/












































































































































Автор: Стрелец-стрелецкий Е.Б. Гензерский Ю.В. Лазнюк М.В. Марченко Д.В. Титок В.П.
Теги: программное обеспечение
Год: 2005



Текст
СТРЕЛЕЦ-СТРЕЛЕЦКИЙ Е.Б. ГЕНЗЕРСКИЙ Ю.В. ЛАЗНЮК М.В. МАРЧЕНКО Д.В. ТИТОК В.П.
Руководство пользователя
ОСНОВЫ
Учебное пособие
Г г Т г г Т г г Г г Т Т Т г
Стрелец-Стрелецкий Е.Б.
Гензерский Ю.В.
Лазнюк М.В.
Марченко Д.В.
Титок В.П.
Руководство пользователя
ОСНОВЫ
Учебное пособие
ЛИРА® 9.2. Руководство пользователя. Основы. Учебное пособие.
Е.Б. Стрелец-Стрелецкий, Ю.В. Гензерский, М.В. Лазнюк, Д.В. Марченко, В.П. Титок. Под ред. Академика PAACH А.С. Городецкого - К.: издательство «ФАКТ», 2005 - 146с.
Книга представляет собой учебное пособие, содержащее основные теоретические и расчетные положения, реализованные в программном комплексе ЛИРА 9.2. В книге приведены основные сведения о методе конечных элементов для расчета линейных и нелинейных задач, принципы конечно-элементного и супер-элементного моделирования, состав и краткое описание библиотеки конечных элементов, а также некоторые алгоритмы расчета и конструирования.
В книге приводится описание новых расчетно-графических систем - МОНТАЖ-плюс, МОСТ, ДИНАМИКА-плюс.
Книга будет полезна как начинающим, так и опытным пользователям, а также всем, кто связан с проектированием и исследованием конструкций.
Рецензенты:
Академик РААСН, д-р техн, наук, профессор Н.И. Карпенко
Академик ТАН Украины, д-р техн, наук, профессор А.О. Рассказов
Рекомендовано к печати Ученым советом НИИ автоматизированных систем в строительстве (НИИАСС) Госстроя Украины.
Содержание
Содержание
от авторов............................................................................................5
ВВЕДЕНИЕ..............................................................................................6
НОВЫЕ ВОЗМОЖНОСТИ ПК ЛИРА 9.2 (ПО СРАВНЕНИЮ С ВЕРСИЕЙ 9.0)..........................................9
1 КРАТКОЕ ОПИСАНИЕ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ ДЛЯ ЛИНЕЙНЫХ ЗАДАЧ................................11
1.1 Общие положения............................................................................11
1.2 Библиотека конечных элементов для линейных задач...........................................14
1.2.1 Универсальный стержень (КЭ 10).............................................................20
1.2.2 Универсальные конечные элементы балок-стенок, тонких плит и оболочек...................
(КЭ 11, 12, 21-24,27, 30, 41, 42, 44)....................................................22
1.2.3 Универсальные конечные элементы пространственной задачи теории упругости (КЭ 31-34,36).27
1.2.4 Специальные конечные элементы (КЭ 51, 53,54,55)........................................28
2 РЕШЕНИЕ СИСТЕМЫ КАНОНИЧЕСКИХ УРАВНЕНИЙ..........................................................30
3 РАСЧЕТ НА ДИНАМИЧЕСКИЕ ВОЗДЕЙСТВИЯ..............................................................31
4 СУПЕРЭЛЕМЕНТНОЕ МОДЕЛИРОВАНИЕ...................................................................34
5 ПРИНЦИПЫ ОПРЕДЕЛЕНИЯ РАСЧЕТНЫХ СОЧЕТАНИЙ УСИЛИЙ (РСУ)........................................ 37
5.1 Стержни.......................................................................................37
5.2 Плоское напряженное состояние.................................................................39
5.3 Плиты.........................................................................................39
5.4 Оболочки......................................................................................40
5.5 Объемные элементы.............................................................................40
5.6 Загружения....................................................................................41
6 РАСЧЕТ НА УСТОЙЧИВОСТЬ..........................................................................42
7 РЕШЕНИЕ НЕЛИНЕЙНЫХ ЗАДАЧ....................................................................... 44
7.1 Общие положения...............................................................................44
7.2 Расчет физически нелинейных задач.............................................................44
7.3 Библиотека законов деформирования материалов................................................ 50
7.4 Типы дробления сечений стержней...............................................................51
7.5 Типы арматурных включений.....................................................................55
7.6 Библиотека конечных элементов для физически нелинейных задач..................................61
7.6.1 Стержневые конечные элементы (КЭ 210 и 205)...............................................61
7.6.2 Конечные элементы тонких пластин и пологих оболочек (КЭ 221-224, 227, 230, 241, 242, 244).62
7.6.3 Конечные элементы плоской деформации грунтов (КЭ 281, 282, 284)...........................63
7.6.4 Конечные элементы для решения пространственной задачи теории упругости (КЭ 231-234, 236)..63
7.7 Библиотека конечных элементов для геометрически нелинейных задач..............................64
7.7.1 Универсальный стержневой элемент (КЭ -310)................................................65
7.7.2 Конечный элемент предварительного натяжения (КЭ 308)......................................65
7.7.3 Конечные элементы тонких оболочек (КЭ 341, 342, 344)......................................65
7.8 Специальные конечные элементы односторонних связей............................................66
7.8.1 Одноузловой элемент односторонней связи (тип КЭ-261)......................................67
7.8.2 Двухузловой элемент односторонней связи (тип КЭ - 262)....................................67
8 РАСЧЕТНО-ГРАФИЧЕСКАЯ СИСТЕМА МОНТАЖ-ПЛЮС........................................................68
9 БИБЛИОТЕКА НОВЫХ КОНЕЧНЫХ ЭЛЕМЕНТОВ.............................................................71
9.1 Универсальные конечные элементы толстой оболочки (КЭ 45, 46, 47)..............................76
9.2 Геометрически нелинейные конечные элементы сильного изгиба (КЭ 309, 341, 342, 344)............76
9.3 Объемные нелинейные конечные элементы грунта (КЭ 271-274, 276)................................76
9.4 Специальные конечные элементы трения (КЭ 263, 264)............................................77
10 РАСЧЕТНО-ГРАФИЧЕСКАЯ СИСТЕМА ДИНАМИКА-ПЛЮС......................................................78
11 РАСЧЕТНО-ГРАФИЧЕСКАЯ СИСТЕМА МОСТ...............................................................81
11.1 Задание исходных данных....................................................................81
11.1.1 Топология.................................................................................81
11.1.2 Нагрузки..................................................................................82
11.1.3 Узлы......................................................................................84
11.1.4 Элементы..................................................................................84
11.2 Отображение результатов расчета............................................................85
3
ЛИРА® 9.2 Руководство пользователя
12 ОСОБЕННОСТИ ЗАДАНИЯ ИСХОДНОЙ ИНФОРМАЦИИ.......................................................87
12.1 Общие положения............................................................................87
12.2 Объединение перемещений....................................................................89
12.3 Абсолютно жесткие вставки..................................................................89
12.4 Угол чистого вращения......................................................................89
12.5 Введение связей конечной жесткости.........................................................91
12.6 Учёт прямой и косой симметрии............................................................. 91
12.7 Задание весов масс для динамических воздействий............................................91
12.8 Сбор нагрузок на фундаменты................................................................92
12.9 Расчетные сочетания нагрузок...............................................................92
12.10 Согласованная система координат для пластин и объемных элементов...........................93
13 ПРИНЦИПЫ АНАЛИЗА РЕЗУЛЬТАТОВ РАСЧЕТА........................................................ 94
13.1 Общие положения............................................................................94
13.2 Правила знаков при чтении результатов расчета..............................................94
13.3 Особенности представления результатов расчета на динамические воздействия..................98
13.4 Суммарные усилия от динамических воздействий..............................................100
13.5 Документирование..........................................................................102
14 ЖЕСТКОСТНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ....................................................... 103
15 ПРОВЕРКА ПРОЧНОСТИ ПО РАЗЛИЧНЫМ ТЕОРИЯМ......................................................110
15.1 Главные напряжения........................................................................110
15.2 КЭ плоской задачи теории упругости........................................................110
15.3 КЭ плиты..................................................................................110
15.4 КЭ объемного НДС..........................................................................111
15.5 КЭ оболочки...............................................................................112
15.6 Вид НДС...................................................................................113
15.7 Стержневые КЭ.............................................................................113
15.8 Вычисление эквивалентных напряжений.......................................................116
15.9 Результаты расчета........................................................................117
16 РАСЧЕТ И ПРОЕКТИРОВАНИЕ СТАЛЬНЫХ КОНСТРУКЦИЙ.................................................118
16 1 Назначение и возможности..................................................................118
16.2 Типы сечений..............................................................................118
16.3 Типы узлов................................................................................121
16.4 Задание дополнительных данных для расчета элементов.......................................121
16.5 Конструктивные и унифицированные элементы.................................................123
16.6 Проверки несущей способности элементов....................................................123
16.7 Описание алгоритмов расчета элементов.....................................................127
16.8 Сквозной расчет элементов............................................................... 130
16.9 Локальный расчет элементов................................................................130
16.10 Представление результатов расчета элементов...............................................130
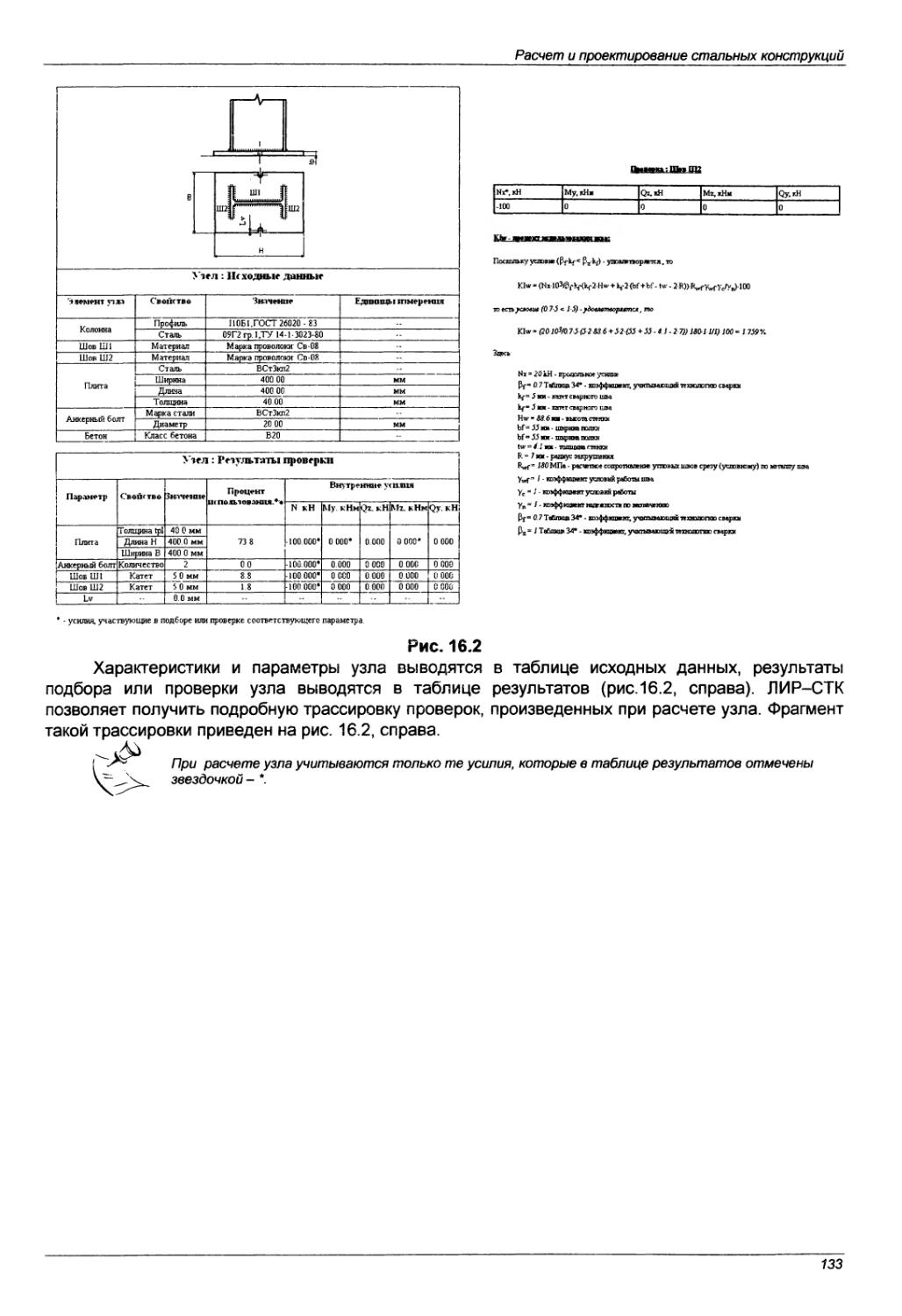
16.11 Расчет узлов..............................................................................132
17 ПОДБОР И ПРОВЕРКА АРМИРОВАНИЯ В ЖЕЛЕЗОБЕТОННЫХ ЭЛЕМЕНТАХ.....................................134
17.1 Общие положения...........................................................................134
17.2 Армирование стержневых элементов..........................................................137
17.3 Проверка заданного армирования в стержневых элементах.....................................139
17.4 Армирование пластинчатых элементов........................................................139
17.5 Проверка заданного армирования в пластинчатых элементах...................................142
ЛИТЕРАТУРА...................................................................................... 143
4
От авторов
От авторов
Эта книга представляет собою один из разделов руководства пользователя по применению программного комплекса ЛИРА 9.2. В ней содержатся базовые сведения о теоретических и расчетных предпосылках, о графических и конструирующих системах, о реализованных в ПК ЛИРА расчетных процессорах. Приводятся описания некоторых алгоритмов и основных приемов работы с комплексом. Кроме того, в книге освещены новые возможности и функции, отличающие версию 9.2 от предшествующих версий.
Разработчики ПК ЛИРА и особенно группа сопровождения комплекса повседневно ощущают стремительный рост квалификации пользователей. Это выражается в многочисленных вопросах, касающихся решения неординарных задач современного строительства. Все чаще появляется необходимость в выполнении расчетов уникальных сооружений, в решении качественно новых задач, возникающих в ходе проектирования, строительства и исследования конструкций. Растет потребность в новых методах и подходах, связанных с построением корректных компьютерных моделей, адекватно отражающих реальную работу конструкций.
К неординарным задачам следует отнести учет физической и геометрической нелинейности, моделирование процессов возведения сооружений и их приспособляемости, учет специфики работы сооружения совместно с грунтовым основанием, моделирование отклика сооружения на различные динамические воздействия и многое другое.
Специалистов, интересующихся теоретическими подходами к решению указанных проблем авторы отсылают к недавно вышедшим в свет монографиям [9, 10], а тех, кто собирается применить эти знания в своей практике, приглашаем ознакомиться с данной книгой. При этом рекомендуется также использовать материал руководства пользователя [3], в котором приведены примеры расчета и проектирования конструкций с применением ПК ЛИРА 9.2.
Авторы выражают самую искреннюю благодарность своим коллегам - коллективу разработчиков ПК ЛИРА:
академику РААСН, докт. техн, наук, проф. А С. Городецкому;
докт. техн, наук, с.н.с. И.Д. Евзерову;
канд.техн.наук:
М.С. Барабаш, Ю.Д. Гераймовичу, Д.А. Городецкому, В.П. Максименко,
А.А. Рассказову, Я.Е. Слободяну, Н.Г. Харченко;
инженерам:
Л.Г. Батрак, В.Е. Боговису, О.И. Буфиус, Е.Б. Важницкой, А.В. Горбовцу,
Р.В. Дидковскому, А.Н. Кекуху, Е.Г. Колесниковой, С.В. Литвиненко,
А.М. Маснухе, Д.В. Медведенко, Т.А. Ниловой, Э.А. Олейник, Н.Н. Павлий, В.Э. Павловскому,
М.В. Римек, Д.И. Сидораку, Л.В. Скачковой, И.Л. Стотланд, Е.И. Торбенко,
Ю.Б Филоненко, В.А. Шелудько, С.В. Юсипенко.
Желаем успеха в освоении ПК ЛИРА 9.2.
5
ЛИРА® 9.2 Руководство пользователя
Введение
Программный комплекс ЛИРА (ПК ЛИРА) - это многофункциональный программный комплекс для расчета, исследования и проектирования конструкций различного назначения.
ПК ЛИРА с успехом применяется в расчетах объектов строительства, машиностроения, мостостроения, атомной энергетики, нефтедобывающей промышленности и во многих других сферах, где актуальны методы строительной механики.
Программные комплексы семейства ЛИРА имеют более чем 40-летнюю историю создания, развития и применения в научных исследованиях и практике проектирования конструкций. Программные комплексы семейства ЛИРА непрерывно совершенствуются и адаптируются к новым операционным системам и графическим средам. Новейшим представителем семейства ЛИРА является ПК ЛИРА версии 9.2.
Кроме общего расчета модели на все возможные виды силовых нагрузок (статических, температурных, деформационных) и динамических воздействий (ветер с учетом пульсации, сейсмические воздействия и т.п.) ПК ЛИРА автоматизирует ряд процессов проектирования: определение расчетных сочетаний нагрузок и усилий, назначение конструктивных элементов, подбор и проверка сечений стальных и железобетонных конструкций с формированием эскизов рабочих чертежей колонн и балок.
ПК ЛИРА позволяет исследовать общую устойчивость рассчитываемой модели, проверить прочность сечений элементов по различным теориям разрушений. ПК ЛИРА предоставляет возможность производить расчеты объектов с учетом физической и геометрической нелинейностей, моделировать процесс возведения сооружения с учетом монтажа и демонтажа элементов.
ПК ЛИРА состоит из нескольких взаимосвязанных информационных систем:
Система ЛИР-ВИЗОР
Система ЛИР-КС (Конструктор сечений)
Расчетные процессоры
Библиотека конечных элементов
Система УСТОЙЧИВОСТЬ
Система ЛИТЕРА
Система ФРАГМЕНТ
Системы ЛИР-АРМ и ЛИР-ЛАРМ (Железобетонные конструкции)
Система ЛИР-СТК (Стальные конструкции)
Система ЛИР-РС (Редактируемый Сортамент)
Система ДОКУМЕНТАТОР
Расчетно-графические системы МОНТАЖ-плюс, МОСТ, ДИНАМИКА-плюс.
Система ЛИР-ВИЗОР - единая графическая среда, которая располагает обширным набором возможностей и функций для формирования адекватных конечно-элементных и суперэлементных моделей рассчитываемых объектов. ЛИР-ВИЗОР позволяет произвести подробное визуальное обследование созданных моделей и их корректировку, описать физико-механические свойства материалов. В этой же среде задаются связи, разнообразные нагрузки, характеристики различных динамических воздействий, а также назначаются взаимосвязи между различными загружениями для определения их наиболее опасных сочетаний.
Возможности системы ЛИР-ВИЗОР по отображению результатов расчета позволяют произвести детальный анализ напряженно-деформированного состояния модели по полям перемещений и напряжений, по эпюрам усилий и прогибов, по мозаикам разрушения элементов, по главным и эквивалентным напряжениям, по формам потери устойчивости и по многим другим параметрам.
ЛИР-ВИЗОР дает исчерпывающую информацию по всему объекту и по его элементам и предоставляет возможность визуализации схемы и ее напряженно-деформированного состояния в графике OpenGL.
ЛИР-ВИЗОР позволяет вести общение со всеми системами комплекса на русском и английском языках, причем замена языка может осуществляться на любой стадии работы с
6
Введение
комплексом. ЛИР-ВИЗОР дает возможность использовать любую действующую систему единиц измерения как при создании модели, так и при анализе результатов расчета.
В состав ПК ЛИРА входит несколько РАСЧЕТНЫХ ПРОЦЕССОРОВ. Все они предназначены для выполнения так называемого основного расчета и реализуют современные усовершенствованные методы решения систем уравнений, обладающие высоким быстродействием и позволяющие решать системы с очень большим числом неизвестных. В версии 9.2 реализован новый алгоритм решения разреженных матриц для линейных задач.
ЛИНЕЙНЫЙ процессор предназначен для решения задач, описывающих работу материала конструкций до достижения предела упругости.
ШАГОВЫЙ процессор позволяет решать задачи, связанные с нелинейной упругостью материала (бетон и железобетон), геометрической нелинейностью (ванты, большепролетные покрытия, мембраны), а также с конструктивной нелинейностью (контактные задачи, односторонние связи, трение). При расчетах нелинейных задач производится автоматический выбор шага нагружения с учетом его истории.
Расчетные процессоры содержат обширную БИБЛИОТЕКУ КОНЕЧНЫХ ЭЛЕМЕНТОВ, которая позволяет создавать адекватные расчетные модели практически без ограничений на описание реальных свойств рассчитываемых объектов. При этом возможно задание линейных и нелинейных законов деформирования материалов, учет геометрической нелинейности с нахождением формы изначально изменяемых систем, а также учет конструктивной нелинейности. Реализованы законы деформирования различных классов железобетона.
Вспомогательные расчетные процессоры позволяют проводить дальнейшие исследования расчетной модели по результатам основного расчета.
Система УСТОЙЧИВОСТЬ дает возможность произвести проверку общей устойчивости рассчитываемого сооружения с определением коэффициента запаса и формы потери устойчивости.
Система ЛИТЕРА реализует вычисление главных и эквивалентных напряжений по различным теориям прочности.
Система ФРАГМЕНТ позволяет определить силы воздействия одного фрагмента рассчитываемого сооружения на другой как нагрузку. В частности, могут быть определены нагрузки, передаваемые наземной частью расчетной схемы на фундаменты.
Система ЛИР-КС (Конструктор сечений) позволяет сформировать сечения произвольной конфигурации в специализированной графической среде, вычислить их осевые, изгибные, крутильные и сдвиговые характеристики. Кроме того, предоставляется возможность вычисления секториальных характеристик сечений, координат центров изгиба и кручения, моментов сопротивления, а также определения формы ядра сечения. При наличии усилий в заданном сечении отображается картина распределения текущих, главных и эквивалентных напряжений, соответствующих различным теориям прочности.
Конструирующие системы ЛИР-АРМ и ЛИР-ЛАРМ реализуют подбор площадей сечения арматуры колонн, балок, плит и оболочек по первому и второму предельным состояниям в соответствии с действующими в мире нормативами. Существует возможность задания произвольных характеристик бетона и арматуры, что имеет большое значение при расчетах, связанных с реконструкцией сооружений. Система позволяет объединять несколько однотипных элементов в конструктивный элемент с целью увязки арматуры по длине всего конструктивного элемента, а также производить унификацию конструктивных элементов. Система может функционировать в локальном режиме, осуществляя как подбор арматуры, так и проверку заданного армирования для одного элемента. По результатам расчета формируются чертежи балок и колонн, а также создаются dxf-файлы чертежей.
Конструирующая система ЛИР-СТК работает в двух режимах - подбора сечений элементов стальных конструкций, таких как фермы, колонны и балки, и проверки заданных сечений в соответствии с действующими в мире нормативами. Допускается объединение нескольких однотипных элементов в конструктивный элемент и унификация конструктивных элементов. Система может функционировать в локальном режиме, позволяя проверить несколько вариантов при конструировании требуемого элемента.
Система ЛИР-РС, которая информационно связана с системой ЛИР-СТК, позволяет использовать редактируемую сортаментную базу прокатных и сварных профилей.
7
ЛИРА® 9.2 Руководствопользователя
Система ДОКУМЕНТАТОР предназначена для формирования отчетов по результатам работы с комплексом. При этом вся информация может быть представлена как в табличном, так и в графическом виде. Табличный и графический разделы необходимой для отчета информации могут быть размещены совместно на специально организуемых для этой цели листах и снабжены комментариями и надписями. Кроме того, табличная информация может быть передана в Microsoft Excel, а графическая - в Microsoft Word. Реализован вывод таблиц в формате HTML.
Расчетно-графическая система МОНТАЖ-плюс реализует моделирование работы сооружения в процессе возведения при многократном изменении расчетной схемы. Этот процессор позволяет также проводить компьютерное моделирование возведения высотных зданий из монолитного железобетона с учетом изменений жесткости и прочности бетона, вызванных временным замораживанием уложенной смеси и другими факторами. Эта система может также служить основой для моделирования прогрессирующего разрушения, что позволяет принимать препятствующие ему конструктивные решения.
Расчетно-графическая система МОСТ позволяет строить поверхности и линии влияния в мостовых сооружениях от подвижной нагрузки.
Расчетно-графическая система ДИНАМИКА-плюс реализует метод прямого интегрирования уравнений движения по времени, что позволяет производить компьютерное моделирование поведения конструкции, в том числе с учетом нелинейности.
ПК ЛИРА поддерживает информационную связь с такими системами как AutoCAD, ArchiCAD, Allplan, HyperSteel, а также ПК МОНОМАХ, ФОК-ПК.
ПК ЛИРА располагает широкой системой контекстной помощи, содержащей информацию о всех компонентах комплекса, о правилах и порядке работы с ними.
8
Новые возможности ПК ЛИРА 9.2 (по сравнению с версией 9.0)
Новые возможности ПК ЛИРА 9.2 (по сравнению с версией 9.0)
Новые расчетные функции
• высокоскоростной расчетный процессор, реализующий современные высокоэффективные алгоритмы построения и решения больших систем уравнений и позволяющий в 5-10 раз сократить время решения систем уравнений, основанных на ленточной структуре;
• новые типы конечных элементов, среди которых КЭ трения, объемные нелинейные КЭ грунта, толстые плиты и оболочки, геометрически нелинейные КЭ стержня и оболочки с учетом больших деформаций (КЭ Ландау-Лифшица);
• шарниры конечной жесткости в стержнях;
• новые модули расчета на сейсмические воздействия, в том числе по пространственным моделям Ю.П. Назарова и В.К. Егупова;
• усовершенствованный расчет на устойчивость с вычислением первых трех форм потери устойчивости;
• вычисление РСН для фрагмента (фундамента) с корректным учетом динамических составляющих.
Новые расчетно-графические системы
МОСТ - для расчета на подвижные нагрузки и построения поверхностей влияния.
МОНТАЖ-плюс - для расчета сооружений при их возведении с учетом сезонных изменений физико-механических характеристик материала (железобетона), размещения временных опор, изменения климатических условий и т.п.
ДИНАМИКА плюс - реализация метода прямого интегрирования уравнений движения по времени для компьютерного моделирования поведения конструкции под динамическими нагрузками, в том числе с учетом нелинейности.
Новые графические функции
• генерация равномерных КЭ сеток (без особых точек, полюсов и т.п.) на сферических и параболических поверхностях;
• генерация пространственных поверхностей вида z=f(x,y) на опорных планах различной конфигурации;
• генерация складчатых поверхностей из КЭ стержней и пластин;
• вычисление геометрии ванты с определением координат узлов разбивки, исходя из стрелы провисания, либо из реальной длины;
• механизм сгущения и преобразования сети КЭ по большому числу критериев;
• механизм перенумерации и сортировки узлов и элементов расчетной схемы по различным критериям;
• задание произвольной кусочно-линейной нагрузки на пластины и стержни;
• автоматическое преобразование фрагментов расчетной схемы в суперэлементы;
• автоматическое преобразование суперэлементов во фрагменты основной схемы;
• назначение строительных осей и отметок с последующим использованием в навигации и документации;
• управляемая настройка цветовой шкалы при отображении результатов;
• согласование местных осей для объемных элементов.
Новые сервисные функции
• сохранение графической информации о задаче в широком наборе графических форматов;
• экспорт-импорт расчетных схем между ПК ЛИРА и STARK-EC;
• система прямой и обратной связи пользователь-разработчик по электронной почте -шаблон стандартного обращения пользователя к разработчику, автоматическое архивирование всех компонентов задачи и т.п.;
• автоматическое сохранение файлов;
• удаление рабочих и временных файлов старых проектов.
Обновления в системе ЛИР-ВИЗОР
• усовершенствованная панель открытия файлов с расширенной информацией о проекте;
• ускоренная упаковка схемы с учетом большого числа критериев;
9
ЛИРА® Руководство пользователя
• расширение функций ПолиФильтра;
• упрощение процедуры сборки расчетной схемы из других схем;
• усовершенствование процедуры задания собственного веса;
• упрощение процедуры и расширение возможностей при задании объединения перемещений узлов, расшивки узлов и задания шарниров в пластинах;
• получение информации о проекциях измеряемых длин и площадей;
• отображение усилий в специальных КЭ, в том числе одноузловых, в виде мозаик;
• новые флаги рисования.
Обновления в системе ЛИР-СТК
• проверка и подбор новых сечений:
Г*
• швеллер из 3-х листов I— ;
Г
• швеллер из листа и уголков «l. ;
• прямоугольное сечение В ;
• три трубы с раскосной решеткой из труб и стержней О ;
• швеллер и двутавр с решеткой '1—^(швеллер может быть прокатный, гнутый, из 3-х листов, из листа и уголков, двутавр - прокатный и составной, решетка - раскосная и раскоснораспорная из любого профиля);
• проверка всех сечений, кроме троса, одиночного уголка и крестовых уголков, на сжатие с изгибом (тип дополнительных характеристик "колонна", "балка", "ферма");
• расчет по Еврокоду 3 обновлен до редакции 1992 года. Версия ЛИР-СТК 9.2 выполняет расчет сечений классов 1...3 по Еврокоду 3.1.1 (ENV 1993-1-1:1992 Е). Расчет по Еврокоду можно полностью трассировать в HTML-виде;
• добавлена возможность выполнения расчета по усилиям от загружений.
Обновления в системе ЛИР-АРМ
• подбор арматуры в стержнях производится с учетом их конструктивных особенностей, стержень - полностью несимметричное армирование, балка - армирование несимметричное относительно одной оси, колонна - симметричное армирование;
• для стержней таврового и двутаврового сечения подбор арматуры осуществляется с учетом расположения арматуры в стенке или в полках;
• учет сдвоенности арматурных стержней в углах сечения стержней при подборе арматуры;
• для стержней подбор арматуры осуществляется до достижения заданного максимального процента армирования.
ю
Краткое описание метода конечных элементов для линейных задач
1 Краткое описание метода конечных элементов для линейных задач
1.1 Общие положения
Во всех программных комплексах семейства ЛИРА реализован метод конечных элементов (МКЭ) в форме перемещений - МКЭ рассматривается для случаев, когда искомой разрешающей функцией служит перемещение. Это вызвано тем, что выбор расчетной схемы для МКЭ в перемещениях легко поддается алгоритмизации, а практическое использование МКЭ немыслимо без применения современных компьютеров.
Уравнения равновесия для задач линейной теории упругости записываются в виде:
Au = -BT(DBu)+f = 0 (1.1)
где: В - матричный линейный дифференциальный оператор, с помощью которого вектор деформаций e(u) выражается через вектор перемещений и, е(и) = Ви;
D - матрица упругости, определяющая линейную связь между векторами напряжений а и деформаций е, <t=De (закон Гука);
ВТ - транспонированная матрица.
Обозначим:
П(и) = j(pBu\Bu)dQ = ~ р(м)г(и)оК2 - потенциальная энергия деформации,
IV(u) = jfudCl - работа внешних сил; п
/(и) = п(и)+ 1/У(и) - полная энергия
(1-2)
Положительная определенность и самосопряженность дифференциального оператора А позволяют перейти от решения дифференциальных уравнений (1.1) к нахождению минимума функционала полной энергии 1(и) - функция и, доставляющая минимум функционалу (1.2), является решением дифференциального уравнения (1.1). Функционал полной энергии вида (1.2) является функционалом Лагранжа.
Условием минимума функционала (1.2) являются равенства принципа возможных перемещений: при любом возможном перемещении v сумма возможных работ внутренних и внешних сил равна нулю.
Обозначим:
a(u,v) = j(DBu\Bv)dQ. = Jcr(u)f(v)d£2 - возможная работа внутренних сил; п п
( f, у) = w(v) = jf • vdQ - возможная работа внешних сил. л
Тогда принцип возможных перемещений запишем в виде:
a(u,v) +(f,v) = 0
Левая часть равенства (1.3) является, как легко показать, производной функционала полной энергии (1.2).
Задача решения уравнений равновесия (1.1) и вариационная задача минимиза_*м функционала (1.2), то есть нахождения функции и, удовлетворяющей (1.3), эквивалентны и имес-одно и то же решение.
ЛИРА® 9.2 Руководство пользователя
Вариационная постановка задачи имеет определенные преимущества, которые вытекают из того, что порядок производных в (1.2) понижается в 2 раза. Поэтому более удобно формулируются граничные условия, смягчаются требования к базисным функциям и упрощается представление разностных выражений.
Метод конечных элементов - вариационный, т. е. нахождение минимума функционала (1.2) производится на основе уравнений (1.3). Основная концепция МКЭ заключается в
непосредственной дискретизации рассчитываемой системы, которая расчленяется расчетной сеткой на конечные элементы. Для полученной дискретной модели вводится система кусочнонепрерывных функций {(рДх)}, определенных на конечном числе подобластей - звездах конечных
элементов (рис. 1.1), т. е.
xeQj
=
х е
Искомая функция перемещений по области системы и(х), xeQ приближенно принимается в виде:
uh(x) = ^ql<pl{x), (14)
/=1
г 1Д....ЯГ
Рис. 1.1
где L - общее число узловых неизвестных, которое в
общем случае не равно числу узлов, так как в каждом узле может быть различное число
неизвестных.
Узловым неизвестным qt в МКЭ, как правило, придается физический смысл, и они представляют собой искомые значения перемещений и их производных в узлах расчетной сетки.
При подстановке (1.4) в (1.3) задача определения непрерывной функции и(х) сводится к определению значений конечного числа неизвестных qh которые находят из системы уравнений:
~ ^Uh = ли “ W(Uh У=7^ f 9 a^h ’и”(f’Uh =
3q, dqt dq,\2 J
= a(uh ,<Pi)+(f,<pt)=^q, jDBtpjBp'CKl + = 0
/=1 n n
(1.5)
при /=1,2...L.
При этом предполагается, что uh(x) удовлетворяет главным граничным условиям. По найденным из (1.5) значениям qt на основе (1.4) определяется функция перемещений по области системы, а по ней, на основе известных соотношений теории упругости, и другие компоненты напряженно-деформированного состояния.
Обозначим:
ки = f(DB?’y)B^eK2 = a(<Ppp/)
° (1.6)
F, = jfy'CKl = а
Матрицу К с элементами Кц называют матрицей жесткости или матрицей системы уравнений МКЭ, вектор Р с элементами Р, - вектором нагрузок или вектором правых частей. Обозначив q- вектор узловых неизвестных, запишем уравнения (1.5) в матричном виде:
Kq + P = 0
(1.7)
12
Краткое описание метода конечных элементов для линейных задач
Выполненное на первом этапе расчета расчленение системы на конечные элементы дает возможность представить возможные работы перемещений и внешних сил в виде сумм по отдельным элементам:
а(и, v) = £ аг (и, v), (f, v) = £ (f, v)r r r
Это позволяет составлять элементы матрицы К и вектора Р из отдельных компонентов. Так, ljэлемент матрицы /Си /элемент вектора Ропределяются по формулам
ге/у rel
где: relj, rel (у знака суммы) - суммирование по всем элементам, содержащим / и J узловые неизвестные; Kljn Р/г - компоненты матрицы жесткости и вектора узловых сил г конечного элемента, которые определяются аналогично (1.6):
Kljr = f(S^rDB(^)dQr (1.8)
Plr = jrffdQr (1.9)
Таким образом, МКЭ дает возможность строить разрешающую систему уравнений (1.5) на основе рассмотрения каждого отдельного конечного элемента, что очень удобно в реализации и является важным достоинством метода.
После выбора системы базисных функций {ф,} процедура МКЭ представляется достаточно формализованной. Выбор - самый ответственный этап, так как он определяет сходимость метода, точность решения задачи, разрешимость системы (1.5).
Принадлежность МКЭ к вариационным методам позволяет сформулировать требования к базисным функциям, обеспечивающим его сходимость:
1) система базисных функций {ф,} должна принадлежать энергетическому пространству НА дифференциального оператора задачи А. Это означает, что наряду с удовлетворением главным граничным условиям, представление разрешающей функции и должно обеспечить существование по всей области Q тех перемещений и их производных, которые входят в функционал (1.2). Элементы, базисные функции которых удовлетворяют этому условию, называются совместными или конформными;
2) функции 9i должны быть линейно независимы. Это требование необходимо для разрешимости системы (1.5);
3) система базисных функций {ф(} должна быть полной в энергетическом пространстве оператора А. Это означает, что функции (1.4) при неограниченном сгущении сетки могут аппроксимировать в энергетическом смысле любые возможные перемещения по области Q с любой заранее заданной степенью точности.
Выполнение этих требований позволяет получить оценку погрешности перемещений и напряжений, полученных на основе МКЭ [9]:
lu-u.L,
(1.11)
где: и, uh (a, ah) - точное и приближенное значения перемещений (напряжений);
L2- континуальный аналог квадратичной невязки;
Си, Со - константы;
h - максимальный размер конечного элемента;
t, г- порядок сходимости МКЭ по перемещениям и напряжениям.
ЛИРА®9.2 Руководство пользователя
Приведенные оценки (1.10), (1.11) имеют не только теоретическое значение, позволяющее судить о сходимости МКЭ: при сгущении сетки приближенное решение <//, стремится к точному и. Они оказываются полезными при практических расчетах, так как по ним можно составить представление о точном решении (подробно об этом сказано в [9]).
Систему уравнений (1.7) можно трактовать как уравнение равновесия. Аналогом ее в строительной механике стержневых систем является система канонических уравнений метода перемещений.
В МКЭ компоненты матрицы жесткости вычисляются, исходя из формул (1.6), (1.8), полученных из минимизации функционала Лагранжа. В строительной механике стержневых систем их находят как реакции от единичных перемещений. Если базисные функции удовлетворяют однородному уравнению равновесия, оба метода дают одинаковый результат.
Выражение (1.7) для получения компонентов вектора Р в строительной механике стержневых систем трактуется как процедура приведения местной нагрузки к узловой.
Таким образом, процедура решения задачи по МКЭ полностью соответствует методам строительной механики стержневых систем. Некоторое отличие можно проследить только в процедуре составления матрицы жесткости: для МКЭ всегда используется формула (1.8), для стержневых систем матрица жесткости часто строится из других соображений. Правда, стержневые системы имеют одну особенность: гипотеза плоских сечений, лежащая в основе их расчета, с одной стороны, обусловливает совместность конечных элементов, с другой стороны, порождает дифференциальный оператор задачи. Поэтому здесь появляется возможность подобрать такие базисные функции, которые, с одной стороны, являются решением однородного дифференциального уравнения, с другой стороны, дают возможность построить совместные конечные элементы. В этом случае МКЭ для стержневых систем будет точным методом в смысле точного решения дифференциальных уравнений вида
__д2их п „ди _
EF---= 0 и EI—/- = О
дх2 дх4
Вместе с тем, можно привести примеры, когда для стержневых систем лучше использовать приближенные базисные функции. К таким примерам относятся стержни с учетом сдвига, стержни на упругом основании, физически и геометрически нелинейные стержни и другие. Решению стержневых систем в этом случае присущи все отличительные особенности МКЭ: приближенное решение, оценка сходимости в виде (1.10,1.11), необходимость дробления стержней по длине для повышения точности приближенного решения и т.п. Вот почему при описании библиотеки конечных элементов ПК ЛИРА для стержней указываются значения t и г. Теоретические основы МКЭ (процедурная часть, исследование сходимости, конструирование КЭ, исследование глубокой связи МКЭ и методов строительной механики) подробно описаны в [10,15].
1.2 Библиотека конечных элементов для линейных задач
Библиотека конечных элементов (БКЭ) содержит элементы, моделирующие работу различных типов конструкций: элементы стержней, четырехугольные и треугольные элементы плоской задачи, плиты, оболочки, элементы пространственной задачи - тетраэдр, параллелепипед, трехгранная призма. Кроме того, в БКЭ имеются различные специальные элементы, моделирующие связь конечной жесткости, упругую податливость между узлами, элементы, задаваемые численной матрицей жесткости.
Все конечные элементы, включенные в БКЭ, теоретически обоснованы, для них получены оценки погрешности по перемещениям и по напряжениям t и г. Теоретически обоснована также возможность задания криволинейных стержней прямолинейными элементами и произвольных оболочек треугольными и прямоугольными (для цилиндрических оболочек) элементами плоской оболочки. Погрешность по напряжениям и перемещениям оценивается здесь величиной, пропорциональной h.
В БКЭ включены только такие элементы, для которых математически доказана сходимость, то есть получены t и т. Значения этих параметров позволяют не только обрести уверенность в результатах решения той или иной задачи, но и оценить напряженно-деформированное состояние
14
Краткое описание метода конечных элементов для линейных задач
конструкции в целом.
Состав библиотеки конечных элементов для линейных задач приведен в табл. 1.1.
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
10 Универсальный стержень |Z v \ А4 У X 1 2 3 4 5 произвольно X, У, Z, их, UY, UZ 1. При наличии упругого основания r=2t=4 2. При учете сдвиговой жесткости г= 2t-4 3. В прочих случаях точное решение
1 Стержень плоской фермы 1 XOZ X, Z Частный случай КЭ-10
2 Стержень плоской рамы 2 XOZ х, Z, UY Частный случай КЭ-10 I
3 Стержень балочного ростверка 3 XOY Z, их, UY Частный случай | КЭ-10 ' I
4 Стержень пространственной фермы 4 произвольно X, У, Z Частный случай КЭ-10
5 Пространственный стержень без учета сдвига 5 произвольно х, У, Z, их, UY, UZ Частный случай КЭ-10
11* УНИЕ прям элем V нереальный юугольный конечный юнт плиты у/ X 3,5 ХОУ Z, их, UY Допускается наличие упругого основания. т=2 t=2
15
ЛИРА® 9.2 Руководство пользователя
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
12* Унив коне Y ерсальный треугольный чный элемент плиты X' S' \ \ । г / \ ^7 х 3,5 XOY Z, их, UY Допускается наличие упругого основания. г= 1 t=2
21 (23)* Универсальный прямоугольный конечный элемент плоской задачи теории упругости (балка-стенка) -Z /г, / 1,2,5 (4,5) XOZ (произвольно) X, Z (X, Y, Z) Допускаются следующие виды плоской задачи теории упругости: плоское напряженное состояние; плоская деформация. г= i t=2
22 (24)* Универсальный треугольный конечный элемент плоской задачи теории упругости (балка-стенка) z tz, / Л/"'ъ 4^” \ / х 1,2,5 (4,5) XOZ (произвольно) x,z (X, Y, Z) т= 1 t=2
16
Краткое описание метода конечных элементов для линейных задач
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
27 (30)* Универсальный четырехугольный (восьмиузловой)конечный элемент плоской задачи теории упругости (балка-стенка) 'П 4,5 (1,2) произвольно (XOZ) х, Y, Z (X, Z) Наличие узлов 5, 6, 7 и 8 необязательно. Т= 1 t=2
Л 5 2\ X,
Параллелепипед tz tz,
31* / / / ,х- L / 4, 5 произвольно х, Y, Z т= 1 t=2
. X
Тетраэдр
kZi
32* Y / 1 4 AxzY1 // у - v3 k~-~\ / х. 4, 5 произвольно х, Y, Z i т= 1 t=2
Г4 2 X
33* Трехгранная призма L № / 6 4, 5 произвольно х, Y, Z т= 1 t=2
17
ЛИРА® 9.2 Руководство пользователя
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
34* Универсальный пространственный изопараметрический шестиузловой конечный элемент ' Л / А 5 / \ / X 4, 5 произвольно Z, их, и, Y г= 1 Г=2
36* Универсальный пространственный изопараметрический восьмиузловой конечный элемент Z 7 8 / 1 2 / X 4, 5 произвольно X ,Y, Z т= 1 t=2
41* Универсальный прямоугольный элемент оболочки \ 1Ж 5 произвольно X, Y, Z их, UY, UZ Допускается наличие упругого основания. Для изгибной группы усилий r=2t=2. Для мембранной группы усилий т= 11= 2.
18
Краткое описание метода конечных элементов для линейных задач
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
42* У 3J Z ниверсальный треугольный земент оболочки S' \ 1 V / X 5 произвольно X, Y, Z, их, UY, UZ Допускается наличие упругого основания. Для изгибной группы усилий г= 11=2. Для мембранной группы усилий г=11= 2
44* У| Ч€ ЭГ Z ниверсальный ггырехугольный конечный 1емент оболочки & }' /А /___2 х 5 произвольно X, Y, Z, их, UY, UZ Допускается наличие упругого основания. Для изгибной группы усилий г= 11=2. Для мембранной группы усилий r=1t= 2.
51 о. КС Z цноузловой элемент связи вечной жесткости 4^ .V JL Z УШ X 5 вдоль осей глобальной системы координат X, Y, Z, их, UY, UZ Применяется для учета податливости опорной связи
53 Законтурный двухузловой конечный элемент упругого основания Z Y< .. / X. 1 2 3,4,5 XOY Z Учитывает влияние полосы грунта за пределами конструкции
19
ЛИРА® 9.2 Руководство пользователя
Таблица 1.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
54 Законтурный одноузловой конечный элемент упругого основания Z X 4 /ff 345 XOY Z Учитывает сдвиговое влияние угловой зоны грунта за пределами конструкции
55 Упругая связь между узлами Z /У V X 1-5 вдоль осей глобальной системы координат х, Y, Z, их, UY, UZ Учет податливости стыков в конструкции
Символ * рядом с номером конечного элемента означает, что для этого элемента
допускается учет ортотропии и анизотропии.
В работах [10, 15] описаны приемы оценки точного решения системы на основе знания г и t, примененного для сравнения двух расчетов - с начальной и удвоенной густотой сетки.
1.2.1 Универсальный стержень (КЭ 10)
Универсальный стержень изображен на рис. 1.2. Стержень имеет местную систему координат XbY^Zb относительно которой задается местная нагрузка, а также определяются усилия. Правила образования местной системы координат изложены в п. 12.4.
Предусматриваются различные возможности прикрепления стержня к узлам схемы:
• при помощи абсолютно жестких вставок вдоль местных осей;
• при помощи снятия связи по любому направлению (снятие связи, соответствующей
линейной степени свободы, обеспечивает проскальзывание; снятие угловой связи -
свободный поворот, то есть цилиндрический шарнир).
Допускается наличие упругого основания. Может учитываться сдвиг.
Матрица жесткости строится для гибкой части АВ, при этом используется новая система координат (рис. 1.3).
Функционал полной потенциальной энергии стержня имеет вид:
20
Краткое описание метода конечных элементов длялинейных задач
п =
EJy
^EJZ
du
dx2
+ GJKpa2 dx-
(1.12)
- f|p* (*)« + Py (xk + Pz (*V + mxa + myp + mzy]dx 0
где: u(x), v(x), w(x) - линейные перемещения по области стержня вдоль местных осей Х1, Y1, Z1 соответственно;
а, В = —, у =----- - угловые перемещения по области стержня относительно местных
dx dx
□сей Х1, Y1.Z1;
рх(х), ру(х), pz(x) - распределенные нагрузки на стержень вдоль местных осей Хь Yb Z,;
тх, тх, тх - распределенные моменты на стержень вокруг местных осей Xb Y^ Z,.
Привязки сосредоточенной и трапециевидной нагрузок задаются относительно упругой части стержня, т.е. возможны отрицательные привязки.
Конечный элемент может работать во всех признаках схем, применяемых при расчете стержневых конструкций.
Конечный элемент допускает местные нагрузки, приведенные в табл. 1.2
Таблица 1.2
Направление нагрузки Схема нагрузки Код нагрузки Допустимые направления Обозначения
Сосредоточенная сила Zi Н к /У / J : а г /=х? у Z к ’ 5 15 X, Y, Z Pifr), а(м) где i=X, Y, Z
Сосредоточенный момент Zt н к y(Y 7 а г /=хг у Z Mi X * 5 15 X, Y, Z j Mi(r), а(м) где •=Х, Y, Z
Равномерно распределенная нагрузка вдоль и вокруг осей Z1 н к угУ /=х, у, Z, их, иу, UZ X к * 6 16 X, Y, Z, UX, UY, UZ дХт/м) где i=X, Y, Z; дДтм/м) где i=UX, UY, UZ
21
ЛИРА® 9.2 Руководство пользователя
Таблица 1.2
Направление нагрузки Схема нагрузки Код нагрузки Допустимые направления i Обозначения
Трапециевидная нагрузка вдоль осей Z) н к ХУ /=х. yf Z "к 7 17 X, Y, Z Q»,(t/m), а,(м), д2Дт/м), а2(м) где i=X, Y, Z
Температура Равномерный продольный нагрев 8 X t (°C), cr( 1/град)
Температура Температурный перепад вдоль оси Z, (вокруг оси Y,) 8 Z(UY) te (°C), to (°C), а(1/град), /?(м)
Температура Температурный перепад вдоль оси Yi (вокруг ОСИ Z-i) 8 Y (UZ) te (°C), to (°C), а(1/град), Ь(м)
Допускается задание местной нагрузки (кроме температурной) на жестких вставках вдоль оси Хг
На рис. 1.4 показаны положительные направления усилий. При этом усилия рассматриваются в сечении, принадлежащем концу стержня
1.2.2 Универсальные конечные элементы балок-стенок, тонких плит и оболочек (КЭ 11,12, 21-24,27, 30, 41, 42, 44)
Предназначены для решения плоской задачи теории упругости, а также прочностного расчета тонких, жестких пластин и тонких пологих оболочек. Материал однородный по толщине элемента, линейно упругий, изотропный.
Тонкими считаются пластины, у которых 5<Lminl<S, где Lm/n - наименьший из размеров в плане; <5-толщина.
Жесткими считаются пластины, у которых наибольший прогиб не превышает 85.
Оболочки считаются тонкими, если R/6>20, где R - минимальный радиус кривизны срединной поверхности.
Оболочки считаются пологими, если Lmin/fo^5, где fo - стрела подъема свода оболочки.
22
Краткое описание метода конечных элементов для линейных задач
При решении плоской задачи теории упругости, МКЭ исходит из общепринятых гипотез об отсутствии деформаций (ez, yxz., ууг = 0 для случаев плоской деформации) или напряжений (сго ?xz, t,z = 0 для случая плоского напряженного состояния). Функционал Лагранжа, как для плоской деформации, так и для плоского напряженного состояния имеет вид:
п(ид) = | jj(axex + °у£у + az£z)dQ-^(Pxu + Pyv)dQ (1 13)
z a a
где: <jx,oy,Txy- нормальные и касательное напряжения;
Е = = — + — - относительные линейные и угловая деформации;
х dx у dy dy dx
и (х, у), v (х, у) - линейные смещения точек срединной плоскости по направлению осей X и Y соответственно;
Рх, Ру - компоненты вектора внешней нагрузки по направлениям осей X и Y соответственно;
Q - двумерная область пластины.
При решении задач изгиба тонких пластин, МКЭ исходит из допущений (гипотез), принятых при построении инженерной теории тонких пластин, а именно:
• гипотезы о прямых нормалях Кирхгофа-Лява (£„ = £yz = 0);
• гипотезы о вертикальном смещении точек срединной плоскости пластины;
• гипотезы об отсутствии поперечного давления (<тх, = 0);
• плоское напряженное состояние.
Функционал полной потенциальной энергии изгибаемой пластины при таких допущениях и при нулевых граничных условиях имеет вид:
n(w)=ljj(MxXx+MyXy+2MxyZxy)dCl-jjfwdQ (114)
где: М„ = Г arzdzJVIu = f crzdzJVI = f r^zd - погонные изгибающие моменты
* У У ЛУ Jg ЛУ
относительно осей Y и X, а также погонный крутящий момент, представляющие собой
интегральные характеристики нормальных и касательного напряжений в направлении осей X и Y:
Хх ~ дх2’ ху ду2 ’ Хху дхду
- кривизны срединной поверхности в направлении осей X
f(x,y) ~ функция внешней нагрузки, ортогональной к срединной поверхности пластины;
w(x,y) - функция прогибов по области срединной поверхности пластины;
Z-отрезок
О 2’2.
Относительные линейные и угловая деформации ех ,еу ,еху через кривизны запишутся следующим образом:
£* дх2 * ^Хх’
= <116>
Для плоского напряженного состояния деформации и напряжения связаны между собой зависимостями:
23
ЛИРА® 9.2 Руководство пользователя
£х -^у)-
£У =^(СТУ -^х). = ^Гху>
(1.16)
где: Е - модуль Юнга; v-коэффициент Пуассона; G- модуль сдвига.
Для случая плоской деформации Е в (1.9) заменяется на E/(1-2v\
v - на v/(1 - v) и вычисляется az-v(ax+ay).
При расчете оболочечных конструкций целесообразно использовать КЭ нулевой кривизны (плоские КЭ) с независимой аппроксимацией нормального и тангенциальных перемещений, которым соответствуют функционалы потенциальной энергии, определяемые выражениями (1.6) и (1.7). Такой конечный элемент является простой комбинацией конечных элементов для плоского напряженного состояния и изгиба пластины с удовлетворением всех необходимых требований. Геометрические особенности оболочки учитываются геометрией вписанного многогранника. Поскольку со сгущением сетки увеличивается точность аппроксимации поверхности оболочки геометрией вписанного многогранника, то сходимость МКЭ в этом случае обеспечивается, что имеет теоретическое подтверждение.
При расчете плит и оболочек, лежащих на упругом основании, используется двухпараметрическая модель упругого основания П.Л. Пастернака, в которой две постоянные С1 и С2 характеризуют работу упругого основания на сжатие и срез (сдвиг). Если С2=0, получим однопараметрическую модель упругого основания Винклера.
Потенциальная энергия системы в этом случае
и = Л+Пу
(1.17)
где: П— потенциальная энергия собственно конструкции, определяемая выражением (1.7), зависящим от типа конструкции;
П1 — потенциальная энергия упругого основания, контактирующего с конструкцией, определяемая выражением
Допускается задание нагрузок на конечный элемент в местной и в общей системах координат с привязкой в местной системе координат. Предусмотрены следующие виды нагрузок (табл. 1.3):
5, 15 - сосредоточенная, задаваемая относительно осей местной или общей систем координат соответственно, с привязкой в местной системе координат;
6,16 - равномерно распределенная, задаваемая относительно осей местной и общей систем координат соответственно;
88 - температурное воздействие.
24
Краткое описание метода конечных элементов для линейных задач
Таблица 1.3
| Тип I КЭ I Нагрузка Схема и описание нагрузки Код нагрузки Направление нагрузки Величина нагрузки и привязка
£1.22, |23. 24, |27. 30 Сосредоточенная нагрузка в плоскости элемента X|O1Z1 (XjOiYO fZXY<) PzfQ Px Xf 5 X z Рх(т),а(м),Ь(м) Рг(т),а(м),Ь(м)
Oi a
41.42 Тоже X Y Рх(т),а(м),Ь(м) Ру(т),а(м),Ь(м)
21. 22, 23.24 То же Z(Y) Zi(Yi) V^^aPzOO \ V \ T «\ Xi \ I Px\ Ь\Л***£5* °* X 15 X z Рх(т),а(м),Ь(м) Р2(т),а(м),Ь(м)
41.42, 44 То же X Y Рх(т),а(м),Ь(м) Ру(т),а(м),Ь(м)
11. 12 41 42, 44 Сосредоточенная нагрузка из плоскости элемента - силы и моменты AZl П ¥i /J₽z / ц/ /' / ,x< / O' / 5 z UX, UY Р2(т),а(м),Ь(м) М(т м),а(м),Ь(м) i
11.12 41 42, 44 То же А2 z< у \ /1₽z / \ / J / Xi \ H? / X >. 15 z UX, UY Pz(m),a(M),b(M) М(т м),а(м),Ь(м)
25
ЛИРА® 9.2 Руководство пользователя
Таблица 1.3
Тип КЭ Нагрузка Схема и описание нагрузки Код нагрузки , Направление нагрузки Величина нагрузки и привязка
21,22, 23, 24, 27, 30 Равномерно распределенная нагрузка в плоскости элемента Zi(Yi) .qzro 6 X z qx(m/M*) qz(m/M2)
| || qx Xi
41,42, 44 То же X Y qx(m/M2) qy(m/M2)
121,23, 27, 30 То же I Z(Y) Zi(Y<) V-L.L? х' X 16 X z qx(m/M2) qz(m/M2)
41,44 То же X Y qx(m/M2) qy(m/M2)
11, 12, 41,42, 44 Равномерно распределенная нагрузка из плоскости элемента - силы и моменты по площади Z’ /Yl q z 6 z их UY qz(m/M2) тх(тм /п.м) ту(тм /п.м)
Xl
11, 12, 41,42, 44 То же z Y .Yi Xl X 16 z их UY qz(m/M2) тх(тм /п.м) ту(тм /п.м)
26
Краткое оп^са^ое метода <онечмьд элементов для линейных задач
Таблица 1.3
Тип КЭ Нагрузка Схема и описание нагрузки Код нагрузки Направление нагрузки Величина нагрузки и привязка
11, 12, 21, 22, 23, 24, 27, 30, 41,42, 44 Температурное воздействие Равномерный нагрев 88 0 t, At, а
21,22. 23, 24, 27, 30 То же Тоже X Z t, At, он t, At, а2
11, 12 То же Температурный перепад их UY t, At, а, t, At, a2
41,42, 44 Тоже Тоже х,их Y,UY t, At, си t, At, a2
1.2.3 Универсальные конечные элементы пространственной задачи теории упругости (КЭ 31-34,36)
Предназначены для определения напряженно-деформированного состояния континуальных объектов и массивных пространственных конструкций из однородного изотропного линейноупругого материала в постановке трехмерной задачи теории упругости.
Функционал Лагранжа при нулевых граничных условиях имеет вид:
П — j(<Tx^ Т ^у£У + °Z£Z + ^Ху£Ху Т ^yz^yz + ^zx&zx\w ~
Л V
- fail + PyV + Pzw}iS - j(XU + YV + ZW)dV (119)
S V
где: ax(x,y,z), o/x,y,z), a/x,y,z), rxy(x,y,z), TyJ,x,y,z), rzx(x,y,z) — компоненты тензора напряжений, являющиеся непрерывными функциями координат;
_ _ ди „ _ду_ _ _ dw F _dv,dw_ _dw,du
x dx' y dy’ z dz’ dy dx' yz dz dy' zx dx dz
- относительные линейные и угловые деформации;
U(x,y,z), V(x,y,z), W(x,y,z) - компоненты перемещений точек тела, параллельные соответственно осям OX,OY,OZ общей системы координат;
Рх, Ру, Рг - компоненты интенсивности поверхностных сил, действующих в направлении осей OX, OY, OZ соответственно;
X, Y, Z -компоненты интенсивности объемных сил (на единицу объема) в направлении осей OX.OY и OZ соответственно.
Деформации и напряжения связаны между собой зависимостями:
£х = - ™у - V(TJ £у = 1(СТУ - vcrx - ^z\
с с (1.20)
1 / \ _ 1 _ 1 1
^Z £ Z ^Х Wy p xy QT xy » ^yz У1' £
где: E - модуль Юнга; v- коэффициент Пуассона; G - модуль сдвига.
27
ЛИРА9 9.2 Руководство пользователя
Допускается задание нагрузок на конечный элемент, как в местной, так и в общей системах координат. Привязка допускается в местной и в общей системе координат, а также в виде приращений в общей системе координат. Предусмотрены следующие виды нагрузок (табл. 1.5):
6, 16 - равномерно распределенная, задаваемая относительно осей местной и общей систем координат соответственно;
8 - температурное воздействие.
Равномерно распределенная нагрузка может быть задана как по всему элементу, так и по грани. Номер грани определяется в соответствии с порядковыми номерами узлов грани (см. табл. 1.4).
Таблица 1.4
—-- -- _ Тип КЭ № грани -—- _ 31,36 33, 34 32
1 1,3, 5,7 1,3, 4,6 1,3,4
2 2,4, 6, 8 1,2, 4,5 1,2,4
3 1,2, 5,6 2, 3, 5, 6 2, 3,4
4 3,4, 7, 8 1,2,3 1,2,3
5 1,2, 3,4 4, 5,6 —
6 5, 6, 7, 8 — —
Таблица 1.5
Тип
। КЭ
Нагрузка
X
Схема и описание Ct £ о
нагрузки 5 В CQ
X
Направление Величина
нагрузки нагрузки и
привязка
31, 32,
33, 34.
36
Равномерно распределенная нагрузка, действующая по направлению осей местной или общей систем координат (q-интенсивность нагрузки; N гр -номер грани).
Если номер грани не задан или равен нулю, то нагрузка является равномерно распределенной, по объему.
Номер грани определяется в соответствии с табл.3.1.4.
q (т/мЗ), N гр=О
6,16
6,16
6,16
q (т/м2), N гр#О
31, 32,
33, 34,
36
Температурное воздействие
t, а
t, ат
t, аг
t, а3
1.2.4 Специальные конечные элементы (КЭ 51, 53,54,55)
Предназначены для ограничения линейных и угловых перемещений по направлениям осей координат, для введения связей конечной жесткости по направлениям осей координат, а также для учета податливости материала между смежными узлами (например, податливость ростверка или металлических прокладок между элементами).
28
Краткое описание метода конечных элементов длялинейных задач
КЭ, моделирующий связи конечной жесткости (тип КЭ-51)
Данный КЭ применяется для введения связи конечной жесткости по направлению одной из осей глобальной или локальной системы координат узла. Так, например, для степени свободы Z конечный элемент позволяет смоделировать работу пружины или упругого основания.
Законтурный двухузловой КЭ упругого основания (тип КЭ-53)
Данный КЭ применяется для моделирования отпора полосы грунта за пределами плиты. Полоса грунта при этом располагается перпендикулярно контуру плиты. Учет отпора за контуром происходит за счет работы грунта на сдвиг. В каждом из узлов имеется по одной степени свободы - перемещение вдоль глобальной оси Z.
Законтурный одноузловой КЭ упругого основания (тип КЭ-54)
Данный КЭ применяется для моделирования отпора угловой зоны грунта, примыкающего к углу плиты. Учет отпора в зоне, примыкающей к углу, происходит за счет работы грунта на сдвиг. В каждом из узлов имеется по одной степени свободы - перемещение вдоль глобальной оси Z.
КЭ, моделирующий упругую связь между узлами (тип КЭ-55)
Данный КЭ предназначен для учета податливости связи между узлами соединения конструктивных элементов - колонны с диафрагмой, ригеля с колонной и т.п. Элемент описывается двумя узлами, в каждом из которых имеется по шесть степеней свободы, определенных относительно осей глобальной системы координат. Таким образом, элемент позволяет смоделировать как линейную, так и угловую податливость связи относительно осей X, Y Z общей системы координат. Узлы, между которыми моделируется податливость, могут иметь одинаковые координаты.
Конечный элемент приспосабливается к признаку схемы.
29
ЛИРА® 9.2 Руководство пользователя
2 Решение системы канонических уравнений
После того как заданная конструкция представлена в виде конечно-элементной схемы, задача об определении перемещений узлов сводится к решению системы линейных алгебраических уравнений вида
АХ=В (2.1)
где: А - симметричная положительно определенная матрица размером N * N;
В - матрица правых частей (загружений) размером N * к (к= количество загружений);
X — искомая матрица перемещений размером k*N.
Поскольку в большинстве случаев матрица А является разреженной, то для уменьшения требуемой оперативной памяти, внешней памяти и времени счета предварительно производится упорядочение неизвестных системы (2.1) с целью минимизации профиля матрицы. Реализованы следующие методы упорядочения: обратный алгоритм Катхилла-Макки, алгоритм «фактор деревьев», алгоритм минимальной степени. Пользователю предоставлена возможность выбора метода упорядочения. По умолчанию используется обратный алгоритм Катхилла-Макки, так как у этого метода минимальные запросы к оперативной памяти. Конкретные рекомендации для выбора метода упорядочения не могут быть даны, так как эффективность того или иного алгоритма существенно зависит от структуры конкретной матрицы А.
Для решения системы (2.1) предварительно производится треугольное разложение матрицы А.
Если в процессе треугольного разложения матрицы А выясняется, что А вырождена, то производится автоматическое наложение связей, которые обеспечивают геометрическую неизменяемость. При этом пользователю предоставляется информация о номерах узлов и номерах степеней свободы, по которым произведено наложение связей. В этом случае рекомендуется внимательно проанализировать расчетную схему и выяснить происхождение геометрической изменяемости конструкции.
Дополнительным сервисным средством является контроль решения системы (2.1). При появлении сообщения о большой величине ошибки решения, которое, как правило, является следствием плохой обусловленности матрицы А, следует внимательно проанализировать величины перемещений узлов и убедиться в том, что полученное решение является приемлемым с инженерной точки зрения.
зо
Расчет на динамические воздействия
3 Расчет на динамические воздействия
Задача динамического расчета формулируется, как и в статическом случае, в виде вариационного равенства
t>0, (31)
6/Г J 6/Г J w- 1 /
</(0) = и 0, du/dt(0) = и,,
где: и, — и (t) — точное решение;
b(u,v), c(u,v) - возможные работы инерционных и демпфирующих сил, и0 - начальные значения перемещения и скорости.
Остальные обозначения те же, что и в статической задаче.
Реализован метод решения динамической задачи, заключающийся в сочетании МКЭ с разложением по формам собственных колебаний. Решение системы уравнений (2.1) ищем в виде
N
i=1
где Uj (t) - скалярные функции;
д - базисные функции соответствующей статической задачи.
Подставив в (3.1) Uh вида (3.2) вместо U и ц (j=1.......N) вместо V, получим систему обыкновенных дифференциальных уравнений
М ^-+С dX~+Kx(t)=P(t), (3.3)
dt2 dt
где: x(t), х0, Xt- векторы с элементами Xt(t)=Uj(t), Х^О) = LjU0, X1(1)=LiU1,
М и С- матрицы масс и демпфирования с элементами т^=Ь(^, ц), c,j = с(ц„
Матрица жесткости К и вектор нагрузок P(t) определяются, как для статической задачи. Этот метод известен как полудискретная аппроксимация. Его погрешность (разность между U и Uh) по потенциальной и кинетической энергии оценивается как в совместном, так и в несовместном случаях величиной, пропорциональной hr.
Систему (3.3) решаем методом разложения по формам собственных колебаний.
Пусть Л, <pi, q>i >=1 решение задачи на собственные значения
К<р =ЛМ<р (3.4)
(Символом <,> обозначается скалярное произведение в R?).
Задача на собственные значения (3.4) решается методом итерации подпространств.
N
Полагая в (3.3) x(t)= у, (<)?>, из ортогональности функции ср, получим (при определенных
i=0
предположениях относительно матрицы С), что система (3.3) распадается на независимые уравнения относительно У, (t):
-у 2 -j
У, (0+ 2^,®/ — У, (0 + ®,2У, (0 = р, t > О,
dt at (3.5)
У,(о)=У,^~'(о)=у,1
где: 0<£ <1, Pt(t)-< Р^р, >, у° =<х°,Мф, >, у1 =<x\M<Pi >
Решение уравнения (5) имеет вид:
31
ЛИРА® 9.2 Руководство пользователя
у. = + у? coset,0 + А £/’.(т)^/‘в'('г) sincr, (f - т)дт,
где: ст, =с>/Л/1-4?
Векторы инерционных сил S,(t) вычисляются по формуле S,(t) =
В расчетах используются величины, выражаемые формулой S,-0 =™ах у, (t)||. При этом:
1. Для ветровой нагрузки Sir0 = wH yh
где: wH - нормативное значение ветровой нагрузки,
у - коэффициент динамичности, зависящий от £ и скорости ветра.
2. Для сейсмической нагрузки S, 0 = &Р„
где: А - относительная величина ускорения,
Д- коэффициент динамичности, зависящий от и £.
f 2л\
3. Для импульсивной и ударной нагрузок t0 < 2.5—
I
о = EiPi^ где. £j, зависит от to, to - время действия импульса;
учитывает периодичность действия нагрузки;
Pj(r)dT - для импульса
Моио(1 + v)- для удара
где: т0, v0- масса и скорость ударяющего тела;
v- коэффициент восстановления формы соударяющихся тел.
Коэффициент у/зависит от того, являются ли колебания установившимися ( n > п | или
I
неустановившимися I n < n I, где п - число повторений импульсов.
I 4^J
4. Для гармонической нагрузки Pt 4 cos 0t + Pl2 sin 0t вычисляются суммарные по всем формам инерционные силы S, и S2 , соответствующие косинусоидальной (действительной) и синусоидальной (мнимой) составляющим:
где: а,- =
Pj,Zi ~ Pj^iai Ь ^Pi,2Zl+Pi,^l
0 л 2 a, = — ,Xi -1-«, ty,
Тогда max £ S, (t) = js, + S22 /
В перечисленных выше вариантах воздействий возможно точное вычисление Yi(t). В остальных случаях решения Yjft^находим численно.
32
Расчет на динамические воздействия
В частности, при расчете на сейсмическую нагрузку по акселерограмме в каждый момент времени tk задается вектор Р*=Р(<к). Тогда в (3.5) имеем Р/,*=Р/<*).
Далее уравнения (3.5) решаются методом конечных разностей по схеме Ньюмарка. Получаем значения перемещений У,irYi(tk) и инерционных сил Si^SjftiJ, по которым вычисляется s„.=7ky,M}
При расчетах на сейсмические воздействия ПК ЛИРА позволяет применить метод спектра ответов. Расчет заключается в том, чтобы при заданной функции S0(w), обычно кусочно-линейной, вычислить линейной интерполяцией значения SofUj). Функция So(u) может быть представлена 'рафиками спектров ускорений, скоростей или перемещений.
Реализованы следующие модули расчета на динамические воздействия:
Модуль 20 - Модуль 30 - Модуль 35 - Модуль 38 - сейсмическое воздействие по СНиП 11-7-81; сейсмическое воздействие по СНиП 11-7-81 с изм. на 01.01.1996 г.; сейсмическое воздействие по СНиП 11-7-81 с изм. на 01.01.2000 г.; сейсмическое воздействие с учетом угловых ускорений грунта по модели Ю.П. Назарова для СНиП 11-7-81 с изм. на 01.01.2000 г.;
Модуль 36 - Модуль 37 - сейсмическое воздействие по ДБН В.1.1-...-2005 (Украина); сейсмическое воздействие по модели В.К. и К.В. Егуповых для ДБН В.1.1-...-2005 (Украина);
Модуль 46 - сейсмическое воздействие с учетом угловых ускорений грунта по модели Ю.П. Назарова для ДБН В.1.1-...-2005 (Украина);
Модуль 27 - Модуль 41 - Модуль 32 - Модуль 33 - Модуль 39 - Модуль 43 - Модуль 40 - Модуль 42 - Модуль 44 - Модуль 45 - Модуль 21 - Модуль 22 - Модуль 23 - Модуль 24 - Модуль 28 - Модуль 100 - сейсмическое воздействие по акселерограмме; сейсмическое воздействие по методу спектра ответов; сейсмическое воздействие по СНРА II-2.02-94 (Армения); сейсмическое воздействие по КМК 2.01.03-96 (Узбекистан); сейсмическое воздействие по СНТ 2.01.08-99 (Туркменистан); сейсмическое воздействие по СНиП в. 1.2-4-98 (Казахстан); сейсмическое воздействие по NF Р 06-013 (Франция); сейсмическое воздействие по I ВС-2000 (США); сейсмическое воздействие по prEN 1998-1:200Х (Еврокод); сейсмическое воздействие по RPA 99-2003 (Алжир); ветровое воздействие с учетом пульсации по СНиП 2.01.07-85*; импульсивное воздействие; ударное воздействие; гармонические колебания; гармонические колебания с учетом частотных зон; модальный анализ.
зз
ЛИРА® 9.2 Руководство пользователя____________________________________________
4 Суперэлементное моделирование
В ПК ЛИРА реализована возможность работы с суперэлементной расчетной Моделью, па количество неизвестных не налагается никаких ограничений. Выбор разбивки схемы на суперэлементы или только на конечные элементы остается за пользователем.
Использование суперэлементов целесообразно в следующих основных случаях:
• предполагаемая размерность задачи при конечно-элементной разбивке превосходит возможности компьютера (память, быстродействие, плохая обусловленность матрицы);
• в задаче содержится большое количество одинаковых конструктивных элементов (панели, объемные блоки и т.п.);
• в задаче присутствуют конструктивные элементы, которые уже были сформированы для ранее рассчитанных объектов;
• в задаче имеет место локальное сосредоточение нелинейно деформируемых элементов.
Часто встречается ситуация, когда задача содержит несколько разнородных объектов, которые различаются по материалу, по набору конечных элементов, по геометрии и т.п. Это может быть, например, силосный комплекс, связанный галереями и опирающийся на плиту на упругом основании. Представление такого объекта в виде конечно-элементной схемы приводит к очень большой размерности задачи, а расчленение его на суперэлементы может существенно ее уменьшить. В этом случае расчетная модель может состоять из трех типов суперэлементов: первый - плита на упругом основании, второй - силосная башня и третий - конструкция галереи.
Еще пример. При расчете панельных домов мелкая разбивка каждой панели приводит к большой размерности задачи, а применение суперэлементов позволяет существенно снизить влияние размерности подобных задач на скорость их выполнения. При этом еще следует учесть, что количество типов суперэлементов в подобных задачах, как правило, невелико.
Существенного сокращения времени счета можно достичь при решении нелинейных задач, в которых присутствуют крупные линейно деформируемые включения. Например, сложные здания (панельные или каркасные дома, силосные башни, резервуары), опирающиеся на грунтовое основание. Для таких зданий учет нелинейной работы основания имеет существенное значение. В этом случае надземное строение необходимо объявить суперэлементом, матрица жесткости которого на каждом шаге нелинейного расчета остается неизменной.
Применение суперэлементов требует определенного навыка, поэтому рекомендуется осваивать работу с ними только после подробного ознакомления со всеми другими возможностями ПК ЛИРА.,
При использовании суперэлементной модели конструкции основная расчётная схема рачленяется на несколько расчетных схем, которые называются схемами суперэлементов. Узлы стыковки суперэлементов с основной схемой называются суперузлами (рис. 4.1).
Алгоритм решения задачи с применением метода суперэлементов (МСЭ) основывается на расчленении исследуемого объекта на S подсхем (суперэлементов), которые объединяются в общую основную схему при помощи No узлов (суперузлов).
Если через Ni обозначить количество внутренних узлов первого суперэлемента, через N2 -узлов второго и т.д., а затем пронумеровать суперузлы, то система уравнений примет вид, показанный на рис. 4.2.
------------------* X
Рис. 4.1
34
Суперэлементное моделирование
В такой постановке решение задачи возможно двумя способами: либо составить систему уравнений полностью и решить ее, либо составлять и решать ее по частям. Сначала составить уравнения для первого суперэлемента, т.е. Аъ А10, Qi и, частично, Ao, Qo, затем исключить Ni неизвестных. Далее проделать то же для остальных суперэлементов, сложить отдельные части Ao, Qo, решить полученные уравнения и, определив перемещения суперузлов, сделать обратный ход для всей системы.
Если суперэлементы отличаются один от другого, то оба способа идентичны как в
Рис. 4.2
отношении количества вычислений, так и в отношении точности счета. Если же в схеме имеются
одинаковые суперэлементы, то количество вычислений можно существенно сократить, если
проделать все вычисления для одного из них и полученные результаты использовать для остальных суперэлементов этого же типа. Такой подход справедлив и в том случае, когда суперэлементы одного типа различно ориентированы относительно глобальной системы координат основной схемы.
Теоретически, суперэлементы можно в свою очередь расчленять на подсхемы (суперэлементы 2-го ранга), развивая этот процесс и организуя своеобразную многоранговую рекурсию. Расчленение на подсхемы обычно не вызывает особых затруднений. Как правило, оно органически связано с конструктивными особенностями объекта как, например, в зданиях из объемных блоков.
В ПК ЛИРА реализован только один ранг суперэлементов. Разработчики полагают, что в подавляющем большинстве случаев этого достаточно для описания расчетной схемы очень высокой размерности.
Рассматривая суперэлементы как конечные элементы, для которых матрица жесткости строится не аналитически, а при помощи численного расчета, можно предложить два алгоритма построения матрицы жесткости. Первый заключается в том, что на суперузлы рассматриваемого
суперэлемента налагаются связи, а элементы матрицы жесткости определяются как реакции в этих связях от последовательных единичных смещений по направлению этих связей.
Другой алгоритм основывается на том, что в физическом смысле исключение j-того неизвестного по Гауссу соответствует освобождению от j-ой связи. Это приводит к следующей схеме построения матрицы жесткости: составляются канонические уравнения для всех узлов i-того суперэлемента, производится исключение Ni неизвестных, соответствующих внутренним узлам. Оставшаяся часть N10 не исключенных уравнений, соответствующих суперузлам, и будет искомой матрицей жесткости
В ПК ЛИРА использован алгоритм второго типа. При этом суперузлы для суперэлемента должны нумероваться в последнюю очередь. Связанные с таким подходом затруднения преодолены следующим образом. Во-первых, нумерация степеней свободы для суперузлов (с учетом того, что они должны иметь последние номера) производится автоматически. Это позволяет не заботиться о порядке нумерации узлов суперэлемента. Во-вторых, в ПК ЛИРА реализован метод Гаусса, использующий существенную «разрыхленность» матрицы канонических уравнений, то есть некий симбиоз ленточного Гаусса, Гаусса с учетом «небоскребной структуры», фронтального метода, метода «спринт». Составление системы уравнений производится в компактной форме - информация дается только о ненулевых элементах с учетом их расположения в системе уравнений, а разворачивание производится только в процессе исключения.
Информацией о наличии суперэлементов в схеме является их особая индексация в исходных данных. Каждый тип суперэлемента описывается и задается полным комплектом документов как для отдельной расчетной схемы, за исключением некоторых изменений.
После ввода исходных данных производится проверка на наличие в них суперэлементов.
При наличии суперэлементов организуется последовательный ввод исходных данных для каждого типа суперэлемента. Построение матрицы жесткости и определение супернагрузок
35
ЛИРА®9.2 Руководствопользователя
(передача нагрузки из области суперэлемента в суперузлы) реализованы как отдельный, специально построенный расчет.
Полученная система канонических уравнений обрабатывается неполным прямым ходом по Гауссу до неизвестных, относящихся к суперузлам. Необработанная часть системы канонических уравнений является искомой матрицей жесткости рассчитываемого суперэлемента и записывается в соответствующие наборы данных.
Аналогичным образом производится определение супернагрузок. Если нагрузка распределена по области суперэлемента, то выполняется построение столбцов правых частей канонической системы и их обработка неполным прямым ходом Гаусса. Необработанные элементы столбцов являются супернагрузками для рассматриваемого суперэлемента и записываются в соответствующие наборы данных.
После этого производится расчет основной схемы. В результате решения системы канонических уравнений основной схемы определяются перемещения суперузлов. Затем производится расчет каждого суперэлемента, который по сути является расчетом на заданные перемещения, а именно: перемещения суперузлов, полученные из расчета основной схемы. Здесь используется уже имеющаяся система канонических уравнений суперэлемента, обработанная неполным прямым ходом по Гауссу. Для нее выполняется несколько (по количеству загружений) обратных ходов. И, наконец, вычисляются перемещения внутренних узлов суперэлемента и определяются остальные компоненты напряженно-деформированного состояния.
36
Принципы определения расчетных сочетаний усилий (РСУ)
5 Принципы определения расчетных сочетаний усилий (РСУ)
Решение задачи об определении наиболее опасных сочетаний нагрузок обеспечивает взаимосвязь между результатами расчета сооружения на различные нагрузки и конструированием его элементов.
В общем случае полное количество сочетаний нагрузок достигает числа 2п, где п-количество приложенных нагрузок. Практически это означает, что для рассчитываемой конструкции необходимо найти 2п напряженно-деформированных состояний, а это неприемлемо даже при использовании современной техники. Уже при сравнительно небольшом значении п достижение результата становится затруднительным, а объем его - необозримым. В связи с этим возникает следующая задача: найти критерий, на основании которого можно было бы ограничить количество рассматриваемых сочетаний нагрузок до числа m (m«2п). Конструирование, выполненное на основании m сочетаний, должно обеспечить прочность конструкции для всех 2п сочетаний.
Для решения этой задачи применяются различные подходы.
Один из таких подходов основан на вычислении расчетных сочетаний нагрузок (РСН) и соответствующих им усилий на основании нормированных формул. Такой подход принят как основной в странах Европы и США. Он вытекает из вероятностной оценки вклада той или иной нагрузки в итоговое напряженно-деформированное состояние сооружения. Для каждого сооружения рассматривается всегда одинаково ограниченное количество сочетаний. При этом весьма вероятно, что наиболее опасные сочетания будут упущены.
Отечественная школа расчета сооружений предлагает два способа решения этой задачи. Оба они основаны на принципе суперпозиции, который справедлив для линейно деформируемых систем. Вследствие этого задача определения опасных сочетаний нагрузок преобразуется в задачу определения опасных сочетаний усилий. Эти последние называются расчетными сочетаниями усилий (РСУ).
Первый из способов базируется на критерии экстремальных усилий в сечении, когда экстремальному значению одного из усилий ставится в соответствие сумма остальных. Например, Ммакс-Мсоотв. MMaKC-NcooTB- Этот способ имел широкое применение в проектной практике.
Второй способ определения РСУ является общим и основан на нахождении экстремумов упругого потенциала в любой точке конструкции от действия многих нагрузок (или многих загружений) [47,48]. Критерий экстремальных усилий при этом рассматривается как частный случай. Применение общего способа приводит к ограниченному (гораздо менее 2п) количеству рассматриваемых РСУ, которые и являются наиболее опасными.
В ПК ЛИРА реализован именно общий способ. При определении РСУ учитываются особенности упругого потенциала, характерные для сечений стержней, пластин, оболочек и объемных тел. Эти особенности позволяют выразить решение задачи через критерий экстремальных напряжений в характерных точках сечений. Благодаря этому количество рассматриваемых сочетаний ограничивается еще более существенно.
5.1 Стержни
В качестве критерия определения РСУ здесь приняты экстремальные значения нормальных и касательных напряжений в контрольных точках сечения (рис. 5.1).
Для нормальных напряжений применяется следующая формула:
где: к - точка сечения стержня (к = 1 + 9).
37
ЛИРА® 9 2 Руководство пользователя
Эта формула преобразуется следующим
образом при у = ±—-z = +—: 2’ 2
М Mz
—— + —— ^z,i ^y.i
(5.2)
где: ЯУ1 и Я11 - ядровые расстояния в сечении стержня (1=1,2).
Такой подход позволяет определить экстремальные нормальные напряжения в сечении любой формы, приведя ее к прямоугольной.
Для касательных напряжений используется приближенная формула:
Qy,z + М Кр ~2~~
(5.3)
Формулы вычисления экстремальных значений для каждой точки сечения приведены в табл. 5.1, а нумерация «критериальных» значений и соответствующих им напряжений - в табл. 5.2. В таблице 5.1 используется принятое для усилий правило знаков.
Кроме экстремальных напряжений вычисляются также экстремальные значения продольной и перерезывающих сил.
Всего для сечения стержня отбирается 34 значения РСУ.
Таблица 5.1
№ точки сечения Нормальные напряжения Касательные напряжения сечения
1 oF = N + Му /Hz2 + Mz /Яу1 —
2 ctF = N + Му /Яг2 - Mz /Яу2 —
3 oF=N - Му/Яг1 - Мг/Яу2 —
4 oF=N - Му/Яг1 +Мг/Яу1 —
5 nF = N + Мг/Яу1 -р - Q* + 2 + 2(Я„.Яу!)
6 oF = М - Мг/Яу2 *Я! I 2 2(ЯУ1+Я„)
7 oF = N + Му/Яй гс = Q । Мкр 2 2(Я„+Я,г)
8 oF = N - Му/Яй Тр = ^г— т 2 2(Я,1+Я„)
38
Принципы определения расчетных сочетаний усилий (РСУ)
Критерии и их значения.
Таблица.5.2
№№ критериев 1 2 3 4 5 6 7 8 9 10
Значение 01 + О1- о2 + о2- Оз + Оз о4 + ОД" Т7 + т7-
№№ критериев 11 12 13 14 15 16 17 18 19 20
Значение т8 + Т8 - т5 + т5- Тб + Тб N+ N- О7 + О7-
№№ критериев 21 22 23 24 25 26 27 28 29 30
Значение о8 + о8- О5 + О5~ Об Об Qy+, N+ Qy-, N+ Qy+, N- Qy-, N-
№№ критериев 31 32 33 34
Значение Qz+, N+ Qz-, N+ Qz+, N- Qz-, N-
5.2 Плоское напряженное состояние
В общем случае главные напряжения в здной и той же точке конструкции для разных загружений имеют различную ориентацию. Поэтому здесь определение РСУ производится то огибающим экстремальным кривым нормальных и касательных напряжений по формулам:
ff«. = Nx cos2 ak + Nz sin2 ak + Txz sin 2ak (5.4)
= (Nz - Nx )sin 2ak + Txz COS 2a k (5.5)
где: /г - номер загружения.
Рис. 5.2
Обозначения приведены на рис. 5.2.
Напряжения вычисляются в диапазоне от 0° до 180°.
5.3 Плиты
Здесь применяется подход, аналогичный тому, который описан в п. 5.2. Изгибные и крутящий моменты в плите дают возможность определить нормальные и касательные напряжения на верхней и нижней поверхностях плиты. Эти напряжения по модулю равны, поэтому формулы ? 3.5.4) и (3.5.5) приобретают вид:
Ma = М„ cos2 ak + М„ sin2 ak + Мхи sin2ak Л Л Jf Л Л jf п
MCa„ = j (МУ -Mx)sin 2ак + cos 2ак
(5.6)
(5.7)
39
ЛИРА® 9.2 Руководство пользователя
5.4 Оболочки
Здесь также применяется аналогичный подход. Напряжения вычисляются на верхней и нижней поверхностях оболочки. При этом учитываются мембранные напряжения и изгибающие усилия по следующим зависимостям:
1/ , 6Л4 н/ .. 6Ми н/ 6М„„
^/B=Nx+—^ ^=Ny±-^, ТЛ=Тху±—^ (5.8)
где: h - толщина оболочки;
вин — индексы, означающие принадлежность к верхней и нижней поверхностям.
5.5 Объемные элементы
Критерием для определения опасных сочетаний напряжений в общем случае НДС приняты экстремальные значения среднего напряжения (гидростатического давления) и главных напряжений девиатора. Определяются углы наклона главных напряжений в каждом элементе для каждого загружения. Вычисление производится по формулам:
сг„ =(тх12 + сгут2 + crzn2 + 2гху/т +2тХ21п + 2тугтп;
<ТТМ 0 ’
f и Ч ( 1 Ч л « ч (5 9)
sx J;Sy z =°Ч1~Зл2/
S. = Sx/2 + Sym2 +Szn2 + 2тху!т + 2т„1п+ 2ryzmn
где:
<Тф - нормальное напряжение на площадке с направляющими косинусами I, т, п к осям Х1, Y1. Z1;
5ф - нормальное напряжение девиатора на этой же площадке;
Сто _ (°* + + az) _ среднее напряжение.
Процесс выбора организован следующим образом. Для данного элемента вычисляются направляющие косинусы главных площадок по всем загружениям. Если в схеме задано п загружений, то будет найдено Зп площадок. Затем вычисляются напряжения 8ф на этих площадках от всех загружений и производится накопление положительных и отрицательных значений напряжений.
В соответствии с этим принято обозначение критериев как трехзначных чисел. Первые две цифры обозначают порядковый номер загружения, на площадках которого вычисляются напряжения от всех загружений. Третья цифра может принимать значения от 1 до 6, которым придается следующий смысл:
1 - положительное суммарное значение напряжения на первой главной площадке;
2 - отрицательное суммарное значение напряжения на первой главной площадке;
3 и 4 - то же на второй главной площадке;
5 и 6 - то же на третьей главной площадке.
Так, например, критерий 143 означает, что на второй главной площадке 14-го загружения получено наибольшее положительное напряжение. Критерий 076 означает, что на третьей главной площадке 7-го загружения получено наибольшее отрицательное напряжение.
Критерии, соответствующие наибольшему и наименьшему значениям среднего напряжения, обозначаются цифрами 7 и 8 соответственно.
40
Принципы определения расчетных сочетаний усилий (РСУ)
U Загружения
При определении РСУ учитываются логические связи между загружениями, которые отражают физический смысл загружений и требования, регламентируемые различными нормативными документами. Выделяются три типа загружений:
• независимые (собственный вес, вес оборудования и т.п.);
• взаимоисключающие (ветер слева и ветер справа, сейсмическое воздействие вдоль разных осей координат и т.п.);
• сопутствующие (тормозные при наличии вертикальных крановых нагрузок и т.п.).
Предоставляется также возможность обозначить знакопеременность загружения при одинаковом модуле его вектора.
41
ЛИРА® 9.2 Руководство пользователя
6 Расчет на устойчивость
Реализованный вариант расчета на устойчивость предполагает, что распределение сил No известно из линейного расчета. Требуется найти значение числового параметра 2о такое, чтобы при силах (Ао * No) произошла потеря устойчивости.
Задача определения критических сил и соответствующих им форм потери устойчивости допускает следующую вариационную формулировку: найти перемещения и * 0 и число Ао такие, чтобы при всех допустимых перемещениях v было справедливо равенство
a(u,v) = 20d(u,v), (6.1)
где: d(u,v)~ возможная работа сил при заданном их распределении No.
Пользуясь выражением (1.3) и обозначив D матрицу с элементами d(.;. - получим
из (6.1) задачу на собственные значения для матриц
КХ = A0DX (6.2)
Погрешность МКЭ в задаче устойчивости для критических сил и соответствующих им форм потери устойчивости пропорциональна hr.
Для решения общей устойчивости применяется метод итерации подпространств (QR-метод), аналогичный методу вычисления частот и форм собственных колебаний в задачах динамики. Этот метод позволяет определить не только первую, но и высшие формы потери устойчивости и соответствующую им критическую нагрузку. В данной версии допускается не более трех форм.
По желанию пользователя могут быть выполнены два варианта расчета:
классический расчет устойчивости по Эйлеру, когда при составлении матрицы D учитываются только продольные усилия в стержнях и мембранные усилия в оболочках;
расчет устойчивости с учетом изгибно-крутильных форм, когда при составлении матрицы D учитываются все усилия.
Расчет реализуется в упругой стадии. Значения усилий в элементах схемы уже вычислены с помощью линейного процессора. При выполнении расчета на устойчивость предполагается, что эти значения выражены через критический параметр нагрузки:
(6.3)
где:
/ - номер загружения;
j - номер элемента в схеме;
Pi- суммарная нагрузка в /-том загружении;
Pxpi- критическая нагрузка в /-том загружении;
Nij- усилия в /-том элементе в /-том загружении;
NKpij - критические усилия в /-том элементе в /-том загружении;
Ai - параметр нагрузки (коэффициент запаса устойчивости).
В процессе счета для каждого загружения определяются первые несколько форм потери устойчивости и соответствующие им коэффициенты запаса.
Допускается также производить проверку устойчивости по линейным комбинациям загружений (РСН).
Если в расчете схемы присутствуют динамические загружения, то расчет устойчивости длг них может быть произведен только после вычисления комбинаций загружений (РСН). Это связанс с тем, что разложенные по формам колебаний результаты расчета на динамическое воздействие необходимо преобразовать в суммарные.
42
Расчет на устойчивость
В результате вычисляются коэффициенты запаса устойчивости Я/, первые формы потери устойчивости и коэффициенты свободной длины для стержневых элементов, исходя из общей устойчивости, по следующим формулам:
^Уи
(6.4)
где:ду#у, nzij- коэффициенты свободной длины j-того стержня соответственно в плоскостях X1oZ1, X1oY1 для i-того загружения;
EJyj, EJZJ- изгибные жесткости j-того стержня в плоскостях соответственно Х1 oZ1, Х1 oY1;
Ыкрц = A. *Nij - критическое продольное усилие сжатия в j-том стержне для i-того загружения;
Л- коэффициент запаса устойчивости для i-того загружения;
lj - длина j-того стержня.
43
ЛИРА®9.2 Руководствопапьзователя
7 Решение нелинейных задач
7.1 Общие положения
Нелинейный процессор предназначен для решения физически и геометрически нелинейных, а также задач с наличием конструктивной нелинейности.
В линейных задачах существует прямая пропорциональность между нагрузками и перемещениями вследствие малости перемещений, а также между напряжениями (усилиями) и деформациями в соответствии с законом Гука. Поэтому для линейных задач справедлив принцип суперпозиции и независимости действия сил.
В физически нелинейных задачах отсутствует прямая пропорциональность между напряжениями и деформациями. Материал конструкции подчиняется нелинейному закону деформирования. Закон деформирования может быть симметричным и несимметричным - с различными пределами сопротивления растяжению и сжатию. Решение этих задач производится шаговым методом.
В геометрически нелинейных задачах отсутствует прямая пропорциональность между деформациями и перемещениями. На практике наибольшее распространение имеет случай больших перемещений при малых деформациях. Решение этих задач производится шаговым методом, причем шаг выбирается автоматически.
В задачах конструктивной нелинейности имеет место изменение расчетной схемы по мере деформирования конструкции, например, в момент достижения некоторой точкой конструкции определенной величины перемещения возникает контакт этой точки с опорой. При решении задач конструктивной нелинейности применяется шагово-итерационный метод.
Для решения нелинейных задач процессор организует пошаговое нагружение конструкции и обеспечивает решение линеаризованной системы уравнений на каждом шаге для текущего приращения вектора узловых нагрузок, сформированного для конкретного нагружения. В работах [10, 15] приведены геометрическая и физическая интерпретации, доказательство сходимости и оценка погрешности для наиболее распространенных методов решения нелинейных задач.
Нелинейный процессор позволяет получить напряженно-деформированное состояние для мономатериальных и для биматериальных, в частности железобетонных, конструкций.
Для решения нелинейных задач необходимо задавать информацию о количестве шагов и коэффициентах к нагрузке. Схема может содержать несколько нагружений, из которых допускается формировать последовательность (историю) нагружений.
7.2 Расчет физически нелинейных задач
Моделирование физической нелинейности материалов конструкций производится с помощью физически нелинейных конечных элементов, воспринимающих информацию из развитой библиотеки законов деформирования материалов (зависимостей о-е). Библиотека законов деформирования позволяет учитывать практически любые физически нелинейные свойства материала. Эта библиотека законов деформирования материала является библиотекой открытого типа и может пополняться новыми законами.
Шаговый процессор позволяет получить напряженно-деформированное состояние, с учетом нелинейных эффектов как для мономатериальных, так и для биматериальных конструкций. Для последних предлагается определенный набор характеристик второго материала (армирующих включений).
Библиотека физически нелинейных конечных элементов содержит также элементы, позволяющие моделировать одностороннюю работу твердого тела и сыпучей среды - грунта на сжатие, с учетом сдвига по схеме плоской деформации в соответствии с законом Кулона.
Матрица жесткости линеаризованной физически нелинейной системы формируется на основании переменных интегральных жесткостей, вычисляемых в точках интегрирования конечного элемента при решении упругой задачи на конкретном шаге. Схема численного интегрирования по области конечного элемента и набор используемых жесткостей определяются типом конечного элемента. Чтобы получить соответствующий набор интегральных жесткостей, сечение конечного элемента в точках интегрирования дробится на ряд элементарных
44
Решение нелинейных задач
подобластей. В центрах этих подобластей определяются новые значения физико-механических характеристик материала в соответствии с заданной диаграммой деформирования. На каждом шаге решается линеаризованная задача с формированием векторов перемещений, усилий и
новых интегральных жесткостей по касательному модулю для последующего шага. Количество шагов и коэффициенты к нагрузке задаются
пользователем. Геометрическая интерпретация шагового метода для случая одноосного растяжения (сжатия)
представлена на рисунке 7.1.
Шаговый процессор позволяет комбинировать линейные и нелинейные
конечные элементы. Допускается расчет по суперэлементной схеме, если нелинейные
элементы присутствуют только в основной схеме.
На каждом шаге
’поизводится оценка напряженно-деформированного состояния. В разделе результатов расчета Сведения о состоянии материалов» приводятся сообщения о развитии или достижении тседельных состояний, появлении пластических шарниров или состояний разрушения.
Для стержневых конечных элементов анализируется напряженно-деформированное состояние поперечных сечений стержня в точках дробления. Напряженно-деформированное состояние в плоских и объемных конечных элементах анализируется в центральной точке элемента.
Библиотека физически нелинейных КЭ содержит элементы, позволяющие производить статический анализ конструкций, состоящих из разнородных конечных элементов, с учетом физической нелинейности материала. Состав библиотеки приведен в табл. 7.1, а более подробная информация содержится в п. 7.6.
45
ЛИРА® 9.2 Руководство пользователя
Таблица
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
205 (2Ю) Универсальный пространственный стержневой конечный элемент суперэлементного построения (Универсальный пространственный стержневой конечный элемент равновесного построения) *Z Л / tYi / Z1\ / \ / 1 абсолютно жесткие вставки 1 1 2 3 4 5 XOZ XOZ XOY произвольно X.Z X, Z, UY X.Y.Z X.Y.Z их, uy, и;
221 (223) Прямоугольный элемент балки-стенки AZ Zi \^' V. .. 3V \ Л \\ <Yi >7 \\ / 2 1 1 2 5 (4,5) XOZ (произвольно) x,z (X,Y,Z)
I 222 (224) Треугольный элемент балки-стенки AZ Zi \ \ ^-Х 1 2 5 (4,5) XOZ (произвольно) x,z (X,Y^)
46
Решение нелинейных задач
Таблица 7.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
230 (227) Четырехугольный (8-узловой) элемент балки-стенки ♦Zl л А 5 А X, 1 2 (4,5) XOZ (произвольно) X.Z (X, Y, Z)
231 Параллелепип Zi 5 ! : xYi г [Л з 1 ед 6 2 8 * .Xi 4 5 произвольно X, Y, Z
232 Гетраэд |Z z’ Y D 4 / ’Y'\ XX>9 ’x, X 4 5 произвольно X, Y.Z
I 233 Прям; HZ i 4 Л зя Tpeyroj lz1/\ I I x’V 1 2 пьная призма 5 * Yi *.Xi : ►x 4 5 произвольно X, Y.Z
47
ЛИРА® 9.2 Руководство пользователя
Таблица 7.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
234 Г V ( 1ространственный 6-ти узловой зопараметрический элемент произвольная треугольная призма) LZ .6 । \ \ / |\5 / 1 \ / 1 \ 1 \ Л / 1 2 / 4 5 произвольно X, Y, Z
236 Г и (| 1ространственный 8-ти узловой зопараметрический элемент произвольный гексаэдр) 12 Z___ 8 2 х л 4 5 произвольно X, Y, Z
241 Г 1рямоугольный элемент оболочки 1Z1 X Y1 3 X 4 х. 5 произвольно X, Y, Z, UX, UZ, UY
242 т реугольный элемент оболочки iZi 2 ,Yi \ \з ►Xi 5 произвольно X.Y.Z UX.UY.UZ
48
Решение нелинейных задач
Таблица 7.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
244 I Универсальный четырехугольный конечный элемент оболочки н а 4 * / \ г \ -ч. 5 произвольно X, Y, Z, UX, UY, UZ : I
281 Прямоугольный элемент грунта (плоская деформация) Zi W У \ \ ^ )<Л 3\\ х'''"' 1 2 XOZ Плоская деформация X,Z j
282 Треугольный элемент грунта (плоская деформация) Zi Ч>Л ►Х 1 2 XOZ Плоская деформация X,Z
284 Четырехугольный элемент грунта (плоская деформация) 1 2 XOZ Плоская деформация X,Z
ЛИР^Э^ Руководствопользователя
7.3 Библиотека законов деформирования материалов
Библиотека законов деформирования основного и армирующего материалов приведена в табл. 7.2. Для бетона прочностные характеристики приняты в соответствии с [16].
Таблица 7.2
Индекс закона
Вид зависимости
Параметры
Экспоненциальная зависимость о
Кусочно-линейная зависимость
14
Её - начальное значение модуля Юнга на сжатие;
о-.р - предельное значение напряжения на сжатие (отрицательное значение);
Её - начальное значение модуля Юнга на растяжение;
ст* - предельное значение напряжения на растяжение.
Предоставляется возможность задавать предельное значение деформации и коэффициент запаса по обобщенному напряжению.
Закон с индексом 11 может быть применен для любого материала, как основного, так и армирующего.
Закон с индексом 21 формируется автоматически в соответствии с расчетной прочностью классов бетона.
Закон с индексом 31 формируется автоматически в соответствии с нормативной прочностью классов бетона.
Сцепление с армирующим материалом не учитывается.
ej - деформация в i-той промежуточной точке; ст,- - напряжение в i-той промежуточной точке. Характеристики ветви сжатия являются отрицательными числами.
Участки задаются слева направо (сжатие-растяжение).
Количество i-точек не ограничено.
Если значение обобщенной деформации выходит за пределы заданной ломаной, то моделируется выключение материала ;Е: = 1) элементарной площадки из работы сечения. Горизонтальные участки задавать запрещено. Закон с индексом 14 может быть применен для любого материала, как основного так и армирующего.
50
Решение нелинейных задач
Таблица 7.2
Индекс закона Вид зависимости Параметры
15 25 35 Экспоненциальная железобетона о лр е "Р зависимость для Ео - начальное значение модуля Юнга на сжатие; о-.р - предельное сопротивление на сжатие; с;? - предельная деформация на сжатие (отрицательное число); Ео - начальное значение модуля Юнга на растяжение; о-; - предельное сопротивление на растяжение; £ р - предельная деформация на растяжение. Закон с индексом 25 формируется автоматически в соответствии с расчетной прочностью классов бетона. Закон с индексом 35 формируется автоматически в соответствии с нормативной прочностью классов бетона. Учитывается сцепление с армирующим материалом |
—1 л У । Е°/ 1 // 1 ✓/ 1 / е+ е 1ф °лр
7.4 Типы дробления сечений стержней
Типы дробления сечений стержневых элементов приведены в табл. 7.3.
Таблица 7.3
Идентификатор Тип сечения Тип дробления Параметры
DS0 S100-S106 Отсутствие дробления Не задаются. Применяется при расчете сжато-растянутых систем (ферм).
Дробление сечения на элементарные полосы
Zo
DS1 S100 NZ=8 Зависит от типа сечения. Применяется в задачах плоского изгиба. NZ - число полос дробления по вертикальной оси. По умолчанию: NZ = 5.
Yo
51
ЛИРА® 9.2 Руководство пользователя
7.3
Тип сечения
Тип дробления
Параметры
S101
*Zo
NZ1 - число полос дробления нижней полки;
NZ2 - число полос дробления стойки.
По умолчанию: NZ1 = 5, NZ2 = 5.
S102
Yo
NZ1 - число полос дробления стойки;
NZ2 - число полос дробления верхней полки.
По умолчанию: NZ1 = 5, NZ2=5.
DS1
S103
Yo
NZ1 - число полос дробления нижней полки;
NZ2 - число полос дробления стойки;
NZ3 - число полос дробления верхней полки;
По умолчанию: NZ1 = 4, NZ2 = 8, NZ3 = 4.
DS1
S104
NZ1 - число полос дробления в полках (полки имеют равное дробление): NZ2 - число полос дробления стойки. По умолчанию: NZ1 = 2, NZ2=4
52
Решение нелинейных задач
7.3
Тип сечения
Тип дробления
Параметры
S105
NZ1 - число полос дробления в полках (полки имеют равное дробление);
NZ2 - число полос дробления в стойках (стойки имеют равное дробление).
По умолчанию: NZ1 = 2, NZ2=4.
DS2
Дробление сечения на элементарные прямоугольники
Зависит от типа сечения.
Применяется в задачах пространственного изгиба, косого изгиба, сложного пространственного нагружения.
NZ - число участков дробления по вертикальной оси;
NY - число участков дробления по горизонтальной оси.
По умолчанию: NZ=5, NY=5.
DS2
S101
S102
NZ1 - число участков дробления нижней полки по вертикальной оси;
NZ2 - число участков дробления стойки по вертикальной оси;
NY1 - число участков дробления нижней полки по горизонтальной оси;
NY2 - число участков дробления стойки по горизонтальной оси.
По умолчанию:
NZ1 = 5, NZ2 = 5,
NY1 = 5, NY2 = 5.
NZ1 - число участков дробления стойки по вертикальной оси;
NZ2 - число участков дробления верхней полки по вертикальной оси;
NY1 - число участков дробления стойки по горизонтальной оси;
NY2 - число участков дробления верхней полки по горизонтальной оси.
По умолчанию:
NZ1=5,NZ2=5,
NY1 = 5, NY2 = 5.
53
ЛИРА® 9.2 Руководствопользовагпеля
7.3
Тип сечения
Тип дробления
Параметры
S103
NY1=4
DS2 S104
NZ1 - число участков дробления нижней полки по вертикальной оси;
NZ2 - число участков дробления стойки по вертикальной оси;
NZ3 - число участков дробления верхней полки по вертикальной оси;
NY1 - число участков дробления нижней полки по горизонтальной оси;
NY2 - число участков дробления стойки по горизонтальной оси;
NY3 - число участков дробления верхней полки по горизонтальной оси.
По умолчанию:
NZ1 = 5, NZ2 = 5, NZ3 = 5,
NY1 = 5, NY2 = 5, NY3 = 5.____________
NZ1 - число участков дробления нижней полки по вертикальной оси;
NZ2 - число участков дробления по вертикальной оси;
NZ3 - число участков дробления верхней полки по вертикальной оси;
NY1 - число участков дробления нижней полки по горизонтальной оси;
NY2 - число участков дробления по горизонтальной оси;
NY3 - число участков дробления верхней полки по горизонтальной оси.
По умолчанию:
NZ1 = 3, NZ2 = 5, NZ3 = 3,
NY1 = 5, NY2 = 2, NY3 = 5.
NZ1 - число участков дробления нижней полки по вертикальной оси;
NZ2 - число участков дробления стоек по вертикальной оси;
NZ3 - число участков дробления верхней полки по вертикальной оси;
NY1 - число участков дробления нижней полки по горизонтальной оси;
NY2 - число участков дробления стоек по горизонтальной оси;
NY3 - число участков дробления верхней полки по горизонтальной оси.
По умолчанию:
NZ1 = 3, NZ2 = 5, NZ3 = 3,
NY1 = 5, NY2 = 2, NY3 = 5.
54
Решение нелинейных задач
7.5 Типы арматурных включений
Типы арматурных включений для стержневых элементов приведены в табл. 7.4.
Типы арматурных включений для плоскостных элементов приведены в табл. 7.5.
Тип арматурного включения для объемных элементов приведен в табл. 7.6.
______________________________________________________________________Таблица 7.4
Идентификатор Тип арматурных включений Поле параметров
SA0 Процент армирования (% арматуры от площади сечения бетона) N - процент армирования (на 100 см длины). Применяется только в сжато-растянутом стержне.
SA1 Листовая горизонтал! защитного слоя >ная арматура без lZo Fai - площадь листа арматуры, dim [см2]; Z1 - привязка листа относительно оси Yo, dim [см]. В типе сечения S105 при задании в стойках моделируется одним листом при дроблении DS1 и двумя листами при дроблении DS2.
F02
Z1 к , к Fol
*0
55
ЛИР^9^2 Руководствопользователя
Таблица 7.4
Тип арматурных включений
Поле параметров
SA2
Листовая вертикальная арматура без
Fai - площадь листа арматуры, dim [см2];
Y1 - привязка листа относительно оси Zo, dim [см]
В типах сечения S104, S105 при задании в пределах полок моделируется двумя листами; в типе сечения S103 допускается только в пределах стойки.
SA3
Fai - площадь точечной арматуры, dim [см2];
Y1 - привязка арматурной точки к оси Zo, dim [см];
Z1 - привязка арматурной точки к оси Yo, dim [см].
SA4
Листовая горизонтальная арматура с защитным слоем, симметричная относительно оси Zo
Fai - площадь листа арматуры, dim [см2];
Ai - защитный слой, dim [см];
Z1 - привязка листа относительно оси Yo, dim [см].
В типе сечения S105 при задании в стойках моделируется одним листом при дроблении DSI и двумя листами при дроблении DS2.
56
Решение нелинейных задач
Таблица 7.4
Тип арматурных включений
Поле параметров
SA5
SA6
SA7
Листовая вертикальная арматура с защитным слоем, симметричная относительно горизонтальной оси симметрии сечения
Листовая горизонтальная арматура общего вида
Листовая вертикальная арматура общего вида
Fai - площадь листа арматуры, dim [см2];
Y1 - привязка листа относительно оси Zo, dim [см];
Bi - защитный слой, dim [см].
В типах сечения S104, S105 при задании в полках моделируется двумя листами; в типе сечения S103 допускается только в пределах стойки.
Fai - площадь листа арматуры, dim [см2];
Z1 - привязка листа относительно оси Yo, dim [см];
All - защитный слой левый, dim [см];
A2i - защитный слой правый, dim [см];
В типе сечения S105 при задании в стойках моделируется одним листом при дроблении DSI и двумя листами при дроблении DS2, при этом А1 i - защитный слой внешних граней сечения, A2i -защитный слой внутренних граней.
Fai - площадь листа арматуры, dim [см2];
Y1 - привязка листа относительно оси Zo, dim [см];
Bli - защитный слой нижний, dim [см];
B2i - защитный слой верхний, dim [см].
В типах сечения S104, S105 при задании в полках моделируется двумя листами при дроблении DS2, при этом: Bli - защитный слой внешних граней сечения, B2i - защитный слой внутренних граней; в типе сечения S103 допускается только в пределах стойки.
57
ЛИРА®9.2 Руководствопользователя
Таблица 7.4
Тип арматурных включений
Поле параметров
Кольцевая арматура в кольцевом
SA8
сечении
Yo
Dai - диаметр оси кольцевой арматуры, dim [см];
Hai - толщина кольца, dim [см].
Fai - площадь точечной арматуры, dim [см2];
Dai - диаметр регулярного точечного включения, dim [см];
Gi - шаг сектора (угол между точками), dim [градус];
Goi - начальная угловая привязка, dim [градус];
Точечная одиночная арматура в кольцевом сечении
Fai - площадь точечной арматуры, dim [см2];
Dai - диаметр точечного включения, dim [см];
Gai - угловая привязка, dim [градус].
58
Решение нелинейных задач
Таблица 7.5
Тип арматурных включений
Параметры
SAO
Процент армирования (отношение объема арматуры к объему конечного элемента)
a) N - общий процент армирования.
б) Nx - процент армирования вдоль оси X; Nz - процент армирования вдоль оси Z.
Nx+ Nz = N
В КЭ 2214- 230 используется вариант "б", где процент армирования представляет собой отношение площади арматуры к площади поперечного сечения элемента.
SA1
Арматура листового типа (физический эквивалент листа)
- толщина листа арматуры, dim [см];
Z4 - привязка листа к серединной поверхности, dim [см];
Ограничения: до пяти листов.
SA2
Арматура стержневого типа (физический эквивалент сетки)
hyl - эквивалентная толщина стержневой арматуры сетки по оси Y, dim [см];
hxi - эквивалентная толщина стержневой арматуры сетки по оси X, dim [см];
ZC(. - привязка сетки к серединной поверхности, dim [см];
Ограничения: до пяти арматурных включений.
SA3
Арматура стержневого типа (физический эквивалент стержневой арматуры осевой ориентации)
hxi - эквивалентная толщина стержневой арматуры по оси X, dim [см];
Zci - привязка стержней к серединной поверхности, dim [см].
Ограничения: до пяти арматурных включений; массив стержней предполагается расположенным в одной плоскости.
59
ЛИРА® 9.2 Руководство пользователя
Таблица 7.5
Идентификатор Тип арматурных включений Параметры
SA4 Apr (фи apiv латура стержневого типа □ический эквивалент стержневой чатуры осевой ориентации) Zo х X Yo hyl - эквивалентная толщина стержневой арматуры по оси Y, dim [см]; Zc, - привязка стержней к серединной поверхности, dim [см]. Ограничения: до пяти арматурных включений; массив стержней предполагается расположенным в одной плоскости.
/ |hyl
h
/S *-zcl Хо
!hy2
SA11 Арматура листового типа (физический эквивалент листа в процентах армирования) - аналог SA1 N., - процент армирования для i-ro листа (в процентах к объёму конечного элемента ), dim [ % ]; Z., - привязка листа к серединной поверхности, dim [см]. Ограничения: до пяти листов.
SA12 Арматура стержневого типа (физический эквивалент сетки в процентах армирования) - аналог SA2 Nyi - процент армирования для i-й сетки по оси Y (в процентах к площади грани I-2K3), dim[%]; Wx/. - процент армирования для i-й сетки по оси X (в процентах к площади грани 1-ЗКЭ), dim[%]; Zcl - привязка сетки к серединной поверхности, dim [см ]. Ограничения: до пяти арматурных включений.
SA13 Арматура стержневого типа (физический эквивалент стержневой арматуры осевой ориентации в процентах армирования) - аналог SA3 - процент армирования для i-ro включения по оси X (в процентах к площади грани 1-3 КЭ), dim[% ], ZC( - привязка стержней к серединной поверхности, dim [см ]. Ограничения: до пяти арматурных включений; массив стержней предполагается расположенным в одной плоскости.
SA14 Арматура стержневого типа (физический эквивалент стержневой арматуры осевой ориентации в процентах армирования) - аналог SA4 Nyi - процент армирования для i-ro включения по оси Y (в процентах к площади грани 1-2 КЭ), dim[%]; Zcl - привязка стержней к серединной поверхности, dim [см ]. Ограничения: до пяти арматурных включений; массив стержней предполагается расположенным в одной плоскости.
60
Решение нелинейных задач
Таблица 7.6
Идентификатор Тип арматурных включений Параметры
SA0 Процент армирования (отношение площади арматуры к площади перпендикулярного сечения элемента вдоль осей X, Y, Z) Fai = Sai/Sbi* 100%, (i=X,Y,Z), где: Sai - суммарная площадь арматуры по i-тому направлению; Sbi - площадь i - того сечения основного материала Fx - процент армирования вдоль оси X; Fy - процент армирования вдоль оси Y; Fz- процент армирования вдоль оси Z. По каждому из направлений армирования арматура учитывается раздельно со своим коэффициентом.
7.6 Библиотека конечных элементов для физически нелинейных задач
Конечные элементы предназначены для моделирования и анализа напряженно-деформированного состояния конструкций с учетом физической нелинейности материала, из которого они выполнены.
7.6.1 Стержневые конечные элементы (КЭ 210 и 205)
КЭ 210 - стержень с переменными координатными функциями.
Матрица жесткости элемента на каждом шаге строится на основании функций, удовлетворяющих однородным уравнениям равновесия при интегральных жесткостях предыдущего шага. При решении уравнений равновесия используется численное интегрирование по пятиточечной квадратурной схеме Гаусса.
КЭ 205 - суперэлементный стержневой элемент. Элемент разбивается по длине (между жесткими вставками) на к (3 < к < 21) равных подэлементов (по умолчанию к = 3). Матрица жесткости подэлемента строится по полученным на предыдущем шаге интегральным жесткостям и координатным функциям конечного элемента 10. Матрица жесткости элемента получена суперэлементным методом.
Интегральные жесткости определяются на каждом шаге для сечений, расположенных в точках интегрирования по длине стержня, по значениям модулей Юнга в дискретных точках поперечного сечения в соответствии с заданным пользователем дроблением.
В стержневых конечных элементах определяются следующие интегральные жесткости:
EF = [EtdF+lEadFa, Ely = [Etz2dF+£Eaz2dFa,
Elz = [E^dF+lEay2dFa, ESy = [E.zdF+^E.zdF,,
(7.1)
FS2 = [F,ydF+j_£:eydFa( ESyz =
jEtyzdF+f EayzdFa
где: Et - значение модуля Юнга в точке для основного материала сечения (бетона);
Еа - значение модуля Юнга в точке для армирующего материала.
Текущие значения модулей Юнга в точке определяются по выбранной зависимости напряжение - деформация из предлагаемого набора библиотеки законов деформирования. Обобщенная деформация в точке определяется из гипотезы плоских сечений:
61
ЛИРА® 9.2 Руководство пользователя
du dv d2w
dx r dx2 dx2
(7.2)
7.6.2 Конечные элементы тонких пластин и пологих оболочек (КЭ 221-224, 227, 230, 241, 242, 244)
Предназначены для решения плоской задачи теории упругости (плоское напряженное состояние и плоская деформация), а также прочностного расчета тонких и пологих оболочек с учетом физической нелинейности материала.
Теоретические сведения о конечно-элементном подходе к решению задачи изгиба и плоской задачи теории упругости справедливы и для плоских физически нелинейных конечных элементов.
Элементы матрицы жесткости определяются с использованием численного интегрирования в следующей форме:
киМиИУк}»
о -5
(7.3)
где: О - область конечного элемента;
Е- матрица интегральных жесткостей k-го шага;
Е- вектор деформаций.
Размерность и компоненты матрицы упругих характеристик зависят от типа конечного элемента. Матрица упругих характеристик конечного элемента плоской пологой оболочки (тип КЭ 241, 242 и 244) имеет вид, представленный в табл. 7.7:
где: Fi- интегральные жесткости плоского напряженного состояния; Di- интегральные жесткости задачи изгиба; Ci- интегральные жесткости взаимовлияния этих двух состояний. Интегральные жесткости вычисляются численным интегрированием по толщине оболочки с учетом наличия арматурных включений. Они зависят от положения точки в Таблица 7.7
F1 F2 С1 С2
F3 F4 СЗ С4
F5 С5
С1 С2 D1 D2
СЗ С4 D3 D4
С5 D5
плане.
Например:
(7.4)
^a(z)-g6(z)_
о ✓ \
где:
E6(z) - модуль Юнга основного материала сечения (бетона);
Ea(z) - модуль Юнга армирующего материала;
v(z) - коэффициент Пуассона в точке;
п - число арматурных включений по толщине сечения оболочки.
62
Решение нелинейных задач
Конечные элементы плоской задачи представляют собой частные случаи конечного элемента оболочки. Для них интегральные жесткости изгиба и взаимовлияния равны нулю. Для решения плоской задачи применяется шагово-итерационный метод.
Определение новых значений модуля Юнга и приведенного коэффициента Пуассона производится по выбранному пользователем закону деформирования материала (табл. 7.2) на основании определенной в данной точке обобщенной деформации:
£i = ^(£х ~ £уТ + £ху (7-5)
При этом для оболочек используется выражение (7.5). Для плоской задачи вычисляются Е1, Е2-
Определение прочности двухкомпонентного (железобетонного) элемента производится на каждом шаге приложения нагрузки по полученным напряжениям и деформациям в центре тяжести КЭ.
Проверяются условия прочности основного материала (бетона) по главным напряжениям (ab aj и деформациям (e1t ej) в соответствии с заданным законом деформирования материала. При этом фиксируется образование одиночных и перекрестных трещин или выкалывание материала при сжатии.
Прочность арматуры в элементе с трещинами определяется с учетом нагельного эффекта в соответствии с [10]. При этом фиксируется текучесть, разрывы или смятие (срез) арматуры.
Для элементов бетонных и железобетонных стержней и оболочек определяется также прочность сечений в соответствии с действующими нормами.
Вся информация о состоянии КЭ на каждом шаге выдается в текстовый файл «Сведения о состоянии материала».
7.6.3 Конечные элементы плоской деформации грунтов (КЭ 281, 282, 284)
Данные элементы аналогичны КЭ 221, 222, 224. Учет специфики грунтов производится на основании зависимости Мора-Кулона для максимального касательного напряжения [4,52]:
ст, - а2 - sin(p) (ст, - ст2) + 2 С cos(p) , (7.6)
где:
ст», <Тг- главные напряжения;
С - сдвиговое сцепление;
Ф - угол внутреннего трения.
Расчет производится шагово-итерационным методом.
7.6.4 Конечные элементы для решения пространственной задачи теории упругости (КЭ 231-234, 236)
Предназначены для определения напряженно-деформированного состояния континуальных объектов и массивных пространственных конструкций в постановке физически нелинейной теории упругости. При этом предполагается, что в начальной стадии материал обладает изотропными свойствами, а при биматериальности - конструктивно-ортотропными (железобетон, фибробетон, композиты и др.).
При расчете применяется шагово-итерационный метод.
Элементы матрицы жесткости произвольного объемного элемента определяются по схеме численного интегрирования МКЭ в приращениях:
Ки = [{Ее,}те,с1У (7.7)
где:
£- вектор деформаций;
V- область элемента;
Е- матрица упругости k-того шага.
ЛИРА® 9.2 Руководствопользователя
Определение новых значений элементов матрицы упругости производится в центре тяжести КЭ по выбранным нелинейным законам деформирования материала на основании главных деформаций еь еъ £з-
7.7 Библиотека конечных элементов для геометрически нелинейных задач
Моделирование геометрической нелинейности производится с помощью конечных элементов, учитывающих изменение геометрии конструкции и работу мембранной группы напряжений (усилий) на новых перемещениях, что позволяет рассчитывать мембранные и вантовые конструкции.
При расчете геометрически нелинейных систем считается, что закон Гука соблюдается. На каждом шаге происходит учет мембранной группы усилий (для стержней - учет продольной силы) при построении матрицы жесткости.
Для решения геометрически нелинейных задач реализован автоматический выбор шага нагружения, что важно при расчете изначально геометрически изменяемых систем для нахождения их равновесной формы. Примером этого может служить нить, изначально имеющая форму параболы и нагруженная сосредоточенной силой. При этом для достижения необходимой точности первый шаг должен быть достаточно малым.
Состав библиотеки приведен в табл. 7.8.
Таблица 7.8
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
310 Унк сте Z нереальный пространственный ржневой конечный элемент (нить) V / " /X X 1 2 4 5 произвольно U,V,W UX, UY, UZ
308 Спе пре Z ьциальный стержневой конечный элемент •дварительного натяжения Z,/ / Y1 /^Y х 1 2 4 5 произвольно U,V,W
341 Прямоугольный элемент оболочки (мембрана) liZl Y1 3 4 »-Х1 5 произвольно и, V, W, UX, UY, UZ
64
Решение нелинейных задач
Таблица 7.8
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
342 Т реугольный элемент оболочки (мембрана) Z1 " ... 5 произвольно U,V,W, UX, UY, UZ
344 ч (' 1 етырехугольный элемент оболочки мембрана) 4 Z1 Y1 X 3 4 , XI 5 произвольно U,V,W, UX, UY, UZ
7.7.1 Универсальный стержневой элемент (КЭ - 310)
Конечный элемент ориентирован на обеспечение расчета всех видов стержневых систем с
учетом геометрической нелинейности и является аналогом универсального линейного стержневого конечного элемента (КЭ - 10).
КЭ 310 может работать как нить.
Для учета геометрической нелинейности стержня считается, что выполняется закон Гука
(стх=Еех), а входящая в это выражение деформация имеет следующий вид: _ du 1 (diT\2 .(dv\2 f dwY d2w „d2w
x dx 2|_ldxJ IdxJ IdxJ J dx2 Уdx2
(7-8)
На каждом шаге происходит учет нормальных напряжений при построении матрицы жесткости.
Конечный элемент имеет местную систему координат, относительно которой образует правую тройку.
7.7.2 Конечный элемент предварительного натяжения (КЭ 308)
Элемент ориентирован на создание предварительного натяжения. Первое загружение данного элемента (или группы элементов этого типа) в расчетной схеме обеспечивает появление в нем заданного усилия. Для последующих загружений КЭ 308 работает как КЭ 310. Каждый узел элемента имеет одну степень свободы - перемещение вдоль местной оси Х1 - и воспринимает только продольное усилие.
7.7.3 Конечные элементы тонких оболочек (КЭ 341, 342, 344)
Элементы предназначены для прочностного расчета тонких пологих оболочек с учетом геометрической нелинейности. Могут работать как элементы мембраны.
65
ЛИРА® 9.2 Руководствопользователя
При учете геометрической нелинейности оболочки полагается, что справедлив закон Гука, а деформации записываются в следующем виде:
г -du, 1(7d2w
* dx 21 dx J dx2 ’
p -dy , 11 div |2 y ~ dy 2^dy J
dy2'
(7-9)
p -du.dy.dw dw d2w
* * dy dx dx dy dxdy
7.8 Специальные конечные элементы односторонних связей
Моделирование конструктивной нелинейности обеспечивается специальными конечными элементами односторонних связей (табл. 7.9), работающими только на сжатие (растяжение). Такие задачи решаются итерационными методами. Если на какой-либо из итераций усилие в связи стало больше (меньше) нуля, то на последующей итерации связь выключается из работы.
Таблица 7.9
№№ КЭ Наименование КЭ Признак схем Плоскость расположения Степени свободы Комментарий
261 О о Z дноузловой элемент дносторонней связи у 1 2 3 4 5 произвольно либо X, либо Y, либо Z, Задаются: жесткость связи, ориентация, признак работы (растяжение или сжатие), величина зазора между конструкцией и связью
X
262 Д о Z вухузловой элемент дносторонней связи Z17 / Y1 / X 1 2 3 4 5 произвольно i I X, Y, ’ Z Задаются: жесткость связи, признак работы (растяжение или сжатие) величина зазора между острукцией и
связыс
бб
Решение нелинейных задач
7.8.1 Одноузловой элемент односторонней связи (тип КЭ-261)
Данный КЭ применяется для введения связи конечной жесткости, работающей либо на растяжение, либо на сжатие по направлению одной из осей глобальной или локальной системы координат узла. Так, например, для степени свободы Z конечный элемент позволяет смоделировать работу пружины или упругого основания. Задание в одном узле ограничений на перемещения по двум и более направлениям моделируется несколькими конечными элементами.
7.8.2 Двухузловой элемент односторонней связи (тип КЭ - 262)
Данный конечный элемент предназначен для моделирования связи, воспринимающей либо растяжение, либо сжатие вдоль местной оси Х1. Правило образования местной системы координат аналогично КЭ 10. Задание в одном и том же узле ограничений на перемещения по двум и более направлениям моделируется несколькими конечными элементами.
67
ЛИРА® 92 Руководствопользователя
8 Расчетно-графическая система МОНТАЖ-плюс
Расчетно-графическая система МОНТАЖ-плюс предназначена для компьютерного моделирования процесса возведения сооружений, в том числе и высотных зданий с монолитными железобетонными конструкциями каркаса. В процессе компьютерного моделирования сооружений из железобетона могут быть учтены климатические условия, при которых происходит замораживание или оттаивание уложенной бетонной смеси. Такой учет реализуется с помощью задания коэффициентов понижения или повышения прочности и модуля деформации бетона на различных стадиях возведения.
На каждой стадии возведения производится расчет соответствующей конструктивной схемы здания, содержащей элементы, смонтированные (или демонтированные) к этому моменту. При этом производится учет текущих прочности и модуля деформации бетона, а также наличия временных стоек опалубки. На каждой стадии такого расчета определяется количество арматуры во всех сечениях железобетонных элементов (колонн, плит перекрытий, диафрагм жесткости). Если проектной арматуры или проектного железобетонного сечения оказывается недостаточно, то выдается информация о необходимости корректировки проектных решений.
Моделируемое здание может иметь неограниченное количество этажей.
Блоки здания могут быть разновысокими. В плане здание может иметь произвольную форму - произвольный набор прямоугольных и криволинейных в плане блоков. Плиты перекрытия также могут иметь произвольный контур (лоджии, эркеры, балконы, произвольно расположенные отверстия любой формы). Плиты перекрытий могут иметь включения различной толщины, могут быть подперты балочным ростверком или иметь безбалочную схему. Допускается задание нагрузок различных типов: равномерно распределенных по всему перекрытию, по области, ограниченной произвольным многоугольником (штамп), или по линии, а также сосредоточенных нагрузок. Расположение временных опор (стоек опалубки), последовательность их установки и удаления могут быть произвольными.
В системе ЛИР-ВИЗОР создается расчетная схема законченного сооружения. Она должна содержать все элементы сооружения - как монтируемые, так и демонтируемые. Однако демонтаж элементов может быть выполнен только один раз.
После того как схема со всеми ее атрибутами создана, необходимо сформировать монтажную таблицу.
Монтажная таблица содержит три набора данных.
1) Стадии. Для каждой стадии возведения указываются элементы, которые будут смонтированы и демонтированы. Допускаются пустые стадии. Обозначим общее количество стадий возведения т.
Пустая стадия имеет состав элементов, соответствующих предшествующей стадии. х Используется только для задания нагрузки.
Каждой стадии возведения должно соответствовать свое монтажное загружение. Таким образом, количество стадий и количество монтажных загружений одинаково и равно т. При этом допускаются пустые монтажные загружения.
Эксплуатационные нагрузки на завершенное сооружение задаются на последних стадиях, которые должны быть пустыми.
2) Группы. Для каждой группы элементов схемы задаются поправочные коэффициенты -к модулю деформации и к прочности бетона в соответствии с номерами стадий возведения.
Поправочные коэффициенты не могут от стадии к стадии принимать убывающие значения.
Если информация о группах не указана, то характеристики материала остаются неизменными на всех стадиях.
3) Дополнительные загружения. Для каждой стадии задаются номера дополнительных загружений и коэффициенты (в том числе нулевые и отрицательные), с которыми эти загружения должны учитываться при возведении.
68
Расчетно-графическая система МОНТАЖ-плюс
Под дополнительными загружениями подразумеваются такие загружения, которые присутствуют только при возведении. Это, например, загружения от складирования строительных материалов, от их перемещения в пределах этажа или с этажа на этаж, и т.п. Эти загружения задаются под номерами, большими, чем т. Обозначим количество дополнительных загружений d.
Кроме монтажной таблицы, должна быть задана таблица моделирования нелинейных загружений, в которой обязательно должно содержаться т строк. Предыстория загружений учитывается всегда.
Наличие суперэлементов в расчетной схеме в данной версии не допускается.
В результате работы расчетного процессора системы МОНТАЖ-плюс для элементов вычисляются усилия и напряжения, накапливаемые в процессе возведения.
По умолчанию перемещения узлов в процессе счета не накапливаются, а вычисляются заново для каждой стадии.
Для определения армирования в элементах усилия и напряжения должны быть импортированы в конструирующую систему ЛИР-АРМ, в которой производится отслеживание количества необходимой арматуры по каждой стадии. Результаты армирования для каждой стадии представлены в виде таблиц, по которым легко оценить, является ли проектное армирование элементов достаточным.
Если информация о группах и дополнительных загружениях не указана, то система МОНТАЖ-плюс работает как система МОНТАЖ. В этом случае может быть задана еще и таблица РСУ, даже если схема содержит нелинейные элементы. При этом количество строк в этой таблице равно т.
Пример моделирования процесса возведения
На рис.8.1 схематически представлен процесс возведения однопролетной трехэтажной рамы.
Рис. 8.1
На каждой стадии возведения производится расчет соответствующей конструктивной схемы на действие собственного веса и монтажных нагрузок с учетом имеющихся, снятых или добавленных временных опор.
1-я стадия монтажа - рис. 8.1-а
Смонтированы элементы 1,2, 3 первого этажа и стойка опалубки -10. Обобщенная нагрузка Pi - собственный вес смонтированных конструкций и монтажная нагрузка, соответствующая этой стадии возведения. В результате расчета на основании полученных усилий определяется арматура в сечениях элементов 1, 2, 3 с учетом пониженной прочности бетона, например К^О.З. Это означает, что на данной стадии бетон в результате замерзания набрал только 30% прочности от полного значения, соответствующего прочностному классу.
69
ЛИРА® 9.2 Руководство пользователя
2-я стадия монтажа - рис. 8.1-6
Кроме элементов первого этажа дополнительно возведены элементы 4, 5, 6 второго этажа и установлена временная стойка 11. Нагрузка Р2 - собственный вес вновь возведенных конструкций и монтажная нагрузка на этом этаже. Усилия в элементах, соответствующие нагрузке Р2, суммируются с зафиксированными усилиями в элементах, присутствовавших на стадии 1 от нагрузки Pi. По полученным усилиям определяется арматура во всех элементах 1, 2, 3, 4, 5, 6 с учетом неполной прочности бетона на этом этаже, например К2=0.45.
3-я стадия монтажа - рис. 8.1-в
Кроме элементов 1, 2, 3, 4, 5, 6 первых двух этажей, возведены элементы 7, 8, 9 третьего этажа и установлена временная стойка 12, временная стойка 11 сохранена, а временная стойка 10 удалена. Нагрузка Р3 - собственный вес вновь возведенных конструкций и монтажная нагрузка на 3-й стадии. Удаление временной стойки моделируется приложением силы Р10, равной усилию в ней.
Накопление усилий в элементах производится аналогично второй стадии, т.е. для ранее возведенных элементов 1-6 происходит суммирование зафиксированных усилий со вновь полученными усилиями.
По найденным усилиям определяется арматура во всех элементах 1-9 с учетом пониженной прочности бетона на этом этапе, например, К3=0.7.
4-я (эксплуатационная) стадия - рис. 8.1-г
На этой стадии расчетная схема соответствует завершенному сооружению. Удаление всех временных стоек выполняется аналогично удалению стойки 10 на 3-й стадии. Обобщенная нагрузка Р4 включает все полезные нагрузки и дополнительные постоянные нагрузки, за исключением нагрузок от собственного веса, включенных в нагрузки Ръ Р2, Р3, усилия от которых зафиксированы на предыдущих стадиях.
Прочность бетона на этой стадии может приниматься в соответствии с классом бетона или быть несколько заниженной, т.к. замораживание бетонной смеси в процессе монтажа может снизить окончательную прочность бетона.
70
Библиотека новых конечных элементов
9 Библиотека новых конечных элементов
Состав библиотеки новых конечных элементов для линейных и нелинейных задач приведен в таблицах 9.1 - 9.5.
Толстые оболочки
Таблица 9.1
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы Комментарий
45 У п т Z 'ниверсальный рямоугольный элемент олстой оболочки \ ъ V X /±^. 5 произвольно X, Y, Z UX, UY, UZ Допускается наличие упругого основания
46 У Т| т< Z ниверсальный реугольный элемент элстой оболочки »Ч' \ 1 / X 5 произвольно X, Y, Z, UX, UY, UZ Допускается наличие упругого основания
47 У ч< 3J Z ниверсальный этырехугольный конечный пемент толстой оболочки & } /А / А?/ / * X 5 произвольно X, Y, Z, UX, UY, UZ Допускается наличие упругого основания
71
ЛИРА® 9.2 Руководство пользователя
Специальные КЭ трения
Таблица 9.2.
№№ КЭ Наименование КЭ Признак схем Плоскость расположения Степени свободы Комментарий
263 Од од трс Z ноузловой посторонний элемент эния л 1 2 3 4 5 произвольно либо X, либо У, либоИ Задаются: жесткость, коэф, трения покоя, ориентация, жесткость сцепления (может быть вычислена автоматически) признак работы (растяжение или сжатие), зазор между конструкцией и связью
_____ ... ,х
264 Дв ОД1 тр< Z ухузловой посторонний элемент *ния * Z1 у» / Y1 X 1 2 3 4 5 произвольно X, Y, Z Задаются: жесткость, коэф, трения покоя, ориентация, жесткость сцепления (может быть вычислена автоматически) признак работы (растяжение или сжатие), зазор между конструкцией и связью
72
Библиотека новых конечных элементов
Объемные конечные элементы грунта
73
ЛИРА® 9.2 Руководство пользователя
Таблица 9.3
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
276 Пространственный 8-ти узловой изопараметрический элемент грунта (произвольный гексаэдр) *z Jr л / V \ 1 ) \ \ ZY 2 Xх 4 5 произвольно X, Y, Z
Геометрически нелинейные элементы с сильным изгибом
Таблица 9.4
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
309 Уш сте кон Z нереальный пространственный ржневой геометрически нелинейный ечный элемент с сильным изгибом z7 / Y1 Х 5 произвольно X.Y.Z, UX, UY, UZ
Геометрически нелинейные КЭ оболочки также могут теперь воспринимать сильный изгиб.
74
Библиотека новых конечных элементов
Физически и геометрически нелинейные КЭ стержня и оболочки
Таблица 9.5
№№ КЭ Наименование КЭ Признак схемы Плоскость расположения Степени свободы
410 Ун1 сте фи Z нереальный пространственный ржневой конечный элемент с учетом зической и геометрической нелинейности k Z1 / / Y1 ' х, х 5 произвольно X, Y, Z, UX, UY, UZ
441 Прямоугольный элемент оболочки с учетом физической и геометрической нелинейности Z1 Y1 з 4 г— ~Х1 5 произвольно X, Y, Z, UX, UY, UZ
442 Треугольный элемент оболочки с учетом физической и геометрической нелинейности 1Z1 2 / Y1 \\3 _ XI 5 произвольно X, Y, Z, UX, UY, UZ
I I 444 Четырехугольный элемент оболочки с учетом физической и геометрической нелинейности 1Z1 Y1 S 3 4 1 г Х1 5 произвольно X, Y, Z, UX, UY, UZ
75
ЛИРА® 9.2 Руководство пользователя
9.1 Универсальные конечные элементы толстой оболочки (КЭ 45, 46,47)
В отличие от КЭ тонких пластин и оболочек при решении задач изгиба здесь применяется функционал Рейснера для полной потенциальной энергии:
n(w) = — +MyZy +2MXy% + Qxyxz + Qy}'yZ>jd£i-^^fwd(l
Мх = [crzzdz, Му = [ cryzdz, М = [т zdz,
* * * - погонные изгибающие моменты
Qx = [r„dz,Qy = [ryzdz
относительно осей Y и X, погонный крутящий момент и погонные перерезывающие силы, представляющие собой интегральные характеристики нормальных и касательных напряжений в направлении осей X, Y, Z.
Касательные напряжения и сдвиги в направлении оси Z:
Тxz G? xz ’ Туг бУуг , dw _ dw
Кривизны срединной поверхности в направлении осей X и Y:
„ _^Р_ у -_8а_ у да\
Хх~дх,хУ~ ду,хху~\ду дх1
Повороты вокруг осей X и Y - а = а(х, у\р = р(х,у).
„ dw _ dw
В отличие от тонких оболочек, здесь не предполагается, что а =-, Р =--. Поэтому
dx dy
касательные напряжения отличны от нуля.
Задание нагрузок и жесткостей аналогично тонким оболочкам.
9.2 Геометрически нелинейные конечные элементы сильного изгиба (КЭ 309, 341, 342, 344)
КЭ 309 - новый стержневой элемент, моделирующий сильный изгиб.
В КЭ оболочки 341, 342 и 344 добавлена возможность учета сильного изгиба.
Матрица жесткости учитывает все накопленные усилия и изменения геометрии системы, строится в системе координат «нового положения» элементов, а затем переводится в исходную систему координат с помощью матрицы косинусов.
Усилия и напряжения вычисляются в системе координат «нового положения».
9.3 Объемные нелинейные конечные элементы грунта (КЭ 271-274, 276)
Данные элементы аналогичны КЭ 231-234, 236. Учет специфики грунтов обеспечивается заданием одного из условий прочности:
1. sin(^)c0 + Зег, - 2Ccos(^) < 0;
2. 2sin(#>) сг0 + 3<т,- - 6Сcos((s>) < 0,
76
Библиотека новых конечных элементов
где: сг0 =Ог1 +ст2 + а3; сг(. = -сг2)2 +(сг2-сг3)2 + (а3-arf ;
о3 < <т2 < сг, < Rs - главные напряжения;
Rs - сопротивление растяжению;
С - сцепление;
ф- угол внутреннего трения.
Допускается учет предварительного напряжения.
При расчете используется шагово-итерационный метод.
9.4 Специальные конечные элементы трения (КЭ 263, 264)
Данные КЭ предназначены для моделирования скольжения между узлом конструкции и опорой. КЭ 263 - одноузловой элемент опоры, КЭ 264 - двухузловой элемент опоры.
Используется условие трения Кулона: | т | < -уа, где:
тиа- касательное и нормальное напряжения;
у - коэффициент трения.
При расчете используется шагово-итерационный метод.
77
ЛИРА® 9.2 Руководство пользователя
10 Расчетно-графическая система ДИНАМИКА-плюс
Расчетно-графическая система ДИНАМИКА-плюс реализует метод прямого интегрирования уравнений движения по времени, что позволяет производить компьютерное моделирование отклика конструкции на динамические воздействия как во время воздействия, так и после его завершения. Система ДИНАМИКА-плюс применяется для решения линейных и нелинейных задач.
К расчету задач динамики во времени допускаются следующие типы конечных элементов:
• все линейные элементы;
• односторонние связи (без трения);
• элементы грунта - плоские и объемные;
• физически нелинейные элементы балки-стенки;
• объемные нелинейные элементы.
Задача линейного динамического расчета формулируется в виде (3.1), для удобства повторяемого ниже:
, Гd^U (ди 'I ( \ ts/iX \ л л
ь —г, V +С —, v +a(u, vy(f(t), v), t > 0,
и(0) = Uo, du/dt(0) = ил
Эта задача решается методом конечных разностей по безусловно устойчивой разностной схеме второго порядка точности:
b(ymu, v) + с v) + a(amu, v) = (fm, v);
tm = m0; um = u(tm \amu = ;
Это система уравнений относительно Um+1, правые части которой зависят от Um, Um+1.
Матрица не зависит от т. Значения Uo, t/_1 определяются из начальных условий.
В результате расчета определяются перемещения, скорости и ускорения узлов, а также усилия и напряжения в элементах, вычисленные во все моменты времени tm.
Для нелинейной задачи в уравнение добавляется нелинейное слагаемое d(u,v), зависящее от характера нелинейности, а в разностную схему - слагаемое d(um,v), которое попадает в правую часть.
Диалоговое окно Динамика во времени
В этом диалоговом окне задается информация, необходимая для расчета динамики во времени. Установленный флажок Выполнять расчет динамики во времени позволяет:
• открыть доступ к полям ввода, в которых задаются: шаг интегрирования, время интегрирования и количество равномерных дроблений шага интегрирования; при этом заданная информация сохраняется в полях ввода и после снятия флажка;
• произвести выбор соответствующей ветки расчетного процессора при включении режима Выполнить расчет.
78
Расчетно-графическая система ДИНАМИКА-плюс
Не путать время интегрирования и время воздействия, задаваемое в параметрах нагрузки.
Задание динамического воздействия для расчета на динамику во времени должно быть организовано следующим образом: всего необходимо сформировать четыре загружения - произвольное статическое загружение под номером 1 (может быть пустым), загружение весами масс под номером 2, загружение узловой динамической нагрузкой под номером 3 и загружение демпфирующей
статической нагрузкой под номером 4. Если учет демпфирования производить не требуется, то загружение 4 может отсутствовать.
Заданная информация сохраняется в полях ввода также и после снятия флажка.
Диалоговое окно Нагрузки для динамики во времени
Диалоговое окно содержит закладки для задания нагрузок на узлы, стержни, пластины, объемные элементы и суперэлементы, а также для задания нагрузок для расчета на динамику во времени.
При обращении к закладке Динамика во времени вызывается диалоговое окно для задания параметров узловой нагрузки в локальной системе координат узла.
, Aj Задание динамического воздействия для расчета на динамику во времени должно быть организовано
следующим образом: всего необходимо сформировать четыре загружения - произвольное статическое загружение под номером 1 (может быть пустым), загружение весами масс под номером 2, загружение узловой динамической нагрузкой под номером 3 и загружение демпфирующей статической нагрузкой под номером 4. Если учет демпфирования производить не требуется, то загружение 4 может отсутствовать.
Кроме радио-кнопок для указания направления воздействия диалоговое окно содержит четыре кнопки для задания типа нагрузки.
Кусочно-линейная (ломаная) нагрузка с произвольным шагом
Синусоидальная нагрузка.
Акселерограмма в относительных единицах.
Кусочно-линейная акселерограмма с равномерным шагом.
При нажатии каждой из кнопок появляется соответствующее диалоговое окно для задания параметров нагрузки.
Кусочно-линейная (ломаная) нагрузка с произвольным шагом
В соответствующих полях ввода задаются вес присоединенной массы и количество точек графика нагрузки. После задания количества точек необходимо выполнить команду Применить, после чего ввести в появившееся поле ввода значения времени t(i) и координаты нагрузки z(i), где i- количество точек. Г рафик отображается при помощи команды просмотра.
Синусоидальная нагрузка
В соответствующих полях ввода задаются: вес присоединенной массы, амплитуда Р силы воздействия, частота воздействия в радианах, сдвиг фазы в градусах, а также время начала и окончания воздействия в секундах. Отображение графика z(i)=P*sin(ti) производится при помощи команды просмотра.
Акселерограмма в относительных единицах
В соответствующих полях ввода задаются: вес присоединенной массы и количество точек графика акселерограммы, время начала воздействия, шаг по времени и коэффициент перевода относительных единиц в единицы. После задания количества точек необходимо выполнить команду Применить, после чего в появившееся поле ввода ввести координаты акселерограммы z(i), где i- количество точек. Отображение графика производится при помощи команды просмотра.
Кусочно-линейная акселерограмма с равномерным шагом
В соответствующих полях ввода задаются вес присоединенной массы и количество точек графика акселерограммы, время начала, шаг во времени и коэффициент к нагрузке. После задания количества точек необходимо выполнить команду Применить, после чего в появившееся поле ввода ввести координаты акселерограммы z(i), где i- количество точек. Отображение графика производится при помощи команды просмотра.
79
ЛИРА® 9.2 Руководство пользователя
Результаты
В ходе расчета на экране отображается график изменения кинетической энергии расчетной схемы.
Результатами работы системы ДИНАМИКА-плюс являются графики движения расчетной схемы под заданным динамическим воздействием, а также графики изменения перемещений, напряжений и усилий во времени. Отображение результатов производится из окна расчетного процессора кнопкой ДИНАМИКА. Графики перемещений или усилий отображаются при помощи указания курсором на соответствующий узел или элемент.
80
. Расчетно-графическая система МОСТ
11 Расчетно-графическая система МОСТ
Расчетно-графическая система МОСТ предназначена для вычисления и графического отображения линий и поверхностей влияния. При этом соблюдаются требования СНиП 2.05.03-84* и норм Украины ДБН, находящихся в стадии утверждения.
Реализованы три вида расчета:
на единичную нагрузку;
на нагрузку от движения пешеходов, автомобильного транспорта, трамвая, метрополитена, а также НК и многоосевую нагрузку;
на сочетание статических и подвижных нагрузок.
Для выполнения расчета необходимо задать хотя бы одно статическое загружение, например, собственный вес.
Допускается не более 15 статических загружений.
Упаковка схемы может быть выполнена только до задания информации о линиях влияния.
11.1 Задание исходных данных
Вызов диалогового окна Линии влияния производится из соответствующего пункта меню Схема.
Диалоговое окно Линии влияния содержит 4 закладки: Топология, Нагрузки, Узлы, Элементы.
11.1.1 Топология
Здесь задается информация о линиях движения, по которым должна проходить единичная нагрузка. В соответствии с этим, для требуемых узлов и элементов будут строиться линии и поверхности влияния.
Для любой (стержневой, плоскостной или комбинированной) схемы моста всегда задается так называемая Первая линия движения, которая должна идти вдоль пролетного строения моста по его правому краю (если смотреть вдоль оси X глобальной системы координат). При этом длина пролетного строения должна быть направлена вдоль оси X.
Все последующие линии движения привязываются к первой линии движения. Положение нагрузок поперек моста привязывается к первой линии движения.
Реализованы два способа задания линий движения: привязкой к краю моста и заданием списка узлов.
Первая линия движения задается только при помощи списка узлов.
В окне располагается счетчик линий движения, который активизируется при помощи кнопки Создать.
При помощи радио-кнопок выбирается способ задания линий движения. Если нажата радио-кнопка Привязкой к краю моста, то появляется доступ к полю ввода Привязка, куда заносится необходимое число. Если нажата радио-кнопка Заданием списка узлов, то открывается доступ к полю ввода списка номеров узлов. Отмеченные на схеме узлы вносятся в поле ввода при нажатии кнопки Обновить. Возможно также задание списка вручную. Кнопка Выделить служит для отметки на схеме узлов, находящихся в заданном списке.
При помощи кнопки Удалить информация о текущей линии движения аннулируется.
81
ЛИРА® SL2 Руководство пользователя
11.1.2 Нагрузки
Здесь задается информация о подвижных нагрузках, прилагаемых к схеме, а также о сочетаниях статических и подвижных нагрузок.
Если в этом диалоге не задана никакая информация, то для заданных узлов и/или элементов будут вычислены линии влияния от единичной нагрузки.
Информация, заданная в этом окне по умолчанию, соответствует ДБН.
Реализованы следующие типы подвижной нагрузки: Пешеходы, Автотранспорт АК, Трамвайный поезд, Трамвайные поезда с промежутками, Метрополитен, НК и сосредоточенная многоосевая нагрузка.
Здесь же задается информация о Сочетании нагрузок.
Пешеходы
Для нагрузки этого типа в соответствующих полях ввода задаются коэффициент для расчета по прочности и величина равномерно распределенной по площади нагрузки, умноженной на ширину тротуара.
При помощи кнопки Привязки открывается доступ к таблице, в которой задаются привязки (поперек моста, то есть вдоль оси Y) центра тяжести пешеходной нагрузки к Первой линии движения. В соответствующее поле ввода нужно внести коэффициент для расчета на прочность Коэф, прочн. равен у*(1+р)
Автотранспорт АК
Для нагрузки этого типа в соответствующих полях ввода задаются коэффициенты для расчета на прочность и выносливость, равномерно распределенная нагрузка, коэффициенты для сосредоточенных нагрузок по полосам для расчета на прочность и выносливость.
В соответствующие поля ввода нужно внести:
Коэффициент для расчета на прочность Коэф, прочн. равен у*(1+р).
Коэффициент для расчета на выносливость для распределенной нагрузки
Коэф- выносл. равен уг*(1+2/Зр)
К.пр.1 - коэффициент к расчетным значениям на прочность для тандема по полосе, которая дает наибольший вклад - произведение коэффициентов у*(1+д)
К.вын.1 - коэффициент к расчетным значениям на выносливость для тандема по полосе, которая дает наибольший вклад - (1+2/Зр).
К.пр.2 - коэффициент к расчетным значениям на прочность для тандема по остальным полосам - произведение коэффициентов у*(1+и).
К.вын.2 - коэффициент к расчетным значениям на выносливость для тандема по остальным полосам - (1+2/Зр).
При нажатии на кнопку Коэф, по полосам в диалоге Привязки задаются коэффициенты sf к распределенной нагрузке и тандему (п.2.14 - СНиП 2.05.03-84* или 2.20 - проекта ДБН).
При нажатии кнопки Осевые нагрузки происходит вызов таблицы для задания осевых нагрузок. Количество осей всегда 2. В этой таблице задаются величина привязки и величина полной осевой нагрузки.
Под словом осевые подразумеваются нагрузки под осями подвижного состава. Величины привязок осей исчисляются так, будто первая ось состава располагается на крайнем левом сечении моста, а все остальные оси еще не находятся на мосту. При этом величины привязок считаются положительными при направлении отсчета против оси X (см. рисунок).
yl У^
у], у2 -- привяжи поперек мосл а xl, пригжкн осей транспорта
полотно моста
82
Расчетно-графическая система МОСТ
Не следует путать привязку оси подвижной нагрузки с привязкой самой нагрузки!
Трамвайный поезд (одиночный состав)
Для нагрузки этого типа в соответствующем поле ввода задаются коэффициенты для расчета на прочность и выносливость. При помощи счетчика количества осей фиксируется требуемое значение. Допускается 4, 8, 12, 16 осей, которые соответствуют одно-, двух-, трех-, четырехвагонному поездам.
В соответствующие поля ввода нужно внести:
Коэф.прочн. равен у*И+Р)>
Коэф.выносл. равен (1+2/Зр).
Для задания осевых нагрузок необходимо нажать кнопку Осевые нагрузки. При этом на экране появляется таблица, количество строк в которой соответствует количеству заданных осей. В этой таблице задаются привязки осей, а также величины полной и порожней нагрузок. Величины привязки осей исчисляются аналогично автотранспорту.
Трамвайные поезда с промежутками
Для задания этой нагрузки нужно сформировать один трамвайный поезд, который может состоять из одного, двух, трех или четырех вагонов (4, 8, 12,16 осей).
В соответствующих полях ввода нужно задать количество трамвайных поездов, следующих друг за другом (количество повторов) и расстояние между головными вагонами. При помощи счетчика задается требуемое количество осей.
В соответствующие поля ввода нужно внести:
Коэф.прочн. равен у/П+м);
Коэф.выносл. равен (1+2/Зр).
Для задания осевых нагрузок необходимо нажать кнопку Осевые нагрузки. При этом на экране появляется таблица, количество строк в которой соответствует количеству заданных осей. В этой таблице задаются привязки осей, а также величины полной и порожней нагрузок. Величины привязки осей исчисляются аналогично автотранспорту.
Метрополитен
Для задания этой нагрузки нужно сформировать один поезд метро, который может состоять из одного, двух, трех или четырех вагонов (4, 8, 12, 16 осей).
В соответствующих полях ввода нужно задать количество поездов метро, следующих друг за другом (количество повторов) и расстояние между головными вагонами. При помощи счетчика задается требуемое количество осей.
В соответствующие поля ввода нужно внести:
Коэф.прочн. равен у*(1+Р)‘,
Коэф.выносл. равен (1+2/Зр).
Для задания осевых нагрузок необходимо нажать кнопку Осевые нагрузки. При этом на экране появляется таблица, количество строк в которой соответствует количеству заданных осей. В этой таблице задаются привязки осей, а также величины полной и порожней нагрузок. Величины привязки осей исчисляются аналогично автотранспорту.
НК и многоосевая нагрузка
Нагрузка этого типа может быть смоделирована с количеством осей не более 25.
В соответствующее поле ввода нужно внести Коэф.прочн., равный у*И+Р)-
Для задания осевых нагрузок необходимо нажать кнопку Осевые нагрузки. При этом на экране появляется таблица, количество строк в которой соответствует количеству заданных осей. В этой таблице задаются привязки осей и величины полной нагрузки. Величины привязки осей исчисляются аналогично автотранспорту.
Для всех типов нагрузки при нажатии кнопки Применить информация о нагрузке фиксируется, а тип нагрузки вносится в поле ввода списков нагрузок.
При нажатии кнопки Удалить текущий тип нагрузки удаляется из списка типов нагрузки.
Если установить флажок Сочетание нагрузок, то становится доступной соответствующая кнопка. При ее нажатии на экране появляется окно, содержащее таблицу расчетных коэффициентов и поля ввода для дополнительных коэффициентов. Количество строк в таблице
83
ЛИРА®9.2 Руководствопользователя
равно количеству статических загружений.
Таблицу РСУ заполнять не нужно.
Статические нагрузки должны быть заданы как нормативные.
В таблице Сочетание нагрузок задаются коэффициенты к нормативным значениям статических загружений, а также коэффициенты к нормативным и расчетным по прочности значениям подвижных нагрузок - yf > 0 и yf < 0. Кроме того, в соответствующих полях ввода задаются дополнительные коэффициенты К1 и S2.
Всего вычисляется два сочетания:
Первое - сумма статических загружений с нагрузкой от пешеходов, от автотранспорта АК и от всех видов рельсового транспорта.
Второе - сумма статических загружений с нагрузкой НК.
При вычислении сочетаний соблюдается следующее правило:
если (К} * П + АТ) > ZP, то вычисляется сочетание (Kf * П + АТ) + ZP * S2;
если (Ki * П + АТ) < ZP, то вычисляется сочетание (Ki * П + АТ) * S2 + ZP,
где: П - нагрузка от пешеходов;
АТ - нагрузка от автотранспорта;
ZP - сумма нагрузок от рельсового транспорта.
Результатом работы модуля Сочетание нагрузок являются значения положительных и отрицательных огибающих для перемещений и усилий в заданных узлах и элементах.
11.1.3 Узлы
Здесь задается список узлов, в которых требуется построить линии и/или поверхности влияния перемещений. Отмеченные узлы заносятся в поле ввода при помощи команды Обновить. Возможно задание номеров узлов вручную.
При помощи кнопки Выделить на схеме отмечаются узлы, внесенные в список.
При нажатии кнопки Применить список узлов фиксируется.
11.1.4 Элементы
Здесь задается список элементов, для которых требуется построить линии и/или поверхности влияния усилий и напряжений. В окне располагается счетчик номеров групп элементов, который активизируется при нажатии кнопки Создать. Элементы должны группироваться по типам конечных элементов. Чтобы указать, для какого именно усилия или напряжения требуется вычислить линии и/или поверхности влияния, необходимо установить флажки, соответствующие видам (номерам) усилий, свойственных тому или иному типу конечного элемента.
Так, для пространственного стержня номер 1 соответствует усилию N,
2 - Мх, 3 - Му, 4 - Qz, 5 - Mz, 6 - Qy.
Для конечного элемента оболочки:
1 - Nx, 2 - Ny, 3 - Тху, 4 - Мх, 5 - Му, 6 - Мху, 7 - Qx, 8 - Qy.
Для учета опорных моментов необходимо установить соответствующий флажок.
При помощи соответствующей радио-кнопки указывается, для какого сечения элемента (стержня) нужно выполнять построение линий влияния - начального или конечного.
Занесение отмеченных элементов в поле ввода производится при помощи команды Обновить. Возможно задание номеров элементов вручную.
При помощи кнопки Выделить на схеме отмечаются узлы, внесенные в список.
При нажатии кнопки Применить список узлов фиксируется.
84
. Расчетно-графическая система МОСТ
11.2 Отображение результатов расчета
А) Графическое
Отображение линий влияния для перемещений узлов производится при помощи вызова Информации об узле в режиме результатов расчета. При нажатии на соответствующую закладку в окне появляется счетчик номеров линий движения, а также список номеров перемещений: 1 - X, 2 - Y, 3 - Z, 4 - UX, 5 - UY, 6 - UZ.
Установленный флажок Показать линии влияния позволяет в окне навигатора получить линии влияния перемещений в текущем узле.
При установке флажка Показать огибающие эпюры их отображение производится в окне навигатора.
Отображение линий влияния для усилий в стержневых элементах производится при помощи вызова Информации об элементе в режиме результатов расчета. При нажатии на соответствующую закладку в окне появляется счетчик номеров линий движения, счетчик номеров сечений в стержне, а также список номеров усилий:
1 - N, 2 - Мх, 3 - Му, 4 - Qz, 5 - Mz, 6 - Qy.
Установленный флажок Показать линии влияния позволяет в окне навигатора получить линии влияния усилий в текущем сечении текущего элемента.
При установке флажка Показать огибающие эпюры производится отображение огибающих эпюр в окне навигатора.
Отображение поверхностей влияния для усилий и/или напряжений в элементах в версии 9.2 производится после завершения расчета при нажатии кнопки МОСТ в меню расчетного процессора.
Б)Табличное
1. Для расчета на единичную нагрузку
Форма результатов для линий влияния перемещений и усилий имеет следующий вид:
Единицы измерения привязок: м
Единицы измерения линейных перемещений: мм
Единицы измерения угловых перемещений: RD*1000
Единицы измерения площадей: m*mm,(m*RD*1000)
ЛИНИИ ВЛИЯНИЯ ПЕРЕМЕЩЕНИЙ
Хп Хк Хт Fm А
Узел 14, направление X, линия влияния -1
0.0140 3.9556 1.2000 0.1295 0.29781
3.9556 5.9898 4.8000 -0.0457 -0.04646
5.9898 8.8816 7.2000 0.0614 0.09610
8.8816 12.0006 10.8000 -0.0699 -0.12165
12.0006 15.0276 13.2000 0.0686 0.11453
15.0276 17.9987 16.8000 -0.0665 -0.10828
17.9987 21.1697 19.2000 0.0694 0.12340
21.1697 24.0089 22.8000 -0.0575 -0.08778
24.0089 26.0851 25.2000 0.0442 0.04592
26.0851 29.9858 28.8000 -0.1196 -0.27196
-0.636 0.678 0.042
Узел 14, направление Z, линия влияния - 1 и т.д.
85
ЛИРА® 9.2 Руководство пользователя
Здесь:
Хп - привязка начала участка от начала линии влияния;
Хк - привязка конца участка от начала линии влияния;
Хт - привязка положения максимума/минимума участка от начала линии влияния;
Fm - значение рассматриваемого фактора при Хт;
А - площадь участка.
При этом участки, площадь которых меньше 0.5% от суммарной по абсолютной величине площади линии влияния, на печать не выводятся. В конце информации об участках по линии влияния выводятся площади отрицательных участков, положительных участков и суммарная площадь с учетом знака (в таблице - синим цветом).
Имена файлов результатов:
имя_34.имя - для участков по линиям влияния перемещений;
имя_35.имя - для участков по линиям влияния усилий.
2. Для расчета на подвижную нагрузку
Имена файлов результатов:
имя_34.имя - участки по линиям влияния перемещений;
имя_36.имя - сжатые результаты перемещений по узлам - только максимальные факторы;
имя_35.имя - участки по линиям влияния усилий;
имя_37.имя - сжатые результаты усилий по элементам - только максимальные факторы;
имя_38.имя - развернутые результаты усилий по элементам - для максимального фактора выводятся соответствующие ему факторы.
3. Для сочетаний статических и подвижных нагрузок
Имена файлов результатов:
имя_34.имя - участки по линиям влияния перемещений;
имя_36.имя - сжатые результаты сочетаний перемещений по узлам - только максимальные факторы;
имя_35.имя - участки по линиям влияния усилий;
имя_37.имя - сжатые результаты сочетаний усилий по элементам - только максимальные факторы;
имя_38.имя - развернутые результаты сочетаний усилий по элементам для максимального фактора выводятся прочие, соответствующие ему, факторы.
86
Особенности задания исходной информации
12 Особенности задания исходной информации
12.1 Общие положения
Расчетная схема представляет собой идеализированную модель конструкции. Модель разбивается на конечные элементы. В результате такой разбивки появляются узлы. Элементы и узлы схемы нумеруются. В опорные узлы следует ввести соответствующие связи - запретить перемещения по каким-либо степеням свободы, либо ограничить перемещения узла конечными элементами, моделирующими работу связи. Нумерация узлов и элементов определяет последовательность задания исходной информации на входном языке и формирование файлов результатов счёта.
Одинаковые жесткостные характеристики элементов объединяются в типы жесткости.
В ПК ЛИРА на уровне задания, обработки и анализа принимаются три системы координат: глобальная (или общая);
местная;
локальная.
Глобальная система координат XYZ - всегда правая декартовая - служит для описания координат узлов всей схемы, для определения направления степеней свободы, идентификации перемещений узлов. Расчетная схема располагается всегда в этой системе координат.
Местная система координат Х1 Y1 Z1 - всегда правая декартовая - является атрибутом каждого конечного элемента. Общее правило ориентации местной системы координат для элемента: ось Х1 направлена от первого узла ко второму. Направление осей Y1 и Z1 определяется для стержней углом чистого вращения, а для плоскостных элементов - плоскостью элемента. Местная система координат служит для задания местной нагрузки, идентификации усилий и напряжений в элементе и ориентации арматуры.
Локальная система координат Х2 Y2 Z2 - всегда правая декартовая - является атрибутом каждого узла схемы. В общем случае локальная система координат совпадает с глобальной. Однако локальная система координат оказывается удобной при работе с цилиндрическими, сферическими схемами или при наложении связей и расчете на заданные перемещения по направлениям, не совпадающим с глобальной системой координат. При расчете цилиндрических или сферических конструкций удобно оперировать цифровыми значениями радиальных, меридиональных и широтных перемещений. При расчете на заданные перемещения или при наличии связей, не совпадающих с направлением глобальной системы координат, можно также применять локальную систему координат.
Местная система координат Х1 Y1 Z1 служит для фиксации положения конечного элемента в схеме, а также для ориентации местной нагрузки, главных осей инерции в сечении стержня, усилий и напряжений, возникающих в элементе.
Для стержневых КЭ местная система координат имеет следующую ориентацию: ось Х1 направлена от начала стержня (первый узел) к концу (второй узел). Оси Y1 и Z1 - это главные центральные оси инерции поперечного сечения стержня и вместе с осью Х1 образуют правую тройку. При этом ось Z1 направлена всегда в верхнее полупространство, a ocbY1 параллельна плоскости XOY.
Однако в общем случае этого недостаточно. Если одна из осей сечения стержня в реальной конструкции не параллельна плоскости XOY, то необходимо задавать угол чистого вращения -угол поворота главных осей инерции относительно положения, принятого по умолчанию (см. п. 12.4).
Для всех плоскостных КЭ ось Х1 направлена от первого узла ко второму. Для прямоугольных элементов плиты и оболочки ocbY1 направлена от первого узла к третьему. Для плосконапряженных элементов от первого узла к третьему направлена ocbZ1. Для треугольных элементов плиты и оболочки ось Y1 ортогональна оси Х1 и расположена в плоскости элемента. Для плосконапряженных треугольных элементов ось Z1 ортогональна оси Х1 и расположена в плоскости элемента.
Для объёмных конечных элементов ось Х1 направлена от первого узла ко второму, ось Y1 располагается в плоскости нижней грани и ортогональна оси Х1. Оси Х1 Y1 Z1 образуют правую тройку.
5?
ЛИРА® 9.2 Руководство пользователя
В общем случае каждый узел схемы имеет 6 степеней свободы: три линейных перемещения вдоль осей X или Х2; Y или Y2; Z или Z2 и три поворота вокруг X или Х2, Y или Y2, Z или Z2.
Для расчетных схем, в которых количество степеней свободы в узле заведомо меньше 6 (плоские фермы, плоские рамы и т.п.), применяется так называемый признак схемы. В ПК ЛИРА задействованы пять признаков схемы:
Признак 1 - схемы, располагаемые в плоскости XOZ; каждый узел имеет 2 степени свободы - линейные перемещения вдоль осей X, Z или Х2, Z2. В этом признаке схемы рассчитываются плоские фермы и балки-стенки.
Признак 2 - схемы, располагаемые в плоскости XOZ; каждый узел имеет 3 степени свободы - линейные перемещения вдоль осей X, Z или Х2, Z2 и поворот вокруг оси Y или Y2. В этом признаке схемы рассчитываются плоские рамы и допускается включение элементов ферм и балок-стенок.
Признак 3 - схемы, располагаемые в плоскости XOY; каждый узел имеет 3 степени свободы - линейное перемещение вдоль оси Z или Z2 и повороты вокруг осей X, Y или Х2, Y2. В этом признаке рассчитываются балочные ростверки и плиты, допускается учет упругого основания.
Признак 4 - пространственные схемы, каждый узел которых имеет 3 степени свободы -линейные перемещения вдоль осей X, Y, Z или Х2, Y2, Z2. В этом признаке рассчитываются пространственные фермы и объемные тела.
Признак 5 - пространственные схемы общего вида с 6 степенями свободы в узле. В этом признаке схемы рассчитываются пространственные каркасы, оболочки и допускается включение объемных тел, учет упругого основания и т.п.
Граничные условия в расчетной схеме могут быть заданы непосредственно на узел, а также смоделированы при помощи связей конечной жесткости, которые позволяют определить реакции в опорных узлах. Чтобы избежать влияния жесткости связей на результат решения задачи, рекомендуется, чтобы величина жесткости вводимых связей была на порядок-два больше максимальной погонной жесткости присутствующей в схеме. Но в каждом отдельном случае нужна индивидуальная оценка.
Статистические воздействия задаются в виде сосредоточенных сил и моментов как в узлы схемы (узловая нагрузка) по направлениям осей глобальной и локальной систем координат, так и на элементы (местная нагрузка) по направлениям местной или глобальной систем координат. Допускается произвольная кусочно-линейная нагрузка между узлами расчетной схемы, а также нагрузка-штамп по произвольному плоскому контуру, соединяющему узлы расчетной схемы.
Силовые нагрузки считаются положительными, если они действуют против соответствующих ( - к осей.
Моментные нагрузки считаются положительными, когда они действуют по часовой стрелке, если смотреть с конца соответствующей оси.
Заданные смещения считаются положительными, если они направлены вдоль соответствующих осей.
Заданные повороты считаются положительными, когда они действуют против часовой стрелки, если смотреть с конца соответствующей оси.
Динамические воздействия задаются как узловые нагрузки, действующие вдоль осей глобальной или локальной системы координат. Веса масс сооружения задаются как собственный вес конструкций, оборудования и т. п. При этом допускается использование как местных, так и узловых нагрузок.
Действие одной нагрузки или группы нагрузок может быть объявлено как отдельное загружение - статическое или динамическое. При наличии нескольких загружений может быть произведен выбор наиболее опасных их сочетаний, которые формируют так называемые расчетные сочетания усилий (РСУ), необходимые при конструировании элементов схемы.
Реализована возможность формирования весов масс для динамического воздействия непосредственно из какого-либо статического загружения.
При создании расчетной схемы могут быть задействованы различные системы единиц измерения. Основными единицами являются единицы длины (L), силы (F), размеров сечений (s), температуры (t).
88
Особенности задания исходной информации
Единицы измерения прочих величин являются производными от основных.
12.2 Объединение перемещений
В ПК ЛИРА предусмотрена возможность задания информации об узлах, имеющих одинаковые перемещения по заданному направлению. Эти перемещения получают один порядковый номер, то есть происходит объединение нескольких неизвестных в системе линейных алгебраических уравнений.
Такой прием позволяет объединять горизонтальные перемещения узлов, принадлежащих перекрытию, в плоских многоэтажных рамах, показывая тем самым, что перекрытие представляет собой жесткий диск: продольная сила, могущая возникнуть в перекрытии, ничтожно мала по сравнению с сечением перекрытия, которое ее воспринимает.
Этот приём может быть использован и для расчета плоских рам на динамические воздействия от ветра или сейсмики в горизонтальном направлении. В этом случае инерционная масса всего перекрытия собирается в один (любой) узел перекрытия. При расчете пространственных рам также можно объединять перемещения по этажам перекрытия. Для симметричной многоэтажной рамы, например, можно пренебречь закручиванием ее вокруг вертикальной оси. Достаточно объединить перемещения всех узлов перекрытия по направлениям X,Y, и расчет в этом случае упрощается.
Для случаев, когда центр жёсткости здания не совпадает с центром масс, а также для несимметричных в плане зданий (особенно при недостаточной расстановке диафрагм жёсткости) закручиванием здания пренебречь нельзя. Здесь следует объединять горизонтальные перемещения на уровне перекрытия по рамам. Если считать, что диск перекрытия не может изменять своей формы, то необходимо ещё и объединение перемещений для всего перекрытия по повороту относительно оси Z. Учет работы плиты перекрытия может быть выполнен, например, при помощи установки крестовых связей. При динамических воздействиях инерционные массы придется прикладывать к каждой из рам на уровне каждого этажа.
Уменьшить число инерционных масс можно с помощью искусственно введённых в расчетную схему траверс. Инерционная масса будет распределяться между рамами на этаже в зависимости от соотношения длины и жёсткости траверс.
12.3 Абсолютно жесткие вставки
Абсолютно жесткие вставки используются, как правило, при нарушении соосности стыковки стержней в узле: стык подкрановой и надкрановой частей колонн, примыкание к колонне ригелей разной высоты, моделирование ребристых плит и т. п.
Жесткие вставки ориентируются вдоль осей местной системы координат Х1, Y1, Z1. Нагрузки, задаваемые на стержень с жёсткими вставками, привязываются к началу упругой части. Заданный шарнир располагается между жёсткой вставкой и упругой частью.
Усилия вычисляются только в упругой части, поэтому при проверке равновесия в узле, где присутствует такой стержень, следует производить перенос усилий из упругой части в узел с учётом заданной нагрузки на вставку.
12.4 Угол чистого вращения
Угол чистого вращения в стержнях возникает тогда, когда направление главных центральных осей сечения не совпадает с направлением, принятым по умолчанию.
По умолчанию принята следующая ориентация местных осей:
А) Для стержней общего положения (не вертикальных) ось Х1 проходит от начала к концу; ось Y1 параллельна горизонтальной плоскости XOY глобальной системы координат; ось Z1 направлена в верхнее полупространство глобальной системы координат.
Матрица направляющих косинусов вычисляется по этому правилу через координаты начала и конца стержня и имеет вид:
89
ЛИРА&92 Руководствопользователя
——^глобальные местные к Y Z
Х1 J m п
Y1(A) -т/^ * Х/(1-п2) /Л1-П2) 0
Z1 — ln/_ t Д/6-n2) -тп/ /Л-»’) 7(1-„2)
Здесь I, т, п - направляющие косинусы оси Х1.
При этом ширина сечения (В) по умолчанию параллельна плоскости XOY.
Угол чистого вращения F для стержня общего положения определяется следующим образом:
начальное сечение стержня совмещается с центром глобальной системы координат;
определяется линия пересечения плоскости начального сечения с плоскостью XOY; эту линию назовем ось А;
направление оси А выбирается так, чтобы при взгляде с ее конца нужно было бы ось Z повернуть до совмещения с осью XI против часовой стрелки на угол, меньший л;
положительный угол F соответствует повороту оси А до совмещения с требуемым положением оси Y1 против часовой стрелки, если смотреть с конца оси Х1.
Если оси Y1 и А совпадают, то угол чистого вращения отсутствует.
Б) Для вертикальных стержней:
если ось Х1 направлена снизу вверх (вдоль оси Z глобальной системы координат), то ось Y1 направлена против оси Y, а ось Z1 - вдоль оси X. Матрица направляющих косинусов имеет следующий вид:
—-^глобальные местные "——_ * Y Z
Х1 0 0 1
Y1(A) 0 -1 0
Z1 1 0 0
Если ось Х1 направлена вниз (против оси Z глобальной системы координат), то ось Y1 направлена против оси Y, а ось Z1 - против оси X. Матрица направляющих косинусов имеет следующий вид:
ьн ые местные -— X Y Z
Х1 0 0 -1
Y1(A) 0 -1 0
Z1 -1 0 0
Для вертикального стержня ось А параллельна оси Y и направлена в противоположную сторону. Положительное направление угла F соответствует вращению оси А до совмещения с
90
Особенности задания исходной информации
требуемым направлением оси Y1 против часовой стрелки, если смотреть с конца оси Х1.
Для вертикальных стержней в любом случае ширина сечения В (размер, параллельный оси Y1) параллельна оси Y глобальной системы координат, а высота сечения Н - параллельна оси X глобальной системы координат.
12.5 Введение связей конечной жесткости
Связь конечной жёсткости (или упруго податливая связь) применяется при моделировании упругого основания и любого упругого опирания узлов расчетной схемы. КЭ типа 51, реализующий такой тип связи, является одноузловым, ориентируется относительно осей глобальной системы координат и имеет единичную длину.
Допускается применение этого КЭ и в случае абсолютно жёстких связей, совпадающих с осями глобальной системы координат. При назначении жесткостей необходимо иметь в виду, что большие величины их могут ухудшить точность счета. Поэтому обычно рекомендуется задавать жесткости на 1 - 2 порядка больше, чем погонные жесткости примыкающих стержней или цилиндрические жесткости пластин. Вычисленные в результате счета усилия в таких элементах облегчают проверку глобального равновесия схемы.
12.6 Учёт прямой и косой симметрии
Если рассчитываемая схема имеет плоскости симметрии, то для уменьшения размерности задачи рекомендуется вводить в расчет часть схемы, ограниченную этими плоскостями.
На узлы, лежащие в плоскости прямой симметрии, налагаются связи, ортогональные этой плоскости, а при косой симметрии - параллельные ей. В табл. 12.1 показано, по каким направлениям степеней свободы на эти узлы накладываются связи.
Таблица 12.1
Симметрия
прямая косая
Плоскости симметрии XOZ XOY YOZ XOZ XOY YOZ
Налагаемые связи Y,UX, UZ Z,UX, UY X,UY, UZ x,z, UY X,Y, UZ Y,Z UX
Если плоскость симметрии не параллельна ни одной из плоскостей общей системы координат, то наложение соответствующих связей можно выполнить с помощью локальной системы координат узла.
Если имеются абсолютно жёсткие связи, не совпадающие с направлением осей общей системы координат, то они реализуются также с помощью локальной системы координат узла.
12.7 Задание весов масс для динамических воздействий
Допускаются следующие способы задания весов масс:
• Задание распределенных весов масс на элементы. При расчете происходит автоматический сбор весов масс в узлы расчетной схемы.
• Задание весов масс в узлы, как сил, действующих в заданном направлении. В этом случае пользователь самостоятельно назначает узлы схемы, в которые будут приложены эти силы, вычисляет их самостоятельно и задает направление их действия.
• Формирование весов масс из статического загружения, описанного ранее. При этом, как и в случае 1, происходит автоматизированный сбор весов масс в узлы. Однако веса масс будут собраны только из тех нагрузок статического загружения, которые действуют вдоль оси Z.
• Допускается применение всех способов в одном и том же загружений.
Загружения сейсмическим и ветровым пульсационным воздействиями описываются при
91
Руководствопользователя
помощи задания лишь весов масс.
Для загружений ударным, импульсивным и гармоническим воздействиями, кроме весов масс необходимо задать еще и характеристики и направления этих воздействий в узлах, где они приложены.
При расчете на импульсивную и ударную нагрузки задаются:
Q - вес дополнительной массы, приходящей в узел. Задается Q=0, если используется автоматический сбор, и Q*0, если возникает необходимость применить способ 3 или внести коррективы в какой-либо узел при автоматическом сборе;
Р - величина силы импульса или удара, усредненная в соответствии с формой воздействия (табл. 12.2);
f- номер формы импульса или удара по табл. 12.2;
т - продолжительность действия импульсивного или ударного воздействия (сек);
То - период повторения действия импульсивного или ударного воздействия (сек);
п - количество повторений.
При расчете на гармонические воздействия:
Q - задается аналогично импульсивному воздействию;
Р - амплитудное значение силы внешнего гармонического воздействия в данном узле;
SC - признак применяемого закона воздействия: косинус или синус;
р- сдвиг фазы (рад).
Если в одной и той же задаче требуется произвести расчет на несколько разнородных динамических загружений и при этом величины веса масс заданы одинаково, то решение задачи на собственные значения производится только один раз для первого из этих загружений. Периоды и формы собственных колебаний будут неизменными и для оставшихся загружений.
Таблица 12.2.
1 2 3 4 5 6
Форма импульса или удара tf(1 1 тип 1 1Z f(t) Ilw» I f(t) 1L * I f(t) I
12.8 Сбор нагрузок на фундаменты
Эта процедура может быть выполнена автоматически при помощи системы ФРАГМЕНТ. Исходными данными служат номера узлов, в которых требуется вычислить нагрузки, номера элементов, входящих в эти узлы, а также угол поворота вокруг оси Z, если, например, оси инерции колонн не совпадают с осями фундаментов.
12.9 Расчетные сочетания нагрузок
Система РСН предназначена для вычисления перемещений в узлах и усилий (напряжений) в элементах от стандартных и произвольных линейных комбинаций загружений. Под стандартными линейными комбинациями подразумеваются комбинации (сочетания), которые установлены нормативными документами.
В процессоре РСН реализованы следующие нормативы: СНиП 2.01.07-85 (Россия, СНГ), Еврокод, ACI 318-95, IBC-2000 (США), BAEL-91 (Франция).
При задании произвольных линейных комбинаций величины и знаки коэффициентов не ограничиваются.
При наличии динамического воздействия должны быть заданы коэффициенты как для воздействия в целом, так и для его составляющих (форм).
Результаты расчета РСН могут быть использованы при конструировании элементов, вычислении нагрузок на фрагмент и проверке прочности.
92
Особенности задания исходной информации
12.10 Согласованная система координат для пластин и объемных элементов
Согласованная система координат предназначена для единообразной ориентации местной системы координат в плоскостных и объемных конечных элементах, принадлежащих выделенному фрагменту расчетной схемы.
Особое значение согласование приобретает при создании схем с помощью автоматической триангуляции плоских фрагментов или пространственной триангуляции объемных фрагментов, когда оси треугольников или тетраэдров получают произвольную ориентацию. Применение согласования позволяет в этом случае произвести ориентацию осей в нужном направлении. Процедура согласования выполняется в режиме создания расчетной схемы. Расчет производится с учетом согласования, а усилия и напряжения, полученные в результате расчета, ориентируются относительно согласованных местных осей.
При конструировании железобетонных конструкций учитывается согласованное направление местных осей в пластинах.
93
ЛИРА&92 Руководствопользователя
13 Принципы анализа результатов расчета
13.1 Общие положения
ПК ЛИРА предоставляет пользователю достаточный набор функций для оценки достоверности напряженно-деформированного состояния схемы в каждом загружений или по комбинациям загружений, для получения цифровой информации по каждому узлу и элементу. Отображаются деформированные схемы, изополя и мозаики перемещений, эпюры усилий в стержнях, изополя и мозаики усилий и напряжений в плоскостных и объемных элементах.
В задаче с динамическими воздействиями пользователь может оценить корректность задания геометрических и жесткостных характеристик, просмотрев анимацию форм собственных и вынужденных колебаний. Например, если у некоторых элементов задана недостаточная жесткость, то в этой части конструкции амплитуда колебаний будет значительно больше, чем у остальной конструкции.
В ПК ЛИРА реализована также возможность графического анализа напряженно-деформированного состояния каждого суперэлемента со всеми сервисными возможностями.
Результаты расчета могут быть представлены как в исходных единицах, так и в отличных от них.
Для сложных расчетных схем, а также для больших задач рекомендуется выполнять расчет на одно или несколько контрольных загружений, в которых характер перемещений известен. Проверка загружений упрощается, когда расчетная схема симметрична, а нагрузки симметричны или кососимметричны.
Если в результате расчета окажется, что перемещения некоторых узлов очень велики, то, скорее всего: отсутствуют необходимые связи; в узле сходятся разнородные конечные элементы, воспринимающие разные степени свободы; система мгновенно изменяема.
Если характер перемещений в схеме отличен от ожидаемого, то необходимо проверить: координаты узлов; наличие связей между элементами; жесткостные характеристики элементов; шарниры и закрепления.
Если проверка глобального равновесия выполнена, а характер перемещений или усилий не удовлетворителен, то расчетная схема некорректна.
Если в результате решения задачи отсутствует равновесие в узле, то следует проанализировать соотношение жесткостей элементов, входящих в узел. Нужно обратить внимание на короткие, но очень жесткие элементы, примыкающие к длинным элементам с небольшой жесткостью, и либо изменить жесткости этих элементов, либо ввести вместо них какие-то другие. Подобная ситуация может привести к неустойчивому решению системы уравнений. В этом случае рекомендуется варьировать значение точности формирования матрицы и решения системы линейных уравнений.
Возможен редкий случай, когда есть равновесие в узлах, но нет глобального равновесия схемы. Здесь следует искать изменяемость в расчетной схеме.
Когда, наконец, получено приемлемое решение от контрольных загружений, можно переходить к решению задачи с реальными загружениями.
Результатами статического расчета схемы являются перемещения узлов схемы и усилия (напряжения) в сечениях элементов.
Результатами динамического расчета являются периоды, частоты и формы собственных колебаний для каждого тона, а также инерционные силы и соответствующие им перемещения узлов и усилия (напряжения) в элементах.
Предоставляется возможность получения твердой копии результатов счета в виде стандартных и интерактивных таблиц, которые снабжаются необходимой и привычной индексацией.
13.2 Правила знаков при чтении результатов расчета
Линейные перемещения положительны, если они направлены вдоль соответствующих осей глобальной или локальной систем координат.
Угловые перемещения (повороты) положительны, когда они вращают узел против часовой стрелки, если смотреть с конца соответствующих осей глобальной или локальной систем
94
Принципы анализа результатов расчета
координат.
В стержневых элементах соблюдается правило знаков для усилий, приведенное в табл. 13.1. При этом рассматривается сечение стержня, принадлежащее его концу.
Правила чтения усилий приведены:
• для КЭ плит - в табл. 13.2;
• для КЭ балки-стенки - в табл. 13.3;
• для КЭ оболочек - в табл. 13.4;
• для объемных КЭ - в табл. 13.5;
• для КЭ связей конечной жесткости и законтурных элементов - в табл. 13.6.
Правила чтения усилий для стержней
Таблица 13.1
Индекс Размерность Описание Положительный знак усилия определяет
N F Осевое усилие Растяжение
Мкр FL Крутящий момент относительно оси Х1 Действие против часовой стрелки, если смотреть с конца оси Х1 на сечение, принадлежащее концу стержня.
Му PL Изгибающий момент относительно оси Y1 Растяжение нижнего волокна (относительно направления оси Z1)
Qz F Перерезывающая сила вдоль оси Z1 Совпадение с направлением оси Z1 для сечения, принадлежащего концу стержня
Mz FL Изгибающий момент относительно оси Z1 Действие против часовой стрелки, если смотреть с конца оси Z1, на сечение, принадлежащее концу стержня
Qy F Перерезывающая сила вдоль оси У1 Совпадение с направлением оси Y1 для сечения, принадлежащего концу стержня.
95
ЛИРА®9.2 Руководствопользователя
Правила чтения усилий для КЭ плит
Таблица 13.2
Индекс Размерность Описание Положительный знак усилия определяет
Мх FL/L Момент, действующий на сечение, ортогональное оси Х1 Растяжение нижнего волокна (относительно оси Z1)
Му FL/L То же, относительно оси Y1 То же
Мху FL/L Крутящий момент Кривизна диагонали 1-4 (или медианы, выходящей из узла1), направленная выпуклостью вниз (относительно оси Z1)
Qx F/L Перерезывающая сила вдоль оси Z1 в сечении, ортогональном оси Х1 Совпадение с направлением оси Z1 на той части КЭ, в которой отсутствует узел 1
Qy F/L То же, в сечении, ортогональном оси Y1 То же
Rz F/L2 Давление на грунт Растяжение грунта
Правила чтения усилий для КЭ балок-стенок
Таблица 13.3
I Индекс Размерность Описание Положительный знак усилия определяет
NX F/L2 Нормальное напряжение вдоль оси Х1 Растяжение
NZ F/L2 То же, вдоль оси Z1 То же
TXZ F/L2 Сдвигающее напряжение Удлинение диагонали 1-4(или медианы, выходящей из узла 1 в треугольном элементе)
96
Принципы анализа результатов расчета
Правила чтения усилий для КЭ оболочек
Таблица 13.4
Индекс Размерность Описание Положительный знак усилия определяет
NX F/L2 Нормальное напряжение вдоль оси Х1 Растяжение
NY F/L2 То же вдоль оси Z1 Растяжение
TXY F/L2 Сдвигающее напряжение Удлинение диагонали 1-4 (или медианы, выходящей из узла 1 в треугольном элементе)
Мх FL/L Момент, действующий на сечение, ортогональное оси Х1 Растяжение нижнего волокна (относительно оси Z1)
Му FL/L То же относительно оси Y1 То же
Мху FL/L Крутящий момент Кривизна диагонали 1-4 (или медианы, выходящей из узла 1), направленной выпуклостью вниз (относительно оси Z1 ).
Qx F/L Перерезывающая сила вдоль оси Z1 в сечении, ортогональном оси Х1 Совпадение с направлением Z1 на той части КЭ, в которой отсутствует узел 1
Qy F/L То же, в сечении, ортогональном оси Y1 То же
Rz F/L2 Давление на грунт Растяжение грунта
Правила чтения усилий для объемных КЭ ___________________________________________Таблица 13.5
Индекс Размерность Описание Положительный знак усилия определяет
NX F/L2 Нормальное напряжение вдоль оси Х1 Растяжение
NY F/L2 То же, вдоль оси Y1 То же
NZ F/L2 То же, вдоль оси Z1 То же
TXY F/L2 Сдвигающее напряжение, параллельное оси Х1 и лежащее в плоскости, параллельной X1oZ1 Совпадение с направлением оси Х1, если NY совпадает по направлению с осью Y1
TXZ F/L2 Сдвигающее напряжение, параллельное оси Х1 и лежащее в плоскости, параллельной X1oY1 Совпадение с направлением оси Х1, если NZ совпадает по направлению с осью Z1
TYZ F/L2 Сдвигающее напряжение, параллельное оси Y1 и лежащее в плоскости, параллельной X1oY1 Совпадение с направлением оси Y1, если NZ совпадает по направлению с осью Z1
97
ЛИРА&92 Руководствопользователя
Правила чтения усилий для специальных типов КЭ 51,55,53,54.
Таблица 13.6
Индекс Размерность Описание Положительный знак усилия определяет
Rx Ry Rz Rux Ruy Ruz F F F FL FL FL Усилия в линейной связи, наложенной вдоль осей координат. Усилия в связи, ограничивающей поворот вокруг осей координат. Действие усилия на узел против соответствующей оси глобальной системы координат. Действие на узел по часовой стрелке, если смотреть с конца соответствующей глобальной оси.
Nx F Усилие в связи, наложенной по направлению оси X Растяжение
Ny F То же, по направлению оси У То же
Nz F То же, по направлению оси Z То же
Mx FL Усилие в связи, воспринимающей поворот относительно оси X Действие на сечение, принадлежащее концу стержня, против часовой стрелки, если смотреть с конца оси X
My FL То же, У То же, У
Mz FL То же, Z То же, Z
RZ1 F Отпор грунта за пределами конструкции в / узле элемента Действие на узел вдоль оси Z
13.3 Особенности представления результатов расчета на динамические воздействия
При расчете на сейсмические, ветровые с учетом пульсации, ударные и импульсивные воздействия определяются собственные частоты a>i(i<KF), где KF - количество форм, заданное пользователем. Вычисляются также периоды собственных колебаний Т, , формы колебаний, инерционные силы и соответствующие им перемещения и усилия. При этом каждая форма порождает единственную составляющую инерционных сил.
При расчете на гармонические колебания с помощью модуля 24 каждая вынужденная частота порождает пару инерционных сил - вещественную составляющую и мнимую составляющую. Эту пара составляющих называется вариантом. Составляющие инерционных сил варианта не имеют физического толкования, но их использование в качестве статических загружений позволяет определить амплитудные значения перемещений, усилий и напряжений для этого варианта.
Количество вариантов и количество учитываемых форм - это не одно и то же.
Модуль 24 позволяет по умолчанию производить учет резонансных состояний для частот меньших вынужденной частоты в.
Количество вариантов определяется следующим образом.
Пусть F- количество форм собственных колебаний, для которых собственные частоты <э,<0,
98
Принципы анализа результатов расчета
где в -заданная вынужденная частота. Если F<s(k/2) (где s - целая часть, kf - заданное количество форм колебаний), то F=c(kt/2), и тогда рассматривается F вариантов. Из них (F-1) вариант соответствует вынужденным частотам #,=<а, (i<F), а F-й вариант соответствует заданной вынужденной частоте в.
В противном случае рассматривается (F+1) вариант. Из них F вариантов соответствует вынужденным частотам 6)=о/ (7<Р/ a (F+1)-n вариант соответствует заданной вынужденной частоте в.
От учета предшествующих частот при задании исходных данных можно отказаться. Тогда будет получен всего один вариант.
При расчете на гармонические колебания с помощью модуля 28 каждая вынужденная частота может порождать одну или несколько пар инерционных сил, каждая из которых имеет вещественную составляющую и мнимую составляющую. Эта пара составляющих называется вариантом. Составляющие инерционных сил варианта не имеют физического толкования, но их использование в качестве статических загружений позволяет определить амплитудные значения перемещений, усилий и напряжений для этого варианта.
Количество вариантов и количество учитываемых форм это не одно и то же.
Модуль 28 учитывает погрешность вычисления собственных частот и возможное их изменение в процессе эксплуатации сооружения путем введения частотных зон, внутри которых должны находиться собственные частоты.
Границы частотных зон определяются по формулам:
оЛ = (1+ «□)<*)?; (13.1)
где: ы'(-, (*)", -левая и правая границы частотной зоны;
£0 - заданная погрешность при определении частоты, зависящая от типа конструкции и расчетной схемы;
о)® - /-я частота собственных колебаний, определенная в результате расчета.
Предполагается, что о, может принимать любое значение в пределах i-той частотной зоны.
При этом возможны два случая положения вынужденной частоты:
а) вынужденная частота попадает в одну или несколько частотных зон;
б) вынужденная частота не попадает ни в одну частотную зону.
К-я частотная зона
ы'к шк 6 шпк
б) К-я частотная зона (К+1)-я частотная зона
---Г ------------------....................--..........1
Шк 0 Шк+1 WK+1 Ы”к
Рис. 13.1
Определение частот собственных колебаний.
а) - при попадании вынужденной частоты в частотную зону, б) - при попадании вынужденной частоты в межчастотную зону.
В первом случае количество вариантов инерционных сил равно количеству попаданий
99
ЛИР^02 Руководствопользователя
вынужденной частоты в частотные зоны, но не более пяти. При этом, если вынужденная частота попала в К-ю частотную зону, то при вычислении инерционных сил К-я собственная частота принимается равной вынужденной частоте, a>K = Q, а остальные собственные частоты - о °
изменяются пропорционально изменению К-ои, 6), = <у, -j-.
Во втором случае количество вариантов определяется следующим образом:
• если вынужденная частота больше максимальной или меньше минимальной собственной частоты, то количество вариантов равно одному; при вычислении инерционных сил собственные частоты принимаются равными соответственно правым или левым границам всех частотных зон.
• если же вынужденная частота попадает в межчастотную зону, то количество вариантов равно двум; при вычислении инерционных сил собственные частоты принимаются равными сначала левым границам всех частотных зон, а затем - правым.
И для модуля 24 и для модуля 28 амплитудные значения вещественной и мнимой составляющих инерционных сил при действии гармонической силы (PcosOt) определяются согласно формулам:
Зк^кЪр* ~п - --------А (13.2)
1=1 /=1
n, ^PJ^J
^K=^KY^<P,k-n-----. (133)
,=1 Z^fU2+/2)
7=1
где:
SK S"k - соответственно вещественная и мнимая составляющие инерционной силы по направлению k-той степени свободы;
PJ - амплитуда внешнего воздействия по j-той степени свободы;
тк, т,- массы, действующие по направлению к-той и j-той степеней свободы;
<Pij, <Pik - относительные ординаты i-той формы собственных колебаний по направлению j-той и к-той степеней свободы;
где -0- частота вынужденных колебаний, о, - частота i-той формы собственных колебаний;
у- коэффициент неупругого сопротивления материала.
13.4 Суммарные усилия от динамических воздействий
При наличии динамических воздействий вычисление РСУ и РСН производится с учетом суммарных усилий от динамических воздействий.
Суммарные усилия N определяются по следующим формулам.
Для сейсмического и импульсивного воздействий (модули 20, 22, 27, 30, 35, 40, 41, 42):
100
Принципы анализа результатов расчета
м
V <=1
где: Л/, - обобщенное усилие от i-той формы колебаний; kf- учитываемое количество форм колебаний.
Для сейсмического воздействия (модуль 32):
J~kf kf
Xrf+YNrP Nj i=1 jtj=^
где: N, - обобщенное усилие от i-той формы колебаний;
kf- учитываемое количество форм колебаний; р- коэффициент, зависящий от отношения периодов собственных колебаний.
Для сейсмического воздействия (модуль 33):
[kf kf^i kf
N = r + °’6 X E Ni Nj
i-1 i=1 j>i
где: Nj - обобщенное усилие от i-той формы колебаний;
kf-учитываемое количество форм колебаний; г- коэффициент редукции.
Для ударного воздействия (модуль 23):
Г*г
V
где: Nia+i - усилие от веса ударяющего тела; Ni - обобщенное усилие от i-той формы колебаний.
Для ветрового воздействия (модуль 21):
Ikf
N = Nk + S£Ni
V <=i
где: Nk — обобщенное усилие от статической ветровой нагрузки;
N, —то же от / - той формы колебаний;
к - номер статического ветрового загружения;
kf- учитываемое количество форм колебаний.
Для гармонических колебаний (модули 24, 28):
Ni = 4N^+N^i
где: Nj — обобщенное усилие для i-того варианта загружения ;
Nri и Nmi — то же от вещественной и мнимой частей гармонической нагрузки от i-той формы колебаний.
101
ЛИРД® 9.2 Руководство пользователя
13.5 Документирование
Кроме привычных для многих поколений пользователей стандартных таблиц по каждому разделу результатов счета, реализована возможность формирования отчета в интерактивном режиме. Автоматически формируется пояснительная записка, содержащая общую информацию о данной задаче.
Для интерактивных таблиц предусмотрен набор редактируемых форм (шапок). Таким образом, имеется возможность создания таблиц любого вида и формирования из них отчета с размещением информации на листах графического документатора.
Графическое документирование позволяет формировать также и набор листов с графической информацией. Графические документы создаются вне зависимости от печатающего устройства. По желанию, могут быть получены твердые копии каждого сформированного листа и всего набора графических документов, созданных и отредактированных заранее. На листы с графической информацией могут быть помещены расчетные схемы, схемы деформирования, эпюры усилий, мозаики и изополя деформаций и усилий, а также цифровая информация из интерактивных таблиц.
102
Жесткостные характеристики элементов
14 Жесткостные характеристики элементов
Для каждого типа конечного элемента задается определенный набор жесткостных характеристик.
Для стержневых элементов жесткостные характеристики могут быть заданы одним из следующих способов:
• характеристики в порядке, обусловленном формой массивного (в частности, бетонного) сечения (табл. 14.1);
• численные характеристики в следующем порядке: EF - продольная жесткость; Ely -изгибная жесткость относительно оси Y1; Elz - то же относительно оси Z1; Glk - жесткость на кручение; GFy - сдвиговая жесткость относительно оси Y1 (вдоль оси Z1); GFz - тс же относительно оси Z1 (вдоль оси Y1). Количество этих характеристик зависит о* -ила конечного элемента:
Тип конечного элемента Задаваемые жесткости
1 EF
2 EF, Ely
3 Ely, GJk
4 EF
5,10 EF, Ely, Eiz, GJk, GFy, GFz
• характеристики стальных профилей и их комбинаций из базы типовых сечений стагг-с>~ проката;
• характеристики сечений нестандартной формы, вычисляемые с помощью системы ЛИР-КС (Конструктор Сечений).
Кроме того, могут быть заданы следующие характеристики:
• жесткие вставки вдоль осей местной системы координат;
• ядровые расстояния сечений - по два числа для каждой из осей инерции при задании численных характеристик;
• величина угла чистого вращения;
• параметры упругого основания А, С1,С2, где А - ширина или высота сечения, С1 и С2 -коэффициенты постели по модели Пастернака;
• признак учета сдвига при составлении матрицы жесткости.
юз
ЛИРА®9.2 Руководствопользователя
104
Жесткостные характеристики элементов
105
ЛИРА® 9.2 Руководствопользователя
106
Жесткостные характеристики элементов
Табл. 14.1
Идентификатор формы сечения
Порядок задания характеристик
Эскиз сечения
S10
Е, b, h, Ьь hi
Е, b, h, bi, hi, b2
S12
E, b, h, bi, hi, b2
Для сечений, заданных в соответствии с табл. 14.1 и с помощью базы сечений стального проката, жесткостные характеристики вычисляются автоматически.
Если жесткостные характеристики сечений стержней заданы численно и при этом необходимо вычислить расчетные сочетания усилий (РСУ), то обязательно должны быть заданы размеры ядровых расстояний.
Для плоскостных конечных элементов задаются следующие характеристики: Е (модуль
107
ЛИРА® 9.2 Руководствопользователя
упругости), v (коэффициент Пуассона) и 8 (толщина элемента). Для объемных конечных элементов задаются Е и v.
Система ЛИР-КС предоставляет возможность компоновать в графической среде сечение сложной формы. Сложное сечение может включать в себя стандартные сечения, сечения прокатных профилей и сечения произвольного контура. Сечение произвольной формы задается внешним контуром и набором внутренних контуров (отверстий). Контуры являются замкнутыми ломаными, которые описываются узлами (вершинами) или задаются графически на масштабной сетке узлов. Задаваемая точность сетки определяет точность задания контуров.
После выполнения процедуры автоматической триангуляции области созданного сечения производится вычисление (численным интегрированием) следующих характеристик:
F-площадь сечения;
Ус, Zc - координаты центра тяжести;
/у, lz - главные центральные моменты инерции, ly > lz;
Fi - угол поворота главных осей инерции;
EF, Ely, Elz - продольная и изгибные жесткости.
Далее строится наименьшее выпуклое множество, содержащее область сечения, и определяются ядровые расстояния У+, Y-, Z+, Z-.
При учете кручения и сдвига вычисляются соответствующие функции напряжений <p1t ср2, (р3. Эти функции определяются по МКЭ как решения дифференциальных уравнений [51]. По функциям напряжений численным интегрированием вычисляются:
1кр - момент инерции на кручение, по <р
Fy, Fz- сдвиговые площади, по (р2, <Рз\
Glxp, GFy, GFz - жесткость на кручение и сдвиговые жесткости;
1ш - бимомент инерции;
Е1ш - жесткость при депланации;
Yg, Zo, - координаты центра кручения;
Yo, Zo - координаты центра изгиба (сдвига).
Все жесткостные характеристики вычисляются относительно главных центральных осей инерции.
По заданным или импортированным после расчета усилиям во всех узлах триангуляционной сетки производится вычисление компонентов напряженного состояния (с учетом правила знаков для усилий в стержнях):
ТХу ~ .
’кр
<дУ >
"у2 , dpj
I 2 dy J
( Qz З?3 ly зу
(14.1)
МкР f ^^1 + у !kAsz
2 dz
[ Qy S?2
1г dz '
где: у, z - координаты узла.
Главные напряжения вычисляются по формуле:
СР 2 = О
(14.2)
При необходимости может быть проведена оценка прочности по различным теориям.
Компоненты напряженного состояния могут быть выданы в виде таблиц (во всех узлах
108
Жесткостные характеристики элементов
триангуляционной сети) или в виде изополей.
ЛИР-КС может работать как в автономном режиме, так и в информационной связи с ПК ЛИРА. При работе в автономном режиме определение жесткостных характеристик может рассматриваться, как самостоятельная задача, а усилия, действующие на сечение, задаются пользователем.
109
ЛИРА? !L2 Руководство пользователя^
15 Проверка прочности по различным теориям
Вычисление главных и эквивалентных напряжений в стержневых, плоскостных и объемных конечных элементах по усилиям от отдельных загружений, а также по расчетным сочетаниям загружений (РСН) или по РСУ производится при помощи системы ЛИТЕРА.
15.1 Главные напряжения
Главные напряжения вычисляются в соответствии с видом напряженно-деформированного состояния (НДС), полученного в результате расчета схемы. Каждый тип конечных элементов обладает определенными особенностями, соответствующими тому НДС, которое ими моделируется при создании расчетной схемы. Так, например, КЭ балки-стенки моделируют плоское напряженное состояние и т.п.
В общем случае НДС в точке тела описывается шестью осевыми компонентами тензора напряжений:
(15.1)
Возможны случаи, когда какие-либо напряжения равны нулю. Для плоского НДС, например, тензор напряжений принимает вид:
К, О Ny, О-
О, О
(15.2)
В любом случае главные напряжения выстраиваются так: N1>N2>N3.
15.2 КЭ плоской задачи теории упругости
Моделируется плоское напряженное состояние в плоскости X1OZ1.
Главные напряжения вычисляются в центре тяжести каждого элемента в его срединной поверхности:
(15.3)
Угол наклона наибольшего главного напряжения N1 к оси Х1:
ср = arctg
N,-N
Txz
(15-4)
15.3 КЭ плиты
Моделируется напряженное состояние в плоскости X1OY1, характеризуемое изгибными усилиями. Осевые напряжения вычисляются для нижней и верхней поверхностей:
GMy , h2 ’
h2 ’ у
+ 6Л^
' h2
(15.5)
h-толщина плиты.
110
Проверка прочности по различным теориям
Главные напряжения и углы их наклона вычисляются по формулам (3.12.3) и (3.12.4).
В срединной поверхности возникают касательные напряжения:
о Q
7^1.5^; ^=1.5-^, (15.6)
которые при вычислении главных напряжений игнорируются.
15.4 КЭ объемного НДС
Определение главных напряжений в этом случае производится из решения кубического уравнения
S3 +pS + q - О
(15.7)
где:
p = -(-S S -S S -S S + Т2 +Т2 +Т2\
q = (S,S,S, + 2Т„Т„Т„-S'T;,-S,Tt' -S^)
s. =N, - N0;S, =Ny -N0;S, =N, Mn;
Корни уравнения (15.7):
(15.8)
Главные напряжения: /V(. = S, + No,
(15.9)
Затем вычисляются направляющие косинусы углов наклона осей к осям местной системы координат КЭ из системы уравнений вида:
(Nx - + Тхут- + Тхгл, = О
• V. + К - ч Х + ТУЛ - О Txzh +ТугГП, +{NZ -Nfo
(15.10)
где: /=1,2,3.
Решив систему трижды, получим матрицу направляющих косинусов:
ш
ЛИРА® 9.2 Руководство пользователя
%
А = 4, m2, n2 (15.11)
7з> m3,
В этом случае вычисляются три угла Эйлера, определяющие положение трех главных напряжений относительно местной системы координат (рис. 15.1):
• 0 (тета) - угол (нутации) между положительными направлениями осей OZ1 и N3 (0 < 0< я);
• у/ (пси) - угол (прецессии) между осью 0X1 и осью ОА (линия пересечения плоскостей X1OY1 и N10N2), положительное направление которой выбирается так, что ОА, OZ1 и N3 образуют правую тройку. Угол у/ отсчитывается от оси 0X1 к 0Y1 (0 < у/ < 2 л);
Рис. 15.1
у>- (фи) - угол (чистого вращения) между осями N1 и ОА отсчитывается от оси N1 к N2 (0 < <р <2л).
Значения углов Эйлера определяются так: в = arccos (п3).
При 0=0, у>=0, у/~ arcsin (т-,), причем если < 0, то у/ = л-arcsin (т^.
Если у/< 0, то у/ = у/+2п.
При <9* 0 w = arcsinl .j.-3--G'i-n3
причем, если
<0,
то у/ - л:- arcsin\
. Если (//<0, то y/ = y/+2n.
Далее & = arcsin] ..-3-
, причем если
то (р - л - arcsin\
. Если <р < 0, то <р = <р +2я.
м
15.5 КЭ оболочки
Моделируется напряженное состояние (в плоскости X1OY1), характеризуемое нормальными и касательными напряжениями в срединной поверхности, а также изгибными усилиями.
Осевые напряжения вычисляются для нижней и верхней поверхностей:
М 7 М., 7 м„,
= Nx = N +6 -f^,N^ = /V + 6
X X fj2 У у fj2 ХУ xy fj2
(15.12)
Главные напряжения для этих поверхностей вычисляются по формулам (15.3) и (15.4).
В срединной поверхности игнорируется влияние напряжений Тху, от перерезывающих сил.
112
Проверка прочности по различным теориям
15.6 Вид НДС
Для объемных конечных элементов производится вычисление параметра Лоде-Надаи, характеризующего вид НДС:
<1513>
Значение
ц = 1 - характеризует чистое сжатие;
ц = 0 - чистый сдвиг;
ц = -1 - чистое растяжение.
15.7 Стержневые КЭ
Главные напряжения в сечениях стержней вычисляются по формуле:
ст12 = +-Jcr*/4 + г*+rz2 , (15.14)
где: сгх, гу, tz нормальное и касательные напряжения в характерных точках сечения стержня.
г, = f,(a, ,м№)
В табл. 15.1 приведены характерные точки для реализованных типов сечений стержней.
Для сечений, не указанных в табл. 3.12.1, а также для сечений, заданных при помощи численных жесткостей и из базы профилей стального проката, главные и эквивалентные напряжения могут быть вычислены с помощью системы ЛИР-КС.
Для нестандартных сечений главные и эквивалентные напряжения вычисляются только с помощью системы ЛИР-КС.
113
ЛИРА® 9.2 Руководствопользователя
Таблица 15.1.
Тип сечения
Форма сечения
Примечание
So
Всего 9 точек.
Si
1. Точки 5 и 6 всегда лежат на пересечении оси Y1 с контуром сечения. 2. Точки 10 и 11 принадлежат стенке . тавра у стыка с полкой.
3. Точки 12 и 13 расположены посередине высоты полки.
4. Точки 14 и 15 расположены посередине высоты стенки.
5. Всего 15 точек.
S2
1. Точки 5 и 6 всегда лежат на пересечении оси Y1 с контуром сечения. 2. Точки 10 и 11 принадлежат стенке тавра у стыка с полкой.
3. Точки 12 и 13 расположены посередине высоты стенки.
4. Точки 14 и 15 расположены посередине высоты полки.
5. Всего 15 точек.
S3
з
4
Z1
8
7
2
1. Точки 5 и 6 всегда лежат на пересечении оси Y1 с контуром сечения. 2.Точки 10 и 11,14 и 15 принадлежат стенке в месте стыка с нижней и верхней полками.
З.Точки 12 и 13, 16 и 17
находятся на серединах высот нижней и верхней полок.
4. Точки 18 и 19 расположены посередине высоты стенки.
5. Всего 19 точек.
114
Проверка прочности по различным теориям
Таблица 15.1.
Примечание
1. Точки 5 и 6 всегда лежат на пересечении оси Y1 с контуром сечения.
2. Точки 7 и 8 всегда лежат на пересечении оси Z1 с контуром сечения. 3. Точки 10,11, 12, 13 лежат на одной вертикали, проходящей через середину полок.
4. Точки 14 и 15 принадлежат стенке у стыков с полками.
5. Всего 15 точек.
Всего 9 точек.
1. Всего 9 точек.
2. При вычислении напряжений в точках 5-8 учитывается толщина кольца.
1. Сечение приводится к кресту:
= h3 + h2;
Н2 = h - h, - h2 - h3‘,
2. Центр тяжести вычисляется для реального сечения.
3. Точки 5 и 6 всегда лежат на пересечении оси Y1 с контуром крестового сечения.
4. Точки 10,11,14,15 принадлежат стенке у стыка с поперечиной.
5. Точки 12,13,16 и 17 лежат на серединах высот Н1 и Н2.
6. Точки 18 и 19 расположены посредине высоты НЗ.
7. Всего 19 точек.
115
ЛИРА® 9.2 Руководство пользователя
15.8 Вычисление эквивалентных напряжений
В таблице 15.2 приведены характеристики реализованных теорий прочности в соответствии с табл. 19 [46].
Таблица 15.2
№№ п/п Наименование теории (критерий прочности) Формула Геометрическая интерпретация Примечания
1 Наибольших главных напряжений Q Я С/) (1) II II Куб с центром, смещенным в сторону гидростатического сжатия
2 Наибольших главных деформаций °"э =^-^2 + <Тз) = аз - + аг) Равносторонний косоугольный параллелепипед, равно наклоненный к осям координат
3 Наибольших касательных напряжений = ^1 — Правильная шестигранная призма, равно наклоненная к осям координат
4 Энергетическая (Губер-Генки-Мизес) <тэ = V, Круговой цилиндр, равно наклоненный к осям координат
5 О. Мора °э = - X О’з 0*5 = Л • — О’з Шестигранная равно наклоненная к осям пирамида Однородный материал с разными пределами сопротивления
6 Ягна-Бужинского о-э =3(1-z)<To +-р-[of -(^-З)- •(^0-2 +<Т2О'з +OT3°’1)J Равно наклоненная к осям поверхность вращения п
7 Баландина °э =3(1-zX +<т,2/о-р Параболоид вращения, равно наклоненный к осям координат
8 Миролюбова °э = 3(1 - zko +1(1 + zki Круговой конус
9 Друккера-Прагера X—Э « <> + J Ч " 4 + 61 ' *1* 1 X} Ч Z 1 . N <0 q Л].’ + Двуполостной параболоид вращения, равно наклоненный к осям координат Рекомендуется для пластичных материалов при Х = 0.3
116
Проверка прочности по различным теориям
Таблица 15.2
№№ п/п Наименование теории (критерий прочности) Формула Геометрическая интерпретация Примечания
10 Волкова о’э + /J Не । = 2/Х$[С • + a2 + °3 ~ 2v(ct,CT2 + a2a3 + О‘з«Г1) + (ст. + ст, , А ст. - ст,, [ 2 3+V<7oJ+ 2 ] исследован
11 Писаренко - Лебедева -1 °3=X°i +(1-z)^i Коническая поверхность Однородный материал
12 Писаренко - Лебедева - 2 о’э •XT = Х<Г) + (1 ~ X)-• J Равно наклоненная к осям поверхность с криволинейным треугольником в октаэдрическом сечении Неоднородный материал А =0.7ч-0.8
(Го - гидростатическое давление
о;— интенсивность напряжений
- предельное напряжение при одноосном растяжении
- то же, при сжатии
то - то же, при чистом сдвиге (кручении)
Х~<г^/а0
я=1/х
<// = а01т0
15.9 Результаты расчета
Результаты, оформленные таблично, маркируются следующим образом. В шапке указывается номер элемента. Для стержней указывается номер сечения и номер точки, в соответствии с таблицей 15.1. Для плит и оболочек указывается еще и тип поверхности по отношению к направлению оси Z1, для идентификации которого используются следующие обозначения:
Е - нижняя поверхность;
I - верхняя поверхность;
М - срединная поверхность.
Строки 2, 3 шапки содержат, соответственно, номер первого и второго узлов конечного элемента.
Для идентификации напряжений используются следующие обозначения:
N1, N2, N3 - главные напряжения.
ТЕТА, PSI, FI - углы Эйлера.
MU - коэффициент Лоде - Надаи.
NExx - эквивалентное напряжение (приведенное к эквивалентному растяжению) по теории прочности с номером хх.
NSxx - эквивалентное напряжение (приведенное к эквивалентному сжатию) по теории прочности с номером хх.
Для плоскостных и объемных элементов в системе ЛИР-ВИЗОР отображаются мозаики и изополя главных и эквивалентных напряжений, а также направления главных площадок.
117
ЛИРА® 9.2 Руководство пользователя
16 Расчет и проектирование стальных конструкций
16.1 Назначение и возможности
Конструирующая система ЛИР-СТК предназначена для подбора и проверки сечений стержневых элементов стальных конструкций и узлов сопряжений элементов стальных конструкций в соответствии со СНиП [38,40,41]. ЛИР-СТК позволяет также выполнять подбор и проверку сечений стержней по нормам Еврокод [60].
ЛИР-СТК позволяет варьировать сечения конструкций. Так, например, заданное в программе ЛИРА железобетонное сечение может быть заменено и рассчитано как стальное.
Расчет выполняется на вычисленные по ПК ЛИРА усилия: усилия от загружений, расчетные сочетания усилий (РСУ), расчетные сочетания нагрузок (РСН), а также на усилия, введенные вручную.
Подбор и проверка может производиться в двух режимах:
• сквозной режим, в процессе которого производится расчет для всех указанных пользователем элементов в автоматическом режиме;
• локальный режим, в процессе которого пользователь может производить многовариантное проектирование - изменять размеры сечения, менять марку стали, варьировать расстановку ребер жесткости и т. п.
Результатами счета являются размеры сечений элементов и проценты использования несущей способности сечений элементов по соответствующим проверкам [41]. Результаты проверки или подбора выдаются в виде текстовых, HTML, Excel таблиц, графических таблиц или копий экрана.
Работа ЛИР-СТК осуществляется на базе нормативных данных, которые содержат сведения о расчетных характеристиках сталей и размерах выпускаемого листового и фасонного проката. База сортамента содержится в системе ЛИР-РС (Редактируемый Сортамент).
16.2 Типы сечений
В зависимости от усилий, действующих в сечении, для стержневых элементов определены следующие расчетные процедуры (табл. 16.1).
Таблица 16.1
Расчетная процедура Усилия
Ферменные элементы Продольного усилия N (сжатие или растяжение)
Изгибаемые элементы Изгибающих моментов Му (в плоскости Z1), Mz (в плоскости Y1), перерезывающих сил Qz и Qy
Элементы колонн (внецентренно-сжатые) нормальной силы (сжатие или растяжение) N и изгибающих моментов Му, Mz; перерезывающих сил Qz, Qy
Канаты Продольное усилие (растяжение)
В табл. 16.2 дано соответствие между сечениями, которые рассчитываются по ЛИР-СТК, и расчетными процедурами. Знак «+» указывает на то, что для данного сечения соответствующая расчетная процедура возможна.
118
Расчет и проектирование стальных конструкций
Таблица 16.2
Элементы Расчет по СНиП Расчет по Еврокоду
Ферма Балка Колонна Канат Ферма Балка Колонна
N Му, Qz, Mz, Qy N, Му, Qz, Mz, Qy N+ N Му, Qz, Mz, Qy N, Му, Qz, Mz, Qy
J Двутавр + + + — + + +
| Составной двутавр + + + — + + +
I Швеллер + + + — + + +
[ ~| Коробка из J швеллеров + + + — + + +
ir“ I. iL, "Ч; Раздвинутые —f двутавры + + + — — — —
J Коробка из двутавров + + + — + + +
1 Два уголка + + + — + —• —
1 1 Крестовые уголки + — — + —
* Уголок + — — — + — —
£) Труба + + + — + + +
Два швеллера + + + — — — —
[Г"" II. ; Два швеллера + + + — — — —
[ 1 Профиль J “Молодечно” + + + — + + +
| | Короб составной + + + — + + +
Несимметричный . двутавр + + + — + + +
Квадрат + + + — — — —
119
ЛИРА® 9.2 Руководствопользователя
Таблица 16.2
Элементы Расчет по СНиП Расчет по Еврокоду
Ферма Балка Колонна Канат Ферма Балка Колонна
N Му, Qz, Mz, Qy N, Му, Qz, Mz, Qy N+ N Му, Qz, Mz, Qy N, Му, Qz, Mz, Qy
Ф Круг + + + — — — —
С С-образный профиль + + + — — — —
I Тавр + + + — + + +
г п! । । Уголковое сечение + + + — — — —
Канат — — — + — — —
1 Прямоугольное сечение + + — — — —
i: Сварной швеллер + + + — — — —
1 Сварной швеллер + + + — — — —
о—о о Три трубы + + + — — — —
11—1| 1 1 iL Ji Швеллер с двутавром + + + — — —
ii ii i J iL Ji Швеллер с двутавром + + + — — — —
Fli i i iL_Ji Швеллер с двутавром + + + — — — —
ii ii i—i' Швеллер с двутавром + + + — — — —
IF^TI i—1! Швеллер с двутавром + + + — — — —
120
Расчет и проектирование стальных конструкций
16.3 Типы узлов
Шарнирное примыкание двутавровой балки к колонне
Шарнирная база двутавровой колонны
Жесткая база двутавровой колонны
Шарнирная база колонны коробчатого сечения
Жесткая база колонны коробчатого сечения
Планируется обновление ЛИР-СТК, в котором количество типов рассчитываемых узлов увеличится до 24.
16.4 Задание дополнительных данных для расчета элементов
На уровне конструирующей системы ЛИР-СТК после импорта задачи нужно задать данные, необходимые для расчета сечений. Далее перечисляются данные, необходимые для расчета по СНиП.
Для всех типов элементов задаются коэффициенты условий работы и коэффициенты надежности.
Необходимо задать коэффициент условий работы ус для проверок сечения по устойчивости и по прочности. Коэффициенты условий работы ус задаются как для всего сечения, так и для каждого элемента сечения в отдельности. Если ус для элемента сечения отличается от ус всего сечения, они будут использованы для проверок устойчивости этого элемента сечения. Например, коэффициент условий работы элемента “стенка” будет использован при проверке местной устойчивости элемента стенки. Когда задается коэффициент условий работы для всего сечения, он дублируется для всех его компонентов. Поэтому после задания коэффициента условий работы для всего сечения необходимо проверить правильность его задания для всех компонентов сечения. В таблице исходных данных локального расчета задается только коэффициент условий работы всего сечения.
Необходимо задать коэффициент надежности по ответственности уп. Коэффициент надежности задается единственный для всего сечения.
Расчетные длины задаются относительно местных осей Z1 и Y1.
Термин «относительно оси» означает плоскость, перпендикулярную оси.
На рис. 16.1 показано расположение местных осей.
121
ЛИРА® 9.2 Руководствопользователя
Расчетные длины задаются в единицах измерения геометрии или как коэффициент длины. В
Плоскость относительно оси Z
последнем случае для получения расчетных длин при запуске расчета вычисляется
геометрическая длина элемента (или конструктивного элемента, если ведется расчет конструктивного элемента), которая умножается на соответствующий коэффициент длины.
Дополнительные данные для ферменных элементов
Предельная гибкость. Предельная гибкость на растяжение всегда задается численно. Гибкость на сжатие может задаваться численно или как случай таблицы 19* [41], если при вычислении предельной гибкости используется коэффициент а.
Предельная гибкость на растяжение всегда по умолчанию равна 300.
При проверках несущей способности элементов из парных уголков может использоваться дополнительный коэффициент 0,8 для основного элемента решетки сварной фермы покрытия и перекрытия. Он умножается на коэффициенты условий работы.
Дополнительные данные для изгибаемых элементов
Ребра жесткости. Необходимо указать, нужно ли ставить ребра жесткости. Если значение шага ребер жесткости установить равным 0, то будет выбран максимально допустимый шаг.
Необходимо указать, как производить расчет - в пределах упругих или пластических деформаций?
Относительный прогиб. Для расчета по второму предельному состоянию нужно указать предельный относительный прогиб - значение, указанное в знаменателе.
Данные для расчета на общую устойчивость
Расчетная длина задается или в единицах измерения геометрии, или в виде коэффициента к геометрической длине элемента, на который, для получения Lef во время расчета, умножается геометрическая длина балки (или конструктивного элемента, если ведется расчет конструктивного элемента).
Дополнительные данные для сжато-изогнутых элементов
Предельная • гибкость. Предельная гибкость на растяжение всегда равна 300. Предельная гибкость на сжатие задается случаем из таблицы 19* [41]. Охвачены только случаи, в которых при вычислении предельной гибкости используется коэффициент альфа из таблицы 19* [41].
Расчетная длина для вычисления ФЬ. Необходима для проверки устойчивости внецентренно-сжатого стержня открытого сечения из плоскости действия момента: N/(c*<py)<Ry*yc (п. 5.30 [41]), где с при больших эксцентриситетах зависит от Фь. В общем случае расчетная длина Lef для вычисления Фь не равна расчетной длине Ly1 или Lz1 применяемой для вычисления <ру Поэтому приходится задавать Lef особо. В расчете стержней замкнутого сечения или при малых эксцентриситетах в расчете стержней открытого сечения величина Lefne участвует.
Расчетные длины ветвей. Задаются для расчета в плоскости, перпендикулярной плоскости соединительной решетки. Расчетные длины ветвей нужны для расчета двухветвенной колонны, для трех- и четырехветвенной колонны они при расчете игнорируются.
Соединительная решетка. После выбора типа соединительной решетки необходимо указать и ее профиль.
Шаг решетки. Если шаг решетки задан равным 0, принимается, что наклон ее к осям ветвей равен 60 градусов.
Дополнительные данные для канатов
На основе соответствующих норм будет предоставлен выбор формы ввода исходных данных, которые соответствуют формулам [44] или формуле, указанной в «Пособии по проектированию стальных конструкций» к [41].
122
Расчет и проектирование стальных конструкций
Расчетное сопротивление Rdh. Используется в формулах [44]. Коэффициент агрегатной прочности для канатов одинарной свивки и закрытых несущих.
16.5 Конструктивные и унифицированные элементы
Конструктивный элемент - это совокупность нескольких конечных элементов, которые при конструировании будут рассматриваться, как единое целое. Если конструктивный элемент состоит из элементов вида БАЛКА, то на схеме он будет обозначаться КБ. Если конструктивный элемент состоит из элементов вида КОЛОННА, то на схеме он будет обозначен КК. Если конструктивный элемент состоит из элементов вида ФЕРМА, то на схеме он будет обозначен КФ. Если конструктивный элемент состоит из элементов вида КАНАТ, то на схеме он будет обозначен К.
В конструктивный элемент могут входить элементы с одинаковым сечением. Между элементами, входящими в конструктивный элемент, не должно быть разрывов, они должны иметь общие узлы и лежать на одной прямой. Конструктивные элементы не могут входить в другие конструктивные элементы и унифицированные группы конечных элементов.
Для расчета выбираются все РСУ, которые возникли во всех сечениях элементов, принадлежащих конструктивному элементу.
Унификация элементов (унификация конечных элементов) применяется, когда необходимо подобрать одинаковое поперечное сечение нескольких элементов. Тогда для расчета выбираются наиболее опасные сочетания (РСУ), которые возникли во всех сечениях элементов унифицированной группы.
Допустимы следующие типы унификации:
• все сечения унифицируются между собой;
• элементы унифицируются между собой по соответствующим сечениям;
• элементы унифицируются между собой с учетом симметрии.
Для унификации по 2 и 3 типу необходимо, чтобы количество расчетных сечений в унифицируемых элементах было одинаковым.
Подбор сечений унифицированной группы производится на РСУ унифицированной группы. Проверка сечений унифицированной группы производится на усилия, возникающие в данном элементе, а не на усилия унифицированной группы.
__ Унификация элементов и конструктивных элементов используется только при расчете по расчетным сочетаниям усилий (РСУ). При подборе сечений элементов по усилиям от загружений или от расчетных сочетаний нагрузок (РСН) унификация игнорируется. В этом случае для подбора используются действительные значения расчетных усилий, возникающих в данном элементе, а не всех элементов унифицированной группы.
Если элементы вида БАЛКА объединены в группу унификации, то на схеме они будут обозначены УБ с номером группы унификации. Для КОЛОНН - УК с номером группы унификации. Для ФЕРМ - УФ с номером группы унификации.
Унификация конструктивных элементов применяется, когда необходимо подобрать одинаковое поперечное сечение элементов. При этом выбираются наиболее опасные РСУ (по тому или иному критерию) из всех элементов унифицированной группы.
При унификации конструктивных элементов необходимо, чтобы количество элементов, входящих в унифицированные конструктивные элементы, было одинаковым. Сечения элементов также должны быть одинаковыми. Количество расчетных сечений по длине конечного элемента должно быть одинаковым.
Для расчета выбираются все РСУ, которые возникли во всех сечениях элементов, принадлежащих конструктивному элементу.
16.6 Проверки несущей способности элементов
Для всех рассчитанных сечений элементов выводятся результаты проверок по прочности и устойчивости (по первому предельному состоянию), гибкости и прогибу (по второму предельному состоянию) и по местной устойчивости. Результаты выводятся в виде процентов использования сечения в сравнении с предельной несущей способностью по той или другой проверке.
123
ЛИРА® 9.2 Руководство пользователя
Для расчета следует задать коэффициент условий работы ус в виде произведения коэффициентов условий работы из таблицы 6* [41], коэффициент надежности по назначению уп, а также все необходимые дополнительные характеристики.
Ниже приведены таблицы со ссылками на пункты [41], используемые в конструирующей системе ЛИР-СТК.
Центрально-сжатые и центрально-растянутые элементы
Таблица 16.3
№ Тип проверки Источник или пункт СНиП Формула проверки, примечания
1 Прочность 5.1 > О' VI
2 Устойчивость 5.3 N « —. ^Ry/c (рА 1
3 Г ибкость 6.15 Л<[Л], Л<[Л] Предельная гибкость [X] задается пользователем. Для элементов типа 1(a), 2(a), 2(6) таблицы 19* [41] выбирается наименьшая [X] из полученной по таблице 19* и заданной в исходных данных
Изгибаемые элементы
Таблица 16.4
№ Тип проверки Источник или пункт СНиП Формула проверки, примечания
! 1 Прочность по нормальным напряжениям 5.12 5.18 м х му W с W - с у Лс Составные сечения рассчитываются без учета пластических деформаций (с=1.0). Прокатные сечения могут рассчитываться с учетом пластических деформаций (с>1.0).
2 Прочность по касательным напряжениям 5.12 | Q | S в It. Для упругих балок к = 1.0, для балок в пластической работе к = 0.9, для колонн - к = 0.5
3 Прочность по приведенным напряжениям 5.14 Ja2+3т2 <1.15Яу/с Местное напряжение не учитывается
124
Расчет и проектирование стальных конструкций
Таблица 16.4
№ Тип проверки Источник или пункт СНиП Формула проверки, примечания
4 Общая устойчивость 5.15, 5.16 '«/ ь ' /ь] м W - Ry’Zc min V ь При обеспечении общей устойчивости по п.п. 5.16(a) или 5.16(6) принимается <pb= 1
5 Устойчивость пояса 7.24 bef/t [be,/t] Увеличение предельного значения [be,/t] за счет недонапряжения не учитывается
6 Устойчивость стенки балки Местная и подвижная нагрузка не учитывается, предполагается отсутствие продольных ребер жесткости ।
'6.1 Устойчивость стенки, не укрепленной ребрами 7.10 I 2 w< 3.2 Подвижная нагрузка не учитывается
6.2 Устойчивость стенки, укрепленной только поперечными ребрами при учете пластической работы балки 7.2,7.5, Пособие по проектированию стальных конструкций к [41] п. 21.23 l^maxl^y re hea t • (Af /Aw + «) Местная и подвижная нагрузка не учитывается, увеличение предельного значения [/e,/t] за счет недонапряжения не учитывается
6.3 Устойчивость стенки, укрепленной только поперечными ребрами при упругой работе балки 7.6, 7.9, 7.10 I/ Л2 ( \г ст ] т 1 + — - Г с V к. ^сг) \ ^сг) Местная и подвижная нагрузка не учитываются, увеличение предельного значения [hef/t] за счет недонапряжения не учитывается. В проверке используется расчетная длина Lef для расчета общей устойчивости балки. Задание Lef>0,lM приводит к тому, что значение р в формуле (77) пункта 7.4* [41] принимается равным 0,8 (Р=0,8), при Lef<0,lM р принимается равным бесконечности (Р=“°). Для коробчатых сечений касательное напряжение вычисляется без учета влияния перерезывающей силы в другой плоскости
7 Прогиб (2-е предельное состояние) — Интегрирование эпюры моментов от нормативных нагрузок для данного элемента или конструктивного элемента.
125
ЛИРА® 9.2 Руководствопользователя
Колонны
Таблица 16.5
№ Тип проверки Источник или пункт СНиП Формула проверки, примечания
1 Прочность 5.1,5.3, 5.25, 5.28 1Л 2: л < Г Мх МУ
Гс , N М A 8W WxcxRyyc WycyRyrc ~ *Гс' Ru-Ус Yu
2 Устойчивость колонны в плоскости действия момента 5.3, 5.27*, 5.32, 7.20* N „ N о <РеА <Р*А Формула проверки выбирается в зависимости от относительного эксцентриситета
3 Устойчивость колонны из плоскости действия момента 5.3, 5.26, 5.27*, 5.30, 5.31, 5.32, 7.20* i Л/ „ л -Ry <рА Уменьшение расчетного момента М в зависимости от условий опирания согласно п.5.31 [41] не учитывается.
4 Устойчивость колонны, подверженной изгибу в 2-х плоскостях I 5.34, 5.35 N <R,„
5 Гибкость колонны 6.15* Л<[Л]
6 Гибкость отдельных ветвей на участке между узлами соединительной решетки по сравнению с гибкостью колонны 5.6 Л<[Л]
7 Устойчивость пояса изгибаемых элементов 7.22*, 7.24 Требования п.5.25
8 Местная устойчивость свеса полки 7.22*, 7.23*, 7.26*, 7.27* be,/t<[be,/t]
9 Стенки центрально и внецентренно сжатых элементов 7.14*, 7.16*, 7.17*,7.18*, 7.20*, 7.21 При необходимости расставляются поперечные ребра жесткости. Если стенка работает в закритической стадии, процент использования по устойчивости всегда равен 100%. Для коробчатых сечений касательное напряжение вычисляется без учета влияния перерезывающей силы в другой плоскости
126
Расчет и проектирование стальных конструкций
Канаты
Таблица 16.6
№ Тип проверки Источник или пункт СНиП Формула проверки, примечания
1 Прочность Пособие по проектированию стальных конструкций к [41] п.3.14 — < УсП r но не более 0,7 Run А YuYmYn
2 Прочность СНиП 2.05.03-84 п. 4.33 N „ -<Kdh m mv где Rdh = 0.63 • Rbn для канатов и пучков параллельно уложенных высокопрочных проволок или О _ 1г ип ™dh “ К * л А-Гп,
16.7 Описание алгоритмов расчета элементов
Проверочный расчет
Каждое сечение элемента при расчете проверяется по формулам, приведенным в п. 16.5. При этом используются следующие предпосылки и допущения:
• Крутящий момент при расчете не учитывается. Составные элементы уголков, швеллеров, соединенных через прокладки, рассчитываются как сплошностенчатые согласно п.5.7(41];
• Расчет соединительных элементов (планок, решеток) сжатых составных стержней выполняется в соответствии с п.5.8*, 5.9, 5.10 [41];
• В алгоритмах предусмотрено требование п.2.14 [41]. Согласно этому пункту, при расчете с учетом сейсмического воздействия вводится дополнительный коэффициент т,ф. Если усилие в данном сечении элемента идентифицировано как сейсмическое, то этот коэффициент вводится автоматически. Коэффициент ткр можно задать в диалоге «Учет сейсмических воздействий».
Проверка несущей способности ферменных элементов
При проверке несущей способности выполняются следующие расчетные процедуры:
• Расчет на прочность в пределах упругих деформаций согласно пункту 5.1 [41];
• Алгоритм расчета на устойчивость составлен в соответствии с указаниями п. 5.3 для стержней с гибкостью, находящейся в пределах 10< А <220. Коэффициент продольного изгиба ф определяется аналитически по формулам, указанным в п. 5.3;
• Гибкость определяется относительно местных осей элемента и сравнивается со значением предельной гибкости, введенным пользователем или определенным согласно таблице 19* [41] для элементов типа 1(a), 2(a), 2(6) в дополнительных характеристиках;
• Расчет местной устойчивости стенки производится в соответствии с п. 7.14*, 7.18*, 7.20*. Если фактическое значение гибкости превышает значение, определяемое по п. 7.14*, то процент использования стенки по устойчивости всегда равен 100%, и производится пересчет общей устойчивости стержня с использованием значения площади Ared вместо А;
• Для составных стержней, кроме расчета стержня на общую устойчивость, проверяется устойчивость отдельных ветвей на участках между узлами согласно п. 5.6. Исследуется гибкость ветви между узлами, гибкость отдельных ветвей на участке между планками, ограничение на которые приводится в этом же пункте.
127
ЛИРА® 9.2 Руководствопользоватегт
Проверка несущей способности изгибаемых элементов
В зависимости от работы, балки рассчитываются в пределах упругих и пластических деформаций. В общем случае проверке подлежит прочность сечения балки по нормальным, касательным и приведенным напряжениям. Расчет балки на прочность при пластических деформациях реализован на основе пункта 5.18, в пределах упругих деформаций - на основе п.5.12, приведенные напряжения - в соответствии с пунктом 5.14*. При этом используются следующие предпосылки:
• Проверка балки на общую устойчивость выполняется на основе пункта 5.15, 5.16*, 5.19*, 5.20 [40], в зависимости от заданной пользователем расчетной длины балки.
Раскрепления стержней, используемые только при расчете прогиба балок, никак не связаны с раскреплениями сжатого пояса балки и расчетной длиной балки при расчете на общую х-'^ устойчивость.
• Проверка общей устойчивости балки при наличии момента в двух плоскостях производится по критерию максимального краевого сжимающего напряжения в сечении с учетом ФЬ для одного из моментов.
• Поскольку в [41] отсутствуют указания по проверке общей устойчивости балок, отличных от двутавровых, тавровых или швеллерных, то при проверке других сечений принято ФЬ=1
• Устойчивость стенки, не подкрепленной ребрами жесткости, проверяется согласно пункту 7.10 [41]. При расчете местной устойчивости стенки не учитывается местная и подвижная нагрузки и предполагается отсутствие продольных ребер жесткости. Проверка местной устойчивости стенок балок, укрепленных поперечными ребрами жесткости, при работе стали в пределах пластических деформаций реализована на основе п.п. 7.2, 7.5, а также п. 21. 23 Пособия по проектированию стальных конструкций. Проверка местной устойчивости стенки балок, укрепленных ребрами жесткости, при работе стали в пределах упругих деформаций реализована на основе п. 7.6, 7.9, 7.10.
• При проверке местной устойчивости стенки балок, предполагается, что в формуле (77) пункта 7.4* [41] коэффициент /?=«, если расчетная длина балки Lef<0,lM и ((3=0,8), если расчетная длина более 0,1м.
• При проверке местной устойчивости стенки коробчатого сечения касательное напряжение вычисляются без учета влияния перерезывающей силы в другой плоскости.
• В процессе подбора, если стенка не удовлетворяет условию местной устойчивости, происходит ее утолщение, поэтому рекомендуется задавать реальный шаг поперечных ребер жесткости. Иначе ребра жесткости будут расставлены с максимально допустимым по согласно п.7.10 [41] расстоянием. Имеется возможность отказаться от установки поперечных ребер, погасив при задании дополнительных характеристик флажок ставить ребра жесткости.
• Проверка местной устойчивости полки выполняется в соответствии с пунктом 7.24 [41].
• Проверка прогиба осуществляется сравнением относительного прогиба, полученного из расчета по ПК ЛИРА, с задаваемым предельным относительным прогибом. Относительный прогиб вычисляется между точками раскрепления стержня, которые задаются пользователем. Точка раскрепления представляет собой точку, прогиб которой условно считается равным нулю. Если раскрепление балки не задано, то в качестве прогиба берется ее полное перемещение относительно местной оси. В каждом расчетном сечении стержня или конструктивного элемента прогиб определяется по каждому загружению. Величина его определяется путем интегрирования эпюры моментов стержня или конструктивного элемента с учетом краевых условий, заданных при назначении раскреплений стержней, иными словами, точек нулевого прогиба. При нахождении прогиба используются нормативные усилия, найденные путем деления расчетного усилия на коэффициент надежности по нагрузке. Далее, на основе информации о составе РСУ, соответствующие прогибы суммируются с учетом коэффициентов сочетаний, заданных при формировании РСУ. Из полученного ряда прогибов выбирается максимальный, который и сопоставляется с заданным предельным прогибом.
128
Расчет и проектирование стальных конструкций
Проверка несущей способности колонн
При проверке несущей способности колонн выполняются следующие расчетные процедуры:
• Проверка сечения внецентренно-сжатых элементов по прочности производится на основе пунктов 5.1, 5.3, 5.25, 5.28 [41].
• Проверка колонн на общую устойчивость в плоскости действия момента выполняется в соответствии с пунктами 5.3, 5.27*, 5.32, 7.20* [41], из плоскости момента - на основе пунктов 5.3, 5.26, 5.27*, 5.30, 5.31, 5.32, 7.20*[41], причем уменьшение момента в зависимости от условий опирания согласно п.5.31 не учитывается. Проверка устойчивости колонны, подверженной изгибу в двух плоскостях, реализована на основе п.5.34, 5.35 [41].
• Если шаг решетки в сквозной колонне не задан, принимается шаг, соответствующий углу наклона 60° к оси колонны.
• При расчете сквозных колонн типа “Раздвинутые двутавры” и “Раздвинутые швеллеры”, если стенка ветви теряет местную устойчивость, Ared для проверки устойчивости ветви и колонны берется так, будто обе ветви потеряли устойчивость. Если стенка ветви сквозного сечения теряет местную устойчивость в любом РСУ, то для проверки устойчивости колонны во всех РСУ берется площадь Ared=min — минимальная редуцированная площадь.
• Проверка устойчивости трубы производится в зависимости от гибкости трубы. Если условная гибкость трубы меньше 0,65, расчет на устойчивость ведется по разделу 8 [41]- расчет листовых конструкций.
• При вычислении расчетных длин соединительной решетки сквозных колонн расчетная длина берется равной расстоянию между центрами узлов решетки.
• Расстояние между соединительными планками всегда задается в свету. При проверке планки по приведенным напряжениям (формула 33 [41]) считается, что в работу включена только стенка сечения.
• При вычислении расчетных длин соединительной решетки сквозных колонн расчетная длина берется равной расстоянию между центрами узлов решетки, за исключением четырехветвевого уголкового сечения.
• Для четырехветвевого уголкового сечения при вычислении расчетных длин используется таблица 13* [41] со следующими оговорками. Радиус инерции i всегда берется минимальный (вт.ч. для поясов). Коэффициент ра принимается согласно таблице 15*, как для случая прикрепления раскоса к поясам сварными швами или болтами, числом не менее двух (первая строка таблицы). При вычислении расчетных длин распорок, распорки принимаются из равнополочных уголков. Если соединительная решетка колонны выполнена не из одиночных уголков, то для вычисления расчетных длин применяется таблица 11.
• Гибкость колонны проверяется в соответствии с п.6.15*, а гибкость ветвей в сквозных сечениях на участке между узлами соединительной решетки - на основе п.5.6 [41].
• Устойчивость стенок колонн проверяется в соответствии с п.7.14*, 7.16*, 7.17*,7.18*, 7.20*, 7.21 [41]. Если условная гибкость стенки сплошных колонн превышает 2.3, расставляются ребра жесткости с шагом 3hef (п. 7.21 [41]).
• При расчете устойчивости стенок сечений учитывается пункт 7.20* [41], допускающий частичную потерю устойчивости с последующим пересчетом проверок общей устойчивости стержней. Если гибкость стенки превышает допустимое значение, определяемое по пункту 7.14* [41], процент устойчивости стенки принимается 100%.
• Если стенка работает в закритической стадии, процент использования по устойчивости стенки всегда равен 100%, а проверка устойчивости стержня колонны пересчитывается для редуцированной площади сечения.
• Местная устойчивость свеса полки проверяется в соответствии с п. 7.22*, 7.23*, 7.26*, 7.27*[41].
• Согласно п.5.27 для сплошностенчатых стержней при относительном эксцентриситете mef>20 и для сквозных стержней при т>20 расчет на устойчивость не требуется. Расчет выполняется как для изгибаемых стержней.
Проверка несущей способности канатов
Проверяется прочность на основе п.4.33 [44] и п.3.14 [59].
129
ЛИРА® 9.2 Руководствопользователя
Подбор сечений прокатных элементов происходит простым перебором от первого сечения в сортаменте по порядку, указанному на вкладке “Ограничения подбора”. Будет подобрано первое, удовлетворившее всем проверкам, сечение. По умолчанию профили отсортированы в порядке возрастания площадей сечений. Таким образом, по умолчанию подбирается сечение с наименьшей площадью. Изменить порядок сортировки профилей в сортаменте можно при помощи программы ЛИР-РС (Редактируемый Сортамент).
Подбор составных сечений происходит при помощи перебора всех возможных профилей. Например, сечение «Составной двутавр» подбирается так. Фиксируется стенка и происходит подбор пояса, затем фиксируется следующая стенка и вновь подбирается пояс, и так далее. В результате образуется множество решений, при которых удовлетворяются все проверки несущей способности, из которых надо выбрать оптимальное. Оптимальное решение - это либо сечение минимальной площади, либо (если сортамент и стенки, и полки отсортирован по стоимости) сечение минимальной стоимости. Поскольку сортаменты в своем исходном состоянии отсортированы по площади, по умолчанию будет подобрано сечение минимальной площади.
При расчете сквозных колонн типа «Раздвинутые двутавры» и «Раздвинутые швеллеры» подбор является оптимальным только для ветви. Если какие-либо проверки, касающиеся стержня колонны в целом, не выполняются, происходит увеличение сечения полки ветви. К таким проверкам относятся: 1) проверки устойчивости стержня колонны; 2) проверки гибкости стержня колонны; 3) требования превышения гибкости колонны над гибкостью ветви на участке между узлами.
16.8 Сквозной расчет элементов
Сквозной расчет предназначен для быстрого подбора или проверки поперечных сечений элементов всей конструкции или ее произвольного фрагмента.
Этот расчет позволяет получить:
• Таблицы результатов для произвольного фрагмента схемы. Результаты создаются в текстовом, HTML, Excel форматах. Для создания файла результатов используйте команду «Стандартные таблицы».
• Наглядное представление о работе сечений расчетной схемы. Цвет элементов расчетной схемы отображает использование несущей способности сечений по проверкам [41], позволяя визуально определить перегруженные или недогруженные элементы. Эту операцию удобно применять для быстрого поиска опасных сечений. Для вывода цветового представления служит команда «Цветовое представление» меню «Результаты».
16.9 Локальный расчет элементов
Этот режим работы позволяет рассчитать отдельное стальное сечение по задаваемым расчетным сочетаниям усилий. Режим применяется для выполнения простых инженерных задач по [41] в соответствии с результатами работы ПК ЛИРА или без таковых. Допускается как подбор, так и проверка элемента. Локальный или автономный расчет позволяет получить весьма подробную информацию об элементе. В окне локального расчета могут отображаться огибающие эпюры усилий, таблица с исходными данными для расчета элемента и таблица, содержащая подробные результаты расчета элемента и его поперечного сечения.
16.10 Представление результатов расчета элементов
Для всех рассчитанных сечений выводятся результаты проверок по прочности и
устойчивости (по первому предельному состоянию), по гибкости и прогибу (по второму
предельному состоянию). Результаты выводятся в виде процентов использования сечения в
сравнении с предельной несущей способностью по той или иной проверке. Результат выглядит
следующим образом:
Процент использования по проверке %ис =
100%'максимальное значение предельная несущая способность
При формировании результатов использовано также понятие процента использования по первому предельному состоянию (1ПС) и по второму предельному состоянию (2ПС).
130
Расчет и проектирование стальных конструкций
Процент использования сечения по 1ПС - это наибольшее значение, полученное из проверок прочности и общей устойчивости по всем РСУ.
Процент использования сечения по 2ПС - это наибольшее значение, полученное из проверок предельной гибкости или прогибу по всем РСУ.
Процент использования сечения по местной устойчивости (МУ) - наибольшее значение, полученное из проверок устойчивости стенки и полки, взятый по всем РСУ.
%ис1 ПС = max{%Hc(i)} - по прочности, устойчивости;
%ис2ПС = max{%nc(i)} - по гибкости, прогибу;
%ис МУ = max{%Hc(i)} - по устойчивости стенки, полки,
где: - количество РСУ
Результаты расчета представляются в табличной форме. Таблицы результатов формируются для выделенных на схеме элементов или же, если ничего не выделено, для всей схемы.
Форма таблицы зависит от вида элемента. Существуют таблицы для БАЛОК, СПЛОШНЫХ КОЛОНН, СКВОЗНЫХ КОЛОНН, ФЕРМ и КАНАТОВ. Таблицы результатов имеют вид.
Балки
Элемент нс Группа Шаг решетки ФЬ min Проценты исчерпания несущей способности балки по сечениям, % Длина элемента
нор тау d УБ Прг УС УП 1ПС 2ПС М.У
Колонны
Элемент нс Группа Шаг решетки (ребер) Проценты исчерпания несущей способности колонны по сечениям, % Длина элемента
нор УУ1 YZ1 yyz ГУ1 |rzi УС УП 1ПС 2ПС М.У
Сквозные колонны
Элемент НС Группа Шаг решетки (ребер) Проценты исчерпания несущей способности колонны по сечениям, % Длина элемента
нор УУ1 |yZ1 |г>г |т FZ1 |ус УП |1ПС 2ПС |М.У
Фермы
Элемент НС Группа Шаг планок Примечание Проценты исчерпания несущей способности фермы по сечениям, % Длина элемента
нор |УУ1 |yZ1 |ГУ1 |rZ1 |УС |УП |1ПС |2ПС |М.У
Канаты
Элемент НС Группа Проценты исчерпания несущей способности каната по сечениям, % Длина элемента
131
ЛИРА^ЗЗ Руководствопользователя
В табл. 16.7 приводятся пояснения к шапкам таблиц результатов.
Таблица 16.7
ЭЛЕМЕНТ номер конечного элемента
НС номер сечения по длине конечного элемента
ГРУППА группа унификации элемента, конструктивный элемент
ШАГ РЕБЕР (РЕШЕТКИ) шаг поперечных ребер жесткости или соединительной решетки (планок — в свету)
ШАГ ПЛАНОК шаг поперечных соединительных планок в свету
ФЬ min минимальный коэффициент поперечного изгиба
Прг относительный прогиб балки (приближенно)
Далее следуют проценты исче рпания несущей способности по проверкам СНиП:
нор нормальные напряжения
тау касательные напряжения
d приведенные напряжения
УБ общая устойчивость балки
УУ1 устойчивость относительно оси Y1
yzi устойчивость относительно оси Z1
yyz устойчивость колонны, сжатой в 2-х плоскостях
ГУ1 предельная гибкость относительно оси Y1
TZ1 предельной гибкости относительно оси Z1
г>г* отношение гибкости сквозной колонны к гибкости ветви *100% или процент использования по прогибу
УС местная устойчивость стенки
УП местная устойчивость сжатого пояса
1ПС сводный процент использования сечения по первому предельному состоянию
2ПС I сводный процент использования сечения по второму предельному состоянию
М.У сводный процент использования сечения по местной устойчивости
! ДЛИНА ЭЛЕМЕНТ геометрическая длина конструктивного элемента
Для ферменных элементов печатается допустимый шаг соединительных планок. Шаг ребер жесткости для ферменных элементов не выводится. Если в ферменных элементах требуется постановка поперечных ребер жесткости, то в графе «Примечание» печатается слово «Ребр». В таком случае для данного элемента необходимы ребра жесткости с шагом не более 3*hef.
Если в ферменных элементах для расчета был использован минимальный радиус инерции, тот в графе «Примечание» записывается слово «мин!».
16.11 Расчет узлов
Исходными данными для расчета узла являются поперечные сечения соединяемых в узле элементов, применяемые сварочные материалы и болты, а также усилия в соединяемых элементах.
Возможны два варианта расчета узла. Первым вариантом является расчет «с нуля», то есть все исходные данные от начала до конца вводятся вручную. Вторым вариантом является расчет, при котором поперечные сечения и усилия соединяемых элементов извлекаются из задачи ЛИР-СТК. Могут быть извлечены как подобранные, так и назначенные сечения.
Во избежание путаницы необходимо четко различать понятия характеристики и параметры элементов узла. Характеристики элементов узла остаются неизменными при подборе. Параметры элементов узла выбираются при подборе. Параметры каждого типа узла приведены в диалоге Свойства узла - таблица Параметры. Можно назначить и характеристики, и параметры узла. Однако следует помнить, что подбор всегда заменяет параметры узла, заданные пользователем. Изменение характеристик и параметров узла производится из диалогов Общее, Свойства узла. Усилия, на которые рассчитываются элементы узла, можно редактировать в диалоге Расчетные усилия.
132
Расчет и проектирование стальных конструкций
Nx*, кН Му.кНм Qz. кН Mz,kHm Qy.rii
-100 0 0 0 0
У зсл : Исходные данные
'элемент утла Свойство Значение Единицы измерения
Колонна Профиль ПОБ1.ГОСТ 26020 - 83
Сталь 09Г2 гр. 1,ТУ 14-1-3023-80
ШовШ1 Материал Марка проволоки Св-08
Шов Ш2 Материал Марка проволоки Св-08
Плита Сталь ВСтЗкп2
Ширина 400 00 мм
Длина 400 00 мм
Толщина 40 00 мм
Анкерный болт Марка стали ВСтЗкп2
Диаметр 20 00 мм
Бетон Класс бетона В20
Узел: Результаты проверки
Параметр Свойство Значение Процент пспольаованияАч Внутренние усилия
N кН Му. кНм Qz. кН Mz, к Нм Qy. кН
Плита Толщина tpl 40 0 мм 73 8 -100.000* 0 000* 0.000 0 000* 0 000
Длина Н 400.0 мм
Ширина В 400 0 мм
Анкерный болт Количество 2 00 -100.000* 0.000 0 000 0 000 0 000
Шов Ш1 Катет 5 0 мм 8.8 -100000* 0 000 0 000 0 000 0 000
Шов Ш2 Катет 5 0 мм 1.8 -100.000* 0 000 0 000 0 000 С COG
Lv 0.0 мм
* - усилия, участвующие в подборе или проверке соответствующего параметра
Поскольку условие (ргЬ- < pzkf) - удовлетворяется, то
KIw - (Nx 103/J$f kf(kf 2 Hw + Ц-2 (bf+bf - tw - 2 RyyR^y^yJyJ-lOO
to ten условие (0 7-5 « 15) -удовлетворится, то
Klw» (20103/0.75(52836+52(55+55-4.1-2 7)) 180-11/1) 100-1759'A
Здесь
Nx = 20 кН - продольное усилие
Pf = 0.7 Таблида 34* - коэффициент; учитывающий технологию сварки
kf = 5 ия - катет сварного шва
kf = 5 мм - катет сварного шва
Hw * 88.6 мм - вьгота стенки
bf = 55 мм - ширина полки
bf = 55 мм - ширина полки
tw = 41 им - толщина стенки
R = 7 мм - радиус закругления
Rwf - ISO МПа - расчетное сопротивление угловых швов срезу (условному) по металлу шва
Ywf ’ i - коэффициент условий работы шва
ус = 1 - коэффициент усдовий работы
yn = I - коэффициент иадекпости по казтмчекию
Pf = 0.7Таблица34* - воэффипжкг, учитывающий технологию сварки
Pz = 1 Таблица 34* - коэффициент, учитывающий технологию сварки
Рис. 16.2
Характеристики и параметры узла выводятся в таблице исходных данных, результаты подбора или проверки узла выводятся в таблице результатов (рис.16.2, справа). ЛИР-СТК позволяет получить подробную трассировку проверок, произведенных при расчете узла. Фрагмент такой трассировки приведен на рис. 16.2, справа.
При расчете узла учитываются только те усилия, которые в таблице результатов отмечены звездочкой - *.
133
ЛИРА® 9.2 Руководствопользователя
17 Подбор и проверка армирования в железобетонных элементах
17.1 Общие положения
Подбор арматуры и проверка заданного армирования в стержневых и пластинчатых элементах для различных случаев напряженного состояния производится при помощи конструирующих систем ЛИР-АРМ и ЛИР-ЛАРМ.
Подбор и проверка армирования может быть выполнена в соответствии со следующими нормативами:
• СНиП 2.03.01-84* Бетонные и железобетонные конструкции;
• ТСН-100 Территориальные строительные нормы г. Москвы. Железобетонные конструкции с арматурой классов А500С и А400С.
• ДСТУ 3760-98 Прокат арматурный для железобетонных конструкций;
• СНиП 52-01-2003 Бетонные и железобетонные конструкции;
• Еврокод prEN 1992-1 (October 2001).
Следует отметить, что в перечисленных нормативных документах охвачены далеко не все возможные формы армируемых сечений и возникающие в них виды напряженных состояний. Так, отсутствуют положения по армированию сечений в форме креста и коробки при косом внецентренном сжатии. Отсутствуют положения, касающиеся армирования Г-образных сечений при кручении. Отсутствуют также положения по армированию пластин и оболочек при действии всего набора усилий и напряжений (изгибающие и крутящие моменты, нормальные и касательные напряжения) и многое другое.
По мнению разработчиков, пользователю должна быть предоставлена возможность получения обоснованного решения в любой неоднозначной ситуации.
В связи с этим, для конструирующих систем ЛИР-АРМ и ЛИР-ЛАРМ разработаны универсальные оптимизационные алгоритмы подбора и проверки продольного и поперечного армирования, позволяющие охватить все виды возникающих напряженных состояний. Эти алгоритмы пригодны для всех форм сечений. Они основаны на фундаментальной теории железобетона и общих положениях норм проектирования. При этом учитываются нормированные диаграммы состояния бетона и арматуры, характер трещинообразования, деформирования и разрушения элементов, рациональное размещение арматуры и её взаимовлияние для различных РСУ и РСН и др.
При определении армирования балок-стенок, плит и оболочек по отечественным нормативам использована теория, изложенная в трудах академика Н И. Карпенко, а по Еврокод prEN 1992-1 (October2001)-теория Вуда.
Определение армирования осуществляется на базе сведений о расчетных характеристиках арматуры и бетона, о диаметрах и площадях арматурных стержней и т.п., которые содержатся в соответствующих нормативах.
Площади арматуры по первой и второй группе предельных состояний вычисляются по усилиям как от отдельных загружений, так и по расчетным сочетаниям нагрузок (РСН) или расчетным сочетаниям усилий (РСУ), полученным в результате расчета.
Для подбора армирования в интерактивном режиме в системе ЛИР-АРМ задаются дополнительные данные: нормативные и расчетные характеристики бетона и арматуры, назначаются конструктивные элементы, задается унификация элементов и т.п.
Для определения и проверки армирования в системе ЛИР-ЛАРМ исходные данные могут быть введены как в интерактивном режиме, так и путем экспорта данных из ЛИР-АРМ с их дальнейшей корректировкой. Допускается многократное изменение параметров сечения, геометрических характеристик, параметров заданного армирования, информации о материалах, а также усилий и сочетаний.
Для определения армирования в элементах расчетной схемы разработаны различные модули армирования СТЕРЖЕНЬ, БАЛКА-СТЕНКА, ПЛИТА, ОБОЛОЧКА.
Реализованные в системах ЛИР-АРМ и ЛИР-ЛАРМ возможности подбора арматуры для сечений стержней в соответствии с различными нормативами указаны в таблицах 17.1, 17.2, 17.3. Для пластин - в таблице 17.4.
В таблицах приняты следующие обозначения:
134
Подбор и проверка армирования в железобетонных элементах
• +А - одновременно наличие соответствующих положений в нормах и наличие универсального алгоритма;
• А - наличие универсального алгоритма и отсутствие соответствующего положения в нормах;
• Ас - учет кручения по К.В. Сахновскому.
Первое и второе предельные состояния отделяются символом «/». Отсутствие этого символа означает, что в нормах отсутствуют соответствующие положения, а алгоритм охватывает и первое и второе предельные состояния.
Стержни. Первое / второе предельное состояние по СНиП 52-01-2003
Таблица 17.1
Тип сечения I Плоский изгиб (ригель) Плоское внецентренное сжатие (колонна) Косое внецентренное сжатие (колонна) Центральное растяжение-сжатие Кручение с изгибом Сложное Напряженное состояние
I Му, Qz, Мкр N, Му, Qz N, Му, Mz, Qy, Qz N Мкр, Му, N, Мкр, Му, Mz, Qy, Qz
' Прямоугольник +А/+А +А/+А +А/+А +А/+А +А/+А А/+А
; Тавр симметричный +А/+А А/+А А/+А А/+А А/+А А/+А
' Двутавр симметричный +А/+А +А/+А А/+А +А/+А А/+А А/+А
, Коробка +А/+А +А/+А А/+А +А/+А А/+А А/+А
| Круг, кольцо +А/+А +А/+А А/+А +А/+А А/+А А/+А
5 Крест : несимметричный А А А А А А
I i Уголок i А А А А А А
| Тавр | несимметричный А А А А А I А
135
ЛИРА®92 Руководствопользователя
Стержни. Первое / второе предельное состояние по СНиП 2.03.01-84*
Таблица 17.2
Тип сечения Плоский изгиб (ригель) Плоское внецентренное сжатие (колонна) Косое внецентренное сжатие (колонна) Центральное растяжение-сжатие Кручение с изгибом Сложное напряженное состояние
Му, Qz, Мкр N, Му, Qz N, Му, Mz, Qy, Qz N Мкр, Му, N, Мкр, Му, Mz, Qy, Qz
Прямоугольник +А/+А +А/+А +А/+А +А/+А +Ас/Ас +Ас/+А
Тавр симметричный +А/+А А/+А А/+А А/+А +Ас/Ас Ас/+А
Двутавр симметричный +А/+А +А/+А А/+А +А/+А +Ас/+А Ас/+А
Коробка +А/+А +А/+А А/+А +А/+А +Ас/+А Ас/+А
Круг, кольцо А/+А +А/+А А/+А +А/+А Ас/+А Ас/+А
Крест несимметричный А А А А +Ас Ас
Уголок +А/+А А А А +Ас Ас
Тавр несимметричный А I А А А Ас Ас
Стержни. Первое предельное состояние по Еврокод prEN 1992-1 (October 2001)
________________________________________________________________Таблица 17.3.
Тип сечения Плоский изгиб (ригель) Плоское внецентренное сжатие (колонна) Косое внецентренное сжатие (колонна) Центральное растяжение-сжатие Кручение с изгибом Сложное напряженное состояние
Му, Qz, Мкр N, Му, Qz N, Му, Mz, Qy, Qz N Мкр, Му, N, Мкр, Му, Mz, Qy, Qz
Прямоугольник +А +А А +А +А А
Тавр симметричный +А А А А А А
Двутавр симметричный +А А А А А А
Коробка +А А А А А А
Круг, кольцо +А А А А А А
Крест несимметричный А А А А А А
Уголок А А А А А А
Тавр несимметричный А А А А А А
136
Подбор и проверка армирования в железобетонных элементах
Пластины и оболочки. Первое/второе состояние предельное состояние при всех нормативах
Таблица 17.4.
Плоское напряженное состояние (балка-стенка) Nx, Ny, Тху Изгиб (плиты) Мх, Му, Мху, Qx, Qy Оболочки Nx, Ny, Тху, Мх, Му, Мху, Qx, Qy
А/А А/А А/А
17.2 Армирование стержневых элементов
Модуль армирования СТЕРЖЕНЬ предназначен для подбора арматуры в стержневых элементах от одновременного действия нормальной силы, крутящего момента, а также изгибающих моментов и перерезывающих сил в двух плоскостях.
Допускаются следующие формы армируемых сечений: прямоугольник, тавр с полкой внизу, тавр с полкой вверху, двутавр, коробчатое сечение, кольцевое и круглое сечения, крестовое сечение, уголковое сечение, тавр со смещенной стенкой и с полкой снизу, тавр со смещенной стенкой и с полкой сверху.
Реализована база, в которой содержатся расчетные и нормативные характеристики материалов, а также процедуры для определения геометрических характеристик бетонного сечения.
Расчет выполняется по первой (прочность) и второй (трещиностойкость) группе предельных состояний.
Универсальный алгоритм подбора продольной арматуры реализует итерационный процесс в основе которого лежит проверка равновесия произвольного сечения с произвольно расположенной арматурой при заданных усилиях. Этот алгоритм учитывает требования норм, в рамках которых ведется расчет: нормативные характеристики материалов, нормативные коэффициенты условий работы, нормы эксплуатации, расчетные длины элементов, параметры надежности, ползучести и т.п.
Процесс наращивания арматуры начинается с начального минимального армирования. Для всех наборов усилий РСУ и РСН данного сечения производится итерационный процесс наращивания арматуры. Процесс ведется с учетом конструктивных требований, задаваемых пользователем. К конструктивным требованиям относятся:
• типы сечения - балка, стержень, колонна;
• типы армирования - симметричное, несимметричное, симметричное относительно одной из осей сечения;
• типы расположения арматуры - либо равномерно вдоль грани, либо в углах с указанием диаметров угловых стержней;
• требования к оптимизации наращивания арматуры в зонах сечений с максимальными фибровыми напряжениями.
Расчет заканчивается, когда подобранная арматура удовлетворяет всем наборам усилий, РСУ или РСН для данного сечения.
Таким образом, реализованный алгоритм отвечает всем требованиям соответствующих норм и является:
• универсальным, т.к. позволяет подобрать произвольно расположенную арматуру в произвольном сечении для общего вида силовых воздействий (т.е. все шесть видов усилий Мх, Му, Мкр, Qx, Qy, N);
• оптимальным, т.к. арматура наращивается в первую очередь в зонах с наибольшими растягивающими напряжениями и учитывается взаимное влияние арматуры для всех наборов усилий РСУ и РСН.
Скорость работы алгоритма зависит от величины наращивания арматуры на каждом шаге. В связи с этим пользователю предоставляется возможность управлять соотношением «точность -скорость», задавая коэффициент приращения площади арматуры.
137
ЛИРА^ЗЗ Руководствопользователя
Расчет элементов на действие поперечной силы осуществляется по методике, изложенной в СНиП 11-21-75 («Бетонные и железобетонные конструкции»). При этом поперечная сила от внешней нагрузки должна быть воспринята бетоном и поперечной арматурой. Площадь поперечной арматуры определяется по максимальному усилию в хомутах на единицу длины элемента. Величина максимального усилия вычисляется на основании пунктов 3.29 - 3.33 [43] для ряда проекций наклонных трещин, расположенных в интервале от Н до 2Н.
Площади продольной и поперечной арматуры, обусловленной кручением, определяются по методике, изложенной в работе [37].
Способность сечения воспринимать крутящий момент и поперечную силу проверяется в соответствии с требованиями СНиП 2.03.01- 84* (Пособие по проектированию бетонных и железобетонных конструкций из тяжелых и легких бетонов без предварительного напряжения арматуры, пп.3.30 и 3.37).
По требованию пользователя выполняется расчет на заданную допустимую ширину раскрытия трещин. Нулевую ширину раскрытия трещин задавать запрещено.
Предусмотрен учет особых условий работы стержня: обычный стержень, балка, нижние колонны первого этажа многоэтажного каркасного здания и другие колонны многоэтажного каркасного здания. Последние особые условия введены по рекомендациям п.З 56 [43].
В общем случае результаты выдаются в трех строчках для каждого сечения:
• полная арматура, подобранная по первой и второй группам предельных состояний;
• арматура, подобранная по первой группе предельных состояний;
• арматура, обусловленная кручением.
В таблицах результатов выдаются площадь сечения продольной и поперечной арматуры, процент армирования, ширина раскрытия трещин и сообщения об ошибках.
Схема расположения арматуры показана на рис 17.1.
Рис. 17.1.
Площади продольной арматуры выдаются в см2:
AU1 - площадь угловой нижней продольной арматуры (в левом нижнем углу сечения);
AU2 - площадь угловой нижней продольной арматуры (в правом нижнем углу сечения);
AU3 - площадь угловой верхней продольной арматуры (в левом верхнем углу сечения);
AU4 - площадь угловой верхней продольной арматуры (в правом верхнем углу сечения);
AS1 - площадь нижней продольной арматуры;
AS2 - площадь верхней продольной арматуры;
AS3 - площадь левой боковой продольной арматуры;
AS4 - площадь правой боковой продольной арматуры;
% - процент армирования.
Площади поперечной арматуры - в см2, подобранные при шаге хомутов 100 см:
ASW1 - вертикальная поперечная арматура;
ASW2 - горизонтальная поперечная арматура;
Ширина раскрытия трещин - в мм:
длит- ширина длительного раскрытия трещин;
крат - ширина кратковременного раскрытия трещин.
При подборе арматуры с выделением угловых стержней в таблице результатов площади
138
Подбор и проверка армирования в железобетонных элементах
угловых стержней печатается в графах AU1, AU2, AU3, AU4. Площади арматуры вдоль соответствующих граней, расположенных между угловыми стержнями печатаются в графах AS1, AS2, AS3, AS4.
Если расчет произведен по алгоритму распределенной арматуры, то площади угловой арматуры AU1, AU2 содержатся в площадях арматуры AS1, a AU3, AU4 соответственно в AS2. При конструировании рекомендуется, чтобы в углах сечения размещались стержни, площадь которых составляет не менее У< площади арматуры AS1 или AS2 и не менее % площади AS3 или AS4. Например, площадь стержня AU3 должна быть не менее % площади AS2 и не менее % площади AS3.
17.3 Проверка заданного армирования в стержневых элементах
Проверка армирования производится в системе ЛИР-ЛАРМ.
В сечении элемента по шаблону задается расстановка продольных арматурных стержней и поперечной арматуры. Различаются следующие типы продольных стержней по расположению в сечении:
• угловые нижние;
• угловые верхние;
• нижние первого ряда;
• нижние второго ряда;
• верхние первого ряда;
• верхние второго ряда;
• боковые слева первого ряда;
• боковые слева второго ряда;
• боковые справа первого ряда;
• боковые справа второго ряда.
• стержни, задаваемые по координатам
Проверка производится следующим образом. Определяется количество продольной арматуры, необходимой для восприятия крутящего момента. Такая арматура должна быть расположена у граней сечения (не в углах). Если необходимая арматура отсутствует, выдается сообщение: «Сечение не проходит при проверке работы на кручение. Коэффициент запаса [к]».
Если восприятие крутящего момента обеспечено, то соответствующая ему арматура, при проверке на нормальную силу и изгибающие моменты, исключается.
Затем проверяется поперечная арматура на действие крутящего момента и поперечных сил. Если поперечной арматуры недостаточно для восприятия крутящего момента и поперечной силы, выдается сообщение: «Сечение не проходит по условию проверки поперечной арматуры на действие поперечной силы».
Затем производится проверка продольной арматуры на действие нормальной силы и изгибающих моментов в двух плоскостях. Если сечение проходит, то усилия увеличиваются с шагом 5% до тех пор, пока не превысят несущую способность сечения. В результате выдается сообщение: «Сечение проходит. Коэффициент запаса [к]», где к - коэффициент к внешним усилиям на предпоследнем шаге итераций.
Если сечение не проходит, то усилия уменьшаются с шагом 5% до тех пор, пока сечение не станет достаточным и выдается сообщение: «Сечение не проходит. Коэффициент запаса [к]», где к - коэффициент к внешним усилиям на последнем шаге итераций.
17.4 Армирование пластинчатых элементов
Алгоритм предназначен для определения армирования:
• тонкостенных железобетонных элементов, в которых действуют изгибающие и крутящие моменты, осевые и перерезывающие силы - элементы оболочки;
• плоских железобетонных элементов, в которых действуют изгибающие и крутящие моменты, а также перерезывающие силы - элементы плиты;
• железобетонных элементов, находящихся в плоском напряженном состоянии - элементы балки-стенки.
139
ЛИРА® 9.2 Руководство пользователя
Подбор арматуры (отдельно продольной и поперечной) выполняется на следующие усилия и напряжения (рис. 17.2):
Nx, Ny, Тху - для балок-стенок;
Мх, Му, Мху, Qx, Qy - для плит;
Nx, Ny, Тху, Мх, Му, Мху, Qx, Qy-для оболочек.
Рис. 17.2.
а -усилия, действующие в элементах балки-стенки, и главные нормальные усилия;
b -усилия, действующие в элементах плиты, и главные изгибающие моменты;
с -усилия, действующие в элементах оболочки, главные нормальные усилия.
Продольная арматура в пластинах подбирается отдельно по прочности и трещиностойкости. Схемы расположения продольной арматуры показаны на рис. 17.3
(а - балок-стенок, Ь, с - плит и оболочек).
♦ у1
Asy-н х1
а Ь,с
Рис. 17.3.
Подбор продольной арматуры осуществляется с обеспечением минимума суммарного расхода арматуры в направлениях Х1 и Y1 при удовлетворении условий прочности [39] и требований норм [36] по ограничению ширины раскрытия нормальных трещин. Ширина раскрытия трещин определяется в соответствии с [39] при учете [36]. Подбор арматуры в пластинчатых элементах осуществляется с учетом работы арматуры по ортогональным направлениям.
Исходя из максимальных усилий (действующих в направлении координатных осей, совпадающих с направлениями расположения стержней арматурной сетки), вычисляются максимальные площади сечения арматуры:
• в плите, как для изгиба;
• в балке-стенке, как для центрального сжатия-растяжения;
• в оболочке, как для внецентренного сжатия-растяжения в одном направлении.
Далее проверяются условия прочности. Выбор условий прочности осуществляется в зависимости от положения расчетного сечения (сжатая грань вверху или внизу) и от схемы трещин. В случае необходимости, сечение арматуры увеличивается с шагом 5% до соблюдения условий прочности [39]. Полученные сечения арматуры принимаются в качестве начального приближения.
В дальнейшем по условиям прочности вычисляются площади арматуры, при которых обеспечивается минимальный суммарный расход стали. Для этого используется алгоритм
140
Подбор и проверка армирования в железобетонных элементах
координатного спуска с отталкиванием [27], разработанный для многомерных задач с большим числом ограничений.
После определения армирования по прочности выполняется проверка ширины раскрытия трещин поочередно для всех сочетаний усилий. Если для i-того сочетания усилий (i = 1...m ) ширина непродолжительного или продолжительного раскрытия трещин превышает допустимое значение [36], то сечение арматуры в направлении, соответствующем углу а<40° (а - угол между трещиной и осью Х1) увеличивается с шагом 5%. После того как требования по ограничению ширины будут удовлетворены, производится проверка следующего сочетания усилий в сечении.
Подбор поперечной арматуры выполняется из условий прочности по перерезывающей силе как для одноосного напряженного состояния при учете каждого из направлений усилий (Qx, Qy) раздельно в соответствии с нормами [36]. Поперечная арматура для балок-стенок не вычисляется.
Первоначально определяется поперечное армирование для направлений Х1 и Y1 независимо. Для стандартизации перехода к произвольному шагу поперечной арматуры, реализован алгоритм побора поперечной арматуры при шаге 100 см.
Подбор поперечной арматуры для пластин выполняется в соответствии с п.п. 3.31-3.33 [43]. При вычислении усилия в хомутах на единицу длины (qsw) определяются qsw, для С0( (длина проекции наклонной трещины на продольную ось элемента) от C0msx=2*/j0 до Comin=ho при h0 = Н, где Н - толщина пластины. Значение qsw0 определено для Сотах- Уменьшая Со на 10% до Comin, находим qsw. Из всех полученных qsw, выбираем максимальное и приравниваем его qsw. Зная qsw, находим Asw. Ширина зоны армирования лежит в пределах от Comax^ho до C0min=h0 qsw = Asw*Rsw/S,
где: qsw- усилие в хомутах на единицу длины элемента в пределах наклонного сечения;
Rsw- расчетное сопротивление поперечной арматуры растяжению;
Asw - площадь сечения хомутов, расположенных в одной нормальной к продольной оси элемента плоскости, пересекающей наклонное сечение;
S - шаг поперечной арматуры (100 см).
Если условие (72) [36] не выполняется, то выдается сообщение о недостаточной толщине элемента.
При анализе результатов подбора поперечной арматуры следует иметь в виду, что для пластин МКЭ дает приближенное решение. При этом погрешность вычисления усилий (напряжений) превышает погрешность вычисления перемещений. В свою очередь, погрешность вычисления перерезывающих сил значительно превышает погрешность вычисления моментов. Особенно это касается треугольных конечных элементов. Наиболее сильно эта погрешность проявляется в местах концентрации напряжений, в частности, в местах примыкания плит к колоннам. Величины перерезывающих сил при этом могут иметь большой разброс. Поперечная арматура, вычисленная по этим значениям, может быть некорректна. Расчет поперечной арматуры в подобных случаях рекомендуется проводить в соответствии с рекомендациями норм по расчету плит на продавливание. В частности, программный комплекс МОНОМАХ содержит модуль, реализующий именно такой подход.
В общем случае результаты выдаются в двух строчках:
• полная арматура, подобранная по первой и второй группам предельных состояний;
• арматура, подобранная по первой группе предельных состояний.
В результате подбора выдаются площади продольной арматуры [см2/п.м]:
• AS1 (ASx-h) - площадь нижней арматуры по направлению оси Х1 (для балки-стенки посредине сечения);
• AS2 (ASy-н) - площадь верхней арматуры по направлению оси Х1;
• AS3 (ASx-b) - площадь нижней арматуры по направлению оси Y1 (для балки-стенки посредине сечения вдоль оси Z1);
• AS4 (ASy-в)- площадь верхней арматуры по направлению оси Y1.
Для поперечной арматуры выдаются площади [см2/п.м]:
• ASW1 - поперечная арматура по направлению оси Х1;
• ASW2 - поперечная арматура по направлению оси Y1;
• ширина кратковременного и длительного раскрытия трещин [мм].
141
ЛИР/^JW Руководствопользовате/т
17.5 Проверка заданного армирования в пластинчатых элементах
Проверка заданного армирования производится в системе ЛИР-ЛАРМ.
Сначала выполняется ввод или корректировка продольной и поперечной арматуры в сечении. Порядок ввода или корректировки продольной арматуры:
• выбирается тип продольной арматуры (нижняя вдоль осей Х1, Y1 или верхняя вдоль осей Х1, Y1);
• если необходимо произвести расстановку арматурных стержней на 1 п.м., то из списка выбирается требуемый диаметр и задается количество стержней; площадь арматуры будет вычислена;
• если расстановка не требуется, то вводится площадь арматуры [см2/п.м].
Порядок ввода или корректировки поперечной арматуры:
• выбирается тип поперечной арматуры вдоль осей Х1 или Y1;
• вводится величина интенсивности поперечной арматуры [тс*м/п.м], либо вводится шаг (м) и площадь поперечной арматуры для этого шага [см2]; интенсивность будет вычислена.
Проверка поперечного армирования производится по максимальной (из двух направлений) перерезывающей силе. Если поперечной арматуры в одном из направлений недостаточно, то выдается сообщение: «Сечение не проходит по условию проверки поперечной арматуры на действие поперечной силы». Расчет прекращается.
Далее выполняется проверка продольной арматуры по первой и второй группе предельных состояний на действие изгибающих и крутящего моментов и осевых сил. Если арматуры недостаточно, то выдаются сообщения: «Сечение не проходит по условиям прочности» или «Сечение не проходит по условиям трещиностойкости».
142
Литература
ЛИТЕРАТУРА
1. Вайнберг Д.В., Городецкий А.С., Киричевский В.В., Сахаров А.С. Метод конечных элементов в механике деформированных тел.//Прикладная механика.-т.8, В.8.-К.: Наука, 1972.-C.3-38.
2. Варвак П.М., Городецкий А.С., Пискунов В.Г. и др. Метод конечных элементов.//К.: Вища школа, 1981.-С. 176.
3. Гензерский Ю.В., Барабаш М.С., Марченко Д.В., Титок В.П. Программный комплекс ЛИРА 9.2. Примеры расчета и проектирования. Учебное пособие-
4. К.: ФАКТ, 2005,- 140с.
5. Горбовец А.В., Евзеров И.Д.. Приближенные схемы для стационарных и нестационарных задач с односторонними ограничениями. Вычислительные технологии, 2000., т.5, №6, стр. 33-35
6. Городецкий А.С., Горбовец А.В., Стрелецкий Е.Б., Павловский В.Э. и др., "МИРАЖ” -программный комплекс для расчета и проектирования конструкций на персональных компьютерах.//К.: препринт НИИАСС.-1991.-С.95.
7. Городецкий А.С. К расчету тонкостенных железобетонных конструкций в неупругой стадии.//Строительные конструкции. -К.:Буд(вельник, 1965.-С.
8. Городецкий А.С., Евзеров И.Д., Стрелец-Стрелецкий Е.Б. и др. Метод конечных элементов: теория и численная реализация. Программный комплекс BHPA-Windows.//K.: Факт, 1997.-С.137
9. Городецкий А.С., Перельмутер А.В., Сливкер В.И. Интеллектуальная программная система - прогноз новых возможностей.//Системы автоматизированного проектирования объектов строительства-К.: Буд!вельник, 1989.-С.43-56.
10. Городецкий А.С., Евзеров И.Д. Компьютерные модели конструкций - К.: ФАКТ, 2005, 344с.
11. Городецкий А.С., Батрак Л.Г., Городецкий Д.А., Лазнюк М.В., Юсипенко С.В. Расчет и проектирование конструкций высотных зданий из монолитного железобетона. - К.: ФАКТ, 2004, 104с.
12. Городецкий А.С., Здоренко В.С., Елсукова К.П., Сливкер В.И. Применение метода конечных элементов к расчету конструкций на упругом основании с двумя коэффициентами постели.//Сопротивление материалов и расчет сооружений. -К.: Буд!вельник, 1975.-С.180-192.
13. Городецкий А.С., Здоренко В.С. К расчету физически нелинейных плоских рамных систем.//Строительная механика и расчет сооружений. - М.: Издательство литературы по строительству, 1969.-С.26-30.
14. Городецкий А.С. Вопросы расчета конструкций в упругопластической стадии на ЭЦВМ.// ЭЦВМ в строительной механике. -М.: Издательство литературы по строительству, 1966 -С.169-174.
15. Городецкий А.С., Заворицкий В.И., Лантух-Лященко А.И., Рассказов А.О. Метод конечных элементов в проектировании транспортных сооружений.//М.: Транспорт, 981-С.143.
16. Городецкий А.С., под ред. ЛИРА версия 9.0. Программный комплекс для расчета и проектирования конструкций. Справочно-теоретическое пособие. - М - К.: ФАКТ, 2003, 472с.
17. Городецкий А.С. К расчету тонкостенных железобетонных конструкций в неупругой стадии //Строительные конструкции. - Киев, НИИСК, - Вып.З, 1965.
18. Городецкий А.С., Здоренко В.С. Расчет железобетонных балок-стенок с учетом образования трещин методом конечных элементов //Сопротивление материалов и теория сооружений. - Киев, 1975, - Вып.27, С.56-66.
19. Динамический расчет сооружений на специальные воздействия. Справочник проектировщика. М.: Стройиздат, 1981.-216с.
20. Дмитриев Л.Г., Касилов А.В. Вантовые покрытия //Расчет и конструирование. - Киев: Буд!вельник , 1968. - 171 с.
21. Евзеров И.Д. Метод конечных элементов при расчете на длительное действие нагрузки// Сопротивление материалов и теория сооружений. - Киев: Буд1вельник, 1990, - Вып.56, С.98-103.
22. Евзеров И.Д. Неконформные конечные элементы в нелинейных и нестационарных задачах строительной механики //Дис. докт.техн.наук.: 01.02.03. - Киев, КИСИ, 1993. -249с.
143
ЛИРА® 9.2 Руководство пользователя
23. Железобетонные стены сейсмостойких зданий : Исследования и основы проектирования: Совм. изд. СССР - Греция/ Г.Н.Ашкинадзе, М.Е.Соколов, Л.Д.Мартынова и др. - М.: Стройиздат, 1988.-504С.
24. Зенкевич О.К. Метод конечных элементов в технике. М.: "МИР", 1971.-542с.
25. Инструкция по расчету несущих конструкций промышленных зданий и сооружений на динамические нагрузки. М.: Стройиздат, 1970.-288С.
26. Карпенко Н И. Теория деформирования железобетона с трещинами. - М.: Стройиздат, 1976.-208с.
27. Карпенко Н.И. Общие модели механики железобетона. - М.: Стройиздат, 1996. - 416с.
28. Качурин В.К. Теория висячих систем. Статический расчет. - М.:Госстройиздат,1962.- 224с.
29. Клепиков С.Н. Расчет конструкций на упругом основании. К.: Буд1вельник, 1967.
30. Кодекс-образец ЕКБ-ФЙП для норм по железобетонным конструкциям (перевод с французского) .М., НИИЖБ, 1984 - 284с.
31. Козачевский А.И. Модификация деформационной теории пластичности бетона и плоское напряженное состояние железобетона с трещинами //Строительная механика и расчет сооружений. - 1983 - № 4. - С. 12-16.
32. Кричевский А.П. Расчет железобетонных инженерных сооружений на температурные воздействия. - М.: Стройиздат, 1984. - 149с.
33. Круглов В.М. Нелинейные соотношения и критерий прочности бетона с трехосном напряженном состоянии //Строительная механика и расчет сооружений. - 1987 - № 1. -С.40-44.
34. Лантух-Лященко А.И. ЛИРА. Программный комплекс для расчета и проектирования конструкций. - Учебное пособие. К.-М., ФАКТ, 2001, 312с.
35. Максименко В.П. Численное моделирование работы железобетонных конструкций в многоосных напряженных состояниях//Дисс. канд. техн.наук.: 05.23.01 - Киев, НИИСК, 1988.-205с.
36. Пастернак П.Л. Основы нового метода расчета фундаментов на упругом основании при помощи двух коэффициентов постели. М.: Госстройиздат, 1954.
37. Пособие по проектированию бетонных и железобетонных конструкций из тяжелых и легких бетонов без предварительного напряжения арматуры (к СНиП 2.03.01-84). М., ЦИТП, 1986, 194с.
38. Сахновский К.В., Железобетонные конструкции. Москва, 1959, 825с.
39. СНиП 2.01.07-85. Нагрузки и воздействия - М.: Стройиздат, 1986,-Збс.
40. СНиП 2.03.01-84.Бетонные и железобетонные конструкции - М.: Стройиздат, 1985.-80с.
41. СНиП 11-7-81.Строительство в сейсмических районах - М.: Стройиздат, 1982.-48с.
42. СНиП 11-23-81*. Стальные конструкции. М.: Стройиздат, 1984.-90С.
43. СНиП 2.02.01-83. Основания зданий и сооружений. М.: Стройиздат, 1984г.
44. СНиП 11-21-75. Бетонные и железобетонные конструкции. М., Стройиздат, 86с.
45. СНиП 2.05.03-84. Мосты и трубы. М., ЦИТП, 1985, 200с.
46. Сопротивление материалов деформированию и разрушению. Справочное пособие (в двух томах) /В.Т.Трощенко, А.Я.Красовский и др.// Институт проблем прочности АН Украины. Киев, Наукова думка, 1994.
47. Справочник по сопротивлению материалов / Писаренко Г. С., Яковлев А. П., Матвеев В.В. - 2-е изд., перераб. и доп. - Киев: Наукова думка, 1988. - 736 с.
48. Стрелец-Стрелецкий Е.Б. Расчетные сочетания напряжений для конструкций типа балки-стенки и плиты.//Строительная механика и расчет сооружений.-1986,- № 3.-С.36-38.
49. Стрелец-Стрелецкий Е.Б. Методы определения опасных комбинаций напряжений при оценке прочности элементов конструкций.//Дисс. канд. техн, наук.: 01.02.03. - Москва, ЦНИИСК им. В.А. Кучеренко, 1987. -125с.
50. Съярле Ф., Метод конечных элементов для эллиптических задач. М.: "МИР", 1980. (гл.8, 8.1, с.418-423), с.512.
51. Тимошенко С П. Войновский-Кригер С. Пластины и оболочки/ Пер. с англ. - М: МИР, 1966. - 635 с.
52. Тимошенко С.П., Гудьер Дж. Теория упругости. М., Наука, 1975, 575с.
53. Ухов С.Б., Семенов В.В., Знаменский В.В., Тер-Мартиросян З.Г., Чернышев С.М. Механика грунтов, основания и фундаменты. М., АСВ, 1994, 524с.
144
Литература
54. Яшин А.В. Критерии прочности и деформирования бетона при простом нагружении для различных видов напряженного состояния//Расчет и конструирование железобетонных конструкций. - М., НИИЖБ. - Вып.39, 1977. - С.48-57.
55. Яшин А.В. Рекомендации по определению прочности и деформационных характеристик бетона при неодноосных напряженных состояниях//Расчет и конструирование железобетонных конструкций. - М., НИИЖБ, 1985. - 72с.
56. Kupfer Н.В. Das nicht-lineare Verhalten des Beton bei zweiachtzigen Beanspruchung // Beton und- Stahlbetonbau. 1973, № 11, pp.269-274.
57. Nilson A.H. Nonlinear Analysis of Reinforced Concrete by the finite element Method. - Journal of American Concrete Institute, 1968, Vol.65, № 9, p. 757-766.
58. Shuidan A..H., Shah S.P. Complete Triaxial Stress-Strain Curves for Concrete. - Journal of the Structural Division, 1982, Vol. 108, №4 p.728-742.
59. СНиП 52-01-2003. Бетонные и железобетонные конструкции М., 2004.
60. Пособие по проектированию стальных конструкций (к СНиП 11-23-81*) М.: ЦИТП Госстроя СССР, 1989. -148 с.
61. Eurocode 3: Design of steel structures. Part 1.1: General rules and rules for building.
CEN, Ref. No. ENV 1993-1-1:1992 E.
62. ЛИРА версия 9.0. Программный комплекс для расчета и проектирования конструкций. Справочно-теоретическое пособие под ред. А С. Городецкого - К - М : ФАКТ, 2003.-464с.
Стрелец-Стрелецкий Е.Б.
Гензерский Ю.В.
Лазнюк М.В.
Марченко Д.В.
Титок В.П.
ЛИРА® 9.2
Руководство пользователя
Основы
Учебное пособие
145