/
















































































Текст
БИБЛИОТЕКА ЮНОГО КОНСТРУКТОРА
МОДЕЛЬ
ПОДВОДНОЙ
лодки
ИЗДАТЕЛЬСТВО ДОСААФ • МОСКВА —1959
П. Е. МИХАЙЛОВ
МОДЕЛЬ
ПОДВОДНОЙ лодки
С МЕХАНИЧЕСКИМ
ДВИГАТЕЛЕМ
ИЗДАТЕЛЬСТВО ДОСААФ
МОСКВА * 1959
Книга рассчитана на широкий круг чита-
телей среднего и старшего школьного возраста,
которые пожелают ознакомиться с устройством,
назначением и основными качествами подводно-
го корабля, а также с конструкцией, особенно-
стью плавания и способом постройки самоход-
ных моделей подводных лодок.
Книга может служить руководством для
морских моделистов, которые занимаются по-
стройкой и конструированием моделей подвод-
ных лодок с электромотором или механическим
двигателем.
Для моделистов-конструкторов даются по-
лезные рекомендации и простейшие способы рас-
чета основных ходовых качеств моделей под-
лодок и их механизмов.
ПОДВОДНЫЕ лодки
ОТ ДЕРЕВЯННЫХ АППАРАТОВ
ДО ПОДВОДНЫХ КОРАБЛЕЙ
Подводными лодками принято называть корабли,
предназначенные для плавания под водой. Подводные
лодки используются для военных действий как на по-
верхности моря, так главным образом для нанесения
внезапных ударов из-под воды.
Идея подводного плавания зародилась свыше трех-
сот лет тому назад, в эпоху парусного деревянного фло-
та. С первых шагов подводные лодки были задуманы
как средство борьбы с военными кораблями противника.
Было очень заманчиво иметь возможность скрытно под
водой подойти к неприятельскому судну, прикрепить к
его днищу мину и, отойдя на безопасное расстояние,
взорвать это судно.
Первая подводная лодка была построена в Лондоне
голландским ученым К. ван Дреббелем в 1620 г.
В России одной из первых подлодок было «потаен-
ное судно» Ефима Никонова, построенное при Петре I
в 1724 г. Деревянное «потаенное судно» благополучно
погружалось, всплывало и при помощи весел могло пе-
редвигаться под водой. Лодка Никонова не была приме-
нена в ратном деле и после смерти изобретателя была
забыта.
Более совершенные деревянные лодки появились
вслед за изобретением гребного винта. В разных местах
было построено несколько лодок, гребные винты кото-
рых вращались за счет мускульной силы человека. Ход
таких лодок, разумеется, был очень невелик, но уже на
них для наблюдения за поверхностью воды были приме-
нены простейшие зеркальные перископы (рис. 1). Все
эти неуклюжие, плохо управляемые, неповоротливые де-
3
Рис. 1. Схема устройства старинной деревянной подводной
лодки с винтом и перископом
ревянные аппараты не имели особенного военного зна-
чения.
С развитием металлического судостроения, с изобре-
тением двигателей внутреннего сгорания (дизелей),
электромоторов и аккумуляторов появилась возмож-
ность конструировать настоящие подводные корабли.
Толчком к быстрому развитию подводного плавания
послужило изобретение самодвижущейся мины, или тор-
педы.
Первая торпеда была построена в Англии в 1866 г.
Р. Уайтхедом и М. Лупписом. За год до этого — в
1865 г. — проект торпеды был предложен русским изо-
бретателем И. Ф. Александровым, но царское прави-
тельство отклонило этот проект.
Торпеда представляет собою стальной снаряд си-
гарообразной формы
z 2 j f (рис. 2). В головной
/_________/ _ . части торпеды разме-
щается большой заряд
/ \'б взрывчатого вещества.
7 В средней части сна-
Рис. 2. Внешний вид торпеды: 1 —
зарядное отделение; 2 — отсек с
сжатым воздухом; 3— кормовая
часть с машинным отделением; 4 —
винты; 5 — стабилизаторы; 6 — го-
ризонтальные рули; 7 — вертикаль-
ные рули
ряда размещены дви-
гатели, которые по-
средством винтов со-
общают торпеде боль-
шую скорость хода
(25—40 узлов). Тор-
4
педа выстреливается в воду по направлению к цели.
После выстрела направление движения торпеды под-
держивается постоянным при помощи рулей, управляе-
мых гидростатом и гироскопическим прибором Обри. В
случае столкновения с кораблем-целью заряд торпеды
взрывается и разрушает борт корабля.
Итак, к концу XIX века стало возможным построить
для подлодок прочные стальные корпуса, обеспечить
приличный надводный ход под дизелями и подводный—
от электромоторов. Достаточный запас электроэнергии
обеспечивался аккумуляторами. С изобретением торпе-
ды подлодки получили подходящее оружие. По сущест-
ву история развития подлодок и начинается с конца
XIX века.
К началу первой мировой войны (1914 г.) подводные
лодки стали технически совершенными военными ко-
раблями, способными выполнять сложные боевые зада-
ния. Уже тогда подводные корабли имели большую
дальность действия, могли делать большие переходы со
скоростью до 12 узлов в надводном положении и имели
подводный ход до 7 узлов.
В первую мировую войну германские подводные лод-
ки широко использовались для нарушения снабжения
Англии и для борьбы с военными кораблями противни-
ков. Подводные лодки крейсеровали по морским торго-
вым путям и топили транспорты противника, использо-
вались для постановки минных заграждений на пути
движения судов и у входов в порты противника.
Основным оружием подводных лодок были торпе-
ды. Кроме торпедного оружия, на лодках устанавлива-
лись одна-две пушки, которые позволяли лодке в над-
водном положении поражать артиллерийским огнем
транспорты и мелкие корабли. Некоторые подводные
лодки оборудовались специально для постановки мин-
ных заграждений.
Практикой выработалась определенная схема кон-
струкции корпуса, а также размещения основных меха-
низмов и вооружения подводных лодок. Во все после-
дующие годы изменялись конструкции отдельных меха-
низмов, машин, немного видоизменялись форма, внеш-
ний вид лодок, но их конструктивные схемы остава-
лись прежними.
Корпус крупной подводной лодки (рис. 3) делается
5
к
Рис. 3. Упрощенный схематический разрез подлодки: 1—проч
ный корпус; 2— рубка; 3— легкий корпус; 4 — водонепро-
ницаемые переборки; 5—торпедные аппараты; 6—электромо-
торы; 7 — дизель-моторы; 8— цистерны смазочного масла;
9—аккумуляторы; 10 — койки для команды; 11 — компас;
12 — штурвал горизонтальных рулей; 13 — штурвал
вертикальных рулей; 14 — перископы; 15 — радиоруб-
ка; 16 — турбокомпрессор продувания балластных ци-
стерн; 17 — цистерны пресной воды; 18 — топливные цистер-
ны; 19— цистерны главного балласта; 20 — уравнительные
цистерны; 21 — дифферентные цистерны; 22 — люки; 23—вен-
тиляционные шахты; 24 — шахты подачи воздуха к дизелям;
25 — носовые горизонтальные рули; 26— кормовые горизон-
тальные рули; 27 — вертикальный руль; 28 — пилы для раз-
резания проволочных сетей; 29 — радиоантенна; 30 — кнех-
ты; 31 — шпили; 32 — орудие
обычно двойным и состоит из прочного корпуса Л
рубки 2, легкого корпуса 3, со всех сторон окружающе-
го прочный корпус. Для мелкой подлодки корпус де-
лается одинарным, в виде прочного корпуса с руб-
кой, дополненной легкой надстройкой сверху и легкой
оконечностью с носа и с кормы. На некоторых, (обыч-
но средних) лодках корпус делается частично
двойным.
Внутренняя полость прочного корпуса делится водо-
непроницаемыми переборками 4 на отдельные отсеки.
В носовом и кормовом отсеках устанавливаются тор-
педные аппараты 5. В остальных отсеках размещались:
машинное отделение с электромоторами 6, дизелями 7
и цистернами смазочного масла S; аккумуляторы 9 и
койки для команды 10; центральный пост с компасом 11,
штурвалами горизонтальных 12 и вертикальных 13 ру-
лей, перископами 14, радиорубкой 15 и органами уп-
равления турбокомпрессором продувания цистерн глав-
ного балласта 16,
Полость между прочным и легким корпусом перего-
6
раживается на ряд мелких отсеков, которые служат ци-
стернами пресной воды /7, топлива 18, главного балла-
ста 19, уравнительного балласта 20, дифферентньг
ми цистернами 21.
В прочном корпусе делаются люки для прохода
команды 22, шахты вытяжной вентиляции 23 и подачи
воздуха к дизелям 24. На корпусе монтируются гори-
зонтальные носовые 25 и кормовые 26 рули, вертикаль-
ный руль 27, пилы для разрезания проволочных сетей
28, радиоантенны 29, кнехты 30, приваренные к проч-
ному корпусу, шпили 31. На палубе устанавливается
одно или два орудия 32.
Большие лодки имеют один-два обычных бортовых
якоря, цепи которых проходят через клюзы в носовых
оконечностях легкого корпуса, и один грибообразный
якорь для стоянки в подводном положении. Веретено
грибообразного якоря втягивается в вертикальный или
несколько наклонный клюз, проходящий в носовой
оконечности легкого корпуса вблизи диаметральной
плоскости. Малые лодки иногда снабжаются только
грибообразным якорем.
Следует иметь в виду, что на схеме (рис. 3) не по-
казано очень много механизмов и приборов, которые
имеются на подлодке.
Подводная лодка представляет собой чрезвычайно
сложный комплекс самых разнообразных машин, прибо-
ров, приспособлений, которые дают возможность коман-
де использовать преимущества подводного плавания.
Способность подлодки скрытно под водой приблизить-
ся к цели делала ее вплоть до конца второй мировой вой-
ны очень серьезной опасностью для надводных судов.
В районы предполагаемой встречи с кораблями про-
тивника лодка обычно переходила ночью в надводном
положении. Днем лодка шла надводным ходом только
вдали от мест возможной встречи с противником.
Днем на позиции лодка ходила под водой на не-
большой глубине. Время от времени вахтенный офицер
лодки поднимал перископ и осматривал горизонт.
В случае появления противника командир вел лод-
ку на сближение с целью. Во время сближения и ата-
ки командир следил за целью в перископ, чтобы пра-
вильно определить момент торпедного залпа. Поэтому
атака далеко не всегда бывала успешной. Перископ и
7
след, который оставался за ним из-за движения лодки,
нарушали скрытность атаки. Если с атакуемого кораб-
ля своевременно замечали перископ, то лодка сама под-
вергалась очень опасной для нее ответной атаке.
Подлодки во второй мировой войне
За два десятка лет перед второй мировой войной
средства нападения подводных лодок были усовершен-
ствованы. Во второй мировой войне использовались
лодки, оснащенные шумопеленгаторами и гидроакусти-
ческими локаторами, которые позволяли вести поиск
цели и выводить лодки в атаку без перископа. Новые
лодки строились на большие водоизмещения, были рас-
считаны на большие районы плавания, на длительное
времяпребывание в море.
С начала Великой Отечественной войны образцы
военного мастерства показали наши подводники-северо-
морцы и прежде всего команды лодок Героев Советско-
го Союза Гаджиева, Колышкина, Фисановича, Стари-
кова, Лунина. Их беспримерные по смелости и искусст-
ву удары по конвоям и базам противника у берегов
Норвегии имели огромное значение для обороны Се-
вера.
Несколько необычными были успешные рейды под-
лодки Героя Советского Союза Лунина против мощно-
го первоклассного линкора «Тирпиц».
«Тирпиц» прибыл в Норвегию для действия против
конвоев транспортов, которые шли в то время через
Северную Атлантику в Мурманск и Архангельск. «Тир-
пиц» вместе с эскадрой должен был проходить по фар-
ватеру в минном заграждении. Подлодка Лунина ожи-
дала линкор. На этом фарватере «Тирпиц» получил
торпедный «гостинец» лунинцев, выпущенный из само-
го неожиданного для немцев места — из минного поля.
Лунин точно выполнил приказ: он не потопил линкора,
а сорвал операцию против нашего конвоя и приковал к
огромному кораблю, помимо команды в две тысячи че-
ловек, еще ремонтные плавучие мастерские и целый
штат персонала, который немцы могли бы использовать
с большей пользой для них.
Интересно, что, пока подбитый «Тирпиц» отстаивал-
ся в Лиинахамари, его не бомбили, его ремонту почти
не мешали. Когда же линкор вновь пытался выйти в
8
море, то подводники Лунина снова «угостили» его торпе-
дой и тем самым «назначили» ему новый ремонт. Уди-
рая из северной Норвегии, фашисты пытались увести
«Тирпиц», но в районе Тромсе он был потоплен союз-
ной авиацией.
Опыт второй мировой войны показал, что подводная
лодка сильное, но не всемогущее оружие. Наряду с со-
вершенствованием техники нападения всегда разви-
вается и техника защиты. Очень сильным противником
подлодки был быстроходный надводный корабль, обо-
рудованный ультразвуковым гидролокатором. С по-
мощью такого полуавтоматического прибора вахтен-
ный акустик как бы просматривал подводное прост-
ранство. В случае обнаружения подлодки корабль ата-
ковал ее, сбрасывал целую серию глубинных бомб, и у
подлодки оставалось мало шансов уйти невредимой.
Фашистские лодки действовали в Баренцовом море
и заходили даже в Карское море. Однако ни один ко-
рабль Северного флота не принес удачи неприятель-
ской подлодке.
Один из эсминцев Северного флота за время войны
провел свыше полутора десятка атак на подводные
лодки. Каждая атака корабля была успешной. Автору,
который был командиром противолодочной обороны
эсминца, особенно запомнились две атаки. Одна из них
привела к взрыву торпед на лодке и к полному ее уни-
чтожению. Вторая атака закончилась тем, что лодка
была так сильно подброшена вверх, что ее рубка пока-
залась над поверхностью воды. Не успела рубка погру-
зиться, как второй эсминец на большом ходу протара-
нил и добил лодку.
Второй случай примечателен тем, что атаку на кон-
вой начали сразу несколько лодок. Обстановка была
очень сложной, но охранение советских военных кораб-
лей было сильным, и ни одна из лодок не смогла ата-
ковать суда, шедшие из Карского моря с весьма важ-
ным грузом.
Подводные лодки с атомным двигателем
За время первой и второй мировой войн торпедное
и артиллерийское оружие подводных лодок существен-
но не изменилось. Источник энергии для движения
9
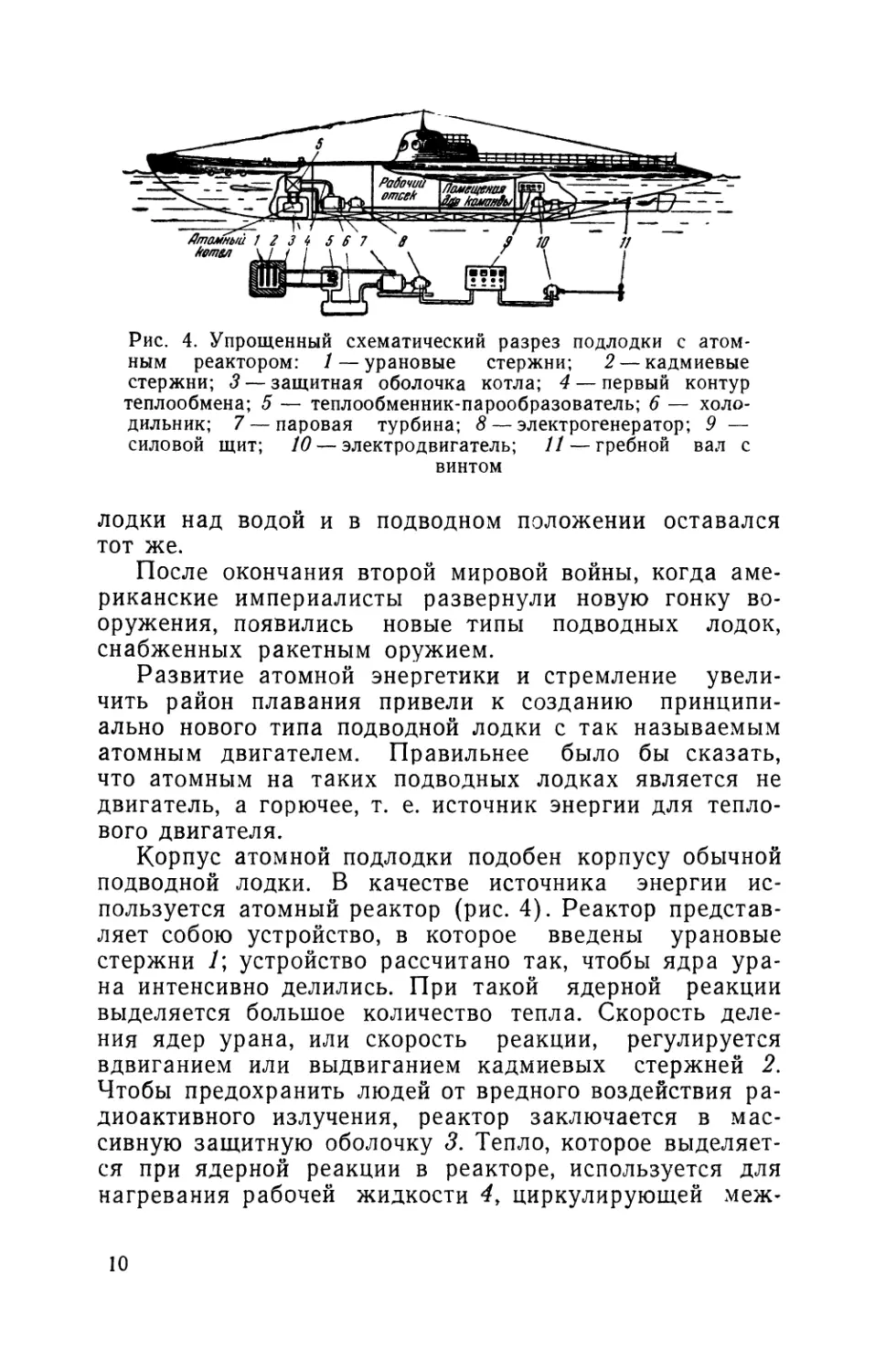
Рис. 4. Упрощенный схематический разрез подлодки с атом-
ным реактором: 1 — урановые стержни; 2— кадмиевые
стержни; 3 — защитная оболочка котла; 4 — первый контур
теплообмена; 5 — теплообменник-парообразователь; 6 — холо-
дильник; 7 — паровая турбина; 8 — электрогенератор; 9 —
силовой щит; 10 — электродвигатель; 11 — гребной вал с
винтом
лодки над водой и в подводном положении оставался
тот же.
После окончания второй мировой войны, когда аме-
риканские империалисты развернули новую гонку во-
оружения, появились новые типы подводных лодок,
снабженных ракетным оружием.
Развитие атомной энергетики и стремление увели-
чить район плавания привели к созданию принципи-
ально нового типа подводной лодки с так называемым
атомным двигателем. Правильнее было бы сказать,
что атомным на таких подводных лодках является не
двигатель, а горючее, т. е. источник энергии для тепло-
вого двигателя.
Корпус атомной подлодки подобен корпусу обычной
подводной лодки. В качестве источника энергии ис-
пользуется атомный реактор (рис. 4). Реактор представ-
ляет собою устройство, в которое введены урановые
стержни /; устройство рассчитано так, чтобы ядра ура-
на интенсивно делились. При такой ядерной реакции
выделяется большое количество тепла. Скорость деле-
ния ядер урана, или скорость реакции, регулируется
вдвиганием или выдвиганием кадмиевых стержней 2.
Чтобы предохранить людей от вредного воздействия ра-
диоактивного излучения, реактор заключается в мас-
сивную защитную оболочку 3. Тепло, которое выделяет-
ся при ядерной реакции в реакторе, используется для
нагревания рабочей жидкости 4, циркулирующей меж-
10
ду реактором и теплообменником. В теплообменнике 5 за
счет тепла рабочей жидкости вода превращается в пар.
Перегретый водяной пар работает в обычной паро-
вой турбине 7 и конденсируется в холодильнике 6. Кон-
денсат насосами вновь подается в теплообменник-па-
рообразователь. Турбина вращает ротор электрическо-
го генератора 8. Электроэнергия через силовой щит 9
может быть подана на электродвигатель 10, связанный
гребным валом с винтом 11, и корабль придет в дви-
жение.
Расчет показывает, что за два месяца непрерывно-
го хода, при мощности на гребном валу около
10000 л. с,, потребуется израсходовать примерно 1,5 кг
урана. При этом скорость хода лодки превысит 20 уз-
лов.
Атомное горючее в малом объеме и малом весе со-
держит очень большую энергию. Поэтому корабль с
атомной установкой должен иметь практически неогра-
ниченный район плавания. Например, строящийся в
Советском Союзе атомный ледокол будет расходовать
в сутки несколько граммов «атомного горючего» вместо
сотни тонн обычного топлива.
Применение атомного горючего на подводных судах
будущего позволит использовать их в мирных целях,
позволит сделать крупные подводные транспортные су-
да, использовать подводные корабли как научные ла-
боратории для изучения тайн морских глубин, истории
нашей планеты. Возможно, такие лодки-лаборатории
позволят решить спор о легендарной Атлантиде, позво-
лят изучить глубинные течения, влияющие на климат
различных районов нашей планеты. Транспортные лод-
ки могут сделать очень простым, коротким водный путь
через Северный Ледовитый океан. Одним словом, если
до нашего времени подводные лодки служили только
войне, то теперь подлодки на атомном горючем, или
атомные подлодки, делают целесообразным мирное ос-
воение подводных дорог.
Большинство людей на земле верит в то, что мир
победит войну и настанет время, когда о военных до-
спехах и снаряжении, о снарядах и торпедах, о линко-
рах и военных подводных лодках люди будут узнавать
из книг и увидят их модели в исторических музеях.
Поэтому уже в наши дни мы вправе строить не
только модели настоящих и исторических военных под-
водных кораблей, но вправе и должны представлять в
моделях подводные суда мирного назначения, суда
близкого будущего. Правда, форма корпуса подводной
лодки мирного назначения не может сильно отличаться
от формы современной подводной лодки, так как она
определяется особенностями подводного плавания и
стремлением обеспечить лодке наилучшие мореходные
качества.
Основные мореходные качества
Подводные лодки должны плавать в надводном по-
ложении, погружаться, плавать под водой, всплывать,
должны обладать способностью маневрировать, иметь
достаточный ход, наконец, они должны быть остойчивы-
ми. Эти основные мореходные качества зависят от кон-
струкции лодки.
Лодка, как всякое тело, притягивается к Земле с
силой G, которая называется весом лодки. Вес G на-
правлен вертикально вниз и приложен к центру тяже-
сти лодки (ц. т.). Если лодку опустить на воду, то под
действием веса она будет стремиться уйти на дно.
На каждый квадратный сантиметр погруженной в
воду поверхности действует удельная сила( давление),
перпендикулярная этой поверхности. Давление будет тем
больше, чем глубже под водой находится поверхность
(рис. 5).
Все удельные силы, направленные горизонтально,
образуют силы бокового сжатия корпуса. Равнодейст-
вующая всех удельных сил, действующих на погружен-
ную поверхность корпуса снизу вверх, является вытал-
кивающей силой Архимеда, или силой поддержания.
Сила поддержания D направлена вертикаль-
но вверх и приложена в центре величины корпуса (ц. в.).
Центром величины называют центр тяжести
вытесненного корпусом объема воды.
На плову вес судна и сила поддержания равны друг
другу, поэтому иначе вес судна называют водоизме-
щением (весовым водоизмещением). Если U— объем
вытесненной воды, а у — удельный вес воды, то водоиз-
мещение равно
G = D = U-^ (1)
12
Запас
плавучести
AG=Gn~GH
Рис. 5. Сила поддержания и весовое водоизме-
щение лодки
Надводное водоизмещение GH подлодки
будет наименьшим, так как балластные цистерны ос-
вобождены от воды.
Подводное водоизмещение Gn подлодки
максимально, так как лодка дополнительно загружена
водяным балластом.
Запасом плавучести AG подлодки называют
разность между подводным и надводным водоизмеще-
нием, т. е.
AG = Gn — GH.
Плавучесть подводных лодок, т. е. способность их
удерживаться в надводном положении при заданном
углублении штевней, принято характеризовать запасом
плавучести. Для различных подлодок величина AG : GH
колеблется от 20 до 30%.
При погружении водоизмещение лодки увеличивают
путем приема воды внутрь корпуса в специальные бал-
ластные цистерны. С наполнением балластных цистерн
запас плавучести уменьшается до нуля и может быть
отрицательным. В последнем случае вес лодки Gn бу-
дет больше сил поддержания D.
Крен или дифферент (поперечное или про-
дольное наклонение) лодки будет появляться всегда,
13
когда центр тяжести (ц. т.) и центр величины (ц. в.) не
будут располагаться на одной вертикали. Единствен-
ным способом изменения взаимного расположения ц. т.
и ц. в. является изменение положения центра тяжести.
Для приведения ц. т. на одну вертикаль с ц. в. исполь-
зуют уравнительные и дифферентные цистерны. Пере-
качиванием воды из одних цистерн в другие добивают-
ся устранения нежелательного крена или дифферента.
Положение ц. т. и ц. в. имеет существенное значение для
остойчивости подлодки.
Остойчивость, т. е. способность судна возвра-
щаться в вертикальное положение после прекращения
действия кренящих сил, можно характеризовать восста-
навливающим моментом.
Восстанавливающий момент М равен
произведению силы поддержания D на кратчайшее рас-
стояние а от ц. т. до направления силы поддержания:
7И = Da.
Чем больший восстанавливающий мо-
мент возникает при крене или дифферен-
те, тем большая остойчивость лодки.
Чтобы восстанавливающий момент лодки всегда
противодействовал крену или дифференту, необходимо
выполнение двух условий:
1) ц. т. и ц. в. не должны совпадать, так как а не
должно быть равно нулю;
2) у лодки в подводном положении ц. в. должен быть
выше ц. т., чтобы лодка не перевернулась. Из этих ус-
ловий следует, что у подлодки ц. в. всегда дол-
жен быть возможно выше ц. т.
Балластные цистерны стремятся разместить как
можно ниже. Тогда при их заполнении ц. в. повышает-
ся, а ц. т. понижается, т. е. остойчивость лодки возрас-
тает.
Ход лодки в надводном положении обычно обе-
спечивает двигатель внутреннего сгорания (типа Дизе-
ля). Подводный ход обеспечивают электродвигатели.
Скорость хода измеряется в узлах.
1 узел — \ мили/час = 0,5]А м/сек.
При равномерном движении лодки мощность двига-
телей расходуется на преодоление сил сопротивления.
14
Для подводных лодок основной вид сопротивления—
сопротивление сил вязкого трения, кото-
рые возникают между движущимся телом и прилегаю
щими слоями жидкости. Меньшее значение для подлод-
ки имеет волновое сопротивление и вихревое со-
противление. Волны и вихри, образующиеся при
движении тела в жидкости, рассеивают часть кинети-
ческой энергии тела, уносят ее. Процесс волно- и вихре-
образования зависит от формы движущегося тела, он
приводит к торможению тела, что равносильно возник-
новению некоторых сил сопротивления.
Суммарная сила сопротивления зависит от величи-
ны поверхности тела, от количества и характера ее не-
ровностей, она примерно пропорциональна квадрату
скорости тела относительно воды.
Мощность, затрачиваемая на движение лодки, растет
примерно пропорционально кубу ее скорости. Так, если
нужно увеличить вдвое скорость лодки, то придется
примерно в восемь раз увеличить мощность ее двигате-
лей. Поэтому у всех подлодок скорость подводного хо-
да значительно меньше скорости хода в надводном по-
ложении (приложение 1).
Итак, ход лодки зависит от мощности двигателя, от
формы корпуса, качества поверхности обшивки, от ка-
чества винтов, от формы и количества выступающих
частей.
Для подводной лодки особое значение имеют гори-
зонтальные рули. Они обеспечивают не только переме-
щение лодки по глубине, но с их помощью осущест-
вляется погружение и всплытие на ходу.
Погружение лодки из надводного положения
достигается наполнением балластных цистерн до поте-
ри запаса плавучести. Окончательно лодка уводится на
глубину перекладкой горизонтальных рулей. По дости-
жении нужной глубины рули отводят в среднее поло-
жение.
Всплытие начинают с подведения лодки к по-
верхности воды посредством горизонтальных рулей. За-
тем продувают среднюю цистерну, открывают рубочный
люк и запускают турбокомпрессор для продувки цис-
терн главного балласта. По мере увеличения запаса
плавучести лодка окончательно переходит в надводное
положение.
15
Изменение курса лодки осуществляется
главным образом действием вертикального руля. Вер-
тикальный руль используется также для удержания
лодки на заданном курсе.
Маневрирование по глубине выполняется
горизонтальными рулями. В особых случаях действие
горизонтальных рулей дополняется регулировкой пла-
вучести и дифферента.
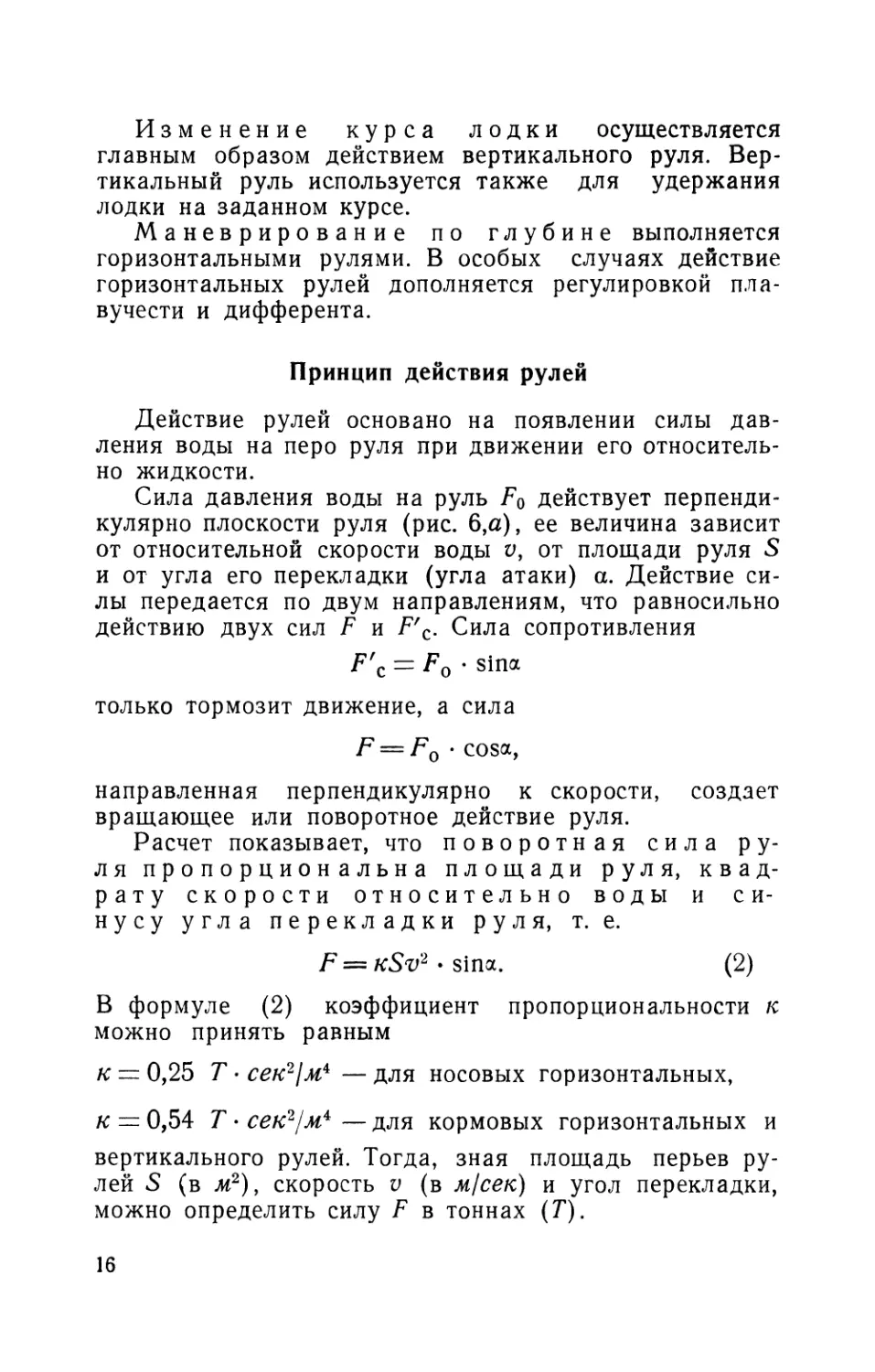
Принцип действия рулей
Действие рулей основано на появлении силы дав-
ления воды на перо руля при движении его относитель-
но жидкости.
Сила давления воды на руль Fo действует перпенди-
кулярно плоскости руля (рис. 6,а), ее величина зависит
от относительной скорости воды v, от площади руля S
и от угла его перекладки (угла атаки) а. Действие си-
лы передается по двум направлениям, что равносильно
действию двух сил F и F'c. Сила сопротивления
F'c = Fo • sina
только тормозит движение, а сила
F = F0 • cosa,
направленная перпендикулярно к скорости, создает
вращающее или поворотное действие руля.
Расчет показывает, что поворотная сила ру-
ля пропорциональна площади руля, квад-
рату скорости относительно воды и си-
нусу угла перекладки руля, т. е.
F = kSv2 • sina. (2)
В формуле (2) коэффициент пропорциональности к
можно принять равным
к — 0,25 Т • сек21м* — для носовых горизонтальных,
к = 0,54 Т • сек2/м*—для кормовых горизонтальных и
вертикального рулей. Тогда, зная площадь перьев ру-
лей S (в jw2), скорость v (в м/сек) и угол перекладки,
можно определить силу F в тоннах (Г).
16
V
Рис. 6. Принцип действия рулей: а — сила давления воды на
руль Fo, поворотная сила F и сила сопротивления Fc ; б —
поворотное действие носовых горизонтальных рулей; в—пово-
ротное действие горизонтальный рулей; г — погружающее
действие горизонтальных рулей
Площадь пера руля выбирается в зависимости от
площади наибольшего продольного сечения корпуса в
плоскости расположения руля.
Площадь пера вертикального руля вы-
бирают приблизительно равной
SB = 0,Q2(LXH). (3)
Площадь перьев носовых горизонталь-
ных рулей не превышает величину, равную
SH =0,03(1X5). (4)
Площадь перьев кормовых горизон-
тальных рулей не больше, чем
SK = 0,01 (L X 5). (5)
Формулы (3), (4) и (5) дают приблизительную за-
висимость между общей площадью перьев и главными
2 Зак. 197
17
размерениями подлодки. Разные конструкторы подло-
док применяют свои числовые коэффициенты, которые
могут быть меньшей величины.
Угол перекладки руля не бывает больше 20—30°,
поэтому значение sina можно считать равным 0,017 а.
В качестве примера рассчитаем наибольшую пово-
ротную силу носовых горизонтальных рулей, если дли-
на лодки £ = 80 м, ширина В = 8 м, наибольший угол
перекладки рулей a = 30° и наибольшая скорость хода
под водой v„ = 10 узлов.
Решение: 1) По формуле (4) общая площадь двух
рулей равна 5 = 0,03 (80X8) = 19 л«2;
2) Для a = 30° найдем sina = 0,017X30 = 0,5;
3) Выразим скорость в м!сек и найдем, что и„ =
= 10 узлов = 5,14 м)сек.
4) Подставляя численное значение величин в форму-
лу (2), найдем искомую силу:
FH=0,25 Т-сек^Х 19 jw2X5,142 м^сек? X 0,5 = 63 Т.
Заметим, что при заданных размерах лодки ее под-
водное водоизмещение будет около 2000 т. Следователь-
но, в нашем примере наибольшая поворотная сила носо-
вых рулей составляет около 6% от веса лодки.
Если ось носового руля отстоит от ц. т. лодки на
расстоянии ан, то момент вращения лодки будет равен
Л4И — F№a„.
Под действием только этого момента дифферент лодки
будет увеличиваться со скоростью примерно 15—20 гра-
дусов в минуту. От увеличения скорости лодки вдвое
поворотная сила и угловая скорость поворота выра-
стут в четыре раза.
Чем больше скорость корабля, тем
сильнее поворотное действие рулей.
Нетрудно убедиться, что в случае одновременного
действия и носовых и кормовых рулей можно или уве-
личить быстроту поворота лодки (рис. 6,в), или умень-
шить ее до нуля. Когда рули переложены в одну сто-
рону, то соответствующие вращательные моменты Мн и
Мк направлены навстречу друг другу.
Углы перекладки рулей можно подобрать так, что
поворот от носовых рулей будет компенсирован дейст-
вием кормовых рулей. Тогда МН = МК и обе силы Ен и
18
F к направлены вниз (рис. 6,г). В этом наиболее инте-
ресном для моделиста случае горизонтальные рули про-
тиводействуют силе поддержания, не создают диффе-
рента, а уводят лодку на глубину.
Теоретический и плазовый чертежи
Основой для расчета мореходных качеств проекти-
руемой лодки, для определения геометрической формы
ее корпуса и изготовления строительных чертежей слу-
жит теоретический чертеж.
Теоретический чертеж корпуса представля-
ет собою изображение проекций сечения обшивки кор-
пуса на три взаимно перпендикулярные плоскости.
Основное вертикальное сечение называется диа-
метральной плоскостью (ДП). Диаметральная
плоскость делит корпус вдоль на две симметричные по-
ловины— правый и левый борта. Линия (след) пересе-
чения ДП с внутренней поверхностью обшивки корпуса
называется линией диаметральной плоскости, или ну-
Рис. 7. Изображение сечений корпуса
19
левым батоксом (ОБ). Ряд вертикальных сечений,
параллельных ДП, образуют первый, второй и т. д. ба-
токсы правого и левого бортов (рис. 7).
Вертикальные сечения, перпендикулярные ДП, обра-
зуют с обшивкой корпуса линии, которые называют
шпангоутами. Нумерация шпангоутов ведется от носа
к корме. Самый полный (широкий) шпангоут, который
обычно располагается посередине корпуса, называется
миделыппангоутом.
Расстояние между сечениями двух ближайших
шпангоутов называют шпацией. Все шпации обыч-
но делают одинаковыми, т. е. расстояния между шпан-
гоутами выбирают равными. Носовыми считают все
шпангоуты от носа до мидельшпангоута, остальные
шпангоуты являются кормовыми.
Горизонтальная поверхность воды с поверхностью
обшивки полностью загруженной лодки на плаву (без
крена и дифферента) образует главную ватерли-
нию (ГВЛ).
Конструктивная ватерлиния (КВЛ) яв-
ляется линией пересечения обшивки проектируемого
корпуса с заданным положением горизонтальной по-
верхности воды. Поэтому на теоретическом чертеже
КВЛ и ГВЛ совпадают. Все другие горизонтальные се-
чения корпуса образуют ватерлинии, которые ну-
меруются снизу вверх. Плоскость нулевой ва-
терлинии должна касаться корпуса снизу, она на-
зывается основной плоскостью. На теоретиче-
ском чертеже все батоксы, шпангоуты и ватерлинии
строятся как линии сечения внутренней поверх-
ности обшивки.
Проекция всех батоксов, шпангоутов и ватерлиний
на ДП образует «бок» теоретического чертежа; проек-
ция тех же линий на плоскость КВЛ называется «полу-
широтой»; проекция этих же линий на плоскость ми-
дельшпангоута носит название «корпус» теоретического
чертежа. Ввиду симметрии правого и левого бортов на
проекции «полуширота» изображают линии сечений
только правого или только левого борта. По той же
причине на проекции «корпус» условились справа от
линии ДП наносить только половины носовых шпангоу-
тов, а слева — только половины кормовых шпангоутов
(рис. 8).
20
Рис. 8. Теоретический чертеж корпуса подлодки
Наибольшие размеры проекций теоретического чер-
тежа определяются главными размерениями
корпуса, к которым относятся наибольшая
ширина В, наибольшая длина L и наиболь-
шая высота Н.
Построение теоретического чертежа начинают с вы-
черчивания прямоугольной сетки. На листе хорошей
плотной бумаги в выбранном масштабе чертят три пря-
моугольника с размерами Hy(L, Ну^В и (V2B) ХД в
которых будут размещены соответственно проекции
«бок», «корпус» и «полуширота».
Стороны длиною L делят на равные отрезки (шпа-
ции) и через точки деления проводят прямые линии —
следы плоскостей сечения шпангоутов. Подобным же
образом проводят следы плоскостей ватерлиний на про-
екциях «бок» и «корпус», а также следы плоскостей
батоксов на проекциях «корпус» и «полуширота».
Следы плоскостей сечения на плоскостях проекций
образуют сетку теоретического чертежа. Плоскости про-
екций («бок», «полуширота», «корпус») взаимно пер-
пендикулярны, но на теоретическом чертеже они изо-
бражаются в одной плоскости.
На проекции «бок» корпус изображается, как вид
сбоку, на «полушироте» — как вид сверху, а «корпус»
дает вид спереди (с носа). Поэтому истинная, неиска-
женная форма сечений получается для батоксов толь-
ко на проекции «бок», для ватерлиний — только на «по-
лушироте», а для шпангоутов — только на проекции
«корпус» (рис. 8).
По готовой сетке очень слабым нажимом каранда-
ша рисуют на глаз истинные формы сечений. В этой
работе руководствуются или таблицами коэффициентов
21
полноты, или чертежами судна прототипа, или моделью
из глины, парафина, пластелина, или расчетом и собст-
венным воображением. В результате получают грубый
набросок будущего чертежа.
Дальше вооружаются измерительным циркулем, ос-
тро отточенным карандашом, резинкой и, набравшись
побольше терпения, начинают кропотливый труд по со-
гласованию точек чертежа. Ведь каждая точка корпу-
са на чертеже изображена в трех местах, на трех про-
екциях.
На грубом наброске чертежа даже опытные про-
ектировщики не смогут провести линию, все точки
которой на всех трех проекциях изображены правильно.
Для согласования чертежа нужно каждую точку пе-
ресечения кривой с прямыми линиями сетки одной про-
екции сверить с положением этой же точки на других
проекциях. Практически на всех проекциях при помо-
щи циркуля сравнивают расстояния от выбранной точ-
ки до ДП, до основной плоскости и до плоскости ми-
дельшпангоута. Все замеченные разности устраняют,
т. е. добиваются равенства всех соответственных рас-
стояний.
Во время согласования чертежа внимательно следят
за тем, чтобы кривые нигде не получались с изломом.
После согласования все точки окончательно соединяют
плавными кривыми и на готовом чертеже делают необ-
ходимые надписи.
По готовому теоретическому чертежу изготовляют
модель корпуса, которую испытывают в специально
оборудованном опытовом бассейне. Результаты
испытания модели позволяют окончательно рассчитать
мореходные качества будущего корабля. Если форма
корпуса выбрана удачно, т. е. если теоретический чер-
теж пригоден, то его вместе с расчетами передают в
конструкторское бюро для разработки и деталировки
строительных чертежей корабля.
Готовый проект корабля передается на судострои-
тельный завод, чтобы в результате труда многочислен-
ных рабочих и инженеров появился на свет стальной
настоящий корабль.
Рождение корабля начинается на гладком черном
полу большого светлого зала, который называют раз-
бивочным плазом. На полу перечерчивают мелом
22
(разбивают) теоретический чертеж в натуральную ве-
личину. После согласования чертежа линии его проек-
ции «корпус», а также очертания форштевня, ахтер-
штевня и других особенных линий прорезают острым ши-
лом для сохранения чертежа на все время постройки.
С плазового чертежа снимаются шаблоны, по которым
затем делают части набора корпуса. Плазовый чер-
теж с разбивочного плаза обычно перечерчивается еще
раз на гладкую деревянную площадку — сбороч-
ный плаз. На сборочном плазовом чертеже обычно
изображают обе половины всех шпангоутов. Сборочный
плаз используется для проверки готовых деталей набо-
ра корпуса. При постройке мелкого судна в качестве
сборочного обычно используют разбивочный плазовый
чертеж.
Строя модель подводной лодки, придется выпили-
вать шпангоуты или их шаблоны, делать носовые и кор-
мовые оконечности. Плазовый чертеж, необходимый при
постройке модели подводной лодки (приложение 1),
может быть выполнен на листе фанеры, картона и да-
же на листе бумаги.
МОДЕЛЬ ПОДВОДНОЙ лодки
Особенности плавания модели
Движение самоходной модели под водой сильно от-
личается от условий плавания настоящей подводной
лодки. После запуска со старта человек не управляет
моделью, не контролирует ее движение. Если на моде-
ли нет автоматов управления рулями, то путь ее будет
зависеть от характера постоянно действующих на рули
сил.
Модель подводной лодки строится с расчетом, что-
бы с выключенным двигателем она плавала в надвод-
ном положении. Устройство на модели балластных ци-
стерн для погружения вызывает затруднение, так как
такая система погружения значительно усложнила бы
модель. Поэтому обычно модели подводных лодок пере-
водятся в подводное положение действием горизон-
тальных рулей.
Установка рулей производится перед запуском и не
меняется во время хода модели.
Рассмотрим условия движения неуправляемой моде-
ли под водой. Вес модели в отличие от веса подлодки
не изменяется с погружением. В надводном положении
модели силы поддержания D равны весу G. С началом
движения модели на ее рули действует сила Fn, на-
правленная вниз, т. е. совпадающая с весом модели G.
Если сумма сил G и Fn окажется больше силы D, то
модель начнет погружаться.
Модель будет перемещаться вниз до тех пор, пока
равнодействующая веса и силы действия рулей (G+Fn)
не станет равной силе поддержания £>. Если ,G+FnD—
то модель не будет перемещаться в вертикальном на-
правлении, а должна идти горизонтально.
24
Погружающей силой fn назовем разность
между равнодействующей сил G и Fn и силой поддер-
жания D. Тогда погружающая сила будет равна
fn=(G+Fn)-D=(G-D)+F„. (6)
Сила поддержания D будет возрастать до полного по-
гружения модели и затем будет постоянной, но боль-
шей веса модели. Поэтому разность (G—D) может
быть только отрицательной величиной. Разность
(G—D) представляет собой подъемную силу модели,
которая всегда направлена вверх и численно равна
d=(D-G). (7)
Из формул (6) и (7) получается, что погружающая
сила равна
f„=F„—d. (8)
Погружающая сила равна разности
между силой действия обоих горизонталь-
ных рулей и подъемной силой погружен-
ной модели.
Величина подъемной силы d является постоянной
характеристикой модели и может быть измерена во
время предварительных испытаний.
Горизонтальные рули действуют на модель так же,
как и на подводную лодку. Поэтому можно воспользо-
ваться для модели известной нам зависимостью силы
F п от скорости лодки ил и угла перекладки рулей а. По
формуле (2) сила Fn равна
Fn=KSv2 • Ksina.
При расчетах для модели силу удобнее выражать в
Граммах (Г). Тогда в формуле (2) следует выражать:
площадь перьев руля S в ел*2, скорость модели — в
см/сек. Коэффициент «к» получается равным: /с =
=0,25 Г. сек2/см4 — для носовых, к = 0,54 Г. сек2/см4 —
для кормовых горизонтальных и вертикальных рулей.
Формулы (3), (4) и (5) дают площади рулей модели в
см2, если L, В и Н модели выражены в см.
На большинстве моделей угол поворота рулей а по-
сле запуска не изменяется. Значит на старте, путем ус-
25
тановки горизонтальных рулей, задается постоянной ве-
личина sina. Площадь рулей тоже не изменяется. Обо-
значив постоянную к • sina через Ki. можно переписать
формулу (2) в таком виде:
Fn = ^2-
Если во время движения модели без дифферента ее
скорость v достаточно велика и постоянна, то сила тоже
будет достаточно большой и постоянной. Тогда, как это
видно из формулы (9), погружающая сила fn будет тоже
постоянной. Худшего положения для модели подвод-
ной лодки и придумать нельзя!
В самом деле, раз действует постоянная погружаю-
щая сила /п то модель будет перемещаться вниз с ус-
корением, т. е. скорость погружения будет возрастать.
Поэтому такая модель будет падать по параболе, пока
не ляжет на дно (рис. 9,а). Не в этом ли одна из при-
чин утраты моделистами своих моделей?
Лучше обстоит дело с моделями, на которых уста-
новлены резиномоторы. Движущая сила винта на мо-
делях с резиномоторами после запуска быстро умень-
шается. Поэтому становится меньше скорость модели
на дистанции и, как видно из формулы (9), уменьшает-
ся сила Fn. В некоторый момент времени (рис. 9,6) си-
ла Fn окажется равной подъемной силе d и погружаю-
щая сила fn станет равной нулю (см. формулу 8). В
этот момент модель будет двигаться в горизонтальном
направлении.
При дальнейшем уменьшении скорости подъемная
сила станет больше Fn, погружающая сила /п окажет-
ся отрицательной и модель начнет всплывать.
Итак, модель с резиномотором будет двигаться по
плавной кривой, достигнет некоторой максимальной
глубины Л, затем снова плавно подойдет к поверхности
воды и всплывет.
Подобным образом ведет себя модель с электромо-
тором, если во время ее хода быстро садятся батареи
электропитания. На некоторых моделях с электродвига-
телем устанавливается реле времени с выключателями
питания. Нетрудно проследить, что такие модели будут
двигаться по параболе вниз, пока не сработает реле
(рис. 9,в). После выключения электромотора модель
26
непостоянна
v
Рис. 9. Схема движения модели: а — с постоянной ско-
ростью; б — с убывающей скоростью (падающая мощ-
ность); в — с выключением двигателя в точке В; г —
с автоматическим регулированием глубины подводного
хода при помощи гидростата
пойдет почти вертикально вверх и всплывет. Всплытие
таких моделей представляет собой довольно неприятное
зрелище: модель «как очумелая» выскакивает из воды.
27
Всплывая, такая модель часто подпрыгивает и плю-
хается в воду не как подводная лодка, а как убитая на
лету дичь.
Модели подлодок с электромоторами и с постоянной
установкой рулей нужно оснащать автоматически ре-
гулирующимся реостатом, включенным последователь-
но с мотором. Такие модели можно было бы назвать
моделями с падающей скоростью хода.
На моделях с постоянной скоростью хода необходи-
мо ставить автоматы глубины, которые в нужный мо-
мент времени могут изменять угол поворота горизон-
тальных рулей. В качестве автомата глубины можно
применить устройство с гидростатом. Если такой ав-
томат будет работать хорошо, то модель (рис. 9,а) мож-
но не загонять глубоко, а заставить ее идти на глубине
в несколько дециметров.
Даже грубое регулирование глубины погружения
модели вполне удовлетворит моделистов. Более жесткие
требования предъявляются к сохранению заданного го-
ризонтального направления движения. Модель не
должна отклоняться от заданного ей
при запуске направления. Многим известно,
насколько трудно соблюсти это условие.
Главным источником причин, сбивающих модель с
курса, являются конструктивные недостатки модели.
Рис. 10. Влияние основных недостатков конструкции
корпуса на устойчивость модели по курсу: а —симмет-
ричный корпус и правильное расположение гребного
вала — силы сопротивления F{ и F2 уравновешивают
силу упора F бив — несимметричный корпус;
г —гребной вал расположен под углом б ДЛ\
д — гребной вал смещен к левому борту от ДП
28
Движение модели происходит в процессе постоянного
уравновешивания движущей силы силами сопротивле-
ния. Движущая сила или упор винта FA направлена
вдоль линии гребного вала (рис. 10,а). На правый и ле-
вый борт модели действуют силы сопротивления Fi и F2.
Модель без руля движется прямоли-
нейно, если равнодействующая сил со-
противления направлена точно навстре-
чу упору винта.
Модель будет поворачивать с курса, если корпус
ее несимметричен (например, один борт полнее друго-
го), так как условие прямолинейного движения будет
нарушено и появится вращательный момент М (рис. 10,6
и в). Аналогичное влияние окажет поворот линии греб-
ного вала относительно диаметрали ДП (рис. 10,г) или
ее смещение (рис. 10,6).
Ошибочно думать, что удачной установкой вертикаль-
ного руля можно устранить вредное действие конструк-
тивных недостатков. Такое заблуждение может возник-
нуть из-за непонимания сложности взаимодействия жид-
кости с движущимся в ней телом. Единственно правиль-
ным способом избавиться от конструктивных причин не-
устойчивости модели на курсе является тщательное вы-
полнение корпуса и возможно более точная установка
линии гребного вала и рулей. Этот способ обеспечит до-
вольно точное движение модели по курсу. Во всяком
случае, отклонения модели от заданного направления не
будут чрезмерно большими и ее движение по курсу бу-
дет удовлетворительным.
Неуправляемая модель из-за влияния случайных
причин не может долго идти прямо. Поэтому для гаран-
тированного прохождения по заданному направлению
модель должна быть оборудована хорошим автоматом
курса. Но такой автомат довольно сложен, и без него
можно вполне обойтись.
Итак, мы проследили основные особенности подвод-
ного плавания модели, влияние ее конструктивных недо-
статков на устойчивость на курсе, выяснили главные
трудности управления и теперь сможем принять соот-
ветствующие конструктивные меры. Особенно важно об-
ратить внимание на качество изготовления корпуса,
устройств и механизмов модели.
29
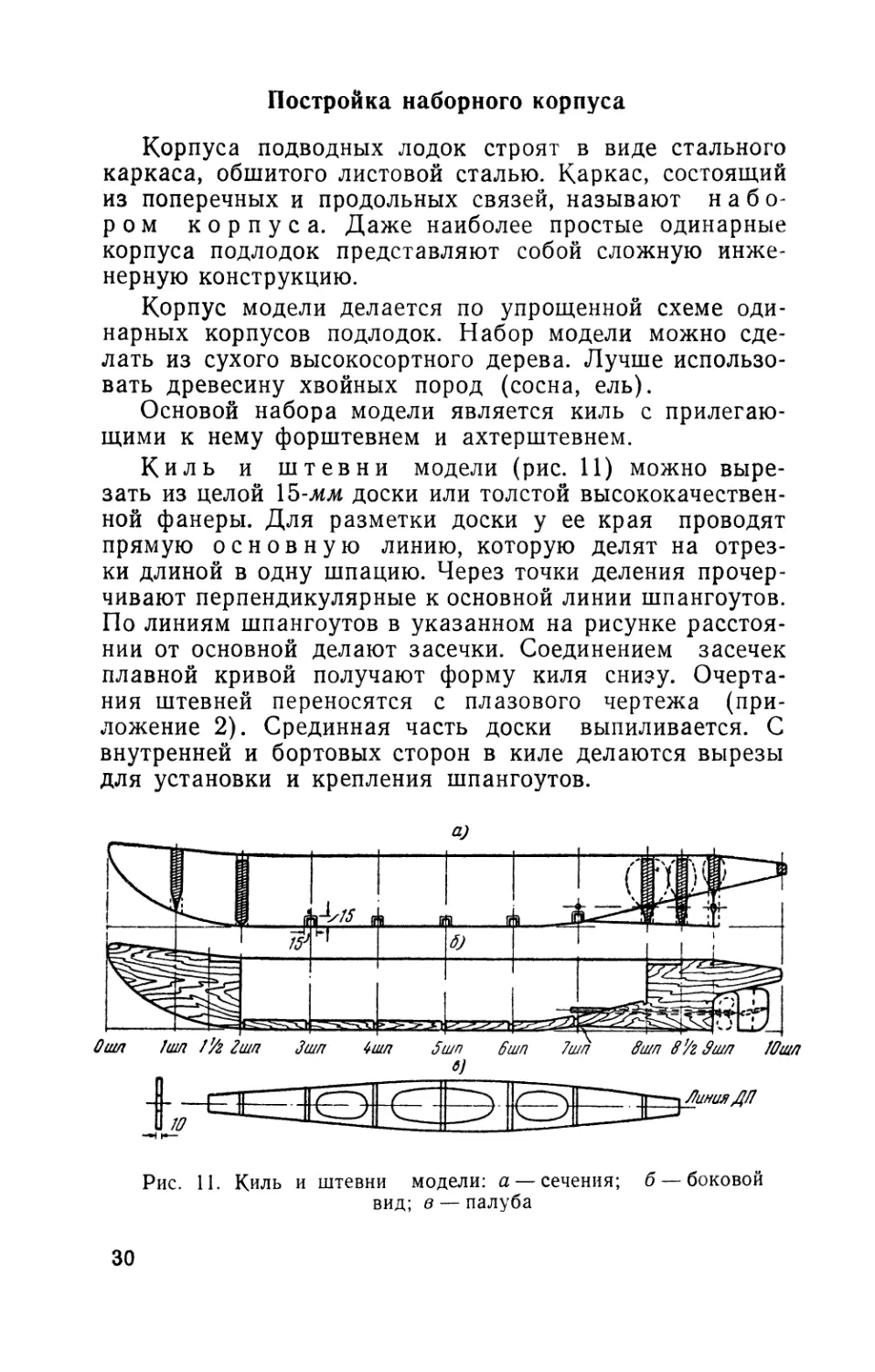
Постройка наборного корпуса
Корпуса подводных лодок строят в виде стального
каркаса, обшитого листовой сталью. Каркас, состоящий
из поперечных и продольных связей, называют набо-
ром корпуса. Даже наиболее простые одинарные
корпуса подлодок представляют собой сложную инже-
нерную конструкцию.
Корпус модели делается по упрощенной схеме оди-
нарных корпусов подлодок. Набор модели можно сде-
лать из сухого высокосортного дерева. Лучше использо-
вать древесину хвойных пород (сосна, ель).
Основой набора модели является киль с прилегаю-
щими к нему форштевнем и ахтерштевнем.
Киль и штевни модели (рис. 11) можно выре-
зать из целой 15-мм доски или толстой высококачествен-
ной фанеры. Для разметки доски у ее края проводят
прямую основную линию, которую делят на отрез-
ки длиной в одну шпацию. Через точки деления прочер-
чивают перпендикулярные к основной линии шпангоутов.
По линиям шпангоутов в указанном на рисунке расстоя-
нии от основной делают засечки. Соединением засечек
плавной кривой получают форму киля снизу. Очерта-
ния штевней переносятся с плазового чертежа (при-
ложение 2). Срединная часть доски выпиливается. С
внутренней и бортовых сторон в киле делаются вырезы
для установки и крепления шпангоутов.
Рис. И. Киль и штевни модели: а —сечения; б — боковой
вид; в — палуба
30
До установки шпангоутов нужно высверлить канал и
установить дейдвудную трубу, как об этом сказано на
стр. 61.
Шпангоуты модели вырезают из 4-мм хорошей
фанеры. Разметка на фанере делается с помощью шаб-
лонов, вычерченных на кальке. Лист кальки наклады-
вают на плазовый чертеж, проводят линию ДП и одну
ветвь шпангоута. Затем калька переворачивается обрат-
ной стороной и снова накладывается на чертеж. Совме-
щают линию ДП и нижнюю точку скопированной ветви
шпангоута с ее изображением на чертеже. Вторично об-
водят по чертежу линию шпангоута.
Полученный внешний контур шпангоута переводят
на фанеру при помощи копировальной бумаги или путем
частых наколов иглой.
В шпангоутах 5, 5 и 6 по предлагаемым размерам
(рис. 12) нужно вырезать средину. Остальные шпангоу-
ты остаются сплошными по всему сечению. Они будут
служить водонепроницаемыми переборками модели.
Вдоль по внешнему контуру каждого шпангоута
размечаются прямоугольные пазы для стрингеров. Па-
зы располагаются на равном расстоянии друг от друга,
симметрично относительно ДП по пять штук с каждого
борта. Паз для соединения с килем делается большего
сечения. Шпангоуты аккуратно выпиливаются лобзиком
по линиям разметки, подгоняются по листу в вырезах на
киле и в пазах палубы. Палуба модели делается в
виде планки с пазами и отверстиями люков (рис. 12).
Люки предназначаются для доступа внутрь корпуса к
механизмам модели.
Стрингеры делаются из деревянных (сосновых)
реек сечением 5X3 мм2. Для изготовления стрингеров
можно использовать длинные линейки, например от рейс-
шины. Такие линейки продаются в магазинах канцеляр-
ских принадлежностей. Линейку придется аккуратно рас-
пилить вдоль на рейки шириной 5 мм.
Сборка набора на клею производится после
изготовления и подгонки всех его частей. Начинают
сборку с установки всех шпангоутов на киль. Места сое-
динения тщательно промазывают клеем. Затем на шпан-
гоуты наклеивают палубу, закрепляют ее двумя шуру-
пами к носовой и кормовой оконечностям и изделие ос-
тавляют для просушки.
31
Место склеивания
шпангоута
Рис. 12. Конструкция шпангоутов: разметка
третьего шпангоута
К постановке стрингеров можно приступить после
полного затвердения клея в местах соединения шпан-
гоутов с килем и палубой. Стрингеры ставят по одно-
му с правого и левого борта, чтобы избежать деформа-
ции и не нарушить симметрию набора. Наклеенный
стрингер следует туго подвязать прочной нитью к каж-
дому шпангоуту.
После просушки мест склеивания частей нужно снять
лишнюю древесину с носовой и кормовой оконечностей
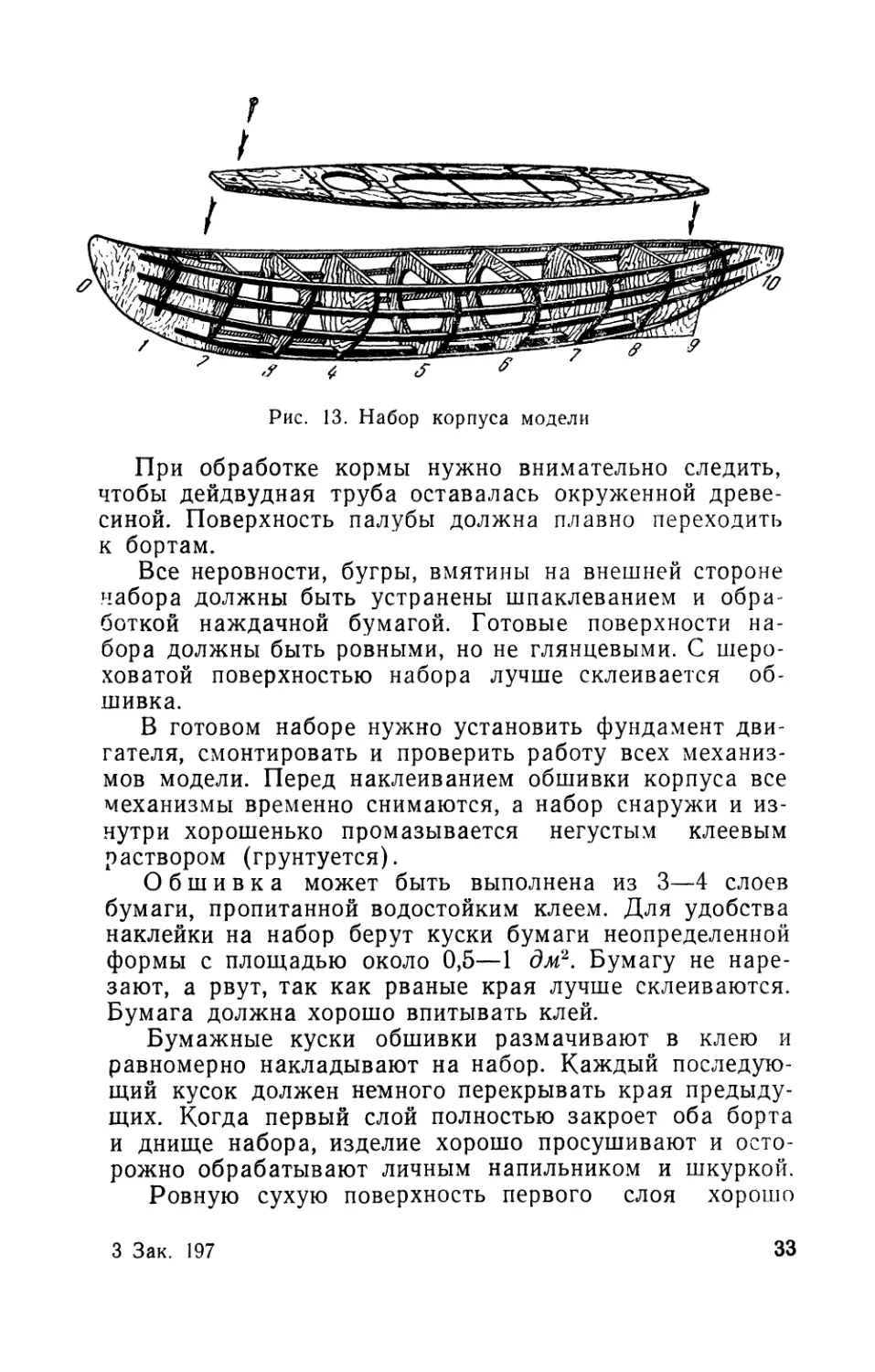
набора. В результате этой работы (рис. 13) кривые по-
верхности, образуемые стрингерами с правого и левого
бортов, должны плавно продолжаться до пересечения
в диаметральной плоскости. Линии пересечения долж-
ны давать очертания форштевня и ахтерштевня.
32
Рис. 13. Набор корпуса модели
При обработке кормы нужно внимательно следить,
чтобы дейдвудная труба оставалась окруженной древе-
синой. Поверхность палубы должна плавно переходить
к бортам.
Все неровности, бугры, вмятины на внешней стороне
набора должны быть устранены шпаклеванием и обра-
боткой наждачной бумагой. Готовые поверхности на-
бора должны быть ровными, но не глянцевыми. С шеро-
ховатой поверхностью набора лучше склеивается об-
шивка.
В готовом наборе нужно установить фундамент дви-
гателя, смонтировать и проверить работу всех механиз-
мов модели. Перед наклеиванием обшивки корпуса все
механизмы временно снимаются, а набор снаружи и из-
нутри хорошенько промазывается негустым клеевым
раствором (грунтуется).
Обшивка может быть выполнена из 3—4 слоев
бумаги, пропитанной водостойким клеем. Для удобства
наклейки на набор берут куски бумаги неопределенной
формы с площадью около 0,5—1 дм2. Бумагу не наре-
зают, а рвут, так как рваные края лучше склеиваются.
Бумага должна хорошо впитывать клей.
Бумажные куски обшивки размачивают в клею и
равномерно накладывают на набор. Каждый последую-
щий кусок должен немного перекрывать края предыду-
щих. Когда первый слой полностью закроет оба борта
и днище набора, изделие хорошо просушивают и осто-
рожно обрабатывают личным напильником и шкуркой.
Ровную сухую поверхность первого слоя хорошо
3 Зак. 197
33
промазывают клеем и наносят второй бумажный слой.
Последним слоем бумаги оклеивается вся поверхность
корпуса, включая палубу, ахтерштевень и форштевень.
Чтобы получить слой однородным по толщине, реко-
мендуется для наклейки последующего слоя использо-
вать бумагу иного цвета, чем для слоя предыдущего. С
той же целью можно каждый готовый слой смазывать
клеем, окрашенным в достаточно яркий цвет. Готовый
корпус следует хорошенько промазать клеем и окрасить
изнутри, прошпаклевать и окрасить снаружи.
Клей для соединения частей набора и для обшивки
должен быть водостойким. Желательно применять ни-
троклей, который быстро сохнет, дает прочные соедине-
ния и совершенно не размокает в воде. Приобрести та-
кой клей нетрудно. Моделисты часто применяют клей
«эмалит», АК и даже нитролаки. Можно с успехом поль-
зоваться клеем БФ, который продается во всех хозяй-
ственных магазинах. Для моделей подлодок применять
казеиновый, а тем более столярный клей не рекомен-
дуется. Эти виды клеев используются в крайнем случае,
при условии весьма тщательной многослойной окраски
модели масляными красками.
Наборный корпус с бумажной обшивкой при тща-
тельном выполнении будет легким, прочным, водонепро-
ницаемым и водостойким.
Корпус модели из жести
Многие моделисты предпочитают строить корпуса
моделей подлодок из кусков жести, соединенных между
собой пайкой на оловянном припое. Некоторым из них
кажется, будто жестяная модель «более подобна» на-
стоящей подлодке, чем деревянная. Других просто при-
влекает высокая прочность металлической модели.
Первое мнение несерьезно, ошибочно, хотя его при-
держиваются многие моделисты и даже руководители
кружков.
Как неверно заключение о подобии двуногого пету-
ха двуногому человеку, так неверно думать, будто из-за
жести «усилится» подобие между моделью и подлодкой.
В самом деле, материал корпуса подлодки работает в
условиях, несравненно более тяжелых, чем материал кор-
пуса модели. Поэтому по нагрузке на материал даже бу-
34
мажный корпус модели оказывается относительно бо-
лее прочным, чем стальной корпус подлодки. Если неко-
торые сравнительно безобидные удары, толчки и сжа-
тия, часто испытываемые моделью, пересчитать по прин-
ципу механического подобия на подлодку, то получат-
ся фактические нагрузки, подобные действию небывало
сильного урагана или глубинных бомб. Поэтому жестя-
ной корпус моделей скорее уменьшает, чем усиливает ее
подобие настоящей подлодке. По отношению к стально-
му корпусу подлодки жестяной корпус модели неверо-
ятно прочен. Конструкторам и не снилось иметь матери-
ал для подлодок по прочности подобный жести на мо-
делях.
Высокая прочность является един-
ственным достоинством жестяного кор-
пуса модели. Самый существенный и крупный не-
достаток металлического корпуса заключается в его
большом собственном весе. Вследствие большого веса
металлический корпус поглощает слишком большую до-
лю запаса плавучести, что не позволяет разместить па
модели достаточный балласт. Поэтому ц. т. модели бу-
дет расположен не только высоко, но и близко к ц. в.
Следовательно, остойчивость металлической
модели будет всегда меньше, чем у де-
ревянной. Чем меньше размеры (объем) модели, тем
более вредно влияние жестяного корпуса на остойчи-
вость. Этим объясняется, почему даже у опытных моде-
листов жестяные модели длиной до 0,5 м не получа-
ются.
Можно считать, что корпуса моделей длиной при-
мерно до 0,7 м следует делать из легкого материала (де-
рево, легкая пластмасса, бумага).
Жестяные корпуса будут достаточно остойчивыми у
крупных моделей, длиной около 1 м и больше. Вообще
же, чем крупнее модель, тем больше имеется оснований
делать корпус из металла.
Другим недостатком жестяных корпусов является
довольно сложная технология постройки, требующая
навыков в работе с жестью и умения хорошо паять.
Неопытные моделисты, как правило, не смогут постро-
ить хороший металлический корпус модели.
Корпус из жести обычно собирают на деревянной
35
болванке. Болванку вырезают из цельного или склеен-
ного из досок бруска размером Посереди-
не, вдоль бруска, проводят прямые (линии ДП).
На верхней и нижней гранях бруска проводят линии
шпангоутов и наносят контур наиболее полной ватерли-
нии. Срезают лишнюю древесину с боков бруска до
контуров ватерлинии. По боковым поверхностям прово-
дят линии шпангоутов, соединяя концы соответствующих
отрезков на верхней и нижней гранях бруска. На боко-
вые стороны наносят очертания нулевого батокса, сре-
зают лишнюю древесину и восстанавливают разметку се-
чений шпангоутов.
Для дальнейшей обработки бруска необходимо сде-
лать шаблоны шпангоутов. Их получают переносом кон-
туров каждого шпангоута на лист фанеры, картона или
жести и последующим вырезанием (удалением) из по-
верхности листа площади, занятой сечением шпан-
гоута.
Проверяя работу шаблонами, от заготовки отструги-
вают лишнюю древесину до тех пор, пока она не при-
мет форму корпуса модели. В результате получится бол-
ванка.
В готовой болванке прорезают пазы, в которые вкла-
дывают киль и шпангоуты, сделанные из полосок же-
сти шириною 5—8 мм. Вместо полосок часто применя-
ют рейки Г-образного, Т-образного или П-образного
профиля. Далее, начиная с носа или кормы, шаг за ша-
гом симметрично с обоих бортов оловом напаивают ку-
ски жестяной обшивки, предварительно подогнанные по
обводу корпуса. Соединения бортов в носу и корме, а
также со стороны верхней палубы прихватываются вре-
менной пайкой.
После сборки бортовой обшивки временная пайка
нарушается и болванка, как из раскрытой раковины,
удаляется из корпуса.
Снятый с болванки корпус окончательно пропаивает-
ся до полной герметичности. Внутренние механизмы ус-
танавливаются через люк в палубе. Разумеется, балле-
ры рулей и дейдвудная труба соединяются с корпусом
тоже при помощи пайки. Готовый корпус обрабатывает-
ся напильниками, надфилями, шкуркой и окраши-
вается.
36
Долбленый корпус
Корпуса малых моделей можно делать как наборны-
ми, так и путем выдалбливания внутренней полости у
болванки. Некоторые моделисты предпочитают второй
способ постройки корпусов и достигают большого эф-
фекта. Для моделей подводной лодки малой (до 0,5 м),
а иногда и средней (до 1 м) длины долбленые корпуса
имеют определенные преимущества, если для болванки
использовано сухое, легкое дерево, хорошо защищенное
от увлажнения.
Болванка для долбленого корпуса делается тем же
способом, что и для сборки корпуса из жести.
Внутренняя полость в корпусе выдалбливается (вы-
резается) со стороны палубы. Размеры полости делают-
ся достаточными для размещения всех механизмов мо-
дели.
Чтобы опустить ц. т. модели возможно ниже, нужно
стараться облегчить верхнюю часть корпуса. Снизу, со
стороны киля, нужно врезать стальной или свинцовый
стержень-балласт. Величину балласта придется подо-
брать опытным путем во время предварительных испы-
таний модели.
Надстройка модели
Надстройка модели подводной лодки состоит из од-
ной рубки. Рубку можно сделать в виде легкой, герме-
тически закрытой коробки, закрепленной на главном лю-
ке модели. Форма, размеры и устройство рубки показа-
ны на рис. 14,а и особых пояснений не требуется.
В предлагаемой конструкции (рис. 14,6) предусмат-
ривается возможность аварийного отделения средней
поплавковой части рубки от модели и всплытия ее на
поверхность.
Конструкция поплавковой части весьма проста: де-
ревянное или жестяное основание — кольцо — закрыто
с боков слегка выпуклыми мембранами из латунной
фольги или тонкой жести; в центре каждой мембраны
впаяны короткие (0,5—1 мм) штырьки, подобные голов-
кам платяных кнопок; в кольцо сверху вделана трубоч-
ка высотой 50—60 мм и диаметром 3—3,5 мм; свобод-
ный конец трубочки имеет резьбу и закрывается вин-
том-пробкой. Трубочка служит макетом перископа и
37
Для большой модели
вое вертикальные
размеры увеличить в
полтара раза, а все
горизонтальные,размеры
увеличить вавое
Рис. 14. Надстройка моделей подлодок; а —макет рубки мо-
дели военной подлодки; б — устройство макета рубки-по-
плавка; в (рис. на след, стр.)—крышка переднего лю-
ка: 1 — палуба; 2— крышка; 3 и 4 — шайбы уплотнения из
мягкой резины, наклеенные клеем БФ; 5 — гайки 3-мм, вре-
занные в палубу и закрепленные клеем БФ; б —отверстия
для болтов; 7 — крепежные болты 3-мм
38
4 им
Продолжение рис. 14
входным ниппелем для подкачки воздуха в поплавок,
если мембраны окажутся сильно вдавленными внутрь.
Снизу основания поплавка нужно сделать маленькую
петельку — рым — и подвязать к ней один конец тон-
кой прочной нити. Другой конец нити крепится к крыш-
ке главного люка модели внутри фальшборта рубки.
Длина нити должна быть вдвое больше возможной глу-
бины подводного хода модели.
Рубка-поплавок вставляется в фальшборт, штырьки
входят (защелкиваются) в неглубокие гнезда и закреп-
ляют поплавок. Во время испытаний устройство регу-
лируется так, чтобы в случае погружения на ненормаль-
но большую глубину сжатые давлением воды мембраны
освободили штырьки и поплавок мог всплыть на по-
верхность. Таким образом, рубка-поплавок должна ра-
ботать как аварийно-спасательный буй модели.
Фальшборт (рис. 14,6) жестко закрепляется на
палубе модели, внутри его спиралью укладывается нить.
Палубные люки должны герметически закры-
ваться крышками (рис. 14,в) с резиновыми прокладка-
ми посредством крепежных З-лш болтов. Поверхности
резиновых шайб и болты следует смазать тавотом или
вазелином.
39
Двигатели для моделей подлодок
Двигателями называют машины или механизмы, ко-
торые в процессе преобразования энергии совершают
механическую работу. Часто говорят, что двигатель со-
вершает работу за счет внешнего источника энергии.
Такими источниками могут быть: тепло топлива, элект-
роэнергия, механическая энергия падающего груза, вра-
щающегося тела (гиромоторы), сжатого или растянуто-
го тела (резины, пружины). Формой энергии источни-
ка определяется классификационное название двига-
теля.
Тепловые двигатели (паровые машины, тур-
бины, двигатели внутреннего сгорания) на моделях под-
лодок применить нельзя.
Электрические двигатели (электромоторы)
можно использовать на достаточно крупных моделях, в
корпусе которых можно разместить необходимое коли-
чество электрических батарей.
Механические двигатели (гиромоторы, ре-
зиномоторы, пружинные механизмы) являются един-
ственным видом двигателей для малых моделей под-
лодок.
Резиномоторы, пружинные двигатели и гиромоторы
являются двигателями периодического действия. Их
работа состоит из двух циклов. В первый (зарядный)
цикл внешними силами заводят мотор (закручивают
резиновый жгут, деформируют пружину, раскручивают
волчок). В результате завода аккумулируется (запа-
сается) механическая энергия. Во второй (рабочий)
цикл двигатель расходует запасенную энергию и со-
вершает полезную работу.
Резиномоторы просты по конструкции, устрой-
ство их общеизвестно, они часто используются на мало-
размерных простейших моделях.
Пружинные двигатели применяют на многих
заводных игрушках, используют как привод часовых ме-
ханизмов, патефонов, самопишущих приборов и автома-
тов. Их можно с успехом применить для модели под-
лодки, если запас энергии заведенной пружины обеспе-
чит необходимый ход и дальность плавания. Для малой
модели может оказаться достаточной энергия завода
пружины от обычного будильника. Патефонная пружина
40
запасает энергию, способную обеспечить ход модели
среднего размера.
Схема действия пружинного двигателя проста. На
оси главной шестерни закреплен подвижный конец ра-
бочей пружины, второй конец пружины зажат в непо-
движной станине. Упругие силы заведенной пружины
вращают главную шестерню, сцепленные с нею вторич-
ные шестеренки и рабочий вал. Передаточное число
шестерен подбирается так, чтобы пружины разворачи-
вались медленно, а рабочий вал делал нужное число
оборотов. На модели рабочим является гребной вал.
Чтобы обеспечить равномерное вращение вала, часто
применяют центробежный регулятор.
Гиромоторы применяются на некоторых видах
внутризаводского или внутригородского транспорта. Так
называемые гиротележки и гиробусы имеют довольно
большие мощности и с грузом в несколько тонн могут
двигаться с обычной для городского транспорта скоро-
стью. Без подзарядки гиробус может пройти по асфаль-
ту несколько километров.
В последние годы гиромоторы устанавливают на
некоторых механических игрушках.
Основной частью гиромотора является вращающий-
ся тяжелый маховик, т. е. массивный волчок (гироскоп).
При зарядке волчок приводится в быстрое вращение по-
средством электромотора. Во время рабочего цикла ме-
ханическую работу получают за счет запасенной волч-
ком энергии.
Для модели очень заманчивы стабилизирующие свой-
ства гироскопа, которые при умелом использовании мо-
гут сделать модель очень устойчивой на курсе.
Из-за отсутствия разработок и неумения проделать
необходимые расчеты пружинные и гироскопические
двигатели не получили пока признания среди модели-
стов. Однако необходимые простейшие расчеты многие
моделисты среднего и старшего возраста вполне могут
освоить.
Простейший расчет ходовых качеств и мощности
Модель на ходу испытывает тормозящее действие
сил сопротивления, которые можно определить анало-
гично известной нам формуле (2). Если в этой фор-
41
муле пересчитать коэффициент к для обтекаемой фор-
мы модели, учесть возможные значения трения в меха-
низмах, заменить площадь сечения по мидель-шпангоу-
ту величиной Ву^Н, то получим приближенную величи-
ну полной силы сопротивления, равную
Рс=0,003(5ХЯ)^ср, (10)
где Fc измеряется в Л В и Н — в см, а средняя скорость
модели ^ср — в см!сек.
Двигатель модели посредством винта должен со-
вершать работу по преодолению этой силы.
Работа двигателя, необходимая для равномерного
движения модели, равна
А=РС/, (11)
где I — длина пути модели. Со скоростью ^ср модель
за время t проходит путь, равный
(12)
Подставляя (12) в (11), выразим работу через скорость
и время
A=Fcv^t. (13)
В формулах (11) и (12) работа выражается в Гем,
если
Fc—в Г, /—в см, ^ср—в см!сек, t— в сек.
1 Л?л/=1/100000 кГм, или 1 кГм~ 100 000 Гем.
Формула (13) показывает, что для обеспечения дви-
жения модели с заданной скоростью необходимо, что-
бы двигатель в единицу времени совершал работу, рав-
ную
p = A:^ = Fc^cp. (14)
Величина Р, измеряемая работой двигателя в единицу
времени, называется мощностью двигателя. Мощность
является важнейшей характеристикой двигателя. Если
двигатель за единицу времени не сможет совершать
необходимой работы, то ход модели будет меньше за-
данного. В таком случае говорят о недостаточной мощ-
ности двигателя.
42
В формуле (14) мощность измеряется в Гсм]сек,, ес-
ли А — в Гем, t — в сек. или Ес — в Г и пср — в см]сек.
Если А выражать в кГм, a t в сек., или Fc в кГ, а
тсрв м!сек, то Р измеряется в кГм!сек.
Часто применяются и другие единицы мощности: од-
на из них называется лошадиной силой (л. с.), другая—
ваттом (вг), или джоулем в секунду (дж/сек)
1 ет=1 дж/сек=0,\02 кГм/'сек=10 200 гГм!сек;
1 л.с.=75 кГм/сек=736 em=Q,Ti& кет.
Сравнивая формулы (10) и (14), получим выражение
средней мощности двигателя через наибольшую шири-
ну В, наибольшую высоту И и среднюю скорость г»ср
модели
Рср = 0,003(ВХ//)<р. (15)
Для данной модели В и Н являются постоянными
величинами. Следовательно, из формул (10) и (15)
можно получить уже известный нам вывод, что силы
сопротивления движению модели прямо
пропорциональны квадрату ее скоро-
сти, а необходимая мощность двига-
теля пропорциональна кубу скорости.
Графики (рис. 15) наглядно показывают, как быстро
возрастают силы сопротивления и необходимая мощ-
ность двигателя с увеличением заданной скорости мо-
дели. Такая зависимость сильно осложняет дело под-
бора двигателя, обеспечивающего заданные ходовые
качества модели, и является причиной довольно частых
неудач. Поэтому при оценке ходовых качеств и подбо-
ре двигателя для модели совершенно необходимо уметь
сделать хотя бы простейшие приблизительные расчеты.
1. Расчет наименьшей подводной ско-
рости v min необходим потому, что погружение моде-
ли обеспечивается только действием горизонтальных
рулей. При наименьшей скорости погружающая сила
Fn должна быть равной запасу плавучести AG.
Для данной модели известны: AG — запас плавуче-
сти, а — угол перекладки горизонтальных рулей, 5 —
площадь перьев всех горизонтальных рулей. Из форму-
лы (2) сразу находим
^•п=ю,5(16)
О - а
43
Отношение силы сопротивления к произведению 8*0
Рис. 15. Зависимость силы сопротивления Fc и мощности
двигателя модели Р от скорости v
Если модель обеспечивается двигателем постоянной
мощности, то скорость модели не должна быть больше
минимальной, так как иначе большая погружающая си-
ла уведет модель на большую глубину (см. стр. 26).
Пример расчета
Дано: AG= 1500 Г\ 5 = 60 см\ а =15°.
Решение: подставляя известные значения величины в
формулу (16), находим минимальную скорость равной
vmin = Ю,5 V= 13,65-14 см/сек.
2. Задание максимальной скорости не-
обходимо в том случае, если двигатель модели работает
в режиме падающей мощности. В этом режиме ско-
рость модели на старте должна быть больше средней,
а в конце дистанции равной минимальной. Если после
прохождения дистанции скорость станет меньше мини-
мальной, то модель начнет всплывать.
Вообще максимальную скорость можно назначать
произвольно, помня о резком росте мощности с увели-
44
чением скорости. Можно рекомендовать выбор макси-
мальной скорости по подобию величине скорости под-
водного хода подлодки соответствующих размеров. Для
этого случая применима формула теории механического
подобия в виде:
^ax = 51,4 v„ : уТ, (17)
где v тах — скорость модели в см1сек\ v„— скорость лод-
ки в узлах; X — масштабное число, показывающее, во
сколько раз размеры подлодки больше размеров мо-
дели.
Пример: масштаб модели 1:100; длина модели
L = 100 см. Найти максимальную скорость модели по
подобию подлодке. Решение: 1) Масштабное число
Х = 100; 2) Определяем длину лодки — прототипа мо-
дели как L„ = "t.L = 100 -100 см =100 м\ 3) По
таблице основных характеристик подлодок (при-
ложение 2) выбираем подводную скорость для подлод-
ки длиной 100 м равной сл =10 узлов (строка 17);
4) По формуле (17) определяем
«W = 51,4 • 10 ' У'ТОСГ= 51,4 см/сек.
3. Определение средней скорости vcp не-
обходимо для расчета мощности двигателя, работающе-
го в режиме падающей мощности. В этом режиме с до-
статочной для расчета точностью движение модели
можно считать равнозамедленным. Тогда средняя ско-
рость будет равна полусумме максимальной (старто-
вой) и минимальной (всплытия) скоростей подводного
хода модели, т. е.
^ср — 0,5 (^т1П + ^maxi • (18)
Пример: известно, что =13 см!сек; vmax=
= 51 м!сек. Подставляя числовые данные в формулу
(18), найдем, что
^ср = 0,5(13+51)= 32 см/сек.
4. Расчет минимальной полезной мощ-
ности двигателя Pmin делается подстановкой из-
вестных величин В, Н и vmin в формулу (15).
45
Минимальная мощность определяет данные двигате-
ля, который должен работать в режиме постоянной ско-
рости. При окончательном выборе двигателя расчетную
величину мощности можно увеличить, но нельзя умень-
шить.
5. Средняя полезная мощность двига-
теля Рср позволяет рассчитать запас энергии, необхо-
димый для прохождения заданной дистанции. Знать эту
величину нужно в случае подбора емкости батарей для
электромотора или зарядной энергии механического дви-
гателя. Для подсчета средней мощности в формулу (15)
следует подставлять известное значение оср.
Пример: для модели ВУ^Н = 100 см2, средняя ско-
рость уср = 32 см/сек. Средняя мощность
Рср = 0,003 X Ю0Х328— 10000 Гсм!сек = 0,\ кГм/сек.
6. Максимальная полезная мощность
двигателя Ртах подсчитывается для определения
первоначальных характеристик механических двигате-
лей или реостатов-регуляторов электромотора, который
должен работать в режиме падающей мощности. При
расчете Ртахь формулу (15) нужно подставить извест-
ную величину vmax.
Пример: известно, что В X Н = 100 см2, vmax=
= 50 см)сек. По формуле (15) находим
Ршад.=0,003 • 100 • 503=37 500 Гсм1сек^£)А кГм/сек.
7. Время подводного хода модели в ре-
жиме падающей скорости (мощности) подсчитывается
после подстановки в формулу (12) известной средней ско-
рости иср и заданного пути под водой I
t = l:vCf>. (19)
Пример: средняя скорость определена равной
иср = 32 см)сек. Модель масштаба 1:100 по классифи-
кации должна пройти дистанцию в 35 м. Считая под-
водный путь равным Z = 35 м, находим время
t = 3000 : 35 = 94 сек. = 1 мин. 34 сек.
8. Расчет полезной работы двигате-
ля А проще всего получается по формуле (14), если
46
известны средняя полезная мощность и время подвод-
ного хода.
Пример: ранее найдено, что Рср =0,1 к.Г м/сек, а
t = 94 сек. Поэтому полезная работа 4=0,1X94 =
= 9,4 кГм.
9. Подсчет минимального запаса энер-
гии 117 необходимо производить с учетом коэффициента
полезного действия самого двигателя и движителя
(гребного винта).
Коэффициентом полезного действия
(к. п. д.) двигателя называется число, по-
казывающее, во сколько раз полезная ра-
бота двигателя меньше затраченной на
нее энергии.
Затраченная энергия всегда больше полезной на ве-
личину бесполезных потерь, которые неизбежны как
вследствие особенностей двигателя, так и из-за механи-
ческого трения работающих в нем частей. Хорошие
электродвигатели имеют большой к.п.д., достигающий
0,9 (90%). В случае применения реостатов к.п.д. следу-
ет снижать на 10—20%. К.п.д. самодельных механиче-
ских двигателей, по-видимому, не будут большим, чем
0,5 (50%).
Коэффициентом полезного действия
гребного винта показывает, во сколько раз мощ-
ность, сообщающая модели движение, меньше мощности,
передаваемой двигателем на гребной вал. К.п.д. гребно-
го винта модели зависит от множества причин и преж-
де всего от расположения; формы и качества выполнения
самого винта.
Для тщательно изготовленного и подобранного при
испытаниях модели винта наименьший к.п.д. можно
принимать равным 0,5. Иными словами, можно считать,
что винт передает корпусу модели только половину
мощности, полученной гребным валом от двигателя.
Общий к.п.д. механизмов движения мо-
дели равен произведению к.п.д. двига-
теля на к.п.д. движителя. Поэтому общий к.п.д.
при установке на модели электродвигателя будет около
0,45, та же величина для механического двигателя ока-
жется не меньше 0,25 (25%).
Для механических двигателей периодического дей-
ствия и для электромоторов с однократным запасом
47
электропитания (малая емкость батарей) минимальный
запас энергии W должен быть равен энергии завода или
полному запасу электроэнергии. Для электромоторов с
большим запасом питания (большая емкость батарей)
минимальный запас энергии W является расходом
электроэнергии на один запуск модели. По определе-
нию
к.п.д.—А : W и W=A : к.п.д. (20)
Пример: определить необходимый минимальный
запас энергии завода пружинного двигателя, если он
должен совершить полезную работу А = 9,4 кГм. При-
нимая общий к.п.д. двигателя равным 0,25, сразу най-
дем: W = 9,4 :0,25 = 37 кГм.
10. Определение расхода электроэнер-
гии на однократный запуск модели сводится к опре-
делению минимального запаса энергии W в ватт-секун-
дах (вт-сек).
Пример: полезная работа должна быть равной
А = 9,4 кГм для электромотора с реостатом к.п.д.=70%.
Определить W в вт-сек.
Решение: так как 1 кЛм = 9,8 вт-сек, то
W = A : к.п.д. = 9,4:0,7 = 13=4 кГм — 130 вт-сек.
Подсчет емкости электробатарей
Минимальная емкость электробата-
рей является важной паспортной характеристикой.
Измеряется емкость в ампер-часах и представляет
собой количество электричества Q, которое батарея мо-
жет перегнать через мотор по замкнутой цепи.
Зная напряжение на моторе и расход электроэнер-
гии на один запуск W, можно подсчитать наименьшую
необходимую емкость Q батареи, которая обеспечит К
запусков. В самом деле, за один запуск расход элект-
роэнергии W равен работе электрического тока за вре-
мя хода модели, т. е.
W-UIt, (21)
где W — электроэнергия в вт-сек\
I — сила сока в амперах (а);
U —напряжение на моторе в вольтах (в);
t — время в сек.
48
Произведение силы тока на время равно количест-
ву электричества, прошедшего через мотор за это вре-
мя. Поэтому за один пробег модели батареи израсходу-
ют количество электричества равное
q = It=W: U.
За К пробегов расход батарей будет в К раз большим
и равным
Q = Kq = КИ.
Сравнивая формулы (21) и (22), определим наимень-
шую потребную емкость батареи равную
Q = АМТ: U {а-сек)
или Q = Жй (а-час)’ <23>
где W — в вт-сек, U — в в.
Моделистам, которые на глазок подбирают батареи,
далеко не всегда удается использовать возможности
своей модели. В одних случаях они перегружают мо-
дель лишним количеством батарей и за счет подъема
ц. т. недопустимо ухудшают остойчивость модели. В
других случаях применяют батареи недостаточной ем-
кости, и после пробных запусков обнаруживается, что
модель не имеет нужного хода. Выбор батареи нужной
емкости исключает оба неприятных случая. Заметим,
что емкость батареи увеличится вдвое, если параллель-
но ей включить вторую такую же батарею.
Пр им ер: на ярлыке батареи значится, что ем-
кость одной батарейки Qi = 2 а-час, напряжение — 4 в.
/Моторчик имеет достаточную мощность, а за один про-
бег модели должен совершить полную работу W =
— 130 вт-сек. Определить необходимую емкость бата-
реи. Сколько батарей следует включить параллельно
мотору, чтобы без смены обеспечить 10 запусков?
Решение. По условию дано: Q = 2 а-час, U = 4 в,
W = 130 вт-сек, К = 10.
По формуле (23) находим, что необходимая ем-
кость
Q= 130ХЮ: (3600X4) ^0,09 а-ч.
Следовательно, одной батарейки на десять запусков
с избытком хватает.
4 Зак. 197
49
Подсчитать емкость и подобрать батареи следует до
окончательного выбора мотора. Этот расчет позволит
лучше разместить весовую нагрузку в корпусе модели,
рационально выбрать места для батареи и для фунда-
мента электромотора.
Установка электромотора
Электродвигатель на модели должен быть жестко
скреплен с корпусом. Мотор привинчивается к дере-
вянному фундаменту, который, в свою очередь, надеж-
но скреплен с набором корпуса.
После определения места установки мотора из це-
лого куска достаточно твердого дерева вырезают по-
душку-фундамент. Его нижняя часть должна иметь
форму внутренней поверхности обшивки и пазы для
киля и стрингеров, проходящих в выбранном месте.
Величина фундамента определяется размерами элект-
ромотора и способом крепления. Малогабаритные мо-
торчики обычно крепятся к фундаменту посредством
хомутиков из полосок толстой жести или тонкого по-
лосового железа. В этом случае в деревянной подушке
рекомендуется сделать не особенно глубокий желоб, в
который можно уложить корпус мотора. Хомутик
плотно прижмет мотор к фундаменту, если будет при-
тянут втугую при завинчивании крепежных шурупов.
Наиболее надежно крепить фундамент к килю и
особенно хомутики к фундаменту при помощи 3—4-мм
болтиков с гайками. При любых способах крепления
фундамент должен быть приклеен к набору и обшивке.
Направление оси мотора должно возможно точнее
совпадать с направлением оси гребного вала. Провод-
ка, выключатель, места соединения проводов с бата-
реей должны быть выполнены очень аккуратно. Прово-
да должны быть достаточного сечения, с хорошей вла-
гостойкой изоляцией. Всякие «временные» проводки
совершенно недопустимы.
Все электрооборудование модели должно быть хо-
рошо закреплено.
Обычные выключатели, или тумблеры, на модели
подлодки устанавливать не рекомендуется, потому что
они требуют больших усилий при включении и их нель-
зя ставить снаружи. Хорошим простейшим выключате-
50
лем может служить длинный болтик с метрической
3-мм резьбой. Длинная (2—3 см) гайка в виде металли-
ческой трубки закрепляется неподвижно в палубе мо-
дели подлодки; к ней припаивается один провод цепи.
Второй провод должен быть припаян к неподвижной
бронзовой или латунной пластинке, свободный конец
которой размещается у внутреннего отверстия гайки.
Болтик свободно, но плотно завинчивается снаружи и
замыкает цепь в момент касания с пластинкой. Голов-
ку болтика можно сделать в форме головы шпиля, а
весь выключатель разместить вместо шпиля. Чтобы во-
да не просачивалась по резьбе болта, верхнюю часть
его можно смазать вазелином.
Еще лучше, если в качестве выключателя применить
общеизвестное гидравлическое (масляное) реле време-
ни, потому что это обеспечит запуск модели из спо-
койного положения.
Энергия упругой деформации
Изменение формы тела под действием внешних сил
называют деформацией этого тела. Различают три вида
деформации: растяжения-сжатия, кручения и изгиба.
Чтобы вызвать любого вида деформацию, необхо-
димо затратить энергию на работу по преодолению
внутренних сил, действующих между молекулами тела.
Молекулярные силы некоторых тел после прекра-
щения действия внешних сил способны восстановить
прежнюю форму тела. Такие тела называют упругими,
а их деформацию — упругой. Энергия, затра-
ченная на упругую деформацию, нака-
пливается (аккумулируется) внутри те-
ла и может быть использована для со-
вершения работы. Поэтому упругие тела (на-
пример, резина или стальная пружина) применяются
в качестве аккумуляторов механической энергии.
Наилучшими упругими свойствами обладает резина,
которая сохраняет эти свойства при двукратном удли-
нении и при очень большом закручивании. Потенци-
альная энергия молекулярных сил резины примерно в
50 раз больше, чем может накопить стальное тело тех
же размеров и при тех же способах деформации. Од-
нако упругость резины зависит от атмосферных влия-
51
ний, уменьшается от действия влаги и по мере старе-
ния. Поэтому в ответственных механизмах использо-
вание резинового аккумулятора ограничено. Для меха-
нических двигателей самоходных моделей резиновый
аккумулятор упругой энергии следует признать наи-
лучшим, если он установлен внутри модели и обере-
гается от действия воды.
В простейших резиномоторах, размещенных снару-
жи корупаса модели, резина работает в невыгодных ус-
ловиях и быстро теряет аккумулирующие свойства. От
запуска к запуску качества простейшего резиномотора
значительно изменяются.
Расчет резиномотора делать нецелесообразно. Мож-
но с уверенностью сказать, что при хорошем качестве
резины мотор для модели до 0,7—0,8 м длины даст
вполне удовлетворительные результаты.
Стальная полоса от небольших нагрузок практиче-
ски не изменяет длины и относительно мало закручи-
вается. Но ее упругая деформация на изгиб обеспечива-
ет довольно большой запас потенциальной энергии мо-
лекулярных сил.
Стальная полоса, изогнутая в виде спирали, обра-
зует спиральную пружину, которая может служить ак-
кумулятором механической энергии. Запас энергии
стальной часовой пружины достигает 30 кГм, или око-
ло 300 вт-сек. Расчет спиральных пружин сложен,
обычно применяют приближенные практические форму-
лы.
Максимальная потенциальная энер-
гия пружины Wn , запасенная при полном заводе,
зависит от качества материала и размеров пружины.
Для грубого, приближенного расчета стальной спираль-
ной пружины (рис. 16) можно принять, что максималь-
ное перемещение конца пружины не превышает величи-
ны х (в мм), равной
х = 0,1 • z • г2 : у, (24)
что максимальная нагрузка на ее внешний конец может
достигать величины Fm (в кГ), равной
Рт= 15 • у3: г, (25)
52
Исходное
Рис. 16. Спиральная пружина: г —радиус пружины; Fт —
максимальная нагрузка; х — деформация; у — толщина
пружины
что, наконец, энергия завода пружины будет не больше
величины Wn (в кГм) равной
IFn==0,002-z-r-y2. (26)
В формулах (24), (25) и (26) приняты обозначения:
г — наибольший внешний радиус незаведенной пружи-
ны в мм (радиус внешней оправки), у — толщина пру-
жины в мм, z— число витков ослабленной пружины.
Ширина пружины в этих формулах явно не вводится.
Предполагается, что ширина пружины около 10#.
Зная максимальную деформацию х, можно опреде-
лить, сколько оборотов сделает барабан до ослаб-
ления пружины:
7V6 = 0,16 • х : г (оборотов). (27)
По нагрузке и радиусу г найдем максимальный
вращательный момент Мт, который может развить
пружина:
Mm = Fm-r=15y*. (28)
Параметры имеющейся пружины (z.r.y) всего можно
измерить, а зная их, легко определить энергию завода.
Наоборот, зная необходимую величину энергии завода,
нетрудно подобрать пружину нужных параметров. За-
метим, что энергия пружины быстро растет с увеличе-
нием ее толщины.
53
Для моделей около 1 м длины часовые пружины
слабы, но, располагая пружиной от патефона, можно
сделать пружинный двигатель и для такой модели.
Пример: подсчитано, что необходимый для моде-
ли запас энергии равен W — 0,8 кГм. Имеется спираль-
ная стальная пружина толщиною у = 0,9 мм, с радиу-
сом г = 35 мм и числом витков z = 10. Выяснить, обе-
спечит ли завод этой пружины необходимый запас
энергии Гп.
Решение: по формуле (26) находим, что
1ГП = 0,002 • 10 • 35 • 0,81 = 0,6 кГм.
Так как №п меньше W, то пружина не обеспечивает
заданного запаса энергии.
Нужно заметить, что в крайнем случае такую пру-
жину можно заставить удовлетворительно работать, ес-
ли принять все меры к увеличению к.п.д. механизмов,
если, насколько возможно, уменьшить трение в под-
шипниках,. тщательно подогнать винт и хорошо отрегу-
лировать горизонтальные рули.
После подбора пружины можно заняться конструи-
рованием и изготовлением пружинного двигателя.
Устройство пружинного двигателя
По существу пружинный двигатель представляет со-
бой редуктор, передающий вращательный момент пру-
жины к рабочему валу (рис. 17,а). Заведенная пружи-
на 1 поворачивает барабан 2 и посредством шестерен
3, 4 передает вращение гребному валу 5. Число оборо-
тов гребного вала пв должно быть в несколько оборо-
тов в секунду. За время прохождения дистанции / вал
сделает Л/в оборотов, равное
NB=nt. (29)
За то же время t пружина должна развернуться,
сделав всего несколько оборотов Л'п . Отношение Nn: NB
называется передаточным числом, которое показы-
вает, во сколько раз гребной вал должен вращаться бы-
стрее, чем барабан пружины, и во сколько раз враща-
тельный момент на гребном валу меньше развиваемого
пружиной.
54
z
Рис. 17. Схема устройства пружинного мотора: / — пружи-
на; 2 — барабан; 3-—4 — шестерни; 5 — гребной вал; с 6 по
8 — шестерни редуктора с большим передаточным числом
Передаточное число шестерен легко подсчитать, ес-
ли известно число оборотов пружины Nn (формула 27),
задано число оборотов гребного вала NB и время про-
хождения дистанции t. Число оборотов вала NB за вре-
мя t найдем по формуле (29).
Известно, что передаточное число пары сцепленных
шестерен равно отношению чисел их зубцов. Чтобы
найти передаточное число нескольких последовательно
сцепленных шестерен, нужно определить и перемно-
жить передаточные числа всех смежных пар. Шестер-
ни, сидящие на одном валу, делают одинаковое число
оборотов.
В редукторе (рис. 17,6) шестерня пружинного бара-
бана имеет 60 зубьев и сцеплена с малой шестерней 4,
имеющей 10 зубцов; передаточное число этой пары рав-
но 6. Шестерня 5 с 50 зубцами сидит на одном валу и
делает одинаковое число оборотов в секунду с шестер-
ней 4, но шестерня 6 вращается в шесть раз быстрее ше-
стерни 5, так как имеет 10 зубьев (передаточное чис-
ло— 6). Шестерня 7 имеет 30 зубьев, а шестерня 8 толь-
ко 10 зубьев; передаточное число между ними равно 3.
Следовательно, передаточное число от шестерни бараба-
на 3 к шестерне гребного вала 8 будет равно 6X6X3=
=108, т. е. гребной вал будет вращаться быстрее бара-
бана в 108 раз.
Заметим, что во сколько раз заданная дистанция
55
модели больше максимальной деформации пружины,
во столько раз скорость модели будет больше скорости
перемещения подвижного конца пружины.
Для изготовления редуктора моделист будет подби-
рать готовые шестерни от старых самопишущих прибо
ров или воспользуется шестеренками от часов. Поэто-
му нет смысла приводить подробный чертеж какого-
либо определенного механизма. Конструктивная схема
с примерными размерами имеется на рисунке.
После подбора шестерен на нужное передаточное
число необходимо выбрать форму и размеры станины,
тщательно разметить на ней места расположения осей
шестерен. Станина должна делаться из листовой брон-
зы, латуни. Можно сделать станину из дуралюминия
или железа, но в этом случае придется изготовить брон-
зовые или латунные подшипники для осей.
Расстояние между осями сцепленных шестерен
должно быть таким, чтобы зубцы входили в зацепле-
ние свободно, без торможения, но и без большого за-
зора.
Для небольших моделей длиной до 0,5 м можно при-
способить механизм старого будильника или других
часов с достаточно мощной пружиной. В этом случае
из часового механизма удаляется маятник и оставляют-
ся шестеренки, обеспечивающие необходимое переда-
точное число.
Для передачи вращения на гребной вал у послед-
ней шестерни механизма придется удлинить ось.
Как всякий механизм, пружинный двигатель рабо-
тает хорошо только тогда, когда очень хорошо сделан.
Устройство резиномотора
Для моделистов, недостаточно хорошо владеющих
слесарным делом, следует рекомендовать резиномотор
с редуктором.
Энергия, запасаемая закрученной резиной, зависит
от качества резины, длины отдельных нитей и их коли-
чества. Для мотора лучше брать много тонких резино-
вых нитей.
В предлагаемой конструкции (рис. 18) незакручен-
ный резиновый жгут 1 имеет длину, равную наиболь-
шей длине модели. Концы жгута подворачиваются и
56
Рис. 18. Устройство резиномотора: /—резиновый жгут; 2—крю-
чок шестерни; 3— крючок заводного приспособления; 4 —
малая шестерня; 5 — ведущая ось; 6 — гибкий соединитель-
ный валик; 7 — станина; 8 — форштевень модели; 9 — труб-
ка; 10 — резьба; // — пробка; 12— отверстие для заводного
штыря или ручки; 13— ручка; 14 — заводной штырь; 15—
стопорная шпилька; 16 — отверстия для шпильки
натуго закрепляются прочной ниткой так, чтобы обра-
зовались узкие петли. Одна петля через носовой люк
туго надевается на крючок 2 оси большой шестерни
редуктора, другой конец — на крючок заводного при-
способления 3. Редуктор состоит из двух шестерен с
передаточным числом около трех. Малая шестерня 4
посажена на длинную ось 5, соединенную с гребным ва-
лом гибким валиком 6. Металлическая станина 7 проч-
но закреплена к деревянному форштевню 8. В корме
заделана металлическая трубка 9, имеющая на кормо-
вом конце внутреннюю резьбу 10. Пробка 11 с крюч-
ком 3 и отверстием 12 с 4-мм резьбой является завод-
ным приспособлением. Для завода пробка вывинчи-
вается и вытягивается вместе с концом резинового
жгута наружу. В отверстие 12 заворачивается штырь
14 или проволочная рукоятка 13. Жгут натягивается
до увеличения длины вдвое. Вручную при помощи ру-
коятки 13 или посредством штыря 14, зажатого в пат-
рон дрели, резина закручивается, пока по всей длине
жгута не образуется сплошной ряд узелков. По мере
закручивания сокращают расстояние до трубки, затем
ввинчивают пробку на место и стопорят заводное при-
способление шпилькой 15 через отверстия 16 в трубке
и в пробке.
Во время завода резиномотора винт нужно застопо-
рить.
57
О конструкции гиромоторов
Вращающееся цилиндрическое тело (волчок) обла-
дает запасом кинетической энергии, которую можно ис-
пользовать для совершения работы. Если цилиндр ве-
сом G г кГ и радиусом Rr см вращается, делая пг обо-
ротов в секунду, то кинетическая энергия его равна
G Р^п^
(кГм).
“ 10000 ’ 7
(30)
Чем больше вес волчка (гироскопа), его радиус и ско-
рость вращения, тем большую кинетическую энергию
он запасает во время завода. Особенно сильно возра-
стает энергия с увеличением радиуса /?г или числа обо-
ротов пг.
Пример 1: если Gr =1 кГ, Rr =9 см; пг = 12 000 об/мин =
= 200 об/сек, то WK = 1X9X40000:10000 = 36 кГм.
Пример 2: для модели с гиромотором необходим
запас энергии WK = 1 кГм. Какой должна быть ско-
рость вращения волчка весом Gr = l кГ и радиусом
/?г — 3 см, чтобы обеспечить ход модели?
Решение: из формулы (30) сразу находим
«r=jAoooo-irK|Or/?2 = ]/ 10000-1:1-9 =100:3=33 об/сек=
= 1980 об/мин.
Формула (30) и рассмотренные примеры показыва-
ют, что допустимые размеры и вполне достижимые
обороты гироскопа позволяют использовать его как
источник энергии для движения модели.
Гиромотор (рис. 19) представляет собой волчок 1 с
малой шестеренкой 3 на оси 2. Малая шестеренка сце-
плена с большой шестерней 4, которая, в свою очередь,
сцеплена с шестеренкой 5. Ось последней малой шесте-
ренки 5 посредством гибкого валика 6 передает враще-
ние гребному валу. Если число оборотов гироскопа пг,
а скорость вращения гребного вала должна быть пг,
то передаточное число всех шестерен должно быть
пг : пг. Редуктор гиромотора уменьшает скорость вра-
щения гребного вала по сравнению с числом оборотов
волчка.
58
Конструкция гиромо-
тора напоминает кон-
струкцию пружинного
двигателя. Но вслед-
ствие больших оборо-
тов волчка его ось ре-
комендуется ставить на
шариковые подшипни-
ки, а подшипники ре-
дуктора и станину сле-
дует делать возможно
тщательнее.
Волчок необходимо
выполнять точно, на
хорошем токарном
станке, тщательно вы-
верять балансировку,
т. е. нужно добиться
Рис. 19. Устройство гиромотора:
1 — волчок; 2 — ось; 3 — малая ше-
стерня; 4 — большая шестерня; 5 —
шестеренка ведущего вала; 6 — гиб-
кий валик
совершенно плавного хода гироскопа.
При установке на модели ось гироскопа должна рас-
полагаться в диаметральной плоскости.
Запустить гироскоп можно двумя способами: пнев-
матически и от электромотора.
Пневматический запуск волчков применяет-
ся в авиационных приборах. У волчков для пневматиче-
ского запуска по ци-
линдрической поверх-
ности делаются канав-
ки (рис. 20). Во вре-
мя запуска через соп-
ло 1 нагнетают воздух,
который, ударяясь в
канавки 2, разгоняет
волчок до нужных обо-
ротов. Поскольку кор-
пус модели подлодки
герметичен, необходи-
мо предусмотреть вы-
ход воздуха наружу.
Перед спуском модели
на воду входное и вы-
ходное отверстия долж-
ны быть закрыты.
Рис. 20. Волчок для пневматиче-
ского запуска: 1 — сопло; 2 — ка-
навки
59
Можно, наоборот, насосом выкачивать воздух из
корпуса модели. Тогда воздух будет проходить в сопло
через входную трубку. Можно, наконец, оба способа
объединить. Для пневматического запуска пригодны
ручные велосипедные и им подобные насосы.
Если есть возможность, то для гиромотора на мо-
дель следует использовать готовый волчок от авиаци-
Рис. 21. Схема запуска волчка от
электродвигателя: 1 — соединитель-
ный зуб; 2 — ось мотора; 3 — мно-
гооборотный пусковой электромотор;
4 — направляющая трубка
онного прибора (курсодержателя или указателя пово-
ротов).
Во время запуска гиромотора гребной вал, разу-
меется, тормозить нельзя.
Запуск от электромотора несколько ус-
ложняет конструкцию гироскопического двигателя, так
как требует устройства пусковых приспособлений. Про-
стейшее приспособление (рис. 21) представляет собой
двойной зуб 1 на оси гироскопа, с которым на время
запуска сцепляется конец 2 удлиненной оси многообо-
ротного пускового мотора 3. Чтобы было легко присое-
диниться к оси волчка, рекомендуется с кормы модели
установить направляющую трубку 4. Наружный конец
направляющей трубки перед спуском модели на воду
закрывается пробкой.
Пусковой электромотор можно установить и внутри
модели, но в этом случае необходимо сделать механизм
разобщения его с осью гироскопа после запуска.
60
Можно, наконец, в качестве гироскопа использовать
бесколлекторный электромотор переменного тока с
очень малым трением в подшипниках. Особенно заман-
чиво изготовить якорь такого электромотора-волчка с
беличьей клеткой и статор с двумя полюсами. В этом
случае для запуска потребуется простейший звуковой
генератор с выходной мощностью в 1—2 вт.
Проще всего, конечно, сделать гиромотор с пневма-
тическим запуском. Удачный выбор двигателя и тща-
тельное его изготовление только наполовину обеспечи-
вают ходовые качества модели. Другая добрая поло-
вина успеха моделиста заложена в правильном выпол-
нении гребного вала и винта.
Линия гребного вала и винт
На модели устанавливается один гребной винт, ось
которого должна возможно точнее совпадать с диа-
метральной плоскостью. Поэтому линию гребного вала
необходимо размечать и прокладывать возможно точ-
нее.
Гребной вал делается из прямой стальной проволо-
ки диаметром 3 мм и длиной 25 мм. Для этой цели по-
дойдет спица от велосипедного колеса. На одном конце
вала по длине на 10 мм нарезается 3-мм резьба, ко-
торая служит для соединения вала со ступицей винта.
Вал проходит внутрь корпуса по дейдвудной трубе,
изготовленной из металлической трубки с внутренним
диаметром в 3,5—4,0 мм. Толщина стенок трубки долж-
на быть не меньше 0,5 мм.
Для прокладки дейдвудной трубы в килевом брусе
на месте входа и выхода навстречу друг другу сверлят-
ся два отверстия. Если эти отверстия не соединятся в
один сквозной канал, то при помощи раскаленной на
огне проволоки можно прожечь разделяющую их дре-
весину. Отверстие следует делать меньшего, чем труба,
диаметра. Канал для трубы должен быть прямым. Ис-
кривления канала можно устранить с помощью раска-
ленной проволоки. Для окончательной обработки ка-
нала полезно изготовить достаточно длинный стальной
стержень с поперечной насечкой. Насечку можно сде-
лать острым зубилом. В готовый канал дейдвудная
труба должна входить плотно, но без особых усилий.
61
Перед установкой на место в оба конца дейдвудной
трубы следует запрессовать или впаять подшипники
гребного вала в виде латунной шайбы толщиной
2—3 мм, с отверстием 3 мм. После запрессовки под-
шипников на концах дейдвудной трубы следует спи-
лить острые кромки и торцы отполировать.
На 10—15 мм от внутреннего конца трубы нужно
сделать наклонное отверстие и напаять на него маслен-
ку в виде 40—50-лии трубки с наружной резьбой почти
во всю ее длину. Ось масленки и смазочного отверстия
в дейдвудной трубе должна быть наклонена примерно
на 45° к наружному концу трубы. Крышка масленки
делается с внутренней резьбой и с закрытым внешним
концом. Готовая дейдвудная труба смазывается вла-
гостойким клеем и изнутри корпуса модели устанавли-
вается на место. Перед установкой трубы килевой ка-
нал смазывается тем же клеем, а отверстие в наруж-
ном подшипнике закрывается деревянной или метал-
лической пробкой. Пробка вынимается сразу после по-
становки трубы на место.
Вал должен свободно вращаться в подшипниках
трубы. Для уменьшения трения следует отполировать
соответствующие места вала. Резьба на концах вала
делается обычными лерками и получается правым вин-
том. Поэтому гребной винт тоже должен быть правого
вращения. Ступицу винта (рис. 22) лучше всего изго-
товить на токарном станке. Резьбу для вала нарезают
обычными 3-мм мечиками. Третьим мечиком до конца
проходить не следует, так как вал со ступицей должен
соединяться втугую.
Под углом в 45° к оси в ступице делается три про-
пила шлицовкой. Каждый пропил должен быть смещен-
ным на 120° от предыдущего. Три лопасти винта дела-
ются из латуни толщиной 1,0 или 0,5 мм. Лопасти
вставляются в пропилы ступицы. Места соединения
ступицы и лопастей тщательно пропаиваются оловом.
После пайки лопасти осторожно изгибают, стараясь
придать им форму винтовой поверхности. При этом
увеличивают углы между осью вала и передними сто-
ронами лопастей. Работа по выгибанию лопастей кро-
потливая, требует терпения, но от удачного ее выпол-
нения во многом зависит ход модели. Необходимо до-
биться, чтобы все лопасти были одинаковыми. Только
62
небольшие отступления от этого правила можно устра-
нить при последующей обработке винта. Когда винту
придали нужную форму, приступают к окончательной
его отделке. При помощи напильников, надфилей и
наждачной бумаги лопастям придают обтекаемую фор-
му. В любом поперечном сечении лопасти ей стараются
.—|—
ё)
Рис. 22. Устройство винта: а — ступица; б — раз-
рез ступицы; в — разметка лопасти; г — уста-
новка лопасти; д — общий вид винта
придать профиль крыла. Причем каждое из таких се-
чений должно образовывать все больший угол с осью
ступицы. Передняя при вращении винта кромка лопа-
сти должна быть округлой, более полной, чем задняя.
Задняя кромка должна быть острой. Все лопасти
должны иметь одинаковый вес, т. е. винт должен быть
отцентрован.
Проверить центровку винта можно на двух горизон-
тально укрепленных лезвиях от безопасной бритвы. На
одно лезвие вал кладется сверху у ступицы, второе
лезвие поддерживает другой свободный конец вала
сверху. Если вал на лезвиях не поворачивается при
любом положении винта, то центровку можно считать
удовлетворительной. В противном случае приходится
больше или меньше подпиливать более тяжелую ло-
пасть, которая стремится опускаться вниз. Отцентро-
ванный винт следует тщательно отполировать и сма-
зать вазелином.
63
Готовый вал, с насаженным на него винтом, встав-
ляется в дейдвудную трубу. На внутренний конец его
навинчивают разрезную втулку. Во втулку вставляют
конец гибкого вала и закрепляют его гайкой. Проверив
надежность соединения гребного вала с гибким валом,
затягивают контргайку. Второй конец гибкого вала та-
ким же способом соединяют с валом электромотора или
механического двигателя.
Чтобы лучше притереть подшипники гребного вала,
следует включить двигатель и немного «погонять» винт
без смазки: убедившись в нормальной работе линии
гребного вала, можно набить смазкой дейдвудную
трубку. Для этого крышку масленки заполняют таво-
том или вазелином и наворачивают на корпус маслен-
ки. Масло выдавливается из крышки и наполняет дей-
двудную трубу. Заполнение можно считать оконченным,
если смазка начнет проходить через наружный под-
шипник гребного вала. Крышку масленки придется
свинчивать и вновь заполнять вазелином. Вазелин обе-
спечит смазку подшипников и не допустит попадания
воды внутрь корпуса модели через дейдвудную трубу.
Среднее число оборотов винта порядка 20 об/сек.
Рули поворота и глубины
Перья рулей желательно делать по форме тела
наилучшего обтекания. Поперечный разрез пера дол-
жен быть подобным профилю крыла.
Вертикальный руль для модели предлагается
делать из двух половин (рис. 23). Передняя половина
1 неподвижно закреплена и служит для стабилизации
движения по курсу. Задняя половина 2 является соб-
ственно рулем.
Баллер руля 3 проходит сквозь гельмпортовую
трубу 4, верхний конец которой чуть-чуть возвышается
над палубой.
Румпель 5 из латунной или стальной пластинки
толщиной около 0,5 мм туго надет на опиленную «под
квадрат» голову баллера руля 6 и припаян к ней. Сво-
бодный конец румпеля после необходимой перекладки
руля зажимается между пластинками 7 при помощи
винта 8, Нижняя пластинка привинчена мелкими шуру-
пами к палубе заподлицо с ее поверхностью. На ниж-
64
Размерь/ наваеь/сс
рулей аля мал а а
маРела
Рис. 23. Рули модели:
А — кормовые рули: 1 — неподвижная часть вертикального
руля; 2 — подвижное перо вертикального руля; 3 —
баллер руля; 4 — гельмпортовая труба; 5 — рум-
пель; 6 — голова баллера руля; 7 — зажимные пластинки;
8 — зажимной винт; 9 — кормовые горизонтальные рули;
Б — носовые рули: 10 — горизонтальная ось; 11— подшип-
ники; 1.2— трубки-сальники; 13 — разрезная втулка; 14 — уп-
равляющий груз
ней пластинке можно нанести градусную шкалу углов
перекладки руля.
Если в кормовой оконечности модели вдоль ДП ус-
тановлена труба, то баллер вертикального руля нельзя
вывести на палубу. В этом случае приспособление для
5 Зак. 197
65
п л ft Разметка частей вертикального руля
Г- -4 8 к- —। Яда малой модели. Материал- латунь ила
(Для большой модели размеры увеличить в полтора раза)
Рис. 24. Конструкция вертикального руля модели без вы-
вода баллера на палубу
установки руля можно сделать со стороны днища мо-
дели (рис. 24).
Каждое перо руля можно согнуть и спаять из тон-
кого оцинкованного железа или жести по данной на
рис. 23—24 разметке. Для большой модели размеры ру-
лей следует увеличить в полтора раза.
Кормовые горизонтальные рули 9 уста-
новлены сзади винта и работают в отбрасываемой вин-
том струе воды. При таком расположении действие ру-
лей усиливается, так как скорость струи больше ско-
рости модели. Кроме того, рули, поставленные сзади
винта, препятствуют закручиванию струи и повышают
общий к.п.д. силовой установки. Кормовые рули моде-
ли не управляются, они жестко закрепляются на пе-
66
редней части вертикального руля. Места соединения
вертикального и горизонтального перьев рулей тща-
тельно пропаиваются оловом.
Во время хода модели на кормовых горизонтальных
рулях возникает погружающая сила, которая стремит-
ся дать модели дифферент на корму. Если носовые ру-
ли также развивают погружающую силу, то модель бу-
дет перемещаться вниз. В противном случае, когда угол
перекладки носовых рулей равен нулю, то модель пой-
дет с дифферентом на корму и будет всплывать.
Носовые горизонтальные рули установ-
лены ниже главной ватерлинии в плоскости сечения
второго шпангоута. Площадь передней части пера руля
должна быть немного больше площади его задней ча-
сти (считая от оси руля). Оба руля жестко закреплены
и напаяны на одну общую ось 10, проходящую перпен-
дикулярно диаметральной плоскости модели. Ось ру-
лей делается из ровного стального прутка диаметром
2—4 мм. Подшипники оси 11 делаются подобно под-
шипникам гребного вала с внешних концов трубок 12
по одному с правого и левого бортов. Трубки длиной по
20 мм каждая с внутренним диаметром немного боль-
ше диаметра оси прочно скрепляются с третьим шпан-
гоутом.
Перед установкой оси трубки набиваются тавотом
или вазелином, на их внутренние концы надеваются
тонкие резиновые трубочки. Когда ось вставляется на
место, на нее надевается разрезная втулка 13, служа-
щая для соединения оси с приводом. Концы резиновых
трубок нужно перевязать ниткой или проволокой как
на трубках, так и на оси. Это обеспечит идеальное уп-
лотнение линии оси рулей. Трубки не должны заметно
противодействовать перекладке рулей на 30°.
Простейший автоматический привод
носовых рулей представляет собой груз 14 весом 100 Г,
ввинченный в резьбу детали 13. Разрезная втулка же-
стко закрепляется посередине оси рулей при помощи
зажимного винта. У модели, стоящей «на ровный киль»
(горизонтально), рули должны быть переложены на
погружение под действием груза 14. Угол перекладки
должен быть минимальным, но не меньше 10°. Рекомен-
дуется этот угол подобрать опытным путем.
Действия простейшего привода сводятся к тому, что
67
угол перекладки рулей уменьшается при получении мо-
делью дифферента на нос и увеличивается от диффе-
рента на корму. Силы погружения носовых рулей будут
соответственно регулировать перемещение моделей по
глубине и не дадут ей уйти глубоко под воду. Кроме
того, сразу после старта, пока модель движется уско-
ренно, инерционные силы вызовут некоторое отклоне-
ние груза 14 от вертикального положения к корме. Это
будет способствовать быстрому уходу модели в под-
водное положение.
Описанный привод вполне обеспечит управляющее
действие носовых рулей на моделях с двигателями убы-
вающей мощности. На моделях с электромоторами в
режиме постоянной мощности необходимо установить
автоматический выключатель с реле времени и автома-
тический регулятор глубины подводного хода. Первый
автомат должен остановить двигатель после прохожде-
ния заданной дистанции. Второй автомат должен не
допустить ухода модели на большую глубину. Автома-
тическое управление глубиной погружения модели
можно осуществить с помощью гидростата.
Гидростат глубины погружения
При погружении модели давление воды возрастает
с глубиной. Давление воздуха внутри жесткого герме-
тического корпуса модели остается равным атмосфер-
ному. Используя разность внешнего давления воды и
внутреннего давления воздуха, можно изготовить при-
бор (гидростат) автоматического управления рулями.
Простейший гидростат (рис. 25) представ-
ляет собой гофрированную мембрану 1 из латунной
фольги или из очень тонкой жести. В центре мембраны
напаян электрический контакт 2. Края мембраны при-
паяны к кольцу 3, имеющему шесть отверстий 4 для
установочных 3-жл! винтов 5.
Для мембранного кольца в крышке носового люка
вырезается гнездо. В центре гнезда сверлится 8-мм от-
верстие. К крышке с внутренней стороны крепится на
клею и медных или алюминиевых заклепках изолирую-
щая плата 6. Посредине платы приклепана контакт-
ная планка 7 с лепестком 8 для напайки провода. Пла-
68
Рис. 25. Устройство гидростата: 1 — мембрана; 2—кон-
такт; 3 — кольцо; 4 — отверстия для крепления; 5 — ус-
тановочные винты; 6 — изолирующая плата; 7 — кон-
тактная планка; 8—лепесток (монтажный вывод);
9 — контактный винт; 10 — пружинка; 11— резиновое
кольцо; 12 — шайба с лепестком; 13 — гайка
та вместе с контактной планкой засверливается в цент-
ре и в отверстии нарезается 3- или 4-мм резьба для
контактного винта 9.
В плате и крышке по отверстиям 4 мембранного
кольца засверливаются и нарезаются 3-мм метчиками
шесть отверстий для установочных винтов 5. При сбор-
ке гидростата ставится пружинка 10 и резиновое коль-
цо уплотнения 11. Мембранное кольцо туго притягивает-
ся к крышке люка установочными винтами 5. На один
из винтов надевается шайба 12 с лепестком для напайки
провода. Шайба зажимается гайкой 13.
При погружении модели давление воды прогибает
мембрану, сжимает пружинку 10 и уменьшает зазор
между контактами 2 и 9. На некоторой глубине кон-
такты замкнутся и включат ток к управляющему уст-
ройству.
Управляющее устройство (рис. 26,а) со-
стоит из катушки 1, подвешенной вместо груза к раз-
резной втулке оси носовых рулей, и катушки 2 со
стальным сердечником. Сердечник делается из стально-
69
Рис. 26. Управляющее устройство: а — реле: 1 — под-
вижная катушка на оси носовых рулей; 2—неподвиж-
ная катушка со стальным сердечником; 3 — основа-
ние; б — электрическая схема устройства
го прутка круглого сечения диаметром 6—8 мм, жестко
связывается с килем посредством дур алюминиевого
или латунного основания 3.
Катушки 1 и 2 соединяются последовательно при
помощи гибкого провода. Свободный конец одной из
катушек припаивается к лепестку установочного винта
мембраны, свободный конец другой катушки присоеди-
няется к батареи питания двигателя. Второй полюс
батареи соединяется с контактным винтом мембраны.
Цепь (рис. 26,6) составляется так, чтобы при срабаты-
вании гидростата катушки отталкивались.
Обмотку катушек следовало бы рассчитать по
напряжению питания, но для этого необходимо знать,
какой мотор будет установлен на модели. Устройство
будет работать удовлетворительно, если катушки на-
мотать виток к витку эмалированным проводом диа-
метром 0,1—0,3 мм до заполнения каркасов. Чем вы-
ше напряжение, тем провод должен быть тоньше. В
крайнем случае придется провод подобрать опытным
путем.
Предлагаемая схема не самая лучшая, но доступ-
на для изготовления. Другие варианты, например с
70
поворотным реле, практически возможно выполнить
при наличии реле заводского изготовления.
Устройство с гидростатом при заданной глубине
срабатывает и отводит рули в нейтральное положение.
Максимальная глубина погружения задается подбо-
ром пружины и регулировкой контактного винта мем-
браны.
Силу давления воды на мембрану для за-
данной глубины легко подсчитать. Если радиус мем-
браны /?м (в см), максимальная глубина погружения
модели h (в см), то сила давления воды (в Г)
равна
Л, =3,14. Я*. Л (31)
Пример. Дано: RM —2 см, Л=50 см. Опреде-
лить FM .
Решение: по формуле (31) находим FM =3,14 X
4X50=628 Г.
Отделка и окраска модели
Ходовые качества и внешний вид модели требуют
очень тщательной обработки поверхности корпуса, де-
талей механизмов и устройств. Поверхность корпуса
и устройств должна быть совершенно гладкой, ров-
ной.
Если на модели винт, рули, шпили, обрамление ил-
люминаторов будут сделаны из латуни, то их поверхно-
сти следует хорошенько выровнять напильниками,
шкуркой и тщательно полировать пастой (например,
ГОИ) или порошком мела.
Окончательный блеск наводится суконкой после про-
мывания деталей бензином. Для предохранения латун-
ных поверхностей от потускнения их можно покрыть
тонким ровным слоем лака.
Деревянные и жестяные поверхности необходимо
сделать ровными, тщательно обработать мелкой шкур-
кой, шпаклевать, грунтовать и окрасить. Для моделей
подлодок рекомендуется применять нитрокраски, нит-
ролаки и шпаклевку на их основе.
Наиболее хорошие покрытия получаются распыле-
нием краски из пульверизатора. Окрашивать модель
71
следует в несколько (3—4) слоев негустой краски.
Каждый слой после высыхания нужно обрабатывать
самой мелкой шкуркой, смоченной в бензине. Послед-
ний лицевой слой желательно полировать до блеска.
Нельзя покрывать нитрокраской по слою масляной
краски или шпаклевки. Если для обшивки использовал-
ся так называемый влагоустойчивый столярный клей,
то покрывать модель следует масляной краской и нит-
рокраской пользоваться не рекомендуется. Во всех ре-
цептах таких клеев включена олифа, на которую нитро-
краски плохо действуют. Надводную часть моделей во-
енных подлодок следует окрашивать в шаровый или
светло-шаровый («стальной») цвет. Для моделей подло-
док невоенного назначения надводная часть корпуса
может быть окрашена в белый, голубовато-белый или
в салатный цвет. Подводная часть всех моделей подло-
док окрашивается в кирпично-красный, черный или зе-
леный цвет. Вдоль всей главной ватерлинии, разде-
ляющей надводную и подводную части, нужно провести
тонкую ровную белую или красную полоску.
Более подробные сведения по отделке и окраске мо-
делей имеются во многих руководствах.
После двукратного покрытия модели краской нуж-
но провести испытания на воде. Лицевой слой краски
следует наносить после испытания модели, исправле-
ния всех ее недостатков и по совершенно просохшим
поверхностям.
Основные испытания модели
Определить качества готовой модели можно только
в процессе испытаний. Эти испытания можно разделить
на две группы: стендовые и ходовые.
Стендовые испытания рекомендуется прово-
дить для определения истинного водоизмещения, запа-
са плавучести, для подбора балласта и налаживания
механизмов, для удифферентовки модели и устранения
крена.
Первые испытания нужно провести для определения
запаса плавучести и веса балласта, который можно ис-
пользовать с целью устранения дифферента, крена, а
также для получения нужного запаса плавучести.
72
Если модель полностью погрузить в сосуд, до краев
наполненный водой, то часть воды выльется. Измеряя
количество литров воды, которое потребуется для по-
полнения сосуда до краев, можно найти подводное во-
доизмещение модели в кГ.
Осторожно погружая модель до КВЛ и вновь заме-
рив количество литров вытесненной воды, можно опре-
делить необходимое надводное водоизмещение в кГ.
По количеству литров воды, вытесненной плаваю-
щей моделью, можно оценить вес модели в кГ. Послед-
нее можно узнать взвешиванием на весах.
Разность между надводным водоизмещением и ве-
сом модели равна искомому весу балласта.
Разность между подводным и надводным водоизме-
щением модели равна запасу плавучести.
Зная вес балласта, можно заготовить необходимое
количество свинцовых или других подходящих грузов.
Размещая грузы у днища модели, следует устранить
крен и дифферент. Модель, полностью загруженная
балластом, должна плавать «на ровный киль». Все
грузы балласта необходимо прочно закрепить по своим
местам.
Если на модели установлен гидростат, то его следует
отрегулировать при стендовых испытаниях. Модель
ставится горизонтально на кильблоки. На мембрану
кладется суконная или толстая хлопачтобумажная
тряпочка и сверху ставится груз, вес которого должен
быть равен рассчитанной (см. стр. 71) силе давления
воды на соответствующей глубине. Регулировкой кон-
тактного винта гидростата добиваются срабатывания
управляющего устройства от возможно меньшей допол-
нительной нагрузки (около 1 Г).
Во время стендовых испытаний внимательно прове-
ряют герметичность корпуса, люков, труб, оси носовых
рулей и дейдвудной трубы.
Ходовые испытания проводятся в неглубоком
бассейне с целью окончательной проверки всех меха-
низмов, для регулирования работы носовых рулей.
После ходовых испытаний модель промывается чи-
стой водой, хорошо просушивается, шлифуется мелкой
шкуркой, покрывается лицевым слоем краски и поли-
руется.
73
Готовая модель хранится на кильблоках в месте за-
щищенном от пыли и прямых солнечных лучей.
Прочно и красиво сделанная, хорошо налаженная и
изученная строителем модель может доставить много
удовольствия самому моделисту и его товарищам. С хо-
рошей моделью можно успешно выступать на город-
ских, районных, областных, республиканских и всесо-
юзных соревнованиях морских моделистов, которые
ежегодно проводятся организациями ДОСААФ
ПРИЛОЖЕНИЯ
Приложение 1
ХАРАКТЕРИСТИКИ И ПЛАЗОВЫЕ ЧЕРТЕЖИ МОДЕЛЕЙ
ПОДВОДНЫХ ЛОДОК
1. Малая модель (чертежи а, б, в), в масшта-
бе 1 :100, соответствует подлодке-прототипу длиной
70,6 м, шириной 7,1 м, с осадкой 4,0 м, с водоизмеще-
нием надводным около 900 Т, подводным—около 1 100 Т.
Характеристика малой модели: класс
«А», длина £=706 лип, ширина В = 71 лип, осадка
Т — 40 мм, наибольшая высота от основной Н = 60 мм,
водоизмещение около G = 900 г, сила поддержания над
водой £> = 900 Г, под водой £> = 1100 Г, запас плаву-
чести около AG = 200 г. Двигатель механический.
2. Большая модель (чертеж Г), в масштабе
1:75, соответствует подлодке-прототипу длиной 106 м,
шириной 10 м, с осадкой 6 м, с водоизмещением около
3000 Т и 3700 Т.
Характеристика большой модели: класс
«Б», £ = 1412 мм, В = 142 мм, 7 = 80 мм, Я =120 мм,
G = D «7200 Г, Dn «8800 Г, AG«1600 Г (23% от во-
доизмещения). Двигатель любой.
Очертания оконечностей большой модели по ДП
можно получить путем увеличения вдвое соответствую-
щих чертежей (б и в) малой модели.
Сравнивая размеры подлодок-прототипов предлагае-
мых моделей с размерами других подлодок (приложе-
ние 1), заметим, что корпуса у наших моделей сделаны
возможно более полными. Для модели это благоприят-
но скажется при размещении механизмов.
Приложение 2
Характеристики некоторых подводных лодок
№ Размеры в метрах Водоизмещение в тыс. тонн Мощность двигателей в тыс. л. с. Скорость хо- да в узлах Вооружение
п/п длина ширина осад- ка над водой под водой дизе- ли элект- ромо- торы над водой под водой торп. апп. артиллерия авто- маты мины
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1 65,0 6,0 4,3 0,68 0,87 2,0 1,1 17 10 4 2—88-мм
2 28,0 4,5 3,0 0,17 0,18 0,1 0,2 6 5 .— — 1 12
3 78,0 6,3 4,2 1,16 1,51 2,4 1,2 15 7 4 1—150-jwjw — 42
4 55,3 5,8 3,2 0,58 0,67 1,0 0,5 14 8 5 1—105-jwAt — —
5 79,0 6,5 4,0 1,18 1,53 3,4 1,8 18 8 4 1—150-jwjh — —
6 66,9 6,3 4,9 0,85 1,05 1,2 1,5 14 11 4 1—100-лш — —
7 65,6 6,1 4,1 0,69 1,04 2,6 1,2 18 9 5 1— 75-мм — —
8 53,0 4,7 2,3 0,30 0,46 1,0 0,5 14 8 4 1— 75-мм — —
9 81,0 6,9 4,3 1,11 1,78 4,0 1,5 20 11 4 2-100-мм — —
10 70,4 6,6 4,0 0,87 1,09 2,0 1,2 15 10 5 1-100-мм — —
11 107,0 8,5 5,1 1,71 2,77 1,0 1,4 23 9 10 3—IOO-jhjw 2 —
12 72,7 6,5 4,0 0,85 1,08 2,4 1,6 17 10 10 1—100-jhjh — 16
13 76,3 7,3 4,0 1,00 1,30 2,4 1,6 16 10 6 1— 75-мм 1 —
14 78,0 6,6 4,6 1,97 1,41 2,9 1,8 16 10 10 1—100-лш 2 —
15 64,8 5,8 4,8 0,86 1,09 3,0 1,4 16 9 8 1-100-мм 2
16 70,5 5,7 4,3 0,86 1,07 1,5 1,0 14 8 4 1—ЮО-мм 2 24
17 100,0 7,6 5,2 1,40 2,00 6,0 1,8 19 10 8 1—120-мм — —
18 120,0 9,0 7,0 2,88 4,30 7,6 3,4 18 10 11 2—200-лш — —
19 116,0 10,2 4,6 2,68 4,08 3,2 2,5 14 9 4 2—150-jkai — 60
20 79,3 8,5 4,1 1,48 2,04 4,4 1,4 17 9 8 1—lOO-JWAt — —
СОДЕРЖАНИЕ
Стр.
Подводные лодки
От деревянных аппаратов до подводных кораблей .... 3
Подлодки во второй мировой войне ......................... 8
Подлодки с атомным горючим................................ 9
Основные мореходные качества............................. 12
Принцип действия рулей................................... 16
Теоретический и плазовый чертежи......................... 19
Модель подводной лодки
Особенности плавания модели............................. 24
Постройка наборного корпуса............................. 30
Корпус модели из жести.................................. 34
Долбленый корпус........................................ 37
Надстройка модели....................................... 37
Двигатели для моделей подлодок.......................... 40
Простейший расчет ходовых качеств и мощности............ 41
Подсчет емкости электробатарей.......................... 48
Установка электромотора................................. 50
Энергия упругой деформации.............................. 51
Устройство пружинного двигателя......................... 54
Устройство резиномотора................................. 56
О конструкции гиромоторов............................... 58
Линия гребного вала и винт.............................. 61
Рули поворота и глубины................................. 64
Гидростат глубины погружения............................ 68
Отделка и окраска моделей............................... 71
Основные испытания моделей.............................. 72
Приложения.............................................. 75
Михайлов Петр Евгеньевич
МОДЕЛЬ ПОДВОДНОЙ
ЛОДКИ С МЕХАНИЧЕСКИМ
ДВИГАТЕЛЕМ
Редактор М. Г. Игошин
Техн. ред. В. И. Кобзарь
______Корректор К. А. Мешкова_______
Сдано в набор 27/Х— 1958 г.
Подписано к печати 21/Ш—1959 г.
Г-50239 2,5 физ. п. л.=4,1 усл. п. л. + вкл.
Уч.-изд. л. = 4,15 Цена 1 р. 25 коп.
Изд. № 2/1325 Тираж 9000 экз.
Издательство ДОСААФ, Москва, Б-66,
_________Ново-Рязанская, д. 26______
Тип. Изд-ва ДОСААФ, г. Тушино. Зак. 197
в
б. Контур носовой оконечности малой модели по диаметральной
плоскости
в. Контур кормовой оконечности малой модели по диаметральной
плоскости
г. Очертания шпангоутов большей модели в натуральную величину
1 р. 25 коп.