/

































































































































Текст
АЭРОДИНАМИКА
САМОЛЕТА
4
ОБОРОНГиЗ
ВОЕННАЯ ВОЗДУШНАЯ ОРДЕНА ЛЕНИНА АКАДЕМИЯ им. Н. Е. ЖУКОВСКОГО
В: С. пышнов
АЭРОДИНАМИКА САМОЛЕТА
ЧАСТЬ ЧЕТВЕРТАЯ
Главным управлением учеб-
ных заведений НКОП утвер-
ждено в качестве учебника
для втузов НКОП
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
МОСКВА ]938 ЛЕНИНГРАД
Рецензенты проф. Н. С. Аржаников и проф. А. Н. Журавченко
Книга представляет собой четвертую часть учебника по
курсу „Аэродинамика самолета" (ч. I, II и III вышли в
1935-1937 гг.).
В соответствии с программой всего курса в ней рассмот-
рены равновесие самолета, устойчивость поперечная и
пути, устойчивость при движении по земле, действие рулей,
потеря скорости и штопор.
Книга является учебником для Военно-воздушной ака-
демии РККА и гражданских авиационных втузов, а так-
же пособием для конструкторов и инженеров-эксплоата-
ционников.
Киевская типография Оборонгиза, Крещатик, 42.^,
ОГЛАВЛЕНИЕ
Предисловие ......................... . .........•................... 5
О б о з н а ч е я и я, измененные в IV части курса по сравнению с принятыми
в I, И и П! частях...................................• . , . . • 7
Моменты вокруг осей х и у
Оси координат.................................................. 8
Моменты от скольжения ......................................... 9
Моменты Мх и Мд от вертикального оперения................. . 13
Момент от фюзеляжа .......................................... 15
Моменты от винта, моторных кабин и поплавков.............. . 16
Момент от руля поворотов......................................... —
Момент от элеронов . .......................................... 17
Равновесие моментов вокруг осей х и у в прямолинейном полете
Планирование со скольжением ....... .............. . ...... 25
Уравновешивание реакции вращения винта....................... 26
Полет с остановленным боковым мотором.......................... 33
Устойчивость поперечная и путевая ............................. 36
Флюгерная устойчивость самолета................................ 37
Изолированная поперечная устойчивость.......................... 39
Боковая устойчивость .......................................... 41
Расчет поперечной устойчивости...........«... ............ 43
Устойчивость при движении по земле
Продольная устойчивость . . •................................. 46
Путевая устойчивость..................................... . 48
Действие рулей
Действие руля высоты ...................................... 57
Действие элеронов......................... • •.............. 64
Работа элеронов при вираже и спирали.......................... 66
Действие руля поворотов...........•........................... 69
Потеря скорости
Поперечная устойчивость и управляемость при полете вблизи
с /. . . . . .................................. 83
у макс * • ..........................
ОГЛАВЛЕНИЕ
Штопор самолета
Общие сведения..............•........................• . . . 91
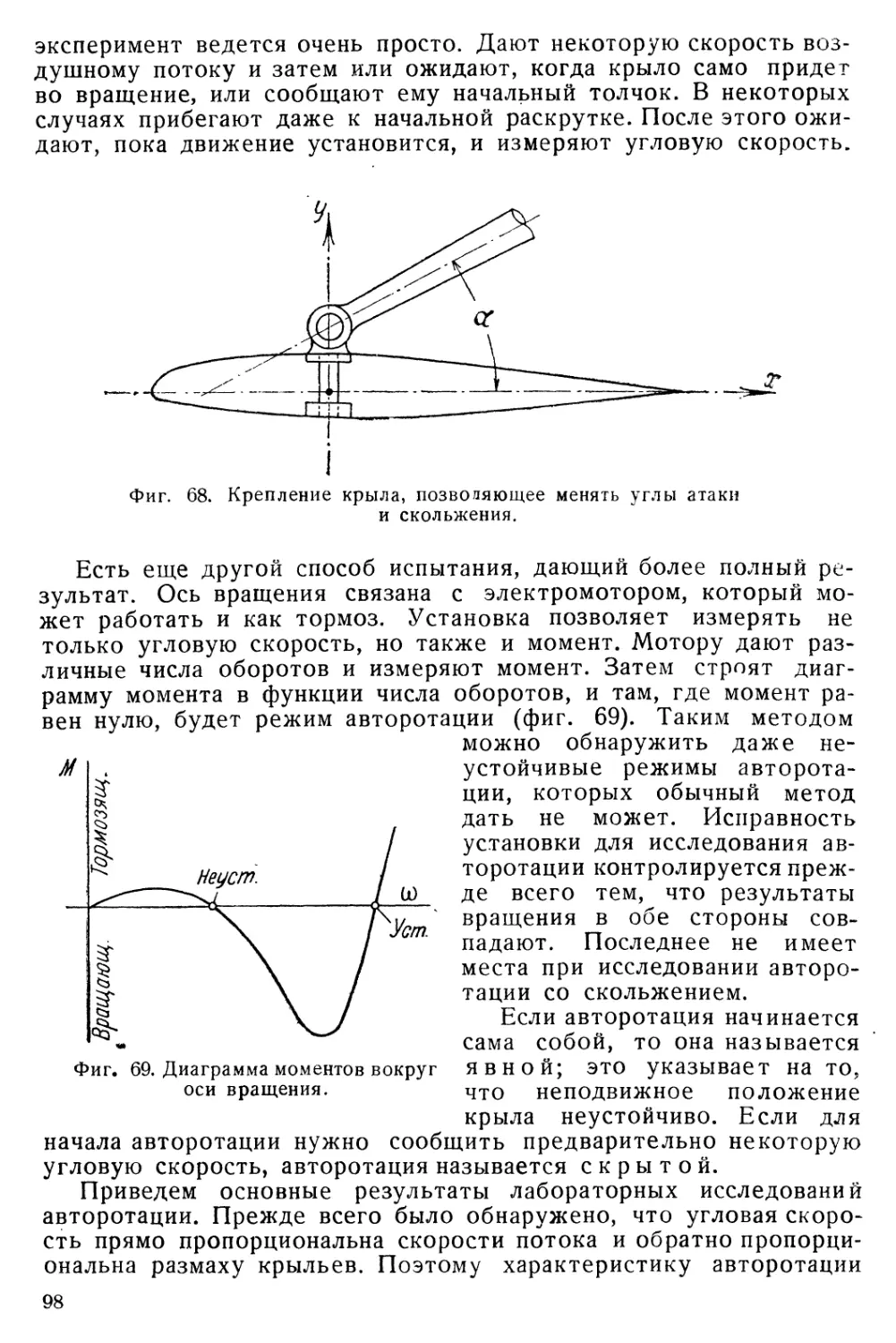
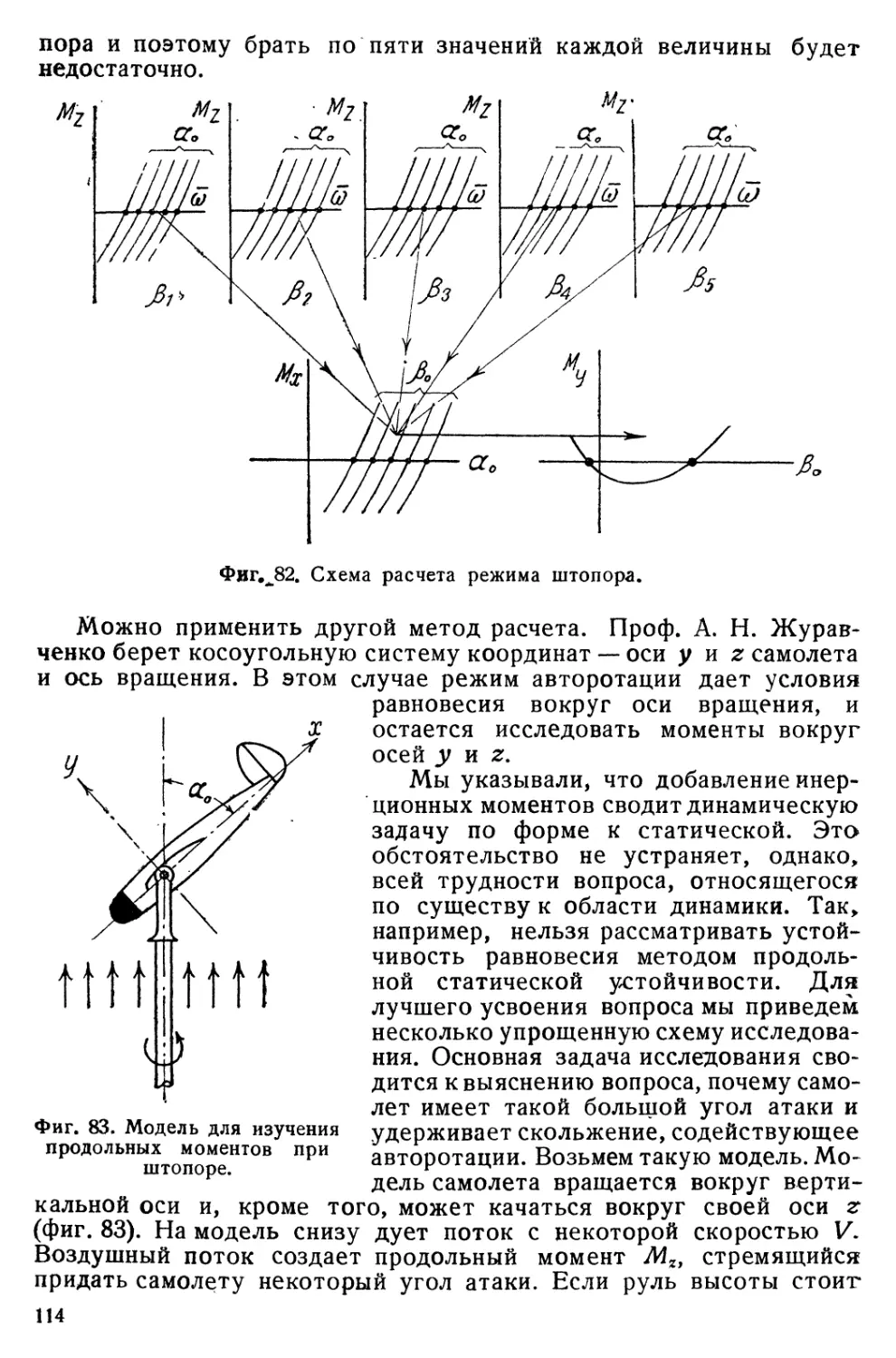
Авторотация................................................... 96
Движение центра тяжести самолета при штопоре................. 104
Углы атаки и скольжения в различных частях крыла и у оперения . 108
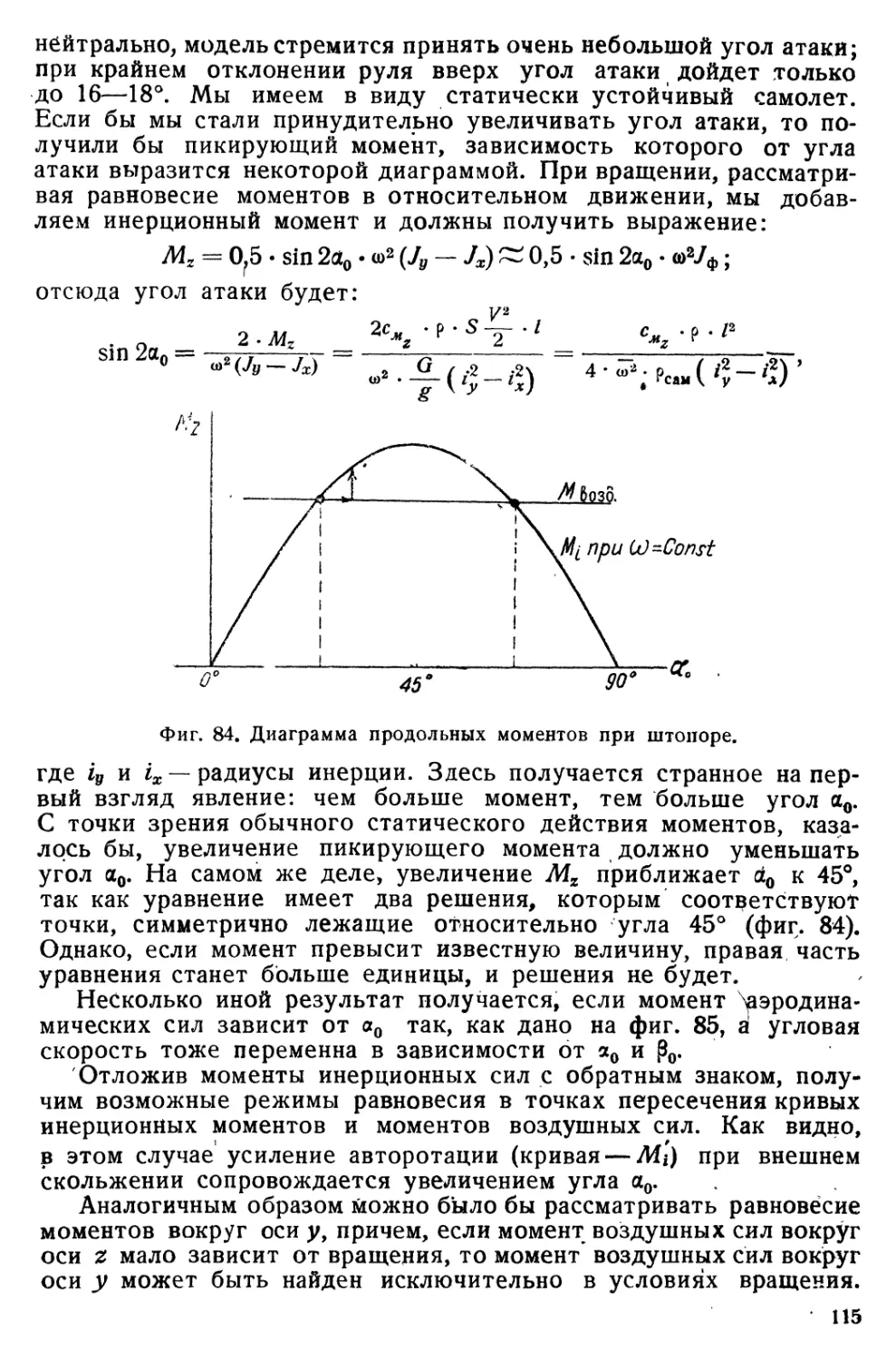
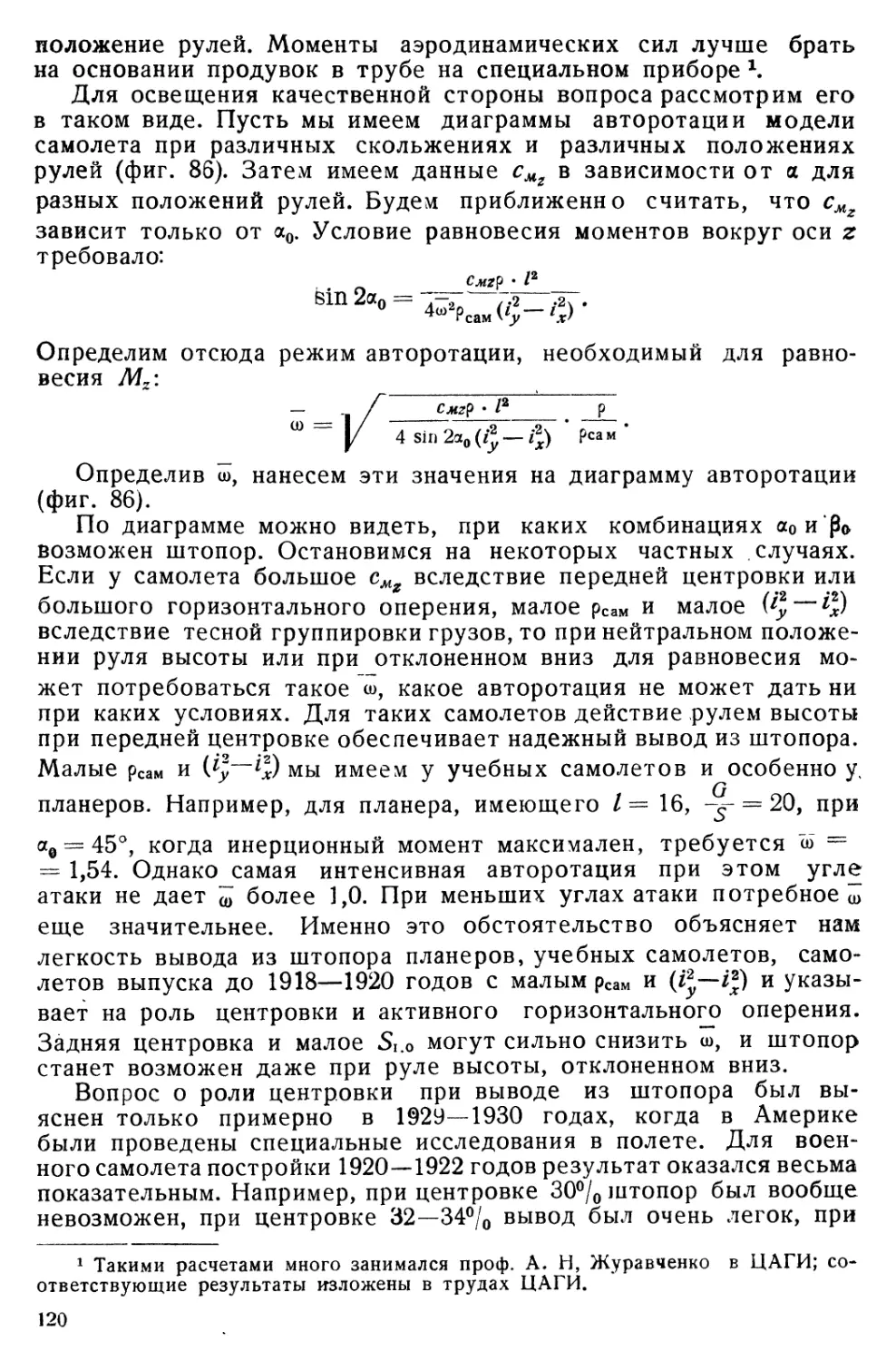
Моменты, действующие при штопоре.......................... 109
Равновесие моментов и режимы штопора . ...................... 113
Выход из штопора............................................ 119
Перегрузки при штопоре и давление на ручку .... ..............
Лабораторное исследование штопора .... . .......... 12*7
Список литературы.......................................... 132
ПРЕДИСЛОВИЕ
С выпуском настоящей — четвертой части курса „Аэродина-
мика самолета" заканчивается изложение вопросов, касающихся
движения самолета, за исключением теории динамической устой-
чивости и автоматического управления самолета. По этим вопро-
сам автор рекомендует книгу Фр. Гос „Устойчивость и управляе-
мость самолетов" и соответствующие труды ЦАГИ, хотя со
временем автор предполагает дать свое изложение указанных
вопросов.
В четвертую часть вошли вопросы, которые излагались авто-
ром на лекциях: моменты относительно осей х и у, уравновеши-
вание реакции вращения винта, полет с остановленным боковым
мотором, основы поперечной устойчивости, основы теории потери
скорости и теории штопора.
Материал, изложенный в главе о действии рулей ,и потере
скорости, на лекциях до сих пор не читался, но, по мнению ав-
тора, он необходим как вступление к изучению динамической
устойчивости. Вопрос об устойчивости при движении по земле
также не читался на лекциях в данном виде, однако мы считаем
необходимым привести этот материал, так как он очень важен. В
таком полном виде этот вопрос излагается впервые.
Изложение теории штопора, а в значительной мере и другого
материала, дано с целью разъяснения основ теории и вовсе не
претендует на полноту и пригодность для проведения самих рас-
четов. По этой причине почти не приведено справочных данных,
часть которых может быть найдена в литературе, список которой
приложен в конце книги.- Справочных данных по многим вопро-
сам, особенно относящимся к штопору и устойчивости при дви-
жении по земле, вообще не имеется.
В теории штопора до сих пор остается много неясного, и это
заставило автора многие вопросы излагать в достаточно осто-
рожной форме.
В плане курса „Аэродинамика самолета", который был указан
в предисловии к первому изданию первой части, был намечен
раздел, посвященный анализу исторического развития самолета.
Однако этот материал до сих пор еще не обработан и намечается
к изданию в виде самостоятельной работы. Отдельные недостатки
изложения, а местами и ошибки, допущенные в изданных частях
курса, могут найти свое объяснение, но, конечно, не оправдание,
в том, что значительная часть материала излагалась в таком систе-
матизированном виде впервые.
Автор очень благодарен рецензентам и редакторам» особенно
проф. А. Н. Журавченко, за многочисленные справедливые заме-
чания.
В четвертой части изменены обозначения согласно принятым
в ЦАГИ. Это, естественно, создаст известные затруднения при
пользовании всеми частями курса, но так как во всей вновь вы-
ходящей специальной литературе приняты новые обозначения,
автор счел необходимым перейти в четвертой части курса на
эти обозначения. При переиздании других частей курса обозна-
чения также будут изменены. При чтении настоящего курса не-
обходимо быть внимательным, чтобы не сделать ошибки. Для
облегчения пользования всеми частями курса в начале книги
дается сравнительная таблица старых и новых обозначений.
Бригинженер В. С. Пышное
ОБОЗНАЧЕНИЯ,
ИЗМЕНЕННЫЕ В IV ЧАСТИ КУРСА
ПО СРАВНЕНИЮ С ПРИНЯТЫМИ В I, II я Щ ЧАСТЯХ
Наименование Обозначение | в /, 1I и 111 ч гстях ' К ’ рса ! Обозначение в IV части курса
Подъемная сила р Y
Лобовое сопротивление . Q X
Тяга винта Ф Р
Угол крена ?
Угол скольжения
Поперечный угол крыльев . . — ф
Коэфициент подъемной силы с = v Р S/2 2Y С)> " Р ХИ2
Коэфициент лобового сопро- тивления 2Х Сх ~ р XV»
Коэфициент боковой силы . . с L- I 2Z ; , с‘ ~ ?SV2
Момент вокруг оси х ... * — мх = Смх -%- SV-1
Момент вокруг оси у . , . . — Му = сМу SV4
Момент вокруг оси г ... . =сМг PSP*cp М-. = CMZ 4" s^ep
Плечо горизонтального опе- рения О xr. о
Плечо вертикального опе- рения — XEL О
Угол скоса потока £ Да
Угол заклинения винта . . .
7
МОМЕНТЫ ВОКРУГ ОСЕЙ х и у
ОСИ КООРДИНАТ
При рассмотрении движения самолета, вообще говоря, нужно
брать три системы осей координат: lj неподвижную в простран-
стве систему, 2) систему осей, связанных с потоком или, вернее,
с траекторией и 3) систему осей, связанную с самолетом.
У
Фиг. 1. Схема осей самолета, угол атаки и угол скольжения.
Чтобы излишне не затруднять изложение, в данной части кур-
са мы обойдемся только одной системой осей, связанной с само-
летом, — х, у, z. Направление воздушного потока по отношению
к самолету будем ориентировать углом атаки а и углом сколь-
жения р. Угол атаки будем измерять между вектором скорости и
плоскостью х ~ z самолета; угол скольжения р—между проек-
цией скорости V на плоскость х — z и осью х. Эта схема пока-
зана на фиг. 1.
Обращаем внимание на знаки углов и моментов. Положитель-
ное направление углов аир показано на фиг. 1. Как видно, +а
соответствует обычно принятому представлению об угле атаки,
а +р соответствует скольжению на левое крыло. Положительный
момент Mz действует от оси х к оси у и стремится уменьшить
8
угол атаки а. Положительный момент Мх действует от оси у к оси z
и стремится накренить самолет на левое крыло. Положительный
момент Мд стремится повернуть самолет от оси z к оси х, т. е.
налево, и уменьшить скольжение. В случае необходимости мы будем
давать еще угол наклона осей самолета к вертикали или к горизон-
тальной плоскости. Данная система осей несколько отличается от
системы, принятой в экспериментальной аэродинамике, но в при-
меняемом при обычном полете диапазоне углов атаки это отли-
чие практически равно нулю. В случае штопора, когда аир очень
велики, данная система позволяет рассмотреть вопрос более
просто.
Моменты вокруг осей х и у пропорциональны скоростному
О V2 Л
напору , зависят от углов аир, угловых скоростей и>х и
(влияние невелико) и ускорений. Кроме того, моменты зависят
от положения органов управления и от вращения винта. Угол атаки
а на Мх и Му влияет обычно мало, а при р = 0 влияние его на
эти моменты равно нулю. Поэтому влияние а рассматривается
совместно с влиянием р.
МОМЕНТЫ ОТ СКОЛЬЖЕНИЯ
Иногда думают, что скольжение является неестественным движе-
нием самолета и даже опасным. На самом деле скольжение наблю-
дается очень часто, но оно почти незаметно. Сколья ением мы назы-
ваем косое движение самолета, при котором направление встреч-
ного потока не лежит в плоскости симметрии. Если самолет
вполне симметричен относительно плоскости х — у и нет сколь-
жения, то, естественно, не будет никаких Мх и Му. Всякое сколь-
жение дает несимметричное обтекание и вызывает моменты Мх и Му.
Начнем с Мх. Скольжение изменяет распределение давления
по крылу и, как правило, дает увеличение подъемной силы того
крыла, которое оказывается несколько впереди. Это объясняется
двумя причинами: во-первых, косым обтеканием, когда торцевая
часть одного конца крыла начинает работать как передняя кромка,
а торцевая часть другого конца — как задняя кромка; во-вторых,
изменением углов атаки половин крыла вследствие наличия по-
перечного угла (поперечного V) крыльев. Таким образом Мх воз-
никает даже у плоского крыла, а поперечный угол крыльев
лишь * увеличивает этот момент.
Объясним причину изменения углов атаки крыльев при сколь-
жении. Возьмем для простоты прямоугольное крыло с попереч-
ным углом и углом атаки а, а затем дадим угол скольжения
(фиг. 2). Возьмем по одному сечению на правом и левом крыльях;
отметим точки входа и выхода потока на обеих проекциях. От
скольжения хорда крыла как бы удлинилась и стала равной со^- .
Пока не было скольжения, передняя кромка имела превышение
над задней на величину #-sina. При скольжении это превышение
изменяется на величину b • sin (3 • sin <Ь, причем с одной стороны
9
оно возрастает, с другой — уменьшается. Синусы углов атаки
будут:
„ * sin а + 6 sin Р sin ф й. oi„ „ &si! а — & sin В sin 6 „„ э
sin а, --------------— cos р; sm а2 =--------&—с •_ cosp.
Так как мы обычно имеем дело лишь с малыми углами а, 3 и
б, то эти выражения можно упростить, полагая:
а1=« + 3-ф; а2 — я — З’ф; Да = р-ф.
Фиг. 2. Изменение углов атаки при скольжении.
Тогда теоретически момент можно было бы написать из условия,
что подъемная сила с одной стороны возрастает на величину
Л Y — В • М. • где 2? = -^, с другой — на такую же вели-
чину уменьшается; в результате получается пара сил с плечом
2z, где z — расстояние от плоскости симметрии до центра давле-
ния одного полукрыла. При положительном скольжении, т. е. при
скольжении на левое крыло, момент Мх поднимает левое крыло,
и его нужно считать отрицательным:
Однако практически момент получится несколько иным, а
именно:
Мх = — Sz -^2 (Вф + k2cy)->
величина k2cy будет давать долю момента за счет изменения об-
текания крыла при скольжении; величина будет учитывать не-
равномерность распределения подъемной силы по размаху.
Если поперечный угол переменен или, как часто бывает, на-
чинается не от корня крыла, а от места присоединенйя консоли,
ю
то мы берем некоторый средний угол ф, получаемый по формуле-
смешения:
, _ 4i3^i 4- 4- ф333г8 + • • •
<Sj 4- 3» + S3 +...) z ’
где Si, S2, S3, ...,Sn— площади отрезков крыла, имеющих углы фц
ф2, Фз.---,фп и расстояния г1( г2, zs,...,zn от плоскости симметрии
самолета до центров давления соответствующих частей крыла.
Расстояние z относится к крылу в целом.
За центры давления всего полукрыла или его частей прини-
мают геометрические центры тяжести соответствующих площа-
дей. Сам поперечный угол ф измеряется обычйо по линии перед-
ней или задней кромки крыла, но ни в коем случае не по верх-
ней или нижней поверхности крыла.
Для удобства перейдем к безразмерному коэфициенту момента:
т (ВФ + *А)₽;
здесь I — полный размах крыла.
Посмотрим, каковы практические значения kt и k2. К сожале-
нию, имеющийся в этом отношении материал весьма ограничен.
Пользуясь данными Барнвелла \ мы получили для прямоуголь-
ного крыла: ^ = 0,76, &а —0,06.
Для крыльев трапецевидных и эллиптических значение для к1г
повидимому, можно взять большее, например 0,85 — 0,9, так как
плохое обтекание конца крыла будет менее сказываться.
На величину Мх влияет также высота расположения крыла
вследствие действия на крыло боковой силы. Для подсчета этого
момента, который мы обозначим М'х, Барнвелл предлагает вы-
ражение:
М'х = yoZ;
Z = — р SK* (0,С04 + 0,196 ф) 3;
у0 берется по средней аэродинамической хорде. Во всех фор-
мулах углы 0 и ф выражены в радианах.
Однако, повидимому, весьма большое влияние оказывает также
расположение фюзеляжа. Если фюзеляж расположен под крылом,
то Мх усиливается, если над крылом, то ослабевает.
Приведенное выражение пригодно только до срыва обтекания.
Если угол атаки близок к критическому, то происходит односторон-
ний срыв струй, и /Их резко возрастает.
Перейдем теперь к моменту крыла вокруг оси у. Так как ось
у связана с самолетом, то нам нужно брать моменты не от сх,
а от сь т. е. от составляющей коэфициентов сх и с9 в плоскости
крыла. Как было выведено еще во второй части курса, ct можно вы-
разить аналитически так:
1 .Flight", April 29, 1926
11
Как мы уже указали, при скольжении происходит как бы пе-
редвижение передней кромки в сторону крыла, на которое про-
исходит скольжение, и затем изменение углов атаки от попереч-
ного угла. Если поперечный угол отсутствует, то по опытам
крыло обнаруживает слабую устойчивость \ т. е. стремление по-
вернуться так, чтобы уничтожить скольжение. Однако по неко-
торым соображениям можно полагать, что на больших углах
атаки (до срыва обтекания) появление пониженного давления
в концевой части крыла может вызвать некоторую неустойчи-
вость, особенно, если конец крыла плавно закруглен; прямой об-
рез крыла даст, конечно, иной результат.
Роль перемены углов атаки можно оценить таким образом.
При перемене угла атаки на величину Да изменение ct будет:
* Да; Да — 8ф.
1 da ’ ‘ т
Тогда вследствие перемены углов атаки ct изменится так:
Дсг=— рф# ( —2.+а0).
Полное изменение ct можно предположить в виде*.
-G = _ k3B (Ф 4- k4) ₽;
величина будет учитывать характер распределения нагрузки
по размаху, а — действие собственно крыла, которое как бы
меняет поперечный угол.
Момент вокруг оси у получим:
М„ = bctSz -ф;
С*9 = pSV*l (ф + £«)₽’
5 5
Коэфициент k:> можно взять около 0,8; В = —уз-;В0=5,5;а0—
1+2-
КЛ
угол атаки нулевой подъемной силы, обычно отрицательный; %,
ф и £ взяты в радианах; k4 — для прямоугольного крыла около
— 0,035, т. е. как бы уменьшает угол ф на 2°. При закругленных
концах крыла можно считать, что k4 равно нулю или даже поло-
жительно.
По этой формуле при малых су крыло будет устойчиво, а за-
тем при достаточно больших ф и су становится неустойчивым.
Необходимо также указать, что плоское крыло обладает иными
свойствами, и, невидимому, там угол ф не влияет на Му.
1 Ф. Ш. Гос, Устойчивость и управляемость самолетов, ОНТИ, 1934
12
Остановимся еще немного на стреловидном крыле. Иногда
крыльям придают стреловидность, скашивая их назад или впе-
ред. Условимся измерять угол стреловидности по углу X между
осью z и линией, идущей через фокусы хорд, т. е. через точки,
лежащие на -j- хорды, считая от передней кромки крыла (фиг. 3).
Будем считать угол положительным при скосе назад.
Если путевой устойчивостью крыла считать устойчивость около
нормали к крылу, как это принято в настоящей работе, то стре-
ловидность устойчивости не повысит. При скольжении обтекание
одного крыла улучшается, а другого — ухудшается. Там, где обте-
кание улучшилось, подъемная сила повышается, и при больших
углах атаки появляется отрицательное ct. Тогда, например, при
скольжении на левое крыло, при стреле назад мы получим боль-
шой момент 7ИХ, накреняющий направо, и момент от ct, заворачиваю-
щий направо; такое направление действия моментов способствует
неустойчивости. При стреле вперед моменты будут обратными.
Таким образом стреловидность назад соответствует как бы
увеличению поперечного угла ф, а стреловидность вперед — его
уменьшению. Мы сейчас не располагаем материалом для установ-
ления эквивалента углов би/, хотя он и может быть найден.
Вообще говоря, придавая крылу стреловидность назад, следует
воздерживаться от большого поперечного угла во избежание по-
лучения излишних моментов /Их. На простых летающих моделях
мы видим как будто бы обратную кар*гину, однако это объяс-
няется плохой профилировкой крыла и очень малым числом Рей-
нольдса.
МОМЕНТЫ Мх и Му ОТ ВЕРТИКАЛЬНОГО ОПЕРЕНИЯ
Для определения этих моментов мы прикладываем силу ZB. о
в центре давления вертикального оперения и, умножая ее н?
плечи, получаем моменты (фиг. 4):
М% = ZB. О .У В. oj Му ZB о Хв. о«
Центр давления берется приблизительно на средней аэро-
динамической хорды оперения и располагается в центре тяжести
13
площади оперения.
При планировании ав. 0 равно скольжению р, хотя, вообще го-
воря, у вертикального оперения от фюзеляжа получается скос
потока. Действие скоса потока можно включить в величину
/ у \2
(—) • Неопределенность величин скоса потока от фюзеляжа и
торможения скорости приводит к тому, что момент от верти-
кального оперения не может быть рассчитан с достаточной точ-
ностью, и приходится прибегать к продувке всей модели на см
✓ у \ 2
Величину , т. е. для планирования, нужно брать не более
0,7 — 0,8, а для моторного полета вводить еще множитель (1 +
р
+ 2вв), где В3 = р. /?. -^-2- {Р — тяга винта, F—ометаемая пло-
щадь). Кроме того, в моторном полете нужно еще учесть скос
потока от струи винта; его мы получим, сложив геометрически
скорость потока со скоростью, сообщенной винтом в направлении
оси л:
Лзв = (1----.. \ • ₽;
\ /1+2Ьв / Г’
Ив. о = р — Дае =
В результате для моторного полета получим:
с«д = ^Чг’4— • Вв.о .
У о • / \ V /пл
14
Напоминаем, что ( у —соответствует планированию. Мы
видим, что в моторном полете сМу всегда возрастает.
В„. о нужно вычислять соответственно удлинению вертикаль-
ного оперения. Можно предложить следующую формулу:
К,, о будет равно квадрату высоты оперения, деленному на пло-
щадь. Если оперение бипланное и сильно раздвинутое, то в рас-
чет вводим полную площадь, а В„. 0 подсчитываем только по од-,
ной части, пренебрегая взаимным влиянием. Если поверхности
лежат близко, можно найти эквивалентное удлинение, как для
биплана.
МОМЕНТ ОТ ФЮЗЕЛЯЖА
Момент от фюзеляжа относительно оси х так незначителен, что
с ним можно не считаться, хотя, зная боковую силу, которую мы сей-
час найдем, его легко подсчитать. Момент от фюзеляжа 2ИВ можн»
считать равным боковой силе, умноженной на плечо Хф (фиг. 5).
Величину боковой силы можно подсчитать по формуле:
А =— Вф5ф
5ф—площадь боковой поверхности фюзеляжа; Вф подсчитываем
Л2
в зависимости от удлинения фюзеляжа Хф = , где й— наиболь-
дФ
шая высота фюзеляжа. Для фюзеляжа с плоскими боками Вф =
= ЗХф; для круглого фюзеляжа Вф = 2Хф.
Точку приложения силы Дф можно считать для фюзеляжа
с узким носом на расстоянии /ф=О,ЗЛф, для фюзеляжа с широким,
носом, как при кольцевом капоте, /ф=0,25Аф.
15
Коэфициент момента фюзеляжа будет:
г ________________________ **Ф о о.
СмУ Ф Sl~ фР’
Лф обычно бывает отрицательное, т. е. центр давления лежит
впереди центра тяжести.
МОМЕНТЫ ОТ ВИНТА, МОТОРНЫХ КАБИН И ПОПЛАВКОВ
Моменты от моторных кабин и поплавков находим точно так же,
как и от фюзеляжа, по тем же самым формулам, т. е. берем боко-
вую площадь, затем удлинение, находим В и, наконец, центр
давления берем так же, как для фюзеляжа. Особо внимательным
нужно быть в отношении знака плеча момента. Если центры дав-
ления лежат впереди центра тяжести, плечи нужно считать от-
рицательными. При сомнении в знаке момента всегда следует
проверить себя, пользуясь принятым правилом знаков моментов.
Выражение для момента от винта берем точно такое же, как
и в продольной устойчивости:
MijR = 0,12 D4 -4М; сМу в = =0,12 •
Д- • SI
хв считается до втулки винта. При тянущем винте лв отрица-
тельно.
Все приведенные выше выражения для Му давали момент, пря-
мо-пропорциональный углу скольжения р. Однако при продувке
часто получаются кривые иного характера. Причина этого лежит
в том, что очень неопределенны условия работы вертикального
оперения. Плохая форма фюзеляжа, наличие отверстий, резких
переходов служат источником образования завихрений, которые
затем попадают на вертикальное оперение и ослабляют его эффек-
тивность. При некотором скольжении оперение выходит из зате-
нения, и момент резко усиливается.
МОМЕНТ ОТ РУЛЯ ПОВОРОТОВ
Момент от руля поворотов действует, главным образом, во-
круг оси у. Рассчитываем мы его по той же формуле, что и
момент от вертикального оперения, но только вместо угла сколь-
жения берем величину где &р.п—угол отклонения руля, а п1—
множитель, показывающий, насколько слабее действует отклоне-
ние руля по сравнению с поворотом всего оперения. Величину и,
можно подсчитать таким образом: пусть SK — площадь киля, 51Р.П—
площадь руля поворота, лежащая позади киля, 52Р.П — вся площадь
руля поворота, лежащая выше киля:
; с S
SB.o=SK+Slp.n+S2P.n; „1=|/ +
Сми = 5Т7 (у2-)™,' ’ В* 0 ' П1 ' ?Jp n‘
16
МОМЕНТ ОТ ЭЛЕРОНОВ
Среди существующих типов элеронов можно выделить два
основных: элероны обыкновенные, представляющие собой часть
крыла у задней кромки, и концевые элероны, расположенные вне
(фиг. 6). Между работой этих элеронов
основной части крыла
есть существенное раз-
личие. Концевые эле-
роны кажутся выгод-
ными, так как они
имеют большое плечо
для создания момента
Мх. Однако эффектив-
ность их хуже по той
причине, что момент
возникает исключи-
тельно благодаря на-
грузке на элерон. Ина-
че работают обычные
элероны. Если мы опу-
скаем обычный элерон,
то, с одной стороны,
возрастает нагрузка на
самый элерон, с дру-
гой стороны — опущенный элерон повышает циркуляцию вокруг
крыла и, следовательно, увеличивает подъемную силу всей впереди
Фиг. 7. Сравнение эффекта поворота всего
крыла (/) и одного элерона (2).
лежащей части крыла. На
фиг. 7 показана диаграмма
изменения су при повороте
всего крыла и при повороте
одного элерона. Как видно,
поворот элерона, хорда ко-
торого составляет лишь
25% хорды крыла, меняет
подъемную силу всего лишь
в 2 раза слабее, чем пово-
рот всего крыла. Прибли-
женно можно считать, что
&сд = В • 8Э д f h., где
v ь
_ dcu
В = для крыла.
Момент МХ9 вызываемый
элеронами, можно полу-
чить, интегрируя элемен-
тарные моменты от изме-
нения подъемной силы ДК|1== Дсв • b • ^-dz.' Так как элеронов
В. С. Пышнов—166—2
17
два, то мы получим:
i i
2 2 2
Мх = 2 J Д У • z = 2 у* b z dz=
2 2 9
_l
2“ __
= 24ф.В.«,у j/
здесь /э — размах одного элерона; коэфициент k должен учиты-
вать особенность формы элерона, а также падение подъемной
силы у концов, что особенно заметно у прямоугольных крыльев.
Интеграл подсчитывают, разбивая крыло на полоски шириной Дг.
Основные вопросы, которые нас интересуют при выборе эле-
ронов, следующие: 1) шарнирный момент, необходимый для от-
клонения элеронов, 2) эффективность элеронов при полете на
угле атаки, близком к СуМакс, и 3) заворачивающий момент Му>
который обычно считается вредным. Приходится часто учитывать
еще и ряд других требований, которые могут оказаться доста-
точно важными. Так, например, применение посадочных щитков
заставляет сокращать до минимума размах элерона /э с целью пре-
доставления большего участка задней части крыла для щитка.
Остановимся вкратце на указанных вопросах. Так как элероны
правый и левый связаны между собой и отклоняются в разные
стороны, то летчику приходится преодолевать разность шарнирных
моментов, понимая ее алгебраически.
Выражение для шарнирного момента имеет такой вид:
z=z Сщ • Ьэ • 5Э • 2 1
ДТИш = 2— * *^э ’ • "2~ • 5э ’
где сШ1 и £ш2 — шарнирные моменты правого и левого элеронов.
Для оценки выгодности элеронов возьмем отношение Мх к ДЛ4Ш
мх __ Смх s >1
ДЛ1ш Дсш ’ ‘
Возьмем для примера прямоугольное крыло с прямоугольным
элероном; тогда коэфициент момента вокруг оси х будет:
® - V 4 (4 - 4)
На основании продувок можно считать, что Дгш прямо пропор-
ционально о, т. е. Дсш = сЪ; S3 = 4 • Ьэ.
18
Как видно, при данном 13 чем элерон рке, тем он лучше, и предел
уменьшения Ь3 определится максимальным значением МХу поскольку
угол отклонения Вэ имеет предел около 20°.
Подобным образом можно найти наивыгоднейшую длину эле-
рона 13. Пусть нам задан момент Мх и мы хотим для того же
крыла подобрать элерон с минимальным ДЛ1Ш.
Мх = ВЬЪ yf (/ • /э — Z|) = const;
отсюда
У/Гb3 (I- 13 — /э) = const = А;
V *э
Подставляем Ьэ в выражение для ДЛ1Ш:
ЛЛ».., = ЫЦ ф = лСш. Л-—;
(1.1Э -а4
для получения минимума выражение ------------j--- должно быть
максимально. Преобразуем его:
'-Д—=i • /? - /?•
'э'4
диференцируем по /э и приравниваем производную нулю:
I -2-1 <'-(} ±1-±1 •
4 1 — U, Z — -j- 1Э ,
/э = ± I = 0,43/.
Этот расчет, конечно, несколько груб, так как он не учитывает
особенностей работы концов крыла. На самом деле следует отно-
шение определять на основании продувок. На фиг. 8 дана
диаграмма -д^— по углу отклонения элерона, причем здесь ДТИщ
дается только для одного элерона. По этой диаграмме видно,
в какую сторону и насколько выгодно отклонять элерон. Для дан-
ного типа элерона наиболее благоприятно работает поднимающийся^
элерон, но до тех пор, пока его угол отклонения не превысит —-12°;
при больших отрицательных углах поднимающийся элерон очень
невыгоден. Конечно, все это относится к данному на фиг. 8 типу
элерона системы Фриз (Frise).
1 Чтобы не получить отношения, равного бесконечности, можно брать обрат-
ную величину.
2* 19
rr 'V1x
Для характеристики элерона мы приняли отношение ,
однако при исследовании эффективности элеронов имеет значение
не только Мх, но и угловая скорость самолета о> относительно направ-
ления полета. Нам желательно, чтобы элерон давал возможно
большее ш при минимальном ДЛ4Ш. Об этом будет подробнее ска-
зано в главе „Действие элеронов".
Фиг. 8. Характеристика элерона.
Вопрос об эффективности элеронов на больших углах атаки
мы рассмотрим совместно с вопросом о моменте Му. Предполо-
жим, что мы летим на очень малом угле атаки. Тогда после
отклонения элеронов один будет нагружен снизу, другой примерно
такой же силой сверху (фиг. 9). Разложив силы на составляющие
вдоль хорды и перпендикулярно к ней, мы получим момент Мх,
но момента Му не будет, так как тангенциальные составляющие
примерно одинаковы. Другое дело при полете на большом угле
20
атаки; опущенный элерон будет иметь- очень большую нагрузку
снизу, поднятый — малую нагрузку сверху. Разложив силы, в этом
случае получим не только момент Л1хг но и момент Му, завора-
чивающий самолет в сторону опущенного элерона. Такое направ-
ление поворота нежела-
тельно, так как оно вызы-
вает скольжение на крыло
с поднятым элероном, а
скольжение даст нам мо-
мент Мх, по знаку обрат-
ный моменту Л1Х от элеро-
нов. При этом совместный
эффект элеронов с кры-
лом на больших а теряется.
В итоге действие элеронов
становится ничтожным.
Приведенные выше рас-
Фиг. 9. Схема, поясняющая образование
заворачивающего, момента.
суждения, конечно, очень
примитивны и даже в неко-
торых случаях неправильны.
Все это было бы справедливо или для плоского крыла, или для
обычного крыла, но на очень большом угле атаки, когда уже
Фиг. 10. Изменение тангенциальной силы
при повороте элерона.
произошел срыв об-
текания. На самом
деле нам нужно
рассматривать изме-
нение тангенциаль-
ной силы не только
одного элерона, но
и всего крыла.
Коэфициент танген-
циальной силы вы-
ражается так:
^=Сг*со8 а-— су - sin а.
Когда на боль-
шом угле атаки, но
еще до срыва обтека-
ния, мы опускаем
элерон вниз, то это
увеличивает сх и су,
причем прибавок
значительно меньше
прибавка &су. В ито-
ге ct если и возра-
стает, то незначи-
тельно. Со стороны поднимающегося элерона имеем небольшое
падение сх и значительно большее падение су. Тогда ct оказыва-
ется увеличенным, и момент Му заворачивает в сторону поднятого
элерона. На фиг. 10 показана зависимость от &э для а = 12°;
М
исходный профиль—симметричный. Мы видим, что поднятие эле-
рона вызывает нарастание ct более быстрое, чем опускание.
Если мы будем измерять момент не вокруг оси у самолета,
а вокруг оси у' потока, направление которой совпадает с направ-
лением подъемной силы, то отклонение элеронов будет создавать
момент, заворачивающий в сторону опущенного элерона, так как
увеличение подъемной силы, как правило, сопровождается увели-
чением лобового сопротивления.
Фирмой Де Хэвиленд (De Havilland) были предложены дифе-
ренциальные элероны. Их особенность заключается в том,
Фиг. 11. Изменение моментов от элеррна
при увеличении угла атаки.
В вопросе управляемости самолета
что отклонение элерона
вверх значительно больше,
чем вниз, например вниз
+ 10°, вверх — 30°. Недоста-
ток их состоит в увеличе-
нии шарнирных моментов
и общем уменьшении подъ-
емной силы, так как
обоих элеронов не одина-
ковы. Если заворачивающий
момент берется относи-
тельно оси у самолета на
углах атаки менее критиче-
ского, то обычные элероны
не создают вредного заво-
рачивающего момента. Од-
нако как только самолет
начнет накреняться с неко-
торой угловой скоростью со,
само крыло создает вредный
момент вокруг оси у. По-
этому желательно, чтобы
Му от элерона компенсиро-
вал момент от крыла. По-
дробнее по этому вопросу
будет сказано в главе о
действии рулей.
всякие неприятности начи-
наются, как только мы подходим к су макс. Это относится и к ра-
боте элеронов. Чем ближе мы подходим к гумакс, тем слабее влияет
поворот элерона на подъемную силу, причем ослабевает действие
не только опускающегося, но и поднимающегося элерона. На фиг. 11
изображена диаграмма изменения см* и см 1 по а, из которой видно
крайне резкое падение с , особенно на углах более 20°. Это
с л
относительно оси у потока.
с м относительно
оси у самолета будет:
с и cos а — сы sin а.
М у м д
22
явление требует специального объяснения, так как если взять крыло
с поворачивающейся подобно элерону задней частью, но в одну
сторону, то мы не будем наблюдать столь резкого изменения в харак-
тере течения су.
С целью повышения эффективности элеронов на больших углах
атаки было сделано большое количество исследований. Наиболее
успешным решением вопроса были концевые плавающие эле-
роны. Идея заключается в том, что элероны освобождаются
от несения нагрузки, как части крыла. Слово „плавающие" опре-
деляет именно то их свойство, что они в нейтральном положении
сами собой устанавливаются в направлении потока при су=0(фиг. 12).
Фиг. 12. Плавающие элероны.
Таким образом они всегда имеют запас подъемной силы от су = О
до некоторого сумакс. Механизм передачи сделан так, что при от-
клонении ручки летчик может лишь отклонять элероны в разные
стороны от того среднего положения, которое они принимают
сами. Причина малого распространения плавающих элеронов объ-
ясняется тем, что главная масса самолетов никогда не летает
на закритических углах атаки, в то же время эти элероны создают
дополнительное сопротивление как ненесущая площадь.
Плавающие элероны с большим успехом применялись на само-
летах, снабженных разрезными крыльями, которые были способны
летать на углах атаки более 20°.
Как было уже указано, вопрос усложнился в связи с примене-
нием посадочных приспособлений. Если применять обычные эле-
роны, то этим ограничивается площадь щитков или закрылков.
Был обследован целый ряд устройств, изображенных на фиг. 13.
Управление при помощи интерцептора (фиг. 13, а) основано на том,
что он вызывает срыв обтекания на верхней поверхности крыла
и тем уменьшает подъемную силу и повышает сопротивление.
Однако полетные испытания дали неблагоприятные результаты.
Элероны в виде дополнительных крылышек, расположенных над
(фиг. 13, б) или под основным крылом, дали неблагоприятные ре-
зультаты. Элероны, отклоняющиеся только вверх (фиг. 13, в),
выдвижные элероны (фиг. 13, г) и устройство, показанное на фиг. 13, д,
Дали более благоприятные результаты.
23
24
РАВНОВЕСИЕ МОМЕНТОВ ВОКРУГ ОСЕЙ хну
В ПРЯМОЛИНЕЙНОМ ПОЛЕТЕ
При планировании без скольжения вопрос равновесия разре-
шается просто в силу симметрии самолета.
При планировании со скольжением необходимо уравновесить
моменты от скольжения при помощи моментов от элеронов и руля
поворотов. В полете с работающим мотором несимметрия вно-
сится реакцией вращения винта. Еще более значительная несим-
метрия получается при остановке бокового мотора у многомо-
торного самолета. Все эти вопросы мы рассмотрим более детально.
ПЛАНИРОВАНИЕ СО СКОЛЬЖЕНИЕМ
Полет со скольжением с точки зрения действующих сил уже
был рассмотрен нами в главе о вираже со скольжением1. Как
было найдено, скольжение дает боко-
вую силу Z. Для получения прямоли-
нейного движения мы должны накренить
самолет так, чтобы горизонтальные
проекции силы Z и подъемной силы Y
взаимно уравновесились:
Z с
Z • cos 7 = Y • sin 7 ; tg ? = v .
1 Ly
Итак, полет будет не только со сколь-
жением р, но и с креном у (фиг. 14).
С точки зрения равновесия моментов
угол крена значения не имеет. Сколь-
Фиг. 14. Расчет угла крена
при полете со скольжением.
жение дает нам момент крыла от сколь-
жения Мл? , который одновременно можно считать моментом
всего самолета, и момент Му? вокруг оси у от различных частей:
самолета, в том числе и от крыла. При нормальной схеме само-
лета Мх стремится выравнять крен, а Му — уничтожить скольже-
ние. Поэтому для достижения равновесия нужно при помощи
элеронов создать момент Мхэ и при помощи руля поворота —
момент Л4ур п , что выражается уравнениями:
М,? +МЛэ = 0; Му? +МУр ,п + МУэ =0.
1 См. ч. III.
25
Мы добавили еще МУэ от отклонения элеронов. Часто бывает
интересно выяснить, на какие скольжения способен самолет. Ответ
на этот вопрос можно получить, если подставить в выше напи-
санные уравнения вместо моментов их выражение в функции
соответствующих переменных. В результате мы получим зависи-
мость угла скольжения р от угла атаки а при условии, что эле-
роны или руль поворота отклонены в крайнее положение (сколь-
жение может ограничиваться как недостатком действия элеронов,
так и недостатком действия руля поворота).
Гораздо правильнее решать эту задачу на основании продувок.
Для этой цели необходимо продуть модель самолета при разных
комбинациях параметров а, р, 8Э и Вр.п. Продувка будет довольно
трудоемкая, так как если взять только по пяти значений каждой
величины, потребуется 625 комбинаций. Это, конечно, не так
страшно, если аэродинамические весы достаточно совершенны
и позволяют менять все параметры находу. Если же весы несо-
вершенны, то можно пойти на упрощение работы, во-первых, огра-
ничившись двумя-тремя углами атаки, например, при cv = 0,lcJMaKC
и су — 0,75Су Макс; затем, если координации рулей при любых сколь-
жениях не требуется, то рулю поворота или элеронам дается только
одно крайнее отклонение. Остается менять только р и измерять
ТИл и Л1у.
Построив кривые Мх и Му по р, получим предельное сколь-
жение там, где кривые пересекут ось р, взяв, конечно, меньшую
величину, так как при этом будет подразумеваться, что другой
руль не отклонен доотказа. Однако еще лучше поступить таким
образом: сначала снять диаграммы смх по Р при разных 8Э и от-
сюда найти 8Э =/(р), а затем снять сму, придавая элеронам уже
найденное положение в зависимости от ₽. К сожалению, подоб-
ных исследований пока почти нет, но их можно рекомендовать
для более полного исследования свойств самолета.
УРАВНОВЕШИВАНИЕ РЕАКЦИИ ВРАЩЕНИЯ ВИНТА
Вопрос об уравновешивании реакции вращения винта известен
очень давно, так как с ним пришлось столкнуться первым кон-
структорам аэропланов. Однако теоретически этот вопрос был
уточнен сравнительно недавно. Повидимому, это произошло по-
тому, что вопрос не был особенно важен для маломощных само-
летов. Нужно сказать, что в некоторых случаях уравновешивание
реакции вращения винта представляет большие затруднения.
Мы не будем объяснять причин образования реакции враще-
ния винта, укажем только, что это—пара сил, момент которой
равен 716,2^, где N—мощность в л. с., п—число оборотов винта
в минуту. Если винтов несколько, моменты следует сложить
алгебраически, причем расстояние между осями винтов роли не
играет, так как пары сил можно переносить, но только не пово-
рачивая оси пары. Число моторов и направление их вращения
роли не играют, Так, например, если один мотор вращает два
26
винта в противоположные стороны, передавая им равные мощ-
ности, то реактивного момента не будет.
В этом случае реакция мотора будет уравновешена реакцией
механизма, меняющего направление вращения второго винта. Ана-
логично, в случае редукторного мотора к реакции мотора нужно
добавить реакцию редуктора. Чтобы не сделать ошибки, лучше
обращать внимание только на винты, их направление вращения,
число оборотов и мощность.
Если оси нескольких винтов непараллельны, то мы геометрически
складываем векторы пар и получаем результирующую пару. Пусть
самолет летит с не-
которым углом ата-
ки а, ось х парал-
лельна хорде, а ось
винта имеет некото-
рый угол установки
по отношению к
хорде крыла <рв
(фиг. 15). Реакцию
вращения винта Л1В
разлагаем на две па-
ры МХв и МУв.
Наиболее старым
способом уравнове-
Фиг. 15. Моменты от реакции вращения винта.
шивания реакции было помещение на одном крыле груза, кото-
рый сдвигал центр тяжести всего самолета вбок и создавал пару
из силы тяжести G и подъем-
Фиг. 16. Уравновешивание реакции
ной силы Y (фиг. 16). Величину
необходимого груза можно
легко подсчитать. Этот спо-
соб имеет некоторые преиму-
щества: так, например, в го-
ризонтальном полете, когда
ось винта тоже близка к го-
ризонтали, мы не получаем
никакой заворачивающей па-
ры. Основным недостатком
этого способа является необ-
вращения винта при помощи груза. ходимость иметь лишний груз,
который для некоторых само-
летов может оказаться относительно большим. Другой недостаток
этого способа в том, что если груз закреплен неподвижно, то при по-
тере скорости самолет обнаруживает сильную тенденцию валиться
на крыло, на котором находится груз; действие такого груза не-
благоприятно и в отношении штопора вследствие неуравновешен-
ности момента груза.
Другой способ заключается в том, что размахи правого и ле-
вого крыльев делаются разными. Этим подъемная сила тоже сдви-
гается в сторону и вместе с силой тяжести дает нужную пару
сил. Заворачивающий момент можем подсчитать следующим
27
образом. Во-первых, имеем заворачивающий момент от разло-
жения 7ИВ:
Му = Мв • sin 4>в.
Если принять направление вращения винта вправо, глядя вдоль
линии полета, за положительное направление, то М*в тоже бу-
дет положителен, так как накреняет самолет влево, а Му при
положительном будет отрицателен, так как заворачивает само-
лет вправо (вектор Мв проектируется в отрицательном направле-
нии оси _у). Затем будет иметься заворачивающий момент от
крыла, так как равнодействующая сил, действующих на крыло,
отодвинулась влево (при правом вращении винта). Разложив рав-
нодействующую на нормальную Л/ и тангенциальную Г, получим
заворачивающий момент My=T*z\ но N • z — Мв, следовательно,
т ct
Му = МВ. — = Мв • -. В итоге заворачивающий момент будет:
сп
/Ив I ~~ — Sin <рв ) ~ Мв (~— <ов) .
\ сп / \ сп /
Практически <$в бывает или равно нулю, или даже отрицательно.
При полете на большой скорости и, следовательно, при малом
ct
угле атаки — положительно, и самолет проявит тенденцию за-
сп
ворачивать влево, т. е. в сторону крыла с большей площадью,
с
При полете на большом угле атаки — отрицательно, и завора-
сп
чивающий момент изменит свой знак. Основной недостаток этого
метода тот же, что и при применении груза, а именно — небла-
гоприятное поведение самолета при потере скорости и штопоре.
Наиболее распространенный способ уравновешивания реакции
вращения винта — это применение элеронов или изменение уста-
новочных углов крыльев.
Теоретически эти способы можно считать равноценными, так
как отклонение элеронов эквивалентно изменению угла атаки,
а переменой профильного сопротивления от небольшого откло-
нения элеронов можно пренебречь.
Рассмотрим сначала момент Мх и его уравновешивание. cos^B
можно принять равным единице. Момент от изменения углов
атаки крыла можно выразить так:
2
gV2 /*
J ^cyb'Z-dz,
о
где &Су — разница в су некоторых сечений крыла, лежащих на
расстоянии z справа и слева. Интегрирование можно произвести
графически, принимая Дсу = В-Да, где Да — разница в установоч-
ных углах правого и левого сечений. Да бывает или постоянно,
или возрастает пропорционально значению z. Величина В пере-
менна по размаху, хотя учитывать это изменение можно только
28
довольно грубо. Если Да постоянно, расчет упрощается и можно
прямо найти его значение:
2
о
Если В условно вынесем за знак интеграла, то самый интеграл
превратится в статический момент площади полукрыла:
i
2
J bzdz=
о
где — координата геометрического центра тяжести площади
полукрыла. Однако вынесение за знак интеграла величины В по-
требует введения поправочного множителя, величина которого
будет зависеть от формы крыла в плане и характера изменения
профилей по размаху. Имеются основания считать, что этот мно-
житель равен 0,8—0,9. Тогда
Да =
2МВ_____
-ф- .0,9B S-г
Если несколько винтов вращаются в одну сторону, то в расчет
подставляем суммарную мощность:
Аа- Z*6'2-2^ .
• 0,9BSzin
Можно это выражение написать еще в таком виде: умножим
?Sl/2 cv
и разделим его на вес самолета О, тогда G:----~ су-> н0 в~
= а — я0. Обозначим:
— f, - „ „ 716,2 —
г1="7 J «1 = *i • I; да ---------'L. (в - а0)
1 21G-lK
(г — а0) — угол'"атаки, если его отсчитывать от плоскости нулевой
подъемной силы. Напоминаем, что выведенная формула относится
к полету на полной мощности, если, конечно, подставлена полная
мощность W и соответствующее число оборотов. Увеличивая угол
атаки при полной мощности, мы получим подъем. Наибольшее Да
потребуется для крутого подъема, когда (а — а0) наиболее велико
и равно примерно 12°, в то время как на максимальной скорости
значение (а— а0) —.около 3°. Если нас интересует Да при гори-
зонтальном полете, то нужно взять соответствующие мощность W
29
и обороты винта в минуту п. Способ определения их указан в
I части курса. Приближенно можно считать, что при уменьше-
нии скорости, начиная от максимальной, мощность меняется про-
порционально кубу скорости, обороты — первой степени, а (а— а0)
—обратно пропорционально квадрату скорости. В результате ока-
зывается, что Да остается без изменения, как и на максимальной
скорости. Все это справедливо, пока сх не начал заметно возра-
стать.
Посмотрим, какие самолеты требуют большего угла Да. Вели-
чина определяется формой крыльев; если считать, что само-
леты летают примерно на одинаковых (а — а0), то Да будет про-
N (G \ АЛ
порционально величине у. ~ Ну—нагрузка на л.с. 1. Мы видим,
что Да обратно пропорционально нагрузке на л.с. размаху крыльев
и числу оборотов. У больших тяжелых самолетов нагрузка на
л.с. велика и размах велик. Поэтому Да получается столь незна-
чительное, что его иногда можно не принимать во внимание.
У небольших быстроходных самолетов, особенно у гоночных,
нагрузка на л.с. мала и размах мал; в результате Да получается
сравнительно боль-
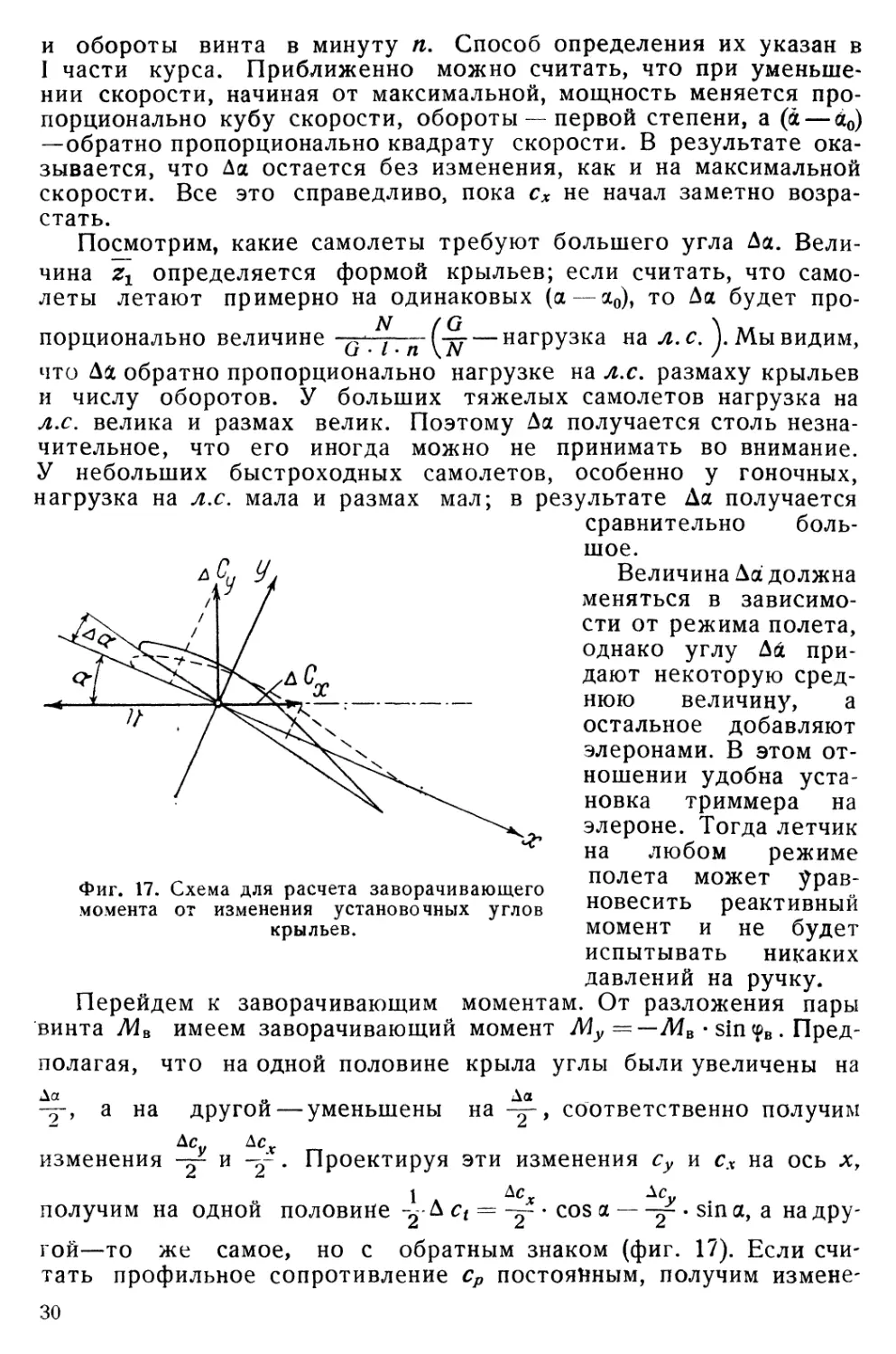
Фиг. 17. Схема для расчета заворачивающего
момента от изменения установочных углов
крыльев.
шое.
Величина Да должна
меняться в зависимо-
сти от режима полета,
однако углу Да при-
дают некоторую сред-
нюю величину, а
остальное добавляют
элеронами. В этом от-
ношении удобна уста-
новка триммера на
элероне. Тогда летчик
на любом режиме
полета может урав-
новесить реактивный
момент и не будет
испытывать никаких
давлений на ручку.
Перейдем к заворачивающим моментам. От разложения пары
винта 7ИВ имеем заворачивающий момент Му • sin<рв. Пред-
полагая, что на одной половине крыла углы были увеличены на
Да о Да
-у, а на другой — уменьшены на , соответственно получим
изменения и . Проектируя эти изменения су и сх на ось л,
1 ^сх ^cv
получим на одной половине ~2 Д ct = • cos а — . sin а, а на дру-
гой—то же самое, но с обратным знаком (фиг. 17). Если счи-
тать профильное сопротивление ср постоянным, получим измене-
30
ние Дсл только из-за индуктивного сопротивления:
= 4- [(сv + Де,,)2 — Су] = (2су &Су 4- Ьсу).
Пренебрегаем величиной Дсу, считаем cosa^l; sin а = а:
А / а \
&ct= ♦ 2 • cv -Ьсу —key а=Асу • 2су — а ] .
Теперь составляем выражение для Му от крыла:
i
2
Л'1уКр = ф J bCtbzdz.
О
Если приближенно считать Acz постоянным и вынести за знак
интеграла, получим:
Поделим ТИо на Мх-
-Г Apr
Му •>₽ _ Лс1 _ А ,2с — И
m~~ --кг-^.-Лсу
Л кр v
Отсюда
-2^а )•
Полный момент Л1У, включая проекцию момента реакции, по»
лучим:
Му = М& ; 2 • Су - а — Фв) = /Ив | -А)у 2 • су — (а + фв)| ;
(а + <рв) — угол наклона оси винта к линии полета. Для удобства
исследования заменим а его выражением из равенства су =
= В (а — а0):
Му = Мв ^-4. - Су — (а0 + фв)] = /Ив Су — (а0 + фв)] •
Величина А для крыла в целом берется равной единице, хотя
можно было бы считать ее переменной по размаху и определить
Му графическим интегрированием. (я0-|-фв)— установочный угол
оси винта по отношению к плоскости нулевой подъемной силы.
Таким образом мы видим, что на заворачивающий момент оказы-
вают влияние: 1) режим полета (через /Ив и су) и 2) установочный
угол (а0 4- фв). Этот угол, как правило, бывает отрицательным. На
более старых самолетах (а0 + фв) доходило до —7°, и это давало
значительный заворачивающий момент на малых су в сторону
крыла с увеличенным углом атаки. Если, например, (я0+ <?в) = —7°
М
или в радианах — 0,12, 1 = 6,^ = 0,12—0,13су, то при полете
31
на максимальной скорости при су =С,2 получим 0,094. При кру-
М
том подъеме сд— 1,0 и .-— = — 0,01, т. е. момент изменил свой знак.
У современных скоростных самолетов (а0 + <рв) равно примерно
м м
— 2°, тогда при су — 0,2, = 0,009; при су = 1,0, = — 0,025.
Как видим, Му в этих случаях различаются весьма сильно. Если
первый самолет обнаруживал тенденцию к развороту на малых су,
то второй обнаружит ее на больших су и в противоположную сто-
рону.
Му уравновешивается или смещением киля, или отклонением
руля поворотов. Во втором случае мы получаем давление „на ногу",
от которого можно, правда,
избавиться триммером на
руле поворотов. Мы не
приводим расчета угла сме-
щения киля или отклонения
руля. Схема этого расчета
ясна, однако практический
расчет будет ‘ затруднен
сложностью учета влияния
вращающейся струи винта.
Смещение киля подбирает-
ся практически.
Есть еще один способ
уравновешивания реакции
вращения винта—путем по-
лета со скольжением. Если
машина валится налево,
летчик^дает правую ногу,
вызывая этим скольжение
налево. Тогда момент от
скольжения уравновеши-
Фиг. 18. Скольжение, вызванное уравно-
вешиванием реакции вращения винта.
Однако скольжение дает боковую
вается реакцией винта,
силу Z, которую приходится
компенсировать накренением самолета.
Нужно еще отметить, что момент /Иу является также причи-
ной некоторого скольжения самолета. Мы уравновешиваем Му
нагрузкой на оперение ZBQ =—— . Но Му— это пара сил, кото-
хв. о
рая должна быть уравновешена тоже парой сил, и вторая сила,
равная ZB. о, получится при скольжении от давления воздушного
потока на фюзеляж (фиг. 18). Взяв приведенное ранее выражение
для Z4), получим:
2ф = 5Ф^-5фр = —
в. о
му
R ри\ г
°ф ф хв. о
32
Возьмем для примера одноместный самолет, летящий со ско-
ростью 50 м/сек. Му = 30, 2?ф = О,5, 5Ф = 5 м\ хв. о = 4,5 м, полу-
чим р*= 0,021 или 1,2°. Это при полете на полной мощности и на
малой скорости, т. е. при подъеме. В горизонтальном полете для
того же самолета получим р не более 0,5°. Самолет будет лететь
совершенно без крена, прямолинейно, но его будет сносить в
сторону как бы от ветра. Для современных самолетов эти углы
столь малы, что их не приходится учитывать в аэронавигации.
ПОЛЕТ С ОСТАНОВЛЕННЫМ БОКОВЫМ МОТОРОМ
Равновесие сил и моментов при полете с остановленным бо-
ковым мотором представляет собой весьма важную, а также и
весьма сложную зада-
чу. В первой части
курса мы указали на
изменения аэродинами-
ческих качеств вслед-
ствие потери мощ-
ности одного или
нескольких моторов.
Если самолет имеет
большой запас мощ-
ности, остановка части
моторов приводит к
значительному сниже-
нию потолка, но все
же полет можно про-
должать. Несимметрия
тяги винтов требует
специального управле-
ния самолетом и, если
самолет не приспособ-
лен к таким полетам
Схема полета с остановленным
мотором при скольжении на оста-
новленный мотор.
чего продолжение полета ста-
или летчик не знает, фИг. 19.
как лететь, то в этом боковым
случае приходится ос-
танавливать мотор с
противоположной стороны, после
новится невозможным.
Одно время думали, что достаточно к вертикальному оперению
приложить силу, уравновешивающую момент от тяги винта P-z.
Но это не так. Тяга винта вместе с лобовым сопротивлением
дает пару сил, и она должна уравновешиваться тоже парой сил.
Одна сила уравновешивающей пары приложена к вертикальному
оперению. Другую силу можно получить или от давления воз-
душного потока на фюзеляж, е^сли лететь со скольжением на
остановленный мотор (фиг. 19), или ее можно получить как резуль-
тат проекции силы тяжести, накренив для этого самолет (фиг. 20).
Однако полет без крена со скольжением на остановленный мотор
В. С. Пышнов—166—3
33
(см. фиг. 19) нецелесообразен и даже невозможен, так как от
скольжения возникает момент от киля, действующий в ту же
сторону, что и момент от тяги винта. Естественно, что для
руля поворотов окажется непосильным бороться одновременно с мо-
Фиг. 20. Расчет угла крена для уравновешивания боковой силы.
ментом от тяги и моментом от скольжения. Гораздо .ручше иметь
скольжение на работающий мотор (фиг. 21), тогда момент от
скольжения уже сам
Фиг. 21. Схема полета с остановленным
боковым мотором при скольжении на
работающий мотор.
частично уравновесит
момент от тяги винта.
Чем сильнее скольже-
ние, тем меньше будет
нагрузка на руль по-
воротов, однако боль-
шое скольжение неже-
лательно по двум
причинам: во-первых»
самолет нужно сильно
накренять, так как
проекция силы тяже-
сти на ось z должна
уравновесить боковую
силу, которая сло-
жится из нагрузки на
вертикальное опере-
ние и на другие боко-
вые поверхности са-
молета, а во-вторых,
скольжение увеличи-
вает лобовое сопро-
тивление.
Весь вопрос можна
исследовать следую-
щим образом. Начнем
€ моментов вокруг оси у. Пусть у нас остановился левый мотор;
34
тогда момент от тяги правого мотора будет Р • z с положитель^
ным знаком. Если считать, что моменты от скольжения и от
отклонения руля высоты линейно зависят от £ и 8Р. п, получим
условие равновесия:
2ЛТ^ = Рг + ^₽+-^-8р.п = 0.
Напоминаем, что положительное 3 — это скольжение на левое
крыло, положительное йр. п соответствует отклонению задней
кромки руля влево (когда дана „левая нога"). Из этого выражения
мы получим зависимость 8Pt п от р. Для удовлетворения урав-
нения 8Р. п или р, или оба эти коэфициента вместе должны быть
отрицательны. Если моменты меняются не по прямой, то расчет
можно произвести на диаграмме, построив серию кривых
в функции р для разных 8р. п. Пересечение кривых с осью абсцисс
даст нам условия равновесия.
Затем переходим к равновесию сил вдоль оси z. Положитель-
ное скольжение дает отрицательную силу Z, также и положи-
тельное йр. п дает отрицательное Zp. п. Положительным угол
крена у будем считать при крене на левое крыло и это даст по-
ложительное Z=Gsiii7. Уравнение равновесия примет вид:
dz dzn п
Подставляя р и 8р. п, определяемые условием равновесия мо-
ментов вокруг оси _у, найдем необходимый угол крена у.
Можно еще рассмотреть равно-
весие моментов вокруг оси х для
выявления отклонения элеронов.
Мы получили, что при останов-
ленном моторе можно лететь при
разных комбинациях р, 8Р. п и у.
Увеличение скольжения на рабо-
тающий мотор уменьшает нагрузку
на руль поворотов, но зато вызы-
вает нагрузку на элероны.
С появлением многомоторных
самолетов появились и приспо-
собления для облегчения полета с
остановленным боковым мотором.
Одно из приспособлений, приме-
нявшееся на самолете советского
конструктора Хиони, заключалось
в тормозящих щитках, установлен-
Фиг. 22. Устройство для автомати-
ческого уравновешивания момента
от бокового мотора.
ных на концах крыльев. Здесь момент от винта уравновеши-
вался лобовым сопротивлением щитка. Это приспособление
хорошо тем, что позволяет лететь без крена и скольжения, но
зато отнимает часть тяги винта. Затем применялись регулируемые
кили. Они позволяют уменьшить крен и скольжение. Есть устрой-
35
ства, основанные на действии струи винта. Например, в струях
двух винтов находятся два киля, установленные под некоторым
углом (фиг. 22). Остановка одного мотора и исчезновение одной
струи создает момент, уравновешивающий частично момент от тяги.
Однако, повидимому, этот момент слаб и устройство мало полезно.
Иногда еще сами оси винтов ставятся под углом (фиг. 23). Это
устройство более полезно, так как, кроме влияния струи на киль,
йтолучается еще уменьшение момента вследствие сокращения
плеча гл
Фиг. 24. Дополнительный
киль для устранения сколь-
жения.
Фиг. 23. Косое расположение осей винтов
для облегчения полета с остановленным
боковым мотором.
Для облегчения полета на одном моторе было бы рационально
такое устройство, которое позволяло бы, помимо регулировки
заднего киля, выдвинуть второй киль вблизи от центра тяжести
с противоположным углом отклонения (фиг. 24). Тогда для урав-
новешивания заворачивающей пары сил мы имели бы тоже пару
сил, и полет происходил бы без всякого крена и скольжения, что
очень ‘ценно с точки зрения аэронавигации и слепого пилотиро-
вания.
УСТОЙЧИВОСТЬ ПОПЕРЕЧНАЯ И ПУТЕВАЯ
Поперечной устойчивостью мы назовем способность
самолета автоматически устранять появившийся крен. Путевой
устойчивостью назовем автоматическую способность самолета
устранять возникшее скольжение. Однако на самом деле такого
разделения этих видов устойчивости в условиях действительного
полета сделать нельзя. Моменты Мх и Му тесно связаны между
собой. Достаточно самолету накрениться, чтобы траектория стала
криволинейной и появилось скольжение. Наоборот, при появлении
скольжения неизбежно происходит образование крена. При более
детальном рассмотрении устойчивости самолета оказывается, что
все виды устойчивости между собой связаны. Любое начальное
возмущение ведет к изменению углов атаки, скольжения и крена.
Продольную устойчивость все же выделяют, так как влияние на нее
Зб
скольжения и крена проявляется лишь при довольно больших
возмущениях. Но поперечную и путевую устойчивости разделить
невозможно. Применяется даже термин боковая устойчи-
вость, объединяющий оба этих понятия.
На практике применяется раздельное рассмотрение устойчивости
поперечной и путевой, хотя это соответствует не действительному
случаю движения, а некоторому условному. Такое изолированное
рассмотрение устойчивости оказывается полезным для дальнейшего
анализа, рассматривающего совместно движения вокруг осей х и у.
ФЛЮГЕРНАЯ УСТОЙЧИВОСТЬ САМОЛЕТА
Флюгерной устойчивостью называют изолированную
путевую устойчивость самолета. Предположим, что самолет имеет
только одну степень свободы
оси у (фиг. 25). Мы назовем
собой устанавливается под
некоторым углом Р по отно-
шению к встречному потоку
и, в частности, при р = 0.
Поведение самолета в этом
случае будет напоминать флю-
гер, указывающий направле-
ние ветра. Флюгерная устой-
чивость проверяется продув-
кой модели в аэродинамиче-
ской трубе путем измерения
моментов вокруг оси у при
разных скольжениях. Следует
различать установки для изме-
рения моментов вокруг оси у
самолета и вокруг оси У
трубы. Если мы возьмем мо-
мент вокруг оси у' трубы, то
он может быть представлен в
и может вращаться только вокруг
самолет устойчивым, если он сам
Фиг. 25. Схема испытания флюгерной
устойчивости.
виде:
Му = Му • cos а — Мх • sin а.
Как мы уже условились ранее, положительный момент повора-
чивает самолет влево, а положительным скольжением будем счи-
тать скольжение на левое крыло, которое может произойти
в результате вращения вправо.
Если самолет получил положительное скольжение, то для его
уничтожения нужен положительный момент. Для наличия флю-
герной устойчивости нужно, чтобы при отклонении от положения
равновесия возникал момент в противоположном направлении.
Отсюда вытекает условие флюгерной устойчивости: при положи-
тельном d$ должен возникать положительный dMy и, наоборот,
при отрицательном d$ — отрицательный dMy. Тогда условие флю-
37
герной устойчивости будет вполне аналогично условию статиче-
ской продольной устойчивости:
->и‘
Фиг. 26. Кривые заворачивающих моментов
для суждения о флюгерной устойчивости.
Определить флюгерную устойчивость можно продувкой в трубе
или расчетом. Следует предпочесть первое, так как расчет мало
надежен ввиду трудности учета некоторых факторов. Результаты
продувки изображены на фиг. 26. Условие устойчивости требует
положительного угла на-
клона касательной к точке
пересечения оси р.
На фиг. 26 даны две
кривые: одна—для устойчи-
вого самолета, другая—для
неустойчивого. Следует об-
ратить внимание на неустой-
чивый самолет. Мы полу-
чили три точки равнове-
сия: среднюю — неустойчи-
вую и крайние — устойчи-
вые. Это указывает на то,
что самолет будет стре-
миться занять положение
равновесия, соответствую-
щее какой-либо крайней
точке, и лететь со скольже-
нием. Такая-картина наблю-
дается в том случае, если
завихрения, сбегающие с
некоторой части самолета, попадают на оперение и снижают
его эффективность. Однако при некотором скольжении опе-
dc
Му
рение выходит из затенения, и производная становится
положительной. Отсутствие надлежащей флюгерной устойчивости
обычно объясняется плохими условиями работы оперения, а это
можно учесть только продувкой.
Остановимся на расчете флюгерной устойчивости. Вокруг оси у
мы имеем моменты от крыла, фюзеляжа, вертикального оперения,
винта и других деталей. Взяв производную по р, получим:
С? = "4-в 4 Ci++ -i-r в*+
При обычной схеме самолета Хф и хв отрицательны. Отсюда
следует, что устойчивость достигается, главным образом, благо-
даря вертикальному оперению.
38
Если момент берется вокруг оси потока у', то, как мы уже
показали, добавляется проекция Мх. Этот добавок особенно заме-
тен при больших углах атаки, тем более что при большом а
момент Мх очень сильно зависит от скольжения.
ИЗОЛИРОВАННАЯ ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
Рассматривая изолированную поперечную устойчивость, мы огра-
ничиваем степень свободы одним вращением вокруг оси х. Можно
рассматривать вращение вокруг оси х самолета, а можно брать
ось х' потока, т. е. ось, совпадающую с направлением скорости.
Прежде всего необходимо уяснить, что никакой устойчивости
вокруг оси х’ нет. Предположим, что модель самолета установ-
лена так, что может вращаться вокруг оси, проходящей через
центр тяжести модели и направленной по оси трубы. Тогда, в какое
бы положение мы ни ставили модель, это не даст никаких момен-
тов, так как обтекание модели не будет изменяться.
На фиг. 27 изображена схема лож-
ного представления об устойчивости.
Иногда изображают картину так, как
будто после накренения направление
подъемной силы не изменилось, и тогда
при низком положении центра тяжести
получается якобы выравнивающий мо-
мент. На самом деле никакого момента
не получается. Иногда приписывают
поперечную устойчивость действию по-
перечного угла крыльев, так как, якобы,
после накренения уменьшается подъем-
ная сила поднятого крыла вследствие
наклона. Однако на самом деле момента
Фиг. 27. Ошибочная схема
поперечной устойчивости.
не получается.
При рассмотрении момента вокруг оси х самолета может полу-
читься устойчивость, так как вращение вокруг оси х дает не только
крен, но и небольшое скольжение, а скольжение даст Мх. Однако при
малых углах атаки скольжение незначительно и момент Мх невелик.
Если угол атаки а и угол крена 7, то угол скольжения р най-
дется из выражения:
tg р = tg а • sin 7.
Интересна теория поперечной устойчивости, предложенная
проф. Дюшен (Е. Duchene) в 1911 г. Он рассуждал так. Предпо-
ложим, что главная ось инерции, лежащая в плоскости симме-
трии самолета, образует некоторый угол с хордой крыла. Если
ось проходит так, что в передней части самолета она подни-
мается вверх, она называется приподнятой осью инерции
(фиг.28,а). На фиг. 28,6 дан пример опущенной оси инер-
ции. Предположим, что на крыло подействовал толчок Q, на-
правление которого перпендикулярно хорде крыла. Раскладываем
силу Q на два направления: Qx, вдоль оси инерции и QB, — пер-
пендикулярно ей. Тогда сила Qx, вызовет вращение вокруг оси у9,
a Qy<i — вокруг оси х0. Сила QXa очень мала, а момент инерции
39
Фиг. 29. Бумажная модель для демонстрации
устойчивости при обратном поперечном угла
крыльев.
вокруг оси у0 велик; следовательно, вращение вокруг осиу0 будет
незначительное. Таким образом от толчка вращение будет, глав-
ным образом, вокруг оси х0. Если ось л0 приподнята, то вращение
вызовет скольжение на противоположное крыло, а это даст вос-
станавливающий момент при наличии поперечного угла крыльев ф_
Однако, как показал Дюшен, при опущенной оси инерции для
устойчивости нужно дать отрицательный угол ф, т. е. опустить
концы крыльев. Если ось л0 опущена и ф отрицательно, вращение
вокруг оси л0 вызывает увеличение угла атаки опускающегося
крыла и потому дает восстанавливающий момент.
Итак, Дюшен рекомендует при приподнятой оси инерции да-
вать положительное ф, при опущеннойотрицательное ф. В до-
казательство правильности своих рассуждений Дюшен сконструи-
ровал летающие бумажные модели, демонстрирующие это правило.
Особенно интересна модель с опущенными крыльями, показанная
на фиг. 29.
Повидимому, эффект наклонения оси инерции сравнительно
слаб, так как практически значительного наклонения оси инерции
трудно достичь. К тому же составляющая сила QXo вызывает
обратное скольжение, хотя и меньшее по величине.
БОКОВАЯ УСТОЙЧИВОСТЬ
Под этим термином мы подразумеваем взаимодействие момен-
тов Мх и Му при нарушении равновесия. Существует теория бо-;
ковой устойчивости самолета, оперирующая всеми шестью урав-
нениями движения самолета, в которые включены силы и моменты
в функции углов и угловых скоростей. Однако мы рассмотрим
боковую устойчивость в более примитивном виде.
При рассмотрении устойчивости всегда нужно иметь в виду
некоторое возмущение движения и затем уже анализировать по-
ведение самолета. Если самолет проявит тенденцию вернуться
к. первоначальному режиму, значит
Можно представить себе раз-
личные причины нарушения боко-
вого равновесия под действием
воздушных течений. Можно иметь
в виду одностороннее действие
встречного порыва ветра. Однако
количественно эта причина не мо-
жет быть значительной. Затем
возможно действие бокового по-
рыва ветра, который вызовет
внезапное скольжение, заворачи-
вающий и накреняющий моменты.
Наибольшее возмущение полу-
чается при одностороннем попада-
нии в восходящий или нисходящий поток. Вертикальные потоки бы-
вают таких небольших размеров,что правое и левое крылья самолета
смогут оказаться в потоках разной скорости. Для простоты рас-
суждения предположим, что только одно крылья попало в восхо-
41
он устойчив.
Фиг. 30. Схема для расчета возму-
щения при попадании крыла в
восходящий поток.
лящий поток (фиг. 30). Восходящий поток дает в основном изме-
нение угла атаки Да = Так как мы повернули не крыло, а
поток, то кроме увеличения подъемной силы Y и сопротивле-
ния X произойдет их поворот на угол Да. Нас интересуют силы,
связанные с самолетом, и мы рассмотрим действие на самолет
изменения нормальной силы N и тангенциальной Т. Увеличение
нормальной силы даст накреняющий момент. Тангенциальная сила
может изменяться различным образом. Если полет происходит
еания скольжения при
крене.
Фиг. 32. Схема спиральной неустойчивости.
на очень малом а, т. е. на большой скорости, изменение угла атаки
почти не дает изменения сь При полете на средних и больших а
увеличение угла атаки дает изменение Д^, направленное вперед, и,
следовательно, вызовет заворот в ту же сторону, куда накренился
самолет. От заворота появится скольжение на поднимающееся крыло,
что усилит накреняющий момент. В итоге через некоторое вре-
мя самолет окажется накрененным и несколько повернутым в
сторону.
Перейдем к анализу дальнейшего поведения самолета. От накре-
нения самолета на угол Ду наклонится подъемная сила и полу-
чится центростремительная сила О-Ду, под действием которой
траектория станет криволинейной. Допустим, что в первое время
никакие моменты не действуют, тогда траектория искривляется,
я самолет остается в прежнем положении. В результате появится
42
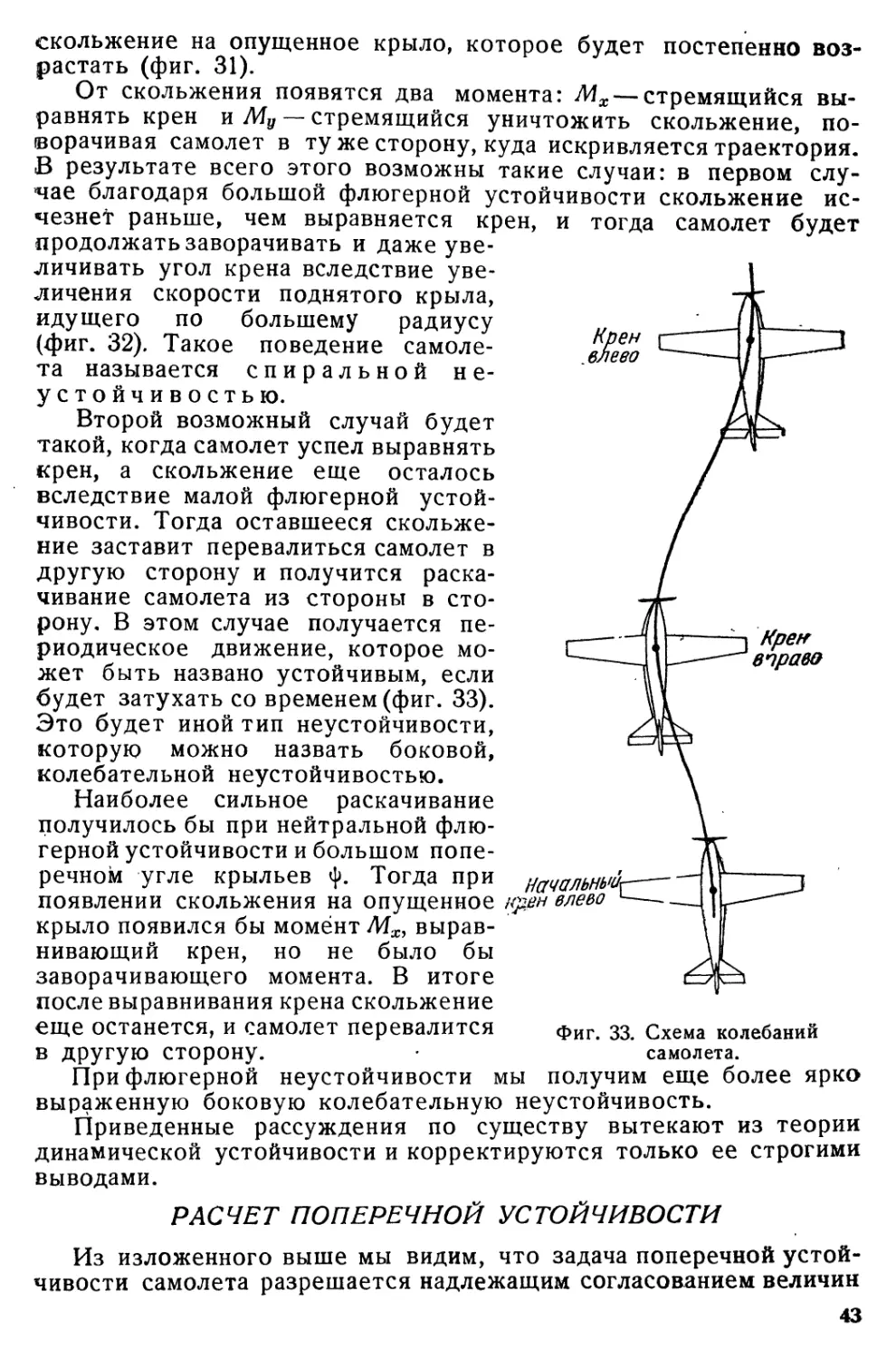
и тогда самолет будет
Крен
влево
Начальный?
Ч Крен
^вправо
Фиг. 33. Схема колебаний
самолета.
получим еще более ярко
по большему радиусу
скольжение на опущенное крыло, которое будет постепенно воз-
растать (фиг. 31).
От скольжения появятся два момента: Мх— стремящийся вы-
равнять крен и Му — стремящийся уничтожить скольжение, по-
ворачивая самолет в ту же сторону,куда искривляется траектория.
В результате всего этого возможны такие случаи: в первом слу-
чае благодаря большой флюгерной устойчивости скольжение ис-
4e3Het раньше, чем выравняется крен,
продолжать заворачивать и даже уве-
личивать угол крена вследствие уве-
личения скорости поднятого крыла,
идущего
(фиг. 32). Такое поведение самоле-
та называется спиральной не-
устойчивостью.
Второй возможный случай будет
такой, когда самолет успел выравнять
крен, а скольжение еще осталось
вследствие малой флюгерной устой-
чивости. Тогда оставшееся скольже-
ние заставит перевалиться самолет в
другую сторону и получится раска-
чивание самолета из стороны в сто-
рону. В этом случае получается пе-
риодическое движение, которое мо-
жет быть названо устойчивым, если
будет затухать со временем (фиг. 33).
Это будет иной тип неустойчивости,
которую можно назвать боковой,
колебательной неустойчивостью.
Наиболее сильное раскачивание
получилось бы при нейтральной флю-
герной устойчивости и большом попе-
речном угле крыльев ф. Тогда при
появлении скольжения на опущенное крен'влево
крыло появился бы момент Мху вырав-
нивающий крен, но не было бы
заворачивающего момента. В итоге
после выравнивания крена скольжение
еще останется, и самолет перевалится
в другую сторону.
При флюгерной неустойчивости мы
выраженную боковую колебательную неустойчивость.
Приведенные рассуждения по существу вытекают из теории
динамической устойчивости и корректируются только ее строгими
выводами.
РАСЧЕТ ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ
Из изложенного выше мы видим, что задача поперечной устой-
чивости самолета разрешается надлежащим согласованием величин
43
заворачивающего и накреняющего моментов при скольжении. Если
заворачивающий момент слишком велик, скольжение будет уни-
чтожено раньше, чем будет выравнен крен, и мы получим спи-
ральную неустойчивость. Весьма интересно обратить внимание на
то обстоятельство, что большой заворачивающий момент есть след-
ствие большой флюгерной устойчивости. И вот большая флюгерная
устойчивость вместо придания самолету устойчивости пути делает
его спирально неустойчивым. На практике хорошо известны слу-
чаи, когда уменьшение размеров вертикального оперения увели-
чивало устойчивость пути.
Если самолет имеет малый заворачивающий момент, но большой
накреняющий, то это также нежелательно, так как будет наблю-
даться раскачивание, которое в некоторых случаях может ока-
заться очень сильным.
Английский инженер Барнвелл (Barnwell) рекомендовал брать
для этих моментов соотношение:
дс«х
-/.-=3.
<>С
ST
Это значит, что при некотором скольжении накреняющий мо-
мент должен быть в три раза больше заворачивающего. Нам ка-
жется, что для самолетов, которые имел в виду Барнвелл, эта
цифра слишком велика. В Америке инж. Корвин-Круковский
(Korvin-Kroukovsky) и проф. Клемин (A. Klemin) рекомендуют брать
это отношение равным 1,5 — 2 и даже менее, особенно при вы-
соком расположении крыла.
дсм
Величина зависит в основном от поперечного угла крыльев,
дсм
а величина ------от вертикального хвостового оперения. Таким
образом весь вопрос о боковой устойчивости состоит в согласо-
вании поперечного угла крыльев и размеров вертикального опе-
рения. Формула Корвин-Круковского прямо дает расчет угла ф:
у С'
+ 0,5° = сх.у -Y".
Коэфициент сх. v рекомендуется брать от 250 до 500; В и Вв. 0 —
производные^— для крыла и вертикального оперения берутся
в зависимости от удлинения (см. стр. 12 и 15), S — площадь крыла;
S'B = SB. о--Sb. о—площадь вертикального оперения; 5ф —
боковая площадь фюзеляжа; Лф — расстояние от центра тяжести
самолета до центра давления фюзеляжа (см. фиг. 5), причем
в формуле имеется в виду, что центр давления фюзеляжа лежит
впереди центра тяжести.
44
в. о в. о в. о
Таким образом SB.O представляет собой площадь вертикального
оперения за вычетом доли площади, идущей на уравновешивание
неустойчивого действия фюзеляжа.
Расчет угла ф можно произвести, задаваясь отношением
дсм* дсм
и определяя моменты по продувке или по формулам,
приведенным выше. В этих расчетах, как и по формуле Корвин-
Круковского, можно получить требуемое соотношение моментов
при разных комбинациях поперечного угла ф и размеров верти-
кального оперения. Какая комбинация будет лучше, сказать пока
нельзя, так как детально вопрос не исследовался. С одной сто-
роны, увеличение угла ф и размеров вертикального оперения дает
более быстрое выравнивание самолета, но зато и возмущение
оказывается более сильным. Практически размеры вертикального
оперения выбирают по данным статистики или из условий облег-
чения вывода самолета из штопора, а затем подбирают необхо-
димый угол ф.
Полный расчет боковой устойчивости очень сложен и еще не
доведен до вида, пригодного для практического приложения.
Приведенный выше приближенный расчет сравнительно груб и не
учитывает многих факторов. Этим и объясняется большой диапа-
зон предлагаемых значений отношения моментов.
Мы указывали, что одностороннее действие восходящего по-
тока вызывает не только крен, но и заворачивание вследствие изме-
нения сь которое особенно значительно на больших углах атаки.
Так как это заворачивание вредно, крыло делают иногда закру-
ченным для уменьшения угла атаки на концах. Тот же результат
можно получить, применяя на конца*х крыла более тонкие про-
фили.
Вопрос боковой устойчивости при полете на близких
к максимальным, будет рассмотрен в главе о потере скорости.
УСТОЙЧИВОСТЬ ПРИ ДВИЖЕНИИ ПО ЗЕМЛЕ
ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ
В третьей части курса даны краткие сведения об устойчивости
яри движении по земле. Иногда рассматривают продольную устой-
чивость при движении с поднятым хвостом. В этот случае хвост
удерживается на весу под действием момента встречного потока
и струи винта.
Фиг. 34..Схема продольных моментов при разбеге.
Возьмем общий случай движения с некоторой скоростью V
(фиг. 34). Составим уравнение для момента относительно центра
тяжести:
^М2 = Л4Кр + Л4Г. о +F-A-cos <рш — ЛЛЛ-sin<рш + Р\Ув',
N = G — cy S-ф; F = f-N\
2 Mz = Мкр + Al г. 0 + Р-ув — h(G — Cy S ф) (sin <рш —/cos <рш),
где f— коэфициент трения колес.
Приравнивая сумму моментов нулю: ^Afz = O, мы можем1
найти 8 руля высоты и, в частности, найти, на какой скорости
46
самолет может поднять хвост. Если рассматривать возможность
подъема хвоста с места, то нужно пользоваться прямо моментами;
из аэродинамических моментов здесь остается один момент от
оперения, вызванный струей винта:
р/2
M'.o = s^ouo^c'yro.^,
где Ув —скорость струи винта, ^соответствует крайнему от-
клонению руля высоты; величина его, повидимому, зависит от
расстояния от оперения до земли и нуждается в специальном иссле-
довании. Предварительно можно брать с от 0,5 до 0,7. Скорость
струи винта можно выразить через тягу:
И. = 2,25/3=,
М'г 0 > Oh (sin <fo — / COS <ро) — Ро • у в,
где ср0 —угол выноса шасси на стоянке.
Для рассмотрения вопроса об устойчивости положения само-
лета с поднятым хвостом нужно продиференцировать сумму мо-
ментов по переменному а. Если встречного потока еще нет, то*
получим:
dMz dMr о
= —------о • Zs(cos<p + f • sin <₽).
К сожалению, мы ничего не можем сказать о —□—, так как оно*
da
зависит от характера изменения с' при удалении хвоста от
У г. о
земли. Если Л1'Опостоянен, то самолет в этом случае неустойчив,,
что вполне понятно, так как центр тяжести находится выше
точки опоры. Однако, повидимому, при низком положении опере-
ния изменение 2И' О придает самолету устойчивость.
При наличии встречного потока, например ветра, или в случае^
когда самолет уже набрал скорость, степень устойчивости быстра
4(Мкр + Л1г.о)
возрастает. Это происходит, во-первых, за счет ------------
в силу наличия статической устойчивости, а также из-за дей-
ствия шасси. Диференцируя момент от шасси, получим:
dMm л
= - h[(б - cgqS) (sin <f -/cos <₽)] =
= — h[(G — cg • q -S) ~ (sincp-/cos<f) +
+ (sin <₽ - f • cos <?) -^(G - c,,?S)] = - h [(G - cyqS) (cos <? -f-
4-/sin <p) — BqS (sin — /• cos <?)] —
, i x • \ Г/i cv4$\ BqS (sin <p —/-cos <p)l „ pH*
= -GA(coStf+/-sin^) Ц1-V)--G-(E^VT/“s^)J’
47
При малой скорости шасси дает неустойчивость, однако с увели-
чением скорости, во-первых, ослабевает нагрузка на шасси, а,
во-вторых, изменение угла атаки меняет силу Л/, что дает устой-
чивое действие. Можно найти скорость, при которой шасси уже
станет давать устойчивое действие. Для определения этой ско-
рости выражение в квадратной скобке приравниваем нулю.
2G
Обозначаем~с = V^; это — скорость, при которой самолет
взлетит при данном су:
- И2 (sin ф——/cos ф) __
Су 7o(cos? + /shl?) ~~ ’
В (sin ср — /cos ф) 1_ 1
(cosср+/sin?) J “ ’
72
ио
V =___________________1________________.
1/1 (sin ? — /cos у) *
V ‘ Су (COS ср -е /sill Ср)
V = - / ---------2 ‘ 0--------
I/ п <?Гг . о(81“<?— /• COS <о)~[
' Р [ у (cos ? + f • sin <р)J
Например, при/=0,05; <р = 20°; 5 = 4,5; су = 0,8 получаем:
-£- = 0,61 и V =.0,61 Ио.
F о
ПУТЕВАЯ УСТОЙЧИВОСТЬ
Рассматривая устойчивость при движении по земле, мы не бу-
дем заниматься поперечной устойчивостью, так как в этом направ-
лении нет свободы движения, если не счдтать качания на аморти-
заторах или опрокидывания на крыло.
Возьмем некоторый общий случай. Самолет катился по земле
и затем внезапно завернул влево, так что получилось некоторое
скольжение (фиг. 35). От скольжения возникают боковые силы:
аэродинамическая Z и от колес сила ZK. Первая сила очень мала.
Перейдем к моментам. Выражения для аэродинамических моментов
в зависимости от угла скольжения нам известны. Следует доба-
вить, что благодаря близости земли Л1Х от скольжения будет уве-
личен. Затем ввиду наличия угловой скорости <»в следует добавить
момент от вертикального оперения, вызванный вращением. ~
щение создает на хвосте боковую скорость ш9 • хв. 0, и изменение
атаки будет Дав. 0=-^—; отсюда получаем момент:
0/2 ю
ЛЛ _ В <? „ Г__ .
•'^В. ^в. О‘-'В. О^В. о 9
Вра-
угла
хв. о _ п о 2 рУ
у ---- £>В.О *->В.О ЛВ.О 2 •
Наиболее важны моменты от колеса и костыля. Силу,
ствующую на колесо, можно разложить на две: силу трения, дей-
ствующую вдоль оси х, равную: xK—fN, и силу, действующую
48
дей-
вдоль оси z, равную: zK = j\ • N — р* • ск • N, где ск — коэфициент,
характеризующий колесо и грунт; N — нормальная реакция колеса;
рк — угол скольжения колеса, равный отношению скорости колеса
вдоль оси z к скорости движения V:
_ Их -Хк
ГК у
(!) • X
=3----------9---“
V 1 V
Если на костыле поставлено колесо с жестко закрепленной
осью, то выражение для момента будет вполне аналогично моменту
колес. Если на костыле стоит ориентирующееся колесо или
костыль дает только простое трение, момент будет равен произ-
ведению силы FK на плечо хк • рк :
Знак -J- указывает на сложение аб-
солютных величин р и .
Рассмотрение устойчивости в
общем виде сложно и не дает
ясной физической картины. Мы
остановимся на двух характерных
случаях: 1) самолет движется по
земле с опущенным костылем,
2) самолет бежит с поднятым хво-
стом и костыль не создает момента.
Обычно при рассмотрении устой-
чивости ограничиваются опреде-
лением момента. Если он дейст-
вует в сторону заворота, то дви-
жение считается неустойчивым.
При таком способе рассмотрения
вопроса самолет в большинстве
случаев оказывается неустойчи-
вым. Мы рассмотрим вопрос не-
сколько иначе.
Если момент действует против
вращения, вопрос ясен. Однако,
даже если момент направлен в
сторону вращения, движение может
оказаться устойчивым в том слу *
чае, если вращение траектории
опередит вращение самолета. Так, фиг. 35. Схема заворачивающих
например, предположим, ЧТО ПО- моментов при движении по земле,
лучилось некоторое скольжение р
и момент Мд стремится усилить разворот; под действием сколь-
жения траектория станет криволинейной и в криволинейном дви-
жении Му станет не заворачивающим, а выравнивающим.
в. С. Пышнов—166—4
49
Мы назовем самолет нейтральным, если' при движении по
некоторой кривой моменты будут в равновесии и движение будет
продолжаться по кривой постоянного радиуса.
Итак, пусть самолет имеет скольжение под углом р. От сколь-
gt >7 _ dZ л
жения возникает боковая сила Z = • р. Боковая сила делает
траекторию криволинейной с радиусом кривизны:
т • V2 G /2
Г
Найдем угловую скорость вращения траектории:
Боковая сила Z сложится из ZK— от колес и ZK— от костыля.
В расчете устойчивости мы исходим из положения безразличного
равновесия, когда сумма моментов равна нулю:
Z^ ’ — Zic • Хк j
, xv 4- х' xv + xv
Z = ZK + ZK = Zk- k-T -k = /VK • CK . pK ..........-4^-,
x„ xv
Подставив NK = N------—t~, получим:
Хк + XK
Отсюда
d^y________1______
tf.8 ~ V / /2\ ’
F-'-bV’W
Уо —скорость, при которой Y=G при данном а.
Теперь находим моменты колес и костыля при данных р и
Если при положительном р момент будет тоже положителен, то
50
самолет устойчив. Условие устойчивости можно написать в виде:
dMg dMy dw
~d$"r ' ~d$
Найдем значения производных. Сперва найдем
и костыль. Нагрузка на колеса будет:
нагрузки на колеса
К
Wj + Л/, = — = О —
хк + хк хк , Лк
Нагрузка на костыль:
N3 = G~^-K-
и\
1
к \ 1'о/
Рассматривая вид спереди (фиг. 36), получим:
(Л^ —W2)z = ZK -ук == (М + ^)ск -
У
Фиг. 36. Накреняющий момент от трения колес.
Отсюда заворачивающий момент от разности сопротивления колес
равен:
W, + М) с./г. ft _ с • Д— л/л ( I -
1 ЛК ’ Хк \ К0 '
Момент колес от скольжения равен:
М = — ZK • хк = — (Gx + О2) • ек • ,3 • Л-К ( 1 — =
dM _ г хк хк /, Vе \
° х'к + Хк'Ск\} Vi)'
Момент колес
Vk
жения —:
от вращения получается от дополнительного сколь-
г Л -YI
l'К г/ I 1 9
v \
“ Ск • 1 ~s I
К ‘ к
ОМ _ 0 хкх\
dmy~ (*'K + xK)-V
Момент от костыля напишем в такой форме. Нагрузка на костыль
N9, сила трения костыля N$-fy боковая сила на костыле ZK =
= М * /' • гк • ? (если костыль дает только трение, то ск =1). Мо-
мент от скольжения будет.
/И = Д/д • f • ск • хк •
d₽ -ск-лк_о + •/ -Ск(1 кз).
Момент от вращения
М = ;
/2
4М М Х* Г /,/ Х* /l
<4 = Nsfc*^r = ° Ск ~V~ • 7“ 7 •
У лк^ лк \ и О/
Из аэродинамических моментов примем во внимание только
моменты от вертикального оперения. Скольжение дает момент:
М = 5в.0? Sb.oXb.O ^2~ 't
~-В S х
— £'в.(>,в.оле.о 2 •
Дополнительный момент от вращения:
Д/Г _ , D с m о с
-- 2 0*->В.0 Л'В.О^, ----2~ • Ов.оОв,олв.о.
Окончательное общее выражение для условия устойчивости
получим:
Получилось довольно громоздкое выражение, содержащее раз-
личные параметры и скорости в различных степенях. Однако
отрицателен только один член, соответствующий моменту колес
52
от скольжения. Для анализа устойчивости следует построить
dM
диаграмму по скорости.
Путевая устойчивость была бы гарантирована в случае, если
/' • с* = ск, т. е. когда коэфициенты бокового трения колес и
костыля равны.
Вообще существует некоторая определенная скорость, при ко-
торой условия устойчивости будут наихудшими. Ее можно найти,
. dM »
произведя диференцирование по И и приравняв производную
нулю. Однако, конечно, нагляднее иметь кривую по V.
Вопрос значительно упрощается, если считать, что аэродина-
/2
мические силы незначительны. Пренебрегая отношением —%, по-
vo
лучим:
1
хк-хк
d₽ хк+х,У * Ск}
IG (*к • Х к • Ск + Хи • Х* • Ск)
' Л К К 1 К Л
g V
У7 . с* Z> С — ---
' к к уг
Т
к ' к
1 -
Ск
1
£-Хк
< 1
к
Теперь мы можем сделать такие выводы: на путевую устой-
чивость влияют: 1) коэфициент бокового трения колес ск, ухуд-
шающий устойчивость, 2) плечо костыля х'к, увеличение которого
всегда полезно, 3) вынос шасси хк. На роли хк мы остановимся
подробнее. Обычно считают, что большой вынос шасси вреден,
однако, если бы мы вздумали сделать подсчет по приведенным
формулам, то убедились бы в обратном. Пользуясь формулой
1________1----
<V2 м
к /
f • ск
ск
1
к / У2 •
/----5+1
И‘Хк
53
* с
построим диаграммы —* по V для разных хк (фиг. 37). Как
ск
видно, увеличение хк позволяет иметь меньшее трение на костыле,
а при заданном/' • с'к мы получим лучшую устойчивость. Как же
увязать это с практикой? Здесь мы имеем очень интересный слу-
чай: пока самолет устойчив, хк увеличивает ее, но если нет пу-
тевой устойчивости, увеличивает момент, стремящийся развер-
нуть самолет, что очень вредно. [Если самолет неустойчив, то,
уменьшая хк, мы не сделаем его устойчивым, хотя степень не-
Фиг. 37. Соотношение коэфициентов бокового трения костыля
и колес по условиям устойчивости в зависимости от скорости.
устойчивости ослабляем. При учете аэродинамических моментов
уменьшение хк может сделать самолет устойчивым. Если не удается
сделать самолет устойчивым,то нужно обеспечить управляемость,
т. е. возможность действием руля поворота уничтожать скольжение,
если оно уже получилось. Однако при неустойчивости скольжение
можно уничтожить только в том случае, если оно не достигло
некоторой критической величины ркр. Определить ркр можно так:
момент от отклонения руля поворота выражается уравнением
ДЛТв.О = *^в-° *^В-О*
Величину &сУв о можно считать примерно равной 0,6; тогда по-
лучим ркр:
Q __ В.О
~~аГ
Необходимо стремиться к увеличению р,Ф.
54
При малых скоростях движения, когда эффект руля поворота
очень слаб, с заворотом бороться лучше при помощи других.сил.
он имеет
торможе-
даче газа
Здесь можно использовать управляемый костыль, если
колесо или нож. Затем можно применить раздельное
ние колес. У двухмоторных самолетов прибегают к
на боковом моторе.
Путевую неустойчивость самолета можно ослаблять
нием выноса шасси хк, однако более целесообразно итти по пути
уменьше-
Фиг. 38. Ориентирующееся шасси
самолета „Блерио IX".
увеличения коэфициента боко-
вого трения костыля/ -с'. Умень-
шение ск колес тоже полезно, но
в некоторых границах, так как
иначе будет ухудшена маневрен-
ность при движении по земле и
рулении с боковым ветром. Ради-
кальное уменьшение ск возможно
путем устройства ориентирую-
щихся колес, подобно тому, как
это применялось на аэропланах
Блерио (фиг. 38). Однако полная
свобода колес делает невозмож-
ным руление при ветре. Иногда
шасси делают на трех и четы-
рех колесах (фиг. 39). Задние
колеса являются основными и
расположены примерно под цент-
ром тяжести. Устойчивость пути
такого самолета близка к устой-
чивости самолета с неориенти-
рующимся колесом на костыле,
колес восстанавливающие моменты от незначительны. Если пе-
реднее колесо ориентирующееся, то руление с боковым ветром за-
труднительно так
как самолет раз-
ворачивается про-
тив ветра.
Внезапный раз-
ворот опасен на
малой скорости,
//^/////7/7/77777^7/7/77/777//^^^ ПРИ К0Т0Р0Й мо-
мент от руля пово-
рота может ока-
заться недоста-
точным, поэтому очень важно устранить причины заворота. Здесь
очень важна правильная установка колес шасси и костыля. Струи
винтов, искривленные крылом, могут быть причиной начала заворота.
Реакция вращения винтов дает неравную нагрузку на колеса и вы-
зывает заворачивающий момент. Еще при трогании самолета с
но только вследствие близости
Фиг. 39. Трехколесное шасси.
55
места следует предупредить возможный заворот. Интересен тот
факт, что чем тверже поверхность аэродрома, тем больше опасность
разворота вследствие большего ск. Устойчивость с поднятым
хвостом можно исследовать по тем же формулам, только выбро-
V
сив члены от костыля и изменив -ту- соответственно положению
самолета. В этом случае неустойчивость дает о себе знать на ма-
лых скоростях, когда действие оперения еще незначительно.
Однако момент от руля поворота благодаря струе винта довольно
велик, и получившийся заворот можно устранить.
При разбеге с поднятым хвостом ухудшение устойчивости пути
может наступить и на большой скорости, если аэродинамическая
флюгерная устойчивость мала, а поперечный угол крыльев велик.
Тогда при случайном завороте, особенно при боковом ветре, мо-
мент крена от скольжения может превысить момент колеса от
боковой силы ZK (фиг. 40), и тогда возрастет нагрузка на вну-
Фиг. 40. Опрокидывание самолета Фиг. 41. Одноколесное шасси,
боковым ветром.
треннее колесо. Трение этого колеса повышается и создается
заворачивающий момент. В худшем случае наружное колесо
приподнимается и самолет, резко развернувшись, терпит аварию.
Это явление наблюдалось у самолетов с низким центром тяже-
сти и узкой колеей колес.
Интересна схема с одноколесным шасси и боковыми костылями
(фиг. 41). В этом случае весьма важно подобрать жесткость ко-
стылей. Она должна быть такова, чтобы не допускать завалива-
ния самолета на крыло, но и не слишком велика, иначе неболь-
шие кочки не аэродроме дадут сильные толчки. Устойчивость
пути получается очень хорошей, так как при завороте накрене-
ние в противоположную сторону повысит трение костыля и даст
выравнивающий момент.
При рассмотрении устойчивости при движении по земле суще-
ственное значение может иметь давление воздушного потока на
стабилизатор и руль высоты. Если эта нагрузка направлена вниз,
она прижимает костыль и улучшает устойчивость. Когда же ста-
билизатор расположен очень низко, то от влияния земли он имеет
стремление приподняться, и это ухудшает устойчивость.
ДЕЙСТВИЕ РУЛЕЙ
Предположим, что самолет летит прямолинейно и равномерно.
В этом случае силы и моменты находятся в равновесии. Затем
пусть летчик отклонит рули — характер движения самолета изме-
нится. Поведение самолета в этом случае представляет большой
интерес. Мы уже говорили об управляемости самолета, характе-
ризуемой зависимостью между отклонением руля высоты или по-
ворота и углами атаки или скольжения1. Мы говорили о мане-
вренности, характеризуемой радиусом и временем виража. Но есть
еще один элемент, на который летчики обращают большое вни-
мание: это время, необходимое на то, чтобы после отклонения
рулей самолет вошел в соответствующий режим. Для перемены
режима необходимо вращение самолета вокруг соответствующей
оси. Летчик желает, чтобы при движении ручки самолет доста-
точно быстро принимал определенную угловую скорость и так же
быстро ее терял. Всякое проявление запаздывания и инерции
является нежелательным.
Анализ действия рулей представляет собой очень сложную за-
дачу и требует решения системы диференциальных уравнений.
Мы рассмотрим вопрос только с физической стороны.
ДЕЙСТВИЕ РУЛЯ ВЫСОТЫ
Пусть самолет летит прямолинейно и равномерно, а затем
руль высоты быстро отклоняется на угол 8 (для простоты будем
считать, что в первоначальный момент 80 == 0). От отклонения
руля появится некоторый момент 7Hz = ^-8; этот момент сооб-
Mz дМ о
щит самолету угловое ускорение = -j- = . От ускоре-
ния начнет появляться угловая скорость wz и начнет меняться
угол атаки. Угловая скорость и перемена угла атаки вызовут
изменение величины момента Mzi так как Mz есть функция угла
атаки, а угловая скорость дает тормозящий момент, о котором
мы уже говорили в теории виража. В итоге угловое ускорение
падает. Кроме того, от перемены угла атаки изменится подъем-
ная сила, появится центростремительная сила, и траектория ста-
нет криволинейной. Криволинейность траектории можно рассма-
1 См. ч. П.
57
тривать как вращение траектории. В результате всего этого после
некоторых колебаний установится угловая скорость вращения са-
молета и траектории, когда угол атаки будет больше начального
на величину Да, угловое ускорение и Mz будут равны нулю. Мо-
мент будет равен нулю по той причине, что, во-первых, момент
от отклонения руля будет снижен изменением угла атаки (мы
имеем в виду статически устойчивый самолет), а остаток будет
уничтожен моментом от вращения.
После того как самолет повернулся на нужный угол, летчик
отпускает ручку в положение, соответствующее новому режиму;
при этом получаются тормозящий момент и отрицательное угло-
вое ускорение, в результате чего угловая скорость уничтожается.
Анализ уравнений движения дал бы нам изменение всех элемен-
тов движения по времени. Мы рассмотрим только те параметры,
которые пропорциональны изменению интересующих нас величин.
Установлено, что мнение летчиков об управляемости складыва-
ется из наблюдения за соотношением между угловой скоростью или
угловым ускорением, с одной стороны, и давлением на ручку — с
другой. Это мнение вполне естественно и имеет простое физическое
объяснение. Изменение режима полета самолета можно уподобить
открытию тяжелой двери, снабженной пневматическим тормозом
(тормоз состоит из цилиндра с поршнем, в котором имеется не-
большое отверстие). Отворяя такую дверь, мы, во-первых, должны
преодолеть инерцию двери, а затем продолжать нажим для пре-
одоления действия тормоза. Двигая ручку управления, летчик как
бы нажимает рукой на самолет и оценивает эффект этого нажима.
Для оценки действия руля высоты найдем следующие две вели-
чины: 1) зависимость начального ускорения от давления на ручку;
2) зависимость угловой скорости от давления на ручку. Мы пола-
гаем, что эти две величины характеризуют поведение самолета.
Угловое ускорение при действии рулем высоты будет:
= Мг = -Ц^.Яг.05г.0лг.о<>
/'“$
где п = -| /
у $Г. о
Давление на ручку будет: Q = &/Иш; k = где л —ход руч-
ки, a k представляет собой коэфициент передачи.
Л1Ш — 2-- ‘ ^Р- В &р.
SP. в —площадь руля высоты, Ьр. 8 — хорда руля высоты.
Само гш приближенно выражают так:
Gil = Pl ЛГ. О 4“ Ръ 9
где рг = ; р2 = (обе величины определяются продувкой).
58
Так как мы считаем, что до отклонения руля сш = 0, а угол
атаки еще не успел перемениться, то получим:
= Р2 • °;
р • и2
“ 2 * *^Р-в ^р в Р2 ’
отсюда
g =Мщ=Q
Р • У г. о Р • У г. о „
2 ^р.в^р.вРг 2 ^р.в^р.в/^
Подставляем 3 в выражение для М- и затем :
Р •
dv>z _ 2~° ’ Br.oSr.oxr.ora
и/ р . у^ ’
-SP'Bbp.BP2k
liv>-
д dt 1 *^г. О -«г. о ^г. о л
— Q ’ 7Г ’ 5р. в ’ Ьр. в ' ~Pi ’
Интересно отметить, что эта величина не зависит от скорости;
ее можно получить практически, если в полете измерять давле-
ние на ручку и угловое ускорение (специальным прибором).
Можно еще сделать такое преобразование:
п = у ; Jz — т- г*; iz — h • I,
где iz— радиус инерции, iz — относительный радиус инерции, после
чего выражение для А примет вид:
д g | / ^Г. О *Т. О ♦ ^г. о
- GP 7* V 5р. в &^“в ‘ pz.k' .
S х
Величины -«у— , .г*-—, ВТ, о и k изменяются в малых преде-
^р. в °р. в
лах. Отсюда мы видим, что у больших и тяжелых самолетов руль
высоты работает более слабо и потому особое внимание нужно
дсш
обращать на снижение р2 = —^, а также полезно делать пере-
менным в полете коэфициент передачи k.
Перейдем к расчету зависимости угловой скорости от усилия
на ручке. Прежде всего найдем зависимость между измене-
нием угла атаки Ла и углом 8. Пусть у нас есть диаграмма Mz
по а, на которой кривая при 8 = 0 пересекает ось абсцисс при
угле атаки а (фиг. 42). Отклонив руль высоты на угол 8, мы пе-
редвигаем диаграмму на некоторую величину, и тогда возникает
59
момент Als, вращающий самолет. По мере увеличения угловой
скорости будет появляться момент AL, противоположный ЛЬ , и,
кроме того, будет убывать вследствие перемены угла атаки.
Наконец, при некотором Да наступит равновесие моментов, и
можно будет написать:
дМ
до
дМ да
да дт
. дМ а
® ш = °-
Перед поставлен знак +, так как Да будет отрицательно.
Мы считаем, что движение установилось, и самолет и траектория
вращаются синхронно. Угловую скорость вращения траектории
получим так: изменение угла атаки дает изменение подъемной
силы ДУ; радиус кривизны траектории будет:
Фиг. 42. Изменение продольного момента при
действии рулем высоты.
рИ А е
_ «У2 _ СИ2 . _ V _ g &Y 2 ' в .
Г — ДУ ~ Р-ДУ ’ Шг ~ г ~ GV ~ GV ’
Т/2
G = су • р • S • ; Дсу = В • Да;
gB • Да . с V да C..V
со = ----- ---• Да у со ; —_ = у .
CyV gB z дау gB
Выражения для производных от моментов будут такие:
дМ _ ?ИГ2 О д Q дМ _дсм рр
до ~ 2 ’ Го г>г о Лг о п> дГ ~ да ~2~ ’ ‘ °СР-
Момент ЛГц> имеется у крыла и у горизонтального оперения.
Однако при обычной схеме моментом крыла можно пренебречь.
Момент от оперения получается вследствие увеличения угла атаки
стабилизатора на величину
-^аг.о
Z г. о
V
60
Этот момент равен:
Л/Г Р О 7Э А Р^Г. О О 2 уэ
=----2 ^Г. О^г. О^г. оЗ^г. О “^T^r.O^r.O^r.O^Z)
dM _ рИ2 0 2
2F Лг- °Лг- °Dl
Из уравнения равновесия моментов находим <oz:
(^L . + ЛИ) = 0;
да дсо д(.о /
дМ
дм
Ш ~ М да дм
да д<& д&
о
дМ дЪ да дМ дВ *
да дМ ' дш 'дш дМ
дМ дЪ
Выражение можно заменить через частную производ-
ную , отвечающую условию <Dz=const; в статической
/rfB х 1
вости этому условию отвечает полная производная (,
ная из условия, что момент от dZ противоположен
, дВ / db х
от da; отсюда следует, что
устойчи-
получен-
моменту
Ш дМ_ . до_________
д& дМ
да
дм
г. о лг. О'
г. о
Подставим значения производных:
в
РИГ2О5Г.О4 0Вг.р-2 _ / j/8 \
27рИ2 <А. о5г. cAo" \ da Iст g В
Нужно иметь в виду, что у статически
Ойг) отрицательно и потому в знаменателе будет сумма.
п 2G
Рассмотрим, как влияет скорость на ш. Подставим су = .
Ш =
о
Л'г. О / \
V • П \ da / ст gB
устойчивого самолета
ВИ
ЪУп
г. о
П
г. о
1___________________
2/z / Реам
ст ’ "V
Реам ЗДеСЬ
деленной
условная „плотность" самолета, равная массе самолета,
G
на площадь и размах крыльев: рсам=^-
1 См. ч. П.
61
Эта величина играет большую роль в вопросах динамики само-
лета. Величина, стоящая в квадратных скобках, может быть взята
как безразмерная характеристика. Большая статическая устойчи-
вость вместе с большим рсам будет давать вялое действие руля
высоты. При статически неустойчивом самолете будет большая
эффективность руля высоты, хотя не следует переходить некото-
рой границы, когда знаменатель обращается в нуль. В этом слу-
чае может быть угловая скорость даже без отклонения руля
высоты.
Найдем связь ок с давлением Q на ручку сначала в общем
виде:
дМ* , дМ да . . дМ Л
до 1 да дм 1 дм ’
n dQ да dQ . dQ *
да дм 1 дм 1 ЭВ
Из второго выражения находим 3 и подставляем в первое:
__ Эо ЭВ / dQ да . dQ \
dQ 4 ~ * “ЛГ + ~д^)’
Решая его относительно w, получим:
_ Q
w эо. л- ___dQ'
да дМ дм дЪ дм дМ ЭВ да дм дм
Как это мы уже делали, подставляем
ЭЛ1 ф rfB\
да * дМ \da Jcr’
да дМ дМ „ dQ dQ dQ
величины-^, -й-, у нас уже имеются; найдем-^, Та- и .
oV2
Q = kMw = k k —2 ^р.в&р.в (Pl^r. о + P$)»
Угол атаки стабилизатора в криволинейном полете будет:
Ц)Х
аст = а + ? — Да Ч--у- ;
Л 2 2В { х
Ла -- -т- Си -г- (а — а0).
«к J кк v 07
Диференцируя Q по а, S и ш, получим:
dQ __ . ?^г. о ~ . п .
до ~ к 2 оР-вС/Р-вг2>
_ Р^.о ~ п (. 2В\
Оа ~ k 2 5Р-«йР-в "Pi Р ’
dQ _ . Р^Г2 О о . „ О
дш к 2 Ор- В°Р- В"1 V •
62
Подставим производные и вынесем из знаменателя
k^VSp, в&р. в хг. о, чем сделаем его безразмерным:
^р.в ^р.в Хг.о
х____________________________ 1___________________________
/ db j eyPi ^г. о I / Ур. оУ _р2 __ ^г. о Zj_2 \ СУ _ / ^г.О V Pi
Д ^/ст 2^Bxr 0 \ V }'п-2 2 Pl\B ~^)gxrQ \ v~) 2.
Объединяем первый и третий члены знаменателя и подстав-
ляем
_ 2G _ G
~ Р5И2 И Рсам ~ g-S-l ’
ш —----т7Т~с-?------ X
^Р^р. в ^р. в Хг. о
Полезно обратить внимание на физический смысл каждого
члена, стоящего в знаменателе: первый член характеризует дав-
ление на ручку, необходимое для увеличения угла атаки; второй
член характеризует давление, необходимое для преодоления про-
тиводействия самолета вращению, и, наконец, третий член харак-
теризует облегчение отклонения руля из-за кривизны траектории.
Применяя компенсацию, мы уменьшаем рг и р2. Однако есть так
называемая серво-компенсация (фиг. 43), при которой уменьшается
только р2> т- е- компенсируется поворот руля. Если же произо-
шло изменение угла атаки всего оперения, усилие не ослабляется.
В итоге при серво-компенсации р2 < В результате при неко-
тором соотношении р2 и рх знаменатель выражения может стать
отрицательным. Это крайне нежелательный случай, аналогичный
случаю перекомпенсации, когда рх или р2 становятся отрицатель-
ными. Впечатление летчика при этом будет такое: для отклоне-
ния руля он прилагает некоторое усилие, по мере же нарастания
угловой скорости давление на ручку падает и становится даже
обратным. Применяя серво-компенсацию, нужно предусмотреть
это явление.
63
ДЕЙСТВИЕ ЭЛЕРОНОВ
Действие элеронов сильно напоминает действие руля высоты.
При отклонении элеронов в первый момент появляется угловое
ускорение, которое, однако, быстро исчезает, и дальше накрене-
ние самолета идет с постоянной угловой скоростью. При возвра-
щении элеронов в начальное положение угловая скорость также
быстро исчезает. Такое поведение самолета объясняется проти-
водействием крыла вращению.
Угловое ускорение в момент отклонения элеронов может быть
легко определено делением момента от элеронов на момент инер-
ции относительно оси х. О моменте элеронов мы уже говорили. Отме-
тим, что угловое ускорение играет в этом случае малую роль.
Рассмотрим подробнее противодействие
Предположим, что самолет вращается
крыла вращению,
вокруг оси х с некоторой
Фиг. 44. Распределение окружных
скоростей при крене.
фиг. 40. изменение угла
атаки, вызванное окруж-
ной скоростью.
ла, лежащее на расстоянии z от плоскости х—у, то оно
будет иметь две скорости—скорость полета V и окружную ско-
рость • z. После сложения скоростей получим изменение угла
атаки (фиг. 45):
• г
tgAa = -^-
При медленных вращениях можно считать tgAa —Да (при
штопоре вращение самолета столь быстро, что это допущение не
применимо). Точно так же в данном случае можно пренебречь
изменением величины скорости.
Изменение углов атаки, естественно, вызовет изменение на-
грузки вдоль размаха крыла и создаст момент, направление кото-
рого на режимах плавного обтекания противоположно направлению
угловой скорости. Этот момент нельзя назвать восстанавливающим,
так как он вовсе не уничтожает крен самолета, а стремится лишь
остановить угловую скорость. Поэтому момент называют гасящим
(демпфирующим), или тормозящим.
Определить тормозящий момент можно следующим образом.
Изменение подъемной силы элемента крыла может быть выраже-
но так:
dY = Дг„ bdz = В • Да bdz = В^-- bzdz.
у 2 2 V £
64
Элементарный момент будет:
Д/И = dYz = Ви>х -%- bz*dz.
х 2
Интегрируя, получим:
п 2
/И = j* Bbz~dz.
__ i
Мы оставили В = — под знаком интеграла, так как оно, вообще
говоря, переменно по размаху. Интеграл может быть найден пу-
тем подсчета площади диаграммы Bbz\ построенной по z (фиг. 46).
Фиг. 46. Диаграмма для расчета тормозящего момента.
Значение В можно получить, используя какой-либо метод расчета
распределения нагрузки по размаху, хотя, конечно, само враще-
ние, вызывая изменение распределения нагрузки, даст и измене-
ние В. Однако обычно это не учитывается. Предположим, нам
удалось подобрать некоторое Вср, тогда, вынося его из-под знака
интеграла, получим интеграл:
+ V" + 4
J bz2dz — J*z2dS = J'X.
2 2
Величина J'x~ момент инерции площади крыла относительно
середины крыла.
Для приведения момента в безразмерную форму разделим его
на
_ М-2 _ ^xBcpJx.
См ~ pSW — VSl~ ’
BSI
D г' •
п ср Jx
Определим угловую скорость вращения крыла, если отклонены
элероны. Для этой цели приравняем момент элеронов тормозящему
в. С. Пышнов—166—5 65
моменту:
~2 2 ___
. ф-. 2 f Bbz*dz = -ф- 8э-2 Гв\/ h-bzdz ;
V £ J & J г ь
J Bb z2dz
о
Приближенно можно В вынести из под знака интеграла и со-
кратить. Если элерон проходит по всему крылу и -у- постоянно,
получим:
Аэ
i
2
/ / bzdz
o'
£
2
j bz2 dz
0
IQ
где Q —удвоенный статический момент площади одного крыла.
В случае прямоугольного крыла
1 £.
2 2
J bzdz = b • Jbz^dz^b—-,
о о
РАБОТА ЭЛЕРОНОВ ПРИ ВИРАЖЕ И СПИРАЛИ
При вираже расстояние от оси вращения до различных частей
крыла различно, а потому скорость будет переменной по размаху,
вследствие чего появится некоторый момент (фиг. 47)х.
Кроме того, при вираже будет иметь место также инерцион-
ный момент, стремящийся уменьшить ' угол крена, и, наконец,
в случае спирали к этому всему добавляется момент от перемены
1 Вопросом о величине момента от переменной скорости и о зависимости
этого момента от угла крена и других параметров самолета занимался проф.
В. П. Вет<Гинкин (см. его книгу „Динамика самолета*, ОНТИ, 1933).
66
углов атаки по размаху, так как различнее части крыла будут
двигаться по спиралям хотя и одинакового шага, но с различным
углом наклона к горизонту.
Фиг. 47. Изменение скоростей по размаху при вираже.
В третьей части курса мы уже применяли разложение враще-
ния самолета при вираже на плоскости х—у и х— z. В частно-
сти, мы получили радиус rz в плоскости
х — z (фиг. 48).
Подставляя значение для радиуса
виража, получим:
г V2
г _ г вир .
z cos 7
у
Подставляем Ивир = :
У cos 7
2 g sin 7 cos 7
sin 27 • sin 2y cy
Отсюда следует, что минимум rz
соответствует виражу или пологой спи-
рали с креном 45°.
Самый малый rz получим, подставив
Практическое Имин, гор ИЛИ Су = 0,7 £у макс
(если Су близок к максимуму, вопрос
требует совершенно иного рассмотре-
ния; таких виражей, вообще говоря,
не делают):
Фиг. 48 Определение радиуса
кривизны траектории в пло-
скости х—г.
у 2
к МИН
гхмин= 2-у- =
G >4
у Макс
67
Накреняющий момент от переменной по размаху скорости по-
получим, составив интеграл:
z
+ 2
MXl [cvbzdzv\.
__1_
“ 2
Скорость в сечении, лежащем на расстоянии z, будет:
V. = V = V (1 + — \
Гг \ Гг J
+ Т
MXl = -ф-у Cybz (1 + ~}dz-,
Очевидно, сМх достигнет максимума при rz мин
— _____4 О_____ _ Реам * 4 * — __ Реам * 4
Г‘ мин = Pg-Sb 0,7cVMaKC ~ р0,7 • Слмакс ’ г “ pc^sn.2 7 '
Как видно См^ будет расти вместе с уменьшением-^-. Расчет
сМх наиболее удобно произвести графическим интегрированием,
1 — / 7 \2 ‘
построив диаграмму cybz ( 1 + ) по z н подсчитав ее площадь.
\ г 2 /
Следует учесть изменение су по размаху хотя бы грубо. Затем
можно внести в величину су изменение от отклонения элеронов,
как это мы уже делали. Для получения более общих выводов
можно прибегнуть к математическому интегрированию, особенно,
если изменение су по размаху незначительно. Вынося су из-под
знака интеграла, получим:
Отсюда мы видим, что при постоянном са первый и третий инте-
гралы равны нулю,^ так как представляют собою произведение
элемента площади bdz на нечетные степени z. Второй интеграл
равен отношению момента инерции площади фигуры J'x к SZ2.
У обычных самолетов I мало по сравнению с rz, и тогда можно
считать (1 +-“) =1 + 2
Если самолет делает спираль, спускаясь или поднимаясь, дви-
жение самолета сложится из вращения вокруг оси спирали и дви-
жения вдоль оси спирали. Вертикальная составляющая скорости
всех частей крыла будет однакова, а горизонтальная — различна
вследствие различного расстояния от оси вращения. В результате
будет некоторое изменение углов атаки по размаху. Если спираль
с подъемом, то произойдет уменьшение углов атаки, причем это
скажется сильнее в частях крыла, идущих с меньшей скоростью,
т. е. со стороны опущенного крыла. Это вызовет образование
накреняющего момента и, следовательно, он прибавится к мо-
менту от разности скоростей.
При спирали со снижением углы атаки возрастут и опять
в большей степени у опущенного крыла. Но в этом случае мы
получим момент, выравнивающий крен.
Момент, возникающий от спирального движения самолета,
можно подсчитать, определив углы атаки и соответственно рас-
пределив су. Однако практически этот момент оказывается не-
значительным, и только в редких случаях — при крутой спирали
малого радиуса — он может уравновесить момент от разности ско-
ростей. При вираже и спирали имеется еще момент от инерци-
онных сил. Количественно он может быть подсчитан по формуле:
Mi = (о2 sin у cos у ЛР = 0,5 w2 sin 2? /кр.
- Практически он тоже незначителен. Когда мы перейдем к што-
пору, то увидим, что там эти два момента играют весьма значи-
тельную роль.
ДЕЙСТВИЕ РУЛЯ ПОВОРОТОВ
Руль поворотов, вообще говоря, является второстепенным орга-
ном управления. Он очень нужен в процессе движения по земле,
так как шасси обычных самолетов не терпит сноса. В полете руль
поворотов служит для создания скольжения по воле летчика и для
уничтожения скольжения, которое появляется само собой в кри-
волинейном движении; наконец, руль поворотов играет важную
роль при выводе самолета из штопора.
При рассмотрении,действия руля высоты мы определяли угло-
вое ускорение Аналогично мы можем найти угловое уско-
рение взяв момент от отклонения руля высоты:
_ ^в. о Хв. о ? о пр. п ^р. п
dt “ 2Jy •
69
Сравним это ускорение с будем считать
х = х ; V = V
в. о г. о » в. о г. о ,
^у _ ^2 ^В. о ^В. О Лр. П ^р. п
~dT:
Угловое ускорение вокруг оси у меньше, чем вокруг оси z,
так как SB.o меньше Sr. о, Въ, 0 обычно меньше Z?r. о, a Jy примерно
в два раза больше Л. С точки зрения улучшения маневренности
и единообразия пилотирования самолетами следует стремиться
к сохранению отношения угловых ускорений при равных отклоне-
ниях рулей. У самолетов с большим размахом крыльев, и осо-
бенно у планеров, Jy значительно превышает Jzt и потому более
слабая эффективность руля поворота бывает более заметна.
Можно рассчитать отклонения руля поворота во время ви-
ража, однако эту работу нельзя выполнить с достаточной точно-
стью, так как трудно учесть разность сопротивлений крыльев,
особенно после отклонения элеронов для уравновешивания мо-
мента относительно оси х.
С точки зрения работы руля поворотов и координации откло-
нений руля поворотов и элеронов наиболее важным моментом
будет процесс накренения самолета элеронами или удержания само-
лета от накренения при попадании в восходящий поток перемен-
ной скорости в направлении размаха крыльев. В теоретическом
отношении оба случая вполне аналогичны. Предположим, мы
отклонили элероны. Тогда, как мы уже выяснили, после краткого
ускоренного вращения устанавливается равномерная угловая ско-
рость, величина которой определяется моментом элеронов и про-
тиводействием крыла от перемены углов атаки.
Причина появления заворачивающего момента объясняется
очень легко. Подъемная сила направлена перпендикулярно встреч-
ному потоку; так как углы атаки по размаху переменны, направ-
ления подъемных сил будут различны. Со стороны опускающегося
крыла подъемная сила несколько отклонится вперед, с противо-
положной— отклонится назад. Для расчета заворачивающего
момента удобно воспользоваться моментом тангенциальных сил.
Как мы уже знаем, увеличение угла атаки сопровождается
уменьшением ct, или нарастанием его отрицательного значения.
Со стороны опускающегося крыла, угол атаки которого возра-
стает, ct направится вперед, на противоположном крыле ct будет
направлено назад. Момент относительно оси у получим, приняв
соответствующее распределение ct по размаху, что можно сделать
в общей форме.
Мы приводим только результат этого громоздкого вывода.
Коэфициент заворачивающего момента от накренения будет:
_ O)Z Jx .
cj»y = Су Т “sF ’
70
/^.—-момент инерции площади крыла. Важно отметить, что сМу
пропорционален т. е. проявляет себя наиболее сильно при
полете на больших углах атаки. Подставив вместо <о найденное
уже нами выражение, связывающее ш с углом отклонения элеро-
нов, мы можем получить сМу в зависимости от отклонения эле-
ронов:
СмУ — ^7 С<) ’
о/
Q3 — статический момент площади частей крыльев, к которым
прилегают элероны, причем моменты обеих половин крыла скла-
дываются.
Определим необходимое отклонение руля поворота, если ни-
каких приспоблений для уменьшения сМу нет:
Сму ~ SI °э Ва.----JI—
в. о в. о I к в.о
2
I 5в. о ^р. п ^р. п«
Для случая планирования
/ у \2
1-^-1 =0,9;
в. о
Q3 Пэ Су — С?в. о * 0,9 Вв. q Пу. п ^р. п,
L°pLn
"V
Qb. О- 5в. о -^в. о»
= 11—1.-’ -
’ Ов.о’
р. п в. о
Нужно стремиться
при большом су\
к тому, чтобы Вр.п было меньше 8Э лаже
5Р-П j .
5э
р-п
отсюда
1 1 . _5_ . -51. < 1 •
' -@в. о пр. п &в. о
"р. п °в. о
пэ равно примерно 0,5; пр.п равно примерно 0,8;
р. п
В в. о — 5,7 ,
в. о
; для К,, о =1,5 Вв. 0 = 2,5.
в. о
Подставляя эти значения, получим при су— 1,2:
Qb.o>0,33Q3 .
Статический момент части площади крыла, прилежащей к эле-
рону, составляет около 0,5 • QKP, где QKp— сумма статических мо-
ментов площадей обеих половин крыла; отсюда
QB. о >0,165 QKP.
У современных самолетов-*^- близко к 0,165, хотя бывают
^кр
и более низкие цифры порядка 0,12 — 0,14.
Особенно большое вертикальное оперение у планеров объяс-
няется именно тем, что у них бывают большие элероны, идущие
почти по всему размаху, и потому Q3 почти равно QKP. Если у
самолета или планера вертикальное оперение невелико, то при по-
лете на больших с„ нельзя применять больших отклонений эле-
ронов.
Из мероприятий, дающих противодействующий момент, изве-
стны диференциальные элероны, о которых мы уже гово-
рили. Однако они дают значительную выгоду только в том случае,
если сделаны по типу концевых элеронов. Если же элероны идут
почти по всему размаху крыла, никакой пользы от них нет. При
действии такими диференциальными элеронами подъемная сила
крыла изменится и летчику придется компенсировать это соот-
ветственным изменением угла атаки. Единственный тип элеронов,
которые совершенно не дают заворачивающето момента, — это
плавающие элероны. В остальных случаях летчик вынужден
для уничтожения момента действовать рулем поворота.
ПОТЕРЯ СКОРОСТИ
Основная особенность самолета как средства транспорта заклю-
чается в том, что самолет не способен двигаться сравнительно
медленно. В полете не может быть допущена скорость менее
некоторой минимальной величины
Она определяется условием равенства подъемной силы и веса.
Если подъемная сила окажется меньше веса или, вернее, если
проекция подъемной силы на вертикаль окажется меньше веса,
мы получим ускорение по вертикали вниз jy, это ускорение будет
давать нарастающую вертикальную скорость и траектория будет
искривляться вниз.
Термин потеря скорости имеет два понятия: 1)недостаток
подъемной силы и 2) полет на угле атаки больше критического.
Необходимо эти понятия разделять, хотя практически оба явле-
ния иногда имеют место одновременно. К сожалению, у нас нет
термина для определения полета на угле атаки больше критического.
На немецком и английском языках есть такие термины; они могли бы
быть переведены на русский язык как „перетянутый полет".
Иногда такой полет у нас называют „закритическим полетом".
Связь недостатка подъемной силы с полетом на угле атаки
больше критического объясняется следующим образом.
Предположим, что летчик чувствует, что линия полета посте-
пенно склоняется вниз, и самолет в силу своей устойчивости
тоже начинает опускать нос, тогда летчик попытается увеличить
подъемную силу путем увеличения угла атаки. Если угол атаки
уже был велик, можно довести самолет до гдмакс. Это особенно
легко может случиться на самолете статически неустойчивом, у
которого сильное изменение угла атаки может произойти даже
без специального отклонения руля высоты, а в силу лишь началь-
ного толчка. При достижении Макс происходят весьма значитель-
ные изменения в характеристиках устойчивости и управляемости.
Особенно сильна тенденция самолета сваливаться на крыло от
незначительных причин, что на малых высотах весьма опасно.
В истории авиации „потеря скорости" была причиной огромного
количества катастроф. Бывали случаи, когда самолет проявлял
тенденцию опустить нос и ударялся под углом о землю, хотя
летчик делал попытки выравнять самолет. Еще чаще случалось,
73
что самолет внезапно сваливался на крыло и падал. Такие случаи
называли скольжением на крыло, хотя это и не было в собствен-
ном виде скольжением на крыло. Интересно, что в первые годы
авиации все эти случаи объясняли порывами ветра и вихрями. По
этой причине опасались летать даже при среднем ветре, ожидая
почти полного штиля.
Действительно, если наблюдаешь внезапное сваливание само-
лета на нос или крыло, трудно представить, чтобы это произо-
шло без мощных внешних причин. Однако через несколько лет
более опытные и сообразительные летчики установили, что ветер
не при чем и что самолет способен сохранять управляемость
даже при очень сильном ветре. Потеря скорости была большим
злом и боролись с ней различными способами. Мы остановимся
дальше несколько подробнее на этих способах.
Решающую роль в борьбе с потерей скорости сыграли два
фактора: дисциплина при полете на малой высоте с непрерывным
контролем скорости по прибору и придание самолетам статичес-
кой продольной устойчивости. О роли положения центра тяжести
в устойчиврсти самолета было известно очень давно, однако не
предполагали, что сравнительно незначительное смещение цент-
ровки может иметь столь тяжелые последствия. Если взять,
например, двухместный самолет, то средняя хорда его крыла
близка к 2 х Из теории статической устойчивости мы знаем, что
обычно запас устойчивости dcMz]dcMy не превышает 0,05 — 0,07, т. е.
5—7°/о средней аэродинамической хорды, и следовательно, для
получения неустойчивости достаточно сдвинуть центр тяжести
на 10 — 15 см. Это может произойти от разных причин, как,
например, от изменения веса экипажа, загрязнения хвоста
и пр.
Рассмотрим раздельно условия полета при недостатке подъем-
ной силы и затем при угле атаки, близком к критическому. При-
чиной недостатка подъемной силы может быть внезапная оста-
новка мотора и неправильное действие летчика. Поэтому ката-
строфы по причине потери скорости часто объясняли „ошибкой
летчика*. Ошибка летчика заключается в том, что он хочет по-
лучить от самолета такой наклон траектории, на который самолет
не способен. Такая ошибка особенно возможна при переходе на
второй режим полета, когда увеличение угла атаки дает умень-
шение угла подъема. Наиболее сильная потеря скорости может
быть при выполнении чрезмерно высокой „горки* и при совер-
шении фигур высшего пилотажа.
Несмотря на большую практическую важность вопроса о потере
скорости, детального теоретического исследования не было сде-
лано. В полном виде исследование было бы весьма сложным. Мы
рассмотрим вопрос приближенно для выявления основных сторон.
Предположим, что самолет летит горизонтально с некоторой
скоростью V\ под соответствующим углом атаки ах. Затем летчик
резко увеличивает угол атаки до некоторой величины а2, которой
соответствовал бы горизонтальный полет на скорости И2. Допу-
стим, что лобовое сопротивление не изменилось, и 1^2< тогда
74
уменьшение скорости должно сопровождаться увеличением высоты
на величину А2, которую мы найдем из условия сохранения энер-
гии. Так как в начальный момент самолет находится ниже уровня Л2,
то произойдет колебательное движение, и самолет будет описывать
некоторую волнистую траекторию относительно нового уровня.
Рассмотрим первую волну, сделав такие допущения: 1) наклон
траектории не превышает 15 —20°, когда косинус угла наклона
траектории можно считать равным единице; 2) тяга винта в сред-
нем равна сопротивлению и потому сумма энергий кинетической
и потенциальной не изменяется. Характер движения будет таков,
как изображено на фиг. 49: после увеличения угла атаки поя-
вится вертикальное ускорение; траектория за точкой 1 с-танет
подниматься, выгибаясь по некоторому радиусу. С подъемом
скорость падает из условия сохранения энергии:
mV2
2
~ -G-h; V2 = Vl-2gh-, (j/J - I"
2g7z _ « _____h
У* ~ h,-
У1
Ло = 2^ представляет собой ту высоту, на которую мог бы под-
няться самолет, если бы скорость упала до нудя. Общее выра-
жение для ускорения по вертикали примет вид:
Y-G
т
Y — подъемная сила.
При угле атаки я2 и скорости И2 подъемная сила равна весу
самолета: Y — G, откуда
1
Для точки 1 со скоростью ускорение будет — 1].
75
Когда скорость упадет до значения 1/2, самолет дойдет до
точки перегиба 2 и поднимется на высоту А2:
v i ~ V2 / ‘ vl \
~ V*)'
Самолет будет иметь вертикальную скорость U2 и наклон тра-
ектории 92, причем sin62 = ~. Дальше самолет будет продолжать
подъем и достигнет точки 3, где скорость равна И3, высота й3, а
I 1
ускорение /3 = g — 1 действует вниз. При сделанных допуще-
I ^2 J
ниях вторая половина волны будет симметрична первой. Опреде-
лим максимальную высоту подъема А3, скорость И3, время совер-
шения волны t и длину волны L.
Возьмем выражение для ускорения и выразим скорость через
высоту:
y = g И2 =
V1 1 2 • g h
dVi
__ 2
dh
VI
d
и
о
Lo
L\v2 f y 2
И Г J A
/ т/2 \
• h-^h2.
vl
На вершине волны U — О,
]7^ у %
h = 2/z2.
g 2
2
2
vl(v_l _ 1
g \4
Перейдем к определению времени:
у? 2g2
U2 = 2g^-2gh-^-h2.
Для удобства дальнейшего интегрирования произведем такое
V2
преобразование: умножим и разделим правую часть на :
h2\ ‘
h2h -]--19
2 2 /
fJ2 _ ( V'h h
v2t 2g- 2g 2
л;
прибавим и вычтем -у -
иг = ( А» - А| +2А2 • h — А2);
^2 "
величину (А2— А)2 или (А — Л2)2 обозначим через г2, выбирая пер-
вое или второе значение из условия положительного знака раз-
ности, во избежание получения мнимой величины:
dz = dh или dz =— dh.
I ] g yf П . h2, 7* dh .
U -K 2 v Лг Z ~~dt’
Для первой
dt = —^7= -7=^= = --7= d (arc sin — .
g V2 V h2 gV 2 V hj
четверти волны z = A2 — А и dz=—dh',
* . 'г
arc sin —;
z, h%
Длй второй
t=_____
gV'2
, n . г, n
zx = A2; z2 = 0; arc sin ;
g-2V2 ’
четверти волны z — h—h2‘, в итоге получим опять
f ...
g-2^2
волны будет:
г=м = у-^У~ = 0,4531/2.
g
Длина волны, если считать скорость в среднем равной И2,
будет:
Время всей
£ = У2Т =0,453 • VI
Вторая и третья четверти волн будут короче, так как скорости
в них меньше.
Действительное колебание самолета отличается от рассмотрен-
ного выше по многим причинам. Во-первых, из-за влияния мощ-
ности. Предположим, что полет происходил на первом режиме.
Тогда, после увеличения угла атаки и соответственного снижения
скорости, самолет поднимется по траектории неустановившимся
движением вверх на величину ДА = —? и затем будет итти
равномерный подъем за счет избытка мощности.
Из фиг. 50 видно, что по отношению к новой траектории от-
клонение самолета будет незначительным и амплитуда колебания
будет небольшой. Иначе обстоит дело в полете на втором ре-
77
жиме. Увеличение угла атаки будет сопровождаться наклонением
траектории вниз, и возмущение самолета по отношению к новой
траектории окажется очень сильным. Взмыв на небольшую вы-
соту, самолет затем резко „клюнет" вниз (фиг. 51). Чем ближе мы
будем к макс, тем резче будет „клевок" вниз.
Второе обстоятельство, влияющее на вид колебания, это изме-
нение углов атаки. Каждому самолету свойственно колебаться
вокруг центра тяжести с частотой, зависящей от степени стати-
ческой устойчивости, скорости полета и момента инерции. При
малой степени продольной устойчивости самолет очень сильно
реагирует на действие руля высоты, и потому летчик легко и не-
вольно может вызвать сильное изменение угла атаки.
Фиг. 50. Траектория полета на первом режиме при резком
увеличении угла атаки.
Очень большое влияние оказывает момент, возникакэщий^от
кривизны траектории. Во второй четверти волны этот момент
стремится увеличить угол атаки, что очень вредно, так г^ак по-
вышает волну | и увеличивает потерю скорости из-за лобовых
сопротивлений. В итоге возрастает время волны Т, длина ее L
и, самое главное, увеличивается снижение в конце волны.
Фиг. 51. Траектория полета на втором режиме при резком
увеличении угла атаки.
Если летчик слишком резко задрал самолет, то нужно принять
меры к сглаживанию получившейся волны. В первой и второй
четвертях волны нужно постараться всемерно уменьшать угол
атаки, в третьей и особенно в четвертой части увеличивать угол
атаки, но не до опасной близости к гума с- Весьма выгодно уве-
личивать м( щность двигателя, так как это уменьшит снижение
в конце волны. Наличие большого запаса мощности является
одним из важнейших условий безопасности при потере скорости.
Исключением является только тот случай, когда увеличение мощ-
ности дает кабрирующий момент. К сожалению, на практике это
часто встречается.
78
Особенно сильно проявляется потеря скорости при внезапной
остановке мотора. Предположим,4 что самолет набирал высоту при
некотором угле наклона траектории 9Х (фиг. 52). После остановки
мотора при той же скорости полета траектория должна быть
нисходящей под углом 92. Как видно, после остановки мотора по
отношению к новой траектории самолет имеет весьма сильное
возмущение. Отказ мотора вскоре после отрыва от земли почти
неизбежно приводит к удару ’о землю. Однако, если вести самолет
определенным образом, можно избежать аварии. Если бы мы при-
наборе высоты имели наклон самолета почти такой, как при пла-
нировании, опасность аварии была бы незначительна. Наклон са-
молета при подъеме фх = а14-9х, при планировании ф2 = а2 — 92.
Углы <рх и <f2 можно сблизить тем, что подъем производить при
малом ах и 9Х. Для этой цели после отрыва от земли производят
выдерживание самолета для набора скорости и подъем первое
время ведут более полого.
Фиг. 52. Траектория полета в случае внезапной остановки мотора.
При внезапной остановке мотора летчик должен возможно
скорее уменьшить наклон самолета, давая ручку от себя. Но это
можно делать только в первой половине волны возмущения. Когда
траектория уже стала склоняться вниз, ручку нужно вновь выби-
рать на себя. К сожалению, летчик легко может упустить это
время. Например, при V около 40 м/сек время волны Т = 0,453* V=
= 18 сек. Продолжительность первой половины волны будет 9 сек.
Следовательно, летчик должен отжать самолет не позднее, чем
через 9 сек. после остановка мотора. Если учесть физиологичес-
кую скорость реакции летчика, а также его попытки повлиять
на мотор, то этого времени ему может нехватить.
Некоторые самолеты при выключении мотора имеют тенден-
цию автоматически уменьшать угол атаки. Это, вообще говоря,,
хорошо, так как заменяет отклонение рулей, которое должен был
бы сделать летчик. Однако во второй половине волны эта тенден-
ция вредна, так как пряпятствует необходимому увеличению угла
атаки. На практике бывали примеры, когда самолеты терпели
аварию только потому, что летчик не мог в достаточной мере
увеличить угол атаки в момент посадки.
79.
Можно поставить себе такую задачу: определить, какая мини-
мальная скорость может быть допущена при подъеме, исходя из
того, что при отказе мотора и при условии, что летчик будет
быстро и правильно действовать рулем высоты, скорость не упа-
дет ниже некоторой заданной величины. Пусть самолет подни-
мается под некоторым углом 9Х, когда вдруг отказал мотор. Летчик
дает ручку от себя, и самолет имеет некоторую перегрузку п,
меньшую единицы. Траектория будет искривляться по некоторому
радиусу (фиг. 53) и приблизительно, когда касательная к траек-
Фиг. 53. Расчет поведения самолета в случае остановки мотора.
тории будет горизонтальна, скорость упадет до минимального
значения, обозначаемого Ио- Точнее минимум скорости будет
соответствовать моменту, когда самолет примет положение пла-
нирования. Для простоты будем задавать скорость в верхней
точке с некоторым запасом против минимальной. Величину ско-
рости мы получим, взяв начальную кинетическую энергию и вычтя
из нее работу подъема Q-h и работу сил сопротивления JX-ds.
Расчеты, произведенные инж. В. Ф. Болотниковым, показали, что
при малом п силы сопротивления весьма мало сказываются на
форме траектории. Нет смысла стремиться к точному решению
поставленной задачи, так как исходные данные могут быть изве-
стны лишь весьма приблизительно. Это относится и к наклону
траектории и к перегрузке. Поэтому произведем лишь простей-
ший расчет.
Составим выражение для отношения скоростей в момент оста-
новки мотора и в тот момент, когда касательная к траектории
горизонтальна.
Возьмем некоторую среднюю точку траектории на фиг. 53
и спроектируем -силы на вертикальное и горизонтальное направ-
ления:
— G + У • cos 9 = mjy\
— (У • sin 9 — X cos 9) =: mjxi
80
Берем среднее значение для сил и считаем 9 = -у-; Y = п • О,
тогда ускорения будут постоянны, и для нахождения скорости
в верхней точке траектории можем написать:
= -n-cos^-); /r = _g^.sin-^- + -^cos4-) ;
Vx = Ио = V cos \ +jx • t\ Vy = V-sin • t = 0.
Подставляем jx, Jy и исключаем t:
Уо= Vcos6x—V-sinO,;
•'У J У
V.
V
("
cos 9X— sin 9X—
pi X fl, \
Sln_+_C0S^_J
(i-rt-c°s4)
Среднее значение -q можно представить в виде:
х _ с* •р •5/8 _ ( v \* е*
@ 2 • G у ^мин у Ср су макс
(V \ 2
-р--) едва ли будет более 3, а чаще —
'мин /
(V
-у--) может быть только при
’'мин /
весьма крутых горках, приближающихся к вертикали. Поскольку
летчик стремится уменьшить угол атаки, сх невелик и отношение
-----— будет примерно ; в итоге величина не будет пре-
су макс dU и
вышать 0,1. В таблице мы даем значения ~ для разных 6 и п,
V о
приняв — 0,1.
6° 10° 20° 30° 40° 50° 60°
V Уо 1,03 1,21 1,42 1,74 2,36 п = 0
V Уо 1,07 1,22 1,53 2,26 8,5 ' — п = 0,5
V _22_ 1,02 1,065 1,13 1,25 1,42 1,65 п =—0,5
Перегрузка п = 0 соответствует отдаче ручки от себя на-
столько, что подъемная сила становится равной нулю, а п =— 0,5
соответствует отрицательной подъемной силе.
В. С. Пышнов—166—6 81
Из этих данных мы видим, насколько выгодно уменьшение угла
атаки.
Интересный пример потери скорости мы имеем при слепом
полете. При отсутствии специальных приборов в слепом полете
летчик судит о наклонении траектории по скорости полета. Пред-
положим, что самолет летел горизонтально, а затем под дейст-
вием некоторой причины „клюнул" вниз. Летчик обнаружит это
не сразу, а лишь тогда, когда самолет уже заметно увеличит
скорость. Для выравнивания самолета летчик увеличит угол атаки,
взяв ручку на себя. При этом в первое время изменится лишь
кривизна траектории, а самолет будет продолжать снижение,
постепенно выравниваясь (фиг. 54). В нижней точке будет наиболь-
Фиг. 54. Пример потери скорости при слепом полете.
шая скорость. Затем самолет начнет подниматься, постепенно
уменьшая скорость. Если летчик, видя, что скорость велика,
будет удерживать увеличенный угол атаки до тех пор, пока ско-
рость не станет равна начальной, то это приведет самолет к по-
тере скорости. Скорость будет равна начальной примерно при
прохождении через начальную высоту, но в этот момент траекто-
рия будет сильно отклонена кверху,и самолет начнет терять скорость.
Во избежание потери скорости нужно было бы прекратить уве-
личение угла атаки еще в нижней точке траектории, когда ско-
рость, дойдя до максимума, начала убывать. Следовательно, летчик
должен руководствоваться не величиной скорости, а темпом ее
изменения. Для облегчения слепого пилотирования, кроме указа-
теля скорости, ставится вариометр, т. е. прибор, показывающий
вертикальную скорость. Тогда по обоим приборам летчик может
значительно легче составить представление о положении самолета.
Наиболее резко проявляется недостаток подъемной силы при
вираже, так как накренение самолета уменьшает вертикальную
составляющую подъемной силы. В теории виража мы уже гово-
рили о минимальной скорости полета, допустимой на вираже.
Опасность потери скорости от чрезмерного угла крена, вообще
говоря, незначительна, так как излишний крен можно быстро
уничтожить. Гораздо хуже сочетание виража с горкой. Из теории
виража мы уже знаем, что при крутых виражах необходимо уве-
82
личивать угол атаки. И вот, выполняя вираж, летчик может
увеличить угол атаки преждевременно, когда самолет еще не на-
кренен в достаточной степени. Тогда и получается горка, т. е.
резкое поднятие траектории с последующим снижением скорости
и стремлением самолета перейти в пикирование. Особенно тяжел
случай отказа мотора при выполнении виража с подъемом. Одно
время применялась очень эффектная фигура — спиральный взлет.
В этом случае после отрыва от земли летчик разгонял самолет,
а затем переводил его на крутой подъем с виражем. Отказ мотора
в этом случае всегда приводил к катастрофе.
Итак, недостаток подъемной силы всегда проявляется во вра-
щении самолета в сторону перехода в пикирование, причем это
вращение не может быть остановлено рулем высоты. Поэтому
летчики считают основным признаком потери скорости падение
эффективности рулей. Однако нельзя говорить о том, что руль
высоты не работает. Он работает, он меняет углы атаки, но ре-
зультат* перемены угла атаки незначителен и не может прекратить
опускания траектории.
Заметив потерю скорости, летчик должен прежде всего уменье
шить угол атаки для ослабления скачка самолета вверх, но, как
только скорость начнет расти, следует умеренно прибавлять угол
атаки. Затем полезно дать винту максимальную тягу, если это не
вызывает дополнительного сильного кабрирования. Точно так же
не следует включать мотор, если высота слишком мала и есть
опасность удариться о землю с работающим мотором.
ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ ПРИ
ПОЛЕТЕ ВБЛИЗИ сумакс
Как мы уже рассмотрели выше, при полете на нормальных
углах атаки самолет обладает такими свойствами: при отклонении
элеронов самолет начинает накреняться с некоторой угловой ско-
ростью, определяемой равновесием моментов—момента от элеронов
и тормозящего момента от цращения. Одновременно самолет имеет
тенденцию завернуть в сторону, обратную крену, что создает
скольжение на опускающееся крыло. Это скольжение (если оно
не уничтожено рулем поворота) препятствует накренению, умень-
шая угловую скорость. При действии одним рулем поворота по-
лучается скольжение, и крыло, на которое происходит скольжение,
увеличивает подъемную силу, давая момент вокруг оси х. Наи-
больший момент от элеронов превышает наибольший момент
вокруг оси х от скольжения, и летчик имеет возможность накре-
нять самолет в любую сторону независимо от скольжения.
Итак, вкратце можно сказать, что при крене самолет обладает
определенной вялостью к накренению, и действие элеронов пре-
обладает над действием руля поворотов. Иначе обстоит дело
при приближении к су макс. Здесь мы сталкиваемся с такими осо-
бенностями: 1) ослабевает тормозящее действие крыльев, 2) по-
является тенденция заворачивать в сторону крена и 3) момент
от скольжения начинает преобладать по сравнению с моментом
83
от элеронов. В итоге самолет, вялый в отношении накренения,
вдруг становится очень резвым и даже неудержимым. Бывают слу-
чаи, когда, прежде чем летчик сообразит, в чем дело, самолет
успевает накрениться на 90° и даже более.
Остановимся вкратце на объяснении этих явлений. При враще-
нии самолета вокруг оси х происходит изменение углов атаки
по размаху крыла, причем Да = -х^2 (см. стр. 64). Изменение углов
атаки сопровождается изменением распределения подъемной силы:
Д Y = bcybbz • ; &Су ~ В • Да.
Отсюда мы видим, что наибольшее значение имеет величина В,
т. е. наклон кривой Су по а. И вот при подходе к сумакс величина В
начинает уменьшаться, при самом гумакс получим В — 0, а затем
она даже становится отрицательной. Тогда при су макс ТОрМОЗЯЩИИ
момент отсутствует, а при еще больших углах момент становится
вращающим и приводит к явлению, называемому штопором.
В качественном отношении здесь все ясно, но определение
момента Мх весьма сложно и выполняется лишь грубо. Дело
в том, что мы обычно имеем кривую су по а для крыла в целом,
а нам нужно знать эту зависимость для разных сечений, и прак-
тически расхождение может быть весьма значительным. Данные
о величине В в разных сечениях крыла можно получить путем
продувки на распределение давления. Однако и здесь, кроме еще
неясных условий подобия, нужно иметь в виду также влияние
фюзеляжа, моторных гондол, гладкости выполнения профиля и
затем большую чувствительность крыла к скольжениям.
Приблизительно до 1920 г. на самолетах применялись почти
исключительно тонкие остроносые- профили. В этом случае пове-
дение самолета на сумакс было весьма плохим. Затем появились
самолеты с крылом толстого профиля, например самолеты Фок-
кера, поведение которых было несравненно лучше (фиг. 55).
Причину этого различия объясняют характером течения кривой су
по а (фиг. 55). Можно считать, что, чем больше кривизна верхней
поверхности профиля и чем плавнее она изменяется, тем медлен-
нее происходит срыв обтекания. Начиная с задней кромки, срыв
постепенно продвигается вперед по мере увеличения угла атаки.
У крыльев более остроносых и с малой кривизной верхней
поверхности срыв распространяется более быстро. Правда, иногда
при продувке наблюдается резкое падение су у крыльев сравни-
тельно толстых и тупоносых; однако в полете таких явлений не
замечалось1. При выборе крыла для проектируемого самолета
часто требуют плавного падения су вблизи максимума. Однако
нет уверенности в том, что продувка достаточно точно отражает
действительное явление, и потому следует считаться в большей
мере с характеристиками, полученными в полете с крыльями,
близкими по профилю с запроектированными. Нет сомнения,
что данный вопрос требует тщательного изучения.
1 По вопросу остроконечного профиля имеются противопоказания приведен-
ным высказываниям, в связи с чем ведутся большие исследования.
84
Кроме подбора наилучшего профиля крыла, велись исследования
с различными приспособлениями, препятствующими срыву обте-
кания или самостоятельно создающими тормозящий момент. Из
устройств последнего вида особенно целесообразны концевые
плавающие элероны. Когда крыло доходит до критического угла
атаки, плавающие элероны продолжают * стоять под нулевым
Фиг. 55. Характеристики крыльев на больших углах атаки.
углом атаки. При появлении угловой скорости <»х они создают тор-
мозящий момент, как всякое крыло при работе на .малом угле
атаки.
Из приспособлений, задерживающих срыв обтекания, наиболее
удачными оказались предкрылки, изобретенные Лахманом
(Lachmann) и Хенли-Пейдж (Handley - Page). В своем первоначаль-
ном виде они представляли собой небольшие крылышки с большой
кривизной профиля, расположенные перед передней кромкой
основного крыла (фиг. 55). Снятие диаграммы су по а и фотогра-
фирование спектра обтекания показали замечательные свойства
85
предкрылков. Срыв обтекания крыла был задержан примерно на 10°.
Если без предкрылка критический угол атаки был 15°, то теперь он
отодвинулся до 25—27°. Одновременно возросло и значение Срмакс.
Интересно, что под действием предкрылков кривая ся по а как
бы продолжилась (фиг. 55). В этом и состоит ценность предкрылков
в отношении устойчивости. Следует вспомнить, что закрылки и
Фиг. 56. Концевые предкрылки на моноплане.
щитки вызывают подня-
тие кривой Су по а, почти
не смещая точки СуМакс.
Применение пред-
крылков для снижения
посадочной скорости не-
удобно, так как это пот-
ребовало бы устройства
очень высокого шасси.
Польза предкрылков за-
ключается в следующем.
Предкрылки отодвигают
критический угол атаки
до 25 — 27°. Так как
продольная управляе-
мость самолета рассчи-
тана только на достиже-
ние углов атаки 18—20°,
то летчик при всем своем
желании не может до-
вести самолет до критического угла атаки. Даже в случае рез-
ких бросков на крыло, остается еще некоторый запас нара-
стания су, обеспечивающий наличие тормозящего момента. Полеты
на углах атаки 20—25°, выполнявшиеся с целью исследования,
были возможны лишь при центровке в 40—45%.
Если предкрылки предназначены только для улучшения попе-
речной устойчивости, нет надобности ставить их вдоль всего крыла.
Достаточно расположить их только у концевых частей крыла,
примерно против элеронов (фиг. 56). У бипланов их ставили
обычно только на концевых частях верхнего крыла. При рассмо-
трении поляры крыла с предкрылком видно, что на малых углах
атаки получается резкое увеличение сх. Это можно было допу-
стить только на самолетах, не претендующих на быстроходность.
Тогда предкрылки были усовершенствованы так, что при прижа-
тии их к основному крылу получался нормальный профиль. Это
достигалось тем, что брался обычный профиль и предкрылок
вырезался из его носовой части (фиг. 57).
Следующим усовершенствованием было устройство автомати-
ческих предкрылков, освобождавших летчика от необходимости
заботиться о своевременном выдвигании или убирании предкрыл-
ков. Практическое выполнение этого устройства оказалось очень
простым. Достаточно было дать предкрылкам возможность пере-
мещаться по некоторой линии, как силы воздушного давления
на больших углах атаки сами отсасывали предкрылок вперед, а
86
на мылых углах атаки — прижимали его к крылу. На фиг. 57 и 58
показаны две системы автоматических предкрылков — на рычагах
и с направляющей трубкой.
Автоматические предкрылки имели массовое распространение
только на английских самолетах. Наиболее детальные исследова-
ния предкрылков можно найти именно в английской литературе.
Причина широкого распространения предкрылков в Англии объяс-
няется особенностями развития там конструкторской мысли. Нигде
в другой стране не культивировался так долго биплан с тонкими
остроносыми крыльями.
Испытание предкрылков на самолетах с более толстыми кры-
льями показало, что улучшение поперечной устойчивости не столь
значительно и что многие самолеты с удачной формой и профилем
крыла ведут себя настолько хорошо, что устройство предкрылков
было бы излишним усложнением конструкции.
Фиг. 57. Автоматический предк-
рылок системы Хенли-Пейдж.
Фиг. 58. Автоматический пред-
крылок системы Кертисс.
Совершенно особо стоит вопрос о применении предкрылков на
самолетах с очень большим диапазоном скоростей. В этом случае
самолет снабжался закрылками или щитками, а также пред-
крылками вдоль всей передней кромки. Эти самолеты должны
были иметь возможность летать на углах атаки, доходящих почти
до 25°. В этом случае большую остроту приобрел вопрос об управ-
ляемости. Особенно сильно проявлял себя заворачивающий момент
при крене. Одним из решений вопроса было применение
плавающих элеронов. Кроме того, применялись еще и следующие
устройства.
Для устранения нежелательного заворота в сторону опущен-
ного элерона необходимо было увеличить сопротивление со сто-
роны поднятого элерона. Для этого предкрылок со стороны под-
нятого элерона прижимался к крылу. Этим усиливалось накреняющее
действие и повышалось лобовое сопротивление, так как при
убранном предкрылке происходил уже срыв обтекания. Такое
устройство в общем рационально, но конструктивно сложно и
приводит к большим давлениям на ручку. Тогда вопрос был ре-
шен иначе. Вместо прижатия предкрылка, его действие уничтожа-
лось небольшой пластинкой, поднимающейся вверх при поднятии
элерона (фиг. 59). Эта пластинка называется интерцептором („пере-
хватчик"). Механизм передачи к интерцептору должен быть таким,
87
чтобы после прижатия предкрылка при полете на малом угле
атаки он больше не отклонялся. Такая система управления дала
хорошие результаты на практике.
Поперечная устойчивость на больших углах атаки зависит
также от формы крыла в плане и распределения углов атаки по
Интерцептор
Фиг. 59. Применение интерцептора у разрезного крыла.
размаху. Если мы имеем прямоугольное крыло, то, как известно
из теории индуктивного сопротивления, скос потока минимален
в средней части крыла и возрастает по направлению к концам.
Поэтому концы крыльев имеют меньший действительный угол
атаки и срыв обтекания происходит позже. На фиг. 60 показано
Фиг. 60. Распределение подъемной силы по размаху
у прямоугольного крыла.
распределение су по размаху при разных углах атаки. Как видно,
когда в центре су уже упал, на краях он довольно высок. Нужно
иметь в виду, что причина этого лежит не только в скосе потока, но
и в особенности обтекания концов крыла, где поток не параллелен
направлению полета. Задержка срыва обтекания на концах (фиг. 61)
благоприятствует устойчивости. Наилучшей формой в этом отно-
шении, повидимому, будет прямоугольное крыло с закругленными
концами.
С развитием монопланов свободно несущего типа выявилась
выгода крыльев с сильным сужением у концов. Это дает значи-
тельное облегчение конструкции, что позволяет увеличить размах
крыльев. Увеличение же размаха повышает качество самолета на
больших углах атаки. Аэродинамический анализ крыльев с боль-
шим сужением, или, как говорят, с сильной трапецевидностью
(отношением хорд крыла у корня и на конце), показывает, что у
концов крыла скос потока меньше, действительный угол атаки
больше и потому су возрастает от середины к концам. В итоге
88
можно ожидать начала срыва обтекания на концах крыла, что и
было обнаружено при испытаниях. Встала проблема устранения
срыва на концах.
Этот вопрос еще более усложнился в связи с применением
посадочных щитков на части крыла, не занятой элеронами, т. е.
на средней части крыла. Тогда повышение су в центре вызвало
дальнейшее ослабление скоса потока у концевой части крыла и
увеличило опасность срыва на концах.
Вопросу борьбы со срывом обтекания на конце крыла уделяют
большое внимание, хотя к моменту, когда писалась эта книга,
исчерпывающих данных еще не было. Было обнаружено, что зна-
чительное влияние оказывает стреловидность передней кромки.
Скашивание передней кромки назад усиливает опасность срыва;
стреловидность вперед задерживает срыв. Можно применить за-
Область срыеа\
Фиг. 61. Начало срыва обтекания при полете без
скольжения.
крутку крыла, т. е. уменьшать угол атаки по направлению к кон-
цам крыла. Однако это невыгодно в нормальном полете, так как
подъемная сила слишком быстро спадает к концам крыла и
индуктивное сопротивление повышается. Хорошие результаты
были получены от применения на концах крыла профиля с более
высоким G/макс. Наконец, оказались выгодными концевые пред-
крылки.
Весьма серьезным фактором, влияющим на срыв обтекания, ока-
залось скольжение. Если поток набегает на крыло не симметрично,
срыв происходит раньше с той стороны крыла, которая находится
несколько сзади (фиг. 62). Односторонний срыв обтекания явля-
ется причиной образования момента вокруг оси х, стремящегося
опустить крыло, на котором произошел срыв, и момента вокруг
оси у, стремящегося завернуть самолет в сторону опускающегося
крыла. Такое направление Му объясняется тем, что там, где нет
срыва, сила Т направлена вперед, 'а в части крыла, где произошел
срыв, сила Т весьма мала и направлена назад.
На основании рассмотренных свойств можно сделать такие вы-
воды: 1) случайный толчок от воздушных течений или действия
элеронами может вызвать сильное накренение, так как тормозя-
89
щий момент слаб или даже совсем отсутствует; 2) скольжение
вызывает односторонний срыв обтекания и дает сильный момент
вокруг оси х, стремящийся накренить самолет в сторону, противо-
положную скольжению, и момент вокруг оси у, стремящийся
Фиг. 62. Начало срыва обтекания при полете со скольжением.
завернуть в сторону крена. Накреняющий момент от сколь-
жения столь значителен, что его нельзя задержать элеронами.
Если при полете вблизи rVMaKc летчик допустит скольжение, са-
молет неудержимо валится на крыло, и при малой высоте полета
произойдет катастрофа. Следовательно, при полете вблизи су макс
не следует делать резких отклонений руля поворотов.
ШТОПОР САМОЛЕТА
ОБЩИЕ СВЕДЕНИЯ
При изложении вопроса о штопоре обычно стараются дать
«формулировку, что такое штопор. Однако никакие формулировки
не помогут представить себе штопор, если не видеть его в на-
туре, на модели или в кино. Это столь характерное движение са-
молета, чтО'его никогда нельзя смешать с другой фигурой. Мы
привыкли видеть самолет, летящим более или менее горизонтально,
и, если не говорить о перемещении самолета в целом, он кажется
неподвижным. Глядя с земли, мы не замечаем никаких колебаний,
да* и на самом деле они весьма незначительны. Даже если само-
лет делает вираж или петлю, движение весьма плавное.
Штопор самолета протекает иначе.
Как рисуется наблюдателю с земли картина штопора? Само-
лет летит горизонтально, постепенно уменьшая скорость. По мере
уменьшения скорости можно заметить некоторое задирание носа;
это летчик увеличивает угол атаки для сохранения необходимой
величины подъемной силы. Затем вдруг самолет стремительно
сваливается на крыло и, устремляясь вниз, приходит в быстрое
вращение. Со стороны кажется, что центр тяжести движется по
вертикали. Вращение столь быстрое, что мы видим только, как
мелькают крылья.
Прекращение штопора происходит так. Сначала вращение резко
замедляется и совсем прекращается, хотя самолет продолжает ле-
теть вертикально вниз, т. е. пикировать. Затем самолет обычным
образом по плавной линии выходит из пикирования в горизонта-
льный полет. Потеря высоты при этом значительная и потому,
если самолет перешел в штопор на малой высоте, гибель его не-
избежна. Бывали случаи, когда самолет начинал штопор на боль-
шой высоте, делал десятки оборотов или, как говорят, витков
.штопора, и разбивался, не имея возможности прекратить враще-
ние. Испытание на штопор самолета новой конструкции представ-
ляет значительную опасность. Эта опасность была очень велика,
когда еще не применялись парашюты. Тем не менее всегда нахо-
дились смельчаки, которые брались за такие испытания.
Нельзя сказать, кто первый сделал штопор. Первые случаи
штопора были неумышленными и кончались катастрофами. Только
через 7—8 лет после начала широкого развития авиации научились
делать штопор умышленно, и была практически разработана ме-
91
тодика вывода из штопора. Однако и до сих пор штопор оста-
ется одним из наименее изученных режимов полета с точки зрения
умения определить теоретически его режим и надежность вывода
самолета из штопора. Это объясняется отнюдь не недостатком вни-
мания к нему. Было проделано большое количество теоретичес-
ких и экспериментальных исследований, однако вопрос оказался
необычайно сложным.
Присмотримся более внимательно к штопорящему самолету.
Прежде всего мы отметим, что скорость самолета не особенно
Фиг. 63. Положение самолета
при штопоре.
вой, что ось вращения лежит
велика и несравненно меньше ско-
рости отвесного пикирования.
Затем легко заметить, что фюзе-
ляж вовсе не вертикален и хвост
описывает некоторую окружность
(фиг. 63). У разных самолетов
скорость вращения и наклон фю-
зеляжа различны. Наклон фюзе-
ляжа и лег в основу суждения о
режиме штопора: если наклон
порядка 20—35° к вертикали, што-
пор называют нормальным или
крутым; при наклоне 35 — 50б —
пологим и при наклоне 50—70°—
плоским. Таким образом при нор-
мальном штопоре самолет вра-
щается в основном вокруг оси х, а
при плоском — вокруг оси у. Тот
или иной режим штопора опре-
деляется равновесием моментов
(этот вопрос мы рассмотрим далее).
Наблюдая за штопором самолета,
можно заметить, особенно если
самолет находится прямо над голо-
как бы несколько впереди самолета
и, следовательно, его центр тяжести тоже движется по некото-
рой очень вытянутой спирали.
Перейдем к объяснению причины штопора. Прежде всего пора-
жает скорость вращения. Какой момент вращает самолет, легко
установить, если вспомнить, что говорилось выше о потере ско-
рости и устойчивости на больших углах атаки. Если самолет
летел на угле атаки больше критического и качнулся на крыло, то
со стороны опускающегося крыла угол атаки будет больше и
произойдет полный срыв обтекания. С противоположной стороны
угол атаки уменьшится и срыва не будет. И вот у поднимающе-
гося крыла, там, где нет срыва, равнодействующая сила будет
больше и будет отклонена вперед; на противоположном крыле эта
сила меньше и будет отклонена назад (фиг. 64). Это и дает нам
моменты вокруг осей х и у, вращающие самолет в штопоре. Для
штопорящего самолета характерна, как это подтверждает экспе-
римент, такая аэродинамическая картина, когда на одном крыле
92
обтекание остается плавным, на другом —имеется ^полный срыв.
В частных случаях при установившемся вращении можно наблю-
дать срыв обтекания и по всему крылу.
Разность углов атаки определяется вращением самолета, кру-
тящие моменты, ускоряя вращение, тем самым усиливают раз-
личие в углах атаки. Крутящий момент, вообще говоря, невелик,
но зато отсутствует тормозящий момент и потому самолет раз-
вивает большую угловую скорость. Быстрота установившегося
вращения определяется не равновесием между действующим и
противодействующим моментами, а тем, что с увеличением угло-
вой скорости угол атаки на стороне плавного обтекания стано-
вится слишком малым и крутящий момент исчезает.
Фиг. 64. Схема сил, действующих на крыло при штопоре.
Весьма важный фактор в штопоре это роль инерционных сил
от вращения. В дальнейшем, при более детальном рассмотрении
вопроса, мы найдем величины инерционных сил и моментов, а сей-
час объясним вопрос более просто. Как известно из механики,
инерционные силы прилагаются к телу для того, чтобы задачу
ускоренного движения свести к задаче равновесия. Так, напри-
мер, в случае штопора, рассматривая моменты вокруг оси z, мы
представляем себе самолет в равновесии, уравновешивая дей-
ствующие моменты моментами инерционных сил.
Инерционные моменты действуют около трех осей (Ох, Оу, Oz)
и связаны с распределением масс в самолете; изучение штопора
предполагает знание эллипсоида инерции.
Особенно велик момент инерции относительно оси Oz*, соот-
ветственный инерционный момент всегда стремится поднять нос
самолета, затягивая последний в опасные плоские штопоры. Как
известно, аэродинамические моменты относительно оси Oz в за-
критической области также исключительно велики, но действуют
в направлении пикирования в сторону выхода из штопора. Эти
93
моменты в прямолинейном полете при ручке на себя доотказа
не допускают самолет в область углов а, больших 20 — 25°, и
только инерционные моменты величины того же порядка способны
перевести самолет на углы плоского штопора в 55 — 6о°.
Остановимся на переходе в штопор. Штопор возможен только
на углах атаки больше критического. Поэтому прежде всего необ-
ходимо увеличивать угол атаки. На устойчивом самолете для
этого требуется взять ручку на себя почти доотказа. Неустой-
чивые и нейтральные самолеты доходят до критического угла
атаки без особого отклонения руля высоты. Требуется лишь
начальный импульс в сторону увеличения углов. Для перехода
в штопор еще недостаточно просто дойти до срыва обтекания;
нужно постараться получить срыв только с одной стороны. Если
угол атаки чрезмерно велик, срыв будет на обоих крыльях, и
вместо штопора получится парашютирование, или падение листом.
Современные самолеты обычно не могут парашютировать, так
как у них нехватает отклонения руля высоты. Итак, желая пере-
вести самолет в штопор, мы подводим его к срыву обтекания,
и когда срыв уже готов получиться, резко отклоняем руль пово-
рота в сторону штопора. Желая перейти в правый штопор, мы
даем ногу вправо, отчего получается скольжение влево. Как мы
уже указывали, скольжение сильно влияет на срыв. Скольжение
на левое крыло вызывает срыв на правом крыле и переход в
правый штопор.
Иногда наблюдается „нежелание" самолета итти в штопор. Это
можно объяснить двумя причинами: или недостаточно действие
руля высоты и самолет не доходит до критического угла атаки,
или недостаточно действие руля поворотов, скольжение получа-
ется незначительное и одностороннего срыва не происходит. На
практике часто отмечалось облегчение перехода в штопор при
увеличении угла отклонения руля высоты или руля поворотов.
Более задняя центровка также облегчает переход в штопор.
Практически различают три вида перевода в штопор: на потере
скорости, на скорости и умышленный срыв с виража. Переход
с потери скорости наиболее распространен, так как при этом
вращение самолета развивается постепенно. Для выполнения
этого упражнения летчик закрывает газ до минимума, но ведет
самолет горизонтально, совершая как бы посадку на вообража-
емую плоскость. Когда самолет начинает проваливаться, летчик
сваливает машину в желаемую сторону рулем поворота. Переход
в штопор на скорости выполняется аналогично, но ручка выби-
рается на себя быстро и, не дожидаясь потери скорости, дается
нога. Самолет начинает делать как бы переворот через крыло, а
затем склоняется вниз.* Большая скорость дает более быстрое
раскручивание самолета, и, если самолет плохо выходит из што-
пора, перехода в штопор на скорости делать не следует.
Умышленный срыв с виража применяют в том случае, если
другие методы не дают результата. На сравнительно небольшой
скорости летчик начинает делать крутой вираж с подъемом, для
чего ручка преждевременно выбирается на себя. Самолет быстро
94
теряет скорость и начинает падать на опущенное крыло; руль поворо-
тов ставится в сторону, обратную виражу, для усиления скольжения.
В результате такого нёустановившегося движения у самолета по-
лучается большой угол атаки и сильное скольжение. Самолет рез-
ко выравнивает крен и переходит в штопор в сторону, обратную
виражу.
Кроме умышленного срыва в штопор, бывают неумышленные
случайные срывы. Очевидно, это будет в том случае, когда лет-
чик действует рулями аналогично тому, как это требовалось бы
для умышленного штопора. Срыв часто получается при неумелом
выполнении глубоких виражей. Статически неустойчивые самоле-
ты, да еще при тонком остроносом профиле крыла, срывались в
штопор с прямолинейного полета. Легко попасть в штопор при
слепом полете без необходимых приборов или при недостаточной
продольной устойчивости. Хорошие современные самолеты почти
никогда не срываются в штопор, если летчик ведет машину нор-
мально и центровка самолета правильна.
Режим штопора зависит от многих факторов. Наиболее важ-
ные из них: быстрота вращения, свойственная данной аэродина-
мической схеме самолета, величина моментов инерции, центровка
самолета, положение рулей. Быстрота вращения зависит также
от положения самолета по отношению к оси вращения. Положе-
ние же это зависит от моментов, действующих относительно
трех осей самолета. В результате получается весьма тесная связь
между всеми элементами штопора, что очень усложняет его ис-
следование.
Идея вывода из штопора такова. У самолета нет органа, спо-
собного остановить вращение. Попытки создания таких органов
пока были неудачны, так как получались слишком тяжелые и гро-
моздкие устройства, применять которые нерационально. Если
нельзя бороться с вращающими моментами, то, очевидно, следует
уничтожить причину вращающих моментов. Мы знаем, что вра-
щающий момент получается от одностороннего срыва обтекания.
Мы можем восстановить плавность обтекания по всему крылу,
только переведя самолет на малые углы атаки. Отсюда следует,
что для вывода из штопора необходимо стремиться перевести
самолет на малые углы атаки, т. е. в пикирование. Действуя ру-
лями для вывода из штопора, летчик имеет одну цель — поста-
вить ось фюзеляжа вертикально. Как только это ему удастся,,
вращающий момент пропадет и вместо него возникнет очень мощ-
ный тормозящий момент, который весьма быстро остановит вра-
щение, после чего остается лишь вывести самолет из пикиро-
вания.
Случаи невыхода из штопора объясняются невозможностью
уменьшить угол атаки.
На основании вышесказанного можно сделать вывод, что пре-
кращение штопора достигается в основном при помощи руля вы-
соты. И это действительно так, если штопор сравнительно кру-
той. Иногда же при пологом штопоре при действии рулем высоты
у некоторых самолетов наблюдается вместо уменьшения угла
9S
атаки даже его увеличение. В этом случае можно сказать, что инер-
ционный момент данного самолета столь велик, что его нельзя
преодолеть моментом от руля высоты.
Как же быть, если руль высоты недостаточен? Тогда прежде
чем действовать рулем высоты, нужно попытаться иным путем
замедлить вращение. Это достигается отклонением руля пово-
ротов против направления штопора. При этом необходимо выж-
дать, пока самолет не замедлит вращения и не обнаружит тен-
денции опустить нос. Ожидание это, довольно неприятное для
летчика, может оказаться настолько продолжительным, что само-
лет успеет сделать несколько витков, потеряв значительную вы-
соту. Медленность уменьшения угловой скорости объясняется
невыгодными условиями работы руля поворота на режиме штопора.
У большинства современных самолетов штопор получается более
или менее плоским, — отсюда очевидна важность роли вертикаль-
ного оперения. Мероприятия, направленные к увеличению эффек-
тивности вертикального оперения, дали очень хорошие резуль-
таты. На второстепенных факторах мы пока останавливаться не
будем, так как это требует более детального рассмотрения теории.
АВТОРОТАЦИЯ
Авторотацией, или самовращением, называется способность
некоторых тел приходить во вращение под действием воздушного
или водяного потока. Самовращение несимметричных тел, напри-
мер ветряной мельницы, вполне понятно; самовращение же вполне
симметричных тел, относительно которых отпадают всякие подо-
зрения в несимметрии, так как вращение их может происходить
в любую сторону с одинаковой угловой скоростью, трудно объяс-
нимо. Вращение вполне симметричных тел давно привлекало вни-
мание ученых. Объяснение этому явлению заключается в том,
что симметричное тело может .обтекаться несимметрично. Инте-
ресен пример с качанием цилиндра. Если мы опустим в воду пра-
вильный цилиндрический стержень и укрепим его так, чтобы он
мог качаться поперек потока, то будем наблюдать непрерывное
раскачивание. Объяснить это можно тем, что поток обтекает ци-
линдр вовсе не так симметрично, как мы это думаем, и, если ци-
линдр качнулся, характер обтекания получается таков, что силы,
действующие на цилиндр, способствуют усилению отклонения.
Если такой цилиндр закрепить на оси, проходящей через его се-
редину, можно наблюдать не только раскачивание, но и вращение.
Вопросами авторотации занимался проф. Н. Е. Жуковский. Он
рассматривал вращение плоских пластинок относительно оси, пер-
пендикулярной к потоку (фиг. 65). Этот случай авторотации очень
легко наблюдать; для этого достаточно вырезать полоску из кар-
тона и бросить ее. Интересен и трудно объясним случай авторота-
ции плоских секторов, опыты с которыми производились в Ку-
чинской аэродинамической лаборатории в 1906 г. (фиг. 66). Здесь
можно предполагать, что воздушный поток, обтекая плоскую по-
верхность, разделяется на два потока, которые вследствие трения
96
тянут пластинку в противоположные стороны. Достаточно небо-
льшого возмущения, чтобы силы, тянущие в одну сторону, полу-
чили перевес и дали вращение.
Фиг. 65. Авторотация плоской
пластинки.
сектора.
Фиг. 66. Авторотация
Для изучения штопора нужно рассматривать авторотацию мо-
делей крыльев относительно оси, совпадающей с линией полета.
Впервые такие опыты стали вести в Англии в 1918—-1919 годах.
Впоследствии подобные опыты проводились во многих лабо-
раториях. Установка для опытов очень простая (фиг. 67). В аэро-
динамической трубе установлена ось на подшипниках, совпадаю-
щая с осью трубы. К концу оси прикреплена модель крыла или
модель самолета. Ось вращения проходит через точку, которая
должна соответствовать центру тяжести самолета. Модель уста-
навливается так, что можно менять угол атаки и угол скольжения.
Пример такой установки показан на фиг. 68. При данной схеме
установки угол атаки измеряется между осью вращения и плос-
костью хорд крыла, а угол скольжения измеряется в плоскости
хорд. Такая система удобна для рассмотрения штопора. Самый
В. С. Пышнов—166—7 97
эксперимент ведется очень просто. Дают некоторую скорость воз-
душному потоку и затем или ожидают, когда крыло само придет
во вращение, или сообщают ему начальный толчок. В некоторых
случаях прибегают даже к начальной раскрутке. После этого ожи-
дают, пока движение установится, и измеряют угловую скорость.
Фиг. 68. Крепление крыла, позволяющее менять углы атаки
и скольжения.
Есть еще другой способ испытания, дающий более полный ре-
зультат. Ось вращения связана с электромотором, который мо-
жет работать и как тормоз. Установка позволяет измерять не
только угловую скорость, но также и момент. Мотору дают раз-
личные числа оборотов и измеряют момент. Затем строят диаг-
рамму момента в функции числа оборотов, и там, где момент ра-
вен нулю, будет режим авторотации (фиг. 69). Таким методом
можно обнаружить даже не-
устойчивые режимы авторота-
ции, которых обычный метод
дать не может. Исправность
установки для исследования ав-
торотации контролируется преж-
де всего тем, что результаты
вращения в обе стороны сов-
падают. Последнее не имеет
места при исследовании авторо-
тации со скольжением.
Если авторотация начинается
сама собой, то она называется
Фиг. 69. Диаграмма моментов вокруг явной; это указывает на то,
оси вращения. чт0 неподвижное положение
крыла неустойчиво. Если для
начала авторотации нужно сообщить предварительно некоторую
угловую скорость, авторотация называется скрытой.
Приведем основные результаты лабораторных исследований
авторотации. Прежде всего было обнаружено, что угловая скоро-
сть прямо пропорциональна скорости потока и обратно пропорци-
ональна размаху крыльев. Поэтому характеристику авторотации
98
удобно выразить в безразмерной форме, введя обозначение:
(!)
СО Z
Tv
Для характеристики модели на основании результатов продувки
дают диаграмму о> в зависимости от а. Безразмерный коэфициент со
имеет очень простой геометрический смысл, ^сли мы сложим гео-
I
метрически скорости конца крыла — окружную со у и скорость про-
движения вперед V, то отношение этих скоростей и будет и
представляет собой tg^a, т. е. тангенс приращения угла атаки на
конце крыла вследствие вращения. Очевидно, что при авторотации
в зависимости от ^формы модели и угла атаки устанавливается
угловая скорость, соответствующая определенной картине обте-
кания. К сожалению, до сих пор не было сделано исследования
зависимости ш от масштабных факторов (числа Рейнольдса). Но
.исследования су показывают, что обычные профили дают увели-
чение авторотации с увеличением Re.
На фиг. 70 дана диаграмма
авторотации для тонкого кры-
ла. Как видно, авторотация
началась примерно от крити-
ческого угла атаки. Дальней-
шее увеличение угла атаки
повышает угловую скорость,
но до известного предела,
после чего при угле атаки
около 33° авторотация пре-
кращается. Обращает на себя
внимание еще то обстоятель-
ство, что на некотором диа-
Фиг. 70. Диаграмма авторотации.
пазоне углов атаки имеются
два режима вращения. Это
как раз относится к тому
случаю, когда кривая М по w дважды пересекает ось и дает мед-
ленный режим вращения—неустойчивый и более быстрый— устой-
чивый (фиг. 69 . Область, где наблюдаются два режима авторотации
(фиг. 70), соответствует скрытой авторотации. Из фиг. 69 мы ви-
дим, что при медленном вращении возникает тормозящий момент,
следовательно, в состоянии покоя мэдсль устойчива. Однако, если
мы дадим предварительную ра^ крутку модели до скорости, боль-
шей режима медленного вращения, момент становится вращающим
и разгоняет модель до второго, более быстрого режима вращения.
Разные профили крыла дают различные характеристики авто-
ротации. Тон ие симметричные профили дают более медленное
врашение, наоборот, толстые профили с изогнутой средней линией,
имеющие высокий сума с, дают| более быстрое вращение и сама
область авторотации более широка.
Подобная характеристика авторотации может быть легко
объяснена и даже примерно подсчитана. Пусть мы имеем вели-
99
чины коэфициентов сд и сх для крыла при углах атаки от 0 до 90°.
Для удобства вычисления моментов вокруг осей х и у самолета
спроектируем су и на оси х и у и тогда получим коэфициенты еп
и ct. Диаграмма сп и ct по а дана на фиг. 71. Пусть крыло имеет
некоторый угол атаки а и вращается при некоторой характери-
стике вращения о>. Тогда на одном конце крыла будем иметь
угол атаки а + arc tg о, на другом конце а—arc tgw и в произволь-
z . 2 —
ном месте а ± —— • arc tg<o. Мы можем построить диаграмму
распределения углов атаки и коэфициентов сп и ct по размаху.
Затем можем подсчитать моменты вокруг осей х и у. Для этой
цели составляем выражения:
1 L
2 2
Мх = у • ctl • b • z • dz\ Му— j* b - z- dz.
i ~ i
2 2
Интегралы можно подсчитать как площади диаграмм сп- b • z и
ct • b z по z (фиг. 72). Проектируя моменты Мх и Му на ось
вращения, получим момент вокруг оси вращения. Произведя
подобный подсчет для разных значений «>, и построив диаграмму М
по а), мы найдем режим авторотации в той точке, где 7И = 0.
Повторяя расчет для разных углов атаки, получим диаграмму авторо-
тации. Конечно, такой расчет чрезвычайно примитивен, но его ре-
зультаты в общем качественно согласуются с результатами продувки.
Ошибка расчета не только в том, что мы не учли числа Рейнольдса
и взаимодействия различных сечений крыла, но главным образом
100
в том, что в качестве исходных данных мы взяли продувку крыла
по углам атаки, в то время как нам, собственно, нужна зависи-
мость сп и ct от а в отдельных сечениях крыла. Эту зависимость
можно было бы получить продувкой на распределение давления
в разных сечениях, и тогда расчет был бы точнее. Несмотря на
свою неточность, данный расчет демонстрирует ход кривой авто-
ротации и указывает на особенности отдельных крыльев.
Возьмем для примера угол атаки 20° (фиг. 71); кривая сп идет
с отрицательным наклоном, а кривая ct — с положительным.
Небольшой вращающий
вокруг осей хну, Вра-
щающие моменты дадут
угловое ускорение. С уве-
личением угловой ско-
рости углы атаки концов
крыла все более удаля-
ются от начального угла
атаки, пока не исчезнет
вращающий момент; тог-
да вращение установится.
Если же мы возьмем
начальный угол атаки 30°,
то здесь наклоны кривых
меняются и при началь-
толчок вызовет вращающие моменты
ном толчке получится
даже тормозящий мо-
Фиг. 72. Диаграмма для расчета моментов
вокруг осей х и у.
мент, хотя и очень нез-
начительный. Однако,
если начальный толчок
будет более сильный,
произойдет более силь-
ное изменение углов ата-
ки, и моменты вновь
станут вращающими.
В итоге мы можем сказать, что там, где наклон кривой сп
отрицателен, а наклон кривой ct положителен, мы имеем неустой-
чивое положение покоя и, следовательно, явную авторотацию.
Чем больше падение сп после прохождения максимума, тем больше
вращающие моменты, тем большая развивается угловая скорость.
Можно говорить, что профили с большим Макс дают большую
угловую скорость. В данном примере мы не имеем авторотации
на очень больших углах атаки. Однако иногда может быть обна-
ружена скрытая авторотация на углах атаки 60—80°.
Очень интересны свойства бипланов. При рпытах в трубе
бипланы без выноса, т. е. когда одно крыло расположено прямо
над другим, показали очень большую скорость вращения, которая
растет по мере увеличения угла атаки вплоть до 90°. У бипланов
с выносом верхнего крыла вперед характеристика мало отличается
от моноплана. Такое свойство биплана очень легко объяснимо.
С той стороны, где угол атаки возрастает, начинается при неко-
101
Фиг. 73. Сравнение диаграмм сп для моноплана
и биплана: /—моноплан, 2—биплан без выноса,
3—биплан с выносом 17,3°.
тором угле атаки затенение верхнего крыла нижним, сп снова
падает и возникает мощный вращающий момент вокруг оси^л.
На фиг. 73 дана диаграмма сп д,ля моноплана и биплана без выноса,
где это ясно видно. Выд-
винув верхнее крыло
вперед, мы ослабляем
или даже уничтожаем
указанное заслонение.
Следующий весьма
важный фактор, влияю-
щий на авторотацию, это
скольжение. Как мы уже
указали, скольжение по-
является вследствие вра-
щения модели вокруг
своей оси у. Условимся
применять такую тер-
минологию: если конец
крыла, который при вра-
щении уменьшает угол
атаки, выдвинут вперед,
то скольжение называется внешним; если этот конец крыла отод-
винут назад, скольжение назовем внутренни м.Например, мы дали
скольжение, выдвинув правое крыло вперед, тогда при вращении
вправо на правом крыле углы атаки будут увеличены, крыло
выдвинуто вперед, и, следовательно, скольжение будет внутрен-
нее. Такая номенклатура взята по аналогии с виражем, если иметь
в виду процесс накренения самолета.
Оказывается, что как в нормальном полете, так и в закрити-
ческой области, крыло, выдвинутое вперед, увеличивает подъем-
ную силу, а противоположное — ее уменьшает. Если мы даем
102
модели внешнее скольжение, то неизбежно увеличиваем враща-
ющий момент, при внутреннем скольжении — уменьшаем его. Так
как при авторотации без скольжения моменты очень малы, то даже
небольшое скольжение весьма сильно меняет режим авторотации.
При внутреннем скольжении авторотация быстро исчезает, при
внешнем, наоборот, интенсивно развивается и сохраняется вплоть
до углов атаки 90°. На фиг. 74 приведены диаграммы авторотации
при разных углах скольжения, причем внешнее скольжение при-
нято отрицательным. На биплан без выноса скольжение влияет
очень мало вследствие того, что основной крутящий момент от
затенения крыльев велик, hJ скольжение мало влияет на величину
момента. На фиг. 75 мы видим, что скольжение мало повлияло на
скорость авторотации.
Интересно отметить, что при скольжении авторотация с неболь-
шим ш имеет место при нормальных углах атаки1. Некоторые
самолеты, не имеющие киля, при брошенном руле поворота делают
крутую спираль, похожую на штопор, хотя при этом никаких
срывов обтекания нет. Авторотация при скольжении наступает и
при наличии полного срыва по всему крылу.
Когда имеется скольжение, тона ось вращения О — О (фиг. 76)
проектируется также продольный момент Mz. Момент вокруг оси
вращения можно выразить так:
М = Мх • cos (х — О) + М, • cos (j — О) + Mz • cos (z — О);
М = Мх ’ cos а . cos р + Му • sin а — Mz • cos а • sin
Ha фиг. 74 и 75 не показано.
103
Положительный, т. е. пикирующий, момент при вращении с
внешним скольжением способствует авторотации, при внутреннем
скольжении — ей мешает. Роль продольного момента особенно
велика для модели самолета, главным образом вследствие боль-
шого момента оперения.
В заключение можно сказать, что в закритической области
авторотация может происходить на разных угловых скоростях,
причем на скорость вращения наиболее сильно влияет скольже-
ние. Влияние скольжения настолько велико, что особенности про-
филя крыла при этом имеют второстепенное значение, и только
биплан без выноса стоит несколько особняком. Повидимому,
можно говорить о верхнем пределе скорости авторотации. Если
вращение слишком быстрое, то на одном крыле угол атаки ста-
новится слишком мал, и это уничтожает вращающий момент.
Можно полагать, что на одном конце крыла величина угла атаки
не опускается ниже 0°. Тогда, если в центре угол атаки а, то
перемена угла вследствие вращения будет тоже а, и максималь-
ная скорость авторотации будет не более
а) ~ tga.
ДВИЖЕНИЕ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА ПРИ ШТОПОРЕ
Как мы знаем, движение центра тяжести определяется дей-
ствующими силами. При штопоре мы имеем две силы: силу
тяжести G и равнодействующую аэродинамических сил R. Когда
движение установится, вертикальная проекция равнодействующей
уравновесится силой тяжести, а горизонтальная составляющая
будет служить центростремительной силой, дающей круговое
движение в горизонтальной плоскости. Сложение этого круго-
вого движения с быстрым опусканием вниз даст вытянутую
спираль.
Нас интересует скорость движения самолета, радиус окруж-
ности, описываемой центром тяжести, и производные отсюда
величины: наклон и шаг спирали и перегрузка. Все эти данные
желательно связать с режимом вращения, определяемым углом
атаки а, углом скольжения 3 и параметром вращения о). В неко-
торых работах по теории штопора берут общий случай располо-
жения равнодействующей по отношению к осям самолета. Это
вызывает значительную сложность геометрии штопора. Желая
избежать геометрической громоздкости выражений, можно сделать
такое допущение. Равнодействующая воздушных сил перпенди-
кулярна к плоскости хорд крыла и, следовательно, направлена по
оси у. Можно утверждать, что отклонения равнодействующей от
оси у незначительны и не играют особой роли. В самом деле,
тангенциальные силы крыла вообще невелики и к тому же частью
направлены вперед, частью назад. Боковые силы также незначи-
тельны вследствие малости боковых площадей, и, кроме того,
при вращении направление боковых сил в передней и задней
частях самолета может быть противоположно. Наконец, при
104
штопоре мы имеем дело с десятками градусов, и ошибки даже
в несколько градусов не могут играть большой роли. Второе
допущение можно сделать относительно величины равнодейству-
ющей силы. Ввиду того, что на самолет действуют в основном
нормальные силы, а углы атаки по размаху меняются в довольно
широких пределах и лежат, главным образом, в закритической
области, можно в качестве коэфициента равнодействующей взять
среднее значение сп для больших углов атаки. Расчеты показы-
вают, что за такую величину можно принять сп = 1,28, т. е. коэфи-
циент сопротивления плоской пластинки.
Фиг. 76. Схема осей и углов при рассмотрении
штопора.
Теперь получилась очень ясная схема (фиг. 76). Имеем ось
вращения О — О; ось у самолета пересекает ось вращения под
углом а0. Если ось х тоже пересекает ось вращения, мы будем
считать такой штопор без геометрического скольжения, хотя, как
мы покажем далее, аэродинамическое скольжение здесь имеет
место. При вращении самолета вокруг оси у появится геометри-
ческое скольжение; обозначим его р0 и будем измерять в плоско-
сти x — z самолета, начиная отсчет от линии, лежашей в плоско-
сти х — z и соединяющей центр тяжести самолета с осью враще-
ния. Эта линия совпадает с проекцией V и на плоскость х — г.
Ввиду сложности геометрической картины полезно данную схему
изготовить в виде модели (фиг. 77). Следует обратить внимание
на то, что при данной схеме изменение скольжения 80 не меняет
угла атаки.
Перейдем к интересующим нас материалам по движению центра
тяжести. Величина <о, угол атаки и угол скольжения определя-
ются равновесием моментов; будем считать, что они нам уже
105
известны. Проектируя равнодействующую на вертикаль, получим
выражение, позволяющее найти скорость по траектории:
R sin а0 = G = 1,28 • • 5 • sin а0;
_/ G_________________
V р • S • 0,64 Sin а0
Так как угол а0 во всяком случае больше
больше. 15—18°, наибольшая скорость будет
крутом штопоре:
V
шт. макс
критического, т. е.
именно при таком
_______~ 2 И
p-S-0,64-siu 15° rop-
пол. мин
При плоском штопоре скорость по траектории довольно близка
к минимальной скорости горизонтального полета. У некоторых
планеров скорость при плоском штопоре бывала порядка 10 м1сек;
это лишь на немного превышает скорость опускания парашюта.
Естественно, что штопор до земли в таком случае даже не
приводил к сильному повреждению планера.
Для радиуса штопора мы можем составить два выражения:
одно, пригодное лишь для штопора, скорость которого устано-
вилась:
R • sin а0 = G; R • cos а0 = т • ы* • г,
откуда
f СТ j __ JL_ . р .
» 0 ю2Г ’ <о2 • tg а0 ’
106
другое выражение относится к штопору, скорость которого еще
не установилась:
/? • cos а0 — т си2 • г = 1,28 у- • S • cos а0;
_ 0,64-p-S- V2 ‘cosa0 _0,64-p-^ S-I/--COSа0
Г ~~ ‘
Окружная скорость в горизонтальной плоскости будет:
W = и • Г' —— •
o>-tgi0
Угол наклона траектории к горизонту 6 получится из выра-
жения:
Л W О’
COS 0 = = —77^7— •
V co.V«tgao
Если взять значения и V для современных самолетов, то
cos 9 будет очень мал, а угол 9 близок к 90°. Так, например, в
среднем V = 30—40 м)сек, = 2 — 4 сект"1, tgao = O,6 — 1,5. Если
взять минимальное и максимальное значения из комбинации этих
цифр, мы получим величину 9 от 74 до 87°. Синус этих углов
достаточно близок к единице, и потому можно считать, что вер-
тикальная скорость U равна скорости по траектории V. Тогда
выражение для радиуса может быть преобразовано в таком виде.
Подставим угловую скорость из уравнения:
- 2U -2V g gl2
= с» = (о получим г = — = -— -------=
/ I ’ J w2’tga0 4.w2. VMga0
__ 0,64 р S -/2 sin <z0 _ 0,64-?-g-S-Z2-cos <z0 .
4G-w2*tga0
~ G
Величину - z можно обозначить известным нам выражением рсам-
г Р 0,16
-г = —----- • • cos а0.
L & <j>“
гсам
Если взять для крутого штопора а0 = 25°, ш =0,25, 2^, рав-
Р
ное в среднем около 5, то получим у = 0,47. При пологом штопоре
а0 = 45°, «> = 0,7, у = 0,С65. Грубо говоря, при крутом штопоре
радиус равен половине размаха крыльев, при пологом и плоском
штопорах радиус весьма незначителен.
Вопрос о роли радиуса штопора будет еще рассмотрен далее.
Перегрузка самолета в целом, равная отношению величины
равнодействующей к весу самолета, будет:
R 0,64 р SV-
п G ~~ G
107
В случае установившегося движения:
К = —----; п —--------
S1D я0 ’ sin я0
Найденная перегрузка относится к самолетам в целом и к частям
лежащим вблизи центра тяжести. Детали самолета, удаленные
от центра тяжести, имеют иную перегрузку.
Выражение для потери высоты за виток можно написать так:
h = • г • tg 9.
Если угол 6 близок к 90°, удобнее считать
h = V -t = V
<D
где t — время совершения одного витка.
Подставив выражение для угловой скорости, получим:
Оказалось, что потеря высоты за виток зависит от размаха
крыльев и характеристики авторотации <о.
УГЛЫ АТАКИ И СКОЛЬЖЕНИЯ В РАЗЛИЧНЫХ ЧАСТЯХ
КРЫЛА И У ОПЕРЕНИЯ
Найдем сначала углы атаки и скольжения вблизи центра тя-
жести самолета. Движение центра тяжести и положение самолета
нам уже известны. Центр тяжести имеет два движения: одно по
вертикали U, другое по окружности w, причем движение по ок-
ружности лежит в плоскости х — z самолета и под углом
к оси z (фиг. 76). Спроектируем вертикальную скорость на ось у.
Тогда угол атаки, равный углу между направлением скорости /
и плоскостью х — z, будет:
U • sin а0 . . h
sin а= у—- sin а0 • sin V.
Угол скольжения, измеряемый в плоскости х — z, мы получим,
спроектировав вертикальную скорость на плоскость х — z и сло-
жив геометрически эту проекцию с окружной скоростью:
® Г и • COS я0 tg 0 • COS cto ’
если 0 близко к 96°, то
Получив углы атаки и скольжения в центре крыла, мы можем
найти их и в других частях крыла. Для этой цели нужно к ком-
понентам скорости V добавить компоненты от вращения. Угловую
108
скорость штопора w, направленную по вертикали, спроектируем
на оси самолета и получим компоненты угловых скоростей:
о)х = (о . cos ft0 • cos 30; Шу — ш • sin а0; = — ш • cos а0 • sin р0.
Для точек, лежащих вблизи оси z, можно пренебречь компо-
нентами скоростей от вращения вокруг оси z, Зная составляющие
скорости V по осям координат самолета, мы складываем геоме-
трически с ними соответствующие скорости от вращения и по-
лучаем искомые углы атаки и скольжения 04 и в разных сече-
ниях крыла:
Vx = V • cos а • cosP; Vy = V • sin a; Vz = V • cos а • sin p;
sin a, = ; V, _ /(Т7-+X7iy+vy;
Во избежание ошибки в знаках всегда следует иметь схему сло-
жения скоростей.
Расчет углов атаки и скольжения иногда удобнее произвести
графически. На фиг. 78 дан пример такого графического расчета.
Углы атаки и скольжения у оперения получаем тем же спо-
собом (фиг. 79), складывая геометрически компоненты скорости И
с компонентами скорости от вращения, но только сначала необ-
ходимо найти эти углы относительно плоскости х — z для места,
где находится оперение, а затем добавить углы между поверх*
ностями оперения и плоскостью х —• z:
ft Г. о = Лг. о + <?г. о»
. , Vu + o>z- Хг. о
sin «г. о =-у-----;
* г. о
Уг. О = vV* + (Ур + 0>z • хг. о)2 4- (Уг — Шу • Хг. 0)s ;
V-. — о
Ух
При изучении штопора особое внимание необходимо уделить
вопросу об углах атаки и скольжения в разных частях самолета.
Для облегчения этой задачи полезно изготовить специальную мо-
дель, подобную изображенной на фиг. 77, и производить на ней
сложение скоростей в виде проволочных многоугольников.
МОМЕНТЫ, ДЕЙСТВУЮЩИЕ ПРИ ШТОПОРЕ
Применяя правило Даламбера к решению механической задачи
штопора, рассматривают кроме аэродинамических моментов еще
и инерционные моменты.
109
о
Фиг. 78. Расчет углов атаки' и скольжения в
произвольном сечении крыла. tgax = - у .
и (л—z\
Моменты аэродинамических сил в первом приближении можно
получить, рассматривая каждый элемент крыла и оперения изо-
лированно под своими углами атаки и скольжения. Так» например,
интересуясь моментом крыла, мы находим распределение углов
атаки и скольжения по размаху, находим скорость в каждом се-
чении, прилагая к ним соответствующие коэфициенты сил, и сумми-
руя, получаем моменты. Однако такой расчет, конечно, весьма
упрощен. Мало того, что найти силы, действующие на отдель-
ные элементы поверхностей, вообще трудно, необходимо помнить,
что весь окружающий поток возмущен, обтекание почти везде
происходит со срывом, и сбегающие с одних частей самолета за-
вихрения попадают на другие его части. Форма завихрений и
скорости внутри них не поддаются точному расчету. Отсюда ясна
необходимость экспериментального определения аэродинамических
моментов. Такие измерения производятся (подробнее о них мы
скажем далее), однако отметим, что до настоящего времени они
производились в условиях малого числа Рейнольдса и потому не
могли дать достаточной точности.
С точки зрения инерционных моментов самолет можно заме-
нить тремя парами масс, расположенными на осях х, у и г. Вра-
щая эту систему около некоторой оси и прилагая к массам
центробежные силы инерции, мы получим инерционные моменты.
Рассмотрим сначала вопрос качественно. Пусть массы располо-
жены для простоты на одинаковом расстоянии от начала коор-
динат. Тогда по осям х и z нужно расположить примерно одина-
ковые массы, а на оси ^-—значительно меньшие, так как у
обычных самолетов разнесение масс по оси у очень незначительно.
В некоторых случаях можно вообще считать, что массы распо-
ложены только по осям х и z.
Для того чтобы было удобно судить о направлении действия
инерционных моментов, мы будем предполагать, что по оси у
массы не разнесены.
На фиг. 80 изображены моменты вокруг оси z. Массы, распо-
ложенные в фюзеляже, стремятся увеличить угол атаки; кассы,
лежащие на оси у, наоборот, стремятся его уменьшить. На фиг. 81
дана схема в отношении оси у. Если нет геометрического сколь-
жения, ось у пересечет ось вращения, а ось z будет горизон-
тальной. В этом случае инерционных моментов вокруг осей х
и у не будет. При наличии скольжения (случай, изображенный
на фиг. 81) массы на оси z стремятся его уменьшить, а массы на
оси х стремятся его увеличить; массы на оси у на скольжение не
влияют.
Выражения для инерционных моментов мы берем в готовом:
виде, так как их вывод приводится в курсах механики:
-= - uz(Jy — Jz);
Myi = О)- • J
Mz — Jy\
ш
Запомнить эти выражения очень легко. Инерционный момент во-
круг оси х оавен произведению компонентов угловых скоростей
по осям у и z, умноженному на разность моментов инерции относи-
тельно этих осей. Для получения инерционных моментов вокруг
Фиг. 80. Инерционный момент
вокруг оси г.
Фиг. 81. Инерционный момент
вокруг оси у.
других осей меняем индексы угловых скоростей и моментов инер-
ции круговой подстановкой.
Если подставить выражения для компонентов угловых ско-
ростей, получим:
Мх. = — о? • sin а0 » cos а0 • sin р0 (/у — Jz) =
= — 0,5 • sin 2а0 • sin Ро • w2 — Jz);
Муi = — из2 * cos а0 • sin Po • cos a0 • cos p0 (Jz — =
= — 0,5 • sin 2p0 • cos2a0 • w2 (Jz — Jx)\
Mz. = (d2 . cos a0 • cos p0 • sin a0 (Jx — Jy) =
= 0,5 • sin • 2a0 • cos Po • 0)2 (Л — Jy)-
Произведем некоторый анализ полученных выражений. Во-пер-
вых, мы видим, что при отсутствии геометрического, скольжения ро
моменты Mxi и МУ1 равны нулю. Как мы уже отметили, разне-
сение масс по оси у весьма незначительно. Пренебрегая этими
массами, мы можем теперь рассматривать самолет состоящим
из двух систем масс. Одни массы расположены вдоль оси х— это
массы фюзеляжа. Другие массы расположены вдоль оси z— это
массы крыла. Затем можно считать, что моменты инерции фюзе-
ляжа вокруг осей у и z равны, а момент вокруг оси х равен нулю:
— 0; /уф = /гф =
112
То же для крыла:
Акр — Акр — Акр= Ар.
Тогда
А = Ар; А = Ар 4“ А>>
Отсюда разности моментов инерции, входящие в выражения для
инерционных моментов, будут:
А А ” Ар; А А “ А Ар;. А А = «А»
а сами выражения примут вид:
Мх. — ~ 0,5 : sin 2а0 • sin р0 • ш2 • Укр,
MUi = —0,5 • sin 2р0 • cos2a0 • <«а (А — Ар)»
МХ1 = — 0,5 • sin 2а0 • cos р0 • ш2/ф.
Как видно, инерционный момент вокруг оси z пропорционален
квадрату угловой скорости, синусу удвоенного угла атаки и мо-
менту инерции фюзеляжа; cos р0 обычно близок к единице. Следует
обратить внимание на то, что знак момента 7ИУ/ зависит от раз-
ности моментов инерции крыла и фюзеляжа.
РАВНОВЕСИЕ МОМЕНТОВ И РЕЖИМЫ ШТОПОРА
Если штопор еще не установился, то кроме найденных выше
инерционных моментов будут еще моменты от угловых ускорений.
Еще не доказано, существует ли обязательно установившийся
режим штопора, когда величины w, a0 и р0 долгое время не меня-
ются. Записи, произведенные в полете, указывают на наличие
колебаний. Однако в теории обычно рассматривают некоторый
установившийся режим.
Расчет режима установившегося штопора представляет собой
довольно сложную задачу, даже если аэродинамические моменты
известны. Мы имеем три оси самолета и вокруг, каждой из осей
должно наступить равновесие. За основные параметры штопора
удобно принять три величины: характеристику вращения ш, угол «о
и угол Ро- Желая найти режим штопора, нужно перебрать разные
комбинации из этих* величин. Например, берем по пять значений
w, До и р0; это даст 125 комбинаций. Для этих 125 комбинаций под-
считываем Mz и строим 25 кривых Mz по ш для разных комбина-
ций а0 и р0. Условие равенства Мх нулю дает нам значения «> для
комбинаций а0 и р0, и потому расчет :МХ мы производим только
для 25 случаев и строим только 5 кривых Мх по а0 для разных рв.
Условие Мх = 0 оставляет нам уже только 5 случаев для раз-
ных ₽о, а соответствующие а0 и ю уже известны. Подсчитав Му
для пяти случаев, строим одну кривую Мд по р0 и там, где AfF=O,
получаем значение р0. После этого по имеющимся данным Легко
найти соответствующие значения а0 и ш. Схема расчета дана на
фиг. 82. При расчете может получиться несколько режимов што-
В. С. Пышнов—166—8 113
пора и поэтому брать по пяти значений каждой величины будет
недостаточно.
Можно применить другой метод расчета. Проф. А. Н. Журав-
ченко берет косоугольную систему координат — оси у и z самолета
и ось вращения. В этом случае режим авторотации дает условия
равновесия вокруг оси вращения, и
X остается исследовать моменты вокруг
осей у и г.
Мы указывали, что добавление инер-
ционных моментов сводит динамическую
задачу по форме к статической. Это
обстоятельство не устраняет, однако,
всей трудности вопроса, относящегося
по существу к области динамики. Так,
например, нельзя рассматривать устой-
чивость равновесия методом продоль-
ной статической устойчивости. Для
лучшего усвоения вопроса мы приведем
несколько упрощенную схему исследова-
ния. Основная задача исследования сво-
дится к выяснению вопроса, почему само-
лет имеет такой большой угол атаки и
Фиг. 83. Модель для изучения удерживает скольжение, содействующее
продольных^^моментов при авторотации. Возьмем такую модель. Мо-
р ’ дель самолета вращается вокруг верти-
кальной оси и, кроме того, может качаться вокруг своей оси z
(фиг. 83). На модель снизу дует поток с некоторой скоростью V.
Воздушный поток создает продольный момент Мг, стремящийся
придать самолету некоторый угол атаки. Если руль высоты стоит
114
нейтрально, модель стремится принять очень небольшой угол атаки;
при крайнем отклонении руля вверх угол атаки дойдет только
до 16—18°. Мы имеем в виду статически устойчивый самолет.
Если бы мы стали принудительно увеличивать угол атаки, то по-
лучили бы пикирующий момент, зависимость которого от угла
атаки выразится некоторой диаграммой. При вращении, рассматри-
вая равновесие моментов в относительном движении, мы добав-
ляем инерционный момент и должны получить выражение:
Л1г = 0,5 • sin 2<х0 • ш2 (J9 — Уд.) 0,5 sin 2а0 • о>27ф;
отсюда угол атаки будет:
Фиг. 84. Диаграмма продольных моментов при штопоре.
где ig и ix — радиусы инерции. Здесь получается странное на пер-
вый взгляд явление: чем больше момент, тем больше угол а0.
С точки зрения обычного статического действия моментов, каза-
лось бы, увеличение пикирующего момента должно уменьшать
угол а0. На самом же деле, увеличение Mz приближает d0 к 45°,
так как уравнение имеет два решения, которым соответствуют
точки, симметрично лежащие относительно угла 45° (фиг. 84).
Однако, если момент превысит известную величину, правая часть
уравнения станет больше единицы, и решения не будет.
Несколько иной результат получается, если момент Аэродина-
мических сил зависит от а0 так, как дано на фиг. 85, а угловая
скорость тоже переменна в зависимости от а0 и р0.
Отложив моменты инерционных сил с обратным знаком, полу-
чим возможные режимы равновесия в точках пересечения кривых
инерционных моментов и моментов воздушных сил. Как видно,
в этом случае усиление авторотации (кривая — Afj) при внешнем
скольжении сопровождается увеличением угла а0.
Аналогичным образом можно было бы рассматривать равновесие
моментов вокруг оси у, причем, если момент воздушных сил вокруг
оси z мало зависит от вращения, то момент воздушных сил вокруг
оси у может быть найден исключительно в условиях вращения.
115
Отсюда мы видим, что угол атаки при штопоре определяется
с одной стороны, инерционными моментами, удельный вес кото-
рых пропорционален и (iy — ix), Me i — отношение радиуса
инерции к размаху крыльев, показывающее степень разнесения
масс. Другой фактор, влияющий на угол атаки,— это скольжение.
Затем, конечно, существенное влияние оказывает профиль крыла
и, особенно, бипланное расположение без выноса, или с малым
выносом.
Фиг. 85. Изменение режима штопора при увеличении
-инерционных моментов.
Рассматривая развитие самолетов, мы прежде всего увидим
неуклонное возрастание инерционного фактора —. Самолеты,
почти не меняя своих размеров, постепенно уплотняются, и на-
грузка имеет тенденцию к рассредоточению. На первых самолетах
экипаж, горючее и мотор были расположены очень компактно и
близко от центра тяжести, а дальше шли весьма легкие фермочки,
несущие рулевые поверхности. У современых самолетов мотор
вынесен вперед, а экипаж отодвинулся почти к самому хвосту.
Если сравнить самолеты сходных размеров времен 1910 и 1937 го-
дов, мы можем оценить увеличение ^^(1у— ix) примерно в 10—
15 раз. Естественно, что это весьма сильно сказалось на режиме
штопора. Самолетам с малым -^а- почти совсем не был знаком
плоский штопор. К тому же крылья тонкого профиля имеют ма-
лый момент вокруг оси у, и при плоском штопоре тормозящее
действие оперения уничтожает авторотацию. Вообще говоря, при
малом плоский штопор мог бы иметь место лишь при очень
задней центровке, когда момент Мг воздушных сил незначителен.
Возрастание в процессе развития самолетов привело к тому,
что штопор самолета становился все более и более плоским
116
Противодействовать этому стали путем увеличения вертйкальВОхб
и горизонтального оперения, что очень ясно видно при сравнении
старых самолетов с современными. Так, например, современные
самолеты имеют увеличение оперения по сравнению с самолетами
1910—1912 годов: вертикального оперения в 2—3 раза, горизон-
тального—в среднем в 1,5 раза.
Вопрос об устойчивости режима штопора еще не был детально
исследован и, несомненно, представляет весьма большую слож-
ность; его исследование следует вести динамическими методами
устойчивости движения.
Остановимся на вопросе о совместимости равновесий отно-
сительно всех трех осей. Равновесие вокруг оси z можно
считать не зависящим от скольжения. Моменты вокруг осей х и
у уравновешиваются инерционными моментами. Напомним о на?
правлении действия этих моментов. Мх. стремится поставить
крылья в горизонтальное положение и тем уничтожить скольже-
ние, независимо от того, какое оно было. Поэтому если Мх—
вращающий аэродинамический момент, скольжение будет внутрен-
нее с тормозящим MXi. Если Мх— тормозящий момент, скольжение
должно быть внешним. Инерционный момент Мд. стремится уни*
чтожить скольжение, независимо от его направления, если момент
инерции крыльев больше момента инерции фюзеляжа. Если же
Л > Л, т. е. момент инерции фюзеляжа больше, то инерционный
момент Мв. стремится усилить скольжение независимо от его
направления. Пример несогласного равновесия можно привести
такой. Пусть Мх и Mff— вращающие моменты, a Jz <.JX. Тогда рав-
новесие моментов вокруг оси х требует внутреннего скольжения,
а равновесие вокруг оси у — внешнего. Очевидно в установившемся
штопоре Мх и Мд должны быть в этом случае разного направления.
Вопросом о роли разности моментов инерции Jx — Jv, которую
упрощенно можно считать разностью моментов инерции крыла и
фюзеляжа, много занимались английские исследователи. Они сде-
лали такие выводы. Уменьшение внутреннего скольжения или
увеличение внешнего способствует усилению авторотации. Если
крыло имеет , большие вращающие моменты, то из условия равно-
весия вокруг оси Мх скольжение будет внутренним;'такое поло-
жение мы имеем для биплана, когда сказывается затенение
крыльев. Если инерционный момент вокруг оси у уменьшает вну-
треннее скольжение, то этим он способствует усилению авторо-
тации. Такое положение будет при Jx > Jz.
Если взять моноплан или биплан с выносом, у которого зате-
нение еще не сказывается, авторотация происходит с внешним
скольжением. В этом случае авторотацию усилит фактор, способ-
ствующий скольжению, т. е. Следовательно, для биплана
опаснее штопор при Jx> Jz\ для моноплана и биплана с боль-
шим выносом опаснее, когда Л > Л.
Высота полета сказывается на режиме штопора, так как изме-
нение-^— довольно значительно. Условия штопори на высоте
117
соответствуют как бы утяжелению самолета и увеличению момен-
тов инерции.
Заканчивая вопрос о режимах штопора, остановимся еще на
роли движения центра тяжести. То, что центр тяжести описывает
окружность, для режима штопора не имеет значения. Гораздо
важнее наклон траектории центра тяжести и скольжение, cos 9
уже был нами найден:
cos 9 = —.
«> • V • tg Од
Уменьшение угла 9 уменьшает угол атаки и увеличивает угол
скольжения. Преобразуем выражение для cos 9, подставив вместо
в и V их выражения:
cos 9 = =— -----------------£11------j
со . 2 U* V • tg «о <t> • 2Иа • tg а0 Sin 6
sin 29 = •S-°-64l-sin^ = o,64 -t-
c0 tg a0 G Реам 0)
Получили выражение, похожее на то, которое было получено
для продольного наклона самолета. Это выражение говорит о том,
что возможны два режима—один для углов более 45°, другой ме-
нее 45°. Если относительная плотность самолета очень мала, sin 29
окажется больше единицы и, следовательно, такой штопор невоз-
можен. Второе решение, когда 9 меньше 45°, относится к обычной
спирали, и тогда угол а0 будет, собственно, 90° — 7, где 7 угол
крена. Посмотрим, когда штопор становится невозможным. Правда
нельзя говорить о полной невозможности штопора, так как в
выражении для sin 29 есть cosa0, который при большом а0 будет
мал и сделает штопор возможным даже при малом рсам. Однако
Крутые штопоры по мере уменьшения рсам становятся невозмож-
ными. Причина этого в том, что чем положе траектория, тем
больше должен быть наклон самолета к вертикали для получе-
ния угла атаки больше критического.
Нет сомнения, что каждый самолет может иметь несколько
режимов штопора. В частности, большое рсам, указывающее на зна-
чительную величину инерционных моментов, вовсе еще не опре-
деляет плоского штопора. Если у самолета авторотация быстра
на сравнительно небольших углах атаки, штопор будет крутым.
Это видно из выражения:
siп 2а0 г==- а7~v j \,
и — Zr)-
Большое w дает малое sin2a0- Для перехода в плоский штопор
нужно перейти через угол 45°. Это может произойти, повидимо-
"му, по причине колебаний величин Mz и о. На некоторых само-
летах переход в плоский штопор требовал специальной методики
ввода, а неумышленно получался примерно один раз на сотню
нормальных штопоров.
Существует еще перевернутый штопор. В этом случае угол
атаки больше критического в сторону отрицательных углов атаки
118
Теория такого штопора не отличается от теории обычного што-
пора, но в перевернутом виде схема самолета как бы изменяется.
Например, если в нормальном положении верхнее крыло было
вынесено вперед, в перевернутом виде мы получим обратный вы-
нос и другую характеристику авторотации. То же касается и про-
филя крыла и формы оперения.
ВЫХОД ИЗ ШТОПОРА
Штопор не нашел себе практического применения ни для граж-
данской, ни для военной авиации, и является лишь эффектной фигу-
рой высшего пилотажа. Правда, иногда рекомендуют при полете на
планере умышленно вводить его в штопор, если летчик в обла-
ках потерял ориентировку. Польза штопора в этом случае заклю-
чается в том, что самолет в
регрузок выберется из
облака вниз. Другие спо- 47
собы потери высоты со-
провождаются набором
большой скорости и со-
здают опасность поломки
планера от действия воз-
душных течений. Но это
применение нужно рас-
сматривать как исклю-
чение.
Изучение штопора на-
правлено к тому, чтобы
уничтожить его совсем —
штопоре быстро и без больших пе-
к Фиг. 86. Расчет возможных режимов штопора
собы быстрого И безот- ПрИ разных положениях рулей,
казного вывода из него
самолета. К сожалению, необходимо констатировать, что пока для
этого еще не найдено вполне надежных средств.
Возможность вывода из штопора можно рассчитывать двумя прин-
ципиально различными методами. Один метод заключается в том,
что проверяют режимы штопора при различных положениях ру-
лей. Если при некоторой комбинации отклонения рулей равнове-
сия всех моментов не получается, то считают, что самолет из
штопора выйдет. Если же режимы штопора имеют место при
всех положениях рулей, то самолет из штопора не выходит, и
тогда начинают вносить изменения в размеры и форму оперения.
Второй метод состоит в расчете неустановившегося движения, выз-
ванного отклонением рулей. Эти методы принципиально сильно
различаются; второй метод более правилен и практически ценен,
так как разрешение вопроса о невозможности равновесия момен-
тов еще не гарантирует быстроты выхода из штопора.
Первый метод расчета производится в таком же порядке, как
и расчет режима штопора вообще. Перебирают различные комби-
нации скоростей вращения, углов атаки, скольжения и меняют
119
положение рулей. Моменты аэродинамических сил лучше брать
на основании продувок в трубе на специальном приборе \
Для освещения качественной стороны вопроса рассмотрим его
в таком виде. Пусть мы имеем диаграммы авторотации модели
самолета при различных скольжениях и различных положениях
рулей (фиг. 86). Затем имеем данные cMz в зависимости от а для
разных положений рулей. Будем приближенно считать, что сМг
зависит только от а0. Условие равновесия моментов вокруг оси z
требовало:
.. п _______________
Sin 2а0 = , .г .2ч .
° 4“2Рсам <1у-*
Определим отсюда режим авторотации, необходимый для равно-
весия Mz*.
/Смг? • /2_______Р
4 Sin 2а0 (Z^ — z*) рса м
Определив ш, нанесем эти значения на диаграмму авторотации
(фиг. 86).
По диаграмме можно видеть, при каких комбинациях а0и'₽о
возможен штопор. Остановимся на некоторых частных случаях.
Если у самолета большое cMjt вследствие передней центровки или
большого горизонтального оперения, малое pcaM и малое
вследствие тесной группировки грузов, то при нейтральном положе-
нии руля высоты или при отклоненном вниз для равновесия мо-
жет потребоваться такое <о, какое авторотация не может дать ни
при каких условиях. Для таких самолетов действие рулем высоты
при передней центровке обеспечивает надежный вывод из штопора.
Малые рсам и мы имеем у учебных самолетов и особенно у,
планеров. Например, для планера, имеющего /= 16, -у-= 20, при
а@ = 45°, когда инерционный момент максимален, требуется оз —
= 1,54. Однако самая интенсивная авторотация при этом угле
атаки не дает более 1,0. При меньших углах атаки потребное ш
еще значительнее. Именно это обстоятельство объясняет нам
легкость вывода из штопора планеров, учебных самолетов, само-
летов выпуска до 1918—1920 годов с малым рсам и (^—zp и указы-
вает на роль центровки и активного горизонтального оперения.
Задняя центровка и малое Si.o могут сильно снизить ш, и штопор
станет возможен даже при руле высоты, отклоненном вниз.
Вопрос о роли центровки при выводе из штопора был вы-
яснен только примерно в 1929—1930 годах, когда в Америке
были проведены специальные исследования в полете. Для воен-
ного самолета постройки 1920—1922 годов результат оказался весьма
показательным. Например, при центровке ЗО°/о штопор был вообще
невозможен, при центровке 32—34% вывод был очень легок, при
1 Такими расчетами много занимался проф. А. Н, Журавченко в ЦАГИ; со-
ответствующие результаты изложены в трудах ЦАГИ.
120
центровке 36—38% появилось запаздывание, которое все возрас-
тало, и при центровке в 40% вывод оказался Невозможен.
Во избежание катастрофы центровку этого самолета можно
было менять в полете, сбрасывая груз дроби, расположенный в
задней части фюзеляжа.
Это исследование показало, что центровка, как и другие фак-
торы не первостепенного значения, может иногда дать большой
эффект, когда самолет находится на пределе выхода или невыхода;
тогда даже незначительные причины могут привести к катастрофе.
Бывали случаи, что самолет, легко выходящий из штопора, при
некоторых условиях выйти из штопора не мог. Разбор подобных
случаев показал, что это происходило при перегрузке самолета,
причем дополнительная нагрузка была положена в задней части
самолета и приводила к отодвиганию центровки назад. С другой
стороны, были случаи, когда задняя центровка улучшала противо-
штопорные свойства самолета.
Передняя центровка как мера борьбы со штопором вскоре ока-
залась недостаточной. Значения рсам и (i2— i?) быстро возрасли
и с точки зрения равновесия моментов вокруг оси z што-
пор стал возможен при различных положениях руля высоты, даже
при передних центровках. Тогда борьбу за выход из штопора ну-
жно было вести по другому направлению, а именно стремиться
ограничивать скорость авторотации. Основное внимание было.об-
ращено на вертикальное оперение. Руль поворота, отклоненный
против вращения, должен сделать невозможной быструю авторо-
тацию, даже при внешнем скольжении. Скорости авторотации при
обратном положении руля поворота должны быть меньше, чем
угловые скорости, требуемые для равновесия продольных момен-
тов. Дальнейшее увеличение рсам для борьбы со штопором потре-
бует создания таких условий, при которых авторотация станет
совсем невозможной. Изыскания специальных устройств для этого
делались, но все они пока оказывались слишком громоздкими.
Для самолетов с большим рсам наиболее характерен плоский
штопор, хотя режимы крутого штопора также могут иметь место.
Выход из плоского штопора, как правило, происходит путем по-
степенного перехода в крутой штопор и, наконец, в пикирование.
Это, естественно, требует значительного времени и приводит к
большой потере высоты. Как исключение наблюдались случаи
остановки вращения до уменьшения угла атаки. Для обеспечения
выхода из плоского штопора основное внимание было обращено
на работу руля поворотов. Здесь пришлось столкнуться с большими
трудностями. Дело в том, что вертикальное оперение, которое
применялось на устаревших самолетах, не только было мало по
величине, но и почти совершенно неэффективно в условиях пло-
ского штопора.
Основная причина потери эффективности заключалась в том,
что зона срыва горизонтального оперения, заслоняла боль-
шую часть вертикального. Тогда стали производить испытания
различных форм оперения, не имеющих такого недостатка. Вна-
чале просто уширили нижнюю часть руля поворотов (фиг. 87), за-
121
тем пробовали поднимать стабилизатор повыше, открывая этим
вертикальное оперение (фиг. 88), делали прорез в стабилизаторе
Фиг. 87. Плохая форма вертикального
оперения (а) и улучшенная (б).
Фиг. 89. Горизонтальное
оперение отодвинуто назад,
Фиг. 90. Горизонтальное опе-
рение выдвинуто вперед.
Фиг. 91. Возмож-
ное затенение го-
ризонтального
оперения крылом.
и, наконец, отодвигали вертикальное оперение от горизонтального
(фиг. 89,90). Последнее мероприятие нужно счи-
тать наиболее рациональным. Довольно выгодно
применение разнесенного вертикального опере-
ния, хотя появление его диктовалось не борьбой
со штопором, а вопросами обстрела. С точки
зрения противоштопорных свойств много занима-
лись оперением, сострящим из двух плоскостей,
соединенных под тупым углом. Такое оперение
может нести функции как вертикального, так
и горизонтального оперений. Однако ряд катаст-
роф, произошедших в разных странах, заставил
к этому оперению отнестись осторожно. Катаст-
рофы произошли из-за поломки фюзеляжа и
вибрации.
Причина малой эффективности оперения мо-
жет быть еще в затеняющем действии фюзеля-
жа и крыла. Особенно неблагоприятен случай,
когда крыло расположено ‘низко, а оперение
высоко (фиг. 91). В этом случае при некотором ав
может произойти почти полное затенение гори-
зонтального оперения и значительное затенение
вертикального. Когда крыло расположено высоко,
поднятие стабилизатора давало хороший результат.
122
Вопрос о том, как нужно действовать рулями для вывода из
плоского штопора, изучен еще недостаточно полно. Действие
одним рулем высоты обычно не дает эффекта, а если штопор был
под углом менее 45°, то дача ручки от себя иногда переводит са-
молет в другой режим равновесия под углом более 45° с ката-
строфическими, последствиями. Иначе обстоит дело при штопоре
на биплане с малым выносом. Там мы имеем большой вращающий
момент вокруг оси х и, следовательно, внутреннее скольжение.
При внутреннем скольжении Mz дает проекцию на ось вращения,
препятствующую вращению, и, следовательно, увеличение Mz вы-
годно. Обычно считают, что при плоском штопоре на моноплане и по-
лутораплане вначале следует сильно отклонять руль поворотов про-
тив штопора и ожидать уменьшения а0. Когда уменьшение а0 стало
заметно, нужно отклонить руль высоты, и машина быстро прекра-
тит штопор. Однако ожидание, пока
угол атаки уменьшится, может быть
продолжительным.
Если штопор плоский, перемена цен-
тровки влияет различно. Передняя цен-
тровка может не дать такого сильного
Mz, который сделал бы невозможным
равновесие вокруг оси г, но зато увели-
чение Mz обязательно будет сопровож-
даться увеличением угловой скорости.
Наоборот, задняя центровка, требуя за-
медления вращения или более плоского
штопора, может поставить самолет в
режим неустойчивой, легко уничтожае-
мой авторотации. Общих правил здесь
дать нельзя, так как большую роль
играет поведение других моментов.
Однако необходимо помнить, что когда
самолет будет уже в крутом штопоре,
задняя центровка окажется всегда
вредной.
Остановимся еще на ряде факторов,
влияющих на вывод из штопора. От-
клонение элеронов при штопоре почти Фиг. 92. Направление действия
не дает момента вокруг оси л, но зато гироскопического момента
дает существенный момент вокруг оси у. винта.
Это обстоятельство довольно важно.
Давая ручку в сторону штопора, мы создаем Л)у, препятствующий
вращению. Дача ручки против штопора, или, как говорят, пере-
крещивание рулей, приводит к неблагоприятному результату. Часто
в инструкциях по выполнению штопора запрещается отклонение
ручки против штопора.
Очень сложен вопрос о роли работы мотора. Здесь мы имеем
ряд факторов, часть которых благоприятна, часть нет. Играют
роль: 1) гироскопический момент вращения винта, имеющий зна-
чительную величину, даже при вращении винта от воздушного
123
потока, 2) момент от тяги винта, 3) крутящий момент на валу
винта, 4) влияние струи винта на оперение. Направление действия
гироскопического момента найти очень легко. Через центр тяжести
самолета проводим ось О', параллельную оси штопора, и на ней
откладываем вектор угловой скорости вращения самолета (фиг. 92).
Вдоль оси х откладываем вектор угловой скорости винта. Тогда
гироскопический момент, стремится соединить векторы угловых
скоростей (фиг. 92). Величина гироскопического момента в пло-
скости О' — х будет:
ЛТГИр = Л • (о sin (О' — х) /в Юв sin а0.
Ввиду малости угла скольжения ро гироскопический момент
действует в основном, как продольный момент. Если направление
штопора и направление вращения винта совпадают, момент—пики-
рующий, в противном случае — кабрирующий. Вопрос о пользе
момента зависит от режима штопора. При крутом штопоре пики-
рующий момент полезен. Относительно момента от тяги винта
можно сказать то же, что и о действии рулем высоты. Момент
от тяги винта благоприятен, если он пикирующий, т. е. если ось
винта лежит выше центра тяжести. Но и это справедливо только
для крутого штопора и в случае штопора на биплане без выноса,,
когда скольжение внутреннее и Mz дает тормозящее действие.
Струя винта, конечно, полезна, но далеко не всегда она попадает
на хвост. Только в случае короткохвостых истребителей или
толкающего винта, как у гидросамолетов, струя доходит до хвоста.
Реакция вращения винта стремится накренить самолет и вызывает
скольжение. Если скольжение становится внутренним, это хорошо;
такой случай имеет место при штопоре против вращения винта
(что невыгодно с точки зрения гироскопического момента).
О роли моментов инерции мы уже говорили. Увеличение раз-
ности Jy — Jx облегчает равновесие продольных моментов при
малых угловых скоростях. До сих пор увеличение этой разности
считалось неблагоприятным, но возможно, что при очень большом
Л — Л штопор станет затруднительным. Разнесение грузов по
высоте самолета уменьшает Jy — Jx и может даже сделать эту
разность равной нулю. В этом случае обычный штопор станет
невозможным. Однако при современных схемах самолетов этого
достичь невозможно. Груз, помещаемый на оси г, т. е. в крыле,
уменьшает скольжение, и это хорошо для моноплана и полуто-
роплана, но плохо для биплана с малым выносом. Помещение
груза на оси л, т. е. в фюзеляже, способствует усилению сколь-
жения, что неблагоприятно для моноплана, так как усиливается
внешнее скольжение.
Для уничтожения авторотации предлагались различные устрой-
ства; некоторые из них практически были испытаны, но ни одно,
пока не получило распространения даже как запасное средство,'
обеспечивающее вывод из штопора при специальных испытания^
самолетов. История этих мероприятий очень поучительна. Иногда^
казалось, что предлагаемое средство явно полезно, но на практик^
оно себя не оправдывало. Мы уже указывали на то, что пикируй
124
ющий момент, вообще говоря полезный, может оказаться
даже вредным. Все это говорит о том, что еще не сделано доста-
точно полного принципиального анализа штопора с точки зрения
поведения твердого тела в весомой сопротивляющейся среде.
Вращение будет невозможно в том случае, если вращающееся
тело увлекает за собой частицы окружающей среды. Тогда при
случайном возникновении вращения энергия вращения будет быстро
израсходована. Однако оказывается, что при штопоре очень трудно
добиться того, чтобы части самолета увлекали за собой частицы
воздуха в направлении окружной скорости. Силы поверхностного
трения дают сравнительно незначительное торможение. При малом
числе Рейнольдса силы трения относительно больше и потому
моменты авторотации слабее. Это обстоятельство сильно пони-
жает ценность испытания малых моделей. На практике отмечались
случаи, когда ухудшение аэродинамической формы частей само-
лета облегчало вывод из штопора; например, при плохом конструк-
тивном выполнении профиля крыла выход из штопора оказывался
легким. Был сделан также и такой эксперимент: на самолете,
имевшем ленточные расчалки,
рек потока. Это, конечно,
сильно испортило полетные
качества самолета, но облег-
чило выход из штопора.
На бипланах пробовали
применять такие устройства:
одну из стоек каждой полу-
коробки крыльев делали по-
воротной, так чтобы летчик
по своему желанию мог по-
ставить стойку на внешнем
(относительно оси штопора)
крыле поперек потока и соз-
дать этим тормозящий момент
вокруг оси у (фиг. 93). На
одном самолете это дало хо-
последние были поставлены попе-
Фиг. 93. Применение тормозящей стойки
на биплане.
роший результат, на другом не дало эффекта.
Автор производил опыты с авторотацией биплана и нашел,
что у биплана без выноса вращающий момент от затенения
крыльев столь велик, что прекратить вращение стойкой невоз-
можно. Аналогичное устройство на моноплане имело бы больше
успеха. Затем у нас и за границей предлагали прикреплять
к хвосту самолета небольшой парашют. После открытия при што-
поре такой парашют даст моменты вокруг осей г и у в очень выгод-
ном сочетании. Опыты с этим устройством дали хороший результат,
однако здесь необходимо принимать некоторые меры предосто-
рожности. Прежде всего необходимо предупредить возможность
запутывания парашюта в оперении, для чего его приподнимают
над оперением; затем сам парашют не находится в покое, а
качается или даже крутится. Это может быть причиной нежела-
тельных явлений. Возможно, что более вытянутая форма пара-
125
шюта будет более удачной. Были предложения применять
небольшие ракеты, но пока ценность этого предложения не
проверена в испытаниях.
Автором было еше предложено следующее.
От бензинового бака вдоль крыла или вдоль фюзеляжа про-
кладывается длинный трубопровод. Если открыть кран, бензин
начнет легко выливаться, но так как труба вращается вместе
с самолетом, то бензин приобретает окружную скорость и, сле-
довательно, выливаясь, поглощает часть энергии вращения. При
быстром выливании уменьшение угловой скорости может быть
значительным.
Перейдем теперь к вопросу о выводе из штопора, рассматри-
вая его как неустановившееся движение. Этот вопрос еще очень
нов, но он заслуживает большого внимания. Уже давно было
замечено, что даже в случае медленного вывода из штопора после
изменения отклонения рулей самолет начинает колебаться.
В практике известны случаи успешного вывода из штопора
путем как бы раскачивания самолета. Если отклонения рулей
недостаточно для быстрого вывода из штопора, то определенная
последовательность возмущений может дать нужный результат.
Бессистемное движение рулями может дать лишь плохой резуль-
тат. Бывали случаи, когда летчик, выйдя из трудного штопора,
потом не мог сказать, что он делал рулями и что именно оказа-
лось полезным. Систематические же возмущения могут существен-
ным образом нарушить характер движения центра тяжести.
Мы указывали, что для принудительного вывода из штопора
применяли сбрасывание груза из задней части фюзеляжа. Теперь
нам ясно, что это полезно не только с точки зрения перемены
центровки вообще, но и как причина внезапного изменения
момента вокруг оси Mz и уменьшения а0. Быстрота сбрасывания
всего груза .очень важна.
ПЕРЕГРУЗКИ ПРИ ШТОПОРЕ И ДАВЛЕНИЕ НА РУЧКУ
Перегрузка при штопоре может быть получена путем сложе-
ния силы тяжести G, действующей по вертикали, и силы инер-
ции /П(о2г, действующей по горизонтали. В частности, для частей,
лежащих в центре тяжести самолета, мы получили более простое
выражение:
п = ;
sin а0 ’
для частей, лежащих позади центра тяжести, мы получим уве-
личение горизонтальной составляющей; для частей, лежащих
впереди ее — уменьшение. Если перегрузка по вертикали равна
единице, то по горизонтали получим:
mco2r_<о2г
«гор = —Q~ = — •
126
Результирующая перегрузка будет:
Например, если в центре тяжести п = 1,41, а0 = 45°, ш — 2,5,
то радиус штопора г = 1,6 л/, точка, лежащая на оси х, при
х = 2 м будет иметь радиус 1,6 + 2 • 0,7 = 3 м, горизонтальная
2 52*3
составляющая перегрузки - = 1,87, полная перегрузка п=2,12.
Экипаж самолета, сидящий в задней части фюзеляжа, подвер-
гается значительной перегрузке, прижимающей его к сиденью и
спинке. Если летчик вынужден покинуть самолет, то выбраться из
кабины бывает довольно трудно.
Давление на ручку слагается из двух моментов: моментов воз-
душных сил и инерционных. Момент воздушных сил, особенно
при плоском штопоре, стремится отклонить руль в крайнее вер-
хнее положение, а момент инерционных сил этому отчасти проти-
водействует. В случае весового уравновешивания рулей инерцион-
ный момент отсутствует. Когда летчик делает штопор, он следит
за давлением на ручку. Если ручка имеет стремление валиться на
летчика, это говорит о переходе самолета в плоский штопор.
Усилие на ручке бывает иногда столь значительно, что летчик не
в состоянии ее отжать. Это объясняется тем, что при большом
угле атаки после срыва обтекания нагрузка распределяется по
рулю почти равномерно и аэродинамическая компенсация стано-
вится недостаточной.
ЛАБОРАТОРНОЕ ИССЛЕДОВАНИЕ ШТОПОРА
Если самолет уже построен, мы можем провести испытание
его на штопор и определить режимы штопора и условия вывода.
Существует аппаратура, которая позволяет произвести замеры
скорости центра тяжести, угловых скоростей и других величин.
Однако при этом испытании всегда есть опасность невыхода
самолета из штопора и отсюда —его аварии. Опасность для эки-
пажа при этом Очень велика, так как выбираться из штопорящего
самолета довольно трудно из-за перегрузки, прижимающей к сиде-
нию, а после выпрыгивания есть риск удариться о крыло, как
это и бывало при испытаниях. Плохо и то, что всякое проис-
шествие при испытании штопора приводит к значительной задержке
с продвижением в серию испытуемого самолета. Поэтому и здесь
обращаются к расчету и к эксперименту.
Теоретический расчет сил и моментов пригоден лишь как
первое приближение, и он может иметь практическую ценность,
если известна некоторая практическая поправка. Определить эту
поправку довольно трудно. Мы знаем, что достаточно точный
расчет полетных качеств и устойчивости возможен лишь на основе
опытов в трубах при соблюдении условий аэродинамического
подобия. Естественно, нужно стремиться к воспроизведению што-
пора в лабораторных условиях.
127
Первоначально эксперимент вели просто на авторотацию, при-
чем замерялись моменты вокруг оси вращения. Исследование
режимов штопора потребовало знания моментов вокруг осей
самолета. В ЦАГИ под руководством проф. Журавченко был
сконструирован прибор, позволяющий в процессе вращения заме-
рять моменты вокруг оси вращения и вокруг осей у и z самолета.
В США был построен анологичный прибор, в котором кроме ш,
углов а0 и Ро можно было менять радиус вращения.
Эти приборы дали интересные и полезные материалы, однако
они обладали существенными недостатками. Первый недостаток —
это малое число Рейнольдса. Этот недостаток можно уменьшить,
делая модель крупнее или проводя испытание в трубах с повы-
шенной плотностью. Итти по линии увеличения скорости потока
трудно, так как увеличение скорости потока повышает угловую
скорость, и это вызывает затруднения со стороны прочности
модели и прибора. Второй недостаток — это громоздкость при-
бора, приводящая к искажению потока или к порче самой мо-
дели. Наконец, третий недостаток — трудоемкость эксперимента
и последующей обработки.
Для каждой модели нужно замерить три момента для различних
комбинаций (о, а0, £0 и положения рулей. В американском приборе
сюда добавляется еще измерение сил. В итоге количество мате-
риала, подвергаемого обработке, — огромно.
Мы уже говорили, что практика интересуется только вопро-
сом вывода самолета из штопора. Поэтому желательно поставить
эксперимент так, чтобы непосредственно получать ответ о спо-
собности самолета выходить из штопора. В Англии уже давно
пробовали испытывать летающие модели, но такой опыт был
затруднителен. Даже для маленькой модели, например в 1/10,
потребовалось бы весьма высокое помещение. Следить за моделью
и фиксировать ее положение путем фотографирования также
затруднительно. Наконец, трудно уберечь модель от поломки
как в случае вывода, так и в случае невыхода из штопора. Тогда
появилась интересная мысль проводить испытание модели в столбе
восходящего потока, скорость которого была бы равна скорости
снижения модели.
Для такого опыта со свободными моделями сначала строили
небольшие трубы, а затем увеличили их размеры до диаметра
3,5—5,0 л. На фиг. 94 показана схема штопорной трубы, постро-
енной в Америке. Эта труба упрощенной схемы, но можно при-
менить и обычные схемы. Весьма интересен вопрос об удержании
модели в центре трубы. В некоторых трубах никаких специаль-
ных приспособлений нет и тем не менее модель делает штопор
примерно в центре трубы. Возможно, что при закрытой рабочей
части модель как бы отталкивается от стенок. В случае открытой
рабочей части прибегают к созданию воздушного барьера, прида-
вая потоку по краям повышенную скорость.
Методика испытания заключается в следующем. Модель само-
лета насаживается на штырь и вводится в поток. Пока скорость
мала, модель авторотирует на штыре, а потом снимается с него
128
и продолжает делать штопор. Первоначально рули стоят в поло*
жении, способствующем штопору, а затем специальный механизм
перекладывает их в иное положение. В случае выхода модель
замедляет вращение, опускает нос и, перейдя в пикирование,
упирается носом в сетку. Если модель из штопора не выходит,
под нее подводят кольцо, затянутое сеткой. Тогда за сеткой
получается малая скорость, и модель садится* на сетку.
При помощи такого испытания легко определить запаздыва-
ние при выводе, а также проверить выгодность различного откло-
нения рулей и влияние различных переделок модели. Регистрация
режима штопора труднее и производится путем киносъемки.
Все это было бы хорошо, если бы были соблюдены подобия
геометрическое, динамическое и аэродинамическое. Геометриче-
ское подобие соблюсти нетрудно. Динамическое подобие требует
соблюдения величины Аэродинамическое подобие требует
соблюдения числа Рейнольдса. Посмотрим, насколько эти требо-
вания совместимы. Соблюдение относительных радиусов инерции
требует такого же распределения масс модели, как и распреде-
ление масс в действительном самолете. Условие динамического
В. С. Пышнов—166—9
129
подобия можно написать в таком виде:
Рсам _
"Т'_
4=п;
*2
а аг
q i — const: q т~
gp5/ ’ рЛ/!
Gy e Р? ( 4 \ 3 __ 1 . G1
G2 Pi \ 1 g2
О2
• рз = и3.
Р1
Если опыт в трубе ведется при такой же плотности воздуха, при
какой совершается и полет, то вес самолета должен изменяться
пропорционально кубу масштаба. Моменты инерции должны бу-
дут- измениться в пятой степени:
А Gi А
J2 G2
Изменение
скорости центра тяжести и угловой скорости будет:
со2 _ (О . 2 • /2 • /г __ _л
12 . со . 2 • Уг ~~ V п
Если штопор производится на высоте, а модель испытывается
в нормальной плотности, мы получим:
G] ?2 _ s G2 ____ ?2 е А ____ G2 ^2 _ Pl
G2 pj G± pi Л3 Gj /j p2 n5
Оказалось, что скорости линейная и угловая остались без
изменения и что модель нужно сделать более тяжелой. Вообще
сделать модель, соблюдая условия веса и моментов инерции, не
так просто, особенно если рсам мало. С этой точки зрения увели-
чение плотности в трубе облегчает работу.
Соблюдение значения числа Рейнольдса приводит к условию:
^14Р1 __ . ^2 4 Pg __ Р*2
н р*2 ’ У1 4 pi н ’
где р* — коэфициент вязкости воздуха.
Подставив значение отношения скоростей и масштабов, по-
лучим:
__L_ e J в Р2 __ Р*2 .
У~П п Р1 р-1 ’
= «1.5 -^2.
Р1 ’
Изменение величины у. зависит от температуры. Если не учи-
тывать изменения условие динамического и аэродинамического
130
подобия формулируются довольно просто: вес модели должен
быть таков, чтобы скорость снижения модели была равна ско-
рости снижения действительного самолета, умноженной на корень
из масштаба, а плотность воздуха увеличена в п1,5 раз. Отсюда
вес модели должен быть:
Пока еще в опытах со штопором не достигали таких условий.
Если взять модель в х/10 натуры, давление в трубе нужно повы-
сить в 31,7 раза. Если самолет весит 1000 кг, модель должна
весить 31,7 кг. Для малой модели выполнить это затруднительно,
тем более что этот вес должен быть распределен соответствую-
щим образом, причем более половины веса должно быть сосредо-
точено в передней част^ фюзеляжа.
Трудность соблюдения всех этих условий заставляет приме-
нять другие способы. В Англии, например, для улучшения по-
добия модели придают небольшое крылышко, усиливающее
авторотацию. Кроме того, можно предполагать, что подбор тур-
булентности улучшит условия подобия.
СПИСОК ЛИТЕРАТУРЫ
Фр. Ш. Гос, Устойчивость и управляемость самолетов. ОНТИ, 1934.
К. Д. Вуд, Техническая аэродинамика, ЦАГИ, 1938.
Справочник авиаконструктора, т. I. ЦАГИ, 1937.
Ц. П Хабинская, Аэродинамич. исследования элеронов. Труды ЦАГИ, 230.
Г. А. Щербаков, Боковая устойчивость самолетов, Технические заметки
ЦАГ И № 72.
А. И. С и л ь м а н, Исследование эффективности элеронов, Технические за-
метки ЦАГИ № 122.
Ц. И. Хабинская, Аэродинамичские исследования концевых плавающих
элеронов, Технические заметки ЦАГИ № 127.
А. И. С и л ь м а н, Аэродинамические исследования элеронов с осевой ком-
пенсацией. Технические заметки ЦАГИ № 139.
В. С. Пышнов, Штопор самолетов. Труды ВВА № 1, 1929,
В. С. Пышнов, Штопор самолета. Труды ВВА № 14, 1936.
В. С. Пышнов, Отчет об исследовании штопора одного самолета. Первая
всесоюзная конференция по аэродинамике. Госавиаавтоиздат, 1932,
Сборник по аэро- и гидродинамике, ОНТИ,1933.
Проф. А* Н. Журавченко, Методы решения задач штопора. Труды
ЦАГИ № 167.
Проф. А. Н. Журавченко, О методе решения задачи штопора. Первая
всесоюзная конференция по аэродинамике, Госавиаавтоиздат, 1932.
Проф. А. Н. Журавченко и А. И. Никитюк, К подсчету моментов
инерции самолетов. Труды ЦАГИ № 94.
Ю. А. Победоносцев, Экспериментальное определение моментов инер
ции самолета. Труды ЦАГИ № 201.
А Рубцова, Исследование модели самолета на штопор. Труды ЦАГИ № 17с
Проф. А. Н. Журавченко, Лабораторные исследования по проблем
штопора и полета в закритической области. Труды ЦАГИ № 200.
В. С. Ведро в, С. А. Коровицкий, Ю. К. Станкевич, Исследование
штопора самолета Р-5 в полете. Труды ЦАГИ № 228.
Т. А. Грумондз, Исследование влияния скольжения самолета на моменть
ротации крыла. Труды ЦАГИ № 251.
Проф. А. Н. Журавченко и Е. А. Вержанская, Исследование што-
пора в аэродинамической трубе с учетом радиуса его траектории. Труды ЦАГИ
№ 260.
Ю. К. Станкевич, Исследование штопора самолета У-2 в полете. Труды
ЦАГИ № 307.
Проф. А. Н. Журавченко, Опыт исследования неустановившегося движе-
ния выхода из штопора. Труды ЦАГИ № 353.
Е. А. Покровский, Приближенный подсчет эффективности вертикального
оперения на закритических углах атаки, Технические заметки ЦАГИ № 166.
Г. А. Щербаков иФ. А Мамонов, Боковое равновесие самолета при
несимметричной тяге винтов. Труды ЦАГИ № 318.
А. И. Филин, Неуправляемые развороты самолетов в конце пробега,
„Вестник воздушного флота№ 9, 1936.
Проф. В. П. В е т ч и н к и н, Динамика самолета, ОНТИ, 1933.
Отв. редактор Е. В. Латынин. Техн, редактор А. Н. Савори.
Сдано в набор 8/VIII 1938 г. Подписано к печ. 30/VIII 1938 г. Автор, д. № 314 Инд. 2
Тираж 8000- Кол- печ. 8,25 Учетно-авт. лист. 9,5, Формат бум. 62 л 947i6- Уполн. Главл.
45549(3762) Заназ № 166.
ОПЕЧАТКИ
Стр. Строка Напечатано Должно быть По чьей вине
19 15 сн. -Г —г 'Г*'1 4 э 4 э JL. /г~7< — fl* 4 иэ 4 1э тип.
25 2 „ Мп тип.
74 24 св. 00,5 0,05 тип.
79 19 сн. возможен возможно тип.
120 14 св. G) (О
№ 166. Пышнов, Аэродинамика самол ета, ч. IV.