88)
где
причем
<Р<
Л =
подобно
X, 0=2 АгХт (*) sitl (°>* — Тг)-
г=1
К
""/('-5W
t„„__ k**?
bb P?--*
B.71)
J /и0 (х) Хт (х) dx
к- ° ,
B.89)
fKw
B.90)
dx
В случае сосредоточенного момента М0 sin wt,
приложенного в сечении с координатой х = а, будет:
и __ МаХг (а)
/*?<*)
dx
B.91)
§ 2] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 61
Далеко идущая аналогия между рассматриваемым случаем и
случаем продольных колебаний избавляет от необходимости
дальнейшего исследования полученных результатов. Все
выводы, сформулированные в конце предыдущего пункта,
полностью сохраняют свою силу и в данном случае.
2.7. Вынужденные изгибные колебания. Подобно тому
как это было сделано в 2.5 и 2.6, рассмотрим
возмущающую поперечную нагрузку частного вида:
д(х, t)—-q0(x)sinwt. B.92)
Для получения уравнения вынужденных колебаний введем
нагрузку B.92) в уравнение B.47). Тогда вместо B.48)
придем к уравнению
Далее поступим, как в 2.5, и будем искать решение
разложением в ряд по фундаментальным функциям
соответствующей однородной задачи:
00
v(x, t) = 2i Xr(x)Sr(t). B.94)
r=a
полагая, что функции Хт уже найдены, и считая
неизвестными функциями Sr. Одновременно представим q0(x) в виде
ряда B.70). При этом для коэффициентов hT вновь
получится выражение B.71); в частном случае сосредоточенной
возмущающей силы P0sinu>f, приложенной в сечении х — а,
для hr остается справедливой формула B.72).
Подставляя теперь в уравнение B.93) разложения B.70)
и B.94), придем к уравнениям
j^x7ST + ^X^ST^XrS= -^sinurf. B.95)
Из B.95) можно получить:
9f Xr S+ * s
62 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [гЛ. I
Обе части этого равенства должны быть постоянными.
Обозначая постоянную через — рР, получим прежнее уравнение
Р0 Sincdt
а)
V
72
8
4
О
-4
-8
-72
Ю3
|\ т
\ 2 1
^Г^
г
б)
Рис. 20. Действие гармонической возмущающей силы
на двухопорную балку: а) схема нагружения; б)
закон движения середины балки.
B.12) для функций Хг(х) и уравнение
_з ?о
B.96)
Sr+P*-§-Sr-\-p2rSr= ^sina)^
для функции Sr(t). Последнее уравнение полностью
совпадает с уравнением B.75), относящимся к вынужденным
продольным колебаниям. Вследствие этого в данном случае
остаются справедливыми все выражения B.76) — B.81), а
также общие заключения, изложенные в конце 2.5,
§ 3] ОСОБЕННОСТИ ВРАЩЕНИЯ ВАЛОВ 63
В качестве примера рассмотрим движение середины шарнирно
опертой балки, подверженной действию гармонической силы Ро sin u>t
(рис. 20, а). Данные, принятые в расчете:
/ = 100 см, ? = 2 ¦ 106 Кгсм\ J=-^-cm*, р = 8 • Ю-8 кгсек^см\
F =s 1 см\ ы = 100 сек-1, k0 = 2 • 106 кг сек/см, Р0 = 10 кг.
Найденный по приведенным выше выражениям закон
движения содержит только нечетные слагаемые; при учете первого и
третьего членов решение имеет вид:
v (g-, t\ = 0,1285 sin (<ot + 1.52) + 0,0015 sin (at + 1,47).
Как видно, основную роль играет первое слагаемое. График
движения изображен на рис. 20, б и представляет собой почти чистую
синусоиду.
§ 3. Особенности вращения валов,
вызванные гистерезисом
3.1. Вступительные замечания. Как уже говорилось
во введении, внутреннее трение является причиной
своеобразных особенностей процесса вращения валов. Ниже
рассматриваются два явления такого рода.
Представим себе двухопорный горизонтальный весомый
вал круглого сечения. Пусть совершается медленное
вращение с угловой скоростью и», отличающейся от критической
(ю <С <">кр).
Если вал изготовлен из идеально упругого материала, то
изогнутая ось вала все время остается точно в вертикальной
плоскости. Вследствие внутреннего трения в материале вала
(или в его сочленениях) явление усложнится и плоскость
изгиба вала образует с вертикальной плоскостью некоторый
угол, пропорциональный коэффициенту поглощения системы.
Этот эффект рассматривается в 3.2; он лежит в основе одного
из экспериментальных способов определения коэффициента
поглощения.
Второе явление состоит в неустойчивости вращения вала
в закритической области (со > о>кр) материала. Оно было
обнаружено сначала в натурных условиях и лишь впоследствии
получило надлежащее теоретическое объяснение. Как
оказалось, внутреннее трение, являясь демпфирующим фактором
в докритической области (при ш < юкр), может оказаться
64 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
причиной «раскачивания» колебании при скорости вращения,
большей чем критическая. В этом случае стабилизация
вращения достигается вчешним трением, либо нелинейностью
системы.
3.2. Особенности изгиба вращающегося вала с
первоначально горизонтальной осью *). Рассмотрим
простейшую схему двухопорного вала, несущего посередине пролета
идеально уравновешенный диск. Если вращение происходит
вдали от критической зоны и в отсутствии каких-либо
возмущений, то ось вала будет неподвижной в пространстве, а ее
изгиб вызывается только силой веса диска. При этом
горизонтальный диаметр делит поперечное сечение
деформированного вала на области растяжения (внизу) и сжатия (наверху);
нейтральная ось напряжений строго горизонтальна, так как
внешние силы (вес диска, реакции опор) вертикальны и
изгибающий момент действует в вертикальной плоскости. На
рис. 21, а цифрами 1 и 2 отмечена нейтральная ось
напряжений. Так как любая точка сечения испытывает циклическую
смену напряжений, то в осях а — s образуется петля
гистерезиса. Соответственно A.30) можно записать уравнение
ветвей петли в виде:
o = Ee±k0u>eQ i / 1 ~ , C.1)
где k0 — коэффициент вязкости материала, е0 — амплитуда
деформации в данной точке сечения (различная для разных
точек). Пусть изображенная на рис. 21, б петля относится
к крайним точкам сечения; петля, построенная для других
точек, имеет соответственно меньшие размеры. Как видно,
равным нулю напряжениям соответствуют отличные от нуля
деформации (см. точки / и 2 на рис. 21,6). Отсюда
следует, что нейтральная ось напряжений не является
нейтральной осью деформаций. Для того чтобы определить
положение последней, обратим внимание на точки 3 и 4
(рис. 21, б). Этим точкам отвечают отличные от нуля
напряжения ог= +?0юе0 и в то же время равные нулю
деформации. Соответствующие точки указаны также на рис. 21, в;
ими и определяется нейтральная ось деформаций.
*) Это явление было впервые исследовано и объяснено Мей-
соном (см. ссылку в книге [64], стр. 222).
§'3]
ОСОБЕННОСТИ ВРАЩЕНИЯ ВАЛОВ
65
Угол между двумя нейтральными осями обозначим через а.
Ось 3—4 перпендикулярна плоскости изгиба оси вала; поэтому
плоскость изгиба составляет такой же угол а с
вертикальной плоскостью (рис. 22, а).
Сила веса диска и вертикальные реакции опор не лежат
в одной плоскости. Поэтому для равновесия системы
необходим вращающий момент, способный уравновесить пару,
Рис. 21. К задаче об изгибе вала: а)
нейтральная ось напряжений; б~) петля гистерезиса для
любой периферийной точки; в) нейтральная ось
деформаций.
образованную названными силами. Работа, совершаемая этим
моментом (приложенным, например, к одному из концов
вала), тратится на преодоление неупругого сопротивления,
возникающего в материале вала.
Как мы установили, при вращении вала против хода
часовой стрелки, когда какая-либо периферийная точка
сечения последовательно пробегает положения /—3—2—4 и т. д.
(см. рис. 21, а и в), она испытывает последовательную
смену напряжения, описываемую соответствующими точками
5 Зак. 1460. Я. Г. Пановко
66 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
петли гистерезиса (см. рис. 21, б). Важно заметить, что
характерное отношение напряжений
одинаково для всех точек любого сечения вала, поскольку
оно не зависит от амплитуды деформации е0.
Если обозначить через а удаление точки 3 от
нейтральной оси напряжений 1—2, то согласно рис. 22, б найдем
Рис. 22. К задаче об изгибе вала: а) изогнутая ось; б) угол между
двумя нейтральными осями; в) эпюра нормальных напряжений.
a^jfl:/?. С другой стороны, рассматривая эпюру
нормальных напряжений, изображенную на рис. 22, в, видим, что
о: R = ог: о0. Следовательно,
a = -=_g-. C.3)
Таким образом, если известны постоянные k0 и Е
"материала вала, то. по формуле C. 3) можно найти угол «увода»
плоскости изогнутой оси вала от вертикальной плоскости.
Любопытно, что этот угол зависит также от угловой
скорости вращения и пропорционален ей; это означает, что чем
быстрее вращается вал, тем отчетливее проявляется
описываемый эффект.
Изложенные соображения Кимболл положил в основу
экспериментального определения коэффициента вязкости k0.
Наблюдая в опыте за величинами а, он получил
возможность определить коэффициент k0.
Разумеется, вместо наблюдения за углом а можно следить
за значениями вращающего момента; он пропорционален
углу а, а следовательно, и коэффициенту вязкости k0. На
этой идее 3. А. Мицкевич (МВТУ им. Н. Э. Баумана) по-
§ 3]
ОСОБЕННОСТИ ВРАЩЕНИЯ ВАЛОВ
67
строила оригинальную установку для оценки демпфирующих
свойств материалов и сочленений.
3.3. Неустойчивость вращения гибкого вала в закри-
тической области. Указанное в заголовке явление впервые
замечено в натурных условиях Ньюкирком [91]. В
предположении упруго-вязких свойств материала оно изучалось
Кимболлом [88], [89], Робертсоном [94], Е. Л. Николаи [34].
В своем изложении будем следовать Е. Л. Николаи и для
выяснения существа вопроса ограничимся простейшими условиями.
Рассмотрим колебания диска, который насажен посередине
вращающегося вертикального двухопорного вала круглого
сечения; будем считать, что диск полностью уравновешен на
Рис. 23. К задаче об устойчивости вращения гибкого
вала: а) изогнутая ось; б) силы, действующие на вал;
в) силы, действующие на диск.
вале. Учет сил вязкого сопротивления в материале вала
позволит обнаружить, что возможны условия, при которых
вертикальная форма оси вала становится неустойчивой и
после сколь угодно малого начального возмущения система
начнет уходить от невозмущенного режима. Пусть в
некоторый момент, от которого ведется отсчет времени, центр
диска каким-либо образом отклонен от оси вращения Oz,
после чего система предоставлена самой себе (рис. 23, а).
Рассмотрим последующий процесс движения, принимая, что
вал только изгибается и не претерпевает деформации круче-
5*
68 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
ния; кроме того, положим, что угловая скорость вращения
вала се остается все время постоянной.
Отнесем рассматриваемую систему к системе
координатных осей xyz, совместив ось г с прямой, проходящей через
центры подшипников. Обозначим через и = и(t), v = v(t)
составляющие прогиба середины вала в направлениях осей х
и у. Мысленно отделим диск от вала и заменим действие
диска на вал силами Pt и Р2 (рис. 23, б). Схема сил,
действующих на диск, показана на рис. 23, в; эти силы равны
по величине и противоположны по направлению силам Рх
и Р2. Дифференциальные уравнения движения диска имеют
вид:
ти = - - Pt; mv = — Р2. C.4)
К решению уравнений мы обратимся позднее; сейчас нам
необходимо рассмотреть изгиб вала для того, чтобы связать
с прогибами вала силы Р, и Р2.
^\
А,
,
~* V-»-
и у
Рис. 24. К задаче об устойчивости вращения
гибкого вала: а) схема перемещений; б) поперечное
сечение вала: оси х\, уг параллельны
неподвижным осям х, у.
Обозначим через р радиус кривизны оси вала в среднем его
сечении. Проекции р на оси х и у обозначим через рх и р .
Очевидно, что соответствующие кривизны пропорциональны
npoi ибам (рис. 24, а):
-— = аи, — = av, C.5)
9х ?у
i де а — одинаковый для обоих направлений коэффициент
пропорциональности, зависящий от опорных условий и длины
вала. (Так, для свободно опертого вала а = -75". для к°нсоль-
3 \
ного вала а = -^ . \
§3]
ОСОБЕННОСТИ ВРАЩЕНИЯ ВАЛОВ
69
Рассмотрим теперь среднее сечение вала (рис. 24, б) и
совместим с центром тяжести Ох этого сечения подвижную
систему осей хи yv остающихся все время параллельными
неподвижным осям х, у. Некоторая точка N, удаленная от
центра тяжести сечения на расстояние г, имеет координаты:
xl = rcoscp, yt = r sinyl3
причем, согласно указанному выше, ср —ш/.
Удлинение в точке N вследствие изгиба вала:
C.6)
,_ *1
Ру
Подставляя сюда C.5) и C.6), получим:
е = — аг (и cos <at -\- v sin wt). C.7)
Соответственно нормальное напряжение в точке N:
а = Ев -\- fe0e = — Ear (a cos t&t -\-v sin at) —
— k0ar (a cos (ot — «со sin wt-\-v sin mt -)- two cos u>t).
Вновь возвращаясь к координатам хи ylt имеем:
о = — xLa (Ей -)- k0u -\- k0wv) — yxa (Ev -\- k0v — k0u>u). C.8)
Система элементарных усилий odF образует изгибающие
моменты относительно осей xlt ух:
М,-
Г ayl dF = aJ[Ev -f- kQv — k0 tou\.
M2 = — Г axt dF = aJ(Eu -\-k0u -\-k0mv).
F
C.9)
Возвращаясь теперь к рис. 23, б, заметим, что изгибающий
момент Mt вызван действием силы Р2, а изгибающий момент М2
вызван действием силы Рг:
м Р*1 ¦
м,
4 *
(ЗЛО)
70 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Приравнивая правые части равенств C.9) и C.10), выразим
силы Р1 и Р2 через прогибы центра тяжести диска:
с- i и • и /У1
tv^rk0v— k0wu = -jgj-.
Pi Iя
Ей -\- k0u -\-k0iov —
48/ *
(Здесь учтено, что а=12/12).
Отсюда следуют искомые выражения для сил Р1 и Р2:
48/
Л = -jj- {Ей + k0u -\- kQ (ov),
48/
Р2 =. -р- (?Ч> -4- &0г> — к0ши).
C.11)
Нужно заметить, что силы Рг и Р2 зависят не только от
самих перемещений и и v, но и от скоростей и и v в
направлениях координатных осей. Подставляя C.11) в C.4),
получим дифференциальные уравнения движения центра
тяжести диска:
?+р*(и .+--*»-«+-§-<„') = 0,
i_|_p»(«+.*o«—*о<»в) = 0.
C.12)
где /?
|2—-
48?/
/п/з
есть квадрат собственной частоты колебаний
диска на невращающемся идеально упругом вале.
Для решения уравнений C.12) положим:
„и
— aveu
и =- а.еЛ
v = а„ел
C.13)
Подставляя C.13) в C.12), получим:
(tf+p2 + p2*0-x)o1-r--^-<oa2=0.
_^mfll-|-(tf+/* + /*-J-XJa^O.
Условие ненулевых решений для а1 и а2 имеет вид:
C.14)
*2+ /*+/*-J *
*о^
Х2-г-р2-+-/>2-^
0. C.15)
§3]
ОСОБЕННОСТИ ВРАЩЕНИЯ ВАЛОВ
71
Отсюда следует характеристическое уравнение четвертой
степени для X:
(х»+/>»-?х+,"),+ (?),=0- (зле)
Если хотя бы один из корней уравнения C.16) будет иметь
положительную действительную часть, то в выражениях C.13)
появятся члены, неограниченно возрастающие с течением
времени. Поэтому, чтобы решения C.13) представляли
затухающий процесс, необходима отрицательность всех
действительных частей, корней уравнения C.16). Это, как
известно, имеет место, если выполнены условия Гурвица:
Ло>0. i41>0. A2>0, А,>0, C.17)
А,А2А3>а1-\-\а1 C.18)
где As — коэффициент при Xs. Условия C.17), очевидно,
выполнены. Следовательно, для устойчивости движения
рассматриваемого вала необходимо лишь выполнение
условия C.18), которое в нашем случае приводит к очень
простому неравенству:
*<р. C.19)
Таким образом, пока угловая скорость вращения вала
меньше критической (а>кр = р), неравенство C.19) выполняется
и вращение устойчиво; при и> > р, т. е. в «закритической»
области, вращение вала неустойчиво.
В действительности неустойчивость вращения вала при
со > р наблюдается далеко не всегда. Основными причинами
несоответствия между теорией, изложенной в 3.3, и опытными
данными являются следующие принятые выше упрощения:
1) пренебрежение внешним трением;
2) описание гистерезисных свойств материала вала при
помощи упруго-вязкой модели.
Рассмотрим здесь влияние внешнего трения. В 4.4 будет
дано решение, не предполагающее упруго-вязкого характера
поведения материала.
Особенно легко учесть силу внешнего трения, если
считать, что она пропорциональна скорости движения центра
тяжести диска. При этом на диск, кроме рассмотренных выше
72
КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ
[ГЛ. I
реакций вала Р1 и Рг, действуют силы — su a — sv (рис. 25),
и вместо уравнений движения C.4) получатся уравнения
ти — —Pt—su; mv = — Р2 — sv. C.20)
Подставляя сюда ранее найденные выражения C.11) для сил Pi
fsu
sir
Рис. 25. Силы, действующие на диск.
и Р2, найдем вместо уравнений C.12)
* + ?(*+% u+%»v) + ±i = 0.
v4~/>2 (v + -§¦ v--§-<*«) +?v = 0.
Вновь представляя решение в виде C.13), получим:
C.21)
koP*
ша.
C.22)
? ! ' L ' \ ?
Соответственно характеристическое уравнение вместо C.16)
принимает вид:
[х2+х(^- + 1L-^]2-Ь(^-соJ^0. C.23)
Пользуясь неравенствами C.17) и C.18), приходим вместо
C.19) к неравенству
Es
«></>-}-
kopm'
C.24)
Характер соответствующих этому неравенству областей
неустойчивости показан на рис. 26; пунктиром показана
граница областей для случая отсутствия внешнего трения (s = 0).
§ 4] ПРИМЕНЕНИЕ УСЛОВНОЙ УПРУГО-ВЯЗКОЙ СХЕМЫ 73
Как видно, внешнее трение смещает границы области
неустойчивости, но не может обеспечить устойчивости при
/w=p
Рис. 26. Область неустойчивости
вращения вала.
любых режимах. Заметим, что низшая точка границы любой
области находится на прямой со = 2р при каких угодно
значениях Е, k0, s.
§ 4. Применение условной упруго-вязкой схемы
4.1. Вступительные замечания. Как подчеркивалось во
введении, экспериментально установлено, что рассеяние энер-
1ии при циклическом деформировании материала практически
не зависит от частоты процесса и зависит только от
амплитуды деформации данного материала. Это, казалось бы,
делает вообще недопустимым использование упруго-вязкой
модели, так как согласно A.31) энергия, рассеиваемая этой
моделью, пропорциональна частоте о>. Однако существуют
приемы, преодолевающие недостатки упруго-вязкой схемы
при одновременном сохранении ее достоинств. Эти приемы
основаны на использовании некоторой условной
упруго-вязкой схемы, эквивалентной заданной схеме в отношении
помещающих свойств.
Пусть поглощающие свойства данной системы не зависят
от частоты процесса и определяются зависимостью @.7):
ЧГ = ЧГ(Л).
D.1)
74 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ (ГЛ. I
Как и выше, следует считать, что функция D.1) тем или
иным способом установлена из опита; о характере
зависимостей типа D.1) см. ниже, в 5.2. Поглошающие свойства
упруго-вязкой модели определяются выражением A.31),
утверждающим зависимость рассеиваемой за цикл энергии от
частоты:
Ч = ъЪц>А*. D.2)
Определим теперь коэффициент вязкости модели таким
образом, чтобы выполнялось равенство ЧГ = 47. Формально
приравнивая D.1) и D.2), найдем эквивалентный коэффициент
вязкости:
? = ^> ' Г4 3)
Эквивалентный коэффициент вязкости для материала
определяется подобным же образом в виде:
А0=-^М. D.4)
Ясно, что коэффициенты k и k0 не являются теперь
характеристиками свойств самой системы или самого материала;
эти коэффициенты зависят от частоты процесса и носят
условный характер. Далее, вместо того чтобы
рассматривать колебания заданной системы, можно рассматривать
колебания условной упруго-вязкой системы с эквивалентным
коэффициентом вязкости D.3) или D.4).
Шлиппе [96] и Бокком [83], а в недавнее время А. П.
Филипповым [69] предложены различные варианты
осуществления изложенной идеи. Отметим, что возможности этих
способов в сущности ограничены условием чистой
монохроматичности колебательного процесса, т. е. условием, что
колебания происходят по гармоническому закону с
частотой ш. Не будучи общим, этот случай, несомненно, является
наиболее важным среди всех возможных частных случаев.
Дело в том, что при резонансе (когда демпфирование
особенно существенно) колебания практически носят
монохроматический характер, так как все гармоники, кроме
резонирующей, имеют относительно небольшие амплитуды.
§ 4] ПРИМЕНЕНИЕ УСЛОВНОЙ УПРУГО-ВЯЗКОЙ СХЕМЫ 75
4,2. Определение амплитуды вынужденных колебаний.
Можно непосредственно использовать известный результат
A.22) для амплитуды вынужденных колебаний системы с одной
степенью свободы при действии возмущающей силы Р =
= Р0 sin <s>t:
А = —_ у" D.5)
V \ jfl) + р*
и подставить сюда согласно D.3):
2n _ k __ W{A)
р"* ~~ тр"* izc<j>A^ '
Тогда вместо D.5) получается:
А= . ZCT ==-. D.6)
Теперь остается тем или иным способом решить относительно А
это уравнение при различных значениях отношения о>: р;
после этого можно построить резонансную кривую Л = А {-—)¦
В частном случае, когда Ч/(Л) пропорционально квадрату
амплитуды А, равенство D.6) превращается в формулу,
непосредственно определяющую амплитуду А.
Иногда равенство D.6) записывают в виде, подобном A.34):
А = Уст D.7)
/(-¦?)"+№)'
где величина ф представляет отношение рассеиваемой за цикл
энергии к наибольшему значению потенциальной энергии:
¦'.-2*-<Л> D.8)
Эту величину естественно назвать по-прежнему
коэффициентом поглощения; в данном случае, конечно, не имеют места
соображения, изложенные в конце 1.3, так как в нашем
случае отношение ЧГ: Пшах не зависит от частоты возмущающей
силы. Сказанное и объясняет разницу между записями A.34)
и D.7).
76 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Как видно, если ф -—¦ const, то решать уравнение D.7)
не нужно, так как оно превращается в формулу,
определяющую значение А в явном виде.
Вместо того, чтобы использовать сразу результат D.5),
Бокк [83] начинает с дифференциального уравнения
колебаний A.20), выразив условный коэффициент вязкости через
коэффициент поглощения с помощью формулы D.3) *):
к— W =- ** . D9}
Соответственно условный коэффициент вязкости для
материала равен
*о=^т-А DЛ0)
жие. Zitm
Тогда полная сила упругого и неупругого сопротивлений
N = cy-\-ky=^c{y-\-^y). D.11)
Соответственно полное напряжение записывается в виде:
о=Ев-4-*0;=я(в+^;). D.12)
При дальнейшем решении задачи о вынужденных
колебаниях, вызванных действием возмущающей силы Р = Р0 sin wt,
нужно следовать пути, указанному в 1.2, и исходить из
уравнения
my-\-c^~y-\-cy=P0smoyt. D.13)
Результат решения, конечно, совпадает с результатом D.7).
Для предположенного Бокком случая t]> = const решение D.7)
позволяет сразу построить всю резонансную кривую. Хотя
выражение D.8) лишается смысла, если на систему действует
несколько сил с несколькими различными частотами, но такое
отсутствие универсальности нельзя считать серьезным
недостатком изложенного способа. Дело в том, что вдали от
резонансных режимов можно вообще не учитывать
демпфирование, а в резонансном режиме доминирующая роль одной
:) См. также работу Шлиппе [96].
§ 41 ПРИМЕНЕНИЕ УСЛОВНОЙ УПРУГО-ВЯЗКОЙ СХЕМЫ 77
из гармоник возмущающей силы делает практически
излишним учет других гармоник.
Применение этого способа к задаче о свободных
колебаниях, очевидно, нецелесообразно, так как соответствующее
уравнение
У + рЩг'у+Р2У = ° <4Л4>
лишается важного для простоты интегрирования свойства
постоянства коэффициентов; коэффициент поглощения ф(Л),
как правило, будет меняться от одного цикла к другому.
Лишь если ф = const (т. е. когда 47 является квадратичной
функцией амплитуды А), из D.14) легко получить решение
в виде:
ЛЛ I i яг ч ЛЛ
у=А0е 4*sin(y 1 — ^/tf-Hj^/V *- sin(itrf + i).
D.15)
Таким образом, в этом случае огибающая кривой затухающих
колебаний является экспонентой; заметим, что
экспоненциальная форма огибающей свойственна только системам
с постоянным коэффициентом поглощения <{i — const.
Следуя способу Бокка, нетрудно построить решение задач
о колебаниях систем с распределенными параметрами при
учете сил внутреннего трения. Единственное существенное
ограничение состоит в условии монохроматичности колебаний,
о чем мы говорили выше. Таким образом, обоснованное
решение может касаться случаев однотонных свободных
колебаний или вынужденных колебаний при действии
моногармонической возмущающей силы.
Иллюстрируем составление уравнения движения системы
с распределенными параметрами на примере задачи о
монохроматических изгибных колебаниях стержня под действием
распределенной нагрузки q(x, t) = g0(x)sinu>t.
Так как
e = -dF* DЛ6)
то вместо B.45) получим, учитывая D.12),
Еу{
?»,_Фо__дЧЦ D17)
78 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Изгибающий момент равен
F
Уравнение движения элемента стержня
-^Г = — p/-^s-+?(JC)sina.f D.19)
после подстановки D.18) принимает вид, подобный
уравнению B.93):
„ ,d4V , „ , ф0 ^^ I ?7 д"У , ч . J. /Л ОГ>\
?Ул? + ^й^гшт+pf ^ -¦= * <*>sin w'- D-2°)
Это уравнение можно было получить также из B.93), если
согласно D.9) положить /ео = о-^-.
Мы не будем останавливаться на операциях
интегрирования этого линейного уравнения и истолковании решения. Ot и
полностью подобны изложенному в 2.7. Подчеркнем лишь,
что сравнительная простота уравнения D.20) явилась
следствием предположенного Бокком постоянства коэффициента
поглощения.
4.3. Приложение способа Бокка к анализу
устойчивости вращения вала (решение Ф. М. Диментберга [12]).
В п. 3.3 была исследована устойчивость вращения вала в за-
критической области при помощи гипотезы Фохта об упруго-
вязком поведении материала. Было установлено, что в
отсутствии внешнего трения вал неустойчив при скорости
вращения, большей чем сокр = р; внешнее трение отодвигает границу
неустойчивости дальше от критической скорости.
Эти выводы можно уточнить, если отказаться от упруго-
вязкой модели Фохта и использовать гипотезу Бокка,
принимая, что коэффициент поглощения ф не зависит от
амплитуды деформации. На первый взгляд может показаться, что
в соответствии с гипотезой Бокка достаточно во все
выражения C.8) — C.24) ввести условный коэффициент вязкости
D.9), содержащий в знаменателе угловую скорость вращения
вала:
я° — 2*0, •
§ 4] ПРИМЕНЕНИЕ УСЛОВНОЙ УПРУГО-ВЯЗКОЙ СХЕМЫ 79
Это, однако, было бы неверным, так как частота циклов
деформации определяется не абсолютной, а
относительной угловой скоростью вращения сечений, т. е. скоростью,
определяемой в системе координат, вращающейся вместе с пре-
цессирующей осью вала. Ясно, что если относительная
угловая скорость равна нулю, то деформации всех волокон вала
остаются постоянными во времени и гистерезис никак
проявиться не может. Принимая *), что угловая скорость
прецессии равна р, и имея в виду, что угловая скорость
вращения сечений в неподвижной системе координат равна со,
получим, что в знаменатель выражения для условного коэффициента
вязкости следует ввести модуль разности \<о — р \. Таким
образом, имеем:
*о=2^7Т- D-21>
Соответственно вместо условия C.24) будет:
(°<Р+ трЪ • D-22)
Если скорость вращения меньше критической (со < р), то
последнее условие приобретает вид:
. . 2ад (р — ш)
тр%
Отсюда вновь следует предположенное неравенство:
о> < р, D.23)
т. е. вал всегда устойчив, независимо от величин s и ф.
Для скорости вращения, большей чем критическая (ш > р),
условие D.22) запишется в виде:
^ . 2ад|оз— р\
"Wo
или
2го? > mpty0. D.24)
*) Предположение о том, что скорость прецессии равна именно
величине р, основано на рассуждении о равенстве центробежной
силы диска и упругой реакции вала (это равенство возможно только
при скорости прецессии р). Анализ, свободный от этого постулата,
дан в работе Э. Л. Позняка [49].
80 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. 1
Заметим, что последнее условие вовсе не содержит угловой
скорости вращения и>; поэтому, если оно выполняется, то
вал будет устойчивым при любой скорости вращения. Отсюда
следует важный практический вывод о том, что устойчивость
на всех режимах вращения может быть обеспечена достаточно
большими значениями коэффициента внешнего трения. Этот
результат существенно отличается от найденного в 3.3;
согласно C.24) в случае упруго-вязкого материала внешнее
трение лишь отодвигает границу области неустойчивости, но
не в состоянии полностью устранить опасность неустойчивости.
В работе М. Я. Леонова и Л. А. Безпалько [28] сделана
попытка дальнейшего уточнения решения и учтена возможная
зависимость коэффициента ф от амплитуды напряжения,
Э. Л. Позняк [49] указал на некорректность такой постановки
задачи. Он отмечает, что, согласно теореме Ляпунова,
устойчивость «в малом» полностью определяется системой
линейных уравнений в вариациях *); поэтому наличие нелинейных
составляющих сил внутреннего трения не повлияет на
устойчивость «в малом». Что же касается устойчивости «в
большом», то ее исследование, строго говоря, не допускает
использованного в работе [28] энергетического критерия
(примененного в свое время еще Робертсоном [94]).
4.4. Способ А. П. Филиппова. В работах [69] и [70]
А. П. Филиппов, основываясь на приведеном выше
соотношении D.11), отказался от предположения ф = const и
исходил из следующего нелинейного выражения для
коэффициента поглощения:
•? =ро -г-Вео + Ьео- С4-25)
где [j.0, {*1, (л,2 — постоянные. Выражение D.25) с точностью
до обозначений совпадает с первыми тремя членами
разложения, приведенного в работе Е. С. Сорокина (см. [55],
формула F.2)). Разумеется, что подбором коэффициентов (а0,
{t,, |А2 можно добиться вполне удовлетворительной
аппроксимации опытной зависимости при помощи выражения D.25) **).
*) Исключая критические случаи.
**) Джиованоцци [86] использовал двучленную формулу типа
D.25) (,и.о = 0). Полагая, что в выражении D.25) \ц — цг = .., = 0,
jjtQ =? 0, вновь получим гипотезу Бокка.
§ 4] ПРИМЕНЕНИЕ УСЛОВНОЙ УПРУГО-ВЯЗКОЙ СХЕМЫ 81
Таким образом,
а^Е\г-\ ej. D.26)
Проследим составление уравнения движения по способу
Л. II. Филиппова на примере задачи о вынужденных изгиб-
ных колебаниях. Вместо D.17) получится согласно D.26)
При вычислении изгибающего момента в текущем сечении
М = — f'oy dF D.28)
F
следует иметь в виду, что амплитуда деформации е0 зависит
не только от абсциссы х, но и от ординаты у. При
монохроматическом процессе в состоянии наибольшего отклонения
v = AY(x), D.29)
где Y{x)— произвольно нормированная форма колебаний.
Тогда для того же состояния
^L=AY"(x). D.30)
Следовательно, амплитуда деформации составляет
e0^\AY"y). D.31)
Подставляя D.31) в D.27), найдем:
.--Е,[? + » + "«Г-'1+»»«'"?}г]. D.32)
Теперь выражение D.28) получит вид:
Л1-=СУ^ + ^ГРо +-JW4 Г |+^И2(П2]ет- D-33)
Здесь
fl*3!^ fy*dF
с, = - j , Ci=^-j-~. D,34)
Q Зак. 1460. Я. Г. Пановкд
82 КОЛЕБАНИЯ УПРУГО-ВЯЗКИХ СИСТЕМ [ГЛ. I
Подставляя это в D.19), получаем уравнение движения в виде:
+ fV2^2 (У"П д^г } -h PF %j? = Я (*) sin mt. D.35)
Мы воздерживаемся от -записи правой части уравнения в виде
произвольной функции f(x, t), поскольку предшествующие
выкладки обязывают предположить монохроматический
процесс колебаний. Впрочем, не имеет большого смысла искать
решение задачи при полигармоническом характере
возмущающей силы; об этом уже мы писали выше.
Дальнейшее решение уравнения D.35) А. П. Филиппов
строит при помощи рядов.
ГЛАВА II
ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ
ВНУТРЕННЕГО ТРЕНИЯ В МАТЕРИАЛЕ
§ 5. Площадь и форма петли гистерезиса
5.1. Вступительные замечания. Существует ряд
экспериментальных способов, позволяющих определить рассеяние
энергии при циклических деформациях *). Выполненные этими
способами исследования дали обширные и достаточно
надежные сведения относительно площади гистерезисных петель
для различных материалов; важно, что во всех случаях
установлена практическая независимость рассеяния энергии
за один цикл от частоты процесса.
Значительно беднее опытный материал, относящийся к
формам гистерезисных петель, т. е. к законам изменения сил
внутреннего трения в процессе циклического деформирования.
Как говорилось во введении, это обстоятельство открыло
широкий простор для различных умозрительных
предположений; на их основе возник ряд в значительной мере
произвольных вариантов аналитического описания сил внутреннего
трения. Эти варианты охарактеризованы в 5.3.
5.2. Опытные данные и варианты описания площади
петли гистерезиса. Обычно результаты опытных
исследований представляются в безразмерном виде, в форме
зависимости коэффициента поглощения ф от амплитуды
деформации г0:
ф = ф(е0) E.1)
или от амплитуды напряжения а0 (а0 = /:е0):
Ф=ФЫ. E-2)
*) Обзор этих способов и анализ опытных данных содержится
в работах [9], [55].
6*
84 прямые Способы Оценки влияния внУтрённ. трения [гл. и
Как оказалось, коэффициент поглощения некоторых
материалов незначительно зависит от амплитуды деформации
(или напряжения); в этих случаях можно принять:
ф = const. E.3)
Так, Е. С. Сорокин [59] предлагает принимать следующие
средние значения: для сосны <1> = 0,07, для железобетона
ф — 0,3 (независимо от амплитуды напряжения). Однако
в большинстве случаев (особенно для материалов,
применяемых в машиностроении) зависимость коэффициента
поглощения ф от амплитуды
напряжения а0 выражена
весьма отчетливо. Для
примера на рис. 27
показаны зависимости,
относящиеся к некоторым
маркам стали [7]. Различными
авторами предлагались
разные формы
аналитического описания
функции ф(з0).
Е. С. Сорокин
указывает весьма общую форму
разложения:
Ф
ол/
DO?
О
cm 5
cm 25
rrn.1
500 700D 7500 2000
*-
см*
Рис. 27. Зависимость коэффициентов
поглощения от амплитуды
напряжений
¦«to-r-'teo T-<teo +
-Из4+..., E.4)
в котором ф0, <]>,, i]>2,. . . —
постоянные,
характеризующие материал. Рассмотренные выше предложения Бокка [83],
Джиованоцци [86] и А. П. Филиппова [69] можно
рассматривать как частные виды зависимости E.4): в предложении
Бокка <1>1 = ф2 = ... = 0, в предложении Джиованоцци
ф2 ^= 4*з = - - - = 0. в предложении Л. П. Филиппова ф3 =
= Ф4= • • • = 0. Робертсон [94[ пользовался кубической
зависимостью Ч/ = рз^, которой соответствует ф0 = t|>2'= т"з ~ • • •
... = 0 в разложении E.4).
Удобным и достаточно гибким является предложение
Н. Н. Давиденкова
4ro=PeSH. E.5)
§ 5] ПЛОЩАДЬ И ФОРМА ПЕТЛИ ГИСТЕРЕЗИСА 85
в котором р и п — постоянные материала, причем п не
обязательно целое число. Зависимости E.5) соответствует
пропорциональность коэффициента поглощения ф величине
а?-1 (или величине е"-1).
В приведенных частных случаях эмпирические функции
ф(е0) содержат от одной (в предложении Бокка и
предложении Робертсона) до трех (в предложении А. П.
Филиппова) постоянных, подлежащих опытному определению.
Е. С. Сорокиным указана зависимость
содержащая четыре постоянные материала.
Вряд ли можно предложить для функций ЧГ и i[> вполне
универсальное и в то же время достаточно простое (т. е.
с малым числом опытных коэффициентов) аналитическое
выражение. Заметим, однако, что для практического
применения в расчетах это и необязательно; при решении задач
энергетическим способом достаточно располагать любым
представлением зависимости W0(a0) (или зависимости ty(a0)),
пусть даже в табличной или графической форме.
Сказанное выше относится к описанию поглощающих
свойств материала. Поглощающие свойства конструкции
(стержня, пластинки и т. д.) могут быть найдены
суммированием энергии, рассеиваемой в элементарных объемах
колеблющегося тела. Если форма колебаний заранее известна,
то распределение деформаций но всему объему тела
характеризуется одной обобщенной координатой у. При этом
оказывается, что зависимость рассеиваемой во всем обьеме
энергии ЧГ от амплитуды А обобщенной координаты у носит
такой же характер, как и зависимость удельной
рассеиваемой энергии Ч70 от амплитуды деформации е0; так, например,
если для материала зависимость Т0 имеет вид E.5), то
для стержня, пластинки и т. п. получится:
V=aA*+K E.7)
где а — коэффициент, зависящий как от материала и вида
конструкции, так и от формы колебаний.
Здесь мы не будем останавливаться на построении
зависимости W(A); ниже этому простому, но важному вопросу
посвящен § 8.
86 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
5.3. Варианты описания формы петли гистерезиса.
Для описания формы замкнутой петли гистерезиса при
монохроматических процессах предлагались следующие
выражения, в которых исключено влияние скорости деформации
(частоты колебаний) на гистерезисные силы:
предложение И. Л. Корчинского[22] (рис. 28, о)*)
о=-Ее + р>; E.8)
второе предложение И. Л. Корчинского [23] (рис. 28, б)
a = ?s±p2s0; E-9)
третье предложение И. Л. Корчинского [23] (рис. 28, в)
6 = E8±p8So(l—?); E-Ю)
предложение Н. Н. Давиденкова [9] (рис. 28, г)
a=Z;{e + ^[2n-V0-(?o±-e;r]}; E.11)
предложение Д. Ю. Панова [35] (рис. 28, д)
a = C?±P4e0[l- (i-J]; E.12)
предложение Е. С. Сорокина [56] (рис. 28, е)
3---Е(е±^ео1/ТЗ|), E.13)
где
ФЫ-=Фо + ф1ео + ф2?о4----; EЛ4)
линейный вариант предложения Е. С. Сорокина [55]
(рис. 28, е)
Г1—-,\. E-15)
E['i'^\/'i
где ф — постоянная;
обобщение предложений Н. Н. Давиденкова и Е. С.
Сорокина [36] (форма совпадает с изображенной на рис. 28, е)
a = ?s + p5e0niA-?l; E.16)
*) См. также работу М. И. Чаевского [77].
§ 5] ПЛОЩАДЬ И ФОРМА ПЕТЛИ ГИСТЕРЕЗИСА 87
1
Л?о /
\/Л
[G
/ <
*-о ?
б) в\
°0
\/А
-0 ^
г1 1
AeS /
\/л
\
/ i
z-o e
Zneo
ь
)
<*0
Г
/ t
т-о *
Рис. 28. Различные формы
петель гистерезиса.
88 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. И
предложение М. Я. Леонова и Л. А. Безпалько [28] (рис.
28, ж)
а = Ег±%е. E.17)
В формулах E.8)—E.12) и E.16), E.17) % п, v
—постоянные материала *).
Приведенные выражения можно разделить на две группы.
К первой относятся выражения E.8), E.9), E.10), E.12)
и E.15), — площадь описываемых ими петель гистерезиса
пропорциональна s^ (квадрату амплитуды деформации); так как
наибольшая потенциальная энергия цикла также
пропорциональна ejj, то коэффициент поглощения ф оказывается
постоянным. Таким образом, выражения первой группы можно
использовать далеко не всегда.
Более гибкими оказываются выражения второй группы:
E.11), E.13), E.16) и E.17), допускающие переменность
коэффициента поглощения в зависимости от е0. Выражениям
E.11), E.16) и E.17) отвечает пропорциональность площади
петли гистерезиса величине г?ь1; соответственно коэффициент
поглощения пропорционален величине efj-1. Выражению E.13)
соответствует коэффициент поглощения, данный зависимостью
E.14). Предложенное автором выражение E.16) описывает
петлю гистерезиса, совпадающую по форме с петлей E.13),
предложенной Е. С. Сорокиным, а по площади (точнее
говоря, по зависимости площади от амплитуды г0) — с петлей
E.11), предложенной Н. Н. Давиденковым.
Указанный выше недостаток предложений первой группы
можно устранить, записав, например, E.12) в обобщенном
виде:
с = ?е+М[1_(±У] E.18)
или в виде:
« = ee±e0(p.0 + h80-l-^+...)[l-(±y].E.19)
В сущности так и поступили М. Я. Леонов и Л. Л.
Безпалько, предложение которых E.17) можно
рассматривать как своеобразное обобщение зависимости И. Л. Корчин-
ского E.8).
*) См. также работу Колоннехти [101].
§ 5] ПЛОЩАДЬ И ФОРМА ПЕТЛИ ГИСТЕРЕЗИСА 89
Однако и после такой модификации приведенные варианты
останутся все же неравноценными, но уже в другом смысле.
Дело в том, что, используя различные аналитические
выражения для о(е), мы, естественно, придем к уравнениям
движения различной сложности; поэтому критерием оценки
различных конкурирующих вариантов оказываются, в конце
концов, соображения легкости решения соответствующих
уравнений. Как мы увидим, с этой важной точки зрения
следует отдать предпочтение эллиптической форме петли.
Однако читатель должен все время иметь в виду, что
применение энергетического метода может вовсе избавить от
необходимости выбора той или иной формы петли
гистерезиса; эта мысль будет разъяснена ниже.
При переходе от материала к конструкции мы придем
к выражениям, подобным E.8)—E.17), с заменой
напряжения а на силу N, деформации е — на обобщенную
координату у и амплитуды деформации е0 — на амплитуду
обобщенной координаты А. Таким образом, петли гистерезиса
для материала и для конструкции выглядят одинаково;
одинакова же и зависимость их площадей от характерных
величин (амплитуды деформации и амплитуды обобщенной
координаты).
Для процессов гармонического типа, когда деформация
меняется по закону
в = во(/) sin [/?(*)*] E.20)
[е0(/) и p(t) — медленно меняющиеся функции времени],
Е. С. Сорокин предложил зависимость
o« = ?e*(l-|-ii.). E.21)
Здесь а* — комплексное напряжение (его мнимая часть
представляет собой истинное напряжение, состоящее из
упругой и неупругой частей), е* — комплексная деформация (его
мнимая часть выражает истинную деформацию е).
Подобными зависимостями пользовались также Вагнер [97] и
Бисплингофф [5]. А. Г. Назаров [31] для случая ф = const
дал следующую формулировку зависимости E.21):
«комплексный вектор напряжения опережает комплексный вектор
деформации на постоянный угол а», т. е.
a*=EsV* E.22)
90 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
(см. рис. 29). Выражения E.21) и E.22) совпадут, если
положить а = ф : 2тг и учесть малость ф. В статье А. С. Ме-
Рис. 29. Комплексные векторы: а) деформаций,
б) напряжений.
ляховецкого [30] содержатся критические замечания по
поводу соотношения E.21).
§ 6. Свободные колебания систем
с одной степенью свободы
6.1. Вступительные замечания. В этом параграфе
описываются три различных способа решения задачи о
свободных колебаниях, сопровождаемых действием сил внутреннего
трения. Первый способ основан на предположении о
медленном изменении амплитуд и относится к случаю, когда
исходная зависимость напряжение — деформация имеет вид
E.16). Второй способ приадлежит Г. С. Писаренко и
представляет собой приложение асимптотического метода
Крылова— Боголюбова к случаю, когда исходная зависимость
имеет форму E.11). Пожалуй, что наиболее естественным
нужно признать третий способ, который опирается на
простейшие, но вполне достаточные энергетические
представления и не нуждается ни в какой конкретизации формы петли
гистерезиса.
6.2. Способ медленно меняющихся амплитуд.
Предположение о достаточно медленном изменении амплитуд
свободных колебаний можно считать вполне уместным в наших
задачах, поскольку демпфирование, вызываемое силами в ну-
§ G] СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 91
треннего трения, как правило, не очень значительно.
Наиболее просто использовать это предположение, если исходить
из зависимости E.16). Для системы с одной степенью
свободы эта зависимость принимает вид:
N = cy±±A»/'l-?, F.1)
где а и п — постоянные конструкции, причем п зависит
только от материала; площадь петли гистерезиса
соответствует выражению E.7). При постоянном А выражение F.1)
описывает замкнутую петлю гистерезиса; однако можно им
пользоваться и при постепенном (но достаточно медленном)
изменении амплитуды А, когда вместо петли образуется
спираль. Тогда уравнение свободных колебаний можно записать
в виде:
Поскольку речь идет о системах со слабым демпфированием,
можно сразу принять, что частота колебательного процесса
остается той же, как если бы силы внутреннего трения вовсе
отсутствовали, т. е. частота равна р. Поэтому ожидаемое
решение можно записать в виде:
y = A(t)cospt. F.3)
Тогда первый член уравнения F.2) окажется равным
у = — 2 Ар sin pt — Ар2 cos pt. F.4)
В согласии с основной идеей способа медленно меняющихся
амплитуд здесь опущен член Acospt, как имеющий
второй порядок малости по сравнению с членом —Apz cos pt.
Принимая решение F.3), получим для последнего члена
уравнения F.2) выражение
+ — 4"i/"l—?=_-1 Ansmpt. F.5)
я/и г А* пт ^ v '
Результат подстановки записан со знаком минус, потому что
рассматриваемое слагаемое находится в одной фазе со
скоростью у.
92 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
Подставляя теперь F.4) и F.5) в дифференциальное
уравнение F.2), получим очень простое уравнение для
функции времени A (t):
Это уравнение относится, собственно, не к колебательному
процессу, а к огибающей кривой колебаний; ясно, однако,
что именно огибающая представляет первостепенный интерес,
а остальные подробности процесса малосущественны.
При решении уравнения F.6) нужно различать два
случая: а) п Ф 1; б) п = 1. В первом случае после разделения
переменных и интегрирования найдем:
А1_п at
А ' ¦ С. F.7)
1 — п 2-ктр
Для определения постоянной интегрирования воспользуемся
начальным условием А = А0 при t = 0; из этого условия
получим, что
F.8)
F.9)
решение
уравнения
А —
Л я
с-.
F.6)
V/,
л1-Л
~1—л
примет
А0
, <«-
1
вид:
1) atAl'1
сТ
Здесь произведена замена 1ътр — сТ, где с — коэффициент
жесткости, Т — период свободных колебаний.
Так, например, при п ==2 из F.9) следует простая
зависимость гиперболического типа:
А = у^ПГ F-Ю)
atAn
сТ
(этот частный результат был получен другим путем Г. Я.
Головкиным [8]). Если га = 0, го зависимость F.9) принимает
вид:
§ 6} СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 93
т. е. убывание амплитуд следует закону арифметической
прогрессии. Этот случай прямолинейной огибающей напоминает
случай затухающих колебаний при действии сил сухого
трения. В таком совпадении нет ничего удивительного. Дело
в том, что при п = О площадь петли гистерезиса,
описываемой соотношением F.1), пропорциональна первой степени
амплитуды колебаний; именно эта зависимость типична и для
задач с сухим трением. Хотя в нашем случае петля
гистерезиса имеет форму эллипса, а в задачах с сухим трением
петля гистерезиса имеет форму параллелограмма, однако эта
разница в форме петель несущественна; совпадение
огибающих предопределено совпадением зависимостей площадей
петель гистерезиса от амплитуды колебаний, т. е., иными
словами, — энергетической эквивалентностью двух различных
задач.
В случае, когда я=1, уравнение F.6) принимает вид:
2Ар^~А = 0. F.12)
После интегрирования и удовлетворения начальному условию
А = А0 при / = О получим:
А = А0е~^. <6ЛЗ)
6.3. Способ Г. С. Писаренко. Известна большая
эффективность метода Крылова — Боголюбова при исследовании
различных задач теории колебаний; он позволяет
последовательно строить решения в виде асимптотических
приближений. К задачам рассматриваемого здесь типа этот метод был
неоднократно применен Г. С. Писаренко (см. его книгу [42]
и последующие публикации [43]—[48]).
Хотя метод Крылова — Боголюбова принципиально
допускает построение сколь угодно высоких приближений,
однако при решении задач рассматриваемого здесь типа
логично ограничиться только первым приближением. Дело
не только в прогрессирующем усложнении выкладок,
необходимых для получения высших приближений; главное
состоит в другом: построение высших приближений имеет
смысл лишь при достаточно точно заданных малых
членах уравнений движения, чего как раз и нет в наших
задачах. Действительно, как уже говорилось, влияние
гистерезиса достоверно определено лишь в интегральном смысле —
94 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ 1ГЛ. II
через площадь петли гистерезиса; сами же силы, входящие
в уравнения движения, описываются в значительной мере
произвольно выбираемыми выражениями. Очевидно, что в этих
условиях построение высших приближений может дать лишь
иллюзию повышения точности решения. Поэтому, описывая
приложение метода Крылова — Боголюбова, мы вполне
сознательно ограничимся только первым приближением. Так как
первое приближение по Крылову — Боголюбову совпадает
с решением по способу Ван-дер-Подя, то полученные ниже
результаты, конечно, совпадают с указанными выше
результатами применения метода медленно меняющихся амплитуд.
В качестве примера обратимся к рассмотренному Г. С. Пи-
саренко J47J случаю крутильных колебаний одномассовой
системы, состоящей из
консольного невесомого
вала, несущего на
свободном конце массивный
диск. Дифференциальное
уравнение для угла
поворота диска имеет вид:
/cp-j-Ccp-f-Af (ср) = О,
F.14)
где ср = ср (t) — угол
поворота диска, / — полярный
момент инерции диска
относительно оси вала,
с = OJp : I—коэффициент
жесткости вала при
кручении, G — модуль сдвига,
Л,
Рис. 30. Петля гистерезиса,
-полярный момент инерции поперечного сечения вала
относительно его центра тяжести, /—длина вала, М—момент
касательных сил внутреннего трения (рис. 30), являющийся
двухзначной функцией угла поворота диска ср.
Для построения функции М Г. С. Писаренко исходит из
гипотезы Н. Н. Давиденкова E.11), записывая ее для
случая сдвига следующим образом:
^^•^-^-^-(То + Т)"]}. F.15)
§ 6] СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 95
Здесь 1 — относительный сдвиг, -f0 — амплитуда
относительного сдвига, зависящая от положения точки в поперечном
сечении вала, v, n — коэффициенты. Заменим в F.15)
T = 6r = 7-r; To = V = Tr- <6Л6>
где 6 — относительный угол закручивания, 60 — амплитуда
относительного угла закручивания, а — амплитуда угла
поворота диска (вследствие предположенной безынерционности
вала крутящий момент, а следовательно, и относительный
угол закручивания постоянны по длине вала). Тогда
вместо F.15) получим:
х = 0|<р^ + -^-[2л-%л —(a±cp)"l|. F.17)
Далее образуется выражение крутящего момента:
М = fxrdF = \c<?± 4cv/?" [2"-V — (fl + cp)"]}.
F.18)
Таким образом, нелинейная часть уравнения F.14) имеет вид:
М=± 4CV*"~! д \2п-Чп - (а + ер)"]. F-19)
Разделив уравнение F.14) на момент инерции диска /,
получим:
<Р+Р2<Р = ± * 4р2^Т~1 , Ко ± Ч>)" — 2"-%"], F.20)
где
рг = с:1 F.21)
есть квадрат частоты свободных колебаний рассматриваемой
системы без внутреннего трения. Малый параметр е введен
для того, чтобы отметить относительную малость правой
части уравнения F.20); в процессе построения первого
приближения следует отбрасывать все величины, которые будут
иметь второй, третий и т. д. порядок малости
относительно s. В окончательных выражениях следует положить
96 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [|'Л. II
Согласно основной идее асимптотического метода первое
приближение решения уравнения F.20) ищется в виде [6]:
? = a cos if-\-ей (а, ф), F.22)
где и {а, ф)— периодическая функция угла ф, имеющая
период 2тг; а и ф— функции времени*), определяемые
дифференциальными уравнениями
^. = еД(а). F.23)
^. = р+еВ(а). F.24)
Согласно уравнению F.23) производная а имеет первый
порядок малости, так что величина а является медленно
меняющейся функцией времени. Из уравнения F.24) можно
заключить, что величина ф меняется во времени «почти» по
линейному закону.
Дальнейшее решение строится следующим образом. При
помощи F.22) — F.24) образуются выражения левой и
правой частей уравнения F.20):
= е (— 2рА sin if — 2раВ cos if -j-/?2 J^- -\-рги\; F.25)
л(л + 3)/"-11Л Y/ J
= eJ^[(liCosrf_2'-1]. F.26)
//(я + З)/"-1 LV Y J v
При составлении второго выражения принято ср^асоэф,
что эквивалентно отбрасыванию величин второго порядка
малости в результате F.26). Приравнивая теперь найденные
выражения F.25) и F.26), получаем уравнение,
определяющее функцию и:
р2 [-^k '-\-и\ — 2рА sin ф -f- 2paB cos ф ±
±_4P4/?"-V rA± 5ф«_2«->1 F.27)
n(n + 3)/"-llv Y J
*) Разумеется, функция времени ф не имеет ничего общего
с коэффициентом поглощения ф; последний вовсе не фигурирует
в операциях по способу Г. С. Писаренко.
§ б] СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 97
Для того чтобы решение этого уравнения не содержало
вековых членов, необходимо отсутствие членов вида sinij>
и соэф в правой части уравнения. Иными словами, если
последний член правой части уравнения F.27) разложить
в ряд Фурье:
±— HO±cosA) — 2 =
П(Я + 3)/П U Y J
ОО
= ^о -h 2 (g"ft cos A* + A* sin ^^^ F-28)
A = l
то должны равняться нулю суммы:
gl-\-2paB = 0, hl-\-2pA — 0, F.29)
т. е.
* = —$' F-3°)
B — 1k- F-31)
Найдем теперь первые коэффициенты Фурье:
I
[¦>
I о
— /"[(l-H-cos^)" — 2"-1]costydtyl =
23"+3Гг(л + 'I2/V^"-V
= ^ — —-; F.32)
% (л + 1) (л + 3) Г Bп + 1) Z"-1
= 4Л/Р-V ( /'*[(i_Cost)--2"-,JsIn*d«!l-
1 ^(я + З)/"-1 [^ lV Y; J Y Y
— f [A -hcost|>)n — 2n_1]sini|>tfi|)} =
« J
_ 2"+3AR"-V(n-l) ,_„,.
3W-V { /•[A_COS(|))»_2»-ijCoslJ,rf(|l.
Sl ^(и + З)/"-1 I «/ lV Y; J Y Y
7сл(я-И)(я-)-ЗК
7 Зак. 1460. Я. Г. Пановко
98 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [гЛ. It
С помощью соотношений F.23), F.30) и F.33) получим
следующее дифференциальное уравнение для функции a(t):
da _, 2^У>Я"-У(я-1) F34
dt тт(п+1)(п + 3Iп-1'
Разделив переменные и интегрируя, образуем общее
решение; подчинив его начальному условию а~а0 при i = 0,
найдем:
а -= „ , г ап F.35)
"" / 2я «sv/?« eg-1 (n— lJ
V я(л + 1)(я + 3)П"-Г
Этим выражением описывается закон убывания амплитуды
колебаний с течением времени. При помощи F.24), F.31)
и F.32) можно найти первое приближение для функции ф;
оно несущественно отличается от произведения pt.
Не следует считать, что задание формы гистерезисной
петли в виде F.15) является существенным при
использовании асимптотического метода. Подобное решение можно
построить, исходя из любой иной формы петли; оно полностью
совпадает с решением F.35), если, меняя описание формы
петли, мы обеспечим сохранение ее площади. Убедимся, что
наиболее целесообразно отказаться от выражения F.15)
в пользу эллиптической петли:
¦c = oT±-|To«i/i—?, <6-36)
V То
соответствующей данному выше выражению E.16). Ее
площадь равна Pf-1- Для энергетической эквивалентности
выражений F.15) и F.36) необходимо, чтобы коэффициенты v,
п и р были связаны соотношением
как это показано в статье [36] (стр. 490). Переходя в F.36)
от величин | и|0к величинам ср и а, получим вместо F.17)
Ч^/'1-?- <6-38>
§ 6] СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 99
и нелинейная часть крутящего момента составит вместо F.19)
|=±2К^з ./TZZ. F.39)
(n + 3)/n V аг к '
Положив здесь ср = a cos ф, получим последний член правой
части дифференциального уравнения F.27) сразу в нужной
форме:
— -sin<b:/= - isintb, F.40)
(n + 3)ln т ^(ге+^^ + З)/"-1 т
не требующей никаких дополнительных операций по
выделению первой гармоники. Условие отсутствия вековых членов
в решении уравнения F.27) запишется теперь в виде:
2"+3рУдл-Ч(п— 1)
яп(п + 1)(п + 3)/л
2РА + „Л .V,. ¦ -l^i - 0 F.41)
и приведет к уравнению
_da_=__ 2"l2jt>v/?"-1an(n—1)
d/ "~ wt(n-f 1)(" + 3)^_I
F.42)
которое полностью совпадает с уравнением F.34). Прежде
всего, заметим, что полученные здесь двумя путями
результаты совпадают не только друг с другом, но и с
результатом приложения метода медленно меняющихся амплитуд.
Чтобы убедиться в этом, нужно лишь приравнять коэффи-
28/?л+3 „,/*" ST
циент —- при множителе а" 1/ 1 — -V в соотноше-
(n + 3)ln F Га*
нии F.39) коэффициенту — при аналогичном множителе
А" у 1 ^- в соотношении F.1); после этого обнаружится,
что выражения F.9) и F.35) не отличаются одно от другого.
Как видно, описание формы петли 1истерезиса в виде F.13)
является не только не единственно возможным при
использовании асимптотического метода, но, можно сказать, и не
самым щелесообразным, так как, лишь принимая
эллиптическую форму петли гистерезиса, мы избавляемся от
необходимости разложения в ряд Фурье и специального
выделения первой гармоники. Иными словами, эллиптическая петля
7*
100 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
сразу представляет собой именно эту, единственно нужную
нам первую гармонику.
Сказанное еще раз наводит на мысль о том, что
конкретизация формы петли гистерезиса вообще является операцией,
чуждой существу вопроса, поскольку результаты решения
задачи о свободных колебаниях вовсе не зависят от этой
формы (при упомянутом выше условии энергетической
эквивалентности различных петель). В то же время
асимптотический метод настоятельно требует, чтобы петля гистерезиса
была описана тем или иным определенным образом.
Возможно ли обойтись без всякой конкретизации формы
петли? На этот вопрос мы ответим, и притом положительно,
в следующем пункте.
6.4. Энергетический способ построения огибающей.
Рассмотрим кривую затухающих колебаний системы с одной
У
а)
^-. t
* \ / i * №»
^¦'"
---Aft;
" \ /лм/
^т-А
б;
?
Рис. 31. Затухание колебаний: а) кривая процесса;
б) убывание амплитуды за один период.
степенью свободы (рис. 31) и отметим значения
потенциальной энергии для двух последовательных состояний
наибольшего отклонения (точки s и s-f-1):
лЧ
п = -•
II
сА
s+t
s+1-
F.43)
§ 6] СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 101
За один цикл уменьшение энергии составляет:
ДП, = -|-(л2-Л*+1). F.44)
При умеренном темпе затухания, который следует
предполагать в задачах рассматриваемого типа, выражение F.44)
можно приближенно записать так:
Ws=-L(As+As+1)(As-As+l)^cAstiAs+l, F.45)
где ДЛу.ь1= As—Ashl—уменьшение амплитуды за
рассматриваемый s-f-1-й период. Согласно рис. 31 ,б примем,
опуская индексы:
ДЛ^ -TA{t), F.46)
где A (t) — уравнение огибающей, Т—период колебаний,
который допустимо считать совпадающим с периодом
колебаний системы без затухания. Следовательно,
ДП=.сГЛЛ. F.47)
Это выражение равно рассеянной за цикл энергии и является
вполне общим; оно справедливо во всех случаях медленно
затухающих колебаний, при любых типах неупругих
сопротивлений. В рассматриваемом случае, когда рассеяние энергии
обусловлено работой сил внутреннего трения, выражение F.47)
должно быть равно величине @.7). Правда, в данном случае
нет замкнутой петли гистерезиса, поскольку амплитуды
постепенно затухают; однако выражение @.7) можно использовать
как приближенно верное в предположенных условиях
достаточно медленного затухания. Приравнивая F.47) и @.7),
получаем:
— cTAA = 4{A), F.48)
причем функция W(A) предполагается известной; если известна
функция 4>(е0) для материала, то в зависимости от
изучаемой формы колебаний можно путем вычислений получить
нужную нам функцию Ч!"(Л). Этому вопросу ниже посвящена
основная часть § 8.
Разделив переменные в F.48) и интегрируя, находим;
А
102 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
Здесь принято, что А = А0 при ? = 0 (отсчет времени ведется
от момента, когда в первый раз достигается наибольшее
отклонение системы). Результат интегрирования правой части
F.49) определяется конкретным видом зависимости W(A).
Рассмотрим для примера встречавшийся выше случай
W (А) =аАп+\ F.50)
Если пф\, то из F.49) получится:
'—W^o^l (б-51)
и соответственно
А =. Ап . F.52)
Этот достаточно общий результат [36] *), справедливость
которого ограничена лишь условием F.50), получен без каких бы
то ни било частных предположений относительно формы
петли гистерезиса. Выше мы неоднократно подчеркивали, что
вид петли не имеет практического значения для протекания
процессов в системах со слабым демпфированием; поэтому
изложенный здесь подход представляется наиболее
естественным; он не требует никакой конкретизации зависимостей,
которая все равно не может повлиять на окончательные
результаты. В самом деле, принимается ли эллиптическая
петля (как это сделано в 6.2 при пользовании способом
медленно меняющихся амплитуд и в 6.3 при пользовании
способом Крылова — Боголюбова) или петля, предложенная
Н. Н. Давиденковым (как это делал Г. С. Писаренко), —
результаты оказываются совпадающими с тем, что мы нашли
здесь без всяких частных предположений относительно формы
петли.
Применение энергетического способа мы иллюстрировали
случаем, когда имеет место зависимость F.50). В общем
случае следует обратиться к выражению F.19). При этом
могут возникнуть некоторые вычислительные трудности, не
носящие, конечно, принципиального характера. В худшем
случае, когда из-за сложности выражения Ч?(А) невозможно
*) Он совпадает с результатом F.9).
§ 6) СВОБОДНЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 10$
в замкнутой форме указанное в F.49) интегрирование, можно
воспользоваться приемом, указанным А. Г. Назаровым [32].
Приравняв F.45) и @.7), найдем:
Ал^=-^г F-53)
и применим это равенство последовательно к нескольким
периодам. Для первого периода имеем ДЛг =—V^-- Вычи-
CAq
слив правую часть, найдем \At по известному значению
начальной амплитуды Aq. Теперь вычислим следующую
амплитуду: ЛХ = Л0 — ДЛХ. Далее по той же формуле F.53) найдем:
затем вычислим амплитуду А2:
Аг=А1 — ДЛ2 F.55)
и т. д. Таким образом, по известной зависимости ч?(Л)
последовательно получаются все характерные точки
огибающей.
6.5. Использование энергетического способа для
определения вида функции W (А). Пусть поглощающая
способность системы неизвестна, но получена опытная кривая
затухающих колебаний (или серия таких кривых). С помощью
способа, изложенного в 6.4, можно по этой кривой
установить вид функции ч? (А); в этом и следует видеть важное
практическое значение этого способа.
Именно так поступил В. С. Чувиковский при исследовании
поглощающей способности судостроительной стали СХЛ-1 [80]. Его
эксперименты производились на консольной балке, которая после
начального отклонения совершала свободные затухающие изгибные
колебания. Значения амплитуды колебаний фиксировались в
течение весьма большого числа циклов (до четырехсот), пока
отклонения системы еще допускали достаточно точные измерения. На рис. 32
точками показаны опытные результаты, относящиеся к одному из
семи испытанных образцов (длина 64,8 см, ширина 12,5 см,
толщина 6 см). В. С. Чувиковский предположил, что зависимость V {А)
имеет вид F.50), и определял параметры а и л из условия
прохождения аппроксимирующей кривой F.52) через три достаточно
характерные опытные точки (обведены кружками). Как видно из рисунка,
даже такой наиболее простой прием обработки опытных данных
104 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. 11
обеспечил достаточную близость всех точек подобранной кривой.
Этим, в сущности, была доказана практическая возможность
аппроксимации функции W (А) в виде F.50) для изученного материала.
Рис. 32. Затухание колебаний образцов из
судостроительной стали.
Разумеется, что если аналитическое выражение
функции W(A) установлено, то не представит никаких
затруднений получить аналитическое выражение и для коэффициента
поглощения:
2ЧГ(А)
ф = .
сА*
F.56)
Впрочем, вовсе не обязательно стремиться именно к
аналитическим выражениям для Ф(Л) и ty(A). Как будет
показано ниже, для успешного анализа вынужденных колебаний
достаточно располагать графиками этих функций. Такие
графики легко строятся путем последовательного применения
формулы F.45) к опытной кривой затухающих колебаний.
Так как ДП = ЧГ, то для коэффициента поглощения имеем
из F.45):
§ 7] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 105
Чтобы не иметь дела с малыми разностями Д.Д4+1,
целесообразно рассматривать сразу несколько периодов и определять
осредненное значение коэффициента поглощения <|> по
формуле [57]
ф = А As—As+m ) F>58)
где т — число периодов. Результаты вычислений по
формулам F.57) или F.58) представляются в виде графика
зависимости коэффициента поглощения ф от амплитуды
колебаний А.
§ 7. Вынужденные колебания систем
с одной степенью свободы
7.1. Вступительные замечания. Рассматривая здесь
способы решения задач о вынужденных колебаниях систем
с одной степенью свободы, мы, как и в § 6, не будем
связывать себя какими-либо ограничениями относительно
конкретного вида системы; предполагается, что тем или иным
способом система уже приведена к одной степени свободы.
В качестве внешней нагрузки мы будем рассматривать
возмущающую силу чисто гармонического вида.
7.2. Применение обобщенной гипотезы Е. С. Сорокина.
Для системы с одной степенью свободы обобщенная
гипотеза Е. С. Сорокина E.21) записывается в виде:
ЛГ---с/(l+ *-?-), G.1)
где N* — комплексная сила суммарного сопротивления
(упругого и неупругого), у* — комплексное перемещение. Если
задана возмущающая сила в виде:
P = P0sin<< G.2)
то ее можно рассматривать как мнимую часть комплексной
силы
Р*=Р0е1»'. G.3)
Тогда уравнение вынужденных колебаний запишется в виде:
/ + />2(l+'i)/ = ^e'4 G.4)
106 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
причем перемещение у является мнимой частью комплексного
перемещения у*:
у=1ш/. G.5)
Стационарную часть решения уравнения G.4) ищем в виде:
у* = Л V'">'. G.6)
Подставив G.6) в G.4), получим уравнение для комплексной
амплитуды колебаний:
_и,д. + р.AЧ_1^)А.==^. G.7)
Отсюда находим, что комплексная амплитуда оказывается
равной
л» ро .
[(¦+4)-Й
Представим знаменатель в показательной форме:
1
-+*?-рЛ
Здесь
и,
Г = arctg ¦
Ч-f)
Тогда вместо G.8) получим:
Л* =
и решение G.6) примет вид:
ср
^e-h,
у* = -^» е'(°>'-т).
-^ ср
G.8)
G.9)
G.10)
G.11)
G.12)
Выделив мнимую часть, получим закон колебаний системы:
у = Im у* -
ср
sin (wt — f) =
§ t\ ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 10?
Приведенное решение не является, конечно, единственно
возможным. Выше, в § 4, способом эквивалентной
линеаризации был найден тот же результат. Там же было отмечено,
что соотношение, выражающее амплитуду колебаний:
Л— Уст GЛ4)
/о-а+ф''
представляет собой формулу для определения амплитуды А
только в случае, когда ty = const. При <Jj Ф const
соотношение G.14) является уравнением, определяющим амплитуду А.
7.3. Тригонометрическая форма решения. Вероятно,
наименее искусственна тригонометрическая форма решения,
которая излагается здесь применительно к случаю, когда
петля гистерезиса описывается выражением E.16); для системы
с одной степенью свободы соответствующее выражение имеет
вид F.1):
Н = су±±А*уГ1--?. G.15)
При этом площадь петли гистерезиса соответствует
выражению E.7):
Ф = яАя+1. G.16)
Тогда уравнение колебаний, вызываемых действием
гармонической возмущающей силы G.2), принимает вид:
5+Л±^/-? = ?*•»*. G-17)
Это на первый взгляд сложное нелинейное уравнение имеет
весьма простое точное решение:
у= Л sin ((of— у). G.18)
Чтобы убедиться в этом, подставим G.18) в G.17):
— Am2 sin (<&t — "f) + Ap2 sin (<et — 7) +
' aA"cos(u>t — T)--=-^-sino)f. G.19)
кт
Последний член левой части записан с одним знаком -(-, так
как нужная смена знака (при изменении знака скорости) здесь
автоматически обеспечивается изменением знака косинуса.
108 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ |ГЛ. П
Действительно, указанное слагаемое находится в одной фазе
со скоростью:
у= Awcos(wt— у), G.20)
как это и должно быть по существу явления 1истерезиса.
Преобразуя G.19), получим:
L4 (р2 — со2) cos у -) sin -у - sin u>t —
— \A (p2 — u>2) sin у — ^- cos -Л cos <at = 0. G.21)
Для тождественною выполнения этого равенства необходимо,
чтобы порознь равнялись нулю оба выражения, стоящие
в квадратных скобках:
А (в2 — о>2) cos у -\ sin т — —- = 0,
Ш
аАп
А (р2 — ш2) sin у cos у = 0.
G.22)
Числа А и у, удовлетворяющие этим уравнениям, делают
выражение G.18) решением уравнения G.17). Из второго
уравнения G.22) находим:
*т = г?т?^Г' G'23)
после чего первое уравнение G.22) можно привести к виду:
У" G.24)
УЬ-Я+ъ*
Это решение, очевидно, совпадает с решениями D.6), D.7)
и G.14), если учесть выражение G.16) для ЧГ(Л).
Равенство G.24) является формулой, непосредственно
определяющей амплитуду колебаний только в случае, когда п =1
(при этом ф = const):
У" =. G.25)
У('-'Й
В других случаях равенство G.24) следует рассматривать
как уравнение, содержащее амплитуду колебаний А в обеих
§ 7] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 10Й
частях равенства. Это уравнение допускает явное решение
относительно А лишь в отдельных частных случаях. Так,
например, при п = 2 из G.24) получим:
Соответствующая кривая динамического коэффициента ja
определяется выражением
( _А_
!Л ~~ Уст
где
//(Щ1-гГ+*-н*-я™
Выражение G.27) содержит статический прогиб уст и этим
по своей структуре несколько отличается от выражения A.25)
для динамического коэффициента упруго-вязкой системы;
это вытекает из существа дела, так как в нашей нелинейной
системе отношение А: уст зависит от силы Р0. Определим
величину |а для трех частных случаев. При — —> 0
(статическое действие силы) находим:
В случае резонанса, когда — =1,
Наконец, при >оо получим:
V-
= 0.
На рис. 33 изображена в качестве примера кривая
динамического коэффициента, построенная по уравнению G.27)
при р = 625.
Немногим сложнее построение резонансной кривой по
уравнению G.24) для произвольного значения п. В этом случае
110 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [гл. It
OS 7,0 15 2,0 р
Рис. 33. Кривая динамического
коэффициента; р — 625, п — 2.
А'
i>
4
3
2
7
7
'
-
—
~i
—
_1
06 0.7 O.S 0.9 W 71~ 7.2 7.3 7/t P
Рис. 34 Кривая динамического
коэффициента; 3 — 2500, /г = 5.
§ 7} ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 1 1 1
целесообразно разрешить G.24) относительно ш: р; при
ш < р получим:
7=/'-*/"¦-?•
G.29)
г у v • v
а при ш > jt?:
G.30)
~/1+^
где коэффициент р является обобщением выражения G.28)
Н^У
G.31)
Дальше остается последовательно построить графики этих
обратных функций. Пример такого построения дан на рис. 34
(для р _^ 2500 и п = 5).
7.4. Определение резонансных амплитуд в системах
с линейными и нелинейными упругими характеристиками.
Во многих практических задачах представляется по-просту
излишним строить всю резонансную кривую, поскольку
решающую роль играют легко вычисляемые резонансные
амплитуды. Эти амплитуды будем обозначать через А0. При
ш —/? из D.7) или G.14) следует:
Пусть, например, W = а Л" ; тогда ф(Л) = — Ап~ иизG.32)
сразу находим для любого я:
Ло-^У^1- G-33)
Отсюда, между прочим, видно, что резонансная амплитуда А0
нелинейно зависит от амплитудного значения возмущающей
силы Р0. Для определения резонансной амплитуды из G.32)
нет необходимости располагать аналитическим выражением
112 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. 11
ф(Л). Пусть зависимость &>(А) представлена в виде графика
(рис. 35). В той же системе координат построена кривая
z —
1ъР
ТА'
G.34)
ф.г
Очевидно, что абсцисса точки пересечения обеих кривых
определяет резонансную амплитуду колебаний.
Соотношение G.32) можно было бы получить
непосредственно, пользуясь простейшими энергетическими
соображениями. Так как при резонансе возмущающая сила и
перемещение сдвинуты по фазе на угол -у, то работа возмущающей
силы за один период
согласно A.32) составляет пР0А0.
Приравнивая эту работу
рассеянной за цикл энергии 47:
Ч7(Д) = 7:/у1о. G.35)
и разделив обе части
полученного равенства на
сА\
П = -F- , вновь придем к
соотношению G.32).
Заметим, что
выражение G.33) не содержит
характеристик жесткости и
инерции системы. Таким образом, хотя изменения жесткости
и массы системы, очевидно, влияют на значение резонансной
частоты, но они не влияют на значение резонансной
амплитуды (если при этом не меняются демпфирующие свойства).
Важно иметь в виду, что решение G.33) остается
справедливым и в тех случаях, когда упругая характеристика
заданной системы нелинейна *). В этих случаях после
определения из G.33) резонансной амплитуды Л0 остается
неизвестной резонансная частота. Для ее нахождения следует
использовать «скелетную» кривую, которая в графической
форме выражает связь собственной частоты нелинейной системы
Рис. 35. Построение для
определения резонансной амплитуды.
*) Имеется в виду достаточно слабая нелинейность, когда
процесс колебаний можно приближенно описать выражением
у — A sin {at — i).
§ 7] ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ 113
с амплитудой колебаний (рис. 36, а); на известных способах
построения этой кривой мы не останавливаемся. Резонансная
частота определяется, как абсцисса точки, имеющей ординату,
равную А0.
Если амплитуда возмущающей силы пропорциональна
квадрату частоты:
Я = Р0ш2 sin wt, G.36)
то вместо G.35) получится уравнение
Ч7(Л) = л:Р0и)М. G.37)
Для системы с линейной упругой характеристикой сюда
нужно подставить ш = р и решить полученное уравнение
А(р)
ф(А)
Р шо Р
Рис 36. Построение для определения резонансной
амплитуды в нелинейной системе.
относительно А. В случае системы с нелинейной упругой
характеристикой в уравнении G.37) неизвестна не только
амплитуда Л0, но и частота ш0, при которой наступает
резонанс. Обе эти величины определяются, как координаты точки
пересечения скелетной кривой и кривой, построенной по
уравнению G.37). На рис. 36, б изображена схема
соответствующего построения.
7.5. Способ Г. С. Писаренко. Ряд публикаций Г. С. Пи-
саренко, суммированных в книге [43], посвящен приложению
метода Крылова — Боголюбова к задачам о вынужденных
колебаниях систем с гистерезисом. Уравнение, относящееся
к системе с одной степенью свободы, записывается в виде:
У + Р2 \У + еф (У)] = sPo sin ш^
G.38)
8 Зак. 1460. Я. Г. Пановко
114 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
причем введенный сюда параметр г должен отмечать малые
члены уравнения.
¦<-
Функция Ф (у) выражает влияние гистерезисных сил;
введение малого множителя е- в данном случае оправдано,
так как гистерезисные силы в среднем за цикл всегда малы
по сравнению с силами инерции и упругости.
Как видно из G.38), малой предполагается также и
возмущающая сила, выраженная правой частью уравнения G.38);
это предположение Г. С. Писаренко мотивировал следующим
образом: «Поскольку рассеяние энергии в материале
(гистерезисные потери) незначительно, для поддержания
установившегося колебания, очевидно, понадобится также и
незначительная внешняя возбуждающая сила. Последнее
обстоятельство целесообразно отметить введением при
периодической внешней силе множителя е». Содержащееся здесь
утверждение о том, что возмущающая сила мала сравнительно
с силой инерции и силой упругости, справедливо только
непосредственно около резонанса; в этой области
действительно малая возмущающая сила вызывает значительные
колебания, а следовательно, и относительно большие силы
инерции и силы упругости. Вдали от резонанса нельзя, конечно,
считать, что возмущающая сила мала по сравнению с силой
инерции и силой упругости.
Таким образом, обсуждаемый способ применим только
в резонансной зоне; так как резонансные амплитуды
определяются изложенным в 7.4 элементарным путем, мы не будем
излагать описываемый Г. С. Писаренко достаточно сложный
ход решения уравнения G.38).
§ 8. Колебания систем с распределенными параметрами
8.1. Вступительные замечания. Свойства инерции,
упругости и диссипации энергии в любой реальной системе
распределены непрерывным образом по всему ее объему.
Общая постановка задачи о колебаниях таких систем приводит
к более или менее значительным вычислительным
затруднениям, особенно в тех случаях, когда коэффициент поглощения
материала зависит от амплитуды напряжений. Однако решение
задач рассматриваемого класса может быть радикально
упрощено, если во всех случаях не считаться с влиянием
§ 8) КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 115
демпфирования на форму колебаний системы. Выше,
в пункте 2.5, мы уже ссылались на «правило Видлера»:
форму вынужденных резонансных колебаний системы со
слабым демпфированием можно считать совпадающей с
соответствующей формой колебаний той же системы без
демпфирования. Применяя это правило, мы приходим к сравнительно
простой задаче об определении лишь масштаба
рассматриваемой формы колебаний, разумеется, что последнюю задачу
нужно решать при непременном учете рассеяния энергии.
Изложенное правило легко обобщается на случаи
нерезонансных вынужденных колебаний; в этих случаях следует
принять, что форма колебаний не отличается от формы,
определяемой при той же частоте без учета демпфирования
(речь идет, разумеется, о монохроматических колебаниях,
возбуждаемых гармоническими внешними силами одной и
той же частоты). То же относится и к монохроматическим
процессам свободных колебаний систем с распределенными
параметрами: форма колебаний может приниматься такой,
как если бы демпфирование полностью отсутствовало; однако
демпфирующие свойства системы определяют закон убывания
масштаба этой формы (т. е. темп затухания колебаний).
При таком подходе во всех случаях вынужденных и
свободных колебаний система обладает как бы одной степенью
свободы, причем обобщенной координатой может служить
перемещение любой точки системы (конечно, кроме заведомо
неподвижных точек — опор или узлов колебаний); форма
колебаний однозначно определяет перемещения всех
остальных точек через одну обобщенную координату.
Если форма колебаний известна, то приведенная масса
и приведенная жесткость системы определяются обычным
способом так, как если бы система вообще не обладала
внутренним трением; поэтому нам остается лишь рассмотреть
приемы приведения поглощающих свойств; этому и посвящено
дальнейшее изложение настоящего параграфа.
Основная идея приведения характеристик демпфирования
состоит в следующем. Пусть известна зависимость
коэффициента поглощения материала от амплитуды напряжения <^0(з0).
Умножив коэффициент поглощения на удельную потенциаль-
ную энергию тгр> найдем выражение удельной рассеиваемой
за цикл энергии: ЧГ0 = ЧГ0 (а0). Зная форму колебаний, можно
8*
116 ПрямыЕ способу оценки влияний внутрённ. -Трения [гл. it
выразить амплитуды напряжений <з0 во всех точках системы х,
у, z через амплитуду обобщенной координаты А, т. е.
получить зависимость а0(А, х, у, z). После этого удельная
рассеиваемая за цикл энергия получает вид зависимости Ч70(Л,
х, у, z). Интегрируя последнее выражение по всему объему
системы, мы получим нужную нам приведенную функцию ^(А).
Этим, можно сказать, завершается построение приведенной
системы; анализ ее колебаний следует дальше вести так,
как это было пояснено в предыдущих двух параграфах для
системы с одной степенью свободы. Рхли W(A) разделить на
потенциальную энергию системы, то получится выражение
для приведенного коэффициента поглощения <^(Л). Разумеется,
эта зависимость определяется не только свойствами материала,
но и свойствами конкретной данной конструкции, а также
формой ее колебаний (или, иначе говоря, их частотой).
Ниже даются примеры построения приведенных
характеристик для типичных систем с распределенными параметрами;
при этом мы будем считать, что характеристика
демпфирования для материала дана в виде (!0(ао) или ^"о(ао)-
Полученные результаты могут быть использованы и для решения
важной обратной задачи, которая возникает при
истолковании опытных виброграмм свободных затухающих колебаний, —¦
задачи определения характеристик <10(а0) или ч?(а0) по
экспериментальным зависимостям °\i(A) или W(A).
8.2.г Приведенная характеристика демпфирования при
продольных колебаниях. Пусть форма колебаний
определяется известной функцией
Х=Х(х). (8.1)
Нормируем ее таким образом, чтобы в характерном сечении,
перемещения которого принимаются за обобщенную
координату, величина X равнялась единице. Тогда перемещение
любого сечения стержня в процессе колебаний определится
зависимостью
и(х, f) = X(x)T(t), (8.2)
где Т (t) — обобщенная координата, определяющая
перемещение упомянутого выше характерного сечения. Обозначим
через А амплитудное значение функции Т (t); в задаче о
вынужденных колебаниях величина А постоянная, а в задаче
§ 8] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЁННЫМИ ПАРАМЕТРАМИ 11?
о свободных затухающих колебаниях меняется от цикла
к циклу. Наибольшему отклонению системы от положения
равновесия соответствуют перемещения
ипп = АХ(х) (8.3)
и деформация
dX
е,
max
= АЖ- <8'4>
Следовательно, амплитуда продольного напряжения в любой
точке стержня определяется зависимостью
dX
а0 — Ег0 = ЕА
dx
(8.5)
Как говорилось в п. 8.1, дальнейшие выкладки должны
опираться на конкретный вид зависимости ^(а,,) [или <-'0(а0)] для
материала. Рассмотрим два различных возможных
представления функции ^(а):
или
ЧГ0 = РвоМ (8-6)
То = Paoo-Ь Рзст2-hP40S-I- ¦ - •. (8-7)
в которых р и и, а также ^ — постоянные материала.
Чаще всего исходная зависимость описывает коэффициент
поглощения материала ij>0, а не рассеиваемую за цикл
энергию ЧГ0; соответственно (8.6) и (8.7) будем рассматривать
два варианта записи:
«h,(o0)=^- = 2p/ror,; (8.8)
Здесь
ФоЫ = ^1 = 2?(р2 + рза0 + ^+...). (8.9)
По=Й <8Л0)
представляет собой удельную потенциальную энергию в
состоянии наибольшего деформирования.
Чтобы найти всю рассеиваемую за цикл энергию,
подставим в выражения (8.6) и (8.7) напряжение а0, данное
соотношением (8.5), и проинтегрируем результат по всему объему;
Il8 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ (гЛ. It
тогда получится, в зависимости от вида функции W0(o0), одно
из следующих выражений:
i
\dx
я+1
dx; -<8Л1)
W = f W0 dV = р (HA)"+l F f j
v о
i
W^fw0dV = $2(EAfFf(?jdx +
v о
i i
+ $.i(EAfFJ'\'?fdx+$i(EAyFf(?)idx+... (8.12)
о о
Найденные выражения можно записать в форме:
W = aAn+1;
W = а2Л2 + а3Л3 -(- а4Л4 + ...,
(8.13)
сходной с полученными для удельной рассеиваемой энергии
(8.8) и (8.9). Важно заметить, что фигурирующие здесь
коэффициенты
i
\ dX_ n+1
dx
u = $En + 1F f
о
* = №/{??**¦•
о
i
dx;
dLX
dx
dx;
(8.14)
зависят не только от свойств материала (что характерно для
коэффициентов р, р2> рз, ...), но и от конструкции в целом
и, более того, от возбужденной формы колебаний (последняя
определяет функцию -гЛ- Для того чтобы получить
приведенный коэффициент поглощения, нужно каждое из
выражений (8.12) и (8.13) разделить на потенциальную энергию
§ 8] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 119
стержня, относящуюся к состоянию крайнего отклонения от
положения равновесия:
n=.f I10 dV - -~ f (dl) dx — ~Т • (8.15)
о
где
о
— приведенный коэффициент жесткости стержня. После
деления (8.11) и (8.12) на (8.15) получим приведенный
коэффициент поглощения для всего стержня:
С\ dX \n+1 .
-j— dx
ф^гр^Д"-1^-, ^^Ia"-1; (8.17)
dx
J [dx/
f
ty=^2$2E-\-2$aE*A?-i
dX p л
-=— dx
dx
/(
Лс /
' dX\*
dx
/(-?)'
№)'
-J-^EM^ h ... =у(а, + аИ+а4Л2+...)-
'd-XA\x
о (8.18)
Коэффициент поглощения, как правило, зависит не только
от свойств материала, но и от рассматриваемой формы коле-
баний, которая определяет тот или иной вид производной —т—.
В выражениях (8.8) и (8.9) содержится и тот частный случай,
когда коэффициент поглощения материала не зависит от
амплитуды напряжения, т. е. ф0 — const; в выражении (8.8) этому
соответствует я=1, а в выражении (8.9) — равенство нулю
всех коэффициентов j3<( кроме fJ3. Из выражений (8.17) и (8.18)
120 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
сразу видно, что в этом частном случае коэффициент
поглощения для всего стержня также перестает зависеть от
амплитуды А и полностью совпадает с коэффициентом поглощения
материала.
Пользуясь приведенными выражениями, рассмотрим
сначала простейший случай одном ассовой системы,
представляющей собой консольный стержень с сосредоточенной на конце
массой т (рис. 37, а). В этом
а] Щ щ~ случае, очевидно,
Х(х). х
I
(8.19)
б;
А.
-Т
Рис. 37. Две схемы стержня,
совершающего продольные
колебания: а) невесомый стержень
с сосредоточенной на конце
массой; б) стержень с
равномерно распределенной массой.
и соответственно
dX 1
dx ~ 1 '
Если справедлива
мость (8.6), то по
(8.11) найдем:
т_ ИЕА)*+1
(8.20)
зависи-
формуле
F . (8.21)
1"
При исходной зависимости (8.7) по формуле (8.12) получим:
MEAIL _l b iEA)* F _i_ h (EA?F
I
W-
+
(8.22)
14 I 13 I ¦
При этом коэффициент поглощения найдется по формулам (8.17)
и (8.18) в одной из следующих форм:
ф = 2р?«(-^)"; (8.23)
ф^2р2Е + 2р8Е41-т-2Р<?D1),+ ••• (8-24)
Немногим сложнее получение приведенной характеристики
демпфирования для консольного стержня с распределенной
массой (рис. 37, б). В случае вынужденных резонансных
колебаний, а также в случае свободных колебаний нужно
пользоваться выражением B.20) *):
Bг— 1)ях .
Х(х) = sin
2/
(8.25)
*) Если рассматриваются вынужденные нерезонансные
колебания, то выражение X (х) будет иным.
§ 8] колебания Систем С распределенными параметрами 121
отсюда находим:
dX_
dx
Bг-1)« <2г-1)«х
2t t-os 2{
(8.26)
Положим, что исходная зависимость ЧГ0(а0) имеет вид (8.6);
тогда по формуле (8.11) получим:
i
v==PF[^^)f?d]-+7i
cos
21
Последнему выражению придадим вид:
W=^r(EA)n+lS(r, я),
кBг-1)
dx. (8.27)
(8.28)
где
5(г,«)=[-^^]Л/ |со8б|-+1Л (8.29)
представляет множитель, зависящий как от показателя
степени п, так и от номера г формы колебаний. Значения
величины S(r, n) для нескольких значений гид даны в
следующей таблице:
\ч. п | 0 1
1
2
3
1 Ц-г)'
3 К"I
• ш
2
1Ш'
10 /5я\5
3 U J
Важно заметить, что приведенная характеристика S(r, n)
существенно зависит от номера г формы колебаний. При этом
большим номерам соответствует более интенсивное рассеяние
энергии, чем меньшим; в этом находит свое выражение факт
относительно большей опасности «младших» резонансов.
1U2 ПРЯМЫЕ СПОСОБЫ бЦЕНКИ ВЛИЯНИЯ ВНУТРЁНН. ТРЕНИЯ |гЛ. II
О
EFA*
Конечно, эта связь величины W с номером г столь же
естественна, как и привычная зависимость приведенной массы и
приведенной жесткости от формы колебаний.
В случае, когда зависимость W0 (a0) имеет вид,
представленный выражением (8.7), получим, согласно формуле (8.12):
W=,$2(EA?FS(r, 3)-\-$3(EAfFS(r, 4)-Ь
+ р4 {ЕА? FS(r,5)+ .... (8.30)
где величины S(r, re) определяются тем же выражением (8.29).
С помощью формул (8.15) и (8.29) получим следующее
выражение потенциальной энергии:
о
EFA*
=- ^-S(r, l). (8.31)
Разделив выражения (8.28) и (8.30) на потенциальную
энергию (8.31), найдем коэффициент поглощения в одной из
следующих записей:
*~ AS{r,\) \~Г) ' (8-32)
-^-[^(г. 3)-hp35(r, 4)(?Л) +
-A-%S(r, Ъ){ЕА?-\- ...]. (8.33)
8.3. Приведенная характеристика демпфирования при
крутильных колебаниях. В данном случае выкладки
принципиально совпадают с приведенными выше, в п. 8.2, для
случая продольных колебаний. Угол поворота любого
сечения запишем в виде, подобном (8.2):
<t(x,t) = X(x)T(f). (8.34)
Здесь ^(л:) — функция, описывающая изменение углов
поворота сечений по длине стержня и зависящая от возбужденной
частоты колебаний; функция Х(х) нормирована таким
образом, что в сечении, перемещение которого принимается за
2?
§ 8] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 123
обобщенную координату, она обращается в единицу. Тогда
функция T(t) представит собой обобщенную координату и
опишет движение упомянутого сечения. Наибольшому
отклонению системы соответствуют углы поворота сечений
?„,„<*)=>»*(*).
(8.35)
где А — амплитудное значение функции T{t). При этом
амплитуда сдвига в произвольной точке сечения сержня
составит:
v0=?
dVmax
dx
= Лр
dX
dx
(8.36)
Амплитудное значение касательно1 о напряжения в любой точке
произвольного поперечного сечения равно
ть=0То-ОЛР|4?|. (8.37)
Если рассеяние энергии в материале описывается
зависимостью типа E.6): W — Р1тл+1, то для всего стержня
получится:
i
¦=f^0^dV=^(GA)n+lrf\^- Л+'<1х, (8.38)
W-
где
.Г = ./•(») = fo^dF — —
р ру ' J г п
2*/?п+3
+ 3
(8.39)
представляет собой своеобразный полярный момент инерции
площади сечения, зависящий, однако, от характеристики
материала п. При п .= 1 этот интеграл превращается в обычный
полярный момент инерции и составляет —~— , где R — радиус
поперечного сечения стержня. При п = 2 можно найти
р 5
Очевидно, что зависимости (8.38) можно придать вид
ЧГ = осАя+1, совпадающий с выражением (8.12); здесь
коэффициент а зависит не только от материала, но и от пара'
метров конструкции, а также от формы колебаний.
124 прямые способы оценки влияния внутренн. трения 1гл. и
В случае, когда система представляет собой невесомую
консоль с массивным диском на конце (рис. 38; а), следует
принять
*(*) =
I
и согласно (8.38) получим, подобно (8.21),
h{GA)n+4*p
ln
(8.40)
(8.41)
Пусть, например, для рассматриваемой системы нужно
построить огибающую кривой свободных затухающих колебаний.
Прежде всего заметим, что
Р]Хя+1 ^_ р-у«+', где
р—коэффициент, входящий в
выражение F.36); следовательно,
p1 = p:G', и (8.41) можно
aj
а:
б/ S
записать в виде:
иг— ^ЛаЯг]
1 1П
Рис. 38. Две схемы стержня,
совершающего крутильные
колебания: а) невесомый стержень с
массивным диском на конце; б)
стержень с распределенной массой.
Эту форму зависимости мы
неоднократно встречали
выше; такова, например,
запись F.50), для
дальнейшего использования которой
следует лишь принять a = $J* :ln. Если подставить сюда
выражение F.37) для C и выражение (8.39) для У*, получим:
_ 2" f3<
К_ 1я-*п(п + \)(п-\-3) 21
(я— I)/?"'1 GnRi _ 2Я+Зч(к— \)R'
п-1
Остается подставить этот результат в уравнение F.52):
А- А»
с.
т>-
2n+S(n-\fR
л-1лп-
я-1
и (л-1-1) (л+ 3O7
что, конечно, совпадает с соотношением F.35).
Для системы с распределенной массой (рис. 38, б) при
свободных или вынужденных резонансных колебаниях следует
§ 8] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 125
в (8.38) примять
Х(х) = тп Bг~1)пх , (8.42)
и подобно (8.28) получится:
MGA)nllJ*
W.
~ P-S{r, n) (8.43)
с прежним смыслом величины S(r, n), данной в формуле (8.29).
Аналогичные выкладки приведут к выражению W(A) и
в тех случаях, когда зависимость ЧГДто) отличается от данной
выражением (8.38); так, в частности, если исходить из
зависимости
ЗД = ^ + ^И^Н •¦•• (8-44)
которая подобна зависимости (8.7), то получится выражение
типа (8.12); нужно только вместо модуля упругости Е
подставить модуль упругости О и вместо площади сечения F
подставить величину У*.
8.4. Приведенная характеристика демпфирования при
изгибных колебаниях. Как и в предыдущих двух пунктах,
положим, что в cocti янии наибольшего отклонения от
положения равновесия прогибы описываются законом
vmaK=AX(x), (8.45)
где А — амплитуда колебаний избранного характерного
сечения балки, Х(х) — нормированная форма прогибов, равная
единице в } казанном сечении. Кривизна оси балки в состоянии
наибольшего отклонения определяется приближенным
выражением
dx*
(8.46)
В произвольной точке сечения с абсциссой х амплитуда
напряжения составляет
°о(х, у)=-Е\хУ\ = Еа\х~
(8.47)
126 ПРЯМЫЕ СПОСОБЫ ОЦЕНКИ ВЛИЯНИЯ ВНУТРЕНН. ТРЕНИЯ [ГЛ. II
Соответственно во всем объеме балки за олин цикл
деформирования рассеивается энергия
W^fw0{EA\^\)dV. (8.48)
v
В случае степенной зависимости
% = №+\ (8.49)
получим выражение, подобное по структуре выражению (8.38):
i
V = $(EA)n?XJ* |*|-glp1dx, (8.50)
о
J*=-J*(n)= f\y\n + 1dF (8.51)
где
— своеобразная физико-геометрическая характеристика,
зависящая не только от формы и размеров сечения, но и от
материала балки; при п—\ (случай постоянного коэффициента
поглощения) J*(l) = J. Конечно, выражению (8.50) можно
придать форму (8.12), причем коэффициент р определяется
не только материалом, но также схемой балки, ее
параметрами и характером формы колебаний. Чтобы образовать
коэффициент поглощения всего стержня, найдем прежде всего
потенциальную энергию:
v о
Разделив (8.50) на (8.52), получим приведенный коэффициент
поглощения:
/I
d* I dx
* = тг(ЕЛ)" —I • <8-53>
/(
<РХ\* J
§ 8] КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ Vll
При п. = 1 получим значение, равное коэффициенту
поглощения материала <]i = 2$E.
Аналогичными выкладками можно определить
характеристики ф и ЧГ для случая, когда ч?0(а0) определяется
зависимостью (8.7).
Рассмотрим два частных при- а/ Ц л
мера. Первый из них относится %|
к консоли с сосредоточенной на
конце массой (рис. 39, а), когда б/ »—
форма колебаний совпадает с кри- yf^ry
вой статического изгиба от
сосредоточенной силы на конце:
Тогда
Х—^^%- <**>
X"
?(-f>
Рис. 39. Две схемы балок,
совершающих изгибные
колебания: а) невесомая консоль с
сосредоточенной на конце
массой; 6") балка с распределенной
массой.
Полагая, что я = 2,
получим:
I
а сечение имеет форму прямоугольника,
/>
X
1Г \П I 1
dx —
27_
4/5
f(X"
>3d* = ^;
2
12
F 0
Подставляя в (8.47), получим:
128/5 (ал)-
По формуле (8.53) находим коэффициент поглощения:
,. __ 27р?%
16Р
-А.
Если масса двухопорной балки распределена по пролету
(рис. 39, б), то при свободных и резонансных вынужденных
колебаниях вместо (8 54) нужно принять
Тогда
X
Х"\ =
тх
I
sin
rxx
(8.55)
(8.56)
128 прямые способы оценки влияния внутрённ. трения [гл. II
и выражение (8.50) имеет вид:
v = й (ЕА)*+Х s.k (r n) j, (/j)_ (8 5?)
где
5*(г, л) - (г*J"-1 » j" | bin ? I" и <tf. (8.58)
о
Некоторые частные значения величины S'{r, л) даны в следующей
таблице:
Как и в задачах о продольных и крутильных колебаниях,
характеристика ЧТ зависят от номера г возбужденной формы колебаний и
допускает представление в виде W = аАп+1.
По выражению (8.53) находим коэффициент поглощения:
_ 2fi/* / ЕА у S'(r, n)J'(n)
Лишь в случае, когда коэффициент поглощения материала не
зависит от амплитуды напряжений, т. е. при я — 1, найдем, что
коэффициент поглощения балки не зависит от амплитуды колебаний,
а также от их формы и совпадает с коэффициентом поглощения
материала.
8.5. Определение характеристик демпфирования
материала по опытной виброграмме свободных
затухающих колебаний. Полученные в пп. 8.2- 8.4 результаты
позволяют не только рассчитать характеристики
демпфирования конструкции по характеристикам демпфирования
материала, но и решить важную практическую задачу об
определении характеристики демпфирования материала Ч?(а0) 1или
ЧГ, (т0)] на основании анализа опытной виброграммы свободных
затухающих колебаний.
§ 8j КОЛЕБАНИЯ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ 129
Чаще всего такие колебания возбуждаются следующим
образом. К системе прикладывается возмущающая сила, и
плавным изменением ее частоты достигается резонансный
режим, соответствующий той или иной собственной частоте.
Затем сила сразу снимается, и последующее движение системы
носит характер свободных затухающих колебаний. После
обработки осциллограммы перемещений какого-либо
характерного сечения (см. выше, п. 6.3) можно получить эмпирическую
зависимость ЧГ(Л); обычно эту зависимость удается представить
в виде:
Ч7 = аЛл+1 (8.60)
или в виде:
ч? = а2А2-+- а3Аз + а4Л4+ ••• (8-61)
Остается по найденным величинам а найти соответствующие
величины р, которые входят в выражения (8.6) и (8.9) Для
этой цели могут служить формулы, полученные в предыдущих
двух пунктах. Пусть, например, эксперимент производился
на консольном стержне, изображенном на рис. 38, а, и после
обработки виброграммы получена зависимость (8.60) с вполне
определенными значениями коэффициентов а и п. Пользуясь
формулой (8.41), имеем:
aA*+x=hiGA?11 /р(п), (8.62)
откуда
h^-^rfpr-cc. (8.63)
a ^v.(n)
Аналогично можно поступить и в других схемах испытаний.
ГЛАВА Ш
ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ
§ 9. Роль конструкционного демпфирования
9.1. Постановка вопроса. Внутреннее трение в
материале является не единственной, а в большинстве случаев и
не основной причиной рассеяния энергии при колебаниях
реальных механических систем. Уже давно было установлено,
что рассеяние энергии в соединениях может оказаться во много
раз значительнее рассеяния энергии, связанного с внутренним
трением в материале. Вследствие трения в сочленениях
зависимость нагрузка — перемещение оказывается неоднозначной,
как и вследствие внутреннего трения в материале. Это
явление может быть названо конструкционным гистерезисом,
а явление рассеяния энергии вследствие действия сил трения
в соединениях — конструкционным демпфированием.
При этом следует четко различать два класса случаев:
1) рассеяние энергии вследствие трения в подвижных
соединениях (типа подшипников); 2) рассеяние энергии вследствие
трения в неподвижных соединениях (типа прессовых,
заклепочных, резьбовых и др.).
Решая задачи первого круга, естественно отвлечься от
деформируемости элементов конструкции, считая их
совершенно жесткими; при решении задач второго круга
игнорирование деформаций недопустимо, и возникает необходимость
одновременного учета как сил трения, так и деформаций
сопрягаемых деталей. Вопросы рассеяния энергии в
подвижных соединениях выходят за границы темы настоящей книги.
Здесь мы остановимся лишь на проблеме рассеяния энергии
в неподвижных соединениях, и именно это явление будем
называть конструкционным демпфированием.
Если еще сравнительно недавно внимание исследователей
было преимущественно привлечено к проблеме внутреннего
§ 9] РОЛЬ КОНСТРУКЦИОННОГО ДЕМПФИРОВАНИЯ 131
трения в материале, то в последние годы наблюдается
заметный рост интереса к проблеме конструкционного
демпфирования. В ряде работ (см. [3], [51] — [53], [99], [100]) можно
найти опытные данные, убедительно подтверждающие
первостепенное значение этой проблемы в многочисленных
конструкциях, о которых уже шла речь во введении. Постепенно
появляются и теоретические исследования конструкционного
демпфирования в упрощенных типичных схемах.
Опубликованным решениям этих задач свойственны
следующие два основных допущения общего характера: материал
элементов соединений предполагается совершенно упругим,
а для фрикционных свойств контактных поверхностей
принимается закон сухого трения. Кроме того, описание
напряженного и деформированного состояний элементов соединения
существенно упрощается кинематическими и статическими
гипотезами, обычными для решения задач методами
сопротивления материалов и прикладной теории упругости.
Некоторые из полученных таким образом теоретических решений
были затем проконтролированы экспериментальным путем;
при этом вполне удовлетворительно была подтверждена
приемлемость отмеченных выше допущений.
Краткая характеристика исследованных случаев дается
в следующем пункте.
9.2. Краткий обзор литературы. В работе Бяня и Хал-
ловелла [92] рассмотрен изгиб консоли, усиленной сверху
и снизу тонкими накладками; накладки прижаты к балке
и занимают лишь часть длины консоли, не доходя до
плоскости заделки (рис. 40, а). Предполагается, что
взаимодействие накладок и балки при ее нагружении концевой
поперечной силой осуществляется в виде касательных усилий
трения; упругое сопротивление проскальзыванию считается
отсутствующим. Взаимодействие накладок и балки различно
на двух участках длины накладки. Вблизи конца балки
касательные усилия между накладками и балкой определяются
обычной формулой сопротивления материалов, при этом
касательные напряжения х меньше предельного значения т0 = pf
(/ — коэффициент трения, р — удельное давление по
контактной поверхности); проскальзывание накладок по балке
отсутствует. Однако для равновесия накладки необходимо,
чтобы в остальной области касательные усилия имели другой
9*
132 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
знак; здесь происходит проскальзывание накладок по балке
и касательные усилия взаимодействия соответствуют
значению ¦:<,> так что каждая из накладок нагружена
самоуравновешенной системой касательных усилий. Нагружение верхней
а)
Щ
jUiintitUH
tTTTTTTTTTTTTT
хР
б;
~-bZ\
¦а-
Рис. 40. Изгиб балки с накладками: а) схема
нагружения балки; б) схема нагружения
верхней накладки.
накладки показано на рис. 40, б; аналогично нагружена и
нижняя накладка (действующие на нее касательные усилия
имеют обратные направления). Следует обратить внимание,
что зона проскальзывания появляется при сколь угодно малых
значениях силы Р.
Гудманом и Клампом [87] решена задача о циклическом
деформировании консольной балки, составленной из двух
|пжжц/Гижшж
1
р
щттттггптгггттггптт»
Рис. 41. Изгиб составной балки.
аР
частей; последние прижаты друг к другу заданным
давлением р (рис. 41). До тех пор, пока нагрузка, заданная
в виде сосредоточенной силы Р, мала, касательные
напряжения т, определяемые элементарной формулой сопротивления
материалов, меньше, чем предельное значение т0; взаимное
проскальзывание частей балки отсутствует, и происходит
§ 9] РОЛЬ КОНСТРУКЦИОННОГО ДЕМПФИРОВАНИЯ 133
совместная деформация обеих частей балки как единого
целого. На этом этапе начального нагружения из-за
отсутствия проскальзывания не происходит никакого рассеяния
энергии.
Когда в процессе роста силы Р касательные напряжения
достигают предельного значения т0, между частями балки
начинается проскальзывание и силы трения совершают
некоторую необратимую работу. Гудманом и Клампом
проанализирован весь симметричный цикл нагружения и найдена
площадь петли гистерезиса (см. ниже, п. 10.3). Оказалось, что
эта площадь своеобразно зависит от давления р, заданного
между частями балки; в частности, установлено, что
существует некоторое оптимальное значение давления, при котором
рассеиваемая за цикл энергия оказывается наибольшей. Этот
факт можно истолковать следующим образом. Если давление р
отсутствует, то силы трения не развиваются и рассеяния
энергии нет. С другой стороны, при достаточно больших
значениях давления р рассеяния энергии не будет благодаря
отсутствию проскальзывания между частями балки.
Следовательно, с ростом р рассеяние энергии сначала увеличивается,
а затем должно уменьшаться.
В статье [39] систематически рассмотрено циклическое
нагружение прессового соединения вал — втулка
продольными силами и крутящими парами. Эти две схемы изображены
на рис. 42, а и б, причем через Р и М обозначены
максимальные значения нагрузки, а через а, — переменный
безразмерный параметр нагрузки, наибольшее значение которого
равно единице. Предполагается, что вал удерживается
во втулке только силами трения и что контактное давление
натяга, обеспечивающее эти силы трения, постоянно по всей
длине зоны контакта. Наибольшее значение нагрузки Р или М
считается настолько малым, что вал целиком не смещается
во втулке.
Решение задачи о распределении касательных напряжений
в схеме, изображенной на рис. 42, б, дано в книге В. И. Фео-
досьева [66]. Поскольку трубка и валик не являются
жесткими, сдвиг на контактной поверхности начинается при
любых, сколь угодно малых значениях М, причем зоны
проскальзывания примыкают к концу валика и к концу трубки.
Для этапа первого нагружения эпюры крутящих моментов
в сечениях валика и трубки показаны на рис, 42, е. В этом
134 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
случае отчетливо видна существенная особенность проблемы
конструкционного гистерезиса в неподвижных соединениях *):
определение сил трения невозможно без анализа
деформаций сопрягаемых элементов.
Подобным же образом выглядит распределение
продольных сил в сечениях вала и втулки в схеме, изображенной
З.Р
?
aj
>
аР
т.М
afti
Нал
б/
в)
в'ГГуЛ/fCt
Рис. 42. Система вал — втулка: а) продольное
нагружение; б) кручение; в) эпюры внутренних
усилий.
на рис. 42, а. В работе [39] прослежен весь цикл нагрузка —
разгрузка — нагрузка и определена энергия, рассеиваемая за
один такой цикл. В работе Г. И. Страхова [63] исследовано
влияние поперечных деформаций вала и втулки на
рассеиваемую энергию; эти деформации неизбежны при продольном
нагружении рассматриваемого соединения и в некоторых
случаях имеют существенное значение.
*) Выражение «неподвижное соединение», которое заимствовано
из курсов деталей машин, следует понимать в условном сцысле,
так как при решении задач конструкционного гистерезиса
учитываются малые смещения и сдвиги.
§ 9] РОЛЬ КОНСТРУКЦИОННОГО ДЕМПФИРОВАНИЯ 135
При продольном нагружении проволочных канатов
также наблюдается конструкционный гистерезис вследствие
проскальзываний, возникающих между отдельными
проволоками; этот вопрос был исследован С. Д. Пономаревым 150].
лМ I
j * » i П П М | И Н П f Н t
ам
Р
¦ / 1 -г
i
i N
a)
Ц 6j
aAf
Рис.43. Изгиб балки с накладками: а) схема нагружения;
б) силы, действующие на концевую часть накладки.
Построение петли гистерезиса для рессоры было дано
В. Л. Бидерманом [4] и Г. И. Страховым [61].
В работе [39] рассмотрен изображенный на рис. 43, а
случай изгиба балки с прижатыми к ней накладками.
В средней части балка деформируется
совместно с накладками и
осуществляется чистый изгиб в обычном
смысле слова; по поверхностям
сопряжения накладок и балки
касательные усилия отсутствуют. Концевые
участки накладок нагружены так,
как показано на рис. 43, б, причем
касательные усилия q равномерно
распределены по всей длине
концевого участка длиной а; они
уравновешивают силу N, приходящуюся на
накладку в средней ее части. Разумеется, что длина с
постепенно растет в процессе роста момента.
Н. Ф. Карпачеву [18] принадлежит исследование роли сил
трения в торсионе, схема которого изображена на рис. 44.
Торсион представляет собой пакет прижатых друг к другу
листов, который скручивается двумя концевыми парами.
Г. И. Страхов [62] исследовал рассеяние энергии при
сжатии пакета дисков. Пакет состоит из чередующихся
Рис. 44. Листовой торсион.
136 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
дисков с различными механическими характеристиками (одна
пара таких дисков изображена на рис. 45). Положим, что
коэффициент трения равен нулю и поэтому по поверхностям
соприкосновения не возникают силы трения; тогда, если
модули упругости дисков различаются, то деформации ег
будут различными, а следовательно, будут различными и
€f< -в
Рис. 45. Пара дисков амор- Рис. 46. Фрикционная
тизатора. муфта.
деформации ег. Ясно, что если / ф 0, то неизбежно
возникают силы трения из-за разницы между деформациями еГ
обоих дисков.
К тому же классу случаев относится схема фрикционной
муфты, изученная В. И. Лебедевой [27] и изображенная
на рис. 46. Два прижатых друг к другу диска образуют
соединение, способное за счет трения передавать крутящий
момент, не превосходящий предельного значения Жпр, при
котором происходит полное проскальзывание дисков. Если
условие М < Мир выполнено, то в процессе нагружения
образуется некоторая круговая зона проскальзывания, радиус
которой меньше радиуса диска и растет с ростом задаваемого
крутящего момента. На периферии дисков образуется
кольцевая зона жесткого сцепления дисков. Последовательно
анализируя процесс нагружения, разгрузки и повторной
нагрузки, В. И. Лебедева построила полную петлю
гистерезиса и определила рассеиваемую за цикл энергию.
Н. Г. Калинин и Ю. А. Лебедев [16] исследовали
конструкционное демпфирование в тонкостенной балке,
состоящей из тонкой стенки и окаймляющих поясов и стоек.
Во всех перечисленных случаях касательные усилия
взаимодействия между сочлененными элементами соединения
предполагаются реализованными только в виде сил трения.
Системы этого типа можно назвать системами с чисто
фрикционным характером взаимодействия частей.
§ 9] РОЛЬ КОНСТРУКЦИОННОГО ДЕМПФИРОВАНИЯ 137
Кроме таких систем, исследован также ряд важных схем,
в которых касательные усилия взаимодействия между частями
осуществляются как в виде сил трения, так и в виде сил
упругого сопротивления сдвигу; к этому типу соединений,
I
; | 1-1
аР
Рис. 47. Изгиб балки с приклепанными
накладками.
в первую очередь, следует отнести заклепочные соединения.
Такие системы мы будем называть системами с
упруго-фрикционным характером взаимодействии частей.
В работе [93] Бянь исследовал конструкционное
демпфирование для схемы, изображенной на рис. 47. Эта схема
а)
аР
i I ! П ! I I I м i i i i | и
IE
¦+-tr
I I I I I I I ! I 1 I I I I i I I
aP
AM
Ф
aM
T
Рис. 48. Две клепаные конструкции: а) продольное
нагружение соединения листов накладками; б) чистый
изгиб балки с накладками.
отличается от схемы, приведенной выше на рис. 40, системой
заклепок, способных создавать упругое сопротивление,
пропорциональное взаимному смещению соответствующих точек
накладок и балки. Ю.А. Лебедев [26] подверг
систематическому изучению два типа заклепочных соединений,
показанных на рис. 48, а и б. Первая схема представляет две
138 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. 14
упругие полосы с двумя прикрепленными накладками;
соединение передает циклически изменяющееся продольное усилие.
Вторая схема является естественным обобщением схемы, данной
выше на рис. 43: балка с двумя приклепанными накладками
нагружена двумя концевыми изгибающими парами. Как
оказалось, и в этих случаях
существует некоторое оптимальное
значение усилия прижатия накладок,
обеспечивающее наибольшее
кона/7 х струкционное демпфирование.
—*¦ *~ К тому же типу систем
с упруго-фрикционным характером
взаимодействия относится также
резьбовое соединение (рис. 49),
рассмотренное в работе [40]. При
Рис. 49. Резьбовое соединение, нагружении такого соединения
происходит некоторое взаимное
проскальзывание витков резьбы болта и гайки; развивающиеся
при этом силы трения и являются причиной конструкционного
гистерезиса.
9.3. Характеристика дальнейшего изложения. Из п. 9.2
видно, что хотя первые теоретические исследования в области
конструкционного демпфирования появились менее десяти лет
назад, однако уже накоплен достаточно обширный материал,
относящийся к соединениям самого различного характера.
Ниже дается анализ лишь самых типичных схем; при этом
мы будем всячески упрощать постановку таких типовых задач
для наиболее отчетливого выявления особенностей их решения.
Во всех рассматриваемых случаях мы ограничимся лишь
специфической стороной вопроса — построением гистере-
зисной петли и вычислением ее площади. Решением
соответствующих динамических задач мы заниматься не будем;
приемы, поясненные в §§ 6 и 7, с успехом могут быть
использованы и в задачах с конструкционным демпфированием.
Дальнейшее изложение ведется раздельно для двух типов
систем:
1) системы с чисто фрикционным характером
взаимодействия частей (§ 10);
2) системы с упруго-фрикционным характером
взаимодействия частей (§ 11).
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 139
Во всех случаях для контактных поверхностей считается
справедливым закон сухого трения, а для материала
сопрягаемых деталей—закон Гука. В целях общности сразу
рассматриваются асимметричные циклы нагружения с
произвольной характеристикой цикла г:
r = ~^, (9-.1)
где Р и Ртш — наибольшее и наименьшее значения нагрузки.
Текущее значение действующей на соединение силы мы будем
обозначать в виде аР, где а— безразмерный параметр
нагрузки. При максимальной нагрузке а= 1, при минимальной
нагрузке а = г.
§ 10. Случаи чисто фрикционного» взаимодействия
10.1. Циклическое растяжение — сжатие простейшей
одномерной системы. На рис. 50 показан простейший
пример— весьма тонкая упругая полоса, прижатая к абсолютно
Р
WA
iiiiiHliltmtn
-« 1 ^
хР
Рис. 50. Продольное нагружение упругой полосы,
прижатой к жесткому основанию.
твердому основанию постоянным давлением р. Рассмотрим
явления, происходящие при нагружении полосы продольной
силой аР, циклически изменяющейся в пределах от Ртш
до Р. Наибольшее значение силы Р будем считать
недостаточным для того, чтобы вызвать сдвижку всей полосы по
основанию, т. е.
P<fpbl. A0.1)
где / — коэффициент трения между полосой и основанием,
b и /— ширина и длина полосы.
Исследуя распределение сил трения между полосой и
основанием, важно обратить внимание на следующие две
особенности рассматриваемой схемы:
140 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
1) силы трения равны предельному значению (на
единицу длины полосы)
q=fpb A0.2)
повсюду, где имеется проскальзывание элементов полосы
по основанию, т. е. на тех участках, где происходит
деформация полосы; это непосредственно вытекает из принятого
закона сухого трения;
2) силы трения полностью отсутствуют на тех участках,
где полоса не деформируется. Действительно, на этих участках
согласно закону Гука полоса не испытывает никакой нагрузки
(а силы трения явились бы такой нагрузкой).
Таким образом, развивающиеся по поверхности
соприкосновения силы трения либа равны q, либо равны нулю.
Принимая закон Гука и закон Кулона, мы исключаем
возможность того, что где-либо действуют силы трения, отличные
от нуля и в то же время меньшие, чем q.
Последовательно рассмотрим три типичных этапа
изменения нагрузки:
1) возрастание силы аР от нуля до наибольшего
значения Р; на этом этапе 0 <; а ^ 1;
2) уменьшение силы лР от наибольшего значения Р до
наименьшего значения Рт\п; на этом этапе г^.а^.1;
3) возрастание силы аР от наименьшего значения Pmin
до наибольшего значения Р; на этом этапе r-^a^l.
При многократном циклическом изменении нагрузки
в интервале [Ртт, Р] Два последних этана будут поочередно
повторяться.
Первый этап. Длина зоны деформации полосы (зоны
проскальзывания) определяется условием равновесия полосы
и равна (рис. 51, а)
а. = —. A0.3)
1 Я к
При постепенном возрастании нагрузки аР длина этой зоны
будет увеличиваться; согласно условию A0.1)
fllmax^^-</. (Ю.4)
ч
Соответственно закону Гука относительное удлинение
элемента деформированной зоны:
# = -йг. (Ю.5)
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЙ 141
где и1(дг, а) — перемещение произвольного сечения в
направлении оси х; N = N(x, a.) — продольная сила в поперечном
сечении полосы, EF — жесткость полосы при растяжении,
aj
^
— 1
: 1
>-i
аР
X
б J ,=
v^
Шах
!, —
лР
s
Ь/
1
1
,
i
^ а2л?ах -*~
<хР
Я
Рис.-51. Силы, действующие на полосу: а) нагрузка;
б) разгрузка; в) повторная нагрузка..
F — площадь сечения полосы. Из условия равновесия
элемента длиной dx следует:
dN
Подставляя сюда A0.5), получим:
&их _ д
dx* ~ EF '
Интеграл этого уравнения:
Условия, относящиеся к сечению, расположенному на границе
недеформированной и деформированной зон:
ах(/ — av a) = 0, jgL(Z_ei, а) = 0. A0.9)
Они выражают отсутствие смещения и продольной силы
в этом сечении. Из A0.9) найдем:
Q (I — ai)
2EF • -i — EF
A0.6)
A0.7)
A0.8)
• OFh' ' I
A0.10)
142 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
Подставляя в A0.8), получим:
«»(*.«)= '<<-2*Г*>', A0.11)
где flj зависит от я и определяется выражением A0.3). Для
дальнейшего нужны следующие зависимости:
«,(*. 1) = ^^^1; (Ю.12)
Mi(/,a)^w- A0ЛЗ)
Зависимость A0.12) описывает распределение перемещений и,
по длине деформированной зоны в конце первого этапа
нагружения. Зависимость A0.13) определяет перемещение
концевого сечения полосы в течение всего первого этапа.
Второй этап. Как только сила схР станет уменьшаться,
концевые элементы полосы начнут смещаться в направлении,
противоположном оси х; соответственно появятся силы
трения, действующие в направлении оси х. Условие равновесия
полосы (рис. 51, б)
aP + qa2 — q(aimiiX — a2)=0 A0.14)
позволит найти длину зоны «обратных» смещений*):
^^. (Ю.15)
причем
а2п1ах=РA2~Г). A0.16)
Уравнение равновесия элемента, мысленно выделенного где-
либо в пределах этой зоны, в отличие от A0.6) имеет вид:
Подставляя сюда A0.5), придем к уравнению
d^u2 q__
dx* ~~ EF'
интеграл которого
аа=Л2 + В8х—gL A0.19)
A0.18)
*) Левее этой зоны остаются зафиксированными смещения и
силы трения, соответствующие концу первого этапа нагрузки.
§10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 143
должен удовлетворять условиям
и2A — аг, я) = 11^1 — а2, 1); A0.20)
?(/_ei..) = ^(/_af.l).
Эти условия выражают равенство перемещений и продольных
сил в сечении х = I — а2, где зона «обратных» смещений
граничит с зоной «прямых» смещений. При составлении правых
частей выражений A0.20) следует исходить из
зависимости A0.12). Из A0.20) получим:
Ai = ~EF [(l — fll maxJ — 2 ^ — в*)];
B2 = ^F{l-2a2 + aimax). (Ю.21)
Следовательно,
и2(х, а) = -^рг [(а2 — at max — xf —
_ (i _ flj, _ ХJ _*2 +2 (J-а2)(а2— almax)l, A0.22)
где с2 зависит от а и определяется выражением A0.15).
Дальше нам потребуются следующие зависимости:
а (х r)- l+2r-r* (l-x)rP g(l-x)* .
U'i(-X- r) — V[EF И EF 2EF ' ^U""J
u2(l,a)=l+?-a* P\ A0.24)
Зависимость A0.23) определяет распределение перемещений н2
по длине зоны «обратных» смещений в конце второго этапа
нагружения, а зависимость A0.24) — закон перемещения
концевого сечения в течение всего второго этапа.
Третий этап. В начале третьего этапа в концевой зоне
вновь возникнут положительные смещения; распределение сил
трения показано на рис. 51, в. Из условия равновесия полосы
аР — (almax — a2max)q— a& -4- (fl2 max — а3) q = 0 A0.25)
определим длину концевого участка:
аз = ^>. A0,26)
144 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [гЛ. III
Дифференциальное уравнение вновь принимает вид A0.7);
его интеграл:
»3 = ^«-T-fl8*+-|jgjr.
Условия в сечении х = 1 — а3:
и3A — а3, а) = и2A — а3, г), i
du.
¦?<'-«* «)
dx
(I — a3> r)
дают:
^ = °+У + ^ [(/ - 2a3f - 241;
2?/-
*«=:Ep[ir+2e»-/]-
Следовательно,
A0.27)
A0.28)
A0.29)
u3(x, a) =
A+2/- — /•*)/» (t — x)rP
4qEF EF
gjl — xy* , g(/ —a> —*)»
2?^ "г ?/•*
A0.30)
и перемещение концевого сечения х = / определяется
зависимостью
A— 2ог + 2г-Ь о«) ри
и3(/, а).
4^?/?
A0.31)
На рис. 52 в качестве иллюстрации показаны зависимости
и1A, а), я2(/, а) и и3(/, а) для случаев /- = 0,5 и г = 0;
здесь отчетливо видны замкнутые петли гистерезиса. Площадь
петли представляет необратимую часть работы, совершаемой
силой аР. Для вычисления этой работы воспользуемся
формулой
р 1
47= J [u2{l, a)—u3(l, a)]d(aP) = P I (u2—u3)dix. A0.32)
Подставляя сюда выражения A0.24) и A0.31), найдем:
чТ =
Р3A— ГK
\2qEF
A0-33)
§ Ю]
СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ
145
Истолкование этого результата будет облегчено, если
обозначить через Pv амплитуду силы а.Р и заметить, что
Рис. 52. Петли гистерезиса: а) г = 0,5; б) г = 0.
Р(\—r) = 2Pv. При этом формула A0.33) приобретает вид:
2Р3
W^-^^T. A0.34)
3qEF "
Отсюда прямо следует, что рассеяние энергии не зависит
от среднего значения силы:
Р ¦ -+-Р
1 т— 2
и определяется переменной составляющей Pv. Кубическая
зависимость 4T(Pj,) no своему характеру сходна с зависи-
Рис. 53. Зависимость рассеиваемой энергии от
давления прижатия р.
мостью площади петли гистерезиса материала от амплитуды
напряжения.
Изображенная на рис. 53 гиперболическая зависимость
рассеиваемой энергии от интенсивности давления р (которому
J 0 Зек. 1460. Я. Г. Падозкр
146 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
пропорциональны силы трения q) соответствует
выражению A0.34); она справедлива лишь при тех достаточно
больших значениях р, которые отвечают условию A0.1). Чем
короче полоса, тем большим должно быть соответствующее
минимальное значение р. Если левый конец полосы
закреплен, то ограничение A0.1) отпадает. Исследование этого
последнего случая приведет к зависимости, показанной
пунктиром на рис. 53.
Для определения коэффициента поглощения необходимо
прежде всего найти наибольшую потенциальную энергию;
согласно рис. 52 последняя равна
1
ах{1, а)йл~-^р. A0.35)
о
При этом
W р-
max *
Так, например, при г = —1, когда PV = P (симметричный
цикл), найдем ф=1. Для систем с конструкционным
демпфированием типичны большие значения коэффициента
поглощения. Все же найденная величина ф может дать искаженное
представление о поглощающих свойствах системы; так, если
полоса продолжается вправо, то при подсчете <]> необходимо
учесть потенциальную энергию этого продолжения, что,
конечно, приведет к значительному уменьшению ф для всей
системы.
10.2. Циклическое нагружение прессового соединения.
Изложенным в п. 10.1 способом можно исследовать случай
циклического продольного нагружения прессового соединения,
состоящего из втулки и запрессованного в нее вала (рис. 42).
Если жесткость вала мала сравнительно с жесткостью втулки,
то можно пренебречь податливостью втулки и непосредственно
использовать полученные в п. 10.1 результаты. В общем же
случае необходим учет конечной жесткости как вала, так
и втулки. Этот общий случай рассмотрен в статье [39],
в которой для упрощения решения было предположено:
1) плоские до деформации сечения вала и втулки остаются
плоскими и после деформации; тем самым принимается
одномерная схема, как и в п. ЮЛ;
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 147
2) давление запрессовки р одинаково по всей поверхности
соприкосновения вала и втулки и не меняется в процессе
нагружения системы.
При анализе распределения сил трения между втулкой
и валом необходимо руководствоваться следующими
обстоятельствами:
1. Силы* трения равны предельному значению повсюду,
где имеет место проскальзывание элементов вала по втулке,
т. е. на тех участках, где различны продольные деформации
вала и втулки.
2. Силы трения равны нулю на тех участках, где
деформации вала и втулки постоянны (и одинаковы) по длине
участков; на этих участках соединение работает как единое
упругое тело и продольные силы распределяются между
валом и втулкой пропорционально их жесткостям с1 и с2.
Опуская выкладки, приведем окончательные выражения для
перемещения концевого сечения *):
«t(/, а) = Д/1+Д/2-г-^-12а*A-р2)_4а2р1.
Ptf -2) Р*
A0.37)
2qc2
Вг(*.а) = Д*1 + Д/2+-^1A+2а-а*)A-р«)-4ар]-
-MW^A+2a-a2>: A0-38>
_ Р(Р —2>/>'(e2_2(U._|_2/- + l). A0.39)
4qc2
В этих выражениях Мг и М2 — удлинения участков вала
и втулки, расположенных вне области непосредственного
контакта; эти величины, очевидно, не влияют на
характеристики рассеяния энергии в соединении; C = сх: (ct -f- c2).
Петля гистерезиса подобна показанной на рис. 52; ее
площадь, вычисленная по формуле A0.32), составляет
\-f P(P-2)'
2Р3
3q
с2
A0.40)
*) В статье [39] эти выражения приведены с существенными
опечатками.
10*
148 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ (гЛ. Ш
При с2-^-оо мы, естественно, получим прежнее
выражение A0.35). На рис.
' ос
/
о
Рис. 54.
втулки
Z 3
4
Влияние жесткости
на рассеиваемую
энергию.
54 графически изображено влияние
конечной жесткости- втулки. По
оси абсцисс отложено
отношение жесткостей ct: c2, а по оси
ординат — отношение площади
ЧГ, вычисленной по формуле
A0.40), к площади W^,
вычисленной по формуле A0.34).
Все приведенные выше
зависимости полностью относятся
и к случаю циклического
кручения того же соединения
(рис. 42, б). В этом случае
следует под с, и сг понимать
жесткости кручения, под Pv —
амплитуду крутящего момента,
а под и (I, а) — угол поворота
концевого сечения.
с,
10.3. Циклическое нагружение составной балки
(поперечный изгиб). Рассмотрим подробности симметричного
цикла для задачи Гудмана и Клампа, схема которой была
дана выше (рис. 41).
Первый этап (рис. 55, а). Пока сила а.Р мала и
напряжения х не превосходят значения x0 — fp, проскальзывания
нет и обе балки деформируются, как одна цельная балка.
При этом прогиб конца определяется обычной формулой
Ч = Ш7- <10-41>
где / — длина балок, У= -у^-, b и h — момент инерции и
размеры сечения каждой из балок. Когда касательные
напряжения, определяемые формулой Журавского
*=ш- <10-42>
достигнут значения т0 = fр, наступает конец первого этапа.
Этому соответствует значение силы
46Ах0
ОоР =
A0.43)
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 149
В конце первого этапа согласно A0.41)
^w=w- <10-44)
Второй этап. После того как нагрузка достигнет
значения OqP, на контактной поверхности начинается
проскальзывание сразу по всей длине I. При дальнейшем росте
силы аР касательные напряжения остаются постоянными и
а)
^^
6/
в)
""Я~
г*т„
а„^а<1
аР
Рис. 55. Нагрузки, действующие на части
балки: а) первый этап; б) второй этап;
в) третий этап.
равными т0. На рис. 55, б изображено нагружение балок.
Каждая из них нагружена возрастающей силой -^- и
постоянной равномерно распределенной моментной нагрузкой
(рис. 55, в)
m0=^L = ^f. A0.45)
При этом прогиб конца балки составляет
v9~
6?/ 3EJ ~ 24Я/ *• "о^
A0.46)
В начале второго этапа, когда а = ао, из A0.46) вновь
получится результат A0.44). Конец второго этапа наступает
при достижении силой аР наибольшего значения Р; при
этом прогиб конца равняется
^A> = wD_3ao)- A0-47>
150 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
Третий этап. Как только начинается уменьшение внешней
силы аР, наступает новый, третий этап процесса. На этом
этапе силы трения постепенно уменьшаются и так как х < т0,
то проскальзывание становится невозможным и происходит
жесткое сцепление обеих балок по контактной поверхности.
Касательные напряжения по контактной поверхности равны
ЗРA—а)
Abh
ЗР, .
:4Wi(a° + a'
Распределенная моментная нагрузка:
Ьхп ЗР. . ..
т = -J- = -g- («о + a — 1).
1). A0.48)
A0.49)
Заметим, что при малых значениях а величина т стано-
ЗР
вится отрицательной и т = — -5-A —«о) при а = 0. Прогиб
определяется по формуле, подобной A0.46);
v3(a)--
6Ef
ml*
3EJ
PI*
24?/
C — 3a,,-)-a). A0.50)
В начале третьего этапа, когда з = 1, из A0.50) вновь
получим результат A0.47).
Рис. 56. Петля гистерезиса.
Из выражения A0.50) видно, что жесткость балки на этом
этапе равна жесткости на первом этапе. На рис. 56 показано
течение процесса на первых трех этапах (сплошная линия).
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 151
Заметим, что при полной разгрузке, когда а = 0,
»з@) = -^A-Яо)- (Ю.51)
Третий этап заканчивается, когда абсолютное значение т
достигает величины т0; согласно A0.48) имеем:
I ЗРA—«!) | ПО 521)
Отсюда находим значение alt при котором кончается третий
этап и начинается четвертый этап:
«1=1—^=1-2«о. A0.53)
Дальнейшие этапы, иллюстрированные пунктиром на
рис. 56, исследуются подобным же образом. На четвертом
этапе происходит проскальзывание по поверхности
соприкосновения обеих балок. Конец четвертого этапа
соответствует минимальной силе Pmin = — Р. На пятом этапе
происходит рост силы яР, и до тех пор, пока г < х0,
проскальзывания нет. После того, как вновь начинается
проскальзывание, наступает шестой этап; его продолжением
служит второй этап, и начиная с а = а0 весь цикл
повторяется. Площадь построенной на рис. 56 петли гистерезиса
после умножения на Р выражается следующим образом:
Ч7=2аоРг/3@). A0.54)
Подставляя сюда A0.43) и A0.51), найдем энергию,
рассеиваемую за один цикл:
W
= n^{p--tA\ <10-55)
Линейность зависимости W (Р) является следствием того,
что проскальзывание происходит сразу по всей длине системы.
В этом смысле рассматриваемый случай является, пожалуй,
исключением из общего правила; в других задачах
рассматриваемого типа, когда происходит постепенное увеличение
зоны проскальзывания, имеет место более резкое возрастание
рассеяния энергии при росте амплитуды нагрузки.
152 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
Особенного внимания заслуживает параболическая
зависимость величины 47 от давления р (рис. 57). При /7 = 0,
ЗР
так же как и при р = -т*тг, рассеяние энергии обращается
в нуль. Эти результаты можно объяснить следующим образом.
pV
8EJ
—
_..
_._
_._.
as
Рис. 57. Зависимость рассеиваемой энергии от давления.
При р = 0 обе части балки изгибаются раздельно и гисте-
ЗР
резиса нет из-за отсутствия сил трения; при р = -ттгг обе
балки работают как одно целое вплоть до значения а= 1,
и так как проскальзывания не происходит, то и силы трения
не совершают никакой работы.
Максимальное рассеяние энергии соответствует давлению
P = J?L. A0.56)
При этом а0 = 0,5 и
Vn
Sfbh '
A0.57)
При помощи тщательно поставленного эксперимента Гудман
и Кламп подтвердили высокую точность полученных выше
результатов.
Для вычисления коэффициента поглощения системы
предварительно нужно найти наибольшую потенциальную энергию
изгиба. Она может быть определена с помощью рис. 56 как
площадь, ограниченная осью абсцисс, отрезками прямых / и
// и вертикалью, проходящей через точку с абсциссой v2(l):
П„
A0.58)
§10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 153
10.4. Циклическое нагружение балки с накладками
(чистый изгиб). Вернемся к изображенной на рис. 43 схеме
балки прямоугольного поперечного сечения с тонкими
накладками, которые прижаты к балке давлением р. Концевые
сечения балки нагружены моментами аМ, действующими
в плоскости симметрии конструкции.
Заметим, что для наших случаев совсем небезразлично,
каким способом осуществлено приложение изгибающего
момента к торцу: приложены ли соответствующие
поверхностные нагрузки только к самой балке, или только к
накладкам, или, наконец, как к балке, так и к накладкам.
Ниже предполагается первый вариант нагружения; сходные
результаты получатся в условиях второго варианта. Если же
нагружение осуществляется соответственно третьему варианту
и продольные напряжения распределены в торцевом сечении
по линейному закону, то силы трения между накладками и
балкой вовсе не развиваются.
Итак, положим, что изгибающие моменты приложены
только к самой балке, а торцевые сечения накладок
свободны от нормальных напряжений. На разных участках длины
взаимодействие балки и накладок будет различным. В
удалении от концов балка и накладки работают совместно и
не происходит проскальзывания по контактным поверхностям.
На этих участках касательные усилия отсутствуют и
нормальное усилие в сечении накладки может быть определено
по формуле
N=-0-аЛ1 = ар ¦?-, A0.59)
где J — момент инерции сечения балки (с учетом накладок),
А — высота сечения балки, F — площадь сечения одной
накладки, а — безразмерный параметр нагрузки,
p = Fft2:2J A0.60)
— постоянная для данной балки, М — наибольшее значение
момента.
На концевых участках происходит проскальзывание
накладок по поверхностям балки; с этим связано появление
касательных усилий q, соответствующих закону сухого
трения. Составим уравнение равновесия для части верхней
накладки, показанной на рис. 43, б:
N — qa = 0. A0.61)
154 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ 1гЛ. III
Соответствующая часть нижней накладки работает подобно
верхней. Равенство A0.61) позволяет определить размеры
участка, в пределах которого происходит проскальзывание:
A0.62)
Как видно, по мере роста нагрузки (т. е. с
увеличением а) проскальзывание распространяется по направлению
к середине балки. Ниже рассматривается случай, когда
наибольшее значение момента невелико и проскальзывание не
доходит до среднего сечения балки:
атах = -^-</. A0.63)
Рассмотрим работу соединения на различных этапах цикла;
вследствие симметрии балки достаточно рассмотреть только
одну ее половину.
Первый этап (нагрузка; 0<^а<^ 1). По мере
увеличения момента аМ проскальзывание от свободного конца
распространяется к середине балки. Соответствующее нагруже-
ние верхней накладки изображено на рис. 58, а, причем
размер а^ участка проскальзывания определяется формулой A0.62).
Рассматривая теперь изгиб правой половины балки под
действием нагрузок, изображенных на рис. 58, б, найдем угол
поворота концевого сечения в процессе первого этапа на-
гружения *):
^> = ^Р+-Щ?, (Ю.64)
где EJ0 — изгибная жесткость балки без накладок. В конце
первого этапа а-1 и
„(I)=™+J|g_. A0.65)
Второй этап (разгрузка; r^a^l). В процессе
разгрузки на части поверхности контакта появляется проскаль-
*) Для этой цели удобнее всего воспользоваться
графоаналитическим методом, рассматривая совокупность сил трения как
равномерно распределенную моыентную нагрузку.
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ
155
зывание обратного направления. Нагружение верхней
накладки показано на рис. 58, в. Приравнивая продольную
а;
ю
-щ.
7
/
* "/
/
>-
а/
\
\)
>
6J
г)
0/
е;
9
/ Л
"Шах
— а,-*-
а//
?
3.
а/У
Рис. 58. Нагрузки, действующие на балку
и верхнюю накладку: а) накладка на
первом этапе; б) балка на первом этапе;
в) накладка на втором этапе; г) балка на
втором этапе; д) накладка на третьем
этапе; е) балка на третьем этапе.
силу A0.59) сумме сил трения, найдем длину участка
проскальзывания:
я __ (l-a)pAf
2qh
A0.66)
Угол поворота концевого сечения балки найдем по схеме,
данной на рис. 58, г в виде:
a(l—P)Af/ , A+2а — аЗ)(ЭМJ
<р2(а) =
Ш0
4qhEJa
A0.67)
156 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
Если в это выражение подставить а = 1 (начало второго
этапа), то вновь получим прежний результат A0.65); для
конца второго этапа, когда а = г, имеем:
^di^+A^gM. (Ш.68,
Третий этап (повторная нагрузка; r-O^.l).
Распределение сил трения при повторном нагружении показано для
верхней накладки на рис. 58, д. Длина участка, на котором
возобновляется прямое проскальзывание, равна
«з = ^-(«-/-). (Ю.69)
Соответственно схеме, изображенной на рис. 58, е,
найдем угол поворота концевого сечения балки:
При а — /- выражения ср3 и ?2 совпадают; также совпадают
выражения <р3 и <pt при а= 1.
Первые слагаемые выражений A0.64), A0.67) и A0.70)
одинаковы; это совпадение не случайно, так как указанные
слагаемые
аA — $)М1 _ aMl
?/0 ~^ EJ
представляют собой угол поворота балки, деформируемой
вместе с накладками как одно целое. Вторые слагаемые
тех же выражений определяют влияние проскальзываний,
развивающихся между балкой и накладками. Структура этих
слагаемых не отличается от структуры правых частей
зависимостей A0.13), A0.24), A0.31), найденных выше для
простейшей задачи. Поэтому характер гистерезисных петель для
рассматриваемой здесь задачи будет таким же, как
изображено на рис. 52.
Для определения рассеяния энергии при циклическом
нагружении воспользуемся выражением A0.32):
W=M /(<p2 — f3)da. A0.71)
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 157
После выполнения квадратур найдем:
,F ,,_ рш»A-г)»
\2qhEJ0
Если теперь ввести амплитуду цикла
М(\— г)
М„ =
A0.72)
A0.73)
W-
A0.74)
то A0.72) можно записать в виде:
3qhEJ0'
Как видно, эта формула но своей структуре совпадает с
выражениями, полученными выше, в пп. 10.1 —10.3, для случаев
растяжения — сжатия; рассеяние энергии пропорционально
кубу амплитуды изгибающего момента и обратно
пропорционально давлению прижатия накладок, причем среднее
значение изгибающего момента не оказывает никакого влияния на
демпфирующие свойства системы.
При ббльших значениях
изгибающего момента
проскальзывание может охватить всю длину
балки. Опуская выкладки,
относящиеся к этому случаю (они даны
в работе [63]), приведем сразу
окончательный результат:
2^Mi. I 2 \
A0.75)
Рис. 59. Зависимость
рассеиваемой энергии от
амплитуды изгибающего момента.
Здесь М0- значение изгибающего момента, при котором
проскальзывание распространяется на всю длину балки. Таким
образом, зависимость W от амплитуды изгибающего момента
имеет вид, изображенный на рис. 59.
10.5. Циклическое нагружение прямоугольной упругой
прокладки. Рассмотрим процесс циклического обжатия
невысокого упругого параллелепипеда двумя совершенно
жесткими плитами (рис. 60, а). Будем предполагать, что размеры
параллелепипеда имеют разный порядок малости: размер
158 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
в направлении оси х значительно превосходит размер 21
в направлении оси у, а последний во много раз больше высоты
параллелепипеда /г, измеряемой в направлении оси z (рис. 60, б).
К такой схеме можно прийти при исследовании работы
упругих прокладок ленточного типа, применяемых для
амортизации различного рода машин.
Рис. 60. Упругая прокладка между двумя жесткими плитами:
а) общая схема; б) координатная система; в) единичная полоска;
г) нагружение элемента полоски.
При сжатии прокладки ее размер в направлении оси z
будет уменьшаться, а размеры в направлениях осей хну —
увеличиваться. Силы трения, развивающиеся при этом по
горизонтальным поверхностям прокладки, будут стеснять
расширение прокладки в направлениях осей х и у, причем
вследствие большой длины прокладки перемещения в
направлении оси х можно считать полностью отсутствующими.
В таком случае достаточно исследовать сжатие любой
единичной полоски, изображенной на рис. 60, в; все
остальные полоски этого типа будут находиться в точно таких же
условиях, как и рассматриваемая полоска.
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 159
Двумя плоскими сечениями, перпендикулярными оси у,
мысленно выделим из полоски элемент показанный на
рис. 60, г. Эти сечения мы будем считать остающимися
плоскими и после нагружеиия. Все грани элемента испытывают
действие нормальных напряжений; кроме того,
горизонтальные грани нагружены касательными напряжениями q;
последние являются напряжениями трения на поверхностях
соприкосновения прокладки и плит. Все указанные напряжения
будем считать равномерно распределенными по площади
каждой грани элемента.
Мы приняли за положительные сжимающие напряжения,
что естественно в нашей задаче. Изображенное на рисунке
направление касательных напряжений соответствует
предположению о смещении элемента в положительном направлении
оси у *).
Уравнение равновесия элемента в проекции на ось у:
dav
dy
Используя закон Гука:
A0.76)
sv~="? [a-r~ Kay + az)b
[а — цСа^ + сд],
= Т1°*—1*(°* + °уI
A0.77)
(положительными теперь следует считать деформации
сжатия) и имея в виду, что ех = 0, найдем из первого и третьего
равенств
Ег,
fWy
Величину гг будем считать постоянной во всех точках
полоски и равной
s* = T> (Ю.79)
*) На рис. 60, г не показаны касательные напряжения в
поперечных сечениях полоски; эти переменные по высоте напряжения
(возникающие согласно свойству парности касательных напряжений)
образуют в каждом сечении самоуравновешенную систему и не
войдут в составляемые далее уравнения.
160 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. Ill
где w — сближение нагружающих плит, которое является
задаваемой величиной. Подставляя A0.78) и A0.79) вA0.76),
приходим к уравнению для напряжения ау:
diy 2,u./oy 2fEw
0. A0.80)
dy ' ЛA — (л) ' Л^A—(J.')
При граничном условии a (/) — 0 решение этого уравнения
имеет вид:
Ew
о..
У цA+ц)
где
_[/('-т)_. j], (Ю.81)
Х=.^/1 . A0.82)
Л A — [j.)
представляет собой постоянную прокладки. Теперь согласно
A0.78) имеем для нормального напряжения oz:
_Ew_x{i^)
¦A(l-^eV ' • A°-83>
На рис. 61 показаны графики распределения нормальных
напряжений <зу и az по длине лолоски.
Следует помнить, что выражения A0.81) и A0.83)
справедливы только в зоне деформирования полоски, где имеется
проскальзывание. Средняя часть длины полоски может
оказаться в состоянии жесткого сцепления с обжимающими
плитами; в этой части не только ?^ = 0, но и е — 0 и согласно
A0.77) и A0.78)
а* = °У=A+Ж1-2,)*; (Ш-84)
¦¦-ТП^Йк- A°-85)
Пусть у*— координата сечения, лежащего на границе
области жесткого сцепления. В этом сечении результат A0.84)
должен равняться результату A0.81):
y-Ew Ew Г х (' -у) _ , 1
A+^A-2A) А (хA+^)Л1е 1J-
Следовательно,
з^Ф-т1»^]- A0-86)
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 161
Отсюда видно, что если
Х< In <¦-—??, A0.87)
то область жесткого сцепления вообще отсутствует. Так, при
|а=0,47 (резина) из A0.87) следует, что при >.< 1,55 зоны
^fwe1 ?ш-
(/-/IV'/? 0-/1-/Л
i 1 >_
Рис. 61. Распределение нормальных
напряжений по длине полоски при нагрузке:
а) напряжения зу; б) напряжения zz.
жесткого сцепления не будет. Если, например, / — 0,2, то
из A0.87) следует отношение -г <[ 4,36. Положим, что
условие A0.87) выполнено, и ограничимся случаем, когда зона
жесткого сцепления отсутствует. В этом случае полную
нагрузку на полоску аР можно найти интегрированием
выражения <зг по всей длине полоски:
*Р = 2 f°,dy = %{?=%-«¦ (Ю.88)
о •
11 Зак. 1460. Я. Г. Пановко
lt>2 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. Ш
Таким образом, на этапе увеличения нагрузки зависимость w
от яР линейна, причем коэффициент жесткости равен
2Е1(ех— 1)
Х/гA— ,и2)
A0.89)
При очень малом значении параметра /- (например, вследствие
малости коэффициента трения /) можно принять е1 ^^Л-\-\,
и формула A0.89) примет вид:
Со=М^)- A0"9°)
Это выражение определяет жесткость прокладки при исче-
зающе малых силах трения.
Обратимся теперь к этапу разгрузки прокладки и прежде
всего выясним распределение напряжений при изменении
направления сил трения q. Нет никакой надобности повторять
все выкладки, так как нужные нам выражения могут быть
сразу записаны по выведенным выше зависимостям путем
простой смены знака при коэффициенте трения /. Так, для
напряжения з получим из A0.81):
3 ^ ?*[e-A('-T)_l] A0.91)
У и. A -у и.) h L J x '
и для напряжения зг согласно выражению A0.83):
_ Ew -ф-т)
г ЛA— |л*)
A0.92)
Распределение напряжений о и az на этапе разгрузки дано
на рис. 62. Зависимость A0.88) заменится теперь такой:
т. е. на рассматриваемом этапе коэффициент жесткости вместо
значения A0.89) принимает значение
2Е1 (!-«-*)
Н ХАA—(*2) • yiv.y-i)
На рис. 63 изображены зависимости A0.88) и A0.93)
лучами / и ///. Из рисунка ясно, что между процессами,
описываемыми лучами / и ///, неизбежно должен лежать этап,
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 163
Рис. 62. Распределение нормальных
напряжений по длине полоски при разгрузке:
а) напряжения зу; б) напряжение zz.
аР
Рис. 63. Петля гистерезиса: а) при пульсирующем
цикле; б) при произвольном асимметричном цикле.
И*
164 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. Ill
на котором отсутствует как прямое, так и обратное
проскальзывание, т. е. этап жесткого сцепления по всей длине *).
Этот этап иллюстрирован на рис. 63 отрезком //.
Согласно выражению A0.84) на этапе жесткого
сцепления изменение сближения обжимающих плит на величину Дщ>
вызывает изменение напряжения на величину
A3'=^^utAw- A0-95)
Так как Дз2 не зависит от координаты у, то соответственное
изменение силы аР составляет
Д(аР) = 2/Д3г = <т^^^Д^ A0.96)
Следовательно, жесткость прокладки на этом этапе равна
_ 2?f(l —к) ПО 07^
C2-(l+f*)(l-2a)- (Ш-°
Таким образом, при пульсирующем цикле петля гистерезиса
имеет форму треугольника. На том же рис. 63, а пунктиром
проведена прямая
zP=c0w^h-^}w, A0.98)
соответствующая данному в A0.90) значению с0 для / = 0.
Если разгрузка производится не до нуля, то петля
гистерезиса принимает форму трапеции (рис. 63, б); ее сторона
IV параллельна стороне //.
10.6. Циклическое нагружение круглой упругой
прокладки. Рассмотрим теперь задачу о сжатии тонкого
круглого диска между двумя совершенно жесткими плитами
(рис. 64, а); по своей сущности эта задача близка к
рассмотренной в п. 10.5. На рис. 64, б показан типичный элемент
диска-прокладки, выделенный двумя бесконечно близкими
осевыми сечениями и лвумя бесконечно близкими
цилиндрическими сечениями. Как и в п. 10.5, за
положительные принимаются сжимающие напряжения. Уравнение
равновесия элемента имеет вид:
dz? g? — з,, 2zJ
d? "+" p "+" h
:0. A0.99)
*) Более подробный анализ показывает, что при разгрузке не
может быть жесткого сцепления на части длины полоски.
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 1б5
Для перемещений а в радиальном направлении примем
обычное правило знаков (положительное перемещение от центра),
а для деформаций — правило знаков, соответствующее
правилу знаков, принятому для напряжений (положительной счи-
Рис. 64. Круглая упругая прокладка: а)
координатная система; б) нагружение элемента
прокладки.
тается деформация укорочения). При этом связь
перемещений и деформаций оказывается такой:
du и w
8р ~dj; е? —~у: е* — т*
Согласно принятым правилам знаков закон Гука
запишется в следующей форме [19]:
20A-(х)/ da р. а , р ,у )
2GA (Х) / (Л <Z*H И . II \ /|П 1ЛП\
°*=—^^(-т^г-^-у+тЁ^е,); } A0.100)
2C A — у.) I [I da [i, и х \
°*~~т-=Щх \~~T=]:~dY~T^:Y+s*)m
Подставляя эти выражения в уравнение равновесия A0.99),
получим:
12 Зак. 1460. Я. Г. Пановко
1б6
где w : h ¦¦
Внутреннее трение в сочленениях
2(х/й
А (I — (х)
[гЛ. I»
A0.102)
представляет собой постоянную прокладки.
Если проскальзывание имеет обратное направление (т. е.
к центру прокладки), что может быть при разгрузке, силы
трения меняют свое направление и уравнение равновесия A0.99)
принимает вид:
h
d0P._|_ V
0,
d? ' Р
и соответственно вместо A0.101) получится:
A0.103)
X(l—n) w
a(j. ft
A0.104)
Как и в п. 10.5, случай, когда проскальзывание
распространяется только на часть прокладки, мы не рассматриваем.
Таким образом, возможны три этапа деформирования
прокладки:
1) этап нагружения, когда справедливо уравнение A0.101),
предполагающее проскальзывание от центра прокладки;
2) этап начала разгрузки, когда проскальзывание
полностью отсутствует;
3) этап последующей разгрузки, когда имеется
проскальзывание к центру прокладки; этому этапу соответствует
уравнение A0.104).
Решения уравнений A0.101) и A0.104) следует подчинить
граничным условиям
а@) = 0; с9(а) = 0. A0.105)
Для этапа нагрузки решение уравнения A0.101) имеет вид:
¦d-rttj.
A0.106)
wa
A
-2ц«)^
(f+'KT-f
A _ rt tf+ A _ 2ц) A + X _ ех)
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 167
Для этапа разгрузки с проскальзыванием решение
уравнения A0.104) получается таким:
wa
~2?h
2гл)A-Х-е-') +Ч1 WeJ'
A_^)Х« + A_2|*)A-Х-е-0
A0.107)
Подставляя теперь найденные решения в третье
уравнение A0.100), найдем распределение напряжений ог по радиусу
прокладки. Для этапа нагрузки:
х U-L)
- - Gw <l + rtM5_V_^ A0Л08)
*— h A— ji.)X« + A— 2fx) A + X — e*) '
а для этапа разгрузки с проскальзыванием:
р
-х A--
Gw A + (л) №е
м» —Т" A— ц)Х»+A— 2и)A— X — е-*) * A0Л09)
Интегрируя выражения A0.108) и A0.109) по всей длине
полоски, получим связь между сжимающей силой и
сближением обжимающих плит. В первом случае найдем:
2шЮт (j±!fHgx-l-*) A01Ш)
Аналогичное выражение для второго случая имеет вид:
„ _ 2*a*Gw (i + rt(e-x_i+X) П0 11П
аи — h (l—,1)Л*-|-A_2ц)A —X —е-*) ' v1"-111'
Найденные зависимости иллюстрируются лучами / и ///
на приведенном выше рис. 63, а. Жесткость прокладки на
этих этапах нагружения соответственно составляет
2*aW (l+tx)(gx_i_X)
Cl— h A—(х)Х? + A—2гх)A+Х —ех) • U^.iiz;
„_2*аЧ? (i+tl)(e-x_1 + X) (Ю.113)
"» ft A—ц)Х»+A—2ЮA—X —e-*) •
Для промежуточного второго этапа, которому
соответствует жесткое сцепление прокладки с плитами, имеем из
третьего уравнения A0.100):
„ __2СA-,л)Ег
1^- <10Л14>
12*
168 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ {гл. Ш
Д(аР):
A0.115)
этапе равняется
A0.116)
Интегрируя это выражение по всей поверхности полоски,
найдем связь между приращением нагрузки и приращением
величины Aw:
,_ 2каЮA— ц) Aw
(l—2(i.) h
так что коэффициент жесткости на втором
_ 2kcPG(\ — \>.)
С2— A—2(Д.)Й •
Если в выражения A0.112) и A0.113) подставить Х = 0,
то после раскрытия неопределенности найдем жесткость
прокладки при отсутствии трения:
_ 2ъаЮ A + ц) __ тиРЕ
с0— ъ ;—jj-.
A0.117)
Закон деформирования такой
прокладки показан на рис. 63, а
пунктиром.
Если прокладка с трением
деформируется не по пульсирующему
циклу, то петля гистерезиса
принимает форму трапеции, как это
изображено выше на рис. 63, б.
10.7. Циклическое нагруже-
ние упрощенной схемы дисковой
муфты [27]. Изображенная на
рис. 46 система состоит из двух
полумуфт, каждая из которых имеет
конечную крутильную жесткость при нагружении моментами а.М.
Чтобы выяснить методику построения петли гистерезиса,
рассмотрим здесь упрощенную осесимметричную схему,
приведенную на рис. 65, а и б; в этой схеме предполагается, что один из
дисков недеформируем и представляет собой жесткое
основание, к которому заданным постоянным давлением прижат
второй, деформируемый, диск. Диск ограничен двумя
параллельными плоскостями и двумя поверхностями круговых
цилиндров; внутренний и наружный диаметры диска равны
соответственно 2а и 2Ь; толщина диска равна h. Заданный
крутящий момент осуществлен в виде системы касательных
Рис. 65. Нагружение диска
прижатого к жесткому
основанию: а) разрез; б) план.
§ 10] СЛУЧАИ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 169
напряжений, равномерно распределенных по внутреннему
контуру и равных
^fl) = "»- A0Л18>
Предполагается, что даже при а = 1, когда крутящий момент
достигает своего наибольшего значения, не происходит
полной сдвижки диска по основанию. Ввиду малой толщины
диска задачу будем считать плоской.
Система напряжений т (а) уравновешивается системой
касательных усилий трения, развивающихся между диском и
жестким основанием. Как и в п. 10.1, силы трения
возникают только в зонах деформации диска и равны предельному
значению q. Предположение о том, что в недеформированной
зоне имеются какие-либо силы трения, противоречило бы
закону Гука, а предположение о том, что в деформированной
зоне (где есть проскальзывание) интенсивность сил трения
отлична от q, не согласуется с законом Кулона.
Рассмотрим подробно первый этап нагружения диска,
когда безразмерный параметр нагрузки постепенно возрастает
Рис. 66. К составлению условий равновесия:
а) всего диска; б) части диска.
от нуля до единицы. При любой, сколь угодно малой
нагрузке яМ вблизи внутреннего контура диска возникает
кольцевая зона проскальзывания диска по основанию. Диск
находится в равновесии под действием нагрузок, изображенных
на рис. 66, а. Внешняя граница области проскальзывания
определяется из условия равновесия
2* Р,
J J qfdpdf?=aM. A0.119)
О а
170 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
где р,— наружный радиус зоны проскальзывания. Из A0.119)
находим:
^=vr-Sl+a3- A0Л20>
Далее, из условия равновесия изображенной на рис. 66, б
части диска найдем касательные напряжения, соответствующие
текущей координате р:
^(Р)=3^-26У-). (Ю.121)
Определив касательные напряжения, можно по закону Гука
записать выражение для сдвига в любой точке диска:
Т(Р) = —-^. A0.122)
Знак минус принят здесь потому, что положительное
направление для напряжений х принято противоположным
обычному. Ввиду того, что радиальные перемещения отсутствуют,
сдвиг выражается только через тангенциальное перемещение v
следующим образом:
1-?-т- A0-'23)
Вследствие осевой симметрии задачи, тангенциальное
перемещение не зависит от координаты <р и является функцией
только координаты р. Таким образом, из A0.122) и A0.123)
получается несложное дифференциальное уравнение для
перемещения V.
Подставляя сюда A0.121) и интегрируя, получим следующее
решение, удовлетворяющее граничному условию ¦у(р1) = 0:
Для точек внутренного контура, где р = а,
.(.)-«№»—)W + ^.-»0, (,0Л26)
§ 1б] СЛУЧАЙ ЧИСТО ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 171
Величина v(a), конечно, зависит от параметра нагрузки а,
так как в правую часть A0.126) входит радиус pv
определяемый по формуле A0.120). Чтобы представить эту
зависимость в явной форме, введем параметры конструкции:
6GA ' г 2ща?
Тогда вместо A0.126) получим:
в (с, а) = ak [(орМ + 3) — 3 f~a$M -+- 1 J. A0.128)
Этим выражением описывается первый этап процесса.
Исследование последующих этапов разгрузки и повторной
нагрузки, в сущности, аналогично соответствующему
исследованию для простейшей системы (см. п. 10.1). Опуская
подробные выкладки, приведем здесь окончательные
результаты (вывод см. в [27]):
v2=ak [арМ — 3 — 3 lh -|-рМ -f-6 j/^l + Ш=А М 1;
A0.129)
v3 = ak [apAf -Ь 3 — 3 f\ -\-$M -f-
+ 6уГ1+ЯЬ:^).Ж_6уЛ1 + Р(а~Г) ^]- (Ю.130)
Петля гистерезиса, которую можно построить по
выражениям A0.128) — A0.130), сходна с петлей гистерезиса для
простейшей одномерной системы (см. рис. 52). Рассеиваемая
за один цикл энергия составляет
1
W = ^f(v2-v3)da. A0.131)
г
Выполняя квадратуру, найдем:
*=-у [(з+рлу (f 1 -+-рл!в- 0-И-]. A0-132)
где
M„ = -^M A0.133)
— амплитуда внешнего момента. Из A0.132) видно, что, как
и в приведенных выше случаях, рассеяние энергии не зависит
i?2 ВНУТРЕННЕЕ TPEHllE В СОЧЛЕНЕНИЯХ (гл- nl
от среднего значения нагрузки; зависимость величины W от
амплитуды момента Mv несколько сложнее, чем. это было
в ранее рассмотренных задачах.
Если деформируемы оба диска и их характеристики
одинаковы, то площадь петли гистерезиса будет вдвое большей.
§ 11. Случаи упруго-фрикционного взаимодействия
11.1. Циклическое растяжение — сжатие простейшей
системы. Для выяснения основных качественных особенностей
деформирования систем с упруго-фрикционным характером
взаимодействия частей рассмотрим простейшую систему,
изображенную на рис. 67, а.
'\
1
d)
в;
N
с/я
си
N+dN
си
Рис. 67. Продольное нагружение упругой
полосы, связанной с жестким основанием
трением и упругими связями: а) схема
нагрузки; б) силы, действующие на элемент;
в) зпюра касательных сил взаимодействия
между полосой и основанием.
Система состоит из упругой полосы, прижатой к жесткому
недеформируемому основанию; она отличается от системы,
исследованной в п. 10.1, наличием связей, упруго
сопротивляющихся проскальзыванию полосы по основанию. Поэтому
между полосой и основанием возникают не только силы
трения, но и касательные усилия взаимодействия, носящие
упругий характер. Число упругих связей предполагается
настолько большим, что становится допустимой замена
дискретных связей их непрерывной системой; при этом упругие
§11] СЛУЧАИ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 173
касательные силы взаимодействия между полосой и
основанием будут считаться распределенными по всей длине полосы.
В данном случае остаются справедливыми указанные
в п. 10.1 особенности распределения сил трения между
полосой и основанием: на участках, где нет проскальзывания,
силы трения равны нулю, а там, где имеется
проскальзывание, эти силы равны своему предельному значению д.
Добавим к этому, что реакции упругих связей возникают также
лишь в тех областях, где имеется проскальзывание полосы
по основанию; таким образом, упругие реакции возникают
только в тех зонах, где имеются силы трения. Интенсивность
реакции упругих связей будем определять зависимостью
S= -CU, (И-1)
где с [кг[см2] — коэффициент жесткости связей, а, — как и
выше, перемещение текущего сечения полосы в направлении
оси дг; это перемещение соответственно трем этапам
процесса будем отмечать индексами 1, 2, 3.
Первый этап. На рис. 66, б изображен элемент полосы,
выделенный в зоне ее деформирования, а также силы,
действующие на этот элемент (N — продольная сила). Уравнение
равновесия
dN
dx—q—ca1 = 0 A1.2)
после замены
N = EF^± A1.3)
приводится к дифференциальному уравнению
<-Pa»i = -^. <П-4>
где
Интеграл уравнения A1.4) имеет вид:
и, = V^-l-B,*-?* —¦?. О1-6)
174 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. Ill
Для определения величин Аг и Blt а также размера
деформирования используем следующие три граничных условия:
игA — а1ш а) = 0;
?¦</-*,. «) = <>: *?(/_«,. «) = -?. A1.7)
Здесь а1— длина области проскальзывания, соответствующая
данному значению а. Предполагается, что сила N не
слишком велика, так что at < / даже при а = 1. Таким образом,
первые два условия относятся к левой границе участка
проскальзывания, где равны нулю перемещение и продольная
сила N, пропорциональная производной -—-; последнее
условие относится к правому концу полосы. При помощи A1.7)
получим:
На рис. 67, в изображено распределение касательных сил
взаимодействия полосы и основания в процессе первого на-
гружения.
Второй этап. На втором этапе вблизи конца появляется
зона обратного проскальзывания; для этой зоны уравнение
запишется в форме:
Решение этого уравнения должно удовлетворять
граничным условиям
и.г{1~~а2, а)=и1A — аг, 1);
<*«2
A1.8)
dx
\l — a„ »)=-SL(/_«!, 1);
?*¦>¦
dx
аР
EF '
(НЛО)
Первые два условия относятся к границе зон прямого и
обратного проскальзывания, где должны совпадать решения
уравнений A1.4) и A1.9) и первые производные этих решений.
I 1 11 СЛУЧАИ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 175
Решение уравнения A1.9) имеет вид, подобный A1.6):
«2 = Д2вМ-|_В2в-Р*_}_1.,
A1.11)
где
А - ?Р
A1.12)
причем длина зоны обратного проскальзывания определяется
формулой
в»=т,п[^-(/"(в-1),+(^),-в+1)]" A1ЛЗ)
Третий этап. Для концевого участка, где возобновляется
«прямое» проскальзывание, уравнение вновь приобретет
прежний вид A1.4), так что интеграл запишется в форме:
e, = V*_f_B8e-P*_i.. (Ц.14)
Для определения длины концевой зоны а3 и величин А3 и В3
служат граничные условия
а3{1 — а3, а)=и2A — а3, г),
du3 ,. ч diio ,, „
¦a±«-<h. a)=^(Z-a3, r),
du3 ,. . оР
Используя A1.15), найдем:
+ )/"(« — гУ+(-^)*+а];
A1.15)
A1.16)
176
ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ
(ГЛ. I»
Пользуясь для йц и2 и «з выражениями A1.6), A1.11) и
A1.14), можно построить петлю гистерезиса для любой
заданной комбинации параметров системы. Общий характер
W
08
06
ОА
0,2
7
2
У
Рис. 68. Влияние жесткости упругих связей на
рассеиваемую энергию.
петли совпадает с изображенным на рис. 52. Площадь петли
определяется но прежней формуле A0.32) и равняется
ч=_ 2д(\-г)Р
l 2^ 1
+/Т.-*+(?)'
1-г + / (,_„.+(?)•
Заменив здесь, как и выше, Р(\—r) = 2Pv, получим:
A1.17)
4? =
2Р3
qEF
2f + T3 In
V i + г8 -i
VI -г Т2 + 1 .
где параметр
Т РЛ,
A1.18)
A1.19)
характеризует роль сил трения по отношению к упругим
касательным усилиям взаимодействия полосы и основания.
При исчезающе малой жесткости связей можно положить,
что р = 0, и выражение в скобках становится
неопределенным. После раскрытия неопределенности выясняется значение
§11] СЛУЧАИ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 177
скобки, равное 1[3; при этом решение A1.18) совпадает
с решением A0.34), полученным выше для случая отсутствия
упругих связей. При исчезающе малых силах трения # = 0,
и все выражение A1.18) обращается в нуль.
На рис. 68 изображена зависимость площади петли
гистерезиса W от безразмерного параметра -р По оси ординат
отложено отношение W к значению \F0, данному в
формуле A0.34) и соответствующему случаю отсутствия упругих
связей. Как видно из графика, уже при f > 2 разница
между W и W0 становится несущественной и рассеяние
энергии можно приближенно оценить, пренебрегая ролью упругих
связей.
Изложенное здесь решение без затруднений может быть
распространено на случай, когда при больших значениях Р
проскальзывание происходит по всей длине полосы.
11.2. Циклическое нагружение заклепочного
соединения. На рис. 48, а была изображена симметричная схема
заклепочного соединения, состоящего из двух листов,
перекрытых двумя накладками; соединение служит для передачи
продольной силы с одного листа на другой. Это часто
встречающаяся в реальных конструкциях система несколько
сложнее простейшей системы, рассмотренной в предыдущем
пункте, так как при нагружении деформируются не только
сами листы, но и обе накладки; однако различие это не
принципиальное, и, не останавливаясь на деталях решения, мы
приведем сразу готовые результаты решения. Для случая,
когда проскальзывание не охватывает всей длины
соединения, Ю. А. Лебедев [26] нашел следующее выражение
энергии, рассеиваемой в соединении за один цикл нагружения:
4Я3
2т2Ч_тз{пХ0-РР+^-A-Р)
+М™1'Ш$)]- A1-20>
Здесь E1F1 — жесткость сечения листа, ЕгРг — жесткость
общего сечения обеих накладок, й = „ „ \ * „ ; остальные
обозначения прежние.
178 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ |гЛ. Ш
При E2F2->оо формула (L1.20) переходит в ранее
полученную формулу A1.18); дополнительный коэффициент 2
объясняется тем, что рассматриваемая система содержит два
листа.
11.3. Циклическое нагружение балки с накладками
(чистый изгиб). Для балки, показанной на рис. 48, б,
последовательный анализ трех этапов нагружения привел
Ю. А. Лебедева к формуле для энергии, рассеиваемой за
один цикл:
2
W--
где
21М9 + \пУг\±0Щ=УЬ.]. A1.21)
^irVllh' <п-22)
h — высота балки, J0 — момент инерции сечения балки без
накладок, У—момент инерции сечения балки с накладками,
F — площадь сечения балки, Mv — амплитуда изгибающего
момента. Следует иметь в виду, что формула A1.21)
относится к случаю, когда проскальзывание происходит только
на части длины накладки.
При с->0 выражение A1.21) становится неопределенным;
после раскрытия неопределенности получится прежняя
формула A0.74), найденная в предположении, что упругие связи
между накладками и балкой отсутствуют.
11.4. Циклическое нагружение резьбового соединения.
Для анализа рассеяния энергии при нагружении резьбового
соединения необходимо предварительно рассмотреть
следующую вспомогательную задачу. Тонкий диск, ограниченный
двумя параллельными плоскостями и двумя коническими
поверхностями (рис. 69, а), нагружен системой нормальных
напряжений ох и ох-\-ках, равномерно распределенных по
основаниям диска.
При дальнейшем анализе деформаций и перемещений будем
исходить из следующих упрощенных представлений; их
удобство и естественность станут ясными ниже, где пойдет
речь о деформации пакета подобных дисков. Положим, что
диск прижат только к нижней конической поверхности неде-
формируемой обоймы; по этой поверхности возникают нор-
§ 11] СЛУЧАИ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 179
мальные реакции р и касательные силы трения fp, которые
считаются равномерно распределенными по всей опорной
поверхности (рис. 69, б). Примем далее, что изгиб диска
IIII II II I II II
йх+Авх
бх
б J к к к к | к к к к к | I |
Рис. 69. К анализу нагрузки резьбового
соединения: а) упрощенная схема одного
витка; б) схема нагружения; в)
напряженное состояние элемента диска.
полностью отсутствует и что плоские до нагружения
основания диска остаются плоскими и после нагружения. Наконец,
предположим, что система опорных реакций вызывает сжатие
диска в радиальном направлении, постоянное по всей его
толщине; разумеется, что на это сжатие окажут известное
влияние и нормальные напряжения, заданные на основаниях
диска. Напряженное состояние элемента диска,
соответствующее принятым допущениям, показано на рис. 69, в.
180 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. Ill
Реакции р определяются из условий равновесия всего
диска:
г Ах tga-j-f v '
Среднее по толщине диска напряжение аг составляет
°r = —1A—/tga). (П.24)
Найдем теперь радиальную деформацию диска,, вызванную
как напряжением af, так и напряжениями а/.
_ а,A— И) _ ?]х __
'— Е Е ~~
— РО— /'gg)(l— I*) Wx /1 1 0кл
Вследствие радиальной деформации происходит изменение
среднего радиуса диска; абсолютное значение этого изменения:
Дг^-е^^^О-/^]—^ + ^. (П.26)
Это уменьшение радиуса диска, в свою очередь, является
причиной смещения диска в направлении оси х:
„=^L = ^L(L=^jOi1^i^ + ^.. (ц.27)
tga 2Etga ' Etga v '
Следует заметить, что смещение диска зависит как от
величины ах (второе слагаемое), так и от величины До,, (первое
слагаемое), определяющей давление;?согласноформулеA1.23).
Рассмотрим теперь процесс разгрузки диска. Начало
этого процесса весьма своеобразно. Как только внешняя
нагрузка на диск начнет уменьшаться, произойдет и
уменьшение сил трения по опорной поверхности. Так как новые
значения сил трения меньше предельного значения fp, то
проскальзывание диска становится невозможным и происходит
жесткое сцепление диска с обоймой. На этом этапе
разгрузки изменение внешних сил не сопровождается никакими
перемещениями диска; этот этап иллюстрирован на рис. 70, а.
Здесь силы трения меньше предельного значения fp и
связаны с реакциями р условием постоянства радиальной
деформации "диска,
§11] СЛУЧАИ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЯ 181
С уменьшением нагрузки силы трения будут также
убывать, сменят знак и, наконец, вновь достигнут своего
предельного значения fp, что будет означать начало обратного
проскальзывания; нагружение диска на этом новом этапе
lLLLiliiiii
Липшиц
Рис. 70. К анализу разгрузки диска: а)
начало разгрузки; проскальзывание
отсутствует; б) продолжение разгрузки.
изображено на рис. 70, б. Этому этапу соответствует
следующая группа выражений, заменяющих соотношения A1.23) —
A1.27) первого этапа нагружения:
11.28)
11.29)
11.30)
11.31)
11.32)
Ьх tga—f '
2
<V = -4-(l+/tga);
е _ iO+/tg«)(i— tO р°х .
г~ 2Е Е '
\r._ prQ+ftg<*)(i — v-) ¦ v-rix ,
2Е ~г- ? '
„ _ Pr(l+ftga)(\— [*) . yr*x
2E\ga ~r Etga'
Приведенные выражения можно получить из
соотношений A1.23) — A1.27) путем простой смены знаков перед коэф->
фициентом трения f.
\Ъ Зак. 1460. Я. Г. Пановко
182 ВНУТРЕННЕЕ ТРЕНИЕ В СОЧЛЕНЕНИЯХ [ГЛ. III
После решения этой вспомогательной задачи мы можем
перейти к решению основного вопроса настоящего пункта
о рассеянии энергии в резьбовом соединении (рис 49). Такое
соединение естественно рассматривать как совокупность
большого числа дисков, находящихся в упругой обойме (гайке);
при этом каждый диск представляет собой упрощенную схему
одного витка нарезки болта. При весьма большом числе
витков естественно перейти к пределу и рассматривать нарезку
состоящей из бесконечно большого числа бесконечно
тоннах басков; этот прием получил широкое распространение
в расчетах резьбовых соединений. Для упрощения наших
выкладок примем, что гайка совершенно жесткая; это
позволит наиболее отчетливо выявить все существенные
особенности решения задачи. Случай, когда учитывается
упругость как болта, так и гайки, рассмотрен в статье [40].
Переходя к пределу, вместо A1.23) получим:
p=*%L<T% (Ц.ЗЗ)
и выражение A1.27) примет вид:
_i*Q-ftg*)Q-v)°x , уг*х
U— 2Etga(tga+f) ~T?tga- ("•<*)
Соответственно производная и по х равна
._ r«(l-/tga)(l-rta; K°;
U ~ 2fitga(tg«+/) ritgV (-U-^
С другой стороны, должно быть
„' — е - 2jL 2Раг — °Х | ^A—/tgg) _
U —г*— Е Е — Е "+" Е ~~
—Ч-\- \,t 1L • о1-36)
Приравнивая A1.35) и A1.36), получим основное уравнение
задачи для первого этапа нагружения:
°"х+аа'х—Ьах=0. A1.37)
Здесь обозначено:
a = _WO+t?> (П.38)
r(l—/tga)(l—[I.)' v ;
*= 2«?^Ц+Л_^. (Ц.39)
Г2A — /tga)(l — fi) 7
§ 11J СЛУЧАЙ УПРУГО-ФРИКЦИОННОГО ВЗАИМОДЕЙСТВИЙ 183
Интеграл этого уравнения, подчиненный граничным условиям:
:0
при д:=:0,
имеет вид:
сх=^р* ПРИ * = /.
е 2 sh -|- Yа* + U
кг*
al
A1.40)
е 2 sh-i- Уа? + 4Ь
Подставляя A1.40) в выражение A1.34) и затем полагая лг = /,
найдем перемещение концевого сечения в зависимости от
действующей силы:
TzEtgOL
A —/tga)(l —р.) / У> + 4ft
4(tga + /)
I
ih j fa*
4b
-»+t
A1.41)
Выражение A1.41) описывает процесс нагружения
соединения: этот процесс иллюстрирован прямой / на рис. 71.
В начале процесса разгрузки
перемещение и остается
неизменным до тех пор, пока силы
трения не сменят знак и не
дойдут до предельного
значения — fp (см. отрезок II на
рис. 71). Далее процесс будет
описываться новыми уравнениями,
которые можно получить
прежним путем, переходя к пределу
в выражениях A1.28) — A1.32).
При этом получится прежнее
Рис. 71. Петля гистерезиса.
уравнение A1.37), но с другими значениями коэффициентов:
2j*/(l+tg»a) . AL42)
A1.43)
b.
>(l+/tg«)(l-f*)'
2tga(tga-/)
r*(l+/tga)(l-n)
Эти выражения можно получить непосредственно из
соотношений A1.38) — A1.39) сменой знака перед коэффициентом
13*
184 BHytPEHHEE ТРЕНИЕ В СОЧЛЕНЕНИЯХ (гЛ. III
трения /. Продолжая таким образом далее, мы придем к
новому выражению для и, которое отличается от
выражения A1.41) только знаком перед /. Луч III на рис. 71
иллюстрирует последний этап процесса нагрузки. Треугольная
петля гистерезиса, образованная отрезками /, // и ///,
относится к пульсирующему циклу. Площадь этой петли равняется
2nErtgal ' /x(/)JL 1 +«(/) J v '
где
m(f, /(l + tg2"),/*, | 2tga(l-rt(tga+/)(l-/tg«).
m U> — 2 (tga +/) V ~ ^p A + tgb)»
„ff\ — ih ^^/2(l+tg^+2tga(l-fx)(tga+/)(l-/tgq)
Пунктирный луч на рис. 71 соответствует случаю отсутствия
гистерезиса (/ = 0).
Рассмотрение цикла с любой иной характеристикой
асимметрии не вызовет никаках принципиальных трудностей.
ЛИТЕРАТУРА
1. Бабаев Н. Н., Поперечные колебания стержня переменного
сечения со свободными концами с учетом сил
внутреннего трения, Инженерный сб., т. 18, изд. АН СССР, 1954.
2. Бабаев Н. Н., О поперечных колебаниях стержня
переменного сечения с учетом деформации сдвига и сил
внутреннего неупругого сопротивления, Инженерный сб., т. 22, изд.
АН СССР, 1955.
3. Бабаев Н. Н, О внутренних сопротивлениях, возникающих
при колебаниях корпуса корабля, Доклад на межинститутском
семинаре по вопросам изучения колебаний упругих систем
с учетом демпфирования, Киев, 1956.
4. Бидерман В. Л, Расчет листовых рессор (в кн. «Расчеты на
прочность в машиностроение), т. I, под общей редакцией
С. Д. Пономарева, Машгиз, 1957).
5. Бисплингофф Р. Л., Эшли X., Халфмэн Р. Л.,
Аэроупругость, ИЛ, Москва, 1958.
6. Боголюбов Н. Н. и Митропольский Ю. А,
Асимптотические методы в теории нелинейных колебаний, Физматгиз,
1958.
7. Гонткевич В. С. и Бутковский В. В., Определение
потерь энергии на внутреннее трение в материале при изгиб-
ных колебаниях, Сб. трудов Лаборатории проблем
быстроходных машин и механизмов АН УССР, вып. 5, 1955.
8. Г о л о в н и н Г. Я., О затухании колебаний, Доклады АН
УССР, № 1, 1949.
9. Д а в и д е н к о в Н. Н., О рассеянии энергии при вибрациях,
Журнал технической физики, т. 8, вып. 6, 1938.
10. Диментберг Ф. М., Поперечные колебания вращающегося
вала при наличии сопротивления трения, Сб. «Поперечные
колебания и критические скорости», № 1, изд. АН СССР,
1951.
11. Диментберг Ф. М., Об устойчивости гибкого вала при
наличии гистерезиса материала, Инженерный сб., т. 16, изд.
АН СССР, 1953.
12. Диментберг Ф. М., Об устойчивости гибкого вала с
неуравновешенным диском при действии внутреннего и
внешнего трений, Изв. АН СССР, Отд. техн. наук, № 10, 1954.
13. Журавлев В. А., Измерение затухания методом вибраций,
Заводская лаборатория, № 2, 1948.
14. ЗайдельманР. Л, Влияние бандажных связей пакетов
лопаток на их демпфирующие свойства, Труды][научно-техниче-
186
ЛИТЕРАТУРА
ского совещания по изучению рассеяния энергии при
колебаниях упругих тел, изд. АН УССР, Киев, 1958.
15. Зин ер К., Упругость и неупругость металлов, ИЛ, 1954.
16. Калинин Н. Г., Лебедев Ю. А., Конструкционное
демпфирование в тонкостенной балке. Изв. АН ЛатвССР, 1959.
17. Карапет ян Б. К., Изв. АН АрмССР, т. 7, № 2, 1954.
18. К а р п а ч е в Н. Ф., Исследование листового торсиона,
Расчеты на прочность элементов конструкций, Труды
Челябинского политехнического института, вып. И, Машгиз, 1957.
19. К а ц А. М., Теория упругости, Гостехиздат, 1956.
20. Коваленко А. Д., Исследование демпфирования при
вибрации пакетов лопаток паровых турбин, Сб. докладов по
динамической прочности деталей машин, Институт
машиноведения АН СССР, изд. АН СССР, 1946.
21. К о л ь с к и й Г., Волны напряжений в твердых телах,И Л, 1955.
22. К о р ч и н с к и й И. Л., О внутреннем сопротивлении
строительных материалов. Вестник инженеров и техников, № 2,1938.
23. К о р ч и н с к и й И. Л., Динамические характеристики
древесины, бетона и железобетона, Сб. «Динамические свойства
строительных материалов), Госстройиздат, 1940.
24. Крылов Н. М. и Боголюбов Н. Н, Новые методы
нелинейной механики, ОНТИ, М.. — Л., 1934.
25. К у ш у л ь М. Я., Поперечные колебания вращающихся валов
при наличии внутреннего и внешнего трений, Изв. АН СССР,
Отд. техн. наук, № ю, 1954.
26. Л е б е д е в Ю. А. Конструкционное демпфирование в
заклепочных соединениях, Изв. АН ЛатвССР, 1959.
27. Л е б е д е в а В. И., Конструкционное демпфирование во
фрикционных муфтах при циклическом нагружении, Изв. АН
ЛатвССР, 1959.
28. Леонов М. Я. и Бе зла ль ко Л. А., К исследованию
устойчивости вала, вращающегося со сверхкритической
скоростью, Вопросы машиноведения и прочности в
машиноведении, т. 4, вып. 3, изд. АН УССР, 1955.
29. Лойцянский Л. Г. и Лурье А. И., Теоретическая
механика, т. 2, 1957.
30. Меляховецкий А. С, Об одной гипотезе внутреннего
сопротивления при колебаниях упругих систем, Инженерный
сб., т. 26, 1958.
31. Назаров А. Г., Об учете явлений гистерезиса при упругих
колебаниях. Изв. АН АрмССР, т. 6, № 4, 1958.
32. Н а з а р о в А. Г., Метод учета рассеяния энергии при упругих
колебаниях, Доклады АН АрмССР т. 16, № 5, 1953.
33. Назаров А. Г. Метод инженерного анализа сейсмических
сил, изд. АН АрмССР, изд. 2, 1959.
34. Николаи Е. Л., К теории гибкого вала, Труды
Ленинградского, политехнического института, № 6, раздел физ.-матем.
наук, вып. 3, 1937.
35. Панов Д. Ю., О крутильных колебаниях стержня при
наличии упругого гистерезиса, Прикл, матем. и мех., т. 4, № 1,
1940.
ЛИТЕРАТУРА
187
36. П а н о в к о Я. Г., Об учете гистерезисных потерь в задачах
прикладной теории упругих колебаний, Журнал технической
физики, т. 23, вып. 3, 1953.
37. Панов ко Я. Г., Учет внешних и внутренних сил неупругого
сопротивления в задачах прикладной теории упругих
колебаний, Сб. «Вопросы динамики и динамической прочности»,
изд. АН ЛатвССР, вып. I, 1953.
38. П а н о в к о Я. Г., О законах затухания колебаний в упругих
системах с гистерезисом, Сб. «Вопросы динамики и
динамической прочности», изд. АН ЛатвССР, вып. 2, 1954.
39. Па нов к о Я. Г., Гольце в Д. И., Страхов Г. И.,
Элементарные задачи конструктивного гистерезиса, Сб. «Вопросы
динамики и динамической прочности*, вып. V, изд. АН
ЛатвССР, 1959.
40. П а н о в к о Я. Г., С т р а х о в Г. И , Конструкционное
демпфирование в резьбовых соединениях, Изв. АН ЛатвССР, 1959.
41. Пановко Я. Г., Состояние и перспективы проблемы учета
гистерезиса в прикладной теории колебаний, Труды научно-
технического совещания по изучению рассеяния энергии при
колебаниях упругих тел, изд. АН УССР, Киев, 1958.
42. П и с а р е н к о Г. С, Поперечные колебания турбинной
лопатки переменного сечения при отсутствии бандажных
связей, Прикладна мехашка, № 1, Киев, 1955.
43. П и с а р е н к о Г. С, Колебания упругих систем с учетом
рассеяния энергии в материале, изд. АН УССР, Киев, 1955.
44. П и с а р е н к о Г. С, Свободные колебания груза на балке
с учетом гистерезисных потерь, Изв. Киевского
политехнического института, т. 18, 1955.
45. П и с а р е н к о Г. С, Рассеяние энергии в материале при
колебаниях упругих тел, Прикладна механ1ка, т. 2, вып. 3, 1956.
46. П и с а р е н к о Г. С, Затухающие колебания под действием
сил, нелинейно зависящих от амплитуды, Изв. Киевского
политехнического института, т. 17, 1956.
47. П и с а р е н ко Г. С. Свободные крутильные колебания
системы с гистерезисом, Изв. Киевского политехнического
института, т. 24, 1957.
48. П и с а р е н к о Г. С, Применение метода малого параметра
к исследованию колебаний упругих систем с гистерезисом,
Труды научно-технического совещания по изучению рассеяния
энергии при колебаниях упругих тел, изд. АН УССР, Киев,
1958.
49. П о з н я к Э. Л., Влияние сил сопротивления на устойчивость
вращающихся валов. Сб. «Проблемы прочности в
машиностроении», вып. 1, изд АН СССР, 1958.
50. Пономарев С. Д., Расчет витых пружин (в кн. «Расчеты
на прочность в машиностроении», т. I, Машгиз, 1957).
51. Решетов Д. Н., Л е в и н а 3. М., Демпфирование
колебаний в деталях станков, Сб. «Исследование колебаний
металлорежущих станков при резании металлов», Машгиз, 1958.
52. С о и ф е р А. М., Изыскание методов конструктивного
188
ЛИТЕРАТУРА
демпфирования вибраций деталей газотурбинных двигателей,
Труды научно-технического совещания по изучению рассеяния
энергии при колебаниях упругих тел, изд. АН УССР, Киев, 1958.
53. Сойфер А. М. и Ф и л ек и н В. П., Конструктивное
демпфирование колебаний тонкостенных оболочек типа
корпусных деталей ГТД, Изв. высших учебных заведений
Министерства высшего образования СССР, Авиационная техника,
№ 1, 1958.
54. С о л о м е н ц е в Н. И., Рассеяние энергии в круглых,
сплошных и тонкостенных стержнях открытого профиля при
крутильных колебаниях, Изв. Киевского политехнического
института, 1957.
55. Сорокин Е. С, Метод учета неупругого сопротивления
материала при расчете конструкций на колебания, Сб.
«Исследования по динамике сооружений*, Госстройиздат, 1951.
56. С о р о к и н Е. С, Замкнутое решение задачи о вынужденных
колебаниях стержней с гистерезисом, Сб «Исследования по
теории сооружений», вып. 4, Госстройиздат, 1949.
57. Сорокин Е. С, К вопросу неупругого сопротивления
строительных материалов при колебаниях, Научное сообщение
ЦНИИПС № 15, Госстройиздат, 1954.
58. С о р о к и н Е. С, Коэффициент диссипации энергии колебаний
жестких тел при действии внутренних и внешних
сопротивлений, Труды научно-технического совещания по изучению
рассеяния энергии при колебаниях упругих тел, изд. АН УССР,
Киев, 1958.
59. С о р о к и н Е. С, Динамический расчет несущих конструкций,
Госстройиздат, 1858.
60. Страхов Г. И., Конструкционный гистерезис в прессовом
соединении при растяжении — сжатии, Изв. АН ЛатвССР,
№ 5, 1958.
61. Страхов Г. И., Характеристики демпфирования в двухлисто-
вой рессоре, Изв. АН ЛатвССР, № 10, 1958.
62. Страхов Г. И., Конструкционный гистерезис в
амортизаторах резинометаллического типа, Сб. «Вопросы динамики и
динамической прочности», вып. VI, изд.АН ЛатвССР, 1959.
63. С т р а х о в Г. И., Простейшие задачи конструкционного
демпфирования, Диссертация на соискание ученой степени
кандидата техн. наук, Институт машиноведения АН ЛатвССР,
1959.
64. Тимошенко СП., Колебания в инженерном деле, Физмат-
гиз, 1959.
65. У л п е Я. Я., Гистерезисные потери в деревне при
асимметричном цикле, Сб. «Вопросы динамики и динамической прочности»
вып. 2, изд. АН ЛатвССР, 1954.
66. Ф е о д о с ь е в В. И., Избранные задачи по сопротивлению
материалов, Гостехиздат, 1958.
67. Филиппов А. П., Вынужденные поперечные колебания
стержней при учете затухания, Изв. АН СССР, № 4, 1935.
68. Филиппов А. П., Колебания конструкций с учетом
затухания, Украинской комплексный научно-исследовательский
ЛИТЕРАТУРА
№
институт сооружений, Сб. «Исследования вибраций
конструкций), Гостехиздат Украины, 1935.
69. Филиппов А. П., Колебания упругих систем, изд. АН
УССР, Киев, 1955.
70. Филиппов А. П., Вынужденные поперечные колебания
турбинных лопаток при учете затухания, Сб. трудов
Лаборатории проблем быстроходных машин и механизмов АН УССР*
вып. 4, 1955.
71. Филиппов А. П., Обзор достижений в теории колебаний
стержней, Прикладна механ!ка, т. 2, 1956.
72. X и л ь ч е в с к и й В. В., Расчет колебаний турбинных лопаток
переменного поперечного сечения при наличии бандажных
связей с учетом гистерезисных потерь, Изв. Киевского
политехнического института, т. 18, 1955.
73. X и л ь ч е в с к и й В. В., Об одной методике
экспериментального исследования рассеяния энергии в материале, Труды
научно-технического совещания по изучению рассеяния
энергии при колебаниях упругих тел, изд. АН УССР, Киев, 1958.
74. X и л ь ч е в с к и й В. В., Зависимость между рассеянием
энергии в материале при плоском и линейном напряженном
состоянии, Доклад на межинститутском семинаре по вопросам
изучения колебаний упругих систем с учетом демпфирования,
Киев, 1958.
75. Ч а е в с к и й М. И., Исследование устойчивости вращения
гибких валов за критической скоростью, Изв. АН СССР, Отд.
техн. наук, № 9, 1955.
76. Ч аевс кий М. И., О существующем методе учета сил
внешнего сопротивления при исследовании устойчивости гибкого
вала с диском, имеющим эксцентриситет, Изв. АН СССР,
Отд. техн. наук, № 11, 1955.
77. Ч а е в с к и й М. И., Об оценке устойчивости движения
гибкого вала с диском. Вопросы машиноведения и
прочности в машиностроении, вып. 4, изд. АН УССР, Киев,
1956.
78. Ч а е в с к и й М. И., Совместное влияние эксцентриситета и
сил внутреннего трения на устойчивость движения гибкого
вала, Вопросы машиноведения и прочности, вып. 5. изд.
АН УССР, Киев, 1956.
79. Ч а е в с к и й М. И., Влияние сил внутреннего трения на
устойчивость движения быстровращающихся валов, Труды
научно-технического совещания по изучению рассеяния
энергии при колебаниях упругих тел, изд. АН УССР, Киев,
1958.
80. Ч у в и к о в с к и й В. С, Исследование резонансных колебаний
конструкций корпуса корабля, Труды научно-технического
совещания по изучению рассеяния энергии при колебаниях
упругих тел, изд. АН УССР, Киев, 1958.
81. Чудновский В. Г., Методы расчета колебаний и
устойчивости стержневых систем, изд. АН УССР, 1952.
82. Шапиро Г. А., Работа заклепочных соединений стальных
конструкций, Стройвоенмориздат, 1949.
190
Литература
83. Воск О., Schwingungsdampfung fung unter Ausniitzung der Werk-
stoffdampfung, Zeitschrift fur angewandte Mathematik und Mecha-
nik, B. 12, H. 5, 1932.
84. Cochardt Л. W., A Method for Determining the Internal
Damping of Machine Members, Journ. of Appl. Mech., vol 21,
№ 3, 1954.
85. Di Tar ant о R. A., A Blade-Vibration-Damping Device, Its
Testing and a Preliminary Theory of Its Operation, Journ. of
Appl. Mech. № 1, 1958.
86. QI о v a n о z z i R., Teoria ed esperienze sullo smorzamento interno
del materiall, L'Aerotechnica, №№ 17—19, 1938.
87. О о о d m a n L. E., К I u m p p J. H., Analysis of Slip Damping,
Journ. of Appl. Mech., № з, 1956.
88. Kimball A. L., Internal Friction Theory of Shaft Whipping,
Gen. Elect. Rev., vol. 27, № 4, 1924.
89. Kimball A. L., Internal Friction as a Couse of Shaft
Whirling, Phil. Mag. F), vol. 49, 1925.
90. Lees, The Whirling of an Overhung Eccentrically Loaded
Shaft, Phil. Mag., vol. 45, 1923.
91. Newklrk B. L., Shaft Whipping, Gen. Elect. Rev., vol. 27,
1924.
92. P i a n T. H. H., H a 11 о w e 11 F. C, Structural Damping in
a Simple Built-up Beam, Proceedings of the First U. S. National
Congress of Applied Mechanics, ASME, p. 97—102, 1952.
93. Plan Т. Н. H., Structural Damping of a Simple Built-up Beam
with Riveted Joints in Bending, Journ. of Appl. Mech., № 1,
1957.
94. Robertson D., Hysteresis Influences on the Whirling of rotors,
Proc. of the Instit. of Mech. Eng., vol. 131, p. 513, 1935.
95. R о b e r t s о n J. M., Y о r g i a d 1 s A. J., Internal Friction i n
Engineerings Materials, Journ. of Appl. Mech., vol. 13, № 9,
1946.
96. Schlippe В., Die innere Dampfung, Ing. Archiv, B. 6, № 2,
1935.
97. Wagner K. W., Einfflhrung in die Lehre, von den Schwingungen
und Wellen, 2. Aufl. Dlertrich'sche Verlag, 1947.
98. Voigt W., Ann. d. Phys., vol. 47, S. 671, 1892.
99. Y a m a d a Y о s h i к a z u. On the Vibrational Damping of
Structural Steel Beams, Mem. Fac, Engng. Kyoto Univ., № 1, 1957.
100. Y u, A.-t., Vibration Damping of Stranged Cable, Proce edings
Soc. Exp. Stress. Anal., 9.
101. Colonnetti O., Nuovi punti dl vista sul problema dell equi-
librio elast.-plast. nel tempo, At. ac. naz. Lincel, 25, № 3—4,
26, № 2, 1959.
102. M у к 1 e s t a d N. O., Fundamentals of Vibration Analysis, N. Y.,
Mc. Or Hill, 1956.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Амплитуда вынужденных
колебаний 75
— деформации 81, 83
— колебаний 23, 107
— напряжения 83
— резонансная 57, 111
Балка с накладками (изгиб) 135
(изгиб чистый) 153, 178
— с распределенной массой 127
— составная (изгиб) 148
— тонкостенная 136
Бокка гипотеза 78
— способ 76
Вал (изгиб) 64
— гибкий (устойчивость
вращения) 67
Ван-дер-Поля способ 94
Виброграмма 128
Видлера правило 57, 61, 115
Гармоника резонирующая 31
Гипотеза Бокка 78
— Давиденкова 94
— Сорокина 165
Гистерезис 12
— конструкционный 130
Гука закон 17
обобщенный 11
Гурвица условие 71
Давиденкова гипотеза 94
— способ 84
— форма петли гистерезиса 86
Давиденкова — Сорокина форма
петли гистерезиса 86
Движение затухающее
апериодическое 46
Декремент колебаний
логарифмический 20
Демпфирование 10
— конструкционное 17, 130
Деформация комплексная 89
Джиованоцци способ 80
Диск (колебания) 67
— тонкий 178
Закон Гука 17
обобщенный (Фохта) 11
— сухого трения 17, 131
— убывания амплитуды 98
— Фохта 41
Затухание колебаний 12
Зона проскальзывания 140
— смещений обратных 142
прямых 143
Импульсы двухсторонние
периодические 37
Канат проволочный 135
Колебание монохроматическое
29
Колебания вынужденные 22, 23,
105
изгибные 61, 81
крутильные 59
нерезонансные 115
продольные 53
— затухающие 46
— свободные 18
затухающие 23, 47
изгибные 49
крутильные 47
незатухающие 47
продольные 41
— стационарные незатухающие
23
192
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Консоль с диском 124
— с накладками 131
— с распределенной массой 120,
124
— с сосредоточенной массой 127
— составная 132
Конструкции клепаные 137
Корчинского форма петли
гистерезиса 86
Коэффициент вязкости 11
приведенный 11
условный 76
эквивалентный 74
— динамический 24
— жесткости 92
приведенный 11, 119
— поглощения 15, 20, 22, 58,
75
приведенный 119
Кривая динамического
коэффициента 109
— резонансная 24, 109
— «скелетная> 112
Кручение циклическое 148
Крылова функции 51
Модель идеально-упругая 9
— Максвелла 13
— Пойнтинга 13
— Фохта (упруго-вязкого тела)
11, 78
Момент изгибающий 49
— инерции полярный 48, 123
— крутящий 48
Муфта дисковая 168
— фрикционная 136
Нагружение циклическое 139,
146 и д.
Напряжение касательное 47
— комплексное 89
— нормальное 49
— полное 76
Огибающая колебаний 92, 100
— экспоненциальная 76
Ортогональность
фундаментальных функций 45
Ось деформаций нейтральная
64
— напряжений нейтральная 64
Пакет дисков 135
Панова форма петли
гистерезиса 86
Период колебаний 27
Петля гистерезиса 12, 64, 86
Давиденкова 86
Давиденкова — Сорокина
86
Корчинского 86
Панова 86
Сорокина 86
Писаренко способ 93, 113
Площадь петли гистерезиса 14
Пойнтинга модель 13
Ползучесть 12
Полоса упругая 139, 172
Потери гистерезисные 114
Правило Видлера 57, 61, 115
Принцип наложения 28
Прогиб 125
Прокладка упругая круглая 164
ленточного типа 158
прямоугольная 157
Работа необратимая 144
Резонанс 24, 29, 31, 57
Релаксация 12
Рессора 135
Робертсона способ 84
Сдвиг фазы 23
— элемента 47
Сила возмущающая
гармоническая 22
, заданная законом
прямоугольного синуса 35
периодическая 32
полигармоническая 27
— трения 136
— упругого сопротивления
сдвигу 137
Система приведенная 15
упруго-вязкая 11
Системы упруго-фрикционные
137, 138
— фрикционные 136, 138
Соединение «вал-втулка> 133
— «вал-трубка» 133
— заклепочное 177
— неподвижное 130
— подвижное 130
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
193
Соединение прессовое 147
— резьбовое 138, 178, 182
Сопротивление внешнее 9
— внутреннее 9
— неупругое .76
— упругое 76
Сорокина гипотеза 165
— способ 84
— форма петли гистерезиса 86
Спираль гистерезисная 20
Способ Бокка 76
— Ван-дер-Поля 94
— Давиденкова 84
— Джиованоцци 80
— медленно меняющихся
амплитуд 90
— Писаренко 93, 113
— Робертсона 84
— Сорокина 84
— Филиппова 80
Стержень с распределенной
массой 42
Схема упруго-вязкая условная
16, 73
Сцепление жесткое 150
Торсион листовой 135
Трение внешнее 71
— внутреннее 16, 17, 63
Трение в сочленениях 16, 17
— сухое 131
Условие Гурвица 71
— отсутствия вековых членов 99
Филиппова способ 80
Фохта закон 11, 41
— модель 11, 78
Функции Крылова 51
Функция фундаментальная 44, 51
Характеристики демпфирования
115, 128
приведенные 122, 125
Цикл пульсирующий 184
Частота возмущающей силы 57
— резонансная 112
—¦ собственная 56, 59
Числа собственные 51
Экспонента 77
Энергия потенциальная 14, 21
рассеиваемая 14, 21, 58
удельная 115
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
«ФИЗМАТГИЗ»
Москва, В-71, Ленинский проспект, 15
ГОТОВЯТСЯ К ИЗДАНИЮ
Амбарцумян С. А, Статика анизотропных слоистых
оболочек.
А р у т ю н я н Н. X., Абрамян Б. Л., Кручение упругих тел.
Болотин В. В., Неконсервативные задачи теории
упругости.
Лурье А. И., Аналитическая механика.
Р а х м а т у л и н X. А., Демьянов Ю. А., Прочность при
интенсивных кратковременных нагрузках.
С е н - В е н а н, Мемуар о кручении призм. Мемуар об изгибе
призм.
Предварительные заказы на эти книги принимают мага-
зимы Книготорга. Оформив заказ на почтовой открытке лично
в магазине, Вы получите извещение о поступлении книги
в магазин. В случае отказа в приеме предварительного заказа
просим сообщить Всесоюзному объединению книжной торговли
по адресу г. Москва, Ленинский проспект, 15.
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
«ФИЗМАТГИЗ»
Москва, В-71, Ленинский проспект, 15
ИМЕЮТСЯ В ПРОДАЖЕ
Б а т ь М. И. и др., Сборник задач по теоретической механике.
Допущено Управлением средних специальных учебных
заведений МВО СССР в качестве учебного пособия для
техникумов, Гостехиздат, 1958, 320 стр., 5 р. 80 к.
Качанов Л. М., Основы теории пластичности. Допущено
Министерством высшего образования СССР в качестве
учебного пособия для государственных университетов,
Гостехиздат, 1956, 324 стр., 6 р. 90 к.
К и р п и ч е в В. Л., Беседы о механике, Гостехиздат, 1951,
360 стр. 6 р. 90 к.
Локк А. С, Управление снарядами (Основы проектирования
управляющих снарядов). Перевод с английского, Физмат-
гиз, 1958, 776 стр. 27 р.
Н е й б е р Г., Концентрация напряжений. Перевод с
немецкого, Гостехиздат, 1947, 204 стр., 7 р. 80 к.
О к у н е в Б. Н., Свободное движение гироскопа, Гостехиздат,
1951,380 стр., 11 р. 20 к.
П р а г е р В., Проблемы теории пластичности. Перев. с
немецкого, Физматгиз, 1958, 136 стр., 6 р. 30 к.
Семенов М. В., Плоские четырехзвенные шарнирные
механизмы, Физматгиз, 1959, 131 стр., 2 р.
Филоненко-Бородич М. М. и др., Курс сопротивления
материалов, часть вторая, изд. 4-е, перераб. Допущено
Министерством высшего образования СССР в качестве
учебника для высших учебных заведений, 1956, стр, 539,
11 р. 20 к.
Книги продаются в книжных магазинах и высылаются
также почтой наложенным платежом без задатка всеми
республиканскими, краевыми и областными отделениями «Книга —
почтой».
Пановко Яков Гилелеви*
ВНУТРЕННЕЕ ТРЕНИЕ
ПРИ КОЛЕБАНИЯХ
УПРУГИХ СИСТЕМ
Редактор И. К. Снитко
Техи. редактор Е. А, Ермакова
Корректор Г. Г. Желтова
*
Сдано в набор 10/V 1960 г. Подписано
к печати 30/IX 1960 г. Бумага 84х108'Ди-
Физ. печ. л. 6,125. Условн. печ. л. 10,05.
Уч.-изд. л. 9,40. Тираж 6000 экз. Т 08945.
Цена книги 6 р. 20 к. С 1/1 1961 г. цена 62 к.
Заказ J* 1460.
*
Государственное издательство
физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
*
Типография I* 2 им. Евг. Соколовой
УПП Ленсовиархоза.
Ленинград, Измайловский пр., 29.