/
























































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Полак Л.С.




Текст
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
Сборник статей классиков науки. Под ред Л.С.Полак
От издательства 5
П. Ферма. Синтез для рефракции (перевод Ю. X. Копелевич) 6
И. Бернулли. Новая задача, к разрешению которой приглашаются 11
математики (перевод В. С. Гохмана)
И. Бернулли. Кривизна луча в неоднородных прозрачных телах и решение 12
задачи, предложенной мною в "Acta" за 1696 г., стр. 269, о
нахождении "брахистохронной линии", т. е. такой линии, по которой
тело должно проходить от одной заданной точки до другой в
кратчайшее время; затем о построении "синхронной кривой", т. е.
волны лучей (перевод В. С. Гохмана)
П. Мопертюи. Закон покоя (перевод В. И. Антроповой) 18
П. Мопертюи. Согласование различных законов природы, которые до сих 23
пор казались несовместимыми (перевод В. И. Антроповой)
Л. Эйлер. Об определении движения брошенных тел в 31
несопротивляющейся среде методом максимумов и минимумов
П. Мопертюи. Законы движения и покоя, выведенные из метафизического 41
принципа (перевод В. И. Антроповой и Л. С. Полака)
Л. Эйлер. Соображения по поводу некоторых общих законов природы, 56
которые наблюдаются в действии любых сил (перевод Д. В. Жаркова)
Л. Эйлер. Соответствие между общими принципами покоя и движения 78
Мопертюи (перевод Л. С. Полака)
Л. Эйлер. Диссертация о принципе наименьшего действия, с разбором 96
возражений славнейшего проф. Кёнига, выдвинутых против этого
принципа (перевод Ю. X. Копелевич и Л. С. Полака)
Ж. Д'Аламбер. Космология (перевод Л. С. Полака) 109
Ж. Лагранж. Применение метода, изложенного в предыдущем мему аре, для 117
решения различных задач динамики (перевод Л. А. Райтман)
Ж. Лагранж. Два отрывка из первого тома "Аналитической Механики" 159
(перевод В. С. Гохмана)
О. Родригес. О применении принципа наименьшего действия к 167
составлению уравнений движения в независимых переменных
(перевод Д. В. Жаркова)
К. Гаусс. Об одном новом общем принципе механики (перевод В. С. 170
Г охмана)
С. Пуассон. Отрывок из второго тома "Трактата о механике" (перевод Л. С. 173
Полака)
У . Гамильтон. Об общем методе в динамике, посредством которого 175
изучение движений всех свободных систем притягивающихся или
отталкивающихся точек сводится к отысканию и
дифференцированию одного центрального соотношения или
характеристической функции (перевод Л. С. Полака)
У . Гамильтон. Второй очерк об общем методе в динамике (перевод Л. С. 234
Полака)
У . Гамильтон. О приложении к Динамике общего математического метода, 284
ранее приложенного к Оптике (перевод Л. С. Полака)
К. Якоби. Заметка об интегрировании дифференциальных уравнений 289
динамики (перевод Д. В. Жаркова)
К. Якоби. О новом общем принципе аналитической механики (перевод Д. 294
В. Жаркова)
К. Якоби. Отрывок из "Лекций по Динамике" (перевод О. А. Полосухиной) 297
М. В. Остроградский. Дифференциальные уравнения проблемы 315
изопериметров (перевод Н. И. Идельсона)
Ф. А. Слудский. Заметка о начале наименьшего действия 388
О. И. Сомов. Замечания, относящиеся к началу наименьшего действия 392
Софу с Ли. Теория возмущений и касательные преобразования (перевод Д. 404
В. Жаркова)
Н. Е. Жуковский. О начале наименьшего действия 425
Г. Гельмгольц. О физическом значении принципа наименьшего действия 430
(перевод Д. В. Жаркова)
Н. Е. Жуковский. О среднем значении кинетического потенциала (перевод 460
А. П. Котельникова)
Г. Гельмгольц. Отрывок из "Лекций по динамике дискретных 462
материальных точек" (перевод Д. В. Жаркова)
Л. Больцман. Два отрывка из "Лекций о принципах механики" (перевод Д. 466
В. Жаркова)
А. Пуанкаре. Отрывок из третьего тома "Новых методов небесной 497
механики" (перевод Л. С. Полака)
Ф. Клейн. О новых английских работах по механике (перевод Л. С. Полака) 513
Г. Герц. Два отрывка из книги "Принципы механики, изложенные в новой 515
связи" (перевод В. Ф. Котова и А. А. Сулимо-Самойло)
О. Гёльдер. О принципах Гамильтона и Мопертюи (перевод Д. В. Жаркова) 538
А. Фосс. О принципах Гамильтона и Мопертюи (перевод Д. В. Жаркова) 564
П. Аппель. Об одной общей форме уравнений динамики и о принципе 568
Гаусса (перевод Д. В. Жаркова)
М. Планк. Отрывок из "Теоретической физики" 571
М. Планк. Принцип наименьшего действия (перевод Л. С. Полака) 580
Д. Гильберт. Основания физики (Первое сообщение) (перевод Д. В. 589
Жаркова)
А. Эйнштейн. Принцип Гамильтона и общая теория относительности 599
Эмми Нетер. Инварианты любых дифференциальных выражений (перевод 604
Д. В. Жаркова)
Эмми Нетер. Инвариантные вариационные задачи (перевод Д. В. Жаркова) 611
Л. де Бройль. Попытка построения теории световых квантов (перевод А. М. 631
Бродского)
Л. де Бройль. Исследования по теории квантов (перевод В. Д. 641
Грамматчиковой и Л. С. Полака)
Э. Шредингер. Квантование как задача о собственных значениях (Первое 668
сообщение) (перевод А. М. Бродского)
Э. Шредингер. Квантование как задача о собственных значениях (Второе 679
сообщение) (перевод А. М. Бродского)
П. Дирак. Обобщенная гамильтонова динамика (перевод Г. А. Соколика) 705
ПРИЛОЖЕНИЯ
Ф. Вольтер. История доктора Акакия и уроженца Сан-Мало (перевод И. К. 723
Каховской)
И. Ферма. Письмо де ла Шамбру (перевод Ю. X. Копелевич) 742
Л. Эйлер. Выдержки из писем к Мопертюи (перевод Л. А. Райтман и Л. С. 746
Полака)
У . Гамильтон. Отрывок из опубликованной в 1940 г. рукописи "Проблема 759
трех тел, рассматриваемая с помощью моей характеристической
функции" (перевод Л. С. Полака)
У . Гамильтон. Исчисление основных соотношений (перевод Л. С. Полака) 763
У . Гамильтон. Письмо Дж. Гершелю (перевод Л. С. Полака) 767
М. В. Остроградский. Письма Н. Д. Брашману (перевод Д. В. Жаркова) 770
А. Пуанкаре. Введение к книге "Электричество и оптика" (перевод Д. В. 773
Жаркова)
А. Зоммерфельд. Отрывок из статьи "Квант действия Планка и его 778
всеобщее значение для молекулярной физики" (перевод Д. В.
Жаркова)
Л. С. Полак. Вариационные принципы механики 780
Примечания 880
Краткий биографический указатель 919
Указатель имен 929
ОТ ИЗДАТЕЛЬСТВА
Вариационные принципы механики и связанный с ними комплекс
физических идей и математических методов имеют актуальное значение как
в теоретической механике, так и в различных научных и технических проб-
лемах. Они находят применение в широком и все более расширяющемся
круге вопросов теоретической физики, механики сплошных сред, теории
упругости, строительной механики, теории колебаний и т. п. Большой
интерес для исследователей и преподавателей, применяющих или изла-
гающих вариационные принципы, представляет также сложная история
возникновения и развития этих принципов.
Учитывая отсутствие соответствующих книг в нашей научной литера-
туре, Издательство решило выпустить сборник основоположных работ по
вариационным принципам, расположив их в основном в хронологическом
порядке, чтобы читатель мог составить представление как о процессе форми-
рования этих принципов, так и о смежных, непосредственно связанных с
ними проблемах.
В сборник, кроме работ, которые по праву могут называться класси-
ческими, помещены также некоторые небольшие работы менее фундамен-
тального значения, помогающие осветить существенные вопросы развития
и смысла вариационных принципов механики. Некоторые документы, до-
полняющие картину и характеризующие подход к этой проблеме классиков
механики, вынесены в приложение.
Огромная литература, которая существует по вариационным принци-
пам, конечно, не могла быть даже и в малой степени охвачена в одном сбор-
нике. Естественно, что для помещения в сборник отобраны прежде всего
основные работы, а также работы, освещающие связанные с вариационными
принципами проблемы теории групп, теории преобразований и т. п. Из
работ, относящихся к применению вариационных принципов в физике,
взяты те, которые имели важное значение в развитии физики и в то же время
помогали уяснению физического смысла, значения и границ применимости
этих принципов за пределами аналитической механики. Вопросы, связанные
с применением вариационных принципов механики для исследований в
области механики сплошных сред и многочисленных прикладных задач,
должны быть рассмотрены особо. Не включены в сборник также работы,
относящиеся к применению вариационных принципов механики в совре-
менных исследованиях по теории квантованных полей и т. п., так как эти
работы освещены в ряде монографий и сборников основных статей, вышед-
ших в самое последнее время.
П. ФЕРМА
СИНТЕЗ ДЛЯ РЕФРАКЦИИ [*]
Ученейший Декарт предложил закон преломления, который, как считают,
согласуется с опытом, но, чтобы доказать его, он выдвинул постулат, по
которому вообще необходимо было принять, что движение света в плотной
среде происходит более легко и беспрепятственно, чем в редкой, что, как
кажется, противоречит естественным фактам.
Итак, поскольку мы пытаемся вывести истинный закон преломления
из противоположной аксиомы, а именно, что движение света происходит
более легко и беспрепятственно в редкой, чем в плотной среде, мы прежде
всего встречаемся с соотношением Декарта. Можно ли вообще wtaQa).ayl-
атшд, т. е. без ложных умозаключений, прийти прямо противоположным
путем к той же истине — это пусть рассмотрят и исследуют более тонкие и
строгие математики. Мы же, оставив в стороне пустые умствования, пола-
гаем, что лучше твердо владеть самой истиной, чем вдаваться в излишние и
бесполезные споры.
Наше доказательство основано на одном постулате : природа действует
наиболее легкими и доступными путями [2]. Мы полагаем, что именно так
нужно выражать эту мысль, а не так, как это принято обычно говорить, что
природа всегда действует по кратчайшим линиям.
Подобно тому, как Галилей [3], когда рассматривал движение тяжелых
тел в природе, измерял отношения этого движения не столько расстоянием,
сколько временем, мы также рассматриваем не кратчайшие расстояния или
линии, а те, которые могут быть пройдены легче, удобнее и за более короткое
время.
Исходя из этого положения, представим на рисунке первом две среды
различной природы. Здесь мы имеем круг АНВМ, диаметр которого ANB
разделяет эти две среды: одну со стороны М, более редкую, другую, со
стороны Н, более плотную ; от точки МкН преломляются прямые MNH,
MRH, пересекающие диаметр в точках N и R.
Согласно аксиоме или постулату, скорость движения вдоль MN в ред-
кой среде будет больше, чел! скорость его вдоль NH в плотной среде, а по-
скольку мы полагаем движение в каждой среде равномерным, отношение
времени движения вдоль MN ко времени движения вдоль NH составляется,
как известно, из отношения MN к NH и обратного отношения скорости
вдоль NH к скорости вдоль MN.
Итак, если скорость по MN относится к скорости по NH так, как прямая
MN относится к NJ, то время движения по NH относится ко времени дви-
жения по MN, как прямая JN относится к NH.
Точно так же будет доказано, что если скорость в более редкой среде
относится к скорости в среде более плотной, как MR к RP, то время
8
П. ФЕРМА
движения по MR будет относиться ко времени движения по RH,
как PR относится к RH.
Отсюда следует, что время движения по прямым MN и NH относится ко
времени движения по прямым MR и RH, как сумма JN и NH относится
к сумме PR и RH.
Таким образом, поскольку природа направляет свет от точки М к точке
Н, нужно найти точку, допустим N, через которую путем изгибания или
преломления свет пришел бы от точки М к точке Н за самое короткое время,
ибо мы предполагаем, что природа, совершая свои действия как можно
скорее, направляет свет по прямой линии. Итак, если сумма JN и NH, кото-
рая является мерой движения по ломаной MNH, будет наименьшей вели-
чиной, наше предположение будет доказано. А это выводится из указанной
теоремы Декарта, как зто тотчас же докажет нам истинная и неприкрашен-
ная геометрия. Декарт выдвинул положение :
Если провести луч от точки М в точку N и от той же точки М опустить
перпендикуляр MD, то отношение большей скорости к меньшей будет равно
отношению DN к NS, и если от точки S возвести
перпендикуляр SH и провести луч NH, то свет,
падающий в редкой среде в точку N, преломится
в плотной среде в направлении к точке Н.
Эта теорема не противоречит нашей геометрии,
как зто видно из следующего чисто геометричес-
кого рассуждения.
Пусть имеем круг АНВМ, у которого диаметр
ANB и центр N. На окружности круга берем
любую точку М, проводим радиус MN и опускаем
на диаметр перпендикуляр MD. Пусть будет
также дано отношение DN и NS так, чтобы
DN было больше NS. Из точки S восстановим
перпендикуляр SH, встречающийся с окруж-
ностью в точке Н, и от этой точки проведем к центру Л7' радиус HN. Отсюда
DN относится к NS, как радиус MN относится к прямой NJ. Я утверж-
даю, что сумма прямых JN и NH будет наименьшей, то есть, если взять
любую точку R на полудиаметре NB и провести прямые MR и RH, то от-
ношение DN к NS будет равно отношению MR к RP ; сумма прямых PR
и RH будет больше суммы прямых JN и NH. Чтобы это доказать, примем,
что радиус MN относится к прямой DN, как прямая RN к прямой NO, и
DN относится kJVS, как NO к NV.
Из построения ясно, что прямая NO меньше, чем прямая NR, так как
прямая DN меньше, чем радиус MN; ясно также, что прямая NV меньше,
чем прямая NO, а прямая NS меньше, чем прямая ND.
Если это так, то, согласно Евклиду, квадрат прямой MR равен квадрату
радиуса MN плюс квадрат прямой NR плюс удвоенное произведение DN
на NR [4 ], но поскольку по построению MN относится к DN, как NR к NO,
произведение MN на NO будет равно произведению DN на NR, следова-
тельно, удвоенное произведение MN на NO равно удвоенному произведению
DN на NR. Итак, квадрат прямой MR равен квадрату MN плюс квадрат
NR плюс удвоенное произведение MN на NO.
Но квадрат прямой NR больше квадрата прямой NO, поскольку прямая
NR больше прямой NO. Следовательно, квадрат прямой MR больше, чем
квадрат прямой MN плюс квадрат прямой NO плюс удвоенное произве-
дение MN на NO. Но сумма квадратов MN и NO и удвоенного произведения
MN на NO равна квадрату единой прямой, составленной из MN и NO.
Следовательно, прямая MR больше суммы двух прямых MN и NO.
СИНТЕЗ ДЛЯ РЕФРАКЦИИ
9
А поскольку из построения DN относится к NS, kzkMN kNJ и как NO к
NV, то DN будет относиться к NS, как сумма прямых MN, NO к сумме прямых
JN и NV. И точно так же DN относится к NS, как MR к RP. Следовательно,
сумма прямых MN, NO относится к сумме прямых JN, NV, как прямая
MR относится к RP. Однако прямая MR больше, чем сумма прямых MN,
NO ; следовательно, прямая PR больше суммы прямых JN, NV.
Остается доказать, что прямая RH больше, чем прямая HV, ибо если это
так, то будет установлено, что сумма прямых PR и RH больше, чем сумма
прямых JN и NH.
В треугольнике NRH, по Евклиду, квадрат RH равен сумме квадратов
NH и NR минус удвоенное произведение SN на NR. Но поскольку из по-
строения радиус MN (или равный ему NH) относится к DN так, как отно-
сится NR к NO, DN относится к NS так, как NO к NV, то равным образол!
HN будет относиться к NS так, как NR к NV.
Следовательно, произведение HN на NV равно произведению NS на NR,
и удвоенное произведение HN на NV равно удвоенному произведению SN
на NR. Поэтому квадрат HR равен сумме квадра-
тов HN и NR минус удвоенное произведение HN
naNV.
Однако доказано, что квадрат NR больше,
чем квадрат NV. Следовательно, квадрат HR
больше, чем сумма квадратов HN и NV минус
удвоенное произведение HN на NV. Но, по
Евклиду, сумма квадратов HN и NV минус
удвоенное произведение HN на NV равна квад-
рату прямой HV. Следовательно, квадрат HR
больше, чем квадрат HV, и поэтому прямая
HR больше, чем прямая HV. Что требовалось
доказать.
Если же мы возьмем точку R на полудиаметре
AN так, что прямые MR и RH будут продолжать друг друга и составлять
одну прямую линию, как это показано на следующем рисунке, то, по-
скольку наше доказательство имеет место для любого случая, будет то же
самое, то есть сумма прямых PR и RH будет больше суммы прямых JN
и NH.
Пусть, как выше, радиус MN относится к DN, как RN к NO, и DN от-
носится к NS, как NO к NV. Ясно, что прямая RN больше, чем прямая NO,
а прямая NO больше, чем прямая NV.
Квадрат MR равен сумме квадратов MN и NR минус удвоенное произ-
ведение DNR, или, согласно вышеприведенному соображению, минус удвоен-
ное произведение MNO. Но поскольку квадрат NR больше квадрата NO,
то квадрат MR будет больше суммы квадратов MN и NO минус удвоенное
произведение MNO. Но сумма квадратов MN и NO минус удвоенное произ-
ведение MNO равна квадрату прямой МО. Следовательно, квадрат прямой
MR больше квадрата прямой МО и поэтому прямая MR будет больше пря-
мой МО.
Но поскольку по построению DN относится к NS, как MN к JN и NO к
NV, то, следовательно, MN относится к JN, как NO к NV, и в свою очередь
MN к NO, как NJ к NV; далее, МО относится к ON, как JV к VN, и в свою
очередь МО относится к JV, как ON к NV, или DN к NS или MR к RP.
Однако доказано, что MR больше, чем МО. Следовательно, PR будет больше,
чем прямая JV. Итак, чтобы всесторонне обосновать наше предположение,
остается доказать, что прямая RH больше суммы двух прямых HN и NV,
а это из вышесказанного весьма легко сделать.
10
П. ФИРМА
Ибо квадрат RH равен сумме квадратов HN и NR плюс удвоенное произ-
ведение SN на NR, или, как это видно из доказанного выше, плюс удвоенное
произведение HN на NV. Но квадрат NR больше квадрата NV, следова-
тельно, квадрат HR больше суммы квадратов HN и NV плюс удвоенное
произведение HN на NV. Отсюда следует, что прямая RH, из показанного
выше, будет больше, чем сумма прямых HN и NV.
Итак, ясно, что прямые PR, RH (или, когда это имеет место, единая пря-
мая PRH) всегда будет больше двух прямых JN, NH. Что и требовалось
доказать.
И. БЕРНУЛЛИ
НОВАЯ ЗАДАЧА,
К РАЗРЕШЕНИЮ КОТОРОЙ ПРИГЛАШАЮТСЯ МАТЕМАТИКИ [5]
В вертикальной плоскости даны две точки А и В (рис. 1). Определить
путь АМВ, спускаясь по которому под влиянием собственной тяжести,
тело М, начав двигаться из точки А, дойдет до другой точки В в кратчайшее
время.
Для того чтобы вызвать интерес со стороны любителей подобных вопро-
сов и побудить их охотнее предпринять попытку разрешения указанной
задачи, довожу до их сведения, что эта задача не сводится к пустой умствен-
ной спекуляции, лишенной какого бы то ни было практического значения,
как это может кому-либо показаться. В действительности, она представляет
очень большой практический интерес и притом, кроме механики, также и
для других дисциплин, что может всем показаться неправдоподобным.
Между прочим (указываю это с целью предупредить возможное непра-
вильное суждение), хотя прямая АВ и является кратчайшей линией между
крайними точками А и В, тем не менее тело проходит ее не в кратчайшее
время, и существует кривая АМВ, хорошо известная геометрам. Я назову
эту линию, если, по истечении текущего года, никто другой ее не назовет.
И. БЕРНУЛЛИ
КРИВИЗНА ЛУЧА В НЕОДНОРОДНЫХ ПРОЗРАЧНЫХ ТЕЛАХ
И РЕШЕНИЕ ЗАДАЧИ,
предложенной мною в «Acta» за 1696 г., стр. 269, о нахождении «брахисто-
хронной линии», т. е. такой линии, по которой тело должно проходить от
одной заданной точки до другой в кратчайшее время; затем о построении
«синхронной кривой», т. е. волны лучей [6]
В последнее время появилось столько методов, которые получили на-
звание методов максимумов и минимумов, что лица, хвалящиеся тем, что они
авторы этих методов или последователи их авторов, считают, что в этом во-
просе почти ничего не осталось сколько-нибудь тонкого, чего они с их
остроумием не могли бы разрешить. Пусть они думают со слов учителя как
им угодно, но если бы они захотели попробовать, то они увидели бы, что наша
задача меньше всего может быть уложена в тесные рамки их методов, если
даже они их настолько расширят, что смогут из заданных многих или беско-
нечно многих величин найти одну, которая будет максимумом или мини-
мумом.
В самом деле, в нашей задаче самые величины, из которых следует избрать
максимум или минимум, не больше определены, чем та величина, которая
определяется. В этом все дело, в этом и заключается вся трудность.
Даже столь знаменитые авторы, как Декарт, Ферма и другие, которые
когда-то так горячо отстаивали превосходство своих собственных методов,
как будто они боролись за свои очаги и жертвенники, или же их привер-
женцы, отстаивавшие их правоту, даже они откровенно признают, что здесь
следует применять не только те методы, которые они внесли в науку.
В мою задачу не входит поносить открытия других, и я не собираюсь
этого делать. Усердно стремясь к достижению поставленных себе целей,
они дали многое. Но в их сочинениях не находится ничего, касающегося
такого рода исследования о максимумах и минимумах, и сами они своим
методам не приписывали способности разрешать иные проблемы, чем задачи
обычного характера.
Я со своей стороны тоже не обещаю дать общего метода, которого было
бы напрасно и искать, но я изложу особые методы, с помощью которых я
счастливо разрешил настоящую задачу, — методы, подходящие не только
для данного, но и для многих других случаев.
Пока другие искали свои решения, я решил свой ответ сразу же пере-
слать знаменитому Лейбницу с тем, чтобы он когда-нибудь довел его до све-
дения публики вместе со своим решением, если он найдет таковое. Впрочем,
я в этом не сомневался, хорошо зная необыкновенные способности этого
остроумнейшего мужа. И действительно, в то время, как я это пишу, я знаю
из частных его писем, которыми он меня часто удостаивает, что моя задача
сверх ожидания ему очень понравилась (по его словам, она своей красотой
КРИВИЗНА ЛУЧА В НЕОДНОРОДНЫХ ПРОЗРАЧНЫХ ТЕЛАХ
13
привлекла его к себе, как яблоко привлекло Еву), и что он тотчас же нашел
ее решение. Что будет сделанр другими,' покажет результат. Во всяком
случае, если такому мужу, столь загруженному делами, эта задача пред-
ставилась в таком виде, что он счел проведенный за нею час не бесполезно
потраченным, то, значит, она стоит того, чтобы геометры посвятили ее разре-
шению некоторое время. Если они это сделают, то они из этого извлекут и ту
пользу, что, разрешив задачу, они получат доступ к сокровеннейшим истинам,
до которых без этого они едва ли доберутся.
Конечно, мы справедливо удивляемся тому, что было впервые открыто
Гюйгенсом[7], а именно, что тяжелое тело совершает таутохронные спуски
по обыкновенной циклоиде, из какой бы точки циклоиды оно ни начало
двигаться, но я не знаю, не будешь ли ты, читатель, совершенно изумлен,
когда я заявлю, что именно эта самая циклоида, т. е. гюйгенсова таутохрона,
и является нашей искомой брахистохроной, что я установил двумя спосо-
бами : косвенным и прямым.
Останавливаясь на изложении первого способа, я укажу, что мною
открыто удивительное совпадение между кривизной луча света в непрерывно
изменяющейся среде и нашей брахистохронной кривой ; я заметил еще и
другие явления, относительно которых мне, впрочем, неизвестно, содер-
жится ли в них что-нибудь сокровенное, что может оказаться полезным
для диоптрики. Во всяком случае остается справедливым указание, которое
я прибавил к своему объявлению о задаче, а именно, что последняя полу-
чит самое широкое применение не для пустой умственной спекуляции, а в
иных дисциплинах, т. е. и в диоптрике.
Подтвердим же на деле то, что было сказано на словах, и прежде всего
изложим наш способ решения задачи.
Ферма в своем письме на имя де ла Шамбра (см. Epist Cartesii Lat, т. Ill,
стр. 147 и Fermatii Opera Mathem, стр. 156 и след.) установил, что луч света,
проходящий из более редкой среды в более плотную, отклоняется к перпен-
дикуляру таким образом, что за данный промежуток времени луч (который,
по предположению, проходит последовательно от точки, испускающей свет,
до освещаемой точки) совершает кратчайший путь ; исходя из этого прин,
ципа, он показал, что синус угла падения находится к синусу угла прелом-
ления в таком же отношении, как заданные разреженности сред, т. е. они
находятся в отношении, обратном отношению плотностей, а значит, и в
отношении скоростей, с которыми луч проходит в среде. Позднее это было
точнее доказано остроумнейшим Лейбницем в «Acta Eruditorum» за 1682 г.,
стр. 185 и далее, а затем вскоре и знаменитым Гюйгенсом в его сочинении
«О свете», стр. 40. Последние подкрепили сильнейшими доводами только
что указанный физический, или, скорее, метафизический принцип, который
Ферма, под влиянием Клерселье, кажется, оставил и, слишком легко от-
казавшись от своих прав, ограничился лишь своими геометрическими
доказательствами.
Если мы теперь возьмем не равномерно плотную среду, а как бы разде-
ленную бесконечно большим количеством расположенных горизонтально
пластинок, промежутки между которыми заполнены прозрачной материей,
плотность которой возрастает или убывает в определенном отношении, то
ясно, что луч, который мы представляем себе в виде шарика, будет распро-
страняться не по прямой линии, апо некоторой кривой (это отметил уже Гюй-
генс в вышеупомянутом сочинении «О свете», хотя он всего меньше опреде-
лил природу этой кривой); эта кривая будет иметь такую форму, что шарик,
пробегая по ней со скоростью, постоянно возрастающей или убывающей в
соответствии с плотностью слоев, дойдет от одной точки до другой в крат-
чайшее время. Известно также, что так как синусы углов преломления в
14
И. БЕРНУЛЛИ
отдельных точках пропорциональны разреженности среды, т. е. пропор-
циональны скоростям шарика, то указанная, кривая обладает тем свойством,
что синусы углов наклона ее к вертикальной линии повсюду находятся в
отношении, пропорциональном отношению скоростей. После сказанного
выше можно без труда понять, что указанная кривая представляет собою
брахистохронную линию, образуемую лучом, проходящим через среду,
разреженности которой пропорциональны скоростям, приобретаемым тяже-
лым телом, падающим по вертикальной линии.
Таким образом, зависит ли увеличение скорости от природы среды, ока-
зывающей большее или меньшее сопротивление, как мы это имеем в случае
луча, или же следует отвлечься от среды и от любых других причин, но мы
видим, что ускорение создается по тому же закону, как и в случае движения
тяжелых тел. Так как в обоих случаях кривая подчинена тому условию,
что она должна быть пройдена в кратчайшее время, то что мешает нам по-
ставить одно на место другого?
Таким образом, можно разрешить нашу задачу в общем виде, какой бы
закон ускорения мы ни установили. Действительно, задача сводится к тому,
что требуется определить кривизну луча в среде, изменяющейся каким
угодно образом, в соответствии с разреженностью этой среды.
Итак, пусть имеется среда FGD (рис. 1), ограниченная горизонталью
FG, на которой расположена излучающая точка А. Пусть будет дана вместе
с вертикальной осью AD кривая АНЕ, ординаты которой НС определяют
степень разреженности среды на высотах АС или скорости луча, либо
шарика в точках М. Искомый искривленный луч пусть будет представлен
линией AM В. Обозначим АС через х, СН — через t, СМ — через у, дифферен-
циал Сс — через dx, дифференциал пт —через dy, дифференциал Мт — через
dz, некоторую произвольно взятую постоянную величину — через а. Отрезо-
чек Мт будет полным синусом, тп будет синусом угла преломления, т. е.
угла наклона кривой к вертикальной линии, а потому в силу того, что мы
только что сказали, тп находится к НС в постоянном отношении, т. е.
Ду _ dz
~1 а ’
отсюда получается следующее уравнение :
a dy = t dz
КРИВИЗНА ЛУЧА В НЕОДНОРОДНЫХ ПРОЗРАЧНЫХ ТЕЛАХ
15
ИЛИ
аа dy2 = tt dz2 = tt dx2 + tt dy2,
последнее же после преобразования даст для искомой кривой АМВ общее
дифференциальное уравнение
, tdx
“У = v=
У аа — tt
Я, таким образом, одновременно решил две замечательные задачи — одну
оптическую, другую механическую, т. е. я сделал больше того, что требовал
от других. Я показал, что хотя эти две задачи взяты из совершенно различ-
ных областей науки, тем не менее они имеют одинаковую природу.
Возьмем теперь специальный случай, а именно обычное положение,
впервые введенное и доказанное Галилеем, согласно которому скорости
падающих весомых тел находятся между собою в отношении корней ква-
дратных их пройденных высот ; ведь к этому, собственно, и относится суще-
ство нашей задачи. При указанных допущениях заданная кривая АНЕ
будет параболой, т. е.
tt = ах
и
t = Vox.
Если мы подставим это в общее уравнение, то будем иметь
dy = dx]l—-— ,
7 у а — х ’
на основании чего я прихожу к заключению, что брахистохронная кривая
является обыкновенной циклоидой.
В самом деле, если круг GLK, диаметр которого равен а, будет катиться
по AG и если начало качения будет в точке А, то точка К опишет циклоиду,
относительно которой можно установить, что она имеет то же дифференциаль-
ное уравнение
dy = dx ]f—,
7 у а — х ’
если обозначить АС через х и СМ через у.
Полученное уравнение может быть преобразовано a priori аналитически
следующим образом:
, / х xdx adx adx — 2xdx
dx I----- = v. =-------,
la — x Vax — xx 2 у ax — xx 2 у ax — xx
HO
adx — 2 xdx
2 Уax — xx
является дифференциаломфвеличины, равной У ax— xx, т. e. LO, a
a dx
ax — xx
представляет собою дифференциал дуги GL; следовательно, если просум-
мировать уравнение
dy = dx ]l —-— ,
7 у а — х ’
16
И. БЕРНУЛЛИ
то мы будем иметь
у, т. е. СМ = GL — LO,
таким образом,
МО = СО - GL + LO.
Если принять во внимание, что СО равен полуокружности GLK, то
СО — GL = LK,
и мы будем иметь
МО = LK + LO,
а если вычесть из обеих частей общую величину LO, то мы получим
ML = LK,
откуда следует, что кривая КМА представляет собою циклоиду.
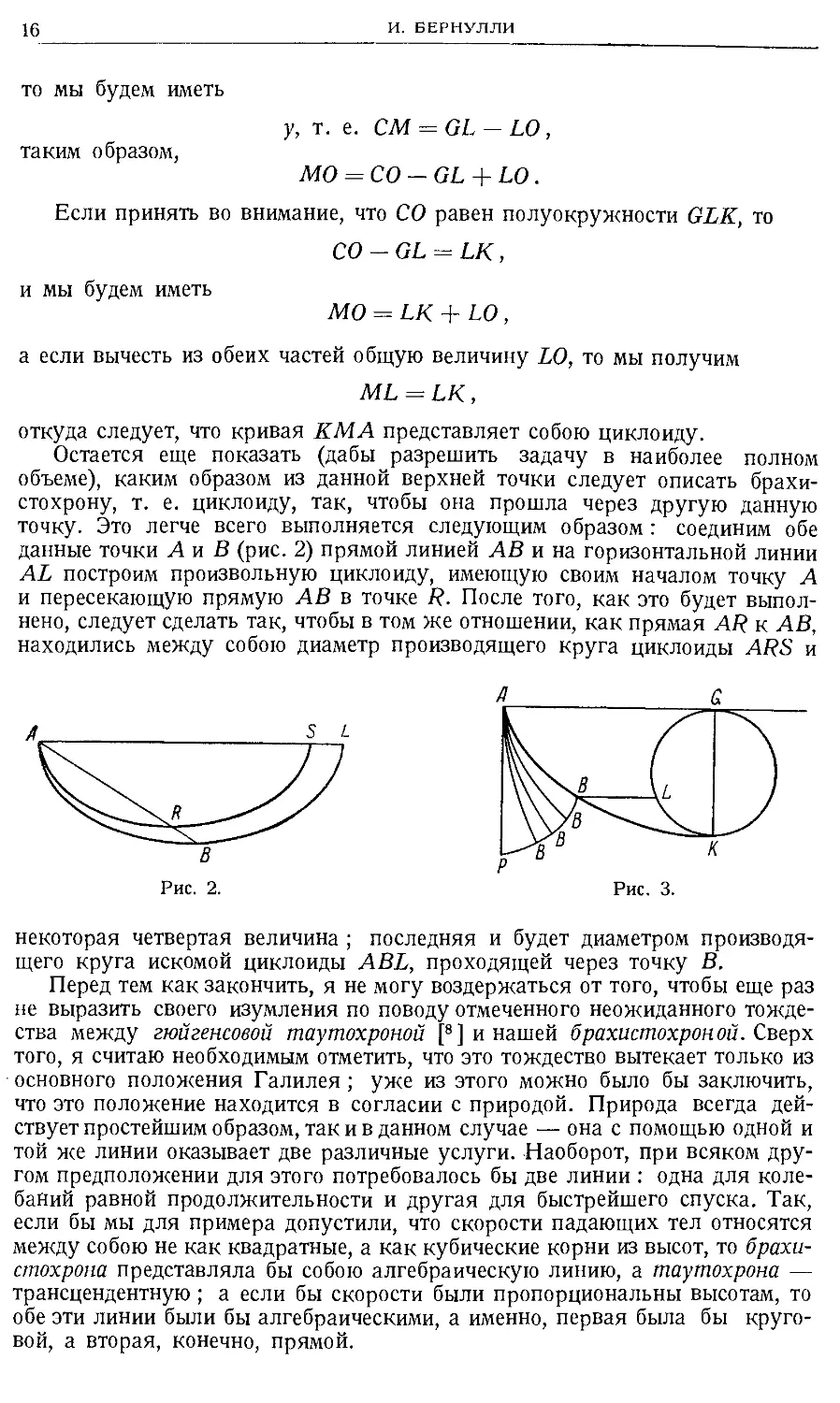
Остается еще показать (дабы разрешить задачу в наиболее полном
объеме), каким образом из данной верхней точки следует описать брахи-
стохрону, т. е. циклоиду, так, чтобы она прошла через другую данную
точку. Это легче всего выполняется следующим образом: соединим обе
данные точки А и В (рис. 2) прямой линией АВ и на горизонтальной линии
AL построим произвольную циклоиду, имеющую своим началом точку А
и пересекающую прямую АВ в точке R. После того, как это будет выпол-
нено, следует сделать так, чтобы в том же отношении, как прямая AR к АВ,
находились между собою диаметр производящего круга циклоиды ARS и
Рис. 2.
некоторая четвертая величина ; последняя и будет диаметром производя-
щего круга искомой циклоиды ABL, проходящей через точку В.
Перед тем как закончить, я не могу воздержаться от того, чтобы еще раз
не выразить своего изумления по поводу отмеченного неожиданного тожде-
ства между гюйгенсовой таутохроной [8] и нашей брахистохроной. Сверх
того, я считаю необходимым отметить, что это тождество вытекает только из
основного положения Галилея ; уже из этого можно было бы заключить,
что это положение находится в согласии с природой. Природа всегда дей-
ствует простейшим образом, так и в данном случае — она с помощью одной и
той же линии оказывает две различные услуги. Наоборот, при всяком дру-
гом предположении для этого потребовалось бы две линии : одна для коле-
баний равной продолжительности и другая для быстрейшего спуска. Так,
если бы мы для примера допустили, что скорости падающих тел относятся
между собою не как квадратные, а как кубические корни из высот, то брахи-
стохрона представляла бы собою алгебраическую линию, а таутохрона —
трансцендентную ; а если бы скорости были пропорциональны высотам, то
обе эти линии были бы алгебраическими, а именно, первая была бы круго-
вой, а вторая, конечно, прямой.
КРИВИЗНА ЛУЧА В НЕОДНОРОДНЫХ ПРОЗРАЧНЫХ ТЕЛАХ
17
Я полагаю, что геометрам доставит некоторое удовольствие, если в каче-
стве приложения я здесь приведу решение задачи, также крайне достойной
исследования, — задачи, которая пришла в голову пишущему эти строки в
связи с расмотренным выше случаем.
Требуется в вертикальной плоскости (рис. 3) найти кривую РВ, которую
можно было бы назвать «синхронной», с тем, чтобы тяжелое тело, падающее
из точки А по смежным циклоидам АВ, достигло различных точек В этой
кривой за одно и то же время.
Пусть AG — горизонтальная линия, а АР — вертикальная. Смысл на-
стоящей задачи заключается в том, что если на AG провести какую-нибудь
циклоиду, то от последней отсекался бы такой кусок АВ, что для прохож-
дения его тяжелому телу, падающему из точки А, потребовалось бы столько
же времени, сколько ему понадобится для падения с указанной высоты по
вертикальной линии АР ; если поступить указанным образом, то точка В
будет лежать на искомой «синхронной кривой» РВ.
Если внимательно продумать то, что нами было выше сказано о луче
света, то нетрудно будет понять, что рассматриваемая кривая представляет
собою то же самое, что и кривая, изображенная Гюйгенсом на чертеже в
его сочинении «О свете», стр. 44, с помощью линии ВС и названная им волной.
Подобно тому, как последняя, согласно прекрасному замечанию Гюйгенса,
нормально пересекает все лучи, исходящие из светящейся точки, точно так
же и наша линия РВ встречает под прямыми углами все циклоиды АВ,
имеющие общее начало в точке А.
Если бы решить превратить эту задачу в чисто геометрическую и пред-
ставить ее в следующем виде :
Определить кривую, которая нормально пересекает все циклоиды, имею-
щие общее начало, то, конечно, она задала бы геометрам большую работу.
Между тем с иной точки зрения, где принимается во внимание рассмотренное
выше падение тел, я эту задачу разрешаю с помощью следующего чрезвы-
чайно легкого построения.
Пусть имеется производящий круг GLK циклоиды АВК и его диаметр
GK; отсечем дугу GL, равную средней пропорциональной между опреде-
ленной избранной линией АР и диаметром GK; тогда я утверждаю, что
линия LB, проведенная параллельно горизонтали AG, пересечет цикло-
иду АВК в точке В.
Если бы кто-нибудь пожелал применить свой метод к другим линиям,
пусть он определит линию, которая пересекает под прямыми углами надле-
жащим образом заданные по своему положению кривые линии, конечно, не
алгебраические, что было бы не очень трудно, а трансцендентные, например
логарифмические, лежащие на общей оси и проведенные через одну общую
точку.
2 Вариационные принципы механики
П. МОПЕРТЮИ
ЗАКОН ПОКОЯ [9]
Если Науки и основываются на некоторых, с первого взгляда простых
и ясных принципах, из которых вытекают все истины, являющиеся их
предметом, то они содержат также и другие принципы, правда, менее простые
и часто открываемые с трудом, но которые зато, будучи раз открыты, оказы-
ваются исключительно полезными. Эти принципы являются своего рода
законами, которых природа придерживается при различных комбина-
циях обстоятельств, и мы исследуем, как она поступает в таких случаях.
Первые принципы совсем не нуждаются в доказательстве ; они становятся
очевидными, как только ум начинает их исследовать ; последним нельзя
дать общее доказательство, потому что вообще невозможно обозреть все
случаи, в которых они имеют место.
Таков, например, весьма известный и полезный в обыкновенной Статике
принцип, согласно которому во всех соединениях тел их общий центр тяже-
сти опускается вниз настолько, насколько это возможно. Таким же является
принцип сохранения живых сил. Строго говоря, никогда не было дано общего
доказательства этих принципов; но никогда никто, привыкший судить о
Науках и знакомый с индукцией, не сомневался в их истинности. Когда
видят, что в тысяче случаев Природа действует некоторым определенный!
способом, никто, обладающий здравым рассудком, не станет думать, что в
тысяча первом случае она будет подчиняться другим законам.
Что касается доказательств a priori такого рода принципов, то не ка-
жется очевидным, что физика могла бы их дать ; они, напротив, кажется,
принадлежат, к некоторой высшей науке. Однако уверенность в них так
велика, что многие математики без колебаний кладут их в основу своих
теорий и ежедневно применяют их при рассмотрении задач, решение кото-
рых без этих принципов стоило бы очень большого труда. Наш ум, довольно
ограниченный, часто уходит слишком далеко от первых принципов по на-
правлению к пункту, к которому он хочет прийти, и он утомляется или укло-
няется со своего пути. Эти законы, о которых мы говорили, освобождают его от
части пути ; он отправляется от них со всеми своими силами, и часто ему
нужно сделать только несколько шагов, чтобы достичь того, чего он желает.
Нет другой науки, в которой нужда в этих принципах чувствовалась
бы больше, чем в Статике и Динамике: осложнение, которое в них полу-
чается из-за взаимоотношения силы и материи, делает здесь эти принципы
более необходимыми, чем в простых Науках. Эти принципы являются убе-
жищем умов усталых или сбитых с пути в своих исследованиях. Они легко
видят, ошиблись ли в своих предложениях, исследуя, применим к ним или
нет такой принцип.
Только в самое последнее время открыли закон, красотой и полезностью
которого нельзя не восхититься ; это — закон о том, что во всякой системе
движущихся упругих тел, взаимодействующих друг с другом, сумма произ-
ЗАКОН ПОКОЯ
19
ведений массы каждого тела на квадрат его скорости, которую называют
живой силой, неизменно остается одинаковой.
Размышляя над природой равновесия, я попытался установить, нет ли
в Статике какого-либо закона такого же рода и нет ли для тел, поддерживае-
мых силами в покое, общего закона, необходимого для того, чтобы покой
имел место ; и вот то, что я нашел и что соблюдает Природа.
Пусть имеется система тел, которые тяготеют или притягиваются к
центрам силами, действующими соответственно на каждое тело, как N-я
степень расстояний тел до центров; для того чтобы все эти тела оста-
вались в покое, необходимо, чтобы сумма произведений каждой массы
на интенсивность силы и на N+1-ю степень ее расстояния до центра
силы (что можно назвать суммой сил покоя) являлась максимумом или
минимумом.
Доказательство. 1. Пусть имеется система какого-нибудь числа
тяжелых точек или тел с очень малыми массами по сравнению с расстояниями
их до центров, к которым они притягиваются. Пусть эти тела М, М', М"
и т. д., прикрепленные к нематериальным радиусам СМ, СМ', СМ", дви-
жутся вокруг фиксированной точки С. Пусть их массы равны т, т', т",
и пусть в таком же числе точек F, F', F" на каждое из тел действуют силы
/, /', /", каждая, пропорциональная п-й степени расстояния FM, F'M',
F"M" = С, С', С" ; каждая сила может действовать только на свое тело.
Продолжим радиусы СМ и проведем из точек F перпендикуляры FG ;
получим (из разложения сил) mf (п для движущей силы, действующей
перпендикулярно радиусу СМ; и эта сила, умноженная на длину рычага СМ,
2*
20
П. МОПЕРТЮИ
станет силой mf Сп • -р^-СМ, которая стремится повернуть этот рычаг,
и аналогично для других рычагов.
Рассмотрим теперь всю систему в расположении, ближайшем к исходному,
а тела — в точках //, //, Р"; проводя линии F/z и описывая из центров F
малые дуги МК, получим : , что после подстановки на место
-^-в движущие силы дает : mf Сп • СМ для каждого тела. И так как
отношение СМ к Мц для всех тел одинаково, то, складывая все произведе-
ния, найдем, что для равновесия системы необходимо, чтобы
mf Р1 dC + т' /' Сп dC' + т" f" Сп dt" = 0 .
Отсюда, очевидно, что mfCn+1 + m'f'C'n+1 + m"f"C"n+1 должно быть макси-
мумом или минимумом, что и требовалось доказать.
2. Если тела вместо того, чтобы быть прикрепленными к несгибаемым
радиусам, прикреплены к хордам, соединенным в точке С, то переведем
систему в новое положение ру ц' у' ц" у” и проведем через Сиу бесконеч-
ную прямую Су. Относя к направлению этой прямой действия тел друг
на друга и проводя из точек М перпендикуляры МР, М'Р', М"Р" к этой
линии, получим, что для равновесия тел необходимо, чтобы
СР r ,f f.,n СР' . „ y.ffn СР"
mf £ ' слГ — т f + т I ~см" •
Опишем теперь из центров F радиусами Fy, F'y, F"y малые дуги уК,
СР СР' СР"
уК', уК" ; в предыдущее уравнение вместоможно под-
СК СК' СК"
ставить —, -f.—, и мы получим :
С у ’ С у С у J
mf С”.СК = m'f Рп • СК' + т" f" Сп СК".
Но хорды соединены в С; СК, СК', СК” суть расстояния, на которые
тела приближаются или удаляются от центра;
подставляя, следовательно, в предыдущее урав-
нение их значения, получим :
mf dt = т' f' Сп dC + т” f С"п d£" .
Отсюда очевидно, что
mf Cn+1 + т' f' C'n+1 + т" f" C"n+1
является максимумом или минимумом, что и тре-
бовалось доказать.
Примечание. Если теперь рассмотрим все
положения соединенных сил и все силы, соеди-
ненные в одной точке, и будем рассматривать силу,
являющуюся результирующей, как постоянную,
действующую на все тела, то увидим, что система
будет находиться в равновесии, если сумма тел,
умноженных каждое на его расстояние до центра
силы, будет максимумом или минимумом.
И если допустим, что этот центр находится на бесконечном расстоянии
от системы, то, очевидно, для равновесия системы необходимо, чтобы центр
тяжести всех тел находился наиболее низко или наиболее высоко, как это
ЗАКОН ПОКОЯ
21
только возможно, иначе говоря, наиболее близко к центру силы или как
можно дальше от него.
Благодаря этой теореме немедленно получается решение многих вопросов
механики, перед которыми иногда останавливались искусные Геометры;
они дали только частные решения, потребовавшие затраты большого труда
и времени*).
Пусть, например, прямой рычаг АСВ движется вокруг точки С и на-
гружен двумя телами А и В ; массы этих тел очень малы по сравнению с их
расстоянием от точки F, к которой они тяготеют ; и пусть в F находится
некоторая сила р, действие которой на тела пропорционально п-й степени
их расстояния до этой точки ; требуется найти положение равновесия.
Проведем через точки F и С безграничную прямую FP и линии FА,
FB и опустим из точек А и В на FP перпендикуляры АР, BQ ; пусть линия
С А = а, СВ = b, CF = с и массы обоих тел равны А и В ; получим :
FA = f(cc + аа + 2сх) и FB = (се + bb —) •
Теперь, по нашей теореме для равновесия, необходимо, чтобы
, п+1
Ftl г 2 be i 2
р А (сс + аа + 2сх) 2 + р В (сс + bb--— xj
было максимумом или минимумом.
Следовательно, имеем
И— 1
. . . , „ х— , „ ( . ,, 2 be А 2 be dx
р А(сс + аа + 2сх) 2 с ах = рВ сс + bb---— xl •
Отсюда
А а (сс + аа + 2 с х) 2 = Bb[cc + bb —
откуда находим
2 2 2 2
а Вп~Т Ьп 1 (сс + bb) — Ап~1 ап~Т (сс + аа)
Х ~~ 2с~ ' 2 п+1 ~2 п+Г •
A”-1an-i + Bn-i bn-i
Беря СР равным этому значению х и проводя через точку Р перпендику-
ляр РА до встречи с рычагом В А, получим положение равновесия.
Уравнение
п-1
/ 2 be 1 2
Аа (сс + аа + 2 сх) 2 = Bb Iсс + bb---------------х)
позволяет видеть следующее :
Если центр силы находится на бесконечном расстоянии, как это предпола-
гается для всех тяжелых тел, которые изучаются в обыкновенной Меха-
нике, то ясно, что какова бы ни была степень расстояния, согласно которой
действует эта сила, члены аа, bb и те члены, которые содержат х, исчезнут
ранее сс. Для равновесия будет достаточно, чтобы Аа = ВЬ, т. е. чтобы массы
:) См. Fermat, Oper. mathem., а также Meehan, de М. Varignon, Sect. V.
22
П. МОПЕРТЮИ
обоих тел находились в обратном отношении к плечам рычага, потому
что равновесие не зависит от х.
Если п = 1, т. е. если сила прямо пропорциональна расстоянию до цен-
тра К, то в качестве условия равновесия мы имеем еще Аа = ВЬ. Отсюда
очевидно, что в таком случае существует еще точка С, относительно которой
система двух тел всегда будет в равновесии, если она была в равновесии
хотя бы один раз, т. е. при этих двух предположениях центр тяжести всегда
один и тот же во всех положениях системы.
Согласно закону покоя, очевидно, что, кроме случая этих двух пред-
положений, невозможно, чтобы существовал подобный центр.
Из простого уравнения
, п-1
п 1 / 2hc А 2
Аа (сс + аа 4- 2сх) 2 = ВЬ ^сс + bb-xj
вытекают только два положения равновесия для рычага : одно справа, а
другое слева.
Имеются, однако, еще два положения, в которых тела пребывают как бы
в состоянии равновесия ; это положения, при которых оба тела находятся
на линии, проходящей через центр силы и через точку опоры.
Хотя предыдущее уравнение не дает этих двух положений, они тем не
менее содержатся в законе покоя и в первом уравнении, из него вытекаю-
щем ; при этом они задаются соотношением dx = О.
Легко видеть, что если сила тяжести неизменна, как это предполагается
в обыкновенной Механике, и направлена к центру Земли, то, строго говоря,
в телах нет центра тяжести, т. е. точки, за которую тело, будучи подвешено,
удерживается в любом положении, хотя в каждом из этих тел имеется
точка, которую физически можно принять за центр тяжести по причине ма-
лости тел и рычагов, являющихся объектом обыкновенной Механики, по
сравнению с расстоянием их до центра Земли.
В дальнейшем мы дадим другие приложения этого закона.
Добавление. Наш закон относится не только к силам, которые
притягивают в зависимости от одной и той же степени расстояния, но и к
силам, совсем независимым от какой бы то ни было его степени. Достаточно,
чтобы эти силы были пропорциональны любой функции расстояния ; вместо
того, чтобы выражать их через /С, /'С', /" С", можно их выразить с помощью
/Z, f'Z', ]"Z", где Z, Z', Z” обозначают произвольные функции расстояний
С, С', С", которым они соответствуют; доказательство остается тем же.
Для того чтобы система была в равновесии, необходимо, чтобы
mjZdt + m'f'Z'dC’ + т" f" Z” dC” + ••• =0,
откуда очевидно, что величина
mf $Zdt + т' /' JZ' d£' + т" f' J Z" dt" + и т. д.
должна быть минимумом.
Закон покоя можно, следовательно, сформулировать таким образом:
Пусть имеется система тел, которые тяготеют или притягиваются к
центрам силами, действующими соответственно на каждое тело, как произ-
вольная функция расстояний тел до центров; чтобы все тела пребывали в
равновесии, необходимо, чтобы сумма произведений каждой массы на интен-
сивность ее силы и на интеграл от каждой функции, умноженной на эле-
мент расстояния до центра (что можно назвать суммой сил покоя), была
минимумом.
П. МОПЕРТЮИ
СОГЛАСОВАНИЕ РАЗЛИЧНЫХ ЗАКОНОВ ПРИРОДЫ,
КОТОРЫЕ ДО СИХ ПОР КАЗАЛИСЬ НЕСОВМЕСТИМЫМИ [10]
Нельзя требовать, чтобы различные средства, имеющиеся у нас для при-
ращения наших знаний, все приводили нас к одним и тем же истинам. Однако
было бы тягостно сознавать, что предложения, которые дает нам Философия
в качестве основных, опровергаются выводами Геометрии или вычисле-
ниями Алгебры.
Памятный пример подобного противоречия относится к одному из наи-
более важных предметов Физики.
Со времени возрождения Наук, с самого их возникновения, не было
сделано более прекрасного открытия, чем открытие законов, управляющих
светом, когда он движется в однородной среде или, встречая непрозрачные
тела, отражается их поверхностью, или когда прозрачные тела заставляют
его менять свой путь при их пересечении. Эти законы образуют основы
науки о свете и цветах.
Но я, может быть, заставлю лучше почувствовать их важность, если вме-
сто того, чтобы излагать такой обширный предмет, остановлюсь только на
некоторой его части; я изложу здесь только более ограниченные и лучше
известные вещи, если скажу, что эти законы являются принципами, лежащими
в основе того великолепного искусства, которое глазу старца, когда у него
слабеют все органы, возвращает первоначальную, силу и придает этому глазу
такую силу, которой он не получил от Природы ; искусства, простирающего
наш взор до самых отдаленных мест пространства, устремляющего его на
самые малые части материи, позволяющего нам открывать предметы, недо-
ступные зрению людей.
Законы, управляющие светом, когда он движется в однородной среде или
когда встречает непроницаемые тела, были известны еще Древним; закон,
указывающий путь света, переходящего из одной среды в другую, известен
только с прошедшего века; его открыл Снеллиус; Декарт пытался его
объяснить, Ферма обрушился на это объяснение. С тех пор этот вопрос стал
объектом исследований очень большого числа Геометров; однако до сих
пор не достигнуто согласование этого закона с другим, которому природа
должна следовать еще более неуклонно.
Приведем законы, которым подчиняется свет:
Первый заключается в том, что в однородной среде свет движется по пря-
мой линии.
Второй — в том, что когда свет встречает тело, сквозь которое он не мо-
жет пройти, то он отражается и угол отражения равен углу его падения,
т. е. после отражения свет образует с поверхностью тела угол, равный углу,
под которым он ее встретил.
Третий закон заключается в том, что когда свет переходит из одной про-
зрачной среды в другую, то его путь, после встречи новой среды, образует
24
П. МОПЕРТЮИ
угол с путем, по которому он следовал в первой среде, и синус угла прелом-
ления всегда находится в одном и том же отношении с синусом угла падения.
Если, например, луч света, переходя из воздуха в воду, преломился так, что
синус угла преломления равен трем четвертям синуса угла его падения,
то под каким бы другим наклоном он ни встретил поверхность воды, синус
преломления всегда будет составлять три четверти синуса соответственного
угла падения.
Первый из этих законов является общим для света и всех тел : они дви-
жутся по прямой линии, если только с этой линии не сворачивает их инород-
ная сила.
Второй является тем самым законом, которому следует упругий мяч,
брошенный на несгибаемую поверхность. Механика доказывает, что мяч,
встречающий такую поверхность, отражается под углом, равным углу встре-
чи с нею ; это же совершает и свет.
Но третий закон объясняется далеко не так удачно. Когда свет переходит
из одной среды в другую, явления совершенно отличны от явлений, имею-
щих место в случае мяча, пересекающего различные среды, и каким бы
способом ни пытались объяснить преломление, находятся трудности, которые
пока еще не преодолены. Я не буду цитировать всех великих людей, рабо-
тавших над этим вопросом, их имена составили бы длинный перечень, кото-
рый был бы в настоящем мемуаре бесполезным украшением, а изложение их
систем составило бы огромный труд; однако я разобью на три класса все
объяснения, данные этими Авторами отражению и преломлению света.
Первый класс содержит в себе объяснения тех, которые хотели вывести
преломление только из наиболее простых и привычных принципов Меха-
ники.
Второй содержит в себе объяснения, которые, кроме принципов Меха-
ники, допускают стремление света к телам, рассматривают его или как при-
тяжение материи или как действие какой угодно причины.
Наконец, третий класс заключает в себе те объяснения, которые хотят
извлечь из одних математических принципов, из тех законов, благодаря
которым сама Природа кажется покоренной высшим Разумом, умеющим
совершать свои действия всегда наиболее простым способом.
Декарт и его последователи принадлежали к первому классу: они рас-
сматривали движение света как движение мяча, который отскакивает при
встрече с поверхностью, нисколько ему не уступающей, или, встречая усту-
пающую ему поверхность, продолжает двигаться дальше, изменяя только
направление пути. Хотя способ, которым пытался объяснить рассматривае-
мые явления этот великий Философ, и несовершенен, но его достоинство
всегда будет заключаться в желании вывести эти явления наиболее просто
только из Механики. Многие Математики подчеркивают ложный вывод (па-
ралогизм), полученный Декартом, и указывают на ошибку в его объяснении.
Ньютон, отчаявшись вывести явления преломления из того, что слу-
чается с телом, встречающим при движении препятствие или продвигаю-
щимся в средах, которые сопротивляются ему различно, прибег к своей
силе притяжения. Допустив один раз эту силу, которой все тела наделены
пропорционально количеству их материи, он объяснил явления прелом-
ления наиболее точным и наиболее строгим образом. Клеро в превосходном
Мемуаре, написанном по этому же вопросу, не только представил в наи-
более ярком свете недостаточность картезианского объяснения, но, допу-
ская стремление света к светящимся телам и рассматривая это стремление
как явление, вызванное некоторой атмосферой, порождающей те же самые
действия, что и сила притяжения, вывел отсюда явления преломления с
ясностью, которую он внес во все излагаемые им предметы.
СОГЛАСОВАНИЕ РАЗЛИЧНЫХ ЗАКОНОВ ПРИРОДЫ
25
Ферма первый почувствовал недостаток объяснения Декарта. Он, по-
видимому, также потерял надежду вывести явления преломления из явления
удара мяча о препятствие или движения мяча в сопротивляющихся сре-
дах ; но он не прибег ни к атмосферам вокруг тел, ни к силе притяжения,
хотя известно, что этот последний принцип не был ему ни неизвестен, ни
противен ; он искал объяснение этих явлений в совсем другом, чисто мате-
матическом принципе.
Каждому известно, что когда свет или некоторое другое тело движется
от одной точки к другой по прямой линии, то это движение совершается и
по наиболее короткому пути и в течение наиболее короткого времени.
Известно также или, по крайней мере, легко узнать, что когда свет отра-
жается, то он движется наиболее кратким и наиболее кратковременным
путем. Доказывают, что шар, который переходит из одной точки в другую
только после отражения плоскостью, чтобы пройти наиболее короткий путь
и за возможно более короткое время, должен составить с этой плоскостью
угол отражения, равный углу падения ; если эти два угла равны, то сумма
двух путей, по которым движется и возвращается мяч, является наиболее
короткой и пробегается в течение времени, меньшего, чем время пробега
всякой другой суммы двух путей, образующих неравные углы.
Следовательно, прямое и отраженное движения света кажутся зави-
сящими от метафизического закона, заключающегося в том, что Природа,
производя свои действия, всегда пользуется наиболее простыми средствами.
Если тело от одной точки к другой должно двигаться, не встречая препят-
ствия, или, если оно должно двигаться, встретившись с непреодолимым
препятствием, то Природа ведет его наиболее коротким путем и в течение
наименьшего времени.
Чтобы применить этот принцип к преломлению, рассмотрим две прони-
цаемые для света среды, разделенные плоскостью, которая является их
общей поверхностью ; допустим, что точка, из которой луч света должен
выйти, находится в одной из этих сред, а точка, которой он должен достичь,
находится в другой среде ; при этом линия, соединяющая эти точки, не
является перпендикуляром к поверхности сред; допустим еще (потому
что это имеет место), что свет движется в каждой среде с различными ско-
ростями. Ясно, что прямая линия, соединяющая две точки, всегда будет
линией наиболее короткого пути для прохождения от одной точки до другой,
но она не будет линией наиболее краткого времени ; это время зависит от
различия скоростей света в различных средах ; поэтому, если луч света
должен употребить возможно меньшее время, необходимо, чтобы при встрече
общей поверхности он преломлялся так, чтобы наибольшая часть пути про-
ходилась им в среде, где он движется наиболее быстро, а наименьшая — в
среде, в которой он движется наиболее медленно.
Именно это и демонстрирует свет, когда он переходит из воздуха в воду:
луч преломляется так, что наибольшая часть пути находится в воздухе, а
наименьшая в воде. Если, следовательно (что было бы разумно), допустить,
что в более разреженной среде свет движется быстрее, чем в более плотной
(раз он движется в воздухе быстрее, чехм в воде), то он следует при этом по
пути, по которому он должен идти для того, чтобы наиболее быстро пройти
от исходной точки до той, которую он должен достичь.
С помощью изложенного принципа Ферма и решил проблему; согласно
этому, такому правдоподобному принципу, свет, который при своем рас-
пространении и отражении всегда идет наиболее короткое возможное время,
следует еще тому же закону при своем преломлении ; и Ферма без колеба-
ний считал, что в более разреженных средах свет движется более легко и
более быстро, чем в средах, где в том же самом пространстве он находит
26
П. МОПЕРТЮИ
большее количество материи. В самом деле, можно ли было с первого взгляда
подумать, что свет более легко и более быстро пересекает хрусталь и воду,
чем воздух и пустоту?
Однако это имеет место. Декарт первый высказал мнение, что свет в более
плотных средах движется более быстро; и хотя объяснение преломления,
которое он отсюда вывел, было недостаточным, его недостаточность не выте-
кала из сделанного допущения. Все системы, дающие некоторое правдоподоб-
ное объяснение явлениям преломления, допускают парадокс или утвер-
ждают его. Лейбниц хотел согласовать мнение Декарта с конечными причи-
нами, но это были только предположения, не выдерживающие критики и
совсем не согласующиеся с другими явлениями Природы*).
Предположение, что свет движется более быстро в более плотных средах,
разрушило все здание, построенное Ферма : свет при пересечении различ-
ных сред не идет ни более коротким путем, ни путем более короткого времени;
луч, переходящий из воздуха в воду, совершая наибольшую часть пути в
воздухе, приходит позднее, чем если бы он совершил там наименьшую часть
пути. В Мемуаре де-Мерана [de Маугап ] об отражении и преломлении
можно прочесть историю спора между Ферма и Декартом, а также увидеть
затруднение и бессилие, в которых находились до сих пор, пытаясь согла-
совать закон преломления с метафизическим принципом.
Глубоко продумав рассматриваемый вопрос, я полагаю, что свет при
переходе из одной среды в другую, уже оставив наиболее короткую дорогу,
являющуюся прямой линией, может также не следовать по пути наибы-
стрейшего времени. В самом деле, какое предпочтение должно здесь иметь
еремя перед протяженностью? Если свет не может идти сразу и по наиболее
короткому пути и по пути кратчайшего времени, то почему он идет скорее
по одному из путей, чем по другому? Он не следует ни по какому из них;
он выбирает путь, имеющий более реальное преимущество : путь, которого
он придерживается, является путем, для которого количество действия
будет наименьшим.
Нужно теперь объяснить, что я понимаю под количеством действия.
При перемещении тела из одной точки в другую необходимо некоторое дей-
ствие : это действие зависит от скорости, имеющейся у тела, и от простран-
ства, пробегаемого последним, но оно не является ни скоростью, ни про-
странством, взятыми в отдельности. Количество действия тем больше, чем
больше скорость тела и чем длиннее путь, пробегаемый телом ; оно пропор-
ционально сумме произведений отрезков на скорость, с которой тело прохо-
дит каждый из них**).
Именно это количество действия является истинной тратой Природы;
и именно оно выгадывается как можно более при движении света.
Пусть две различные среды, разделенные поверхностью, представленной
линией CD, таковы, что скорость света в среде, которая находится сверху,
равна т, а в среде, которая находится снизу, равна п. Пусть луч света,
выходящий из заданной точки А, должен достичь заданной точки В ; чтобы
найти точку R, в которой он должен преломиться, я отыскиваю точку, в
которой при преломлении луча количество действия является наименьшим;
и я нахожу, что mAR + nRB должно быть минимумом.
Или, восстанавливая к общей поверхности двух сред перпендикуляры
AC, BD, получим
т ]'АСг + CR2 + п yBDz + DRz = min.
*) См. замечание Эйлера в конце нашего Мему ара.
**) Так как здесь имеется только единственное тело, то от его массы мы отвлекаемся.
СОГЛАСОВАНИЕ РАЗЛИЧНЫХ ЗАКОНОВ ПРИРОДЫ
27
Или, так как АС и BD постоянны, получим
т CR dCR । п DR dDR ______
У АС2 + CR* + Уво2 + Од2 —
Но CD постоянно, поэтому dCR = — dDR. Следовательно, имеем
mCR nDR _ CR DR
“Д7Г“~87Г-° И ~AR--BR-n-m’
т. е. синус падения с синусом преломления составляют отношение, обратное
отношению скоростей света в каждой среде.
Все явления преломления согласуются теперь с важным принципом,
по которому Природа при осуществлении своих действий идет всегда наи-
более простыми путями. Из этого принципа следует, что когда свет перехо-
дит из одной среды в другую, синус его угла преломления с синусом его
угла падения находятся в отношении, обратном отношению скоростей,
которые свет имел в каждой среде. Но эта основа, это количество действия,
которое Природа сберегает при движении света через различные среды,
сохраняется ли оно также тогда, когда свет отражается непрозрачными
телами, и в простом его движении? Да, эта величина всегда является наи-
меньшей, насколько только это возможно.
В обоих случаях, отражения и распространения, скорость света остается
одной и той же, наименьшее количество действия дает в одно и то же время
наиболее короткий путь и наиболее короткое время. Но этот путь, наиболее
короткий и наиболее быстро пробегаемый, является только следствием из
наименьшего количества действия; это следствие и было взято Ферма в
качестве принципа.
Раз открыв истинный принцип, я вывожу из него все законы, которым
подчиняется свет как при своем распространении, так и при отражении и
преломлении.
Я знаю, что многие Математики испытывают отвращение к конечным
причинам в применении к Физике, и я согласен с ними в одном пункте;
я признаю, что вводить эти причины небезопасно: ошибка, вытекающая
из подобного применения, в которую впали такие люди, как Ферма, лишний
раз доказывает только, насколько опасно употребление этих причин. Можно,
однако, сказать, что то, что приводило людей к заблуждению, не является
самим принципом ; это — поспешность, с которой люди принимали за прин-
цип то, что является лишь следствием из него.
Вряд ли можно сомневаться в том, что все предметы управляются одним
Верховным Существом, которое снабдило материю силами, указывающими
на его могущество, заставило эту материю осуществлять действия, говоря-
щие о его мудрости : гармония двух этих атрибутов настолько совершенна,
что, без сомнения, все действия Природы можно было бы вывести из каж-
дого из них, взятого в отдельности. Механика слепа и должна подчиняться
намерениям Разума, наиболее ясного и наиболее свободного ; и если бы
наш ум был достаточно разносторонним, он увидел бы равным образом при-
чины физических действий как при вычислении свойств тел, так и при на-
хождении наиболее удобного пути их движения.
Первое из этих средств для нас более доступно, но оно не уводит нас
очень далеко. Второе иногда вводит нас в заблуждение, потому что мы
плохо знаем, какова цель Природы, и мы можем составить себе неверное
понятие о количестве, которое мы можем рассматривать как расход Природы
при совершении ее действий.
Чтобы соединить размах с безопасностью, в наших исследованиях следует
употреблять и первое и второе из этих средств. Вычислим движения тел,
28
П. МОПЕРТЮИ
но также посмотрим, каковы намерения Разума, который заставляет эти
тела двигаться.
Кажется, первые попытки такого рода в Математике сделали древние
Философы; они нашли метафизические отношения в свойствах чисел и тел,
и когда они говорили, что занятием Бога была Геометрия, под этим они, без
сомнения, понимали науку, которая сравнивает творения его могущества
с намерениями его мудрости.
Слишком мало было Геометров, чтобы осуществить их замысел; то, что
они нам оставили, мало обосновано или непонятно. Совершенство, которого
достигло после них вычислительное искусство, дает нам больше возмож-
ностей для успеха и, может быть, сторицей компенсирует то преимущество,
которое имели эти великие гении, по сравнению с нами.
NB. Когда мы прочли предыдущий Мемуар в Парижской Королевской
Академии наук, мы узнали со слов Мерана в его Memoire sur la reflexion
des corps, Mem. de 1’Acad. de Paris, annee 1723, что сделал по интересую-
щему нас вопросу Лейбниц. Как и он, мы бы смешали это мнение Лейбница
с мнением Ферма ; вот изложение этого мнения, извлеченное из Мемуара
Эйлера Mem. de 1’Acad. R. des Sciences de Berlin, т. VII.
Лейбниц также пытался опровергнуть объяснение Ферма. В Actes de
Leipzig для объяснения преломления света он намеревался обратиться к
Философии конечных причин, которые были изгнаны Декартом, и восста-
новить объяснение, выведенное Декартом из рассмотрения столкновения
тел, в противоположность мнению Ферма. Он начинает, следовательно,
с отрицания того, что Природа действует или по наиболее короткому пути
или по пути наименьшего времени ; но утверждает, что она выбирает наи-
более легкий путь, который не должен совпадать ни с каким из двух на-
званных. Для определения этого наиболее легкого пути служит сопроти-
вление, оказываемое лучу света при пересечении рассматриваемых прозрач-
ных сред; и он предполагает, что это сопротивление различно в различных
средах. Он устанавливает (что совпадает с мнением Ферма), что в более
плотных средах, таких, как вода и стекло, сопротивление больше, чем в
воздухе и других разреженных средах. Допустив это, он рассматривает
трудность, встречающуюся лучу при пересечении какой-либо среды, и
определяет эту трудность с помощью произведения пути на сопротивление.
Он утверждает, что луч всегда следует по тому пути, для которого сумма
таким образом измеренных трудностей является наименьшей; и по методу
максимума и минимума он находит правило, известное из опыта. Но хотя
это объяснение на первый взгляд кажется согласующимся с объяснением
Ферма, оно, однако, затем истолковывается с такой удивительной хитростью,
что становится диаметрально противоположным последнему, и согласуется
с объяснением Декарта. Ибо, хотя Лейбниц допустил, что сопротивление
стекла больше, чем сопротивление воздуха, он утверждает, что луч движется
в стекле быстрее, чем в воздухе ; и благодаря тому, что при этом сопроти-
вление стекла считается большим, получается, конечно, из ряда вон выходя-
щий парадокс. И вот как он пытается его объяснить. Он говорит, что большее
сопротивление препятствует рассеянию лучей, вместо того, чтобы сказать,
что лучи рассеиваются больше там, где меньше сопротивление; и что когда
диффузия затруднена, сжатые лучи при своем переходе, подобно потоку,
который течет в более узком русле, приобретают в результате этого боль-
шую скорость. Таким образом, объяснение Лейбница согласуется,с объясне-
нием Декарта в том, что и тот и другой приписывают лучам большую ско-
рость в более плотной среде ; при этом Декарт полагал, что лучи движутся
с большей скоростью в среде с большей плотностью потому, что сопроти-
вление там меньше; Лейбниц, напротив, приписывает эту большую скорость
СОГЛАСОВАНИЕ РАЗЛИЧНЫХ ЗАКОНОВ ПРИРОДЫ
29
большему сопротивлению. Можно или нельзя допустить такое мнение, я
здесь не обсуждаю ; но я должен отметить, что хотя Лейбниц, кажется,
хотел рассмотреть этот принцип наиболее легкого пути как универсальный,
он никогда не применял его ни к какому другому случаю и не показал, как
в других случаях должна быть определена эта трудность, которую следует
сделать минимумом. Если сказать, как выше, что это — произведение прой-
денного пути на сопротивление, то во многих случаях будет абсолютно
невозможно определить, что должно понимать под сопротивлением, терми-
ном весьма расплывчатым; как, например, эта трудность должна быть
определена, когда пет никакого сопротивления, как при движении небесных
тел? Будет ли движение совершаться по единственному пути, потому что
сопротивление равно нулю, и можно ли рассматривать этот путь как всюду
одинаковый? Но отсюда следует, что'в этих движениях пробегаемый путь
должен быть минимумом и, следовательно, прямой линией, что совершенно
противоречит эксперименту. Если, напротив, движение совершается в со-
противляющейся среде, то можно ли сказать, что это движение будет таким,
что произведение описанного пути на сопротивление является минимумом?
Отсюда вывели бы самые абсурдные заключения. Следовательно, ясно видно,
что принцип наиболее легкого пути в том виде, в каком он был предложен
и объяснен Лейбницем, нельзя применить ни к какому другому явлению,
кроме явления движения света.
Однако представляется, что можно придать этому принципу ббльшую
широту с помощью истолкования, изложенного в нижеследующих заме-
чаниях. Так как Лейбниц допускает, что лучи движутся тем быстрее, чем
большее сопротивление они встречают, то в этом случае скорость будет
пропорциональна сопротивлению и может быть взята в качестве меры по-
следнего ; оценка трудности, в соответствии с тем, что делал Лейбниц, све-
дется к произведению описанного пути на скорость, и если считать это произ-
ведение минимумом, то это будет согласоваться с принципом де-Мопертюи,
который определяет количество действия тем же произведением протяжен-
ности на скорость. Так как это произведение не только в движении лучей,
но и во всех движениях и во всех действиях Природы на самом деле является
наивозможно малым, и именно в этом состоит принцип наименьшего дей-
ствия, то можно сначала подумать, что Лейбниц имел в виду этот принцип,
согласующийся с его принципом наиболее легкого пути. Однако, если бы
мы без всяких исключений допустили рассуждение Лейбница, которым он
хочет доказать, что наибольшее сопротивление увеличивает скорость, то
никто бы никогда не подумал, что во всяком движении скорость возрастает
с сопротивлением ; в Природе имеется бесконечное число примеров, в кото-
рых бросается в глаза противоположное и в которых сопротивление умень-
шает скорость. Следовательно, здесь получилось чисто случайно, что прин-
цип наиболее легкого пути согласуется с принципом наименьшего действия;
таким же образом оказалось, что принцип Птолемея наиболее короткого
пути в Оптике и в Катоптрике согласуется с принципом наименьшего дей-
ствия, хотя только в этом принципе следует искать объяснение этих явлений.
Таким образом, когда Лейбниц дал свой принцип наиболее легкого пути в
качестве универсального закона Природы и положил трудность пропор-
циональной произведению пути на сопротивление, он не согласовал его с
принципом наименьшего действия ни в каком другом случае, кроме случая,
в котором скорость пропорциональна сопротивлению, случая, который
является, конечно, очень редким, чтобы не сказать, что другого такого же
просто не существует.
Во всех других случаях, следовательно, принцип, наиболее легкого пути
очень сильно отличается от принципа наименьшего действия; и Лейбниц
30 П. МОПЕРТЮИ
противоречил бы сам себе, если бы потребовал, чтобы в операциях Природы
произведение описанного пути на скорость было бы минимумом, за исклю-
чением единственного случая, в котором скорость пропорциональна сопро-
тивлению. Отсюда мы с уверенностью заключаем, что принцип наименьшего
действия был не только совершенно неизвестен Лейбницу, но что он применил
совершенно иной принцип, который согласуется с принципом наименьшего
действия только в очень небольшом числе случаев, в то время как в бес-
конечном числе других случаев он явно противоположен этому принципу.
Кроме того, этот принцип Лейбница, как общий принцип, каким он кажется,
применяется только в очень немногих случаях и, может быть, даже только
в единственном, о котором мы говорили. Во всех других случаях его совсем
нельзя применить, потому что неизвестно, как следует измерять сопроти-
вление, и каким бы способом его ни измеряли, оно всегда будет приводить к
большим ошибкам. Итак, отсюда следует, что Лейбниц никогда не владел
принципом наименьшего количества действия и что, напротив, он владел
совсем противоположным принципом, употребление которого, кроме един-
ственного случая, совсем невозможно или привело бы к ошибке. И не очевидно
также, что Лейбниц хотел применить свой принцип в каком-либо другом
случае.
Л. ЭЙЛЕР
ОБ ОПРЕДЕЛЕНИИ ДВИЖЕНИЯ БРОШЕННЫХ ТЕЛ
В НЕСОПРОТИВЛЯЮЩЕЙСЯ СРЕДЕ МЕТОДОМ МАКСИМУМОВ
И МИНИМУМОВ [и]
1. Так как все явления природы следуют какому-нибудь закону макси-
мума или минимума, то нет никакого сомнения, что и для кривых линий,
которые описывают брошенные тела, когда на них действуют какие-нибудь
силы, имеет место какое-то свойство максимума или минимума. Определить
из принципов метафизики a priori, каково именно это свойство, по-види-
мому, не так легко; но так как сами эти кривые можно определить при
помощи прямого метода, то отсюда, при должном внимании, можно будет
заключить о том, чтб в этих кривых является максимумом или минимумом.
Подлежит рассмотрению главным образом эффект, происходящий от дей-
ствующих сил; и так как он состоит в порожденном ими движении тела, то
представляется сообразным с истиной, что это самое движение, или, точнее,
совокупность всех движений, присущих брошенному телу, должна быть
минимумом. Хотя может показаться, что это заключение недостаточно обос-
новано, однако, если я покажу, что оно согласуется с истиной, уже извест-
ной a priori, то оно приобретет такой вес, что все сомнения, которые могли
бы относительно него возникнуть, совершенно исчезнут. Более того, когда
его истинность будет доказана, легче будет проникнуть в скрытые законы
природы и конечные причины и подкрепить это утверждение убедитель-
нейшими соображениями.
2. Пусть масса брошенного тела равна М, а его обусловленная высотой
скорость при прохождении малого промежутка ds равна v; количество
движения в этом месте будет равно M\v [12]; будучи умножено на длину
самого промежутка ds, оно даст Mds]/v, совокупное движение тела на про-
межутке ds. Теперь я утверждаю, что линия, описываемая телом, будет
такова, что среди всех других линий, содержащихся между теми же пре-
делами, у нее будет минимум J Mdsfv, или, так как М постоянное, J ds\v.
Если же рассматривать искомую кривую так, как будто бы она была дана,
то можно из действующих сил определить скорость уй через величины, от-
носящиеся к кривой, и, следовательно, определить саму кривую методом
максимумов и минимумов. Впрочем, можно зто выражение, полученное из
количества движения, привести также и к живым силам; действительно,
положив время, в течение которого пробегается элемент ds, равным dt, так
как ds = dt уй, будем иметь
Jds\'v ='§vdt,’
так что для кривой, описываемой брошенным телом, сумма всех живых сил,
находящихся в теле в отдельные моменты времени, будет наименьшей.
Таким образом, ни те, кто полагает, что силы следует оценивать по самим
32
Л. ЭЙЛЕР
скоростям, ни те, кто — по квадратам скоростей, не найдут здесь ничего
неприемлемого.
3. Итак, прежде всего, если мы положим, что никакие решительно силы
не действуют на тело, то и его скорость, которую я здесь только и принимаю
во внимание (ибо направление охватит сам метод максимумов и минимумов),
не претерпит никакого изменения, поэтому v будет величиной постоянной,
равной, например, Ь. Отсюда, если тело, не подверженное действию никаких
сил, будет как-нибудь брошено, то оно опишет такую линию, для которой
будет наименьшим j ds уь или J ds — s. Следовательно, этот путь сам будет
наименьшим из всех, заключенных между теми же пределами, а значит,
прямолинейным, совершенно так, как требуют первые основания механики.
Этот случай я привел не потому, что я думал подтвердить им мой
принцип: тот же самый прямолинейный путь по-
лучился бы, какую бы я ни взял другую функцию
от v вместо скорости fv ; но, начиная с простей-
ших случаев, легче будет понять самый смысл ука-
занного согласия.
4. Перехожу к случаю однородной тяжести,
когда брошенное тело повсюду испытывает дей-
ствие ускоряющей силы, равной g, вниз, по направ-
лениям, нормальным к горизонтальной плоскости.
Пусть AM (рис. 1) — кривая, которую описывает
тело при этих условиях; возьмем за ось вертикаль-
ную прямую АР и положим абсциссу АР = х, ор-
динату РМ = у и элемент кривой Мт = ds ; сле-
довательно, в соответствии с природой действующей силы,
dv = gdx и v = а + gx •
Значит, кривая будет такова, что для нее будет минимумом
J ds Уя + gx .
Положим
dy = р dx,
так что будет
ds = dx У1 + р2
и минимумом должен быть
J dx V(a + gx) (Г+Р2) ,
а это выражение при сравнении с общей формой J Z dx дает
z = FCflTgxHf+72У;
поэтому, так как было положено
dZ = Mdx + Mdy + Pdp,
получим
N = 0 и Р =
У1 + Р‘
Так как дифференциальное значение равно
ОБ ОПРЕДЕЛЕНИИ ДВИЖЕНИЯ БРОШЕННЫХ ТЕЛ
33
то в настоящем случае, вследствие
N = 0,
окажется
dP = 0
и
р = Ус.
Будем иметь, следовательно,
УС = Р + g’L = dy + 8х
И+V ds
откуда получается
С dx2 + С dy2 = dy2 (а + gx)
и
, dx Ус
dy = -----------;
У а— С + gx
будучи проинтегрировано, это уравнение, дает
У = f У gx).
5. Очевидно, что это уравнение параболы. Но полезно будет внима-
тельно рассмотреть его согласие с истиной. Прежде всего ясно, что там, где
а - С + gx = 0,
касательная к кривой горизонтальна или
dx = 0.
А так как начало абсцисс А зависит от нашего усмотрения, то возьмем его
в этом самом месте, и получится
С = а;
затем пусть сама ось проходит через эту высшую точку кривой, так что при
х = 0 окажется и у = 0. При соблюдении этих условий уравнение кривой
будет таково :
оно не только, как это очевидно, принадлежит параболе, но, так как скорость
в точке А есть у а, то высота С А, падая с которой под воздействием той же
самой силы g, тело приобретает такую же скорость, с какой оно движется
в точке А, будет равна а/g ; т. е. она равняется четвертой части параметра,
совершенно так, как это выводится прямым методом из учения о движении
брошенных тел.
6. Пусть сила, действующая на тело, будет, как и раньше, повсюду на-
правлена вертикально вниз, но сама не будет постоянной, а будет как-нибудь
зависеть от высоты СР. Значит, если положить абсциссу СР — х, то сила,
с которой тело в точке М стремится вниз, будет равна X, некоторой функции
от х. Если теперь принять за ординату РМ = у, элемент дуги Мт = ds и
dy = р dx, то будет
dv = X dx
и
v == А + J X dx,
34
Л. ЭЙЛЕР
откуда минимумом должно быть выражение
$dxV(A + $Xdx)(] +ps) ,
из которого получим для описываемой кривой такое уравнение :
\Tq _ Р^А + S х dx
VT+V
и
р =Ус = dy
Х~А^с+]~хах dx
или
Следовательно,
раньше, dy = р dx,
касательная к кривой будет горизонтальна там, где
J X dx = С — А .
Это же самое уравнение траектории тела находится
и прямым методом.
7. Пусть теперь на тело действуют в М (рис. 2) две
силы, одна горизонтальная, равная Y, по направле-
нию МР, другая вертикальная, равная X, по на-
правлению MQ. Пусть при этом X — некоторая функ-
ция вертикального отрезка MQ = СР = х, a Y —
некоторая функция ординаты РМ = у. Положив, как
будем иметь
dv = — X dx — Y dy,
и получим
v = А — X dx — ^Y dy;
отсюда, минимумом должно быть выражение
fdxУ(1+р* 2)(А-jXdx-j-Fdy) .
Продифференцировав
<1+р2)(Д-У Xdx-SYdy) ,
получим
- Xdx У1 + р3 YdyУГ+р3- | р^рУд - j' Xdx - $ Y~dy
2yA~-\Xdx- $ Ydy 2^A^\Xdx- $ Ydy У1 + p3
Положив здесь
N =____-YJUZ______
2 У A -\Xdx-\Y dy
И
p — A-\Xdx-\ Ydy
Ун-p2
будем иметь для искомой кривой уравнение
ОБ ОПРЕДЕЛЕНИИ ДВИЖЕНИЯ БРОШЕННЫХ ТЕЛ
35
ИЛИ
N dx = dP;
отсюда, следовательно, получается
— Y dx у 1 + р2 _ dp У А — $ X dx - \ Y dy_____pXdx - pY dy
2 УД - \ ~dy (1 + p2) УГ+р" 2 УЙ+Р2) И - 5 Xdx^Ydy) ’
или
dp Уд - ? Xdx=~\Ydy ____________Xdx- Y dy_______
(1 + р2)УТ+Т^ 2 У(1 + p2) (Д — $ X dx — $ У dy) ’
а поэтому
2 dp X dy — Y dx
1 + p2 ~ A — $ X dx — $ Y dy
Что это уравнение согласуется с истиной, станет ясным, если вместо
A- J X dx- j У dy
подставить v, ибо тогда будет
2 -у dp _ X dy — Y dx
(1 + p2)3:2 ~ У1
Но радиус соприкасающегося круга
_ (1 + p2)3:2dx .
dp
введя его, имеем
2 г,- _ Y dx — X dy
г ds ’
2v R Y dx — Xdy
где — есть центробежная сила тела, а ----dg----- выражает нормальную
силу, составленную из действующих сил, а равенство этих сил непременно
имеет место при всяком движении брошенных тел.
8. Найденное уравнение
2 dp X dy — Y dx
1 + рг “ У4 — $ X dx — $ У dy
может быть проинтегрировано в общем виде, если его умножить на
р (А -\Xdx-\Ydy)
1 + р2
тогда получится
2pdp (Д - JXdx — $ Y dy) р1 X dx + Y dy _ „
(1 - p2)2 ’ 1 + p2 J ’
что после интегрирования дает
—р2 $ X dx + $ У dy — А _г
ГТр2 ’
или
fy dy - р2 X dx = А + С + Ср*,
откуда
р= Ув + sydy
ус’+’рслГ
36
Л. ЭЙЛЕР
если подставить В вместо — А—С. Так как р = , то будем иметь для
искомой кривой уравнение
J УB^Ydy “J Vc+tTst ’
в котором переменные хи у отделены одна от другой. Или, обращая постоян-
ные В и С в отрицательные, будем иметь
[' dy _ Г dx
J Ув J УС < X dx
Иа основании этого легко построить кривую, однако, извлечь алгебраи-
ческие уравнения, поскольку они здесь содержатся, не так легко. Пусть
X и Y подобные функции, а именно, степени от х и у ; получим
а это уравнение, если п = 1, дает параболу, если же п = 2 — эллипс, имею-
щий центр в С, хотя в последнем случае каждое из интегрирований требует
квадратуры круга. Итак, представляется правдоподобным, что и в других
случаях, когда ни одно из интегрирований не удается, уравнению удов-
летворяют алгебраические кривые ; но метода для их нахождения до сих
пор не имеется.
9. Пусть на тело М постоянно давит по направлению МС к неподвиж-
ной точке сила, пропорциональная какой-нибудь функции от расстояния
МС. Положим, как и раньше, СР = х, РМ = у и dy = pdx ; пусть СМ =
= У х2 4- у2 = t и пусть Т — функция от t, выражающая центростремитель-
ную силу. Разложим эту силу на боковые по MQ и МР ; сила, влекущая
по направлению MQ, будет равна , а сила по МР будет равна ; отсюда
получается ускорение
dv=^l2L^._Iy^L = __Tdt,
потому что
xdx + У dy = tdt;
отсюда
v = A-$Tdt.
Поэтому минимумом должно быть выражение
f dx У(1+ р2) (A^jTdi)
Согласно правилу, продифференцируем величину |/(1-j-р2)(А — $Tdi)
получим
Т dt У1 4- ps р dp У А — \ Т dt
2УТ- $ Tdi УГ+72
Так как dt = Х^Х^~У^У, будем иметЬ ;
N = -_jyJI±pL
2У~А-\ТМ
ОБ ОПРЕДЕЛЕНИИ ДВИЖЕНИЯ БРОШЕННЫХ ТЕЛ
37
И
р = pU-)Tdt .
У1 + р2
составляем уравнение
Ndx = dP,
которое дает
Т у dx У1 + р2 dp} А — )Т dt рТ dt
2/У А - $ TdT (1 + р2)У1 + р2 2У(Т+Р)(А -)Tdt)
а это уравнение, будучи упрощено, перейдет в уравнение
Т (х dy — у dx) dp
2t\A^)Tdi) ~ “1 + р2 ‘
10. Хотя это уравнение содержит четыре различные буквы, однако, при
должной умелости его можно проинтегрировать. Действительно, так как
у dy + xdx — t dt — ру dx 4- xdx ,
то будем иметь :
а подстановка этих значений в уравнение даст
(рх — у) Т dt _ dp
2 (х + ру) (А - $ Т dt) ~ 1 + р2
или
Т dt _ =___dp (х + ру)_
2 (А - $ Т dt) (1 + р2) (рх - у)
Оба эти выражения могут быть проинтегрированы посредством логариф-
мов ; действительно,
f T(A^TTdO = — 2 ZИ ~ J Т>
а
Г dp(x + py)
•' (1 + Р2) (р* - У)
распадается на
Г xdp _ Г р dp = . рх у
J рх -у J 1 + Р2 уГ+~Р2 ’
так что имеем
__ с = Рх У
\ А \ Т dt | 1 I pl- ’
это уравнение показывает, что скорость тела в точке М, равная У А — }Tdt,
обратно пропорциональна длине перпендикуляра, опущенного из С на каса-
тельную, что составляет отличительное свойство такого движения.
11. Эта же задача удобнее решается, если принять за вторую перемен-
ную прямую СМ. Но изложенный выше метод и не требует, чтобы обе пере-
менные были прямоугольными координатами, лишь бы только это были
такие две величины, определив которые мы тем самым определим точку
кривой. По этой причине нельзя было бы принять за эти две переменные
расстояние СМ и перпендикуляр, опущенный из С на касательную, потому
38
Л.ЭЙЛЕР
что, хотя бы и были даны расстояние от центра и перпендикуляр к каса-
тельной, этим, однако, не определяется место точки на кривой. Но ничто
не мешает принять за две переменные расстояние СМ
и дугу ВР (рис. 3) окружности, описанной из центра С;
ибо если даны дуга ВР и расстояние СМ, то точка
кривой М так же определена, как и с помощью
прямоугольных координат. Это замечание делает при-
менимость метода гораздо более широкой, чем могло
бы казаться без него.
12. Итак, пусть расстояние тела от центра
МС = х, а сила, которая действует на тело по нап-
равлению к центру С, равна X и является некоторой
функцией от х. Из центра С опишем произвольно
выбранным радиусом ВС = с окружность, дуга кото-
рой ВР займет место второй переменной у, так что
Рр = dy = р dx. Вследствие действия силы имеем
dv= — Xdx,
откуда
v = А — J X dx.
Из центра С радиусом СМ = х опишем малую дугу Мп ; тогда будет
тп = dx и СР:Рр = СМ : Мп ,
откуда получается
Мп=~Р^
и элемент пути
Мт = dx jfl 4- •
Поэтому минимумом должно быть такое выражение
J dx |/(А — JX dx) ^1 4-
р2 х2 'i
из которого получается дифференциальное значение
1 рх2 У А - X dx
С Ус2 + р2 X2
которое, будучи согласно правилу приравнено нулю, даст уравнение
ус = рх2Уд-] Xdx~
с }с2 + р2 х2
или
Сс4 4- Сс2 р2 х2 = (А - у X dx) р2х4,
откуда получается
р =с2 Ус с2 Ус
V(A - JXdx)x4 - Сс2х2 х У (А - $ X dx) х2 - Сс2
ИЛИ
dy = c2dx/C .
х У (А - S X dx) х2 - Сс2
Это же самое уравнение находится и прямым методом.
ОБ ОПРЕДЕЛЕНИИ ДВИЖЕНИЯ БРОШЕННЫХ ТЕЛ
39
13. Итак, на этих случаях ясно видно согласие установленного здесь
принципа с истиной ; но может еще оставаться сомнение, будет ли иметь
место это согласие также и в более сложных случаях. Поэтому надо будет
внимательно исследовать, насколько широкий смысл имеет этот принцип,
чтобы не придавать ему большего значения, чем позволяет его сущность.
Чтобы развить это, нужно разделить все случаи движения брошенных тел
на два рода. Для первого из них скорость, которую тело имеет в каждом
месте, зависит только от его положения, так что если оно будет возвращаться
к одному и тому же положению, то будет приобретать снова ту же самую
скорость; так бывает, если тело влекут к одному или нескольким непо-
движным центрам силы, пропорциональные каким-нибудь функциям расстоя-
ний от этих центров. Ко второму роду я отношу те случаи движения брошен-
ных тел, когда скорость тела не определяется одним только местом его пре-
бывания; это бывает, либо если центры, к которым стремится тело, будут
подвижны, либо если движение происходит в сопротивляющейся среде.
Установив это разделение, нужно сказать, что всякий раз, когда движение
тела будет принадлежать к первому роду, т. е. тело будут увлекать не только
к одному, но и к любому числу неподвижных центров какие-нибудь силы,
в этом движении сумма всех элементарных движений будет наименьшей.
14. Того же самого требует и сущность задания: ведь если между дан-
ными пределами разыскивается та кривая, для которой Jds составлял
бы минимум, то тем самым предполагается, что в каждом из обоих пределов
скорость тела одна и та же, какая бы кривая ни являлась путем тела. Сколько
бы ни было неподвижных центров сил, скорость тела в любой точке М
(рис. 2) выражается определенной функцией обеих переменных СР = х и
РМ = у.
Итак, пусть v — некоторая функция от х и у, так что
dv=Tdx+ V dy;
посмотрим, покажет ли наш принцип действительную траекторию тела.
Так как dv = Tdx ф- Vdy, то тело будет двигаться так же, как если бы на
него действовали в М две силы, одна Т, в направлении параллельном аб-
сциссам х, другая V, в направлении параллельном ординатам у ; отсюда
получается тангенциальная сила, равная
Tdx+ Vdy~
ds ’
и нормальная сила, равная
— Vdx+Tdy
ds
В силу же природы свободного движения должно быть
2v _ -Vdx+ Т dy _ - V + Тр .
г ~ ds ~ VTTF ’
если метод максимумов и минимумов приведет к этому уравнению, то наш
принцип непременно будет сообразен с истиной.
15. Так как согласно этому принципу должен быть минимумом
j'dxV«;(l + р2) ,
то продифференцируем величину
IMi + р2)
40
Л. ЭЙЛЕР
и так как dv = Tdx Vdy, получим
Т dx /1 + р2 । V dy У1 + р3 । pdp Уу
2У«Г 2^ у УГ+р7
откуда по данным нами правилам получается для искомой кривой следу-
ющее уравнение:
V dxУ1 + р2 _ р У у _ dp\v . р (Т dx + V dy)
2}У" У1 + р2 (l+p2)3'2 2У«(1 + Р2)
ИЛИ
dpVt> ___ Tpdx— V dx
(1+р2)3:2 2 У«Г(1 + р2)'
Но радиус соприкасающегося круга в точке М равен
-(1 + р2)ДхУ1 + р2 .
dp ’
если положить его равным г, то будем иметь
2jv _ Тр - V
г УГ+"р2~ ’
совершенно то же, что находим посредством прямого метода.
Итак, если только действующие силы таковы, что их можно свести к
двум силам Т и V, действующим по направлениям, параллельным коорди-
натам х и у, и пропорциональным каким-нибудь функциям этих перемен-
ных х и у, то для описываемой кривой движение тела, собранное по всем
элементам, всегда будет наименьшим.
16. Итак, этот принцип имеет столь широкое значение, что подлежащим
изъятию представляется только движение, возмущаемое сопротивлением
среды; причем легко видеть причину этого изъятия, потому что в этом
случае тело, приходя к одному и тому же месту различными путями, при-
обретает не одну и ту же скорость. Таким образом, если устранить всякое
сопротивление движению брошенных тел, то всегда будет иметь место то
постоянное свойство, что сумма всех элементарных движений будет наимень-
шей. И это свойство будет наблюдаться не только в движении одного тела,
но и в движении нескольких тел, рассматриваемых вместе; как бы они ни
действовали одно на другое, всегда сумма всех движений остается наимень-
шей. Так как такого рода движения трудно поддаются расчету, то здесь это
легче понять из основных принципов, чем из согласия вычислений, произ-
веденных по обоим методам. Действительно, так как тела в силу инерции
сопротивляются всякому изменению состояния, то они, если только будут
свободны, будут насколько возможно меньше подчиняться действующим
силам ; отсюда вытекает, что в порожденном движении эффект, произве-
денный силами, должен быть меньшим, чем если бы тело или тела двигались
каким-либо иным способом. Хотя сила этого рассуждения еще недостаточно
видна, все же, так как оно согласно с истиной, я не сомневаюсь, что при
помощи принципов здравой метафизики оно может быть возведено к большей
очевидности ; но это я представляю другим, тем, кто занимается метафи-
зикой.
П. МОПЕРТЮИ
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ
ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА [13]
Принцип, на котором основан нижеследующий Труд, я сформулировал
15 апреля 1744 г. в публичном Собрании Парижской Королевской Академии
наук, о чем свидетельствуют Акты этой Академии.
К концу того же года Профессор Эйлер представил свою превосходную
книгу: Methodus inveniendi lineas curvas maximi minimive proprietate gau-
dentes. В Дополнении, присоединенном к ней, этот знаменитый Геометр
доказывает, что в траекториях, которые описывают тела под действием
центральных сил, скорость, умноженная на элемент кривой, всегда образует
minimum.
Э1йо замечание мне тем более приятно, что оно является прекрасным
применением моего принципа к движению Планет; здесь этот принцип
действительно является правилом.
Теперь я попытаюсь извлечь из того же источника истины высшего рода
и более важные.
I. ИЗУЧЕНИЕ ДОКАЗАТЕЛЬСТВ СУЩЕСТВОВАНИЯ БОГА,
ИЗВЛЕЧЕННЫХ ИЗ ЧУДЕС ПРИРОДЫ
Остаемся ли мы замкнутыми сами в себе йли выходим из этой замкну-
тости, чтобы рассмотреть чудеса Вселенной, мы находим столько доказа-
тельств существования всемогущего и мудрейшего Существа, что в некото-
ром роде необходимо уменьшить их число, стремящееся возрасти, или, по
крайней мере, необходимо сделать выбор между этими доказательствами,
изучить их силу и их слабость, и придать каждому вес, который они должны
иметь, ибо нельзя повредить истине более, чем желанием построить ее на
ложных умозаключениях.
Я не рассматриваю здесь доказательства, которое находят в идее беско-
нечного Существа, идее слишком большой, чтобы мы могли извлечь ее из
нашей собственной основы или из какой-либо другой конечной основы ;
аргумент который, кажется, доказывает, что имеется совершенное, бесконеч-
ное Существо.
Я совсем не прибегаю к тому согласию всех людей с существованием
Бога, которое казалось таким сильным доказательством древнему Фило-
софу Рима*). Я не обсуждаю, верно ли то, что существует какой-то народ,
который не согласен в этом вопросе с другими (если бы кучка людей думала
иначе, чем все другие обитатели Земли, можно было бы сделать исключение),
а также не рассматриваю того разнообразия, которое может быть в идеях о
Боге у всех тех, кто допускает его существование, разнообразия, мешающего
извлечь большое преимущество из этого согласия.
*) Cicer. Tuscul., I, 13.
42
П. МОПЕРТЮИ
Наконец, я не буду останавливаться на том,что можно вывести из интел-
лекта, который мы находим в себе, из этой искры мудрости и могущества ;
мудрость и могущество мы видим разлитыми в конечных Существах; это
предполагает огромный и вечный источник, из которого они берут свое
начало.
Все эти аргументы мне представляются очень сильными, но они не явля-
ются аргументами такого рода, которые рассматриваю я.
В течение всего прошедшего времени люди, изучавшие Вселенную,
находили в ней знаки мудрости и могущества Того, кто ею управляет. Чем
больше успехов делает знание Физики, тем больше появляется таких до-
казательств. Одни, смутно пораженные свойствами Божества, которого
они находят во всякий момент в Природе, другие, с плохим пониманием
религиозных предметов, дали несколько доказательств большей силы, чем
эти доказательства должны иметь, или же принимали за доказательства то,
что ими не является.
Может быть, было бы допустимо ослабить строгость аргументов, если
недостает доводов для установления несомненного и полезного принципа ;
но здесь аргументы достаточно сильны и число их достаточно велико для
того, чтобы сделать изучение более строгим и выбор — более тщательным.
Я не буду останавливаться на доказательствах существования верхов-
ного Существа, выведенных Древними из красоты, порядка и слаженности
Вселенной. Можно ознакомиться с доказательствами, которые имеются у
Цицерона*), и с доказательствами, которые он приводит по Аристотелю**).
Они знали о Природе слишком мало, чтобы быть в праве ею восхищаться.
Я присоединяюсь к Философу, который благодаря своим открытиям достиг
большего, чем они, в обсуждении этих чудес, и умозаключения которого
более точны, чем все их умозаключения.
Ньютон затронул, кажется, больше таких доказательств, которые мы
находим при созерцании Вселенной, чем всяких других, которые он мог
бы извлечь из глубины своего ума.
Этот великий человек полагал***), что движения небесных тел ясно до-
казывают существование Того, кто ими управляет. Шесть Планет — Мерку-
рий, Венера, Земля, Марс, Юпитер и Сатурн — вращаются вокруг Солнца.
Все они движутся в одном и том же направлении и описывают приблизи-
тельно концентрические орбиты, в то время как другой вид звезд, Кометы,
описывая совершенно иные орбиты, движутся в совсем другого рода направ-
лениях^'.- пробегают все участки Неба. Ньютон полагал, что такое едино-
образие может быть только результатом воли верховного Существа.
Менее возвышенные предметы не казались ему доставляющими менее
сильные аргументы. Единообразие, наблюдаемое в строении Животных,
их чудесная, полная пользы, организация, были для него убедительными
доказательствами существования всемогущего и мудрейшего Творца****).
Множество Физиков после Ньютона обнаружили Бога в Звездах, Насе-
комых, Растениях, Воде*****).
Не будем скрывать слабости некоторых их доводов, а чтобы лучше
познакомиться с злоупотреблениями в доказательствах существования
Бога, рассмотрим доказательства, которые казались столь сильными
даже Ньютону.
*) Tuscul., I. 28 et 29.
**) De Nat. Deor., II. 37, 38.
***) Newt. Opticks. Ill Book. Query 31.
**•*) Theol. Astron, de Derham. Theol. Phys, du meme. Theol. des Insectes de Lesser.
*****) Theol. de i’Eau de Fabricius.
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 43
Единообразие движения Планет, говорит он, с необходимостью доказы-
вает выбор. Невозможно, чтобы слепая Судьба заставляла их двигаться
всегда в одном и том же направлении и по приблизительно концентрическим
орбитам.
Ньютон мог бы добавить к этой однообразности движения Планет то, что
все они движутся почти в одной и той же плоскости. Пространство, в которое
заключены все их орбиты, составляет приблизительно только 17-ю часть
поверхности сферы. Если, следовательно, примем орбиту Земли за плоскость,
к которой отнесем все другие, и рассмотрим ее положение как результат
случайности, то вероятность того, что 5 других орбит не заключены в этой
Зоне, будет равна отношению 175 — 1 к 1, иначе говоря, отношению
1419856 к 1.
Если допустим, как Ньютон, что все небесные тела, притягивающиеся
к Солнцу, движутся в пустоте, то будет почти невероятным, что случай-
ность заставляет их двигаться так, а не иначе. Остается, однако, некоторая
вероятность этого, и, следовательно, нельзя сказать, что это единообразие
является результатом выбора.
Но более того, альтернатива выбора или крайней случайности основы-
вается только на бессилии системы Ньютона, дать физическую причину
этого единообразия. Для других Философов, которые допускают су-
ществование жидкости, увлекающей Планеты или только ослабляющей
их движение, одинаковость их движений не кажется необъяснимой;
она не предполагает более единственного толчка случайности и не дока-
зывает более существование Бога, который сообщил Материи именно
это движение*).
Я не знаю, является ли очень сильным аргумент, который Ньютон извле-
кает из строения Животных. Если единообразие, наблюдаемое нами во мно-
гом, является доказательством, то не опровергается ли это доказательство
бесконечным разнообразием, которое мы наблюдаем во многом другом?
Не выходя за пределы животного мира, пусть сравнят Орла с Мухой,
Оленя с Улиткой, Кита с Устрицей ; и пусть обсудят такое единообразие.
В самом деле, другие Философы доказательство хотят найти существо-
вания Бога в разнообразии форм, и я не знаю, кто из них имеет лучшие
основания.
Аргумент; извлеченный из соответствия различных частей Животных
с их нуждами, кажется более прочным. Их ноги не для того ли созданыт,
чтобы ходить, их крылья — чтобы летать, их глаза — чтобы видеть, их
рот — чтобы есть, другие части — чтобы воспроизводить себе подобных? Все
это не указывает ли на намерение и замысел, которые руководили их построе-
нием? Этот аргумент поражал Древних, он изумлял и Ньютона; напрасно
самые большие враги Провидения возражают против того, что применение
совсем не являлось целью, а было следствием построения частей Животных.
Будто бы случайность образовала глаза, уши, язык, которыми пользуются,
чтобы видеть, слышать и говорить**).
Но нельзя ли было бы сказать, что так как в случайных комбинациях
продуктов Природы могли существовать только те, которые обладали не-
которыми отношениями соответствия, то нет чудес в том, что это соответствие
находится во всех в действительности существующих видах? Говорят, слу-
чай произвел множество Индивидуумов. Меньшее число их было построено
так, что части Животных могли удовлетворять их нуждам. В другом, беско-
нечно большом числе их не было ни соответствия, ни порядка. Животные
*) Смотри Сочинение D. Bernoulli, Sur 1’inclin. des plans des orbites des Planfetes.
**) Lucret. lib., IV.
44
П. МОПЕРТЮИ
без рта не могли жить, другие, у которых отсутствовали органы размноже-
ния, не могли сохраняться непрерывно; остались только те, у которых
имелись порядок и соответствие; и те виды, которые мы видим теперь,
являются только весьма небольшой частью того, что слепая Судьба
произвела.
Почти все современные Авторы, излагавшие Физику или Естественную
Историю, только увеличили число доказательств, извлекаемых из органи-
зации Животных и Планет, и продвинули их в самые мелкие детали Природы.
Чтобы не приводить здесь слишком неприличные примеры, которые были
бы только слишком общими, я скажу лишь о примере*), в котором находят
Бога в складках кожи Носорога: это животное, будучи покрыто очень
грубой кожей, не могло бы двигаться без этих складок. Не наносится ли
ущерб великим истинам, которые намереваются доказать с помощью такого
аргумента? Что сказать о том, кто отрицает Провидение потому, что чешуя
Черепахи не сгибается и не соединяется? Довод того, кто доказывает его
на коже Носорога, имеет ту же силу. Оставим эти пустяки тем, кто не чув-
ствует их вздорности.
Другие Философы впадают в противоположную крайность. Слишком
мало касаясь знаков Разума и Замысла, которые мы находим в Природе,
они хотели изгнать из нее все конечные причины. Они думали, что благо-
даря материи и движению Мир мог сформироваться таким, каким он явля-
ется. Одни видели высший Разум во всем ; другие совсем не видели его и
считали, что слепая Механика могла образовать наиболее организованные
тела Планет и Животных и управлять всеми чудесами, которые мы видим во
Вселенной**).
Из всего только что сказанного видно, что главный аргумент Декарта,
основанный на наличии у нас идеи о совершенном Существе, не является
таким метафизическим аргументом, который мы ищем, и он не произвел
большого впечатления на Ньютона; а все доказательства, которые Ньютон
извлекает из единообразия и соответствия различных частей Вселенной, не
могли бы показаться доказательствами Декарту.
Нужно признать, что этими доказательствами злоупотребляют: одни
придают этим доказательствам силу, которой они не имеют, другие слишком
увеличивают число доказательств. Тела Животных и Планет являются слиш-
ком сложными Механизмами, последние составляющие их части ускользают
от нашего понимания; а о применении и назначении их мы знаем слишком
мало для того, чтобы судить о мудрости и могуществе, которые нужны
были для их построения. Если некоторые из них кажутся доведенными
до высокой степени совершенства, то другие кажутся набросанными
только вчерне. Многие из них могли бы показаться бесполезными или
вредными, если бы мы судили о них только по нашим знаниям, а не пред-
полагали заранее, что их ввело во Вселенную мудрейшее и всемогущее
Существо.
Что служит в строении какого-либо животного установлению видимости
порядка и соответствия, когда мы вдруг останавливаемся перед некоторым
досадным заключением? Змея, которая не ходит, не летает, не могла бы
укрыться от преследования других животных, если бы громадное число
позвонков не придавало ее телу такой гибкости, что она ползает быстрее,
чем ходят многие животные. Она погибла бы от холода зимой, если бы ее
удлиненная и заостренная форма не наделяла ее способностью углубляться
в землю; непрерывно ползая, она бы поранила себя, или перервалась при
*) Philos. Transact., № 470.
**) Descartes, Princip. L’Homme de Descartes.
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫ ВЕД ЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 45
переходе через отверстия, куда она прячется, если бы ее тело не было покрыто
чувствительной и чешуйчатой кожей. Не чудесно ли все это? Но для чего
все это служит? Для сохранения животного, зуб которого умерщвляет чело-
века. О! возразят, вы не знаете полезности Змей. Они, вероятно, необходимы
во Вселенной : они содержат превосходные лекарства, которые вам не
известны. Следовательно, обойдем молчанием или, по крайней мере, не будем
удивляться такому замечательному устройству животного, которое известно,
как вредное.
Все заполнено подобными доводами в сочинениях Натуралистов. Пона-
блюдайте за созданием Мух и Муравьев; вас удивит забота Провидения о
яйцах насекомых, о пище для детенышей, о куколках, о развитии их частей
при всех превращениях. Все это приводит к созданию насекомого, докучли-
вого для людей, насекомого, которое пожирает первая птица и которое
попадает в сети Паука.
В то время как одна сторона изложенного здесь содержит в себе дока-
зательства мудрости и могущества Создателя, не грозит ли вторая опас-
ностью утвердить в неверии в него?
Величайшие умы, достойные уважения, как благодаря своей набожности,
так и благодаря своим познаниям*), не могли не признать, что соответствие
и порядок не кажутся наблюдаемыми во Вселенной в таком ясном виде,
чтобы это позволило нам без затруднений понять Вселенную, как произ-
ведение мудрейшего и всемогущего Существа. Зло всех видов, беспорядок,
порок, скорбь казались им с трудом согласующимися с господством такого
Владыки.
Посмотрите, говорили они, на эту Землю; моря покрывают половину
ее, на остальной части вы видите крутые скалы, ледяные районы, горячий
песок. Изучите нравы тех, кто ее населяет; вы найдете ложь, воровство,
убийство, и повсюду пороков больше, чем добродетели. Среди этих
несчастных существ вы найдете многих отчаявшихся в мучениях по-
дагры и каменной болезни, многих изнемогающих от других недугов,
продолжительность которых невыносима; почти все удручены заботами
и печалями.
Некоторые Философы, кажется, были так поражены этой картиной, что,
забыв все красоты Вселенной, пытались только оправдать Бога в том, что
он создал такие несовершенные вещи. Одним казалось, что для сохранения
его мудрости следует уменьшить его могущество, говоря, что он сделал все,
что мог и что лучше сделать не мог**). То, что находится во всевозможных
Мирах, несмотря на свои недостатки, является все же лучшим. Другим
казалось, что для сохранения могущества следует нанести ущерб мудрости.
Согласно им Бог мог бы сделать Мир более совершенным, чем тот, в котором
мы живем, но нужно было бы для этого употребить слишком сложные сред-
ства; его интересовал более способ действия, нежели совершенство произ-
ведения***). Последние прибегают к примеру Художника, который полагает,
что окружность, начерченная без циркуля, лучше доказывает его мастерство,
чем более сложные и более правильные фигуры, начерченные с помощью
инструментов.
Я не нахожу ни один из этих ответов удовлетворительным. Настоящий
Философ не должен позволить ни ослепить себя частями Вселенной, в кото-
рых блещет порядок и соответствие, ни поколебать себя частями, в которых
он этого не находит. Несмотря на все беспорядки, которые он заметит в
*) Medit. Chret. et Metaph. du P. Malebranche. Medit. VII.
**) Leibnitz. Theod. II часть, № 224, 225.
***) Malebranche Medit. Chret et Metaph. VII.
46
П. МОПЕРТЮИ
Природе, он найдет в ней достаточно признаков мудрости и могущества ее
Автора, чтобы не отречься от него.
Я совсем не говорю о Философах другого рода, которые утверждают,
что в Природе совсем нет плохого: Все, что существует, хорошо*). Если из-
учить это положение, не предполагая заранее существования всемогущего и
мудрейшего Существа, то оно не будет непоколебимым. Если извлечь его
из предположения о мудрейшем и всемогущем Существе, то оно будет только
Актом веры. Сначала оно кажется делающим честь Верховному Разуму,
но в сущности оно стремится все подчинить необходимости. Это скорее уте-
шение в наших несчастьях, чем похвала нашему благополучию.
Я возвращаюсь к доказательствам, которые извлекают из созерцания
Природы.
Те, которые больше всего сосредоточивались на этих доказательствах,
совсем недостаточно изучили их силу и их объем. Множество вещей во
Вселенной возвещает, что они не управляются слепым Могуществом. По-
всюду мы замечаем ряд действий, направленных к некоторой цели; это гово-
рит только о разуме и замыслах; в цели этих замыслов и следует искать
мудрость. Искусство исполнения не является достаточным, необходимо,
чтобы замысел был разумным. Если бы мы не восхищались замыслом, мы бы
отрицали Творца; и тем сильнее было бы отрицание, чем больше было бы
потрачено искусства на постройку машины, которая не приносила бы ни-
какой пользы или действие которой было бы вредным. Разве мы восхищались
бы правильностью в движении Планет, которые движутся все в одном и том
же направлении, почти в одной и той же плоскости и по почти подобным
орбитам, если бы видели, что было бы лучше заставить их двигаться иначе.
Так как ядовитые Растения и вредные Животные производятся и тщательно
сохраняются в Природе, то дано ли нам познать мудрость и доброту Того,
кто их создал? Если бы во Вселенной мы находили только подобные вещи,
то они могли быть только произведением Злых Духов. Правда, наш взгляд
довольно ограничен, и нельзя требовать, чтобы он очень далеко прослеживал
порядок и связь вещей. Если бы он мог это сделать, без сомнения, он был
бы поражен, как мудростью замыслов, так и разумом в исполнении. Но в
том состоянии бессилия, в котором мы находимся, мы не можем соединить
эти различные атрибуты. Ибо, хотя бесконечный разум с необходимостью
предполагает мудрость, ограниченному разуму может ее не доставать; и
было бы желательно, чтобы Вселенная была обязана своим началом слепой
Судьбе в той же мере, в какой она является произведением такого разума.
П. НУЖНО ИСКАТЬ ДОКАЗАТЕЛЬСТВО СУЩЕСТВОВАНИЯ БОГА В ОБЩИХ
ЗАКОНАХ ПРИРОДЫ. ЗАКОНЫ, СОГЛАСНО КОТОРЫМ ДВИЖЕНИЕ
СОХРАНЯЕТСЯ, РАСПРЕДЕЛЯЕТСЯ И УНИЧТОЖАЕТСЯ, ОСНОВАНЫ
НА АТРИБУТАХ ВЫСШЕГО РАЗУМА
Следовательно, не в мелких деталях, не в частях Вселенной, отношения
которых мы слишком мало знаем, нужно искать Верховное Существо, а в
Явлениях, всеобщность которых не подвержена никаким исключениям, а
простота их полностью поддается нашему обозрению.
Правда, это исследование будет более трудным, чем исследование, состо-
ящее только в изучении насекомого, цветка или другого объекта такого же
рода из тех, которые Природа представляет нашему взору в любое время.
*) Pope, Essai sur 1’homme.
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 47
Но мы можем в своем движении обратиться за помощью к уверенному гиду,
хотя еще не направили свои шаги туда, куда мы хотим идти.
До сих пор Математика почти не имела целью грубые потребности тел
или бесполезные спекуляции ума. Ее едва ли думали применить для дока-
зательства или открытия истин, не относящихся к пространству и числам.
Ибо не следует впадать в ошибку из-за некоторых Трудов, только по виду
являющихся математическими, а по существу — весьма сомнительной и тем-
ной Метафизикой. Пример некоторых Философов должен показать, что слова
лемма, теорема, королларий не вносят математической уверенности во все;
что эта уверенность не зависит ни от этих важных слов, ни даже от метода,
которого придерживаются Геометры, а зависит от простоты рассматриваемых
ими объектов.
Посмотрим, можем ли мы более удачно применить эту науку. Доказа-
тельство существования Бога, которое она нам предоставит, по сравнению
со всеми другими будет иметь преимущество очевидности, характерное для
математических истин. Те, у кого не было достаточно веры в математические
доводы, уверуют в бесспорность такого рода доказательств, а те, которые не
были удовлетворены популярными доказательствами, найдут в наших до-
казательствах достаточно точности и возвышенности.
Остановимся, следовательно, на простых теориях наиболее чудесных
объектов. Организация Животных, множество и малость частей организма
насекомых, необъятность небесных тел, расстояния между ними и их вра-
щение более способны изумить наш ум, чем прояснить его. Верховное Суще-
ство имеется всюду, но не всюду оно одинаково видимо. Его мы лучше Ьидим
в более простых объектах; его находим в первичных законах, которым оно
подчинило Природу, в тех всеобщих правилах, согласно которым Движение
сохраняется, распределяется и уничтожается, и не находим в явлениях,
являющихся только слишком сложными следствиями этих законов.
Исходя из этих законов, законов, найденных Математиками и подтверж-
дающихся опытом, я мог бы вывести признаки мудрости и могущества Вер-
ховного Существа. Однако, так как указанные нами законы опираются на
гипотезы, не являющиеся чисто геометрическими, и потому уверенность в
них не представляется основанной на строгих доказательствах, я считаю более
верным и более полезным вывести эти законы из атрибутов всемогущего и
мудрейшего Существа. Если законы, найденные мною на этом пути, будут
такими же, какие на самом деле наблюдаются во Вселенной, то не будет ли
это наиболее сильным доказательством существования Творца этих законов?
Но могут сказать, что хотя законы Движения и Покоя были доказаны
до сих пор только с помощью гипотез и экспериментов, они, может быть,
являются необходимыми следствиями природы Тел, и нет ничего произволь-
ного в их установлении? Вы приписываете Провидению то, что на самом
деле является только Необходимостью.
Если верно, что законы Движения и Покоя являются необходимыми
следствиями природы Тел, то это даже еще лучше доказывает совершен-
ство Верховного Существа: все предметы упорядочены так, что слепая и
необходимая Математика выполняет то, что предписал более ясный и более
свободный Разум.
Некоторые Философы Древности утверждали, что совсем нет движения.
Слишком изощренное применение ума опровергало то, что замечали их
чувства. Трудности, с которыми встречались Древние, постигая, как дви-
жутся Тела, заставляли их отрицать, как то, что Тела движутся, так и воз-
можность их движения. Мы не будем останавливаться на аргументах, с
помощью которых они пытались обосновать свое мнение. Но заметим, что
Движение можно было бы отрицать только с помощью рассуждений,
48
П. МОПЕРТЮИ
уничтожающих существование всех объектов вне нас, сводящих Вселен-
ную к нашему собственному существованию, а все Явления — к нашим
восприятиям.
Правда, мы знаем о Движении только благодаря нашим чувствам, но
много ли таких вещей, о которых мы узнаем иначе? Движущая сила, мощ-
ность, которой обладает тело в движении, чтобы двигать другие тела, явля-
ются словами, придуманными для пополнения наших знаний, и обозначают
только результаты Явлений. Только привычка мешает нам почувствовать
все то чудесное, что имеется в передаче Движения. С тех пор, как мы от-
крыли глаза, ничто не поражает их так часто, как это явление. Тот, кто о
нем не размышлял, не находит в нем ничего темного; а тот, кто о нем много
думал, отчаивается что-либо в нем понять.
Если бы кто-нибудь, никогда не соприкасавшийся с Телом и никогда
не имевший в виду столкнуться с ним, но знающий из опыта, что случается,
когда смешивают вместе различные цвета, видел синее тело движущимся к
желтому телу и задался вопросом, что случится, когда оба тела встретятся,
то, может быть, он мог бы вполне правдоподобно сказать, что синее тело
станет зеленым, как только оно столкнется с желтым телом. Но угадал ли
бы он, что два тела объединятся, чтобы двигаться с общей скоростью
или что одно из них сообщит другому часть своей скорости и будет
двигаться в toai же направлении с другой скоростью, или что оно от-
разится в противоположном направлении? Я не думаю, чтобы это было
возможно.
Однако, как только коснутся Тел, как только узнают, что они непрони-
цаемы, как только докажут, что нужна некоторая сила, чтобы изменить
состояние Покоя или Движения, в котором они находятся, увидят, что когда
одно Тело движется к другому и достигает его, то оно необходимо отразится
или остановится, или уменьшит свою скорость, чтобы передвинуть тело,
которое при встрече находится в покое, или изменить движение последнего,
если оно движется. Но как эти изменения происходят? Какова та сила, ко-
торую, как кажется, должны иметь Тела, чтобы действовать друг на друга.
Мы видим части Материи в движении; с другой стороны, мы видим их
в покое. Движение не является, следовательно, существенным свойством
Материи. Это — состояние, в котором она может находиться или не нахо-
диться; и мы не видим, как бы она могла обеспечить сама себя (se procurer
d’elle—meme).
Части Материи, движущиеся в Природе, получили, следовательно, свое
движение благодаря некоторой внешней причине, до сих пор мне неизвест-
ной. И так как они сами по себе безразличны к Движению или Покою, то те
из них, которые находились в Покое, в нем и остаются, а те, которые дви-
гались хотя бы однажды, продолжают двигаться до тех пор, пока какая-
либо причина не изменит этого состояния.
Когда одна часть Материи, находящейся в движении, встречает другую
ее часть, находящуюся в покое, то она сообщает последней часть своего
движения или даже все свое движение. И так как встреча двух частей Ма-
терии, из которых одна находится в покое, а другая в движении, или обе
находятся в движении, всегда сопровождается некоторым изменением в
состоянии обеих, то Удар кажется причиной этого изменения, хотя было бы
абсурдом сказать, что часть Материи, которая не может двигаться сама по
себе, может двигать другую.
Чтобы найти первоначальную причину Движения, величайший Философ
Древности прибег к первому Движителю, неподвижному и неделимому*).
*) Aristot. Physic. Lib., VIII.
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 49
Один из современных Философов не только признает Бога творцом началь-
ного движения, сообщенного Материи, но считает Действие Бога постоянно
необходимым для всех распределений и видоизменений Движения. Не бу-
дучи в состоянии понять, как возможность движения может быть свой-
ственна телу, он считает нужным основываться на отрицании того, что она
свойственна телу, и заключает, что когда одно тело толкает или оказывает
давление на другое, то им движет только Бог; толчок является только по-
водом, чтобы определить Бога в движении*).
Эти Философы предположили причину Движения только в Боге, потому
что они не знали, в чем ее найти; не в состоянии понять, что Материя не
оказывает никакого действия на образование, распределение и уничтожение
Движения, они прибегли к нематериальному Существу. Нужно было бы
знать, что все законы Движения и Покоя основываются на наиболее глу-
боком принципе, чтобы увидеть, что своим установлением они обязаны
всемогущему и мудрейшему Существу, действует ли это Существо непосред-
ственно, дает ли оно возможность Телам действовать друг на друга, употреб-
ляет ли какое-либо другое средство, о котором мы еще не знаем.
Простейший из законов Природы, закон Покоя или Равновесия, изве-
стен в течение многих веков; но он до сих пор кажется не имеющим никакой
связи с законами Движения, которые было очень трудно открыть.
Эти исследования еще так мало привлекают внимания или так мало
ушли от древних, что можно сказать, что до сих пор они являются совер-
шенно новой наукой. В самом деле, как бы Древние открыли законы Дви-
жения, когда одни из них сводили все свои рассуждения о Движении к софи-
стическим диспутам, а другие утверждали, что Движения совсем нет?
Более трудолюбивые и более здравомыслящие Философы не считают, что
трудности, связанные с первыми принципами вещей, могут быть основанием
для того, чтобы потерять надежду узнать что-либо об этих принципах, или
оправданием, освобождающим нас от всякого исследования.
Как только был введен истинный метод Философии, не стали уже до-
вольствоваться бесполезными диспутами о природе Движения, а пожелали
узнать, согласно каким законам движение распределяется, сохраняется и
уничтожается, так как почувствовали, что эти законы являются основой
всякой Натуральной Философии.
Великий Декарт, наиболее смелый Философ, попытался найти эти законы,
но ошибся. Но так как само время показало, наконец, что этот вопрос в не-
котором роде созрел, то стало ясно, что эти неизвестные в течение стольких
веков законы открываются повсюду. Гюйгенс, Валлис и Врен нашли
их в одно и то же время. Многие Математики после них, найдя эти законы
различными путями, утвердили их.
Однако все Математики, достигнув в настоящее время согласия в самых
сложных случаях, не могут этого добиться в наиболее простом-случае. Все
согласны с одинаковым распределением Движения при Ударе упругих Тел,
но рассматривают для твердых Тел распределение движения различными
способами; некоторые математики утверждают, что не знают, как следует
определять распределение Движения при Ударе твердых Тел. Затруднения,
которые им при этом встречались, заставили их прийти к выводу, отрицаю-
щему существование и даже возможность твердых Тел. Они утверждают,
что Тела, принятые за твердые, являются только упругими Телами, жест-
кость которых определяет изгиб их частей и их незаметное выпрямление.
Ссылаются на опыты, которые проделали над Телами, вульгарно назы-
ваемыми твердыми, опыты, доказывающие, что эти Тела являются только
*) Malebranche, Entretiens sur la Metaph. Entret., VII.
Ranuaiiunum.iA nnuununu mpyshuizu
50
П. МОПЕРТЮИ
упругими. Когда два шара из слоновой кости, стали или стекла сталкива-
ются, то хотя после удара оказывается, что они приняли первоначальную
форму, они не могут ее сохранять постоянно. В этом убеждаются глазами,
если один из шаров окрашивают в какую-либо краску, которая может сти-
раться и прилипать к другому; по величине пятна видно, что шары сплю-
щиваются от удара, хотя после него не остается в их фигуре какого-либо
чувствительного изменения.
К этим опытам присоединяют математические рассуждения: утвер-
ждают, что Твердость, в строгом смысле слова, потребовала бы от Природы
действий, несовмеетимых с некоторым Законом Непрерывности. Говорят,
что если бы твердое тело встречало непоколебимое препятствие, то оно необ-
ходимо теряло бы вдруг свою скорость, не переходя через какую-либо сту-
пень уменьшения, или что его скорость превращалась бы в противополож-
ную скорость и положительная скорость становилась бы отрицательной, не
переходя через покой.
Однако я сознаюсь, что не чувствую силы этого рассуждения. Я не знаю,
достаточно ли известен способ, которым Движение производится или унич-
тожается, для того чтобы можно было сказать, что закон непрерывности
здесь нарушен; я даже плохо знаю, что является этим законом. Если бы
предположили, что скорость возрастает или уменьшается ступенями, то не
было ли бы всегда скачков от одной ступени к другой? И незаметные скачки
не нарушили ли бы непрерывности настолько, что привели бы к внезапному
уничтожению Вселенной?
Что касается опытов, на которые они ссылаются, то из них очевидно,
что Твердость можно спутать с Упругостью; но эти опыты не доказывают,
что они являются одним и тем же. Напротив, с тех пор как размышляют о
непроницаемости Тел, представляется, что она не отличается от твердости,
или что твердость является необходимым следствием непроницаемости.
Если в большинстве Тел составляющие их части отделяются или сгибаются,
то это происходит только потому, что эти тела являются скоплениями дру-
гих тел; простые, первоначальные Тела, являющиеся элементами всех
других, должны быть твердыми, несгибаемыми, неизменными.
Чем больше изучают упругость, тем становится более ясным, что это
свойство зависит только от такой особой структуры Тел, которая оставляет
между их частицами интервалы, благодаря которым частицы могут сги-
баться.
Поэтому, кажется, было бы лучше опереться на утверждение, что все.
первоначальные Тела являются твердыми, чем на утверждение, что в При-
роде совсем нет Твердых Тел. Однако я не знаю, позволит ли нам способ, с
помощью которого мы изучаем Тела, допустить одно или другое из этих
утверждений. Я думаю, что со мной согласятся, если я скажу, что наиболее
сильным доводом, на основании которого стали допускать только Упругие
Тела, было бессилие найти законы передачи Движения Твердых Тел.
Декарт допустил существование Твердых Тел и думал найти законы их
Движения. Он исходил из довольно правдоподобного принципа, согласно
которому количество Движения в Природе сохраняется всегда одинаковым.
Он вывел отсюда ложные законы, потому что принцип не был верным.
Философы, которые появились после него, были поражены другим со-
хранением, а именно, сохранением того, что они назвали Живой Силой и что
является произведением каждой массы на квадрат ее скорости. Они не осно-
вывали свои законы Движения на этом сохранении, а вывели это сохранение
•из законов Движения. Однако, так как сохранение Живой Силы имело место
только при ударе Упругих Тел, то у них утвердилось мнение, что других
Тел в Природе совсем нет.
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 51
Сохранение Движения верно только в некоторых случаях. Сохранение
Живой Силы имеет место только для некоторых Тел. Ни то, ни другое не
может превратиться ни в универсальный принцип, ни в общий результат
законов Движения.
Если исследовать принципы, на которых основываются некоторые Ав-
торы, открывшие эти законы, и пути, которыми они следовали, то придется
изумиться, увидев, что они их так удачно достигли. И невозможно не поду-
мать, что они полагались на эти принципы меньше, чем на опыт. Те, которые
рассуждали более верно, установили, что принцип, используемый ими для
объяснения передачи движения Упругих Тел, не может применяться к пере-
даче Движения Твердых Тел. Наконец, ни один из принципов, употребляв-
шихся до сих пор, как для законов Движения Твердых Тел, так и для зако-
нов Движения упругих Тел, не распространяется на законы Покоя.
После такого множества людей, работавших над этим вопросом, я едва
осмеливаюсь сказать, что открыл универсальный принцип, на котором осно-
вываются все законы, и который распространяется одинаково и на Твердые
Тела и на Упругие Тела, от которого зависят Движение и Покой всех телес-
ных сущностей (субстанций).
Это — принцип наименьшего количества действия; принцип, такой муд-
рый, такой достойный Верховного Существа. Этому принципу Природа,
кажется, постоянно и неотступно следует; она соблюдает его не только во
всех своих изменениях, но она также стремится его сохранить и в своем
постоянстве. При Ударе Тел Движение распределяется таким об разом, что
количество действия, которое допускает произведенное изменение, является
наименьшим возможным. В Покое Тела, поддерживающиеся в равновесии,
должны располагаться так, что если бы они совершили некоторое малое
Движение, то количество действия было бы наименьшим.
Законы Движения и Покоя, выведенные из этого принципа, являются
точно теми, какие наблюдаются в Природе; мы можем восхищаться резуль-
татами применения этого принципа ко всем явлениям. Движение Живот*
ных, произрастание Растений, вращение Звезд являются только его след-
ствиями и зрелище Вселенной становится еще более величественным, еще
более прекрасным, еще более достойным своего Творца, когда становится
известно, что небольшое число законов, наиболее мудро установленных,
достаточно для всех ее движений. Вот когда можно получить правильное
представление о могуществе и мудрости Верховного Существа, а отнюдь не
тогда, когда об этом судят по некоторой малой части, не зная ни строения,
ни назначения, ни связи ее с другими частями. Какое удовольствие для
человеческого ума, рассматривая эти законы, являющиеся принципом Дви-
жения и Покоя всех Тел Вселенной, найти в них доказательство существо-
вания Того, кто ею управляет!
Ш. ИССЛЕДОВАНИЕ ЗАКОНОВ ДВИЖЕНИЯ И ПОКОЯ
Находятся ли Тела в покое или в движении, они обладают некоторой
силой для продолжения состояния, в котором находятся; эта сила, принад-
лежащая всем частям Материи, всегда пропорциональна количеству Ма-
терии, содержащейся в этих Телах, и называется их инерцией.
Непроницаемость Тел и их инерция делают необходимым установление
некоторых законов для согласования этих двух свойств, которые в Природе
во всякий момент противопоставлены одно другому. Когда встречаются два
Тела, не имеющие возможности проникнуть друг в друга, необходимо, чтобы
Покой одного и Движение другого, или Движения обоих Тел были
4*
52
П. МОПЕРТЮИ
изменены; это изменение, зависящее от силы, с которой оба Тела сталкива-
ются, мы рассматриваем как то, что является Ударом. Посмотрим, от чего
он зависит; и если мы не можем иметь достаточно ясного представления
о его силе, то рассмотрим по крайней мере обстоятельства, при которых он
происходит одинаковым образом.
Допустим здесь, как допускали все, кто искал законы Движения, что
Тела встречаются прямо, т. е. что их центры тяжести движутся по одной
прямой линии, являющейся направлением их движения, и что при Ударе
эта линия проходит через место их соприкосновения, перпендикулярно к
нему. Это последнее условие всегда имеет место, если Тела являются шарами
из однородного материала, такими, какие мы здесь рассматриваем.
Если Тело, двигающееся с некоторой скоростью, встречает другое Тело,
находящееся в покое, то Удар будет таким же, как если бы последнее Тело,
двигаясь со скоростью первого, встретило его в состоянии покоя.
Если два Тела, двигаясь одно к другому, встречаются, то Удар будет
таким же, как если бы одно из них было в покое, а другое встретило его со
скоростью, равной сумме скоростей первого и второго.
Вообще, следовательно, если два Тела встречаются, то независимо от
того, находится ли одно из них в покое, движутся ли оба они одно к дру-
гому или движутся оба в одну и ту же сторону, каковы бы ни были их ско-
рости, Удар будет одним и тем же, при условии, что сумма или разность
этих скоростей (что называется относительной скоростью) одна и та же.
Величина Удара двух данных Тел зависит только от их относительной
скорости.
Справедливость этого предложения легко усматривается, если пред-
ставить себе, что оба Тела увлекаются подвижной плоскостью, скорость
которой, уничтожая скорость одного из них, придает другому сумму или
разность скоростей, имеющихся у Тел. Удар двух Тел на плоскости был
бы таким же, как на неподвижной плоскости.
Рассмотрим теперь разницу между Твердостью и Упругостью Тел, про-
являемую при Ударе.
Совершенно Твердые Тела суть Тела, частицы которых не разделяются
и не сгибаются, и, следовательно, форма которых неизменна.
Совершенно Упругие Тела суть Тела, частицы которых после сгибания
снова выпрямляются, снова принимают свое первоначальное положение
и придают телу его первоначальную форму. Что касается природы этой
Упругости, то мы не беремся ее объяснить; здесь достаточно знания ее
результата.
Я не говорю здесь ни о Пенистых Телах [des Corps Maus], ни о Жидких
Телах ; они являются только скоплениями или Твердых или Упругих Тел.
Когда два Твердых Тела встречаются и их частицы не разделяются и не
сгибаются, Удар изменяет только их скорости. Оба Тела давят друг на
друга и подталкивают друг друга до тех пор, пока скорость одного не будет
равна скорости другого. Твердые Тела после Удара, следовательно, будут
двигаться с общей скоростью.
Но когда встречаются два Упругих Тела, наряду с тем, что они давят
и толкают друг друга, Удар используется также для сгибания их частиц.
Оба Тела остаются в соприкосновении до тех пор, пока их упругость, напря-
гаемая Ударом настолько, насколько возможно, не разделит их, отбрасывая
и заставляя удаляться с такими скоростями, с какими они сближались. Так
как относительная скорость двух Тел является единственной причиной
напряжения их упругости, необходимо, чтобы расслабление воспроизводило
действие, равное тому, которое было причиной напряжения, т. е. соответ-
ствующая скорость в противоположном направлении должна быть равна
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 53
первоначальной. Следовательно, относительная скорость Упругих Тел после
Удара остается такой же, как и до него.
Найдем теперь Законы, согласно которым Движение распределяется
между двумя ударяющимися Телами, независимо от того являются эти
Тела Твердыми или Упругими.
Мы выведем эти Законы из единственного Принципа, и из того же самого
Принципа мы выведем Законы Покоя Тел.
Общий Принцип
Когда в природе происходит некоторое изменение, Количество Действия,
необходимое для этого изменения, является наименьшим возможным.
Количество Действия есть произведение Массы Тел на их скорость и на
расстояние, которое они пробегают. Когда Тело перемещается из одного
места в другое, Действие тем больше, чем больше Масса, чем быстрее ско-
рость и чем длиннее расстояние, которое оно проходит.
Проблема I
Найти Законы Движения Твердых Тел
Пусть два твердых Тела, Массы которых равны А и В, движутся в одну
и ту же сторону со скоростями а и Ь, но А движется быстрее, чем В, так
что А догоняет В и ударяет его. Пусть общая скорость обоих тел после
удара равна х < а и > Ь. Изменение, совершившееся во Вселенной, состоит
в том, что тело А, которое двигалось со скоростью а, и за некоторое время
пробегало пространство, равное а, движется уже только со скоростью х и
пробегает только пространство, равное х. Тело В, которое двигалось со ско-
ростью b и пробегало только пространство, равное Ь, движется теперь со ско-
ростью х и пробегает пространство, равное х.
Это изменение является, следовательно, таким же, какое было бы, если бы,
пока тело А двигалось со скоростью а и пробегало пространство а, оно увле-
калось бы назад нематериальной плоскостью, движущейся со скоростью
а—х, на расстояние а — х; и пока тело В двигалось бы со скоростью b
и пробегало пространство Ь, оно увлекалось бы вперед нематериальной пло-
скостью, движущейся со скоростью х — Ь, на расстояние х — Ь.
Итак, если тела А и В движутся с собственными скоростями на этих
подвижных плоскостях или находятся на них в покое, а движение этих
нагруженных плоскостей является таким же, то Количества Действия,
произведенные в Природе, будут равны А(а—х)2 и В(х — б)2, сумма кото-
рых должна быть наименьшей возможной. Следовательно, имеем
Ааа — 2Аах + Ахх + Вхх — 2Bbx + Bbb = Minimum
или
— 2 Аа dx + 2 Ах dx + 2Вх dx — 2Bb dx = 0,
откуда для общей скорости получаем
Аа |- ВЬ
v — -----
А + В
В том случае, когда оба тела движутся в одну и ту же сторону, коли-
чество уничтоженного движения и произведенное количество движения
равны ; и полное количество движения после удара остается таким же,
каким оно было до него.
54
П. МОПЕРТЮИ
Легко применить то же самое рассуждение к случаю, когда тела дви-
жутся навстречу друг другу; здесь достаточно рассматривать b как отри-
цательную скорость относительно а ; и общая скорость будет
Да - вь
Х — Л-,- В •
Если тело встречает непоколебимое препятствие, можно рассматривать
это препятствие как тело с бесконечной Массой, находящейся в покое, Если,
следовательно, В бесконечно, то скорость х = О.
Посмотрим теперь, что происходит, когда Тела Упруги. Тела, о которых
мы будем сейчас говорить, являются Телами, имеющими совершенную
Упругость.
Проблема II
Найти Законы Движения Упругих Тел
Пусть два Упругих Тела, Массы которых равны А и В, движутся в одну
и ту же сторону со скоростями а и Ь, но А движется быстрее, чем В, так что
оно догонит В и толкнет его; пусть а и /? — скорости тел после удара;
сумма или разность этих скоростей после удара остается той же, какой она
была до него.
Изменение, произведенное во Вселенной, состоит в том, что тело А, кото-
рое двигалось со скоростью а и которое за некоторое время пробегало про-
странство, равное а, движется уже только со скоростью а и пробегает только
пространство а; тело В, которое двигалось только со скоростью b и пробе-
гало пространство, равное Ь, движется со скоростью (I и пробегает простран-
ство /?.
Это изменение является, следовательно, таким же, какое произошло бы,
если бы пока тело А двигалось со скоростью а и пробегало пространство,
равное а, оно увлекалось бы назад нематериальной плоскостью, двигаю-
щейся со скоростью а — а, на расстояние, равное а —а; и пока тело В дви-
галось бы со скоростью b и пробегало пространство Ь, оно увлекалось бы
вперед нематериальной плоскостью, двигающейся со скоростью Р — Ь, на
расстояние (I — Ь.
Итак, если тела А и В движутся с собственными скоростями на подвиж-
ных плоскостях или, если они находятся на них в покое, а движение этих
нагруженных плоскостей является таким же, то Количества Действия,
произведенные в Природе, будут равны А (а — а)2 и В(Ь — /З)2, сумма кото-
рых должна быть наименьшей возможной. Следовательно, имеем
Ааа — 2 Ааа — Ааа + ВРР — 2bbP + Bbb = Minimum
или
— 2Aada + 2Даda + 2Bpdp -2Bbdp = 0.
Но для Упругих Тел относительная скорость после удара остается той
же самой, как и до него, поэтому имеем р — а — а — b или Р — а 4- а — b
и dP = da, что после подстановки в предыдущее уравнение дает для скоро-
стей
Аа — Ва + 2ВЬ о 2Аа — АЬ + ВЬ
“ =-----А + В---- И Р =-------J+B-------•
Если тела движутся навстречу друг другу, легко применить то же самое
рассуждение: достаточно при этом рассматривать b как отрицательную
ЗАКОНЫ ДВИЖЕНИЯ И ПОКОЯ, ВЫВЕДЕННЫЕ ИЗ МЕТАФИЗИЧЕСКОГО ПРИНЦИПА 55
величину относительно а; тогда скорости будут
Аа - Ba- 2Bb о 2Аа + Ab - ВЬ
« =-----д + в---- И =---------Д + В---*
Если одно из тел до удара находится в покое, то b = 0, и скорости будут
Аа — Ва о 2Аа
а = -А-ГГ И ^^+В-
Если одним из тел является непоколебимое препятствие, то, рассматривая
это препятствие как тело В с бесконечной Массой в покое, получим, что ско-
рость а — —а, т. е. тело А будет отброшено с той же скоростью, которую
оно имело, ударяясь о препятствие.
Если возьмем сумму живых Сил, то увидим, что после удара она остается
такой же, какой была до него, т. е.
Ааа + Bfifi = Ааа + ВЬЬ.
Здесь сумма Живых Сил сохраняется после удара, но это сохранение
имеет место только для Упругих Тел, а не для Твердых Тел. Общим прин-
ципом, который распространяется и на те и на другие, является то, что
Количество Действия, необходимое для того, чтобы произвести некоторое
изменение в Природе, является наименьшим возможным.
Этот принцип является таким универсальным и таким плодотворным,
что из него вытекает Закон Покоя или Равновесия. Очевидно, при этом нет
различия между Твердыми и Упругими Телами.
Проблема 111
Найти Закон Покоя
Рассмотрим здесь Тела, прикрепленные к Рычагу, и чтобы найти точку,
относительно которой они остаются в равновесии, я найду такую точку, что
если бы Рычаг получил некоторое малое движение, то Количество Действия
было бы наименьшим возможным.
Пусть с — длина Рычага, который я предполагаю нематериальным; на
его концах помещены Тела с массами, равными А и В. Пусть z — расстояние
Тела А до искомой точки, и с — z — расстояние тела В до нее; очевидно,
что если бы Рычаг сделал некоторое малое движение, то тела А и В опи-
сали бы малые подобные между собой Дуги, пропорциональные расстояниям
этих тел до искомой точки. Эти Дуги будут, следовательно, пространством,
пробегаемым телами, и будут в то же самое время представлять их скорости.
Количество Действия будет, следовательно, пропорционально произведению
каждого Тела на квадрат его Дуги или (потому что Дуги подобны) произ-
ведению каждого тела на квадрат расстояния до точки, вокруг которой
поворачивается Рычаг, т. е. Azz и В(с — z)2, сумма которых должна быть
наименьшей возможной. Следовательно, имеем
Azz + Вес — 2Bcz + Bzz = Minimum
или
zAc dz — 2Bc dz + 2Bz dz = 0,
откуда получаем :
Вс
2 =-----—
A + В ’
Это и есть основное Предложение Статики.
Л. ЭЙЛЕР
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ
ОБЩИХ ЗАКОНОВ ПРИРОДЫ, КОТОРЫЕ НАБЛЮДАЮТСЯ
В ДЕЙСТВИИ ЛЮБЫХ СИЛ[М]
I. В предыдущей заметке я исследовал форму, которую должна принять
нить, совершенно гибкая или обладающая известной степенью жесткости,
под действием каких-либо сил, направленных к неподвижным точкам, число
которых может быть каким угодно ; там я нашел выражения, значение
которых для фигуры равновесия является наименьшим ; таким образом,
если бы были известны откуда-нибудь эти выражения, можно было бы по
методу maxima и minima найти фигуру равновесия такой нити, не прини-
мая непосредственно во внимание принципов механики, на которых это
отыскание основывается. Уже давно философы придерживаются с доста-
точным основанием того мнения, что природа во всех своих творениях стре-
мится постоянно к некоторому минимуму; Мопертюи только что поставил
этот взгляд вне всяких сомнений в нескольких заметках, относящихся как к
состоянию равновесия тел, так и к их движению. Поэтому мы считаем, что мы
в состоянии найти этот минимум для форм нитей, находящихся под действием
каких-либо сил. Но, если я пришел к познанию этого минимума a posteriori,
то теперь речь идет о том, чтобы провести рассуждения, которые могут при-
вести нас к тому же познанию a priori, иначе говоря, нужно найти принципы,
из которых можно было бы сделать вывод об этом минимуме, даже если бы
мы не знали еще кривой, форму которой принимает нить в действитель-
ности. Эти принципы, коль скоро они были бы открыты, не замедлили бы
пролить свет на законы, которые природа соблюдает в бесконечном числе
других своих явлений, для объяснения которых механика еще не достигла
достаточной степени совершенства; нет сомнения в том, что метафизика
сможет получить из этого открытия значительное количество разъяснений
о способе действия сил вообще.
II. Чтобы обеспечить больший успех этому исследованию, следует начать
с того же соображения, которым воспользовался Мопертюи, для устано-
вления общего закона покоя : это соображение приведет нас к более точ-
ному и более плодотворному пониманию того, что разумеют под количеством
действия сил. Мы увидим, что то, что обозначается этим термином, имеет
первостепенное значение в вопросах о действии сил, независимо от того,
находятся ли тела, на которые действуют силы, в покое, или же они приве-
дены в движение ; это я покажу при помощи ряда весьма убедительных
доказательств. После этого легко будет согласиться с тем, что это количество
действия сил должно входить во все выражения, значения которых явля-
ются наименьшими при том эффекте, который производят эти силы. То, что
природа во всех своих творениях употребляет наименьшее возможное коли-
чество действия, является общепризнанным правилом ; но до сих пор в боль-
шинстве случаев было в высшей степени трудно точно определить это коли-
чество действия, об экономии которого так заботится природа. Но как только
СООБРАЖЕНИЯ по ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
57
мы образуем понятие, несколько отличающееся от понятия действия сил,
которое Мопертюи так удачно открыл для изучавшегося им случая равно-
весия, сейчас же будет устранено большинство других трудностей, которые,
по-видимому, связаны с рядом разнообразных случаев, и мы будем вынуж-
дены признать, что это понятие может быть приложено повсюду как в
механике, так и вообще в физике. Но если бы даже кто-либо не одобрил
доказательств, при помощи которых я применяю это понятие к ряду эффектов,
производимых теми или иными силами, все же он был бы вынужден признать.
основательность этого понятия благодаря многочисленным случаям, кото-
рые могут быть проверены при помощи обычных принципов механики.
III. Главным предметом исследований Мопертюи, при открытии им
общего закона покоя, в «Memoires de I’Academie royale des sciences de
Paris», 1740, была форма, которую должна принять жидкая масса, все
частицы которой находятся под действием каких-либо сил. Я также буду
рассматривать жидкую массу, все частицы которой притягиваются к непо-
движным центрам, число которых может,быть каким угодно, силами, пропор-
циональными некоторым функциям расстояний от этих центров ; прежде
всего я займусь отысканием формы, которую должна принять эта жидкая
масса для того, чтобы она была в покое,
или в равновесии. Затем я постараюсь
найти, что в этой форме равновесия будет
иметь максимум или минимум, для того
чтобы быть в состоянии определить, что
следует понимать под наименованием ко-
личества действия приложенных сил; в
заключение путем некоторых рассужде-
ний я дам почувствовать первостепен-
ную важность этого понятия во всех
изысканиях, относящихся к эффектам,
производимым какими-либо силами.
Прежде всего очевидно, что для того,
чтобы такая жидкая масса была в рав-
новесии, необходимо, чтобы среднее направление сил, действующих на
каждую частицу, находящуюся на поверхности, было перпендикулярно
к поверхности ; в самом деле, если бы среднее направление сил было
наклонно к поверхности, частица, которая находится под действием этих сил,
пришла бы в движение в направлении проекции этой наклонной на касатель-
ную плоскость, а следовательно, масса никак не была бы в равновесии.
Чтобы подойти к этому исследованию, я начну с общего определения
положения прямой, перпендикулярной к какой-либо поверхности.
IV. 3 а д а ч а ’. Дана некоторая поверхность, на которой находится
точках. Найти положение прямой ZP, перпендикулярной к этой поверх-
ности в точке Z.
Решение. Чтобы определить вид этой поверхности, я выбираю произ-
вольно три оси АВ, АС и AD (рис. 1), перпендикулярные между собой ; из
них пусть АВ и АС лежат в плоскости чертежа, а третья ось AD — перпен-
дикулярна к ней. Из какой-либо точки Z поверхности я опускаю перпенди-
куляр ZY на плоскость ВАС, а из точки Y—перпендикуляр YX на ось АВ,
так что положение точки Z будет определяться тремя координатами АХ,
XY и YZ, которые я назову АХ = х, XY = у и YZ = z. Теперь, после того
как вид поверхности выражен некоторым уравнением между этими тремя
координатами х, у, z, мне остается только рассмотреть дифференциал
X dx + У dy + Z dz = 0,
58
Л. ЭЙЛЕР
где X, Y, Z обозначают некоторые функции координат х, у, z, которые могут
быть найдены дифференцированием конечного уравнения поверхности.
Теперь я рассматриваю прежде всего фигуру EZ, которая получается при
пересечении данной поверхности плоскостью IYZ, параллельной плоско-
сти BAD. Вид этой кривой EZ будет выражен данным уравнением, если
положить XY = у постоянной, а следовательно, ее дифференциал dy = О,
так что для этой кривой EZ мы будем иметь уравнение
X dx + Z dz = 0,
связывающее две координаты IY = х и YZ = z. Пусть прямая ZM будет
перпендикулярна к этому сечению EZ; тогда известно, что субнормаль
_ dz dz X r _,.
У М будет равняться z ; отсюда, так как — мы будем иметь YM =
= — . Проведем на плоскости ВАС, к которой секущая плоскость IYZ
перпендикулярна, через точку М прямую МР, перпендикулярную к YM;
ясно, что все прямые, проведенные через точку Z и пересекающие эту пря-
мую МР, также будут перпендикулярны к сечению EZ. Следовательно,
среди этих прямых будет и та прямая ZP, которая перпендикулярна не только
к сечению EZ, но также и к самой данной поверхности. Чтобы найти этот
искомый перпендикуляр, я подобным же образом пересекаю данную поверх-
ность плоскостью XYZ, параллельной плоскости CAD ; предположим, что
FZ — полученное сечение; его вид будет определяться общим уравнением,
в котором АХ = х положено постоянной величиной, а следовательно, dx = 0.
Тогда для сечения FZ получим уравнение
Ydy + Zdz = О,
связывающее координаты XY = у и YZ = z. Проведем также и к этому
сечению FZ перпендикуляр ZN; тогда, очевидно, субнормаль будет
YN = _ Л.
dy Z •
Если через точку N- провести перпендикуляр NP к прямой YN в плоскости
ВАС, к которой перпендикулярно сечение FZ, то все прямые, проходящие через
точку Z и пересекающие прямую NP, будут также перпендикулярны к сече-
нию FZ. Следовательно, если из точки Р пересечения прямых МР и NP мы
проведем прямую PZ, она будет перпендикулярна к самой данной поверх-
ности EZF. Итак, точку Р, в которой искомый перпендикуляр встречает
плоскость ВАС, мы найдем, если возьмем YM = —и YN — — -и
если на этих отрезках построим параллелограмм YMPN; четвертая вер-
шина его, Р, будет искомой точкой. Итак, очевидно, что, имея для поверх-
ности дифференциальное уравнение Xdx-\- Ydy + Zdz = O, можно полу-
чить из него длины отрезков YM и YN в конечном виде. Это и требовалось
найти.
V. Задача II. Найти силы, которые могут действовать на точку Z
заданной поверхности, при условии, что их среднее направление перпен-
дикулярно к этой поверхности.
Решение. Пусть, как и раньше, Xdx-\- Ydy-\-Zdz = 0 — дифферен-
циальное уравнение, которое определяет вид заданной поверхности в коор-
динатах АХ = х, XY = у и YZ — z. Какие бы силы ни действовали на
точку Z, они всегда могут быть приведены к трем силам, направления кото-
рых параллельны трем осям АВ, АС и AD. Пусть Q — сила, действующая
в направлении, параллельном АВ, R — сила, действующая в направлении
АС и S —-в направлении AD таким образом, что эти силы стремятся увели-
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
59
чит^ значения переменных х, у, z. Так как среднее направление этих сил
[15] должно быть перпендикулярно к поверхности, то оно совпадает с пря-
мой ZP, положение которой мы только что определили, найдя YM = —
у?
и YN = — -j-. Пусть Р— сила, которая, действуя в направлении ZP, экви-
валентна трем заданным силам Q, R, S. Поэтому эта сила Р, будучи разло-
жена по направлениям ZY и YP, даст в направлении ZY силу, равную
YP YP
~2Р~Р, а в направлении, параллельном YP, — силу, равную—^-Р; эту по-
следнюю мы разложим еще по направлениям YM и YN и получим в напра-
влении УМ силу ZP ~P, а в направлении YN — силу, равную Р. Итак,
сила Р будет разложена на три силы по направлениям, параллельным трем
осям АВ, AC, AD; из них первая, которая действует параллельно АВ,
будет равна вторая, которая действует параллельно АС, будет равна
YN п «и « YZ
2Р~ Р, третья, которая действует параллельно AD, будет равна —т^-Р,
потому что направление ZY последней противоположно направлению оси
AD, к которой мы ее относим. Итак, чтобы сила Р, направленная перпен-
дикулярно к поверхности по ZP [16 ], была эквивалентна данным силам Q,
R, S, необходимо, чтобы эти последние были соответственно равны тем трем
силам, на которые мы только что разложили силу Р. Следовательно, мы по-
лучаем следующие равенства :
Q = -^-P, R = ~P И S = --g-P.
Так как мы нашли
XZ лгкг Yz
YM =-----2 и YN =--------2” >
то вследствие того, что YZ — z, мы будем иметь [17] :
YP = | ^XX+YY и ZP = У XX + YY + ZZ .
Положим для сокращения
у XX + УУ + ZZ~ = W;
так как
ZP = -^L ,
то три найденных равенства заменяются такими :
<?=-4p> р=-тгр и S--4P-
Следовательно, три силы Q, R, S, которые действуют по направлениям трех
координат х, у, z, будут относиться как величины X, У, Z, которые входят
в дифференциальное уравнение
X dx + У dy + Z dz = 0,
выражающее вид поверхности. Что и требовалось найти.
VI. Задача III. Найти форму, которую примет жидкая масса, если
на все её частицы действуют какие-либо силы.
60
Л.ЭЙЛЕР
Решение. Пусть Z — точка на поверхности той жидкой массы, форму
[18 ] которой мы ищем, или, что сводится к тому же, речь идет о том, чтобы
найти уравнение, связывающее три координаты АХ = х, XY = у и FZ = z,
которое выражает вид поверхности данной жидкой массы. Пусть дифферен-
циал уравнения, которое мы ищем, будет
X dx + Y dy + Z dz = 0.
Теперь, какие бы силы ни действовали на точку Z, их можно будет свести
к силам вдоль наших трех координат. Итак, пусть Q будет сила, которая
действует в направлении, параллельном АХ; R — сила, которая действует
в направлении, параллельном XY, и S — сила, которая действует в
направлении YZ. Если так, то для равновесия жидкой массы необходимо,
чтобы среднее направление этих трех сил было перпендикулярно к поверх-
ности. Поэтому, если через Р обозначить силу, эквивалентную трем данным
силам Q, R и S, которая должна действовать перпендикулярно к поверх-
ности, и положить для сокращения W = У XX -|- YY + ZZ, то решение
предыдущей задачи даст нам следующие уравнения :
q=-4p’ r--wp> s=~ zwp-
Из этих уравнений мы находим
x=--*q, y = -^-r, z=--^s.
Если эти значения подставить в уравнение
Xdx+ Ydy + Zdz = O,
которое должно выражать искомую форму, то мы получим уравнение :
Q dx + R dy + S dz = 0.
Отсюда видно, что, зная силы Q, R, S, которые действуют на каждую точку
жидкой массы по направлениям трех координат х, у, z, нет ничего проще,
как составить дифференциальное уравнение, выражающее ту форму
жидкой массы, которую нужно было найти. Тогда сила, эквивалентная
трем силам Q, R, S, которые действуют совместно на точку Z, будет равна
Р = fQQ + RR + ST
и будет иметь направление перпендикуляра к поверхности. Чтобы найти это
направление, нужно только взять УМ = —& и YN = —и построить
на этих отрезках прямоугольник YMPN ; его вершина Р даст положение
точки Р, в которой перпендикуляр ZP к поверхности встречает плоскость
ВАС. Сверх того, надо заметить, что для того, чтобы форма была возможна,
силы Q, R, S должны быть такими функциями координат х, у, z, чтобы урав-
нению
Q dx + R dy + S dz = О
можно было придать конечный вид.
VII. Известно, что уравнение, которое содержит только два переменных,
всегда возможно интегрировать, т. е. всегда существует такое конечное
уравнение между этими двумя переменными, которое, будучи продифферен-
цировано, даст данное дифференциальное уравнение, хотя очень часто мы
не в состоянии найти это, служащее интегралом, конечное уравнение. Не
так обстоит дело с дифференциальными уравнениями, которые содержат три
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
61
переменных количества, как-то : х, у и z ; в ряде случаев совершенно невоз-
можно получить такое уравнение путем дифференцирования какого-то ко-
нечного уравнения. Примером может служить уравнение
xdx + у dy + xdz = 0.
В самом деле, так как два первых члена х dx + у dy интегрируемы
сами по себе, то невозможно найти такой множитель, после умножения
на который уравнение стало бы интегрируемым.
Получены даже условия, при которых такое уравнение оказывается
возможным или невозможным. Клеро и Даламбер доказали, что урав-
нение вида
Q dx + R dy + S dz = О
возможно только в том случае, если будет
, D(0S SQ'J „ fdQ Э7?'| n
‘ЧэГ dzj 6 Uy dxj~U"
В этом уравнении выражение означает производную функции R в пред-
положении, что только z является переменным, так что его дифферен-
циал dz уничтожается знаменателем dz. Подобным же образом значение
8S
-т,— найдется в предположении," что только у является переменным при
дифференцировании функции S, а чтобы найти значение дифференци-
руя S, следует считать переменным только х; таким образом, выражения
dR dS 8S 80 ~
’эГ’ ~ду~ ’ Их’ И* и т' д’ содержать только конечные количества,
потому что знаменатели уничтожают дифференциалы в числителях. Итак,
всякий раз когда функции Q, R, S не обладают свойством, выражаемым
этим уравнением, уравнение
Q dx + R dy + S dz = О
будет невозможно, и в этих случаях жидкая масса никогда не сможет
прийти в состояние равновесия, как очень хорошо покзал Клеро в своем
сочинении о фигуре Земли.
VIII. Наиболее очевидный случай, для которого уравнение
Qdx + Rdy + Sdz = О
оказывается возможным, имеет место, если Q есть функция х, R — функция
у и S — функция z, ибо тогда каждый член уравнения интегрируется в от-
дельности. Итак, если на каждую частицу жидкой массы действуют три силы
Q, R и S по направлениям трех осей АВ, АС и AD, или трех координат х, у
и z и если сила Q, действующая в направлении х, выражается какой-то функ-
цией х, сила R, действующая в направлении у — функцией у и сила S — функ-
цией z, то вследствие интегрируемости дифференциала
Qdx + Rdy + Sdz = 0,
форма жидкой массы выразится следующим интегралом :
f Qdx + $Rdy + $Sdz = A,
где А обозначает постоянную величину, определяемую количеством жидко-
сти. Следовательно, в этом случае жидкая масса будет приведена к состоя-
62
Л. ЭЙЛЕР
нию равновесия, и в каждой точке поверхности значение выражения
J" Q dx + J R dy + J S dz
будет одно и то же. Если же мы будем рассматривать вообще природу равно-
весия, мы легко заметим, что она требует повсюду равенства действия сил,
хотя бы мы заранее и не знали, как следует оценить это действие сил. Но
видя в указанном случае, что количество
J Q dx + J R dy + J S dz
остается повсюду одним и тем же, мы отсюда заключим с большой вероят-
ностью, что именно это выражение представляет количество действия сил,
которое при равновесии повсюду должно быть одним и тем же. Итак, коли-
чество действия сил Q, R и S, которые действуют на точку Z таким образом,
как я только что предположил, будет равно
J Q dx + J" R dy + J S dz ;
это выражение совершенно согласно с принципами Мопертюи, всю силу и
важность которых я с большей ясностью покажу в следующих рассуж-
дениях.
IX. Задача IV. Жидкая масса притягивается к нескольким неподвиж-
ным центрам С, С', С" силами, пропорциональными некоторым функциям
расстояний. Найти форму, которую примет эта жидкая масса.
Решение. Пусть будет Z — какая-либо точка поверхности данной
жидкой массы (рис. 2); расстояния этой точки от неподвижных центров
С, С', С" пусть будут: CZ = v, C'Z — v', C'Z = v", а силы, которыми эта
точка Z притягивается к этим цент-
рам, пусть будут какими-то функциями
V, V' k\V" этих расстояний. Сила V,
которая тянет в направлении ZC, есть
некоторая функция v, сила V' в на-
правлении ZC —функция v' и сила V"
в направлении ZC" — функция v".
После этого выберем, как и раньше,
три взаимно перпендикулярные оси и
проведем через точку Z три прямые
ZQ, ZR, ZY, параллельные этим осям.
По этим прямым мы разложим силы V,
V', V", которые действуют на точку Z.
Для этого достаточно представить себе
плоскости, параллельные плоскости
QZR, которые проходят через точки С,
перпендикулярной к ним прямой ZY
в точках Y, Y', Y", и в этих плоскостях мы проведем прямые СХ, СХ',
СХ", параллельные ZQ и перпендикулярные к ним прямые YX, Y'X',
Y"X", которые будут параллельны ZR. Теперь мы будем иметь для каждого
центра С, С', С" три координаты, которые мы обозначим так: для центра
С : СХ = х, XY = у и YZ = z ; для центра С : С'Х' = х', X'Y' = у',
Y'Z' = z'; и для центра С" : С'Х" = х", X"Y" = у" и Y"Z” = z".
Для этих координат мы прежде всего получим такие уравнения :
т = хх + уу + zz,
и
V’tf = Х'Х' + у’у’ + Z'Z'
v”v" = х"х" + у"у" + z"z".
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
63
Так как переменные х, х', х" отличаются только постоянными количествами,
то их дифференциалы будут равны между собой, откуда мы будем иметь
dx = dx' = dx" ; на том же основании dy = dy' = dy" и dz = dz' = dz".
Если теперь силу ZC = V разложить по направлениям ZQ, ZR и ZY, то
получатся следующие три силы:
ZQ = , ZR = ~-у- , ZK = —,
V 1 V 7 V
из силы ZC' получатся силы :
ZQ = , ZR = , ZY = ^4- ,
V 7 V V
и из силы ZC" — силы ZY = 9 v"
V"x" ZQ - J > ZR — ХУ
В результате совместного действия ствовать : по направлению ZQ этих сила трех сил на точку Z будет дей- Ух У'Х' У"Х" V v' v" 9
по направлению ZR сила Уу , vy , V V' “Г" V" ’
по направлению ZY сила Vz Vzy - vyj_ г? v' v"
Поскольку эти силы действуют в направлениях, противоположных тем,
которые мы придали силам Q, R и S в предыдущей задаче, мы получим :
а _______Ух _ V'x' _ У"х"
v v' ’
о _ _ Уу_ _ У'у' У"у"
v v' v" 9
„ _______Vz_ _ V'z' __ V"z”
v v' v"
Но форма поверхности этой жидкой массы будет выражаться таким урав-
нением :
Q dx + R dy + S dz = 0.
Подставляя сюда найденные выражения для Q, R, S, мы получим после
изменения знаков следующее уравнение :
Vxdx V'x'dx' V"x" dx" . Vy dy
V ' v' ”1” v" * V
, V'y' dy' V'y" dy"
n- »' ' a'' ”r"
Vzdz V'z' dz' V"z" dz'
v ' v' ' v'
Прежние формулы, которые выражают расстояния v, v', v", дают:
x dx + у dy + z dz = v dv,
x' dx' + y’ dy’ + z' dz' = v' dv’,
x"dx" + y"dy" + z^z” = v”dv".
Следовательно, форма жидкой массы будет выражаться уравнением
Vd»+ Vdv’ + Vdv" = 0,
в котором каждый член интегрируем сам по себе, а поэтому мы будем иметь
64
Л. ЭЙЛЕР
для искомой формы следующий интеграл :
У V dv + J V dv' +* J V" dv" = const,
что и требовалось найти.
X. То же самое уравнение может быть найдено независимо от распо-
ложения трех осей, которое является произвольным и на конечном урав-
нении не отражается. Нужно только рассматривать бесконечно малый ли-
нейный элемент Zz, который мы берем произвольным образом от точки Z на
поверхности жидкой массы. Ясно, что для того, чтобы точка Z могла быть
в равновесии, или оставаться в покое, необходимо, чтобы силы, которые
действуют на точку Z по направлению Zz, исчезали после того, как дей-
ствующие на нее силы V, V', V" разложены на составляющие по направле-
нию Zz и по направлению, перпендикулярному к нему. Если бы силы вдоль
Zz не уничтожались взаимно, ничто не препятствовало бы тому, чтобы точка
Z двигалась фактически по этому направлению, а следовательно, жидкая
масса не была бы в равновесии. Силы, которые получаются при этом разло-
жении в направлении элемента Zz, называют касательными; эти-то касатель-
ные силы и должны взаимно уничтожаться, или их сумма должна быть рав-
на нулю. Чтобы найти эти касательные силы, я провожу через точку z к
прямым CZ, CZ', CZ" перпендикуляры zt, zt', zt"; полагая Zz = ds, мы
будем иметь
Zt = —dv, Zt’ = -dV, Zt" = —dv”.
Подобие элементарных треугольников Zzt, Zzt', Zzt” треугольникам, кото-
рые получают, опуская перпендикуляры из точек С, С', С" на касательную,
или на продолжение элемента Zz, дает касательные силы, получающиеся от
разложения каждой из сил V, V', V", а именно, от разложения силы V мы
получим касательную силу, равную s—, сила V даст касательную силу
V' д®' as V" dt/'
----—, сила V" — касательную силу —. Так как сумма касатель-
ных сил должна быть равна нулю, то мы получим для формы жидкой массы
уравнение
V dv V' dv' V" dv" _
ds ds ds ’
или же
Vdv+ Vdv’ + V” dv” = 0,
интегралом которого будет уравнение
J Vdv + J V dv' + J V" dv" = C,
а это как раз то уравнение, к которому нас привело предыдущее решение.
XI. Итак, только что рассмотренная жидкая масса, находящаяся под
действием сил V, V', V", придет в состояние равновесия, а форма, которую
она примет при этом, будет обладать тем свойством, что для каждой точки
Z поверхности значение выражения
f Vdv + f Vdv’ + J V" dv"
будет повсюду одно и то же. Итак, вследствие того, что состояние равно-
весия требует со всех сторон равного действия, прежде всего ясно, что именно
это выражение нам даст количество действия, которое уравновешивается
со всех сторон, и не приходится сомневаться в том, что это выражение
У Vdv+ J Vdv’ + J V" dv"
является истинной мерой количества действия сил, действующих на жидкую
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
65
массу; это не подлежало бы сомнению даже в том случае, если бы не было
других оснований, которые позволили бы нам определить эту меру. Но Мо-
пертюи в своей прекрасной статье о законах равновесия разъяснил принци-
пы, из которых он вывел точно ту же самую меру количества действия сил ;
эти принципы дали ему для рассмотренного случая равновесия жидкой
массы то же самое выражение
J V dv + J V dv'+ J V" dv",
причем ему не пришлось прибегать к обычным принципам механики. Отсюда
можно вывести следующее правило для нахождения количества действия
сил, которые приложены к какой-либо точке Z : каждую силу V следует
умножить на дифференциал линии ZC — v, в направлении которой дей-
ствует эта сила, взять интеграл от произведения V dv, и сумма всех этих
интегралов
J Vdv+ J V'dv' + J V" dv"
даст количество действия всех этих сил на точку Z. Это правило, которое
вытекает непосредственно из принципов Мопертюи, таким образом, вполне
согласуется с решением, которое я только что вывел из обычных принципов
механики.
XII. Мопертюи в своих рассуждениях по этому вопросу пошел еще
дальше и высказал мнение, что количество действия сил, которые дейст-
вуют на частицы поверхности жидкой массы, не только повсюду одно и то
же, но что его значение является наименьшим из всех возможных. Это свой-
ство, столь согласное с общими законами природы, которая стремится по-
стоянно получить известный эффект наименьшей ценой, является также
вполне естественным следствием из решения, которое я только что нашел.
В самом деле, так как значение этого выражения
J Vdv + J V'dv' + J V" dv"
повсюду одно и то же, то его дифференциал равен нулю, или
Vdv + V'dv' + V'dv" =0.
Но известно, что для того, чтобы переменная величина была наибольшей
или наименьшей, нужно, чтобы ее дифференциал был равен нулю. Обратно,
так как для формы жидкой массы дифференциал
{Vdv+lV'dv'+ V" dv"
равен нулю, то можно сказать, что его интеграл является минимумом. Правда,
это обращение не всегда справедливо ; например, хотя для круга, который
выражается уравнением
хх + уу = аа,
дифференциал количества хх + уу и равен нулю, но мы не могли бы сказать,
что количество xx-J-yy здесь является максимумом или минимумом. Общий
принцип природы требует, чтобы количество действия
f V^ + f V' dv'+ J V" dv"
было минимумом, так что исключение, получающееся в приведенном при-
мере с кругом, здесь не может иметь места; я сейчас докажу этот вывод
при помощи совершенно частного случая, который непосредственно очевиден.
XIII. Предположим, что жидкая масса уменьшается до бесконечности,
так что она сокращается до одной точки Z ; спрашивается, где должна быть
помещена эта точка Z, чтобы она, находясь под притяжением к центрам сил
5 Вариационные принципы механики
66
Л. ЭЙЛЕР
С, С', С", была в равновесии. Прежде всего мы убедимся, что это место рав-
новесия точки Z будет там, где количество действия сил, или значение выра-
жения
J Vdv+ J Vdv’ + J V" dv"
будет наименьшим. Когда я это докажу, будет совсем нетрудно признать,
что для случая жидкой массы конечной протяженности имеет место то же
самое рассуждение и так как дифференциал того же самого выражения
также равен нулю, то значение этого выражения будет минимумом. Ибо, если
бы это заключение не было справедливо в случае жидкой массы, то оно так
же не было бы справедливо и в случае, когда жидкая масса сократилась
в одну точку. Но от случая состояния равновесия точки, находящейся под
действием каких-либо сил, который я только что рассмотрел, зависят первые
основания статики, а именно, сложение и разложение сил, истинность кото-
рого поэтому тем менее подвергается сомнениям ; впрочем, доказательства,
которыми обычно тут пользуются, недостаточно точны, ибо в них привно-
сится рассмотрение движения, которое представляется совершенно чуждым
в том случае, когда идет речь о состоянии покоя. Николай Бернулли
хорошо показал этот общий недостаток в I томе записок Петербургской
академии, где он дал прекрасное доказательство этого принципа статики,
являющееся весьма остроумным и в то же время чисто геометрическим,
основанным на неоспоримых аксиомах.
XIV. Все же я льщу себя надеждой, что следующее доказательство того
же принципа, которое я сейчас дам, будет признано в равной мере убеди-
тельным, хотя оно и основывается на некотором принципе, взятом из мета-
£ g .......... F
Рис. 3.
физики. Пусть Z — какая-нибудь точка, которая
под действием трех сил V, V, V”, действующих
по направлениям ZC,ZC',ZC", находится в данное
время в равновесии; можно утверждать, что тогда
эти три силы относятся между собой, как синусы
противоположных углов C'ZC", CZC", CZC' (рис.3).
Чтобы доказать эту истину, на которой основы-
вается вся статика, я буду рассматривать вместо
сил упругие нити, равные между собой, кото-
рые, будучи прикреплены к линиям АВ, А'В',
А"В" и оттянуты к неподвижным стенкам EF,
E'F', E"F", действуют на точку Z посредством
стержней ZC, ZC', ZC" точно так же, как и дан-
ные силы V, V', V". Пусть сила, с которой каж-
дая упругая нить стремится сократиться, будет
равна единице, а число нитей, которые прикреп-
лены к линии АВ и стремятся приблизить ее к
стенке EF, пусть будет равно V, с тем, чтобы
полная сила этих упругих нитей была равна V и чтобы на точку Z,
таким образом, действовала та же сила V в направлении ZC. Пусть точно
так же число подобных нитей, прикрепленных к линии А'В', будет равно
V', и число нитей, прикрепленных к линии А"В", равно V", с тем, чтобы
на точку Z в направлениях ZC и ZC" действовали силы V и V'.
XV. При таких условиях ясно, что эти силы действуют лишь поскольку
упругие нити стремятся сократиться, и точка Z могла бы находиться в покое
лишь при невозможности дальнейшего сокращения длин всех этих нитей
одновременно. Поэтому со мной легко согласятся, что точка Z будет тогда
в равновесии, когда нити сократились насколько это возможно, или когда
сумма длин всех нитей, взятых вместе, будет наименьшей ; в самом деле,
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
67
если бы точка Z могла быть оттянута в другое место 2, в котором сокращение
длин нитей, рассматриваемых вместе, было еще значительнее, то не было
бы сомнения в том, что силы перенесли бы точку в это место, прежде чем
наступило бы состояние равновесия. Этот принцип столь очевиден, что до-
статочно очень немного поразмыслить, чтобы быть убежденным в его истин-
ности ; в самом деле, нити фактически будут укорачиваться, пока будет
возможно дальнейшее их сокращение и они не прекратят своего действия,
пока не встретят непреодолимых препятствий, которые сделают невозмож-
ным еще большее сокращение. Итак, если мы обозначим длины упругих
нитей так : AG = х, A'G' = х' и A"G" = х", то общая длина всех нитей,
взятых вместе, будет равна
Vx 4- V'x' 4- Vx"
и эта длина будет, следовательно, наименьшей, когда точка Z придет в со-
стояние равновесия.
XVI. Поэтому, если точка Z будет смещена бесконечно мало из поло-
жения равновесия, то значение выражения
Vx 4- V'x' 4- V"x"
останется тем же самым, или его дифференциал
Vdx+ V'dx'+ V" dx"
будет равен нулю ; ибо я здесь буду рассматривать силы V, V', V” как по-
стоянные, так что они не увеличиваются и не уменьшаются, когда упругие
нити удлиняются или сокращаются ; я здесь делаю это предположение,
чтобы иметь дело со случаем более очевидным и менее запутанным; после
этого нетрудно рассмотреть и случай, когда силы V, V и V" сами перемен-
ные. Итак, предположим, что точка Z смещена на бесконечно малое расстоя-
ние Zz, а так как это изменение может быть произведено бесчисленным
множеством способов, я выберу тот, при котором точка z так же удалена от
АВ, как и точка Z, так что при этом смещении нити AG и ВН не претерпевают
никакого изменения. Но так как точка Z этим перемещением Zz прибли-
жается к E'F' и удаляется от E"F", то нити A'G' и В'Н' укорачиваются, а нити
A"G" и В''Н" удлиняются; следовательно, линия А'В', к которой прикре-
плены нити, перейдет в положение а'Ь', а линия А" В" — в а"Ь", поэтому
сокращение одних нитей будет равно А'а', удлинение других •— А"а". Но
по свойству бесконечно малых общее удлинение V"А"а" с одной стороны
должно быть равно полному сокращению длин [19 ] с другой стороны. Про-
ведем линии zc’ и zc", равные и параллельные линиям ZC' и ZC", и опустим
перпендикуляры Zq, zp; тогда сокращение длины А'а' будет равно Zp, а
удлинение А"а" равно zq; поэтому мы будем иметь
V Zp = V" zq,
откуда получается пропорция
V: V" = zq:Zp.
Но, если принять Zz за полный синус [20], то zq будет синусом угла zZq или
угла CZC", так как углы CZz и C"Zq прямые ; точно так же Zp будет коси-
нусом угла zZp, а следовательно, синусом угла CZC'; отсюда следует, что
силы V' и V" относятся между собой, как синусы углов CZC" и CZC', а из
этого можно вывести известную пропорцию :
сила ZC : сила ZC': сила ZC" = sin C'ZC" : sin CZC" : sin CZC'.
XVII. Это новое доказательство общего принципа статики, в силу кото-
рого три силы, приложенные в одной точке, находятся в равновесии, когда
ч*
68
Л. ЭЙЛЕР
эти силы относятся между собой, как синусы противоположных углов,
убеждает нас не только в том, что дифференциальное выражение
V dx + V dx' + V" dx"
должно равняться нулю, но и в том, что значение конечного выражения
Vx + V'x' + V"x"
в этом случае является наименьшим. Я предположил здесь силы V, V', V"
постоянными, или что они остаются теми же самыми, каким бы изменениям
ни подвергались упругие нити, которыми я их заменил ; но дифференциаль-
ное выражение останется прежним, хотя бы силы и были переменными.
С этой целью достаточно обозначить расстояние ZC = v, ZC' = v’, ZC" — v".
Тогда имеем: dx = —dv, dx' = —dv', dx" = —dv". Кроме того, если
силы V, V', V" суть какие-то функции этих расстояний v, v',v", то состоя-
ние равновесия точки Z все-таки определится тем же дифференциальным
уравнением
Vdv + Vdv' + V" dv",
которое было найдено при решении задачи, и теперь нет никакого сомнения,
что его интеграл
J Vdv+ J V'dv' + J Vdv"
будет иметь также минимальное значение. Но, если это выражение будет
минимумом в случае, когда силы действуют только на одну единственную
точку Z, то оно подобным же образом будет минимумом и в случае какой-
либо жидкой массы, которая находится под действием тех же сил. Следо-
вательно, мы имеем самые большие основания утверждать, что количество
действия сил V, V', V" на некоторую точку Z должно иметь выражение
J Vdv]+ J Vdv’ + J Vdv",
и далее, что это выражение имеет место независимо от того, будем ли мы
рассматривать точку как единственную, или же как принадлежащую какой-
либо жидкой массе. Вот та несокрушимая опора, на которой основывается
вышеуказанное правило определения количества действия каких-либо сил
на данную точку [21].
XVIII. Последующие рассуждения еще лучше разъяснят понятие коли-
чества действия сил, и мы поймем более ясно, почему количество действия
сил V, V', V" на точку Z должно выражаться как раз формулой
У Vdv + j Vdv’[+ J Vdv”.
В предыдущем исследовании, где я вместо сил V, V, V" брал равные между
собой упругие нити, действие каждой силы, приложенной к точке Z, пред-
ставлялось суммой длин всех упругих нитей, которые заменяют силы; в
самом деле, мы видели, что если обозначить длину AG всех упругих нитей,
заменяющих силу V, через х, и если V означает число этих нитей (силу каж-
дой мы полагаем равной единице), то общая сумма всех этих нитей равна
Vx; так получается количество Vx, которое представляет действие силы
V на точку Z, ибо Vx выражает действительное состояние сокращения упру-
гих нитей, от которого зависит действие силы V. Тогда, полагая все расстоя-
ние от точки Z до неподвижных стенок равным EF = v,a постоянное расстоя-
ние ZC равным а, мы будем иметь х — v — а, и действие силы V будет равно
У(г — а) в предположении, что сила V постоянна, или что ее величина вовсе
не зависит от расстояния v. В случае же, когда сила V зависит от расстояния
v или, что сводится к тому же, от длины х упругих нитей, число V нитей
было бы переменным и их общая длина более не была бы Vx, или V (х—а),
но, как легко заметить, для получения этой общей длины нужно было бы
СООБРАЖЕНИЯ по поводу некоторых ОБЩИХ ЗАКОНОВ природы
69
взять интеграл от V dx или V dv, так как V является переменной. Теперь
уже J V dv будет выражать полную длину всех упругих нитей, замещаю-
щих силу V, а следовательно, очевидно, что то же выражение f V dv пред-
ставит также и количество действия силы V на точку Z ; понятно также, что
количество действия многих сил V, V', V" будет равно
j Vdv+ у Vdv' + у V dv".
XIX. Более того, выражение
У Vdv + $ Vdv' + у Vdv"
не только имеет столь большое применение в состоянии покоя, но от него
также принципиально зависит определение движения. В самом деле, пред-
положим, что тело, находящееся под действием сил V, V', V", направлен-
ных к центрам С, С', С", прошло уже дугу AZ некоторой кривой, начав свое
движение из состояния покоя в точке А ; пусть и — скорость, которую тело
приобретет в точке Z, а и -ф du — та скорость, которую оно будет иметь в
точке z, пройдя элементарную дугу Zz = ds (рис. 4). Обозначим через
CZ = v, C'Z — v', C"Z = v" расстояния тела, находящегося в Z, от центров
С, С' и С", а через V, V', V" — силы, которыми тело притягивается к этим
центрам. Опускаем перпендикуляры zt, zt', zt" из точки z на прямые CZ, C'Z,
C"Z; тогда будем иметь : Zt = — dv, Zt' = — dv', Zt" = — dv", откуда
V dv V' dv' V" dv"
получаем касательные силы -----—,----------------— и, следовательно,
движение тела, при котором оно проходит
элемент Zz = ds, будет ускоряться силой
V dv + V' dv' + V" dv"
------------—--------; если умножить ее на
расстояние ds, то получится произведение
скорости и на ее дифференциал, таким образом,
мы получим уравнение
и du = - Vdv - V dv' - V" dv",
интеграл которого будет
-ии = С — У Vdv - у V'dv' - у Vdv",
где постоянная С должна быть выбрана из того ь
условия, чтобы в точке А скорость обращалась Рис. 4.
в нуль. Итак, половина квадрата скорости в
точке Z, или, что то же, высота, соответствующая этой скорости, будет пред-
ставляться выражением
С - у Vdv - у V dv' - у V” dv",
состоящим из двух частей, из которых первая часть С зависит исключительно
от точки А, из которой началось движение ; вторая же часть
- У Vdv - у Vdv' — у Vdv"
зависит исключительно от точки Z, в которую тело пришло. Следовательно,
выражение
У Vdv + $ Vdv' + у V"dv",
которое в состоянии покоя показывает количество действия сил на точку Z,
выражает также и в состоянии движения ту часть квадрата скорости, кото-
рая зависит от точки Z, так что это выражение имеет первостепенную важ-
ность как в состоянии покоя, так и в состоянии движения.
70
Л. ЭЙЛЕР
XX. Установив, таким образом, истинное понятие количества действия
каких-либо сил на данную точку, находится ли она в покое или в движении,
я покажу более ясно обширное применение этого понятия, рассматривая
несколько неподвижных центров С, С', С" и т. д., которые одновременно
притягивают силами V, V', V" и т. д., пропорциональными каким-то функ-
циям расстояний v, v', v" и т. д. таким образом, что количество действия
этих сил на точку Z, расстояние которой от этих центров суть v, v', v" и т. д.,
равно
f V dv + J V dv' + J V" dv” + ...
Сначала мы найдем между этими центрами сил место, где надо поместить
тело, рассматриваемое как точка, чтобы оно оставалось в покое, или в рав-
новесии ; я только что показал, что искомая точка Z будет там, где значение
выражения
j Vdv + J Vdv' + f Vdv”
или количества действия является наименьшим. С помощью этого свойства
мы легко найдем место точки Z, перемещая эту точку на бесконечно малое
расстояние Zz и полагая дифференциал
V dv + V' dv' + V” dv"
равным нулю так, как я это показал в случае, когда на точку Z действовали
три силы. В этом состоит сложение и разложение сил, которое является
основой всей статики ; отсюда видно, что один принцип количества дей-
ствия составляет фундамент этой науки.
XXI. Затем, рассматривая жидкую массу, все частицы которой при-
тягиваются к центрам сил С, С', С" и т. д., найдем еще форму, которую при-
мет эта жидкая масса, пользуясь только количеством действия. Для этого
нужно, как я показал, чтобы количество действия сил было одним и тем
же повсюду, в каждой точке поверхности жидкой массы ; отсюда, вид этой
поверхности будет выражаться таким уравнением :
J V dv + [ V dv' + [ V" dv" + ... = const.
Иначе говоря, эта жидкая масса может быть в покое только в таком месте и
при такой форме, для которых полное количество действия будет наимень-
шим возможным, т. е. чтобы жидкая масса была в равновесии, необходимо,
чтобы значение выражения
J Vdv + J V dv' + f V” dv" + ...
было минимальным. На этом принципе основывается вся гидростатика, или
теория равновесия жидкостей. В самом деле, если мы будем рассматривать
только одну центральную силу, чтобы иметь случай естественного притя-
жения, мы будем иметь для состояния равновесия жидкой массы уравнение
[ у dv = С, а так как V есть функция v, то расстояние v будет постоянным;
поэтому все точки поверхности жидкости должны быть одинаково удалены
от центра земли, т. е. поверхность жидкости будет горизонтальной.
XXII. Не только количество действия сил на одну-единственную точку Z
должно быть наименьшим, но легко убедиться в том, что и в жидкой массе,
находящейся в состоянии равновесия, полная сумма всех количеств дей-
ствия сил на все элементы жидкой массы должна быть минимумом. Поэтому,
если обозначить через dS какую-либо частицу жидкой массы и если коли-
чество действия сил V, V', V" и т. д. на эту частицу будет равно
f Vdv + J V dtf + ^V"dv" + ...,
поскольку она рассматривается как точка, ясно, что количество действия
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
71
на элемент dS будет равно
dS (f Vdv + $V'dv' + J V" dv" + ...),
где dS уже рассматривается как собрание многих точек, для каждой из
которых количество действия сил равно
f Vdv + J V’ dv' + J V" dv" + ... ,
так что это количество должно быть умножено на число точек элемента dS,
т. е. на самый элемент dS, чтобы иметь количество действия сил на этот эле-
мент dS. Следовательно, количество действия сил на всю массу жидкости
будет равно
pS (J Vdv + ]' V'dv' + J V" dv" + ...).
Значение именно этого интегрального выражения и должно быть наимень-
шим, потому что оно содержит полную сумму всех количеств действия сил
на все частицы жидкой массы. Отсюда легко получить следующее общее
правило для нахождения состояния равновесия какого-либо тела, находя-
щегося под действием каких-либо сил : Следует умножить каждый эле-
мент тела на количество действия сил, которые на него действуют; инте-
грал этого произведения, который будет полным количеством действия на
все тело, должен быть минимумом. Всякий, кто поймет значение понятия
количества действия сил на одну точку, которое я только что обосновал при
помощи весьма веских доводов, согласится без труда с тем, что во всех слу-
чаях равновесия сумма всех количеств действия должна быть наименьшей.
XXIII. Если все тело, состояние равновесия которого мы ищем, беско-
нечно мало, так что dS выражает все это тело, то полное количество дей-
ствия будет равно
dS (J Vdv + J V dv’ + J V" dv" +
это количество будет минимумом, если
f Vdv + J V dv' + $V"dv" + ...
будет иметь наименьшее значение, так как dSпостоянно; это — случай, кото-
рый я разобрал уже выше. Но если данное тело есть жидкая масса, элемен-
том которой является dS, уже не так ясно, что фигура, для которой выра-
жение
f dS (f V dv + J V' dv' + J V" dv" + ...)
имеет минимум, будет той же самой, которую я нашел раньше и которая
обладала тем свойством, что в каждой точке поверхности количество дей-
ствия
J Vdv + f V'dv' + J V" dv"
имело постоянное значение. Дело в том, что вообще в высшей степени трудно
найти такую форму тела, для которой выражение
J dS (J Vdv + J V dv' + J V" dv" + ...)
имеет максимул! или минимум, ибо этот метод достаточно разработан только
для фигур на плоскости.
Итак, чтобы подкрепить справедливость этого общего правила и пока-
зать, что оно ведет к тому же решению, которое я нашел, я рассмотрю жид-
кую массу, бесконечно тонкую, расположенную в плоскости, причем все
частицы этой массы притягиваются к нескольким неподвижным центрам
С, С', С" и т. д., расположенным в той же плоскости.
72
Л. ЭЙЛЕР
XXIV. Пусть AM — поверхность этой жидкой массы, когда она нахо-
дится в равновесии (рис. 5); чтобы найти ее форму, возьмем координа-
ты СХ = х, ХМ = у, а для других цент-
ров подобными координатами пусть бу-
дут : С'Х' = х', Х'М — у', С"Х” — х”,
Х"М = у"; мы будем иметь dx = dx' = dx”
и dy = dy' = dy”. Но прежде чем рассмат-
ривать точку М, нужно найти количест-
во действия на элемент ХхтМ площади
СХМА, которая у нас представляет жид-
кую массу. Для этой цели возьмем какую-
либо частицу Yy этого элемента ХхтМ
и положим XY = у, X'Y = у', X”Y = у”;
частицу Yy возьмем равной dxdy. Теперь пусть расстояния от этой
частицы до центров сил будут CY = v, C'Y = v', C”Y = v”, а сами силы,
как и до сих пор, V, V', V”, так что мы имеем
w = хх + yy, = х'х' + у'у', = х"х" + у"у".
Тогда, если количество действия этих сил на точку Y будет
Г Vdv + f V'dv' + f Vdv",
то количество действия на частицу Yy будет равно
dxdy (f Vdv + J V dv' + J V" dv");
интеграл от этого выражения в предположении, что х является постоянным,
даст количество действия сил на весь элемент ХхтМ при условии, что точку
Y продвигают до М и что смысл обозначений у, / и у” остается тот же, какой
был им придан вначале. Следовательно, количество действия сил на весь
элемент площади ХхтМ будет равно
dx$dy($ Vdv + ^V'dv' + J V" dv" + ...),
если предположить, что в этом интеграле абсцисса х постоянна, и меняется
только апликата у. Я обозначу для сокращения этот интеграл, который полу-
чается в предположении постоянства х, через U :
$dy (f Vdv + J V' dv’ + J V" dv" + ...) = U,
так что дифференциал функции U, взятый все еще в предположении постоян-
ства х, будет
dy (J Vdv + [ V dv' + [ V" dv" + ...),
или, если положить вообще
dU = М dx + N dy,
то мы будем иметь
N = J Vdv + J V' dv' + J V" dv" + ...
XXV. После того как найдено таким образом количество действия на
элемент ХхтМ, равное Udx, ясно, что количество действия на всю площадь
СХМА будет равно JUdx. Следовательно, это количество \U dx должно
быть наименьшим между всеми формами, которые эта площадь могла бы
принять ; дело идет, следовательно, о том, чтобы найти среди всех фигур
с одной и той же площадью J у dx такую, для которой значение выражения
J Udx — наименьшее. Эта задача сводится к такой, как если бы среди воз-
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ 73.
можных кривых искали кривую, для которой выражение
a J у dx + J U dx или J dx (U + а у)
имеет минимум. Для этого, следуя моему методу, сравним это выражение с
С Z dx, полагая
dZ = М dx + Ndy + Pdp + • •.
Искомая кривая тогда будет
N-^ = Q.
ОХ
Но так как
Z = U + ау
и U содержит только переменные х и у, мы будем иметь
N = 0
или, иначе, дифференциал выражения U + ау, взятый в предположении,
что переменным является только у, должен быть равен нулю. Следовательно,
так как дифференциал функции U, взятый в предположении, что меняется
только у, равен
dy (J V dv 4- J V dv' + J V" dv"),
а дифференциал ay равен ady, мы получим для искомой кривой AM урав-
нение
а + J V dv + J V dv' + J V" dv" = 0,
или, иначе, количество действия сил на каждую точку кривой AM должно
быть одним и тем же, совершенно так, как это было найдено при помощи
других принципов. Такое прекрасное согласие нашего общего принципа в
этих случаях не оставляет ни малейшего сомнения в том, что он будет подоб-
ным же образом согласовываться и во всех других случаях.
XXVI. Мы убедимся еще более в истинности этого общего принципа,
если заметим, что выражение, наименьшее значение которого соответствует
фигуре равновесия гибких нитей, в совершенстве согласуется с этим прин-
ципом. В самом деле, пусть AM будет фигурой равновесия совершенно
гибкой нити, каждый из элементов которой притягивается к центрам С, С',
С" силами V, V' и V". Согласно нашему принципу нить останется в покое,
если сумма всех действий сил на нить AM будет наименьшей. Чтобы найти
эту сумму, следует искать количество действия на элемент Мт = ds; если
обозначить расстояния СМ = v, С'М = v', С"М — v", то количество дейст-
вия на точку М равно
+ J V'dv' + J V'dv",
действие на элемент Мт = ds будет равно
ds (JV dv + j V dv' + J V" dv"),
и следовательно, суммой всех действий на часть нити AM будет интеграл
J ds tfVdv + J V dv' + J V" dv").
Минимальное значение этого выражения даст нам фигуру равновесия нити.
Определив в предыдущей статье фигуру равновесия такой нити при помощи
обычных принципов механики, я уже заметил, что эта фигура находится,
если искать кривую, для которой значение этого же выражения
J ds (JV dv + J V dv’ 4- J V" dv")
является наименьшим.
74
Л. ЭЙЛЕР
XXVII. Я не могу обойти молчанием одно по истине прекрасное свойство
фигуры равновесия совершенно гибкой нити, имеющей повсюду одинаковую
плотность, свойство, к которому приводит это решение. Пусть AM (рис. 6) —
совершенно гибкая нить, повсюду одинаковой плотности, и пусть каждая
точка этой нити притягивается к трем
центрам С, С', С" силами V, V', V",
которые являются какими-то функциями
расстояний СМ = v, СМ' = v', СМ” = v".
Обозначим абсциссы следующим обра-
зом: СХ = х, С'Х' =—х', С"Х" = — х",
апликаты ХМ = у, Х'М = у', Х"М = у";
так как dx = dx' = dx'' и dy= dy = dy',
то элемент Mm кривой будет
Рис. 6.
ds = l/dx2 + dy2 .
Пусть будет теперь
dy = pdx
и
dp = qdx.
Тогда метод максимумов и минимумов дает для кривой равновесия нити
AM следующее уравнение :
- рх) _1_ ~ рх') , у (у" - рх") _
V ' V ' V'
= TyLpP~^Vdv + ^V’dv’+^V"dv',>>’
где
$Vdv + J V'dv' + J V" dv"
выражает количество действия на точку М. Разделим обе части уравнения
на
U+P.P-
Так как радиус развертки
МО = <1 + РР) + РР
Я
то мы будем иметь уравнение
) V dx + ) V' dv + у У dv"_ _ V (у -J>x)_ У (у'-- рх’) У (у" - рх")
мо ®У1 + рр г)'У1 + рр ®"У! + рр
Но
у — рх ___ у dx — xdy
У1 + рр ds
выражает перпендикуляр СТ, опущенный из центра С на касательную МТ ;
в самом деле, опуская из точки X на ту же касательную перпендикуляр
ХР и CQ — на ХР, мы видим сначала, что
хр = ^
ds
и
XQ = ^-y-
х ds
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
75
так что
р'г _ У dx — xdy _ у— рх
~ \ С- рр
Если из других центров С', С" опустить подобным же образом перпенди-
куляры С'Т' и С"Т" на касательную, то написанное уравнение примет вид
У + $ V'dv'+ \ V'dv" = V_ с V с,т, \Г_ с„т„
MO v 'г;' ' v"
Умножим это уравнение почленно на МО. Тогда
ст-мо _ ст-мо
v ~ СМ
выразит линию MR, после того как из точки О на продолжение линии СМ
опущен перпендикуляр OR. Отсюда мы выводим следующее свойство :
Если из центра О соприкасающегося круга в точке М провести перпенди-
куляры OR, OR', OR" на продолжения расстояний СМ, С'М, С"М, то коли-
чество действия сил на точку М, т. е.
p^ + J’ V' dv'+ V” dv"
будет равно
V • MR + V' MR’ + V” • MR".
XXVIII. Наш принцип оказывается еще более общим и распространяется
также и на упругие нити, как я это показал в моей предыдущей статье :
дело только в том, чтобы привести эффект упругости к понятию количества
действия. Сохраним все обозначения предыдущего случая, в котором каждая
частица нити AM притягивается к центрам С, С', С" силами V, V', V", и
пусть радиус развертки, от которого зависит сила упругости, равен
, - A s
силу упругости обычно полагают равной - -, или —, если нить не имеет по-
всюду одну и ту же плотность, так что упругость в одном месте больше или
меньше, чем в другом. Чтобы придать решению большую общность, я пред-
положу, что в точке М упругость равна Т, где буква Т обозначает какую-то
функцию от г, которая содержит также длину нити в случае, когда последняя
имеет переменную упругость. После этого принципы механики дают нам
для фигуры равновесия упругой нити следующее уравнение :
'г . с г f vx . V'x' v"х" . а
Т = + J ds (— + +^-+..J-
c г j f vy , V' у , V" у” . a
— \ dx cfs -A- H-H-----+ ....
.1 J { V V V J
Для того чтобы найти то же самое уравнение методом максимумов и мини-
мумов, необходимо к количеству действия сил V, V', V" на точку М, рав-
ному
j V dv + j V dv' + j V” dv" + • • ,
прибавить количество действия упругости, которую я выше обозначил через Т.
Вводя обозначение у = t , так что t пропорционально кривизне, мы легко
76
Л. ЭЙЛЕР
сообразим, что подобно тому, как сила V производит действие J V dv, так
же сила Т дает действие J Т dt. Следовательно, если обозначить массу эле-
мента нити через Mm = dS, то полная сумма всех действий на часть нити AS
будет равна
[ dS (J Vdv + j V dv' + j V" dv" + ... + j T dt
и зта сумма будет наименьшей, когда нить находится в равновесии; это
свойство должно иметь место в силу нашего принципа не только, когда цен-
тры сил С, С', С" находятся в одной плоскости с фигурой нити, но также и в
том случае, когда они имеют любое расположение.
XXIX. Но, установив общий принцип, что при всяком состоянии равно-
весия сумма всех действий сил для всех частиц тела, находящегося в рав-
новесии, имеет минимум, я замечу
сверх того, что тот же самый принцип
имеет место при всех свободных дви-
жениях тел, какие бы силы на пихни
действовали. Пусть тело, после того
как оно получило какое-то движение,
притягивается постоянно к несколь-
ким центрам сил С, С', С” и т. д.
(рис. 7) и пусть силы V, V', V" выра-
жаются какими-то функциями рассто-
яний СМ = v, С'М = v', С"М = v" ;
это тело каждое мгновение будет
испытывать другое количество дейст-
вия этих сил, и в момент, когда оно
находится в М, количество действия
равно
J Vdv + $ V' dv' + J V" dv" ,
как я показал в начале этого рассуждения. Тогда, если обозначить элемент
времени через dt, мгновенное количество действия, которое испытывает тело
в течение этого элемента времени dt, будет равно
dt$Vdv + $ V dv' + .fV" dv" + ...),
а, следовательно, сумма всех мгновенных действий, которым подвергается
тело за конечное время t, будет равна
$dt($ V dv + \ V'dv' + \ V" dv" + ...).
Теперь совершенно естественно, что тело изберет тот путь, при котором
сумма всех мгновенных действий имеет минимум. Вот — новый общий прин-
цип для свободного движения тел, находящихся под действием любых сил,
истинность которого становится очевидной, как только мы задумаемся над
понятием количества действия, которое я установил.
XXX. Пользуясь этим принципом, мы найдем в действительности те же
кривые для движения тел, находящихся под действием любых сил, к кото-
рым нас приводят обычные принципы механики. В самом деле, этот принцип
вовсе не отличается от того, которым я пользовался для определения этих
же кривых по методу максимумов и минимумов : я там показал совсем как
этого требует принцип Мопертюи, что, если обозначить через Мт = ds
СООБРАЖЕНИЯ ПО ПОВОДУ НЕКОТОРЫХ ОБЩИХ ЗАКОНОВ ПРИРОДЫ
77
элемент кривой, а скорость тела в точке М — через и, то значение выражения
Juds
всегда будет иметь максимум. Я заметил там, что количество действия
J Vdv + J V dv'[+]^V" dv"[,
будучи отнято от некоторого постоянного количества, дает квадрат ско-
рости ии, так что
J Vdv + J V dv' + J V" dv" = С — ии .
Но, согласно нашему новому принципу, выражение
[ dt (С — ии),
или
Ct — § uudt,
будет иметь минимум, или, иначе, в течение того же времени t значение вы-
ражения j uudt, или, на основании равенства ds = и dt, значение выражения
J и ds должно иметь максимум, совершенно так, как я это доказал в моем
«Traite de Maximis et Minimis».
Л. ЭЙЛЕР
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ
И ДВИЖЕНИЯ МОПЕРТЮИ [»]
I. Когда Мопертюи, наш достойнейший Президент, открыл два общих
принципа, один — для состояния покоя и равновесия, а другой для состоя-
ния движения, сначала казалось, что эти два принципа не имеют ничего
общего, потому, что основываются на совершенно различных понятиях.
Однако я покажу, что оба эти принципа опираются на одно и то же осно-
вание и находятся в самой тесной связи, так что если мы соглашаемся с
одним, то и не вызывает сомнения другой, иначе говоря, если один прочно
установлен, то из этого непосредственно следует строгое доказательство
другого. Это замечательное соответствие представляется мне весьма
важным, так как оно проливает яркий свет как на один, так и на другой
принцип; и чем больше связаны между собой эти два принципа, тем больше
они соответствуют простоте Природы.
II. Я начну с общего принципа покоя или равновесия. После того как
полностью сформулирую его, в соответствии с объяснением, которое дал
Знаменитый Автор в Memoires de ГАсабёпйе Royale des Sciences de Paris
за 1740 г., я с помощью простого рассуждения установлю, что общий принцип
движения является необходимым следствием из этого принципа. Очевидно,
принцип покоя не может встретить никаких возражений, тем более, что после
его Автора я также указал на справедливость этого принципа в огромномчисле
совершенно различных между собою случаев, поэтому уже одного указан-
ного соответствия будет достаточно для опровержения всех возражений,
которые можно сделать против другого принципа — принципа движения.
И я надеюсь, что изложение этого соответствия будет наиболее убедитель-
ным способом отстоять эти два принципа, а также показать их новизну:
до Мопертюи никто, конечно, не имел о них никакого представления.
III. Мопертюи сформулировал закон покоя в таких выражениях:
«Пусть имеется система тел, которые тяготеют или притягиваются к
центрам силами, действующими на каждое тело пропорционально л-й
степени их расстояний до центров ; для того чтобы все эти тела оставались
в покое, необходимо, чтобы сумма произведений каждой массы на величину
силы и на (л + 1)-ю степень расстояния до центра силы (что можно назвать
суммой сил покоя) была максимумом или минимумом». Таким образом,
обозначая массу какого-нибудь тела, принадлежащего системе, через М,
а расстояние этого тела до центра через z, к которому оно притягивается с
силой /z", получим для тела М произведение Mfzn+1; сумма всех подобных
произведений, соответствующих каждому телу системы, будет максимумом
или минимумом, когда тело находится в равновесии.
IV. Чтобы показать справедливость этого закона, Мопертюи рассматри-
вает два случая; в каждом из них имеется система трех тел, связанных
между собою. В первом из них он считает эти тела прикрепленными к нема-
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 79
термальным радиусам, движущимся вокруг фиксированной точки; во
втором он считает их прикрепленными к хордам, соединенным в подвижной
точке. И хотя эти два случая совершенно различны между собой, он показы-
вает, что и в первом и во втором случае вышеупомянутый закон выполняется.
Полагая массу каждого из трех тел равной М, расстояние до центра, к кото-
рому оно притягивается, равным z и самую силу равной /г", он показывает
с помощью обыкновенных принципов Динамики, что в случае равновесия
сумма выражений Mfzndz, соответствующих каждому из тел, равна нулю.
Отсюда, очевидно, следует, что сумма их интегралов или п * Mfzn+1
будет максимумом или минимумом, и если показатель п всюду один и тот
же, то можно опустить общий коэффициент •
V. Поскольку оба рассмотренных случая совершенно различны между
собою, легко установить, что то же самое правило должно иметь место во
всех случаях равновесия трех тел, потому что каково бы ни было состояние
тел, оно должно быть свойственно им всем. Очевидно также, что если вместо
трех тел система будет составлена из многих и даже из какого угодно числа
тел,это правило всегда будет иметь место. Кроме того, не обязательно, чтобы
силы были пропорциональны расстояниям в одинаковой степени, если только
не пренебрегать коэффициентами, поскольку они различаются между
собою для различных тел, на которые действуют силы.
VI. Ничто не мешает также предположить силы непропорциональными
любым функциям расстояний. Так, если какое-либо из тел с массой, равной
М, и с расстоянием до центра силы, равным z, притягивается к этому центру
какой-нибудь ускоряющей силой, равной V (вместо fzn), то с помощью тех
же рассуждений найдем, что в состоянии равновесия сумма всех выраже-
ний MV dz будет равна нулю. И, следовательно, сумма их интегралов §MVdz
будет максимумом или минимумом. Здесь следует заметить, и это я покажу
ниже, что в действительности имеется два вида равновесия, для одного из
которых сумма этих выражений является минимумом, а для другого — макси-
мумом.
VII. Если одно и то же тело М, являющееся частью системы, увлекается
в одно и то же время к различным центрам, от которых оно удалено на рас-
стояния z, z', z" и т. д. несколькими ускоряющими силами V, V', V'' и т. д.,
то каждая сила в отдельности образует для этого тела М выражение указан-
ного выше вида ; и полное выражение для этого тела, входящее в формулу
максимума или минимума, будет:
J MVdz + J МУ dz’ + J MV” dz" + ...
Или, так как масса тела М постоянна, это выражение примет вид:
Л1([ Vdz + J V'dz' + J V" dz" + ...).
Сумма всех подобных выражений, соответствующих каждому телу сис-
темы, будет обязательно максимумом или минимумом в случае равновесия.
Или же, так как MV, МУ,'МУ' и т. д. выражают движущие силы, то, если
обозначим движущие силы через V, V', V” и т. д., наша формула запи-
шется так:
j Vdz + J V'dz' + ^V"dz" + ...
VIII. He обязательно также рассматривать полные расстояния каждого
тела до центров сил, к которым оно притягивается ; для удобства вычисле-
ния на направлениях, по которым тела увлекаются, допустимо брать произ-
вольно фиксированные точки и рассматривать расстояния до этих точек.
80
Л. ЭЙЛЕР
Пусть эти расстояния будут v, v', v" и т. д. в отличие от расстояний z, z', z"
и т. д. до самых центров. Так как разности между этими расстояниями z — v,
z' — v', z” — v” постоянны, то получим dz — dv, dz' — dv' и dz” — dv”,
так что выражение для формулы максимума или минимума будет иметь
вид
М (J Vdv + f V dv' + j' V" dv" + и t. д.).
В нем можно опустить массу М, тогда V, V', V” и т. д. будут выражать уже
движущие силы.
IX. Следовательно, если имеется система каких-нибудь тел, находя-
щаяся в равновесии, то будем рассматривать отдельно каждое тело со всеми,
действующими на него силами; в результате этого для тела, масса которого
равна М, получим формулу
М (J V dv + J V dv’ + J V" dv" + и т. д.),
где V, V, V” и т. д. обозначают ускоряющие силы ; но если последние обоз-
начают движущие силы, тогда следует опустить массу М, так как она уже
содержится в этих обозначениях. Затем из всех этих формул, найденных для
каждого тела или каждой частицы системы тел, составим сумму; эта сумма,
являясь максимумом или минимумом, определит состояние равновесия.
К этому правилу сводится, следовательно, универсальный принцип равно-
весия Мопертюи, распространяющийся на все тела, как на твердые, так и
на жидкие, как несгибаемые, так и
М сгибаемые, и даже упругие, как можно
видеть из Мемуаров, находящихся в
/ \ —у Mem. de 1’Acad. Roy. des Sciences et
/ \ Belles Lettres de Prusse за 1748 г., где
/ \ я исследовал, что является максимумом
/ \ или минимумом в состоянии равновесия
/ \ этих различных видов тел.
/ X. X. Так как этот принцип приводит
\ к формуле
Рис. 1. J V dv 4- J V dv' + J V" dv" + и т. д.,
то я позволю себе, как для краткости,
так и для точности речи, назвать это
выражение особым словом, и мне кажется, что слово усилие [d’effort] было
бы наиболее подходящим. Так как сумма всех таких выражений, соответствую-
щих каждому элементу тела, в равновесии является максимумом или мини-
мумом, неплохо было бы сказать, что сумма всех усилий в случае равновесия
является наибольшей или наименьшей. Следовательно, если тело М увле-
кается силами V, V', V” и т. д., направленными к фиксированным точкам
V, V', V” и т. д., и если расстояния MV = v, MV' = v', MV” = v” и т. д.,
то усилие этих сил на тело М будет равно JV dv 4- J V' dv' 4- J V” dv” 4- и
т. д. или, если буквы V, V, V” и т. д. выражают ускоряющие силы, то усилие
будет равно M(J V dv 4- J V' dv' 4- J V” dv” 4- и т. д.).
XI. Следовательно, в силу общего принципа- покоя Мопертюи ни одно-
тело, как твердое, так и жидкое, не будет находиться в равновесии, если
только сумма всех усилий, действующих на каждый элемент тела, не будет
наименьшей или наибольшей, насколько это возможно. Однако ниже я по-
кажу, что наибольшая величина имеет место только в исключительно осо-
бых случаях, когда равновесие не восстанавливается после его нарушения ;
во всех других случаях, в которых равновесие постоянно, имеет место наи-
меньшая величина суммы. Я замечу здесь мимоходом, что есть случаи,
когда сумма усилий становится равной нулю, но эти случаи не только
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТУЮИ 81
не противоречат принципу, но скорее лучше подтверждают его, ибо При-
рода, имея в виду, так сказать, сделать сумму усилий наименьшей, главной
своей целью ставит, без сомнения, заставить ее исчезнуть полностью ; когда,
и только когда это невозможно, она должна довольствоваться тем, чтобы
сделать ее по возможности малой. Таков в нескольких словах принцип
равновесия или покоя Мопертюи.
XII. Установив этот принцип для покоя или равновесия, не естественно
ли было бы сказать, что тот же принцип имеет место также и при движении
тел, увлекаемых подобными же силами, ибо, если замыслом Природы
является по возможности наибольшая экономия на сумме усилий, то необ-
ходимо, чтобы она распространялась также и на движение, если только
принять, что усилия существуют не только одно мгновение, но и все мгно-
вения, в течение которых продолжается движение. Так, если усилие или
сумма усилий для какого-то момента движения равна Ф и если положить
элемент времени равным dt, то необходимо, чтобы интегральное выражение
J Фdt было минимумом. Таким образом, если для случая равновесия вели-
чина Ф должна быть минимумом, то те же законы Природы, как кажется,
требуют, чтобы для движения формула J Фй1 была наименьшей.
XIII. И как раз в в этой формуле заключается другой принцип Мопертюи,
рассматривающий движение, хотя с первого взгляда он может показаться
несколько иным. Чтобы показать это замечательное соответствие, я замечу
только, что когда тело движется, находясь под действием упомянутых сил
V, V', V", и т. д., усилие Ф, которому подчиняется тело, выражает в то же
самое время живую силу тела или произведение массы тела М на квадрат
его скорости. Следовательно, если положить его скорость равной и, то вы-
ражение, которое должно быть минимумом, будет §Muudt; но udt выражает
элемент пространства, пробегаемого телом за время dt; и, следовательно,
полагая это пространство равным ds, мы получим §Muds для приравнивания
минимуму. То есть нужно в каждый момент умножить массу тела М на
скорость и, кроме того, на пробегаемое пространство ds; сумма всех этих
произведений должна быть минимумом.
XIV. Я пришел, таким образом, к тем же словам, которыми поль-
зуется Мопертюи для определения своей идеи действия, когда он говорит,
что действие есть произведение массы на скорость и пробегаемое простран-
ство. Так, в случае предыдущего параграфа выражение Ми ds есть коли-
чество действия в какой-либо момент, если точно воспользоваться манерой
выражения Мопертюи. Согласно тем же самым представлениям движение
тел должно быть таким, чтобы сумма всех элементарных действий или
J Muds была минимумом. В IVтоме наших Memoires я показал также, что
этот принцип приводит как раз к тем кривым, которые находят по обыкно-
венным принципам Механики. Очевидно, что этот принцип движения Мо-
пертюи является необходимым следствием его общего принципа покоя
или равновесия.
XV. Так как в движении выражение Ф dt, данное выше, является как раз
тем, что Мопертюи называет действием тела в течение бесконечно малого
времени dt, то можно с таким же правом сказать, что Ф обозначает мгновен-
ное действие, если не принимать во внимание время ; в этом случае Ф соот-
ветствует тому, что называют живой силой. Следовательно, и в случае покоя
или равновесия, когда совсем нет движения, то же самое выражение Ф обо-
значает полное усилие и поэтому ничто не мешает дать ему то же название
действия. В этом случае действие и усилие будут выражать одно и то же ;
и это наименование также вполне обосновано. Таким образом, согласно
представлению Мопертюи можно сказать, что как в движении, так и в покое
количество действия всегда является наименьшим, насколько возможно.
82
Л. ЭЙЛЕР
XVI. Но нужно доказать еще то, что я сформулировал в § VIII ; это
доказательство лучше пояснит нам соответствие между тем, что я называю
усилием и идеей действия Мопертюи. Итак, пусть тело М притягивается
к центрам сил V, V', V" и т. д. силами V, V', V" и т. д.; положим расстоя-
ния VM = v, V'M — v', V"M = v" и т. д, а самые силы пусть будут любыми
функциями этих расстояний ; пусть тело описало до данного момента кри-
вую ЕМ, и в настоящий момент его скорость в М пусть равна и; с этой
скоростью тело проходит элемент кривой Мт = ds в течение времени dt,
и мы будем иметь ds = и dt. Согласно тому, что я изложил, усилие сил на
тело М будет равно J V dv 4- J V dv' 4- f V" dv" 4- и т. д., если рассматри-
вать движущие силы; следовательно, обозна-
чая усилие через Ф, мы получим :'
Ф = J V dv 4~'J V dv' 4- dv"i+ и т. д.
XVII. Теперь, чтобы определить саму
скорость тела в соответствии с действующими
на него силами, нужно только получить из
этих сил, с помощью известного разложения,
касательные силы. Для этого проведем из
точки т на направление сил перпендикуляры
mv, mv', mv" и т. д. и по правилам разложения
установим, что касательная сила, получающая-
ся из силы Mv = V, есть ~^v V = — V
’ Мт ds
благодаря тому, что Mv = — dv. Точно так
же касательные силы, получающиеся t из
других сил V', V", будут
-Mv’ . V' = — V' и —- V"
Мт ds v Мт v
V"
ds
„ ~ V dv — V' dv' — V" dv"
Следовательно полная касательная сила будет-----------------d~--------.
Обозначим эту касательную силу через Т. По принципам Механики получим
Mdu = Т dt или 2Ми du = T ds, в силу того, что ds = и dt. Следовательно,.
2Ми du = — V dv — V' dv’ — V" dv” — и т. д.
Отсюда, взяв интегралы, получим:
Мии = const — J V dv — J V' dv' — J V" dv" — и т. д.
XVIII. Следовательно, так как по предложению
J Vdv 4- J V' dv' 4- J V" dv" 4- и т. д.
выражает усилие сил на тело М, которое я положил равным Ф, то, оче-
видно, мы получим : Мии = const — Ф. Легко показать, что постоянная
не нарушает соответствия между усилием Ф и живой силой тела Мии,
которое я только что установил, ибо если J Ф dt является максимумом или
минимумом, то формула J Мии dt или J Ми ds будет также максимумом или
минимумом, потому что член J const dt = const t не входит в рассмотрение
максимума или минимума. Помимо того, усилие Ф, выраженное интеграль-
ной формулой, содержит уже в себе произвольную постоянную, так что
я мог бы совершенно пренебречь этой постоянной и просто положить
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 83
Мии = —Ф; тогда тождественность была бы еще более очевидной. Однако,
если взять вышеупомянутые интегралы в фиксированных пределах, так что
усилие Ф получит определенное значение, то добавление постоянной будет
необходимо, так как скорость тела М, зависящая от начальной скорости
тела, может быть любой. Следовательно, эта начальная скорость есть та
добавочная постоянная, которая должна быть определена в каждом рас-
сматриваемом случае. Но какой бы ни была эта
величина, она совсем не затрагивает определение
максимума или минимума.
XIX. Однако, так как живая сила Мии равна
усилию Ф, взятому с обратным знаком, то следует
заметить, что когда J Мии dt или J Ми ds является
минимумом, выражение J Ф dt будет максимумом
и обратно. Но хотя разница между максимумом и
минимумом представляется очень большой, она
тем не менее никоим образом не является след-
ствием самой Природы, потому что максимум и
минимум отличаются между собой только в от-
ношении знаков, так что когда какая-либо вели-
чина z является максимумом, та же самая вели-
чина, взятая с обратным знаком, т. е. —z, является
минимумом. Вот почему метод нахождения как
максимума, так и минимума один и тот же. Тот,
кто хотел бы с этой стороны напасть на открытое
нами тождество между живой силой Мии и уси-
лием Ф, на самом деле допустил бы только не-
обоснованную придирку.
XX. Но если тождество между усилием и живой
силой доказано только для случая, когда в движе-
нии находится единственное тело, то может возник-
нуть сомнение, будет ли то же самое тождество существовать тогда, когда
движется несколько тел, соединенных между собою каким-нибудь способом
и образующих сгибаемое или даже жидкое тело. Но в этих случаях, какими
бы сложными они ни были, я утверждаю, что сумма живых сил всех элемен-
тов тела всегда сводится к сумме всех усилий, которым подвержены все
элементы в одно и то же время. Чтобы это доказать, достаточно рассмотреть
только два тела М и N, связанные между собою с помощью стержня MN,
поддерживающего их всегда на заданном расстоянии так, что движение
одного зависит от движения другого. Затем, чтобы не слишком загромо-
ждать доказательство, я рассмотрю только один центр силы V, к которому
притягиваются оба тела. Легко видеть, что то же самое доказательство будет
распространяться как на какое угодно число тел, соединенных между собою,
так и на какое угодно число центров сил.
XXI. Пусть, следовательно, MV = х и NV — у обозначают расстояния,
на которые оба тела удалены от центра V в заданный момент. Пусть X —
какая-либо функция от х, выражающая ускоряющую силу, с которой тело
М притягивается к V, и пусть подобная же функция от у равна Y и выра-
жает ускоряющую силу, с которой тело N притягивается к V.
Следовательно, если обозначим через М и N массы обоих тел, то движу-
щие силы, которыми тела притягиваются к точке V, будут равны MX и
NY ; и, следовательно, усилия на теле по данному мной определению будут
равны J MX dx и J NY dy или же М j X dx и N J Y dy, в силу постоянства
масс. Следовательно, если сумму усилий положим равной Ф, то получим
Ф = М J X dx + N J’ Y dy [23].
6*
84 л. Эйлер
XXII. Пусть теперь скорость тела в точке М равна и, а скорость тела
в точке N равна v ; с этими скоростями за элемент времени dt тела будут
пробегать пути Мт и Nn, и мы получим Мт = и dt, Nn = v dt. Из точек т
и п проведем перпендикуляры тх и пу к линиям VM и V-N, чтобы иметь
Мх = — dx и Ny = — dy ; тогда центростремительная сила для тела -М
образует касательную силу, равную • МХ = —’ а для тела
N — касательную силу, равную • NY = —°®а тела свя'
заны между собою стержнем MN; этот стержень находится в состоянии,
характеризуемом некоторой степенью натяжения, которое пусть равно Т;
благодаря натяжению стержень будет притягивать оба тела друг к
другу и поддерживать их на заданном расстоянии; наконец, пусть
тп = MN. Следовательно, проводя из М на тп и из N на MN пер-
пендикуляры Мр и nq, получим тр = Nq; и сила Т будет действовать
на тело М с касательной силой, равной — Т =-----потому что
она стремится замедлить движение, а на тело N — с касательной силой,
павной Т = TNq — Tmp
равной Nn 1 vdt vdt
XXIII. В целом, следовательно, тело М будет подвержено действию
касательной силы, которая после умножения на элемент
времени dt должна быть равна 2М du, откуда получаем:
2Ми du — — MX dx — Tmp .
Точно так же другое тело увлекается касательной силой •-----~ ’
если умножим эту силу на dt, то произведение должно быть равно 2N dv,
что приводит к следующему уравнению :
2Nvdv — — NYdy + Tmp.
Сложим теперь эти два равенства, чтобы получить
2Ми du + 2Nv dv= — MX dx — NY dy;
интеграл этого выражения будет :
Мии + Nvv = const — М § Xdx — N §Y dy
или в силу того, что Ф = М J X dx -|- N J Y dy,
Мии + Nvv = const — Ф.
XXIV. Очевидно, Мии и Nvv выражают здесь живые силы каждого из
двух тел, так что сумма живых сил равна const — Ф или просто равна Ф,
если включить в нее постоянную ; и следовательно, сумма живых сил и
сумма усилий в каждый момент времени выражаются одной и той же фор-
мулой. Следовательно, если во время движения формула J Ф dt является
максимумом или минимумом, как требует принцип равновесия Мопертюи,
то это абсолютно то же самое, что J Мии dt -f- J Nvv dt или J Mu • Mm -f-
+ J Nv Nn является максимумом или минимумом. Но Ми • Мт, по Мо-
пертюи, обозначает количество действия тела М и Nv • Nn—количество дей-
ствия тела N за время dt. Следовательно, оба принципа Мопертюи вполне
согласуются также и в более широком смысле.
XXV. Таково, следовательно, данное нами доказательство тождества
обоих принципов Мопертюи ; из этого доказательства видно, что один из
принципов является необходимым следствием другого и что, доказав спра-
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 85
ведливость одного, поставим другой также вне всякого сомнения. Легко
также понять, что так как я вывел принцип движения из принципа покоя,
то последний должен быть также следствием первого, хотя доказательство
в этом случае является более трудным. Ибо, если хотят перейти от движения
к покою, то должны предположить движение бесконечно малым, а это при-
водит к большим спорам относительно бесконечно малых скоростей и про-
странств, пробегаемых в течение бесконечно малого времени, которые будут
выражаться дифференциалами второго порядка. Но доказав тождествен-
ность этих принципов, следует только воспользоваться понятием усилия в
случае равновесия, и убедиться, что оно приводит к тому же, как если бы
мы действительно вошли в детали бесконечно малого движения.
XXVI. Все сводится, следовательно, к доказательству справедливости
принципа покоя, после которого принцип движения не должен более вызы-
вать сомнений. Но ведь кроме того, что сам Мопертюи дал ему прочное дока-
зательство, он подтвердил его истинность также применением этого прин-
ципа ко многим случаям, для которых он показал, что равновесие всегда
вполне согласуется с его принципом. И я нашел формулы, являющиеся
максимумом или минимумом для форм, которые принимают всякого рода
тела, как гнущиеся, так и упругие, и даже жидкие, подверженные действию
каких-либо сил ; эти формулы всегда одинаково содержат то, что я только
что выразил термином усилие [d’effort ]. Все это вместе, следовательно, за-
менит полное доказательство этого принципа, оставив как можно меньше
сомнения в его истинности. Но в тех же самых доказательствах содержится
также доказательство другого принципа — принципа движения, тесно свя-
занного с принципом равновесия.
XXVII. Более того, этот принцип равновесия, будучи вполне установлен-
ным, один приводит нас ко всем результатам, полученным до сих пор в
Статике или Динамике. С помощью этого единственного принципа вся
Наука о равновесии могла бы быть объяснена во всей своей общности, без
употребления какого-либо другого принципа. Это тем более замечатель-
но, что, как известно, до сих пор для определения различных случаев
равновесия пользовались несколькими различными принципами, ибо спо-
соб, которым обычно объясняют разложение сил, предполагает принципы
отличные от тех, с помощью которых объясняют природу рычага. Всегда,
следовательно, важно открыть принцип, который один способен охватить
все различные случаи равновесия, рассматриваемые в Динамике.
XXVIII. Следовательно, если это большое преимущество свойственно
принципу Мопертюи, то нет никакого сомнения в том, что этот принцип
содержит в себе сущность почти всех наших знаний в Науке о равновесии и
что он должен рассматриваться как истинная основа этой Науки и как наи-
более нерушимый закон Природы. Более того, нельзя не согласиться, что
этот принцип — наиболее удачное и наиболее важное открытие из тех, кото-
рые когда-либо были сделаны в этой Науке, потому что до сих пор не могли
найти такой принцип, который был бы общим для всех случаев равновесия.
И без сомнения, заслуживает наибольшего внимания то, что этот принцип
в то же время открывает нам, так сказать, истинное намерение [intention].
Природы, которая действует с возможно наименьшими затратами.
XXIX. Я полагаю, что важность предмета требует, чтобы я показал,
как все основные элементы Динамики весьма естественно вытекают из,этого
великого принципа Природы, в силу которого никакие силы не были бы в
равновесии, если бы сумма их усилий не была наименьшей. Это, без сом-
нения, будет способствовать представлению рассматриваемого принципа в
полном объеме и сделает очевидной его сущность, проявляющуюся в при-
ложениях к случаям, более трудным, чем те, которые я изложил в своих
86
Л. ЭЙЛЕР
Мемуарах по этому вопросу в IV томе наших Memoires. Благодаря этому
станет очевидным, что вся Динамика и, следовательно, так же Механика
основаны на этом единственном принципе и могут быть объяснены с его
помощью без необходимости прибегать к другим принципам.
XXX. Я начну со случая, в котором несколько сил приложено к одной
точке, и покажу, что точка не будет находиться в равновесии, если только
сумма усилий не будет наименьшей. Именно отсюда вытекает основной прин-
цип разложения сил, являющийся последним выводом всей Статики и
других наук, зависящих от нее. Я, следовательно, покажу, что этот фунда-
ментальный принцип есть только весьма естественное следствие универсаль-
ного принципа равновесия Мопертюи. С этой целью я предположу силы,
действующие на точку постоянными, чтобы не углубляться в исследование
задач с переменными силами.
XXXI. Пусть сначала мы имеем точку О, увлекаемую двумя силами ОА
и ОВ к фиксированным точкам А и В с помощью, если угодно, двух грузов,
привязанных к ней нитями АО и ВО и
О подвешенных к блокам, укрепленным
в А и В. Пусть А — сила или груз,
у/ который тянет по ОА, и В — сила
или груз, действующий по ОВ; если
г/________________________обозначим расстояние ОА = х и
р ОВ = у, то усилие силы А будет рав-
Рис 4 но С A dx = Ах, а усилие силы В равно
ис’ ' J Bdy = By. Следовательно, в силу
нашего принципа точка О не будет
находиться в покое, если только сумма усилий Ах + By не будет возможно
наименьшей.
XXXII. Проведя прямую АВ, восстановим из точки О к ней перпенди-
куляр ОР, и пусть АВ — а, АР = s, OP=z; отсюда получим ВР— а — s и,
следовательно, х = f (zz + ss) и у =/[22+(а— s)2]. Необходимо, сле-
довательно, чтобы такая формула была минимумом:
A Y(zz + ss) + В У [zz + (а — s)2] .
Bzdz л _ n
= 0 или 2=0.
Так как эта формула содержит две переменные z и s, то ясно, что относительно
z она станет наименьшей только тогда, когда 2 = 0, ибо, если продифферен-
цируем предложенную формулу, считая переменной только 2, и приравняем
нулю, то получим :
Az dz
^(zz + ss) -и у [zz~+ (а - s)2]
XXXIII. Для случая равновесия, следовательно, необходимо, чтобы
2 = 0, т. е. чтобы ОР = 2 = 0; и наша формула примет вид As + В(а — $);
для того чтобы она была минимумом, необходимо, чтобы Ads — В ds = О
или А = В. Следовательно, две силы, приложенные к точке О, не будут в
состоянии равновесия, если только их направления не будут противополож-
ны между собой и если сами силы не будут равны. Таков первый принцип
Статики, непосредственно выведенный из нашего принципа ; из него следует,
что для равновесия двух сил необходимо, чтобы они были равны между собой
и противоположны по направлению.
XXXIV. Рассмотрим теперь случай трех сил ОА, ОВ и ОС, действую-
щих на точку О, и обозначим эти силы буквами А, В, С (рис. 5). Полагая
расстояния О А = х, ОВ = у и ОС = z, для усилий этих трех сил получим :
J A dx = Ах; § Bdy = By и J С dz — Cz.
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 87
Следовательно, необходимо, чтобы Ах + By + Cz было минимумом. Отсюда,
как и выше, прежде всего видим, что это будет только тогда, когда А, В, С
и О будут находиться в одной и той же плоскости, так как если бы точка О
была приподнята над плоскостью АВС, выражение Ах + By + Cz было
бы больше, чем в том случае, когда точка О находится в той же самой пло-
скости.
XXXV. Итак, необходимо, следовательно, чтобы Adx + В dy + С dz =
= 0; для того чтобы определить значения дифференциалов dx, dy и dz,
допустим, что точка О перемещается в бесконечно близкую точку о. Пусть
угол АО В = р, ВОС = q и СОА = г, так что р Ц- q + г равно четырем
прямым углам. Так как направление бесконечно малого изменения Оо
произвольно, то его можно взять на прямой VOo и обозначить угол AOV =
= со ; тогда получим угол BOV = со -j- Р
и COV = (о + р + q- Следовательно, с
полагая интервал Оо = do бесконечно /
малым, получим дифференциалы : /
dx = do cosco; dy = do cos (co + p), /
dz = do cos (co + p + q). /
V------
XXXVI. Следовательно, в случае
равновесия согласно нашему принципу
должно быть
A cos со + В cos (со + Р) + &
+ Ceos (со + р+ ^) = 0; Рис. 5;
значение этого выражения определяется углом со. Разложение косинусов
дает :
A cos со -|- В cos со cos р + С cos со cos (р + q) — В sin со sin р —
— С sin со sin (р + q) = 0;
необходимо, чтобы по отдельности
и А + Bcosp + Ccos(p + q) = 0, и Bsinp + С sin (р + q) = 0.
XXXVII. Но так как р + q = 360° — г, то получим sin (р + q) = — sin г,
и, следовательно, последнее равенство примет вид
Bsinp — С sin г = 0 или В: С = sin г: sin р.
Таким образом, в случае равновесия необходимо, чтобы сила ОВ отно-
силась к силе СО, как синус угла АОС к синусу угла АОВ. Отсюда, три
силы должны относиться друг к другу как синусы противолежащих углов ;
приведенное сейчас доказательство для сил В и С будет иметь место также
для любых двух других сил, таких, как А и В, А и С и т. д.
XXXVIII. Если бы это доказательство показалось еще сомнительным,
нужно было бы только из уравнения В sin р = С sin г получить или зна-
чение В = vinr- или С = и подставить в первое равенство; так,
sin р Sin Г г г ’
„ С sin г
если взять В = gjn —-, то указанное равенство примет вид
А 4----SinР ’ +Ccos(p + q) = 0.
88
Л,ЭЙЛЕР
были в
Но так как р q — 360° — г, то cos (р + q) — cos г ; следовательно,
уравнение после умножения на sin р примет вид
A sin р + С (sin г cos р + cos г sin р) = 0,
или A sin р + С sin (р -|-г) = 0, и так как sin (р + г) = — sin q, то полу-
чим A sin р — С sin q = 0, а следовательно, А : С = sin q : sin р.
$ XXXIX. Возьмем линии ОА, ОВ и ОС пропорциональными самим си-
лам и продолжим линию СО с другой стороны до точки Е, так что ОЕ = ОС ;
тогда легко увидеть, что эта линия ОЕ
будет диагональю АВ, замыкающей сто-
роны параллелограмма ОА и ОВ. И так
как АО : ВО = sin ВОЕ : sin АОЕ, то
АО: ВО — sin ВОС: sin АОС.
Затем из треугольника АОЕ (рис. 6) полу-
чим :
О А : О Е = sin АЕО: sin ОАЕ =
= sin ВОС: sin АОВ,
откуда видно, что ОЕ будет равно ОС.
XL. Следовательно, для того чтобы три
силы, приложенные к точке О,
равновесии, необходимо, чтобы выполня-
лось следующее условие: если из двух
любых сил, например О А и ОВ, образуем
параллелограмм АОВЕ, то третья ОС должна совпадать с продолжением
его диагонали ЕО и быть равной этой диагонали. Но эта сила ОС, нахо-
дясь в равновесии с силами ОА и ОВ, будет в равновесии с силой ОЕ,
которой она равна и противоположна ; следовательно, как силы О А и О В
вместе, так и одна сила ОЕ уравновешиваются одной и той же силой ОС
отсюда следует, что сила ОЕ эквивалентна двум силам ОА и ОВ. Вот, сле-
довательно, еще один основной принцип, принцип разложения и эквива-
лентности сил, на котором основывается почти вся Динамика и который
является необходимым следствием прин-
ципа покоя и равновесия.
XLI. Этот же принцип приводит нас
также с самого начала к критерию, кото-
рым обычно пользуются для распознавания
состояния равновесия тогда, когда на точ-
ку О действует несколько сил ; этот кри-
терий, хотя и получается легко из разло-
жения сил, однако непосредственно выте-
кает из нашего принципа, без необходи-
мости использовать только что найденный
результат. Пусть к точке О (рис. 7) [24]
приложено сколько угодно сил ОА, ОВ,
ОС, OD и т. д.; обозначим их буквами
A, B,C,D и т. д. и положим углы АОВ—р,
ВОС = q, COD = г, DO А = s ; если через
нибудь линию VZ и назовем угол AOV = со, то для равновесия, так же как
было найдено для случая трех сил, найдем такое равенство :
A cos со + В cos (со + р) + С cos (<о + р + q) + D cos (со + Р + <1 + г) = 0,
и каким бы ни было число сил, мы всегда придем к подобному уравнению.
какую-
мы проведем
точку
о
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 89
XLII. Возьмем линии О А, ОВ, ОС, OD пропорциональными самим силам
А, В, С, D, так, чтобы силы могли быть выражены прямыми линиями, и про-
ведем из точек А, В, С, D на прямую VZ перпендикуляры Аа, ВЬ, Сс, Dd;
ясно, что получим
Оа = О A cos со;
ОЬ = — ОВ cos (со + р);
Ос = — ОС cos (со + р + q);
Od = OD cos (co + p + q + r).
Следовательно, состояние равновесия требует, чтобы
Оа - ОЬ - Ос + Od = О
или же, чтобы сумма интервалов Оа + Od, которые находятся с одной сто-
роны от точки О на прямой VZ, была равна сумме интервалов ОЬ + Ос,
находящихся на этой прямой с другой стороны.
XLIII. Так как угол со может быть взят произвольно, подставим 90° + со
вместо со, и так как тогда косинусы заменяются синусами, то для состояния
равновесия получим:
A sin со + В sin (со + р) + С sin (со + р + q) + D sin (со + р + q + г) = 0.
Полагая, как прежде, угол AOV = со, получим для перпендикуляров :
Аа = О A sin со,
ВЬ = ОВ sin (со + р),
Сс =. — ОС sin (со + р + q),
Dd = — OD sin (со + р + q + г)
и, следовательно,
Аа + ВЬ — Сс — Dd = 0,
так что сумма перпендикуляров Аа + ВЬ, находящихся под линией VZ,
всегда должна быть равна сумме перпендикуляров Сс + Dd, находящихся
над этой линией.
XLIV. Таковы, следовательно, два характерных принципа, с помощью
которых обыкновенно судят о состоянии равновесия какого угодно числа
сил, действующих на заданную точку, и которые выводят обыкновенно из
разложения сил. Но они, так же как разложение, являются непосредствен-
ным следствием нашего общего принципа. Я мог бы тем же способом пока-
зать, что этот принцип дает также известные условия равновесия четырех
или нескольких сил, не лежащих в одной плоскости ; но это потребовало бы
слишком сложных чертежей. Я могу прийти к этому более легким путем:
можно вывести эти условия из обычного разложения, которое уже является
следствием общего принципа ; нет никакого сомнения в том, что все более
сложные случаи также являются такими следствиями.
XLV. Я перехожу к свойствам рычага, чтобы показать, что они также
являются необходимым следствием нашего принципа. Итак, пусть PQ —
прямой рычаг, движущийся вокруг точки О; на его концах Р и Q прило-
жены силы РА и QB; пусть направления сил сначала перпендикулярны
рычагу. Если положим эти силы РА = А и QB = В, а расстояния РА = х
и QB = у, то усилия будут Ах и By, и их сумма Ах + By должна быть мини-
мумом, для чего необходимо, чтобы Adx+ Bdy = O. Пусть рычаг перейдет
90
Л. ЭЙЛЕР
в бесконечно близкое положение pOq. Тогда получим : dx = Рр и dy =
= —Qq, откуда АРр— B-Qq = O или А : B = Qq :Рр. Но Qq :Рр = OQ : ОР;
Рис. 8.
следовательно, А : В = OQ : ОР или
А • ОР = В • OQ, что является главным
свойством рычага (рис. 8).
XLVI. Не предполагая это главное свой-
ство рычага, мы можем получить общую
теорию рычага непосредственно из наше-
го принципа, какова бы ни была форма
рычага и каковы бы ни были силы, дейст-
вующие на него. Пусть, следовательно,
дан какой-нибудь кривой рычаг PROSQ,
движущийся вокруг своей опоры О;
к нему приложены различно направленные силы РА = A, QB = В,
RC = С, SD — D. Проведем из точки О к точкам приложения сил
прямые OP, OQ, OR, OS и пусть углы
АРО = а; BQO=P; CRO = y; DSO = 8.
Кроме того, на направлениях сил возьмем произвольно фиксированные
точки А, В, С, D и пусть расстояния
АР = р; BQ = q; CR = г ; DS = s ;
сумма усилий этих сил будет равна Ар + Bq + Cr + Ds. Следовательно,
для состояния равновесия получим
A dp + В dq + С dr + D ds = 0.
XLVII. Чтобы найти отношение этих дифференциалов, представим
себе, что рычаг бесконечно
мало поворачивается вокруг
точки О, так что достигает
положения prOsq, описав
бесконечно малый угол da>.
Благодаря этому движению
точки Р, Q, R, S опишут во-
круг точки О дуги кругов
Рр — ОР • da); Qq = OQ day;
Pr — OR • da); Ss = OS da).
Из центров А, В, С опишем
также дуги кругов Ра, qb,
Rc, sd.
Рис. 9.
Так как угол АРО = а, а углы АРа и ОРр — прямые, то угол рРа будет
равен 180° — а, следовательно, sin рРа = sin а, и следовательно, ар = dp =
= Рр sin а = OP da) sin а. Тем же способом получим сг = dr = Rr sin у =
= OR • day sin у. С другой стороны, так как угол BQO = /8 и OQq = 90°,
получим qQb = ft — 90°, Qqb = 180° —ft ; следовательно, Qqb = sin и
Qb = — dq = Qq sin ft = OQ day sin /?.
Точно так же получим:
Sd = — ds = Ss sin <5 = OS • da) • sin <5.
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 01
XLVIII. Следовательно, имея
dp = OPda) sin а;
dr = OP da) sin у;
dq = — OQsin/i;
ds — — OS dm sin 8,
после деления на da) найдем для случая равновесия такое уравнение :
А ОР • sin а + С • ОР • sin у = В • OQ sin fl + D OS • sin <5.
Но известно, чтоА • OP • sin а выражает собой момент силы РА относитель-
но точки О; следовательно, смысл этого урав-
нения таков, что сумма моментов с одной стороны
от точки опоры О равна сумме моментов с другой
ее стороны; а в этом и состоит все учение о
рычаге.
XLIX. Наклонная плоскость в Статике (рис. 10)
представляет собой задачу, требующую особого
изложения, которое также выводится непосред-
ственно из нашего принципа. Пусть имеется нак-
лонная плоскость EF на горизонтальном основа-
нии FG; на плоскости находится тело О, поддер-
живаемое силой, которая притягивает его по
направлению ОВ. Требуется найти условия, при
которых тело О будет находиться в равновесии.
Пусть угол наклона плоскости EFG = у, а угол
ВОЕ, составленный направлением силы ОВ
с плоскостью накло-
на FE, равен <3 ; вес тела или сила, которая увлекает его вниз по вер-
тикали ОА, равна А, а сила В, которая его поддерживает, равна В.
Обозначим расстояние О А — хи ОВ = у; сумма усилий этих двух
сил будет равна Ах -J- By, и она должна быть наименьшей; следователь-
но, A dx + В dy — 0.
L. Пусть тело О бесконечно мало меняет положение на наклонной пло-
скости и переходит в точку о, продвинувшись вперед на Оо = ds. Проведем
из точки о на О А перпендикуляр оа и из О на Во — перпендикуляр ОЬ;
ясно, что после этого изменения получим : Оа = — dx и ob = dy. Но так
как угол Ооа — у, получим Оа =
г F = ds sin у, а угол ОоЬ = ЕОВ = <3
даст ОВ = ds cos 5, так что dx =
= —ds sin у и dy = ds cos 6. Следо-
вательно, для состояния равновесия
------необходимо, чтобы Ads sin у -f-
* Ч-jB ds cos <3 = 0 или A sin у = В
sin <3 ; иначе говоря, сила OB
должна относиться к весу тела О,
Н-----как синус подъема наклонной
рис. 11 плоскости к косинусу угла ЕОВ,
образованного направлением силы
ОВ с наклонной плоскостью. Это же самое свойство получается из обыкно-
венных принципов Статики.
LI. Этого, может быть, было бы достаточно, чтобы показать, что все
случаи равновесия, которые объясняются в Статике, весьма естественно
вытекают из нашего принципа, так что с помощью только этого принципа
92
Л. ЭЙЛЕР
вся Статика могла бы получить полное завершение. Однако я еще замечу,
что условия, необходимые для равновесия, этот принцип доставляет часто
намного быстрее, чем обыкновенные принципы. Ибо, пользуясь в сложных
случаях обычными принципами, нужно в каждой комбинации сил, дейст-
вующихдруг на друга, найти, что должно быть сделано разложением сил.
Употребляя же наш общий принцип, мы достигнем цели без этих деталей.
LII. Чтобы полностью убедиться в этом важном преимуществе, рассмо-
трим какую-нибудь машину, заключенную в ящик EFGH и состоящую из
какого угодно числа деталей; пусть мы даже не знаем ее строения. Пусть
эта машина применяется для преодоления некоторого сопротивления с по-
мощью силы АР, приложенной в машине. Пусть сила сопротивления равна
PQ ; первая сила равна Р, а последняя равна Q. Пусть, кроме того, расстоя-
ние АР = х, BQ — у. В силу нашего принципа обе силы не будут нахо-
диться в равновесии, если только сумма усилий Рх + Qy не будет наимень-
шей или не будет Р dx + Q dy = 0. Но чтобы получить отношение дифферен-
циалов dx и dy, допустим, что сила АР продвинулась вперед на расстояние
Рр и в то же время сопротивление BQ отступило на расстояние Qq ; уста-
новив это, получим dx = Рр и dy = — Qq ; следовательно, в случае равно-
весия получим Р- Рр = Q • Qq (рис. 11).
LIII. Вот, следовательно, общий принцип всех машин, непосредственно
вытекающий из универсального принципа покоя. И хотя этот принцип из-
вестен уже с давних пор, следует заметить, что никто еще не дал его строгого
доказательства. Так что можно утверждать, что этот принцип получил свою
достоверность благодаря нашему универсальному принципу. Но, может
быть, мне захотят возразить, что общий принцип равновесия в действитель-
ности не отличается от общего принципа всякой машины, а так как послед-
ний известен с давних пор, то тем самым становится под сомнение новизна
первого. И так как это единственное место, со стороны которого могут на-
пасть на этот важный принцип Мопертюи, полезно предупредить это воз-
ражение.
LIV. Однако я замечу сначала, что смысл принципа Механики, с помощью
которого объясняют состояние равновесия всех машин, совершенно отли-
чается от общего принципа покоя, ибо первый касается равенства произ-
ведений, получающихся умножением, с одной стороны, движущей силы,
а с другой стороны, сопротивления на пробегаемые ими пространства. По-
следний вместо этого требует минимума суммы усилий. Кроме того, принцип
машин распространяется только на две силы, одна из которых заставляет
машину двигаться, а другая есть сила сопротивления, противодействующая
движению, тогда как общий принцип покоя применим к какому угодно числу
сил. Наконец, первый принцип предполагает силы постоянными, в то время
как другой принцип предполагает силы изменяющимися по любому закону.
Следовательно, принцип покоя, как имеющий совсем другой смысл и беско-
нечно большую общность, не может никоим образом совпадать с другим
принципом машин, и его новизна не может вызывать сомнения.
LV. Кроме того, просто обязаны признать, что принцип машин сильно
ограничен. Некоторая кажущаяся общность имеет место только в отношении
машин, когда речь идет о равновесии двух сил — движущей силы и силы
сопротивления. И никто еще не догадался вывести из этого принципа кри-
визну сгибаемых тел, так же как тел сцепления, не говоря уже об упругих
телах и о форме жидких тел, которые должны рассматриваться как находя-
щиеся под действием каких-либо сил. Но я уже показал, что все эти формы
весьма удачно находятся с помощью общего принципа покоя Мопертюи.
Таким образом, имеются всевозможные основания для того, чтобы рассма-
тривать этот принцип как важнейшее открытие в Механике.
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПРИНЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 93
LIV. Во всех случаях равновесия, которые я до сих пор исследовал с
помощью этого принципа, сумма усилий являлась бесспорно минимумом;
но имеются также случаи равновесия, где сумма усилий становится макси-
мумом. Ибо следует заметить, что силы должны обязательно поддержи-
ваться в равновесии как в одном, так и в другом случае, т. е. как тогда, когда
сумма их усилий является максимумом, так и тогда, когда она является
минимумом. Но равновесие, которое получается в случае максимума, имеет
совершенно другую природу, чем равновесие в случае минимума. Полу-
чается приблизительно такая же разница, как между равновесием конуса,
покоящегося на основании, и равновесием конуса, покоящегося на своей
вершине ; и тот и другой случаи возможны, но первый соответствует мини-
муму, а второй — максимуму.
LVII. Так как метод тот же самый, то хотят ли найти максимум или
минимум, наш общий принцип одинаково приводит к равновесиям того и
другого рода, хотя они существенно различаются между собой. Разница
такая же, какая имеется между двумя упомянутыми положениями конуса,
ибо равновесие, которое получается из минимума, таково, что когда произ-
водится бесконечно малое изменение, равновесие восстанавливается само
собой. Вместо этого равновесие, в котором сумма усилий является макси-
мумом, не только не восстанавливается после такого
шается все больше и больше. Так, конус, покоящий-
ся на своей вершине, падает, едва только его кос-
нутся.
LVIII. Чтобы привести пример, в котором усилие
является максимумом, я припомнил особый случай,
предложенный мне некогда. Пусть CD является
фиксированной стенкой (рис. 12), на которую нужно
опереть рычаг АВ так, чтобы, поддерживаясь на
фиксированной точке О и подвергаясь в А действию
веса Р, он оставался в равновесии. Допустим, что
стенки и точка совершенно гладкие, так что рычаг
может свободно скользить, не испытывая при этом
изменения, но нару-
ни малейшего трения; допустим также, если угодно,
что рычаг невесом, так что, кроме веса Р, нет другой силы, действующей
на него; легко свести к этому случаю тот, в котором рычаг является
тяжелым. Этот случай, который к тому же не так легко решить с помощью
обыкновенных принципов Механики, замечателен в том отношении, что
может быть употреблен для нахождения двух средних пропорциональных
двух заданных линий.
LIX. Пусть, следовательно, длина рычага АВ — а; расстояние опоры
О до стенки ОЕ — b; вес или сила, с которой конец А увлекается вниз,
равен Р или, что то же самое, допустим, что точка А притягивается этой
силой к фиксированной точке F, взятой на линии EOF. Полагая, следо-
вательно, расстояние AF = z, получим усилие Pz, которое, становясь макси-
мумом, дает Р dz или dz = 0 ; ибо очевидно, что расстояние AF может
быть только минимумом ввиду того, что скользит ли конец В вверх или
вниз, расстояние AF может становиться совсем малым.
LX. Чтобы раскрыть этот случай равновесия, положим часть рычага
О В между стенкой и опорой, равной х, и в силу того, что ОЕ = Ь, получим
BE = |/(хх — bb). Следовательно, так как АО = а — х, получим О В : BE =
= О А : AF и
A F = z = = £ К(хх^< - Г(хх - bb) ,
94
Л. ЭЙЛЕР
откуда выводим :
__ abb dx х dx ____ dx {abb — x3)
xx У (xx — bb) У (xx — bb) xx У (xx — bb)
Следовательно, необходимо, чтобы x3 == abb или x = ]/abb, т. e. часть
OB будет первой из двух средних пропорциональных между линиями ОЕ
и АВ. Но это же самое решение получается также с помощью обыкновен-
ных принципов Механики.
LXI. Рассмотрев здесь постоянные силы, добавим несколько слов о
силах переменных и в частности, о силе пружин ; здесь будет содержаться
правило Бернулли, которое я объяснил в своих Мемуарах в IV томе Мёш.
de 1’Acad. и которое относится к нахождению усилий упругих сил. Пусть
АО — рычаг, движущийся вокруг точки О, прикрепленной к фиксирован-
ному потолку ОВ с помощью пружины EF в форме дуги круга с центром
в О. Допустим, что сила пружины пропорциональна углу ВО А, так что
рычаг увлекается ею всегда перпендикулярно в точке F. Пусть тот же самый
рычаг натягивается вниз постоянной силой АР в точке Р. Требуется найти
условия, при которых этот рычаг будет в равновесии (рис. 13).
LXII. Пусть линия О В горизонтальна, а
„ Е_______________АР вертикальна ; полагая силу АР = А рас-
[ СТОяНие АР, взятое от точки А до фиксированной
Iточки Р в одном и том же направлении, равным
х, найдем, что усилие этой силы [25 ] равно Ах.
Г Но чтобы найти усилие силы пружины, положим
а угол ВО А = <р ; тогда сила пружины в этом
Е<р
состоянии равна ——, если предположить, что
ее сила для постоянного угла а есть Е. Пусть,
кроме того, интервал ОЕ = OF = /. Но в то
Рис- 13- время как рычаг продвинется на бесконечно ма-
лый угол АОа = dtp, пружина растянется на
длину Ff = f dtp. Следовательно, мы получим силу, равную , которой
соответствует элемент кривой fdtp; следовательно, ее усилие будет
Г Е<р ,, Ef
J — -fdtp = -^-tptp.
Ef
LXIII. Следовательно, сумма усилий равна Ах + -^чхр ; для состояния
равновесия необходимо, чтобы Adx + ^-tpdtp = 0. Но если рычаг достиг
ближайшего состояния Оа, точка А будет перенесена в а по дуге Аа = a dtp;
полагая длину рычага О А = а и проведя горизонтальную линию ар,
мы получим dx = — Ар ; но если угол а Ар = ВО А == tp, получим Ар =
= a dtp - cos tp, откуда
Ef
— Аа dtp cos tp + -J- tpdtp = 0
или
A Ef
Aa cos tp = - ~ (p.
Очевидно, это —верное условие равновесия, ибо Аа cos tp выражает момент
pj Е(р
силы АР = А относительно точки О n-’-tp = —- / — момент силы пружи-
ны ; и эти моменты должны быть равны между собой.
СООТВЕТСТВИЕ МЕЖДУ ОБЩИМИ ПГИЦИПАМИ ПОКОЯ И ДВИЖЕНИЯ МОПЕРТЮИ 95
LXIV. Отсюда очевидно обратное : усилие пружины, которое мы только
Ef к
что нашли равным ^ 9999, выражено верно; и, следовательно, убеждаемся
также в справедливости правила Бернулли, которое я пояснил в упомяну-
тых своих Мемуарах, чтобы найти усилие упругости упругих кривых. Ибо
выражает то, что я назвал там абсолютной упругостью, и так как угол
ВОА = 99 тамбе сконечно мал, то он будет обратно пропорционален радиусу
развертки [ la developpee ]; следовательно, если положим этот радиус
равным г, то усилие упругости будет выражено в видеесли принять С
произвольной постоянной. Это и есть точное выражение Бернулли, кото-
рым я воспользовался в упомянутом месте.
Л. ЭЙЛЕР
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ,
с разбором возражений славнейшего проф. Кёнига,
выдвинутых против этого принципа ]
Берлин, 1753
Те, которые до сих пор приняли участие в споре, возникшем по поводу
принципа наименьшего действия, большею частью имели весьма превратное
мнение об обсуждавшихся по этому поводу вопросах. Сначала ведь речь
шла единственно лишь об известном отрывке письма, приписанном Лейб-
ницу, и Академия решила не брать на себя разбора ни одного другого из
многочисленных вопросов, поднятых Кёнигом. Впоследствии, однако, в
сочинениях, изданных проф. Кёнигом и его покровителями, не только под-
вергается необдуманным нападкам суждение Академии по этому первона-
чальному вопросу, но также безосновательно порицается и объявляется не
соответствующим истине самый принцип знаменитейшего президента, уста-
навливающий, что природа во всех своих проявлениях
пользуется наименьшей затратой действия. Итак,
чтобы дать отпор этим злонамеренным судьям, мы решили выступить здесь
перед публикой с двумя диссертациями, первая из которых посвящена изло-
жению сущности принципа наименьшего действия, вторая же опровергает
возражения, выдвинутые сл. проф. Кёнигом против этого принципа. Хотя
обе эти диссертации, поскольку они были зачитаны в Академии, должны
быть опубликованы в ее «Записках», однако, поскольку сл. профессор гро-
зиться издать отдельное сочинение против этого принципа, мы сочли разум-
ным ускорить публикацию этих диссертаций, чтобы, с одной стороны, утвер-
дить истинность самого принципа и укрепить его против выдвинутых ранее
возражений, и, с другой стороны, чтобы самому противнику полнее изло-
жить существо вопроса, по которому он нападает.
В первой диссертации тщательно исследовано то, что было известно
философам, как древним, так и новейшим, об этом принципе бережливости,
и ясно показано, что среди них нет и не было такого, кто с точностью познал бы
этот принцип, хотя многие действительно подозревали наличие в природе
такого принципа. Доказано, что и те, у которых знаменитый президент, —
как в этом его обвиняет сл. профессор, — почерпнул свой принцип, были
весьма далеки от познания такого всеобщего принципа, хотя не отрицается,
что и этим авторам и другим были известны некоторые частные принципы,
которые могут иметь место лишь в очень немногих случаях. Ведь вся сила
принципа знаменитого Мопертюи состоит именно в крайней всеобщности.
Ибо если бы он был приложил! лишь к отдельным случаям, мы легко согла-
сились бы со сл. профессором и его защитниками, что невелика будет слава
такого открытия. Отсюда мы утверждаем, что будь этот принцип верен или
не верен, открытие его не может быть приписано никому другому, кроме
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
97
как знаменитому президенту. Но помимо этого в той же диссертации доста-
точно ясно доказана истинность этого принципа, насколько это можно было
сделать без средств, уводящих слишком глубоко в анализ. Наиболее полное
же доказательство изложено в особом сочинении, представленном Академии.
Итак, остается только опровергнуть возражения сл. профессора против
этого принципа. А это будет подробно рассмотрено во второй диссертации,
ибо ведь и сам он, и его покровители постоянно кричат, будто в статье
Кёнига, помещенной в Acta Lipsiensia, принцип знаменитого президента раз-
рушен до основания убедительнейшими доказательствами, притом не мета-
физическими, а геометрическими. Тем более я счел необходимым тщательней-
шим образом проверить эти столь хваленые доказательства, если сам Кёниг
требует такого большого доверия к ним. Такая проверка действительно
обнаружила, что эти доказательства страдают огромными пороками, даже
сверх всякой меры, так что самому автору, несомненно, должно быть очень
стыдно. И придется ему самому поразмыслить, следует ли ему или не сле-
дует издавать тот труд, созданием которого он до сих пор все еще угрожает.
А после того, как он издал защиту своей «апелляции», еще более уместно
выступить перед публикой с этим разбором его сочинения, помещенного в
Acta Lipsiensia, ибо сей славнейший муж в этом новом писании снова взы-
вает прежде всего к своим геометрическим доказательствам и в них ста-
рается извратить основной момент всего спора. Отсюда мы имеем основание
полагать, что этот разбор полностью удовлетворит его желанию.
Имеется, однако, еще другой род людей, которые, не владея никакими
началами, необходимыми для разбора этого вопроса, тем не менее всячески
старались ввязаться в этот спор. Но поскольку они бесстыдно пользуются
пустыми и голыми утверждениями, без всякого понимания сути дела, мы
считали себя в праве вовсе им не отвечать.
О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
Если бы вопрос состоял в том, кому из философов первому пришло в
голову, что природа во всех своих проявлениях идет легчайшим путем,
или, что то же самое, пользуется наименьшими затратами, то, разумеется,
было бы смешно, если бы эту честь захотел приписать себе кто-нибудь из
философов нашего времени. Ибо уже древнейшие философы знали, что при-
рода ничего не делает напрасно, что вполне соответствует мысли о наимень-
ших затратах. Ведь если природа допускала бы излишние затраты, то она,
несомненно, что-то делала бы напрасно. Уже Аристотель часто упоминает
об этом догмате, однако, как это кажется, он скорее почерпнул его у своих
предшественников, чем придумал сам. В дальнейшем же эта мысль настолько
закрепилась в философских школах, что из нее был создан первый канон
философии, пока, наконец, Декарт не попытался его опровергнуть. Итак,
когда сл. Кёниг называет нам Мальбранша, Гравезанда, Вольфа и других,
которые установили, что природа всегда идет легчайшим путем или затра-
чивает меньше всего действия в своих проявлениях, то мы не только пол-
ностью с ним соглашаемся, но и весьма охотно допускаем, что он мог бы
назвать таких имен еще много больше. Ведь и наш знаменитый президент
никогда не утверждал, что до него не было никого, кто думал бы об этом
общем законе природы, и эту честь, как бы она ни была велика, он охотно
оставляет другим, тем, которых Кёниг сочтет достойными ее.
Итак, речь идет здесь не о том, кто первый сказал, что в природе суще-
ствует такой общий закон, а о том, кто первый тщательно описал этот закон
и определил тот истинный объект, к крайнему уменьшению которого природа
постоянно стремится не только в некоторых, но решительно во всех своих
7 Вапианионные ппиннипы механики
98
Л. ЭЙЛЕР
проявлениях. А это, как мы с полным правом утверждаем, никто не сделал
ранее, чем знаменитейший президент. Следовательно, мы согласны с тем,
что многие признавали этот закон в общем виде, однако, настолько туман-
но, что они вовсе не знали, что именно в проявлениях природы является
наименьшим. Далее, мы также соглашаемся, что некоторые поняли даже,
что именно является наименьшим в отдельных проявлениях природы, но
это было настолько тесно связано лишь с некоторыми частными случаями,
что или никак не могло быть приспособлено к другим случаям, или способ
приложения был совершенно неизвестен. Но хотя эта вторая стадия позна-
ния достойна всяческой похвалы, и следует считать, что именно она открыла
путь к более полному познанию, ибо наша наука обычно идет вперед по
ступеням от частного к общему, однако, поскольку здесь рассматривается
всеобъемлющая сила природы, простирающаяся решительно на все проявле-
ния, невозможно вообще придавать какое-либо значение той силе, которая
заключена лишь в частных случаях. И следует считать, что лишь тот постиг
истинное свойство природы, заключающее в себе высшую сущность нашего
познания, кто сумел точно определить во всех проявлениях природы то,
что есть наименьшее. Но ведь до знаменитейшего де Мопертюи мы, без-
условно, не находим никого, кто обнаружил бы такое полное познание, и
поэтому одно лишь то, что он ясно изложил этот общий закон, вполне закре-
пляет за ним славу первооткрывателя. В самом деле, как можно считать,
что он почерпнул этот закон у другого, если никто ранее не заявлял, что
познал его?
Однако, кажется, ни с кем не было бы так бессмысленно вести этот спор,
как со сл. профессором Кёнигом, который дерзко отрицает, что в природе
существует такой общий закон, и даже нелепейшим образом высмеивает
этот принцип бережливости, в котором и содержится достигаемое природой
наименьшее. К тому же еще он так истолковывает великого Лейбница,
слова которого приводит, будто сам Лейбниц был весьма далек от познания
такого принципа. Отсюда видно, что Кёниг не может отказывать знаменитей-
шему президенту в открытии этого принципа, который сам он объявляет
ложным от начала до конца. Между тем, однако, он противоречит себе,
когда называет Мальбранша, Гравезанда, Вольфа и самого Лейбница, у кото-
рых знам. де Мопертюи якобы почерпнул свой принцип. Ибо этих мужей
он не уличает ни в какой ошибке. Как же может он обвинять господина
де Мопертюи, будто тот у них позаимствовал свой принцип? Но он говорит:
то, что он взял у этих авторов, верно, а что сам добавил, ложно. Итак, он
признает, что в принципе знам. президента содержится нечто такое, о чем
никогда не было сказано этими авторами, и сие он щедро уступает этому
мужу — мы вполне удовлетворены таким признанием. Ибо ведь то, чем прин-
цип знам. де Мопертюи отличается от взглядов достопамятных авторов,
заключается в крайней всеобщности, которую Кёниг вовсе не одобряет.
Тем самым он признает, что эти авторы были весьма далеки от познания
такого всеобщего закона природы, и красноречиво оставляет открытие этого
закона одному только нашему президенту, в чем и заключается, главным
образом, корень вопроса. А что Кёниг твердит, будто этот принцип ложный,
то это нас мало заботит, ибо истина нисколько не зависит от его мнения, и
мы намерены ниже ясно показать, какой жалкий вздор представляют его
доказательства, которыми он так похвалялся. Итак, когда будут разбиты
эти возражения, которые он считал неопровержимыми, сам Кёниг будет
вынужден признать не только то, что этот принцип знам. г-на де Мопертюи
прекрасен и чрезвычайно важен для всей философии, но и то, что честь его
открытия не может быть приписана никому другому, ибо ведь на
того же самого, кого он поносил за открытие, которое считал ложным,
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
99
он вынужден будет перенести и хвалу за него, после того как признает
его истинным.
Между тем, однако, поскольку этот спор, в который сл. Кёниг втянул
Академию, дал повод также к обсуждению вопроса о наименьшем, дости-
гаемом природой, и об этом, при явном подстрекательстве со стороны Кё-
нига, повсюду толкуют весьма превратно, будет не бесполезным кратко и
ясно напомнить о том, что было известно по этому вопросу до знам. Мо-
пертюи.
Прежде всего, хотя древнейшие философы и последователи Аристотеля
установили, что природа ничего не делает напрасно и во всех своих про-
явлениях избирает кратчайший или легчайший путь, и в этом принципе они
полагали главную конечную причину, к которой стремится природа, однако
нет сведений о том, чтобы они объясняли какое-либо явление на основе
этого принципа. Если бы все движения производились природой по прямьш
линиям, то это легко склоняло бы к выводу, что природа избирает прямую
линию, ибо она является кратчайшей между двумя точками. Действительно,
как это можно видеть из Птолемея, именно этой причине приписывалось,
что лучи света идут к нам по прямой линии. Однако поскольку это не проис-
ходит, если среда, через которую передаются лучи, не является однородной,
то такое объяснение было слишком ограниченным, чтобы заслуживать вни-
мания. Ибо поскольку, за исключением этого случая, едва ли встречается
какое-либо движение, производимое природой, которое бы происходило
по прямой линии, то было достаточно очевидно, что природа не стремится
к кратчайшей линии в собственном смысле этого слова. Итак, нашлись и
такие философы, которые полагали, что можно равным образом в качестве
кратчайшей взять круговую линию. И это, возможно, потому, что они научи-
лись у геометров, что на поверхности шара дуги наибольших окружностей
представляют кратчайшие линии между двумя точками. Отсюда, поскольку
они полагали, что небесные тела обращаются по кругу, они без колебаний при-
писывали конечную причину такого движения этому свойству круга. Но так
как теперь известно, что линии, описываемые небесными телами, не только
не являются окружностями, но даже принадлежат к роду наиболее транс-
цендентных линий, такое мнение о прямых или круговых линиях, к кото-
рым будто бы стремится природа, оказалось совершенно несостоятельным,
и тем самым казалась почти опровергнутой и мысль о том, что природу
радует нечто наименьшее. И нет никакого сомнения, что по этой самой при-
чине Декарт и его последователи сочли нужным вообще убрать из фило-
софии конечные причины, ибо они показали, что во всех проявлениях при-
роды имеет место скорее крайнее непостоянство, чем какой-либо определен-
ный общий закон. Итак, обновление и развитие философии не сделало нас
более осведомленными относительно этого принципа. Наоборот, оно, ка-
жется, скорее закрыло перед нами познание его.
Однако в некоторых особых случаях осталась как бы некая тень этого
общего принципа. Среди них прежде всего заслуживает упоминания отра-
жение света, относительно которого уже Птолемей, объясняя, что угол
отражения постоянно равен углу падения, показал, что путь, который со-
вершает таким образом луч, является кратчайшим, так что, если бы он отра-
жался иначе, он описал бы более длинный путь. Одновременно, однако,
было замечено, что это объяснение никоим образом не может иметь места
для преломления лучей света, где ломаная линия никак не может иметь
ничего общего с кратчайшим путем.
Итак, хотя было ясно, что в прямом и отраженном движении лучей при-
рода действительно избирает кратчайший путь, однако уже одно прелом-
ление делало очевидным, что закон природы менее всего может состоять
100
Л. ЭЙЛЕР
в избирании кратчайшего пути, потому что бесчисленные другие явления
разбивали этот закон. Итак, поскольку нужно было найти общий закон при-
роды в движении лучей как прямом, так и отраженном, должно было быть
наименьшим нечто другое, помимо длины пути, а именно то, что в этих слу-
чаях выразилось в кратчайшем пути, но сущность чего могла бы иметь
место одновременно и в преломлении лучей. Размышляя об этом, Ферма
установил, что лучи света в своем движении ищут не столько кратчайшую
линию, сколько такую линию, по которой они могут пройти от одного места
до другого за кратчайшее время. Ибо он принимал, что в одной и той же
среде лучи несутся с одинаковой скоростью, так что в одной и той же среде
время пропорционально пройденному пути, и поэтому как в прямолинейном
движении, так и в отраженном кратчайший путь непременно должен быть
связан также с наименьшим временем. В прозрачных же средах различной
плотности, как, например, в воздухе, воде, стекле, он предположил также
различную скорость лучей света, а именно, большую скорость в более редких
средах, например в воздухе, и меньшую в более плотных, как в стекле.
Такая мысль казалась вполне согласующейся с природой. И из этой гипо-
тезы, на которую яростно нападал Декарт, Ферма, наконец, преодолев огром-
ные трудности вычисления, счастливо объяснил явления преломления и
показал, что синусы углов падения и преломления постоянно должны со-
хранять между собой одно и то же отношение, как это показывали опыты.
Декарт же, который был главным противником Ферма, полностью отри-
цая конечные причины, объяснял преломление совершенно по-другому.
Прибегнув к помощи закона столкновения тел, он показал, что сферическое
тело, если его бросить под углом в жидкость, должно отклониться от своего
пути, а так как он представлял себе лучи света как ряд мельчайших шари-
ков, он отсюда заключил, что, если луч входит косо в другую прозрачную
среду, его направление должно измениться. Из этого он получил те же пра-
вила преломления, которые показывал опыт. Однако Декарт расходился
с Ферма в том, что предполагал, будто лучи света в более плотной среде,
например в стекле, движутся быстрее, чем в среде более редкой, например в
воздухе, тогда как Ферма установил обратное. Декарту казалось, что лучи
движутся в стекле быстрее, чем в воздухе, потому, что стекло оказывает
меньшее сопротивление их прохождению, чем воздух, и он пытался дать
объяснение этому, исходя из основ своей философии. Этот спор, который в
то время велся с величайшим ожесточением, кажется тем более удивитель-
ным, что Декарт же установил, что свет мгновенно распространяется на'са-
мые большие расстояния и поэтому не может связываться с понятием ско-
рости ; поэтому самый вопрос, распространяются ли лучи быстрее через
воздух или через стекло, уже был весьма неуместен.
Но хотя мнение Ферма было поддержано многими философами и мате-
матиками, которые не были приверженцами учения Декарта, дело, однако,
обстояло далеко не так, чтобы Ферма мог претендовать на открытие всеоб-
щего закона, которому природа следует во всех своих проявлениях. Ведь
этот проницательнейший ученый муж хорошо понимал, что такой принцип
наименьшего времени имеет место только в движении света и никоим обра-
зом не может распространяться на Другие явления; он никак не мог впасть
в такую ошибку, чтобы считать, будто брошенный камень или планеты в
небе движутся так, что подчиняются закону наименьшего времени. Поэтому,
если бы его мнение и было правильно, оно не имело бы значения для обсуж-
даемого сейчас вопроса, ибо речь идет не о каком-то специальном принципе,
а о самом всеобщем, который был бы действителен для всех проявлений при-
роды. И еще из-за того, что он имел противником Декарта и не сумел его
опровергнуть, он тем более не может повредить нашей течке зрения.
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ Щ!
Лейбниц тоже пытался отвергнуть объяснение Ферма: в Acta Lipsiensia
за 1682 год он для объяснения преломления света решил снова ввести в фило-
софию конечные причины, изгнанные Декартом, так, чтобы одновременно
могло оставаться в силе то объяснение Декарта, взятое из столкновения тел,
которое было противоположно объяснению Ферма. Итак, он решительно
отрицает, что природа стремится к кратчайшему пути или к наименьшему
времени, но утверждает, что она скорее избирает наиболее легкий путь, —
а это не следует смешивать ни с тем, ни с другим из предыдущих. А чтобы
определить этот наиболее легкий путь, он обращается к сопротивлению,
которое встречают лучи света, проникающие через какую-нибудь прозрач-
ную среду, и принимает, что сопротивление различных сред различно. Он
стоит также на том — ив этом он, кажется, поддерживает мнение Ферма, —
что в более плотной среде, как, например, в воде и стекле, сопротивление
больше, чем в воздухе и в других более редких средах. Исходя из такой
предпосылки, он выдвигает понятие трудности (difficultas), которую пре-
одолевает луч, проходя через какую-либо среду, и эту трудность он опреде-
ляет из длины пути, помноженной на сопротивление. Он полагает, что луч
всегда следует по такому пути, для которого сумма всех трудностей, полу-
ченных указанным выше путем, была бы наименьшей; отсюда он по методу
максимумов и минимумов выводит то же самое правило, которому учит
опыт. На первый взгляд кажется, что такое объяснение согласуется с объяс-
нением Ферма. Однако дальше он с удивительной тонкостью истолковы-
вает его так, что оно прямо противопоставляется Ферма и сближается с
объяснением Декарта. Ведь, хотя он считает сопротивление стекла большим,
чем сопротивление воздуха, он, однако, утверждает, что лучи в стекле рас-
пространяются быстрее, чем в воздухе, и это именно потому, что сопроти-
вление у стекла больше, чем у воздуха. Это было бы, разумеется, величайшим
парадоксом. Но он старается понять это следующим образом: при боль-
шом сопротивлении, говорит он, достигается то, что лучи меньше рассеи-
ваются, в то время как там, где сопротивление меньше, они больше рассеи-
ваются по сторонам. А когда рассеиванье сдерживается, лучи больше сжи-
маются на своей тропе и подобно реке, которая должна проходить по более
узкому руслу, отсюда приобретают большую скорость. Итак, объяснения
Лейбница и Декарта сходятся в том, что оба они приписывают лучам в более
плотной среде большую скорость. Относительно же причины этого увели-
чения скорости взгляды их прямо противоположны, ибо, по мнению Де-
карта, лучи в более плотной среде движутся быстрее потому, что сопротив-
ление там меньше, Лейбниц же приписывал увеличение скорости большему
сопротивлению. Можно ли допустить такую мысль или нельзя — я не стану
это здесь разбирать. Однако я должен указать на то, что сам Лейбниц этот
принцип наиболее легкого пути, хотя он кажется установленным как всеоб-
щий, не прилагал ни к какому другому случаю и не учил, каким образом
следует определять в других случаях эту самую трудность, которая должна
быть наименьшей. А если он скажет, что это нужно делать так же, как здесь,
т. е. брать произведение пройденного пути на сопротивление, то в большин-
стве случаев вообще невозможно будет определить это сопротивление, ибо
оно является понятием весьма расплывчатым. Тогда же, когда нет никакого
сопротивления, как, например, в движении небесных тел, каким образом
можно будет определить трудность? Или, может быть, из одного только
пройденного пути, так как сопротивление здесь повсюду должно прини-
маться за нулевое? Но отсюда вытекало бы, что при таком движении сам
пройденный путь должен быть наименьшим, и поэтому он был бы прямо-
линейным, вопреки тому, что показывает практика. Если же движение
происходит в сопротивляющейся среде, где во всяком случае имеется сопро-
102
Л. ЭЙЛЕР
тивление, то неужели он скажет, что движение будет происходить так,
чтобы произведение пройденного пути на сопротивление было наименьшим?
Ведь отсюда последовали бы самые абсурдные заключения. Из этого ясно
видно, что этот принцип наиболее легкого пути, так, как он предложен и
объяснен Лейбницем, не может быть применен для объяснения никаких
других явлений, кроме движения света.
Может, правда, показаться, что если почерпнуть истолкование из
соединенных вместе теорий, то тогда этому принципу можно будет придать
гораздо более широкое распространение. Ведь поскольку Лейбниц пола-
гает, что лучи движутся тем быстрее, чем больше преодолеваемое ими сопро-
тивление, то в этом случае скорость будет пропорциональна сопротивлению,
поэтому она может быть применена в качестве его меры. Отсюда трудность,
как это установлено Лейбницем, определяется произведением пройденного
пути на скорость. И если это положить за наименьшее, мы получим объясне-
ние знам. г-на де Мопертюи, согласно мнению которого количество действия
должно быть выражено через то же самое произведение пройденного пути
на скорость. Поэтому, поскольку это произведение действительно является
наименьшим не только в движении лучей, но решительно во всех движениях
и проявлениях природы, то в этом именно и состоит принцип наименьшего
действия. Отсюда может показаться, будто этот самый принцип был замечен
уже Лейбницем и совпадает с его принципом наиболее легкого пути. Но если
бы мы даже допустили, без всякого исключения, теорию Лейбница, в которой
ему угодно утверждать, что от увеличения сопротивления скорость возра-
стает, никто, разумеется, не подумает, что это происходит во всяком дви-
жении, чтобы с ростом сопротивления тотчас же возрастала скорость. Скорее
наоборот, из бесчисленных случаев ясно видно, что от сопротивления ско-
рость уменьшается. Поэтому следует считать, что здесь лишь случайно по-
лучилось, что принцип наиболее легкого пути совпал с принципом наимень-
шего действия, точно так же, как случайно выходит, что в оптике и катоп-
трике птолемеев принцип наименьшего пути тоже совпадает с этим принци-
пом, хотя сущность этих явлений следует искать лишь в одном этом принципе.
Отсюда сам Лейбниц, когда он выдает принцип наиболее легкого пути за
общий закон природы и считает, что трудность пропорциональна произ-
ведению пройденного пути на сопротивление, не может допустить принцип
наименьшего действия ни в каких других случаях, кроме тех, где скорость
возрастает одинаково с сопротивлением. Но такие случаи чрезвычайно редки,
а может быть, они и вовсе не существуют.
Поэтому во всех остальных случаях принцип наиболее легкого пути
весьма несходен с принципом наименьшего действия, и Лейбниц, если бы
он когда-нибудь заявил, что в проявлениях природы произведение пройден-
ного пути на скорость является наименьшим, противоречил бы сам себе, за
исключением лишь тех случаев, когда скорость пропорциональна самому
сопротивлению. И отсюда мы прямо заключаем, что принцип наименьшего
действия не только был Лейбницу совершенно неизвестен, но сам он даже
пользовался принципом совсем противоположным, таким, который совпа-
дает с первым лишь в чрезвычайно редких и весьма частных случаях, во всех
же остальных явно с ним расходится. Если это так, то этот принцип Лейб-
ница, каким бы общим он ни казался, может быть применен в очень редких
случаях, а возможно, исключительно только в тех, которые были упомя-
нуты; во всех же остальных он не может быть приложен, потому что неиз-
вестно, каким образом следует измерять сопротивление, и как бы мы его
ни определяли, мы всегда будем впадать в грубейшие ошибки. Итак, Лейб-
ниц был весьма далек от того, чтобы когда-либо заметить силу принципа
наименьшего действия. Более того, он облюбовал противоположный прин-
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
103
цип, применение которого, за исключением одного только случая, или невоз-
можно, или явно ошибочно. К тому же ведь неизвестно, чтобы Лейбниц хотел
применить этот принцип в каком-либо другом случае.
Итак, вряд ли можно было придумать что-нибудь более нелепое, чем тот
известный отрывок из письма, где великому Лейбницу приписывается прин-
цип, прямо противоположный тому, который он публично предложил.
И разница во времени не может оправдать это очевидное противоречие, если
бы мы даже предположили, что Лейбниц в разные времена применял раз-
личные принципы. Ведь поскольку Лейбниц объяснял преломление из
принципа, совершенно противоположного и весьма расходящегося с прин-
ципом наименьшего действия, то если бы он в дальнейшем пришел к по-
знанию этого всеобщего принципа, который может быть очень легко при-
ложен к явлениям света, он, несомненно, тотчас же пожелал бы показать
его применение для того случая, который он раньше выводил из противо-
положного принципа.
Здесь весьма достойно внимания также то обстоятельство, что ревност-
ный последователь Лейбница в одно и то же время заставляет нас принять
два положения: первое, что принцип наименьшего действия соответствует
действительности, затем, что его не надо приписывать Лейбницу. А это
уже дело удивительной ловкости сл. Кёнига : одних он пытается убедить,
что принцип знамен, де Мопертюи лишен всякого основания, других же,
т. е. тех, кого он не сумел убедить в этом, он старается заставить поверить,
что этот принцип открыт самим Лейбницем; но во втором Кёниг преуспел
не более, чем в первом.
Ведь в то время как последователи Лейбница по заслугам высоко ценят
как все его сочинения, так в том числе и упомянутую статью, помещенную
в Acta Lipsiensia, приходится, право, весьма удивляться тому, что знам.
барон фон Вольф, в остальном последовательный приверженец взглядов
Лейбница, в объяснении преломления света так далеко отошел от своего учи-
теля, что, отвергнув его чрезвычайно тонкое объяснение, решил перенести в
свои Элементы диоптрики объяснение Ферма, осмеянное Лейбницем. Так,
во второй задаче § 35 этот великий муж, исходя из положения, что скорость
света различна в различных средах, а именно, в более плотных скорость
меньше, в более редких — больше, ищет время, за которое луч, следуя по
какому-либо пути, дойдет от данной точки до другой, расположенной в дру-
гой среде. Отсюда он заключает, что, поскольку природа действует всегда
кратчайшим путем, это время должно быть наименьшим. Здесь, однако,
не видно, каким образом он от кратчайшего пути выводит заключение о
наименьшем времени. Кроме того, он не приводит никакого доказательства
этого утверждения и никакой ссылки, в то время как в ином случае он едва
ли привел бы без ссылки даже аксиому, что целое больше своей части. От-
сюда, таким образом, поскольку главный последователь Лейбница не только
опустил его объяснение преломления, но даже предпочел ему объяснение
Ферма, мы можем с уверенностью заключить, что этому проницательному
мужу объяснение Лейбница казалось весьма сомнительным, и поэтому такой
принцип, которым управлялась бы вся природа, менее всего следует чер-
пать из этого источника.
Кроме того наименьшего, к чему стремится природа в движении света,
философы, и особенно математики, искали также в других проявлениях при-
роды то, что является наименьшим. Мы же должны здесь прежде всего обра-
титься к математикам, ибо они имеют обыкновение не только тщательно
описывать то, что, по их мнению, есть наименьшее, но также показывают,
каким образом это есть наименьшее, в то время как философы, питающие
отвращение к математическим занятиям, наоборот, обычно довольствуются
104
Л. ЭЙЛЕР
терминами расплывчатыми и ничего определенного не обозначающими, из
чего невозможно даже понять, что же есть наименьшее. А тем более они
не сообщают, каким образом оно становится наименьшим. Например, они
утверждают вообще, что природа действует по кратчайшему или по наи-
более легкому пути, но не объясняют, каков же в каждом случае этот крат-
чайший и наиболее легкий путь, и не показывают, каким образом этот путь в
каждом случае становится кратчайшим и наиболее легким. Математики же,
более тщательно исследовав этот вопрос, из общего закона природы, по-
лученного в туманной форме от древних мыслителей, рассмотрели лишь
некоторые частные явления и исследовали, что в них действительно явля-
ется наименьшим. Однако мы не находим здесь ничего больше, чем то, что
наблюдали некоторые авторы относительно законов столкновения тел.
И хотя это, разумеется, связано лишь с весьма частным случаем, сл. Кёниг,
однако, не усомнился обвинить знам. президента, будто он оттуда выхватил
свой общий принцип и даже, утаив имена авторов, совершил грубейший
плагиат. Такое обвинение тем более абсурдно, что, по признанно самого
Кёнига, то наблюдение наименьшего, которое имеет место в столкновении
тел, весьма ограничено и охватывает лишь какой-нибудь случай столкно-
вения. Знам. же президент вывел на свет принцип самый общий, и вся его
сила состоит именно в этой всеобщности, что, разумеется, никоим образом
не могло быть выведено из весьма частного наблюдения. Кёниг называет
Гравезанда и Энгельгарда, с которыми знам. президент больше всего сбли-
зился, и утверждает, будто он не выдвинул ничего, что не было бы уже
раньше замечено этими мужами. Но здесь нам становится ясно, как день, до
какой степени Кёниг противоречит, сам себе, ибо ведь то, что сказано этими
мужами, он весьма одобряет. Как же может он обвинять знам. президента
в такой огромной ошибке, если президент не сказал ничего другого? Ведь
лишь по одному тому, что его принцип Кёнигом объявляется ложным, не
может быть, чтобы он был похищен у этих названных Кёнигом героев. К
тому же славнейший Энгельгард вряд ли поблагодарил бы Кёнига за то,
что он впутал его имя в эту тяжбу. Правда, это кажется почетным, что он
уже 20 лет тому назад говорил то же самое, что знаменитейший де Мопертюи
не так давно предложил как большое открытие. Однако Кёниг, как бы для
того, чтобы еще больше сбить с толку знамен, мужа, скоро добавляет, что
это же открытие уже тридцать лет тому назад было опубликовано славн.
Гравезандом и оттуда было известно даже новичкам в науке. Таким образом,
то, что он только что, кажется, упоминал к чести Энгельгарда, он тут
же превращает в позорнейший плагиат, ибо выводит его говорящим так,
как будто он что-то открыл, в то время как это было уже опубликовано
за десять лет до него в книге Гравезанда. Итак, если Кёниг столь не-
справедлив к друзьям, не приходится вовсе удивляться, что он ведет себя
так нечестно в отношении своих противников и без зазрения совести воз-
водит на них такие обвинения, в которых нельзя найти даже видимости
правды.
Но посмотрим, что же говорили Энгельгард и Гравезанд: ведь необ-
ходимо, чтобы оба они установили то же, что знам. президент, и чтобы оба
они говорили то же самое. Однако открытие Гравезанда в изложении самого
Кёнига состоит в следующем : если два тела, лишенные упругости, встре-
чаются друг с другом так, что после столкновения каждое из них остается
в состоянии покоя, то тогда сумма живых сил до столкновения была наи-
меньшей, ибо представляется, что относительная скорость остается той же
самой. Отсюда выводится следующее положение: в столкновении неупру-
гих тел количество живой силы, которое теряется, равно наименьшей живой
силе, которую те же тела могут приобрести, в то время как относительная
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
105
скорость остается той же, что до столкновения. Положение, не имеющее
никакого значения, и в нем не обнаруживается ни малейшего сходства с
принципом наименьшего действия. Ведь там речь идет только о том, что
теряется, и в этом самом заключается не наименьшая живая сила, а нечто
такое, что лишь сводится к другой живой силе, которая может приниматься
за наименьшее только в некоем определенном и совсем особом смысле; здесь
же определяется то, что достигается на самом деле: видимое различие так
велико, что больше представить себе невозможно. Нисколько не поможет
здесь и то, что Гравезанд говорит о столкновении многих тел, ибо это взято
из того же самого принципа. К тому же сила этого положения настолько
ограничена, что оно простирается только на столкновение тел, и притом
неупругих, в то время как принцип наименьшего действия, наоборот, прости-
рается очень широко и не подчинен никакому ограничению. Если взвесить
все это, то разве здравомыслящему человеку может прийти в голову обви-
нять того, кто открыл широко простирающуюся истину, будто он выхва-
тил ее из очень частного и притом далекого случая? Такого несостоя-
тельного обвинения никто, разумеется, не мог бы ожидать от сл. Кёнига,
если бы он не был вообще ослеплен яростью своих насмешек, которой он
был увлечен настолько, что везде, где он наталкивался на слово «наи-
меньшее», он считал, что обнаружил источник принципа наименьшего
действия.
Итак, поскольку даже Кёниг не мог найти других явлений движения,
в которых кем-либо было бы замечено нечто наименьшее, всякий должен
согласиться, что до знам. де Мопертюи были известны лишь очень немногие
случаи, притом весьма ограниченные, в которых было открыто некое поня-
тие наименьшего, и не было решительно никого, кто приписывал бы себе
открытие такого всеобщего принципа.
Я не отношу сюда также мое наблюдение, которым я установил, что если
в движении небесных тел, как и вообще во всяком движении тел, притяги-
ваемых к центрам сил, в отдельные мельчайшие отрезки времени массу дви-
жущегося тела помножить на пройденное расстояние и скорость, то сумма
всех этих произведений всегда будет наименьшая. Хотя это наблюдение идет
далеко впереди упомянутых выше и произведение, которым я пользуюсь,
выражает то самое действие, как оно определяется знам. де Мопертюи, од-
нако прежде всего следует отметить, что мое наблюдение появилось лишь
после того, как знаменитейший муж уже изложил свой принцип, так что
оно не может нанести никакого ущерба его новизне. Далее, ведь я постиг
это замечательное свойство, как говорят, не априорно, а апостериорно, ибо
лишь после многочисленных опытов я вывел ту формулу, которая в такого
рода движениях приобретает наименьшее значение. Поэтому я не решился
приписывать ей большую силу, чем для тех случаев, которые я исследовал.
И я, право, никогда не считал, что причастен к открытию такого рода прин-
ципа, простирающегося значительно шире, вполне удовлетворенный тем,
что проследил эту тонкую особенность в движениях, совершаемых вокруг
центров сил. К тому же сам Кёниг, кажется, придает мало значения этому
моему наблюдению, ибо после моих доказательств, притом не метафизиче-
ских, а математических, он все еще сомневается, приобретают ли формулы,
которые я исследовал, наименьшее значение или наибольшее. Поэтому я
бы очень хотел, чтобы столь великий учитель проверил мои доказательства,
указал бы, по своему разумению, на скрытые в них ошибки; ведь я очень
охотно поучился бы у столь тонкого наставника.
Кроме этого, однако, еще в равновесии тел были отмечены такого рода
случаи, в которых ясно можно было проследить нечто наименьшее. Ибо
легко было заметить, что тяжелые тела не могут удерживаться в равновесии,
106 л. ЭЙЛЕР
если их центр тяжести не занимает самого низкого положения. Отсюда вся-
кому равновесию тяжелых тел было приписано то свойство, что расстояние
их центра тяжести от центра земли должно быть наименьшим. Из этого
принципа по изопериметрическому методу математики определили многие
кривые линии, как цепную линию, которую образует свободно подвешенная
за два конца цепь, или холщевую линию, в которую изгибается холст, напол-
ненный жидкостью, и еще несколько кривых такого рода, в которых общий
центр тяжести непременно занимает наиболее низкое положение. Но когда
тела такого рода находятся очень близко к центру земли или какому-либо
другому центру сил, так что направления возбуждения нельзя было бы
более считать параллельными, то тогда рассмотрение центра тяжести было
бы вообще несостоятельно, потому что в телах больше нет такой точки, кото-
рая обладала бы свойством центра тяжести. Тогда, следовательно, и этот
принцип, выведенный, из наибольшего опускания центра тяжести, не будет
иметь места и поэтому не может считаться всеобщим, поскольку он отно-
сится только к состоянию равновесия; и тем менее он может распростра-
няться на движение. Между тем, однако, были и такие, которые и в неко-
торых случаях такого рода замечали какой-то вид центра тяжести, из наи-
большего опускания которого могло бы определяться состояние равновесия;
но никто не дерзал возводить это во всеобщий принцип, который имел бы
место во всяком состоянии равновесия. Прекрасный образец этого, для не-
коего весьма частного случая, дал Даниил Бернулли, муж проницательней-
ший в такого рода умозрениях, когда он совершенно априорно обозначил
то количество, которое является наименьшим в кривых линиях у упругих
тел; позднее я ясно доказал правильность этого. Это открытие, если его
сравнить с другими ранее найденными частными принципами, должно, не-
сомненно, быть признано самым значительным. Но сл. Кёниг открыто при-
знает, что даже не понял его, когда он, Кёниг, до сих пор настойчиво упор-
ствует в грубейшей ошибке, будто то выражение, которое, по утверждению
извести. Бернулли, является наименьшим в кривизне упругих тел, сводится
к нулю. Но каким образом он, исходя из совершенно неверного соображения,
впал в такую огромную ошибку —это будет подробно показано ниже. Итак,
все то, что было исследовано до сих пор о том наименьшем, к которому
стремится природа во всех своих проявлениях, как для состояния движе-
ния, так и для равновесия, все это было приспособлено лишь для весьма
частных случаев и не связывалось одно с другим так, чтобы из этого мог
быть выведен какой-то всеобщий принцип, который распространялся бы,
по крайней мере, на рассмотренные случаи. Отсюда можно видеть, какой
важный вклад внес в это дело знам. де Мопертюи и как мало он должен
бояться возбужденного Кёнигом подозрения, будто он заимствовал свои
принципы у других.
Ведь Мопертюи уже в 1740 г. изложил в Mem. de 1’Acad. de Paris общий
принцип покоя и равновесия, принцип, который не только объединяет в себе
удивительной связью упомянутые частные принципы, как вытекающие из
природы центра тяжести, так и приспособленные к упругим телам, какими
бы различными они ни казались, — но своей крайней всеобщностью он рас-
пространяется также решительно на все случаи равновесия, каким бы обра-
зом они ни сопоставлялись как с понятием тел, так и с понятием возбуждаю-
щих сил. Ведь из одного только этого принципа не только полностью объ-
ясняются все вообще состояния равновесия, какие могут когда-либо сущест-
вовать в твердых, гибких, упругих и жидких телах, но и определяются с
удивительной легкостью, так что этот принцип по праву может считаться
величайшим открытием в механике. Ибо как только был установлен этот
принцип, все, что рассматривалось до сих пор как в динамике, так и в
ДИССЕРТАЦИЯ О ПРИНЦИПЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
107
гидродинамике, настолько прояснилось, что даже самые сложные случаи
которые прямым способом требуют очень утомительных исследований, сво-
дятся к весьма простому и изящному вычислению. Но прежде всего из него
очень легко определяется состояние равновесия в машинах всякого рода,
как бы они ни были сложны, так что нет необходимости даже учитывать
их строение, что обычно очень усложняет вычисление. И поскольку пер-
вейшие элементы этой науки следуют весьма естественным образом из дан-
ного принципа, можно считать, что в нем очень удобно и весьма успешно
заключается вся основа как динамики, так и гидродинамики, ибо принцип
этот таков, что правильность его может быть показана и понята из не-
которых совершенно очевидных соображений. Он не требует какого-либо
рассмотрения движения, которым нарушался бы порядок различных
наук. Нужно ведь только рассмотреть, каким образом действуют возбуж-
дающие силы на отдельные частички тела, и из каждого возбуждения
вывести некое количество, которое можно назвать действенностью (efficacia)
для каждой силы. Далее устанавливается, что равновесие будет тогда,
когда сумма всех этих действенностей будет наименьшей. И, таким об-
разом, вся динамика и гидродинамика могут быть с удивительной лег-
костью раскрыты посредством одного только метода максимумов и ми-
нимумов.
Итак, было бы очень смешно, если бы кто-нибудь захотел хотя бы сопо-
ставить этот прекраснейший и плодотворнейший принцип с тем бесплодным
и нелепым принципом, который пытается предложить Кёниг. Ибо в нем
так путано смешиваются между собой динамика и форономика, что невоз-
можно познать никакое состояние равновесия, если нет при этом совершен-
ного познания движения. А поскольку в динамике не только не предпола-
гается такое познание, но оно обычно требует еще тонких исследований,
то оно имеет место лишь в очень немногих случаях. Как это будет ясно
показано ниже, принцип Кёнига может быть применен лишь в одном-
двух случаях, да и то только при недопустимом смешении самых различ-
ных наук.
Таким образом, принцип, выведенный впервые на свет знаменитым пре-
зидентом, заслуживает всяческих похвал, и нет никакого сомнения, что он
далеко превосходит все открытия в динамике, сделанные до сих пор. В самом
деле, ведь его применение не только распространяется на всю динамику —
и уже одно это означало бы крайнюю всеобщность, — но с небольшим и весь-
ма естественным прибавлением этот принцип успешно простирается на всю
науку о движении: для каждого предложенного движения находится то,
что я назвал действенностью для отдельных элементов времени, и, как это
легко можно понять, эта сумма должна быть наименьшей. Если приложить
это условие к движению, то возникает другой известный всеобщий принцип
знам. президента, который он назвал принципом наименьшего действия,
ибо легко может быть доказано — я это сделал уже в специальной диссер-
тации, — что если сложить вышеупомянутые действенности для отдельных
элементов времени, то из этого получится произведение массы на скорость
и пройденное расстояние, а в этом произведении и заключается понятие
действия.
Итак, эти два принципа связаны между собой столь тесными узами, что
их скорее следовало бы считать за один. И точно так, как принцип движения
прямо вытекает из принципа равновесия, также и принцип движения или
наименьшего действия в свою очередь может быть приложен к любому слу-
чаю равновесия. И решительно все науки, которые обычно принято подра-
зумевать под словом «механика», является ли их предметом равновесие или
движение, настолько прочно опираются на один этот принцип, что из него
108 л. ЭЙЛЕР
может быть достигнуто самое широкое и совершенное их изучение. Из этого
становится также очевидным, что тот, кто согласился с одним из этих двух
принципов, не может сомневаться и во втором; и если принцип равновесия
обоснован убедительными доказательствами, то следует считать, что такою
же степенью достоверности обладает и другой принцип, принцип движения.
Таким образом, сочетание этих двух принципов, или вернее, каждый из
них в отдельности, поскольку они связаны друг с другом теснейшей связью,
открывает самый всеобщий закон природы, в котором мы сейчас с исчерпы-
вающей точностью познаем то, что раньше только подозревали: природа
во всех своих проявлениях стремится к некоему наименьшему, и это наи-
меньшее, как определил знам. президент, бесспорно, заключается в понятии
действия, так что теперь не остается больше места для каких-либо возраже-
ний.
Ж. Д’АЛАМБЕР
КОСМОЛОГИЯ [27]
Космология — существительное женского рода. Это слово, образованное
из двух греческих слов хост/го; — мир и Лоуо; — знание, буквально озна-
чает — знание о мире, т. е. знание, которое рассматривает Вселенную,
где мы живем, такой, какова она в настоящее время. Этим она (космология)
отличается от космографии и космогонии (см. эти слова).
Следовательно, космология является по существу общей, подтверждаемой
доказательствами физикой, которая, не вникая в слишком случайные детали
фактов, рассматривает с метафизической стороны результаты этих самых
фактов, показывает существующие между ними единство и аналогию и тем
самым пытается открыть часть общих законов, коими управляется Вселен-
ная. Все в природе связано; все сущности связаны цепью, непрерывные
части которой мы иногда наблюдаем, хотя в большинстве случаев эта непре-
рывность от нас и ускользает. Искусство философии состоит не в том, как
это слишком часто случается, чтобы насильственно сближать удаленные
части, невпопад соединяя эту цепь там, где она разорвана; ибо подобной
попыткой мы только разделяем части, которые еще держались, или же раз-
деляем их еще больше на конце, противоположном тому, который мы сбли-
жаем; искусство философии состоит в том, чтобы добавлять новые звенья
разъединенным частям, дабы сделать их возможно менее удаленными. Но
философия не должна льстить себя тем, что не будет пустоты во многих
местах. Чтобы создать звенья, о которых идет речь, нужно принять во вни-
мание две вещи: наблюдаемые факты, образующие вещество звеньев, и
общие законы природы, образующие между ними связи. Я называю общими
законами те законы, которые кажутся наблюдаемыми в большом количе-
стве явлений, ибо я остерегаюсь говорить во всех.
Таковы законы движения, которые являются следствием непроницае-
мости тел и источником многих наблюдаемых нами в природе явлений.
Фигура и движение (я имею в виду движение, происходящее от им-
пульса) — вот главная часть принципов, на коих покоится космология.
От них не следует без необходимости слишком удаляться, но также не сле-
дует слишком настаивать, что они единственные; мы Не знаем всех фактов,
как же мы можем утверждать, что все они объясняются одним-единственным
законом? Подобное утверждение окажется тем более опрометчивым, что
среди самих фактов, которые мы знаем, имеются такие, которых законы
импульса до сих пор объяснить не могли (см. «Attraction»).
Может быть, когда-нибудь это и удастся, но в ожидании этого великого
открытия ограничим наше суждение об универсальности этих законов.
Может быть (и это по меньшей мере столь же вероятно), имеется общий закон,
который есть и будет всегда неизвестен нам; мы наблюдаем только частные
следствия этого закона, неясные и ограниченные, следствия, которые мы
продолжаем называть общими законами.
110
Ж. Д'АЛАМБЕР
Эта догадка весьма сходна с идеей, которую мы должны себе создать о
единстве и простоте природы (см. «Nature»). Впрочем, если мы будем раз-
мышлять над слабостью нашего духа, мы еще больше будем удивляться
тому, что он открыл, а не тому, что для него еще остается скрытым.
Но главная польза, которую мы должны извлечь из космологии, — это
возвыситься через общие законы природы к познанию ее творца, мудрость
которого эти законы установила, показала то, что нам надлежало о ней знать
для нашей пользы или забавы, и скрыла от нас остальное, дабы научить нас
сомневаться.
Таким образом, космология есть наука о мире, или Вселенной, рассмат-
риваемой вообще, поскольку она есть сущность сложная и тем не менее
простая, благодаря единству и гармонии своих частей; целое, которое
управляется высшим разумом и пружины которого сочетаются, приводятся
в действие и изменяются этим разумом.
«До г. Вольфа, — говорит г. Форми в одной из сообщенных нам статей, —
это название было неизвестно в школах, т. е. не было никакой особой
части курса философии, которая бы так называлась. Ни один метафизик,
по-видимому, даже не думал об этой части, и в столь огромном числе томов,
написанных по метафизике, ничего не говорили о космологии. Наконец,
г. Вольф подарил нам работу под таким названием «Cosmologia generalis,
methodo scientifica pertractata, qua ad Solidam, imprimis Dei atque naturae,
cognitionem via sternitur, Francot. et Lips., in 4°, 1731». (Имеется новое
издание 1737 г.)
Он издал эту работу непосредственно после онтологии и в качестве вто-
рой части метафизики, ибо он там установил принципы, которые нужны
ему в естественной теологии для доказательства существования и атрибутов
бога из случайности Вселенной и наличия порядка в природе. Вольф име-
нует ее общей космологией или трансцендентной, ибо она содержит только
одну абстрактную теорему, которая по отношению к физике является тем,
чем онтология является по отношению к остальной философии.
Понятия этой науки вытекают из онтологии, так как речь идет о при-
ложении к миру общей теории бытия и бытия сложного. На помощь этому
рассмотрению мира приходят наблюдения и опыты. Таким образом, можно
сказать, что имеется двоякая космология: космология теоретическая и
космология экспериментальная.
Из этих двух космологий г. Вольф собственно ограничился первой,
как это показывает название его труда ; но он, тем не менее, не пренебрег
той помощью, которую ему мог оказать опыт, для утверждения этих прин-
ципов. И та и другая излагают принципы, которые служат для доказатель-
ства существования бога и его атрибутов. Основные проблемы, которые
охватывает общая космология, сводятся к объяснению, каким образом мир
возникает из совокупности простых субстанций, и к развитию общих прин-
ципов модификаций материальных вещей. Именно это — наиболее ценный
плод космологии; его одного достаточно, чтобы почувствовать ее ценность
и стремиться к ее разработке, даже если бы она не давала ничего другого.
Таким образом, удается доказать, что созерцание видимого мира приводит
нас к познанию невидимой сущности, являющейся его творцом. Г-н Вольф
кажется чрезвычайно убежденным в полезности и в верности этого нового
пути, который он себе проложил; и вот как он об этом выражается:
«Я вынужден заявить, что, будучи во славу божию больше всего оза-
бочен изложением (своих взглядов) о познании бога научным способом, не
нашел никакой другой дороги, дающей возможность достигнуть этой цели,
кроме той, которую указывает настоящее изложение, как не нашел я и
философа, который надлежащим образом шел бы по этому пути, хотя не
космология
111
следовало бы лишать славы и тех людей, которые, особенно в наше время,
пытались применять к натуральному богословию метод доказательства»
(Вольф).
Несколько лет тому назад г. Мопертюи дал нам опыт космологии, кото-
рый, по-видимому, был разработан согласно принципам и взглядам, выше
нами изложенным. Он думает, что мы не имеем ни достаточно фактов, ни
достаточно принципов, чтобы охватить природу с одной точки зрения. Он
удовлетворяется изложением системы Вселенной; он намеревается дать
ее общие законы и отсюда извлекает новое доказательство существова-
ния бога. Так как этот труд вызвал в 1752 г. оживленный спор, то я здесь
помещу некоторые соображения, разъясняющие этот вопрос.
Я буду возможно краток и надеюсь быть беспристрастным.
Общий закон г. Мопертюи есть закон наименьшего количества действия
(см. его определение и изложение в слове «Действие»), Здесь мы добавим
следующие замечания.
Лейбниц, сформулировав особую идею о силе движущихся тел, о чем
мы будем говорить в слове «Force», назвал ее живой, силой и утвер-
ждал, что она есть произведение массы на квадрат скорости, или, что то
же самое, что она является как бы квадратом скорости при принятии
массы за единицу.
Г-н Вольф в «Memoires de St.-Petersbourg», т. 1, вздумал умножить
живую силу на время, и это произведение он назвал действием, допуская,
по-видимому, что действие тела есть результат всех сил, производимых им
в каждое мгновение, и, следовательно, есть сумма всех мгновенных живых
сил. Можно было бы спросить у сторонников Лейбница, вождем которых
как бы считался Вольф, к чему они выдумали это метафизическое различие
между действием и живой силой, —• различие, которое, быть может, они не
должны были бы полагать между ними, по крайней мере, следуя, созданному
ими представлению о живой силе, но здесь не об этом идет речь, и мы об
этом сможем поговорить в слове «Force».
Пока мы допустим в качестве произвольного названия это понятие дей-
ствия, и мы сперва заметим, что оно сводится к тому же, что и идея г. Мо-
пертюи. Ибо произведение пространства на скорость — то же самое, что и
произведение квадрата скорости на время. В работах, цитированных нами
в слове «Action», г. Мопертюи вовсе не говорит о том, знаком ли он с опре-
делением г. Вольфа. По-видимому, — нет; что касается нас, то мы не знали
этого определения, когда писали статью «Действие», и здесь мы хотим до-
бросовестно воздать должное каждому. Впрочем, не имеет значения, взял
ли Мопертюи эту идею у Вольфа, или лишь сошелся с ним во взглядах, ибо
здесь речь идет единственно о сделанных им отсюда выводах, к которым
г. Вольф не имеет никакого отношения. Г-н Мопертюи является первым,
кто показал, что при преломлении количество действия есть минимум. Не
менее твердо установлено :
1) Этот принцип совершенно отличен от принципа —«природа действует
всегда по самому простому пути», ибо этот последний принцип — неясный,
из которого можно сделать сотню совершенно различных приложений, в
зависимости от определения, которое пожелают дать тому, что подразуме-
вают под наиболее простым путем природы, т. е. в зависимости от того, по-
желают ли видеть простоту природы и кратчайший путь в прямолинейном
направлении, т. е. в краткости направления, или же в краткости времени,
или в минимуме количества движения, или в минимуме живой силы, или в
минимуме действия и т. д. Следовательно, принцип г. Мопертюи отнюдь не
является принципом простейшего пути, взятым неопределенно, но точным
изложением того, что он считает за простейший путь природы.
112
Ж. Д’АЛАМБЕР
2) Мы показали, что этот принцип весьма отличен от принципа Лейб-
ница (см. «Action»), и было бы весьма странным, если бы Лейбниц был, как
утверждали, знаком с принципом г. Мопертюи и в то же время не подумал
о его приложении к преломлению. Но ниже мы коснемся вопроса с
фактической стороны.
3) Установлено, что этот принцип Мопертюи, примененный к рефракции,
примиряет конечные причины с механикой, по крайней мере в данном слу-
чае, чего еще никто не сделал. Этим примирением будут интересоваться в
большей или меньшей степени в зависимости от большего или меньшего
интереса к конечным причинам (см. зто слово).
Но сторонники Лейбница должны быть этим, по крайней мере, весьма
удовлетворены. Более того, г. Эйлер показал, что этот принцип имеет место
в кривых, описываемых телом, притягиваемым или толкаемым к неподвиж-
ной точке. Это красивое предложение распространяет принцип г. Мопертюи
также на малую кривую, описываемую корпускулой света при прохож-
дении из одной среды в другую, так что с этой точки зрения принцип оказы-
вается истинным вообще и без ограничений.
В Memoires de 1’Academie des Sciences de Prusse за 1751 г. г. Эйлер
показал еще множество других случаев, где этот принцип применяется с
легкостью и изяществом.
4) Этот принцип отличается от принципа равенства нулю живой силы
по двум соображениям: в принципе Мопертюи речь идет не о нуле, а о
минимуме и, кроме того, в действие вводится время, которое вовсе не входит
в живую силу.
Это не значит, что принцип равенства живой силы нулю также не имеет
места в большом числе случаев. Это не значит, что из равенства живой силы
нулю нельзя вывести многое из того, что выводят из минимальности дей-
ствия; но это не доказывает тождественности обоих принципов, ибо к тому
же самому заключению можно прийти разными путями.
5) В статье Causes finales мы видели, что принцип минимальности
времени терпит фиаско в вопросе об отражении в вогнутых зеркалах. Ка-
жется, что так же дело обстоит с минимальностью действия, так как тогда
путь светового луча есть максимум, а действие — также максимум. Правда,
что здесь можно было бы подогнать этот принцип, постоянно относя отра-
жение к плоским поверхностям; но, быть может, противникам конечных при-
чин этот ответ придется не по вкусу; лучше сказать, как мне кажется, что здесь
действие есть некоторый максимум, а в других случаях — некоторый мини-
мум. Будет не меньшей заслугой впервые применить этот принцип к прелом-
лению, и дело будет обстоять, как и с принципом сохранения живых сил,
который прилагается к удару упругих тел, но не имеет места в твердых
телах.
б) Г-н Мопертюи применил этот закон минимальности действия к удару,
и он первый определил одним и тем же принципом законы удара твердых
тел и упругих. Правда, приложение этого принципа здесь немного более
сложно, более запутано, менее просто и, быть может, менее строго, чем в
случае преломления.
В итоге нашего обсуждения то, что мы здесь сказали о Мопертюи, отнюдь
не невыгодно для г. Мопертюи. Он предполагает, что два твердых тела А, В
движутся в одном направлении : одно — со скоростью а, другое со скоро-
стью Ь, и что их общая скорость после удара равна х ; очевидно, говорит он,
изменение, происшедшее в природе, состоит в том, что А потеряло скорость
а — х, а тело В приобрело скорость х — Ь, следовательно, количество дей-
ствия, необходимое для произведения этого изменения, которое следует при-
равнивать минимуму, есть А(а — х)2 -ф В(х — Ь)2, что и дает обычную фор-
КОСМОЛОГИЯ из
мулу удара твердых тел Все это весьма справедливо. Но все зави-
сит также от смысла, который хотят придать словам «изменение, происшедшее
в природе»: разве нельзя сказать, что происшедшее изменение состоит в том,
что тело А, имевшее до удара количество действия или силы Ааа, меняет
его после удара на количество Ахх, и аналогично тело В и, таким образом,
что Ааа — Ахх есть изменение, происшедшее в теле А, а Вхх — Bbb — из-
менение, происшедшее в теле В. Так что количество действия, вызвавшее
это изменение, будет Ааа — Ахх 4- Вхх — Bbb. Между тем, это количество,
приравненное минимуму, не дает более вышеприведенного закона удара
твердых тел. Вот одно возражение, которое можно сделать г. Мопертюи и
которое ему почти что было сделано, с той лишь разницей, что Ахх — Ааа +
4- Вхх —• Bbb предположили равным минимуму, вычитая количество Ааа —
— Ахх из количества Вхх — Bbb, вместо того, чтобы его прибавить, как
повидимому, также можно было бы сделать, потому что оба количества
Ааа — Ахх и Вхх — Bbb положительны, хотя одно должно быть вычитаемо
из Ааа, а второе прибавляемо к Bbb, и могут быть сложены вместе независимо
от направления, в котором они действуют. Как бы то ни было, кажется,
что можно было бы примирить или избежать всякой трудности в этом во-
просе, ставя вместо слов «изменение в природе», которые заключены в усло-
вии теоремы г. Мопертюи, слова «изменение в скорости»; тогда введенная
им действительная двусмысленность не будет больше иметь места.
Мы не допускаем, что здесь в вычислении г. Мопертюи количество дей-
ствия смешивается с количеством живой силы: действительно, если пред-
положить время одинаковым, как это сделано в данном случае, то оба эти
количества будут пропорциональны друг другу, и можно сказать, что коли-
чество действия никогда не следует смешивать с живой силой, потому что,
согласно определению г. Мопертюи, время входит в количество действия.
Кроме того, в случае твердых тел, поскольку изменение происходит в неде-
лимый момент — время, равное нулю, — постольку не будет никакого дей-
ствия. На это возражение можно ответить, что когда тело движется или
стремится двигаться с некоторой скоростью, всегда имеется действитель-
ное или возможное количество действия, которое будет соответствовать его
движению, если бы оно двигалось равномерно с этой скоростью в течение
некоторого времени. Таким образом, вместо слов: «количество действия,
необходимого для произведения этого изменения» можно поставить слова:
«количество движения, соответствующее этому изменению», и дать, таким
образом, правило г. Мопертюи: «В производимом ударом изменении в ско-
рости тел количество действия, которое будет отвечать этому изменению,
есть наименьшее возможное, предполагая время постоянным». Мы говорим:
«предполагая время постоянным»; эта модификация и, даже если угодно,
ограничение необходима по двум соображениям:
1) потому что при ударе твердых тел, где, строго говоря, время равно
нулю, предположения, что время постоянно или переменно, — оба явля-
ются предположениями равно произвольными, и нужно, следовательно,
принимать одно из них;
2) потому что при ударе упругих тел изменение происходит в конечное
время, хотя и весьма малое, не равное нулю. По крайней мере весьма веро-
ятно, что это время не одно и то же при разных ударах. Таким образом, здесь
еще более необходимо выдвинуть предположение, о котором идет речь.
Действительно, время, которое здесь предполагается постоянным, есть время,
взятое произвольно и совершенно не зависящее от времени, в течение кото-
рого сообщается движение; за истинное количество действия, употреблен-
ного на происшедшее изменение, можно принять сумму малых количеств
8 Вариационные принципы механики
114
Ж. Д’АЛАМБЕР
действий, затраченных за время, в течение которого усилие возникает и
исчезает. Может быть, скажут, что в этом случае г. Мопертюи должен был
воспользоваться словом живая сила вместо слова действие, ибо время, соб-
ственно говоря, здесь не играет роли. На это он, без сомнения, возразит, что
он считал возможным связать этот закон в одно общее выражение с законом,
который он установил для преломления. Если здесь заменить слово живая
сила словом действие, все же окажется правильным, что г. Мопертюи первый
свел удар твердых и упругих тел к одному закону; и это — самое главное;
впрочем, и его теорема о преломлении ничего от этого не теряет. Безуслов-
ный факт, что общие законы движения были найдены без этого принципа,
но, быть может, полезно показать, как он к ним применяется. Ясно, что,
будучи так применен, этот принцип будет и может быть только каким-либо
другим уже известным, но иначе изложенным принципом. Но так обстоит
со всеми математическими истинами; в основе они являются только преоб-
разованиями одной в другую (см. «Le Discours preliminaire», part viig).
Например, принцип сохранения живых сил в действительности есть только
древний принцип равновесия, как я это показал в своей «Динамике» (2-d
part, chap. jv). Это не мешает принципу сохранения живых сил быть весьма
полезным и делать честь его изобретателям.
7) Мопертюи применяет также свой принцип к равновесию рычага;
но для этого необходимо сделать некоторые допущения, между прочим,
допустить, что скорость всегда пропорциональна расстоянию от точки
опоры и что время — постоянно, как в ударе твердых тел. Кроме того, нужно
допустить, что длина рычага дана и что имеется точка опоры, ибо если была
бы дана точка опоры и одно из плеч, а отыскивалось бы другое плечо, то при
помощи принципа действия нашли бы, что это плечо равно нулю. Впрочем,
предположения, которые здесь делает г. Мопертюи, допустимы. Чтобы быть
неуязвимым, достаточно их изложить, но всякое другое предположение также
должно было бы быть изложено.
Применение и употребление принципа не допускает большей общности.
Что касается вводимого им предположения, что грузы являются как бы
массами, то это предположение дано самой природой, 'и оно имеет место
во всех теоремах о центре тяжести тел, которые не рассматриваются из-за
этого, как менее общие.
Из всего, что мы сказали, следует, что принцип минимальности действия
имеет место в большом числе явлений природы, что среди них есть такие,
как преломление и орбиты планет, к которым он прилагается с большой лег-
костью, и многие другие случаи, рассмотренные г. Эйлером (см. Mem. Acad.
Berlin, 1751, и статья «Action»), что этот принцип прилагается ко многим
другим случаям с некоторыми изменениями, более или менее произволь-
ными, но что он всегда сам по себе полезен для механики и мог бы облегчить
разрешение некоторых проблем.
У Мопертюи оспаривали приоритет в открытии этого принципа.
Г-н Кёниг для доказательства этого сперва привел место из Лейбница,
извлеченное из рукописного, письма этого философа; это место, напеча-
танное в «Лейпцигских актах», май, 1751 г., содержало грубую ошибку,
которая, по уверениям г. Кёнига, является опечаткой, он ее исправил,
и, действительно, это переделанное место частично представляет принцип
наименьшего действия. Если бы даже письмо Лейбница было подлинным
(чего мы отнюдь не предрешаем), оно, не будучи опубликовано, ни
в какой мере не умаляет принадлежности этого принципа г. Мопертюи.
Г-н Кёниг, видимо, признает это в своем «Обращении к публике» о
решении Прусской академии наук, вынесенном против подлинности этого
отрывка.
КОСМОЛОГИЯ
115
Г-н Кёниг сперва процитировал письмо, о котором идет речь, как напи-
санное г. Германну, но затем он признал, что не знал, кому оно было напи-
сано ; он воспроизводит это письмо все полностью в своем «Обращении»,
где его и можно прочесть; оно весьма длинно, помечено Ганновером 16 ок-
тября 1707 г.; не рассматривая вопроса о его подлинности в целом, речь
идет только о том, чтобы узнать, что тот, кто его передал г. Кёнигу, ничего
не прибавил или не изменил данный отрывок. Г-н Кёниг говорит, что полу-
чил это письмо из рук г. Henzy, несколько лет тому назад обезглавленного в.
Берне. Он уверяет, что он имеет на руках много других писем Лейбница,
которые ему передал этот самый г. Henzy. По словам Кёнига, многие из них
написаны рукой г. Henzy. По поводу письма, о котором идет речь, г. Кёниг
отнюдь не говорит нам о том, какой рукой оно написано. Он только говорит,
что он имеет много других писем, написанных той же рукой, и что одно из
них оказалось в напечатанном сборнике in 4°, и в своем «Обращении» он
переписывает эти письма. Г-н Кёниг также не говорит нам, видел ли
он оригинал этого письма, написанный рукой Лейбница. Вот факты, на осно-
вании которых публике предоставляется судить, был ли подлинным цитиро-
ванный отрывок или нет.
Мы также должны уведомить, что г. Кёниг в «Лейпцигских актах» дает
теорему о живых силах абсолютно ту же, что и теорема г. Куртиврона, на-
печатанная в Memoires de I’Academie des Sciences, 1748, стр. 304 и которую
Куртиврон зачитал Академии до публикации мемуара г. Кёнига (см. эту
теорему в слове «Центр равновесия»).
Нам только остается сказать два слова о метафизическом употреблении,
которое г. Мопертюи сделал из своего принципа. Как мы уже указали выше,
мы думаем, что определение количества движения есть определение тер-
мина чисто математического и произвольного.
Можно было бы назвать действием произведение массы на скорость или
на ее квадрат, или на некоторую функцию пространства и времени ; про-
странство и время суть два единственных объекта, которые мы ясно видим
в движении тел; можно делать сколько угодно математических комбина-
ций из этих двух вещей, и все это можно назвать действием; но первоначаль-
ное и метафизическое понятие слова действие не будет от этого яснее. Вообще
все теоремы о действии, определенном как угодно, о сохранении живых сил,
о покое или равномерном движении центра тяжести и о прочих подобных
законах суть не больше, как более или менее общие математические теоремы,
а не философские принципы. Например, когда из двух тел, прикрепленных
к рычагу, одно опускается, а другое поднимается, находят, если угодно,
как г. Кёниг, что сумма живых сил равна нулю, ибо складывают с противо-
положными знаками количества, имеющие противоположные направления.
Но это есть положение геометрии, а не истина метафизики, потому что, в
сущности, эти живые силы, имея противоположные направления, вполне-
реальны, и можно было бы при другом направлении отрицать равенство
суммы этих сил нулю. Дело обстоит так, словно утверждали бы, что в си-
стеме тел вовсе нет движения, когда количества движений равны и проти-
воположны по знаку, хотя и реальны.
Следовательно, принцип г. Мопертюи, как и другие, есть только мате-
матический 'Принцип; и мы думаем, что сам Мопертюи не очень далек от
такого представления, тем более, что он не занял никакой позиции в мета-
физическом вопросе о живых силах, с которым связана идея «действия»
(см. Maupertuis, Oeuvres, Dresden, 1752, in 4°).
Правда, он вывел из своего принципа существование бога чисто мате-
матически, если верить, что этот принцип наблюдается в природе. Впрочем,
это доказательство существования бога он дал как пример доказательства,
О*
116
Ж. Д’АЛАМБЕР
выведенного из общих законов Вселенной, — пример, которому он не при-
дает ни исключительной силы, ни превосходства перед другими доказатель-
ствами. Он лишь справедливо настаивает, что особенно следует стремиться
доказать существование бога общими явлениями и не ограничиваться выво-
дом его из частных явлений, хотя и признает, что и этот вывод является
полезным. Смотри предисловие к его произведению, в котором он полностью
оправдался от злословных обвинений, коим злые или невежественные кри-
тики подвергли его по этому вопросу, потому, что нет ничего более модного
в настоящее время, чем обвинение в атеизме, возбуждаемое вкривь и вкось
против философов теми, кто философами не является. (См. также «Les
actes de Leipsic de Mai 1751»; «L’appel de M. Koenig au public», «Memoires
1’Academie de Berlin, 1750—1751» и т. д.)
Вот каковы (по крайней мере на сегодня — февраль 1754 г.) работы,
действительно необходимые, ибо в них затронут рассматриваемый вопрос.
Мы должны добавить, что г. Мопертюи никогда не отвечал на возводимые
на него нападки по этому поводу, о которых мы скажем: «Да не произно-
сятся они в вашей среде, ибо это не подобает философам». Этот спор о дей-
ствии, если нам будет позволено сказать, несколько походит на некоторые
религиозные споры по горечи, которая была в него вложена, и по количеству
людей, принявших в нем участие, ничего в этом не смысля.
Ж. ЛАГРАНЖ
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ
МЕМУАРЕ, ДЛЯ РЕШЕНИЯ РАЗЛИЧНЫХ ЗАДАЧ ДИНАМИКИ [28]
Г. Эйлер, в приложении к превосходному труду, носящему название :
Methodus inveniendi lineas curvas maximi minimive proprietate gaudentes:
sive solutio Problematis isoperimetrici latissimo sensu accepti, обосновал
принцип, согласно которому для траекторий, описываемых телами под
действием центральных сил, интеграл скорости, помноженной на элемент
кривой, будет всегда максимум или минимум.
Я предполагаю здесь обобщить этот принцип и показать его применение
для решения всех задач Динамики.
I. Общий принцип. Пусть имеется сколько угодно тел М, М',
М",..., которые действуют одно на другое каким-либо способом и которые,
кроме того, двигаются под действием центральных сил, пропорциональных
каким-либо функциям расстояний; пусть s, s', s'',... обозначают про-
странства, пройденные телами за время t, а и, и', и",... пусть будут их ско-
ростями к концу этого времени; выражение
М J и ds + М' ]' и’ ds' + М" J и" ds” + ...
всегда будет максимумом или минимумом.
Задача I. Найти движение тела М, притягиваемого к произвольному
числу неподвижных центров силами Р, Q, R,..., являющимися какими-
либо функциями расстояний.
Решение. Так как в данном случае имеется только одно тело М, то
выражение, которое должно быть максимумом или минимумом, будет просто
М J и ds; тогда в соответствии с методом, изложенным в предыдущем Ме-
муаре, мы получим уравнение
д (М J и ds) = О
или, разделив на постоянную величину М,
<5 (( и ds) = 0.
Но
<5 (и ds) = и д ds + <5 и ds;
следовательно, заменяя выражение 6(У и ds) на эквивалентное ему У д(и ds),
как это было сделано мною ранее (параграф I предыдущего Мемуара), мы
получим уравнение
У (и <5 ds + <5 и ds) = 0.
Пусть р, q, г,... — расстояния тела М от центров сил Р, Q, R,... ; тогда,
как известно всем Геометрам,
= const — У (Р dp + Q dq + R dr + ...);
118
Ж. ЛАГРАНЖ
«следовательно,
и ди = — <5 f (Р dp + Q dq + R dr + ...) =
= - J' (dP dp + P <5 dp + dQ dq + Q <5 dq + dR dr + R <5 dr + .. .)
или, заменяя о dp, d dq, d dr, ... на ddp, ddq, ddr,...'u интегрируя no
частям члены Pddp, Qddq, Rddr,..., получим
и ди = — P др — Qdq — R dr — ...
. . . + f (dp dp — dP dp + dQ dq — dQ dq + dR dr — dR dr .
Тогда согласно гипотезе
P = fonct p , Q = fonct<7, 7? = fonctr, ...;
дифференцируя, найдем
8P_ _ dP JQ_ _ dR
dp dp ’ 8q dq ’ Sr dr ’’’ ’
и, следовательно,
dPdp — dPdp = 0 , dQ dq — dQ dq = 0 , dR dr — dRd r= 0, . ..
Тогда
udu= —Pdp — Qdq—Rdr — .. . и duds = —P dtdp — Qdtdq—Rdtdr — ...
ds
Подставляя вместо равное ему dt, преобразуем приведенное выше урав-
нение в следующее:
[(ц <5 ds — Р dt др — Q dt dq — R dt dr — ...) = 0. (A)
Теперь нужно найти отношения разностей др, dq, dr,..., dds, что может
быть сделано различными способами в зависимости от вида координат, с
помощью которых представляются траектории. Возьмем сначала прямо-
угольные координаты х, у, z ; в этом случае
ds = ]Т/х2 + dy2 + dz2,
dx 8 dx + dy S dy + dzd dz dx d 8x + dy d 8y -y dzddz
следовательно, получим ----------------------=-------------(js-------,
заменяя d dx на d dx; тогда
Исключая из этого выражения дифференциалы величин dx, by, dz методом
интегрирования по частям, использованным в предыдущем Мемуаре, полу-
чим следующее преобразование:
1 и) ds - - ,f р h + 1i.‘Xdy + i +
. udx . . tidy & . и dz s
+ - - ox ----dy + - T - dz .
1 ds ' ds 7 1 ds
Теперь остается только выразить разности др, dq, dr,... через дх, by, dz.
Для этого надо найти аналитические выражения линий р, q, г, при помощи
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
119
координат х, у, z, и определить их дифференциалы, заменяя 5 на d. Пред-
положил! в общем случае, что
dp = L dx + I dy 4-2 dz,
dq = M dx + m dy + p.dz,
dr = N dx 4- n dy 4- v dz;
ясно, что будет также
др — L дх + / ду 4- 2 dz ,
dq — М дх 4- П1 бу + pdz ,
dr = М дх 4- п ду 4- v dz.
Следовательно, если положить для краткости
PL + QM + RN = П,
Р1 4- Qm 4- Rn = Q,
РХ +Qp +Rv = Ч>,
то получим
P dp 4- Q dq 4- R dr 4- ... = П dx 4- Q dy 4- W dz.
После этих подстановок уравнение (А) примет следующий вид:
- J [ р+ndt] + р ЧГ + &] +
, и dx < , и dy „ , и dz « г.
4- - — дх + ду + dz = О . (В)
ds 1 ds 7 1 ds ' '
Это уравнение должно иметь место, какие бы значения ни придавались раз-
ностям дх, бу, dz; поэтому имеем три следующих уравнения:
d-~+ITdt = O,
d “^у_ + q dt = 0,
ds ’
du~ + W dt = O.
as
Именно эти уравнения будут служить для определения кривой, описанной
телом М, и его скорости в каждый момент времени.
Если подставить dt вместо d^, умножитьпервое уравнение на -dp второе
dy dz
на третье на-^- и затем проинтегрировать их, то получим
w пл, &-?-№,
откуда, исключив dt и извлекая квадратный корень, получим уравнения
dx ______________________________ dy
I а- — 5 П dx I b2 — J P dy
dx _ dz
I a- - 1 IT dx I P — i I' dz ’
120
Ж. ЛАГРАНЖ
где неизвестные будут разделены, если
77 = fonctx, I2 = foncty, V7 = fonctz.
II. Замечание. Что касается членов
и dx с . и dy . . иdz с
—т— ох 4—~ оу Н—oz,
ds 1 ds 7 ds ’
то их можно не принимать во внимание, предположив, что оба конца траек-
тории заданы, так как предположение приводит к исчезновению начальных
и конечных дх, dy, dz и, следовательно, всех упомянутых членов (см. п. IV
предыдущего Мемуара).
III. Следствие. Представим себе, что подвижное тело М, подвер-
женное действию тех же сил Р, Q, R,..., вынуждено двигаться по искрив-
ленной поверхности, определяемой уравнением dz — р dx -р q dy ; заменяя
d на 6, получим dz = р dx + q by, а подставляя это значение <5z в уравнение
(В) и приравнивая коэффициенты при 6х и dy нулю, получим два уравнения :
d + Пdt + [d “f- + Vdt] p = 0,
d^+Qdt + [d^- + Vdt]q = 0,
которые, вместе с заданным уравнением
dz = р dx + q dy,
достаточны для решения задачи.
IV. Д р у г о е решение. Вместо двух прямоугольных координат
х, у возьмем переменный радиус х, который вращается вокруг неподвижной
точки в той же плоскости х-в. и у-в и положение которого в каждый момент
определяется углом <р. Сохраняя третью координату z, которую надо пред-
ставить себе проведенной из конца радиуса х перпендикулярно к плоскости
угла <р, легко найти, что элемент кривой ds будет
fх2 d<p2 + dx2 + dz2 ;
тогда, дифференцируя, получим
_ х2 dtp Й d<p + х dtp2 ёх + dx 8 dx + dz 8 dz _
ds
___ x2 dtp d 8<p + x dtp2 8x + dx ddx + dz d 8z
~__ds
Подставляя это значение в интегральную формулу J и d ds и исключая
дифференциалы величин dtp, йх, dz, получим обычным путем интегрирования
по частям
[иdds = - f Iddtp + (d - -^1 dx + d^-<5zl +
J J L ds \ as ds ) as J
as r 1 ds ds
После подстановки этого значения J ud ds в уравнение (А) п. I останется
только привести разности dp, dq, dr,... к разностям dx, dy, dz. Для этого
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
121
предположим в общем случае, что
dp = L dx 4-1 dtp + к dz,
dq = M dx + m d<p + pdz,
dr = N dx + n dtp -\-v dz,
а также
dp = L dx 4* I dtp 4- Л dz,
dq — M dx + mdtp Л- udz,
dr — N dx 4- n dtp 4- v dz.
Следовательно, если сделать те же предположения, что и при предыдущем
решении, то получим также
Р dp 4- Q dq 4- R dz 4- ... = П dx + & dtp 4- T dz,
а уравнение (А) окончательно примет вид:
- J[(d ^^+Qdt) dtp + ^d11^- + Hdt] dx +
+ (rfT + ¥ZrfO<5z]+J^<59? + T<5x+-l^'5z = 0-
Теперь, если предположить, как в п. II, что начальная и конечная точки
траектории заданы, то становится ясно, что д<р, дх, dz, которые им соответ-
ствуют, будут равны нулю и, следовательно, три последних члена этого
уравнения тоже обратятся в нуль. Итак, чтобы удовлетворить оставшейся
части этого уравнения, независимо от произвольных разностей dtp, дх, dz,
надо положить коэффициенты при них равными нулю и тогда получим
общие уравнения движения тел :
d ux^ + Qdt==0> d + п dt = 0, d~- + ^dt = O.
ds
Подставив в эти уравнения dt вместо — и проинтегрировав первое из них,
№ d<p
помножив его предварительно на получим
откуда
dt =_______________________________xLd?____.
У2а2 - 2[£2x2dg> ’
подставляя это значение во второе уравнение и полагая для сокращения
^2«2 — 2 \ шх2 dtp = U,
будем иметь
. Udx и dtp Пх2 dtp _п
а x2d<p х '+ и и
или, заменяя через у, получим
-ч^-иу^ + ^-о,
122
Ж. ЛАГРАНЖ
что по дифференцировании дает, считая dtp константой и умножая на
,, dU , , „ П dtp3 _
-d2y-----dy-у dtp* + = 0 ,
потому что
du __ Qx3 dtp ___ Q dtp
— ~~ — — ,
П + ~>аУ.
-d*y -yd<p*+ dtp2 = 0,
уравнение, применимое для многих частных случаев. Наконец, третье урав-
нение, умноженное на у(-и затем проинтегрированное, дает
2^ = ^~^dz.
Отсюда исключим значение dt. Сравнив с найденным выше, получим
уравнение
dz ______ dtp
IT'P dz — Uy3
V. Следствие. Если тело вынуждено двигаться по поверхности
данной кривизны, то, характеризуя эту поверхность с помощью трех пере-
менных х, <р, z и предполагая ее выраженной уравнением
dz = р dtp 4- q dx,
подставим в уравнение (С) р -f- q дх вместо dz, затем приравняем нулю
коэффициенты при <5х и 699 и получим:
d +Sdt+ id u-fz + ^dt}p = 0 ,
ds ' 1 V ds J r
d f +ndt + {d U dt] q = 0 .
ds ds I ds
VI. Примечание I. Мы предположили, что силы Р, Q, R,... суть
какие-либо функции расстояний р, q, г,... ; однако легко доказать при
помощи принципов Динамики, что найденные уравнения являются общими
для всех видов ускоряющих сил. В этом можно убедиться, заметив, что упо-
мянутые уравнения не содержат закона, согласно которому силыР, Q, R,...
возрастают или убывают, но содержат только величины и мгновенные на-
правления этих сил, как это легко увидеть, подставив вместо П,& и 4J их
значения. В итоге анализа предыдущих решений становится ясно, что гипо-
теза
P = fonctp, Q = fonct <7, R = fonctr, ...
служит только для приравнивания нулю интегрального выражения
[ (др dp — dP др 4- dQ dq — dQ dq + dR dr — dR dr ...).
Впрочем, для этого было бы достаточно, чтобы величины Р, Q, R,...
были связаны так:
дР dp — dP др 4- dQ dq — dQ dq 4- dR dr — dR dr 4- ... = 0;
пусть тогда P,Q, R, ... — какие-либо функции p, q, r, ... такие, что но
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
123
дифференцировании
dP = A dp + В dq + С dr + ... ,
dQ = D dp + E dq + F dr + ... ,
dR = G dp + H dq + I dr + ... ;
ясно, что равным образом имеем
dP = Adp + Bdq + С dr + ... ,
dQ = Ddp + Edq+ Fdr + ... ,
dR = Q dp + H dq + I dr + . . .
Подставляя эти значения в условное уравнение и сократив его, получим
(B—D) (dp dq - dq dp) + (C-G) (dp dr - dr dp) + (F—H) (dq dr - dr dq) = 0,
-следовательно,
B — D — 0, C —G = 0, F-H-0,
или
dP __ dQ dP _ dR dQ __ dj?
dq dp ’ dr dp ’ dr dq ’
т. e. P dp + Q dq \- R dr y • • • является полным дифференциалом. Если
это условие имеет место — значение и би будет равно
—Р dp — Q dq ~~ R dr — ;
иначе говоря, нужно еще принять во внимание интеграл
$(dPdp-dPdp+ ...),
чтобы сделать формулу J и ds настоящим максимумом или минимумом, но
уравнения, которые будут найдены в этом случае, не будут истинными
уравнениями движения тела.
VII. Примечание II. Это единственная задача, к которой г. Эйлер
применил свой принцип. Он также решил ее для двух случаев: случая
прямоугольных координат и случая радиусов, выходящих из неподвижного
центра. Однако для сравнения его решений с нашими нужно заметить :
1. Что г. Эйлер рассматривал только кривые простой кривизны.
2. Что он искал максимум или минимул! формулы J и ds, учитывая только
переменность ординаты у в первом случае и переменность угла, обозначен-
ного нами q>, во втором случае (см. Приложение, цитированное в начале
этого Мемуара).
Следует добавить, что при помощи нашего метода можно найти решение
этой задачи многими другими способами в зависимости от разных видов
координат, которые будут избраны для представления искомой траектории.
VIII. Задача II общая. Пусть имеется какая-либо система, состоя-
щая из многих тел М, М', М",..., которые подвержены действию скольких
угодно центральных сил, а именно :
М — действию сил Р, Q, R,... ,
М' — действию сил Р', Q', R',... ,
М”— действию сил Р", Q", R",. .. ,
и пусть эти тела сверх того действуют друг на друга какими-либо силами
взаимного притяжения ; найти движение каждого из этих тел.
Решение: Все сводится к тому, чтобы привести выражение
М J' и ds +. М' J и' ds' + М" J и" ds" + ...
124
Ж. ЛАГРАНЖ
к максимуму или минимуму. Тогда, по нашему методу,
<5 (М J и ds) + <5 (М' J и' ds') + д (М" J и" ds") + ... = 0,
или, так как М есть константа (п. 1), то
<5 (М [ и ds) = М д J и ds = М J (и д ds + и ди dt) = J М (иди ds + и ди dt).
Подставляя dt вместо-^, ~^г>- > найдем
д (М' j и' ds') = § М’ (и' д ds' + и' ди' dt),
д (М" f и” ds") = f М" (и" д ds" + и" ди" dt), и т. д.
В результате получим уравнение
[ [Ми д ds + М'и' д ds' + М"и" д ds" + . . .
... + (Миди + М'и' ди' + М"и" ди" + ...)Л] = 0. (D)
Пусть теперь р, q, г,... — расстояния от тела М до центров сил Р, Q, R,...
и р', q’, г',..., р”, q", г"... — расстояния других тел М', М" до центров их
сил Р', Q', R',.. .,Р", Q", R",... Пусть, кроме того, / будет расстояние между
телом М и телом М' и F — сила, с которой каждая точка одного тела притя-
гивает каждую точку другого ; /' — расстояние между телами М' и М",
a F' — сила их притяжения и так далее. Пусть g — расстояние между телом
М' и телом М" и G — их протяжение, и так для всех других тел ; по об-
щему принципу сохранения живых сил получим уравнение
Ми2 + М'и'2 + М"и"2 + ... = MU2 + M'U'2 + M"U"2 + ... =
= — 2М J (Р dp + Q dq -р R dr + ...) —
- 2М' j‘(Р' dp' +Q' dq' + R' dr' +...)-
- 2 M" f (P" dp" + Q"dq" +R" dr" +...)-
- 2 MM' $Fdf-2 MM” $F'df - ... - 2 M'M" $Gdg - ...,
где U, U', U",... — первоначальные скорости тел M, М', М",...
Итак, предположив, что
Р = fonct р, Q—fouctq, R = fonct г, ... ,
Р' = fonct р', Q’ = fonct q', R' = fonct r', ... ,
F = fonct /,..., G = fonct g , ... ,
найдем при помощи вычисления, аналогичного проделанному в задаче I,
дифференциальное уравнение:
Ми ди + М'и’ ди' + М"и" ди” + ... =
— — М (Р др -J- Q dq -J- R dr —
- М' (Р' др' + Q' dq' -PR' dr' + . . .) -
- М" (Р" др" + Q" dq" -PR" dr" +...)-
- MM'F df - MM” F'df - ... M'M" Gdg- ... (U)
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
125
Теперь надо найти значения разностей д ds, & ds', д ds",..., которые за-
висят, очевидно, от природы координат, примененных для представления
кривых, описываемых каждым телом.
IX. Первый случай. Пусть, как в п. I, х, у, z — три прямоуголь-
ные координаты, которые определяют положение тела М в какое-либо время,
пусть также х'у у', z', х", у", z",... — другие прямоугольные координаты,
параллельные первым, для положения тел М', М", в то же самое время; мы
получим, как в п I,
_ dx d дх + dy d ду + dz d dz
ds ’
а также
„ , , dx'd dx' 4- dy’d dy' 4- dz'd dz'
л dx" d dx" + dy" d dy" + dz" d dz"
°as — -
и так далее.
Подставим эти значения в уравнение (D), исключим, как обычно, диф-
ференциалы бх, ду, dz, дх', dy',... ; тогда получим, пренебрегая всеми чле-
нами, не стоящими под знаком J, которые можно положить равными нулю
в соответствии с примечанием к п. II, следующее выражение:
f\Md-^dx + Md^dy + Mdud--dz + M'du-.d~dx' +
J L ds ds ' ds as
+ M'd dy' + M’d dz' + M-d dx" +
+ M" ddy" + M” d u~dz” +
- (Mu du + M'u' du’ + M”u” du" + .. .) df] = 0 .
(E)
Теперь остается только подставить в это уравнение вместо
MU du + M'u' du' + M"U" du" + ... ;
его значение, взятое из уравнения (U), и затем привести разности
dp, dq, dr, ... , dp', dq', . . .,df, df, . . . , dg, . ..
к разностям
dx, dy , dz, dx', dy', dz',. . . ,
методом, аналогичным примененному в предыдущей задаче. После этого,
если каждое тело полностью свободно так, что все разности <5х, ду, dz, дх',
ду',... остаются произвольными, то приравняв коэффициенты при каждом
из них нулю, получим в три раза больше уравнений, чем тел. Эти уравнения,
взятые в совокупности, достаточны для определения всех искомых скоростей
и кривых. Но если одно или несколько из этих тел вынуждены двигаться
по данным кривым или поверхностям и, кроме того, действуют друг на
друга либо толкая, либо дергая друг друга при посредстве нитей или негиб-
126
Ж. ЛАГРАНЖ
ких стержней или каким-либо другим способом, то тогда будем искать соот-
ношения, которые должны иметь место между разностями дх, ду, dz, дх',
ду',... Этим мы уменьшим их число до минимально возможного и, положив
затем коэффициенты при каждом из них равными нулю, получим все урав-
нения, необходимые для решения задачи.
X. Следствие. Предположим, что система совершенно свободна и
тела действуют друг на друга каким-либо способом; предположим, кроме
того, что все тела подвержены действию трех сил Р, Q, R, направленных
параллельно координатам х, у, z и одинаковых для каждого из тел; под-
ставим в уравнение (U) X, у, z вместо р, q, г и получим
Ми ди + М’и' ди' + М"и" ди" + ... =
= - М(Рдх+ Q ду 4- R dz) - М' (Р дх' + Qdy' + Rdz’) —
-М"(Рдх"+ Qdy"+Rdz")- ... -MM'Fdf-
- MM"F’ df - ... - M’M"G dg - ...
Подставим это значение Mu ди 4- М'и' ди' 4- ... в уравнение (Е), и пусть
х' = х + X , у' = у 4- Y , z' =z 4- Z,
х" = х-уХ', y"=y-\-Y’, z" = z^Z',
Вследствие равенств
дх' = дх 4- дх , ду' = ду 4- бу , dz’ = dz 4- dZ,
дх" = дх 4- дХ', ду" = ду 4- ду, dz" = dz + dZ',
ясно, что линии /, g,..., которые определяют расстояния между телами,
будут зависеть исключительно от линий X, У, Z, X', Y', Z',..., которые
определяют их взаимное расположение. Таким образом, выражения раз-
ностей df, df', dg,... ни в коем случае не будут содержать разностей 6х, ду,
dz; более того, заметим, что эти приращения дх, ду, dz будут совершенно
независимыми от всех разностей дХ, dY.
Очевидно, что взаимное действие тел зависит только от их относительного
расположения, а именно от линий X, У, Z, X', У', Z', X",..., приращения
дХ, дУ, dZ, дХ', дУ', dZ',... будут связаны между собой отношениями,
определяемыми природой задачи. Отсюда следует, что множители при 6х,
бу, dz, ... в уравнении (Е) должны быть по отдельности равны нулю. Это
дает три общих уравнения:
Md“.~ + M'd Ll'-~ + М" d —
ds ds ds
4- ... 4- (M 4- M' 4-' M" 4- ...)Pdf = O,
MdLl-^ 4- M'd 4- M" d4- • • + (M 4- M' 4- M" 4- . •.) Q dt = 0,
M d~- 4- M’d—ff-4- M" d^-- + ... + (M у M' + M" + .. .)Rdt = 0.
Так как
ds _ ds' _ ds"
и и' и"
.. =dt,
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
127
то, следовательно, эти уравнения примут вид
d+ (М + М' + М" + .. .)Pdt = О,
d ™аУ +M\dyL+J^df±^ + (М + М' + м” + ...)Qdt = O,
d +(М + М' + М" + ...)Rdt = O;
отсюда видно, что если в каждый момент времени взять в системе одну точку,
положение которой будет определяться тремя координатами — одной,
параллельной х и равной
MX + М'Х' + М"х" + • •
мужум" - . 7 '' ’
другой, параллельной у и равной
Му -у М'у’ + М"у” 4- ...
М М’ М"~УТУ " ’
и третьей, параллельной z и равной
Mz + M’z' + M"z" + ...
лГ + л-г+Тм" +Л” • ’
то эта точка будет двигаться просто как тело, подверженное действию трех
сил Р, Q, R. Кроме того, очевидно, что эта точка будет не чем иным, как цен-
тром тяжести системы, т. е. всех составляющих ее тел М, М',...
XI. Второй случай. Возьмем, как в п. IV, вместо двух прямо-
угольных координат х и у радиус-вектор х с углом tp, и пусть другие коорди-
наты х', у', х", у",... будут заменены радиусами-векторами х', х",..., выходя-
щими из той же неподвижной точки, что и луч х с соответственными углами
д/, <р",..., взятыми в той же плоскости, что и угол tp. Как в п. IV, найдем
, _ х2 d<p d dtp + х d<p2 8х 4- dxd dx 4- dzd dz
ds ’
а также
„ , , _ x2 d<p'd dtp' 4- x' dtp’2 dx' 4- dx’d dx’ + dz'd dz'
% j „ _ x"2 dy d dtp" 4- x" dtp"2 dx" 4- dx" d dx" 4- dz" d dz"
ddS -
и т. д. Подставилг эти значения в уравнение (D) п. VIII и, проделав те же
сокращения, что и в п. IV, получим
ГГлуг^г их2 dtp Л
М а-dtp 4-
.1 L os
, . , ( , и dx их dtp2 1 . , ., , и dz „
+ Mid —j-------- <5х + М d dz +
V ds ds ) ds
, ... . u'x'2 dtp' £ , . ... ( .u'dx' u'x' dtp'2] „ , . u'dz' .
+ M d ds' W +M [d-dlT - dx + M d ~ds' ~ dz +
+ M” d dtp" -PM" fd—.-^- - —dx"+M"d d~-^dz" +
1 ds r ds ds J 1 ds
+ (Миди + M’u' du' + M’u' du" + ...) dt] =0. (F)
128
Ж. ЛАГРАНЖ
В этом уравнении я отобрал все члены, стоящие вне знака J, потому что они
обращаются в нуль, если предположить, что начальная и конечная точки
траектории заданы. Это уравнение, аналогичное уравнению (Е) из п. IX,
потребует только операций, подобных выполненным в этом параграфе для
нахождения движения каждого тела. Примеры этому мы найдем в сле-
дующих задачах.
XII. Следствие. Если система совершенно свободна или если она
вынуждена двигаться вокруг неподвижной точки и все действующие на тела
силы направлены к этой точке, то, принимая ее за центр радиусов-векторов
х, х', х",... и полагая
9/ = 9? + 0, 9?" = 9? -J- Ф’,,,,
легко видеть, что 69? будет совершенно независимо от других разностей дФ,
6Ф',..., dx, dx', dx",..., каково бы ни было взаимодействие тел; кроме
того, очевидно, что все разности др, dq, df,..., которые входят в значение
Миди + М’и' ди',...,
будут также независимы от разности dtp. Отсюда следует, что все члены
уравнения (F), которые стоят при разностях dtp, должны быть после под-
становки dtp + дФ, dtp + дФ',... на место dtp', dtp",... равны нулю отдельно
от остальной части уравнения ; после исключения dtp получим уравнение
Md + М'd + м„ d + ... = о,
ds ds ds 1 ’
интеграл которого будет
Mux*d<p . М'и’х’* dtp' . М"и"х"г d<p" , ,
+-----------+------+ • • • = const. (G)
Подставив dt вместо .. в знаменателе и обозначив через И кон-
станту, найдем
Мх2 d<p + М'х’2 dtp' 4- М"х”2 dtp" 4- ... = Hdt.
Интегрируя снова, получим
М J x2dtp + М' $x'2dtp' +М" J x"2dtp” + ... =Ht.
Очевидно, что интеграл
J х2 dtp
выражает площадь, которую проекция тела М описывает вокруг центра сил,
а другие интегралы,
J x^dtp', Jх"2 dtp", ...,
выражают площади, описанные проекциями других тел М', М",... вокруг
того же центра. Следовательно, сумма этих площадей, помноженных каждая
на массу описывающего их тела, всегда пропорциональна времени.
Читатель, который полюбопытствует посмотреть доказательство этой
теоремы, выведенной из принципов Механики, найдет его в Мемуаре г. ка-
валера д’Арси, изданном в Мемуарах Парижской Королевской Академии
наук в 1747 г.; там же он найдет применение этой теоремы при решении
многих задач Динамики.
В заключение мы заметим, что уравнение (G) содержит принцип, который
гг. Даниил Бернулли и Эйлер назвали сохранением момента вращательного
движения и который состоит в том, что сумма произведений массы М каждого
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ Л'.ЕМУАРЕ
129
их dq>
тела на его круговую скорость —и на расстояние х до центра постоянна
во время движения системы (см. Memoires de I’Academie royale des Scien-
ces de Berlin, 1745 г. и Opuscules г. Эйлера, изданные в Берлине в 1746 г.).
То же уравнение (G) содержит также принцип г. кавалера д’Арси, гла-
сящий, что сумма произведений массы каждого тела М на скорость и и на
х2 d<p
перпендикуляр —, восстановленный из центра на направление движе-
ния тела, всегда является постоянной величиной (см. Memoires de 1’Acade-
mie de Paris, 1749, 1752).
XIII. Пр имечание. Легко обнаружить при помощи способа, кото-
рый я дал в примечании к п. VI, что уравнение (U) будет вообще справед-
ливым всякий раз, когда формула
— М (Р dp + Q dq + R dr + ...) — M' (P' dp' + Q' dq' + R' dr' + ...) — ...,
которая выражает величину
Mudu + M'u'du'+ M"u"du" + ...,
будет полным дифференциалом. Во всех других случаях, это уравнение не
сможет служить для нахождения условий максимума или минимума инте-
грального выражения
М J u ds + М' J и' ds' + М" [ и” ds"+
но всегда будет пригодно для нахождения движений тел М, М', М",...,
каковы бы ни были силы, их вызывающие. Таким образом, не затрудняясь
определением, является ли формула, о которой мы говорили, действительно
максимумом или минимумом, можно всегда, при любой гипотезе о силах,
использовать уравнение (U).
XXIX. Задача IV. Найти движение негибкой нити, на каждую точку
которой действуют какие-либо силы Р, Q, R,...
Решение. Сохраняя обозначения, данные в п. XXV, обозначим,
кроме того, через и — искомую скорость каждого элемента, ds — малое
расстояние, которое он проходит за время dt; легко заметить, что выра-
жение нашего общего принципа примет вид
Sdm [ и ds [29].
Согласно нашему методу уравнение
д Sdm uds = O
в силу постоянства dm при изменении кривизны нити преобразуется в
5 dm д j и ds = 0,
Sdm J (и д ds + du ds) = Sdm J ид ds + Sdm f ududt = 0,
ds
где вместо — подставлено dt.
Теперь, если взять для каждого элемента нити три прямоугольные коор-
динаты х, у, z, как это сделано в задаче I, то получим
д ds = (dx ddx + dyddy + dzd dz)
и
f и d ds = — $ (d dx + d dy + d <5z) ,
130
Ж. ЛАГРАНЖ
где опять dt подставлено вместо—. Тог да интеграл Sdm§ и dds примет вид
- J Sdm(d —dx + d-^-dy +d-^-dz],
где переставлены знаки S и J, что, очевидно, разрешается.
Такой же перестановкой знаков изменим выражение
Sdm^ududt на J Sdmududt
и получим уравнение
$Sdm(ududt- d-^-dx-d^-dy-d^ dz) = O. (К)
Теперь речь идет о том, чтобы найти значение »S dmu ди dt. Нетрудно
видеть, что уравнение (U) п. VIII, примененное к данному случаю, дает
Sdmudu = - Sdm(Pdp + 'Qdq + Rdr + ...).
Умножив это уравнение на dt, значение которого одинаково для всех эле-
ментов нити, получим
Sdmududt= - Sdm(Pdp + Q dq + Rdr + .. .)dt,
или подставляя в соответствии с предположениями, сделанными в п. I,
П дх + Q ду + W dz вместо Р др + Q dq + R dr + ..., найдем
Sdmududt = — S dm (П dtdx + Qdtdy + Wdtdz). (X)
Это значение, подставленное в уравнение (К), дает
- J^r + ndt)dx + (d-^- + Qdt]dy + (d 4-У dt] &] = 0. (L)
Так как каждый элемент нити ds = /dx2 + dy2 + dz2, предполагается
негибким, то мы будем иметь, как в п. XXV, уравнение
dx-5r + dy-/+dz^T = 0-
По той же причине
d Цйх2 + dy2 + dz2 = 0,
что дает
dx d dx + dy d dy + dz d dz = q.
и, поменяв местами 5 и d, получим
dx d dx + dy d dy + dz d dz = 0,
откуда найдем
, » dy d dy + dz d dz
d&c =-------чг—•
Интегрируя, получим
Sd<5x = dx = d'x - S dyd^ + dzdfe ,
где д'х есть значение дх, когда интеграл, обозначенный S, равен нулю, или,
иначе говоря, значение дх на начальном конце нити. Подставив это значение
дх в уравнение (L), получим из выражения
Sdm (d + П d/J дх
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
131
выражение
Sdm (d^- + ndi\S'x-Sdm\(d~ + ndt\S(^-ddy + -^-ddz]\.
V at f LI at 1 J V d* J ' dx j J
А так как разность 6'x есть постоянная величина, то она может быть выне-
сена за знак интеграла; следовательно, если Т dt выражает полное значение
интеграла
Sdm (d^- + ndt],
то выражение S dm р + П dt] д 'х сведется просто к Т dt д'х. Теперь надо
исключить разности ду и dz в выражении
[Sdm (d £ + П л) d бу + £ dte)],
что можно легко сделать с помощью метода, изложенного в п. IX предыду-
щего Мемуара [30]. Следуя этому методу, мы находим, что если Т dt пред-
ставляет, как и выше, полное значение интеграла
Sdm (d + П dt],
I at 1 J ’
и если обозначить для краткости
Tdt —Sdm [d~ + ndt] = Udt,
то получим
Sdm [d^- +ndt)S-fddy = dy -Sd1^ ду,
и также
Sdmfd-^ + П dt] S-^d5z = dz -Sd--^- dz ,
V at 1 j dx dx dx ’
где выражения, которые находятся вне знака интеграла S, должны быть
взяты согласно условиям, изложенным в п. 1 предыдущего Мемуара;
значение V dt, которое соответствует конечной точке нити, равно нулю,
потому что Sdm[d^y + П dt] становится здесь равным Т dt и для началь-
ной точки это значение также равно Tdt, потому что Sdm [d-^ + TIdt]
равно нулю; следовательно, если координаты, соответствующие этой
точке, обозначить через 'х, 'у, z, то получим-—ду для точного
значения выражения —ду и — т Z~ $'z для аналогичного выраже-
и dt dz s
ния —dz.
В результате этих подстановок найдем
sim [(d £ + пл) о бу + £ d &)] =
= _ Td(рх + )-У+ л) - S(d бу + dfc),
Q*
а уравнение (L) перейдет в следующее:
- fi>x + Tdt - f’SRd ^fy+dmd^t +
J v 1 d x 7 1 d x J J P dx ' at 1
+ dmQdt)dy + (d + dmd~ + dm'P dt] dz] =0, (M)
откуда получим для всех точек нити вообще
d dy +dm[d^- + -Qdt] = 0 ,
dx V dt 1 J ’
d ^JJ^L + dm (d d.z. + Wdt] = 0 ,
dx 1 \ dt ' J ’
и эти уравнения с найденным ранее уравнением
послужат для определения движения нити.
Если в этих уравнениях положить П = — Р, £2 = О, УР = 0, то они ока-
жутся такими же, как уравнения из п. XXV, в чем легко убедиться, прибег-
нув к очень простому вычислению.
XXX. Схолия I. Теперь, чтобы удовлетворить, наконец, уравнению
(М), положим
(д’х + ^р'у + ^d’z)Tdf = O,
\ U A U а у
т. е. уравнение, относящееся исключительно к начальной точке нити.
Предположим сначала, что эта точка абсолютно неподвижна, тогда ясно,
что б'х = 0, д'у = 0, <3'z = О, а это обратит в нуль все члены уравнения, о
котором идет речь; тогда уравнение, найденное в конце предыдущего пара-
графа, окажется достаточным для решения этой задачи.
Но если другой конец нити тоже неподвижен, тогда придется внести не-
которые изменения в эти уравнения. Для этого возьмем снова уравнение
д'х = д'х - S d ду + ~ d dz)
dx 7 1 dx j
и найдем, проинтегрировав его по частям с прибавлением необходимых
констант,
дх = д'х- ^ду- ^dz + ^-d'y + ^-d'z + S(d £dy + d>dz).
dx 7 dx 1 d x 7 1 dx 1 I dx 7 1 dx )
Обозначим через x', у', z' значения x, у, z, которые соответствуют концу нити,
и отнесем только что найденное уравнение к этой точке; тогда получим,
поменяв местами
dx' + ду' + ~ dz'—d'x —^-d'y-^d'z-S (d^dy + d^dz] = O.
1 dx' 7 1 dx' d’x 7 dx I dx 7 1 dx J
Интеграл
S fd dy -f- d dz]
t dx 7 1 dx J
берется вдоль всей длины нити. Так как это уравнение справедливо для
всех моментов движения нити, то можно его умножить на dt и взять интеграл
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
133
по времени t; получим, следовательно, применяя для всех членов знак j,
уравнение
J (*' + Wл - тгй 'г) Ч‘ -
-|'S(d i<5y + d-g&l« = °, (N)
которое должно иметь место одновременно с основным уравнением (М);
полагая затем дх', ду', dz', д'х, д'у, d'z равными нулю в соответствии с гипо-
тезой, приведем это уравнение к следующему виду:
Я умножаю это уравнение на неопределенный коэффициент к и прибавляю
к уравнению (М); так как 6'х, д'у, d'z равны нулю, то я получаю
- \S\(d^^ + dmd^ + dmQdt + d^kdt\dy +
J | ИЛ UL С1Л J
+ (d U dz + dm d + dm W dt + d кdt] <5z] = 0 ,
1 1 dx 1 at ax J J
откуда я нахожу для движения нити :
d ««L + dm(d+ Vл) + dkdt = °,
а третье уравнение будет таким же, как в предыдущем параграфе.
XXXI. Схолия II. Уравнение (N), умноженное на неопределенный
коэффициент к и затем прибавленное к уравнению (М), дает вообще
j" | (dx' дх’ + dy' ду’ + dz' dz’) — (d’x <5’х + d’y <5’у + d’z d'z) dt —
-^S[(d^^ + d^kdt + dmd^- + dmQdi]dy +
+ (d ^dx^ + d к dt + dm d ~ + dm W dt]dz ] = 0 .
Члены, находящиеся под двойным знаком J<S, дадут сначала для общего
движения нити те же уравнения, что и в предыдущем параграфе; затем
другие члены, находящиеся под действием только знака J, дадут уравнение
(dx' дх’ + dy' ду’ + dz' dz’) — (d’x d’x + d’y <5’у + d’z <5’z) dt = 0 ,
откуда можно сделать следующие выводы :
1. Если нить неподвижно закреплена на двух концах, то
д'х, д'у, d'z, дх’, ду’, dz’
сами по себе равны нулю, и уравнение, о котором идет речь, не добавляет
ни одного нового условия; это тот же случай, что и в предыдущем пара-
графе.
134
Ж. ЛАГРАНЖ
2. Если закреплен только один конец нити, .то либо б’х, <3'у, d’z, либо
дх', ду', dz' будут равны нулю; в первом случае останется уравнение
(dx' дх' + dy' ду' + dz' dz') = 0 ,
которое можно удовлетворить, только положив к = 0; во втором — остав-
шееся уравнение
— (d’x <5’х + d'y д'у -j- d'z d'z) — dt = О
необходимо приводит к тому, что
к + Т = О, т. е. Т = — к.
3. Если нить закреплена на одном конце неподвижного круглого стерж-
ня, вдоль которого она может скользить при помощи кольца, а уравнение
стержня в общем виде будет
dz = m dx + п dy,
тогда предположим, что
d'z = 'm д'х + 'п д'у , или dz’ = m’ дх’ + п' ду',
в зависимости от того, будет это начальная или конечная точка нити, кото-
рая описывает данную кривую ; подставляя в приведенное выше уравнение
значение d'z или dz', получим из него для первого случая два условия:
d'x + 'md'z = 0, d'y + 'п d'z = 0,
и, более того, к = 0, если другой конец нити свободен, а для второго случая
найдем также
dx' + tn' dz' = 0, dy' + п' dz' = 0,
и, более того, Т + к = 0, если начальная точка свободна.
4. Если оба конца нити скользят вдоль обеих кривых, представленных
уравнениями
d'z = 'm d’x + 'п d'y, dz’ — m’ dx’ + n’ dy’,
то, подставляя'm d’x + 'пд'у вместо d'z и m'dx' + п'ду' вместо dz', получим
d'x + 'md’z = 0, d'y + 'nd'z = O, dx' + m'dz' = 0, dy' + n'dz' = G.
5. Если оба конца этой нити соединены между собой так, что образуется
замкнутая кривая, то в этом случае х' = 'х, у' = 'у, z' = 'z, и общее урав-
нение примет вид
— (d’x d’x + d'y <5'у + d'z d'z) = 0 ,
откуда Т = 0, как в первом случае (п. 1).
Все эти уравнения, впрочем, должны проверяться при помощи констант,
которые будут найдены в общих уравнениях предыдущего параграфа после
их интегрирования.
XXXII. Схолия III. Представим себе, что нить нагружена телом с
конечной массой М', и находится под действем каких-либо сил Р', Q', R',...
ПРИМЕНЕНИЕ. МЕТО ДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
135
Ясно, что в этом случае выражение, которое должно быть максимумом или
минимумом, не будет просто S dm J ads, а будет
S dm J и ds + М’ J и' ds’,
где и' — скорость тела М', a ds' — элемент кривой, которую тело описывает.
Это последнее выражение, будучи преобразовано, как выражение задачи I,
даст для своего дифференциала
- М’ J [fd ™ + П’di] дх' + (d + Q’ di] + (dd?) &'] .
Эту величину мы прибавим к первому члену общего уравнения предыду-
щего параграфа и получим
-J[рИ'd + M’ITdt-kdi] дх’ + {М’d^ + M’Q'dt-kdt] ду'+
+ (M’d^-+ М'Ч" dt - -^7kdt] dz' + (d’x <5’х + d'y <5’y + d’z^zl ^±Adf] -
— J S[(d U+ d к dt + dmd-У- + dm Qdt] dy —
„(d^^ + d^fcdJ + dmd-^ + dm^d?) &] = 0. (P)
Члены, находящиеся под двойным знаком J S, дадут для движения нити
вообще те же уравнения п. XXX, которые не имеет смысла повторять. Дру-
гие члены дадут уравнение
{M’d + M’II’dt-kdt) дх’ + (М’ d~ + M' Q’ dt - kdt] ду’ +
+ [M’d-^ + M' 4" dt-^kdi] dz’ + (d'xd'x-l-d'y^y+d’za’zJ-^^d^O.
Итак, если тело M' свободно таким образом, что разности дх', ду', dz'
остаются неопределенными, то
М’ (d ЧГ + n'di]-kdt = 0,
М’ (d + Q> dt} ~ 4F к dt = 0 ’
M'(d^- + 4"dt)-^kdt =0.
I at ) dx
Эти уравнения будут служить для определения движения тела М'.
Если это тело вынуждено двигаться по поверхности, заданной урав-
нением
dz' = т' dx' + n’ dy’,
то подставим, как обычно, т' дх' + п' ду' вместо dz' и выведем следующие
уравнения :
Al'fd ^ + n’dt] -kdt+ [ЛГ (d dt] - ~ kdt]m' = 0 ,
Л1' fd Л) “ (d d^ - /сdfl л' = 0.
у I* t J С1Л> I у IXI J ХЛ Л I
136
Ж. ЛАГРАНЖ
Для членов
(d’x д'х + d’y <5’у + d'z d'z) T-^xk dt,
которые относятся к начальной точке нити, они образуют те же усло-
вия, что и в предыдущем параграфе, в зависимости от различных обстоя-
тельств движения этой точки. Но если представить себе сверх того в этой
точке другое тело 'М, побуждаемое силами 'Р, 'Q, 'R,..., таким образом,
чтобы нить была нагружена обоими телами 'М, М', неподвижно закреплен-
ными по концам, тогда мы имели бы для формулы максимума или минимума
Sdm J и ds + М' \и' ds' + 'Мgild's,
и нашли бы, сделав расчет, подобный приведенному выше, что первый член
уравнения (Р) примет вид
- 'М ][(</ ~ + 'Пdt] д'х +^d~-+'Q dt} д'у + (d -g- + "Р dt} <5’z] ,
что не меняет ничего в формулах, найденных для движения нити и другого
тела М'; сверх того, будет получено уравнение
[’Md ~ + 'М 'Ildt + (Т + к) dt} д'х +
+ ['Ald-g + 'M'Qdt + -g- (Т + к) dt] д'у +
+ \'Md ^+'M'^dt + -^(T + k) dt] d'z —О,
I Ul U A J
из которого можно получить для движения тела 'М формулы, аналогичные
формулам, найденным для тела М'.
XXXIII. Задача VII. Решить предыдущую задачу, предположив, что
нить сжимаемая и упругая.
Решение. Пусть F — пружина, или сила сжатия каждого элемента
нити, тогда получим при помощи уравнения (U) п. VIII
Sdm иди= — S dm(P др + Q dq + R дг + . . .) — Sf df ,
что дает при умножении на dt и подстановке П дх + Q ду 4- rP dz вместо
Р др + Q dq + R дг + ... и ds вместо /, уравнение
Sdmududt = — Sdm(IIdtdx + Qdtdy + *?dtdz) — Sfdtdds. . (Y)
Если
ds = ]/dx2 + dy2 + dz2 ,
TO
j _ dx d dx + dy d dy -|- dz d dz _ dx d dx + dy d<5 у + dz d dz
ds ds ’
следовательно, подставляя это значение в Sf dt д ds и интегрируя по частям
с соответствующими константами, получим
Sf dt д ds = -gf- (dx' дх' + dy' ду' + dz' dz') —
- (d’x <5’x + d’y <5’y + d’z d'z) - S(d dx + d gg dy + d <5z) dt.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
137
Теперь, чтобы решить задачу, остается только подставить в уравнение (К)
п. XXIX вместо S dm и ди dt только что найденное значение; тогда получим
— f Г (dx' <5х' + dy' ду' + dz' dz') — (d’x д'х + d’y <5'у + d'z d'z) +
। | as ci s i
+ [ ^[(d F^x dt — dmITdt — dmd j dx +
+ f d dt — dm Q dt — dm d -^-1 dy +
1 I, ds at ) '
+ fd F,d- dt — dm*? dt — dm d dz ] = 0,
1 as at j J
откуда, для общих уравнений движения нити найдем
d ^^dt- dm(ndt + d~) = О ,
ds V 1 at J ’
d -F dy dt — dm(@dt+ d -^4 = 0 ,
ds V at J 1
d-^dt-dm (^dt + d~) = O ,
as \ ' at j 7
что согласуется с тем, что было найдено в п. XXVII, если подставить Q — O,
ух = О и—Р вместо П. Сверх того, будем иметь уравнение
(dx' дх’ + dy' ду' + dz' dz') — (d'x д'х + d’y Ту + d’z Tz) -^d/- = 0 ,
которое рассматривается так же как уравнение (Р), и из которого можно,
следовательно, сделать, такие же выводы о движении обоих концов нити.
Эти подробности я оставляю читателю.
XL. Задача IX. Найти законы движения неупругих жидкостей.
Решение. Очевидно, что уравнение (L), которое служило для решения
предыдущей задачи, имеет место и здесь, так как оно является общим для
некоторой системы частиц dm, которые двигаются под действием каких-
либо сил Р, Q, Р,...
Пусть D — плотность каждой частицы dm жидкости, тогда
dm = D dxdy dz,
и уравнение (L) примет вид
\ S3 dx dy dz D ||d ~ + П dt} dx + (d + Q dt} dy +
+ (d4+’#z*)&]=0- (a)
Я ставлю показатель степени 3 к знаку S, чтобы выразить три интеграции,
содержащиеся в этом знаке относительно трех переменных х, у, z, которые
мы в последующем будем рассматривать каждую отдельно.
Так как мы считаем жидкость несжимаемой, то объем каждой частицы
dm, выраженный как dx dy dz, остается всегда одним и тем же; следова-
тельно,
dy dz d dx + dx dz d dy + dx dy d dz = 0,
138
Ж. ЛАГРАНЖ
т. е.
ddx.ddy.ddz ______„
dx ' dy ' dz ’
или, подставляя dd вместо dd,
ddx . ddy . ddz n ...
-dx- + ^F + ^F = °- (b)
Аналогично получим
dy dz d dx + dx dz d dy + dx dy d dz = 0,
или
dy dz d dx + dx dz d dy + dx dy d dz = 0,
что дает
, s , (d Sy d dz 'i
d dx = — dx —r2- 4- - ,
I dy 1 dz J ’
и, следовательно,
S d dx = dx = d 'x — S dx • (c)
Здесь d’x есть значение дх, когда интеграл S dx равен нулю, но
так как этот интеграл должен быть взят при условии, что только х изме-
няется, то отсюда следует, что величина д'х будет постоянной относительно
х, но переменной относительно у и z, т. е. что эта величина будет функцией
у и z.
Итак, после подстановки ,в уравнение (а) вместо дх только что найден-
ного его значения, интегральное выражение
S3dx dydzD[d~ + IIdt] dx
перейдет в следующее :
S3 dxdy dz D (d + Пdf) d'x -
-S3dxdydz|o(d^ + ndljSdx(4yL + -d^-j] •
Записываю сначала первый преобразованный член так:
S2 dy dz SdxD^d ~ + П dt] d'x,
1 {at ' J
это выражение, как хорошо видно, эквивалентно только что приведенному
Пусть полное значение
SdxD(d^ + ndi]
{at 1 J
будет выражено через Тdt; ясно, что так как <3’х постоянно относительно х,
то получим
SdxD (d J + Пdf) d’x = d'xSdxD (d + 77df) = d’x Tdt;
следовательно,
S3 dx dy dz D (d + Пdf) d’x = S2 dy dz Tdt d'x.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
139
Я представляю также второй член в следующей форме:
S2 dy dz S dx [D (d + dt) S dx (4^ + 4^)] ;
затем я преобразую интеграл
по методу п. IX предыдущего Мемуара; предполагая для сокращения
Udt-=Tdt-SdxD(d^ + ndt) ,
получим преобразованное выражение
Q j 1 г л ( d $У । d <5z \
odx(Jdl| ду + dz J ’
где остается только один знак интеграции; предложенное выражение при-
мет тогда вид
SadydzSdxUdf (4г + 4г‘) ’
или, что одно и тоже,
S8 dx dy dz U dt (4^ + 4г") ’
где остается только исключить разности Sy и dz.
Для этого необходимо рассмотреть сначала интеграции, относящиеся к
переменным у и г, представив этот интеграл в следующем виде:
S"dxdzSdy °''''1» + S’ dxdy Sdz.
'v
Итак, обычным методом интегрирования по частям, находим
Sdy-^=(/d(dy-Sdy^dy.
Uy uyj j
Я пишу S dy —.^--9 gy вместо равного ему Sd (Udt) Sy для того, чтобы указать,
что этот интеграл, так же как дифференциал dU dt, должен быть взят с уче-
том переменности только одного у. Пусть 'у есть значение у в начальной точке
< . d (U dt) „ „ ...
интеграла о dy ---j—- Sy, а у—значение у в его конечной точке и пусть U
будет значение U при подстановке 'у вместо у и U' — значение U при у= у';
по примечанию к п. I предыдущего Мемуара мы найдем, что полное значение
выражения U dt Sy будет U'dt Sy' — 'U dt S'y.
Но даже при непродолжительном размышлении над смыслом выражений
легко видеть, что когда U = 'U, то интеграл SdxD (d~ + Ildt j равен
нулю, а когда U = U', то этот интеграл как раз равен Т dt. Поэтому будем
иметь 'U = Т и U' = 0 ; следовательно, окончательно
Sdp^ = -Td'y-SdyA<^«)ey.
При помощи таких же действий и рассуждений получим
S dz _ тd’z - Sdz:
140
Ж. ЛАГРАНЖ
итак,
S3 dx dy dz U dt f
7 \ dy ' dz J
перейдет в
— S2 dx dz T dt d'y — S2 dx dz S dy d dy —
- S2 dx dy T dt d'z - S2 dx dy S dz d dz,
или, по приведении,
- S2 dx dz T dt d'y - S2 dx dz T dt d'z - S3 dx dy dz (d ^ydt) dy + ;
а следовательно,
S3dxdy dzD(d~ + IIdt) dx = S2dydzT dtd'x- S2dxdzdtd'y -
— 52 dx dy Tdt d'z + S3 dx dy dz ty + d •
Тогда уравнение (а) примет вид
f (S2 dy dz T dt d'x + S2 dx dz T dt d'y + »S2 dx dy T dt d'z) +
+ J S3 dx dy dz + D + Q л)] 8У +
+ + = (d)
отсюда получим для движения каждой частицы жидкости в общем случае
+ D (d-~- + Qdt} = 0,
dy 1 I dt 'J ’ . .
(e)
+ D(d-%- + Ydt] = 0 .
dz 1 V dt 1 )
Затем, чтобы удовлетворить оставшейся части уравнения, положим
S2 dy dz Т dtd'x + S2 dx dz T dt d'y + S2 dx dy T dtd'z = 0 . (f)
XLI. Следствие I. Значение U dt, равное
T dt - S dxD (d^ + Пdt] ,
представляет собой интеграл, взятый только при переменном х ; подставим
это значение в уравнение (е), но чтобы иметь возможность исключить
знак S, возьмем дифференциалы этих двух уравнений, предполагая пере-
менными только х, что даст при подстановке вместо d его значения
— D (d + 77 dt] два уравнения :
d[D(d-^ +ZTdfJ] +
dy dx ’
dz dx ’
ПРИМЕНЕНИЕ МЕТОДА. ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
141
которые, будучи присоединены к уравнению (Ь), найденному выше, дадут
возможность найти значения х, у, z для любого времени.
XLII. Следствие II. Таковы уравнения, при помощи которых можно
в общем определить движение неупругой жидкости, подвергнутой действию
каких-либо сил Р, Q, R..., которые действуют по некоторым направлениям,
или же под действием сил П, Q, У7, направленных по линиям х, у, z; это
легко видеть, рассматривая значения величин П, Q, W (п. I).
Чтобы глубже изучить уравнения, о которых идет речь, выразим через
а, /3, у скорости каждой частицы жидкости, параллельные координатам
dx dy dz j.
x, у, z, т. e. значения ; разделив на dt, получим
А(РП) _
dy —
dt J a (PG)
dx dx
d (DIP) _ d C dt J d (D'P)
dz dx "i" dx
dx + dy + dz U ’
(h)
Из этих уравнений видно, что величины а, [}, у необходимо являются
функциями переменных х, у, z, которые определяют положение частиц в
каждый момент времени, и времени, протекшего с момента начала движе-
ния; а так как ясно, что в момент dt переменные х, у, z получают значения
х -j- a dt, у + /3 dt, z -Ру dt, то изменения величин a, ft, у в этот момент будут
„ da j. dp .. dy
не только ~trdt, -£-dt, —Z-dt, но
at ’at ’at ’
da ai , da At i da o . da ,.
~dt-dt + ^adt + wpdt + ~terdt’
-dTdt + ^adt + wfidt + ^ydt’
^Ldt+^adt + ^fidt + ^-ydt,
dt 1 dx ' dy r ' dz ' ’
и такими будут значения da, dfi, dy; следовательно, если подставить эти
значения в уравнения (h) и предположить для большей простоты силы
П, Q, У7 равными нулю или такими, что
d(DH) _ d(D£i) d(DH) _ d(DP)
dy dx ’ dz dx ’
и кроме того, плотность D постоянной, то получим, разделив на D и обозна-
чив все дифференциалы через d, что здесь совершенно безразлично,
d2a d2a „ d2a d2a da da da dp da dy _
dtdy a dxdy “ dy2 dy dz dx dy + dy dy + dz dy ~
d2P , <Pp ,e_d*P_ d2P dp da dP dp dp dy
dt dx "r" dx2 " dx dy dx dz dx dx dy dx dz dx ’
d2a . d2a . о d2a . d2a . da da . da dp . da dy
dt dz "i" a dxdz "i" ” dy dz dz2 dx dz dy dz dz dz
<Py , d2y „ d2y . d2y dy da dy dp dy dy
dt dx "r" dx2 " dx dy "i" dx dz dx dx dy dx dz dx ’
142
Ж. ЛАГРАНЖ
Эти уравнения могут быть записаны сокращенно, если положить
da __________________ dji _ da _____ dy _
dy dx ’ dz dx V ’
что приведет их к такому виду:
- aAL - pAL + у AL + и (AL 4-AL\ + AlAL _ AL = о
dt dx р dy 7 dz + I dx dy J dz dy dz dx
(k)
Al . a Al - в Al + y Al , v (Al - AL} - Al AL _ Al AL = 0.
dt dx p dy 7 dz + I dx dy) dy dz dy dx ’J
Можно удовлетворить этим двум уравнениям, положив
= = v = Al_Al = o, AL — Al = o
• dy dx ’ dz dx ’ dz dy
в чем легко убедиться; третье из этих условий является очевидно необ-
ходимым следствием двух первых; тогда действительно у нас должны будут
выполняться только два условия, которые можно проще выразить, сказав,
что a dx + /3 dy + у dz должно быть полным дифференциалом; эти условия,
соединенные с тем, которое дает уравнение (i), при замене d на d, т. е. с урав-
нением
AL > ALiAL^q
dx dy dz ’
послужат для определения движений жидкости во многих частных случаях.
Эти случаи сводятся к таким, в которых предполагается, что частицы
жидкости описывают неизменные кривые, что имеет место тогда, когда ско-
рости а, р, у независимы от времени t, т. е. когда величины а, 0, у являются
просто функциями х, у, z, умноженными на одну и ту же функцию t. Дейст-
вительно, пусть в общие уравнения(h) будут подставлены 6а, 6ft, бу вместо
a, L У (Q ~ некоторая функция t, a a, у рассматриваются как неопреде-
ленные функции х, у, z без /); тогда, разделив на б2, найдем :
д d& , „ d/z , д dfi , dfi f da dP) , da dy dp dy _ n
-^4T + aAT + ~& + 7~<b +f*[^ + ~d7) + ’
2LAL + aAL + BAL + v Al + v(Al + AL\+AlAL _AlAL = 0'
IP dt ‘ dx ' dy ' 7 dz ‘ \ dx ‘ dy ) ‘ dy dz dy dx
Так как только члены содержат t, то для того, чтобы уравнения
были возможны, необходимо, чтобы зти члены отдельно от всех остальных
были равны нулю; тогда р = О и v = О, что удовлетворяет оставшейся части
обоих уравнений, как это было показано выше.
Имеется, однако, случай, когда предыдущие уравнения могут быть верны
и без предположения, что р — 0 и v = О ; это — тот случай, когда
1 do
-^dT = const,
т. е. когда
ф=«-М И <I = tL,
. - и dO v df)
где а и б —две какие-либо константы, так как тогда члены
о кажутся совершенно независимыми от времени t, так же, как все другие.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
143
Впрочем, комбинируя уравнения р = 0, v — 0 с уравнением (i), можно
отделить неопределенные a, ft, у и получить
tfx2 + °,
d*P d3p - л
dx3 dy3 dz3 ’
cPy . d3y d3y =
dx3 ”* dy3 ' dz3
XLIII. 3 амечание. Когда будут найдены при помощи уравнений
предыдущего параграфа общие значения а, 0, у, то, сверх того, надо
будет определить эти значения таким образом, чтобы частицы, соприкасаю-
щиеся со стенками сосуда, в котором движется жидкость, могли бы сколь-
зить вдоль этих стенок ; пусть х', у', z' их координаты и
dz' = pdz' + qdy’,
уравнение, которое выражает форму данного сосуда ; тогда при подстановке
вместо dx', dy', dz' их значений a'dt, ft'dt, y'dt и обозначая через а', [}', у'
значения a, ft, у, когда х, у, z становятся х', у', z', получим уравнение
[/ = + qF >’
которое должно быть справедливо независимо от t.
В случае, когда время t совсем не входит в отношение скоростей а, ft, у,
ясно, что оно не войдет также в уравнение
/ = pa' + qfi';
но тогда значения a, ft, у будут гораздо менее общими и может случиться,
что это уравнение будет правильно только, если предположить, что вели-
чины р и q подчинены определенным условиям, т. е. сосуд имеет опреде-
ленную форму.Именно это отметил г. Д’Аламбер в замечательном Мемуаре
о законах движения жидкости, напечатанном в первом томе его Opuscules
math£matiques. Но этот ученый Геометр полагает, более того, что если сосуд
будет иметь какую-либо другую форму, то движение жидкости нельзя будет
определять по этому же расчету; в этом-то я и не могу согласиться с ним,
ибо мне кажется, что единственное, что надо было заключить в данном
случае, так это то, что частное предположение, что р = 0 и v = 0 переста-
нет быть точным и следовательно, значения а, /3, у будут зависеть от об-
щего решения уравнений (к).
Правда, г. Д'Аламбер отмечает, что уравнения р = 0, v = 0 являются
единственно точными уравнениями для определения законов движения
жидкостей; он основывается на том, что скорости a, ft, у должны быть
независимы от времени t для частиц, которые текут вдоль стенок сосуда.
Отсюда он заключает, что так должно быть в общем для всех частиц жид-
кости ; но это следствие, если я осмелюсь это сказать, совсем не кажется
мне достаточно справедливым. Действительно, мне кажется, что очень легко
можно вообразить функции х, у, z такими, что переменная t исчезает из их
выражения только когда х, у, z становятся х', у', z' и связаны уравнением
dz’ = pdx' + q dy'.
Вообще, мне кажется безусловным, что, решая уравнения (h), (i) методами,
аналогичными тем, которые я объяснил в статье Recherches sur le Son [81],
144
Ж. ЛАГРАНЖ
напечатанной ранее, будем иметь решение, применимое ко всем возможным
случаям, при помощи которого можно будет определить движение жидко-
стей, движущихся в сосуде какой-либо формы и получивших вначале любые
импульсы.
Трудности могут встретиться только в тех случаях, когда жидкость раз-
делится при движении и перестанет представлять собой сплошную массу;
но тогда найдя при помощи вычислений (что всегда возможно) места, где
жидкость должна разделиться на много частей, рассмотрим каждую часть
отдельно и определим ее движение, считая ее изолированной массой.
В предыдущем параграфе мы заметили, что есть один случай, когда урав-
нения р = 0, v = 0 не являются обязательными для гипотезы, что скорости
а, /3, у могут быть независимы от времени t. Г. Д’Аламбер также отметил
это в п. X своего выше упомянутого Мемуара ; но он находит при помощи
своих формул, что случай, о котором идет речь, именно тот, где имеет место
равенство
6 = ас1,
вместо того, чтобы в соответствии с нашими формулами этот случай имел
место, когда
А разница вытекает из маленькой ошибки, которая проскользнула в вычи-
слениях Д’Аламбера, но, впрочем, не влияет на остальные его остро-
умные исследования.
Чтобы показать правильность нашего рассуждения, рассмотрим урав-
нения г. Д’Аламбера, которые он дает в п. I упомянутого Мемуара о тяже-
лых жидкостях, движущихся в плоскости. Эти уравнения следующие:
dP _ 11 °1
dz dx ’ ' '
d (g — Ввр — Af)q — qT) _ d(— QqA — QpB' — pT) /r)O.
_ _ — , )
где g — тяжесть, 6 — как и выше некоторая функция времени t; Oq и Op вы-
ражают скорости, названные нами а и у, а величины А, В, А', В', Т таковы,
что
d (в9) = qTdt + О A dx + OBdz, d (Op) = pTdt + OA’ dx + OB' dz.
Первое из этих уравнений вытекает из несжимаемости частиц жидкости
и сводится, следовательно, к вышеприведенному уравнению (i), если при-
равнять в нем /3 = 0. Что касается второго, то автор выводит его из того
соображения, что горизонтальные и вертикальные силы, теряемые в каждый
момент времени частицами жидкости, должны находиться в равновесии;
эти силы, по его мнению, имеют вид:
g- ВОр- AOq -qT , -OqA'- ОрВ'- pT ,
что дает по общим законам равновесия жидкостей уравнение, о котором мы
говорим. Итак, я утверждаю, что в соответствии с гипотезами г. Д'Аламбера
надо писать О2 вместо 0 в выражении заданных сил. Ибо легко видеть, что эти
силы в общем равны
da dy
% dt~ ’’ dF ’
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ 145
а именно,
_ d(6q) __ а(врЬ
ь dt ’ dt ’
т. е.
„ в A dx OB dz ™ OA'dx 6В' dz
^-qT-------dt-------dT~ ’ - PT--------dt-------dT~ :
HO
dx = a dt = Oqdt, dz = у dt = Op dt;
следовательно, эти величины будут
g — qT — 02Aq — 02Вр , -pT - 0*A'q - 0*B'p .
Таким образом, мы получим уравнение
d(g — Вв2р - Ав2д — q Т) = Д(- &дА' - &рВ' - рГ)
dz ~ dx
из которого время t исчезает только тогда, когда 02 пропорционально Т, т. е.
ТЛ dd ,
дг 02 Const ,
отсюда находим, как выше, что
в то время как по уравнению г. Д’Аламбера
Т .
-х- = const,
и
что дает после интегрирования
0 = ас',
как это нашел автор.
XLIV. Следствие III. Если вместо рассмотрения скоростей а, /3, у
мы захотим рассмотреть самые переменные х, у, z, то заметим, что эти пере-
менные могут быть только функциями времени t и значений, которые они
имели в начале движения, когда t = 0, значений, которые должны быть
полностью произвольными, чтобы решение задачи было по возможности
общим.
Обозначим эти значения через X, Y, Z, т. е. предположим, что перемен-
ные х, у, z, которые представляют положение каждой частицы жидкости
после некоторого времени t, были в начале движения равны X, Y, Z; раз-
ности х, у, z выразятся, в общем, следующим образом :
разн. x = LdX + MdY + NdZ + adt,
разн. у = Р dX + Q dY + RdZ + fidt,
разн. z = S dX + T dY + U dZ + у dt,
так, что
dx = a dt, dy — fidt, dz = ydt,
и
dx = LdX + MdY + NdZ,
dy = PdX+ QdY + RdZ,
dz = SdX+ TdY + UdZ,
10 Вариационные принципы механики
146
Ж. ЛАГРАНЖ
Подставив в уравнения (g) и (Ь) а,р,у вместо и предположив;
к тому же для упрощения расчетов, что D постоянно и
d(DII) _ d(DQ) d(DIT) _ d(D'P)
dy — dx ’ dz dx ’
найдем после деления двух уравнений (g) на D dt и уравнения (Ь) на dt
.da , dfi .da dy
d d -J,- d —- d --
dt __ dt dt _________ dt
” dy ~ ~ dx ’ dz —' dx ’ '
da d/? . dy
dx ' dy ' dz
(m)
Как известно,
. da
ddf
dy
выражает коэффициент, который имел бы у в дифферен-
циале-—-, в предположении, что а была выражена как функция х, у, z, t;
и аналогично в отношении других подобных выражений. Итак, поскольку
величины а, р, у являются согласно допущению функциями X, Y, Z, нужно
будет заменить в а, р, у переменные X, У, Z их значениями, выраженными
через х, у, z, и затем дифференцировать, считая х, у, z переменными или, что
то же самое, дифференцировать сначала величины а, р, у, заставляя ме-
няться X, Y, Z и заменить затем dX, dY, dZ их значениями, выраженными
через dx, dy, dz.
Из выражений dx, dy, dz, приведенных выше, найдем по общим правилам
Алгебры:
dX =
(QU - RT) dx + (NT - MU) dy + (MR - NQ) dz
К
(RS - PU) dx + (LU - NS) dy + (NP - LR) dz
aY ~ К
,7 (PT - QS) dx + (MS - LT) dy + (LQ - MP) dz
az------------------K
X подставлено для краткости вместо LQU — MPU + MRS — NQS +
4- NPT — LRT. Так как da есть разность a, которая возникает из разно-
стей dx, dy, dz, или из разностей dX, dY, dZ, то, следовательно, в общем
получим
^=Scdx+^dY+^-dZ’
кроме того, в силу того, что разность х есть полный дифференциал, будем:
иметь
da dL da dM da dN
— — — — - —
dX dt ’ dY dt ’ dZ dt .
Итак,
, dL ,v , dM ... , dN ... da = -drdX + ^rdY + ^rdZ>
так же будет найдено
dr = ^dX + ^dY + ^dZ-
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
147
Подставляя вместо dX, dY, dZ значения, найденные раньше, получим
(QU -RT)^- + (RS -PU)^L + (PT- QS)
da =--------------—-------------— dx +
A
(NT - MU) ^-+(LU- NS) + (MS - LT) ~
H----------------K--------------dy +
(MR - NQ) + (NP -lR)~ + (LQ - MP)
4.-------“----------E---------£L dz ,
(QU-RT)^- + (RS — PU)~~ + (PT — QS) ~
at at at dx +
К
(NT- MU)^~ + (LU- NS)-^ + (MS-LT)~
+ --------------"-------------d~dy +
(MR -NQ)-jr + (NP — LR)+ (LQ -
4-----------~--------i,---------------—dz ,
i\
(QU -RT)-^- + (RS -PU)~ + (PT- QS)
dy =-------------------~----------------dt-dx +
(NT - MU)^- + (LU -NS)^- + (MS - LT)
+---------«------“------:-------«L dy +
(MR -NQ)--[r+ (NP - LR)--- + (LQ - MP)-^
Итак, взяв в выражении da коэффициент dx, в выражении d/З коэффициент
dy и в выражении dy коэффициент dz, получим значения , -~
и уравнение (ш) примет вид
(QU - RT)^ + (RS -PU)^- + (PT - QS) +
+ (NT - MU) + (LU - NS) + (MS - LT) +
+ (MR-NQ)^- + (NP-LR)^- + (LQ -NP)-^- = 0,
или, что то же самое, — 0, откуда = const, т. е. LQU — MPU +
4- MRS — NQS 4- NPT — LRT — И, где И есть функция X, Y, Z, не со-
держащая t, т. е. Н есть значение при t = 0.
В отношении двух уравнений (/) заметим, что d есть то же самое,
d da , ,
что —— , поэтому остается только продифференцировать значение da,
10*
14S
Ж. ЛАГРАНЖ
найденное выше, по времени t; Тогда получим
, da 6~dT - dX + - r/2M .v , d3N dP dY+ dP dZ’
аналогичным образом найдем
d-< dt - Z dX + dP dP z ’
d-^- dt = ^dX + d*T d*U d/2 + dp dZ.
Заменим также в этих выражениях (как это сделано выше в выражениях
da, dft, dy) значения dX, dY, dZ на dx, dy, dz, и, взяв коэффициенты при dy и
dz дифференциала d и коэффициенты dx в дифференциалах d и d ~ ,
получим значения
d^- d< d-^
dt dt dt
dz ’ dx ’ dx
(NT - MU)
(MR-NQ)-±
. da
ddt
dy ’
которые, будучи подставлены вместо этих величин в уравнения (/), дадут
нам, если отбросить общий знаменатель К, два уравнения :
мм лгдг
+ (LU - NS) + (MS ~ LT) =
= (QU ~RT)^~+ (RS -PU)^- + (PT — QS)d~,
+ (NP -LR)^- + (LQ - MP) =
N2Q (PT (PU
= (QU - RT) + (RS -PU)^ + (PT — QS)-^~.
Если подставить в эти два уравнения, так же как в найденное ранее для
. ,, „ о гг г г . dx dx dx dy dy dy dz
L, M, N, P, Q, R, S, T, U их значения , -^y, ,
~dY’ то ПОЛУЧИМ ТРИ общих уравнения, которые будут содержать
только переменные х, у, z с их производными по X, Y, Z и t, с помощью ко-
торых можно будет определить положение каждой частицы жидкости в
каждый момент ее движения.
XLV. Схолия. Уравнения
d (Dll') _ d (DO) d(D7/) = d(D7J)
dy dx ’ dz dx ’
приведенные нами в п. XLII для упрощения формул (h), имеют место, когда
все силы П, Q, У7 таковы, что их действия на частицы жидкости взаимно
уничтожаются, т. е. частицы жидкости, подвергнутые действию этих сил,
находятся в равновесии.
Действительно, если жидкость находится в покое, то скорости a, ft, у рав-
ны нулю, и уравнения (h) сводятся к только что приведенным.
Впрочем, чтобы иметь возможность использовать уравнения, о которых
иДет речь, нет необходимости в том, чтобы величины D, П, Q, У7 были исклю-
чительно функциями х, у, z, как это можно было бы заключить из рассмот-
рения формы этих уравнений.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
149
Предположим, например, что величины D, П, Q, У7 заключают, кроме
переменных х, у, z, еще четвертую переменную s, представленную какой-
либо линией; тогда ясно, что, каковы бы ни были природа и положение
этой линии, ее дифференциал ds всегда можно выразить таким способом:
A dx 4- В dy 4- С dz, а следовательно, полное значение выражения
которое является не чем иным, как коэффициентом при dy в дифферен-
циале DH, будет
d J- В d (D//) •
dy ' ds . ’
так же найдем
d (DH) d (РП)
~dz ds' ’
d (РР) , д d (РР)
dx + Л ds
d(P'/') , д d (Р'/')
dx ds ’
„ d (DH) <i(D£2) d(Dtf') _ •
для полных значении выражении , — ---—, —• При. под-
становке этих значений в приведенные выше уравнения, они примут вид:
d (РП) d (РП) _ d (РР) d (РР)
dy ds dx ds
d (РП) d (P7Z) _ d (PT) д d (PT) .
dz h ds dx ds
в этих уравнениях дифференциалы, зависящие от каждой из переменных
х, у, z, s, оказываются отделенными.
Я сделаю замечание относительно одного места замечательного «Трак-
тата о сопротивлении жидкостей» (п. 164).
Если плотность D постоянна, то уравнения
d (PZ7) _ d(PP) d (P7/) _ d(PT)
dy dx ’ dz dx
при делении на D переходят в следующие:
. ап_ _ dP jin _ jt^
dy dx ’ dz dx ’
которые содержат условия равновесия однородных жидкостей.
Предположим, что жидкость состоит из различных слоев, каждый из кото-
рых имеет свою плотность. Найдем уравнение ее движения. Пусть коорди-
наты каждого из слоев суть х, у, z, тогда согласно нашей гипотезе получим
dP , . dP , , dP , n
-5— dx 4- -j— dy 4- dz = 0.
dx dy z dz
Уравнения
d (P7/) = d (PP) d (РЯ) = d(Py)
dy dx ’ dz dx
дают
П~ 4- D = Q~+ D--.— ,
dy dy dx dx
II 4- D ~ = T ~ 4- D ~ ;
dz dz dx dx ’
150
Ж. ЛАГРАНЖ
подставляя в верхнее уравнение значения , полученные из после-
дующих уравнений, и перегруппировав члены, получим
ая (, . я , . v , \ . Df/iQ ап ч , , (а'Р аП],1
TT (dx + Оу + т dzj + т [(— - dy + (— - —) с!г] = 0,
или, умножив на^-,
“ Wd.-Pdv + Fdz) + « - dy + (-£- -0=0.
Это уравнение представляет форму каждого слоя, имеющего плотность
отличную от плотности других слоев.
Если мы имеем
ап _ дя дп _ оу
dy dx ’ dz dx ’
т. e. если силы П, Q, *Р по своей природе таковы, что они могут держать в
равновесии некоторую массу однородной жидкости, то предыдущее урав-
нение сведется к уравнению
4—(п dx+Q dy+* dz>=0 -
что дает
П dx 4- Q dy 4- У7 dz = 0.
Это уравнение, как легко видеть, есть общее уравнение слоев уровней.
Отсюда следует, что в этом случае каждый слой необходимо будет иметь на
всем своем протяжении постоянную плотность.
Таков должен был быть порядок в различных частях земли, если бы она
была первоначально жидкостью, ибо легко доказать путем вычислений, и
г. Клеро показал в п. LIV своей «Theorie de la figure de la Terre» [за], что
силы П, Q, W, являющиеся результирующими всех притяжений, которые
частицы оказывают друг на друга, сами по себе подчинены условиям :
ап = dfi ап ач'
dy dx ’ dz ~ dx
Однако великий Геометр предположил, что не всегда необходимо, чтобы
поверхности разных слоев представляли собой поверхности уровня и дал
другой принцип для определения формы этих поверхностей*). Но уравнения,
к которым приводит его принцип, в сущности те же самые, что и уравнения
слоев уровней.
Чтобы доказать это в общем виде, возьмем сфероид, состоящий из слоев
разных плотностей, радиус которого в общем случае равен г + aZ, где
г — величина постоянная в одном и том же слое, Z — некоторая функция
гиг (переменного угла для всех точек каждого слоя) и, наконец, а обозна-
чает малую постоянную величину. Пусть полное притяжение, оказываемое
сфероидом на каждую частицу какого-либо слоя, будет сведено к двум силам:
одной—вертикальной, т. е. перпендикулярной к слою, которая без ощутимой
ошибки может быть предположена равной силе тяжести, направленной
к центру сфероида, и другой — горизонтальной, т. е. ориентированной в
направлении самого слоя, который приблизительно перпендикулярен к
*) См. Приложение в конце книги «Essai sur la resistance des Fluides», цитирован-
ной выше, и третью часть «Recherches sur le systerne du Monde», стр. 226 и след.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
151
радиусу. Обозначим первую силу 77, а вторую Q. По принципу знаменитого
Автора, о котором мы только что говорили, надо будет горизонтальную
силу Q умножить на Лг dz, где Л — плотность жидкости, которую мы пред-
полагаем функцией только г, затем продифференцировать ее по г; верти-
кальную силу Я надо умножить на Л [dr ф- a ~^~dr] и затем продифференци-
ровать полученное выражение по z, после чего, приравняв полученные
дифференциалы, получим уравнение
ило d[j77+
dzly£> V dr I . .
—з— dr dz =--------.-------dz dr,
dr dz ’
ИЛИ
1— «lLa.
dr 1 dr dz
Проделав вычисления, найдем, что величины 77, О, Z всегда будут таковы,
что
drQ
~dr
rfz
В итоге останется только уравнение
rQ =0 ,
dr ’
которое дает Q = 0, т. е. горизонтальная сила равна нулю, и следовательно,
каждый слой будет слоем уровня.
XLVI. Следствие IV. Теперь я беру уравнение (f). Природа членов,
из которых состоит это уравнение, свидетельствует о том, что оно относится
исключительно к нижней поверхности жидкости. Однако если предполо-
жить, что совсем нет стенок, поддерживающих жидкость, то значения
<5'х, <5'у и <5'z будут совершенно произвольными, и уравнение (f) можно будет
проверить, только положив в общем Т = 0, или приравняв нулю полное
значение интеграла S dxD + Пdi] .
Пусть уравнения (е) будут отнесены к нижней поверхности жидкости;
подставим'х, 'у, 'z вместо х, у, z и предположим интеграл SdxD^d-^ ф- П dt]
равным нулю, что приведет к U = Т, тогда получим
= 'о р + 'П dt\, = 'D +"Pdt] ,
d'y 1, dt ' J ’ d z 1 dt 1 J ’
и
,,г dT ,, , dT ,, , dT ,,
dT = —— d'x + — — d'y 4- - d'z =
d'x dy 7 dz
= 'D |р4г + 'ndt] d'x + (d^df + 'Qdt) d> + (d4F + d'z] •
Это — значение дифференциала T, взятое на поверхности, о которой мы
говорили : итак, раз величина Т обычно равна нулю, то ее дифференциал
также будет равен нулю, и следовательно, получим уравнение
(d^ + 'П dt] d'x + (d + 'Q dt] d'y + [d^- + "P dt] d'z = 0,
которое будет таким, какое должна иметь внешняя поверхность жидкости.
152
Ж. ЛАГРАНЖ
Подобное уравнение может быть найдено для верхней поверхности жидг
кости; ибо, обозначив через х', у', z' координаты этой поверхности и через
U' — значение U, когда х, у, z становятся равными х', у', z', будем иметь
в общем случае, как это уже было замечено в п. XL, U' = 0.
Следовательно, также
АТГ, dU' , , , dir , , . dir , , n
dU = ^Гйх +~~dTdy +“dP-dz =0’
или
-d (y d°-dx = - D dx fd-J- + П df) ,
dx I dt ‘J
И
d{U.dt) = — D (d-%- + S2dt] , d (^- = - D (d-%- + Tdt] ;
dy V dt 1 ) ’ dz dt 1 J ’
тогда
dU' = - ~ Г (d~ + IT dt] dx' + fd-^- + Q' dt] dy' 4-
dt I I. dt ' J 1 \ dt ' )
+ [d^ + T> dt] dz'] = 0 .
Следовательно, в общем, когда жидкость свободна со всех сторон, ее внеш-
няя поверхность должна быть определена уравнением
(d-^ + Hdi] dx + [d-J + Qdt] dy 4- [d^ + Tdt] dz = 0 .
Предположим теперь, что жидкость поддерживается неподвижными
стенками какой-либо формы, уравнение которых
dz = m dx + п dy.
Если рассмотреть три выражения интегралов в уравнении (f), то видно, что
каждое содержит две интеграции: первое — по у и z, второе — по х и z и
третье — по х и у. Раз отношение трех переменных х, у, z задано уравнением
dz = m dx 4- п dy, то эти различные интегралы могут быть все сведены к
одному виду, т. е. могут быть взяты только по двум переменным х и у. Для
этого надо только в первое уравнение подставить вместо dz его значение,
выраженное через х, m dx, а во второе — его значение, выраженное через
у, ndy, после чего уравнение (f) примет вид
S2 dx dy (m дх 4- п <5у 4- dz) Т dt = 0.
Но раз
dz = m dx + п dy,
то мы должны иметь также
dz = m дх + п ду;
тогда уравнение будет тождеством и не даст никакого условия. Итак, все
сведется к тому, чтобы общие уравнения (Ь) и (е) удовлетворяли, после их
интегрирования, заданному уравнению
dz = m dx 4- и dy.
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
153
XLVII. Примечание, Я не распространяюсь на эту тему, чтобы не
перейти границ, которые я поставил себе в настоящем Мемуаре. Впрочем,
по формулам и методам, данным в этой задаче и в предыдущих, можно будет
найти решение еще многих вопросов, касающихся жидкостей, как, например,
найти движение жидкости, заключенной в подвижном сосуде; колебания
тела, плавающего в жидкости; сопротивление жидкости, оказываемое телу,
которое в ней движется, и другие задачи такого же рода.
XLVIII. Задача X. Найти законы движения упругих
жидкостей.
Р е ш е н и е. Согласно нашему общему принципу нужно, чтобы вели-
чина Ssdm J и ds была максимумом или минимумом; итак, рассуждая так
же, как в задаче VI, найдем уравнение
f S3 dm (и ди dt — d ~ дх — d-^ ду — d ~ = 0.
J V at at ' at J
Но если никакая сила не действует между частицами dm, то мы получим
в соответствии с формулой (X) той же задачи
S3 dm ududt = Ss dm (П dt дх + £2 dt ду -у T dt dz).
Однако если предположить жидкость упругой, надо рассматривать
каждую частицу как пружину, которая действиет со всех сторон на сосед-
ние частицы. Обозначив через F силу пружины и через / — длину, на кото-
рую она стремится растянуться, найдем, применив здесь формулу (U) п. VIII
S3dmudu = - Ss dm(P др + Qdq + Rdr +...)- S3 F df,
или, подставив П дх + Q ду + IP dz вместо Р др Q dq 4- R дг + ..., и
взяв F отрицательным, потому что здесь эта сила стремится удалить час-
тицы, найдем
S3 dm и ди = — S3 dm (П дх + £2 ду + IP dz) + S3 F df.
Подставляя это значение в последнее уравнение и заменив dm его зна-
чением D dx dy dz, получим
— | S3 dx dy dzD [(d -d*- + Пdtj dx + + £2dt} dy
+ (d~ + 4'dt}dz\+^S3Fdfdt = 0. (n)
Так как действие пружины F состоит в увеличении объема каждой час-
тицы dm, то ясно, что этот объем следует считать значением растяжения /,
т. е. / = dx dy dz, следовательно, переставив знаки 6 и d, получим
df = dy dz д dx + dx dz d dy + dx dy <5 dz = dy dz d dx + dx dz d dy + dx dy d dz ;
и далее
S3Fdf = S3(F dy dzddx-r Fix dzd<5y + Fdxdyd&) =
= S3dxdydz d <5x +-^d<5y +d <5z) .
Это уравнение можно записать в таком виде:
S2dy dzSdx~ddx + S2dxdzSdy~-ddy + S2dxdy Sdz~ddz.
154
Ж. ЛАГРАНЖ
Выражение S dxd dx сводится после интегрирования по частям к виду:
F дх — S dx дх
dx
(я mraiydx-^- вместо dF, чтобы показать, что этот дифференциал должен
быть взят только по х) и
F'dx'-'Fd'x- Sdx^-dx,
dx ’
дополняя интеграл согласно замечанию, сделанному нами в конце п. I пре-
дыдущего Мемуара [28]. Заменим также
Sdy — ddy на F'ду'—'F д'у ~ S dy -d~ ду,
и
Sdz-^-ddz на F'dz'— 'Fd'z —Sdz-~~dz.
Тогда
S3 Fdf = S2 dy dz(F' dx' - ’F<5 ’x) + S2 dxdz (F'dy' -'Fd'y) +
+ S2dxdy(F'dz'-'Fd'z)-S2dydzSdx~dx-
-S2dxdzSdy~rdy-S2dx dySdz-^dz =
= S2 dy dz F' dx' + S2 dx dz F' dy' 4- S2 dx dy F' dz' —
— S2dydz'Fd'x — S2dxdz'Fd'y — »S2dxdy'Fd'z —
— S3 dx dy dz dx 4- dy 4- dz) ;
7 I dx dy 7 1 dz ) ’
следовательно, заменив в уравнении (n) S3F df только что найденным выра-
жением, мы, наконец, получим
J [S2 dy dz F' дх' 4- S2 dx dz F' dy' 4- S2 dx dy F' dz’ — S2 dy dz ’F d’x —
— S2 dx dz 'F d'y — S2 dx dy 'F d'z] dt — J S2 dx dy dz ^£>d 4-
+ Dndt + -^dt]dx + (Dd^ + DQdt + -^dt]dy +
+ {Dd^- + DWdt + ^-dt]dz]=Q,
уравнение, приведенное к виду, требуемому нашим методом. Предполо-
жив, что коэффициенты при каждой из разностей 13х, ду,. dz равны нулю,
получим
D fd ~ 4- FIdt\ + ~dt = O,
V dt 1 ) dx ’
D(d^+^d/) + ^df = °,
p(d>4-^df)4-<df = °,
(P)
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
155
и оставшаяся часть уравнения даст
S2 dy dz F' bx' + S2 dx dz F' by' 4- S2 dx dy F' dz' —
— S2 dy dz ’F d’x — S2 dx dz ’F d'y — S2 dx dy 'F d'z = 0. (q)
XLIX. [®з]. Следствие I. Три уравнения (p) содержат основные
законы движения упругих жидкостей. Чтобы применить эти уравнения,
предположим, как в п. XLII, что
dx dy о dz
подставим вместо da, dp, dy их значения, найденные в том же параграфе.
Обозначив для простоты все разности через d, найдем после деления на
D dt три уравнения:
da , da „ da da „ 1 dF
-dF + adx+^dy+^dr + n—D ~dx~ ’
dp . dp , д dp , dp , n 1 dF z v
~dF+a to +^dy- + y-dz +^ = - D W’ (Г)
n JL _1_ /? dy ! ... dy I 4f — _ 1 dF
dt + dx + ? dy + dz "r D dz ’
в которых останется только заменить F и D их значениями, выраженными
с помощью х, у, z, /.
Эти значения будут найдены следующим способом: F выражает силу
упругости каждой частички жидкости, которая обычно пропорциональна
плотности; предположим, следовательно, для общности, что эта сила будет
какой-либо функцией этой плотности, так что dF = EdD; получим
d/7 F dD dF ~ р dD
dx dx ’ dy ~ dy ' dz ~ dz ’
Затем, чтобы найти D, заметим, что масса dm каждой частички жидкости
равна D dx dy dz и что зта масса остается всегда постоянной, какое бы дви-
жение не получала жидкость; следовательно, ее дифференциал при пере-
.менном t должен быть равен нулю, что дает
d(Ddx dydz) _ _
dt U ’
а именно:
dx dy dz + D dy dz + D dx dz + D dx dy = 0 ,
ui ui at ui
или dD d dx d dy ddz
JL + D dx ddx _ dt ~ ddx dt _L. di 0
Ho следовательно, dy 1 d4 = d dz - 0 a;
dt da
так же найдем d dy dx dx ’ d dz
dt dt и — dz dy
dy dy ’ dz ’
156
Ж. ЛАГРАНЖ
кроме того, ~ dt выражает изменение D в момент времени dt. Итак, если
предположить, что D представлено какой-либо функцией от х, у, z, t, най-
дем полное значение dt в виде
at
dD dD . dD о ,, dD ,,
~dFdt + -^adt + -dVPdt + у dt;
подставим эти значения в верхнее уравнение, заменив буквы d на d и, умно-
жив все на D. Получим
dD dD . о dD dD ~ ( da dfi dy \ „
. ~dT + a-d^ + ^ + ^ + D[-d^ + w + ~^) = 0’
или
dD , d (Da) d(D?) d(Dy) = „
dt dx dy dz
— уравнение, из которого мы узнаем D и, следовательно, F.
L. Следствие II. Пусть, согласно нашей обычной гипотезе, F = D,
а следовательно, Е = 1, и пусть уравнения (г) будут записаны в таком виде :
D dx ’ D dy ’ D dz ’
тогда
D dx ’ D dy ’ D dz ’
Предположим еще, что
da d& _i_ dlL — it
dx + dy + dz U’
тогда получим (см. предыдущий параграф) уравнение
dD , dD , а dD , dD . n
—.r + a ---H P —J-H 7 -3- + E>U = 0.
dt 1 dx 1 r dy 1 ' dz 1
.. dD dD dD
Отсюда, исключив величины с помощью предыдущих урав-
нений, разделив на D и переместив члены, получим
dD
^=d^D=aL + f}M + yN_Uj
или, для краткости
dig£> _ т
dt
Итак, приведенные выше формулы сведутся к следующим выражениям:
dx ’ dy ’ dz ’
стало быть, сравнивая эти уравнения с только что найденным, мы получим
уравнения
dL _ dr dM _ dr dN _ dT
dt dx ’ dt dy ’ dt dz ’
ПРИМЕНЕНИЕ МЕТОДА, ИЗЛОЖЕННОГО В ПРЕДЫДУЩЕМ МЕМУАРЕ
157
в которых буквы D больше нет. Мы найдем еще, комбинируя предыдущие
уравнения,
_ dM dL _ dN_
dy dx ’ dz dx ’
два уравнения таких же, как уравнения (к) в п. XLII. Итак, мы получили
пять уравнений, все освобожденные от буквы D, из которых для решения
задачи будет достаточно трех, выбранных произвольно.
Если предположить, что движение жидкости дошло до какого-нибудь
постоянного состояния, то = 0, и, следовательно, Т = 0.
LI. С л е д с т в и е III. Можно также еще представить движение жид-
кости с помощью переменных X, Y, Z, t, как в п. XLIV. Для этого найдем
сначала значение D по способу уравнения (s), которое после введения букв
«, /?, у примет вид :
dP
dt da dff . dy __ n
D "i- dx "i- dy dz
По формуле указанного параграфа находим
dK da dj5 . dy dt dx "i- dy "i- dz К ’
следовательно, dP dK J!L + ^L = O! P ' К
откуда находим 1g D + Ig К = const,
т. е. DK = h и D'=~.
Чтобы определить константу К, заметим, что в начале движения
dx = dX, dy — dY, dz =-- dZ;
следовательно,
L = 1 , M = 0, TV = 0, P = 0, Q = 1, /?= 0, S = 0, T = 0, U = I ,
что дает К = 1, откуда следует, что h должно быть равно плотности D,
которую жидкость имеет в первый момент движения.
Найдя выражение D, остается только заменить его в уравнениях (р),
а так как D является функцией X, Y, Z, t, то его дифференциал, если поло-
жить t постоянной, будет выражен так:
EdX + FdY -\-GdZ.
о dP dP dP г
Итак, для получения значении-^-, надо будет еще подставить вместо
dX, dY, dZ их выражения через dx, dy, dz, найденные в n.XLIV, что, положив
Е (QU - RT) + F(RS- PU) + G(PT - QS) = А,
Е (NT - MU) + F(LU — NS)G (MS - LT) = В,
E (MR -NQ) + F (NP - LR) + G (LQ - MP) = C ,
158
Ж. ЛАГРАНЖ
даст
dD = Adx+ В dy + Cdz К
откуда dD А dD В dD С
dx К ’ dy К ’ dz К ’
и, следовательно, согласно гипотезе п. XLIX,
dF = ЕА dF = ЕВ dF _ ЕС
dx К ’ dy ~~ К ’ dz ~ К ‘
Подставим эти значения в уравнение (р) и получим, разделив на D, кото-
ft
рое равно-=,
А.
at 1 b
Если предположить в этих уравнениях
77=0, 0 = 0, У/ = 0, # = 2g,
то они оказываются такими же, какие г. Эйлер нашел другим путем (Recher-
ches sur la propagation des ebranlements dans un milieu elastique, Miscella-
nea Taurinensia, т. II, стр. 6).
LII. Примечание. В отношении уравнения (q), которое осталось
еще рассмотреть, мы докажем рассуждением, подобным рассуждению-
в п. XLVI, что если жидкость опирается на три неподвижные стенки, то
три члена
S2 dy dz 'F d'x + S2 dx dz 'F d'y + S2 dxdy'F d'z
всегда равны нулю так же, как и три других:
S2 dy dz F’ dx1 + S2 dx dz F' dy' + S2 dx dy F' dz'.
Но если предположить жидкость свободной со всех сторон или только с
какой-нибудь одной стороны, тогда величина F должна стать равной нулю-
на внешней поверхности жидкости в тех местах, где она свободна; мы будем
иметь для этой поверхности уравнение dF = 0, т. е.
44 dx + 44 dy + 44 dz = 0 >
dx 1 dy 7 1 dz ’
dF dF dF .
или, подставляя вместо—.— , —их значения, взятые из уравнении (р),.
получим х у Z
(d^- + ndt}dx + {d^r+ Qdt\dy +[d-^ + ^dt] dz = О,
точно так, как это было найдено в цитированном параграфе для неупругих,
жидкостей.
Ж. ЛАГРАНЖ
ДВА ОТРЫВКА ИЗ ПЕРВОГО ТОМА «АНАЛИТИЧЕСКОЙ
МЕХАНИКИ» [«*]
17. Перехожу, наконец, к четвертому принципу, который я называю-
принципом наименьшего действия — по аналогии с тем, который был дан
под этим же названием Мопертюи и который затем приобрел известность
благодаря работам многих знаменитых авторов. Этот принцип, с аналити-
ческой точки зрения, заключается в том, что при движении тел, действую-
щих друг на друга, сумма произведений масс на скорости и на пройденные
пути является минимумом. Мопертюи выводит отсюда законы отражения
и преломления света, равно как и законы удара тел; эти выводы помещены
в двух мемуарах, из которых первый был опубликован в Memoires de ГАса-
demie des Sciences de Paris, 1744 г., а второй спустя два года в Memoires
de I’Academie des Sciences de Berlin.
Однако указанные применения носят слишком специальный характер,
чтобы на них можно было построить доказательство общего принципа ;
кроме того, они несколько неопределенны и произвольны, что придает не-
которую ненадежность и выводам, которые можно было бы сделать на их
основании о точности самого принципа. Поэтому мне кажется, что было бы
неправильно изложенный в таком виде принцип ставить в один ряд с теми
принципами, которые были указаны выше. Существует, однако, и другой
способ его применения, более общий и более точный, который один только
и заслуживает внимания математиков. Первую идею этого принципа дал
Эйлер в конце своего сочинения «De isoperimetricis», напечатанного в
Лозанне в 1744 г.; он показал, что при траекториях, описанных под дей-
ствием центральных сил, интеграл скорости, умноженный на элемент кривой,
всегда является максимумом или минимумом.
Указанное свойство, найденное Эйлером при движении изолированных
тел, которое представлялось присущим только этим телам, я, пользуясь
принципом сохранения живых сил, распространил на движения любой
системы тел, действующих друг на друга каким угодно образом; отсюда
вытекает новый общий принцип, согласно которому сумма произведений
масс на интегралы скоростей, умноженных на элементы пройденных путей,
является всегда максимумом или минимумом.
Таков тот принцип, которому, хотя и не вполне точно, я даю здесь на-
звание принципа наименьшего действия и на который я смотрю не как на
метафизический принцип, а как на простой и общий вывод из законов меха-
ники. Во втором томе Memoires de Turin*) можно увидеть применение, ко-
торое я дал ему для разрешения многих трудных проблем механики. Этот
принцип, будучи соединен с принципом живых сил и развит по правилам
вариационного исчисления, дает тотчас же все уравнения, необходимые для
*) Oeuvres de Lagrange, т. 1, стр. 365.
160
Ж. ЛАГРАНЖ
разрешения каждой проблемы; отсюда возникает столь же простой, сколь
и общий, метод разрешения проблем, касающихся движения тел. Однако
этот метод представляет собою не что иное, как следствие метода, составляю-
щего предмет второй части настоящей работы и обладающего в то же время
тем преимуществом, что он выводится из первых принципов механики.
§ VI. Свойства, касающиеся наименьшего действия
39. Рассмотрим теперь четвертый принцип, а именно, принцип наимень-
шего действия.
Если мы обозначим через и скорость любого тела т системы, то будем
иметь
dx2 . dy2 . dz2
dt2 ~ dt2 ~ dt2 ’
и уравнение живых сил (п. 34) [35] примет следующий вид:
если последнее выражение продифференцировать в смысле символа 6, то
оно даст
о т {и ди + дП) = 0.
Но так как П является функцией р, q, г,..., то мы имеем
d!I = Pdp + Qdq + Rdr + ...
Таким образом,
Sm (Р др Q dq R дг ...)= — Smu ди .
Это уравнение всегда будет иметь место, если
Р dp + Q dq + R dr + ...
представляет собою интегрируемую величину и если связь между телами
не зависит от времени ; оно перестает быть верным, когда одно из приведен-
ных условий не выполнено.
Если указанное выше выражение теперь подставить в общую формулу
динамики (п. 5, отд. II) [36], то последняя примет следующий вид :
Q (d2x s , (Ру s , cPz s s 1 „
О m Г dx + Ж + lit2 & ~ u du J = ° •
Ho
c?x dx + d2y dy + d2z dz =
= d (dx dx + dydy + dz dz) — dxddx — dy ddy — dz d dz.
Так как символы d и 6 выражают совершенно независимые друг от друга
дифференциал и вариацию, то величины d дх, d ду, d dz должны предста-
влять собою то же самое, что и д dx, д dy, д dz. Кроме того, ясно, что
dxddx + dy д dy + dzddz = ±-d(dx2 + dy2 + dz2).
Таким образом, мы имеем
d2x дх + d2y ду + d2z dz =
= d (dx dx + dydy + dz dz) — ^d (dx2 + dy2 + dz2).
ДВА ОТРЫВКА ИЗ ПЕРВОГО ТОМА «АНАЛИТИЧЕСКОЙ МЕХАНИКИ»
161
— и <5и1 = 0 ,
Пусть $ представляет собою пространство или дугу, описанную телом т
за время t; тогда мы имеем
ds = /dx2 + dy2 + dz2 , dt = -^~.
Следовательно,
d2x dx + d2y dy + d2z dz — d (dx dx + dydy + dz dz) — ds dds,
и отсюда
d2x s„ , <Py a.. , л ~ d (dx Sx i -dy Sy i dz Sz >l2 <5 ds
~dP~ °x + °У + 0 2 — d/2 ds
В силу этого рассматриваемая общая формула примет следующий вид:
[ d(dxSx + dy Sy + dzSz) S ds
L eft2 ds
или, если все члены помножить на постоянный элемент [37] dt = и при-
нять во внимание, что и d ds + ds du — d(u ds),
Sm [ _ <5 {u ds)] = о .
Так как знак интеграла J не связан со знаками дифференциалов d и 6,
то последние можно поставить впереди интеграла, в результате чего урав-
нение примет следующий вид:
d Sm dx + dy + dz] — d Smu ds = 0.
I dt 1 dt ' 1 dt J
Проинтегрируем это уравнение по отношению к знаку дифференциала d
и обозначим это интегрирование с помощью обычного знака интеграла J ;
тогда мы получим
Sт dx + dy +~^~ <5z) — f <5 Smu ds = const.
V dt 1 dt f 1 dt J J
Но знак J в выражении
J d S mu ds
может относиться только к переменным и и s и не находится ни в какой
связи со знаками О и d ; поэтому ясно, что указанное выражение тожде-
ственно со следующим :
d S т J и ds;
если мы предположим, что в тех точках, где начинается интегрирование
J и ds,
dx = 0, dy = 0, dz = 0,
то произвольная постоянная должна равняться нулю, так как в этих точках
левая часть уравнения должна обратиться в нуль. Таким образом, в этих
случаях мы имеем
dSm^uds=Sm dx + dy + dz\ .
11 Пяпия1типины₽ гтпинпигты механики
162
Ж. ЛАГРАНЖ
Следовательно, если, сверх того, мы предположим, что вариации дх, ду,
dz равны нулю также и в тех точках, где интегрирование J и ds кончается,
то мы получим просто
dSm$uds = 0,
т. е. вариация величины Sm J lids будет равна нулю ; таким образом, эта
последняя величина будет максимумом или минимумом.
Итак, отсюда вытекает следующая общая теорема.
При движении любой системы тел, находящихся под действием взаимных
сил притяжения, или сил, направленных к неподвижным центрам и пропор-
циональных каким-либо функциям расстояний, кривые, описываемые различ-
ными телами, а равно их скорости, необходимо таковы, что сумма произ-
ведений отдельных масс на интеграл скорости, умноженной на элемент кри-
вой, является максимумом или минимумом — при условии, что первые и
последние точки каждой кривой рассматриваются как заданные, так что
вариации координат, соответствующих этим точкам, равны нулю.
Такова теорема, которую под названием принципа наименьшего действия
мы упомянули в конце первого отдела*).
40. Однако приведенная теорема не только содержит в себе интересное
свойство движения тел, но может также послужить для определения этого
движения. В самом деле, так как выражение Sm J uds должно быть мак-
симумом или минимумом, остается только, пользуясь методом вариаций,
выяснить условия, при которых она может принять указанные выше зна-
чения ; если применить общее уравнение сохранения живых сил, то мы
всегда найдем все уравнения, необходимые для определения движения
каждого тела. Действительно, для существования максимума или мини-
мума необходимо, чтобы вариация была равна нулю; следовательно, мы
имеем
<5 Sm§ uds = 0;
отсюда, проделав приведенные выше операции в обратном порядке, мы най-
дем ту общую формулу, из которой мы исходим.
Для того чтобы сделать этот метод более ясным, мы изложим его здесь
в нескольких словах. Условие максимума или минимума вообще дает
dSm$uds=0.
Если знак дифференциала б ввести под знаки S и J (что согласно природе
этих различных знаков, очевидно, допустимо), то мы получим уравнение
S т J б (и ds) = 0,
♦) Интеграл § т J и ds оказывается максимумом или минимумом, если его сравнить
с аналогичными интегралами, относящимися ко всякому другому движению системы,
которое было бы вызвано теми же силами и при котором, несмотря на введение новых
связей, допускающих существование принципа живых сил, начальные и конечные поло-
жения оставались бы одними и теми же. Возможно, что это заключение, которое с очевид-
ностью следует из доказательства, в тексте выражено недостаточно ясно. (Прим. Берт-
рана.) [88]
По поводу этого принципа можно посмотреть статью О. Родригеса, напечатанную в
Correspondence de I’ficole Polytechnique, т. Ill, стр. 159 и книгу Якоби Vorlesungen Ober
Dynamik. (Прим. Дарбу.) [”]
[Есть русский перевод: Якоби, Лекции по динамике, ОНТИ, М.—Л., 1936. См.
также стр. 294 настоящей книги. — Прим, ред.]
ДВА ОТРЫВКА ИЗ ПЕРВОГО ТОМА «АНАЛИТИЧЕСКОЙ МЕХАНИКИ!
163.
или, дифференцируя в смысле символа 3,
5 т J (ds ди + и д ds) = 0.
Я рассматриваю сначала первую часть этого выражения :
Sm J ds ди.
Если вместо ds подставить его значение и dt, то зта часть примет вид :
S т\ ududt
или, если изменить порядок знаков *S и J, которые совершенно независимы
друг от друга, то она примет следующий вид:
§dt S ти ди.
Но общее уравнение принципа живых сил дает (п. 34)
Sти2 — 2Н — 2 S тП,
где dll равно
Pdp + Qdq + Rdr + ...;
поэтому, если приведенное выражение продифференцировать в смысле сим-
вола 3, то получим
Sтиди = — SтдП = — Sт(Рдр + Qdq + Rdr + ...).
Так как согласно допущению П является алгебраической функцией
p,q,r,..., то дифференциал дП представляет собою то же самое, что и dPI,
с заменой только символа d символом 3. Таким образом, величина
»S т J ds ди
будет приведена к следующему виду:
- $dt Sm (Рдр + Qdq + Rdr + ...).
Затем я рассматриваю вторую часть
5 т J ид ds
и подставляю в нее вместо элемента ds его величину, выраженную с по-
мощью прямоугольных координат или с помощью каких-либо других пере-
менных. Если мы пользуемся прямоугольными координатами х, у, z, то
ds = ]/dx2 + dy2 + dz2 ;
следовательно, дифференцируя в смысле символа 3, мы получим
<5 ds = ~ д dx + ddy ~- ddz
ds 'ds z 1 ds
или, переставив знаки d и 3 и написав dd вместо dd, что всегда допустимо
164
Ж. ЛАГРАНЖ
ввиду независимости этих символов,
dds = ^-ddx + ^-ddy + ~ddz;
ds ' ds z 1 ds ’
ds
таким образом, подставив это значение и написав dt вместо —, мы получим
I “ 6 “ вх + % о + -у “ Ь)
Так как здесь под знаком интеграла J находятся дифференциалы вариа-
ций дх, ду, dz, то следует их устранить, пользуясь известной операцией инте-
грирования по частям согласно правилам вариационного исчисления. Таким
образом, величина J d дх преобразуется в другую, ей эквивалентную :
-дх-
dt J dt ’
если предположить, что обе крайние точки кривой заданы, так что коорди-
наты, соответствующие пределам интеграла, не изменяются, то мы будем
иметь просто
Аналогично найдем
^ddy=-^dyd^- и ^rddz=-$dzd^-.
Таким образом, мы получим следующее преобразованное выражение:
J ui * = - f (to «$ + «у d > + «г d .
Следовательно, величина Sm J и dds, если переставить знаки $ и J, a dt
считать постоянной величиной, примет следующий вид [40]:
-faSm(dxd-^- +dyd-^-+ .
Таким образом, мы получим следующее уравнение максимума или мини-
мума :
$dtSm(Pdp + Qdq + Rdr + ... + ^dx+^-dy+ -§-<5z) = 0,
которое, вообще говоря, должно иметь силу для всех возможных вариаций ;
поэтому величина, стоящая под знаком J, должна в любой момент быть рав-
ной нулю; таким образом, мы получим неопределенное уравнение
Sm(Pdp + Qdq + Rdr + ...+ ^дх + ду + -g-<5z) = 0,
которое -представляет собою не что иное, как общую формулу динамики
(отд. II, п. 5) и которое, следовательно, подобно ей даст все уравнения, необ-
ходимые для решения настоящей задачи.
41. Вместо координат х, у, z можно также воспользоваться любыми
другими неопределенными величинами, и тогда все сведется к тому, чтобы
элемент дуги ds выразить в функции этих неопределенных величин. Так,
например, если взять радиус, или прямолинейное расстояние от начала
ДВА ОТРЫВКА ИЗ ПЕРВОГО ТОМА «АНАЛИТИЧЕСКОЙ МЕХАНИКИ»
165
координат, которое мы назовем д, и два угла, из которых один, у>, пусть
обозначает угол, образуемый упомянутым радиусом с плоскостью ху, а
другой, — угол, образуемый проекцией того же радиуса на указанную
плоскость с осью х, то
z — р sin tp, у = р cos sin tp, х = р cos v cos?’,
а отсюда мы получим
ds2 = dx2 + dy2 + dz2 — dp2 + p2 (dy>2 + cos2 dtp2);
это выражение можно было бы вывести и непосредственно, пользуясь гео-
метрическим методом: Продифференцировав в смысле <5 и написав dd вместо
dd, мы получим
ds dds = dp d др + p (dtp2 + cos2 tp dtp2) dp +
+ p2 (dtp ddtp — sin tp cos tp dtp2 dtp + cos2 tp dtp d dtp),
,, ds
откуда, разделив на dt = — и проинтегрировав, получим
p«s=H<^+f(^+cosS^w +
+ f dt (p2 “ p2 sin V cos V> <5?> + P2 cos2 tp .
Двойной символ dd под знаком J можно устранить путем интегрирования
по частям. Сначала отбросим члены, содержащие вариации вне знака J,
так как эти вариации, которые в данном случае должны относиться к преде-
лам интеграла, становятся равными нулю, благодаря принятому допущению,
что начальные и конечные точки кривых, описываемых телами, наперед за-
даны и являются неизменными. В результате мы получим следующее преоб-
разованное выражение:
Ju<5ds = -Jdu<5S=-JdZ Ш-
। о • d<p2 ,
+ | р2 Sin tp COS tp ~^~ +
Таким образом, уравнение максимума или минимума примет следующий
вид:
\dt Sm\pdP + Qdq+Rdr + ...+ [^--pd-^-p cos2 tp^\ др +
LIL J
+ [ p2 sin v cos v +
d (cos2 у
dtp + —L—л = 0.
Если приравнять нулю величину, стоящую под знаком J, мы получим
неопределенное уравнение, аналогичное уравнению, приведенному в преды-
дущем пункте, которое, однако, вместо вариаций dx, dy, dz будет содержать
вариации dQ, dtp, dtp; отсюда можно вывести уравнения, необходимые для
решения поставленной задачи, если сначала все вариации свести к возможно
166
Ж. ЛАГРАНЖ
меньшему их числу и затем отдельно приравнять нулю все члены, в состав
которых входит каждая из оставшихся вариаций.
Если воспользоваться другими неопределенными величинами, то мы
получим иные формулы, но можно быть уверенным, что в каждом отдельном
случае всегда можно получить наиболее простые формулы, вытекающие из
природы этих неопределенных величин. Смотри Мётойеэ de ГАсабёпне
de Turin*), т. II, где этот метод был применен для разрешения различных
вопросов механики [и].
42. Впрочем, так как ds = и dt, то величина
Sm^uds,
которая представляет собою максимум или минимум, может быть приве-
дена к следующему виду : Sm J u2dt или J dtSmu2, r/ieSmu2 выражает жи-
вую силу всей системы в любое мгновение. Таким образом, рассматриваемый
принцип сводится, собственно, к тому, что сумма живых сил всех тел от
момента, когда они выходят из заданных точек, до того момента, когда они
приходят в другие заданные точки, является максимумом или минимумом.
Следовательно, его можно было бы с большим основанием назвать прин-
ципом наибольшей или наименьшей живой силы; эта формулировка имела
бы то преимущество, что она была бы общей, как для движения, так и для
равновесия; в самом деле, в отд. III «Статики» (п. 22) мы видели, что при
прохождении положения равновесия живая сила системы всегда бывает
наибольшей или наименьшей.
*) См. также интересную статью О. Родригеса в Correspondance sur 1’Ёсо1е Polytech -
nique, т. Ill, стр. 159. (Прим. Бертрана.) [См. стр. 117 и 167 настоящей книги. — Прим,
ред.]
О. РОДРИГЕС
О ПРИМЕНЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
К СОСТАВЛЕНИЮ УРАВНЕНИЙ ДВИЖЕНИЯ В НЕЗАВИСИМЫХ
ПЕРЕМЕННЫХ |42]
Принцип наименьшего действия, как известно, состоит в том, что для
системы масс, находящейся под действием притягивающих или отталки-
вающих сил — при соблюдении принципа живых сил — сумма существующих
мгновенно живых сил всех масс при переходе из одного заданного в другое,
также заданное положение, имеет максимум или минимум.
Этот принцип в соединении с принципом живых сил может служить
для составления уравнений движения системы в каждом отдельном случае ;
но, как мне кажется, никто еще не подумал о том, чтобы уравнение, выра-
жающее принцип живых сил, применять просто как условное уравнение и
применить поэтому метод неопределенных множителей [43]. Этим путем,
вводя непосредственно независимые переменные системы, я пришел к тем
общим уравнениям движения, которые даны в «Аналитической механике»
(ч. II, отд. 4) и к которым Лагранж пришел или посредством прямого преоб-
разования координат, или посредством применения общих уравнений вари-
ационного исчисления к этим преобразованиям.
Метод, которым пользуюсь я, представляет собой замечательный пример
применения метода неопределенных множителей в теории максимумов и
минимумов, а также пример того, как эти множители вполне опреде-
ляются при помощи граничных условий. Этот метод, кроме того, имеет то
преимущество, что обе функции Т и V здесь непосредственно вводятся в
вычисления; из них- первая представляет собой половину суммы живых
сил, а другая — интеграл суммы количеств движения.
Эта функция Т будет всегда, какие бы переменные мы ни вводили, одно-
родной функцией второй степени относительно производных от независи-
мых переменных, так что, если эти переменные обозначить через у, <р и
т. д., а их производные — через I', у>', <р', то будем иметь уравнение [44 ]
ът е, , ът , . ът , .
2Т = ъГ* + + •••
Принцип наименьшего действия требует, чтобы интеграл
J-7-df
имел максимум или минимум при условии, что начальное и конечное поло-
жения заданы ; в связи с этим вариации координат на обоих пределах интег-
рала равны нулю. Вариация б J Т dt, или J д(Т dt) [45 ], должна, следова-
тельно, также быть равной нулю. Но принцип живых сил дает условие
Т+ V = Н,
где Н обозначает произвольную постоянную.
Согласно методам вариационного исчисления нужно к интегралу
§ дТ dt
прибавить
$ldt(dT + dV) [4в],
где Я — переменный неопределенный множитель ; тогда вариации не за-
висят от условного уравнения.
Теперь уравнение для минимума получает вид
J’ {дТ dt + Я dt (дТ + W)} = 0.
Но нужно считать переменным и время [47 ]; в самом деле, координаты
получают вполне определенные изменения только на пределах, тогда как
изменения времени остаются совершенно произвольными. Но можно сна-
чала оставить время неизменяющимся, если только позднее вместо вариаций
д<р,... ввести величины
d$ — dt , dy) — у)’ dt, д<р — <р' dt.
и к той части, которая не находится под знаком интеграла, прибавить член
ТЫ*).
Таким образом, мы имеем:
о = |Л[(Я + 1)<5Т + Я<5Т],
где
Д1. эк д£ , dv я ,эу, ,
oV — о; 4—x— dy) 4—х— dtp
9у 9у г
И
Ы 9Т А£ , 9Т dds , дТ д . дТ абу) , дТ д . 9Т ddyp ,
Путем интегрирования по частям исключим двойной символ dd; а если
теперь принять во внимание вариацию времени, то мы получим следующее
преобразованное уравнение:
О = U + (d£ - F dt) + W (dy> - у>' dt) + Ф(д<р- <р' dt)+ .. ,}dt,
в котором
и = Т dt + (Я + 1) [-— (<Н - £'dt) + ..,
или
l+1)(-5pf+f'* + IP’’+ -)-(2А+1)Т«,
эу+м+1)эт
эГ + (х + 1) “эТ at-
Следовательно, мы имеем неопределенные уравнения :
5= о, = Q, Ф=0, ...,
к которым надо добавить уравнение
T+V=H,
*) См. добавление к «Calcul des fonctions» (22-я лекция) [48].
О ПРИМЕНЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
16»
чтобы исключить Я, а граничное уравнение имеет вид
U2 —и1 = 0;
но на пределах интегрирования вариации б£, бу, бу,... равны нулю; по-
этому уравнение приводится к виду
(22 + 1 )х 6fx - (22 + 1)2 6f2 = 0.
Так как вариации б?п 6f2 независимы, то мы получаем уравнения
(2Я+1)1 = 0, (2А+1)2 = 0,
которым должна удовлетворять величина Л. Если теперь помножить урав-
нения
3=0, Т =0, Ф = 0, ...*
соответственно на d£, dip, d<p,... и прибавить полученные результаты к пер-
вому уравнению, то после всех упрощений, принимая во внимание уравнение
dT + dV = 0, получим
(22 + V)dT + Td(2X+ 1) = 0.
Из этого уравнения следует
2Л+ 1 = ^,
где К — произвольная постоянная; чтобы удовлетворить условиям на
границах, следует, очевидно, положить К = 0. Тогда получается просто
2Л+1 = 0, Л = —
Если это значение подставить в уравнения движения, то получаются сле-
дующие уравнения :
. ът ът , ъу п
d ъ$' ъ$ + ft dt 0 >
. ът ът .. , ъу А
d ----о— dt “з— dt — 0,
dip dip 1 dip
..........................
которые, как мы видим, являются уравнениями аналитической механики.
Если бы переменные не были независимыми одна от другой и если бы,
следовательно, существовали условные уравнения М = О, N = 0 и т. д.,
то, очевидно, в предыдущих уравнениях добавились бы члены
где pi, v,... суть неопределенные коэффициенты.
К. ГАУСС
ОБ ОДНОМ НОВОМ ОБЩЕМ ПРИНЦИПЕ МЕХАНИКИ [м]
Как известно, принцип виртуальных скоростей превращает любую проб-
лему статики в вопрос чистой математики, а с помощью принципа Д’Алам-
бера динамика в свою очередь сводится к статике. Отсюда следует, что ни
один основной принцип равновесия или движения не может существенно от-
личаться от двух упомянутых нами выше принципов и что каков бы ни был
этот принцип, его всегда можно рассматривать как более или менее непо-
средственный вывод из них.
Это не значит, что всякая новая теорема не заслуживает поэтому никакого
внимания. Наоборот, всегда интересно и поучительно исследовать законы
природы с новой точки зрения, придем ли мы при этом к более простому
трактованию того или иного частного вопроса или достигнем лишь большей
точности формулировок.
Великий геометр, столь блестяще обосновавший науку о движении на
принципе виртуальных скоростей, не пренебрег возможностью улучшить
и обобщить принцип Мопертюи, касающийся .наименьшего действия, и, как
известно, этот принцип зачастую с большой пользой применяется геомет-
рами*).
Подлинный характер принципа виртуальных скоростей заключается в
том, что он является, так сказать, общей формулой, решающей задачи ста-
тики, и что, следовательно, он может занять место всякого другого прин-
ципа, но он не носит на себе печати абсолютной очевидности, которая убеж-
дает, при ознакомлении с его изложением.
С этой точки зрения основная теорема, которую я собираюсь изложить,
должна, мне кажется, получить предпочтение; сверх того, она обладает
тем преимуществом, что одновременно охватывает общие законы равно-
весия и движения.
Если для прогрессивного развития науки и для индивидуального иссле-
дования представляется более удобным идти от легкого к тому, что кажется
более трудным, и от простых законов к более сложным, то, с другой стороны,
наш ум, дойдя до более высокой точки зрения, требует обратного движения,
в силу которого вся статика представляется ему в качестве частного случая
динамики. Й упомянутый нами геометр, по-видимому, оценил это обратное
*) Я позволю себе здесь сделать одно замечание [и]. Я считаю неудовлетворительным
метод, примененный другим великим геометром (Laplace, M6moires de 1’Institut, 1809)
для вывода закона преломлений Гюйгенса из принципа наименьшего действия. Действи-
тельно, этот принцип по существу предполагает наличие принципа живых сил, на осно-
вании которого скорость точек в движении полностью определяется их положением, а
направление, по которому они движутся, не оказывает на нее никакого влияния. Тем
не менее, это влияние является исходной точкой рассуждений упомянутого нами автора.
Мне думается, что все усилия геометров объяснить двойное преломление в рамках эмис-
сионной гипотезы останутся бесплодными до тех пор, пока световые молекулы будут
рассматриваться как простые точки.
ОБ ОДНОМ НОВОМ ОБЩЕМ ПРИНЦИПЕ МЕХАНИКИ
171
движение, представляя в качестве преимущества принципа наименьшего
действия возможность охватить одновременно законы движения и законы
равновесия, если этот принцип рассматривать в качестве принципа наи-
большей или наименьшей живой силы. Но надо признать, что эта мысль
является более остроумной, чем верной, так как в этих двух случаях мини-
мум имеет место при совершенно различных условиях.
Новый принцип заключается в следующем:
Движение системы материальных точек, связанных между собою произ-
вольным образом и подверженных любым влияниям, в каждое мгновение
происходит в наиболее совершенном, какое только возможно, согласии с тем
движением, каким обладали бы эти точки, если бы все они стали свобод-
ными, т. е. оно происходит с наименьшим возможным принуждением, если
в качестве меры принуждения, примененного в течение бесконечно малого
мгновения, принять сумму произведений массы каждой точки на квадрат
величины ее отклонения от того положения, которое она заняла бы, если бы
была свободной.
Пусть т, т', т" — массы точек, а, а', а" — соответственно их по-
ложения, Ь, V, Ь" — места, которые они заняли бы по истечении неко-
торого бесконечно малого промежутка времени под влиянием действующих
на них сил и скорости, приобретенной ими к началу этого промежутка.
Приведенный выше принцип гласит, что положения с, с', с",..., которые
эти точки займут, являются (из всех положений, допускаемых наложен-
ными на них связями) такими, для которых сумма
т be2 + т' Ь'с'2 -р т” Ь"с"2 + ...
являемся минимумом.
Равновесие является частным случаем общего закона ; оно имеет место
в том случае, когда точки не имеют скорости, и сумма
т • ab2 + т’ а'Ь’2 + ...
является минимумом или, другими словами, когда сохранение системы в
состоянии покоя является более близким к свободному движению, которое
каждая точка стремится принять, из всех любых возможных перемещений.
Обоснование принципа может быть легко проведено следующим образом:
Сила, действующая на точку т в течение мгновения dt, очевидно, состоит
из : 1) силы, которая, присоединяясь к эффекту приобретенной скорости,
переместила бы точку из а в с, 2) силы, которая (если допустить, что точка
находится в покое в с) одновременно заставила бы ее переместиться из с в Ь.
Сказанное, очевидно, относится и к остальным точкам.
Согласно принципу Д’Аламбера*) точки т, т', т",... находились бы в
равновесии, если бы в положениях с, с', с",... они были под влиянием вто-
рых из указанных выше сил, действующих по направлениям cb, с'Ь',...
и пропорциональных этим малым отрезкам. Следовательно, согласно
*) Обычное выражение молчаливо предполагает, что каждое возможное движение
может быть осуществлено также и в противоположном направлении, например, точка
должна оставаться на некоторой определенной поверхности, расстояние между двумя
точками должно быть неизменным и т. д.
Однако это есть не необходимое и в природе не всегда нужное ограничение. Поверх-
ность какого-либо непроницаемого тела не только принуждает материальную точку
оставаться на ней, но обусловливает появление этой точки только на одной стороне этой
поверхности; напряженная, нерастяжимая, но гибкая нить, стягивающая две точки,
делает возможным только увеличение, но не уменьшение расстояния между ними и т. д.
Почему же мы не хотим с самого начала так выразить закон возможных перемещений,
чтобы он охватил все случаи? [52].
172
К. ГАУСС
принципу виртуальных скоростей сумма виртуальных моментов этих сил
должна быть равна нулю для всех перемещений, допускаемых связями,
или же, точнее, эта сумма никогда не может стать положительной.
Пусть у, у', у",... — положения, которые точки т, т', т",... могут
занять без нарушения связей системы, и О, О', 0",... — углы, образуемые
с 7> с' с" у", • • • соответственно с cb, с'Ь', с"Ь",... ; тогда сумма
21 т • cb • су cos О
должна равняться нулю или быть отрицательной.
Но ясно, что мы имеем
yb2 = cb2 + су2 -2cb-cy cos 0,
следовательно,
2’ myb2 — £ mcb2 = тсу2 — 2^ mcb • су cost?
и, стало быть, выражение
У myb2 — £ mcb2
всегда положительно, откуда следует, что Zmyb2 всегда больше суммы
ЕтсЬ2, т. е. что Smcb2 всегда является минимумом, что и требовалось
доказать [53 ]. Весьма примечательно, что когда свободные движения несов-
местимы с природой системы, то они изменяются совершенно так же, как
геометры при своих исчислениях изменяют выводы, полученные ими непо-
средственно, применяя к ним метод наименьших квадратов, с тем чтобы
сделать эти выводы совместимыми с необходимыми условиями, предписан-
ными природой вопроса [54].
Настоящую аналогию можно было бы продолжить, но это выходит за
пределы поставленной мною в данный момент задачи [55].
. С. ПУАССОН
ОТРЫВОК ИЗ ВТОРОГО ТОМА «ТРАКТАТА О МЕХАНИКЕ» [м]
§ 573. Если в движении системы тел, для которой действует закон
живых сил, взять произведение скорости каждой материальной точки систе-
мы на ее массу и на элемент ее траектории и подобные произведения, полу-
ченные для всех материальных точек, суммировать, а затем сумму эту проин-
тегрировать от одного заданного положения до другого, тоже заданного, то
значение полученного интеграла будет вообще минимумом.
Эта теорема является развитием теоремы из § 160 [87] и доказывается
тем же способом ; поэтому для краткости мы этого доказательства приводить
не будем.
Если обозначить через ds элемент траектории массы т, скорость на кото-
ром равна v, то получим интеграл 27 mv ds, который вообще имеет минималь-
ное значение; но в некоторых случаях, как, например, в случае движения
материальной точки по замкнутой поверхности, минимум может быть заме-
нен максимумом ; тогда следует только доказать, что § X mv ds всегда равен
нулю.
Так как ds — v dt, то найденный интеграл может быть 'выражен через
J V dt, если принять V = 27щг?2.
Другими словами, принцип наименьшего действия означает, что интеграл
произведения живой силы системы на элемент времени есть вообще мини-
мум ; так в природе система тел переносится из одного положения в другое
с затратой наименьшего возможного количества живой силы.
Если к движущимся точкам не приложено никакой движущей силы, то
скорость v остается постоянной (§ 565) [58] и время прохождения пути
минимально.
Если сравнить принцип наименьшего действия, принцип живых сил,
принцип сохранения движения центра тяжести и закон площадей, то уви-
дим, что первый принцип — это только правило для составления дифферен-
циальных уравнений движения, теперь уже бесполезное, поскольку мы
можем получить эти уравнения способом более непосредственным и более
общим по формуле (1) из § 531 [59]; между тем другие принципы, помимо
того, что они содержат в себе важные особенности движения, имеют еще и
то преимущество, что позволяют получить единственно известные нам в
большинстве задач интегралы этих дифференциальных уравнений.
Принцип сохранения движения центра тяжести дает нам три интеграла,
а именно:
£ тх = а 2J т + At,
v ту = b У1 т + Bt,
£ mz = с т + Ct,
174
С. ПУАССОН
где а, Ь, с, А, В, С являются шестью произвольными постоянными. Из них
три первые представляют собой координаты центра тяжести системы в на-
чальный момент движения, а три другие выражают суммы количества дви-
жения для этого момента, взятые параллельно осям координат для всех
точек системы.
По закону площадей получаем три первых интеграла, а именно :
2 т (х dy — у dx) = с dt,
2' т (z dx — х dz) = с’ dt,
£ т(у dz — z dy) = c" dt,
где с, с', с"— три произвольные постоянные, выражающие начальные коли-
чества движения всех точек системы по отношению к осям z, у, х или удвоен-
ные площади, описанные вокруг этих же осей в единицу времени.
Наконец, принцип живых сил дает один-единственный интеграл, а
именно, уравнение (Ь) из § 564 [в0 ], которое запишется в следующем виде :
где D является произвольной постоянной.
У. ГАМИЛЬТОН
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ,
посредством которого изучение движений всех свободных систем притя-
гивающихся или отталкивающихся точек сводится к отысканию и диффе-
ренцированию одного центрального соотношения или характеристической
функции*) [61]
СОДЕРЖАНИЕ
Вводные замечания ............................................. 175-
Интегрирование уравнений движения системы; характеристическая
функция такого движения и закон переменного действия ....... 177
Проверка предыдущих интегралов ................................. 181
Введение относительных или полярных координат или других отметок
положения системы........................................... 185
Отделение относительного движения системы от движения ее центра
тяжести; характеристическая функция такого относительного
движения и закон ее вариации................................ 192
О системах из двух точек в общем; характеристическая функция дви-
жения любой бинарной системы................................ 199
О невозмущенном движении планеты или кометы вокруг Солнца; зави-
симость характеристической функции такого движения от хорды
и суммы радиусов ........................................... 207
О системах из трех точек вообще и об их характеристических функциях 212
Общий метод усовершенствования приближенного выражения харак-
теристической функции движения системы в любой задаче дина
мики........................................................ 220
Применение вышеизложенного метода к случаю тройной или множе-
ственной системы с любыми законами притяжения или отталкивания
и с одной преобладающей массой.............................. 222
Строгий переход от теории бинарных к теории множественных систем
посредством возмущающей части полной характеристической функ-
ции и приближенные выражения для возмущений ................ 227
Введение времени в общем виде в выражение характеристической
функции в любой задаче динамики ............................ 232
Вводные замечания
Теоретическое развитие законов движения тел [62] — проблема на-
столько интересная и значительная, что она привлекала к себе внимание
всех самых выдающихся математиков, начиная с создания Галилеем дина-
мики как математической науки и в особенности со времени того изумитель-
*) Сообщено капитаном военно-морского флота Бофортом, членом Королевской
Академии (впоследствии адмирал сэр Фрэнсис Бофорт).
176
У. ГАМИЛЬТОН
ного развития, которое было дано этой науке Ньютоном! Из числа последо-
вателей этих блестящих ученых Лагранж, пожалуй, больше, чем какой-
либо другой аналитик, сделал для того, чтобы расширить и придать строй-
ность подобным дедуктивным исследованиям, доказав, что самые разнооб-
разные следствия, относящиеся к движению системы тел, могут быть выве-
дены из одной основной формулы. При этом красота метода настолько соот-
ветствует достоинству результата, что эта великая работа превращается в
своего рода математическую поэму. Однако наука о действии силы в про-
странстве и времени претерпела еще один переворот [63] и сделалась более
«динамичной», полностью отказавшись от представлений о твердых телах,
о сцеплении и о материальных связях или о представленных геометрически
условиях, которые были так удачно использованы Лагранжей в качестве
основы его рассуждений, и все больше склоняясь к тому, чтобы свести все
связи и действия тел к притяжению и отталкиванию точек; в то время как
эта наука развивается таким образом в направлении усовершенствования
физических воззрений, она может развиваться и в другом направлении путем
разработки математических методов. Поэтому, предложенный в данной ра-
боте метод для дедуктивного изучения движений притягивающихся и оттал-
кивающихся систем, быть может, будет встречен со снисходительностью,
как попытка помочь в дальнейшем развитии исследования, ставящего перед
собой столь высокие цели.
В обычно применяемых методах определение движения свободной точки
в пространстве под влиянием ускоряющих сил состоит в интегрировании
трех обыкновенных дифференциальных уравнений второго порядка, а опре-
деление движения системы свободных точек, взаимно притягивающихся или
отталкивающихся, — в интегрировании системы подобных уравнений, число
которых втрое больше числа притягивающихся или отталкивающихся точек,
если только мы предварительно не уменьшим это последнее число на еди-
ницу, рассматривая только относительные движения. Таким образом, в
солнечной системе, если мы рассматриваем только взаимные притяжения
Солнца и десяти известных планет [64], определение движений последних
относительно первого при помощи обычных методов сводится к интегриро-
ванию системы тридцати обыкновенных дифференциальных уравнений вто-
рого порядка, связывающих координаты и время, или же, при помощи преоб-
разования Лагранжа, — к интегрированию системы шестидесяти обыкновен-
ных дифференциальных уравнений первого порядка, связывающих время и
эллиптические элементы. При помощи этих интегрирований тридцать пере-
менных координат или шестьдесят переменных элементов могут быть най-
дены, как функции времени. В методе, предложенном в данной работе, за-
дача сводится к отысканию и дифференцированию единственной функции,
которая удовлетворяет двум уравнениям в частных производных первого
порядка и второй степени; подобным же образом всякая другая динамиче-
ская задача, относящаяся к движениям (как бы многочисленны они не были)
любой системы притягивающихся или отталкивающихся точек (даже если
мы предполагаем, что эти точки ограничены какими-либо условиями связи,
совместными с законом живой силы), сводится к изучению одной централь-
ной функции, форма которой определяет и характеризует свойства движу-
щейся системы и определяется двумя дифференциальными уравнениями в
частных производных первого порядка в сочетании с некоторыми простыми
соображениями. Таким образом, по крайней мере интегрирование многих
уравнений одного класса заменяется интегрированием двух уравнений
другого класса, и даже если считать, что этим не достигается никакого прак-
тического облегчения, тем не менее можно получить некое интеллектуальное
наслаждение от сведения, пожалуй, самого сложного из всех исследований,
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
177
относящихся к силам и движениям тела, к изучению одной характеристи-
ческой функции*), к раскрытию одного центрального отношения.
Данная работа не претендует на то, чтобы полностью исчерпать этот
обширный предмет, так как это представляет собой задачу, которая может
потребовать многих лет трудов многих ученых, но имеет своей задачей
только развить самую мысль и наметить путь для других. Поэтому, хотя
этот метод может быть использован в самых разнообразных динамических
исследованиях, в настоящей работе он применяется только к орбитам и
возмущениям системы с любыми законами притяжения или отталкивания и
с одной преобладающей массой или центром преобладающей энергии и при-
том в данном исследовании лишь настолько, насколько это представляется
нужным, чтобы сделать понятным самый принцип. Следует отметить, что
этот динамический принцип представляет собой лишь другую форму той
же идеи, которая уже была применена в оптике в «Теории систем лучей»,
и что намерение приложить ее к движениям системы тел было выражено
при опубликовании этой теории**). При этом не только сама идея, но также
и способ вычисления, примененный к наукам оптики и динамики, по-види-
мому, не ограничивается этими двумя науками, но может найти и другие
применения ; при этом характерное для него специфическое сочетание
принципов вариаций с принципом частных производных для определения и
использования важного класса интегралов может при дальнейшем раз-
витии этого метода будущими трудами математиков вырасти в отдельную
отрасль анализа [65].
Уильям Р. Гамильтон
Обсерватория, Дублин, март 1834 г.
Интегрирование уравнений движения системы; характеристическая
функция такого движения и закон переменного действия
1. Известные дифференциальные уравнения движения системы свобод-
ных точек, отталкивающих или притягивающих друг друга согласно любым
функциям их расстояний и не возмущенных какой-либо внешней силой,
могут быть представлены следующей формулой :
V т(х” дх + у" ду + z" dz) = ди. (1)
В этой формуле знак суммирования У распространяется на все точки
системы : т — для любой такой точки это константа, называемая ее массой ;
х", у", z" — компоненты ускорения или вторые производные прямоугольных
координат х, у, z, взятые по времени; дх, ду, dz — любые произвольные
бесконечно малые смещения, которые может получить точка в тех же трех
взаимно-перпендикулярных направлениях; dU представляет собой беско-
нечно малую, соответствующую этим смещениям вариацию функции U масс
*) Лагранж, а после него Лаплас и другие применяли единственную функцию для
выражения различных сил системы, получая таким образом изящным способом диффе-
ренциальные уравнения ее движения. Эта концепция придает огромную простоту поста-
новке задачи динамики, но решение этой задачи или выражение самих движений и их
интегралов зависит от весьма отличной и бывшей до сих пор неизвестной функции, пока-
зать которую представляет собой задачу настоящей работы.
**) Transactions of the Royal Irish Academy, т. XV, стр. 80. [Заметка об этом динами-
ческом принципе была позже дана в статье <<On a general Method of expressing the Paths
of Light and of the Planets», напечатанной в Dublin Lniversity Review в октябре 1833 г.
— Прим, ped.)
15} РаПИЯПГГЛШ.ЬГР ПГШЦП wrrur mpysuuvu
178
У. ГАМИЛЬТОН
и взаимных расстояний отдельных точек системы, форма которой зависит
от законов их взаимодействия согласно уравнению:
U = Ztnmi-f(r), (2)
причем г представляет собой расстояние между любыми двумя точками т,
т1г а функция /(г) такова, что ее производная или дифференциал /(г) выра-
жает закон их отталкивания, являясь отрицательной в случае притяжения.
Функция, обозначенная здесь U, может быть названа силовой функцией
системы; она в высшей степени полезна в теоретической механике, в кото-
рую она была введена Лагранжем [66] и дает следующие изящные формы
дифференциальных уравнений движения, входящих в формулу (1):
ди
mrz
ди
1 - dZ1 ’
„ dU „ dU
т2 А = , • • • > тп х„ = -т— ;
22 <5х2 ’ ’ П п Sxn ,
„ ди „ ди
= •••> тпУп = ^;
„ 6U „ ди
т2 4 = -j—, ..., тп z" = -т—,
22 бга ’ ’ " п din ’
(3)
„ dU
1 ’
причем вторые члены этих уравнений представляют собой частные производ-
ные первого порядка функции U [ет]. Однако, несмотря на изящество и
простоту этого хорошо известного способа изложения главной задачи дина-
мики, трудность решения этой задачи, или хотя бы выражения ее решения,
до сих пор казалась непреодолимой, так что до сих пор для этих общих урав-
нений системы, состоящей из п точек, было найдено только семь промежу-
точных интегралов или интегралов первого порядка с таким же числом
произвольных постоянных вместо Зп промежуточных и Зп конечных интег-
ралов, включающих бп постоянных. Кроме того, не найден такой интеграл
относительно движения, который не нужно было бы проинтегрировать
вновь. Не найдено также общее решение, определяющее (как это следует
требовать от полного решения) Зп отношений между п массами т1, ..., тп,
Зп переменными координатами х1; у1, zly..., хп, уп, zn, переменным
временем t и бп начальными данными задачи, а именно начальными коор-
динатами а1, Ь1У с1У..ап, Ьп, сп и их начальными скоростями а[, Ь{, с[,...,
а', Ь'п, с'п; величины, названные здесь начальными, — это те, которые
соответствуют произвольному началу времени. Однако (как будет видно
далее) эти давно искомые зависимости можно выразить при помощи частных
производных новой центральной или главной функции, к отысканию и
использованию которой сводится трудность математической динамики.
_ 2. Если мы для краткости напишем:
Т =4-^т(х'2 + У'2 + г'2)’ (4)
причем 2 Т означает, как в «Mecanique Analytique», полную живую силу [68]
системы (х', у, z' по аналогии с нашим предыдущим обозначением пред-
ставляют собой прямоугольные компоненты скорости точки т, или первые
производные ее координат, взятые по времени); удобное и хорошо известное
сочетание дифференциальных уравнений движения, получаемое путем за-
мены вариаций координат их дифференциалами в формуле (1), может быть
выражено следующим образом:
dT = dU, (5)
что дает по интегрировании знаменитый закон живой силы :
T = U + H. (б)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
179
В этом выражении, которое представляет собой один из семи упомянутых
выше известных интегралов, величина Н не зависит от времени и не меняется
при переходе точек системы от одной группы положений к другой. Напри-
мер, исходное уравнение, соответствующее начальному моменту времени,
может быть написано следующим образом :
T0=U0 + H. (7)
Однако величина Н может получить любое произвольное приращение,
когда мы мысленно переходим от системы, движущейся по одному пути, к
той же системе, движущейся по другому пути, при тех же динамических
соотношениях между ускорениями и положениями ее точек, но при раз-
личных начальных данных; полученное таким образом приращение Н,
очевидно, связано с аналогичными приращениями функций Т и V при по-
мощи отношения
ДТ=Ли + ЛН, (8)
а это в случае бесконечно малых изменений удобно записать следующим
образом:
dT = dU + dH. (9)
Это последнее отношение, будучи помножено на dt и проинтегрировано,
приводит к важному результату, ибо посредством (4) и (1) оно принимает
следующий вид:
J 2' tn (dx дх' + dy • ду' + dz • dz’) = f 2 m (dx' dx +
+ dy' dy + dz' • dz) + J dH dt, (10)
что дает согласно принципам вариационного исчисления
<5 V = 2'(*' Ьх + У' by + 2' dz) — 2’ (а' ba + b' db + с' дс) + tdH, (А)
если мы обозначим через V интеграл
t
V — J2’ ш(х' dx + у' dy + z' dz) — J 27" dt, (В)
о
а именно, накопленную живую силу, часто называемую действием системы
от ее начального до конечного положения.
Если же мы будем рассматривать (и, как легко заметить, мы имеем на
это право) действие V как функцию начальных и конечных координат и
величины Н, то мы получим посредством (А) следующие группы уравне-
ний : во-первых,
6V = т1 х,, OXj 1 1 ’ 6У _ бх2 ' = т2х2, , дУ _ 8xn ~ = mn у
<5У — = т, у(, <5У1 171 6V _ бу2 " = Ш2у2, ... , dV _ $Уп = mn y'n; (C)
6У = m.z. , ($21 1 1 ’ 6У 6z2 “ = m2z2, ... , — = ten = mn
во-вторых, 6У дУ _ <4 — — m2 а2, ... dV = - a, 1 >
<5У 6У _ бб2 — m2b'2, ... 6V ’ &bn — - - mn b Ч У (D)
6У — т1с1, 6JZ _ бс2 — tn2c2, ... 6У ’ ten = “ - mn C'r
12*
180
У. ГАМИЛЬТОН
и, наконец, уравнение,
Таким образом, если бы эта функция V была известна, оставалось бы
только исключить Н из Зп + 1 уравнений (С) и (Е) для того, чтобы полу-
чить все Зп промежуточных интегралов или из (D) и (Е) для того, чтобы
получить все Зп конечных интегралов дифференциальных уравнений движе-
ния, т. е. получить искомые Зп зависимости между Зп переменными ко-
ординатами и временем, включающие также массы и упомянутые выше бп
начальных данных. Открытие этих зависимостей (как мы уже говорили)
представляло бы собой общее решение общей задачи динамики. Таким
образом, мы по крайней мере свели общую задачу к отысканию и диффе-
ренцированию единственной функции V, которую мы будем называть
характеристической функцией движения системы, а уравнение (А), вы-
ражающее фундаментальный закон ее вариации, будем называть уравне-
нием характеристической функции или законом переменного действия.
3. Для того чтобы более ясно показать, что действие или накопленную
живую силу системы или, другими словами, интеграл произведения живой
силы на элемент времени можно рассматривать как функцию упомянутых
выше бп + 1 величин, а именно начальных и конечных координат и вели-
чины Н, следует отметить, что все, что зависит от способа и времени движения
системы, может рассматриваться как такая функция. В самом деле, закон
живой силы в первоначальном виде в сочетании с известными или неизвест-
ными Зп зависимостями между временем, начальными данными и перемен-
ными координатами всегда дает известные или неизвестные Зп + 1 зависи-
мости, связывающие время и начальные компоненты скоростей с началь-
ными и конечными координатами и с Н. Однако благодаря тому, что Лагранж
не пришел к представлению о действии как функции такого рода, те след-
ствия, которые были выведены здесь из формулы (А) для изменения этого
определенного интеграла, не были замечены ни им, ни другими блестящими
аналитиками, занимавшимися вопросами теоретической механики, несмотря
на то, что в их распоряжении была формула для вариации этого интеграла,
не очень отличающаяся от нашей. Дело в том, что Лагранж и другие,
рассматривая движение системы, показали, что вариация этого определен-
ного интеграла исчезает, когда даны крайние координаты и постоянная Н.
Они, по-видимому, вывели из этого результата только хорошо известный
закон наименьшего действия, а именно: 1) если представить точки или
тела системы движущимися от данной группы начальных к заданной группе
конечных положений не так, как это в действительности происходит, и даже
не так, как они могли бы двигаться в соответствии с общими законами
динамики, или с дифференциальными уравнениями движения, но так, чтобы
не нарушать какие-либо предполагаемые геометрические связи, а также ту
единственную динамическую зависимость между скоростями и конфигура-
циями, которая составляет закон живой силы; 2) если, кроме того, это гео-
метрически мыслимое, но динамически невозможное движение заставить
отличаться бесконечно мало от действительного способа движения системы
между заданными крайними положениями, то варьированное значение опре-
деленного интеграла, называемого действием или накопленной живой
силой системы, находящейся в представленном таким образом движении,
будет отличаться бесконечно мало от действительного значения этого инте-
грала. Но когда этот закон наименьшего, или, как его лучше было бы наз-
вать, стационарного действия, применяется к определению фактического
движения системы, он служит только для того, чтобы по правилам вариацион-
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
181
ного исчисления получить дифференциальные уравнения движения второго
порядка, которые всегда можно получить другим путем. Поэтому Ла-
гранж [69], Лаплас и Пуассон [’°], по-видимому, не без основания пренебре-
жительно отзывались о полезности этого принципа при тогдашнем состоянии
динамики. Возможно, что иной принцип, который вводится в настоящей
работе под названием закона переменного действия, в котором мы переходим
от действительного движения к другому, динамически возможному движе-
нию, варьируя крайние положения системы и (в общем) величину Н, и кото-
рый служит для выражения посредством единственной функции не только
дифференциальных уравнений движения, но и их промежуточных и конеч-
ных интегралов, встретит другую оценку.
Проверка предыдущих интегралов
4. Для проверки, которой не следует пренебрегать, и в то же время
для иллюстрации этого нового принципа мы можем вывести известные
дифференциальные уравнения движения из нашей системы промежуточных
интегралов и затем снова показать соответствие их нашей конечной инте-
гральной системе. В качестве предпосылки к такой проверке полезно отме-
тить, что конечное уравнение (б) живой силы в сочетании с системой (С)
принимает следующий новый вид [я] :
1 х? 1 । (6V\2 ! и ! и
12 тф <5у ) + (. 6г J / > (F)
а начальное уравнение живой силы (7) с помощью (D) принимает вид
1 v 1 (гбуу pvy pvyi _ ,
+ nd + nd ) ~ Uo + Н• <G)
Этим двум уравнениям в частных производных, начальному и конеч-
ному, первого порядка, но второй степени, должна тождественно удовлетво-
рять характеристическая функция V; они дают (как мы увидим далее)
основное средство для раскрытия формы этой функции V и имеют сущест-
венное значение для ее теории. Если бы форма этой функции была известна,
томы могли бы исключить Зп — 1 начальных координат из Зп уравнений (С),
и хотя мы еще не можем фактически осуществить процесс этого исклю-
чения, мы вправе утверждать, что оно удалит наряду с другими и остаю-
щуюся начальную координату и приведет к уравнению (б) конечной живой
силы, которое затем могло бы быть преобразовано в уравнение (F). Подоб-
ным же образом мы можем заключить, что все Зп конечных координат
могут быть совместно исключены из Зп уравнений (D) и что результатом
этого будет начальное уравнение живой силы (7) или преобразованное
уравнение (G). Поэтому мы можем рассматривать закон живой силы, который
помог нам раскрыть свойства нашей характеристической функции V, как
включенный в эти свойства и получающийся в каждом частном случае путем
исключения из систем (С) и (D); при рассмотрении любой из этих систем
или при проведении любого другого динамического исследования методом
этой характеристической функции мы вправе использовать уравнения в
частных производных (F) и (G), которым эта функция необходимо должна
удовлетворять.
Теперь нам будет легко вывести, как мы и предполагали, известные
уравнения движения (3) второго порядка посредством дифференцирования
и исключения постоянных из нашей промежуточной интегральной системы
182
У. ГАМИЛЬТОН
(С), (Е) или даже из части этой системы, а именно из группы (С) в сочетании
с уравнением (F). Таким образом мы получаем :
<1 fJV / U У , f U У , , , и "V ,
Х1 ~дхГ %2 бх, дхг + • • • + Хп бх^бх^ +
+ , б2У , , У1Ч” Vo /1Sx1Sy1 ‘ yi б2У бх, бу2 , , , б2У , , б2У , 1 ••• 1 бхру„ +21 бхр21 +
+ , б2У бх, бг 1 •• +Z , б2У _ " бх,бгп 1 6У т, бх. б2У бх? +
+ 1 6У ^2 ^2 б» У бх, бх2 + .. . 1 бу ‘ тп 6хп б2У бх, бхп 1 6У б2У "1” т2 6уг 6Xi бу2 "1”
+ 1 6У m2 бу2 б2 у бх, бу2 + .. . 1 6У тп дуп б2У бх, буп +
+ 1 6У m, 6z, б2У бх, бх. + -^- бу б2У бг2 бх, бг2 + ... 1 6У б2У ^п $Zn
= — > бх, 1 (| 2m V руу < бх J ( бу J Г буу ’ nd, !=к(и+")’ (11)
т. е. мы получаем
(12)
Подобным же образом мы можем (при помощи дифференцирования) вывести
из интегралов (С) и из выражения (F) все другие известные дифференциаль-
ные уравнения движения второго порядка, содержащиеся в группе (3), или,
точнее, мы можем сразу же вывести формулу (1), которая содержит все
эти известные уравнения, приняв во внимание, что промежуточные инте-
гралы (С) вместе с соотношением (F) дают [’а]
^т(хдх + уду + zdz) = 2лгйх + =
v W8V б , dv б , dv 6 'I -V (6У . , бу A . 6У л \ _
т (бх бх + бу бу + 6z бг J ( бх + бу У + бг J
-ЧлГх s , с б . . б А 1 (ГбУ\г , /буу , рУУ|
— £ (йх &х + ду бу + вг J 2m Ц бх J ( бу J + ( dz J f
= 2(tei + Sy^ + te-^)(U + H) = dU. (13)
5. Теперь мы должны показать, что наша промежуточная интегральная
система, состоящая из уравнений (С) и (Е) с Зп произвольными постоянными
ai> &i> ci> • • •, ап> Ьп, сп (включающая также вспомогательную постоянную Н),
совместна с нашей конечной интегральной системой уравнений (D) и (Е),
которая содержит Зп других произвольных постоянных, именно а'1} Ь'ь с'1}...
..., ап, Ьп, с'п. Взяв производные от уравнений (С), (D), (Е) по времени,
получим для первой группы :
d 6У d 6У d 6У
dt 6Xi = m1x^, dt бХа = rn2 Хг , .. • , dt 6xn — illn Xn ,
d 6У d 6У d 6У
dt бУ1 = Wj y{, dt бУг = т2у;, .. • > dt бУп = mn Уп; (H)
d 6У d 6У d 6У
~dt 6Zi = zl, dt 6z2 = т2г;,_.. • > dt 6zn
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
183
для второй группы :
d dt -^-=0 Sat и’ d dt ЙУ йй2 = o, ..., d dt ЙУ <5a„ = 0;
d i>V А d ЙУ d <5У = 0;
dt 6b1 U’ dt йй2 - 0, ... , dt (D
d w A d ЙУ d ЙУ
= 0, ... , = 0
dt dt йс2 dt бСл
и, наконец, для последнего уравнения
d ЙУ (K)
dt 6Н
Комбинируя уравнения (С) с (Н) и с соотношением (F), мы вывели в пре-
дыдущем параграфе известные уравнения движения (3) и теперь должны по-
казать совместность тех же промежуточных интегралов (С) с группой про-
изводных (I), выведенных из конечных интегралов.
Первое уравнение группы (I) может быть развернуто так:
n = v' 8av д_ v' д. д. &V д. д. ,
1 йах йхг ’’ 2 8аг йх2 “г • • • “г п Sflj $хп ’’ йуг ’’ ^2 8аг 8у2 ’’ '''
. „л в2У . , i>*V . , &V . . , Й»У ....
•" +У" 8аг8уп +Z1 8аг8гх + Zz <5<fiz2 + Zn Ьагбгп ’ ( 4)
другие могут быть развернуты аналогичным образом. Поэтому, для того
чтобы показать, что они удовлетворяются группой (С), достаточно доказать,
что верны следующие уравнения :
О = — у
и ба,
°=4-^
(L)
где целое число i получает любое значение от 1 до п включительно. Это
можно немедленно показать и получить таким образом требуемую проверку,
для чего достаточно взять вариацию выражения (F) по начальным коорди-
натам, подобно тому как в предыдущей проверке мы брали ее вариацию по
конечным координатам, и таким образом получить результаты, которые
согласуются с известными уравнениями движения и могут быть представ-
лены следующим образом:
(М)
То же отношение (F), когда оно варьируется по величине Н, приводит к
выражению
<5 х 1 f(йуу . fSVV . (sv\ai , ,Nn
2^(brJ + Ьг) + Гб?) ) - 1 ’ (N)
а это последнее, будучи развернуто, согласуется с уравнением (К), что пред-
ставляет собой новое подтверждение совместности наших предыдущих
результатов. Точно так же не многим труднее было бы, исходя из изложен-
ных выше принципов, прямо проинтегрировать наши интегралы первого
порядка и таким образом вывести нашу конечную интегральную систему
другим способом.
6. Мы сможем считать еще одним подтверждением наших собственных
общих интегральных уравнений доказательство того, что они заключают
в себе не только известный закон живой силы, но также шесть других извест-
ных интегралов первого порядка : закон движения центра тяжести и закон
площадей. Для этой цели необходимо только отметить, что из концепции
нашей характеристической функции V с очевидностью следует, что эта
функция зависит от начальных и конечных положений притягивающихся
или отталкивающихся точек системы, не как отнесенных к какому-либо
внешнему стандарту, а только как сравниваемых друг с другом ; следова-
тельно, эта функция не будет меняться, если мы, не делая никаких реальных
изменений ни в начальной, ни в конечной конфигурации, ни в их отношении
друг к другу, сразу изменим все начальные и все конечные положения точек
системы при помощи какого-нибудь общего движения, будь то перенос
или вращение [73]. Теперь, рассматривая три координатных переноса,
мы получим три следующих уравнения в частных производных первого
порядка, которым должна удовлетворять функция V:
W йу
^-йг + ^-йг-о,
V SZ.
“йу
ж-, ЙУ
<5У
8Ь
ЙУ
<5с
0;
0,
(О)
а рассматривая три координатных вращения, мы получим три других соот-
ношения между частными производными того же порядка той же характе-
ристической функции:
-r£)+^(« 6У 8b h = 0;
6У 6c ЙУА c 6b J = 0; (P)
6V 6a ЙУА -a^-\ Ьс ; = 0.
Если мы заменим конечные производные V конечными компонентами импуль-
са, а начальные производные — начальными компонентами, взятыми с отри-
цательным знаком согласно динамическим свойствам этой функции, выра-
женным интегралами (С) и (D), то мы изменим также уравнения в частных
производных (О) и (Р) и получим следующее :
£ тх’= £ та'; 2 тУ = 2 mb1; £ mz’= £ тс'; (15)
и
2/ т (ху' — ух') =^т (ab' — Ьа');
% т (yz' — zy') = 2' т (be' — cb’);
Z m (zx’ — x/) = 2' m (ca’ — ac’).
(16)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
185
Следовательно, таким путем мы можем вывести из свойств нашей харак-
теристической функции шесть других известных интегралов, упомянутых
выше, помимо того седьмого, который содержится в законе живой силы
и который помог нам открыть наш метод.
Введение относительных или полярных координат или других отметок
положения системы [74]
7. Свойство нашей характеристической функции, выражающееся в том,
что она зависит только от внутренних или взаимных отношений между
начальными и конечными положениями точек притягивающейся или оттал-
кивающейся системы, свидетельствует о преимуществе применения внутрен-
них или относительных координат. По аналогии с другими применениями
алгебраических методов к исследованиям геометрического типа можно
предполагать, что полярные и другие отметки положения могут также
зачастую оказаться полезными. Предполагая, следовательно, что Зп конеч-
ных координат хх, yv z1} ..., хп, уп, zn выражены как Зп функций других
переменных %,..., и что Зп начальных координат подобным же
образом выражены как функции аналогичных Зп величин, которые мы обоз-
начим еп е2,..., езл, перейдем к определению общего метода для введе-
ния этих новых отметок положения в выражения наших основных зависи-
мостей.
Для этой цели нам нужно только преобразовать закон переменного дей-
ствия или основную формулу (А) путем преобразования двух сумм:
2” т (х' <5х + / <5у + z' dz) и >' т (а’ да + b’ дЬ + с' de),
которые она включает и которые соответственно эквивалентны следующим
более развернутым выражениям:
2* т (х' дх + у' ду + z' dz) = тг (xj <3хх + у{ дуг + z[ <5zx) + |
+ (ха$х2 + У?+ z2^2) + ••• + г (17)
+ тп (х’п дхп + у'п дуп +z; dzn); J
2 т (а' да + b’ дЬ + с' дс) = тх (а^ дах + д\ + cj dq) +
+ И?2 (й2 + ^2 *^2 + С2 ^Сг) + • • • +
+ тп (а’п дап + b’n дЬп + с'п дсп).
(18)
Теперь, поскольку х, является, по предположению, функцией Зп новых
отметок положения ..., г]зт его вариация <5х( и его производная X;
могут быть выражены следующим образом:
= ••• <19>
= -й+...(ао>
и аналогично для у; и zf. Таким образом, если мы посредством равенств (20)
будем рассматривать х'{ как функцию , узп, включающую в общем
186
У. ГАМИЛЬТОН
также т]3п, и если мы возьмем ее частные производные первого поря-
дка по t]'v , Узп, то мы найдем соотношения
йх< ___ 8xj 6xj ____________ dxi
ОХ< йх/
6»7дП 6г]3п
(21)
и получим следующие новые выражения для вариаций 8xit dyit dZj:
(22)
Подставляя эти выражения (22) вместо вариаций в сумму (17), мы легко
преобразуем ее в следующую:
2 m (х' дх + у’ду + z’ dz) = m (х' ~ + у + z' +
+ m (х' 1Г7 + / 7^’ + "хМ ^2 + • • • +
I ^2 7 ^2 fy2J '2 ' 1 I
+ m (х' 7Г~ + У' + z> ТпА ^%п ~
I ’ й^3„ . 8rfa) >in
йТ <, . йТ . , , ЙТ „
= й^^ + ^д%+ ••• +й^^-
Здесь Т — та же величина, что и раньше, а именно, половина конечной
живой силы системы, но теперь рассматриваемая как функция J/i, • • ,Узп
и включающая также массы и в общем случае величины г^,..., г)3п, полу-
ченная путем подстановки вместо величин х', у', z' их значений вида (20)
в уравнение, определяющее Т:
T = y^m(x'2 + y'2 + z'2). (4)
Подобным же образом мы находим следующее преобразование для
суммы (18):
2т(а'да + Ь'дЬ + с'дс) = ^де1 + -^де2+ ... +^де3п. (24)
Таким образом, закон переменного действия [формула (А)], будучи
выражен данными более общими координатами или отметками положения,
принимает вид [75]
(Q)
но вместо групп (С) и (D), на которые распадался этот закон, он дает
теперь совместно с уравнением (Е) другие группы:
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
187
Величины ех, е2,..., езп и е^, е3,..., е'зп представляют собой начальные
данные, относящиеся к способу движения системы, а Зп конечных интегралов,
связывающих эти би начальных данных и п масс со временем t и с Зп конеч-
ными или переменными величинами т]3>..., j;3n, отмечающими перемен-
ные положения п движущихся точек системы, получаются теперь путем
исключения вспомогательной постоянной Н из Зп + 1 уравнений (S) и (Е).
В то же время Зп промежуточных интеграла или интегралы первого порядка,
которые связывают те же переменные отметки положения и их первые
производные со временем, массами и начальными отметками положения,
получаются в результате исключения той же вспомогательной постоянной
Н из уравнений (R) и (Е). Поэтому наша основная формула и промежуточные
и конечные интегралы могут быть очень просто выражены в любой новой
группе координат. При этом частные производные (F), (G), которым должна
удовлетворять наша характеристическая функция V и которые, как мы
уже говорили, имеют существенное значение для теории этой функции,
также могут быть легко выражены любыми подобными преобразованными
координатами путем простого сочетания конечных и начальных выражений
закона живой силы:
Т = U + Н, (6)
Т0=П0 + Н,
(7)
с новыми группами уравнений (R) и (S). Для этого мы теперь должны рас-
сматривать функцию U масс и взаимных расстояний отдельных точек системы
как зависящую от новых отметок положения »?2,..., »?3п, а аналогичную
функцию Uo — как зависящую подобным же образом от начальных величин
€х, е3,..., езп. Мы должны также предположить, что Т является (что в
действительности возможно) функцией ее собственных производных-^-,
дт st „
всегда однородной второй степени по отношению к ним
и может также в явном виде включать величины »?1, »/2,..., ^]3п, а То. является
подобной же функцией производных
Итак,
ат0 Sei ’ &та Sei ’ дТа Se'3„ ‘
Т = F (-4т- ST ST I
Г ( 8тц ’ StjsnJ ’
т n = F , ST0 (25)
Sei ’ • • J безп ) ’
причем производные Т и То заменяются своими значениями (R) и (S), давая
взамен (F) и (G) два других преобразованных уравнения, а именно:
г, (8V sv sv ч .. . „
F > • • • > Л— =U + Н, (Т)
и, вследствие однородности и степени То
-{SV dV SV 1 _ rr I и /тп
Uei ’ 4........йезл J U° + H •
8. Точно так же совсем нетрудно вывести аналогичное преобразование
известных дифференциальных уравнений движения второго порядка для
любой системы свободных точек, взяв вариацию новой формы (Т) закона
живой силы и использовав динамические значения производных нашей
188
У. ГАМИЛЬТОН
характеристической функции. В самом деле, если мы заметим, что конечная
живая сила 2Т, рассматриваемая как функция переменных yz,...,
и ’/J, , v'sn> обязательно является однородной функцией второй
степени относительно последней группы переменных и, следовательно,
должна удовлетворять условию
О'Г , ST . , ЙТ . , , &Т
2T==%Stf+W + ••• +%п^( (26)
то мы найдем, что ее полная вариация
+ •••+^^зп (27)
может быть представлена в виде
Л'Г / А дТ . ' А дТ I I ' А 6Т
+ ••• +
6Т <, 6Т <, 8Т \
- «й-г^=
= (28)
Таким образом, полная вариация нового уравнения в частных производных
(Т) может быть записана следующим образом :
-£(’^~зН = -^Л’ + ,Н- (V)
(29)
(30)
Заметив, что rf = — и что величины вида у являются единственными,
которые меняются со временем, найдем, что
z A XJ ( d W $ , d 8V А \ , d 6V iLJ
or} [at оу 1 1 at oe J at oH ’
так как тождество 6 dV = ddV в развернутом виде дает
Разлагая выражение (V) вариации половины живой силы на столько
отдельных уравнений, сколько оно содержит независимых вариаций, мы
получаем не только уравнение
d &v _ .
dt ш — 1 ’
которое уже появлялось, и группу
dt fiej и ’ dt 8е2
которая может быть сразу же получена путем дифференцирования конечных
интеграллов (S), но также группу других Зп уравнений вида
дт 8и
dt 6г/ &т) 6т] ’
dt 6esn
(К)
(W)
(X)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
189
которые посредством промежуточных интегралов (R) дают уравнение
d ST dt dp' dT _ Sp du dp ’ (Y)
или в более полном виде
d ЙТ ST SU
— ___— — '—"— .——
dt dpi *7i
d ST ST dU
— —— -. . . ... 1—
dt Ъц'г (Z)
d dT 6T _ SU
dt dpsn dp3n
Эти последние преобразования дифференциальных уравнений движения
второго порядка системы притягивающихся или отталкивающихся точек
во всех отношениях совпадают (не считая небольших различий в написании)
с изящными каноническими формами, данными Лагранжем в Mecanique
Analytique, но нам казалось, что стоит вывести их заново из свойств нашей
характеристической функции. Предположим (как это часто считается удоб-
ным и даже необходимым), что п точек системы не являются целиком
свободными и подвержены не только своим собственным взаимным при-
тяжениям и отталкиваниям, но связаны любыми геометрическими усло-
виями и подвергаются влиянию любых внешних факторов, согласующихся
с законом сохранения живой силы так, что число независимых отметок поло-
жения будет менее велико, а силовая функция менее проста, чем раньше.
Тогда мы можем доказать при помощи рассуждения, очень сходного с
предыдущим, что и при этих предположениях (которые, однако, дух дина-
мики все более и более склонен исключать) накопленная живая сила, или
действие V системы, представляет собой характеристическую функцию
движения уже разобранного выше рода. Эта функция выражается тем же
законом и формулой вариации, подверженной тем же преобразованиям,
и обязана удовлетворять таким же способом, как и выше, конечной и началь-
ной зависимости между ее частными производными первого порядка. Она
приводит при помощи варьирования одной из этих двух зависимостей к тем
же каноническим формам, которые были даны Лагранжем для дифферен-
циальных уравнений движения, и дает, исходя из изложенных выше прин-
ципов, их промежуточные и конечные интегралы. По отношению же к тем
мыслимым случаям, в которых закон живой силы не имеет места, наш метод
также неприменим ; однако среди людей, наиболее глубоко занимавшихся
математической динамикой вселенной, все более крепнет убеждение, что
представление о таких случаях вызывается недостаточным пониманием
взаимодействия тел.
9. Из предыдущих замечаний следует, что для того, чтобы применить
наш метод к любой задаче динамики, относящейся к любой движущейся
системе, необходимо сочетать известный закон живой силы с нашим законом
переменного действия. Общее выражение этого последнего закона может
быть получено следующим образом. Прежде всего мы должны выразить
величину Т, т. е. половину живой силы системы, как функцию (которая
всегда будет однородной функцией второй степени) производных р'й и т. д.
любых прямоугольных координат или других отметок положения системы.
Затем мы должны взять вариацию этой однородной функции по % и т. д.
и заменить вариации 8р[, 8p'z и т. д. вариациями ори и т. д. самих отметок
положения. Наконец, надо вычесть из конечного значения результата на-
190
У. ГАМИЛЬТОН
чальное значение и приравнять полученную разность величине SV—t <5Н[76].
Легко заметить, что это общее правило, или процесс получения вариации
характеристической функции V, применим даже тогда, когда отметки поло-
жения % и т. д. не независимы одна от другой. Это будет иметь место в
том случае, когда по соображениям удобства они взяты в числе большем,
чем число прямоугольных координат отдельных точек системы. В самом
деле, если мы предположим, что Зп прямоугольных координат х, у, z, ...,
хп, Уп, zn выражены посредством какого-либо преобразования как функции
Зп+ к других отметок положения ijz,..^Зп+к, которые поэтому долж-
ны быть связаны к уравнениями условий
0 = ф1 (% , ‘Нз, , Ъп+к),
О = Ф2 (% , %, • • •, %п+л),
(31)
0 = Фц(’71, %, •••, Ъп+к),
дающими к новых отметок положения как функции остальных Зп отметок,
%«+1 = , Ъ, • • • > %п) ,
%п+2 = ^2 (% , Vi, • • • > %п) >
(32)
%n+ft = ^(’71> %, •••> %п)>
то выражение
т = m(x'z + yz + z'2)
превратится благодаря введению этих новых переменных в однородную
функцию второй степени Зп + к величин т]'2, ..., >?зЛ1+л, включающую
в общем также Вариация ее может быть выражена следую-
щим образом:
(4)
или, иначе,
<5Т= | 1 8т]зп+к J д^'зп+к +
+ 1 V fyrn+k J ^hri + k
дт + йй1^+^^+ •• •+>^ + . вТ А ' * + "йи— ’
благодаря соотношениям (32), которые, будучи дифференцированы по вре-
мени, дают:
, , й«Рх . , йУ, . . , 64^
^lan+l — ’ll + % S% + • • • + %n Sfj3n ,
, , Й«Р9 . , Й«Р9 , , , <5!P2
’?Зп+2 = ’?1^Г + %-^-+
(33)
(34)
(35)
, _ , №к . , ЬЧ'к
Ъп+к -
&Т]ЗП
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
191
и, следовательно, варьируя лишь величины вида т)',
, , й7/1 А ' ! б7/1 А ' ! , <^1 А '
^ЗП+1 = <4 + ~д~ <4 + • • • + ёЧ3п ,
^ + 2 = ^^+^^ + +^ЗП, (зб)
А , • ЙТ^ , , , ЙТ^ , , , , Wk , ,
дЧзп+к— 6Г]1 $41 + Ьг)г $Чз + ••• + 8rj3n $Чзп-
Сравнивая два выражения (33) и (34), мы при помощи (36) находим
соотношения
ST = ( ЙТ) , ( st ) вч\ г 8Т ) йу2 г ST ) SVk
Sr}{ t Srj'l J ’’ I Sf/3n + l J бг)г ’’ ( <5»7зп + 2 J Srfr ”** I Sl)’3n+t J 6г)х ’
JL = fjn , pr_) , CJ?L) рт ) s^
Sifl \6rj'2) \Sr)3„+i) бщ \6r)i„+z) 6r/2 dr/2 ’ /371
ST = ( ST ) Г ST ) S^ ( ЙТ _) й^2 Г ST 'j SVk
Srfsn ’’ ( Srj'3n + l J St]3n "T" (Srj3n + 2 J Stjsn "f • • • f (<5^n + i J St}3n ’
которые дают посредством (32)
••• + = ••• + (жгг)^з^- (38)
Следовательно, мы можем написать выражение (Q) в следующем более
общем виде :
ы = + (А‘)
Здесь производные образуются, считая все Зп + к величин .
• ••> Ч3п+к независимыми ; это есть распространение провозглашенного выше
правила образования вариации характеристической функции V.
Мы не можем сразу разложить это новое выражение (А1) для 6V, как мы
это делали для (Q), рассматривая все вариации ду, де как независимые.
Однако мы сможем разложить (А1), если предварительно примем во вни-
мание конечные уравнения условий (31) и аналогичные начальные урав-
нения условий, а именно:
О — (^1 1 ^2 > . . . > ^3n + fc) >
0= Ф2(^1> ^2> •••, ^Зп + fc),
(39)
0=ФЛ(ех, е2, ..., e3n+fc).
Для этого мы должны прибавить вариации функций tp^ , tpk, Фп ..«, Фк,
соответственно помноженные на подлежащие определению множители
Л1? ..., Лк. Таким образом, закон переменного действия прини-
мает следующий новый вид:
= + + + (В1)
192
У. ГАМИЛЬТОН
и распадается на бп 4- 2/с 4- 1 отдельных выражений для частных производ-
ных первого порядка характеристической функции V:
<tyi U’/iJ 1 <5% + 2 <5^ + + к 6^ ’
дУ _ I J ^2 I 3 ^2 I I 1 6^к .
(«fyj 1 6rh 2 + ’ ’ + к 6г]г ’
8У = ( ) I 2 6<P1 [ 4-2 6(рк •
дт]зп+к I <5»7зп+4 ) ~У 1 &г]ап+к ' ' • • ~У к fy]3n+k ’
%- __р*щ+л + ...+4
оег { dei J 1 дег 2 дег 1
™ =_№1+Л^. + Л,^.+ ...+Л,
ое2 \ без) 1 де2 1 2 де2 '
^ = -(#Ч + л,-^+
оезп+к {oe3n+kj 1 ое3п+к к оезп+к
и старое уравнение (Е). Аналогичное введение множителей в канонических
формах Лагранжа для дифференциальных уравнений движения второго
порядка, посредством которых сумма вида 2 складывается с ~ во
втором члене формулы (Y), также легко оправдывается, исходя из принципов
данной работы.
Отделение относительного движения системы от движения ее центра
тяжести; характеристическая функция такого относительного движения
и закон ее вариации
10. В качестве примера предыдущих преобразований и в то же время
в качестве важного случая их применения мы введем теперь относительные
координаты х, у, z, отнесенные к внутреннему началу х,„ у„, z„, т.е. положим:
X, — x,j 4- х„, у, — yrj 4- У», Z; = z,i 4- Z„ (40)
и аналогичным образом й, = й,, 4" = b,, 4" b„, ci — c'i + с» > (41)
совместно и Введя с дифференциальными выражениями x't = x',t 4- х'„, у\ = y',i 4- у’„, a’t = a',i 4- a'„, Ь\ = b',i 4- b'„, выражения (42) для прямоугольных z'i = z’i 4- Z'„ — с',, 4- c'„. компонентов (42) (43) скорости в
равенство (4), мы найдем, что значение живой силы 2T распадается на
три следующие части:
2Т = 2’ m (х'2 4- у'2 4- z'2) = £ m (х',2 4- у’,2 4- z’,2} 4-
4- 2(х; v тх', 4- у'„ 1" ту', 4- z'„ 2" mz’,) 4- (х’„2 4- у'2 4- zi2) 2’ ™, (44)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
193
и тогда, установив, как мы вправе сделать, три уравнения условий
2 тх = 0, 2' ту = 0, 2 mz = 0, (45)
которые посредством равенств (40) дают
JT тх £ mv У mz , лсл
х„ — , У» = v ' , , (46)
Ут' т ' £т ’ v
где х„, у„, z„ являются координатами точки, называемой центром тяжести
системы, можем свести функцию Т к форме
Т = Т,+ Т„, (47)
в которой
Г, = | (х',2 + у',2 + z;2) (48)
и
Т„ = ~ (х'„2 + у',? + z;2) 2' m. (49)
Посредством этого известного разложения полная живая сила 2Т системы
распадается на две части 2Т, и 2Т,„ первая из которых, 2Т,, может быть
названа относительной живой силой, так как она получается исключи-
тельно из относительных скоростей точек системы в их движениях вокруг
общего центра тяжести х„, у„, z„, в то время как вторая часть, 2Т„, полу-
чается только из абсолютного движения этого центра тяжести в пространстве
и будет такой, как если бы все массы системы были объединены в этом общем
центре. В то же время закон живой силы Т = U + Н (6) с помощью закона
движения центра тяжести распадается на два следующих отдельных урав-
нения :
Т, = U + Н, (50)
и
Т„ = Н„, (51)
причем Н, и Н„ представляют собой две новые постоянные, независимые
от времени t, и притом такие, что
Н, + н„ = н. (52)
Подобным же образом мы можем разложить действие или накопленную
живую силу V, которая равна определенному интегралу J 2Tdt, на две сле-
дующие аналогичные части : 0
V=V, + V„, (Е1)
определяемые двумя уравнениями :
V, = J 2Т, dt (F1)
о
и
V„ = $2T„dt. (G1)
О
Последнее уравнение при помощи равенства (51) приводится к виду
V„=2H,,t, (53)
13 Вариационные принципы механики
194
У. ГАМИЛЬТОН
т. е. результат, который согласно закону движения центра тяжести может
быть выражен таким образом [”] :
V„ = У(х„ - а,,)2 + (у„ - b„)2 + (z„ - с,,)2 • У2Н„£т , (Н1)
где а,„ Ь„, с„ представляют собой начальные координаты центра тяжести,
так что
Для вариации 6V полной функции V получим
dV = % т (х' дх, — а', да, + у', ду, — b', db, + z', dz, — с', дс,) +
+ (х'„ дх„ — а'„ да,, + у'„ ду„ — b'„ db„ + z'„ dz„ — с'„ дс„) £т +
+ t дН + £ т дх, + т ду, + Я3 £ т dz, + Лл 2’ т да, +
+ Л2 v т 8Ь, + Л3 £ т дс,. (I1)
В то время как вариация части V,,, определяемой уравнением (Н1), как
легко можно показать, имеет вид:
dV„ = (х'„дх„—а'„да„ + у' dy„—b'„db„ + z'„dz„—c'„dc„) £ т + t дН„, (К1)
вариация части V, может быть выражена таким образом :
dV, ~ Ут (х', дх, — а', да, + у', ду, — b' db, + z', dz, — с', дс,) +
+ t дН, +^12'т дх, + Я2 2/ т ду, + Я3 2’ т dz, + тда, +
+ Л2 £тдЬ, + Л3£тдс,. (L1)
Она распадается на следующие отдельные выражения, в которых часть V,
рассматривается как функция 6п + 1 величин ху, y-it z-,, ач, b't, сч, Н-.
Однако только бп — 5 из них действительно являются независимыми.
Таким образом, имеем первую группу:
Ж' 1
sXri — х' 1 + > • • • >
dv, , , ,
— т1У'1~Г >
dV' , , о
= m1Z, 1 + А3т1, ...,
и вторую группу
SV, да,2 = — т^а',^ + Л1т1,
dv, _ дЬ,г Ьг 1 iTi^,
ду, дс,г = -т1с',1 + Л3т1, ...
Наконец,
8V,
SH,
SV, дх,п 8V, ду,п дУ, dz,n = mnx',n + l1mn; = mny',n + Я2т„; (Mi>
+ ^3 mn
SV, Sa,n = ~mn а;„ + Л1т„;
SV, db, n = —mn д', n + -^2 mn i (№>
SV, de, n = ~mn n "^3 ^n- -
-t. (O*>
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
195
Для шести множителей Я1; Л2, Л3, Alt Л2, Л3, которые были введены тремя
конечными уравнениями условий (45) и тремя аналогичными начальными
уравнениями условий
та, = 0, 2Г mbt = 0, 2' тс> = 0, (55)
мы, продифференцировав эти уравнения, получаем
2,1 тх', = 0, ту’, = 0, mz’, = 0 (56)
и
2 та', = 0, 2' mb', = 0 , тс', = 0. (57)
Следовательно,
<5Vz 8V, 6Vz
j - дх' я - 6у' л - дг, (5й 1
2 т ’ 2 т ’ Лз 2 т
и
avz <5К, „ dV,
л 2 да, л дЬ, л дс,
2 т ’ ^2“ 2 т ’ 3 2 т
11. В качестве примера определения этих множителей мы можем пред-
положить, что часть V, полного действия V была выражена до дифферен-
цирования как функция Н, и следующих 6п — б независимых величин :
Xz 1 X, п , Х'2 Х> п = 2? ••• > X/п—1 X, п 1 > I
= У'2~У'п = ^2. • ••> У'п~1-У'п=^п-1; [ (60)
2/i Z, п , Z, 2 Z, п ^2 j • • • j 2/ 1 2/ п 1 J
и
й/1 Clr п — «1 , df 2 О-' п — а2 г
Ь'1 Ь'П~ Р\> Ь, 2 — b, п = flz,
С'1 — С, п = у1, с, 2 — Cz п = у2 ,
О' п—1 О' п 1 j
Ъ/ п—1 Ь' п Рп—1 J
п—1 п Уп—1 >
(61)
т. е. разностей центробарических координат [78 ], или, другими словами,
как функция координат (начальных и конечных) п — 1 точек системы,
отнесенных к п-й точке как внутреннему или подвижному началу, так как
центробарические координаты Xz„ уч, z,it а,„ b>t, cri посредством уравнений
условий могут быть сами выражены как их функции, а именно:
„ 2 mS 2 тп г У mJ
Xz; = f; — ---, У', = Vi---, Z,, = Q, — ; (62)
' ' >.m ' f 1 ‘ 2 m 2 m ’ v '
подобным же образом
2 та , о 2 mft я 2 ту /с_.
a'i = ai — V m > b'i = Pt — V J, , C'l = Vi-----, (63)
1 ‘ 2m ‘ 2m 2m
относительно которых надо отметить, что шесть величин цп, <Qn, ап, @п, уп
должны рассматриваться как обращающиеся в нуль независимо одна от
другой. Когда V,, таким образом, выражена как функция центробарических
координат, включающая только их разности, она, очевидно, будет удовле-
творять шести уравнениям в частных производных [79] :
^ = 0,
дх, ’
^ = 0
у = О У= о
ay, и ’ 6Z, ’
V» о, 2’^ = 0;
(Р1)
196
У. ГАМИЛЬТОН
поэтому после подстановки такой функции V шесть множителей, определен-
ных посредством (58) и (59), исчезнут, так что мы получим
— 0 , я2 = 0, яз = о, Л = 0 , л2 = о, Л3 = О, (64)
а группы (М1) и (N1) сведутся к двум следующим группам :
SV, Sx„ =^1^1- ЙУ, т2 х', 2, • • • > 6У,
ЙХ, 2 йх, п
SV, ЙУ, ЙУ,
-° = ТП, у', ! , ЙУ, 2 — т2у:2, • • - > йу, п = тпу',п; (Q1)
SV, ЙУ, ЙУ,
Sz,, йг, j m2z',2, • • • , йг, п = тп z', п
и
йу, т , ЙУ, ЙУ,
— = — т,а,., Sa,! 1 1 ’ Sa, 2 — -т2 а', 2, • • • йа,п - - тп а', п
йу, ,, Sb,,- т^ь'^ ЙУ, _ ЙЙ, 2 — -т2Ь',2, • • • ЙУ, п = тпЬ',п, (R1)
ЙУ, ЙУ, 6 у,
Sc„ - т1С'1’ ЙС, 2 -т2 с', 2, • • • » йс,„ С/ п ,
во всех отношениях аналогичным группам (С) и (D). Следовательно, для
относительного движения системы около ее собственного центра тяжести
мы находим уравнения того же вида, как те, которые мы получили раньше
для абсолютного движения той же системы точек в пространстве. Мы видим
также, что, исследуя только такое относительное движение, полезно ограни-
читься частью V, нашей полной характеристической функции, т. е. отно-
сительным действием системы или накопленной живой силой движения
вокруг центра тяжести, и рассматривать эту часть как характеристи-
ческую функцию такого относительного движения в смысле, аналогичном
тому, который уже был расъяснен ранее.
Однако это относительное действие, или часть V,, межет быть выражено
другим способом и даже бесконечно разнообразными способами с помощью
шести уравнений условий, которые связывают 6п центробарических коорди-
нат ; каждая другая его форма даст другую группу значений для шести
множителей Я2, Я3, Л„ Л2, Л3. Например, мы можем при помощи преды-
дущего способа исключить из выражения V, шесть центробарических коор-
динат точки тт с тем чтобы это выражение включало только центробари-
ческие координаты других п — 1 точек системы, и тогда мы будем иметь
4~~=о, 4^=». 4^=о. 4^1=0. 4^=о.
' Sy,n Sz,n ’ Sa, п 1 ’ Sb,n
= О, (S1)
ос, п ’ v '
Й2,п
после чего посредством шести последних уравнений групп (М1) и (N1) эти
множители примут значения :
*i=-x',n, ^=~У>п, Ai = a',n, Л2 = Ь',п, Л3 = с',п, (65)
и посредством равенств (60) и (61) предыдущие 6л — 6 уравнений тех же
групп (М1) и (N1) сведутся к виду :
ЙУ, = т&, й У, = т2^2, ЙУ, = тп_,in-i;
ЙХ, j ЙХ, 2 • • • э йх, п-1
ЙУ, = т,г)', , ЙУ, = т2ц2, ЙУ, = ц'п-,; (Т1)
йу,1 ЙУ, 2 • • • f йу, п-1
ЙУ, ЙУ, = т2С2> ЙУ, = tnn^i Си—1
Sz„ йг, 2 • • • » йг, п-1
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
197
И
ду, , дУ,
= —ГПл и, , -т-= — т2 а, ,
да,,----------------------111 да, 2-2 2 ’
дУ, о, дУ, о,
-дь^ = ~т^^
дУ, , дУ,
~д^~ т1У1’ $С,2 - m2/2,
dv, _ _
da,n-i ~ mn-ian-i;
дУ, _ ™ а,
db,n-i ~ тп-1Рп1>
дУ,
дс, п-1 ~ тп-1Уп-1-
12. Мы можем также выразить относительное действие V, как функцию
не центробарических, но каких-то других внутренних координат или отметок
относительного положения. Мы можем, например, выразить V, и ее вариацию
как функции уже упомянутых б/г — б независимых внутренних координат
f, г), t, а, Р, у и их вариаций, определяя их, совершенно безотносительно
к центру тяжести, уравнениями
£i %п > Vi У1 Уп ’ %t Z„, I (бб)
а,-= Pi = bi-bn, yi = Ci-cn. J
Для всех таких преобразований SV, легко установить правило или закон,
который можно назвать законом относительного переменного действия
(в точности аналогично правилу (В1)), а именно:
bV, = 2 (-^0 brp - 2 (4^) be, +tbH, + £l, &p, + 2Л ЬФ,. (V1)
Это означает, что мы выразим половину Т, относительной живой силы
системы как функцию скоростей любых отметок относительного поло-
жения и затем, взяв вариацию Т относительно tf, заменим эти вариации
вариациями самих отметок положения; вычтем начальное значение резуль-
тата из конечного и сложим вариации конечной и начальной функций <р,
и Ф,, которые входят в уравнения условий <р, = О, Ф, = 0 (соединяющие
конечные и начальные отметки относительного положения), соответственно
помноженные на неопределенные множители Я,, Л,; наконец, приравняем
полный результат величине 6V,—t дН,, где Н, является независимой от вре-
мени величиной в уравнении (50) относительной живой силы, а V, является
относительным действием, вариацию которого мы хотим найти. Нет необхо-
димости останавливаться здесь на демонстрации этого нового правила (V1),
которое легко можно вывести либо на основе уже изложенных принципов,
либо исходя из закона живой силы, при помощи вариационного исчисления
в сочетании с дифференциальными уравнениями второго порядка относи-
тельного движения.
Для того чтобы представить пример его применения, вернемся к уже
упоминавшейся задаче, заключающейся в том, чтобы изобразить 6V, посред-
ством бп — 5 независимых вариаций 6f,, б»?,, бСп ба,, <5/3,, бу,-, дН,. Для
этой цели мы используем известную преобразованую форму живой силы
2Т,, помноженную на сумму масс системы, а именно :
27, 2 m = 2 mk {(х< - x'k)2 + (у{ - y'k)2 + (z< - z'k)2}, (67)
причем знак суммирования 2? во втором члене распространяется на все по-
парные сочетания точек, которые могут быть образованы без повторения.
Это преобразование посредством (бб) дает
2Т, £ m = тп 2> т («Г2 + г]'2 + f'2) +
+ 2< m, тк {(£' - fi)2 + (»?;• - ч’ьУ + С; - СО2}, (68)
198
У. ГАМИЛЬТОН
где знак суммирования 27, распространяется только на первые п — 1 точек
системы. Применяя, следовательно, наше общее правило, или закон пере-
менного относительного действия, и следя за тем, чтобы бп— б внутренних
координат £,»?, С, а, р, у были независимы, мы найдем следующее новое
выражение:
SV, = t SH, + ~уг~2' т Sg — a’ Sa + rf St] — ($' Sfi + £' — у' Sy) +
+ m, mk {(£ - %'k) Wi — ^k) + (v't ~ Vk) (fyi ~ to]k) +
+ (<5£ - 6 %) (<5C,. - S£k)} - mi rnk {(a< - a’k) (Sat - Sak) +
+ (Pi ~ P’k) Ж - Spk) + (y< - y’k) (Syt - dyfc)}, (W1)
которое помимо уравнения (О1) даст следующие группы :
ЗУ, mC' ) J ’
ЗУ, 8гц = у‘т 2тМ »?') = mt]' ) J’m J ’ (X1)
8 V, 8 Ci = J5j-Г) = "!<(«- mC' A J
и ЗУ, —пи / f f\ ( f = -=— 2 Ш (a, — а ) = — mt a, - J1 m v 1 ' 1 ma’
За/ J ’
ЗУ, 2,тР' ) (Y1)
8?ч у m P) IPi 2 m J ’
ЗУ, _ Зу/ - y'2m(y'i y') - m, (у' III \ _ 2"' my' ) 2 m J ’
Эти результаты могут быть суммированы следующим образом :
S V, = t SH, + £,т (? S$ — a' Sa + rf St] — ft’ Sfi + £'<$£ — у' Sy) —
— (2r Z'mSg + 2 т 2,mSr] + 2, т? 2< т SQ +
+ (2\ т а' 2, mSa + 2, т/У 2'тёР + ту' 2>т ;
они могли бы быть выведены из нашего правила иным способом при помощи
другого известного преобразования
т, = ±2.т+С'2)-. (в9)
Для того же чтобы получить для любой группы внутренних или относи-
тельных отметок положения два уравнения в частных производных, которым
должна удовлетворять характеристическая функция V, относительного
движения и которые представляют (как мы убедимся далее) главный способ
раскрытия ее формы, а именно уравнения, аналогичные тем, которые обо-
значены (F) и (G), нам только нужно исключить приращения отметок поло-
жения системы, которые определяют конечные и начальные компоненты
относительных скоростей ее точек согласно закону переменного относитель-
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
199
ного действия, исходя из конечных и начальных выражений закона отно-
сительной живой силы, а именно из следующих уравнений :
Т, = U + Н, (50)
и
Т,0 = £70 + Н,-. (70)
Закон площадей [или свойство, относящееся к вращению, которое было
выражено уравнениями в частных производных (Р) ], также всегда может
быть выражен в относительных координатах; он поможет нам раскрыть
форму характеристической функции V,, показав, что эта функция включает
только такие внутренние координаты (числом б/г — 9), которые не меняются
при любом общем вращении всех конечных и начальных точек вокруг центра
тяжести или вокруг любого другого внутреннего начала, при условии, что
при определении эффектов такого вращения это начало рассматривается как
неподвижное, а величина Н, как постоянная. Таким образом, общая задача
динамики, касающаяся движений свободной системы п точек, притяги-
вающих или отталкивающих друг друга, сводится в конце концов при
использовании метода, изложенного в данной работе, к отысканию и диффе-
ренцированию функции V,, зависящей от б/г — 9 внутренних или относи-
тельных координат [80] и от величины Н, и удовлетворяющей двум урав-
нениям в частных производных первого порядка и второй степени. При
интегрировании этих уравнений мы должны проследить за тем, чтобы в
принятом начале движения, а именно в момент, когда t = 0, конечные или
переменные координаты были равны их начальным значениям, причем
частная производная-^- исчезает. При этом в момент времени, отстоящий
на бесконечно малую величину от начального, дифференциальные изменения
координат имеют коэффициенты, связанные посредством закона переменного
относительного действия с другими частными производными характеристи-
ческой функции V,. Здесь можно отметить, что хотя рассмотрение точки,
обычно называемой центром тяжести, весьма просто подсказывается про-
цессом, описанным в десятом параграфе, тем не менее, этот внутренний
центр еще проще определяется нашими более ранними выводами из закона
переменного действия. Эти выводы показывают, что компоненты относитель-
ных конечных скоростей в любой системе притягивающихся или отталкиваю-
щихся точек могут быть выражены при помощи разностей величин вида
1 sv 1 sv 1 sv „
----s—,----т—,------т— . Следовательно, при вычислении этих относитель-
т дх ’ т ду ’ т dz ’ г
ных скоростей выгодно ввести в выражение характеристической функции
V, среди отметок крайних положений системы конечные суммы 27 тх, S ту,
2 mz и аналогично также начальные суммы 27 та, Е mb, Е тс, так как при
дифференцировании этого выражения для вычисления относительных ско-
ростей эти суммы могут рассматриваться как постоянные.
О системах из двух точек в общем; характеристическая функция движения
любой бинарной системы
13. Для иллюстрации изложенных выше принципов, которые распро-
страняются на любую свободную систему точек притягивающих или оттал-
кивающих друг друга, каково бы ни было их число, рассмотрим, в част-
ности, систему двух таких точек. Для такой системы известная силовая
функция U посредством (2) принимает вид
Cr = m1m2/(r), (71)
200
У. ГАМИЛЬТОН
где
r = ^1-x2)2 + (yi-y2)2 + (z1-z2)2 (72)
представляет собой расстояние между двумя точками mv т2, а / (г) — функ-
цию этого расстояния, так что ее производная или дифференциальный коэф-
фициент /'(г) выражает закон отталкивания или притяжения точек, в зависи-
мости от того, является ли она положительной или отрицательной. Теперь
известные дифференциальные уравнения движения второго порядка выра-
жаются на основании равенства (1) следующей формулой :
/721 (xjйхх + У1 дуг + dzj + т2 (х2 Ьх2 + у2 ду2 + z2dz2) = т1 т2 bf (г) , (73)
следовательно, отдельно они будут :
Sf(r)
х;= т2
У(г)
<5хх
У1— т2 й
Z1 = т2
Х2 = 7721
ЭЦг)
<5х2
„ 8 (г)
У 2 = /771 ,
1 <5у2
= /771
У (Г)
<5г2
(74)
Задача интегрирования этих уравнений состоит в том, чтобы попы-
таться найти с их помощью шесть отношений между временем t, массами
/721, т2> шестью переменными координатами хп ylt zlt х2, у2, z2 и их началь-
ными^ значениями и начальными скоростями av br, clt а2, b2, с2, a'lt Ь'г, с[, а2,
Ь2, с2. Если бы мы знали эти шесть конечных интегралов и сочетали их с
начальной формой закона живой силы или известного промежуточного
интеграла
у (х12 4" У12 4" zi2) 4- у (х22 + У22 4- z22) — mi /722 / (г) + 77 , (75)
т. е. с выражением
у Ш1 («12+ Ь'2 + с!2) + у т2 (а22 + Ь22 + с22) = (r0) + Н, (76)
в котором г0 представляет собой начальное расстояние
Го = Ж - «2)2 + (Й1 -- ь2)2 + (С1 - с2)2 , (77)
а Н — постоянную величину, введенную при интегрировании, то мы могли
бы путем комбинирования этих семи отношений определить время t и шесть
начальных компонентов скорости a'r, b'„ c'v а2, Ь2, с2 как функции двенад-
цати конечных и начальных координат xv yv z1( х2, у2, z2, av b}, clt a2, b2, c2
и величины H (включающей также массы). Следовательно, мы могли бы
определить все, что зависит от способа и времени движения этой системы
двух точек, как функцию тех же самых граничных координат и той же вели-
чины Н. В частности, мы могли бы определить действие или накопленную
живую силу системы, т. е.
V = /771 J (X'2 + У12 + z'2) dt + т2 J (х^2 + у'22 + z'2) dt, (А2)
о о
как функцию этих тринадцати величин xv ylt zr, х2) у2, z2, alt Ьг, clt а2> b2, с2,
Н и вычислить вариацию этой функции
ЙХ1 + <5У1 + <5х2 дХг + ду2 + <5г2 dZ2 +
+ ~S^ 301 + dbl + 3ci + 3a2 + <5b2 3b<2 + &2 3Ci + 8H 3H- (B )
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
201
Однако сущность нашего метода состоит в том, чтобы предварительно
вывести выражение этой вариации при помощи нашего закона переменного
действия, а именно :
<3V = тг (х[ дхг — «1 даг + у[ ду1 — Ь[ дЬ1 + z[ 6z1 — с[ йсх) +
+ т2 (х% дх2 — Й2 да2 + у'г дуг — b2 db2 + z' dz2 — С2 дс2) + tdH, (С 2)
и в том, чтобы рассматривать V как характеристическую функцию дви-
жения, из формы которой можно вывести все промежуточные и все конечные
интегралы известных дифференциальных уравнений, разложив выражения
(С2) на следующие отдельные группы (включенные в (С) и (D)) :
6v ,6V
-=— = т, х,, т— = т, х,,
6х, оу, ’
6V ,6V
т— = т„ х,, -т— = т2 х2,
йх2 2 2’ 6у2 2 21
и
—= — т,а,, -^-=—т,Ь,,
6аг ’ 6Ь, ’
6V , 6V ,,
^=~т2а2, -^=-т2Ь2,
~s— — ТГЪ X/ .
OZ, ’
^--max2
(D2)
ЙУ т ,
s '— — —Ш, с,,
ОС, ’
dv /
6с2 “ т* Ci
(Е2)
и на следующее, уже встречавшееся ранее, уравнение
6V _,
6Н
В этом новом методе трудность интегрирования шести известных урав-
нений движения второго порядка (74) сводится к отысканию и дифференци-
рованию единственной функции V ; для того чтобы найти форму этой функ-
ции, мы должны применить следующие два уравнения в частных производ-
ных первого порядка :
1 ((йу-|2 ( 6V \2 г дул2)____1 к йу~|2 г йу-j2 с дула( =
2т1 К ЙХ! J ‘I 6ytJ ‘ [ 6z2 J J + 2m2 6x2J ‘ I 6у2 J ‘ \ йг2 ) )
= m1m2f(r) + H, (F2)
1 ((ЙУЙ2 [ ЙУ ~|2 Г ЙУ Ч 2| 1 [Г ЙУЧ2 , ( ЙУ ~|2 , ( ЙУ Ча| =
гт ^й^; ‘ ‘ ( йсх J / ”1 2m2 ll ЙЙ2 J ‘ I Й&2) I-1 йс2 J /
= /л1т2/(г0) + Н, (G2)
совместно с некоторыми простыми соображениями. Из изложенных выше
принципов легко вытекает, что интеграл этих двух уравнений в данном слу-
чае имеет вид:
V = У(х„ — а„)2 + (у„ — Ь„У + (z„ — с„)2 Н„ (пц — т2) +
<н’>
в котором х„, у„, z„, а„, Ь,„ с„ обозначают конечные и начальные координаты
центра тяжести системы:
х„
ffli Xi + т2 х2
т1 + т2
а„
01^+т2 а2
тг + т2
mi У1 + т2 у2
tn2 -f- т2
т1 + т2 Ь2
mi + т2
тг + т2
тг сг + т2 с2
+ т2
(78)
202
У. ГАМИЛЬТОН
а & — угол между конечными и начальными расстояниями г, г0. Мы также
написали для краткости
Р - ± ]^2 (m, + m2) [f (г) + ,
(79)
где применение верхнего или нижнего знака зависит от того, увеличивается
или уменьшается расстояние г; мы ввели три вспомогательные величины
h, Н,, Н„, определяемые условием
0 = ^+j7Fdr’ U2)
в сочетании с двумя следующими :
W1 f - йр дг =][<х — а )2 4- (v — b )2 4- (z — с )2"?г-
т1 + т2' J SH, аг ]1 {х" "> + °"' + с"> ]/ 2 Н„
н, + н„ = н.
Эти вспомогательные величины, хотя и являются функциями двенадцати
крайних координат, все же могут рассматриваться как постоянные при
вычислении трех определенных интегралов или пределов сумм многочислен-
ных малых элементов
Jpdr, j^-dr, j-^-dr.
Форма (Н2) для характеристической функции бинарной системы может
рассматриваться как главное или радикальное соотношение, которое вклю-
чает всю теорию движения такой системы и все детали этого движения
могут быть выведены из него при помощи нашего метода. Однако ввиду того,
что теория бинарных систем трудами более ранних авторов доведена до
большого совершенства, нам достаточно будет здесь дать вкратце несколько
примеров такого вывода.
14. Форма (Н2) характеристической функции бинарной системы опреде-
ленно включает, когда р заменяется своим значением (79), двенадцать вели-
чин х,„ у„, z„, а„, Ь„, с,„ г, r0, h, Н,, Н„ (кроме масс тг, т2, которые всегда
считаются данными); поэтому ее вариация может быть выражена сле-
дующим образом:
А1/ 6V A I 6V А. I А , 6V . , SV .. , SV .
6 v = 6х" + да" + “Ж” дЬ" + дс" +
I SV A I SV A I SV АО , 6V я. , SV , dV ...
+ Sr + <5г0-<5г°+ Ю + Sh М+ SH, (L )
Если в этом выражении положить для краткости
Я = ]/ 2 Н" + /опх
F + (у„ - Ь„у + (г„ - с„У ’
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
203
то мы получим
8х„ а^’ 8у„ Л(У„ Ь„), 8V , , ч 8V , ,, 8а„ Х^’ 8Ь„ У")’ 8z„ с")’ 8V (М2) 8с„ ~~ ^С" Z"> ’
а если положить
Ро = ± ]/2(mi + m2)[f(r0) + ~п^гГ} , (81)
Г \ ”<1 Ul2 / { о
то, так как знак радикала определяется тем же правилом, что и в случае р,
мы получим
8V 8г ~ _ т2р 8V _ —т2ra 8V _ 41^^ + m2h ,.,2^ т1 + т2 ’ 8r0 т1 + т2 ’ 8& mt + т2 ' '
Кроме того, согласно уравнениям условий (I2), (К2) мы имеем
^ = ° (О2)
И ш. - т. - f рг > м- + >н- ~ >н 0”) Го
Поэтому выражение (L2) может быть преобразовано следующим образом:
6V = Я{(х„ - а„) (дх„ — да„) + (у„ — Ь„) (ду„ — дЬ„) +
+ (z„ - с„) (dz„ - дс,,)} + (Р дг - Ро дг0 + hd&) +
***1 “Г ***2
+ J -у-д/7 , (Q2)
Го
и при помощи нашего общего метода может быть разложено на двенадцать
отдельных выражений для конечных и начальных компонентов скоростей,
а именно :
, 1 dv Л . ч , т2 / or , , тг А
х{ =-----si-----------(х„ — аЛ Ч------— р---------Н h—s— ,
1 mt 8xt т1+т2 ' ’ т1 + т2 V 8xt 1 8xt)
, 1 8V Л , , . . т2 ( 8г , 8& А
У1 ~~ 8yt ~ + т2 (У" ~ ") “I" т2 [Р 8уг <5yJ ’
~ = ~~~ (Z„ - С„) + + h ,
1 mt 8 zt + т2 ' Wj + т2 у 8zt 1 8i zr ) у
, __ 1 8V ___ А . nit ( 8г 8&\
2 т2 8х2 mt + т2 ' т1 + т2 V <5х2 8х2) ’
,___ 1 8V А . , . . fflj ( 8г 8b \
У2 — т2 8у2 ~ т1 + т2 — т1-\-т2 [Р ~8у^ Л <5yJ ’
, __ 1 8V ___ А . . т1 ( 8г , ь 8& \
Zz т2 6z2 т14- т2 ^Z" С"' т1 + т2 у dz2 8z2 J
204
У. ГАМИЛЬТОН
и
01 mt 8а2 т1+ т2 'Х" а"' тх + т2 If0 8at 8at J ’
,, — 18V _ 2 , h\ л- m* (n Sr° h
01 ~ ~ mi+m2 m1 + m2 I™ n 8bJ ’
, __ —1 8V _ 2 , _____ > , m2 f 8r0 __ , 8&
C1 — nit Set — mi + m2 *Z" ' nti + тг v0 hi J ’
, _ —18V _____ 2 ___ . mi ( 8r0 __ , 8& )
°2 m2 8a2 mt + m2 ' " "’ ' mt + m2 V0 8a2 <3a2 J ’
,, —18V 2 , । m, ( 8r„ . 8& \
v2 — “Z T7 ---- ~~Z j ~ \У/> Ь„) + ZZ j I Po Ah Ah I >
Z7lg 00^ ТП-^ 771% /711 “H 771% \ O&g '
C' = ~1<5V = Я (z _ c ) + mi fo Ao_ _ л Jt)
2 m2 8c2 mi + m2 ' " mt + m2 V0 $c2 dc2 J
и на следующее выражение для времени движения системы:
которое при помощи равенств (К2), (79) и (80) может быть выражено в виде
тг + т2
2
(U2)
Шесть уравнений (R2) дают шесть промежуточных интегралов, а шесть
уравнений (S2) дают шесть конечных интегралов шести известных диффе-
ренциальных уравнений движения для любой бинарной системы, если мы
исключим или определим три вспомогательные величины й, Н„ Н„ при
помощи трех условий (I2), (Т2), (U2). Таким образом, если мы заметим, что
расстояния г, г0 и заключенный между ними угол зависят только от отно-
сительных координат, которые могут быть обозначены
х2 — f > У1 Уг — "Ч > zi z2 — £ > I (g2)
flj <z2 = a > й2 = P, Ci c2 = у, j
то мы, выполнив простые вычисления, легко получим три промежуточных
интеграла для центра тяжести системы:
x'„t = x„ — a„, y'„t = y„ — b„, z'„t=z« — c« (83)
и три конечных интеграла
a',t = x„ — a„, b'„t = y„ — b„, c'„t = z„ — с„, (84)
выражающих хорошо известный закон прямолинейного и равномерного
движения этого центра. Мы получаем также три промежуточных интеграла
для относительного движения одной точки системы вокруг другой:
£, _ „ бг , д&
8^ + Л 8^ ’
(85)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
205
и три конечных интеграла
, дг0 , д&
а ~ ?о ~d^~h ~8(Г ’
а, _ Sr0 , д&
Р ~ Ро dfi п др ’
, дг„ , д&
У — Ро Л -fy- >
(86)
в которых вспомогательные величины h, Н, определяются посредством
равенств (I2), (Т2) и в которых зависимость величин г, г0, & от f, ч, С, а, р, у
выражается уравнениями
Г = ff2 + ?72 + С2 , Го = У а2 + /?2 + у2 , /То cos •& = fa + -f- Су.
Теперь, если мы для краткости напишем
Д __ _Р_I D _ Г> __ Ро [
г I* r2tg# ’ rrosin# ’ r0 ' dtg# ’
то получим три промежуточных интеграла
f' = AC - Ва, ??' = Ari - Вр, С = АС — By
и три конечных интеграла
a' = Bf — Ca , р' = Вч~Ср, у' = ВС — Су
уравнений относительного движения. Эти интегралы дают
Сч' — Ч? = аР' — Ра' — В (arj — (1$),
чС — С?/ = Ру' — уР' = в (PC — уч),
СС' — СС = ya' — ау' = В (уС — аС)
С (ар' — Ра') + С (Ру' — уР') + Ч (Уа' — аУ') = 0;
(87)
(88)
(89)
(90)
(91)
(92)
они содержат, следовательно, известный закон равных площадей и закон
плоскости относительной орбиты. Если ради упрощения мы возьмем эту
плоскость вместо плоскости Сч, то величины С, С' у, у' исчезнут, и мы смо-
жем написать
f = rcos6, ?? = г sir. О, С = 0, a = rocos0o> Р — гоsin, У=0 (93)
и
С' = г' cosfl — 0' г sin 6 , ч' = sin 0 — О' г cos S, С = 0,1
a'= г'cos 0О — r0 sin 60, р' — rosin0o + 0'orocos0o, у' = 0.j
При этом углы 0, 0о отсчитываются от какой-либо неподвижной линии
в плоскости, причем они таковы, что их разность
6 - 60 = . (95)
Эти значения дают
Сч' — ЧС = г20', аР' — ра' = г^о , аг] — рС = rr0 sin & (96)
206
У. ГАМИЛЬТОН
и, следовательно, при помощи равенств (88) и (91) получаем
г2О' = г^,>й. (97)
Отсюда величина-|-й представляет собой постоянную секториальную ско-
рость в относительном движении системы, причем, как легко заметить, этот
результат не зависит от направлений трех прямоугольных координат. Вели-
чины (93), (94) дают также
fcosO +sin в = г,
acos0o + /?sin0o = ro,
f'cosS + У sin 6 = г', acos 0 +/?sin 0=rocos$J (9g)
a' cos O0 + /5' sin 0O = r'o, f cos 60 + у sin 60 = r cos & j
и, следовательно, посредством промежуточных и конечных интегралов
(89), (90) получим
г' = Р, Го = Ро • (99)
Эти результаты, очевидно, согласуются с условием (Т2) и посредством
равенств (79) и (81) дают для всех направлений координат :
г'2 + - 2 (п?1 + т2) f (г) =
= r'o2 + - 2 (тх + Щ2) / (Го) = 2 Н, Ц- + 4-1 . (100)
Го \,,ll ,flzJ
Поэтому другая вспомогательная величина Н, также является постоян-
ной, не зависящей от времени, и входит как таковая в постоянную часть
выражения I г'о2 + -^-1 квадрата относительной скорости. Уравнение условии
(I2), связывающее эти две постоянные h, Н, с пределами длин радиуса-вектора
гис углом &, описываемым этим радиусом при вращении от его начального
до конечного направления, представляет собой уравнение плоскости относи-
тельной орбиты, а другое уравнение условия (Т2), связывающее эти две по-
стоянные с теми же крайними расстояниями и с временем, дает закон скоро-
сти взаимного сближения или удаления.
Следует отметить, что часть V, полной характеристической функции V,
которая представляет относительное действие и определяет относительное
движение в системе, а именно:
\ Г о /
при помощи равенства (I2) может быть написана в виде
= Г [р _ й dr (W2)
mt 4- т2 J v dh J
Го
или окончательно при помощи равенства (79) — в виде
V, = 2 J dr ; (X2)
Го
само условие (I2) также при помощи равенства (79) может быть преобразо-
вано следующим образом :
* = (Y2)
Го
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
207
Все эти результаты легкого поддаются проверке. Уравнения в частных
производных, связанные с законом относительной живой силы, которым
должна удовлетворять характеристическая функция V, относительного дви-
жения, могут быть написаны в следующем виде :
SV’ V I 1 Ч2___ 2m1m2 (j j i и \
«М2 , 1 ( 2mim2
WJ +^ГСЖ1 - m1 + m2 (Uo + H') >
№
и если вариация первых уравнений из этой пары берется по отношению к
г и &, причем следует обратить внимание на динамические значения производ-
ных характеристической функции, то это приведет (как и в предыдущих
случаях) к известным дифференциальным уравнениям второго порядка-
О невозмущенном движении планеты или кометы вокруг Солнца;
зависимость характеристической функции такого движения от хорды
и суммы радиусов
15. Пусть для определенности
/(г) = у, (101)
т. е. мы будем рассматривать такую бинарную систему как планета или
комета и Солнце, подчиненную ньютонову закону притяжения; для крат-
кости положим
m1 + m2 = /z, — = Р, 2н =а’ ( 02)
Теперь характеристическая функция V относительного движения может
быть выражена следующим образом :
= + J dr) > (Аз).
Г о
где р рассматривается как функция крайних радиусов-векторов г0 и г и
ограниченного ими угла •&, включающего также величину а или связанную
с ней величину Н, и определяемого условием
м ,/2 , • <в’>
Г2 \------------f
у гр ар г2
т. е. производной от выражения (А3), взятой по р. При этом верхний знак
в каждом выражении берется, когда расстояние увеличивается, а нижний
знак — когда это расстояние уменьшается; величина р рассматривается
при вычислении обоих определенных интегралов как постоянная. Из ска-
занного выше вытекает, что эта величина р является постоянной также в
том смысле, что она не зависит от времени и не меняется в процессе движения
и что условие (В3), связывающее эту постоянную с г, г0, &, представляет
собой уравнение плоской относительной орбиты, которая, следовательно
(как это давно известно), является эллипсом, гиперболой или параболой
в зависимости от того, является ли постоянная положительной, отрица-
тельной или нулем, причем начало г всегда представляет собой фокус кривой,
208
У. ГАМИЛЬТОН
а р представляет собой полупараметр. Отсюда также вытекает, что время
движения может быть выражено следующим образом:
и, следовательно,
8V, _ 2а2 8V,
8Н, т1тг 8а
(С3)
(D3)
Последнее выражение известно. Здесь мы ограничиваемся случаем, когда
а > 0, и вводим известные дополнительные величины, называемые эксцентри-
ситетом и эксцентрической аномалией, а именно :
и
что дает
± ]г2аг — г2 — pa = aesinv, .
(ЮЗ)
(Ю4)
(Ю5)
где v считается постоянно возрастающей во времени; следовательно, как
хорошо известно,
г = а(1 — ecosv), г0 = а(1 — ecosvo),
(VT+T v] (1П-+Т v) (106)
=2 tg-1 !]/т^1 I! - 2tg-1 н тй ?!
и
1 /
f= и—(v — v0 — е sin v + е sin v0). (107)
г А4
Мы находим, что выражение характеристической функции относитель-
ного движения
.. _ mt т2 Г (г а)_______ ,рз<
J l/IZXZT ’
г» I г а г2
выведенное из (А3) и (В3), может быть преобразовано следующим образом :
V, = m1m2V — {v — v0 + е sin v — е sin v0),
1 A*
(F3)
где эксцентриситет e и конечные и начальные эксцентрические аномалии v,
vQ должны рассматриваться как функции конечного и начального радиусов
г, г0 и угла •&, определяемых посредством уравнений (106). Выражение (F3)
может быть написано следующим образом :
V, = 2 /т?! m2 j/(у, -|- е, sin v,),
если мы для краткости положим
V — V*
v,-------2““
v 4- vB
е, — е cos —
(G3)
(Ю8)
Для полного определения характеристической функции данного относи-
тельного движения остается, следовательно, определить две переменные
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
209
v и е в качестве функций г, г0, & или функций какой-либо другой группы
величин, которые характеризуют форму и величину плоского треугольника,
ограниченного конечным и начальным радиусами-векторами и эллиптической
хордой.
Для этой цели удобно ввести саму эллиптическую хорду, которую мы
обозначим ± т, так что
т2 = г2 г2 — 2rocos$, (109)
так как эта хорда может быть выражена как функция двух переменных
v,, е, (включая также среднее расстояние а) следующим образом. Значение
(106) угла & с помощью равенства (95) для 6 —0о дает
®-2tg-ij]/’4^4tgf! = 0o-2tg-ijy-p4- tg-j-Us, (по)
( у 1 с ") ( у 1 - с )
где <5 представляет собой новую постоянную, независимую от времени,
а именно одно из значений полярного угла 9, соответствующее минимуму
радиуса-вектора, и, следовательно, с помощью (106):
г cos (0 — S) = a (cos v — е), г sin {в — S) = а /1 — е2 sin v, I
_____________________________________________________ Hill)
r0 cos (0O — S) = a (cos v0 — e), r0 sin (0O — S) = a |/1 — e2 sin v0. J
Эти выражения дают следующее значение для квадрата эллиптической
хорды:
т2 == [г cos (6 — S) — r0 cos (0О — ш)}2 + {г sin (0 — S) — r0 sin (в0 — й>)| =
= a2 {(cos v — cos г>0)2 + (1 — г2) (sin v — sin г>0)2} =
= 4a2 sin ^(sin —_|_ (i _ ezy (cos ” ”° j | = 4a2(l —e?) sinw?. (112)
Мы можем также считать, что т имеет тот же знак, что и v, если мы в после-
довательные эллиптические периоды или обращения, начинающиеся от
начального положения, будем попеременно рассматривать его то как поло-
жительный, то как отрицательный.
Кроме того, если мы обозначим через о сумму двух эллиптических, конеч-
ного и начального, радиусов-векторов, так что
° = г + г 0
(ИЗ)
то при наших сокращениях имеем
а = 2а (1 — с, cos г?,);
(114)
переменные v,, е, являются поэтому функциями а, т, а, и, следовательно,
характеристическая функция V сама является функцией этих трех величин.
Поэтому мы можем написать
у = w .рр.
m1 + m2 ’ ' '
причем w является функцией а, т, а, форму которой следует определить
путем исключения v, и е, из трех уравнений :
w = 2 |//ла (у, + е, sin v,),
о = 2а (1 — е, cos гь),
т = 2а (1 — г?)2 sin v,,
(I3)
14 Вариационные принципы механики
210
У. ГАМИЛЬТОН
и можно считать, что эта новая функция w сама является характеристической
функцией эллиптического движения. Закон ее варьирования выражен сле-
дующим образом в обозначениях, принятых в данной работе:
div = £'<?£— а' да + rf дт) + др + С' <5£ — / ду + (К3>
В этом выражении f, г/, С представляют собой относительные координаты
точки т1 во время t, отнесенные к другой притягивающейся точке т2 как
к началу и к любым трем прямоугольным осям; £', гр, t,' представляют
собой их приращения или три прямоугольных компонента конечной относи-
тельной скорости ; а, Р, у, а', р', у' представляют собой начальные значения
или значения в момент времени, равный нулю, этих относительных координат
и компонентов относительной скорости; а представляет собой величину, не-
зависимую от времени, а именно среднее расстояние двух точек щх, т2, а //
представляет собой сумму их масс. Теперь все свойства невозмущенного
эллиптического движения планеты или кометы вокруг Солнца могут быть
выведены новым способом из упрощенной характеристической функции w
путем сравнения ее вариации (К3) со следующей формой:
в которой
. <51Т „ . <51Т <51Т
<7 = + + + /«2 + + у* ,
т = ± а)2 + (?? -ру^Г-yY .
(L3)
(М3)
Это сравнение возвращает нас назад к общим интегральным уравнениям
относительного движения бинарной системы (89) и (90), но теперь мы имеем
следующие конкретные значения коэффициентов А, В и С :
. 1 <51V 1 <5w R _ 1 <51V „ _ 1 Sw 1 <51V N3
A ~ Y~Sa + Y <k ’ С ~ т <5т ’ ~ r0 да + r <5r U Z
div <5iv <5iv
и для трех частных производных имеем следующее соотно-
шение :
<5iv . <5w . <5iv w
a ~—p a —p t , (O3)
Sa Sa Sr 2 ’ '
где w является однородной функцией степени у по отношению к трем вели-
чинам а, а, т. Мы имеем также, приняв во внимание равенство (I3),
Sw __ f1 sinz>, <5iv _ V ц У1 — ei .p3.
Sa \ a e, — cos v ’ Sr f a cos v, — e, ' ’
Отсюда
Sw Sw —2fir i' |2 _L ( <5w)2 /i ___________ 4/ta ~3.
Ar ~~ if- ’ CdrJ + — YUY • 14 '
И, наконец, отсюда можно вывести следующие замечательные выражения:
(R3)
Эти выражения, как мы убедимся, окажутся очень важными для прило-
жения настоящего метода к теории эллиптического движения.
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
211
16. В данном случае мы не станем вдаваться в какие-нибудь подробности
такого приложения, но можем отметить, что то обстоятельство, что характе-
ристическая функция включает только эллиптическую хорду и сумму край-
них радиусов (кроме среднего расстояния и суммы масс), представляет при
помощи нашего общего метода новое доказательство хорошо известной тео-
ремы, заключающейся в том, что эллиптическое время также зависит от той
же хорды и суммы радиусов и дает новое выражение для закона этой зави-
симости, а именно [81]:
f = —- • (S3)
ft ёа ' ’
Можно отметить также, что та же форма характеристической функции
эллиптического движения при помощи нашего общего метода приводит
к следующим любопытным, но не новым свойствам эллипса, заключающимся
в том, что если провести к такой кривой две касательные из какой-либо
общей внешней точки, то эти касательные стягивают равные углы в одном
фокусе, а также стягивают равные углы и в другом. И обратно, если какая-
нибудь плоская кривая обладает этим свойством, будучи отнесена к непо-
движной точке в своей собственной плоскости, которая может быть принята
за начало полярных координат г, 0, то эта кривая должна удовлетворять
следующему уравнению :
, (/16] . 1 .. . а 1
ctg —Ы - - = (J + 2) -й ,
° ( 2 ) г ' ' df) г ’
которое может быть приведено к следующему виду :
fJL + JO 1 = 0
( dO d63 J г
и отсюда интегрированием получим
г =___________________________________?______
1 + е cos (6 — со) ’
(П5)
(116)
(И7)
следовательно, кривая представляет собой коническое сечение, а неподвиж-
ная точка — один из ее фокусов.
Свойства параболического движения являются предельными случаями
свойств эллиптического движения и могут быть выведены из них, если мы
возьмем
Н = О или а=оо. (118)
Следовательно, характеристическая функция w и время t в параболическом,
так же как и в эллиптическом, движении представляют собой функции
хорды и суммы радиусов. Таким образом, полагая в предыдущих выраже-
ниях а бесконечным, мы находим для параболического движения следующие
уравнения в частных производных :
8w <5w ।
8а ' 8т )
4 /I
а 4- т ’
' <5iv <5w)2
8а 8т)
(Т3)
4 ц
а — т
Действительно, легко можно показать, что параболическая форма упрощен-
ной характеристической функции w будет
W = 2 (fa 4- т ± Уи — т ) ,
(U3)
14!
212
У. ГАМИЛЬТОН
где т, как и раньше, представляет собой хорду, а а — сумму радиусов, в то
время как аналогичный предел выражения (S3) для времени будет
t== +
(V3)
Последнее выражение известно [82].
Формулы (К3) и (L3), к сравнению которых мы свели изучение эллипти-
ческого движения, распространяются также на гиперболическое движение
и в любой бинарной системе, подчиняющейся ньютоновым законам притя-
жения. Упрощенная характеристическая функция может быть выражена
определенным интегралом
(W3)
где функция w по-прежнему связана с относительным действием V, посред-
ством уравнения (Н3), тогда как время t, которое при помощи закона пере-
менного действия всегда может быть выведено из этой функции, представлено
следующим связанным с ним интегралом :
И Uv-
t =
(X3)
при условии, что в пределах интегрирования радикал не исчезает и не ста-
новится бесконечным. В том случае, когда это условие не соблюдено, мы все
же можем выразить упрощенную характеристическую функцию w и время
t при помощи следующих аналогичных интегралов :
и
,= f±(^U)U
(Y3)
(Z3)
в которых мы можем для краткости положить
ст -4- т ст — т
°' = “_2—‘
(П9)
и в которых легко определить знаки радикалов. Однако, если мы в настоящий
момент попытаемся полностью осуществить эти преобразования, это заведет
нас слишком далеко ; сейчас пора заняться рассмотрением свойств систем,
состоящих более чем из двух точек.
О системах из трех точек вообще и об их характеристических функциях
17. Для любой системы из трех точек известные дифференциальные
уравнения движения вто рого порядка охватываются следующей фор-
мулой :
(xj dXi + у'! <3yr + <5гх) + m2 (х2 <3х2 + у2 <5у2 + z£ <3z2) +
+ Щ3(х3дх3 + y3dy3 + z3dz3) = (120)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
213
причем известная силовая функция U принимает форму
U = тх т2 /(1,2) + ms /(1,3) + т2тз /<2,3) > (121)
где /(2-3) соответственно представляют собой функции трех следую-
щих взаимных расстояний точек системы :
/-(1.2) = У(хх - Х2)2 + (ух - у2)2 + (zx - z2)2 . r(1.3) = f(X1 - Х3)2 + (ух - у3)2 + (ZX - z3)2 , = У(х2 - Х3)2 + (у2 - уз)2 + (z2 - z3)2 . J (122)
Следовательно, известные дифференциальные уравнения движения отдельно
для точки т1 имеют вид:
Xl = m2 kx + m3 <5/(i.s) <5xx ’
„ <5/(1.2) У1=^2-ТУГ + m3
zx = т2 — 1 2 dZi + m3
(123)
для точек т2 и т3 имеем шесть аналогичных уравнений. Здесь х{ и т. д.
обозначают компоненты ускорения точек ть т2, т3 или вторые производные
их координат, взятые по времени. Проинтегрировать эти уравнения — значит
найти с их помощью девять соотношений между временем t, тремя массами
гих, т2, т3, девятью переменными координатами хх, ух, zx, х2, у2, z2, х3, у3, z3
и их девятью начальными значениями и девятью начальными мерами их
приращений, которые можно обозначить как ах, blt cv а2, b2> с2, а3, Ь3, с3,
а[, b'v q, а2, b2, с2, а3, Ь3, с3. Известный промежуточный интеграл, включаю-
щий закон живой силы, а именно:
у тх.(х^2 + у(2 + z'2) + у т2 (х'2 + у'2 + z'2) + у т3 (х'2 + у'2 + z'2) =
= т1 т2 /(1’2) + пц т3 /(1>3> + т2 т3 /<2>3) + Н, (124)
дает следующее начальное соотношение :
- т1 (a? + b? + су2) + ~т2 (а22 + Ь22 + с22) + у т3 (а32 + Ь32 + с’32) =
= т2 + т1 т3 + т2 т3 + Н, (125)
в котором /0(1,2), Д1,3), /(2,з> конструируются из начальных координат точно
так же, как /(1>2), /<1>3), /<2,3) из конечных координат. Теперь, если бы мы знали
девять конечных интегралов уравнений движения этой тройной системы
и сочетали их с начальной формой (125) закона живой силы, то мы имели
бы десять соотношений для определения десяти величин t, а[, b'lt сх, а2, Ь2, с2,
«з, Ь3, с3, т. е. времени и девяти начальных компонентов скоростей трех точек
как функций девяти конечных и девяти начальных координат, а также
величины Н, включая также и массы. Мы могли бы таким образом определить
все, что зависит от способа и времени движения системы из ее началь-
ного в конечное положение, в качестве функции тех же граничных
214
У. ГАМИЛЬТОН
Координат и Н. В частности, мы могли бы определить действие V или нако-
пленную живую силу системы, а именно:
V = т1 J (х']2 + у'2 + zj2) dt + m2 J (x22 + У22 + 42)dt + ms j" (42 + Уз2 + 42)dt,
0 0 0
(A4)
как функцию этих девятнадцати величин xv yv zx, x2, y2, z2, x3, y3, z3, av br, q,
а2, b2, с2, а3, b3, с3, Н и могли бы вычислить вариацию этой функции
о,, SV X , SV . , *V . 1 SV X 1 SV XK 1 SV X , dV — jj uXi 4" x “ 4—5— dz-t4- ® vct-t 4- Au vb-t 4- * 4“ <5xt 1 1 8yx 71 1 1 1 8ax 11 11 <5^ 1 1
. ёУ . ,dV . , dV . ,8V. , 8V .. , 3V . , + <*2+^- Sz2 &2+ <4+ ^2+ ^2 +
,8V. , 8V . ,8V. , 8V . , 8V .. 8V . . 5V „„ + <5x3 ЙХз+“<5у3 ЙУз+ &3 &з+ <5a3 Ййз+ <503 + <5c3 дсз + SHdH'
(B«)
Однако закон переменного действия предварительно дает для этой
вариации выражение
д V = т1 (х[ дхг — а[ dq + ух <5yq — Ь[ ЬЬг + z'r dzr — bc±) +
+ m2 (x2 dx2 — a2 ba2 + y2 by2 — b'2 bb2 + z2 bz2 — c2 bc2) +
+ m3 (x3 dx3 — a3 ba3 + y3 by3 — b3 db3 + z3 dz3 — c3 bc3) + t dH
(C4)
и, следовательно, показывает, что отыскание всех промежуточных и конеч-
ных интегральных уравнений движения системы может быть сведено к
отысканию и дифференцированию этой одной характеристической функ-
ции V, потому что если бы мы знали эту одну функцию, то имели бы девять
промежуточных интегралов известных дифференциальных уравнений в виде
ЗУ дУ ёУ
8х1 = mi х[, 8У1 = ГП1У'1, 8гх ^miz'i-,
ЗУ ёУ ёУ
8х2 = т2 х2, 8у2 = т2у'2, ёг2 = m2z2;
ду ёУ дУ
дх3 = т3х'3, 8у3 = т3у'3, 8z3 = m3z'3
(D4)
и девять конечных интегралов в виде
ёУ , ёУ ёУ ,
8V , ёУ ,, ёУ ёа2 ~ т2а2’ -§ь; — т2Ь2> — ~т2 С2 ; (Е4)
<5V , dv ёУ да3 ~ тз(Ъ, ёь;——тзьз, ~^——т3с3,
причем вспомогательная постоянная Н исключается и время t вводится
посредством другого уравнения, часто встречающегося в данной работе:
1 8Н ’
(Е)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
215
Тот же закон переменного действия подсказывает еще один метод иссле-
дования формы этой характеристической функции, не требующий предвари-
тельного интегрирования известных уравнений движения, а именно, инте-
грирование двух уравнений в частных производных, связанных с законом
живой силы :
1 (руд2 , рул2, f m2i_______________1 if m2 pv\ /m2i
2mx <5xx J "T” V I J J ‘ 2m2 i llx2 J (3y2) ‘ ( Sz2 J J ’
+ lip (О 2+ (жГ + ®2} = m2 /<1,2) + m> m3 /(1’3) + m2 m3 + H
(F4)
i fpv)2 fm2 , fm2i____________i_jr,5l/f2, pp j pp I ,
2ml |l. Sat J ‘ ( dbx ) "F (.) J "F 2 m3 ц <5a2 J ‘ J 1 t<5c2 J ( ‘
, i (rm2 , (Sv\2 , m2i л» > , и
+ "2тТ|Ы +Ud + W 1 = +
(G4)
Для того чтобы облегчить определение этим способом функции V, которая
зависит от 18 координат, мы можем, исходя из принципов, изложенных
ранее, разделить ее на часть V,,, зависящую только от движения центра
тяжести системы и определяемую формулой (Н1), и на часть V,, зависящую
только от относительных движений вокруг этого внутреннего центра и рав-
ную накопленной живой силе, связанной только с этим относительным
движением. Таким образом, трудность сводится к определению относитель-
ного действия V, ; и если мы введем относительные координаты
fl — x± x3, -П1 = У1~Уа, V2 = y2~ya< C1 = Z1_Z3, 1 (126)
h = X2 -^3, ^2 — Z2 -4 1
al = Я1 -Оз, Pl = ^3 > 71 = Ci c3, i (127)
(Z2 = ^2 -Оз, P2 ~ ^2 ^3 > ?2 — C2 -C3, 1
то, исходя из принципов, изложенных в десятом и последующих параграфах
легко убедиться в том, что функция V, может рассматриваться как завися-
щая только от этих относительных координат и от величины Н,, аналогич-
ной Н (помимо масс системы), и что она должна удовлетворять двум урав-
нениям в частных производных, аналогичным (F4) и (G4), а именно :
1 fpm2 , (ду,у рт21_______1 fpm , РМ , pm 2|
2mx Ц <5{x J ‘ ( I <5Ci J f ‘ 2m2 |t <5f2 J ‘ I 'la J ‘ I <5f2 J J ‘
1 ifSv, sv,\ (Sv, , 5v,) , (Sv, m2l_
+ ipRip + ipj + (ip + ip) + lip + ipj j -
= m2 p2> 4- m1 ms p-v + m2 m.. + H, (H4)
и
i ffsv, v pip pm2l__________1 [pip2 pm2 pm2l
2m1 Sat ) ~m <5/?! J ‘ ( Syt J J ‘ 2m2 Sa2 J ‘ ( <5/?2 J ‘ I <5y2 J J ‘
. 1 jfsv, <np2 . (Sv, £m2 , pK/ . m2i _
2m3 ^ax “F &2 J "F ( Sp1 “F sp2 J ( Sy1 + Sy2 ) | —
= mi m2 Д1’2) + mx m3 + m2 m3 + H,. (I4)
216
У. ГАМИЛЬТОН
При этом закон вариации этой функции по z' имеет вид:
<5 V, = t SH, + mt — а[дах + S^ - ft dft + С' +
“Ь ^2 (^2 ^2 ~~~ ®2 ^®2 + ^?2 ^?2 ^2 ^/^2 ""Ь ^2^2 У2 ^Уг)
- {(т1 + т* (т1 + т* -
— (^оф + т2а') (т^ + т2<5а2) + (т^ + гад') (т1&г]1 +—
— (™1& + т2Р'2) (т1др1 + т2<2) + (^й + m2C') (тх Сх + m2ft>) -
- (m17; + m2y')(m1d71 + m2dyii)}. (К4)
Это выражение таким же образом, как и выше, распадается на шесть про-
межуточных и шесть конечных интегралов относительного движения,
а именно на следующие уравнения :
1 SV, SV, = fl — -Vi = d- m! & + m2 ПН + m2 + m3 ’ m1 + m2+m3 ’ m1 c; + m2 c; 1 1 1 = r - ss, “Ь ^2 ^2 . mi-m, + m3 ’ mx + m2 % . (I?)
sv,
1 SV, ^2 SV, + m2 + m3 ’ Ci ^2 ^2
И "h + m2 + m3 ’ 8^ ' + m2 + m3 J
г! — 1 Sv, m1 ft + m2 a2 —1 SV, mx a' + m2 a'
—1 Sa1 SV, al =&- = 7i~ ft + m2 ft 1 3 йа2 SV, a2 = ^- = ?2- m1 + m2 + m3 rrii + m2 ft • (M4)
—1 <5ft SV, тягает, ’ ml ft + m2 ?2 П?2 — 1 <5ft SV, m1 + m2 + m3 mi yi + m2 y'2
m2 m3 J П?2 8y2 m1 + m2+ m3
которые следует комбинировать с нашей старой формулой
<5 К/
SH,
t .
(О1)
18. Величина Н, в V, и аналогичная величина Н„ в V,,, действительно,
независимы от времени и не меняются в ходе движения, но дух нашего метода
требует того, чтобы при выведении абсолютного действия или первоначаль-
ной характеристической функции V из двух частей V, и V,, мы рассматри-
вали эти две части Н, и Н„ первоначальной величины Н как функции, каждая
из которых включает девять начальных и девять конечных интегралов точек
тройной системы ; при этом формы этих двух функций восемнадцати коорди-
нат и Н определяются двумя условиями :
Sv, <5к„
sh, ~~ sh„ ’
Н, + Н„ = Н.
(N4)
Однако из этих условий вытекает, что когда мы берем вариацию полной
первоначальной функции V первого порядка по отношению к восемнадцати
координатам, то можем рассматривать две вспомогательные величины Н,
и Н„ как постоянные ; следовательно, мы имеем следующие выражения
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
217
для частных производных первого порядка V, взятых по координатам,
параллельным х:
ЗУ ЗУ, ЗУ,, ЗУ _ ЗУ, 1 т1 ЗУ,, .
3xt — 1 + m2 + m3 3x„ ’ 3at За, mj + ш2 + т3 ёа„ ’
ЗУ jy^ <5^2 + П72 ЗУ,, ЗУ ЗУ, । ЧЬ- Wj 4- т2 + т3 ЗУ,, (О4)
Зх2 mi + m2 + m3 ёх„ ’ За2 За2 За,, ’
ЗУ -ЗУ, ЗУ, m3 ЗУ„ ЗУ ЗУ, ЗУ, т3 ЗУ,,
Зх3 3^2 X/z За3 ёа1 За2 ' т14-т24-т3 ёа„ ’
совместно с аналогичными выражениями для частных производных того
же порядка, взятых по другим координатам. Подставляя эти выражения
в выражения формы (О) :
ёУ ёУ ёУ ЗУ ёУ ёУ _
Зх, "I- Зх2 "г Зх3 "г За, ‘ ёа2 ёа3 ’
5У1 '^Уг йУз 332 1 ёЬ3 ’ v
ёУ ёУ ёУ ёУ ёУ ёУ = п
ёгх "i- ёг2 "т- 3z3 Зе, ёс2 ёс3 ’
мы убеждаемся в том, что эти уравнения становятся тождествами, так как
ёУ„ ёУ„ _ „ ёУ„ ёУ„ __ „ ёУ„ ёУ „ _
ёх„ ""Г” ёа„ ’ ёу„ ‘ ёЬ„ ’ ёг„ ёс„
(Q4)
Однако, подставляя аналогичным образом выражения (О4) в уравнения
вида (Р), первое из которых для тройной системы имеет вид:
ёу ёУ , зу ЗУ , ЗУ зу ,
- У1-ЗГ + -ёу; - &Г + х*-ёу; ~ Ь Зх? +
+ а! 3&! Ь1 ёаг + “2 ёь2 &2 За2 + аз — °, (R >
и принимая во внимание условие
ЗУ,, , ЗУ,, „
- Ь"~ёаГ = 0
ЗУ,, ЗУ,, ,
Х" ёу„ У" Зх„ +а" ёЬ.
(S4)
наряду с двумя другими аналогичными условиями, мы найдем, что часть V,,
или характеристическая функция относительного движения тройной системы,
должна удовлетворять трем следующим условиям, включающим ее частные
производные первого порядка и первой степени :
n t ЗУ, ЗУ, , . ЗУ,
0 3f, + Srh
п ЗУ, . ЗУ, , ЗУ,
0 3Cj 3% +,?2
п _ г Зу, ЗУ, . ЗУ,
3^
л I7'
~ За2 ’
ЗУ,
ЗУ, , ЗУ, о ЗУ, , ЗУ,
^2 + а! 01 да3 + а2 3/32
.ЗУ, ЗУ, ЗУ, ЗУ,
+ &У1 71 + 72 ^2 ’
ЗУ, , ЗУ, ЗУ, , ЗУ, Зу,
2 ЗС2 + У1 ёаг ai ёу1 У2 ёа2 а2 ёу2
(Т4)
Отсюда видно, что эта функция может зависеть только от формы и размеров
пятиугольника, вообще не плоского, образуемого точкой /п3 (рассматривае-
мой как неподвижная) и начальными и конечными положениями двух
218
У. ГАМИЛЬТОН
других точек тхи т2; например, пятиугольник, углы которого расположены
в следующем порядке : т3) (тх), (пъ,), т2, mv причем (тх) и (т2) обозна-
чают начальные положения точек т1 и т9 относительно т3 как неподвиж-
ного начала. Форма и величина этого пятиугольника могут определяться
десятью взаимными расстояниями его пяти вершин, т. е. пятью сторонами
и пятью диагоналями, которые могут быть обозначены следующим образом :
^з(^1) = , (т1) (т2) = , (т2) ГС2 =
т2 mx , mx m3 = , m3 (m2) = \Ty ,
; m1)m2=^yd2 , (m2)mx = ]fd3 , m2m3 = У^, m1(m1)=ydy,
(128)
где значения Sx,. . ., d5 в качестве функций двенадцати относительных коор-
динат таковы :
sx = <4 + ^ + 7*, S2 = (a2-a1)2 + (j52-^)2 + (72-71)2,
S3 = (f2 - a2)2 + (Ъ - &)2 + (C2 - К)2,
S4= (fi - f2)2 + (m ~ %)2 + (Ci - C2)2 , S5 = f2 + + Cf, g)
di = «! + ft + 7l, d2 = (f2 - ax)2 + (r)2 - + (C2 - ytf ,
dS = (fi - a2)2 + fri - ft)2 + (Ci - y2)2 ,
d4 = f22 + ^ + C!, d5 = (fi-ai)2+ (m-ft)2 + (Ci-71)2.
Эти десять расстояний и т. д. не являются, однако, полностью независи-
мыми, а связаны одним уравнением, а именно [83] :
0 =SfS2 +S2S2 +S|S2 +SISI +SISI+
+Sldl +Sldf +Sfdi +Sjdl +
+dldf +dldl +dUl +dld2, +dldl-
—2SIS3S, -2SIS.S, —2S2S3 Sx —2S2 Sx S2 -2S2S2S3-
~2SlS3d3 -2S2S4d4 —2S2S3d3 —2SlSydy -2S2Sd2-
—2SfSid3 -2S2S5d4 —2818yd, -2SlS2dy —2S2S3d2-
—2SX d2 dl —2S2d3df -2Syd,dl —2S,dydl~
-2Syftdt —2S2dld5 —2S3dld1 -2Si(Pyd2 —2S3 dl d3-
—2d1d22d3 —2d2d3dt —M3dld, -2dtdldy —2d,dld2~
—4SX S3S4d3 —4S2 S4 S5 d4 —4S3S3 Syd, —4>S4 Sx S2 dy -4S5S2S3d2-
—4SX d2 d3 di —4S2 d3 dt ds —dt d, dy —4S4 d, dy d2 4S3 dy d2d3
—2SX S2 S3 dt —2S2 838^ —2S3 S4 S5 dy ~2SiS,S1d2 2S3SxS2d3
2SX S3 dx d2 —2S2 St d2 d3 —2S3 S, d3 d/y —2S4 Sy d4 ds —2S3 S2d,dy—
2SX d1 d3 ds —2S2 d2 d4 d4 —2S3 d3 d, d2 —2S4 d4 dy d3 2Sg d5d2d4 +
-f-2Sx S2 S3 S4 4~2S2 S3 S4 S3 +2S3 S4 S5 Sx -f-2S4 Sg Sy S2 4-2S5SxS2S3+
4~2<Sx S2 S4 d3 +2S2 <S3 S5 d4 -f-2S3 S4 Sy d. +2S4S3S2dx 4-2S5SxS3d2+
-f- 2SX S3 S4 dx 4~2S2 <S4 S5 d2 +2S3S, Syd3 +2S4 Sx S2 dt 4-2S5S2<S3dg+
4~2Sx S2 d3 di 4-2S2 <S3 d4 d3 -f-2S3 Sid, dy -f- 2S4 S5 dy d2 -f-2Sg Sxd2d3+
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
219
4~2SX S3 d2 d3 4-2S2 Sy d3 dy 4~2S3 S5 dy d3 4-2S4 Sy ds dy +2S5S2dyd2 +
+2SX S4 dy d2 4-2S2 S5 d2 d3 4-2S3 Sx d3 dy 4-2Sx S2 dy d5 +2S5S3d5dx4-
+2SX Sydyd3 4-2S2 S5 d2 dy +2S3 Sy d3 d5 4-2Sx S2 dy dy 4-2S5S3d5d24-
4-2Sx S4 d2 d3 4-2S2 S5 d3 dy 4-2S3 Sx dy d5 4-2S4 S2d5dy 4~2<S5 <S3dxd24~
+ 2SX Sy d3 dy 4~2S2 S5 dy d5 4~2S3 Sy d5 dy 4~2Sx S2 dy d2 4-2SsS3d2dg4-
4-2Sx dyd2d3 4~2S2 d2 d3 dy -}-2S3 d3 dy d5 4"2<Sx dy d5 dy +2S5d5dxd24-
H_2S1dijd4d5 4-2S2d4d5dx 4~2S3 d5 dy d2 4~2S4 dy d2 d3 4-2S5d2d3d44-
4~2dx d2 d3 dy +2d2 di d-, +2d3dyd5dy +2dyd3dy d2 4~2d5 dy d2 d3.
(130)
Поэтому они могут быть выражены как функции девяти независимых
величин, например четырех линий и пяти углов г(1), г™, г(2), г^2), 0(1),
9(2), 0j,2), I, от которых они зависят, следующим образом :
.S2 = 41'2 + го'2 — 2 Го ’г®(cos &£' cos 4- sin sin Qf cos z),
S3 = r'2)2 + rf2 - 2 r<2> r® cos (№> - 0®),
S4 = r<2'2 4- r<112 — 2 r® r(1> (cos 0(1) cos 0l2> 4- sin 011’ sin 0'2’ cos i),
S5 = r,1>2,
(131)
d2 = r<2>2 +41>2 — 2 r<2> r’o11 (cos 0® cos Sq1’ + sin 0® sin Oft' cos i),
d3 = 42’2 + r<1>2 — 2 r(02> r(1> (cos 0^2>cos 0<r’ 4- sin 0<2) sin 0(1) cos z),
d4 = r®2,
d5 = r<i>2 4- r®2 - 2 r(1) r® cos (0® - 0®).
При этом два линейных символа г(1), г(2) означают для краткости те же
два конечных радиуса-вектора, которые ранее были обозначены как г(1,3),
г<2.з),аГ(Ои г® представляют собой начальные значения этих радиусов;
0(1), 0(2), 0(,n, 0f,2) представляют собой углы, образуемые этими радиусами
с линией пересечения двух плоскостей^1), г(1), 42), г(2), а [ представляет собой
наклон этих двух плоскостей по отношению друг к другу. Поэтому мы
можем считать, что характеристическая функция V, относительного дви-
жения для любой тройной системы зависит только от этих последних линий
и углов и величины Н,.
Рассуждение, которое мы сочли полезным здесь развить для любой
•системы трех точек, притягивающих или отталкивающих одна другую
в зависимости от любых функций их расстояний, уже приводилось в более
общей форме в п. 12 этой работы и показывает, например, что характеристи-
ческая функция относительного движения в системе четырех таких точек
зависит от формы и величины семиугольника и, следовательно, только от
взаимных расстояний его углов, число которых =) 21, но которые
связаны шестью уравнениями условий, так что независимыми остаются
только пятнадцать. Эти замечания легко можно распространить на любую
множественную систему.
220
У. ГАМИЛЬТОН
Общий метод усовершенствования приближенного выражения
характеристической функции движения системы
в любой задаче динамики
19. Уравнение в частных производных (F), которому должна удовле-
творять характеристическая функция V во всякой задаче динамики, не без
пользы может быть подвергнуто некоторым общим преобразованиям путем
разделения этой функции V на две любые части:
V1+V2=V. (U4>
Если мы для сокращения введем 7\ и Т2, определяемые двумя следую-
щими уравнениями :
аналогичными соотношению
которое было использовано для преобразования закона живой силы в урав-
нении в частных производных (F), то получим посредством (U4)
Т=Т14-Т24-2’~(4^4г~ + ^~Д + 4^4г^ • (х4)
11 2 m t dx дх ду ду 1 dz dz ) v '
Это выражение при помощи формулы (С) или при помощи закона перемен-
ного действия может быть преобразовано далее, так как этот закон дает
следующее символическое уравнение :
" m t dx dx ' dy dy ' dz dz J ~ dt ’ '
где символы в обоих членах предпосылаются любой функции переменных
координат системы, не обязательно включающей время. Отсюда посредством
(U4) и (V4) мы получаем
ч, 1 г dvt dv2 dv, акл _ av2 2Т
m I dx dx ' dy dy dz dz ) dt 2 ' '
Таким образом, мы находим следующее общее и строгое преобразование
уравнения (F):
_^ = Г_Т1 + Т2. (Д5)
Здесь Т сохранено ради симметрии и понятности вместо равнозначного
выражения U ф- Н. Если предположить, как мы вправе сделать, что часть Ух
подобно полной функции V взята такой, что она исчезает со временем,
тогда и другая часть У2 будет обладать этим свойством и может быть выра-
жена определенным интегралом
V2= f (T-T^TJdt. (В5)
О
В более общем виде, если мы применим принципы, изложенные в п. 7,
и введем Зп отметок т]2, . . ., узп переменных положений п точек любой
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
221
системы (будь то сами прямоугольные координаты или какие бы то ни было
их функции), то получим
ЙУ ЙУ ёу 'i
ёт]1 ’ ёт)2 ’ ' ' ’ й%п)
(С5)
и по аналогии можем принять два следующих определяющих уравнения :
т _ р ( ёу, jyL йуи
1 Г I ёу1 ’ й% ’ ’ ’ ‘ ’ ёт]т ) ’
(Da)
Т-Р
2 ( <5^1 ’ ёт)2 ’ ’ ’ ’ ’ di]3n J ’
При этом функция F всегда является рациональной, целой и однородной
второго измерения и поэтому она такова, что (кроме других свойств)
T-Tl + T,+ 7; - ёУг , ёт, й4^ о?у2 Н ... +- й ёТ\ ЙУ2 ёУ ё-1]зп ёг)зп , 1(Е5)
йТ йТ, , йТ2 ЙТ ЙТХ , ёТ2 (F5) (G5) также (Н5)
. ёУ ЙУХ 1 ЙУ2 ’ ё->Ц ё^ й?у1 И йТ2 ёУ2 ёУ2 ёУ2 * ёУ2 ёг)! „ ёУ2 ёт)2 ёт <4 Исходя из принципов, изложенных йТ йТ ’ ’ ’ ’ й Sv ё 6V1 ёт]ЗП ёузп , > ёУ2 = ‘ ’ "Г" v ёУ2 ёузп ёг)ЗП в восьмом параграфе, ЙТ ОТ)ЗП = 2Т2. мы имеем Van,
л sv й о — о °Ч1 ёу ~ ё^2 - /2 > • • • 1 ё ЙУ й»узп
и поскольку значения Tfv ..., rfam очевидно, дают символическое уравнение
, ё । ! ё , ё d /15ч
••• = О5)
то уравнение (А5) все еще сохраняет силу в отношении введенных более
общих отметок положения движущейся системы и все еще приводит к выра-
жению (В5), если только мы предполагаем, как и раньше, что обе части пол-
ной характеристической функции взяты такими, что они исчезают со вре-
менем.
На первый взгляд может показаться, что это строгое преобразование
(В5) уравнения в частных производных (F) или аналогичного уравнения (Т)
с непрямолинейными координатами вряд ли поможет в раскрытии формы
части У2 характеристической функции V (предполагается, что другая часть
Vr найдена ранее), так как она под знаком интеграла в члене Т2 включает
частные производные искомой части V2. Но, если мы заметим, что эти неиз-
вестные производные входят только своими квадратами и произведениями,
то увидим, что это дает общий метод усовершенствования приближения
в любой задаче динамики, так как если первая часть Ух является прибли-
женным значением полной искомой функции V, то вторая часть V2 будет
мала, а член Т2также будет не только мал, но в общем будет более высокого
порядка малости. Поэтому мы в общем улучшим приближенное значение Ух
222
У. ГАМИЛЬТОН
характеристической функции V путем прибавления к ней определенного»
интеграла
V2= [(T-TJdt, (К5)
о
хотя, в отличие от (В5), это не есть совершенно строгое выражение остаю- щейся части функции. При вычислении этого интеграла (К5) для получения улучшенного приближения Vx мы можем воспользоваться следующими аналогичными приближениями к точным формулам (D) и (Е):
-ns—1- = — т1 , ёаг 1 1 ’ ёУг _ да2 — т2а2, .. Wi = ’ ёап -тпа'п;
SV1 и дУг _ —т2 Ь2, .. ёУг _ зьп - -тп Ь'п; (L5)
-ГП1С1 , и дУ! _ дс2 ^2 Х2 > дн ~ 1 ёУг __ ‘ ’ ёсп ~ -тп с'п (М5)
или при любых других отметках начального или конечного положения
(вместо прямоугольных координат) следующими приближенными формами
строгих уравнений (S):
дег <5ех ’ 3et де2 ’ * ‘ ’ ёеяп де2П ’ ' '
совместно с формулой (М5). При помощи этих новых формул способ движения
системы выражается приближенно и не строго.
Эти замечания легко можно распространить на задачи относительного
движения и показать, что в таких задачах мы имеем строгое преобразование
V,2=\(J,-T,1 + T,2)dt (О®>
о
и приближенное выражение
V,2= § (Т, — T,^)dt, (Р®)
о
причем V,± представляет собой приближенное значение функции V, относи-
тельного движения, У/2 представляет собой поправку этого значения, а
Т,1У Т,2 являются однородными функциями второй степени, состоящими из
частных производных этих двух частей V,v V ,2, точно так же как Т, состоит
из производных полной функции V. Эти общие замечания могут быть с поль-
зой иллюстрированы конкретным и широким применением.
Применение вышеизложенного метода к случаю тройной или множественной
системы с любыми законами притяжения или отталкивания
и с одной преобладающей массой
20. Значение (68) относительной живой силы 2Т системы сводится
последовательно к следующим частям: 2Т/Х), 2Т,(2),..., 2Т(,п~1\ при предполо-
жении, что все п — 1 первые массы последовательно исчезают, за исключе-
нием одной, а именно, сводится к части
2 Т‘Х) = ’ 0 32>
'Щ. -ф- тп
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
223
когда только тх и тп не исчезают,
к части
2Т'2’ = 4+^7’ <’33>
когда только т2 и тп не исчезают и т. д.,
и к части
2^-г, = + + ’ (134)
которая остается, если сохраняются только две последние массы. Сумма
этих п — 1 частей в общем не равна полной относительной живой силе 2Т
системы при сохранении всех п масс, но мало отличается от нее в том случае,
когда первые п — 1 массы малы по сравнению с последней массой тп, так
как точное значение этой разницы посредством (68) и посредством (132),
(133) и (134) будет выражаться так [84] :
2Т, — 277’ — 2Л2)
2тг
тп
(ТУ - Т,) +
_|_ 2^2 /у^(2)
ГПп
2 тП-1 / J'(n-l) -1
тп ' ' ' '
+ 2' т, тк{(^ - &)2 + W + (С; - ЭД2} (135)
Эго — выражение второго порядка малости в том случае, когда рассматри-
ваемые /7 — 1 массы суть величины первого порядка малости. Обозначим
, . . ., относительные действия или накопленные относительные
живые силы, какими они были бы в п — 1 бинарных системах (пцп,,),
(m2mn),..., («!„_! тп) без возмущений других малых масс всей множественной
системы п точек. При вычислении этих п определенных интегралов
V?> =^2T^dt, V,w= $ 2TPdt, ..., V'"-1’ = j 2Г"”1’dt (Q5)
0 P 0
пренебрежем этими возмущениями, то получим в качестве приближенного
значения полного относительного действия У, системы сумму ее
значений для этих отдельных бинарных систем:
yzl = + у® + ... + . (R5)
Эта сумма согласно нашей теории бинарных систем может быть иначе
выражена следующим образом :
у ____ т1тП wt1) m2 тп w(2)
71 — m1 + mn "I" m2 + mn
mn-i тп w<n-1>
ffln-i + тп
если для краткости напишем
Д1)
ИХ1) = WW) + [ r'(11dr(1),
/1)
А2)
^(2) — Л(2) 0(2) + J r'<2> dr(2) ,
г(2)
ГО
(S5)
(Т5)
r(n—1)
г0
224
У. ГАМИЛЬТОН
В этом выражении
rw=±y2(mi + rnn)fm + 2gm
лт2
X1)2
Г'(П--Г)
±^2{тп^ + m„) /("-« + 2g<^)
ft(n-l)2
Г<П-1)2 ’
(U5)
r(1), . . ., г*"”1) представляют собой сокращенные выражения для расстояний,
г(1’п), ..., г—’п> и /(1), . .., представляют собой сокращенные напи-
сания для функций /("-w этих расстояний, производные которых
в зависимости от того, являются ли они отрицательными или положитель-
ными, выражают законы притяжения или отталкивания ; мы ввели также
2п — 2 вспомогательные величины й(1), g(1), .. ., g(n~1), которые должны
быть исключены или определены при помощи следующих уравнений усло-
вий [85] :
г(1)
г0
Г<2> Дг'(2)
0 = 4- С dr(2)
U V ф J <5Л(2) аГ ’ (V5)
г(2> '
'о
О = + * Г dr—
/л-1)
ГО
И
ИЛИ
вместе
гт
Г ДгС1) _
.1 r'W ~
г<1>
го
Г (ir<2) _
.1 г'(2) ~
<5u»W <5иХ2)
SgW “ <5g(2) ~
с последним условием
r(n--D
__ Г dr("-D
— J Г'(Л-1)
г(М-1>
ГО
8w'n~ *)
= <5g(n-i) ’
gW т2 g(2) ms g(3) ffl"-1 g(n^1) _
m1 + mn "i” m2 + mn ' m3+ mn mn-i + m mn ’
(W5)
(X5)
(Y*)
, углы, которые конечные расстояния
системы
rd)
'о > • • •
Мы обозначили через
г(1),..., первых п — 1 точек от последней или n-й точки
образуют с начальными расстояниями, а именно соответственно с
..., Вариация суммы будет вследствие равенства (S5):
$ у ггцгпп днК1) m2 тп <5u»(2) . . mn-i тп 8w<n~1')
Z1 ~ т1 + та т2 + тп л • • • т тп1 _|_ 1Пп ,
где при помощи уравнений условий мы можем рассматривать все
гательные величины /г(1), g(1), ..., /г(п“1), g*"-1) как постоянные,
считается заданным. Таким образом, та часть этой вариации dV,v
зависит от вариаций конечных относительных координат, может быть напи-
сана в следующем виде :
т, тп (йиА1) х f. , dwd) „ duH1) Ч
--- ТЕ" + Т— 0% + Тг— +
m1 + mn Г J J
m„mn f 8w(2) , <5u»(2) x , йиХ2) )
— ^2 + ~л— ^2 + • • •
m2 + mn 1 2 дг]2 '2 <5£2 й)
тп~1 mn ( <3tp(n—1) о днХп-1)
m„_i + тл I <5£n~i n~1 8t]n-i ^n~l 8^n-i
V'l
(Z*)
ВСПОМО-
если H,
которая
(A6)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
225
Из уравнений (Т5), (U5)
получаем точно :
или посредством теории бинарных систем мы
= 2(m2 + mn)f^ + 2^-,
(В6)
«ShK"-1) А
df,,-/)
и точный закон относительной живой силы для всей множественной системы
будет иметь вид
Т, = и + Н,,. (50)
где
U = ffljnh/w + щ2р> + ... (Св)
и [86]
т = 1Р + -Ц /ВД2 + Р-Г + вд2> +
' 2 (т1 “Г mnJ Ц 8£г J I Л?! J dfi ) |Р
+± fj_ + jiwpi)2 + pi) + VU
' 2 [ m2 ' df2 J + l <fy2 J + I df2 J p
+a( i + j_)ppp2 + рч)2 + pin +
2 t tTln-i mn J (L 8$n-i J l 8t}n-i J I df,,„i J j
, 1 V (JYl Pl _J_ , A VL Pl)
+ mn -' ( df,- 8& + 8Vi 8Vk T df,- df/, ) • '
Заменяя в последнем выражении производные характеристической
функции V, производными ее первой части У,г и принимая во внимание
предыдущие уравнения [87], мы получим
7\ = тп Р m, р + Н, + тп
mi тк
тп + mi тп + тк
X
duX') dwW du»(O div(*) dw(')
df/ df/, 1 6r]i дт]к 1 df.
<E‘>
и, следовательно,
Tz - T,± = v, m, mk -
mn f dw(l) div^) . du'(') SwW divW divTO'd ,p6.
(mn — mi) (mn + mk) I df/ df/, "г 8гц 8r)k df, dfpj ’ '
Отсюда общее преобразование предыдущего параграфа строго дает для
остающейся части V,2 характеристической функции V, относительного
движения системы уравнение
t
V,2 = ^T,2dt
О
m, тк J /<
+
о
ЛА) _
div(;) divfO . duX1) dwW duXO dwXfe)
df/ df/, ~г~ 8гц 8rjk ~r~ df/ df/,
-P(mn + m,) (mn + mk}
dt-, (G6)
1 D.
226
У. ГАМИЛЬТОН
и приближенно — выражение
К2 = 2', rnt mh J IfW - (P PK + P pk + d dt • (H®)
0
Это последнее выражение мы можем скомбинировать с приближенными
формулами, строго применимыми только к бинарным системам:
и
Sw(') , dir(') dirt1) — 'dfz~ ’ (I6)
, днЯО “' — da; a, dlV<') , div(') V‘ dvt (K6)
, dirt1) — <5g<0 (L«)
Мы также имеем для бинарных систем следующие точные дифференциаль-
ные уравнения движения второго порядка :
f.,, . , . <5/(2') „ , , . d/(') ч d/(')
= (тп + m,) ; rit = (mn + m<) ; = >
которые позволяют нам различными способами преобразовать приближенное
выражение (Н6). Таким образом, в случае тройной системы с любыми зако-
нами притяжения или отталкивания, но с одной преобладающей массой т3
возмущающая часть У,2 характеристической функции V относительного
движения может быть написана в виде
У,2 = m, т2 W, (N6)
где коэффициент W может быть приближенно выражен следующим образом :
W = + + (О«)
I /Цо J
О ’ 3 7
или так [88] :
-Р % -Т++а <р‘>
или, наконец,
1 (f. duX2) , dirt2) ? dwX2) dirt2) о <5нХ2) dnK2) ) ,пв>
- v ({> TV + TV + А tv + - tv + А tv + ”> ^v) •
В общем для множественной системы мы можем написать
у/2 = \\ т. тк (R6)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
227
и приближенно
1 (.. div(') , <51V(O , f. <5u»(') <5u»(0 о div(') div(') A ,cfi,
- + ai!^T + "W + ^~^г) ’ (S )
или
U'<«> = f+ { *2 + „ *2 + c,2ffU _
J V 11 S$k ' or)k 1 OQk )
1 (t <5uXft) <5ip(fe) f. divM ,5w(fc) „ SwW , SwUV 1
------?<• --------F Vi ~я------F -i ^s>-F ai ~x---+ Pi ~ + vi ~i-------- • (T )
mn ( ' S-r)k SQk оаи Sfik Svk ) ’
Строгий переход от теории бинарных к теории множественных систем
посредством возмущающей части полной характеристической функции
и приближенные выражения для возмущений
21. Три уравнения (К6) в том случае, когда вспомогательная постоянная
исключается посредством формулы (L6), строго представляют (согласно
нашей теории) три конечных интеграла трех известных уравнений второго
порядка (М6) для относительного движения бинарной системы (mz mrt)
и дают для такой системы три переменные относительные координаты
Vi, как функции их начальных значений и начальных скоростей
аь Pi, vi, a'i, Pi, v't и времени t. Подобным же образом три уравнения (I6), по
исключении g(,) посредством (L6), представляют собой три промежуточных
интеграла этих же известных дифференциальных уравнений движения той
же бинарной системы. Эти интегралы перестают быть строгими, когда мы
вводим возмущения относительного движения этой частной или бинарной
системы (гщгПп), возникающие вследствие притяжений или отталкиваний
других точек т,- всей предполагаемой множественной системы. Однако они
могут быть исправлены и сделаны строгими путем использования остаю-
щейся части V,2 полной характеристической функции относительного дви-
жения V вместе с главной частью приближенного значения У,г
Уравнения (X1), (Y1) двенадцатого параграфа дают строго
1 SV, 1 v SV, , _ 1 JV/ 1 v SV,
mt SSi ' mn SSi ’ 1 mt Sr]i "K mn ' Sr}i ’
„ 1 SV- 1 v sv,
— mi dCi’ + mn S?i
(U6)
и
1 SV, 1_ v SV, _ _ 1 SV, 1_ v sv,
mi Sat "T" mn Sat ’ m; Sfit ' mi л' ,
, 1 SV, , 1 SV,
— y'_ —-----------------1-----N’----------
1 mt Svi 1 mn Sv, ’
и, следовательно, используя (А6), получим:
du»!') — t' KT mk SwP-) 1 SV,2 1 dVz2
S^i mk + mn SSk mt SSt mn Sit '
divO) = v't \T mk Sw{k) 1 sv,2 1 V sv,t (W6)
St}i ff mk + mn Srjk mt Stu mn Srjt ’
<5ivO) \T mk SwW 1 SV.., 1 \T sv,2
Sti mk + mn SHk mt SCi mn sti
15*
228
У. ГАМИЛЬТОН
и аналогично
<5нЯ!) = ai + mk + 1 W'2 , 1 f>V,2
дщ mk + mn 8ak mi mn dat ’
— P'i + — mk 1 1 Wi 1 v 8V,2
8f}i mk + mn 8?k mi mn Wi ’
— v'i + mk + 1 W'2 , 1 W,2
8vj mk + mn Mk) mi mn —' 6vi
При этом знак суммы относится только к возмущающим массам тк, за
исключением т, и тп, а эти уравнения (W6), (X6) представляют собой точные
формулы, соответствующие приближенным соотношениям (I6), (К6). Подоб-
ным же образом формула (L6) для времени движения в бинарной системе,
представляющая только приближение, когда система рассматривается как
множественная, может быть исправлена на случай возмущения путем при-
бавления к ней аналогичного члена, выведенного из возмущающей части
V,2 полной характеристической функции, т. е. путем замены ее на выра-
жение
что дает для w(,) исправленное и точное выражение
"dg<0- ~ 1 ' 8Н, •
При этом предполагается, что здесь V,2 выбрано так, чтобы служить
точно поправкой V,r Если, следовательно, при помощи теории бинарных
•систем или путем исключения g(,) между четырьмя уравнениями (К6), (L6)
мы выведем выражения для трех переменных относительных координат
Vi, Si как функций времени t и шести начальных величин a,-, ph vit а',-, /?', v'it
а. именно :
Si = Ф1 (а,-, Pi, Vi, a'i, P't, Vi, 0 ,
Vi = ф2 (a{, , Vi, a'i, Р\, y', t),
Si = Ф3 (а/ > Pt ’ Vi. a'i > P'i ,v'i,t),
(A7)
то будем знать, что следующие соотношения являются строго и тождественно
истинными [89] :
Si = ф1 (а,, Pi, Vi,
Vi = ф2 (а/, Pi, Vi,
Si = фз (а/, Pi, Vi,
<5nX')
<3az ’
8af ’
«SuK')
dat ’
<M') <5нЛ') A
Wi ’ 8yi ’ <5g(0 J ’
<5цЯ') duX') <5цЯ') 'I (B7)
Wi " Wi ’ 6g(0j ’
<5iv<z> 8w(i>
Wi ’ Wi ’ <5g(*)J J
Следовательно, эти соотношения будут справедливы и тогда, когда мы
подставим вместо четырех производных w(,) их точные значения (X6) и (Zc)
для случая множественной системы. Таким образом, мы можем сохранить
для любой множественной системы конечные интегралы (А7) движения
бинарной системы, если только мы прибавим к начальным компонентам
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
229
a'-, (3'it y'i относительной скорости, а ко времени t следующие возмущенные
члены:
и
л ' _ v тк ____1 Sv'^ ।________L у 6v'2
а‘ тк + тп бак mi dat тп dai ’
л о, _ v тк dwik> 1 дУ,г J_ v дУ,2
" тк + тп 8fik mi dfit тп ' d(V ’ '
д , __ у тк <5uXfe) 1 дУ,,, ,____1 ч, дУ
У’ тк + тп дук mt дуг тп “' ду;
= (D?)
Таким же образом, так как теория бинарных систем (или исключение g(i)
из четырех уравнений (I6), (L6)) дала три промежуточных интеграла вида
= % (f,,»?,, с,, «<, Pi, г,, о,
»?; = (£, Vi, ti > ai > , 7i, о -
£ = Уз &, Vi, ^i, ai > Pi > 7i > о,
(E7)
то можно сделать вывод, что уравнения
<5иХ‘) f. о <5иЛ’)\
~^r = ^[^,Vi^I,ai^i,yi,^-} , (F‘)
<5иУ) о <5нЯ')Ч
являются тождественными и, следовательно, должны оставаться истин-
ными, когда при переходе ко множественной системе мы подставляем
вместо производных иК'> их точные значения (W6), (Z6). Поэтому три про-
межуточных интеграла (Е7) движения бинарной системы могут быть строго
приспособлены к случаю множественной системы, если сначала прибавить
к времени t возмущающий член (D7), а затем прибавить к получившимся
значениям конечных компонентов относительной скорости следующие
величины :
Av’t = тк dwW д^к dwW дг)к + + 1 mi 1 mi -АЕх, dHi + дгц 1 v m„ ' 1 v mH dV,2 д^Г dv,.z (G7)
тк + тп тк
тк + тп dr/t
тк dwik) 1 1 <5V,2 1 X' dV,2
*э i н тк + т„ дСк “Г mt dCi 1 mn dCi
22. Для того чтобы вывести из этих строгих результатов некоторые
полезные приближенные выражения, мы пренебрежем в возмущениях
членами второго порядка малости по отношению к малым массам системы
и по отношению к постоянной 2Н, относительной живой силы, которая,
230
У. ГАМИЛЬТОН
как легко заметать, будет малой того же порядка, что и массы. Тогда возму-
щения координат, выведенные методом, изложенным выше, будут иметь вид :
=
(Н’)
В этих выражениях мы можем взамен строгих значений (С7) для zl«<, Aft\, dy-
применить следующие приближенные значения :
л~, ч, тк <5u»W , 1 Sat
' тп Sak 1 mi
А в '- — v -тк Sw(k) , 1 SV,2
тп Wk 1 mt Wi
л , ,, тк <5u»(k) 1 sy,2
A?i = 2» — ' тп 8ук IHi 6yi
(Г)
Для вычисления четырех производных
sy2 sy,2 sy,2 8У,г
Sai ’ 8flj ’ Syt ’ SH
которые входят в значения (I7), (D7), мы можем рассматривать V,2 при
помощи (R6), (Т6) и на основе теории бинарных систем как функцию началь-
ных и конечных относительных координат и начальных компонентов относи-
тельных скоростей, включая также явно время tun — 2 вспомогательные
величины вида £к\ Затем мы должны рассматривать эти начальные компо-
ненты, вспомогательные величины и время как зависящие в свою очередь
от начальных и конечных координат и от Н. Однако, исходя из изложенных
выше принципов, нетрудно доказать, что при таком подходе к t и g(/£) их
вариации при данной степени приближения будут [90]
(К7)
S ( d2u»(ft) 'j- 1 ( о, s SwC1) | /17,
причем знак варьирования 5 относится только к начальным и конечным
координатам, а
дМО _ <W) S&
SgW2 St Sai Sgt1) Sai
<W) S$j WO S^
+ Sfii Sg1') Sfi't ~ Syi Sgib Sy'i ’
(M7)
и аналогично для соотношений между производными двух других координат
С,. Из зтого следует, что t и g<k) и, следовательно, ак, fik, ук могут рассматри-
ваться как постоянные, когда мы берем вариацию возмущающей части V,2
для вычисления возмущений (Н7), и что члены, включающиеzlf, уничтожаются
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
231
другими членами. Поэтому мы можем просто написать [91] :
(N>)
применяя для zl«' следующее новое выражение :
t t
zla = а „ т,А —.— dt + -д— — dt +
1 * К I I ОЩ 1 octi J ОЩ 1
о о
8% ( <5Х; г 8RW ।
+ Ащ J -Wdt + WJ dt< (°)
о о
совместно с аналогичными выражениями для Jft, Jy,', в которых знак суммы
S„ относится к возмущающим массам, а величина
= + gg + JgL + J/g (И
' 1 ' dSk Sr/k 1 df/с ' '
согласно теории бинарных систем рассматривается как зависящая от
az, ft, Vi> а'ь Ft, Vb ak, Pi<> Vk, ak, fik, Vk, t, в т0 время как a<, $, у на основе
тех же правил считаются зависящими от a;, yh £(, г^, и t. Можно также
легко показать, что имеет место [92] уравнение
_8$i 8a'i 8$i 8щ 8Si _<5a£ _ 8£i
daj Sa; "I” 8ft'i 8°>i 8y'e 8yt 8ai /
и другие аналогичные уравнения ; поэтому возмущения координат £, можно
выразить следующим образом :
1 е v I 6-i Г 8R(W ., 8& г 8R(W
= 2^-^-1 - -d— dt - ~sirdt +
6 0
8^t C 8RW) . r 8RW
+ J '8fti al 8ft al +
о о
, 8$i C 8RW 8Si f ВДМ) 1
+ W.H— д --Jr7j’frT‘"i ’ (R>
0 0
а возмущения двух других координат могут быть выражены аналогично.
На основе тех же принципов получается, что когда мы берем первые
производные этих возмущений (R7), интегралы могут рассматриваться как
постоянные ; поэтому мы можем либо представить перемену места возму-
щенной точки на ее относительной орбите вокруг тп путем незначитель-
ного изменения начальных компонентов скорости без изменения начального
положения с последующим использованием правил для бинарных систем,
либо мы можем немедленно вычислить возмущения положения и скорости
путем применения тех же правил, немедленно изменив также начальное
положение и начальную скорость. Если мы применим первый из этих двух
232
У. ГАМИЛЬТОН
методов, мы должны воспользоваться выражениями (О7), которые могут
быть записаны следующим образом :
t
Aa'i = тк ~ dt,
О
t
Л ft = J /?<'» dt,
0
t
Ay't = 2'» tnk J RdM dt;
0
(S’)
если же мы примем последний метод, мы должны взять :
тк f 8RC.4 8а j dt, Zla,- = \T м 4 mk Г 8R(W , , dt , J Otti 0
Л Pi ~ jL" м 0 dRfW dt, mk J 8^ Ul ’ 0
^У "'«J 8R(W 8Vi dt, = X’ mk t г ——— dt, J oyt
о
Лагранж пользовался последним методом, но первый подсказывается
более непосредственно принципами настоящей работы [83] .
Введение времени в общем виде в выражение характеристической функции
в любой задаче динамики
23. Прежде чем мы закончим этот очерк нашего общего метода в дина-
мике, уместно будет вкратце остановиться на преобразовании характеристи-
ческой функции, которое может быть использовано во всех ее приложениях.
Это преобразование состоит в том, что мы пишем [84]
V = tH + S
и рассматриваем часть S, а именно определенный интеграл
S = / (Г + U) dt,
О
(U7)
(V7)
как функцию начальных и конечных координат и времени, вариация кото'
рого согласно нашему закону переменного действия будет такова :
dS = —Нд t + 2* т (х' дх — а' да + У' ду — b' db + Z' dz — с' дс). (W7)
ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
233
Отсюда частные производные первого порядка этой вспомогательной функ-
ции S будут 4 = -«; (X7) 8Xi~m‘X'‘’ 8У1~т^’ 8zt m‘Z'i (Y?)
и й« , 8S 6S , = — m,a , — m<b , = (Z7) oat ‘ ‘ ’ obi 1 1 oct 11 v ’
Эти последние выражения (Z7) представляют собой формы конечных
интегралов движения любой системы, соответствующие результату исклю-
чения Н из уравнений (D) и (Е), а выражения (Y7) представляют собой
формы промежуточных интегралов, во многих отношениях более удобные,
чем применявшиеся ранее.
24. Рамки данной работы не позволяют нам развить следствия, вытекаю-
щие из этих новых выражений. Мы можем отметить только, что вспомога-
тельная функция S должна удовлетворять двум следующим уравнениям
в частных производных первого порядка, аналогичным уравнениям (F)
и (G) и выведенным из последних :
и что для того, чтобы корректировать приближенное значение значения S
при интегрировании этих уравнений, или для того., чтобы найти остающуюся
часть S2, если
S = S1 + «2, (С8)
мы можем воспользоваться символическим уравнением
а__ <з_ vJLP5 8S 8 \ 8S 8 \
dt 6t "т" m t йх йх "г" 8y бу "т" йг йг J
которое строго дает
если мы по аналогии принимаем определение
и, следовательно, приближенно
S2= J (U-UJdt.
О
(D8)
(Е8)
(F8)
(G8)
При этом части S2 берутся такими, чтобы они исчезали со временем.
Эти замечания легко могут быть распространены на относительные и поляр-
ные координаты и другие отметки положения. Они дают новый и лучший
способ изучения орбит и возмущений системы посредством новой и лучшей
формы функции и метода, изложенного в данной работе.
У. ГАМИЛЬТОН
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ [95]
СОДЕРЖАНИЕ
Вводные замечания ........................................... 234
Преобразования дифференциальных уравнений движения притягиваю-
щейся или отталкивающейся системы ........................ 235
Интегрирование уравнений движения посредством одной главной
функции .................:................................ 238
Исследование пары дифференциальных уравнений в частных произ-
водных первого порядка, которым должна удовлетворять главная
функция .................................................. 239
Общий метод усовершенствования приближенного выражения глав-
ной функции в любой задаче динамики ...................... 240
Строгая теория возмущений, основанная на свойствах возмущающей
части полной главной функции ................................ 242
Приближенные выражения, выведенные из предыдущей строгой теории 244
Другая строгая теория возмущения, основанная на свойствах возму-
щающей части константы закона живой силы и дающая формулы
для варьирования элементов, более аналогичные уже известным 246
Упрощение дифференциальных уравнений, определяющих постепенно
меняющиеся элементы в любой задаче на возмущение и интегриро-
вание упрощенных уравнений посредством некоторых функций
элементов ................................................... 249
Аналогичные формулы для движения отдельной точки ............ 253
Математический пример: рассмотрение движения метательных снарядов 258
Замечания по поводу предыдущего примера .•................... 269
Возобновление рассмотрения систем притягивающихся точек; диф-
ференциальные уравнения внутреннего или относительного дви-
жения ; интегрирование с помощью главной функции ........ 270
Упрощение дифференциальных выражений посредством соответствую-
щего выбора элементов.................................... 274
О существенном различии между системами переменных элементов,
рассматриваемых в данном очерке, и системами, которые приме-
нялись математиками до сих пор .......................... 279
Интегрирование упрощенных уравнений, определяющих новые пере-
менные элементы.......................................... 281
Вводные замечания
В предыдущей работе содержался общий метод сведения всех самых
важных задач динамики к изучению одной характеристической функции,
одного центрального или главного соотношения. В заключение этой работы
указывалось, что многих исключений, требуемых этим методом в его перво-
начальной концепции, можно было бы избежать путем общего преобразо-
вания, вводящего время прямо в часть S полной характеристической функ-
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
235
ции V; теперь же мы предполагаем сосредоточить внимание главным
образом на этой части S и обозначить ее как главную функцию. Свойства этой
части или функции S, о которых вкратце упоминалось в предыдущей работе,
здесь будут разобраны более полно, в особенности в отношении ее приме-
нений к вопросам возмущения, в которых она позволяет обойтись без многих
утомительных и сложных процессов и дает нам возможность точно выразить
возмущенную конфигурацию системы посредством правил невозмущенного
движения, если только мы соответствующим образом изменим начальные
компоненты скоростей. В данной работе в несколько более общем виде
рассматривается способ, впервые разработанный Лагранжей [96] и затем
усовершенствованный Пуассоном, строгого распространения на возмущенное
движение правил невозмущенного движения путем постепенного варьиро-
вания элементов, вдвое превосходящих по численности число координат
или других отметок положения системы ; кроме того, общий метод вычисле-
ния, ранее применявшийся автором данной работы к аналогичным вопросам
оптики и динамики, теперь применяется к интегрированию уравнений,
определяющих эти элементы. Этот общий метод основан главным образом
на сочетании принципов вариаций с принципами частных производных и
может создать (когда он будет завершен трудами других аналитиков) отдель-
ную отрасль алгебры, которую можно назвать исчислением главных функ-
ций [97], так как во всех основных применениях алгебры к физике и в очень
широкой области чисто математических вопросов оно сводит определение
многих взаимосвязанных функций к отысканию и изучению одного главного
или центрального соотношения. В применении к интегрированию уравнений
переменных элементов он подсказывает, как показано здесь, рассмотрение
некоторой функции элементов, которые могут быть выбраны разнообразными
способами и могут быть либо строго определены, либо к ним можно, по
крайней мере, приблизиться с неограниченной точностью при помощи
следствий из общего метода. Для иллюстрации всех этих новых общих про-
цессов, и в особенности тех, которые связаны с проблемами возмущения,
эти элементы использованы в данной работе при рассмотрении простого
примера, подсказываемого движениями метательных снарядов, причем их
параболический путь рассматривается как невозмущенный. В качестве
более сложного примера здесь снова рассматривается по новому способу
проблема определения движений тройной или множественной системы при
любых законах притяжения или отталкивания и с одной преобладающей
массой, затрагивавшаяся в предыдущей работе. Для этого составляются
и интегрируются дифференциальные уравнения новой группы переменных
величин, полностью отличных теоретически (хотя мало отличающихся на
практике) от элементов, применяемых Лагранжем. Новая группа перемен-
ных имеет то преимущество, что дифференциалы всех новых элементов и для
возмущенных и для невозмущенных масс могут быть выражены производ-
ными одной возмущающей функции.
Преобразования дифференциальных уравнений движения притягивающейся
или отталкивающейся системы
1. Математикам хорошо известно, что дифференциальные уравнения
движения любой системы свободных точек, притягивающих или отталкиваю-
щих друг друга, в зависимости от какой-либо функции их расстояний,
и не возмущенных какой-либо внешней силой, могут быть выражены следую-
щей формулой :
Д' т (х" бх + у" ду -|- z" <5z) = dU, (1)
236
У. ГАМИЛЬТОН
причем знак суммы 27 распространяется на все точки системы ; т является
для всякой такой точки постоянной, называемой ее массой ; х, у, z являются
ее прямоугольными координатами, х", у", z" представляют собой ускорения
или вторые производные по времени, дх, ду, dz — любые произвольные
бесконечно малые вариации этих координат, a U — некоторая силовая
функция, введенная в динамику Лагранжем, включающая массы и взаимные
расстояния нескольких точек системы. Если число этих точек равно и,
то формула (1) может быть разложена на Зп обычных дифференциальных
уравнения второго порядка между координатами и временем
т,х = -тг-; mi У = ; miz" = -т- •
' ' 8xi 1/1 8yi ’ ‘ ‘ 8ц
m, z;
(2)
Интегрирование этих дифференциальных уравнений движения притяги-
вающейся или отталкивающейся системы, или некоторое преобразование их,
представляет собой главную и возможно единственную проблему математи-
ческой динамики.
2. Для того чтобы облегчить и обобщить решение этой проблемы, полезно
предварительно выразить Зп прямоугольных координат х, у, z как функции
Зп других более общих отметок положения ifa, t]2, . .., t]3n ; тогда дифферен-
циальные уравнения движения принимают следующую, более общую форму,
открытую Лагранжем :
d <зт п)
dt Зц, 8-rji 8тц ’ ' '
где
Т = у 2’ т (х'2 + у'2 + z'2) . (4)
В самом деле, из уравнений (2) или (1) следует уравнение
SU ( П дх „ <5у „ dz\
= 1 т Iх ---------Н У X ~ + 2 Т— =
О’?! k 3l]i 1 7 OJ/f 1 OT]i J
d ,, f , 6x , , Sy , , 8z A
= 2 m X x-------У У + z -д— ~
dt V 8гц 1 7 тц 1 orji J
,, f , d Sx , , d Sv T , d 8z \
X' -y у-----h У ут д-- + Z' - - y— , (5)
V dt 8гц 1 7 dt or], 1 dt 8гц) ’ ' 7
в котором
v ( r dx , 8y , 8z \ , 8x' . , Sy' , , 8z' A ST
2 m x + у' -\-z -y- = 2 m x' y-5- + / yr- + z' y- = (6)
6гц 1 7 6гц 1 6гц) \ otji 7 1 or^i) 6гц v 7
И
xt ( r d 6x f d 6y d 6z \
tTl lx -p у — -p Z —ТГ — I —
\ dt 6гц 1 7 dt 6гц 1 dt 6гц)
= 2 rn x' .------H У V- + Z 7Г- = , (7)
“ V Srji 1 7 Srji 1 Srjt J Srji ' 7
при этом T рассматривается здесь как функция 6п величин г)' и t], полу-
ченных путем введения в ее определение (4) значений
+^”4“ ит-д- (8)
Иное доказательство этого важного преобразования дано в Mecanique
Analytique.
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
237
3. Поскольку Т является однородной функцией второй степени относи-
тельно она должна удовлетворять условию
27 = (9)
а поскольку вариация той же функции Т, очевидно, может быть выражена
следующим образом :
« = V + 4^ *0 • (10)
то эта вариация может быть также выражена следующим образом :
но
Тогда, если мы для краткости положим
ST — ~ 8Т — ~ /пх
<5% ~’ • • • ’ <%„ ~О2)
и будем рассматривать Т (как мы это вправе сделать) как функцию следую-
щего вида :
Т = F (сох, со2, . . , ызп > Vi, Vz > • • • j Van) > (13)
то увидим, что
.)/ , ЙГ
ЙО?! ’ • • • ’ (14)
и 3F ЙГ Sf ЙТ
Й% й% ’ ‘ ’ 8>1зп ’ (15)
и, следовательно, общее уравнение (3) может быть преобразовано так:
da>i _ dt = 3(U—F) 8rji (16)
Теперь, если мы для краткости введем следующее выражение И :
н = F ~ и = F ("1, "2, .. ., со3„ , % ., т)3п) — U (г]!, rj2, -г]3п), (17)
то подойдем к новому способу представления дифференциальных уравнений
движения системы п точек притягивающих или отталкивающих одна дру-
гую [98] :
8H dw1 8H
dt ЙО»! ’ dt й?/1 ’
dd>2 ЙН
dt йсо2 ’ dt
8г]зп ЙН йсоз/г 6H
dt (Зсозп ’ dt ^'/зп
(А)
С этой точки зрения задача математической динамики для системы п
точек заключается в том, чтобы проинтегрировать систему (А) 6п обычных
дифференциальных уравнений первого порядка, содержащих 6п перемен-
ных rjh со,- и время t, а решение этой задачи должно состоять в определении
этих 6п переменных как функций времени и их собственных начальных
238
У. ГАМИЛЬТОН
значений, которые мы можем обозначить как ef, pt. Все эти 6п функций или
6п соотношений для определения этих функций могут быть выражены в
совершенно общем и строгом виде методом, предложенным в предыдущей
работе, или следующим упрощенным процессом.
Интегрирование уравнений движения посредством одной главной функции
4. Если мы возьмем вариацию определенного интеграла
s=(18)
О 4
не варьируя t или dt, то при помощи вариационного исчисления найдем
dS = \dS'-dt, (19)
О
где
У = (20>
и, следовательно ["],
<2'>
т. е. с помощью уравнений движения (А) получим
№ = у(мА + 4*,) = А (22)
Вариация интеграла S имеет вид :
<5<8' = У (тдг/ — р де), (23)
р и е по-прежнему являются начальными значениями. Когда S рассматри-
вается как функция 6п величин е, (включающая также время), она раз-
лагается па следующие б/z выражений :
<38 <38
^-<3^ ;
-- _ <38 _ <38
("3п “ <3^ ’ Рзп ~ ёезп ’
которые, очевидно, являются формами искомых интегралов бп дифферен-
циальных уравнений движения (А), содержащими только одну неизвестную
функцию S. Таким образом, трудности решения задач математической дина-
мики сводятся к отысканию и изучению этой одной функции S, которая
поэтому может быть названа главной функцией движения системы.
Эта функция S была введена в первой работе в виде
S = f (Т + U)dt,
О
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
239
причем символы Т и U имели в этой форме свои обычные значения. Следует
отметить, что когда S выражается этим определенным интегралом, условия
для исчезновения его вариации (если заданы начальные и конечные коорди-
наты и время) в точности представляют собой дифференциальные уравнения
движения (3) в форме, данной Лагранжем. Поэтому вариация этого опреде-
ленного интеграла S обладает тем двойным свойством, что она дает диффе-
ренциальные уравнения движения для любых преобразованных координат,
когда крайние положения рассматриваются как закрепленные, а также дает
интегралы этих дифференциальных уравнений, когда крайние положения
рассматриваются как переменные [х °].
5. Хотя функция S, по-видимому, заслуживает названия главной функции,
данного ей здесь, так как она служит для того, чтобы как будто самым
простым образом выразить интегралы уравнений движения и самые диффе-
ренциальные уравнения, тем не менее анализ приводит к другим функциям,
которые также могут быть использованы для выражения интегралов этих
уравнений. Так, если мы напишем
Q= /(-24 + (24)
и возьмем вариацию этого интеграла Q, не варьируя t или dt, то при помощи
процесса, аналогичного рассмотренному, найдем
<5Q = 4 <5<й — е <5р), (25)
так что если мы будем рассматривать Q как функцию 6л величин со,, р, и
времени, то получим 6л выражений
которые представляют собой другие формы интегралов уравнений движе-
ния (А), включающие Q вместо S. Мы можем воспользоваться также инте-
гралом
V= = 2’F<4, (27)
О е
который в предыдущей работе был назван характеристической функцией.
Вариация его, если рассматривать этот интеграл как функцию бл + 1 вели-
чин гр, eb Н, будет
ЗУ = P^e) + tdH. (28)
Все эти функции S, Q, V связаны таким образом, что ф^рмы и свойства
любой из них могут быть выведены из форм и свойств другой [101].
Исследование пары дифференциальных уравнений в частных производных
первого порядка, которым должна удовлетворять главная функция
6. При образовании вариации (23) или частных производных (В) главной
функции S вариация времени была опущена. Однако производную-^- ,
соответствующую этой вариации, легко можно вычислить, поскольку оче-
видное уравнение
__ &s v_4L 4. /осп
240
У. ГАМИЛЬТ Н
с помощью (20) и (А), (В) дает
<3S
~8t
с 8н и
= 8 — V со = — Н .
OU)
(30)
Также очевидно, что эта производная или величина —Н является по-
стоянной, т. е. не меняющейся во время движения системы, так как диффе-
ренциальные уравнения движения (А) дают
dH _ V ( 8н । 8н 1 _ Л /ЭИ
dt ~ I dt + (Зеб dt J ‘ W
Поэтому, если мы займемся уравнением (17) и отметим, что функция F
по необходимости является рациональной, целой и однородной второй сте-
пени по отношению к величинам со,-, то увидим, что главная функция S
должна удовлетворять двум следующим уравнениям между ее частными
производными первого порядка, которые представляют главное средство
для раскрытия ее вида [102] :
(3S , „ ( 8S 8S ss
<3/ + 1(5»;, ’ Srj2 ’ ’ дт/зп ’ ’
• , »7зп) = U О?! , V2 , • • • , Vsn) ,
(3S , „ (8S 8S (3S
<3/ + ((3ej ’ <3е2 ’ ’ ’ ’ ’ <3езл ’ ’
, = и (ег, е2, ... , е3п).
(С)
И наоборот, если известна форма S, то из нее можно вывести формы
этих уравнений (С) путем исключения величин е или г) из выражений ее
частных производных. Таким образом, мы можем вернуться от главной
функции S к функциям F и U и, следовательно, к выражению Я и к урав-
нениям движения (А).
Аналогичные замечания относятся к функциям Q и V, которые должны
удовлетворять уравнениям в частных производных :
(3Q . -- - (3Q
------sV + F со, , со2, . . . , со„„ ,
dt 1 I 1 ’ 2 ’ ’ лп ’ ocoj
(5Q_ 8Q \
(Зсб2 ’ • • • ’ дшзп)
-4Т+ F(P1’P2,
и
(3Q _ 8Q _ (3Q \
<5Д1 ’ 6р2 ’ ’ ’ ’ ’ 8рзП )
= И (_ в$ _
I ’ йр2 ’ ’ ’ •
(32)
8Q ]
8рзп J
Р ( (ЗУ (ЗУ (ЗУ ) „ , '
Fl<4 ’ “<’•••’••• ’M = H + U(rjl,7j2, ...,V3n),
- ( (ЗУ (ЗУ (ЗУ б „ , Г1.
F [ (Зв1 ’ (Зе2 ’ • • • ’ 8ё~зп ’ ’ Ё2 ’ ; • ’ езп] — 77 + tv От , е2 , . . . , %„) .
Общий метод усовершенствования приближенного выражения главной
функции в любой задаче 'динамики
7. Если мы разделим главную функцию 8 на любые две части
Si + S2 = S (34)
и подставим их сумму вместо S в первое уравнение (С), то функция F в силу
ее рациональной, целой и однородной формы и степени может быть выра-
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
241
жена следующим, новым образом :
ss as
8rh ’ ' ' ' ’ 8rj3n ’ ’ • • • ’ ^3n
) ^2 ,
*71 ' *7i I fy
5Sj dSj
T2- , > • •
<»/i ’ mj3n 11
sst
<3S2
8r/sn ,1’
SS„
<332
8г/зп
+ F' Nr4 -7Г1- + • • • + F' (тгЧ
1 «h 7 1 V <’W< J <5»?зп
так как [103]
F’ 1Ц5*-) = F' - F'
8гц J 1. 8гц ) V 8гц )
И
v F' (_^2_) = 2 f( 5Sa . . 5Sa n-, «» I .
( drj J br/ ( 6% ’ ’ ’ ’ ’ 8rjsn ’ ’ ’ ’ ’ ’ ^3nJ
(35)
(36)
(37)
Поскольку с помощью (А) и (В) мы получим
(38)
то легко преобразуем первое уравнение (С) в следующее :
dS2 <5$! , ., , . „ ( SSj <5$! А .
~dT = - ~дГ + ’ • • •’ %п) - Р 1-^- >• • ’ Ъ > • • •> М +
। с ( 8S2 А ,р.,
+ .......Ч' <D)
что дает строго
s*=I {- т+ч»>-F (~5~- ’“)}‘в+
+.И->-.<Е>
если только предположить, что обе части, Slt S2, подобно полной главной
функции S подобраны так, чтобы они исчезали со временем.
Это общее и строгое преобразование представляет общий метод усовер-
шенствования приближенного выражения главной функции S в любой
задаче динамики, так как если часть является таким приближенным
выражением, то остающаяся часть, S2, будет мала, а однородная функция F,
включающая квадраты и произведения производных этой малой части во
втором определенном интеграле (Е), будет вообще также мала и более высо-
кого порядка малости. Поэтому мы можем в общем пренебречь этим вторым
определенным интегралом при переходе ко второму приближению и улуч-
шить первое приближенное выражение путем прибавления к нему сле-
дующей поправки :
JS> = j {- ......Ъ.) - F ( 5 . . . 1,.....dl; (F)
при вычислении этого определенного интеграла мы можем воспользоваться
следующими приближенными формами для интегралов уравнений движения :
«SSj 6S, <33.
Р^-~~8Г ’Р*-~~8^’ • • ->Ры- ~'Те:п
(39)
1Й п
242
У. ГАМИЛЬТОН
выражая при их помощи сперва переменные гр как функции времени и 6п
постоянных е„ р,- и затем исключив после интегрирования Зп величин pi
при помощи тех же приближенных формул. Когда же мы получим таким обра-
зом улучшенное выражение или второе приближенное значение + JSj
для главной функции S, оно может быть подобным же образом подставлено
вместо первого приближенного значения с тем чтобы получить еще
большее приближение ; этот процесс можно повторять бесконечно.
Аналогичный процесс можно применить для бесконечного улучшения
первого приближенного выражения функций Q или V.
Строгая теория возмущений, основанная на свойствах возмущающей части
полной главной функции
8. Если мы разделим выражение Н (17) на две любые части того же
рода :
Нх + Н2 = Н, (40)
где
Hi = (coi, со2, ... , «Зп, %, ... , %„) — Ur (%, %, ..., %„) (41)
и
Н2 = F2 ("i > "2 > • • • , "зп , %, %, . . . , %„) — U2 (% , % , .. . , %п), (42)
причем функции Fb Fa, Ulr U2 таковы, что
F^F^F, U1 + U2^U, (43)
то дифференциальные уравнения движения (А) примут вид
drji _ 8Нг ЗН2 dat ______ 8Н1 8Н2
dt Suit ' <3cu( ’ dt 8t]i 8тц ’ ' '
и если часть И2 и ее производные малы, то они не будут сильно отли-
чаться от дифференциальных уравнений :
drji 8Нг daii 8Нг .....
dt 8d>i ’ dt 8rjj ’ ' '
так что строгие интегралы последней системы будут приближенными инте-
гралами первой. Тогда, путем соответствующего подбора преобладающего
члена-74 мы во всех случаях образуем и строго интегрируем такую систему
бп уравнений (Н), дающую выражения для 6п переменных тр, а>( в
качестве функций времени t и их собственных начальных значений е„
которые могут быть написаны так :
= е2> , е3п, р1гр2, , р3п), (44)
= Ч>,(!, С1, е2, ... , е3п, Р1, р2, ... , р3п). (45)
Более простое движение, определенное таким образом посредством точных
интегралов (Н), может быть названо невозмущенным движением предложен-
ной системы и точек, а более сложное движение, выраженное точными
интегралами (G), может по контрасту быть названо возмущенным движением
этой системы. Переход же от одной системы к другой можно обозначить как
задачу возмущения.
9. Для того чтобы осуществить этот переход, надо отметить, что поскольку
дифференциальные уравнения невозмущенного движения (Н) имеют тот же
вид, что и первоначальные уравнения (А), их интегралы могут быть вырг-
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
243
жены аналогично, т. е. следующим образом :
<^1 „ <«1 /Т\
«>/ = -4, А = (I)
причем Sx здесь представляет собой главную функцию невозмущенного дви-
жения или определенный интеграл
Si= (46)
о
рассматриваемый как функция времени и величин е,. Подобным же
образом, если мы представим полную главную функцию возмущенного дви-
жения как Sx 4- S2, то строгие интегралы (G) могут быть выражены посред-
ством (В) следующим образом :
<5SX . <5S2 <5Sx 8S.
Ю1 = —Г2- + -Г-~ > Pi =-S~-----s— • (К)
1 o7}i 1 отц ’ oet dei v '
Сравнивая формы (44) co второй группой уравнений (1) для интегралов невоз-
мущенного движения, мы найдем, что следующие соотношения между функ-
циями Ф„ Sx должны быть строго и тождественно истинными :
л <t -5S, <5S. <5S. 'i
Tl, ~ ’ e2 , • • , eSn ,-,----, • • • ,------s — , (47)
" '' 1 1 ’ £ ’ in ' oe1 ’ <5e2 ’ ’ <5e3n J ' '
и что, следовательно, при помощи равенств (К) интегралы возмущенного
движения могут быть представлены в следующем виде :
Л , <55, , <5S2 , <5S, 'I
= e2, ... , e3n, Pi+~^~, Pz + ^p ••• - Рзп + ^J • (L)
Таким образом, мы можем точно вычислить возмущенные переменные у,-
по правилам невозмущенного движения (44), если мы, не меняя времени t
или начальных значений е, этих переменных, которые определяют начальную
конфигурацию, изменим (в общем) начальные скорости и направления
путем прибавления к элементам р, следующих возмущающих членов :
. Л 8S, , 8S, . 8S, ....
= ^2 = -^, JP3n = ^. (М)
Это представляет собой замечательный результат, охватывающий всю
теорию возмущений. Мы можем вывести из него частные производные ц}
или связанные с ней величины которые определяют возмущенные напра-
вления и скорости движения в любое время t. Однако аналогичное рас-
суждение тотчас дает общее выражение :
ds2 . (. „ . r.8S2 . <5S2 . <5S2 a ,n14
eSn,P + ^,P2+-^-, ... .Рзп+^-J, (N)
откуда следует, что после того, как мы изменим начальные скорости и
направления или элементы p[t как и раньше, при помощи возмущающих
членов (М), можно применить правила невозмущенного движения (45)
для вычисления скоростей и направлений во время t или переменных вели-
чин со, если, в конце концов, применить к вычисленным таким образом
величинам следующие новые поправки на возмущение:
л— <5S2 л— 8S2 л— 8S2
ZJCO, = -5—- , 2JCO2 = -j~ , . . . , ZJCO,„ = т—- . (О)
1 <5% ’ 2 6г)2 ’ ’ лп дт]зп ' '
1fi*
244
У. ГАМИЛЬТОН
Приближенные выражения, выведенные
из предыдущей строгой теории
10. Изложенная выше теория дает действительно точные выражения
для возмущений при переходе от более простого движения (Н) или (I)
к более сложному движению (G) или (К). Однако может показаться, что эти
выражения мало полезны, поскольку они включают неизвестную возму-
щающую функцию S2 (а именно возмущенную часть полной главной функ-
ции о), а также неизвестные возмущенные координаты или отметки поло-
жения Однако в последнее время было показано, что во всех случаях,
когда найдена первая приближенная форма главной функции S, как, напри-
мер, здесь главная функция Sx невозмущенного движения, поправка S2
может быть в общем внесена с бесконечно увеличивающейся точностью.
Но так как возмущения (М) и (О) включают возмущенные координаты
лишь поскольку они входят в производные этой малой возмущающей
функции S2, то очевидно, что можно подставить вместо этих координат
сперва их невозмущенные значения, а затем корректировать результат путем
подстановки более точных выражений.
И. Функция Sx невозмущенного движения должна строго удовлетво-
рять двум уравнениям в частных производных формы (С), а именно :
SS, , „ ( SS. SS, А ,г / ч
+ F1 (. <5<?х ’ ' ’' ’ 6ezn ’ £1 ’ " ' ’ £зп) ~ ^х ^х ’ ' ’ ' ’ ’
и, следовательно, согласно равенству (D) возмущающая функция S2 дол-
жна строго удовлетворять условию
...,^г,7?х, ..., +
+ F[^ ---’Ч (Q)
и может (ввиду того, что F является однородной функцией первой степени)
быть приближенно выражена так:
t
*S2 = J {t/2 (%, ..., 7]3п) — F2 > • • • > % > • • • > W
о
или с помощью равенства (I) так :
S2= , Цзп) — ^г(«>х, .. - , ш3п, т11, , v3n)}dt, (S)
О
т. е., принимая во внимание равенство (42),
S2=-fH26tt. (Т)
о
В этом выражении Н2 дается непосредственно как функция переменных
величин T)it со,, но может рассматриваться в том же порядке приближения,
как известная функция их начальных значений е(, pt и времени t, полученных
путем подстановки вместо тр, w, их невозмущенных значений (44), (45) в
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
245
качестве функций этих величин. Поэтому его вариация может быть выра-
жена одним из следующих двух способов :
или
»н2 = V др) + 4гд/.
(48)
(49)
Принимая последнюю точку зрения и проведя интегрирование (Т) по
времени, причем элементы р, рассматриваются как постоянные, мы должны
затем подставить вместо величин р, их невозмущенные выражения (39)
или (1), и тогда мы найдем для вариации возмущающей функции S2 следую-
щее выражение [104] :
t t
dS2 = -Нг dt + v (_ Ье J dt + <5 Jg-J dt) . (50)
о 0
Это позволяет нам преобразовать выражения (М) и (О), характеризующие
возмущение, в следующие приближенные выражения :
и
/.1р, =
,f to*+2 ffSj f dH2 Se Set J Sp (U)
0 0 t
1 ~ oeorp J Sp (V)
о
включающие только функции и величины, которые согласно теории невозму-
щенного движения могут рассматриваться как заданные,
12. С той же степенью приближения, если мы напишем вариацию
выражения (44) невозмущенной координаты т]1 в виде
^ = 4га' + ^(тггг + ^^)> <51>
то возмущение этой координаты может быть выражено так:
т. е. согласно (U)
:Ar]i=^±tL^dt
п dpi J <5ех
о
<5??(
op г У
J Овзп
о
(W)
дгц d2Si Srp S2SY
ёрг <5е? "Г" Sp2 <5ех <3е2
drp S2SX \ (
драп Se1Sean J J
0
(52)
f fyi d2S1 дтц d2$i I fyi
. X ^Р1 др2 <5*?ЗЛ <5^2 дрзп
J О&2
О
&S1} I
de*u ) J драп
0
246
У. ГАМИЛЬТОН
Кроме того, тождество (47) дает [105]
8гц _ 8гц 8гц 8гц «^Sj
бек 6px 8вк 6et "Г" дрг дек 6ег + • • • + дрзп бек 8em
Поэтому выражение (52) может быть сокращено так:
Л
<5pi J °ei дРзл J de8n 1
о о
+ ™dt.
ogj J opx oezn J орзп
о о
(53)
(X)
Это показывает, что вместо точных возмущенных членов (М) мы можем
приближенно воспользоваться выражением
t
Лр^-^dt, (Y)
о
чтобы вычислить возмущенную конфигурацию в любое время t на основе
правил невозмущенного движения, при условии, что, помимо такого изме-
нения начальных скоростей и направлений, мы изменим также начальную
конфигурацию согласно формуле:
о
Нетрудно будет подобным же образом вычислить приближенные выра-
жения для возмущенных направлений и скоростей в любое время t; однако
лучше, если мы снова другим способом рассмотрим строгую теорию воз-
мущения.
Другая строгая теория возмущения, основанная на свойствах
возмущающей части константы закона живой силы и дающая формулы
для варьирования элементов, более аналогичных уже известным
13. Предположим, что теория невозмущенного движения дала нам 6п
постоянных eh pt или любые комбинации их кг, к2, ..., квп в качестве
функций 6л переменных т)ц ю, и времени t, которые могут быть обозначены
так:
kt = Xi (f, , ^2,. • • •. ’Узп , , "а, , <»зп) (54)
Эти элементы к, дают взаимно выражения для переменных ш, в тер-
минах этих элементов и времени, аналогичные (44) и (45) и могущие быть
записанными аналогичным образом:
= kt,k2, ...,к6п), = ...,к6п). (55)
Тогда полная производная каждого такого элемента или функции кь взятая
по времени (в том виде, в каком она явно и неявно входит в выражение (54)),
должна исчезать в невозмущенном движении. Таким образом, посредством
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
247
дифференциальных уравнений такого движения (Н) должно строго и тож-
дественно иметь место следующее общее соотношение:
0 , v ( SHi _ Ski
St “ V dco Sai Sr] J
(56)
Если, переходя к возмущенному движению, мы сохраняем уравнение (54)
в качестве определения величины kit то эта величина больше не будет постоян-
ной, но будет продолжать удовлетворять обратным соотношениям (55) и
может быть по аналогии названа переменным элементом движения, а ее
полная производная по времени может быть посредством тождественного
уравнения (56) и при помощи дифференциальных уравнений возмущенного
движения (G) строго выражена следующим образом:
dfa _ у ( 6ki SH2 Sk, Sh2 A , j
dt ( Sr] Sai Sai Sr] J ' '
14. Этот результат (А1) заключает в себе всю теорию постепенного варьи-
рования элементов возмущенного движения системы; однако он может
быть подвергнут полезному преобразованию путем подстановки выражений
(55) вместо переменных со, как функций времени и элементов движения,
поскольку это приведет к системе 6п точных и простых дифференциальных
уравнений первого порядка между этими переменными элементами и време-
нем. Таким образом, если мы выражаем величину Н2 как функцию этих
последних переменных, то ее вариация дН2 принимает следующий, новый вид:
<5Н2= v ^dk + ^dt,
(57)
что дает путем сопоставления с формой (48) и при помощи (54)
SH2 _ v SH2 Sk . SH2 _ v SH2 Sk_
Sr]r Sk Sr]r ’ Sair Sk Sair
(58)
Таким образом, общее уравнение (А1) преобразуется в следующее :
где
dki sh2 , sh2 . .
dt — a‘-J Skz + a'-2 Sk2 + • • • + вп
SH2
Sk6n ’
G-i, s — ( fa fry J >
(Bl)
(Cl)
так что остается только исключить переменные со из выражений этих
последних коэффициентов. Замечательно то, что это исключение устраняет
также символ t и оставляет коэффициенты a,iS, выраженные как функции
одних элементов к и не включающие явно времени. Эта общая теорема
динамики, которая, возможно, немного шире, чем аналогичные результаты,
полученные Лагранжей и Пуассоном, поскольку в ней возмущающие члены
в дифференциальных уравнениях движения не зависят обязательно от кон-
фигурации, может быть исследована следующим образом.
15. Знак суммы 27 в (О) подобно тому же знаку без индекса в других
аналогичных уравнениях, в которых он уже встречался в этой работе, отно-
сится не к явно введенным индексам, какими, например, здесь являются
z, $ в величине, подлежащей суммированию, а к индексу, который не введен
явно и который здесь можно обозначить г. Таким образом, если мы для боль-
248
У. ГАМИЛЬТОН
шей ясности введем этот переменный индекс и его пределы, то выражение
(С1) превратится в следующее :
а ____ узп f dfa Ski Sks 'j
- 2 mi [Srjr -5^7 - 7^7 ~Stj7J > (эу)
а его полная производная по времени может быть разделена на следующие
две части :
d _ V3„ ( Ski d dks _ Sks d Ski A . v3„ 7 Sks d Ski_________________Skt_ d Sks 'j
df ,,s dt <5cor di Swr J ' ^tnl ( Scdr dt Si]r Sair dt S/jrJ’
(60)
которые мы далее будем вычислять отдельно и затем сложим вместе. Согласно
определению (54) и дифференциальным уравнениям возмущенного дви-
жения (G) имеем равенства
d Ski = S*kt v3„ ( S2k ( SH, SH2 \ _ S2kj f SHt 6H2\ I
dt SaJr St Sa>r — <5^u Sair \ Saiu Saiu J ,SajuSd>r I, S/ju S/ju Jj ’
(61)
в которых вследствие тождества (56)
<?•&» _____V3n (Sk^ SHr _ Ski_ SH^
St Sair Sa>r lu)i (Srju Sa>u Saiu Srju J ' '
Поэтому мы имеем
d Ski _ y3„ f S2ki SH2 S*kj 6H2 Ski S2Hl _ Ski S2Hl j
dt Sair <u)1 ( Srju Sai, 8aiu Saiu Sa>r Sr]u 8aiu Srju Sair Sr/U Saiu Sair J
(63)
d Sks K „
-g=- может быть найдена отсюда путем простои замены i на s, так
что [10в]
S*ki
>зп f dfo d Sks _____ Sks d Ski )____ v3nj 3„ If Sks______________
lr)1 ( Sr/r dt Sair Srjr dt Sair J “lr’u> 1,1 Ц Srjr Saiu Sai,
_ Ski S*k SH^ t Skj S2ks __ Sks
Srjr Saiu Sair J di]., ' \ Si/r Sr/U Sair Srjr
S2ki SH2
Stju Sa>r ) Saiu
f Ski Sks Sks
t Sr]r Saiu Srjr
и аналогично
van JL dkt _ J^L
— ( <5<y7 dt Srjr Sair
_ Ski S*ks SHt
Sair Siju Srjr J Saiu
fjk^ Sks__ Sks
( Sair Srju Sair
Ski SWy fSks^ Sta
Saiu J Srju Sair ' I Sr]r Srju
Sksi ___ -озп, зп If ^ks
dt Srjr) "tr’u> 1’ 1H Sair
fjki_ S2ks_____________Sks
( Sair Saiu Srj' Sair
dki\ S^Ht f Sks Ski
Siju ) Saiu Srjr "T^ S<H2 Saiu
Ski afa) 84^ I
Sr]r Srju J da>u Sair J (64)
6*kj _
Srju Srjr
SVij 'j 8Hr ,
Saiu Srjr J Srju
Ski 84^ |
Sair Saiu J Siju Srjr) ' (65)
Следовательно, сложив два последних выражения и произведя необходи-
мые сокращения, мы находим при помощи соотношений (60) [т]
d л _______ \’3п (дш> । о<и>
d7 «ьs - 21 <«>1 + Di,s
Scau J
(Di)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
249
где
дщ> = V3H ( Sks _______S°ki________Ski S2ks i Ski d2ks
i,s (г>1 [ <5d>u <5oJr Sr], SauSojr <5a>r Sa>u Sr]r
Sks S2ki
ftoir $ши Sty
i(u>__ V3n ( $ks ^ki
'i,s — <nl dtySty
Ski S*ks Ski S*ks Sks &kt A
йсог Sr]u Srjr ' St]r S>iu Sior Sty St]u SaJr )
Поскольку общая форма (D1) для -- aiiS не содержит никакого члена, незави-
SH, SH,
симого от возмущающих величин , то отсюда легко сделатьважныи
вывод, уже упоминавшийся ранее, а именно, что производные ai>s в дифферен-
циалах (В1) элементов могут быть выражены как функций одних этих
элементов, не включающих явно время [108].
Очевидно также, что коэффициенты aiiS обладают следующим свойством :
и
as,i = — ai,s
(67)
(68)
поэтому член, пропорциональный исчезает из выражения (В1) для
dki SH. SH. SH. dki
член в выражении — при сложении уничтожает
SH. SH, S SH, dks ‘
член -а,, в выражении Поэтому мы имеем
Sks • Ski r Sks dt J
или
SH2 dk _ «
^~Sk~ ~dt —
(E1)
dH. SH.
___A __,___
dt St ’
(F1)
Это означает, что если мы берем первую полную производную возмущаю-
щего выражения Н2 по времени, то элементы могут рассматриваться как
постоянные.
Упрощение дифференциальных уравнений, определяющих постепенно
меняющиеся элементы в любой задаче на возмущение, и интегрирование
упрощенных уравнений посредством некоторых функций элементов
16. Самым естественным выбором таких элементов будет такой, при
котором они будут соответствовать при невозмущенном движении началь-
ным величинам е,-, р,. Эти величины при помощи дифференциальных урав-
нений (Н) могут быть выражены в невозмущенном движении следующим
образом:
г sh. , г SH,
= J ^dt’ Pt = ^+ .f ~d±dt’ (69)
0 o'
и если мы предположим, что они найдены путем исключения в форме
+ ф<(/, %, %> • • • , w2, ... , w3n), i (70)
Р, = W, + V7, (/, %%, • • • , Van, , w2, ... , w3n), J
250
У. ГАМИЛЬТОН
то легко видеть, что следующие уравнения должны быть строго и тожде-
ственно истинными [1М] для всех значений со, :
0 = Ф,(0лх, %, ... , сох, юг, ... , <о3п), |
О = У,(0, , %, ... , %п, сох, со2, ... , а>3п). |
Поэтому, когда мы, переходя к возмущенному движению, устанавливаем
уравнения определения
, %п, «1, «2, • •• , «зп), | (72)
2,- = со, + %, йх, соа, ... , со3п), |
вводя 6п переменных элементов kb кь в которых группа А,- была бы пред-
ставлена в нашем недавнем обозначении как
А,- — ^зп+1, (73)
Ski Sk, S2.i SXi
то мы видим, что все частные производные вида , -^=-
исчезают, когда t = 0, за исключением следующих :
Поэтому, когда t = 0 в коэффициентах a, s (59), все эти коэффициенты исче-
зают за исключением следующих:
вт.Зп+г ~ 1 > ^3n+r,r = 1 • 1.(75)
Однако доказано, что эти коэффициенты ais, когда они выражены как
функции элементов, не содержат явно времени,’ а предположение, что t = О,
не устанавливает никакого соотношения между этими би элементами кь А/;
которые по-прежнему остаются независимыми. Поэтому коэффициенты
ais не могут приобрести значений 1, 0, —1 при предположении, что / = 0, если
только они не имели этих значений постоянно и независимо от этого пред-
положения, Отсюда дифференциальные уравнения вида (В1) могут быть
выражены для данной системы переменных элементов следующим, более
простым образом:
dki _ SH2 . ДА, _ SH2 (СЦ
dt S}.i ’ dt Ski '° '
Эти выражения легко можно проверить при помощи формулы (Е1),
которая теперь принимает такой вид:
V ( № । ^7^2 „ /НМ
I Sk dt *" st dt J ~ >
17. eb p„ очевидно, представляют собой начальные значения переменных
элементов А„А, согласно определениям(72) и тождественным уравнениям(71).
Таким образом, задача строгого интегрирования уравнений возмущенного
движения (G), связывающего переменные со, и время, или задача опре-
деления этих переменных в качестве функций времени и их собственных
начальных значений е„ строго преобразуется в задачу интегрирования
уравнений (G1) или определения би элементов А:,-, А,- как функций времени
и тех же самых начальных значений. Главное преимущество этого преобразо-
вания заключается в том, что при малых возмущениях новые переменные(т.е.
элементы) меняются лишь незначительно, и еще в том, что поскольку новые
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
251
дифференциальные уравнения имеют тот же вид, что и старые, их можно
интегрировать аналогичным способом. Следовательно, рассматривая опре-
деленный интеграл
£ = (76)
как функцию времени и 6л величин к1г к2, ..., кзп, ev е2, ..., езп, и заметив,
что при помощи процесса, аналогичного тому, который дан в четвертом
параграфе настоящей работы, можно показать, что его вариация, взятая
по отношению к последним величинам, будет
(К1)
<5E = 2'G^-P^), (I1)
мы находим, что строгие интегралы дифференциальных уравнений (G1)
могут быть выражены уравнениями
. _ dE _ dE
~ Ski ’ Pi~~ det ’
в которые входит только одна неизвестная функция элементов Е, и проблема
возмущения при помощи этого нового метода сводится к отысканию и из-
учению этой единственной функции.
Мы также могли положить
С=/{-2^->-+Нг)л
О
(77)
и рассматривать этот определенный интеграл С как функцию времени и
6п величин 2,-, д и тогда нашли бы другие формы для интегралов дифферен-
циальных уравнений переменных элементов, а именно :
, . бс дс
<5Л ’ е‘ ~ др,
(L1)
При этом каждая из этих функций элементов С и Е должна удовлетворять
некоему уравнению в частных производных, аналогичному первому урав-
нению из каждой пары, упомянутой в шестом параграфе этой работы и выве-
денной на основе аналогичных принципов [ио].
18. Таким образом, из формы функции £ и из уравнений (К1), (G1) и (76)
видно, что частная производная этой функции, взятая по времени, пред-
ставляет собой
dE = dE
dt ~ dt
v dE dk _ „
“lkdt~ ’
(M1)
следовательно, если мы разделим эту функцию Е на любые две части
Е1 + Е3 = Е (N1)
и если для общей ясности мы напишем выражение Н2 в виде
7/2 = Н2 (t , ki, k2 , . . . , k3n , ^1 , ^2 ; • • • , ^3n) I (O1)
то получим строго уравнение в частных производных
dt 1 dt 1 2 ( 1 ’ 3nj dkt ' dkx’ ’ dkzn dkSn) v ’
Когда часть E2 мала и мы пренебрегаем квадратами и произведениями ее
частных производных, эти уравнения с помощью (G1) и (К1) приближенно
252
У. ГАМИЛЬТОН
приводятся к следующему [ш]:
о___ , dEt . j, (. , , jSE,
u - ~dT + ~дГ + ,Klt...,K3n, Ski
d£x 'j
(5/Сзп J
(Q1)
Отсюда, с той же степенью приближения, видим, что если часть Ev подобно
полной функции Е, взята такой, чтобы она исчезала со временем, то мы
получим
Е2= -Ц^Г + И*
О ' v
(R1)
д£\
и, таким образом, первое приближенное выражение Ег можно последова-
тельно и неопределенно долго корректировать.
Посредством (L1) и (G1) и при помощи определения (77) имеем
дС__ </с _
dt dt <5A dt
и поэтому функция С должна строго удовлетворять уравнению
производных
de __ [ de de , , )
~дЕ - > л3п)
(S1)
в частных
(Т1)
Если же мы положим, что
С = Сх + С2, (U1)
и предположим, что часть С2 мала, то строгое уравнение
<5СХ , <5С2 „ [, de, , <5С2
dt dt d^ ' dAj
_d(\
1 d^sn
......-Q <v‘>
если принять во внимание равенства (G1) и (L1), приближенно приведется
к виду
2§-=-т+«Ф’<~.......-5^....М <w*>
и путем интегрирования превратится в следующее:
+«>('’%-......(х1>
О' 1 ’
причем предполагается, что части Сх и С2 исчезают раздельно, когда t = О,
подобно полной функции элементов С.
Для того же чтобы получить такое первое приближение £х или Сх любой
из этих двух функций элементов Ей С, мы можем заменить в определениях
(76) и (77) переменные элементы к и 2 их начальными значениями е. и р и
затем исключить одну группу этих начальных значений при помощи соот-
ветствующей группы следующих приближенных уравнений, выведенных из
формулы (G1):
kt=^+i^~dt <Y1>
о р'
и
<zl)
о
Отсюда легко можно видеть, что эти две функции элементов С и Е свя-
заны друг с другом [112], а также с возмущающей функцией S2, так что
форма любой из них может быть выведена из формы любой другой в том
случае, когда функция Sx невозмущенного движения известна.
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
253
Аналогичные формулы для движения отдельной точки
19. Хотя наш общий метод в динамике предназначен главным образом
для изучения систем притягивающихся или отталкивающихся точек, он не
ограничивается ими, но может быть использован во всех вопросах, к которым
применяется закон живых сил. Все анализы, приведенные в данной работе,
и в особенности теория возмущений, могут быть не без пользы проиллюстри-
рованы на следующих аналогичных рассуждениях и выводах, относящихся
к движению одной точки.
Представим себе точку с тремя прямоугольными координатами х, у, z,
движущуюся по орбите, определяемой тремя простыми дифференциальными
уравнениями второго порядка, имеющими форму, аналогичную уравнениям
(2), а именно :
<5х ’ У ду ’ dz ’
(78)
причем U представляет собой любую данную функцию координат, не вклю-
чающую явно время, и установим следующее определение, аналогичное (4):
T = i(x'2 + y'2 + z'2). (79)
При этом х', у', z' представляют собой первые, а х", у", z" — вторые про-
изводные координат, рассматриваемых как функции времени /. Если же для
большей общности или простоты выразить прямоугольные координаты
х, у, z как функции трех других отметок положения r]2, г/3, то Т превра-
тится в однородную функцию второй степени их первых производных
т/р т)'2, т]'3, взятых по времени, и если мы для сокращения положим
дТ - дТ - дТ ,Qn.
СО1 = -д-т- , «2 = “ГТ , = тт , (80)
то Т можно рассматривать так же, как функцию
Т= F («J , й2 , со3 , 7llf 7/2, 713),
(81)
являющуюся однородной функцией второй степени по отношению к со2, со3.
Можно также положить для сокращения
, ю2, 53, , ??2, ?73) - СТ , %, %) = Н, (82)
и тогда вместо трех дифференциальных уравнений второго порядка (78)
мы можем применить шесть следующих уравнений первого порядка, анало-
гичных уравнениям (А) и полученных путем аналогичных рассуждений :
*71 dt dd51 = + ~ <50?! ’ — дн *?2 dt doj2 = +-ЛЯ- <5о>2 ’ <5% _ dt </сй3 _ + <5йз ’ 1 дН [ (83)
dt *71 ’ dt <4 ’ dt *7» ‘ J
20. Строгие интегралы этих шести дифференциальных уравнений могут
быть выражены в следующих формах, аналогичных (В):
дз _ <53 - _ <53
CO-i — “т . COn — ё • (1)<з — —г ,
_ <53 _ <53 _ <5S
Р1 <5ех ’ Т'г < Рз >
(84)
254
У. ГАМИЛЬТОН
где ev е2, е3, pv р2, р3 представляют собой начальные значения или значения
при t = 0 величин т/2, %, <о2, «3, a S представляет собой определенный
интеграл
<• 8Н , _ <5Н , _ ёН
I I —“Г2 "Г СОо О
к 1 ^1 “ <5w2 3 <5ft>3
(85}
рассматриваемый как функция т/3, е1; е2, е3 и t. Величина Н не меняется
в процессе движения, и функция S должна удовлетворять следующим двум
уравнениям в частных производных первого порядка, аналогичным двум
уравнениям (С):
<55 Г <55 <55
<51 "Г” ( <5ег ’ <5е2
8S Г Г / X
<5е3 ’ е± ’ е2 ’ — U (Ci, с2, е3).
(86)
Отсюда эта важная функция S, которую можно назвать главной функцией
движения, может быть строго выражена в следующем виде, полученном
путем рассуждений, аналогичных тем, которые приведены в седьмом пара-
графе этой работы :
s=Si+5\-^+ и^> - F (-4J- > %)} +
( <55 <5St <55 _ <551 <5Si А ,,.
I6rh <5^1 ’ дг]2 <5/;2 ’ '<5г;3 <5% ’ Г<1’ У2’ ^3J ’ (87)
при этом Sx представляет собой любую произвольную функцию тех же вели-
чин г/р т/2, т)3, вр е2, е3, /, которые выбраны так, чтобы они исчезали со вре-
менем. Если же эта произвольная функция Sj выбрана так, что она пред-
ставляет собой новое приближенное значение главной функции .S, то мы
можем во втором приближении пренебречь вторым определенным инте-
гралом в выражении (87).
21. Первое приближение этого рода мы получим, разделив выражение Н
(82) на две части, из которых преобладающую обозначим через Hlt а мень-
шую — через Н2, и, пренебрегая частью Н2, заменим дифференциальные
уравнения (83) другими, а именно:
d’h _
dt <56>i ’ dt <5cu3 ’ dt <5й3 ’
da^ 8Нг dio2 <5H, dcu3 <5Hj
dt <5»7i ’ dt <5»?2 ’ dt ~~ <5»?з * .
(88)
После этого строго проинтегрируем эти упрощенные уравнения, относящиеся
к более простому движению, которое можно назвать невозмущенным движе-
нием точки. Тогда для главной функции такого невозмущенного движения
определенный интеграл
г Г— <5Н-
- <5Ht
’2 <5сй3
. <5Hj
>3 <5<й3
(89)
рассматриваемый как функция г)2, r/3, elt е2, е3, t, будет представлять
собой приближенное значение первоначальной функции S возмущенного
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
255
движения. Эта первоначальная функция соответствует более сложным диф-
ференциальным уравнениям :
*71 _ dt 6Н. <5Н, <5а), 4cux ’ *?2 _ dt <5cu, дН2 дш2 ’ d>h dt = , <5и3 <5H, 4и3 ’
dcoj <5Н, <5Н, do). дН1 ЛН2 do). дНг <5Н,
dt ~ 4»?! Й»?! ’ dt dt 4»?3 4%
(90)
Функция Sx невозмущенного движения должна удовлетворять двум
уравнениям в частных производных первого порядка, аналогичным двум
уравнениям (86), а интегралы невозмущенного движения могут быть пред-
ставлены следующим образом :
_ <53. . <53, W2 = ’ 0^2 <5S, СО» = ~г~- 4»?3
<53. <53, <53.
Р1 = Г1 ’ оех ’ ^=--4Г’ ^ = --4^
(91)
в то время как интегралы возмущенного движения могут быть с одинаковой
строгостью выражены в следующих аналогичных формах :
<53, <5S, I4»?i ’ со2 = <53, <5S, 4»?2 + 4»;, ’ со3 = <5St <53, 4% + 4% ’ (92)
Р1 = - <5St _ <53, <5ег <5ег ’ Рз = <5St <53, <5е, <5е, ’ Рз = _ 4Si _ аз, 4% 4е3 ’
если S2 обозначает точную поправку функции Sx или возмущающую часть
полной главной функции S. Исходя из изложенной выше общей теории
приближения, эта возмущающая часть, или функция S2, может быть при-
ближенно выражена определенным интегралом (Т):
52 = -/я2Л, (93)
О
при вычислении которого можно применить уравнения (91).
22. Если интегралы невозмущенного движения (91) дают :
J?i = 0x(f, Ci, е2, е3, Pi, Р2, Рз), ]
Р2 = 02(f, elr е2, е3, р19 р2, р3), | (94)
% = фз(*> £i, е2, е3, plt р2, р3), )
wi = G > £1 > £а > £3 > Pi > Рз, Рз) >
w2 = ^2 (^ > ei, e3i £3 > Pl’ Рз, Рз) ’
тз = Ч/з{1 ’ £1 ’ е2’ ез ’ Р1 ’ Рз ’ Рз) ’
(95)
то интегралы возмущенного движения (92) могут быть строго преобразованы
следующим образом :
, , <53, , <53, , aS, А
% = $1 (t, С1, £2 ,£3, Р1 + , Рз + , Рз+ ,
л и , 43, . <53, , <5S2]
г1з-Фз{1,£1,£з,£з’Р1 + -^’Рз + -^,Рз+-^}’
, 43, , аз, . <53, А
% = £1, £2, ез’Р1 + -^.Р2+^-,Рз+-^~]
(96)
256
У. ГАМИЛЬТОН
и
- <53„ , (. , 63» , <53„ , <5S2 'I
= + elte2,e3,P1 + -^-, р2 + -^-,Рз + —J ,
- - <5S„ , Л . <5S2 , 6S2 . <5S2 Ч
w2 = ^ + ^[f,ei,e2,e3,Pi + -^, p2 + ^,p3+ -a^J ,
- <5S2 , [. , 6S2 , <SS2 , 6S2)
"з = -^7 + e3> P1 + ^, p2 + ^, Рз + 5
(97)
здесь S2 представляет собой точную возмущающую функцию, а возмущения
положения в любое время t могут быть приближенно выражены формулой :
11 <5ех J дрх де2 J др2 de3 J <5р3
ООО
- р- - 4^ г а - \^>-dt
&Pi J де1 др2 J <5е2 <5р3 J ое3
ООО
(98)
и двумя аналогичными формулами для возмущений двух других координат
или отметок положения у2, %. В этих формулах предполагается, что коорди-
наты и Н2 выражены посредством теории невозмущеНного движения как
функции времени t и постоянных elt е2, е3, рг, р2, р3.
23. Если интегралы невозмущенного движения путем исключения дают
для этих постоянных выражения вида :
<?1 = Pi + (<, Pi, Рг, Рз , «1, «г, «з) , «2 = Рг + Ф2 (f , Pl , Vi, Рз, «1, «2 , «з) - (99)
«3 = Рз + Ф3 (< , Р1 , Рг , Рз , «1 , «2 , «з)
и
Pi = «I + Vi (<, Pi, Рг, Рз , «1, «г, «з) , р2 = ш2 + у2 (f, Pl , р2, Рз , «1, ы2, "з) , (100)
Рз = "з + ^з(<» Pi, Рг, Рз, "1, ®2> шз)
и если для возмущенного движения мы принимаем определения :
*i = Pi + Ф1 (<, Pi, Рг , Рз , «1, «2 , «з) , ]
*2 = Рг + ф2 (f, Pi, Рг , Рз > «1, м2 , «з), *з = Рз + фз (t, гц, Рг, Рз , «1, «2 , й3) Я1 = «1 + ^1 (t, pi, рг, Рз , «1, «2, «з) , > (Ю1)
Я2 = Й2 + у2 (f , ГЦ , р2 , Г)3 , , «2 , СО3) , 4 = «3 + Уз (t, Pi, Рг , Рз, «1, «г , "з), (Ю2)
то мы получим для такого возмущенного движения следующие точные
уравнения, имеющие форму уравнений (94) и (95) :
Pl — Ф1 (t , к± , А2 , ^3 , , ^2 , *3) > |
Р2 ~ ^г G, *1 Дг Дз , ^1, ^г, ^з) , । (ЮЗ)
Рз = ^3 (^ , , ^2 > ^3 > ^т , ^2 , ^з) /
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
257
и
&>i = (/, кх, к2, к3 , 2,, 2g, 2g), 1
«2 = ^2(^ к1 ,кг, к3, 21,22,23), ’ (104)
«з = у3 (t, к±, к2, к3,2Х, 22, 23) j
и можем обозначить величины кг, к2, к3, 2Х, 22, 23 как шесть переменных
элементов движения. Для того чтобы определить эти шесть переменных
элементов, мы можем воспользоваться шестью следующими точными диффе-
ренциальными уравнениями первого порядка, где предполагается, что Н2
выражено посредством (ЮЗ) и (104) как функция элементов и времени :
dkx Лк.г dk3 t>H3
dt <52x ’ dt dz2 ’ dt
(Ю5)
d^ <5H2 dk2 <5H2 ^3 6H2
dt ~ 6kx ’ dt <%2 ’ dt ^3 ’
а строгие интегралы этих шести уравнений могут быть выражены следующим
образом :
. — ')Е ; _ 6Е_ t
Z1 — 'ЙЛГ ’ ~ дк3 ’ Лз ~ ~6к3 ’
— бЕ — _ SE —
Р1 де, ’ Р3 <5е2 ’ Р3 де3 ’
причем постоянные elt е2, е3, pv р2, р3 сохраняют свое только что устано-
вленное значение и поэтому представляют собой начальные значения эле-
ментов к1г к2, к3, 21; 22, 23. В то же время функция £, которая может быть
названа функцией элементов, так как ее форма определяет законы их вариа-
ций, представляет собой определенный интеграл
E = S +. 007)
0 v £ Л 7
рассматриваемый как функция kv к2, к3, elt е2, е3 и t.
Интегралы уравнений (105) могут быть также выражены другим спо-
собом :
к __ , _ _<5С_ _ JC )
~ + <52, ’ К2 - -И , «з - + у, ,
- (108)
<5С <5С <5С V '
б, - С • бо ““ с » ~с. , I
1 2 <^2 ’ 3 <^3 J
причем С представляет собой определенный интеграл
+ (109)
0 1 2 з /
рассматриваемый как функция 21; 22, 23, pv р3, р3 и t. Легко можно доказать,
что каждая из этих двух функций элементов С и Е должна удовлетворять
уравнению в частных производных первого порядка [113], которое должно
быть дано заранее и которое может помочь открыть формы этих двух функций
и в особенности улучшить приближенное выражение любой из них. Все
эти выводы, относящиеся к движению единственной точки, аналогичны
выводам, уже сделанным в данной работе в отношении системы притяги-
вающихся или отталкивающихся точек.
17 Вариационные принципы механики
258
У. ГАМИЛЬТОН
Математический пример:
рассмотрение движения метательных снарядов <
24. Если три отметки положения р2, % движущейся точки предста-
вляют собой прямоугольные координаты и если функция U имеет форму
-g% —y{/z2(’?i + ’?2)+ ’,2’?з}> (НО)
причем g, р, v являются постоянными, то выражение
Я =(со* + 0)2 +g7?3+ у (’ll + ’12) +1'2?7з} (I11)
должно быть подставлено в общие формы (83) для того, чтобы образовать
шесть дифференциальных уравнений движения первого порядка, а именно :
drir dt dco, n dn, — dt W2, dd), r> dt W3, dd), 9 (112)
в качестве своих точных инте-
Эти дифференциальные уравнения имеют
гралов шесть следующих выражений [ш] :
и
r]l = er cos fi t + — sin fi t,
% = e2c.o$fit + sin p t,
= e3 cos vt + -y- sin v t — vers v t,
= рг cos fi t — fi ex sin ц t,
co2 = p2 cos fi t — fi e2 sin fi t,
co3 = p3 cos v t — (r e3 + sin vt,
(H3)
(H4)
причем ev e2, e3, pv p2, p3 по-прежнему представляют собой начальные зна-
чения функций р2, р3, со1, со2, со3.
Применяя эти интегральные уравнения для вычисления функции S,
т. е. для вычисления с помощью формул (85) и (ПО) определенного инте-
грала
S = f р + у + ^з. + U]dt, (115)
мы находим :
1(0,2 + 0)2 + 0)2) = 1{р2 + Р1 +Р1 + /1* (el + е2) + Р + -J)2} +
+ у { Pl + Рз - Р* (е1 + $} cos 2 fit - 1Р (ei Pi + е2 р2) sin 2 /i t +
+ у [pl - + f) }CoS 2 vt - f (ves + J) Рз sin 2 vt, (116)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
259
U = - Цр[ + Pl + Pl + Р2 (el + €1) + (те3 4- f j2} +
+ {Pi + Pl + P2 (e2i + e$} cos2pt-~p(e1p1 + e2p2)sin2pt +
+ тЙ ~ (” ез + f )2}cos 2” t - ~ (r e3 + -J) p3 sin 2 vt, (117)
и отсюда
S = § + [pl + pl - P2 (el + el) - у (ei Pi + e2 p2) vers 2 p t +
+ [pl - e3 + f )2} - у P3 (e3 + vers 2 v t. (118)
Однако для того, чтобы выразить эту функцию S, как это предполагается
нашим общим методом, в терминах конечных и начальных координат и вре-
мени, мы должны применить аналогичные выражения для постоянных
Pi, р2, р3, выведенные из интегралов (113):
иг/, — fie1 cos fi t
sin /л t ’
firf2 — fie2 cos fi t
sin fi t ’
g ( ? \
v n, + —— [ve3-----------cos v t
v \ v I
sin v t
тогда находим
о = g2t , p fa — gt)2 + fa — , v fa — e3)2 _
2»! Г 2 ' tgfi t 2 ’ tg v t
- P (’ll Cl + P2 e2) tg y^ - T (% 4- -i) k + ^-1 tg-^ .
(119)
(120)
Эта главная функция S удовлетворяет следующим двум уравнениям
в частных производных первого порядка вида (86):
и если ее форма была ранее найдена при помощи этих двух уравнений или
каким-нибудь другим способом, то тогда из нее можно (при помощи нашего
общего метода) вывести интегралы уравнений движения в форме:
^1 = -^=Р(Р1- ej ctgpt - ре± tg-^- ,
«2 = = Р (т - е2) ctg/zt - ре2 tg ,
% = у~ = v (Ъ - е3) ctg vt - [ге3 + tg-у
(122)
17*
260
У. ГАМИЛЬТОН
и
Pi = - -^7 = Ofc - ei)ctg& + tgy ,
Рг = - =.«(% - е2) ctg/г/ + ^%tg ,
Рз = - ” (% - е8) ctgvt + (” % + у) tg^ ,
(123)
причем последние две группы уравнений совпадают с группой (119) или (113)
и в сочетании с первой группой (122) приводят к другой, ранее данной группе
интегралов (114).
25. Предположим теперь для иллюстрации теории возмущения, что
постоянные а и v малы и что после разделения выражения (111) для Н на
две части :
= y («1 + «г + «з) + £% (124)
и
^2 = 4{р2(р! + »?!) + |'2^}, (125)
мы сперва пренебрегаем малой частью Н2 и таким образом посредством (88)
образуем более простые дифференциальные уравнения движения, которые
мы назовем невозмущенными:
cb]1 —
dt -С0]
Т = °>
dt J ’
doj..
~dT = -i-
(126)
О
dt ’
Эти новые уравнения имеют в качестве своих точных интегралов вида
(94) и (95) следующие выражения :
= ei +/М, Р2 = ег + /М> Рз = ез + Рз t — -%~ gt2 (127)
и _ _ _
«1 = Р1, «2=Р2, b>3 = P3-gt, (128)
а главная функция SA того же невозмущенного движения будет согласно (89)
$! = / = / (М+4+21 -ge3-2gp3/ + ^2) dt =
о v ' о v 7
= t _ SPst3 + |g2P (129)
или, наконец, согласно (127)
Si = (Л1п£1)а+^-Л)а + (>?з -/з)2 _ | gf(% + e3)-Xg2Z3. (130)
Эта функция удовлетворяет, как и должно быть, следующим двум урав-
нениям в частных производных :
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
261
Если при помощи этих двух уравнений или любым другим путем мы находим
форму (130) главной функции Sv то из нее при помощи нашего общего метода
можно вывести интегральные уравнения (127) и (128) в следующем виде :
С01 — /Л ei <4 t ’ ^2 ^2 fl 32)
Cl>2 <5»?2 t ’
ш3 = L of <5<53 t 2
<5Si »?i — ei
Pl — . <5ex t ’
р2= - ^*^1 ^2 ^2 <5e2 t ’ (133)
Рз= ~ Чз ез । L af <5e3 t 2 g >
причем последняя из этих групп совпадает с выражением (127), а первая
группа с выражением (128).
26. Возвращаясь теперь от этого более простого движения к упомянутому
ранее более сложному движению и обозначая через S2 ту возмущающую
часть, или функцию, которая должна быть прибавлена к Sv для того чтобы
составить полную главную функцию 8 этого более сложного движения, мы
получаем путем применения нашего общего метода следующее строгое выра-
жение для этой возмущающей функции :
в котором мы можем пренебречь вторым определенным интегралом и вычи-
слить первый посредством уравнений невозмущенного движения. Таким
образом, посредством (125), (127) мы находим приближенно
-Я2= -4-{(е1 + Р102+ (e2 + p2f)2}-4(e3 + /’3f-ygf2)2 (135)
и отсюда путем интегрирования [ш] находим
S2 = — Y&2(ei + * — у {“2(ei Pi ~ егРи) + г2 езРз}<2 -
-у{л2(Р2 + РЪ +r2(pl- ge3)}t3+ v2g2fi, (136)
или при помощи формул (133) —
+ e1rti + 4- 4) — 4^4^ + 4- е% +
+ |g(%+/3)f2 + ^-g2/4}. (137)
Здесь ошибка будет четвертого порядка по отношению к малым величи-
нам/гиг. Если мы пренебрежем этой малой ошибкой, то можем с помощью
нашего общего метода вывести приближенные формы для интегралов воз-
262
У. ГАМИЛЬТОН
мущенного движения из корректированной функции Sx + S2 в виде.:
= 6St <55, П1 — «1 t fi2t 3 'pi + у е1) ,
со2 = ^2 <552 = ^2 t /л2 t 3~ Рг + ~2 > (138)
<о3 = | dS2 = % —е3 t 2 8' v2t ( ,1 1
и
Р1 = — <55, _ <5ех <5S2 _ <5£1 »71 —«1 t ф 3 +4^) >
Ра = — <55\ _ <5е2 <55, <5е2 — t 3 /2 + У ^2) ’ (139)
Ра = — <5е3 &s2 <5е2 t +4Чез+ йз+8^2) f
или при том же порядке приближения :
Ъ. = + /?11 - + ‘- /?1 f) ,
%== е2 +p2t-^-p2t2[e2 + ~p2tj ,
P2 = e3 + p3t-^gt2 - у i»2 t2[e3 + ~p3t
= P2t(e1 + ,
«2 = Р2 — (е2 + у ^2 0 ’
«3 = Рз - - v2t («з + у Pat - у gf2) •
(140)
(141)
В соответствии с этим, если мы развернем строгие интегралы возмущен-
ного движения (113) и (114) вплоть до квадратов малых величин р и v
включительно, то придем к этим приближенным интегралам; если же мы
развернем выражение (120) главной функции такого движения с той же
степенью точности, то получим сумму двух выражений (130) и (137).
27. Для того чтобы еще дальше проиллюстрировать на данном примере
наш общий метод последовательного приближения, пусть S3 обозначает
небольшую неизвестную поправку приближенного выражения (137), так
что теперь мы будем иметь для данного возмущенного движения строго
S = Sr + S2 -f- S3, (142)
где Si и S2 определяются по формулам (130) и (137). Подставляя Sx + S2
вместо Si в общее преобразование (87), мы находим для данной задачи [116]:
(143)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
263
и если мы пренебрежем только членами восьмой и более высоких степеней
по отношению к малым величинам р и v, то можно ограничиться первым
из этих двух определенных интегралов и воспользоваться для его вычисле-
ния приближенными выражениями (140) для координат возмущенного
движения. Таким образом, мы получим весьма хорошее приближенное
выражение
е , 1 V , ( , 1 VI л.
= - is J * j (’ll + -2 eij + (% + 2 4 fd ~~
0
- it Jf2 (%+ез+4 )2 dt:=
0
= — 360 (4 ~ 7,71 + 4,li + e2 + 4ei) —
- + 4e|) - 4йГ + ез) - -
- -945- (’ll + -jg- ’ll ^1 + ^ + ’ll + 76 % % + el -
i’6Z5 7 , . 31 , „5 17veg/7 , . . 31v6g2/9 ...
~ 945 73 + ‘1б'%ез + ез) до320 (% + 725760“’ 144)
которое представляет собой сумму членов четвертой и шестой степени в
развернутом выражении (120) и при помощи нашего общего метода дает
соответственно приближенные выражения для интегралов возмущенного
движения в виде
и
<58, , <5S2 . <5S3
Ю1 = V L + Г + ,
1 difr 8^ 8^
2 ' <5% ‘ <5% ’
<58. , <5S„ , <58,
СОо — —s--+ “5-4" Ч--
3 <5% <5>73 8ri3 f
п ^1_______^2 <5S3
г*1 8ег 8ег 8ег ’
<58, <583
^=--<-^-“<577’
П = ^2 ^3
Se3 8е3 8е3 '
(145)
(146)
28. Для того чтобы проиллюстрировать на том же примере теорию
постепенно меняющихся элементов, примем следующие определения для
данного возмущенного движения :
и назовем эти шесть величин кг, к2, к3, Л2, Л3 переменными элементами
движения по аналогии с шестью постоянными величинами elt е2, е3, р1; р2, р3,
которые могут быть для невозмущенного движения представлены аналогии-
264
У. ГАМИЛЬТОН
ным путем, а именно, по формулам (127) и (128):
—е2=% —е3 = % — a>3t — ~gt2 , I (J48)
Pi = , Pz=a>z, Рз = «з + g t • I
Тогда мы получим для шести возмущенных переменных г/2, %, сд1; ш2, со3
точные выражения той же формы, что и в интегралах (127) и (128) невозму-
щенного движения, но с переменными элементами вместо постоянных,
а именно:
’71 = + »7а = +-^> *1з = к3 + Л31 —gt2 , | Q.
а»! = Лг, <z>2 — Л2 , a>3 = Л3 gt. J
Строгое определение шести переменных элементов кг, к2, к3, Л1г Л2, Л3 в
качестве функций времени и их собственных начальных значений ev е2, е3,
Pi, р2, р3 будет зависеть от интегрирования шести следующих уравнений в
обычных дифференциалах первого порядка, имеющих форму (105):
(150)
(151)
причем H2 здесь представляет собой выражение
Н2 = 4 {(к1 - Л, t)2 + (к2 + Л21)2} + (к3 + Л31 - У']'. (152)
которое получается из формулы (125) путем подстановки вместо возмущен-
ных координат рг, р2, р3 их значений (149) в. качестве функций переменных
элементов и времени. Эту систему уравнений (150) и (151) нетрудно строго
пооинтегрировать, и нам вскоре представится случай вывести их полные и
точные интегралы. Однако мы в течение некоторого времени будем обращаться
с этими точными интегралами как с неизвестными, с тем чтобы иметь воз-
можность показать на примере-наш общий метод неопределенного прибли-
жения для всех таких динамических вопросов, основанных на свойствах
функций элементов С и Е. Можно воспользоваться любой из этих функций,
и мы воспользуемся здесь функцией С.
29. Эта функция посредством формул (109) и (152) может быть точно
выражена следующим образом :
С = 4 J (Я^2 - + %f2 ~kl)dt + ^U U t - | gt2]2-k2\dt, (153)
о 0 7 '
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
265
и поэтому имеет следующее первое приближенное значение, полученное
благодаря тому, что мы рассматриваем элементы кг, к2, к3, z2, z3 как
постоянные и равные их начальным значениям е2, е3, pv р2, р3 :
С = - |{р2(^ + el) +Л1} + [р2(р! + Pi) + -
-^-v2gP3 + -^^g2. (154)
Подобным же образом мы имеем в качестве первых приближений того
же типа, который выражен общей формулой (Z1), следующие результаты,
выведенные из уравнений (151):
= Pi - Р2 t + у Pjf2) ,
4 = Рг — Р2 («21 + ~2 Рг?) ,
4 = Рз - (е31 + Рз ? - у ё?) -
и, следовательно, в качестве приближений того же рода :
1 а А — Pi
1 а К — Р-1
e2 = ---p2t-^^,
e3 = -i-P^ + i&2~-^r-
(155)
(156)
Подставляя эти значения вместо начальных постоянных ev е2, е3 в прибли-
женное значение (154) функции элементов С, мы получаем следующее прибли-
женное выражение Сг для этой функции, имеющее форму, которая вытекает
из нашей теории :
_ 1 / Gi - Pi)2 + (4~Ря)2 , (4 - Рз)21 _
2/ I /I* ' Д )
- -у {(Яг - р1)р1 + (Я2 - р2) р2 + (Я3 + р3) (р3 - у gf)} +
+ i {(Р2 (Pl + pi) + *2 Рз} - 4 ёРз + . (157)
В данном случае в соответствии с принципами, изложенными в восем-
надцатом параграфе, точная функция С должна удовлетворять уравнению
в частных производных:
<5С (( <5С , , Д2 , ( дС , , Д21 , v2 ( дС . . , 1 ,Д2 /1КС.
и если написать ее в форме (U1)
С = Ci С2,
то Сх представляет собой первое приближение, которое, по предположению,
исчезает со временем, и тогда поправка С2 должна строго удовлетворять
266
У. ГАМИЛЬТОН
условию
С2”~.Н—tvw + M + гЫт + М +~2”hv+z3(_
6
t
1 1 rf 2(<5C2V , of(5C2V 9rdC2V)^ /1ЕЛЧ
- Tgi2) \dt - -2-J \p? +/*2|X-j + ’’’bt) ]dt. (159)
Переходя ко второму приближению, мы можем пренебречь вторым
определенным интегралом и можем вычислить первый при помощи прибли-
женных уравнений (155), после чего получим
с2 = - J {& - Р1у + (Я2 - р2у + (Я3 - р3)2} dt +
О
+4 j pi <+ - pj+ъ - р*)}dt+i$ b - 4 - р*>/2 dt=
= - з {(^ - Pi)2 + (4 - Р2)2 + Л - Рз)2} +
+ 2Т № Р1 & ~ PJ + Р2 Р* ~ Р^ + И Р* <2з - Рз)} -
- + g (*3 - Рз) + 24 (Р4 Р2 + Р4 Р! + Рз) ~ 2^ ”4 g Рз + И %2 ’
(160)
Мы можем подобным же образом усовершенствовать это второе приближение,
вычислив новый определенный интеграл С3 с помощью следующих более
приближенных форм соотношений между переменными элементами z2, z3
и начальными постоянными, выведенными посредством нашего общего
метода :
— ДС2 _ е± ~ 8Р1 8Р1 ~ h~Pi 0 , Р2 । F 1 *Р1 f I , P2t2 । Pltl] - (1 I" 6 +-24 J 2'U + 12 + 60 J ’
- мг <Ю2 2 <5р2 Зр2 Лг — Рг fl P^P i 1РР\ fP* (1 i P*P i Р*Р\ t I1 + 6 + 24 J ' 2 U + 12 + 60 J ’
р = 3 дрз $Рз _ Лз — Рз (< , f2t2 , fl I1) _ tP3 fj 1 ?2t2 , . v2t ( 1 . 6 1 24 J 2 ( 1 12 1 60 J “Г
(161)
. gP (. 7v*t‘£
+ -g- (1 + —ад— + ~4Q~J >
в которых мы можем рассчитывать только на члены до второго порядка,
но которые, когда они освобождены от малых делителей, позволяют довести
точность до четвертого порядка, и тогда [117]
^i = Pi-р2ф1 + 4piz) +ъ“Р4/3(е1 + t^1Z) ’
к.=р2 - р2ф2+4^)+4-“4/з Ь+т Р2 0 ’
(162)
4 = Рз - v2t Ь + у Рз * - + ivi Р Ь + ^p3f - 4g/2) •
Однако, если мы уделим немного внимания природе этого процесса, то
увидим, что все последующие поправки, к которым он приводит, могут
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
267
быть только рациональными, целыми и однородными функциями второй
степени величин z2, z3, р2, р3, g и что все они могут быть выражены
в форме их суммы или в форме полной искомой функции С :
С = Iм Pi)2 + — Pi) + Р2 Сц р[ +
+ /г-2 atl (z2 - р2у + bp pi (Л2 - р2) + /z2 Ср pl +
+ г"2 а, (z3 — р3)2 + bv рз (Я3 — р3) + г2 Cv р2 _|_
+ ШЪ-р3) + *211,£рз + гЧг^, (163)
причем, поскольку коэффициенты ац, а„ и т. д. являются функциями малых
величин р и v, а также времени, то остается только раскрыть их форму.
Отсюда, обозначая их дифференциалы, взятые по времени, в виде
da,t — a', dt, da„ = a'„dt, (164)
и подставляя выражение (162) в точное уравнение в частных производных
(158), мы приходим к шести уравнениям в обычных дифференциалах пер-
вого порядка
2а,'. = (2а„ + р2/)2 b'r = (2av+v4)(b,+t); c'=y(^ + f)2;
/(165)
/' = (2a,+v2t)[f, — 4> h[. = (bv+f)(f„ — ’ /2j ; i'„ = у —|f2)
и к следующим условиям для определения шести произвольных постоян-
ных, введенных при интегрировании :
ао ~ — 2 ’ f° = 6^ ’ С° = 2Т ’ = 24 ’ = 9(Г ’ (166)
Таким образом, отмечая, что а„, Ьр, Ср могут быть получены из я,,, Ь„ с„
заменой v на р, мы без труда находим
а„ = —2 v21 —v ctg vt, Op = 1 24 — 2
Ьр — , , 1 , vt ~t + vtg-2-, bp = + _l , fit tg^-,
cv — ь = — 1 4- 1 vt 2y2 ‘ 2 ’ 4^-^+vctg^- = 1 2ft2 1 , fit f cr - — fl3 l& 2 ’ (167)
Л» = t2 t . vt 2 V2 ‘S' 2 ’
iv = t t3 P TjT ~ 'бн' — Tv3 Ct£vt •
форма функции С полностью известна, и мы имеем
Таким образом,
268
У. ГАМИЛЬТОН
следующее строгое выражение для этой функции элементов:
р _____ _ (Л Р1)2 7 (^2 РгР_____(^3 Рз)2 _
2 /г tg ftt 2 v tg vt
- 4{(*1 - Pl)2 + - Рг)2 + (Яз - Рз)2} ~
- t{Pi - Pi) + р2(Я2 - p2) 7 р3(Я3 - p3)} -
~ 7 {Pi (*i ~ Pi) + P2 (Я2 - Рг)} tg 4“ + T Рз (Яз - Рз) tg-^-
-4(p! + Pi + pi) + 7(P! + Pi)tg4 + vPitg4 +
+ (f ~^ + Vct§(;-3 " Рз) + (4 + 4^4)^Рз +
+ - У ~ 17 Ctg vt] ’ (168>
которое может быть преобразовано разными способами и при помощи нашего
общего метода Дает следующие системы строгих интегралов дифференциаль-
ных уравнений переменных элементов (150) и (151):
2 — <*р2 —
<5С
-Q --- «’ ---
3 <5Рз
Я1-Р1 _ Р1 . _pt_
fi sin fit fi ° 2 ’
^2 P2 _____ P2 xp. _P^__
fi sin fit fi 2 ’
h — Pz _ Рз t 2L I s_ r t _ П
v sin vt v ° 2 ' v (sin vt v)
и
ki=iv = - & - Pi) 0+7 ct§ p*)+pi H+7 tg 4) ’
*2 = 77 = -(;-2-P2)0 + 7ctM + PiH + 7tg 4) ’
*3 = 77 = “(Яз - Рз) (t + 4 ctg +Ps(-t + ytg7r) +
ctg vt
(169)
(170)
t. e.
Я1 = Pi cos fit — егр sin pt,
Я2 == pz cos pt — e%p sin pt,
Я3 = Рз cos vt — es v sin vt + g G —sin vt
^1 = ei (cos pt + pt sin pt) 7 рг f— sin pt — t cos pt\ ,
kz = e„ (cos pt 7 pt sin pt) 7 pz [— sin pt — t cos ,
\p J
f^s = £3 (cos vt 7 vt sin vt) 7 ps sin vt — t cos rfj —
( vers vt t . , , P7
— g ------3---------sm vt 7 y .
° v v2 v 2 J
(171)
(172)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
269
Соответственно эти строгие выражения шести переменных элементов
в данной динамической проблеме согласуются с результатами, полученными
из шести обыкновенных дифференциальных уравнений (150) и (151) при
помощи обычных методов интегрирования и с теми, которые получены
путем исключения из уравнений (113), (114), (147).
Замечания по поводу предыдущего примера
30. Пример, которым мы занимались в последних шести параграфах, не
является совершенно идеальным, но находит некоторое осуществление в
движении метательного снаряда в пустом пространстве. Если мы будем
рассматривать землю как шар с радиусом /? и предположим, что ускоряющая
сила тяжести меняется обратно пропорционально квадрату расстояния г
от ее центра и равна gna поверхности, то эта сила вообще будети,
чтобы применить дифференциальные уравнения (78) к движению метатель-
ного снаряда в пустом пространстве, достаточно взять
(173)
Если мы поместим начало прямоугольных координат у земной поверх-
ности и предположим, что полуось -\-z направлена вертикально вверх,
то получим
Г = У(/? + Z)2 + X2 + у2
(174)
п______О7 । jz2_ _ ччл
и — “r R 2 R ’
(175)
пренебрегая только теми, очень малыми членами, которые имеют в качестве
знаменателя квадрат земного радиуса. Таким образом, если мы пренебрежем
подобными членами, то силовая функция U в данном случае будет иметь
форму (110), на чем основаны все рассуждения, приведенные в примере, при-
чем малые постоянные соответственно представляют собой действительные и
мнимые величины . Поэтому мы можем применить результаты,
полученные в последних параграфах, к движениям метательных снарядов
в пустом пространстве подстановкой этих значений вместо постоянных,
а также заменяя там, где это необходимо, тригонометрические функции
экспоненциальными. Однако, помимо теоретической легкости и малого
практического значения исследований, относящихся к таким метательным
снарядам, эти результаты будут точны лишь до первой отрицательной сте-
пени (включительно) земного радиуса, потому что выражение (ПО) для
силовой функции точно лишь в такой же степени ; поэтому строгие и при-
ближенные исследования, основанные на этом выражении и изложенные
в шести предыдущих параграфах, предлагаются лишь как математические
иллюстрации общего метода, распространяющегося на все проблемы дина-
мики или, по крайней мере, на все те проблемы, к которым применим закон
живых сил.
270
У. ГАМИЛЬТОН
Возобновление рассмотрения систем притягивающихся точек;
дифференциальные уравнения внутреннего или относительного движения;
интегрирование с помощью главной функции
31. Возвращаясь теперь от движения единственной точки к более важ-
ному исследованию системы притягивающихся или отталкивающихся
точек, получим дифференциальные уравнения (А), которые могут быть
представлены следующим образом:
dt 8Н = v (^ - dw дт)), (А2)
а для того, чтобы отделить абсолютное движение всей системы в пространстве
от движения ее точек относительно друг друга, примем следующие отметки
положения:
Y — ~ тХ V — ~ тУ 7 ~ mZ
л"~ ’ у"~ 2'т ’ 2"т
и
= Xt - Хп , = у,- - уп, С,. = Zi - zn .
(176)
(177)
Это три прямоугольные координаты центра тяжести системы, отнесенные
к началу координат, закрепленному в пространстве, и Зп — 3 прямо-
угольные координаты п — 1 масс тг, т2, ..., отнесенные к п-й массе
тп, как к внутреннему или движущемуся началу координат, но с осями,
параллельными первым [118].
Затем мы найдем, как и в предшествующей статье*),
Т =~-(х'„г + у;,2 + z;,2)Sm + l2- т (F2 + + -
“ 2Sm К27' т Г)2 + т + (Г' т И2}, (178)
причем знак суммирования 27, относится только к первым п — 1 массам.
Поэтому
Если мы затем положим для сокращения :
v, _ 1 <57 = F — 27, т§'
х> ~ т 8? 2 tn ’
V 1 &Т = v' — 2Л tnrj' (180)
'' т drf Zm ’
у т <?£' = С' - 27, тС' Sm ’
то получим выражение
Н = у (х(,2 + у;2 + г,?) 27 m + -127, m (х',2 + у;2 + z',2) +
+
2^ {(27, тх,')2 + (27, ту',)* + (27, mz’,)*}- U. (В2)
*) См. стр. 198, уравнение (69).
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
271
Вариацию этого выражения следует сравнить со следующей формой (А2):
dt dH = (dx„ dx'„ — dx'„ dx„ + dy„ dy'„ — dy'„ dy„ + dz„ dz'„ — dz'„ dz„) Xm +
+ 27, m dx', — dx', d£ + dt] dy', — dy', df] 4- dt dz', — dz', dt), (C2)
чтобы образовать посредством нашего общего метода би дифференциальных
уравнений движения первого порядка между би величинами х„, у„, z„,
х'„,у'„, z'„, f, f], t, x',, у',, z', и временем t. Определяя таким образом вариацию
Н, мы должны помнить, что силовая функция U зависит только от Зи — 3
внутренних координат t, f], t и имеет вид
U = тп (1Щ + т2 /2 +... + mn-i /п-i) +
+ тг т2 А, 2 + т3 Д,3 + ... + тп_2 тп^ fn_2> , (D2)
где /; есть функция расстояния т, от тп, a fiik — функция расстояния т,-
от тк, так что их производные функции или первые дифференциальные
коэффициенты, взятые по расстояниям, выражают законы взаимного оттал-
кивания, являясь отрицательными в случае притяжения.
Далее, мы получим две отдельные группы уравнений : для движения
всей системы точек в пространстве и для движения этих точек относительно
друг друга, а именно, во-первых, группу
dx„ = x'„dt, dx'„ = Q,
dy„ = у'„ dt,
dz„ =z'„dt,
dy'„ = 0,
dz'„ = 0,
(181)
и, во-вторых, группу
dt = (х' + ^-27,тх',)Л,
dt = (z', mz',)dt,
Шесть дифференциальных уравнений
щих x„,y„,z,
ного движения центра тяжести системы,
. , 1 &и ..
dx', = at dt >
dy', = ^dt,
J т dfj ’
, , 1 &U
dz, = —dt.
т <5£
(482)
первого порядка (181), связываю-
x',i, y'„, zj, и t, содержат закон прямолинейного и равномер-
_ ------- -------, а Qn — g уравнений того же
порядка (182), связывающих би — 6 переменных I, f], t, х',, у'„ z, и время,
являются формами дифференциальных уравнений внутреннего или относи-
тельного движения. Мы могли бы исключить Зи —3 вспомогательных пере-
менных xl,y,', zl в этих последних уравнениях и получить таким образом
еще одну группу Зп — 3 уравнений второго порядка, включающую только
относительные координаты
t
и время •
1 <517 1 27 SU
т ~ss + n,
1 SU 1 27 <5—
т Sr/ + mn ' Sri ’
1 SU 1 v SU
т "dt + mn Sq
(183)
Для многих целей удобнее оставить уравнения (182), опустив, однако,
для простоты нижние штрихи вспомогательных переменных х',, у',, z',, так
как легко доказать, что эти вспомогательные переменные (180) являются
компонентами центробарической скорости [119], и поэтому при исследо-
вании свойств внутреннего или относительного движения мы можем пред-
положить, что центр тяжести системы закреплен в пространстве в начале
координат х, у, г. Мы можем также для простоты опустить нижний штрих
в 27,, подразумевая, что суммирование должно распространяться только на
первые п — 1 массы, и обозначая для большей определенности п-ю массу
посредством особого символа М. Тогда можно выразить дифференциальные
уравнения относительного движения следующей упрощенной формулой :
dtdH = Zm (dS <3х' — dx' d$ + dr] dy’ — dy' dr) -|- dt dz' — dz' <5C), (E2)
в которой
H = у27т (x'2 + y'2 + z'2) + mx')2 + (27 my')2 + (27 mz')2} — U. (F2)
Интегралы этих уравнений относительного движения содержатся (со-
гласно нашему общему методу) в формуле
dS = S т (х' dt — а' <5а -f- у'dp — b' df3 + z' dt — с' dy), (G2)
в которой а, /3, у, а', Ь', с' обозначают первоначальные величины f, ц, С, х', у', zt,
a S является главной функцией относительного движения системы, т. е. это
рассмотренная ранее функция S, упрощенная посредством опускания той
части, которая исчезает при закреплении центра тяжести.
Функция S дает в общем виде законы движения этого центра или инте-
гралы уравнений (181).
Второй пример: случай тройной или множественной системы
с одной преобладающей массой; уравнения невозмущенных движений других
масс в отдельных бинарных системах относительно этой преобладающей
массы; дифференциалы всех их элементов, выраженные посредством коэф-
фициентов одной возмущающей функции.
82. Предположим теперь, что п — 1 массы малы по сравнению с н-й
массой М, и разделим выражение (F2) длй Н на две следующие части :
Я1 =27^(1 +^(х'2+у'2+г'2)-М27щ/,
Н2 = “дг W *2 + Ус Уг + zlz' - M/i,2) + ...
(Н2)
• • • Н-(X; Xk + у'- у'к + z'i z'k — Mfit *)+...,
из которых последняя мала по сравнению с первой и может быть опущена
в первом приближении. Пренебрегая ею, мы придем к следующим би — б
дифференциальным уравнениям первого порядка, относящимся к более
простому движению, которое может быть названо невозмущенным:
dx' 1 ДН, Л df .
dt т дх' ( ' MJЛ ’ dt т д; д; ’
dn _ 1 ЗД, = Г. .mA d/ = 1 ДН, =м$!_. /па
dt т ду' ( ' М) " ’ dt т dr] дц ’ ' '
_(i । • dz' - 1 ДН, _ df
dt т dz' (1ГМГ ’ dt т д’; д£ ’
Эти уравнения распадаются на п—1 групп, соответствующих п — 1
двойным системам (т, М). Легко проинтегрировать уравнения каждой
группы отдельно. Мы можем предположить далее, что эти интегралы най-
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
273
дены в таких формах:
к = Z(1) (t, %, 7), с, х', у’, Z’),
A = X(2)(t, х’> У’> г'У
Л = Z(3) (t, Г), t,, X’, У’, Z'),
V = X(i) (t, %, 7], С, х’, у', Z'),
Т = ^(5) g, g, х>, у',
т — %(в) g, g, X>t у!, г>у
(К2)
Шесть величин к, Я, fi, v, т, а> являются константами невозмущенного
движения какой-либо одной двойной системы. Поэтому шесть функций,
таких, как %(1), /2), %(3), %(4), /5), %(6), или к, Я, /z, v, т, со тождественно удо-
влетворяют следующему уравнению :
Sk Sk SH,________Sk 6Н, Sk SH, _ 6к_ SH, 8к 8Н, Sk SH,
St ' St Sx' Sx' St ~T" St] Sy' Sy' St] "г” St Sz' Sz' 8t ’
и пяти другим аналогичным уравнениям для пяти остальных элементов
2, д, v, т, со какой-либо двойной системы (т, М).
33. Возвращаясь теперь к первоначальной множественной системе, мы
можем оставить уравнения (К2) как определения, но тогда уже не можем
больше рассматривать элементы kt, Я;., /z;, vit т;-, со; двойной системы (ть М)
как постоянные, потому что система возмущается теперь другими массами тк.
Однако 6п —-6 уравнений возмущенного относительного движения,
когда мы их запишем в форме
dt SH, <5H2 dx' SH, SH„,
dt Sx' Sx' ’ Hl dt — St st
dt] SH, SH2 Ш dy' _ SH, SH2
dt Sy' + Sy' ’ dt St] St]
dt = dt 8Jli, Sz' SHz Sz' ’ m dz' ~dT SH, ~ ~St SH2 St
(М2)
и объединим с тождествами вида (L2), дадут нам следующее простое выра-
жение для дифференциала элемента к в его возмущенном и изменяющемся
состоянии :
dk _ Sk SHZ __ Sk SH* Sk dH2 dfc dH2 dfc SH2 _ Sk SH. <N2.
m dt 8t dx' Sx' St ' St] Sy' Sy' St] "t" St Sz' Sz' St ’ *
совместно с аналогичными выражениями для дифференциалов других эле-
ментов. Если мы выразим £, у, С, х', у', z' и, следовательно, само Н2 как
функции, зависящие от времени и этих переменных элементов, мы можем
преобразовать бп — 6 дифференциальных уравнений 1-го порядка (М2),
связывающих £, у, С, х', у', z', t в такое же число уравнений того же порядка
между этими переменными элементами и временем. Они будут иметь такую
форму:
>4 = 4 4 + -
"4=4 ё"к + Т;+4 S -
dv f f 1 ,f A1 , f 1 (5^2 1 f 1 ^^2 I f 1 ^^2
m -dt = b кУ Sk + "df + -ЙД + b т> ’
^t = M 6Sk + {ь Я} + {г, л} + {r, r} + {T, co} 45 ,
18 Вариационные принципы механики
если мы примем для упрощения, что
f 8к <5Л 8к <5Л 8к <5Л 8к <5Л 8к <5Л 8к <5Л р2.
V’ Л} — Sx, Sy, gy,
и из этого символа образуем другие символы, {к, р}, {А, к} и т. д., путем
чередования букв. Очевидно, что эти символы имеют такие свойства :
{2, к} = - {к, 2}, {к, /с} = 0. (184)
Из п. 15 вытекает, что комбинации {к, Я} и т. д., представленные в функции
этих элементов, не содержат время в явном виде. Существуют, вообще говоря,
согласно свойствам (184) только 15 таких различных комбинаций для каждой
из п — 1 систем. Но всего их могло бы быть 15п —15, если бы они не
допускали дальнейшего сокращения.
Однако из рассмотрения принципов п. 16 следует, что 12п—12 этих
комбинаций могут быть приведены к нулю посредством соответствующего
выбора элементов. Ниже предлагается иной путь значительного упрощения
уравнений, по крайней мере для обширного класса случаев, в которых
невозмущенное расстояние между двумя точками каждой двойной системы
(m, М) допускает минимальное значение.
Упрощение дифференциальных выражений
посредством соответствующего выбора элементов
34. Когда невозмущенное расстояние г от т до М может принять мини-
мальное значение q, соответствующее времени т и удовлетворяющее в это
же время условиям
г' = 0; г">0, (185)
тогда интегралы группы (J2), или известные законы невозмущенного движе-
ния т относительно М, могут быть представлены следующим образом:
к = + ЧХ'У + №’ ~ ty'Y + — £z')2} ;
А = к — £/ + т)Х’;
М dr
M+my^-dr
а> — v sin-1
fc • С • г-1
У 2/U — Л2
dr к .
'dr
Здесь минимальное расстояние q является функцией двух элементов к, ц,
которые должны удовлетворять условиям
2At + 2Af./(9)-(l+g|; = 0, Mf(q)+(l+^>0, (186)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
275
a sin-1 s, tg-1 t использованы (согласно написанию сэра Джона Гершеля)
[12°], чтобы выразить не косеканс и котангенс, а обратные функции, соот-
ветствующие синусу и косинусу или дугам, которые чаще называют
arc (sin=s), arc (tg=l). Следует отметить также, что множитель
Uf
который
мы ввели под знак интеграла, не является лишним. Оставаясь равным еди-
нице по абсолютной величине, он сообщает ей знак плюс или минус в зави-
симости от того, является ли dr положительным или отрицательным, т. е.
соответственно увеличивается г дли уменьшается. Это сделано, чтобы при-
дать каждому подынтегральному выражению неизменно положительное
значение.
Вообще говоря, по-видимому, это полезное правило (хотя ему не всегда
следуют математики) употреблять символ квадратного корня |/7? только
для положительных величин, если впереди специально не поставлен отри-
цательный знак. Тогда будет означать положительную или отрицатель-
ную единицу, соответственно тому, является ли г положительным или отрица-
тельным.
Предполагается, что дуга, обозначаемая синусом в выражении элемента со,
избрана таким образом, что она непрерывно увеличивается с течением
времени.
35. После этих замечаний относительно символики применим фор-
мулу (Р2), чтобы вычислить значения пятнадцати комбинаций вида {к, Я}
шести постоянных величин или элементов (Q2).
Так как
r = (187)
то легко видеть, что шесть комбинаций четырех первых элементов будут
{к, Я} = 0, {к, д} = 0, {k,v} = 0, {Я, д} = 0, {Я, v} = 1, =
(188)
Чтобы образовать четыре комбинации этих четырех элементов с т, нужно
принять во внимание, что пятый элемент т, как это видно из его выражения
в (Q2), явно содержит (помимо времени) расстояние г и два элемента к, /л.
Определенные выше 'комбинации показывают, что эти два элемента могут
считаться постоянными при образовании четырех искомых комбинаций.
Нам следует учесть изменение г, и если мы интерпретируем с помощью
правила (Р2) символы {к, г}, {Я, г}, {д, г}, г} и примем во внимание урав-
нения (J2), то увидим, что
{£,г} = 0, {Я,г} = 0; {Л,г}=-5, {v,r} = 0, (189)
гдеявляется полной производной г при невозмущенном движении, опре-
деленном уравнениями (J2). Следовательно,
{к, т} = 0, {Я, г} = 0 , [v, т} = 0 (190)
и
w—<191)
Очевидно, что в процессе дифференцирования выражений элементов
(Q2) мы можем считать эти элементы постоянными, если заменим дифферен-
циалы £, г/, С, х', у', z’ их невозмущенными значениями. Остается вычислить
18
276
У. ГАМИЛЬТОН
пять комбинаций пяти рассмотренных элементов с последним элементом со,
который представлен в (Q2) как функция расстояния г, координаты С и четы-
рех элементов к, А, v. Таким образом, мы можем использовать формулу
{М = {е,г} + {е,С} + {е,к} + {е,А} + М + {е,г},
(192)
если в ней е будет каким-либо из первых пяти элементов или расстоянием г.
Тогда
(193)
и
<5со f й/eV1 <5со df <5со <5со , Л ОДД
If — IlzJ ’ Sr ~ ~ Sr df’ St ~ *• '1У4'
Формула (192) может быть записана' в следующем виде :
и
Z'
S’ 4- r/y' + fz'
8e
dz'
Мы легко найдем с помощью этой формулы, что
{к, со} = — 1 ; {Я, со} = 0; {/с, со} = 0;
1 — dr
f dt dfi
(195)
(196)
6v
Sz'
Sai Sai _
St 31 = u-
(197)
Формула (195) распространяется также и на комбинацию {г, со}, но в
процессе вычисления этой последней комбинации мы должны помнить,
что т определяется уравнениями (Q2) как функция к, /и, г, так что
St _ • dt
Sr ~ ~Sr’
(198)
Таким образом, с помощью уже определенных комбинаций (196), мы
видим, что
+ (|Ю>
где Вг и Qr — сокращенное обозначение коэффициентов при dr в подынте-
гральном выражении формул (Q2), а именно :
°’ Ч^)г,42'‘+л,'<г>-
(200)
Эти коэффициенты, очевидно, связаны соотношением
>+4?==°’ (201>
которое (после интегрирования) принимает вид
4?'‘,г+Я!3'‘,г=0- <202>
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
277
Здесь г, является величиной, независимой по отношению к элементам к и у.
Мы могли бы, следовательно, сразу заключить с помощью (199), что комби-
нация {т, со} исчезает, если бы не обнаружилась трудность, заключающаяся
в необходимости варьирования нижнего предела q, зависящего от этих
двух элементов, и в том, что на этом нижнем пределе коэффициенты 0г, Qr
становятся бесконечными.
Однако соотношение (202) показывает, что мы можем представить комби-
нацию {т, со} следующим образом :
Г/ Г/
{т,са}~~дк\ (203)
где г, является вспомогательной и произвольной величиной, которая факти-
чески не может повлиять на результат, но может облегчить вычисление.
Другими словами, мы можем придать расстоянию г произвольное значение,
не изменяющееся в зависимости от бесконечно малых вариаций к, у. Это
может оказать помощь в процессе вычисления значения формулы (199).
Поэтому мы можем предположить, что увеличение расстояния г — q мало
и соответствует малому положительному интервалу времени t — т, в течение
которого расстояние г и его производная г' постоянно увеличиваются.
И далее, после первого момента т величина
(204)
будет постоянно ограничена, положительна и будет уменьшаться в течение
того же самого интервала времени, так что ее интеграл должен быть больше,
чем в том случае, если бы он имел постоянно свое конечное значение, т. е.
f-T=j0rdr>(r-00r. (205)
9
Следовательцо, хотя Вг стремится к бесконечности, тем не менее (г — q) • Вг
стремится к нулю, когда при уменьшении интервала мы заставляем г стре-
миться к q. Поэтому разность
(* j М ~j- т к с д , Д4 т С ( к к \ д > /плг\
<206)
S ч ч
будет также стремиться к нулю одновременно с ее частной производной
первого порядка, взятой по у [121].
Мы находим, таким образом, следующую формулу для {т, со} (приняв
во внимание, что, как было показано, эта комбинация не зависит от г):
<207>
9 9
где знак Л означает, что берется предел, к которому стремится это выра-
жение, когда г стремится к q. г
В последней формуле, как и в (199), интеграл J 0r dr можно рассматривать
ч
как известную функцию от г, q, к, у или просто от г, q, к, если у исключается
278
У. ГАМИЛЬТОН
с помощью первого условия (186). Следовательно, он исчезает независимо
от к, когда г = q. Это можно обозначить так :
j 0r dr = Ф (г, q, к) — Ф (q, q, к),
ч
(208)
причем форма функции Ф зависит от закона притяжения или отталкивания.
Поэтому, когда рассматривается зависимость этого интеграла от к и ц через
посредство зависимости от к и q, необходимо, чтобы интеграл не изменялся
вместе с к в процессе вычисления {т, со} по формуле (207), потому что его
г
частные производные (-gg-j"полученные, когда q считается постоянной,
ч
исчезают в пределе при г = q. Его изменение с изменением q также не
должно иметь места, потому что согласно формуле (186)
8q f М + т к 8q
~3к М 1? ЗД —
(209)
Поэтому рассматриваемый интеграл может считаться постоянным, и мы
найдем, наконец,
{т, со} = 0. (210)
Выражения (199) или (203) — оба стремятся к бесконечности, когда г
стремится к q, но всегда уничтожают друг друга.
36. Объединяя теперь наши результаты и представляя для большей
ясности каждую комбинацию в двух формах, в каких она встречается,
когда изменяется порядок элементов, мы получаем для каждой двойной
системы следующие тридцать выражений [122]:
{к, Я} = 0, {к, 4 = 0, {к, 4 = 0, {к, 4 = 0, {/с,со}=-1,
{Я, fc} = 0, {Я, 4 = 0, {Я, »»} = 1, {Я, 4 = 0 , {Я, со} = 0,
{/«, к} = 0, {^,Я} = 0, {р, 4 = 0, {^,4 = 1, {/«, со} = 0,
4 = 0, {»>, Я} = — 1 , {у, 4 = 0 , {»', т} = 0 , {г, 4 = 0,
{т, 4 = 0, {т, Я} = 0 , {т, 4 = — 1, {т, »»} = 0, {т, со} = 0,
{со, 4=1, {со, Я} = 0, {со, 4 = 0, {со, 4 = 0, {со, т} = 0 .
В этой системе три комбинации
{^, 4 ’ {"’ к}, {Я,
равны каждая положительной единице; три обратные комбинации
{т, 4’ {Я\ со}, {^, Я}
равны каждая отрицательной единице, а все остальные равны нулю. Шесть
дифференциальных уравнений первого порядка для шести переменных
элементов какой-либо двойной системы (m, М) имеют согласно (О2) следую-
щий вид:
du mdt~ 8Нг 8t ’ m dr _ ~dt ~ 8H2 д/u ,
dai mdt = 8H2 8k ’ m dk _ dt 8H, (S2)
m-dt = 8Иг 8v ’ m dv ~dt ~ _ 8H2 <?a •
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
279
Если мы опустим вариацию t, то все они могут быть в итоге представ-
лены в следующей форме для вариации Нг:
dH2 = 2 т{р' <5т -— т' dfi + со' dk — к’ dm 4- 2' dv — v' dX). (Т2)
Эта единственная формула дает возможность вывести все бп — б диффе-
ренциальных уравнений первого порядка для всех переменных элементов
всех двойных систем из вариации или из частных производных одной вели-
чины Н2, выраженной как функция этих элементов.
Если мы решим ввести в уравнение (Т2) для dH2 вариацию времени t,
то должны только заменить дт на 5т — dt, потому что согласно (Q2) dt
входит только в таком виде, т. е. t входит только в форме t — т, в выражения
Чь tt, y'i, как функции времени и этих элементов. Мы имеем поэтому
<ш2 х, dH. „
и, следовательно, согласно формулам (Н2), (Q2),
^1 = 2’тЛ-
Окончательно находим
dH, _ дН2
dt — dt '
(211)
(212)
(U2)
Эта замечательная форма для дифференциала величины Нь рассматри-
ваемой как переменный элемент, является общей для всех проблем динамики.
Посредством общего метода она может быть выведена из формул пп. 13
и 14, которые дают [123] :
dH, = 8Нг у fdHi dki — SH1 „ (dH, дк6п _ dH, <U6„) _
dt dk, ( dt] dco dco dr]) ‘ ‘ dksn ( dr] dco dco 8г] J
__ SH? dk, dH, dk? 8Нг дк6п _ _ 5Н2
dk, dt ' dk2 dt+'--+ dk6n dt ~~ dt '
где кг, к2,..., квп являются какими-либо бп элементами системы, выражен-
ными как функции времени и величин г), а>. При специальном и более кон-
кретном разборе мы увидим, что Н, + Н2 является постоянной возмущен-
ного движения и что при взятии первых прок годных от Н2 по времени эти
элементы могут согласно (F1) считаться постоянными. Это также замеча-
тельный результат только что рассмотренных общих принципов, но нетрудно
проверить, что первая частная производная какого-либо элемента к„
взятая по времени, может быть выражена как функция одного только
элемента, не включающая время в явном виде.
О существенном различии между системами переменных элементов,
рассматриваемых в данном очерке, и системами, которые применялись
математиками до сих пор
37. Когда мы проинтегрируем дифференциальные уравнения переменных
элементов (S2), то сможем вычислить переменные относительные координаты
£, у, С для какой-либо двойной системы (m, М) с помощью законов невозму-
щенного движения, выраженных уравнениями (J2), (Q2) или посредством
280
У. ГАМИЛЬТОН
следующих формул:
Л
£ = г(cos О + у sin (0 — v) sinг),
Л
?; = г (sin0 —•-y-sin(0 — у) cos»»), >
К
f = -^V2^-22sin(0-y).
Л
(V2)
В этих формулах расстояние г определяется как функция времени t
и элементов т, к, посредством пятого уравнения (Q2). В уравнениях (V2)
имеем [124]
0 = со +
М + т dr к
-------7=-----dr
М У dr2 г2
м + т к2 ’
.2
(W2)
М
3
где q по-прежнему выражает минимум г, когда орбита рассматривается
как постоянная, и по-прежнему связано с элементами к, согласно пер-
вому уравнению условий (186). С астрономической точки зрения, М — это
Солнце ; т — планета ; £, ту, С — гелиоцентрические прямоугольные коорди-
наты ; г — радиус-вектор ; 0 — долгота по орбите; а> — долгота периге-
лия ; v — долгота точки пересечения орбит; 0 — со — действительная
аномалия ; 0 — v — угол (argument) широты ; ц — неизменная часть поло-
вины квадрата невозмущенной гелиоцентрической скорости, уменьшенной
в отношении массы Солнца (М) к суммарной массе Солнца и планеты
(М + т); к — двойная секториальная скорость, уменьшенная в том же
отношении — обратный синус наклона орбиты ; q — расстояние пери-
гелия и т — время прохождения перигелия. Закон притяжения и отталки-
вания остается здесь неопределенным. По закону Ньютона является
массой Солнца, деленной на большую ось орбиты, взятую с отрицательным
знаком, а к — квадратный корень из половины параметра, умноженный
на массу Солнца и деленный на квадратный корень из суммы масс Солнца
и планеты.
Изменяющийся эллипс или другая орбита, требуемая предшествующими
формулами, соответственно (хотя и немного) отличается от орбиты, исполь-
зуемой до сих пор астрономами.
Это происходит потому, что она правильно дает гелиоцентрические коор-
динаты, но не гелиоцентрические компоненты скорости без дифференцирова-
ния элементов при вычислении.
Поэтому наша орбита (по существу) не касается, но пересекает (хотя
и под очень малым углом) подлинную гелиоцентрическую орбиту, описы-
ваемую под влиянием всех возмущающих сил.
38. Из рассмотренной теории следует, что если мы дифференцируем
выражения (V2) для гелиоцентрических координат, не дифференцируя
элементов, а затем определяем по отношению к ним новые переменные эле-
менты, то их значения являются функциями времени, полученными из
уравнений (S2).
Компоненты центробарической скорости мы выводим согласно формулам
(J2) или следующим из них :
, _ МУ _ Mrf , _ МУ
М+т' у ~ М+т’ М~т'
(214)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
281
Тогда эти центробарические компоненты будут теми же функциями
времени и новых переменных элементов, которые могли быть выведены
иначе посредством исключения из интегралов (Q2). Они будут строго пред-
ставлять (путем распространения теории на эти ранее упоминавшиеся инте-
гралы) компоненты скорости возмущенной планеты т относительно центра
тяжести всей солнечной системы. Мы предпочли (и это вполне соответствует
общему направлению нашего метода), чтобы эти центробарические компо-
ненты скорости были вспомогательными переменными, объединяемыми с
гелиоцентрическими координатами. Их возмущенные значения были в этом
случае строго выражены формулами невозмущенного движения. Этот выбор
сделал необходимым видоизменить эти последние формулы и определить
орбиту, существенно отличающуюся теоретически (хотя мало отличаю-
щуюся практически) от орбиты, так блестяще разработанной Лагранжем.
Орбита, которую он себе представлял, была более просто связана с гелио-
центрическим движением единственной планеты, следовательно, она давала
для такого гелиоцентрического движения как скорость, так и положение
(планеты). Орбита, которую мы избрали, быть может, более тесно связана
с концепцией множественной системы, движущейся относительно ее общего
центра тяжести и подверженной в каждой ее части влиянию со стороны
всех остальных. Какая бы орбита ни была в будущем принята астрономами,
следует помнить, что обе они одинаково пригодны для описания небесных
явлений, если числовые элементы каждой системы будут соответствующим
образом определены при наблюдениях, а элементы другой системы орбит
будут выведены из результатов наблюдения в процессе вычисления. Тем
временем математики решат : пожертвовать ли частично простотой той
геометрической концепции, исходя из которой выведены теории Лагранжа
и Пуассона для простоты другого рода (которая хотя еще не введена, но
была бы желательна для этих превосходных теорий), получаемой благодаря
нашим достижениям в строгом выражении дифференциалов всех наших
собственных новых переменных элементов через посредство единственной
функции (поскольку до сих пор казалось необходимым употреблять одну
функцию для Земли, возмущенной Венерой, и другую функцию для Венеры,
возмущенной Землей).
Интегрирование упрощенных уравнений, определяющих новые
переменные элементы
39. Упрощенные дифференциальные уравнения переменных элементов
(S2) имеют ту же форму, как и уравнения (А), и могут быть проинтегрированы
аналогичным способом.
Если мы примем для упрощения
(’•»•’)=/ {J <И (*)
о
и символы (/i, со, Я) и т. д. интерпретируем подобным же образом, то сможем
легко определить вариации следующих восьми комбинаций:
(т, к, v), (р, СО, Я), (/«, к, v), (т, со, Я),
(t,co,v), (ft, к, 2), (т, к, 2), (fi,co,v),
282
У. ГАМИЛЬТОН
а именно:
д (т, к, v) = 2/ • т (т д/л — т0 д/л0 + к да) — кодшо 4- ?дЛ — ?одЛо) — H2dt,
д (/л,а), X) = 2” • т (/лодто — /10дт -[-а)одко — а)дк -[-Лодро — Лдр) — H2dt,
д(/л,к, v) = £-m (/л0 <5т0 — /лдт-^кдо) — кода)о-[-рдЛ — ?одЛо) — H2dt,
д(т, а),Л) = £ • т(тд/л— тод/ло-(-а)одко — а)дк -f- %odv — Лдг) — H2dt,
(Y2)
д (т, о), v) — £ • т (т д/л — т0 д/л0-[- а)одко — а)дк + »»<52 — v0<520) — H2dt,
д(/л, к, Л) = £ т(/лодто — /лдт + к до) — кода)о-[- Лодуо— Лдг) — H2dt,
д(т, к, Л) = £ • т (т d/i — Tod/io-[-к да) — кода)о-[-Лодго —Лдр) —H2dt,
д (/л, а), Л) = J/ • т (/лодто — /лдт-\-а)одко — а)дк -\-?дЛ — ?одЛо) — H2dt,
где к0, Ло, /л0, v0, т0, а)0 являются начальными значениями элементов к, Л, /л,
v, т, а). Если затем мы рассмотрим, например, первую из этих восьми комби-
наций как функцию всех Зп — 3 элементов /ль со,, Л( и их начальных значе-
ний /л^, со01„ Л^, включающих вообще в явном виде также и время, то полу-
чим следующие выражения для би — б строгих интегралов бп — б урав-
нений (S2):
d , . . d . . .
= miTO.l=
m>ki = ifi>k>vY> m'ko.i = I’ (z2)
Подобным способом мы можем вывести формы тех же строгих интегралов
из какой-либо одной из восьми комбинаций (Y2). Определение всех перемен-
ных элементов было бы поэтому вполне завершено, если бы мы могли найти
полные выражения для какой-либо одной из этих восьми комбинаций.
40. Первое приближенное выражение для какой-либо одной из них
может быть найдено в виде, какой мы предположительно приняли для Н2,
а именно в виде функции элементов и времени, которая может быть обозна-
чена таким образом:
Н2 = Н2 (t, кх , Лг , /лх , vlf Ту О)у ..., кп—I , ^п-1 , Цп—1 > vn-l > тп-1 > тп—1)- (А3)
В этой функции переменные элементы заменены их первоначальными
значениями и использованы следующие приближенные интегралы уравне-
ний (S2):
0 от0 т = Т0 — Ч mJ 0 ^dt O/i0
t « = co0+±J 0 к = к0 — t -f mJ 0 dH2 dco0 dt
*=*»+![ ^<и, dva v = v0~ t 4 mJ dH. dh dt
(В3)
ВТОРОЙ ОЧЕРК ОБ ОБЩЕМ МЕТОДЕ В ДИНАМИКЕ
283
Если мы обозначим, например, первую из восьми комбинаций (Y2) через G,
так что
G = (т, к, v), (С»)
то получим в качестве первого приближенного значения
+ (D>)
Выразив таким образом Gr как функцию времени и первоначальных
элементов, мы можем исключить начальные значения т0, к0, v0 и ввести
вместо них конечные значения р, со, 2 так, чтобы получить выражение для Gr
в виде, показанном в (Z2), а именно как функцию времени t переменных
элементов р, со, 2 и их начальных значений /л0, со0, 20. Приближенное выра-
жение, найденное таким образом, может быть уточнено тем путем, какой
часто применялся в этом очерке для других подобных целей. Функция G
или комбинация (т, к, v) должна строго удовлетворять согласно (Y2), (А3)
следующему дифференциальному уравнению в частных производных:
п _ 50 w Г/ 1 130 2 1 1 1 dG
dt ' 2 ( ’ mx <5cox ’ 1 ’ ’ m1 <32x. ’ mx d/t, ’ Ю1’ m2 da>2
(E3)
Каждая из других аналогичных функций или комбинаций (Y2) должна
удовлетворять аналогичному уравнению. Если мы затем заменим G на
G± + G2 и пренебрежем квадратами и произведениями коэффициентов малой
поправки G2, причем Gx является уже найденным первым приближением,
то придем (во втором приближении согласно уже рассмотренным принци-
пам) к следующему выражению этой поправки:
О
2 з 1 1 <3Gi
тх <5сох ’ 1 ’ ’ т1 <UX ’ mx d/i, ’ С°1’ '
которая может непрерывно и неограниченно становиться точнее путем
повторения того же процесса введения поправки. Таким образом, теорети-
чески мы можем считать проблему решенной. Однако она остается для
будущего обсуждения и, возможно, для действительного испытания, чтобы
определить, какие из различных процессов последовательного и неограни-
ченного приближения, выведенные в настоящем очерке, а также в преды-
дущем, как результаты одного общего метода и как следствия централь-
ной идеи лучше всего применимы для численного приложения и для
математического исследования явлений [125].
У. ГАМИЛЬТОН
О ПРИЛОЖЕНИИ К ДИНАМИКЕ ОБЩЕГО МАТЕМАТИЧЕСКОГО»
МЕТОДА, РАНЕЕ ПРИЛОЖЕННОГО К ОПТИКЕ [126]
Метод основан на комбинации принципов вариационного исчисления
с частными производными и может рассматриваться математиками как особая
ветвь алгебры, которая может быть названа исчислением главной функции,
потому что во всех важных приложениях алгебры к физике и в очень широ-
ком классе чисто математических вопросов этот метод сводит определение
многих взаимно связанных функций к отысканию и изучению главного или
центрального соотношения. В приложениях этого метода к динамике (прежде
этот метод был применен к оптике) профессор Гамильтон открыл существо-
вание главной функции, которая, если ее форма полностью известна, дает
по определении ее частных производных все первые и все конечные инте-
гралы известных уравнений движения. Профессор Гамильтон придерживается
мнения, что математическое объяснение всех явлений материи, отличных
от жизненных явлений, будет окончательно найдено в зависимости от свойств
системы отталкивающихся или притягивающихся точек. И он думает, что те,,
кто не одобряет его мнения во всей его общности, могут все же признать
при современном состоянии науки свойства таких систем более важными,
чем какая-либо другая область приложения математики к физике. Он,
таким образом, считает фундаментальной проблемой динамики «определить
Зл прямоугольных координат или других характеристик положения сво-
бодной системы притягивающихся и отталкивающихся точек как функции
времени», включающих, следовательно, бл начальных постоянных, которые-
зависят от начальных условий движения, и включающих, кроме того,
л других констант, называемых массами, которые измеряют на стандартном
расстоянии притягательные и отталкивательные действия (energies). Обозна-
чая эти л масс через тх, т2,... ,тп и их Зл прямоугольных координат —
через yv zlt ..., хп, уп, zn и, следовательно, Зл компонентов ускорения
или вторых производных этих координат по времени — через х1; Уъ zv ...
• • •> хп, уп, zn, он принимает лагранжеву постановку этой проблемы, именно
формулу следующего вида :
2 т(хдх + уду + 'zdz) = dU, (1)
в которой V есть сумма произведений взятых попарно и перемноженных
между собой масс на некоторую функцию их взаимного расстояния, так что
первая производная этой функции выражает закон их взаимного притя-
жения, являясь отрицательной в случае отталкивания. Таким образом,
для солнечной системы каждое произведение двух масс умножается на
обратное значение их расстояния, и результаты должны быть сложены
для того, чтобы образовать функцию U.
О ПРИЛОЖЕНИИ к ДИНАМИКЕ ОБЩЕГО МЕТОДА
285
Мистер Гамильтон умножает далее эту формулу Лагранжа на элемент
времени dt и интегрирует от О до t, полагая, что время и его элемент не под-
лежат варьированию. Он обозначает начальные значения (или значения
для времени t = 0) координат х, у, z и их первых производных х, у, z через
а, Ь, с и а, Ь, с и, таким образом, получает из формулы Лагранжа (1) другую
важную формулу:
2 т(хдх — ада + уду — bdb + zdz — с дс) = dS. (2)
-S есть определенный интеграл [127]
t
S = ${u + 2™(x* + y2 + ziidt. (3)
о
Если известные уравнения движения в форме
полностью интегрируемы, то они дадут Зп координат х, у, z и, следовательно,
S как функцию времени t, масс т,..., тп и бп начальных констант а, Ь, с,
а, Ь, с, так что по исключении Зп начальных компонентов скорости а, ь, с
мы в общем получим отношение между 7п + 2 величинами S, /, т, х, у, z,
а, Ь, с, которые дадут S как функцию времени, масс и конечных и начальных
координат. Мы еще не знаем формы этой последней функции, но мы знаем
ее вариацию (2), взятую в отношении бп координат; вследствие независи-
мости этих бп вариаций мы можем разделить выражение (2) на две группы,
содержащие каждая Зп уравнений, а именно:
8S QS . 8S
= ¥ = (5)
и
as 8S , as •
э^ = /и;д,., = -^ = miCi. (6)
Члены, стоящие в этих равенствах слева, суть частные производные функции
S, .которую мистер Гамильтон назвал главной функцией движения притя-
гивающихся или отталкивающихся систем. Он думает, что если математики
изучат эту главную функцию S и эти группы уравнений (5) и (6), они
должны будут оценить их значение. Из группы (5) определяют Зп промежу-
точных интегралов известных уравнений движения (4) в форме Зп отношений
между временем t, массами т, варьированными координатами х, у, z, варьи-
рованными составляющими скорости х, у, z и Зп начальными константами
а, Ь, с, в то время как группа (6) определяет Зп конечных интегралов тех же
известных дифференциальных уравнений, как.Зп отношений с бп началь-
ными и произвольными константами а, Ь, с, а, Ь, с между временем, массами
и Зп варьированными координатами. Эти Зп промежуточных и Зп конечных
интегралов разрешают проблему динамики. Математики же находят семь
промежуточных и ни одного конечного интеграла.
Решение профессором Гамильтоном этой замечательной проблемы содер-
жит, действительно, одну неизвестную функцию, именно — главную функ-
цию S, к изучению и отысканию которой сводится математическая динамика.
Эта функция не может быть смешана с прекрасно известной функцией
Лагранжа*) для простого и удобного выражения известных уравнений дви-
жения. Функция Лагранжа ставит, функция Гамильтона решает проблему.
Одна годится для того, чтобы образовать дифференциальные уравнения
*) Здесь имеется в виду уравнение (1).
286
У. ГАМИЛЬТОН
движения, другая может давать их интегралы. Разрабатывая продолжение
этого нового пути и открывая форму этой новой функции, мистер Гамильтон
замечает, что она должна удовлетворять следующему уравнению в частных
производных первого порядка и второй степени (время теперь варьируется):
9* . у .L f W2 . (9S? - f V) = у (7)
которое может быть строго преобразовано следующим образом при помощи
уравнения (5):
О
1 Jv1 к95 , г95 95л2 , (dS 9$1У1
о
Sx — произвольная функция тех же величин t, т, х, у, z, а, Ь, с, предпола-
гаемая только (подобно S) исчезающей в момент времени t = 0. Если эта
произвольная функция Sx выбрана так, что она дает приближенное значение
искомой функции S (и всегда легко выбрать ее таким образом), то оба опре-
деленных интеграла в формуле (8) малы, но второй в общем меньше, чем
первый; им можно пренебречь, переходя ко второму приближению, и в
вычислении первого определенного интеграла можно употреблять следую-
щую приближенную форму уравнений (6):
as -as l ds
da ’ db ’ de ' '
Таким образом, первое приближение может быть успешно и неограни-
ченно исправлено. И для практического улучшения метода ничего более,
кажется, не требуется, кроме того, чтобы сделать этот процесс исправления
более легким и скорым в его приложениях. Профессор Гамильтон написал
две статьи об этом новом методе динамики, и одна из них уже печатается
во второй части «Philosophical Transactions» в Лондоне за 1834 г. Метод не
является в первом представлении таким простым по форме. Он употребляет
сначала характеристическую функцию V, более тесно связанную с той опти-
ческой функцией, которую он открыл и обозначил той же буквой в своей
«Теории систем лучей». И в динамике, и в оптике эта функция есть величина,
называемая «действием» и рассматриваемая как зависящая (главным обра-
зом) от конечных и начальных координат. Но если эта функция действия
применяется в динамике, она включает вспомогательную величину Н,
а именно известную постоянную часть в выражении половины живой силы
системы; и много беспокойных исключений требуется впоследствии при
применении этой функции, которые устраняются новой формой метода.
Мистер Гамильтон думает, однако, отметить кратко новые свойства этой
постоянной Н, которые подсказывают новый способ выражения дифферен-
циалов и интегралов уравнений движения притягивающихся или отталки-
вающихся систем. Часто полезно выразить Зп координат х, у, z, ..., хп, уп, zn
как функции Зп других отметок положения [128], которые могут быть
обозначены так : ..., у3п, и если Зп новых переменных сох, ..., а>3п
будут введены и определены как
со, = £ т [х + у + z , (10)
\ dm drji 1 drji) ’ v '
О ПРИЛОЖЕНИИ к ДИНАМИКЕ ОБЩЕГО МЕТОДА
287
то в общем возможно обратно выразить бп переменных х, у, z, х, у, z как
функции 6л переменных р и ш, т. е. возможно, следовательно, выразить Н
как функцию
Н = У ^-(х2 + у2 + z2) — U (11)
в форме
Я=Г(й1,...,су3п, »?!,. . .,%п) - -,»7зп), (12)
в которой F есть рациональная, целая и однородная функция второй степени
относительно переменных су; теперь мистер Гамильтон находит, что если
величина Н выражена таким образом, как функция бп новых переменных
р, со, то ее вариация может быть определена в такой форме :
дН = дсо — со др), (13)
где р, cb обозначают первые производные новых переменных р, со, взятые по
времени. Зп дифференциальных уравнения движения второго порядка (4),
связывающие прямоугольные координаты и время для какой-либо притяги-
вающейся или отталкивающейся системы, могут быть, следовательно, общим
образом преобразованы в двойное число уравнений первого порядка между
бп переменными и временем в форме
= = (,4>
Проинтегрировать эту систему уравнений значит выделить из нее бп отно-
шений между временем t и бп переменными рь ар и бп их начальными зна-
чениями, которые могут быть обозначены как ei} р,. Мистер Гамильтон решает
проблему в этой более общей форме при помощи той же самой главной
функции S, что и выше, рассматривая ее, однако, как зависящую теперь от
новых отметок р и е конечных и начальных положений различных точек
системы. Полагая в этом новом обозначении
t
S= I (15)
J { 00) J '
0
и рассматривая время как заданное, он находит формулу вариации :
dS = 2(wdp-pde) (16)
и, следовательно, бп отдельных уравнений
СУ,
9S_
dpi ’
Pi
dS
det ’
(17)
которые суть формы искомых отношений. Профессор Гамильтон думает,
что эти две формулы для вариаций (13) и (16), а именно :
и
дН = ^ (»; <5су — су др)
<5S = (а> др — р де)
(А)
(В)
заслуживают внимания, как выражающие в сжатой и простой форме одна —
дифференциалы, а другая — интегралы уравнений движения притяги-
вающейся или отталкивающейся системы. Они могут быть распространены
288
У. ГАМИЛЬТОН
и на другие проблемы динамики, кроме этой главной задачи. Выражение Н
всегда может быть легко найдено, и функция S может быть определена с
неопределенной точностью методом последовательных приближений в том
смысле, как это разъяснено выше.
Эти свойства его главной функции рассматриваются более полно в его
труде «Second Essay on a General Method in Dynamics», в котором он вводит
различные формы некоторой функции элементов (Function of Elements),
связанные с главной функцией и друг с другом, применяет их к вопросу
о возмущениях и показывает, что для возмущений систем из трех или боль-
шего числа масс с некоторым законом притяжения или отталкивания и с од-
ной преобладающей массой дифференциальные уравнения варьированных
элементов всех малых масс могут быть выражены вместе так же просто,
как и обычным путем, коэффициентами одной функции возмущения, которой
является возмущенная часть полного выражения Н, и могут быть строго
интегрированы при помощи следствий его общего метода.
К. ЯКОБИ
ЗАМЕТКА ОБ ИНТЕГРИРОВАНИИ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ ДИНАМИКИ [130]
Форма, которую Лагранж придал дифференциальным уравнениям дина-
мики, до сего времени служила только для того, чтобы с изяществом выпол-
нять различные преобразования, для которых пригодны эти уравнения,
и для того, чтобы с легкостью и притом во всей их широте выводить общие
законы механики. Однако из этой же формы можно извлечь важную выгоду
с точки зрения самого интегрирования этих уравнений, что, как мне кажется,
добавляет новую ветвь к аналитической механике. Я наметил ее основные
черты в сообщении, сделанном 29 истекшего ноября Берлинской академии,
после того, как имел честь представить Вашей прославленной академии,
приблизительно год назад, пример, способный дать почувствовать дух и
полезность нового метода. Я нашел, что всякий раз, когда имеет место прин-
цип наименьшего действия, можно следовать по такому пути в интегрирова-
нии дифференциальных уравнений движения, что каждый из интегра-
лов, найденных последовательно, понижает порядок этих уравнений на
две единицы, если отождествлять постоянно порядок системы обыкновен-
ных дифференциальных уравнений с числом произвольных постоянных,
которое вводит их полное интегрирование. Высказанное предложение имеет
место также и в случаях, когда функция, производные которой дают состав-
ляющие сил, действующих на различные материальные точки, содержит
явно время. Мы находим, например, в случае одной точки, вынужденной
оставаться на заданной поверхности и подверженной действию только цен-
тральных сил, что дифференциальное уравнение второго порядка, которым
определяется это движение, приводится к квадратурам, как только найден
один-единственный интеграл. Наикратчайшие линии на поверхности входят
в этот случай.
В то время как я составлял пространную статью, относящуюся к этим
исследованиям, я был отвлечен вопросами из области теории чисел, которая
всегда была излюбленным предметом большого числа математиков; только
после опубликования результатов, полученных в этой области, я вернусь
к моей работе по динамике. В ожидании этого я осмеливаюсь представить
Академии заметку, о которой я говорил выше и которая только что была
напечатана в журнале Крелля.
Здесь можно также привести подробности открытия, о котором я раньше
известил Академию: полное интегрирование дифференциальных уравнений,
составленных Лежандром, от которых зависит существование максимума
или минимума в изопериметрической задаче. Метод, которым я пользуюсь,
есть новое и замечательное приложение известного метода вариации произ-
вольных постоянных; он основывается в принципе на важных свойствах
19 Вариационные принципы механики
290
К. ЯКОБИ
линейных дифференциальных уравнений, которым можно придать форму
у dx dx2 + dxm U >
где у(т) заменяет Таким путем мы приходим к простому и общему предло-
жению, которое весьма удобно для приложений. Например, если его при-
менить к кратчайшим линиям на замкнутой поверхности, выходящим из
одной точки, которые, вообще говоря, будут огибать кривую, образованную
их последовательными пересечениями, мы приходим к теореме, гласящей,
что «дуга такой линии, начинающаяся от общей исходной точки и оканчи-
вающаяся раньше, чем она достигнет своей точки касания с общей оги-
бающей, всегда является кратчайшим путем на поверхности между двумя
ее концами, но если эту дугу продолжить за точку соприкасания или по
крайней мере, до этой точки, то между этими двумя концами не будет ни
самого большого, ни самого короткого пути».
Я полагаю, что принцип наименьшего действия следует рассматривать
как один из наиболее важных принципов механики. В самом деле, мы видим,
как молодой Лагранж в одной из статей в Miscellanea Taurinensia, пред-
ставляющей собой бессмертную работу, стоящую выше всякой похвалы,
в один прием выводит из этого принципа целиком всю аналитическую меха-
нику. Принцип возможных скоростей был введен лишь в последующих
работах только для проведения методических доказательств. Почему же
аналитическая механика, эта неблагодарная дочь, нашла нужным осудить
принцип наименьшего действия как бесполезный? Если работы Гамильтона
и исследования, о которых я говорил выше, добавляют нечто существенное
к аналитической механике, то этим мы обязаны как раз этому принципу.
Мне кажется, что упомянутый принцип обычно преподносится недо-
статочно ясно и что даже невозможно уловить его истинный смысл, после
того как дано лишь его определение, не прибегая к доказательству. Это
происходит от того, что забывают добавить в самом определении принципа,
что под знаком интеграла, который должен иметь минимум, элемент времени
предполагается исключенным с помощью уравнения живых сил. Это послед-
нее имеет вид
~ ds2 = (U + h) dt2,
где h — произвольная постоянная ; поэтому не интеграл
а интеграл
УУСТ+й VSmds2
должен согласно принципу наименьшего действия иметь минимум. Гамиль-
тон дал строгое доказательство этого, так же как и Эйлер в своем «Новом
методе» (Nova methodus) и т. д. Но можно сделать довольно существенное
возражение против определения этого принципа в том виде, как оно дано
Лагранжей; это возражение относится к словам максимум и минимум.
В самом деле, легко доказать, что максимума никогда не может быть, что
для движения, ограниченного известными пределами, всегда имеет место
минимум, а при выходе за эти пределы нет ни максимума, ни минимума.
Применяя принцип к равномерному движению точки по поверхности,
Лагранж говорит, что в этом случае имеет место минимум, потому что-
максимума не может быть; Лагранж, стало быть, думал, что есть случаи,.
ЗАМЕТКА ОБ ИНТЕГРИРОВАНИИ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДИНАМИКИ 291
когда вместо минимума получается максимум. Мне кажется, что, заменяя
на «максимум и минимум» в Miscellanea Taurinensia и в своих последующих
работах слово «минимум» — единственное, которым всегда пользовались
Эйлер и Лаплас, Лагранж хотел в краткой и остроумной форме подвергнуть
критике мнение Эйлера, который считал, что возможно при помощи его
принципа выразить божественное провидение. В самом деле, если допустить
как одинаково возможные максимум и минимум, продолжая приписывать
рассматриваемому интегралу его метафизическое истолкование, то это было
бы равносильно утверждению, что природа заставляет действовать силы
то с наибольшей, то с наименьшей мудростью. Позднее ни Лагранж, ни его
последователи не попытались как-нибудь оправдать добавление максимума.
В настоящее время представление какого-либо закона в форме теоремы
о максимуме и минимуме все больше и больше теряет свой характер физи-
ческий или метафизический, так как теперь доказывают, что большие классы
аналитических задач, например те, которые связаны с интегрированием
уравнений в частных производных первого порядка между любым числом
переменных, могут быть представлены как изопериметрические задачи.
В своей статье я доказываю обратное: все задачи об изопериметрах,
в которых под знаком интеграла имеется некоторое число функций одного
переменного с их производными любого порядка, могут быть приведены к
интегрированию уравнения в частных производных первого порядка.
Мне кажется, что предыдущие замечания могут заставить признать, что
между принципом наименьшего действия и законом равновесия нет никакого
параллелизма и никакой гармонии, как это думал Эйлер и даже Лагранж.
Эйлер в Берлинских мемуарах*) высказал даже мнение, что, рассмат-
ривая бесконечно малое движение, возможно вывести закон равновесия из
принципа наименьшего действия и что единственное затруднение, которое
здесь имеет место, состоит в том, чтобы разобраться во всех бесконечно
малых, которые фигурируют в этой задаче. Видимость подобной гармонии
исчезает в большой своей части, если привести интеграл к его правильному
виду ___________
J Уи + h YSmds2 [181].
Но одно обстоятельство, кажется, a priori доказывает, что параллелизм,
на котором настаивает Эйлер, невозможен. Именно, на основании замечаний,
сделанных выше, интеграл при бесконечно малых движениях всегда имеет
настоящий минимум, тогда как в так называемом законе покоя может полу-
читься максимум, минимум или ни тот, ни другой.
Заканчивая, беру на себя смелость привести в качестве извлечений из
работы, о которой я говорил выше, следующие теоремы, которые я считаю
важными.
I. Пусть
(Рх 'ди (Ру ди (Pz ди
т dP ~ дх ’ т dP ~ ду ’ т dP ~ .'dz ’ • • •
— Зп дифференциальных уравнений движения свободной системы; пусть
у Z т (dx2 + dy2 + dz2) = (U + h) dt2
— уравнение живых сил, где h — произвольная постоянная. Пусть V — пол-
ное решение уравнения в частных производных
^ЖГ+Ш+Ш]="+4'
*) Мётоиез de ГАсабёпне royale des sciences et belles lettres, Аппёе 1748, Berlin, 1750,
1 Q *
292
К. ЯКОБИ
решение, которое, помимо постоянной, добавляемой просто при помощи
сложения, должно содержать Зп — 1 произвольных постоянных ау а2, ...
..., а3п_1; я утверждаю прежде всего, что Зп уравнений
QV _ д дУ _ д 9V _ д QV . .
Эа, Эа2 ’.•••’ Эазп_1 КЗп-1> I Т" т >
В которых ^зп-1 суть Зп — 1 новых произвольных постоянных,
будут полными интегралами данных дифференциальных уравнений с бп
произвольными постоянными «!, а2, , а-зп-ь Рзп-i, h, т. Установив
это, предположим, что движение испытывает возмущения и что дифферен-
циальные уравнения возмущенного движения принимают вид :
d2x _ 91/ , ЭД d2y _ ад ЭД
т dP Эх "Т” Эх ’ т dt2 ду "Т” ду ’ ’ ' ’ ’
если с помощью формул для первичного движения выразить функцию /2
через t и через бп произвольных постоянных, то производные этих последних
в возмущенном движении будут
dar ___ dQ da2 __________ ЭД
~dT~ ~dfk’ ~dF~~d^’
dft _ ЭР dft2 _ ЭД
dt 9a, ’ dt da2 ’
daan-x _ 9Д
dt д^зп—i ’
dpsn—i 9Д
dt даЗП—i , di dti
dh __ (9Д
~dt~~ ~dr~ ’
dr 9Д
Первая часть теоремы является лишь простым обобщением теоремы Гамиль-
тона, который требует, чтобы произвольные постоянные были начальными
и конечными значениями координат и чтобы функция V удовлетворяла еще
второму уравнению в частных производных. Вторая часть теоремы, относя-
щаяся к варьированию произвольных постоянных, совершенно новая.
Я изложил здесь, ради простоты, только случай свободного движения, но я
легко распространил эту теорему на движение системы, подчиненной неко-
торым условиям. При помощи этой теоремы можно найти путем вычисления
элементы, производные которых для возмущенного движения принимают
ту простую форму, которую они имеют в теореме, форму, которую я в своей
статье называю канонической. Это легко подтверждается в эллиптическом
движении, где интегрирование уравнения в частных производных
(£Г+(<№7=<--9
приводит к известным формулам эллиптического движения и одновременно
к шести элементам, способным удовлетворить поставленной цели, а именно:
обратная величина большой оси, квадратный корень из полупериметра,
произведение этого последнего на косинус наклонения, расстояние от вос-
ходящего узла, долгота перигелия и время прохождения через перигелий.
Так как из какого-либо полного решения уравнения в частных производ-
ных первого порядка выводятся все остальные полные решения, теорема,
которую я здесь сформулировал, дает также решение другой интересной
задачи, а именно : по некоторой данной системе элементов, которые связаны
с временем в возмущенном движении системой дифференциальных уравне-
ний в канонической форме, найти все другие системы элементов, которые
обладают тем же свойством.
Решение этой задачи заключается в следующей теореме анализа.
ЗАМЕТ КА ОБ ИНТЕГРИРОВАНИИ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДИНАМИКИ 293
II. Пусть дана система дифференциальных уравнений :
da, ЬН da2 ЭН ~dt~ ~ db^’ ~dT ~ дЬг ’ “ d&i _ 1 ЭН <fe2 _ ЭН . dt ~ 1 Ъаг ’ dt ' да2 ’ " da,-п ЪН •’ “dT ~ Э&^Г’ dbrn . ЭН ’ dt ~ ' Эат ’
где Н — какая-то функция t и переменных пусть будут аь а2, ..., ат, - ные с прежними переменными следующими ' ' > • • • > > - новые переменные, связан- уравнениями :
Q'P _ д д Эщ ~ Pi’ Эа2 ~ '2 ’ Э!Р • . ЭУ , эа1 да2 °2 ’ • &V _ д • ’ ’ Эат Рт ’ SV _ . • ’ ’ Ъат ~ °т ’
где W — некоторая функция переменных av а2, .. ., ат, а1г а2, . .., ат, не
зависящая ни от времени, ни от каких-либо других переменных ; я утверж-
даю, что если выразить при помощи предыдущих уравнений функцию Н
через t и через новые переменные а1; а2, ..., ат, рг, ..., ()т, то между
этими последними переменными будут иметь место дифференциальные урав-
нения в точности такой же формы, что и данные, а именно :
dar QH da2 QH ~dT ~~ Э/?7 ’ ~dT- — Э& ’ ЭН dt ' 9aj ’ dt ' Эа2 ’ dam QH •’ ~dt “ 9/9,n ’ dfan _ , ЭН •’ dt *“ Sam ’
Можно вывести из этой теоремы другие теоремы, менее общие, подставляя
Р+Л + (лЧ'2 +•. . вместо Vх и исключая множители Л, [л, ... при помощи
уравнений
^1 = 0, ^2 = 0,...
Доказательство этих теорем не представляет затруднений.
К. ЯКОБИ
О НОВОМ ОБЩЕМ ПРИНЦИПЕ АНАЛИТИЧЕСКОЙ МЕХАНИКИ [132j
По поводу различных задач, относящихся к движению системы мате-
риальных точек и рассмотренных до сего времени, можно сделать одно
важное и интересное замечание : Во всех случаях, когда силы являются функ-
циями только координат движущихся точек и когда задачу удалось свести
к интегрированию дифференциального уравнения первого порядка с двумя
переменными, оказывается также возможным свести эту задачу к квадра-
турам. Мне удалось превратить это замечание в общее положение, которое,
как мне кажется, дает новый принцип механики. Этот принцип, так же как
и другие общие принципы механики, дает возможность получить интеграл,
но с той разницей, что другие принципы дают только первые интегралы
дифференциальных уравнений динамики, тогда как новый принцип приводит
к последнему интегралу. Этот принцип обладает общностью, более высокой,
нежели другие принципы, потому что он применим к случаям, когда анали-
тические выражения сил, а также уравнения, выражающие структуру
системы, содержат координаты движущихся точек в любой форме. С другой
стороны, принципы сохранения живых сил, сохранения площадей и сохра-
нения центра тяжести во многих отношениях имеют преимущество перед
новым принципом. Прежде всего, эти принципы дают конечное уравнение
между координатами движущихся точек и составляющими их скоростей,
тогда как интеграл, получаемый на основании нового принципа, требует
еще квадратур. Во-вторых, применение нового принципа предполагает, что
уже найдены все интегралы, кроме одного, предположение, которое осу-
ществляется лишь в очень небольшом количестве задач. Но это обстоятель-
ство не может уменьшить- ценности нового принципа, в чем, я надеюсь,
убедит применение его к нескольким примерам.
1°. Рассмотрим, например, орбиту, которую описывает планета вокруг
Солнца. Дифференциальные уравнения второго порядка, которые прихо-
дится интегрировать, можно свести к форме уравнений первого порядка,
вводя в качестве новых переменных первые производные. Таким образом,
определение орбиты планеты будет зависеть от интегрирования трех диффе-
ренциальных уравнений первого порядка между четырьмя переменными;
два интеграла этих уравнений получаются на основе принципа живых сил
и принципа площадей, что сводит вопрос к интегрированию одного уравне-
ния первого порядка с двумя переменными. Так вот, на основании моей
общей теоремы это интегрирование может быть приведено к квадратурам.
Итак, если угодно применять ее вместе с другими общими принципами меха-
ники, то можно сказать, что этих принципов оказывается достаточно, чтобы
привести определение орбиты планеты к квадратурам.
2°. Рассмотрим движение точки, притягиваемой по закону Ньютона
к двум неподвижным центрам. Если начальная скорость находится в пло-
О НОВОМ ОБЩЕМ ПРИНЦИПЕ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
295
скости, проходящей через движущуюся точку и оба центра притяжения,
то опять приходится интегрировать три дифференциальных уравнения пер-
вого порядка между четырьмя переменными. Один интеграл этих уравнений
дает принцип живых сил. Эйлер нашел второй интеграл, и таким образом
ему удалось свести задачу к одному дифференциальному уравнению первого
порядка между двумя переменными. Но это уравнение настолько сложно,
что всякий другой, кроме этого неустрашимого математика, отступил бы
перед мыслью предпринять интегрирование этого уравнения и привести его
к квадратурам. В то же время на основании моего нового принципа это
приведение могло бы быть осуществлено путем применения общего правила,
без блуждания ощупью и безо всякого напряжения ума.
3°. Рассмотрим еще знаменитую задачу о вращении твердого тела вокруг
неподвижной точки при отсутствии каких-либо сил. В этой задаче прихо-
дится интегрировать пять дифференциальных уравнений первого порядка
между шестью переменными. Принцип живых сил дает здесь один интеграл,
три других получаются из принципа площадей, пятый интеграл непосред-
ственно выводится из моего принципа. Таким образом, все интегралы в
этой трудной задаче получаются только лишь из общих принципов механики,
без того чтобы понадобилось писать хотя бы одну формулу или производить
замену переменных.
Этих примеров, как мне кажется, достаточно, чтобы согласиться тракто-
вать эту новую теорему как один из общих принципов динамики. Теперь
я постараюсь изложить самое правило, при помощи которого последнее
интегрирование, которое приходится выполнять при решении задач меха-
ники, оказывается приведенным к квадратурам, причем силы по-прежнему
являются функциями одних только координат.
Возьмем сначала какую-либо систему совершенно свободных материаль-
ных точек. Пусть /' = const — первый интеграл уравнений движения,
где /' есть функция координат движущихся точек и производных по времени
первого порядка от этих координат. С помощью уравнения
/' = const
я исключаю какую-либо одну из переменных и обозначаю через р' частную
производную от /' по этой переменной. Пусть будет f" = const — другой
интеграл. Посредством этого уравнения я исключаю вторую переменную
и обозначаю через р" частную производную от f" по этой переменной. Пред-
положим, что известны все интегралы задачи, кроме одного, и что для каж-
дого интеграла / = const мы находим соответствующую величину р, т. е.
частную производную от / по той переменной,которая исключается с помощью
данного интеграла. Так как число переменных превышает на единицу число
интегралов, то если исключить посредством каждого из интегралов одну
переменную, все переменные окажутся выраженными через две из них.
Назовем эти две переменные х и у, и пусть х' и / — их первые производные
по времени ; выразим через х и у величины х' и /, так же как и все величины
р', р", ... Так как х' и у' — первые производные от х и у по времени, то
имеет место уравнение
у' dx — х' dy = 0,
где х’ и / — известные функции двух переменных х и у. Именно это диффе-
ренциальное уравнение, последнее из всех, и нужно интегрировать, чтобы
иметь полное решение задачи. Я доказываю, что, деля это уравнение на
произведение величин р', р", . . ., мы обращаем левую часть этого уравнения
в полный дифференциал, что вообще приводит интегрирование этого урав-
нения к квадратурам.
296
К. ЯКОБИ
В случае произвольной системы материальных точек простота предыду-
щей теоремы нисколько не нарушается при условии, что дифференциальным
уравнениям динамики дадут ту замечательную форму, в которой их
впервые представил Гамильтон и которую отныне следует предпочесть во
всех общих исследованиях, относящихя к аналитической механике. Правда,
формулы Гамильтона относятся исключительно к случаям, когда составляю-
щие сил являются частными производными одной и той же функции коорди-
нат ; однако было нетрудно внести изменения, необходимые для того, чтобы
сделать эти формулы применимыми в общем случае, когда силы выражаются
любыми функциями координат.
Когда время входит явно в аналитические выражения сил и в уравнения
связей, наложенных на систему, принцип последнего множителя, выведен-
ный из общего правила, приложим также и к этому классу динамических
задач. Есть даже несколько частных задач, для которых, хотя в них учиты-
вается сопротивление среды, все же имеют место подобные теоремы; это,
например, случай кометы, обращающейся вокруг Солнца в среде, сопротив-
ление которой пропорционально некоторой степени скорости этой кометы.
Анализ, который привел меня к новому общему принципу аналитической
механики, только что сообщенному мной настоящему прославленному
собранию, может быть применен к большому числу вопросов интегрального
исчисления. Я объединил эти различные приложения в пространной статье,
которую, как я надеюсь, я смогу опубликовать по моем возвращении в
Кенигсберг и которую я не замедлю представить Академии, как только она
будет отпечатана.
К. ЯКОБИ
ОТРЫВОК ИЗ «ЛЕКЦИЙ ПО ДИНАМИКЕ» [133]
Шестая лекция
Принцип наименьшего действия
Мы переходим теперь к новому принципу, который уже не дает, подобно
прежним, интеграла [134]. Это есть «principe de la moindre action», непра-
вильно называемый принципом наименьшего действия. Значение его заклю-
чается, во-первых, в той форме, которую он придает дифференциальным
уравнениям движения, во-вторых, в том, что он дает функцию, которая обра-
щается в минимум, когда удовлетворяются эти дифференциальные уравнения.
Хотя такой минимум существует во всех задачах, но, как правило, неиз-
вестно, где его искать. Поэтому, в то время как самое интересное в этом
принципе то, что вообще можно получить минимум, раньше придавали
преувеличенное значение тому, что такой минимум существует. Пример
принципа, о котором идет речь, встречается в уже ранее цитированной статье
Эйлера «De motu projectorum».
После того как Эйлер доказал этот принцип для случая притяжения
к неподвижным центрам, ему не удалось доказать его для взаимных притя-
жений, для которых было неизвестно значение принципа живой силы; по-
этому он довольствуется тем заявлением, что для случая взаимных притя-
жений выкладки были бы слишком длинны, но принцип наименьшего
действия должен и здесь иметь место, так как основные положения здоровой
метафизики показали, что силы природы всегда обязательно должны произ-
водить наименьшее действие (как он думал, благодаря присущей телам
инертности). Но этого не показывает ни здоровая и никакая вообще мета-
физика, и на самом деле Эйлера побудило к такой фразе только неправильное
понимание названия «наименьшее действие». Мопертюи хотел этим назва-
нием выразить, что природа свои действия производит с наименьшей затратой
сил, и в этом заключается истинное значение названия «principe de la moindre
action».
Почти во всех учебниках, даже и в лучших, как Пуассона, Лагранжа
и Лапласа, этот принцип представлен так, что, по моему мнению, его нельзя
понять. Именно, говорится, что интеграл
J S mjVjdSi
(гдег?, = обозначает скорость точки /п,) должен быть минимумом, если
интегрирование производится от одного положения системы до другого.
При этом, правда, говорится, что теорема применима только в том случае,
если имеет место теорема живых сил, но при этом забывают сказать, что при
298
К. ЯКОБИ
помощи теоремы живых сил необходимо исключить из предыдущего инте-
грала время и все свести к пространственным элементам. Минимум предыду-
щего интеграла надо понимать так, что когда даны начальное и конечное
положения системы, то из всех возможных путей, ведущих из одного поло-
жения в другое, для действительно пробегаемого пути интеграл будет
минимумом [135].
Исключим время из предыдущего интеграла. Так как г?, = ~~, то
г „ , ( S mi ds}
Но по теореме живых сил
у щ,- г?? = (7 + й [136],
или
?^ = 2(U + h),
1 _ 1/2 (И + Л)
dt У S mt ds}
Если внести это значение l/dt, то получим
J 2 mtv,- ds, = J УЦй+Ji) У 2 т^.
Дифференциальные уравнения движения дают после интегрирования Зп
координаты задачи, выраженные через время; но из двух таких выражений
для координат можно исключить время и получить при желании Зп — 1
координат, выраженных через одну из них, например через хг При таком
предположении можно вместо 2 rrijds* подставить 2 mt dxl, и тогда
получится интеграл в форме
^2(U + h) \2mi[^dxl,
с которой связано теперь вполне определенное понятие.
Напишем теперь, чтобы не давать ни одной из координат предпочтения,
интеграл в прежней форме:
тогда мы можем принцип наименьшего действия выразить так:
Если даны два положения системы (т. е. если известны значения, которые
принимают для х1 = а и хх = b остальные Зп — 1 координат) и интеграл
^2(U+T) У2т^
распространен на весь путь системы от первого ее положения до второго,
то его значение будет для истинного пути минимумом по сравнению со
всеми остальными возможными путями, т. е. с такими, которые совместны
с условиями системы (если таковые существуют). Таким образом,
f №(U + h) yjniTds2-
будет минимумом или
<5JУ2(СГ+й) = О П. (1)
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
299
Теперь уже трудно найти метафизическую причину для принципа наимень-
шего действия, когда он, как это необходимо, выражен в этой истинной форме.
Существуют minima совсем другого рода, из которых тоже можно получить
дифференциальные уравнения движения и которые в этом отношении обе-
щают много больше.
Принципу наименьшего действия должно быть поставлено еще одно
ограничение. Именно, минимум интеграла имеет место не между двумя
любыми положениями системы, но только тогда, когда конечное и начальное
положения достаточно близки друг к другу [138]. Мы сейчас объясним,
какую границу здесь нельзя переходить.
Рассмотрим сначала один особенный случай. Пусть единственная мате-
риальная точка двигается по данной поверхности под влиянием начального
толчка, и пусть на нее не действуют силы притяжения. В этом случае U = О,
а сумма 27 mtds} превращается в mds2; таким образом, J ds или s будет
минимумом, т. е. материальная точка описывает кратчайшую линию на
данной поверхности. Но кратчайшие линии сохраняют свое свойство быть
минимумом только между известными границами ;
например, на шаре, где кратчайшими линиями
служат большие круги, это свойство не имеет
места, как только будем рассматривать длину, ко-
торая больше, чем 180°. Чтобы это увидеть, не надо
обращаться к дополнению до 360°, что ничего не
доказало бы, так как minima должны иметь место
всегда только по отношению к бесконечно близко а
лежащим линиям ; мы убеждаемся в этом иным
способом. Пусть В будет полюсом А ; продолжим
большой круг АаВ через В до С и проведем
большой круг АР В бесконечно близко к АаВ;
тогда АаВС = АрВ + ВС = Ар + рВ Ц- ВС. Да-
лее, пусть р лежит бесконечно близко к В, а PC
есть дуга большого круга ; тогда рС < РВ + ВС
и, следовательно, ломаная линия Ар + рС мень-
ше, чем большой круг АаВС. Таким образом, на шаре 180° есть граница
минимальных свойств. Чтобы эту границу определить в общем случае,
я установил путем более глубоких исследований следующую теорему.
Если из какой-нибудь точки поверхности провести по всем направлениям
кратчайшие линии, то могут встретиться два случая: две бесконечно близкие
кратчайшие линии либо проходят все время одна возле другой, не пересекаясь,
либо они вновь пересекаются, и тогда последовательность всех точек пересе-
чения образует их огибающую кривую. В первом случае кратчайшие линии
никогда не перестают быть кратчайшими, во втором они будут таковыми
только до точки касания с огибающей кривой.
Первое имеет место, как это само собой разумеется, для всех разверты-
вающихся поверхностей, так как на плоскости прямые, проходящие через
одну точку, никогда вновь не пересекаются ; далее, как я нашел, это имеет
место для всех вогнуто-выпуклых поверхностей, т. е. для таких, у которых
два взаимно-перпендикулярных нормальных сечения имеют радиусы кри-
визны, направленные в противоположные стороны, например для одно-
полостного гиперболоида и для гиперболического параболоида. Из этого,
впрочем, не следует, что не могут существовать вогнуто-вогнутые поверх-
ности, которые не принадлежали бы к этой категории, по крайней мере
невозможность такого случая не доказана.
Пример второго рода дает эллипсоид вращения. Возьмем его мало отли-
чающимся от шара ; тогда кратчайшие линии, которые проходят через
300
К. ЯКОБИ
любую точку поверхности, хотя и не будут, как на шаре, пересекаться все
в полюсе, но будут в окрестности полюса иметь маленькую огибающую
кривую. При поверхностном рассмотрении это обстоятельство кажется
парадоксальным; действительно, огибающая кривая вообще имеет то
свойство, что система кривых, которые она огибает, не может входить во
внутреннюю ее область. Поэтому должна была бы существовать часть поверх-
ности, обладающая тем свойством, что в любую точку пространства, ограни-
ченного этой поверхностью, нельзя провести из данной точки кратчайшую
линию, что невозможно. Но парадокс этот выясняется при более точном
исследовании огибающей кривой, как видно из прилагаемого чертежа, на
котором ABCD изображает огибающую кривую, которая приблизительно
имеет вид эволюты эллипса, a EFG — кратчайшую линию. Она выходит
из Е, входит в часть поверхности, ограниченную огибающей, касается ее в
точке F и перестает с этого места быть кратчайшей линией. Это свойство
кратчайших линий, что они перестают быть таковыми после соприкосно-
вения с общей их огибающей, найдено, как ска-
зано, путем глубоких исследований ; но после
того как о1но найдено, его легко увидеть, потому
что когда две бесконечно близкие кратчайшие
линии пересекаются, в их точке пересечения об-
ращается в нуль не только первая, но и вторая
вариация, и разность сводится, таким образом, к
бесконечно малым величинам третьего порядка,
т. е. не будет никакого минимума.
Мы возвращаемся теперь снова к общему
рассмотрению минимума для принципа наимень-
шего действия. Произвольные постоянные, ко-
торые получаются после интегрирования диф-
ференциальных уравнений движения, опре-
делятся всего проще через начальные положения
и начальные скорости движения; через эти началь-
ные данные определятся все постоянные инте-
грирования, так что не может быть никакой многозначности. Но в принципе
наименьшего действия предполагаются заданными не начальные положения
и начальные скорости, а начальные и конечные положения системы. Поэтому,
чтобы найти истинное движение, надо решить уравнения, определяющие
начальные скорости из конечных положений. Эти уравнения не обязательно
будут линейными, вследствие чего можно получить несколько систем зна-
чений начальных скоростей, и им соответствует тогда несколько движений
системы из данных начальных положений в данные конечные положения,
и все эти движения дают minima относительно бесконечно близких к ним
движений. Если теперь интервал начальных и конечных положений изме-
нять непрерывно, начиная от нуля, то различные системы значений, которые
получаются при решении уравнений для начальных скоростей, также будут
изменяться. Когда при таком изменении систем значений наступит случай,
что две системы значений равны друг другу, то это и будет границей, за кото-
рой нет больше минимума.
Эту теорему, которая, кстати сказать, не имеет никакого значения для
механики в узком смысле, я опубликовал в журнале Крелля*), но только
как заметку без доказательства. Как пример к ней, рассмотрим движение
планет вокруг Солнца. Даны : фокус А эллипса как местоположение Солнца,
большая ось эллипса и, кроме того, два положения р и q планеты. Обозначим
*)Том 17, стр. 68 й след .
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
301
второй, пока неизвестный, фокус через В; тогда через данные отрезки опре-
делятся расстояния точки В от обоих положений планеты р и q, а именно,
эти расстояния равны а — Ар и а — Aq благодаря известному свойству
эллипса. Но это дает для В два положения В и В', одно выше, другое ниже
линии, соединяющей ри q. Таким образом, получаются два эллипса, а вместе
с тем также два движения планеты, которые возможны при заданных отрез-
ках. Чтобы оба решения совпали, точки Ви В’ должны лежать на линии,
соединяющей р и q, т. е. р, В и q должны лежать на одной прямой, а тогда q
совпадает с р'. Таким образом, р' обозначает границу, за которую нельзя
распространять интеграл, имеющий начало р
в р, так, чтобы он не переставал быть ми- ---
нимумом. / \ /?
Мы возвращаемся теперь к собственно / / \
механическому значению принципа на- / / \ / \А
именьшего действия. Оно состоит в том, I __________________у Zy?.
что в уравнении (1) этой лекции заклю- I #
чаются основные уравнения динамики в \ \ /
том случае, когда имеет место принцип \ \ /
живой силы. В самом деле, уравнение (1) X. \с,
имело вид
<5 jУ2Р + Й) У/M?? = 0. Рис. з.
Здесь после исключения времени все координаты можно выразить как функ-
ции одной из них, например хх, и поэтому можно написать:
<5 J У2Р + Й) У 2 "к gy ‘ dxf = О
или
Если положим теперь
= = у — Z’.
dX1 x‘’ dX1 y" dX1
TO
8J ]/2(С7+й) У2~т^х^ + у^ + г'у)dxt = 0.
Вводя обозначения
2 (U + ft) = A, 2 (x? + у? + z?) = В, УД У В = Р,
имеем, наконец,
<5jPdx1 = 0,
откуда получаем правило : подставляем в J Р dxt вместо xh yit zt соответ-
ственно X; + <5х„ yt + бу,, z, + dzir где <5х;, бу,, dzt обозначают произволь-
ные функции, умноженные на бесконечно малый множитель а и не об-
ращающиеся в бесконечность внутри границ интегрирования, разлагаем
по степеням а, и тогда полагаем член, умноженный на первую степень а,
равным нулю. При этом надо заметить, что, во-первых, так как границы
интегрирования даны, то от них не будет никаких вариаций, во-вторых,
что по той же причине все вариации на границах должны исчезать и, нако-
нец, что дхг вообще есть нуль, так как хх — независимая переменная.
302
К. ЯКОБИ
Поэтому по правилам вариационного исчисления получаем
6jPdXx = JdPdxx =
ЭР s . ЭР J, . ЬР „ , . ЭР „ , . ЭР . л ,
w^/+ бх,. + Wi бу,. + 6z,.JdX,.
Но
f‘dXX
~ ^dxt = ~ dxt- -^LdX'dXj
Эх,- dXi 1 Эх, ' J dXj ! 1
или, так как бх, исчезает на границах интегрирования,
и 9₽
d Эх,
dx.
Подобные же уравнения получатся для у,- и
7 ЭР \ (
Но
бх, dxx.
Zi\ пользуясь ими, получим
w 8Р
эу;
d ЭР
ЭР bz'j
bzi dxj
1бг,- dx-L.
P = YA^B, A = 2(U-\-h), B = 2'mI(x;2 + /i2 + 2?)>
ЭР
Эх/
X1/Ё. 9А _ 1/s
2 У А Эх/ \ А Эх/ ’
следовательно,
ЭР
эх;
1 1М ЭВ ]/А
2 I в эх; — у в т‘ Х‘ ’
d 8Р _
ЭР _ 9xZ = 1М ъи
Qxi dx, \ A dXi
dx.
Если теперь положим (см. стр. 298)
в ,
dxx = dt,
(2)
то получим
ЭР
Эх/
ьи
8X1
d2x
dP
и подобные же уравнения для у, и z,-. Введя эти выражения, на йдем
ЧУЬ +(%- *+
+ (4&-m.4XWrfx‘-
ОТРЫВОК ИЗ «ЛЕКЦИЙ ПО ДИНАМИКЕ»
303
Но так как по нашему принципу эта вариация должна исчезнуть, то имеем
„ d2x/\ .о , (QU d2yi\ ,,, , (dU <Pzi\ . )
О ~ 2 ((. Эх, т‘ dP J §Х‘ + I dyt т‘ dP J $У‘ + ( Эх, т‘ dP J $Z‘ J
ИЛИ
v, (d2Xi s , d‘yi s , (Pzi s') v? (л , dU s . dU s A
(.“dF ^Xi + dF + ~dP^Zi j — ( Эх} ^Xi + dyi $У‘ 9z7 $Zi) ’
(3)
а это есть прежнее символическое уравнение [139].
Уравнение (2) есть не что иное, как теорема живых сил : действительно,
при помощи квадратуры получаем
Bdx2 = Adt2
или
+Ш!=2 (и+4 •
Это можно было предвидеть, так как мы исключили время из интеграла прин-
ципа наименьшего действия при помощи теоремы живых сил.
Седьмая лекция
Дальнейшее изучение принципа наименьшего действия.
Множители Лагранжа
Кроме того недостатка, что при обычном способе выражения принципа
наименьшего действия теорема живых сил не вводится в интеграл, выражаю-
щий этот принцип, плохо еще то, что обычно говорят: интеграл должен
быть наибольшим или наименьшим; между тем надо сказать : его первая
вариация должна обращаться в нуль. Смешение этих никоим образом не
тождественных требований так вошло в обычай, что его едва можно поста-
вить в упрек авторам. На этой почве между Лагранжей и Пуассоном про-
изошло замечательное qui pro quo, которое относится к кратчайшей линии.
Лагранж говорит совершенно справедливо, что в этом случае интеграл
никогда не может сделаться максимумом, потому что как ни длинна будет
кривая, соединяющая две точки на данной поверхности, всегда можно найти
еще более длинную, а отсюда он заключает, что интеграл всегда должен
быть минимумом. Напротив, Пуассон, который знал, что интеграл в извест-
ных случаях, в частности для замкнутой поверхности, за известными грани-
цами перестает быть минимумом, заключил отсюда, что в этих случаях
интеграл должен быть максимумом. Оба заключения неправильны ; в случае
кратчайших линий интеграл во всяком случае никогда не будет максимумом,
а будет либо минимумом, либо ни тем, ни другим, —• ни максимумом, ни
минимумом.
Исключение времени из интеграла, рассматриваемого при получении
принципа наименьшего действия, должно производиться обязательно при
помощи принципа живой силы, а не при помощи принципа площадей или
какого-либо другого интегрального уравнения задачи ; только таким путем
можно придти к принципу наименьшего действия. Лагранж в одном месте
говорит, что он в Туринском Мемуаре вывел дифференциальные уравнения
движения из принципа наименьшего действия в соединении с принципом
живых сил. Такой способ выражения после сделанных выше замечаний не
допустим. Лагранж применил только что открытое им вариационное исчисле-
ние к использованному уже Эйлером принципу наименьшего действия, но
употребил при этом принцип живых сил в расширенном виде, приданном
304
К. ЯКОБИ
ему Даниилом Бернулли, и таким образом пришел к общему символическому
уравнению динамики, из которого мы исходили и которое мы здесь еще
раз напишем:
+ + = 2’(x^1 + y^; + z&1.), (1)
где в правой части надо поставить dU, когда имеет место принцип живых
сил. Если отвлечься от того, что dU в принятом в вариационном исчислении
смысле только тогда может быть поставлена в правой части уравнения, когда
величины X, Y, Z являются частными производными одной и той же функции
U, и рассматривать dU просто как символическое сокращенное обозначение,
то равенство
2 «Ч = ди (2)
будет служить также и для того случая, когда теорема живых сил не имеет
места. Это уравнение, как уже раньше было упомянуто, справедливо также
и тогда, когда имеются условные уравнения, но тогда вариации не будут
больше зависимы друг от друга. Если имеется т условных уравнений
/ = 0, ? = 0,..., (3)
то между вариациями тоже существует т условных уравнений :
(4)
и т. д.
При помощи этих т уравнений можно исключить из уравнения (1) т
из Зп вариаций dx,-, dy„ <5z„ и если после этого оставшиеся вариации поло-
жить независимыми друг от друга, то символическое уравнение (1) распадется
на дифференциальные уравнения движения. Но зто исключение было бы
очень затруднительно и имело бы, кроме того, некоторые неприятные сто-
роны ; во-первых, пришлось бы некоторые координаты предпочесть другим,
и поэтому получились бы несимметричные формулы, а, во-вторых, для
различного числа условных уравнений получалась бы различная форма
результатов исключения, вследствие чего общность исследования была бы
сильно затруднена. Все эти трудности преодолел Лагранж введением мно-
жителей (метод, который уже Эйлер часто употреблял в задачах «de maximis
et minimis»). Так как в уравнения (1) и (4) вариации <5х„ <5у,-, 8zt входят
линейно, то исключение т из них можно произвести следующим образом.
Умножаем уравнения (4) соответственно на множители Я, /*, . . . и склады-
ваем их с (1); полученное уравнение назовем (а).
Определяем теперь множители Я, /*, ... так, чтобы в уравнении (а)
т выражений, умноженных на вариации <5хг, <5у,-, 8zh .. ., тождественно
обращались в нуль ; тогда, приравняв нулю выражения, умноженные на
остальные Зп — т вариаций, получим дифференциальные уравнения задачи.
Таким образом, видим, что в уравнении (а) все Зп выражений, умноженных
на <5у„ dz,, ..., надо положить равными нулю и рассматривать эти
уравнения так, что т из них определяют множители Я, /*,..., а остальные,
в которые надо подставить найденные таким образом множители, дают
дифференциальные уравнения задачи. Другими словами, из Зп уравнений,
на которые распадается уравнение (а), если все вариации рассматривать
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
305
как независимые, надо исключить т множителей Л, [л,..., и тогда получатся
Зп — т дифференциальных уравнений задачи. Но вместо того, чтобы произ-
водить это исключение, лучше оставить неизвестные множители в Зп урав-
нениях и исследовать дальше эти последние ; они будут тогда иметь вид :
щ,
d2xi
= Л to? +
8у
Эх/
mt
ГП<
' dt2
___ у I 1 9/
Л2 Г,+Х’Эу(
dt2 ' 1 dzi
dtp
'dyi
dtp
Эй
(5)
где для всех n значений i везде входят одни и те же множители Л, /л, ...
Это и есть та форма, которую Лагранж дал уравнениям движения системы,
связанной любыми условиями.
Величины, прибавленные к силам Х„ Ylt Zh выражают действие системы,
т. е. изменение, которое приложенные силы претерпевают благодаря связям
материальных точек. К этому же результату приходят в статике, когда дока-
зывают, что в случае, когда в п точках системы приложены силы
; 9/ , 8?> , , д! , Эр . df dtp
z + лЖ'+лЖ + --” aW + a^ + ---’
параллельные координатным осям, то эти силы уничтожаются связями си-
стемы, откуда вытекает, что уничтожаемые связями системы силы не опре-
делены, но содержат неопределенные величины Л, /л, ... Поэтому введение
множителей Л, /л,... не есть просто искусственный прием вычисления, — на
самом деле эти величины имеют в статике вполне определенное значение.
От только что приведенной теоремы статики можно теперь перейти к урав-
нениям (5) движения, притом основывая переход от статики к механике на
следующем рассуждении.
Благодаря связям системы материальные точки не могут следовать сооб-
щенным им импульсам. Чтобы получить истинное движение, надо при-
соединить такие силы, комплекс которых уничтожался бы связями системы
и после присоединения которых систему можно было бы рассматривать так,
будто точки следуют приложенным к ним силам без сопротивления ; дру-
гими словами, после присоединения сил, уничтожающихся связями системы,
можно рассматривать систему как свободную. Это можно установить как
принцип, и из него сами собою получатся уравнения (5).
Именно этот принцип, давший нам благодаря присутствию связей системы
изменение сил, вызывающих ускорение, служит также и для того, чтобы
найти изменение мгновенных сил, возникающее под действием связей системы.
Формулы, которые тут надо применить, совершенно те же самые. Если на
точку т, действуют мгновенные импульсы tz„ i>„ с„ то, принимая во вни-
мание связи системы, получим следующие измененные импульсы:
। о 9/ , д<р ,
°' + я1 Ж+Л1 -^7+ •••’
, , 5 9/ , dtp
ь< + ^ э^ + ^1 ж +’ • •’ ’
г I Л Д- и Ъч> I
(6)
где величины Л1( /л1г ... снова остаются одними и теми же для всех точек
системы.
20 Вариационные принципы механики
306
К. ЯКОБИ
Если мы хотим определить величины Я, д, ... и 21г ..., то надо диф-
ференцировать уравнения / = 0, <р = 0, ... Для определения величин
Я, /г, ... их надо продифференцировать два раза и затем подставить вторые
производные координат из уравнений (5); для определения же величин
juv . .. их нужно дифференцировать только один раз, так как мгновенные
импульсы пропорциональны скоростям, т. е. первым производным. Разло-
жим, в самом деле, уравнения для определения Ях, pilf ..., предполагая,
что мгновенные импульсы b(, ct действуют в начале движения и что
система в этот момент находится в полном покое. При таких обстоятельствах
мы можем для начала движения совсем не принимать во внимание силы,
вызывающие ускорение, так как эти силы могут дать только бесконечно
малые скорости, поэтому мы должны для определения Ях, /гх, ... составить
дифференциальные уравнения
Э/ dxt . Э/ dyt df dzt] _ „
dxt dt dyt dt Oz, dt J
dtp dxt . d<p dyt dtp dzt\ _ ~
dxt dt *" dyt dt *" dzt dt f u
dxt dyt dzt
и т. д. и подставить в них вместо величины (6), разделив их
предварительно на mt. Это дает следующий результат: полагаем
yj. ( э/ 8/ Э/ 0/ 0/ df\
mi t dxt dxt dyt dyt dzt dzt J
1 Г df dtp . df dtp df dtp A
~mt I dxt 0x7 "I- dyt dyt dZi dzt J ’
тогда для определения Ях, juv . . . имеем уравнения :
О = Д + (/, /)Я1 + (/, <р) /л + (/, V) + • • •,
о = в + (<?,/) Ях + (<р,ср)/г1+ (<p,ip)vx + .. .,
о = с + (у, /) ях + (у, + (V», V») +. ..
(?)
И т. д.
Той же формы будут уравнения для определения Я, и, ..., только тут
А, В, С, ... принимают другие значения.
Возвращаемся теперь к дифференциальным уравнениям (5). Если мы их
помножим соответственно на 6 х„ 6 у(, <5 z( й сложим все Зп произведений,
то получим снова символическое уравнение, которое мы обозначили выше
через (а), именно :
dxz + ^dy,-+ ^&,) = ^ + Я^ + А^ + ...; (8)
это уравнение равнозначно системе (5).
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
307
Чтобы рассмотреть всю совокупность задач, которые содержатся в урав-
нениях (5), мы должны принять во внимание случай, когда в условия входит
явно время ; тогда тоже имеют место уравнения (5). Чтобы получить пред-
ставление о том, как время может входить в условия, предположим, напри-
мер, что материальные точки связаны с подвижными центрами, движение
которых дано ; связь эта такова, что центры действуют на материальные
точки, не вызывая реакции. Но для этого предположения необходимо дать
подвижным центрам массы, которые по сравнению с массами материальных
точек бесконечно велики. В этом случае без дальнейших рассуждений берем
для материальных точек уравнения (5); подвижные же центры сохраняют
без изменения данные им движения. В самом деле, пусть М будет масса одного
центра, принимаемая за бесконечно большую, р — одна из его координат;
тогда сила, действующая в направлении координаты р, пропорциональна М ;
если мы назовем ее МР, то имеем, принимая во внимание связи системы,
М^. = МР + л|- + «^ + ...
После деления на бесконечно большую массу М получим
Р
dt‘ ’
все же остальные члены выпадут. То же получим для прочих координат,
т. е. центры следуют данным им движениям, не обращая внимания на связи.
Значения Я, р, ... и ... будут здесь, конечно, другие, чем раньше,
так как при дифференцировании присоединяются еще частные производ-
ные по t. Например, к А (уравнения (7)) присоединяется член к В — член
ду °
эгит-д-
Однако время может входить в условия совершенно иначе, например,
когда связь двух точек ослабляется или расширяется, хотя бы при возраста-
нии температуры; но все условия такого рода можно свести к подвижным
центрам, если только взять как основное положение, что две связи, которые
приводят к одним и тем же уравнениям, могут заменять одна другую.
Время, кроме того, может еще очень затруднить дело, если, например,
с течением времени меняются массы. Но до сих пор не было необходимости
делать это предположение для мировой системы, так как наблюдения, нуж-
ные, чтобы решить, имеет ли оно место, еще недостаточно точны.
Восьмая лекция
Интеграл Гамильтона и вторая лагранжева форма
уравнений динамики
Вместо принципа наименьшего действия можно представить другой
принцип, который также состоит в том, что первая вариация некоторого
интеграла обращается в нуль, и из которого можно получить дифферен-
циальные уравнения движения еще более просто, чем из принципа наимень-
шего действия. Этот принцип раньше оставался незамеченным, вероятно,
потому, что здесь вместе с исчезновением вариации вообще не получается
минимум, как это имеет место для принципа наименьшего действия. Гамиль-
тон был первым, исходившим из этого принципа. Мы воспользуемся этим
принципом для того, чтобы представить уравнения движения в той форме,
которую им дал Лагранж в аналитической механике. Пусть, прежде всего,
20*
308
К. ЯКОБИ
силы Xh Ylt Zt будут частными производными функции U ; далее, пусть Т
будет половина живой силы, т. е.
тогда новый принцип содержится в уравнении
5J(T + U)dt = O. (1)
Этот принцип по сравнению с принципом наименьшего действия более общий
постольку, поскольку здесь U может содержать явно также и t, что в первом
принципе исключается, так как из него время должно быть исключено при
помощи теоремы живой силы, которая может иметь место только в том
случае, если U не содержит явно времени.
Воспользуемся уравнением (1), чтобы показать возможность приведения
дифференциальных уравнений движения к одному дифференциальному
уравнению в частных производных первого порядка. Как показал Гамильтон,
вариацию (1) можно разложить с помощью интегрирования по частям на
две части так, что одна из них стоит вне, а другая под знаком интеграла
и каждая сама по себе должна исчезать. Таким образом, выражение, стоящее
под знаком интеграла, будучи приравнено нулю, дает дифференциальные
уравнения задачи, а выражение вне знака интеграла дает их интегральные
уравнения.
Новый принцип, выраженный полностью, формулируется так:
Если даны положения системы в данный начальный момент t0 и в дан-,
ный конечный момент то для определения действительно происходящего
движения служит уравнение
d$(T + U)dt = O. (1)
Здесь интеграл берется от t0 до fv U есть силовая функция и может также
содержать явно время, а Т есть половина живой силы, так что имеем
Т = ~ 2 mt (х-2 + у-2 + z?),
, dxt л1 dyt dzt
Xi ~ dt ’ dt ’ Z> ~ dt ’
Если выполнить указанную в этом принципе вариацию, приписав коорди-
натам по правилам вариационного исчисления вариации 8xh <5у„ dz,- и
оставив неизменной независимую переменную t, то получим
<5 J Tdt = §dTdt = J 2 mt (x't дх\ + y't dy] + z] dz} dt.
Подставляя вместо dx'b 8y'b <5z'- выражения и инте-
грируя по частям, найдем:
= 2 mt (х- dxt + у dyt + z\ dz} - J 2 mt (x"t dxt + y" dyt + z" dz} dt,
где x"t, y't, г", — вторые производные от x„ у,-, z,, .взятые no t. Но так как
начальные и конечные положения даны, то dxh dyt, dzt уничтожаются на
границах интегрирования и члены, стоящие вне знака интеграла, обращаются
в нуль, так что
d J Т dt = - J 2 mt (х- dxt +'у- ду, + z" dz} dt;
ОТРЫВОК ИЗ «ЛЕКЦИЙ ПО ДИНАМИКЕ»
309
таким образом, имеем
д J (Т + U) dt = - J{2 mi (х" dXi + у- dyt + $ Szd -8U}dt, (2)
где
srr x? ( ®U .. . QU s . QU 5, A
= 2 + ^-Sy,+ — tZi) .
Из уравнения (2) на самом деле следует данное ранее во второй лекции
символическое основное уравнение динамики.
Содержащийся в уравнении (1) принцип очень полезен при преобразо-
вании координат. Уравнение это имеет место для всякой системы координат
поэтому в новой системе надо так же варьировать по новым координатам,
как раньше по старым, и вся подстановка, которая должна быть произве-
дена, ограничивается обоими выражениями Т и U.
Применим это сначала к полярным координатам; формулы преобразо-
вания в этом случае имеем такие :
Xt = Kj cos <Pi ,
у,- = г,-sing?, cos ¥>,,
г, = r, sin <pi sin ipi.
Отсюда следует после дифференцирования :
dXi = cos <pi drt — rt sin <pi d<pt,
dy, = sin <Pi cos <Pi drt + r, cos g?,- cos d<pt — rt sin g?z sin ,
dZi = sin <pi sin ipi drt + r, cos g?(- sin dg?, 4- r, sin g?;- cos ipi dy>i;
поэтому
или
где
dx} + dy} 4- dz} = dr} 4- r} d<p} 4- r} sin2 g?, d y>},
+ У? + Z;2 = r? 4- r'i2 <p? 4-r? sin2 Vt >
Таким образом, тотчас получаем
т = у 2 rnt (х,-2 4- yj2 4- zj2) = у 2 mt (г? 4- г} 4- г;2 sin2 <р{ у-2). (3)
При этом предположении и допущении, что U также выражено через новые
координаты, мы найдем уравнение, следующее из 6 j (Т 4- U)dt = 0 по
общим правилам вариационного исчисления.
Пусть Р есть функция нескольких переменных р,... и их первых произ-
водных р',..., причем предполагается, что все р зависят от одной независи-
мой переменной t, и пусть первая вариация от J Pdt исчезает, т. е.
8$Pdt = 0,
где интеграл надо брать от tQ до и где значения р, соответствующие этим
значениям t, заданы ; тогда путем выкладок, таких же, как и в шестой лекции
(стр. 301 и след.), придем к уравнению
' dP
Л ’Х.' dp' S
О = > -------др.
L dt др J
(4)
310
К. ЯКОБИ
В нашем случае вместо величин р стоят г,-, а Р = Т + U; далее,
U не содержит производных г', <р\, у'; поэтому получаем :
d
а Qr'i QT QU
dt дп Qn _
d &Г-
a Q<p't QT QU я ,
' 9T
Эу’г
dt -
QT QU x
Qyt
Но на основании уравнения (3)
QT , QT 2 , QT 2 • 2
-^-т- = т, гг; = m, r2t <pt; д-z = m^sin2?»,-^;
Off ‘ ” Q(fj ’ ITl’ dy>i 11 T,rl’
ЭТ f Zn . Q ,QX dT 1 9 • П '9 n
=mi(ri<pi2+ rism2<piVi2); y mir^m2<piy)i2; -^ = 0;
таким образом, имеем:
О = JF {m-t — rt <p't2 — rt sin2 <pi ^;2^ — drt +
, -4? ( (d(r2<p'i) 1 2 • n '94 9UI s , v? ( d (rf sin2 <pt уЛ Э U\ s
+ 2 [-^-~2Г^П 2(P‘^ ~ 9^} §(P‘ + 2
ИЛИ
-S’ mi - rl Г?-') Sina9>, V'l‘) Sr, +
+ (t - - j r? sin 2ft _
\ UI “ / UI j
( QU « QU « , QU sA sfr
= 2 Ы ж J = §u.
Если имеются еще условные уравнения / = 0, <а = 0,..., то в правой части
этого уравнения к Ьи присоединяется еще сумма Я <3/ 4- р дсо 4- ... и, таким
образом, в этом случае получится
2 mi {(^Г — Г/ ?>? - Г, Sin2 <Pt V42) dr I 4- Sin 2??, tf2) 4-
+ =dU + ^df + pd(o+... (5)
Это уравнение распадается на Зп уравнений следующего вида :
„ (d2rt -22) । о 9/ . Эсо
Zn'|^~r'9’'2 —riSin29’,^}= -Qi^ + ^ + P +
fd (г2 <p'i) 1 2 • 2 '2) 9t/ , 1 9/ Эсо
mi { и/ — V Sln 4>i У’П = 5----------------й------------------F---,
1 ( at 2 1 T1 1 J Э??г d(pi r wpi
'v\ rxr r
(6)
Особенную важность имеет преобразование первоначальных координат
в новые, которые выбраны так, что когда все через них выражено, то условные
уравнения выполняются сами собой. Именно, если имеется m условных
уравнений, то можно все Зп координат выразить через З/г — m из них или
через Зп — m функций от них. В большинстве случаев очень важно ввести
не самые координаты, но новые величины так, чтобы избежать иррациональ-
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
311
ностей. Например, при движении точки по эллипсоиду наибольшую важ-
ность имеют формулы:
x = flcos7?; у — bsinr; cos С; z = с sin т/sin
Обозначим новые Зп — т = к величин через qx, q2, ... ,qk; эти величины
должны быть таковы, что если через них выразить х1; ylt zv х2, у2, z2, ...
и подставить эти выражения в т условных уравнений f = 0, а> — 0, ...,
то левые части этих уравнений обратятся тождественно в нуль, т. е. должны
иметь место тождества :
/(<li, Чъ-.-, Чк) = О-, qk) = 0,..., (7)
причем q не связаны никаким уравнением. Благодаря этому дифференциаль-
ные уравнения движения значительно упростятся. Именно, общее символи-
ческое основное уравнение динамики для любой системы координат при
существовании.условных уравнений будет
ЭТ
Qq's __ 8Т
dt Qqs
dqs — dU Я df 4- A +
где знак суммы распространяется на все q. Но для наших величин q урав-
нения (7) имеют место тождественно ; поэтому после введения этих величин
будем иметь <5/ = 0, <3со = 0 и т. д., и предыдущее уравнение приводится
к уравнению
ЪТ
Qq's _ ЭТ
dt Qqs _
которое разлагается на к дифференциальных уравнений вида
Qqs _ ЭТ _ QU
dt Qqs ~~ Qqs
(8)
Это — та форма, в которой Лагранж представил дифференциальные урав-
нения движения уже в старом издании Аналитической механики [14°].
Если представим себе все координаты выраженными через величины q,
то получим после дифференцирования :
, dz, , , Qzi , , . Qzi ,
Zi~ + + +
Если подставим эти значения в Т = ~ S + у'2 + z'f), то получим
выражение, которое представляет собой однородную функцию второй сте-
пени относительно величин q'v q'2, ..., q'k, коэффициенты которой — извест-
ные функции от qx, q2, . .., дк. Если мы положим
QT
Qq’s ~Ps’
312
К. ЯКОБИ
то уравнение (8) можем написать еще так:
dps d(T + U)
dt bqs
(9)
Это, правда, еще не окончательная форма уравнений движения, так
как она требует дальнейших преобразований ; но раньше чем этим заняться,
распространим предыдущее рассуждение на тот случай, когда не существует
силовой функции, а на месте dU в первоначальном символическом урав-
нении стоит S(Xi dXi + Yt dVi + Zi dz,). Когда все выражено в величинах
q, то dU = 8qs. Если это сравнить с только что упомянутым
выражением S (X, дХ/ + Yt бу, + Z( <3z;) и вспомнить о правиле, дан-
ном во второй лекции, по которому при преобразовании координат надо
представить вместо dxit dyh 8zt соответственно 8qs; dqy,
azi
dqs
8qs то легко видеть, что вместо
s
аи
aqs
dqs войдет выражение
и, таким образом, вместо будет стоять выражение
«. = i(Xcg- + r, > + *<<)
(10)
Посредством этого преобразования уравнение (8) заменится следующим:
ат
_______(11)
dt aqs Vs‘ { ’
Если будем подставлять сюда вместо s значения от 1 до к', то получим для
рассматриваемого случая уравнения движения, выраженные в величинах q.
Мы хотим убедиться в справедливости уравнения (11) еще другим путем
и для этого будем исходить из уравнений (5), данных в предыдущей лекции :
, 1 at , э<о
Z72; • .".о ' —- X/ -I” Л -5-[- Ц ,
1 dt2 11 Эх/ 1 Эх,- 1 ’
d2yr ,, , , at , а<о
m‘ ~dt2~ ~Yt + ^ 'эуГ + • • • ’
</2zi „ , , at . a<o ,
Умножаем эти уравнения на -|у-, и суммируем по i; тогда получим
множителем при 2 выражение
у f д! Эх‘ I э/ Эу< । Э/ дк)
( Эх/ aqs dyi dqs dzi dqs J dqs
Но выражение в правой части исчезает на основании уравнений (7)
и то же будет с коэффициентом при /г...; поэтому получаем, принимая во
внимание уравнение (10) :
У m Id!>Xi dxi I 9yf I d2Zl Эгг I — n
‘(dt2 aqs dt2 aqs + dt2 aqs f 4s’ { '
ОТРЫВОК из «ЛЕКЦИЙ ПО ДИНАМИКЕ»
313
Чтобы убедиться в справедливости уравнения (11), мы должны показать,
что его левая часть тождественна с левой частью уравнения (12). Это будет
показано таким образом. Мы имеем
поэтому ЪТ _ Qq's ~ -^mt(x't -g-+y; r 7
QT _ Qqs Qy'i d(]s । z> jten
Но мы имеем еще дифференциальные уравнения :
X'i = Qxt , dxt , . + Ws Ь + • Dx/ , Q^qk'
y't = 9У‘ 1 дуг n' I э9Л1+.'э^ + -- ъ^-а' Qqk qk ’
Z'i = Qzt , , Qzt , , Э^^ + -- dZi a’ ~Qqk qk ’
откуда следует, что
Qx't _ Qq's ~ Qxt . Qy't _ Qyt , Qqs ’ Qqs Qqs ’ , Qzi dzt ’ Qq's Qqs
Далее, имеем:
Qx't _ Qqs Q2Xi Qqs Qq,, qi 1 QqsQq, q* 1 •• Q2Xi , _ Qqs Qqk qk
Qy'i = Qqs Q2yt QqsQqi qi 1 QqsQq2 1 " &У1 a' ’. Qqs Qqk 4k ~
Qz'i _ Qqs Q2zt Qqs Qq! q'>+ QqsQq2^+" &Zl n' — Qqsdqk 4k
. Эх/
Qqs
dt
d-^
Qqs
dt~
. 9Z'
Qqs
dt
Подстановка этих значений в и в дает
Qqs Qqs
' .9xi + у' М + z
Qqs Г Qqs 1 Qqs) ’
Qxt Qyi dz,
dt y‘ dt
QT
Qq's
ЭТ
^ = Лт‘\х'<
dt
поэтому
, ЭТ
d Qq's
dt
ЪТ
Qqs
Qxt . dy\ Qyt . dzj
dqs dt Qqs dt
Qxt . d2yi Qyi . d2zt
а отсюда следуют тождественность уравнений (И) и (12) и вместе с тем
правильность первого из них.
d2Xi
Qzi
Qqs
QZi
314
К. ЯКОБИ
Итак, если силовой функции нет, то уравнения движения будут вида (1);
если она есть, то уравнения будут иметь вид (8) или, что то же, вид (9),
а именно:
dPs = э (т + и) = ът
dt 'dqs ’ Ps &q's ’
Благодаря форме этих уравнений получаем непосредственно следующий
замечательный результат: Если можно выбрать новые переменные так,
что одна из них, qs, не входит в силовую функцию и что в Т не входит сама
переменная qs, а входит только ее производная q(s, то из этого обстоятельства
каждый раз получится интеграл данной системы дифференциальных урав-
нений, именно ps = const или, что то же, = const. Действительно, при
сделанном предположении 9 = 0; поэтому имеем ~ = 0, откуда
р, = const. Этот случай имеет место, например, при притяжении точки одним
неподвижным центром. Если этот центр находится в начале координат,
то имеем в полярных координатах (см. уравнение (3)):
17 = —; Т = 4- т (г'2 + г2 <р'2 + г2 sin2 <ру>'2),
и, таким образом, у не входит в U, а в Т входит не само у, а его производная
у', поэтому имеем
= mr2 sin2 <р • у' = const,
или, внося множитель т в постоянную,
г2 sin2 <р • у' = const,
что можно было бы вывести и из третьего уравнения (6). Это есть принцип
площадей для плоскости у, z.
В самом деле, так как
х = г cos <р; у = г sin g? cos у; z = г sin 9? sin у,
то
, z 1 , yz'—zy’
^ = 7;
или после умножения на у2 = г2 sin2 95 cos2 уз:
9-9 > dz dv
г2 sin2 g> w — у — z ;
T T dt dt ’
поэтому получим
« • « > dz dy ,
r2 Sin2 95 • y>' = у — — z~= const,
' T J dt dt
т. ё. принцип площадей для плоскости у, z.
М. В. ОСТРОГРАДСКИЙ
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ
ИЗОПЕРИМЕТРОВ [141|
Мы рассматриваем в этом Мемуаре важные, до сих пор не замеченные
следствия, вытекающие из выражения вариации некоторой функции, пред-
полагая, что эта функция содержит вместе с основной или независимой
переменной также функции этой переменной и их производные различных
порядков. Для упрощения рассуждения обозначим изучаемую нами функцию
через А и назовем независимую переменную временем. Это наименование
оправдывается тем, что независимая переменная играет у нас ту же роль,
что и время в динамике.
Известно, что вариация А, которая зависит от времени, от каких-либо
функций времени и их производных, распадается на две части. Первая часть
является полным дифференциалом, каковы бы ни были функции времени,
входящие в А, и вариации этих функций. Другая часть, напротив, неинтегри-
руема, если только что названные функции и их вариации остаются произ-
вольными. Однако, подчиняя эти функции и их вариации определенным
условиям, мы можем не только сделать эту часть интегрируемой, но даже,
если бы это было признано необходимым, привести ее к нулю. Среди беско-
нечного множества способов этого приведения один представляется наиболее
замечательным. Он состоит в исключении неинтегрируемой части единственно
за счет функций, содержащихся в А, не затрагивая их вариаций. Этим спо-
собом исключения пользуются в проблеме изопериметров. Применяя его,
можно получить те дифференциальные уравнения, которые имеют место в
этой проблеме.
Эти уравнения содержат как очень частный случай уравнения дина-
мики ; они заслуживают внимания не только уже в силу этого обстоятель-
ства, но и сами по себе.
Как следствие этих уравнений, как бы одновременно с ними, мы получим
весьма замечательную формулу, а именно равенство между вариацией А
и ее первой частью, которая всегда интегрируема, если вторая часть этой
вариации приведена к нулю. Эта формула превращает полную вариацию
в полный дифференциал ; она является основой настоящего исследования
и приводит к важным следствиям. Она представляет собой не что иное,
как те дифференциальные уравнения, которые установлены для обращения
в нуль интегрируемой части, т. е. дифференциальные уравнения проблемы
изопериметров. Однако она представляет эти уравнения в форме, которая
позволяет легко вывести из нее многие важные свойства, которые не так
легко раскрыть, изучая эти же уравнения в их обычной форме.
Для сокращения мы будем называть эту формулу фундаментальной
формулой или фундаментальным уравнением.
316
М. В. ОСТРОГРАДСКИЙ
Неизвестные, которые входят в эту формулу, те же самые, которые
входят в задачу об изопериметре, а именно функции времени, содержа-
щиеся в А, и их производные до некоторого определенного порядка, который
мы не считаем нужным уточнять. Однако не все эти переменные удобны
для наших исследований. Мы оставим только половину из них, заменив
остальные более удобными.
Оказывается, что переменные, применением которых достигается наиболь-
шая простота и которые наилучшим образом соответствуют проблеме, — это
те переменные, которые находятся под знаком d в дифференциальной части
фундаментальной формулы, где они являются коэффициентами при вариа-
циях и их производных. Эти величины, повторяем, составляют только
половину общего числа неизвестных, поэтому за другую половину мы при-
мем функции, входящие в А, вместе с теми их производными, которые также
заключены в А, за исключением одной производной высшего порядка каж-
дой из этих функций.
При помощи весьма простого преобразования фундаментальная формула
распадается на систему дифференциальных уравнений первого порядка,
число которых равно числу неизвестных, о которых мы только что говорили
выше. Эти уравнения совершенно подобны общим формулам динамики,
хотя эта наука является только очень частным случаем проблемы изопери-
метров. В наших формулах, как и в формулах динамики, дифференциалы
неизвестных выражаются через вариации некоторой функции, которую мы
здесь определим и которая зависит только от времени и неизвестных незави-
симых переменных проблемы.
Кроме того, мы без труда приходим к тем же дифференциальным уравне-
ниям без помощи фундаментальной формулы.
Не следует упускать из вида, что эта формула устанавливает равенство
между полным дифференциалом и вариацией величины А, каковы бы ни
были приращения или вариации функций времени, содержащихся в А.
Если придать этим приращениям частные значения, делающие вариацию
А интегрируемой, то фундаментальная формула превращается в равенство
между двумя полными дифференциалами. Тогда можно ее интегрировать
и она дает также интегралы дифференциальных уравнений проблемы изо-
периметров, так как эта формула выражает, в сущности, эти же уравнения.
Если, например, величина А не содержит времени неявно, то заменяют
ее вариацию полным дифференциалом, приравнивая соответствующие при-
ращения функций, которые в ней содержатся, их дифференциалам. Отсюда
мы получим интеграл, который для проблемы изопериметров имеет значение,
аналогичное значению интеграла живых сил для динамики.
Но, возвращаясь к вариациям функций времени во всей их общности,
предположим для определенности, что дифференциал составляет левую
часть этого уравнения, а вариация — его правую часть.
После интегрирования формулы, написанной в таком виде, дифферен-
циал в левой части исчезнет, а в правой части окажется знак интеграла,
т. е. правая часть будет состоять из интеграла от вариации А плюс произ-
вольная постоянная. Так как знаки вариации и интеграла можно менять
местами, то правую часть можно представить в виде вариации интеграла
от функции А плюс постоянная.
Мы позволим себе опустить в этом Мемуаре доказательство возможности
перемены местами знаков интеграла и вариации и ограничимся только
утверждением этого :
1°. Все интегралы фундаментальной формулы или дифференциальных
уравнений проблемы изопериметров зависят от частных производных одной
и той же функции, а именно интеграла от А. Половина неизвестных в упомя-
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
317
нутых уравнениях являются частными производными этой функции; дру-
гая половина задается уравнениями, которые получают приравниванием
остальных частных производных той же функции произвольным пос-
тоянным.
2°. Функция «интеграл от Л» удовлетворяет уравнению в частных произ-
водных первого порядка. Она сама не входит в это уравнение, а входят
только ее производные.
3°. Полный интеграл этого уравнения достаточен для разрешения про-
блемы изопериметров, т. е. для нахождения полного интеграла системы
дифференциальных уравнений, связанных с этой проблемой.
Мы опускаем в этом Мемуаре некоторые результаты, получающиеся
отсюда на основании частных предположений. Эти результаты трудно выра-
зить без специальных алгебраических обозначений. Мы ограничиваемся
ссылкой на то, что они выводятся целиком из фундаментальной формулы
с такой же простотой и легкостью, как и теоремы динамики.
Наконец, путем одновременного применения двух различных вариацион-
ных характеристик к фундаментальному уравнению мы придем к теореме,
значительно более общей, чем аналогичная теорема Лагранжа, положенная
им в основу исследования вариаций произвольных постоянных в вопросах
динамики. Мы установим для проблемы изопериметров теорию варьирования
произвольных постоянных.
Наши исследования, без сомнения, аналогичны методам, употребляемым
в динамике. Однако нельзя сказать, что мы только непосредственно при-
меняем эти методы. Если бы это было так, теория, которую мы установили,
была бы давно получена первым геометром, познакомившимся с ее аналогом
в динамике. Мы думаем, что стоим на правильной точке зрения, утверждая,
что открытие свойств этой системы дифференциальных уравнений четного
порядка с произвольным числом неизвестных относится к проблеме изопери-
метров, частным случаем которых являются уравнения динамики. Приемы
для установления этого аналогичны предлагаемым здесь нами, так как осно-
ваны на принципе, который является для динамики тем, чем наша основная
формула является для проблемы изопериметров. Но этот принцип, а именно
«принцип потерянных сил», основан на теории движения и по этой причине
не относится к статике. Наоборот, принцип, который мы установили мето-
дами чистого анализа, заключает равновесие потерянных сил как частный
случай. Он не был и не мог быть замечен со старой точки зрения, и, следова-
тельно, невозможно было заметить, что метод, которому он дал начало, прило-
жим ктеориям несравненно более общим и широким, чем теория динамики.
Мы возвращаемся теперь к предмету нашего Мемуара, чтобы указать
другие применения нашего принципа и, особенно, случай, когда имеются
заранее заданные соотношения между функциями, заключенными в вели-
чине, обозначенной выше буквою А.
1. Обозначим через V произвольную функцию от независимой перемен-
ной t, величин х1( х2, ..., хт, рассматриваемых как функции t, и их произ-
водных по t различных порядков. Порядок старшей производной от х может
меняться для различных функций. Однако, чтобы не входить в некоторые
кропотливые подробности, мы будем говорить так, как если бы все они были
одного порядка, и предоставляем читателю изменить соответствующим
образом наши рассуждения, если это окажется необходимым.
Независимую переменную t будем называть временем, отчасти для облег-
чения изложения, отчасти же потому, что роль ее, вообще говоря, такова
же, как роль времени в уравнениях динамики.
Представим себе, что все переменные : t, xv х2, х3,..., хт получили
одновременно бесконечно малые и совершенно произвольные приращения
318
М. В. ОСТРОГРАДСКИЙ
St, бх1; бх2, ..., дхт и найдем вариацию 6 (Vdf) при том предположении,
что она вызвана исключительно вышеупомянутыми приращениями, причем
характер функции Уй ни в каком отношении и ни в какой мере не изме-
нялся.
Обозначим через i и к два переменных целых числа, заключенных в пре-
делах от 1 до т для первого из них и от 0 до п для второго. Тогда при этих
предположениях получим :
S (V dt) = VdSt + SV dt — d(V St) SV dt — dV St,
l==l k=O 0 I
и
m n flv
S {Vdf) = d(VSf) + £ g (dtSxW - St dx™).
Мы обозначаем первые, вторые, /с-е производные функции х, как обычно,
через х', х", ..., x(W.
Вариация бх должна иметь наиболее общий смысл. В этом случае она
вызывается одновременно двумя причинами: изменением независимой
переменной и изменением характера функции. В случае бесконечно малых
приращений первого порядка каждая из этих причин действует так, как
если бы она была единственной, и их общее действие равно сумме этих
частных действий. Но если переменная t превращается в t + St, а характер
функции не изменяется, то приращение функции, как это следует из основ-
ных понятий дифференциального исчисления, будет х'- dt. Поэтому, если
мы обозначим через Sto, приращение, которое х,- получает вследствие изме-
нения его природы, при постоянном t, то получим
Sxt = x'i St + Sail,
где 6 c»i есть бесконечно малое, совершенно произвольное приращение.
Мы могли обозначить его просто через to,-, но предпочли бсо„ чтобы отметить
его малость.
Продифференцировав приведенное выражение для бх1; получим
d SXj = x't d St + x St dt + Sa>i dt;
с другой стороны,
d Sxi = SdXi = S (x’j dt) = x'j d St + S x\ dt.
Следовательно, сравнивая, получим
Sx\ = x" St + Sai'i.
.. _ г d 6a>i
Мы написали 6toz вместо dt , так как здесь не возникает опасения
смешения обозначений.
Читатель хорошо понимает, что знак б«о, не представляет никакой опе-
рации над a>i; он обозначает произвольную бесконечно малую величину
и должен рассматриваться так, как если бы бсо, было одной буквой. Поэтому
штрих обозначает его производную.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
319
Сравнение выражений дхк и дх'к даст нам без всяких вычислений
Sx" = х'" St + Sm" , Sx”' = х""St + ,
и вообще
Sx(? = x«+r> St + Sat?,
откуда получим
йх(*> dt — dx(k) = Sw<k> dt,
и, следовательно,
S (V dt) = d(V St) + dt^ £ ~Sl) (0
Z = 1 fc=o OXfc
/c=n
Рассматривая сумму dt JP
k=Q
8V
8x<fc>
<5co(fc), мы для простоты опустили в ней
индекс z, но после нескольких преобразований мы опять введем его. Эту
сумму целесообразно разложить на две части с тем, чтобы одна из них была
полным дифференциалом. Предположим, следовательно, что
к=п су к—п— 1
dt ^-^Su^SSudt + d 2 SkSa>W,
к=0 °Х к —О
где величины 3 и — коэффициенты, не зависящие от бсо и ее производных.
Производя указанное дифференцирование, получим :
к=п к=п—1
к=0 М ' к=0
ИЛИ
kZ? (W к dV к I dV к dV А (к)
> ——- Sw(k> = - Sa> Н------Sa>(n> 4- у —Soxk>,
dx<k) dx dxW 1 гН dxW> ’
к=0 к=1
к = п-1 k=n —1
2 f,- <wi+1> = Sa>™ + 2; Seo™ ,
fc=O k=l
k=n—l k=n—I
У & S(oW = ^S(o + >’ ZLScoW,
k^O k^l
отсюда, производя подстановки и перенося все члены в одну сторону,
получим
О=(н + Г - sm + ^п+1 - 1 (^-1 + ^ - So)W •
Это уравнение разлагается на следующие :
_ dv dV
~ dx ’ 4Гп"1 dx<") ’
<? — v —
— rfx<fc) Sfc-
Вводя опять индекс z, получим
t _ dV t _ dV i = dV
dxtf> ’ ^'C~1 dxW ^’к’ dXi
320
М. В. ОСТРОГРАДСКИЙ
Второе из этих уравнений действительно для значений к от к = 1 до
к = п — 1, и все три — для значений i от i — 1 до i = т.
Взяв значение удовлетворяющее первому уравнению (2), мы
ПОЛУЧИМ ИЗ ВТОРОГО СООТВеТСТВеННО £,>-2, £(,n-3, %i,n-4> • • • > £i,2> %i,l> %ь a из
последнего В; объединяя все эти величины, получим:
t = -^-
s‘-n-1 dx\n} ’
к = dV ( dV Y
п-2 dx<n-i> — dx<n> J >
* = dV ( dV Y C dV V
§i>n~3 ~ dx\n-2> I dxp-1TJ + [dxy ) ’
.. dV I dV I dV Г dV Y"
n~4 “ dx?-® [ dxY~2> J + [ dxf-^ J I dxW J ’
hk
dV Ys)
dxpt+s+T>' J
Так как величины £ имеют упомянутые выше значения, мы имеем
к=п aV к=п—1
dt 2 6 = S‘ 6 dt + d 2
Л=0 axi fc=0
и, следовательно,
i=m i=mk—n—l \
d(Vdt) = dt^ В^ + а Vdt + ^ •
k=0
(4)
Это — известная формула для вариации дифференцируемой функции.
Мы могли бы не приводить доказательства этого факта, но все же поме-
щаем его для желающих.
Если положить &t = 0 и продолжать обозначать через SV вариацию V в
предположении, что t не меняется, получим
i=m к=п—1
dvdt = dt 2 Si^i + d2 2
1 = 1 ( = 1 fc=0
Формула (4) служит для определения символа d(Vdt), но она превратится в
алгебраическое тождество, если на место этого символа подставить его выра-
жение, определенное каким-нибудь другим путем. Например, определение
i=m к=п
d(VSf) + dt2
к^о ах‘
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
321
даваемое уравнением (1), приводит к тождеству
i-т к=п i=m i=m к=п—1
d 2 2 = dt2 + d2 2
= 1 1=0 ax‘ 1 = 1 1 = 1 k=0
которое мы обозначили номером (5) потому, что первый член есть не что
иное, как SV dt, в том предположении, что dt = 0. Всякое тождество пре-
вратится в уравнение, если в одной из его частей заменить несколько величин
их частными значениями, не изменяя остальных величин. Полученное таким
образом уравнение будет заключать в себе некоторые частные предположе-
ния, сделанные при выводе его из тождества. Выбирая эти предположения
подходящим образом, можно добиться того, что полученное уравнение будет
свободно от всяких иных условий. Оставшиеся условия можно записать в
виде уравнения двумя разными способами, что часто дает важные преиму-
щества.
2. Предположим, что
i-m
^'5,.15ю,= 0. (6)
i 1
Тогда формула (4) примет вид
(I т к = п — 1 i
vst + 2 2 (7>
1—1 к=о !
и мы придем к весьма замечательному соотношению, содержащему полную
вариацию и полный дифференциал, но которое по своему смыслу есть не что
иное, как уравнение
Ч™ da>i = 0, (б)
t= 1
только что введенное нами. Действительно, формулы (6) и (7) не предпо-
лагают ничего другого, и комбинируя их с помощью тождества (4), незави-
симо от всяких иных предположений, мы получим лишь уравнение (6) и
ничего более. Из того, что уравнения (6) и (7) приводятся одно к другому,
следует, что они выражают одно и тоже соотношение в двух различных
формах. Но так как одно из них легче приводит к результату, чем другое
удобно рассматривать их одновременно. Положив в формуле (7) dt = 0, мы’
получим
t=m к=п—1
SVdt = d£ У ' (8)
/=1 k=Q
ИЛИ
i~m к^п i = m k=n — l
= (8Z)
1 = 1 fc_0 1=1 fc = 0
Уравнение (6) можно рассматривать, с одной стороны, как соотношение
между вариациями бсо, а с другой, как связь между функциями х. С первой
точки зрения оно позволяет исключить одну из вариаций
iScoj, да>2 , <5ю3 , ... , <3сот
или,, что то же самое, выразить все вариации через т — 1 других произволь-
ных величин. Но этим путем мы только вернемся к уравнениям (3) и (4).
Рассмотрим теперь уравнение (4) как соотношение между функциями х.
21 Вариационные принципы механики
322
М. В. ОСТРОГРАДСКИЙ
Припишем да) бесконечно малые произвольные значения, не превращаю-
щие (4) в тождество. Каждой системе этих значений отвечает одно или не-
сколько соотношений между неизвестными х. Все эти соотношения будут,
очевидно, заключаться среди тех, которые мы получим, приписывая до)
абсолютно произвольные значения.
В этом предположении уравнение (4) распадается на т следующих урав-
нений :
— 0 j “2 ~ 0 > “3 = 0 > •••> “т = 0 .
Их все можно представить в виде
Н, = 0, (9)
где i пробегает т значений 1, 2, 3,..., т. Уравнения (9) превратят вариацию
d(Vdt) в полный дифференциал независимо от величины да). Они совпадут
с дифференциальными уравнениями проблемы изопериметров. Это проис-
ходит потому, что упомянутая проблема требует обращения в нуль инте-
грала
$d(Vdf)
при произвольных до, что может иметь место лишь в том случае, если ва-
риация d(Vdf) интегрируема. А это последнее условие выполняется лишь
в силу (9).
Займемся теперь уравнениями, связанными с проблемой изопериметров.
Они заключают в себе как частный случай уравнения динамики. В этом
случае можно предположить, что функция V содержит производные от х,
порядка не выше первого, и является относительно этих производных очень
простым выражением частного вида, именно целой рациональной функцией
второй степени.
Мы еще раз напоминаем читателю, что для простоты предполагаем стар-
шие производные всех функций х, входящих в V, имеющими один и тот же
порядок п.
Если встретится необходимость, то формулы можно будет изменить
соответствующим образом. Для этого нужно будет только найти частные
разности функции V относительно не определенных еще производных.
Дифференциальные уравнения (9) имеют порядок 2п ; число их т равно
числу неизвестных х. Эти уравнения удобно заменить 2пт уравнениями пер-
вого порядка с 2пт неизвестными. Для этого нужно только рассматривать
как неизвестные наряду с х и производные от х до 2п — 1-го порядка вклю-
чительно.
Все новые неизвестные будут связаны уравнениями первого порядка
dx^x-dt, dx'^x’-dt, dx'- = х-" dt, ..., dx;2'1- 21^ х™ -11 d/,
число которых в связи с изменяемостью индекса i есть 2пт — т. Заменяя
в уравнениях (9) производные порядка 2п соответственно на
^йп-l) </л(22П~1)
Л ’ dt ’ • • • ’ dt ’
получим еще т недостающих уравнений.
Но функции, принятые нами здесь за неизвестные, не относятся все цели-
ком к проблеме изопериметров. Мы оставили только половину из них, заме-
нив остальные более удобными величинами, а именно, мы сохранили неиз-
вестные х и их производные до п — 1-го порядка включительно. Эти пт
неизвестные мы хотим определить в первую очередь. Оставшиеся пт неиз-
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
323
вестные, т. е. производные порядка от п до 2п — 1 включительно, мы заменим
величинами
1 > 2 > • • • > $i, п—1 >
число которых, принимая во внимание изменяемость i, есть точно пт. Если
мы найдем эти новые неизвестные £, то по формулам (3) найдем и производные
порядков от п до 2п—1.
Составим теперь дифференциальные уравнения первого порядка, содер-
жащие наши 2пт неизвестные :
X,, x't , х", . .. , xT~v ;
%i > 1 , £<,2 , n-1 •
Для этого воспользуемся уравнением (7); заменив в нем вариацию
ее значением 6х(/!) — х(кн1> dt, мы получим
d (V dt) = d | V dt - dt k x',k+1)l + 2 2 d(h k dx(k}) .
I 1 = 1 к 0 J i=l fc = 0
Ho
d k dx*1) = d k dxp) + d^, k dx\k> - dx1/1’ d^, k
обозначив для краткости
m n— 1
2 2 hkx^+1} = T,
i l fc=0
V-T-в
и подставив, получим
<5 (0 dt) = d(& dt) + J- 2 (d^,k dx1/” - dx/” <5£„,),
1 = 1 fc = 0
откуда, положив
dhk = ^,kdt + dd>iik
и, вспоминая, что
<5х/° = Х*+1,Й + dmitk,
будем иметь
d (0 dt) = d(6 dt) + £ 2 k d^ - dx/” da)if k).
k=Q
(10)
(II)
(12)
Чтобы получить уравнения (11) и (12), отбросим в левой части формулы (7)
вариацию
^Jj’^e,,/£(/x'k, = ^(7'd0,
1=1 к=О
а в правой части ту же вариацию представим в форме
(т n~1 1 т и—1
2 2 \-2 2 (^,kdx^ - dx^d^,k)
1 = 1 k=0 ) i=l k=0
или, что то же самое,
(m n-1 \ m n-1
2 2 - 2 2 (d^kd^^dx^d<Biik).
i=l k=o ) i=i fc=o
Мы пришли к уравнению (И) или (12).
21*
324
М. В. ОСТРОГРАДСКИЙ
Действительно, после вычитания формула (7) примет вид
d(0dt) = d
т п—1 т п—1
v dt - 2 2 к № - ды‘+> + 22. (d+ - d^
i=ik=--0 J i=lfc=6
ИЛИ
in п—1
т п— 1
д (&dt) = d V dt - £ Zi, к (ёх^} - дш\к>) + JV JV (d£i,k - dxf1dwi>k).
= 1 k=0
i=l fc = 0
Вследствие 6x^) — <5«>;w = x;fc4 *> dt эти уравнения суть, очевидно, формулы
(11) и (12).
Функция 0 содержит, кроме времени t, 2пт + т величин, а именно :
пт функций £, которые вместе с х и их производными до п-го порядка вклю-
чительно составляют полное число 2пт + т. В это число входят т производ-
ных п-го порядка от функций х, которые являются посторонними для за-
дачи.
Все остальные величины как £, так и х с их производными до порядка
п — 1, являются неизвестными, которые нужно определить для решения
проблемы. Следовательно, нам нужно избавиться от т производных п-го
порядка. Для этого мы воспользуемся первой из формул (3), которую можно
записать в виде т уравнений
dV _ . dV __ dV_ _ ?
dx™ “ Sl.n-l, -dx<n> - ?2, n-l , , dx>m - n-1
Они заключают только неизвестные нашей проблемы и п-е производные,
которые нужно исключить из функции 0. Мы теперь обладаем всем необхо-
димым для этого исключения и можем рассматривать функцию 0, как не
зависящую от п-х производных :
Г(П) „(п>
Л1 > л2 > • • • > лт •
Следовательно, она содержит лишь неизвестные
х,-, xj, х-,...., х)"-1»;
е,-, е;, ,..., ^п~1У,
число которых равно 2тп, так как индекс i изменяется от 1 до т.
До настоящего момента мы воспользовались только первой из формул (3);
остальные нам не были нужны. Они заключают производные от х выше п-го
порядка, которые являются для нашей задачи посторонними и не входят
в 0. Как мы упоминали выше, эти формулы можно использовать после того,
как найдены переменные £, для определения производных от х порядка
выше п, если не предпочесть этому непосредственное дифференцирование.
Заменив левую часть уравнения (12) на
” "-1 ( d® , ,к} . d® '
У *“4 Н-----ЛЁ-- <*°t к
мы получим формулу
2 2 к - dx+ к) =
/=1 fc = O
d& с—
т?— ом,- ь
d(i,k hK
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
325
которая, вследствие того, что вариации <5со ничем не связаны, распадается
на соотношения :
dx*> = - dt.
dii, к 1
Эти соотношения при всевозможных i и к дают 2пт дифференциальных
уравнений с таким же числом неизвестных.
Формулы (14) суть дифференциальные уравнения проблемы изопери-
метров, представленные в наиболее простой форме.
Геометры ранее уже придали такую форму общим уравнениям движения.
Таким образом, хотя уравнения динамики и являются частным случаем
проблемы изопериметров, эта проблема описывается теми же самыми урав-
нениями и в той же форме, что и движение динамических систем. Мы уви-
дим, что то же относится и к их интегралам. Это последнее представляется
нам особенно замечательным.
Мы могли бы не только легко вывести уравнения (14), но и упростить
все вычисления в этом Мемуаре, если бы рассматривали время t как незави-
симое относительно символа <5. Но, может быть и напрасно, мы не хотели пред-
положить dt = О.
3. Уравнения (14) можно вывести и независимо от формулы (7). Для
этого воспользуемся тремя уравнениями (2). Положив в них S,- = О, полу-
чим :
dV _ £ _ dV £ _ dV
Первое из этих уравнений представляет систему, которой мы пользовались
для исключения п-х производных х)п), x.(n),..., х^> из функции 0. Мы упо-
требляем их снова для этой цели и заметим, что п-е производные зависят
только от
1, x'i ,х", ... ,х)"-1),
и не содержат ни одной из величин £,-,2,..., ^>п_2
Из этого следует, что при всех i функция V после исключения п-х произ-
водных будет зависеть только от переменных t, xt, х\, x'i,..., х^1*, %i<n^
и не будет зависеть от .., £,(Л_2.
Третье из уравнений (15),
= i,v у
1 dxt ’
в предположении что — О, превратится в частный случай второго
уравнения при к = 0. Действительно, при это.м значении к, второе из урав-
нений дает
т. е. (так как = О)
dxt
Следовательно, принимая, что -
e,-,_1 = o,
326
М. . ОСТ ОГРАДСК и
мы можем рассматривать только второе уравнение (15), именно
Л' _ ,
Si’k~ dx*'
(16)
так как одно из них мы уже использовали, а другое есть частный случай
формулы (16).
Таким образом, последняя формула при различных i и к представляет
пт дифференциальных уравнений, связывающих неизвестные проблемы
изопериметров. Добавив к ней пт уравнений
rfx<k> = x;fc+1)rfl, (17)
связывающих те же неизвестные, мы получим все уравнения, относящиеся
к нашей проблеме.
Как мы сейчас покажем, уравнения (16) и (17) тождественны уравнениям
(14). Исключим, для удобства, из этих уравнений п-е производные х(п), после
чего уравнения будут содержать только неизвестные нашей задачи.
Мы предполагали ранее
(Ю)
0 = V-Т
и получили, дифференцируя,
7 лт ) _ . ( dT ) Л+1)
I dx*') fc-1 ’ (^i,k J ‘
( d& ) — ( _ t 7 _ _x<fc+i>
(d^) ~ ( dx*) {dfi,k J '
следовательно, уравнения (16) и (17) превратятся в
Мы заключили в скобки частные производные, так как получили их, не
принимая во внимание первого уравнения из формул (3).
Эти уравнения дают производные х(п) как функции других величин,
которые должны заменить упомянутые производные в V, Т и 0.
Это обстоятельство необходимо рассмотреть внимательнее.
Для этого заметим сначала, что первое из уравнений (3) тождественно с
уравнением
/ dV ) _ 7 dQ )
I dx'"*) ! dx/” J
или с уравнением
Затем, дифференцируя функцию 0, получим
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
327
где I обозначает один из номеров переменных. Так же получим
d& _ ( d& )
d)k, к ~ I dii, к ) ’
где к изменяется до п — 1. Но
d& _ _ к d& J к _d& ) dx'w
d£,n-i ~ I dfi,n~rj + .r-j (dx-‘n,J ’
Принимая во внимание уравнение
мы получим для всех значений z и к соотношения
к (10 , __ d0 _ cl®
( dx{fc) J dx1/-' ’ I rfsi, к J dki, к ’
и, следовательно, выражения (16) и (17) сведутся к соотношениям :
dS,, к = , dx)^ = - 1r-dt. (14)
'>К dxlfe> ’ 1 dii,k ' ’
Предполагая, что zz-е производные от х исключены из функции 0, мы
нашли частные производные этой функции по всем ее аргументам за исклю-
чением I.
Определим производную 0 по t. Мы имеем
4® = f rf®) , ‘vH®_) х<п+1) .
dt I dt J ^^(dx'V J ‘
i d& } „
так как । = 0 , получим
d0 = к dQ\
dt ~ ( dt ) '
Так как переменная t входит явно только в V, то
гj/0 ) _ к dV 'i
( dt) — ( dt) ’
следовательно,
d0 __ к dV'j
d/ I <7/ / ’
и можно написать
d0 _ dV
dt dt ’
подразумевая, что функция V содержит п-ю производную от х.
Мы только проверили уравнения (14); но их легко также доказать при
ранее принятом условии, т. е. независимо от формулы (7).
Не представляет труда заметить, что выражения ~ и
- - х?+1} могут быть представлены для всех номеров z и к при помощи част-
d& d& „ „ ,
ных производных и одной и той же функции 0, которую мы мо-
жем рассматривать сначала как неизвестную и определить позднее. Другими
328
М. В. ОСТРОГРАДСКИЙ
словами, речь идет об утверждении, что выражение
i=m k = n — l jv 1 л ]
является полным дифференциалом, если рассматривать £, хи их производные
как независимые переменные.
Итак, принимая во внимание, что
мы получим
И так как
к=п — 1
^-1 = °; 2^^dx<k' = 2
к=О к--=о
ТО
к=п-
1 к=п i AV \
- dx<-k> = 2'
J /с=0 V °*i /
k=n—1
2 hkdx^.
fc=0
Дифференциал, который мы считали полным, будет иметь вид
i = m к=п / ji/ \ i=m к=п—1
2 1 ЬтИdx^ ~ 2 2' * dx?+1' + х'к1’d^ *) •
i=l fc=0 V Х1 ’ г-1 k=o
Следуя предположению, что х со своими производными являются независи-
мыми переменными, дифференцируем по этим переменным, не изменяя
времени t :
i = m к=п , ,
Следовательно, наш дифференциал принимает вид:
dV-d'y к"^ 1Л x<fe+1) или d(V - 7) = d& .
1=1 fc=o
Следовательно,
Предполагая в этом уравнении величину & свободной от xw, мы можем
получить отсюда уравнения (14), так как дифференциалы rfxp и d£l<lc неза-
висимы друг от друга и вполне произвольны.
Анализ, при помощи которого мы установили уравнения проблемы
изопериметров и уравнения, которые из них вытекают, оказывается недо-
статочным в том частном случае, когда формулы
dV t dV _ t dV _ t dV t
dx<n> *2.11-1, dx<m -*3.n-l, •••> dx<n> *m,n-l
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
329
устанавливают некоторые соотношения между неизвестными проблемы.
Но нам этот случай встретиться не может, потому что наши т формул вклю-
чают вместе с неизвестными проблемы т производных х^\ х^п\хЙ\
не относящихся к проблеме и не накладывающих никаких условий на пере-
менные. В частных случаях, например в таком, где некоторые из частных
производных
ЭК ЭК ЭК
Эх"11 ’ Эх^> ’ ' ’ дх™
не заключают п-х производных функции х, переменные х,, х-, х,,..., х)л-1),
I,., |;1, £,-|2,..., могут оказаться связанными между собой некото-
рыми соотношениями. Эти соотношения, уменьшая число неизвестных,
облегчают решение вопроса. Но в этом случае анализ, который привел нас
в предыдущем параграфе к уравнению (14), неприменим. Это происходит
потому, что последние соотношения между неизвестными устанавливают
соотношения между их вариациями, и мы не можем приравнивать коэф-
фициенты при вариациях, как мы делали это раньше, при переходе от урав-
нения (13) к (14). Нужно сначала исключить все зависимые соотношения с
помощью уравнений условия или по методу неопределенных множителей.
Мы предоставляем читателю самому исследовать все упомянутые нами
частные случаи. Наиболее замечательным из них по своей простоте является
тот, при котором V содержит п-е производные только линейно.
4. Умножая уравнения (14), первое на dx)fc), второе на — и скла-
дывая их, получим
(18)
т. е.
Но
.= т
' -C, / d& , ,k} . d& ) n
k=o 1 }
d& = -°
at
i--m
к^п
к=о
из чего следует
d& = ~~ dt
dt
(19)
или, так как
d& _ dV
ИГ ~ ~di'
то
dV
= - - dt .
at
(19)
Здесь функция V предполагается содержащей fc-ю производную величин х.
Уравнения
,t d& л 1
dx<fo dt’ j
dxf = --r-dt I
(Ki,к J
(14)
следуют из разложения соотношения (9), которое в свою очередь является
лишь переписанной по-другому формулой (7).
Мы можем опять составить эту формулу с помощью наших уравнений,
умножив первое из них на и второе на — и просуммировав по всем
330
М. В. ОСТРОГРАДСКИЙ
индексам i и к. Итак, уравнения (14) равносильны формуле (7). Следователь-
но, формула (7) является более простой комбинацией уравнений (14) и по-
этому к рассмотрению этой комбинации можно свести исследование урав-
нения (14).
Действительно, произвольные величины, заключающиеся в формуле (7)
или (9), суть вариации da>t; все остальные зависят от них.
Приписывая им последовательно различные частные значения, мы по-
лучим значения, отвечающие формуле (7), которые будут представлять част-
ные комбинации уравнений (14). Каждая из этих комбинаций может заме-
нить одно из уравнений (14), и так как число возможных комбинаций не
ограничено, то мы можем сделать его равным числу уравнений (14). Сле-
довательно, эти последние будут заменены частными значениями фор-
мулы (7).
Необходимо только, чтобы зти значения не были взаимно зависимы.
Если значения зависимы, откидывают их и берут новые так, чтобы общее
число равнялось числу уравнений (14).
Следовательно, вместо уравнений (14) мы можем рассматривать частные
значения формулы (7) или самоё общую формулу, заключающую эти частные
значения. Если можно проинтегрировать некоторые из этих частных зна-
чений, то получим, очевидно, столько же интегралов уравнений (14). Это
происходит потому, что интегрирование какого-нибудь частного значения
формулы (7) сводится к интегрированию суммы произведений этих урав-
нений на подходящим образом выбранные множители. Если бы можно было
проинтегрировать формулу (7) в общем случае независимо от значений
дш1; мы нашли бы все интегралы проблемы изопериметров.
Следовательно, интегрирование дифференциальных уравнений этой проб-
лемы сводится к нахождению таких значений при которых формула
/ t = п к -- п — I \
d\Vdt + \ = HVdt) (7)
V i-=I k = 0 J
или, точнее, ее правая часть, становится интегрируемой (левая часть инте-
грируема при любых &ш).
Определение этих величин в общем случае представляет большие труд-
ности. В частном же случае это определение упрощается. Например, если
dV . „
частная производная — не содержит ни функции х, ни их производных, то
вариация 5(V dt) превращается в полный дифференциал, если выполнено
при любых номерах i и к
Действительно, мы имеем в общем случае
s(Vdt) = d(vdt) + dt 2 2^
i = l fc=o X‘
следовательно, по предположению, что
= dx(!p,
получим
i = m k=n jV
d(Vdt) = d(VSt) + dt
i-l k-0
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
331
Итак,
i т к п jV
dv = dt 4- "V V -d—(/yW
av dt al+ dxw ax> -
откуда следует
д (Vdt) — d(V St) + dVdt~ ~ dt,
и формула (7) сводится к уравнению
г=т к--а--1 IV
d 2 2 ^k^+1)~dV- %dt
i=[ k —0
или к
dV
dT = dV - dt;
at y
интегрируя, получим
T= V-^-dt + h
или
0-/^л + л=°,
Г dV
где h является произвольной постоянной и интеграл есть квадра-
dV
тура, так как, по предположению, производная содержит только время t.
По этому же предположению мы можем для простоты записать V вместо
и получим
T=V + h (20)
или
0 + h = 0 . (20)
Новая функция V не содержит времени явно, так же как и функция
0 = V — Т.
Интеграл, который мы только что написали, превратится в частном случае
динамики в закон живых сил. Мы могли бы получить это немедленно, поло-
жив
daAp = dx*P
в формуле (8), которая является не чем иным, как формулой (7), где поло-
жено 6/ = 0. Мы еще раз повторяем, что наш анализ значительно упростился
бы, если бы мы предположили, что время остается постоянным по отноше-
нию к символу 6.
Возвратимся к уравнению (12). Положив в нем rfw® = rfx®, получим
te,.k = d^k-dS‘‘k dt.
В производной ~~ учтено лишь явное вхождение времени в Если
dV
мы предположим, что производная зависит только от времени или что
новая функция I не содержит явно времени, величина тоже не будет
332
М. В. ОСТРОГРАДСКИЙ
явно содержать его и частная производная будет равна нулю, т. е.
$mi,k — •
Следовательно,
d£it к — dx,t к S<ot,k — d!h, к dxtf* — dx(P d^ik = Q
и формула (12) превратится в
d(&dt)-d(&dt) = 0;
так как
( m fc=„ 1 d& d& ,
то этот результат приводит к уравнению
d0-~-dt = O. (19)
Принимая во внимание предположение относительно V, получим
d0 = О,
что является дифференциалом живых сил.
5. Предполагая вариации дт абсолютно произвольными и интегрируя
формулу (7) по времени, получим
V dt + ‘у к~У1 е,- fc<5co® = <3 [ V dt + const; (21)
i±i й) ’ J
так как по принципам вариационного исчисления символ а можно выносить
за знак интеграла, то
И dt + * jF1 дшЮ = <5 f V dt + const.
k=O ’ J
Заменяя W/0 ее значением — <3x(£+1) dt и написав Т вместо суммы
i=m к=п—1
JP а ® вместо V — Т, мы получим
(=1 к=О
0dt+‘^k~^ ^likdx^ = d(v dt +const. (21)
k^O ’ J
Правая часть формулы (21) заключает невыполнимое интегрирование, так
как мы предположили, что дифференциальная функция V dt не интегри-
руема, а следовательно, не интегрируема и вариация d(V dt).
Предположение, что V dt есть полный дифференциал, возвратит нас
тождественно к формуле (7) и к уравнениям (9) и не даст никакого резуль-
тата. Действительно, полагая
Vdt = dU,
получим
Я _ ли
~ dx<*> ’
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
333
и уравнение (7) превратится в
f)dU = ddU.
Кроме того, если бы функция V состояла из двух частей, Р ф- Q', причем Q'
была бы полной производной'по времени, все, что зависит от этой функции,
исчезло бы из формулы (7) и уравнений (9). В этом случае, принимая за
неизвестные
л dU
Дх®
вместо мы пришли бы к уравнениям (14).
Формула (21) содержит как частный случай динамический принцип
наименьшего действия, но, с нашей точки зрения, его нельзя рассматривать
не только как принцип, но даже как простую теорему. Он кажется нам
только простым следствием, очевидным результатом применения метода
вариаций к теории maxima и minima.
Однако, принимая во внимание известность этого принципа и в особен-
ности манеру, в которой он рассматривается, мы войдем в некоторые отно-
сящиеся к нему детали. Предупреждаем при этом читателя, что, говоря о
принципе динамики, мы будем иметь в виду более общие формулы, относя-
щиеся к интересующей нас проблеме изопериметров.
В динамике отправляются либо от формулы (9) или (14), либо, что явля-
ется более простым, от уравнений, выражающих принцип потерянных сил,
видоизменением которого являются формулы (9) и (14). Какова бы ни была
точка отправления, мы придем после более или менее простых преобразо-
ваний к формуле (7) и, следовательно, к нашему интегралу по времени (21).
Вычисляя этот последний между данными пределами и выбирая такие
условия, при которых все внеинтегральные члены исчезнут, получим
<5[КЙ>0. (22)
Этот результат приводит к заключению, что интеграл
; v dt (23)
достигает минимума или максимума, что и является принципом наимень-
шего действия.
На самом деле вариация интеграла может обращаться в нуль и в том
случае, когда интеграл не допускает ни наибольшего, ни наименьшего зна-
чения, но геометры обычно говорят и в этом случае о минимуме или макси-
муме, без сомнения, для простоты изложения, и мы будем в этом, следовать
их примеру.
Рассматриваемый с прежней точки зрения принцип наименьшего дейст-
вия кажется довольно значительной теоремой. Если его доказывать, исходя
из формул (9) или (14), или из формулы, выражающей равновесие потерян-
ных сил, то приходим к результату
d$Vdt = O. (22)
Но если отправляться, как это сделали мы, от формулы (7) или, что то же
самое, от уравнений (21), то уравнение
д § V dt — 0, (22)
будучи заключено в том, которое служило точкой отправления, не пред-
ставляет никакой теоремы.
334
М. В. ОСТРОГРАДСКИЙ
Мы не останавливались бы более на принципе наименьшего действия,
если бы геометры, занимавшиеся этим принципом, остановились на урав-
нении (22). Но они пошли дальше. Они комбинировали это уравнение вместе
с дифференциалом в смысле 6 выражения закона живых сил, что приводит
к нашему интегралу (20).
С помощью этой комбинации можно заменить в выражении
(УЛ, (23)
которое должно достигать минимума, функцию V на величину Т, которая
обозначает в динамике живую силу системы*). Если бы указанный способ
сведения минимума интеграла (23) к минимуму интеграла j Т dt не был
неудобным, как мы это покажем в следующем параграфе, то этот способ
позволял бы высказать принцип наименьшего действия в применении к част-
ным случаям с большей простотой и удобством. Это произошло бы потому,
что интеграл J Т dt зависит только от кривых, описываемых точками си-
стемы, и не зависит от действующих сил, приложенных к ним, — неоспоримое
преимущество перед интегралом (23), который зависит от сил, действующих
на систему.
Мы сейчас приведем в основном метод, употребляющийся геометрами
после Лагранжа для сведения минимума первого из двух интегралов
J V dt, $Tdt
к минимуму второго. Мы исключим вариацию
<5 [ V dt
из уравнения (21) с помощью формулы (20) живых сил. Умножая формулу
(20) на dt и интегрируя, получим
f 0dt + ht — const.
Затем, дифференцируя в смысле 5, получим
<5 [ 0 dt + h dt + t dh = const
или, так как h = — 0, то
6 J 0 dt = 0 St — 1dh -f- const.
Мы варьируем произвольную постоянную h, чтобы не упустить никаких
причин, влияющих на величины бх. Эти последние изменяются по двум
причинам : вследствие варьирования времени t и вследствие изменения
формы функций х. Первая причина, очень простая по природе, может ввести
в дх лишь x'dt, вторая гораздо более сложна и может ввести несколько чле-
нов в каждую из дх. Эти члены мы обозначим через дш. Таким образом, мы
учитываем не зависящую от времени вариацию параметров, входящих в
функции х. Такими параметрами являются, в частности, явно входящие в
функции х произвольные постоянные интегрирования, и потому их вари-
ации неявно входят в Зсо. Вычитая последнее уравнение из формулы
б f V dt = 0 dt + 2 + const,
J tt k (l
*) Геометры и инженеры понимают под живой силой разные величины, а именно:
инженеры принимают половину той величины, которую принимают геометры. Мы в этом
Мемуаре стоим на точке зрения геометров.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
335
найдем
d(Tdt=‘j£ £iJcdx^ + tdh + const. (24)
J k=0
Если мы теперь возьмем интеграл от левой части в пределах, выбранных
таким образом, чтобы правая часть, проинтегрированная в тех же пределах,
исчезла, то получим
djTd/ = O, (25)
из чего можем заключить, что интеграл
jTdf, (26)
взятый в пределах, выбранных подходящим образом, является минимумом.
Это и есть другой вывод принципа наименьшего действия, предпочитаемый
в динамике.
Исходя из формулы (25), Лагранж вновь возвращается к уравнениям
(9) или (14), или, что то же самое, к формуле (7). Мы воспроизведем его ана-
лиз с некоторыми изменениями.
Прежде всего, чтобы не быть связанными условием, относящимся к пре-
делам интегрирования, воспользуемся вместо формулы (25) формулой (26),
которая свободна от этих условий. Заменяя в ней Т на V — 0, получим
d[Vdt = 'х" ' £!>fc<W + <5 + tdh + const.
J i=l k=O ’ J
Заменив 0 на — h, получим
d J 0 dt + tdh == — h dt + const = 0 dt + const.
Следовательно,
d f V dt = 0 dt + J? ^itkdx^ + const (21)
J i=l k=O
и нужно лишь продифференцировать результат, чтобы получить формулу (7).
Принцип наименьшего действия, обобщенный в проблеме изопериметров,
заключается в том, что интеграл J Т dt, взятый в пределах, выбранных под-
ходящим образом, приобретает наименьшее значение, если величины х и £
удовлетворяют уравнениям (14). При этом предполагается, что эти величины
удовлетворяют также уравнению живых сил. Таким образом, если принять
за х и £ произвольные величины, удовлетворяющие уравнению живых сил,
0 + h = 0, (20)
то интеграл J Т dt, отвечающий им, будет больше, чем интеграл, отвечающий
значениям х и £, удовлетворяющим уравнениям (14), которые заключают в
себе, как мы видели, уравнение живых сил.
6. Мы уже условились говорить о минимуме или максимуме интеграла
в том случае, когда вариация интеграла обращается в нуль. Для этого необ-
ходимо, чтобы вариация была интегрируема и чтобы этот интеграл был
равен нулю.- Мы воспользуемся этим замечанием, чтобы немного обобщить
некоторые утверждения, относящиеся к проблеме изопериметрбв. Мы будем
говорить, что при превращении вариации в нуль будет иметь место не мини-
мум или максимум интеграла, а что эта вариация становится интегрируемой.
Так, та часть проблемы изопериметров, которой мы занимались, имеет дело
со случаем интегрируемости вариации 6(V df), и мы видели, что ее решение
336
М. В. ОСТРОГРАДСКИЙ
приводит к уравнениям (14). Это происходит потому, что если неизвестные х
и £ удовлетворяют этим уравнениям, наша вариация становится интегри-
руемой при любых приращениях дх и ее интеграл дается формулой (21).
Предполагая, что функция V не содержит явно времени t, мы нашли
интеграл уравнений (14); это интеграл живых сил
& + h = 0. (20)
Этот интеграл связывает переменные х и £, никак не связывая их вариаций
бх. Поэтому нельзя дифференцировать в смысле 6 уравнение
0 + h = 0, (20)
не связывая некоторым соотношением свободные ранее вариации, появля-
ющиеся после дифференцирования. Это простое обстоятельство ускольз-
нуло, по-видимому, от внимания Лагранжа, так что анализ великого гео-
метра*) не кажется нам безупречным [142|. Отвлечемся на время от формул
(14) и предположим, что х и £ удовлетворяют только уравнению (20), и будем
рассматривать только такие х и £. Тогда х + бх и £ 4- б£, заключенные
среди возможных значений х и £, тоже удовлетворяют уравнению (20).
Мы имеем
<5(0 + й) = О
или
б (0 dt) +3(h dt) = 0.
Заменяя 0 на V — Т, перепишем последнее уравнение в виде
д (Т dt) = б (V dt) + dd (ЙО .
Из этого следует, что вариации 3(Т dt) и d(V dt) интегрируемы одновре-
менно, т. е. интегрируемость одной влечет интегрируемость другой. Таков
результат Лагранжа. Но после сделанного нами этот результат становится
очевидным и не составляет никакой теоремы. Действительно, что можно
вывести из очевидной интегрируемости вариаций 6 (Т dt) и 3 (V dt)?
Положив сначала, что дА — дВ, постараемся получить что-нибудь из
одновременной интегрируемости дА и дВ. Если АаВ, будучи функциями х
и дх, связаны соотношением ЗА = дВ, можно ли сказать, что интегрируе-
мость d(Vdt) вытекает из уравнений (14), если d(Tdf) удовлетворяет этому
уравнению? Уравнения (14) делают 3(V dt) интегрируемой при любых дх,
а в действительности речь идет только о дх, связанных условием
5(0 Н- Л) = О,
и если предположить выполненными уравнения (14) без этого условия, то
вариация 3 (V df) будет интегрируемой, а вариация 3 (Т dt) не будет интегри-
руемой, потому что уравнение
d(Tdt) = d(Vdt) + dd(ht)
не имеет места.
Отправляясь от интегрируемости вариации, Лагранж возвращается к
уравнениям (9) или (14), но анализ великого геометра неточен. Вот его слегка
измененное изложение.
*)J. Lagrange, Mecanique analytique, т. 1, стр. 296 [имеется русский перевод:
Лагранж, Аналитическая механика, т. 1, Гостехиздат, 1950. — Прим. ред.].
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
337
Вариация 3 (Т dt) является полным дифференциалом, но Т = V — 0,
поэтому выражение d(V dt)— d(0dt) или, так как 0 =—h, выражение
3 (V dt) + d d(ht) также есть полный дифференциал. Но d d(ht), очевидно,
интегрируемо, а поэтому 3 (V dt) также интегрируемо.
Таким образом, отыскивая условия интегрируемости выражения 3 (V dt),
возвращаются к уравнениям (9) или (14), но только в том случае, если Зх
никак не связаны между собой. Если допустить, что
8 (0 + h) = 0,
то мы не придем к этим уравнениям.
Предполагая
0 + ft = О и 3 (0 + ft) = 0,
найдем условия интегрируемости функций 3(7 dt) и 3 (V dt). Так как эти
условия одинаковы для обеих функций, мы рассмотрим одну из них, напри-
мер первую.
Как известно, вопрос сводится к интегрируемости суммы
3 (7 dt) + 2. dt 8(0 + h),
где множитель Л есть функция независимой переменной.
Мы заменим предыдущее выражение на
'8 dt [7 + Л (0 + ft)],
что можно сделать, принимая во внимание уравнение живых сил.
Это изменение ничего не меняет в интересующем нас вопросе, но окажется
полезным в теории максимумов и минимумов, в частности, там, где нужно
различать максимум и минимум.
Заменяя АнаА + 1и7-|-0наУв предыдущем выражении, получим
выражение
3 dt [V + h + А (0 + ft)]
или, так как вариация
8hdt = d 8ht
всегда интегрируема, то оно принимает вид
8dt[V + Л (0 + ft)].
Итак, вопрос сводится к интегрируемости d (V dt) в предположении, что
3 (0 + h) = 0.
Таким образом, и проблема изопериметров и принцип наименьшего дей-
ствия требуют интегрируемости 3(V d‘). Но первая требует интегрируемости
при произвольных дх, тогда как второй предполагает условия
3 (0 + h) = 0.
Лагранж, а позднее и другие геометры рассматривали обе проблемы как
один вопрос, требуя, чтобы функция V имела частный вид, а именно не
зависела бы от времени, внося этим ограничение. Исключая это, повторяем,
что проблема изопериметров и принцип наименьшего действия были для
Лагранжа одним и тем же вопросом. Ибо этот великий геометр, отправляясь
от одного, пришел к другому. Само собой разумеется, что мы ограничиваемся
97 Ran,Id-niA,1,,4O . ..л,,,,.
338
М. В. ОСТРОГРАДСКИЙ
проблемой изопериметров и рассматриваем динамику как частный случай
этой проблемы.
Чтобы выяснить, в каком направлении нам двигаться дальше, решим
сначала, будут ли условия интегрируемости при произвольных для
8(Vdt) и 8 dt [V + Я (0 ф- Л)]
одинаковы или различны. Хотя неизвестные х последней формулы и связаны
соотношением
&+ /1=0, (20)
но это не отражается на их вариациях 8х.
Мы уже дали (§ 2) условия интегрируемости вариации 5(V dt). Найдем
теперь эти условия, для вариации
8dt [V ф-Я(0 ф- Я)].
Для отыскания их надо придать предыдущему выражению ту форму, в
которой мы написали вариацию 6(V dt), т. е. написать
8(Vdt) = dt‘j? Si8a>i + d(V8t) + еглдсо<Р, (4)
1 = 1 1=1 fc=O
и нам остается только найти 6Я dt (0 ф- Л). Так как 0 ф- h равно нулю, то
<5Я dt (0 + Л) = Л80 dt + Adhdt,
а затем, по правилам вариационного исчисления,
к=2п— 1 jZ)
80dt = d0 8t + dt V V
1“1 d*p
или, так как уравнение 0 ф- Л = 0 влечет за собой d0 = 0, то
i=m к=2п— 1
80dt = dt 2, 2
1=1 fc=O
d&
dx®
8<Л'р ,
и следовательно,
8Adt(0 + h) = X8hdt + dt
1 = 1 k~“o dX’
Положим
k=2n— 1 jz,. k=2n-2
dt Я 8a>& > = Qi 8a)i dt ф- d Ci, к
k^o dXi k=O
Производя дифференцирование, получим
fc=2n-1 jzj k = 2n-2
*-^8a>™ = Zi8O>i+ (C'i,k^ + Citk8^) ,
fc=O aX‘ k=O
или, как легко проверить,
к=2п— 1
к=О
d&- dco® =
dx<p '
= (Z,. - Ci,-^ - SaiT-» + k
k=O
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
339
Так как величины Сг-,—х и £>2л-1 можно выбирать произвольно, положим
Это даст нам
к=2п-1
fc=O
d&
dx(lf>
к=2п —
да>Ф> — х
fc=O
(Vi,k + Ct,k-i)№».
2 2
Следовательно, мы имеем для всех значений к, от 0 до 2п—1 включительно,
C'i,k + Ci,k-1 = ^.
(27)
Затем, подставляя, имеем
<52 dt (0 + h) = 2 dh dt + dt ‘j? Z, <5co, + </ * V 2 M>
i=l i=1 k=O
и, наконец,
<5 dt [V + 2 (0 + Й)] = 2 dh dt + (Si + Z;) <5co; +
1 = 1
+ d V dt +
i — m k=n—\
2 2 ^м> +
i=l *=O
i=m fc=2n-2
2 2
i=l k=O
Рассматривая, так как это допустимо, произведение 2 dt как дифференциал
dju некоторой функции /*, мы можем член
Idhdt
предыдущего выражения представить как полный дифференциал
d (/г <5/z).
Следовательно, для интегрируемости вариации
<3 [V dt + (0 + h) dju]
нужно лишь выполнение равенства
+ Z,= 0, (28)
а это равенство имеет место для всех значений z.
Из уравнения (28) следует, что интеграл нашей вариации будет иметь
вид
J (3 [V dt + (0 + h) d/u] = const + p dh + V dt +
i=m k—n—1 i=m k—2n—2
+ 2 2 2 2 ^dco(i+ (29)
i = l fc=O i = l k=O
Уравнения (28) вместе с уравнением живых сил составляют i 4- 1 урав-
нений, т. е. как раз столько, сколько неизвестных. Действительно, кроме i
функций х, у нас есть еще неизвестная 2 или
22*
340
М. В. ОСТРОГРАДСКИЙ
Величины £ нам уже известны из формул (3), а величины С можно найти
из формулы (27), которая последовательно дает
г - 1 d&
^i,2n-2 — Л d£(2n-l) >
г _______ j d®_________I; d® |'
^i,2n-S - л dx(?n-2) dx(?n-l) J ’
,. _ j d& Vt (j V
Ч2П-4 - Z dx(2n-3) — |Z rfx(2n-2)J + (Z dX(?H-D J ’
t _ j d& (i d& r_L.h d& Г h d& V"
^,2n-5 - Z dx(?n- 4) [Z rfx(2n-3) J + |Z dx(?n-2) J [Z dx(2n-l) J >
s=2n-fc-2
=
s=0
d&
,(s)
dx^ + k + WI
Мы уже видели из предыдущего, что условия (9) и (28) интегрируемости
вариаций
<5(V dt) и ddt [V-h 2(<9ft)]
совершенно различны, если только мы не положим Л = 0.
В этом случае Z, превратятся в нули и уравнение (28) обратится в урав-
нение (9). Но предположение 2 = 0 есть лишь частный случай, и, принимая
его, мы сужаем решение занимающего нас вопроса. Это положение принима-
лось Лагранжей тогда, когда великий геометр, исходя из принципа наимень-
шего действия, выводил общие уравнения движения. Но если бы мы и здесь
следовали этому правилу и не обобщили множитель, на который нужно
умножать уравнение условия, с последующим прибавлением к вариации
интеграла, который должен иметь минимальное значение, то получили бы
результат, аналогичный формуле (28), т. е. совершенно отличный'от найден-
ного нами.
1 ^Из предыдущего анализа видно, что если переменные связаны соотноше-
нием
& + h = 0, (20)
то им отвечают минимумы интегралов J V dt и J Т dt. Следовательно, за
принцип наименьшего действия можно принять формулу
Vdt = O,
так же как и формулу 3 j Т dt = 0.
Неизвестные х, которые дают минимальные значения этим двум интегра-
лам, совершенно отличны от тех, которые дают абсолютный минимум пер-
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
341
вому из интегралов. Этот результат, по крайней мере в первый момент, пока-
жется некоторым читателям удивительным. Действительно, предположение,
что функция V содержит лишь время t, продолжает оставаться в силе, и
неизвестные х, дающие интегралу J V dt абсолютный минимум, необходимо
удовлетворяют уравнению
0 + й = О. (20)
Поэтому естественно думать, что абсолютный минимум этого интеграла и
минимум относительно функций х должны достигаться одновременно. Но
это не так. Ниоткуда не следует, что абсолютный минимум нашего интеграла,
будучи, без сомнения, и относительным минимумом, является в то же время
наименьшим из всех значений интеграла J V dt, отвечающих переменным X,
удовлетворяющим уравнению (20).
Все что мы сказали, относится также и к случаю, когда мы вынуждены
рассматривать лишь интегрируемость вариации 6 (V dt). Действительно, если
эта вариация интегрируема, то она остается интегрируемой и в том случае,
ели мы подчиним 8х уравнению
д(0 + /г) = О.
Она даже может стать после этого интегрируемой в том случае, если не
была интегрируемой ранее.
Предыдущий анализ, учитывая все обстоятельства, дает все случаи инте-
грируемости, как абсолютные, так и относительные. Первые отвечают пред-
положению 2 = 0, вторые требуют, чтобы 2 была отлична от нуля. Пред-
положение
2 = 0,
очевидно, допустимо ; оно уменьшает число неизвестных, но в то же время
делает одно из уравнений, а именно уравнение (20), следствием остальных.
Один интеграл уравнений (28) легко найти. Это можно сделать несколь-
кими способами. Мы изберем способ, заключающийся в том, чтобы добиться
при подходящем условии интегрируемости вариации
8(Vdt + (& + h)d/i),
находящейся в первом члене уравнения (29). Это уравнение, принимая во
внимание формулу (4) и то, что вследствие 0 -|- h = 0 выражение
5 (0 + h) df* = d/z 8 (0 + h) = 2 8 (0 + h) dt
можно представить в виде
<•/ i—m 1 t=m k=2n-2
2 <5 (0 + Л)+ ySfda) \ dt = const +/z <5ft + V У Cltk <Mfc)
JI (=1 ) t=i fc=o
или
8 (0 + h) dt = d (0 + ft) 8t + 8h dt + dt 1 ~ .
Следовательно, исключая d(0 + h)8t = 0, получим
= m fc=2n—1 jza i = m 1 l = m A.- = 2n—2
2" 2 ;;S)'5wfc+ >'s-'5w--|d/ = const +
11 = 1 fc=O ax I i=l J 1-1 fc=O
Первый член этого уравнения не только стал интегрируемым, но его даже
342
М. В. ОСТРОГРАДСКИЙ
можно исключить, положив
dw(f} = (/х<Л).
Действительно, при этом предположении окажется
jza i=mk=2n— 1
dx® ‘
d&
dx®
fc=o 1
= (/0 = 0.
Затем уравнение (5) в силу того же предположения превратится в
i=m
Л==П Jt/
откуда, вследствие
получаем
S(dXi = dV — dT = d0 = O.
i = l
i=m k=2n~2
Мы имеем, следовательно, искомый интеграл С,Лх^+1)= const.'
i=i fcbb
Это есть интеграл живых сил для уравнений, которые относятся к относи-
тельным минимальным значениям интеграла J V dt или, точнее, к интегри-
руемости Вариации б (V dt), в предположении, что
<Э(0 + ft) = 0.
7. Возвратимся к уравнению
<Э fv(// = const + Vdt + 'jg
J 1=1 fc=o
Его первый член заключает в себе двойную операцию, обозначенную
символом 6 J, произвести которую невозможно. Действительно, могут пред-
ставиться две возможности : уравнения (9) или (14) либо выполнены, либо
не выполнены. Во втором случае невозможно интегрирование, так как V dt
не есть полный дифференциал. В первом же случае эту функцию можно
сделать интегрируемой и даже можно исключить из нее все переменные,
кроме /. Но, выполнив интегрирование J V dt, мы не сможем взять от него
вариацию, а производя первую из операций 6 J, не сможем произвести
вторую.
Если изменить порядок символов 6 и [ и искать сначала d(Vdf), то при-
дем, согласно предположению о переменных х, к одной из формул (4) или (7).
При произвольных предположениях придем к первой формуле, а при пред-
положении (9) — ко второй. Затем, интегрируя, придем к формуле (21) или
к формуле
г i — mk — n г i = m
6(Vdt) = const + Vdt + 2 + dt 2 S‘da>‘‘ (30)
J i = l fc=O J i = l
Но обе эти формулы, каждая при своем предположении, служат лишь для
определения интеграла df) и не приводят ни к какому другому ре-
зультату. Имея это в виду, условимся писать символы 6 и J в порядке 6 J.
Рассмотрим вариацию 6 J V dt саму по себе, т. е. независимо от всего
предшествовавшего.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
343
Если в ней заменить функции х их выражениями через t, то V превратится
в определенную функцию той же переменной t. Такой же определенной
функцией с точностью до произвольной постоянной будет интеграл J V dt,
но тогда невозможно будет найти вариацию б J V dt. Действительно, вели-
чины х после подстановки бесследно исчезнут из интеграла J V dt и будет
невозможно установить вариации бх. Это было бы равносильно попытке
найти изменение функции, зная только значение, которое она принимает
при замене переменной определенным числом. Если воздержаться от варьи-
рования t, что приводит к предположению, что
бш,- = 0,
то формула (30) дает тождественно
д J V dt = const 4- V dt,
что ни к чему не приводит.
Но дифференциал V dt может стать интегрируемым и без полного опре-
деления вида функции х от t. Ограничим эти функции лишь настолько, чтобы
V dt стало интегрируемым ; для этого каждая из них должна принимать
бесконечное множество различных значений и изменяться без того, чтобы
менялось время. Предположим, что х принимают соответствующие значения,
выбранные из тех, о которых только что шла речь. Обозначим интеграл
J V dt буквою S. Тогда формула (30) примет вид
6S = const + V dt + 4- (31)
i=l fc=0 ’ J i=l
Таким образом, если продолжать рассматривать бх как совершенно
произвольные, то будет невозможно отыскать вариацию интеграла S, который
окажется вполне определенным вместе с функциями х. Следовательно, фор-
мула (31) не приведет ни к какому результату. Но если мы придадим бх
такие значения, при которых величины х 4- бх совпадут с величинами,
играющими роль х в V dt, то последний дифференциал станет интегрируемым.
Тогда вариация 6S найдется по обычным правилам дифференциального исчи-
сления и формула (31) дает важные следствия. Само собой разумеется, что
бю, входящие в эту формулу, должны быть подчинены ограничениям, нало-
женным на бх.
Чтобы показать применение формул (31), предположим, что переменные х
удовлетворяют условиям (9) или (14). Это предположение превратит пере-
менные х в функции времени, не вполне определенные, так как они заклю-
чают 2пт произвольных постоянных, введенных при интегрировании. Варьи-
руя эти постоянные, мы можем, не изменяя времени, бесконечным множе-
ством способов варьировать каждую из переменных х. В вариации бх, вы-
званной изменением произвольных постоянных и времени вместе, часть
x'dt будет отвечать изменению времени, а часть бсо — изменению произволь-
ных постоянных.
Таким образом, обозначая эти постоянные через alt а2, а3,..., а2пт, полу-
чим
и вообще
г 2пт , (к)
6coW= у ^Ь-даг.
^i da>
Буква г обозначает номер, меняющийся от 1 до 2пт включительно.
344
М. В. ОСТРОГРАДСКИЙ
Найденные из уравнений (14) или (9) значения х будут функциями вре-
мени и постоянных а; они превратят V в функцию времени и тех же по-
стоянных. Мы найдем интеграл
J Vdt = S
простым интегрированием по t. Подставляя это значение S в формулу (31)
и принимая во внимание, что наши х обратят в нуль величины Sh получим
f=mfc=n-l
<5S = const + Vdt +
1 = 1
или, вследствие того, что
{<е r=2nm ,<?
dt ' dar г ’
г= 1
найдем
jo r=2nm ._ ( = m Л=п-1
4г6t + 2 -ir даг =const + v dt + 2 2 d(W •
u r— 1 UUr /—1 b_r>
Так как Зсо не содержат 6f, то из этого уравнения сначала находим
у = —
v dt ’
а затем -
i=2nm i=mk=n~l
= const + v Si,kd(o^.
r / = 1 Л=0
r=2nm
Заменив здесь бсо® их значениями У ах ’ даг, получим
;Ti dar
г=2пт 1 = т Л=п-1 r=2nm j./fci
2 даг = const + V
r=i dar (. = 1 , = ] dar
(32)
(33)
(34)
(35)
Так, как да произвольны, то предыдущие уравнения распадаются на
следующие :
даг = const +
dar
dxfp .
dar ’
(36)
число их (по числу значений г) равно 2пт.
Уравнения, заключенные в формуле (36), устанавливают соотношения
между величинами произвольными постоянными и временем. Следова-
тельно, они могут служить интегралами уравнений (14). Но хотя число их
равно числу уравнений, они не представляют все интегралы. Действительног
хотя они включают тп неизвестных £, они могут дать только значения этих
неизвестных, а никак не значения х, которых они не содержат.
Они представляют, следовательно, лишь тп, т. е. половину всех интегра-
лов. После исключения величин £ они дадут тождества или соотношения
между произвольными постоянными, введенными интегрированием, и вели-
чиной const в уравнении (35). Формула (33) может также рассматриваться
как интеграл уравнений (14) или (9). Интегралы этих уравнений устанав-
ливают 2пт соотношений между временем t, 4пт величинами х, £, а именно :
тп величин х, тп величин $ и 2пт произвольных постоянных а. Обозначим
эти соотношения через
Fs = 0, (37)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
345
где Fs — функция всех упомянутых 4пт 4- 1 величин, a s меняется от 1 да
2пт включительно.
Функцию S можно представить многими различными способами. Дейст-
вительно, после того как мы с помощью уравнений (14) сделаем дифферен-
циал V dt интегрируемым по t и произведем интегрирование, то получим
S = J V dt
как функцию некоторых из величин t, х, £ и а. Действительно, после того
как V dt станет интегрируемым, вовсе не обязательно, что оно будет содер-
жать t и а. Но каков бы ни был вид полученного интеграла S, в него можно
сразу ввести с помощью соотношений (37) 2тп 4- 1 величин, выбранных по
произволу среди 4пт 4- 1 величин t, х, $ и а. Вследствие произвола этого
выбора и произвольности а мы будем далеки от того, чтобы получить опре-
деленную систему 2тп величин, а получим, наоборот, систему бесконечно
разнообразную. Поэтому функция S и имеет неограниченное множество
представлений.
Вообразим себе какое-нибудь из этих представлений. Исходя из формулы
(32) и употребляя метод неопределенных множителей, мы найдем общее соот-
ношение
i=mfc=n—1 s=2mn
<58 = const 4- Vdt 4- £ + j? ^<5FS, (38)»
1=1 fc=0 s=1
где вариация 6FS относится ко всем величинам, входящим в Fs, так что
Лг । fc=^71 ( dFs s см , dFs 1 . dFs ,
I - - 1 n — U \ * / I — 1
dFs
Производная учитывает изменение всего, что меняется в Fs вместе со
временем. Так как при последнем предположении уравнение
Fs = 0 (37 )
необходимо влечет
^ = 0,
dt
то мы можем освободить себя от варьирования t в дифференциале 6F,.
Формула (38) вследствие неопределенности множителей Л не предпола-
гает какого-либо соотношения между дифференциалами dt, dco, бсо, да и долж-
на иметь место независимо от этих дифференциалов.
Формула (38) распадется на 4тп 4- 1 уравнений, которые, как и в фор-
муле (37), будут представлять интегралы дифференциальных уравнений (14).
Среди этих интегралов мы всегда будем иметь соотношение
= (33)
каков бы ни был вид выражения 8 и если в производной-^- варьируются
все члены, зависящие от времени.
Вместо того чтобы применять метод неопределенных множителей, мы
можем из 2пт уравнений
> dFs = 0,
где
1 / jn ) i —2mn jд*
О = V V dco® 4- da>i J 4- V даг,
346
М. В. ОСТРОГРАДСКИЙ
определить 2тп вариаций 6с5,Л, даг через 2тп других, так как их име-
ется всего 4тп. Затем эти вариации, как совершенно произвольные, введем
в формулу (32) и, перенеся все члены в одну сторону, приравняем нулю все
коэффициенты в отдельности. Это даст нам еще 2тп уравнений, кроме урав-
нений (33). Все это позволит оставить в формуле (32) произвольными лишь
вариации да,.
Введем в функцию S время t, тп переменных х и тп постоянных а, прини-
мая их за полное число 2пт постоянных. Мы получим достаточно частный
вид функции S, но однозначный и определенный.
Величины а выбираются произвольно и, как мы только что говорили,
представляют все различные системы произвольных постоянных для инте-
гралов уравнений (14). Функция S будет окончательно определена, когда
будут фиксированы пределы интеграла f V dt, который она представляет,
и точно определена система постоянных^ и переменных х, входящих в S.
Не фиксируя сначала систему постоянных а, мы предположим, что в S
будут входить только тп постоянных. Остальные же величины а с номерами
от тп + 1 до 2пт мы будем считать не содержащимися в S.
Тогда получим
as __ as <is dx^
dar dar dx^ dar ’
так как индекс г не превосходит тп. В производной-у-, которая представляет
собой первое слагаемое, варьируются все члены, зависящие от а. Во втором
слагаемом аналогичная производная не берется по аг. Предыдущее урав-
нение должно быть заменено уравнением
ds _ Ч™ ' ds dy^’
dar fcTo ’
если r > mn.
Подставляя полученное значение в формулу (36), мы получим
i = m fc=n-l i jo
o=CODSt+^ 2
1=1 fc=O 1 u I I
dx®
dar ’
(39)
если r > mn и
dS x , dS 1 dx^ ....
----= const + V R, k------—— , (40)
dar | ,>k dx® I dar ’ v 7
если r < mn.
Можно всегда ввести в S систему тп произвольных постоянных, выбран-
ных таким образом, чтобы неизвестные gik были представлены соответст-
dS г,
венно частными производными -у^-. Для этого достаточно взять за постоян-
ные, о которых идет речь, значения величин х в точке, относящейся к началу
интеграла S.
Чтобы доказать это, рассмотрим формулу
д S = const + V dt + ‘у к У' 8а>ф,
(32)
в которую входит, кроме вариации dt, тп дифференциалов да> и все те, кото-
рые входят в постоянную, обозначенную const, и в 6S. Следует так преобразо-
вать эту формулу, чтобы она содержала только произвольные и независимые
друг от друга дифференциалы, чтобы можно было приравнять соответствую-
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
347
щие коэффициенты левой и правой части. Чтобы сделать это преобразование,
надо принять во внимание дифференциалы, содержащиеся в const и в SS,
фиксировав начальное значение интеграла
S = J Vdt.
Обозначим через т начальное значение t, где т может быть нулем или другим
определенным числом.
Мы получим
S = $Vdt, (41.)
откуда при помощи принципов вариационного исчисления определим S
как функцию t и т, х и тп постоянных а
i = m к = п—1
dS = V dt - V(J dt +
1 = 1 k~0
где Vo является значением V при t = т.
doj^> +
dxW 0W ‘ +
as
dar
dar,
Но, с другой стороны, имеем
dS = dt + d-S dr + JV ™
4S „
— da,.
da, r
Сравнивая, получим
(33)
. (42)
dS dS
причем в производных — и — варьируются все члены, зависящие от t и т.
Правая часть формулы (32) обращается в нуль при t = т ; это свойство слу-
жит для определения постоянной. Обозначив через а,,,. и начальные
значения и xW, получим
const = — V^dr — aik.dc^.
1 = 1 /с —О
Здесь мы варьируем величину т, предполагая, что полная вариация
имеет вид
a(A-ri) _р dcdp.
Подставляя значение SS и const в формулу (32), получим
i = m к = п — 1
i = l fc=0
.jq к — тп jo i — m к=п — 1
’ + У ~~ Sar = У У ($1 к — ai к da(li'>') .
dx№ ‘ 1 da, r v ‘ ‘ ’
Теперь, чтобы приравнять коэффициенты при вариациях, которые содержит
формула (32), надо свести эти вариации к наименьшему возможному числу,
так как, не сделав этого, мы придем к неправильным результатам. Так, на-
пример, если, оставив постоянную аг любой, сравнить коэффициенты при
doJfd, предполагая
£ _ dS
то получим неточное уравнение.
348
М. В. ОСТРОГРАДСКИЙ
Проще всего исключить из нашей формулы все излишние дифференциалы,,
мешающие нам сравнивать коэффициенты при других дифференциалах.
Можно предположить, что произвольные постоянные аг — единственные
величины, оставленные произвольными в нашей формуле — соответствуют
начальным значениям х, которые мы обозначим через а/к). Таким образом,.
мы получим
i—m к—п— 1
as
йхф
Wp
и, следовательно,
i—mk—n—1 I \ i=m fc=n—1
1=1 fc=O 1“ i I J i=l fc=0
Это уравнение содержит только 2пт дифференциалов 8, из которых именно-
дифференциалы постоянных введенные при помощи интегрирования,,
совершенно произвольны.
Другие 8а> также могут считаться произвольными, так как они получены
произвольным дифференцированием 2тп постоянных интегрирования. Как
следствие, мы получим уравнения :
я _ dS
dS _
da(p “
(43}
которые являются интегралами дифференциальных уравнений (14), напи-
санными в очень удобной форме. Но чтобы их можно было употреблять,
нужно найти функцию S и представить ее в той форме, которую мы ей только
что придали, что требует интегрирования уравнений (14) и соответствующих
преобразований. Следовательно, интегралы уравнений (14) в форме (43)
могут быть получены только после того, как уравнения (14) будут проин-
тегрированы в какой-нибудь другой форме. Это обстоятельство уменьшает
значение уравнений (43). Но они приводят к другим интересным результатам.
Так, можно показать, что неизвестные £ могут быть представлены как част-
ные производные одной и той же функции S. Используя это обстоятельство,
мы можем найти интегралы уравнений (14) в форме (43), зная только часть
этих интегралов в какой-нибудь другой форме.
8. Рассмотрим уравнение
= у
dt
(33)
которое имеет место, каковы бы ни были постоянные и переменные, входя-
щие в S. Предполагая, что S содержит только переменные t и х, мы получим
dS fc="r1 dS к+1
dt dt + dxC?) 1 ’
о dS
где в производной в первом слагаемом варьируются только те члены, в
которые / входит явно.
Следовательно,
у1 у
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
349
Если мы предположим еще, что S содержит только тп постоянных, кото-
рые являются начальными значениями переменных х, то мы можем заменить
производную величиной !-itk. Эта замена дает нам
dS- v(* + D — т
d^ х'
и, следовательно,
(44)
Если из т -|- 1 уравнений
dV _ . av _ я
dx&> - Sl.n-1 > - «2П-1 ,
-t
dx%>
и из уравнения
0 = V-T
мы исключим т производных xfp, х^, • • •, то получим соотношение
между временем t и неизвестными х, £ и функцией 0. Заменяя в этом соотно-
шении £ на соответствующие частные производные S, а именно на ,
и подставив вместо 0, мы придем к соотношению
<р — 0 (45)
между временем t, неизвестными х и частными производными функции S.
Сама функция S в соотношение не входит. Отсюда следует, что если какое-
нибудь значение S удовлетворяет уравнению <р — 0, то этому уравнению
будет удовлетворять также это значение, увеличенное на произвольную
постоянную. Это является следствием того, что S представляет собой инте-
грал и должно содержать произвольную постоянную аддитивно. Функция S
обращается в нуль при t = т, что определяет произвольную постоянную, но
это обстоятельство не указано в уравнении (45).
Заметим, что если дифференциальное уравнение типа (45) обращается
в нуль при условии S = 0 для t = т, то функция S вполне определена. Но
этого нет в нашем случае, так как х является не независимой переменной,
а функцией времени, и условие S — 0 при t = т имеет место не для всех
значений х, а только Для их начальных значений.
Вместо уравнения (45) мы будем рассматривать уравнение (44), заменив
значения S, полученные из 0, частными производными функции S.
Предположим, что функция 0 не зависит от х(п> и имеет тот же вид, что
и в уравнениях (14). Таким образом, уравнение (44), как и (45), является соот-
ношением между переменной t, х и частными производными от S. Функция
S в это соотношение не входит. Очевидно, что уравнение (44) сводится к урав-
нению (45), если разрешить его относительно . Если функция S удовле-
творяет уравнению (44) или (45), то она может иметь бесконечное множество
различных форм. Следует заметить, что любое значение функции S, удов-
летворяющее уравнению (44), удовлетворяет формулам (14), если положить
= (46)
350
М. В. ОСТРОГРАДСКИЙ
где i и к принимают все возможные значения. Продифференцируем по t зна-
чение S из формулы (46), варьируя все члены, зависящие от t. Мы получим
d^'k ~ [dt dx™ + dx™ dx%> dX i'
и, подставляя в уравнения (14), получим :
dx™ = - dt,
dO d2S , d2S
-------—---------------|_ > >---------------v И 4-1)
'dxtk) dtdx^ dxVp dxtf!'* '
или
d2S _ d& k‘=^Zl d& ________d2S____
dt dx^ dx^fi d£j, k, dx^p dxty> ’
dx(® =------dt.
При этом мы предполагаем, что £, содержащиеся в 0, заменены до диф-
ференцирования на соответствующие производные S.
Из формулы (46) вытекает, что только что написанные уравнения спра-
ведливы при любом S. Но следует напомнить, что S удовлетворяет урав-
нению (44), каковы бы ни были х и t. Дифференцируя это уравнение по х^>,.
мы получим тождественно
cPS _ d& , d& _________d2S_____
dt dx11-'1 dxflf> A-“o dS^ ^ dx^
Так как первое из уравнений, заменяющих формулы (14), обращается в
тождество, наши формулы приводятся к виду
<"’ =---^dt, (47)
и, следовательно, вместо 2тп уравнений, заключающих 2тп неизвестных х
и мы приходим к тп уравнениям, содержащим лишь неизвестные х.
Дифференцируя уравнение (44) по х^к\ напишем для удобства
d&
вместо----.
Мы подразумеваем, что в функции 0 уравнения (44) неизвестные 5 заме-
нены частными производными от S.
Интегрируя уравнения (46), получаем значения, которые вместе с фор-
мулой (46) удовлетворяют уравнениям (14). Но, действуя таким образом,
мы получаем только частные интегралы уравнений, так как функция S не
содержит достаточного числа постоянных.
Мы показали раньше, что функция S содержит аддитивно одну произ-
вольную постоянную, что следует из природы уравнений (44) или (45), кото-
рым S удовлетворяет. Но из уравнения (44), записанного в частных производ-
ных, видно, что S может содержать и другие произвольные постоянные.
Чтобы получить полный интеграл уравнений (14), достаточно, чтобы число
произвольных постоянных, входящих в £, было не менее чем тп.
Действительно, интегралы
<46>
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
351
содержащие тп произвольных постоянных, и интегралы уравнений
dxW = (47)
1 aSi,k ’ ' ’
содержащие остальные произвольные постоянные, удовлетворяют урав-
нениям (14), и мы получаем, таким образом, полный интеграл этих уравнений.
Остается найти интегралы уравнений (47). Функция S, удовлетворяю-
щая уравнению (44), содержит некоторое количество произвольных постоян-
ных, каждая из которых дает интеграл уравнений (47).
Действительно, обозначая через а одну из наших постоянных, мы полу-
dS
чим интегралы = а, где буква а обозначает новую произвольную посто-
янную.
Для доказательства этого положения дифференцируем предполагаемый
интеграл — = а по t, варьируя все функции х, зависящие от t. Мы получим
d2S _ t~m fc=n-l d2S dx(p _ Q
dtda iTt fcTo da dx(i} dt
Заменяя —его значением — из уравнения (47), мы получим
_d2S_ _ k=^r1 d& d2S
dt da ~ di'iik da dx^ '
Эго соотношение должно быть тождеством, если предполагаемый интеграл
действительно им является. Итак, наше соотношение является производной
по а тождества (44). Действительно, дифференцируя формулу (44) по а и
замечая, что эта величина входит только в 0, так как она содержится в
t _ dS
^•к ~ dx<k) >
мы получим тождество
d2S _ к=(£1 d& d2S
dtda fcTo d^i,k dadxy
Каждая из постоянных а даст соответственно интеграл уравнений (47).
Итак, как и раньше, если функция S содержит тп произвольных посто-
янных а1} а2,..., атп, не считая аддитивной, которую мы для сокращения
обозначим через С, мы получаем все интегралы уравнений (47) и, следова-
тельно, все интегралы уравнений (14). Последние могут быть написаны в
виде
JL = a (48)
'k dxty ’ dar ’ 7
где /, к, г изменяются соответственно от 1 до т, от 0 до к — 1 и от 1 до тп,
а аг является новой произвольной постоянной.
Если количество постоянных а, содержащихся в S, меньше тп, мы по-
лучим частное решение уравнений (14). Для этого нужно будет проинтегри-
ровать сначала уравнения (47), так как функция S в этом случае не даст
значения этих интегралов. Если функция S содержит больше чем тп постоян-
ных а, мы получим полное решение уравнений (14), не отличающееся в дей-
352
М. В. ОСТРОГРАДСКИЙ .
ствительности от решения, полученного в случае, когда число постоянных а
равно тп. Это можно показать на основании теории дифференциальных
уравнений в частных производных. Интегралы (48), даже если их число
больше 2тп, не дают в действительности более 2тп различных соотношений
и различных произвольных постоянных.
Следуя Лагранжу, назовем полным решением или полным интегралом
уравнения в частных производных всякую функцию, удовлетворяющую
уравнению и содержащую столько произвольных постоянных, сколько
имеется независимых переменных.
Значение S, удовлетворяющее уравнениям (14), является полным инте-
гралом уравнения (44) или (45), так как удовлетворяет этим уравнениям и
содержит тп 1 произврльных постоянных, т. е. столько же, сколько
имеется переменных t и х, рассматриваемых в уравнении (44) как незави-
симые.
Функция
S = J Vdt,
т
где за произвольные постоянные а мы приняли начальные значения х, явля-
ется также полным интегралом уравнений (44).
Мы видели раньше, что она дает интегралы (43) уравнений (14), теперь
же мы видим, что, кроме нее, эту роль может играть любое полное решение
уравнения (44) или (45), т. е. являться интегралом уравнений проблемы
изопериметров.
Мы заметим также, что всякое полное решение S уравнения (44) дает
дифференциальное соотношение
dS = Vdt.
Действительно, дифференцируя,
(IS
ds=li
получим
dx™
1-vOO “л г
или
следовательно,
dS = 0 dt + dt'jp
f=0
к=п-\
dS = (0+ T)dt= Vdt,
или, что то же самое,
г=тп
~г~Ьаг + <5С.
dar
9. Рассмотрим специальный частный случай, когда имеет место закон
nr dv
живых сил. Мы знаем, что в этом случае производная по времени -& со-
держит лишь переменную t. Это позволяет разложить функцию V на две части:
одну, содержащую лишь неизвестные и их производные, и другую, завися-
щую только от времени. Так как эта последняя часть является точной произ-
водной, ее легко исключить с помощью замечания, сделанного в начале
параграфа 5. После этого функция V не будет содержать времени явно.
Мы будем продолжать пользоваться буквой V для обозначения изменен-
ной таким образом функции.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
353
Так как имеет место уравнение живой силы, то
6> + й = 0, ' (20)
где h означает произвольную постоянную.
Заметим сначала, между прочим, что если обозначить через <90 значение
0 для t = т, то получим
& = &0.
Следовательно, уравнение (44) можно переписать в виде
dS п
где 0О является функцией начальных значений переменных х и £, т. е. и
aitk. Заменяя здесь с помощью формул (43) aiik на производные—
мы получим уравнение
(49)
между величинами а, частными производными функции S по этим величинам
и по времени. Таким образом, в рассматриваемом нами частном случае S
удовлетворяет сразу двум уравнениям (44) и (49).
Но, само собой разумеется, что S будет не любым полным решением урав-
нения (44), а лишь тем полным решением, при котором произвольные постоян-
ные суть начальные значения переменных х.
Если мы заменим I в первом из двух уравнений
0 + Л = 0, 0О + Л = 0 ,
и а во втором на соответствующие производные S, то получим два других
уравнения в частных производных, которым удовлетворяет то же самое
м dS
полное решение и которые не содержат производно и—- .
Мы вернемся в дальнейшем к первому из этих уравнений.
Рассмотрим теперь функцию S во всей общности, предполагая, что она
удовлетворяет лишь уравнениям (44) или (45) как полное решение.
В силу принципа живых сил уравнение (44) дает
т. е. после интегрирования
S=—ht + R.
Буква R обозначает здесь функцию переменных х, которая содержит
тп + 1 произвольных постоянных и не содержит t. В число постоянных
входит Л — постоянная живых сил и аддитивная постоянная, так же как и
в S. Обозначим буквами а1г аг,..., атп^1 остальные произвольные постоян-
ные. Интегралы (48) уравнений (14) можно написать в виде :
t _ dR
dR
dar a‘
dll
(50)
где e обозначает произвольную постоянную.
354
М. В. ОСТРОГРАДСКИЙ '
Заменяя в уравнениях (44) или (45) функцию S значением R — ht, най-
дем соотношение между переменными х и частными производными функции
R, которое не содержит самой этой функции и для которого R, заключенное
в формуле (50), является полным интегралом. Это соотношение есть
0 + Л = О, (51)
что мы получим, заменив в формуле (44) значение S его выражением R — ht.
Величина & действительно содержит те же самые производные R и таким
же образом, как 3 в формуле (44).
Заметьте еще, что, заменяя в уравнении живых сил 0 на V—Т, вы полу-
чите
У=Т— Л.
Умножив на dt и проинтегрировав, найдете
J Vdt = §Tdt — ht
или
3 = $Tdt-ht.
Из этого вы заключите, что
R = \ Т dt, (52)
или
f*i—m к=п—\
\2 2 (53)
J i=l fc=0
или еще
i — m к=п—1 r'i = m к—п—1
1 = 1 fc=0 J 1 = 1 к=о
и если вы замените 3 на R — ht в формуле (32), вы получите
dR = const + (V + hjdt + tdh + 'j? £iikdcoM
1 = 1 к = 0
или, так как из уравнения живых сил следует
i = mfc=n-l
у + л = т = ^ 2
1=1 к=0
то получите
dR = const + t dh + * J;' M>. (54)
1 = 1 k = 0
Рассмотрим уравнение, которое дает 0 как функцию хи f и которое,
как мы уже говорили, получается путем исключения n-х производных 4П),
х£\..., х(£> из формул
dV £ dV t dV _ Л
dx<*>
Если мы в это уравнение подставим вместо 0 ее значение —Л, полученное
из закона живых сил, то получим интеграл уравнений (14), играющий роль
интеграла живых сил. Пусть
/1 = 0
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ 355
представляет этот интеграл. Предположим еще, что мы нашли каким-то
путем тп—1 остальных интегралов
/2 = 0, /3 = 0, ..., /тп = 0
тех же дифференциальных уравнений, которые, кроме произвольной по-
стоянной Л, содержат еще тп — 1 других. Эти постоянные мы обозначим
через а1; а2,..., amn_v
Первый интеграл содержит одну постоянную Л.
Запишем для простоты наши тп интегралов в виде
Л = 0, (55)
где индекс г пробегает значения 1, 2,..., тп.
С помощью интегралов (55) мы можем представить тп из 2тп перемен-
ных х, $ как функции тп остальных и тп произвольных постоянных. Первые
тп переменных мы можем выбрать произвольно. Для того чтобы различать
эти переменные, мы будем называть первые переменными (А), а вторые пере-
менными (а).
Таким образом, (А) будут функциями (а) и произвольных постоянных.
Подставляя значение переменных (А) в интеграл живых сил, мы полу-
чим тождество, потому что интеграл
А = о,
который заменяет его, служил нам для определения переменных, т. е. мы
получим тождественно
0 + Л = О.
Продифференцируем это уравнение по всем неизвестным величинам, т. е.
по переменным (а) и произвольным постоянным. Тогда получим тождест-
венно
2 2 Jb+« = °.
, 0 fc=l ' )
Умножив на dt и заменив
их значениями из уравнения (14), мы получим нетождественное соотно-
шение :
dt = * (dx(lp - d£i>k дхф). (56)
1 = 1 fc=0
Это уравнение содержит 2тп совершенно произвольных вариаций, а
Именно тп вариаций величин (а) и тп вариаций произвольных постоянных.
Оно даст 2тп частных уравнений, которые зависят от переменных (а) и (А).
Предположим для определенности, что величинами (а) являются х, а
величинами (А) являются £. Сравнивая коэффициенты при вариациях 6Л и
да в обоих членах уравнения (56), получим
dt = ^
i = l
1=т k=n-i
к^О
~-dx(p
an ‘
(57)
2
OQ*
356
М. В. ОСТРОГРАДСКИЙ
и, каково бы ни было значение индекса г,
i=m к=п-1 jt.,
i=l к=о
(58)
После этого от уравнения (56) останется еще
i=m к=п— 1
° = 2 2 (dx^d^-d^dx™).
i=l fc=O
Дифференциалы Sf относятся в действительности только к величинам х,
функциями которых, по предположению, являются переменные f. Последнее
уравнение можно, очевидно, переписать следующим образом:
к—п-1 ..... .. _
2 d^,k^= 2 dxWit',k',
к=0 - ’ i'=l fc'=0
i=m
m к'=п— 1
НО
Ъ'.к
i=m k=n-\ je., ,,
2 2
следовательно, наше
уравнение примет вид
Г=т
i'=l fc"=O '
i=m к=п-1
k'=n—l ,
“ di,’k~dx^
что, ввиду произвольности 5x)k), дает
к=п~ 1
i'*=m
4lv= У
к=0
(59)
или, вследствие того, что
i'=m
к'=п~ 1
k'=Q
dW l' ’
получим
i=m
к=п-\
----;-----------]
dx%> dxtn J ‘ •
dij,k
d£i',k'
(60)
n = 0
d>№ a*"
Заменяя dx)fc) на
..
— ztb—dt >
dii.k ’
получим тождественно
т
Л=О
d&_ / d£i’,k' dSt,k 1 j.
!,k I dxty dx^,'> I
(61)
Можно было бы получить эти различные результаты, дифференцируя
тождество
& + Л = О
по всем входящим в него величинам. Так, предполагая, как было сделано
выше, что f являются функциями х и произвольных постоянных, мы убе-
димся, что последнее уравнение обратится в тождество относительно х и
произвольных постоянных. Поэтому при всех индексах i, к, г мы получим
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
357
из него тождественно
— + 1 = О,
dh ’
— = О = О
dar U’ d^f> ’
или, опять тождественно,
i=m 2 i = \ fc=S’-#-^+i=o,] k-Го dii’k dh
i = m к=п~' j^d^ = n dii,k dar ’
i = \
i'=m '‘'“"-I a® dSt’k' , d®
i-=l i^0 dt^'k- 1 dx^)- 0
(62)
Умножая два первых уравнения на dt и заменяя на — dx\k
получим
i = m к=п-1 dSi к
dt = 2 2 ~dtdx™’ (57)
i = l к=О
i = m к=п— 1 ,,е. ,
° = ^ 2 <м>
i=l к=О г
Последние уравнения не являются более тождествами. Они полностью
заменяют формулы
d^ = --ff-dt,
' dit,k
которые вместе с тождественными результатами служили нам для полу-
чения вышеупомянутых уравнений.
Мы имеем еще тождество
Г=т
°= 2
i'=l
к'^° d® dh',k- . d®
d^i-.k' dxtf> dxt.k '
Подставляя в уравнение
d^,k =
d®
dx^ dt
вместо $iik их выражения через x и произвольные постоянные, получим
fc'=n-l
d^j.k
dx^>
dx<k,) =
d®
dxty
dt,
а если заменить еще на---------------^—dt, то получим тождественно
d$i',k'
_ k'=n-l d@ d^k d0
dS dxW dxW
i'=l k’=O s‘ Л i
Следовательно, формула, которая нас интересует, превратится в
_ d& _ d^ ч
j^Q d^k' | d^p dx<p J
358
М. В. ОСТРОГРАДСКИЙ
или, что то же самое, в
Этот результат, будучи комбинацией двух тождеств, сам является тож-
деством.
Два способа, которые мы употребили для получения формул (57), (58) и
(61), отличаются только тем, что в первом случае мы варьируем одновре-
менно все независимые величины, как х, так и произвольные постоянные,
тогда как во втором варьировали их последовательно одну за другой в
отдельности.
После получения тп интегралов
А = о, /2 = о, ..., /тп = о
остается проинтегрировать еще уравнения
dx(lf> =--dt
1 d£i,k
или заменяющие их уравнения (57) и (58).
Эти последние немедленно интегрируются, если найденные значения £
делают интегрируемой форму
i~m к = п—1
2 2
i=l fc = 0
Действительно, обозначая через R интеграл этого выражения, мы по-
лучим
я _ dR
- dx& ’
где R — функция тп величин х и тп произвольных постоянных h и а. По-
этому вследствие формул (57) и (58) получим
dt = d~, 0 = d~,
dh ’ dar '
т. e. мы пришли к интегралам (50).
Кроме того, допуская, что выражение
i = m к = п— 1
2 2
i=l к=0
интегрируемо при найденных выражениях £, получим немедленно интегри-
рующие множители для дифференциальных уравнений
dx® = -~dt,
1 d^i,k
единственных, которые мы должны решить. Эти интегрирующие множители
суть соответственно
d£i,k „
dh dar ’
где г принимает любое возможное значение. Действительно, последовательно
умножив на соответствующие множители наши дифференциальные урав-
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
359
нения и сложив их, получим
i-m
/=-1
d® d$i,k
d^i,k ~dfT’
d®
Si dar d^’
или, в силу двух первых формул (62) и потому, что
i = m
2
i=l
к^-> dSi,k
dh'
/.=n-l
получим окончательно
dar ' dar ’
dt = d
dR
dh ’
0 = dlT~ •
dar
d^-d%’
Последнее уравнение справедливо для всех значений г.
К аналогичным результатам мы придем и в том случае, если предполо-
жим, что с помощью тп интегралов
/х = о, /2 = о, ..., fmn = 0
величины х определены как функции £ и произвольных постоянных, или
часть х и часть £ определены как функции оставшихся переменных и произ-
вольных постоянных. Читатель может сам получить этот результат.
10. Если найденные значения £ не делают интегрируемым выражение
1=т к=п-1
£ 2 ^dxW>
1=1 к=О
то уравнения (57) и (58) не интегрируются непосредственно, и для их реше-
ния нужно искать особые методы. Но нам вовсе не нужно искать все их
интегралы. Достаточно найти лишь столько, чтобы выражение
i=m к=п— 1
2 2 ^dx™
i = l fc=0
было интегрируемым при выполнении между величинами х соотношений,
установленных найденными интегралами.
Ясно, что рассмотренный нами случай сводится к предположению, что
найдено более чем тп интегралов уравнений (14), так что не только £, но и
некоторые из х выражаются через оставшиеся, и далее, что при условии
исключения из выражения
i — m к=п—1
2 2 ^dx^
1=1 к=0
всех зависимых переменных последнее становится полным дифференциалом.
Мы здесь говорим о зависимости и независимости лишь относительно соот-
ношений, устанавливаемых найденными интегралами.
Для большей симметрии и удобства предположим, что мы выразили все
переменные £ и х через другие величины С2)..., и через произвольные
360
М. В. ОСТРОГРАДСКИЙ
постоянные, заключающиеся в найденных интегралах. Величины х и £
должны удовлетворять тождественно соотношениям, устанавливаемым ин-
тегралами, при любых переменных С. Число этих последних вместе с числом
интегралов должно быть~равно 2тп, так что х и f, найденные из наших соот-
ношений, должны быть функциями I переменных и 2тп — I постоянных.
Подставляя эти функции в выражение
i=m к=п—1
2 2 ^dx?>
i = l к=0
и полагая для краткости
(63)
мы получим
i=m fc=n-l
s=m
2 ^,k dx^ = Zsdts.
1=1 fc=O s=l
Так как, по предположению, выражение Zsdts есть полный диффе-
1
ренциал, величина R будет вполне определенной функцией переменных С и
произвольных постоянных. Дифференцируя ее по какой-нибудь из произ-
вольных постоянных, обозначенной буквой а, получим
но
2 2
i=l к=0 I
^LdxW + ^kd
da
d^ 1
da J
= d™
da
.dxf$ _ dxf 'p ,l£ dx™
da — da + d da
следовательно,
i = m
2
i = l
k=n— 1
2
i. = 0
diik a *сф At
dx(<)--------------- di-, k
da 1 da
i=m k=n-l dx™
.Д da
i=l k=0
(64)
Если же продифференцируем по одной из С, то найдем
At , dRA2t Ati^"c=l~1ldii,k A <k) , t Ad^
d^o. dt + di d dx i -|- %itk d
dxL
i,K dZ
fc = O
или, принимая во внимание (63),
i=m к—п—\ I At. ДуЦО I dP
д 2
Так как
^.kd
dxdft
ИГ
dx^>
di
dti,k + d
dxdf>
~~dT
мы получим тождественный результат
4’ 1 A(dR dx^
d^ = d w ~ii
ни к чему не приводящий.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
361
Первый член здесь равен нулю вследствие интегрируемости выражения
i=m к=п-1
У ^t,kdx^, а второй — в силу формулы (63).
1=1 к = 0
Установив это, возвратимся к интегралу живых сил
0 + /z = O.
Так как он употреблялся для выражения х и £ через С и произвольные по-
стоянные, то он превращается в тождество после подстановки этих выра-
жений и после дифференцирования дает 2тп следующих тождеств :
где индексы г и s принимают соответственно значения 1, 2,..., тп — I — 1
и 1, 2,..., I, потому что, хотя число произвольных постоянных равно тп — I,
одна из них есть h. Число же переменных С равно I.
Предыдущие тождества приводятся к следующим:
О — 1 'v ' =х 1 ( d@ d^’k _i_ d® dx(P 1
fcTo I d^-k dh dX^ dh ) ’
0 = f d® dtl>k a® dx^\
~ | d^.k dar dxV dar | ’
0 = 'V 1 ( d6> d^k 4- d0
fc”o | d*i,k < + dx^ dCs ’
После умножения на dt и замены частных производных 0 их значениями
из уравнений (14) два первые тождества обратятся в уравнения
i = т dt=z 2 dh dx<P- dx^ dh
i = l k=0 I
°= > 1 = 1 fc=n-l l .It X- fcTo ' dar dx^ — d£, dar
(65)
или, принимая во внимание (63) и (64),
/ dff i = m к=п-1
. dx™
l’k dh
I dR i = mk=n-l dx^>\
0 — d У У
\dar ’ dar j
откуда непосредственно получаем 2mn — l интегралов
(66)
dR
a=-—
dar
i=m
fc="41 dxW
-2 ~dh' ’.
k=0
k~^~l dx<?
2, ^’k~da~ ’
fc=O aar
(67)
dR __ '
dft £
где буквы £ и ar обозначают произвольные постоянные.
Комбинируя эти интегралы с теми, которые мы предположили извест-
ными заранее и которых было 2тп — I, мы получим 4тп — 21 интегралов.
Но они должны сводиться по природе дифференциальных уравнений (14)
лишь к 2тп различным интегралам.
После того как мы найдем столько интегралов уравнений (14), сколько
i = m к=п~1
нужно для того, чтобы выражение J? £ Siikdx)^, при х и £, связан-
/=1 =о
ных полученными интегральными соотношениями, превратилось в полный
дифференциал, можно завершить с помощью интегрирующих множителей
решение уравнений (14). Эти интегрирующие множители находятся очень
легко.
Действительно,умножая наши уравнения соответственно на _ dx(‘} и d^>k
dh dh
и складывая их, получим
Отсюда, вследствие того, что
Л=п-1р@ Лсф , d® d?k\
i^i Йь ИР dh + d^i,k dh )'
( d® dx^ d® d?,k 1
| dx№ ~~diT ~dhj
d®
~dh
найдем
dt
dx™
dh
Тем же самым способом, употребляя аг вместо h и принимая во внимание
И' I d0 dx® d® dgi>k\
dar dhk dar |
~- = 0,
da.
найдем
i=m k=n—l z/v® 1
У У \^d^>-^-d^k\.
da. da. ’I
Легко проверить, что функция
d? Av(k) dx<P At 1
-r2-dx®------г— d^; k ,
da 1 da l>k
из которой исключены все переменные, кроме С, есть полный дифференциал.
Величина а обозначает там одну из произвольных постоянных Л/, ах, а2,...
..., a2mn-i. Действительно, если обозначить через С и С' две любые величины
из f1, С2,..., ?z, нам останется только доказать равенство
к=^1 (dltjc dx™ dx$> d?<k ) _
df £—0 I. da ' d? da d? J
d 1 / dtiik dx^ dx$> dSitk\
~ df' I da dt; da d£ Г
Произведя дифференцирование и необходимые преобразования, получим
k~!yl рх® d4itk d£iik <Рх^> dx^ d4itk d£i>k
T“o Cdf^dadf + df dad? dt; dad? d? dad?)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
363
т. е.
0= _£ V "V dx^
da й П) V df J ’
но выражение
‘4? fc=Vpx® dsiik dxV df,.a
le dC df J
тождественно равно нулю вследствие того условия, что выражение
i=m к=п—1
1 = 1 fc=O
s=(
сведено к переменным С, т. е. Zsdf есть полный дифференциал. Таким
S-- 1
образом, множители _ dx(^ и d'‘-k делают уравнение (14) интегрируемым, и
da da
легко проверить многими способами, что их интегралы сводятся к урав-
нениям (67).
11. Покажем на нескольких примерах применение выводов п. 9 [ш].
Для этого примем на протяжении п. 11, что функция V не содержит времени t.
Будем теперь придавать V, различные формы относительно переменных х.
В качестве первого примера предположим, что V содержит лишь одну
неизвестную х и притом будет относительно х функцией первого порядка.
Тогда мы получим
£ dV
* ~ dx7 ’
и дифференциальными уравнениями проблемы изопериметров будут урав-
нения
d& . d© ,,
d£ — — dt, dx — —-7T- dt.
dx d$
Решение их полностью зависит от двух интегралов, из которых один
представляет собой интеграл живых сил
v-ex' + л.
С помощью этого интеграла и соотношения I = найдем £ и х' как функции
х и h.
Если подставить эти функции вместо ? и х в интеграл, получим, очевидно,
тождество. Дифференцируя его по постоянной h, получим другое тождество :
или
В действительности это последнее уравнение не есть тождество. Это про-
исходит потому, что замена £ и х' на £ и х' является только кажущейся.
Но мы получим действительно тождество, если заменим £ и х' их выраже-
ниями через х и h. Умножая на dt, получим
dt= ~dhdx>
364
M. В. ОСТРОГРАДСКИЙ
откуда
f+£=4Pdx-
Это второй и последний интеграл дифференциальных уравнений нашей
проблемы. Он находится простой квадратурой, потому что не содержит ни-
каких переменных, кроме £. Величина е здесь играет роль произвольной
постоянной.
В качестве второго примера предположим, что функция будет второго
порядка относительно неизвестной х. Тогда, обозначая-^ = £х, &t= V —
— £х' - и исключая х" из этих соотношений, получим в качестве диф-
ференциальных уравнений проблемы четыре следующих уравнения :
d^ = ^dt, dx=-^dt,
dx df ’
d^^-^dt, dx' = --~dt.
1 dx df
Их полное решение дается четырьмя интегралами, один из которых есть
интеграл живых сил
0 + /г = О.
Предположим, что каким-то способом найден еще один интеграл
/ = О
с новой произвольной постоянной а. Буква / обозначает функцию перемен-
ных х, х', 5, и] двух постоянных h и а. Выражая с помощью двух инте-
гралов
0 + й = О, / = О
величины £ и через переменные х, х', мы получим формулы
£ = fonct (х, х', h, а) = fonct (х, х', h, а),
которые полностью заменяют предыдущие интегралы и сами могут рас-
сматриваться как интегралы нашей проблемы. Если их продифференциро-
вать по времени, то получим
dS = £dx + £dx'’ ^^dx + ^dx'.
Если отсюда с помощью уравнений проблемы исключить дифференциалы
dx, dx', dS, dSr, то получим тождества
П= 4-——4-—п— — 4-— 4^4-—
dx ' df dx ' d£i dx' ’ dx' ' df dx ' d$x dx'
С другой стороны, интеграл
0 + h = O,
если в нем заменить £ и £х их выражениями через х, х', h, а, также превра-
тится в тождество. Дифференцируя его как по х и х', так и по /г и а, получим
еще четыре тождества :
О _ d& d& dg d0 d£t n _ d@ , d® de , d& dfl
dx ' df dx ' df, dx ’ dx' df dx' df, dx' ’
л _ 1 I d& df d& df, n _ d& df d& df,
U + ds d« + dej (ft ’ df da + df, da '
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
365
Сравнивая первые два с двумя полученными ранее тождествами, полу-
чим тождественно
dx' dx ‘
Это доказывает нам, что переменные £ и можно рассматривать как
частные производные одной и той же функции по х и х'. Обозначая эту функ-
цию буквой R, можем написать
dR t _ dR
dx ’ 1 dx'
и, следовательно,
/? = J-(fdx + fxdx').
Установив это, умножим два оставшихся тождества на dt и заменим в
них соответственно jfdt и dt на — dx и — dx'. Тогда получим следую-
щие уравнения:
т. е.
d*R । ^R , , „ dPR . . dPR ..
dt == —-?r~ dx 4“ • j?- dx , 0 — “3—— dx *4—dx
dxdh 1 dx dh ’ dxda 1 dx da
или
.. и dR „ , dR.
dt = d-y~-, 0 = d-т- ;
dn da ’
интегрируя, получим
, , dR dR
t 4- e = -,T a = .
1 dh ’ da
Таким образом мы нашли два оставшихся интеграла интересующей нас
задачи с произвольными постоянными е и а.
Мы видим, что рассмотренный нами , случай зависит от единственного
интеграла
/ = О,
так как три другие находятся по нашей теории или непосредственно или
путем квадратур.
Предположим теперь, что функция V содержит две неизвестные и являет-
ся функцией первого порядка относительно обеих. Обозначая зти перемен-
ные во избежание нумерации буквами х и у, рассмотрим случай
V = fonct (х, у, х', у').
Положим
и исключим х' и у. Мы получим уравнение, из которого можно определить
0 как функцию х, у, т). С помощью функции 0 образуем четыре дифферен-
циальных уравнения :
dS^^df, dx=-^dt-
dv = ^dt- dy=-%dt.
366
М. В. ОСТРОГРАДСКИЙ
Это и есть уравнения проблемы.
Для полного решения надо найти четыре интеграла. Результатом одного
интегрирования является уравнение живых сил :
& + h = 0.
Предположим, что каким-то особым способом мы нашли еще один интеграл
/ = 0
с произвольной постоянной а. Тогда оставшиеся два интеграла легко найти
следующим способом.
Представим себе, что мы привели, интегралы
& + h = 0, t = О
к виду :
S = fonct (х, y,h,a), г) = fonct (х, у, h, а).
Дифференцируя по времени, получим:
+>«>'
Подставляя сюда вместо dx, dy, di, dt] их значения из дифференциальных
уравнений проблемы, найдем :
П = — 4- — d^ i d&_ rf® d& dg d& dj
dx ' dg dx ' dg dy ’ dy ' dg dx ' dg dy ‘
Эти уравнения превратятся в тождества, если вместо i и т] подставить
их выражения через х, у, h и а. Произведя ту же подстановку в интеграле
живых сил
& + h = O,
получим также тождество. Производя эту подстановку лишь формально,
мы можем дифференцировать наш интеграл по каждой из величин х, у, h, а.
Это даст нам четыре следующие формулы:
„ d0 . 40 dg d& dr) „ _ d& d& dg d& dr)
dx ' dg dx ' dr) dx ’ dy ' dg dy dr) dy ’
n _ . , d& dg dQ. dr] d& dg d& dr)
u ~ ‘ + d% dh -r drj dh , dg- da ' dr) da '
Две первые из них в сравнении с двумя предшествующими дадут тожде-
ственно
dg __ dv
dy dx '
Это показывает нам, что’выражение idx-\-ridy интегрируемо. Полагая
R = j (i dx + т] dy),
можем переписать две оставшиеся формулы в виде
л _ I ! d& d*R d& d2R Q _ 40 I d® d*R
U — 1 + dg dxdh ' dr) dy dh, ’ dg dx da ' dr) dx da ’
Если мы теперь умножим их на dt и заменим в силу дифференциальных
уравнений величины
d& Af „ d® Я/
-rz-dt и ,-df
dg dr)
•ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
367
на —dx и —dy, то получим
я/ , d2R .
dt — dx —~ dy,
dx dh 1 dy dh ' ’
n d2R . . d2R ,
О = < < dx 4- . dy,
dx da 1 dy da '
где
dt = d-£~,
dh ’
° = d ;
da ’
интегрируя, получим
dR
dh ’
da ’
где e и a — произвольные постоянные.
Из предшествующего ясно, что случай V = fonct (х, у, х', /), так же как
случай V — fonct (х, х', х"), требует единственного интеграла
/ = О,
потому что три другие находятся из нашей общей теории.
Если мы предположим
x'2 + у'2
V= 2
где буква U обозначает функцию, зависящую только от переменных х и у,
то получим случай движения материальной точки по плоской кривой. Пред-
положим, что движение относится к прямоугольным координатам и что
проекции ускорений на координатные оси суть
dU dU
dx И dy ’
Такое движение рассматривалось Пуассоном*). Блестящий геометр цитирует
письмбо Якои, посвященное этому предмету, но я не знаком с этим письмом**).
12. Возвратимся к формуле (7); заменив в ней doa^ на 6x)fe) — х^+1))6/,
получим
d(V dt) = d(0dt+ 'jp k~^ (68)
V i=l k=O ’ )
Так как эта формула справедлива при любом смысле дифференциро-
вания, обозначенного символом 6, мы можем получить для другой системы
произвольных вариаций, обозначенных символом Л, выражение
(i—m к=п—1 \
0/1/+ £ Si,k21x^ .
1=1 л=о ’ '
Дифференцируя это равенство в смысле 6, а уравнение (68) в смысле /1,
получим
M(Vdt) = d <50Д/ + 0дЛ1 +
/ = ’77 к=П~ 1
1=1 к=О
AS(Vdt) = dh&dt + @Л <5/ + к (Л^к^ + е,д/1йх(Р) •
1 = 1 fc=O
*) Journal Math£matique par M. Liouville, т. II, стр. 334 и сл.
**) Мы опускаем другие приложения общей теории, изложенной в п. 9, потому что
во время печатания работы мы заметили, что можно сразу обобщить и упростить эти при-
ложения. Мы заметили также, что можно упростить многие положения общей теории и
сделать некоторые дополнения. Этому вопросу будет посвящен наш следующий Мемуар.
368
М. В. ОСТРОГРАДСКИЙ
Если мы ограничим общность вариаций 6 и А, подчинив их условию,
выраженному символическим равенством
дА = Ад,
то мы получим, сравнивая правые части двух последних уравнений и при-
водя подобные члены
i=m к=п-1
d A&dt-d&At+ £ (ASiikdx^-<5£,дЛх®) =0;
fc=0
(69)
интегрируя, придем к выражению
i=m к—п—\
Aedt — d&AtA-^ (d^,fc^xW-^,.>fcdx®) = const. (70)
Здесь const обозначает величину, не зависящую от времени.
Каким бы простым ни казался метод, приведший нас к уравнению (70),
он отказывается нам служить, если мы не ограничим подходящим образом
дифференциалы 6 и А. Действительно, нетрудно показать, что кроме условия
дА = Ад,
которое мы наложили, наши дифференциалы должны удовлетворять и дру-
гому. Мы сейчас поясним это.
Мы исходили из формулы (68), заменив в ней 6 на А. Это можно сделать
потому, что исходная формула, полученная из основных принципов вариа-
ционного исчисления, верна при произвольном 6. Но нельзя упускать из
йида, что как формула (68), так и формула, полученная из нее заменой 6
на А, предполагает неизвестные х и S связанными уравнениями (9) или (14).
Эти последние уравнения не имели бы никакого отношения к вариациям
ди А, если бы мы не дифференцировали их одно в смысле А, а другое в смысле
6. А это дифференцирование приводит к замене в них х и на х + dx и £ +
+ AS в одном случае и на х + дх и S + &S— в другом. Следовательно, вели-
чины х + Ах, х дх и S + AS, S + dS становятся на место х и S лишь по-
стольку, поскольку они удовлетворяют уравнениям (9) или (14). Без этого
условия как формула (68), так и формула, полученная из нее заменой д на А,
не будут справедливы. Но если переменные х + Ах, х + дх, S + AS, S + dS
удовлетворяют уравнениям (14), они должны находиться среди х и S, кото-
рые удовлетворяют этим уравнениям и которые отличаются друг от друга
лишь на произвольные постоянные величины, введенные интегрированием.
Из этого можно заключить, что вариации д и А могут быть лишь дифферен-
циалами, относящимися к этим постоянным, неизвестными функциями кото-
рых являются х и S. Что же касается приращений или дифференциалов диА
упомянутых постоянных, то они не должны зависеть от времени, а в осталь-
ном могут быть абсолютно произвольными.
Важно отметить, что когда, дифференцируя в смысле д и А, варьируют
время t (dt и At соответственно), нужно варьировать его и в дх, Ах, dS, AS.
Члены, пропорциональные приращениям dt и At и фигурирующие в только
что упомянутых вариациях, нисколько не мешают переменным х -f- дх,
х+Ax,S + dS,S+ № удовлетворять уравнениям (14) или (9). Так, обо-
значая через ах, а2,..., а2тп 2тп произвольных постоянных, введенных при
интегрировании этих уравнений, мы можем записать все наиболее общее,
что мы можем допустить относительно дх, Ах, dS, AS для всех индексов i и к
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
369
в виде :
дхф = dx® dt isdmn 2 r=l dx(A dar дйг.
Лх® = dx^fl dt At + r-'lmn 2 r=l dx(lA dar Aar
ъ,к = dhk dt # + r=2mn r=\ dii.k dar Ьйг,
А^,к = ttj.k dt J/ + r=2mn 2 r=l tti.k dar Aar
(71)
Ничто не мешает нам не варьировать время в вариациях дх, Ах, д£, А£, по-
этому мы можем положить dt = 0 в формуле (68) и, следовательно, At = О
в той, которая из нее получается при замене 6 на А.
Это условие приведет нас вместо (70) к формуле
v 0%t,к — <%t,к^х®) = const, (70)
которую мы обозначаем тоже номером (70) и в которой
Ах(к) =
дх(к) =
dxfA
dar
г=2тп
Г=1
dx<k)
da,
Aar,
(72)
^i,k
dar
r=2mn
^i,k =
d$. к л
-^Aa,
dar
для всех i и к. Дифференциалы даг и /1аг суть бесконечно малые вариации,
не зависящие от времени, потому что, если бы они от него зависели, то по-
стоянные интегрирования а + да, а -р Аа включали бы время, чего не
может быть.
Мы обозначили одним и тем же номером (70) две формулы, потому что
они только внешне отличаются друг от друга. Действительно, легко прове-
рить, что первые два слагаемых в первом уравнении (70) равны нулю и
формула приводится ко второму уравнению (70).
Вариациям дх\к\ /1х®, dl-itk, ASi>k мы можем придавать лишь значения
(71) или, проще, значения (72). Мы должны наложить это ограничение, чтобы
не впасть в ошибку, которую делают геометры, занимающиеся принципом
наименьшего действия.
Они дифференцируют уравнение живых сил посредством д, не обращая
внимания на то, что это уравнение удовлетворяется только значениями х,
но никак не значениями х + бх.
Что касается выбора между уравнениями (71) и (72), то первым пользу-
ются в первом уравнении (70), где дх и Ах отличны от нуля, а вторым — во
24 Вариационные принципы механики
370
М. В. ОСТРОГРАДСКИЙ
втором уравнении (70). Но как мы уже говорили, обе формулы приводят
к одному результату, так что мы для простоты будем пользоваться вторым
уравнением (70) и значением (72) для вариаций dx^>, Ах(к), 8^,к, Аё1>к.
Может быть, не совсем ясно, что обе формулы (70) дают одно и то же.
Для того чтобы убедиться в этом, припишем упомянутым выше вариациям
значения (72).
Это приведет к предположению, что символы б и А относятся лишь к
произвольным постоянным, оставляя время неизменным.
В этом предположении значения вариаций, определенных равенствами
(71), будут иметь вид
-J-dt+dx®; ^‘dt + df,.fe>
+ d^At±A^k,
и очевидно, что, обозначая через Q произвольную функцию t, х, £, мы полу-
чим
dQ = £2' dt + dQ,
AQ = Q'At + AQ.
Символы б и /1 слева от знака равенства предполагают переменными
время и произвольные постоянные; справа — только произвольные по-
стоянные ; Q' — полная производная от Q по времени.
Условившись, что с настоящего момента символы А и б относятся лишь
к произвольным постоянным, перепишем уравнение (70) в виде
const = (&'At + J0) dt — (&' dt + 60) At +
i=m й=п-1г,., x / . (*) x
+ 2 2 +M-
- (*r* + «>.») (тл + b: <’)
или, делая очевидные преобразования,
i=m lc=n~]
const = 2' 2 № к - df,. к Ах<р) +
1=1 Л=О
+ dt [л0 -22 - ^w-^i.k)
-At[d0-Z2^ dx® - df f, k |].
Отсюда, заменяя
d&
производные и
исчезнут, и мы получим уравнение
производные по времени и _ dx^ на
——убедимся, что члены, умноженные на
а$1,к
частные
dt и zft,
const = 22 (^f,.к ~ к М?), (70)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
371
которое является второй формулой (70) и в котором символы 6 и d относятся
лишь к произвольным постоянным а. , .
Мы можем получить уравнение (70) и с помощью прямого вычисления.
Этот способ предпочтительнее предыдущего для установления ограничений,
налагаемых на дифференциалы 6 и А. Возвратимся к уравнению (4) и пере-
пишем его в виде
i=m i=m k=n—i I
d(Vdt) = Si(dtdXi-dtdXi) + dt 0dt + j? Siikd^> . (73)
k=O
Эта формула свободна от всяких ограничений как относительно х и
так и их вариаций 6. Само собой разумеется, что остается зависимость произ-
водных и их вариаций от первообразных функций и их вариаций.
Так как уравнение (73) является тождеством, то ничто не мешает диффе-
ренцировать его в смысле Л, отличном от дифференцирования 6.
Производя это дифференцирование, получим
i=m
Ad(Vdt) = Р, A (dt дх,- - dt dx,) + (dt дх,- - dt dXi) AE,] +
i=m к=п—1
+ d A0dl + 0Adl + J>' j? (J^dx^ + ^zldxT) .
к=О
Если мы теперь учтем уравнения (9) или (14), которые сводятся к пред-
положению
Нг = 0, (9)
то получим истинное значение двойной вариации
Ad (Vdt) = (dt dx, - dt dXi) AEt +
1=1
+ d /10 8t + 0/1 dt +
i=m k=n—l
1=1 /£=0
а ад
при обязательном соблюдении уравнений (9) или (14) в произвольных ва-
риациях А и б. Если мы в предыдущем уравнении поменяем местами А и б,
что, очевидно, допустимо, то получим
dA (Vdt) = (dt Ах,— Atdx,-)dE,- +
i=i
+ d d0At + 0dAt +
i=m
(d^kAx^ + ^ikdAx^)
k=0
2
Вычитая последнее из предыдущего, найдем
d\A0dt — d0At + 0(Adl — dAf) + ‘/? к1
I i=l к=0
=?т
- d^ к Лх®) + £,- к 0 dx<? - <5 Jx®) + J? 10xt dt - dXi At) dE, +
+ (dx, At - AXjdt) dE, + (dx, dt - dxt dt) AE-, = Ad (Vdt) -dA(Vdt)•.
24*
372
М. В. ОСТРОГРАДСКИЙ
Мы ввели дифференциал dEb который равен нулю в силу уравнения (9).
Для этого достаточно заметить, что выражение, стоящее под знаком 27,
есть ! определитель из девяти величин
dt, dt, At, dxt, dxt, Axit dEt, dE,, AEt;
мы говорим только о простом, а не о двойном знаке 27.
Легко проверить, что при законном предположении
' Adt = dAt
приращения Sf и At исчезнут из последнего уравнения и оно приведется к
выражению
Ад(Vdt) - дА (Vdt) = d 2 №.,кМ* - +
+ (A дхр - d Jx<f)] + dt J? (dxt АЕ/ - Axt dE).
Знаки 8 и А в действительности предполагают время неизменным и от-
носятся лишь к изменению формы х и £.
' Полагая
дЕ. = О, АЕ. = 0 , (74)
получим
Ad(Vdt) - дА (Vdt) = d££ [Аёькдхф - д^кАхф + $itk(A <5x® - dAx^)].
Так как уравнения (74) устанавливают соотношения между вариациями
функций х, мы получим
А
i'=m
1'=1
к=2п
к=О ‘
dSt
dx<?
Ах«).
' Заменяя &Eb АЕ, их нулевыми значениями, мы получим дифференциаль-
ные уравнения, связывающие 8х и Ах. Так как эти уравнения отвечают все-
возможным номерам i, то число их равно числу величин дх и Ах. Они инте-
грируются с большой легкостью, если известно решение уравнений (9)
или (14).
Действительно, это решение определяет переменные х как функции вре-
мени й 2щп произвольных постоянных а1( а2,..., а2тп, и если заменить х
этими функциями, получим тождественно
.5,. = О
для всех i и, следовательно, также
или
i'=m к=2п riE- dxtty
/=1 fc=o ил I' ииг
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ 373
для всех значений г. Сравнивая эти последние уравнения с уравнениями
т
к=2п
дхф,
i'=m
0=
i'=l
dSj
dxty
Дх^,
которые являются уравнениями (74), немедленно получим, что они удовле-
творяются при
Д^) = ^-
' dar 1 dar
ИЛИ
av(^) dx<l->
дхф = , Дхф =
' dar ’ ’ dar
dx(k^ dxd^
для всех г. Следовательно, 2тп частных производных --г-5-, ‘ , ...
(lU| UUy
dx^
..., -;-Д—будут также частными значениями дх® и Дх^, которые удовлет-
ddzmn
воряют уравнениям (71). Таким образом, эти уравнения, будучи линейными,
имеют полными интегралами выражения
дх(к) =
dxW
Сг ’
Дх<» =
г=2тп
г=1
г ~1а^
где С и С' — произвольные постоянные. Но вариации dx)k) и Дх^ суть бес-
конечно малые. Из этого следует, что величины даг и Даг должны быть та-
кими же, т. е. обозначая через даг и Даг бесконечно малые, не зависящие от
времени, но в остальном совершенно произвольные величины, мы можем
положить
Сг = Ьаг, Сг = Даг,
что дает :
ёх^ =
dx™
dar
bar,
r=2mn
dx® =
r = l
dx^
dar
Даг.
Следовательно, имеем также :
r=2mn
tej.k
dar
r=2m n
dar ,
Таким образом, мы пришли к формулам (72) и можем быть уверены, что
без малейшего уменьшения общности символов б и Д можно считать их
дифференциалами, относящимися лишь к произвольным постоянным, неявно
содержащимся в х и £. Таким образом, поскольку б и Д суть обычные диф-
ференциалы, условие дД = Дд необходимо выполняется и уравнение
Д6 (Vdt) - ёД (Vdt)
^d'~2 dx® + ^ijc (/1М} ~ W’)l
i=l k=0
374
М. В. ОСТРОГРАДСКИЙ
приводится к уравнению
i=m Л=п-1
( = 1 fc=O
которое после интегрирования дает
к * №I, и dxW - к = const, (70)
1=1 Л=0
где const обозначает величину, не зависящую от времени.
13. Подставим в уравнение (70) вместо дифференциалов дх}Л), Дх^>,
Л^,к соответственно следующие выражения :
dx^fi
da,-
dxty
das
4as;
r=2mn
djt,k
dar
dSt.k
das
даг,
bar;
4as;
мы получим тогда
r=2mn s=2tnn i=m k=n-l
const = &arAas
r=l s=i 1 = 1 Л=0
dxW dSitk
Лс(Р dgitk
dar dar
das das
Так как вариации Sar и Jas связаны лишь предположением их дифферен-
циальной малости и независимости от времени, предыдущее уравнение
распадается на
dx^ dSitk d^ dli k
dar das dar das
(75)
для всех значений г и s. Буква С означает переменную, не зависящую от
времени.
Уравнение (75) является фундаментальным в теории вариации произ-
вольных постоянных. Мы.для краткости будем обозначать его
(г, s) = const. (76)
При всевозможных комбинациях значений г, s символ (г, s) имеет 4т?п2
значений, но так как, очевидно,
(г, г) = 0, (77)
то 2тп из них будут нулями и остается лишь 2тп (2тп — 1), которыми мы
и будем заниматься. Прежде всего, замечаем, что
(r,s) = - (s,r)
или
(г, s) + (s, г) = 0, (78)
следовательно, из 2тп (2тп — 1) величин остается вычислить лишь поло-
вину или тп (2тп — 1).
Эти оставшиеся тп (2тп — 1) значений (г, s) символа отвечают различ-
ным комбинациям по две из независимых от времени alf а2,..а2тп и могут
быть вычислены только в частном случае, т. е. когда известны функция V
и система произвольных постоянных а, полученных при интегрировании
уравнений (14).
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
375
Если мы рассмотрим три различных значения символа (г, s), обозначенные
через (г, s), (s, q), {q, г), то легко проверить, что справедливо
d(r, s) d(s л) , d(q, г) _ „ ,7g,
daq I- dar das ' ‘
Действительно,
d(r,s) _ к=^’ГЛс® d2Si<k dx<p d2^^ d2x® d$i>k _ <?хф dSi<k'
daq J”, j“0 das daq das das daq dar daq dar dar daq das das
и аналогично для двух других производных.
Складывая эти три уравнения, мы увидим, что все члены правой части
взаимно уничтожаются и получается формула (79), которая небесполезна
в частных вопросах теории вариации произвольных постоянных.
Зная системы постоянных а, можно без труда вычислить все значения
символа (г, s), не зная функции V, т. е. не конструируя уравнений (14),
интегрирование которых и даст постоянные а. Наиболее простые системы
мы получим, принимая за произвольные постоянные значения х и f в какой-
нибудь данный момент.
Назовем для удобства эти значения начальными и рассмотрим систему
таких постоянных.
Так как символ (г, s) не зависит от времени, можно придавать этой пере-
менной произвольные частные значения, не меняя самого символа. Придадим
t значение того момента, которому отвечали начальные значения х и f, при-
нятые за произвольные постоянные. Так как х и f будут играть роль а, то
очевидно из уравнения (76), что символ (г, s) будет иметь значения 0 или
± 1. Имеем прежде всего, что
(М) = О,
когда две величины а с номерами г и s представляют начальные значения х
или f. Поэтому в первом случае окажется
= 0 ; = 0 ,
dar das
а во втором
^Ё = 0- - О
dar ’ das
Это дает нам 2тп {тп — 1) значений символа (г, s), равных нулю.
Теперь рассмотрим случай, когда из двух переменных аг и as одна пред-
ставляет начальные значения х, а другая — f. Если, например, аг есть на-
чальное значение х, мы получим
что дает
(г, $) = 1 или (г, $) = О
соответственно тому, является ли as начальным значением f;,k с теми же
номерами i, к, что и х^\ или каким-нибудь другим. Мы видим, что из т?п2
значений символа рассматриваемой нами категории только тп равны еди-
нице, а тп {тп — 1) остальных равны нулю. Предположим теперь, что аг
376
М. В. ОСТРОГРАДСКИЙ
есть начальное значение одной из fiA, например f. Тогда as будет пред-
ставлять начальное значение одной из переменных х, и мы получим
(Г, $) =
Azs ’
откуда заключаем, что
(г, S) = — 1 или (г, s) = 0,
соответственно тому, представляет ли as начальное значение с теми же
номерами, что или какого-нибудь другого х. Мы видим, как и выше,
что из т2п2 значений символа (г, $), в предположении, что аг и as суть началь-
ные значения одного из f и одного из х соответственно, только тп равны
— 1, а тп(тп— 1) остальных суть нули. Мы имеем, следовательно, всего
4тп (тп — 1) нулевых значений символа (г, s), тп значений, равных + 1,
и тп, равных — 1, т. е. имеем всего 4/гш (тп — 1) + 2тп = 2тп (2тп — 1)
значений, представляющих все возможные значения, за исключением случая
г = s, когда символ равен нулю даже в общем случае.
Для объединения полученных результатов назовем соответственными
переменные х и £ с одинаковыми номерами i и к. Следовательно, каждому
х^> отвечает переменная и обратно : переменные хи £ с разными номе-
рами не суть соответственные, например х^ и f5>6.
Положив это, будем иметь : (г, s) = 1, когда аг будет значением х и as —
значением соответствующей f; (г, $) = — 1, если. аг есть начальное зна-
чение f и а, — соответствующее значение х.
Во всех других случаях (г, s) = 0.
Заметим, что символ (г, $) не равен нулю лишь тогда, когда аг и as пред-
ставляют начальные значения соответствующих величин.
14. Предположим теперь, что вместо уравнения (14) мы должны раз-
решить систему
— dx® + ^i,k dt ,
d^=-^dt-^i>kdt,
(80)
где величины X,A и суть заданные функции времени t и х, £. Для реше-
ния их нужно воспользоваться решением уравнений (14), считая перемен-
ные а, не зависящие там от времени, функциями времени.
Интегрирование уравнений (14) дает для х и f
х = / (t, alt ай, ... , a2mn),
£ — F (t, Qi, ... , й2тп) .
Предположим, что и для системы (80) окажется
X f (t, Clj, fl2 , ... , @2тп) 1
% — F (t, flj, fl2 , . . . , йгтп)
с той лишь разницей, что постоянные а содержат время t, тогда как в выра-
жении х и f из уравнений (14) они абсолютно независимы от времени.
Предполагая, что переменные а содержат время t, от которого раньше
не зависели, мы даем им несравненно больший простор, чем они имели раньше,
и поэтому неудивительно, что они дают решение вопроса, которого не могли
дать, оставаясь независимыми от времени.
Подставим в уравнении (80) вместо х и f их выражения
/ ^1, #2 > • • । ^2mn) > F (t, Ct2 , . . . , <?2m) .
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
377
Подстановка производится совсем просто в правых частях уравнений,
потому что они содержат только самые переменные х и f. Для выражения
дифференциалов dx и df, образующих левые части, нужно различать члены,
получающиеся при дифференцировании по t, явно входящему в х и f, и члены,
получающиеся при дифференцировании по t, входящему в величины а.
Мы воспользуемся символом Л, который до сих пор относился к произволь-
ным вариациям а, для второй группы членов и будем писать полные диффе-
ренциалы х и f в виде:
-*> + Лх,
#d/4-/1f,
at 1
где
4f =
r=2mn
У X-dar.
dar r
После подстановки уравнения (80) перейдут в уравнения
- + dt + Xlkdt,
dxkc>
~~dt "
+ Дх® =
^dt-Ehkdt.
Если бы величины а не зависели от времени, мы имели бы вследствие
самой природы х и f тожественно
dSj к d& dxltp d&
dt ” dx<V ’ ' ~dT ~ ~~ ’
Эти уравнения продолжают оставаться тождественными и тогда, когда
содержат время, потому что они не зависят от величин а и имеют место
при замене каждой из величин а любой величиной. Следовательно,
X,-.kdt,
Дх® = — Ei:kdt.
(81)
Это дифференциальные уравнения первого порядка. Число этих урав-
нений 2тп равно числу искомых функций а. Мы представим их в более
удобной форме. Для этого вычтем второе, умноженное на 6f,iA., из первого,
умноженного на <3х®. Мы получим
Д fк Ы? - <5f ,• к Дх® = (X, к М? + н, к <5f. к) dt.
Символ 6 обозначает, как и раньше, дифференцирование, относящееся
к произвольным изменениям величин а.
Суммируя полученные уравнения по i и к, получим
: = т /<-п 1 i=m
2’ 2 «, к <5х® - к Дх®) = dt 2 2 к J • <82>
ьн к=о i=i fc=o
Это уравнение не отличается от уравнения (81). Действительно, вслед-
ствие произвольности <3х® и d(itk оно удовлетворяется лишь при равенстве
коэффициентов при этих членах, что и дает уравнения (81).
378
M. В. ОСТРОГРАДСКИЙ •
Хотя первый член уравнения (82) совершенно подобен первому члену
•формулы (70), нельзя заключить, что сумма
1=т к=п—1
1=1 fc=Q
не зависит от времени. Она является такой в уравнении (70), где а не зависят
•от времени. Но она теряет эту независимость, когда а становятся функциями
времени. Однако поскольку переменная t входит явно в х и £, постольку она
исчезнет из выражения
i—т к=п—1
1 — 1 А=О
которое зависит лишь от времени, входящего в я, и потому не изменится,
если вместо общих выражений
х = Щ,ах, а2, ... ,a2mn), £ = F С, я2, , а2тп),
мы подставим в него выражения, относящиеся к какому-нибудь определен-
ному моменту, например t = 0. Само собой разумеется, что время фикси-
руется лишь там, где оно входит явно, и остается произвольным в функ-
циях а.
Заменяя дифференциалы дх(к), Ах^к\ д^л, А^,к их значениями
2тп Иу
2тп dx(k)
2тп нь
V даг;
dar
2тп
2
da
da*
получаем из уравнений (82) формулу
2тп 2тп т п—1 / d£ к
г=1 5=1 i = l k = 0 V ^аг
da, dar
или, обозначая для краткости,
получим
2тп 2тп 2тп
2 2 (Г’ s) = 2 Ar bar •
r=l S=1 r=l
(83)
Так как даг произвольны, последнее уравнение распадается на уравнения
г=2тп
2 (r,s)das— Ardt, (84)
r= 1
которые при всевозможных номерах г составляют 2тп уравнений, заменяю-
щих формулы (81), и из которых можно найти 2тп значений а как функции
времени. Остается только заметить, что вследствие природы символа (г, s)
переменная t не входит в первый член уравнения (84). Этот член содержит
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
379
лишь переученные а и их дифференциалы в линейной форме. Функция Аг
может содержать время явно.
Приложение формулы (84) к частным случаям требует вычисления
символа (г, s) для различных номеров г и s. Мы уже говорили, что нужно
найти тп (2тп — 1) значений символа непосредственно, а остальные —
с помощью найденных. Эти вычисления, вообще говоря, требуют знания х
и f как функций а. Но при подходящим образом выбранных системах постоян-
ных интегрирования можно легко определить все значения символа (г, s),
не только не зная выражения х и f через а, но даже не интегрируя ни одного
из уравнений (14).
Среди этих систем надо различать такие, в которых а являются началь-
ными значениями х и f. Образуем дифференциальные уравнения, обладаю-
щие такой системой.
Так как величины а означают в действительности начальные значения х
и £, удобно изменить нумерацию, связав каждое начальное значение с отве-
чающей ему переменной. Мы обозначим через aV начальное значение х/Л),
а через aitk — начальное значение £;л.. Вместо уравнения (83) мы будем
.писать :
Кроме того, в символе (г, $) мы будем писать вместо номеров сами вели-
чины, введенные интегрированием.
Применяя новые обозначения, мы можем записать уравнения (84) в инте-
ресующем нас частном случае следующим образом:
' J? * ‘ К"® fl<^) da^'} + fl-'> к') daf,h’] = AVdt,
fc'=0
i'=m k'—n—l
2 £ [^i,k,^)d^ + (aitk,ar,k')dar>k] = Ai>kdt.
i'=l fc^=0
Мы видели, что символ (г, s) обращается в нуль всякий раз, когда он не
относится к начальным значениям соответствующих переменных, и равен
+ 1 или — 1, когда относится к ним. Следовательно, кроме (aV, а,,к) = 1
и (ai)k, aV) = — 1, все другие значения (г, s) в предыдущих уравнениях
суть нули, т. е. уравнения имеют очень простой вид :
da, к = AV dt, I
(86)
daV = — Ai kdt. J
Формулы (86) являются, по-видимому, более удобными для приложений,
чем общие формулы (84). Эти последние относятся к произвольной системе
постоянных, введенных при интегрировании уравнений (14). Но они дают
только линейные функции дифференциалов наших переменных по времени,
а не каждый дифференциал в отдельности. Для получения отдельных диф-
ференциалов нужно сначала решить линейные уравнения (84). Наоборот,
формулы (86) дают каждый дифференциал в отдельности и в очень простой
форме, но они относятся только к переменным, являющимся начальными
значениями х и f и удобным не во всех вопросах.
380
М. В. ОСТРОГРАДСКИЙ
Итак, с помощью частных формул (86) можно найти дифференциалы
каждой из переменных, принадлежащих к произвольной системе величин,
введенных при интегрировании уравнений (14), и притом не разрешая урав-
нений (84) относительно этих дифференциалов.
Как известно, интегрирование системы дифференциальных уравнений
может ввести бесконечное множество различных систем переменных вели-
чин, которые называют обычно произвольными постоянными. Известно
также, что эти переменные, когда они принадлежат к одной и той же систе-
ме, совершенно независимы между собой.
Но переменные одной системы необходимо должны быть функциями пере-
менных всякой другой системы. Так, например, каждая из величин ах, а2,...
..., д2тп, которые представляют собой некоторую систему переменных,,
введенных при интегрировании (14), будут функциями aW и aitk которые
являются начальными значениями х и £. Это происходит вследствие того,
что последние переменные тоже представляют некоторую систему, которая
может появиться при интегрировании (14).
Рассматривая аг как функции и д,Л., получим
i=m к=п-1
dar = 2: 2
(=1 к = О
( dar
l’k +
dar
da(,p
da{k}
или, принимая во внимание (86),
dar = dt V V -
iTiiTol da^
_ л
'>k daWj'
Подставляя на место А(к) и Д/л их значения из (85), получим
i = m
к=0
m к'=п-1
dx(kA
dSi'.k
k' da«A
i'=m k'=n— 1 /
7^2 z
dxfk‘>
dai,k
d$i',k
k'
dai,k
Так как
dX^kA S~2mn (ia
s—2mn fttz
das dx(,p ’
то, подставляя, имеем
2mn m n-1
dar = dt2£2
s=l 1 = 1 fc=o
das
das da^p ’
d^,',k' __
dat,k
dar das
dal k da<A
В силу (83) имеем
dx^kA S“2mn
da.
S=^n tty.k' das
das dai,k ’
dxtfA da
das dai,k
aar uas I | v- ал i'
da- t, I I г *do.
uu { uui i{) i'^1 ^=0 \ uus
d!h’,k‘
das
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
381
Следовательно,
2ттт т п—1
dar = dt 2 А*
s= 1 1 = 1 fc=O
dar das dar das
daik da(f> da^ dai k
или, так как
( dar das dar d°s
k^O \dai,k da(i) dai,h
то
2mn
dar = dt (an as) As.
s= 1
(87)
(88)
Символ (ar, as) имеет некоторые свойства, подобные свойствам символа
(г, s). Например, очевидно, что
(ar, as) + (as, ar) = 0,
а когда s = г, то
(ar, аг) = 0.
Но символ (ar, as) обладает еще весьма замечательным свойством, заклю-
чающимся в том, что, вычисляя его значение, можно употреблять вместо
начальных значений a/k) и а,А сами величины xz(fc) и £( А, так что этот символ,
определяемый формулой (87), можно определить еще и так:
m n — I / dar dao dar da* \
(ar, as) = J? rfx® </£, J’
(89)
Мы сейчас докажем это важное предложение, установленное впервые
Пуассоном для случая динамики. Но прежде заметим, что для употребления
формулы (88) нужно вычислить тп (2тп — 1) значений символа (ar, as).
Для этого, найдя интегралы уравнений (14), полагаем t равным его началь-
ному значению. Это дает все соотношения, которые могут быть между вве-
денными при интегрировании переменными alt а2тп и начальными
значениями х и £, образующими другую систему, могущую появиться при
интегрировании. С помощью этих соотношений находят все частные произ-
водные переменных аг, а2,..., а2тп и с помощью этих производных по фор-
мулам (89) находят значения символа (ar, as).
Заметим теперь, что формула (89), если придать t начальное значение,
превратится в уравнение
™ ! I dar das dar das 1
(Cr, as) = 2 \ dai k da(k> ^ daW ’
i — 1 k=0 I l>K i 1 '
(87)
Из этого мы заключаем, что для доказательства интересующей нас теоремы
достаточно показать, что сумма
V ( dar d<ls — dar das I
Го I dS-^ dxW d(itk]
не зависит от времени, т. е. имеет в каждый момент одно и то же значение.
Поэтому тогда, очевидно,
х? "v / dar das d<lr das 1 v ""V ( d<ir dcts d<lr dUs i
м) V d%‘.k da<dP dx^ d^‘>k ' ITi fcTo ’ dxi,k dx^ dx^ dat k J ’
382
М. В. ОСТРОГРАДСКИЙ
что и доказывает точность формулы (89). Таким образом, дело сводится к:
доказательству того, что дифференциал
я V ( dar dUs dar das 1
j“l dx(i} dSi,K)
или
V "'V ( dd^ zf dar _ dar /7 da* _L dar das
dx(P dSi<k dsik dx^
da, ' dar A
— ----— d-----— I
d^i,k
равен нулю. Для этого предположим, что мы выразили с помощью инте-
гралов уравнений (14) одну из переменных а1г а2>..а^п, например аг, как
функцию t, х и £ без других переменных а. Дифференцируя найденное
таким образом выражение ar по t, получим
dar
dT
dar
d^’,k’
0 =
d^,k-
dar
dxty)
dx(/l‘-'>
или, заменяя дифференциалы d£;,.k, и dx^ правыми частями уравнений:
(14) и разделив на dt, получим
dar I” f dar d® dar d® A
dt ^o[d*i',k' d^i’,k’J
Эта последняя формула, вследствие свойств интегралов дифференциаль-
ных уравнений, должна быть тождеством и ее можно дифференцировать по»
любым х и £. Дифференцируя по х$к) и £/Л, получим тождества
О = ~а-г—
dt d^f>
!" ( d2ar d®______________d2ar d® )
^o\dxWdti',k' dx<P d^d^P dSt'^J
™ f dar d2 & dar d2® A
+ i’Ti ^o[d^',K' dxfVdxPp dxfy'> dx<f>dSr
И
___<Par__ « Г____________<fiar d& d\_________________. d& A
dtdSi,k i^o{d^,Kdii',k' dx(P d^i.kd^P d^i’,k'J +
” 1 / dar ____d2&____ dar dz& 1
M)[d^i',K' а^,ках(Р d^P dStikd{r kJ'
Отсюда, дифференцируя частные производные
и заменяя d^t,,k, и dx)?0 соответственно на
da. da.
И -d^ П0 BPeMeHtt
d®
———, получим
d®
dxdp
f dar _ d?ar ™ { d2ar d® d2ar d® A
| J <77 dx® ^0^dx®df,-fc/ d^P dx<pdxty'> dfi' k’J’
' dar ] d2ar < dt "v f d2<ir d&____________________________d® A
db,kJ dtdti'k dx<P d£i kdx<p dfy'/'J'
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
383
Сравнение этих результатов с двумя предыдущими тождествами дает
dar к'=571 / dar d2® dar d2® \
dx® j“0 |dx(-0 dxff> d£i' k' dSj'ji' dx^pdx^P/’
dar k,=v4 dar <P® dar di® A
d^i.k ~ ?“i j?“o d£>,kd-r,k- di-i^- dlikdx<Pj'
Выполняя c as операции, аналогичные тем, которые мы проделали с аг, най-
дем для дифференциалов и выражения, аналогичные предыду-
щим. Эти выражения получаются из предыдущих простой заменой номера г
на s:
da_ 1 “т ( da. d20 da. d26> A
d di® = dt До (d/p dxtpdfr>r _ 77,7 ’
das JJL I dar d2® dar d2® 1
d^i,k~ 7“1 dSi,kd$i’,k' d^i’,k’ d^t,kdx(P J’
Подставляя в дифференциал
"v "x* [ dar elas aar das A
1“1 £“0 I d^i,k dx^ d*P d^i,k J ’
t. e. в
™ "r* ( da, . da. da da, , dar , da, da dar A
f^W)V'x(i) d%i,k d^ dSi,k + d^t,k d*t,k dx®)’
вместо
d-^-, d-^-, d-^fc, d — -
d^i,k d^i.k dxW dx?
их выражения, только что полученные, и полагая для краткости
dar das d2® , dar das d2@ t
i, k.i’.k’ — dxfk^) dy(k) + dx(p ^г>к- dii kd^p 1
dar das d2® dar das d2®
d$i k dx<k"> dxVpdxVp d$i’,k' d^i,k dxWdxVp ’
мы найдем
__ ( da. da da. da \ m n-\ m n-\
\=dt^^ 2 2 ^,k--P^k)^
1 = 1 fc=O \a?>,k axi ux 1 asi,k J i=l k=o 1=1 ^=o
Но очевидно, что интегрирование в данных пределах, произведенное
как посредством 27, так и посредством J, не зависит от переменных интегри-
рования, а зависит лишь от пределов. Поэтому мы можем вместо Pi,,k',i.k
писать Pi:kii/<k,, потому что при этом лишь меняются переменные i', к' на i, к
и обратно. После такой замены правая часть последнего уравнения исчезнет
и будет
т п~ 1 I da. da. da. da A
i“i fcT0 [d%i,k dxW dx(P dfi.k ) ~ ’
004
m. о, <jv i rui
что после интегрирования Дает
/ dar das dar da. \ , „
|di^ dx® “ di^J= const = c
(90)
Буква С обозначает переменную, не зависящую от времени. Следова-
тельно,
™ ”“4 ( da da dar da \
i^01.^7 W ~ = (o" fls-
(89)
Мы уже говорили, что частные производные от а для вычисления суммы
у, \! I dar das __ dar das А
Д k^o \d£i,k dx{P dxW dhk '
находят из интегралов уравнений (14), которые устанавливают 2тп соот
ношений между 4тл + 1 величинами, именно между х, £, а и t. Вследствие
этих соотношений можно рассматривать а как функции х, £ и t, и если в этом
предположении продифференцировать упомянутые соотношения по каждой
х и каждой J, рассматриваемым как независимые друг от друга и от времени,
то получим 4m2n2 линейных уравнений между производными а, откуда и
можно найти эти производные для вычисления всех значений символа
(аГ) as) или суммы
\dSi,k dxW dSi,k)
Значения, о которых мы говорили, содержат а, х, £ и t. Но если из них
с помощью интегралов уравнений (14) исключить х и £, то уйдет также и
время, и наши значения будут выражаться через переменные а, независимые
от времени. Это и есть результат, выражаемый формулой (89) или (90).
Если мы не имеем всех интегралов (14), мы не сможем вычислить всех
значений символа (ar, as). Значение одного-единственного интеграла не
дает, вообще говоря, ни одного значения, два интеграла дают лишь два
значения (аг, as) и (<zs, аг), которые, отличаясь только знаком, могут счи-
таться за одно; I интегралов в общем случае дают 1(1 — 1) значений символа,
но это число надо уменьшить в два раза, так как два значения, отличающихся
порядком букв, отличаются только знаком и могут считаться за одно.
Все значений символа (ar, as), которые находятся с помощью I
интегралов, зависят от х, £ и 1 и тех из величин а, которые содержатся в I
данных интегралах. Заметим еще, что мы не можем избавиться от х и £, как
в случае 2тп интегралов, так как I интегральных соотношений недоста-
точно для нахождения 2тп величин, если
I < 2тп.
Но с помощью этих же соотношений можно избавиться, используя их
соответствующим образом, от величины а, так как последних столько же,
сколько интегралов, т. е. мы можем предполагать, если окажется нужным,
что величины а не входят в найденные (ar, as).
Но сделали ли мы это предположение или будем считать, что найденные
значений символа (ar, as) содержат а, эти значения всегда будут
независимыми от времени. Следовательно, можно приравнять каждый из
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
385
них переменной, не зависящей от времени, а это даст нам соотно-
шении между х, £ и временем, т. е. столько же, сколько интегралов урав-
нений (14).
Если среди последних находятся такие, которые не входят в данное ранее
число I, то мы можем использовать их для получения новых значений
символа и т. д.
Блестящий французский геометр Пуассон не заметил, по-видимому,
одной из полученных им формул, которая в частном случае динамики сво-
дится к нашему уравнению (90). Это не первый и, без сомнения, не последний
пример того, как автор не замечает всех применений или следствий установ-
ленной им теоремы или принципа. Так как он рассматривает теорему только
в применении к объекту, который имеет в виду, то неудивительно, что мно-
гие применения и следствия ускользают от его внимания. Однако, по спра-
ведливости, ему должна принадлежать большая часть заслуг открытия
следствий, выведенных другими из его принципов.
15. Определение значений символа (ar, as) может быть упрощено в неко-
торых частных случаях посредством особых преобразований и приемов.
Но вдаваться в детали этого не является нашей задачей, и мы ограничимся
только одним замечанием.
Умножим второе из уравнений :
.е d&
d^-k ” dx?) dt ’
на множитель ITiik — конечную функцию х и £ или содержащую в линейной
форме дифференциалы этих переменных относительно произвольных посто-
янных, и вычтем результат из первого уравнения, умноженного на функ-
цию pitk, аналогичную niik. Мы получим
Pi,к d%i,k — nifk dxW — + IIi k | dt,
откуда
m n — 1 m n— 1 / ч
22 +n»ir-
i=l k=o i = l*=O'- ux I aii,k)
Если выбрать piik и П1к таким образом, чтобы сделать последнее уравнение
интегрируемым, то получим
Буква Н обозначает переменную, независимую от времени. Уравне-
ние (91) есть интеграл уравнений (14). Из последних получим
Mi,к
дГн)
-^dt + Xi>kdt,
dx^^-^-dt-Si_kdf,
(80)
остается только предположить, что Н зависит от причем вид этой зависи-
25 Вариационные принципы механики
386
М. В. ОСТРОГРАДСКИЙ
мости подлежит определению. Продифференцируем (91), считая Н перемен-
ной. Мы получим
т п — 1 т л—1 / jjq j/q \
22(p^d^~n^d^-dt22 \P^^ + n‘^-} + dH-
i=lk=O i = llc=o\ ил i u*i,kJ
Заменяя df й dx их значениями (80) и вычеркивая то, что взаимно унич-
тожится, получим
dH = dt 2 2 (Р* si,k) • (92)
1=1к=0
Это уравнение дает значение Н, при котором формула (91) превращается
в интеграл уравнений (80). На самом деле предыдущее выражение для dH
не имеет формы (88), подходящей для величин, введенных интегрированием
когда они превращаются в функции времени. Но его нетрудно привести к
такой форме в частном случае.
Предположим, например, что функция V, а следовательно и 0, не содер-
жит явно времени. Тогда можно сделать формулу (91) интегрируемой, по-
ложив
— d@ п —_________
i,k~
так как при этом она превращается в уравнение
<9з>
или в
0 + h = 0. (93)
Величина — h и будет значением Н, подходящим для нашего частного
случая.
Уравнение (93) отличается от уравнения живых сил только тем, что
величина h зависит здесь от времени. Ее величина, или, вернее, величина
ее дифференциала по времени, получается из формулы (92):
d& d& „ /плч
или, если заменить —и —— их значениями из уравнении (80), то
Сс Л. । W % у
i=mк=п—1
dh = 2 2 +
1 = 1 fc=0
(94)
Для приведения дифференциала dh к форме (88) заметим, что так как 0
не содержит явно времени, она не входит больше в уравнения (14). Из этого,
как известно, следует, что между величинами, появившимися при интегри-
ровании, имеется одна, которая всюду добавляется к времени. Поэтому,
обозначая только что упомянутую величину через е, мы должны считать
как х, так и f функциями t + е.
Это имеет место, повторяем, вследствие того, что нигде t не появляется
без сопровождающей его е и нигде е не появляется без t. Поэтому
= d£ik = ^dt,
1 de f 1>K de
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
387
что дает*
i=mк=п~ 1
л=о
, с- I
'fc ds “'>к de )
Сравнивая сумму в правой части этого уравнения с формулой (83), устанав-
ливаем, что сумма есть одна из функций А. Обозначая последнюю через Ае,
получим
dh = Aedt. (95)
Это и дает нам изменение постоянной живых сил, произведенное воз-
мущающими силами.
Если теперь применить этот результат к уравнению (88), то немедленно
найдем следующие значения символа (а„ as):
(h, е) = 1, (96)
а затем
(Л,о,) = 0, (97)
причем (96) и (97) имеют место всегда, когда as представляет величину, вве-
денную при интегрировании и отличную от е. В предыдущем примере мы
видели, что один-единственный интеграл уравнений (14) в частном случае
может дать несколько значений символа (ar, as).
При применении формулы (92) исследуют, не являются ли интегрирую-
щие множители pi<k и П[Л в то же самое время производными х и £ по пере-
менным а или линейными функциями этих производных. Если это оказы-
вается так, можно легко привести дифференциал dH величины Н, даваемой
интегралом уравнения (91), к форме (88), что немедленно дает несколько
значений символа (ar, as).
Примером этого может служить динамика.
Когда исходные данные, служащие для образования уравнений движе-
ния системы, т. е. определение системы и функция сил, не зависят ни от
направления осей координат, предполагаемых ортогональными, ни от по-
ложения их начала, то дифференциальные уравнения движения не содер-
жат величин, относящихся к направлению осей, и не изменяются, когда
рассматривается прямолинейное и равномерное движение начала. Из этого
мы заключаем, что среди величин, введенных при интегрировании этих урав-
нений, содержится девять величин, относящихся к направлению осей коор-
динат, положению в данный момент их начала и прямолинейному и равно-
мерному движению этого начала. Этого заключения нельзя сделать при
криволинейном или неравномерном движении, так как тогда вследствие сил
инерции вид дифференциальных уравнений будет зависеть от характера
этого движения.
Если предположить, следовательно, что множители р и П будут част-
ными производными координат, выбранных для определения движения,
по каждой из девяти упомянутых величин, то формула (91) в занимающем
нас случае динамики становится интегрируемой и мы получаем девять инте-
гралов со столькими же произвольными постоянными Н. Таким образом,
если принять во внимание значения множителей р и П, то уравнение (92)
приобретает удобную форму. Мы придадим dH и девяти произвольным по-
стоянным Н вариации, произведенные возмущающими силами. Следова-
тельно, мы одновременно получим значительное число величин символа
(ar, as), и тогда можно будет определить посредством прямого вычисления
те значения нашего символа, которые ускользают от нас при частных методах.
Мы вскоре покажем это на примере [144].
25*
Ф. А. СЛУДСКИЙ
ЗАМЕТКА О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ [145]
Настоящая замётка служит пополнением реферата, прочитанного мною
17 декабря 1866 г. в Математическом обществе и напечатанного в 1-м вы-
пуске 11-го тома Математического сборника. Я намерен показать на при-
мере разницу между выражениями начала наименьшего действия, данными
Лагранжей и Остроградским.
Для простоты ограничимся опять случаем движения свободной точки,
массу которой будем принимать равною единице.
Начало наименьшего действия Лагранжа, в применении к движению
свободной точки, состоит в том, что [ Т dt для движения точки, определяе-
мого уравнениями
ЛП __ (Рх (1П _ (Ру dTI _ <Pz
Пх — Пр ’ Пу~— Пр ’ Пх ~ Пр~ ’
имеет величину, меньшую, чем для всякого другого движения, проходя-
щего через те же начальную и конечную точки и удовлетворяющего тому
же условию : Т — П h.
Сравниваемые движения мы определяем кинематически — определяем
тем, что они проходят через одни и те же точки пространства и подчиняются
одному и тому же условию. Для большей ясности постараемся характери-
зовать их динамически, характеризовать производящими их силами и на-
чальными скоростями.
Начальные скорости всех сравниваемых движений должны быть равны
по величине, так как все эти движения начинаются в одной и той же точке
пространства и так как все они подчиняются условию : Т = П + h. На-
правления начальных скоростей могут быть различны.
Если свободное движение сравнивается со свободными же, то, очевидно,
эти последние не могут происходить под действием той же силы; иначе все
сравниваемые движения определялись бы уравнениями
W7 (Рх dll _ (Ру dU (pz
dx dP ’ dy dP ’ dz dP
и для всех движений J Т dt имел бы наименьшую величину. Сила измени-
^0
ется, следовательно, в сравниваемых движениях.
Всякое несвободное движение можно рассматривать как свободное, проис-
ходящее под действием силы и сопротивлений.
U Включая в число сравниваемых движений свободные и несвободные,
можно изменение силы в сравниваемых движениях производить трояко:
1) можно изменять самую движущую силу; 2) можно, не изменяя самой
движущей силы, прибавлять к ней сопротивления; 3) можно изменять
ЗАМЕТКА О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
389
самую силу и прибавлять к ней сопротивления. Из этих трех случаев осо-
бенно замечателен второй.
Уравнение Т = П + h всегда будет иметь место, если силовая функция и
условия не будут содержать времени и если величина начальной скорости
будет одна и та же. Начало наименьшего действия Лагранжа получает здесь
tl
следующее простое выражение : J Tdt для свободного движения точки
имеет величину, меньшую, чем для всякого несвободного, происходящего
под действием той же силы, имеющего ту же начальную скорость (по вели-
чине) и проходящего через те же начальную и конечную точки.
Обратимся к примеру.
Вообразим параболическое движение наклонно брошенной тяжелой
точки. Положим, что начальная скорость v очень велика, но угол у на-
клона ее к горизонту очень мал. Это движение сначала будет очень мало раз-
ниться от горизонтального прямолинейного равномерного, имеющего ско-
рость^. (Для большего сближения движений можно, если угодно, заменить
тяжесть другою постоянною силою, имеющею произвольно малую напря-
женность.) Положим, что оба движения происходят в плоскости xz, первое
определяется уравнениями
х = v0 cos (pt, z = v0 sin (pt — у g?2;
второе определяется уравнениями
x = vot, z = 0.
Силовая функция для первого движения будет : — gz. Уравнение Т =
= П + h или t2 = vl — 2gz будет иметь место и при втором движении.
Сравним оба движения между теми точками, в которых пересекаются траек-
тории ; сравним выражения $Tdt:
t.
для первого движения
Т = У И - 2 vQ sin <р gt + g?2},
для второго движения
т — X „2 .
для первого движения
, _ 2 v0 Sin гр
1 ~ g ’
для второго движения
. _ 2 v0 sin у cos у .
для первого движения
1 sin2
390
Ф. А. СЛУДСКИЙ
для второго движения
tt
г?;; sin 99 f, 1 . , 1 . . I
= -- - --- 1 — -„ Sin2 9» — — sin49> — .. 4 .
g I 2 r 8 J
tl
Итак, при малых величинах у величина §Tdt ДДЯ первого движения
to
меньше, чем для второго.
Начало наименьшего действия Остро градского в применении к дви-
жению свободной точки состоит в том, что J (Т + П) dt для движения
to
точки, определяемого уравнениями
НЯ _ d*x dn __ d*y dH _ _d*z_
dx ~ dt* ’ dy ~ dt* ’ dz ~ dt* ’
имеет величину меньшую, чем для всякого другого, проходящего через те
же начальную и конечную точки, начинающегося и оканчивающегося в те
же моменты времени.
Начальные скорости могут здесь различаться не только по направлению,
но и по величине. Все сравниваемые движения не могут и здесь происходить
под действием одной и той же силы, иначе все они определялись бы урав-
нениями
dn d*x dH _ d*y dH d*z
dx dt* ’ dy dt* ’ dz dt* ’
и для всех j (T + П) dt имел бы наименьшую величину. Изменение силы
г»
в сравниваемых движениях может быть заменено прибавкою сопротивлений,
происходящих от условий.
Возьмем опять параболическое движение наклонно брошенной тяжелой
точки и горизонтальное прямолинейное равномерное.
Сравним величины J (П + T)dt для этих движений. Так как оба дви-
«0
жения должны начинаться и оканчиваться не только в одних и тех же точ-
ках пространства, но в одни и те же моменты времени, то величины началь-
ной скорости в них должны быть различны. Изменим величину начальной
скорости во втором движении, означим ее через v1. Она будет равна
v0 cos <р. Примем за П силовую функцию первого движения. Для первого
движения
П + Т = у (у% — 4 v0 sin <р gt + 2 g2 /2),
для второго движения
П +Т — y4cos2?>.
Для обоих движений
, ___ 2 v0 sin <р
h —-----------
g
заметка о начале наименьшего действия
391
Для первого движения
[(П + T)dt = [1-4sin2 Я ’
J s L о J
t,
для второго движения
§(II-\-T)dt = - sin2-?],
fl
Итак, у (П 4- Т) dt для первого движения меньше, чем для второго.
t.
Если бы мы приняли за П силовую функцию второго движения
fl
(нуль), то нашли бы, что для первого движения J (П Т) dt равняется
4
у? sin 9? (л 2 . о А
-—-— U — у sin2 J и что для второго движения он равняется
vosm<p (j — sins?,). Результат, как и должно быть, получился бы
обратный.
386
М. В. ОСТРОГРАДСКИЙ
мости подлежит определению. Продифференцируем (91), считая Н перемен-
ной. Мы получим
т п — 1 т л—1 / jjq j/q х
22(p^d^-n^d^-dt22 \P^^ + n‘^-} + dH-
i=lk=O i=llc=o\ ил i u?i,k/
Заменяя df й dx их значениями (80) и вычеркивая то, что взаимно унич-
тожится, получим
dH = dt 2 2 (Р* sitk) • (92)
1=1к=0
Это уравнение дает значение Н, при котором формула (91) превращается
в интеграл уравнений (80). На самом деле предыдущее выражение для dH
не имеет формы (88), подходящей для величин, введенных интегрированием
когда они превращаются в функции времени. Но его нетрудно привести к
такой форме в частном случае.
Предположим, например, что функция V, а следовательно и 0, не содер-
жит явно времени. Тогда можно сделать формулу (91) интегрируемой, по-
ложив
— d@ п —_________
i,k~
так как при этом она превращается в уравнение
<9з>
или в
0 + h = 0. (93)
Величина — h и будет значением Н, подходящим для нашего частного
случая.
Уравнение (93) отличается от уравнения живых сил только тем, что
величина h зависит здесь от времени. Ее величина, или, вернее, величина
ее дифференциала по времени, получается из формулы (92):
d& d& „ /плч
или, если заменить —и —— их значениями из уравнении (80), то
Сс Л. । W % у
i=mк=п—1
dh = 2 2 +
1 = 1 fc=0
(94)
Для приведения дифференциала dh к форме (88) заметим, что так как 0
не содержит явно времени, она не входит больше в уравнения (14). Из этого,
как известно, следует, что между величинами, появившимися при интегри-
ровании, имеется одна, которая всюду добавляется к времени. Поэтому,
обозначая только что упомянутую величину через е, мы должны считать
как х, так и f функциями t + е.
Это имеет место, повторяем, вследствие того, что нигде t не появляется
без сопровождающей его е и нигде е не появляется без t. Поэтому
= d£ik = ^dt,
1 de f 1>K de
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПРОБЛЕМЫ ИЗОПЕРИМЕТРОВ
387
что дает
i=mк=п-1
dh=dt£ 2
1=1 к=0
(у dx^
I
‘•к de )
Сравнивая сумму в правой части этого уравнения с формулой (83), устанав-
ливаем, что сумма есть одна из функций А. Обозначая последнюю через Ае,
получим
dh = Aedt. (95)
Это и дает нам изменение постоянной живых сил, произведенное воз-
мущающими силами.
Если теперь применить этот результат к уравнению (88), то немедленно
найдем следующие значения символа (аг, as):
(h, е) = 1, (96)
а затем
(h,as) = 0, (97)
причем (96) и (97) имеют место всегда, когда as представляет величину, вве-
денную при интегрировании и отличную от е. В предыдущем примере мы
видели, что один-единственный интеграл уравнений (14) в частном случае
может дать несколько значений символа (ar, as).
При применении формулы (92) исследуют, не являются ли интегрирую-
щие множители pi<k и в то же самое время производными х и £ по пере-
менным а или линейными функциями этих производных. Если это оказы-
вается так, можно легко привести дифференциал dH величины И, даваемой
интегралом уравнения (91), к форме (88), что немедленно дает несколько
значений символа (а„ as).
Примером этого может служить динамика.
Когда исходные данные, служащие для образования уравнений движе-
ния системы, т. е. определение системы и функция сил, не зависят ни от
направления осей координат, предполагаемых ортогональными, ни от по-
ложения их начала, то дифференциальные уравнения движения не содер-
жат величин, относящихся к направлению осей, и не изменяются, когда
рассматривается прямолинейное и равномерное движение начала. Из этого
мы заключаем, что среди величин, введенных при интегрировании этих урав-
нений, содержится девять величин, относящихся к направлению осей коор-
динат, положению в данный момент их начала и прямолинейному и равно-
мерному движению этого начала. Этого заключения нельзя сделать при
криволинейном или неравномерном движении, так как тогда вследствие сил
инерции вид дифференциальных уравнений будет зависеть от характера
этого движения.
Если предположить, следовательно, что множители р и П будут част-
ными производными координат, выбранных для определения движения,
по каждой из девяти упомянутых величин, то формула (91) в занимающем
нас случае динамики становится интегрируемой и мы получаем девять инте-
гралов со столькими же произвольными постоянными И. Таким образом,
если принять во внимание значения множителей р и П, то уравнение (92)
приобретает удобную форму. Мы придадим dH и девяти произвольным по-
стоянным Н вариации, произведенные возмущающими силами. Следова-
тельно, мы одновременно получим значительное число величин символа
(ar> as), и тогда можно будет определить посредством прямого вычисления
те значения нашего символа, которые ускользают от нас при частных методах.
Мы вскоре покажем это на примере [144].
25*
Ф. А. СЛУДСКИЙ
ЗАМЕТКА О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ [145]
Настоящая замётка служит пополнением реферата, прочитанного мною
17 декабря 1866 г. в Математическом обществе и напечатанного в 1-м вы-
пуске 11-го тома Математического сборника. Я намерен показать на при-
мере разницу между выражениями начала наименьшего действия, данными
Лагранжем и Остроградским.
Для простоты ограничимся опять случаем движения свободной точки,
массу которой будем принимать равною единице.
Начало наименьшего действия Лагранжа, в применении к движению
свободной точки, состоит в том, что f Т dt для движения точки, определяе-
мого уравнениями
ЛП __ d2x dH _ (Ру dn ______ d2z
dx ~ ~dP ’ ~dy~ — ~~dP ’ ~dz~ ~ ~dP~ ’
имеет величину, меньшую, чем для всякого другого движения, проходя-
щего через те же начальную и конечную точки и удовлетворяющего тому
же условию : Т = П + /г.
Сравниваемые движения мы определяем кинематически — определяем
тем, что они проходят через одни и те же точки пространства и подчиняются
одному и тому же условию. Для большей ясности постараемся характери-
зовать их динамически, характеризовать производящими их силами и на-
чальными скоростями.
Начальные скорости всех сравниваемых движений должны быть равны
по величине, так как все эти движения начинаются в одной и той же точке
пространства и так как все они подчиняются условию : Т = П + h. На-
правления начальных скоростей могут быть различны.
Если свободное движение сравнивается со свободными же, то, очевидно,
эти последние не могут происходить под действием той же силы; иначе все
сравниваемые движения определялись бы уравнениями
rdH (Рх dn ____ (Ру dn (pz
dx dP ’ dy dP ’ dz dP
и для всех движений J Т dt имел бы наименьшую величину. Сила изменя-
'о
ется, следовательно, в сравниваемых движениях.
Всякое несвободное движение можно рассматривать как свободное, проис-
ходящее под действием силы и сопротивлений.
М Включая в число сравниваемых движений свободные и несвободные,
можно изменение силы в сравниваемых движениях производить трояко:
1) можно изменять самую движущую силу; 2) можно, не изменяя самой
движущей силы, прибавлять к ней сопротивления; 3) можно изменять
ЗАМЕТКА О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
389
самую силу и прибавлять к ней сопротивления. Из этих трех случаев осо-
бенно замечателен второй.
Уравнение Т = П + h всегда будет иметь место, если силовая функция и
условия не будут содержать времени и если величина начальной скорости
будет одна и та же. Начало наименьшего действия Лагранжа получает здесь
Л
следующее простое выражение : J Tdt Для свободного движения точки
имеет величину, меньшую, чем для всякого несвободного, происходящего
под действием той же силы, имеющего ту же начальную скорость (по вели-
чине) и проходящего через те же начальную и конечную точки.
Обратимся к примеру.
Вообразим параболическое движение наклонно брошенной тяжелой
точки. Положим, что начальная скорость v очень велика, но угол на-
клона ее к горизонту очень мал. Это движение сначала будет очень мало раз-
ниться от горизонтального прямолинейного равномерного, имеющего ско-
рость v0. (Для большего сближения движений можно, если угодно, заменить
тяжесть другою постоянною силою, имеющею произвольно малую напря-
женность.) Положим, что оба движения происходят в плоскости xz, первое
определяется уравнениями
х = v0 cos (pt, z = v0 sin <pt — у gf2;
второе определяется уравнениями
x = vot, z = 0.
Силовая функция для первого движения будет : — gz. Уравнение Т =
= П 4- h. или и2 = v20 — 2gz будет иметь место и при втором движении.
Сравним оба движения между теми точками, в которых пересекаются траек-
тории ; сравним выражения jTdf:
t.
для первого движения
Т = У И - 2 v0 sin (pgt + gt2},
для второго движения
Т — „2 .
1 — 2 °’
для первого движения
. _ 2 v0 Sin гр
1 ~ g ’
для второго движения
. _ 2 v0 sin q> cos <р
для первого движения
frr .. sin д> Г, 2 . „ 1
J L1 - 3-s,n2 9^1,
390
Ф. А. СЛУДСЦИЙ
для второго движения
I Tdt = fi~sin2?, =
J s s
to
v%sina> f. 1 . 9 1 • л )
= -- - —- 1 — -„ Sin2 9» — — sin4?,— .. 4 .
g I 2 r 8 J
<>
Итак, при малых величинах tp величина jTdf для первого движения
*0
меньше, чем для второго.
Начало наименьшего действия Остро градского в применении к дви-
жению свободной точки состоит в том, что J (Т 4- П) dt для движения
to
точки, определяемого уравнениями
UH ___ <Рх аП ___ Ру dn ___ d2z
dx ~~ dP ’ dy dt1 ’ dz dP ’
имеет величину меньшую, чем для всякого другого, проходящего через те
же начальную и конечную точки, начинающегося и оканчивающегося в те
же моменты времени.
Начальные скорости могут здесь различаться не только по направлению,
но и по величине. Все сравниваемые движения не могут и здесь происходить
под действием одной и той же силы, иначе все они определялись бы урав-
нениями
dH ___ d2x dn ____ d2y dn d2z
dx dP ’ dy dP ’ dz dP ’
и для всех j (T ~j_ П) dt имел бы наименьшую величину. Изменение силы
t,
в сравниваемых движениях может быть заменено прибавкою сопротивлений,
происходящих от условий.
Возьмем опять параболическое движение наклонно брошенной тяжелой
точки и горизонтальное прямолинейное равномерное.
Сравним величины J (П + T)dt для этих движений. Так как оба дви-
<0
жения должны начинаться и оканчиваться не только в одних и тех же точ-
ках пространства, но в одни и те же моменты времени, то величины началь-
ной скорости в них должны быть различны. Изменим величину начальной
скорости во втором движении, означим ее через v1. Она будет равна
i>0coSip. Примем за П силовую функцию первого движения. Для первого
движения
П + Т = —4 vosin gf +2 g2 f2),
для второго движения
П+Т = vlcos2 <р.
Для обоих движений
. _ 2 v0 sin tp
ЗАМЕТКА О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
391
Для первого движения
J(7T + Т)dt = [1 - у sin2 <р],
to
для второго движения
^(n + T)dt = _ sin2-?].
to
fl
Итак, у (П + Т) dt для первого движения меньше, чем для второго.
t.
Если бы мы приняли за П силовую функцию второго движения
fl
(нуль), то нашли бы, что для первого движения J (П -|- Т) dt равняется
4
v„ sin <р f. 2 . 9 А
—-— р— у sin2 и что для второго движения он равняется
—(1 — sin2??). Результат, как и должно быть, получился бы
обратный.
о. и. СОМОВ
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ
НАИМЕНЬШЕГО ДЕЙСТВИЯ
1. Остроградский в мемуаре о дифференциальных уравнениях, относя-
щихся к вопросу об изопериметрах (Memoire sur les equations differenteilles
relatives au probl£me des isoperimetres, 1848. Memoires de I’academie de
St.-Petersbourg, VI serie. Sciences math, et phys., т. IV, стр. 42), изложив
общий способ находить уравнения, выражающие условие, что вариация
данной интегрируемой функции должна быть точным дифференциалом,
и указав, что в этих уравнениях содержатся как частный случай
уравнения динамики, высказывает мнение, что анализ, которым Лагранж
выводит уравнения динамики из начала наименьшего действия, не
верен и что нельзя получить эти уравнения, требуя, чтобы варьяция
интеграла, выражающего действие, была равна нулю, или, что то же,
требуя, чтобы варьяция подынтегрального выражения была точным диф-
ференциалом, потому что (как думает Остро градский) при этом варьяции
координат или главных переменных, заменяющих координаты, обусловли-
ваются уравнением, происходящим от варьяции уравнения живой силы ;
между тем как для вывода изопериметрических уравнений, содержащих в
себе уравнения динамики, необходимо рассматривать эти варьяции как
величины совершенно независимые. После того Остроградский в подтвер-
ждение своего мнения показывает, что если приложим общий способ разы-
скания относительных max или min к интегралу, выражающему действие
или, что то же, к разысканию условия, что варьяция подынтегральной функ-
ции есть точный дифференциал, соединив с этой варьяциею посредством
неопределенного множителя условное уравнение, происходящее от варьяции
живой силы, то получаются уравнения, отличающиеся от уравнений
динамики.
Ни Гамильтон, ни Якоби, столь блистательно усовершенствовавшие
общую теорию динамики, основание которой положил Лагранж, не видят
неточности в анализе Лагранжа, указываемой Остроградским, и Якоби в
своих лекциях о динамике (Vorlesungen fiber Dynamik, Berlin, 1886, стр. 49),
изменив несколько прием Лагранжа для доказательства, что уравнения
динамики содержатся в начале наименьшего действия, приходит совер-
шенно к тому же результату, как и Лагранж. Упомянутый же выше прием,
которым Остроградский хочет доказать, что уравнения динамики не могут
вытекать из начала наименьшего действия, был уже употреблен с против-
ной целью Родригом (01. Rodrigues, Correspondence sur 1’ecole polytech-
nique, t. Ill, 1819), и Родриг вывел из начала наименьшего действия
уравнения динамики в том общем виде, как они даны Лагранжей в анали-
тической механике. Это кажущееся несогласие результатов Родрига и Ост-
роградского зависит только от того, что Остроградский не заботится об
определении множителя, посредством которого условное уравнение соеди-
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ
393
нено с варьяциею подынтегральной функции, а Родриг его находит, с по-
мощью уравнений, относящихся к пределам интеграла. При этом Родриг
не усматривает никакой неточности в приеме Лагранжа и предлагает вместо
него свой с тою только целью, чтобы дать новый замечательный пример
употребления множителей при разыскании наибольших и наименьших
величин и окончательного определения таких множителей с помощью урав-
нений, относящихся к пределам.
Приведенное мною мнение Остроградского было сообщено отчасти
вместе с другими воззрениями профессору Брашману в 1853 г. в письме,
которое было напечатано с некоторыми пропусками в первом томе Москов-
ского математического сборника в 1866 г. После того появилось в нашей
литературе несколько рассуждений о йачале наименьшего действия; одни
утверждали справедливость мнения Остроградского, что начало наимень-
шего действия в том виде, как его дает Лагранж, не имеет места; другие, —
что начало верно, но анализ Лагранжа ошибочен; наконец, третьи, —•
что начало верно, что нет никакой ошибки в лагранжевом доказательстве.
Присоединяясь к тем, которые утверждают последнее мнение, я постараюсь
показать в этой записке источник того недоразумения, которое побудила
Остроградского к вышесказанному обвинению Лагранжа в неточности
анализа, и подтвердить новыми разъяснениями справедливость заключения,
что в начале наименьшего действия (в том смысле, как понимает его Ла-
гранж) в самом деле содержатся все уравнения динамики.
2. Сущность лагранжева доказательства (Mecanique analytique, Paris,
1853, т. I, стр. 279), что из начала наименьшего действия выводятся урав-
нения динамики, состоит в следующем : варьяция интеграла, выражаю-
щего действие, преобразовывается в интеграл от момента потерянных сил
относительно возможных перемещений, и этот момент полагается равным
нулю на основании того, что варьяция действия должна быть равна
нулю; отсюда Лагранж заключает, что начало наименьшего действия дает
общее уравнение динамики, выражающее равновесие потерянных сил.
Далее в члене сороковом Лагранж говорит, что из этого уравнения выво-
дятся все уравнения, необходимые для решения вопроса, а в следующем
члене, сорок первом, замечает, что прямоугольные прямолинейные коорди-
наты могут быть заменены другими переменными, и для примера заменяет
полярными ; от такого замечания получается линейное уравнение относи-
тельно варьяций новых переменных, откуда можно выводить все уравнения,
необходимые для решения вопроса, приведя сперва все варьяции к наи-
меньшему числу и составив отдельные уравнения из членов, заключающих
каждую варьяцию: «et on en tirera les equations necessaires pour la solu-
tion du ргоЫёте, en reduisant d’abord toutes les variations du plus petit
nombre possible, faisant ensuite des equations sep'arees des termes affectes
de chacune des variations» *). Неполнота лагранжева доказательства,
состоящая в том, что он не выводит на самом деле уравнений дина-
мики, была, как кажется, главным поводом к недоразумению, в ко-
торое впал Остроградский. Подводя лагранжев вопрос об отыскании
условий, при котором варьяция действия равна нулю, под свой взгляд,
по которому требуются условия интегрируемости выражения <5(Т df), где Т
есть сумма произведений масс на квадраты скоростей (по нынешним поня-
тиям двойная живая сила), Остроградский (стр. 42 его мемуара) уверяет,
что «Лагранж, исходя от интегрируемости а (Т df)} получает уравнения (9)
*) «Отсюда можно вывести уравнения, необходимые для решения поставленной за-
дачи, если сначала все варьяции свести к возможно меньшему их числу и затем отдельно,
приравнять нулю все члены, в состав которых входит каждая из оставшихся варьяций».
394
О. и. СОМОВ
и (14) (заключающие в себе уравнения динамики), но анализ великого
геометра неточен» и что будто существо этого анализа (измененного сооб-
разно со взглядом Остроградского) состоит в следующем : «варьяция 5 (Т dt)
есть точный дифференциал; но Т=У — О *), следовательно, а (V dt) —
— d(Odf) или, по причине 0 = —h, d(V dt)— d d(ht) также есть точный
дифференциал»; но dd(ht), очевидно, интегрируется, а потому a(Vdt) будет
также интегрируема. Отыскивая же условия интегрируемости а (V dt), мы
получим уравнения (9) и (14) (т. е. уравнения динамики). Но можно их
получить не иначе, как освободив варьяции дх от всякой между ними
зависимости, а этого мы не достигнем, если положим
д(0 + h) = 0.
Все это, однакож, мало похоже на то, что говорит Лагранж в Аналити-
ческой механике, в 40-м члене второй части. Уравнение (а), или д^Т —
= dU -j- dh, не представляет никакой связи между варьяциями ах главных
переменных, приведенных к наименьшему числу, потому что оно, кроме
этих варьяций, содержит еще a dt, которая, как сам Остроградский полагает,
не равна нулю; следовательно, можно взять варьяции ах совершенно
произвольно, лишь бы при этом было взято для a dt соответственное зна-
чение, выведенное из уравнения (а). Варьяции дх в таком только случае
будут связаны между собою уравнение (а), когда ddt = 0; но этого Лагранж
не предполагает, что ясно видно из формулы, находящейся в конце стр. 275
(Мёсап. analytique, Paris, 1853); следовательно, варьяции, находящиеся
в упомянутом выше результате Лагранжа, не обусловлены уравнением (а).
Но они обусловлены иначе,.а именно тем, что варьяции переменной, к кото-
рой отнесено интегрирование, в интеграле, выражающем действие, равны
нулю, потому что Лагранж в самом начале своего доказательства д J заме-
няет J 3 и через то предполагает, что пределы интеграла остаются без варья-
ции ; следовательно, он мысленно относит интегрирование к такой пере-
менной, варьяция которой равна нулю как для пределов интеграла, так и
для промежуточных значений. Эта переменная не есть время, потому что
d dt не равен нулю ; но можно для нее взять одну из координат, как делает
Якоби, или некоторую определенную функцию главных переменных, заме-
няющих координаты. Вследствие этого варьяции этих переменных будут
связаны линейным уравнением, помощью которого можно исключить из
момента потерянных сил, находящегося под знаком интеграла в резуль-
тате Лагранжа, одну варьяцию, после чего мы вправе будем приравнять
нулю коэффициенты у остальных варьяций ; от этого получатся уравнения,
число которых будет одним меньше числа всех уравнений динамики ; но это
недостающее уравнение дополняется уравнением живых сил. То же заклю-
чение относится и к результату, получаемому Якоби (Vorlesungen tiber
Dynamik, стр. 49). Якоби для большей легкости исключает дифференциал
времени под знаком интеграла, выражающего действие, помощью урав-
нения живой силы и относит интегрирование к одной из координат. Такое
преобразование интеграла, выражающего действие, было доказано Лиувил-
лем**) прежде появления в свет лекций Якоби о динамике. Хотя оно способ-
*) Обозначая через U потенциал сил, должно положить V—-^-T+Un6 = U —^-Т.
Уравнение живых сил есть в + h = 0 или Т — U + h.
**) Expression remarquable de la quantity qui, dans le mouvepient d’un systeme de points
mat£riels a liaisons quelconques est un minimum en vertu du principe de la moindre action.
Journal de math, pures et appliqu6es, серия 2, т. 1.
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ
395
ствует и уяснению начала наименьшего действия, однакож не составляет
необходимости. Относя интегрирование ко времени и изменяя предел инте-
грала, можно получить самое общее выражение варьяции действия и вы-
вести из него как частный случай Лагранжа начало наименьшего действия.
Помощью того же выражения, не прибегая к приему Родрига, легко дока-
зать, что в начале наименьшего действия содержатся все уравнения дина-
мики, и получить эти уравнения под каноническим видом.
3. Пусть будет т, т', т",... — система материальных точек, свободных,
или связанных так, что условные уравнения, происходящие от связей, не
содержат явно время. Помощью этих уравнений, как известно, можно выра-
зить координаты всех точек в функции нескольких между собою независи-
мых величин qlt q2,..., qn, которые мы будем называть главными перемен-
ными. В случае свободных точек для этих переменных можно взять коор-
динаты какого-либо рода. Произвольные функции времени t, взятые для
?i> Qn, определят одно из возможных движений системы, т. е. дви-
жение, допускаемое связями. Изменив бесконечно мало эти функции на
Qi + ш1, ?2 + т2>- • > Qn + тп, мы изменим бесконечно мало и движение на
другое, также возможное. Положим, что точки (М, М',...) представляют
положение системы во время t в первом движении, а (/z, ц', /л",...) — во
втором. Бесконечно малая величина а>к будет варьяцией ’переменной qk,
происходящей от перемещения системы Му, М'у',... ; но эта варьяция
есть только частная, взятая так, что время t остается без варьяции. Пере-
менная qk может получить варьяцию dqk от перемещения системы из поло-
жения (М, М',...) в положение (у, v',...), которое примут точки (/г, у',...)
во втором движении во время t + dt, причем dt — произвольная бесконечно
малая величина. Перемещение (Mv, M'v',...) есть сложное из перемещения
(Му, М' у',...) и перемещения (yv, /z' v',...); вследствие первого из этих
составляющих перемещений qk переменится на qk -|- а>к, а это, вследствие
второго составляющего перемещения, обратится в qk + юк -{- dt + dt;
отсюда, пренебрегая бесконечно малою высшего порядка dt, получим
dqk = + q'k dt, где q'k = . Мы подчиним dqk условию, что данная
функция а = f(qlt q2,..., qn), не содержащая явно ни времени t, ни произ-
водной q'k, остается без варьяции от перемещения (Mv, M'v',...); тогда
варьяции dqlt dq2,..., dqn будут связаны линейным уравнением
da . , da s , da t .
~d^^1+~d^^+- • • + ^<5^ = 0- t1)
Рассматривая движение от времени tr до времени t2, положим, что
(Mlt М'2,...), (/z1; /z',...)
представляют положения точек
(М,М',...), (у, у’,...)
во время tlt а
(М%, М%,...), (/z2, у%,...)
—положения тех же точек во время /2, и пусть (vlt v'2,...), (v2v'2,...) будут
положения точек (v, v',...), соответствующие положениям (Af1( M'lt...) и
(М2, М'2,...) точек (М, М',...). Траектории точек в первоначальном
движении
МГММ2, М[М'М'2
(2)
396'
о. и. сомов
можно взять произвольно, и потом положить какую-либо зависимость
между t и переменными qlf q2,..qn. Уравнения траекторий (2) можно полу-
чить следующим образом: возьмем для qlt q2)..qn произвольные функции а;
от этого координаты всех точек сделаются известными функциями а;
из уравнений, выражающих в функции а три координаты одной точки
М, выключим а; это даст два уравнения траектории MtMMz; так же най-
дем уравнения прочих траекторий (2). Подобным образом помощью функ-
ций а, выражающих qk + bqk, найдем траектории
P'tP'' P’Z > • • •
ИЛИ
vt vv2, v't v' v2,. . .
и установим потом между t и qk + а>к или между t + dt и qk + 8qk такую
зависимость, которая при шк = О или при dqk = О давала бы зависимость
между t и qk в первоначальном движении. После этих предварительных
понятий о варьяциях, известных, впрочем, из начал варьяционного исчи-
сления, предложим себе найти варьяцию интеграла, называемого действием.
4. Если означим через v, v', v",... скорости масс т, т', т",... во время t
в первоначальном движении, то Т = у 2 ~-^(mv2 + т' v'2 + ...) будет
живая сила системы, и, как известно, она выразится однородною функциею
второй степени относительно производных qk == , которою пусть будет
Т = yZ ars q’r q’s, где коэффициенты ars суть известные^ функции перемен-
ных qk, не содержащие явно время. Интеграл
t,
A=\2Tdt (1)
ь
называется действием (action). Если переменим функции времени qk, опре-
деляющие первоначальное движение на qk + а>к, то Т переменится на Т +
+ что представит живую силу в измененном движении во время t, т. е.
когда система будет иметь положение (дх, /г',...), а величина А переме-
нится на
A + d1A = j2(T + d1T)dt (2)
ь
и будет относиться к движению от положения (/гп X,•••) Д° /4 •••)*
Разность величин (2) и (1), пренебрегая бесконечно малыми высших по-
рядков,
t,
М = {2^ Tdt, (3)
ь
будет варьяция действия, взятая в том предположении, что время t остается
без варьяции. Она существенно различна от варьяции по знаку а, т. е. от
f.
dA = d^2Tdt,
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ 397
которая равна разности
t,
J гст + ^т)^-|2тл,
где + 8tr есть время, когда точки (/z, ц',...) будут в (у, v'lt...) и t2 + 8t2 —
время, когда они придут в (у2, v2, ...). Пренебрегая бесконечно малыми
высших порядков, получим
К
8А = J 2<5г Т dt + 2Та 8t2 - 2Т\ 8tr = 8rA + 2Та 8t2 - 27\ 8tr, (4)
h
где 7\ и Т2 суть значения Т, соответствующие t = и t = t2.
Можно проверить эту величину 8А, переменив в А интегрирование по t
на интегрирование по а. Тогда
A=\2T-^-da,
J аа
«>
где ах и а2 суть значения а для крайних положений (Mlt М[,...) и (М^ М2,...)
и
М _ р (27 %) На - f [б (27) + 27 4 •£] da;
а, а,
НО
d2T
<5(2Т) = <51(2Т)+ -%-81 и <5^ = 4Д,
' ’ 1' 7 1 d< аа da
dT
потому что да = О, следовательно,
8А = [14(27) 4^ + -^- # + 2T-^-]da = f д^Т-f-da+f d(2TSt) da.
J L v ' da ' da 1 da J J 1 da 'J da
ax ai “1
Переменив опять интегрирование по а на интегрирование по t, будем иметь
t, tt
8 А = J (2Т) dt + J d(2TS$ dt = М + 2Т2 8t2 - 27\ 8tr,
ta tt
что согласно с формулою (4).
Зависимость между t и qt, q2,...,qn в первоначальном движении уста-
новим уравнением
Т = U + й, (5)
где U — данная функция от qlt q2,..qn, не содержащая явно t, и h — по-
стоянное количество; отсюда получим
dqr dqs
398
О. и. сомов
Мы допустим такую же зависимость между t и qlt qa,..., qn и в измененном
движении, переменив только постоянную h на h + <5Л, где <5 Л — бесконечно
малая величина.
От этого получим уравнение
<5Т = <ЗСГ+<Зй,
(7)
связывающее dqk с ddt и ddt. Оно равносильно с тем, которое получим, взяв
варьяцию уравнения (б), а именно:
а.
<ЗГ = ^Х+ <3
ars
dqr dqs
da da
da .
2(U + h)
Это уравнение, как мы заметили в члене 2, не обусловливает варьяций
dqk, а дает возможность определить <5f, соответствующее произвольным
значениям dqk.
Приняв во внимание уравнения (5) и (6), раскроем выражение (4). Озна-
чая, как обыкновенно принято, через рк вспомогательные величины Пуас-
dT
сона , вследствие однородности Т относительно qk имеем 2Т = S pkqk и
2 ё,Т = £ рк ё^'к + 2 Чк $1Рк
Так как варьяция д^к взята при условии, что t и dt остаются без варьяции»
с . dd, qk
то qk = , а потому
и, следовательно,
2 \Т = + 2 q'k tiPk - 2 Рк \<h (8)
С другой стороны, если мы выразим Т в функции переменных укирки возь-
мем варьяции по знаку то получим
^ = 2^к + 2^1Рк,
а так как
^т = 2^^к + 2и'к\Рк (9)
и вследствие уравнения (7), в котором должно положить dt = О, чтобы пе-
рейти от варьяций 6 к получим
Сравнив это с выражением (9), найдем
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ
399
или
где положено Н=Т — U, как принято в начале Гамильтона. Поэтому
выражение (8) приводится к следующему:
Подставив это в формулу (3) и интегрируя по частям, получим
*
м = |(* жш- [2’(^ + ^)^л + (4-/1),3/г- (10>
Чтобы перейти отсюда к выражению (4), стоит только прибавить
2T2<3f2— 2T1dt1 = 2РкЯ'к^’
следовательно,
2 2Pk^k + q'k^- i2{p'k + ^\^kdt + (t2-Qdh. (11)
| г i J \ ч ЦП- Я
11
Здесь имеем
&1Як + Як М — юк + Як М = dqk
и
з +-Z)(р'к - ж)dqk ~ + S) q'k
и так как
। dil 'I ' ^(dT ,, ат , аи Л (IT (IU n
lPfc + Ж» qk “ 2{~diPk + dqkqk ~ ~d^qk] ~ ~dT ~ lit “ °’ <I2>
TO
2 (rt + О = 2 (rt - <)««.
и формула (11) приведется к следующей :
М = Г2^рЛ^-\2(p'K + ^}^kdt + (t2-tr)dh. (13)
|ij J \ чук j
Эти формулы одного вида с формулою (10). .
Положим теперь, что первоначальное движение происходит от действия
сил, имеющих потенциалом функцию U; тогда переменные qk определя-
ются уравнениями
= (при^=1,2,..., /с), (14)
в которых заключается и уравнение (5); вследствие же уравнения (14)
варьяции (10) и (13) освобождаются от знака интеграла и приводятся к сле-
дующим выражениям:
М = (2'Рк«>/()2-(2’Рк «>к)1 + (h - fi) > (15)
дА = (£Рк 6q)z-(SPk^k)i + (tz-ti)Sh, (16)
400
о. и. сомов
где (Г рка>к\ и (Г pkdq)1 суть значения Г ркык и £рк dq для положения си-
стемы (тИр M'lf...), а (Хрка>к)а и (Epkdqk)a — значения тех же функций для
положения (М2, М'а,...).
Если эти два крайних положения системы не изменяются, то соответ-
ственные им значения варьяций dqk равны нулю, т. е. точки v[,...) и
(уа, ?2,...) совпадают соответственно с точками (М1г М'1г...) и (Ма, М'2,...);
в таком случае (Ерк dq^ = 0, (Ерк dqk\ = 0 и, следовательно,
dA = (ta-t1)dh. (17)
Здесь dh = dT — dU = dH, а потому
dA = (ta-tJdH, (18)
т. e. когда крайние положения системы не изменяются, тогда варьяция дей-
ствия равна времени движения, умноженному на варьяцию разности живой
силы и потенциала, если только в измененном движении имеет место урав-
нение живой силы. Когда потенциал U способен иметь значение maxim,
и Ur есть самое большое из них, то Ur — U будет то, что Rankin (Ранкин)
называет потенциальною энергией), а Е = Т + Ur — V (сумма активной
энергии Т с потенциальною) — полною энергиею. Так как dUr — 0, то
dE = dh, и уравнение (17) дает dA — (ta — dE, m. е. варьяция действия
равна времени движения на варьяцию полной энергии.
В этой теореме, самой по себе замечательной, содержится как частный
случай лагранжево начало наименьшего действия, которое получим, положив
dh или dE равным нулю. Тогда 6А = 0, т. е. если истинное движение изме-
нится бесконечно мало на другое, так что крайние положения не изменяются
и в новом движении имеет место закон сохранения полной энергии, причем
первая варьяция полной энергии равна нулю, то и первая варьяция действия
равна нулю. Вот, кажется, самое определительное понятие о начале наи-
меньшего действия как теореме аналитической механики.
Условие, что dqk = 0 для крайних положений, дает а>к + qkdt = 0, т. е.
а>к = —qkdt, а потому в рассматриваемом случае формула (15) приводится
к следующей :
<51Д = — + (2 Рк 4k)i — 27'2 <5/2 2 7\ = (f2 /х) dh.
Из этого видно, что если dh = 0, то равно нулю ; это, впрочем, полу-
чается прямо из формулы (4), если положить dA = 0. Итак, dA и drA вместе
не равны нулю, и было бы ошибочно выразить начало наименьшего действия
уравнением d±A = 0.
5. Перейдем теперь к доказательству лагранжевой теоремы, что в начале
наименьшего действия содержатся все уравнения динамики.
Положив, как требует это начало, dh = 0 и для крайних положений
dqk = 0, по формуле (13) будем иметь
t,
Надобно показать, что из условия dA = 0 или
о»»
можно вывести уравнения динамики под каноническим видом.
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ
401
Вместе с уравнением (18) имеем условное уравнение
+ + + = (19)
Здесь а есть функция произвольного вида относительно переменных
91, Чъ- • •> Чп- Для избежания исключительных случаев мы положим, что
она содержит все эти переменные, и для простоты возьмем для него линей-
ную функцию
а = ах 91 + “2 9а + • • • + ап 9п ,
где ни один из коэффициентов а1( а2,..., ап не равен нулю; в таком случае
условное уравнение (19) приводится к следующему:
ai ^91 + аа ^9г + • • + ап $Чп — 0. (20)
Положим, что все варьяции, исключая bqr и bqs, равны нулю; тогда
уравнение (20) можно удовлетворить, положив &qr = as fi, dqs = —arfi и
взяв для fi произвольную величину; от этого по уравнению (18) получим
<21>
«1
и, следовательно,
₽; + ^=о (22)
для всякого значения г. Итак, уравнение (18) заменяется системой урав-
нений
, . dH л / । dH _______f\ г । dH __r\
^+ns=0- • i,’’+ts=0’ ,23)
что вместе с системою
' - п' _ п' — dlL
dPi dpi ’ ’ Чп dp,I ’
вытекающею из формулы
, _ dT _ d(T — и)
— dpn ~ dpn ’
представляет полную "систему уравнений динамики под каноническим ви-
дом. Уравнения (23) приводятся к лагранжевым уравнениям:
, _ dT dU > _ dT dU
P1 ~ dqt ' dc^ ’ ‘ ‘ Pn dqn ' dqn ’
если подставим T—U вместо H и заменим частную производную--, взятую
в том предположении, что Т есть функция величин qr и рг, частною произ-
dT
водною , где
Т =~2arsq'rq's.
Изложенное нами в этом параграфе может быть применено к результату
Лагранжа (Мёс. ап., 1853, стр. 279)
$dtS(Pdp + Qdq + Rdr+... + dxd^ + dyd^ + dzd-^] =0
26 Вариационные принципы механики
402
о. и. СОМОВ
после того, как р, q, г,..., х, у, z,... будут выражены в функции величин
qb q2,..., qn. Бертран на то, что Лагранж говорит об этом уравнении, делает
следующее замечание: «П n’est pas absolument exact de dire que cette
equation a lieu pour toutes les variations possibles, car les equations de la
liaison doivent toujours etre satisfaites. La suppression de l’int£gration par
rapport au temps semblerait devoir etre justifiee d’un autre maniere, en
remarquant par example que les valeurs de t entre lesquelies elle est
prise sont arbitrages»*). Лагранж не упускает из виду условий связей,
потому что в конце члена 41 он говорит о приведении помощью этих
условий всех варьяций дх, ду, dz,... к наименьшему числу. Мнение
же Бертрана, что можно освободить предыдущее уравнение от знака
интеграла на том основании, что пределы интеграла произвольны,
несправедливо. Эти пределы не произвольны, а определены крайними
положениями системы. Допустить в интеграле произвольные пределы
значило бы допустить, что положение системы во всякое время остается
неизменяемым или что варьяции дх, ду, dz равны нулю для всякого вре-
мени, а это обращало бы подынтегральное выражение тождественно в
нуль и, следовательно, не привело бы к требуемому результату. Подынте-
гральное выражение в лагранжевой формуле полагается равным нулю на
другом основании, которое указано во всяком руководстве к варьяционному
исчислению, а именно, на основании произвола значений независимых варья-
ций, в функции которых выражаются все варьяции др, dq,..., дх, ду,...
Если бы подынтегральное выражение не было равно нулю тождественно
относительно произвольных варьяций, то для последних можно было
бы взять такие значения, при которых все элементы интеграла были
бы положительные и, следовательно, самый интеграл не равнялся бы
нулю.
6. Скажу несколько слов об уравнении
d$(T + U)dt = O, (а)
заменяющем лагранжево начало наименьшего действия, без тех ограни-
чений в Т, U и варьяциях dqr, какие требует последнее. Вследствие того, что
Остроградский в письме к Брашману указывает на необходимость рассмат-
ривать minimum интеграла dt вместо minimum J Т dt, некоторые из
наших математиков стали называть начало, заключающееся в уравнении (а),
началом Остроградского ; между тем как Якоби, Кирхгоф, Нейман и дру-
гие известные иностранные математики называют его гамильтоновым, так
как оно прямо вытекает из гамильтонова выражения варьяции главной
функции S = J(T + U)dt. (Philosophical Transactions of the Royal So iety
of London, 1835, ч. I, Second Essay on a General Method in Dynamics.)
Гамильтоново же начало варьяции главной функции имеет основанием
уравнение, данное Лагранжем в мемуаре : Sur la theorie gen6rale des varia-
tions des constantes arbitaires dans tous les problfemes de la mecanique;
Memoires de ГInstitut national, 1808, а именно:
11F (dr~dr' + ds~^ + ''') = dZ’ <b>
*) «Утверждение, что это уравнение имеет место для всех возможных варьяций, ие
является совершенно точным, так как уравнения связей должны быть всегда удовле-
творены. Выполнение интегрирования по времени, как кажется, должно быть оправдано
другим способом, заметив, например, что значения t, между которыми берется интеграл,
являются произвольными».
ЗАМЕЧАНИЯ, ОТНОСЯЩИЕСЯ К НАЧАЛУ НАИМЕНЬШЕГО ДЕЙСТВИЯ 403
гдеZ есть Т U; г, s,... —• главные переменные и г', s',... — их производ-
ные по времени. Взяв интеграл, получим прямо гамильтоново выражение
главной функции
где знаки 1 и 2 показывают, что выражение в скобках относится к пределам
интеграла. Уравнение (Ь) служит основанием тому воззрению на уравнение
динамики, которое Остроградский высказывает в конце своего письма к
Брашману, что эти уравнения суть условия интегрируемости варьяции
SZ = <5Т + dU.
С.-Петербург
25 января 1871 г.
СОФУС ли
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ [147]
В теории возмущений идет речь о решении следующей задачи :
Задача I. Определить наиболее общее преобразование
хк = Хк(х1;..хп, Рг, ...» рп),
р’к = Рк{х1,..., хп, рг, ..., Рп) (к = 1, ..., п),
которое одновременно переводит все совместные системы вида
“*” = --£<“ <‘=I........">
в системы того же вида между новыми переменными [148].
Якоби и Бур, как известно, нашли, что самое общее преобразование
требуемого типа определяется уравнениями
(Хк X,) = (X, Л) = (Рк Pt) = 0, (Рк X к) = 1. (0)
С другой стороны, для касательных преобразований, как мною устано-
влено, основной задачей является следующая :
Задача II. Определить наиболее общим образом 2п величин Х1;...
..., Хп, Plt..., Рп как функций от xlt..., хп, plt.рп так, чтобы имело
место соотношение вида
Pi dXr +... + Рп dXn = pr dxr +... + рп dxn + d V
в предположении, что V рассматривается как неопределенная функция
от хь..., xn,Pi,..-,Pn-
Как я показал, самое общее решение этой задачи получается, если взять
любую систему величин Хк, Рк, удовлетворяющую соотношениям (0)*).
Таким путем была открыта точная связь между двумя кажущимися раз-
личными задачами. Эта связь при моей синтетической концепции была
a priori так ясна, что я в ранее представившемся случае**) назвал задачу II
лишь другой формой задачи I. Но теперь я убедился, что даже выдающиеся
математики не поняли ясно внутреннего основания этой связи. Поэтому я
считаю целесообразным доходчиво доказать путем аналитических рассуж-
дений, что названные задачи действительно могут быть взаимно сведены
одна к другой. Одновременно я показываю, что в моих более ранних иссле-
*) Якоби рассматривает задачу II, добавляя дальнейшее требование, чтобы урав-
нения Хх = flj,..., Хп = ап были разрешимы относительно р1(..рп. Он признает необ-
ходимость соотношений (0) при его постановке вопроса, но выполнения этого условия
недостаточно.
**) S о р h u s Lie, Ueber partielle Differentialgleichungen erster Ordnung, Gesammelte
Abhandlungen, Leipzig—Oslo, 1922, t. 3, стр. 49.
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
405
дованиях по касательным преобразованиям решаются две общие задачи,
которые следует рассматривать как обобщения задачи I.
В связи с только что указанным я доказываю путем новых рассуждений,
что дифференциальные уравнения механики, так же как и дифференциаль-
ные уравнения вариационного исчисления, могут быть приведены к канони-
ческой форме. Знаменитая теория Гамильтона—Якоби приобретает, быть
может, таким путем большую простоту, чем прежде.
В последнем параграфе я решаю следующую задачу :
Задача III. Определить наиболее общее преобразование, которое за-
данную систему вида
dx« = l^dt’ dP'< = ~^dt (k=\,...,ri)
переводит в подобную же систему.
Соответствующие преобразования, которые теперь уже не будут неза-
висимыми от вида функции F, в общем случае не являются касательными
преобразованиями.
Наконец, я указываю, но без доказательства, общий случай, в котором
интегрирование заданной совместной системы допускает соответствующие
упрощения, подобные тем, которые имеют место в случае канонической
системы.
§ 1. Общие канонические системы
1. 2п уравнений вида
х' — Xt = дх, = Vi(xlt ..., хп, Pi, ..., рп) dt,
p'-p,= <5p,= Q,(Xi, ..., хп, Pi, ..., pn)dt,
в которых dt обозначает любую (i = 1,..., п) бесконечно малую величину»
определяют бесконечно малое преобразование между величинами
Рп-
Я требую теперь, сверх того, чтобы это преобразование было бесконечно
малым касательным преобразованием в аналитической форме, т. е. чтобы
разность
Р^х[ + ... + p'ndx'n-(p1dx1+... + pndxr)
была полным дифференциалом Это дает уравнение
^2PidXi = dQ,
или, если выполнить соответствующие операции,
dx‘ + Pi i = dQ ’
откуда после перестановки символов б и d получается
Подставляя сюда выражения (1) для бх,- и мы находим уравнение
2’(Q,dx, + p,dr,) = di2,
которое эквивалентно следующим 2п уравнениям :
QQ ЭУ,- ЪО X' bYi
^ = Qr + ^pt~^, -^ = 2р^.
406
СОФУС ли
Э -у ЭУ| _ Э -у SYi
Ъре “Г Pi Qpr Ьрг i Pi Qpe ’
откуда после отбрасывания взаимно уничтожающихся членов находим
dQr = dQe 9Qr dYg ЭУе = дУг .
9хе Ьхг ’ дре ~~ дХг ’ орг — дре ’
откуда следует, что Yr и Qe равны соответственно частным производным
по рг и —Xg от некоторой функции переменных х1;..., хп, plt..рп:
у ... эг п _ QP
Уг ~ Qpr ’ ~ 9хе '
Отсюда получается следующая лемма :
Лемма 1. Каждое бесконечно малое касательное преобразование между
х, р имеет вид
где F обозначает любую функцию переменных хъ..хп, ръ..., рп*)-
2. Я теперь ищу, наоборот, наиболее общее выражение
Hz = ^'Xfc(Xi, Pn)dxk+ 2Pk(xi> •••> Pn)dpk,
k=l fc=l
которое обладает тем свойством, что выражение
8W _ у ( dW dF _ dW 9F\
dt k 9xfc Эр* dpk dXk) ’
какова бы ни была функция F, всегда является полным дифференциалом.
Уравнение, выражающее это условие,
-^-= dQ(x1, хп, Р1, рп)
после выполнения соответствующих операций принимает вид
dQ = 2 Xk d + (F, Хк) dxk - 2 Рк d Рк) dPk,
откуда
9Д = > х Э2^ _ 92/7 + (F X 't
дХи ^Лк дркдХ, ЬХкдХи +И’Л“)’
= V Хк —__________УРк —_________\-(F Р) Г149]
Эр» к к дрк Ьр« к Ьхк 9ря
♦) С помощью этой теоремы задача I принимает форму: «Определить наиболее общее
аналитическое преобразование, при котором все бесконечно малые касательные преоб-
разования остаются таковыми». Само собой понятно, что каждое касательное преобразо-
вание является именно таким преобразованием.
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
407
Теперь мы образуем тождество
э эд __ э эд
Эр» 9хи Эхц Эр»
и приходим таким путем, опуская взаимно уничтожающиеся члены, к сле-
дующему :
у, ЪХк &F _ у, дРк &F , ( 9F V ) , ЭХИ _
dpv дрк Эх„ dpv дхк дхи ( Эр» ’ “7 ' ( ’ Эр» J
_ у, дХк 92F у, дРк d2F____( &F p \(F ЭР»'! = 0
У* Эх» дрк dpv Эхц Эх* Эр» L Эхц ’ v) V ’ Эхц)
Это соотношение должно иметь место, какова бы ни была функция F.
Поэтому, если объединить все члены, содержащие одну и ту же производную
от F, то коэффициенты при каждой такой производной должны равняться
нулю. Это дает следующие уравнения :
дХк ЭР» , j
TS7-Tta=° (2)
ЭХ» _ ЭР» ЭХЦ _ ЭР„ ZO4
bpv дх-р др и дХи *
.эх". _ = о (4)
Эхк дх,, U ’ 17
дРи дРк п /еч
(5>
Э 7 ЭХ,, _ ЭР» А „ Э 7 ЭХЦ _ ЭР»1 0
Qxk V Эр» дхи] ’ дрк ( Эр» Эхи J ' ' '
г\е: ЭХ» ЭР»
Оба последних уравнения показывают, что величина ---------------~ по-
(jpv ОХу
стоянна и одновременно, на основании уравнения (3), не зависит от v. Поэтому,
обозначая через А абсолютную постоянную, мы можем положить
ЭХ» ЭР» д
9 р» Эх» ,
откуда
= о (г>=1, п). (7)
dpv ЭХ» ' ’ ’ > ' 7
С другой стороны, ясно, что уравнения (2) и (4) могут быть записаны так :
9 {Хк - Арк) _ ЭР» . ,
9^»
Э {Хк — Арк) _ Э (X» — Ар»)
Эх» дхк
Эти уравнения вместе с уравнениями (5) и (7) показывают, что величины
Хк — Арк и Pi являются частными производными соответственно по хк и р,
некоторой функции переменных х1;..., хп, ръ.рп:
= Р, = ^- (t=l......................»).
Отсюда следует, что искомое выражение для W имеет вид
408
СОФУС ли
или, что сводится к тому же, вид
A^pkdxk + dU.
Л
Легко подтвердить также, что и наоборот, это выражение всегда обла-
дает требуемым свойством, каковы бы ни были постоянная А и функция U.
В самом деле,
откуда
с другой стороны,
6 ATT ASU
^idu==d~st-
Таким образом, мы можем высказать следующую лемму:
Лемма 2. Если данное выражение
W = ^Xkdxk + ^Pkdpk
к к
обладает тем свойством, что (F, IV) есть всегда полный дифференциал в
переменных х1(..хп, р1г..., рп, какова бы ни была функция F, то W имеет
вид
А^ pkdxk + dU.
к
. 3. После того как это установлено, я предполагаю, что в совместную
систему
ай8' (*-'...........”> <8)
и в выражение
Pi dxi + • • • + Рп dxn
вместо хх, х„, рп введены новые переменные, например yv ...
• • •> Уп> <71,- • Чп- При этом сначала на ук и qk не налагается никаких других
ограничений, кроме того, само собою разумеющегося, что они являются
независимыми функциями переменных х1(..., хп, р1г..., рп. Пусть
есть новая форма совместной системы (8) и пусть
2Pkdxk = 2 Ykdyk + 2Qkdqk = W,
к
где Yk и Qk суть некоторые функции переменных yv..., уп, qv..., qn.
В силу изложенного
<5УИ _ у, Г ЭИ/ 9F QW 9F Т _ .Q
St ~~ V Эх; Эр; Эр; Эх; J —
Отсюда, если и здесь ввести новые переменные, получается
эи/ эи/ ) ,п
+ ~д~9гЧ = dQ-
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
409=
Если мы, в частности, потребуем, чтобы г]к и пк имели вид
эф эф ,, , ч
,г]к = —, ик =—-— (к = 1, ..., п),
lk dqk ’ к дук ' '
какова бы ни была функция F, то по лемме 2, если рассматривать IV как
функцию переменных у1г..., уп, qlt---, qn, эта функция должна иметь вид.
IV = А 2 Qi dy, + dV
и, таким образом,
^pkdxk = AJP qi dyt + dV,
к i
что сводится к тому, что наше преобразование должно быть касательным
преобразованием между х^..., хп, Рп---, рп и у,--., уп, qlt---, qn- Итак:
Теорема 1. Если данное преобразование между xlt..., хп, plf..., рп
и Уп • • •, Уп, Qn- - -, Qn обладает тем свойством, что оно переводит любую
совместную систему вида
в подобную же систему между ylt..., уп, qv..., q„, то это — касательное
преобразование и, стало быть, имеет место соотношение вида
<‘=]....">
^pkdxk = A^qkdyk + dV.
к
4. Я ставлю теперь вопрос о наиболее общем касательном преобразо-
вании между х1(..хп, рг,---, Рп и Уп • • -, Уп, Qn - - - , Qn, которое переводит
заданную каноническую систему
<‘=1.......")
в другую определенную систему
<* = '.....">•
Другими словами, я ищу наиболее общее касательное преобразование,
которое переводит выражение (Хх, /) в выражение (Fv /). Согласно моей
теории касательных преобразований это сводится к тому, чтобы искать наи-
более общее касательное преобразование, переводящее Хг в F1. Оно будет
найдено, если составить в самой общей форме две канонические группы :
*1, ..., Хп, Р1г Рп,
Ylt ...,Yn, Q1( Qn,
соответственно в переменных х, р и у, q, так чтобы в эти группы входили
Хг и F1. Если затем положить
Xk = Yk, Pk = Qk,
то эти уравнения определят наиболее общее преобразование требуемого
типа.
В частности, можно потребовать, чтобы Хг и Yx были одинаковыми
функциями соответственно переменных х1;хп, plt---, рп и переменных
410
СОФУС ли
Ун • • •, Уп, Qv • •, Qn- Решение этой частной задачи вытекает непосред-
ственно из только что сказанного.
5. Если одновременно дано несколько уравнений вида
(FT, F) = 0, ..., (Fr,F) = 0, (хх, ...» хп, Р1, рп), (9)
то можно искать наиболее общее касательное преобразование, которое пере-
водит их соответственно в
(01(F)=O, (Фг, F) = 0, (ух, ..., уп, qlt ... , qn).
Это сводится к тому, чтобы искать наиболее общее касательное преобразо-
вание, переводящее функции F1;..., Fr соответственно в Фп..., Фг. В своей
теории инвариантов касательных преобразований- (Math. Ann., т. VIII,
стр. 272)*) я показал, как можно при помощи выполнимых операций
решить, возможна ли данная задача этого типа. Если да, то искомое пре-
образование находится посредством интегрирования обыкновенных диффе-
ренциальных уравнений.
В частности, если уравнения (9) образуют полную систему, то можно
искать наиболее общее касательное преобразование, которое переводит эту
систему в другую полную систему
(Ф1; F) = 0, (Ф2, F) = 0, ...
между переменными yv..., уп, qv..., qn. Согласно доказанному мною (Math.
Ann., т. VIII, стр. 251 и далее)**) Fv..., Fr и Фъ Ф2)... должны составлять
группы из одного и того же числа членов и с одним и тем же числом раз-
личных функций. Если это требование выполнено, то нужно привести обе
эти группы к их каноническим видам:
Х1г ..., Хе, Plt Pr-S,
Л, ..., Ye, Qlf ... , Qr-e
и искать тогда в самой общей форме канонические системы величин :
..., Хп, Plt ..., Рп,
Ylf ..., Yn, Qlt ..., Qn.
Тогда уравнения
Xk = Yk, Pk = Qk
определяют наиболее общую систему требуемого типа.
§ 2. Канонические системы, характеристическая функция
которых имеет вид p+f(®i, . р1; • • • > Рп)
Я обращаюсь теперь к случаю, важному с точки зрения приложений к
механике и вариационному исчислению, а именно к случаю, когда харак-
теристическая функция имеет вид
p + /(Xi, ..., х„, рг, рп).
*)Sophus Lie, Gesammelte Abhandlungen, Leipzig—Oslo, 1929, т. IV, § 16, № 36.
**)Там же, п. 10—13, № 23—29.
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
411
В соответствующей совместной системе
<5х _ дхк _ 8р _ 8рк #
1 ~ э/ — ~
дрк Эх Эх*
нет надобности брать член
ёр _ дрк
~ э/ ’
Эх Эх*
так как остальные члены вовсе не содержат р. Между прочим, следует заме-
тить, что теперь вспомогательная величина t равна х.
6. Мы ищем наиболее общую систему уравнений
<5х* = Мх, > • • •, , Pi, • • •, Рп) <5х,
йрк = Рк (х, хх, ..., х„, рг, рп)дх {к п),
в силу которой выражение
(Pi dxx + ... + рп dxn)
получает вид
йФ + со (х, хх, ..., хп, р1г рп) dx.
Это требование выражается уравнением
Рк d$k + Рк dxk = dФ + a>dx,
к=1 к-1
откуда
1x7 + = 1х7 (г=1, ...» п),
-V. Ык ЭФ . . ч
Агэре - эр7 ” л)’
V „ Ык ЭФ ,
Отсюда получается таким же путем, как и раньше :
Ьрк _ dpi дт]к ___ d§i dSk d$i дрк _________ Эсо Э^* дш
Эх; — Эх* ’ Эр; — Эх* ’ Эр/ ““ Эр* ’ Эх — Эх* ’ Эх Эр*
Следовательно, имеется такая функция U переменных хь..., хп, plt..., рп,
что
Итак, имеет место следующая лемма :
Лемма 3. 'Если выражение
~^(Pidx1+ ... + рп dxn),
образованное на основании уравнений
бхк = ^кбх, брк = укдх (к = 1, ..., л),
412
СОФУС ли
имеет вид
dW + a>dx,
то имеется такая функция U переменных х, xlt..., хп, р1г..рп, что
t dU ди , V ъи
^к~~ дрк ’ Г,к~~ дхк Vе 1, п), «о эх •
7. Мы будем далее искать наиболее общее выражение
J' Xkdxk + ^Pkdpk + Xdx= W,
fc=i fc=i
производная которого по x, составленная на основании'уравнений
дХк=~^6х’ SPk=z-~^Sx •••’")’
имеет вид
dQ-pcodx.
При этом предполагается, что К не является"’ "определенной величиной,
а рассматривается как неопределенная функция переменных х, xlt..., хПг
Р1,---> Рп-
Условное уравнение
= dQ + (о dx
fix '
принимает после выполнения соответствующих выкладок вид
dQ + mdx= ^Xk^L- JPpkd™L +
к к дРк к к дхк^
+ ^(р + К, Xk)dxk+ ^(р + К, Pk)dpk + (p + K,X)dx,
к к
откуда
<>Р _ х- у Эак v р ’ э*к , „ у ,
дхи ^Лк дркдхи <£Ик ЪХкЪХи +\Р + ^’ лп)>
> = ^-^-^Т^г + (Р + К,
Теперь мы составляем тождество
д эР _ э дР
dpv дХи ~ Эхц Эр» ’
и, опуская взаимно уничтожающиеся члены, находим таким путем
v дХк д*К у. дРк дгк . f , к ЭХаЧ , ( дК х Ч _
dpv дрк дхи dpv QXk дхи V ’ Эр» J I Эр» ’ “J
дХк Э!Х , дРк Э2Х ( . у ЭР» A d 1__П
дхи дркдрц дХи дХидр« ( 9хц ,
Это соотношение должно существовать, какова бы ни была функция К.
Поэтому, если объединить члены, содержащие одну и ту же производную
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
413
от К, то коэффициенты при каждой из этих производных должны обращаться
в нуль. Это дает следующие соотношения :
dXk &Pt> _ dPv dXk = 0 при k=f=v
dXy dPv dXu dPu
dpv dXy ~ Эри dxu ’
dXu dXk dPu dPk :0,
dXk dxu дрк dpa
Э dxk f dXu _ I dpv ЭР„Л 0XU J o,
Э дрк f dXu _ I dpv ЭРИ _ Эхи J o,
Э Ox Г ЭХЦ _ I Qpv ЭРИ = dxu J 0.
Три последних уравнения показывают, что величина
ЭХ„ _ дРу
dpv дХу
постоянна, а в силу уравнений (а) эта постоянная не зависит от v. Мы имеем,
следовательно,
или
-а-^----------- = А = const,
Эр,; ОХ/; ’
8(Х Лр.) _ .....
Эру ОХу '
Рассуждая так же, как в п. 2, мы приходим к заключению, что величины
Хк — Арк и Р( являются частными производными по хк и р,- некоторой
функции переменных х, хп..., хп> р^..., рп:
X - Ап - QU Р - QU
откуда
V __ дп I dU р _____ dU
Хк-Арк + -^,
и, таким образом, W имеет вид
А рк dxk + dU + <р dx.
к
Наоборот, легко убедиться в том, что это выражение всегда, т. е.. каковы
бы ни были постоянная А и функции U и гр, обладает требуемым свойством.
В самом деле, мы имеем:
4-tu = d^,
ОХ ох 1
-4zr(<pdx) = -¥-dx.
ox vr ' (5x
414
СОФУС ли
Таким образом, мы можем сформулировать следующую лемму:
Лемма 4. Если выражение
(р + К, Хк dxk 4- Рк dpk + X dx),
( к к J
в котором Хк, Рк и X — заданные функции величин х, х1;..., х„, р1г..рп,
а К означает неопределенную функцию тех же величин, всегда имеет вид
dQ 4“ dx,
какова бы ни была функция К, то выражению
J* Xk dxk 4- Рк dpk 4- X dx
к к
можно придать вид
рк dxk 4- dU 4- ср dx.
к
При этом А — произвольная постоянная, a U и у — произвольные функции
величин х, xlt..., хп, plt.рп.
8. Представим себе теперь, что в совместной системе
8хк = ^-8х, дрк=—^г~дх (к=1, ..., п)
К дрк охк ' > > /
и в выражении
IV = Pi dxi 4- • • • + Рп dxn
вместо х, х1;..., х„, ft,..., рп введены новые переменные, скажем,
х, Уъ‘ • •> Уп, Qi, - • Яп- При этом на величины ук сначала налагается лишь
одно ограничение, что они не зависят от хп..., хп, plt..., рп. Пусть
дУк^Чквх, dqk = tk8x (к=1,...,п) (10)
— новый вид нашей совместной системы и пусть
Л pkdxk = J?Ykdyk + 21Qkdqk + Ydx= W,
к к к
где Yk, Qkn Y — некоторые определенные функции новых переменных.
Вследствие формы, которую имеет W в старых переменных, имеет место
уравнение вида
-пг-= dQ 4- ш dx.
дх 1
Если ввести здесь новые переменные, то получается
где выражение слева имеет обычный смысл.
Если теперь, в частности, преобразованная система (10), какова бы ни
была функция К, всегда имеет каноническую форму
6Ук = ^кдх’ d^k==~ly^SXi (к=1,...,п),
то выражение W согласно предыдущей лемме должно иметь вид
А% qkdyk + dV + <pdx.
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
415-
Следовательно,
Рк dxk = А qk dyk + dV + g>dx.
к и
Если к обеим частям этого уравнения прибавить величину р dx и обозначить
притом сумму <р + р через Aq, то получается
pdx + p1dx1 + ... + Pndxn = A (qdx + Qidyi + +qn dyn) + dV.
Этим доказывается, что наше преобразование можно считать касательным
преобразованием.
Теорема II. Если заданное преобразование между х, х1(..., хп, р,
рг,..., рп и х, уь..., уп, q, qx,..qn обладает свойством переводить каждую
систему вида
6Xi = -^~-dx, дрк=--^-дх (к=1,...,п)
в подобную систему между новыми переменными в предположении, что К
обозначает произвольную функцию переменных х, х1?..., хп, р, plt.рп, то
наше преобразование является касательным преобразованием, т. е. имеет
место соотношение вида
Рdx + Pidxi +... + рпdxn = A (qdx + qxdyx +. • • + dyn) + dV.
9. Пусть теперь задана определенная система
SXk = -^Sx> dpk=~^Sx (х’ xi’ • • •> хп, Pi, •Рп),
которую желательно при помощи касательного преобразования перевести в
другую определенную систему
8ук = ^8х’ 8(1к=~^8х (х’ , Уп, Qi, , qn)-
При искомом преобразовании уравнение
_9/__ _____9Х -9?-А = о = (п + Х Л
Эх ( дХк дрк дрк дхк) 'Р ' ’ ‘'
переходит в уравнение
Эх I дук dqk dqk дук) U \Ч^2> lf>
где / обозначает неизвестную функцию переменных х, хг,..., хп, рг,--., рп
или же переменных х, у1г..., уп, qlt.qn.
Здесь нельзя заключить непосредственно, что р + X при рассматривае-
мом преобразовании переходит в q -|- Y. Поэтому пусть
q + U(x, У1, ..., Уп, Q1, , Qn)
будет та функция, в которую преобразуется р + X. Тогда, согласно теории
касательных преобразований, (р + X, f) перейдет в (q -|- U, f), так что
(q + Y, f) = (q + U, f),
откуда следует
(Y-U, f) = 0;
это уравнение должно оставаться в силе, если вместо / будет подставлена
любая функция переменных х, хь..., хп, рг,..рп, представляющая собой
416
СОФУС ли
инволюцию функции р X. Таким образом, мы можем заключить, что
Y — U есть постоянная :
£7 = Y + А.
Следовательно, искомое преобразование переводит p-f-Хв^ + У + Ал
Чтобы определить это преобразование наиболее общим образом, обра-
зуем две канонические группы:
х,Х1} Хп, р + Х, Рг............Рп, (11)
х,Л, ..., Yn, q + Y+ A, Q1; ..., Qn, (12)
причем Хк, Рк суть функции переменных х, хх,..хп, ....... a Yk, Qk —
функции х, Ух,..., уп, qn. Тогда уравнения
х = х, p + X = q + Y + A, Pk — Qk, Xk = Yk (к=1..............п)
определяют искомое преобразование.
Между прочим, следует заметить, что величины (12) продолжают образо-
вывать каноническую группу, если положить постоянную А равной нулю.
Поэтому искомое наиболее общее преобразование между переменными х,
х1(..., хп, рь..., рп и переменными х, ух,..., уп, qlf..., qn находится путем
перевода р + X самым общим образом при помощи касательного преобразо-
вания в q Y.
§ 3. Приложения к механике и вариационному исчислению
Якоби, как известно, впервые показал, что интегрирование так назы-
ваемых канонических совместных систем
= <к='.................<13>
допускает особые, свойственные этим системам преобразования. После того
Вейлер (Weiler), Майер (Mayer), а также и я сам развили для интегрирования
таких систем еще более простые методы.
10. Поэтому, если нам дана какая-либо совместная система, то рекомен-
дуется поставить вопрос, нельзя ли ее привести к каноническому виду.
Известно, что Гамильтон привел дифференциальные уравнения механики
для широкого ряда случаев к этому виду. Якоби обратил внимание на важ-
ность этого приведения и одновременно показал, что существует более об-
щая категория задач механики, которые можно облечь в данную форму.
Сейчас я выведу эту теорию Гамильтона—Якоби новым способом, опи-
раясь на предшествующее изложение. При этом я сначала рассмотрю простой
случай известного числа свободных точек, которые движутся под действием
их взаимного притяжения или также и под действием неподвижных точек.
Пусть х1; х2,..., хп — координаты наших точек. Пусть V — силовая
функция, которая может также зависеть и от времени. Тогда, как известно,
движение определяется уравнениями
Если мы положим
= П (/г=1, ...', л), (14)
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
417
то будем иметь
Чтобы привести уравнения (14) и (15) к канонической форме, нужно только,
как это непосредственно видно в этом простейшем случае, положить
±-(yl + ... + y*)-U = T.
В самом деле, тогда наши уравнения принимают вид
<5/ дук St дхк ' ’
Это и есть тот путь, которым Якоби пришел к своему первому результату.
Для того чтобы иметь возможность обобщить эту теорию, целесообразно
поискать внутреннее основание полученного результата.
Так как введение величин х1;..., хп, уь..., уп в качестве независимых
переменных приводит данную систему к каноническому виду, то на осно-
вании предыдущего параграфа выражение
(Ух dxi + ... + уп dxn)
должно иметь вид
dQ + odt.
Это подтверждается следующим образом.
Мы имеем
i£ykdxk = 2^dxk + ^ykd^,
OL к к ‘ к
откуда на основании (14) и (15) находим
£ykdxk = 2^dxk + £ykdyk = d + - 4rd/-
в чем и заключается доказательство.
Обратимся теперь к общему случаю, когда координаты хп..., хп связаны
несколькими соотношениями, которые могут включать также и время t:
fi(Xi, ..., хп, 0 = 0, ... , /9(х1; ..., хп, 0 = 0- (16)
При этом мы по-прежнему предполагаем существование силовой функции U.
Согласно Лагранжу движение определяется уравнениями
= + (*=1- ••-«) (17)
совместно с уравнениями (16).
Естественно поставить вопрос, нельзя ли и теперь выражению
У k dxk
т к
придать форму
dQ + о dt.
Мы находим
4
01 к к 01 к Ul
27 Вариационные принципы механики
418
СОФУС ли
откуда на основании уравнений (17) получается
у -S' л ох„ = 2 (+ 2 >! -$-) + 2 ft <1ук=
= “ + 4 2й) + 2 <4, - + 2 >, ^г) <“;
но все dft обращаются в нуль, и мы, таким образом, находим
4-£ykdxk = d [t/ +
чем и оправдывается наше предположение.
В выражении Еук dxk величины хк и ук = связаны уравнениями (16).
Мы исключим зависимые величины ук и dxk, причем, конечно, должны войти
величины t и dt. Удобно мыслить уравнения разрешенными относительно q
величин, скажем хп_д+1,..., хп :
*k = <pk(*i, •••. xn-q, I) (k = n-q+l, п).
Это дает
dxfc = 24^dx'- + -^dZ (k = n-q + 1, ..., п) (18)
Г—1
И
л = 3-а-> + тг (‘-"Ч+1...............">• <19>
е=1
Если подставить эти значения в выражение ^ykdxk, то получится:
к
или
л- "v d-r fv л- 4 fjcf,k Г49?i* v л- дсрк\
+ ^dxryr+ £ , эх7 Д ъГвУк + ~эП •
г— 1 L k=n—q+\ \e=l w )
Таким образом найдено уравнение вида
J ук dxk = Y1 dX1 +... + Yn_q dxn_q + Ydt.
k=i
Поэтому, если величины Л, при помощи уравнений (16), (17) и (19) опре-
делить как функции от хк, ук и t и затем ввести в нашу совместную систему
величины х1;..., хп, Yv..., Yn_q, t в качестве переменных, то на основании
леммы 3 она примет канонический вид:
= <fc=1’ •••’ ")•
Функция W может быть, очевидно, определена в каждом отдельном случае.
Новые переменные У, являются частными производными некоторой
определенной величины. В самом деле, если положить
у (У1 + • • • + Ул) ~ ’
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
419
ТО
откуда имеем для г = 1,..., п — q :
= v -l. 4 Э|Р ("v v _i_ )
дуг + , Ji дХг \^'дхеУв+ dt ’
fc=n--,+ i l?=l к )
так что
у _ v - 9!3
1 9У1 ’ • • • ’ 1 - дуп-д •
И. Если поставить себе целью определить величины хь..хп как функ-
ции времени таким образом, чтобы интеграл
Xi.....хп, х;, ..x')dt,
где
х, _ дхк
к 8t ,
имел минимальное значение, то для этого, как известно, нужно, чтобы удов-
летворялись уравнения
= 0 <t=1.........")• <2°)
Эти уравнения вместе с уравнениями
4г = х* (Л=1, л)
образуют 2л-членную совместную систему, которая, согласно Якоби, прини-
мает канонический вид, если ввести в качестве переменных величины
= (fc=l, (21)
Чтобы просто доказать это фундаментальное предложение, образуем
производную по t от выражения Еук dxk :
jZiA = 2-"^, + 2ъ “‘в-.
откуда находим на основании уравнений (21) и (20)
^2<Укйхк = 2i^dxk + ^-S^dx’k, или ^ykdxk = d<p - -^-dt,
VAk VI - VI
что и доказывает требуемое.
§ 4. Решение задачи III
12. Предположим теперь, что некоторая определенная каноническая
система
(fc=l, ...,«) (22)
благодаря введению переменных у1;..., уп, qlt..., qn, где
Ук = Ук(Х1, , хп, Рг, .... рп),
. . (к = 1, ..., л),
Qk = 9к (Xi, • • •, хп , рк, ..., рп) v
27*
420
СОФУС ли
принимает вид
= (*=1, ..., п).
Если это преобразование не является касательным преобразованием, то
положим
2 Чк ЛУк = 2*к dxk + 2Рк dpk = VV.
Существует (лемма 1) соотношение вида
4 2 Чк dyk = (®i, 2 Чк dyk) = AQ,
откуда
4 (2 Хк dXk + 2 Рк dPk] = AQ.
I к к J
Пусть, с другой стороны, задано любое выражение
Xkdxk + Pkdpk (23)
к к
с нормальной л-членной формой, производная которого по t является пол-
ным дифференциалом :
4 Хк Ахк + 2 Р’кАрк\ = | Fi, 2 Хк Ахк + 2 Рк Арк) = dQ. (24)
' I к к ) к к к
Если теперь привести выражение Xkdxk + P'kdpk к его нормальной
форме * к
2Хк dxk -|- JS*Рк dpk = q[ dy[ + • + q'n dy'n + AO,
к к
то система (22) посредством введения в качестве переменных величин ук, qk
(которые мы предполагаем независимыми) снова принимает канонический
вид :
= s4k = ~-^^t (*=1,...,«).
Если желательно найти наиболее общее преобразование, которое сохра-
няет системе (22) ее канонический вид, то надо искать самое общее выра-
жение (23), удовлетворяющее соотношению вида (24), а затем привести это
выражение наиболее общим способом к его нормальному виду. Этим непо-
средственно получается искомое преобразование.
Будем теперь искать 2л-членную каноническую группу, содержащую Fp.
Fr,..-, F^G^.-^Gn,
и затем введем эти величины в качестве переменных. Речь идет о том,
чтобы найти наиболее общее выражение
ZLkAFk + 2MkdGk, (25)
к к
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
421
которое удовлетворяет соотношению вида
(F,, 2 U dFk + 2 Мк dGk) = dQ.
к к
Но это уравнение принимает вид
2^dFk + 2
к к
дМк
9GX
dGk = dQ,
откуда получаем
QLk __ ЭД дМк ЭД
9G, QFk ’ 9G, dGk
(к = 1, . . .,n)
или путем интегрирования по переменной Gr
Lk=J~^-dG1, M/t^['g-dG1 (к=1,...,п). (26)
В этих выражениях для величин Lk и Мк роль постоянных интеграции
играют произвольные функции переменных Flf...,Fn, G2,..., Gn, тогда
как через £2 обозначена произвольная функция всех переменных Fk ц Gk.
Если затем в выражении (25) выразим Fk и Gk в функции от хк и рк, то
получим наиболее общее выражение
2Xkdxk + ^Pkdpk
к к
удовлетворяющее соотношению вида
(Л, 2 хк dxk + 2 Рк dpk) = dQ.
к
После этого искомое преобразование находится по ранее установленным
правилам.
13. Чтобы доказать в явной форме, что преобразования, найденные ука-
занным способом, вообще говоря, не являются касательными преобразо-
ваниями, я приведу нижеследующие рассуждения.
Формулы (26), если обозначить через кк и рк произвольные функции
переменных G2,..., Gn, Fv..., Fn, могут быть написаны так:
(к = 1, ..., л).
(27)
Если соответствующее преобразование должно быть касательным преоб-
разованием, то должно иметь место соотношение
^LkdFk + ^MkdGk = 2Pkdxk + dV = 2GkdFk + dn,
к к к к
откуда
Lk = Gk+-^_, Мк=^ (к = 1, ..., л). (28)
Если положить
П- ^QdG1 = S,
422
СОФУС ли
то эти формулы дают вместе с формулами (27) уравнения
4 — + Рк — -qq^ (^—1, .. л).
Но так как лк и рк, вообще говоря, являются произвольными функциями
переменных G2>..., Gn, Fv..., Fn, то этим действительно доказано, что наши
преобразования лишь в виде исключения являются касательными преоб-
разованиями. Это приводит к следующей теореме:
Теорема III. Чтобы каноническую систему
dxk=°^dt, dpk = -^^dt (fc=l, ..., л)
“ dpk г dxk ' 7
наиболее общим образом преобразовать в подобную же систему, поступают
так: удовлетворяют уравнению
2P^xk = 2GkdFk + dV
к к
наиболее общим образом и затем полагают
Fk 4 Ч Рк Ч Ь • • • > л),
где U обозначает любую функцию переменных Fk и Gk, а 4 и рк — произ-
вольные функции переменных G2,..., Gn, F^..., Fn. После этого приводят
выражение
2FkdFk + 2^kdGk
к к
наиболее общим образом к виду
Q1dY1+ ... + QndYn +dY.
Тогда уравнения
• dk = Qk > Ук = к
определяют наиболее общее преобразование требуемого типа.
14. Примечание. Если дано какое-либо выражение Пфаффа:
Х-± dx-± Ч- •. • Ч- Хп dxn — Yi X dx,
то можно поставить себе задачей найти наиболее общее бесконечно малое
преобразование
= + •••
которое удовлетворяет соотношению вида
A(£Xdx) = dQ,
а также дает
A(£Xdx) = 0.
Эти задачи всегда разрешимы. Если, в частности, т = 2п, и притом нор-
мальная форма XX dx л-членна с 2п независимыми функциями, то первая
задача требует только выполнимых операций.
Пусть, наоборот, дана полная система
А/ = 0, ..., Aqf = O.
ТЕОРИЯ ВОЗМУЩЕНИЙ И КАСАТЕЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
423
Предположим, что известно выражение
Xi dxT + ... + Хт dxm ,
которое удовлетворяет q соотношениям вида
Д/ (Z X dx) = d&i (или = 0).
Поставим задачей наиболее полно использовать это обстоятельство. Если,
в частности, q = 1, т = 2п, и притом нормальная форма выражения
£Xdx
содержит 2п независимых функций, то интегрирование уравнений Д /= О
требует нескольких операций, число которых равно 2п—2,2п—4,..6,4,2.
В соответствующем месте я распространю все свои исследования по диф-
ференциальным уравнениям в частных производных первого порядка на
задачу Пфаффа.
Собственные аннотации
1. Наиболее общее преобразование
Х'к = Хк{Х1, . .., Хп, ..., рп), I (j)
= ’ Хп, Р1> •••> Рп), ’
которое превращает одновременно все совместные системы вида
dXk = ~fipk~dt ’ dpk = ~ ~dxTdt
в системы того же вида, согласно Якоби и Буру определяется урав-
нениями
(X,, Xft) = (X,, Pk) = (Pi, Рк) = О, (Рк,Хк)=1. (3)
Согласно исследованиям автора по касательным преобразованиям, напи-
санные соотношения одновременно определяют наиболее общую систему
величин Xh Pj, которая удовлетворяет условному уравнению вида
Р1 dXT + ... + Рп dXn = pi dx-i + ... + рп dxn = dQ.
Работа посвящена отысканию внутреннего основания этой связи между
теорией возмущений и теорией касательных преобразований.
Если требуется найти наиболее общее преобразование, которое только
одну систему (2) превращает в подобную систему, то соотношения (3) более
не являются необходимыми.
Все преобразования, которые удовлетворяют такому требованию, могут
быть определены.
2. В теории возмущений решается следующая задача:
Задача {.Определить наиболее общее преобразование
Хк = Хк (Xi, . . ., Хп , pi, ..., рп),
Рк = Рк (х1, • Хп, Р1, , Рп),
424
СОФУС 'ЛИ
которое одновременно переводит все совместные системы вида
dXk~b^dt’ dPk--------------------------------?mdt
в системы того же вида.
Якоби и Бур показали, что наиболее общее преобразование требуемого
типа определяется уравнениями
(X,, Хк) = (X,, Рк) = (Р,, рк) = О, (Р,-, X,) = 1.
С другой стороны, согласно более ранним работам автора в основе теории
касательных преобразований лежит следующая задача :
Задача II. Определить наиболее общим образом 2п величин Хи..., Хп,
Pv..., Рп как функции переменных xlt..., хп, plt...,pn таким образом,
чтобы имело место соотношение вида
Pi dXr + ... + Рп dXn — р± dx1 + ... + рп dxn + dV
в предположении, что V рассматривается как неопределенная функция
переменных xlt..., хп, plf..., рп.
Как известно, общее решение этой задачи получается, если взять любую
систему величин Хк, Рк, которая удовлетворяет условию (1). Этим была
доказана тесная связь между двумя, как казалось, различными задачами.
В настоящей работе при помощи аналитических рассуждений выясняется
внутреннее основание этого тождества. Одновременно ставятся и решаются
аналогичные задачи. В частности, решается следующая новая задача:
Задача III. Определить наиболее общее преобразование, которое за-
данную систему вида
, dF a dF ..
dxk = — dt, dpk= —тг— dt
дрк дхк
переводит в подобную же систему.
Показывается, что соответствующие преобразования, которые все могут
быть определены, вообще говоря, не являются касательными преобразова-
ниями.
Н. Е. ЖУКОВСКИЙ
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ [15°]
§ 1. Серре в своем мемуаре о начале наименьшего действия*) пополнил
теорему Лагранжа, доказав, что вторая вариация от действия есть величина
существенно положительная, и, следовательно, действие имеет наимень-
шую величину при действительном движении системы. Но, несмотря на
остроумный анализ знаменитого ученого, его исследование настолько слож-
но, что не может быть изложено в курсах механики. Я думаю, что поэтому
не будет лишено интереса простое геометрическое доказательство, с по-
мощью которого обнаруживается, что действие имеет при действительном
движении системы наименьшую величину, тем более, что это доказательство
распространяется и на принцип Остроградского.
§ 2. Пусть дана система п точек с р условиями в ее первоначальном поло-
жении а, alt..., ап, находящаяся под действием сил, имеющих силовую,
функцию U. Рассмотрим два бесконечно
близких движения этой системы, из ко-
торых одно совершается по путям af,
а^,..., anfn, а, другое — по путям ab,
..., апЬп (см. рисунок). Назовем через
Т живую силу системы и напишем интеграл
живых сил :
U-T + h = 0, (1)
где h — постоянное. Действие в движении
по траекториям af, arfr,..., anfn условимся
обозначать через (af), так что
(a/)=f27'd(; (2)
о
t есть время, в которое система переходит из начального положения в поло-
жение /, /1;..., fn. Этот интеграл на основании формулы (1) может быть пред-
ставлен так:
+ T + h)dt.
(3)
Предположим, что постоянное й одинаково как для движения по траек-
ториям af, а^г, ..., anfn, так и для движения по траекториям ab,
*)Serret, Comptes Rendus des Эёаrices de l’Acad6mie des Sciences, t. LXXII,
стр. 696 (1871).
426
Н. Е. ЖУКОВСКИЙ
«1&1, ..., апЬп, и определим вариацию (ab) — (af):
<ab) - (af) = Г, 2T dt + j£ dx + &) dt +
о
t
. f v f dx ddx . dy ddy , dz ddz\
+J 2 ™ hr ~dT + + -dt~ir)dt-
о
Интегрируем по частям :
t
f (dx ddx . dy ddy , dz ddz)
J 2m hrT + -i-at- + Д1г) dt =
0
0
Ho
Ю , _ If , , It It dx s,
i dx = O, dx = d x— -^dt,
I I I I dt
л if dx , Л |f \t dy , Jf I* dz .
d|xH + dri^-+d\zl -dt=vcosa-ds’
где v — скорость точки f, a = bfe, 6s = bf ; поэтому
t
f v? ( dx ddx . dy ddy . dz ddz\
}2^[w^r + 4t-dr + -dt^r)dt =
о
t
= У mv cos a • ds — 2T dt — | m dx + dy + ~ dz) dt.
6
, Подставляем:
t
(ab) — (af) = J? mv cos a ds + [(“|г — m 4^) dx +
о
Здесь подынтегральная величина обращается в нуль на основании главной
теоремы динамики, и мы получаем
(ab) — (af) = mv cos а ds; (4)
формула (4) показывает, что при
mv cos a - ds = О (5)
действия (af) и (ab) одинаковы.
Бесконечно малые линии fb, f^,..fnbn, удовлетворяющие условию (5),
вполне определены, так как они должны, кроме того, соединять точки
системы Ь, Ьь..., Ьп во втором движении с некоторыми соответственными
положениями этих точек f, fv...,fn в первом движении. Условимся назы-
вать такие бесконечно малые линии линиями равного действия.
§3. Сравниваем теперь действие (adc) в действительном движении си-
стемы с действием (abc) в каком-нибудь другом ее движении, кинематически
возможном и удовлетворяющем уравнению (1), причем постоянное h в этом
воображаемом движении то же, что и в действительном движении. Пусть
будет b, blt..bn — ряд положений точек системы в какой-нибудь момент
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
427
второго движения. Проведем траектории ab, а^,..., апЬп некоторого дей-
ствительного движения системы, при котором она, имея то же постоянное А,
переходит в некоторое время из a, аг,..., ап в Ь, Ь1г..., Ьп. Это вспомогатель-
ное движение будет вполне определенное, потому что для определения его
Зп — р + 1 начальных скоростей мы получим Зп — р уравнений, выра-
жающих, что точки системы вступают одновременно в b, blt..., bn, да еще
уравнение (1). Проведем траектории ае, а^,..., апеп подобного же вспомо-
гательного движения для точек е, бесконечно близких к точкам
Ь, Ьь..., Ьп, и вообще проведем траектории таких вспомогательных
движений для всех положений точек системы на путях abc, а^с^.. .,апЬпсп.
Представим теперь действие (abc), исключая из него dt с помощью интег-
рала (1), как это делает Якоби :
{abc) = j ]/2(U + rf/2 . (6)
Здесь dl, dlv..., dln суть элементарные пути, пройденные по траекториям
abc, aj^,..., anbncn. Пусть будет для некоторого элемента времени
dl = be, dl1 = b1e1, ..., dln = bnen.
Проведем через точки b, bv..bn линии равного действия
fb = ds, f1b1 = ds1, ..., fnbn = dsn
и положим
fe — da, f1e1 = da1, ..., fnen = dan.
Из бесконечно малых треугольников bfe, Ь-^е^..., bnfnen получим
dP = da2 + <5s2 — 2 da ds cos a.
Умножаем это уравнение на массу т точки а и берем сумму, распространен-
ную на все точки системы:
2 mdl2 = Z mdc2 -|- £ mds2 — 2 % т da ds cos а.
Но по формуле (5)
2 т da ds cos а. = dt £ mv ds cos a = 0;
dt есть время, в которое система пробегает бесконечно малые пути /е,
/д,..., fnen. Мы получаем:
2 т dl2 > 2 da2
или
V2(U + h) 2 mdl2 > l/2{U+h)2mda2.
Подставляем сюда
У 2 (L/ + A) 2”m da2 = (fe) = (ae) — (ab) = d (ab).
Находим :
]/2 (U + h)£mdl2 > d (ab).
Берем от обеих частей интеграл, распространенный на все движение по
путям abc, а^Су... :
Jf2 (U + A)% mdl2> adc
(7)
428
Н. Е. ЖУКОВСКИЙ
ИЛИ по (6)
(abc) > (adc). (8)
Это равенство доказывает теорему Лагранжа.
§4. Обращаемся к принципу Остроградского. Условимся обозначать
через [af] следующий интеграл :
[af]=\(T + U)dt, (9)
о
распространенный на движение системы по траекториям af, а^,..anfn.
Вообразим бесконечно близкое движение по траекториям ab, arbv..anbni
совершающееся в то же время, и определим вариацию [ab ] — [af ]:
hi - Hi
о
t
, С v (dx ddx . dy d <5y , dz ddz\ ,,
+ I 2 ™ T + -dt-dF)dt •
о
Здесь делаем такие же преобразования, как в § 2, полагая при этом bt = 0.
Получаем :
[а&] — [tz/j = 2 mvcosads. (10)
§ 5. Сравним теперь интеграл [adc ] в действительном движении системы
с интегралом [abc ] в некотором другом движении, возможном для нее кине-
матически и совершающемся в то же время как действительное движение.
Пусть Ь, Ьп будут положения точек системы в какой-нибудь момент
воображаемого движения. Проведем траектории ab, а^,..., апЬп некото-
рого действительного движения, при котором точки системы вступают в
b, blt..., bn в то же время, как при воображаемом движении. Такое вспомо-
гательное действительное движение вполне определенное, потому что для
отыскания его Зп — р + 1 начальных скоростей имеем Зп — р -f- 1 уравне-
ний, выражающих, что точки системы вступают в данное время в b, blt..., Ьп.
Проведем подобным же образом траектории ае, ахег,..., апеп вспомога-
тельного движения для положения системы е, е1У...,еп, бесконечно близ-
кого положению Ь, Ьг,Ьп, и для всех других ее положений на путях
abc, a^fC^..., anbncn. Возьмем на траекториях ае, ахег,..., апеп точки /,
в которые система вступает при вспомогательном движении в то
же время, в которое она вступает в точки Ь, Ьг,..., Ьп при воображаемом
движении.
Из бесконечно малых треугольников bfe, Ь^геь..., bnfnen получаем по-
добно предыдущему следующее неравенство :
2 т dl2 > 2 т dd2 — 2 2 т da 6s cos а.
Назовем через Т живую силу системы при движении по be, b^,..., Ьпеп,
через Т' — ее живую силу при движении по fe, f^,..., fnen и через dt — бес-
конечно малое время этих движений. Получим :
2mdl2 = 2Tdt2,
2 mda2 = 2T'dt2.
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
429
Вследствие этого наше неравенство будет:
Tdt>T' dt — т cos a ds.
Но по (10)
т ~11Т cos а 5s = — [«/] ’
следовательно,
Tdt>T'dt + [afl - [ab].
Прибавляем к обеим частям V dt :
(Т + U) dt > (Т + U)dt + [с/] - [flb].
Замечаем, что
(Г + U)dt = [/е] , [а/] + [/е] = [ае], [ае] - [а&] = d [а&].
Получаем
(Т + U)dt>d[ab],
Берем от обеих частей интеграл, распространенный на все движение:
J (Т + U) dt > [adc]
о
или
[abc] > [adc].
Это неравенство дает принцип Остроградского.
§6. Заметим, что данное нами доказательство начала наименьшего дей-
ствия неприложимо в некоторых случаях, указанных Якоби*); но это суть
именно те случаи, когда J 2Т dt под условием (1) не имеет ни минимума, ни
максимума. Подробное исследование этого вопроса мы надеемся предло-
жить читателю в приготовляемом нами к печати сочинении «О прочности
движения».
*) С. Jacobi, Vorlesungen Uber Dynamik, Berlin, 1866, стр. 46—47. [Есть русский
перевод : К. Якоби, Лекции по динамике, ОНТИ, 1936, стр. 41; см. также стр. 297—
315 настоящей книги. — Прим, ред.]
Г. ГЕЛЬМГОЛЬЦ
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА
НАИМЕНЬШЕГО ДЕЙСТВИЯ [И1]
Говоря в этой статье о принципе наименьшего действия, я хотел бы,
чтобы под этим понимали не только первоначальную форму этого принципа,
принадлежащую П. де Мопертюи*), которая, между прочим, лишь много
позже (это сделал Лагранж) получила точное определение условий варьи-
рования и полное доказательство. Я хочу под этим названием, как самым
старым и наиболее известным, понимать также различные преобразованные
формы этого предложения, которые были развиты из принципа Мопертюи
У. Гамильтоном**) [152]. Последний составил два дифференциальных
уравнения, которые, как показал К. Якоби, могут быть объединены в одно ;
эти уравнения служат исходным пунктом упомянутых выше, а также многих
других возможных преобразований, причем физические предположения,
лежащие в основе расчетов, совершенно не меняются.
Названные исследователи сначала применили принцип наименьшего
действия лишь к механике весомых тел и представляли при помощи этого
принципа либо движение системы совершенно свободных материальных
точек, либо системы материальных точек, подчиненных жестким связям.
Физические предположения, из которых они исходили, в основном заклю-
чались в законах движения Ньютона и том способе, каким обычно в меха-
нике в соответствии с опытом определяли действие неизменяемых связей,
наложенных на материальные точки. Однако позже, когда научились пра-
вильно обращаться с интегралом Мопертюи, выяснилось, что нужна также
предпосылка о справедливости закона сохранения энергии***). Сначала это
казалось существенным ограничением области пригодности принципа наи-
меньшего действия, пока новейшие физические исследования не показали,
что закон сохранения энергии имеет всеобщую значимость, так что упомя-
нутое кажущееся ограничение на деле ничего не ограничивает. Нужно
только для исследуемого явления знать полностью все формы, в которых
проявляются эквиваленты энергии, чтобы включить их в расчеты. С другой
стороны, казалось спорным, могут ли быть подведены под принцип наи-
меньшего действия другие физические процессы, которые не сводятся не-
посредственно к движению весомых масс и ньютоновым законам, процессы,
в которых, однако, фигурируют известные количества энергии.
В качестве формы принципа наименьшего действия, наиболее удобной
для исследований, которые я намерен изложить, я изберу одну из гамиль-
*) Histoire de 1’Acad. des Sciences de Paris, 1744, апрель 15. Histoire de 1’Acad. Royale
de Berlin, 1746, стр. 267.
**) Philosoph. Transact., 1834, t. 2, стр. 247—308 ; 1835, т. 1, стр. 95—144.
***) Сам Мопертюи этого не заметил: он считает свой принцип более общим, нежели
принцип сохранения живых сил. (Histoire de 1’Acad. de Berlin, 1746, стр. 285.) К. Якоби
выясняет этот факт в начале лекции 6 по динамике.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
431
тоновых форм, которая допускает, что на соответствующую механическую
систему, кроме внутренних, исключительно консервативных сил, действуют
также внешние силы, зависящие от времени; работа этих внешних сил
должна быть подсчитана особо. Если обозначить через F потенциальную
энергию системы, через L — ее живую силу, то функция (гамильтонова
главная функция), временной интеграл которой при нормальном движении
между крайними положениями принимает экстремальное значение, будет
Н = F — L,
вто время как энергия системы
Е = F + L.
Здесь F зависит только от координат, a L есть однородная функция второго
порядка от скоростей.
Функция Н есть та самая функция, через производные которой Лагранж
выразил силы, которыми движущаяся система действует на внешние тела.
Ввиду того, что функция Н играет важную роль во всех относящихся сюда
задачах, я хотел бы именно вследствие указанной ее связи с силами пред-
ложить для нее название кинетического потенциала. В различных разделах
физики предложен целый ряд соответствующих названий. Сюда относится
потенциал двух электрических токов Ф. Е. Неймана, электродинамический
потенциалР. Клаузиуса*); Дж. У. Гиббс**) называет в термодинамике ту
самую функцию, которую я называю свободной энергией, силовой функцией
для постоянной температуры, тогда как П. Дюгем***) называет ту же функ-
цию термодинамическим потенциалом. Таким образом, имеется достаточно
прецедентов для выбора нового названия.
Принцип наименьшего действия может быть тогда высказан в следую-
щей форме:
Среднее значение кинетического потенциала, подсчитанное для одина-
ковых элементов времени и взятое со знаком минус, является минимальным
на действительном пути системы по сравнению со всеми другими соседними
путями, которые приводят за одно и то же время из начального положения
в конечное. Для покоя кинетический потенциал переходит в значение потен-
циальной энергии (или потенциала в прежнем смысле слова). В этом слу-
чае нет надобности брать среднее значение, так как различные при дви-
жении значения делаются здесь равными между собой. Для покоя наш
закон говорит просто, что потенциальная энергия при равновесии должна
иметь минимум****).
Якоби показал, что функция Н может содержать время также explicitе,
не делая невозможным образование вариации и вытекающего отсюда диф-
ференциального уравнения. Я использовал это, чтобы добавить к Н еще
сумму % (Pi-Pi), в которой pt обозначает координату, а Р, — силу, дейст-
вующую в направлении координаты р,; смысл этого будет точнее разъяснен
ниже. Величины Р( рассматриваются как заданные функции времени,
однако независимые от координат. В этой форме теорема о минимуме вари-
ации дает уравнения Лагранжа для сил Р,. Тем самым целый ряд специаль-
*) Borchardt—Crelle Journ. f. Math., т. 82, стр. 85, также в Wiedemann’s Annalen, т. 1,
стр. 36.
**) Transact. Connecticut Academy, т. 3, стр. 108—248 ; 343—524, Silliman’s Journ.,
1878, т. 16, стр. 441—458.
***) Le Potentiel Thermodynamique, Paris, 1886.
****) Следует заметить, что уже Эйлер пытался обосновать таким путем принцип
наименьшего действия, но он брал среднее значение величины F, а не F — L. (Histoire de
1’Acad. Royale de Berlin, 1751, стр. 175.)
432
Г. ГЕЛЬМГОЛЬЦ
ных исследований, основанных на уравнениях Лагранжа, оказывается под-
веденным под несколько видоизмененный принцип наименьшего действия.
Там, где нужно отличать этот видоизмененный принцип от первоначального,
я буду называть его законом минимума отрицательного кинетиче-
ского потенциала.
Форма уравнений движения, данная Лагранжем, важна именно потому,
что мы можем ее применить ко всем случаям, в которых участвуют различные,
еще не облеченные в математическую форму процессы, как-то: трение,
гальваническое сопротивление [153] и т. д., и где между этими силами и
консервативными силами системы, входящими в формулу Лагранжа, должно
иметь место равновесие.
Из других эквивалентов работы здесь подлежат рассмотрению наряду
с потенциальной и кинетической энергиями весомых масс также термиче-
ские, электродинамические и электромагнитные эквиваленты. Движение
тепла до сих пор рассматривалось во всяком случае как особенно сложный
случай движения весомых атомов. Но так как нагретые тела одновременно
излучают волны в эфире, то это ограничение, которое при простейших допу-
щениях позволяет на самом деле вывести закон Карно, как это показали
Клаузиус*) и Больцман**), может рассматриваться лишь как гипотеза, до-
статочная на первых порах ; действие других сил, например электродина-
мических, не может быть с уверенностью исключено.
С другой стороны, то, что известные законы обратимых процессов могут
быть фактически выражены в форме уравнений Лагранжа, а следовательно,
и в форме теоремы минимальности кинетического потенциала, я доказал в
моих статьях о статике моноциклических движений***). Но при этом обна-
руживается, что температура, которая измеряет интенсивность термиче-
ского движения, входит в функцию, подлежащую интегрированию, в значи-
тельно более сложной форме, чем та, в которой скорости входят в выраже-
ние кинетической энергии весомых систем. В вышеупомянутых статьях
я показал, что подобные формы при известных ограничивающих предполо-
жениях могут возникать путем исключения некоторых координат и для
систем весомых масс, так что появление таких, более сложных форм не на-
ходится в противоречии с возможностью применения лагранжевых уравне-
ний движения. Однако, если хотят изучать общие свойства систем, подчи-
няющихся принципу наименьшего действия, необходимо отбросить старое,
более узкое предположение, согласно которому скорости входят только в
выражение живой силы и притом в форме однородной функции второй сте-
пени : надо исследовать, как будет обстоять дело, если Н есть функция
любого вида от координат и скоростей.
Экспериментальные подтверждения того факта, что и химические силы,
когда мы можем их принудить работать обратимым образом, подчиняются
закону Карно, могут быть получены, правда, пока в очень небольшом числе
случаев, но эти случаи тем более примечательны, что в них мы устанавли-
ваем количественные зависимости между процессами, казалось бы, совер-
шенно различной природы****).
*) Poggendorff Annalen, 1871, т. 142, стр. 433—461.
**) Wiener Sitzungsberichte, 1866, т. 53, ч. 2, стр. 195—200.
***) Borchardt—Crelle Journ. f. Math., т. 97, стр. 112—123; также Н. Н е 1 m h о 11 z,
Wissenschaftliche Abhandlungen, т. 3, стр. 120—133.
****)См. мои три статьи о термодинамике химических процессов, Sitzungsberichte der
Berliner Academie, 1882, 2 февраля, 27 июля ; 1883, 31 мая, а также Н. Helmholtz,
Wissenschaftliche Abhandlungen, т. 2, стр. 958—992; т. 3, стр. 92—114. Хороший
обзор полученных до сего времени результатов имеется в вышеупомянутой книге
П. Дюгема.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
433
Наконец, наблюдения над электромагнитными и электродинамическими
дальнодействиями замкнутых электрических токов привели к выражениям
для пондеромоторных и электромоторных сил, которые во всяком случае
примыкают к выражениям, которые Лагранж дал для механики весомых
тел. Первым, кто дал такую формулировку для законов электродинамики,
был Ф. Нейман *) (старший). Электрические токи, т. е. количество электри-
чества, которое в единицу времени проходит через элемент поверхности,
ограниченный материальными частицами проводника, рассматриваются им
как скорости. Позже В. Вебер и Клаузиус дали другие формы, в кото-
рых вместо скоростей тока фигурируют относительная или абсолютная
скорости количеств электричества в пространстве. Для замкнутых токов
следствия из этих разных формулировок во всем совпадают. Они оказыва-
ются различными для незамкнутых токов. Накопленные в этой области
факты показывают, что закон Неймана недостаточен, если, применяя его,
принимать в расчет только движение электричества, происходящее в про-
воднике. Нужно, кроме того, принять во внимание также рассмотренные
Фарадеем и Максвеллом движения электричества в изоляторах, которые
имеют место при возникновении или при исчезновении в них диэлектриче-
ской поляризации. Если таким путем расширить закон Неймана, то под
него подойдут и экспериментально изученные до сего времени действия
незамкнутых токов.
Однако и здесь имеется различие в форме функций по сравнению с функ-
циями для весомых масс. Для электродинамических явлений скорости
электричества входят в функцию второй степени, коэффициенты которой,
однако, даже при переходе к прямоугольным координатам не делаются по-
стоянными в отличие от того, что имеет место для масс в выражении кине-
тической энергии весомых систем. Наконец, коль скоро в действие всту-
пают постоянные магниты, появляются линейные функции скоростей.
Как раз исследования формы кинетического потенциала, требуемой
максвелловой теорией электродинамики [154], привели меня к настоящим
предварительным рассуждениям.
Наконец, и учение о свете во всех основных вопросах может быть согла-
совано с гипотезой о том, что эфир является средой со свойствами, подобными
свойствам твердого упругого весомого тела. Известные трудности в теории
отражения и преломления еще легче преодолеваются, если исходить из
максвелловой электромагнитной гипотезы. Можно быть того или другого
мнения, но нужно признать годность принципа наименьшего действия для
светового движения, по крайней мере, поскольку его явления объясняются
указанными теориями.
Отсюда ясно уже теперь, что область применимости принципа наимень-
шего действия расширилась далеко за пределы механики весомых тел и что
большие надежды Мопертюи на его всеобщность приближаются, как кажется,
к осуществлению, как бы ни были скудны механические доказательства и
как бы ни были полны противоречий метафизические умозрительные рас-
суждения, которые сам автор сумел привести в пользу своего нового
принципа.
Уже теперь можно считать вероятным, что этот принцип является общим
законом для всех обратимых естественных процессов, что же касается необ-
ратимых процессов, как, например, возникновение и распространение тепла,
то эта необратимость заключается не в сущности предмета, а только лишь
*) См. мои работы по теории электродинамики: Borchardt—Crelle Journ. f. Math.,
т. 72, стр. 57 ; т. 75, стр. 35 ; т. 78, стр. 273, а также Н. Н е 1 m h о 11 z, Wissenschaft-
liche Abhandlungen, т. 1, стр. 545—628, 647—687 и 702—762.
434
Г. ГЕЛЬМГОЛЬЦ
в ограниченности наших средств, которые не позволяют нам вновь упоря-
дочить беспорядочные атомные движения или изменить направление дви-
жения всех атомов, охваченных тепловым движением, на точно противопо-
ложное первоначальному.
Во всяком случае, мне кажется, что всеобщая значимость принципа
наименьшего действия настолько не подлежит сомнению, что он может пре-
тендовать на большую роль в качестве эвристического принципа и путевод-
ной нити в исканиях формулировок для законов новых классов явлений.
У этого принципа имеется преимущество, которое заключается в воз-
можности объединить в узких рамках одной формулы все условия, влияю-
щие на изучаемый класс явлений, и таким образом окинуть взглядом все
существенное в них.
При таком положении вещей я счел нужным рассмотреть доказательство
обобщенного принципа и общие выводы. Этот обзор может быть весьма
кратким в тех частях, где речь идет о применении уже известных методов при
несколько расширенных допущениях. При этом я старался выделить именно
те следствия, которые относятся к условиям, доступным наблюдению, и
которые, будучи сформулированы, способны служить признаком пригод-
ности принципа в соответствующей области.
В § 1 изложена теорема о минимуме кинетического потенциала при
самых широких предположениях о природе функции Н и из этой теоремы
выведены уравнения движения в форме Лагранжа. Здесь же обсуждены те
изменения, с помощью которых эти обобщенные формы могут быть при-
менены к изучению системы подвижных тел.
В § 2 из нашей формы принципа выводится закон сохранения энергии
и показывается, как можно определить значение энергии из значения кине-
тического потенциала. Мы имеем
где qt — скорости. При этом обнаруживается, что, наоборот, не в каждом
случае, в котором установлено постоянство энергии, имеет силу и принцип
наименьшего действия. Последний, стало быть, высказывает больше, чем
первый, и нашей задачей является установить, в чем именно заключается
эта разница. Одновременно с этим приводятся некоторые конкретные меха-
нические и физические процессы, с тем чтобы их можно было использовать
в качестве примеров, поясняющих содержание как двух первых параграфов,
так и последующих, и тем самым сделать более наглядным значение прин-
ципа.
В § 3 изложен разбор противоположной задачи, а именно задачи о том,
как вывести Н из Е. Это достигается интегрированием вышеприведенного
дифференциального уравнения, что вводит, следовательно, произвольные
постоянные интегрирования, которые должны быть однородными функ-
циями первой степени от qt. Этот шаг имеет то значение, что после него ока-
зывается возможным, зная полностью зависимость энергии от координат и
скоростей, найти кинетический потенциал и вместе с тем определить все
движение системы в предположении, что имеет место принцип наименьшего
действия. Члены, линейные относительно q,* соответствующие «скрытым
движениям», большей частью определяются без затруднений.
В § 4 рассматриваются соотношения взаимности между силами, кото-
рыми система действует на окружающие тела, с одной стороны, и ее уско-
рениями и скоростями — с другой. Среди этих соотношений много в высшей
степени интересных зависимостей между физическими явлениями, например:
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
435
связь между электромагнитными и электродинамическими законами Ампера,
с одной стороны, и законом индукции — с другой ; ряд термодинамических
законов, например связь между увеличением давления, вызванным повыше-
нием температуры, в замкнутом объеме и повышением температуры в резуль-
тате сжатия ; аналогичные факты при термоэлектрических и электрохими-
ческих процессах. Наконец, можно доказать, что принцип наименьшего
действия пригоден всякий раз, когда имеют место перечисленные в § 4 соот-
ношения взаимности между силами. Но это доказательство я откладываю до
более позднего сообщения.
В § 5 коротко повторяются теоремы Гамильтона в общей форме, а
в § 6 даются вытекающие отсюда законы взаимности для изменений в пря-
мом и обратном движениях, возникающих в системе в результате небольших
толчков. Здесь мы встречаемся с соотношениями взаимности в области звука
и света, которые я доказал, но только для покоящихся систем, в своих более
ранних работах.
Наконец, в § 7 вместо скоростей вводятся количества движения, что
дает новую форму вариационной задачи, а также, наряду с уже известными
измененными представлениями сил, дает другой закон взаимности прямого
и обратного движений.
§ 1. Формулировка принципа
Я предполагаю, что мгновенное состояние рассматриваемой системы тел
полностью определяется достаточным числом независимых координат р( ;
скорости изменений координат я обозначаю через
Далее, я обозначаю через Р, силу, которую движущаяся система тел разви-
вает при изменении координаты р„ так что — Р, есть внешняя сила, которая
должна действовать на систему в направлении координаты р( с тем, чтобы
рассматриваемое движение могло происходить именно так, как это пред-
положено.
Эти введенные Лагранжем силы Р, вообще представляют собой совокуп-
ность составляющих сил, которые сами могут действовать на различные
части системы и тем самым определены по своей величине и составу, так что
Pjdpt выражает работу, которую сила Р, отдает наружу, когда координата
р, переходит в р,- + dp,; в то же время Р, не совершает работы, когда
координата р^ остается неизменной, а остальные координаты р; испыты-
вают любые изменения.
В дальнейшем мы предполагаем, что величины Р, заданы для проме-
жутка времени от t = t0 до t = tr в функции времени, но независимо от ко-
ординат.
Пусть Н — функция координат и .скоростей, от которой мы первона-
чально требуем лишь, чтобы она во всех положениях, соответствующих
данному промежутку времени, имела конечные первые и вторые частные
производные по Д и qt. Теперь мы образуем интеграл
+ ^Ptp^dt, (2)
t.
в котором pi варьируем так, чтобы их вариации для t = /0 и t = были
равны нулю, а в промежуточные моменты времени были любыми дифферен-
436
Г. ГЕЛЬМГОЛЬЦ
цируемыми функциями времени. Тогда согласно известным методам вариа-
ционного исчисления равенство
<5Ф = 0
(3)
будет иметь место, если в течение всего движения справедливо равенство
(4)
Это, как известно, дифференциальные уравнения движения системы в форме,
которую им придал Лагранж.
Исключение координат. В первоначальных применениях принципа к
движениям свободной системы материальных точек функция И, как я уже
упомянул во введении, имела форму
Я = F — L,
где величина F должна быть функцией только от р,-, L — однородной функ-
цией второй степени от q,, причем коэффициенты последней функции зави-
сят от pi. Для свободной системы число координат р,- втрое больше числа
имеющихся материальных точек.
Однако во многих случаях число координат может уменьшаться без
изменения формы выражений, данных уравнениями (2), (3) и (4).
До сих пор из этих случаев лучше всего изучен такой, когда свобода
движения системы ограничена так называемыми жесткими связями, кото-
рые математически могут быть выражены уравнениями между координа-
тами. При этом функция Н по-прежнему составляется из F и L и не меня-
ются свойства этих двух последних функций, но число переменных коорди-
нат может быть значительно уменьшено.
Другой заслуживающий внимания случай уменьшения числа координат
получается, когда некоторые из координат, которые мы будем отмечать
индексом /, входят в выражение для Н только под знаком производной по
времени, и соответствующие силы длительно равны нулю. При этих
обстоятельствах уравнения (4), определяющие значения Pj, сводятся к сле-
дующим :
или
dt [dpjJ
™=с
dqj Cj'
(5)
(6)
Можно воспользоваться этими уравнениями, линейными относительно
qt (а также и q}), для того чтобы выразить qj через остальные скорости и
через Pj, а дальше исключить qj из Н. Полученное путем такого исключения
выражение для И обозначим через 1р. Тогда имеем
Эф _ ЭН у ( дН dqj\
dpt ~~ dpi + ( dqj dpt J ’
откуда, принимая во внимание уравнения (б), получаем
Если положить
= (7)
то мы находим
эн __ ЬН'
др, ~~ Qpi ’
а также
эн = дН’
dqt ~ dqt ’
дН' d(dH’\ .
р‘- “ ~д^ + ~dt[-^n-
В этом случае, стало быть, в уравнениях (8) место первоначальной функции
Н полностью занимает функция Н' которая свободна от и р7, однако,
содержит члены, линейные относительно qiy которые вытекают из выраже-
ний для qj.
Примером такого рода случаев могло бы служить вращение волчка во-
круг его оси симметрии, когда может меняться направление этой оси, но не
угловая скорость вращения вокруг оси.
Далее, в качестве примера можно назвать движение системы, отнесенное
к вращающейся системе прямоугольных координат, например к системе,
связанной с земным шаром.
В соответствии с этой аналогией с механикой весомых тел мы будем рас-
сматривать также и другие случаи физических процессов, в которых функ-
ция Н содержит члены, линейные относительно скоростей, как случаи со
скрытым движением, хотя в настоящее время сюда относятся случаи, где
существование такого скрытого движения не может быть с несомненностью
доказано, как, например, при взаимодействии между магнитами и электри-
ческими токами. Для магнитов, как известно, уже Ампер предположил
существование скрытого движения; оно обнаруживает свое влияние и при
электромагнитном вращении плоскости поляризации света, как это отме-
чает У. Томсон, хотя здесь и нельзя обнаружить участия электрических
токов.
От случаев, в которых Н содержит скорости только в членах второй
степени, упомянутые случаи существенно отличаются тем, что в них дви-
жение в одних и тех же условиях не может идти в обратном направлении,
если только одновременно не будут обращены и скрытые движения.
Иногда, по крайней мере для некоторых классов движений, исключение
скоростей может привести к еще более сложным формам функции И; по-
добные случаи я разобрал в моей первой статье о моноциклических дви-
жениях*). Здесь мы можем условия исключения взять еще несколько более
общими. Предположим, что имеется некоторая группа координат рк таких,
что соответствующие qk входят в выражение живой силы лишь в форме произ-
ведений с другими скоростями той же группы, но не встречаются умножен-
ными на скорости q^ не принадлежащие к упомянутой группе, так что все
частные производные вида
Э2Н
dqk dqj
равны нулю; предположим, кроме того, что все силы Рк всегда остаются
равными нулю. При этих обстоятельствах оказываются возможными такие
движения системы, при которых рк длительно сохраняют постоянные зна-
чения, так что qk остаются равными нулю.
♦) Borchardt—Crelle Journ. f. Math., т. 97, стр. 120—122. См. также Н. Н е 1 m h о 11 z,
Wissenschaftliche Abhandlungen, Leipzig, 1895, t. 3, стр. 129—132.
438
Г. ГЕЛЬМГОЛЬЦ
Упрощение уравнений движения для систем этого класса состоит в том,
что если все qk равны нулю, то и все также равны нулю. Таким образом,
из уравнения (4) получается
и
8Н
дрк
= 0
ЭН d / ЭН)
J dpj dt I dqjl
(9)
(Ю)
Если уравнений (9), число которых равно числу координат рк, будет доста-
точно для того, чтобы выразить эти величины в функции pj и q]t то можно
при помощи полученных значений исключить рк из Н, причем Н обращается
в еще более сложную функцию qj; эту функцию мы обозначим через
Тогда по правилам дифференциального исчисления имеем :
8ф _ ЭН у. Г ЭН дрк |
Эру — Эр; + ( 9 Рк ‘ Qpj J ’
9§ _ 9Н ЭН дрк ).
0£/ — к I дРк dpj J’
отсюда в силу уравнений (9)
ЭН _ 9£> 9Н _ _9£>
&Pj dpj И 9W ~ Qqj '
Уравнения (10) сводятся, стало быть, к таким:
р = _ .1 х Г Л) •
J dpj dt ( dq/J ’
(И)
(12)
в эти уравнения входят только pj и qJt и функция § вообще не равна больше
сумме функции координат и однородной функции второй степени относи-
тельно скоростей.
Однако, если первоначальная функция Н была именно такой, что
на движение системы не влияли скрытые движения, то уравнения (9) —
уравнения второй степени относительно qf, поэтому значения рк могут
оставаться неизменными (даже если они многозначны), когда все q} меняют
одновременно знак, откуда следует, что и в этом случае движение системы
в целом обратимо.
В механике весомых масс мы можем называть задачи, в которых функ-
ция Н содержит скорости qt в первой степени или в степени выше второй,
неполными задачами, поскольку часть возможных движений здесь исклю-
чена и часть координат, необходимых для определения положения системы,
не входит в функцию Н, а некоторые силы предполагаются постоянно рав-
ными нулю, так что уже не могут быть заданы любым образом.
Функциональный определитель импульсов. Ради краткости будем обозна-
чать величины встречающиеся в предыдущих рассуждениях, так:
5/
9Н
э9,-
(13)
и называть sr импульсами. В движении свободной системы, отнесенной к
прямоугольной системе координат, им соответствуют произведения масс на
скорости ; производные по времени от этих произведений у Ньютона явля-
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
439
ются мерой соответствующей составляющей силы
v d ( dx'»
Х — It
В более сложных случаях влияние, оказываемое инерцией масс, принимаю-
щих участие в движении при определенном виде движения, бывает раз-
личным в зависимости от положения масс. Например, при вращательном
движении твердого тела импульс оказывается равным произведению мо-
мента инерции на угловую скорость. В этом смысле величины s,- являются
мерой влияния инерции масс, принимающих участие в движении; их уско-
рение составляет соответствующую часть движущей силы, как показывают
уравнения (3).
В механике весомых тел величины st в первоначальных, полных задачах
являются линейными однородными функциями величин qt, причем коэф-
фициенты при них, вообще говоря, суть функции величин р, и, таким образом,
получается система линейных уравнений
(14)
Если эти уравнения разрешить относительно величин q]t то последние пред-
ставляются как линейные однородные функции величин sz. Это было бы не-
к dSi
возможно, если бы определитель величин или соответственно величин
ъ-н s , 1 „ „ ,
-QqiQq:- был тождественно равен нулю. Но последний случай мог бы иметь
место только в том случае, когда живая сила для некоторых движений обра-
щалась бы в нуль при конечных значениях скоростей. Дело обстоит именно
так, потому что L есть существенно положительная однородная функция
второй степени от величин </,-:
i
Если бы упомянутый определитель был равен нулю, то все а следова-
тельно, и L могли бы оказаться равными нулю при отличных от нуля зна-
чениях величин qt.
Условие того, чтобы определитель уравнений (14) не равнялся тожде-
ственно нулю, может быть высказано в такой форме: между величинами st и
Pt не должно существовать тождественной зависимости, не содержащей
q,, а поэтому q, всегда могут быть представлены как функции sz и р(.
Это обстоятельство остается в силе, когда, как в случае скрытых дви-
жений, некоторые из s,- могут быть постоянными или, как в случае исклю-
ченных рк, равными нулю. Значения оставшихся s,- при этом не меняются.
Так как для электрических движений и для обратимых тепловых движений
имеет место то же самое, поскольку в настоящее время известны физические
законы этих явлений, то нет до сих пор никаких физических поводов к тому,
чтобы предусматривать исключительные случаи, когда определитель урав-
нений (14) оказался бы равным нулю; поэтому в дальнейшем мы будем
предполагать, что указанный определитель может оказаться тождественно
равным нулю не иначе, как только для особых значений р;.
Если придерживаться этого условия, то вариационная задача может
быть сформулирована так, что уравнения
(1)
440
Г. ГЕЛЬМГОЛЬЦ
которые в начале этого параграфа были составлены независимо, войдут в
эту задачу.
Пусть, как и выше, Н есть функция переменных р, и qlf Pt — функция
одного только времени. Положим
фх=J а (в - 2 [(», - л]| <'5>
и потребуем, чтобы имело место равенство
^Ф1==0
(16)
для любых вариаций величин р, и qh которые мы будем рассматривать как
независимые переменные. Для моментов времени f0 и все др, должны рав-
няться нулю, вариации же dqi и тут остаются произвольными.
Варьирование по qj дает
... - д*Н
откуда получаются уравнения (1), так как определитель величин
не может тождественно равняться нулю.
Варьирование по р,- выполняется так, как показано выше, и дает тот
же результат.
Введем следующее обозначение для входящей в уравнение (15) функции
переменных р,- и :
(величина Е, как это будет показано в следующем параграфе, есть энергия);
тогда уравнение (15) принимает вид
i,
01 = jdf{e- ^р/^ + л-р,]}. (17)
^0
Я привожу здесь эту форму потому, что в конце этой статьи мы встретимся
с аналогичной формой, причем, однако, обе эти формы в физических иссле-
дованиях выглядят совершенно непохожими одна на другую, пока в точ-
ности не известно, какие величины следует рассматривать как pf, q, и $,•
С другой стороны, как раз эти формы объединяют в себе наиболее пол-
ную постановку задачи.
§ 2. Отношение к принципу постоянства энергии
Если уравнения (4) последовательно умножить на и сложить, то
получим
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
44?
Если, как и раньше, положить
Е = И- 2 (?. <) (18>
то можно написать
+ = (19)
Здесь первая сумма выражает внешнюю работу сил Р, за элемент
времени dt. Таким образом, получается, что мерой убывания или возраста-,
ния величины Е служит соответственно положительная или отрицательная
работа, которую совершают эти силы. Отсюда следует, что Е обозначает
запас энергии системы, выраженный через ее координаты р,- и скорости qt.
Отсюда видно, что принцип наименьшего действия, взятый в форме § 1,
включает всегда принцип постоянства энергии.
С другой стороны, не является необходимым, чтобы принцип наимень-
шего действия был пригоден во всех мыслимых случаях, которые подчинены
закону постоянства энергии. Можно к системе уравнений (4) сделать разно-
образные добавления, которые во всяком случае не мешают выводу урав-
нения (19), но устраняют возможность облечения задачи в вариационную
форму. Например, прибавим член вида <р • qj к тому из уравнений (4), кото-
рое содержит индекс i, и член вида — ср q.;—к уравнению с индексом /', где
(р есть какая-то функция координат. Если теперь для вывода уравнения
энергии первое из названных уравнений помножить на q„ а второе — на qj,
то добавочные члены взаимно уничтожаются и постоянство энергии по-
прежнему остается. Однако соответствующую вариацию
'PttjbPi- <hdPj)
можно считать полной вариацией функции переменных р, и q( только в том
случае, когда функция <р зависит только от переменных qtpj и ^р(.
Если бы функция <?, взятая в добавочных членах, не зависела от скоро-
стей, то соответствующее движение не было бы обратимым. Но мы могли
бы взять за tp некоторую линейную функцию скоростей; тогда все движе-
ние могло бы протекать и в обратном направлении.
Так как такие члены мы можем вставить в любую выбранную пару урав-
нений системы (4), то можно представить себе весьма много разнообразных
случаев, в которых оказывается справедливым закон постоянства энергии,
но не принцип наименьшего действия.
Отсюда следует, что последний принцип там, где он имеет место, выра-
жает некоторый особый характер консервативных сил, который еще не
вытекает из определения этих сил как консервативных.
Пояснительные примеры
В дальнейшем нам придется неоднократно приводить примеры, которые
сделают наглядным значение полученных предложений; поэтому я позволю
себе уже здесь описать несколько случаев, на которые я мог бы коротко
ссылаться не только в связи с уже изложенным в этом и предыдущем пара-
графах, но также и при дальнейшем изложении.
Пример 1. Волчок. Пусть волчок есть тело вращения в кардановом
подвесе; внешнее кольцо а может вращаться вокруг вертикальной оси ;
угол поворота этого кольца, отсчитанный в некоторой определенной верти-
кальной плоскости, мы назовем а ; второе кольцо, Ь, может вращаться отно-
сительно первого вокруг горизонтальной оси, причем угол между плоско-
442
Г. ГЕЛЬМГОЛЬЦ
стями колец а и b я обозначу через р. Пусть ось вращения волчка располо-
жена в кольце b перпендикулярно к оси относительного вращения колец
аиЬ. Угол между определенной меридиональной плоскостью волчка и пло-
скостью кольца b пусть будет у ; момент инерции волчка относительно его
оси вращения обозначим через 21, момент инерции относительно одной из
его экваториальных осей — через 23; моментами инерции колец пренебре-
гаем. Тогда живая сила волчка выразится следующим образом :
Н=—Ь.
(20)
Отсюда получаются обобщенные силы А, В и С, стремящиеся увеличить
углы а, р и у :
А = - [21 cos р^ + cos р + 23 sin* р£] , (21)
В = - 21 sin р (4 + cos р + 23 sin р cos р ( - 23 , (22)
c=4MI+cos^)]- (23>
Сила А есть попросту вращающий момент, который стремится вращать
кольцо а; такое же значение имеет сила В по отношению к кольцу Ь. Что
касается силы С, то она стремится вращать волчок относительно кольца Ь,
поэтому она выражает взаимодействие между кольцом b и волчком.
Если сила С отсутствует, то из уравнения (23) имеем
««+“^4г)=с- <24’
Отсюда получается значение Н' согласно уравнению (7):
=4 т - i ® [si"’ Ш ® 1+с cos <25>
Значения сил А и В получаются из уравнений (21), (22) и (24):
А — (с cos р — 23 sin2 р ,
at V at j
В = с sin р + 23 sin р cos р — 53 Д/Г- •
‘at ‘ 1 (at J at2
(26)
Первый, постоянный, член в формуле для Н' может быть опущен, так как в
конечном счете он входит только в произвольную постоянную функции Е;
последний член, линейный, отсутствует в выражении для L.
Пример 2. Электродинамическое действие замкнутой цепи тока по
потенциальному закону *).
Мы будем понимать под Ij силу тока в i-й цепи, а под р, — координаты
весомых масс, живой силой которых мы пренебрегаем. Функция Н имеет
форму
W = -4^^(Q^-/r4), (27)
J *
*) См. мою работу в Borchardt—Crelle Journ. f. Math., т. 72, стр. 70—72, также
Н. Helmholtz, Wissenschaftliche Abhandlungen, Leipzig, 1895, т. 1, стр. 560—564.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
443
где Q]ik суть функции pt, а каждый из индексов j и к принимает последова-
тельно значения, соответствующие всем электрическим цепям. Индуцирован-
ные электромагнитные силы, которые я буду обозначать через таковы:
(28)
(29)
Если действует также постоянный магнит, положение которого опреде-
ляется координатой р0, то в выражение для Н входит еще ряд линейных
членов, которые я обозначу через h и которые имеют вид
j
(30)
где Rj — функции координат р( и р0. Определение сил происходит по тому
же самому методу. Полная электродинамическая энергия выражается так:
Функция h здесь выпадает, так как
Входящая сюда величина Е = — Н, как и живая сила весомых масс для
замкнутых цепей, — существенно положительная величина. Я показал это
в моих работах по электродинамике *). Кроме того, Е есть однородная функ-
ция второй степени от а потому здесь можно повторить соображения,
Ъ2Н
высказанные в конце § 1, по которым определитель величин не может
быть равен тождественно нулю.
Пример 3. Термодинамика. Законы обратимых тепловых процессов
при выборе соответствующих координат могут быть представлены **) в сле-
дующей форме:
= _ л ±_ ( 83 )
dt dt ( )’
(31)
E^Z-^+L. (32)
Здесь — функция координат р, и абсолютной температуры 0 (я называю
эту функцию «свободной энергией»), L — живая сила видимых движений
тяжелых масс, следовательно, однородная функция второй степени величин
Pi и qb не зависящая от 0 ; dQ — количество тепла, поступающее в тело
извне за элемент времени dt, т. е. работа, которую совершают внешние силы,
действие которых состоит только в увеличении теплового движения.
*) Borchardt—Crelle Journ. f. Math., т. 72, стр. 86 и далее, и стр. 125, также Н. Н е 1 т-
h ol tz, Wissenschaftliche Abhandlungen, Leipzig, 1805, т. 1, стр. 578 и 623.
**) Borchardt—Crelle Journ. f. Math., т. 97, стр. 112—117, также H. Helmholtz,
Wissenschaftliche Abhandlungen, т. 3, стр. 120—127. Живая сила L видимых движений
добавлена здесь, чтобы обеспечить желательную полноту и общность.
444
Г. ГЕЛЬМГОЛЬЦ
К той же самой форме
полагая
при измененных переменных мы приходим,
83 _ _ с
где S — некоторая функция от s и далее, полагая
„ Э5
^ЭГ = ^
(33)
Если величины Низ выразить как функции р, и >?[см. Abhandlungen, т. 1,
уравнение (ld)]*), то эти уравнения могут быть написаны следующим
образом [155j :
dQ qdS ds
+l- <x>
Эти уравнения подобно уравнениям (31) и (32) имеют такую же форму
(см. § 3), что и уравнения движения моноциклических систем, кинети-
ческий потенциал которых есть Н — L и для которых г/ обозначает
скорость, s — импульс в моноциклическом движении.
Если обозначить через силу, действующую в направлении скорости
'q, то мы будем иметь
Рм -rj- dt = dQ.
(37)
Аналогия с выражениями Лагранжа, следовательно, здесь сохраняется,
каким бы образом ни зависела энтропия S от импульса s моноциклического
движения. Возможность соединения одинаково нагретых систем тел в одну
систему и кинетическая теория газов заставляют в этом случае1 принять
О — s • q,
s---f-=cl"s-
Поэтому следовало бы для каждой данной системы тел считать, что темпера-
тура пропорциональна живой силе теплового движения, как это до меня,
по-видимому, пытались сделать Клаузиус и Больцман **). Последующие
применения этого примера не зависят от вопроса о соотношении между
функциями S и s.
*) См. Н. Helmholtz, Wissenschaftliche Abhandlungen, т. 3, стр. 125.
**) В своем докладе Берлинской академии (Sitzungsberichte, 8 декабря 1884 г.) я вы-
сказал это предложение в более определенной форме, но я тогда признал, что для обес-
печения одного шага в доказательстве требовалось дальнейшее ограничивающее усло-
вие, физическое значение которого я не могу интерпретировать так, как это, я надеюсь,
будет сделано впоследствии. Поэтому я должен признать возражения, сделанные Больц-
маном (Wiener Sitzungsberichte, серия 2, т. 92, 8 октября 1885 г.) против этого пред-
ложения, оправданными в этом отношении.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
445
Тепловое движение, по-видимому, следует рассматривать как наиболее
важный пример исключения координат рк; поэтому Н может быть
сложной функцией О или 17. Однако мои исследования, касающиеся слож-
ных моноциклических систем, показали, что и значительно более сложные
виды движений, гораздо более сходные с внутренними молекулярными
движениями, также могут вести к таким же законам.
§ 3. Вывод кинетического
потенциала из выражения энергии
При физических исследованиях часто бывает легче и надежнее сна-
чала выяснить, каковы обстоятельства, влияющие на запас энергии в
какой-либо системе тел, а затем определить значение функции Е, неже-
ли искать общие законы изменений и из них определять кинетический
потенциал. Поэтому мы переходим теперь к вопросу о том, каким образом
кинетический потенциал может быть определен из выражения полной
энергии.
Предположим, что величина Е найдена как функция р, и q,. Форма этой
функции находится из уравнения (18):
Отсюда следует
Э£ ___ _ у j- д2Н \
8?j "7 Г' dQidqj J '
(38)
Для составления уравнений движения необходимо варьировать функ-
цию Ф, заданную уравнением (2). При зтом нужно предполагать, что первые
и вторые производные от Н остаются конечными на всем пути, пройденном
системой. Затем из уравнения (38) следует, что если все qi суть нули, то в
, эе
нуль обращаются также и все .
О других ограничениях вида функции Е, которые определяются ее физи-
ческим значением, упомянем здесь только коротко:
1. Входящие в уравнения координаты свободной системы должны опре-
делять только относительное положение системы, ибо повсюду в простран-
стве при одинаковом положении одних масс относительно других явление
движения должно протекать совершенно одинаково.
2. Значение функции Е для конечных расстояний между массами и ко-
нечных скоростей должно иметь конечный минимум, иначе запас работы
в системе был бы бесконечно велик. Поэтому значение Е при неограни-
ченно возрастающем должно быть непременно положительным. Я поста-
рался показать *) при рассмотрении электродинамической теории В. Вебе-
ра, какие недопустимые следствия вытекают из противоположного до-
пущения.
Из уравнения (18) сначала просто получается, что если величина Н мо-
жет быть представлена как сумма однородных целых функций любой степени
от переменных различной величины, то то же самое имеет место и для
функции Е. Обозначим однородную функцию л-й степени от д, через Рп,
*) Borchardt—Crelle Journ. f. Math., т. 72, стр. 85; §§ 4—7; т. 75, стр. 35—62, а также
Н. Helmholtz, Wissenschaftliche Abhandlungen, 1895, т. 1, стр. 578—611 и 647—679.
446
Г. ГЕЛЬМГОЛЬЦ
тогда
н = ^Рп, (39)
Е = 2(1~п)Рп’ (40)
п х
ИЛИ
Е = Ро - Ра - 2Р3 - ...
Члены первой степени Рг в выражении для Е отпадают, Ро соответствует
не зависящей от движения потенциальной энергии, которую мы выше обо-
значили через F, Р2 соответствует (— L). Члены высшего порядка по-
являются в задачах механики весомых тел только в случаях, видоизме-
ненных путем исключения некоторых координат.
Впрочем, поставленная задача может быть решена также и в случае,
когда Е — совершенно произвольная функция скоростей, удовлетворяющая
ЭЕ
только поставленному выше условию, что все в соответствии с уравнением
(38) приближаются к нулевому значению, когда q, делаются равными нулю.
Для нашей цели достаточно будет сохранить вышеуказанное требование,
согласно которому коэффициенты в системе уравнений (38) должны быть
конечными, хотя вообще допустимы также и случаи, когда эти коэффи-
циенты являются бесконечными, но интегрируемыми.
Для решения нашей задачи мы в выражениях для Е и Н сделаем подста-
новку
?( = хОн (41)
понимая под х переменный множитель, при изменении которого меняются,
правда, значения величин qh но сохраняются неизменными их отношения.
Выражения для Н и Е, получаемые после этой подстановки, я обозначаю
через Н' и Е'. Тогда
> = (42)
Так как согласно условию, введенному при составлении уравнения (38),
все равны нулю, если равны нулю все qt (зто по уравнению (41) имеет
место при х = 0), то
= 0 при х = 0. (43)
Это означает, что согласно нашим допущениям для весьма малых значений х
величина Е' сама должна быть пропорциональной х (если не высшей сте-
пени х). С другой стороны, мы имеем
следовательно,
= + (44)
а отсюда
ЬЕ' _ _ Э2Н'
Эх ~ Х Эх2 ’
(45)
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
447
Если для дифференциального уравнения (44)
= (46)
существует еще второе решение, которое мы обозначим через Н", то
О — И' — И" — х-^~ (Н' — Н"),
т. е.
1п(Н'-Н") = 1пх + 1пС, или Н’ — Н" = х-С,
где С может быть функцией qt. Но эта последняя может быть только одно-
родной функцией первой степени, если Н' — Н" должна быть представлена
так же, как функция ф, свободная от х.
Теперь остается только найти частный интеграл уравнения (44).
Мы получим этот интеграл, если сначала напишем уравнение (44) для
х = 0 в следующем виде :
£0==н0
и вычтем последнее уравнение из уравнения (44):
Е’ - Ео = (Н' - Но) -х^(Н’- Но).
По разделении на х2 получаем отсюда
_^(E'_e0) = 4(Z£=^>).
В силу соображений, высказанных в связи с уравнением (43), величина,
стоящая в левой части последнего уравнения, будет конечной и при х = 0 ;
интегрируя его в пределах от х = 0 до х = 1, найдем
Н'-Но = - J^Adx + Hj, (47)
о
где постоянная интегрирования Нг, как уже было отмечено, может быть
любой однородной функцией первой степени от переменных qt.
Следовательно, Е однсзначно выражается при помощи уравнения (18)
через И. В то же время при получении Н из Е остается неопределенной
добавочная функция Hv которая соответствует «скрытым» движениям.
Вопрос о том, необходимы ли подобные члены первой степени, в отдельных
специальных задачах решается большей частью на основании условий, при
которых движение может протекать в обратном порядке.
Если, стало быть, при решении соответствующей задачи известно, какие
физические величины в выражении для Е должны рассматриваться как
координаты и какие — как скорости, то поставленная здесь задача может
быть, как правило, решена. Но встречаются также и такие случаи, в
которых ответ на указанный вопрос представляется неопределенным.
§ 4. Общие свойства сил движущихся систем
Известно, что если покоящаяся система действует на внешние тела си-
лами, подчиняющимися закону сохранения энергии, то эти силы должны
удовлетворять некоторым соотношениям, которые могут быть выражены
448
Г. ГЕЛЬМГОЛЬЦ
уравнениями
dPj = Э/j
Эр; ~ Эр,- ’
и что если эти уравнения имеют место, то может быть найдено значение
потенциальной энергии.
Для движущихся систем, которые удовлетворяют закону минимума
кинетической энергии, точно так же можно составить подобные соотноше-
ния, получаемые непосредственно из лагранжевых выражений для сил.
При этом последние должны рассматриваться не только как функции коор-
динат ph как это делается для покоящихся систем, а также как функции
.скоростей q, и ускорений
Уравнение (4)
Pi
q'i
dqt
dt
(48)
(4)
ЪН d S ЭН ]
Эр, ' dt [ Эф J
дает непосредственно
Pt
ЭН v ( &Н 'I у, Г Э2Н _ ,
dpi ' у V dPj Цр ' j I 9Ф
А. Силы и ускорения
Силы, представленные в такой форме, являются линейными функциями
ускорений. Коэффициент при q- в выражении для силы Р, может быть выра-
жен следующим образом :
ЭР, _ Э2н __ bPj_
dqj dqtdqj — dq'; ’
(49)
что означает следующее: Если ускорение q'j увеличивает силу Pt в некоторое
число раз, то ускорение q'i увеличивает силу Pj во столько же раз. Имеет ли
место подобное явление в каком-либо данном определенном случае, зависит
от того, будет ли величина отлична от нуля или равна нулю. Эта
величина равна нулю, например, для движений совершенно свободной
системы весомых материальных точек, если они отнесены к прямоугольной
системе координат. Каждая отдельная составляющая силы действует
ускоряюще только в направлении той координаты, которой она соот-
ветствует.
Для волчка в примере 1 § 2 мы имеем :
эд ъв = 0
dfi" ~ да" ~ U ’
ЭД дС л«- п
э^ = -э^- =~9tcos^
ЭС____дВ _ п
9/9" ЭУГ “ ° ’
где а", Р" и у" — ускорения углов а, fi и у.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
449
В примере 2 для электродинамических действий мы имеем :
ЭР,- _ Э®/ г.
Ы} ~ dqt “°’
эе7 _
э/^ ~ э/)
Первое уравнение имеет следующий смысл : так как пондеромоторная сила
в цепи электрического тока не зависит от ускорения токов, то и индуциро-
ванная электродвижущая сила не может зависеть от ускорения проводников
тока (однако в том и другом случае возможна зависимость от скоростей).
Последнее уравнение говорит, что если при заданном положении и форме
цепей тока Ьис увеличение силы ®;-, действующей в Ь, посредством электро-
динамической индукции заставляет возрасти величину Ik, то равное возра-
стание силы производит такое же действие на
В примере 3, где рассматриваются термодинамические действия, эти
взаимные зависимости отпадают, так как живая сила L тяжелых масс не
зависит от температуры, а следовательно, произведения О • q, не встречаются
в выражении для
В. Соотношения между силами и скоростями
Из уравнений (38) далее следует:
эр, _ _ Э2н э2н d г Э2н -1
dqj dpt dqj dpj dqt ' dt ( dqi dqj J'
Следовательно,
ЭР, dPj 9 d ( Э2Н ) 9 d I dP,A _ 9 d C dPj )
dqj' ' dqt Z dt ( dqtdqj J 2 dt [dq) J 2 dt ( dq{ J ’
В очень большом числе случаев
ЭР,- ЭР; Э2Н ,
5— = const,
dqj dqi dqtdqj
отсюда следует:
ЭР, _ ЭР;
dqj ~ dqt ’
(50)
(51)
(52)
т. е. : Если увеличение скорости qj при сохранении постоянного положе-
ния и постоянных ускорений вызывает возрастание силы Рь то соответ-
ствующее увеличение скорости q, уменьшит силуРГ В примерах А) уже обра-
щалось внимание на случаи, в которых предварительное условие (51) вы-
полнено. Эти примеры лучше всего показывают широкое значение этого
предложения, но они показывают также, что нужно убедиться в выпол-
нении предварительного условия, прежде чем применять вместо общего
уравнения (50) упрощенное выражение (52).
Пример 1. Волчок. Если сила, которая увеличивает угол /?, т. е.
стремится удалить ось волчка от вертикали, поддерживает более быстрое
Эа
прецессионное движение , то сила, которая стремится ускорить прецес-
сию, будет приближать ось к вертикали.
Пример 2. Закон электродинамической индукции (закон Ленца).
Относительное движение двух электрических цепей, которое поддержи-
вается пондеромоторными электродинамическими силами, вызывает инду-
Rfl ПиЛТТЫЛИигиТА nnuuminl.1
450
Г. ГЕЛЬМГОЛЬЦ
цированные электродвижущие силы, которые противодействуют имеющимся
токам.
Соответствующая зависимость обнаруживается при движении магнита
относительно проводника тока.
Пример 3. Термодинамика: Если повышение температуры увеличи-
вает давление в системе тел, то сжатие этой последней вызовет повышение
температуры.
Для этого случая мы можем, используя обозначения и пояснения § 2 к
этому примеру, написать уравнение (52) после умножения обеих частей на р
в таком виде:
(53>
или в соответствии с формулой (37):
8 ( dQ А = , 8Р,
Эу/ I dt J ' 8 In г/
(53)
Но на основании уравнения (34)
Следовательно,
Э ( dQ А _ 8s
8?i ( dt J ~ 71 dpt '
Согласно уравнению (35) мы имели
а так как L не зависит от г], то
dPi _ _ 82Н _ 8s
dpt 8j? dpt ’
(54>
(55)
что совместно с уравнением (54) подтверждает справедливость уравнения
(53), а тем самым и применимость нашего общего предложения. При этом
можно было бы любую из функций г] уравнения (33) рассматривать как
скорость ; нужно только, чтобы тогда соответственно величина фигури-
ровала в качестве ускорения. Температура # также принадлежит к числу
интегрирующих делителей ц, так что имеет место уравнение
8 ( dQ А _ dPt
dqt I dt J ~' 8 In# '
dO
Так как в этом примере производная должна равняться нулю, то вели-
8 ( dQ А „
чина (-—-J есть скорость, с которой поступает тепло, когда параметр р,
растет со скоростью qh в то время как # остается постоянной. Отсюда полу-
чается данная выше формулировка предложения.
Те же самые соображения могут быть применены к необратимым частям
термоэлектрических и электрохимических процессов.
Явление Пельтье. Если нагревание какого-либо места замкнутой
цепи производит электрический ток, то тот же самый ток вызовет охла-
ждение того же места цепи (если отвлечься от нагревания вследствие элек-
трического сопротивления).
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
451
Электрохимия. Если нагревание постоянного гальванического
элемента увеличивает электродвижущую силу, то прохождение тока в том
же элементе вызовет переход теплоты в скрытое состояние*).
Вышеприведенные формулы, однако, указывают не только знак соответ-
ствующего изменения, но одновременно дают указание и на количества, о
которых идет речь.
С. Зависимости между силами и координатами
Наконец, из уравнения (48) следует:
дР, _ А/ = d ( д‘н______д‘н ) = 1А ( ЭР;- _ ЭРИ
dpj 'dpi dt t d<li dpj dqj dpt J 2 dt ( 'dqj dqt J ' ' '
Для случая покоя, когда правая часть обращается в нуль, отсюда полу-
чается общий закон консервативных сил :
Но то же самое условие выполняется, если временами движение происходит
так, что правая часть уравнения (56) оказывается равной нулю. Тут мы также
можем применить закон (57), чтобы образовать для сил нагретых тел или
соответственно моноциклических систем силовую функцию, если только
во время движения одна из функций т] в уравнении (33) остается постоянной.
Если мы при этом пренебрежем живой силой L упорядоченных движений,
то согласно уравнению (35) мы будем просто иметь
р эн
др, ’
т. е. наше уравнение (57) удовлетворяется. Но с этим случаем мы встре-
чаемся почти всегда, когда занимаемся механикой земных тел, более или
менее нагретых. Несмотря на то, что тела внутри одержимы сильным дви-
жением, мы можем, например, для теории их упругих действий на основании
доказанного здесь закона образовать силовые функции молекулярных сил
и применять их так, как если бы их состояние равновесия было устойчивым
в абсолютном покое.
Я хочу здесь еще заметить, что для того чтобы доказать, что существует
кинетический потенциал и что силы Р, могут быть по способу, указан-
ному Лагранжем, выражены через его производные и что уравнения дви-
жения могут быть сведены к принципу наименьшего действия, оказывается
достаточно соотношений взаимности для сил, выражаемых уравнениями :
dPj _ dPj
dq) — dq’t ’
dPj dPj = 2 A ( dPJ )
' dq, Z dt ( 'dq'j J ’
dPi _ 'dPj _±d_ ( ЭР, _ dPj )
dpj dpi 2 dt ( dqj 'dq, J
(49)
(50)
(56)
*) См. мои статьи по термодинамике химических явлений. Sitzungsberichte der Berliner
Akademie, 1882, 2 февраля, стр. 24—26 ; 1882, 27 июня, стр. 825—835, а также Н. Helm-
holtz, Wissenschaftliche Abhandlungen, Leipzig, 1895, т. 2, стр. 958—979.
29*
1 . I C.JIDJV1I UJ1DIJ
(в связи с тем, что Р, являются линейными функциями q't, т. е.
w = »’ <58>
и с ранее данными определениями :
«<—гг. (О
«;=^- (-»))
Итак, перечисленные здесь зависимости между силами полностью харак-
теризуют те движения, к которым применим принцип наименьшего действия.
Доказательство этого предложения для случая, когда имеется не более
трех координат р„ может быть дано непосредственно методами современ-
ного математического анализа. Для этого нужно, однако, воспользоваться
предложениями из области теории потенциальных функций в пространстве
трех измерений. Для перехода к большему числу координат потребуются
соответствующие предложения для большего числа координат. Их можно
получить в той мере, в какой они нужны для нашего доказательства. Но так
как это вопрос, имеющий самостоятельный интерес, то мне кажется не-
целесообразным решать его здесь попутно, и я поэтому предпочитаю дать
указанное доказательство при другом, более удобном случае.
Другие общие свойства движений, происходящих с соблюдением прин-
ципа наименьшего действия, будут изложены в следующих параграфах.
§ 5. Обобщение дифференциального уравнения Гамильтона
Гамильтон показал, как представить образованную им при несколько
более узких предположениях функцию Ф,
Ф = - L)dt,
t.
в виде функции времени t = — tQ и значений координат, соответствующих
моментам и t0. Мы обозначим координаты и импульсы для момента соот-
ветственно через pi и sb а для момента t0 — через р,- и §f. Предполагается,
что в течение времени tr — tQ изменения координат р, происходят согласно
законам движения. Тогда, очевидно, интеграл, обозначенный через Ф, может
быть вычислен как функция переменных р„ р, и t; в этом случае мы имеем
ЭФ
Ж ~ ~ s< ’
эф „
-эГ = £’
или
йФ = Е dt - 2' & dp,) + S & d^t). (60)
i i
Это преобразование может быть выполнено также и при более широких
допущениях, сделанных нами в § 1*). Для цели, которую мы ставим здесь
') Как это заметил уже К. Якоби в своих «лекциях по динамике», лекция XIX.
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
453
перед собой, будет достаточно сделать это в предположении, что силы Р,
равны нулю. В остальном функция Н может быть любой функцией р, и qh
лишь бы она удовлетворяла упомянутым выше условиям непрерывности.
Две первые системы уравнений (59), как известно, получаются при вы-
полнении интегрирования по частям, с помощью которого при варьировании
функции Ф переходят от d/р к др,. Входящая в третье из уравнений (59)
ЭФ
частная производная по времени-^- получается, если искать изменение
функции Ф, которому она подвергается при продолжении действительного
движения на промежуток времени dt. При этом р; возрастает на q, dt; с
другой стороны, уравнение (2) показывает, что упомянутая вариация Ф
равняется конечному значению Н dt. Таким образом,
и Г 0Ф । У ( 0Ф „ Н
[ Qt + i (8р7 ^01
или на основании уравнений (59) и (18)
8Ф _
dt ~~
Из уравнений (59) вытекают следующие соотношения между величинами
sh и Е, если они представлены как функции переменных р„ р,и t:
8s/ 8S; 8s,• _ dSj dSt _ d§j
Sp; ~ 8р,- ’ Эр; — dpt ’ apj dpt
8Е _ _ 0‘Т dE __ 88/
Эр/ ~ dt ’ dpt dt •
Если эти условия выполнены, то
Edt — 2 (st dPi) + 2? (§i dtp,) = dФ
(61)
(62)
(63)
является полным дифференциалом функции переменных р„ pf и t.
Соотношения между Е, Я; и
Впрочем, величины Е, st и входящие в уравнение (63), если они долж-
ны соответствовать энергии и импульсам в движении системы, возможном
при отсутствии внешних сил, не будут вполне независимы одна от другой.
В самом деле, уравнения движения системы, как уже показал Гамильтон,
могут быть представлены системой уравнений
= const. (64)
Так как §,• суть функции величин р;, t и р;, то отсюда, вообще говоря, р,
могут быть определены как функции времени t и величин р,- и играющих
роль постоянных интеграции; этим задается положение системы для любого
последующего момента. Если в случае консервативной системы получен-
ные таким путем значения р, подставить в выражение для Е, то Е обратится
в функцию переменных р, и которая тогда уже не может зависеть от
времени. Возвращаясь к уравнениям (59), найдем
т = («)
454
Г. ГЕЛЬМГОЛЬЦ
это значит, что для функции Ф должно иметь место дифференциальное урав-
нение первого порядка между ее частными производными и , причем
коэффициенты в этом уравнении зависят только от pz.
Точно так же мы можем проследить и обратный путь системы от неко-
торого конечного положения, причем мы значения р, и я, должны рассматри-
вать как постоянные. Тогда уравнения
st = const
дают величины pz в функции t и постоянных значений я, и pz. Если подста-
вить эти выражения для pz в выражение функции Е, последняя оказывается
представленной как функция я, и р, при полном исключении t. Отсюда сле-
дует, что для функции Ф должно существовать второе дифференциальное
уравнение
ЭФ Г ( эф a
ЭФ ЭФ , ,
между частными производными и , коэффициенты которого зависят
только от Pi.
Оба эти уравнения у Гамильтона носят более определенный характер,
ибо он рассматривает обе составные части кинетического потенциала как
заранее данные и притом в старой, более узкой форме, тогда как мы здесь
разыскиваем лишь самый вид тех движений, которые соответствуют одно-
временно и принципу сохранения энергии, и принципу наименьшего дей-
ствия.
К этому нужно еще добавить, что каждая пара соответствующих я, и
должна представлять собою значения одной и той же функции в начале и
в конце промежутка времени t. Поэтому, если мы применим дифференциаль-
ное уравнение (63) к весьма малым промежуткам времени t, то для действи-
тельного движения следует положить
= (67)
причем эти qt будут тем больше приближаться к значениям соответствующих
скоростей, чем меньше t. Тогда разность я,- —с убыванием t должна стре-
миться к нулю. Если дифференциальное уравнение (63) и эти добавочные
условия удовлетворены, то удовлетворены и условия вариационной задачи.
Наконец, остается только оставить р, постоянными, a pt изменять так,
как они изменяются при действительном движении в течение элемента вре-
мени dt, т. е. положить dpz = 0 и dpt = qtdt.
Таким путем получаем из уравнения (63)
ЛФ = [Е~ S(8iqi)]dt, (63')
или
Ф = (68)
о
где Е, Si и qt под знаком интеграла получают значения, которые они имеют
в действительности в момент t, отсчитанный от начала соответствующего
движения. Это — прежнее представление функции Ф. Что это выражение
для Ф, будучи определено для действительно пройденного системой пути,
должно удовлетворять условию минимума, —это показывает уравнение (63').
В самом деле, если мы представим себе путь системы из положения, которое
у нас обозначается индексом 0, в положение, обозначенное индексом 2, раз*
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
455
деленным на две части промежуточным переменным положением, которое
мы назовем 1, то согласно уравнению (68)
фо,2 = Фод + 01>2-
Если мы теперь будем варьировать координаты промежуточного положения,
то на основании уравнения (63') будем иметь
<5Ф0,1 = — <^1,2 = — 2 (S/ • fyi) ,
а следовательно :
<500,2 = 0-
Это можно распространить, как легко видеть, на любое деление пути, на
любое число путей; отсюда следует, что интеграл 0О,2 не меняется, если
происходят какие-либо небольшие изменения промежуточных положений.
Теорема о минимуме зависит от соблюдения уравнения (63'), так же как
и само это уравнение зависит от выполнения условия минимума, и это имеет
место как для обобщенного вида функции Н, так и для первоначального,
более узкого, из которого исходили Лагранж и Гамильтон.
Изложенные в этом параграфе условия, которые налагаются на величины,
входящие в дифференциал (63'), сводятся к уравнению, которое дает Е как
функцию pi и s„ если воспользоваться преобразованием К. Якоби*).
§ 6. Взаимность прямого и обратного движений
Я называю движение системы обратимым в том случае, если ряд поло-
жений, которые система занимала при прямом движении, может быть прой-
ден в обратном порядке без приложения других сил и за те же промежутки
времени, соответствующие каждой паре одних и тех же положений. Обра-
щение возможно, если значение кинетического потенциала не меняется при
изменении знака у всех qi. Но если в выражение кинетического потенциала
входят произведения или степени нечетного измерения, как это, например,
бывает при наличии скрытых движений (§ 1), то движение будет обратимым
только в том случае, если возможно с механической точки зрения сделать
отрицательными также и часть постоянных (скорости скрытого движения)
так, чтобы при одновременном изменении знака у этих постоянных и у всех
q, величина Н не меняла своего значения. Этот результат легко получается
из рассмотрения уравнений движения (4), если принять во внимание, что при
обращении движения и dt меняет знак на противоположный.
Закон взаимности
В моих акустических исследованиях**) я доказал закон взаимности, кото-
рый в своих лекциях обычно легко распространял на малые колебания
любой колеблющейся механической системы около положения устойчивого
равновесия. Но этот закон имеет еще большую общность и остается в силе
для любой движущейся системы, которая подчиняется закону наимень-
шего действия и движется обратимым способом.
*) Я к о б и, Лекции по динамике, лекция XX.
**)Theorie der Luftschwingungen in ROhren mit offenen Enden (Теория колебаний воз-
духа в трубах с открытыми концами). Borchardt—Crelle Journ. f. Math., т. 57, стр. 27—30,
также Н. Helmholtz, Wissenschaftliche Abhandlungen, т. 1, стр. 332—335.
456
Г. ГЕЛЬМГОЛЬЦ
Пусть изменение первоначального движения состоит в том, что в момент
времени t0 все начальные положения остаются без изменения, а один из им-
пульсов увеличивается на d§r Пусть вследствие этого координата р2 в
момент времени получает приращение dp2- Тогда, если в обращенном дви-
жении в положении, соответствующем значениям р, координат, изменить
импульс s2 настолько же, насколько раньше был изменен импульс то по
истечении времени t = tx—tQ координата рх получит такое же прираще-
ние, как в первом случае координата р2.
Так как все dt и dp, должны быть равны нулю, то мы имеем
dpj. (69)
Из величин d$t только d^1 должна быть отлична от нуля. Для краткости
введем такое обозначение :
Согласно уравнениям (61) величины aitj равны величинам aJti. Обозна-
чим через D(o) определитель величин aitj. Если он не равен тождественно
нулю, то из уравнений (69) при сделанном ограничении следует
< Й1 п D
= (71)
Если мы, наоборот, потребуем, чтобы все dp,, а также и все dst, за исклю-
чением ds2, равнялись нулю, то мы получим для прямого движения, прини-
мая во внимание соотношение (70), соответствующее уравнение
, _ 8 1nD(—<т) .
a^l~ 0(-%2) aSi'
Для обращенного движения знаки импульсов, а также и знаки величин ai:J
меняются на обратные, и для обращенного движения мы получаем
(72)
Из уравнений (71) и (72) следует равенство
dp2: d§i = dpi : ds2,
которым доказывается высказанный выше закон.
Что касается исключительного случая, когда определитель D(c) равен
тождественно нулю, то в этом случае приращения dpj не были бы непременно
равны нулю, хотя бы и все без исключения d£, равнялись нулю. Движение
системы должно было бы быть вполне определено и тем самым должны были
бы быть однозначно определены все значения р, по истечении времени t,
если бы были даны все начальные положения р, и начальные скорости для
начала промежутка времени t. Поэтому упомянутый исключительный слу-
чай мог бы иметь место только при том условии, что £\ не определяются
полностью значениями величин что исключено замечаниями, сделанными
в конце § 1. Следовательно,, нет надобности рассматривать этот исключи-
тельный случай.
Предположенные здесь внезапные изменения значений §,• и s„ при кото-
рых сами координаты не испытывают изменения значений, могли бы быть
вызваны механически тем, что мы заставили бы силы Р, действовать в тече-
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
457
ние очень малого времени, но весьма интенсивно. При этом можно пред-
положить, что скорости изменяются так, что даже наибольшая достигнутая
скорость не будет иметь достаточно времени, чтобы заметно изменить поло-
жение. При таком допущении из уравнения (1) следует
- Pjdt = зг — s0.
Так как Р, в принятых там обозначениях есть сила, с которой движущаяся
система действует на внешние объекты, то —Р, есть внешняя противодей-
ствующая сила, которая необходима для совершения требуемого изменения
движения.
Мы будем такое действие сил называть по примеру У. Томсона ударом
в направлении координаты pt. При этом следует заметить, что, вообще говоря,
силы Р, являются агрегатами составляющих сил, которые действуют на
различные части системы и так распределены, что агрегат сил Р, не совер-
шает работы при изменении каких-либо других координат, кроме р,. Так
как, далее, нам приходится различать прямое и обратное движения, то ока-
зывается целесообразным считать положительными те приращения
которые увеличивают прямой импульс равно как считать положитель-
ными те перемещения dpt, которые увеличивают расстояние р,- — р,-; на-
оборот, для обратного движения следует рассматривать также и отрицатель-
ные значения dst, которые увеличивают обратный импульс (— s,) и отрица-
тельные перемещения (— dp,), которые увеличивают расстояния р, — р(,
эквивалентными положительным изменениям d§, и dp{ при прямом дви-
жении.
Тогда закон взаимности может быть выражен следующим образом:
Если удар, который увеличивает только импульс в начальном поло-
жении при прямом движении на величину d§it увеличил координату Pj в
конечном положении на dp}-, то эквивалентный обратный удар, который
увеличивает настолько же обратный импульс —Sj в прежнем конечном
положении, вызовет по истечении времени t эквивалентное обратное изме-
нение координаты р,.
§ 7. Введение импульсов вместо скоростей
в качестве независимых переменных
Дифференциальное уравнение (63) открывает много возможностей для
преобразования выражений путем выбора других независимых переменных,
которыми частично пользовался уже Гамильтон*). Но так как он при этом
предполагал, что живая сила является однородной функцией второго по-
рядка от скоростей, то я позволю себе здесь провести то из этих преобразо-
ваний для более общей формы задачи, при котором не приходится исключать
действие внешних переменных сил. Это'преобразование получается следую-
щим образом: в выражении для Н или соответственно для Е скорости q,
заменяются импульсами
Мы рассматривали кинетический потенциал Н как функцию р, и qi.
В соответствии с этим
= (73)
*) Philosoph. Transact., 1835, ч. 1, стр. 98—100, см. также К. Якоби, Лекции по
динамике, лекция XIX.
458
Г. ГЕЛЬМГОЛЬЦ
Мы ввели обозначение
Отсюда следует
— =s-
dqi s‘
dE = d[H + 2 (s, </,)] = 2 dp, + qt ds,) .
(74)
Если определитель величин
качестве переменных вместо
а(?уне равен нулю, мы можем р, и sl ввести в
Pi и qt, и тогда из уравнения (74) получается:
ЭН _ Э£ _ dpt _ Э£
Эр, Эр, ’ dt dst '
Здесь при частных дифференцированиях предполагается, что И выражается
в функции переменных р, и q,, а Е — в функции переменных р, и s,.
Отсюда находим значение силы, определяемое уравнением (4):
р __ дЕ dst dpt ________ дЕ /7
~~dpt ~dT ’ ( э'
Соответствующая вариационная задача получает несколько иную форму
по сравнению с формой Гамильтона :
= Jdt {е + 21 [Р, (Л + #)]} • (77)
Здесь Р, рассматривается как функция одного только времени, Е — как
функция р, и s,. Проварьируем р, и s,- одни независимо от других и потре-
буем, чтобы для предельных значений времени все dst были равны нулю.
Тогда без других вспомогательных уравнений условие
ЙУ7 = О
дает обе системы уравнений движения (75).
При таком способе представления нам вовсе не нужно знать кинети-
ческую энергию, но нам должны быть известны величины s„ которые
для более общей формы Е мы можем вывести из q, только посредством
функции Н.
Соответствующая форма дифференциального уравнения (63) для случая,
когда Р( равны нулю, получается путем прибавления к обеим частям урав-
нения
d# = Е d/ - 2 (Si dp^ - 2 & dpi) (63)
величины ‘ '
rf[^(s,P,)- SM];
это дает ’ 1
d P + 2 & Pt) ~ 2 & fc)] = d^ = E dt+ 2 (Pt dSi) - 2 (Р/ d§,). (76)
t i it
Поэтому, если E, p, и р,- представлены как функции времени t, а также пере-
менных s,- и то справедливы следующие системы уравнений :
Эр/ __ dpj Эр,- Эру Эр, Эру дЕ dpt дЕ Эр/
Эху “ dst ’ Эёу ~ dZi ’ Э§7 — ~dsT’ dsi — dt ’ d§i — ЭЕ"
О ФИЗИЧЕСКОМ ЗНАЧЕНИИ ПРИНЦИПА НАИМЕНЬШЕГО ДЕЙСТВИЯ
459
Средняя из этих систем уравнений может быть снова применена подобно
уравнениям (61) для того, чтобы образовать второй закон взаимности. В на-
чале промежутка времени t совершается перемещение 6рп тогда как другие
р, и §,• остаются без изменения ; в результате по истечении времени t вели-
чина s2 изменяется на ds2. Затем при обратном движении изменяется только
р2 на величину 6р2, в результате чего по истечении времени t импульс
меняется на величину Тогда мы опять будем иметь
<5р!: <5s2 = <5р2 •’ (78)
в предположении, что определитель уравнений
не равен нулю. Если же он равен нулю, то оба положения являются взаим-
ными фокусами движения.
Берлин, апрель 1886.
Н. Е. ЖУКОВСКИЙ
О СРЕДНЕМ ЗНАЧЕНИИ КИНЕТИЧЕСКОГО ПОТЕНЦИАЛА р56]
В своей очень интересной статье «О физическом значении принципа наи-
меньшего действия» Г. Гельмгольц*) называет взятый по времени интеграл
t
yJ(F — L)dt, где F и L означают потенциальную энергию системы и ее
о
живую силу, «средним значением кинетического потенциала» и устана-
вливает следующий принцип: «Среднее значение кинетического потенциала
на действительном пути системы есть минимум сравнительно со значениями
его на других близких путях, которые приводят систему в то же время из
того же начального в то же конечное положение». По моему мнению, среднее
значение кинетического потенциала в этом случае имеет не минимум, а ма-
ксимум. Это можно доказать следующим образом. Займемся
С для простоты случаем одной только материальной точки
/\ (с двумя или тремя степенями свободы) и сравним ее действи-
/ \ тельное движение по пути abc с другим, воображаемым,
/ \л кинематически возможным, которое происходит по пути
/ У\\ а^с за т0 же вРемя (см- рисунок). Возьмем на пути ahc
/ /какую-нибудь точку е и определим такое действительное
Ь/ / /\ движение нашей материальной точки, при котором она по
/ / / j пути ае приходит из а в е в то же время, как при вообра-
I // I жаемом движении по пути ahe. Если точку е мы будем
I / У постепенно перемещать от а к с, то путь ае будет изменять-
ся, начиная с бесконечно малого пути и кончая путем аЬс.
Предположим, что материальная точка за бесконечно
малый промежуток времени dt переходит в воображаемом
движении из е в d, а в действительном движении по пути
ag из / в g. Так как действительные движения по пути af и ае проис-
ходят за один и тот же промежуток времени, то на основании принципа
Гамильтона мы получим
ab . aJ
f (F — L)dt — J (F — L)dt= — mv cos a da,
где m — масса материальной точки, v — ее скорость в точке /, da — беско-
нечно малая линия ef и а — угол gfe. Положив fg = ds и eg = dl, мы из бес-
конечно малого треугольника efg найдем
dl2 = ds2 + da2 — 2 ds da • cos a.
*) H. Helmholtz, Journal fur die reine und angewandte Mathematik, t. 100, вып. 2,
1886. [См. предыдущую статью. Прим, ped.]
О СРЕДНЕМ ЗНАЧЕНИИ КИНЕТИЧЕСКОГО ПОТЕНЦИАЛА
461
Отсюда получается неравенство
т ( dl V . т ( ds V ds .
аЫ Й>1Ы dt-m-^do-c^a,
которое на основании вышенаписанной формулы переходит в следующее :
ab af
т ( Э’«' > f (£Уд+f <F - о - о «
Прибавим к обеим частям этого неравенства Fgdt, где Fg означает потен-
циальную энергию в точке g, и дадим ему такой вид :
а/ ае
J (F - L) dt + [f, - f (£)’] dt - J (F - L) dt > [F„ - )!] dt,
♦
или
ag ae
$(F-L)dt- J (F — L)dt> [F, - (f )2] dt. '
Сложим такие неравенства для всех элементов dt воображаемого движения :
abc ahc
j (F — L)df>J(F- L)dt.
Разделив обе части этого неравенства на время t, в течение которого проис-
ходит движение по путям abc и ahc, найдем, что среднее значение кинети-
ческого потенциала в действительном движении будет больше среднего
значения его в воображаемом движении. Это доказательство легко может
быть распространено на любую систему материальных точек.
Справедливость моего положения можно проверить и на примерах.
Вообразим материальную точку, брошенную со скоростью vQ под углом <р
к горизонту и движущуюся по параболе под действием силы тяжести, и
сравним ее движение с равномерным движением, которое происходит за то
же время по прямой линии, соединяющей точки пересечения параболы с
горизонтальной плоскостью ; мы получим среднее значение кинетического
потенциала для прямолинейного движения
1 0-9 OlVo
mv% sin2 <р--->
которое, очевидно, меньше, чем среднее значение кинетического потенциала
2 9-9
у mvl sin2 <р-5-
для параболического движения.
Г. ГЕЛЬМГОЛЬЦ
ОТРЫВОК ИЗ ЛЕКЦИЙ ПО ДИНАМИКЕ
ДИСКРЕТНЫХ МАТЕРИАЛЬНЫХ ТОЧЕК»!157]
4. РАСШИРЕНИЕ ОБЛАСТИ, В КОТОРОЙ ИМЕЮТ СИЛУ
ДИНАМИЧЕСКИЕ ПРИНЦИПЫ
§ 75. Добавление любых внешних сил
Во втором отделе этой четвертой части [168 ] был установлен в качестве
принципа, выражающего в краткой форме способ действия чистых движу-
щих сил, принцип Гамильтона
t,
<5 J(0 — L) df = О, (1)
t0
из которого путем выполнения указанным в этом отделе способом вариации
временного интеграла мы вывели лагранжевы уравнения движения для
любых координат в такой форме :
+ А (2А) = о (2)
dpi dpi + dt I dqt J ‘ ‘ ’
В обоих выражениях, различающихся между собой только по форме, фигу-
рируют как функции состояния обе известные формы энергии : потенциаль-
ная Ф и кинетическая L. Тем самым область применимости этих принципов
ограничивается консервативными системами, в которых действующие силы
либо являются исключительно внутренними (свободные системы), либо
такими внешними силами, для которых известно выражение потенциальной
энергии, например сила тяжести или притяжение Солнцем в примерах
§§ 73 и 74. Однако часто случается, что необходимо предусмотреть действие
таких внешних сил,, величина и направление которых в каждый данный
момент, правда, известны, но консервативность которых не установлена,
а иногда и не может быть установлена; это имеет место во всех тех
неполных отображениях действительности, в которых оперируют с
силами, входящими в расчет как заданные функции времени.
Вышеизложенные принципы механики можно расширить таким образом,
что они смогут дать правильное основание также и для решения только что
упомянутых задач. Именно, к потенциальной энергии присоединяют опре-
деленные добавочные члены, которые при дифференцировании по коорди-
натам дают, наряду с консервативными внутренними силами, и внешние
силы. Эти внешние силы можно мыслить разложенными на составляющие,
из которых каждая ускоряет только одну координату системы ; составляю-
ОТРЫВОК ИЗ «ЛЕКЦИЙ по динамике дискретных материальных точек> 463
щую, соответствующую координате pit мы обозначим через (—Р,). Поста-
вленный здесь знак (—) не ограничивает по существу направления силы, ибо
Pt следует рассматривать как алгебрическую величину. Когда при движении
системы координата изменяется на dpi; то при этом, если (—Р,) имеет поло-
жительное значение, внешняя сила производит работу, следовательно,
энергия системы увеличивается ; наоборот, если при этом (—Р() отрица-
тельна, иначе говоря, если сама величина Р, имеет положительное зна-
чение, то система производит работу за счет своего запаса энергии. Коли-
чество этой отданной наружу энергии, согласно определению понятия ра-
боты, равно 4- Р,- dpi; выбор знака (—) при составляющей силы и имел
целью дать положительное по форме выражение этой работе, произведенной
системой ; можно сказать, что Р, есть та сила, с которой система реагирует
на внешние влияния, увеличивающие координату pt. Если ввести условие,
что Р, не зависят от внутреннего состояния системы и являются заданными
функциями времени или в простейшем случае вообще постоянны, то доба-
вочные члены легко находятся в форме суммы, которая содержит каждую
из сил Р„ умноженную на соответствующую координату р,. (Именно такое
добавление мы уже делали в конце § 60, в условиях равновесия, уравнение
(154b) [15в]; только знак там был противоположным, потому что внешние
силы там были введены положительными.) Принцип Гамильтона при-
обретает тогда расширенную форму :
t,
д$(ф-ь + £Р:Р1)а1 = о. (3)
Вариация интеграла и теперь также может быть выполнена путем варьи-
рования Pi, как и в § 65, причем следует оставить в силе условие, что поло-
жения, получающиеся в результате виртуальных перемещений, проходятся
точками системы одновременно с действительными положениями и что Р,
как функции одного только времени не участвуют в вариации. Отсюда
вытекает требование :
которое при произвольных функциях времени др, может быть удовлетворено
только в том случае, если во всякое время выражение, заключенное в пря-
мые скобки, для любого значения i в отдельности равно нулю. Таким путем
получается следующая система уравнений :
ЭФ _l dL _ d (_?£.)
dpi "I” dpi dt [ dqi J ’
(4)
которая и дает желаемое расширение дифференциальных уравнений Ла-
гранжа. Реакция движущейся системы против внешних сил (ибо таков
г> \ ( эф А
смысл величин Р{) складывается из внутренних сил и аналогов цен-
тробежнои силы из которых вычитаются скорости изменения коли-
честв движения (mutationes motus (изменения движения) второй аксиомы
Ньютона), представляющиеся после выполнения над L предписанных диф-
ференцирований как однородные линейные функции ускорений. Если р,
означают декартовы координаты в неподвижной системе, то
464
Г. ГЕЛЬМГОЛЬЦ
следовательно,
9L
&qt
dxt
= m'~dT
d Г 9L ) _ d*Xi_
dt I dqt ) ~ m‘ dt2
и
t. e., по определению Ньютона, силы, которые сообщили бы соответствующим
точкам, если бы те были свободны, как раз их фактические ускорения.
Взятые со знаком минус, с которым они входят в уравнение (4), эти состав-
ные части реакции соответствуют отрицательным д'аламберовым добавочным
силам, которые способны уравновесить приложенные силы, в то время как
только положительные д'аламберовы добавочные силы управляют движе-
нием. Между прочим, можно и уравнения (4) преобразовать, перенося
производные от количеств движения со знаком плюс влево, а силы Pt со
знаком минус — вправо ; но тогда мы не будем иметь дело с реакциями, а
будем иметь уравнения, которые представляют ускорения как результат
действия внутренних и внешних сил.
§ 76. Кинетический потенциал
В принципе Гамильтона оба вида энергии фигурируют только совместно,
в форме разности Ф—L, при выполнении варьирования они разделяются.
Между тем дифференциальные уравнения Лагранжа как первоначальные
(2), так и расширенные (4) легко написать в такой форме, чтобы и в них оба
вида энергии также входили только в форме разности. Так как потенциаль-
ЭФ
ная энергия зависит только от координат, но не от скоростей, все , а еле-
довательно, и все — равны нулю. Поэтому, если последние выражения
прибавить к правым частям уравнений (4), то этим их справедливость не
нарушится, а следовательно, их можно написать в таком виде :
9(Ф— L) d (д(Ф — Ь)\
dpi + dt [ dqt J
(4')
так что и в это выражение входит только разность Ф—L, временной интеграл
от которой, согласно принципу Гамильтона, должен иметь экстремальное
значение. В дальнейшем мы эту функцию, которая только и нужна для выра-
жения динамических принципов, будем обозначать одним знаком И, полагая
Ф - L = Н, (5)
и называть эту величину кинетическим потенциалом системы. Кинетический
потенциал имеет размерность энергии и вследствие наличия составной части
Ф содержит аддитивную неопределенную постоянную, В статических зада-
чах, где живая сила либо равна нулю либо имеет вследствие равномерного
движения всей системы постоянное значение L, которое сливается с неопре-
деленной постоянной, кинетический потенциал, разумеется, совпадает с
потенциальной энергией, а условие равновесия (153а) [16°] может быть
записано также в такой форме :
дН = 0.
Это условие непосредственно требует только, чтобы имело место равенство
дФ - дЬ = 0,
но предположение, что это уравнение могло бы быть удовлетворено тем, что
<5Ф = <5L и при этом каждая из вариаций в отдельности не равна нулю,
приводит к противоречию с принципом сохранения энергии, который не
допускает, чтобы при какой-либо вариации Ф и L одновременно возрастали;
остается следовательно, только предположить, что дФ = 0 и 6L = 0, а это
и есть ранее полученные статические условия.
ОТРЫВОК ИЗ «ЛЕКЦИЙ ПО ДИНАМИКЕ ДИСКРЕТНЫХ МАТЕРИАЛЬНЫХ ТОЧЕК» 465
Для движущейся системы функция Н подлежит еще ограничениям,
вытекающим из ее определения!: она должна состоять из функции одних
только координат р,-, из которой вычитается существенно положительная
однородная квадратичная функция скоростей qt) коэффициенты которой
также могут зависеть только от координат р,. Введение обозначения Н преж-
де всего является только формальным упрощением; точно так же введение
термина «кинетический потенциал» не обогащает нашего знания, но только
содействует более краткому выражению мысли, когда мы хотим облечь
принцип Гамильтона в словесную форму. Существенное значение этой
функции можно усмотреть только из того обстоятельства, что теперь ста-
новится возможным, выйдя за пределы видимых явлений движения, при-
дать уравнениям, выражающим законы термодинамики и электродинамики,
те же формы, которые принцип Гамильтона дает для динамики весомых
масс; при этом, конечно, И не подчиняется уже только что упомянутым
ограничивающим условиям, но является подлежащей определению в каж-
дой области функцией величин р,- и qit определяющих состояние системы.
Два ряда параметров р,- и qt не должны непременно находиться в полном
взаимном соответствии: могут существовать некоторые q, а соответствующие
р отсутствовать, и наоборот.
Подобные общие принципы, в которых выставляется требование, чтобы
интеграл некоторой функции состояния, распространенный на время, в
течение которого происходит изменение состояния, имел экстремальное зна-
чение, иногда обязательно минимальное, выдвигались неоднократно. Эти
принципы имели различную форму, соответствующую тем или другим усло-
виям, налагаемым на варьирование, но при правильном выполнении тре-
буемых варьирований все эти принципы приводят к одним и тем же диффе-
ренциальным уравнениям для рассматриваемых процессов. Первым из
этих интегральных принципов был предложенный Мопертюи принцип наи-
меньшего действия, в котором утверждалось, что при всех происходящих в
природе явлениях среднее значение живой силы имеет минимальное зна-
чение. Условия варьирования, имеющие при этом место для механических
задач, найдены только Лагранжем, и тем самым этот принцип был только
им научно обоснован. Эти условия с современной точки зрения могут быть
выражены требованием, чтобы полная энергия варьированного движения
оставалась равной полной энергии действительного движения. Впрочем, к
тем же результатам приводит принцип Гамильтона, при котором имеет место
другое условие, а именно, что время не затрагивается варьированием. Это
последнее условие имеет то преимущество, что мы имеем возможность присо-
единить к Н добавочные члены, относящиеся к внешним силам. Поэтому
мы оставляем форму Гамильтона, которая теперь при сохранении прежнего
условия варьирования гласит:
ь
d$Hdt = O,
^0
или в расширенной форме:
ь
t.
Расширенные уравнения Лагранжа получают форму:
Р _ дН d f ЭНЛ
“ dpt + dt [ dqi J
(6)
(6')
(б")
30 Йяпияпипнные ппинпипы меха ики
Л. БОЛЬЦМАН
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ» [»»}
* *
*
§ 35. Принцип действия как основной принцип естествознания
В исторической перспективе, конечно, представление о центральных-
силах явно или неявно привело к постепенному развитию механики в ее
современной форме. Однако из этого отнюдь не следует делать вывода, что
представление о центральных силах всегда должно оставаться основанием
механики. Достаточно часто встречаются случаи, когда то или иное поло-
жение, которое вначале найдено при определенных ограничивающих усло-
виях, впоследствии оказывается действительным в более общих случаях.
Например, такие принципы механики, как принцип виртуального пере-
мещения или принцип стационарного действия [162], также оказались дей-
ствительными при условиях, которые не могли быть реализованы с помо-
щью центральных сил.
В самом деле, часто высказывалось мнение о том, что следует отбросить
представление о центральных силах и вместо него положить в основу меха-
ники какой-либо другой из всеобщих принципов. Если избрать для этого
принцип энергии, то надо принять еще целый ряд других положений, так
как принцип энергии гораздо более специален, чем уравнения механики,
и вывести всю совокупность материала механики из этого единого принципа
не удастся. Если избрать принцип стационарного действия, то нет необходи-
мости принимать какие-либо дополнительные условия, так как из этого
принципа фактически вытекает вся совокупность уравнений механики.
- Можно принять во внимание даже такой случай, когда состояние си-
стемы определяется не координатами, фиксирующими положение в трех-
мерном пространстве. Так, например, Гиббс, Гельмгольц и другие устано-
вили соотношения, которые содержат температуру, электрическое состо-
яние и другие подобные переменные и которые заключают в себе в ка-
честве специальных случаев, принципы механики, в особенности прин-
цип стационарного действия. Однако эти соотношения, с другой точки зре-
ния, являются гораздо менее общими. Иногда они действительны исключи-
тельно для таких состояний, которые бесконечно мало отличаются от состо-
яния равновесия; далее, они содержат в себе неясности, чуждые механике,
как, например, понятие энтропии, необратимости и многочисленные эмпири-
чески полученные свойства температуры, электричества и т. д., представ-
ление о которых отнюдь не является таким простым, как представление о
геометрических соотношениях точек.
Возможность появления в теорий электричества, в теории теплоты
и т. д. уравнений, аналогичных уравнениям механики, так же как и особые
свойства величин, встречающихся в этих теориях, можно объяснить тем,
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
467
что явления теплоты, электричества и т. д. вызваны скрытым механическим
движением. Неясности в отношениях величин, встречающихся в других
разделах физики, можно осветить с помощью механических образов, напри-
мер, энтропию и понятие необратимости можно рассмотреть, применяя
исчисление вероятностей к поведению множества материальных точек.
Когда я говорю, что механические образы могли бы осветить подобные
неясности, то этим я не хочу сказать, что положения и движения материаль-
ных точек в пространстве являются чем-то таким, простейшие элементы
чего можно считать совершенно объяснимыми. Наоборот, объяснить послед-
ние элементы нашего познания вообще невозможно, так как объяснить —
означает сводить к известному, простейшему, и поэтому то, к чему все сво-
дится, всегда остается необъяснимым. Поэтому, если бы все объяснялось
основными простейшими понятиями механики, то зато они остались бы
навеки такими же необъяснимыми, каким для нас сегодня является учение
об электричестве.
Я не хочу также спорить о том, что является более ясным — само по себе
понятие положения в пространстве, понятие температуры или электриче-
скогозаряда — подобный спор был бы беспредметным. Но было бы значительно
яснее, если бы мы могли посредством представления о движении материаль-
ных точек в пространстве, т. е. посредством одного-единственного и единого
принципа, объяснить не только все явления движения твердых, жидких и
газообразных тел, но и теплоты, света, электричества, магнетизма, грави-
тации. Это было бы яснее, чем употребление для каждого из этих действую-
щих агентов целого инвентаря таких совершенно необычных понятий, как
температура, электрический заряд, потенциал, характеризуем ли мы эти
необычные понятия как нечто совершенно самостоятельное или только как
разрозненные факторы энергии, особо постулируемые для каждой формы
энергии.
Если говорить вообще о грядущих столетиях или даже тысячелетиях,
то я охотно соглашусь с тем, что было бы смелым надеяться, что современ-
ная механическая картина мира сохранится навеки — даже лишь в своих
существеннейших чертах.
Поэтому я очень далек от того, чтобы недооценивать попытки отыскать
всеобщие уравнения, частными случаями которых являются механические
уравнения. Я был бы удовлетворен результатом этой книги, если бы, доказав,
какой ясной может и должна быть картина мира, содействовал бы созданию
иной, более объемлющей и ясной картины мира, будь то на основе прин-
ципа энергии или принципа стационарного действия, или прямейшего пути.
Я хочу противодействовать только легкомыслию, которое объявляет старую
механическую картину мира преодоленной точкой зрения, не дождавшись,
пока будет в деталях выработана иная, такого же рода картина мира, начи-
ная с первоосновы и до применения ее к важнейшим явлениям, давно и исчер-
пывающе описанным старой картиной мира; легкомыслию, которое даже
не представляет себе трудностей создания новой картины мира. Если стре-
миться избежать картины материальных точек, то нельзя впоследствии
вводить в механику материальные точки, а следовало бы исходить из дру-
гого рода единичных сущностей или элементов *), чьи свойства были бы опи-
саны так же ясно, как свойства материальных точек.
Изложенное выше я написал приблизительно семь лет тому назад. За-
ключительный абзац представляет собою, следовательно, требование, выста-
вленное мною семь лет назад (таков возраст рукописи настоящей книги).
Я преднамеренно опубликовал все это без изменений. То, чего я ожидал
*) Ср. Wied. Ann., т. 60, 1897, стр. 247 [«’].
468
Л. БОЛЬЦМАН
через столетия или даже тысячелетия, наполовину свершилось в течение
семи лет.
Но луч надежды на немеханическое объяснение природы исходил не от
энергетики, не от феноменологии, а от атомной теории, фантастические гипо-
тезы которой также превосходят старую атомную теорию, как ее элементар-
ные образования по своей малости превосходят старые атомы. Излишне
говорить о том, что я имею в виду современную электронную теорию. Она,
конечно, не стремится объяснить понятие массы и силы и закон инерции из
простейшего, легко понимаемого; ее простейшие основные понятия и законы
наверно останутся такими же необъяснимыми, как законы механики для
механической картины мира. Но преимущество возможности вывести
всю механику из других представлений, все равно необходимых для объяс-
нения электромагнетизма, было бы так же велико, как и обратное механи-
ческое объяснение явлений электромагнетизма. Пусть эта первая возмож-
ность осуществится и пусть исполнится мое требование, выставленное семь
лет назад!
IV. АНАЛОГИИ С ПРЕДЛОЖЕНИЯМИ ИЗ ОБЛАСТИ ФИЗИКИ, ОСОБЕННО
С ПРЕДЛОЖЕНИЯМИ ТЕОРИИ ТЕПЛОТЫ
§ 42. Аналогия с подведенным количеством тепла
Своеобразие уравнений термодинамики обусловлено тем, что прира-
щение количества подведенного тепла не выражается полным дифферен-
циалом. В то же время дифференциал дЕ подведенной энергии всегда явля-
ется полным дифференциалом, пока мы рассматриваем, как это имело место
в примерах предыдущих параграфов, склерономные системы. Поэтому, если
мы, ограничиваясь рассмотрением таких систем, пожелали бы провести
параллель между дифференциалом подведенного количества тепла и прира-
щением полной энергии, то даже в этом важнейшем пункте отсутствовала
бы аналогия.
Именно поэтому уже Клаузиус рассматривал системы, в которых встре-
чаются дальнодействия, закон которых меняется с течением времени, так
что вместо определенной постоянной, обычно входящей в силовую функ-
цию V, появляются очень медленно изменяющиеся со временем параметры,
и рассматриваемая механическая система оказывается реономной [164].
Например, представим себе поршень, запирающий некоторое количество
нагретого газа в виде внешних отталкивающих нормальных сил, действую-
щих на молекулы газа, причем эти силы с приближением к поверхности
поршня внезапно принимают весьма большие значения. Тогда медленный
отход поршня можно представить себе в форме медленного изменения силовой
функции этих сил. Аналогично этому Клаузиус рассматривает движения
под действием центральных сил, закон которых содержит параметры, изме-
няющиеся с течением времени.
Но при таком представлении Клаузиуса об изменчивости законов дей-
ствия сил природы возникают трудности вычислительного порядка. В выра-
жение силовой функции этих сил входит всегда аддитивная произвольная
постоянная, которую мы можем мыслить определенной из условия, что для
некоторого положения всех материальных точек системы (нулевой уровень
потенциала) функция V обращается в нуль. Для склерономных систем совер-
шенно безразлично, какое положение мы при этом выбираем. Но если закон
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
469
действия силы изменяется со временем, то изменяется также и работа, кото-
рая требуется для перевода системы из одного нулевого положения в дру-
гое. Значение функции V меняется поэтому различным образом в зависимо-
сти от того, какое положение системы принято за нулевое; для того чтобы
определить это значение, необходимо указать, какое именно положение
принято за нулевое.
Лучше всего в этом случае выбирать всегда то положение, при котором
все материальные точки системы так далеко отстоят одна от другой, а также
от всех действующих на них прочих точек, что ни на одну из точек системы
не действует никакая сколько-нибудь значительная сила. В реальных слу-
чаях этот выбор нулевого положения всегда возможен. Только при законах
действия сил, полученных путем отвлеченного математического построения,
например, если сила взаимодействия двух материальных точек принимается
прямо пропорциональной их расстоянию, этот выбор нулевого положения
делается невозможным.
Правда, предположение Клаузиуса о том, что закон для сил взаимодей-
ствия материальных точек изменяется с течением времени, дает возможность
провести полную аналогию с термодинамическими уравнениями, однако в
природе мы не замечаем ничего, что указывало бы на изменение закона
действия каких-либо определенных сил в зависимости от времени. Более
того, всякому физическому исследованию пришел бы конец, если бы мы не
были уверены в том, что законы природы, которые мы установили сегодня,
остаются в силе и в последующее время. Таким образом, при упомянутом
предположении Клаузиуса баланс энергии получается совершенно неопре-
деленным и к его однозначному установлению можно прийти лишь путем
более или менее произвольных допущений. Поэтому представляется удоб-
ным вместо предположения о переменном законе действия сил допустить,
что с п материальными точками, образующими рассматриваемую систему,
взаимодействуют еще v других материальных точек. Последние точки оста-
ются совершенно неподвижными при неварьированном движении, а при
варьировании движения они в высшей степени медленно изменяют свое
положение. При таком предположении также отпадает вышеупомянутая
трудность вычислительного характера.
В этом случае параллель проводится не между всей энергией, подведен-
ной к п точкам, с одной стороны, и подведенным количеством тепла, с
другой стороны. Здесь работа, которую получили п точек вследствие их
движения под действием сил со стороны v точек, соответствует внешней ра-
боте, подведенной к телу, и только остальная подведенная энергия соответ-
ствует подведенной теплоте. Таким образом, дифференциал той части энер-
гии, которая соответствует подведенной теплоте, не является полным диф-
ференциалом, в то время как дифференциал полной подведенной энергии все
же есть полный дифференциал.
Положение п материальных точек будет определяться s координатами
(быстро изменяющимися параметрами), положение v точек — g координа-
тами (медленно изменяющимися параметрами).
Таким путем можно, например, получить хорошую картину обратимых
изменений состояния газа, запертого поршнем. Молекулярное движение и
внутреннее атомное движение молекул газа соответствуют быстрому дви-
жению п рассматриваемых материальных точек. С другой стороны, моле-
кулы поршня, тепловым движением которых мы можем пренебречь без
существенного изменения постановки задачи, соответствуют v материальным
точкам, которые приходят в движение только при изменении состояния
газа (притом в движение очень медленное, по крайней мере пока это изме-
нение состояния обратимо).
470
Л. БОЛЬЦМАН
§ 43. Понятие о циклических и родственных циклическим движениях
Речь идет теперь о том, чтобы быстрому движению материальных точек
также приписать такие свойства, которые, по возможности, сделали бы это
движение способным верно отобразить характерные свойства теплового
движения. Задача — дать краткое систематическое описание всех основных
типов механических систем, которые применялись для этой цели, — затруд-
няется тем, что многие из этих систем имеют общие признаки, а различные
авторы считали то одни, то другие из этих признаков самыми существенными,
благодаря чему и терминология сделалась неустойчивой. В той попытке,
которую я здесь делаю, едва ли мне удастся достигнуть полноты и нагляд-
ности описания; к тому же я был вынужден немного отступать от терми-
нологии того или другого автора.
Если принять основные воззрения механической теории теплоты, то
самое выдающееся свойство тепловой энергии будет заключаться в том, что,
хотя в нагретом теле непрестанно имеет место быстрое движение мельчай-
ших частиц, однако, несмотря на это, мы не замечаем никаких изменений во
внешне воспринимаемом состоянии тела, в то время как обычно, когда
какое-либо тело движется, мы ясно видим непрерывное изменение состояния
тела с течением времени.
Ту же особенность мы находим и в других областях физики. Так, при
прохождении электрического тока постоянной силы через покоящийся про-
водник, вблизи которого находятся неподвижные магниты или железные
массы, мы нигде, кроме питающей батареи, не находим ни малейшего изме-
нения с течением времени; тем не менее, Максвелл объясняет свойства
электрического тока, исходя из того, что его сущность состоит в интенсив-
ном движении, которое происходит частью внутри проводника, частью в
Окружающем эфире.
Посмотрим, какая механическая модель обладает подобными свойствами.
Пример такой модели представляет вращающееся вокруг своей оси абсо-
лютно твердое тело вращения, которое не имеет других движений, кроме
быстрого вращения вокруг оси. Другим примером может служить безвих-
ревое течение совершенно однородной несжимаемой жидкости без трения в
замкнутом канале с абсолютно твердыми стенками. Такого рода движения
мы будем называть циклическими.
Специальными видами циклических систем уже и раньше неоднократно
пользовались в механике и теории теплоты, в особенности Ранкин. Макс-
велл впервые рассмотрел циклические системы общего типа и применил их
к объяснению электромагнитных и электродинамических явлений. Приме-
нением к теории теплоты циклических систем более общего вида, чем у
Ранкина, дальнейшим развитием основных уравнений, составленных для
этих систем уже Максвеллом, а также основами современной терминологии
в этой области мы обязаны Гельмгольцу.
Циклические системы в строгом смысле слова (в дальнейшем мы будем
их называть подлинными циклами) —г это такие системы, в которых хотя
и имеют место любые движения, однако при том условии, что когда какая-
либо материальная частица оставляет некоторое место пространства, всегда
немедленно на это место вступает другая, совершенно такая же частица, со
скоростью, численно равной скорости первой частицы и одинаково с ней
направленной. Координата называется подлинно циклической, если система
совершает циклическое движение при изменении одной этой координаты,
в то время как другие координаты сохраняют неизменными свои значения.
Молекулярные движения, которые согласно механической теории теп-
лоты представляют собой теплоту, не являются по воззрениям этой теории
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
471
строго циклическими. Только вследствие большого числа движущихся
молекул при выходе какой-либо молекулы из определенного состояния
движения вблизи нее появляется другая молекула с очень близким состоя-
нием движения, так что внешне мы не замечаем никакого изменения. По-
этому понятие подлинно циклической системы было расширено следующим
образом. Характерным для подлинно циклических систем является то об-
стоятельство, что все их свойства зависят не от значения самих подлинно
циклических координат, а только от скоростей их изменения. Поэтому цик-
лическая координата, не стоящая под знаком производной, не может входить
ни в выражение живой силы, ни в выражения действующих па систему
сил, ни в функции, выражающие условия связей. Обобщая понятие под-
линно циклических координат, мы, по примеру Герца, будем попросту назы-
вать циклической любую координату, которая не входит иначе как под
знаком производной по времени ни в одно из вышеупомянутых выражений.
Если на точки некоторой системы не действуют ни внутренние, ни внеш-
ние силы, как это Герц принимает для всех систем, то при условии, что нет
уравнений связей, даже прямоугольные координаты являются циклическими.
Известное сродство с циклическими системами имеют системы, обла-
дающие периодическим движением, для которых, стало быть, по прошествии
известного времени повторяются точно те же самые состояния движения,
в той же последовательности; эти системы мы будем кратко называть
периодическими системами. Если периодически движущиеся массы играют
второстепенную роль, то периодические системы могут обладать почти всеми
свойствами подлинно циклических систем. Например, они могут отличаться
от подлинно циклических систем только тем, что в их состав входят вращаю-
щиеся зубчатые колеса, взад и вперед движущиеся поршни и другие колеблю-
щиеся массы.
Гельмгольц идет еще дальше и рассматривает системы, которые подчи-
нены только тому условию, что не только сумма кинетической и потенциаль-
ной энергий, но и каждая из этих энергий в отдельности остается постоянной.
Он называет такие системы изокинетическими. Еще более общее понятие
образует Клаузиус. Он называет стационарным такое движение, при котором
ни одна прямоугольная координата и ни одна из составляющих по коорди-
натным осям скорости материальной точки не возрастает неограниченно,
как бы долго ни продолжалось движение. Я предпочитаю называть такое
движение «конечным». Предположим теперь, что движение не является
периодическим в том смысле, что по истечении конечного промежутка вре-
мени все материальные точки возвращаются одновременно в точности к
прежнему положению с прежней по величине и направлению скоростью
и затем снова начинают точно такое движение; однако предположим,
что движение подчиняется такому закону, что если взять средние значения
за некоторый промежуток времени живой силы, составляющей скорости
или одной из прямоугольных координат какой-либо точки или всей силовой
функции V и т. д., и заставить промежуток времени, для которого вычислено
соответствующее среднее, неограниченно возрастать, не варьируя движения,
то каждое из этих средних значений будет стремиться к определенному
пределу. Такое движение мы будем называть измеримым.
§ 44. Специальные примеры
Прежде чем перейти к вычислениям, поясним сказанное несколькими
примерами.
Первый пример — уже неоднократно упоминавшийся пример из
кинетической теории газов или капельных жидкостей. Система образуется
472
Л. БОЛЬЦМАН
п материальными точками, которые движутся в цилиндрическом сосуде
с твердыми стенками, закрытом совершенно плотным поршнем, движу-
щимся без трения. Движение материальных точек происходит совершенно
так, как движутся, согласно воззрениям механической теории теплоты,
молекулы газа, следующего закону ван-дер-Ваальса, или молекулы капель-
ной жидкости. Увеличение живой силы, хотя бы за счет получаемых откуда-
то извне молекулярных ударов, соответствует подведенному теплу, которое
пошло на повышение температуры, тогда как работа против действующих
между п материальными точками внутренних сил соответствует внутренней
работе, s переменных — это величины, необходимые для определения поло-
жения п материальных точек.
Поршень движется только медленно, так что его давление все время
приблизительно равно противодавлению материальных точек, между кото-
рыми постоянно осуществляется равновесие живой силы. Переменные в
количестве g определяют положение поршня. Работа силы, с которой пор-
шень действует на материальные точки, есть внешняя работа. Она равна
работе сил, действующих на поршень извне. Такая система при достаточно
большом числе молекул есть неподлинный цикл: она изокинетична, конечна
и измерима, но это не периодическая система.
Второй пример: модель центрального движения. Подобно тому
как мы это сделали в конце § 41 [les], мы рассматриваем центральное дви-
жение одной-единственной материальной точки. Но мы позаботимся о том,
чтобы во время этого центрального движения обе постоянные А и а, которые
определяют закон действия центральной силы, могли изменяться медленно.
Вместо допущения Клаузиуса о непосредственном изменении законов
природы мы предположим, что изменение А и а вызвано обычными механи-
ческими средствами. Прежде всего, если речь идет о центральном движении
планеты вокруг Солнца, то мы можем себе представить, что извне на Солнце
все время падают массы (метеориты), так что его масса, а следовательно,
и сила притяжения Солнцем планеты возрастают со временем. Если бы мы
хотели построить замкнутый процесс, аналогичный круговому процессу
Карно, то сначала, например, должны были бы падать массы на Солнце.
При этом получалась бы внешняя работа. Затем должна была бы быть умень-
шена живая сила центрального движения, которой соответствует тепловая
энергия нагретого тела. После этого следовало бы упомянутые массы удалить
с Солнца на бесконечно большое расстояние. При этом пришлось бы затра-
тить меньшее количество работы, чем было выиграно прежде, при падении
масс на Солнце, так как теперь планета более удалена и дает меньшую
силу притяжения. Наконец, нужно было бы привести энергию обращения
планеты опять к прежнему уровню путем соответствующего подвода энергии
извне. Мы предполагаем, что конфигурация, положение и скорости системы
в конце снова оказываются теми же, что и в начале процесса. Так как траек-
тория была бы всегда замкнутой, то уже имелась бы полная аналогия со
вторым законом термодинамики. Если обозначить через Т среднюю живую
силу планеты в ее движении вокруг Солнца и через 6Q — ту энергию, кото-
рая в течение бесконечно малой части процесса должна быть подведена к
планете путем повышения живой силы ее обращения вокруг Солнца, то
полным дифференциалом будет не oQ, а величина -4S-, поскольку масса
Солнца увеличивается или уменьшается все время настолько медленно,
что можно принять, что за время полного обращения планеты это увеличение
и уменьшение малы и происходят равномерно. Можно было бы это подтвер-
дить путем детальных вычислений, но падение масс на Солнце является
процессом, неудобным для расчетов.
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
473
Можно себе представить некоторое устройство, правда, несколько
абстрактное с физической точки зрения, но более ясное с механической
точки зрения, которое с большой общностью иллюстрирует все возможные
случаи. Пусть очень маленький, совершенно гладкий шарик массы т дви-
жется по гладкой горизонтальной плоскости. К шарику привязана гибкая
нерастяжимая невесомая нить, которая проходит через отверстие в плоскости,
затем свешивается вертикально и несет на конце лишенный массы магнит-
ный полюс А, который может двигаться без трения в вертикальной трубке.
Под этим полюсом, на одной вертикали с ним находится весьма короткий
магнит, который может вращаться вокруг горизонтальной оси; два очень
близких полюса этого магнита назовем В и С.
Во время центрального движения, совершаемого шариком, можно путем
маленьких ударов медленно сообщать шарику добавочную живую силу
(это соответствует притоку тепла), а также медленно вращать магнит (соот-
ветственно движению поршня). Таким образом можно медленно изменить
состояние системы, а затем опять, другим путем, возвратиться к старому
состоянию движения. Можно, например, при более медленном движении
шарика т вращать короткий магнит, затем сообщить добавочную живую
силу, после этого при быстром движении повернуть магнит в старое поло-
жение и, наконец, убавить живую силу настолько, чтобы она вернулась
к прежнему значению, и при этом изменить направление движения так,
чтобы в конце концов получилась прежняя траектория при том же положении
магнита. Переменные, определяющие положение массы т на плоскости, —те
же, которые мы раньше назвали «-переменными; g-переменные сводятся
теперь к одной, именно к углу поворота магнита.
Можно двумя способами достичь того, что внешняя сила, действующая
на магнит, не будет изменяться периодически во время неварьированного
движения, а будет медленно изменяться со временем только в том случае,
когда движение варьируется. Первый способ состоит в том, что мы считаем
время обращения массы т очень малым, а момент инерции магнита относи-
тельно его оси вращения очень большим, так что за время перехода массы
т из перигелия в афелий магнит поворачивается на исчезающе малый угол.
Во-вторых, можно себе представить, что на горизонтальной плоскости вместо
одной массы имеется бесконечное множество совершенно одинаковых масс т,
которые находятся во всех возможных фазах одного и того же центрального
движения и, не мешая друг другу, движутся одна независимо от другой
и все находятся одинаковым образом под воздействием магнита через посред-
ство одинаковых вышеописанных устройств. Таким путем система может
быть превращена в изокинетическую в смысле Гельмгольца, а также и в
подлинно циклическую. Последнее — в том случае, если все эти массы уже
в начальный момент непрерывно распределены соответствующим образом
по площади, которую они описывают с течением времени в центральном
движении. Но в этом случае для определения положения одной из мате-
риальных точек, находящихся в состоянии центрального движения, кроме
медленно изменяющихся координат, которые определяют положение магнита
или магнитов, недостаточно задания одной циклической переменной: для
этого нужны две переменные (две прямоугольные координаты на плоскости,
или длина дуги траектории и направление движения на заданном расстоянии
от центра сил).
Если желательно, чтобы центральное движение каждой массы происхо-
дило по ньютоновскому закону тяготения, то нельзя применять обыкновен-
ный магнит, а нужно, чтобы полюс А притягивался более близким полюс-
сом В с силой, обратно пропорциональной первой степени расстояния, а по-
люом С — с такой же силой отталкивался. Тогда опять-таки полным диф-
474
Л. БОЛЬЦМАН
ференциалом будет не 6Q, а -48- . Если имеются одновременно два магнита, из
которых один обладает только что указанными свойствами, а другой дей-
ствует по тому же закону, что и обыкновенный магнит, и притом оба магнита
могут вращаться один независимо от другого, то получается движение, при
котором центральная сила следует закону, упомянутому в конце § 41, причем
обе постоянные Лиа можно изменять одну независимо от другой.
В последнем случае также и-^8- не является полным дифференциалом;
отсюда можно видеть, что не для всех изокинетических, а также не для
<50 . , „
всех подлинно циклических систем -=?- есть полный дифференциал. За
подробными расчетами для всех этих примеров я отсылаю к статьям в
Wien. Sitz. Вег., II, 92, стр. 853, октябрь 1885; Exn. Rep. d. Physik, 22,
стр. 135.
Третий пример. Некоторая масса быстро вращается вокруг оси,
причем ее расстояние от оси является медленно изменяющимся параметром.
Это —• поучительный пример циклической системы в расширенном смысле,
согласно терминологии Герца, системы, которая не является подлинным
циклом. Этот пример в дальнейшем, ради краткости, будет именоваться
Центробежной моделью. По поводу прекрасной аналогии, которую пове-
дение этого простого устройства обнаруживает с теоремой Карно и с пове-
дением совершенных газов, смотри мои «Лекции о максвелловой теории
электричества и света», т.1, лекция 2. В той же книге (лекции 4 и б) описано
устройство, в котором возможны два, не зависящих одно от другого цикли-
ческих движения.
Четвертый пример: модель с потоком жидкости. Лишенная
трения несжимаемая жидкость находится в состоянии безвихревого дви-
жения в замкнутом канале.
Форма канала, а также его поперечное сечение в различных местах
могут медленно изменяться, однако без изменения общей емкости канала.
Эта система является подлинным циклом.
§ 45. Движение непериодическое и не носящее циклического характера
Сначала мы поставим задачу в самой общей форме. Представим себе
п материальных точек (шарики т в модели центрального движения), по-
ложение которых определяется при помощи s обобщенных координат. Эти
координаты могут быть связаны а условиями, совершенно не меняющимися с
течением времени, которые, следовательно, остаются одними и теми же
также и для всех варьированных движений.
Позже мы предположим, что движение этих п материальных точек —
циклическое или родственное ему. Пока же мы оставим его самым общим.
Эти п точек образуют рассматриваемую механическую систему. Кроме
того, мы имеем еще три рода материальных точек.
1. Пусть прежде всего с п упомянутыми материальными точками взаимо-
действуют другие п' материальных точек, которые сохраняют неизменными
свои положения в пространстве и поэтому без нарушения общности могут
быть включены в число п точек. Например, в примере с моделью централь-
ного движения в том месте, где нить проходит через отверстие, может нахо-
диться неподвижная неизменяемая масса, которая действует на шарик т
центральной силой, изменяющейся по любому закону. Такие массы могли
бы быть размещены неподвижно и в других местах плоскости движения.
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
475
2. Кроме того, пусть с п материальными точками взаимодействуют
v других точек, положение которых определяется g обобщенными коорди-
натами (медленно изменяющиеся переменные, или параметры). Это поло-
жение в одних случаях остается неизменным, в других опять весьма ме-
дленно изменяется. Эти v точек по отношению к рассматриваемой системе
считаются внешними. Они соответствуют магниту в модели центрального
движения.
3. Пусть имеется еще N других материальных точек, которые действуют
только на v точек и вовсе не действуют на п точек и поэтому стоят совер-
шенно в стороне от рассматриваемой системы.
В том случае, когда v точек находятся полностью в состоянии покоя,
силы, которыми N точек действуют на v точек, должны полностью уравно-
вешиваться силами, действующими на v точек со стороны п точек; в том
случае, когда v точек медленно движутся, состояние должно очень мало
отличаться от состояния равновесия. На модели центрального движения
.V сил — это те силы, приложенные к магниту, которые должны уравнове-
шиваться силами, действующими на магнитный полюс А.
Пусть Т — живая сила п точек, F — силовая функция всех сил взаимо-
действия этих точек и сил, которыми на п точек действуют п' точек. Работу
всех этих сил мы назовем внутренней работой, работу тех сил, которые дей-
ствуют со стороны v точек на п точек (внешних сил), назовем внешней работой.
Внешнюю обобщенную силу, соответствующую обобщенной координате ph
системы п точек, т. е. одну из сил, происходящих от взаимодействия п то-
чек, с одной стороны, и v точек — с другой, мы обозначим через Силы,
действующие между п точками и v точками, пусть также обладают силовой
функцией, которую мы обозначим через Q; общая же силовая функция
F -j- Q всех сил, действующих между п, п' и v точками, пусть будет V.
Если предпочесть вовсе не говорить о v точках, то внешнее действие на
п точек определяется только силами $й, имеющими силовую функцию Q,
которая, однако, в этом случае содержит медленно изменяющиеся пара-
метры.
Пусть сначала п материальных точек движутся при неизменном поло-
жении v точек в течение времени tr —10; это движение мы назовем неварьи-
рованным движением п точек. Обозначим через Т среднее значение живой
•силы для неварьированного движения за время —10; тогда
^0
аналогично^ этой формуле подсчитаем среднее значение V, которое обозна-
чим через V, и т. д.
Сначала мы сравним с неварьированным движением другое движение,
которое отличается от первого бесконечно мало, начинается в то же самое
время t0, что и неварьированное движение, и кончается в момент времени
4 + бесконечно мало отличающийся от
Какому-либо состоянию А неварьированного движения всегда соответ-
ствует то состояние В варьированного движения, которое имеет место в тот
же самый момент. Пусть в состоянии В живая сила п точек Т будет на дТ
больше, чем в состоянии А.
Значения s координат всех п точек будут в состоянии В несколько отлич-
ными от их значений в состоянии А. Вызванные одним только этим обстоя-
тельством приращения величин F, Q и V мы обозначим через 3F, &-Q и <5У.
476
Л. БОЛЬЦМАН
Далее, если
₽«=~
есть полная обобщенная сила, соответствующая координате ph системы
п точек, то
dF + dQ = dV = - v Ph dPfl. (241)
h=l
Таким образом, SV, как и раньше, обозначает общее количество энергии,
подведенной к п точкам, которое затрачивается на совершение работы
против всех сил, действующих на п точек. Если, далее, дТ обозначает при-
ращение живой силы этих точек, то к системе п точек должно быть каким-то
путем подведено количество энергии, равное
dE = dT + dV = dJn + dQ = dJntV-dvQ. (242)
чтобы перевести систему из состояния А в состояние В. Силы, которые
обусловливают этот приток энергии и которые мы теперь будем просто назы-
вать добавочными силами, — совершенно новые силы, которые не имеют
ничего общего с силами, действующими при неварьированном движении.
Можно провести параллель между этой энергией и количеством тепла dQ,
подведенного к некоторому телу, в то время как величина Jn = Т + F
(или же, если угодно, J„,n — Т + V) аналогична всей внутренней энергии
нагретого тела, живой силе молекулярного движения и количеству тепла,
затраченному на совершение внутренней работы.
§ 46. Расширенная система
Обозначим через д„ Q и д„ V приращения силовых функций Q и V, которые
зависят от того, что в состоянии В также и v материальных точек занимают
положения, несколько отличные от положений в состоянии А, так что полные
приращения, которые испытывают величины V и Q при переходе из состояния
А в состояние В, равны
<5П0ЛН V = dV+dvV, дполн .Q = d.Q + dv.Q, (243)
а выражение
д Jn>v = дТ + dV + dvV (244)
выражает полное приращение всей энергии Jn<v — Т + V расширенной
системы п + v точек.
Поэтому можно сказать: если бы переход из неварьированного в варьи-
рованное состояние имел место как раз в момент t, так что состояние А
непосредственно переходило бы в состояние В, то тогда к системе п точек
посредством добавочных сил подводилась бы энергия дЕ, а посредством
действия v точек подводилась энергия — dQ, так что внутренняя энергия
системы возросла бы на djn — дТ + dF или из всей энергии дЕ, подведен-
ной посредством добавочных сил, часть дТ + dF идет на увеличение соб-
ственной энергии, а часть д& расходуется на совершение внешней работы.
Q есть силовая функция взаимодействия п и v точек. Так как здесь идет
речь только о механической картине известных явлений природы, то совер-
шенно безразлично, какие точки причисляются к рассматриваемой системе
и какие рассматриваются как внешние. В одном случае может в особенности
выдвигаться одна, в другом — другая аналогия со свойствами нагретого
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
477
тела. Поэтому можно также и v точек причислять к рассматриваемой системе,
так что тогда
V = F + Q
является потенциальной, а
Jnr = Т + V — Т + F + Q
— полной энергией всей рассматриваемой системы. Тогда опять дТ + 6V
было бы аналогично подведенному теплу, но 6rV = было бы аналогично
энергии, подведенной к системе в форме внешней работы, тогда как —6/2
аналогично количеству тепла, затраченного на совершение.внешней работы.
Когда силы, имеющие силовую функцию Q, не являются обычными
дальнодействиями, а принимают нулевые значения при некотором опреде-
ленном расстоянии точек, между которыми они действуют, а при несколько
большем или несколько меньшем расстоянии бесконечно возрастают, то,
несмотря на это, Q постоянна, поэтому
dQ + dvQ = 0,
и обе точки зрения приводят к одному и тому же. В центробежной модели
это условие, конечно, выполняется; пользуясь образом газа, запертого
поршнем, можно также без существенного видоизменения задачи считать
это условие выполненным, так как и в этом случае на изменение силовой
функции тех сил, которые действуют между молекулами газа и молекулами
поршня, затрачивается исчезающе малое количество энергии, так что изме-
нений Q можно не принимать в расчет.
Через мы обозначили силы, которыми v точек действуют на п точек
(поршень на газ). Равные и одинаково направленные силы действуют в случае
покоя v точек со стороны N точек на v точек (рука или грузы с наружной
стороны легко подвижного, запирающего газ поршня). Численно равными
и противоположно направленными силами действуют п точек на v точек
или v точек на N точек. Для случая исключительно медленного движения
? точек, когда почти весь процесс оказывается обратимым (обратимое расши-
рение газа), сказанное выполняется, если не в точности, то по крайней мере
с очень большим приближением.
Поэтому —d,V есть также та работа, которая совершается вследствие
движения v точек против тех сил, которыми N точек действуют на v точек
и которые обусловливают то обстоятельство, что последние при неварьи-
рованном движении остаются в покое, а при варьированном движутся весьма
медленно. Эти силы полностью равны силам $ft.
§ 47. Применение принципа наименьшего действия
Теперь дЕ, дТ и б У имеют тот же самый смысл, что и в фор-
муле (223) § 36.
Функция V, конечно, содержит, кроме координат п точек, также и коор-
динаты v точек, и выражения, содержащие последние, играют в выражении
силовой функции роль медленно изменяющихся параметров, поскольку
v точек движутся медленно; однако это не имеет места, пока движение
остается неварьированным. Поэтому во время неварьированного движения
функция V координат п материальных точек не содержит явно входящего
времени: это одно только и предполагается в § 36. Действия, производимые
478
Л. БОЛЬЦМАН
бесконечно малым движением v точек, приписываются там добавочным силам.
Поэтому теперь опять имеет силу уравнение (223), а именно:
2 <5 f'T dt = f‘ dE dt + f ($ dpi - q°h dpg).
До сих пор мы рассматривали неварьированное движение в течение про-
межутка времени t± —10 и наряду с ним, совершенно независимо от него,
варьированное движение в течение промежутка времени + dtr—10.
Теперь мы займемся рассмотрением перехода от одного движения к дру-
гому. Тут прежде всего совершенно безразлично, в какой или в какие
моменты времени на протяжении всего времени t± —10 добавочные силы
подвели энергию к п точкам. Наоборот, совсем не безразлично, произошло
ли все смещение v точек в один-единственный момент, лежащий между t0
и tlt или же это смещение составилось из нескольких смещений на протя-
жении времени —10, а также, когда именно произошло каждое из этих
частных смещений.
Приращение полной энергии п точек есть
dE - dQ = <5 (Т + F) = djn ,
а приращение всей живой силы и силовой функции п + v точек
djn<v = dT + dF + Зполнй = dT + <5П0ЛН V.
Значения, которые принимают эти приращения к концу движения, т. е.
в момент t± + dtv, естественно, не зависят от того, в какой именно момент
имело место полное перемещение v точек, если только это перемещение оди-
наково для всех точек. Напротив, общая внешняя работа, будем ли мы ее
определять как dQ или как — д„ Q, зависит от того, когда имело место пере-
мещение v точек; то же самое относится и к энергии dT -}- dV, которую
добавочные силы в общем должны подвести за время —10 к п точкам.
В самом деле, эта энергия равна
dT + <5Г10Л„;У - dr.Q = dT + dF + dQ.
Пусть теперь в течение всего времени tr —10 движения v точек передви-
гаются равномерно из положения, которое они занимают для неварьирован-
ного движения, в положение, соответствующее варьированному движению,
таким образом, что первое положение они имеют в момент t0, а последнего
достигают как раз в момент tT. В то время как движение п точек может про-
исходить с большей или меньшей скоростью, v точек должны двигаться
бесконечно медленно, но совершенно равномерно, так что за конечный про-
межуток времени —f0 они проходят только очень малые пути, почему
мы и назвали величины, выражающие их влияние на движение, медленно
изменяющимися параметрами.
Если обозначить через dvQ работу, которую должны были бы совершить
v точек против сил, имеющих силовую функцию Q, если бы все перемещение
v точек произошло в момент времени t, то при рассматриваемом теперь
постепенном перемещении v точек в течение времени dt совершается работа
dvQdt 5 п .к
~——, причем приращение различно для различных фаз движения
*1 *8
и поэтому является функцией от t. Таким образом, вся работа, совершенная
в течение времени tt —10 v точками против сил, обладающих силовой функ-
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
479
цией-Q, в случае постепенного перемещения v точек равна
= т±т J<5, Q dt. (245)
1 °
Допустим, что при этом действуют также подобранные подходящим образом
добавочные силы, которые вместе с перемещением v точек преобразуют
неварьированное движение в варьированное, так что в момент t0 материаль-
ные точки движутся еще так, как это соответствует неварьированному дви-
жению в этот момент времени, тогда как в момент времени tT Д- dt1 они дви-
жутся в точности так, как им положено двигаться в варьированном движе-
нии в этот момент времени (момент времени Д- dt± в варьированном дви-
жении соответствует конечному моменту tT неварьированного движения).
Тогда добавочные силы должны к п материальным точкам подвести энергию
dQ = дт + <5ПОЛН V - —17-|’<ЗгЙЛ = 1-4-]'((ЗТ + <5У)Й. (246)
1 ° 4 1 0
Когда именно в течение промежутка времени —10 и каким образом подей-
ствуют добавочные силы, здесь совершенно безразлично, лишь бы в конечном
итоге получалось в точности варьированное движение. Ибо, если полный
прирост энергии п точек и полное перемещение v точек, а таким образом
и отданная наружу энергия те же самые, то этим определяется и энергия,
подведенная добавочными силами*).
Но дТ Д- <5У есть та же самая величина, которая в формуле (223) § 36
была обозначена через дЕ и, поэтому из уравнения (246) получается:
(G - t0) dQ = 2d ^Tdt - dp\ - q« dpPh). (247)
i, h-l
§ 48. Рассмотрение периодических движений
Если неварьированное и варьированное движения — периодические,
то можно легко представить себе все три движения, о которых шла речь
в предыдущем параграфе, а именно неварьированное, варьированное и дви-
жение, представляющее собой постепенный переход от первого ко второму,
осуществленными во времени последовательно одно за другим.
Пусть i есть период неварьированного, i Д- di — варьированного дви-
жения; тогда можно положить ^ = ^+1, dt1 = di. Представим себе,
что сперва происходит несколько раз в течение времени i неварьированное
движение, затем в течение времени i (или 2z, 3z) v точек медленно переме-
*) Если система — подлинно циклическая, т. е. когда в неварьированном движении
на место каждой массы, покидающей свое место, тотчас же вступает другая, совершенно
такая же масса с Численно равной и одинаково направленной скоростью, причем v точек
на последнюю массу действуют совершенно так же, как и на первую, что имеет место и
для варьированного движения, то в этом случае 8VQ имеет одно и то же значение для всех
значений t и формула (246) пригодна также и в том случае, когда v точек переходят из не-
варьированного положения в варьированное, двигаясь неравномерно; внешняя работа
тогда вовсе не зависит от того, когда происходит перемещение v точек. Однако все еще
предполагается, что все движение v точек за время tt —10 очень мало. Даже, если оно
происходит скачкообразно, все же за конечное время может произойти только бесконеч-
но малый скачок. При этом условии можно рассматривать величины, выражающие влия-
ние v точек, все еще как медленно изменяющиеся параметры.
480
Л. БОЛЬЦМАН
щаются, причем действуют также добавочные силы, и, наконец, несколько
раз в течение времени i 4- di протекает варьированное движение. Все эти
процессы мыслятся происходящими один за другим во времени, и можно,
если угодно, совсем отбросить различие между изменениями во времени
и вариациями.
В этом случае, когда как неварьированное, так и варьированное дви-
жения — периодические, вариации на обоих пределах делаются равными и
отсюда
= 2 = <5 In (zT)2. (248)
Налицо почти полная аналогия со вторым законом термодинамики.
Будем переходить к новым и новым варьированным путям, причем v
точек занимают все новые и новые положения, но движутся относительно п
точек бесконечно медленно или, при циклическом движении п точек, может
быть, испытывают бесконечно малый скачок по прошествии конечного про-
межутка времени. Будем постоянно варьировать движение таким образом,
пока не получатся конечные изменения всех величин и пока, наконец, не
будет совершен полный круговой процесс, т. е. мы возвратимся, в конце
концов, к тому же движению п точек, сопровождаемому теми же положе-
ниями v точек, однако без простого повторения тех же самых в точности
движений п точек и тех же самых положений v точек в обратном порядке.
Общее количество всей энергии, подведенной к п точкам посредством
добавочных сил, которое мы будем обозначать просто через J dQ, вообще
не будет исчезать для всех этих вариаций состояний, хотя к концу происхо-
дит возврат к первоначальному состоянию. Наоборот, [ -4?- всегда будет
J т
равняться нулю. В самом деле, -4S- по формуле (248) равняется приращению
In (zT)2, следовательно, Jесть разность значений In (zT)2 в начальном
и конечном состояниях. Но так как в рассматриваемом случае начальное
и конечное состояния тождественны, то эта разность должна быть равна
нулю.
Если мы, например (назовем это процессом А), сначала переместим v то-
чек, затем ускорим движение п точек, потом возвратим v точек в их старое
положение и, наконец, отнимем у п точек столько энергии, а направления
скоростей изменим так, чтобы движение этих точек сделалось в точности
тождественным со старым, то величина всегда будет равна нулю.
Наоборот, величина J* dQ, вообще говоря, не будет равна нулю. Последнее
выражение будет, естественно, то же по абсолютному значению, но проти-
воположно по знаку, если какой-либо ряд состояний движения п точек
и положений v точек будет пробегаться в противоположном направлении
(процесс В).
Процессу А соответствует следующий порядок явлений: сначала дают
газу расшириться, затем нагревают его, затем сжимают его при повышенной
температуре до прежнего объема и, наконец, охлаждают его, пока он не
вернется к прежнему состоянию, причем все это происходит обратимым
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
481
образом. Непосредственное обращение такого порядка соответствует про-
цессу В.
Рассмотренные нами системы отличаются от нагретых тел тем, что их
состояние еще никоим образом не определяется их энергией и положением v
точек (внешняя обстановка). Так, например, материальная точка т в при-
мере 2 § 44 при одной и той же энергии и при одной и той же внешней обста-
новке может двигаться по кругу или по эллиптической траектории и т. д.
Так как энтропияJ4S- равняется 2 In (if)2 и каждая ее функция, умно-
женная на интегрирующий множитель, также должна быть интегрирующим
множителем, то и i является интегрирующим множителем для dQ. Так как
i есть время, в течение которого частица совершает полное обращение, то
у дает число обращений в единицу времени (число целое, правильная или
неправильная дробь).
Само собою разумеется, что под периодическим движением мы понимали
в этом параграфе такое движение, при котором по истечении периода пря-
моугольные координаты всех материальных точек возвращаются к своим
прежним значениям. В то время как периодические движения показывают
полнейшую аналогию со вторым законом, центральное движение по незам-
кнутой траектории, описанное в конце §41 [166 ] и в § 44 в качестве примера 2,
дает пример непериодического движения, обладающего следующими свой-
ствами: оно очень похоже на движение, рассмотренное в этом параграфе,
и даже может быть превращено в подлинно циклическое движение (отнюдь
не моноциклическое) путем рассмотрения бесконечно большого Числа мате-
риальных точек, движущихся в одной и той же плоскости; однако для
последнего движения даже при фиксированном положении v точек (магни-
тов, от которых зависят значения 2. и а), а тем более при меняющемся поло-
жении v точек интеграл J-4В-, распространенный на полный круговой про-
цесс, уже не исчезает, ибо 6Q, вообще говоря, не имеет интегрирующих
множителей.
В этом случае только путем допущения одновременного существования очень
многих систем со всеми возможными секторными скоростями, между кото-
рыми состояния распределяются по законам теории вероятностей, может
быть восстановлена аналогия со вторым законом термодинамики.
Этим же допущением устраняется одно обстоятельство, также нарушаю-
щее аналогию между нагретыми телами и рассмотренной нами теперь систе-
мой п материальных точек. Это обстоятельство заключается в том, что состоя-
ние нагретых тел для своего полного определения, помимо указания внеш-
ней обстановки, требует задания значения только одной переменной (темпе-
ратуры), в то время как на движение рассмотренных систем, наряду с поло-
жением п точек и количеством энергии, могут влиять еще и другие постоян-
ные, определяющие начальное движение п точек и появившиеся в резуль-
тате интегрирования их дифференциальных уравнений. Однако глубже
вникать в это мы здесь не будем.
§ 49. Теория циклов
Перейдем теперь к изложению некоторых специальных предложений из
теории циклов. Мы понимаем, как уже упоминалось, под циклическими
координатами попросту такие, которые не входят в недифференцированном
виде ни в выражения для живой силы, ни в выражения для действующих
сил или в имеющиеся уравнения связей. Также упоминалось, что
31 Вариационные принципы механики
482
Л. БОЛЬЦМАН
прямоугольные координаты являются тоже циклическими в случае, когда
нет сил в обычном смысле механики и когда отсутствуют условия, ограничи-
вающие свободу движения. Однако они не определяют конечного движения,
т. е. такого движения, при котором для любого времени значения прямо-
угольных координат и их производных по времени заключены в конечных
пределах. Наоборот, переменная, которая определяет положение центро-
бежной модели, описанной в § 44 в качестве примера 3, является циклической
координатой в расширенном герцевском смысле; эта координата, хотя она
сама и может возрастать неограниченно с возрастанием времени, все же при
всяких обстоятельствах определяет конечное движение.
Подлинно циклической координатой, с другой стороны, является такая,
которая определяет подлинно циклическое движение, т. е. если она меняется
при сохранении постоянных значений другими координатами, то на место
каждой массы, которая покидает свое положение в пространстве, должна
тотчас же вступать другая масса, вполне тождественная с первой и движу-
щаяся в том же направлении с той же скоростью, в чем и состоит признак
подлинно циклического движения.
Пусть нам дана система, удовлетворяющая следующим условиям : 1) среди
переменных, определяющих положение материальных точек системы,
имеются циклические; 2) по сравнению со скоростью изменения циклических
переменных (циклическими скоростями) производные по времени (скорости
изменения) прочих переменных, которые, сверх того, необходимы для опре-
деления положения точек системы, весьма малы; эти последние переменные
называются поэтому медленно изменяющимися переменными или пара-
метрами; Наконец, 3) пусть циклические ускорения также весьма малы
по сравнению с циклическими скоростями; это значит, что изменения цикли-
ческих скоростей, происходящие за промежутки времени, в течение которых
абсолютные значения циклических координат изменились уже весьма зна-
чительно, все еще очень малы. В этом случае мы будем систему называть
циклической системой или, еще короче, циклом.
Если, вдобавок, движение системы конечное, то мы назовем ее конечным
циклом. Если циклические переменные все подлинно циклические, то мы
назовем систему подлинным циклом. Если имеется только одна независимая
циклическая переменная, то система называется моноциклом, если две —
бициклом, вообще же — полициклом; если существуют п независимых цикли-
ческих переменных, то мы имеем п-цикл.
Таким образом, в случае подлинного цикла, пока параметры сохраняют
постоянные значения, нельзя заметить никаких изменений в наблюдаемом
извне состоянии цикла, несмотря на то, что внутри него происходит оживлен-
ное движение. Это обнаруживается на нагретых телах, на проволоках, по
которым текут постоянные электрические токи, но то же можно наблюдать
и на абсолютно симметрическом волчке, вращающемся вокруг своей оси,
или на совершенно однородной жидкости, протекающей по замкнутой трубке.
Однако если циклические скорости и параметры медленно меняются, то это
соответствует газу, который медленно нагревается или обратимым образом
расширяется или сжимается. Другим примером может служить медленное
изменение силы тока или механическое изменение положения проволоки,
по которой идет электрический ток, а также медленное движение или дефор-
мация вращающегося тела или канала, по которому течет весомая жидкость.
Общие формулы, полученные в §§ 45—47, можно применять к циклам,
вводя при этом ряд упрощений. Предположим опять, что цикл состоит из
п материальных точек, положение которых определяется частью цикли-
ческими, частью же — медленно изменяющимися координатами. Первые
мы будем обозначать через рь, последние — через ра. Они не должны удовле-
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
483
творять больше никаким уравнениям связей. Эти п материальных точек
соответствуют тем, которые мы и раньше, в §§ 45—47, называли п материаль-
ными точками.
Так как рь не входят в конечном виде в выражение для Т, то обобщенные
силы, соответствующие циклическим координатам рь (циклические силы),
выражаются так:
А = (249)
где
(250)
Силы Рь соответствуют добавочным силам §§ 45—47; энергию, подводимую
к циклу через эти силы, мы назовем циклически подведенной; она соответ-
ствует подведенному теплу.
Далее, так как члены, содержащие вторые производные по времени от
рь или ра, а также члены первого или, тем более, второго порядка относи-
тельно р'а можно рассматривать как исчезающе малые по сравнению с теми
членами, которые содержат только ра и рь, то обобщенные силы, соответствую-
щие параметрам ра, будут:
^ = -Ж- <251)
Так как Т есть однородная квадратичная функция р'ь, то все ph и ра могут
оставаться постоянными, а следовательно, может быть р^ = р'а — 0, если
все Рь исчезают. Наоборот, если это имеет место, то Ра, вообще говоря,
имеют значения, отличные от нуля. Мы будем подразделять на различные
классы обобщенные силы, соответствующие параметрам ра. Они могут
быть отчасти результатом взаимодействий п точек, а отчасти результатом
действия других материальных точек, которые соответствуют п' точкам
§§ 45—47 и подобно им предполагаются раз навсегда закрепленными в про-
странстве; эти точки мы будем называть неподвижными материальными точ-
ками. Впрочем, как и раньше, они могут быть причислены к п материальным
точкам. Все эти силы, как происходящие от Взаимодействия п точек, так
и от действия имеющихся неподвижных точек, мы будем называть внутрен-
ними силами; они во всяком случае должны иметь склерономную силовую
функцию, которую мы опять обозначим через F. Таким образом, все проис-
ходящие отсюда составляющие сил Ра будут равны —.
К этим силам, для того чтобы ра оставались постоянными, вообще говоря,
должны быть присоединены еще другие силы, которые мы обозначим через фа
и будем называть внешними обобщенными силами. Материальные точки,
от которых исходят эти силы, соответствуют v материальным точкам §§ 45—47,
и мы опять их назовем v точками. Эти точки рассматриваются как внешние
по отношению к рассматриваемой системе.
Если в точности р"ь = р^ = 0, т. е. циклическое движение вполне ста-
ционарно, то и положение v материальных точек остается неизменным
и должно быть таким, чтобы в точности соблюдалось равенство
(252)
Это соответствует тому, что мы в §§ 45—47 назвали неварьированным дви-
жением. Если теперь, в теории циклов, опять положить
T-F = H, T + F = Е, (253)
31*
484
. БО ЬЦМАН
где буквы Н и Е имеют те же значения, что и в §§ 45—47, но несколько отлич-
ные от того значения, которое им придается в других разделах этой книги,
то уравнения (249) и (252) можно написать также в форме:
<254>
Если медленно изменяющиеся параметры и значения рь будут медленно
меняться, то должны немного отличаться от тех значений, которые им
придаются этими уравнениями, а величины Рь должны быть немного отлич-
ными от нуля. Эти последние силы тогда будут соответствовать тем силам,
которые в §§ 45—47 мы назвали добавочными силами; это наименование
мы сохраним за ними и теперь. Энергия, подведенная этими силами как цик-
лически подведенная энергия, соответствует подведенному количеству тепла
в теории теплоты.
Медленное изменение, которое циклическое движение претерпевает
благодаря добавочным силам, а также вследствие того обстоятельства, что
силы, исходящие от v точек, не имеют в точности значений, определяемых
уравнениями (252), соответствует тому, что в §§ 45-47 мы назвали вариацией
движения. Впрочем, теперь нет необходимости рассматривать постепенное
изменение стационарного циклического движения, вызванное медленным
движением v точек и действием добавочных сил, как проблему вариацион-
ного исчисления и особо отмечать символом д соответствующие приращения.
Теперь можно это постепенное изменение состояния рассматривать как обыч-
ное движение, происходящее с течением времени под действием добавочных
сил и изменения положения v точек. Это особенно напрашивается при подлин-
ных циклах, у которых неварьированное движение не представляет собой
видимого изменения состояния, так что ощутимые временные изменения
появляются только при медленном варьировании движения.
Значения Т, V и т. д., соответствующие любому моменту времени неварьи-
рованного движения, для циклов совпадают со средними значениями Т, V
и т. д. тех же величин для неварьированного движения. Совершенно безраз-
лично, в какой момент времени неварьированного движения начинается
варьирование, носящее характер механического движения под действием
заданных сил; оно может продолжаться сколь угодно долго, привести
постепенно к конечному изменению и окончиться в любое время. Если в
какой-либо его фазе внезапно оказывается р"ь = р'а = 0, тотчас получается
соответствующее этой фазе неварьированное движение.
Здесь ясно обнаруживается, каким образом рассмотренная в начале этой
книги вариация может постепенно приблизиться по своему характеру к
обычному, происходящему во времени движению, при котором, однако, одни
координаты изменяются много быстрее, а другие —• много медленнее.
Мы сохраним все же для этих изменений циклических движений, насту-
пающих постепенно с течением времени, по-прежнему название вариаций.
Уравнения движения для изменений ра, которые появляются от того, что
имеют значения, не равные в точности тем, которые заданы уравнениями
(252) и (254), мы напишем только в § 53.
§ 50. Интегрирующий множитель
для дифференциала циклически подводимой энергии
Работа, которая при варьировании циклических движений производится
за время dt силой Рь, согласно уравнению (249) выражается так:
dQb = Рь dpb = Рь р'ь dt = р’ь dqb. (255)
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
485
Сумма dQ всех dQb выражает работу, совершенную всеми силами Рь (цикли-
ческими или добавочными), работу, которую мы назвали циклически под-
водимой энергией и которая аналогична подводимому теплу.
В случае, когда система является моноциклом и единственная цикли-
ческая переменная обозначается через р без индекса, мы получаем
dQ = р' dq,
или, так как Т = p'q,
Таким образом есть полный дифференциал, a In q является энтропией.
Эта формула применима ко всем подлинным моноциклам, в которых любые
массы совершают циклическое движение, так что все они в течение одного
и того же времени одновременно возвращаются в свое исходное положение
и затем снова повторяют то же самое движение. Такие моноциклы Гельм-
гольц называет простыми подлинными моноциклами; легко видеть, что они
образуют частный случай периодических систем, рассмотренных в § 48.
Пусть в состав цикла входит несколько различных систем масс, из кото-
рых каждая система совершает подобное описанному, переходящее само
в себя движение, причем периоды i, ilf i2, . . . для отдельных систем различны.
Тогда, если длительность этих периодов, помимо зависимости от медленно
изменяющихся параметров, зависит также от многих независимых цикли-
ческих скоростей, то система называется несвязанным или частично связан-
ным полициклом; если же эта длительность зависит, кроме параметров,
от значения одной-единственной циклической скорости, то система назы-
вается вполне связанным полициклом или сложным моноциклом. Если
в последнем случае число отношений-у, -у-,... конечно и значения этих
отношений совершенно независимы от значений параметров (медленно из-
меняющихся координат), то можно эти отношения без существенного измене-
ния условий мыслить как рациональные дроби, хотя и с очень большим
общим знаменателем; поэтому можно найти такой, больший, промежуток
времени /, для которого движение всех систем масс является периодически
повторяющимся, так что вся механическая система представляет собою
простой подлинный моноцикл с периодом / и все доказанное для такой
системы оказывается приложимым и в данном случае.
Однако это становится сомнительным, когда число отношений -у, #,...
является бесконечно большим, и во всяком случае не имеет места, когда
эти отношения являются непрерывными функциями параметров, потому
что тогда циклические координаты вместе с параметрами, вообще говоря,
не образуют систему голономных координат*). Но все выведенные формулы
*) Borchardts — Crelle Journal, т. 98, вып. 1, стр. 87 (1855); Wien. Sitz. Вег., т. 111,
стр. 1603 (1902). Представим себе, например, два параллельных конических вала, сужаю-
щихся в противоположных направлениях. Пусть имеется бесконечный ремень или фрик-
ционный диск, который непрерывно перемещается вдоль этих валов таким образом, что он
соединяет то толстую часть одного вала с тонкой частью второго, то наоборот. Примем
путь s какой-нибудь точки первого вала, не лежащей на его оси вращения, за цикличе-
скую координату, а перемещение а ремня или фрикционного диска—за медленно изменяю-
щуюся координату. Увеличим теперь s на конечную величину а, потом а — также на ко-
нечную величину а; затем, наоборот, сначала увеличим а на величину а, а потом s — на
величину а. В том и другом случае какая-либо точка второго вала, не лежащая на его оси
вращения, не попадет, вообще говоря, на одно и то же место. Итак, хотя заданием значе-
486
Л. БОЛЬЦМАН
годятся только для голономных координат, ибо, как мы уже упомянули
в § 4 (в сноске на стр. 16), во всей книге, за исключением §§ 27 и 28, под обоб-
щенными координатами понимаются исключительно голономные обобщенные
координаты. Мы не будем по этому поводу вдаваться в дальнейшие подроб-
ности, а докажем лишь одно, весьма общее предложение, найденное Гельм-
гольцем.
Пусть дана любая сложная моноциклическая (т. е. полностью связанная
полициклическая) система, медленно меняющиеся координаты которой мы
обозначим через ра, а быстро изменяющиеся координаты — через р. Пред-
полагается, что при соответствующем изменении движение может проте-
кать совершенно так же, как и ранее, причем только все скорости умно-
жаются на одно и то же для всех скоростей постоянное, но совершенно
произвольное число п, так что длительность всех процессов уменьшается
в п раз. Если теперь имеется всего лишь один медленно изменяющийся пара-
метр ра, то вся содержащаяся в системе живая сила является интегрирую-
щим делителем для дифференциала подводимой извне энергии; если же
имеется несколько параметров ра, то та же самая особенность имеет место
всякий раз, когда этот дифференциал вообще имеет интегрирующие мно-
жители.
Пусть сначала имеется лишь один медленно меняющийся параметр ра;
в этом случае возможны два рода изменений состояния: 1) при неизменных
траекториях пропорционально меняются только скорости всех движущихся
частей, 2) меняются траектории. Форма траекторий зависит поэтому только
от одной независимой переменной величины, тогда как другая независимая
переменная величина определяет только скорости, с которыми точки дви-
жутся по траекториям. Если по-прежнему варьировать пределы таким
образом, чтобы последний член в уравнении (223) [167] обращался в нуль,
то при возвращений на прежнюю траекторию мы должны прийти к перво-
начальным пределам, оба члена в правой части уравнения (238) [1в8]
dQ , .
делаются равными и -у- делается полным дифференциалом.
Если имеется больше одного медленно изменяющегося параметра qa,
то Т, вообще говоря, не является интегрирующим делителем для dQ, так
как при возвращении в точности к прежнему состоянию системы, вообще
говоря, не повторяются прежние пределы интегрирования, поскольку
пределы опять изменяются таким образом, чтобы последний член в урав-
нении (223) исчезал; однако и в этом случае можно доказать, что величина Т
должна быть интегрирующим делителем, если только вообще для dQ суще-
ствуют интегрирующие множители.
Пусть будет вообще
dQ = M-dN,
Т и ра мы принимаем за независимые переменные.
Согласно только что доказанному, если все ра, за исключением одного,
постоянны, величина Т должна быть интегрирующим делителем для dQ;
поэтому, если g — один из индексов a, a dag — дифференциал, соответствую-
щий множителю Т, то прежде всего мы имеем
м№-dT + ^-dpg} = T(-^-dT + -Q-dpg]. (257)
V дТ dpg дТ dpg ‘<4 '
„ ds „ - „
нии а и ~ определяются все скорости, так что в случае, когда мы имеем перед сооои по-
длинный цикл, оказывается известным полностью его доступное наблюдению состояние,
однако заданием значений а и s нельзя определить положение всех точек системы; стало
быть, а и s не являются голономными обобщенными координатами.
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
487
Это уравнение должно быть справедливо для всех комбинаций значений,
предполагаемых постоянными, переменных р1; р2, ..., pg_1; pg+1, ... По-
этому, если М и N даны, то отсюда ag определяется с точностью до выра-
жения, содержащего все только что упомянутые переменные. То же самое
имеет место также и для любого другого из индексов а, например для Л;
тогда таким же образом мы получаем
M(^T + l£M = 7^‘i7' + -sS‘/4 <258)
причем, естественно, тождественность ag и oh еще не установлена. Из этого
уравнения, а также из уравнения (257) непосредственно следует
8Т — дТ * ' '
Поэтому величины ag и oh могут отличаться одна от другой лишь на вели-
чину, которая не содержит Т, а содержит только ра. Положим
ag = a + 77g, ah = a-\-IIh,
где П не являются больше функциями Т; тогда из уравнения (257) следует:
М^г = Т~ (260)
01 01 у
и
+ [(261)
opg V opg dpg J ’
для всякого значения g; отсюда, далее, вытекает;
dQ =\М dN=T (da + dpg] > (262)
где суммирование распространяется на все возможные значения индекса g.
Так как по положению dQ имеет интегрирующий множитель, то этот диффе-
ренциал должен иметь интегрирующий множитель и в том случае, если все
ра, кроме двух, например р„ и ph, считать постоянными. Если теперь разде-
лить дифференциал dQ на Т, то получим
9(7 л'г i f 9<т I d-ZTg ) , ( 8<т , 'ЭЛл 'I , _ dQ
0Г dT + ( 9pg + 0pg J dpg + ( QPh + QPh jdph T • (263)
Согласно сказанному и это дифференциальное выражение должно иметь
интегрирующий множитель. Если записать известное условие этого, то можно
видеть, что из него следует либо
— = 0,
эт ’
либо
= (264)
эр?эдл dpgdph
для любых пар значений g и Л. Первое уравнение никогда не может быть
удовлетворено, так как иначе при сохранении постоянства ра для увеличения
живой силы не нужно было бы никакого притока энергии. Поэтому должны
иметь место уравнения (264), из которых следует, что dpg есть полный
дифференциал функции П переменных ра, и следовательно,
dQ = T-d(a + n).
488
Л. БОЛЬЦМАН
§ 51. Адиабатическое и изоциклическое движение
чЕсли для какого-либо цикла все Рь равны нулю, тогда как имеют зна-
чения, отличные от тех, которые определяются уравнениями (252) и (249),
так что параметры ра медленно изменяются, то движение называется адиаба-
тическим. Тогда из уравнений (254) вытекает, что импульсы qa, отнесенные
к циклическим координатам, все должны быть постоянными. Однако иногда
циклические скорости вследствие медленного изменения параметров будут
также медленно изменяться. Если же силы Рь в течение медленного изме-
нения параметров постоянно имеют такие значения, что рь остаются совер-
шенно неизменными, то движение называется изоциклическим.
Примером адиабатического движения служит вращающееся вокруг
своей оси тело вращения или описанная в § 44 в качестве примера 3 центро-
бежная модель, если никогда не появляется вращающий момент относи-
тельно оси вращения. С другой стороны, центробежная модель совершает
изоциклическое движение, если ее угловая скорость поддерживается посто-
янной соответствующими силами приложенными к кривошипу, хотя
подвижная масса т то медленно приближается к оси вращения, то медленно
удаляется от нее.
Физические аналогии с адиабатическим движением представляют нагре-
тые тела, при изменении состояния которых тепло и не подводится к ним
и не отнимается у них (отсюда термин «адиабатический» также и в приме-
нении к аналогичным движениям механических циклов), электрические цепи
при постоянных электродвижущих силах, движущиеся проводники, стати-
чески заряженные постоянными количествами электричества. Соответствую-
щие физические процессы делаются аналогичными изоциклическим движе-
ниям, если температура нагретых тел, сила электрического тока в цепях,
потенциал электростатически заряженного проводника поддерживаются
постоянными. При вращении твердого тела движение делается изоцикли-
ческим, если тело путем ременной или зубчатой передачи соединено с вра-
щающимся маховиком бесконечной массы или с твердым телом, угловая
скорость которого поддерживается строго постоянной; физические анало-
гии дает нагретое тело, соединенное посредством хорошего проводника тепла
с бесконечным запасом тепла, электрический проводник, на концах которого
поддерживается постоянная разность потенциалов (соединен клеммами с
источником питания), в электростатике —заземленное тело, что Гельмгольц
обозначает как соединение с землей, с запасом тепла и т. д.
В уравнении (254) частные производные должны пониматься таким обра-
зом, что X поддерживаются постоянными, так что изменения состояния
происходят изоциклически. Мы будем, как это делалось в § 9, отмечать
символы частных производных, при образовании которых р'ь рассматриваются
как постоянные, индексом р'; такие же, при образовании которых постоян-
ными считаются qb, — индексом q.
Поэтому можно сказать: И есть силовая функция обобщенных сил $а,
соответствующих параметрам ра, для изоциклического изменения состояния;
в термодинамике ей соответствует изотермический термодинамический
потенциал; при каждом изоциклическом движении величина
представляет собой энергию, подведенную к циклу при изменении пара-
метров ра силами ^а, действующими на цикл (т. е. энергия подводится в
форме внешней работы). Так как все приращение энергии составляет
dE = dF + dT,
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
489'
то отсюда следует, что
dQ = 2 dT,
т. е. циклически подведенная энергия равна удвоенному приращению кине-
тической энергии.
На основании уравнения (63) [169] имеем
_э»т — _ 8р'г
’ Эра — Ьра ’
откуда
_э?е — _ др'н
Ьра dPa
Поэтому первое из уравнений (254) можно также представить в виде
U, = (265)
Внешние силы можно поэтому назвать также адиабатическими част-
ными производными от Е по координатам ра, а —Е — адиабатической сило-
вой функцией. Таким образом, при адиабатическом движении вся энергия,
подведенная к системе путем внешней работы, равна dE, т. е. равна общему
приращению энергии, что само собой понятно, так как в этом случае внешняя
работа является единственным источником притока энергии.
Применяя доказанную теорему о том, что как при адиабатическом, так
и при изоциклическом изменении состояния внешние силы имеют силовую
функцию, мы в теории теплоты получаем следующее предложение: Если
нагретое твердое тело любыми приложенными к нему внешними силами
деформируется адиабатически или изотермически, а в остальном произволь-
ным образом, то работа деформации всегда является полным дифферен-
циалом, как если бы внешние силы уравновешивались силами, исходящими
от покоящихся материальных частиц. И это имеет место несмотря на то,
что частицы тела находятся в оживленнейшем тепловом движении.
§ 52. Взаимные зависимости Герца
1. Пусть в одном случае состояние цикла меняется медленно адиабати-
чески так, что только один параметр ра увеличивается на dpa‘, в другом
случае—та к, что только параметр ра, получает приращение dpa>. Пусть в пер-
вом случае обобщенная внешняя сила 5Ца,, соответствующая параметру ра,,
получает приращение d^a>, во втором случае внешняя сила $а,, соответ-
ствующая параметру ра, получает приращение d^a; тогда будем иметь
соотношение
<Е$а’ _ d^a .
dPa dpa' ’
то же самое имеет место и тогда, когда все движения происходят изоцикли-
чески. Мы можем относящиеся к обоим случаям соотношения записать более
точно так:
______ 'Л/фа Qp'ffia' Эр-^Sa
ЭДа ЭРа' Эра Эра'
Доказательство непосредственно вытекает из уравнений (254) и (265),
т. е. из того обстоятельства, что внешние силы как при адиабатическом,
так и при изоциклическом изменении состояния обладают силовой функ-
цией.
490
Л.БОЛЬЦМАН
2. Из уравнений
™ 3F ддТ QF „ , ЭТ
— дра Ьра ’ Qqb “° И Pb ~ bqb
(последнее получено на основании уравнения (60) f1,0]) следует:
8ffa _ _ ОдРЬ
Qqt> дра
(266)
Предположим, что приращение dqb циклического импульса qb при сохране-
нии остальными q и всеми параметрами постоянных значений вызывает при-
ращение обобщенной силы $а, соответствующей параметру ра; пред-
положим, далее, что адиабатическое приращение dpa параметра ра при
постоянстве всех прочих параметров вызывает приращение dp'b цикли-
ческой скорости р'ь; тогда dp'b и d^a имеют противоположные знаки, а отно-
шения приращений dqb и dpa, рассматриваемых как причины, к соответствую-
щим изменениям и dpb, рассматриваемым как следствия, равны между
собой по абсолютному значению (как говорит Герц, отношения следствия
к причине в обоих случаях равны). Поэтому в этих условиях
ffa dpb
dqb dpa ‘ ' ° ’
Так как для моноцикла приращения dpb и dqb должны быть одного знака,
то для моноцикла имеет место также следующее предложение: Если уве-
личение циклической скорости р' при постоянстве параметров увеличивает
обобщенную силу по какому-либо параметру ра, то адиабатическое прира-
щение этого параметра при постоянстве остальных должно уменьшить цик-
лическую скорость р'.
3. Пусть сила вызывает входящее в уравнение (267) приращение dqb
в течение времени dt; тогда
с другой стороны,
dqb = Pbdt,
Я1' —
™ dt
есть скорость, с которой возрастает сила в тех условиях, при которых
имеет место уравнение (267). Левая часть этого уравнения поэтому равна
т'
и если в правой части для большей ясности опять перейти к форме записи
уравнения (266), то из уравнения (267) следует:
ffg GqPb
РЬ Ьра ’
(268)
или в словесной формулировке: Если все параметры постоянны, а все
обобщенные силы, соответствующие циклическим координатам, за исключе-
нием одной (Р6), равны нулю и если обобщенная сила $Q, соответствующая
параметру ра, должна за время dt возрасти на ^’adt, то адиабатическое при-
ращение ра при постоянстве прочих параметров вызывает убывание рь,
и опять отношение причины к следствию в обоих случаях одно и то же,
если силу Рь рассматривать как причину, скорость изменения силы $а,
равную — как ее следствие, а с другой стороны, приращение коорди-
наты dpa как причину, и убывание циклической скорости — dpb — как след-
ствие этой причины.
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
491
4. Из соотношений
следует:
$ = и qb = M-
*а Ьра + Ьра 4b Ьр'ь
Эфа _ др'Ць
др'ь ЬРа ’
(269)
т. е. если при постоянстве остальных циклических скоростей и параметров
приращение какой-нибудь циклической скорости р'ь вызывает приращение
внешней обобщенной силы соответствующей параметру ра, то изоцикли-
ческое приращение ра при постоянстве остальных параметров вызывает
также приращение циклического импульса qb, соответствующего р'ь; при
этом, как сокращенно выражается Герц, опять для бесконечно малых при-
ращений отношение следствия к причине в обоих случаях — одно и то же.
И опять-таки для моноциклов приращение циклической скорости имеет тот
же знак, что и приращение циклического импульса.
5. Совершенно так, как из уравнения (266) было получено уравнение (268),
можно из уравнения (269) образовать новое. При образовании частной произ-
водной в правой части последнего уравнения принято, что и Рь имеют
такие значения, что все параметры, за исключением одного ра, остаются
постоянными. При этом Рь означает обобщенную силу, соответствующую
циклической координате рь, а приращения величин ра и qb за время dt
мы обозначим через dpa и dqb. Тогда частное будет равно величине,
“Ра
которая в формуле (269) обозначена через , но dpa = p'adt и dqb = Pb dt;
opa
поэтому
Эо-go _fb
Qpa ~ Pa
и уравнение (269) можно написать в виде
Эфа = Рь
dp'b р'а
(270)
Словами это можно выразить так: Если при постоянстве прочих цикли-
ческих скоростей и параметров приращение одной циклической скорости
рь вызывает приращение обобщенной силы фа, соответствующей параметру
ра, то для обеспечения изоциклического приращения ра при постоянстве
остальных параметров циклической координате рь должна соответствовать
обобщенная сила Рь; при этом опять отношения между причиной и след-
ствием в обоих случаях должны быть равны, если рассматривать прира-
щение рь как причину и приращение как ее следствие, а с другой стороны,
скорость р'а, с которой изоциклически меняется ра, — как причину необхо-
димости приложить силу Рь, последнюю же — как следствие этой причины.
§ 53. Теоремы Гельмгольца о смешанных циклах
Гельмгольцу принадлежат некоторые соображения, обладающие не-
сколько большей общностью. Пусть опять дана система из п точек, которые
могут находиться во взаимодействии с п' точками, закрепленными раз и
навсегда, причем эти точки могут быть также, если угодно, причислены к
п точкам. Пусть F — силовая функция всех сил, действующих между эти-
ми точками, Т — кинетическая энергия п точек. Здесь положим опять, как
492
Л. БОЛЬЦМАН
мы это делали в §§ 45—52 (но вразрез с прежними нашими обозначениями):
T + F = E,
T-F = H,
так что Е есть полная энергия п + п' точек. Между координатами, которые
определяют положение п точек, могут быть циклические, которые мы опять
обозначим через рь; это значит, что они могут входить в выражения для
Т и F только под знаком производной по времени. В выражение-для Т могут
входить только р'ь. Пусть общее число этих циклических координат будет о.
Следовательно, полная обобщенная сила —взаимодействия п + п
точек, соответствующая какой-либо циклической координате, должна быть
равна нулю. Остальные координаты могут и не быть медленно изменяю-
щимися, это — совершенно произвольные координаты. Мы назовем их
поэтому обычными координатами и обозначим их опять через ph. Пусть
их общее число будет $. Величины р не должны удовлетворять больше ника-
ким уравнениям связей. Такую систему, которая хотя и содержит цикли-
ческие координаты, однако остальные координаты которой не являются
медленно изменяющимися или, по крайней мере, не все будут медленно изме-
няющимися, мы назовем смешанным циклом, а в противоположность ему
такую систему, которая содержит только циклические или медленно изме-
няющиеся координаты, будем называть чистым циклом.
Легче всего понять вывод относящихся сюда уравнений, если считать,
что известны строение системы п + п' точек, силовая функция F, а также
движение точек, т. е. все их координаты известны в функции времени, и
поставить вопрос о том, какие обобщенные силы Рь соответствуют цикли-
ческим координатам и какие силы соответствующие обычным коорди-
натам, должны быть присоединены к силам, имеющим силовую функцию F,
чтобы вызвать заданное изменение координат во времени. Тогда для цикли-
ческих координат должны иметь место уравнения (254), т. е.
Р _ d ( эя)
b dt (
(271)
для обычных координат — обыкновенные уравнения Лагранжа
щ = А ( эя) _ эя
w> — at{ dp'h J dph
Для любого индекса b или h должно быть
эн _ эт
др' др' У ’
(272)
(273)
Искомые силы Рь и как и раньше, мы будем предполагать исходящими
от каких-либо внешних материальных точек (у точек), которые, впрочем,
в дальнейшем нас занимать не будут. Эти силы, если параметры р заданы
в функции времени, также могут быть определены как функции времени из
уравнений (271) и (272), иначе говоря, может быть дан ответ на вопрос о том,
какие внешние силы Рь и должны быть в каждое данное мгновение при-
соединены к силам, обусловленным силовой функцией, чтобы вызвать задан-
ное движение.
Понятно, что уравнения (271) и (272) существуют совершенно независимо
от того, какие величины в них рассматривают как заданные и какие являются
искомыми. Эти уравнения также справедливы и в том случае, если Рь и
заданы как функции времени и даже если они заданы как функции коор-
динат, скоростей или вообще любых переменных величин и если поставлена
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
493
задача определить движение (т. е. найти р при заданных начальных значе-
ниях р и р'). В этом последнем случае и левые части уравнений (271) и (272)
содержали бы искомые неизвестные. Более того, в сущности совершенно
безразлично, какие силы мы относим за счет силовой функции как внутрен-
ние и какие причисляем к как внешние; безразлично, относим ли мы
тела, от которых исходят известные силы, к системе или рассматриваем
их как не принадлежащие системе, нужно только при этом оставаться
вполне последовательным. Так, например, Гельмгольц в электродинамике
относит электрическое сопротивление к $ только потому, что оно порождает
необратимые процессы. Мы, однако, для большей наглядности будем всегда
представлять себе, что функция F и движение заданы и что вопрос ставится
о силах Рь и необходимых для осуществления движения.
Уравнения в форме (272) должны занять место уравнений (252) и (254),
если мы хотим теорию циклов, изложенную в §§ 49—51, развивать без всяких
упрощающих допущений или, вообще, если мы хотим решить вопрос о том,
как должны меняться с течением времени медленно изменяющиеся пара-
метры под действием заданных сил $Q. В самом деле, если мы хотим полу-
чить ответ на этот вопрос, то, очевидно, нельзя пренебрегать величинами
р'а и р"а. В уравнениях же (271) и (272) нет более места указанным упрощающим
допущениям, ибо условие, что циклические координаты входят в выражения
для Т и F только под знаком производной, осуществляется не только прибли-
женно, а совершенно точно.
Уравнение (272) имеет форму, указанную в начале § 34, которая получа-
ется, если в общем уравнении Лагранжа (50) [ш] положить л = 0, а функ-
ции V придать вид (220) [172].
Предположим сначала, что все Рь равны нулю, так что циклические дви-
жения протекают адиабатически. Тогда согласно уравнениям (271) величины
Ж = ?ь <274>
все время остаются постоянными. Если значения этих постоянных заданы,
то с помощью о уравнений (274) можно исключить о величин р'ь из Т, а следо-
вательно, и из Н. Но так как в уравнении (274) есть члены, содержащие р'
в первой степени, а также члены, свободные от р', то после произведенного
исключения Т будет квадратичной функцией остальных р' (а именно p’h),
но эта функция уже не будет однородной, а будет иметь члены, линейные
относительно p’h, и один член, совершенно свободный от них. Тогда также
и величина §, которая получается из Н после исключения величин р'ь
посредством уравнений (274), содержит члены, линейные относительно p'h.
Примером могла бы служить система, которая содержит тело, вращаю-
щееся без трения и без (других) сопротивлений вокруг одной из его главных
осей инерции как маятник, который мы рассматривали в § 22. Угол, произ-
водная по времени от которого определяет угловую скорость вращающегося
тела, является соответствующей координатой рь; далее, нужно было бы
предположить, что силы прилагаются всегда только к обоим концам валов,
так что всегда отсутствует момент, ускоряющий или замедляющий вращение.
Максвелл пользуется образом вращающегося тела, подчиненного такому
условию, для того чтобы объяснить магнетизм внутри элемента объема
эфира, и разъясняет этим тот факт, что электромагнитная энергия эфира
содержит члены, линейные относительно сил тока, тогда как чисто электро-
динамическая энергия является однородной квадратичной функцией сил
тока. Силы тока Максвелл рассматривает как скорости изменения цикли-
ческих координат.
494
Л. БОЛЬЦМАН
Для получения § из функции Н мы выразили входящие в эту функцию
величины р'ь посредством уравнений (274) через ph и p'h. Поэтому
эф _ эн . ° эн М Эрл Эрл dpi Ьрь ’ Эф = дРь ЭН. 4 8Н . 9Ph 9Р» Ьр'ь Ьр'ь
или, на основании уравнений (274),
ЭН Эф 4 dpi дрь Ьпь -“j ™ дрь ’ ЪН = dp'h эф 4 п &рь_ Эрп Й Чь dph •
Если здесь положить
= 2qbp;>, (275)
»=i
то получается
оН' _ оН ЪН' = эн
Эрл Эрл ’ Эрл Эрл
Здесь предполагается, что в Н' величины р'ь исключены при помощи урав-
нений (274), но при образовании производных и величины р'ь счита-
ются постоянными. Поэтому общее уравнение движения (272), если предполо-
жить, что величины р'ь выражены посредством уравнений (274) через ph
и p'h, принимает для каждого ph такую же форму:
™ 4 (дн'У _ М.
tfz lap* J [ЭрЛ •
(276)
Стало быть, достаточно вместо Н поставить величину И', в которой вели-
чины р’ь мыслятся выраженными с помощью уравнений (274) в функции
ph и p’h, так что Н' в общем случае является неоднородной квадратичной
функцией величин p’h.
В качестве примера мы рассмотрим еще раз задачу из области теории
вращения твердого тела вокруг неподвижной точки, уже изложенную в
§ 22. Пусть твердое тело может вращаться вокруг неподвижной точки.
Его эллипсоид инерции для этой точки есть эллипсоид вращения.
Мы примем те же обозначения, что и раньше, и пусть опять ось ОС сов-
падает с осью вращения эллипсоида инерции.
Тогда переменная В удовлетворяет условиям, которые мы теперь нало-
жили на координаты, обозначенные через рь. Если, стало быть, обобщенная
сила, соответствующая параметру В, все время равна нулю, то согласно
уравнению (274)
ън ън ът „ .
ьръ ~ !эв' эв' const’
Если обозначить эту постоянную через —vj,- то из третьего уравне-
ния (121) [173] следует:
с А’ — В' = v
в соответствии с уравнением (124). Если посредством этого уравнения исклю-
чить В' из выражения (123) для Т, то мы получим
Н = Т = (у2 А'2 + С'2) + 4 ”2 • (277)
ДВА ОТРЫВКА ИЗ «ЛЕКЦИЙ О ПРИНЦИПАХ МЕХАНИКИ»
495
В последних наших расчетах F является силовой функцией внутренних
сил системы, а следовательно, так как в данном случае системой является
одно твердое тело, то F равняется нулю. Сила тяжести или вообще силы 21
и 6 рассматриваются как внешние силы и содержатся в другой части силовой
функции ^hPh [уравнение (220)]. Н здесь постоянно и равно Т — F,
h=l
а не Т — V, как ранее в этой книге.
Выражение (277) есть то, что мы в уравнении (275) обозначили через
Из этого уравнения следует
Я' = § + VJB = у (У2 А'2 + С'2) + ”JcA' > (278)
V2
где постоянная —J -у опущена как излишняя. Из этой величины Н' должны
быть получены обобщенные силы 21 и соответствующие параметрам
А и С, при помощи уравнений, которые имеют в точности форму уравнений
Лагранжа.
Следовательно,
nv d ( ЬН' "j дН' /г- d ( SH' ) дН' /970\
Путем подстановки значения (278) для Н' получаем из этих уравнений
21 = ± (в у2 А'- vjc), ^ = G(C" — cyA'2) + JvyA'. (280)
Уравнения (279) имеют точно форму уравнений Лагранжа, но Н' теперь
содержит также члены первой степени относительно скоростей. Движения
не могут происходить точно в обратном порядке. Маятник, с которым соеди-
нен вращающийся волчок, имеет (как мы это уже видели в § 22) для коле-
баний, при которых его центр тяжести движется по кругу, разные периоды
колебаний для одного и для другого направлении обращения, в то время
как волчок вращается в одну и ту же сторону. Совершенно аналогично этому
потенциал электрических токов, если имеются постоянные магниты, содержит
члены, линейные относительно сил тока или скоростей. От этого обстоя-
тельства зависит электромагнитное вращение плоскости поляризации света.
Эта поразительная аналогия, разумеется, не служит доказательством того,
что при только что упомянутых физических явлениях действительно играют
роль скрытые вращательные движения. Но эта аналогия может быть самым
естественным образом объяснена этой гипотезой и указывает во всяком
случае на то, что сравнительное изучение обоих родов явлений обещает
объяснение дальнейших фактов. Движение твердого тела, рассматриваемое
в описанном примере, является, между прочим, чистым моноциклом,
если силы 21 и К имеют как раз такие значения, что А и С меняются очень
медленно в сравнении с В, в противном случае это — смешанный моноцикл.
К случаю, когда Н является еще более сложной функцией скоростей,
Гельмгольц подходит следующим образом. Пусть выражение живой силы
состоит из двух слагаемых, из которых одно содержит только некоторые
определенные скорости р'с, а второе — только остальные скорости р’ь так что
496
Л. БОЛЬЦМАН
Так как F вовсе не содержит скоростей, то отсюда следует также
д2н
Ър'с dPd
= 0.
Кроме того, каждая из обобщенных сил, соответствующих координатам pd,
равна нулю, т. е. = 0. Здесь и в дальнейшем уже нет речи о цикли-
ческих движениях.
Во всяком случае возможны такие движения системы, для которых все
p'd исчезают, а потому все pd остаются все время постоянными. Так как И
не содержит членов, линейных относительно какой-либо скорости pd, то для
любого индекса d имеем
~ = 0, (281)
а из уравнения (272) следует для любого индекса d:
^=°- <282)
Из этих уравнений, если отвлечься от особых случаев, определяются коорди-
наты pd как функции рс и р'с. Если подставить найденные таким путем зна-
чения pd в выражение для Н, то получим функцию от рс и р'с, которую мы
обозначим через £). Функция § не должна быть непременно квадратичной
функцией р'С) эти величины могут входить в функцию § любым образом,
однако она должна быть четной функцией величин р'с. Тогда получим:
Э§ ___ ЭН . QH Qpd Э§ _____________ QH . -у, QH Qpd
дрс дРс d дРй дРс ’ dPc дРс d дрл др'с ’
отсюда на основании уравнений (281) и (282)
Эф _ ЭН Эф = ЭН
Эре — Эре ’ др'с ~ дрс ’
и уравнения Лагранжа для координат рс сохраняют свою форму, если в
них вместо Н подставить §. Если в силу уравнений связей некоторые ско-
рости оказываются исключенными из выражения для Н, то соответствующую
задачу Гельмгольц называет неполной, ибо она ограничивается отысканием
только таких движений, которые допускаются этими уравнениями связей.
Если подыскивать механические аналогии физических явлений, то нельзя
заранее знать, какие переменные должны соответствовать координатам и
какие — скоростям. Но в физике почти всегда энергия определяется
экспериментально как функция некоторых переменных. Поэтому полную
механическую задачу можно тогда использовать в качестве аналогии физи-
ческого процесса, если определенное экспериментальное выражение для
энергии есть однородная квадратичная функция некоторых переменных,
которые в этом случае следует считать аналогичными скоростям. Если же
мы в качестве аналогии берем неполную механическую задачу, то остается
открытым вопрос о том, какие из физических переменных поставить в парал-
лель со скоростями и какие — с координатами, так как и те и другие могут
содержаться в выражении для энергии в любой форме.
А. ПУАНКАРЕ
336.
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ
НЕБЕСНОЙ МЕХАНИКИ» [™] .
Глава XXIX
Различные виды принципа наименьшего действия
Пусть
Х1, х2, ..., хп, yv у2, ..., уп
— две группы переменных, a F — некоторая функция этих переменных.
Рассмотрим интеграл
У = /'(-р + 2-у,^)л.
Вариация этого интеграла может быть написана так:
J + 2 - 2У^] И
Для того чтобы эта вариация равнялась нулю, нужно прежде всего иметь [175]
dxt dF dyt _ dF ...
dt dyt ’ dt dxt ’ ' '
что дает нам канонические уравнения. Но это условие не является достаточ-
ным. Если оно выполнено, то имеем
<У = 2ЛМх,]^,
но нужно, кроме того, чтобы правая сторона этого равенства была равна
нулю. Так именно и будет, если предположить, что дх,- равны нулю на обеих
границах, т. е. что начальные и конечные значения х, заданы. При этих
условиях интеграл J, который мы называем действием, есть минимум.
Возьмем другие переменные, и пусть х\ и у\ — эти новые переменные ;
предположим, что они выбраны так, чтобы выражение
2 y't dx't — 2 У, d*t = dS (2)
было полным дифференциалом.
В этом случае мы видели, что изменение переменных не изменяет кано-
нического вида уравнений, и результат этот, впрочем, явится немедленным
следствием различных предположений, которые изложены далее; пусть
тогда
J’ = J‘(-F + 2yl^dt.
»О
99 Оптчоо. ..л.тгтмг. . ..own, .
498
А. ПУАНКАРЕ
Имеем
где So и Sj являются значениями функции S при t = t0 и t = fr Таким обра-
зом,
V' = + RSJW; • (3)
Если канонические уравнения (1) удовлетворены, то
V= + [2y;^]^ (4)
и, следовательно, согласно (2) и (3)
<5 J’ = + [2 У'. <5 • (4bis>
Но подобно тому ^ак соотношение (4) эквивалентно уравнениям (1), соотно-
шение (4 bis) эквивалентно уравнениям
Итак, мы видим, что выражение (4) эквивалентно (4bis), уравнения (1)
эквивалентны уравнениям (Ibis), а это означает, как мы уже знаем, что
замена переменных не изменяет канонического вида уравнений.
Отсюда следует, что действие J' будет минимумом, если предположить,
что начальные и конечные значения переменных х'( заданы. Таким образом,
каждой системе канонических переменных соответствует новый вид прин-
ципа наименьшего действия.
Уравнения (1) приводят к интегралу живых сил
F = й, (5)
где й есть постоянная.
Мы предполагали до сих пор, что обе границы t0 и заданы; что же
произойдет, если эти границы рассматривать как переменные? Так как F
не зависит явно от времени, то мы не ограничим общности, допустив, что
есть постоянная, и дав только приращение dtv Примем, например, t0 — О
и допустим, что после вариации переменные х, и у,- имеют в момент ~ 4- dtj)
*1
те же значения, которые они имели в момент t до вариации.
До вариации имеем
J — — + 2 J
но J у,- ~~ dt = J у; dXj от времени не зависит и, значит, его вариация равна
нулю. Таким образом, имеем просто
dj=~h
Производная действия J по верхней границе интегрирования равна
постоянной энергии й с обратным знаком.
Если эта постоянная есть нуль, то действие J опять-таки есть минимум,
когда начальные и конечные значения переменных х, рассматриваются как
заданные и даже в том случае, если начальное и конечное значения времени
t0 и (г не рассматриваются как заданные.
Если заменить F через F — й, то J обращается в
У+й^-fo), (6)
а так как уравнения (1) не изменяются, то это выражение (б) есть опять-таки
минимум.
ОТРЫВОК из ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 4QQ
Но если заменить F через F — h, постоянная живых сил, которая рав-
нялась й, обращается в нуль; следовательно, выражение (б) есть минимум,
даже если fx и t0 не рассматриваются как заданные.
Действие J есть минимум, каковы бы ни были переменные х, и у,-; оно
a fortiori будет минимум, если мы наложим на него новое условие, совмести-
мое с уравнениями (1), например условие удовлетворять первой группе
уравнений (1), т. е.
dx, _ dF
dt dyt ’
откуда
fo iff
где положено
H=-F+ .
Определенное таким образом действие есть минимум. Это — гамильтонова
форма принципа наименьшего действия. Предположим теперь, что
й = 0.
Пусть, далее, переменные х,- и у, не рассматриваются более как независимые;
наложим на них условие
F = 0.
Это ограничение, совместимое с уравнениями (1), не будет препятствовать
тому, чтобы действие J оказалось минимумом. Тогда
и, так как й равно нулю, то этот интеграл есть минимум, даже если /х и t0
не рассматриваются как заданные.
Наложим теперь условия
dxt _ dF
dt ~ dyt ’
откуда найдем у, в функции :
( dx, dx, dxn t
или же
v — у Y rfX1 rfX3 rfXl dXn rfXll
Уi 'гц i > 2 > • • • > n t > • • • > dt J ' \ '
Подставим вместо у,- их значения (7) в выражение для J ив уравнение
F = 0.
Из этого уравнения исключим в функции хк и . Затем подставим это
tZx
значение в выражения (7) и в J; теперь этот последний интеграл примет
вид
^У^йх^Фйх,,
где Ф есть функция хк и производных-^-.
32*
500
А. ПУАНКАРЕ
337.
338.
Этот интеграл, взятый таким образом в независимой от времени форме,
снова оказывается минимумом. В данном случае — это принцип наимень-
шего действия в форме Мопертюи. Если бы h не было равно нулю, то следо-
вало бы только заменить F на F — h.
Рассмотрим теперь частный случай, имеющий наиболее важное значение.
Полагаем
F = T — U,
причем Т — однородная функция второй степени переменных у,-, в то время
как U не зависит от этих переменных. Тогда получим
2Уг^ = 2Т, Н=т + и.
Согласно принципу Гамильтона интеграл
$'(T + U)dt
ь
должен быть минимумом.
Посмотрим, что произойдет с принципом Мопертюи; уравнение живых
сил имеет вид
Т— U = h.
Действие по Мопертюи тогда будет:
J (Т + U + й) dt.
В уравнениях
dxt _ dF = dT
dt ~ dyt dyt
вторые члены — линейные и однородные функции у,; следовательно, Т —
однородная второй степени функция ; заменим в выражении Т произ-
dxi .
водные через dxt; получим
т —
1 ~ dP ’
где dx2 будет линейной и однородной функцией п дифференциалов dx,-;
отсюда находим
.. _ dr _ dr
— KF ~ Уи + h
Действие по Мопертюи тогда примет вид
Чтобы иметь возможность изучить другие частные случаи, положим
для краткости
, dxt
х‘ ~ ~dT •
Исключим у,- из уравнений
так, чтобы принять за новые переменные х,- и x't; обозначим обыкновенным d
производные, взятые по х,- и у,-, и круглым Э —производные, взятые по х, и х;-.
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 501
Теперь мы легко найдем хорошо известные соотношения
„ - 9Н 9Н _ _ JJL р _ V Y'. 9Н _ И
дх'; ’ dxt dxt ’ ' Эх',-
и увидим, что уравнения (1) эквивалентны уравнениям Лагранжа
d дн _ эн
dt dx'i дх/
Установив это положение, рассмотрим тот случай, когда Н имеет следующий
вид:
н = н0 + н1 + Н2,
причем Но, Нь Н2 — функции однородные, соответственно О, 1, 2-й степени
переменных х'.. В этом случае величины
2'х;^-=2Н! + Н,. И » = -> + >
являются функциями линейными, но не однородными относительно х'
Гамильтоново действие сохраняет тот же вид
JHd.
Посмотрим, что произойдет с действием по Мопертюи.
Пусть h есть постоянная живых сил; действие по Мопертюи примет вид
J(W + h)dt,
но требуется придать ему вид, независимый от времени.
Для этого положим
Н2 есть не что иное, как живая сила, ad? есть выражение этой живой
силы после замены х- через dx,. A do обозначает выражение, которое полу-
чится, если в Н{ заменить х( через dx, ; значит, это — форма линейная и одно-
родная относительно дифференциалов dx,.
Если мы примем во внимание уравнение живых сил
Н2 = Но + /2,
откуда
.. dT
dt = -----= ,
то действие по Мопертюи примет вид
f[2drf//0+/2 +da].
Принцип Мопертюи применим как к тому случаю, с которым мы имеем
дело, так и к случаю абсолютного движения; но имеется существенная
разница в отношении того, что из него следует в каждом из этих случаев.
Во всех задачах, которые нам встретятся, живая сила Т или Н2 — суще-
ственно положительные величины; это — квадратичная, определенно положи-
тельная форма. В случае абсолютного движения (п. 337) действие
j2dT ft/4-/г существенно положительно; оно не меняется при перемене
пределов. Наоборот, в данном случае действие составляется из двух членов:
первый, J 2 dr /н0 + й , будет всегда положительным и не . меняется при
502
А. ПУАНКАРЕ
перемене пределов; второй же, J da, меняет знак при перемене пределов
и может быть как положительным, так и отрицательным.
Если мы примем во внимание, что в некоторых случаях при обращении
первого члена в нуль второй член в нуль не обращается, то увидим, что
действие не всегда имеет положительный знак; это обстоятельство создаст
нам в дальнейшем большие трудности.
зз9. Чтобы показать, как применяются приведенные выше соображения к
относительному движению, рассмотрим сначала абсолютное движение
системы; положим, что
Н=Т + и
и что положение системы определяется п 4- 1 переменными хр х2, ..., хп, со,
где хп х2, ..., х„ достаточны для того, чтобы определить относительное
положение различных точек системы, а со определяет ориентацию системы
в пространстве.
Если система изолирована, то U будет зависеть только от хи х2, ..., хп,
Т будет квадратичной формой, однородной относительно х[, х2,..., хп, со',
коэффициенты которой зависят исключительно от х1; х2, ..., х„.
Получим уравнение
где р — постоянная; мы получили интеграл площадей.
Установив это, возьмем гамильтоново действие J в виде
J-i'Hdf,
Го
тогда, если уравнения движения удовлетворены, то
J dxj 1 dco' Jf==fo
Действие будет минимумом (или, вернее, его первая вариация будет
нулем), если начальные и конечные значения х, и со рассматриваются как
заданные, т. е. если бх, = 5со = 0 для t = t0 и для t =
Предположим теперь, что мы считаем заданными только начальные и
конечные значения х;, но не со ; тогда получим
= [р == р
Пусть тогда
и
отсюда очевидно, что
И' — Н — р со'
Г = J Н'Л;
V = о.
Из уравнения = р исключаем со', которое является линейной неодно-
родной функцией х-; мы видим также, что Н' есть квадратичная неодно-
родная относительно х, функция.
Значит, Н здесь будет иметь вид Но + Нх + Н2, изученный в п. 338.
Таким образом, интеграл J' будет минимумом даже и тогда, когда началь-
ное и конечное значения со не рассматриваются как заданные.
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 5Q3
Заметим, что
J' = J — Р К ~ %),
где со0 и со1 являются значениями со для t = t0 и для t =
340. Возьмем теперь систему, отнесенную к подвижным осям и подчиненную
силам, которые зависят только от относительного положения системы по
отношению к подвижным осям. Предположим, кроме того, что оси находятся
в равномерном вращательном движении с постоянной угловой скоростью со'.
, Эта задача сразу же сводится к предыдущей. Нам придется только при-
дать подвижным осям очень большой момент инерции так, чтобы угловая
скорость оставалась постоянной.
Тогда для абсолютного движения имеем
Н = т + и = 1\ + Т2 + и.
Силовая функция U зависит только от переменных х„ которые опре-
деляют положение системы по отношению к подвижным осям; 7\, живая
сила системы, зависит от х; и является квадратичной формой относительно
х\ и со'; Т2, живая сила подвижных осей, равна у со'2 и момент инерции I
очень велик.
Тогда
р = + 1со'
г аш 1
и
Н' = Н - рсо' = (7\ +T2 + U)_ -g-co' - /со'2,
где
и, т i rr dT\ , Ia>'2
Итак,
W' = T’
Так как / и р очень велики по сравнению с-^~-, то это уравнение опреде-
ляет приближенно
а более точно —
Кроме того,
, р 1 ат-
I I dw
Находим таким образом
H' = T1 + U--g- + ±-
В правой стороне предпоследний член есть постоянная величина, а послед-
ним можно пренебречь, так как / очень велико.
Так как к Н' можно прибавить какую-либо постоянную, ничего не
изменяя в принципе Гамильтона, то мы, полагая
Н" = + U,
504
А. ПУАНКАРЕ
найдем, что интеграл
J" = $f£"dt
должен быть минимумом (даже и в том случае, когда начальные и конечные
значения ср не даны).
В выражении Н" надо рассматривать, а>' как заданную постоянную;
Н” будет тогда квадратичной неоднородной функцией х', вида Но -h.Hj 4- Н2.
Пусть, например, мы имеем материальную точку массы единица, дви-
жущуюся в плоскости, координаты которой относительно подвижных осей
обозначаются через £ и т/. Имеем
-г _ — °>' ч)2 + (»?' + f)2
Л- 2
тогда
н2 = г И1 = , Но = ^1(? + г?)+и.
Интеграл
J = + H0)dt
to
есть минимум, если будем рассматривать границы t0 и tv а также начальные
и конечные значения £ и г/ как заданные.
Интеграл живых сил тогда можно записать в виде
Н2 = Н + й,
а мы видели, что интеграл
J' — J (Н2 + 4- Но 4- й) dt = J 4- й (f1 f0)
есть минимум, даже если t0 и fx не рассматриваются как заданные.
Находим тогда
J’ = [ (2W2 + HJ dt = $ [ds У/ТоТй- + - г/ d£)],
полагая
ds2 = d£2 4- drf.
Это — обобщенный принцип Мопертюи.
В задачах, которые нам предстоит рассмотреть, U всегда будет положи-
тельным, а следовательно, J будет существенно положительным.
Но относительно J' это не всегда так.
Действительно, при й отрицательном мы должны считать точку £, ц
замкнутой в области, определяемой неравенством
#о + й>О.
Первый член величины, стоящей под знаком J, т. е. член ds ^Но 4- й, суще-
ственно положительный; но второй член меняет знак, когда принятое напра-
вление пройденной траектории изменяется на обратное.
Если точка %, т) расположена очень близко к границе области, в которой
она замкнута, если, следовательно, Но 4-й. очень мало, то первый член
будет очень малым и выражение получит знак второго члена.
. Значит,, J' не существенно положительное. В этом можно убедиться также
из уравнения • .
- JJ + Л Gi U-
Если й отрицательно, то первый член положительный, а второй — отри-
цательный.
ОТРЫВОК из ТРЕТЬЕГО ТОМА «.НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 505
341.
Кинетические фокусы
До сих пор, когда я говорил: такой-то интеграл есть минимум, — я
употреблял сокращенный, но нейравильный способ выражения, который,
впрочем, никого не мог ввести в заблуждение; я хотел сказать: первая
вариация этого интеграла равна нулю; это условие необходимо для полу-
чения минимума, но оно недостаточно.
Теперь разыщем условие, необходимое для того, чтобы изученные нами
в предыдущих разделах интегралы J и J', первые вариации которых были
равны нулю, оказались бы действительно минимумами. Это разыскание
связано с трудным вопросом о вторых вариациях и с красивой теорией
кинетических фокусов.
Напомним основы этих теорий.
Пусть х1( х2, ..., хп — функции t, а х{, х2, . .., х'п — их производные;
г,
рассмотрим интеграл J = j / (хг, x't)dt, первая вариация которого 6J равна
нулю, если принять начальные и конечные значения х(- как заданные.
Для того чтобы этот интеграл был минимумом, нужно сначала иметь
условие, необходимое, но недостаточное, которое я назову условием (А).
Оно состоит в том, чтобы выражение
f(xt,xl + £,) - 24-Д ,
рассматриваемое как функция е,-, было минимумом.
Условие (А) не является достаточным, кроме того случая, когда границы
интегрирования очень сближены. В остальных случаях необходимо нало-
жить еще одно условие, которое я назову условием (В). Прежде чем сформу-
лировать это условие, надо напомнить определение кинетических фокусов.
Чтобы 6J == 0, необходимо и достаточно, чтобы х, удовлетворяли п диф-
ференциальным уравнениям второго порядка, которые я назову уравне-
ниями (С).
Пусть
X, = (/)
— решение этих уравнений.
Другое решение, бесконечно близкое к первому, пусть будет
xi= чч (0 4~ ;
составим линейные уравнения в вариациях, которым удовлетворяют
и которые я назову (D).
Общее решение этих уравнений (D) будет вида
к=2п
(/ = 1,2,
к=1
где Ак — это 2п постоянных интегрирования, a gik — это 2п2 функций t,
совершенно определенных и соответствующих 2п частным решениям линей-
ных уравнений (D).
На этом основании запишем, что все обращаются в нуль для двух
заданных моментов t = t' и t — t"; мы найдем 2п линейных уравнений,
из которых сможем исключить 2п неизвестных Ак.
Таким образом, получим уравнение
А (Г, t") = О,
506
А. ПУАНКАРЕ
где J есть определитель:
£1.1 £1.2 • • • £1.2п
Sn.l Sn-2 • • • Sn.2n
£// £/Z £/Z
Sl.l S1.2 • • • Si.2n
fi" t"
Sn-1 Sn.2 • • • Sn.2n
Здесь %ik и f"k — функции gik после замены в них t на f и на t" соответ-
ственно.
Если моменты Г и t" удовлетворяют уравнению J = 0, то мы скажем,
что это два сопряженных момента и что две точки М' и М" пространства
п измерений, которые имеют соответственно координаты
<Pi (?), (р2 (?), ... ,<рп (?),
(Pi(t"), <p2(t”), ... ,<pn(t"),
являются двумя сопряженными точками.
Если, кроме того, момент ?', сопряженный с моментом ? и более поздний
из них, является моментом, наиболее близким к ?, то мы скажем, что М"
есть фокус М'.
Теперь мы можем сформулировать условие (В): оно состоит в том,
что между t0 и не должно быть никакого момента, сопряженного с t0.
Чтобы J было минимумом, необходимо и достаточно удовлетворить
условиям (А) и (В). Отсюда немедленно вытекает следующее:
Пусть t0, fj, t2, t3 — четыре момента. Пусть Мо, Ми М2, М3 — соответ-
ствующие им точки кривой
*1 ~ Ф1 (0> Х2 — Чр2 (0> • • , Хп — (рп (?)•
Предположим, что Мг есть фокус Мо, а М3 — фокус М2. Если условие (А)
удовлетворено, то мы сможем получить
А < А < А < А>
или
А) < А А А,
ИЛИ
А < А < А <'' А,
но не сможем получить
А < А < А < А >
в этом случае интеграл j должен быть минимумом, потому что условие (В)
удовлетворено, а интеграл f не будет минимумом, потому что условие (В)
is,
не будет относительно него удовлетворено.
Но это невозможно, потому что фикции х,- можно варьировать между
t2 и tj—s, не варьируя их в то же время между t0 и t2.
Легко выясняется геометрический смысл предыдущего.
Кривая пространства п измерений
xi = <Pi(t)>
представляющая собой решение уравнений (С), может быть названа траек-
торией, которую я обозначаю через Т.
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 5Q7
Кривая
xi — Vi +
будет представлять собой бесконечно близкую траекторию.
Если через точку М' провести одну из этих траекторий Т', бесконечно
близких к Т, и если эта траектория снова пересечет траекторию Т в точке М"
(точнее говоря, расстояние М" от этой точки будет бесконечно малым выс-
шего порядка), то точки М' и М" будут сопряженными в том случае, если
точка, которая описывает Т', проходит, кроме того, через М' и бесконечно
близко к М" в моменты t' и t" соответственно.
342. Согласно принципу Гамильтона условие (А) всегда удовлетворено;
действительно,
Н = Н0+Н1 + Н2,
и Н2 есть квадратичная форма, однородная относительно x’j.
Во всех задачах динамики это — определенная и положительная квад-
ратичная форма.
Если мы заменим х'; через х- + обратится в
„ ( , . v, dHx\
а Н2 обратится в
н2(х/) + н2(£,) + 2Ч^.
Кроме того,
следовательно,
Н (х< + г,) = Но + Нг + Н2 + v £( + н2 (£;),
откуда, наконец, получим
НМ + £() - 2” е,- -g- = W + Н2 (£/).
Первый член соответствует функции
№ + Si)-vei-^,
а так как квадратичная форма Н2 (£1) определенно положительная, то мы
видим, что это выражение является минимумом для е, = 0, т. е. что условие
(А) удовлетворено.
343. Перейдем теперь к принципу Мопертюи в абсолютном движении. Инте-
грал, который требуется исследовать, имеет вид J dr, причем dr2 есть
определенно положительная квадратичная форма дифференциалов dx;.
Примем на время хт за независимую переменную; тогда интеграл полу-
читвид J ахь где 1-^-1 есть многочлен второй степениР, не однородный
dxi
(но существенно положительный) относительно .
Итак, пусть
dr jfp dxt
dxr у dxr'
Вопрос в том, является ли
508
А. ПУАНКАРЕ
минимумом для с,- = 0, или, другими словами, будет ли вторая производная
радикала
Ур«М
взятая по t, положительной.
dxi
Но каковы бы ни были-5—и eh мы получим
uXj
p(-^+Si/)=flf2 + 2^ + c,
где а, b и с не зависят от t; вторая производная радикала тогда равна
ас — Ь2
~(at2 + 2Ы + с)3'2 '
Так как многочлен Р существенно положительный, то это выражение тоже
положительно и условие (А) всегда удовлетворено.
344. Переходим к принципу Мопертюи в относительном движении. Нам
тогда придется иметь дело с интегралом
f [ds /Яо + /г + ш' (f dy - v df)],
где, принимая f за независимую переменную, имеем
f df [/(Яо + /г) (1 + у'2) + «о' (fif — г/)].
Необходимо теперь определить, является ли вторая производная по у' от
/(Яо + /г) (/ + у'2) + (о (f>/ — у)
положительной. Эта производная равна
(I + ч'2)3'2 ’
Условие (А) опять удовлетворено.
Итак, условие (А) само собой удовлетворяется во всех тех случаях,
которые нам придется исследовать.
Фокусы по Мопертюи
345. Кинетические фокусы несколько различны в зависимости от того, рас-
сматриваем ли мы действие Гамильтона или действие по Мопертюи. Чтобы
лучше уяснить себе это, рассмотрим случай двух степеней срОбоды, и пусть
х и у — две переменные, определяющие положение системы, которые мы
можем рассматривать как координаты в плоскости.
Пусть
х = У = /2(0
— уравнения траектории Т, которая будет плоской кривой. Положим
x = /i(0 + f, У = /2(0 + »?
и, отбросив квадраты f и у, составим вариационные уравнения. Так как они
линейные и 4-го порядка, то мы получим:
f = «1 fi + £з + «4 h > У — ai Vi + а2 % + «3 % + «4 % ’
где а, — постоянные интегрирования, a f, и у, — функции t.
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 5QQ
Уравнение из п.341
примет тогда вид
zl (Г, t”) = О
^2 £'з ^4
У1 % Уг Уз $3 У4 % = 0.
у’’ Уз Уз У*4
(1)
Именно это уравнение определяет гамильтоновы фокусы.
Смысл его следующий : точка х, у, которая описывает траекторию Т,
и точка х + f, у + у, которая описывает бесконечно близкую траекторию
Т' в два различных момента, а именно в моменты f и t", оказываются отде-
ленными друг от друга расстоянием, бесконечно малым высшего порядка.
Но не этим условиям должны удовлетворять фокусы по Мопертюи.
Две точки траектории Т, а именно обе точки М' и М", которые соответствуют
моментам t' и t", должны находиться на расстоянии, бесконечно малом
высшего порядка от траектории Т'. В этом случае отнюдь не требуется,
чтобы точка, движущаяся по траектории Т', проходила точно в момент t”,
например, бесконечно близко к М”. Но зато постоянная живых сил должна
иметь одно и то же значение как для Т, так и для Т'. Для гамильтоновых
фокусов это последнее условие не обязательно.
Одним из решений уравнений в вариациях будет:
£ = п = Ш-
Мы можем, следовательно, предположить
£=л (г), у[ = л (D, %=/; с"),= л (г).
Так определяются обе функции £4 и
С другой стороны, разность между постоянной живых сил для траек-
тории Т и постоянной живых сил для траектории Т' бесконечно мала; это,
очевидно, линейная функция четырех бесконечно малых постоянных д1,
@2> ^3,
Мы можем, не ограничивая общности, предположить, что эта разность
точно равна д4.
Тогда для того, чтобы значение постоянной живых сил для Т и Т' было
одинаково, необходимым условием является, чтобы д4 = О или же
f + fl2f2 + fl3f3, У = a4»?i + a2% + «з»73-
Так как £ и у должны быть равны нулю при t = t', то имеем уравнения
Я1 + а2 £' + а3 = 0, а4 + а2 + «з Уз = 0.
С другой стороны, значение х + £, у + у для t = t'’ + е должно быть тем
же (до бесконечно малых, близких к высшему порядку малости), что и зна-
чение х и у для t = t", что можно записать так :
(е + ajg + а2£" + fl3f3 = 0, (е + а4) у" + а2у”2 + «з»73 = О,
откуда путем исключения получим
£' о £;
У2 Уз О У1
510
А. ПУАНКАРЕ
Раскрывая определитель, находим
^з-^l
и, полагая
£i % — ?з 41
придадим уравнению (2) вид
С(Г) = С(Г).
(3)
346.
Применение к периодическим решениям
Если мы имеем дело с периодическим решением периода 2л, то функции
/1(0 и /г(0 предыдущего раздела будут периодическими периода 2л; такими
же будут и
А = А(О, ^=/а(0-
Кроме того, вариационные уравнения допускают согласно гл. IV другие
частные решения вида
£ = Ч>2 (0,
f = e-a^3(0,
£=мо+шо,
у = у>2 (f),
»? = e~at Уз(0 ,
»? = У4(0 +WHO-
В этих уравнениях /? есть постоянная, а и —а являются характеристи-
ческими показателями степени, а у и у — периодическими функциями.
Пусть
Р(Х’У^ -^) = const
есть уравнение живых сил; тогда
dF t , dF , dF d$ . dF dr) .
dx $ dy dx dt *" . dy dt ’
d'Ht d-jt
где А есть постоянная. Если в этом уравнении мы заменим £ и 4 через eatcp2,
eaty>2, то его левая сторона обращается в периодическую функцию t, умно-
женную на еа<; так как она должна быть постоянной, то необходимо, чтобы
она была равна нулю.
Мы имеем, следовательно,
А = 0.
Это означает, что обе бесконечно близкие траектории, уравнения которых
х = А(0, У = /а(О
и
X = А (0 + e“W), У = /а (0 + (О
соответствуют одному и тому же значению постоянной живых сил.
То же самое можно сказать и относительно траектории, уравнение кото-
рой имеет вид
х = h(t) + e-atg>3(t), y = f2(t)- e~atip3(t).
ОТРЫВОК ИЗ ТРЕТЬЕГО ТОМА «НОВЫХ МЕТОДОВ НЕБЕСНОЙ МЕХАНИКИ» 511
Следовательно, мы имеем право полагать
= eat 4>г, = eat у>2,
g3 = e~at(p3, y3=e-atv3.
Тогда f будет всегда иметь вид:
С (0 = е2“' G (t),
где G (/) — периодическая функция.
Случай устойчивых решений
347. Теперь мы должны различать два случая:
Г. Решение устойчивое и а2 отрицательное. В этом случае и ^з, %
и % — величины мнимые сопряженные; С и G имеют модулем единицу.
Мы сделаем три гипотезы, которые оправдаем ниже. Предположим:
1) что G(f) никогда не обращается ни в нуль, ни в бесконечность;
2) что функция
Z + _2_lnG(f) = r,
которая существенно действительна, является также и непрерывно возра-
стающей;
3) что InG(f) является функцией периодической.
Тогда уравнение (3) может быть записано, если обозначить через т' и
т" оба значения т, соответствующих f и t", в следующем виде:
т" — т' = (к — целое).
Каждому значению t соответствует одно-единственное значение т и каж-
дому значению т — одно-единственное значение t. Следовательно, чтобы
к = 0, нужно, чтобы t' = t". Если же требуется, чтобы t" > ?, то к должен
быть положительным.
Принимая к = 1, мы придаем t" — f наименьшее значение; тогда
и точка М" есть фокус для М'.
Важно отметить следующее обстоятельство.
Приведенные соображения применимы в тех случаях, когда In G (?)
является периодической функцией; но вообще нам известно только то,
что G (f) есть периодическая функция, и отсюда непосредственно следует, что
In G (f)
возрастает на величину, кратную 2in, например на 2kin, если t возрастает
на 2 п. Тогда
In G (f) — ikt
есть функция периодическая.
Возьмем в этом случае
G' (/) = G (0 e~ikt, а' = а + -^;
512
А. ПУАНКАРЕ
для С получим
С (t) = e2at G (t) = e2a'f G'(t).
Вместо
T = / +JLlnG(0
возьмем
r^f + ^inG' (0;
так как In G (?) есть величина периодическая, то предшествующие выводы
сохраняют свое значение.
Уравнение (3) запишется так:
т" — т' = (т — целое),
и М" будет фокусом М', если
348. Так оправдалась одна из трех гипотез, т. е. что In G (t) должен быть перио-
дическим.
Теперь я утверждаю, что функция т должна быть, как мы и предпола-
гали, непрерывно возрастающей.
Действительно, предположим, что эта функция допускает максимум т0
для t = t0; мы могли бы найти два момента t' и t" таких, чтобы соответствую-
щие значения т' и т" функции т были равны, и два других момента t2 и t2
таких, чтобы та = т2; таких, наконец, чтобы пять моментов, впрочем, очень
близких один к другому, удовлетворяли неравенствам
‘2 ‘1 ‘О £1 ‘2-
Тогда было бы фокусом t[, a t2 — фокусом t2, а мы видели выше, что такие
неравенства невозможны, когда удовлетворено условие (А).
Я утверждаю теперь, что G (?) не может обратиться в нуль; действительно,
мы имеем
fi % — f з
Числитель и знаменатель функции С (?) — мнимые сопряженные; если один
из них обращается в нуль, то другой тоже обратится в нуль; таким образом,
функция С(?) не может быть ни нулем, ни бесконечностью.
Так оправдались все наши гипотезы.
Ф. КЛЕЙН
О НОВЫХ АНГЛИЙСКИХ РАБОТАХ ПО МЕХАНИКЕ [17в]
Характерное отличие английских работ по механике от работ, выпол-
няемых на континенте, состоит, по моему мнению, в их тенденции, направ-
ленной на непосредственное постижение действительности, и в насквозь про-
никающей их наглядности изложения. Вследствие этого указанные работы
должны заставить задуматься привычных к абстрактному ходу мысли
математиков и в этом отношении ничего не теряется оттого (а даже скорее
оказывается полезным), что упомянутые исследования по большей части
выполнены не так методично и не так строго, как мы это считаем обще-
принятым.
Среди отдельных вопросов, которые я хочу ближе рассмотреть, замечание
об истории возникновения гамильтоновой теории интегрирования должно
иметь общий интерес. Относящиеся сюда обстоятельства, как кажется,
являются совершенно неизвестными, хотя сам Гамильтон с достаточной
ясностью писал об этом в различных местах своих работ, особенно в своей
первой статье о системах лучей (1828).
Гамильтон нашел такое представление корпускулярной теории, согласно
которому определение светового луча, проходящего через какую-либо неодно-
родную (но изотропную) среду, представляет собой специальный случай
обычной механической задачи движения материальной точки; мы можем
тут же добавить, что требуемая специализация не является существенной
и что, более того, если перейти к пространствам высших измерений, то каж-
дая механическая проблема может быть приведена к определению пути
светового луча, проходящего через какую-либо соответствующую среду.
Открытие Гамильтона, согласно которому интегрирование дифферен-
циальных уравнений динамики стоит в связи с интегрированием некоторого
уравнения в частных производных первого порядка, основывалось на выводе
результатов геометрической оптики, известных в корпускулярной теории,
с точки зрения волновой теории, что имело большое значение в развитии
физики своего времени. Теория Гамильтона интегрирования дифферен-
циальных уравнений динамики есть прежде всего не что иное, как все-
общая аналитическая формулировка хорошо известного в физической
форме соотношения между световым лучом и световой волной. В силу
изложенного здесь исходного положения делается понятной и та ненуж-
но частная форма, в которой Гамильтон опубликовал свою теорию и из
которой исходил Якоби. Гамильтон первоначально исходил в своих ис-
следованиях систем лучей из практических запросов оптического прибо-
ростроения. В силу этого он рассматривал только такие световые волны,
которые выходят из отдельных точек. Обобщение Якоби, вытекавшее отсюда,
состояло в том, что для определения луча должны точно так же применяться
и другие произвольные световые волны. Как известно, в оптике посредством
так называемого принципа Гюйгенса из специальных волн строят общие;
33 Вариационные принципы механики
514
Ф. КЛЕЙН
это построение есть точный эквивалент аналитического процесса, посредством
которого в теории дифференциальных уравнений в частных производных
первого порядка переходят от какого-либо «полного» решения к «общему».
[Оптика в том смысле, в каком мы ее здесь понимали, есть геометрическая
оптика, которая имеет дело с понятием светового луча (следовательно,
явления дифракции принципиально исключаются) и при применении обыч-
ных прямоугольных координат подчиняется дифференциальному уравнению
в частных производных первого порядка второй степени :
+ m2 + m 2_ _l fjv у = 0 (п
(Эх J (Эу J (8г ) с3 { dt) ' >
В силу этого она сначала представляется совершенно отличной от физи-
ческой оптики, в центре которой стоит дифференциальное уравнение в част-
ных производных второго порядка первой степени :
82Ф 82Ф , 82Ф 1 82Ф п
Эх2 + 8у2 + 8z2 с2 8Z2 ~ ‘
Однако геометрическая оптика может считаться предельным случаем
физической, когда рассматриваются бесконечно малые длины волн. В самом
деле, подставим в уравнение (2) для Ф выражение e2nikf(x’v’z'r> и устремим
к к бесконечности; тогда в пределе получим уравнение (1). Ср. Debye
в добавлении к статье A. So mmеrfe 1 d u. J. Runge, Annalen der Physik,
4 серия, t. 35, 1911, стр. 290. F. Klein.]
Г. ГЕРЦ
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ,
ИЗЛОЖЕННЫЕ В НОВОЙ СВЯЗИ» [177]
Раздел 5
ПУТИ МАТЕРИАЛЬНОЙ СИСТЕМЫ
I. Прямейшие пути
1st. Определение 1. Элемент пути материальной системы называется
более прямым, чем какой-либо другой, если он имеет меньшую кривизну.
152. Определение 2. Прямейшим элементом пути называется возмож-
ный элемент пути, являющийся более прямым, чем все другие возможные
элементы путей, которые имеют вместе с ним общее положение и направ-
ление.
153. Определение 3. Путь называется самым прямым, если все эле-
менты его самые прямые.
154. Аналитическое представление. Все элементы пути, среди
которых есть прямейший элемент, имеют общее положение и направление,
т. е. имеют одинаковые значения координат и первых производных от коор-
динат по независимым переменным. Кривизна их выражается через вторые
производные от координат. С помощью их и различаются элементы пути.
Ясно, что вторые производные должны быть такими функциями координат
и первых производных, которые обращали бы кривизну самого прямого
элемента в минимум.
Уравнения, которые выражают это условие, должны выполняться для
всех положений прямейшего пути; они, таким образом, являются одновре-
менно дифференциальными уравнениями.
155. Задача 1. Выразить дифференциальные уравнения прямейшего пути
материальной системы в прямоугольных координатах материальной системы.
Возьмем в качестве независимого переменного длину пути. Так как
имеются в виду возможные пути, то Зп величин х' согласно пп. 128 и 100 [178 ]
подчиняются I уравнениям:
зп
2' хьг х'„ = 0. (а)
V=1
Следовательно, Зп величин х" подчиняются i уравнениям:
эп Зп зп я
2'^^"+2'2'- i =0, (b)
v= 1 v= 1 ,«= 1
которые получаются из (а) посредством дифференцирования.
33*
516
Г. ГЕРЦ
Предполагая (Ь) непротиворечивыми, мы должны так определить х",
чтобы они обращали кривизну с (п. 106) или, что то же самое, у с2 в мини-
мум, а именно, выражение
1
2 m *'
(с)
должно принять минимальное значение.
По правилам дифференциального исчисления поступаем следующим
образом: умножаем каждое из уравнений (Ь) на неопределенный множи-
тель, который для Z-ro уравнения назовем SL-, далее, суммируем частные
производные по каждой из величин х" левой стороны полученных уравнений
с частными производными, взятыми по той же величине от формы (с), которую
следует привести к минимуму; приравниваем полученные суммы нулю
и получаем Зп уравнений вида
^-K + ^xLrSL^0, (d)
L = 1
которые с i уравнениями (b) дают для определения Зп 4- i величин х" и S
Зп + i линейных однородных уравнений, и, следовательно, имея в виду (с),
найдем наименьшую кривизну. Выполнение (d) для всех положений воз-
можного пути является, таким образом, необходимым условием для того,
чтобы путь был прямейшим, и уравнения (d) являются, следовательно,
искомыми дифференциальными уравнениями прямейшего пути.
ив. Примечание 1. Уравнения (d) представляют также и достаточные
условия минимума, ибо вторые производные
эа са
[эх; дх’^
исчезают, коль скоро v и /л различные; если же v и /л равны, то они необхо-
димо положительны. Следовательно, значение кривизны не может иметь
других значений, кроме минимума. Выполнение уравнений (d) для всех
положений возможного пути есть, следовательно, достаточное условие того,
чтобы путь был прямейшим.
«7. Примечание 2. Имея в виду п. 72 [179], можно уравнения (d)
записать так:
y^-iCos(5’x’)=-^xL,SL.
Уравнения (d) дают, следовательно, представление о том, как должно
меняться направление вдоль пути, чтобы путь был прямейшим; именно,
каждое из этих уравнений дает изменение наклона пути относительно неко-
торой определенной прямоугольной координаты.
158. Задача 2. Выразить в обобщенных координатах дифференциальные
уравнения прямейшего пути материальной системы.
Возьмем опять в качестве независимого переменного длину пути. Коорди-
наты ре и их производные р' удовлетворяют к уравнениям п. 130:
J>eP; = O, (а)
p=i
а величины р" — уравнениям:
+ = (b)
е=1 е=1а=1 г
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
517
Среди всех значений р", удовлетворяющих этим уравнениям, имеются те,
которые обращают кривизну с, а следовательно, и правую сторону урав-
нения (с) п. 108 в минимум. Если мы поступим по правилам дифференциаль-
ного исчисления, как в п. 155, т. е. введем множитель Пх, на который умно-
жим х-е уравнение (Ь), то получим необходимое условие минимума в форме:
<7—1 <7 = 1 Т=1 Х=1
где д для каждого уравнения получает определенное значение от 1 до г.
Вместе с уравнениями (Ь) они образуют г + к неоднородных линейных
уравнений для определения г — к величин р"е и Пх, а затем по п. 108 [18° ]
определяется наименьшая кривизна. Выполнение уравнений (с) для всех
положений пути является необходимым условием для того, чтобы путь
был прямейшим.
159. Примечание 1. Выполнение уравнений (с) является вместе с тем
и достаточным условием для минимума кривизны, а следовательно, и для
прямейшего пути. Ибо п. 108 есть лишь трансформация п. 106 для кривизны.
Следовательно, здесь, как и в п. 156, найдем, что уравнения (с) достаточны
для минимума кривизны, т. е. для прямейшего пути [181].
160. Примечание 2. Согласно п. 75 имеем
cos (s, Ре) = ав„ р’„,
0=1
следовательно,
4s Cos Ре^ = 2;ае°Р°+ 2 2 Р° Р*
Поэтому уравнения (158) можно записать в таком виде:
j ____ 1 г г о Л к
~^aeecos(S,pe)) = ^2^^p'p'-^pxenx.
Уравнения (с) п. 158 дают, следовательно, представление о том, как
должно меняться направление вдоль пути, чтобы путь оставался прямейшим.
Именно, каждое из этих уравнений дает изменение наклона пути относи-
тельно определенной координаты ре.
lei. Теорема. Из данного положения в данном направлении возможен
один и только один прямейший путь. Ибо, если заданы положение и направ-
ление, то уравнения пп. 158 и 155 определяют, и притом однозначно, значения
для изменения направления ; следовательно, они через данные величины
однозначно определяют начальное положение и направление в ближайшем
элементе пути; таким же образом — для следующего элемента и т. д. до
бесконечности.
162. Следствие. Вообще невозможно провести прямейший путь между
двумя любыми положениями заданной системы.
Ибо множество возможных перемещений из данного положения, равно
числу свобод движения системы. Многообразие возможных направлений
в одном положении и поэтому многообразие прямейших путей из него на
единицу меньше. Многообразие положений, которые достигаются из данного
положения прямейшими путями, так же точно равно числу степеней сво-
боды. Однако многообразие возможных положений может равняться числу
используемых координат, а поэтому вообще число их больше, чем' число
направлений.
518
Г. ГЕРЦ
163. Замечание 1. Для того чтобы все прямейшие пути материальной
системы, положения которой отмечаются с помощью ре, можно было пред-
ставить уравнениями только между этими координатами, не является необ-
ходимым знание каких-либо Зп функций, которые полностью определяют
положение отдельных точек системы как функции ре. Для этого, напротив,
достаточно, чтобы наряду с уравнениями условий системы, выраженными
через ре, были даны ~ г {г + 1) величин аеа как известные функции от ре.
Ибо дифференциальные уравнения прямейшего пути (158с) могут быть
записаны явно, когда наряду с р^ заданы аеа как функции ре.
164. Замечание 2. Для того чтобы прямейший путь материальной
системы, положение которой определяется с помощью ре, выразить через
уравнения для этих ре, достаточно, наряду со знанием уравнений условий
для ре, знания любого бесконечно малого возможного перемещения как
функции этих координат рв и их изменений.
Именно, если ds является указанной длиной в требуемой форме, то будет
иметь место
_ 1 ЭМ.з2
йе°— 2 ъаРе ddpa •
1в5 Замечание 3. Для того чтобы знать значение кривизны в каждом
положении прямейшего пути, недостаточно знания — г (г + 1) функций аея.
1
Необходимо еще знаниег2 (г + I)2 функций ава^ п. 108 [182].
Знание положения всех отдельных точек как функций ре также не явля-
ется необходимым для определения кривизны.
II. Кратчайшие и геодезические пути
lee. Определение 1. Кратчайшим путем материальной системы между
двумя ее положениями называется возможный путь между этими положе-
ниями, длина которого меньше, чем длина какого-нибудь другого, бесконечно
близкого пути между теми же положениями.
167. Замечание 1. Определение это не исключает того, что между двумя
положениями можно построить несколько кратчайших путей. Кратчайший
из этих путей называется абсолютно кратчайшим путем. Он есть одновре-
менно кратчайший путь, который вообще возможен между этими поло-
жениями.
168. Замечание 2. Между какими-нибудь двумя возможными поло-
жениями материальной системы всегда возможен, по крайней мере, один
кратчайший путь. Ибо возможные пути между возможными положениями
всегда существуют, п. 114 [183]; среди них, следовательно, есть и абсолютно
кратчайший путь, т. е. тот, который короче, чем соседние пути. Эти последние
он должен иметь вследствие предположенной непрерывности (пп. 115 и 121).
169. Замечание 3. Кратчайший путь между двумя положениями есть
одновременно кратчайший путь между двумя любыми положениями этого
пути. Каждая часть кратчайшего пути есть также кратчайший путь.
по. Замечание 4. Длина кратчайшего пути отличается лишь на беско-
нечно малую величину высшего порядка от длины всех соседних путей
между теми же концевыми положениями. Длина же перемещения, которое
переводит соседний путь в кратчайший, есть бесконечно малая величина
первого порядка.
171. Определение 2. Геодезическим путем материальной системы назы-
вается каждый путь, длина которого между двумя любыми положениями
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
519
отличается лишь на бесконечно малую величину высшего порядка от длины
любого другого, бесконечно близкого соседнего пути между теми же поло-
жениями.
172. Замечание 1. Каждый кратчайший путь между двумя положениями
есть геодезический путь.
Следовательно, определение п. 171 не содержит внутреннего противо-
речия, ибо существуют пути, удовлетворяющие этому определению.
из. Замечание 2. Между двумя любыми возможными положениями
всегда возможен, по крайней мере, один геодезический путь (пп. 168, 172).
174. Замечание. 3. Геодезический путь не является обязательно крат-
чайшим путем между какими-либо двумя его положениями.
Из определений нельзя заключить, что каждый геодезический путь
является также кратчайшим путем, и простые примеры показывают, что
существуют геодезические пути, которые не являются одновременно крат-
чайшими путями между данными концевыми положениями. Такие примеры
могут заимствоваться уже из геометрии отдельных материальных точек,
т. е. из обычной геометрии, и могут, следовательно, рассматриваться как
известные.
ns. Замечание 4. Если между двумя положениями существует один-
единственный геодезический путь, то он является в то же время кратчайшим
и, именно, абсолютно кратчайшим. В противном случае возникает по пп. 168
и 172 противоречие с нашим предположением.
ив. Замечание 5. Геодезический путь есть всегда кратчайший путь
между любыми двумя достаточно близкими соседними положениями, находя-
щимися на конечном расстоянии друг от друга.
Пусть между двумя любыми положениями рассматриваемого геодези-
ческого пути будет некоторое количество других геодезических путей.
С одним из этих путей должен совпадать абсолютно кратчайший путь
(п. 172) между этими положениями. Если теперь мы будем сближать оба
положения вдоль рассматриваемого геодезического пути, то длина этого
пути и одновременно длина абсолютного кратчайшего пути будут стре-
миться к нулю, в то время как остальные геодезические пути остаются
конечными. По крайней мере, начиная от некоторого конечного расстояния
между положениями, геодезический путь, вдоль которого оба положения
сближаются, должен совпасть с абсолютно кратчайшим из них.
177. Аналитическое представление. Необходимым и достаточ-
ным аналитическим условием геодезического пути является требование,
чтобы интеграл элементов пути п. 99 [184], а именно J ds, взятый между
какими-нибудь двумя положениями пути, имел вариацию, равную нулю,
если координатам пути сообщают любые непрерывные вариации, предпола-
гая лишь, что: 1) эти вариации исчезают на пределах интеграла и 2) вариа-
ции координат и их дифференциалы удовлетворяют уравнениям условий
системы. Необходимое и достаточное условие для этого получается из диф-
ференциальных уравнений, которым должны удовлетворять координаты
пути, рассматриваемые как функции любой переменной, и которые, следо-
вательно, будут дифференциальными уравнениями геодезического пути.
ns. Выполнение этих дифференциальных уравнений для всех точек возмож-
ного пути является одновременно необходимым условием (п. 172) того,
чтобы путь был кратчайшим, и, следовательно, эти дифференциальные урав-
нения являются одновременно'дифференциальными уравнениями кратчай-
шего пути. Равенство нулю вариации интеграла, однако, не является доста-
точным условием того, чтобы путь между двумя конечными положениями
был кратчайшим. Для этого необходимо, чтобы для каждой допустимой
вариации координат вторая вариация интеграла была существенно
520
Г. ГЕРЦ
положительной. Для достаточно близких соседних положений пути, ко-
торые удовлетворяют дифференциальным уравнениям, это условие (п. 176)
всегда автоматически выполняется.
79. Задача 1. Представить в прямоугольных координатах дифферен-
циальные уравнения геодезического пути материальной системы.
Зп прямоугольных координат х„ которые мы сначала рассматриваем
как функции любой переменной, должны до и после вариации удовле-
творять z уравнениям (п. 128):
. Зп
xL, dx, = 0. (а)
V=1
Зп вариаций dx„ связаны, следовательно, i уравнениями, получаемыми
из уравнения (а) варьированием:
Зп Зп Зп о
2 xL,ddx, + = °- (ь>
v=l v—1 д—1
Так как длина ds элемента пути зависит не от х„ а только от dx„ то его
вариация будет
dds = <5 dx, = у -^~ddx,.
ЪйХр ddxv
v= 1 1
После такой предпосылки следует положить:
д J ds = (' 6 ds — 0. (с)
По правилам вариационного исчисления мы умножим каждое уравнение
(Ь) на пока произвольные функции от координат х, и сложим сумму
левых сторон полученных уравнений (она равна нулю) с вариациями элемен-
тов интеграла. Посредством интегрирования по частям исключаем диффе-
ренциалы вариаций; наконец, полагаем равными нулю множители при
произвольных вариациях Ьх,. Таким образом, получаем Зп дифференциаль-
ных уравнений вида
которые вместе с уравнениями (а) образуют Зп i уравнений для опреде
ления Зп + z функций х, и Эти дифференциальные уравнения являются
необходимыми условиями для исчезновения вариации интеграла. Всякий
геодезический путь удовлетворяет этим же уравнениям, следовательно, это
есть искомое решение задачи.
во. Примечание 1. Дифференциальные уравнения п. 179 являются
также и достаточными условиями для того, чтобы путь был геодезическим.
Ибо, если они выполняются, то вариация интеграла J ds равна членам,
которые при интегрировании по частям появляются перед знаком интеграла,
следовательно, обозначив через 0 и 1 верхний и нижний пределы, полу-
чим
Если мы допустим, таким образом, что для двух каких-нибудь положений
пути вариации 8х, равны нулю, то исчезает также вариация интеграла
между теми же положениями как пределами этого интеграла, и поэтому
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
521
требуемое для геодезических путей достаточное аналитическое условие
выполнено согласно (177).
181. Примечание 2. Если мы пользуемся в качестве независимой пере-
менной длиной пути, то, принимая во внимание пп. 55 и 100, можно урав-
нения (d) п. 179 после деления на ds написать в виде уравнений
4* + = (а)
L = 1 L = 1 /2--' '
которые вместе с i уравнениями, полученными в результате дифференци-
рования уравнения (а) п. 179, т. е. уравнениями
in Зп ЗП
+ (b)
V 1 11=1/2=1
определяют Зп + i неоднородных линейных уравнений для нахождения
Зп + i величин х" и £ и, таким образом, определяют эти величины как
однозначные функции х„, х'„ и
182. Примечание 3. Имея в виду п. 72, уравнения (а) п. 181 можно
записать в такой форме:
У4- 4 <»s м)=- 2 (4г - 44) ь к.
Следовательно, уравнения (а) п. 181 дают представление о том, как должно
изменяться направление при одном и том же заданном начале, для того
чтобы путь был геодезическим. Именно, каждое отдельное уравнение дает
изменение наклона кривой относительно определенной прямоугольной коор-
динаты.
18з. Задача 2. Выразить дифференциальные уравнения геодезического
пути материальной системы в ее обобщенных координатах рв.
Пусть г координат рв связаны к уравнениями п. 130
^pxedpe = O (а)
0=1
и, следовательно, г вариаций dpQ связаны уравнениями
^Р^аёРв + ^^-sPadPe = o. (b)
0=1 * 0=1 сг= 1 “°
Длина бесконечно малого перемещения ds зависит теперь от всех dpe, ре..
Следовательно,
Затем следует положить
6 [ ds = J 6 ds = 0. (с)
Поступая по правилам вариационного исчисления точно так, как в п. 179,
и обозначая через пх множитель х-го уравнения (Ь), получим г дифферен-
циальных уравнений вида
“ (w) - ж+ii i (44 - 44)я- * - °’ w>
184.
185.
522 г. герц
которые вместе с уравнениями (а) дают г + к дифференциальных уравнений
для г + к функций ре и 7iK. Эти уравнения, являющиеся необходимыми
условиями для исчезания вариаций, выполняются, следовательно, для всех
положений геодезического пути; таким образом, они содержат решение
поставленной задачи.
Примечание 1. Дифференциальные уравнения (d) п. 183 являются
также достаточными условиями для того, чтобы путь был геодезическим.
Ибо если они выполняются, то вариация длины пути (см. п. 180) удовлетво-
ряет условию
Если мы допускаем, таким образом, что для каких-нибудь двух положений
пути вариации координат исчезают, то исчезает и вариация интеграла между
теми же положениями как пределами, и поэтому для геодезического пути
выполняются желаемые аналитические условия (п. 177).
Примечание 2. Если мы в качестве независимой переменной выбе-
рем длину пути, то найдем г уравнений геодезического пути, получающихся
вследствие того, что мы делим уравнение (d) п. 183 на ds и для ds подставляем
его значение, выраженное через ре и dpe, согласно уравнению (d) п. 57:
1 да ат
2 дре
х=
к 1
лхр’а = 0. (а)
Эти уравнения вместе с к вытекающими из уравнения (а) п. 183 уравнениями
Q— 1 Q— 1 СГ= 1
др*е
Э Ра
Р'вРа = 0
(Ь)
к
+ ^Рхе^х
Х= 1
к
<Эрг .
. о
388.
187.
дают г + к неоднородных линейных уравнений для г + к величин р", тг'
и представляют вместе с тем эти величины как однозначные функции ре,
р’е и лх.
Примечание 3. Вводя в качестве независимого переменного длину
пути и имея в виду уравнения п. 92, получим уравнения (а) п. 185 в виде:
~ (YaK cos (s, рв)) =
сг=1т —1 х—1 х=1сг=1 г
т. е. получим уравнения, характеризующие изменение направления геодези-
ческого пути с изменением его длины. А именно, каждое отдельное урав-
нение указывает, как изменяется наклон этого пути относительно соответ-
ствующей координаты ре.
Замечание 1. Геодезический путь не может быть определен только
лишь заданием положения и направления одного его элемента, ибо из дан-
ного положения в данном направлении возможно провести бесконечное
число геодезических путей. Если для некоторого положения пути даны
рв, ре и к величин лх, то они по п. 185 однозначно определяют ближайший
элемент, и, следовательно, продолжение пути возможно однозначно опре-
деленным образом. Задание направлений пути в этом заданном положении
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
523
дает только величины рв и р'е и, следовательно, не удовлетворяет условиям
геодезического пути, но допускает, если нет налицо особых отношений,
/с-кратную бесконечность геодезических путей.
188. Замечание 2. Если дифференциальные уравнения рассмотренной
системы не допускают интеграла, то из 2г величин ре и р', которые определяют
положение и направление в системе, 2г — к величин могут быть выбраны
произвольно, а именно, г величин ре и г — к величин ре. Эти 2г — к произ-
вольных величин вместе с к произвольными величинами в данном поло-
жении могут рассматриваться как 2г произвольных постоянных, которые
вместе с дифференциальными уравнениями (а) п. 185 определяют геодези-
ческий путь и которые также должны содержаться в интегралах этих урав-
нений, ибо по п. 173 можно связать каждое возможное положение системы
с каждым другим через геодезический путь. Именно, если дифференциаль-
ные уравнения системы не допускают конечных соотношений между ре,
то каждая мыслимая система , значений зтих величин является также воз-
можной системой значений; следовательно, произвольное начальное и
конечное положения системы определются 2г произвольными значениями
этих координат.
189. Замечание 3. Для каждого интеграла дифференциальных урав-
нений материальной системы число постоянных, которые определяют геоде-
зический путь, уменьшается на два.
Именно, если уравнения условий дают I конечных уравнений между ре,
то можно из г координат ре принять за произвольные лишь г — I, и, следо-
вательно, из 2г величин ре и р' произвольных будет только 2г — I — к.
В этом случае дифференциальные уравнения могут быть приведены посред-
ством умножения на соответствующие множители и сложения к такому виду,
что I из них дают непосредственно интегрируемые уравнения, а именно,
те уравнения, которые получаются в результате дифференцирования I конеч-
ных соотношений. Для каждого такого уравнения с индексом Я имеем:
дРе дра ~ '
Следовательно, в этом случае соответствующие величины лц исчезают из
уравнений (а) п. 125, и все р” и л'х однозначно определяются через к — I
значений остальных лх. В общем, следовательно, остаются еще 2г — 21
произвольных определяющих элементов; два элемента исчезли для каждого
конечного уравнения.
Впрочем, эти 2г — 21 произвольных постоянных все же достаточны,
как это и должно быть, для того чтобы каждое возможное положение связать
с каждым другим возможным положением посредством геодезического пути,
ибо если между ре существует I конечных уравнений, то достаточно про-
вести путь так, чтобы два его положения имели г —• I общих координат с
каждым данным положением. Совпадение в отношении остальных координат
будет иметь место само по себе.
Ш. Соотношения между прямейшими
и геодезическими путями
1м- Теорема. Для голономйых систем каждый прямейший путь есть
геодезический, и наоборот.
Для доказательства воспользуемся прямоугольными координатами. Если
система голономная, то имеется i уравнений условий, которые умножением
на соответствующие множители и сложением в необходимом порядке получат
интегрируемую форму, т. е. их левые части совпадут с точными диффёрен-
524
Г. ГЕРЦ
циалами интегралов уравнений условий. Для каждой
1^, имеем тогда
Эх/^ Ъх[,у q
Эх» Эхи ’
системы значений:
(а)
и дифференциальные уравнения геодезического пути будут в соответствии
с уравнениями (а) п. 181
-^х;+ ^xL»&=.0. (b>
Эти последние отличаются от уравнений (d) п. 155 прямейшего пути только
обозначениями:
^-1-Дх^О, (с
так как ни £г, ни Bt не встречаются в остальных уравнениях. Каждый
возможный путь, который после подходящего определения £г удовлетворяет-
первому уравнению, будет удовлетворять и второму, если положить 2^ = ££_
Точно так же каждое решение уравнений (с) является одновременно реше-
нием уравнений (Ь). Удовлетворение уравнениям (Ь) и (с) является достаточ-
ным условием того, чтобы путь был геодезическим или также прямейшим.
191. Следствие 1. В голономной системе между какими-нибудь двумя
возможными положениями в возможном направлении возможен лишь
единственный геодезический путь (п. 161).
«г. Следствие 2. В голономной системе между какими-нибудь двумя
возможными положениями' всегда возможен по крайней мере один прямей-
ший путь (п. 173).
193. Теорема. Если в материальной системе каждый геодезический путь
есть одновременно и прямейший, то система голономная.
Из каждого возможного положения в данном направлении, по п. 161,
возможен лишь единственный прямейший путь, следовательно, в соответ-
ствии с предпосылкой, единственный геодезический путь. Точно так же-
согласно п. 173 каждое возможное положение может быть достигнуто посред-
ством одного из этих путей. Следовательно, число свобод движения системы
равно числу ее независимых координат, т. е. согласно п. 146 система является
голономной.
194. Следствие. Если система не является голономной, то каждый геоде-
зический путь, вообще говоря, не является в то же время прямейшим.
Это следует из того, что здесь в каждом направлении возможно провести
лишь один прямейший, но много геодезических путей (пп. 161 и 187).
195. Замечание. В неголономных системах каждый прямейший путь,
вообще говоря, не является геодезическим. Это положение будет доказано,
коль скоро мы укажем такую систему, в которой прямейшие пути не нахо-
дятся среди геодезических. Примем ради простоты, что между г координа-
тами ре системы имеется лишь одно-единственное неинтегрируемое урав-
нение условия, и пусть оно имеет вид
= (а>
е=1
Сделаем предположение, что каждый прямейший путь есть в то же время
и геодезический; тогда возможно было бы для каждой возможной системы
значений ре и р'е так определить, по крайней мере, одну систему значений р’„.
чтобы одновременно удовлетворить как уравнениям п. 158, так и урав-
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
525
нениям (а) п. 185. Поэтому для всех возможных ре и р'е должны быть удо-
влетворены уравнения, которые получаются от попарного вычитания указан-
ных уравнений:
Ст = 1
Это есть г уравнений для величины (П1—они совместны друг
с другом лишь тогда, когда для всех пар значений р и т удовлетворяется
уравнение
1 ( дР1<г _ 8pig 'l n> _ 1 f dPio_dPit 1 n'
Pie I dpg dpa J ° Pit “l l Эрг dpa J
Если теперь в г — 1 этих зависимых уравнений одну из величин р' выразим
с помощью уравнений (а) через остальные, то отношения между последними
будут совершенно произвольными величинами. Коэффициент при каждой
такой величине должен равняться нулю. Мы получим, таким образом, как
необходимое следствие нашего предположения, (г — I)2 уравнений между г
функциями р1е и их г2 первыми частными производными. В особых случаях
эти уравнения могут быть совокупно удовлетворены, ибо они удовлетво-
ряются, если уравнения (а) являются интегрируемыми. Однако вообще мы не
имеем права предполагать функции pv подчиненными даже одному-един-
ственному условию и, следовательно, вообще наше предположение было
недопустимо. Этим самым утверждение доказано.
Выводы (от п. 190 до п. 195). В голономных системах содержание
понятий геодезического и прямейшего пути совпадает; в неголономных
системах эти понятия имеют в общем совершенно различные значения.
* *
*
Раздел 2
ОСНОВНОЙ ЗАКОН
308. В качестве основной задачи механики мы рассматриваем изучение явле-
ний и зависимых от времени свойств материальных систем, выводимых из
независимых от времени свойств этих систем. Для решения этой задачи
мы имеем следующий и только следующий опытно принятый основной.
зо9. закон [185]:
Основной закон. Каждая свободная система пребывает в состоя-
нии покоя или равномерного движения вдоль прямейшего пути (Systema
omne liberum perseverare in statu suo quiescendi vel movendi uniformiter in
directissimam).
3io. Замечание 1. Основной закон содержит высказывание, которое отно-
сится только к свободным системам. Однако, так как каждая часть свободной
системы может быть несвободной, то из основного закона можно вывести
следствия, которые будут относиться и к несвободным системам.
зц. Замечание 2. Совокупность следствий, которые можно извлечь из
основного закона о свободной системе и ее несвободных частях, составляет
содержание механики. Других причин движения, кроме тех, которые выте-
кают из основного закона, наша механика не знает. Познание основного
закона, соответственно нашему пониманию последнего, есть не только
необходимое, но также и достаточное условие для решения задач механики,
и это есть существенная часть нашего утверждения.
312. Замечание 3. Определение. Каждое движение какой-нибудь
материальной системы или ее частей, которое происходит в согласии с основ-
526
Г. ГЕРЦ
ным законом, мы называем естественным движением системы в противопо-
ложность всем мыслимым и возможным движениям последней (пп. 257, 258).
Механика, следовательно, имеет дело с естественными движениями свобод-
ных материальных систем и их частей.
3t3. Замечание 4. Мы рассматриваем явления телесного мира как меха-
нически, а следовательно, и физически объяснимые, когда их можно познать
как мыслимо необходимые следствия основного закона и независимых от
времени свойств материальных систем.
эм. Замечание 5. Полное объяснение явлений телесного мира требует,
таким образом: 1) их механического или физического объяснения; 2) объяс-
нения основного закона; 3) объяснения не зависящих от времени свойств
телесного мира.
Однако второе и третье из этих объяснений мы не причисляем к области
физики.
Обоснованность основного закона
315. Основной закон мы рассматриваем как вероятный результат всеобщего
опыта. Говоря точнее, основной закон является гипотезой или допущением,
заключающим в себе большое количество опытов и не отвергающимся ника-
ким опытом. Что касается отношения естественных материальных систем
к основному закону, то их можно разделить на три класса.
эм. 1. Первый класс охватывает такие системы тел или части систем, которые
удовлетворяют условиям свободной системы по непосредственному резуль-
тату опыта, в отношении которых основной закон находит применение без
дальнейших оговорок. Сюда относятся, например, твердые тела, движу-
щиеся в пустом пространстве, или идеальные жидкости, движущиеся в
замкнутых сосудах. Из опытов над такими системами тел выведен основной
закон. В отношении этого первого класса основной закон представляет
чистый факт опыта.
зп. 2. Второй класс охватывает такие системы тел, которые тогда и
только тогда подчиняются предпосылкам основного закона или которые
тогда и только тогда следуют основному закону, когда к непосредст-
венному чувственному опыту прибавляются некоторые гипотезы о их
природе.
а) Сюда, относятся, во-первых, такие системы, которые, по-видимому,
не удовлетворяют условию непрерывности в отдельных положениях, следо-
вательно, те системы, в которых происходят удары в самом широком смысле
слова.
Здесь достаточна в высшей степени вероятная гипотеза, что все прерыв-
ности являются только кажущимися, и исчезают, как только мы прини-
маем во внимание достаточно малые элементы пространства и времени.
б) Сюда, во-вторых, относятся такие системы, в которых действуют силы
дальнодействия, силы теплоты и другие не всегда полностью понятые при-
чины движения.
Если мы приводим в состояние покоя осязаемые тела таких систем, то
они не остаются в этом состоянии, а после освобождения снова начинают
двигаться. Следовательно, они, видимо, не подчиняются основному закону,
однако здесь можно ввести гипотезу, что осязаемые тела не являются един-
ственными массами, их видимые движения не являются единственными дви-
жениями таких систем, а могут существовать еще другие скрытые движения
в системах, которые снова сообщаются осязаемым телам, как только мы их
вновь освободим. Об этих скрытых движениях можно, очевидно, всегда
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ:
527
сделать такие предположения, чтобы полные системы подчинялись основ-
ному закону.
В отношении этого второго класса естественных систем основной закон
носит характер довольно вероятной и, насколько можно судить, всегда
допустимой гипотезы.
318. 3. Третий класс содержит такие системы тел, движения которых нельзя
представить как необходимые следствия основного закона и для которых
не могут быть даны определенные гипотезы, подчиняющие их основному
закону. Сюда относятся, например, такие системы, которые содержат живые
существа. Наше незнание всех относящихся сюда систем настолько, однако,
велико, что мы не имеем основания утверждать, что невозможно введение
соответствующих гипотез и что явления в этих системах противоречат
основному закону.
В отношении этого третьего класса системы тел основной закон носит,
таким образом, характер лишь допустимой гипотезы.
319. Примечание. Если допустимо принять, что в природе нет никаких
свободных систем, которые не подчинялись бы основному закону, то допу-
стимо рассматривать вообще каждую систему именно как такую свободную
систему или как часть такой системы; при этих предположениях в природе
не будет в действительности существовать никакой системы, движения
которой не определялись бы посредством ее связей и основного закона..
Ограничение основного закона
зге. В системе тел, которая подчиняется основному закону, не существует
никаких новых движений, а также никаких причин новых движений, а
только продолжение уже существовавших движений определенным простей-
шим способом. Едва ли можно отказаться от того, чтобы не признать такую
систему тел неживой или мертвой.
Если бы мы захотели распространить это положение на всю природу
как наиболее всеобщую свободную материальную систему и сказать, что
вся природа следует с одинаковой скоростью по прямейшему пути, то мы
оказались бы в противоречии со здравым смыслом и естественным чувством.
Поэтому представляется более осторожным ограничить вероятную силу
основного закона неживой системой. Это совпадает с высказыванием о том,
что основной закон, примененный к системам третьего класса (п. 318),
является маловероятной гипотезой.
321. В последующем это соображение не принято во внимание, и не пред-
ставляется необходимым принимать его во внимание, потому что, как мы
видели, основной закон и в отношении этих систем представляет гипотезу,
если и не вероятную, то во всяком случае допустимую.
Если бы можно было доказать, что живые системы противоречат основ-
ному закону, то они выделились бы в результате этого из механики. Одновре-
менно наша механика потребовала бы тогда некоторого дополнения в отно-
шении тех несвободных систем, которые сами хотя и являются неживыми,
однако представляют собой части таких свободных систем, которые содержат
живые существа. Это дополнение могло бы быть дано согласно опытам в
следующем виде: живые системы не могут оказывать на неживые системы
иного влияния, чем то, которое могло бы быть оказано неживой системой.
В соответствии с этим возможно заменить каждую живую систему неживой,
которая может представить первую в рассматриваемой проблеме и задание
которой необходимо для того, чтобы рассматриваемую проблему сделать
чисто механической.
528
Г. ГЕРЦ
згг. Примечание. В обычном представлении механики подобная ого-
ворка считается излишней, и принимается за истину тот факт, что основной
закон одинаково охватывает как живую, так и неживую природу. Это допу-
стимо в обычном изложении, так как здесь мы оставляем для сил, входящих
в основные законы, самое широкое поле действия и оставляем за собою
право провести позже исследование за пределами механики — являются
ли силы живой и мертвой природы различными и какие свойства отличают
одни от других. В нашем же изложении следует соблюдать большую осто-
рожность, так как большое число опытов, которые прежде всего относятся
к неживой природе, уже включено в основной закон, и возможность более
позднего разграничения делается значительно уже.
Анализ основного закона
зга. Выбранная формулировка основного закона намеренно примыкает
непосредственно к формулировке первого закона движения Ньютона.
Эта формулировка содержит три независимых высказывания, а именно:
1. Свободная система не следует другим возможным путям, кроме пря-
мейшего пути.
2. Различные свободные системы описывают за одинаковые промежутки
времени пропорциональные друг другу длины путей.
3. Измеряемое часами время (п. 298) [186] возрастает пропорционально
длине пути какой-нибудь движущейся свободной системы.
Только первые два высказывания содержат опытные факты большой
общности. Третье же оправдывает лишь наше произвольное установление
об измерении времени и основано на специальном опыте, а именно, что хро-
нометр в определенном отношении ведет себя как свободная система, хотя
в точном понимании он не является таковым.
Метод применения основного закона
324. Если ставится определенный вопрос относительно движения материаль-
ной системы, то неизбежно должен иметь место один из следующих трех
случаев:
1. Вопрос может быть поставлен таким образом, что основной закон
является достаточным для определенного ответа. В этом случае проблема
является определенной механической проблемой, решение которой полу-
чается в результате применения основного закона.
зге. 2. Вопрос может быть поставлен таким образом, что основной закон
непосредственно не является достаточным для определенного ответа на
него, но постановка вопроса допускает одно или несколько допущений,
посредством которых делается возможным применение основного закона.
Если возможно одно-единственное допущение и если мы предполагаем,
что проблема является механической, то это допущение и должно иметь
место; следовательно, проблема может рассматриваться как определенная
механическая проблема, решение которой получается в результате при-
менения дополнительного допущения и основного закона.
Если возможно несколько допущений и если мы предполагаем, что
проблема вообще является механической, то должно иметь место одно из
этих допущений; проблема может рассматриваться как неопределенная
механическая проблема, и применение основного закона к различным воз-
можным допущениям дает возможное решение.
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
529
зге. 3. Вопрос может быть поставлен таким образом, что основной закон
не является достаточным для ответа и что не могут быть добавлены никакие
допущения, посредством которых применение основного закона сделалось
бы возможным. В этом случае в самой постановке вопроса должно содер-
жаться противоречие с основным законом или со свойствами систем, к кото-
рым относится вопрос; следовательно, поставленный вопрос вообще не
может рассматриваться как механическая проблема.
Приближенное применение основного закона
327. Замечание. Если из заданных уравнений условий системы вместе
с основным законом вытекают уравнения, которые имеют форму уравнений
условий, то для определения движения системы безразлично, рассматриваем
ли мы эти первоначальные уравнения условий или наряду с ними и вместо
них выведенные уравнения условий в качестве уравнений связей системы.
Действительно, если мы отбросим из первоначальных уравнений усло-
вий все те, которые вытекают аналитически из оставшихся и из выве-
денных уравнений условий, то оставшимся первоначальным выведенным
уравнениям удовлетворяют только возможные перемещения, хотя в общем
и не все перемещения, которые были возможны в соответствии с первона-
чальными уравнениями. Путь, который был прямейшим при первоначаль-
ном более широком многообразии, тем более будет таковым при теперешнем
более ограниченном многообразии. И так как среди этого более ограничен-
ного многообразия должны оказаться естественные пути, то они будут являть-
ся прямейшими среди тех, которые возможны согласно теперешним урав-
нениям условий, что и требовалось доказать.
зге. Следствие 1. Если из опыта мы знаем, что система удовлетворяет
фактически некоторым уравнениям условий, то для применения основного
закона безразлично, являются ли эти связи первоначальными, т. е. необъяс-
нимыми дальше физически (п. 313), или они являются такими связями,
которые могут быть представлены как необходимые следствия других
связей и основного закона, которые, следовательно, допускают механи-
ческое объяснение.
329. Следствие 2. Если из опыта мы знаем, что определенные уравнения
условий материальной системы удовлетворяются только приближенно, а не
точно, то также допустимо рассматривать эти уравнения условий как при-
ближенное представление истинных связей и получать в результате приме-
нения основного закона приближенные высказывания о движении системы,
хотя несомненно, что эти приближенные уравнения условий представляют
не первоначальную непрерывную закономерную связь, но могут рассматри-
ваться только как приближенные следствия неизвестных связей и основного
закона.
ззо. Примечание. На предыдущем следствии основывается каждое
практическое применение нашей механики. Ибо достаточно точное исследо-
вание показывает, что для всех связей между обычными ощущаемыми мас-
сами, которые открывает физика и применяет механика, они имеют только
приближенное значение и поэтому могут быть только производными связями.
Мы вынуждены искать в мире атомов последние первоначальные связи,
а они нам не известны. Но если бы они даже были известны, мы должны
были бы отказаться от их использования для практических целей и посту-
пить так, как мы поступаем, ибо действительное овладение каждой пробле-
мой требует всегда ограничения рассмотрения чрезвычайно малым числом
переменных, в то время как обращение к связям атомов сделало бы необхо-
530
Г. ГЕРЦ
димым введение бесконечного числа переменных. Тот факт, что мы можем,
однако, применять основной закон в указанном нами смысле, не является,
наряду с основным законом, новым фактом опыта, а является необходимым
следствием самого основного закона.
Раздел 3
ДВИЖЕНИЕ СВОБОДНЫХ СИСТЕМ. ОБЩИЕ СВОЙСТВА ДВИЖЕНИЯ
1. Определенность движения
зз1. Теорема. Естественное движение свободной системы однозначно
определено посредством задания положения и скорости системы в определен-
ное время. Ибо путь системы однозначно определен положением и направле-
нием скорости (п. 161) [187]. Постоянная скорость системы на ее пути опре-
деляется величиной скорости в начальный момент.
зз2. Следствие 1. Посредством состояния (п. 261) свободной системы
в данный момент однозначно определяются ее будущее и предшествующее
состояния во все моменты времени.
ззз. Следствие 2. Если в каком-нибудь положении скорость системы
может обращаться (что допустимо с точки зрения уравнений условий),
то система будет пробегать положения своего предыдущего движения в
обратной последовательности.
зз4. Замечание 1. В свободной голономной системе (п. 123) всегда суще-
ствует естественное движение, которое переводит систему в заданное время
из произвольно заданного начального положения в произвольно заданное
конечное положение, ибо естественный путь между обоимц положениями
всегда возможен (п. 192) [188]; на этом пути всякая скорость является
допустимой, следовательно, также и такая, которая позволяет системе
пройти заданный отрезок в заданное время.
ззз. Примечание. Предыдущее замечание остается верным, если вместо
времени перехода поставить скорость системы на ее пути или энергию
системы.
ззб. Замечание 2. Свободная система, которая не является голономной,
не может быть переведена из любого возможного начального положения
в любое возможное конечное положение при помощи естественного дви-
жения (п. 162).
зз7. Теорема. Естественное движение свободной голономной системы
определяется заданием двух положений, в которых система должна нахо-
диться в два определенных момента времени, ибо этим заданием определяется
путь системы и скорость на этом пути.
ззз. Примечание 1. Определение естественного движения заданием
двух его положений является, вообще говоря, многозначным; оно будет
однозначным, если расстояние обоих положений не превышает известной
конечной меры, а длина описанного пути должна быть порядка этого расстоя-
ния (пп. 167, 172, 176, 190) [18«].
ззз. Примечание 2. Естественное движение свободной голономной
системы определяется двумя положениями системы и промежутком времени
перехода, или скоростью системы на ее пути, или энергией системы.
2. Сохранение энергии
340. Теорема. Энергия свободной системы, находящейся в произвольном
движении, не изменяется со временем, ибо энергия состоит (п. 282) из
массы системы, а также из скорости, которые не меняются.
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
531
341. Примечание 1. Из трех отдельных высказываний, на которые мы
разложили основной закон (и. 323), мы используем для доказательства
предложения лишь второе и третье.
Мы можем сделать третье ненужным и высказать теорему независимо
от определенного характера измерения времени, если мы представим ее
в такой форме: отношение энергий каких-нибудь двух любых движений
свободной системы не изменяется со временем.
342. П р и м е ч а н и е 2. Положение о сохранении энергии есть необходимое
следствие основного закона. Наоборот, из положения о сохранении знергии
вытекает второе отдельное утверждение этого закона, однако не вытекает
первое, и, следовательно, не вытекает утверждение всего закона. Можно
было бы мыслить естественные системы, для которых имела бы силу тео-
рема о сохранений энергии и которые, тем не менее, не двигались бы по
прямейшим путям. Например, можно было бы мыслить, что теорема о сохра-
нении энергии имеет значение также для живых систем и все-таки послед-
ние, несмотря на зто, не подчинялись бы нашей механике. Наоборот, воз-
можно представить естественную систему, которая движется по прямей-
шему пути и для которой, однако, закон сохранения энергии не имеет места.
343. Примечание 3. В последнее время высказывают мнение, что энер-
гия движущейся системы связана с определенным местом и перемещается
от места к месту. Позтому энергию сравнивают с материей как в зтом
смысле, так и в смысле неразрушимости.
\ Такое понимание энергии, очевидно, сильно отклоняется от представле-
ний развиваемой здесь механики. С равным, однако, не с большим правом,
можно сказать: энергия' движущейся системы существует в месте системы;
можно также сказать: скорость движущегося тела связана с местом послед-
него. Этот последний способ выражения, однако, неупотребителен.
3. Наименьшее ускорение
344. ''Теорема. Свободная система движется так, что величина ее ускоре-
ния в каждый момент является наименьшей; речь идет об ускорениях,
которые согласуются с мгновенным положением, мгновенной скоростью и
связями системы.
Ибо квадрат величины ускорения согласно пп. 280 и 281 равен w4c2 + й2.
Так как теперь для естественного движения г> = 0 и, следовательно,
v имеет постоянное значение, а с имеет наименьшее значение, допускаемое
данным направлением движения и связями системы, то ускорение само
принимает наименьшее значение, согласующееся с указанными ограничи-
вающими обстоятельствами.
345. Примечание 1. Высказанное в предыдущей теореме свойство
естественного движения определяет это движение однозначно, и поэтому
эта теорема может вполне заменить основной закон, ибо если выражение
w2 с4 1'2
должно быть минимумом, то прежде всего должно быть i> — 0, следовательно,
система проходит путь с постоянной скоростью; далее, или v — 0, но тогда
система покоится, или с должно быть минимумом, и тогда путь будет пря-
мейшим.
з4б. Примечание 2. Теорема п. 344, представленная как основной
закон, имеет перед используемой формой также и то преимущество, что она
формулирует закон как единое неделимое высказывание, а не как внешнее
532
Г. ГЕРЦ
объединение в одно предложение отдельных высказываний. Однако исполь-
зуемая форма имеет то преимущество, что она позволяет яснее и отчетливее
распознать смысл отдельных положений.
4. Кратчайший путь
347- Теорема. Естественный путь свободной голономной системы между
какими-нибудь двумя, достаточно близкими положениями короче, чем
какой-нибудь другой возможный путь между теми же положениями. Ибо
в голономной системе прямейший путь между достаточно близкими поло-
жениями является одновременно кратчайшим (пп. 190, 176) [19°].
348. Примечание 1. Если отбросить ограничения относительно доста-
точной близости положений, то нельзя утверждать, что естественный путь
короче, чем все другие пути, а также что он короче, чем все соседние пути;
однако всегда имеет место утверждение, содержащееся в предыдущей
теореме, что вариация длины пути исчезает (пп. 190, 171) [191] при пере-
ходе к любому близкому возможному пути.
349- Примечание 2. Предыдущая теорема соответствует принципу
наименьшего действия в форме Якоби. Ибо если мы назовем через mv
массу, ds„ — длину пути v-й точки системы в определенный момент времени,
то теорема выражает, что вариация интеграла
= [£mrds*
v= 1
равна нулю при естественном движении системы, а это и есть форма Якоби
принципа наименьшего действия.
П р и м е ч а н и е 3. Для того чтобы представить отношение между
теоремой п. 347 и принципом Якоби, мы можем сказать: соответственно
обычному пониманию механики эта теорема представляет собой частный
случай теоремы Якоби, а именно случай, когда силы не действуют.
По нашему пониманию, наоборот, предпосылки полной теоремы Якоби
следует считать более узкими, а теорема Якоби является специальной фор-
мой выражения нашей теоремы.
Примечание 4. Теорема п. 347 не содержит теорему о сохранении
энергии ни как предпосылку, ни как следствие, являясь полностью от нее
независимой. Вместе с теоремой об энергии она может вполне заменить
основной закон, однако лишь для голономных систем. Применяя эту теорему
к другим системам, мы также получим определенные движения, но эти дви-
жения будут противоречить основному закону (п. 194) [192 ], следовательно,
дадут неправильное решение поставленных механических проблем.
5. Кратчайшее время
Теорема. Естественное движение свободной голономной системы
приводит систему из данного начального положения в достаточно близкое
конечное положение за более короткое время, чем какое-нибудь другое
возможное движение с одинаковым постоянным значением энергии, ибо
если для всех сравниваемых движений энергия и, следовательно, скорость
пути одинаковы, то время перехода пропорционально длине пути и, сле-
довательно, является наименьшим для кратчайшего, т. е. для естествен-
ного, пути.
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ механики»
533
ззз. Примечание. Если отбросить ограничения относительно достаточ-
ной близости положений, то время перехода не будет обязательно мини-
мумом, но оно всегда сохраняет свойство быть одинаковым для естествен-
ного пути и для всех бесконечно близких к нему возможных путей (п. 348).
354. Следствие 1. Для естественного пути свободной голономной системы
между данными, достаточно близкими, концевыми положениями интеграл
от энергии по времени меньше, чем для каких-нибудь других возможных
движений с тем же самым постоянным значением энергии, ибо указанный
интеграл равен произведению данного постоянного значения энергии на
промежуток времени перехода.
355. Примечание 1. Теорема п. 352 в форме следствия п. 354 соот-
ветствует принципу наименьшего действия Мопертюи. Чтобы выразить точно
отношение к этому принципу, мы должны выражаться так же, как в п. 350.
356. Примечание 2. Следствие п. 354, а также теорема п. 352 предпола-
гают для сравниваемых друг с другом движений энергию и время посто-
янными. Вместе с предположением, что естественное движение находится
среди сравниваемых, они достаточны для определения естественного дви-
жения и могут заменить основной закон, но только для голономных систем.
Их предпосылки, примененные к другим системам, привели бы к неправиль-
ным механическим решениям.
357. Следствие 2. Свободная голономная система из своего начального
положения в заданное время переносится естественным движением на боль-
шее прямейшее расстояние, чем посредством какого-нибудь возможного
движения, которое происходит с тем же постоянным значением энергии.
6. Наименьший временной интеграл энергии
358. Теорема. Временной интеграл энергии при переходе свободной голо-
номной системы из данного начального положения в достаточно близкое
конечное положение меньше для естественного движения, чем для любого
другого возможного движения, которое переводит систему в одинаковое
время из данного начального положения в заданное конечное положение.
Именно, если мы сравним сначала движения на одном и том же пути
длины S, то среди них интеграл от энергии по времени достигает минимума
для тех движений, для которых скорость v является постоянной. Ибо, так
как сумма величин v dt имеет заданное значение, то сумма величин w2 dt
достигнет тогда и лишь тогда наименьшего значения, если все v равны.
Если, однако, скорость v постоянна, то интеграл от энергии по времени равен
~mS2/T, гдеТ есть продолжительность перехода. Так как Т дано, то для
различных путей системы интеграл от энергии по времени получается как
квадрат длины пути; первая величина, таким образом, как и последняя,
имеет минимальное значение для естественного пути.
359. Примечание 1. Если отбросить ограничения о достаточно близких
положениях, то интеграл от энергии по времени не необходимо имеет мини-
мум, однако его вариация всегда исчезает при переходе к другим рас-
сматриваемым движениям п. 348.
зев. Примечание 2. Предыдущая теорема соответствует принципу
Гамильтона. Если мы желаем точно выразить свое к нему отношение, то
должны поступить так же, как в п. 350.
зб1. Примечание 3. Теорема п. 358 и следствие п. 354 согласованы
между собой в том, что они среди известных классов возможных движений
выделяют естественное движение благодаря одному и тому же признаку,
534
Г. ГЕРЦ
именно, минимальному значению интеграла от энергии по времени. Однако
они существенно различаются друг от друга благодаря тому, что рассматри-
вают совершенно различные классы возможных движений.
362. Примечание 4. Теорема о сохранении энергии есть необходимое
следствие теоремы п. 358, и поэтому теорема эта, будучи представлена как
принцип, может полностью заменить основной закон, однако лишь при-
менительно к голономным системам. Если отбросить ограничение о голоном-
ности системы, то мы получим также определенные, но стоящие в противо-
речии с основным законом движения материальных систем.
Обзор пп. 347—362
збз. Если мы пользуемся теоремами пп. 347, 352, 354, 358, выражающими
свойства естественных движений, как принципами для полного или частич-
ного определения этих движений, то мы делаем происходящие в настоящее
время изменения в состоянии системы зависящими от таких особенностей
движения, которые могут наступить лишь в будущем и которые часто в
жизни человека являются желательными для достижения определенной
цели. Это обстоятельство иногда приводило физиков и философов к тому,
чтобы усмотреть в законах механики выражение сознательного намерения
в отношении будущих целей, связанного с предвидением наиболее целесооб-
разных средств. Такое понимание, однако, не является необходимым и даже
не является допустимым.
364. Что такое понимание этих принципов не необходимо, следует из
того, что свойства естественного движения, являющиеся как бы обозначе-
нием цели, познаются нами как мыслимо необходимые следствия закона,
в котором не содержится выражение предвидения будущего.
365. Что указанное понимание принципов недопустимо, следует из того,
что свойства естественного движения, которые являются обозначением
стремления к будущему результату, имеются не у всех естественных дви-
жений. Если бы природа действительно имела целью достигать кратчайшего
пути, наименьшей затраты энергии и кратчайшего времени, то невозможно
понять, как могут существовать системы, в которых, несмотря на возмож-
ность достижения этих целей, природа постоянно терпит в этом неудачу.
зев. Если желают видеть выражение определенной воли в том, что системы
среди всех возможных элементов пути выбирают всегда прямейший, то
это — слишком свободное понимание. В этом случае выражение опреде-
ленной воли можно было бы видеть в том, что естественная система выби-
рает из всех возможных движений не произвольные движения, но только
такие, которые отмечены особыми признаками и которые заранее могут быть
определены.
Аналитическое представление.
Дифференциальные уравнения движения
зет. Объяснение. Под дифференциальными уравнениями движения
системы понимаем дифференциальные уравнения, в которых время является
независимым переменным, а координаты системы — зависимыми перемен-
ными и которые вместе с начальным положением и начальной скоростью
однозначно определяют движение системы (п. 331).
зев. Задача 1. Представить дифференциальные уравнения движения сво-
бодной системы в прямоугольных координатах последней.
В уравнении (d) п. 155 [19S] мы имели дифференциальные уравнения
прямейшего пути системы в прямоугольных координатах. В эти уравнения
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
535
мы введем вместо длины пути время t в качестве независимой переменной.
По основному закону ds/dt = v независимо от t и, следовательно, от $;
поэтому мы имеем
xv = x'vv, xv = х" v2.
Если мы умножим уравнение (d) п. 155 на ти2 и положим для сокращения
mv2 3L = XL, то получим для решения задачи Зп уравнений вида
mrxr + xLv XL = 0, (а)
Ь=1
которые вместе с I уравнениями (см. уравнение (Ь) п. 155)
Зп Зп Зп Д Y
= ° (Ь)
V = 1 V=l
определяют Зл + i величин х„ и XL как однозначные функции xv и xv.
зев. Примечание 1. Уравнения движения свободной системы в форме
п. 368 называют обыкновенно уравнениями Лагранжа 1-го рода.
зто. Примечание 2. Каждое отдельное уравнение (а) п. 368 дает, после
того как определено XL, компоненту ускорения системы вдоль определенной
прямоугольной координаты системы.
371. Задача 2. Выразить дифференциальные уравнения движения свобод-
ной системы в обобщенных координатах pt.
Дифференциальные уравнения прямейшего пути, выраженные через рв,
мы находим в уравнении (с) п. 158 [194]. В эти последние введем вместо
длины пути время как независимую переменную, а также заметим, что по
основному закону
pe = P'ev, ps = p"ev2.
Следовательно, если мы уравнения (с) п. 158 умножим на mv2 и заменим
mv2 П„ через Рх, то получим г уравнений:
mj + = (а)
I и=1 а=1т=1Ч 7 )
которые вместе с к уравнениями (см. уравнения (Ь) п. 158)
Ур^ре + ^^рер'-о (Ь)
е=1 е=1а=1
определяют г + к величин рв и Рх как однозначные функции рв и рв.
372. Примечание. Используя соотношение п. 277 [195], мы запишем
уравнения движения (а) п. 371 в форме
к
mfe + ^РхеР^О-
Х=1
Каждое из этих уравнений определяет компоненту ускорения системы
вдоль координаты рв, выраженную в функции мгновенных положений и
скоростей системы.
536
Г. ГЕРЦ
373.
Следствие 1. Если мы выразим с помощью уравнения (а) п. 291
компоненту ускорения через энергию, то уравнения движения свободной
системы примут вид
d ( ЪРЕ )
di I Эр? J
^~ + 2р-р—о.
374. Примечание 1. Дифференциальные уравнения в этой форме назы-
ваются обобщенными уравнениями Лагранжа 2-го рода (см. п. 369).
375. Примечание 2. Если координата рв является свободной, то она
не встречается в уравнениях условий системы (п. 140) [196]; соответствую-
щие величины рхе равны нулю и уравнения движения, отнесенные к рв,
принимают вид
d ( ЭРЕ\ ___ дрЕ = п
dt L 0Ре J дре
В голономной системе (п. 144) всегда можно уравнения движения пред-
ставить в этой простой форме.
376. Следствие 2. Уравнения движения свободной голономной системы,
для которой имеем г свободных координат рв, можно записать в виде 2г
уравнений (пп. 289, 375) [197]:,;
а = ^
Чв Ърр ’
а =^-
q° др ’
(а)
(Ь)
из которых первые содержат лишь определения, а последние содержат
факты опыта. Уравнения движения в этой форме можно понимать как 2г
дифференциальных уравнений первого порядка, которые с 2г начальными
значениями определяют 2г величин pQ и qQ в виде функций времени.
377. Примечание 1. Уравнения (а) и (Ь) п. 376 можно назвать уравне-
ниями движения в форме Пуассона.
378. Примечание 2. Из уравнений п. 376 следуют два соотношения:
9pgg __ дрЧа z_\
дра дРв ’
дрЧе __ Эр9а
дра дре ’ V '
которые обладают простым физическим смыслом. Оба соотношения содержат
элементы опыта и служат для всякого возможного движения системы,
следовательно, могут быть использованы при определенных обстоятельствах
для проверки основного закона.
Третье аналогичное соотношение, выведенное только из равенства (а)
п. 376, было бы только следствием наших определений.
379. Следствие 3. Уравнения движения свободной голономной системы
можно записать в форме 2г уравнений (пп. 290, 289, 292, 375) [198]:
380.
даЕ • д„Е
ре = -^> =
среди которых первые содержат лишь определения, а последние — факты
опыта. Уравнения движения в этой форме можно рассматривать как 2г
дифференциальных уравнений первого порядка, которые вместе с 2г началь-
ными данными определяют в виде функций времени 2г величин рв и qe.
Примечание 1. Уравнения (а) и (Ь) п. 379 обычно называют уравне-
ниями движения свободной системы в форме Гамильтона.
ДВА ОТРЫВКА ИЗ КНИГИ «ПРИНЦИПЫ МЕХАНИКИ»
537
381. Примечание 2. Из уравнений п. 379 следуют два взаимных соотно-
шения:
Ьр„ Ърв ’ W
которые обладают простым физическим смыслом. Оба соотношения содержат
элементы опыта и выделяют естественные движения из всех возможных
движений. Они могут, таким образом, при особых обстоятельствах под-
твердить обратной проверкой основной закон. Третье аналогичное соотно-
шение, которое может быть выведено только из уравнения (а) п. 379, было
бы только следствием наших определений и, таким образом, не имело бы
механического смысла. Нужно отметить, что уравнения (а) пп. 378 и 381
представляют различные высказывания, а не одно и то же высказывание
в различной форме.
О. ГЁЛЬДЕР
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ [18«]
Во введении к своей механике Генрих Герц говорит*), что принцип
Гамильтона часто дает физически неверные результаты. В доказательство
он приводит случай, в котором, как он сам замечает, путем простого рассуж-
дения без расчетов можно обозреть как те движения, которые могут быть
фактически совершены, так и движения, которые соответствуют принципу
Гамильтона. Герц добавляет, что результат не меняется, если вместо прин-
ципа Гамильтона воспользоваться принципом наименьшего действия Мопер-
тюи. Рассмотрим его пример. В этом примере дан шар, который по инерции
катится без скольжения по неподвижной горизонтальной плоскости**).
Согласно Герцу, здесь принципу Гамильтона будут соответствовать такие
движения, которые при заданной постоянной живой силе в кратчайшее
время достигают заданной цели; отсюда вытекает, что переход из любого
начального положения в любое конечное положение был бы возможен без
приложения какой бы то ни было силы. Это заключение, которое больше
относится к принципу наименьшего действия, нежели к принципу Гамиль-
тона, получается примерно так. Если произвольно выбрать начальное и
конечное положения шара, то всегда возможны переходы из первого во
второе путем чистого качения***). Из всех этих переходов, каждый из кото-
рых совершается при сохранении постоянной живой силы и при одной и той
же живой силе, один, определенный, потребует наименьшего времени****).
Он соответствует, по мнению Герца, принципу Гамильтона и принципу
наименьшего действия. Этому результату Герц противопоставляет тот факт,
что в действительности, несмотря на произвол выбора начальной скорости,
естественный переход из одного положения в любое другое положение при
отсутствии действия сил невозможен.
Только что высказанная, для Герца сама собой понятная истина полу-
чается и на самом деле путем простого рассуждения. Для этого мы только
должны иметь в виду, что движение должно определяться начальным
состоянием шара. Кроме начального положения в определении начального
состояния участвуют также мгновенная ось вращения, которую мы проведем
через центр, соответствующая угловая скорость и поступательная скорость.
*) Gesammelte Werke, 1894, т. Ill, стр. 23.
**) Шар может и не быть однородным. Если он однороден, то получается равномерное
движение центра шара в сочетании с равномерным вращением шара вокруг проходящей
через центр шара оси, занимающей неизменное положение относительно шара.
***) По поводу существования этих переходов ср. последнее примечание п. 12. На то
обстоятельство, что и те переходы, которые здесь привлекаются для доказательства,
должны совершаться путем качения без скольжения, у Герца в этом месте ясно не указы-
вается; однако без этого условия вывод не мог бы быть сделан. Что я правильно выра-
жаю мысль Герца, добавляя это условие, следует из номеров 347, 358, 112, 111.
♦***) С этим можно согласиться, хотя со строго математической точки зрения это еще
можно оспаривать.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
539
Ось можно провести через центр в любом направлении, угловая скорость
также может быть взята произвольно; но поступательная скорость тогда
определяется по величине и направлению, ибо должно иметь место качение
без скольжения по горизонтальной плоскости. Величина начальной угловой
скорости здесь не важна. Но так как начальная ось вращения может быть
выбрана дважды бесконечным числом способов, а каждый выбор оси ведет
к одномерному многообразию положений шара, то из некоторого данного
положения шар может попасть в трижды бесконечное число положений.
Но всевозможные положения шара образуют многообразие пяти измерений,
ибо положения центра образуют двухмерное многообразие, а шар может
быть еще повернут вокруг центра трижды бесконечным числом способов.
Отсюда и получается невозможность перехода из одного заданного поло-
жения в другое заданное положение без действия сил.
Попытка объяснить полученное противоречие тем, что в природе, строго
говоря, не встречается качение, которое не было бы связано хотя бы с неболь-
шим скольжением, не удовлетворяет и самого Герца.
Из предшествующего достаточно ясно, что здесь речь идет не о противо-
речии между обычной механикой и опытом, а скорее о взаимно противоре-
чащих друг другу следствиях из различных способов рассуждения. Поэтому
противоречие должно быть разрешено на основании теории.
Такое решение содержится в подробных рассуждениях книги Герца.
Чтобы их понять, следует обратить внимание на уравнения связей, которые
могут быть наложены на движущуюся систему. Герц допускает только
уравнения связей, не содержащие времени; однако координаты точек си-
стемы могуть входить под знаком дифференциала. Уравнения связей мы возь-
мем в форме
v (q>irdx, + y>irdyv + xlrdzr) = 0 (z = 1,2, ...) *), ...
w U)
где величины, обозначенные буквами <р, у>, %, суть функции координат
*1, Ут, z1; х2, у2, z2, х3, у3, z3, ...
материальных точек. Необходимо отметить особенный случай, когда усло-
вия (1) в совокупности эквивалентны комплексу условий в форме
</Ф1 = 0, Ж> = 0, ..., (2)
т. е. эти условия «безусловно интегрируемы». В этом случае Герц называет
систему голономной**). Его решение упомянутого ранее противоречия таково:
установленный им основной закон механики годен вообще для голономных
и неголономных систем; но из него получаются принцип Гамильтона и
принцип наименьшего действия, только если ограничиться голономными
системами. Шар, катящийся по плоскости, представляет собой в случае связи,
устраняющей скольжение, неголономную систему.
Это решение могло бы нас удовлетворить, если бы ему не противостояло
всеобщее убеждение, что принцип Гамильтона является лишь другой формой
принципа Д’Аламбера и что последний применим всегда. Отклонение от
обычных взглядов, к которому приводит теория Герца, не может быть объяс-
нено также и тем фактом, что Герц положил в основу новый закон, ибо его
основной закон в тех случаях, которые он рассматривает, эквивалентен
*) См. № 124. Такие условия рассматривал уже Фосс, см. Math. Ann., т. 25, стр. 258
и далее.
**) См. №№ 123, 132, 133.
540
О. ГЁЛЬДЕР
принципу Д’Аламбера*). Таким образом возникает чисто математический
в своей основе вопрос: требует ли обычный вывод принципа Гамильтона из
принципа Д’Аламбера ограничивающего условия? Решению этого вопроса и
служит настоящая работа. Ответ заключается в том, что если принцип Д’Алам-
бера имеет всеобщее значение, то и принцип Гамильтона в его наиболее
полной форме должен быть справедливым всегда. Но если избрать форму,
принятую Герцем, то, действительно, появляется указанное им ограничение.
В этой работе я изложу точнее, чем это сделано до сих пор, еще некоторые
другие пункты: во-первых, само понятие варьирования движения, затем
формы принципа наименьшего действия, отношение этого принципа к прин-
ципу Гамильтона и возможность охватить оба эти принципа одним, более
общим, интегральным принципом. Равным образом будет показано, что и
принцип наименьшего действия можно сформулировать так, чтобы он оста-
вался в силе в том случае, когда в уравнения связей входит время.
О чем в обоих принципах идет речь, я сейчас, по крайней мере, упомяну,
рассмотрев еще раз движение шара. Шар при своем действительном дви-
жении, являющемся чистым качением, занимает непрерывную последова-
тельность положений. Применение названных принципов требует неболь-
шого изменения движения. Чтобы осуществить последнее, мы прежде всего
сдвинем немного каждое из пройденных шаром положений так, что возникнет
вторая непрерывная последовательность положений; в то же время поло-
жения этой новой последовательности находятся в соответствии с поло-
жениями первой последовательности. Этим второе движение полностью еще
не определено, ибо не указано, что в обоих движениях соответствующие
положения проходятся одновременно; в принципе Гамильтона это требуется,
тогда как принцип наименьшего действия устанавливает нечто другое.
Но оба принципа следует здесь применять, считая, что упомянутые малые
смещения шара получаются путем одного качения, в то время как Герц
в противоречии с этим применил условие, что и второе, т. е. варьированное,
движение само является качением без скольжения. Если правильно выпол-
нить вариации, то получается качение шара, которое Герц охарактеризовал
*) Ср. № 394 у Герца. Что касается его основного закона, который он без надоб-
ности ограничивает свободными системами (№№ 309, 122, 117), то он содержит два выска-
ds
зывания. Первое устанавливает постоянство производной по времени -у-; величина s
при этом определяется уравнением
ds2 £ тг = £ m„ (dx2 + dy2 + dz2),
(-) (»)
где т2,... обозначают массы точек системы. Очевидно, эта часть основного закона
есть не что иное, как закон сохранения живой силы. Вторая часть сводится к тому, что
при движении величина
17 d2X1’? ( d2M2 л. ( ?1
(’)
всегда имеет минимум. Если в последней сумме положить s = const • t, то получается
по существу то же выражение, которое согласно принципу наименьшего принуждения
Гаусса должно иметь минимум, причем, однако, силы, которые Герц в своих основаниях
исключает, должны быть положены равными нулю. Рекомендуется сравнить это мое изло-
жение основного закона Герца с №№ 309, 266, 263, 55, 100, 106, 151, 152, 153 его книги;
вместо его обозначений координат я ввел опять обычные обозначения прямоугольных
координат.
На мой взгляд, значение книги Герца заключается не в форме основного закона, а
в том факте, что из закона, не содержащего сил, как бы он ни был сформулирован, путем
математического построения получаются силы. Об этом построении, которое появляется
лишь в последующих частях книги и стоит далеко от предмета моей работы, я. здесь рас-
пространяться не буду.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
541
как соответствующее действительному положению вещей. Теперь признают,
что действительное движение, вообще говоря, разнородно с варьированным
движением. Следовательно, если действительное движение и требует меньше
времени, то тем не менее оно не выделяется из группы однородных с ним
движений. Мы же издавна привыкли принцип наименьшего действия и
принцип Гамильтона формулировать исключительно так, что вариация не-
которого интеграла или интеграл, содержащий вариации, приравнивается
нулю. При этом название принципа наименьшего действия уже не соответ-
ствует его содержанию.
§ 1. Вариация движения
Чтобы сделать более ясным понятие вариации движения, мы сначала
рассмотрим одну свободную материальную точку. Ее движение следует
варьировать так, чтобы начальное положение А и конечное положение В
оставались неизменными. Первоначальное движение — это то, которое имеет
место в действительности; новое, варьированное движение является только
вспомогательным математическим представлением. Поэтому можно траек-
торию нового движения выбрать так, чтобы она мало отличалась от прежней
траектории и шла бы приблизительно параллельно ей*); в остальном она
может быть произвольна. Движение по новой траектории после этого может
происходить по любому закону. Предположим, что оба движения начинаются
одновременно в точке А; нет надобности, чтобы они одновременно закан-
чивались в точке В, чего как раз не будет в том случае, когда действительное
движение совершается в течение более короткого времени, чем варьирован-
ное. Чтобы теперь составить себе точное представление о вариации, нужно
каждое положение, которое точка занимает при варьированном движении,
отнести к некоторому положению, занимаемому точкой в первоначальном
движении**). Например: без установления такого соответствия вариация
интеграла \Tdt, в котором Т обозначает живую силу, a t — время, имела
бы какое-то значение, но равенство
d J Tdt = f d (Tdf)
было бы лишено смысла. Таким образом, тождественные начальные поло-
жения, а также конечные положения приводятся в соответствие одно
с другим. Отсюда видно, что в случае, когда движения неодновременно закан-
чиваются в точке В, соответствие не может быть установлено так, что соот-
ветствующие положения обоих движений проходятся одновременно. Итак,
точечное соответствие между обеими траекториями мы установим произ-
вольно и будем следить за тем, чтобы расстояния между соответствующими
положениями были малы***). Может показаться удивительным, что это точеч-
ное соответствие траекторий лишено физического смысла, но ведь это соответ-
ствие, как и вообще вариация движения, есть только математическое вспо-
могательное построение. Примем на время для упрощения способа выра-
жения за начало отсчета времени то мгновение, в которое оба движения начи-
наются из точки А. Если С и С' — два соответствующих положения в двух
движениях, то мы обозначим время, протекшее при первоначальном дви-
жении из А в С, через т, а время, протекшее при переходе из А в С' при
*) См. первую сноску к § 2.
**) Это важное обстоятельство нужно иметь в виду уже в геометрических задачах
вариационного исчисления ; Вейерштрасс постоянно подчеркивал его в своих лекциях.
***) Точнее, две соответствующие бесконечно малые дуги обеих траекторий в каждом
месте должны находиться в определенном отношении, и это отношение повсюду должно
мало отличаться от единицы. Ср. первую сноску к § 2.
542
о. гЕльдер
варьированном движении, через т + дт. Таким образом, вариация времени
дт есть не что иное, как разность между моментами прохождения через
соответствующие положения. Вариация дифференциала времени есть алге-
браическая разность между временем, затраченным на осуществление малой
части кового движения, и временем, которое требуется на совершение соот-
ветствующей части прежнего движения*). Если, вдобавок, сравнить для этих
малых частей обоих движений начальные и конечные моменты времени,
то легко усмотреть, что вариация дифференциала времени равна дифферен-
циалу вариации времени; это находится в соответствии с известным предло-
жением о переместительности символов d и д.
Лучше всего вариация движения нашей точки выполняется так. Сначала
сообщают каждой точке первоначальной траектории некоторое смещение,
так что возникает новая траектория, точки которой находятся в соответствии
с точками прежней траектории. Затем определяют скорость в каждой точке
новой траектории. Эта скорость должна мало отличаться от скорости в соот-
ветствующем месте прежней траектории, но в остальном может быть взята
произвольно. После этого мы будем различать два способа определения этой
вариации движения.
Первый способ варьирования получается из условия, что соответ-
ствующие места обеих траекторий проходятся одновременно; тогда оба
движения должны закончиться в точке В одновременно.
Второй способ варьирования связан с силами, под действием которых
происходит первоначальное движение. Если мы предположим силы такими,
что можно говорить о «потенциальной энергии», то этот способ варьирования
можно определить следующим образом. Для соответствующих состояний
в сравниваемых движениях полная энергия должна быть одна и та же.
Это условие варьирования позже будет сформулировано иначе так, что оно
будет подходить и для остальных случаев. Полная энергия складывается из
живой силы и потенциальной энергии. Но так как первоначальное движение
предполагается заданным, то для каждого места С пути в этом движении
даны живая сила и потенциальная энергия. Для соответствующего места С'
варьированного пути сначала известна лишь потенциальная энергия, завися-
щая только от положения. Из поставленного здесь условия варьирования
получается для места С' еще живая сила, а вместе с тем и скорость.
После того как новая траектория и ее точечное соответствие с прежней
траекторией установлены, варьированное движение полностью определяется
как из первого условия варьирования, так и из второго условия, но в обоих
случаях по-разному. При втором способе варьирования время варьируется,
при первом способе — нет.
Аналогично обстоит дело и при движении материальной системы. Если
мы вместе с Герцем будем понимать под «положением системы» совокупность
положений точек системы, то движение заключается в непрерывной после-
довательности положений системы, которые проходятся определенным
образом с течением времени. Чтобы варьировать такое первоначальное дви-
жение, мы сообщим сначала каждому положению системы малое переме-
щение так, что получается новая непрерывная последовательность поло-
жений системы. Если в первоначальной последовательности система проходит
через одно и то же положение два раза, то мы имеем два перекрывающихся
положения, которые, естественно, могут быть смещены различным образом.
Теперь новые траектории точек системы и соответствие между точками этих
*) Более точный способ обозначений, принятый в чистой математике и устанавли-
вающий различие, с одной стороны, между дифференциалом и приращением, а с другой—
между вариацией и приращением, был бы здесь нецелесообразным.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
54Я
траекторий установлены; поэтому можно при наиболее общем способе
варьирования для одной точки системы во всех точках ее новой траектории
выбрать скорость. Но если твердо установить, что либо новые положения
должны быть пройдены одновременно с соответствующими старыми поло-
жениями, либо для двух взаимно соответствующих состояний обоих
движений полная энергия должна быть одна и та же, то этим полностью
будет определено, как должна быть пройдена новая последовательность
положений системы.
В предшествующем изложении мы не принимали в расчет уравнения
связей. Если движение подчинено условиям связей, то это не лишает нас
возможности сравнивать такое движение с варьированным движением,
не удовлетворяющим этим условиям связей.
§ 2. Вывод интегральных принципов
Теперь я рассматриваю в смысле обычной механики материальную
систему, движущуюся под действием сил и одновременно удовлетворяющую
уравнениям связей. В уравнения связей может также входить время. Доста-
точно считать систему отнесенной к системе прямоугольных координат.
Варьируя движение, я сначала не обращаю внимания на уравнения связей.
Если тг, т2, .. . — массы материальных точек, то для вариации живой
силы получается:
При этом, например,
о dx» ___ 8 dx» -dt — 8dt- dx» _ d 8х» -dt — dtit- dx» *),
° ~dT ~ dP ~ dfi~.
*) Здесь должна применяться эта формула вариационного исчисления, так как вели-
чина, по которой происходит дифференцирование, варьируется. Если мы хотим этого
избежать, то мы должны, как это сделал, например, Гельмгольц, ввести еще переменную
Тогда мы относим положения первоначального движения к значениям параметра ft и
те же значения параметра привязываем к соответствующим положениям в варьированном
движении. Таким образом, ft не варьируется, а варьируется время t. В особенности на-
глядной представляется следующая точка зрения. Пусть т есть время движения от на-
чального положения системы А до положения С в первоначальном движении, а т + 8г —
время, которое проходит от начального положения А до соответствующего положения С'
в варьированном движении. Все величины, включая и 8t, могут рассматриваться как
dx
функции т. Тогда 8 есть разница между составляющими по оси х скорости массы т»
для варьированного и неварьированного движений. Очевидно, стало быть,
dx» _
dr
dx» d8x» 'j Г. . d8r 'i dx,.
dr dr ) I dr J dr '
Если теперь произвести разложение в ряд и пренебречь членами высшего порядка в выра-
жениях производных вариаций, то получается
d 8х» dx» d 8т
dr dr dr ’
dx» __ d (x„ + fey) __ dx» ___ dt (Xr +
~dF “ ~d(r + 8r) ЧГ - (r + dr)
t. e. формула, стоящая в тексте. Одновременно мы убеждаемся в том, что не только вариа-
ции, но и их производные должны предполагаться малыми.
544
О. ГЁЛЬДЕР
Если с помощью этого уравнения и аналогичных ему уравнений преобразо-
вать правую часть равенства (3), то найдем
длр__ ( dx? d fix? । dy? d Sy? । dzv d Szv q .p d St
~ ft v\dt dt~ ' ~~dt dt~'~di dTj~ 7 ~dF ‘
Это уравнение должно быть умножено на dt и проинтегрировано в пределах
от t0 до tn между которыми протекает первоначальное движение. После
интегрирования по частям мы получаем
f dTdt= — J 2” mv № dxv + dt - 2 $lTddt *>; (4)
«0 to (?) V 7 to
для t0 и tx положение системы мыслится неварьированным, благодаря чему
пропадают члены, которые при интегрировании по частям должны были
стоять перед интегралами.
Если теперь Xr, Y„, Z„ обозначают компоненты силы, действующей на
массу mv, то д' U определяется формулой
д' U — £ (Х„ дх„ + Y„ ду„ + Z„ dz„). (5)
О)
Уравнение (5) опять умножается на dt, интегрируется и затем прибавляется
к уравнению (4); таким путем получается
]{2Tddt + (dT + d'U)dt} =
К
= fdt 2 {(^ “ т> 4^-) дх* + (Уг ~mr dyv + (z, - mv dzr }. (6)
Если в то же время выполнить вариацию движения так, чтобы величины
дх„, ду„, dzv представляли виртуальное перемещение системы, то правая
часть последнего уравнения по принципу Д’Аламбера должна быть равна
нулю. Мы имеем, следовательно, теорему:
Если сравнить действительное движение материальной системы с дви-
жением, немного отличающимся от него, причем начальное и конечное поло-
жения системы остаются неварьированными, а перемещения из каждого
положения действительного движения в соответствующее положение
варьированного движения должны быть перемещениями виртуальными, то
${2Tddt + (dT + d'U)dt} = 0**). (7)
В этом уравнении Т обозначает живую силу, а д' U работу, которую совер-
шили бы действующие силы на одном из только что названных, вообра-
жаемых перемещений.
При этом варьирование можно еще специализировать, пользуясь первым
или вторым способами варьирования, установленными в §• 1.
1. Мы требуем, чтобы соответствующие положения действительного и
варьированного движений проходились одновременно, т. е. мы полагаем
dt = 0 и получаем
f (дТ + d'U) dt = 0.
Это — принцип Гамильтона.
*) В основном эта формула имеется уже у Серре (Secret, Comptes rendus de i’Acad.
des Sciences, t. LXXII, 1871, стр. 700, № 7).
**) Собственно говоря, интеграл делается лишь бесконечно малым высшего порядка,
если те величины, которые до сего времени предполагались малыми, будут бесконечно
малыми первого порядка.
О.ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
545
2. Мы полагаем, обобщая второй из прежде указанных способов варьи-
рования,
дТ = d'U. (8)
Тем самым мы требуем, чтобы разность между живыми силами для взаимно
соответствующих состояний обоих движений равнялась работе, которую
совершили бы действующие силы на перемещении, соединяющем соответ-
ствующие положения. Этим определяется, каким образом должна пробе-
гаться непрерывная последовательность варьированных положений. Следо-
вательно, можно в уравнении (7) величину d'U заменить через dT, и тогда
мы получим для этих специального вида вариаций
О = [ {Td dt + dT dt} = ${Tddt + dT dt} = f S (T dt),
t. e.
O = d$Tdt*).
Это — принцип наименьшего действия в его расширенной форме **).
Другая форма этого принципа будет разобрана в § 4.
§ 3. Виртуальные перемещения. Эквивалентность принципов
Виртуальное перемещение здесь понимается так же, как и при аналити-
ческой формулировке принципа Д’Аламбера. По этому принципу в любой
момент времени потерянные силы уравновешиваются связями, наложенными
на точки системы в данный момент времени. Если, например, материальные
точки вынуждены двигаться так, чтобы удовлетворялись условия
mi (х1, У1, . . ., х2, у2, z2; 0 = 0 (г =1,2,.. .), (9)
то для t нужно ввести его мгновенное значение. Связи, имеющие место в
данный момент, допускают перемещения, удовлетворяющие уравнениям
да>1 s , Эго/ t . Эго/ t . Эго/ , , Эго/ , , Эго/ , „
+ + ••• + +
________________ (10)
*) Справедливость формулы J <5 (Т dt) = д J Т dt не затрагивается тем, что при варьи-
ровании изменяется интервал времени. Чтобы убедиться в этом, можно разложить инте-
грал J Т dt на его элементы и отнять от каждого из этих элементов величину, соответствую-
щую ему в варьированном движении.
** ) Эту форму принципа обстоятельно изложил Гельмгольц в Sitzungsberichte der
Berliner Akademie, 1887: Helmholtz’s Ges. Abhandlungen, 1895, t. Ill, стр. 249.
Величину F, названную им потенциальной энергией, лучше было бы определить как взя-
тую со знаком минус силовую функцию. Именно, так как функция F, кроме координат,
должна содержать и время, то отпадает уравнение, которым можно было бы мотивировать
термин «потенциальная энергия». Можно возразить еще нечто против способа представ-
ления Гельмгольца. Если сравнить уравнения, обозначенные у него на стр. 259 (If) и (1g),
ЭЕ
то можно заметить, что в разложении вариации 6F опущен член Й и что только благо-
даря этому получены правильные уравнения движения. Гельмгольц обосновывает свой
способ решения замечанием, что величина F могла бы рассматриваться так же, как функ-
ция координат и, вместо t, как функция & (ср. мое первое примечание к этому параграфу).
Но & не варьируется; однако ясно указано, что время должно варьироваться. Следо-
вательно, t в первоначальном движении является не той функцией времени, что в варьи-
рованном движении. Поэтому это рассуждение неприемлемо. Но все представление ста-
новится верным, как только мы будем рассматривать величину, которую Гельмгольц
обозначает через 6F, как работу. В соответствии с этим приходится по-другому формулир о
вать и условие для варьирования.
35 Пяпияттилинктр ПП1ЛНПИПК1 МРХЯН И1Л
546
о, ГЕЛЬДЕР
Эти перемещения являются виртуальными, и их можно ввести в условие
равновесия потерянных сил, т. е. в уравнение
2 {(*,- dx, + (у,- dy, + dz„) = 0 .
To обстоятельство, что в уравнении (10) нет члена dt, может быть выра-
жено словами утверждением, что при применении принципа Д’Аламбера
время не должно варьироваться. Это правило соблюдается, даже если в
другом случае встречается вариация времени. Считаясь с тем, что мы, будучи
последовательными, должны обозначить через йсо; уравнения, определяю-
щие виртуальные перемещения, возьмем их в таком виде:
<5со,. -<5/= 0 . (11)
Если движение системы подчинено уравнениям связей вида (1)
V (у;> dx, + dy, + Xiv dz,) = 0 (z = 1, 2, ...),
где функции <f>, ip, x зависят только от координат, то виртуальные переме-
щения удовлетворяют соотношениям
2' (<Pi, dx, + ipiv dy, 4- х» dz,) = 0 (/=1,2,...)*).
0
Нужно еще заметить, что во всех случаях перемещения отдельных поло-
жений системы не зависят друг от друга. Поэтому можно считать отличными
от нуля перемещения только для бесконечно малой части движения. Если
связать это представление с уравнением (6), то получается известное заклю-
чение вариационного исчисления о том, что постоянное исчезновение левой
части уравнения (б) вызывает исчезновение также каждого отдельного
элемента интеграла, стоящего в правой части.
Требование, чтобы интеграл (7) исчезал для всех наших вариаций, опять
влечет за собой выполнение принципа Д’Аламбера. Рассмотрим подробнее
правую часть уравнения (6). Будем считать силы и действительное движение
материальной системы заданными; тогда упомянутая правая часть опре-
деляется исключительно посредством перемещений положений системы.
Она не зависит от того, как с течением времени пробегается новая, образо-
ванная путем перемещений, последовательность положений. Поэтому не
имеет значения, оставим ли мы вариацию движения общей, если отвлечься
от неизбежных условий связей, или же ограничим себя первым или вторым
из особых способов варьирования.
*) Аналогия приводит к сделанному Фоссом (там же, стр. 286) предложению брать
условия, которым подчинено движение, в форме
2Г (<pi, dx, + уч, dy, + xi, dz,) + cu; dt = 0 (i = 1, 2, ...),
0
где <p, y>, %, a> — функции координат и времени. Уравнения для виртуальных переме-
щений получаются отсюда путем замены dt на 0, a dx,, dy,, dz, — на ёх,, ёу„ ёх,. Тут под-
ходящим примером мог бы служить шар, катящийся без скольжения по плоскости, кото-
рая движется заданным образом в зависимости от времени.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
547
Из этого и предшествующего параграфов мы заключаем, что как принцип
Гамильтона, так и принцип наименьшего действия в вышеприведенной форме
эквивалентны принципу Д’Аламбера*).
§ 4. Видоизменение принципов
Если существует силовая функция U, то уравнение (5) принимает вид
err ( Ъи » . Ьи s . QU s 'i
би = Л1-Я7 + Ж •
V
Если функция U наряду с координатами содержит также время t, то все
же в случае, если время не варьируется, мы имеем
d'U = bU, (12)
и принцип Гамильтона можно выразить уравнение?4
b j (Т + U) dt = 0.
Когда дело идет о вариациях, которых требует принцип наименьшего
действия, то должна существовать не зависящая от времени силовая функ-
ция U, если должно удовлетворяться уравнение (12). Условие варьирова-
ния (8) может быть тогда выражено тем, что величина Т — U должна иметь
одно и то же значение для двух соответствующих положений действитель-
ного и варьированного движений. Если, кроме того, время не входит в урав-
нения связей, будь то дифференциальные уравнения вида (1) или конечные
уравнения, то при действительном движении величина Т — U остается
постоянной**). Тогда — U называется потенциальной энергией, Т—U — пол-
ной энергией, и можно видеть, что полная энергия вообще не меняется ни
во время движения, ни при варьировании. Таким путем получается более
узкая форма принципа наименьшего действия. Эта форма принципа пред-
полагает известным, что действительное движение подчиняется предло-
жению о постоянстве энергии, и определяет точнее это движение тем,
что оно, будучи сравнено с другим движением, мало от него отклоняющимся
и протекающим с той же постоянной энергией, удовлетворяет условию
з j т dt = о;;
*) Тем самым предрешен и вывод дифференциальных уравнений движения из прин-
ципа Гамильтона и из принципа наименьшего действия, причем одновременно могут
быть введены новые координаты. Вывод дифференциальных уравнений из принципа
Гамильтона не требует дальнейших пояснений; он дан Фоссом (там же, стр. 263) в симво-
лической форме, тогда как наша концепция вариации движения всегда позволяет прямое
применение принципа. Вывод уравнений из принципа наименьшего действия дал повод к
различным работам (см. Родригес, Correspondance sur I’ficole 1трёпа1е Polytechnique,
т. Ill, стр. 159, и Майер (A. Mayer), Ber. d. Konigl. Sachs. Ges. d. Wiss., math.-phys.
Klasse, 1886, стр. 343). Проще всего идти в обратном порядке нашим указанным выше
путем. Составляем в любых координатах выражение
д § Т dt = §(dTdt+ TSdt)
и заменяем затем величину 6 dt, которая здесь входит explicite и implicite, при помощи
уравнения (8), некоторым выражением, умноженным на dt, которое содержит вариации
положений и их производные. От этих производных мы избавляемся интегрированием по
частям. Таким путем получается интеграл, который аналогичен правой части уравнения
(6). Положив этот интеграл равным нулю и принимая во внимание независимость вир-
туальных перемещений отдельных положений системы, мы получаем дифференциальные
уравнения движения.
**) См. § 5. См. также Voss Math. Ann., т. 25, стр. 266.
35*
548
О. ГЁЛЬДЕР
при этом вариации положения должны быть виртуальными перемещениями,
а начальное и конечное положения должны оставаться неварьированными.
Эта более узкая форма применима, когда существует не зависящая от вре-
мени силовая функция и время не входит также в уравнения связей *).
§ 5. Расширенная форма принципа наименьшего действия и теорема
о сохранении энергии
Более узкая форма принципа наименьшего действия предполагает
существование предложения о постоянстве энергии, расширенная форма
этого не предполагает. Мы можем также вывести предложение о постоянстве
энергии из расширенной формы принципа, если мы предположим существо-
вание силовой функции, а также независимость этой функции и уравнений
связей от времени. Если мы будем считать упомянутое предложение неиз-
вестным и предположим, например, что величина Т — U при действитель-
ном движении в промежутке времени от t' до t" неизменно возрастает в алге-
*) Я не буду здесь исследовать, в какой мере уже у Мопертюи можно говорить о не-
котором определенном принципе и какова доля других авторов в формировании идеи
этого принципа, в особенности Эйлера (см. A. Mayer, Geschichte des Prinzips der klein-
sten Action, 1877, и Helmholtz, там же). У Лагранжа в «Аналитической механике»
(2-е изд., 1911, т. 1, стр. 296 и далее) имеется вывод принципа наименьшего действия из
основного уравнения динамики. При этом он допускает, что уравнение, выражающее
предложение о сохранении энергии, при вариации (без изменения входящих в него по-
стоянных) продолжает оставаться в силе. Таким путем он получает соотношение, соответ-
ствующее уравнению (8) нашего текста. Из названного допущения следует заключить,
что Лагранж в приведенном месте имел в виду более узкую форму принципа. Но если
уравнение (8) ввести прямо в качестве условия варьирования, оставить в остальном ход
доказательства Лагранжа полностью без изменения и поставить вопрос о минимальных
предположениях, при которых оно имеет силу, то мы придем к расширенной форме прин-
ципа. Указание на эту форму содержится также в его более ранней работе в Miscellanea
Taurinensia, т. II, 1760—1761 (Oeuvres, 1867, т. I, стр. 365 и далее). Именно там, в п. XIII,
говорится, что соотношение (U), полученное в п. VIII, которое есть не что иное, как наше
уравнение (8), применимо в случае совершенно произвольных сил. Большинство после-
дователей Лагранжа взяли от него лишь более узкую форму принципа как, например,
Гамильтон в Phylosophical Transactions, 1834, стр. 252. Якоби сообщил этой форме прин-
ципа другое выражение, выразив под знаком интеграла величину Т dt через элементы
•объема и постоянную, которая есть не что иное, как постоянное и неварьируемое в дан-
ном случае значение Т — U (Vorlesungen Uber Dynamik, 1866, лекция 6). Только Гельм-
гольц в приведенной работе вылущил из трудов Лагранжа расширенную форму прин-
ципа. Что касается отношения этой формы принципа наименьшего действия к принципу
Гамильтона (Phylosophical Transactions, 1835, стр. 99), то я нахожу в противоположность
Гельмгольцу, что между обоими этими принципами должно проводиться строгое разли-
чие. Так как оба они эквивалентны принципу Д’А ламбера, то они также являются
следствиями один другого. Несмотря на это, ни один из этих принципов не может быть
непосредственно подведен под другой, ибо они относятся к различным способам варьи-
рования. Но оба принципа получаются путем специализации заключающегося в урав-
нении (7) интегрального принципа, в котором варьирование движения выполнено более
общим способом. Интеграл (7) стоит в близкой связи с гельмгольцевой интегральной
формулой (2Ь):
'’J[JF+(л+-у)
Именно, если здесь выполнить вариацию под знаком интеграла, причем величину Л сле-
дует оставить неварьированной, dt проварьировать (см. последнюю сноску к § 2), <5 Г за-
менить работой, т. е. d'U нашего текста, то получается интеграл, который для L = Т,
1
2
Л =
& = t совпадает с половиной нашего интеграла (7). Чтобы иметь право после
варьирования положить & = t, нужно только смотреть на & как на время, которое
в действительном движении требуется для достижения некоторого определенного поло-
жения.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
549
браическом смысле, то тогда положения, занимаемые при t < t' и при t t",
могут не смещаться. Всякое положение С, занимаемое при f <Z t <. t",
варьируется в такое положение С', которое само занимается при действи-
тельном движении, но в более поздний момент времени, лежащий также
между t' и t". Эти перемещения являются виртуальными, так как время
не входит в уравнения связей*.) Согласно условию варьирования, как оно
может быть высказано теперь, когда имеется независимая от времени силовая
функция, величина Т — U должна в положении С' варьированного движе-
ния иметь то же значение, что и для положения С действительного движения.
Но мы предположили, что величина Т — U в действительном движении от С
до С' неизменно возрастает; следовательно, Т—U, а значит и живая сила Т
в положении С' варьированного движения должны быть меньше, чем
в действительном. Мы можем поэтому принять отношение между этими
двумя живыми силами равным е2 : 1, где е<1. Тогда при прохождении
через положение С' все скорости варьированного движения будут находиться
в отношении е : 1 к скоростям, с которыми система проходит С' в действи-
тельном движении, ибо пути систем в обоих движениях совпадают. Сравним
теперь два малых интервала варьированного и действительного движений,
а именно такие интервалы, в которые пробегаются одни и те же близкие
к С' различные положения и которые, стало быть, при варьировании не
рассматриваются как соответствующие друг другу; тогда затраченные вре-
мена будут относиться как 1 : s, а части интеграла как е : 1. Следовательно,
при избранном способе варьирования распространенная на промежуток
времени от t' до t" часть интеграла J Т dt, выражающего «действие», будет
уменьшена; более Точное рассмотрение показывает, что другие части инте-
грала не изменяются. Таким образом, получается уменьшение всего интеграла,
и можно показать, что это уменьшение вообще будет одного порядка малости
с вариациями координат и с величинами 1 — е. Если бы положения системы
были смещены в противоположном направлении, то получилось бы при
варьировании увеличение интеграла J Т dt. Поэтому нельзя, не впадая
в противоречие с принципом наименьшего действия, мыслить величину
Т — U возрастающей в действительном движении; естественно, что ее
нельзя мыслить и убывающей. Итак, величина Т — U постоянна.
§ 6. Разнородность действительного и варьированного движений
Повсюду следует соблюдать условие, что вариации положения должны
быть виртуальными перемещениями. Иначе обстояло бы дело, если бы мы
выдвинули требование, что варьированное движение должно удовлетворять
тем же уравнениям связей, что и действительное движение. Если, например,
уравнения связей даны в форме (9), т. е. как обыкновенные уравнения
mi (xi, Уь Zi, • • •, xr, у„ z„ t) = 0 (z =1,2,...),
то последнее требование повлекло бы за собой равенства
а», (х± 4- дх1} ..zr + dzr, t + dt) = О,
а отсюда и
d<x>i = 0.
*) См. G. Kirchhoff, Vorlesungen fiber Mathematische Physik, т. II, Mechanik,
Leipzig, 1877, стр. 25 и 34. Соотношение между виртуальным и действительным переме-
щениями, о котором говорит Герц в № 111, основано на том, что он не вводит времени в
уравнения движения.
550
О. ГЁЛЬДЕР
Но применение принципов механики требует соблюдения уравнений (11):
^,--9Т^ = 0 0 = 1,2,...).
Эти уравнения согласуются с требованием = 0, когда
=0
dt v >
т. е. когда в функции (9) не входит время и когда dt = 0, т. е. когда должен
быть применен принцип Гамильтона. Напротив, применяя принцип наимень-
шего действия, следует обращать внимание на упомянутую разницу, когда
в уравнения связей входит время. В этом случае действительное и варьиро-
ванное движения разнородны.
Эта разнородность появляется и в принципе Гамильтона*), когда урав-
нения связей даны как дифференциальные уравнения в форме (1), причем
время в них не входит. Это сделается ясным из примера следующего пара-
графа. Здесь следует только отметить, что разнородность движений опять-
таки исчезает, когда имеются герцевы голономные материальные системы.
В этом случае условия могут быть взяты в форме (2):
'</0, = 0 (i =1,2,.. .);
эти условия выражают, что величины Ф2, .. . при движении должны
оставаться постоянными, причем эти постоянные значения не должны быть
заранее заданы. Если теперь варьированное движение должно удовлетворять
тем же самым условиям, то можно было бы по сути дела для этого движения
выбрать другие постоянные значения Ф1г Ф2; но это исключено тем, что
начальное и конечное положения не варьируются. Теперь видно, что резуль-
тат получается тот же самый, как если бы варьирование было выполнено
в соответствии с уравнениями
<ЗФг = О (z = 1, 2,...).
Но эти последние уравнения получаются из уравнений связей, если диффе-
ренциалы координат заменить вариациями координат; эти уравнения, сле-
довательно, соответствуют верному требованию, чтобы вариации положений
были виртуальными перемещениями. Теперь выясняется, почему точка зре-
ния Герца на принципы Мопертюи и Гамильтона внесла ограничение голо-
номными системами. Именно, Герц принимает варьированную траекторию
за возможную, т. е. за такую, которая удовлетворяет тем же условиям,
что и действительная траектория **).
§ 7. Особое условие движения для одной точки
Изложенное целесообразно пояснить примером. Так как здесь должны
быть только выяснены трудности, связанные с варьированием, то, как мне
кажется, будет достаточно, если я изберу некоторое весьма простое, хотя
и едва ли реализуемое движение; оно принадлежит, между прочим, к дви-
жениям, допущенным Герцем***). Пусть материальная точка, на которую
*) Это обстоятельство отметил уже К. Нейман при изучении качения, на что я
обратил внимание только во время печатания этой статьи. См. Вег. d. Sachs. Ges. d. Wiss.,
math.-phys. K1-, 1888, стр. 34, особенно слова: «Напротив, воображаемое движение,
вообще говоря, не будет соответствовать характеру системы».
**) См. №№ 347, 358, 110, 112, ИЗ.
***) Его также рассматривал Фосс (Math. Ann., т. 25, стр. 280) [см. стр. 564 настоящей
книги. — Прим. ред.].
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
551
не действуют никакие силы, связана в своем движении уравнением
<р (х, у, z)dx + у> (х, у, z)dy + % (х, у, z) dz = 0. (13)
Следовательно, точка в любом положении вынуждена двигаться вдоль
заданного элемента поверхности; направляющие косинусы элемента поверх-
ности в положении х, у, z относятся как
<р (х, у, z): у> (х, у, z): % (х, у, z).
Уравнение (13) в особых случаях может быть проинтегрировано в форме
со (х, у, z) = const.
В этом случае мы называем уравнение (13) интегрируемым; тогда существует
такая функция £2 (х, у, z), при умножении на которую левая часть уравне-
ния (13) обращается в полный дифференциал. Чтобы это имело место, функ-
ция £2 должна удовлетворять условиям
a (Д • у) = 8 (-Q • у) Э (Q • у) = 8 (Q • %) 8 (Д • z) = д (-Q • у)
Эу Эх ’ 8z — Эу ’ Эх 8z ’
которым, если обозначить частные производные по х, у, z соответственно
индексами 1, 2, 3, может быть придана форма:
£2(ур2 — y>i) = £21ip — £22(р, £2(ip3 — %а) = й2% — £2aip,
£2 (Xi — <Рз) = £23 9> — Qi Z •
Если эти уравнения умножить соответственно на %, у, ip и сложить, то полу-
чается
% (^2 — ¥’1)4-9’ (% —%г) +¥’(Zi — 9’з) = °- (14)
Это — условие интегрируемости, которое не всегда выполняется*). Но когда
оно выполнено, материальная точка, на которую наложена вышеуказанная
связь, представляет собой голономную систему.
§ 8. Варьирование траектории
При варьировании этого движения в основном приходится иметь дело
с траекториями. Рассмотрим траекторию, соответствующую уравнению (13).
Применение механических принципов требует, чтобы вариации положений
были виртуальными перемещениями, т. е. чтобы они соответствовали урав-
нению
<р дх 4- ip ду 4- X 6z = 0. (15)
Так как это имеет место для перемещений всех положений, то будет также
d (ср дх 4- ip ду + X 6z) — 0. (16)
Но если мы хотим варьировать так, чтобы варьированная траектория удовле-
творяла тем же условиям, что и первоначальная, то уравнение (13) должно
иметь силу для двух малых, соответствующих одна другой частей обеих
траекторий. Вычитая полученные таким образом уравнения, получаем
д (рр dx 4- ip dy 4- % dz) = 0. (17)
*) Найденное условие является также и достаточным условием интегрируемости
(см. A. Mayer, Math. Ann., т. 5, стр. 450—452, и Lie, Theorie der Transformations-
gruppen, ч. I, 1888, стр. 90—93).
552
О. ГЁЛЬДЕР
Связь обоих выдвинутых здесь для варьирования требований станет яснее,
если мы найдем такие варьирования, которые выполняют оба требования.
Если уравнения (16) и (17) развернуть и вычесть одно из другого, то в резуль-
тате будем иметь
(Т’г — Vi) (йх dy — бу dx) + (% — %2) (бу dz — 6z dy) +
+ (Zi — p3)(dzdx— dxdz) = O. (18)
Уравнение (15) совместно с соотношением (13), выполняемым для первона-
чальной траектории, дает пропорцию
(5х dy — бу dx): (бу dz — dz dy): (dz dx — dx dz) = %: tp: ip.
Но эта пропорция совместима с уравнением (18) только тогда, когда либо
выполняется условие интегрируемости (14), либо
dx : бу : dz = dx : dy : dz. (19)
В последнем случае мы встречаемся с варьированием совсем особого рода,
с варьированием траектории в самое себя, что соответствует варьированию,
примененному в § 5. Но уравнение (15) допускает более общий вид решения.
Точно так же уравнению (17), т. е.*) уравнению
О + (I + < 6У + +
+ (-^ёх+^дУ +-^~dz}dz + <pddx + у) ddy + yddz = Q,
можно удовлетворить вариациями, которые исчезают на концах траектории,
а на протяжении траектории не удовлетворяют пропорции (19).
Поэтому, если условие интегрируемости не соблюдено, то оба требования
ведут к разного рода вариациям. Эти вариации грубо можно представить
в наглядной форме следующим образом. Каждой точке первоначальной
траектории соответствует согласно уравнению (13) элемент поверхности,
который можно рассматривать как плоский. Эти плоскости огибаются
*) Если сначала считать вариации конечными и если варьированная траектория
должна удовлетворять тому же условию (13), что и первоначальная, то это попросту озна-
чало бы существование уравнения
<р (х+ дх, У + ду, Z + dz) (X + дх) + у> (х + дх, у +
+ ду, Z + dz) (у + ду) + у (X + дх, у + dy,z + dz) + dz) = О,
где с — какая-либо переменная, в зависимость от которой можно поставить положение
переменной точки первоначальной траектории. Из этого уравнения после вычитания
уравнения
, , dx . , . dy , . . dz -
4><x,y,z)-^- + V(x,y,z) -- + Z(x, V,z)— =0
и после отбрасывания членов, которыми можно пренебречь, получается уравнение, стоя-
щее в тексте. При этом вариации и их производные следует рассматривать как малые пер-
вого порядка и опускать величины более высокого порядка.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
553
некоторой развертывающейся поверхностью а. Варьированная траектория
идет все время приблизительно параллельно первоначальной, и таким
образом обе вместе образуют узкую ленту. При вариациях, которые соответ-
ствуют механическим принципам, отрезок, определяемый составляющими
бх, бу, 6z, лежит на элементе поверхности, соответствующем согласно
уравнению (13) точке (х, у, z), а тем самым и на поверхности а; при другого
рода вариациях этого нет. Поэтому в первом случае указанную ленту можно
приближенно рассматривать как вырезанную из поверхности а*), тогда
как во втором случае она образует вдоль первоначальной траектории
конечные углы с развертывающейся поверхностью а.
§ 9. Уравнения движения. Действительные и геодезические траектории
Составим теперь дифференциальные уравнения движения для материаль-
ной точки. Мы применим принцип наименьшего действия в более узкой
форме. Если обозначить через s длину дуги траектории, то для действитель-
ного движения скорость
4 = с (20)
постоянна на основании теоремы о сохранении энергии. Варьированное
движение надо мыслить происходящим с той же скоростью. Принцип в этом
случае дает
--б С Tdt = d Ссdt = d Сds = 0 .
т с J J J
Путем преобразования находим:
б $ds = = f =
= С ddx + -d~- ddy +-~ddz\ = 0 .
J yds ' ds ! ' ds J
Последний интеграл разбиваем на три слагаемых и интегрируем по частям;
затем вследствие исчезновения начальной и конечной вариаций получаем
С (-^-dx _^dy-^4dz)ds = 0. (21)
J V ds2 ds2 ds2 J '
Вариации определяются тем, что бх, бу, 6z представляют виртуальное
перемещение, т. е. они определяются уравнением
dx dy 4- % dz — 0.
Левую часть этого уравнения нужно умножить на Я ds и затем прибавить
под знаком последнего интеграла. Таким путем мы сперва получаем
j {(^ - -£-)дх+h’ - if} ду+- -S-)Чds=° ’
а отсюда
= (22)
ds2 r ds2 ds2 f v '
*) См. Voss, Math. Ann., t. 25, стр. 267 [см. стр. 564 настоящей книги. — Прим. ред.].
554
О. ГЁЛЬДЕР
Так как Я здесь означает неизвестную переменную, то смысл уравнений (22)
сводится к пропорции
d2x d2y <Pz , „
-ds^: ~d^ = (P^^- (23>
TJ (РХ (?У <Fz g. „
Но, как известно, вторые производные относятся между собой
как направляющие косинусы лежащей в соприкасающейся плоскости нор-
мали траектории. Эта нормаль, таким образом, тождественна с нормалью
к элементу поверхности, соответствующему точке х, у, z по уравнению (13).
Таким образом, в каждой точке траектории соприкасающаяся плоскость
перпендикулярна к элементу поверхности, соответствующему этой точке*).
Уравнения (20) и (22) соответствуют обеим формулировкам основного
закона Герца**), тогда как дифференциальные уравнения (22) совместно с
уравнением (13) определяют введенные там Герцем «прямейшие траек-
тории»***).
Мы только что определили действительную траекторию при помощи
уравнения
5 j ds = 0. (24)
Составим теперь то же самое уравнение, но при другой точке зрения на
варьирование. Мы теперь не будем больше требовать, чтобы вариации поло-
жений были виртуальными перемещениями, но мы потребуем, чтобы варьи-
рованная траектория удовлетворяла тому же самому дифференциальному
уравнению (13), которому мы подчиняем траекторию, подлежащую варьиро-
ванию. Теперь перед нами стоит совсем другая задача вариационного исчисле-
ния, из которой, вообще говоря, не вытекают действительные траектории
материальной точки. В этой задаче вариации следует подчинить условию (17),
т. е. уравнению
д<р dx 4- dip dy + 3% dz 4- <p d dx ip d dy + % d dz = 0. (25)
Раскрывая уравнение (24), как раньше, мы опять получаем уравнение (21).
В последнем уравнении следует под знаком интеграла прибавить левую
часть уравнения (25), умноженную на Я ****).Тогда мы, после того как проинте-
грируем по частям некоторые из членов, стоящих под знаком интеграла,
получаем обычным способом:
d2x . ( Эу dx Эу dy Э% dz d , _ n ,
ds2 Z ( Эх ds + Эх ds + Эх ds ) + ds W) U ’’
d2y 3 ( Ъ<р dx 8y dy dX dz d _ n
ds2 ( dy ds dy ds Т dy ds ) ds ' ’
T-z i ( 8y dx dy dx dz ) d „
ds2 t dz ds fiz ds dz ds J ds ' X>
*) Cm. Voss, Math. Ann., t. 25, стр. 280. Если рассматривать варьированную траек-
торию как расположенную в развертывающейся поверхности а предыдущего параграфа,
то условие 6 j ds дает действительную траекторию как «геодезическую линию» поверх-
ности а в обычном смысле слова. Но тем самым мы сейчас же приходим к геометрическому
свойству, высказанному в тексте.
**) № 309.
***) См. Г е р ц, № 155d. Так как мы вывели эти траектории из принципа наимень-
шего действия, здесь неважно, насколько основательно они могут быть названы «наи-
более прямыми».
**♦*) В отношении этого правила вариационного исчисления см. Schaeffer, Math.
Ann., т. 25, стр. 555 и далее, и A. Mayer, Вег. d. math.-phys. KI- d. Sachs. Ges. d. Wiss.,
1885, 1895 и Math. Ann., t. 26.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
555
Этим уравнениям можно также придать такую форму:
d2x . d Л ds2 ds [ 9y _ I 8x Эу ' ~9y , - J ds ( 0z _ ( 9x dtp 'j . dz ~dz ) A~ds = 0,
d2y . dA 1 ~d^ + V~dT~\ ( dx _ < 9y 9y ) dz J 1 Я^ - ’ ds [Оф _ ( 9y dy> A . dx ~d x J Л “ds7 = 0,
d2z . dA ds2 ds ( 9y I 9z 9% 9x . ]^- ) ds ( 9y I 9z dx 1 . dy ~dy J Л dT = 0;
(26)
они определяют вместе с уравнением (13) так называемые «геодезические
траектории»*).
Герц показал, что для его голономных систем геодезические траектории
совпадают с наиболее прямыми, т. е. с действительными траекториями**).
В самом деле, если условие интегрируемости выполнено, то можно считать,
что уравнение (13) задано так, что <р dx + у> dy + % dz есть полный дифферен-
циал. Тогда имеют место соотношения
dtp _ Эу №ф ______ 9/ [Эу _____ 9%
ду Эх ’ 0z дх ’ dz ду
и уравнения (26) в связи с этим выражают не что иное, как существование
пропорции (23).
§ 10. Множественность действительных и геодезических траекторий
Действительная траектория материальной точки полностью определена,
если даны начальное положение и начальное направление. Это вытекает
из механических оснований, но это можно было бы также доказать, исходя
из найденного геометрического свойства действительных траекторий. Если
же дано только начальное положение А, то начальное направление на зле-
менте поверхности, соответствующем точке А, можно выбрать произвольно.
Таким образом, из определенного места выходит бесконечно большое число
действительных траекторий.
Иначе ведут себя геодезические траектории, когда не выполняется
условие интегрируемости. Они определяются уравнениями (26), к которым
присоединяется еще (13). Уравнение (13) после дифференцирования дает:
_1_ + у + + + 9?dz_jdx
v ds2 4 ds2 z ds2 T (Эх ds T 6y ds ‘ dz ds J ds
Г Эу dx _9y dy , Эу dz A dy . ( 9/ dx Э/ dy _0% dz A dz_ _ n /971
' ( Эх ds dy ds dz ds J ds ( Эх ds dy ds ' dz ds J ds '' '
ci2x d2y
С помощью этого уравнения и уравнений (26) можно выразить ,
через х, у, z,2.,~, . Можно, следовательно, с помощью на-
ds2 ’ ds ‘ ’7 ’ ’ ’ ds ds ds ’ ’
званных уравнений определить величины х, у, z, А как функции s, если для
некоторого начального значения s заданы соответствующие начальные-зна-
чения величин х, У, z> ^7, , Я. Если же, с другой стороны, выполнить
интегрирование уравнений (26) и (27) при каких-либо начальных значениях,
то получаются функции, которые в силу уравнения (27) удовлетворяют
*) Г е р ц, № 181 ; Voss, Math. Ann., т. 25, стр. 282.
**)№ 190.
556
О. ГЁЛЬДЕР
условию
dx . dy , dz
w -----h V ~r~ + Z t~
r ds r ds . ' ds
где Сг означает постоянную. Так как, далее, из уравнений (26) после умно-
dx dy dz
жения на, -у-, и сложения вытекает соотношение
ds ds ds
d4_dx^ d2y dy <Pz dz_ I dx , dy , dz\ dz = Q
ds2 ds ’ ds2 ds ’ ds2 ds ’ V ds ' ds ’ z ds J ds ’
то полученные функции должны также удовлетворять условию
Здесь С2 — постоянная. Начальные значения должны быть выбраны так,
чтобы было Сх = О и С2 = 1. Отсюда видно, что коль скоро дано начальное
положение х, у, z, можно еще произвольно выбрать начальные значения
величин s, 1 и отношения ™. Начальное значение s не существенно,
и, таким образом, в уравнение подлежащей определению геодезической
траектории входят еще две постоянные. Однако можно показать, что началь-
ное значение 2 только тогда влияет на вид траектории, когда не выполнено
условие интегрируемости (14)*). Следовательно, если для какой-либо точки
величина
У (% — Хг) + Ч> (Zi — <Рз) + Z faa — Vi) (28)
не равна нулю, то из этой точки выходит дважды бесконечное число действи-
тельных траекторий.
Этот результат аналогичен результату, найденному для шара. В случае
шара движения, исходящие из некоторого заданного положения и удовле-
творяющие задаче о минимуме, упомянутой во введении, образуют многооб-
разие высшего порядка по сравнению с теми движениями, которые может
выполнять шар, исходя из заданного положения, при отсутствии действия сил.
§ 11. Движение катящегося шара. Уравнения связей
Теперь мы составим дифференциальные уравнения для движения катя-
щегося шара. Пусть будут — координаты относительно неподвижной в
пространстве прямоугольной системы координат. По неподвижной плоскости
катится без скольжения шар. Пусть будут х, у, z — координаты относи-
d2z
*) Уравнения (26), если принять во внимание условие (13), а также если иметь в виду,
что s обозначает длину дуги, дают соотношение
[ d*x d2y \ dz ( d2y cPz} dx , [ d‘2z <Px A dy
V “ds2"-’’“d^J dT+ Г ~ds*~ ~ * V ds2) ds~ + Г ds^ ~ z ds2 J ds ~
= [ (4°2 —Vi)x + (% — Z2) <P + (Zi — <Ps) V ] z •
Если, стало быть, выражение (28) не исчезает на всем пути, то на заданной геодезической
траектории Л является заданной функцией положения. Поэтому две выходящие из одной
точки геодезические траектории, которым соответствуют различные начальные значения
Л, будут, наверное, различными, если в начальном положении, а следовательно, и в его
окрестности выражение (28) отлично от нуля. Если же выражение (28) исчезает для
всех значений х, у, z, то следует вспомнить замечание, сделанное в конце последнего пара-
графа.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
557
тельно прямоугольной системы координат, неизменно связанной с шаром;
эта система имеет начало в центре шара. Тогда имеют место следующие
уравнения, в которых £, ту, С и х, у, z суть координаты одной и той же точки :
f = а + ахх + аау -j- a3z,
У = fi + fiiX + /32у -j- /33z,
С = У+ у^+ у2у+ y3z
X = — а) + fi-^ — fi) + У1 (С — у),
У = а2 (5 — «) + fiz (V — fi) + Уг (С — У),
Z = а3 (£ - «) + Рз (П ~ fi) + Уз G - У)-
(29)
В первой системе координат £ = а, ту = /?, 4 = 7 суть координаты центра
шара, a a, fl, у — координаты той точки, в которой шар касается плоскости
fy; величина у постоянна и равна радиусу а шара. Частица шара, которая
находится как раз в точке касания, должна в данный момент иметь скорость,
равную нулю, так как иначе имело бы место скольжение. Поэтому для
частицы шара в момент ее нахождения в точке касания справедливы соот-
ношения
d£ dt' _ dr/ _ dZ _ „ dt dt ’
иначе, da da, -dt + dt-X . da, , da, n T dt y T dt ’
dP 1 Y dt + dt I dl\ , q
dy । dV1 dt ' dt , dy2 dy3 n + ~dTy + dtz ''
(30)
Здесь х, у, z суть те значения, которые получаются из уравнений (29), если
положить в них £ = а, г) = fl, С = 0. Следовательно, в уравнение (30) сле-
дует подставлять
х=— уу!=— aylt у=— ууг=— ауг, z=—yy3=—ay3.
Таким образом получаем:
da ~dt~ = a ( da, . da, . da, A
dJL dt = a
dy ~dt~ = a dt dt ' Уз dt J '
(31)
Из этих уравнений последнее удовлетворяется само собою, так как величина
у постоянна, а правая часть исчезает в силу соотношений ортогонального
преобразования координат. Два первых уравнения, следовательно, вместе
с уравнением у = а являются условиями чистого качения*).
*) См. Neumann, Sachs. Вег., 1888, стр. 358.
558
О. ГЁЛЬДЕР
§ 12. Характер уравнений связей
Чтобы познакомиться с характером связей, выразим коэффициенты в
формулах преобразования координат с помощью формул Эйлера*):
аг = — cos <р cos f cos d — sin <p sin /, a2 = — cos <p sin / cos d + sin <p cos f,
= — sin <p cos f cos d — cos <p sin f, = — sin V sin / cos # — cos <p cos f,
= cos f sin &, y2 = sin / sin #, I
a3 = cos <p sin d,
f>3 = sin <p sin &,
y3 = cos &.
Вводя эти значения в уравнения (31), получим
da — — a sin у sin d df + a cos <р d d, df> = a cos <р sin d df + «sin <p dd. (33)
Эти уравнения не являются безусловно интегрируемыми, они даже вообще
не интегрируемы **).
*) Novi Commentarii Acad. Petrop., т. XV, 1770, стр. 75. По поводу геометрического
значения углов д>, {, # см., например, G. Kirchhoff, Vorlesungen fiber Mathematische
Physik, т. II, Mechanik, Leipzig, 1877, стр. 43 и 44.
**) Это значит, что нет также такой функции а> (а, ft, у, /, ff), дифференциал которой
исчезал бы в силу уравнений (33). В самом деле, такая функция должна была бы (ср.
А. М а у е г, Math. Ann., т. 5, стр. 449, и L i е, Theorie der Transformationsgruppen, разд. 1,
стр. 91 и 92) удовлетворять следующим уравнениям в частных производных:
Осо
-ту- = 0 ,
оу>
Осо . . „ Осо , . „ Осо
-тг;--a sin <р sin & —-р a cos <р sin # -7^ = 0 ,
of да г др ’
Осо . Осо . Осо _
"Od +flC0S?’^ + aSln?’ Ж=°-
Эти уравнения, которые не образуют полную систему (ср. С 1 е b s с h, Journal fйг die
reine und angewandte Mathematik, t. 65, стр. 258), могут быть дополнены до полной системы
и тогда сейчас же покажут, что может быть доказано и непосредственно, что им может
удовлетворить только постоянная.
Отсутствие функции со, обладающей названным свойством, следует также из того, что
эта функция согласно дифференциальным уравнениям (33) должна была бы сохранять
постоянное значение; но можно перейти от каждой системы значений а1( ф1г к
любой другой а2, /?2, <р2, f2, не нарушая при этом переходе уравнений (33), причем шар
может быть переведен из каждого данного положения в каждое другое положение путем
качения без скольжения. Так как этим фактом пользуется и Герц, то здесь нет надобности
более о нем распространяться. Если w обозначает некоторый постоянный угол, выражен-
ный в дуговой мере, и если считать д также постоянным, то уравнениям (33) можно удо-
влетворить такими значениями:
a sin d „ a sin # . , w
a — W----=---COS ф, [} = W---------sin ф, f = ф .
^77 ^77
Здесь g> может быть какой-либо функцией времени, и мы имеем перед собой известное
движение. Если ф пробегает значения в интервале от 0 до 2 л, то в конце движения а, ft,
а также [см. уравнение (32)] и а3, fiz, yz получают те же значения, что и вначале. Таким
образом, путем чистого качения мы получаем то же конечное положение шара, как если
бы мы его только повернули вокруг оси z. Так как при этом угол / изменился на w, то w
и дает угол этого поворота. Ось г не имеет особого направления; поэтому можно каждое
вращение вокруг центра шара, с точки зрения его конечного результата, заменить только
качением. Путем сложения движений можно убедиться, что можно из каждого началь-
ного положения в каждое конечное положение перейти путем чистого качения. Так как
это движение составлено из кусков, то в нем встречались бы разрывы непрерывности в
скоростях, но их можно будет устранить путем небольших изменений движения.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
559
Шар, который может катиться, но не скользить по плоскости, предста-
вляет собой, следовательно, неголономную материальную систему.
§ 13. Новая форма условий связей
Мгновенное состояние движения шара мы будем теперь рассматривать
как составленное из вращения вокруг оси, проходящей через центр, и посту-
пательного движения. Пусть будут p,q,r — составляющие угловой скорости,
и, v, w — составляющие поступательной скорости, те и другие по осям
х, у, z. Эти составляющие определяются уравнениями*):
п___ „ da2 । о dfiz ।
Р - ОзТ + Рз-^Г + 7з-^~ ,
а _ а da3 । о dp, , v
-а^ dt + dt + 71 dt' ’
f — Г, dai I О dh , „ dV1
r - а*~1Г + Pz-dF + Ъ-dT
и
(34)
da . o dp , dy
u=a^~d-r + ^-dr + ^-dr’
da o dp , dy
v -^-dr+^-ir + ^^F’
da . o dp dy
Далее имеют место соотношения **):
da. da, da, 1
- Orf , = ОзР - a±r, = axq - a2p ,
= (35)
= ~ - 4F = ^зР - 71Г ’ -^S- = Yiq - У2Р
Если мы теперь в уравнениях (34) вместо подставим 0, вместо —
правые части уравнений (31), а после этого величины
dax dai da, dp1 dp2 dp3
'IT ’ dt ’ dt ’ dt ’ dt ’ ~~dT
заменим правыми частями уравнений (35), то, воспользовавшись еще соот-
ношениями ортогонального преобразования координат, получим
и = a (y3q — у2г),
v = a far - у3р),
w = а (у2р - yrq).
(36)
*) См., например, G. Kirchhoff, цит. соч., стр. 50.
**) Там же.
560
О. ГЁЛЬДЕР
Эти уравнения выражают зависимость, которая существует при качении
без скольжения между вращением и поступательным движением*). Состав-
ляющие р, q, г угловой скорости могут быть взяты произвольно.
§ 14. Уравнения движения
После проведенной подготовки можно составить дифференциальные урав-
нения движения**). Я пользуюсь здесь принципом Гамильтона. Так как
не действуют никакие силы, то следует положить
]' 6Т dt = О,
причем следует соблюдать соответствующий способ варьирования. Так как
система координат х, у, z мыслится. связанной с шаром, то кинетическая
энергия есть раз навсегда заданная функция величин р, q, г, и, v, w, и мы
получаем
г ( dT . , дТ „ . dT , . dT , . dT я . dT , А ,, А
-75— + -а— Sq + ~d— &Г + ' &U + + "a- \dt = 0. (37).
J I Эр г Эр 4 8г 1 Эи 1 dv 1 dw J ' ’
Надо выразить встречающиеся здесь вариации составляющих скорости
Вариация движения здесь производится опять так, что сначала каждое
из пробегаемых в первоначальном движении положений получает малое
перемещение. Перемещение разлагается на вращение вокруг центра шара
и поступательное перемещение. Вращение и поступательное перемещение
дают по осям х, у, z составляющие р', q', f и и', v', w'. Вариации составляю-
щих скоростей представляются формулами***)
дР = ~аГ + ^~УГ’
= ~аГ + гр' ~г'р’ ’
дг = ~dT + Р? ~ Р'^
и формулами
ои = + vr — v г + w q -- wq ,
s dv' , , . , , ,
ov = + wp — w p + u r — ur ,
s dw' . , , , , ,
mv = + uq — и q + v p — vp .
(38)
(39)
Вывод этих формул основывается на перестановке символов и 5. Такая
перестановка допустима, если время не варьируется, а это как раз и является
условием варьирования для принципа Гамильтона.
Теперь в уравнении (37) мы вводим вместо др, dq, 6r, би, dv, dw правые
части уравнений (38) и (39). Принимая во внимание, что вариации для
начала и конца рассматриваемого интервала должны обращаться в нуль,
*) Нетрудно вывести эти уравнения геометрически.
**) Мы можем воспользоваться для качения также общими уравнениями Неймана
(Neumann, Вег. d. Sachs. Ges., 1888, стр. 36 и 39).
***) Kirchhoff, цит. соч., стр. 58 и 59.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
561
мы получаем после некоторых интегрирований по частям:
If____d_ ЪТ . 8Т __ ЪТ
J П dt др г Г T)<f q Ъг
. ЪТ ЪТ'
4-W-x-----V -5—
dv dw ,
Р’ +
, ( d ЪТ . ЪТ dT . ЪТ дТ\ , .
+ 1- dt d(l ^P-dr-r dp ^!, dw— +
, f d ЪТ , ЪТ ЪТ . ЪТ ът\ , ,
+ (~ л--эг + ? P-§i + v ~эй~ 11 ъ1Г)г +
( d ЪТ ЪТ
+ [~-dl~w + r&lr~
„ ЬТ\ , , ( d ЪТ , ЪТ ът\ , ,
?“Эвг)и +l~ dt ~Ъ^ + P'ltw ~ гЭж) v +
(___d oT , 8J
( dt 0iv ' ’ ди
ЪТ} n
о-X— w \dt = 0
r dv J |
(40)
До сих пор в этом параграфе не применялось условие, наложенное на
движение. Так как шар должен катиться без скольжения, то и перемещения,
соответствующие вариациям, которые являются виртуальными перемеще-
ниями, должны быть чистым качением. Каждое из этих малых переме-
щений разлагается на вращение и поступательное перемещение, и составляю-
щие такого вращения и такого поступательного перемещения должны быть
связаны соотношениями. Эти соотношения аналогичны соотношениям (36);
они таковы :
«' = a(у3q’ - у2г'), V = а(у±г' - у3р'), w' = а(у2р' - y1q').
Если мы введем эти значения и', v', w' в уравнение (40), то получим (так как
составляющие р', q’, г' вращения произвольны) следующие уравнения:
d ЪТ d ЪТ . d ЪТ ЪТ . ЪТ , , . ЪТ ,
"Э7 - а ^dtltv- + й ~dt dw~ ~Г~ЪЧ- + ^-а ЬГ+^) -уц +
+ (-w + ay2p)~~ + (v + ay3p)-^- = O,
d ЪТ d ЪТ , d ЪТ ЪТ , ЪТ / , х ЭТ
-dt -W~ayi dt - dw +а^-л^Г-Р~ъ7 + г-^~а ^P+y^v +
(41)
, , . . ЪТ , , . . ЪТ n
+ и + a Уз ?) - 9,7 + (w 4- a y! q) — 0,
d oT d ЪТ , d ЪТ ЪТ . ЪТ , л . ЪТ ,
dP 'W ~а^ ^t ^iT + a'^ dt ~bv ~ ~bp + P^q ~ a +?1P)~bw +
4-(_г + а?1Г) +(Ц+ fl?2r)^L = o.
Это — искомые дифференциальные уравнения, которыми в соединении
с условием (36) определяется движение*).
*) В этих уравнениях производные
ЪТ
др
ит.д. образуются путем дифференцирования
функции, которая выражает живую силу для движения шара, состоящего из качения со
скольжением. Именно, эти производные получены из подсчета величины 8Т, а живую силу
Т [- ST варьированного движения нельзя определять из выражения, пригодного только
для чистого качения. Это обстоятельство оставлено без внимания при выводе специаль-
ных формул Неймана, которые относятся к качению по неподвижной плоскости. Эти
формулы (Вег. d. Sachs. Ges., math.-phys. KI., 1883, стр. 42 и 1885, стр. 368) нуждаются
поэтому в соответствующей поправке.
36 Кяпияпипниыр ппиипипы механики
562
О. ГЁЛЬДЕР
§ 15. Специальный случай
Предположим еще, что шар, не будучи однородным, тем не менее имеет
центр тяжести в своем геометрическом центре. Система координат х, у, z
образована главными осями инерции для центра тяжести. Живая сила выра-
жается тогда уравнением
2Т = (u2 + v2 + w2) М + Рр2 + Qq2 + Rr2,
где М обозначает массу; P,Q,R— главные моменты инерции. Уравнения (41)
получают вид:
Р^-~ aM{ya^-y^+(R-Q)qr +
+ аМ [7з (pv — qu) + 7з (pw — ru)] = 0 ,
л dq ( dw du A .
Q-dT~ aM[y14r^734r] + (P-R)rp +
+ «Л4 [y8 (qw — rv) + 71 (qu — pv)] = 0,
- aM h -iT -’’><)+ « -p> M +
+ aM [yj (ru — pw) + y2 (rv — ?w)] = 0 .
Дифференцируя уравнения (36), получаем:
„ [ °'у3 n_dy2 r i „ Й _ „ dr}
dt a[ dt У dt r /з dt ?2 dt J ’
dt a[ dt r dt P dt Уз dt J ’
dw ( dy„ dy, „ . dp dq\
~dT-a[-irP-4r(i +^dP-^-dT}-
(43)
Эти уравнения нужны затем, чтобы исключить величины — из урав-
нений (42). После этого заменяем еще величины , -^р~, -^-правыми
частями уравнений (35) и, наконец, и, v, w — правыми частями уравнений
(36). Тогда мы получаем окончательно :
[Р + а2М (у3 + у2)] - а2М71 - а2Му2ys^ = (Q_p)qr,
[Q + а2М(у23 + у2)] 4 “ а2Му2у3^~ а2Му2 y1^ = (R-P)rp, (44)
[Я + «2 Л4 (у! + у!)] - a2Mys а2М7з у2 = (P-Q)pq.
Мы имеем уравнения, линейные относительно причем определи-
тель системы положителен. Таким образом, мы получаем величины-^ ,
do dr
, —, выраженные через величины 71, у2, у3, р, q, г, которые, если не счи-
тать соотношения
71 + 71 + Уз = 1 >
могут быть выбраны для начального состояния произвольно.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
563.
Простейшим случаем будет тот, в котором
Р = Q = R,
как, например, для однородного шара. Тогда из уравнений (44) получается:
4р _ _ dr _ n •
" df ~ dt ~~ dt ~ ’
т. e. мы имеем равномерное вращение вокруг оси, неизменно связанной
с шаром. С помощью последних уравнений, а также соотношений (43), (35)
и (36) теперь получаем еще:
(ах и + а2 v + «з w) = 0, ~ (fa и + /?2 v + /?3 w) = 0.
Это означает, что центр шара движется прямолинейно равномерно.
Теперь предположим опять, что моменты инерции Р, Q, R различны,
но начальное состояние возьмем такое, при котором р = q = 0. Тогда в
начале движения ось вращения совпадает с одной из главных осей. Урав-
нения (44) теперь показывают, что все время остается p = q = Onr = const,
и движение в этом случае протекает так же, как при однородном шаре.
Это можно было предвидеть. В самом деле, если представить себе начальное
состояние таким, как указано, а шар —• совершенно свободным при отсут-
ствии приложенных к нему сил, то движение будет протекать так, как только
что описано. Если при этом начальное состояние соответствует чистому
качению по плоскости, то это же самое имеет место и во всех последующих
состояниях. Если к этому добавить связь, препятствующую скольжению,
®т это ничего не изменит в данном движении.
А. ФОСС
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ [20° ]
Значение принципа наименьшего действия в форме, высказанной Лагран-
жей, как известно, долго оставалось под сомнением, хотя уже Остроград-
ский установил при рассмотрении изопериметрической проблемы общие
вариационные принципы. Гёльдеру принадлежит заслуга полного разъясне-
ния вопроса, новое обсуждение которого было вызвано исследованиями
Герца и Гельмгольца. Гёльдер обстоятельно рассмотрел*) связь принципа
наименьшего действия с «принципом Гамильтона» и природу возникающих
при этом представлений, связанных с вариационным аспектом проблемы,
и, если я теперь возвращаюсь к его работе, то не для того, чтобы добавить
к ней что-либо принципиально существенное. Применение того же хода
мысли к случаю совершенно общих координат требует некоторых сообра-
жений, не содержащихся в работе Гёльдера, в которой применяются коорди-
наты, явно от времени не зависящие. Развить эти соображения, пожалуй,
будет не лишним. С этой целью я прежде всего воспроизведу ход мыслей
Гёльдера**) в несколько измененной форме, а затем изложу его, пользуясь
совершенно общими координатами.
§ 1. Формулировка принципов Гамильтона и Мопертюи у Гёльдера
Пусть имеется такая задача механики, в которой координаты х, у, z
связаны не зависящими от времени условиями, которые частично могут
иметь форму линейных дифференциальных уравнений; далее, пусть Т —
живая сила, а
d'U = Z + Yh dyh + Zh dzh)
h
— виртуальная работа действующих сил.
Конечным уравнениям связи можно удовлетворить, ввода координаты
q, (г = 1, 2, ..., п); тогда Т преобразуется в однородную функцию второй
степени величин </•, a d'U принимает вид
d'U = 2Qidqi, (1)
i
причем q, связаны, сверх того, еще дифференциальными уравнениями:
*) A. Holder, Ueber die Principien von Hamilton und Maupertuis, GOtt. Nachr.,
1896, вып. 2, стр. 1—36 [см. стр. 538 настоящей книги. — Прим. ped.].
**) О применении координат qi, между прочим, упоминает и Гёльдер (там же, стр. 14).
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
565
Если сообщить t и q, такие вариации, что смещенные положения Р' точек
Р системы соответствуют значениям t 4- dt, qt 4- dq,, так что 8qi} St явля-
ются теми вариациями для момента t, при которых первоначальные коорди-
наты xh, yh, zh получают произвольные виртуальные перемещения dxh, dyh,
dzh, то общеизвестным методом*) мы находим
А'Г х? QT . . V- QT (ddqt ,6dt\
а следовательно,
dt ST + 2Tddt = dt £ dqt + + [2Т - J; ?! dt,
или, если по теореме об однородных функциях последний член опустить,
а второй член преобразовать путем интегрирования по частям в пределах
от t0 до t1} то получим
it+2тим - [ v44+/2’« - 4ж) dt
t. t.
Если к обеим частям уравнения прибавить
§ d'U dt
1 О
и опустить в правой части член, не содержащий знака интеграла, то, прини-
мая во внимание уравнения (1), получим
f, t,
J dt ST 4- 2Т 4- S'Udt = J£ (4?T + - Tf ж) ddi dt.
t, t„
Если теперь время оставить неварьированным, то отсюда следует
f 07 + м/) «Г = / 2 « + Q. - 4 о '
К /«
а требование обращения в нуль интеграла Гамильтона дает дифференциаль-
ные уравнения механики
дТ _|_ rj d дТ ___ ' ,
di/i Г Xi dt Qg-. Psi 1
и обратно.
Если же время варьировать, а изменение энергии согласно Гёльдеру
подчинить условию
ST — d’U = О,
то, принимая во внимание условия (2), получим
t<3 to
так что и расширенный принцип наименьшего действия**) оказывается пол-
ностью эквивалентным дифференциальным уравнениям механики.
*) См. Н б 1 d е г, там же, стр. 9.
**) Ср. Holder, там же, стр. 11.
566
А. ФОСС
§ 2. Случай обобщенных координат
Допустим теперь, что и конечные уравнения связей содержат явно
время. Если от них освободиться, вводя координаты qt (i = 1, 2, ..., п)
и полагая, таким образом, хЛ, ул, zh равными некоторым функциям перемен-
ных t и qt, то дифференциальные уравнения связей, даже если они до этого
явно не содержат t в качестве дифференциала или аргумента, принимают вид
>'Pksdqs +phdt = O, 1, 2, ..., v, (3)
S
где теперь уже pks, рк суть функции qb t, так что здесь следует предполагать
осуществленным этот общий случай, рассмотренный мною уже в 1884 г.*).
В то же время Т есть функция второй степени от q',**).
Если теперь сообщить координатам хЛ, yh, zh вариации, изменяя qt, t
на bqit dt, то хЛ изменяются на величину
тогда как
d%h Эх/; / Эхл
~dt ~ QqT ‘ ~дГ ’
Однако, применяя принцип Д’Аламбера, мы должны пользоваться только
виртуальными Перемещениями <3'хЛ, б'уЛ, d'zh. Принимая во внимание
уравнение
<3'хЛ = dxh - x'hdt = (Sq, - q'A),
мы видим теперь, что при таком воззрении***) виртуальные перемещения д'
соответствуют значениям
d'qt = - q'i St, (4)
так что
Если t увеличить на dt, a qt на dq,, то из уравнения (4) вытекает еще:
S' dqt = Sdq,'q'^dt + q"i Stdt. (5)
Совершенно так же, как и раньше, получаем
/ 11 IT + 2Т= [2"<- <4; + Р тгSl +
to
+u (£ - 1 » * «+/(»•- 2 W)• * •
to to
*) A. Voss, Ueber die Differentialgleichungen der Mechanik, Math. Ann., t. 25, стр. 258.
**) В дальнейшем этот особый вид функции Т не играет роли.
***) Ср. относящееся сюда замечание в книге: J. Routh, Dynamik, т. 2, стр. 329.
О ПРИНЦИПАХ ГАМИЛЬТОНА И МОПЕРТЮИ
567
или, если преобразовать последний интеграл при помощи интегрирования
по частям, то предыдущее выражение оказывается равным
h
Если теперь принять во внимание, что
d (п'Г X? 97"1 о ! О х? 9Т । х? 97 „« х- d Г 97"1
d/[2T ^Я,дс/-.] 2 + 2 9?| <7, + 9?Л,' ^?<dz[ 9?;J’
и если к обеим частям уравнения прибавить интеграл
$8'Udt = q.dt,
а также если опустить в правой части члены, не содержащие знака интеграла,
распорядившись вариациями в начале и в конце промежутка времени, то
найдем следующее уравнение:
\dtdT + 2T8dt + dT6t + d'Udt^ \2(-^~-^^ + Q^'qidt. (6)
Кроме того, из уравнений (3) следует
2 q'. + pk = o, X pki ty, + pkft = о,
или, на основании условия (4), получаем уравнение
2" рм <7, = 0,
представляющее собою условия, которым подчинены виртуальные переме-
щения. Если теперь положить dt равным нулю, то слева опять получается
гамильтоново интегральное условие, как эквивалентное уравнениям
эг а ът , л 3
Э9, dt dq'i + “ £ Ак Рм '
Если, с другой стороны, в качестве условия, которое налагается на энер-
гию варьированного движения, принять следующее:
d'Udt + dTdt = ЬТ dt, (7)
то отсюда вытекает расширенный принцип наименьшего действия. Условие
(7) можно еще преобразовать. Мы имеем:
или на основании уравнений (7) и (5) при соответствующих обозначениях,
так что и здесь при виртуальном перемещении полная энергия не изменяется,
так как последнее уравнение может быть записано также в виде
<5'(Т-Ц) = 0.
Таким образом, соответствующее исследование проведено и в самом общем
случае.
П. АППЕЛЬ
ОБ ОДНОЙ ОБЩЕЙ ФОРМЕ УРАВНЕНИЙ ДИНАМИКИ
И О ПРИНЦИПЕ ГАУССА [2°i ]
В томе 121 этого журнала нами была опубликована статья «Об одной
общей форме уравнений динамики»; мы просим разрешения представить
две дополнительные заметки, относящиеся к теме этой статьи, одну — мате-
матического характера, другую — библиографического, — о принципе
наименьшего принуждения Гаусса.
1. Уравнения Лагранжа применимы, когда связи некоторой системы
без трения могут быть выражены в конечной форме и когда применяются
параметры, являющиеся истинными координатами. Предположим для упро-
щения, что существует силовая функция U. Тогда можно написать урав-
нения движения, если только известны выражения половины живой силы
Т и U в функции независимых параметров.
Если, напротив, все связи не могут быть выражены соотношениями в
конечной форме, то нельзя более применять уравнения Лагранжа; чтобы
написать уравнения движения, достаточно знать U и функцию S = у 21m J2,
образованную ускорениями так же, как Т образуется из скоростей. Но
является ли это условие необходимым?
Могут ли существовать уравнения движения более общие, нежели урав-
нения Лагранжа, применимые ко всем случаям и требующие для своего
составления только знания двух функций: Т и U? Мы сейчас покажем,
что такие уравнения не существуют. Для этого мы приведем две различные
системы, для которых функции Т и U тождественно равны, причем, однако,
уравнения движения этих систем не одни и те же.
Первая система. Представим себе тяжелое тело, удовлетворяю-
щее следующим условиям:
1) тело заканчивается острым ребром в форме круга радиуса а;
2) центр тяжести G тела находится в центре круга К;
3) эллипсоид инерции для центра тяжести G есть эллипсоид вращения
относительно перпендикуляра Gz к плоскости круга.
Предположим, далее, что тело, построенное таким образом, вынуждено
катиться без скольжения по неподвижной горизонтальной плоскости, кото-
рой оно касается круговым ребром К.
Пусть будет Ga полупрямая, проведенная из центра G вертикально
вверх; примем за ось Gy перпендикуляр к плоскости aGz и за ось Gx —
перпендикуляр к плоскости yGz; тогда Gy будет горизонталью плоскости
круга К, а Gx — линией наибольшего ската этой плоскости, заканчиваю-
щейся в точке соприкосновения круга К с неподвижной плоскостью. Обо-
значим через 0 угол оси Gz с вертикалью Ga и через у — угол оси Gy с неко-
торой определенной неподвижной горизонталью. Эти два угла определяют
ОБ ОДНОЙ ОБЩЕЙ ФОРМЕ УРАВНЕНИЙ ДИНАМИКИ И О ПРИНЦИПЕ ГАУССА 569-
ориентацию трехгранника Gxyz. Чтобы определить положение твердого
тела относительно трехгранника Gxyz, достаточно знать угол <р, который
образует с осью Gy радиус круга К, неизменно связанный с телом.
Таким образом, мгновенное вращение ш тела слагается из вращения
трехгранника и из вращения = у' вокруг оси Gz. Составляющие р, q, г
вращения <о таковы:
р = — у>' sin в, q = 0' г = у>' cos в 4- Ч>' •
С другой стороны, условие качения круга К требует, чтобы квадрат
скорости центра тяжести G был равен a2 (q2 4- г2). В результате, принимая
массу тела за единицу и обозначая через А и С соответственно моменты
инерции относительно осей Gx и Gz, имеем
27 = a2 (q2 4- г2) 4- А (р2 + q2) 4- Сг2,
откуда получаются окончательные выражения для функций Т и U:
2Т = А у'2 sin2 0 4- (А 4- а2) О'2 4- (С + а2) (у/ cos 0 + 7')2, |
(J = — ga sin 0. f
Вторая система. Пусть имеется второе твердое тело той же формы,,
с тем же радиусом а и с той же массой, что и предыдущее. Предположим,
что масса в этом теле распределена иначе и притом так, что если обозначить
через А1 и Сх моменты инерции, аналогичные А и С, то мы будем иметь
Ах = А, Сх = С 4- а2.
Наложим на это тело следующие две связи: тело касается круговым ребром
К неподвижной горизонтальной плоскости Р1, по которой оно может сколь-
зить без трения; центр тяжести Стела скользит без трения по неподвижной
окружности в вертикальной плоскости; радиус этой окружности равен а,
а центр О находится в неподвижной плоскости Р1.
Чтобы выразить указанные связи, возьмем те же подвижные оси Gxyz
и те же обозначения, что и выше; назовем х1; у1; z1 абсолютные координаты
точки G относительно двух осей Охх и Oyv находящихся в плоскости Pv
а через OzT обозначим ось, направленную вертикально вверх. Можно пред-
положить, что неподвижная окружность, которую описывает точка G,
лежит в плоскости x-flzp, тогда мы будем иметь:
для первой связи z± = a sin О,
для второй связи уг — 0, х| 4- z2 = а2,
откуда, очевидно,
Xx = a cos 0.
При этих условиях мы имеем
2ТХ = х!2 4- у? + А2 4- А. (р2 4- <?2) 4- г2,
откуда, в силу значений х1( у1; г1( Ах и Сх,
271 = А ¥>'2 sin2 0 4- (А 4- а2) 0'2 4- (С 4- а2) (у' cos 0 4- д>')2,
иг — — ga sin 0.
Мы видим, что функции 7 и 7Х, U и Uv тождественно равны; между тем
уравнения движения различны, ибо уравнения Лагранжа применимы ко
второй системе и неприменимы к первой. Это мы и хотели доказать.
(2)
570
П. АППЕЛЬ
Можно заметить, что из трех уравнений движения два могут быть при-
ведены к одной и той же форме в обеих системах: в самом деле, интеграл
живых сил, очевидно, в обоих случаях один и тот же, кроме того, как уже
показал Слессер (Slesser) в статье, помещенной в Quarterly Journal of Mathe-
matics (1873), мы имеем право написать для первой системы уравнение Ла-
гранжа, относящееся к 0; это, очевидно, можно сделать и для второй системы.
Но третьи уравнения различны для двух движений: для второй системы
мы имеем интеграл г = г0, который не имеет места для первой системы.
Само собой понятно, что разница между двумя движениями обнаружи-
вается непосредственно, если образовать две функции S и S1; применяя
формулы нашей предыдущей статьи. (См. также Journal de Mathematiques
pures et appliquees, вып. 1, 1900.)
2. Библиографические указания. Мы дали в конце пре-
дыдущей статьи несколько беглых и неполных указаний относительно ана-
литического выражения принципа Гаусса. Мы обязаны А. Мейеру из Лейп-
цига следующими историческими и библиографическими сведениями. Анали-
тическое выражение Гаусса было уже указано Якоби в одной еще не опубли-
кованной его лекции; независимо от Якоби оно было дано Шефлером
(Scheffler) [III том журнала Шлёмильха (Schlomilch), стр. 197]. Оно воспро-
изводится у Маха (Mach, Die Mechanik in ihrer Entstehung historisch-
kritisch dargestellt, Leipzig, 1883), у Герца, которого мы цитировали, у Больц-
мана (Boltzmann, Vorlesungen uber die Prinzipe der Mechanik, Leipzig,
1897). Наконец, Уилард Гиббс (Willard Gibbs) в прекрасной работе «On the
fundamental formulae of Dynamics» (American Journal of Mathematics, т. II,
1879) дал приложения этого аналитического выражения принципа Гаусса
к различным задачам, особенно к вопросу о вращении твердых тел.
М. ПЛАНК
ОТРЫВОК ИЗ «ТЕОРЕТИЧЕСКОЙ ФИЗИКИ» [М2]
VII лекция (14 мая 1909 г.)
ОБЩАЯ ДИНАМИКА. ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ
' Три недели тому назад, анализируя перед вами современное состояние
системы теоретической физики и ее вероятное дальнейшее развитие, я ста-
рался главным образом показать, что в теоретической физике будущего
наиболее важным и окончательным подразделением всех физических явлений
будет подразделение их на обратимые и необратимые процессы. В следую-
щих затем лекциях мы видели, что с помощью теории вероятностей и с
введением гипотезы элементарного хаоса все необратимые процессы могут
быть разложены на элементарные обратимые процессы, другими словами,
что необратимость не является элементарным свойством физических явлений,
а является исключительно свойством скопления многочисленных однород-
ных элементарных явлений, из которых каждое в отдельности вполне обра-
тимо, и обусловлена особым, именно макроскопическим, способом рассмотре-
ния самого явления. С этой точки зрения можно с полным правом утверж-
дать, что в конце концов все явления природы обратимы. Необратимость
явлений, образованных из средних значений элементарных явлений, т. е.
макроскопических изменений состояния, не противоречит этому утвержде-
нию, — это я подробно излагал в третьей лекции. Я позволю себе здесь
сделать одно более общее замечание. Мы привыкли искать в физике объясне-
ния явлений природы путем разложения их на элементы. Мы рассматри-
ваем каждый сложный процесс, как состоящий из элементарных процессов,
анализируем его, рассматривая целое как совокупность частей. Этот метод,
однако, предполагает, что при таком подразделении характер целого не
меняется, совершенно так же, как каждое измерение физического явления
происходит в предположении, что введение измерительных инструментов
не влияет на ход явления. Здесь мы имеем случай, когда вышеупомянутое
условие не выполняется и где прямое заключение о целом по части привело
бы к ложным результатам. Действительно, как только мы разложим какой-
либо необратимый процесс на элементарные составные части, беспорядок
исчезает, и сама необратимость, так сказать, ускользает из-под рук. Таким
образом, необратимый процесс останется непонятным тому, кто стоит на
той точке зрения, что все свойства целого могут быть выведены из свойств
его частей. Мне кажется, что с подобным затруднением мы встречаемся
также в большинстве вопросов, касающихся духовной жизни человека.
Так как, таким образом, необратимость является как бы исключенной
из природы, то становится ясным, что общая элементарная динамика имеет
дело с процессами только обратимыми. Мы будем поэтому заниматься исклю-
чительно обратимыми процессами. Что в них особенно ценно с теоретической
572
М. ПЛАНК
точки зрения, — это то, что все обратимые процессы, будь они по природе
механического, электродинамического или термического характера, — все
они подчинены одному и тому же принципу, дающему однозначный ответ
на все вопросы, касающиеся хода процесса. Этот закон не есть принцип
сохранения энергии, который, хотя и приложим ко всем явлениям, но опре-
деляет их ход неоднозначно; это принцип более общий: принцип наимень-
шего действия.
Принцип наименьшего действия вырос, на почве механики [203 ], где
он стоит в одном ряду с другими принципами одинаковой важности; эти
принципы следующие: принцип Д’Аламбера, принцип возможных пере-
мещений, принцип Гаусса наименьшего принуждения и уравнения Лагранжа
первого и второго рода. Все эти принципы эквивалентны друг другу и пред-
•ставляют в сущности различные формулировки одного и того же закона;
в одних случаях представляется более удобным применить один, в других
случаях — другой принцип. Принцип же наименьшего действия имеет
перед ними то очень ценное преимущество, что он в одном уравнении дает
соотношение между величинами, имеющими непосредственное значение не
только для механики, но и для электродинамики и термодинамики; эти
величины: пространство, время и потенциал. Вот почему этот принцип
имеет непосредственное применение и к явлениям немеханического харак-
тера и, как показывают результаты, применения его к электродинамике и
термодинамике действительно приводят к законам, имеющим место в этих
науках. Так как мы в нашем изложении имеем в виду объединение системы
теоретической физики и наиболее общее представление физических законо-
мерностей, то принцип наименьшего действия должен для нас играть глав-
ную роль. Я покажу его применение на нескольких простых примерах.
Вот общая формулировка принципа наименьшего действия в той форме,
в какой она была дана Гельмгольцем: между всеми переходами какого-
либо подверженного внешним воздействиям физического образа, которые
могли быть совершены им в определенное время из определенного началь-
ного в определенное конечное положение, переход, в действительности
происходящий в природе, подчиняется тому условию, что интеграл
ь
f(<3H + A)d/ = O, (1)
t.
где 6 представляет произвольное изменение независимых координат (и ско-
ростей), а А — бесконечно малое приращение энергии (внешняя работа),
получаемое рассматриваемым нами образом при изменении д, функция же
Н есть кинетический потенциал. Мы говорили здесь о положениях, коорди-
натах и скоростях образа не исключительно в механическом смысле, но
имели в виду также совокупность более общих координат и полученных из
них величин, которые могут иметь разнообразные значения, например
количеств электричества, объемов и т. п. При применениях принципа наи-
меньшего действия следует отличать случаи, когда обобщенные коорди-
наты, определяющие положения рассматриваемого образа, входят в конеч-
ном числе, от случая, когда они представляют непрерывную совокупность.
С этой точки зрения мы и разделим рассматриваемые ниже примеры.
I. Положение (конфигурация) определяется конечным числом координат
В обыкновенной механике этот случай будет иметь место в каждой си-
стеме, состоящей из конечного числа материальных точек или твердых тел,
между координатами которых существуют неизменяемые уравнения условий.
ОТРЫВОК ИЗ «ТЕОРЕТИЧЕСКОЙ ФИЗИКИ»
573
Если мы назовем через <pv <р2, ... независимые координаты, то внешняя
работа будет
А = Фг д<рг + Ф2 д<р2 + ... = дЕ, (2)
где Фц Ф2, . .. — «слагающие внешних сил», соответствующие отдельным
координатам, а Е —энергия системы. Таким образом, принцип наименьшего
действия принимает вид
ь
f dt dq>i + d<pt + Ф, dqji) — 0 ; (3)
J V д</>1 Ъ<р1 '
отсюда получаются уравнения движения:
+ = 0 <4>
dt I S<pi ) dg>t
и т. д. для всех индексов 1,2, . . . Умножая отдельные уравнения последо"
вательно на <plt <р2, . . ., складывая и интегрируя по времени, получим урав-
нение сохранения энергии, причем энергия Е дается уравнением
(5)
В обыкновенной механике Н = L — U, где L — кинетическая, a U —
потенциальная энергия. Так как L представляет однородную функцию второй
степени относительно ф, то из уравнения (5) следует
E = 2L-H = L + U.
Однако это уравнение вообще не имеет места. Мы перейдем теперь к
рассмотрению квазистационарного движения системы линейных провод-
ников, по которым протекают простые замкнутые гальванические токи.
Состояние системы определяется положением и скоростью проводников,
а также силой тока в каждом из них в отдельности. Пусть <plt q>'lt <р"г, .. .
означают координаты, относящиеся к положению первого проводника;
подобные выражения будут иметь место и для остальных проводников.
Каково будет приращение энергии или внешней работы, соответствующее
возможному изменению всех координат? Системе можно сообщить энергию,
действуя на нее механически или электромагнитной индукцией. В первом
случае мы будем иметь работу механическую, во втором —электромоторную.
Механическая работа будет опять иметь вид
0J <?991 + Ф[ д(р[ 4- ... +Ф2д<р2+ ...
Обозначим, далее, через Е1; Е2 электродвижущие силы, индуктированные
в отдельных проводниках внешними воздействиями (например, движущи-
мися магнитами, непринадлежащими системе); тогда произведенная извне
на токи в проводниках нашей системы электромоторная работа будет равна
Ej Е2 де2 4* . . . ,
где 6е1; 6е2, ... — количества электричества, протекающие при бесконечно
малом возможном потоке через сечения проводников. Конечные значения
сил токов будем обозначать через ё1( ё2, ... Таким образом, электрическое
состояние первого проводника будет вообще определяться силой тока ёх,
574
М. ПЛАНК
механическое же (положение и скорость) — координатами <pr, <р[, <p"lt.. .
и соответствующими скоростями <рх, <р[, <р{,... Координаты е1т е2, ... носят
название «циклических», так как состояние определяется не их значением
в известный момент, а только их производными по времени, подобно тому
как состояние тела вращения, могущего вращаться вокруг оси симметрии,
зависит не от самого угла вращения, а от угловой скорости вращения. Введя
вышеуказанные обозначения, мы можем теперь применить принцип наимень-
шего действия к рассматриваемому нами случаю. Здесь
где Hv — механический потенциал, зависящий от <р и ср, электрокинетический
же потенциал имеет следующий вид:
Не — Ml + Мг "Ь Мз + • • • + ~2 Мг + • • •
Величины Lu, L12, Lls, . . ., L22, ... — так называемые коэффициенты само-
индукции и взаимной индукции, зависят известным образом от <рь <р{, . . .,
фь • • •
Таким образом, по уравнению (4) для движения первого проводника
будем иметь
ф_____) I I дНе п
1 dt ( ' 8^ ' Э^!
Подобным же образом для ср[, <р\, ... и для протекающего по нему тока
Законы механических (пондеромоторных) действий можно понимать
таким образом, что к обыкновенной силе, выражаемой через Ф1Г присоеди-
няется для первого проводника механическая сила:
ЪНе = 1 Э£ц -2 ,
Йу, 2 87), 1 '
—
£1 ё3 + . . . ,
слагающаяся из действия тока на самого себя (первое слагаемое) и из дей-
ствий на него остальных токов (остальные слагаемые). Законы же электри-
ческих действий могут быть выражены таким образом, что, кроме внешней
электродвижущей силы Е1г на первый проводник действует еще электродви-
жущая сила:
d ( ЭНе A d .г • . . • . • .
~~ ( — — df (Mi ei "Ь Ms е2 + Мз е3 ф- .. .),
в свою очередь слагающаяся из действия тока на самого себя (самоиндукция)
и из индуктированных действий остальных токов, и что внешняя электродви-
жущая сила и результирующая сила, обусловленная всеми индукционными
эффектами, уравновешивают друг друга.
Ни гальваническая проводимость, ни гальваническое сопротивление в
этих уравнениях не содержатся, так как соответствующая им энергия,
теплота Джоуля, возникает с помощью необратимого процесса, а эти про-
цессы не могут быть представлены принципом наименьшего действия. Впро-
чем, это действие, а также и другие необратимые действия могут быть фор-
мально введены в рассмотрение приемом, предложенным Гельмгольцем ;
для этого нужно в данном случае ввести еще одну внешнюю электродвижу-
щую силу сопротивления w, действующую в смысле уменьшения энергии
системы. Это изменение энергии для бесконечно малого промежутка вре-
мени будет
(wi + w2 ё| 4- iv3 ё| + .. .) dt = — (ш ёх deT 4- ir2 ё2 de2 4- • • •).
ОТРЫВОК'ИЗ «ТЕОРЕТИЧЕСКОЙ ФИЗИКИ»
575
Чтобы внешняя работа £\ dex + Е2 de2 + ... обнимала также теплоту
Джоуля, нужно в электромоторных уравнениях к слагающим внешних сил
Elt Ег, . .. присоединить еще добавочные члены —й\ ёх, —iv2 ё2, ...
Особенного интереса заслуживает применение принципа наименьшего
действия к процессам термодинамическим, так как здесь с особенной ясно-
стью выступает важность вопроса о выборе обобщенных координат, опре-
деляющих состояние образа. С точки зрения чистой термодинамики можно
выбрать совершенно произвольно переменные, определяющие положения
системы; так, например, для газа с определенными неизменяемыми свойст-
вами можно взять любые две из следующих величин: объем V, температуру Т,
давление р, энергию Е, энтропию S, остальные же выразить в функции
этих двух. Здесь дело обстоит совсем иначе. Действительно, для приме-
нения принципа наименьшего действия нужно знать изменение энергии
или полную работу А, произведенную извне на газ при произвольном беско-
нечно малом изменении состояния газа. Эта работа равна
А = - pW + TSS,
vjsji Т bS — сообщенная извне теплота, р 6V — произведенная извне меха-
ническая работа. Чтобы согласовать это выражение с общим выражением
для внешней работы (2)
А = Ф± + Ф2 д<р2 ,
удобнее всего принять V и S за общие координаты состояния и приравнять
их соответственно и <р2; тогда р и Т будут представлять собой общие
слагающие силы Фг и Ф2. Далее, так как в термодинамике каждое обратимое
изменение состояния протекает бесконечно медленно, то слагающие ско-
ростей V и S, а также и остальные производные по времени можно поло-
жить равными нулю; тогда принцип наименьшего действия (3) и (4) приве-
дется к уравнению
Ф+ 9" =0,
др
или в нашем случае
, ( ан ч „ , „ . ( ан ч л
Р I Js “ 0 И Т + (. ЭХ J v ~ ° ‘
Далее, по (5)
Е = — Н.
Что эти уравнения имеют место, видно из того, что они представляют
иную форму уравнения:
Приведенные здесь соображения в сущности те же, что и в энергетике
Маха, Оствальда, Хельма, Видебурга. Общие координаты V и S соответ-
ствуют «множителям емкости» и их теории, а р и Т — «множителям напря-
жения»*). Если ограничиться обратимыми процессами, то не представило
бы никаких затруднений довести их точку зрения до конца, а также рас-
пространить ее на случай химических явлений.
*) Выдвигаемая энергетиками на первый план разложимость дифференциала энергии
на два множителя не представляет какого-либо особенного свойства энергии, а есть про-
стое выражение того общеизвестного предложения, по которому дифференциал какой-
либо функции F(x) равен произведению из дифференциала dx на производную F'(x).
576
М. ПЛАНК
Совершенно иной характер носит другой' метод исследования термо-
динамических явлений, введенный в физику впервые Гельмгольцем. Одна
из общих координат, V, удержана, а вместо другой, S, введена некоторая
циклическая координата, — мы ее будем обозначать, как в предыдущем
примере, через е, но она входит в выражение кинетического потенциала Н
не сама, а-в виде производной по времени ё; эта производная ё представляет
температуру Т. Таким образом, Н зависит только от V и Т. Уравнение для
полной внешней работы по (2) будет иметь вид
А = -рЫ + Еде.
Чтобы это выражение совпадало с термодинамическими, нужно поло-
жить Е бе = Т 6S, а также
Ede = TdS, Edt = dS.
Уравнения, вытекающие из принципа наименьшего действия (3) и (4),
будут иметь вид
( дН 'i л г-, d ( дН А _
— р+Ьу?- =о и =о>
r V дТ at \ дТ
ИЛИ
=Edt = dS,
\ оТ Jv
и, интегрируя, получим
(S =S,
I ST )v
причем произвольная постоянная положена равной нулю. Для энергии по
уравнению (5) получим
.эн т(9н } н
откуда
Н = - (Е - TS).
Таким образом, Н противоположно по знаку той функции, которую Гельм-
гольц назвал свободной энергией образа; вышенаписанные уравнения
известны из термодинамики.
Точка зрения Гельмгольца может быть также вполне последовательно
доведена до конца, и, пока мы ограничиваемся рассмотрением обратимых
процессов, трудно отдать одной из них предпочтение. Однако, с принци-
пиальной точки зрения, вывод Гельмгольца имеет то преимущество, что он
более удовлетворяет нашему стремлению объединить систему физики. В энер-
гетическом представлении независимые переменные V и S не стоят ни в
какой связи друг с другом; теплота есть форма энергии, по существу отли-
чающаяся от энергии механической, к которой она никаким образом не
может быть сведена. У Гельмгольца тепловая энергия сведена к движению,
а это представляет такой же шаг вперед, как сведение световых волн к
электромагнитным.
Правда, для необратимых процессов и теория Гельмгольца оказывается
недостаточной; на эту область, как мы об этом подробно говорили раньше,
может пролить свет только введение исчисления вероятностей. Этим объясня-
ется, что более строгие энергетики не хотят знать необратимых процессов
и либо считают их пока сомнительными, либо вообще игнорируют.. Вдействи-
ОТРЫВОК ИЗ «ТЕОРЕТИЧЕСКОЙ ФИЗИКИ»
577
дельности дело обстоит совсем наоборот: необратимые процессы — единст-
венные, действительно происходящие в природе; обратимые же процессы
суть идеальные, имеющие очень важное значение в теории, в природе же
они никогда вполне не осуществляются.
11. Обобщенные координаты состояния составляют непрерывное
многообразие
Как наиболее простой пример, можно рассмотреть вывод законов беско-
нечно малых движений абсолютно упругого тела. За координаты состояния
можно взять слагающие перемещения vx, vy, vz материальной точки из ее
положения равновесия (х, у, z) как функции координат х, у, z. Внешняя
работа выражается поверхностным интегралом
А = J da (Xv dvx + Yv dvy + Zv dvz)
(da —• элемент поверхности, v — внутренняя нормаль), кинетический потен-
циал представляется опять в виде разности между кинетической энергией L
и потенциальной U :
H = L — U.
Кинетическая энергия
L = J (vl + $у + г>г),
где dr— элемент объема, к — объемная плотность. Потенциальная энергия
U есть также объемный интеграл, распространенный на некоторую одно-
родную функцию / второй степени, представляющую потенциальную энергию
элемента объема. Она зависит, как можно убедиться из чисто геометрических
соображений, только от шести величин деформации:
Qvx Эгу Qvz
~дх ~ Хх ’ ~~ду~ ~ ’ ~дГ Zz '
dv? , 9v, dv? , dvx dvx , dvv
+ ~ду~ —У^ — гУ’ "ЭГ + ~ЭгГ — ~ xz > ^jy + ~э7 = xy = Ух-
В общем, следовательно, / содержит 21 не зависящую друг от друга про-
извольную постоянную, которые характеризуют упругое состояние вещества.
Для изотропных субстанций это число в силу симметрии сводится к 2. Под-
ставив полученные значения в выражение принципа наименьшего действия
(3) и (4), получим
pf[Jdr/c(i>x<5i>x + ..-)-^т^дхх + ^-дху+ .. .)+§da(Xvdvx+.. .)] = 0.
Положив для краткости
9/__ X Ъхх Хх ’ — — Y — Z 8уг ~ —
У _.v дУу _ д/ 7 х dzx —
VL-Z dzx — х ’ df X у дху ~ у~~ 1х
и приведя интегрированием по частям вариации dvX) dvy, frt>z, а также
вариации дхх, дху, бхг, ... к вариациям 6vx, bvy, dv,, найдем следующие
37 Вариационные принципы механики
578
М. ПЛАНК
уравнения, имеющие место для точек внутри тела:
, , ЭХх . dY , dz А
kvx + -а---Ь ---Ь = 0, ...
х ох 1 ду 1 Эг ’
и на поверхности
Х„ = Хх cos v х + XyCosvy + Xzcosvz, ...,
как это известно из теории упругости. Из уравнений на поверхности выте-
кает механическое значение величин Хх, Yy, ... как поверхностных сил.
Приложим, наконец, принцип наименьшего действия к одному специаль-
ному случаю из области электродинамики, а именно к электродинамическим
явлениям в покоящемся однородном непроводнике, например в пустоте.
Этот вывод мало чем отличается от только что приведенного. Единственным
отличием будет то, что в электродинамике зависимость потенциальной энер-
гии U от обобщенных координат v несколько иная, чем для упругой среды.
Итак, положим опять для внешней работы
А = J da (Х„ dvx 4- Y, dvy 4- Zv dvz), ...
и для кинетического потенциала
Н = L — U,
откуда опять
Е = j dr у («>2 4- «>2 4- i>2) = Jdr у (i>)2.
Между тем здесь мы напишем
U = Jdry (curl г)2.
Этими положениями вполне определяются не только динамические урав-
нения, но и предельные условия. Действительно, принцип наименьшего
действия (1) и (3) дает
J dt [ J dr (i)x dvx + ...) — [ dr h (curlx v 6 curlx v 4- ...) J da (X, dvx 4- ...)] — 0.
Отсюда таким же путем, как в теории упругости, найдем для точек
внутри тела
. _ h ( д curly v д curl2 v
—Qy
или, короче,
к v = — h curl curl v,
и для поверхности
X? = h (curl2 v cos v у — curly v cos v z), ...
Эти уравнения будут совпадать с известными электродинамическими
уравнениями, если положить L равной электрической, a U — магнитной
энергии (или наоборот). Действительно, положим
'•-wW и
(F и 2 — силы поля, е — диэлектрическая постоянная, у, — магнитная
проницаемость) и сравним эти значения с вышенаписанными выражениями
L и U : тогда можно написать
= — F ]/, curl v = 2 ]/-~-г. (6)
I 4 л к’ у 4л к
ОТРЫВОК ИЗ «ТЕОРЕТИЧЕСКОЙ ФИЗИКИ»
579
Отсюда прежде всего, исключая v, получим
й = —1/^4cur' f ,
подставляя далее v и curl v в kv = — h curl curl v, получим
F — 1/^4 curl Й.
у £ к
Сравнивая эти выражения с электродинамическими выражениями в так
называемых единицах Гаусса:
ц й = — с curl F, eF = с curl й
(с — скорость распространения света в пустоте), мы видим, что они будут
тождественны, если положить
с _ 1/ е/г и с д/г
fi f /ik е ек
Из этих двух уравнений получается для квадрата скорости распостра-
нения
п _ с2
к е fi
Из уравнения внешней работы получаем выражение для энергии, поступаю-
щей извне,
dt J da (Х„ vx + Yv vy +
или, имея в виду уравнение для X,:
dt J da h [(curla v cos vy — curly v cos vz) t>~ + ...
Это выражение после подстановки из (6) вместо v и curl v их значений будет
тождественно с известным выражением Пойнтинга для потока энергии.
Таким образом, применяя принцип наименьшего действия, при надлежа-
щем выборе выражения для кинетического потенциала Н, мы получили
известные уравнения электромагнитного поля Максвелла.
Но сведены ли таким образом электродинамические явления к механи-
ческим? Нисколько, ибо вектор V, которым мы пользовались, не представ-
ляет величины механической. Невозможно также вообще истолковать v
механически, например v как перемещение, v как скорость, curl v как
вращение. Ибо, например, в электростатическом поле v постоянно, между
тем v растет неопределенно со временем; таким образом, curl v нельзя истол-
ковать как вращение*).
Таким образом, хотя вышеприведенные соображения не доказали воз-
можности механического истолкования электрических явлений, но, с другой
стороны, из них несомненно вытекает, что значение принципа наименьшего
действия распространяется далеко за пределы механики в узком смысле
слова и что этот принцип может быть положен в основание общей дина-
мики, так как он объемлет собою все обратимые процессы.
*) О невозможности свести электрические явления к движениям непрерывной среды
см. особенно Н. W i 11 е, О современном состоянии вопроса механического толкования
электрических явлений, Берлин, 1906.
ОТ*
М. ПЛАНК
ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ [2Э4]
С тех пор как существует научная физика, высшей целью, мерцавшей
перед нею, было разрешение задачи — как обобщить все явления природы,
наблюдавшиеся в прошлом и могущие быть наблюдаемыми в будущем,
в одном простом принципе, который позволит выводить из процессов настоя-
щего как прошедшие, так и, в особенности, будущие процессы. Эта цель
сегодня не достигнута ; она не будет достигнута полностью и в будущем,
что лежит в самой природе вещей, но все больше и больше приближаться
к ней—вполне возможно. История теоретической физики показывает, что на
пути к этой цели уже получено большое количество важных результатов,
отчетливо свидетельствующих о том, что эта идеальная проблема не является
чисто утопической, а наоборот, чрезвычайно плодотворной ; поэтому с прак-
тической точки зрения она заслуживает того, чтобы ее постоянно иметь
в виду.
Среди более или менее общих законов, которые характеризуют дости-
жения физической науки в ее развитии за последние столетия, принцип
наименьшего действия в настоящее время является как раз таким, который
по форме и по содержанию может претендовать на то, что он ближе всего
подошел к упомянутой выше идеальной конечной цели физического иссле-
дования. Значение принципа, если его выразить с необходимой общностью,
распространяется не только на механические, но также и на термические
и электродинамические явления; во всех областях его применения он не
только дает представление о некоторых свойствах встречающихся процессов,
но совершенно отчетливо определяет ход физических процессов в простран-
стве и времени, отвечая на все относящиеся к этому вопросы, если известны
необходимые постоянные и произвольно определяемые внешние условия.
Однако еще до настоящего времени это основное положение принципа
наименьшего действия не было совершенно бесспорным. Принцип сохране-
ния энергии, который также господствует над всей физикой и, несомненно,
умеет преимущество большей наглядности, некоторое время особенно сильно
конкурировал с принципом наименьшего действия. Поэтому, да будет мне
разрешено сопоставить оба принципа.
Принцип сохранения энергии можно вывести из принципа наименьшего
действия; следовательно, он в нем содержится; между тем сделать обратное
не удается. Поэтому принцип сохранения энергии является более частным,
а принцип наименьшего действия — более общим законом. Поясним это на
простом примере движения свободной материальной точки, не подвержен-
ной никаким силам. В соответствии с принципом сохранения энергии, такая
точка движется с постоянной скоростью, но о направлении этой скорости
принцип сохранения энергии не говорит абсолютно ничего, так как кинети-
ческая энергия совершенно не зависит от направления. С одинаковым
ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ
581
успехом траектория точки могла бы быть, например, прямолинейной или
круговой. Принцип же наименьшего действия требует большего (о чем
более подробно будет указано ниже); он требует, чтобы траектория точки
была прямолинейной.
В данном простом случае можно было бы попытаться дополнить содер-
жание принципа сохранения энергии определенными простыми предполо-
жениями, например, что у свободно движущейся точки остается постоянной
не только вся кинетическая энергия, но и частичное количество кинетической
энергии, которое падает на определенное пространственное направление.
Между тем такое дополнение было бы чуждо принципу сохранения энергии,
и его трудно было бы применить к более общим случаям. Так, например,
для сферического маятника (тяжелая материальная точка на твердой по-
верхности шара) из принципа сохранения энергии можно вывести только
то заключение, что кинетическая энергия маятника при движении вверх
определенным образом уменьшается, а при движении вниз увеличивается.
Но траекторию пути эти условия еще однозначно не определяют, тогда как
принцип наименьшего действия полностью отвечает на любой вопрос,
относящийся к движению.
Причина неодинакового значения обоих принципов состоит в том, что
принцип сохранения энергии, примененный к конкретному случаю, дает
одно-единственное уравнение, тогда как для полного изучения движения
необходимо столько уравнений, сколько имеется независимых координат,
следовательно, для движения свободной точки три, а для движения сфери-
ческого маятника два уравнения. Принцип же наименьшего действия в
каждом случае дает как раз столько уравнений, сколько имеется независи-
мых координат. Принцип наименьшего действия способен охватить большое
количество уравнений в одном-единственном положении, потому что он
в противоположность принципу сохранения энергии является вариацион-
ным принципом. Из бесчисленного количества движений, возможных в рам-
ках наложенных условий, принцип наименьшего действия с помощью
простого отличительного признака выхватывает совершенно определенное
движение и характеризует его как действительно имеющее место в природе.
Этот признак заключается в том, что при переходе от действительного дви-
жения к любому бесконечно близкому возможному движению, точнее, при
каждой, совместимой с наложенными условиями, бесконечно малой вариа-
ции действительного движения, характерная для вариации определенная
величина обращается в нуль. Из этого условия следует, как и при всякой
проблеме максимума или минимума, особое уравнение для каждой незави-
симой координаты.
Понятно, что содержание принципа наименьшего действия приобретает
определенный смысл только в том случае, когда точно указаны как нало-
женные условия, которым должны быть подчинены возможные движения,
так и характерная величина, которая для любой вариации действительного
движения должна исчезнуть. В формулировке принципа наименьшего дей-
ствия издавна составляло трудность нахождение правильного определения
этих условий и варьируемой величины. Но не менее ясно, что мысль охватить
в одном-единственном вариационном принципе все множество уравнений,
необходимых для характеристики движения любой сложной механической
системы, сама по себе имеет выдающееся значение и является важным
успехом теоретического исследования.
В связи с этим надо вспомнить о Теодицее Лейбница, в которой выдвинут
тезис о том, что истинным миром среди всех миров, которые могли бы быть
сотворены, является тот мир, который наряду с неизбежным злом содержит
в себе максимум добра. Этот тезис является не чем иным, как вариационным
582
М. ПЛАНК
принципом, выраженным в'такой же форме, как возникший позднее принцип
наименьшего действия. Неизбежное сцепление добра и зла играет при этом
роль предписанных условий, и ясно, что фактически из этого тезиса могли
бы быть выведены все особенности действительного мира, если бы удалось
математически точно сформулировать, с оДной стороны, меру для коли-
чества добра, с другой стороны — предписанные условия. Второе так же
важно, как и первое.
Однако надо было пройти длинный путь, прежде чем пустая форма нашего
принципа могла быть наполнена богатым содержанием. Прежде всего дело
заключалось в том, чтобы найти характерную величину, значение которой
для действительного движения должно быть равно нулю. Тут с самого
начала можно исходить из двух различных точек зрения. В соответствии
с одной точкой зрения характерную величину относят к отдельному моменту
или к бесконечно малому элементу времени; в соответствии с другой, наобо-
рот, к конечному промежутку времени движения. Смотря по тому, решаются
ли встать на первую или на вторую точку зрения, приходят к двум различ-
ным классам вариационных принципов.
К первому классу относятся принцип возможных перемещений Бернулли,
принцип сил инерции Д’Аламбера, принцип наименьшего принуждения
Гаусса и принцип прямейшего пути Герца. Все эти вариационные принципы
можно охарактеризовать как дифференциальные принципы, поскольку
они вводят в качестве характерного признака действительного движения
свойство движения, которое имеет значение для одного-единственного
момента или элемента времени. Для систем механики все эти принципы
эквивалентны и законам-движения Ньютона, и между собою. Но все они
страдают тем недостатком, что имеют смысл только для механических
процессов и что их формулировка делает необходимым пользоваться спе-
циальными координатами точек рассматриваемой материальной системы.
Их формулировка, в зависимости от выбора координат точки, совершенно
различна, и даже, чаще всего, относительно сложна и мало наглядна.
От этого порока — неизбежности специальных механических коорди-
нат — можно освободиться, если сформулировать вариационный принцип
как интегральный принцип, отнеся его с самого начала к конечному интер-
валу времени. В таком случае действительное движение отличается от
всех возможных движений тем свойством, что для любой из его допусти-
мых вариаций определенный интеграл по времени исчезает. В важнейших
случаях это условие может быть сформулировано и так, что для действи-
тельного движения определенный интеграл по времени, определяемый как
количество действия или действие движения, меньше, чем для всякого дру-
гого движения, связанного наложенными условиями. При этом действие
одной-единственной материальной точки, по Лейбницу, равно интегралу
по времени от кинетической энергии или, что является тем же самым,
равно интегралу от скорости по пути.
В этой формулировке принцип наименьшего действия может быть выра-
жен безотносительно к каким-либо специальным координатам точки и даже
вообще без предпосылки, что процесс является механическим, так как в его
формулировке играют роль только энергия и время. Правда, с введением
интеграла по времени возникает особое обстоятельство, с давних пор
и по сей день способное вызвать у некоторых физиков и исследователей
теории познания определенные сомнения относительно принципа наимень-
шего действия, как вообще относительно любого интегрального принципа.
А именно, при этом действительное движение в определенное время рассчи-
тывается с помощью рассмотрения будущего движения, следовательно,
настоящее состояние делается в известной мере зависимым от позднейших
ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ
583
состояний, и это придает принципу некоторый телеологический привкус.
Тот, кто придерживается только принципа причинности, будет требовать,
чтобы как причины, так и все свойства движения были понятны и выведены из
предыдущих состояний, независимо оттого, что произойдет когда-либо в буду-
щем. Это кажется не только обоснованным, но и соответствует правилу эконо-
мии мышления. Наоборот, тот, кто в системе законов природы ищет высших,
по возможности обозримых связей, тот в интересах желанной гармонии
с самого начала считает дозволенными такие вспомогательные средства,
как ссылка на события позднейшего времени. Хотя эти средства не являются
такими уж необходимыми для полного описания процессов природы, но,
пожалуй, являются удобными для применения и наглядными для объясне-
ния. Я напомню о том, что в математической физике часто только для того,
чтобы сохранить симметрию уравнений, отказываются от сведёния входя-
щих в вычисление величин к независимым переменным и охотнее вводят
в вычисление одно или несколько лишних переменных только для того,
чтобы использовать чисто формальное, но весьма практичное преимущество,
которое представляет собою сохранение симметрии. После Галилея физика
достигла своих наибольших успехов благодаря сознательному отказу от
всяких телеологических методов. Поэтому и в настоящее время она отно-
сится резко отрицательно ко всем попыткам объединить закон причинности
с телеологической точкой зрения. Но хотя для формулирования законов
механики нет необходимости вводить конечные промежутки времени, все же
по этой причине нельзя отвергать интегральные принципы. Вопрос об их
обоснованности не имеет ничего общего с телеологией и является скорее
практическим вопросом. Он сводится к тому, полезнее ли других форму-
лировок для теоретической физики формулировка законов природы в том
виде, в каком она разрешается интегральными принципами. На этот вопрос
с точки зрения современного исследования надо ответить утвердительно
хотя бы вследствие уже упомянутой независимости от специального выбора
координат точки. Однако, как мы увидим далее, только современный прин-
цип относительности способствовал полному пониманию того, что не только
практически важно, но даже необходимо ввести конечные промежутки
времени в основные принципы механики.
В формулировках принципа наименьшего действия, обсуждавшихся до
сих пор, не уделялось внимания условиям движений, предположенных
возможными, и все-таки эти условия имеют такое же значение, как и сама
величина действия, так как в зависимости от характера наложенных условий
содержание принципа принимает совершенно различное значение. Дело
идет не только о признаке, по которому сделан выбор, но и о природе дви-
жений, которые подлежат отбору. Однако, пока это обстоятельство, недо-
оценка которого привела ко многим роковым ошибкам, было ясно понято
и принцип наименьшего действия получил первую правильную формули-
ровку, прошло длительное время. Если открытие принципа наименьшего
действия приурочить именно к этому моменту, то только Лагранжу можно
приписать эту заслугу. Между тем такая оценка была бы несправедлива
в отношении тех людей, которые подготовили почву и начали работу, впослед-
ствии удачно завершенную Лагранжем. К числу этих людей относятся
прежде всего Лейбниц, судя главным образом по его письму 1707 г.,
оригинал которого утерян, затем Мопертюи и Эйлер.
Моро де Мопертюи, назначенный Фридрихом Великим президентом
Прусской Академии наук (1746—1759), не только признал существование
и значение принципа наименьшего действия, но, напрягая все свои силы,
пытался выставить этот принцип в благоприятном свете как в науке, так и
за пределами науки. Правда, рвение, граничащее с раздражительностью,
с которым Мопертюи возвещал современникам свой принцип все в новых
формах и защищал его во всех направлениях от зачастую обоснованных
возражений, стоит в некотором противоречии с научным значением форму-
лировки, которую он считал наиболее подходящей. Нельзя отделаться от
мысли, что движущая сила его энергичной поддержки объективно недоста-
точного тезиса вытекала не только из научной убежденности, но в такой же
степени и из твердого намерения при всех обстоятельствах обеспечить себе
приоритет открытия, которое он считал важнейшим делом своей жизни.
В пользу этого особенно говорит то, иначе прямо-таки непонятное ослепление,
с которым он оспаривал подлинность упомянутого выше письма Лейбница,
опубликованного профессором Самуилом Кёнигом (1751 г.), доходя в исполь-
зовании порученной ему высокой должности до грани злоупотребления.
Правда, никому человеческая слабость и тщеславие не были отомщены более
жестоко, чем президенту Берлинской Академии.
Историографы изложили те потрясающие превратности, которые в этом
случае дали повод вмешаться даже философу-королю. Они получили воз-
можность много раз обстоятельно и живо изложить эту историю в академи-
ческих речах: А. Майера (1877 г.), Г. фон Гельмгольца (1887 г.), Е. Дюбуа-
Раймонда (1892 г.), Дильса (1898 г.). Связь рассматриваемой проблемы
с общим развитием математических наук освещена в «Истории математики»
Кантора, ее значение для Берлинской Академии наук освещено в истории
этой корпорации, составленной Гарнаком.
Формулировка принципа наименьшего действия, данная Мопертюи,
не говорит ничего другого, кроме того, что «количество действия, употреблен-
ное на происходящие в природе изменения, всегда является минимальным».
Следовательно, строго говоря, она вообще не дает никакого заключения о
законах изменения. Ибо до тех пор, пока не установлены условия, кото-
рым должны быть подчинены возможные изменения, еще ничего не сказано
о том, какие изменения должны быть сравниваемы между собой. Мопертюи
не хватило аналитической критики для того, чтобы ясно увидеть этот пробел.
Этот недостаток станет тем понятнее, что сам Л. Эйлер, который в отстаи-
вании принципа стоял на стороне своего коллеги и друга и, во всяком
случае, как математик значительно превосходил Мопертюи, не смог добить-
ся ясной формулировки принципа.
Заслуга Мопертюи, собственно, заключалась скорее в том, что он вообще
искал принцип минимума, который являлся, в сущности, путеводной звездой
его спекуляций. Поэтому он привлек также принцип Ферма, так называемый
принцип скорейшего прибытия, хоти с принципом наименьшего действия
он находится в весьма косвенной и для тогдашней физики во всяком случае
непонятной связи. В основе этого интереса к принципу минимума лежала
метафизическая идея о том, что господство божества открывается в при-
роде, что поэтому в основе каждого процесса природы лежит намере-
ние, направленноё на достижение определенной цели и знающее,
как достичь эту цель наикратчайшим путем, с помощью наипростейших
средств.
Насколько неудовлетворительны подобные телеологические размышления
и насколько они способны ввести в заблуждение, можно лучше всего убедить-
ся, если подумать над тем, что принцип наименьшего действия в самом об-
щем виде вовсе не является принципом минимума. Так, например, тезис о
том, что траектория материальной точки, свободно движущейся на шаре и
не подчиненной движущим силам, представляет собою кратчайшую линию
между исходным и конечным положениями, не действителен в том случае,
если траектория длиннее, чем половина длины окружности большого круга
на шаре. Следовательно, божественное предвидение не было в состоянии
ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ
585
действовать за пределами половины окружности. Еще разительнее то
обстоятельство, что для «неголономной» системы принцип относится
к виртуальным движениям, которые даже не являются возможными
движениями, благодаря чему условие минимума совершенно теряет
смысл.
Однако, несмотря на все это, нельзя упустить из вида того непоколеби-
мого исторического факта, что твердая вера во внутреннюю взаимосвязь
законов природы с господством высшего разума являлась непосредственной
исходной точкой открытия принципа наименьшего действия и что такая
вера в случае, если она с самого начала не втиснута в слишком узкие
рамки, не может быть несомненно доказана, но также никогда не может
быть несомненно опровергнута, так как в конце концов можно каждое
всплывающее противоречие снова и снова объяснять недостатками форму-
лировки.
Ж. Лагранж первый ясно сформулировал принцип наименьшего дей-
ствия (1760 г.). Среди всех движений, которые приводят систему материаль-
ных точек при постоянной полной энергии из определенного исходного поло-
жения в определенное конечное положение, действительное движение произ-
водит минимальное действие. Следовательно, возможные движения должны
удовлетворять принципу сохранения энергии, зато они могут происходить
в любое время. В соответствии с этой формулировкой путь одной материаль-
ной точки без приложенной движущей силы таков, что она с постоянной
скоростью и в кратчайшее время достигнет цели. В качестве кривой пути
получается линия кратчайшей длины, т. е. для свободной точки — прямая
линия. К. Якоби и У. Гамильтон показали впоследствии, что принцип
допускает и совершенно иные формулировки. Особую важность для буду-
щего представляла формулировка, которую предложил Гамильтон. В ней
сравниваемые возможные движения не должны обладать постоянной полной
энергией, а вместо этого все должны протекать в одно и то же время.
Но в таком случае действие, которое для действительного движения прини-
мает минимальное значение, надо выражать не интегралом по времени от
кинетической энергии, данным Мопертюи, а интегралом по времени от раз-
ности между кинетической и потенциальной энергиями. В применении к ука-
занному выше примеру материальной точки, движущейся без воздействия
движущих сил, принцип из всех возможных кривых дает в качестве
траектории ту, на которой точка в определенное время с наименьшей
скоростью достигает своей цели, следовательно, опять-таки наикратчайшую
линию.
Характерно, что принцип наименьшего действия, даже после того, как
он был полностью узаконен в механике Лагранжем, не оказал никакого
существенного практического влияния на научный прогресс. Его рассматри-
вали скорее как математический курьез, как интересный, но излишний
придаток к ньютоновым законам движения. Еще в 1837 г. Пуассон смог
назвать его «лишь бесполезным правилом». Только после исследований
Томсона и Тэта, Г. Кирхгофа, К. Неймана, Л. Больцмана и др., когда оказа-
лось, что принцип наименьшего действия является инструментом, отлично
используемым для разрешения проблем гидродинамики и теории упругости,
в то время как другие математические методы частью оказались более неуклю-
жими, частью вовсе отказывали, был подготовлен перелом и начали ценить
эвристическое значение принципа. Томсон и Тэт сказали об этом (1867 г.):
«знаменитый принцип наименьшего действия Мопертюи до сих пор рас-
сматривался скорее как странное и несколько запутанное свойство дви-
жения, чем как полезное руководство в кинетических исследованиях.
Но мы твердо убеждены, что ему придадут гораздо более глубокое
586
М. ПЛАНК
значение не только в абстрактной динамике, но и в теории многих отде-
лов физики, которые в настоящее время начинают получать динамические
объяснения».
Правда, оказалось также, что в применении принципа надо соблюдать
величайшую осторожность, дабы не впасть в ошибку, а именно при форму-
лировании условий для возможных перемещений. Так, например, применяя
принцип наименьшего действия к движению твердого тела в жидкости при
отсутствии трения и вращения, недостаточно оставить неизменными началь-
ное и конечное положения твердого тела; необходимо оставить без изме-
нений также начальное и конечное положения всех частиц жидкости.
Ошибку другого рода сделал Г. Герц, когда он во введении к своей механике
применил принцип наименьшего действия к движению шара, катящегося
по горизонтальной плоскости, и при этом для возможных перемещений
поставил условия, недопустимые для неголономной системы. Заслуга разъяс-
нения этого обстоятельства принадлежит в первую очередь О. Гёльдеру
и А. Фоссу.
Однако только тогда непосредственное, основное значение принципа
наименьшего действия получило всеобщее признание, когда оказалось, что
он применим также и к таким системам, механизм которых или вовсе не из-
вестен, или настолько сложен, что свести его к обычным координатам невоз-
можно. После того как Л. Больцман и позже Р. Клаузиус установили
тесную связь принципа наименьшего действия со вторым началом термо-
динамики, Г. Гельмгольц (1886 г.) дал впервые наиболее полно охватываю-
щее, систематическое сопоставление всех в то время возможных применений
принципа в трех больших областях физики — в механике, электродинамике
и термодинамике. Эти применения поражали своей многосторонностью
и полнотой.
Для своих расчетов Гельмгольц избрал гамильтонову форму принципа
как наиболее удобную, снабдив ее некоторыми дополнениями, скорее фор-
мального характера. Величину, интеграл по времени которой представляет
действие Гамильтона, он назвал «кинетическим потенциалом». При этом,
однако, он еще сохранил предпосылку, что принцип наименьшего действия
по существу является механическим; но это ограничение в его ана-
лизе уже несколько отступило на задний план, так как при рассмотрении
многих систем, например гальванических токов, магнитов, ему не надо
было входить в рассмотрение их специальных механических свойств. Зато
Гельмгольц уже тогда предпринял решительный шаг, заключающийся в
том, что кинетический потенциал он не стал выводить из энергии как
разность кинетической и потенциальной энергий, что делалось до него, а,
наоборот, взял за основу кинетический потенциал в качестве первичной
величины и из него определил как все другие законы движения, так и
величину энергии.
Результатом этого нового способа рассмотрения оказалось, главным
образом, значительное, бросающееся в глаза, обобщение. А именно : кинети-
ческий потенциал в противоположность энергии отличается не только
своей аналитической формой, но и своей величиной, в зависимости от вы-
бора независимых переменных. Привожу пример: используя некоторые
уравнения движения, можно с их помощью соответственно сокращать число
независимых переменных. Тогда исключенные переменные совсем исчезают,
они соответствуют так называемым скрытым движениям. В каждом таком
случае кинетический потенциал принимает другую величину, и этим объяс-
няются, например, разнообразные выражения потенциала, с которым сталки-
ваются в термодинамике, в зависимости от выбора независимых переменных.
Гельмгольц показал, как эти различные выражения связаны между собой
ПРИНЦИП НАИМЕНЬШЕГО ДЕЙСТВИЯ
587
и как они вытекают одно из другого. Он показал также, что кинетический
потенциал может принимать такую форму, в которой он уже больше не
представляет собой разности кинетической и потенциальной энергий. Это
обстоятельство как раз и дает возможность особенна отчетливо понять
универсальность принципа действия, так как нигде вне пределов механики
различие между кинетической и потенциальной энергиями больше невоз-
можно, а следовательно, вне этих пределов отпадает возможность одно-
значно вывести кинетический потенциал из энергии; обратное же во всех
случаях является легким и простым.
Если Гельмгольц, по крайней мере в принципе, мог придерживаться
предпосылки о том, что все физические процессы сводятся к движе-
ниям простых материальных точек, то выполнимость этого предполо-
жения относительно, например, электродинамических процессов стала
с тех пор по меньшей мере сомнительной. Но несомненно, что принцип
наименьшего действия полностью доказал свою применимость и плодотвор-
ность как раз в области не механической физики, а именно, в электродина-
мике чистого вакуума. Дж. Лармор (1900 г.), Г. Шварцшильд (1903 г.) и
другие, не нуждаясь в каких бы то ни было механических гипотезах, вывели
из принципа Гамильтона основные уравнения электродинамики и элек-
тронной теории.
Таким образом, принцип наименьшего действия проделал точно такое
же развитие, какое несколько раньше проделал принцип сохранения энергии.
И его вначале все считали механическим принципом; некоторое время его
всеобщее значение приводилось как раз в качестве доказательства в пользу
механистического взгляда на природу. В настоящее время этот взгляд на
природу сильно поколеблен, тогда как никто не имеет повода серьезно сомне-
ваться в универсальности принципа сохранения энергии. Если бы еще
сегодня рассматривать принцип наименьшего действия в качестве специаль-
ного механического принципа, то можно было бы оказаться виновным
в подобной односторонности.
Однако блестящего успеха принцип наименьшего действия добился
тогда, когда оказалось, что он не только сохранил значение, но и пригоден
для того, чтобы занять первое место среди всех физических законов в совре-
менной теории относительности Эйнштейна, которая лишила универсаль-
ности такое множество физических теорем. Причина этого в основном заклю-
чается в том, что величина действия Гамильтона (а не Мопертюи) является
инвариантом относительно преобразований Лоренца, т. е. что она независима
от специальной системы отсчета наблюдателя, производящего измерения.
В этом основном свойстве лежит также глубокое объяснение того, на первый
взгляд неудачного обстоятельства, что величина действия относится к про-
межутку, а не к моменту времени. В теории относительности пространство
и время играют одинаковую роль. Вычислить из данного состояния мате-
риальной системы в определенный момент времени состояния будущего
и прошедшего является по теории относительности задачей такого же рода,
как задача — из процессов, разыгрывающихся в разное время в определенной
плоскости, вычислить процессы, происходящие спереди и сзади плоскости.
Если первая задача обычно характеризуется как собственно физическая
проблема, то, строго говоря, в этом заключается произвольное и несуществен-
ное ограничение, которое имеет свое историческое объяснение только в том,
что разрешение этой задачи для человечества в подавляющем числе случаев
практически полезнее, чем второй. Поскольку вычисление величины действия
материальной системы требует интегрирования по пространству, занимае-
мому телами, то, чтобы пространство не получило предпочтения перед вре-
менем, величина действия должна содержать также интеграл по времени,
588 м. планк
так как только пространство и время, вместе взятые, образуют «мир», к
которому относится величина действия.
Как принципу наименьшего действия, так и принципу сохранения
энергии в теории относительности отведено определенное место. Но энергия
не является инвариантом по отношению к преобразованиям Лоренца, так
же как она раньше не была им по отношению к преобразованиям Галилея,
потому что в ней время играет преимищественную роль. Соответствующим
коррелатом для пространства является принцип сохранения количества
движения. Однако над обоими принципами возвышается, охватывая их,
принцип наименьшего действия, который поэтому господствует над всеми
обратимыми процессами физики. Правда, необратимость этот принцип никак
не объясняет, так как в соответствии с ним каждый процесс может проте-
кать как в пространстве, так и во времени в любом направлении — вперед
или назад. Проблема необратимости поэтому здесь не подлежит обсуждению.
Д. ГИЛЬБЕРТ
ОСНОВАНИЯ ФИЗИКИ [205]
(Первое сообщение)
Грандиозные задачи, поставленные Эйнштейном*), а также остроумно
разработанные для их решения методы, его глубоко идущие мысли и образо-
вание оригинальных понятий, с помощью которых Ми**) строил свою элек-
тродинамику, открыли для исследований по основаниям физики новые пути.
Я хотел бы в последующем, следуя аксиоматическому методу и исходя
по существу из двух аксиом, составить новую систему основных уравнений
физики. Эти уравнения, обладая идеальным изяществом, содержат одновре-
менно решение задач Эйнштейна и Ми. Более подробное изложение вопроса,
и прежде всего специальное применение моих основных уравнений к важ-
нейшим вопросам учения об электричестве, я оставляю до более поздних
сообщений.
Пусть ws (s = 1, 2, 3, 4) — какие-либо координаты, существенно одно-
значно определяющие мировые точки, так называемые мировые параметры
(наиболее общие пространственно-временные координаты). Величины, харак-
теризующие событие в ws, суть: 1) десять впервые введенных Эйнштейном
гравитационных потенциалов g^ (р, v — 1, 2, 3, 4), обладающих симметри-
чно-тензорным характером в отношении любого преобразования мировых
параметров ws; 2) четыре электродинамических потенциала qs, обладающих
векторным характером в том же смысле.
Физическое событие не произвольно. Для него всегда выполняются
следующие две аксиомы :
Аксиома I (аксиома Ми о мировой функции)***).
Закон физического события определяется мировой функцией Н, которая
зависит от следующих аргументов:
g,„g„, = ^, (К. I = 1.2. з, 4), (1)
4s. • (2)
Вариация интеграла
J Н Ygdco, где g = | g/U', |, dco = dwt dw2 dw3 dwit
должна быть равна нулю для любого из 14 потенциалов gIJV, qs.
*) Sitzungsber. d. Berliner Akad., 1914, стр. 1030; 1915, стр. 778, 799, 831, 844.
**) Ann. d. Phys., 1912, t. 37, стр. 511 ; т. 39, стр. 1 ; 1913, т. 40, стр. 1.
***) Мировые функции Ми зависят не в точности от этих аргументов; в частности, при-
менение аргументов (2) восходит к Борну; однако как раз введениеи применение подоб-
ной мировой функции в принципе Гамильтона характерны для электродинамики Ми.
590
Д. ГИЛЬБЕРТ
Вместо аргументов (1) можно, очевидно, подставить также аргументы :
& ’ё' Эич ’ blk bwibwk ’ W
причем g'№ обозначает частное от деления на g минора определителя g,
соответствующего элементу g;<v.
Аксиома II (аксиома об общей инвариантности)*).
Мировая функция Н инвариантна по отношению к любому преобразо-
ванию мировых параметров ws.
Аксиома II есть простейшее математическое выражение того требования,
что связь (die Verkettung) потенциалов g/w, qs сама по себе совершенно не
зависит от способа, которым установлено соответствие между мировыми
точками и мировыми координатами.
Основой для построения моей теории служит математическое предло-
жение, доказательство которого я изложу в другом месте.
Теорема I. Если выражение J инвариантно по отношению к любым
преобразованиям и содержит п величин и их производных и если из условия
t$jYgda> = 0
составить п лагранжевых вариационных уравнений для этих п величин,
то в этой инвариантной системе п дифференциальных уравнений четыре
всегда являются следствием п — 4 остальных, в том смысле, что всегда четыре
не зависящие одна от другой линейные комбинации этих п дифференциаль-
ных уравнений и их полных производных тождественно удовлетворяются.
По отношению к частным производным по g'"’, g^r и g£f, которые входят
в формулы (4) и в следующие формулы, раз навсегда заметим, что в силу сим-
метрии индексов р и v, с одной стороны, и индексов k, I — с другой, частные
производные по g"” и g£” следует брать с коэффициентом 1 или х/2, смотря
по тому, будет ли соответственно р = v или далее, частные произ-
водные по g'« следует брать соответственно с множителями 1, х/2 и х/4
в зависимости от того, какой из трех случаев имеет место : р = v и к — I,
р = v и к^ I или р v и к = I, или, наконец, р ф v и к^ I.
Из аксиомы I получаются прежде всего в соответствии с десятью грави-
тационными потенциалами g^ десять дифференциальных уравнений Ла-
гранжа
+ ^-^-^^ = 0 v = 1,2,3,4), (4)
8g"” 8^ 8g£” dwlcdwl dgff
а затем в соответствии с четырьмя электродинамическими потенциалами qs
четыре дифференциальных уравнения Лагранжа:
9 = ° (/2= 1,2,3,4). (5)
Для сокращения обозначим левые части уравнений (4), (5) соответственно
через
Уравнения (4) можно назвать основными уравнениями тяготения, урав-
*) Требование ортогональной инвариантности выдвинул уже Ми. В только что сфор-
мулированной аксиоме II основная мысль Эйнштейна об общей инвариантности находит
свое простейшее выражение; впрочем, у Эйнштейна принцип Гамильтона играет только
второстепенную роль, и его функции Н никоим образом не являются общими инвариан-
тами и не содержат электрических потенциалов.
ОСНОВАНИЯ ФИЗИКИ (ПЕРВОЕ СООБЩЕНИЕ)
591
нения (5) — основными электродинамическими уравнениями или обобщен-
ными уравнениями Максвелла. На основании выдвинутой выше теоремы
мы можем четыре уравнения (5) рассматривать как следствие уравнений (4),
т. е. непосредственно на основании этого математического предложения мы
можем высказать утверждение, что в указанном смысле электродинами-
ческие явления суть следствия тяготения. В этом результате я вижу простое
и поразительное решение проблемы Римана, который первым пытался уста-
новить теоретически связь между тяготением и светом.
В дальнейшем мы будем пользоваться тем легко доказываемым фактом,
что если р1 (j = 1, 2, 3, 4) обозначает произвольный контравариантный
вектор, то выражение
р^ = 2 № р* - g^ pvs - г р$ [pi = ^
представляет симметричный контравариантный тензор, а выражение
S
— ковариантный вектор.
Далее мы устанавливаем две математические теоремы, которые гласят
следующее:
Теорема II. Если J есть инвариант, содержащий величины gM’', gf”,
gg[, qs, qsk, то для всех аргументов и для любого произвольного контра-
вариантного вектора ps имеет место следующее тождество:
-Z (-^7Jr+.-^-4fgr+ +
v,i,k dffi dgtk ) s,k \dqs Qqsk )
где
= 2^ Pm +g"mPti,
Agf = — 2g%P™ + >
^gik = -2 + gtm PV + gl'm PD + >
4qs = - 2qmp™,
m
” 2 QsmPk + •
Эту теорему можно сформулировать также следующим образом :
Если J есть инвариант, a ps, как и раньше, — произвольный вектор, то
имеет место тождество
2^f = PJ- (в)
Здесь положено :
P=Pg + P4>
Pg = ^i,k 1г+ рГ + рГкыйР
Р“= + Plk~bq^}’
причем введены следующие сокращенные обозначения:
,,,, Эр'"’ Q2pPv dpi
r№v _ r _ ___—___ n — ____r
Pk Qwk ’ Qwkdwi ’ P,k Qwk
592
Д. ГИЛЬБЕРТ
Доказательство соотношения (6) получается легко ; в самом деле, оче-
видно, что тождество справедливо, если есть постоянный вектор, а отсюда
вследствие инвариантности этого тождества вытекает его справедливость
вообще.
Теорема III. Если J есть инвариант, зависящий только от и их
производных, и если, как и выше, обозначить вариационные производные
от Kg J по g'"’ через [VgJLv, т0 выражение
где под h“v понимается любой контравариантный тензор, есть инвариант;
если в этой сумме вместо /Г'” поставить некоторый особый тензор и напи-
сать
где выражения
= S [VgJ]^v, 11, = -2 2№Л^г
зависят только от g'"’ и их производных, то равенство
имеет место тождественно для всех аргументов, именно для g'"’ и их про-
изводных.
Для доказательства рассмотрим интеграл
JjKgdw’ (dw = dw1dw2dw&dwt),
который распространяется на некоторую часть четырехмерного мира. Далее,
пусть ff будет вектор, который обращается в нуль вместе со своими произ-
водными на трехмерной поверхности рассматриваемой части мира. Так как
то из формулы
Р № Н) = п 2 if + « 2 Р1 + п й) -2 ,
s s s I a^s J s о H's
которая будет выведена дальше (см. стр. 594), следует:
s о H's
откуда получается
^PgUVs)da> = О,
а вследствие способа образования лагранжевой производной — также и
следующее:
f SVTgJl^dc» = 0.
J /<>*
Наконец, введение в это равенство величин is, ils показывает, что
а потому утверждение нашей теоремы справедливо.
ОСНОВАНИЯ ФИЗИКИ (ПЕРВОЕ СООБЩЕНИЕ)
593
Важнейшей нашей целью теперь являются установление понятия энергии
и вывод теоремы энергии на основе только двух аксиом I и II.
Для этого мы сначала образуем выражение
pg(Vgtf) = 2
рИ, | 8VgH ,
8gf Pk + 8g$ '
Здесь
жить
дн
8g£?
есть смешанный тензор четвертого ранга, и потому, если поло-
(VI = V 2 Г (gw + ,
{ *4 а
то выражение
? SH - АГ
(8)
представит контраградиентный вектор.
Поэтому, если образовать выражение
то оно больше не будет содержать вторых производных р^, а потому будет
иметь вид
Vg (в,тр^ + Bkvpf),
(i,v,k
где
вк = ън________8 ЭН ЭН (/ щ ЭН (/УП
tn 8gf 31V( 9ggF ag$ IpfCbiJ
есть также смешанный тензор.
Теперь образуем вектор
Ь1=2В1^ (9)
мл
и тогда получим
РДЯН) - 2 = 2 (10)
С другой стороны, мы образуем выражение
ан
тогда есть тензор, а выражение
I v? 8Н
С = ~дЧкГРк
представляет контраградиентный вектор. Соответственно подобно преды-
дущему
= 2 |Геи]1Р1. .(12)
38 Вариационные принципы механики
594
Д. ГИЛЬБЕРТ
Если принять теперь во внимание основные уравнения (4) и (5), то путем
сложения равенств (10) и (12) мы находим
р(ген)=^а^'+;,+с,).
Но
Р(УёЮ= + = fgPH + н 2(^ps + Vgii\,
pifv * к 'Jyys /
и поэтому, в силу тождества (6),
Р(ПН) - К 2 Р- + н 2 (<g. Р- + r^j = 2 .
Таким образом, мы получаем, наконец, инвариантное уравнение
’ ^-^Vg(Hpl-al-l>l-cl) = O.
Теперь мы принимаем во внимание, что
эн _ эн
dqik Qqkt
есть кососимметричный контравариантный тензор ; вследствие этого
d'= 1 (13)
2}g k^s 9tVs " ®qki ) ) ' '
будет контравариантным вектором, который, очевидно, удовлетворяет тож-
деству
п
Эн»;
Если мы теперь определим
е1 = Нр1 — а1 —Ь1 — с1 — dl (14)
как вектор энергии, то вектор энергии есть контравариантный вектор,
который зависит линейно от произвольного вектора pF и тождественно,
при любом выборе этого вектора pf удовлетворяет инвариантному урав-
нению энергии:
i Qwi
Что касается мировой функции Н, то для того, чтобы ее выбор сделался
однозначным, нужны дальнейшие аксиомы. Если уравнения тяготения
должны содержать только вторые производные от потенциалов g“”, то фун-
кция Н должна иметь вид
Н = К + L,
где К обозначает инвариант тензора Римана (кривизна четырехмерного-
многообразия):
К = 21 Г ,
( 8 (ft xi 8 J/zi'l) . f (fi х) (Л (fi 14 T
* I 8tvv | х I 8ivJ j х J ) "I 2 И Л J | х I | Л / | х М ’
a L зависит только от величин g'1”, gf”, qs, qsk. В дальнейшем мы сделаем
упрощающее допущение, что L не содержит g“v.
ОСНОВАНИЯ ФИЗИКИ (ПЕРВОЕ СООБЩЕНИЕ)
595
Теперь мы применяем теорему II к инварианту L и получаем
2 + # (<7smPfcm+<7mfcPsm + <7m^) = O.
ntv,m ь $,т Чй> s^m 4SK
(15)
Приравнивание нулю коэффициентов при р^к слева дает уравнение
f oL ЭД ) _
Г+ ’
или
эд , эд п .
\dqsk + dqks “ 0 • (16>
т. е. производные электродинамических потенциалов qs входят в комбинации
Mks qsk qks.
Таким образом, мы приходим к тому, что при наших допущениях инва-
риант L, кроме потенциалов g"’', qs, зависит только от компонентов кососим-
метричного инвариантного тензора
М = (Mks)== Ral{qs),
т. е. так называемого электромагнитного шести-вектора. Этот результат,
которым только теперь определяется характер максвелловых уравнений,
получается здесь, по существу, как следствие общей инвариантности, т. е.
на основе аксиомы II.
Если в тождестве (15) положить коэффициент при р”т слева равным
нулю, то, пользуясь уравнением (16), мы получим
= » (-=1,2,3,4). (17)
Это уравнение позволяет сделать важное преобразование электромагнит-
ной энергии, т. е. происходящей от L части вектора энергии. Именно, зта
часть получается следующим образом из уравнений (11), (13), (14):
г г _ у .. _ _у 8 [(эУаД — Э^д1р5Q 1
LP dqktPk гПмЭвдЦ dqik дфа P 9 J '
В силу соотношения (16), принимая во внимание уравнения (5), этому
выражению можно придать вид
(^ = 0> l^s’ = (18)
Это выражение на основании уравнения (17) равно
_ 2 у эУГд i q>
Vg 8g)- g Р • (1у>
На основании формул (21), которые будут выведены дальше, отсюда
можно, в частности, усмотреть, что электромагнитная энергия, а вместе
с тем и полный вектор энергии могут быть выражены только через К, так
что сюда войдут только g“p и их производные, но не qs и их производные.
Если в выражении (18) перейти к пределу, полагая
Sfi» = О 0м =/= v), gw — 1 >
38*
то это выражение в точности совпадает с тем выражением, которое Ми ввел
в своей электродинамике : электромагнитный тензор энергии Ми есть не
что иное, как инвариантный тензор, получающийся путем дифференци-
рования инварианта L по потенциалам тяготения g^ при указанном переходе
к пределу. Это обстоятельство впервые указало мне на необходимость сущест-
вования тесной связи между общей теорией относительности Эйнштейна
и электродинамикой Ми и дало мне доказательство справедливости развитой
здесь теории.
Остается еще непосредственно показать, принимая
Н = К + L, (20)
каким образом полученные выше обобщенные уравнения Максвелла (5)
вытекают из уравнений тяготения (4) в указанном выше смысле.
Если применить введенный перед этим способ обозначения вариационных
производных по g''”, то уравнения тяготения в силу равенства (20) полу-
чают вид _
[Кёкк + ^ = °- (2D
Первый член слева преобразуется следующим образом :
[У? — У? (Кд? 2 К ,
как легко получается непосредственно из того, что Kflv, помимо gt,„, есть
единственный тензор второго ранга и К — единственный инвариант, которые
могут быть получены исключительно из g''” и из первых и вторых производ-
ных g^, g$.
Получаемые таким путем дифференциальные уравнения тяготения со-
звучны, как мне кажется, грандиозной теории общей относительности, выдви-
нутой Эйнштейном в его последних работах*).
Если мы дальше, как и выше, вообще будем обозначать вариационные
производные от ]/g J по электромагнитному потенциалу qh через
гур /1 - ^SJ У 8 8VgJ
HgJJh- 8?Л Slv,; 89л/[ >
то, на основании равенства (20) мы получим электродинамические урав-
нения в виде
[KgL]ft = O. (22)
Но так как К есть инвариант, зависящий только от g''1' и их производных,
то на основании теоремы III тождественно удовлетворяется уравнение (7),
где
is= J't/gKl^gr (23)
и
n = -2^[/iKUg"z (р = 1,2,3,4). (24)
На основании формул (21) и (24) выражение
(19) равно — Путем
*) Berliner Sitzungsber., 1915, там же.
ОСНОВАНИЯ ФИЗИКИ (ПЕРВОЕ СООБЩЕНИЕ)
597
дифференцирования по wm и суммирования по т мы получаем на основании
уравнения (7)
-2(- Геit? + 8+ 2Л7„) - - +
т о Wm \ иЦт s ulvism J vwv
+ 2 + +^T^^| +
m I Owm \ s OWs uqms J I s OWs OQms J)
+2([Геь}.-^-)м, + 2^-^,
так как
9^L=[WL1 I V 9 9^L
dqm iyg4m + -f qWs dqms
и
V Э SKjL _ fy- , aVjL
m dwm dqSm l'S )s dqs ‘
Теперь мы примем во внимание, что на основании уравнения (16)
V 82 9 Vjz.
m,s 9lVm 9lV$ dqms ’
и тогда после соответствующих преобразований получим
г” = “ + “i DT L]m + Мп» [Kg b]m) +
I 8 IjZ । X Э Kg L Э Ms? mt\
dqm 4mr 1% dMSm dwm ' '
С другой стороны,
8KgZ _ V9KgL ydVgL у aKjL dqms
8ivr s,m dgsm v m 3qm mv ms dqms dwr
Первый член правой части на основании уравнений (21) и (23) есть не
что иное, как i„. Последний член справа равен по абсолютной величине
и противоположен по знаку последнему члену правой части уравнения (25);
в самом деле,
V 8 Kg~L ( dMSv dqms \ n .
dMsm I dWm dwj~4’
так как выражение
dMSr dqms dzqv____d2 qs d2 qm
dwm dw„ ~~ 0WS dWm dwv dwm dw„ 9ws
симметрично, а первый множитель под знаком суммы в уравнении (26)
кососимметричен относительно s и т.
Поэтому из уравнения (25) вытекает уравнение
2 (Мт, L]m + q.^m [Kg L]m) = 0; (27)
это значит, что из уравнений тяготения (4) действительно вытекают четыре
независимые одна от другой линейные комбинации (27) основных электро-
динамических уравнений и их первых производных. Это есть точное мате-
ЭУ«
Д. i ИЛООСГ 1
матическое выражение высказанного выше утверждения о характере элек-
тродинамики как следствия тяготения.
Так как величина L на основании нашего предположения не должна
зависеть от производных g'"', то L должна быть функцией четырех общих
определенных инвариантов, которые соответствуют введенным Ми специаль-
ным ортогональным инвариантам ; из них простейшими являются следую-
щие два :
<? = 2 MmnMlkgmkgnl
k,l,m,n
И
q = £qkqigkl-
k,l
Простейшее и, с точки зрения строения величины К, самое естественное
выражение для L есть вместе с тем то, которое соответствует электродина-
мике Ми, а именно:
L = aQ+/(<?)
или, в частности, если следовать Ми,
L = aQ + ^,
где /(г/) — какая-либо функция q, а а и ft — постоянные.
Как мы видим, при соответствующем толковании немногие простые
предположения, высказанные в аксиомах I и II, оказываются достаточными
для построения теории, посредством которой не только в корне преобразуются
наши представления о пространстве, времени и движении в направлении,
указанном Эйнштейном, но и, как я убежден, при помощи составленных
здесь уравнений будут разъяснены сокровеннейшие, до сих пор скрытые
явления внутри атома, и на их основе должно оказаться возможным вообще
свести все физические постоянные к математическим постоянным. Таким
путем мы приближаемся к возможности превратить в принципе физику
в науку, подобную геометрии, которая составляет, несомненно, прекрасней-
ший образец аксиоматического метода, пользующегося в данном случае
услугами мощных инструментов математического анализа, а именно вариа-
ционного исчисления и теории инвариантов.
А. ЭЙНШТЕЙН
ПРИНЦИП ГАМИЛЬТОНА
И ОБЩАЯ ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [«*]
В последнее время Г. Лоренцу и Д. Гильберту*) удалось придать общей
теории относительности особенно наглядную форму благодаря тому, что они
вывели ее уравнения из одного-единственного вариационного принципа. То
же самое будет сделано и в данной статье. При этом моя цель будет заклю-
чаться в том, чтобы сделать основные соотношения возможно более ясными
и настолько общими, насколько это допускает точка зрения общей относи-
тельности. В противоположность изложению главным образом Гильберта,
о свойствах материи будет сделано по возможности мало специальных допу-
щений. С другой стороны, в противовес моему собственному последнему изло-
жению предмета выбор координатной системы останется теперь совершенно
свободным.
§ 1. Вариационный принцип и уравнения поля тяготения и материи
Пусть гравитационное поле, как обычно, описано тензором**) (или
соответственно g''”), а материя (включая электромагнитное поле) — любым
числом прострайственно-временных функций qe, инвариантный характер
которых нам безразличен. Пусть, далее, Н есть функция от
g"’” ga ( QXaJ, gar ( дХадХг J’ И dXa J •
В таком случае вариационный принцип
<5{ j Н dr} = 0 (1)
дает столько дифференциальных уравнений, сколько имеется определенных
функций g,„ и q^y, если только мы при этом установим, что g"” и q^y должны
быть варьированы независимо друг от друга так, чтобы на границах интегри-
Q(5 o/xv
рования все dq^y, 5g*‘” и —— обращались в нуль.
Мы допустим теперь, что функция Н по отношению ко всем g£ линейна
и притом такова, что коэффициенты при gg; зависят только от g'"’. В таком
случае вариационный принцип (1) можно заменить другим, более удобным
для нас вариационным принципом. Интегрируя надлежащим образом по
частям, получаем
jHdT = jH*dT+>, (2)
*) Четыре статьи Г. Лоренца в Publicationen d. KOnigl. Akad. van Wetensch. te Am-
sterdam за 1915 й 1916 гг.; D. Hilbert, G6tt. Nachr., 1915, Heft 3.
**) Вначале мы не пользуемся тензорным характером
где F есть интеграл, взятый по границе рассматриваемой области, а вели-
чина Н* зависит только от g'"', g“, qM, q(e}a, но не зависит больше от g£.
Из (2) для интересующих нас вариаций получаем
= <5{J H*dr}, (3)
поэтому мы вправе заменить наш вариационный принцип (1) следующим
более удобным
<5{fH*dT} = 0. (la)
Выполнив вариации по g!" и qM, получим следующие формулы*) в качестве
уравнений поля тяготения и материи :
Э ЭХа (ОН* ' v 9gr' 1 _ 9Н* 1 0g*'” = 0, (4)
9 ( ЭН* 'j эн* — л
Эха 1 Э?(е)
§ 2. Раздельное существование гравитационного поля
Если не сделать никаких специальных допущений о том, каким образом
Н зависит от g^, g“”, gg, q(e), qMa, то нельзя разделить компоненты знергии
на две части, из которых одна относится к полю тяготения, а другая — к
материи. Для того чтобы теория допускала подобное деление, мы прини-
маем, что
Н = G + М, (б)
где G зависит только от gw, g:", gg, а М зависит только от g", q(Q1), q((,)a. Фор-
мулы (4) и (5) принимают тогда следующий вид :
Э ( 9G* | 9G* _ ЭМ .
9ха tags’ J 9g'"’ “ 9g“’ ’ ( '
Э ( эм ________ЭМ = п
Эха ( Э?(е)а J дд(„) ’ ' '
При этом G* относится к G так, как Н* к Н. Следует, однако, заметить,
что уравнения (8) или (5) пришлось бы заменить другими, если бы мы при-
няли, что М и Н зависят не только от первых, но и от высших производных
от q<j,). Равным образом возможно, что q^y следует рассматривать не независи-
мыми друг от друга, а как величины, связанные друг с другом некоторыми
условиями. Все это не имеет значения для дальнейшего изложения, так как
последнее основано исключительно на уравнениях (7), которые были полу-
чены посредством варьирования интеграла по g'".
*) Ради краткости в формулах пропущен знак суммы 2. Необходимо всегда иметь
в виду суммирование по тем значкам, которые встречаются дважды в том или ином Члене.
Следовательно, в (4), например, ) означает
р э ( эн* )
/ 9ха [ dg^J •
ПРИНЦИП ГАМИЛЬТОНА И ОБЩАЯ ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
601
§ 3. Свойства уравнений поля тяготения, вытекающие из теории инвариантов
Введем теперь допущение, что
ds2 = g^ dXp dx„
(9>
представляет собой инвариант. Тем самым установлен характер преобразо-
вания gw О характере преобразования <?(»), описывающих материю, мы не
делаем никаких допущений. Напротив, пусть функции
П = -^=-, <3 = -^
У-g У-g
М
И М =-47=
У—g
будут инвариантами по отношению к любым подстановкам пространственно-
временных координат. Из этих предпосылок вытекает общая ковариант-
ность уравнений (7) и (8), выведенных из (1). Далее следует, что G (с точ-
ностью до постоянного множителя) должно равняться скаляру риманов-
ского тензора кривизны; ибо нет другого инварианта со свойствами, кото-
рыми должен обладать G*). Тем самым вполне определены и G*, и вместе
с ним левая часть уравнения поля (7)**).
Из общего постулата относительности вытекают определенные свойства
функции G*, которые мы теперь и выведем. С этой целью произведем беско-
нечно малое преобразование координат, полагая
х' = х„ + Jx„;
(Ю)
zfxp представляют собой любые, бесконечно малые функции координат,
х' — координаты мировой точки в новой системе, х„ — координаты той же
точки в старой системе. Как для координат, так и для всякой другой вели-
чины Ч' справедлив закон преобразования вида
у/' = у/ _|_ zfy/,
причем Д V7 всегда может быть выражено через Дх„.
Из ковариантных свойств g'"' легко выводятся законы преобразования
для g“” и g“v :
= (Н)
uaq t/Ла
8 g"”) _ Лха
Qxa Qxa •
(12)
Так как G* зависит только от g^ и g%”, то,
вычислить Д G*. Таким образом, получается
пользуясь (11) и (12), можно
8 Лха 2 8G* 8Mxg
Ьх„ 8g2” " 8х„ dxa
(13)
где ради краткости положено
S”a = 2 -|- 2 9G* g>" + G* <5” __g/'“ (14)
ag"a g sgrgo ° agrr 7
*) Этим объясняется, почему требование общей относительности приводит к вполне
определенной теории тяготения.
**) Интегрируя по частям, получаем
о* = у=7 [{у}{^} - {"4{7}] •
602
А. ЭЙНШТЕЙН
Из этих двух уравнений мы выводим два следствия, важных в дальней-
шем. Мы знаем, что инвариантно по отношению к любым подстанов-
V-?
G*
кам, но ,,_-- этим свойством не обладает. Однако легко доказать относи-
V-g
тельно последней величины, что она инвариантна по отношению к линейным
подстановкам координат. Отсюда следует, что правая часть (13) всегда обра-
Q2 Д у
щается в нуль, когда все ——равны нулю, и что G*^ должно удовле-
иХу ОХц
творять тождеству
£ = 0. (15)
Если мы, далее, будем брать такие Л хг, которые отличны от нуля только
внутри рассматриваемой области, но обращаются в нуль на бесконечно
близком расстоянии от границы области, то при выбранном нами преобразо-
вании значение интеграла, входящего в уравнение (2) и взятого по границе
области, не изменится ; следовательно,
J (F) = О,
и поэтому*)
zl{j'Gdr} = zl|j'G* dr} .1
Левая часть уравнения должна, однако, обратиться в нуль, так как и
-у^=-, и g dr суть инварианты. Следовательно, правая часть тоже
равна нулю.
На основании (13), (14) и (15) получаем сначала
f —V g"’ JXct dr = 0. (16)
J Э x, э
Если преобразовать это уравнение двукратным интегрированием по
частям и принять во внимание свободный выбор Л х„, то получим тождество
—-—p^rg^WO- (17)
;Эх„ЭХа ( .1 v ’
Сделаем теперь выводы, следующие из двух тождеств (16) и (17); послед-
ние вытекают из инвариантности 57^=- и, следовательно, из постулата общей
Г— g
относительности.
Для этого преобразуем сначала уравнения поля тяготения посредством
смешанного умножения на g"”. Тогда получим (при перестановке значков
о и v) уравнения, эквивалентные уравнениям поля (7) :
(18)
где положено
(19)
« = + <20>
*) Если ввести G и G* вместо Н и Н*.
ПРИНЦИП ГАМИЛЬТОНА И ОБЩАЯ ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
603
Последнее выражение для t* следует из равенств (14) и (15). Дифферен-
цируя равенство (18) по х, и суммируя по г, имеем на основании ра-
вентсва (17)
1^т + П) = 0. (21)
Формула (21) выражает закон сохранения импульса и энергии. Назовем
Т„ компонентами энергии материи и tj — компонентами энергии поля
тяготения.
Умножив уравнения (7) поля тяготения на gg” и просуммировав их по
/лиг, получим в силу равенства (20):
или в силу равенств (19) и (21):
+ = (22)
где Тдг означает g,a Т®. Мы имеем здесь четыре уравнения, которым должны
удовлетворять энергетические компоненты материи.
Следует отметить, что общековариантные законы сохранения импульса
и энергии (21) и (22) получены только из одних уравнений (7) для поля тяго-
тения в соединении с постулатом общей ковариантности (относительности)
без применения уравнений поля (8) для материальных явлений.
ЭММИ НЕТЕР
ИНВАРИАНТЫ ЛЮБЫХ ДИФФЕРЕНЦИАЛЬНЫХ ВЫРАЖЕНИЙ [207]
(Доложено на заседании от 25 января 1918 г. Ф. К л е й ном)
Под дифференциальным выражением я понимаю функцию
/ (х, dx) = / (х1; ..., хп, dxr, ..., dxn)
от п переменных хХ) . .., х„ и их дифференциалов dxlt ..., dxn, которая
предполагается аналитической относительно обеих систем п аргументов,
но не обязательно вещественной. Я кладу в основу группу аналитических
преобразований переменных, которой соответствует группа всех линейных
преобразований дифференциалов :
xi = xi(y1,...,yn))dxf = ^-gdyfc,<5xr = ^-g-<5yfc; (1)
пусть эти преобразования переводят выражение / (х, dx) в g (у, dy). Под
инвариантом выражения / (х, dx) я понимаю инвариант в отношении этой
группы и той группы, которая получается из этой группы для высших
дифференциалов d2x, d8x, ... и для производных от / (х, dx); иначе говоря,
такую (аналитическую) функцию J, что для любого f в силу уравнений (1)
имеет место следующее равенство, тождественное в отношении переменных
и всех встречающихся в нем дифференциалов :
dx’dx>d*x’ •••) =
В полном соответствии с этим должен определяться инвариант совместной
системы дифференциальных выражений. В частности, если такой инвариант
содержит только первые дифференциалы dx, йх и производные только по
этим дифференциалам, но не по самим переменным, то не имеет значения
то обстоятельство, что в функции и в линейные выражения дифференциалов
входят сами переменные; эти специальные инварианты становятся инва-
риантами по отношению к группе всех линейных преобразований дифферен-
циалов dx, йх с неопределенными коэффициентами и должны быть названы
проективными инвариантами совместной системы.
Эе+“/
bxelTdx'’' П0ВСЮДУ сокращенно ставится вместо
Э₽+«/
Эх,! ... Эх1е Э dxkt... Э dxka ’
где индексы обозначают числа от 1 до п.
ИНВАРИАНТЫ ЛЮБЫХ ДИФФЕРЕНЦИАЛЬНЫХ ВЫРАЖЕНИЙ
605
Для квадратичных однородных дифференциальных форм Кристофель
(Crelle, 70) и Риччи (Math. Annalen, 54) составили такую систему инвариант-
ных образований, что все инварианты делаются проективными инвариантами
этой совместной системы, чем вопросы о полноте инвариантов и об экви-
валентности сведены к вопросам линейной теории инвариантов, что я на-
звала бы «теоремой приведения» (Reductionstheorem). Полная система состоит
из счетного бесконечного множества форм ; но для инвариантов каждого
конечного порядка р (т. е. таких, которые не содержат производных по
переменным выше порядка р) — лишь из конечного множества форм.
В дальнейшем я покажу пригодность «теоремы приведения» для любых
дифференциальных выражений; и именно здесь речь идет опять о полной
системе бесконечного счетного множества инвариантных образований,
которое, однако, оказывается конечным для любого конечного порядка.
Но в то время как Кристофель и Риччи для образования инвариантов и для
доказательства теоремы приведения опираются на трудно обозримые исклю-
чения, я получаю инварианты непосредственно путем инвариантного диффе-
ренцирования и варьирования (последнее может попросту рассматриваться
как дифференцирование по другим параметрам). Алгоритм этого инва-
риантного дифференцирования был развит Риманом (Werke, XXII) и Липши-
цем (Crelle, 70, 72), работы которых примыкают к Лагранжу (Mecanique
analytique, ч. 2, раздел IV). Но у них дело не доведено до теоремы приве-
дения. Вспомогательное средство для доказательства теоремы приведения
для квадратичных форм дают введенные Риманом «нормальные коорди-
наты» [208] (Werke, XIII), которые преобразуют в прямые линии экстре-
мали соответствующей вариационной задачи, выходящие из одной точки, но
существуют только для однородных дифференциальных выражений :
/(х,xdx) = Ф(х) f (х, dx) *).
Неоднородный случай, впрочем, сводится к вышеуказанному случаю.
I. Образование инвариантов
Вообще говоря, не обрывающийся ряд проективных инвариантов для
/(х, dx) дают нам поляры. Вследствие линейности преобразования дифферен-
циалов, из равенства
/(х, dx)= g(y, dy)
следует также
/ (х, dx + 2 дх) = g (у, dy + Я бу)
и отсюда, путем разложения по Я получаются следующие, характерные для
инвариантности соотношения:
/(dx) = g(dy),
! ' х? / (dx) * а_____ g (dy)
ddx° — ddya
дуа.
*) Легко показать, что Ф (х) равно хс, где с обозначает какую-нибудь вещественную
или комплексную величину.
606
ЭММИ НЕТЕР
Каждая поляра путем применения варьирования 5 дает основание для
построения необрывающегося ряда общих инвариантов [209]:
йг/(х, dx) = деg(у,dy),
у f = W -
'd . Э dx“ •“ Э dya 7
(р = 0,1,2 ...).
Соотношения (2) и (3) позволяют, в силу определения (1), прочитать
законы преобразования для производных от / (х, dx), чем, впрочем, нам не
придется пользоваться в дальнейшем. Из инвариантов (3) можно посред-
ством линейной комбинации получить «нормальную форму р-й вариации»,
которая для р = 1 имеется у Лагранжа, а для р = 2 — у Римана ; эта форма
характеризуется тем, что исключаются смешанные дифференциалы (р + 1)-го
порядка : de д, d^1 й2,... Для этой формы получаем :
Q1==df(dx)-dfs(dx),
Q2 = &f-ddfs + ±d*fa,
Qe = &f- \dfe + - <5e~2 t/2/d2 + ... + de fa,
4 p .
(4)
Из инвариантов (4) путем обобщения риманова метода можно прийти
к инвариантам, которые содержат только первые дифференциалы; такие
инварианты мы будем называть «основными функциями». Именно, если в
выражении для заменить дифференциалы производными, то получается
Й1 = 0
(тождественно в отношении йх), т. е. в точности лагранжевы уравнения
1. Я составляю теперь
инвариантное условие, чтобы выражение (d + Яй) удовлетворяло этим
лагренЖевым уравнениям :
(d + Яй) = д f (dx + Яй) - (d + Яй) (dx + Я дх) = 0 (5)
(тождественно относительно й х), откуда для однородного выражения / (dx)
посредством подстановки д = d + Яй получается следующее выражение:
(d + Яй) f(dx + Я йх) = 0, (6)
за исключением случая однородности первого порядка. В последнем случае
уравнение (б) должно быть добавлено в качестве нового условия, так как
тогда система уравнений (5) представляет только (п — 1) независимых
условий. Если в выражении (5) или соответственно в выражениях (5) и (б)
ИНВАРИАНТЫ ЛЮБЫХ ДИФФЕРЕНЦИАЛЬНЫХ ВЫРАЖЕНИЙ
607
положить коэффициенты при нулевой, первой и второй степенях Я равными
нулю, то мы получим три инвариантные системы уравнений:
<р = 0, = 0, % = О
(тождественно относительно <5х), посредством которых d2x, ddx, d2x могут
быть выражены через первые дифференциалы. Дальнейших инвариантных
систем уравнений
da(p = 0, day> = 0, dax — 0, da-1<5% = 0,)
da-2^% = o, ..., <5’% = 0 (<т = 0, 1,2, ...) j ?
будет тогда как раз достаточно, чтобы выразить все высшие дифференциалы
через первые*). Функции (4) вместе с инвариантной системой уравнений (7)
дают, следовательно, основные функции |Д>] с одними только первыми
дифференциалами, причем [Х?г ] тождественно обращается в нуль [210].
Так же точно из дифференциала dh (dx, dx) основной функции h можно
на основании уравнений (7) вновь получить основную функцию, которая
может быть названа «ковариантной производной» [й(1) ] от h [211]; и пусть
вообще [й(ст)] обозначает ковариантную производную от [М’х) ]. Таким
образом, оба эти процесса ведут к следующему дважды бесконечному ряду
основных функций :
[й2],т,. . .
Pd,m, • • •, га,-
Далее, можно показать, что левые части уравнений, выражающих высшие
дифференциалы через первые, коградиентны первым дифференциалам (т. е.
подлежат одинаковым линейным преобразованиям). Поэтому, если вместо
высших дифференциалов ввести эти левые части р, q, г, . . . в качестве аргу-
ментов инварианта, то последний будет зависеть, кроме производных, еще
только от взаимно коградиентных величин. Вышеуказанный способ образо-
вания функций (8) сводится просто к введению этих новых величин ; каждый
инвариант переходит таким путем в сумму инвариантов, и из этих последних
выделяют такие, которые содержат как раз dx, dx, но не р, q, г, ...
В дальнейшем будет показано, что в предположении однородности
/ (х, dx) = Ф(у.)1 (dx)
основными функциями (8) исчерпывается искомая полная система.
II. Нормальные координаты, эквивалентность и теорема приведения
К нормальным координатам я прихожу путем интегрирования вариацион-
ной задачи, относящейся к / :
Qr = df ~ f9 = 0 (тождественно в отношении бх), 1
(как следствие добавочного условия).|
*) Только линейная форма 27А/ dxt нуждается в особом рассмотрении, ибо в этом,
случае система уравнений (5) не содержит вторых дифференциалов.
608
ЭММИ НЕТЕР
Вследствие предположенной однородности выражения f(dx) эта система
уравнений преобразуется в самое себя при подстановке t = хт ; если, стало
быть, на основании уравнений (9) выразить как функцию первой
производной, то <pV> будет однородной функцией р-го порядка :
rf 0°)
Если при интегрировании уравнений (9) задать для t = t0 начальные зна-
, х dx (dx\ „
чения х = (х)0, -т- = -7- и если положить
' ' dt \ dt 7о
и, =«-<.) (О, , (11)
где параметр (? — ?0) в силу условия
/f#l=const
будет пропорционален «длине экстремали», то разложение в ряд по степе-
ням (? — ?0) на основании условия (10) дает :
х, - (х,)о = Ui + у (и) + ... + 4г ^(и) + ••• О2)
* V •
Это разложение можно рассматривать как формулу преобразования пере-
менных х, = Х( (и), причем величины и как раз и будут нормальными коорди-
натами Римана. Эти координаты преобразуют, следовательно, по формулам
(11) и (12) экстремали, проходящие через точку (х0), в прямые. Любому пре-
образованию переменной х = х (у) соответствует, далее, на основании соот-
ношения (11) линейное преобразование и = u(v) соответствующих нормаль-
ных координат, причем коэффициенты зависят только от произвольной си-
темы значений (х)0, а дифференциалы du, ди преобразуются так же, как
и сами функции и.
Если подставить (12) в выражение / (х, dx), то оно переходит в F (и, du)
или же при разложении в ряд по степеням,
F(u,du)^F0(u,du) + F1(u,du) + ... + Fe(u,du) + ... , (13)
где Fe (u, du) обозначает однородную форму g-го измерения относительно и.
Вследствие линейности преобразования и = и (у) на основании условия
F (и, du) = G (у, dv)
отдельные однородные составные части также преобразуются соответствен-
ным образом:
Fe (u, du) = Ов (v, dv). (14)
Таким образом, если взять в качестве (х)0 какую-нибудь определенную,
постоянную систему значений, то, как показывают уравнения (13) и (14),
эквивалентность выражений / (dx) и g (dy) равнозначна с эквивалентностью
соответствующих систем функций Fe(u, du) по отношению к линейному
преобразованию. Выражения Fe(u,du) или соответствующие выражения
Fg (ди, du) представляют собою инварианты выражения / (dx) в точке х = (х)0,
ИНВАРИАНТЫ ЛЮБЫХ ДИФФЕРЕНЦИАЛЬНЫХ ВЫРАЖЕНИЙ
609
а именно, они образуют полную систему основных функций для этой точки
х = (х)0. В самом деле, мы имеем
и ’ 7 о! доие ’ ддие ( due ’
эта последняя производная может быть при помощи (12) выпажена через
производные от / (dx), взятые для х = (х)0, совершенно так же, как анало-
гично образованная производная от G(dv) выражается через производные
от g (dy). На основании равенства
Г Эе+а F (du) ) _ Ъе+° Ft(8u, du)
( dueddua Jo d6ueddua
любой инвариант выражения / (dx) = F (du), взятый в точке х = (х)0, делается
проективным инвариантом выражения F (ди, du), коль скоро мы подставим
вместо высших дифференциалов величины р, q, г, ..., коградиентные dx, дх.
Но ведь на (х)0 можно смотреть как на параметр ; всякому инварианту в
точке х = (х)0 соответствует инвариант выражения f (dx), если только (х)0
опять заменить через х. Если Fe (ди, du) становятся инвариантами Ч*в (дх, dx),
взятыми в точке х = (х)0 (для х = (х)0 du, ди переходят в dx, дх), то выра-
жения Wg сами образуют основные функции полной системы. Теперь нужно
еще эту систему основных функций явно выразить через инварианты
выражения / (dx), а именно, через функции (8). Что это возможно, явствует
из способа их получения посредством дифференцирования. Именно, для
членов высшего порядка эти процессы переходят в простые полярпроцессы
(Polarprozesfe), и преобразование, аналогичное разложению в ряд Клебша—
Гордана [212], в связи с заключением по индукции относительно отбрасы-
ваемых членов доказывает высказанное утверждение. Если дело идет об
инвариантах совместной системы, то к новым функциям (8) приходится
прибавить ковариантные производные остальных дифференциальных выра-
жений, как это показывает введение в эти выражения нормальных координат,
относящихся к f (dx).
Эквивалентность выражений / (dx) и g (dy), которая была сведена к фор-
муле (14), таким образом, делается также равнозначащей с эквивалент-
ностью выражений *Рв или также функций (8) по отношению к линейному
преобразованию дифференциалов ; при этом не требуется никаких особых
условий интегрируемости, как это’ вытекает из возможности сведения к
равенству (14). Этим теорема приведения доказана во всех своих частях.
В частности, тождественное исчезновение ряда функций [й2], [Х23],...
..., [Ц,], ... необходимо и достаточно для того, чтобы выражение f(dx)
можно было преобразовать в выражение с постоянными коэффици-
ентами.
Наконец, если положить в основу вместо группы всех аналитических
преобразований некоторую подгруппу, то и группа соответствующих линей-
ных преобразований величин и переходит в подгруппу проективной группы ;
инварианты выражения / (dx) становятся опять инвариантами функций (8)
по отношению к линейному преобразованию, но теперь уже по отношению
к этой подгруппе. Так можно путем гомогенизации свести случай неоднород-
ных функций f (dx) к аффинной группе; полная система может быть здесь
выведена из функций (8), образованных для большего на единицу числа
переменных.
Из теоремы приведения получается специальный случай квадратичных
форм или вообще форм р-го измерения. Для этого нужно систему функций
Ряпияниомныр ппйипипы
010
^7XVUTin
оборвать на [£?2] или вообще на [£?р] и их ковариантных производных;
при этом все дальнейшие основные функции становятся проективными инва-
риантами первых. Этим объясняется особое положение римановой формы
кривизны [£2] среди квадратичных форм. Вопрос об эквивалентности квад-
ратичных форм или соответственно форм р-го измерения сводится как раз
к эквивалентности функций [£?2] или соответственно [-С?р] и их
ковариантных производных по отношению к линейным преобразованиям,
а тождественное исчезновение [£?2] или соответственно [Й2], ..., [Г2р]
необходимо и достаточно для возможности преобразования в формы с по-
стоянными коэффициентами ; этим в отношении квадратичных форм вы-
сказывается один из наиболее известных результатов.
Более подробное изложение должно появиться вслед за этим в Math.
Annalen.
ЭММИ НЕТЕР
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ [213]
(Ф. Клейну, к пятидесятилетнему докторскому юбилею)
(Доложено Ф. Клейном в заседании от 26 июля 1918 г.*))
Речь идет о вариационных задачах, которые допускают непрерывную
группу (в смысле Ли); вытекающие отсюда следствия для соответствующих
дифференциальных уравнений находят свое наиболее общее выражение в
теоремах, которые формулируются в § 1 и доказываются в последующих
параграфах. Относительно этих дифференциальных уравнений, возникаю-
щих из вариационных задач, возможны высказывания, значительно более
точные, нежели относительно любых допускающих группу дифференциаль-
ных уравнений, которые являются предметом исследований Ли. Итак,
последующее изложение базируется на объединении методов формального
вариационного исчисления с методами теории групп Ли. Для специальных
групп и для вариационных задач это объединение методов не ново; я упо-
мяну Гамеля и Герглоца (Herglotz), занимавшихся специальными конеч-
ными группами, Лоренца и его учеников (например, Фоккера), Вейля
и Клейна, занимавшихся специальными бесконечными группами **). Вторая
статья Клейна и настоящая работа в особенности взаимно повлияли друг
на друга; в связи с этим я хотела бы указать на заключительные замечания
в статье Клейна.
§ 1. Предварительные замечания и формулировка теорем
Все функции, которые фигурируют в дальнейшем, предполагаются ана-
литическими или, по крайней мере, непрерывными и конечными, а часто
и непрерывно дифференцируемыми и однозначными в рассматриваемой
области.
Под «группой преобразований», как известно, понимают такую систему
преобразований, при которой каждому преобразованию соответствует обрат-
ное преобразование, принадлежащее той же системе, и преобразование,
составленное из любых двух преобразований системы, принадлежит также
данной системе. Группа называется конечной непрерывной группой, если
ее преобразования все заключены в наиболее общем преобразовании, завися-
щем аналитически от р существенных параметров р (т. е. эти р параметров
не могут быть представлены как р функций меньшего числа параметров).
*) Окончательная редакция рукописи была передана лишь в конце сентября.
♦*) Н a m е 1, Math. Ann., т. 59 и Zs. f. Math, und Phys., т. 50; Herglotz, Ann. d.
Phys. (4), t. 36, в особенности § 9, стр. 511. Fokker, Verslag. d. Amsterdam. Akad.,
27 января 1917 г. По поводу дальнейшей литературы см. вторую статью Клейна в
Gottingen Nachrichten, 19 июля 1918 г.
В недавно опубликованной работе Кнезера (Kneser, Math. Zs., т. 2) идет речь о
составлении инвариантов схожим методом.
612
ЭММИ НЕТЕР
В соответствии с этим под бесконечной непрерывной группой &хв пони-
мают такую. группу, для которой наиболее общие преобразования зависят
от р существенных произвольных функций р (х) и их производных или ана-
литически, или, по крайней мере, так, что эта зависимость выражается непре-
рывными функциями, допускающими конечное число непрерывных произ-
водных. Промежуточное положение занимает группа, зависящая от беско-
нечно большого числа параметров, но не от произвольных функций. Нако-
нец, смешанной группой называют такую, которая зависит как от произ-
вольных функций, так и от параметров*).
Пусть х1( ..., хп — независимые переменные, иг (х), ..., щ, (х) — их
функции. Если подвергнуть х и и преобразованиям некоторой группы, то
вследствие предполагаемой обратимости преобразований преобразованные
величины опять будут содержать в точности п независимых величин yv ..уп;
остальные величины, зависящие от первых, мы обозначим через ^(у), ...
. ..,^(у). В преобразованиях могут встречаться производные от и по х,
Т. е. ,... ** ***)). Некоторая функция называется инвариантом группы,
если существует соотношение
D( ди дги } п f dv Эаг> )
U, дх , . . J — Р V, , . . . j .
В частности, интеграл I является инвариантом группы, если имеет место
соотношение
/ = (1)
где интегрирование распространяется на любую действительную область х
и на соответствующую область у****).
С другой стороны, для некоторого любого, необязательно инвариант-
ного, интеграла I я получаю первую вариацию д! и преобразую ее по пра-
вилам вариационного исчисления посредством интегрирования по частям.
Если считать, что ди исчезают на пределах вместе со всеми встречающимися
производными (вообще же они произвольны), то получаем
= У ••• = I •••pu,]dx, (2)
*) Ли определяет в «Основаниях теории бесконечных непрерывных групп преобразо-
ваний» («Grunglagen f йг die Theorie der unendlichen kontinuierlichenTransformationsgruppen»,
Ber. d. K. Sachs. Ges. der Wissenschaften, 1891) (цитируется: «Основания») бесконечную
непрерывную группу как такую группу преобразований, преобразования которой даны
наиболее общими решениями системы дифференциальных уравнений в частных производ-
ных, поскольку эти решения зависят не только от конечного числа параметров. Таким
путем получают один из вышеуказанных типов, отличных от конечной группы; в то же
время, наоборот, предельный случай бесконечно большого числа параметров может не
удовлетворять никакой системе дифференциальных уравнений.
**) Я опускаю, где возможно, индексы также и при суммировании, так что пишется
Э2и д»иа
вместо-z—а—и т. д.
дхг дхр дху
***) Я пишу сокращенно dx, dy вместо dxv..., dxn, dyv..., dyn.
****) Все аргументы, встречающиеся в преобразованиях х, и, е, р(х), предполагаются
действительными, тогда как коэффициенты могут быть и комплексными. Но так как в
конечных результатах речь идет о тождествах между х, и, параметрами и произвольными
функциями, то эти результаты сохраняют свою силу и для комплексных значений, по-
скольку все встречающиеся функции предполагаются аналитическими. Значительная
часть результатов может быть обоснована без обращения к интегрированию, так что
здесь ограничение действительными значениями не является необходимым и при обосно-
вании. Напротив, кажется, что рассуждения конца § 2 и начала § 5 не могут быть прове-
дены без интегрирования.
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
613
где у) обозначают лагранжевы выражения, т. е. левые части уравнений
Лагранжа для соответствующей вариационной задачи д! = 0. Этому инте-
гральному соотношению соответствует не содержащее интегралов тож-
дество между ди и его производными; это тождество получается путем
приписывания членов, соответствующих значениям на границах. Как пока-
зывает интегрирование по частям, эти члены представляют собой интегралы
от дивергенций, т. е. от выражений
причем в выражение А линейно входят ди и его производные. Таким путем
получается
2 y>t ди, = df + Div А . (3)
Если, в частности, / содержит только первые производные от и, то в случае
простого интеграла тождество (3) совпадает с уравнением, которое Гойн
(Heun) назвал «лагранжевым центральным уравнением»:
2^. = У-£(2^,) (4=$). (4)
в то время как для л-кратного интеграла уравнение (3) переходит в сле-
дующее:
^Vidut^df - ^-(У-^-ди1\-...-^-^-ди1
аХ1 / V Qxn
(5)
Для простого интеграла и для х производных от и уравнение (3) прини-
мает вид:
соответствующее тождество имеет место при л-кратном интеграле; в
частности, А содержит ди до (х — 1)-й производной. То обстоятельство,
что посредством уравнений (4), (5), (6) фактически определяются лагран-
жевы выражения y>h следует из того, что путем комбинирования правых
частей могут быть исключены все высшие производные от ди, в то время
как, с другой стороны, удовлетворяется соотношение (2), к которому одно-
значно приводит интегрирование по частям.
В дальнейшем речь будет идти о двух следующих теоремах:
I. Если интеграл I инвариантен по отношению к некоторой группе
то е линейно независимых комбинаций лагранжевых выражений обра-
щаются в дивергенции и, обратно, из последнего условия вытекает инвариант-
ность I по отношению к некоторой группе ®г. Теорема сохраняет спра-
ведливость и в предельном случае бесконечно большого числа параметров.
II. Если интеграл I инвариантен по отношению к группе в кото-
рой встречаются производные до а-й производной, то имеют место р
614
ЭММИ НЕТЕР
тождественных соотношений между лагранжевыми выражениями и их
производными до о-го порядка; здесь также возможно обращение*).
Для смешанных групп сохраняют силу обе теоремы; следовательно,
имеются как зависимости, так и не зависимые от них соотношения дивер-
генции (Divergenzrelationen) [214].
Если перейти от этих тождеств к соответствующей вариационной задаче,
т. е. если положить у> = 0 **), то теорема I для случая одномерного простран-
ства, в котором дивергенция переходит в полный дифференциал, устанавли-
вает существование q первых интегралов, между которыми во всяком
случае могут существовать нелинейные зависимости***); в многомерном
случае получаются уравнения дивергенции, которые теперь часто опреде-
ляют как «теоремы сохранения»; теорема II говорит, что q уравнений из
общего числа уравнений Лагранжа являются следствием остальных.
Простейший пример к теореме II — без обращения — представляет вейер-
штрассовское параметрическое представление ; здесь интеграл при одно-
родности первого порядка является, понятно, инвариантным, если заменить
независимую переменную х произвольной функцией х, которая оставляет
функцию и неизменной [у = р(х), vt(y) = н,(х)]. Таким образом, появляется
одна произвольная функция, но без производных; этому соответствует
известная линейная зависимость между самими выражениями Лагранжа :
X? Л
Другой пример дает «общая теория относительности» физиков; здесь идет
речь о группе всех преобразований х:
У/ = Pt (х),
тогда как и (обозначаемые здесь через g^ и q) подвергаются преобразованиям,
которые индуцируются первыми для коэффициентов квадратичной и линей-
ной формы и содержат первые производные от произвольных функций
р(х). Этому соответствуют известные п зависимостей между выражениями
Лагранжа и их первыми производными****).
Если, в частности, специализировать группу, не допуская производных
от н(х>в преобразованиях и, кроме того, требуя, чтобы преобразуемые неза-
висимые величины зависели только от х, а не от и, то (как будет показано
в § 5) из инвариантности интеграла / следует относительная инвариант-
ность 2/ ^(Зщ*****), а также дивергенций, фигурирующих в теореме I, коль
скоро параметры подвергаются соответствующим преобразованиям. Отсюда
следует еще, что и упомянутые выше первые интегралы допускают группу.
Для теоремы II точно так .же получается относительная инвариантность
левых частей зависимостей, составленных при помощи произвольных функ-
ций; как следствие этого получается еще одна функция, дивергенция
которой тождественно исчезает и допускает группу, которая в теории отно-
сительности физиков осуществляет связь между этими зависимостями и зако-
номэнергии******). Теорема II дает, наконец, методом теории групп доказа-
тельство связанного с этим утверждения Гильберта об отпадении некоторых
*) По поводу некоторых тривиальных случаев, ср. § 2, 2-е примечание.
**) Для большей общности можно было бы также положить у>( = Ti, см. § 3, первую
сноску.
***) См. конец § 3.
****)См. хотя бы представление Клейна.
*****) Это значит, что 8Ui получает при преобразовании некоторый множитель.
***♦♦*) См. вторую статью Клейна.
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
615
теорем, касающихся энергии, в «общей относительности». С этими добавочными
замечаниями теорема I содержит все известные в механике теоремы
о первых интегралах, в то время как теорема II может считаться наибольшим
возможным обобщением с точки зрения теории групп «общей теории относи-
тельности».
§ 2. Соотношения дивергенций и зависимости
Пусть ® — некоторая конечная или бесконечная непрерывная группа;
тогда можно достигнуть того, что тождественному преобразованию будут
соответствовать нулевые значения параметров е или соответственно произ-
вольных функций р(х)*). Следовательно, наиболее общее преобразование
будет иметь вид:
У< = А,(х, и, . .1 = Xi + Ах, + ...,
(7)
vt (у,) = Biи, • • •) = Ui + AUi+...,
где A xit А и, обозначают члены низшего измерения относительно е, со-
ответственно р(х) и их производных; следует принять, что они здесь
входят линейно. Как выяснится далее, это не является ограничением
общности.
Пусть теперь интеграл I будет инвариантом по отношению к ®, следо-
вательно, будет удовлетворяться соотношение (1). В частности, тогда I будет
также инвариантом по отношению к содержащемуся в ® бесконечно малому
преобразованию:
у( = х,- + AXi, Vi (у) = Ui + AUi;
для этого случая соотношение (1) переходит в такое:
° = dZ = J ... J/[y,ti(y), -|p...)dy-J... J/(x,u(x), ...jrfx,
где первый интеграл распространяется на область х + А х, соответствующую
области х. Это интегрирование может быть, впрочем, также преобразовано
в интегрирование по области х при помощи следующего преобразования,
имеющего силу для бесконечно малых А х:
= / pfx.’OO. -57, •• •) ix+J J Div «, (8)
Таким образом, если вместо бесконечно малого преобразования А и напи-
сать вариацию
8Ui = Vi(x)-Ui(x) = Aui-^~-Axi, (9)
*) Ср., например, Л и, Основания, стр. 331. Если дело касается произвольных функ-
ций, то следует специальные значения аа параметров заменить определенными функ-
др°
циями ра , ,... и в соответствии с этим значения а + е — функциями ра + р (х),
дра др
-эГ + ^ит-д-
616
ЭММИ НЕТЕР
то уравнения (7) и (8) переходят в следующее:
О = J . J{<5/ + Div(j-Ax)]dx. (10)
Правая часть есть известная формула одновременного варьирования
зависимых и независимых переменных. Так как соотношение (10) удовле-
творяется при интегрировании по любой области, то подынтегральное выра-
жение должно исчезать тождественно ; итак, дифференциальные уравнения
Ли в случае инвариантности I принимают вид соотношения
df + Div (/- Ах) =0. (И)
Если здесь на основании (3) представить df через выражения Лагранжа,
то получается:
2 y>i дщ = Div В (В= A — f • Ах), (12)
и это соотношение представляет собой для каждого инвариантного интеграла
I тождество относительно всех входящих в него аргументов; это и есть
искомая форма дифференциальных уравнений Ли для /*).
Будем считать сначала ® конечной непрерывной группой; так как, по
предположению, Аи и Ах линейны относительно параметров е1; ..., ег,
то на основании (9) то же самое имеет место и для вариации ди и ее произ-
водных ; таким образом, А и В линейны относительно е. Поэтому, если
я положу
В== BWE1 + ... + В^Ев, ди = ди<г> ег+ . . . + ди^Ев,
где, следовательно, д ит,... являются функциями от х, и, ~,..., то из
уравнения (12) вытекают искомые соотношения дивергенций:
21 % диф = Div В«.......2 duty = Div В®. (13)
Итак, q линейно независимых комбинаций лагранжевых выражений
переходят в дивергенции; линейная независимость следует из того, что
согласно равенству (9) из условий ди —О, Ах=0 вытекало бы, что Аи — 0,
Ах=0, и поэтому между бесконечно малыми преобразованиями существовала
бы зависимость. Но по условию она не имеет места ни для какого значения
параметра, ибо иначе группа ®г, вновь получаемая посредством интегриро-
вания из бесконечно малых преобразований, зависела бы от меньшего, чем
о, числа существенных параметров. Другая же возможность ди = О,
Div (/ • Ах) = 0 была исключена. Эти заключения сохраняют еще силу
также и в предельном случае бесконечно большого числа параметров.
Пусть теперь ® — бесконечная непрерывная группа ; тогда опять
ди и ее производные, а следовательно, и В будут линейными относительно
произвольных функций р(х) и их производных**); предположим, что путем
*) Соотношение (12) обращается в 0 = 0 для тривиального случая, который может
представиться только, если Лх, Ли зависят также от производных от и, т. е. когда
Div(/-z1x) =0, <5u=0; эти бесконечно малые преобразования, стало быть, всегда отщеп-
ляются от групп; при формулировании теорем нужно учитывать только число осталь-
ных параметров или произвольных функций. Вопрос о том, образуют ли остальные беско-
нечно малые преобразования все еще группу, остается открытым.
**) Обращение показывает, что предположение о том, что р свободны от и, , ... ,
не означает никакого ограничения.
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧ
617
подстановки значений ди все еще независимо от (12) получается:
2 Vt fat = 2 Vi {аф(x, и,...) pw (x) + ft® (x, u,...) + ...
... + c/A) (x, u,...)
Теперь на основании тождества
V (X, и...) 8^Jx) = (- 1)г р (х) mod Div [215J
можно аналогично формуле интегрирования по частям заменить производи
ные от р самими функциями р и дивергенциями, которые становятся линей-
ными относительно р и их производных; таким образом получается :
?Vi = 2 {(*(Р ¥0 - i (- 1/ (Wvi)} Pw + Div Г
(14>
и в соединении с (12)
2 {им - -к (*w +••+(- рт=и»(в - л-
(15>
Теперь я образую л-кратный интеграл от (15), распространенный на какую-
либо область ; выбираю функции р(х) так, чтобы они исчезали на границе
вместе со всеми производными, входящими в (В — Г). Так как интеграл
от дивергенции сводится к интегралу, взятому по границе области, то исчезает
также и интеграл от левой части уравнения (15) для произвольных функций
р(х), подчиненных только одному условию, чтобы они исчезали вместе с
достаточным числом их производных на границе; отсюда известным путем
вытекает исчезновение подынтегрального выражения для каждой функции
р(х), а значит, имеют место р следующих соотношений:
+ •••+(- 0’^ С'М =0 С = '. 2.............Й-
(16)
Это — искомые зависимости между выражениями Лагранжа и их произ-
водными при инвариантности интеграла I относительно ; линейная
независимость обнаруживается так же, как и выше, ибо обращение приводит
обратно к равенству (12), а от бесконечно малых преобразований можно
делать заключение обратно к конечным, как это будет подробнее развито в
§ 4. Поэтому для ®оое уже среди бесконечно малых преобразований всегда
появляются q произвольных преобразований. Из уравнений (15) и (16)
следует еще
Div;(B - г) = о.
Если в соответствии со «смешанной группой» предположить, что Их и Ли
линейны относительно е и р(х), то можно видеть, полагая один раз все р(х),
а другой раз все е равными нулю, что в этом случае имеют место как соот-
ношения дивергенций (13), так и зависимости (16).
618
ЭММИ НЕТЕР
§ 3. Обращение в случае конечной группы
Чтобы показать обращение, просмотрим сначала в основном предше-
ствующие выводы в обратном порядке. Из существования соотношений (13)
вытекает после умножения на е и сложения справедливость равенства (12),
а в силу тождества (3) отсюда вытекает и соотношение
3/ + Div0-B) = O.
Значит, если положить
Их = у(Д-В),
то таким путем мы придем к равенству (11); отсюда, наконец, путем инте-
грирования получаем равенство (7):
Д1 = О,
т. е. инвариантность I по отношению к бесконечно малому преобразованию,
определяемому через И х, Ди, причем Ди, в силу равенства (9), определяются
через Дх и ди, а Дх и Ди становятся линейными относительно пара-
метров. Но равенство
Д1 = 0
влечет за собой, как известно, инвариантность I по отношению к конеч-
ным преобразованиям, которые получаются путем интегрирования системы
совместных уравнений:
^ = Дх,, ^ = Ди, при/ = о! ' (17)
dt 1 ’ dt ‘ 1 | и, = V. 4 ’
Эти конечные преобразования содержат g параметров alt..., ае, а именно
комбинации telf .. ., tee. Из предположения о том, что должно быть q и
только q независимых соотношений дивергенций, следует, далее, что конеч-
_ Эи
ные преобразования, поскольку они не содержат производных , всегда
образуют группу. В противном случае, по крайней мере, одно бесконечно
малое преобразование, образованное посредством скобочного процесса Ли
(Lie’ schen Klammerprozess) [216 ], не было бы линейной комбинацией g
остальных, атак как I допускает и это преобразование, то существовало бы
больше чем g линейно независимых соотношений дивергенций или же это
бесконечно малое преобразование имело бы специальную форму, такую,
что du=O, Div (}-Дх)=0, но тогда Дх и Ду в противоречии с предположе-
нием зависели бы от производных. Вопрос о том, может ли представиться
случай, когда в Дх или Ди входят производные, должен остаться откры-
тым; в этом случае к определенному выше Дх пришлось бы присоединить
все функции Дх, для которых Div (/ • Дх) = О, чтобы снова получить
группу, но добавленные таким путем параметры не должны, согласно
условию, приниматься во внимание. Этим доказано обращение.
Из этого обращения следует еще, что фактически мы имеем право брать
Дх и Ди линейными относительно параметров. В самом деле, если бы
Ди и Дх были формами высших степеней относительно е, то вследствие
линейной независимости произведений степеней е соответствующие соот-
ношения (13) получились бы в большем числе, а из них после обращения
вытекает инвариантность интеграла I по отношению к группе, бесконечно
малые преобразования которой содержат параметры линейно. Если эта труп-
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
619
на должна содержать в точности q параметров, то неизбежно будут существо-
вать линейные зависимости между соотношениями дивергенций, получен-
ными первоначально, благодаря членам высшей степени относительно е.
Нужно еще заметить, что в случае, когда Лх и Ли содержат также
производные от и, конечные преобразования могут зависеть от бесконечно
большого числа производных от и; в самом деле, интегрирование системы
(17) ведет в этом случае, при определении , к уравнению
л [ Эи ) _ ЪЛи -у Эи 9 Лхх
I ахх) дхх 9хл 9хк ’
так что число производных от и, вообще говоря, возрастает с каждой сту-
пенью. Так, например,
/ = у«'2, = — u", yi • х =-А-(ц — ц'х), ди — х-е,
Лх =—Ли = (х-------------
и'2 ’ I и' )
Так как лагранжевы выражения дивергенции тождественно исчезают,
то обращение показывает еще следующее: если I допускает группу
®е, то каждый интеграл, который отличается от I только на интеграл по
границе, т. е. интеграл от дивергенции, также допускает группу ®е с теми
же самыми диь группу, бесконечно малые преобразования которой, вообще
говоря, будут содержать производные от и. Так, например, в соответствии с
вышеприведенным примером
1 2 Г dx I х Jj
допускает бесконечно малое преобразование
Ли = хе, Лх = 0;
в то же время в бесконечно малые преобразования, соответствующие /,
входят производные от и.
Если перейти к вариационной задаче, т. е. если положить у>, = 0 *), то
•соотношения (13) переходят в уравнения:
DivB(1) = 0, ..., DivB(e) = 0,
которые часто называются «законами сохранения». В одномерном случае
отсюда следует:
В(1) = const, ..., = const;
при этом В содержат производные порядка не выше 2 х — 1 от и [согласно
(б) ], коль скоро Ли и Лх не содержат производных более высокого порядка,
чем входящие в f производные порядка х. Так как в у>, вообще говоря, встре-
чаются производные порядка 2х**), то, следовательно, имеются налицо q
первых интегралов. Что между ними могут существовать нелинейные эависи-
*) Уравнения чч = О или, несколько более общб, чч = Ti, где Т/ — вновь вводимые
функции, называются в физике уравнениями поля. В случае чч = Ti тождества (13) пере-
ходят в уравнения: Div BW = £ TiSmW, которые в физике именуются также законами
сохранения.
**) Поскольку f не является линейной функцией и-х производных.
620
ЭММИ НЕТЕР
мости, показывает опять вышеприведенный пример /. Линейно независимым^
Ли — elt Лх — е2 соответствуют линейно независимые соотношения:
в то время как между первыми интегралами
и' = const, u'2 = const
существует нелинейная зависимость. При этом дело идет об элементарном
случае, когда Ли, Лх не содержат производных от и *).
§ 4. Обращение в случае бесконечной группы
Прежде всего покажем, что допущение линейности Лх и Ли не пред-
ставляет собой никакого ограничения ; это и без использования обращения
вытекает из того факта, что ®оое формально зависит от q и только от о
произвольных функций. Именно, можно показать, что в случае нелиней-
ности при сложении преобразований, при котором члены низшего порядка
суммируются, увеличилось бы число произвольных функций. В самом деле,,
пусть
у = А[х,и,~, ...,р) = х + 2'а(х, и, ...)р” + &(х, и, +
+ С^2НЮ’+ ••• +4^)’+ •••’ [Р’(Р^)’1 + • • • + (Р(е)Л
и соответственно
v = B(x, ........р);
тогда путем сложения с
. ( &v t
z = ....q)
мы получаем для членов низшего порядка
Z = х + 2 а к+<Г) + b {р’"1^’ + q"-1 -g-} + с К2 (-ЙТ + ^’2 CSTI + • •'
\ I vA vA I I ’ vA J \ 'Ja J I
Если здесь какой-либо коэффициент, отличный от а и Ь, не равен нулю,,
следовательно, для какого-либо а > 1 действительно встретится член
ОУ+«Г-
то его нельзя рассматривать как производную оцной-единственной функции
или как произведение степеней таковой; следовательно, число произволь-
ных функций возросло по сравнению с предположенным. Если же исчезают
все коэффициенты, отличные от а и Ь, то в зависимости от значений пока-
зателей г,,..., ve могут представиться два случая : либо второй член
является производной от первого (как это, например, всегда имеет место для
*) Вообще существует еще зависимость и'л == const для любого Л и соответственна
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
621
'@001)‘, так что фактически получается линейность, либо число произвольных
-функций и здесь возрастает. Итак, вследствие линейности функций р(х)
бесконечно малые преобразования удовлетворяют системе линейных диффе-
ренциальных уравнений в частных производных, а так как условие существо-
вания группы выполнено, то они, по определению Ли («Основания», § 10),
образуют «бесконечную группу бесконечно малых преобразований».
Обращение здесь получается подобно тому, как в случае конечной группы.
Существование зависимостей (16) ведет после умножения на р(Л)(х) и сло-
жения при помощи тождественного преобразования (14) к уравнению
2 = Div Г,
а отсюда вытекает, как и в § 3, определение Дх и Ju и инвариантность
интеграла I относительно этих бесконечно малых преобразований, которые
в действительности зависят линейно от q произвольных функций и от их про-
изводных до порядка а включительно. Что эти бесконечно малые преобразо-
Эи _
вания, если они не содержат производных , ..., наверное, образуют
группу, следует, как и в § 3, из того, что иначе при сложении было бы
введено больше произвольных функций, в то время как, по предположению,
должно быть только q зависимостей (16); следовательно, эти преобразования
образуют «бесконечную группу бесконечно малых преобразований». Но
такая группа состоит («Основания», теорема VII, стр. 391) из самых общих
бесконечно малых преобразований известной, сторого определенной в
смысле Ли, «бесконечной группы ® конечных преобразований». Каждое
конечное преобразование при этом получается из бесконечно малого («Осно-
вания», § 7)*) путем интегрирования совместной системы:
= при 1 = 0
dt l’ dt u г | щ = Vt,
причем может оказаться нужным рассматривать произвольные функции
р(х) еще и как зависящие от t. Значит, ® действительно зависит от q про-
извольных функций; в частности, достаточно предположить р(х) свобод-
ными от t, чтобы эта зависимость оказалась аналитической относительно
произвольных функций q(x) = t-p(x) **). Если входят производные
то может оказаться необходимым, прежде чем сделать тот же вывод, добавить
еще бесконечно малое преобразование ди = 0, Div (/ • Лх) = 0.
В связи с примером, приводимым Ли («Основания», § 7), укажем еще
довольно общий случай, в котором можно добраться до явных формул,
в которые входят производные от произвольных функций порядка не выше о ;
стало быть, в этом случае обращение получается полное. Это — такие группы
бесконечно малых преобразований, которым соответствует группа всех
преобразований х и «вытекающих» из них преобразований и, т. е. такие
*) Отсюда, в частности, следует, что группа ®,полученная из бесконечно малых преоб-
разований Лх и Л й некоторой группы &«,в, опять приводит к группе &«,в, ибо ®„е не содер-
жит никаких отличных от Эх, Ли, зависящих от произвольных функций бесконечно ма-
лых преобразований, и не может содержать также независимых от них, но зависящих от
параметров преобразований, так как иначе это была бы смешанная группа. Но беско-
нечно малые преобразования, как показано выше, определяют собой конечные преобра-
зования.
♦♦) Вопрос о том, всегда ли имеет место этот последний случай, поставлен Ли в иной
формулировке («Основания», § 7 и конец § 13).
622
ЭММИ НЕТЕР
преобразования и, при которых Ди, а следовательно, и и зависят только от
произвольных функций, входящих в Дх ; при этом предполагается еще, что
производные-^,..., в Ju не входят. Следовательно, мы имеем
Дх, = (х), Ди, = |а(Л) (х, и) р(Л) + fy Л) + ... + с(Л) |.
Так как из бесконечно малого преобразования Дх = рх получается каждое
преобразование х = у + g (у) с произвольным g (у), то можно, в частности,
установить такую зависимость р (х) от t, чтобы получилась одночленная
группа
х,= У( + t g,(у), (18)
которая при t = 0 переходит в тождество, а для t = 1 — в искомое преобра-
зование х = у + g(y).
В самом деле, путем дифференцирования из уравнения (18) получается
-^L = g!(y) = P(/)(^O> (19)
где р(х, Z) определяется через g(y) путем обращения выражения (18), и на-
оборот, уравнение (18) получается из (19) при добавочном условии: х, = у,
при t = 0; ‘это условие однозначно определяет интеграл. При помощи урав-
нения (18) можно х, входящие в Ди, выразить через «постоянные интег-
рации» у и через t; тогда g(y) войдут как раз под знаком производных до
порядка а включительно; при этом в выражениях
Эр = у- 9g . дух
дх ~ дук Эх
by дх с- дР-р , bg
0^- выражаются через вообще-—^- — выражаются в функции...
Эх Э°х
..., ..., . Таким образом, для определения и получается система
уравнений
= ....(при f = 0 u, = v,),
в которой только t и и являются переменными, a g (у) принадлежат к коэффи-
циентам ; таким образом, интегрирование дает
u, = vi + B,(v,g(y),^,...,^-,t}M,
т. е. преобразования, которые зависят только от а производных произволь-
ных функций. Эти преобразования согласно (18) включают тождество при
g (у) = 0, а то, что они образуют группу, вытекает из того, что указанный
процесс дает каждое преобразование х = у + g (у), чем однозначно устанав-
ливается и вытекающее отсюда преобразование для и; следовательно,
группа ® полностью определена.
Из обращения следует еще, что если мы получаем произвольные функции
ди
зависящими только от х, но не от и, -х—,..., то это не означает никакого
ограничения. В последнем случае в тождественное преобразование (14), a
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
623
следовательно, и в (15), кроме pw входили бы также • • • Поэтому,
Эх
если последовательно полагать нулевой, первой, ... степени относи-
ли -L
тельно и, ,... с произвольными функциями от х в качестве коэффициен-
тов, то снова появятся зависимости (16), но в большем числе; однако эти
зависимости согласно рассмотренному выше обращению приводятся к преды-
дущему случаю посредством соединения с произвольными функциями, зави-
сящими только от х. Точно так же можно показать, что одновременному
появлению зависимостей и независимых от них соотношений дивергенций
соответствуют смешанные группы*).
§ 5. Инвариантность отдельных составных частей соотношений
Если специализировать группу ®, ограничившись простейшим обычно
рассматриваемым случаем, когда в преобразования не входят производные
от и и когда преобразуемые независимые переменные зависят только от х,
а не от и, то можно сделать вывод об инвариантности отдельных составных
*) Как в § 3, из обращения следует, что, помимо интеграла I, каждый интеграл, разня-
щийся от_него на интеграл I* от дивергенции, также допускает бесконечную группу с
теми же би, причем, однако, Дх и Ли, вообще говоря, будут содержать производные от и.
Такой интеграл I* Эйнштейн ввел в общую теорию относительности, чтобы получить более
простое выражение законов энергии ; я указываю бесконечно малые преобразования,
которые допускает этот интеграл I*, примыкая в обозначениях ко второй статье Клейна.
Интеграл
/ = ]...] К dm = J ... J S dS
допускает группу всех преобразований w и полученную из нее для g/(>>; отсюда следуют
зависимости [(30) у Клейна]:
v nUV -I- 2 У — О
«щ-gr 9wfJ -О.
Но
/* = J ... j S'* dS ,
где
S* = й + Div ,
а следовательно, получаем
S'* — S'
-- vl-piV )
где S, S* означают выражения Лагранжа. Приведенные зависимости будут, стало быть,
такими же и для S* ; после умножения на и сложения получается посредством обрат-
ного преобразования
2 р>" + 2 Div ( У g^ S^ р1) = О,
SS1* л
6S* + Div 2g^ ----= 0.
Путем сравнения с дифференциальным уравнением Ли найдем
бй* + Div (S* Лп>) = 0.
Отсюда следуют бесконечно малые преобразования, допускаемые интегралом I*:
Aw° = 2 ,
Jg“1' = puv -|- guv Лпа.
Эти бесконечно малые преобразования зависят, следовательно, от первой и второй произ-
водных guv и содержат производные р вместе с их первыми производными.
t>24
эмми ншпг
частей в формулах. Прежде всего получается путем уже известных умоза-
ключений инвариантность интеграла
J ••• J(2 v'da^dx,
а следовательно, относительная инвариантность выражения
где под <5 понимается какая-нибудь вариация. В самом деле, мы, с одной
'стороны, имеем
<51 = f ... р/ (х, и, -g-, ...) dx = f ... $df(y,v, ...) dy,
V s s Эи
•с другой — равные нулю на границе значения ди, д -т~,... , которым
вследствие линейности и однородности преобразования величин ди, й -g-
соответствуют также исчезающие на границе величины dv, д -g-,... :
J ... р/ (х, и, ...) dx = J - • • •) dx>
f ... |й/(у,»,-^-, ...)dy = f... • ••)dvi)dy;
следовательно, для исчезающих на границе значений ди, й ~, ... будем
иметь
f ... ...) йи,)(/х= f . • • fU1 у; (г>, .. .)dv,)dy =
= J... ...)йг;1.)|^-|л.
Если в третьем интеграле выразить у, v, dv через х, и, ди и положить его
равным первому, то будем иметь соотношение
j ... ...)йи,)</х = 0
для исчезающего на границе, а в остальном произвольного ди, а отсюда,
как известно, вытекает исчезновение подынтегральной функции для
любого ди; следовательно, мы имеем тождественное относительно ди
соотношение:
Zyt(u, ...)йи,= |-^-|(^у>/(», ...)dv,),
которое устанавливает относительную инвариантность выражения £ duh
а следовательно, инвариантность интеграла
Р •. f С2 % Мdx **)•
*) То есть у. Sth получает при преобразовании множитель, что в алгебраической
теории инвариантов всегда называют относительной инвариантностью.
** ) Эти рассуждения отпадают, если у зависит также от и, так как в этом случае выра-
жение
содержит также члены
а следовательно, преобразование при помощи дивергенции не приводит к выраже-
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
625
Чтобы применить это к выведенным соотношениям дивергенций и к
зависимостям, нужно сначала доказать, что ди, выведенное из Ди, Дх,
действительно будет удовлетворять законам преобразования для ди, коль
скоро только параметры или соответственно произвольные функции в
dv будут определены так, чтобы они соответствовали подобной группе
бесконечно малых преобразований относительно у, v. Если обозначить через
— преобразование, которое переводит х и и в у и v, через $р — бесконечно
малое преобразование, преобразующее х и и в самих себя, то подобное ему
преобразование дается формулой
где, следовательно, параметры или соответственно произвольные функции
2 определяются при помощи р и q. Формулами это выражается так :
= хДх(х,р), и* = и + Ди(х,и, р),
у = A(x,q), v = В(х, и, q),
’Zq’&p Ч = А (х + Ах (х, р), q), v* = В (х + Дх (р), и + Ди (р), q).
Но отсюда получается
гг = гдд,-!,
следовательно,
р = у + Ау (г), v* = v + Av (г),
причем вследствие обращения, рассматриваются как функции у и прини-
маются в расчет только бесконечно малые члены, так что имеет место то-
ждество
Ч = У + Ау(г) = у ^~Лх(р), )
} (20)
v* = v + Ду (г) = v + Jx (р) + —J— Ди (р). j
Если здесь вместо £ = х + Лх поставить £ —Д%, благодаря чему £ снова
переходит в х, а следовательно, Дх исчезает, то по первой из формул (20)
р также переходит в у = р —Др; если при помощи этой подстановкиДи(р)
ниям Лагранжа; то же самое будет, если допустить производные от и ; в этом случае dv
. s du
становятся линеиными комбинациями из ди, о и следовательно, приводят
к тождеству
J ••• j’(2'zi(u, ...))dx = 0
только после нового преобразования с дивергенциями ; таким образом, справа опять не
появляются выражения Лагранжа.
Вопрос о том, можно ли вывести заключение о существовании соотношений дивер-
генций уже из инвариантности интеграла
J • - • J (2.' 4>i dui) dx
после обращения, равнозначен вопросу о том, можно ли отсюда сделать заключение об
инвариантности 1 по отношению к группе, которая ведет не обязательно к тем же Ди,Дх,
но, конечно, к прежнему ди. В специальном случае простого интеграла и наличия лишь
первых производных в выражении для / можно в случае конечной группы из инвариант-
ности выражений Лагранжа прийти к существованию первых интегралов (ср., например,
Engel, Getting. Nachr., 1916, стр. 270).
40 Вариационные принципы механики
626
ЭММИ НЕТЕР
переводится в 6 и (р), то также и Av (г) переходит в dv (г), и вторая из фор-
мул (20) дает:
v + dv (u, v, .. . , г) = v + J? ЪВ&иЛ) 2и ,
dv(y,v, ...,r) = £~-duK(x,u,p),
так что действительно удовлетворяются формулы преобразования для
вариаций, коль скоро только dv предполагается зависящим от параметров
или соответственно от произвольных функций г*).
Отсюда следует, в частности, относительная инвариантность выражения
27 у, dUj, а также (учитывая (12) и то, что соотношения для дивергенций
выполняются также и для у, v) относительная инвариантность величины
Div В ; далее, на основании (14) и (13), относительная инвариантность
Div Г и связанных с левых сторон зависимостей, где всегда в преобразо-
ванных формулах следует заменять произвольные р(х) (соответственно и
параметры) через г. Отсюда получается еще относительная инвариантность
Div (В — Г), т. е. дивергенции не исчезающей тождественно системы
функций В — Г, дивергенция которой, однако, тождественно равна нулю.
Из относительной инвариантности Div В в одномерном случае и для
конечной группы можно вывести еще заключение об инвариантности первых
интегралов. Параметрическое преобразование, соответствующее бесконечно
малому преобразованию, согласно (20) 'будет линейным и однородным и
вследствие обратимости всех преобразований е будут также выражаться
линейно и однородно через преобразованные параметры е*. Эта обратимость
наверняка сохраняется, если положить ip — 0, ибо в формулы (20) не входят
производные от и.
Если приравнять коэффициенты при е* в уравнении
Div В (х, и, . .. , е) = Div В (у, v, ... , е*),
то функции
4-В''Чу, v, ...)
также становятся линейными однородными функциями от
4~Вм(х,и, ...),
так что из равенства
|В“’(Х,«,...) = О
или
Вм (х,и, ...) = const
также следует
4~ВЛ(у, v, ...) = 0
dy v ’ 7
или
В'7) (У, v, . ..) = const.
Таким образом, q первых интегралов, которые соответствуют некоторой
группе &е, также допускают группу, так что упрощается и дальнейшее-
*) Мы видим опять, что у следует брать независимым от и и т. д., чтобы эти заключения
были справедливы. В качестве примера можно назвать указанные Клейном и dqe,
которые удовлетворяют преобразованиям для вариаций, коль скоро р подвергаются
векторному преобразованию.
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
627
интегрирование. Простейшим примером этого может служить случай, когда
функция / свободна от х или от и, что соответствует бесконечно малому
преобразованию Лх = е, Ли = 0 или соответственно Лх = 0, Ли ~ е.
Тогда ди делается равным е , или соответственно е, а так как В выво-
дится из f и ди путем дифференцирования и рациональных операций, то
она, следовательно, также свободна от х или соответственно от и и допускает
соответствующие группы*).
§ 6. Утверждение Гильберта
Наконец, из предыдущего получается еще доказательство утверждения
Гильберта о связи отказа от собственных законов энергии с «общей относи-
тельностью» (первая статья Клейна, Gottingen Nachr., 1917, ответ, первый
абзац) и именно в обобщенной формулировке, с точки зрения теории групп.
Пусть интеграл I допускает группу и пусть какая-либо конечная
группа, возникшая из первой путем придания специального вида произ-
вольным функциям ; следовательно, &„ является подгруппой Беско-
нечной группе тогда соответствуют зависимости (16), конечной группе
&а — соотношения дивергенций (13); обратно, из существования каких-либо
соотношений дивергенций вытекает инвариантность / по отношению к
некоторой конечной группе, которая в том и только в том случае совпадает с
®о, когда ди являются линейными комбинациями ди, получающихся из
&<,. Следовательно, инвариантность по отношению к ®о не может повести
к каким-либо соотношениям дивергенций, отличным от (13). Но так как
из существования зависимостей (16) следует инвариантность / по отно-
шению к бесконечно малым преобразованиям Ли и Лх группы при
любом виде р (х), то отсюда, в частности, следует уже и инвариантность
относительно возникающих путем специализации вида функций беско-
нечно малых преобразований группы ®а, а следовательно, и по отношению
к самой группе ®а. Соотношения дивергенций
£ ip, du\ta = Div -ВЛ
должны быть следствиями зависимостей (16), которые можно записать и так:
2 Vi а? = Div ,
*) В случаях, в которых уже из инвариантности выражения
( (—" Vt ди/) dx
вытекает существование первых интегралов, последние не допускают полную группу
; например, в случае, если
§ (и" ди) dx
допускает бесконечно малое преобразование Лх = е2, Ли — ег + хе3, в то время как пер-
вый интеграл
и — и' х = const,
соответствующий Лх = 0, Ли = хе3, не допускает оба других бесконечно малых преоб-
разования, так как он содержит в явной форме как и, так и х. Этому первому интегралу
как раз соответствуют бесконечно малые преобразования Для /, содержащие производные.
Таким образом, можно видеть, что инвариантность интеграла
(2’ Vi dui) dx
во всяком случае дает меньше, чем инвариантность I, что и следует отметить по поводу
вопроса, поставленного в предыдущем замечании.
40*
628
ЭММИ НЕТЕР
где /я) суть линейные комбинации выражений Лагранжа и их производных.
Так как ip входят линейно как в (13), так и в (16), то, в частности, соотно-
шения дивергенций должны быть линейными комбинациями зависимостей
(16); таким образом, получается
Div В1'1 = Div (J? а %™),
и сами В<Л) выражаются линейно через /, т. е. через выражения Лагранжа
вместе с их производными и через функции, дивергенция которых тожде-
ственно исчезает, например, хотя бы такие, как В — Г (конец § 2), для
которых Div (В — Г) = 0 и где дивергенция одновременно обладает свой-
ством инвариантности. Соотношения для дивергенций, в которых В(>>
составляются заданным образом из выражений Лагранжа и их производных,
я буду называть «несобственными», все остальные — «собственными».
Обратно, если соотношения для дивергенций являются линейными ком-
бинациями зависимостей (16), т. е. они — «несобственные», то из инвариант-
ности по отношению к следует инвариантность по- отношению к &а ;
становится подгруппой группы Соотношения дивергенций, соот-
ветствующие некоторой конечной группе &а, тогда и только тогда являются
несобственными, когда группа &а есть подгруппа некоторой бесконечной
группы, по отношению к которой инвариантен интеграл I.
Путем специализации групп отсюда получается первоначальное утвер-
ждение Гильберта. Под «группой смещения» мы будем понимать конечную
группу
У/ = х,- + е,, V,- (у) = и, (х),
следовательно,
Axt — е,, Аи,=О, ди, — — ел.
Инвариантность по отношению к группе смещения означает, очевидно, что в
интеграле
/ = f ... J7(x,n, ...)dx
х не входят явно в /. Соответствующие п соотношений дивергенций
2 у,= Div (Я = 1,2, ...,п)
мы назовем «соотношениями энергии», так как соответствующие вариацион-
ной задаче «законы сохранения»
Div = О
соответствуют «законам энергии», а В<Я)—«компонентам энергии». Итак, спра-
ведливо следующее положение : Если 1 допускает группу смещения, то
соотношения энергии в том и только в том случае будут несобственными,
когда интеграл 1 инвариантен по отношению к бесконечной группе, которая
включает в качестве подгруппы группу смещения*).
Примером таких бесконечных групп служит группа всех преобразований
для х и таких вытекающих из них преобразований для и (х), в которые входят
только производные произвольных функций р(х); группа смещения полу-
*) Законы энергии классической механики, а также старой «теории относительности»
(в которой ^dx2 преобразуется в самое себя) являются «собственными», так как здесь нет
никаких бесконечных групп.
ИНВАРИАНТНЫЕ ВАРИАЦИОННЫЕ ЗАДАЧИ
629'
чается путем специализации р(,)(х) — е,; однако должен остаться открытым
вопрос, даны ли этим — с присоединением групп, возникающих в результате
прибавления к / интеграла по границе, — наиболее общие из этих групп.
Индуцированные преобразования данного вида НФзвдйсают, когда величины
и подвергаются преобразованию коэффициентов «полной дифференциальной
формы», т. е. формы
2’ a х,- + £ b х, dxx+ ..
которая, помимо dx, содержит еще дифференциалы высших порядков ; более
специальные преобразования, при которых р(х) входят под знаком только
первой производной, даются преобразованием коэффициентов обыкновенных
дифференциальных форм
Z с dXj. .. dxx;
обычно только эти преобразования и рассматривались.
Другая группа данного вида, которая из-за появления логарифмического
члена не может быть преобразованием коэффициентов, такова :
У = X + р (х), V,- = Ui + In [1 + р'(х)] = Ui + In ,
z'l X = р (х), J Ui = р'(х) *), dUi = р'(х) —u'ip (х).
Зависимости (16) здесь будут такими :
^(VlU; + »=o,
несобственные соотношения энергии принимают вид
V ( , d(w + const) a „
+------тх-----) = 0-
Простейший инвариантный интеграл группы таков :
р р—2ut
Наиболее общий интеграл / определяется интегрированием дифференциаль-
ного уравнения Ли (11)
а/ + ™(/’Лх) = °,
которое посредством подстановки значений для Лх и du, поскольку мы
считаем функцию f зависящей только от первых производных от и, пре-
образуется в такое :
-^гР(х) + [^ ^-п; + /}р'(х) + {2 Д)р»(х) = о
(тождественное относительно р(х), р'(х), р"(х)). Эта система уравнений обла-
*) Из этих бесконечно малых преобразований определяются конечные преобразования
в обратном порядке по методу, указанному в конце § 4.
630
ЭММИ НЕТЕР
дает уже для случая двух функций и(х) решениями, которые действительно
содержат произвольные функции, а именно :
f = (41 - Щ) Ф - u2, -„-„“'„J >
где Ф означает произвольную функцию указанных аргументов.
Гильберт, как хорошо известно, утверждает, что падение собственных
законов энергии есть характерный признак «общей теории относительности».
Для того чтобы это утверждение оправдывалось буквально, следует термин
«общая относительность» понимать шире, чем это делается обычно, а также
распространить его на рассмотренные выше группы,.зависящие от п произ-
вольных функций*).
*) Этим опять подтверждается справедливость замечания Клейна о том, что употре-
бительный в физике термин относительность следует заменить термином инвариантность
по отношению к некоторой группе. (Ueber die Geometrischen Grundlagen der Lorentzgruppe,
Jahrber. d. d. Math. Vereinig, t. 19 (1910), стр. 287; перепечатано в Phys. Zs.)
Л. ДЕ БРОЙЛЬ
ПОПЫТКА ПОСТРОЕНИЯ ТЕОРИИ СВЕТОВЫХ КВАНТОВ*)!217]
I. Световой квант
Накопленные в последние годы экспериментальные доказательства,
по-видимому, решительно свидетельствуют в пользу действительного су-
ществования световых квантов. Кажется все более и более правдоподобным,
что фотоэлектрический эффект, являющийся основным механизмом обмена
энергией между излучением и материей, всегда подчиняется эйнштейнов-
скому закону фотоэффекта. Опыты по фотографическим действиям света и
недавние результаты А. Комптона об изменении длины волны рассеянных
рентгеновских лучей было бы трудно объяснить без использования представ-
ления о световых квантах. С теоретической стороны представления Бора,
которые подтверждаются столь многими экспериментальными доказатель-
ствами, основаны на том постулате, что атомы могут испускать или погло-
щать лучистую энергию частоты v только ограниченными количествами,
равными h v ; теория Эйнштейна флуктуаций энергии в черном излучении
также с необходимостью приводит к подобным представлениям.
В настоящей статье [218] я буду предполагать реальное существование
световых квантов и постараюсь выяснить, как можно примирить с этим
предположением неоспоримые экспериментальные данные, на которых
основана волновая теория.
Особенно естественным из-за своей простоты предположением является
допущение того, что все световые кванты одинаковы и что различны лишь их
скорости. Мы предположим также, что «масса покоя» каждого светового
кванта имеет заданную величину т0; поскольку атомы света обладают
скоростями, очень близкими по величине к эйнштейновской предельной
скорости с, они должны иметь малую (но не бесконечно малую в математи-
ческом смысле) массу; частота соответствующего излучения должна быть
связана с полной энергией кванта соотношением
, т0С2
= v—,
У1-/?’
однако, так как величина 1 — у?2 очень мала, мы можем написать, что
О _ « _ 1 _ 1 ml с*_
Р ~ с 2'iW'
Световые кванты, вероятно, имеют скорости, несколько различающиеся по
величине, однако различие настолько невелико, что разница между значе-
ниями этих скоростей и значением с не может быть установлена с помощью
*) Представлено Р. Фаулером.
л. де. ькииль
каких-либо экспериментальных средств. Величина т0 должна иметь, по-
видимому, самое большее порядок 10-50г[219].
Как очевидно, световые кванты должны обладать внутренней бинарной
симметрией, связанной с симметрией электромагнитных волн и определяемой
некоторой осью поляризации. Позднее мы снова вернемся к этому заме-
чанию.
II. Черное излучение как газ световых квантов
Рассмотрим газ, состоящий из описанных нами выше световых квантов.
При заданной температуре (не слишком близкой к абсолютному нулю)
почти все эти световые атомы имеют скорости v = fic, очень мало отлича-
ющиеся по величине от с. Полная энергия каждого из этих атомов равна
а его количество движения равно
С = m°g
УГ-’
так что приближенно
G=^-.
С
Легко видеть, что давление подобного газа на ограждающую стенку равно
p = ^-2Gc = j-nW,
где п число световых квантов в единице объема.
Это выражение совпадает с выражением, следующим из электромагнитной
теории; используя нерелятивистские формулы, мы получили бы вдвое
больший результат.
Теперь возникает вопрос, можем ли мы применять для квантового газа
максвелловский закон распределения энергии? В механике Эйнштейна
сохраняет силу теорема Лиувилля, на которой основывается статистическая
механика; мы можем, далее, взять для величины элементарной фазовой
ячейки значение, пропорциональное dx dy dz dp dq dr, если переменные x,
у, z являются прямоугольными координатами, а р, q, г — соответствующими
импульсами. Вследствие канонического закона распределения, число атомов,
изображающая точка которых находится в элементе dx dy dz dp dq dr,
должно быть пропорционально величине
w V/
е kTdxdydz dp dq dr = e kT-4 л G2 dG dv,
где dv — элемент объема, a G — импульс. Поскольку G = —, это число
определяется также выражением
Cfe kTW2dWdv.
Каждый квант имеет полную энергию, равную h v ; в этом случае энергия,
содержащаяся в объеме dv и переносимая световыми квантами с энергией
hv, равна
_ hy_
С*е kTv3dvdv.
Это, очевидно, виновская предельная форма закона излучения. Два года
ПОПЫТКА ПОСТРОЕНИЯ ТЕОРИИ СВЕТОВЫХ КВАНТОВ
633
назад мне удалось *) показать, что, используя предложенную План-
ком гипотезу о том, что величина элемента фазового объема равна
dx dy dz dp dq dr, можно получить для плотности лучистой энергии
значение
uv dv = —=— v3e кТ dv.
cs
Это было хотя и не полным, но обнадеживающим результатом. Казалось,
что предположение о конечных элементах фазового объема имеет несколько
произвольный и необъяснимый характер. Более того, закон Вина является
только предельной формой истинного закона излучения.Для объяснения
другого члена ряда я был вынужден предположить существование различ-
ных квантовых агрегатов.
Сейчас такие трудности, по-видимому, могут быть устранены, но,
прежде чем перейти к соответствующему изложению, нам нужно выяснить
ряд понятий; впоследствии мы еще вернемся к газу «черного излучения».
III. Важная теорема о движении тел
Рассмотрим дижущееся тело, масса покоя которого равна т0; движение
происходит по отношению к определенному наблюдателю со скоростью
v = /?с (/? < 1). Вследствие принципа эквивалентности упомянутое тело
должно обладать внутренней энергией т0с2. Квантовые соотношения наводят
на мысль приписать эту внутреннюю энергию некоторому периодическому
явлению, частота которого равна v0 = ir0c2. Для покоящегося наблюдателя
ТП м
полной энергией является величина у_Л=-, и соответствующей частотой
к- 1 т„ с2
будет v = .
у /! У1 — /З2
Однако, если на внутреннее периодическое явление смотрит покоящийся
наблюдатель, то частота данного явления ему будет казаться более низкой
и равной v1 = v0 У1 — Д2, т. е. наблюдателю процесс покажется протекающим
пропорционально sin 2jtv1t. Частота v1 совершенно отлична от v ; однако
эти частоты связаны согласно основной теореме, дающей нам физическую
интерпретацию величины v.
Предположим, что в момент t = 0 движущееся тело совпадает по длине
с волной, обладающей заданным выше значением частоты v и распространи-
С ' с2
ющейся со скоростью у-= — . Согласно предположениям Эйнштейна, подоб-
ная волна не может переносить энергии.
Наша теорема заключается в следующем : Если внутреннее явление в
движущемся теле совпадает в начальный момент по фазе с волной, то это
фазовое соответствие будет сохраняться и в дальнейшем. В самом деле:
в момент t движущееся тело находится на расстоянии х = vt от исходного
положения, а происходящее в нем внутреннее явление пропорционально
sin 2лт1 ; волна в этой же точке определяется выражением sin 2 т> (f —
— = sin 2 юх — у) • Оба эти содержащие синус выражения будут
равны, и фазовое соответствие сохранится, если соблюдено следующее
условие:
_______________ И = г (1 — /?2),
*) См. Journal de Physique, ноябрь 1922 г.
<634
Л. ДЕ БРОЙЛЬ
которое, очевидно, выполняется по определению величин v и vv Этот
важный результат неявно содержится в лоренцевом преобразовании вре-
мени. Если местным временем наблюдателя, дижущегося вместе с телом,
является т, то это время будет определять внутреннее явление посредством
функции sin 2да'от. Согласно преобразованию Лоренца, покоящийся
наблюдатель должен описывать то же самое явление посредством функции
sin 2лг>0 у==- [t—-—-j, которая может интерпретироваться как опи-
сание волны с частотой , распространяющейся вдоль оси х со
скоростью
Мы, далее, склоняемся к тому допущению, что, быть может, каждое
движущееся тело сопровождается волной и что разделение движения тела
и распространения волны является невозможным.
Эта мысль может быть выражена также другим способом. Группа волн
с очень мало отличающимися частотами имеет «групповую скорость» U,
которая недавно была изучена лордом Рэлеем и которая в обычной теории
является скоростью «распространения энергии». Эта групповая скорость
связана с фазовой скоростью соотношением
1JW
и dl-
Если частота v равна у , а величина v равна , то мы получаем
соотношение U = fic, так что можно сказать : скорость движущегося тела
является скоростью распространения энергии группы волн, обладающих при
оченьмало отличающихся значениях fi частотами ~ и скоростями-^.
IV. Механика и геометрическая оптика
Попытка распространения предыдущих положений на случай переменной
скорости является, хотя и весьма трудной, но очень заманчивой задачей.
Если движущееся тело описывает в какой-либо среде кривую траекторию,
то мы говорим, что существует силовое поле; в каждой точке поля может
быть подсчитана потенциальная энергия и, проходя через эту точку, тело
обладает скоростью, которая определяется из условия постоянства значения
его полной энергии. По-видимому, естественно предположить, что фазовая
волна должна иметь в некоторой точке скорость и частоту, определяемые тем
значением, которое имела бы величина fi, если бы тело находилось в данной
точке. Распространяясь, фазовая волна обладает постоянной частотой v
и непрерывно изменяющейся скоростью v.
Быть может, какой-либо новый электромагнетизм даст нам законы дан-
ного сложного распространения, однако окончательный результат ясен,
по-видимому, заранее. Именно, лучи фазовой волны совпадают с динами-
чески возможными траекториями. В самом деле, траектория лучей может
быть здесь подсчитана с помощью принципа Ферма так же, как в средах с
переменной дисперсией ; в данном случае принцип Ферма может быть
записан следующим образом (Я — длина волны, ds—элемент траектории):
= <И ds = 0.
J Л J V J У1
ПОПЫТКА ПОСТРОЕНИЯ ТЕОРИИ СВЕТОВЫХ КВАНТОВ
635
По принципу наименьшего действия в форме Мопертюи динамическая
'траектория определяется уравнением
д fm0c2L=L= - УТ-?2 ] dt = д = д \^Lds = 0.
J V У1 —/?2 ! JVi —/?2 J V1-/?2
.Данный результат оправдывает приведенное выше утверждение.
После этого настолько просто показать выполнимость теоремы о фазовом
соответствии, что дальнейшие детали доказательства приводить, по-види-
мому, не требуется.
Настоящая теория подсказывает интересное объяснение условий устой-
чивости Бора. В момент времени t = 0 электрон находится в точке А своей
траектории. Исходящая в этот момент из точки А фазовая волна опишет всю
траекторию и вновь встретится с электроном в точке А'. Очевидно, необходи-
мо, чтобы при встрече с электроном данная волна находилась с ним в одной
фазе. Это можно выразить так: «Движение может быть устойчивым лишь
в том случае, если длина фазовой волны соизмерима с длиной траектории».
Условием соизмеримости в этом случае будет соотношение :
о
h УТ=Л2
dt = п
(и — целое число ; Т — период вращения).
Мы можем в квантовой теории записывать условия устойчивости в вве-
денной Эйнштейном общей форме, которая в квазипериодических случаях
вследствие существования бесконечного количества псевдопериодов вырож-
дается в условия Зоммерфельда. Обозначим импульсы через рх, ру, рг; тогда
общее условие Эйнштейна примет вид J (рх dx + pv dy + рг dz) = nh (n —
целое число) или, иначе,
т т
f т м + «2 + v2) dt = f 57^- F С2 dt = nh ,
J У1 - /?2 v у ' J У1 - р
о о
что в точности совпадает с полученным ранее результатом.
V. Распространение световых квантов и проблема когерентности
Используем теперь наши результаты для изучения того, как распро-
страняются свободные световые кванты, скорость которых по величине
всегда лишь ненамного меньше, чем с. Мы можем сказать : атом света
с полной энергией, равной hv, является областью внутреннего перио-
дического явления, протекающего с точки зрения неподвижного наблюда-
теля всюду, в одной фазе с волной, распространяющейся по тому же нап-
равлению, что и атом света со скоростью, почти совпадающей со скоростью
света с (немного большей). Световой квант является до известной степени
частью этой волны ; для объяснения интерференции и других явлений вол-
новой оптики нужно, однако, еще понять, каким образом частью одной и
той же волны может быть несколько световых квантов. В этом заклю-
чается проблема когерентности.
В теории световых квантов приходится, по-видимому, ввести следующую
гипотезу: Возбужденный атом при встрече с фазовой волной приобретает
определенную вероятность испустить световой квант; эта вероятность
зависит везде от интенсивности указанной волны. Возможно, что эта гипотеза
636
Л. ДЕ БРОЙЛЬ
покажется произвольной, но я все же считаю, что любая теория когерент-
ности должна принять какой-нибудь постулат такого рода.
Как известно, испускание радиоактивными веществами у-лучей
является полностью самопроизвольным, тем не менее это обстоятельство не
может рассматриваться как возражение против нашего взгляда, так как
«среднее время жизни» каждого из известных радиоактивных атомов всегда
намного больше, чем период у-лучей.
Итак, при испускании некоторым атомом светового кванта одновременно
излучается сферическая фазовая волна, которая в свою очередь будет воз-
буждать, встречаясь с близкими к источнику излучения атомами, новое
испускание квантов. Эта нематериальная фазовая волна будет переносить
большое количество малых порций энергии, которые постепенно будут дан-
ной волной теряться и внутренние явления у которых являются когерент-
ными.
VI. Дифракция на краю экрана и принцип инерции
Корпускулярная теория света встречается в данном случае с большими
трудностями. Уже со времен Ньютона известно, что проходящие вблизи
края экрана световые лучи не остаются прямолинейными и что некоторые
из них проникают в область геометрической тени. Ньютон приписывал это
отклонение влиянию некоторых сил, которые якобы действуют со стороны
края экрана на световые корпускулы. Мне кажется, что это явление заслу-
живает, очевидно, более общего объяснения. Так как, по-видимому, между7
движением тел и распространением волн существует глубокая связь и так
как лучи фазовых волн могут теперь рассматриваться как траектории (воз-
можные траектории) квантов энергии, мы склонны отказаться от принципа
инерции и утверждаем: Движущееся тело всегда должно следовать за лучом-
своей фазовой волны. При распространении волны форма поверхностей равной
фазы будет непрерывно изменяться, и тело всегда будет двигаться, согласно
нашему утверждению, по общему перпендикуляру двух бесконечно близких
поверхностей.
Когда принцип Ферма становится более непригоден для подсчета траек-
торий лучей, то непригоден также более для подсчета траектории тела и
принцип наименьшего действия ; я считаю, что подобные представления
могут рассматриваться как некоторый вид синтеза оптики и механики.
Мы должны еще уточнить некоторые пункты,. Луч, который приобретает
согласно нашим идеям важное физическое значение, может быть определен так,
как указано выше, по непрерывно распространяющемуся малому участку
фазовой волны; но он не может быть определен в каждой точке посредством
задания взятой по всем волнам геометрической суммы векторов, называемой
в электромагнитной теории вектором Пойнтинга. Обсудим нечто подобное
эксперименту Винера. Мы посылаем цуг плоских волн в нормальном на-
правлении к полностью отражающей плоской зеркальной поверхности ;
образуются стоячие волны; отражающее зеркало является узловой поверх-
ностью для электрического вектора, узловая поверхность для магнитного
вектора отстоит от зеркала на расстоянии ~ Я, плоскость, отстоящая от зер-
кала на у Я, является вновь узловой поверхностью для электрического век-
тора, и так далее. На каждой узловой поверхности вектор Пойнтинга равен
нулю. Можем мы утверждать, что через эти поверхности не проходит энер-
гия? Конечно, нет ; мы можем лишь сказать, что интерференционное состо-
яние на этих поверхностях остается все время одним и тем же. В каждом
случае интерференции встречается подобное же затруднение. В волновой
ПОПЫТКА ПОСТРОЕНИЯ ТЕОРИИ СВЕТОВЫХ КВАНТОВ
637
теории распространение энергии носит до некоторой степени фиктивный
характер, зато в этой теории можно без труда проводить точное вычисление
интерференционных полос; мы постараемся выяснить причину этого в
•следующем параграфе.
VII. Новое объяснение полос интерференции
Рассмотрим способы, которыми можно установить присутствие света в
некоторой точке пространства : непосредственное восприятие рассеянного
света, фотографические испытания, тепловой эффект и другие. Все эти
способы в действительности могут быть, по-видимому, сведены к фото-
электрическому эффекту и к рассеянию света. В самом деле, при встрече с
материальным атомом световой квант обладает определенной, зависящей от
внешних факторов вероятностью поглощения или рассеяния. Если, далее,
теории удастся определить эти вероятности, пренебрегая действительными
перемещениями энергии, то можно будет правильно определить в каждой точке
средние значения сил взаимодействия между излучением и материей. Следуя
электромагнитной теории (в согласии с этой точкой зрения находится также
принцип соответствия Бора), я склонен предположить, что для материаль-
ного атома вероятность поглощения или рассеяния светового кванта опре-
деляется геометрической суммой каких-либо из векторов, определяющих
сталкивающиеся с этим атомом фазовые волны. Последнее предположение в
действительности полностью аналогично гипотезе, принимаемой в электро-
магнитной теории, где интенсивность наблюдаемого света связывается с
величиной равнодействующей электрического вектора. Так, в эксперимен-
те Винера фотографическое действие происходит лишь на узловых плоскостях
электрического вектора; согласно электромагнитной теории магнитная
•энергия света не является наблюдаемой.
Рассмотрим теперь интерференционный эксперимент Юнга. Несколько
атомов света проходят через отверстия и дифрагируют вдоль луча соседних
частей своих фазовых волн. В пространстве за перегородкой способность этих
атомов к фотоэлектрическому действию будет изменяться от точки к точке в
зависимости от состояния интерференции двух фазовых волн, прошедших
через два отверстия. Мы увидим, таким образом, полосы интерференции,
каким бы ни было малым число дифрагирующих квантов и какой бы незна-
чительной ни была интенсивность падающего света. Световые кванты пере-
секают все темные и светлые полосы; непрерывно изменяется лишь их
способность к взаимодействию с материей. Такое истолкование, которое,
по-видимому, устраняет возражения и против предположения о световых
квантах, и против предположения о распространении энергии через темные
интерференционные полосы, может быть обобщено на все интерферен-
ционные и дифракционные явления.
VIII. Кванты и механическая теория газов
Для вычисления постоянной энтропии и так называемой химической
постоянной Планк и Нернст были вынуждены ввести квантовые положения в
•теорию газов. Как было разъяснено ранее, Планк принял за элемент
•фазового объема величину dx dy dz dp dq dr или — m30~ У 2 w dw dxdydz.
Мы попытаемся теперь оправдать это предположение.
Каждый атом, двигающийся со скоростью /Зс, можно считать связанным
с волновой группой, фазовая скорость которой равна V = -j, частота равна
638
Л. ДЕ БВОИЛЬ
у и групповая скорость равна U = /Зс. Состояние газа может быть,
устойчивым лишь тогда, если соответствующие атомам волны образуют*
систему стоячих волн. Используя известный метод, предложенный Джинсом,,
мы получаем, что отнесенное к единице объема число волн, частота которых
изменяется в интервале v, v + dv *), равно
nv dv = v2 dv = fiv2dv.
Если w — кинетическая энергия атома и v — соответствующая ему частота.,
то имеет место равенство
hv= = w + "V2 = m0c2(l +а),
гдеа = •
Теперь легко получить, что величина п„ dv определяется соотношением ~
п„ dv = тос(1 — а) ]/а (2 + а) dw.
Каждая фазовая волна может нести с собой один, два или более атомов, так
что согласно каноническому закону число атомов с энергией h v будет*
пропорционально величине
ею
^-mlc (1 + а)]/а(2 + а) dwdxdy dz У е кТ '
Рассмотрим сначала материальный газ, атомы которого обладают относи-
тельно большой массой и относительно малыми скоростями. Мы в этом,
случае можем пренебречь всеми членами разложения по а, кроме первого,
и можем, таким образом, положить, что 1 + а = 1. Число атомов с кинети-
ческой энергией iv будет с точностью до постоянного множителя равняться*
. ________ _
~ т%3 У 2 w dwdxdy dze кТ.
Этот результат оправдывает метод Планка и приводит к обычной форме-
закона Максвелла.
В случае газа световых квантов величина а всегда велика, и мы должны-
брать все члены ряда. Вводя вследствие внутренней симметрии светового-
кванта множитель 2, находим, что плотность лучистой энергии пропор-
циональна
~ nhv
8 Л Q V “Sr J 8П V3 ,
-^w3^e кт dw= ---------------dV'
1 ект—1
Изложенный в журнале Journal de Physique (ноябрь 1922 г.) метод пока-
зывает, что коэффициент пропорциональности равен в данном случае еди-
нице, так что мы получили истинный закон излучения.
IX. Открытые вопросы
В случае принятия сформулированных в этой статье концепций придется
значительно видоизменить электромагнитную теорию. Так называемые*
электрическая и магнитная энергии окажутся некоторыми усредненными;
*) L ё о n Brillouin, Theorie des Quanta, стр. 38, Paris, A. Blanchard.
ПОПЫТКА ПОСТРОЕНИЯ ТЕОРИИ СВЕТОВЫХ КВАНТОВ
639
величинами, а вся истинная энергия полей будет обладать, вероятно, кор-
пускулярной мелкозернистой структурой. Построение нового электромагне-
тизма является, по-видимому, очень трудной задачей, но у нас уже есть одно
руководящее положение : согласно принципу соответствия и вышеизложен-
ному характеристический вектор старой электромагнитной теории должен
определять вероятность взаимодействия между материей и разделенной на
мелкие порции энергией.
Новый электромагнетизм даст решение многих проблем. Законы распро-
странения волн теории Максвелла будут, вероятно, справедливы и для не
несущих энергию световых фазовых волн, а рассеяние лучистой энергии
будет объясняться как результат изгибания лучей (т. е. траекторий световых
квантов). По-видимому, имеется большая аналогия между рассеянием
излучения и рассеянием частиц; уменьшение скорости частиц при проходе
через перегородку можно, таким образом, сравнивать с уменьшением частоты
рентгеновских лучей при рассеянии, которое недавно было вычислено и
экспериментально исследовано А. Комптоном.
Объяснение оптической дисперсии окажется более затруднительным..
Классические теории (включая электронную теорию) описывают лишь
усредненный результат этого явления, которое вызвано сложными элементар-
ными взаимодействиями между излучением и атомами ; мы будем здесь,
несомненно, вынуждены тщательно отличать истинное движение энергии
от распространения суммарного интерференционного состояния. Вид резо-
нанса, проявляющийся в изменении показателя преломления, более не пред-
ставляется несовместимым с прерывностью света.
Остаются открытыми и многие другие вопросы. Каков механизм брег-
говской абсорбции? Что происходит, когда атом переходит из одного стабиль-
ного состояния в другое, и как атом испускает одиночный квант? Как можно
ввести прерывную структуру энергии в нашу концепцию упругих волн и в
теорию удельных теплоемкостей Дебая?
Наконец, мы должны отметить, что квантовые соотношения остаются пока
некоторыми постулатами, определяющими постоянную /?, истинное значение
которой совершенно не ясно; впрочем, кажется, что вся квантовая загадка
сведена теперь к этому одному-единственному пункту.
Выводы
В настоящей статье принято, что свет состоит по существу из световых
квантов, каждый из которых обладает одной и той же чрезвычайно малой
массой. Математически показано, что преобразование Лоренца—Эйнштейна
совместно с квантовыми соотношениями приводит к необходимости связать
движение тела и распространение волны и что это представление дает физи-
ческую интерпретацию аналитических условий устойчивости Бора. Дифрак-
ция является, по-видимому, совместимой с обобщением ньютоновской дина-
мики. Далее, оказывается возможным сохранить как корпускулярный, так
и волновой характер света и дать с помощью гипотез, подсказываемых
электромагнитной теорией и принципом соответствия, правдоподобное
объяснение когерентности и интерференционных полос. Наконец, показано,
почему кванты должны входить в динамическую теорию газов и почему
•закон Планка является предельной формой закона Максвелла для газа
световых квантов.
Хотя возможно, что многие из этих предположений будут оспорены и
изменены, все же сейчас не может оставаться ни малейших сомнений в реаль-
ности существования световых квантов. Кроме того, если наше мнение будет
признано, то так как оно основано на относительности времени, вся сово-
640
Л. ДЕ БРОЙЛЬ
купность экспериментальных доказательств существования «квантов» будет
лодтверждаьт концепции Эйнштейна.
1 октября 1923 г.
Примечание. После того как я написал эту статью, мне удалось
получить содержащиеся в четвертом разделе результаты в несколько отлич-
ной и значительно более общей форме.
Принцип наименьшего действия для материальной точки может быть
выражен в четырехмерной записи уравнением:
4
Itdxl = 0,
1
где величины /, являются ковариантными компонентами четырехмерного
вектора, временная компонента которого равна энергии точки, деленной на с,
а пространственные компоненты равны компонентам вектора количества
движения.
Аналогично, при изучении распространения волн мы должны написать:
4
jpOrfx' — °,
1 ’
где величины О, являются ковариантными компонентами четырехмерного
вектора, временная компонента которого равна деленной на с частоте, а
V 1
пространственные компоненты направлены вдоль луча и равны -рг = у
(V—фазовая скорость). Далее, из квантовых соотношений следует, что 1Л=НОЛ.
Я предлагаю вообще положить, что / = hO. Из этого утверждения непосред-
ственно следует .идентичность принципов Ферма и Мопертюи, причем стано-
вится возможным строгий вывод скорости фазовых волн в любом электро-
магнитном поле.
Л. ДЕ БРОЙЛЬ
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ [220 ]
Исторический обзор [221]
I. ОТ XVI до хх в.
Современная наука возникла в конце XVI в. под влиянием интеллек-
туального обновления, вызванного Возрождением. В то время как астрономи-
ческая наука развивалась очень быстро, науки о равновесии и движении —
статика и динамика — создавались медленно. Известно, что Ньютон был
первым, кто превратил динамику в однородную доктрину и своим знаме-
нитым законом всемирного тяготения открыл для этой новой науки огромные
возможности применения и проверки. В XVIII и XIX вв. очень многие гео-
метры, астрономы и физики развивали принципы Ньютона и механика
дошла до таких вершин красоты и рациональной гармонии, что физическая
сторона этой науки, была почти забыта. В частности, всю механику стали
выводить из одного принципа — принципа наименьшего действия, выдви-
нутого сперва Мопертюи, а затем в несколько другом виде Гамильтоном и
имеющего исключительно изящную и лаконучную математическую форму.
Благодаря проникновению в акустику, гидродинамику, оптику и в
явления капиллярности, механика некоторое время как бы преобладала
над всеми этими областями. Труднее было ей вобрать в себя новую область
науки, возникшую в XIX в., — термодинамику. Если один из двух основных
принципов этой науки — принцип сохранения энергии — может быть легко
объяснен на основании понятий механики, то этого нельзя сказать о втором
— о возрастании энтропии. Работы Клаузиуса и Больцмана по изучению
аналогии термодинамических величин с некоторыми величинами, играю-
щими роль в периодических движениях, работы, которые и сейчас вполне
современны, не смогли все-таки связать обе точки зрения. Но замечательная
кинетическая теория газов Максвелла и Больцмана и более общая док-
трина — так называемая статистическая механика Больцмана и Гиббса —
показали, что динамика, если дополнить ее понятиями теории вероятности,
позволяет интерпретировать основные положения термодинамики.
Начиная с XVII в., наука о свете — оптика — привлекала внимание
исследователей. Наиболее обычные явления (прямолинейное распростране-
ние, отражение, преломление), образующие нашу современную геометри-
ческую оптику, были, естественно, изучены первыми. Многие ученые, в
частности Декарт и Гюйгенс, работали над установлением законов этих
явлений, а Ферма обобщил .их, выведя синтетический принцип, носящий его
имя, который, будучи выражен в терминах современной математики, напо-
минает по форме принцип наименьшего действия. Гюйгенс склонялся к
волновой теории света, но Ньютон, чувствуя в основных законах геометри-
ческой оптики глубокую аналогию с динамикой материальной точки, твор-
цом которой он являлся, развил корпускулярную теорию света, так назы-
41 Вариационные принципы механики
642
Л. ДЕ БРОЙЛЬ
ваемую теорию испускания, и смог даже с помощью несколько искусствен-
ных гипотез объяснить явления, которые сейчас считаются областью вол-
новой оптики (кольца Ньютона).
В начале XIX в. идеи Гюйгенса начали превалировать над идеями
Ньютона. Опыты по интерференции света, впервые поставленные Юнгом,
было трудно и практически невозможно интерпретировать, исходя из
корпускулярной теории. Френель развил тогда свою замечательную теорию
упругого распространения световых волн, и с этого момента доверие к кон-
цепции Ньютона стало непрерывно уменьшаться. Одним из'больших успехов
Френеля было объяснение прямолинейного распространения света, интер-
претация которого в теории испускания была чисто интуитивной. Когда две
теории, основанные на идеях, кажущихся совершенно различными, объ-
ясняют с одинаковым изяществом одну и ту же экспериментально доказан-
ную истину, то всегда возникает вопрос, действительно ли противоположны
обе точки зрения и не является ли эта противоположность лишь следствием
того, что наши усилия синтезировать их оказались недостаточными. Такой
вопрос не поднимался в эпоху Френеля : представление о корпускулах света
было признано наивным и отброшено.
XIX в. увидел рождение совершенно новой области физики, которая
произвела грандиозный переворот как в наших представлениях о природе
вещей, так и в нашей промышленности, а именно науки об электричестве.
Мы не будем напоминать здесь, как она создавалась работами Вольта,
Ампера, Лапласа, Фарадея и других исследователей. Важно только сказать,
что Максвелл сумел обобщить в исключительно точных математических
формулах результаты, полученные его предшественниками, и показать, что
всю оптику можно рассматривать как часть электромагнетизма. Работы
Герца и в еще большей степени работы Г. Лоренца усовершенствовали теорию
Максвелла ; кроме того, Лоренц ввел в нее понятие о прерывности электри-
чества, разработанное ранее Дж. Томсоном и так блестяще подтвержденное
опытом. Правда, развитие электромагнитной теории показало нереальность
представлений Френеля об упругом эфире и этим как бы отделило оптику от
механики. Но многие физики после самого Максвелла пытались еще в конце
прошлого века найти механическое объяснение электромагнитного эфира и
объяснить таким образом не только новые представления оптики с точки
зрения динамики, но и объяснить с помощью этих представлений все электри-
ческие и магнитные явления.
Таким образом, в конце века появилась надежда на близкий и полный
синтез всей физики.
II. XX В. ОТНОСИТЕЛЬНОСТЬ И КВАНТЫ
Однако на этой картине оставалось несколько темных пятен. Лорд
Кельвин в 1900 г. сказал, что на горизонте физики собираются две угрожаю-
щие темные тучи. Одной из них являлись трудности, возникшие после знаме-
нитого опыта Майкельсона и Морлея, результаты которого казались несов-
местимыми с существовавшими тогда представлениями. Второй тучей был
крах методов статистической механики в области теории излучения черного
тела ; теорема равномерного распределения энергии — неизбежное следствие
статистической механики — действительно приводила к определенному распре-
делению энергии между различными частотами в излучении, находящемся в
равновесии. Однако закон этого распределения (закон Рэлея—Джинса)
находится в грубом противоречии с опытом и является почти абсурдным, так
как из него вытекает бесконечное значение полной плотности энергии, что,
очевидно, не имеет никакого физического смысла.
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
643
В первые годы двадцатого века обе тучи лорда Кельвина, если можно так
выразиться, сконденсировались — одна в теорию относительности, другая —
в теорию квантов.
Мы не будем говорить здесь о том, как трудности, возникшие вследствие
опыта Майкельсона, изучались сначала Лоренцем и Фиц-Джеральдом и как
они были затем решены А. Эйнштейном, усилием мысли, может быть, беспри-
мерным. В последние годы об этом много писали более авторитетные, чем мы,
лица. Мы будем считать здесь основные положения теории относительности,
по крайней мере в ее специальной форме, известными и будем пользоваться
ими по мере надобности.
Напротив, теорию квантов мы здесь кратко расскажем. Понятие кванта
было введено в науку в 1900 г. Максом Планком. Этот ученый изучал тогда
теоретически проблему излучения черного тела, и так как термодинамическое
равновесие зависит от природы излучателя, он придумал очень простой
излучатель, так называемый резонатор Планка, состоящий из квазиупруго
связанного электрона, обладающего, таким образом, частотой колебаний,
независимой от его энергии. Если применить классические законы электро-
магнетизма и статистической механики к обмену энергией между такими
резонаторами и излучением, то это приведет к закону Рэлея, о безусловной
неточности которого говорилось выше. Во избежание этого и чтобы прийти к
результатам, более согласным с экспериментальными фактами, Планк
выдвигает странный постулат : «Обмен энергией между резонаторами (или
веществом) и излучением происходит только конечными порциями, равными
частоте, умноженной на /?, причем h представляет собой новую универсаль-
ную константу физики». Каждой частоте соответствует, таким образом, в
некотором роде атом энергии — квант энергии. Рассмотрение полученных
данных дало Планку необходимые основания для расчета константы /?, и най-
денное при этом значение (/?= 6,545 • 10~27) по существу не было изменено,
несмотря на многочисленные последующие определения, сделанные самыми
различными методами. Это — один из наиболее прекрасных примеров могу-
щества теоретической физики.
Кванты, как масляное пятно, быстро пропитали собой все области
физики. Введение квантов устраняло некоторые трудности, относящиеся
к удельным теплоемкостям газа, одновременно оно же позволило сначала
Эйнштейну, затем Нернсту и Линдеману и, наконец, в более совершенной
форме Дебаю, Борну и Карману создать удовлетворительную теорию удель-
ной теплоемкости твердых тел и объснить, почему закон Дюлонга и Пти,
основанный на классической статистике, содержит важные исключения и
выполняется, как и закон Рэлея, только в ограниченной области.
Кванты проникли также в такую область науки, в которой их никто не
ожидал встретить, —в теорию газов. Метод Больцмана оставлял неопределен-
ным значение аддитивной константы, входящей в выражение для энтропии.
Чтобы получить возможность применения теоремы Нернста и получить
точные значения химических констант, Планк ввел кванты и сделал это в
довольно парадоксальной форме, приписав элементу фазового пространства
молекулы конечное значение, равное /?3. Изучение фотоэлектрического
эффекта привело к новой загадке. Фотоэлектрическим эффектом называют
испускание веществом движущихся электронов под влиянием излучения.
Опыт показывает, что энергия испущенных электронов зависит от частоты
возбуждающего излучения, а не от его интенсивности, что является пара-
доксальным. Эйнштейн объяснил в 1905 г. это странное явление, приняв, что
излучение может поглощаться только квантами hv; с тех пор считается,
что если электрон поглощает энергию hv и для выхода из вещества затра-
чивает работу w, то его конечная кинетическая энергия будет hv — iv. Этот
644
Л. ДЕ БРОЙЛЬ
закон был неоднократно подтвержден. Благодаря своей глубокой интуиции
Эйнштейн почувствовал, что настало время каким-то образом вернуться к
корпускулярной концепции света и выдвинул гипотезу, что всякое излучение
с частотой v состоит из атомов энергии со значением h v. Эта гипотеза квантов
света (lichtquanten), противоречащая всем фактам волновой оптики, пока-
залась слишком упрощенной и была отвергнута большинством физиков.
В ответ на возражения Лоренца, Джинса и других Эйнштейн показал,
что исследование флуктуаций излучения черного тела приводит к пред-
ставлению о прерывности излучающей энергии. Международный конгресс
физиков, организованный Сольвеем в Брюсселе в 1911 г., был целиком
посвящен проблеме квантов; после него Анри Пуанкаре, незадолго до
своей смерти, опубликовал несколько работ, посвященных проблеме квантов
и показывающих необходимость принятия идей Планка.
В 1913 г. Нильс Бор выдвинул свою теорию атома. Он предположил,
совместно с Резерфордом и Ван-ден-Бреком, что атом состоит из положитель-
ного ядра, окруженного облаком электронов, причем ядро имеет N элемен-
тарных положительных зарядов 4,77 • Ю-10 CGSE, а число электронов равно
N, благодаря чему атом является нейтральным. N — это атомное число,
равное номеру элемента в периодической системе Менделеева. Для того
чтобы иметь возможность предсказать оптические частоты, например, для
водорода, атом которого содержит один электрон и является поэтому
наиболее простым, Бор выдвигает две гипотезы:
1) из бесконечного числа траекторий, которые электрон может описывать
вокруг ядра, устойчивы только некоторые и условие устойчивости опреде-
ляется константой Планка. В главе III мы рассмотрим эти условия;
2) когда внутриатомный электрон переходит с одной стабильной
орбиты на другую, происходит испускание или поглощение кванта энер-
гии с частотой V. Испускаемая или поглощаемая частота v связана,
таким образом, с изменением полной энергии 5е атома соотношением
| 5 £ | = h V.
Хорошо известна великолепная судьба теории Бора за эти 10 лет. Она
сразу дала возможность предсказать спектральные серии водорода и ионизи-
рованного гелия и исследовать спектры Х-лучей, а знаменитый закон Мозли,
связывающий атомное число со спектральными реперами в области лучей
Рентгена, значительно расширил область ее применения. Зоммерфельд,
Эпштейн, Шварцшильд, сам Бор и другие исследователи усовершенствовали
теорию Бора, установили более общие правила квантования, объяснили
эффекты Штарка и Зеемана, детально интерпретировали оптические спектры
и т. д. Но глубокое значение квантов оставалось еще непонятым. Изучение
фотоэлектрического действия Х-лучей, проведенное Морисом де Бройлем,
открытие фотоэлектрического действия гамма-лучей Резерфордом и Эллисом
еще больше подчеркнули корпускулярный характер этих излучений, так что
квант энергии hr с каждым днем все больше становился истинным атомом
света. Но продолжали еще существовать прежние возражения против этих
представлений и даже в области Х-лучей волновая теория приводила к
прекрасным результатам, как, например, предсказание явления интерферен-
ции в работах Лауз и явления рассеяния в работах Дебая, Брэгга и т. д.
Однако совсем недавно и рассеяние было в свою очередь рассмотрено с
корпускулярной точки зрения А. Комптоном : его теоретические и экспери-
ментальные работы показали, что электрон, рассеивающий излучение, полу-
чает некоторый импульс, как при ударе. Естественно, что энергия кванта
излучения при этом уменьшается ; вследствие этого рассеянное излучение’
обладает переменной частотой, зависящей от направления рассеяния и мень-
шей, чем частота падающего излучения.
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
645
Короче говоря, по-видимому, настал момент попытаться объединить
корпускулярные и волновые представления и несколько углубить пони-
мание истинной сущности кванта. Это и было проделано нами недавно, и
основной целью настоящей статьи является более полное рассмотрение вво-
димых нами новых идей, тех успехов, к которым они привели, а также
большого числа содержащихся в них пробелов*).
Глава 1
ФАЗОВАЯ ВОЛНА
I. Кванты и относительность
Одним из наиболее замечательных современных представлений, выведен-
ных теорией относительности, является инертность энергии. Согласно
Эйнштейну энергия обладает массой, а всякая масса представляет собой
энергию. Масса и энергия всегда связаны друг с другом общим выражением:
энергия = масса х с2,
где i— константа, которую называют «скоростью света», но которую мы
предпочтем назвать «предельной скоростью энергии», по причинам, изло-
женным дальше. Так как всегда существует пропорциональность между
массой и энергией, то материю и энергию следует рассматривать как сино-
нимы, обозначающие одну и ту же физическую реальность.
Сначала атомная теория, затем теория электронов приучили на с считать
материю существенно дискретной; из этого следовало, что все формы
энергии, в противоположность прежним представлениям о свете, если не
полностью сконцентрированы маленькими порциями в пространстве, то во
всяком случае сосредоточиваются в некоторых особых точках.
Согласно принципу инертности энергии тело, собственная масса которого
(т. е. масса, измеренная связанным с ним наблюдателем) равна т0, об-
ладает собственной энергией т0с2. Если тело движется равномерно со
скоростью v = /Зс по отношению к наблюдателю, которого мы для простоты
назовем неподвижным наблюдателем, то его масса будет иметь значение
т0
, а его энергия согласно хорошо известному результату релятивист-
ской динамики будет, следовательно,
та с2
Увеличение энергии тела по
отношению к неподвижному наблюдателю при переходе тела от состояния
покоя к движению со скоростью v = /Зс можно определить как кинети-
ческую энергию. Ее значение выражается следующим уравнением:
£кин — ТУ" ~ = ^0 I "ТТ--— — 1 I ,
И-/?2 ш-£2 )
*) Приведем здесь несколько работ по теории квантов : J. Perrin, Les atomes,
Alcan, 1913; H. P о i n с a г ё, Dernieres pens6es, Flammarion, 1913 ; E. Bauer, Recher-
ches sur le rayonnement, These de doctoral, 1912 ; La thdorie du rayonnement et les quanta
(l'r Congres Solvay, 1911), риЬНёе par P. Langevin et M. de Broglie ; M. Planck, Theorie
der Warmestrahlung, J.-A. Barth,-Leipzig, 1921 (4е edit.); L. Brillouin, La thdorie
des quanta et 1’atome de Bohr (Conf, rapports), 1921 ; P. Reiche, Die quantentheorie,
J.. Springer, Berlin, 1921 ; A. Sommerfeld, La constitution de 1’atome et les raies
spectrales. Trad. Bellenot, A. Blanchard, 1923 ; A. L a n d ё, Vorschritte der quantentheorie,
F. Steinhopff, Dresden, 1922 ; Atomes et electrons (3е congas Solvay), Gauthier-Villars, 1923.
646
Л. ДЕ БРОЙЛЬ
которое для малых значений f} естественно приводит к классической форме:
£кин = "2 m0Vz .
Напомнив это, попытаемся выяснить, в какой форме можно ввести кванты
в релятивистскую динамику. Нам кажется, что основной идеей теории кван-
тов является невозможность рассматривать некоторое изолированное коли-
чество энергии, не приписывая ей определенной частоты. Эта связь выра-
жается соотношением, которое я назову квантовым соотношением :
энергия = h х частота,
где й — константа Планка.
В ходе развития теории квантов много раз возникал вопрос о механи-
ческом действии и неоднократно делались попытки излагать квантовое
соотношение, вводя в него действие вместо энергии. Действительно, кон-
станта h имеет размерность действия, а именно ML2T-1, и это не случайно,
так как теория относительности учит нас относить действие к основным
«инвариантам» физики. Но действие есть величина очень абстрактная, и после
длительных размышлений о квантах света и о фотоэлектрическом эффекте
мы были принуждены принять за основу энергетическое изложение, не
отказываясь от дальнейшего исследования причин значительной роли
действия в большом числе вопросов.
Квантовое соотношение не имело бы большого смысла, если бы энергия
распределялась в пространстве непрерывно, но мы только что показали, что
это совсем не так. Таким образом, можно себе представить, что согласно
какому-то великому закону природы каждая порция энергии массы т0
связана с периодическим явлением частоты v уравнением
= т0с2,
где v0, конечно, измеряется в системе, связанной с порцией энергии. Эта
гипотеза является основой нашей системы. Ценность этой гипотезы, как и
всякой гипотезы, заключается в ценности тех выводов, к которым она при-
водит.
Следует ли считать периодическое явление локализованным внутри
порции энергии? Это совсем не необходимо. Из раздела Ill будет видно, что
оно распространяется на большую часть пространства. К тому же, что сле-
дует понимать под выражением «внутри порции энергии»? Электрон пред-
ставляется нам изолированной порцией энергйи, которую, как нам, может
быть и необоснованно, кажется, мы лучше всего знаем ; между тем, исходя
из имеющихся представлений, энергия электрона распространена по всему
пространству с очень большой концентрацией в области чрезвычайно малых
размеров, свойства которой нам к тому же весьма мало известны. То, что
характеризует электрон как атом энергии, это не маленькое место, зани-
маемое им в пространстве (я повторяю, что он занимает все пространство
целиком), а тот факт, что он неделим, что он не может быть разбит на части,
что он представляет собой единство*).
Принимая существование частоты, связанной с порцией энергии, найдем,
каким образом эта частота представляется неподвижному наблюдателю, о
котором говорилось выше. Преобразование времени Лоренца—Эйнштейна
показывает, что периодическое явление, связанное с движущимся телом,
представляется неподвижному наблюдателю замедленным в отношении
*) Трудности, с язанные с взаимодействием большого числа заряженных центров
изложены в главе IV. [Эту главу мы не приводим. — Прим, ред.]
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
647
1 к У1 —ft2. Это и есть знаменитое соотношение замедления часов. Таким
образом, частота, регистрируемая неподвижным наблюдателем, будет
н = „0 уГ-Т' = •
С другой стороны, так как энергия движущегося тела по отношению к тому
т с2
же наблюдателю равна у===- , то соответствующая частота, согласно
квантовому соотношению, будет v = у у====,-. Обе частоты и v суще-
ственно различны, поскольку фактор /1 —/З2 входит в их выражения
по-разному. Здесь есть трудность, которую я долго не мог преодолеть; мне
удалось разрешить ее с помощью следующей теоремы, которую я назову
теоремой гармонии фаз.
«Периодическое явление, связанное с движущимся телом, частота кото-
рого для неподвижного наблюдателя равна ~ т0 с2 У1 — /З2, кажется ему
постоянно находящимся в одной фазе с волной частоты v = ~ т0 с2 у===-,
распространяющейся в том же направлении, что и движущееся тело, со ско-
ростью V =
Показать это можно просто. Предположим, что при t = 0 периодическое
явление, присущее движущемуся телу, и упомянутая выше волна находятся
в одйой фазе. За время t движущееся тело успевает пройти расстояние, равное
х~ р ct, и фаза периодического явления изменяется на vr t = —[/1 — Р2-ду
Фаза той части волны, которая перекрывает движущееся тело, изменилась на
П _ £х) тас2 1 (х___________= тос2 и.-—й х
к с J h VY _ дг I/3 с с J Л ’ с ‘
с
Как мы и предположили, существует согласованность фаз.
Эту теорему можно доказать и другим способом, по существу таким же,
но, может быть, более убедительным. Для t0 (собственное время движущегося
тела, связанного с наблюдателем) преобразование Лоренца дает
t ______1___ff _
0 ]/1 — £2 V с J '
Периодическое явление, которое мы вообразили, представляется этому
наблюдателю в виде синусоидальной функции voto. Для неподвижного
наблюдателя это явление представляется той же синусоидальной функцией
1 fх А „ v.
v0 , которая представляет собой волну с частотой — ,
распространяющуюся со скоростью-у в том же направлении, что и движу-
щееся тело.
Необходимо теперь подумать о природе волны, существование которой
мы только что предположили. Тот факт, что ее скорость V — у обязательно
больше с (/3 всегда меньше 1, так как иначе масса была бы бесконечной или
мнимой), показывает, что эта волна не переносит энергии. Наша теорема по-
казывает, что эта волна представляет собой распределение рассматриваемого
периодического явления в фазовом пространстве; это — так называемая
«фазовая волна».
Для большей точности мы сделаем несколько грубое, но достаточно
наглядное сравнение с одним механическим явлением. Представим себе на
горизонтальной плоскости окружность очень большого радиуса ; на этой
плоскости подвешены идентичные системы, представляющие собой пружины
с грузом. Число таких систем, приходящихся на единицу поверхности, и
их плотность быстро уменьшаются по мере удаления от центра плоскости;
наибольшая концентрация их имеет место около центра. Все системы —
пружины с грузом — вполне идентичны и имеют один и тот же период;
предположим теперь, что они колеблются с одной и той же амплитудой
и в одной и той же фазе. Поверхность, проходящая через центры тяжестей
этих грузов, будет плоскостью, попеременно то поднимающейся, то опус-
кающейся. Мы получаем, таким образом, грубую аналогию с воображаемой
нами порцией изолированной энергии.
Именно так представляется описанное выше явление наблюдателю,
связанному с указанной плоскостью. Если другой наблюдатель видит, что
плоскость перемещается, причем скорость ее равномерного поступательного
движения рарна v = fie, то каждый груз будет ему представляться в виде
маленьких часов, подчиняющихся закону замедления Эйнштейна ; кроме
того, плоскость и распределение колебательных систем не будут более
изотропны вокруг центра вследствие сокращения Лоренца. Но самый важ-
ный факт для нас (как будет лучше объяснено в третьем разделе), —это сдвиг
фаз движений различных грузов.
Если в какой-то момент времени неподвижный наблюдатель будет рас-
сматривать геометрическое место центров тяжести различных грузов, то оно
представится ему в виде цилиндрической поверхности, вертикальные сечения
которой являются синусоидами, параллельными скорости плоскости. Эта
поверхность соответствует в нашем случае фазовой волне; согласно
нашей общей теореме,, эта поверхность движется со скоростью , парал-
лельной скорости плоскости, и частота колебаний точки фиксированной
абсциссы, покоящейся на ней постоянно, равна частоте собственных коле-
баний пружин, умноженной на
__—_ . Из этого примера ясно видно
(и это служит оправданием его пространного изложения), что фазовая волна
соответствует переносу фазы, а не энергии.
Нам кажется, что изложенные результаты имеют чрезвычайно важное
значение, так как они устанавливают при помощи гипотезы, в сильной
степени внушенной представлениями о квантах, связь между движением
тела и распространием волны и предусматривают возможность объединения
антагонистических теорий о природе излучения. Мы уже знаем теперь, что
прямолинейное распространение фазовой волны связано с прямолинейным
движением тела; принцип Ферма, примененный к фазовой волне, определяет
ее лучи как прямые, в то время как принцип Мопертюи, примененный к
движущемуся телу, определяет его прямолинейную траекторию как один из
лучей волны. В главе II мы попытаемся обобщить это совпадение.
II. Скорость фазы и скорость группы
Мы должны теперь доказать существование важной связи между ско-
ростью движущегося тела и скоростью фазовой волны. Если волны с близ-
кими частотами распространяются в одном и том же направлении Ох со
скоростями V, которые мы назовем скоростями распространения фазы, то
их суперпозиция приведет к появлению биений в том случае, когда скорость
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
649
V изменяется с изменением частоты v. Эти явления были, в частности, изу-
чены лордом Рэлеем для случая дисперсионных сред.
Рассмотрим две волны с близкими частотами v и v' = v 4- dv и скоростями
V и V'~ = V + <5 г ; их суперпозиция может быть выражена аналити-
чески следующим уравнением, полученным при пренебрежении во втором
члене величиной dv по сравнению с v :
sin 2 п GI —~ 4- 99) 4- sin 2 а 1 —4- y'j =
= 2 sin 2a vt —
v x , A ~
-y- 4- y> I COS 2a
dv . ,
2"'+^
Мы получили, таким образом, результирующую синусоидальную волну,
амплитуда которой модулирована частотой dv, так как знак косинуса не
существен. Это — известный результат. Если обозначить скорость распро-
странения пульсаций или скорость группы волн через U, то
1 __ d
и ~
dv
Вернемся к фазовым волнам. Примем, что скорость движущегося тела
v = (Зс, где (3 не имеет определенного значения, но заключено в пределах
между р и р 4- 3/3 ; частоты соответствующих волн находятся в небольшом
интервале v, v 4- dv.
Мы устанавливаем теперь следующую теорему, которая нам в даль-
нейшем понадобится: «Скорость группы фазовых волн равна скорости
движущегося тела». Действительно, эта скорость группы волн определяется
только что приведенной формулой, в которой V и v можно рассматривать
как функции (3, поскольку
V = -
(3 ’
1 т0с2
v = ,
Л У1-£2
Можно написать
dv
U =--
4т
или
т0_с_________1 _
li ~~ (1
. Ц = т0 С _ v |/1 —
d 0 h ' d 0
dv _ т0с2 (3
(Т
Тогда U = /Зс — V.
Скорость группы,фазовых волн точно равна скорости движущегося тела.
Этот результат требует одного замечания : в волновой теории дисперсии, если
исключить зоны поглощения, скорость энергии равна скорости группы.*)
Однако несмотря на то, что мы исходим здесь из совершенно другой точки
зрения, результат оказался совершенно таким же, так как скорость движу-
щегося тела и есть скорость перемещения энергии.
*) См., например, Ьёоп Brillouin, La theorie des quanta et 1’atome de Bohr, ch. I.
65J
Л. ДЕ БРОЙЛЬ
III. Фазовая волна в пространстве-времени
Минковский первым показал, что, рассматривая евклидово многообразие
в четырех измерениях, так называемую вселенную, или пространство-
время, можно геометрически просто представить введенные Эйнштейном
связи между пространством и временем. Для этого он брал три оси в прямо-
угольных координатах пространства и четвертую ось, нормальную к трем
первым, на которую наносились значения времени, умноженные на с У— 1.
Сейчас принято относить к четвертой оси вещественное значение ct, но в
этом случае плоскости, проходящие через эту ось и нормальные к простран-
ству, будут иметь гиперболическую псевдоевклидову геометрию, основной
инвариант которой будет c2dtz —
dx2 — dy2 — dz2.
Рассмотрим таким образом простран-
ство-время, отнесенное к четырем пря-
моугольным осям так называемого «непо-
движного» наблюдателя. Примем за ось
х прямолинейную траекторию движуще-
гося тела и нанесем на график плоскость
Otx, содержащую ось времени и выше-
названную траекторию. В этих услови-
ях мировая линия движущегося тела
представлена прямой, находящейся под
углом не меньше 45° к оси времени ; зта
линия является к тому же осью времени
для наблюдателя, связанного с движу-
щимся телом. На нашем графике две оси времени проходят через нуль, что
не ограничивает общности рассуждений.
Если скорость движущегося тела для неподвижного наблюдателя равна
fie, то наклон Ot' будет иметь значение ~. Прямая Ох' расположена в
плоскости Юх пространства наблюдателя, начинающегося с времени t = О,
симметрично к Ot' относительно биссектрисы OD; это легко показать
аналитически с помощью преобразования Лоренца, но это является также
прямым результатом того факта, что предельная скорость энергии с имеет
одинаковое значение для всех систем отсчета. Наклон Ох' равен, таким
образом, /3. Если пространство, окружающее движущееся тело, является
местом периодического явления, то состояние пространства будет повто-
ряться для перемещающегося наблюдателя каждый раз, когда пройдет время
у О А = у А В, равное собственному периоду явления То = ~ •
Прямые, параллельные Ох', являются, таким образом, следами «равно-
фазных пространств» наблюдателя, смещающегося на плоскости xOt. Точки
... а', О, а, .... прёдставляют собой проекцию их пересечений с простран-
ством неподвижного наблюдателя в момент t = 0; зти пересечения двух
пространств с тремя измерениями являются двумерными поверхностями и
даже плоскостями, потому что все рассматриваемые здесь пространства
евклидовы. Сечение пространства-времени, которое для неподвижного на-
блюдателя является пространством, с течением времени будет представлять-
ся прямой, параллельной Ох и равномерно смещающейся по направлению
возрастающих t. Легко видеть, что равнофазные плоскости ... а', О, а, ...
смешаются в пространстве неподвижного наблюдателя со скоростью-j-.
Действительно, если прямая Ох' на рис. 1 представляет собой пространство
неподвижного наблюдателя при t = 1, то adQ = с. Фаза, которая при t = О
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
651
находилась в а, теперь находится в а±; таким образом, она сместилась в
пространстве неподвижного наблюдателя на длину айаг в направлении Ох
за единицу времени. Можно, таким образом, ска-
зать, что ее скорость будет
V = а0 а± = а0 a ctg (хОх') = ~ .
Ансамбль равнофазных плоскостей представляет
собой так называемую фазовую волну.
Остается рассмотреть вопрос о частотах. На-
чертим опять небольшой упрощенный рисунок.
Прямые 7 и 2 представляют собой для связанного
с ними наблюдателя два последовательных равно-
фазных пространства. Как было сказано, АВ в с раз больше собственного
_ h
периода То = .
АС, являющаяся проекцией АВ на ось Ot, равна
с7\ = сТ0 .
0 У1 - £2
Это является результатом простого применения тригонометрических соот-
ношений ; однако следует отметить, что, применяя тригонометрию к фигу-
рам плоскости xOt, следует всегда помнить об анизотропии, свойственной
этой плоскости.
Треугольник АВС дает
АВ2 = АС2 - СВ2 = АС2(1 - tg2 CAB) = АС2(1 - /З2),
АС = Л “ ,
Ki-/?2
что н требовалось доказать.
Частота представляет собой ту частоту периодического явления, кото-
* 1
рую отмечает неподвижнрый наблюдатель, следящий за смещением этого
периодического явления, а именно :
Период волн в одной точке пространства для неподвижного наблюдателя
выражается не величиной у АС, а величиной у AD . Произведем расчет
этого периода.
Из маленького треугольника BCD находим соотношение
св __ 1
DC ~~ Р ’
откуда
DC = fi СВ = Р АС.
Но AD = AC — DC = АС (1 — Л-
Новый период Т будет, таким образом, равен
T=U-AC(1 -02) То1'1 ,
652
Л. ДЕ БРОЙЛЬ
а частота v волн будет
v = 1 = уо __________т0 с2.
т У1 — /?2 йУГ^^г
Таким образом, мы получаем хорошее совпадение с результатами, найденными
аналитически в разделе I, но теперь можно видеть, как они связаны с общей
концепцией пространства-времени и почему смещение по фазе периоди-
ческих движений, происходящее в различных точках пространства, зависит
от способа определения одновременности в теории относительности.
Глава II
ПРИНЦИП МОПЕРТЮИ И ПРИНЦИП ФЕРМА
I. Цель данной главы
В этой главе мы попытаемся обобщить результаты первой главы на случай
движущегося тела, движение которого непрямолинейно и неравномерно.
Переменное движение предполагает существование силового поля, которому
это движущееся тело подчинено. Современное состояние наших знаний
предполагает существование двух видов таких полей : поля тяготения и
электромагнитного поля. Общая теория относительности считает, что поле
тяготения является искривлением пространства-времени. В настоящей статье
мы будем систематически отбрасывать все касающееся тяготения, оставляя
за собой право вернуться к этому в другой работе. Таким образом, в насто-
ящий момент силовое поле будет для нас электромагнитным полем и дина-
мика переменного движения будет изучать движение тела, имеющего
электрический заряд в электромагнитном поле.
Нам придется встретиться в этой главе с достаточно большими труд-
ностями, потому что теория относительности — надежный путеводитель при
исследовании равномерных движений — еще не дает окончательного заклю-
чения относительно неравномерных движений. Во время недавнего пре-
бывания Эйнштейна в Париже Пенлевэ выдвинул интересные возражения
против теории относительности ; Ланжевен легко сумел их отвести, так как
все они предполагали ускорения, в то время как преобразование Лоренца—
Эйнштейна применимо только к равномерному движению. Аргументы зна-
менитого математика лишний раз доказали, что применение идей Эйнштейна
становится вопросом деликатным, как только дело касается ускорений, и в
этом отношении эти аргументы очень поучительны. Метод первой главы,
позволивший нам изучить фазовую волну, здесь абсолютно непригоден.
Фазовая волна, сопровождающая движение тела, при условии, конечно,
принятия наших представлений, имеет свойства, которые зависят от при-
роды этого движущегося тела; так, например, частота движущегося тела
зависит от полной энергии. Поэтому естественно будет предположить, что
если силовое поле воздействует на движение тела, то оно будет действовать
также и на распространение его фазовой волны. Руководствуясь идеей
полной идентичности принципа наименьшего действия и принципа Ферма,
я был вынужден с самого начала моих исследований в этой области принять,
что для заданного значения полной энергии движущегося тела и вследствие
этого для частоты его фазовой волны возможные динамические траектории
движущегося тела совпадают с возможными лучами фазовой волны. Это
привело меня к хорошему результату, который будет изложен в третьей
главе, а именно, к интерпретации установленных Бором условий внутри-
атомной устойчивости. К сожалению, это потребовало довольно произволь-
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
653
ных гипотез о значении скоростей распространения V фазовой волны в
каждой точке поля. Здесь мы, наоборот, воспользуемся методом, который
кажется нам значительно более общим и более подходящим. С одной стороны,
мы исследуем механический принцип наименьшего действия в его класси-
ческих формах Гамильтона и Мопертюи и в релятивистской динамике, а с
другой стороны, с очень общей точки зрения, — распространение волн и
принцип Ферма. В этом случае нам придется представить себе некоторый
синтез этих двух исследований, синтез может быть спорный, но теорети-
ческое изящество его неоспоримо. Одновременно мы получим решение
поставленной задачи.
П. Два принципа наименьшего действия в классической динамике
Принцип наименьшего действия в гамильтоновой форме выражается в
классической динамике следующим образом :
/з «Динамические уравнения могут быть выведены из того, что интеграл
У L dt, взятый в фиксированных пределах времени для начальных и конеч-
ii
ных‘значений, задаваемых параметрами qh определяющими состояние систе-
мы, имеет стационарное значение». По определению, L называют функцией
Лагранжа и предполагают, что она зависит от переменных q, и q, = .
Таким образом, имеем
<3 f L dt = 0.
t\
Известным методом вариационного исчисления отсюда выводятся так на-
зываемые уравнения Лагранжа
а с 8L А __ 8L
dt ( 8qi J dqt ’
число которых равно числу переменных qt.
Остается определить функцию L. Классическая динамика полагает
функцию L равной разности кинетической и потенциальной энергии:
£. = ^кин ^пот •
Дальше мы увидим, что релятивистская динамика применяет другое
выражение для L.
Перейдем теперь к принципу наименьшего действия в форме Мопертюи.
Для этого заметим сначала, что уравнения Лагранжа в своей общей форме,
приведенной выше, допускают первый интеграл, так называемую «энергию
системы», равную
IV = -L +
i 8qi
при условии, однако, что функция L не зависит явно от времени, что мы и
будем предполагать в дальнейшем. Действительно, при этом получаем
dW v’ \8L v’ 8L .. dL .. V j 8L A .
~dT ~ ~ ~~ + ~dt Ы?) ~
V* • Г d ( 8L 1 aL "I
что согласно уравнениям Лагранжа равно нулю. Таким образом,
W = const.
654
Л. ДЕ БРОЙЛЬ
Применим теперь принцип Гамильтона ко всем «варьированным» траек-
ториям, которые переводят систему из начального состояния А в конечное
состояние В и которые соответствуют определенному значению энергии IV.
Поскольку W, 4 и f2 — константы, можно написать
д = + W)dt — O,
t, /1
или
причем последний интеграл распространяется на все значения q, в пределах
между значениями, определяющими состояния А и В, таким образом, чтобы
время при этом исключалось. Тогда для полученной новой формы не при-
ходится вводить никаких ограничений, относящихся ко времени. Однако
варьированные траектории должны всегда соответствовать одному и тому
же значению W энергии.
Согласно классической записи канонических уравнений примем : р, =
= . Импульсы pt являются каноническими сопряженными переменных
q(. Принцип Мопертюи напишется в классической динамике так:
д 1 2 Р‘ = 0 ’
A i
где L = ЕКин —Впот, причем Ет„ не зависит от qif а ЕКин является одно-
родной квадратичной функцией ср. В силу теоремы Эйлера
2’ pi dq, = 2 Pi Qi dt = 2 Екин dt.
Для материальной точки Екин = у mv2 , и принцип наименьшего действия
принимает форму, которая была известна ранее всех других:
в
<3 J mvdl = 0,
А
где dl—элемент траектории.
Ш. Два принципа наименьшего действия в динамике электрона
Вернемся к вопросу динамики электрона с релятивистской точки зрения..
Слово «электрон» следует понимать в общем смысле как материальную точку;
обладающую электрическим зарядом. Предположим, что электрон, помещен-
ный вне поля, обладает собственной массой т0; его электрический заряд
обозначается через е.
Рассмотрим снова пространство-время ; пространственные координаты
обозначим через х1, х2 и х3; координату ct через х4. Основной инвариант —
«элемент длины» — выражается соомношением
ds = Y(dx1)2 — (dx1)2 — (dx2)2 — (dx3)2.
В этом и в следующих параграфах мы постоянно будем применять не-
которые обозначения тензорного исчисления.
Мировая линия в каждой точке имеет касательную, направление кото-
рой определяет вектор мировой скорости, длина которого равна единице
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
655
и контравариантные составляющие которого даются соотношением
• dxi
ul^-~ (1 = 1,2, 3,4).
- ds v '
Отсюда следует, что u'u, = 1.
Представим себе движущееся тело, описывающее мировую линию; при
прохождении через рассматриваемую точку скорость его равна v = fie
с компонентами vx, vy, v.. Компоненты мировой скорости будут
izx = —и1 —-----, и2 = —и2 =------------,
cVl— Д2 сУ1—дг
и, = — и3 =----, и4 = и4 = .
3 сУ1-дз 4 У1-Д2
Чтобы определить электромагнитное поле, следует при помощи уравнений
Г1=— <рг = — ах; <р2= —<р3 = —ау-, <р3 = —<р3 = —az; <р4 = <р1 = у?
ввести второй мировой вектор, компоненты которого равны функциям век-
тор-потенциала а и скалярного потенциала у.
Рассмотрим теперь две точки Р и Q пространства-времени, соответству-
ющие заданным значениям координат пространства’и времени. Можно рас-
сматривать криволинейный интеграл, взятый по мировой линии, идущей от
Р к Q ; интегрируемая функция, естественно, должна быть инвариантной.
Положим, что
Q . §
[ (—т0 с — e<Pi и1) ds = \ (-—т0 сщ — е и1 ds
р р
является этим интегралом. Принцип Гамильтона утверждает, что если
мировая линия движущегося тела проходит через Р и Q, то она имеет такую
форму, для которой определенный выше интеграл имеет стационарное
значение.
С помощью соотношения
J, = т0 си( 4- е (i = 1, 2, 3, 4)
определим третий мировой вектор. Принцип наименьшего действия при-
мет вид
Q Q
& } Uidx1 + Jzdx3 + J3dx3 + J4dx4) = <3 f = 0.
p p
Несколько далее мы раскроем физический смысл мирового вектора J.
Пока вернемся к обычной форме уравнений динамики, заменив в первой
форме интеграла действия величину ds на с dt fl — fi3.
Таким образом получаем
---------------------
<5 J 1“"шо с2 У1 — Р2 — е с <?4 — е vx + <?2 vy + <р3 ^г)] dt = 0,
ti
где t4 и tz соответствуют точкам Р и Q пространства-времени.
Если существует чисто электростатическое поле, то величины <р4, <pz, <р3
равны нулю и функция Лагранжа примет часто употребляемую форму
L = —m0c2fl —/З2 — еу.
656
Л. ДЕ БРОЙЛЬ
*2
Поскольку во всех случаях принцип Гамильтона имеет форму 5 J Ldt = О,
он всегда приводит к уравнениям Лагранжа :
= (/=1,2,3).
dt V dqt J dqt v 7
Во всех случаях, в которых потенциалы не зависят от времени, мы снова
встречаемся с принципом сохранения энергии
W = — L + £ ptлр: = const , р, = (i = 1,2,3).
Рассуждая так же, как это было сделано выше, приходим к принципу
Мопертюи
в
<3 J 2* Pi dq‘ = 0 ,
A i
где А и В — две точки пространства, соответствующие системе отсчета,
применяемой в точках Р и Q пространства-времени.
Величины рг, р2, р3, равные частным производным функции L по соот-
ветствующим скоростям, могут помочь определить вектор р, который мы
назовем вектором импульса. Если нет магнитного поля (независимо от того,
есть ли электрическое поле), то прямолинейные компоненты этого
вектора будут:
_ mavx _ тауу __ mayz
Рх У1 - ’ Ру У'Г—7F ’ У1 —
Таким образом, этот вектор тождествен количеству движения, и интеграл
действия Мопертюи представляется в простой форме, предложенной самим
Мопертюи, с той только разницей, что масса изменяется теперь с изменением
скорости по закону Лоренца.
Если есть магнитное поле, то для компонентов вектора импульса находят
выражения:
* = ЖТ + ^’ Py-W^ + eay> +
Теперь уже нет тождества между вектором р и количеством движения;
из этого следует, что выражение для интеграла действия становится более
сложным.
Рассмотрим помещенное в поле движущееся тело, полная энергия кото-
рого задана в каждой точке поля, доступной движущемуся телу;
скорость последнего определяется уравнением энергии, но a priori направ-
ление его движения может быть любым. Выражения для рх, ру и р2 показы-
вают, что вектор импульса имеет одну и ту же величину в любой точке элект-
ростатического поля независимо от рассматриваемого направления. Это,
однако, не так при существовании магнитного поля: величина вектора р
зависит при этом от угла между выбранным направлением и вектор-потен-
циалом, как это следует из выражения рх + Ру + pl- Это замечание нам
понадобится в дальнейшем.
Чтобы закончить этот параграф, вернемся к физическому смыслу миро-
вого вектора J, от которого зависит интеграл Гамильтона. Мы выразили
его как
Ji — mocut + е<Pi (z = 1, 2, 3, 4).
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
657
С помощью значений и, и находим
J1 — ~Рх , Jz — Ру > Js — Pz > Ji — — •
Контравариантные компоненты будут
J1==Px, J2-Py, JS = Pz,
Таким образом, мы имеем дело со знаменитым вектором «мирового им-
пульса», который объединяет энергию и количество движения.
Из выражения
Q
(/=1,2,3,4)
р
можно вывести (если J4 постоянно)
в
(z = 1,2,3).
А
Это—наиболее лаконичная форма для перехода от одного способа изло-
жения стационарности действия к другому.
IV. Распространение волн. Принцип Ферма
Тем же методом, который применялся в двух предыдущих параграфах, мы
рассмотрим распространение фазы синусоидального колебания. Для этого
мы встанем на очень общую точку зрения и нам снова придется рассматривать
пространство-время.
Рассмотрим функцию sin tp, предположив, что дифференциал <р зависит от
переменных х‘ пространства и времени. В пространстве-времени имеется
бесконечное число мировых линий, вдоль которых функция <р постоянна.
Волновая теория в той форме, в которой она представлена в работах
Гюйгенса и Френеля, заставляет нас различать некоторые из этих линий,
проекции которых на пространство наблюдателя являются для него «лучами»
в обычном оптическом смысле.
Положим, как и раньше, что Р и Q — две точки пространства-времени.
Если, мировой луч пройдет через эти две точки, то какой закон будет опре-
делять его форму? Рассмотрим криволинейный интеграл j dy и определим
мировой луч в гамильтоновой форме р
Q
д f d<p = 0 .
р
Интеграл действительно должен быть стационарным, иначе совпадающие
по фазе возмущения, исходящие из некоторой точки пространства и после
пробега по нескольким различным путям пересекающиеся в другой точке,
окажутся различными по фазе.
Фаза инвариантна; таким образом, если мы положим
dtp = 2п (Or dx1 + О2 dx2 + О3 dx3 + 04 dx1) = 2тгО, dx1,
то величины О;, обычно являющиеся функциями х‘, будут ковариантными
компонентами мирового вектора — вектора мировой волны. Если I — на-
42 Вариационные принципы механики
658
Л. ДЕ БРОЙЛЬ
правление луча в обычном смысле, то d<p, как правило, рассматривают
в форме
d<p = 2л [vdt —у di],
где v — частота, а V — скорость распространения. Тогда можно положить
01 = — -р- cos (х, /), 02 = — ~ cos (у, I),
03 =--Jrcos(z,/), 04 = -^.
Вектор мировой волны распадается, следовательно, на временную компо-
„ „ V
ненту, пропорциональную частоте, и пространственный вектор п длиной у,
ориентированный по направлению распространения. Мы назовем этот вектор
волновым числом потому, что он равен обратной величине длины волны. Если
частота v постоянна, то нужно перейти от гамильтоновой формы
9
S^Ojdx1 = 0
р
к форме Мопертюи
в
<3 J O1dx1 + O3dx2 + 03dx3 =0,
А
где А и В —• точки пространства, соответствующие Р и Q. Подставляя вместо
Olt 02 и 03 их значения, получаем
В таком виде принцип Мопертюи совпадает с принципом Ферма.
Как в предыдущем параграфе надо было знать распределение вектора р
в поле, чтобы найти проходящую через две определенные точки траекторию
движущегося тела с заданной полной энергией, так и здесь, чтобы найти луч
волны известной частоты, проходящий через две заданные точки, достаточно
знать распределение в пространстве вектора волнового числа, определя-
ющего в каждой точке и для каждого направления скорость распростра-
нения.
V. Истолкование квантового соотношения
Мы подошли теперь к кульминационному пункту этой главы. В самом ее
начале мы поставили следующий вопрос: «если движущееся тело пере-
мещается в силовом поле неравномерно, то как происходит распространение
его фазовой волны?». Вместо того чтобы находить путем последовательных
приближений, как я это делал сначала, скорость распространения в каждой
точке и для каждого направления, я применил ^вантовое соотношение,
может быть, несколько гипотетически, но в глубоком и бесспорном согласии
с духом теории относительности.
Мы до сих пор принимали, что hv = w, где w — полная энергия движу-
щегося тела, a v — частота его фазовой волны. С другой стороны, преды-
дущие параграфы научили нас определять два мировых вектора J и О,
которые играют совершенно симметричную роль в изучении движения тела
и распространения волны.
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
659
Если ввести эти векторы, то соотношение hv = W примет вид
Тот факт, что два вектора имеют одну одинаковую компоненту, еще не
доказывает, что то же имеет место и для других компонентов. Вводя
само собой напрашивающееся обобщение, положим
Oi = ^Ji (1 = 1,2, 3,4).
Изменение dtp относительно бесконечно малой части фазовой волны
будет равно:
d<p = 2nOidxi = ~ Jidx‘.
Принцип Ферма примет при этом вид
в 3 в 3
Jtdxl = 3^SPidxl^O.
Al Al
Таким образом, мы приходим к следующему положению: Принцип
Ферма, примененный к фазовой волне, идентичен принципу Мопертюи,
примененному к движущемуся телу. Возможные динамические траектории
движущегося тела идентичны с возможными лучами волны.
Нам представляется, что такая идея глубокой связи между двумя прин-
ципами геометрической оптики и динамики является чрезвычайно ценной
для отыскания пути к синтезу волн и квантов.
Гипотеза о пропорциональности векторов J и О является в некотором
смысле истолкованием квантового соотношения, обычное изложение кото-
рого явно неудовлетворительно, так как оно вводит энергию без неразлучного
ее спутника — количества движения. Новое изложение гораздо более удо-
влетворительно, потому что оно выражается через равенство двух мировых
векторов.
VI. Частные случаи. Обсуждение
Общие концепции, изложенные в предыдущем параграфе, должны быть
теперь применены к частным случаям с целью уяснения их смысла.
а) Рассмотрим сначала прямолинейное и равномерное движение сво-
бодно движущегося тела. Гипотезы, выдвинутые в начале первой главы,
позволили нам полностью изучить этот случай на основе специального прин-
ципа относительности. Посмотрим, сможем ли мы найти предсказанное зна-
чение для скорости распространения фазовой волны :
у —
К /? •
Положим
т0 с2
v ~ПГ ~ h У 1 — Д2 ’
1 у р dqt = 1 dt Л = — ,
л r h У1-Д2 V
откуда V = у. Мы дали истолкование этого результата с точки зрения прост-
ранства-времени.
660
Л. ДЕ БРОЙЛЬ
б) Рассмотрим электрон в электростатическом поле (атом Бора). Мы дол-
жны предположить, что фазовая волна, имеющая частоту v, равную част-
ному от деления полной энергии движущегося тела на h, будет
W = + еу> = hv.
¥1-р»
Поскольку магнитное поле равно нулю, получаем просто
Отсюда
_ т„ух
Рх уг~^
И т. д.,
1 торс
h Ki-jS2
dl = — dl.
v
1 4’ л
тосг
1Г . - + еу>
тарс
УГ^Т2
L (1 еуУ1 — Р*\ = — f 1
|8 ( т0с2 ) р (
еу> )________ с W
W — еу> J Р W — еу>
Этот результат требует нескольких замечаний. С физической точки зрения
он означает, что фазовая волна с частотой v = распространяется в электро-
статическом поле от одной точки к другой с переменной скоростью, соот-
ветствующей значению потенциала. Действительно, скорость V выражается
непосредственно через у> с помощью члена (обычно малого по срав-
нению с единицей) и неявно через/?, которое рассчитывается в каждой точке
как функция W и у.
Кроме того, заметим, что V есть функция массы и заряда движущегося
тела. Это может показаться странным, но на самом деле это не так странно,
как кажется. Рассмотрим электрон, центр С кото-
Рис. з.
рого перемещается со скоростью о; по класси-
ческому представлению в некоторой точке Р, ко-
ординаты которой в связанной с электроном
системе известны, сосредоточено определенное
количество электромагнитной энергии, представ-
ляющей собой некоторым образом часть электро-
на. Предположим, что после прохождения обла-
сти R, где существует более или менее сложное электромагнитное поле,
электрону сообщается та же скорость », но иначе направленная.
Точка Р системы, связанная с электроном, переместилась в точку Р' и
можно сказать, что энергия, первоначально находившаяся в Р, перешла в Р'.
Смещение этой энергии в R может быть рассчитано только при заданных
массе и заряде электрона, даже если известны поля. Это бесспорное заклю-
чение может с первого взгляда показаться странным, потому что мы обычно
привыкли рассматривать массу и заряд (так же как количество движения и
энергию) как величины, связанные с центром электрона. Таким же образом
.распространение в поле фазовой волны, которую, по нашему мнению, следует
считать основной составной частью электрона, должно зависеть от заряда
и массы.
Напомним теперь результаты, полученные в предыдущей главе для слу-
чая равномерного движения. Там нам пришлось рассматривать фазовую
волну как результат пересечений пространством неподвижного наблюда-
теля прошедших, настоящих и будущих пространств перемещающегося
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
661
наблюдателя. Мы могли бы попытаться вновь найти данное выше значение V,
исследуя последовательные «фазы» движущегося тела и устанавливая
смещение для неподвижного наблюдателя сечений его пространства
состояниями равных фаз.
К сожалению, мы сталкиваемся здесь с большими трудностями. Теория
относительности не дает нам определенного указания на то, каким образом
наблюдатель, увлекаемый неравномерным движением, отсекает в каждый
момент свое пространство в пространстве-времени ; по-видимому, нет осно-
ваний считать это сечение плоским, как в случае равномерного движения.
Но даже если бы эта трудность была преодолена, мы все равно были бы в
затруднении. Действительно, тело, движущееся равномерно, должно опи-
сывать одинаковую кривую для связанного с ней наблюдателя независимо
от скорости равномерного движения по отношению к осям отсчета; это
следует из принципа, что галилеевские оси, совершающие друг по отношению
к другу движение равномерного переноса, эквивалентны. Если наше равно-
мерно движущееся тело окружено для связанного с ним наблюдателя перио-
дическим явлением, имеющим повсюду одну и ту же фазу, то это же должно
иметь место для всех скоростей равномерного движения и это оправдывает
наш метод, изложенный в первой главе. Но если движение неравномерно, то
описание движущегося тела, сделанное связанным с ним наблюдателем, не
может быть таким же; мы совершенно не можем сказать, как он определит
периодическое явление и припишет ли он ему одну и ту же фазу в любой
точке пространства.
Может быть, можно подойти к проблеме с другого конца — принять
результаты, полученные в этой главе из совершенно других соображений, и
попытаться вывести из них, каким образом, теория относительности должна
рассматривать вопросы переменного движения, чтобы прийти к таким же
заключениям. Мы не можем заниматься этой трудной проблемой.
в) Рассмотрим общий случай движения электрона в электромагнитном
поле. Мы имеем:
Лт = W = yr^= + eV.
У1—у
Кроме того, мы показали выше, что следует положить
7П0 Vx .
Рх = 57=^=- + И Т. Д.,
х У1 - р х
где ах, ау и аг — компоненты вектор-потенциала. Таким образом,
1 ’ j 1 л । е vdl
— 5 Pi d(h = т т/——- dl 4— aidl = —.
n У1- n 1 v
Отсюда находим
П70С2
^^+еа,
Vi — г
= c W i
£ W — eip ai_’
1 G
где G — количество движения, a a, — проекция вектор-потенциала на напра-
вление I. Среда в каждой точке уже неизотропна. Скорость V изменяется в
зависимости от рассматриваемого направления, а скорость движущегося
тела v уже не совпадает по направлению с нормалью к фазовой волне, опреде-
ляемой вектором р = hn. Луч не совпадает более с нормалью волны —
классическое заключение для оптики анизотропных сред.
662
Л. ДЕ БРОЙЛЬ
Можно спросить, что будет с теоремой равенства скоростей движуще-
гося тела и группы фазо'вых волн: v = (ic.
Заметим сначала, что .скорость V фазы, вдоль луча, определяется
соотношением
3 3
т 2/ Pt dq1 = Pi ~аг dl = dl'>
у не равно у р, потому что здесь dl и р не имеют одного и того же
направления.
Мы можем, не нарушая общности, принять за ось х направление
движения тела в рассматриваемой точке и проекцию вектора р на это напра-
вление назвать рх. Тогда, по определению, имеем
V __ 1
Первое из канонических уравнений дает равенство
где U — скорость группы, следующей за лучем.
Результат раздела II первой главы является, таким образом, совершенно
общим и вытекающим непосредственно из первой группы уравнений Гамиль-
тона.
Глава III
КВАНТОВЫЕ УСЛОВИЯ УСТОЙЧИВОСТИ ТРАЕКТОРИЙ
I. Условия устойчивости Бора—Зоммерфельда
В своей теории атома Бор впервые высказал предположение, что из числа
замкнутых траекторий, описываемых электроном вокруг положительного
центра, только некоторые устойчивы, другие же либо не реализуются в
природе, либо настолько неустойчивы, что их не стоит принимать в расчет.
Ограничиваясь круговыми орбитами, имеющими только одну степень сво-
боды, Бор выдвинул следующее условие: Устойчивыми являются только
такие круговые орбиты, для которых момент количества движения является
целым кратным , где h — константа Планка. Это можно записать
в виде
т0 со К2 = п ~ (п — целое число),
или
2л
J ре dO = nh,
о
где' 0 — азимутальный угол, выбранный как координата q Лагранжа, а
ре — соответствующий импульс.
Чтобы распространить этот вывод на случай большого числа степеней
свободы, Зоммерфельд и Уильсон показали, что можно выбрать такие коор-
динаты qt, для которых условия квантования орбит будут
ф pt dqt = nth (Гц — целые числа).
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
663
Знак f показывает, что интеграл распространен на всю область изменения
координат.
В 1917 г. Эйнштейн дал условие квантования в инвариантной форме по
отношению к изменению координат*). Мы дадим его для случая замкнутых
орбит ; оно будет в этом случае иметь вид
з
f 2? Pi dqi = nh (n — целое число),
где интеграл распространен на всю длину траектории. Мы узнаем интеграл
действия Мопертюи, который имеет большое значение в теории квантов.
К тому же этот интеграл не зависит от выбора координат пространства благо-
даря известному свойству, выражающему ковариантный характер компо-
нентов pi вектора импульса. При помощи классического метода Якоби этот
интеграл определяется как полный интеграл уравнения в частных произ-
водных
"(<•«<)= И' С-1' 2...........А
содержащий / произвольных констант, одна из которых — энергия W. Если
имеется только одна степень свободы, то соотношение Эйнштейна фиксирует
энергию W ; если число степеней свободы больше единицы (в наиболее важ-
ном случае движения электрона во внутриатомном поле имеются a priori
три степени свободы), то получается только одно соотношение между W
и целым числом п, а именно, для эллипсов Кеплера, если пренебречь изме-
нением массы при изменении скорости. Но если движение квазипериодично,
что, кстати говоря, имеет место благодаря изменению, о котором говорилось
выше, то можно найти координаты, которые колеблются в определенных
пределах (либрации), и существует бесконечное число псевдопериодов,
приблизительно равных целым кратным периодов либраций. В конце
каждого из этих псевдопериодов движущееся тело возвращается в состояние,
произвольно близкое к начальному состоянию. Уравнение Эйнштейна, при-
мененное к каждому из этих псевдопериодов, приводит к бесконечности
условий, которые совместимы только в том случае, если выполняются усло-
вия Зоммерфельда ; так как число последних равно числу степеней свободы,
все константы оказываются фиксированными и не остается никакой неопре-
деленности.
Чтобы рассчитать интегралы Зоммерфельда, можно с успехом восполь-
зоваться уравнением Якоби и теоремой вычетов, а также понятием угловых
переменных. За последние годы эти вопросы были предметом многочислен-
ных работ, изложенных в прекрасной книге Зоммерфельда «Atombau und
Spectrallinien» (франц, издание, перевод Bellenot, Изд-во Blanchard, 1923 г.).
Мы не будем здесь заниматься этими вопросами, а ограничимся замечанием,
что, в конце концов, проблема квантования в принципе полностью сводится
к условию Эйнштейна для замкнутых орбит. Если нам удастся объяснить
это условие, то тем самым мы выясним вопрос об устойчивых траекториях.
II. Интерпретация условия Эйнштейна
Понятие фазовой волны дает нам возможность объяснить условие Эйн-
штейна. Из рассуждений второй главы следует, что траектория движущегося
тела является одним из лучей его фазовой волны; последняя должна про-
*) Zum Quantensatz von Sommerfeld und Epstein (Ber. der deutschen. Phys. Ges., 1917,
стр. 82).
664
Л. ДЕ БРОЙЛЬ
бегать вдоль траектории с постоянной частотой (потому что полная энергия
постоянна) и с переменной скоростью, значение которой мы научились
вычислять. Распространение, таким образом, аналогично распространению
волны жидкости в замкнутом канале с переменной глубиной. С физической
точки зрения очевидно, что для того, чтобы получить стабильный режим,
длина канала должна находиться в резонансе с волной; иначе говоря,
участки волны, следующие одна за другой на расстоянии, равном целому
кратному длины I канала и потому находящиеся в одной и той же точке
последнего, должны совпадать по фазе. Условие резонанса будет I = п Л,
если длина волны постоянна и ф dl = п (целое) в общем случае.
Появляющийся здесь интеграл есть интеграл принципа Ферма; мы
показали, что его следует считать равным интегралу действия Мопертюи,
деленному на h. Условие резонанса идентично, таким образом, условию
устойчивости, требуемому теорией квантов.
Этот прекрасный результат, являющийся непосредственным следствием
идей, высказанных в предыдущей главе, служит наилучшим оправданием
нашего способа рассмотрения проблемы квантов.
В частном случае круговых орбит в атоме Бора имеем тоф v dl=2nRmov=nh,
а так как v = a>R, где со — угловая скорость, то
Это и есть простая форма, впервые рассмотренная Бором.
Таким образом, мы видим, почему некоторые орбиты устойчивы, но не
знаем еще, каким образом происходит переход от одной устойчивой орбиты
к другой. Характер возмущения, сопровождающего этот переход, может быть
изучен только с помощью соответствующим образом измененной электро-
магнитной теории, а такой теорией мы пока не владеем.
III. Условие Зоммерфельда для квазипериодических движений
Я постараюсь показать, что если условие устойчивости для замкнутой
орбиты есть ф2’Л dq' = nh, то условия устойчивости для квазипериоди-
ческих движений неизбежно будут иметь вид ф р( dq' — nth (nt — целое
число, i = 1,2, 3). Таким образом, условия кратности Зоммерфельда также
приводят к резонансу фазовой волны.
Отметим сначала, что, поскольку электрон имеет конечные размеры (если,
как мы принимаем, условия устойчивости зависят от реакций, оказываемых
на него его собственной фазовой волной), то должно быть совпадение по фазе
между всеми частями волны, проходящей на расстоянии от центра электрона,
которое меньше малого, но конечного значения, порядка, например, вели-
чины радиуса электрона (10-13 см). Непринятие этого предположения
означало бы, что электрон является геометрической точкой без размеров
и луч его фазовой волны представляет собой линию нулевой плотности.
Это невозможно с физической точки зрения.
Напомним теперь известное свойство квазипериодических траекторий.
Если М — положение центра движущегося тела на траектории в заданный
момент и если из М как центра будет описана произвольная сфера малого,
но конечного радиуса R, то можно будет найти бесконечное число таких
интервалов времени, к концу каждого из которых движущееся тело вернется
в сферу радиуса R.
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
665
Кроме того, каждый из этих интервалов времени или «приближенных
периодов» г будет удовлетворять равенствам
Т = Л171 ~Ь £1 == ^2^*2 ~Ь £2 = «3T3 ~Ь £3 >
где Ть Т2 и Т3 являются периодами изменения (либрации) координат
q\ q2 и q3. Количества е, могут быть сделаны меньшими некоторого заранее
заданного малого, но конечного числа Чем меньше будет ц, тем длиннее
будет наиболее короткий из периодов т.
Предположим, что радиус R выбран равным максимальному расстоянию
действия фазовой волны на электрон, т. е. расстоянию, которое было опре-
делено выше. Тогда к каждому приближенному периоду т можно будет
применить условие совпадения фаз в форме
г 3
^SPidq^nh,
о 1
которое можно также написать в виде
т, т, т,
«1J Pi dt+n2$ Pi ft Л+«з J Ра 4з dt + ех (рх qjt + е2 (р2 q2)e + е3 (р3 q3)T = nil.
ООО
Но условие резонанса никогда не выполняется строго. Если математик
требует, чтобы разность фаз при резонансе была точно равна п -2п, то
физик должен удовлетвориться тем, что она равна п • 2 п ± а, где а меньше
малой, но конечной величины е, которая, если можно так выразиться,
измеряет область, где резонанс можно считать физически реализованным.
Величины Pt и qt остаются во время движения конечными; можно найти
шесть таких величин Рг и Q,, которые всегда дадут
Pi<P(, qt<Qi. (z = 1,2,3).
Выберем предел т] так, чтобы PiQt< ; мы видим, что при на-
писании условия резонанса для каждого из приближенных периодов можно-
будет пренебречь членами с е, и написать
ni^Pi’qidt + n2’J р2 q2 dt + n3\ р3 q3 dt = nh.
ООО
В левой части уравнения пг, п2 и п3 являются известными целыми
числами, в правой части п — произвольное целое. Мы имеем бесконечное
число подобных уравнений с различными значениями пг, п2 и п3. Чтобы
удовлетворить этим уравнениям, необходимо и достаточно, чтобы каждый
из интегралов
Т,
У piqidt = jpidqi
о
был равен целому кратному й.
Это и есть условие Зоммерфельда.
Предыдущее доказательство кажется убедительным. Однако здесь нужно
выдвинуть одно возражение. Условия устойчивости могут начать играть
роль только через промежуток времени порядка самого короткого из интер-
валов времени т, который уже очень велик ; если бы, например, этого при-
шлось ждать миллион лет, то это равносильно тому, что эти условия никогда
666
Л. ДЕ БРОЙЛЬ
не осуществятся. Это возражение не существенно, так как периоды г могут
быть очень большими по сравнению с периодом либрации Th но могут быть
очень малыми по отношению к обычной шкале времени; действительно,
в атоме периоды Т, имеют величину от 10-15 до 10-20 сек.
Можно себе представить величину приближенных периодов в слу-
чае траектории Зоммерфельда Lz для водорода. Вращение перигелия
во время периода либрации радиуса-вектора порядка 10-5-2л:. Наиболее
короткий из приближенных периодов будет, таким образом, приблизительно
в 105 раз больше периода радиальной переменной (10-15 сек.) и будет порядка
Ю-10 сек. Таким образом, действительно получается, что условия устой-
чивости начнут играть роль через промежуток времени, недоступный нашим
наблюдениям, и следовательно, траектории без резонанса покажутся нам
несуществующими.
Принцип примененного здесь рассуждения был заимствован у Л. Брил-
люэна, который писал в своей диссертации (стр. 351): «Чтобы интеграл
Мопертюи, взятый для всех приближенных периодов т, был целым кратным
й, нужно, чтобы каждый из интегралов, относящихся к каждой переменной и
взятый для соответствующего периода, был равен целому числу квантов;
именно так Зоммерфельд излагает свои квантовые условия».
ВЫВОДЫ И ЗАКЛЮЧЕНИЯ
В кратком историческом обзоре развития физики, начиная с XVII в.,
в частности динамики и оптики, мы показали, каким образом проблема
квантов зародилась из параллелизма корпускулярной и волновой концеп-
ций света; затем мы показали, с какой ежедневно возрастающей силой
понятие квантов стало влиять на умы ученых XX века.
В первой главе мы приняли за основной постулат существование перио-
дического явления, связанного с каждой отдельной порцией энергии, зависи-
мость которой от собственной массы выражена соотношением Планка—
Эйнштейна. Теория относительности показала нам, таким образом, необ-
ходимость связать с равномерным движением всякого движущегося тела
распространение с постоянной скоростью некоторой фазовой волны, и мы
смогли объснить это распространение, пользуясь представлением Минков-
ского о пространстве-времени.
Рассматривая во второй главе этот вопрос в более общем случае тела,
имеющего электрический заряд и перемещающегося с переменной скоростью
в электромагнитном поле, мы показали, что по нашим представлениям прин-
цип наименьшего действия в форме Мопертюи и принцип согласования фаз
•Ферма весьма вероятно могут быть двумя аспектами одного и того же
закона; это привело нас к пониманию истолкования квантового соот-
ношения, определяющего скорость фазовой волны в электромагнитном поле.
Конечно, идея, что за движением материальной точки всегда скрывается
распространение волны, должна быть изучена и дополнена, но если удастся
найти для нее совершенно удовлетворительную форму, то она представит
собой синтез большой рациональной красоты.
Наиболее важное следствие, которое может быть выведено из этой идеи,
изложено в третьей главе. Напомнив законы устойчивости квантованных
траекторий, которые были получены в результате недавних многочисленных
работ, мы показали, что их можно объяснить как выражение резонанса
•фазовой волны и длины замкнутых или квазизамкнутых траекторий. Мы
полагаем, что это — первое физически правдоподобное объяснение условий
устойчивости Бора—Зоммерфельда.
ИССЛЕДОВАНИЯ ПО ТЕОРИИ КВАНТОВ
667
Трудности, возникшие при одновременном смещении двух заряженных
центров, были изложены в четвертой главе, в частности, случай круговых
движений ядра и электрона вокруг их центра тяжести в атоме водорода.
В пятой главе при помощи ранее полученных результатов мы пытались
представить себе возможность концентрирования излученной энергии
вокруг некоторых особых точек, и показали, какая глубокая гармония, оче-
видно, существует между противоположными точками зрения Ньютона и
Френеля, гармония, которая подтверждается идентичностью многочисленных
предвидений. Электромагнитная теория не может быть сохранена в своей
обычной форме, но перестроить ее очень трудно. Мы предлагаем для этой
цели качественную теорию интерференции.
В шестой главе мы резюмировали различные последовательные теории
диффузии X- и у-лучей через аморфные тела, обращая особое внимание на
предложенную недавно теорию П. Дебая и А. Комптона, которая делает
почти осязаемым существование квантов света.
Наконец, в седьмой главе мы вводим в статистическую механику понятие
фазовой волны, находим величину элемента распространения по фазе, пред-
ложенную Планком, и получаем закон излучения черного тела в виде закона
Максвелла для газа, образованного из атомов света, при условии, однако,
допущения некоторой связи между движениями отдельных атомов, зна-
чение которой видно также из изучения флуктуаций энергии.
Короче говоря, я развил новые идеи, которые, быть может, помогут уско-
рить необходимый синтез, объединяющий физику излучений, так странно
разделенную в настоящее время на две области, где царят две противополож-
ные концепции: корпускулярная и волновая. Я предчувствовал, что с
помощью принципов динамики материальной точки, если уметь правильно
их анализировать, можно, без сомнения, выразить распространение и согла-
сование фаз, и старался, насколько мог, вывести из этого объяснение некото-
рых загадок, выдвигаемых теорией квантов. Пытаясь зто сделать, я пришел
к некоторым интересным заключениям, которые, может быть, позволяют
надеяться прийти к более полным результатам, следуя по тому же пути.
Но сначала нужно было бы создать новую электромагнитную теорию, есте-
ственно, удовлетворяющую принципу относительности, учитывающую пре-
рывную структуру излучаемой энергии и физическую природу фазовых волн
и оставляющую, наконец, теории Максвелла—Лоренца характер статисти-
ческого приближения, объясняющий закономерность ее применения и точ-
ность ее предвидений в очень большом числе случаев.
Я нарочно дал довольно неотчетливые определения фазовой волны и
периодического явления, которое она, так же как и кванты света, некоторым
образом выражает. Настоящую теорию нужно, таким образом, рассматри-
вать скорее как форму, физическое содержание которой не вполне устано-
влено, чем как окончательно разработанную стройную теорию.
Э. ШРЕДИНГЕР
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ [222J
(Первое сообщение)
§ 1. В этом сообщении я собираюсь показать на простейшем примере
нерелятивистского свободного атома водорода, что обычные правила кван-
тования могут быть заменены другими положениями, в которых уже не
вводится каких-либо «целых чисел». Целочисленность получается при этом
естественным образом сама по себе подобно тому, как сама по себе полу-
чается целочисленность числа узлов при рассмотрении колеблющейся струны.
Это новое представление может быть обобщено, и я думаю, что оно тесно
связано с истинной природой квантования.
Обычная форма квантовых правил связана с уравнением в частных
производных Гамильтона:
"(«•<) = £• (»
Ищется решение этого уравнения, представляющее собой сумму функций
каждая из которых зависит только от одной из независимых переменных q.
Введем теперь вместо 8 новую неизвестную функцию так, чтобы эта
функция у> имела вид произведения функций, зависящих только от одной
координаты. Для этого положим :
8 == К In у>. (2}
Постоянную К приходится ввести из соображений размерности, по которым
она должна обладать размерностью действия. Таким образом, получаем
соотношение:
= (1'>
v у dq7 х
Мы не будем искать решение уравнения (17, а поставим следующую задачу.
При пренебрежении изменениями массы уравнение (Г) можно всегда свести,
по крайней мере в случае одноэлектронной проблемы, к следующему виду:
Квадратичная форма от функции у> и ее первых производных равна нулю.
Ищем такую действительную во всем конфигурационном пространстве,
однозначную, ограниченную и всюду дважды дифференцируемую функцию-
у>, которая дает экстремальное значение интегралу от упомянутой квадратич-
ной формы, распространенному по всему конфигурационному пространству*).
Эта вариационная проблема и заменяет у нас квантовые условия.
Возьмем сначала Н в виде функции Гамильтона кеплеровой проблемы и
покажем, что выставленное требование может быть выполнено не для всех,
*) Я не упускаю из вида, что подобная формулировка не является вполне одно-
значной.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
669
а только для положительных и лишь для некоторых дискретных отрица-
тельных значений Е. Это означает, что названная вариационная проблема
имеет непрерывную и дискретную области спектра собственных значений.
Дискретная часть спектра соответствует бальмеровским термам, а непрерыв-
ная —энергиям движения по гиперболическим траекториям. Чтобы сохраня-
лось численное соответствие, величину К следует приравнять ,
Поскольку выбор системы координат является несущественным при
установлении вариационных уравнений, воспользуемся прямоугольными
декартовыми координатами. Тогда уравнение (Г) будет записываться в
нашем случае (е, т—заряд и масса электрона) следующим образом [223]:
и наша вариационная проблема примет вид:
у _ < [(» + (-§-)• + (>-) - > (Е+3 ^]-0. (3)
Интеграл берется здесь по всему пространству. Обычным способом отсюда
получаем
у+ ^(£ + 4)у] =0- (4)
Следовательно, должно быть, во-первых, справедливо уравнение
z1V+^-(E + 4)v’ = 0> (5)
и, во-вторых, должен равняться нулю распространенный по всей бесконечно
удаленной замкнутой поверхности интеграл
= (6)
{Из (6) следует, что мы должны наложить дополнительное условие, касаю-
щееся поведения ду в бесконечности, если хотим действительно получить
упомянутый выше непрерывный спектр. На данном вопросе мы еще спе-
циально остановимся ниже.)
Уравнение (5) можно решить, например, в сферических координатах
г, &, tp, представив у в виде произведения функций от г, -б и tp. Этот метод
решения общеизвестен. Зависимость от углов будет выражаться шаровой
функцией, зависимость от радиуса г (соответствующую функцию мы обозна-
чим через %) можно получить без труда из дифференциального уравнения
02Z , 2 8Z , (2тЕ , 2 те1, л(п+1){______п
+ + ------г2--JX-O. (?)
Как известно, п должно быть обязательно целочисленным, в противном
случае зависимость от углов не будет однозначной. Нам нужны лишь реше-
ния (7), которые остаются конечными для всех положительных, действи-
тельных значений г. Уравнение (7) имеет на комплексной r-плоскости две
особенности при г = 0 и при г=оо, причем лишь во второй из них, г=оо, все
интегралы уравнения будут иметь существенно особую точку*). Эти две осо-
*) Я глубоко благодарен Герману Вейлю за его помощь в решении уравнения (7)
В дальнейшем за подтверждением не доказанных в самой работе утверждений я отсылаю
к книге : |. Schlesinger, Differentialgleichungen (Sammlung Schubert, № 13, Goschen,
1900, особенно главы 3 и 5).
о/и
а. ШГЬДПП! С. Г
бые точки являются граничными для нашего действительного интервала
изменения г. Как известно, в подобном случае требование ограниченности в
граничных точках для функции х равносильно наложению граничного'
условия. Уравнение, вообще говоря, может не иметь ни одного интеграла,
остающегося ограниченным в обеих этих точках; подобный интеграл
существует лишь при некоторых специальных значениях входящих в урав-
нения постоянных. Эти специальные значения следует определить.
Рассмотренные выше положения составляют основное содержание всего
исследования.
Изучим прежде всего поведение решения в особой точке г = 0. Так
называемое определяющее уравнение, характеризующее поведение интеграла
в особой точке, будет в данном случае иметь вид
е(е- 1) + 2е — п(п + 1) = о, (8>
причем его корни равны
ei = n, е2 = -(л + 1). (8'>
Оба канонических интеграла будут содержать в этой точке п и соответствен-
но —(п + 1) в показателе степени. Из положительности п следует, что для
нашей цели пригоден лишь первый из этих интегралов, который может быть
представлен в виде степенного ряда, начинающегося с гп, поскольку он
соответствует большему значению степени п. (Второй, не интересующий нас
интеграл, соответствующий меньшему значению корня определяющего
уравнения, может при разложении содержать логарифмический член,
поскольку разность — (п + 1) — п целочисленна.) Так как ближайшая
особая точка лежит в бесконечности, ряд, соответствующий взятому нами
первому интегралу, везде сходится и представляет собой целую трансцен-
дентную функцию. Мы установили, таким образом, что искомое решение
представляет собой определенную с точностью до несущественного постоян-
ного множителя однозначную целую трансцендентную функцию, соот-
ветствующую при г = 0 показателю степени п.
Теперь нужно исследовать поведение этой функции при стремлении г
к бесконечности по положительной действительной оси. Для этого сделаем
в уравнении (7) подстановку
X = raU, (9)
где а подобрано таким образом, чтобы исключить в уравнении (7) слагаемое,
содержащее множитель . Как нетрудно проверить, величина а при этом
должна равняться или п, или — (п + 1), а уравнение (7) примет форму
« + 2fcL..)№ + ^(£+^u = 0. (7.)
Двум интегралам этого уравнения при г = 0 соответствуют показатели
степени 0 и —2а — 1.
При а = п первый из этих интегралов, а при а = — (п + 1) второй
интеграл будут соответствовать согласно (9) нашей искомой целой транс-
цендентной функции, которая является однозначной. Не теряя общности, мы
можем, следовательно, ограничиться одним из двух значений а. Выберем
значение
а = п. (10)
Решению U при этом будет соответствовать при г = 0 показатель степени,
равный нулю. Уравнение (7') принадлежит к типу уравнений Лапласа,
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
671
общий вид которых такой:
U" + ро + 4) U' + (£о + = 0. (77
В нашем случае входящие сюда постоянные равны
4) = 0, <5Х = 2 (а + 1), е0 = , q = . (11)
Этот тип уравнений сравнительно легко поддается рассмотрению, так как так
называемое преобразование Лапласа, в общем случае не меняющее порядка
уравнения, сводит в данном случае уравнение (7") к уравнению первого
порядка, которое в свою очередь разрешимо в квадратурах. Это позволяет
выразить решение уравнения (7") в виде интеграла на комплексной плос-
кости [224 ]. Я привожу здесь конечный результат*). Выражение
U = [ e2r (z — Ci)’1-1 (z — tg)02-1 dz (12)
L
является решением равнения (7"), если путь интегрирования L выбран
так, чтобы имело место равенство
J d? (z ~ dz = 0 • <13>
L
Константы q, c2, ax, a2 имеют следующие значения : q и c2 представляют
собой корни квадратного уравнения
z2 -f- z 4- е0 — 0,
а ах и а2 определяются формулами
„ ____ ®1 + ^1 С1 „ ________ £1 + ^1 С2
(X- -- . (Хд ------------- ---------- .
С1-С2 ’ 2 с2-сг
(14)
(14')
Таким образом, в частном случае уравнения (7') согласно (11) и (10) имеем
(147
Интегральное представление (12) позволяет не только изучить асимпто-
тическое поведение общей совокупности решений уравнения (7") при г,
стремящемся к бесконечности, но и дает возможность исследовать некоторое
определенное решение, что всегда значительно труднее.
Мы исключим пока тот случай, при котором постоянные ах и а2 равны
действительным целым числам. Это равенство имеет место (причем всегда
одновременно для обеих постоянных) лишь тогда, когда выполняется
условие :
= действительному целому числу. (15)
Таким образом, мы считаем, что равенство (15) не выполняется.
Поведение совокупности решений при стремлении г к бесконечности по
определенному пути (в нашем случае г стремится к бесконечности всегда по
*) См. предыдущее примечание. Теория этого уравнения развита Пуанкаре и Горном
(J. Horn).
672
Э. ШРЕДИНГЕР
положительной вещественной оси) определяется поведением двух линейно
независимых решений, которые получаются при следующих двух особо
подобранных путях интегрирования L и которые мы обозначим через иг и
U2*). По обоим путям интегрирования z выходит из бесконечности и возвра-
щается обратно в таком направлении, что имеет место соотношение
Итегг = 0, (16)
2=со
т. е. действительная часть zr стремится к —оо. Благодаря этому выполняется
условие (13). При этом в одном случае (решение UJ обходится один раз точка
clt а в другом случае (решение U2) — точка с2.
Оба эти решения при достаточно больших положительных действительных
значениях г имеют следующие асимптотические (в смысле Пуанкаре) пред-
ставления :
Uj, — е^Т г"01 (- 1)“* (е2я'а1 - 1) Г (aj (С1 - Сг)^"1,
U2 — ecs г~аг (—1)°2 (е2л1°2 — 1) Г (a^ (ca - cj11*-1,
причем мы ограничились здесь первыми членами асимптотических разло-
жений по возрастающим целым отрицательным степеням. Рассмотрим, далее,
раздельно случаи Е > 0 и Е < 0.
1. Е>0. Прежде всего отметим, что в этом случае равенство (15) авто-
матически не выполняется, так как величина /— 2тЕ является чисто мни-
мой. Согласно (14") чисто мнимыми будут значения сх и с2. Таким образом,
поскольку г вещественно, экспоненциальные функции в формуле (17) явля-
ются ограниченными периодическими функциями. Принимая также значения
a-i и а2, можно из (14") получить, что оба решения Ux и U2 вблизи нуля
пропорциональны г-"-1. То же самое должно иметь место и для исследуе-
мого нами случая целого трансцендентного U, поскольку последнее всегда
может быть составлено из некоторой линейной комбинации иг и U2. Соот-
ношение (9) вместе с (10) показывает, далее, что функция %, т. е. целое
трансцендентное решение исходного уравнения (7), все еще пропорциональна
— вблизи нуля, так как это / можно получить умножением U на гп. Иначе
говоря, имеет место следующее:
Эйлеровское дифференциальное уравнение (5) нашей вариационной задачи
имеет при всех положительных значениях Е решения, которые во всем про-
странстве однозначны, ограничены, непрерывны и стремятся к нулю как
у, все время непрерывно осциллируя. На поверхностном условии (6)мы еще
• должны будем остановится особо.
2. Е < 0. В данном случае заранее не очевидно, что равенство (15) не
имеет места, но мы это все же вначале предположим. Тогда согласно форму-
лам (14") и (17) функция иг неограниченно возрастает при г-> оо и функция
U2, наоборот, экспоненциально стремится к нулю. Исследуемое целое транс-
цендентное U (так же как и /) останется тогда и только тогда ограниченным,
если оно будет совпадать с точностью до численного коэффициента с реше-
нием U2. Это, однако, не имеет места, что можно проверить следующим
образом : выбираем в выражении (12) замкнутый путь интегрирования L,
*) В том случае, когда выполняется равенство (15), по крайней мере один из описан-
ных в тексте путей интегрирования не может быть использован, так как соответствующий
интеграл равняется при этом нулю.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
673
обходящий обе точки сх и с2; этот путь будет действительно замкнутым на
римановой плоскости подынтегрального выражения из-за целочисленности
суммы аг 4- а2; следовательно, условие (13) автоматически выполняется,
после чего легко показать, что интеграл (12) представляет в данном случае
нашу целую трансцендентную функцию U. Этот интеграл в самом деле можно
разложить по положительным степеням г в ряд, который сходится во всяком
случае при достаточно малых г, так что данный интеграл должен являться
решением, совпадающим с U. Итак, решение U представляется с помощью
(12), если за L взять замкнутый путь, обходящий точки сх и с2. Этот замкну-
тый путь можно аддитивно составить из частей рассмотренных ранее путей
интегрирования, соответствующих и U2, с не равными нулю коэффициен-
тами, например 1 и е2л,а>. Таким образом, решение U действительно
нельзя получить из одной функции U2, в пего обязательно должна также
входить функция иг.
Наше целое трансцендентное U не будет, следовательно, при сделанных
предположениях и стремящемся к бесконечности г ограниченным. Не про-
водя пока полного исследования, т. е. не приводя доказательства того, что
примененный способ дает все линейно независимые решения, мы можем
высказать следующее положение :
Для отрицательных Е, не удовлетворяющих условию (15), рассматри-
ваемая вариационная задача не имеет решения.
Нам остается теперь рассмотреть лишь дискретную совокупность отрица-
тельных значений Е, для которых выполняется условие (15). Оба значения,
ах и а2, будут при этом целочисленными. Из двух путей интегрирования,
приводивших нас ранее к фундаментальной системе Z71; U2, первый должен
быть, наверное, изменен, чтобы не получить равного нулю результата. Дело
в том, что величина аг — 1 безусловно положительна, так что точка сх не
является ни точкой разветвления, ни полюсом подынтегрального выражения,
которое в зтой точке имеет обычный нуль. Точка с2 тоже может стать регуляр-
ной, если a2 — 1 не будет отрицательным. В каждом из этих случаев, однако,
можно без труда подобрать два подходящих пути L и даже провести интегри-
рование в замкнутой форме с помощью обычных функций, тем самым впол-
не определив поведение решений.
Пусть, в частности,
—-у^=- = I (/ = 1,2, 3, 4, ...).
кУ-2т£ v
(15')
Тогда согласно (14") имеют место равенства
a-t—l—l + n, «2 — .1 = — 1 + п. (14'")
Рассмотрим раздельно случаи I < п и I > п.
Пусть
a) п. При этом обе точки, с2 и сх, теряют свой сингулярный характер,
благодаря чему появляется возможность использовать их в качестве началь-
ного или конечного пункта пути интегрирования L без нарушения условия
(13). Третьей, удовлетворяющей нашим требованиям, граничной точкой
является отрицательная бесконечность. Формула (12) при любом из путей
интегрирования между двумя из этих трех точек даст решение уравнения,
причем среди этих решений только два будут линейно независимыми, как
это можно легко проверить, вычислив соответствующие интегралы в замкнутой
форме. В частности, целое трансцендентное решение может быть получено
при интегрировании от сх до с2. Без каких-либо вычислений ясно, что этот
интеграл остается регулярным при г = 0. Я это подчеркиваю в связи с тем
43 Вариационные принципы механики
674
Э. ШРЕДИНГЕР
что фактическое вычисление интеграла в данном случае только усложняет
рассмотрение. Наоборот, для выяснения поведения интеграла при стремя-
щихся к бесконечности значениях г удобно провести интегрирование;
при этом оказывается, что ограниченным при г-> оо остается лишь тот из
двух линейно независимых интегралов, который при г = О равен бесконеч-
ности. Таким образом, при I п задача не имеет решения.
б) I п. Тогда согласно формуле (14'") точка q будет нулем, а точка с2
полюсом по меньшей мере первого порядка для подынтегрального выражения.
Два независимых решения могут быть получены здесь следующим образом :
в одном случае используется путь интегрирования L, идущий из точки
z = — со к нулю ради предосторожности с обходом полюса ; другой путь
оканчивается в полюсе. Последний путь приводит к целому трансцендентному
решению, умноженному на г", значение которого мы выписываем, не при-
водя вычислений (напоминаем при этом, что умножение U на г” возвращает
нас к функции у):
/«-х-r-(is>
Это решение является пригодным, поскольку оно остается ограничен-
ным при всех действительных положительных значениях г. Благодаря тому,
что оно экспоненциально исчезает в бесконечности, выполняется также
условие (6). Объединим результаты, полученные для отрицательных зна-
чений Е следующим образом.
При отрицательных Е наша вариационная задача имеет решения тогда
и только тогда, когда значение Е удовлетворяет условию (15). При этом целое
число и, соответствующее номеру используемой в решении шаровой функции,
должно принимать значения, меньшие, чем I, что может быть всегда выпол-
нено, по крайней мере, одним способом. Входящая в решение функция, завися-
щая от г, определяется при этом уравнением (18).
Подсчет числа постоянных в шаровой функции показывает, что найденное
решение содержит при допустимых комбинациях (п, I) ровно 2п 4- 1 про-
извольных постоянных; при заданном значении I число произвольных по-
стоянных равно, таким образом, I2.
Мы тем самым в основном подтвердили выставленные в начале статьи
утверждения о свойствах спектра собственных значений нашей вариацион-
ной задачи, ио доказательство еще нельзя считать полным.
Нужно, во-первых, еще показать полноту всей использованной системы
собственных функций. Этим вопросом в данной статье я заниматься не буду.
Согласно другим исследованиям можно предположить, что мы не пропу-
стили какого-либо собственного значения.
Во-вторых, следует здесь напомнить, что использованные для положи-
тельных значений Е собственные функции не являются действительными
решениями поставленной нами вначале проблемы, поскольку при г->«>
1 0у 1 „
значение у стремится к нулю лишь как —, а значение как -а . Поверхност-
ный интеграл (6) будет поэтому в бесконечности иметь порядок бу. Если
желательно строго получить непрерывный спектр, то при постановке задачи
нужно добавить то условие, что значение бу в бесконечности равно нулю
или, по крайней мере, стремится к постоянной величине, не зависящей от
направления, по которому происходит стремление к бесконечности; в послед-
нем случае поверхностный интеграл (6) обратится в нуль из-за свойств
входящих в решение шаровых функций.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ 675
§ 2. Из условия (15) следует, что
-E,= 2-^z-. (19)
Таким образом, мы получаем известные уровни энергии Бора, соответ-
ствующие бальмеровым термам, если положим введенную по соображениям
размерности величину
К - 2"л • (20)
Тогда будет иметь место соотношение
Здесь I является главным квантовым числом п + 1 аналогично азимуталь-
ному квантовому числу ; при более подробном определении шаровых функ-
ций мы сможем расщепить это число на величины, сопоставленные «эквато-
риальному» и соответственно «полярному» кванту. Эти величины характе-
ризуют здесь систему узловых линий на сфере. «Радиальное квантовое число»
I — п — 1 определяет в свою очередь число «узловых сфер», так как нетрудно
убедиться, что функция /(х) в (18) имеет ровно I — п — 1 положительных
действительных корней. Положительные значения Е соответствуют конти-
нууму гиперболических траекторий, которым можно, в известном смысле,
сопоставить значение радиального квантового числа, равное °о. С этим
согласуется поведение решения при Е > 0, которое, как мы видели, стре-
мится к бесконечности, непрерывно осциллируя.
Представляет еще интерес, что область, внутри которой функция (18)
заметно отличается от нуля, определяется по порядку величины большой осью
соответствующего эллипса. Обратная величина множителя, который входит
у нас в качестве коэффициента перед/- и аргументе безразмерной функции j,
имеет, очевидно, размерность длины, а ее значение равно
К _ КУ l<-l iit
у. 2 in е ,1и'“ -1.Г-//1Г ' / /
где сц — длина полуоси эллипса, соответствующего l-й траектории. Равен-
ство (21) следует из формулы (19) и известного соотношения Е; — — •
Выражение (21) определяет порядок величины искомой области при малых I
и и, так как тогда можно принять, что корни /(х) мало отличаются от еди-
ницы. Это не будет иметь места, когда коэффициенты полиномов становятся
большими числами. Я не могу сейчас рассмотреть вопрос о значениях корней
подробнее, но, по-видимому, все же приведенное утверждение следует счи-
тать приблизительно правильным.
§ 3. Довольно естественно связывать функцию /д с некоторым колеба-
тельным процессом в атоме, в котором реальность электронных траекторий
в последнее время неоднократно подвергалась сомнению. Я сначала тоже
хотел обосновать новое понимание квантовых правил, используя’указанный
сравнительно наглядный путь, но потом предпочел рассмотренный в статье
чисто математический способ, так- как он даст возможность лучше выяснить
все существенные стороны вопрос;!. Существенным .мне кажется то, что
квантовые правила нс вводятся больше как загадочное «требование цело-
численности», а определяются необходимостью ограниченности и однознач-
ности некоторой определенной пространственной функции.
676
Э. ШРЕДИНГЕР
Я не считаю возможным до тех пор, пока не будут успешно рассчитаны
новым способом более сложные задачи, подробнее рассматривать истолко-
вание введенного колебательного процесса. Не исключена возможность, что
подобные расчеты приведут к простому совпадению с выводами обычной
квантовой теории. Например, при рассмотрении по приведенному способу
релятивистской задачи Кеплера, если действовать по указанным вначале
правилам, получается замечательный результат: полуцелые квантовые числа
(радиальное и азимутальное).
Все же может быть позволено сделать несколько замечаний об истолко-
вании приведенных положений. Прежде всего нельзя не упомянуть, что основ-
ным исходным толчком, приведшим к появлению приведенных здесь рассуж-
дений, была диссертация де Бройля*), содержащая много глубоких идей, а
также размышлений о пространственном распределении «фазовых волн»,
которым, как показано де Бройлем, всякий раз соответствует периодическое
или квазипериодическое движение электрона, если только эти волны уклады-
ваются на траектории целое число раз. Главное отличие от теории де Бройля,
в которой говорится о прямолинейно распространяющейся волне, заклю-
чается здесь в том, что мы рассматриваем, если использовать волновую
трактовку, стоячие собственные колебания. Я недавно показал**), что,
рассматривая подобные стоячие собственные колебания и пользуясь
законом де Бройля дисперсии фазовых волн, можно обосновать теорию газов
Эйнштейна. Предыдущее изложение является в свою очередь как бы обобще-
нием рассуждений, приведенных в связи с упомянутой газовой моделью;
Если связывать одну из функций (18) после умножения на шаровую
функцию п-го порядка с некоторым собственным колебанием, то тогда вели-
чина Е должна быть как-то связана с частотой этого процесса. Обычно в
сходных случаях колебательных процессов параметр (чаще всего обозна-
чаемый через Я) пропорционален квадрату частоты. Но в нашем случае
подобный подход привел бы для отрицательных значений Е к мнимым
значениям частоты и, кроме того, интуитивные соображения квантового
теоретика говорят, что здесь должна иметь место пропорциональность зна-
чения Е самой частоте, а не ее квадрату.
Противоречие разрешается следующим образом. Для параметра Е вариа-
ционного соотношения (5) предварительно не установлен какой-либо
нулевой уровень, в особенности потому, что искомая функция у содержит
множителем, кроме функции, куда входит Е, еще функцию от г, к которой
при изменении нулевого уровня прибавляется аддитивная постоянная.
Следовательно, «теоретик колебательных процессов» должен ожидать, что
квадрату частоты будет пропорционально не само Е, а величина, измененная
по сравнению с £ на некоторую постоянную. Пусть эта постоянная очень
велика по сравнению с суммой всех имеющихся отрицательных значений Е
(которые, как следует из формулы (15), конечны]. Тогда соответствующие
частоты будут действительными и их относительно малые изменения дей-
ствительно окажутся приближенно пропорциональными Е. Но именно этого
и требует «интуиция» квантового теоретика, поскольку нулевой уровень
энергии не является фиксированным р5].
Данное истолкование, по которому частота колебания определяется с
помощью соотношения
Р = С'][С~+Е = С'УС + ~=Е+ (22)
*) L. de Broglie, Ann. d. Phys. (10) 3, стр. 22 (1925) и Theses Paris (1924).
*♦) Physik. Zs. (находится в печати).
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
677
где постоянная С много больше всех значений Е, имеет еще то значительное
преимущество, что позволяет разъяснить боровское условие для частот.
Соответственно этому условию частота излучения пропорциональна раз-
ности энергий, т. е. согласно (22) пропорциональна разности между соб-
ственными частотами v гипотетического колебательного процесса. Следова-
тельно, хотя все собственные частоты много больше частот излучения, эти
две величины тесно связаны друг с другом, причем последняя из них явля-
ется как бы глубоким «разностным тоном» собственного колебания, проте-
кающего со значительно большей частотой. То, что при переходе энергии от
одного собственного колебания к другому появляется нечто (по моей трак-
товке, световая волна) с частотой, равной разности частот собственных
колебаний, достаточно понятно; нужно лишь предположить, что световая
волна первоначально связана с биениями, появляющимися всегда при по-
добных переходах в любой точке пространства и что частота света опреде-
ляется числом максимумов, через которые проходит наш колебательный
процесс за секунду.
Может возникнуть мнение, что приведенные выводы основываются на
соотношении (22) в его приближенном виде (после разложения корня),
благодаря чему само условие частот Бора становится, очевидно, также
приближенным. Однако это заключение является ошибочным и будет полно-
стью опровергнуто, если развить релятивистскую теорию, использование
которой необходимо для глубокого понимания вопроса. Очевидно, что боль-
шая аддитивная постоянная С тесно связана с энергией покоя электрона
тс2. В релятивистской теории не потребуется также вторичного независимого
введения постоянной h (которая была уже введена в формуле (20))
в условие частот. Однако свободное от оговорок релятивистское рассмот-
рение, к сожалению, встречает пока определенные трудности, затронутые
выше.
Не требует особых разъяснений то обстоятельство, что представление, по
которому при квантовом переходе энергия переходит из одной колебательной
формы в другую, значительно более удовлетворительно, чем представление о
перескакивающем электроне. Изменение формы колебания всегда может
происходить в пространстве и времени, оно вполне может длиться время,
равное определяемому экспериментально времени процесса излучения
(ср. опыты с Качаловыми лучами В. Вина), так что собственные частоты и
соответственно частота биения изменятся, если на сравнительно короткое
время излучающий атом окажется в электрическом поле. Соответствующий
экспериментальный факт приводил до сих пор, как известно, к большим
теоретическим трудностям; это видно, например, из дискуссии Бора—
Крамерса—Слэтера.
Несмотря на все достигнутые успехи, нельзя все же забывать, что пред-
ставление, по которому при отсутствии излучения атом находится в состо-
янии некоторого колебания с собственной частотой, все еще очень грубо
отражает фактически существующий колебательный процесс. Как известно,
макроскопическая система ведет себя в данном случае совершенно другим
образом, излучая все время смесь частот собственных колебаний. Однако не
следует поспешно обращать особое внимание на этот факт, так как и в
случае отдельного атома не исключена возможность существования сово-
купности собственных колебаний, причем частоты только этих колебаний
совпадают с частотами, к испусканию которых атом способен при определен-
ных условиях. Кроме того, допущение возможности одновременного действи-
тельного излучения одним и тем же атомом целого ряда определенных
спектральных линий не противоречит опыту. Таким образом, вполне можно
считать, что лишь в нормальном состоянии (и приближенно в «метастабиль-
('78 Э. ШРЕДИНГЕР
пых состояниях») атом колеблется с одной частотой и именно по этой причине
не излучает, так как не появляется никаких биений. Возбуждение состоит
в дополнительном появлении еще одной или нескольких частот, благодаря
чему возникают затем биения, вызывающие излучение света.
Можно, во всяком случае, принять, что собственные колебания с одним
и тем же значением частоты возбуждаются одновременно. Кратные собствен-
ные значения соответствуют на языке существующей теории случаям
вырождения. Квантование вырожденной системы связано с произвольным
распределением энергии по колебаниям с одинаковыми собственными зна-
чениями.
Добавление при корректуре 28/П 1926 г.
В случае классической механики консервативной системы можно сформулировать
нашу вариационную задачу изящнее, чем это было здесь сделано, без непосредственной
связи с уравнением Гамильтона, следующим образом [агв]. Пусть T(q, р) — кинетическая
энергия, зависящая от координат и импульсов, V — потенциальная энергия, dr — «рацио-
нально измеренный» элемент объема конфигурационного пространства, т. е. произве-
дение dqlt dq2..dqn, умноженное еще на корень квадратный из дискриминанта квадра-
тичной формы T(q, р) (ср. Гиббс, Статистическая механика). Тогда значение функции
у> должно придавать «интегралу Гамильтона»
+ (23)
(24)
'стационарное значение при дополнительном нормирующем условии
у2 dr — 1 .
Собственные iiiiI4i'iiii>i этой вариацпоппой проблемы, являющиеся, как известно, также
стационарными значениями интеграла (23), и дают согласно нашим предположениям
квантовые уровни энергии.
Относительно формулы (14") следует еще заметить, что величина аг в основном сов-
падает с известным выражением Зоммерфельда —-Д- + }'С (ср. «Atombau», 4 Aufl.,
II А
стр. 775).
Цюрих, Физический институт университета
(поступило 27 января 1926 г.).
Э. ШРЕДИНГЕР
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ [227 ]
(Второе сообщение)*)
§ 1. Аналогия Гамильтона между механикой и оптикой
Прежде чем заниматься решением квантовой задачи о собственных зна-
чениях для новых конкретных систем, мы подробнее осветим общую связь
между дифференциальным уравнением Гамильтона (у. Г.) некоторой механи-
ческой проблемы и «соответствующим» волновым уравнением, т. е. в рассмот-
ренном ранее частном случае связь кеплеровои задачи с "уравнением (5<)
первого сообщения. Данная общая связь пока была лишь кратко выражена
аналитическим образом посредством неясного самого по себе преобразова-
ния (2) и столь же неясного перехода от приравнивания нулю некоторого
выражения к требованию того, чтобы пространственный интеграл от этого
же выражения был стационарным**).
Внутренняя связь между теорией Гамильтона и волновыми процессами
давно известна. Эта связь была ясна уже самому Гамильтону, она даже
лежала в основе его теоретической механики, которую он строил, исходя из
оптики неоднородных сред***). Вариационный принцип Гамильтона может
рассматриваться как принцип Ферма для распространения волн в конфи-
гурационном пространстве (g-простраистве); при этом у. Г. выражает
здесь принцип Гюйгенса для данных воли. В большинстве современных
изложений эти глубокие идеи Гамильтона теряют, к сожалению, свой яркий
наглядный вид и сводятся к значительно более бесцветным аналитическим
соотношениям ****).
*) См. журнал Ann. d. Phys., 1926, 79, стр. 361. Для понимания данной работы пред-
варительное чтение первого сообщения не является необходимым.
♦♦) В этой статье мы в дальнейшем не будем придерживаться данного способа вычисле-
ний. Он должен служить лишь для предварительной ориентировки при установлении
внешней связи волнового уравнения с у. Г. Функция у в действительности не находится
в таком соотношении с функцией действия рассматриваемого движения, как это следует
нз формулы (2) первого сообщения. Напротив, связь между волновым уравнением и вариа-
ционной задачей очень проста: подынтегральное выражение стационарного интеграла
представляет собой функцию Лагранжа волнового процесса.
***)Ср., например, Уиттекер, Аналитическая динамика, Deutsche Ausgabe bei
Springer, 1924, т. 11, стр. 306 и сл.
**»*) ф. Кленн излагает с лета 1891 г. в своих лекциях по механике теорию Якобн,
исходя из квазноптнческнх рассмотрений в неевклидовых пространствах высшего числа
измерений. Ср. F. Klein, Jahresber. d. Deutsch. Math, Ver. 1,1891 и Zs. f. Math. u. Phys.
46, 1901. (Собр. соч., т. Il, стр. 601 и 603.) B> второй заметке Клейн с некоторой укориз-
ной отмечает, что его доклад, сделанный десять лет назад перед собранием естествоиспы-
тателей в Галле, в котором была изложена указанная связь и было подчеркнуто большое
значение оптических работ Гамильтона, «не встретил внимания, которого я ожидал».
Я благодарен проф. Зоммерфельду за дружеское письменное указание на соображения
Ф. Клейна. См. «Atombau», нзд. 4, стр. 803.
680
Э. ШРЕДИНГЕР
Рассмотрим общую задачу классической механики консервативной
сустемы; у, Г. будет в этом случае иметь вид
~эГ + + v(^k) = 0, (1)
где W —функция действия, т. е. интеграл по времени от функции Лагранжа
Т — V, взятый по некоторому пути движения системы и рассматриваемый
как функция конечного положения и времени.
Символы qk обозначают координаты; величина Т, являющаяся кинети-
ческой энергией, представляет собой функцию координат и импульсов (квад-
ратичную форму относительно последних); импульсы, согласно известным
правилам, заменены в уравнении (1) на соответствующие частные произ-
водные . Величина V соответствует потенциальной энергии. При решении
уравнения (1) делается подстановка
W=-Et + S(qk), (2)
после чего уравнение (1) переходит в уравнение
о'>
Буквой Е обозначена первая произвольная константа интегрирования,
являющаяся, как известно, энергией системы. Мы сохранили в уравнении (Г)
функцию W, не заменив ее, как делается обычно, на не зависящую от вре-
мени функцию S. Это, однако, несущественно.
Согласно Герцу смысл уравнения (V) можно выразить очень просто и
наглядно, если рассмотреть конфигурационное пространство (пространство
переменных qk) с введенной в него с помощью кинетической энергии системы
неевклидовой метрикой [228 ]. Пусть Т — кинетическая энергия, рассматри-
ваемая в отличие от предыдущего случая не как функция импульсов, а как
функция скоростей qk; тогда полагаем квадрат линейного элемента ds
равным
ds2 = 2 Т (qk, qk) dt2. (3)
Правая сторона равенства (3) фактически не содержит dt, что видно после
подстановки qk dt = dqk, приводящей к квадратичной форме от dqk.
Введенная метрика (3) определяет известным образом угол между двумя
линейными элементами, дивергенцию и ротор от вектора, градиент и оператор
Лапласа (div grad) от скаляра и т. д., совершенно подобно тому, как это
обычно делается в трехмерном евклидовом пространстве, понятиями которого
вообще можно здесь свободно пользоваться, заменяя лишь все время евкли-
дов линейный элемент на несколько более сложный линейный элемент (3).
Мы таким образом установили, какой неевклидовый смысл следует придавать
в дальнейшем геометрическим образам в q-пространстве.
Одной из важнейших особенностей является здесь то, что при вычислении
нужно тщательно различать ковариантные и контравариантные компоненты
векторов и тензоров. Это приводит, однако, не к большим осложениям, чем,
например, применение косоугольных декартовых координат.
Величины qk являются прототипом контравариантного вектора. Зави-
сящие от qk коэффициенты в форме 2Т имеют ковариантный характер; они
образуют ковариантный фундаментальный тензор. Величина 2Т является
контравариантной формой, соответствующей форме 2Т, так как импульсы
образуют компоненты ковариантного вектора, соответствующего контра-
вариантному вектору qk. Левая сторона уравнения (Г) представляет, следо-
вательно, просто-напросто контравариантную фундаментальную форму, в
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
681
которую в качестве переменных введены величины-^--, являющиеся по сво-
ему смыслу компонентами ковариантного вектора grad W.
Такой же смысл имеет переход в выражении кинетической энергии от
скоростей к импульсам, поскольку ковариантные компоненты можно под-
ставлять только в ковариантную форму, так как иначе не получится имею-
щего смысл выражения, т. е. инварианта.
Уравнение (?) совпадает, таким образом, с условием
(grad IV)2 = 2 (Е - V) (1")
или
| grad WI = ^2(E^V) . (1"').
Это условие можно легко проанализировать. Пусть найдена функция W
(вида (2)), удовлетворяющая условию (!"')• Тогда эту функцию можно в каж-
дом случае наглядно описать при каком-либо определенном значении t, изо-
бразив семейство поверхностей W = const в ^-пространстве и поставив в
соответствие каждой из них определенное значение W.
С одной стороны, как мы сейчас покажем, уравнение (V") дает метод
последовательного построения всех поверхностей постоянного уровня и
метод определения соответствующих
им значений W, если задана какая-
либо одна из поверхностей W — const
и соответствующее ей значение W.
С другой стороны, требующиеся при
подобном построении исходные данные,
а именно: некоторая начальная по-
верхность и значение величины W
могут быть заданы совершенно произ-
вольно, после чего функция, удовле-
творяющая уравнению (1"), может быть
построена двузначным образом. При
этом мы пока считаем время постоянным. Таким образом, рассмотренный
способ построения поверхностей постоянного уровня полностью исчерпывает
содержание дифференциального уравнения, любое решение которого можно
получить, исходя из соответствующим образом выбранной поверхности и
некоторого значения W.
Перейдем теперь к изложенному способу построения. Пусть произвольной
поверхности (см. рисунок) приписано значение функции W, равное IVO. Что-
бы найти поверхность постоянного уровня, соответствующую значению
IVO + dW0, восставляем в каждой точке исходной поверхности перпенди-
куляр и откладываем на нем в положительном направлении (одну сторону
мы заранее уславливаемся считать положительной, а другую отрицательной)
длину
, dW,
ds =
-2 (Е — V)
(4)
Конечные точки перпендикуляров будут заполнять при этом поверхность
IVO + dW0. Продолжая действовать подобным образом в положительном
и отрицательном направлениях, можно последовательно построить все семей-
ство поверхностей постоянного уровня.
Способ построения двузначен, поскольку можно переменить обозначение
положительной и отрицательной сторон на исходной поверхности. Этого,
однако, нельзя сделать на дальнейших этапах построения ни на какой другой
682
Э. ШРЕДИНГЕР
поверхности, так как производные по W должны быть непрерывными. Сверх
того, оба получающихся семейства поверхностей постоянного уровня, оче-
видно, идентичны, и лишь приписанные им значения W изменяются в проти-
воположных направлениях.
Если рассмотреть теперь чрезвычайно простую зависимость от времени t,
то из уравнения (2) следует, что и для какого-либо более позднего (или более
раннего) значения времени t + f распределение значений W будет пред-
ставляться тем же самым семейством поверхностей постоянного уровня,
что и при времени t; нужно лишь всюду заменить значения IV на IV + Ef.
Значения IV, так сказать, сдвигаются по определенному простому закону от
одной поверхности постоянного уровня к другой, причем при положительной
величине Е сдвиг происходит в сторону растущих значений W. Вместо этого
можно также считать, что сдвигаются сами поверхности, причем каждая из
них сохраняет свое значение IV, но принимает форму и положение следующей
поверхности семейства. Закон движения поверхностей определяется тем,
например, что поверхность IVO должна принять ко времени t + A t поло-
жение, занимавшееся в момент t поверхностью IVO + Е dt. Этого можно
достичь согласно формуле (4), сдвигая каждую точку поверхности IVO в
направлении положительной нормали на длину
, Edt
ds = v—г---
1'2 (Е-V)
(5)
Это означает, что поверхности сдвигаются с нормальной скоростью
Л>_ _ _ Е
U ~~ <{t ~ ]f2~(E—~V) ’
которая после задания постоянной Е является функцией только положения
в пространстве.
Теперь очевидно, что нашу систему поверхностей IV = const можно
рассматривать как систему волновых поверхностей поступательного ста-
ционарного волнового движения в ^-пространстве, причем скорость дви-
жения в каждой точке пространства определяется посредством формулы (6).
Дело в том, что наш метод построения можно, очевидно, заменить построе-
нием с помощью элементарных волн Гюйгенса (радиуса ds (5)) и их оги-
бающих. «Коэффициент преломления» обратно пропорционален величине и
(б) и зависит от положения, но не от направления. Таким образом, оптически
^-пространство неоднородно, но изотропно. Элементарные волны являются
сферами, причем сферами, как это следует здесь еще раз подчеркнуть, в
смысле линейного элемента, определяемого формулой (3).
Функция действия IV играет для нашей волновой системы роль фазы;
у. Г. является выражением принципа Гюйгенса. Если сформулировать
принцип Ферма в виде
(6)
О <5 [ ‘ J v) j’ 2J dt ---= 2- d$2Tdf, (7)
р, р, " ь t,
то мы прямо получаем принцип Гамильтона в форме Мопертюи (при инте-
грировании и варьировании имеет место равенство Т + V = Е = const).
«Лучи», т. е. ортогональные траектории волновых поверхностей, являются
также путями движения системы с энергией Е согласно известным урав-
нениям :
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
683
из которых следует, что из каждой частной функции действия можно полу-
чить ряд путей движения системы, подобно тому как ток получается из своего
потенциала скоростей *). (Импульсы рк образуют, попросту говоря, ковари-
антный вектор скорости, причем из формулы (8) следует, что этот вектор
равен градиенту от функции действия.)
Хотя в предыдущих рассуждениях говорится о волновых поверхностях,
скорости распространения и принципе Гюйгенса, по существу рассматри-
вается аналогия не между механикой и волновой оптикой, а аналогия между
механикой и геометрической оптикой. Дело в том, что понятие луча, с кото-
рым главным образом связывается механика, является в основном понятием
геометрической оптики и только в геометрической оптике имеет строгий
смысл. Принцип Ферма также может быть истолкован в рамках геометри-
ческой оптики с использованием понятия о показателе преломления. Кроме
того, система ^-поверхностей, рассматриваемых как волновые поверхности,
значительно слабее связана с механическим движением, поскольку изобра-
жающая механическую систему точка распространяется по лучу не с волновой
скоростью и, а со скоростью, пропорциональной (при постоянном значении Е)
у. Из формулы (3) сразу получается для этой скорости значение
г, = А = fTT = |/2 (Е - V) . (9)
Приведенное утверждение очевидно. Во-первых, из уравнений (8) следует,
что скорость системы тем больше, чем больше grad W, т. е. больше там, где
И'-поверхности сближаются, или, что то же самое, где мало значение //.
Во-вторых, величина W представляет собой, по определению, интеграл по
времени от функции Лагранжа, вследствие чего эта величина изменяется
во время движения (за время dt на (Г — V) dt), так что мы не можем все
время сопоставлять точке, изображающей систему, одни и те же W-поверх-
ности.
Вообще не имеется механических параллелей для таких важнейших
понятий волновой теории, как амплитуда, длина волны, частота, т. е. вообще
для понятий, характеризующих форму волны; ничего нельзя сказать о
самой волновой функции, лишь функции W можно придать для волн смысл
фазы, весьма, впрочем, условно из-за неопределенности формы волны.
Если рассматривать весь приведенный параллелизм понятий только как
любопытный наглядный способ выражения, то отсутствие полной аналогии
не приводит к каким-либо затруднениям и стремление к последовательному
проведению этого параллелизма не имеет смысла. Аналогия сохранялась бы
в данном случае лишь с геометрической, или, самое большее, с весьма упро-
щенной волновой оптикой. Не изменяет положения вещей и то обстоятель-
ство, что в случае света геометрическая оптика представляет лишь весьма
грубое приближение. При попытке последовательного построения оптики
в (/-пространстве следовало бы, таким образом, для сохранения параллелизма
заботиться о том**), чтобы не очень отклониться от предельного случая гео-
*) Ср. в особенности A. Einstein, Verh. d. D. Physik. Ges., 19, стр. 77, 82, 1917.
Изложенное там понимание квантовых условий более всех из имевшихся ранее примы-
кает к предлагаемому в этой статье истолкованию. На цитированную работу ссылается
также и де Бройль.
**) См. для оптического случая работу А. Зоммерфельда и И. Руиге, Ann.
d. Phys. 35, стр. 290, 1911, где (соответственно устному замечанию Дебая) показано, как
можно из уравнения второго порядка и первой степени для волновой функции («волновое
уравнение») строго получить в предельном случае стремящейся к нулю длины волны
уравнение первого порядка и второй степени для фазы («уравнение Гамильтона»).
684
Э. ШРЕДИНГЕР
метрической оптики, выбирая, например, длину волны настолько малой,
чтобы она была много меньше всех размеров, определяющих передвижение
системы. В этом случае подобная попытка не может привести к чему-либо
новому; она лишь излишне усложняет приведенную аналогию.
Так можно было бы подумать с первого взгляда. Однако уже первая
попытка построения полной волновой картины приводит к таким порази-
тельным следствиям, что, наоборот, появляется другое подозрение. Ведь
сейчас известно, что наша классическая механика неверна при малых раз-
мерах и большой кривизне траекторий; не является ли это обстоятельство
вполне аналогичным известной неприменимости геометрической оптики,
т. е. оптики с «бесконечно малой длиной волны», в случае «препятствий» или
«отверстий», сравнимых по размерам с действительной конечной длиной
волны. Быть может, наша классическая механика представляет полную ана-
логию с геометрической оптикой и подобно последней отказывается служить
и не согласуется с действительным положением вещей при размерах и
радиусе кривизны траекторий, приближающихся по величине к некоторой
длине волны, которая теперь принимает в ^-пространстве реальный смысл.
Тогда целесообразно попытаться построить «волновую механику»*) и первым
шагом на этом пути является, конечно, волновое истолкование представ-
лений Гамильтона.
§ 2. «Геометрическая» и «волновая» механика
Сделаем прежде всего предположение, что при построении рассматри-
ваемой аналогии нужно считать введенную выше волновую систему сину-
соидальной волной. Хотя это предположение является простейшим и естест-
венным, однако вследствие его основного значения нужно подчеркнуть неко-
торую вносимую им произвольность. Таким образом, время может входить
1в волновую функцию лишь посредством множителя sin (...), аргумент
которого также линейно зависит от W. Поскольку функция W является
действием, а фаза синуса безразмерна, то коэффициент перед W должен иметь
размерность, обратную размерности действия. Мы примем, что этот коэф-
фициент носит универсальный характер, т. е. не зависит не только от Е,
но и от природы механической системы; обозначим его сразу через
Таким образом получаем зависящий от времени множитель в виде
. (2л W , Л . ( 2л Et , 2л S (qk) . Л
sin I—+ const I — sin I —----1----- - _|_ const I . (10)'
Отсюда для частоты v волны вытекает соотношение
г = (11)
Таким образом, без введения каких-либо искусственных гипотез получается,
что частота волны в ^-пространстве пропорциональна энергии системы**).
Это утверждение, конечно, имеет смысл только лишь, если энергия Е опре-
делена не как в классической механике, с точностью до аддитивной постоян-
ной, а абсолютно. От этой аддитивной постоянной не зависит согласно фор-
мулам (б) и (11) длина волны
Я = — = • . " , (12)
v f2(E-V) V '
*) Ср. A. Einstein, Berl. Вег., 1925.
♦♦) В первом сообщении из-за использования чисто спекулятивных предположений
это равенство получилось лишь приближенно.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
685
поскольку подкоренное выражение является удвоенной кинетической энер-
гией. При предварительном грубом сравнении этой длины волны с размерами
траектории электрона в атоме водорода, полученными с помощью класси-
ческой механики, следует обратить внимание на то, что вследствие формулы
(3) «расстояние» в нашем ^-пространстве имеет размерность не длины, а
длины, умноженной на корень из массы. Такую же размерность имеет 2.
Как легко видеть, при подобном сравнении мы должны делить 2 на раз-
мер траектории (равный а сантиметрам), умноженный на корень из массы
электрона т. Получающееся отношение имеет порядок величины
h
mv а ’
где v—мгновенная скорость электрона (см/сек). Знаменатель mva имеет здесь
порядок величины механического момента количества движения. То, что
эта величина в случае кеплеровых траекторий атомных размеров имеет по
меньшей мере порядок 10~27, следует без всякой квантовой теории из значе-
ний массы и заряда электрона. Таким образом, мы действительно получим
для границы приближенной справедливости классической механики правиль-
ный порядок величины, если будем идентифицировать нашу постоянную h
с планковским квантом действия. Все это имеет смысл лишь предварительной
ориентировки.
Если выразить в формуле (б) Е согласно (11) через v, то получается, что
Зависимость волновой скорости от энергии системы переходит таким образом
в своеобразную зависимость от частоты, т. е. получается закон дисперсии
волн. Этот закон представляет чрезвычайный интерес. Мы указывали в § 1,
что движение волновых поверхностей слабо связано с движением системы
точек, поскольку скорости этих движений не равны и не могут быть равны.
Однако согласно формулам (9), (11) и (б') скорость движения системы v
имеет и для волн очень конкретный смысл. Как легко показать, имеет место
равенство
V “ 7
т. е. скорость движения системы точек равна скорости группы волн, мало
отличающихся по частотам (скорости распространения сигнала). Мы вновь
получили закон, выведенный де Бройлем в его прекрасном исследовании*)
для «фазовых волн»электрона в непосредственной связи с теорией относитель-
ности. Этому исследованию в значительной мере обязано появление моей
работы. Очевидно, что в данном случае дело идет об имеющей большую
общность теореме, которая не является простым следствием теории относи-
тельности, а верна также и для любой консервативной системы, подчиняю-
щейся обычно механике.
Приведенные обстоятельства позволяют значительно теснее, чем это
можно было до сих пор, связать изображение движения точки с распростра-
нением волн. Можно попытаться построить волновую группу, имеющую во
всех направлениях относительно малые размеры. Подобная волновая группа
') L. de Broglie, Ann. de Phys. (10) 3, 1925, стр. 22 (Theses, Paris, 1924).
686
Э. ШРЕДИНГЕР
будет, по-видимому, двигаться по тем >ке законам, что и отдельная изобра-
жающая механическую систему точка. При этом получается, так сказать,
суррогат изображающей точки до тех пор, пока протяженность нашей,
волновой группы пренебрежимо мала по отношению к траектории системы
и ее можно считать точечной. Это будет во всяком случае иметь место лишь
тогда, когда размеры и в особенности радиус кривизны траектории очень
велики по сравнению с длиной волны. Дело в том, что из аналогии с обычной
оптикой непосредственно ясно, что протяженность волновой группы не может
быть в нашем случае меньше длины волны, а должна, наоборот, составлять
во всех измерениях значительное число длин волн для того, чтобы составля-
ющие группы волны могли оставаться приближенно монохроматическими.
Мы вынуждены требовать выполнения этого условия, так как волновая
группа в целом должна распространяться с определенной групповой ско-
ростью и соответствовать механической системе с определенной энергией
(см. равенство (11)).
По-моему, подобные волновые группы можно построить, причем таким
же способом, каким Дебай*) и фон Лауэ**) решили задачу обычной оптики
о нахождении точного аналитического представления для светового конуса
или светового пучка. При этом появляется еще крайне интересная связь с
не рассмотренной в § 1 частью теории Якоби—Гамильтона, а именно с из-
вестным способом получения интегралов уравнений движения посредством
дифференцирования полного интеграла уравнения Гамильтона по постоян-
ным интегрирования. Как мы сейчас увидим, упомянутый только что метод
получения интегралов движения Якоби равносилен в нашем случае следу-
ющему положению : изображающая механическую систему точка совпадает
длительный период с той точкой, где встречается определенный континуум
волн в равной фазе.
Строгое волновое представление «пучка лучей», исходящих из некоторого
источника, с «резко» ограниченным конечным поперечным сечением, полу-
чается в оптике, по Дебаю, следующим образом: берется суперпозиция
континуума плоских волн, каждая из которых заполняет все пространство,
при этом нормали к входящим в суперпозицию волновым поверхностям
изменяются в пределах заданного угла. Вне определенного двойного конуса
волны в результате интерференции почти совершенно уничтожают друг друга,
так что с ограничениями, связанными с дифракцией, получается волновое
представление ограниченного светового пучка. Подобным же образом можно
представить и бесконечно узкий лучевой конус, изменяя лишь волновую
нормаль совокупности плоских волн внутри бесконечно малого телесного
угла. Этим обстоятельством воспользовался фон Лауэ в своей знаменитой
работе о степенях свободы лучевых пучков***). Наконец, вместо того чтобы
использовать, как это до сих пор молчаливо предполагалось, только чисто
монохроматические волны, можно варьировать частоту внутри некоторого
бесконечно малого интервала и посредством соответствующего подбора
амплитуд и фаз ограничить возмущение областью, которая будет сравнитель-
но мала также и в продольном направлении. Таким образом может быть
получено аналитическое представлений «энергетического пакета» сравни-
тельно небольших размеров ; этот пакет будет передвигаться со скоростью
света или в случае дисперсии с групповой скоростью. При этом мгно-
венное положение энергетического пакета (если не касаться его струк-
туры) определяется естественным образом, как та точка пространства, где
*) Р. De bye, Ann. d. Phvs. 30, 1909, стр. 755.
**) 1). v. L a u e, Ann. d. Phys. 44, 1914, стр. 1197 (§ 2).
***) См. предыдущее примечание.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
687
все участвующие в суперпозиции плоские волны встречаются в точно одина-
ковой фазе [229].
Применим теперь приведенные рассуждения к волнам в (/-пространстве.
Выберем в «/-пространстве для некоторого момента времени определенную
точку Р, через которую в момент времени t должен пройти в заданном на-
правлении волновой пакет. Пусть также заданы средняя частота v или сред-
нее значение Е для этого пакета. Подобныб'условйЯ соответствуют задайиго
в случае механической системы исходной конфигурации и компонентов
скорости в начальный момент. (Задание энергии и направления движения
равносильно заданию значений компонентов скорости.)
Чтобы произвести оптическое построение, используем прежде всего
некоторое семейство волновых поверхностей, соответствующее нужной нам.
частоте, т. е. возьмем некоторое решение уравнения Гамильтона (Г) с опре-
деленным значением Е; это решение, которое мы обозначим буквой W,
должно обладать также следующим свойством: нормаль к поверхности по-
стоянного уровня, проходящей в момент t через точку Р, например к поверх-
ности
W = IV,., (14)
должна быть направлена в точке Р в некотором заданном направлении Р.
Этого, однако, еще недостаточно. Мы также должны иметь возможность
бесконечно мало варьировать волновую поверхность, и притом н способами
(п — число степеней свободы в ^-пространстве), так, чтобы нормали к этим
поверхностям в точке Р заполняли (п — 1)-мерный бесконечно малый угол
и частота -у изменялась на бесконечно малом одномерном интервале, причем
также необходимо, чтобы все плоскости из получившегося бесконечно малого
n-мерного континуума в момент t встречались в точке Р со строго одинаковой
фазой. Затем следует определить, где лежит в какой-нибудь другой момент
времени точка, в которой вновь выполняется условие равенства всех фаз
сходящихся к ней волн.
Для того чтобы это можно было сделать, достаточно иметь некоторое
решение W уравнения Гамильтона, содержащее, кроме константы Е, кото-
рую мы временно будем обозначать аг, еще п — 1 существенных постоянных
а2, Оз, а4, ..., ап. Дело в том, что тогда мы сможем, во-первых, придать
постоянной ах заданное значение Е и, во-вторых, будем иметь возможность
определить постоянные а2, а3, ..., ап таким образом, чтобы проходящая
через точку Р поверхность семейства имела в этой точке заданное направ-
ление нормали R. Пусть в дальнейшем постоянные а1; а2, . .. ап имеют как
раз такие значения и пусть формула (14) определяет проходящую через
точку Р в момент t поверхность рассматриваемого семейства. Рассмотрим
затем континуум семейств поверхностей, принадлежащих ограниченному
бесконечно малому интервалу изменения величин ah. Один из членов этого
континуума, т. е. одно семейство поверхностей, определяется посредством
уравнения
... , 8W . . 81V . , ЭИ/ . х
W +-х—daj +-=—da» 4-... +-х—da„ = const (15)
Эс^ 1 da2 Л 1 dan n v 7
при заданных значениях da1( da2, ..., da„ и заданной варьируемой величине
const. Та отдельная поверхность из этого семейства, которая во время t
проходит через точку Р, получится при следующем выборе величины cons! :
W + Tai dar + . .. + -ga- dan - U 0 + [ 8ai J dar + .. . -r (j-g—JQ da„ , (15 )
688
Э. ШРЕДИНГЕР
( dW A к
где через и т. д. обозначены постоянные, которые получаются после
подстановки в соответствующие производные координат точки Р и времени t
, , А
(последнее фактически входит, впрочем, лишь в -^-1 •
Плоскости (15'), соответствующие всем возможным совокупностям зна-
чений (/аь da2,.,., dan) образуют в свою очередь некоторое семейство.
В момент t все эти плоскости проходят через точку Р, их нормали заполняют
малый (п—1)-мерный пространственный угол, кроме того, параметр Е изме-
няется у них в некоторой малой области. Это семейство (15') составлено таким
образом, что каждая из входящих в него поверхностей является также
членом какого-нибудь семейства (15), причем именно тем членом, который в
момент t проходит через точку Р.
Примем теперь, что фазовые углы волновых функций, принадлежащих
семействам (15), совпадают с фазовыми углами, соответствующими поверх-
ностям, входящим одновременно в (15'), т. е. совпадают в момент t в точке Р.
Зададим теперь вопрос : найдется ли при любом значении времени такая
точка, в которой будут пересекаться все поверхности семейства (15) и в
которой вследствие этого все волновые.функции, соответствующие семей-
ствам (15), будут совпадать по фазе? Ответ будет следующий : такая точка,
в которой совпадают фазы, найдется, однако эта точка не будет общей
точкой пересечения поверхностей семейства (15'), так как такой точки в
каждый момент времени больше не существует. Более того, точки с одина-
ковой фазой оказываются такими, что с изменением времени те поверх-
ности семейства (15), которые входят одновременно в это семейство,
непрерывно меняются.
Это можно установить следующим образом. В общей точке пересечения
всех составляющих семейства (15') в некоторый момент времени должны
одновременно иметь место равенства
0 ’ Эа! ( Эа1 Jo ’ Эа2 I Эа2 Jo ’ ’ ’ ’ ’ I 8ап Jo ’ '
так как величины d аг внутри некоторой малой области произвольны.
В этих п + 1 равенствах правые части являются постоянными, а левые —
функциями п + 1 величин qlt q2, ..qn, t. Равенства (16) удовлетворяются
системой начальных значений, т. е. координатами точки Р в исходный момент
времени t. При любом другом значении t эта система окажется переопреде-
ленной.’
Можно, однако, поступить следующим образом. Откинув сначала первое
равенство W = Wo, определим с помощью п остальных равенств координаты
qk как функции времени и постоянных. Точку с этими координатами обозна-
чим Q. В ней первое равенство, очевидно, не будет выполнено, наоборот,
левая сторона этого равенства будет отличаться от правой на некоторую
величину. Если вспомнить происхождение соотношений (16) из условия
(15'), то из сказанного становится очевидным, что Q представляет собой
общую точку не системы поверхностей (15'), а некоторой другой системы,
получающейся после изменения правой стороны (15') на одну и ту же для
всех поверхностей величину. Обозначим полученную таким образом систему
поверхностей (15"). Для нее точка Q будет общей точкой. Как это было
ранее отмечено, в (15") войдут из семейства (15) уже не те поверхности,
которые входили в (15'). Эта замена поверхностей в (15') происходит вслед-
ствие изменения постоянной const в равенстве (15) на одинаковую величину
для всех составляющих. Таким образом, фаза у всех составляющих также
изменяется на одну и ту же величину. Поэтому члены нового семейства,
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
689
которое мы обозначили (15"), будут, пересекаясь в точке Q, так же как и
члены семейства (15'), совпадать по фазе. Это означает также, что точка Q,
определенная с помощью п уравнений
9IV
9at
Э1У
9an
9lV )
9an Jo
(17)
/ 91V
I 9«i Jo ’
как функция времени, будет всегда оставаться точкой одинаковой фазы всего
семейства волновых поверхностей (15).
Из п поверхностей, пересечение которых определяет согласно (17) точку Q,
все, кроме первой, закреплены (только первое из равенств (17) содержит
время). Линия пересечения п — 1 закрепленных поверхностей определяет
траекторию точки Q. Как нетрудно показать, эта линия пересечения является
ортогональной траекторией семейства поверхностей W = const. Функция
W, по исходному предположению, удовлетворяет уравнению Гамильтона (Г)
тождественно по alr a2, . .., ап. Если продифференцировать теперь уравне-
ние Гамильтона по ак (к = 2,3,..., п), то станет видно, что нормаль к
9VV . .
поверхности = const перпендикулярна в каждой точке поверхности к
нормали, проходящей через ту же точку поверхности W = const, т. е. каждая
из этих двух поверхностей содержит нормаль другой поверхности. Если
линия пересечения п — 1 неподвижных поверхностей (17) не разветвляется,
что наверняка имеет место в общем случае, то каждый линейный элемент этой
линии должен совпадать как единственный общий элемент всех п — 1
поверхностей, с нормалью к проходящей через данную точку lV-поверхности,
т. е. эта линия пересечения действительно будет ортогональной траекторией
семейства наших lV-поверхностей, что и требовалось доказать.
Довольно длинные рассуждения, приведшие нас к равенствам (17), могут
быть высказаны кратко, так сказать, стенографически, следующим обра-
зом: с точностью до универсальной константы ~ функция W означает фазу
волновой функции. Если теперь имеется не одна, а целое непрерывное много-
образие волновых систем, соответствующих различным непрерывно изменя-
9IV ,
ющимся значениям параметра а„ то уравнения = const являются вы*
ражением того, что все бесконечно мало отличающиеся члены этого много-
образия (волновые системы) имеют совпадающие значения фазы. Эти сравне-
ния определяют, таким образом, геометрическое место точек одинаковой фазы.
Если число уравнений достаточно велико, то это геометрическое место сжи-
мается в точку: положение этой точки одинаковой фазы определяется урав-
нениями как функция времени.
Поскольку система (17) совпадает с известной второй системой равенств
Якоби, то мы показали, таким образом, что точка совпадающих фаз некото-
рого п-па раметрического инфинитезимального многообразия волновых систем
двигается по тем же законам, что и точка, изображающая механическую
систему.
Я считаю, далее, даже при специальном выборе амплитуд и формы вол-
новых поверхностей очень сложной задачей строгое доказательство того, что
суперпозиция этих волновых систем приводит к наличию заметного возму-
щения лишь в сравнительно малой окрестности точки совпадающих фаз,
в то время как во всех остальных точках интерференция приводит к от-
сутствию заметных возмущений. Я лишь выставлю соответствующую физи-
ческую гипотезу, не занимаясь только что поставленной задачей, которую
имеет смысл решать лишь после того, как эта гипотеза будет оправдана
и ее применения потребуют тщательного анализа.
44 Ваоиаиионные поиниипы механики
690
Э. ШРЕДИНГЕР
Наоборот, можно быть совершенно уверенным в том, что линейные раз-
меры области, в которой заключено возмущение, составляют во всех направ-
лениях еще значительное число длин волн. Это очевидно, во-первых, потому,
что при удалении от точки совпадающих фаз на расстояние, равное неболь-
шому числу длин волн, совпадение фаз почти не нарушится и условия интер-
ференции почти не изменятся. Во-вторых, достаточно учесть, что данное
условие выполняется в трехмерном евклидовом случае обычной оптики,
чтобы убедиться в том, что это имеет место в общем случае.
Я утверждаю теперь с большой уверенностью следующее:
Действительное механическое явление следует понимать или изобра-
жать как волновой процесс в ^-пространстве, а не как движение изображаю-
щей точки в этом пространстве. Рассмотрение движения изображающей
точки, составляющее предмет классической механики, является лишь при-
ближенным способом изучения поведения системы и может быть оправдано
лишь подобно тому, как в некоторых случаях оправдывается применение
лучевой или геометрической оптики для изучения действительных волновых
оптических процессов. Макроскопический механический процесс должен
изображаться как волновой сигнал описанного выше вида, который с
достаточным приближением может считаться точечным в сравнении с гео-
метрической структурой траектории. Как мы видели, для подобного сигнала
или группы волн действительно выполняются точно те же законы движения,
что и устанавливаемые классической механикой законы движения изобра-
жающей систему точки. Подобный способ рассмотрения теряет, однако,
всякий смысл, если размеры траектории не очень велики по сравнению с
длиной волны или даже сравнимы с ней. В этом случае следует перейти к
строгому волновому рассмотрению, т. е. следует изображать многообразие
возможных процессов, исходя из волнового уравнения, а не из основных
уравнений механики, которые для объяснения сущности микроструктуры
механического движения столь же непригодны, как и геометрическая оптика
для объяснения явлений дифракции.
Поскольку все же известное истолкование этой микроструктуры, конечно,
при дополнительных весьма искусственных предположениях, может быть
получено с помощью классической механики (причем имеются значительные
практические достижения), то мне кажется особенно знаменательным, что
подобное истолкование (я имею в виду квантовую теорию в форме, пред-
ложенной Зоммерфельдом, Шварцшильдом, Эпштейном и некоторыми дру-
гими) находится в теснейшей связи с уравнением Гамильтона и теорией
Гамильтона—Якоби, т. е. с той формой классической механики, которая уже
содержит отчетливое указание на истинный волновой характер движения.
Уравнение Гамильтона соответствует как раз принципу Гюйгенса (в его
старой наивной, а не в строгой, приданной ему Кирхгофом форме). И по-
добно тому, как последний принцип, дополненный совершенно непонятными
с точки зрения геометрической оптики правилами (правило зон Френеля)
уже в значительной мере разъясняет явления дифракции, можно в некоторой
мере уяснить, исходя из теории функции действия, происходящие в атоме
процессы. Напротив, можно запутаться в неразрешимых противоречиях,
если пытаться, как это кажется естественным, полностью удержать и для
атомных процессов понятие траектории системы; подобно этому бессмыс-
ленно, как известно, подробно изучать в области дифракционных явлений
движение светового луча.
Представим себе следующее. Я при этом не собираюсь еще давать изо-
бражение действительного положения вещей, которое полностью не может
быть получено из имеющихся исходных положений без исследования самого
волнового уравнения ; я предполагаю предложить лишь чисто качествен-
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
691
ную иллюстрацию. Итак, представим себе группу волн с описанными выше
свойствами, движущуюся по какому-либо малому и, например, замкнутому
«пути», размеры которого сравнимы с длиной волны и, тем самым, меньше
размеров рассматриваемой группы волн. Как очевидно, «путь системы), в
смысле классической механики являющийся траекторией точки совпада-
ющих фаз, не будет при этом как-либо выделен, поскольку вокруг такой
точки имеется еще целый континуум точек, в которых также имеет место
почти полное совпадение фаз и которые описывают совершенно другие
«пути». Иначе говоря : волновая группа заполняет сразу не только всю
траекторию, но и достаточно большую часть соседнего с этой траекторией
пространства.
В этом смысле я истолковываю «фазовые волны», сопровождающие согла-
сно де Бройлю движущийся электрон; в этом же смысле не имеет какого-
либо особого значения, во всяком случае в атоме, траектория электрона и тем
более его положение на этой траектории. Подобным же образом я истолко-
вываю получающее все большее и большее признание утверждение о том,
что, во-первых, фаза движущегося в атоме электрона не имеет реального
смысла; что, во-вторых, никогда нельзя приписывать электрону в некоторый
определенный момент времени положения на определенной, выделенной
квантовыми условиями квантовой траектории; что, в-третьих, истиннее
законы квантовой механики состоят не в предписывании правил для отдель-
ных траекторий, а что эти законы связывают в действительности с помощью
уравнений все многообразие траекторий некоторой системы, так что, оче-
видно, между различными траекториями существует известное взаимодей-
ствие *).
Понятно, что тщательный анализ экспериментов должен подтвердить
подобные утверждения, если только на экспериментальные данные действи-
тельно влияет, как мы это считаем, указанная структура движения. Из при-
веденных нами утверждений следует невозможность последовательного
истолкования понятий: «положение электрона» и «траектория электрона»;
если все же попытаться сохранить зти понятия, то они неизбежно окажутся
противоречивыми. Это противоречие настолько резко, что возникает сомне-
ние, может ли вообще быть понята сущность движения в атоме с помощью
пространственно-временной формы мышления. С философской точки зрения,
я считаю решение вопроса в подобном духе равносильным полному пора-
жению, так как мы в действительности не можем изменить своих методов
мышления и все, что не познаваемо с помощью этих методов, не может быть
понято вообще. Подобные случаи, возможно, существуют, но я не верю в то,
что к ним относится и проблема структуры атома. С нашей точки зрения, нет
никаких оснований для подобных сомнений, хотя, или лучше сказать
потому, что их причина вполне понятна. Подобным образом могбытакже
потерпеть крушение сторонник геометрической оптики, подходя в своих
опытах к явлениям дифракции и используя понятие луча, оправданное
макроскопической оптикой ; этот оптик мог бы в конце концов тоже прийти
к мысли, что законы геометрии неприменимы к явлениям дифракции, по-
скольку считаемые им прямыми и независимыми друг от друга световые лучи
при этих явлениях каждый раз замечательным образом закручиваются в
однородной среде и заметно влияют друг на друга. Я считаю, что здесь имеет
место очень тесная аналогия. Даже для необъяснимых закручиваний в атоме
эта аналогия сохраняет силу — вспомним о «внемеханическом принуждении»,
придуманном для объяснения аномального эффекта Зеемана.
*) Ср. в особенности цитируемые в дальнейшем работы Гейзенберга, Борна, Иордана,
Дирака, а также статью Н. Бора (Die Naturwissenschaften, Januar 1926).
44*
692
Э. ШРЕДИНГЕР
Как действовать при волновом построении механики в тех случаях,
когда резко проявляется волновой характер процессов? Следует исходить
не из основных уравнений механики, а из волнового уравнения в (/-простран-
ству и затем рассматривать многообразие определяемых этим уравнением
процессов. В этом сообщении волновое уравнение не было до сих пор явно
использовано, даже его вид еще не установлен. Некоторые данные для уста-
новления волнового уравнения дает содержащаяся в формулах (б) и (б')
зависимость волновой скорости от параметра механической энергии или
частоты, но, очевидно, что только с помощью этих данных нельзя однозначно
установить вид волнового уравнения. Для простоты будем сначала считать,
хотя это вообще не очевидно, что наше уравнение второго порядка. Полагаем
затем, что для волновой функции у имеет место уравнение
div grad — -1-^ = 0, (18)
выполняющееся для процессов, зависимость которых от времени опреде-
ляется множителем е2л,,,(. Это означает также, что вследствие формул (б),
(б') и (11) имеет место уравнение
div grad у> -|- (Л v — V) = 0, (18')
или
div grad (Е - У)у, = О. (18")
Дифференциальные операции следует здесь, разумеется, понимать в связи
с определением линейного элемента (3). Однако даже при предположении,
что Должен иметь место второй порядок, приведенное уравнение не является
единственным совместным с формулой (6); возможны обобщения, в которых
div grad ip заменяется выражением
grad^ , (19)
где / может быть любой функцией qk, зависящей также приемлемым образом
от Е, от V (qk) и от коэффициентов линейного элемента (3) (можно, например,
представить себе, что f = и). Мы снова здесь руководствовались только стрем-
лением к простоте; при этом не исключено, что были сделаны ошибочные
выводы *).
Переход к использованию дифференциального уравнения в частных
производных вместо основных уравнений динамики в случае атомных проб-
лем кажется сначала чрезвычайно неприятным из-за огромного количества
решений, которыми обладает это уравнение. Уже классическая механика
приводила не к одному решению уравнений, а к целому обширному мно-
жеству решений, составляющему непрерывное семейство, в то время как,
согласно опыту, в действительности может реализоваться лишь прерывное
множество этих решений. Задача квантовой теории по господствующему
сейчас мнению заключается как раз в том, чтобы с помощью некоторых
«квантовых условий» выделить из непрерывного семейства решений класси-
*) Введение функции / (qk) обозначает, что от точки к точке изменяется не только
«плотность», но и «упругость».
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
693
ческой механики дискретное семейство траекторий, соответствующих дей-
ствительно возможным движениям. Кажется бесполезным искать выход из
создавшегося положения в указанном нами направлении, поскольку сначала
при подобном подходе мощность множества решений не только не умень-
шается, но даже увеличивается.
Однако ведь и задачи классической динамики могут быть сведены к
дифференциальному уравнению в частных производных, а именно к уравне-
нию Гамильтона. При этом множество решений подобной задачи вовсе не
соответствует множеству решений у. Г. Любой «полный» интеграл у. Г.
уже полностью решает механическую проблему, каждый другой полный
интеграл приводит к тем же траекториям, множество которых лишь по-
иному составлено.
Что касается опасений, возникающих в связи с выбором уравнения (18)
в качестве основного положения атомной механики, то ведь я нигде не
утверждал, что к этому уравнению не должны быть добавлены еще и другие
дополнительные положения. Однако эти дополнительные условия будут,
по-видимому, обладать не столь неожиданным и непонятным характером,
как теперешние «квантовые правила»; даже, наоборот, их вид типичен для
физических задач, пользующихся уравнениями в частных производных (име-
ются в виду начальные и граничные условия). Эти условия не будут ни в
какой мере аналогичны квантовым правилам, так как квантовые условия во
всех случаях классической динамики, которые я до сих пор исследовал,
заключаются в самом уравнении (18). Данное уравнение само выделяет в
известных случаях, причем как раз тогда, когда это также следует из опыта,
некоторые определенные частоты или уровни энергии, как единственно воз-
можные при стационарных процессах; при этом не предъявляются ни-
какие дополнительные требования, кроме того, физически почти очевидного
условия, что функция у; должна быть в конфигурационном пространстве
однозначной, ограниченной и непрерывной.
Высказанное опасение, таким образом, не оправдывается, по крайней мере
в случай уровней энергии или, осторожней говоря, в случае частот (так как
нельзя забывать, что остается неясным, как следует истолковывать «энергию
колебаний», поскольку лишь в случае одного тела можно говорить о чем-то,
что поддается истолкованию как колебания в действительном трехмерном
пространстве). Определение квантовых уровней не разбивается больше на
два, по существу различных, этапа, а именно: 1) на нахождение всех динами-
чески возможных траекторий и 2) на отбрасывание большинства полученных
на первом этапе решений с выделением некоторых немногих, удовлетворя-
ющих специальным требованиям; напротив, квантовые уровни определяются
теперь сразу как собственные значения уравнения (18), при которых выполня-
ются введенные выше естественные граничные условия.
Пока я с достоверностью не могу судить о том, получится ли подобным
образом аналитическое объяснение и более сложных случаев. Я могу это
только предполагать. Большинству исследователей, конечно, кажется, что при
описанном выше делящемся на этапы методе первый этап дает решение более
сложной проблемы, чем это собственно требуется для получения оконча-
тельного результата: получения выражения для энергии, имеющего обычно
вид очень простой рациональной функции от квантовых чисел. Уже приме-
нение метода Гамильтона—Якоби приводит, как известно, к большим
упрощениям [230 ], причем отпадает необходимость в фактическом решении
механических уравнений. Вместо того чтобы брать интегралы, представля-
ющие импульсы с переменным верхним пределом, достаточно их интегри-
ровать по замкнутому в комплексной плоскости пути, что представляет
значительно меньше труда. Кроме того, если действительно известен полный
694
Э. ШРЕДИНГЕР
интеграл уравнения Гамильтона, т. е. если он выражен в виде квадратур, то
в принципе может быть получено решение механической проблемы при
любых начальных условиях. При нахождении собственных значений диффе-
ренциального уравнения обычно, особенно в конкретных задачах, получаю^
решение сначала без учета граничных условий и условий устойчивости и
лишь затем, исходя из явного вида решения, выбирают значения параметров,
при которых названные условия должны выполняться. Примером подобного
подхода может служить наше первое сообщение. На указанном примере
видно также, что, как это характерно вообще для задач о собственных
значениях, решение, имеющее в общем случае крайне громоздкий аналити-
ческий вид (формула (12) цитируемой работы), значительно упрощается для
собственных значений, соответствующих «естественным граничными услови-
ям». Я недостаточно знаком с тем, разработаны ли уже сейчас прямые методы
вычисления собственных значений, подобно тому, как это сделано для
выяснения распределения собственных значений большого номера. По-
следний предельный случай не представляет здесь прямого интереса, по-
скольку он соответствует классической, макроскопической механике. Для
спектроскопии и атомной физики нужны как раз первые 5 или 10 собствен-
ных значений; даже нахождение лишь одного, первого из них, было бы
большим достижением, поскольку тем самым был бы определен потенциал
ионизации. Сведение проблемы собственных значений к задаче на экстремум
без непосредственного использования дифференциального уравнения при-
водит к отчетливому изложению, и, по-моему, вероятно, что будут найдены
по крайней мере прибилженные методы, основанные на подобном сведении,
поскольку в них имеется настоятельная необходимость. По меньшей мере,
в отдельных случаях должно быть возможным исследование того, удовле-
творяют ли задаче те собственные значения, численные величины которых
получены с большой точностью спектроскопически.
Я не Ajory здесь обойти молчанием то обстоятельство, что сейчас делаются
попытки устранения трудностей квантовой теории со стороны Гейзенберга,
Борна, Иордана и некоторых других выдающихся ученых*), причем благо-
даря значительности достигнутых успехов нельзя сомневаться в том, что
полученные результаты содержат по крайней мере известную долю истины
[231]. Как мы уже отмечали, особенно близок по тенденции к данной
работе метод Гейзенберга. Однако по применяемым методам предлагаемая
попытка решения проблемы настолько отлична от подхода Гейзенберга,
что мне пока не удалось найти звено, связующее эти два способа. Я совер-
шенно уверен в том, что обе эти попытки не только не будут противоречить
друг другу, но даже, наоборот, вследствие полного различия исходных
положения и методов окажутся взаимно дополняющими. Сила гейзен-
берговской программы заключается в том, что она обещает вычислить
интенсивности линий, в то время как мы к этому вопросу пока совершенно
не подходили. Сила же предложенного в данной работе метода заключается,
как я могу судить, в использовании руководящего физического представ-
ления, согласно которому микроскопические и макроскопические явления
связаны друг с другом, причем разъясняется, почему при истолковании
каждого случая требуются внешне различные приемы. Мне лично особенно
нравится приведенное в конце предыдущей статьи истолкование излучае-
мых частот как «биений», причем я думаю, что таким образом будет получено
также наглядное истолкование формул для интенсивности.
*) W. Heisenberg, Zs. f. Phys. 33, стр. 879 (1925); M. Born und P. Jordan,
ibid. 34, стр. 858 (1925); M. Born, W. Heisenberg und P. Jordan, ebendort
35, стр. 557 (1926); P. Dirac, Proc. Roy. Soc., London 109, стр. 642 (1925).
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
695
§ 3. Примеры
Мы собираемся здесь добавить к рассмотренной в предыдущем сообще-
нии кеплеровой задаче несколько других примеров. При этом взяты лишь-
простейшие случаи, поскольку мы пока ограничиваемся классической ме-
ханикой и не вводим магнитного поля*).
1. Планковский осциллятор. Вопросы вырождения
Рассмотрим прежде всего одномерный осциллятор. Пусть координата q
будет отклонением, умноженным на корень квадратный из массы. Тогда оба
выражения кинетической энергии будут иметь вид
т=у?2’ Т==т/’2- (2°)
Потенциальная энергия будет равна
V(q) = 2iWoq*, (21)
где ^ — собственная частота в механическом смысле. Уравнение (18) в этом
случае примет форму :
+ т (£ - 2 л2”2о?2) V- = 0 • (22)
Положим для сокращения
8я2Е , 16 rfi г’
а = —« —, b = —, (23)
тогда вместо уравнения (22) получится
-^- + (a-bq2)ip = 0. (22')
Введем в качестве независимой переменной величину
x=qfr, <24>
после чего получаем
-^+(#-ф=0- (22’’
Собственные значения и собственные функции этого уравнения известны**).
Собственные значения в используемых обозначениях равны
^=1,3,5,...,(2п + 1)... (25)
Собственными функциями являются ортогональные функции Эрмита:
е“тН„(х), (26)
*) В релятивистской механике, а также при учете магнитного поля у. Г. становится
сложнее. В случае отдельного электрона согласно у. Г. разность четырехмерного градиента
функции действия и некоторого заданного вектора (четырехмериого потенциала) равна
постоянной величине. Волновое истолкование этого положения довольно затруднительно.
**) Ср. С о u г a n t — Hilbert, Methoden der mathematischen Physik, I, Berlin,
bei Springer (1924), V, § 9, стр. 261, уравнение 43 и далее, II, § 10, 4, стр. 76.
696
Э. ШРЕДИНГЕР
причем п-й полином Эрмита Нп(х) может быть определен как
= (27)
или в явном виде как
Нп (х) = (2 х)п - -(rc"0 (2 х)"-2 + ”(n-.1H”_z_2)(n-3) (2 х)”“4 - ... (27')
Первые из этих полиномов равны:
Н0(х)=1, Н1(х) = 2х, Н2(х) = 4х2 — 2 , Н3 (х) = 8х3 - 12х,
Н4(х)= 1бх4-48х2+12 ... (27")
Рассматривая сначала собственные значения, согласно равенствам (25) и
(23) получаем
En = ^±±hv0, п = 0, 1,2,3, ... (25')
В качестве квантовых уровней получаются, таким образом, так называемые
«полуцелые» кратные «энергетического кванта», характерного для осцилля-
тора, т. е. нечетные кратные величины —1 Расстояния между уровнями,
определяющие излучение, получаются такими же, что и в существующей
теории. Замечательным образом наши квантовые уровни точно равны
уровням, полученным по теории Гейзенберга! Для теории теплоемкостей
полученное отличие от существующих теорий имеет известное значение, в
особенности тогда, когда из-за теплового расширения изменяется собствен-
ная частота v0. Формально при этом дело идет о старом вопросе нулевой
энергии, вставшем уже ранее в связи с дилеммой: какое из истолкований
планковской теории, первое или второе, считать правильным. Дополнитель-
„ tlVn
ныи член -у- изменяет также закон границ спектральных полос.
Вид собственных функций (26), если вновь ввести переменную q, будет
следующий:
_ 2яа да , .--х
yn(q) = e h Нп2лЛ^1. (26')
Рассмотрение формулы (27") показывает, что первая собственная функция
представляет собой гауссовский «закон распределения вероятностей», вторая
собственная функция в начале координат обращается в нуль и совпадает
при положительных х с двумерным максвелловым законом распределения
по скоростям, который продолжается в сторону отрицательных х нечетным
образом. Третья собственная функция вновь является четной, кроме того,
она отрицательна в начале координат и имеет два симметричных нуля в
точках ± и т. д. Качественное поведение остальных функций легко
поддается рассмотрению. При этом следует заметить, что корни каждого
последующего полинома разделяют корни предыдущего. Из формулы (26)
следует, что характеристические точки собственных функций, как, например,
полуширина (для п — 0), нули, максимумы, лежат преимущественно в об-
ласти, доступной и для классического осциллятора, поскольку, как легко
получить, классическая амплитуда п-го колебания равна
УДи _ 1 1/ fi 11 2 п + 1
2 л v0 2 я I v0 у 2
(28)
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
697
Однако точное значение абсциссы классической точки поворота не соот-
ветствует какой-либо особенности в поведении собственной функции, как
это можно было бы предположить, так как точки поворота имеют для фазо-
вых волн тот смысл, что в них квадрат скорости распространения стано-
вится бесконечным, а при еще большем отклонении отрицательным. В диффе-
ренциальном уравнении (22) классической точке поворота соответствует
лишь обращение в нуль коэффициента при у, что не приводит к появлению
какой-либо сингулярности.
Я должен здесь отметить, что подобное обращение в нуль коэффициента
при у и появление мнимых значений скорости распространения имеют место
и в общем случае, а не только для осциллятора. Это — как раз аналитиче-
ская причина того, что посредством задания одного условия ограниченности
искомой функции выделяются точные собственные значения. Рассмотрим
вопрос подробнее. Волновое уравнение с вещественной скоростью распрост-
ранения, как известно, означает следующее: чем меньше значение функции в
какой-либо точке среднего значения в окрестности этой точки, тем быстрее
возрастает значение функции, и наоборот. Тем самым в данном случае, ана-
логично более наглядному сходному результату для уравнения тепло-
проводности, с течением времени происходит сглаживание и невозможен
неограниченный рост функции. Волновое уравнение с мнимой скоростью
распространения означает как раз обратное: значения функции, большие,
чем ее среднее значение в окрестности рассматриваемой точки, ускоренно
возрастают (а убывают замедленно). Таким образом ясно, что удовлетво-
ряющая этому уравнению функция легко может оказаться неограниченно
возрастающей. Чтобы избежать подобного роста, приходится использо-
вать значительные ограничения, что уже приводит к точным собствен-
ным значениям. В самом деле, уже на рассмотренном в первом сооб-
щении примере видно, что требование существования точных собственных
значений становится сразу невыполнимым, если только выбрать там вели-
чину Е положительной, благодаря чему становится действительной во всем
пространстве волновая скорость распространения.
Вернемся после этого отступления к осциллятору и выясним вопрос,
что изменится, если у нашего осциллятора будет не одна, а две или более
степени свободы (пространственный осциллятор, твердое тело). Если каждой
координате соответствуют различные механические собственные частоты (зна-
чения v0), то все останется по-прежнему. При этом достаточно представить
у> в виде произведения функций от каждой из координат, чтобы вся проблема
распалась на столько же задач рассмотренного типа, сколько имеется
координат. Собственные функции будут произведением ортогональных
функций Эрмита, собственные значения всей задачи будут суммами соб-
ственных значений, полученных для каждого измерения, во всех возможных
сочетаниях. Ни одно собственное значение (всей системы) не будет кратным,
если считать, что никакие из значений т0 не находятся в рациональном
отношении.
Если же, наоборот, последнее имеет место, то указанный метод рассмот-
рения, хотя и останется возможным, но уже, наверное, не будет единствен-
ным. Появятся кратные собственные значения, и рассмотренное выше «раз-
деление» может быть также произведено и в других системах координат,
например в случае однородного трехмерного осциллятора, в пространствен-
ных полярных координатах*). Получающиеся собственные значения будут,
*) При этом зависимость от радиуса г будет определяться уравнением, которое следует
рассматривать с помощью метода, совершенно подобного примененному в первом сооб-
щении для исследования кеплеровой задачи. Одномерный осциллятор, между прочим,-
698
Э. ШРЕДИНГЕР
однако, в каждом случае точно одними и теми же уже потому, что имеется
доказательство «полноты» каждой из этих систем собственных функций.
Нетрудно увидеть при этом полную аналогию с известными соотношениями,
которые в существующей квантовой теории встречаются в случае вырожде-
ния. Лишь в одном пункте имеется формальное различие, не являющееся,
однако, неприятным. Если применить квантовые условия Зоммерфельда—
Эйнштейна, пренебрегая возможным вырождением, то хотя и получаются
такие же энергетические уровни, тем не менее допустимые траектории
оказываются различными, в зависимости от различного выбора системы
координат. В нашем случае это не имеет места. Правда, мы приходим к
совершенно различным системам собственных функций, если, например,
решать задачу о колебаниях, соответствующую невозмущенной кеплеровой
проблеме, не в полярных координатах, как это делалось в первом сообщении,
а в параболических. Но возможным колебательным состоянием следует счи-
тать не отдельное собственное колебание, а их любую конечную или беско-
нечную линейную комби нацию. Таким образом, всегда можно линейно
выразить полученные одним способом собственные функции через другую
систему собственных функций, если только последняя является полной.
Нельзя, конечно, совершенно обойти молчанием не упоминавшийся до
сих пор вопрос о том, как в действительности распределяется энергия по
собственным колебаниям в каком-либо из конкретных случаев. В соответ-
ствии с существующей квантовой теорией следует склониться к тому пред-
положению, что определенное заданное значение энергии в вырожденном
случае в отличие от случая отсутствия вырождения должно иметь лишь
совокупность собственных колебаний, принадлежащих некоторому собствен-
ному значению, а не каждое колебание в отдельности. Я этот вопрос должен
пока оставить совершенно открытым; в частности, остается нерешенным,
являются ли вообще найденные «энергетические уровни» в действительности
последовательными значениями энергии колебательного процесса или они
имеют лишь смысл частот. Для установления точных частот излучения, если
принять теорию биений, вообще более не обязательно истолковывать соб-
ственные значения как уровни энергии.
2. Ротатор с закрепленной осью
Из-за отсутствия потенциальной энергии в случае евклидова линейного
элемента этот пример является простейшим, мыслимым в волновой теории.
Пусть А — момент инерции и <р— угол вращения, тогда волновое уравнение,
очевидно, принимает вид
1 d2y> . 8л2Е А
-д+ =
(29)
Оно имеет решение :
sin
cos
8л2Е А
(30)
Аргумент должен быть здесь целым кратным ср уже по той простой причине,
также приводит к тому же уравнению, если только за независимую переменную принять
q2. Именно таким образом я и решал сначала данную задачу. Указанию, что в данном
случае дело идет.об уравнении полиномов Эрмита, я обязан Е. Fues’y. Как я впоследствии
узнал, получающиеся при решении кеплеровой задачи полиномы (ур-ние (18) первого
Сообщения) являются (2п + 1)-ми производными от (и + Ц-х полиномов Лагерра.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
699
что функция у иначе не будет в области изменения аргумента ни однознач-
ной, ни непрерывной, поскольку значение ср + 2л; эквивалентно значению ср.
Это условие приводит к известному результату
с п2 h2 п
— 8л2 А )
в полном соответствии с существующей теорией.
Данный результат не может быть, однако, использован для исследования
спектральных полос, так как ниже выяснится то своеобразное обстоятель-
ство, что теория ротатора со свободной осью приводит к совершенно другим
выводам. Подобное положение имеет место в общем случае. При применении
волновой механики нельзя считать для упрощения вычислений число сте-
пеней свободы меньшим действительного даже тогда, когда из интегралов
механических уравнений следует, что при некоторых движениях системы
определенные степени свободы не проявляются. В микромеханике система
основных механических уравнений становится совершенно непригодной, и
определяемые этой системой траектории самостоятельно не существуют.
Волновой процесс заполняет все фазовое пространство. Известно, что для
волнового процесса существенно даже число измерений, в которых он про-
текает.
3. Твердый ротатор со свободной осью
Если ввести в качестве координат полярные углы & и ср осевой линии,
то кинетическая энергия как функция импульсов примет вид
-Т = ТЛ • <32>
По форме выражение (32) аналогично кинетической энергии материальной
точки, движущейся по сфере. Входящий в (18) дифференциальный оператор
будет поэтому совпадать с зависящей от полярных углов частью простран-
ственного оператора Лапласа, так что уравнение (18") примет вид
1 Э f . п Эу 1 , 1 Э2у 8лАЕ „
—•—Л Ьд ~ I Sin $ Qд I Ч-:—ГгГ ~а~2- 7.2-V — ® • (33)
Sind 9d \ dd J sin2d 8y2 ft2 ' v '
Требование однозначности и непрерывности у на сфере приводит, как
известно, к собственным значениям
^-^Е = /г(/г + 1) (72 = 0,1,2,3...). (34)
Собственными функциями будут, очевидно, сферические функции. Энергети-
ческие уровни имеют вид
(72 = 0,1,2,3...). (34')
Это выражение отличается от всех предыдущих (кроме, быть может,
гейзенберговского). Экспериментальные данные говорят, однако, в пользу
того, что в формулу (31) по различным основаниям нужно подставлять
«полуцелые» значения п. Очевидно, что (34') приводит практически к тем же
результатам, что и выражение (31) при полуцелых п, так как
п(п+ l)=^ + yJ -т.
700
Э. ШРЕДИНГЕР
Разница заключается, таким образом, лишь в малой аддитивной постоянной;
расстояния между уровнями в случае формулы (34') остаются такими же,
как и при «полуцелом квантовании». Этот результат сохраняет также силу
и для коротковолновой области, в которой момент инерции в начальном и
конечном состояниях различается из-за «электронных скачков», так как при
этом самое большее ко всем линиям из одной серии добавляется лишь малое
постоянное слагаемое, незаметное в больших «электронных термах» или в
термах, связанных с колебаниями ядер. Отметим, что из произведенного до
сих пор анализа с определенностью не следует возможность учитывать это
малое дополнительное слагаемое посредством использования выражения
2 й2 /_1_____1_)
4 8л2 ( А А') '
Представление о моменте инерции, определяемом с помощью «квантовых
условий» для движения электронов и колебаний ядер, выходит из рассматри-
ваемого круга идей. В следующем примере мы покажем, что приближенно
можно одновременные колебания ядер и вращение в двухатомных молекулах
рассматривать как некоторый синтез разобранных в примерах 1 и 3 случаев *).
Можно еще упомянуть, что значению п = 0 соответствует равенство функции
у) не нулю, а некоторой постоянной величине, т. е. при этом получается не-
которое колебание с постоянной амплитудой на всей поверхности сферы.
4. Упругий ротатор (двухатомная молекула)
Согласно сделанному в конце п. 2 замечанию, мы должны здесь с самого
начала считать, что имеется шесть степеней свободы, как это имеет место на
самом деле. Возьмем сначала декартовы координаты хр у1; zn х2, у2, z2
обеих молекул, массы которых положим равными т1ит2. Пусты будет рас-
стоянием между ними, а V — потенциальной энергией, равной
V = 2 л2 vl /л (г — г0)2, (35)
где г = У(Х1 - х2)2 + (у! - у2)2 + (zx - z2)2.
Здесь
' т, + т2 ' '
является «приведенной массой», ?0 — механической собственной частотой
колебания ядер вдоль соединяющей их оси, а г0 представляет собой рассто-
яние, при котором потенциальная энергия принимает минимальное значение.
При этом все пока рассматривается в смысле обычной механики.
Колебательное уравнение (18") принимает здесь следующий вид:
1 ( Й2у Э2у ) । 1 ( д2Ч> I б2^ | ,
~т^ I дх2, + ~дуТ + ~д^ ) + 7п7 (9xf + ду2 + Izf I +
+ ^[Е-2л2^ (г-го)2]у = О. (37)
Введем в качестве новых независимых переменных величины х, у, z, £, р, С:
X = Xj — х2,
У = У1-У2,
? = ?! ~ Z2 ,
(ffli + m2)g = mr Xj + т2 х2,
(mi + m2) г) = тг уг + т2 у2,
(т± + т2) С = п?! z1 + m2z2.
(38)
♦)Ср. A. Sommerfeld, Atombau und Spektrallinien, 4 Aufl., стр. 833. Мы пока
не рассматриваем ангармонический дополнительный член в потенциальной энергии.
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
701
После их подстановки получаем
1 7 Э2у> ! 82у> . 82у> А ! 1 ( Э2у> ! 82у . 82у> 1
[“Эх2" + + Эх2 J + mx + т2 [ Э£2 + + ЭС2 J +
+ [«" - Ь’ (г —r0)2] у = 0, (37')
где для сокращения положено
Мы теперь можем представить функцию в виде произведения функции,
зависящей от относительных координат х, у, z, на функцию, зависящую от
координат центра тяжести f, у, Z:
V = f (x, у, z) g (f, y, 0. (40)
Для определения функции g получается уравнение
(S + U + 4И + constxg = 0> (41)
имеющее тот же вид, что и уравнение свободного движения материальной
точки с массой тг + т2- Константа имеет в этом случае следующий смысл :
, 8л2Е( ,.т
const = —— , (42)
где Et — трансляционная энергия данной материальной точки. Подставим
значение константы (42) в (41). Собственные значения параметра Et зависят
теперь от того, требуется ли вводить в какой-либо части всего пространства
дополнительные слагаемые в потенциальной энергии или нет. Если это не
требуется, то можно брать все положительные значения Et, в то время как
все отрицательные значения недопустимы. В самом деле, в этом случае
уравнение (41) имеет решения, не равные нулю тождественно и ограни-
ченные во всем пространстве тогда и только тогда, когда Et положительно.
Если же молекула находится в каком-либо «ящике», то это равносильно
введению для функции соответствующих граничных условий или, говоря по-
следовательнее, резкому изменению уравнения (41) на поверхности ящика
из-за появления новых членов в потенциальной энергии. Тем самым
выделяется спектр дискретных собственных значений Et, т. е. происходит
«квантование трансляционного движения». Это обстоятельство было недавно
мною рассмотрено в общих чертах, причем также было показано, что
подобное квантование приводит к теории газов Эйнштейна *). .
Зависящий от координат относительного движения частиц х, у, z мно-
житель / из волновой функции tp определяется теперь уравнением
+ + + = (43)
где для сокращения положено
_ ^,=£4 . (и.
Введем теперь вместо координат х, у, z полярные координаты г, <р (что
*) См. Phys. Zs. 27, стр. 95 (1926).
702
Э. ШРЕДИНГЕР
согласуется с использованным ранее значением г). После умножения на /л
получаем
± ±(Г2 JL) + ± (sin (sin &-%-} + —!____+
г2 Эг ( Or J г2 | ( Э# sin2# &р2J
+ [/ла' — /лЬ' (r — r0)2] / = 0. (43')
Представим функцию / также в виде произведения функций. Множитель,
зависящий от полярных углов, §удет представлять собой сферическую функ-
цию л-го порядка и выражение, стоящее в фигурных скобках, равно
— п (п + 1) /.
Предположим, что это значение подставлено в формулу (43') и для про-
стоты сохраним для зависящего от г множителя обозначение /. Введем затем
в качестве новой искомой функции величину
Z = г/ (44)
и в качестве независимой переменной величину
0 = г-го. (45)
После подстановки получаем
+ = (46)
До сих пор вычисления удавалось проводить строго. Сделаем теперь
известное приближение, причем я отмечаю, что приведенное ниже обосно-
вание этого приближения нельзя считать полным. Сравним уравнение (46)
со сходным по строению уже рассмотренным уравнением (22'), которое отли-
чается от (46) лишь появлением у коэффициента перед неизвестной функцией
дополнительных слагаемых, имеющих относительный порядок величины
. Это можно увидеть, если разложить в ряд выражение
г о
п(п + 1) _ П (л + 1) Л _ 2q . Зе2
(г О + е)2 Г? I1 Г 0 Г2
подставить
о
— и ввести
Го
величину:
его в (46), сгруппировать члены с одинаковыми
вместо q новую переменную q', отличающуюся от о
и (л + 1)
\ г0 /
Уравнение (46) примет при этом вид
+ [£])>: = о.
(47)
степенями
на малую
(48)
(46')
где для сокращения положено :
а - и а' - 2L2L+J1 (i_______'LQL+J)____
и~^а г$ С Го/< &'+ з л (л + 1)
, ,, 3 л (л + 1)
& = /г ft' Н--•
> о
(49)
КВАНТОВАНИЕ КАК ЗАДАЧА О СОБСТВЕННЫХ ЗНАЧЕНИЯХ
703
Символ — в формуле (46) обозначает слагаемые более высокого порядка
L ro J
о'
относительно величины чем наименьшие оставляемые члены.
го
Об уравнении (22'), с которым мы сейчас сравниваем уравнение (46'),
нам известно, что его первая собственная функция заметно отлична от нуля
лишь в некоторой малой области по обе стороны от начала координат. Только
при более высоких порядковых числах эта область постепенно расп/иряется.
При небольших порядковых числах соответствующая область для урав-
нения (46') будет в действительности меньше г0, если подставить поря-
док величин молекулярных констант и отбросить член — . Отсюда мы
выводим то, как я повторяю, нестрогое заключение, что для первой собствен-
ной функции, а также первого собственного значения подобным образом
получается приемлемое приближение в области, где эта первая собственная
функция вообще заметно отлична от нуля. Из прежнего условия для соб-
ственных значений (25) с помощью несложного вычисления после возвра-
щения к старым обозначениям вместо' (49), (39) и (39') и введения для сокра-
щения новой малой величины
л (л + 1) h2 _ п (л_+1) h2_
16л«1>02А2
получаются следующие уровни энергии :
Б = Е. + ^^-(1-Т^)+^Л^Г1+37 (51).
(п = 0, 1, 2, ... ; 1 = 0, 1, 2, ...),
где, кроме того, использована запись момента инерции в виде
А=рг%. (52)
Говоря языком классической механики, величина е представляет собой
квадрат отношения частоты вращения к частоте колебания v0 и является
поэтому в случае молекулы действительно малой величиной, так что фор-
мула (51) имеет обычное строение, если пренебречь связанными с е малыми
поправками и отмеченными ранее неточностями.. Эта формула является
синтезом формул (25') и (34), причем еще добавляется слагаемое тран-
сляционной энергии Et. Следует подчеркнуть, что качество приближения
определяется не только малостью е, малой должна также быть и величина I.
Практически I действительно оказывается обычно небольшим числом.
Связанные с е поправки в (51) еще не учитывают отклонение ядерных
колебаний от чисто гармонического типа. Поэтому сравнение с формулой
Кратцера (см. Зоммерфельд, цит. соч.) или с экспериментом еще невозможно.
Я привел данный случай только как пример того, каким образом сохраня-
ется в волновой механике наглядное понятие равновесной конфигурации
системы ядер, лишь в малой окрестности которой волновая амплитуда
заметно отличается от нуля. Непосредственная интерпретация нашей вол-
новой функции, зависящей от шести переменных, в трехмерном простран-
стве встречается с очевидными трудностями.
К вращательно-колебательной задаче для двухатомной молекулы при
учете ангармонических членов в энергии связи придется поэтому еще воз-
вратиться. Красивый прием, избранный Кратцером при классическом рас-
смотрении задачи, является простейшим также и в случае волновой меха-
ники. При этом, однако, чтобы дойти до вычисления деталей полосатых
704
Э. ШРЕДИНГЕР
спектров, приходится применить теорию возмущения собственных значений
и собственных функций, т. е. учесть в этих значениях и функциях изменения,
которые происходят, когда в коэффициенте перед неизвестной в дифферен-
циальном уравнении добавляется малый «возмущающий член». Эта «теория
возмущений» вполне аналогична соответствующей теории классической
механики, причем проблема в данном случае более проста по той причине,
что в волновой механике пользуются только линейными соотношениями.
В первом приближении оправдывается утверждение, что возмущенные
собственные значения равГНы «усредненному по невозмущенному движению»
члену возмущения.
Теория возмущений значительно расширяет границы, в которых воз-
можно аналитическое использование новой теории. Я могу уже здесь указать
тот практически важный результат, что найденное выражение для эффекта
Штарка первого порядка действительно совпадает с формулой Эпштейна,
подтвержденной экспериментом.
Цюрих, Физический институт университета
(поступило 23 февраля 1926 г.)
П. ДИРАК
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА [232 ]
1. Введение
Уравнения динамики были записаны в общем виде Лагранжем с помощью
системы обобщенных координат и скоростей.
Эквивалентная общая форма динамических уравнений, записанных в
терминах координат и импульсов, была предложена Гамильтоном. Сравним
достоинства обеих форм записи.
Пользуясь формализмом Лагранжа, легко удовлетворить требованию
релятивистской инвариантности, выбирая действие, т. е. интеграл, от
лагранжиана по времени в виде, инвариантном относительно группы
Лоренца. Мы не знаем столь же простого пути релятивизации гамильтоно'ва
формализма. При создании квантовой теории приходится исходить из гамиль-
тонова формализма. Существуют надежные правила перехода от класси-
ческой гамильтоновой динамики к квантовой динамике, основанные на
замене координат и импульсов линейными операторами. Эти правила в
простых случаях приводят к однозначным результатам и хотя в более слож-
ных случаях их нельзя применить без известной неоднозначности, они по-
казали себя вполне пригодными для любой практической цели.
Таким образом, оба формализма имеют в настоящее время свои преиму-
щества, что и делает необходимым пользоваться и тем и другим. Оба форма-
лизма тесно связаны друг с другом. Исходя из лагранжиана и вводя им-
пульсы, можно в случае, если импульсы—независимые функции от скоростей,
получить гамильтониан. В настоящей работе построена более общая теория,
применимая к случаю, когда импульсы не являются независимыми функци-
ями от скоростей. Получена обобщенная формулировка гамильтонова- прин-
ципа, которую по-прежнему можно использовать для квантования и которая
оказывается особенно удобной для релятивистского описания динамических
процессов.
2. Сильные и слабые уравнения
Рассмотрим динамическую систему с N степенями свободы, заданную в
терминах обобщенных координат qn (п = I, 2, ... ,N) и скоростей или
qn. Вначале будем считать лагранжиан L произвольной функцией координат
и скоростей:
(1)
Импульс задается соотношением
Введем операцию варьирования, независимо изменяющую каждую из
о
706
П. ДИРАК
величин qn, qn, рп на малую величину dqn, dqn, дрп порядка в, причем
варьирование ведется с точностью до е. В результате варьирования урав-
нения (2) перестанут удовлетворяться, так как их правая часть будет отли-
чаться от левой на величину е. В дальнейшем мы будем различать два вида
уравнений: уравнения типа (2), которые нарушаются с точностью до г
после варьирования [233], и уравнения, выполняющиеся с точностью до е
после варьирования. Уравнение (I) принадлежит ко второму виду, поскольку
вариация L, по определению, равна вариации функции L(q, q). Уравнения
второго вида мы назовем слабыми уравнениями и будем записывать с по-
мощью обычного символа равенства (=), первый же вид уравнений назовем
сильными уравнениями и будем обозначать символом (=). Имеют место
следующие общие правила варьирования слабых и сильных уравнений :
если А ~ 0, то дА = О,
если X = 0, то дХ =f= 0.
Из слабого уравнения X = 0 следует, что 5 X2 = 2Х д X = 0. Таким
образом, мы получаем сильное уравнение X2 == 0. Аналогично из двух
слабых уравнений Хх = 0 и Х2' = 0 следует уравнение
Х,Х2 = 0.
Возможен случай, когда N величин dLldqn, стоящих в правой части
уравнения (2), являются независимыми функциями N скоростей qn. В этом
случае уравнения (2) задают qn как функции от всех qn и рп. Этот случай
(мы будем называть его в дальнейшем обычным случаем) рассматривался до
сих пор во всех динамических теориях как единственно возможный.
Если величины dLld.qn не являются независимыми функциями скоростей,
то мы можем исключить величины q из уравнений (2) и получить одно или
несколько уравнений
Ф(<7,р) = 0, (3)
содержащих только q и р.
Мы можем считать, не нарушая общности, что уравнения (3) записаны
таким образом, что варьирование изменяет Ф на величину порядка в, так как
в случае, если Ф изменяется на величину порядка sfc, мы всегда можем удов-
летворить нашему условию, заменив Ф на Таким образом, уравнение (3)
нарушается при варьировании с точностью до в, так что вполне справедливо
считать его слабым уравнением. Используем теперь полную систему неза-
висимых уравнений типа (3) :
Фт(<7,р) = 0 (т=1, 2,...,М). (4)
Условие независимости означает, что ни одно из Ф нельзя выразить линей-
но через другие Ф с коэффициентами, зависящими от q и р. Условие полноты
означает, что каждая функция q и р, обращающаяся в 0 при учете уравнений
(2) и изменяющаяся на в при варьировании, линейно выражается через Фт
с коэффициентами, зависящими от q и р. Связь сильных и слабых уравнений
можно интерпретировать следующим образом.
Координаты q, q и р образуют ЗУ-мерное пространство. В этом простран-
стве существует 2У-мерная область, в которой удовлетворяются уравне-
ния (2). Назовем эту область /?. Уравнения (4) также удовлетворяются в R,
так как они вытекают из (2). Теперь рассмотрим множество точек ЗУ-мерного
пространства, удаленных от области R на расстояние, не превышающее е.
Точки образуют ЗУ-мерную окрестность порядка г. Назовем ее Rf. Тогда
слабые уравнения удовлетворяются в области R, а сильные — в области Rt.
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
707
3. Гамильтониан
Гамильтониан Н определяется как
Н рп qn - L , (5)
где суммирование подразумевается по двум одинаковым индексам. Имеем:
дН = д (рп qn - L) = рп dqn + qn дрп - dqn - dqn =
= qn дРп - (6)
Мы нашли, что dH не зависит от dqn. Этот важный результат имеет место
как в обычном, так и в общем случаях.
Уравнение (5) задает И как функцию от q, q и р, определенную в 3N-
мерном пространстве координат q, q и р. Мы используем это определение
только в области Re, в которой результат (6) выполняется с точностью до
первого порядка. Это значит, что если мы положим q = const и р — const
и произведем вариацию первого порядка величин q, то вариация Н будет
второго порядка. Таким образом, если мы положим q = const и р = const,
заменим q на конечную величину и останемся в о бласти Re, что возможно,
когда не имеет места обычный случай, то вариация будет первого по-
рядка. В области же R вариация будет равна нулю.
Следовательно, И в области R зависит только от q и р. Обозначая эту
фукцию через £ (q, р), имеем слабое уравнение
H = §(q,p), (7)
выполняющееся в области R.
В обычном случае § совпадает с обычным гамильтонианом. После пол-
ного варьирования имеем:
<60
Таким образом, б (Я — §) зависит только от dq и др. Вариация д (Н— £>)
обращается в нуль для тех вариаций по q и р, для которых при надлежащем
выборе dq сохраняются уравнения (2). Единственное ограничение, наложен-
ное. на dq и dp, требует, чтобы сохранялись уравнения (4) (они должны
приводить к dФm = 0 для всех т). Таким образом, д (Н — §) равно нулю
для всех dq и dp, обращающих в нуль d<l>m ; отсюда для произвольных
dq и dp имеет место
д(Я-§) = «тдФт (8>
с некоторыми коэффициентами vm.
Коэффициенты vm, являющиеся функциями от q, q и р, можно с помощью
(2) выразить только через q и q. Из (4) и (8) получим
д(Н-ф-г;тФт) = д(Я-©)-«тдФт-Фтдг;т = О, (9)
а отсюда
Н = & + vm Фт .
Мы имеем сильное уравнение, выполняющееся с точностью до первого
порядка в области R„ в противоположность слабому уравнению (7), вы-
полняющемуся только в области R.
ЛХ*
708
П. ДИРАК
Из уравнения (8) следует:
» = Ц. »р„ + -Ц. + „„ (J* Jp„ + а,,).
Сравнивая дН с (6), получим
о = 4- v - Фт (10)
Чп &рп + т ъРп ’
Qqn Qqn т Qqn ’ 4
Уравнения (10) выражают q в терминах q, р и v. Из них следует, что 2N
переменных qn и qn можно выразить через 2N + М переменных qn, рп, vm.
Между 2N 4- М переменными существует М соотношений (4). Других
соотношений между этими переменными не может быть, так как иначе они
не были бы независимыми. Таким образом, каждое v независимо от q, р и
других V. Переменные v можно рассматривать как своего рода скорости.
С их помощью можно задать те q, которые не могут быть выражены через
q и р. Когда мы имеем дело с гамильтоновым формализмом, мы пользуемся в
качестве основных переменных теми q, р и v, которые связаны только соот-
ношениями (4). Эти переменные мы назовем гамильтоновыми переменными.
4. Уравнения движения
Будем считать обычные уравнения Лагранжа слабыми уравнениями :
Э£ /<
Подставляя в (12) значения рп из (2), получаем уравнения, содержащие
ускорения qn. В обычном случае эти уравнения задают q в терминах q и q.
В случае, когда имеют место М уравнений (4), уравнения движения
дают только N — М соотношений для величин q. Остальные М уравнений
движения описывают изменения Фт с изменением времени. Для того чтобы
система уравнений была совместной, Фт должны обращаться в нуль. Усло-
вия совместности будут изучены ниже.
С помощью (11) уравнения движения (12) принимают вид
п =___________________________ v -дФт ПЗ)
Рп oqn т <>qn • '
Уравнения (13) вместе с уравнениями (10) образуют систему динамических
уравнений Гамильтона. Уравнения заданы функцией § и соотношениями
Фт = 0. Гамильтоновы уравнения движения задают q и р в терминах гамиль-
тоновых переменных q, р, v. Уравнения не содержат какой-либо непосред-
ственной информации о и, но, изучая условия совместности, из них можно
извлечь косвенную информацию о г.
Уравнения Гамильтона легче записать с помощью скобки Пуассона
(С. П.). Каждым двум функциям £ и т), зависящим от q и р, ставится в соот-
ветствие скобка Пуассона:
_____(14)
И’’/j — bqn Ърп Qpn Qqn ' '
Легко проверить, что скобка Пуассона инвариантна относительно преобра-
зований к новым q и р, при которых новые q являются независимыми функ-
циями от исходных, причем новые р задаются соотношением (2), включа-
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
709
ющим L, выраженным в новых q и их производных по времени. Это свойство
скобки Пуассона делает ее важным понятием. Скобка Пуассона удовле-
творяет следующим соотношениям :
[£,»?] == — [»?, £],
R, f (т,• • )] ^7 R,R,%] + • • • >
р, M] + k [U]] + [С, [£,»?]] = о.
(15)
Во втором равенстве f - произвольная функция переменных величин
»?1, т)2,.каждая из которых зависит от q и р. Последнее равенство, известное
как равенство Пуассона [234], применимо к любым трем функциям
£, т], С от q и р.
Желательно распространить С. П. на случай функций, зависящих также
от q, которые не выражаются через q и р. Предполагаем, что такие обоб-
щенные С. П. подчиняются соотношениям (15), но в остальном произвольны.
С другой стороны, мы можем предположить, что q — произвольные функции
от q и р, и вывести равенства (15) для £, р и С, содержащих q.
Из сильного уравнения А = 0 вытекают слабые уравнения
-^ = 0, -|^- = о, 4” = 0-
и$п dqn дрп
Отсюда, пользуясь вторым из соотношений (15), имеем
[£, Д] = 0
для произвольного £.
В некоторых случаях мы имеем [<£, Д | 0 (например, в случае, когда,
по определению, А = 0), но, вообще говоря, это не имеет места. Из слабого
уравнения X = 0 равенство [£, X ] = 0 не вытекает. Если g — некоторая
функция от q и р, то получаем из уравнений (10) и (13):
Э? ( Э£) ЭФтА Э? ( Э£> , 8Фт А г r-т, г -г, 1
g “ ~Qqn~ ("Эр? + Vm Ър~ + Vm АдгГ) = + Vm
Равенство (16) является общим уравнением движения Гамильтона. Оно
может быть также записано с помощью уравнений (4) в виде
g = [g£>] + Vm [g, фт] + [g, ”т] фт = [g, Щ , (17)
причем оно принимает тот же вид, что и обычное уравнение Гамильтона,
записанное с помощью скобки Пуассона.
5. Однородные скорости
Теория принимает особенно простой вид в случае, если L является одно-
родной функцией первой степени относительно скоростей. Тогда импульсы,
заданные соотношением (2), — однородные функции нулевой степени относи-
тельно q и, таким образом, зависят только от отношений q.
Так как мы имеем N значений р и только Л7 — 1 отношений q, то должно
быть по крайней мере одно соотношение (4), связывающее q и р. Случай,
когда имеется только одно соотношение между q и р, можно рассматривать
как обычный. Из теоремы Эйлера следует
' (18)
710
П. ДИРАК
Отсюда
L ' Qn Рп ,
так что
/7 = 0. (19)
Это слабое уравнение, выполняющееся в области R, позволяет считать
£> = 0. Тогда из (9) следует
Н = отФт. (20)
Общее уравнение движения примет теперь вид
g = vm[g, Фт]. (21)
Таким образом, в этом случае уравнения движения Гамильтона задаются
равенством Фт — 0. Правая часть уравнения (21) однородна относительно v.
Решение уравнений движения определяется о точностью до множителя у,
являющегося произвольной функцией времени.
Новое решение уравнения движения, содержащее скорость изменения
динамических переменных с изменением времени, также умножается на у.
Новое решение можно получить из исходного решения, заменив t новой неза-
висимой переменной т так, чтобы dt/d- = у. Новая независимая переменная
совершенно произвольна: она может быть любой функцией t, q и q. Таким
образом, из любого решения уравнения движения можно получить другое
решение, заменяя t произвольным т, причем уравнения движения не дают
никакой информации о независимом переменном. Эта важная черта динами-
ческой теории с лагранжианом L, однородным относительно скоростей,
делает ее особенно удобной для релятивистского описания. Лагранжиан
любой динамической системы можно сделать однородным первого порядка
относительно всех скоростей, приняв t за добавочную координату q0 и
пользуясь равенством q0 = 1. Отсюда может быть выведено новое уравнение
Лагранжа для всех q, как было показано автором *): Этим путем новую
формулировку для общей динамической системы можно получить в терминах
однородных скоростей.
Новая формулировка задает те же уравнения, что и старая, кроме q0 — 1.
Чтобы получить и это уравнение, приходится считать его добавочным усло-
вием, не следующим из уравнений движения, но совместным с ними. Однако
мы можем прекрасно обойтись без него, так как оно нужно лишь для того,
чтобы задать независимую переменную, которая иначе была бы произволь-
ной в формулировке динамической системы с однородными скоростями.
Таким образом, мы можем, не нарушая общности, рассматривать только
теории с однородными скоростями. В дальнейшем мы будем рассматривать
только такие системы, так как они ведут к более простым уравнениям,
причем точка будет означать дифференцирование по произвольной независи-
мой переменной т.
6. Условие совместности
Чтобы удовлетворить условию совместности, уравнения движения дол-
жны обращать все Фт в нуль. Таким образом, подставляя Фт< в (21), получим
Мфт,Фт'] = 0. (22)
Предположим, что уравнения (22) максимально упрощены с помощью
системы уравнений (4). Приведение может содержать в себе также исклю-
*) Р. Dirac, Homogeneous variables in classical dynamics, Proc. Camb. Phil. Soc.,
t. 29 (1933), 389.
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
711
чение множителей, когда они считаются отличными от нуля. Результи-
рующие уравнения могут принадлежать к одному из четырех тмпов.
Тип 1. Уравнение содержит переменные v. *
Тип 2. Уравнение не зависит от v, но включает переменные р и q.
Оно имеет, таким образом, вид
% (р, q) = 0 (23)
н не зависит от уравнений (4).
Тип 3. Уравнение приводится к равенству 0 = 0.
Тип 4. Уравнение приводится к выражению 1 = 0.
Уравнения типа 2 ведут к еще одному типу условия совместности, так
как % должны оставаться равными нулю* Подставляя % в (21), имеем
Z] = 0- (24)
Уравнения, приведенные с помощью соотношений (4) и уже полученных
равенств (23), также принадлежат к одному из перечисленных типов. Если
это тип 2, то мы приходим к новому условию совместности. Мы повторяем эту
операцию для каждого соотношения (2), пока не приходим к уравнению
нового типа. Если мы получим таким образом уравнения типа 4, то уравнения
движения не совместны. Этот случай, как не представляющий интереса, мы
исключаем. Уравнения типа 3 удовлетворяются автоматически. Остаются
лишь уравнения типа 1 и 2. Обратимся к полной системе уравнений типа 2:
Ыр.?) = 0 (/с = 1,2,..., к). (25)
Предположим, что функции %к выбраны подобно Фк в (4) так, что их вариа-
ции— порядка е. В этом случае равенства (25) можно считать слабыми. Эти
новые слабые уравнения сводят область R, в которой удовлетворяются все
слабые уравнения, к (2N — /^-измерениям. Область Rs также будет редуци-
рована, так как она теперь будет состоять из точек, находящихся в е-окре-
стности новой области R.
Для изучения уравнений типа 1 удобно ввести новые понятия. Мы будем
говорить, что величина Фт принадлежит к первому классу, если ее скобка
Пуассона для каждой пары Ф и % равна нулю. Таким образом, Фт> при-
надлежит к первому классу, если
[Фт,Фт]=0, [Фт,Хк]=0. (26)
Эти равенства должны выполняться только в слабом смысле, иначе
говоря, они выполняются только лишь как следствие равенств Фт = О
и ь = 0.
Таким образом, левые части (26) должны быть равны в сильном смысле
некоторым линейным функциям от Фт и %к; Ф, не удовлетворяющие этим
условиям, мы назовем Ф второго класса. Произведем линейное преобразо-
вание вида
Ф*т = ?тт'Фт’, (27)
где у — любое функции q и р, такие, что детерминант утп не обращается в
нуль в слабом смысле. Тогда в рамках нашей теории можно считать, что Ф*
эквивалентны Ф. Произведем преобразование этого рода таким образом, чтобы
перевести максимально возможное число Ф в первый класс. Ф первого класса
обозначил! через Фа, а Ф второго класса — через Фр, причем
/5=1,2, , В; а = В + 1, В + 2, ..., М.
712
П. ДИРАК
Если Фт', принадлежит к первому классу, то уравнение (22) автомати-
чески удовлетворяется. В дальнейшем в уравнениях (22) и (24) .ограничимся
Фт, принадлежащими ко второму классу. Таким образом, оставшиеся урав-
нения (22) и (24) запишутся в виде
Ф3,] = 0, 0,0’ = 1,2, ..., В, I
=0, к =1,2,..., к. I (28)
Все они принадлежат к типу 1. Из уравнений видно, что либо все равны
нулю, либо матрица
0 А А] А, Фз] • • А, Фр] A, Xi] • • [*i,Xk]
[ф2, Ф1] 0 [Ф2, Фз] • • [Ф2, A, Z1] . • [ф2- Хк]
[^вА] \фв, ф2] \®В, . .. 0 [^B,Zi]. • [0b,zJ
(29)
имеет ранг меньше В в слабом смысле [235].
Докажем теперь, что правильна первая альтернатива. Считаем, что
матрица (29) имеет ранг U < В. Образуем детерминант
D = Ф2 0 А, ^1] А, Ф2] 0 А, [ф2> Фз] • Pi, Фц] • . Р2, Фц] • (30)
&U + 1 [<WJ А/+1, Ф2] [<W»1
D — линейная функция от Ф$ и, следовательно, обращается в нуль в слабом
смысле. С. П. для D с произвольной величиной / равна сумме детерминантов,
каждый из которых задан С. П. одного из столбцов (30) с /.
Все эти детерминанты, кроме первого, соответствующего первому столбцу,
равны нулю в слабом смысле, так как элементы их первых столбцов равны
нулю в слабом смысле. Таким образом :
[D,f] =
РъЛ 0 [М2] Рв • • • [А,
Р2,Л АА] 0 Р2, Фз] • • • Р2, &и] • (31)
[Фи+1,Ф1] [^в^з] •••
Если мы положил! / равным Фа> то первый столбец (31) будет равен нулю и,
следовательно, [D, Фа] = 0. Если же / одно из Ф$ или %, то либо (31) имеет
два равных столбца и, следовательно, равен нулю, либо (31) является
минором матрицы (29) с U + 1 строчками и также равен нулю, так как мы
предположили, что (29) имеет ранг U. Таким образом, С. П. для D со всеми
Ф и % равны нулю. D может исчезать также в сильном смысле, если сомно-
жители элементов первого столбца равны нулю в слабом смысле. В случае,
если это имеет место, мы вводим новый детерминант D, столбцы которого,
кроме первого, являются любыми U столбцами детерминанта (29), а строчки—
(U + 1) строчками (29). То, что мы всегда можем выбрать такой детерми-
нант таким образом, чтобы не все сомножители элементов первого столбца
обращались в нуль, следует из предположения, что ранг (29) равен U. Мы
получим таким образом D, который является Ф первого класса и линейной
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
713
функцией относительно Фв. Но это находится в противоречии с высказанным
ранее предположением о том, что преобразование утп переводит макси-
мально возможное число Ф в первый класс. Таким образом, мы заключаем, что
если максимально возможное число Ф переведено в первый класс, то v,
соответствующие величинам Ф второго класса, равны нулю. Гамильтониан
(20) приводится тогда к виду
(32)
Уравнение движения принимает вид
g = [g, Фо] • (33)
Обращение в нуль и уравнение (25) гарантируют выполнение условий
совместности; va остаются совершенно произвольными. Каждое из них
вводит свободное движение, соответствующее произвольной функции,
входящей в полное решение уравнений движения. В обычном случае имеет
место только одно Ф, очевидно принадлежащая к первому классу, и, следо-
вательно, имеет место лишь одна произвольная функция, входящая в реше-
ние уравнения движения. Это связано с произвольным характером неза-
висимого переменного.
7. Дополнительные условия
Имея дело с конкретным случаем динамической системы, можно наложить
добавочные условия на координаты и скорости. Такие условия должны быть
введены как слабые уравнения. С помощью (10) (с £> = 0) дополнительные
условия приобретают вид соотношений между q, р и v. Из них можно полу-
чить уравнения, связывающие только дир. Такие уравнения можно вклю-
чить в систему-(25) в качестве добавочных /-уравнений. Это потребует доба-
вочных условий совместности и, следовательно, новых /-уравнений. Тогда Ф
первого класса должны быть выбраны таким образом, чтобы С. П. для Ф
с новыми / были равны нулю. Такимобразом, дополнительные условия умень-
шают число Ф первого класса, что ведет к уменьшению свободных движений.
Те дополнительные условия, которые не вводят новых /-уравнений, связы-
вают переменные va. Эти условия обычно более сложны, чем простое требо-
вание обращения в нуль некоторых v, подобно всем условиям, вытекающим
из условий совместности. Они ведут к дальнейшему уменьшению числа сво-
бодных движений, которое после этой редукции становится меньше числа Ф
первого класса.
8. Преобразования гамильтонова формализма
Возьмем систему функций 0s (s = 1, 2, . . ., s) от р и q, таких, что детер-
минант
О Рп Ф2] Рь 03] ... [Ms] I
л \ 0 [М3] ... [Ms] I
л = \ (34)
i Ps, Ps, 02] ft, М • о
не обращается в нуль в слабом смысле, что предполагает четное s. Пусть
css, обозначает множитель при [0S,0S' J, деленный на J, так что
^Ss' :== Cs's ]
и [ (35)
Css, [0S, 6Ь] = . J
714
П. ДИРАК
Тогда можно определить новую скобку Пуассона [£, т) ]* для каждых двух
величин £ и т):
[£,»?] + ’Я- (36)
Легко видеть, что новая С. П. удовлетворяет первым двум законам (15).
Путем непосредственных вычислений можно показать, что новая С. П.
удовлетворяет также тождеству Пуассона (см. приложение). Для новой
С. П. имеет место равенство:
[е, 0j* = [е, + [f, м R, 0S] - [£, M =о (37)
для произвольного £.
Чтобы понять смысл новой С. П., рассмотрим случай, когда величины О
состоят из s/2 координат q и им сопряженных р. Мы видим, что новые С. П.
получаются из старых опусканием членов, содержащих дифференцирование
по этим р и q в выражении (14). Таким образом, новая С. П. относится к
системе с N—у степенями свободы, рели мы будем считать, что 0 — произ-
вольные функции от некоторых р и q, то мы получим эту же самую новую
С. П. В этом общем случае новая С. П. будет отнесена к системе с N—%
степенями свободы, но уменьшение числа степеней свободы производится
более сложно, чем в предыдущем случае. Предположим, что 0 принадлежат
к Ф и / (Ф должны быть второго класса, так как иначе J = 0). Тогда имеем
[0S, Н ] = 0 для всех s и отсюда
[g,/7]* = [g,/7] = g (38)
для любого g, зависящего от q и р. Такими образом, новая С. П. может быть
использована для получения гамильтоновых уравнений движения. Мы
получим таким способом более простой вид уравнений движения, содер-
жащий меньшее число эффективных степеней свободы. Все 0 обращаются в
нуль в слабом смысле; Если мы работаем только с новой С. П., то можно
считать, что каждое из 0 равно нулю в сильном смысле, не впадая в противо-
речие, так как на основании (37) С. П. от 0 и любой величины равна нулю.
Тогда, пользуясь уравнением 0s = 0, мы можем упростить гамильтониан.
Будем говорить, что / относится к первому классу, если С. П. от всех Ф и /
равны нулю, в противоположном же случае отнесем ее ко второму классу.
Произведем линейное преобразование
Z* = Ткк’ Хк + Укт Фт , (39)
где у и у' — любые функции от q, р, такие, что | утп | 0. Тогда новые /
•эквивалентны старым в рамках нашей теории. С помощью этого преобразо-
вания переведем максимальное число / в первый класс, причем / первого
класса обозначим /а, а второго %?. Примем за 0 все и Фц. Тогда J не обра-
щается в нуль. Доказательство совершенно эквивалентно приведенному
выше доказательству теоремы о ранге матрицы (29). Предполагая, что ранг
Л — Т < s и конструируя детерминант вида
5 0, 0 [01( 02] ... [0Ъ 0Г]
I..................................., (40)
I ®Г+1 • • • ...........[^Т+1,0т] I
принадлежащий к Ф или / первого класса и линейный относительно Ф$ и
/з, приходим к противоречию с предположением, что никакие Ф и / не могут
уже быть преобразованы в первый класс. Выбирая таким образом 0, мы
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
715
получаем максимальное упрощение этого метода. Мы получаем новую схему,
в которой все Фр- и /^-уравнения сильные. Эти уравнения можно использо-
вать для исключения всех q и р из теории. Новая схема не однозначна, так
как Фр и %р не единственно возможные.
Заменяя Фр и %р их линейной комбинацией, мы не изменили окончательной
формы гамильтоновой схемы. Однако, добавляя к Фр и %р произвольные
функции от Фа и от Фа и %а соответственно, что не меняет ни 3, ни с„<, но,
вообще говоря, меняет [£, ц ]*, мы увидим, что гамильтонова схема не со-
храняется при таком преобразовании. Различные формы схемы, разумеется,
эквивалентны, так как они приводят к одинаковым уравнениям движения.
В качестве приложения изложенного метода рассмотрим случай лагран-
жиана, не содержащего некоторых скоростей. Предположим, что L не содер-
жит qj (/=1,2,..., J < N). Тогда каждое Pj равно нулю в слабом смысле
и Ф — в сильном смысле. Предположим, что никакая линейная форма от pj
не принадлежит к первому классу. Тогда можно рассматривать pj как Фр.
Будем теперь считать половину общего числа величин 0 — pjt а другую
половину Ф или % второго класса, выбранными таким образом, чтобы 3 не
обращался в нуль. Назовем эти последние- Oj. Выбирая таким образом 0,
легко видеть, что новая С. П. может быть получена из определения (14),
примененного только к тем степеням свободы, для которых q не является
qJr причем каждое pj считается сильно равным нулю, а каждое qt сильно
равным функции от других q и р, заданной уравнениями Oj = О.
Таким образом, мы получили новую гамильтонову схему (не обязательно
с максимальным упрощением, так как могут быть и другие Фр и %р, не вхо-
дящие в число 0), в которой qj и Pj не являются независимыми динамическими
переменными.
Можно прийти к новой схеме более прямым путем, если с самого начала
не считать qj координатами и не вводить сопряженных импульсов. Посмот-
рим, какие изменения это внесет в теорию.
Определим п таким образом, чтобы оно принимало значения, при которых
q не принадлежит к q^, т. е. значения J + 1, J + 2, . . ., N. Тогда (2) и (5)
по-прежнему удовлетворяются, а (6) может быть заменено выражением
(41)
Уравнения
(w) = 0 (42)
будем считать дополнительными условиями в данном методе. Выражение
(41) сводится к (6). Отсюда можно заключить, что И имеет форму (20), где
Фт — функции от qn и рп, независимые от q} и равные нулю при учете урав-
нений (2). В остальном теория развивается, как раньше в терминах Ф и %,
не включающих q^ Уравнения Ф и %, включающие qj, можно рассматривать
как уравнения, выражающие qj через другие переменные и поэтому не игра-
ющие никакой роли. В этой теории мы имеем лагранжиан L, содержащий
qp включающие импульсы. Появление импульсов в лагранжиане совершенно
.аналогично появлению скоростей va в гамильтониане.
9. Гамильтониан как исходный пункт
Вместо того, чтобы исходить из лагранжиана и получать из него гамиль-
тониан, можно исходить из гамильтониана. Вводятся динамические пере-
менные qn и рп (п = 1, 2,..., N) или, может быть, другие динамические пере-
менные, между которыми существуют соотношения (15).
716
• Д А
Переменные связаны известными слабыми равенствами типа Ф-урав-
нений. С точки зрения этого метода не имеет смысла делать различие между
Ф и х- По крайней мере одна из Ф должна принадлежать к первому классу,
т. е. либо С. П. этой Ф со всеми другими равна нулю, либо не выполняются
условия совместности. Будем считать Н линейной функцией от Ф первого
класса с новыми переменными va в качестве коэффициентов и примем гамиль-
тоновы уравнения движения (17) или (33). v зависят произвольно от неза-
висимого пемеренного т. Предыдущая схема уравнений движения, вы-
веденная из лагранжиана и, возможно, включающая % наряду с Ф, может
рассматриваться как пример предлагаемой схемы в случае, если на v нало-
жены дополнительные условия, требующие, чтобы некоторые из v были
равны нулю. Фа, соответствующие этим va, есть % первого класса, введенные
в предыдущей схеме.
Такие дополнительные условия и всякие другие, включающие v, не
представляют ценности в релятивистской динамике и не могут быть введены
в квантовую механику, поэтому мы ими в дальнейшем пользоваться не будем.
Дополнительные условия, не включающие v, являются Ф-уравнениями.
Докажем, что скобка Пуассона двух Ф первого класса сама принад-
лежит к Ф первого класса. [Фа, Фа> ] равна нулю слабо и, следовательно,
сильно равна линейной функции от Ф, которые в настоящей схеме являются
единственными величинами, слабо равными нулю. Мы должны, очевидно,,
показать, что С. П. для произвольного Ф слабо равна нулю.
Из тождества Пуассона следует:
[ф, [Фо, = [ [Ф, Фа], ] - [ [Ф. ФЛ Фа] • (43)
Так как Фа принадлежит к первому классу, то [Ф, Фа] равна нулю слабо и,
следовательно, сильно равняется линейной форме от Ф. Отсюда С. П. для:
Фа, первого класса слабо равна нулю. Аналогично второй член правой части
равенства (43) слабо равен нулю, что и требовалось доказать. Пусть имеется
А независимых Ф первого класса и М независимых Ф любого класса. В фазо-
вом пространстве (22У-мерное пространство переменных qn и рп) имеется
(2N — М)-мерное подпространство, в котором удовлетворяются все Ф-урав-
нения. Назовем его (2N — 7И)-пространством. Состояние динамической:
системы для некоторого т задается точкой р в (2N — 7И)-пространстве, в.
которой удовлетворяются все Ф-уравнения. Движение системы задается
кривой в (2N — 7И)-пространстве, выходящей из точки р. Так как А и va
произвольны, то кривая может принимать любое направление в малом А-мер-
ном объеме, окружающем точку р. Такие малые окрестности измерений
окружают каждую точку в (2N — 7И)-мерном пространстве. Покажем, что
эти малые окрестности интегрируемы. Предположим, что для интервала
т, йг = Ё1 все v, кроме va>, равного единице, равны нулю. То же самое пред-
полагается относительно интервала б г = е2, в котором от нуля отлично
только va«, также равное единице. Тогда любая функция от р и q примет при
замене т на т + е вид
g + ®1 [g, Фа']
В конечной точке второго интервала, пренебрегая el и е2, но, беря члены
порядка получим выражение для сдвига g:
g + ei [g, ф J + е2 [g + £1 lg> фа ] , фа'] • (44)
Меняя порядок движений, имеем
g + ®2 [g, Фа ] + £i [g + ®2 [g, Ф<А, фа'] • (45)
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
717
Разность (44) и (45) приводится с помощью тождества Пуассона к виду
«1 «2 [gl > Ф J] • (46)
Как было показано ранее, [Ф,/, Фа«] принадлежит к Ф первого класса.
Таким образом, формула (46) задает возможный сдвиг g, вытекающий из
уравнений движения при некотором выборе v и, следовательно, соответству-
ющий движению в малой' A-мерной окрестности начальной точки. Таким
образом, имеем условие интегрируемости.
Дополнительные условия, наложенные на v, могут нарушить условие
интегрируемости. Следовательно, условие интегрируемости не всегда вы-
полняется для уравнений движения, выведенных из L. Интегрируя малые
окрестности, получим систему A-мерных пространств, покрывающих
(2N — Д4)-мерное пространство, таким образом, что движение всегда про-
исходит в одном из них. Назовем эти пространства A-пространствами. Каж-
дая кривая в A-пространстве представляет возможное решение уравнений
движения. Каждая точка (2N — Л4)-пространства принадлежит одному из
A-пространств, содержащему все движения, имеющие эту точку исходной.
A-пространство можно было бы рассматривать как решение уравнения.
Любая точка в A-пространстве задается А-координатами, зависящими от q
и р. Назовем их ta {а = 1, 2, ..., А). Они будут играть роль переменных.
A-пространство можно описать, задавая q и р как функции от ta. Если g
является функцией от р и q, то имеем
Z = <)1а ’ (47)
Применяя (33) к g и ta, имеем
«а [g, Фа] = «а [<а, Фа] •
Так как уравнение выполняется для произвольного va, то
к,ф;] = ра,фо](^). (48)
Уравнения (48) можно рассматривать как уравнения движения, задающие
A-пространство. В теории с однородными скоростями они чрезвычайно близки
к обычным гамильтоновым уравнениям, к которым они сводятся при А = 1
(единственное ta в этом случае рассматривается как время).
Чтобы перейти к лагранжиану, введем скорости qn :
ЭФа , .П\
— Va г>Рп (49)
L определяется тогда как
L = pnqn- Н = рпдп-таФа. ' (50)
Это равенство задает L как функцию от q, q, р и v, линейную относи-
тельно q и V. Варьируя независимо по q, q, р и v, получим:
<5L = qn Ьрп + рп dqn - Фа Sva - va [(-^) &Рп ] =
= (51)
Таким образом, 8L зависит только от дрп и dva (ср. с (б)). Если (49) вместе
с Ф-уравнениями задает q как независимые функции от р и v, причем р и v
могут рассматриваться как функции от q и q, то можно показать с по-
мощью (51), что L сильно равен функции, зависящей только от q и q.
718
П. ДИРАК
Эта функция должна обладать однородностью первого порядка относи-
тельно q. Дифференцируя по q или q, имеем
Ж ~ Рп ’ Ж ~~Va ~ Рп'
— обычные уравнения Лагранжа.
Если уравнение (49) вместе с Ф-уравнениями не задает q как независимые
функции от р и v, то мы получим уравнения, связывающе q и q :
ЪМ = О (/=1,2,..., Л (53>
/? — однородны относительно q, причем мы пишем их так, чтобы однород-
ность была первого порядка.
Рассуждая так же, как в п. 3, получим результат, аналогичный (9):
L^2+^jRj, (54)
где 2 зависит только от q и q и является однородной функцией первого
порядка относительно q. Величины зависят от q, р и v. В случае, если 2
независимые переменные, мы получим (52).
Тогда мы имеем L, содержащий импульсы, подобные рассмотренным в
предыдущем параграфе, и соответствующие q^ предыдущего параграфа.
Равенства (53) выполняют роль дополнительных условий.
10. Приложение к релятивистской динамике
Обычная нерелятивистская динамика имеет дело с состоянием динами-
ческой системы в определенный момент времени, заданным значениями q и р.
С помощью уравнений движения можно, зная состояние в один момент вре-
мени, вычислить состояние в другой момент времени. Такие уравнения дви-
жения, записанные в гамильтоновой форме с однородными скоростями,
требуют только Ф первого класса. Чтобы построить динамическую теорию,
необходимо ввести систему уравнений, допускающую наблюдателей с любыми
скоростями, причем каждому наблюдателю ставится в соответствие момент
времени. Под моментом мы подразумевали трехмерную гиперплоскость в.
пространстве-времени с нормалью внутри светового конуса. Момент вре-
мени задают, таким образом, четырьмя параметрами: тремя направляющими
косинусами нормали гиперповерхности или скорости наблюдателя и чет-
вертым параметром, позволяющим различать моменты для одного и того
же наблюдателя.
С помощью релятивистской динамики можно, исходя из данного состо-
яния в любой момент времени, построить новое состояние, соответствующее
новому моменту времени. Зависимость динамических переменных от момента
времени задается уравнением движения. Уравнения движения должны
допускать произвольные движения момента, как параллельные переносы
в пространстве-времени, так и изменения направления его нормали. Та-
ким образом, первые четыре Ф первого класса должны задать четыре сво-
бодных движения момента. Эти четыре параметра должны подчиняться урав-
нениям (17) или (33) как обычные динамические переменные q и р, но в
отличие от других q и р их удобно использовать в качестве /-переменных
уравнения (48), описывающих изменение q и р с изменением момента времени.
Другие формы релятивистской динамики, не включающие понятие момента,
обсуждались ранее автором*).
*) Р. A. Dirac, Forms of relativistic dynamics, Rev. Mod. Phys., t. 21 (1949), 392.,
St. John’s College, Cambridge.
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
7Ш
В этой работе состояние задается точкой в пространстве-времени. В
этом формализме также использованы четыре Ф первого класса, задающие
четыре свободных движения фронта [23«]. Наконец, мы можем задать
состояние динамической системы на трехмерной, пространственно-подобной
гиперповерхности. Деформации этой гиперповерхности задаются бесконеч-
ным множеством Ф первого класса. В каждом из этих формализмов пере-
менные, описывающие точку, фронт или пространственно-подобную гипер-
поверхность, рассматриваются как q, подчиняющиеся уравнениям (17) или
(33) и могут быть использованы как величины в уравнениях (48). Рас-
смотренные выше Ф первого класса — наименьшая возможная система,
необходимая для построения релятивистской динамики в одной из рассмот-
ренных выше форм. Возможны также и другие Ф. Так, например, в электро-
динамике, допускающей градиентные преобразования, существуют допол-
нительные степени свободы, которые требуют введения дополнительных Ф
первого класса.
11. Квантование
Для квантования динамической системы необходимо ввести систему
линейных операторов, соответствующих динамическим переменным q и р
и их функциям. Классическим переменным — скоростям и переменным,
содержащим т, не могут быть поставлены в соответствие операторы. Опера-
торы действуют на векторы у) в гильбертовом пространстве, причем их пред-
ставители в любом представлении (волновые функции) задают состояния
квантовой системы. Вещественные классические переменные соответствуют
эрмитовым операторам. Соответствие между классическими и квантовыми
величинами основано на двух принципах, которые, обозначая соответству-
ющие классические и квантовые величины одинаковыми буквами, сформули-
руем следующим образом:
I) Скобка Пуассона для классических переменных соответствует ком-
мутатору
[I, р] -> 2 п (I р — р £)//Л.
II) Слабые уравнения, связывающие классические величины, ссответ
ствуют линейным условиям, наложенным на у:
z(<7,p) = o-^/y> = o.
Процесс перехода от классической к квантовой механике нельзя считать
математически строго сформулированным, так как в каждом случае, когда
классическая величина включает произведение двух величин, скобка
Пуассона которых не равна нулю, возникает неоднозначность в определении
последовательности, в которой эти сомножители войдут в соответственное
квантовое выражение. Практически в простых примерах такой вопрос не
возникает. В более же сложных выражениях бывает невозможно выбрать
последовательность сомножителей так, чтобы не нарушалась совместность
квантовых уравнений. В настоящее время методы квантования представляют
собой набор практических рецептов, применение которых диктуется главным
образом соображениями простоты. Существуют обстоятельства, на которые
следует обращать внимание при переходе к квантовой механике, чтобы
не нарушить совместность квантовых соотношений. В классической теории
мы имеем ряд Ф-уравнений (/-уравнения также считаются за Ф-уравнения),
используемых в квантовой теории в соответствии с принципом II). При
720 п. дирак
преобразовании Ф, аналогичном преобразованию классических величин (27),
коэффициенты у должны всегда стоять слева от Ф. Общее выражение для Ф
в квантовой теории является линейной функцией от данных Ф с коэффи-
циентом у слева от Ф.
Из двух квантовых уравнений, полученных из Ф-уравнений согласно II,
Фг ip = 0, Ф2 у) = 0,
получим
Ф2 Фг ip = о, Ф1Ф21р = 0.
Отсюда по принципу I найдем
[Ф^Ф^у^О,
что соответствует классическому слабому уравнению
Ф2] = 0.
Заключаем отсюда, что если переход к квантовой теории возможен, все Ф
должны быть первого класса.
Классическую теорию с Ф второго класса можно проквантовать, при-
меняя преобразования, примененные в п. 8, переводящие все Ф^-уравнения
в сильные равенства. Сильные уравнения соответствуют в квантовой теории
уравнениям, выражающим одни операторы через другие.
Квантовые уравнения Фу> = 0, полученные применением принципа II
к Ф-уравнениям первого класса, являются волновыми уравнениями
Шредингера.
Обычная классическая динамика с одним Ф первого класса приводит к
одному уравнению Шредингера. В обобщенной теории каждому класси-
ческому свободному движению ставится в соответствие уравнение Шредин-
гера. Операторы, входящие в эти уравнения; соответствуют классическим
динамическим переменным для некоторого значения т.
Операторы, соответствующие разным т, принадлежат к разным алгеб-
раическим системам. По-видимому, квантовая теория не содержит какого-
либо аналога зависимости от классических переменных. Однако зависи-
мость классических величин от t, описанная уравнением (48), имеет кванто-
вый аналог в случае, если классические С. П. [fa, ta'] = 0 при а -/- а' и, сле-
довательно, соответствующие операторы квантовой теории могут принимать
одновременно численные значения [237]. Этому требованию удовлетворяет
ряд систем t, введенных в различных формах релятивистской динамики,
рассмотренных в п. 10. Уравнения (48) нельзя непосредственно прокванто-
вать, потому что, как легко проверить, соответствующие квантовые урав-
нения не будут инвариантны относительно общих преобразований (27).
Приведем уравнение (48) к стандартному виду. Преобразование (27) вводит
новую систему Ф, именно Фа, находящуюся в однозначном соответствии с
системой ta, таким образом, что
(55)
При этом уравнение (48) приводится к виду
= (ЭД
Проквантовав эти уравнения, мы получим квантовые уравнения в пред-
ставлении Гейзенберга для обобщенной динамики.
ОБОБЩЕННАЯ ГАМИЛЬТОНОВА ДИНАМИКА
721
Приложение
Доказательство тождества Пуассона для новых С. П.,
заданных уравнением (36)
Различные 0 обозначаем индексами t, г, s, . .. Имеем, по определению:
[[£,77]*, q* = [[^»?] + [МЛ +
+ [[£ + [^ 0г] crs [0S, 77], 0Z] cta [0U, C] =
= [ [Mb Л + [ k- 0r], q crs [0S, 77] + [£, 0J [crs, q +
+ [0S,»?] + k, 02] crs [[0S) 77], q + [ k, 77] ,et ] Ctu [0U, q+
+ [ k, 0r], 0/] crs [0S, 77] ctu [0U, q +
+ k, 0r] k™ 0/] [0S,»?] clu [0U, a + k, 02] crs [[05,77], 0Z] ctu [0U, С]. (57)
Пусть оператор S обозначает суммирование по всем циклическим переста-
новкам £, 77, £. Требуется доказать, что
24k- = °-
Применяя S к первому члену (57), получим нуль на основании обычного
тождества Пуассона. 2, примененный ко второму, четвертому и пятому
членам, дает на основании обычного тождества Пуассона:
2 crs [0S, 77] {[k, 0j, q + [ [02, q, q + [ [с, q, 02]} = о.
Применяя S к шестому и восьмому членам (57), получаем, подвергая г, u, s, /
циклической перестановке:
crs ctu 2 [0S, 4 [0U, q {[ k, 02], 0/] + [ [0/, q, 0r]} =
= - crs ctu 2 [03,4 [0U, q [ [0r, 0,], q • (58)
Из (35) следует, что
hu[0r,0j,q = o
или
[c<u,q [0r,0j +c<u[[0r,0(],q = o. (59)
Еще раз пользуясь (35), приведем (58) к следующему виду:
Crs [0г, 0/] 2 [0S, V] [0Ц, q k(u, q = 2 [0/ 4 [0U, q q.
Применение S к седьмому члену (57) дает:
[q 0r] h, 0S] k, 0U]{ ctu [crs, et] + Ctr [c5u, + Cts [cur, 0J}. (60)
Обозначив через Srsu суммирование по двум одновременным циклическим
перестановкам г, s, и и г', s', и', имееги :
2rSu Cr'r cS'S си.и [ [0r,, esq, eq = 0. (61)
46 Вариационные принципы механики
722
П. ДИРАК
Заменяя в (59) £ на 9и’, получим, что
[Сгг, О и'] [°г, <М+ Сг.г [ [0Г, (М, м = о.
Тогда из уравнения (61) получим
Srsu^s's^u'u [^, ®SZ] l^r'r, 0и'] = О .
Из (35) следует:
2rsu ^и'и [^rs, 0и'] = О ,
значит, (60) равняется нулю, что и завершает доказательство. Все доказа-
тельство проведено в терминах сильных уравнений.
ПРИЛОЖЕНИЯ
Ф. ВОЛЬТЕР
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО [238 ]
От нового издателя
Под заглавием «История доктора Акакия и уроженца Сен-Мало» по-
явилась в 1753 г. брошюра in 8° на 44 страницах.
Это было собрание небольших произведений, которые ранее печатались
отдельно. Сюда входили: 1. Диатриба доктора Акакия, включающая
«Постановление инквизиции», «Суждения профессоров» и «Анализ писем».
2. Памятное заседание. 3. Мирный договор. 4. Письмо доктора Акакия.
Сборник этих статеек был снабжен предисловием, а между статьями было
вставлено по нескольку фраз, обозначенных NB. Я так и оставил в своем
издании эти фразы под знаком NB.
Под общим, весьма подходящим заглавием «История доктора Акакия»
эти статьи перепечатывались в различных изданиях «Политики века Людо-
вика XIV». Некоторые из этих статей относятся к 1752 г., другие к 1753 г.;
я их отнес поэтому к 1752—1753 гг.
Эти небольшие произведения, о каждом из которых я скажу ниже по
нескольку слов, были написайы по поводу ссоры Мопертюи с Кёнигом.
Об этой ссоре оказалось возможным получить письменную справку у одного
члена Берлинской Академии (от 18/II 1752 г.).
Примечания, подписанные Кл., принадлежат Клагенсону, которому я
обязан и многими другими сведениями.
История доктора Акакия и уроженца Сен-Мало*)
Один человек, родом из Сен-Мало, долгое время страдал болезнью,
именуемой по-гречески филотимией, или, как некоторые говорят, фило-
кратией**).
Мозг больного был настолько поврежден сильнейшими приступами этой
болезни, что уроженец Сен-Мало принялся в своих писаниях нападать на
врачей и опровергать доказательства бытия божия. Порой мерещилось ему,
что он пронзает земной шар до самого центра, иногда он воображал, что
воздвигает латинский город. Он утверждал также, что душу можно познать
путем анатомирования обезьян.
Под конец он дошел до того, что возомнил себя вдвое выше Лейбница***),
исполина прошлого столетия, хотя ростом он был неполных пяти футов.
*) Пьер-Луи Моро де Мопертюи родился в Сен-Мало 15/IX 1698 г., президент Берлин-
ской Академии, умер 27/VII 1759 г.
**) Филотимия означает тщеславие, любовь к почестям, филократия — любовь к вла-
сти (Кл.>.
***) Лейбниц родился 3/VII 1646 г., умер в 1716 г.
724
Ф. ВОЛЬТЕР
Один из прежних его товарищей, швейцарец, профессор*) из Гэя,
опечаленный его тяжелым состоянием, поехал к нему, чтобы указать ему
его подлинный размер.
Но уроженец Сен-Мало, вместо того чтобы оценить значение оказанной
ему услуги, объявил профессора фальсификатором и нарушителем законов
моритимии**).
Тогда врач Акакия***), понявший, что болезнь находится уже в послед-
ней стадии, составил следующее безобидное лекарство, которое предписал
давать больному secundum atrem со всей возможной деликатностью, чтобы
не усилить греховных его настроений.
Диатриба доктора Акакия****)
Нередко случается в наши дни, что никому не ведомые лица выпускают
в свет свои малоценные произведения под именем знаменитых авторов.
Всякие бывают шарлатаны. И вот один из них прикрылся именем знамени-
тейшей Академии, чтобы сбыть свою сомнительную стряпню.
Совершенно невероятно, чтобы известный президент Академии мог быть
автором приписываемой ему книги. Ведь этот выдающийся профессор открыл,
что природа действует согласно простейшим законам и при этом всегда
следует принципу экономии сил. Поэтому нельзя сомневаться, что он изба-
вил бы тех немногочисленных читателей, которые в состоянии прочесть его
книги, от излишнего труда дважды перечитывать одно и то же: один раз — в
книге «Произведения», другой раз — в книге «Письма». Ведь по крайней мере
третья часть содержания одной книги дословно списана с другой. Кроме
того, этот великий человек, далекий от всякого шарлатанства, не мог бы
опубликовать письма, которые никому не были написаны; он несомненно
избежал бы также ряда мелких ошибок, простительных только какому-
нибудь юнцу.
*) Кёниг Самуил, родился в 1712 г. в Бедингене, немецком городке, за четыре мил/z
от Франкфурта и 2 у, отГенау; он не был швейцарцем, как утверждает Вольтер; умер
в 1757 г.
**) Это слово означает честь и достоинство глупцов (Кл.).
***) Мартин Бесхитростный, врач Франциска I и профессор Коллеж де Франс, принял
имя Акакия, что является точным переводом его имени на греческий язык.
****) Если верить Мопертюи, то «Диатриба доктора Акакия» была напечатана сразу
во многих местах. Формэй сообщает, что Вольтер издал «Диатрибу», воспользовавшись
разрешением, которое ему было выдано на напечатание «Защиты д-ра Болингброка».
Но издание «Диатрибы» не было распространено. Король прусский велел сжечь это произ-
ведение рукой палача на площади 24 декабря 1752 г. Оба великих человека рассорились
после этого окончательно, и Вольтер уехал из Берлина. Когда в 1756 г. он включил «Диат-
рибу» в собрание своих сочинений, он предпослал ей следующее предисловие:
«Эта шутка так часто уже появлялась в печати, что ее нельзя исключить из этого
Собрания. Это невинная болтовня о смешной книге президента Академии, выпущенной
в 1752 г. Совершенно исключительным явлением были утверждения философа о том, что
не существует никаких других доказательств бытия божия, кроме алгебраической фор-
мулы ; что душа человека, приходя в возбужденное состояние, может предвидеть
будущее; что можно сохранить себе жизнь на три или четыре века, закупорив все
поры тела. Много подобных вещей можно найти в этой книге.
Один математик из Гэя выступил в печати против первого из этих утверждений и рас-
крыл его математическую ошибочность. Разгорелась ссора, и президент возбудил целое дело
перед судом своей собственной Академии, находящейся в полной от него зависимости, и
заставил академиков осудить своего противника как фальсификатора. Эта несправед-
ливость возмутила всю литературную Европу и явилась поводом к написанию статьи,
предлагаемой вниманию читателя. Это — ряд намеков на те места книги, над которыми
особенно смеялась публика. В ней речь ведется как бы от лица врача, потому что в книге
сказано, что врачу не следует платить, если он не вылечит больного».
Это предисловие Вольтера относится лишь к «Диатрибе д-ра Акакия» и не касается
всего сборника статей под общим названием «История д-ра Акакия» (Прим. изд.).
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
725
Меня, надеюсь, не заподозрят в том, что во мне говорит профессиональная
заинтересованность, если я сочту оскорбительным, что с врачами обраща-
ются, как с книгопродавцами.
Автор собирается уморить нас голодом. Он не желает, чтобы врачам
платили в тех случаях, когда больной не выздоравливает. «Не платят ведь
живописцу, — говорит он, — если картина плоха». О, молодой человек, как
вы жестоки и несправедливы! Разве герцог Орлеанский, регент Франции,
не оплатил самым щедрым образом ту пачкотню, которой Гуапель украсил
галлереи Пале-Рояля? Разве клиент лишает законного гонорара своего
адвоката, проигравшего дело? Врач обещает лечить, но не обещает вылечить.
Он затрачивает свой труд, и этот труд оплачивается ... И что же! Вы по-
завидовали врачам!
Что сказал бы, по-вашему, человек, которому платят 1200 дукатов за
разглагольствования о математике и метафизике, за то, что он разрезал двух
жаб и, кроме того, заказал свой портрет, где он изображен в меховой шапке,
если бы к нему обратился казначей с такой примерно речью:
«Милостивый государь, с вас следует удержать сто дукатов за то, что
вы написали, будто звезды устроены подобно ветряным мельницам; еще сто
дукатов удерживается с вас за ваше утверждение, что луна будет у нас
похищена залетевшей кометой и что подобная же опасность угрожает даже
солнцу; еще сто дукатов следует с вас за то, что вы вообразили, будто на
землю будут падать кометы, состоящие сплошь из золота и бриллиантов.
Триста дукатов налагается на вас за утверждение, будто ребенок обра-
зуется в матке благодаря силе притяжения*) и что левый глаз притягивает
правую ногу**); не менее четырехсот дукатов следует урезать из вашего
жалованья за то, что вы вообразили, что душа познается посредством при-
менения опиума или если разрезать голову великана, и проч., и проч.
Ясно, что в итоге от жалованья бедного философа ничего бы не осталось;
и как бы вам понравилось, если бы мы, врачи, посмеялись над ним, заверяя
его, что вознаграждение полагается не за мнимую, а за действительную
полезность той или иной вещи.
Опрометчивый молодой человек обвиняет моих собратьев-врачей в недо-
статке смелости. Он говорит, что открытием всех известных лекарств мы
обязаны лишь случаю или же диким племенам; врачи же не нашли ни
одного.
Следует растолковать ему, что только опыт натолкнул людей на знаком-
ство с лекарственными действиями трав. Ни Гиппократ, ни Бернав,ни Ширак,
ни Сена никогда бы не догадались, глядя на хинное дерево, что оно должно
излечивать лихорадку, или, увидев ревень, что он является слабительным,
а при виде маков им бы не пришло в голову, что они обладают снотворным
действием. Только случай может привести к открытию свойств растений.
Врачи все же изобрели некоторые лекарства с помощью химии.
Врачи не хвалятся тем, что излечивают всегда, но они ставят себе в
заслугу, что делают все возможное для облегчения человеческих страданий.
Сомнительно, чтобы молодой человек, позволяющий себе так дурно
относиться к врачам, оказал роду человеческому столько добра, сколько
сделал, например, тот человек, который вырвал из пасти смерти, казалось
бы, уже совершенно безнадежного маршала Саксонского после победы при
Фонтенуа.
*) В «Произведениях» и «Письмах» Мопертюи.
**) См. его «Venus physique». Во всех изданиях «Диатрибы» написано: «левый глаз
притягивает правую ногу». Это, конечно, утрировка мыслей Мопертюи, которые и в
«Extrait de la Bibliotheque raisonn6e» приведены не текстуально.
726
Ф. ВОЛЬТЕР
Наш юный резонер настаивает на том, чтобы врачи были только эмпири-
ками и не вдавались бы ни в какие теории.
Однако, что сказали бы вы о человеке, который при постройке дома
положился бы всецело на каменщиков, предоставив им обтесывать камни
как придется, и отверг бы услуги архитекторов?
Молодой человек дает врачам мудрый совет пренебречь анатомией. Однако
в этом случае анатомы будут на нашей стороне. Удивляет нас только небла-
годарность автора, который кое-чем обязан хирургам Монпелье как раз
в той области, где требуется хорошее знание внутреннего строения головы,
да и в других областях.
Автор, очевидно, мало сведущ и в истории. Рассуждая о необходимости
извлекать пользу из казни преступников, производя различные опыты над
ними, автор заявляет, что до сих пор это никогда не осуществлялось*).
Он не знает того общеизвестного факта, что уже во времена Людовика XI
над человеком, приговоренным к смерти, был произведен опыт рассечения;
он не знает, что покойная королева Англии приказала испробовать действие
оспенной прививки на четырех приговоренных; не знает он также и ряда
других случаев.
Но недостаток знаний автор восполняет избытком своеобразного вообра-
жения. Он, в качестве физика, предлагает, например, для излечения апоплек-
сии применять центробежную силу, для чего больных следует заставлять
выделывать пируэты. Идея, по правде сказать, принадлежит не ему, но он
сумел придать ей совершенно новое выражение. Он рекомендовал нам также
обмазывать больных древесной смолой или протыкать им кожу иглами.
Разумеется, если он в своей врачебной практике будет применять подоб-
ные методы, то больные, весьма вероятно, вполне с ним согласятся, что вра-
чам платить не следует.
Удивительнее всего поступает этот жестокий враг факультета, который
так безжалостно хочет лишить нас заработка, когда он предлагает разорять
самих больных, очевидно, с целью смягчить гнев врачей.
Он приказывает (он ведь большой деспот), чтобы каждый врач лечил
лишь один какой-нибудь вид заболевания. Таким образом, если человек
страдает подагрой, лихорадкой, расстройством желудка, болезнью глаз и
болезнью ушей, ему придется оплачивать пятерых врачей вместо одного.
Впрочем, возможно, что в таких случаях предусмотрено, чтобы каждый
врач получал лишь х/6 обычной платы.
В недалеком будущем автор предложит всем набожным людям завести
отдельного духовника для каждого порока: одного для мелкого тщеславия,
другого для зависти, скрытой под суровой и надменной маской, третьего —
для бешеной страсти к проискам и интригам по поводу всяких пустяков
и еще одного для всяких других грехов.
Но не будем отвлекаться и вернемся к нашим собратьям.
«Лучший врач, — говорит он, — это тот, который меньше всего рассуж-
дает»**).
По-видимому, в области философии автор так же верен этой аксиоме,
как Канай в области теологии***).
*) См. в «Произведениях» стр. 198, изд. 1752 г. Там было напечатано «никогда не было
осуществлено». Цитата Вольтера точна, но Мопертюи, найдя замечание Вольтера пра-
вильным, уже в следующем издании 1753 г. написал: «однако почти никогда не осу-
ществлялось».
♦*) Мопертюи говорит: «Лучший врач тот, кто меньше всего рассуждает и больше
всего наблюдает» («Произведения», стр. 347).
***) «Ничего от разума ... — вот настоящая религия. Ничего от разума!...»— таково
суждение П. Каная в «Разговорах маршала де Гокинкура», составляющих часть «Произ-
ведений Сент-Эвремона» (Изд.).
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
727
Несмотря на свою ненависть к рассуждениям, автор все же предается
глубоким размышлениям о способах продления жизни.
Во-первых, он согласен со всеми разумными людьми, — с чем мы его
и поздравляем, — что предки наши жили от 800 до 900 лет. Затем, установив
самостоятельно и независимо от Лейбница, что «зрелость не есть возраст
силы и мужественности, но возраст смерти», он предлагает отдалить этот
возраст зрелости, подобно тому как сохраняют яйца, не давая им наклю-
нуться.
Это—чудесный секрет, и мы советуем автору укрепить за собой честь
этого открытия в каком-нибудь курятнике или посредством смертного при-
говора какой-нибудь Академии.
Из приведенного видно, что если бы эти воображаемые «Письма» были
действительно письмами президента, то это мог бы быть только президент
Бедлама. Нет, они бесспорно принадлежат перу какого-то юнца, который
вздумал украсить свое творение именем мудреца, почитаемого всей Европой,
и который сам ведь дал согласие на то, чтобы его провозгласили великим
человеком.
Мы иногда видали на карнавале в Италии арлекина, наряженного архи-
епископом. Но арлекина легко было распознать по его манере благословлять
народ. Рано или поздно обманщика разоблачают. Это напоминает басню
Лафонтена :
«Кусочек ушка выглянул, к несчастью,
— И обнаружился обман».
А в данном случае уши видны целиком*).
Ввиду всего вышеизложенного мы передаем Святейшей Инквизиции
книгу, приписываемую Президенту, полагаясь на непогрешимые познания
этого ученого судилища, к которому врачи, как известно, питают столь
высокое доверие.
Постановление Римской Инквизиции
Мы, отец Панкратий и проч., инквизитор по делам веры, прочли «Диа-
трибу» монсеньора Акакия, личного врача папы. Не уразумев, что значит
слово «Диатриба», мы, однако, не нашли в ней ничего противного вере и
Декреталиям.
Иначе обстоит дело с «Произведениями» и «Письмами» молодого человека,
укрывшегося под именем президента.
Воззвав к духу святому, нашли мы в его творениях множество положений
дерзких, еретических и близких к ереси. Все они подлежат осуждению.
Особенно — ив частности — мы предаем анафеме «Опыт Космологии»,
где неизвестный, ослепленный наущениями детей Велиала и видящий все
в мрачном свете, клеветнически и вопреки Священному Писанию утверждает,
что пожирание мух пауками является ошибкой Провидения; в вышена-
званной «Космологии» далее утверждается, что единственным доказатель-
ством бытия божия является то, что z равно ВС, деленному на А плюс В.
Эти буквы, извлеченные из «Grimoire», несомненно дьявольские, и мы
заявляем, что они посягают на авторитет Св. Престола. И так как мы, как
это нам и подобает, не имеем никакого понятия о предметах, именуемых
*) «Письма» Мопертюи я смог достать только в изд. 1752—1753 гг., a «Venus physique»
только в изд. 1745 г. и, признаюсь, не нашел там приведенных Вольтером цитат, так как
нумерация страниц отличается от нумерации страниц приведенного им издания. Но,
как уже раньше указывалось, Мопертюи делал поправки после замечаний Вольтера, и
нельзя ставить в вину Вольтеру, что приводимые им цитаты в новом издании уже не могут
быть отысканы.
728
Ф. ВОЛЬТЕР
физикой, математикой, динамикой и метафизикой, то мы предписали досто-
почтенным профессорам Коллегии «1а sapience» просмотреть «Произведения»
и «Письма» молодого человека и дать нам о них точный отчет.
Бог да поможет им в этом!
Суждение профессоров Коллегии «Sapience»
Мы заявляем, что законы столкновений тел абсолютно твердых являются
чисто ребяческими и мнимыми ввиду того, что не существует ни одного
известного нам абсолютно твердого тела, а только абсолютно твердые умы,
на которые мы тщетно пытались воздействовать.
Утверждение, что произведение пространства на время является всегда
наименьшей возможной величиной, нам кажется неправильным, так как,
согласно Лейбницу (и это уже считается доказанным), означенное произ-
ведение является иногда и наибольшей возможной величиной. По-види-
мому, автор принял во внимание только половину идеи Лейбница. Он,
однако, поступил правильно, не приняв идею Лейбница целиком.
В остальном мы присоединяемся к той оценке, которую дали произве-
дениям молодого человека монсеньор Акакия, врач папы, и многие другие,
особенно в отношении «Venus physique».
Мы советуем молодому человеку в тот момент, когда он приступит со
своей женой (если таковая у него имеется) к делу воспроизведения потомства,
не думать, что ребенок может зародиться в матке посредством силы притя-
жения. Мы увещеваем его не завидовать улиткам и жабам в любовных делах
и поменьше подражать стилю Фонтенеля в ожидании, пока, наконец, в зре-
лом возрасте, у него не сформируется его собственный стиль.
Приступаем теперь к анализу «Писем», в которых мы нашли почти все
содержание «Произведений», использованное, таким образом, дважды.
Мы хотим убедить автора не сбывать два раза один и тот же товар под
разными названиями.
Это не подобает честному торговцу, каким ему надлежало бы быть.
Разбор «Писем» молодого человека, укрывшегося под именем президента
Г. Прежде всего автор должен усвоить, что слово «предусмотритель-
ность», обозначающее способность, свойственную человеку, не может быть
заменено словом «предвидение».
Слово «предвидение» может быть применено исключительно к тому по-
знанию, которым бог прозревает будущее.
Нужно знать правильное значение различных терминов перед тем, как
браться за перо.
Следует также знать, что душу увидеть нельзя. Душа может видеть,
но сама остается незримой.
Эти незначительные заблуждения молодой человек легко может испра-
вить.
2°. Неверно, что благодаря памяти мы больше теряем, чем выигрываем.
Кандидат должен знать, что память способна сохранять мысли и что,
потеряв память, мы лишаемся возможности не только написать плохую
книгу, но и управлять своим поведением. Молодому человеку необходимо
развивать свою память!
3°. Автор, далее, приводит следующее смехотворное положение: подобно
тому как тело, выведенное из своего первоначального состояния, стремится
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
729
вновь к нему вернуться, так и душа всегда возвращается вновь к тому
состоянию довольства или горести, которое свойственно ей по ее природе.
В данном случае кандидат должно быть плохо выразил свою мысль.
Он, очевидно, хотел сказать, что каждый человек в конце концов возвра-
щается к первоначальным свойствам своего характера.
Так, например, человек после усиленных стараний сделаться философом
возвращается к свойственной ему мелочности. Но эта истина настолько
тривиальна, что повторять ее не имеет смысла.
Впрочем, уверенность в том, что самые старые истины приобретают
свежесть новизны, если их преподнести читателям в туманных выражениях,
является обычным заблуждением молодости.
4°. Кандидат ошибается также, утверждая, что пространство является
только восприятием нашего духа. Если когда-нибудь ему придется зани-
маться наукой серьезно, то он увидит, что пространство не то же самое, что
цвет или звук, которые существуют только в наших ощущениях, как это
известно всякому школьнику.
5°. Что касается германской национальности, которую автор всячески
поносит и считает слабоумной, употребляя соответствующие выражения,
то такое отношение к немцам нам кажется неблагодарным и несправедливым.
Дело не только в ошибочности этой оценки, но ведь надо соблюдать и
учтивость.
Вероятно, кандидат считает, что он что-нибудь выдумал после Лейбница,
но уверяем его, что во всяком случае пороха он не выдумал.
б°. Мы также боимся, что у товарищей нашего автора явится некоторое
искушение заняться поисками философского камня, потому что, по его
словам, «с какой бы точки зрения ни посмотреть на это дело, доказать невоз-
можность успеха нельзя». Он, правда, признает, что безумно вкладывать
все свое состояние в эти поиски.
Но так как, с другой стороны, в своих рассуждениях о «сумме счастья»
автор признает, что, несмотря на недоказуемость положений христианской
религии, она все же имеет множество последователей, то, с тем большим
основанием, некоторые лица могут довести себя до полного разорения во
имя великой цели, поскольку, как утверждает автор, есть возможность
достичь успеха.
7°. Мы опускаем кое-что, чтобы не испытывать терпение читателя и не
утомлять ум монсеньора инквизитора; но мы думаем, что они будут очень
удивлены, узнав, что молодой студент намерен вскрывать мозги великанов
ростом в 12 футов, а также волосатых людей, имеющих хвост, с целью
исследовать природу души; что он посредством муки, разведенной водой,
выводит угрей, которые беременны другими угрями, а из хлебных зерен
выводит рыб.
Думаем, что это позабавит монсеньора инквизитора.
8°. Но он уже не станет смеяться, когда услышит, что каждый может
стать пророком и что знать будущее так же легко, как знать прошлое. Автор
признает, что доводы в пользу судебной астрологии столь Же убедительны,
как и доводы против нее. Он утверждает, что восприятие прошлого, настоя-
щего и будущего различается лишь степенью душевной активности. Он
надеется, что воображение, при увеличении теплоты и экзальтации, покажет
нам будущее, подобно тому как память показывает нам прошлое.
Мы единогласно решили, что мозг философа уже достаточно возбужден
и что скоро этот философ начнет пророчествовать. Мы не знаем, будет ли
он в числе малых или великих пророков, но очень боимся, что он явится
провозвестником несчастья, потому что, даже в своем трактате о счастье,
он говорит только о печалях и особенно скорбит о несчастных сумасшедших.
730
Ф. ВОЛЬТЕР
Мы выражаем свое соболезнование всем безумцам; но если возбужденная
душа философа уже прозрела будущее, не увидала ли она там чего-нибудь
забавного?
9°. Нам кажется, что у него есть желание поехать в Австралийские
земли, хотя при чтении его книг скорее думается, что он оттуда только что
вернулся; однако он не знает, что земля Фридриха-Генриха, расположен-
ная за 40° южной широты, уже давно открыта. Предупреждаем его, что,
если он, вместо того чтобы направиться в Австралию, вздумает плыть прямо
к Северному полюсу, никто не последует за ним.
10°. Следует указать автору на затруднительность осуществления его
желания прорыть яму, доходящую до центра земли (куда он, очевидно,
хочет спрятаться от стыда за выдвинутый проект). Ведь для того, чтобы
вырыть такую яму, пришлось бы срыть 400 миль земли. А это могло бы
нарушить систему европейского равновесия.
В эту яму, так же как и на Северный полюс, никто за ним не последует.
Что же касается того латинского города, который он думает построить, то,
по нашему мнению, его следует воздвигнуть на краю этой ямы.
В заключение мы просим д-ра Акакия прописать ему какие-нибудь
освежающие настойки. Автору же рекомендуем поучиться в каком-либо
университете, а также настоятельно просим его быть поскромнее.
Если когда-либо будут направлены в Финляндию физики для того,
чтобы произвести измерения, необходимые для проверки тех открытий
Ньютона, к которым он пришел благодаря своей величественной теории
тяготения и центробежной силы, и если наш автор окажется в числе этих
ученых, пусть он не старается казаться выше своих товарищей; пусть не
добивается, чтобы его изображали расплющивающим земной шар, подобно
тому как изображают Атласа поддерживающим небо.
Лик земли не изменится от того, что автор поселился в городке, где стоит
шведский гарнизон. Советуем ему также не упоминать по каждому поводу
про Полярный круг.
Если какой-нибудь школьный товарищ дружески выскажет ему свое
мнение, отличное от его мнения; если он доверчиво признается ему, что
опирается на авторитет Лейбница и некоторых других философов; если
он покажет ему частным образом письмо Лейбница, в котором категорически
опровергается мнение нашего кандидата, пусть вышеназванный кандидат
не воображает и не говорит всем и каждому, что письмо Лейбница поддель-
ное и состряпано с целью похитить у него славу оригинального мыслителя.
Пусть он не принимает свое заблуждение в одном из вопросов динамики,
не имеющем к тому же никакого практического значения, за великолепное
открытие.
Если этот товарищ, несколько раз говоривший ему о своей работе, в кото-
рой он выступает против него — со всей возможной скромностью и восхваляя
своего противника, — печатает, наконец, с его же согласия эту работу, пусть
он не вздумает обвинять этого товарища в оскорблении его академического
величества.
Если этот же товарищ признавался ему не раз, что это письмо Лейбница,
как и некоторые другие письма, было получено им от человека, умершего
несколько лет назад*), пусть кандидат не лукавит, стараясь использовать
это признание, и не пускает в ход тех хитростей, которыми некто**) действо-
вал против Мерана, Кассини и других истинных философов; пусть в легко-
мысленном споре он не требует воскрешения мертвого для того, чтобы тот
♦) Henzy, обезглавленный в Берне.
**) Здесь подразумевается один человек, причинивший много страданий господам
Мерану и Кассини.
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
731
доложил ему сам о ничтожной мелочи из письма Лейбница; пусть он отло-
жит это чудо до той поры, как станет пророком. Пусть он никого не компро-
метирует в ссоре из-за пустяка, раздутого им до огромных размеров, и пусть
не требует вмешательства богов в войну мышей и лягушек. Пусть он не пи-
шет письма за письмом великой княгине, чтобы принудить к молчанию своего
противника, чтоб связать ему руки и уничтожить его по своему произволу.
Пусть в споре по ничтожному вопросу динамики он не требует, чтобы
некий профессор в порядке академического подвига явился через месяц,
дабы предстать перед судом; пусть он затем не добивается его заочного
осуждения за покушение на его славу*), за составление поддельных писем,
особенно в тех случаях, когда совершенно очевидно, что письма Лейбница —
это именно письма Лейбница, а, с другой стороны, письма за подписью
президента никогда не были получены его корреспондентами, так же как
никогда не были прочитаны публикой.
Пусть он не пытается лишить кого-нибудь права законной самозащиты,
памятуя, что тот, кто, будучи неправ, стараясь опозорить другого, позорит
сам себя.
Пусть он поймет, что все писатели равны, и он будет только в выигрыше
от этого равенства.
Пусть он не вздумает требовать, чтобы никто ничего не печатал без его
разрешения.
В заключение мы обращаемся к нему с увещеванием быть послушным,
изучать серьезную науку, а не заниматься пустыми дрязгами. То, что ученый
выигрывает, строя козни другим, то он теряет в своем духовном богатстве,
подобно тому как в механике, выигрывая время, мы проигрываем в силе.
Слишком часто мы видим молодых людей, которые подавали большие
надежды и хорошо работали, а кончали тем, что писали глупости; это
потому, что они захотели стать искусными придворными, вместо того, чтобы
быть искусными писателями; потому что науку они подменили тщеславием
и предпочли рассеянность, которая ослабляет разум, сосредоточенности,
которая его укрепляет. Их хвалили — они стали недостойными похвалы,
их награждали — они стали недостойными наград; они хотели казаться
и перестали быть, потому что сумма ошибок у одного писателя эквивалентна
сумме смешного, и таким образом «существование его равноценно небытию»**).
NB. Это мягкое лекарство оказало, как это часто случается, действие,
обратное тому, которого следовало ожидать.
Желчь уроженца Сен-Мало была им возбуждена еще больше, чем его
душа. Он безжалостно сжег предписание врача***), и болезнь ухудшилась.
Он стал настаивать на продолжении своих опытов и созвал с этой целью
памятное заседание, о котором мы сейчас правдиво расскажем.
Памятное заседание****)
В первых числах октября 1751 г.*****) собрались в экстренном порядке
ученые под председательством высоко ученого президента.
*) Он написал два письма принцессе Оранской, умоляя ее заставить замолчать своего
противника Кёнига, библиотекаря этой принцессы, и добился его осуждения как фаль-
сификатора.
♦*) Писатель, о котором идет речь, сказал, что если человек испытал столько же дурного,
эколько хорошего, то «бытие его равноценно небытию» («1е n6ant vaut sen existance»).
***) Фридрих по требованию Мопертюи приказал сжечь «Диатрибу» д-ра Акакия 24/ХП.
1752. г.
*♦**) Имеется отдельное издание на восьми страницах in 8°.
*****) Дата, по-видимому, вымышлена. Публичные заседания Академии происходили в
январе и в июле, а не в октябре.
Когда все заняли свои места, президент произнес похвальное слово одному
члену общества, недавно созревшему*) из-за того, что не были приняты
предупредительные меры, а именно, не были закупорены поры его тела, что
сохранило бы его подобно свежему яйцу, согласно новому методу. Он дока-
зал, что врач убил больного тем, что пренебрег лечением по способу центри-
фуги, и вынес решение объявить врачу выговор и лишить его вознаграж-
дения.
Он закончил, промолвив вскользь, со своей обычной скромностью,
несколько слов о самом себе ...
Затем пред лицом ученых всей удивленной Европы было приступлено
после сложных приготовлений к проверке опытов, предложенных прези-
дентом.
Во-первых, два врача представили каждый по больному, обмазанному
смолой, и два хирурга проткнули им бедра и руки длинными иглами. Боль-
ные, которые до тех пор едва могли пошевелиться, принялись сразу же
бегать и кричать изо всех сил.
Этот факт был тотчас же зарегистрирован секретарем.
Затем выступил аптекарь с большой банкой опия. Он поставил эту
банку на том произведении президента, дабы удвоить силу действия сна-
добья. Некоторую дозу опия дали молодому, полному сил человеку. И вот
ко всеобщему удивлению он уснул, и сновидения его были так блаженны,
что подбежавшие дамы перепугались.
Так была в совершенстве познана природа души, как это прекрасно
предугадал президент.
После этого явились все городские чернорабочие, чтобы быстро вырыть
яму до самого центра земли, ибо стремления президента простирались именно
на такую глубину. Но так как дело это было несколько затяжное, то решили
отложить его до следующего раза, а пока что постоянный секретарь Акаде-
мии устроил встречу рабочих с каменщиками — строителями Вавилонской
башни.
Тут же президент приказал зафрахтовать судно, чтобы ехать в Австра-
лийские земли производить вскрытия великанов и волосатых людей с длин-
ными хвостами; он объявил, что отправляется в путешествие лично, так
как хочет подышать воздухом своей родины, что было встречено аплодисмен-
тами всех собравшихся.
Далее приступили, по приказанию президента и согласно его теории,
к скрещиванию индейского петуха с мулом. Это происходило во дворе
Академии. В то время как поэт корпорации слагал эпиталаму, президент,
очень галантный человек, угощал дам великолепной закуской — паштетом
из угрей, причем в каждом угре было еще по одному угрю. Они родились
внезапно из разведенной муки. Тут были также большие блюда рыб, которые
тут же возникали из проросших хлебных зерен, что доставило дамам особое
удовольствие.
Затем президент выпил стакан крепкого ликера и доказал собранию,
что видеть будущее так же просто, как и прошедшее. Он потер языком
губы и долго вертел головой; приведя свое воображение в возбужденное
состояние, начал пророчествовать. Его пророчество не приводится здесь;
оно будет целиком помещено в альманахе Академии.
Заседание закончилось очень красноречивым выступлением постоян-
ного секретаря**).
*) То есть скончавшемуся (Кл.).
**) Формей, которого Вольтер ниже называет вечным секретарем. Он составлял «по-
хвальные слова» многим своим собратьям.
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
733
«Один лишь Эразм достоин был бы произнести вам похвалу» — сказал он*).
Затем он превознес монаду президента до небес, или, по крайней мере, до
облаков, смело поставив его рядом с Сирано де Бержераком. Под конец
соорудили трон из мочевых пузырей, и на следующий день ему надлежало
улететь на луну, где Астольф нашел, как говорят, то, что президент
потерял**).
NB. Уроженец Сен-Мало не улетел на луну, как собирался; он ограни-
чился тем, что лаял на луну. Добрый д-р Акакия, видя, что болезнь прогрес-
сирует, задумал смягчить остроту ее приступов, примирив президента с
д-ром швейцарцем, который внушил ему такую неприязнь, показав ему его
подлинный рост. Доктор, считавший, что антипатия — болезнь вполне изле-
чимая, предложил следующий мирный договор.
Мирный договор, заключенный между
г. президентом и г. профессором***) 1 января 1753 г.****)
Ввиду того, что вся Европа встревожена опасной ссорой по поводу
алгебраической формулы и проч., обе стороны, принципиально заинтересо-
ванные в возникшей войне, желая предупредить нестерпимое долее для
читателей пролитие чернил, пришли, наконец, к соглашению на следующих
условиях :
Президент отправится на место своего президенства и скажет своим
пэрам следующее :
Г. Мы имели достаточно времени, чтобы осознать свою ошибку, и просим
теперь г. профессора забыть все прошлое. Мы очень сожалем о том, что наде-
лали столько шума из-за пустяков.
Мы сожалеем о том, что обвинили в вымысле видного профессора, все
предположения которого относились исключительно к монадам и предуста-
новленной гармонии*****).
2°. Мы подписали и скрепили нашей большой печатью свидетельство,
которым мы возвращаем свободу республике литераторов, и заявляем,
что впредь разрешается писать против нас, не подвергаясь за это обвинениям
в нечестности.
3°. Мы просим прощения у бога за наше утверждение, будто не сущест-
вует других доказательств его бытия, кроме того, что А плюс В, деленное
на z, и т. д. . . . И если, что маловероятно, рассуждения подобного рода
соблазнят кого-нибудь из наших читателей, мы даем ему благой совет :
заняться чем-нибудь более полезным и отойти от мыслей, которые могли
ему прийти в голову насчет этого предмета, в котором мы сами ничего не
понимаем.
Гг. инквизиторы, которые разбираются в этом не лучше нашего, не
осудят нас по всей строгости.
*) Который, как известно, написал «Похвалу глупости».
**) «Неистовый Ролланд», песня XXXIV. (Изд.)
***) Кёниг, профессор из Гэя (Кл.).
****) Отдельным изданием вышло под заглавием «Мирный договор, заключенный между
президентом Мопертюи и профессором Кёнигом. Берлин, 1753, in 8°, 19 стр., датир.
1 июня 1753 г. Эпиграфом к нему поставлены слова Горация :
«Rediculum acri
Fortius ас melins».
*****) Игра слов: зиррозё — вымышленный, supposer — предполагать, допускать.
(Прим, перев.)
4°. Впредь мы разрешаем всем больным оплачивать своих врачей, а вра-
чам разрешаем лечить несколько болезней, а не одну. Мы учли, что в про-
тивном случае, если какой-либо больной, страдающий резью желудка, пошлет
за врачом — специалистом по камням в почках, то может случиться, что
врач, вместо того чтобы прописать ему промывательное, произведет над ним
операцию удаления этих камней.
5°. Мы заявляем, что, собираясь строить латинский город, мы предусмо-
трели, чтобы все повара, прачки и метельщики улиц изучили предварительно
латинский язык и чтобы при этом не исключена была возможность, что эти
лица предпочли бы заняться преподаванием грамматики, вместо того чтобы
стряпать и стирать рубашки. Но мы рассудили, что учащиеся и регенты
могли бы обходиться без рубашек, наподобие древних римлян, и даже без
кухарок. Этим вопросом мы займемся позднее, когда у нас будет больше
времени и когда мы сами основательно изучим латынь.
б°. Если в будущем нам случится затронуть вопрос о спаривании и о
зародыше, мы даем обещание предварительно изучить анатомию и не утверж-
дать, что врачи должны быть невежественны. Мы не станем завидовать
улиткам и не будем обращаться к ним с нежными словами: «Невинные ули-
точки, получайте и возвращайте тысячекратно удары копий, которыми
снабдила вас природа ... Наши же копья — это ухаживание и взгляды...».
Фраза эта очень скверная. Скромное ухаживание отнюдь не может счи-
таться копьем, — да и вообще все эти выражения совершенно не академи-
ческие.
7°. Мы не станем завидовать и жабам и не будем говорить о них языком
овчарни. Заметим, что Фонтенель, которому мы пытались подражать, не
воспевал жаб в своих эклогах.
8°. Мы предоставим богу создавать людей так, как ему это угодно,
и никогда не станем вмешиваться в это дело. Мы предоставляем каждому
свободу не верить в то, что палец правой ноги притягивается левым глазом,
а кисть руки прижимается к предплечью силой притяжения.
9°. Если мы поедем в Австралийские земли, то мы обещаем Академии
привести ей оттуда четырех великанов ростом в 12 футов и четырех волоса-
тых людей с длинными хвостами. Мы рассечем их живьем, не рассчитывая
при этом узнать природу души лучше, чем мы знали ее до сих пор: но всегда
полезно в научных целях иметь для вскрытия крупные человеческие экзем-
пляры.
10°. Если мы поедем морем прямо к Северному полюсу, мы никого не
возьмем с собой в это путешествие, кроме г-на .. .*), который однажды
сопровождал уже нас в не известные ему области.
1 Г. Что касается дыры, которую мы хотели просверлить до самого ядра
земли, то мы категорически отказываемся от этого предприятия, потому что,
какова бы ни была истина на дне колодца, но самый-то колодец слишком
трудно вырыть. Рабочие, строившие Вавилонскую башню, уже все пере-
мерли. Ни один государь не соглашается брать на себя это дело, потому что
отверстие было бы великовато: пришлось бы вырыть по крайней мере
целую Германию, что нанесло бы значительный ущерб европейскому равно-
весию. Итак, мы оставляем лицо земли таким, какое оно есть. Не доверяя
самим себе, мы, как только у нас появится желание рыть, будем заставлять
себя оставаться на поверхности земли.
♦) Вольтер имет в виду Меряна, который цитируется ниже. Иногда к его фамилии
прибавляли частицу «de>>. Он родился в Базеле в 1723 г. Мопертюи устроил ему неболь-
шую пенсию и местечко в Академии. Специальностью его были метафизика и филология.
Однако во время ссоры Мопертюи с Кёнигом он выступил с докладом по математике,
совершенно ему не знакомой. Умер 12 января 1807 г. (Изд.).
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
735
12°. Мы признаем, что предсказывать будущее несколько труднее, чем
уметь Читать Тита Ливия или Фукидида. Мы будем смирять, а не возбуждать
свою душу. Мы признаем, что мы еще не имеем пророческого дара, хотя
и имеем к нему большое предрасположение, если только проницательность
способствует предвидению. Когда мы говорили, что знание прошедшего
и будущего — одно и то же, то это означало, что мы не знаем ни того, ни
другого.
13°. Мы по-прежнему считаем, что можно прекрасно дожить до 800—900
лет, закупорив все поры и дыхательные пути, но обязуемся не производить
подобных опытов ни над кем из опасения, чтобы пациент не достиг внезапно
такого возраста зрелости, который есть смерть.
14°. Мы обязуемся не писать больше в мрачных тонах о счастье, предостав-
ляя, впрочем, каждому желающему покончить самоубийством, стать христиа-
нином и проч., и проч.
15°. Мы больше не будем унижать немцев: мы признаем, что Коперники,
Кеплеры, Лейбницы, Вольфы, Геллеры, Гохштеды представляют собой кое-
что ; мы учились у Бернулли и будем изучать их и впредь.
Мы признаем также, что г-н профессор Эйлер, который согласился быть
нашим замес тителем, является очень крупным геометром. Он защищал
наши положения посредством формул, в которых мы сами ничего не
могли понять; но те, кто в этом разбирается, уверяли нас, что формулы
эти гениальны, как и другие работы названного профессора, нашего
заместителя.
16°. Так как мы от всего сердца хотим заключить прочный и постоян-
ный мир, мы торжественно обещаем сделать все от нас зависящее, чтобы
не преступать ни в наших рассуждениях, ни в наших поступках трех великих
основ германской философии, а именно: принципа противоречия*), прин-
ципа достаточного основания и принципа непрерывности. В силу этого
обещания мы не позволим себе никаких противоречий в своих писаниях
и постараемся строить свое поведение на разумных основаниях и последо-
вательно**).
17°. Что касается Вольфа, нашего великого соперника, то ввиду того,
что его труды многотомны, а мы ничего не читаем, мы не можем приняться
за ознакомление с его работами, чтобы иметь право судить о них. Мы со-
храняем поэтому прерогативу, принадлежащую, по нашему мнению, пре-
зиденту Академии, — оценивать произвольно достоинства книги, не дав
себе труда прочесть ее.
18°. Тем не менее, чтобы дать еще одно доказательство нашей благосклон-
ности, мы настойчиво советуем молодым людям прочесть книги Вольфа
прежде, чем презирать их; чтобы дать им хороший пример, мы сами при-
мемся изучать маленькую книжку логики этого немца, тем более, что в том
полку, где мы служили во Франции в дни нашей молодости, мы не имели
случая слышать о таких вещах.
19°. Наконец, чтобы представить самое большое доказательство нашего
искреннего желания дать отдых литературной Европе, мы соглашаемся
на то, чтобы действие этого договора распространялось и на нашего глав-
ного врага, Вольтера, хотя у нас имеются важные причины не допускать
этого. Если только он даст обещание не упоминать о нас ни в прозе, ни в
*) «Я освобождаю себя от стеснительного обязательства, которому все равно я не в
силах был бы подчиниться: я не буду придерживаться никакого определенного порядка,
а буду переходить от предмета к предмету, как они придут мне на ум; я даже позволю
себе противоречия» (Мопертюи, «Письма»),
**) Игра слов: raison suffisante — достаточное основание, raison — разум (Прим,
перев.).
736
Ф. ВОЛЬТЕР
стихах, мы обещаем, со своей стороны, прекратить наши козни, не прибегая
больше к услугам исполнителя высшего правосудия, чтобы отомстить ему
за его шутки, и не угрожать ему силой своих рук больше, чем силой своего
ума. Мы больше не будем вгонять его в дрожь: пусть он дрожит только
тогда, когда его трясет лихорадка. В конце концов предоставим Ла Бомеля*)
суду его собственной совести.
Помимо этого, чтобы не оставлять Кёнигу и его сторонникам никакого
повода для неудовольствия, наш главный заместитель, Леонард Эйлер**),
заявляет нашими устами следующее:
I. Он чистосердечно признает, что никогда не изучал философии и
искренне раскаивается в том, что поддался моим убеждениям, будто фило-
софию можно знать и не изучая ее. Впредь он будет довольствоваться славой,
что из всех математиков Европы он может написать на бумаге наиболее
длинное вычисление в заданное время.
II. Несмотря на его превосходство в искусстве вычисления, этот великий
человек обещает, кроме того, нашими устами, что он будет более тщательно,
чем раньше, изучать основы этого искусства и их связь с очевидностью,
чтобы не вступать в противоречие с Евклидом, как это, к несчастью, случа-
лось с ним, по его собственному признанию.
III. И хотя он является фениксом среди алгебраистов, он краснеет и
будет краснеть и впредь за то, что восставал против здравого смысла и про-
стейших понятий, выводя такие, например, формулы : тело, притягиваемое
к центру силами, непрерывно ускоряющими его движение, остановится
в момент самого сильного разбега***), или же, что было бы всего удивитель-
нее, что тело в известных случаях исчезает внезапно и нельзя установить,
что с ним сталось****).
Наш главный заместитель опечален тем, что сделал подобные умозаклю-
чения, смехотворность которых доказал ему Робинс*****). Мы же раскаи-
ваемся в том, что и мы когда-то восхищались этими формулами, что было
великим скандалом среди геометров.
IV. Чтобы несколько умилостивить немецких философов, он сделает все
возможное, чтобы не подчинять разума ошибочной формуле. Он на коленях
будет просить прощенья у логиков за то, что по поводу противоречивых
результатов своих вычислений он написал: «Это кажется неправдоподобным,
но, чем бы это ни являлось, нужно больше верить вычислениям, чем нашему
собственному суждению». (Hoc quidem veritati videtur minus consentaneum.
Quidquid vero sit hie calculo potius quam nostro judicio est fidendum. Cm.
«Механику» Эйлера, т. I, стр. 208.)
V. Чтобы вернуть себе милость геометров, он постарается внести неко-
торое изящество в те анализы, которые он им будет представлять; он не
будет составлять вычисления на 60 страницах для того, чтобы прийти к
результатам, которые могли бы быть получены на 10 строках рассуждений;
каждый раз, когда он засучит рукава, чтобы производить в течение трех
дней и трех ночей подряд какое-либо вычисление, он подумает сперва чет-
верть часа над тем, чтобы определить принципы, которые должны лечь
*) Ла Бомель (1727—1773) — французский писатель, многократно выступал с пам-
флетами, враждебными Вольтеру, нападая на его передовые взгляды и на него лично
(Прим. ред.).
♦♦) Л. Эйлер, родился в 1707 г., умер 7/IX 1783 г., писал в пользу Мопертюи во время
его ссоры с Кёнигом.
***) См. Эйлер, Механика, т. I, стр. 268.
**♦*) Ex quo sequitur postquam corpus in centram pervenerit nusquam ampluis repereri,
sed quasi anihilari. Item: corpus statim ac in centrum pervenerit, ibi evanescet, neque ultra
centrum progredietur neque reventetur. Эйлер, Механика, стр. 276 и 315.
**♦**) Бенжамин Робинс, Трактат о движении.
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
737
в основание этих вычислений. И если он найдет, как уверяют многие, что
сможет обойтись без доброй половины своей работы, пусть он нам уступит
остальное — он знает, как мы в этом нуждаемся.
VI. Этот великий человек не хочет скрывать своего огорчения по поводу
того, что им было написано, согласно теореме М. Гравезанда, что коли-
чество живой силы не равно количеству произведенного действия и что
соответственная скорость при решении проблемы не принимается за неиз-
менную.
Мы зарываемся с головой в нашу лапмюду*), стыдясь того, что мы одобряли
эти исключительные глупости. Мы просим прощенья у профессора из Гэя
за то, что настаивали на них, вопреки его доказательствам, которые мы
плохо прочли и термины которых мы плохо передали,
Г. Эйлер обещает прочитывать более добросовестно те произведения,
которые он собирается опровергать. Я же никогда не забуду надеть очки,
чтобы самому проверить, как он их прочел, когда мне придется давать свою
подпись под его опровержениями.
VII. Что касается молодого автора странных статей, который отличался
исключительным усердием, ратуя за нас, то, несмотря на его решительное
отвращение к громкой репутации, мы не можем не упомянуть о нем в этом
трактате. Мы хотим, чтобы он пользовался благами мира так же, как и мы.
Мы обещаем, что он больше не возмутит вселенной своими выступлениями
в области метафизики. Он не будет больше писать относительно cogito ergo
sum**). Он не станет прибегать к опиуму (по нашему методу), чтобы открыть
природу души, но попробует применять ellebore, дозу которого будет опре-
делять Либеркун***), врач нашей Академии. То, что он проиграет в славе,
возместится ему наличными деньгами из академической кассы.
По окончании этой прекрасной и мудрой речи постоянный секретарь
прочел вслух декларацию проф. Кёнига, суть которой сводилась к следую-
щему :
1) Потрудившись в течение всей жизни над тем, чтобы подчинить свое
воображение господству разума, он признает себя неспособным к восприятию
идей столь блестящих, как идеи, порожденные гением президента и выра-
женные в его писаниях. Он уступает ему пальму первенства и всегда будет
считать себя ниже его.
2) Но чтобы избавить г. президента от неприятных подозрений, он будет
впредь осмотрительнее, приводя цитаты; он не выдвинет ни одного науч-
ного факта, если не сможет доказать его подписью присяжного нотариуса
и четырех свидетелей, людей добропорядочной жизни; в своих рассужде-
ниях о минимуме действия он не будет ссылаться на фрагменты из писем,
не имея оригинала в руках.
С целью облегчить примирение, он простит президенту утверждение,
будто всякое писание, оригинал которого не может быть предъявлен, явля-
ется подложным; он также не заподозрит г. президента в том, что он не
питает достаточного доверия и к книгам нашей святой религии.
3) В интересах мира и в качестве эквивалента своему членству в Бер-
линской Академии (от которого профессор вынужден был отказаться) он
*) Это слово употребляется на севере для обозначения одежды из оленьей шкуры.
Вольтер часто насмехался над нарядом Мопертюи, который после возвращения из Торнео
заказал свой портрет в санях и в меховых одеждах.
**) «Меран, о котором уже говорилось в одной из этих статеек, напрасно старался
быть заметным, как существо, существующее и мыслящее, посредством перепевов (rapso-
dies) некоторых мыслей Локка относительно cogito ergo sum». В этих выражениях гово-
рится о нем в «Извлечении из письма одного берлинского академика», in 8° из 8 страниц,
составляющего часть Мопертюизианы (Изд.).
***) Либеркун, родился в Берлине в 1711 г. и был известен как анатом. Умер в 1756 г.
•
47 Вариационные принципы механики
738
Ф. ВОЛЬТЕР
примет профессуру философии в том латинском городе, который намерен
построить президент, как только ему станет известно, что там уже начали
произносить проповеди, вести судебные дела и играть на сцене на латинском
языке. В этом случае он приложит все силы, чтобы говорить и писать в стиле
Episiolae obscurorum vi orum*), чтобы ввести там, насколько это окажется
возможным, такую латынь, которую и президент смог бы понимать.
4) А покамест он поставит по монаде или простейшему существу рядом
с каждым великаном, доставленным в Академию г-ном президентом. И те,
и другие будут рассечены, чтобы увидеть, в ком из них легче познается при-
рода души.
5) Сверх того, он соглашается от всего сердца, чтобы все остальное счи-
талось как бы не бывшим, чтобы борющиеся лица обеих партий все без
исключения признали, что каждая сторона зашла слишком далеко и что
следовало бы начать с того, чем публика закончила, т. е. рассмеяться.
Академия с восхищением выслушала этот договор, встретила рукоплеска-
ниями каждую его статью и гарантировала его выполнение; а чтобы плоды
этого счастливого собрания были восчувствованы всей Европой, Академия
постановила, чтобы в договор было внесено еще одно условие, а именно:
чтобы все занимающиеся писательством жили впредь, как братья, начиная
с того дня, когда все женщины, считающие себя красивыми, перестанут
завидовать друг другу.
Предположено было после надлежащей ратификации договора пропеть
Те Deum, переложенное на музыку французом и исполненное итальянцами;
отслужить большую мессу, причем священником был бы иезуит, а диако-
ном — янсенист.
Таким образом всеобщий мир был бы установлен во всем христианском мире.
И кто бы мог подумать, что проект мирного договора не будет принят
г-ном президентом!
Но когда дело дошло до подписи и выполнения договора, меланхолия
и филократия президента вспыхнули с удвоенной силой при резко выражен-
ных симптомах.
Он распалился гневом против своего доброго врача Акакия, который
в это время сам лежал больной в Лейпциге в Германии**).
Президент написал ему письмо, в котором метал громы и молнии и заяв-
лял, что явится сам, чтобы убить его.
Письмо президента врачу Акакию***)
Заявляю вам, что здоровье мое удовлетворительно и позволяет мне разы-
скать вас, где бы вы ни находились, чтобы совершить над вами акт самого
полного мщения. Благодарите свойственные мне почтительность и повино-
вение, которые до сих пор удерживали мою руку. Трепещите!
Подписано: Мопертюи****).
♦) См. «Письма» Мопертюи, стр. 187.
♦*) См. «Переписка», Письмо Вольтера Року, апрель 1753 г.
***) Появилось в 1753 г. «Искусство правильной философской аргументации, прило-
женное на практике старым кавалерийским капитаном, переряженным философом», in 8°,
на 8 стр., с эпиграфом из Овидия Spectemur agendo и содержащее только одно маленькое
письмо Мопертюи и ответ Вольтера (стр. 509 под заглавием «Письмо д-ра Акакия». Им
было предпослано следующее «Предупреждение»: публика может положиться на подлин-
ность этих писем. Их оригиналы уже фабрикуются. Строки, помещенные между этими
двумя письмами, были добавлены, когда печаталась «История д-ра Акакия».
♦ ***) В т. Ill «.\ouvelle bigarrure», май 1753 г., воспроизводится «Искусство хорошей
аргументации», т. е. записка президента и ответ д-ра Акакия; затем помещено письмо
Мопертюи целиком, датированное 3 апреля 1753 г., в котором содержится все выписан-
ное Вольтером, кроме последнего слова «Трепещите!».
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
73»
Со времен Пурсоньяка, который угрожал своему врачу, что будет при-
ходить к нему со шпагой в руке, никогда еще не было такого злого больного.
Перепуганный д-р Акакия прибегнул к защите Лейпцигского университета,
направив туда приводимое ниже ходатайство:
Врач Акакия, укрывшийся в Лейпцигском университете, где он ищет
убежища от покушения лапландца, уроженца Сен-Мало, который решил
обязательно убить его под кровом университета, настоятельно умоляет
г. г. докторов и студентов вооружиться против этого варвара своими чер-
нильницами и перочинными ножами. Он обращается, в частности, к своим
собратьям и надеется, что они дадут слабительное зтому дикарю, как только
он появится, что они постараются сохранить, насколько позволит их искус-
ство, хотя бы остатки рассудка у жестокого лопаря и остаток жизни для
их собрата, доброго Акакия, который вверяет себя их заботам. Он просит
г-д аптекарей помнить о нем при этих обстоятельствах. •
В силу зтого ходатайства университет дал распоряжение арестовать
уроженца Сен-Мало у городских ворот, как только он появится для выпол-
нения своего отцеубийственного замысла против доброго Акакия, который
был ему вторым отцом.
Вот точные приказы университета, найденные в Acta eruditorum:
Выдержки из лейпцигского журнала
«Det Hofmeister»
«Некто написал одному из жителей Лейпцига письмо, обещая его убить.
Так как убийство противоречит привилегиям ярмарки, то просят всех и
каждого заявить немедленно о появлении означенного лица у ворот Лейп-
цига. Это — философ: походка его является сложным сочетанием рассеян-
ности и стремительности. Глаза у него маленькие и круглые; такой же парик,
приплюснутый нос и противная физиономия. Лицо у него полное, а ум его
полон мыслями о собственной персоне. В кармане он всегда носит скаль-
пель, чтобы взрезать всех людей высокого роста.
Сообщившему сведения об этом человеке будет немедленно выдано 6000
дукатов из фондов того латинского города, который он велел -построить,
или из стоимости первой же из тех комет из золота и бриллиантов, которые
беспрерывно будут падать на землю, согласно предсказаниям этого философа
и убийцы».
Сам Акакия безотлагательно написал ответ своему больному и еще раз
постарался излечить его разум в следующем дружелюбном письме:
Письмо д-ра Акакия уроженцу Сен-Мало
Г-н президент.
Я получил письмо, которым вы меня почтили. Вы мне сообщаете, что
чувствуете себя хорошо, что ваши силы полностью восстановились, и вы
угрожаете меня убить, если я опубликую письма Ла Бомеля. Какая небла-
годарность по отношению к вашему врачу Акакия!
Вам недостаточно того, что вы приказали не платить врачам, вы еще
собираетесь меня убивать! Этот образ действия не подобает вам ни как пре-
зиденту Академии, ни как доброму христианину. Я поздравляю вас с добрым
здоровьем; но у меня не столько сил, сколько у вас. Уже две недели, как
я нахожусь в постели, и я прошу вас отложить маленький физический опыт,
который вы намерены проделать.
47*
740
Ф. ВОЛЬТЕР
Может быть, вы хотите меня анатомировать? Но подумайте, я ведь не
австралийский гигант, и мозг мой настолько мал, что, рассматривая его
волокна, вы не получите никаких новых познаний о душе. Кроме того,
если вы меня убьете, то, пожалуй, вспомните, что М. Ла Бомель обещал
меня преследовать до самого ада, и он, конечно, последует за мной и туда.
Хотя яма, которая должна быть вырыта по вашему приказу и ведет
прямо в ад, еще не начата, но ведь есть и другие способы туда проникнуть;
и получается таким образом, что и на том свете со мной будут поступать
так же грубо, как вы поступали со мной на этом.
Неужели же Ваше недоброжелательство дойдет до зтого!
Будьте добры, обратите ваше внимание еще и на следующий пустяк.
Если вы захотите привести вашу душу в состояние экзальтации, дабы
прозреть будущее, то вы увидите, что, если вы явитесь с намерением меня
убить в г. Лейпциг, где вас любят не больше, чем в другом месте, и где хра-
нится ваше письмо, вы рискуете быть повешенным, а это слишком бы прибли-
зило момент вашей зрелости и не приличествует президенту Академии.
Я советую вам прежде всего объявить на одном из ваших заседаний, что
письмо это вымышлено с целью омрачить вашу славу.
После этого вам может быть и будет дозволено убить меня за оскорбление
вашего самолюбия.
В конце концов я еще очень слаб; вы найдете меня в постели, и я смогу
бросить вам в голову только мою спринцовку и ночной горшок. Но как
только я немного окрепну, я заряжу свой пистолет пушечным порохом и,
умножив массу на квадрат скорости, разовью такую силу, что и действие
и вы сами будете сведены к нулю.
Я вам всажу свинец в голову; мне кажется, что это будет ей на пользу.
Но печальным для вас явится то обстоятельство, что изобрели порох немцы,
которых вы так поносили, и что они же изобрели и книгопечатание.
Прощайте, мой дорогой президент!
Р. S. Здесь имеется 60 человек, которые осмелились жестоко насмехаться
над вами. Они спрашивают, в какой день вы собираетесь их убить.
Можно было надеяться, что это последнее сердечное послание сможет,
наконец, воздействовать на строптивый дух уроженца Сен-Мало, что он
откажется от своих жестоких опытов, что он больше не будет преследовать
ни швейцарцев, ни акакиев, что он оставит в покое немцев и что когда-
нибудь, совершенно излечившись, он сам станет смеяться над симптомами
своей болезни.
Д-р Акакия, как человек осмотрительный, щадя деликатные чувства
г. президента, скромно обратился к вечному секретарю Академии, вышена-
званному Maloin*). Он написал так :
Г-н вечный секретарь!
Посылаю вам смертный приговор, вынесенный мне президентом, вместе
со свидетельством о покровительстве, выданном мне всеми врачами и апте-
карями г. Лейпцига.
Вы видите, что президент уже не ограничивается опытами, которые он
проектировал в Австралийских землях, и что он хочет и на севере разлучить
мою душу с телом. Это первый случай, что президент собирается убить одного
из своих советников.
*) Этот постоянный секретарь Берлинской Академии был Формей. Он был почти веч-
ным, так как умер лишь в 1797 г., 86 лет от роду.
ИСТОРИЯ ДОКТОРА АКАКИЯ И УРОЖЕНЦА СЕН-МАЛО
741
Согласуется ли это с законом наименьшего действия?
Какой ужасный человек этот президент! Направо — обвиняет в подлоге,
налево — убивает; доказывает существование бога через А + В, деленное
на z. По правде сказать, ничего подобного до сих пор не видано.
Мне пришло в голову одно маленькое соображение. Ведь когда президент
меня убьет, анатомирует и похоронит, необходимо будет произнести мне
в Академии похвальное слово, согласно превосходному обычаю.
Если президент возьмет это дело на себя, то затруднений не представится.
Известно ведь, как он это проделал над маршалом Шмето, которому при
жизни он причинил некоторые огорчения. Если же надгробное слово при-
дется сказать вам, то это будет для вас, как и для всякого другого, весьма
затруднительно. Вы — священник, я — непосвященный; вы кальвинист — я
папист; вы писатель — я тоже; вы здоровы — я врач.
Итак, чтобы избежать надгробного слова и чтобы устранить все неудоб-
ства, предоставьте мне умереть от жестокой руки президента и вычеркните
из списка ваших избранников.
Вы, впрочем, понимаете, что раз я приговорен к смерти, то надлежало
предварительно лишить меня ученой степени.
Итак, вычеркните меня из ваших списков. Поставьте меня рядом с Кёни-
гом, который имел несчастье обладать разумом, и я буду вместе с этим обви-
няемым терпеливо ждать своей смерти.
Pariterque jacentes
Igno vere diis. (Phars. II, 92—93).
Метафизически
Ваш смиренный и покорный слуга Акакия.
* *
*
Окончание истории д-ра Акакия.
П. ФЕРМА
ПИСЬМО ДЕ ЛА ШАМБРУ [239 ]
Тулуза, август, 1657 г.
Милостивый государь.
1. Я осмелился не послушаться Вас, когда Вы, прислав мне Вашу
книгу [24°], написали, чтобы я ее не читал. Подарок, сделанный Вами,
я принимаю как драгоценный знак дружбы, которой Вы оказываете мне
честь. Но чтение книги заставило меня понять эту дружбу как благо, которое
нужно беречь заботливо, почтительно и благоговейно. Чтобы доказать это
Вам, я не буду говорить о других Ваших физических теориях, хотя они полны
очень глубоких и очень тонких соображений; я хотел бы только' остано-
вить немного Ваше внимание на вопросе об отражении и преломлении, и это
письмо лишь возместит утерянную диссертацию на эту же тему, которую
я послал Вам несколько лет тому назад и которая, как мне известно, не попала
в Ваши руки. Там я утверждаю, что кое в чем вступаю с Вами в союз едино-
мышленников, и осмеливаюсь заверить Вас, что если Вы потерпите с моей
стороны некоторую примесь математики к Вашей физике, то мы будем
делать работу сообща и нам придется, прежде всего, защищаться от г-на
Декарта и всех его друзей.
2. Прежде всего, я признаю вместе с Вами правильность принципа, что
природа действует всегда наиболее короткими путями. Из него вы прекрасно
выводите равенство углов падения и отражения; возражение тех, которые
говорят, что две линии, соединяющие источник света и глаз наблюдателя
в вогнутом зеркале, являются очень часто самыми длинными, не существенно,
если только Вы примете во внимание другой неоспоримый принцип: все
то, что падает на кривую линию, какой бы природы оно ни было, должно
рассматриваться так, как будто оно падает на прямую, которая касается
этой кривой в точке падения. Это может быть доказано аргументом из физики,
основанным в свою очередь на геометрическом положении.
Принцип физики состоит в том, что природа совершает свои движения
по наиболее простым путям. Поскольку прямая линия более проста, чем
круговая или какая-либо другая кривая, то следует полагать, что движение
луча, который падает на кривую, происходит скорее по прямой, касательной
к кривой, чем по самой кривой.
Во-первых, потому, что эта касательная прямая более проста, чем кривая ;
во-вторых (и это вытекает из геометрий), потому что, согласно началам
Евклида, никакая кривая не может находиться между кривой и касатель-
ной. Так что движение по прямой, которая касается кривой, будет точно
такое же, как по кривой, которой она касается.
И на этом основании никогда нельзя сказать, что две прямые, по кото-
рым идет свет или луч, могут быть когда-либо самыми длинными в вогнутых
зеркалах, ибо даже и в этом случае они являются более короткими из всех
ПИСЬМО ДЕ ЛА ШАМБРУ
743
преломления в нашем
тех, которые могут отражаться от прямой, касающейся кривой. Поэтому
не следует предполагать, что природа в этом случае действует наоборот,
или заключать, что она в каком-либо другом виде зеркал следует способу
движения, отличному от того, который свойствен ей в плоских зеркалах.
Таким образом, для отражения Ваш принцип оказывается полностью обосно-
ванным.
3. Однако можем ли мы из того, что он оказался действительным для
отражения, извлечь какую-нибудь пользу для преломления? Мне кажется,
что эта задача нетрудная и нужно лишь немного геометрии, чтобы ее
решить.
Я не стану останавливаться на опровержении доказательства г-на
Декарта. Я уже однажды оспаривал его еще при жизни Декарта — как ска-
зал бы Марциал, viventi atque sentienti [M1], — но он не выступил с отве-
том. Использование этих сложных движений
есть дело весьма тонкое, и рассматривать
и излагать этот вопрос нужно с величай-
шей осторожностью. Я сравниваю их с не-
которыми лекарствами, которые становятся
ядами, если их не приготовить тщательно и
надлежащим образом. Поэтому мне доста-
точно сказать, что г-н Декарт не доказал
ничего и что я полностью присоединяюсь к
Вашему мнению в том, что Вы возражали ему.
Но нужно пойти дальше и найти обоснование
общем принципе, то есть в том, что природа действует всегда наиболее корот-
ким и наиболее легким путем. Сначала кажется, что сделать это невозможно
и что Вы сами выдвинули против себя возражение, которое может показаться
неоспоримым. Ибо на стр. 315 Вашей книги две линии СВ и ВА, которые
образуют угол падения и угол отражения, являются более длинными, чем
прямая ADC, которая служит им основанием в треугольнике АВС, и, по
идее нашего принципа, луч из С в А должен был бы быть единственным
истинным путем природы, что, однако, противоречит опыту. Но из этого
затруднения можно легко выйти, если предположить вместе с Вами и всеми
другими, исследовавшими эту проблему, что сопротивление сред различно
и что всегда имеется определенное соотношение или пропорция между этими
двумя сопротивлениями в тех случаях, когда две среды имеют определенную
консистенцию и когда они однородны.
Не удивляйтесь тому, что я говорю о сопротивлении после того, как Вы
определили, что движение света совершается мгновенно и что преломление
вызвано лишь естественным антагонизмом, который существует между светом
и материей. Ибо, согласитесь ли Вы со мной, что движение света без всякой
последовательности во времени может быть оспариваемо и что Ваше дока-
зательство не вполне убедительно, или нужно будет принять Ваше опреде-
ление и признать, что свет «убегает» от обилия враждебной ему материи,
я нахожу, даже в этом последнем случае, что поскольку свет «убегает»
от материи, а «убегают» лишь от того, что затрудняет и сопротивляется,
то можно, не удаляясь от Вашей точки зрения, поместить сопротивление
там, где Вы помещали «бегство» или «уклонение».
Пусть, например, на Вашем рисунке луч СВ меняет среду в точке В,
где он преломляется, чтобы пойти в точку А. Если бы эти две среды были
одинаковы, то сопротивление по пути луча на линии СВ относилось бы к
сопротивлению по пути луча на линии В А, как линия СВ относится к линии
В А. Ибо когда та и другая среды одинаковы, сопротивление по пути будет
одинаково в каждой из них, следовательно, оно прямо пропорционально
744
П. ФЕРМА
пройденному расстоянию. Отсюда вытекает, что если среды различны и,
следовательно, сопротивление различно, нельзя больше говорить, что сопро-
тивление по пути луча на линии СВ относится к сопротивлению по пути
луча на линии В А, как линия СВ к линии В А ; но в этом случае сопротивле-
ние на линии СВ будет относиться к сопротивлению на линии В А, как СВ
относится к другой линии, отношение которой к линии В А выразит отно-
шение двух различных сопротивлений.
Например, если сопротивление в среде А в два раза больше сопротивле-
ния в среде С, сопротивление по СВ будет относиться к сопротивлению по
В А, как линия СВ относится к двойной линии В А ; и если сопротивление
в среде С в два раза больше, чем сопротивление в среде А, то сопротивление
по линии СВ будет относиться к сопротивлению по линии ВА, как длина
линии СВ к половине длины линии В А. Так что в этих двух случаях
оба сопротивления по линиям СВ и ВА, взятые вместе, могут быть выра-
жены или линией СВ плюс половина линии ВА, или линией СВ плюс
две длины В А.
Вы, несомненно, уже видите вывод, вытекающий из этого рассуждения.
Например, даны две точки С и А в двух различных средах, разделенных
линией DB и имеющих такую природу, что сопротивление одной будет в два
раза больше сопротивления другой. Нужно найти точку В, в которой пре-
рвется и преломится луч, идущий от С к А или от А к С.
Если мы предположим, что задача уже решена и что природа действует
всегда наиболее коротким и наиболее легким путем, сопротивление по
линии СВ плюс сопротивление по линии В А составит сумму двух сопроти-
влений, и эта сумма, чтобы удовлетворить принципу, должна быть наимень-
шей из всех сумм, какие могут встречаться в любой точке на линии DB.
В данном же случае эти два соединенных сопротивления представлены
или линией СВ плюс половина ВА, или той же линией СВ плюс две
линии ВА.
Вопрос, стало быть, сводится к следующей’геометрической задаче.
Даны две точки С и А и прямая DB, найти на прямой DB такую точку,
чтобы, если мы проведем прямые СВ и ВА, сумма линий СВ и половины
В А была бы наименьшей из всех сумм, взятых таким образом, или точно
так же сумма СВ и двух В А была бы наименьшей из всех сумм, взятых таким
же образом.
Точка В, которая будет найдена в результате решения этой задачи,
и будет точкой, где произойдет преломление.
Таким образом, Вы видите, что нужно, чтобы луч прервался и прело-
мился, поскольку среды различны. Поэтому, хотя сумма двух лийий СВ
и ВА будет всегда больше, чем сумма двух линий CD и DA, тем не менее
линия СВ плюс половина В А или плюс две В А может быть более короткой,
чем линия CD плюс половина линии DA или плюс две DA.
Я согласен с Вами, что эта задача не из легких. Но, поскольку при-
рода решает ее во всех преломлениях, чтобы не отклониться от сво-
его обычного образа действий, почему мы не можем взяться за такую
задачу?
Я заверяю Вас, что предложу решение этой задачи, когда это Вам будет
угодно, и сделаю из него те выводы, которые смогут прочно обосновать пра-
вильность нашего мнения. Во-первых, я выведу из него, что перпендикуляр-
ный луч не преломляется; что свет, преломившись на первой поверхности,
больше не изменяет принятого им направления; что преломленный луч
то приближается к перпендикуляру, то удаляется от него, в зависимости
от того, переходит ли он из среды более редкой в более плотную или наобо-
рот ; одним словом, эта теория точно согласуется со всеми явлениями.
ПИСЬМО ДЕ ЛА ШАМБРУ
745
Ведь если бы это было неверно, можно было бы сказать так, как сказал
Галилей по поводу другого случая, что природа, как нам кажется, движима
per pigiiarsi gioco di nostri ghiribizzi — причудами нашей фантазии.
Однако, виноват — я забыл, что предметом этого письма должно было
быть только выражение благодарности. Умоляю Вас, Милостивый государь,
простить мне это длинное рассуждение, — хотя оно и вызвано только инте-
ресом, который Вы питаете к этому вопросу, — и принять его в любом
случае как свидетельство уважения, которое я питаю к Вашей учености,
и почтения, с которым остаюсь, Милостивый государь,
Вашим покорнейшим и доброжелательным слугой
Ферма
Л. ЭЙЛЕР
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ [242 ]
10 декабря 1745 г.
Я нашел эту проблему гораздо более трудной, чем это представлялось мне
ранее, и встречал в ней почти всюду непреодолимые препятствия. Тем неменее,
я собрал приложенные к сему статьи, из которых некоторые смогут послу-
жить для более полного определения состояния данного вопроса, решение
которого остается за Вами. Я прочитал также, Милостивый государь,
Ваш превосходный труд о великом принципе покоя [ш] и без лести имею
честь уверить Вас, что ценю разработку этой темы неизмеримо больше, чем
наиболее изящные решения частных проблем. В самом деле, я убежден,
что повсюду природа действует согласно некоему принципу максимума или
минимума, а обнаружение в каждом случае этого максимума или минимума
и есть, по моему мнению, не только очень возвышенная, но также очень
полезная для углубления нашего познания задача; мне кажется также,
что именно в этом следует искать подлинные основы метафизики. Одновре-
менно я считаю Ваш принцип более общим, чем Вы предполагаете, и убеж-
ден, что он имеет место в системе любых тел, находящихся в состоянии покоя,
где каждая частица в определенном направлении подвергается действию
движущей силы Р; взяв в том же направлении элемент пространства dz,
по которому указанная частица перемещается за бесконечно малое время dt,
если она будет свободна от этой системы, я говорю, что $Pdz будет макси-
мумом или минимумом, но признаю, что в этом случае данный принцип не
может быть доказан геометрически, как Вы это сделали. В конце моего трак-
тата об изопериметрах я вывел упругие кривые из принципа максимума
или минимума, который мне сообщил господин Бернулли и который, как я
теперь вижу, совершенно естественно вытекает из Вашего принципа. В том
же месте я показал также, что в движениях природа постоянно соблюдает
определенный максимум или минимум, и я определил при помощи этого
принципа все кривые траектории, которые должны описать тела, притяги-
ваемые к неподвижному центру или друг к другу.
Пусть масса такого тела будет М, скорость тела в какой-либо точке его
орбиты и и отрезок проходимого пути ds, тогда я говорю, что f Muds всегда
будет максимумом; и если имеется много тел М, М', М” и‘т. д., которые
притягивают друг друга по какому-либо закону при скоростях в данный
момент времени и, и', и" и т. д. и пройденных за одно и то же время рас-
стояниях, равных ds, ds', ds", то движение всех тел вместе будет таким, что
J Muds + J M'u'ds' + J M"u"ds" и т. д. будет максимумом. Правда, я не
смогу доказать этот принцип строго, но, учитывая, что он всегда дает мне
то же решение, что и обычные принципы механики, я совершенно убежден
в его справедливости. Однако нам не хватает великой науки, которая осно-
вывается на общих принципах, наблюдаемых в природе, и мне кажется,
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
747
что именно в этом заключается подлинная метафизика в том смысле, что она
содержит первые принципы физики и математики; метафизика Лейбница
и Вольфа еще очень далека от такой науки.
24 мая 1746 г.
Милостивый государь,
Следует признаться, что я еще не вижу достаточно ясно, каким образом
рассмотрение пройденного за данное время расстояния должно войти в
определение количества действия; я хотел бы знать, бывают или нет такие
случаи, когда пространство не пропорционально скорости? Из тех примеров,
к которым Вы применяете это правило, я вижу, что это пространство всегда
выражено самой скоростью таким образом, что количество действия, которое
вызывает изменение движения, становится равным произведению массы на
квадрат скорости; если бы это имело место всегда, я думаю, что дело стало
бы более ясным, если принять во внимание, что вместо пространства
можно всегда брать собственно скорость. Ведь если бы имелись случаи,
когда это не разрешается (если бы изменение не происходило равномер-
ным движением или пространство, пройденное в какое-то время, могло
быть не пропорционально скорости), разве не уместно было бы их упомя-
нуть? Или, во всяком случае, разве не одно и то же, сказать, что следует
брать пространство, разделенное на время; мне кажется, что это более точно
сказано, потому что одно только слово «время» без определения его коли-
чества может иногда оставить некоторую неуверенность при применении.
Прочитав заново главы 20 и 21, я подумал, что скорость, которую нужно
считать сообщенной нематериальным плоскостям, всегда равна разности или
изменению скорости каждого тела. Это одно могло бы оказаться достаточным
для применения этого правила, учитывая, что эта идея служит только для
более четкого выражения самого изменения, происходящего в каждом теле:
что же касается силы, которую потребуется приложить, чтобы произвести
эти движения, я не вижу в ней необходимости при применении правила,
потому что определение количества действия не имеет отношения ни к
какой силе, и мне кажется, что можно освободить себя от обсуждения вопроса:
сколько силы потребуется, чтобы сообщить данному телу некоторую степень
скорости? Этот вопрос даже не имеет определенного смысла, если не принять
во внимание время, за которое изменение должно произойти, так как самая
маленькая сила способна произвести самую большую степень скорости, лишь
бы хватило времени. По этой причине я считаю, что можно было бы совсем
обойти рассуждение о силе, изложенное в главе 21. Так как установлено в
главе 20, что изменение тела А состоит в изменении скорости а — хи про-
странства а—х, а тела В в изменении скорости х— b и пространства х — Ь,
все данные, нужные для применения правила, уже определены; отсюда можно
уже сделать вывод, что количество действия будет: А(а—х)2 + В(х — Ь)2,
не учитывая никаких новых соображений, каким было бы соображение о
какой-либо силе. Тем не менее, я не решился бы добавить эти размышления
на полях книги из-за сомнения, которое у меня остается насчет количества
действия по отношению к пространству, как я указывал вначале.
28 декабря 1746 г.
Милостивый государь,
Я убежден, что идея нематериальной плоскости, которую Вы вообра-
жаете, чтобы представить разницу между состояниями, в которых находятся
тела до и после удара, очень правильна и, конечно, ею можно поль-
748
Л. ЭЙЛЕР
зоваться всегда, ничем не рискуя; однако я сильно сомневаюсь, можно ли
осуществить ту же идею, предложив, например, такой вопрос. Пусть имеется
плоскость ABCD в состоянии покоя и на ней тело М движется с данной
скоростью т в направлении MN (рис. 1); спрашивается, что случится, когда
плоскость испытает толчок данной силы PQ? В этом случае я говорю, что
если предположить плоскость идеально гладкой, то движение тела М
окажется совершенно не нарушенным действием силы PQ и плоскость ABCD
будет скользить под телом М, не нарушая его движения. Итак, чтобы тело
М участвовало в движении, сообщаемом плоскости, нужно приложить к
нему равную ускоряющую силу. Но я хочу заметить, что это обстоятельство
совершенно не касается тех целей, которые Вы имели в виду; и мне кажется,
что Вашу мысль можно было бы выразить следующим образом, позволяющим
избежать этого сомнения : достоверно, что изменение движения тела остается
тем же независимо от того, относится ли движение к абсолютному простран-
ству в покое или к пространству, имеющему равномерное движение по пря-
мой линии. Так, если тело М, отнесенное к абсолютному пространству и
имеющее скорость т в направлении MN, внезапно меняет скорость (вслед-
ствие какого-либо удара) и начинает двигаться со скоростью т + р в том
же направлении MN, то изменение его скорости будет //. Отнесем теперь
то же тело М с претерпеваемым им изменением к пространству ABCD,
которое движется со скоростью р в направлении QP; по отношению к этой
двигающейся плоскости скорость
тела до удара была равна т — р,
а после удара т + р — р ; измене-
ние скорости будет таким же, как
в предыдущем случае. Принимая это
для рассматриваемого Вами случая,
когда тела А и В, отнесенные к аб-
солютному пространству, движутся
со скоростями а и Ъ до удара, а
после удара их общая скорость
будет х, можно сказать, что изменение, испытанное телом А, будет таким
же, как если бы оно было перенесено на какую-либо подвижную пло-
скость. Перенесем его тогда на плоскость, которая движется со скоростью а
в том же направлении АС, ясно, что тело А по отношению к этой плоско-
сти будет иметь до удара скорость, равную нулю, а после удара скорость
х — а или а — х в обратном направлении; так как это изменение будет
таким же, как в случае с бесконечным пространством, то мы видим прежде
всего, что изменение, которое происходит с телом А, оказывается таким же,
как если бы после состояния покоя, в котором оно находилось, ему сообщили
скорость, равную (а — х). Если перенести тем же способом тело В на плос-
кость, движущуюся со скоростью b в направлении С А, то его скорость до
удара будет также равна нулю, а после удара равна (х — Ь) и, следовательно,
вызванное ударом изменение, происшедшее с телом В, будет таким же, как
если бы ему (находящемуся в покое) сообщили скорость, равную (х —• 0).
Итак, следуя Вашему принципу, Милостивый государь, действие, требуемое
для того, чтобы вызвать эти изменения, будет равно А(а — х)2 для тела А и
В(х — Ь)2 для тела В, в полном соответствии с тем, что было найдено Вами.
26 июля 1747 г.
Имею честь подробно описать Вам мою попытку доказать, если это воз-
можно, справедливость принципов механики для законов удара, предполагая,
что эти принципы установлены опытом.
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
749
Пусть два тела А и В действительно сталкиваются между собой; вместо
силы, с которой они действуют друг на друга, я предполагаю между ними
пружину ху или ab, которая напрягается по мере того, как происходит
столкновение (рис. 2); пусть А и В — массы тел, а а и b — их скорости до
удара, направленные обе от О к Z; в какой-то момент, в течение которого
продолжается удар, пусть будет определено в закрепленной точке О:
расстояние Оа = х,
„ ОЬ — у,
скорость А = v,
„ В = и,
элемент времени == dt.
Тогда мы будем иметь:
Л = = ду
v и ’
Z
длина пружины ab — у — х = z короче естественной длины, имеющей место
в начале столкновения, обозначим ее с. Таким образом, укорочение пру-
жины будет равно с — z, а сила р пружины будет некоторой функцией
(с — z); она толкает тело А на-
зад, а тело В вперед. По известным д Д
правилам, мы будем иметь: --------------
р dt = — A dv = В du.
' Рис. 2.
Но, так как я еще обязан сомне-
ваться в справедливости этих правил, я выберу еще более общие выражения.
Для этого пусть V и U — какие-то функции, подобные скоростям v и и, и
Р — какая-то функция р, которая будет, следовательно, функцией (с — z),
и вместо полученных формул я рассмотрю следующие:
Pdt =~AdV и Pdt= + BdU,
которые, будучи более общими, заключают подлинные [предполагаемые?]
формулы, которых не содержат обычные выражения. Эти две формулы дают
сначала :
AdV + BdU = 0 I
,, dx dy
а вследствие dt = — = —
V и
Pdx-—AvdV и Pdy= + BudU; II
вычитая одну из другой, получаем:
AvdV + BudU = P(dy-dx) = Pdz. Ill
Но P есть функция (с — z) или z, J Pdz будет функцией v (c — z), которую
примем равной //(с — z), и это третье уравнение дает
A [vdV + B^ udU^f:(c-z). IV
Теперь, зная из опыта, что в течение всякого удара общий центр тяжести
обоих тел продолжает двигаться равномерно, можно сделать вывод, что
Av ц- Ви есть постоянная величина, тогда Adv Ц- В du = 0. Но уравне-
ние I дает:
AdV + BdU = О,
750
' Л. ЭЙЛЕР
откуда ; следовательно, раз V и U суть функции, подобные v и и,
dV аи _
так что то, как бы ни отличались v и и, необходимо, чтобы
V и U были пропорциональны самим скоростям v и и. Поскольку речь
идет только о пропорциональности, пусть V = v и U = и. Тогда равно-
мерное движение центра тяжести дает нам уже менее общие формулы
Р dt = — Adv и Р dt = В du, отличающиеся от обычных только тем, что Р
означает здесь какую-либо функцию побудительной силы р, и отсюда еще
не следует, что Р должно быть равно р.
Итак, рассмотрев до сих пор только одно известное условие столкнове-
ния, общее для тел упругих и неупругих, я перейду к рассмотрению других
условий для тех и других тел. Для неупругих тел известно, что удар прекра-
щается, как только углубление (enfoncements) или интервал (с — z) стано-
вится наибольшим, т. е. когда dz = 0 = dy — dx. В этом случае уравнение
III дает Av dV ф- Ви dU = 0 ; тогда уравнение I, прибавленное к преды-
дущему, покажет нам, что v = и или что тела после удара движутся общим
движением. Кроме того, найдя V= v и С7= и, мы будем иметь A dv ф- В du = О
и отсюда Av 4- Ви = const — Аа ф- ВЬ, и мы узнаем, что количество дви-
жения одно и то же до и после удара. Так как это обстоятельство пол-
ностью определяет удар неупругих тел, то нерешенным остается лишь
вопрос, равна ли функция Р самой силе р или нет.
Для упругих тел удар прекращается, как только интервал z снова стано-
вится равен с; значит, выражение //(с — z) будет одинаковым до и после
удара. Следовательно, из IV значение A§vdV-\-B§udU будет также
одинаковым до и после удара. Если установлено, что V = v и U — и, то
это и будет сумма живых сил Av2 ф- Ви2, которая будет одинаковой до и
после удара. Следовательно, известные законы удара оставляют неопреде-
ленной формулу, заключающую правила механики; эти законы показы-
вают лишь, что Pdt = — Adv и Pdt = В du; остается еще нерешенным,
какой функцией силы р должно быть Р.
Однако другие эксперименты над падением тел и движением маятников
показывают с очевидностью, что Р = р, и тем самым дают возможность убе-
диться в справедливости общих законов движения. Но совершенно иным
является вопрос, есть ли эта истина (которая не может быть подвергнута
сомнению в этом мире) необходимая или случайная, или имел ли бог воз-
можность создать такой мир, в котором действовали бы другие законы,
например, что Adv ф- p2dt или что AvdU= pdt, или другие формулы, отлич-
ные от Adv = рdt. Гг. Лейбниц и Вольф утверждали это и рассматривали
формулу Adv = pdt только как истину, справедливую для этого мира или,
может быть, только для нашей земли, считая, что на других небесных телах,
может быть, имеют место другие формулы. Я же придерживаюсь совершенно
иного мнения и полагаю, что доказал, что эта истина является такой же
необходимой, как геометрические истины. Я это сделал в 1-м томе моей
механики.
26 апреля 1748 г.
В настоящее время я работаю над заметкой о большом количестве механи-
ческих кривых, которые я определяю прежде всего из принципов механики,
а затем ищу выражения, значения которых становятся минимумом для
этих же самых кривых,чтобы a poste iori выяснить в каждом случае формулы,
представляющие то, что Вы называете количеством действия. Я считаю,
что тем самым легче будет находить эти формулы a priori.
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
751
3 мая 1748 г.
Милостивый государь,
Имею честь послать Вам мою заметку о минимумах, которые имеют
место для кривых, образованных действием каких-либо сил. Эти исследо-
вания стоили мне больших трудов, но я хорошо вознагражден тем, что вижу,
как Ваши принципы, которые Вы употребляете для выражения количества
действия, оказываются значительно более общими, чем я предполагал, что
они применимы не только к разным видам сил, но также к силе упругости.
Учитывая, что именно метафизика должна снабдить фундаментом Ваши
принципы, я считаю, что развитие этой проблемы сможет значительно
усовершенствовать нашу науку. Может быть, эта тема смогла бы выдвинуть
какой-либо вопрос, достойный быть предложенным на премию Математи-
ческого класса, хотя я и не вижу пока еще, как это можно сделать надле-
жащим образом. Тем не менее, так как срок подачи такого предложения
приближается, я беру на себя смелость присовокупить к сему проект, кото-
рый я представлял четыре года тому назад в Академию с той же целью.
Из него тогда был выбран IV вопрос. Так как Парижская академия завла-
дела третьим вопросом, для обсуждения остаются лишь I и II.
8 мая 1748 г.
Милостивый государь,
Правда, когда я составлял последнюю заметку о минимумах, у меня
не было перед глазами Вашей превосходной заметки о законе покоя и я
полагался исключительно на то, что мог вспомнить, и на кое-какие заметки,
которые я сделал в ..., моих противников, когда читал Вашу работу. Я и
сейчас считаю, что мои формулы для минимумов находятся в полном согла-
сии с Вашими принципами и что они даже непосредственно следуют из них.
Если с первого взгляда кажется, что в них имеется какое-то различие, то
это происходит оттого, что Вы применили Ваши принципы к поискам формы
жидкой массы, все частицы которой влекомы к закрепленным точкам, в то
время как я рассматривал гибкую нить, подверженную подобному же дей-
ствию. Я абсолютно ясно вспоминаю, что если применить Ваши принципы
к случаю обычной силы тяготения, то они сведутся к наибольшему опуска-
нию общего центра тяжести; это опускание и составляет как раз содержание
моих формул для этого случая.
Если Вы, Милостивый государь, согласитесь, что метод, при помощи
которого находится цепная линия, предполагая опускание центра тяжести
или, скорее, расстояние от этого центра до центра земли минимумом, соот-
ветствует Вашим принципам, тогда то же согласие должно необходимо
обнаружиться во всех моих формулах потому, что они требуют только наи-
более полного приближения всего тела к точкам, к которым оно влекомо.
Итак, это свойство цепной линии так естественно вытекает из Ваших прин-
ципов, что с этой стороны я не жду никакого исключения.
Более того, я отлично помню место в Вашем сочинении, где предпола-
гается, что жидкая масса притягивается ко многим неподвижным точкам.
Пусть частичка М притягивается к точкам А, В, С, Dh т. д. силами, которые
являются как бы степенями расстояния АМа, ВМ", СМУ, DMS и т. д. (рис. 3).
Тогда Вы показываете, что выражение
М1'"1 , ВЖ1 , CAfy+i , DAf’+i ,
-T+T- + “7+Т- + -у+Т- + -^+Т" + И Т-д-
будет минимумом.
752
Л. ЭЙЛЕР
Однако ясно, что это выражение есть не что иное, как
J AMadAM + J BMpdBM + J ClWdCM + J DMddDM + и т. д.
Пусть расстояния AM = v, ВМ = v’, DM = v" и т. д. и, чтобы случай был
более общим, пусть силы будут любой функцией этих расстояний, т. е. сила
МА = V, сила МВ = V', сила МС = V", MD = V'" и т. д. В этом случае,
в силу Вашего правила, выражение
f Vdv + f V dv’ + J’ V" dv" + J V" dv"'
будет минимумом, где его дифференциал следует предположить равным
нулю, чтобы найти форму жидкой массы, которая притягивается к этим
точкам А, В,С, D и т. д.; и в этом случае я считаю, что не ошибаюсь насчет
содержания Вашей статьи. Одновременно это самое выражение и есть точно
то, которое входит в мою формулу, когда я хочу определить фигуру гибкой
нити, все элементы Мт которой притягиваются теми же силами V, V',
V", V'" и т. д. к неподвижным точкам А, В, С, D и т. д. Вся разница состоит
только в том, что в случае, который рассматриваете Вы, выражение
J vdv + J V dv' + J V" dv" + J V" dv"’ и т. д.
должно быть минимумом, в то время как для гибкой нити, элементом кото-
рой является Мт = ds, формула
J ds(§ V dv + J V dv’ + J V" dv" 4- [ V" dv"' и т. д.)
есть минимум. Итак, учитывая, что эти два случая значительно отличаются
друг от друга и фигура гибкой нити очень далека от формы, которую должна
принять жидкая масса, хотя бы подверженная тем
4/ же силам, можно сделать вывод, что не удиви-
тельно, что обе формулы не в точности одина-
ковы. Однако в них можно сразу заметить такое
\ большое соответствие, что не может быть никакого
./!' / / I сомнения, что и та и другая формулы основаны на
/ \ одних и тех же принципах. Это есть та восхити-
g' / 1 тельная гармония, о которой я имел честь говорить
/ \ Вам, что она поразила меня. И я надеюсь, что
С D после этих разъяснений Вы не встретите больше
Рис 3 затруднений и согласитесь с теми выражениями,
которые я употреблял в моем сочинении, чтобы
отметить совершенное соответствие моих формул
с Вашей теорией. Тем не менее, если Вы считаете уместным, я включу в
свое сочинение только что изложенные соображения для того, чтобы все
были убеждены в этом соответствии, которое мне кажется настолько совер-
шенным, насколько это возможно для таких различных случаев. Я прошу
Вас оказать мне честь Вашими указаниями по этому поводу.
Должен также отметить, что я считаю, что формулы минимума, которые
я.дал, являются единственными, ведущими к кривым, которые я ищу. Хотя
я мог бы дать еще другие формулы, значение которых тоже было бы наимень-
шим для этих кривых, однако уравнения, которые дают эти формулы в соот-
ветствии с моим методом, являются слишком общими и содержат также кри-
вые, которые не имеют ничего общего с моей темой, в то время как мои
формулы не содержат ничего, что не соответствовало бы проблемам, которые
я имею в виду.
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
753
9 мая 1748 г.
Я льщу себя надеждой, что Вы не будете больше сомневаться ни в спра-
ведливости моей формулы минимума
J ds (J V dv + J V dv' + f V" dv" + J V” dv"’ + и т. д.)
для формы совершенно гибкой нити, ни в соответствии этой формулы с выра-
жением j V dv -|- J V' dv' + J V" dv" 4- J V'" dv"' + ит. д., которое Вы находите
для формы жидкой массы, подверженной тем же силам; и я не сомневаюсь,
что те же принципы, которые привели Вас к Вашей формуле, .которую я
не могу точно вспомнить, приводят и к моей при условии учета природы
случая, который я трактую. Я только что обнаружил почти подобную
формулу для совершенно отличного случая. Если подвижная точка М
(рис. 4) притягивается к закрепленным точкам С, С', С", С"' силами V, V',
V", V"', которые являются некоторыми функциями расстояний, СМ = v,
С'М = v', С"М = v", С"'М = v"', и если эта точка свободно описывает
кривую MN, то я говорю, что для этой кривой значение выражения
J’ dt (J Vdv + J V'dv' + J V"dv") будет миниму-
мом, где dt обозначает время, затрачиваемое по- '
движной точкой на прохождение пространства //РчХ
Мт. Это выражение находится в соответствии / / I \
с тем, которое я давал ранее, J lids, где через / / I \ \
и я обозначал скорость тела в М и ds — элемент / / I \ N
пространства Мт, ибо раз ds = и dt, это выраже- / / \ \
ние переходит в J ии dt, а по законам механики / I
значение ии выражается через J Vdv J V'dv' + С'
4- J V"dv". Я представляю себе, что, внима-
тельно рассматривая эти случаи и разные спо- Рис‘ 4-
собы, при помощи которых это же выражение J V dv 4~ J V' dv' 4- J V” dv"
входит в каждый из них, будет не так трудно найти принципы ме-
тафизики, которые приводят к этим формулам ; и хотя мы не будем еще в
состоянии достичь этой цели, по крайней мере можно будет, учитывая вели-
колепную гармонию этих формул, сделать заключение, что они должны не-
обходимо вытекать из одних и тех же принципов; на мой взгляд ни одна из
этих формул не должна ни в какой мере нарушать справедливость других.
4 июня 1748 г.
Меня продолжает волновать один вопрос, связанный с моим сочинением
о минимумах, имеющих место в кривых, образованных либо совершенно
гибкими, либо упругими нитями, подвергающимися действию каких-либо
сил. Я позволил себе высказать Вам все соображения, убеждающие меня
в том, что мои формулы не противоречат данной Вами теории; однако я
думаю, что последняя болезнь помешала Вам взвесить мои соображения.
Осмелюсь ли умолять Вас, Милостивый государь, соблаговолить еще раз
удостоить вниманием письма, которые я имел тогда смелость адресовать
Вам в Потсдам. Я убежден в том, что Вы не найдете больше ни малейшего
противоречия между Вашими принципами и моим формулами и что Вы
признаете в них большое сходство, о котором я говорил. Правда, тогда
я еще не видел, каким образом мои формулы могут быть выведены из Ваших
принципов, несмотря на то, что я очень хорошо понял применение, которое
Вы им дали для нахождения формы жидкой массы, подвергнутой действию
48 Вариационные принципы механики
754
Л. ЭЙЛЕР
каких-либо сил. Но сейчас мне представляется, что те рассуждения, кото-
рыми Вы пользовались, должны привести к моим формулам, о которых я
должен прежде всего сказать, что они рассматривают случай, совершенно
отличный от того, который рассматривали Вы. Вот с этого я хотел бы начать
свое рассуждение.
Пусть даны центры сил, расстояния которых от данной точки равны v, v',
v", v'" и т. д., а их движущие силы в этой точке V, V', V", V'" есть какие-то
функции расстояний. Тогда при рассмотрении жидкой массы, подвергну-
той действию этих сил, количество действия всех этих сил должно быть
минимумом или его дифференциал равен нулю. Итак, Вы очень обоснованно
показываете, что это количество действия выражается JVdv 4- J V'dv' 4-
+ J V” dv'' 4- и т. д. Теперь, рассматривая гибкую нить, подвергнутую
действию этих же сил, для определения ее формы будет уже недостаточно
учитывать только количество действия сил, которое окажется, как прежде,
равным J V dv 4- J V' dv' 4- J V" dv" 4- и т. д. (потому что очевидно, что
гибкая нить должна принять форму, значительно отличающуюся от той,
которая подходит для жидкой массы), но это количество действия должно
быть приложено к элементам нити, на которые это действие распростра-
няется. Пусть ds — элемент нити, а действие сил, приложенных к нему, будет
равно ds (JV dv 4- f V' dv' 4- JV" dv" 4- и т. д.). Теперь мне кажется вполне
естественным сказать, что в этом случае сумма всех действий сил, приложен-
ных к элементам нити, должна быть минимумом, т. е. для формы нити фор-
мула J ds (j V dv + J V' dv' + J V" dv" + ...) будет минимумом.
Более того, при рассмотрении движения брошенного тела, притягивае-
мого теми же силами, чтобы найти кривую, которую оно опишет, мне кажется
также естественным утверждать, что для этой кривой сумма всех количеств
действия сил, отнесенных к элементам времени, должна быть минимумом.
Количество же действия этих сил в соответствии с Вашими принципами
равно J V dv + j V dv' 4- j’ V” dv" 4- и т. д.; следовательно, обозначая через
dt элемент времени в этих кривых, описанных брошенным телом, выраже-
ние С dt (j' V dv 4- J V' dv' 4- J V" dv" 4- ...) должно быть минимумом...
После этих многочисленных разъяснений мне остается только еще раз
покорнейше просить Вас, Милостивый государь, прочитать их с некоторым
вниманием, так как я уверен, что Вы вынесете более лестное суждение о
моем сочинении, которое имело несчастье показаться Вам противоречащим
Вашим принципам. Мне чрезвычайно важно, чтобы Вы переменили отно-
шение к этому предмету, и поэтому я надеюсь на Вашу доброту, так чтобы
мои повторные оправдания оказались ненужными.
8 июня 1748 г.
Милостивый государь,
Я Вам бесконечно обязан за объяснение, которое Вы соблаговолили мне
дать о Вашем впечатлении по поводу количества действия и формул, значе-
ние которых есть максимум или минимум в кривых, произведенных силами.
До этого объяснения я лишь очень смутно понимал, в чем могла состоять
разница между Вашими идеями и выдвинутыми на эти темы мною, что зна-
чительно усиливало мое беспокойство. Но теперь, получив достаточные
разъяснения, я откровенно признаюсь, что ошибочно давал название коли-
чества действия многим выражениям, сильно отличающимся друг от друга,
не понимая, как я сумею обосновать это наименование. Исключив зто, я
теперь уверен более чем когда-либо, что формулы максимумов и минимумов,
которые я нашел a posteriori, не наносят ни малейшего ущерба справедли-
вости принципов, на которых Вы основали свои рассуждения. Чтобы яснее
объяснить это, я рассмотрю несколько центров сил С, С', С" и т. д. (рис. 5),
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
755
расстояния которых от некой точки М будут: СМ — v, С'М == v', С"М = v"
и т. д., а силы V, V', V" и т. д., притягивающие зту точку М к центрам, —
некие функции расстояний v, v', v" и т. д. Теперь нужно найти форму жид-
кой массы, притягиваемой этими силами, на поверхности которой пусть
лежит точка М; я нахожу в соответствии с Вашими принципами это урав-
нение: J Vdv + J V'dv' 4- J V"dv" 4- и т. д. = const, или, поскольку диф-
ференциал этого количества равен нулю, можно будет сказать, что выра-
жение j Vdv 4- J V'dv' 4- J V"dv" 4- и т. д. есть максимум или минимум.
Именно зта формула выражает по Вашему мнению, Милостивый государь,
количество действия сил V, V', V” и т. д., пока они действуют на точку М.
Теперь, рассматривая другой случай, где точка М будет элементом гибкой
нити, подвешенной за оба конца, Вы допускаете сначала, что форма, которую
примет эта нить, будет значительно отличной от формы жидкой массы.
Так, если имеется только один центр сил С, удаленный в бесконечность для
того, чтобы имел место случай естественного тяготения, то форма жидкой
С
Рис. 5.
массы станет горизонтальной плоскостью, в то время как подвешенная нить
примет форму цепной линии. Отсюда ясно, что выражение, которое будет
минимумом для формы нити, должно быть совершенно отличным от выра-
жения минимума для формы жидкой массы; следовательно, раз выра-
жение j Vdv 4- J V'dv' 4-J V"dv" 4- и т. д. является минимумом в этом
последнем случае, оно не будет им для нити, несмотря
на то, что эта самая формула кажется выражающей коли-
чество действия сил на точку М одинаково как в одном,
так и в другом случае. Это необходимо вытекает, по-
скольку формулы минимума в этих двух разных случаях
не могут быть одинаковы: или количества действия сил
на точку М не одинаковы, или формулы минимума в
этих слизях совсем не выражают количество действия
сил. Я не хотел бы утверждать зто последнее потому,
что считаю очень разумным определять количество
действия сил одной и той же формулой, которая яв-
ляется минимумом, но мне кажется, что для того, чтобы иметь количество
действия, недостаточно учитывать только действующие силы, но следует
также считаться с природой тела, на которое они действуют. С этой целью
я хотел бы назвать формулу J Vdv 4- f V'dv' 4- J V"dv" 4- и т. д. абсолют-
ным количеством действия сил на точку М, где не принимается во внимание
природа тела, которому принадлежит точка М; мне кажется, достаточно
ясно, что, поскольку жидкая масса повсюду легко подчиняется действию
сил, то именно абсолютное количество действия должно быть минимумом.
Но ясно также, что если точка М есть элемент висячей нити, которая не так
легко поддается действию сил, то ее изгиб не зависит исключительно от
абсолютного количества действия, а нуждается в присоединении чего-то,
что содержится в природе нити; я хотел бы назвать то, что происходит от
этого, абсолютным количеством действия сил, приложенных в данном случае
к нити. Я нашел, что если элемент нити в точке М обозначить ds, то значение'
выражения f dstf Vdv 4- J V'dv' 4- J V"dv" 4- и т. д.) будет наименьшим
для формы нити; поскольку J Vdv 4- J V'dv' 4- J V"dv" 4- и т. д. есть абсо-
лютное количество действия сил, то я сказал, что выражение J ds(J Vdv 4-
4- J V'dtf 4- J V"dv" 4- и t. д.) есть количество действия, отнесенное к
природе нити.
Точно так же, если точка М обозначает тело, брошенное каким-либо
способом, и мы захотели бы определить кривую, которую оно опишет, то
формула f Vdv 4- J V'dv' 4- J V"dv" 4- и т. д. будет также абсолютным
количеством действия сил, но количество действия, приложенное в данном
756
Л. ЭЙЛЕР
случае, значение которого есть действительно минимум, будет ^dtt^Vdv +
+ J V'dv' + J V"dv" + и т.д.), где dt означает элемент времени. Это послед-
нее выражение находится в полном согласии с выражением [ и ds (где ds
означает элемент пространства и и — скорость тела, так как JV dv 4- f V' dv' 4-
+ J V"dv" 4- и т. д. выражает квадрат скорости ии, а и dt = ds), которое
Вы вывели непосредственно из Ваших принципов; невозможно, чтобы
обнаружилось малейшее реальное противоречие между Вашими принци-
пами и формулами, которые я вывел a posteriori; может быть, только отдель-
ные неудачно выбранные выражения, которыми я пользовался, могли Вам
показаться противоречащими тем, которые употребляли Вы, и, таким обра-
зом, мне останется только изменить некоторые слова в моем труде, чтобы из
него убрать все, что сможет показаться несовместимым с Вашей теорией.
Я Вас умоляю, Милостивый государь, удостоить некоторым вниманием
то, что я позволяю себе смелость излагать Вам по этому поводу, и откро-
венно сказать мне, удовлетворяет ли это Вас. Ибо я был бы в отчаянии,
если бы дал Вам повод с основанием заподозрить меня в том, что я хотел
покривить душой и пустыми комплиментами заставить Вас поверить в то,
что я принял Ваши идеи, в то время как я их действительно принял.
Скорее, я был совершенно очарован тем, что выражение J V dv + {V'dv' +
+ ( V"dv" -у и т.д., которое Вы именуете количеством действия,'встрети-
лось повсюду во всех моих исследованиях, и я подумал, что его нельзя пере-
оценить. Но особенно я пришел в восторг, когда увидел, что действие упру-
гости, которое было до тех пор для меня неразрешимым, следовало совер-
шенно тем же законам, что и действие обычных сил, содержащееся в выра-
жении J Vdv 4- J V'dv' 4- j' V"dv" 4- и т. д. Находясь в этом состоянии,
я не могу Вам выразить, как я был огорчен, когда узнал, что Вы были
недовольны моей работой; теперь же я тем более обрадован тем, что Вы
оказали мне милость и высказались по этому поводу, потому что я надеюсь,
что мое доказательство неизбежно убедит Вас в моей правоте. В настоящее
время я работаю над другим трудом на ту же тему, в котором я покажу на
еще большем числе различных случаев важность и распространенность
Вашей формулы J Vdv 4- J V'dv' 4- J V"dv" и т. д., и я льщу себя надеждой,
что после этих разъяснений Вы будете совершенно довольны.
14 июня 1748 г.
Милостивый государь,
Я только что окончил мои исследования о принципе количества действия
и беру на себя смелость послать их Вам со смиренной просьбой уделить им
некоторое внимание. Я льщу себя надеждой, что Вы будете совершенно
довольны и найдете в этих вычислениях Ваш замечательный принцип коли-
чества действия лучше всего утвержденным и претворенным таким образом,
что в рассмотренном мною случае Вы заметите повсюду самое прекрасное
соответствие с Вашими идеями. Ибо я должен признаться, что в моей преды-
дущей работе я еще недостаточно разобрался в этом вопросе, но теперь мне
все кажется ясным и не вызывает более никаких сомнений. Работа, которую
я имею честь представить Вам, содержит три раздела : первый рассматривает
оценку количества действия каких-либо сил, где я показываю, что если
точка притягивается ко многим закрепленным центрам С, С', С" и т. д. силами
V, V', V" и т. д., которые являются некоторыми функциями расстояний
v, v', v" и т. д. этой точки от центров, то количество действия этих сил на
эту точку будет равно J Vdv 4- f V' dv' 4- J V" dv" 4- и т. д., что находится
в совершенном согласии с тем способом, которым пользовались Вы для
выражения количества действия в Вашем сочинении об общем законе покоя.
ВЫДЕРЖКИ ИЗ ПИСЕМ К МОПЕРТЮИ
757
Во второй главе я утверждаю, что когда какое-либо тело (будет ли оно
твердым или жидким, гибким или жестким или упругим) под действием этих
сил находится в состоянии равновесия, то сумма всех действий, влияющих
на все элементы тела и выраженных в соответствии с первой главой, будет
минимумом. Этот единственный принцип дает мне форму какой-либо жидкой
массы; кривую, которую образует нить, будь она гибкая или упругая.
Итак, этот принцип не только находится в соответствии с Вашей теорией,
но он также есть именно тот,' который Вы выдвинули.
Третья глава рассматривает движение тела, притягиваемого этими же
самыми силами, и я доказываю в ней, что это движение всегда будет иметь
то свойство, что сумма всех количеств действия, которое тело испытывает
в каждый момент, будет минимумом. Я тем более уверен, что Вы согласитесь
также и с этим принципом, потому что он сводится к тому, из которого в
трактате о максимумах и минимумах я вывел орбиты планет и других тел,
притягиваемых какими-либо силами.
В соответствии с новыми сведениями, которые я приобрел, я внесу неко-
торые изменения в выражения из моей предыдущей работы на эту тему,
которые могут показаться содержащими что-нибудь противоречащее Вашей
теории и моим последним исследованиям.
4 февраля 1758 г. [244 ]
В связи с тем, что математический раздел был почти закончен, когда мы
получили Ваш замечательный мемуар, мы поместили его в начале раздела
спекулятивной философии. Первая часть была прочитана перёд публичной
ассамблеей, а другая—на обычных собра-
ниях. Удивительно, что Ваш принцип на- f
именьшего действия может вызывать ма- :
лейшее возражение после стольких разъ- !
яснений и осуществленных применений его. i
Но еще более удивительно, что Ваши зави- ______
стники могли чего-то ожидать в этом смы- а с ' iz ~в Y
еле от Кёнига, который никогда не создал
ничего стоящего. Нет сомнений в том, что Рис- 6-
Ваш принцип получит значительно большее
распространение, чем то, которое он имел до сих пор. Я считаю, что сле-
дующий случай, который касается не просто минимума, а минимума
миниморума, поразит многих противников.
Задача (рис. б). Шар М ударился с данной скоростью перпендику-
лярно о стержень АВ, находящийся в покое. Найти движение шара и стер-
жня после удара (предполагая и тот и другой неупругими).
Решение. Пусть М — масса шара и а — скорость, с которой он тол-
кает стержень в перпендикулярном направлении LC. Пусть х — скорость
шара после удара и, следовательно, М(а — х)2 будет действием, произведен-
ным шаром.
Удар сообщит стержню движение, которое в первый момент будет иметь
место вокруг какой-то неизвестной точки V, но окажется таким, что полное
действие будет наименьшим. Надо, значит, определить не только скорость х,
но также точку V так, чтобы сумма действий, произведенных вместе в шаре
и стержне, оказалась наименьшей.
С этой целью положим массу стержня равной N, его длину АВ = b
и части АС = с, ВС = е, таким образом, что b = с 4- е, и пусть неизвестное
758
Л. ЭЙЛЕР
расстояние CV — v. Теперь, так как тела твердые, то скорость точки С
после удара будет также равна х. Рассмотрим часть стрежня Zz, полагая:
расстояние VZ—z. Масса этой части будет ^-dz-, скорость ~. Следовательно,
„ _ N dz xxzz
произведенное в этом случае действие будет —-----— -, и его интеграл есть
дг х х z*
+ const, откуда мы выводим действие, произведенное во всем стержне:
[(г + с)3 ~ (у — с)3] — (3 + 3 ег>г> + 3 сег> — 3 есг> + с3 4- е3) =
= (3 v v + 3 (с — ё) v + сс — се + её),
так как b = с + е. Отсюда общее действие есть
М (а - х)а + Nxx (1 + —- + £с-~/-1+ее-Л ,
и нужно найти, при каких значениях х и v оно будет минимумом.
Будем считать сначала, что х уже имеет точное значение и для опре-
деления значения v дифференцирование дает:
(с— ё) dv 2(сс — се + е e)dv п 2(сс — се+её) .
--------------------„—я = U ИЛИ V = ,77-г- ,
v v 3 Vs-3 (е — с)
если подставить это значение, то полное действие
должно еще быть минимумом по отношению к х, что дает:
„ .. . . , Nbb х А
—2 М (а — х) + -тгА----:—= О
v ' ' 2 (с с —се + ее)
или
_ . 4Ма (с с —се + е е)
Х~~ 4М(сс — се +ее) +Nbb
1) Если бы шар ударил стержень посередине таким образом, что
с = е и b = 2с, мы имели бы обычный случай, а именно: v = CV — <=о или
стержень не повернулся бы, а х = л^а^- было бы общей скоростью
обоих тел.
2) Если бы шар ударил в конец А таким образом, что с = 0 и е = Ь,
... 2 , 4Ма
то. v = AV = ^b и х = ^йтг.
Можно было бы представить себе случай, где пришлось бы определять
три или более неизвестных, чтобы превратить полное действие в минимум,
и результат всегда будет в согласии с тем, что мы находили обычным спо-
собом.
У. ГАМИЛЬТОН
ОТРЫВОК ИЗ ОПУБЛИКОВАННОЙ В 1940 Г. РУКОПИСИ
«ПРОБЛЕМА ТРЕХ ТЕЛ, РАССМАТРИВАЕМАЯ С ПОМОЩЬЮ МОЕЙ
ХАРАКТЕРИСТИЧЕСКОЙ ФУНКЦИИ» [24S]
Характеристическая функция эллиптического движения и уравнение-^- = t
Из предшествующих исследований мне известно, что функция опре-
деляемая уравнениями (510), (512), (514) [24в], действительно тождественно
удовлетворяет уравнению в частных производных (523) f247 ]. Но чтобы
установить заново это важное положение и чтобы в то же время подготовить
переход к другим исследованиям, введем следующие сокращенные обозна-
чения :
ecos-Ц-1^ (528)
е' cos = С'. (529)
Тогда
Vj = fa (u - и0 + 2 f sin -‘Цр) , (530)
= fcf |u' - u'o + 2 C sin ) , (531)
L^- = 1 - C cos “ “ и-° , (532)
Z = 2 a sin /l-C2' ; (533)
следовательно, рассматривая а как постоянную величину, имеем:
+fcos-^=^)<5(tz-iz0) + 2<5: sin^=^, (534)
= £ Sin ^-=2£<l & (и - tz0) - 2 cos ; (535)
4L=4ctgA^L^u-uo)-<536>
: (sin cos = J(cos ^)2 _ , (537)
(1 — C2) — sin (u — u0) — C sin =
= 8 (u - u0) If cos I2 - J2|, (538)
(X ^7 j
760
У. ГАМИЛЬТОН
( и — ив \2
(cos—2—)~:а
(1 - С2) sin “ ~
= (1 + С COS ) {2 ~Y COS --2^ - * (Г± Го)| U-Uo)2_ 2 J
_ d(r-i- r0) u—u0 = 2dx ( u-uB _ <5 (r + r„) a J 2 X I °" 2 1 4 fl(l-£2) ( « U — Un . (cos 2 4- c), (539)
это дает:
v— . и — u0 Л1/ _ S1” 2 f 2(1—C2)<5% 1 д,_ ,
1 «-«o J X «4 1 Го) - cos —— C ’
H — £2 <5/ — sin -- -2-^<5(г+Го) . (540)
Ya (cos
Мы знаем —ч- и . Теперь <5(r + r„) <5/ »
= । dV1 dx dr 6 (r + r0) ‘ <5/ dr’ (541)
<5V, <5 V, dx (542) (543)
гёО дх гдв ’ также <5/ _ Г — rB cos (0 — 0O)
dr X ’
dx _ rB sin (0 — 0O) rdO ~ X (544)
(-£)’ + ciU! _ 1 ; V or J 1 \ гов J ’ (545)
мы должны, следовательно, иметь :
1 _ £2 + (^п JL-JV)2 + rocos (0 — 0О) — г = _ j} (; cos u ~ “° L Г)2, (546)
COS 2 i
откуда, используя (512), получим :
/ и — UB ^\2
Г Го 2 (547)
а2 0 —0О ’
\ cos 2 ' ИЛИ fcosu~u° d2- (r+ro)2-*2 • (548)
1 " 2 Ч 4 fl2 ’
и это последнее условие удовлетворяется при помощи (532), (533). (См. 10-й
лист серий об эллиптическом движении, начатых в августе 1833.)
Стоит отметить, что, используя (532) и (533), мы имеем не только
Г и — Uo <A2 (r_f_r)2—
cos—г,— С = v , 6—— , но также и
V 2 J 4 а2
_ (2 (549)
ОТРЫВОК из ОПУБЛИКОВАННОЙ В 1940 Г. РУКОПИСИ «ПРОБЛЕМА ТРЕХ ТЕЛ» 761
Следовательно,
С8 + (cos—2 = 2 - , (550)
и, следовательно,
l_:8 + (sinJ£^8 = Z±r<L_ (551)
так что
(41 , V = 4(r + r0Tz) _ 1 =______4______X
( <5/ <5(г + r„) J (г + г,,)2 — %2 а г + г0 ± z а ’ ' ’
и, следовательно,
ЭУ, , = V___________4_ _ _ 1
4/ 4 (r + ro) I г + г„ + х а ’
ЭУ1 _ 8 У, _ 1/ 4__________________Г
8/ <5 (г + г„) ~ ± У г + г0 — X а ’
24 = . 1/.ZZIZZZJL ± |” 1 . _ '
8/ У г + г0 + х 4 а i г + г0- х 4 а ’
(553)
(554)
(555)
4 2 <55б>
Когда мы берем верхний знак в этих двух последних уравнениях, то
имеем :
(557)
выражение, которое я широко использовал в предыдущих исследованиях.
В общем случае можно положить :
V1 J ± F г + г„ + х 4 а dx'
-х
(558)
Если мы хотим рассматривать а не как постоянную величину, то нужно
только заменить в (540)
<5 l/j на /ад (y==j > д % на ад (—J и <5 (г + г0) на а д ,
и мы получим :
24 = 1 (_4 _ v 24
8а а{ 2 * 8х
__^4__)
8(Г + г0),/
(559)
*) [Подкоренные выражения, очевидно, такие же, как в формуле (555). Прим. ред. ]
(г + г0)
762
У, ГАМИЛЬТОН
Это также следует из того, что V! является однородной функцией сте-
пени % от а, г + г0, %. Мы имеем, следовательно,
1 (ц — U„ f. . и — и„| 1 (и — и„ и + ив . и — un)
= ==- —х—2- — с sin —= -==- —— е cos —^-5- sin —=-5- =
\ а I £ ) у а \ 2 J
1 пТ Т
= -2-уТ {« - «о -е (Sin и - sin п0)} = 2 (] , т) > (560)
где Т — эллиптическое время. Это последнее выражение показывает, что
хотя мы должны в настоящем методе рассматривать полуоси а, а' как функ-
ции координат, их вариации тем не менее исчезают из вариации части
mV1 + m'V'i функции V, поэтому
т-^д>а+т -^-да = т+ (T+H^J = °’ <561>
согласно (300) р48]. Мы можем, следовательно, при дифференцировании
тУг mV} рассматривать а, а' как постоянные, и, следовательно, можно
дифференцировать Vj только по координатам т, а V} только по координатам т'.
Мы также видим, что если предположить т' = 0 и таким образом свести
V к mVj и, следовательно, к функции от г + г0, %, а, т, которая может рас-
сматриваться как функция г + г0, %, Л, т, то мы имеем :
<57 <57, да тТ Г dh \-1
dh ~ т да dh ~ 2(1 + т) а2 [ да J
(562)
Это будет чрезвычайно любопытная теорема, если мы сможем найти,
, dV
что в общем случае — t.
Таким образом, мы сможем завершить наше решение задачи о трех телах
или о любой другой системе при помощи функции действия V без использо-
вания какого-либо интегрирования, после того как эта функция однажды
определена.
В то же
dV
часть ,
dh ’
время, не считая т или т' исчезающе малыми, мы видим, что
которая не является малой, а именно
или
<57. . , <57j <57i da . , <5 7,' da'
m -nr- + m > или m -yr- -yr + m tz rnr ,
dh dh da dh da dh ’
m T a~2 da m' T а'~2 da'
2(1+m) dh + 2(1 +m') dh ’
в действительности равна T на основании (300).
(8 января 1834 г.) Тремя страницами далее я даю общее доказательство
6V
справедливости этой теоремы / = При помощи этой теоремы интегриро-
вание дифференциальных уравнений движения любой системы тел (включая
задачу вращения) сводится к нахождению вида функции V, дифференци-
рованию ее по начальным координатам и Л и определению конечных коорди-
нат как функций полученных таким образом частных производных и началь-
ных координат. Полученные таким путем выражения для конечных коор-
динат не должны содержать h.
У. ГАМИЛЬТОН
ИСЧИСЛЕНИЕ ОСНОВНЫХ СООТНОШЕНИЙ [249]
Метод основных соотношений является развитием того способа анализа,
который был ранее приложен сэром Уильямом Гамильтоном к исследованию
оптики и динамики; его существо и дух могут быть поняты из следующего
краткого наброска.
Пусть хр х2, ..., хп — любое число п функций одной независимой пере-
менной $, с которой они связаны одним заданным дифференциальным урав-
нением первого порядка, но не первой степени,
О = /(s,xv хп, ds, dxlt dxn),
(1)
а также (п — 1) другими дифференциальными уравнениями второго порядка,
к которым, как вспомогательным к данному уравнению (1), приводит вычисле-
ние вариаций и которые могут быть записаны так :
Г (Хх) -df'(dxt) /'(х„) -df' (dxn)
f'tdxj ••• f'(dxn)
(2)
Пусть также av ..., ап будут п начальными значениями п функций
хр .. ., хп и пусть будут п начальными значениями их п производ-
ных функций или дифференциальных коэффициентов
соответствующих любому данному начальному значению а независимой
переменной $. Если мы сможем проинтегрировать систему п дифферен-
циальных уравнений (1) и (2), то получим п выражений для п функций
хр ..., хп вида
= <р± (s, a, alt..ап, а[,..ап),
xz = 9>2 (s, а, «р ..., ап, а[,..а;),
(3)
хп = <Рп («> «, «1, • • •> ап, a’i, •> «п) .
и с помощью начальных уравнений, аналогичных (1), можем затем исключить
«1, . .., а'п и вывести соотношение вида
О = у (s, Хр..., хп, a, аг,..., ап),
(4)
то есть соотношение между начальными и конечными значениями п + 1
связанных переменных $, хр ..., х„. Обратно, автор установил, что если
известно одно соотношение (4), то из него возможно вывести выражения для
п искомых интегралов (3) системы п дифференциальных уравнений (1) и (2)
или для п искомых соотношений между s, х1; ..., хп и а, а1} ..., ап, а[, ..., а'п,
764
У. ГАМИЛЬТОН
каким бы большим ни было число п. Таким образом, все эти многочисленные
соотношения (3) неявно заключены в одном соотношении (4), которое в силу
этого автор предложил называть основным интегральным соотношением
или, короче, основным соотношением задачи.
Автор установил справедливость следующих уравнений :
Г (ds) = f' (dx,) _ = /' (dx„)
Ч>' (s) (*i) ' ’ ' Ч>' (*п) ’ 7
которые могут быть приведены к виду
a1 = g>1(a,s,x1,...,xn,x{,...,x^,
................................................. (6)
ап = <Рп(а, s, *1, • •хп,х^, ...,x'),J
являясь, очевидно, преобразованием п искомых интегралов (3). Что касается
Способа, которым без предварительного выполнения интегрирований (3)
можно найти основное соотношение (4) (или вводимую этим соотношением
главную функцию), когда оно разрешается относительно первоначальной
независимой переменной s
s = y(x1, ..., xn,a,alf ..., ап), (7)
то автор отмечает, что может быть определено уравнение первого порядка
в частных производных, которому эта главная функция <р должна удовле-
творять, а также и начальное условие, выбранное’так, чтобы устранить не-
определенность, которая иначе остается.
Действительно, уравнения (5) могут быть написаны таким образом:
j5 (ds) _ 8s 8 (ds) _ 8s
8(dx,) ~ 8x, ’ ’'8(dxn) ~~ 8xn ’ * '
где
_d(ds) = _f(dxt) и Js_ l(x} f9>
6 (dx,:) /' (ds) 8xt ’ U
и так как, в силу (1), существует известное соотношение вида
О _ р [s х х У (ds) fl о)
и г (s,x1; ...,хп, 6(rfXi) , р (1UJ
то должно иметь место и следующее соотношение :
0 = ....(11)
то есть главная функция <р должна удовлетворять следующему уравнению
первого порядка в частных производных :
О = F(y, хп ..., хп, д/ (Xi), . .., ср’ (х„)), (12>
а также следующему начальному условию :
О = lim / (а, й1; ..., ап, х — а, хг — а1; ..., х„ — а„). (13)
Таковы наиболее существенные основы нового метода анализа, который
сэр У. Гамильтон предложил назвать методом основных соотношений,
простейшим типом которого, вероятно, является формула
$(ds) _ _ 8s
8(dx) 8х ’ ' '
интерпретируемая подобно уравнениям (8).
ИСЧИСЛЕНИЕ ОСНОВНЫХ СООТНОШЕНИЙ
765
Простейшим примером, который может показать значение и приложение
этих принципов, является, по-видимому, тот, для которого дифференциаль-
ные уравнения таковы :
d (dx,) _ d (dx2)
dx, dx2
и
O')
(2')
Обычное интегрирование дает здесь
х3 = а, + a,(s — a); x2 = a2 + a2(s — a) (3')
и, следовательно, приводит к следующему соотношению (в данном случае
основному):
О = (Xj — Oj)2 + (х2 - а2)2 — (s — а)2, (4')
или _______
S = а + f(Xj - aj2 + (х2 - а2)2, (7')
ибо благодаря (1') имеем а2 + а22 = 1. Это позволяет нам проверить соотно-
шения (8) или (14), для которых получаем :
<5s Xj — а, dx, б (ds)
бх, s — a ds б (dx,)
и подобным же образом
6s __ б (ds)
бх2 ““ 6(dx2)
Обратно, если в этом примере задано следующее соотношение, выведенное
из (1'),
( 6(ds)V p(ds)V . П(П
то для определения вида (7') главной функции s может быть использовано
(согласно принципам нового метода) следующее дифференциальное урав-
нение первого порядка в частных производных:
с Лс \2 ( Лс \2
““ЬУ+Ы;)-1 <“'>
в сочетании с начальным условием
О = lim {- 1 •' (13')
«=а (V — я / \ s — а ) j х
Следовательно, основываясь на тех же новых принципах, можно вывести
обычные интегралы (3') в виде
«1 = *1 + ai (а — s); а2 = х2 + а2 (а — s). (6')
В таких простых случаях, как в настоящем примере, использование
нового метода не дает преимуществ, однако в большом числе вопросов,
включая все вопросы математической оптики и математической динамики
(по крайней мере, в том свете, в каком рассматривает эти науки автор настоя-
щего сообщения), и в общем случае при решении всех задач, где приходится
интегрировать системы обыкновенных дифференциальных уравнений (как
766 У- ГАМИЛЬТОН
второго, так и более высокого порядка), к которым приводит вариационное
исчисление, метод основных соотношений сразу определяет систему конечных
выражений для интегралов предложенных уравнений, что крайне редко
может быть достигнуто ранее применявшимися методами.
Например, представляется невозможным любым другим методом выра-
зить строго, в конечных выражениях, интегралы дифференциальных урав-
нений движения системы из многих точек, притягивающих или отталкиваю-
щих друг друга, однако это можно легко выполнить путем частного приме-
нения изложенных здесь общих принципов*). Автор надеется представить
в дальнейшем эти принципы в еще более общем виде.
*) См. Philosophical Transactions за 1834 и 1835 гг„ а также Report of British Asso-
ciation. [См. стр. 175—288 настоящей книги. Прим, ред.]
У. ГАМИЛЬТОН
ПИСЬМО ДЖ. ГЕРШЕЛЮ Р50]
Приступая теперь к динамике, думаю, что вы не нуждаетесь в напомина-
нии, что Зп дифференциальных уравнений движения второго порядка между
Зп прямоугольными координатами хх, yv zp ..., хп, уп, zn и временем t для
системы п притягивающихся или отталкивающихся масс т1г ..., тп, рас-
сматриваемых как свободные точки, могут быть заключены в следующую
формулу :
£т(хдх + уду + z&) = (1)
где х, у, z являются составляющими ускорения какой-нибудь массы т,
а /(г) — определенной функцией взаимного расстояния г между двумя
массами какой-либо пары ттх, так что производная функция /' (г) выражает
закон отталкивания, будучи отрицательной в случае притяжения. Вы также
не нуждаетесь в сообщении о том, какими безуспешными оказались попытки
математиков точно интегрировать систему Зп уравнений второго порядка,
так изящно выраженную вышеуказанной формулой Лагранжа. Для полной
законченности подобного интегрирования было необходимо, как Вы знаете,
найти Зп соотношений между временем, Зп переменными величинами и бп
постоянными; но аналитики, насколько мне известно, не нашли и даже не
выразили пока ни одного подобного соотношения. Судите сами, выражает
ли их все точно следующий метод с помощью одной основной функции и
сводитли, таким образом, проблему динамики к поискам одного центрального
соотношения ... Таким образом, все свелось к поискам формы функции S ;
не такой функции, которая формулировала бы, а которая разрешала бы.
проблему, и не только служила бы, подобно лагранжевой пертурбационной
функции R, для того, чтобы изящно выразить известные дифференциальные
уравнения движения, но дала бы посредством своих собственных частных
производных доселе неизвестные первые и конечные интегралы этих важных
уравнений ...
Таковы наиболее существенные черты моего нового метода в динамике.
Он не представился мне сразу в такой простой форме. Я употребил, как вы
найдете почти повсюду в моей первой статье, характеристическую функцию
V, представляющуюся аналогичной с оптической функцией, о которой я
упоминал в том же письме, и выражающую, как и в оптике, зависимость
величины, называемой «действием», от конечных и начальных координат.
Но эта функция в динамике заключает в себе также в виде вспомогательной
величины константу Н в известном выражении для половины живой силы
системы, а исключения, посредством которых я был принужден избавиться
от этой вспомогательной константы и ввести взамен ее время, сделали метод
более обширным, чем в настоящей его форме, особенно по отношению к вопро-
сам возмущенного движения.
768
У. ГАМИЛЬТОН
Для вопросов этого рода у меня имеются два совершенно различных
процесса, один вытекает более непосредственно из свойств моей главной
функции 8, а второй, имея сходство с процессами, известными математикам,
в сущности, выведен из того же нового аналитического метода или исчисле-
ния главной функции.
Согласно первому процессу, я варьировал не начальные координаты
системы, а лишь начальные компоненты ее скоростей, чтобы вычислить
окончательную или возмущенную конфигурацию при помощи правил невоз-
мущенного движения; согласно второму процессу, я варьировал одновре-
менно начальные положения и скорости, чтобы вычислить сразу же конеч-
ные или возмущенные координаты и скорости нескольких точек системы.
Формула обоих процессов представляется мне такой простой, какой можно
было ожидать, по при применении второго процесса к солнечной или другим
аналогичным системам я принужден мысленно представить орбиту планеты
совсем отличной от принятой в теории, хотя немного отличающейся в дей-
ствительности от той, которую так прекрасно представил Лагранж. Моя
орбита является менее простой с геометрической точки зрения, но зато вза-
мен этого она имеет, возможно, некоторые важные преимущества для вычис-
ления.
Вам хорошо известно, что общий метод варьирования параметров
Лагранжа состоит в привлечении интегралов одного уравнения (или группы
уравнений) к другому уравнению посредством трактовки постоянных пер-
вого уравнения как переменных второго. Рассматривая их таким образом,
часто можно выбрать наугад несколько произвольных условий, которые
удовлетворят этим новым переменным величинам, особенно в приложениях
к динамике, в которых уравнения, интегрируемые первыми, обычно бывают
второго порядка, а количество постоянных в их интегралах равно двойному
числу зависимых переменных. Принцип, по которому Лагранж выбирал
произвольные условия, чтобы удовлетворить своим переменным параметрам,
был превосходен и заключался в понижении порядка, так как он вел к воз-
растанию числа дифференциальных уравнений движения. Я стремился и
достиг того же преимущества иметь новые дифференциальные уравнения
не выше первого порядка, но пришел к иному выбору параметров, ибо
исходил из другой группы первоначальных дифференциальных уравнений,
каждое из которых само первого порядка ...
Вообще дифференциалы всех моих варьированных элементов для сол-
нечной системы могут быть очень просто выражены частными производными
одной пертурбационной функции Н2, взятыми относительно этих элементов,
в то время как метод Лагранжа требует дифференцирования одной возму-
щенной функции для Юпитера, возмущенного Сатурном, и второй подобной
функции для Сатурна, возмущенного Юпитером.
Это большое преимущество, как, вероятно, и будет признано, примиряет
меня с неудобством вводить новую группу орбит и с потерей геометрической
простоты, на которую я указывал; неудобство заключается в том, что мои
орбиты не касаются, а пересекают (хотя под очень маленькими углами)
действительные гелиоцентрические орбиты, описанные под действием всех
возмущающих сил. Моя новая варьированная орбита любой планеты пра-
вильно дает возмущенные гелиоцентрические координаты и вспомогательные
величины х, у, z при помощи правил невозмущенного движения, но если мы
не продифференцируем элементов каждой планеты или не сопоставием орбиты
всех планет, то они не дадут правильно тех вспомогательных переменных
для возмущенного движения, которые употреблял Лагранж, именно — ком-
понентов гелиоцентрических скоростей. Но алгебраически они были лишь
подсказаны формой его первоначальных дифференциальных уравнений, а
ПИСЬМО ДЖ. ГЕРШЕЛЮ
769
астрономически они вовсе бесполезны, за исключением тех случаев, когда
могут служить для вычисления гелиоцентрических координат; другие
вспомогательные переменные, если от них можно было легко избавиться
в конце вычисления, одинаково привлекали внимание как алгебраиста, так
и астронома; вспомогательные переменные, которые я выбрал, кажутся
мне достойными подобного внимания, потому что служат для упрощения
как первоначальных дифференциальных уравнений, так и последующих
преобразований, хотя они и предполагают новую группу переменных пара-
метров или элементов. Будучи огорчен потерей прекрасного геометрического
свойства касания между действительными и варьированными орбитами,
отнесенными к центру Солнца, я все же думаю, что свойство моих новых
орбит, заключающееся в том, что они непосредственно дают компоненты
скорости каждой планеты относительно центра тяжести всей солнечной
системы, связывает их даже несколько сильнее, чем у Лагранжа, с идеей
сложной системы, движущейся вокруг своего общего центра тяжести и в
каждой части находящейся под влиянием действий всех остальных частей.
Исходя из связи указанных орбит с этой идеей и из необходимости прини-
мать в соображение массы и движения всей солнечной системы, прежде
чем новые элементы какой-либо планеты могут быть совершенно точно опре-
делены, я почувствовал соблазн дать этим новым эллипсам название систе-
матических планетных орбит. Их вековые изменения следуют тем же зако-
нам, что и у обыкновенных орбит. И вообще, если бы этот новый способ
приняли, то не было бы необходимости отбрасывать все прежние резуль-
таты, ибо обратная величина расстояния между двумя планетами является
главным пунктом, который нужно развить как в функции Лагранжа, так
и в моей возмущенной функции, хотя развитие у меня будет, конечно, более
симметричным .. .
-ДР ВагшэпнпиикГР ЛПЙНПИПЫ МбХЭНИКИ
М. В. ОСТРОГРАДСКИЙ
ПИСЬМА Н. Д. БРАШМАНУ [«*]
I
Мой дорогой и добрый друг!
Мое зрение служит причиной того, что я до сих пор не послал Вам статью
о принципе наименьшего действия; вот она.
Я беру уравнение движения в форме
z + Yду + Z& - т = о.
Допустим, что
2’(Х<5х+ Y dy + Zdz)
является полной вариацией некоторой функции П, то есть что эта
сумма равна дП; мы будем иметь :
дп = v т + у + .
С другой стороны,
d2x дх + (Ру ду + (Pzdz = d (dx дх + dy ду + dz dz) —
— (dx ddx + dyddy + dzddz) = d (dx dx + dy dy + dz dz) —
— g dx +dy . + dz _ _ vfiv df2 r
где v означает скорость движущейся материальной точки т. Таким образом,,
уравнение движения получает вид
s п 1 vi s j х-i ( dx 8х + dy fry + dz 8z 1
дП + £mvdv = d£ т I----------I >
или же
ёП + d^ ^ = d^m
dx8x + dy 8y + dz8z '
dt* .
или, наконец, если обозначить через Т живую силу системы*):
dxbx + dy Sy + dzSz
di*
d(n + T) = d£m (
*) Лагранж и другие математики называют 2~2~ половиной живой силы, но теперь
mv^
довольно распространенным является обозначение 2~~2~ как всей живой силы, что сле-
дует предпочесть.
ПИСЬМА Н. Д. БРАШМАНУ
771
Я умножаю последнее уравнение на dt и интегрирую его в пределах, для
которых х, у, z имеют значения х^, у0, 20 и х1г yv ; я имею :
<5 J (П т) dt = 2' (dX1 SX1 + dyi дУ1 + dZ1 SZ1 —
dt
v m ( dXo йх,, 4- dy0 <5y0 dz0 6z0
III 1 -----
dt ) ’
Поэтому, если вместе с Лагранжей ограничить общность вариаций,
относя их к кривым, которые все начинаются в точках х$, у0, z0 и все окан-
чиваются в точках хр ур 2р то мы будем иметь <3хо = О, <3уо = О, Sz0 = О,
dXj = О, бу! = О, SZj = О, следовательно,
д J (П + Т) dt = 0 ,
а это означает, что J (П -f- Т) dt имеет минимум. Согласно Лаграпжу имеет
минимум J Tdt, но его анализ неточен.
Не знаю, достаточно ли ясно я выразился относительно дх0 = О, <5у0 =0,...
Вот в чем дело: координаты х, у, z принадлежат кривой, которую описывает
точка т, проходящая через точки х0, у0, z0 и хг, yv z±; координаты х + Зх,
у + ду, z + dz принадлежат близкой кривой, которую Лагранж подчиняет
условию проходить через те же точки, благодаря чему оказывается дх0 — О,
<5у0 = 0, ... Итак, именно J (П T)dt, а не J Tdt, имеет минимум. (Автор
высказывает здесь неудовольствие против той части анализа Лагранжа,
где обратно, из условия д § Tdt, выводятся уравнения движения.)*) Что
же нам сказать по этому поводу? Нужно обратить в минимум интеграл
J (77 4- 7') dt; мы будем иметь :
J (<5Т7 + дТ) dt = 0;
— у m (dx d бх + dy d бу + dz d бг
- 2 dt2
— (d2x бх + d2y бу + d2z 8z
После подстановки получаем:
J p n - 2 m jd*x dx + d*y Sy + & ) 1 _
но
dx бх + dy бу + dz dz
dt
df Л-
— V т I dx° 6хо + аУ« $Уо + dz° 'I v т f dX1 3х1 + d i + dzi Szi 1
-2m -d/2 J - 2 m dt J.
Так как члены, стоящие под знаком интеграла, должны исчезать независимо
от тех,
которые не находятся под знаком интеграла, мы будем иметь:
дП - 2т = о,
или
d2x бх + d2y бу + d2z 6z
dt2
а это и есть уравнение движения.
Вот, с точностью до некоторых ограничений, ограничений совершенно
излишних, и которые я ввел, чтобы как можно меньше отклоняться от
*) Эти слова в Матем. сборнике написаны по-русски. [Очевидно, это — примечание
редактора Матем. сборника. Прим, ред.]
49*
772
М. В. ОСТРОГРАДСК и
Лагранжа, вот принцип наименьшего действия. Я его изложу иначе, а именно
так: 1°. я буду пользоваться любыми координатами, 2°. (что существенно)
условия минимума и максимума я заменю условиями интегрируемости.
Вам, конечно, известно, что условия интегрируемости играют очень большую
роль в механике, например в гидростатике и гидродинамике. Я утверждаю,
что вся механика есть вопрос интегрируемости, это условие содержит в себе
первое как частный случай; оно требует только, чтобы вариация была
интегрируемой, тогда как условие максимума требует не только, чтобы эта
вариация была интегрируемой, но и того, чтобы ее интеграл обращался в
нуль.
Остроградский
II
Я сообщил некоторым из моих друзей нижеследующий результат, кото-
рый заключает в себе всю механику, и я спешу поставить Вас в из-
вестность об этом результате, чтобы, в случае надобности, я мог опи-
раться на Ваше свидетельство.
Сумма момента движущих сил, момента сил, которые заменяют связи
системы, и вариации живой силы, выраженных в любых координатах, явля-
ется полной производной по времени.
Это — наиболее простой и наиболее общий результат, который может
быть получен из динамических соображений. Условие полной производной
свойственно не только гидростатике и гидродинамике; оно принадлежит
всей науке о движении.
Навсегда Ваш друг
2 февраля 1853 г.
Остроградский
А. ПУАНКАРЕ
ВВЕДЕНИЕ К КНИГЕ «ЭЛЕКТРИЧЕСТВО И ОПТИКА» [й2]
Когда французский читатель впервые открывает книгу Максвелла,
к его восхищению примешивается чувство беспокойства, а подчас даже
и недоверия. Только после глубокого знакомства и ценой больших усилий
удается рассеять это чувство. Впрочем, у некоторых выдающихся умов оно
так и осталось навсегда.
Почему же идеи английского ученого с таким трудом воспринимаются
у нас? Без сомнения, причина этого в том, что воспитание, полученное боль-
шинством образованных французов, приучило их ценить выше всех других
качеств точность и логичность.
Прежние теории математической физики нас полностью удовлетворяли
в этом отношении. Все наши великие ученые, начиная с Лапласа и кончая
Коши, действовали одним и тем же способом. Исходя из точно высказанных
гипотез, они с математической строгостью выводили все следствия из них,
а затем сравнивали их с результатами опыта. Кажется, что они хотели при-
дать каждой ветви физики ту же точность, которой обладает Небесная
Механика.
Ум, привыкший восхищаться подобными образцами, трудно удовлетво-
рить какой-либо теорией. Он не только не потерпит ни малейшего намека
на противоречие, но он потребует, чтобы отдельные части теории были логи-
чески увязаны между собой и чтобы число различных гипотез было сведено
к минимуму.
Но это еще не все; у него появятся еще другие требования, которые мне
кажутся менее обоснованными. За материей, воспринимаемой нашими
органами чувств и которую мы познаем из опыта, он захочет увидеть другую
материю, единственно подлинную в его глазах, которая будет обладать
только чисто геометрическими свойствами и атомы которой будут не чем
иным, как математическими точками, подчиняющимися лишь законам дина-
мики. И все же он будет стараться, в неосознанном противоречии, предста-
вить себе эти атомы, неделимые и бесцветные, и, следовательно, как можно
больше приблизить их к обычной материи.
Только тогда он будет полностью удовлетворен и вообразит себя проник-
шим в тайны вселенной. Если это удовлетворение и обманчиво, тем не менее
расставаться с ним тягостно.
Так, открывая том Максвелла, француз ожидает найти там единую
теорию, столь же логичную и столь же строгую, как физическая оптика,
основанная на гипотезе эфира; в таком случае его ждет, однако, разочаро-
вание, от которого я хотел бы избавить читателя, предупредив его с самого
начала о том, что он должен искать у Максвелла и чего он там не сможет
найти.
Максвелл не дает механического объяснения электричества и магнетизма;
он ограничивается тем, что доказывает возможность такого объяснения.
774
А. ПУАНКАРЕ
Равным образом он показывает, что оптические явления — не что иное,
как частный случай электромагнитных явлений. Из всякой теории электри-
чества, следовательно, можно непосредственно вывести теорию света.
Обратное положение, к сожалению, неверно; из полного объяснения
света не всегда легко получить полное объяснение электрических явлений.
Это, в частности, не легко сделать, если исходить из теории Френеля. Без
сомнения, это не является невозможным; но к этому нельзя подойти, не
спросив себя, не придется ли отказаться от замечательных результатов,
которые мы считаем нашим несомненным достоянием. Это представляется
шагом назад; и многие крупные умы не хотели бы с этим мириться.
Если читатель согласится ограничить свои чаяния, все же он натолкнется
еще на другие трудности; английский ученый не стремится построить
единое здание теории, окончательной и вполне упорядоченной, он, кажется,
скорее возводит большое число строений, временных и обособленных, сооб-
щение между которыми затруднительно, а подчас и невозможно.
Возьмем в качестве примера главу, в которой объясняются электростати-
ческие притяжения при помощи давлений и натяжений, господствующих
в диэлектрической среде. Эту главу можно было бы выкинуть без того,
чтобы оставшаяся часть книги сделалась от этого менее ясной или менее
полной; с другой стороны, эта глава содержит самодовлеющую теорию,
которую можно было бы понять, не читая ни одной строчки из того, что
предшествует, или из того, что следует за этой главой. Она не только не-
зависима от остальной части труда, но ее трудно увязать с основными идеями
книги, как это далее покажет более углубленное обсуждение; Максвелл
и не стремится к этой увязке, он ограничивается словами: «I have not been
able to make the next step, namely, to account by mechanical considerations
for these stresses in the dielectric»*) (2-е изд., т. 1, стр. 154).
Этого примера достаточно, чтобы пояснить мою мысль ; я мог бы при-
вести еще много других. Так, например, кто усомнится, читая страницы,
посвященные магнитной вращательной поляризации, в тождественности
оптических и магнитных явлений.
Итак, не следует обольщать себя надеждой избежать всякого противо-
речия, но надо с этим примириться. Две противоречивые теории, если их
только не смешивать и если не искать в них сущности вещей, обе могут
быть полезным орудием исследования, и, быть может, чтение Максвелла
было бы менее плодотворным, если бы он не открыл нам столько новых
различных путей.
Но основная идея находится здесь, так сказать, в несколько замаскирован-
ном виде. Она настолько замаскирована, что в большей части популярных
работ эта идея оказывается единственным пунктом, оставшимся совершенно
в стороне.
Я считаю себя обязанным, чтобы лучше выявить важность этой идеи,
выяснить в этом введении, в чем она состоит.
Во всяком физическом явлении есть некоторое число параметров, кото-
рые получаются непосредственно из опыта и которые опыт дает возможность
измерить. Я назову их qlt q2,... ,qn.
Наблюдение, далее, дает нам законы изменения этих параметров, и эти
законы, вообще говоря, могут быть представлены в форме дифференциальных
уравнений, которые связывают параметры q между собой и со временем.
Что нужно сделать, чтобы дать механическое истолкование подобного
явления?
*) Я не смог сделать следующего шага, а именно, объяснить с помощью механических
соображений эти напряжения в диэлектрике.
ВВЕДЕНИЕ К КНИГЕ «ЭЛЕКТРИЧЕСТВО И ОПТИКА»
775
Надо постараться объяснить его либо при помощи движения обычной
материи, либо при помощи движения одной или нескольких гипотетических
жидкостей.
Эти жидкости мы будем рассматривать как образованные очень большим
числом изолированных частиц; пусть т1г т2,... ,тр — массы этих частиц ;
и пусть х,-, у„ 2,- — координаты частиц т,.
Далее, придется предположить, что имеет место сохранение энергии и,
следовательно, существует некоторая функция (—U) от Зр координат
х„ У<» zi, которая играет роль силовой функции. Тогда Зр уравнений дви-
жения будут иметь вид:
d2Xi
d^yi
d2z;
1 at2
dU
dxi
ъи
Эу,
ъи
Qzi
(О
Кинетическая энергия системы равна
T=y2'm,(x? + y? + i?).
Потенциальная энергия равна U, а уравнение, выражающее сохранение
энергии, напишется так:
Т + U = const.
Мы будем иметь полное механическое объяснение явления, если будем,
с одной стороны, знать силовую функцию (—U) и, с другой стороны, сумеем
выразить Зр координат х,-, yb z,- через п параметров q.
Если заменить эти координаты их выражениями через q, то уравнения (1)
примут другую форму. Потенциальная энергия U сделается функцией q;
что же касается кинетической энергии Т, то она будет зависеть не только
от параметров q, но и от их производных q, причем она будет однородной
функцией второй степени относительно этих производных. Законы движения
будут тогда выражены уравнениями Лагранжа
dt I Щк jdqk^Qqk ' J
Если теория подходит, то уравнения (2) должны быть тождественны
с непосредственно наблюдаемыми экспериментальными законами.
Итак, для того чтобы механическое объяснение явления было возмож-
ным, нужно, чтобы оказалось возможным найти две функции U и Т, завися-
щие : первая — только от параметров q, вторая — от этих параметров и их
производных; нужно, далее, чтобы Т была однородной функцией второго
порядка по отношению к этим производным и чтобы дифференциальным
уравнениям, выведенным из опыта, могла быть придана форма (2). Справед-
ливо и обратное предложение; всякий раз, когда можно найти эти две
функции Т и U, есть уверенность, что явление поддается механическому
объяснению.
В самом деле, пусть Ufa, q2, ..., qn), Tfa, q2, ..., qn, qlt qa, ..., qn) или,
проще, Ufa), Tfa, qk) — эти две функции.
Что остается сделать, чтобы получить полное объяснение?
776
А. ПУАНКАРЕ
Остается найти р постоянных т1( т2, ..., тр и Зр функций параметров q :
?2, ?2. •••> ?п), ?2, ••• , ?п)>
где i = 1, 2, ..., р, или, короче,
Vi (?fc) > Vi (Як), в, (?fc),
которые можно было бы рассматривать соответственно как массы и коорди-
наты
Xi = Vi, yi = Vt, Zi = 6i
р частиц системы.
Для этого названные функции должны будут удовлетворять следующему
условию : должно тождественно выполняться
т (Як ,Цк) = ^ 2’m, (х? + У? + z?) = У 2 m'i (vl + vf + б?),
где
Q<Pi , • ®4>i , , • ttyi
'Pi-<h^ + <h^+
Так как число р может быть взято сколь угодно большим, то всегда
можно удовлетворить этому условию, и притом бесконечным множеством
способов.
.Итак, коль скоро существуют функции U(qk) и T(qk, qk), можно найти
бесконечное множество механических объяснений явления.
Поэтому, если какое-либо явление допускает механическое объяснение,
то для него возможно бесконечное множество других механических объясне-
ний, которые в равной мере соответствуют всем частным особенностям,
выявленным опытом.
Вышеизложенное подтверждается историей всех разделов физики;
например, в оптике Френель считает колебания перпендикулярными к
плоскости поляризации. Нейман рассматривает их как параллельные этой
плоскости. Долгое время искали «experimentum crucis», который позволил
бы сделать выбор между этими двумя теориями, и не могли его найти.
Точно так же, не выходя из области электричества, мы можем констати-
ровать, что теория двух жидкостей и теория одной жидкости в равной
степени удовлетворительно учитывают все законы, наблюдаемые в электро-
статике.
Все эти факты легко объясняются благодаря свойствам уравнений Ла-
гранжа, которые я только что напомнил.
Теперь нетрудно понять основную идею Максвелла.
Чтобы доказать возможность механического объяснения электричества,
нам не нужно затруднять себя отысканием этого самого объяснения, доста-
точно знать выражения двух функций Т и U, которые обе являются состав-
ными частями энергии, образовать с их помощью уравнения Лагранжа и
затем сравнить эти уравнения с экспериментальными законами.
Но как сделать выбор между всеми этими возможными объяснениями,
в то время как опыт не оказывает нам никакой помощи при этом выборе.
Быть может, настанет день, когда физиков перестанут интересовать эти
вопросы, не поддающиеся решению позитивными методами, и они предоставят
их решение метафизикам. Но этот день еще не пришел ; человек не так-то
легко примиряется с мыслью навеки отказаться от познания сущности
вещей.
ВВЕДЕНИЕ К КНИГЕ «ЭЛЕКТРИЧЕСТВО И ОПТИКА»
777
Итак, наш выбор может основываться только на соображениях, в кото-
рых очень большую роль играет субъективная оценка; между тем есть
решения, от которых всякий откажется из-за их странности, и есть другие,
которые всякий предпочтет по причине их простоты.
Что касается электричества и магнетизма, то Максвелл воздерживается
от какого-либо выбора. И это не потому, что он систематически игнорирует
все, что не может быть получено позитивными методами; время, которое
он посвятил кинетической теории газов, достаточно свидетельствует об этом.
Я добавлю, что если в своем большом труде он не развивает никакого пол-
ного объяснения, то в свое время он пытался дать таковое в статье в Philo-
sophical Magazine. Странность и сложность гипотез, которые он должен был
сделать, заставили его затем отказаться от этого объяснения.
Ту же мысль мы вновь обнаруживаем во всем его труде. В нем освещается
все, что есть существенного, то есть то, что должно оставаться общим для
всех теорий; все, что подходит только к какой-либо частной теории, почти
всегда обходится молчанием. Таким образом, читатель оказывается перед
почти пустой формой материи, которую он сначала старался воспринять
как какую-то мимолетную и неуловимую тень. Но усилия, которые он был
принужден таким образом делать, заставляют его мыслить, и в конце концов
он понимает, что было подчас что-то искусственное в тех цельных теориях,
которыми он раньше восхищался.
Как.раз в электростатике моя задача была наиболее трудной; именно
здесь в особенности обнаруживается недостаток точности. Один из фран-
цузских ученых, изучавших особенно глубоко труд Максвелла, сказал мне
однажды: «Я все понимаю в его книге, за исключением того, что такое
наэлектризованный шар». Поэтому я считал себя обязанным особенно долго
задержаться на этой ветви науки. Я не хотел оставить понятию электриче-
ского смещения ту неопределенность, которая является причиной всех его
неясностей; я тем более не хотел, уточняя мысль автора, сказать больше,
чем сказал он, и тем самым совершить в отношении его предательство.
Я решил изложить последовательно две полные, но совершенно различные
теории. Я надеюсь, что читатель без труда усмотрит то общее, что имеют
эти две теории, а следовательно, и то, что в них есть существенного. Он пре-
дупрежден, кроме того, что ни одна из этих теорий не представляет сущ-
ности вещей. В первой я допускаю существование двух жидкостей, электри-
чества и fluide inducteur, которые могут быть столь же полезными, как и две
жидкости Кулона, но которые обладают не в большей степени объективной
реальностью. Так же точно гипотеза о клеточном строении диэлектриков
имеет целью только лучше разъяснить идею Максвелла, сблизив ее с идеями,
более близкими нам. Поступая таким образом, я не прибавляю ничего к мысли
английского автора и, тем более, ничего не отнимаю от нее; ибо следует
заметить, что Максвелл никогда не рассматривал «what we may call an
electric displacement» *) как действительное движение некоторой действитель-
ной материи.
Я очень благодарен г-ну Блондену (Blondin), который собрал и отредак-
тировал лекции, которые я читал в летнем семестре 1888 г., подобно тому
как он это уже сделал в отношении моих лекций, посвященных физической
оптике.
*) То, что мы можем назвать электрическим смещением.
А. ЗОММЕРФЕЛЬД
ОТРЫВОК ИЗ СТАТЬИ «КВАНТ ДЕЙСТВИЯ ПЛАНКА
И ЕГО ВСЕОБЩЕЕ ЗНАЧЕНИЕ ДЛЯ МОЛЕКУЛЯРНОЙ
ФИЗИКИ» f263]
7. Квант действия и время обмена энергии
при чисто молекулярных процессах
Этим мы заканчиваем доклад об учении о квантах энергии, или квантах
света. Это учение, очевидно, ограничивается в настоящее время периоди-
ческими процессами. Но если мы будем на него смотреть как на следствие
всеобщего свойства молекул, то мы должны будем принять во внимание также
индивидуальные непериодические молекулярные процессы.
Эта более общая точка зрения, как мне кажется, уже выражена со всей
желательной точностью в размерности и в планковском обозначении кванта
действия. Универсальная постоянная, которая вызвана к жизни теорети-
ческим и экспериментальным исследованием излучения, не является квантом
энергии (размерности эрга), но квантом действия :
h = 6,55 • 10-27 эрг сек,
то есть имеет размерность [энергия х время]. Мы полагаем поэтому: всеоб-
щее свойство всех молекул, которое выявляется в излучении, состоит не в
том, что появляются известные характерные количества энергии, а в том,
что процесс обмена энергии во времени упорядочен всеобщим образом.
Говоря попросту, большое количество энергии воспринимается или отдается
материей за короткое время, малое количество энергии — за более долгое
время; при этом произведение энергии на время или временной интеграл
энергии (подлежащий более точному определению) определяется величиной й.
Рассмотрим два относящихся сюда примера.
а) Поглощение энергии. Катодные лучи большой скорости дают жесткие
рентгеновские лучи, катодные лучи меньшей скорости — мягкие. Большую
или меньшую жесткость рентгеновских лучей следует рассматривать как
меру меньшей или большей ширины импульса, или, что приводит к тому
же, как меру меньшего или большего времени процесса торможения. Итак,
катодные лучи с большой энергией тормозятся в течение короткого времени,
катодные лучи с меньшей энергией — в течение большего промежутка вре-
мени. Этот результат, хорошо известный нам из опыта, тем не менее, в высшей
степени удивителен. Он противоречит всякой аналогии из области баллистики
и дает нам указание качественного характера на то, что при чисто моле-
кулярных процессах приходится иметь дело с величиной, которая опре-
деляется произведением воспринятой энергии на длительность этого про-
цесса. Как я недавно показал, эта точка зрения может быть проведена также
ОТРЫВОК из СТАТЬИ «КВАНТ ДЕЙСТВИЯ ПЛАНКА»
779
количественно и проверена тем, что из наблюдения поляризованной энергии
рентгеновских лучей вычисляют величину Л*).
б) Излучение энергии. Жесткие Д-лучи сопровождаются жесткими
у-лучами. Хотя и это открытие в некоторых частностях является еще спор-
ным в настоящее время, все же в большинстве случаев оно, без сомнения,
подтверждается. Жесткость Д-лучей есть мера их энергии, жесткость у-лучей
мы опять рассматриваем как меру ширины их импульса, иди, что то же,
как меру того времени, в течение которого ^-частица достигла своей скорости.
Таким образом, и в радиоактивности господствует замечательное правило :
большие количества энергии излучаются в течение короткого времени,
меньшие — в течение более долгого времени **).
К более точному предложению для величины энергия-время мы придем,
если будем следовать термину «квант действия», весьма удачно выбранному
Планком. Этот термин указывает на временной интеграл J (Т — U) dt,
который встречается в принципе Гамильтона; это —- так называемое дей-
ствие. Здесь Т — кинетическая, U — потенциальная энергия рассматривае-
мой механической системы. В случаях, когда нельзя провести разделение
энергии на кинетическую и потенциальную, Планк пишет вместо этого
J Н dt и называет величину Н вместе с Гельмгольцем кинетическим потен-
циалом.
Если мы будем смотреть на принцип действия вместе с Гельмгольцем—
Планком как на высшее основное предложение механики и физики, то при-
дем к установлению связи между основной постоянной излучения h и имею-
щим ту же размерность действием J Н dt. Мы приходим, таким образом,
к следующей гипотезе об общем значении величины /г.
При каждом чисто молекулярном процессе каждая молекула воспри-
нимает или отдает определенное универсальное количество действия, именно
количество
\Hdt = ^,
о
где т — длительность процесса действия. Н мы большей частью рассматри-
ваем просто как сокращенное обозначение для Т — U; множитель ~
в правой части введен с учетом законов фотоэлектрического эффекта.
*) Sitzungsber. d. Bayer. Akademie, 1911, ст. 1.
**) Там же.
Л. С. ПОЛАК
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
ВВЕДЕНИЕ
Вариационные принципы механики и связанный с ними комплекс физи-
ческих идей и математических методов играют важную роль в теоретической
и прикладной механике, а также в физике.
Трудно указать какую-либо другую область физико-математических
наук, в которой столь глубоко сочетались бы абстрактные математические
исследования и конкретное физическое содержание. Вариационные принци-
пы механики — не только великолепный инструмент научного исследования
самых сложных и многогранных проблем природы и техники, но и свое-
образная форма выражения законов движения, имеющая смысл далеко за
пределами классической механики, в которой она возникла.
Вариационные принципы механики неразрывно связаны с теорией групп
преобразований, синтезом аналитического и геометрического аспектов меха-
ники, оптико-механической аналогией и единой волново-корпускулярной
картиной движений, классической и квантовой теорией физических полей,
вариационными методами решения задач движения, равновесия, устойчи-
вости и структуры физических систем и другими фундаментальными про-
блемами.
I. РАЗВИТИЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ МЕХАНИКИ
Предыстория вариационных принципов механики
и оптико-механической аналогии
Вариационный принцип для физической проблемы впервые был отчет-
ливо сформулирован в геометрической оптике в XVII в. и применен к реше-
нию задач отражения и преломления света. Это был принцип кратчайшего
времени или принцип Ферма. Естественно, возникает вопрос о том, почему
экстремальный принцип возник первоначально в оптике, а не в механике,
хотя и в последней уже в то время имелось достаточно отдельных высказы-
ваний о простоте законов движения или, в телеологическом варианте, о том,
что природа достигает своих целей простейшими средствами.
Дело в том, что для оптической задачи величина, которая должна быть
минимумом в конкретных явлениях, легко доступна пониманию и не требует
дальнейших исследований. Это —время. Как бы ни относиться к философ-
ским проблемам, связанным с категорией времени, наглядные и издревле
измеряемые интервалы времени в достаточно широких пределах не нуждают-
ся в другом определении, кроме возможности сравнения их, т. е. установле-
ния отношений равенства и «больше или меньше».
Иное положение в механике. В механике совсем не очевидно, какая
величина в процессе движения должна быть минимумом (или максимумом),
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
781
и, как мы теперь знаем, структура этой величины отнюдь не является про-
стой; в механике, кроме того, необходимо специальное выяснение харак-
тера варьированных движений.
Поэтому, хотя поиски экстремальных соотношений в оптике и механике
начались на самой заре развития вариационного исчисления, которое и воз-
никло в связи с этими поисками и при решении соответствующих частных
задач (например, задачи о брахистохроне), однако оформились они в виде
ясных математических выражений раньше всего в оптике, где не требовалось
ни разработки такого сложного понятия, как «действие», ни выяснения харак-
тера его варьирования. Однако время входит и в картину механического
движения, поэтому, почти одновременно с возникновением принципа крат-
чайшего времени в оптике, возникла идея о применении его в механике,
а также о разработке в механике самостоятельного, но аналогичного по
структуре принципа. Механистическая концепция физической картины
мира подсказывала возможность единого принципа для оптики и механики —
первая, еще не ясная, но чреватая многочисленными последствиями идея
оптико-механической аналогии.
Пьер Ферма в 1662 г. положил в основу своего исследования закона
преломления принцип кратчайшего времени. В заметке «Synthesis ad Refrac-
tiones» он вывел закон преломления света геометрическим способом, исходя
из этого принципа. По мнению Ферма, «природа действует наиболее легкими
доступными путями, а отнюдь не более краткими», как это думают многие.
Это положение является единственным постулатом, который Ферма кладет
в основание своих рассуждений. Конкретизируя эту идею, он говорит:
«Подобно тому как Галилей, когда рассматривал движение тяжелых тел
в природе, измерял отношения его не столько расстоянием, сколько вре-
менем, мы так же рассматриваем не кратчайшие расстояния или линии, а
те, которые могут быть пройдены легче, удобнее и за более короткое время*)».
Вывод закона преломления, проведенный геометрическим способом,
очень громоздок. В изложениях различных авторов своеобразная прелесть
рассуждений Ферма почти исчезает.
Как известно, принцип Ферма является наиболее общей математической
формой выражения законов геометрической оптики.
Итак, принцип кратчайшего времени был сформулирован и продемон-
стрирован в геометрической оптике. Немедленно и закономерно возникла
проблема отыскания аналогичных задач с минимальным значением времени
в механике. Рассмотрение одной из них связано с возникновением вариа-
ционного исчисления р привело в дальнейшем к формулированию вариа-
ционного принципа в механике. Более широкая постановка таких задач
связана с проблемой определения кривой при условии, что некоторая вели-
чина, связанная с ее формой, имеет максимум или минимум, т. е. отыска-
нием кривой, обладающей некоторым свойством максимума или минимума.
Первой задачей такого рода была задача, приведенная Ньютоном в его
Началах (книга II, секция VII, предложение 34): какую форму надо придать
твердому телу вращения, движущемуся вокруг оси, для того, чтобы испыты-
ваемое им сопротивление было наименьшим? Решение задачи он привел без
указания способа, которым оно было найдено.
В 1696 г. в июньской книге лейпцигского журнала «Acta Eruditorum»
(стр. 264) И. Бернулли опубликовал заметку «Problema novum, ad cujus solu-
tionum Mathematics invitantur» **) («Новая задача, к разрешению которой
приглашаются математики»). Это была знаменитая задача о брахистохроне
*) П. Ферма, см. стр. 7 настоящей книги.
**) И. Бернулли, см. стр. 11 настоящей книги.
788
Л. С. ПОЛАК
скорость в элементе пути. Вся кривая может быть брахистохроной, хотя
каждый элемент ее и не обнаруживает этого свойства. Это означает, что
принцип Якова Бернулли не является универсальным.
В 1697 г. И. Бернулли была поставлена еще одна задача на отыскание
минимума. Эта задача состояла в проведении кратчайшей линии между
двумя заданными точками на произвольной поверхности. Первые исследо-
вания этой задачи были выполнены Лейбницем и Яковом Бернулли, но
наиболее важный результат был найден самим И. Бернулли. Он показал,
что в любой точке кратчайшей-линии соприкасающаяся плоскость перпен-
дикулярна к касательной плоскости к поверхности, что, как известно, есть
основное свойство геодезических линий. Понимая всю важность задачи
о геодезических линиях, И. Бернулли хотя и не опубликовал сразу найден-
ный результат (он сообщил его в конце 1728 г. Упсальскому профессору
Клингенштерну, а напечатаны его работы о геодезических линиях были
лишь в 1742 г.), но предложил заняться этой задачей своему ученику
Л. Эйлеру. Эйлер, которому тогда был 21 год, но который уже тогда «вы-
числял без какого-либо видимого усилия,.как человек дышит, как орлы
поддерживают себя в потоке воздуха» (Араго), напечатал в 1728 г. статью
«De linea brevissima in superficie quaqunque duo quaelibet puncta iungente»,
в которой он дал общее решение поставленной задачи. Четыре года спустя
Эйлер опубликовал мемуар «Problematis isoperimetrici in latissimo sensu
accepti solutio generalis», в котором изопериметрическая задача была
сформулирована в общем виде. Затем во втором томе сочинения «Mecanica
sive motus scientia analytice exposita», вышедшем в 1736 г., Эйлер снова
занялся исследованием геодезических линий и решил изопериметрическую
задачу о брахистохроне заданной длины. Наконец, в 1744 г. отдельным
изданием вышел трактат, в котором Эйлер собрал почти все свои исследо-
вания предыдущих лет, посвященные этим проблемам.
В письме от 28 января 1741 г. Даниил Бернулли спрашивал Эйлера,
может ли он решить проблему центральных сил методом изопериметров.
Эйлер нашел решение этой задачи в марте 1743 г. В 1744 г. оно было опубли-
ковано им в приложении «Об определении движения брошенных тел в несо-
противляющейся среде методом максимумов и минимумов» к знаменитой
книге «Метод нахождения кривых линий, обладающих свойствами максимума
или минимума, или решение изопериметрической задачи, взятой в самом
широком смысле». Эйлеру, как правильно указывает Серре*), принадлежит
исторически первая отчетливая идея математического содержания, которое
вкладывается наукой в принцип наименьшего действия. Именно Эйлер в
1744 г. в указанном приложении показал, что для траекторий, описываемых
под действием центральных сил, интеграл f vds, vjat v — скорость, всегда
равен минимуму или максимуму. Эйлер не' дал этому выражению какого-
либо специального наименования.
Математическое выражение, называемое принципом наименьшего дей-
ствия, у Эйлера естественно вытекало из его работ по отысканию кривых,
обладающих экстремальными свойствами. Однако, если геометрическая
задача блестяще решалась «методом изопериметров», то в случае механи-
ческого движения приходилось ограничиваться решением уже решенных
задач (a posteriori), так как указать из общих соображений, какая именно
величина в том или ином случае будет иметь максимум и минимум, не уда-
валось. Это ограничивало сферу применения и эвристическое значение прин-
ципа наименьшего действия у Эйлера. Еще одно ограничение универсаль-
*) J. S е г г е t, Мётоке sur le principe de la moindre action, C. R. Ac. des Sc.
12/VI 1872, стр. 697—698.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
789
поста его характера явствовало из того, что у Эйлера он органически связан
с законом живых сил и .имеет место только там, где применим последний.
Из выражения §vds = §v2dt видно, как заключает Эйлер, откликаясь
на споры о мере движения, что «. . . ни те, кто полагает, что силы сле-
дует оценивать по самим скоростям, ни те, кто — по квадратам скоростей,
не найдут здесь ничего неприемлемого»*).
Этим ‘замечанием Эйлера в неявном виде формулируется ограничение
области применения принципа наименьшего действия кругом проблем,
в которых силы имеют потенциал **). Таким образом, согласно Эйлеру,
необходимым условием применимости принципа наименьшего действия
является подчинение системы закону живых сил, в. то время как
Мопертюи усматривал универсальность своего принципа наименьшего
количества действия именно в том, что он имеет более общее значение, чем
закон живых сил, или другие законы механики. В то же время в той форме,
которую придал Мопертюи этому принципу, он имеет смысл только для
конечных и мгновенных изменений скорости, и поэтому из него можно полу-
чать только уравнения, связывающие конечные величины. Эйлерова же форма
принципа наименьшего действия охватывает непрерывные движения, и из
нее получаются дифференциальные уравнения траекторий.
Работа Эйлера делает совершенно незначительной роль Мопертюи,
которому, по существу говоря, принадлежит только название принципа,
да и то не слишком удачное.
Мопертюи сам пишет : «Этот великий геометр (Л. Эйлер. — Л. П.) не
только обосновал принцип более основательно, чем это сделал я, но его
взор, более объемлющий и более проникновенный, чем мой, привел его к
открытию следствий, которых я не извлек»***).
Однако, несмотря на то, что выражение J v ds, являющееся математически
осмысленной формой принципа наименьшего действия, дано Эйлером неза-
висимо и одновременно с работами Мопертюи, которые были математически
аморфны и не заключали в себе ядра будущего прогресса, Эйлер всегда под-
черкивал приоритет Мопертюи. Возможно, это объясняется тем, что при
своей склонности к метафизическим спекуляциям он отдавал предпочтение
априорной и кажущейся универсальной метафизической аргументации
Мопертюи по сравнению с своими результатами, найденными им, как он
сам говорит, a posteriori.
Возможно также, что неоднократное подчеркивание Эйлером приоритета
Мопертюи обусловлено в какой-то мере и его дружескими чувствами к пре-
зиденту Берлинской Академии.
Что же касается взглядов Эйлера на теологическое обоснование прин-
ципа, то они во многом близки к взглядам Мопертюи. Математическое рас-
смотрение интересующей нас проблемы не обходится у Эйлера без телеологи-
*) Л. Эйлер, см. стр. 31 настоящей книги.
**) Насколько была ясна важность этого вопроса многим ученым того времени, видно
из приводимого ниже отрывка неопубликованного письма Лаланда.
В письме от 2/Ш 1753 г. (Архив АН СССР, ф. 136, оп. 2, № 3, л. 315, 316) Лаланд пишет
Эйлеру : «Я прочитал с удовольствием Ваши мемуары в защиту Мопертюи ; я хотел бы,
чтобы Вами было обращено больше внимания на то, чем принцип наименьшего действия
отличается от принципа живых сил, потому что и тот и другой оценивают действия
(Faction) квадратом скорости, предполагая время постоянным; в случае, рассмотренном
в статье Кёнига, живая сила равна нулю, ее элемент также равен нулю, точно так же как
элемент действия у Мопертюи, так что здесь нет никакой разницы между ними. С другой
стороны, кажется, что Кёниг находится в согласии с Вами, когда он говорит, что „если
полный элемент живой силы делается равным нулю, то имеет место равновесие”, это
означает не что иное, как то, что живая сила есть минимум...».
***) Maupertuis, Lettres, Lettre XI sur ce qui s’est раззё a 1’occasion du principe
de la moindre quantite d’action, Oeuvres, t. 2, Lyon, 1768, стр. 281.
ческих, метафизических соображений. Эти соображения не играют никакой
роли в разработке метода минимумов и максимумов в целом и в решении
конкретных задач статики и динамики.
В процессе развития вариационных принципов и методов телеологи-
ческие аргументы и идеи постепенно естественно отпадают, так как им нет
места в подлинно научном знании..Уже Эйлер убедился в том, что каузаль-
ное объяснение совсем не эквивалентно телеологическому описанию явлений,
но имеет перед последним то очевидное преимущество, что любая проблема
механики может быть решена без помощи принципа наименьшего действия,
в то время как применение последнего требует при рассмотрении конкретных
задач предварительного знания их решения.
Эйлер, поддерживавший Мопертюи во время известной дискуссии, сна-
чала пользуется прямо телеологической аргументацией для обоснования
принципа, но, в конце концов, приходит к выводам, по существу говоря
лишающим принцип столь дорогого для Мопертюи божественного ореола.
Указав, что метод, развитый им для исследования движения в поле цен-
тральных сил, может быть применен к задаче о нахождении условий равно-
весия механических систем, Эйлер усматривает обоснование такой возмож-
ности в аргументах, доказательная сила которых ему самому представляется
недостаточной :
«... Так как тела в силу инерции сопротивляются всякому изменению
состояния, то они, если только будут свободны, будут насколько возможно
меньше подчиняться действующим силам ; отсюда вытекает, что в порожден-
ном движении эффект, произведенный силами, должен быть меньшим, чем
если бы тела двигались каким-либо иным способом. Хотя сила этого рассуж-
дения еще недостаточно видна, все же, так как оно согласно с истиной,
я не сомневаюсь, что при помощи принципов здравой метафизики оно может
быть возведено к большей очевидности; но это я предоставляю другим — тем,
кто занимается метафизикой»*).
Это, конечно, излишняя скромность — Эйлер сам не мало занимался
метафизикой.
Для него характерно стремление дать натурфилософское обоснование
механики, не довольствуясь тем, что ее основные законы есть научное обоб-
щение эксперимента и наблюдения. Поэтому он многократно возвращается
к проблемам, находящимся на стыке математики, механики, натурфилософии
и философии. Им опубликована, например, работа, любопытная с точки
зрения изучения попыток ученых XVIII в. связать воедино философию и
механику: «Enodatio questionis: utrum materiae facultas cogitandi tribui
possit nec ne? ex principiis mechanics petit а»**) («Основанное на принципах
механики исследование вопроса, можно ли материи приписать способность
мышления, или нельзя?»). В этой работе механика привлекается на помощь
метафизике. Однако есть у Эйлера и такие работы, где метафизика полагается
в основание механики: «Essay d’une demonstration metaphysique de principe
gdneral de I’equilibre»***) («Опыт метафизического доказательства общего
принципа равновесия»).
Склонность Эйлера к проблемам, относившимся в XVIII в. к метафизике,
и присущие ему теологические и телеологические тенденции проявились
и в его известной популярной книге «Письма о разных физических и фило-
зофических материях, писанные к некоторой немецкой принцессе, с француз-
ского языка на российский, переведенные Степаном Румовским» (1768—1772).
*) Л. Эйлер, См. стр. 40 настоящей книги.
**) L. Euler, Opuscula varii argumenti, 1, Berlin, 1746, стр. 277—286.
***) L. Euler, Мёт. de 1’Acad. des Sci. de Berlin, t. 7 (1751), 1753, стр. 264—254.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
791
Эта книга получила отрицательную оценку со стороны крупнейших
ученых механиков Д’Аламбера и Лагранжа, которые представляли прогрес-
сивные идеи в науке XVIII в., развивавшиеся в знаменитой Энциклопедии,
одним из руководителей которой был Д’Аламбер.
Они восприняли книгу Эйлера как выступление против антитеологи-
ческих, материалистических взглядов передовых французских ученых.
Лагранж пишет Д’Аламберу: «Труды, которые Эйлер публикует в
Петербурге, были написаны давно и оставались в рукописи лишь за отсут-
ствием издателя, который хотел бы ими заняться; среди них имеется одно
сочинение, которое он не должен был бы публиковать ради своей чести:
это — „Письма к немецкой принцессе”» (Письмо от 2/XII 1769 г.)*). И в. дру-
гом письме : «Письма Эйлера к немецкой принцессе, которые Вы желаете
видеть и которые, может быть, Вас позабавят выходками против вольно-
думцев»**).
Д'Аламбер в письме (от 16/VI 1769 г.) Лагранжу остроумно сравнивает
эту работу Эйлера с имеющими печальную известность комментариями
Ньютона к Апокалипсису : «... Судя по тому, что Вы мне о них говорите
(речь идет о сочинении Эйлера „Письма к немецкой принцессе” — Л. П.),
это — его комментарии к Апокалипсису. Наш друг — великий аналитик,
но довольно плохой философ»***).
Прочитав «Письма к немецкой принцессе», Д’Аламбер пишет (письмо
Лагранжу он 7/VIII 1769 г.):
«Вы имели полное основание говорить, что он не должен был печатать
это произведение ради своей чести. Это просто невероятно, как такой вели-
кий гений, каким он является в геометрии и анализе, может быть в мета-
физике ниже самого маленького школяра, чтобы не сказать — таким пло-
ским и абсурдным, и вот действительно подходящий случай воскликнуть :
Не все богами даровано одному (Non omnia eidem Dii dedere)****).
В течение 1746—1749 гг. Эйлер подготовляет к печати несколько работ,
посвященных поискам выражений, имеющих минимум в различных задачах
динамики и статики. Эти работы были напечатаны в 1750—1753 гг.
В статье «Recherhes sur les plus grands et les plus petits qui se trouvent dans
les actions des forces» Эйлер рассмотрел с помощью методов вариационного
исчисления различные задачи равновесия гибкой нити под действием каких-
либо сил при различных условиях. Применив для рассмотрения этих задач
принцип наименьшего действия, Эйлер расширил сферу его применения,
распространив его на упругие силы.
Завершив этот новый цикл исследований по применению принципа
наименьшего действия к проблемам механики, Эйлер приходит, в общем,
к тем же выводам, что и в 1744 г. Эйлер снова отмечает, что существуют два
метода решения проблем механики: «один метод — прямой, основанный на
законах равновесия или движения; другой . .. применяет формулы, которые
должны быть максимумами или минимумами и решение которых находится
с помощью метода максимумов и минимумов. Первый находит решение,
определяя эффект по действующим силам; другой рассматривает конечные
причины и выводит действия»*****). Оба метода, полагает Эйлер, должны
находиться в полном согласии и приводить к одному и тому же ре-
шению, и именно это согласие убеждает нас в истинности решения,
*) L a grange, Oeuvres, т. 13, стр. 132.
**) Там же, стр. 143.
***) Там же, стр. 135.
****) Там же, стр. 147—148.
*****) L. Euler, Recherches sur les plus grands et les plus petits qui se trouvent dans
les actions des forces, Mem. de 1’Acad. des Sci. de Berlin, t. 4 (1748), стр. 151, 1750.
792.
JI. (J. 11UJ1AH.
поскольку каждый из рассматриваемых методов основан на несомненных
принципах.
«Однако, — замечает Эйлер, — ... часто очень трудно найти выражение,
которое должно быть максимумом и минимумом.. .»*). Поиски такого
выражения, по мнению Эйлера, собственно говоря, принадлежат не к области
математики, а «... к метафизике, поскольку необходимо знать цель, которую
природа полагает в своих действиях»**). Метафизика же отнюдь не достигла
такой степени совершенства, чтобы для каждого действия, производимого
природой, указать то «количество действия», которое является наименьшим;
мы еще очень далеки от этого, и поэтому почти совершенно невозможно
отыскать для большого числа различных случаев формулы, которые будут
иметь максимум или минимум. Напротив, если известно решение, найденное
прямым методом, то не представляет труда угадать формулы, которые при-
ведут к тому же самому решению, если отыскать их максимум или минимум.
Таким образом, если нельзя вторым методом a priori находить непосред-
ственно законы явлений, то, зная решение, найденное прямым методом;
«... мы знаем a posteriori эти формулы, которые выражают количество дей-
ствия, и тогда не представляет более труда показать их истинность с помощью
принципов, известных в метафизике»***).
Мы видели, что по мнению Мопертюи принцип наименьшего количества
действия является универсальным законом, который в конечном счете поз-
воляет дедуктивным путем вывести все законы природы и в первую очередь
решить любые частные задачи механики.
В отличие от него Эйлер, начав с высказываний в том же духе, приходит
к другим выводам. Исследуя фактическое применение принципа к частным
задачам механики, Эйлер увидел, что найти выражение, которое должно
быть максимумом или минимумом, для каждой данной частной задачи можно
только тогда, когда уже известно решение этой задачи, проведенное исходя
из обычных общих принципов механики, формулирующих не конечные
цели, а причинно-следственные связи явлений. Таким образом, эвристи-
ческое значение принципа оказалось ничтожным. Он не дает возможности
предвидеть или установить законы даже тех механических явлений, которые
всесторонне исследуются обычными дифференциальными уравнениями дви-
жения Ньютона. Как также было отмечено Эйлером, универсальность прин-
ципа наименьшего действия даже в пределах механики не является уста-
новленной и он, Эйлер, не может сколько-нибудь уверенно оценить границы
его применимости. Надо отметить, что Эйлер совершенно не рассматривал
вопроса об определении характера варьируемых движений.
После ряда попыток Эйлер прекратил свои исследования, связанные
с принципом наименьшего действия, хотя эта область очень интересовала
его как приложение разработанных им методов отыскания кривых линий,
обладающих свойством максимума или минимума. Все это показывает,
что хотя Эйлер и не освободился полностью от влияния телеологического
финализма Мопертюи, он, однако, стремился, так сказать, математизировать
принцип наименьшего действия. Эйлер, несмотря на использование им
терминологии Мопертюи, сформулировал идеи, далеко превосходящие огра-
ниченные и односторонние высказывания Мопертюи. Эйлеру принадлежит
первая точная и математически плодотворная формулировка принципа
наименьшего действия, открывшая новые горизонты для подлинно научного
применения.
*)Там же, стр. 151.
**) Там же, стр. 152.
***)Там же, стр. 152.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
793
Именно Эйлер развил в отчетливый и последовательно-стройный ма-
тематический метод те идеи, которые иначе рисковали остаться в глазах
поколений блестящей, но не слишком глубокой догадкой. В этом смысле
Эйлер является действительным основоположником научно сформулирован-
ного принципа наименьшего действия в механике. Он придал ему научную
форму, и нужен был еще только один шаг для того, чтобы завершить полное
освобождение принципа наименьшего действия от метафизических лохмотьев
и математически обобщить его. Этот шаг был сделан Лагранжем.
Принцип наименьшего действия у Лагранжа
Научное творчество Лагранжа падает на период, непосредственно пред-
шествовавший Великой французской революции 1789 г., и на время самой
революции. Несмотря на то, что лично Лагранж оставался в стороне от поли-
тических бурь, сотрясавших не только Францию, но всю Европу, он все
же в какой-то мере отразил дух этой замечательной эпохи в своем подходе
к осмыслению результатов математических исследований в механике.
Приближался исторический час, когда даже пушки, этот, по словам
Ришелье, последний довод королей, не смогли защитить то, что мешало
бурному потоку развития нового: новой техники, новых социальных отно-
шений. Деятельность буржуазии того времени «направлена на непосред-
ственную дейвтвительность, на мирское наслаждение и мирские интересы,
на земной мир»*). А пока идет интенсивная экономическая, политическая,
идеологическая борьба так называемого «третьего сословия», в лице его
передовой части, с отживающим, но еще господствующим и стремящимся
закрепить это господство абсолютистско-феодальным строем.
Это сословие уже ясно отдает себе отчет в природе и характере суще-
ствующего строя. Шамфор восклицает: «Дворянство, — говорят дворяне, —
есть посредник между королем и народом. О да, как охотничья собака есть
посредник между охотником и зайцами». Ограниченные в возможности кри-
тики оружием, они берутся за оружие критики и на всех участках искус-
ства, литературы, философии и науки, ломают традиционные схемы и пред-
ставления. Ряд оттенков выступает в этой борьбе: догматический теизм,
двусмысленный пантеизм, респектабельный деизм и, наконец, откровенный
атеизм, которые представляют собой всю сложную нюансировку расстановки
социально-исторических сил в этот предреволюционный период. От просве-
тителей с их лозунгом, что «разум в конце концов всегда оказывается прав»,
через энциклопедистов с их стремлением дать новую систему науки, до меха-
нистического материализма Гольбаха, Гельвеция и других развертывается
идеологическая концепция наступающих передовых социальных сил. Им
нужна наука, нужна сама по себе, в своем теоретическом и прикладном
аспекте, нужна и как мощное оружие в борьбе с теизмом, с господством
религии в сфере сознания.
Здание науки, фундамент которого был заложен в XVII в. трудами Гали-
лея, Кеплера, Гюйгенса, Ньютона, Лейбница и ряда других ученых, каждый
из которых представляет собой «гордость человечества», продолжало расти,
усложняться, перестраиваться и в XVIII в. Изменялись планы отдельных
частей научного здания, создавались новые великолепные пристройки, воз-
водились новые, неведомые ранее отделы и секции, но основной доминантой
научного искания, в борьбе обретавшей свою силу и мощь, оставался механи-
стический материализм. Великая борьба за освобождение человеческого
познания от религиозных и всяких иных пут, за буржуазную «свободу»
*) Маркс и Энгельс, Соч., т. 3, стр. 155.
794
Л. С. ПОЛАК
человека-индивида, который, по словам Руссо, «рождается свободным, а
повсюду в цепях», находит свое отражение и проявление в грандиозных
событиях политической жизни, в литературных памфлетах, в обычаях,
в искусстве и, наконец, в научных исследованиях.
Развитие науки в XVIII в., в первую очередь в одной из передовых стран
того времени — Франции, часто характеризуется как период формальной
систематизации и математической разработки наследстваXVII в.Это, конечно,
односторонняя точка зрения, ибо сама систематизация предполагает уточ-
нение и выявление принципов, исходных положений. Недаром в XVIII в.
развертывается борьба между картезианцами и ньютонианцами, проходит
дискуссия о принципах механики Ньютона, создаются и разрабатываются
принцип Д’Аламбера, принцип возможных перемещений, закон живых сил,
принцип наименьшего действия и целый ряд других основополагающих
законов и принципов. Неслучайно ученые ищут новых форм изложения
материала механической науки. Этот обостренный интерес к принципиаль-
ной стороне, к обоснованию науки оплодотворяет научное развитие и сам
находит в нем свое оправдание.
Механика во всех ее приложениях получила исключительный блеск
благодаря трудам Эйлера, Лагранжа, Лапласа. Разъясняется движение
планет на основе закона Ньютона; в открытиях В. Гершеля дости-
гаются неведомые ранее глубины бесконечного звездного архипелага.
В физике Ламберт разрабатывает фотометрию, изучает теплоту; Дюфе,
Ноллэ, Франклин и, особенно, Кулон изучают электричество, создавая
новую технику научного эксперимента. В химии работами Шееле, Пристли,
Кэвендиша, Шталя получены в чистом виде кислород, водород, азот, опре-
делен состав воды, изобретена химическая номенклатура, выяснена неразру-
шимость вещества, установлением которой Ломоносов и Лавуазье увен-
чивают эти открытия. Выдающимися исследованиями заложены основы
минералогии и геологии: Роже-де-Лиль, Бюффон и др. создают новые
теории и строят грандиозные картины развития Земли. Начинает раз-
виваться и наука об органической материи: Линней устанавливает
ботаническую номенклатуру, братья Жюссье открывают взаимное со-
подчинение признаков и естественную классификацию. Реомюр и Спал-
ланцани объясняют пищеварение, Лавуазье, объясняет дыхание, Галлер
описывает условия и фазы зарождения. Люди проникают в самую глубь
животного царства. Реомюр издает свои описания насекомых. Лионне тратит
двадцать лет на изучение ивовой гусеницы, Спалланцани воскрешает своих
коловраток, Нидгем показывает инфузорий, Ламарк исподволь подготовляет
свою философию зоологии.
Интерес к научным открытиям и исследованиям в высокой степени уси-
ливается благодаря тесной связи научных проблем с общими вопросами
миропонимания и философии. В XVIII в. ученые, независимо от области
исследования, называются еще философами; математики пишут фило-
софские трактаты, философы непосредственно переносят в свои концепции
идеи и тенденции построения наук, и в первую очередь наук механических.
Универсальность и специализация, эксперимент и вычисление, философия
и конкретные знания, высоты абстракции и широкая популяризация сли-
ваются воедино в трудах передовых ученых этого времени.
Остановим наше внимание на вождях общественного мнения, провоз-
вестниках новой философии. В той или иной мере они все знакомы с естест-
венными науками. Вольтер не только излагает одним из первых оптику
и астрономию Ньютона, но производит опыты и вычисления. Он представ-
ляет в Академию наук записки «Об измерении двигательной силы», «О свой-
ствах и распространении теплоты». В его. лаборатории имеются все извест-
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
795
ные тогда физические и химические приборы: он работает с термометром
Реомюра, призмой Ньютона, пирометром Мушенбрека.
Знаменитый автор «Духа законов» Монтескье читает в Академии Бордо
лекции о механизме эха, об отправлениях почек, печатает свои наблюдения
над растениями и насекомыми. Руссо слушает курс химии, занимается
гербаризацией. Дидро преподает математику, пожираемый неутолимой
жаждой знания во всех областях науки, искусства, вплоть до технических
вопросов производства. Бюффон занимается металлургией, оптикой, геогра-
фией, анатомией. Философ Кондильяк пишет краткие учебники арифме-
тики, алгебры, механики и астрономии. Кондорсе, Лаланд — одновременно
математики, физики, астрономы, философы, политики, историки науки и
техники. Гольбах, Ламеттри, Кабанис—химики, натуралисты, физиологи,
медики, философы. Д’Аламбер—механик, математик, астроном, философ.
Все они — исследователи, вычислители, экспериментаторы, философы,
ораторы, писатели — горят такой неутолимой жаждой познания, что каждый
из них с полным правом мог бы воскликнуть : «Если бы мне жить сто жиз-
ней, ойи не насытили бы всей жажды познания, которая сжигает меня»*).
Но эти ученые не представляют собой единого лагеря, борьба раздирает
мир науки так же, как и общественный строй, и в этой схватке нового со
старым обе стороны хотят поставить науку на службу своим целям и задачам.
В такой общеисторической и историко-научной обстановке развивается
творчество Лагранжа. Ему принадлежат фундаментальные результаты в
аналитической механике, и именно он сыграл решающую роль в развитии
принципа наименьшего действия. В 1760 г. проблема принципа «наимень-
шего действия» становится объектом его внимания.
Лагранж занимает в истории механики чрезвычайно важное место.
Он сам в предисловии к своей «Аналитической механике» говорит : «.. .план
этого сочинения совершенно новый. Я имел в виду свести всю теорию
механики и методы решения связанных с ней задач к общим формулам,
простое развитие которых дает все необходимые для решения каждой
задачи уравнения». «... Это сочинение, кроме того, будет полезно и в другом
отношении : оно объединит и представит с одной общей точки зрения раз-
личные до сих пор найденные принципы, служащие для решения задач
механики, покажет их взаимную связь и зависимость и даст возможность
судить об их верности и области их применения»**).
И действительно, его «Аналитическая механика» сыграла роль сочинения,
открывшего новый этап в развитии механики. Основная для Лагранжа
идея построения механики как систематического и гармоничного здания,
возводимого на фундаменте единой общей предпосылки, пронизывает «Анали-
тическую механику». И это стремление к систематичности и изяществу выра-
жений, к математической законченности построения нашло восторженную
оценку у другого великого мастера математического анализа проблем
механики — Гамильтона. Во введении к своей работе «Общий метод дина-
мики» Гамильтон говорит: «Лагранж, может быть, сделал больше, чем все
другие аналитики, для того, чтобы придать широту и гармонию таким дедук-
тивным исследованиям, показав, что самые разнообразные следствия отно-
сительно движения системы тел могут быть выведены из одной основной фор-
мулы; красота метода настолько соответствует достоинству результата, что
эта великая работа превращается в своего рода математическую поэму»***).
*) Эти слова принадлежат В. Я. Брюсову. См. В. Брюсов, Неизданные стихотво-
рения. Черновые заметки 1910—1911 гг., Гослитиздат, 1935, стр. 3.
**) Л а г р а н ж, Аналитическая механика, т. 1, ИЛ, М.—Л., 1950, стр. 9.
***) У. Гамильтон, см. стр. 175 настоящей книги.
796
Л. С. ПОЛАК
Максвелл говорит о методе Лагранжа:
«Лагранж поставил себе цель свести динамику к чистому анализу. Он начи-
нает с выражения элементарных динамических отношений в виде соответ-
ственных отношений между чисто алгебраическими величинами, и из полу-
ченных таким образом уравнений он выводит свои окончательные уравнения
путем чисто алгебраического процесса. Некоторые величины (выражающие
взаимодействия между частями системы, поставленными в зависимость
между собой физическими связями) появляются в уравнениях движения
составных частей системы, а исследование Лагранжа, рассматриваемое с
математической точки зрения, есть метод исключения этих величин из
конечных уравнений. Следя за постепенным ходом этих исключений, ум
занимается вычислениями, оставляя в стороне динамические идеи»*).
Конечно, создание такой теории предполагало достаточное развитие
математики. «Только развитие идей и методов чистой математики дало воз-
можность построить математическую теорию динамики и осветить таким
образом многие истины, которые не могли быть открыты без математи-
ческого построения, и если мы захотим развить динамические теории других
наук, мы должны вдохновить наш ум этими динамическими истинами, так
же, как математическими методами. Создавая идеи и язык науки, которая,
подобно электричеству,имеет дело с силами и их действиями, мы должны
непременно сохранять в уме основные идеи динамической науки, чтобы
при начале развития этой науки избежать всего, способного стать в противо-
речие с уже установившимися положениями и с тем, чтобы по мере проясне-
ния наших идей принятый нами язык мог помочь нам, а не являлся бы
лишним затруднением»**).
Для нас в этой блестящей характеристике является важным подчерки-
вание основного значения математического метода для работы Лагранжа
в области механики. И действительно, в силу аналитического (и принци-
пиально аналитического) характера его механики подход Лагранжа к отдель-
ным проблемам теснейшим образом связан с его математическими работами
в различных ветвях анализа. Фурье говорит: «...Он сводит все законы
равновесия и движения к одному принципу, и, что не менее удивительно,
он их подчиняет одному методу исчисления, изобретателем которого он сам
является»***). В самом деле, как известно, с Лагранжа начинается новая
эпоха вариационного исчисления.
Лагранж не только придал простой вид решению ранее поставлен-
ных задач, найдя удобный алгоритм, но применил также этот новый
метод к решению целого ряда сложных проблем земной и небесной ме-
ханики.
Первая его работа, посвященная принципу наименьшего действия, также
появилась на свет как развитие и приложение его математических работ по
вариационному исчислению.
В 1760—1761 гг. в «Miscellanea Taurinensia», т. 2, Лагранж опубликовал
статью под названием «Essai d’une nouvelle methode pour determiner les
maxima et les minima des formules integrates indefinies». Непосредственно за
ней, в том же томе, он печатает статью под характерным заглавием «Applica-
tion de la methode, exposee dans les memoires precedents a la solution de
differents problemes de Dynamique»****).
*) Maxwell, I., A treatise on Electricity and Magnetism, t. 2, 3 ed., Oxford, 1892,
§564, стр. 199—200.
**) Там же, § 567, стр. 210.
***) Цит. по книге R е b i ё г е, Mathdmatique et mathdmaticiens, стр. 129.
****)См. стр. 117 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
797
Лагранж ссылается в начале статьи на работу Эйлера «Methodus inve-
niendi lineas curvas maximi minimive proprietate gaudentes sive solutio pro-
blematis isoperimetrici latissimo sen' u accepti», в которой Эйлер показал,
что для случая движения в поле центральной силы траектория, по которой
движется тело, удовлетворяет требованию
(' vds = minimum.
Лагранж обобщает этот принцип и придает ему выражение
v mi f Vj ds, = minimum.
Это определение и выражает тот шаг вперед, который совершил Лагранж
в развитии принципа наименьшего действия. Он распространил принцип,
сформулированный у Эйлера для материальной точки, на случай произ-
вольной системы точек, связанных между собой и действующих друг на
друга совершенно произвольным образом.
Таким образом, оказывается возможным применить принцип наимень-
шего действия к динамике системы. Дейетвительно, пользуясь принципом
наименьшего действия, Лагранж в своем мемуаре аналитически решает
ряд проблем динамики. Это дало повод Якоби заметить, что лагранжев
принцип наименьшего действия есть мать всей нашей аналитической меха-
ники.
По установленным в его предшествующем мемуаре правилам вариацион-
ного исчисления Лагранж пишет, что
^2’ vds = 0,
а так как
<5 J (у ds) = J <5 (у ds),
то, преобразуя выражение
<5 (у ds) = v <5 ds + ds,
получаем :
2 m J (v <3 ds + dv ds) = 0.
Затем Лагранж вводит условие, что если p,q,r... — расстояния тела
от центров сил Р, Q, R . . ., то
~ = const — J (Pdp + Q dq + Rdr + ...)
или
vdv = —<5 J(Pdp + Q dq + Rdr + ...) = — f (dPdp + Pddp + ...).
Таким образом, уже в самом начале исследования вводится как необходи-
мое условие принцип живых сил.
Этим предрешается и круг задач, рассматриваемых Лагранжей в его
сочинении.
Возвращаясь к рассмотрению общего направления этой работы, напом-
ним, как мы уже отметили, что само заглавие подчеркивает сугубо математи-
ческий характер этого сочинения Лагранжа. Действительно, в нем не затра-
гивается ни одна из проблем, связанных с обоснованием механики. В этой
работе проблемы механики представляют собой лишь определенный класс
задач вариационного исчисления.
Мы видим, что Лагранж, для которого механика была «аналитической
геометрией четырех измерений» и о котором говорили, что он более интере-
с вался выкладками, чем логическим содержанием понятий, подошел здесь
798
Л. С. ПОЛАК
к принципу наименьшего действия как чистый математик. Для него воз-
можность широкого применения принципа основывается на разработанном
им вариационном методе. Это есть лишь удобный и изящный способ решения
задач.
Лагранж не связывает никаких «метафизических» предпосылок с пора-
жавшим умы фактом минимальности «действия»; и вообще о нем с пол-
ным правом можно сказать, что в противоположность многим своим совре-
менникам он был не только чужд «метафизике», но и прекрасно осознал
неприменимость подобной аргументации внутри механической науки.
Всякие попытки связать науку с религией, телеологией вызывали у
него глубокий протест. Всякое явное влияние религии на науку отталки-
вало Лагранжа. В этом смысле характерно резко отрицательное отноше-
ние Лагранжа к одному .из ученых иезуитов — Бошковичу. Он пишет Кон-
дорсе: «Я в восторге, что вы, наконец, отделались от Бошковича: каковы
бы ни были заслуги его трудов, я думаю, что они все же стоят больше, чем
его личность. Он монах и иезуит, которого следовало бы сжечь (Il est moine
et j esuite a bruler»*).
Лагранжу совершенно чужды теологические рассуждения Мопертюи.
И не находят у него никакого отклика слова Эйлера в письме к нему от &
ноября 1762 г.: «Какое удовлетворение получил бы Мопертюи, если бы был
еще жив, увидев свой принцип наименьшего действия возведенным на высшую
ступень, доступную для него»**).
И, словно отвечая Эйлеру, Лагранж в своей «Аналитической механике»
говорит, что он называет этот принцип «принципом наименьшего действия,
по аналогии с принципом, который Мопертюи дал под этим названием».
Для Лагранжа принцип наименьшего действия не связан с тем специфи-
ческим теологическим содержанием, которое вложил в него Мопертюи.
Итак, в первой своей юношеской работе Лагранж стоит на сугубо мате-
матической точке зрения, даже не затрагивая вопроса о содержании исполь-
зуемого им принципа. Здесь математический формализм, вообще при-
сущий Лагранжу, нашел отчетливое выражение.
Однако, основываясь на том, что J dt 2 mv2 = £ т § vds, Лагранж в
«Аналитической механике» ставит вопрос о физическом смысле принципа
наименьшего действия. В самом деле, Лагранж отнюдь не так безразличен
к физической стороне механических проблем, как это обычно полагают.
Да и трудно было бы ожидать, чтобы Лагранж, живший в кругу людей,
которые не только живо интересовались философией, но иногда сами явля-
лись крупными философами (например Гольбах, Д’Аламбер и др.), остался
совершенно в стороне от проблемы обоснования механики и анализа содер-
жания ее понятий. Исторической легендой является обычное представление
о Лагранже, как об ученом, который равнодушно и даже презрительно отно-
сился к философским проблемам. Мало кому известно, что в жизни Лагранжа
был период, когда он временно потерял интерес к математике и уси-
ленно занимался философией, химией, медициной и другими науками.
Все современники, знавшие его лично, указывают, что он хотя и не писал
ничего на специально философские темы, но с большим интересом принимал
участие в философских беседах и спорах.
Для характеристики отношения Лагранжа к философским проблемам
мы находим у Ф. А. Ланге любопытное указание. При изложении обстоя-
тельств, связанных с выходом «взволновавшей весь образованный мир»
книги Гольбаха «Система природы», он отмечает, что в силу ряда причин
*) Lagrange, Oeuvres, т. 14, стр. 20.
**) La grange, Oeuvres, т. 14, стр. 201.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
799
современники с трудом поверили в авторство Гольбаха. Даже когда было
установлено, что книга вышла из его кружка, приписали авторство мате-
матику Лагранжу, который был домашним учителем в семье Гольбаха
(другие же приписывали авторство Дидро). «Теперь — пишет Ланге, — не
подлежит никакому сомнению, что Гольбах — истинный автор, хотя при
выполнении отдельных частей принимали участие Лагранж — ученый
специалист, Дидро и др»*).
Наконец, знаменитые введения к отдельным главам «Аналитической
механики» представляют собой попытку подойти к обоснованию механи-
ческих понятий и законов без «метафизики». Конечно, это не исключает
того, что формальная сторона очень сильна у Лагранжа и что он, как заме-
чает Гаусс, иногда слишком много полагался на символическое вычисление
при решении задач, не давая себе достаточного отчета в каждом шаге своих
математических выкладок. Именно поэтому чрезвычайно существенно бро-
сить взгляд на подход Лагранжа к обоснованию дифференциального исчи-
сления.
Действительно, Лагранж прежде всего математик. И для нас особенно
важно, что и в его отношении к обоснованию анализа бесконечно малых
проявляются те же самые формализующие тенденции. Он сомневается в
современном ему обосновании анализа и устраняет эти сомнения тем, что
«отказывается от него (от анализа. — Л. Л.) как от общей дисциплины,
понимая под ним просто собрание формальных правил, относящихся к
частным специальным функциям»**).
Конечно, «такое самоограничение чисто формальными построениями
устраняло для того времени целый ряд затруднений»***).
В первую очередь это самоограничение давало возможность избавиться
от всей той путаницы и неясности, которая существовала в основных прин-
ципиальных вопросах обоснования анализа. Маркс замечает, что, «поскольку
дело касается чистого анализа, Лагранж действительно отделался от всего
того, что ему представляется метафизической трансцендентностью в ньюто-
новских флюксиях, лейбницовских бесконечно малых различных порядков,
в теории предельных значений исчезающих величин, в существовании
как символа дифференциального коэффициента»****).
Можно ли сказать, что Лагранж здесь разрешил проблему обоснования
и построения системы анализа? Ни в коем случае. Во-первых, «определение
функции, принимаемое Лагранжем, слишком узко»*****), во-вторых, отказ
от старых методов «не мешает тому, что в приложении своей теории к
кривым и т. д. он сам постоянно нуждается в том или другом из этих мета-
физических представлений»******).
Таким образом, и здесь проявляется характерное для Лагранжа стремле-
ние не отказываться от основных проблем, но решать их путем известного
*) Ф. А. Ланге, История материализма. Перев. Вл. Соловьева, изд. 1899,
стр. 222. К сожалению, Ланге не указывает источника, из которого он заимствовал это
сообщение, так что нет возможности его проверить. Но так как мы здесь не исследуем
биографии Лагранжа, то для нас имеет интерес уже самая возможность постановки во-
проса об участии Лагранжа в работе над книгой, явившейся знаменем французского
материализма XVIII в.
**) Ф. Клейн, Вопросы элементарной и высшей математики, ч. 1, изд. Mathesis,
Одесса, 1912, стр. 133.
***) Там же.
****) Сб. «Марксизм и естествознание». Из математических рукописей К. Маркса,
Партиздат, М., 1933, стр. 155.
*****) Цит. соч. Ф. Клейна, стр. 359.
******) Сб. «Марксизм и естествознание». Из математических рукописей К. Маркса,
Партиздат, М., 1933, стр. 155.
800
JI. C. НОЛАН
формального самоограничения. Путь, который не может не быть связан
с известным обеднением мысли.
Каким бы мало удовлетворительным ни представлялось нам это направле-
ние, мы все же видим, что Лагранж, завидовавший Ньютону, «на долю
которого выпало счастье объяснить мировую систему», не мог не попытаться
выяснить смысл выводимых им соотношений. В чем же он усматривает смысл
принципа наименьшего действия, сведенного им на положение следствия
основного закона механики?
Ответ Лагранжа предуказан тем, что, как мы видели выше, область при-
менения принципа ограничена для него сферой применения закона живых
сил. Если вспомнить, что Лагранж показал, что принцип наименьшего
действия может быть выражен в форме интеграла §dt 2 mv2, который должен
равняться максимуму или минимуму, то станет совершенно ясен ответ
Лагранжа на поставленный выше вопрос.
Согласно его толкованию, физический смысл принципа наименьшего
действия заключается в конкретизации закона живых сил. Более того,
Лагранж увязывает это толкование с установленным им ранее фактом
из статики, что в случае равновесия живая сила всегда максимальна или
минимальна.
Так как Лагранж по существу рассматривает системы, для которых
действителен закон сохранения энергии -т,—h П (х, у, z) = Н, то это утвер-
ждение выражает тот факт, что в случае равновесия потенциальная энергия
имеет всегда соответственно минимум или максимум.
Поэтому поводу Гаусс справедливо замечает, что приведенное положение
Лагранжа скорее остроумно, чем правильно, так как минимум в случае
полож:ения равновесия и в случае движения имеет место в совершенно раз-
личном смысле.
Развитая Лагранжей точка зрения на принцип наименьшего действия
разделялась рядом ученых того времени. Например, Лаплас, который рас-
ширил сферу приложения принципа в оптике, применив его к преломлению
света в кристаллах, говорит о механическом содержании этого принципа:
«Интеграл живой силы системы, умноженный на элемент времени, есть мини-
мум, так что, следовательно, истинная экономия природы есть экономия
живой силы»*). Ограниченность этого толкования в настоящее время, после
работ Гамильтона, Гельмгольца и др., после теории относительности и кван-
товой механики совершенно очевидна.
Итак, мы видим, что Лагранж и здесь, как и в проблеме обоснования
анализа, идет по пути известного самоограничения. Он ограничивает сферу
применимости принципа наименьшего действия областью применимости
закона живых сил, следуя в этом отношении за Эйлером. Он рассматривает
свойство интеграла J dt £ mv2 давать минимум или максимум для действи-
тельного движения как свойство аналитического характера. «У Лагранжа
принцип наименьшего действия перестал уже иметь явно логическое зна-
чение, признаком которого было бы нечто большее, чем чисто аналитические
свойства, выражающиеся возможностью делать вариацию нулем», — гово-
рит Дюринг**). Но то, что Дюринг считает достоинством Лагранжа, на са-
мом деле есть его недостаток, ибо, кроме «метафизики», существует
также научный анализ физического содержания математических выраже-
ний***). Исследование Лагранжа, которое было выше нами рассмотрено, пред-
*) L а р 1 а с е, Oeuvres, т. 6, стр. 205.
**) Д ю р и н г, Критическая история принципов механики, Москва, 1893, стр. 263.
***) Между прочим, у самого Лагранжа можно найти примеры такого анализа.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
801
ставляет собой попытку раскрыть «логическое значение» принципа наимень-
шего действия. Эта попытка основана на ограниченной базе и связана стрем-
лением уйти от трудностей путем формального определения. Такая трактовка,
конечно, не могла решить заключенной в принципе наименьшего действия
проблемы. Однако она имела то преимущество, что давала возможность
«отделаться от всего того, что Лагранжу представлялось метафизической
трансцендентностью» (Маркс, см. стр. 799). Действительно, в заключение
характеристики, данной Лагранжем принципу наименьшего действия,
Лагранж говорит, что он рассматривает его «не как метафизический прин-
цип, а как простой и общий вывод из законов механики»*).
Здесь, таким образом, Лагранж настойчиво и совершенно определенно
отказывается от всякой метафизической трактовки принципа. Под метафизи-
ческой же трактовкой тогда понималось теолого —телеологическое обос-
нование принципа наименьшего действия, образец которого имеется в работе
Мопертюи.
Лагранж самое название «принцип наименьшего действия» употребляет
лишь .по традиции. Это название отнюдь не соответствует математической
формулировке принципа. Телеология вытекает не из механики в ее математи-
ческой формулировке, а привносится извне предзятыми и произвольными
обобщениями и неопределенными наименованиями, «словно неопределенные
и произвольные наименования составляли сущность законов природы и
с помощью какого-то скрытого свойства способны простые выводы из из-
вестных законов механики возвести до степени конечных причин»**).
Это — весьма интересное положение. Лагранж правильно подмечает
произвольность наименования величины mvs действием. Он указывает, что
эта произвольность и неясность в терминологии дают возможность протаски-
вать телеологию туда, где ей иначе не было бы места. Эти даваемые нами
наименования ни в коем случае «не составляют сущности законов при-
роды».
Аналогичные взгляды высказывал Д'Аламбер. Он говорил : «Какую бы
ни занять позицию как относительно метафизики, которая ему (принципу
Мопертюи. — Л. П.) служит основанием, так и относительно данного Мопер-
тюи понятия количества действия, все же останется верным, что произведе-
ние пути- на скорость есть минимум в наиболее общих законах природы.
Эта геометрическая истина, которой мы обязаны Мопертюи, будет существо-
вать всегда. Можно, если угодно, принять понятие количество действия
только в качестве сокращенного способа выражать произведение пути на
скорость»***).
Лагранж, вместе с тем, отвергает претензии принципа наименьшего
действия на всеобщую значимость и на звание основного общего закона
природы. Мы уже видели активное наступление теологии на науку под
флагом самой науки в XVIII в., выразившееся в работах Мопертюи, отчасти
Эйлера и др. И тот факт, что Лагранж отвергал всякие метафизические
мотивы, связанные с нажимом на антропоморфно близкое нам «наименьшее
действие», помогал материалистически-детерминистическому мировоззрению
в его борьбе с идеалистической телеологией.
Однако Лагранж, отвергнув притязания идеалистической телеологии в
отношении обоснования принципа наименьшего действия, только отграни-
чивает область телеологии от области науки. Он всегда был пассивен, этот
‘(Лагранж, см. стр. 159 настоящей книги.
**) Лагранж, Аналитическая механика, т. 1, ГТТИ, изд. 2-е, 1950, стр. 318.
***) D’A 1 е m b е г t, Статья «Action» в Encyclopddie ou dictionnaire raisonnd des scien-
ces, des arts et des mdtiers, т. 1, 1752.
51 Вариационные принципы механики
802
Л. С. ПОЛАК
гениальный математик. Он работал в условиях прусской монархии, Франции
Людовика XVI и Великой французской революции. Люди, знавшие его
лично, пишут, что все его существо «было проникнуто тихой иронией».
Он не был борцом, провозвестником какой-либо великой идеи; он только
отделял от себя и от своей механики телеологическую метафизику. Он больше
всего любил покой и уединение. «Я занимаюсь геометрией спокойно и в
тишине. А так как меня ничто и никто не торопит, то я работаю больше для
моего удовольствия, нежели по должности; я похожу на вельмож, охотни-
ков строиться : я строю, ломаю, перестраиваю до тех пор, пока не выйдет
что-нибудь такое, чем я остаюсь несколько доволен»*). А в письме к Лапласу
он говорит: «Я рассматриваю споры как совершенно бесполезные для
преуспевания науки и как ведущие только к потере времени и покоя».. .**).
И недаром Лагранж дает в письме к Д’Аламберу такую печальную харак-
теристику состояния и перспектив математического исследования: «Я думаю
также, что шахта становится слишком глубокой и что ее придется рано или
поздно бросить, если не будут открыты новые рудоносные жилы. Физика
и химия представляют ныне сокровиша, гораздо более блестящие и более
легко эксплуатируемые; таким образом, по-видимому, все всецело обрати-
лись в эту сторону, и возможно, что места по геометрии в Академии наук
сделаются когда-нибудь тем, чем являются в настоящее время кафедры араб-
ского языка в университетах»***). Он пытается замкнуться в мир формальных
определений и вычислений. Но это приводит к обеднению мысли. И как он
восхищается «этим чертом Монжем», у которого бывают такие гениально
смелые идеи. И все же не может преодолеть гипнотизирующей силы своего
аналитического аппарата. Таким образом, мы видим в подходе Лагранжа
к проблемам механики, а также и в характере его влияния на последующее
развитие этой науки, сложную картину. С одной стороны, отделением меха-
ники от телеологической метафизики Лагранж сыграл положительную роль
и надолго определил соотношение механики и философии. Но именно по-
стольку, поскольку здесь на место вытесняемой из науки телеологии под-
ставлена философия, подход Лагранжа к проблемам механики послужил
исходным пунктом для создания той особой манеры изложения этой науки,
которая может быть охарактеризована как чисто аналитическая механика.
И безусловно к Лагранжу уходят корни развившегося в XIX в. формально-
описательного направления в механике.
Непосредственно к Лагранжу восходят и взгляды Кирхгофа. В первом
параграфе своих «Vorlesungen fiber mathematische Physik» (т. Mechanik, 1876)
он говорит, что «задачей механики является описать полно и простейшим
образом происходящие в природе движения». Для выполнения этой задачи
Кирхгоф считает вполне достаточными представления пространства, времени
и материи, так как «движение есть изменение координат со временем; то,
что движется, есть материя». При помощи этих средств должна строиться
механика, а также должны конструироваться все «вспомогательные понятия,
которые при этом (построении механики — Л. П.) окажутся необходимыми,
например, понятия силы и массы». Нетрудно видеть непосредственную
связь высказываний Кирхгофа и концепции Лагранжа.
Итак, если Лагранжем нацело отвергнуто всякое телеологическое обос-
нование принципа наименьшего действия, то в чем же состоит смысл и зна-
чение этого принципа? Все значение, которое можно приписать этому прин-
*) А р а г о, Биографии знаменитых астрономов, физиков и геометров, перев. П е-
ревощикова, 1859, т. 3, стр. 351.
**) La grange, Oeuvres, т. 14, стр. 85.
***) Lagrange, Oeuvres, т. 13, стр. 368.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
803
ципу, определяется его связью с законом сохранения живой силы и его
математической формой выражения. «Этот принцип, будучи соединен с прин-
ципом живых сил и развит по правилам вариационного исчисления, дает
тотчас же все уравнения, необходимые для разрешения каждой проблемы»*).
Он действительно представляет собой общий метод решения проблем
движения тел, но это ни в коем случае не есть самостоятельный, особый
метод, а по самой своей сути «этот метод сам по себе является только след-
ствием изложенного во второй части этого труда»**).
Таким образом, в «Аналитической механике» принцип наименьшего
действия ни в коей мере не является основным принципом механики (не
говоря уже о природе).
Работы Лапласа, Л. Карно и Пуассона, связанные с принципом
наименьшего действия
В это же время Лаплас**) приложил метод, примененный Мопертюи для
получения с корпускулярной точки зрения закона преломления обычного
луча, к задаче двойного лучепреломления. Лаплас использовал принцип
наименьшего действия, математическая сторона которого настолько усовер-
шенствовалась со времен Мопертюи, что стало возможно применять его
К более сложным проблемам, чем лростое преломление света. Лаплас пред-
положил, что кристаллическая среда действует на световые корпускулы
необыкновенного луча так, что изменяет их скорость в отношении, которое
зависит от наклона необыкновенного луча к оси кристалла. В самом деле,
разность квадратов скоростей обыкновенного и необыкновенного луча
пропорциональна квадрату синуса угла, который образует необыкновенный
луч с осью кристалла. Принцип наименьшего действия тогда приводит к
закону преломления, тождественному с тем, который был найден Гюйгенсом.
Закон преломления необыкновенного луча может быть также выведен из
принципа Ферма при допущении, что скорость обратно пропорциональна
той, которая предполагается при рассмотрении вопроса с помощью прин-
ципа наименьшего действия; скорость, соответствующая принципу Ферма,
согласуется со скоростью, найденной Гюйгенсом.
Теория Лапласа была подвергнута критике Юнгом***), который указал
на невероятность существования такой системы сил, которая требуется для
изменения скоростей световых корпускул. Однако самое сильное возражение,
разрушающее все рассуждения Лапласа, сделал Гаусс в примечании к своей
работе «Об одном новом общем принципе механики»****). Он говорит: «Я по-
зволю себе сделать одно замечание. Я считаю неудовлетворительным метод,
примененный другим великим геометром (Laplace, Memoires de 1’Institut,
1809) для вывода закона преломлений Гюйгенса из принципа наименьшего
действия. Действительно, этот принцип, по существу, предполагает наличие
принципа живых сил, на основании которого скорость точек в движении
полностью определяется их положением, а направление, по которому они
движутся, не оказывает на нее никакого влияния. Тем не менее, это влияние
является исходной точкой рассуждений упомянутого нами автора. Мне
думается, что все усилия геометров объяснить двойное преломление в рам-
ках эмиссионной гипотезы останутся бесплодными до тех пор, пока световые
молекулы будут рассматриваться как простые точки».
*) Л агран ж, см. стр. 160 настоящей книги.
**) I. ар lace, Sur la double r6fraction dans le spath d’Islande, Мёт. de 1’Inst., 1809,
стр. 300.
***) Th. J о u n g, Miscellaneous Works, т. 1, стр. 220.
****) Гаусс, см. стр. 110 настоящей книги.
51*
804
Л. С. ПОЛАК
Среди других исследователей, занимавшихся в рассматриваемую эпоху
вопросами, связанными с' принципом наименьшего действия, необходимо
отметить Л. Карно. Под непосредственным влиянием работ Лагранжа
Л. Карно применил принцип наименьшего действия к теории удара и установ-
лению общих теорем импульсивного движения. В формулировке Л. Карно,
данной в 1803 г., как говорит сам Карно, «более не остается ничего неопреде-
ленного в принципе Мопертюи, который выражен строго и математически»*).
Исключив категорически всякий метафизический аспект, Л. Карно указы-
вает вместе с тем, что претензии Мопертюи на универсальность принципа
не обоснованы, и в частности отмечает, что и в области законов удара,
которые выводил из него Мопертюи, этот принцип не охватывает случая,
когда тела имеют различную степень упругости. В отдельных же случаях
с помощью этого принципа можно получить интересные результаты.
Л. Карно находит таким путем важную теорему, что для всякой материаль-
ной системы, подчиненной связям без трения, в которой без наличия прямо
приложенных импульсов происходят резкие изменения скоростей, всегда
будет иметься общая потеря живой силы, равная живой силе, соответствую-
щей этим изменениям скоростей.
Следующий важный щаг в развитии интересующего нас круга идей сделал
замечательный французский ученый Пуассон, исходя из разработанного
Лагранжей и им метода вариации произвольных постоянных. Вместе с тем
Пуассон как бы завершил исключение всякой посторонней метафизики из
вопросов, связанных с соотношением, получившим название принципа
наименьшего действия.
Место, которое отвел Пуассон в своей механике принципу наименьшего
действия, интересно с историко-научной точки зрения.
Установив, что при отсутствии ускоряющих сил материальная точка всегда
движется на заданной поверхности по наиболее короткой линии, по которой
на этой поверхности можно перейти от одной точки к другой, Пуассон заме-
чает, что это свойство траектории подвижной точки есть лишь частный слу-
чай более общего свойства, которое получило неподходящее название прин-
ципа наименьшего действия.
В общем во всех существенных пунктах изложение Пуассона близко
изложению Лагранжа.
Лишь в одном пункте Пуассон рассматривает вопрос о принципе наимень-
шего действия с иной точки зрения. Как мы уже отмечали, оптический
аспект принципа у Лагранжа отсутствовал. Напротив, именно Лаплас —
непосредственный учитель Пуассона — применил рассматриваемый принцип
для вывода закона двойного преломления света в исландском шпате. Поэтому
поводу Пуассон замечает, что наиболее замечательным применением прин-
ципа является вывод из него законов отражения и преломления света.
Исследования Гамильтона в области геометрической оптики
и оптико-механической аналогии
Следующим этапом в истории вариационных принципов, подготовленным
как развитием механики, так и развитием геометрической оптики в ин-
тересующем нас аспекте, явились исследования ирландского математика
У. Гамильтона**).
*) L. Carnot, Principes fondamentaux de l’6quilibre et du mouvement, т. 1, Paris,
1803, preface.
**) Библиографию работ Гамильтона см. в книге : Л. С. Полак, У. Р. Гамильтон
и принцип стационарного действия, Изд-во АН СССР, 1936, стр. 262—269.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
805
В 30-х годах XIX в. Гамильтон строит свой общий метод динамики на
основе рассмотрения и развития оптико-механической аналогии.
Обширный комплекс его исследований сыграл важнейшую роль в раз-
витии вариационных принципов механики.
Общие философские воззрения Гамильтона были близки к взглядам
Беркли и Канта. В его письмах и конспектах мы находим много высказы-
ваний в духе идеалистической философии. Он даже пытался трактовать
алгебру как науку о «числом времени».
По мнению Гамильтона, «истина (науки. —Л. П.), строго говоря, идеальна
и заключается в ее последовательности»*), т. е. в непротиворечивости.
В области методологии научного познания взгляды Гамильтона прогрес-
сивны в отличие от его общефилософских воззрений. Так, определяя задачи
физики, он говорит: «Цель физики как науки — констатировать и объяснять
видимые явления, классифицировать и обобщать факты, открывать скрытое
единство и постоянство природы среди видимого разнообразия и измен-
чивости, построить хотя бы отчасти историю внешнего мира, при-
способленную к пониманию человека, дать отчет о прошлых явлениях и
предвидеть будущие явления, изучать язык и истолковывать пророчества
вселенной»**).
При рассмотрении методов научного познания в их историческом разви-
тии Гамильтон различает две стадии: индуктивную и дедуктивную.
Наука, в частности оптика и динамика, по мнению Гамильтона, «имеет
два различных направления процесса, которые могут быть названы путями
анализа и синтеза, восходящей и нисходящей линиями, индуктивным и
дедуктивным методом. В каждой физической науке мы должны восходить
от фактов к законам путем индукции и анализа и можем нисходить от законов
к следствиям дедуктивным или синтетическим путем. Мы должны собирать
и группировать явления до тех пор, пока научное воображение различит
в них скрытый закон и единство возникнет из многообразия ; и затем мы
должны вновь вывести из единства многообразие и с помощью открытого
нами закона предвидеть еще не обнаруженные явления»***).
Таким образом, для построения дедуктивной науки необходимо сформу-
лировать основной закон или принцип большой общности, который явится
исходным пунктом всего исследования. Общий метод «должен вытекать из
некоторого закона или принципа наивысшей общности», он должен быть
«наивысшей и наиболее общей аксиомой в смысле Бэкона»****).
Что же собой представляет общая аксиома в смысле Бэкона? В «Новом
органоне» мы читаем : «... много можно ожидать от наук, когда в надле-
жащей постепенности, т. е. по непрекращающемуся ряду ступенек, без пере-
рыва, без скачков научатся восходить от частных фактов к аксиомам низшего
порядка, от последних к средним аксиомам ..., чтобы достигнуть самых
широких обобщений. Ибо аксиомы низшего порядка мало чем отличаются
от простого опыта. Но высшие аксиомы или самые широкие обобщения ...
суть чисто идеальные; это — настоящие отвлечения, не имеющие ни реаль-
*) Извлечение из написанной Гамильтоном вступительной лекции к курсу астро-
номии (1831). Цит. по книге: G. Graves, Life of sir W. R. Hamilton, т. 1, Dublin,
стр. 46. В этой книге материал расположен в строго хронологическом порядке, в силу
чего указание даты приводимого в ней документа вполне заменяет указание страниц.
Поэтому во всех дальнейших ссылках на документы, взятые из этой книги, приводится
только дата.
**) Цит. по Graves, Указ, соч., т. 1.
***) W. R. Hamilton, On a general Method of Expressing the Paths of Light and
the Planets by the Coefficients of a Characteristic Function, Math. Pap., т. 1, Cambridge,
1931, стр. 314.
****) Там же, стр. 316.
806
Л. С. ПОЛАК
ности, ни прочности. Настоящие аксиомы, надежные и как бы живые, суть
средние аксиомы, на которых покоятся все надежды, все истинное счастье
человечества ... Значение же этих аксиом в том, что они могут дать больше,
чем заключено в том материале, из которого они получены»*).
Приведенные выше слова Гамильтона очень хорошо определяют характер
его основных исследований: дедуктивное развитие той или иной теории
на основе ранее найденных путем индукции общих принципов.
Рассмотрим сущность и значение работ Гамильтона в области геометри-
ческой оптики и механики.
Еще Герон выводил закон отражения света из принципа кратчайшего
пути.
Пьер Ферма, как мы видели, поставил во главу угла своего исследования
закона преломления принцип кратчайшего времени.
В 1808 г. Малюс доказал теорему, которая играет важную роль в гео-
метрической оптике**). Теорема зта гласит, что если пучок световых лучей,
выходящих из некоторого центра или вообще нормальных к заданной поверх-
ности, подвергается любому числу преломлений, то пучок лучей, выходящих
из последней поверхности, будет по-прежнему состоять из нормалей к неко-
торому семейству поверхностей.
Таким образом, эта теорема связывает световые лучи с некоторыми поверх-
ностями, названными каустическими.
В 1816 г. Дюпен в общем виде дал доказательство этой теоремы для случая
отражения света. Французская академия создала специальную комиссию
в составе Араго, Ампера и Коши, подтвердившую правильность работы
Дюпена. В 1825 г. Кетле и одновременно с ним Жергонн дали полное до-
казательство этой теоремы. ч
Теорему Малюса можно рассматривать с трех различных точек зрения:
во-первых, исходя из опытных законов отражения и преломления, во-вторых,
исходя из принципа Ферма или принципа наименьшего действия и, наконец,
в-третьих, исходя из волновой теории, в которой согласно построениям
Гюйгенса—Френеля волновой фронт нормален к лучу.
Волновая теория делает теорему Малюса очевидной, ибо любое семейство
волновых поверхностей имеет ортогональные траектории,/ которые и явля-
ются лучами. Это означает, что теорема Малюса заключена в скрытом виде
в волновой теории света. Гамильтон замечает по этому поводу : «... более
всего удивительно, что важная и оспаривавшаяся теорема была открыта
и как нечто обыкновенное употреблялась Гюйгенсом более чем сто лет назад
и затем была так полно забыта»***).
Интерес Гамильтона к оптике восходит еще к тому времени, когда он
сидел на школьной скамье. Интерес этот возник благодаря изучению различ-
ных математических трактатов по оптике и механике, к которому Гамильтон
приступил после того, как обнаружились его математические способности.
Углубление этого интереса обусловливалось связью проблем геометрической
оптики с вопросами конструкции астрономических инструментов, которые
Гамильтон изучал в связи со своими астрономическими занятиями. Уже в
1824 г., т. е. девятнадцати лет он написал оставшуюся неопубликованной
работу «On caustics» («О каустиках»). С того момента, когда он в 1827 г.
*) Ф. Бэкон, Новый органон, Собр. соч. Перев. Бибикова, т. 2, Спб. 1874,
стр. 83—84.
**) Геометрия систем лучей подробно и в очень общем виде разработана Куммером
в труде «Allgemeine Theorie der geradlinigen Strahlungssysteme», Crelle Journ., t. 57, 1860,
CTp. 189—230.
***) У. P. Гамильтон, Письмо к Обре де Веру (Aubrey de Vere) от 9 мая 1834 г.
Цит. по G. Graves, V. 1.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
807
стал во главе Дублинской обсерватории, его интерес к оптике нашел и
более непосредственное практическое основание.
Начиная с 1827 г., Гамильтон публикует ряд работ по теории систем
лучей. По поводу формы этих работ Ф. Клейн делает очень меткое замечание.
Он говорит, что «эти статьи по их форме суть все, что угодно, только не
безупречные; в необозримом, неуклюжем порядке, полные невыведенных
намеков и повторений, они все-таки представляют собою большое богатство
мыслей»*). Первые работы Гамильтона были «по форме весьма растрепан-
ными»**), замечает Лармор.
Эти работы, завершившиеся блестящим предсказанием конической рефрак-
ции, представляют основное из того, что сделано Гамильтоном в оптике.
Он подошел к проблемам геометрической оптики с очень общей точки зрения,
стремясь найти такое математическое соотношение, к которому сводились
бы все проблемы этой науки. Он исходил при этом из мысли, что этап индук-
ции, который он, как мы выше видели, считал в развитии всякой науки пред-
шествующим этапу дедукции, для геометрической оптики уже завершен.
История этой науки, по мнению Гамильтона, уже выявила наиболее общее
свойство оптических явлений, которое, будучи сформулировано математи-
чески, должно быть положено в основу геометрической оптики. Излагая
в кратком очерке историю оптики, Гамильтон прежде всего подчеркивает
прямолинейность распространения света. Этот опытный факт в конце концов
выкристаллизовывается в следующее важное положение, которое является
«фундаментальной теоремой» оптики: «Связь между освещением и осве-
щающим телом, или между рассматриваемым объектом и воспринимающим
глазом, осуществляется посредством постепенного, но очень быстрого распро-
странения некоторого предмета или влияния, или состояния, называемого
светом, от светящихся или видимых тел вдоль математических или физи-
ческих линий, называемых обычно лучами и оказывающихся при самых
общих условиях точно или приближенно прямыми»***).
Для объяснения законов прямолинейного распространения света были
предложены две основные теории. Это — теории Ньютона и Гюйгенса.
По мнению Гамильтона, обе они основываются на сравнении, аналогии.
Первая сравнивает распространение света с движением частиц; применяя
к ним принцип инерции, эта теория легко объясняет факт прямолинейного
распространения света. Вторая же сравнивает распространение света с
распространением звука в воздухе и .водяными волнами. По мнению Гюй-
генса, «нет такой вещи в обычном смысле слова, такого тела, которое двига-
лось бы от Солнца к Земле или от видимого объекта к глазу; а есть сос-
тояние, движение, возмущение, которые были сначала в одном месте, затем
в другом»****). Эта теория утверждает существование эфира — некоторой
среды, непрерывно заполняющей пространство. Развитая и обогащенная
Френелем и Юнгом, она дает как будто бы большее согласие с опытными
фактами, чем теория Ньютона.
Какая же теория кажется более приемлемой Гамильтону? Он пользуется
сначала корпускулярными, а затем волновыми представлениями, но не
потому, что считает, что природа света действительно такова, а потому,
*) Ф. Кл ейн, Лекции о развитии математики в XIX столетии, ч. 1, М.—Л., 1937,
стр. 239.
**)J. Larmor, Mathematical and Physical Papers, т. 1 (Appendix), London, 1927,
стр. 640.
***)W.R. Hamilton, On a general Method of Expressing the Paths of Light and
of the Planets by the Coefficients of Characteristic Function, Math. Pap., т. 1, стр. 312.
***♦) Там же, стр. 313.
808
Л. С. ПОЛАК
что при их помощи можно лучше удовлетворить наблюдаемым фактам.
Гамильтон рассматривает математическую оптику, не только не ставя перед
собой, но даже считая вообще несущественной проблему о природе света.
Сравнение с наблюдаемыми явлениями—это все, что может быть достигнуто.
«Примем ли мы ньютонову или гюйгенсову, или какую-либо другую физи-
ческую теорию для объяснения законов, которые регулируют линии свето-
вой или видимой свяЗи, мы можем рассматривать сами эти законы и свойства
и отношения этих линейных траекторий света как важнейший предмет само-
стоятельного изучения и образовать отдельную науку, называемую часто
математической оптикой»*). В одном письме, определяя задачи своей теории
системы лучей (и, между прочим, косвенно указывая на связь ее в конечной
инстанции с практическими потребностями), он пишет: «Моей целью было
не открывать новые феномены, не улучшать конструкции оптических инстру-
ментов, но с помощью дифференциального или флюксионного исчисления
преобразовать геометрию света посредством установления единого метода
для решений всех проблем этой науки, выводимых из рассмотрения централь-
ного или характеристического соотношения»**). Для построения законов
геометрической оптики достаточно одного представления о прямолинейности
распространения света и принципа Ферма. Поскольку в «Теории систем
лучей» рассматриваются вопросы геометрии света, постольку Гамильтон
совершенно прав, когда говорит : «... для образования моего общего метода
не является даже необходимым принимать какое-либо частное мнение отно-
сительно природы света»***). Этот метод, как мы видим, существенно фено-
менологичен. Однако эта феноменологичность диктуется самим характером
изучаемых проблем, давая возможность наиболее быстрого и простого их ох-
вата; кроме того, развиваемая таким образом теория является необходимым
моментом для перехода к физической оптике, имеющей дело с теми или иными
гипотезами о внутренней структуре света. Однако именно то, что Гамильтон
решает задачи высшей геометрической оптики, очень характерно для его
общего подхода к проблемам, лежащим вне чистой математики. Он сам
указывает, что его основной целью является «ввести гармонию и единство
в размышления и заключения оптики, рассматриваемой как часть чистой
науки»****).
То, что для Гюйгенса и Юнга являлось проблемой, для Гамильтона —
исходный пункт. Они ставили себе задачу объяснить опытный факт пря-
молинейного распространения света, выводя его из каких-то причин, скрытых
во внутренней природе световых явлений. Гамильтон видит свою задачу
не в обяснении этого факта, а в такой его формулировке, которая макси-
мально удовлетворяла бы стремлению к единству и стройности математи-
ческой схемы. Это не значит, что нельзя пользоваться вспомогательными
конструкциями, вроде волновых фронтов, но не следует приписывать им
реальность. Все значение этих вспомогательных конструкций состоит в том,
чтобы сделать возможной математическую формулировку наблюдаемых
соотношений. В этом Гамильтон убедился еще больше, когда в третьем
добавлении к своей «Теории систем лучей» показал, что построенный им
общий метод геометрической оптики может быть выражен как корпускуляр-
ным, так и волновым языком, причем, независимо от принятого аспекта,
*) W. R. Н a tn i 11 о n, On a general Method of Expressing the Paths of Light and
the Planets by the Coefficients of Characteristic Function, Math. Pap., т. 1, стр. 314.
**) У. P. Гамильтон, Письмо к Кольриджу (S. Coleridge) от 3 октября 1832 г.
Цит. по G. Graves.
***) Там же.
*“*) Там. же.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
809
весь аналитический аппарат сохраняется, и при желании все выводы могут
быть истолкованы как в терминах волновой, так и в терминах корпускуляр-
ной теории.
Основные научные интересы Гамильтона в этот период его жизни кон-
центрировались вокруг таких математических проблем, которые так или
иначе были связаны с астрономией. Его работы по оптике были в различной
степени связаны с задачей улучшения астрономических наблюдательных
средств, его динамические исследования —• с задачами движения небесных
тел и, особенно, с теорией возмущения. Он не проявлял большого интереса
ни к измерительной технике астрономии, ни к отдельным вопросам этой
науки. Его интересы не выходили за пределы математической разработки
проблем оптики и динамики. Его занятия общей теорией оптически х систем
связаны с проблемами изучения оптических свойств астрономическихинстру-
ментов. Это видно из простого перечисления названий некоторых его работ*).
Заглавия этих работ показывают, что Гамильтон непосредственно изучал
и сам разрабатывал теорию оптических приборов. Долголетняя работа в
качестве астронома Ирландии и руководителя Дублинской астрономической
обсерватории непосредственно толкала Гамильтона к таким проблемам.
В силу же особенностей его таланта деятельность его направлялась не по
линии конструктивно-экспериментальной, а по линии теоретико-математи-
ческой разработки тех или иных оптических проблем, непосредственно или
в конечном счете имевших важное практическое значение. Что Гамильтон
имел в виду практические интересы, видно из того, какие лучи рассматри-
ваются им в его основной оптической работе «Теория систем лучей». Клейн
говорит по этому поводу: «Гамильтон первоначально исходил‘в своих
исследованиях систем лучей из практических запросов оптического при-
боростроения. Поэтому он рассматривал только такие световые волны,
которые исходят из отдельных точек»**).
Как мы уже отмечали выше, Гамильтон считал, что дедуктивная наука
должна развиваться, отправляясь от некоторого обобщения опытных дан-
ных. Это обобщение должно характеризовать некоторое наиболее общее,
типичное свойство рассматриваемого круга явлений. Соотношение, которое
Гамильтон кладет в основу своего исследования, — это принцип Ферма.
Опыт показывает, говорит Гамильтон, что во всех случаях, когда мы
имеем дело с распространением света в каких-либо средах при самых разно-
образных условиях, траектория луча оказывается подчиненной одному
основному соотношению. Это соотношение гласит, что путь распространения
света от «одной точки к другой всегда оказывается таким, что если его срав-
нить с другими бесконечно близкими линиями, при помощи которых могут
быть соединены эти точки в мысли и в геометрии, то некоторый интеграл,
или сумма, называемый часто «действие» и зависящий по определенным пра-
вилам от длины и положения траектории и среды, в которой распространяет-
ся свет, меньше всех подобных интегралов для других соседних линий»***).
Центральная идея этого метода — идея характеристической функции
для каждой оптической системы лучей. Это характеристическое соотноше-
ние, различное для различных систем, таково, что геометрические свойства
*) «On the Effect of Aberration in Prismatic Interference», «The Auxiliary Function for
Two Thin Lenses Close'together in Vacuo and for a single Thin Lense in Vacuo»; «The aber-
ration of an Optical Instrument of Revolution»; «Two letters to Professor Phillips on the
Construction of Object Glasses»; «On the Impruvement of the Double Achromatic Object
Glass» и t. д.
**) F. Klei n, Uber neuere englische Arbeiten zur Mechanik, Gesamm. Mathem. Ab-
handl., t. 2, Springer, 1922, стр. 601—602. См. стр. 513 настоящей книги.
***) W. R. Hamilton, On a general Method of Expressing the Paths of Light and
the Planets..., Math. Pap., т. 1, стр. 613.
810
Л. С. ПОЛАК
системы могут быть выведены из него методом, аналогичным тому, который
был изобретен Декартом для алгебраического решения геометрических
проблем. Все свойства оптических систем для каждой кривой или поверх-
ности вытекают из основного соотношения. В этой теории устанавливается
связь восьми величин, из которых шесть суть координаты двух переменных,
оптически связанных точек в пространстве, седьмая есть индекс цвета
(index of colour) и восьмая, которую Гамильтон назвал характеристической
функцией, есть «действие» между двумя переменными точками. Эта функция
называется характеристической, ибо Гамильтон нашел, что в характере
зависимости этой функции от семи названных выше величин заключены все
свойства оптической системы. Поэтому Гамильтон говорит: «Я рассматриваю
все проблемы математической оптики, относящиеся ко всем мыслимым
сочетаниям заркал, линз, кристаллов и атмосфер, как сводимые к изучению
этой характеристической функции, посредством ... фундаментальной фор-
мулы»*).
Гамильтон отмечает, что построить общую теорию системы лучей это
значит «обобщить изучение одной системы так, чтобы можно было, не изменяя
плана, перейти к изучению других и установить общие правила и общий
метод для того, чтобы гармонично связывать между собой эти отдельные
оптические устройства»**).
Для того чтобы решить эту задачу, надо воспользоваться новой мате-
матикой, в первую очередь аналитической геометрией Декарта. Первым
применил этот метод к геометрической оптике Малюс. Однако метод Гамиль-
тона имеет более общий характер. Вводя одну функцию, которая полностью
характеризует оптическую систему, Гамильтон указывает: «Функция,
которую я ... полагаю в основу своего метода дедукции в математической
оптике, представлялась прежним авторам в другой связи выражением
результата весьма высокой и обширной индукции ; она называется законом
наименьшего действия, а иногда принципом наименьшего времени и заклю-
чает в себе все, что было до сих пор открыто относительно правил, определяю-
щих форму и положение линий, по которым распространяется свет, и изме-
нений направления этих линий, вызываемых отражением или преломлением,
обычным или необычным. Некоторое количество, являющееся в одной теории
действием, а в другой — временем, затрачиваемое при переходе от любой
одной точки к любой другой, оказывается меньшим, если свет идет своим
фактическим путем, а не каким-нибудь иным, или же, по крайней мере,
имеет то, что на языке специалистов называется вариацией, равной нулю»***).
Мы видим, что Гамильтон рассматривает вводимую им функцию как
результат индукции в оптической науке. Эта функция охватывает всю
геометрическую оптику. Но важно и другое. Гамильтон уже здесь отмечает
в общем виде родство принципа Ферма и принципа наименьшего действия.
Конечно, отсюда еще довольно далеко до построения такой математической
схемы, в которой оптика лучей совпала бы с механикой материальной точки.
Здесь еще нет ничего принципиально нового, ибо родство принципа Ферма
и принципа наименьшего действия отмечалось и ранее. Лишь в последующее
время, когда в разработанной Гамильтоном математической теории совпадут
формы уравнений лучевой оптики и механики, определится то, что мы назы-
ваем оптико-механической аналогией. Но уже в 1827 г. Гамильтон прекрасно
*) W. R. Hamilton, Ona View of Mathematical Optics, Brit. Assos. of the Advanc.
of Sc. Rep., 1831—1832, стр. 545—547 ; Math. Pap., т. 1, стр. 295—297.
**) У. P. Гамильтон, Сообщение о теории систем лучей, представленное 23/IV
1827 г. Королевской Ирландской Академии. См. Graves.
***) Там же.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
811
сознает математическую новизну своего метода, подчеркивая, что благодаря
этому методу «математическая оптика представляется... в совершенно
новом виде, аналогичном тому, в каком Декарт представил применение
алгебры к геометрии»*).
Рассмотрим теперь математический метод Гамильтона, с помощью кото-
рого он исследовал законы систем лучей.
Если свет проходит через среду, оптическая плотность которой непре-
рывно изменяется (например земная атмосфера), то траектория луча будет
кривой линией. Для определения этой линии надо, согласно правилам
вариационного исчисления, исследовать вариацию интеграла J v ds, где
v — преломляющая сила среды, a ds — элемент траектории ; пределы
интегрирования фиксированы. Имеем:
б [ (vds) = [ б (vds) = v 2' a-i дх, — v0 £ aoi dxoi +
i i
. с ( dv , , , dxi
+ 2 \ ds + dv~r~
J f (dx/ ds
где a, — косинусы углов, которые направления луча образуют с осями
в конечном положении, а0( — те же величины в начальном положении.
Поскольку конечные положения фиксированы, то интегралы в правой части
(1) обращаются в нуль.
Покажем, что лучи перпендикулярны к некоторым поверхностям (вол-
новым поверхностям), для которых J vds равен некоторой определенной
величине. Лучи исходят из одной точки или поверхности перпендикулярно
к ней, и поэтому второй член в правой части (1) исчезает.
Тогда
(1)
(2)
д J v ds = v 2.' а, бх,.
Положим вариацию (2) равной нулю, т. е. интеграл равным некоторой посто-
янной величине; тогда
2* а, дх, = 0,
что и доказывает, что траектория искривленного луча пересекает упомяну-
тую поверхность под прямым углом.
Обозначим J vds = V для точки х,- и траектории в среде со скоростью v ;
тогда косинусы а, определяются уравнениями
а‘ v Эх/
Здесь V — характеристическая функция Гамильтона, при помощи которой
можно вывести все свойства системы лучей, если нам известен вид функции v.
Заметив, что 2"а/ = L из уравнения (3) легко получить :
(3)
V2
(4)
Этой функцией Гамильтон и пользуется во всех своих последующих
работах по оптике.
Найденный результат в виде соотношения (2) Гамильтон называет прин-
ципом постоянного действия (principle of Constant Action). Название это
выбрано им из двух соображений: во-первых, для того, чтобы «отметить
*) У. Р. Гамильтон, Сообщение о теории систем лучей, представленное 23/IV
1827 г. Королевской Ирландской Академии. См. Graves.
812
Л. С. ПОЛАК
связь с известным законом наименьшего действия», и, во-вторых, «потому
что он (принцип постоянного действия. — Л. П.) дает непосредственно диф-
ференциальное уравнение того важного класса поверхностей, которые
согласно гипотезе колебаний называются волнами, а согласно гипотезе
испускания частиц могут быть названы поверхностями постоянного дей-
ствия»*).
В этом же добавлении Гамильтон формулирует основной закон:
= (5)
и показывает, что соотношение (5) приводит к следующим общим уравне-
ниям луча :
-^-ds = d^~ (г = 1,2,3), (6)
dxt dxi у '
причем два уравнения (6) определяют третье уравнение.
Эти уравнения непосредственно связаны с уравнениями динамики в
форме Лагранжа. В самом деле, заметив, что а, = и обозначив-^-=xj,
найдем :
d ду ду р
W dxi Эх?— ’ V'
где v = v(Xj, x'j).
Это уравнение имеет ту же форму, что и известные уравнения динамики
Лагранжа второго рода, которые являются необходимым условием для
существования экстремума интеграла принципа. Гамильтона—Остроград-
ского.
Таким образом, уже здесь отчетливо видна связь развиваемой Гамильто-
ном математической теории систем лучей с механикой.
В третьем добавлении теория характеристической функции достигает
большой общности. Здесь v является уже функцией начальных и конечных
координат и цветового индекса (Chromatic index), т. е., частоты:
v = v (х,, х0,, %). (8а)
В общем случае элемент криволинейного пути
ds-Y^^x,)2 ,
i
а
v = v (х, > ai = ~^> х} 8b)
Вариация v равна :
dv = б х, + <5а, + ~ d%, (9)
и так как Д' «?= b то производные определятся так, чтобы удовлетворялось
условие ’
= (Ю)
т. е. v — однородная функция первого порядка относительно а,.
*) W. R. Hamilton, Supplement to the Theory of Systems of Rays, Math. Pap.,
t. 1, стр. 107.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
813
Фундаментальная задача математической оптики состоит в определении
зависимости а, а0( от х„ xoi, %. Эта задача решается с помощью основного
уравнения, которое Гамильтон называет законом переменного действия:
(11)
Вариация 6V стационарна при распространении света. Это уравнение рас-
падается на шесть уравнений, которые дают искомую зависимость:
ЭК dv
Эх/ За/ ’
ЭУ Эг>0
Эх0/ daoi
(i = 1,2,3).
(12)
Основная идея Гамильтона состоит в том, что он рассматривает V = j vds
как функцию граничных точек. Другими словами, после того как значение
V вычислено интегрированием выражения 6V = 0 при постоянных преде-
лах, он рассматривает V как функцию этих пределов. Функцию V он называет
характеристической функцией, а в физике называют у V = c(t —10) оптичес-
ким путем, который является основным понятием в геометрической оптике.
Как кажется с первого взгляда, уравнения (12) требуют для приложения
к некоторой системе сред знания формы функции V и вида функций v и
(т. е. оптических свойств конечной и начальных сред). Однако, как указы-
вает Гамильтон, сами эти функции среды v и v0 могут быть’выведены из харак-
теристической функции V. Гамильтон показывает, что если V есть однород-
ная функция а„ а для V имеем два уравнения в частных производных
и
то, обозначив
получим :
(13)
ЭУ ЭУ
Эх/ = а, И Эх0/ “
а/ _ Эй aoi Эй
V За/ ’ v0 ~ Эст0/
(14)
откуда, после простых преобразований, найдем :
dxt _____ Эй d<j[ _______________ Эй
= — ~дх/ ’
(15)
Родство формы уравнений (13) с уравнениями динамики очевидно:
V соответствует интегралу действия Эйлера — Лагранжа, уравнение (13) —
уравнению живых сил, % — некоторой функции полной энергии.
Уравнения (15) имеют форму канонических уравнений динамики и выра-
жают распространение поверхности V = const как касательное преобразо-
вание вдоль луча.
Следовательно, развивая метод характеристической функции, мы вновь
получили уравнения, имеющие форму уравнений динамики, с той лишь
разницей, что раньше были получены уравнения, имеющие форму уравнений
Лагранжа, теперь же — канонические уравнения, введенные в динамику
Гамильтоном.
С математической точки зрения, переход от системы переменных
х, У, z, a, fj, у к системе х', у', z', а', (У, у', или переход от одной поверхности
к другой, можно рассматривать как преобразование.
814
.. ii47Jlrtr\
Функция V определяет, следовательно, такое преобразование простран-
ства, которое переводит одну произвольную поверхность в другую. Если
две первоначальные поверхности касаются в какой-либо точке, то получен-
ные из них преобразованием две поверхности также будут касаться в некото-
рой точке, сопоставленной первой точке. Поэтому Софус Ли и назвал это
преобразование касательным*).
Что же касается практического значения «принципа переменного дей-
ствия», то Ф. Клейн справедливо указывает, что он «служит не для того,
чтобы дать ответ на вопрос о собственных целях, которые преследует природа
в оптических процессах, но для того, чтобы ответить на вполне законный
вопрос конструктора оптических приборов, как нужно искусственно соче-
тать эти процессы для получения возможно более совершенного при-
бора»**).
Раздел 26-й третьего добавления к «Теории системы лучей» Гамильтон
посвятил «увязке предшествовавшего взгляда на оптику с волновой (undu-
latory) теорией света». Как указывает заголовок этого отдела «величины
QV QV QV
а, т, v или т- е. частные производные первого порядка харак-
теристической функции V, взятые по конечным координатам, представляют
собой в волновой теории света компоненты нормальной медленности (normal
slowne s) распространения волн. Фундаментальная формула (11) может
быть легко объяснена и доказана согласно принципам этой теории»***).
Цель этого раздела состоит в. том, чтобы показать правомерность найден-
ных результатов в волновой теории. Все прежние рассуждения базировались
на принципе наименьшего действия и развивались в терминах эмиссионной
гипотезы. Гамильтон хочет показать, что все аналитические результаты
могут быть сохранены. Заметим, что в своем нобелевском докладе Шредин-
гер****) дает следующую характеристику принципа Ферма: «Таким образом,
принцип Ферма представляется просто тривиальной квинтэссенцией (курсив
Шредингера. — Л. П.) волновой теории». В волновой теории этот принцип
находит свое обоснование: «только с точки зрения волновой теории прин-
цип Ферма становится вполне понятным и перестает быть чудом»*****).
С точки зрения волновой теории, V будет временем распространения
света данного цвета от источника х', у', z' до точки х, у, z через некоторую
комбинацию сред, т. е.
V = V (х, у, z, х', у’, z', %).
Если нормальная волновая скорость со задана как функция а, /?, у (направля-
ющих косинусов нормали к волновой поверхности) и х, у, z, х, то V может
быть легко определено. Уравнение волны, имевшей в момент времени t = О
координаты х', у', z', будет
У(х, у, z, х', у', z', х) = t-
Если зта волна проходит путь х + йх, у + йу, z + йг за время t + й/, то
йх = St
Эх
*) S. Li е, Die St6rungstheorie und die BerOhrungstransformation, Arch, for Math, of
Nat. M id., t. 2, Kristiania, 1877. См. также стр. 404 настоящей книги.
**)Ф. Клейн, Лекции о развитии математики в XIX столетии, ч. 1, Гостехиздат,
19 7, стр. 241.
***) W. R. Hamilton, Third Supplement to an Essay on the Theory of Systems of
Rays, Math. Pap., т. 1, стр. 277. «Нормальная медленность» равна обратной скорости.
*♦**) В. Г е йз е н б е р г, Э. Шредингер, П. Дирак, Современная квантовая
механика, Гостехиздат, 1934, стр. 41—60.
♦♦♦**) Там же, стр. 45—46.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
815
и т. д. С другой стороны, очевидно, что
v а §х = (о St,
а следовательно,
ЭУ ______________________ а ЭУ _____ fi ЭУ _____ у
Эх со ’ ду со ’ dz at ' '
Вспоминая, что а2 4-/З2 4- у2 = 1, возводя уравнения (16) в квадрат и
складывая их, получим:
f( JYJ2 + (2TV 1 f 9J№ = ± (] 7\
Эх ) + ( dy J + [ 'dz J J co ’ V ' ‘
Выясним волновой смысл величин <т,, которые были определены урав-
нениями
Величины а,- пропорциональны направляющим косинусам нормали к волне,
для которой V = const и которая имеет своим уравнением
Положим
<5 V = a,. Sxi = 0.
Тогда направляющие косинусы выразятся произведением at т и т будет
нормальной скоростью, потому что бесконечно малое время 6V, в течение
которого волна распространяется по нормали на бесконечно малое рас-
стояние dl от точки х,- до точки х,- 4- <т,- со 6Z, будет равно
<5V = VCT,-CT;(U^=]V««^(CT,)2 = . (18)
Следовательно, ст; можно назвать компонентами нормальной медленности.
Отсюда легко выводится основное уравнение теории систем лучей Гамиль-
тона.
Оптика лучей основывается на уравнении, имеющем в прямоугольных
координатах вид
х iJv? _ JLm2 = о (19)
I Эх,) с2 (dt J ’ ' '
i
которое является дифференциальным уравнением в частных производных
первого порядка второй степени. В физической оптике, охватывающей
явления интерференции и дифракции, основным будет уравнение
Л.. ( |_____i f ।
Л ( дх? J с2 I 9/2 J “ ’
(20)
которое является дифференциальным уравнением второго порядка первой
степени. Различие между этими фундаментальными уравнениями, таким
образом, весьма велико. Однако, как известно, последнее уравнение пере-
ходит в первое в предельном случае бесконечно малой длины волны, выра-
жая тем самым переход физической оптики в геометрическую.
Итак, Гамильтон показал, что геометрическая оптика сводится к одному
и тому же аналитическому аппарату, независимо от того, пользуемся мы
•816
Л. С. ПОЛАК
в физической оптике волновыми или корпускулярными представлениями.
Геометрическая оптика есть предельный случай физической оптики. Кар-
тины корпускулярная и волновая, вообще говоря, существенно различны,
но при исследовании геометрических свойств оптического луча приводят
к одним и тем же результатам. Луч может быть истолкован и как нормаль
к некоторой волновой поверхности, и как траектория потока световых частиц.
Математический формализм теории и в том, и в другом случае один и тот
же. Уже в этом заключена идея оптико-механической аналогии.
Как мы видели, обобщая принцип Ферма, Гамильтон рассматривал v
не только как функцию координат точки х, и %, но и как функцию от а, (направ-
ляющих косинусов луча по отношению к некоторой особой системе осей
кристалла). Это дало ему возможность подойти к проблеме распространения
света в двухосных кристаллах. Исследуя волновую поверхность в двухосных
кристаллах, Гамильтон дал ясную картину ее геометрической формы и
открыл существование четырех плоскостей, касающихся ее вдоль кони-
ческих сечений.
22 октября 1832 г. Гамильтон представил Ирландской Академии третье
добавление к своей «Теории систем лучей». В нем было теоретически пред-
сказано существование внешней и внутренней конической рефракции.
Гамильтон немедленно по получении этого результата написал своему Другу
Г. Ллойду, прося его осуществить соответствующие опыты. После больших
затруднений и неудач Ллойду удалось обнаружить предсказанные Гамиль-
тоном явления. 14 декабря того же года Ллойд сообщил Гамильтону за-
пиской, что он, наконец, нашел коническую рефракцию на кристаллах
арагонита.
Работы Гамильтона по теории систем лучей остались мало известными
на континенте. Одной из основных причин этого является то, что «Trans-
actions» Ирландской Академии в Германии, Франции и России являлся
редким и малодоступным журналом. Неумелая и запутанная форма изло-
жения этих работ Гамильтона также не способствовала их распространению.
Только постепенно идеи, заключенные в этих работах Гамильтона, становятся
известными. В Англии Максвелл*), а в Германии Брунс**) и Ф. Клейн***)
в той или иной степени, в связи с работами Гамильтона, продолжали разви-
вать это направление, и впоследствии методы, созданные Гамильтоном,
нашли широкое применение в геометрической' оптике, теории оптических
приборов и электронной оптике.
Динамика Гамильтона
От разработки оптических проблем к динамике Гамильтон перешел
вполне закономерно. Прежде всего внутренняя логика разработанного им
метода исследования оптических проблем вела к распространению этого
метода на динамику. Связь той математической формы, в которую он облек
*) J. К. Maxwell, On the General Laws of Optical Instruments, Sci. Pap., 6, Camb-
ridge, 1890, стр.- 271—286; его же, On Hamilton’s Characteristic Function for a Narrow
Beam of Light, стр. 381—391 ; его же, On the Relation of Geometrical Optics to other Parts
of Mathematics and Physiks, стр. 391—393; его же, On the Application of Hamilton’s
Characteristic Function to the Theory of an Optical Instrument Symmetrical about its Axes,
стр. 439—445.
**) H. Brun s, Das Eikonal, Abhandl. d. Mathem. Phys. KI. d. Kgl- Sachs. Ges. d.
Wiss, t. 1,'Leipzig, 1895, стр. 325 и след.
***) F. Klein, Uber das Brunssche Eikonal, Zs. f. Mathem. und Phys., 46, 1901, стр.
372—375; Uber neuere englische Arbeiten zur Mechanik, Gesam. Mathem. Abhandl., t. 2,
стр. 601—602. См. также стр. 513 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
817
геометрическую оптику, с уравнениями механики была ему ясна еще задолго
до написания мемуаров по динамике. Конечно, из того, что внутренняя
логика оптических работ Гамильтона приводила к возможности расширения
сферы применения его метода, не вытекает, что именно сам Гамильтон
должен был проделать этот новый этап. Тот факт, что именно Гамильтон
исследовал данную проблему, объясняется еще некоторыми дополнительными
условиями. Прежде всего нужно указать на интересы Гамильтона в области
астрономии. Будучи королевским астрономом Ирландии и .профессором
астрономии, он, хотя и держался в стороне от наблюдательной астрономии,
но усиленно интересовался проблемами небесной механики. Чтение курса
астрономии, который тогда в основном представлял собой небесную меха-
нику ; вычислительные работы Дублинской обсерватории в связи с составле-
нием навигационных таблиц; наконец, тесная связь математики, которая
всегда была его основной стихией, с небесной механикой — все это толкало
его к занятиям в области математических методов механики. Поэтому он,
исследуя различные системы притягивающихся или отталкивающихся
материальных точек, прилагает свой метод прежде всего к решению класси-
ческой проблемы возмущенного движения.
Наконец, объединение оптики и механики в единой математической
схеме вытекало из основных методологических воззрений Гамильтона ; его
склонность к общей и абстрактной постановке вопросов благоприятствовала
этим работам.
Таким образом, как объективные причины — потребности небесной меха-
ники, так и субъективные—деятельность Гамильтона в качестве королевского
астронома и профессора астрономии, и, наконец, внутренняя логика его работ
(оптико-механическая аналогия) — определили направление работы Гамиль-
тона в области дальнейшей разработки найденного и примененного им в
оптике математического метода. Сам Гамильтон неоднократно подчеркивал
тесную связь своих работ по динамике с предшествовавшими работами по тео-
рии систем лучей. В письмо к Уэвеллу (18 марта 1834 г.) он пишет, что публи-
куемая им в «Philosophical Transactions» работа есть «новое приложение тех
математических принципов, которые . . . (он. — Л. П.) уже прилагал к
оптике». В его письме к Дж. Гершелю (17 октября 1834 г.) мы читаем следую-
щее : «... почти достигнув в оптике желаемой цели, ... я вернулся к ста-
рому проекту применения того же метода к динамике». Гамильтон не ставит
себе задачи создания новых или даже видоизменения классических основных
принципов механики. Его задача—иная ; она точно выражена им в названии
его работы : «On a general Method in Dynamics; by which the study of the
Motions of all Free Systems of Attracting or Repelling Points is Reduced to the
Search and Differentiation of the Central Relation or Characteristic Function»*).
Эта работа Гамильтона послужила основанием для Остроградского,
Буняковского и Фусса представить его в 1838 г. к избранию членом-
корреспондентом Российской Академии наук; избрание состоялось в том
же году.
В механике Гамильтон является прямым продолжателем направления
Лагранжа. Это выражается не только в его восхищении «Аналитической
механикой», которую он называл «научной поэмой», и не только в том, что
Гамильтон работал аналитически, не используя наглядных геометрических
представлений даже там, где они могли бы оказать ему непосредственную
помощь. Важнейшим обстоятельством здесь является точка зрения Гамиль-
тона на задачи исследования в области механики, сближающая его с Лагран-
*) W. R. Hamilton, Phil. Trans. Roy. Soc., London, 1834—1835, Math. Pap., t. 2;
см. также стр. 175 настоящей книги.
52 Вариационные принципы механики
818
Л. С. ПОЛАК
жем: механические проблемы суть класс математических задач, разработка:
механики есть разработка математических методов*).
К тому времени, когда Гамильтон перешел от проблем геометрической
оптики к изучению проблем динамики, принцип наименьшего действия имел,,
как мы видели, уже почти девяностолетнюю историю.
Исторически первой работой Гамильтона в области динамики является
неопубликованная при его жизни рукопись, помеченная 1833 г. и озаглавлен-
ная «Проблема трех тел, рассмотренная с помощью моей характеристической
функции»**). В этой рукописи рассматривается проблема трех тел: Солнца,
Юпитера и Сатурна, и вводится сначала характеристическая функция
V = f Tdt.
о
Гамильтон показывает, что эта функция должна удовлетворять двум
уравнениям в частных производных первого порядка. Он сравнивает най-
денное им решение с решением Лапласа, определяет характеристическую
, QV
функцию для эллиптического движения, устанавливает уравнение = t,
где И — полная энергия системы («константа живых сил», по его термино-
логии). Далее он доказывает, что два уравнения в частных производных,
которым удовлетворяет функция V, действительно дают общее решение,
и ищет это решение с помощью последовательных приближений.
Уже в этой работе даны многие существенные результаты, которые
вошли в более поздние статьи Гамильтона, опубликованные им в 1834—
1835 гг.
В этих статьях развивается оригинальная идея Гамильтона : рассматри-
вать входящий в принцип действия интеграл после его вычисления как
функцию от его пределов.
В них. формула для главной функции Гамильтона V дана для случая
системы точек, но для простоты мы рассмотрим случай движения одной
точки. В этом случае уравнения движения будет :
ди
дх;
(i — 1,2,3),
(21)
причем кинетическая энергия
Т (22)
z i
а силовая функция U = будет функцией только координат. Начальные
значения координат обозначим хо;, а скорости хо;. Запишем закон живых
сил в форме
т = и + н.
Величина Н, которая получила название гамильтониана системы, незави-
сима от времени для данного движения системы ; но поскольку при пере-
ходе к другому движению изменяются начальные данные, постольку //
изменяется с изменением Т и U и, следовательно,
дТ = dU + 6Н.
*) В аналитический метод Лагранжа вполне можно ввести геометрические аналогии
и представления. Это можно сделать, ибо свойства уравнений Лагранжа тесно связаны
со свойствами некоторой квадратичной формы точно такого же вида, какой имеет в гео-
метрии форма, выражающая дугу кривой.
**) W. R. Hamilton, Dynamics, Cambridge University Press, The Math. Pap. t. 2,.
1940, стр. 1—103.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
819
Умножая на dt и интегрируя от нуля до t и приняв во внимание закон
живых сил и хорошо известное уравнение
2 mxt 8xt = 8U,
i
Гамильтон получает:
J 2' т dxi §Xj = J 2 т dx. 8х, + J 8Н dt.
ООО
Обозначив
Г = f v^rfx, = j2Td/, (23)
о о
он получает по правилам вариационного исчисления .
8 V = 21 тх, 8xt — v f^Xoi 8xOi + t8H. (24)
Надо заметить, что координаты х, и скорости х,- являются функциями t, xQi, xoi,
а следовательно, V есть также функция этих величин. Но если х( есть функция
f, xoi, х0„ то можно, напротив, рассматривать х0;- как функцию t, xit xoi и,
таким образом, V будет функцией х,-, Хо,-, /. Подобным же образом Н есть
функция х;, xoi, t; исключив t, найдем V как функцию х„ Хо,, Н. Тогда из
(24) получим:
-§~ = шх,-, (25а)
(25b)
"э/Г = t, (25с)
и если рассматривать V как известную функцию х, у, z, Xq, у0, z^, Н, то
исключение Н дает возможность получить уравнения, которые будут на
самом деле интегральными уравнениями проблемы.
Функция V удовлетворяет двум дифференциальным уравнениям в част-
ных производных:
1 X( 8И2 гт । и
2 т-^[ dxt) —и + и>
(26)
2
= и0 + н0,
которые, если они могут быть проинтегрированы, дадут V как функцию
х„ х0„ Н ; тем самым движение системы будет определено.
Гамильтон говорил : «если функция V известна, то остается только
исключить Н из Зп + 1 уравнений (25а), (25с) для того, чтобы получить
все Зп первых интегралов, или из (25b) и (25с) для получения всех Зп конеч-
ных интегралов дифференциальных уравнений движения; в конечном
счете это сводится к получению Зп искомых соотношений между Зп пере-
менными координатами и временем, включающих, следовательно, массы
и 6п вышеупомянутых начальных данных; открытие этих соотношений
явится общим решением общей проблемы динамики»*).
*) W. R. Hamilton, On a general Method in Dynamics, Phil. Trans, 4. 1, 1834y
стр. 251—252.
820
Л. С. ПОЛАК
Таким образом, «уравнение (24), выражающее фундаментальный закон
вариации V, мы назовем уравнением характеристической функции или
законом переменного действия»*).
Гамильтон обнаружил, что «в динамике эта функция V включает в себя
в виде вспомогательной величины константу Н в известном выражении
половины живой силы системы»**).
Это привело его к мысли ввести новую функцию S, которая была бы
связана с V и из которой была бы исключена упомянутая константа. В итоге
«исключения, посредством которых (Гамильтон. —Л. П.). .. был вынужден
избавиться от этой вспомогательной константы и ввести взамен ее время,
сделали метод более обширным, чем он был»***). В дальнейшем функция S
становится основной функцией Гамильтона. Уже в конце своей первой
статьи Гамильтон помещает краткую главу под названием «General Intro-
duction of the Time into the Expression of the Characteristic Function in
any Dynamical Problem» («Введение времени в общем виде в выражение
характеристической функции в любой задаче динамики»).
Функция S связана с функцией V уравнением
V = Ш + S . (27)
или, что то же самое, новая главная функция S определена уравнением
S = J (Т + U) dt = j Ldt, (28)
о о
тде
S = S (х,, х0,, 0,
в то время как
V= V(xz, х01, Н).
Выражение для вариации S будет таково :
<5S = — И dt + т Z х,dxt— т £ х0( d х0,, (29)
i i
что эквивалентно системе
OS • QS QS „ /опч
&Xi=mX‘’ = -ЬГ=~Н’ <30>
где первые три уравнения дают промежуточные, а вторые три — конечные
интегралы. Функция S удовлетворяет двум уравнениям в частных произ-
водных :
95 > 1 У ( 9S V = п
Qt + 2 т [ Эх J — U ’
(31)
as i yfds [Г v '
Ы + 2 т ' 9Xqi J — и0’
которые, если они могут быть проинтегрированы, дадут S как функцию
х, у, z, х0, у0, z0, t и таким образом определится движение системы.
Как показал Якоби, на самом деле достаточно одного уравнения.
*) Там же, стр. 252.
**) У. Р. Га мильтон, Письмо Дж. Гершелю от 17 марта 1834 г. Цит. по G. Graves.
***) Там же.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
821
В этой же работе Гамильтон выводит уравнения, получившие название
канонических уравнений Гамильтона.
Еще в 1809 г. Пуассон ввел функцию £ (рр, — ?, рассматриваемую как
i
функцию qt и pt, и вывел половину гамильтоновых уравнений*).
Лагранж в 1809 г., рассматривая варьирование элементов орбит, уста-
новил систему уравнений в гамильтоновой форме, в которую вместо функции
Н входила пертурбационная функция /?**).
Во втором издании «Аналитической механики» Лагранж приводит сле-
дующие уравнения :
dat dR dSt dR
dt dSi ’ dt dot ’
„ dT
где at — начальные значения координат, S, — начальные значения = pt.
Это — простейший пример системы канонических элементов.
Возьмем консервативную механическую систему, имеющую п степеней
свободы и находящуюся в постоянном консервативном поле сил. Ее дви-
жение может быть выражено дифференциальными уравнениями различной
формы. Среди них уравнения, введенные Гамильтоном, имеют прежде
всего преимущество симметрии. В гамильтоновом методе состояние механи-
ческой системы с п степенями свободы определяется п координатами qt,
которые фиксируют конфигурацию системы и п соответствующих им-
пульсов Р(.
Координаты q, могут быть выбраны различными путями, в частном
случае это могут быть декартовы координаты х, у, z, цилиндрические или
сферические координаты. Во всех случаях всякое изменение qt вызывает
изменение р;.
В консервативном поле имеем :
Т = U + const
в течение действительного движения. Т определяется п значениями q, и п
значениями р„ a U — только п значениями qt. Отсюда видно, что полная
энергия системы будет выражаться некоторой комбинацией из п координат
qt и п моментов р,. Такое выражение полной энергии называется гамильто-
новой функцией и обозначается H(qt, pt). Построение гамильтоновой функции
для данной механической системы не вызывает затруднений. Точный вид
этой функции зависит, однако, от особенностей как рассматриваемой механи-
ческой системы, так и поля, в котором она движется, а следовательно,
и от выбора п координат qt.
Удачный выбор qt может сильно облегчить решение задачи ; в особен-
ности просто решается динамическая проблема, если можно выбрать п
координат q( так, что Н будет функцией только р,.
Для консервативной системы с п степенями свободы движение выра-
жается 2п дифференциальными уравнениями первого порядка простого
вида :
dH . dH
“ "Эр? ’ Pi — dqt
(32)
*) S. D. Poisson, Memoirc sur la variation de constantes arbitraires dans les ques-
tions de M£canique, Journ. de I’ficole Polytechn., t. 8, 1809, стр. 266—344.
**) L a gr a n ge, Seconde MSmoire sur la variation des constantes arbitraires dans les
problemes de MScanique, dans lequel on simplifie 1’application des formules g£nerales Л ses
problemes, Мёт. Inst., 1809, стр. 343—352; Oeuvres, t. 6, стр. 809 и след.
Уравнения Гамильтона пишутся в такой форме только для консерватив-
ных систем, и в таком виде они неприменимы в случае полей, не имеющих
потенциала, и в случае неголономных связей.
В физике уравнения Гамильтона в форме (32) играют первостепенную
роль, в частности в статистической и в квантовой механике.
Значение гамильтоновой функции Н как для классической, так и для
квантовой механики прекрасно выразил Дирак. Рассмотрев вид этой функции
и ту форму, которую она принимает для квантово-механических задач, он
пишет: «Мы теперь в состоянии получить все, что требуется для любой
механической системы, для которой известна гамильтонова функция И,
выраженная через q и р, быть может, зависящая также явно и от /»*).
Таким образом, задание Н полностью определяет и притом однозначно
поведение классической системы. Что же касается соотношения функции Н
для классической системы и для системы квантово-механической, то тут
имеется налицо следующее важное обстоятельство. «Одной и той же класси-
ческой функции Гамильтона может соответствовать, вообще говоря, не-
сколько функций Гамильтона в квантовой механике ; поэтому, если дается
определенная механическая система в классической механике, то, вообще
говоря, нет никакого смысла говорить о такой же самой системе в квантовой
теории. Однако существуют и исключения из этого общего правила ; и на
практике во многих случаях в квантовой механике оказывается возможным
однозначно описывать механические системы языком классической тео-
рии»**).
Мы видим здесь отражение того общего факта, что хотя микромир имеет
свои собственные специфические закономерности, представляя собой качест-
венно своеобразную форму, но его специфичность не абсолютна. Микромир
внутренне связан с макромиром. В известных пределах мы можем непосред-
ственно пользоваться для изучения явлений микромира понятиями и соот-
ношениями, полученными как обобщение макроскопического человеческого
опыта. Гейзенберг указывает, что в квантовой механике «математическая
схема в конце концов внешне похожа на классическую теорию и отличается
от последней только наличием перестановочных соотношений, при помощи
которых, впрочем, уравнения движения могут быть выведены из функции
Гамильтона»***).
Надо заметить, что в математике уравнения того же вида, что и (32),
определяют касательное преобразование. В силу этого «весь процесс
движения можно рассматривать как постепенное развертывание контактного
преобразования»****).
Функция Гамильтона Н зависит от q, и р,:
H = ^qipi-L(qi,qi>t) = 2qi^-L, (33)
где L — функция Лагранжа (в частном случае разность кинетической и
потенциальной энергии). Она введена для случая, когда Н = H(t), Гамиль-
тоном и обобщена в форме (33) М. В. Остроградским.
Таково богатое математическое содержание развитого Гамильтоном
общего метода рассмотрения проблем механики.
В 1837 г. Якоби рассмотрел общее понятие канонических переменных.
*) П. Дирак, Основы квантовой механики, Гостехиздат, 1932, стр. 112.
**) Там же.
***) В. Гейзенберг, Э. Шредингер, П. Дирак, Современная квантовая
механика, Гостехиздат, 1934, стр. 21.
****) Э. Т. Уиттекер, Аналитическая динамика, Перев. Малкина, ГОНТИ,
М,—Л., 1937, стр. 335—336.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
823
Он исследовал вопрос о том, каковы самые общие канонические подста-
новки, т. е. подстановки
pt = <Pi (qoi, pOl)> q, = Vi (q»i, Poi),
которые переводят канонические уравнения снова в канонические. Эта
проблема с групповой точки зрения была совершенно иначе разработана
Софусом Ли в так называемой теории касательных преобразований.
Якоби дал первое решение поставленной задачи, показав, что величины
qh pi всегда связаны с qoi, poi каноническим преобразованием, если можно
положить :
где Q — произвольная дифференцируемая функция qoi, qt. Эти формулы
имеют тот же вид, что и формулы для гамильтоновых функций V и S. Оче-
видно, что именно формулы Гамильтона привели Якоби к его исследованиям.
Этот метод можно обобщить на все подобного рода канонические преобра-
зования. Оказалось, что предпочтительнее не определять qt, pt явно, а уста-
новить те дифференциальные уравнения, которым они должны удовлет-
ворять. Следуя Пуассону, Шеринг и Ли в 1873 г. ввели символические
скобки. Определим
[Ц У] = 2 (4^- ; (35)
1 4 i X. upoi oqoi dqoi орщ) 1 v '
тогда условия того, что функции qb pt определяют каноническую систему
.преобразований, будут иметь вид:
(36)
[?,. <Ь1=0, ' |0 при i*j.
Отсюда легко получается теорема Лиувилля о том, что функциональный
определитель канонического преобразования равен +1 или —1.
Как же Гамильтон определяет место своего принципа и связанного с
ним метода в системе физических наук? Ведь он недвусмысленно отказался
признать космологическое значение принципа наименьшего действия.
В самом деле, Гамильтон пишет:
«Хотя закон наименьшего действия стал, таким образом, в ряд высочай-
ших теорем физики, все же его притязания на космологическую необходи-
мость, на основе экономии во Вселенной, в настоящее время обычно отвер-
гаются. Среди других причин это вытекает и из того, что величина, которая
претендует на то, чтобы быть сэкономленной, в действительности часто
расточительно расходуется»*).
Гамильтон видит в нем средство «преобразовать в широком смысле слова
всю динамику»**) и считает, что сфера его применения значительно шире,
чем только оптика и динамика. Эта широкая программа им самим осущест-
вляется только частично, его задача — набросать основной план, развитие
которого — дело будущего. Речь идет о новом построении физики, как он
сам говорит в одном письме :
«Что касается заглавия — „О новом методе в динамике”, — признаюсь,
что при точном истолковании оно означает : исключение оптики из моей
*) W. R. Hamilton, On a general Method of Expressing the Paths of Light and of
the Planets by the Coefficients of a Characteristic Function, Math. Pap., т. 1, стр. 317.
**) У. P. Гамильтон, Письмо к дяде Джемсу от 12 марта 1834г. Цит.
по G. Graves.
824
Л. С. ПОЛАК
исследовательской работы и включение гидростатики со многими другими
отделами физической науки, лишь отдаленно связанными с астрономией.
Но таково было мое намерение, ибо я надеюсь и стремлюсь преобразовать
в широком смысле слова всю динамику при помощи теории характеристи-
ческой функции или закона центрального отношения ; однако в настоящее
время я, конечно, не претендую на большее, как только набросать точный
план, по которому можно будет выполнить эту великую задачу. С другой
стороны, я сейчас не предлагаю Королевскому обществу такой обширной
работы, какой она была бы по необходимости, в которой динамика и оптика
рассматривались бы заведомо как естественные следствия из одного общего
принципа. Пока я удовлетворился тем, что предложил одну дисциплину
Ирландии, а другую — Англии, не теряя, вместе с каждой, надежды на их
будущий союз, осуществленный практически. Несколько заключительных
фраз из моего вступления к „Динамике”, написанных до прибытия вашего
письма, но еще не отосланных и пока sub judice, могут служить объяснением
к только что сказанному и материалом для вашей будущей критики. В настоя-
щее время было бы безрассудно пытаться приступить к такой обширной
теме, обнимающей в действительности наиболее важные физические явления,
хотя в этом случае метод настоящей работы мог бы распространиться на
вопросы, касающиеся вращений, вибраций и толчков твердых и жидких тел,
и на другие важные исследования и предназначался бы для употребления
в будущем ; здесь метод будет применен лишь к проблеме орбит и пертур-
баций планет, и то лишь настолько, чтобы сделать принцип само собой
понятным. Уместно отметить, что этот динамический принцип является
только другой формой идеи, уже примененной мною к оптике в «Теории
систем лучей», и что намерение применить ее к движениям систем тел было
объявлено при публикации этой теории. Алгебраический метод, который,
таким образом, служил примером в «Оптике» и «Динамике», кажется, не
ограничивается двумя этими дисциплинами и допускает более широкую
сферу применения. Заключающееся в методе особое соединение законов
вариации с законами частных дифференциалов может образовать в будущем,
когда он разовьется трудами математиков, отдельную ветвь анализа»*).
Оценивая значение своей работы об общем методе динамики, Гамильтон
прежде всего подчеркивает, что благодаря найденной им новой математи-
ческой форме «динамика и оптика будут рассмотрены как следствия общего
принципа»**). Для него основной целью является установление единой схемы,
в которой из некоторого основного соотношения выводились бы все законы
механики и оптики.
Итак, Гамильтон придает своему методу основное значение. Он считает,
что этот метод должен охватить всю физику. Это универсальное значение
разработанного им метода основывается на его математической форме.
Единство и простота, симметрия, достигаемая таким путем, — вот главней-
шие и определяющие преимущества нового метода, по мнению Гамильтона.
Гамильтон придает своей работе специфически математический характер..
Не только в самих статьях, опубликованных в «Philosophical Transactions»,
он избегает каких-либо философских вопросов, но и в письме к де Мор-
гану оценивает свою работу как лежащую в области математической
разработки задач динамики. Несмотря на резко выраженные интересы к
общим вопросам теории познания, Гамильтон пишет свои статьи макси-
мально формально***).
*) У. Р. Гамильтон, Письмо к дяде Джемсу от 12 марта 1834 г. Цит. по G. Graves.
**) Там же.
***) «Unmetaphysisch», как он выражается в письме к Уэвеллю.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
825
Он сам характеризует свои исследования так:
«Мои собственные исследования по динамике лежат в совершенно ином
направлении, они приводят меня к системе строгих и общих выражений
для интегралов дифференциальных уравнений движения системы материаль-
ных точек»*).
Исследования Якоби и Остроградского в области вариационных принципов
механики
Так были заложены основы аналитической механики Гамильтона, став-
шие в дальнейшем основой динамики Гамильтона—Якоби. Именно замеча-
тельный немецкий математик Якоби блестяще развил, уточнил и значи-
тельно обогатил идеи Гамильтона в области интегрирования дифферен-
циальных уравнений движения.
Однако физическая сторона проблемы у Якоби обеднена, так как в его
изложении утрачиваются всякие следы связи оптики с механикой, всякие
следы оптико-механической аналогии. Уже у Якоби оптико-механическая
аналогия подвергается забвению, которое продлилось до следующего возрож-
дения проблемы корпускулярно-волнового синтеза в XX в.
Зато Якоби не только развил теорию интегрирования дифференциаль-
ных уравнений динамики, но и нашел такую форму выражения для прин-
ципа наименьшего действия, в которой его глубокая связь с геометрией
обобщенного пространства делается особенно прозрачной.
' Согласно Гамильтону функция
V= V(qit qoi, (37}
из которой с помощью
ЭУ _ дУ __
'dqt Р‘ ’ QqOi ~ Ро‘
можно получить импульсы, в силу соотношения
Н(qt, Pi) = T-U = h
дважды, как функция от qoi и qit удовлетворяет некоторому дифференциаль-
ному уравнению в частных производных
<ма>
/ Эу л
+ h =0. (38b)
Якоби показал, исходя из этого, что если найдено какое-нибудь общее реше-
ние (38), т. е. решение с п — 1 произвольными постоянными, то этого доста-
точно для того, чтобы с помощью такого полного решения можно было полу-
чить траекторию проблемы в проинтегрированной форме.
Действительно, если имеется такое решение
V= V(qif cr, ..., c„_x), (39)
то достаточно написать :
ЭУ Эу ЭУ
Pi dqt ’ Эс,1 ’ • • • ’ 0с„_! — а’г~1 (40)
*) У. Р. Гамильтон, Письмо к де Моргану от 18 февраля 1842 г. Циг.
по G. Graves.
«26
Л. С. ПОЛАК
Число постоянных с и а, т. е. 2п — 2, является как раз тем числом произ-
вольных постоянных, которое необходимо для определения всех траекторий
в пространстве, число измерений которого снижено благодаря соотношению
Н + h = 0 до 2п — 1.
Эта связь между дифференциальными уравнениями динамики и диффе-
ренциальными уравнениями в частных производных относится к общей
теории дифференциальных уравнений в частных производных первого
порядка, где она и была открыта Коши в 1819 г. задолго до Якоби. После
того как Якоби самостоятельно подметил и изучил эту связь, он получил
общую теорию интегрирования дифференциальных уравнений динамики.
Метод состоит в том, что вместо непосредственного исследования основных
уравнений динамики ищут достаточно общее решение гамильтоновых урав-
нений в частных производных, из которого интегрирование первых полу-
чается, так сказать, само сабой.
Общий вид и обоснование этой теории и дал Якоби. В функции S или V,
исследованные Гамильтоном, входят константы — начальные координаты
(а в S также и энергия). Якоби показал, что это ограничение необязательно
и что вместо (38а) или (38b) необходимо только одно уравнение, а именно:
"(«'<) = £ <41>
или
"(«-О + тг =“• <42>
Якоби указывает, что случай, когда одновременно имеют место закон
живых сил и принцип наименьшего действия, очень важен : «Гамильтон
заметил, что в этом случае задача может быть сведена к нелинейному диффе-
ренциальному уравнению в частных производных первого порядка. Если
•найдено одно его полное решение, то получаются все интегральные урав-
нения. Функцию, определенную этим дифференциальным уравнением,
Гамильтон называет характеристической.
Прекрасное соотношение, найденное Гамильтоном, было несколько недо-
ступно и туманно вследствие того, что он свою характеристическую функцию
заставил зависеть еще от второго дифференциального уравнения в частных
производных. Присоединение этого условия усложняет ненужным образом
все открытие, так как более точное исследование показывает, что второе
дифференциальное уравнение в частных производных совершенно излишне»*).
Для уравнения (42) Якоби доказал, что можно рассматривать любой
полный интеграл этого уравнения, т. е. интеграл, содержащий столько
произвольных постоянных, сколько имеется независимых переменных.
Можно показать, обозначив через ar (г = 1, 2, . . ., п) п постоянных инте-
грирования, что система движется таким путем, что производные V по аг
с течением времени не изменяются, т. е.
QV _ д
Эаг
где рг — новые произвольные постоянные. Это выражение иногда называют
теоремой Якоби ; оно содержит 2п постоянных аг и 0Г. Импульсы в любой
точке траектории могут быть вычислены из формул
ЭУ
dqr ~ Рг • • •
*) К. Якоби, Лекции по динамике, ОНТИ, Л.—М., 1936, стр. 6.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
827
..Аналогично для (41), где аг(г = 1,2,...,?? — 1), получим уравнение
03 д
которое содержит (2п — 1) произвольных постоянных ап (}r, Е. Импульсы
находятся из
Якоби рассматривал только ту форму функций действия, которая осно-
вана на функции V, и ограничился прямоугольными координатами. Якоби
критиковал Гамильтона за то, что тот не пришел прямо к общей форме
теории :
«Я поэтому не знаю, почему Гамильтон для того, чтобы быть в состоянии
указать общие интегралы выше приведенных дифференциальных уравнений,
требует введения функции V от бл + 1 переменных, а именно Зп величин
Л, У/, Зп величин а,-, с, и величины t, которая удовлетворяет одновре-
менно двум уравнениям в частных производных первого порядка :
QV , 1 „ 17 9И2 , Г 9И2 1 Г9^121 ы
Э/ + 2 т‘ Ц Эх? J (. ‘dyi J + I dzi J J и ’
(43)
w , 1 „ 17 9И2 , ( 9И2 , f 9И21 гг
“эг + т т' [ЫН + btd + Ыг) 1 ~ и° ’,
в то время как мы показали, что совершенно достаточно знать некоторую
функцию Зп + 1 величин t, х„ yit z„ которая удовлетворяет одному урав-
нению
и содержит, кроме постоянной, прибавляемой к V, также Зп других произ-
вольных постоянных»*).
После того как дифференциальные уравнения движения написаны на
основании вариационного принципа Гамильтона, возникает вопрос об их
фактической интеграции. Для этой цели Гамильтоном и Якоби системати-
чески развита специальная теория. Эта теория имела особое значение для
небесной механики и для классической теории атома Бора—Зоммерфельда.
Построение этой теории заключает в себе три последовательных этапа.
Прежде всего необходимо найти возможно более простую форму дифферен-
циальных уравнений движения. Эта форма была найдена в канонических
уравнениях Гамильтона. Затем надо установить общие законы таких преоб-
разований этих дифференциальных уравнений, при которых они сохраняли
бы свою форму. Такими законами оказались канонические преобразования
и теория важнейших их инвариантов. Наконец, надо развить собственно
теорию интегрирования систем канонических уравнений. Решение этой
задачи привело к установлению и интегрированию уравнения в частных
производных Гамильтона—Якоби.
Первое систематическое изложение этих вопросов дал К. Якоби в своих
замечательных «Лекциях по динамике».
Установить единое правило для строгого решения дифференциального
уравнения Гамильтона—Якоби невозможно. Однако во многих случаях
можно найти решение благодаря теореме о том, что S представляет сумму
функций, каждая из которых в отдельности зависит от координаты q (и, кроме
:) С. G. J. Jacobi, Gesam. Werke, Bd. 4, стр. 173.
828
Л. С. ПОЛАК
того, от постоянных интегрирования af):
S = Sx (q±) + ... + Sj (qf).
Тогда уравнение в частных производных
.....= <45>
распадается на / обыкновенных дифференциальных уравнений
с f 95 1
или, разрешая их,
-q^- — Рк (Чк, ак)
В этом случае говорят, что уравнение (45) решается разделением пере-
менных.
В той форме, которую придал Якоби принципу наименьшего действия,
связь его с законом живых сил видна еще более резко, чем у Лагранжа..
В оценке принципа в той.форме, в которой время исключено, а именно
6 J (U + ft) v mt ds* = 0, (4б>
Якоби также во многом очень близок Лагранжу. Он говорит, что «трудно'
найти метафизическую причину для принципа наименьшего действия, когда
он, как это необходимо, выражен в этой истинной форме (46)»*).
Значение принципа наименьшего действия, по мнению Якоби, состоит,
«во-первых, в той форме, которую он придает дифференциальным уравне-
ниям движения, во-вторых, в том, что он дает функцию, которая обращается
в минимум, когда удовлетворяются эти дифференциальные уравнения. Хотя
такой минимум существует во всех задачах, но, как правило, неизвестно,
где его искать. Поэтому в то время, как самое интересное в этом принципе то,
что вообще можно получить минимум, раньше придавали преувеличенное
значение тому, что такой минимум существует»**).
Якоби указывает далее, что принципу наименьшего действия должно
быть поставлено еще одно важное ограничение. Оно состоит в том, что мини-
мум имеет место не между двумя любыми положениями системы, но только
в тех случаях, когда конечное и начальное положения достаточно близки
друг другу.
Что же касается механического значения принципа наименьшего дей-
ствия, то оно, по мнению Якоби, состоит в том, что в нем заключаются основ-
ные уравнения динамики в том случае, когда имеет место принцип живой
силы.
Переходя к принципу Гамильтона, Якоби отмечает, что из него можно
получить уравнения движения более простым способом, чем из принципа
наименьшего действия. Кроме того, этот принцип более общий, чем принцип
наименьшего действия, поскольку входящая в него силовая функция может
содержать в явном виде также и время f. В формулировке же, данной
Якоби принципу наименьшего действия, время исключено с помощью
*) К. Якоби, см. стр. 297, 298 настоящей книги.
**) Там же.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
829
закона живых сил, предполагающего, что силовая функция не содер-
жит явно времени.
В 1834 г. Якоби введено понятие о последнем множителе.
Пусть дана система дифференциальных уравнений
dx, _ dx2 _ __ dxn _ dx , .„ч
— ~Х^ ~ ~ ~х ' '4 '
Предположим, что известны п — 1 интегралов этой системы и пусть эти
интегралы будут
fr(xlt х2, ... , хп, х) = аг (г = 1, 2, ... , п — 1).
При помощи этих интегралов выразим хх, х2, ..., x„_t как функции от
,хп и х. Тогда останется еще проинтегрировать лишь одно уравнение первого
порядка :
• dxn _ dx
Х„ ~~~Х ’
где величины xv х2, ..., хп^1 выражены через хп и х.
Интеграл этого уравнения будет J (X' dxn — Х'п dx) = const, где
М — одно из решений уравнений в частных производных
ТКГ <*“> + < +••+ <м*") + -V (*«) = 0
.ad — якобиан
_ ® (/12_ /2 ’ ’ • ’ > /
Э (Xj, Х2 , . . . , Хп-1)
"Функция М называется последним множителем.
С середины XIX в. начинается интенсивная разработка всего сложного
круга механических, математических и физических идей, связанных с вариа-
ционными принципами механики, с теорией Гамильтона—Якоби, с учением
о преобразованиях.
Подробное рассмотрение всех относящихся сюда работ представляет,
собственно говоря, уже задачу истории вариационного исчисления или
истории'аналитической динамики в целом. Мы же рассмотрим лишь f е из них,
которые в той или иной степени существенно обогатили, развили и углубили
понимание вариационных принципов механики, прежде всего с математи-
ческой точки зрения. Первое место по праву принадлежит здесь замечатель-
ному русскому математику М. В. Остроградскому.
Применяя принцип, сформулированный им в 1834—-1835 гг., Гамильтон
исходил из допущения, что система может быть и несвободна, но кинетическая
энергия является однородной функцией второго порядка от обобщенных
скоростей. Таким образом, он неявно предполагал стационарность связей.
М. В. Остроградский получил тот же принцип в 1848 г., не налагая этих
ограничений, а рассмотрев связанную с ним вариационную проблему в более
общем виде*). Поэтому рассматриваемый принцип получил название принципа
Г амильтона—Остроградского.
Остроградский читал свой«Мёто1ге sur les equations differentielles relatives
aux problemes des isoperimetres» («Мемуар о дифференциальных уравнениях
проблемы изопериметров») 29 ноября 1848 г. на заседании Российской Академии
*)М. Ostrogradsky, Sur les int6grales des 6quations generales de la dynamique,
Mem. de 1’Acad. de Sci. des St-Plq, t. 8, № 3, 1850, 33—43.
830
Л. С. ПОЛАК
наук и опубликовал его в 1850 г. Вот кратко основная идея Остроградского..
Пусть V — функция независимой переменной t, а также переменных xmf.
которые предполагаются функциями t, и производных этих функций по L.
Предположим, кроме того, что V включает производные каждой из функций
хт до л-го порядка включительно. Если 6 J Vdt — 0, то по известным прави-
лам вариационного исчисления получим т дифференциальных уравнений,,
каждое из которых будет порядка 2л. Остроградский показал, что эти диф-
ференциальные уравнения эквивалентны некоторой группе 2тп дифферен-
циальных уравнений в частных производных первого порядка. Это и есть
содержание первой части работы Остроградского*). Далее Остроградский
подробно рассматривает вопрос об интегрировании уравнений, которые
получаются таким образом, и рассматривает их свойства. Иначе говоря, он.
впервые показал, что канонические уравнения можно рассматривать как
нормальную форму, в которую может быть с помощью одних лишь диффе-
ренцирований и исключений преобразована любая группа уравнений,.,
возникающая из вариационной проблемы**).
В формулах Остроградского, как и в формулах динамики, дифферен-
циалы неизвестных выражаются через вариации некоторой функции, которая'
зависит только от времени и неизвестных рассматриваемой проблемы-
Общая теория, развитая Остроградским, позволяет ему утверждать, что-
его основная формула «содержит как частный случай динамический прин-
цип наименьшего действия», который поэтому «нельзя рассматривать не
только как принцип, но даже как простую теорему. Он кажется нам только
простым следствием, очевидным результатом применения метода вариаций,
к теории maxima и minima»***).
Остроградский указывает, что анализ Лагранжа в той части его ана-
литической механики, где он выводит уравнение движения из принципа
наименьшего действия вместе с законом живых сил, неточен. Остроградский
считает, что в силу применения закона живых сил между некторыми пере-
менными, которые Лагранж полагает независимыми, существует зависимость-
Излагая в несколько измененном виде вывод принципа наименьшего
действия Лагранжем, Остроградский отмечает то чрезвычайно существен-
ное обстоятельство, что вариации бх изменяются по двум причинам: вслед-
ствие варьирования времени t и вследствие изменения формы функции х.
Первая иричина может ввести в бх только член х dt, вторая же -горазда
более сложна и может ввести в каждую из бх несколько членов. Вводя их,
мы учитываем не зависящую от времени вариацию параметров, входящих
в функцию х. Такими параметрами являются, в частности, постоянные
интегрирования, и поэтому их вариация не должна упускаться из вида.
Эту особенность он положил в основу своей формулировки вариационных
принципов в динамике.
Касательное преобразование Софуса Ли и динамика Гамильтона—Якоби
Как ясно из предшествовавшего изложения, существует внутренняя
связь между аналитической динамикой Гамильтона—Якоби и общей теорией
преобразований. Однако только Софус Ли раскрыл эту связь и придал ей
поразительно красивую и богатую многообразными следствиями форму.
Основное в динамике Гамильтона—Якоби —это вариационный принцип,
связанный с оптико-механической аналогией, теория интегрирования кано-
*) Ту же проблему позднее исследовал Клебш.
**) См. стр. 336 настоящей книги.
***)М. В. О с т р о г р а д с к и й, см. стр. ЗЗЗ настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
831
нических уравнений Гамильтона и уравнение в частных производных:
Гамильтона—Якоби в связи с касательным преобразованием. Внутренний
смысл всей этой математической схемы заключен в ее связи с принципом
Гюйгенса, в возможности представлять механическое движение не только
в виде перемещения тела (системы точек), но и в виде развертывания каса-
тельного преобразования поверхностей равного действия, в глубокой связи
траектории луча с некоторой поверхностью (волновой или «действия»),,
выражающей взаимосвязанность корпускулярного и волнового аспектов
движения в механике и физике.
Однако этот глубокий смысл раскрывается полностью лишь с груп-
повой точки зрения. Предположим, что мы имеем две группы переменных
величин и что для любых значений первой группы определены значения
второй, и наоборот. Таким образом устанавливается соответствие между
двумя группами переменных. Математическое выражение такого соот-
ветствия называется преобразованием. Если каждому значению переменных
одной группы соответствует одно и только одно распределение значений
второй группы и если обратное тоже имеет место, то такое соответствие
между двумя группами называется одно-однозначным. Если обозначить
первую группу значений через А, то преобразование, выражающее одно-
однозначное соответствие, определяет вторую группу значений пере-
менных А'.
Интересующий нас вид преобразований был развит Софусом Ли.
В замечательной работе «Die Storungstheorie und die Beriihrungtransfor-
mationen», опубликованной в 1877 г., Софус Ли рассмотрел связь касатель-
ного преобразования с задачей возмущенного движения. Глубокая мысль
Ли состоит в том, что проблема теории возмущения по самому своемусуществу
есть проблема преобразования.
Он указывает, что в теории возмущений рассматривается следующая
задача : определить общее преобразование
х^ = Хк(х1г ... , хп, Р1, ... , рп), |
Рк = . , хп, Р1....рп), j '
которое одновременно преобразует систему, имеющую форму
*к ~ дрк ’ Рк ~ дХк ’
в систему той же формы между новыми переменными. Эти преобразования
Ли назвал «касательными». Дело в том, что если две кривые на исходной
плоскости касаются одна другой, то это означает не что иное, как то, что
они имеют общий линейный элемент. Тогда и соответствующие им кривые
в новой плоскости преобразования также должны иметь общий линейный
элемент, т. е. общую точку с общим направлением в ней. Касание двух
кривых является, следовательно, инвариантным свойством этого преобразо-
вания. На это и указывает его название.
Касательное преобразование Софуса Ли, имеющее исключительное зна-
чение в общей теории преобразования, находит применение в механике как
в силу своей связи с теорией возмущений, так и из-за того, что так назы-
ваемое каноническое преобразование, столь важное в динамике, является
частным случаем касательного преобразования.
В уравнении Гамильтона переменными, которые определяют развитие
механической системы, являются обобщенные координаты q и обобщенные
импульсы р. Гамильтонова функция Н(р, q), которая входит в гамильтоновы
уравнения, обычно является функцией обеих этих переменных. Если мы
преобразуем переменные q и р в новые переменные q пр посредством какого-
832
Л. С. ПОЛАК
либо произвольного преобразования, то общая форма гамильтоновых урав-
нений изменится. Однако Якоби показал, что существует некоторое преобра-
зование, отличающееся тем свойством, что оно оставляет форму этих урав-
нений неизменной. Так как уравнения Гамильтона часто называются канони-
ческими уравнениями динамики, то указанным преобразованиям было дано
наименование канонических преобразований*). Канонические преобразования
представляют собой специальный случай касательного преобразования.
Касательное преобразование в трехмерном пространстве определяется так:
x' = f(x,y,z, рх, ру), у'=<p(x,y,z, рх, ру), z' = y(x,y,z,px, Ру).
В том случае, когда ни х', ни у' не зависят от z и только z' зависит от этой
переменной, причем z’ имеет вид z + /(х, у, рх, ру), мы имеем каноническое
преобразование.
Предположим, что мы произвели некоторое каноническое преобразование
гамильтоновых уравнений некоторой данной задачи. Уравнения сохранили
свою форму, но гамильтонова функция H(q, р) превратилась в функцию
H(q, р) новых переменных q пр. Если мы умеем интегрировать новые гамиль-
тоновы уравнения, то решение исходных уравнений будет немедленно най-
дено и задача тем самым решена. В общем случае новые уравнения могут
не иметь никаких преимуществ перед исходными в отношении интегрируе-
мости. Но Якоби показал, что если можно построить такое каноническое
преобразование, которое преобразует гамильтонову функцию H(q, р) в
Н(р), которая содержит только переменные р, то полученные уравнения
Гамильтона могут быть немедленно проинтегрированы и, следовательно,
динамическая задача решена. Таким образом, метод Якоби состоит в замене
прямого интегрирования уравнений Гамильтона отысканием соответствую-
щего канонического преобразования. Этот метод Якоби для интегрирования
уравнений Гамильтона является примером преобразования одной математи-
ческой проблемы в другую. Вместо попыток прямо интегрировать уравнения
Гамильтона, мы ищем решение совершенно другого рода уравнения. Подоб-
ная же картина имеет место для случая связи между конформными преобра-
зованиями и задачей Дирихле.
Важность скобок Пуассона определяется тем, что они инвариантны по
отношению к касательным преобразованиям, т. е. к таким преобразованиям
канонических переменных, которые оставляют уравнения движения неизмен-
ными. В силу этого уравнения движения могут быть выражены посредством
скобок Пуассона. Условия того, чтобы преобразование, преобразующее
одну систему переменных в другую, было касательным, могут быть написаны
с помощью скобок Пуассона следующим образом :
<7у) = 0, (pt, Pj) = O,
(4i, Pj) = 0 ,
(4i, Pj)=',
i, j = 1,2, ... , n,
i,j = 1,2, ... , n, i ssz j,
i,j = 1,2, ...,«, i = j
В классической механике скобки Пуассона могут считаться определением
канонических переменных, но они имеют смысл только тогда, когда q, и р,
являются функциями других переменных q* и р*, о которых уже известно,
что они канонические. Иначе дело обстоит в квантовой механике.
Если в классической теории понятие канонических переменных является
понятием механики, то в квантовой теории это скорее алгебраическое
*) Функции S и Н называются производящими функциями канонического преобра-
зования.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
833
понятие. В квантовой механике задача состоит не только в определении
уравнений движения, но и в нахождении специфических квантовых условий,
которые в некотором смысле слова заменяют действующий в классической
механике коммутативный закон умножения. Дирак пишет : «Известно, что
в некоторых предельных случаях, например, когда массы очень велики,
классическая механика удачно описывает поведение механических систем.
Если же мы не имеем дела с этими предельными случаями, то можно на-
деяться построить теорию таких же механических систем, сделав в класси-
ческих уравнениях некоторые естественные обобщения и выбрав квантовые
условия таким образом, чтобы они были естественным обобщением класси-
ческого закона, по которому все переменные коммутируют' друг с другом.
Мы увидим, что таким путем возможно построить квантовую теорию отдель-
ных механических систем, аналогичную классической механике»*). Как же
построить уравнения движения для квантовой системы по аналогии с класси-
ческой механикой? Для этого, по мысли Дирака, надо воспользоваться
скобками Пуассона. Этим классическим скобкам соответствуют некоторые
аналоги и в квантовой теории.
Дирак определяет квантовые скобки Пуассона так, чтобы и они обладали
известными свойствами классических скобок Пуассона (в первую очередь
линейностью и инвариантностью при касательном преобразовании). Тогда
нетрудно получить для любых переменных д и г] :
А = & A»7i) , А/а) >
где Л не зависит от д' и т) и является числом, и притом вещественным. Следо-
вательно, для любых двух переменных квантовые скобки Пуассона (#, т?)
определяются Так:
дт] — г/д — ih (д, г]), (50)
где Л — универсальная постоянная размерности действия (т. е. произведения
количества движения на длину). Такая размерность вытекает из того, что
в классической механике отношение д-q к скобке Пуассона (д,»?) имеет
размерность действия.
Развитие математических проблем аналитической механики
вариационных принципов в XIX в.
На основе результатов, найденных Дагранжем, Гамильтоном, Якоби,
Остроградским, Ли, возник ряд новых математических и механических
проблем.
Еще Якоби**) показал, что если первая вариация простого определенного
интеграла равна нулю, то вторая вариация интеграла может быть приве-
дена к виду, удобному для исследования.
Основываясь на этом результате, Серре***) в нескольких мемуарах, напе-
чатанных в 1871—1879 гг., решил вопрос о минимуме интеграла действия
в общем виде, доказав, что вариация второго порядка интеграла действия
для действительного движения положительна и минимум этого интеграла
имеет место при некоторых ограничениях, наложенных на пределы интегри-
рования.
*) Дирак, Основы квантовой механики. Гостехиздат, 1932, стр. 112.
**) С. О. J. Jacobi, Zur Theorie der Variationsrechnung und der Differentialgleichun-
gen, Journal von Crelle, t. 17, 1837.
***) C. S e r r e t, M£moire sur le principe de la moindre action, Мёга. Acad, de Sci, 1871.
53 Вариационные принципы механики
Продолжая исследования М. В. Остроградского, Ф. А. Слудский*) и затем
М. И. Талызин**) показали, что принцип наименьшего действия в форме
Эйлера—Лагранжа и принцип Гамильтона—Остроградского существенно
различны. Дело в том, что в принципе Гамильтона вариации координат 67,
изохронны и время не варьируется, так как каждой точке действительной
траектории ставится в соответствие точка на другой бесконечно близкой
кривой, причем обе точки проходятся в один и тот же момент времени.
В случае же принципа Эйлера—Лагранжа связи стационарны и имеет
место закон живых сил Т = U + h. При этом допущении время должно
варьироваться.
О. И. Сомов***) также подчеркивает разницу между вариациями в рас-
сматриваемых принципах. И. Д. Соколов, В. П. Ермаков, Г. К. Суслов и
Д. К. Бобылев****) исследовали, при каких условиях действие фактически
является минимальным. Д. К. Суслов обобщал принцип Гамильтона-Остро-
градского на случай неголономных связей. Д. К. Бобылев использовал при
исследовании вариации действия метод вариации произвольных постоян-
ных. Н. Е. Жуковский*****) посвятил принципу наименьшего • действия
•две статьи.
Ф. А. Слудский получил уравнение движения для системы материаль-
ных точек, рассматривая полную вариацию интеграла действия. Вычисление
условного экстремума интеграла действия Слудский сводит к вычислению
безусловного экстремума по способу неопределенных множителей Лагранжа,
причем неопределенный множитель Я определяет по способу Родригеса
с помощью уравнений, относящихся к пределам интеграла.
Вывод Слудского представляет развитие способа Родригеса и распро-
странение его на случай, когда координаты точек системы не являются
независимыми, а удовлетворяют уравнениям связей. Кроме того, Ф. А. Слуд-
ский внес в способ Родригеса ясность и определенность, четко выделив
изохронные и полные вариации координат.
Без ссылки на Родригеса и, по-видимому, независимо от него Е. И. Раус,
начиная с 1877 г., опубликовал аналогичные исследования******) о прин-
ципе наименьшего действия. Раус исходит из основного уравнения, в ко-
тором он варьирует также и t:
<3 [Фdt = [Фdt + £(tyi - 4iJ +
+ <5|>
to
где Ф есть функция q, <7, и t. Отсюда, во-первых, следует, что если Ф = Т U,
*) Ф. А. Слудский, О начале наименьшего действия, Матем. сб., т. 2, 1867.
**) М. И. Талызин, О начале наименьшего действия, Матем. сб., т. 2, 1867.
***)0. И. Сомов, Замечания, относящиеся к принципу наименьшего действия,
Матем. сб., т. 5, 1870.
****) и. Д. Соколов, О начале наименьшего действия, Матем. сб., т. 5, 1870;
В. П. Ермаков, Принцип наименьшего действия в связи с преобразованиями
дифференциальных уравнений второго порядка, Киевские университетские Известия,
1891 ;
Г. К. Суслов, К вопросу о начале наименьшего действия, Киевские универси-
тетские Известия, 1891 ;
Д. К. Бобылев, О начале Гамильтона или Остроградского и о начале наимень-
шего действия, Приложение к 61-му тому Записок Академии наук, Спб., 1889.
****») Н. Е. Жуковский, Собр. соч. т. I, 1948, стр. 51—57 и 207—209.
******) Routh, A treatise of stability of a given state of Motion, London, 1877.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
835
6/ = 0 и на пределах интегрирования 67, = 0, то 6 J (Т + U)dt = 0, т. е. имеют
силу уравнения движения, открытые Лагранжей, и наоборот; во-вторых,
когда U и уравнения связей определенно не зависимы от времени,
то Ф — 2Т и dq, = 0 на пределах интегрирования, a dt, однако, не
равно нулю, так что мы можем построить еще условие для варьирования.
В этом случае мы избираем условие, что энергия Т —17 в момент времени t
в действительном движении равна энергии в варьированном движении в
соответствующий момент времени t + dt, иными словами, мы определяем
dt из уравнения 5 (Т — U) = О, и тогда легко видеть, что принцип наимень-
шего действия равнозначен системе уравнений Лагранжа.
Здесь полезно еще раз заметить, что когда вводится условие, что энергия
при действительном движении постоянна, то имеется в виду, что-^- = О,
но не обязательно, чтобы было также dh = 0. У Гамильтона в «принципе
переменного действия» мы рассматриваем «действие» V = J 2Tdt при усло-
вии, что dh не равна нулю и
<5 V = 2 тп, Xj дх, + t dh. (52)
В принципе же наименьшего действия, наоборот, рассматривается мно-
жество движений системы между заданными начальными и конечными
положениями, причем здесь каждое движение, кроме естественного, является
вынужденным. Процесс варьирования здесь совершенно другой, и поскольку
энергия как в ходе каждого отдельного движения, так и в любом движении
постоянна, то имеем как~ = 0, так и dh = 0.
7 at 7
Замечание Рауса, что dx — х dt есть виртуальное перемещение, исполь-
зовано А. Фоссом*) и М. Рети**) для другого случая, а именно, когда урав-
нения связей не являются определенно независимыми от времени.
В самом деле, х = <рп (qit f), где q. — обобщенные координаты, и поскольку
t должно варьироваться,
dqt dt
Следовательно, дх — д dt есть виртуальное перемещение. Но и в том
случае, когда мы вместо dq, пользуемся другими вариациями qb то есть
dqt — q dt, то
W (дс1: ~ * dt
также есть виртуальное перемещение. Вообще говоря, значение какой-
либо функции у = <р(х) может изменяться при изменении независимой пере-
менной х на dx (ради краткости мы пользуемся здесь обозначением дифферен-
циального исчисления), так что дифференциал dy будет выражаться так:
dy = <р (х + dx) — <р (х).
*) A. Voss, Uber die Principe von Hamilton und Maupertuis. Nachrichten von der
Konigl. Gesellsch. der Wissensch. zu Gottingen, Math. Phys. Rlasse, Gottingen, 1900 стр.
322—327. См. также стр. 564 настоящей книги.
**) М. R ё t h у, Ober das Princip der Rleinsten Action und das Hamilton’sche Princip.
Math. Annalen, t. 48, 1897, Leipzig, стр. 514—547.
836
Л. С. ПОЛАК
Значение у может также изменяться, без изменения t, благодаря вариации
формы функции <р (от (х) до (х) = <р (х) + £<р (х), где <р (х) — любая
функция, е — бесконечно малое положительное число).
Оставляя обозначение «вариации» б лишь для изменения формы <р, полу-
чим для полного изменения у : dy + бу, так как dx = 0, то есть независимая
переменная не варьируется, но и не является неизменной и, кроме того,
с dny _ dn 8 у
dxn dxn '
Тем не менее, Лагранж варьировал также и независимые переменные.
Изложение Лагранжей вопроса о варьировании t кажется недостаточно
ясным, однако несомненно, что в принципе наименьшего действия он считает
t переменным.
Другие механики в основном приняли то понятие вариации, которое
дано Эйлером в его более поздней статье о методе Лагранжа. Это понятие
заключается в следующем. «Вариация» функции имеет место, когда заклю-
ченные в ней параметры претерпевают изменение. Якоби в книге«Voilesungen
fiber Dynamik» утверждает, например, что вариации Sqt заключают в себе
лишь изменения qb которые проистекают от изменений содержащихся в qt
произвольных постоянных. В соответствии с этим он делает вывод, что неза-
висимые переменные не варьируются, так что St — 0.
Вопрос о смысле вариаций в принципах Гамильтона и наименьшего
действия рассмотрел в 1896 г. Гёльдер*).
Для того, чтобы составить отчетливое представление о смысле вариации,
необходимо каждое положение точки при варьированном движении отнести
и какому-либо положению точки в первоначальном движении. Без устано-
вления такого соответствия нельзя написать
д§ Tdt = §S(Tdf). (53)
Установить такое соответствие можно произвольно, так как оно лишено
физического смысла: вариация движения есть только математическое
вспомогательное построение. Вариация времени будет разностью между
моментами прохождения через соответствующие положения.
Для того чтобы выполнить вариацию движения, сообщим сначала каж-
дой точке первоначальной траектории некоторое смещение, так что возни-
кает новая траектория с точками, соответственными исходной траектории ;
затем определим скорость каждой точки новой траектории, причем она
может быть произвольной, но возможно мало отличающейся от скорости
в соответствующей точке исходной траектории.
Эту скорость можно определить двумя способами: 1) соответствующие
точки обеих траекторий проходятся одновременно, 2) полная энергия для
соответствующих точек траекторий одна и та же.
Так как полная энергия есть Т — U, а первоначальное движение задано,
то для каждого положения варьированного движения сначала известна
лишь потенциальная энергия, и затем в силу Е = Т — U из условия варьи-
рования получается значение кинетической энергии, а следовательно, и
скорости.
Легко видеть, что при втором способе варьирования время варьируется,
а при первом — нет.
Вывод интегрального принципа для общего случая варьирования при-
водит Гёльдера при допущении, что вариация движения выполнена так,
*) О. Holder, Uber die Principien von Hamilton und Maupertuis. Nachricht. von der
KQnigl. Gesellsch. der Naturwissensch. zu GOttingen, Math. Phys. Klasse, 1896, GOttingen.
См. также стр. 538 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
837
что 6х„ бу,-, бг,- есть виртуальные перемещения системы, к выражению
§ {2Т ddt + (dT + d'U) dt} = 0, (53')
где d'U = 2/ (X бх, + Y бу,- + Z dzt) — работа, которую совершили бы
действующие силы на одном из этих воображаемых перемещений.
Воспользуемся теперь двумя введенными способами вариации. При
изохронной вариации dt — 0 и из формулы (53') получим :
f (6Т + d'U) dt = 0, (54)
т. е. принцип Гамильтона. При изоэнергетической — ЬТ = d'U и из (53)
$d(Tdt) = d$Tdt = O, (55)
т. е. принцип наименьшего действия.
Если существует силовая функция U, то
1,2,3,
v uXiv
причем, если даже dU содержит время, то все-таки в том случае, когда время
не варьируется,
d'U = dU, (56)
и для принципа Гамильтона получим обычное выражение
d$'(T + U)dt = O. (57)
ft
В случае же вариации, требуемой принципом наименьшего действия,
должна существовать не зависящая от времени функция U, чтобы удовле-
творялось соотношение (55).
Отсюда получается сразу более узкая форма принципа наименьшего
действия для того случая, когда существует не зависящая от времени силовая
функция и время не входит в уравнение связей ; при этом вариации поло-
жений должны быть виртуальными перемещениями, а начальное и конечное
положения должны оставаться неварьированными.
Лагранж в «Аналитической Механике» рассматривает именно эту узкую
форму принципа наименьшего действия. Однако указание на более широкую
форму принципа содержится в его ранней работе*), где в № 13 прямо указы-
вается на то, что полученное Лагранжем в № 8 этой статьи соотношение,
тождественное с уравнением (55), применимо в случае произвольных сил.
Большинство ученых, разрабатывавших этот вопрос после Лагранжа, взяли
у него как раз узкую форму принципа (в том числе Гамильтон и Якоби).
Лишь Гельмгольц**) рассмотрел расширенную форму принципа. Однако
Гельмгольц не счел нужным проводить отчетливое различие между прин-
ципом наименьшего действия в расширенной форме и принципом Гамиль-
тона. Он основывался при этом на том безусловно верном положении, что
оба эти принципа эквивалентны уравнению Д’Аламбера и в силу этого
являются следствиями один другого. Тем не менее, это не дает права отож-
дествлять их, так как варьирование, применяемое в каждом из этих прин-
ципов, производится совершенно различным способом. Оба эти принципа
*) J. Lagrange, Application de la mdthode ехрозёе dans le m£moire ргёсёбеЩ a
la solution de diffёrents probl£mes de dynamique, Miscellanea Taurinensia, t. 2, 1760—1761 ;
Oeuvres de Lagrange, т. 1, 1867, стр. 367 и сл. См. также стр. 117 настоящей книги.
**) Н. Helmholtz, Zur Oeschichte des Princips der Kleinsten Wirkung, Wissensch.
Abhandl., t. 3, 1895, Leipzig, стр. 249.
JI. V. IIUJIAK
получаются из соотношения (53) при различных специализациях общего
способа варьирования.
Рассмотрим важный вопрос о варьировании несколько подробнее. Вариа-
ции положения должны быть виртуальными перемещениями. Если бы мы
потребовали, чтобы варьированное движение удовлетворяло тем же уравне-
ниям связей, что и действительное, то в случае уравнений связей вида
сок (xi, , z,, 0 = О
Для варьированного движения получили бы :
а>к (х, 4- йх,, t + <50 = О
й, следовательно,
да>к — 0,
но согласно принципу Д’Аламбера уравнения, определяющие виртуальные
перемещения, имеют вид
Это уравнение согласуется с &<ок = 0 только в том случае, когда или = О,
т. е. в уравнения связей не входит время,, или dt — 0, т. е. когда должен
применяться принцип Гамильтона. При применении же принципа наимень-
шего действия оказывается существенным, входит время в уравнения связей
йли нет. Действительное и варьированное движение в этом случае сущест-
венно различны.
Пусть материальная точка, на которую не действуют никакие силы,
связана в своем движении уравнением
<Р (х, у, z)dx + y (х, у, z)dy + x (х, y,z)dz = O, (58)
т. е. в любом положении точка должна двигаться вдоль заданного элемента
поверхности.
В некоторых случаях уравнение (58) может быть проинтегрировано
в виде со (х, у, z) = const; тогда существует такая функция £2 (х, у, z), при
умножении на которую левая сторона (58) делается полным дифференциалом.
Функция £2 должна для этого удовлетворять условиям
8(Qy) _ 8(0у) а (Оу) _ 8(QZ) a (Ox) = a (Qy)
ду дх ’ dz ' ду ’ Эх dz ’ ' '
или, обозначив частные производные по х, у, z соответственными индексами,
получим:
®(<Ру ~ Ч>3 = QxV ~ ®уЧ> >
Q (% - Ху) = X - V,
Q (Хх — <f>l)=®z<P—®xX-
Умножив эти уравнения соответственно на %, у, у и сложив, получим выра-
жение
X (<Ру — Ух) + <Р (Vz — Ху) + У> (Хх — <Рг) = 0 , (60)
которое и является условием интегрируемости, а следовательно, и голоном-
ности системы, состоящей из точки, на которую наложена связь (58).
Для нахождения дифференциальных уравнений движения свободной
точки воспользуемся принципом наименьшего действия в узкой форме.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
839
В этом случае получим, очевидно,
<3 J ds = О
или
(dx 6 dx + dy д dy + dz d dz)
ds
d j ds = J 5 ds
(61)
Проинтегрировав (61) по частям и используя равенство вариаций коор-
динат нулю на концах траектории, найдем :
4(^+4^+^*)*-°- ,в2)
Так как вариации представляют собой виртуальные перемещения, то они
определяются уравнением
<р <5х + у> ду + X & = 0.
Умножив левую сторону этого уравнения на Я ds и прибавив его к выра-
жению под знаком интеграла, получим :
J {(^ - -$)дх + (^ -4Й йУ + ^х--^]&} ds = °’
откуда
или
сРх . d2y . d2z .
Ю? — № — Ay,
d2x d2y d2z
TSF ' ds-~' yds2' — (P'-'V -X-
(63)
Как известно, эти вторые производные относятся друг к другу, как направ-
ляющие косинусы нормали траектории, лежащей в соприкасающейся
плоскости, тождественной с нормалью к элементу поверхности, соответствую-
щему точке (х, у, z). Таким образом, в каждой точке траектории соприкасаю-
щаяся плоскость перпендикулярна к элементу поверхности, соответствую-
щему этой точке. Таково геометрическое свойство действительной траек-
тории.
То же уравнение можно получить и при другом определении варьиро-
вания. Требование, чтобы вариации положений были виртуальными переме-
щениями, теперь устраняется. Вместо него выдвигается требование, чтобы
варьированная траектория подчинялась тому же уравнению
<р (х, у, z)dx + tp (х, у, z)dy + х (*, У> z) dz = 0, (58)
которому подчинена подлежащая варьированию траектория. Здесь
имеет место совсем другая задача вариационного исчисления, из которой,
вообще говоря, не возникают действительные траектории материальной
точки. Вариации в этом случае должны удовлетворять уравнению
dq> dx 4- ду) dy + д% dz + <р d дх + у d <5у + % d dz = 0 . (64)
Раскрывая 6 f ds = 0 согласно (61), прибавляя левую часть уравнения (64),
умноженную' на Я, и интегрируя по частям, получим после небольших
преобразований :
= = 0 (65)
ds2 т ds V дх ду J ds г Эх dz j ds ' '
и аналогично для у и z.
840
Л. С. ПОЛАК
Эти уравнения вместе с уравнением (58) определяют так называемые
«геодезические траектории».
Герц*) показал, что для голономных систем геодезические траектории
совпадают с наиболее прямыми, т. е.1 с действительными траекториями.
Геометризация аналитической механики Гамильтона—Якоби
Проблема геометризации основных соотношений динамики, вытекавшая
из глубокого внутреннего родства теории поверхностей и проблемы отыска-
ния динамических траекторий для различных механических систем, вызвала
многочисленные исследования.
Теория относительности отнюдь не является первой теорией, геометр и-
зующей динамику. Теория относительности в этом смысле была лишь первой
теорией, проводившей геометризацию в пространстве-времени.
Уже в классической механике, придав принципу наименьшего действия
подходящую форму, геометризовали общую задачу динамики.
Исходя из работ Якоби, Томсона и Тэта, Лиувилля и Липшица, Дарбу**)
развил геометризацию проблем .динамики, рассматривая среди всех возмож-
ных движений с силовой функцией U такие, которым отвечает одно и то же
значение постоянной h закона сохранения энергии, или, что то же самое,
одна и та же полная энергия.
Если взять в качестве основной формы
2 Т dt2 = aik dqt dqk
и ввести импульсы
Pi = atjQj>
то
2T — aikpiPk.
Тогда уравнение в частных производных Якоби запишется так :
aik 1Г~1Г =2(U + h).
bqt dqk \ i /
Пусть в — полный интеграл этого уравнения и пусть Ov 02, ..., Оп-1 —
частные интегралы линейного в F уравнения
ikde_dF_ =
Согласно Липшицу имеем:
2 (U + h) aik dq, dqk ^dQ^ + f^, dOn^),
откуда для действительного движения, при котором
= dO2 = ... = dO^ = 0,
имеем:
d^2(U + h) = 0.
Таким образом, с помощью этого выражения принципа наименьшего
действия определение траектории тела сводится к отысканию геодезической
линии, т. е. к чисто геометрической задаче о нахождении экстремума
интеграла (46).
*) Н. Hertz, Die Principien der Mechanik in neuem Zusammenhange dargestellt,
Gesammelte Werke, t. 3, 1910, § 190. См. также стр. 515 настоящей книги.
**) G. D а г b о u x, Lemons sur la th£orie g£n£rale des surfaces et les applications g£o-
metriques du calcul infinit&imal, t. 2, ч. VI—VIII, стр. 480—511, 1899, Paris.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
841
Форма, которую придал Якоби принципу наименьшего действия, выра-
жает собою тот факт, что траектория консервативной, склерономной, голо-
номной системы является геодезической линией в многообразии конфигура-
ций с линейным элементом действия. Уравнения движения будут иметь,
следовательно, вид
Как нами выше уже было отмечено, во второй половине XIX в. в первую
очередь в работах Софуса Ли выявилась органическая связь механики в
форме Гамильтона—Якоби с теорией преобразований.
Лиувилль показал, что при любом движении, определяемом канонической
системой, протяженность или объем в фазовом пространстве (р, q) являются
инвариантными. В 1891 г. Ф. Клейном была проанализирована связь лучевой
оптики и динамики в л-мерных пространствах.
Канонические уравнения оказывались, по существу говоря, математи-
ческим выражением принципа Гюйгенса, рассматриваемого в его перво-
начальном геометрическом виде. Механическое движение с этой точки
зрения рассматривается как непрерывное саморазвертывание касательного
преобразования. Глубокая аналогия между идеями гамильтоновой меха-
ники, не зависящей от выбора системы координат, и геометрией многомер-
ных пространств привела к геометризации механики. Было выяснено, что
разыскание движения голономных систем со связями, независимыми от
времени под действием сил, имеющих потенциал, может быть сведено к
задаче геодезических линий. Механика Герца, основанная на его прин-
ципе прямейшего пути, была геометризована в л-мерном пространстве;
однако она, несмотря на последовательность построения, оказалась ма-
лоплодотворной в силу сложной замены сил связями со скрытыми, вообще
говоря, системами.
Внутренний синтез аналитических аспектов динамики и геометризации
в л-мерных пространствах, отражая глубокое родство выражения коли-
чественных связей материального мира в анализе и геометрии, привел к
такой «геометризации механики», которая в какой-то степени подготовила
аналогичные, но гораздо более фундаментальные идеи теории относитель-
ности. Геометризация принципа наименьшего действия в форме Якоби
б J /2 (U + h) 2 ds] = 0, определяющего траектории с одной и той же
полной энергией, была осуществлена в работах Лиувилля (1856 г.), Лип-
шица (1871 г.), Томсона и Тэта (1879 г.), Леви-Чивита (1896 г.) и Дарбу,
посвятившего этой проблеме две части своих «Лекций об общей теории
поверхностей».
Первые идеи о связи динамики системы с движением точки в л-мерном
пространстве были довольно неотчетливо изложены Риманом в 1854 г.
В 1869 г. Бельтрами и в 1872 г. Липшиц использовали геометрические методы.
В 1917 г. Леви-Чивита применил понятие параллелизма к механике. Идея
многомерного риманова пространства постепенно все глубже внедрялась
в механику. В конце XIX в. Дарбу и Герц рассматривали динамическую
систему как точку, движущуюся в л-мерном пространстве. В 1894 г. Пенлеве
изучал механические проблемы с помощью многомерных пространств,
используя главным образом евклидову метрику. Наконец, тензорные методы
в динамике ведут свое начало от работ Риччи и Леви-Чивита 1900 г. Даль-
нейшее развитие этих идей принадлежит Райту (1908 г.), Гораку (1924 г.),
Синджу (1926 г.), Вранцеану (1926 г.), Скаутену (1929 г.) и другим.
Поведение динамической системы оказалось таким, какое естественно
приписать точке в «-мерном пространстве. Движение системы представляется
842
Л. С. ПОЛАК
тем самым не как движение совокупности так или иначе связанных частиц
в трехмерном евклидовом пространстве, а как движение одной-единственной
точки «-мерного риманова пространства. Динамическая траектория естест-
венного движения между двумя заданными конфигурациями при заданном
значении энергии будет некоторой кривой метрического многообразия, для
которого установлено мероопределение вида
ds2 = 2 ankdqndqk.
Таким образом, фундаментальный синтез геометрического и аналити-
ческого аспектов, представление движения в «-мерных неевклидовых про-
странствах, обобщенная концепция корпускулярно-волнового движения
являются основными тенденциями развития классической динамики системы
XIX в. и начала XX в. Именно это позволило использовать классическую
динамику для углубления познания действительных закономерностей мате-
риального мира.
Развитие и обобщение вариационных принципов механики в XIX— XX вв.
Развитие вариационных принципов механики во второй половине XIX в.
и начале XX в. произошло прежде всего путем обобщения их на различные
виды механических систем и выяснения характера варьированных движе-
ний (см. выше), а затем путем распространения их на механику сплошных
сред и путем разработки смежных вопросов аналитической механики.
Упомянем прежде всего о вариационном принципе Кастилиано—начале наи-
меньшей работы деформации*).
Особое преимущество принципа Гамильтона обнаруживается в меха-
нике сплошных сред, так как этот принцип позволяет получить не только
дифференциальные уравнения задачи, но также и краевые условия, которым
должны удовлетворять решения этих дифференциальных уравнений в част-
ных производных.
В качестве примера приведем вывод из принципа Гамильтона уравнений
Эйлера для движения несжимаемой жидкости. Подвергнем массу жидкости
виртуальному смещению ds, которое, однако, не нарушает условия несжи-
маемости <р — —- = 0, где A v — первоначальный, а Av' — изменен-
ный объем элемента жидкости. Так как <р = divs, то должно быть :
д<р — div ds = 0.
Это условие будет выполнено, если в подынтегральное выражение в
принципе Гамильтона добавить величину dtp, умноженную на множитель
Лагранжа Я.
Тогда
+ M+ Я<ЭД = 0, (бб)
о
где все величины относятся к единице объема, а интегрирование по dr
распространяется на весь объем жидкости.
Далее,
дТ — р (г, dv) , дА = (F, ds) .
*) См., например, Л. С. Л е й б е н з о н, Вариационные методы решения задач тео-
ири упругости, М.—Л., 1943; Я. А. Пратусевич, Вариационные методы в строи-
тельной механике, Гостехиздат, М.—Л., 1948.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
843
Введя действительную скорость v = , получим для ее виртуальной ва-
риации
Преобразуем член с дТ:
J p(v, dv)dt = J р -~ds)dt = [ (— p-^, 5s] d/;
<0 to V to 7
так как Я 695 = Я div 5s, то для члена Л д<р напишем следующее выражение:
Л div 5s = div (Я ds) — grad (Я, 5s) .
По теореме Гаусса—Остроградского получим :
j' Я (div 5s) dr = J Я 5s do — J (grad Я, 5s) dr.
Используя приведенные преобразования, имеем :
[ dt J dr f—p + F — grad (Я, 5.s)j + J dt f do • Я dsn = 0. (67)
fo ^0
Из первого интеграла, так как 5s благодаря введению множителя Я
может быть выбрано произвольно, получим :
Р - J + §rad 2 = F •
Это и является уравнением Эйлера, если Я отождествляется с давлением р.
Таким образом, с точки зрения аналитической механики гидродинамическое
давление р представляет реакцию, связанную с условием несжимаемости,
которому должен удовлетворять выбор Я. Интеграл по поверхности, который
также обращается в нуль согласно принципу Гамильтона, дает граничные
условия, требующиеся для полного определения давления.
Для полной характеристики комплекса вопросов, связанных с вариа-
ционными принципами, необходимо отметить, что, кроме уравнений Ла-
гранжа второго рода и канонических уравнений Гамильтона, была найдена
еще одна группа уравнений, занимающая промежуточное положение между
уравнениями Лагранжа и Гамильтона. Существенно новое, особенно для
приложений в физике, внес в этот вопрос аналитической механики Раус.
В 70-х годах XIX в. Раус*) вывел уравнения движения, занимающие
промежуточное положение между уравнениями Гамильтона и уравнениями
Лагранжа. Для получения уравнений Рауса разобьем все степени свободы
системы на две группы; одну, состоящую из (/ — г) степеней свободы,
будем описывать обобщенными координатами Лагранжа qlt q2, ..., qf-r,
, qf_r, вторую же группу будем характеризовать гамильтоновыми
обобщенными координатами и импульсами qf-r+1, ..., qf, Pf-r+i, , Pf-
Вместо функции Лагранжа L или функции Гамильтона Н вводим теперь
функцию Рауса 7?, причем
R = /?(/,?!, ... , qf; ft , ... , qf-r; pf-r+1, ... , pf).
*) R о u t h, A treatise of a stability of a given state of motion, 1877, London.
844
Л. С. ПОЛАК
Определяем 7? следующим образом :
f
R= 2 РкЯк-...,qf), (A>
k=f—r+l
ИЛИ
f-r
R = H{t,q1, ...,qf;pi, pf)- yplcqlc. (B>
fc=i
При r = f функция Рауса переходит в функцию Гамильтона, а при г — 0 —
с точностью до знака переходит в функцию Лагранжа. Написав два выра-
жения для полного дифференциала R из (А) и (В) и воспользовавшись
известным выражением для dL, после небольших преобразований найдем
уравнения Рауса :
для к = 1,2,...,/ — г
Рх=-^’ <68>
для к = f — r + 1, / — г 4- 2,..., /
P*=--W’ *< = + <• <б9>
Первая группа уравнений относится к типу уравнений Лагранжа (при
R — — L), а г — уравнений второй группы относятся к типу уравнений
Гамильтона (при Н — R).
Раус выводил эти уравнения для приложений к циклическим системам.
Для этого надо принять, что координаты второй группы степеней свободы
являются циклическими и, следовательно, не входят в функцию Лагранжа,
а также согласно первому уравнению из второй группы рк оказываются
постоянными. Подставляя зти постоянные рк в (В), получим функцию Рауса,
зависящую только от / — г координат первой группы qk и от qk. Для этих
координат справедлива первая группа уравнений Рауса, в силу чего задача
сводится к / — г уравнений типа Лагранжа.
Гельмгольц положил этот вид уравнения Рауса в основу своей теории
моно- и полициклических систем, связанной с основными проблемами термо-
динамики.
В 80-х годах XIX в. Пуанкаре ввел понятие об интегральных инвариан-
тах. Пусть дана система обыкновенных дифференциальных уравнений
= (70)
где Xi —- заданные функции х„ t. Эти уравнения можно рассматривать как
уравнения движения точки в пространстве n-измерений. Многообразие такого
рода точек, занимающих в начальный момент некоторую m-мерную область
Ао, будет и для всякого последующего момента занимать некоторую т-мер-
ную область А. Распространенный на область А m-кратный интеграл назы-
вается интегральным инвариантом, если он сохраняет одинаковые значения
для всякого момента времени. Так, например, при движении несжимаемой
жидкости интеграл для объема жидкости, распространенный на все ее
частицы, заполняющие в начальный момент определенную область, будет
интегральным инвариантом, ибо состоящий из этих частиц объем жидкости
не изменяется со временем.
Теория интегральных инвариантов создана А. Пуанкаре и изложена
им в труде «Methodes nouvelles de la m£canique celeste», t. III. Пуанкаре
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
845
показал, что общие уравнения динамики обладают тем свойством, что они
допускают линейный интегральный инвариант
(71)
или, что естественно получается из теории Гамильтона,
^SPtdqt-HbT. (72)
Выражению под знаком интеграла можно дать название тензора «коли-
чество движения — энергия». Элементарное действие Гамильтона есть не
что иное, как тензор, рассматриваемый вдоль траектории.
Дифференциальные уравнения движения не только допускают интеграль-
ный инвариант (71), но и являются единственными дифференциальными
уравнениями, обладающими этим свойством. Поэтому в основу механики
можно положить следующий принцип — «принцип сохранения количества
движения и энергии»: «Движения материальной системы (с вполне голоном-
ными связями), находящейся под действием сил, имеющих силовую функ-
цию, управляются дифференциальными уравнениями первого порядка, связы-
вающими время, параметры положения и параметры скоростей и эти диффе-
ренциальные уравнения характеризуются тем свойством, что интеграл тензора
„количество движения —энергия”, распространенный на любую непрерыв-
ную, линейную, замкнутую последовательность состояний системы, не
меняет значения при перемещении этих состояний каким-либо способом
вдоль соответственных траекторий»*).
Эта формулировка, хотя и весьма абстрактна, но имеет и некоторые преи-
мущества. Дело в том, что уравнения Лагранжа не зависят от координатной
системы, в чем и заключается их значение, но время в этих уравнениях еще
играет особую роль. Напротив, принцип сохранения количества движения
и энергии позволяет дать законам динамики форму, не зависящую от выбора
координат пространства-времени. Действительно, если одновременно заме-
нить переменные, относящиеся к параметрам положения системы и ко вре-
мени, то достаточно иметь выражение тензора «количество движения —
энергия» в новой системе координат, чтобы получить уравнения движения.
Эта схема охватывает, естественно, и релятивистскую механику.
Рассмотрим непрерывную, линейную, замкнутую последовательность
траекторий, каждая из которых ограничена промежутками времени
Л == t± —10. Полная вариация действия, когда мы вернемся к начальной
траектории, будет равна нулю, так что, интегрируя по произвольному
параметру а (х; = f( (а, /)), получим :
J(Sx'Sx’— Edt\ = J(2’rtiiXi SXi — E8t)0.
Для понимания дальнейшего введем пространство состояний—про-
странство семи измерений (х, у, z, х, у, z, f). Траекторию можно определить
как последовательность состояний, соответствующих одному и тому же
реальному движению точки, т. е. как решение системы дифференциальных
уравнений
В силу этого криволинейный интеграл
J 2’ х, <>хг — Edt,
') Э. К a p т а н, Интегральные инварианты, Гостехиздат, М.—Л., 1940, стр. 9.
846
Л. С. ПОЛАК
взятый вдоль некоторой замкнутой кривой пространства состояний, не изме-
няется, если переместить каким-либо способом каждое из составляющих
его состояний вдоль траектории, соответствующей этому состоянию.
Подынтегральное выражение можно рассматривать как элементарную
работу четырехмерного вектора, имеющего в качестве пространственных
компонентов три компонента импульса, а в качестве компонента по времени —
энергию.
Если теперь взять последовательность одновременных состояний, т. е.
положить dt = 0, то получим
J 2 х, дх,,
для которого имеет место следующая теорема: если рассматривать замкну-
тую последовательность траекторий и если взять на этих траекториях
состояния, соответствующие какому-либо определенному моменту t> то
интеграл J У трс, дх,, взятый по замкнутой последовательности полученных
таким образом состояний, не зависит от t. Это и есть определение интеграль-
ного инварианта согласно А. Пуанкаре.
Картан отмечает следующее важное обстоятельство: «Замечательно, что
если вместо последовательности одновременных состояний мы будем рас-
сматривать последовательность состояний, удовлетворяющих соотношениям
дх, — х,: dt, то тензор Z т.х,дх,—Е dT приводится к элементарному
действию Гамильтона
V = [у т х2 + U j dt.
Следовательно, «интегральный инвариант Пуанкаре и действие Гамиль-
тона представляют собой лишь два различных вида интеграла „количество
движения — энергия”, хотя с первого взгляда между этими двумя поня-
тиями и нет никакой связи»*).
Доказав, что дифференциальные уравнения движения являются единст-
венными, которые допускают в качестве инварианта интеграл J Vdr, взятый
по любому замкнутому контуру, можно перейти к построению других инте-
гральных инвариантов. Из них очень важное значение имеет интегральный
инвариант
J'J’vWft-
Он означает, что если дано двумерное многообразие траекторий и на каждой
траектории состояние, соответствующее определенному моменту времени t,
то двойной интеграл, распространенный по всем этим состояниям, не зави-
сит от t.
Существуют ли и другие инварианты при канонических преобразова-
ниях? Пуанкаре указал на ряд интегральных инвариантов. Можно пока-
зать, что интеграл
J = HSdpidqi
распространенный на любые двухмерные части 2/-мерного пространства
(р, q), является таким инвариантом.
Пусть р, и q, — функции двух параметров и и v, тогда
dpi dq.
Эи Эи
Эр/ dq.
du dv.
(73)
i dv dv
*) Цит. книга, стр. 16—17.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
847
Инвариантность будет доказана, если показать, что
2
i
dpi dqt
ди ди
dpi dqt
dpt dqj
dv dv
du du
dpi dqi
dv dv
(74)
при условии, что qb р, получаются из q и р с помощью канонических преобра-
зований. Напишем преобразование в форме
п __ W (Qi > Pi > • > t) _ dV (.41 • Pi >: t)
Pi----------l)q. , Qi~ dpt > W
где V — некоторая функция, зависящая от 2/ старых и новых переменных,
а также от времени ; V называется производящей функцией канонического
преобразования.
Заменяя с помощью преобразований (75) qb р, через qb ph имеем :
dpt dqt У Э2У дрк dqi dpk dqi
V du dpt du dqt = 2 к У dqi dpk Э2У ди дрк ди dqt — dqt dpk du dpk du dq.
dv dv к dqt дрк dv dv 'dv dv
Переставляя индексы, получим :
dpt dqk_
ди ди
dpt dqk
х Э2У
dqkdpi
dv dv
Теперь, если воспользоваться вторым из уравнений (75), то подынтегральное
выражение будет:
dpi у Э2У . dqk
ди dptdqii ди
dpt у Э2У _ J>qk
dv dptдрк dv
dpi
ди
dpi
dv
dqt
du
dqi
dv
(76)
= у
чем и доказана инвариантность J1.
Вполне аналогично можно доказать инвариантность выражения
Jz = ШS2 dptdpbdqidqb,
а также
/з = И J У И 2 dpt dpk dpt dqt dqk dqt
и так далее и, наконец, последнего интеграла
= $ ... ^dp1...dpfdq1...dq/.
Таким образом, объем в фазовом пространстве остается инвариантом относи-
тельно канонических преобразований.
Пуанкаре с замечательным успехом использовал интегральные инвари-
анты в своих исследованиях по устойчивости.
В заметке, опубликованной в 1896 г. в Comptes Rendus, Кёниге также
исследовал интегральные инварианты, выражаемые (и — 1)-кратными инте-
гралами вида
j = J.... J 21 Mi dxt ... dx,-! dxi+1 ... dxn,
n-1
848
Л. С. ПОЛАК
в предположении, что коэффициенты X дифференциальных уравнений, равно
как и функции Л4„ не зависят от t.
А. Пуанкаре выяснил связь теории интегральных инвариантов с теорией
множителей системы Якоби, важность которых для интегрирования системы
->=JX(x(0), ,7=1,2, ...,п
уже отмечена нами. Эта связь состоит в том, что функция под знаком инте-
грального инварианта порядка, равного порядку системы, является множи-
телем Якоби и обратно.
Пуанкаре не ограничился исследованием только инвариантов порядка,
равного порядку системы; он показал, что полезно ввести в рассмотрение
и более общие инварианты, определяемые интегралами, распространенными
на многообразие с каким угодно числом измерений, меньшим порядка системы
(линейные, поверхностные и другие интегралы).
Распространение принципа Гамильтона на системы с произвольными
связями выдвинуло проблему вывода уравнений движения для неголоном-
ных систем.
Впервые уравнения для неголономной системы в обобщенных коорди-
натах и не содержащие неопределенных множителей Лагранжа получил
С. А. Чаплыгин*). В его уравнения, аналогично уравнениям Лагранжа
2-го рода, входит некоторая квадратичная функция от обобщенных ско-
ростей, имеющая вид дифференциального выражения первого порядка.
Развитие идей Чаплыгина было проведено П. Воронцом**).
Другое направление механики неголономных систем связано с работами
П. Аппеля***), который в 1899 г. получил уравнения, действительные как
для голономных, так и неголономных связей. Однако, в отличие от уравнений
Чаплыгина — Воронца, для составления уравнений Аппеля требуется
предварительное нахождение некоторой квадратичной функции обобщенных
ускорений (а не обобщенных скоростей) — дифференциального выражения
второго порядка.
Итак, основные этапы развития аналитической динамики таковы: пер-
вым шагом явилось установление лагранжевой формы уравнений движения,
затем лагранжев метод вариации произвольных постоянных и аналогичная
теория Пуассона и связанные с нею проблемы интегрирования; затем
Гамильтон представил интегральные уравнения посредством единственной
характеристической функции, определяемой a posteriori посредством ин-
тегральных уравнений, предполагаемых известными, или из того усло-
вия, что она должна одновременно удовлетворять двум дифференциаль-
ным уравнениям в частных производных; Гамильтон же нашел новую
форму уравнений движения; Якоби свел интегрирование дифференциаль-
ных уравнений динамики к нахождению полного интеграла единственного
дифференциального уравнения в частных производных; он же развил
теорию последнего множителя системы дифференциальных уравнений дви-
жения; Остроградский рассмотрел проблему интегрирования уравнений
динамики; Раус нашел новую форму дифференциальных уравнений дви-
жений; Пуанкаре развил теорию интегральных инвариантов; наконец,
*) С. А. Чаплыгин, О движении тяжелого тела вращения на горизонтальной
плоскости, Труды отд. физич. наук Общества любителей естествознания, т. 9, в. 1, 1897,
стр. 10—16; Поли. собр. соч., т. 1, 1933, стр. 159—171.
**) П. В о р о н е ц, Об уравнениях движения неголономных систем, Матем., т. 22, вып.
4, 1902, стр. 43.
***) Р. Appel, Sur les Mouvements de roulement; 6quations du mouvement analogues
a celles de Lagrange, Comptes Rendus, 129, 1899, стр. 317—320.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
849
Чаплыгин, Аппель и др. обобщйли уравнения динамики голономных систем
на системы неголономные. Одновременно с этим процессом развития соб-
ственно аналитической динамики и в, первую очередь, ее математических
методов, шел и процесс выяснения ее внутреннего геометрического смысла —
процесс синтеза геометрического и аналитического аспектов.
Принципы Гаусса и Герца
Особое место среди вариационных принципов механики занимает принцип
наименьшего принуждения, сформулированный Гауссом*) в 1829 г., уста-
новление которого непосредственно связано с его работами о способе наимень-
ших квадратов. Особенностью принципа Гаусса является то, что задача
определения движения сводится к отысканию минимума конечного выра-
жения
Х(вгсгу,
г
где ВГСГ — отрезок, соединяющий точку Вг, в которой оказалась бы частица
при свободном движении через время dt, с точкой Сг, соответствующей ее
положению при наложенных связях. Это геометрическое выражение прин-
ципа Гаусса может быть приведено к выражению через силы в виде тре-
/ v \2
бования минимума для mr —— I , где выражение в скобках есть, в
известном смысле, мера действия внешних условий на r-ю координату, так
как оно дает отклонение от свободного движения, вызванное принуждением.
Если ввести потерянные силы в смысле Д’Аламбера и обратные массы, то
окажется, что в выражении принципа они играют такую же роль, как
погрешности и статистические веса в теории ошибок.
В принципе Гаусса, в отличие от рассмотренных ранее вариационных
принципов, варьируются лишь ускорения хг.
Глубокое развитие идеи Гаусса дал в 1892—-1893 гг. Герц**), разрабо-
тавший принцип прямейшего пути; ценность принципа Герца состоит
в том, что он сводит задачи механики к проблеме геодезических линий
и тем самым геометризует классическую динамику. Принцип Герца
был бы просто частным случаем принципа Гаусса, если бы он не
заменил сил, действующих на систему, связями ее с другими системами,
находящимися с ней во взаимодействии. Этим самым Герц как бы
изучал только свободные системы, вводя кроме наблюдаемых еще и
«скрытые массы» и «скрытые движения». Исторические корни меха-
ники Герца содержатся в работах Гельмгольца о «скрытых движениях»
(введение которых у Герца оказывается логически необходимым следст-
вием его концепции основ механики) и в работе Кирхгофа по выясне-
нию основ механики. В своей формулировке: «каждое естественное дви-
жение самостоятельной материальной системы состоит в том, что система
движется с постоянной скоростью по одному из своих прямейших путей»,
Герц объединяет, по существу говоря, закон инерции и принцип наимень-
шего принуждения. Герц отмечает глубокую связь своего принципа с теорией
поверхностей и многочисленные аналогии, которые возникают при его рас-
смотрении. Принцип Герца находится в тесной связи с геометрической опти-
кой и теоремой Бельтрами—Липшица, так как между прямейшими путями
и нормальными к ним поверхностями в процессе движения имеет место то
*) Гаусс, Об одном новом общем принципе механики, см. стр. 170 настоящей книги.
** ) Г. Герц, см. стр. 515 настоящей книги.
54 Вариационные принципы механики
850
Л. С. ПОЛАК
же соотношение, что и между лучами и вдлновыми поверхностями. Герц
полностью исключил всякие телеологические умозаключения из своего прин-
ципа, так как в нем не содержится никакого выражения определения настоя-
щего через будущее. Сам Герц показал, что принцип прямейшего пути непос-
редственно связан с принципом наименьшего действия в форме Якоби и с
принципом Гамильтона.
II. РОЛЬ ВАРИАЦИОННЫХ ПРИНЦИПОВ МЕХАНИКИ В КЛАССИЧЕСКОЙ
И НОВОЙ ФИЗИКЕ
Роль вариационных принципов механики
в развитии классической физики
В связи с развитием термодинамики и молекулярно-кинетической теории
тепловых явлений в середине XIX в. перед сторонниками механистического
мировоззрения возникла задача свести этот новый круг проблем к механике.
В первую очередь речь шла о втором начале термодинамики, которое, с харак-
терной для него и глубоко чуждой классической механике идеей необрати-
мости, вносило новый элемент в физическую картину мира. Первые попытки
вывести второе начало термодинамики из механических принципов были
сделаны Больцманом*), Клаузиусом**) и Чили***) в 60—70-х годах XIX в.
Чили ошибочно полагал, что он вывел второе начало прямо из принципа
Гамильтона, в то время как Больцман и Клаузиус видели, что для решения
этой задачи надо внести в принцип Гамильтона существенное изменение,
которое расширит сам принцип, придав ему, однако, по существу, различный
смысл внутри механики и вне ее.
Введя представление о времени прохождения точкой замкнутого цикла
i и о фазе движения, а также о средних значениях координат и скоростей,
Клаузиус с помощью закона сохранения энергии находит выражение, ана-
логичное по форме принципу наименьшего действия, с той только разницей,
что интегрирование производится от нуля до i. Таким образом, здесь пред-
положен замкнутый характер действительного и варьированного движений,
не совпадающих ни в одной точке, в то время как в обычном принципе наи-
меньшего действия начальные и конечные точки являются общими.
Для кинетической энергии, которую получила система, Клаузиус далее
находит :
Екии = Т д % m с In Т,, (77)
где Т — абсолютная температура, введенная из предположения, что
= mcT, а с — некоторая определенная для каждой точки постоянная.
Обозначив А6ЕКИИ = &Q, где А — тепловой эквивалент работы, и
А 2 2тс In Т, через S, напишем 6Q = Т <58, где S есть та самая величина,
которую Клаузиус назвал энтропией; заменив 6 на d и проинтегрировав зто
уравнение для кругового процесса, получим ф = 0 . Следовательно, при
*) L. Boltzmann, Uber die mechanischen Bedeutung des zweiten Hauptsatzes der
Warmetheorie, Sitzungsberich. Wien. Acad. t. LIII, 1866, стр. 195.
**) R. Clausius, Uber die Zurilckfilhrung des zweiten Hauptsatzes der mechani-
schen Warmetheorie auf allgemeine mechanische Principien, Pogg. Ann, 142, 1871, стр. 435.
***) C. S z i 1 y, Das Hamilton’sche Princip und der zweite Hauptsatz der mechanischen
Warmetheorie, Pogg. Ann., 145, 1872, стр. 295.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
851
введенных допущениях о движении и характере варьирования «второе
начало механической теории теплоты сводится к общим механическим
принципам»*).
Анализ работ Чили (1872—1873 гг.), который считал, что вывел второе
начало из принципа Гамильтона без всяких дополнительных допущений,
и даже вывел второе начало из первого, показывает, что результаты
Чилч ошибочны; Чили не принял во внимание ни характера варьиро-
вания, ни того, что, когда U претерпевают изменения, независимые от
изменения координат, принцип Гамильтона неприменим, ни того, что при
неупорядоченном движении точек нельзя вводить общее время i для всех
точек.
Далее, в 1873 г. Клаузиус**), введя канонические переменные и используя
вместо принципа Гамильтона принцип наименьшего действия, который
менее удобен для целей обобщения механики на тепловые явления, получил
выражение, аналогичное второму началу. Однако и в этом случае говорить
о прямом выводе второго начала из принципов механики нельзя. Получен-
ные выражения оказались эвристически бесполезными и физически отнюдь
не поддаются сколько-нибудь простому и наглядному истолкованию. По
существу, идея физики, выводимой из одного (и только одного) единообразно
понимаемого принципа, не была реализована, а подменена идеей объе-
динения различных областей физики (в данном случае механики и теории
теплоты) с помощью одного соотношения, но рассматриваемого с разных,
внутренне неувязанных точек зрения. Это означало, что феноменологи-
ческая увязка теории теплоты и механики не обогатила физическую кар-
тину мира.
В 1866 г. Больцман поставил вопрос о «механическом значении второго
начала теории теплоты». Для того чтобы ответить на него, он рассматривал
средние значения силовой функции и живой силы системы, в которой дви-
жения являются периодическими, и вариации этих средних значений, когда
изменяются внешние воздействия на систему. В такой постановке задача,
естественно, приводится к принципу Гамильтона. Обобщая принцип Гамиль-
тона, найдем:
2d J Tdt = j (d/z + dV)dt + 2’ p,-dd , (78)
1 |г"+дго
где V — потенциальная энергия, с которой связаны силы, приложенные
к системе для того, чтобы сохранить связи постоянными, а р,
QL ~
. Этим
dq.
уравнением воспользовались в 1871—1872 гг. Чили и Клаузиус; в 1897 г.
Больцман вывел его в самом общем виде: теплота, сообщенная системе
при некотором переходе, равна сумме приращения внутренней неупорядо-
ченной энергии и упорядоченной работы, произведенной системой. Если
этот переход совершается непрерывно и постепенно от момента t0 до момента
то для него выводится формула Больцмана в общем виде :
о о
AQ = - ’ [ dQ dt = 2 d [ T dt
to
(79)
*) R. Clausius, Uber die Zuriickfiihrung des zweiten Hauptsatzes der mechanischen
Wdrmetheorie auf allgemeine mechanische Principien. Pogg. Ann., 142, 1871, стр. 461.
**) R. Clausius, Uber einen neuen mechanischen Satz in Bezug auf stationare Bewe-
gungen, Pogg. Ann., 150, 1873, стр. 106.
54*
852
Л. С. ПОЛАК
В случае периодического движения последний член исчезает, j Tdt = Тт,
__ т
где Т — среднее значение кинетической энергии, т — период, и получаем
AQ — б f Tdt = у 2d (Тт). Если процесс адиабатический, то JQ = O
и Тт = const, т. е. Тт — адиабатический инвариант. Этот же метод можно
применить к изучению условно-периодических систем, которые можно рас-
сматривать как наложение совокупности периодических систем с различ-
ными несоизмеримыми периодами.
Такими процессами можно апроксимировать тепловые движения, иссле-
дуя их с помощью обобщенного принципа Гамильтона. Найденные аналоги
не принесли сколько-нибудь нового и перспективного понимания тепловых
явлений, в то время как статистическая механика вскрыла глубокий смысл
необратимости в учении о вероятности состояния системы и о флукту-
ациях, представление о которых чуждо классической механике. Однако
рассмотренное направление дало ряд результатов, которые обогатили
физическую науку: обобщение принципа Гамильтона, теорию цикли-
ческих систем, понятие об обобщенных вариациях и об условно-периоди-
ческих движениях. Они нашли немаловажное применение в различных
областях физики.
Трудности, возникшие перед физикой, стремившейся свести все много-
образие физических явлений к механическому движению, послужили одной
из причин назревавшего в конце XIX в. кризиса в физике, выразившегося,
в частности, в появлении направлений, проповедовавших отказ от объясне-
ния явлений и переход к чистому описанию. В физике конца» XIX в. эту
идею провозгласил так называемый энергетизм. Энергетики пытались по-
строить всю физику на основе понятия энергии (исключив вещество с его
сложной атомистической структурой), опираясь на закон сохранения
энергии и принцип Гамильтона. Больцман подверг критике допущенные
энергетиками научные ошибки, а Ленин — их философскую концепцию.
Крах «энергетики» показал, что построить физику чисто феноменологически
нельзя. Тот факт, что и энергетики, и их противники пользовались принципом
Гамильтона, показывает, что один и тот же математический аппарат может
служить для оформления различных физических картин. Физическая кар-
тина мира может строиться при помощи принципа Гамильтона, но не мо-
жет быть из него выводима (если не знать заранее, что требуется получить).
В XIX в. идеал Лапласа еще казался осуществимым. Согласно
Гельмгольцу, сведение всех физических явлений к действию механических
сил является основой полного понимания природы. В 80-х годах XIX в.
Гельмгольц*) пришел к выводу, что для решения этой основной задачи
нужно использовать принцип наименьшего действия, обобщив его на тот
случай, когда лагранжиан есть функция q и q любой формы, т. е. отказаться
от характерного для механики допущения, что кинетическая энергия есть
однородная квадратичная форма скоростей, а потенциальная энергия —
функция только координат (и времени). Принцип наименьшего действия,
по мнению Гельмгольца, представляет собой эвристический принцип для
формулирования законов новых классов явлений. Для такого расширения
сферы применения принципа необходимо ввести в рассмотрение скрытые
движения некоторых недоступных нашему наблюдению масс. Клаузиус
пытался решить ту же проблему, введя гипотезу об изменении законов
природы, происходящем по определенным законам. Однако установление
*) Н. Helmholtz, Die physikalischen Bedeutung des Princips der kleinsten Wir-
kung, Wiss. Abhandl., t. 3, 1895, см. также стр. 430 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
853
такой иерархии законов создает новые трудности для науки. Гельмгольц
же строит механические модели, которые могут иметь свойства, аналогичные
тепловым процессам. Таким аналогом могут служить циклические системы,
т. е. такие, свойства которых не зависят от абсолютной величины координат,
а зависят только от скорости их изменения. Поэтому основной проблемой
является построение лагранжиана (по терминологии Гельмгольца—кинети-
ческого потенциала) для подобных систем. Центральную роль играет в этой
проблеме кинетический потенциал, в который скорости входят линейно.
В ряде статей и основной работе «О физическом значении принципа наимень-
шего действия» Гельмгольц с помощью кинетического потенциала и пред-
ставления о скрытых движениях пытался охватить единой механической
схемой термо- и электродинамику. Выведя значение преобразованного кине-
тического потенциала
L = L — У cbqb, (80)
ь
где сь — постоянные,^представляющие неизменяющиеся моменты цикли-
ческого движения, a L зависит от qa и qa, определяющих положение и ско-
рость цикла в целом, и в отличие от L вместо координат отдельных точек
qb содержит также qa и qa, через которые они теперь выражены. Таким обра-
зом, в L, кроме квадратичной функции, входят члены £ которые, после
подстановки в них решения для qb, содержат скорости qa в первой степени.
Это и есть основная особенность циклических систем. Очевидно, что L
останется неизменным при изменении направления процесса на обратное
(при перемене знаков </а), а для движения, характеризуемого кинетическим
потенциалом L, получится новый кинетический потенциал и, следовательно,
другое дифференциальное уравнение. Процесс необратим. Однако наблю-
даемых циклических движений недостаточно для объяснения необратимых
движений. Поэтому Гельмгольц допускает, что существуют скрытые цикли-
ческие движения (примером их может служить движение системы из быстро
вращающегося шара, заключенного в непроницаемую оболочку, которая
является также опорой оси вращения).
Рассматривая взаимоотношения между силами, действующими одно-
временно на систему в различных направлениях, и соответствующими им
скоростями и ускорениями, Гельмгольц*) с помощью выражения кинети-
ческого потенциала и уравнений Лагранжа выводит законы взаимности
между силами и ускорениями, силами и скоростями, силами и координа-
тами. Так, например, , где Fa, Fc — силы, действующие на
qa и qc; qa, qc — соответствующие ускорения. Если определенное приращение
qc увеличивает силу Fa, то равное приращение qa увеличит силу Fc в том
же отношении. Эти соотношения взаимности интересны тем, что они прило-
жимы и к немеханическим явлениям. Гельмгольц получает из них электро-
динамический закон Ленца, закон термоэлектрического эффекта и ряд
других.
Гельмгольц исследовал также вопрос о том, какая форма кинетического
потенциала требуется электродинамикой Максвелла.
Стремление устранить из физики понятие потенциальной энергии явля-
ется характерной особенностью кинетического направления в физике второй
половины XIX в. В 1883—1888 гг. Дж. Дж. Томсон**) использовал полу-
*) HJ Helmholtz, Vorlesungen Uber die Dynamik diskreter Massenpunkte, т. 1,
1911.
**)J. J. Thomson, Applications of Dynamics to Physics and Chemistry, London,
1886.
854
Л. С. ПОЛАК
ченные Раусом в механике результаты для того, чтобы показать, что различные
виды потенциальной энергии, наблюдаемые в природе, могут рассматри-
ваться как наблюдаемый эффект скрытых движений. Исходя из убеждения,
что итоги развития физики за предшествующие пятьдесят лет показывают
объяснимость всех физических явлений динамическими принципами, Дж.
Томсон ставит перед собой задачу с помощью принципа Гамильтона и урав-
нений Лагранжа исследовать различные физические явления без использо-
вания второго начала термодинамики. Преимущество такого подхода — в
фундаментальною бобщающем характере его; трудность —в том, что в каждом
отдельном случае требуется дальнейшее исследование для перевода физи-
ческих величин на язык механических понятий, т. е. необходим некоторый
критерий для установления того, является ли та или иная физическая
величина координатой или ее производной. Используя тот факт, что при-
менение принципа Гамильтона не требует знания природы механизма иссле-
дуемых систем, Дж. Томсон развивает кинетическую концепцию потенци-
альной энергии.
Пусть в Т некоторые координаты входят только в виде q, и нет выра-
жений вида произведений q^j, тогда для s = i
A[_9L)_2L==0
dt ' Эф-) dqt ’
а ДЛЯ S = j
dT
Исключим теперь qj. Этот важный шаг был сделан впервые Раусом. Коор-
динаты qj Дж. Томсон назвал киностеническими, У. Томсон и П. Тэт —
игнорируемыми координатами, Гельмгольц дал этим явлениям наимено-
вание скрытых движений. По исключении qj величина Т перейдет в Т и
d ( дТ} дТ д „ ,О1Ч
dt ( dqt) dqt ~ dqt (81)
где правая сторона—функция только q,. Если рассматривать правую сторону
как силовую функцию U, то можно объяснить появление силовой функции
чисто кинетическим способом и свести, таким образом, потенциальную энер-
гию к кинетической энергии «игнорируемых» масс. С точки зрения Дж.
Томсона, вся энергия — кинетическая, все члены в уравнениях Лагранжа
выражают кинетическую энергию и вопрос только в том, создается ли
эта кинетическая энергия изменением обычных или игнорируемых коорди-
нат. Глубокая идея объяснения всех явлений свойствами материи в дви-
жении ограничена у Дж. Томсона представлением о том, что это движение
является механическим, и именно к нему сводятся все другие виды наблю-
даемых изменений.
М. Планк утверждал, что объединение различных областей физики в
единое целое может быть выполнено с помощью принципа Гамильтона.
С точки зрения М. Планка*), развитой им в первой четверти XX в., общим
принципом всех обратимых процессов является принцип наименьшего
действия, который лежит в основе построения единой физической картины
мира, так как он совершенно симметрично заключает в себе четыре мировые
координаты и инвариантен при всех лоренцовых преобразованиях. Принцип
наименьшего действия возник в механике, но сфера его применимости охва-
тывает термодинамику и электродинамику. Поэтому задача объединения
*) М. Планк, см. стр. 580 настоящей книги, а также М. Планк, Отношение
новейшей физики к механическому мировоззрению, Изд. Физика, 1911.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
855
теоретической физики должна решаться с его помощью, для чего надо рас-
смотреть случаи, когда конфигурация системы определяется конечным
числом координат, а также те, в которых координаты состояния системы
представляют собой непрерывное многообразие. В первом случае принцип
Гамильтона дает :
J dt v dq, + dq, + Ф,- dq,) = 0 , (82)
to
где Ф; — слагающие внешних сил по координатам, а во втором
J dt [j dr • р v q. dq, _ [ ЦС <5xx + -£L dxy + ...) + f daj/0: = 0 ,
(83)
где d , da — соответственно элементы объема и поверхности, р — плот-
ность, / — некоторая однородная функция второй степени, представляющая
потенциальную энергию единицы объема, а хх = ... — величины дефор-
маций. Важнейшим вопросом является применение принципа Гамильтона
к термодинамическим процессам. В этом случае переменными будут р, V, Т, S
и изменение энергии (или полной работы) А = — р 8V + Т 8S, которое
надо сопоставить с общим выражением А = Фг 8qt ф- Ф2 8q2. Примем V
и S за координаты, а р и Т будут как бы слагающими сил Фх и Ф2. Так как
термодинамическое обратимое изменение состояния протекает бесконечно
медленно, то V, 8 и т. д. можно положить равными нулю и из принципа
Гамильтона получим:
ф+ 4г=0
или
’+®v=0’
а так как из Е = v q — L следует в данном случае Е = — L, где Е —
полная энергия, то написанное уравнение есть измененная запись уравне-
ния dS = dE + р .
Рассмотренный выше метод исследования термодинамических явлений
Гельмгольца имеет совершенно иной смысл. У него координата V сохра-
няется, а вместо S вводится некоторая циклическая координата е, входящая
в выражение L только в виде е ; эта производная представляет температуру,
следовательно, L = L(V, Т) и Л = — р dV + Е де, откуда на основании
принципа наименьшего действия получим:
-р+(#-] =0, Е-~(-^) =0
( dv Jt dt { дТ Jv
ИЛИ
" О),-5
(произвольная постоянная, равная нулю).
Так как Е = ё ~ - L = Т-^- - L, то L = — (Е — TS), т. е. L
de di х
противоположно по знаку свободной энергии системы. Позиция Гельмгольца
по сравнению с точкой зрения Планка имеет то принципиальное пре-
имущество, что тепловая энергия рассматривается им как движение некото-
рых масс, а слабость ее в том, что эти массы — скрытые, ненаблюдаемые.
856
Л. С. ПОЛАК
Развитие электродинамики в XIX в. поставило перед механистической
концепцией физики еще более трудную проблему, чем развитие теории
теплоты, так как здесь наряду с частицей или ансамблем частиц впервые
возникла проблема непрерывного поля.
Функция Лагранжа L = L(q, q, t) представляет собою функцию времени
и функционал от возможных траекторий qt(f) частиц системы. По аналогии
можно предположить, что функция Лагранжа для поля является функцио-
налом от амплитуды ip(r,f). Обычно ее представляют в виде интеграла от
плотности лагранжиана, взятого по всему пространству:
L = J L (у, grad ip, ip, I) dV, (84)
где появление grad ip в аргументе L обязано тому обстоятельству, что поле
имеет несчетно большое число степеней свободы и ip непрерывно зависит
от г. Так как обычно предполагается, что лагранжиан зависит от функций
поля и их производных не выше первого порядка, то соответствующие урав-
нения оказываются дифференциальными уравнениями не выше второго
порядка. Для свободных полей на лагранжиан налагается требование
линейности и однородности уравнений этих полей. К этим уравнениям при-
водят лишь лагранжианы, квадратичные по функциям поля и их производ-
ным. Эти условия в совокупности с релятивистской инвариантностью и
трансформационными свойствами функций поля определяют лагранжиан
с точностью до коэффициентов. Если исходить из вариационной задачи, то
уравнения Эйлера—Лагранжа должны быть именно уравнениями поля.
Продолжая классическую традицию английской физики У. Томсона,
Фарадея Мак-Куллоха, Максвелла, которые шли по пути построения физи-
ческих (механических) моделей на основе аналогии, Лармор*) в конце XIX в.
также ставит перед собой задачу сведения всего многообразия явлений к
динамическим принципам. Он считает центральной задачей разработку идеи
о каком-либо определенном характере связи между эфиром и веществом.
Для этой цели он воспользовался принципом наименьшего действия, кото-
рый, по его мнению, позволяет свести к динамике такие физические теории,
внутренний динамический механизм которых скрыт от непосредственного
наблюдения. Аналогичную точку зрения на проблемы электродинамики
развивал ранее Гельмгольц. Лармор находит классический вид лагранжиана
и, воспользовавшись определением величин Е и Н и тем, что полная энер-
гия системы связана с L, выводит уравнения Максвелла. Легко доказать,
идя несколько иным путем, что уравнения
div в 2? = 4 л: р, rot Н = е Е + 4 л: J
и вариационные принципы в форме Ldt эквивалентны четырем урав-
нениям Максвелла.
Подобрав лагранжиан, соответствующий заранее известному виду выра-
жения электрической и магнитной энергии, Лармор получает уравнения
Максвелла. Зададим лагранжиан в виде
р ~ еф+ е% A.*L ; (85)
где Ф, А — скалярный и векторный потенциалы, е — заряд частицы, с —
скорость света, a F = т0 с2 1 —
тогда для гамильтоновой функ-
*)J. Larmor, Aether and Matter, Cambridge, 1900.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
857
ции Н получим выражение
Н = с]12 [р, - ~)2 + т0с2 ~ т0с2 + еФ. (86)
Таким образом, канонические уравнения Гамильтона применимы к задаче
движения заряда в электромагнитном поле, но, в отличие от динамики, Н
уже не является однородной квадратичной функцией моментов, даже в
нерелятивистском приближении.
Принцип Гамильтона применим к описанию явлений в любом поле,
отличающемся от обычной задачи динамики тем, что в последней есть одна
независимая переменная t и несколько зависимых переменных qh в то время
как в случае поля qi и t являются независимыми переменными, а величины,
характеризующие поле, являются зависимыми переменными. Поле и заря-
женные тела образуют систему, подчиняющуюся гамильтоновой динамике.
В начале XX в. Г. Ми*) развил точку зрения, аналогичную позиции
Лармора. Он, как и ряд других физиков, представлял себе единую картину
мира как картину одной формы движения. В этом смысле электромагнитная
картина ничем не отличается от механической. И та, и другая не отражают
реальной структуры материального мира.
Анализ характерного для развития физики XIX в. метода построения
моделей всех немеханических явлений на основе механических аналогий
был дан в 90-х годах XIX в. Г. Герцем и А. Пуанкаре. Герц пришел к выводу,
что бесконечно много физических совершенно различных систем могут быть
моделями одной и той же системы и каждая система есть модель бесконечно
многих, совершенно различных систем. Таким образом, механистическая
картина мира не однозначна. К таким же выводам пришел А. Пуанкаре,
исходя из рассмотрения механических моделей, которые строятся с помощью
принципа Гамильтона. Таким образом, механистическое объяснение не
выполняет своей главной задачи, так как оно не позволяет сделать сколько-
нибудь однозначный вывод о сущности явлений природы. Это — необходи-
мое следствие немеханической сущности явлений природы и фактически
окончательное падение механицизма. Впрочем, как это часто бывает, истори-
чески он пережил сам себя. А. Пуанкаре делает отсюда идеалистические
выводы, которые подверг глубокой и справедливой критике В. И. Ленин.
Итак, можно сказать, что в классической теории теплоты и в класси-
ческой теории поля вариационные принципы использовались либо для
реализации попыток механического или электромагнитного объяснения
всех физических явлений, либо для феноменологического, объединения их
законов в одной математической форме.
Роль вариационных принципов механики в развитии новой физики
Для выяснения места вариационных принципов в физической картине
мира и их эвристической ценности необходимо было развитие корпуску-
лярно-полевого синтеза и глубокое проникновение в теоретическую физику
идеи фундаментального значения инвариантов групп преобразования. Это
развитие исторически осуществлялось в теории относительности, квантовой
механике (нерелятивистской и релятивистской) и квантовой теории полей.
С релятивистской точки зрения плотность, умноженная на четырех-
мерный объем пространства—времени, есть действие в смысле Гамильтона.
*) G. М i е, Grundlagen einer Theorie der Materie, Erste Mitteilung, Ann. d. Phys,, t. 37
1912.
858
Л. С. ПОЛАК
Выражение L имеет в теории относительности (в части, зависящей от Т)
вид ______
-m^^\-^dt, (87)
причем величина, стоящая под знаком интеграла, является элементом
собственного времени, который был признан Минковским простейшим
инвариантом специальной теории относительности и введен Эйнштейном
в качестве элемента мировой линии в общую теорию относительности.
Принцип Гамильтона в этой форме автоматически удовлетворяет требованию
инвариантности теории относительности (так же как и уравнения Лагранжа).
Почти одновременно с открытием Эйнштейном общей теории относитель-
ности Д. Гильберт*) в 1915 г. попытался построить теорию, в основу
которой положена аксиома, согласно которой законы физических процессов
могут быть выведены из требований : 1) для скалярной мировой функ-
ции Н ШШ1
= ? = 1,2,3,4, (88)
для каждого из четырнадцати потенциалов Эйнштейна; 2) Н есть инва-
риант относительно произвольного преобразования ту. В то время как
у Эйнштейна принцип Гамильтона играл подчиненную роль, в работе
Д. Гильберта он выдвинут на первый план. Д. Гильберт получил из этих
аксиом эйнштейновы уравнения гравитационного и электромагнитного
полей. Несколько позднее Эйнштейн**) посвятил специальную работу прин-
ципу Гамильтона, из которого он также вывел уравнения гравитационного
поля при меньшем, чем у Гильберта, количестве допущений о свойствах
вещества. Вывод Эйнштейна представляет интерес в том отношении, что он
вполне аналогичен такому же выводу уравнений классической механики и,
по существу, есть лишь реализация связи вариации некоторого интеграла
с уравнением вариационной (изопериметрической) задачи. В ходе рассужде-
ний Эйнштейн, конечно, полагает, что
ds2 = dx„ dx„
есть инвариант. Таким образом, при выводе законов явлений из принципа
Гамильтона требуются либо оправданные физическим материалом гипотезы
о поле и веществе, либо знание экспериментальных параметров и зависи-
мостей. Выводя из этого принципа релятивистские уравнения, мы выигры-
ваем скорее в математическом изяществе, чем в физическом понимании.
Это сведение математической схемы тех или иных физических процессов
к принципу Гамильтона важно, однако, в методологическом отношении,
так как позволяет утверждать, что для них имеет место единый тип каузаль-
ных связей.
В 1900 г. «действие» появилось в физике как особая, новая и в высшей
степени важная величина в виде так называемого кванта действия, введен-
ного в теорию излучения абсолютно черного тела М. Планком. Обратив
внимание на размерность (действие = энергия х время), А. Зоммерфельд***)
в 1911 г. сделал допущение, что временное протекание обмена энергии
у молекул (проявляющееся в излучении), упорядочено некоторым общим
образом : при каждом молекулярном процессе отдается или получается
определенная универсальная величина действия, а именно,
J 2 71
о
*) Д. Гильберт, см. стр. 589 настоящей книги.
**)А. Эйнштейн, см. стр. 599 настоящей книги.
♦**) А. Зоммерфельд, см. стр. 7 78 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
859
где т — продолжительность процесса. Это положение может быть в известной
мере обосновано соображениями теории относительности. Таким образом,
Зоммерфельдом была сделана первая робкая попытка связать классический
принцип Гамильтона с квантованным характером микропроцессов. В 1912 г.
А. Пуанкаре рассмотрел связь динамики в форме Гамильтона—Якоби с кван-
тованностью действия и энергии, опираясь на теорию последнего множи-
теля Якоби и статистическую механику Больцмана—Планка. Он показал,
что гипотеза квантов — единственная, которая приводит к правильному
закону распределения энергии в спектре излучения абсолютно черного тела,
но что между квантовым законом Планка и классической механикой сущест-
вует прямая антиномия. Тот факт, что единица есть последний множитель
канонических уравнений классической механики, обозначает, что последняя
с необходимостью внутренне связана с равномерным распределением энер-
гии по степеням свободы. Последний множитель для квантовой системы, в
отличие от системы классической, должен иметь существенно прерывный
характер.
Развитие теории атома Н. Бора естественно привело от рассмотрения
простейшего случая кругового движения электрона в атоме к изучению
более сложных его движений. Такое расширение теории Бора было сделано
А. Зоммерфельдом*), Уильсоном**) и др. В 1915 г. Зоммерфельд обратил
внимание на то, что идея Планка***) о возможности только таких последо-
вательных состояний, площадь между кривыми которых в фазовом простран-
стве будет равна /г, и, следовательно, об ограниченной делимости этого про-
странства (оно построено из элементов с площадью /г), находится в связи
с представлением круговых орбит Н. Бора. А. Зоммерфельд нашел, что
ipdq = nh, (89)
где слева стоит интеграл действия, известный под названием фазового инте-
грала. С помощью этого интеграла Зоммерфельд рассмотрел задачу атома
водорода, ввел радиальное и азимутальные квантовые числа и показал, что
энергия зависит от суммы квантовых чисел, а не от каждого из них в отдель-
ности. Этим же методом он воспользовался при решении задачи водородо-
подобного атома и объяснил тонкую структуру спектральных линий.
Исторический приоритет в квантовании фазового интеграла принадлежит
Уильсону, который выдвинул ту же гипотезу на несколько месяцев раньше,
допустив, что взятый по периоду -—интеграл2 f Tkdt = nkh.
Теории Зоммерфельда и Уильсона страдали тем существенным недостат-
ком, что не удавалось указать каких-либо правил для выбора координат,
к которым должны быть приложены квантовые условия. Это очевидно только
для специального случая кеплерова эллипса.
Первый шаг к решению этой проблемы был сделан Эпштейном****) в
1916 г. в работе об эффекте Штарка. Эпштейн заимствовал из астрономии
метод, много раз прилагавшийся для решения уравнения Гамильтона—
Якоби и известный под названием «разделения переменных». Этот метод
ведет прямо к определению энергетического уровня без промежуточных
вычислений орбит. Другой подход к проблеме был независимо от Эпштейна
в том же году разработан Шварцшильдом*****) на основании теории условно-
*) A. Sommerfeld, Sitzungsber. d. Bay. Akad., 1915, 425; Ann. d. Phys., t. 51,
1916, стр. 1.
**)W. Wilson, Phil. Mag., t. 29, 1915, стр. 795.
***) M. Planck, Die physikalische Structur der Phasenraums, Ann. d. Phys., t. 50,
1916, стр. 385.
****) P. S. Epstein, Ann. d. Phys., t. 51, 1916, стр. 168.
*****) к. Schwar zshild, Sitzungsber. d. Preuss. Akad., 1916, стр. 548.
86Э
Л. С. ПОЛАК
периодического движения Штауда—Штеккеля. Введя для этих движений
некоторые переменные действия Jr и угловые переменные <рг, Шварцшильд
получил в этих координатах канонические уравнения и условие кванто-
вания
$Jrd<pr = nh. (90 >
Эпштейн показал полную эквивалентность обоих методов. Во всех этих
методах использован математический прием, состоящий в применении пре-
образования Лежандра. В старой «классической» квантовой механике стре-
мились ввести такие координаты, которые делают функцию Гамильтона
зависимой только от канонически сопряженных импульсов, так как в этом
случае механическая задача легко разрешима.
П. Эренфест*) в 1916 г. теоретически обосновал квантовые условия
Зоммерфельда и др. с помощью адиабатической гипотезы. Он использовал
представление об адиабатических инвариантах систем, а Баджере позднее
показал, что фазовые интегралы действия есть адиабатические инварианты,
которые по идее Эренфеста являются квантующимися переменными.
В классической теории всегда рассматривается интеграл J 2' Pidqt, а в
квантовой теории [ Pidq,, так как в квантовой теории функция действия
расщепляется на частичные S,(^), в то время как в теории Гамильтона—
Якоби разделение переменных есть лишь способ решения уравнения.
Основной дефект теории Бора—Зоммерфельда состоял в том, что она
определяла все множество классических орбит и на последней стадии вычис-
лений отбрасывала большинство из них. Но и в решении конкретных задач
методы классической квантовой теории привели к расхождению с опытом,
как зто показал Крамере**) в 1923 г. в работе, посвященной теории атома
гелия. Он же показал, что модель Бора динамически неустойчива. Неудача
с моделью гелия лишила теорию Бора мощного орудия исследования —
методов классической механики, и вся теория обратилась в почти интуитив-
ное угадывание истинных отношений.
Параллельно и в связи с развитием, квантовой теории Бора идет разви-
тие проблемы корпускулярно-волнового синтеза природы света и вещества.
Для того чтобы увязать корпускулярную и волновую картину света и веще-
ства, классическая физика имела уже разработанный мощный аппарат оп-
тико-механической аналогии. Л. де-Бройль***) в 1924 г. руководствовался
мыслью о глубоком тождестве принципа наименьшего действия с принципом
Ферма. По мысли де-Бройля основной является задача вывести из волновой
теории такое выражение для групповой скорости, которое представляло
бы скорость луча корпускулярной теории. Де-Бройль воспользовался тео-
рией относительности для того, чтобы показать эквивалентность принципов
Ферма и наименьшего действия. Он ввел четырехмерный волновой вектор и,
установив связь между ним и таким же вектором принципа наименьшего
действия, нашел для четвертых компонент соотношение О4 = -|- . Л. де-
Бройль сделал смелую гипотезу о том, что такое же соотношение имеет
место и для других компонент:
O = (91)
Из этой гипотезы следует фундаментальный вывод: динамические воз-
можные траектории точки тождественны с возможными лучами волны.
♦) Р. Е h г е n f е s t, Ann. d. Phys., т. 51, 1916, стр. 327.
♦*) H. Kramers, Zs. f. Phys. t. 13, 1923, стр. 312.
*♦*) Л. де-Бройль, см. стр. 631 настоящей книги.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
861
Для квантового условия Бора—Зоммерфельда получается просто, что
замкнутая траектория электрона должна содержать целое число длин волн.
Принцип наименьшего действия и принцип Ферма представляют собой
два аспекта одного и того же закона. Каждая корпускула сопоставляется
с неразрывно связанным с ней волновым процессом. Оптико-механическая
аналогия приобрела новый смысл, особенно когда эксперимент подтвердил
гипотезу де-Бройля.
Следующий шаг в развитии оптико-механической аналогии сделал
Э. Шредингер*) в 1926 г. Он усмотрел в принципе Гамильтона результат
игры волн, который лежит в основе движения материальных точек. Он
использовал оптико-механическую аналогию для того, чтобы «спасти сущ-
ность механики, чье дыхание ясно чувствовалось в микрокосмосе»**).
Опираясь на механику Гамильтона—Якоби и на результаты развития
геометрической оптики в трудах Бельтрами, Липшица, Брунса, Ф. Клейна,
Дебая, Зоммерфельда и Рунге, которые с помощью уравнения эйконала
придали геометрической оптике обобщенный вид и нашли для ее соотно-
шений векторное выражение, Шредингер исходил из гамильтоновой анало-
гии. Он применил неевклидово мероопределение ds2 = 2T\qk, q^dt2 и все
последующие рассуждения вел в пространстве конфигураций. Воспользо-
вавшись построением ортогональных некоторому лучу поверхностей дей-'
ствия и уравнением Гамильтона—Якоби и показав, что эти поверхности
распространяются в пространстве в виде волнового фронта, Шредингер
пришел к выводу, что принцип Гамильтона выражает собой принцип Гюй-
генса в его до-френелевой формулировке. Отсюда, воспользовавшись соот-
ношением Я = Шредингер получает свое основное волновое уравнение,
так как в то время как оптико-механическая аналогия Гамильтона целиком
лежит в пределах макроскопической физики, Шредингер осуществляет
переход от макро- к микрофизике. Если в аналогии Гамильтона нет места
для таких понятий, как длина волны и амплитуда, то здесь они вводятся
в теорию. Переход от макромеханики к микромеханике совершается через
оптику лучей и волновую оптику. Для этого необходимо разорвать цепь
математической дедукции, написав для синусоидальной волны
sin + const] . (92)
Введение 1/Л в обобщенную оптико-механическую аналогию позволяет
получить уравнение
Ау>+8^(Е~ V)q> = 0, (93)
которое заключает в себе квантовые условия, и написать :
Н^’2^Т^г)У, = ИУ’’ <94>
т. е. обычную форму уравнения Шредингера для амплитуды. Предельный
переход от волновой механики атома к классической механике формально
аналогичен гамильтонову переходу, как это показали А. Вентцель и
Л. Бриллюен. Применение оптико-механической аналогии Шредингером—
пример аналогии по форме математических законов физических процессов.
*) Э. Шредингер, см. стр. 668 настоящей книги.
*♦) Сб. Современная квантовая механика, ГТТИ, 1934, статья Э. Шредингера
«Основная идея волновой механики», стр. 47—48.
862
Л. С. ПОЛАК
Состояние физики в XIX в. не давало еще никаких указаний на то, что
классическая механика является лишь приближением волновой механики,
представляя собою своего рода «геометрическую оптику». Потребовалось
пройти огромный путь, чтобы это стало ясно..Только опыты Дэвисона и
Джермера изменили научную обстановку.
Переходя к вопросу о роли вариационных принципов в построении кван-
товой теории полей, необходимо прежде всего указать, что эта теория на
сегодняшний день не является завершенной, т. е. дающей внутренне не-
противоречивое описание определенного круга физических явлений.
Обычный путь построения релятивистской квантовой локальной теории
поля таков:
а) В гейзенберговском представлении прежде всего из операторов поля
строится лагранжиан, удовлетворяющий различным условиям инвариант-
ности, условию локальности, условию невведения высших производных и,
в большинстве случаев, условию невведения нелинейных членов. Указан-
ными условиями и заданием геометрических свойств полей лагранжиан
определяется однозначно с точностью до масштабных коэффициентов (квази-
зарядов). Уравнения для операторов поля получаются обычным образом,
как уравнения Эйлера—Лагранжа вариационной задачи. Из лагранжиана
непосредственно выводятся операторы всех физических величин : энергии-
импульса, 4-вектора тока и т. д. В случае связанных полей лагранжиан
может быть представлен в виде суммы. Так, например, в случае связанных
электромагнитного и электронно-позитронного полей
L = 2>0(Л) Т- L0(y>) -|- L-.nt, (95)
где два первых члена справа — лагранжианы свободных полей, а послед-
ний—лагранжиан взаимодействия электромагнитного и спинорного полей,
б) Шредингеровское представление является наиболее полным анало-
гом классической гамильтоновой схемы. Это представление исторически
оказалось особенно плодотворным в нерелятивистской квантовой механике.
К шредингеровскому представлению можно просто перейти от гейзенбер-
говского представления; это показывает эквивалентность лагранжево-
гейзенберговского и гамильтоново-шредингеровского формализмов. Наиболее
существенным отличием шредингеровского представления является отчет-
ливое разделение динамического и кинематического аспектов задачи. Этим,
в частности, объясняется успех шредингеровского представления в нереля-
тивистской теории и его затруднение в релятивистском случае, где по-
добное разделение является затруднительным. Переход от гейзенбергов-
ского представления к шредингеровскому осуществляется каноническим
преобразованием с помощью гамильтониана Н (трактуемого как оператор
сдвига по времени) как производящей функции.
в) Представление взаимодействия получается (в электродинамике и ме-
зодинамике без производных) из гейзенберговского также каноническим
преобразованием с тем отличием, что за функцию преобразования берется
не весь гамильтониан, а только член Нт-, описывающий взаимодействие
полей.
Все рассмотренные формулировки квантовой теории полей, каждая
из которых имеет классический аналог, не дают внутренне непротиворечи-
вого решения проблем теории (расходимости!). Все они основаны на явной
предпосылке применимости принципа Гамильтона к данной области физи-
ческих явлений, а этот принцип и связанные с ним гамильтонов и лагранжев
формализм до настоящего времени являются наиболее универсальным вы-
ражением принципа причинности в физике.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
863
III. К ВОПРОСУ О СМЫСЛЕ И ЗНАЧЕНИИ ВАРИАЦИОННЫХ ПРИНЦИПОВ
В’МЕХАНИКЕ И ФИЗИКЕ
1. В основе применения и физического смысла вариационных принци-
пов механики лежат две теоремы : теорема независимости Гильберта и тео-
рема Эмми Нетер. Первая теорема дает математическое обоснование ва-
риационных принципов, вторая — раскрывает их физический смысл, связы-
вая их с центральной физической проблемой — проблемой инвариантов
различных групп преобразований.
Из теоремы независимости Гильберта*) не только непосредственно сле-
дуют хорошо известные условия минимума функционала, но также и все
существенные положения теории Гамильтона—Якоби.
Еще более велико значение теоремы Нетер.
В 1851 г. Сильвестр впервые ввел понятие об инвариантах алгебраи-
ческих форм. В так называемой Эрлангенской программе Ф. Клейн, сфор-
мулировал принцип, что каждое многообразие (в том числе различные
геометрии) задается системой инвариантов относительно некоторой группы
преобразований. С другой стороны, в 70-х годах XIX в. Софус Ли установил
связь между интегралами дифференциальных уравнений и инвариантами
непрерывных групп. Отсюда вытекает возможность интерпретации механики
в терминах непрерывной группы и ее инвариантов. Основываясь на объ-
единении вариационного исчисления и методов теории групп Ли, Э. Нетер
в 1918 г. дала алгоритм, позволяющий найти систему инвариантов любой
физической теории, формулируемой при помощи лагранжева или гамиль-
тонова формализма.
Теорема Нетер гласит, что всякому непрерывному преобразованию ко-
ординат, обращающему в нуль вариацию действия, при котором задан
также закон преобразования функций поля, соответствует определенный
инвариант, т. е. сохраняющаяся комбинация функций поля и их производ-
ных**). Так, инвариантности лагранжевой функции относительно смещения
начала отсчета в пространстве (однородности пространства) соответствует
закон сохранения количества движения; инвариантности лагранжевой
функции относительно смещения начала отсчета времени (однородности
времени) соответствует закон сохранения энергии ; инвариантности отно-
сительно пространственных поворотов (изотропности пространства) соот-
ветствует закон сохранения момента количества движения. Инвариант-
ность относительно преобразований Лоренца***), т. е. вращений в плоско-
стях приводит к обобщенному закону сохранения движения
центра тяжести. Таким образом, в четырехмерном пространстве времени
имеем всего десять фундаментальных законов сохранения.
Собственно говоря, физический смысл принципа Гамильтона глубже
и полнее всего выражается теоремой Нетер.
2. Появление электромагнитного поля в физике не только как модель-
ного образа Фарадея, но и как системы, законы которой могут быть
выражены с помощью уравнений типа уравнений Лагранжа и некоторыми
*) D. Hilbert, Mathematische probleme, Gesamm. Abhandl., т. 3, Берлин, 1935,
стр. 290—329 ; Zur Variationsrechnung, Math. Annalen, t. 62, 1906, стр. 351—370, см.
также Gesamm. Abhandl., т. 3, стр. 38—57. Изложение теории Гильберта см. также в
книге автора «Вариационные принципы механики» (в печ.).
**) Очень наглядный и красивый вывод теоремы Нетер дан в книге : Н. Н. Б о г fl-
любо в и Д. В. Ширков, Введение в теорию квантованных полей, Гостехиздат,
1957, стр. 20—23.
***) В релятивистской квантовой механике мы переходим от группы Лоренца к ее
представлениям, которые определяют преобразования волновых функций.
864
Л. С. ПОЛАК
обобщенными формулировками опытных данных, привело к фундаменталь-
ным изменениям в классической физике. Оказалось, во-первых, что нельзя
этот новый элемент физической картины мира свести к единому кинети-
ческому механизму, который охватывал бы тепловые, электромагнит-
ные и другие явления, хотя в ряде частных случаев это и удавалось сделать.
Во-вторых, оказалось, что хотя и можно выразить законы электромагнитного
поля в форме принципа Гамильтона, но это выражение нуждается в сущест-
венно новом и чуждом механике определении лагранжиана. Определение
его вводится уже не на основании единой модели явлений, а по аналогии,
которую можно установить между элементами, фигурирующими в описании
электромагнитных явлений и в классической механике.
На место единой физической картины мира была поставлена объединен-
ная картина, б которой отдельные части связывались вариационным прин-
ципом, но в каждой из этих частей требовалось как для их описания и
объяснения, так и для применения вариационного принципа введение хотя
и механически толкуемых, но не сводимых и не связанных между собой
понятий и представлений (например, локализация энергии в электродина-
мике и вероятность в термодинамике). Никакое прибавление слова «дина-
мика» к названию отдельных частей физики не могло, конечно, ничего изме-
нить в этом смысле.
Развитие физики есть процесс неравномерный, но в целом ускоренный.
Поэтому единая картина мира дольше задержалась на историко-научной
сцене, чем объединенная, которая быстро в течение трети столетия отошла
в прошлое, в основном под натиском бурного развития физики XX в.
. Однако этот вариант механистической физики более гибок, чем класси-
ческий, и потому он появился и в новой квантовой физике, особенно на пер-
вой стадии ее развития, и на историческом рубеже создания волновой и
квантовой механики, и при разработке релятивистской квантовой электро-
динамики.
3. Вопрос об определении места вариационных принципов механики в
системе физических знаний заключается, конечно, в первую очередь в
форме выражения этого принципа. Однако указанный вопрос не исчер-
пывается этой формой. Обычное толкование принципа наименьшего
действия состоит в том, что его широкое применение в физике основано на
удобной форме. Ряд авторов стоит на той точке зрения, что содержание
принципа Гамильтона тождественно с содержанием основных уравнений
динамики. Так, например, Кирхгоф говорит: «Принцип Гамильтона, д’алам-
беровы и лагранжевы дифференциальные уравнения поэтому совершенно рав-
нозначны»*). Такая точка зрения господствует в научной литературе XIX в.
Тем не менее, отождествление содержания принципа Гамильтона и уравне-
ний динамики представляет собой положение недостаточно обоснованное.
Методологической основой этой концепции является непонимание соотно-
шения между формой и содержанием вообще. Тот факт, что как в механике,
так и вне ее принцип Гамильтона применяется в одной и той же форме,
еще недостаточен для того, чтобы сделать вывод о том, что содержание этого
принципа в том и другом случае одно и то же. Принцип Гамильтона выра-
жает некоторое свойство неорганической природы, общее ряду форм дви-
жения, и постольку он применим к механическому движению как частному
случаю.
По сравнению с принципом Д'Аламбера принцип Гамильтона имеет то
преимущество, что в нем рассматривается один единственный скаляр L;
*)G. Kirchhoff, Vorlesungen fiber mathematische Physik, t. 2, 1876, Leipzig,
стр . 23.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ 865
таким образом, отпадает необходимость отыскивать ускорение каждой
частицы и определять виртуальную работу сил инерции.
Сопоставление принципа Гамильтона с принципом наименьшего дей-
ствия Эйлера—Лагранжа показывает, что первый допускает более широкое
обобщение. Принцип Гамильтона является наиболее общей и абстрактной
формой изложения физической сущности механики. Почти для всех разде-
лов физики можно найти вариационные принципы, которые приведут к
соответствующим «уравнениям движения»; при таком построении теории
этих отделов физики будут характеризоваться известной структурной ана-
логией, имеющей серьезную познавательную ценность.
4. Широко распространенное в литературе выражение «доказательство
принципа (начала)» безусловно является неправильным. Принципы не
доказываются, они вводятся и формулируются как обобщение широкого
класса опытных данных. То, что называется доказательством принципов,
есть вывод из принципов уравнений движения. Такой вывод показывает
лишь, что для круга опытных фактов, выражаемых уравнениями движения,
тот или иной принцип (или начало) не приводит к абсурдным результатам,
а действительно выражает некоторую совокупность экспериментальных
данных. Будет ли этот принцип охватывать и другие явления, не описывае-
мые уравнениями движения, или даже те же явления, но осложненные
наложенными дополнительно условиями, сказать на основании такого
«доказательства» нельзя. Такое «доказательство» устанавливает лишь, что
в данной области принцип и уравнения движения эквивалентны, т. е. выра-
жают одни и те же наблюдаемые явления, хотя и в различной математи-
ческой форме.
5. Принцип Гамильтона охватывает и механические и целый ряд немеха-
нических явлений. Выводя принцип Гамильтона из уравнений динамики,
мы выводим его как механический принцип. В той же математической
форме он выступает и как закон немеханических явлений. На основании
этого часто делалось такое заключение: раз принцип Гамильтона есть
механический принцип (и притом выводимый из уравнений динамики),
то из факта его применимости к немеханическим явлениям следует меха-
ническая природа этих явлений. Ошибочность этого заключения оче-
видна.
Необходимо здесь отметить, что формулировка законов механики в форме
принципа Гамильтона имеет и то значение, что он позволяет установить,
как нужно описывать немеханические системы с той же математической
строгостью, которая характерна для классической механики. Принцип
Гамильтона нельзя рассматривать как чисто механический принцип.
Здесь интересно отметить, что есть закон, который во многом аналогичен
принципу Гамильтона и который имеет очень общий характер. Этот закон
часто служит физику трамплином для перепрыгивания провалов в экспери-
ментальных данных. Он гласит, что всякая система стремится к состоянию
с минимумом потенциальной энергии. Такое состояние, вообще говоря,
будет равновесным, хотя и не обязательно. Это — важный эвристический
метод физики. Например, в теории Бора мы говорим, что электрон спонтанно
переходит из возбужденного в нормальное состояние, так как он стремится
к состоянию с минимумом энергии. Впрочем, аналогичную формулировку
можно дать и второму началу термодинамики, особенно в его вероятностной
трактовке. Важен следующий факт : если задано исходное состояние физи-
ческой системы и ее энергетический баланс, то можно указать, в общем,
направление, в котором будет происходить изменение состояния системы.
Таким образом, этот, по сути дела, вариационный принцип минимума потен-
циальной энергии лежит в основе исследования задач устойчивого равно-
866
Л. С. ПОЛАК
весия. Законы же процессов движения проще всего формулируются с по-
мощью принципа Гамильтона*).
6. Заметим, что близость принципа Гамильтона и принципа наименьшего
действия не исключает различия между ними.
Поясним на очень простом примере различие между принципом Гамиль-
тона и принципом наименьшего действия.
Пусть имеется система материальных точек, которая свободно или по
принуждению движется по какой-либо неизменной поверхности и на которую
явно не действуют никакие силы. Тогда U постоянно и для варьированного
движения имеет то же постоянное значение. Так как Т + U должно быть
постоянно и неизменно для варьированного и неварьированного движений,
то Т, а также и v должны для обоих движений быть одинаковыми и постоян-
ными.
Следовательно,
J mv2dt = mv J ds
^0
должен иметь экстремум. Так как m и v — константы, то должно быть
8§ds — 0,
так что длина f ds пути от неизменного начального положения к неизменному
конечному положению должна быть для действительного движения экстре-
мальной без того, чтобы время, требуемое для варьированного и неварьиро-
ванного движений, было одним, и тем же.
Если же применить к этому случаю принцип Гамильтона, то окажется,
что для варьированного движения скорость от точки к точке несколько
различна, однако изменяется так, чтобы полное время перехода от фикси-
рованного начального положения к фиксированному конечному положе-
нию не изменялось (т. е. не варьировалось). Следовательно, в этом случае
должно быть согласно принципу Гамильтона (так как V, —10 и m — кон-
станты)
d j’va<ft = O.
Этот пример ясно показывает, в чем именно состоит различие между двумя
принципами : Гамильтона и наименьшего действия.
7. Надо далее указать на тесную связь принципа Гамильтона с принци-
пом инерции, лежащим в основе классической механики Галилея—Ньютона.
Если мы обратим внимание на первую аксиому механики Ньютона
(v = const для изолированного от внешних воздействий тела), то легко
убедиться в ее не только внешней, но и внутренней связи с принципом
наименьшего действия. Во-первых, для случая отсутствия внешних сил
требование экстремума для интеграла J v ds дает прямую линию или беско-
нечность. Последнее мы отбрасываем, так как бесконечных траекторий
между двумя точками может быть бесконечно много. Таким образом, мы
получаем первую аксиому Ньютона из принципа наименьшего действия
(однако в самом принципе заключено значительно большее содержание,
чем в первой аксиоме Ньютона). Во-вторых, с точки зрения антропоморфно
*) Это сродство равновесного состояния и состояния движения в известной мере вы-
ражает их глубокую внутреннюю связь. Пуансо замечает: «...состояние равновесия
тел является простым моментом движения, в котором исчезают как мера сил их действия-
ми, так и сами эти действия» (L. Р о i n s о t, El£ments de statique). Цит. по русск. перев.
под ред. А. Долгова : Пуансо, Начала статики, 1920, стр. 5. Общеизвестна позиция
диалектического материализма в этом вопросе.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
867
рассуждающего наблюдателя, сохранение состояния сопряжено с наимень-
шей затратой «действия». Существенно здесь отметить, что первая аксиома
Ньютона вместе со второй представляет собой формулировку принципа
причинности на языке механики, состоящую в том, что каждое изменение
должно иметь обусловившую его причину. Рассмотрение этой причины как
внешней относительно тела, изменяющего свое состояние, есть одна из
характерных черт механистического миропонимания. Таким образом, в
самой основе механики Ньютона заложен четко сформулированный на
языке механики принцип причинности. В то же время эта аксиома Ньютона
получается из принципа наименьшего действия, которому усиленно пытались
придать телеологическое истолкование.
Однако, как было уже отмЛено, экстремальный характер вариацион-
ного принципа лишает телеологическое истолкование какого-либо смысла.
Особенно отчетливо это видно при рассмотрении формы, которую Якоби
придал принципу наименьшего действия.
Сделаем несколько дополнительных замечаний.
Из выражения, найденного Якоби для принципа наименьшего дейст-
вия, видно, что если силовая функция и связи не зависят от времени, то и
траектория определяется независимо от времени, что не очевидно в урав-
нениях Лагранжа, но ясно видно из рассмотрения канонических уравне-
ний, которые показывают также, что если траектория известна, то время
определяется квадратурой. В принципе наименьшего действия в форме
Якоби рассматривается траектория изображающей точки, а не закон ее
движения по этой траектории, так как время в этот принцип не входит ни
в явном, ни в неявном виде. Поэтому из этого выражения принципа можно
получить уравнения движения изображающей точки только введя какой-
либо параметр.
Что же касается принципа Гамильтона, то с его помощью вариацион-
ные задачи в классической механике рассматриваются двумя различными
методами.
В одном из них функция действия S задается на всем интервале дви-
жения и вариации координат при t = и t = t.2 должны обращаться в нуль,
что эквивалентно заданию начальных и конечных условий. В другом методе,
связанном с теорией Гамильтона—-Якоби, функция S выражается неопре-
деленным интегралом, т. е. как бы обрывается на некотором моменте вре-
мени ; в этом случае задаются только начальные условия, некоторым обра-
зом фиксирующие нижний предел интеграла действия.
В классической механике исследуются такие задачи, в которых оба
метода эквивалентны.
Наконец, необходимо указать, что вне классической механики, особенно
там, где отыскиваются уравнения поля, а не уравнения движения в точном
смысле слова, теряет смысл характерное для классического принципа Га-
мильтона разделение на кинетическую и потенциальную энергию. Здесь
речь может идти о лагранжевой функции, зависящей от некоторых «коор-
динат», их первых производных и времени. Возможность разделения лагран-
жевой функции на две функции Т = T(q, q) и V = V(q, f) отнюдь не явля-
ется существенной и не имеет общего значения в физике.
8. Принципы, выраженные в форме вариации каких-либо интегралов
и функций, формулируют существенные экстремальные свойства законов
динамики.
Ведь если задана система сил (уравнения движения) и начальные условия,
то каждое последующее положение материальной точки в любой момент
времени однозначно определено. Принцип Гамильтона дает уравнения дви-
жения механики и, следовательно, отнюдь не противоречит причинно-
55*
868
Л. С. ПОЛАК
следственному подходу, заключенному в них. Но он охватывает движение
в целом интегрально, в то время как уравнения движения разбивают его на
ряд последовательных элементов.
В задачах механики число степеней свободы, вообще говоря, обычно
невелико, в то время как число точек системы очень велико. Как в случае
системы твердых тел, так и, в особенности, в случае непрерывной среды
применение обобщенных координат позволяет свести задачу к конечному
числу уравнений, каково бы ни было число точек.
Использование обобщенных координат — одно из преимуществ форма-
лизма Гамильтона—Якоби. Что же касается уравнений Лагранжа, то их
особенное преимущество состоит в том, что все вычисления сводятся к соста-
влению выражения для кинетической энергии, выраженной в функции
/, q, q, и к простым дифференцированиям. При рассмотрении принципа
Гамильтона надо допустить, что систему можно заставить перейти от того
же начального к тому же конечному положению, что и в действительном
движении, с помощью некоторого фиктивного движения (бесконечно мало
отличающегося от действительного), не заботясь о том, чтобы удовлетворя-
лись уравнения динамики, но сохраняя связи. Интеграл Гамильтона может
обратиться в нуль для всех вариаций, совместимых со связями, лишь в том
случае, если сумма под знаком интеграла постоянно равна нулю. В против-
ном случае, изменяя знаки всех 6 одновременно, можно выбрать их так,
чтобы сумма под знаком интеграла была все время положительна, а следо-
вательно, интеграл не был бы равен нулю. При £7 = 0 из принципа
Гамильтона получим:
= (96)
а так как Т существенно положительно, то естественно считать это выра-
жение условием минимума.
Эта теорема аналогична принципу наименьшего действия, но отличается
от него, так как последний не зависит от рассмотрения времени. В класси-
ческой механике принцип Гамильтона выражает свойство движения, за-
висящее от времени, а принцип наименьшего действия (особенно отчет-
ливо это видно в форме, приданной ему Якоби) — свойство, не зависящее
от времени. В случае, когда £7 = 0, имеем Т = h, и из принципа наимень-
шего действия получаем:
j'ftdf = ft(f1-f0). (97)
fo
Условие того, что этот интеграл есть минимум, заключается в данном
случае в том, что соответствующее значение (7, — Q должно быть наимень-
шим. Таким образом, в отсутствие движущих сил среди всех движений, при
которых Т сохраняет одно и то же данное значение, действительным дви-
жением будет то, которое переводит систему из ее начального в конечное
положение в кратчайшее время.
В отличие от минимума принципа Гамильтона условие минимума, входя-
щее в формулировку принципа наименьшего принуждения, осуществляется
без каких-либо ограничений, так как здесь речь идет о минимуме положи-
тельной квадратичной формы, что не требует дальнейшего исследования.
9. Определение траектории с помощью принципа наименьшего действия
в форме Якоби сводится к чисто геометрической задаче нахождения экстре-
мума интеграла [ У (Т) (U + й) ds2, т.е. к определению геодезической линии.
S1
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
869
Время при этом исключается из рассмотрения. Этот интеграл представ-
ляет собой действие в смысле механики лишь при дополнительном
условии введения гипотезы, что энергия Т + U ~ const при движении
системы.
Задачи динамики могут быть формулированы языком высшей геометрии,
если связать каждую динамическую проблему с соответствующей формой
метрической геометрии. В общем случае — это нериманова геометрия,
причем конфигурационное пространство включает время в качестве коорди-
наты, равноправной с другими переменными. Тогда траектории механи-
ческого движения тел будут представлены кратчайшими или геодезическими
линиями такого метрического многообразия, в то время как волновые поверх-
ности (или поверхности действия) становятся параллельными поверхностями.
Геодезические же линии могут быть построены как ортогональные траекто-
рии к этим поверхностям. Тогда динамические процессы движения кор-
пускулярных систем совпадают с задачей распространения света в оптически
неоднородной среде.
В противоположность принципу Д’Аламбера, согласно которому дви-
жение определяется начальным положением точки и ее начальной ско-
ростью, принцип наименьшего действия определяет движение по начальному
и конечному положениям точки. При всех сравниваемых бесконечно близких
движениях только начальные и конечные положения остаются без измене-
ния, тогда как скорости, даже начальные скорости, могут быть произвольно
варьируемы в пределах, допустимых заданными связями.
По существу говоря, вариационные принципы не являются ни первыми,
ни единственными в отношении выделения осуществляющихся в природе
движений из всех возможных движений. Уравнения движения Ньютона
также выделяют из всех возможных движений — точнее говоря, из всех
мыслимых движений — естественные движения, удовлетворяющие аксиомам
механики Ньютона, среди которых первая аксиома является частным слу-
чаем обобщенного принципа прямейшего пути Герца. Различие в характере
выделения группы естественных движений с помощью уравнений Ньютона
от выделения их с помощью вариационных принципов состоит в том, что
в первом случае условием является только соответствие аксиомам механики,
а во втором это соответствие выражено через экстремальное условие, для
применения которого небходимо сравнение возможных движений между
собой. Нечто аналогичное уже имело место и в принципе возможных пере-
мещений.
Когда мы выражаем принципы механики в интегральной форме, то,
если интеграл берется по времени, поведение системы как бы рассматривается
в будущий и прошедший моменты времени в отличие от принципов, выра-
женных в дифференциальной форме. Однако это кажущееся «предвидение
будущего» и определение из будущего настоящего является действительно
кажущимся,' так как вариационные принципы легко могут быть преобразо-
ваны к такому виду, при котором время исключено (выражение принципа
наименьшего действия, данное Якоби) или не входит совершенно (принцип
Герца).
10. Однако различные формы механики имеют различное значение
как в отношении решения механических, так и, в особенности, в от-
ношении немеханических проблем. Та форма, которую придал механике
Лагранж, основав ее на законах, выраженных в дифференциальной форме,
оказалась чрезвычайно продуктивной для решения проблем технической
механики.
Другая форма механики, основанная на интегральных принципах,
которую придали механике Гамильтон и Якоби, стала основным .методом
R70
Л. С. ПОЛАК
для исследования ряда проблем астрономии и физики как макрокосмоса,
так и микрокосмоса.
В чем же причина этого различия, которое тем более интересно, что в
сфере механики налицо полная эквивалентность дифференциальных и инте-
гральных принципов.
Прежде всего необходимо указать, что дифференциальные принципы
обладают одним общим недостатком. Формулировка этих принципов всегда
требует введения особых координат для исследуемой системы. Необходи-
мость введения таких координат придает решению каждой проблемы специ-
фически механический вид. Но дело не только в этом. Физика должна фор-
мулировать законы природы так, чтобы они не зависели от произвольного
выбора исследователем системы координат. Физический закон, сформулиро-
ванный нами, должен быть инвариантным относительно той или иной группы
преобразований координат. Эти преобразования должны быть выражением
каких-то фундаментальных свойств материального мира. Инвариантность
является необходимым, хотя и недостаточным условием истинности форму-
лированных нами физических законов. То, что те или иные законы инва-
риантны лишь по отношению к тем или иным преобразованиям, введенным
как логическое обобщение опытных данных (преобразование Галилея — рав-
номерного движения и сложения скоростей, преобразование Лоренца —
опыта Майкельсона и т. п.), указывает на определенные границы, на сферу
применения этих законов. Так, уравнение Шредингера, которое не инва-
риантно по отношению к лоренцовым преобразованиям, являясь аналогом
уравнений классической механики, ограничено соответствующим образом
в объеме охватываемых им явлений. Интегральный же принцип Гамильтона
имеет то огромное преимущество, что он может быть сформулирован так,
что окажется инвариантным по отношению к любым преобразованиям
координатных систем.
11. Рассматриваемые в принципе наименьшего действия варьированные
состояния физически невозможны. Однако это, конечно, не все возможные
состояния, а только какая-либо группа их, удовлетворяющая некоторым
условиям. Так, например, в интеграле Гамильтона таким условием является
требование одного и того же значения времени для перехода из начального
в конечное состояние. Если же вводить какое-либо условие, отличающее
принимаемые во внимание варьированные состояния от не принимаемых,
то возникает очевидное затруднение : «все такие состояния нельзя выразить
при помощи математических форм, достаточных для описания других невоз-
можных состояний»*).
Эддингтон остроумно замечает, что принцип наименьшего действия
можно сравнить с утверждением, что «если бы законы арифметики перестали
быть верными, то 2 + 2 было бы больше или равно (но наверное не меньше)
четырем»**). Легко видеть, что это положение может быть сформулировано,
если «неправильные системы арифметики» будут иметь неправильность
какого-либо определенного вида. Если взять общий случай любых «непра-
вильных систем арифметики», то, конечно, приведенное выше утверждение
не имеет смысла. Аналогично и в принципе наименьшего действия мы выде-
ляем из всех невозможных движений, не находящихся в согласии с зако-
нами природы, определенный ограниченный класс. Значение и смысл такого
выделения состоит как раз в том, что проводимое сравнение позволяет глубже
и всестороннее понять свойства и особенности действительного движения.
*) А. Эддингтон, Теория относительности, Перев. под ред. Д. Д. Иваненко,
ГТТИ, 1934, стр. 263.
**) Там же, стр. 265.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
871
12. Принцип Гамильтона может быть применен к неконсервативным сис-
темам. В этом случае вместо U необходимо будет писать X dx + Ydy + Z dz.
Несмотря на некоторое усложнение, принцип сохраняет свое значение.
Точно так же принцип Гамильтона допускает обобщение и на неголо-
номные системы. Принцип Гамильтона рассматривает протекание явлений
во времени. Закон же сохранения энергии не включает времени; для
замкнутой системы он констатирует постоянство баланса энергии при
трансформации ее в течение процесса от начального к конечному состоя-
нию. Но закон сохранения энергии не указывает на путь, которым сис-
тема должна перейти из начального в конечное состояние; другими
словами, закон сохранения энергии допускает сколько угодно путей
из начального в конечное состояние, лишь бы соблюдалось условие по-
стоянства величины энергии в течение процесса. Закон сохранения энер-
гии не дает однозначного ответа на вопрос о течении процесса. Если
сравнить этот закон с принципом наименьшего действия, то разница
между ними прежде всего проявляется в одном интересном факте. Если
взять изолированную точку, то закон сохранения энергии требует для
нее постоянства скорости (у = const), но ничего не говорит о направлении
движения (т. е. о характере траектории). Из принципа же наименьшего
действия непосредственно следует, что траектория этой изолированной точки
будет прямой линией, ибо при v = const выражение 6^mvds = Q дает
J’ ds = min, т. е. прямую линию.
Далее, формула закона сохранения энергии может быть выведена из
принципа Гамильтона, обратное же без дополнительных предположений
невозможно. Таким образом, в принципе Гамильтона мы имеем более общую
формулировку реальных соотношений, чем в законе сохранения энергии.
Значение принципа Гамильтона резко возрастает благодаря тому, что он
может быть сформулирован таким образом, что входящие в него величины
будут иметь не только механическое значение. Другими словами, исходя
из механической формулировки принципа, мы расширяем область его
применения и на другие отделы физики. Это достигается путем вве-
дения понятия обобщенных координат, под которыми понимается сово-
купность любых параметров, которыми однозначно определяются состояния
системы.
При этом все другие параметры, как, например, скорости, должны быть
получены из этих обобщенных координат. Таким образом, принцип, оста-
ваясь механическим по своему происхождению, охватывает другие области
физики. Первостепенную роль в этом расширении сферы действия принципа
играет аналогия, ибо хотя по содержанию обобщенные координаты могут
существенно отличаться от координат механики х, у, г, но формы связи
их между собой и скоростями их изменений совпадают с соответствующими
формами механики. В сущности, значение принципа Гамильтона в клас-
сической неполевой физике сводится к весьма простому обстоятельству.
Исследуется какая-либо физическая система, о которой a priori нельзя
утверждать, что она удовлетворяет уравнениям Лагранжа. Непосредственно
подставлять значения соответствующих функций в эти уравнения не всегда
можно: во-первых, часто трудно подобрать соответствующий вид функции,
а во-вторых, неясно, будут ли она удовлетворять этим уравнениям. По-
этому на сцену выступает принцип Гамильтона. Если удастся параметры
такой системы привести к виду функции L и если эта функция обратит в
нуль вариацию интеграла Гамильтона, то тогда, введя эту функцию в урав-
нения Лагранжа, можно динамически определить систему.
Принцип Гамильтона (так же как и другие интегральные принципы)
прежде всего обобщает свойства, присущие уравнениям движения, а по-
872
Л. С. ПОЛАК
скольку эти последние являются выражением законов механики, то также
и свойства этих законов.
13. В основе законов механики лежит определенный тип каузальной
связи — так называемая динамическая закономерность, смысл которой
в механике состоит в том, что если заданы начальные условия системы
и действующие силы, то положение системы на траектории в любой
момент времени однозначно определено. В целом можно признать, как
говорит Гамель*), что в основе механики лежат следующие всеобщие
аксйЬмы познания природы : «А — время и пространство однородны;
В — пространство изотропно ...; С (достаточного основания) — все
явления должны иметь свою познаваемую причину, которой они одно-
значно определены; D — не существует никакой исключительной длины,
никакой исключительной (ausgezeichnete) скорости и никакой исклю-
чительной массы, которые имели бы значение для построения класси-
ческой механики».
Вряд ли все эти «аксиомы» можно считать «всеобщими аксиомами по-
знания», но для классической механики они безусловно имеют смысл. Это
значит, что вариационные принципы механики заключают в себе — в своем
содержании и математической форме — указанные «аксиомы». Изучение
любой области или процессов мира, в которых пространство окажется ани-
зотропным или в которых существует квантованная (элементарная) длина
и т. п., потребует изменения — обобщения вариационных принципов. Обоб-
щение принципа причинности также приводит к дальнейшему обобщению
принципа действия. Таким образом, исключается какая-либо возможность
телеологической точки зрения. Впрочем, телеология должна быть отбро-
шена уже потому, что принципы действия являются не минимальными, а
вариационными принципами. Они утверждают только, что вариация инте-
грала равна нулю в том случае, когда зависимые переменные получают
малое изменение, подчиненное некоторым граничным условиям, или, более
строго, эта вариация есть величина бесконечно малая второго порядка.
Когда выполняются условия минимума, вариационное условие также вы-
полняется, но обратное не имеет места. Действительный минимум интеграла
действия получается в том случае, когда взят достаточно короткий участок
пути.
Вариационные принципы выражают дифференциальные уравнения физи-
ческих явлений в виде одной компактной теоремы, в них мы имеем такой
тип принципов, который объединяет законы большой части физики. Законы
различных областей физики выражаются несложными дифференциальными
уравнениями, широко распространенным свойством которых является то,
что они могут быть сформулированы в виде вариационного принципа. Всякий
же вариационный принцип эквивалентен некоторой системе дифференциаль-
ных уравнений. Таким образом, если законы каких-либо физических явлений
выражаются дифференциальными уравнениями, то, исходя из чисто мате-
матических соображений, не связанных с сущностью этих явлений, воз-
можно их приведение к вариационный форме. Это важно постольку, по-
скольку позволяет записать эти уравнения в форме, независимой от системы
координат.
В электродинамике одна и та же функция Лагранжа служит для вывода
уравнений поля и заряженных тел, что математически отнюдь не является
очевидным. Это обстоятельство связано с тем, что уравнения системы поле—
тело могут быть написаны в гамильтоновой форме, которая далее необходима
*) С. Hamel, Die Axiome der Mechanik, Handbuch der Physik, т. V, Berlin, J. Sprin-
ger, 1927, стр. 6—7.
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
873
для перехода к квантовой механике. Так как действительно классические
теории являются только приближениями или аналогами соответственных
квантовомеханических теорий, то можно было бы ожидать, что класси-
ческие принципы теории будут применимы в квантовой механике. Однако
квантовомеханический эквивалент уравнения Гамильтона не сводим к вариа-
ционным принципам классической физики благодаря существенному изме-
нению физического смысла входящих в него величин.
14. Таким образом, принцип Гамильтона, может быть в несколько пара-
доксальной форме, выражает существенное свойство, присущее динами-
ческой закономерности. А так как внутри механики принцип Гамильтона
эквивалентен уравнениям движения, то он в той же степени связан или
является конкретным определением динамической закономерности, в какой
она выражается уравнениями движения.
Следовательно, везде за пределами собственно механики, где имеет место
каузальная связь такого типа, должен действовать и принцип Гамильтона.
Уже классическая физика, кроме динамической, оказалась вынужденной
рассматривать и так называемую статистическую закономерность. Все раз-
личные типы каузальной связи имеют общим то, что они устанавливают
какое-то соотношение между двумя явлениями в пространстве и времени.
Поскольку в них имеется общее, постольку формула, выражающая один
из частных типов каузальной связи, в известном, ограниченном смысле
может иметь место и для другого типа.
Статистическая закономерность (закономерность поведения ансамбля),
хотя и является уже иным типом каузальной связи, чем динамическая,
но в то же время является ближайшей к ней по своему характеру, поскольку
в основе ее лежит наложение реальных движений огромного количества
дискретных частиц, входящих в статистический ансамбль. То, что это—иной
тип каузальной связи для ансамбля, видно уже из необходимости ввести
понятие о микроканоническом распределении и вероятности. То, что этот
тип близок к динамическому, видно, во-первых, из того, что возможность
рассмотрения такого ансамбля основана на экспериментально подтвержден-
ном представлении о механическом однородном и независимом (на длине
свободного пробега) движении каждой из частиц, входящих в ансамбль,
и, во-вторых, из того, что описание поведения физических классических
ансамблей осуществляется в статистической механике гамильтоновыми
уравнениями с помощью тех же по форме и существу функций, которые
применяются в классической механике.
Переход к новому типу каузальной связи, который условно можно было
бы назвать «квантовым» и который характерен для квантовой (нереляти-
вистской и релятивистской) механики, где уже классические величины
заменяются операторами, где вероятность состояния индивидуальной частицы
и индивидуального акта взаимодействия имеет, как известно, совсем иной
смысл, чем вероятность состояния ансамбля в классической статистической
механике, приводит к тому, что положение и роль принципа Гамильтона
оказываются в квантовой механике совершенно иными, чем в классической
физике. Важная историческая роль, сыгранная принципом и оптико-механи-
ческой аналогией в начальной стадии формирования волновой механики,
объясняется не только тем, что существует реальная связь и предельный
переход от механики атома к классической физике, но также и тем, что
существуют общие черты в типах каузальной связи макро- и микрокосмоса.
Но именно потому, что для энергии и времени, так же как для импульса
и соответствующей координаты, в квантовой механике имеют место переста-
новочные соотношения, а сами они являются уже операторами, классический
интеграл Гамильтона (и принцип наименьшего действия) имеет в ней не-
874
Л. С. ПОЛАК
сколько иной физический смысл, чем тот, который он имел в физике
обратимых макроскопических процессов.
Это обстоятельство отражает фундаментальное отличие квантовой тео-
рии от классической, которое состоит в том, что в квантовой теории опре-
деляется амплитуда вероятности, а не сама вероятность. В квантовой те-
ории полей изменение смысла принципа связано с новыми условиями инва-
риантности, локальности и т. п.
15. В возможности образования любой волны как огибающей вторичных
предшествующих волн (которая, по существу, выражает свойство группы
однородных касательных преобразований) заключается существенный харак-
тер распространения посредством волн.
Так как канонические уравнения вполне определяются функцией Н(р, q),
то отсюда следует весьма наглядное, с физической точки зрения, заключение,
что явление распространения волн может быть полностью описано, если
известна скорость распространения, выраженная в функции места и ориен-
тации фронта волны.
Распространение света в какой угодно среде представляет собой процесс,
определяемый однородной канонической системой с соответствующей ха-
рактеристической функцией H[p(q)], конечной, однородной и первой
степени относительно р. Это и есть аналитическое выражение принципа
Гюйгенса, рассматриваемого в его первоначальном, исключительно геометри-
ческом виде.
Пусть большое количество невзаимодействующих точек выброшено с
одинаковой энергией Н из некоторой точки на поверхности 27. Поле сил,
в котором движутся точки, считаем консервативным. Частицы описывают
некоторые траектории, которые на начальном участке перпендикулярны к
этой поверхности. Рассмотрим одну из частиц. Она покидает точку О поверх-
ности S в момент времени t — 0 и достигает некоторой точки А на траектории
в момент времени t. Взяв интеграл принципа наименьшего действия в форме
Лагранжа от О до А, предположив в точке О действие равным нулю, мы
найдем, что действие частицы в точке А равно этому интегралу. Следова-
тельно, частица на каждом участке своей траектории связана с некоторым
значением действия и действие возрастает по мере того, как частица описы-
вает траекторию. Очевидно, что мы можем определить действие в любой
точке траектории независимо от того, находится там на самом деле частица
или нет.
Рассмотрим теперь поток частиц. Предположим, как выше, действие
равным нулю во всех точках поверхности £, из которых вылетают частицы.
В точке А любой траектории действие имеет некоторое значение. Соединив
все точки с одинаковым действием, получим непрерывные поверхности —
поверхности равного действия. Уравнения динамики показывают, что эти
поверхности пересекаются всеми траекториями под прямым углом. Так как
взятая нами точка А есть произвольная точка траектории, то можно заклю-
чить, что поверхности равного действия образуют простое бесконечное
семейство и что траектории ортогональны к этим поверхностям.
Одной из этих поверхностей будет поверхность 27, на которой действие
равно нулю, а на всех остальных оно возрастает вдоль траектории. Надо
заметить, чтобы избежать возможного недоразумения, что частицы, вышед-
шие с поверхности 27 одновременно, достигают какой-либо заданной поверх-
ности действия отнюдь не в одно и то же время.
Если взять гамильтоново действие, то поверхности равного действия
в консервативном поле для частицы, движущейся из точки О в точку А,
мы получим, определив значение интеграла от Т+ U (= Т — V) по времени
движения между этими точками ; допустив, что на поверхности 27 гамиль-
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
875
тоново действие равно нулю, мы получим, таким образом, его значение
в точке А.
Предположим далее, что частица покидает точку О в момент времени
t = 0.
В таком случае, если обозначить лагранжево действие в точке А через V,
то гамильтоново действие для той же точки будет:
S = V — Ш, (98)
где Н — полная энергия, с которой частица движется, a t — время движения
частицы от О до А. Из (98) видно, что так как на поверхности как было
уже предположено, V = 0, то S на той же поверхности будет равно нулю
в начальный момент времени t = 0.
Таким образом, гамильтоново действие связано с движущейся частицей,
или, иначе говоря, оно имеет значение только в точках, через которые про-
ходит частица. Однако гамильтоново действие имеет и более общий характер
и может быть определено для каждой точки траектории и в каждый момент
времени. Пусть в момент времени t частица проходит через точку А, тогда
(98) определит гамильтоново действие частицы в этой точке. Однако и после
того, как частица пройдет А (или раньше, чем она достигнет точки А),
формула (98) определяет гамильтоново действие в этой точке для каждого
момента времени t. Из формулы (98) видно, что с течением времени гамильто-
ново действие в точке А убывает по величине, а в данный момент времени
оно возрастает вдоль траектории.
Возьмем на различных траекториях те точки, для которых гамильтоново
действие в момент времени t имеет то же значение S, как в точке А. Тогда
(98) показывает, что для всех этих точек лагранжево действие будет одина-
ково : S + Ш. Следовательно, точки равных значений гамильтонова дей-
ствия в данный момент времени будут покрывать поверхность равного
лагранжева действия. Это имеет место для всех моментов времени и для
всех точек на траектории.
Таким образом, поверхности равного гамильтонова действия S совпадают
во всякий момент времени с поверхностями равного лагранжева действия V.
Однако между этими поверхностями существует одно существенное и
важное различие. Поверхность равного лагранжева действия есть фиксиро-
ванная поверхность, которая не меняет своего положения с течением вре-
мени. Что же касается поверхности равного гамильтонова действия, то она
не остается фиксированной, так как мы видели, что величина гамильтонова
действия в какой-либо фиксированной точке меняется с течением времени.
Легко показать, исходя из (98), как поверхность равного гамильтонова
действия должна двигаться для того, чтобы оставаться связанной с одним
и тем же фиксированным значением действия. Поверхность эта должна
двигаться нормально к траекториям со скоростью, определенной в каждой
точке и равной Н/р, где р— величина импульса частицы в рассматриваемой
точке. Эта скорость совпадает с той, которую де Бройль ввел для волновой
скорости своих волн и, следовательно, для скорости их волновых фронтов,
а так как волны де Бройля также перпендикулярны к их траекториям,
то отсюда вытекает, что его волновые фронты движутся вдоль поверхностей
равного гамильтонова действия.
16. Заметим, что из выражения, найденного Якоби для принципа наимень-
шего действия, видно, что если силовая функция и связи не зависят от вре-
мени, то и определение траектории выполняется независимо от времени,
что не представляется очевидным в уравнениях Лагранжа, но непосред-
ственно ясно из рассмотрения канонических уравнений, которые показывают
876
Л. С. ПОЛАК
также, что если траектория известна, то время определяется квадратурой.
Принцип наименьшего действия предполагает, что система имеет несколько
степеней свободы, так как если бы имелась только одна степень свободы,
то для определения движения было бы достаточно одного уравнения. Так
как в этом случае движение может быть полностью определено законом
живых сил, то действительное движение будет единственным, которое ему
удовлетворяет, и поэтому не может быть сравниваемо с каким-либо другим
движением.
17. Как известно, преобразование Лежандра переводит функцию данной
группы переменных в новую функцию новой группы переменных. Старые
и новые переменные относятся друг к другу, как точечное преобразование.
Это преобразование обладает тем замечательным свойством, что оно совер-
шенно симметрично в обеих системах, и то же преобразование, которое пере-
водит старую систему в новую, переводит и, обратно, новую систему в старую.
Лежандрово преобразование может быть приложено к лагранжиану,
рассматриваемому как функция переменных преобразования qb а также
координат положения qt и времени t. При этом скорости преобразуются в
импульсы, а лагранжиан — в гамильтониан. Преобразование Лежандра
при приложении его к уравнениям Лагранжа отделяет дифференцирование
по времени от алгебраического процесса и приводит к каноническим урав-
нениям. В самом деле, определив обобщенный импульс р, через лагран-
жиан
(а>
запишем уравнения Лагранжа в форме
* 9L /к\
= <ь>
С помощью преобразования Лежандра определение (а) перейдет в
причем ни (а), ни (с) не выражают какого-либо физического закона, а явля-
ются определением обобщенного импульса через скорости и скорости через
импульсы.
Так как
L = 2 Ра - Я,
то уравнение (Ь) перейдет в
Полученные, таким образом, канонические уравнения (с) и (d) совершенно^
эквивалентны исходным уравнениям Лагранжа ; перед последними они
имеют то преимущество, что производные по t находятся только в левой
стороне уравнений, так как гамильтониан не содержит каких-либо произ-
водных от qt и pi по t.
Наиболее эффективный метод исследования и решения канонических
уравнений движения есть преобразование координат, то есть переход к новой
системе координат, которая лучше позволяет провести решение, чем перво-
начальная.
Гамильтонова функция есть инвариант по отношению к точечным преоб-
разованиям вида
qn = tn (Qi, , Qn),
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
877
если новая система координат покоится относительно прежней. В противном
случае в гамильтониане появляются циклические координаты — жиро-
скопические члены. Эти точечные преобразования являются подгруппой
группы преобразований С. Ли, которые в случае классической механики
характеризуются требованием, чтобы
2,(Pi<59/-P1.<5Qi) = <5S,
где
S = S(9„, Qn).
функция S называется производящей функцией канонического преобра-
зования. Так как
<5S — I — tyh Н-о/Г &Qi I ,
V oqt 1 oQi ’
ТО
Pi = "о— , Pi=------ъгГ •
Это — общее условие канонического преобразования, причем любая
функция qt и Qt может быть выбрана как производящая функция канони-
ческого преобразования. В добавление к этой функции могут быть заданы
некоторые условия между и Q, (число условий может изменяться от 1 до л).
Формулы канонического преобразования имеют ту особенность, что они
не выражают это преобразование в явном виде. Вместо определения новых
переменных только через старые, или наоборот, обычно применяется сме-
шанное представление, в котором старые обобщенные импульсы выражаются
через старые и новые координаты положения. Как известно, если ввести
риманово мероопределение, то гамильтонова характеристическая функция
в оптике и основная функция в динамике определяют «расстояние» в римано-
вом пространстве, выраженное в функции координат конечных точек этого
расстояния. Эта функция, которая тесно связана с вариационным интегра-
лом, является производящей функцией некоторого частного канонического
преобразования.
Для классической механики основной группой преобразований явля-
ются канонические преобразования. Группу преобразований можно опре-
делить либо посредством бесконечно малых преобразований, либо посред-
ством инвариантов этой группы. Первый способ, в котором задаются беско-
нечно малые изменения канонических переменных qh pt при бесконечно
малом каноническом преобразовании, выражен уравнениями Гамильтона,
второй—инвариантностью действия.
Необходимо отличать два вида канонических преобразований. В пер-
вом мы переходим от одних переменных к другим для одного и того же
состояния системы, во втором же изучаем законы изменения канонических
переменных, которые выражают законы изменения состояний механической
системы.
Таким образом, естественно формулируется связь между аналитической
механикой вариационных принципов и теорией групп преобразования. Эта
связь допускает дальнейшее обобщение.
18. Благодаря рассмотренным свойствам методы Лагранжа и Гамиль-
тона приобрели значение в физике. Это значение еще более увеличивается,
если учесть тесную внутреннюю связь принципа Гамильтона и оптики —
связь, выраженную в оптико-механической аналогии, являющуюся одним
из проявлений фундаментального синтеза полевого и корпускулярного
аспектов физических процессов. Принцип Гамильтона дает общие формы
878
Л. С. ПОЛАК
связи величин, которые, именно в силу своей общности, могут быть при-
менены для характеристики самых разнообразных физических процессов.
Но эта общая и абстрактная форма пуста без включения в нее конкретных
соотношений, взятых из опыта. Именно это определило роль принципа
Гамильтона в истории физики.
Сопоставим в заключение методы Гамильтона и Лагранжа. В гамильто-
новом формализме основными величинами являются qb pt и Н. Гамильто-
ниан можно построить с помощью функции Лагранжа и qt и pt. Отсюда не-
посредственно получаются канонические уравнения и динамические пере-
менные. Однако в гамильтоновом формализме время все же играет особую
роль по сравнению с пространственными координатами, являясь, по суще-
ству говоря, единственной независимой переменной. С одной стороны, это
дает возможность провести далеко идущую аналогию с классической меха-
никой, но, с другой стороны, именно поэтому теория оказывается реляти-
вистски неинвариантной. Напротив, в лагранжевом формализме не вводят
функции qb Pi, Н (хотя это и возможно). В лагранжевом методе исходят
из вариационного принципа для лагранжиана системы. Из условий для
его экстремума получают уравнения движения, а динамические перемен-
ные (энергия — импульс, заряд и т. п.) определяются как инварианты, со-
ответствующие различным преобразованиям системы координат и, в случае
теории полей, функций поля. В лагранжевом формализме время входит
совершенно симметрично с пространством и теория с самого начала реляти-
вистски ковариантна, но зато аналогия с механикой системы точек оказы-
вается гораздо менее отчетливой.
Основное различие лагранжева и гамильтонова методов в том, что в
первом поведение системы описывается при помощи связанных между со-
бою величин qt и qt — и поэтому варьирование 8qt надо’при выводе урав-
нений Лагранжа выполнять через независимые вариации дер ; это осущест-
вляется интегрированием по частям, в результате которого появляются
члены вида ~d~-, приводящие к уравнениям второго порядка. В то же
время в обычном формализме Гамильтона qt и рг независимы и являются рав-
ноправными переменными, т. е. рг связаны с qt только уравнениями движе-
ния, а не какими-либо заранее заданными соотношениями. Разделение пере-
менных на две независимые группы, связанные между собой почти симме-
тричным образом посредством уравнений Гамильтона, — характерная черта
гамильтонова метода. Наименование же переменных qt и р,- обобщенными
координатами и импульсами имеет только исторический смысл. Эта равно-
правность «координат» и «импульсов» дает большие возможности для выбора
величин, определяющих изменение состояний физической системы.
В формализме Лагранжа рассматривается пространство конфигураций
переменных qlt в гамильтоновом же формализме механические движения
и движения изображающей точки представляются в фазовом пространстве
2п переменных и р,. В то время как пространство конфигураций имеет
геометрию риманова типа, фазовое пространство не имеет определенной
геометрической структуры и только для удобства вычислений можно пред-
положить, что qi и pi образуют прямоугольные координаты 2п-мерного
евклидова пространства.
Удвоение числа измерений является только кажущимся усложнением, а
на самом деле введение фазового пространства имеет большие преимущества
перед рассмотрением задач в пространстве конфигураций.
В самом деле, во многих задачах недостаточно рассматривать только
одну траекторию, отвечающую определенным начальным условиям и пред-
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
879
ставляющую собою частное решение уравнений движения, а необходимо
рассмотреть всю совокупность траекторий, которая соответствует любым
начальным условиям и представляет полное решение этих уравнений. Это
и имеет место при рассмотрении фазового пространства гамильтоновых
уравнений, так как полное решение канонических уравнений найдено, если
qt и pt определены как функции времени t и 2п произвольных постоянных
(?г)о и (Pi)o> то есть значений qt и Д при t = 0.
Однако резкой грани между лагранжевым и гамильтоновым методами
нет. Каждый из них имеет свои преимущества, и они тесно связаны друг
с другом. Как мы уже отмечали, исходя из лагранжиана и вводя импульсы,
можно, если импульсы—независимые функции скоростей, получить гамиль-
тониан.
* *
*
Подводя итоги, можно сказать, что вариационные принципы механики
не только выражают в простой инвариантной форме уравнения движения
и уравнения полей, но и заключают в себе синтез дискретного и кон-
тинуального аспектов движения и являются выражением обобщенного
принципа причинности в физике.
Прошлое науки по-иному раскрывается перед нами на каждой принци-
пиально новой ступени ее развития.
Вариационные принципы механики связаны с таким большим количест-
вом различных проблем, применения их так разнообразны, число посвящен-
ных им работ настолько велико, что в нашем обзоре оказалось возможным
бегло коснуться лишь некоторых из этих вопросов. Изучение и анализ их
с точки зрения математической, механической, физической, философской,
безусловно, является одной из интереснейших тем для научного исследо-
вания.
ПРИМЕЧАНИЯ*)
[х] Работа П. Ферма «Synthesis ad refractiones» помещена в «Oeuvres Р. Fermat», т. 1,
Paris, 1891, стр. 173—179.
Этот второй отрывок о законе рефракции вместе с предыдущим («Analysis ad refrac-
tiones»), посланным Ферма де ла Шамбру с письмом от 1/1 1662 г., явно является в
«Корреспонденции Декарта» самостоятельным; это именно то сочинение, которое Ферма
обещает прислать де ла Шамбру в конце письма от 1/1 1662 г., если тот этого пожелает,
и иа это сочинение особенно ссылается Клерселье (Clerselier) в своем письме к Ферма
от 20 мая 1662 г. Судя по копии Клерселье, оно могло быть отослано де ла Шамбру в
феврале 1662 г.
[2] В доказательстве Ферма, по существу говоря, фигурирует утверждение, что
вариация времени по действительной траектории и по соседнему возможному пути равна
нулю. Это условие необходимо, но не достаточно для того, чтобы время было минимумом.
В простом случае, рассмотренном Ферма, условие минимальности и вариационное
условие совпадают, но в более сложных случаях это не имеет места.
Первое настоящее оправдание принципа Ферма дал Гюйгенс в «Трактате о свете»,
где на основе своей «волновой» теории вывел, что коэффициент преломления на границе
двух сред равен отношению скоростей света в этих средах.
Математическое выражение принципа Ферма имеет вид
Q
5 [—= 0,
J V
р
т. е. вариация интеграла равна нулю, что означает: разность между этим интегралом,
взятым вдоль действительного пути и интегралом взятым вдоль соседней траектории, есть
бесконечно малая величина второго порядка по сравнению с расстоянием между путями.
Существенное значение имеет вопрос : какая скорость входит в интеграл Ферма —
фазовая или групповая, что имеет значение в дисперсионной среде. Волновая оптика-
показывает, что это — волновая скорость. Отсюда возникает новое возможное видоиз
менеиие идеи Ферма : время, требуемое для группы волн, чтобы пройти между двумя
точками, было бы минимумом, a v было бы тогда групповой скоростью.
[3] «Discorsi е Dimostrazioni matematiche intorno a due nove scienze attenenti alia
Mecanica ed i movimenti locali, del Sigr Galileo Galilei», Leyde, 1638.
[4] Ферма в соответствии co своим чисто геометрическим методом изложения назы-
вает произведение вида 2 АВ-ВС, где АВ+ВС, «двойным прямоугольником АВ на
ВС». В дальнейшем для ясности изложения мы везде заменим этот термин на привычное
«удвоенное произведение АВ на ВС».
[6] Заметка «Problema novum, ad cujus solutionem Mathematici invitantur» была
напечатана в лейпцигском журнале «Acta Eruditorum» за 1696 г. в июньской книге, стр.
264 и в «Opera Omnia», 1742, т. 1, стр. 161. Русский перевод, выполненный В. С. Гохманом,
помещен в книге : И. Бернулли, Избранные сочинения по механике, ОНТИ, М.—Л.,
1937.
[6] Статья «Curvatura Radii in diaphanus non uniformibus, solutioque problematis a se
in „Acta”, 1696, стр. 269 propositi de invenienda „Linea Brachistochrona” etc.» была на-
*) Примечания составлены Л. С. Полаком. Прн составлении примечаний частично
использованы отдельные замечания и примечания Журдена, Конвея и Мак-Коннеля.
Примечания 208, 209, 213 и 232—237 составлены Г. А. Соколиком. Ссылки на примечания
редактора Сборника в тексте статей сборника обзначены так : [137]. Примечания авторов
статей обозначены так*). В немногих случаях, когда примечания редактора помещены
непосредственно под текстом статей, они заключены в квадратные скобки и отмечены
подписью: Прим. ред. Нумерация рисунков в каждой статье самостоятельная незави-
симо от того, какова была нумерация их в подлинниках статей и книг.
ПРИМЕЧАНИЯ
881
печатана в «Acta Eruditorum», 1697, Mai, стр. 206 и в «Opera omnia», 1742, т. 1, стр. 187.
Русский перевод, выполненный В. С. Гохманом, помещен в книге : И. Бернулли,
Избранные сочинения по механике, ОНТИ, М.—Л., 1937.
[7] Открытие Гюйгенса помещено в его сочинении о маятнике: «Horologium oscil-
latorium», Paris, 1673.
[8] Когда круг радиуса г катится по горизонтальной прямой, то каждая точка его
периферии описывает циклоиду
. х = г (<р — sin <р), у = г (1 — cos <р).
Если обратить циклоиду так, чтобы ее концы были направлены вверх, то получим
таутохрону — кривую, двигаясь из любой точки которой тяжелая точка затрачивает
одно и то же время для того, чтобы достигнуть на ней самого нижнего положения.
[9] Статья Мопертюи «ьа loi du repos» прочитана во Французской Академии 20 фев-
раля 1740 г., перепечатана в «Oeuvres de М. de Maupertuis», т. 4, Lyon, 1756, стр. 45—63.
(Характеристику работ Мопертюи см. «Послесловие», стр. 784—787.)
[10] Статья «Accord de diff£rentes lois de la Nature qui avaient jusqu’ici paru incom-
patibles» была прочитана в публичном заседании Академии наук в Париже 15 апреля
1744 г. и напечатана в «Histoire de l’Acad6mie des Sciences de Paris», 1744. Она перепеча-
тана в «Oeuvres de M. de Maupertuis, nouvelle 6dition corrig6e et augment£e», t. 4, Lyon,
1756, стр. 3—28.
E11] Работа «Об определении движения брошенных тел в несопротивляющейся среде
методом максимумов и минимумов» напечатана в качестве второго приложения к книге
Эйлера «Methodus inveniendi Lineas Curvas maximi minimive proprietate gaudentes sive
solutio problematis isoperimetrici latissimo sensu accepti», вышедшей в 1744 г. в издании
Bousquet, Lausannae et Genevae. Русский перевод опубликован в вышедшей под ред.
проф. Н. С. Кошлякова книге «Метод нахождения кривых линий, обладающих свойствами
максимума, либо минимума или решение изопериметрической задачи, взятой в самом
широком смысле, Леонарда Эйлера, королевского профессора и члена Императорской
Петербургской Академии наук», ГТТИ, М.—Л., 1934.
Эйлер показал, что для того, чтобы указать кривую, для которой значение некоторой
величины было бы наибольшим или наименьшим по сравнению с другими, величина эта
должна быть неопределенной интегральной величиной (quantitas integralis indefinita),
которая может быть проинтегрирована только в том случае, если будет взято заданное
соотношение между х и у. Следовательно, должно быть
W=$Zdx, (4)
где величина Z должна быть образована так, чтобы дифференциал Z dx не мог быть про-
интегрирован без установления соотношения между х и у. Дифференциал Z
dZ = М dx+ N dy+ Р dp , (5)
7 dy
если Z = Z I x, у, p =
Задача нахождения кривой, для которой (' Z dx будет абсолютным максимумом или
минимумом, приводит к классическому уравнению Эйлера
dP
N-------j— = 0 или N dx = dP, (6)
dx
причем, за исключением тех случаев, когда в Р не входит р, это уравнение будет диффе-
ренциальным уравнением второго порядка и при интегрировании появятся две произ-
вольные постоянные.
Согласно излагаемому методу сначала находят дифференциальные значения фор-
мулы
хг
W = § Z dx
и затем составляют уравнения, определяющие искомую экстремальную кривую.
Е12] Эйлер обозначает скорость через yv; соответственно с этим скорость, обуслов-
ленная высотой брошенного тела (celeritas debita altitudini), равна v.
[13] Статья «Les lois de mouvement et du repos d6duites d’un Principe Metaphysique»
опубликована в «Histoire de l’Acad6mie R. des Sciences et Belles Lettres», аппёе 1746, Berlin,
1748 (M6moires de l’Acad6mie R. des Sciences et Belles Lettres, 1746), стр. 267—294. Статья
помещена не в разделе математических наук, а в отделе «Classe de Philosophie Speculative».
Характеристику этой работы Мопертюи см. стр. 784—787 настоящей книги.
56 Вариационные принципы механики
382
ПРИМЕЧАНИЯ
[14] Статья «Reflexions sur quelques lois generales de la nature qui s’observent dans
les effets des forces quelconques» была напечатана в «Histoire de l’Acad6mie Royale des
Scienceset Belles Lettres.», аппёе 1748, Berlin, 1750. Classe de math6matique, стр. 189—218.
[16] Под «средним направлением сил» Эйлер, очевидно, понимает направление равно-
действующей всех сил, действующих на каждую частицу, находящуюся на поверхности.
[16] Сила ZP является равнодействующей трех сил, направленных по осям координат.
[17] хх и т. п. у Эйлера означает х2 и т. д.
[“] Эйлер употребляет здесь слово «figure».
[19] Подразумевается «длин всех нитей».
[20] Эйлер пишет «sinus total».
[21] Собственно говоря, Эйлер рассматривает здесь принцип минимума потенциаль-
ной энергии.
[22] Статья «Harmonie entre les principes g£n£raux de repos et de mouvement de M. de
Maupertuis» была напечатана в «Memoires de 1’Academie Royale des Sciences et Belles Let-
tres», Berlin, t. 7 (1751), 1753, стр. 169—198.
В этой статье (см. стр. 78) Эйлер, по существу говоря, хочет обосновать принцип
наименьшего действия на законе минимума потенциальной энергии.
[23] В подлиннике пропущено N во втором члене справа. «Effort» — еще не оформ-
ленное представление о механической работе.
[24] На рис. 7 перепутаны обозначения : вместо с надо d, вместо <5 надо с, опущено Ь.
[2б] Нами сохранено выражение «усилие сил», характерное для еще не разработан-
ной терминологии механики того времени.
[26] Статья «Dissertatio de principio minimae actionis una cum examine objectionum
Cl. prof. Koenigii contra hoc principium factarum» была опубликована в Берлине в 1753 г.
отдельной книгой.
[27] Статья Д’Аламбера «Cosmologie» написана для издававшейся им совместно с
Дидро энциклопедии и напечатана в «Encyclopedic ou Dictionnaire raisonne des sciences,
des arts et des metiers, par une societe des gens de lettres», t. 4, 1754, стр. 294—297. Харак-
теристику взглядов Д’Аламбера см. в «Послесловии», стр. 785, 786.
[28] Статья «Application de la methode exposee dans le memoire precedent a la solution
des diff6rents problemes de dynamique» напечатана впервые во 2-м томе: «Miscellanea Tau-
rinensia» за 1760—1761 гг. (перепечатана в книге : Lagrange, Oeuvres, т. 1, Paris,
1867, стр. 365—468). Печатается с некоторыми сокращениями.
Статья, на которую ссылается Лагранж и продолжением которой является публи-
куемая частично работа, была напечатена во 2-м томе «Miscellanea Taurinensia» за 1760—
1761 гг. (перепечатана в книге : Lagrange, Oeuvres, т. 1, Paris, 1867, стр. 335—362)
под названием «Essai d’une nouvelle methode pour determiner les maxima et les minima
des formules integrates ind6finies».
В этой работе Лагранж излагает свой метод, который требует применения только
дифференциального и интегрального исчисления. Для того чтобы отличить операцию
варьирования от дифференцирования, Лагранж впервые вводит обозначение д. Поэтому
3Z выражает у него «дифференциал» Z, не совпадающий с dz, хотя если имеет место dZ =
= т dx, то равным образом 8Z = т дх. Прежде всего Лагранж решает следующую задачу:
имеем j Z, где Z — некоторая определенная функция переменных х, и их производных;
надо найти такое отношение между этими переменными, при котором (' Z будет макси-
мумом или минимумом.
Имеем:
d$Z = $dZ = 0.
Пусть
3 Z = п dxt + р д dxi + q д d2Xi + г д d3xt
следовательно,
f п <5х; + J р 3 dxt + J q <5 d2xt + j’ г 8 d3xt + ... = 0 .
Замечая, что 8 dx = d8x и т. д., и интегрируя по частям
J р d дх = рдх — § dp дх,
J qd28x = q ddx — dq дх + (' d2q дх ,
получим:
]' (n — dp + d2q — dsr + ...) dxt + (p — dq + d2 r — ...) dxt +
+ (q — dr + . ..) d dxt + (r — . • •) d2 dxt + ... = 0 .
ПРИМЕЧАНИЯ
883
Отсюда получаем искомое условие
п — dp + d2q — d3r + • • = 0 .
[29] S dm обозначает сумму всех элементов массы нити; несмотря на то что, dm —
бесконечно малая величина, результат суммирования всех dm конечен и равен массе
всей нити. Операции S и d таковы, что S ddx = dx; кроме того,-^- dx = 0.
Знак d в отличие от d применяется Лагранжем для обозначения бесконечно малого
, , d , -
элемента, например длины ds, следовательно, ds обозначает производную по времени
от такого элемента.
[3“] В п. 9. «Essai d’une nouvelle m6thode pour d6terminer les maxima et lee minima
des formules intdgraiesinddfinies» рассматривается задача : найти минимум или максимум
выражения f Z, предполагая, что Z есть произвольная алгебраическая функция, образо-
ванная переменными х, у, г и их дифференциалами dx, dy, dz, d2x, d2y,... и величины
И = f Z', где Z' — другая алгебраическая функция тех же переменных.
[з1] Статью «Recherches sur la nature et la propagation du son» cm. «Oeuvres de La-
grange», t. 1, Paris, 1867, стр. 39—151.
[32] Есть русский перевод под названием «Теория фигуры Земли». Серия «Классики
науки», Изд. АН СССР, 1947.
[33] В п. XLIX дано уравнение неразрывности.
L34] Первое издание «M6canique Analytique par М. de la Grange, de I’Acaddmie des
Sciences de Paris, de Cellesde Berlin, de P6tersbourg, de Turin, etc.» вышло в Париже в
1788 г. (См. также «Oeuvres de Lagrange», т. 11, 12, Paris, 1888.)
Печатаемые отрывки взяты из книги : Ж. Лагранж, Аналитическая механика,
т. 1, перев. В. С. Гохмана под ред. Л. Г. Лойцянского и А. И. Лурье, изд. 2-е, Гостехиздат,
М.—Л, 1950. Динамика. Отдел третий, § VI, стр. 379—390. Перевод выполнен с послед-
него французского издания «Oeuvres de Lagrange».
[S5] q-о есть уравнение
где F есть постоянная, равная значению левой части этого уравнения для данного вре-
мени. П здесь обозначает отрицательную силовую функцию (термин этот впервые по-
явился в 1834 г. у У. Р. Гамильтона), так что это уравнение есть известный интеграл живой
силы и выражает принцип живой силы.
[36] То есть принцип Д’Аламбера
(d2x . d2y х d2z ]
S т [~dF 6 Х + IF Sy + ~d? S Z + * П) = ° •
[37] Слова «постоянный элемент» (I’dldment constant) введены Лагранжем во втором
издании.
[зз] ЭтоТпримечание Бертрана появилось, естественно, лишь в третьем издании
«Аналитической механики» («Oeuvres de Lagrange», т. XI, стр. 318).
[33] Это примечание Дарбу впервые появилось в четвертом издании («Oeuvres de
Lagrange», т. XI, стр. 318).
[40] В первом издании это место звучало так : «Величина Sm J adds, если переставить
знаки S и что всегда допустимо» ....ново втором издании Лагранж добавил : «и пред-
положить dt постоянным» (en supposant dt constant).
[41] Следующий далее № 42 («Oeuvres», т. XI, стр. 323—324) отсутствует в первом
издании и имеется лишь во втором и последующих изданиях.
[42] Статья Родригеса «De la maniere d’employer le principe de la moindre action, pour
obtenir les 6quations du mouvement rapportdes aux variables inddpendentes» напечатана
в «Correspondances sur 1’Ecole Polytechnique», t. 3, № 2, Mai 1816, стр. 159—162. Ввиду
невозможности достать французский подлинник статьи перевод сделан с немецкого пере-
вода этой статьи, помещенного в сборнике «Abhandlungen fiber die Prinzipien der Mecha-
nik», изданном в серии «Ostwald’s Klassiker der exacten Naturwissenschaften», № 167.
[43] Свой метод неопределенных множителей Лагранж впервые изложил в «Мёса-
nique analytique», 1788, стр. 45 и далее, стр. 227 и далее. Строгое обоснование этого метода
дали А. Майер и Турксма.
[“] Вместо употребляемого Родригесом d мы обозначаем здесь частную производную
через Ъ; это обозначение введено Лежандром и Якоби.
[46] Здесь мы пишем точнее d(T dt) вместо дТ dt у Родригеса.
[4в] Это не совсем точно. Мы должны добавить еще
dftdt (Т + V - Н) = Adt (dT + dV) + f Addt (Т + V - Н).
56*
884
ПРИМЕЧАНИЯ
Только тогда, когда время остается неизменным, то есть dt = О, уравнение для минимума
будет иметь вид
J {dT dt Л dt (<5Т + <5V)} = 0,
но это, разумеется, лишь приближенное уравнение, поскольку мы должны допускать и
вариацию времени. Точное уравнение см. в прим. 49.
[47] Относительно вариации времени у Родригеса А. Майер в сочинении «Die beiden
allgetneinen Satze der Variationsrechnung, welche den beiden Formen des Prinzips der klein-
sten Aktion in der Dynamik entsprechen», Leipzig, Math.-Physik. Berichte, 1887, на стр.
343—344 пишет: «С точки зрения динамики, в которой всегда допускается вариация
положения рассматриваемой системы точек в данный момент, это настолько непривычно,
что я раньше вовсе не представлял себе такой возможности. Но как только мы, отказав-
шись от чисто динамического толкования, допускаем вариацию не только координат
точек, но также и времени, тотчас же становится понятным тот пункт в выводе Лагранжа,
который всегда представлял наибольшие трудности. А именно, становится ясным, почему
уравнение живой силы, если его записать как условное уравнение, может, однако, оста-
вить совершенно неограниченными вариации координат ; и тогда мы видим, что утверж-
дение Якоби, согласно которому в принципе наименьшего действия необходимо из
интеграла действия исключить время посредством закона живой силы, не вполне
верно и что наряду с той формой принципа наименьшего действия, которую придал
ему Якоби, существует еще вторая, не менее правомерная форма; именно эта вторая
форма, а не принцип Гамильтона, есть то, что Лагранж лишь неточно сформулировал и
правильно, хотя и без обычно свойственной ему ясности, доказал».
Без ссылки на Родригеса и, по-видимому, независимо от него опубликовал аналогич-
ные исследования о принципе наименьшего действия Раус (Е. J. Rout h, An Elemen-
tary Treatise on the Dynamics of a system of Rigid Bodies, Лондон, 1877, стр. 305—312,
560—562); это в основном совпадает с текстом Е. J. Routh, The advanced part (part
If) of a Treatise on the Dynamics of a System of Rigid Bodies, 6-е изд., Лондон, 1905, стр.
301—309. Раус (цит. соч., стр. 301, 306) исходит из основного уравнения, в котором он
варьирует также и t:
б б
Г Г ЪФ Тб Г ( ЯФ d дФ \
л J ф л = [ф + - Ж й) L + Р (ж - ж)й) dt ’
t,
где Ф есть функция qv, qv и t. Отсюда следует (там же, стр. 303, 305—306): 1) если Ф =
= Т + U, dt = 0 и на пределах интегрирования dqv = 0, то легко можно заключить, что,
f,
когда d J (Т + U) dt = 0, то имеют силу уравнения движения, открытые Лагранжем, и
L
наоборот; 2) когда U и условные уравнения явно независимы от времени, а Ф = 2Т и на
пределах интегрирования dqv = 0, а$1 не равно нулю, так что мы можем еще установить
уравнение условия для варьирования, тогда мы избираем условие, что энергия Т — U ко
времени t в действительном движении равна энергии в варьированном движении к соот-
ветствующему времени t + dt, иными словами, мы определяем dt из уравнения
d (Г — U) = 0,
и тогда видим, что принцип наименьшего действия равнозначен с системой уравнений
Лагранжа.
Раус, как и Родригес, пользуется способом неопределенного множителя Лагранжа,
причем он полагает
IV = 7'+(T — U — й) Я ,
d J W dt = 0 , (а)
где dh = 0, и вначале не принимает во внимание условие dT = dU, а затем определяет Я
так, что это условие соблюдается (он находит, что Л = — . Если бы нам нужно было
принять, что dt = 0 в уравнении (а), то мы имели бы уравнение, которое, по-видимому,
было бы эквивалентно уравнению Лагранжа лишь при Л = —. Тогда уравнение (а)
превратилось бы в принцип Гамильтона
б
-’-|(<5Т+<517)Й = О,
to
ПРИМЕЧАНИЯ
885
и отсюда, очевидно, возникает мнение, изложенное нами в начале примечания. Ср. также
Раус, цит. соч., стр. 306, № 454.
Здесь полезно будет заметить, что когда говорят, что энергия при действительном
движении постоянна, то имеют в виду, что = 0, но не обязательно dh = 0; у Гамиль-
тона в «принципе переменного действия» мы рассматриваем «действие»
V = ]’ 2 Т dt
t,
как некоторое множество естественных движений системы при небольших изменениях
(dh) ее начальной энергии и соответственно небольших изменениях конечных положений.
Здесь dh не равно нулю, и
<5 V = [ mr xr dxr + t dh]1'
В принципе же наименьшего действия, наоборот, рассматривается множество дви-
жений (если вообще существуют возможные движения) системы между данными началь-
ными и конечными положениями, и здесь каждое движение, кроме естественного, явля-
ется вынужденным. Процесс варьирования <5 здесь совершенно другой, и поскольку
энергия как для каждого отдельного движения, так и для любого движения постоянна
(ft = const), то мы имеем как = 0, так и dh = 0 .
Замечание Рауса (цит. соч., стр. 303), что dx— xdt есть возможное перемещение,
использовано А. Фоссом и независимо от Рауса и Фосса Рети (М. R е t h у, Uber das
Prinzip der Aktion und fiber die Klasse mechanischer Prinzipien, denen es angehOrt, Math.
Ann., т. VIII, 1904, стр. 109—194) для другого случая, а именно, когда условные уравне-
ния не являются явно независимыми от времени.
В самом деле,
x = <p(q1,q2, ... ,qn,t),
где q,, — обобщенные координаты, и поскольку t должно варьироваться,
+ <«>
d х----dt есть, следовательно, возможное перемещение. Но и в том случае, когда
ot
мы вместо этого dqp в уравнении (б) воспользуемся другими вариациями q„, то есть
dq„ — t}„dt, то
£ (dq„ -л qv dt) = dx — xdt
OQv
также есть возможное перемещение х. Об употреблении первой формы (у Гёльдера и
Журдена) и о близких исследованиях Рети ем. Math. Ann., т. XV, 1908, стр. 513—527.
[48] 22-я лекция Лагранжа из «Lemons sut le calcul des fonctions», Париж, 1806, стр.
441—501 озаглавлена: «M6thode des variations d6duite de la consideration des fonctions».
Рассматриваемые вопросы изложены на стр. 451—452, 457—460. В самом деле, если
принять, что Т есть функция £ и f, которые, однако, не содержат явно t*), и если d есть
вариация, при которой варьируются S и t, то
что и доказывает это утверждение.
[48] Это опять неточно. Поскольку Т не содержит явно время, то
ЪТ ЪТ
ат = —+ ...
*) Так что
ЪТ ЪТ
dT--brds + ~^ds,
а не
лт 97 , 97 а- , 97 а.
886
ПРИМЕЧАНИЯ
Но нельзя предположить, что
«ели t варьируется. Эта ошибка встречается у Бертрана в прим. VI в его издании «Аналити-
ческой механики», см. «Oeuvre de Lagrange», т. XI, стр. 468—484. На стр. 482 он пользу-
ется уравнением
. , ddq
dq ~~dt~
поскольку
d$' =
dd$
' dt
tz d dt
S ~dT
так что
и
ът dbg
9f' dt
ЪТ
s df
ddt
dt +
$dTdt = ^.(dS-S'dt) + ... + Tdt + $dt ...}.
Таким образом, когда
T + Л(Т + V — H) = W,
а
= w<5/+ + . I
J од о$ ut о; J )
то
0= О + (Л4-1)(-Ц- + ...) - 2 (Я+1) Т dt +уdt
йоскольку
9VV ЪТ ЪТ , ЪТ ,
= 2Т .
А так как <5f,... на границах равны нулю, то, положив часть, стоящую не под знаком
интеграла, также равной нулю, получим:
{IV — 2(Я + 1) Г}<5< = 0.
Поскольку dt не равно нулю на границах, то А нужно определять так, чтобы, когда
Т 4- V — Н, выполнялось
z(V —Н) —(Z+1)Т = 0,
то есть, как заключает Родригес, А =-----. Тогда часть, находящаяся под знаком
интеграла, дает уравнения движения Лагранжа.
о « г> d Э1Г
Заметим, что в обозначении Родригеса -----------= а
of at of
[so] Заметка Гаусса «Uber ein neues allgemeines Grundgesetz der Mechanik» напеча-
тана в 4-м томе «Crelle Journal fur die reine Mathematik» за 1829 г. и перепечатана в Gauss’s
Werke, т. 5, стр. 23. Нами использован русский перевод, помещенный в приложении ко
2-му тому «Аналитической механики» Лагранжа.
[611 Это замечание относится к соч. Лапласа в Мёт. de 1’Institut, 1809.
[62] Уже в 1798 г. Фурье («Мёт. sur la Statique», Journ. de 1’Ecole Polytechn., cah. V,
1798, стр. 20; Oeuvres, т. II, стр. 475—521, особенно стр. 488) рассматривал случай, когда
условия выражены неравенствами. Условия, выражаемые равенствами, отвечают требо-
ванию, чтобы наряду с каждым возможным перемещением допускалось также и проти-
воположное, и принцип возможных перемещений гласит, что когда перемещения должны
удовлетворять s условным уравнениям
(ir, l dxr + ifr, i dyr + Cr, l dzr) = 0 (Z = 1, 2, ... , s) ,
ПРИМЕЧАНИЯ
887
то для равновесия необходимо и достаточно, чтобы
£ (Хг дхг + Yr дуг + Zr dZr) = О .
Г
Но когда не все перемещения обратимы, например, когда два тела, связанных друг
с другом нитью, приближаются друг к другу, но из-за длины нити не могут удалиться
друг от друга или когда тело может скользить или катиться по поверхности другого
тела, но не может ни удалиться от этой поверхности, ни проникнуть в нее, в этих случаях
сумма виртуальных работ может без нарушения равновесия быть равной нулю или
отрицательному числу, и тогда необходимым и достаточным условием равновесия будет:
£ (X, дхг + Yr дуг + Zr дгг) 0 .
Это предложение независимо друг от друга сформулировали Фурье, Гаусс и Остро-
градский (Ostrogradsky, Consid6rations g6n6rales sur les moments des forces, чит.
7 ноября 1834 г., Мёт. de Г Acad. de St.-Petersb., 6, Sc. Math, et Phys. т. 1, Sc. Math.,
Phys. etNaturelle, т. Ill, 1838, стр. 129—150). Ср. также L. В oltzmann, Vorlesungen
liber die Prinzipe der Mechanik, ч. 1, Лейпциг, 1897, стр. 115—122, 143—144.
[63] Аналитическое выражение принципа Гаусса. Если обо-
значить координаты точки массы т ко времени t через (х, у, г), то по разложении в ряд
Тейлора они ко времени t + dt будут :
х + хdt + ~х dt2, у + у dt + -~у dt2, z + zdt + ~zdt2.
Но если ко времени t связи, наложенные на систему, внезапно будут устранены, то
ость если точка т будет двигаться свободно и лишь под воздействием внешних сил
X, Y, Z, то тогда координаты ко времени t + dt будут :
х + х dt + ~ — dt2, .
2 т
откуда «принуждение» будет:
При естественном движении ускорения приводят принуждение Z к минимуму, так что при
обозначении через д2 вариации, изменяющей лишь ускорения х (но не х и х), получим
условие
<Й4 Г „ (Хг 'Ь - ! 1 л
<52Z------— I mt I —-----xf I <52 Хг 4- •.. I — 0 .
(Это условие, как известно, не достаточно для наличия минимума; однако, что каса-
ется механики, то оно необходимо и достаточно для естественного движения, когда не
даны никакие уравнения условий.) Шеринг (Abh. d. Kgl- Gesellsch. der Wiss. zu Gottingen,
Math. Klasse, т. XVIII, 1873, стр. 3—54) утверждает, что по принципу Гаусса как dx,
так и d2x должны определяться так, чтобы Z было минимумом. Однако Липшиц (Journ.
fur. Math., т. LXXXII, 1877, стр. 316 и далее, особенно стр. 321) показал, что здесь имеется
ошибка и что слова Гаусса «свободное движение», вопреки мнению Шеринга, не могут
быть истолкованы как совершенно произвольное свободное движение. Липшиц прини-
мает, что уравнения условий
Фг = const (у = 1,2, ...)
зависят только от координат и не зависят ни от времени, ни от скоростей. Он формулирует
принцип при следующих двух предпосылках.
А. Компоненты скоростей выбираются так, что они удовлетворяют Ф, = 0.
В. Эти компоненты противоречат уравнениям условий. Липшиц находит, что только
первая предпосылка ведет к правильным уравнениям условий:
По принципу Гаусса, следовательно, варьируются только ускорения, но не ско-
рости, т. е.
d2t — д2хГ — д2хг — 0 ‘ ... ,
однако дхг не равно нулю.
888
ПРИМЕЧАНИЯ
После того как мы уже видели, что «свободное движение» у Гаусса означает не совер-
шенно произвольное свободное движение, а лишь воображаемое движение, которое
могло бы совершаться, если бы в естественном движении ко времени t связи были
внезапно устранены, а силы X , Yr, Zr сохранены, мы можем исследовать, как должна
быть выражена вариация Гаусса аналитически.
Пусть х., yr, zr будут координатами точек тг во время /• Во время t + dt при действи-
тельном движении координаты точек тг будут:
хг + xrdt + у xrdt* + ... , ... (1)
В ближайший момент t 4- dt 4- d(t + dt) — t 4- 2 dt, поскольку dt постоянно, координаты
будут:
xr + 2 xr dt 4- 2 x dt2 4- .......
Если бы, наоборот, точки тг во время t были свободны, то координаты во время t 4- dt
были бы :
хг 4- хг dt 4- dt*,...,...
2 тг
следовательно, они совпадали бы с координатами (1) до бесконечно малой второго порядка,
а координаты во время t 4- 2 dt имели бы вид:
хг 4- 2хг dt 4- 2 Xr dt*.
ГПг
Минимум принуждения, следовательно, нужно понимать так пусть положения
всех точек к заданному времени t и t 4- dt одинаковы; отсюда, если имеются налицо
только внешние силы X, Y, Z (а не связи), можно вычислить положение, которое точки
будут иметь ко времени t 4- 2 dt. Допустим, точка т, была бы ко времени t 4- 2 dt в точке
Ег. Пусть теперь всем точкам ко времени t 4- 2 dt придано некоторое другое, связанное
с условиями, положение, при этом т, будет находиться в некоторой точке Fr; из всех
этих положений ко времени t 4- 2 dt под совместным воздействием внешних сил и свя-
зей системы действительно осуществляются те, для которых
^tnr (£rfr)2= ’ ^J_[(mXr_xr)2+ ...]
Г Ui г iTlf
есть минимум, так как dt можно рассматривать как заданную постоянную. Отсюда мы
видим, что в вариационном процессе Гаусса ни координаты, ни их производные не
варьируются.
Если вместе с Гиббсом (On the Fundamental Formulae of Dynamics, Amer. Journ. of
Math., т. II, 1879, стр. 49—64, ср. также Л. Больцман, Vorlesungen liber die Prin-
zipe der Mechanik, ч. 1, стр. 209—212) представить себе вариацию, обозначенную через <53,
для которой
<5g Хг ===- == 6 , ... ,
и если уравнения связей имеют форму
<Pi(.t,x1,y1,z1, ...)=0, (2)
то, дифференцируя (2) по t, получим:
-^.+ И-^*г4-. .-1 = 0,
dt г I Эхг )
при этом Ф содержит только время, координаты и их первые производные. Отсюда выте-
кает :
так что д^ХТ удовлетворяют тем же самым условиям, что и бхг,... в предложенной
Лагранжем форме принципа Д’Аламбера. А именно, поскольку перемещения должны
ПРИМЕЧАНИЯ
889
иметь место при 3t = 0 (ср. Ф. Э. Б. Журден, Bibl. Math. ,3 Folge, т. VI, 1906, стр.
352—353), имеем:
\ OXf J
Таким образом, можно вместо уравнения Д’Аламбера
2 [(Хг - тгхг) Зхг + ... ] = О (А)
Г
написать
.У [ (Хг — тг хг) 32хг 4- ... ] = О (В)
г
в качестве основного уравнения механики, то это уравнение может быть выражено через
d2Z = 0, где Z есть принуждение. Иными словами, первая вариация Z при переходе от
действительного движения к движению, варьируемому «по способу Гаусса» (Больц-
ман, указ, соч., стр. 210) и обозначенному через <52, исчезает; действительно Z для таких
вариаций будет минимумом.
Далее легко заметить, что ничто не препятствует тому, чтобы уравнения связей
были линейными дифференциальными уравнениями (возможно, не интегрируемыми,,
т. е. система не «голономна», ср. Больцман, указ, соч., стр. 119, 212).
Таким образом, вместо (2) имеем:
У (fr, i dxr + цг, i dyr + fr, i dzr) + 61 dt = 0, (3)J
r
или, что то же самое,
dxr = У pv, Г dq„ + рг dt, ... ,
V
где qv суть независимые друг от друга параметры («обобщенные координаты»), если вместо
(3) можно было бы составить конечные уравнения условий вида (2); тогда
'1 Эхх + ’ dt '
Точно так же легко можно видеть, что когда <5, есть вариационный процесс, при
котором
<5ххг = 0 ,
мы прихоДим к принципу
У [(Хг — fflrXr) ЗгХг + ... ] = 0,
Г
который является, так сказать, промежуточным между (А) и (В), но который не ведет,
как (В), к новым уравнениям в обобщенных координатах (ср. Jourdain, Quart.
Journ. of Math., Jan. 1909).
Дж. В. Гиббс (см. указ, соч.) независимо от Гаусса и из совершенно других сообра-
жений вывел принцип
У [(Хг — тг Хг) д2хг + ... ] =s 0,
Г
ИЛИ
<52 (б7 — У mr 0,
где U есть силовая функция, a u, = хг + yr j- zr. Гиббс ищет в динамике метод, анало-
гичный методу Лагранжа в статике, который основывался бы на принципе возможных
перемещений, то есть не был бы простым сведением динамики к статике через принцип
Д’Аламбера. В том случае, когда имеются налицо только уравнения связей, Гиббс
дает (там же, стр. 63—64, однако с весьма неясными обозначениями: d вместо Э, V вместо
Т, Qr вместо Qr, вместо ?,) новые уравнения движения:
(г =1,2,(4)
где
Т = ^У.
В 1899 г. П. Аппель опубликовал статью «Les mouvements de roulement en dyna-
mique», C. R., t. CXXIX, 1899, стр. 317—320, 450—460. (Вместо T Аппель пользуется
обозначением S.) Аппель делает существенное замечание, что принцип Гамильтона не
'890
ПРИМЕЧАНИЯ
•становится неприменимым для неголономных систем, как уравнение Лагранжа, когда
некоторые координаты (xr, уг, zr) могут быть выражены только не интегрируемыми диф-
ференциальными уравнениями dxr = pr,rdqv + prdt,... с параметрами qlt..., qn. Такие
V
уравнения связей были лишь вскользь отмечены Лагранжем (ср. Jourdain, Bib.
Math., т. VI, 1906, стр. 350—352) и подробно рассмотрены Фоссом в 1884 г. (но без указа-
ния, что они имеют место также и при качении). Что они имеют место в случаях, когда
тело катится без скольжения, было замечено Раусом, Феррерсом, К. Нейманом, Герцем
и др. Механическую систему, которая частично подчинена таким условиям, Герц назвал
«неголономной».
Аппель заключает из
дхг = У Pr^dq,, ...
что принцип Д’Аламбера ведет к п уравнениям
^">г[хг -^-+ =QV (к = 1,2, ... , л)
г \ u4v J
и тем самым также к уравнению (4). Если мы образуем функцию
R = Т - У Q„ q„,
то можно написать уравнения
-Ж = 0 (?= 1,2, ... , л):
dq, ' ’
это является условием того, что значения приводят величину R к минимуму. Наоборот,
если найденные таким образом значения q? приводят величину R к минимуму, то одно-
родные члены второй степени от R происходят из Г и образуют положительную квад-
ратичную форму. На том же основании мы заключаем, что ускорения приводят функцию
y^-^[(mrXr-Xr)2+ •••
к минимуму, а это есть принцип Гаусса.
Наконец, Ф. Э. В. Журден («Math. Gazette, т. II, 1903, стр. 337—340) независимо от
Гиббса и Аппеля ввел обобщенные координаты в формулу
[(Хг — mrxr) 62хг + ... ] = О
и нашел уравнения (4). Но когда он затем узнал об открытии Аппеля, что уравнения (4)
охватывают неголономные связи, он доказал, что эти уравнения согласуются с обоб-
щенными уравнениями Лагранжа (см. N. М. Ferrers, Extension of Lagranges equations,
Quart. Journ. of Math., т. XII, 1873, стр. 1, 5):
_ d ЪТ f. d dx,
(iv= ,; ~a-------— mr lXr
dt dijp \ dt d([v
(v = 1, 2,..., n),
последний член которых может быть приведен к
„ ( Ъхг ) ЪТ
£ Шг Хт -х----Г . . . — Q ,
и притом лишь тогда, когда система голономна. Принцип Гаусса в модифицированной
редакции, что силы X, У, Z, которые в понимании «динамики без сил» Герца исключены
(ср. A. Voss, Encycl. d. math. Wiss., т. IV, 1, стр. 62—64, 85), образует единственный
основной закон Герца (Gesam. Werke, т. Ill, Лейпциг, 1894, № 309, 344—346). Ср.
О. Г ё л ь д е р, О принципах Гамильтона и Мопертюи, стр. 538 настоящей книги.
Обобщенное определение силы и ее меры, данное Л. Кенигсбергером (Die Prinzipien
der Mechanik, Mathem. Untersuch., Leipzig, 1901; Voss, Encycl., указ, статья, стр. 91),
привело к тому, что обобщенный принцип Гамильтона принимает форму
d ЪН
dq,, dt ‘dq,
dn
• (-1)" —
ЪН
dtn aq™
Q, <5?,, dt = 0 .
ПРИМЕЧАНИЯ
891
«(Кенигсбергер, указ, соч., стр. 47—54). Кенигсбергер дал также обобщенный принцип
наименьшего принуждения Гаусса (там же, стр. 67—73) и расширенный принцип наи-
меньшего действия (там же, стр. 73—82).
[и] Поясним это замечание Гаусса.
В способе наименьших квадратов определяется сумма квадратов индивидуальных
ошибок т измерений п параметров, причем т > и, и значения параметров проблемы опре-
деляются из принципа, что зта сумма должна быть минимумом.
Принцип наименьшего принуждения заключает Зп членов суммы, образующей Z,
которые соответствуют Зп наблюдениям. Это число больше числа неизвестных iji в силу т
заданных кинематических условий. «Ошибка» представлена отклонением величины дейст-
вующей силы от силы инерции. Множитель 1/т(- может быть интерпретирован как весовой
фактор по аналогии с неравноточными наблюдениями, которым приписывается вес в
зависимости от их характера.
[66] Хотя условие принципа наименьшего принуждения устанавливает первона-
чально лишь стационарность значения Z, однако легко доказать, что в данном случае
стационарность автоматически приводит к минимуму без каких-либо дальнейших усло-
вий. Это следует из того, что Z, будучи суммой существенно положительных членов,
.должен где-то иметь минимум.
Принцип Гаусса проще принципа наименьшего действия в том отношении, что он
не требует интегрирования по времени. Однако он требует рассмотрения ускорений, в то
время как принцип наименьшего действия требует рассмотрения скоростей. Принцип
Гаусса применим и к неголономным системам.
Герц дал блестящую геометрическую интерпретацию принципа Гаусса для специаль-
ного случая, когда действующие силы равны нулю. В этом случае Z может быть интер-
претировано как геодезическая кривизна пути изображающей точки, которая пред-
ставляет положение механической системы в Зп-мерном евклидовом пространстве с пря-
моугольными координатами ут7х(, У 7777 У/, 1'лт7 27. Эта точка в силу заданного принуж-
дения должна оставаться внутри некоторого подпространства этого Зп-мерного прост-
ранства. Принцип Z — min может быть теперь выражен как требование, чтобы для изо-
бражающей точки кривизна в каждой точке ее пути имела наименьшее значение, совме-
стимое с заданным принуждением. Это означает, что путь изображающей точки стремится
быть насколько возможно прямым. Отсюда принцип прямейшего пути Герца.
[66] Этот отрывок представляет собой § 573 книги Пуассона <Trait6 de M6canique»
par S. D. Poisson, изд. 2-е, т. II, Paris, 1833.
[67] В § 160 1-го тома рассматривается свойство движения материальной точки,
.которому дано наименование — принцип наименьшего дейстйия.
[68] В § 565 установлено, что сумма живых сил системы точек постоянна до тех пор,
пока система не подвержена действию никаких движущих сил.
[68] В § 531 рассматривается общая формула принципа Д’Аламбера, из которой
могут быть выведены все уравнения движения системы материальных точек, взаимные
«связи которых выражены заданными уравнениями.
[6“] Уравнение (Ь) § 564
2 т v2 — V1 т к2 = 2<р (х, у, z, х', ...) — 2<р (а, Ь, с, а', Ь', с'
тде v, к — скорости в моменты времени t н t0 = 0, соответственно а, Ь, с, а', Ь', с',... —
начальные значения координат х, у, z, х', у', z',... точек с массой т, т',...
[61] Статья «On a general Method in Dynamics, by which the Study of the Motions of all
free Systems Attracting or Repelling Points is Reduced to the Search and Differentiation of
One Central Relation or Characteristic Function» опубликована в «Phil. Trans, of the Roy.
Soc.», ч. II, 1834, стр. 247—308 ; перепечатана в книге W. R. Hamilton, Math. Pap.,
t. 2, Cambridge, 1940, стр. 103—162.
[62] О развитии теоретической динамики см. в настоящей книге «Послесловие».
[63] Гамильтон имеет здесь в виду гипотезу Бошковича о строении материи (1743).
[м] В момент, когда писалась эта работа, были известны шесть планет и четыре
астероида.
[66] Впоследствии Гамильтон развил это предположение в «Исчислении основных
соотношений», см. Math. Pap., т. 2, стр. 297—410. См. стр. 763 настоящей книги.
[66] Лагранж в «Аналитической механике» пользовался отрицательной функцией U,
обозначая ее V.
[67] Гамильтон обозначает частную производную через 6; мы сохранили это обо-
значение.
[68] Термин vis viva был впервые применен Лейбницем. Термин энергия был введен
Томасом Юнгом (Natural Philosophy, Lecture VIII) и термин работа — Кориолисом; в
1862 г., Гамильтон писал Тэту : «Энергия и работа в их старом английском значении —
это вещи, мне знакомые. Но у меня лишь самые туманные представления о современном
значении этих терминов», см. Graves, Life of W. R. Hamilton, t. Ill, стр. 150).
892
ПРИМЕЧАНИЯ
t68] Замечания Лагранжа о принципе наименьшего действия см. на стр. 159 настоя-
щей книги.
[’°] Замечания Пуассона о принципе наименьшего действия см. на стр. 173 настоя-
щей книги.
[”] Эти уравнения в точности аналогичны уравнениям £2 = О, £2' = 0 третьего при-
ложения, Matn. Pap., т. 1, стр. 170, 485. Критические замечания Якоби см. на стр. 307 на-
стоящей книги.
[«] mrx;fer=4--^-<5xr=2-
01 ОХг
„ 1 <5V 8*V .
Xs ОХг = £--------.----S---о---OXr =
ms oxs oxs 8xr
82У
8xr 8xs
oxr \2ms\oxs) J oxr
[73] Функция V, очевидно, не зависит от выбора осей координат и рассматриваемые
движения эквивалентны изменениям осей координат. Следовательно, значение V не
меняется при таких движениях.
[м] «Marks of position» мы переводим дословно — отметки положения; по существу
говоря, это обобщенные координаты.
[76] Уравнение (Q) проще всего можно получить следующим образом без введения
декартовых координат. Пусть Т будет функцией ц и г£, причем однородной функцией
второй степени относительно rf, и удовлетворяет уравнению Т = U + Й, где U представ-
ляет собой функцию rj, а Н -— постоянная вдоль каждой из рассматриваемых кривых..
Если мы напишем
w"’-
о о
то получим:
о о
- „„ - 2- - [' ч.
~ дт? 1 ~ де' J \дт]' J J V J
о о
НО
.У г1’ = 2Т = Т + и + Н,
ОТ]
и следовательно,
„ .(8Т Ч v 8Т . , „ 8U я
-йЫ7г 2 “фг $71+~^г ^+дн-
Отсюда мы находим, что
„ 8Т х 8Т0 „ , f (d 8Т 8Т 8U\
о V — о дт] — —у-- де -р t дн — I У? I ——— ——-— •: — о | дт] dt.
от] де J V dt дт] дт] от])
о
Это (исходя из принципа наименьшего действия) ведет к уравнениям (Z), из которых:
непосредственно следует уравнение (Q).
г 7вт v ЭТ QT , , ,
L J 2 8п — 2 8е = 8V — 18Н.
at] ~ де
[”] Если v — скорость центра тяжести, то
(Хц Яц)2 + (Уц i’ll)2 + (ги сп)2 = с212 = 2 НХ112/_У tn.
[’8] Термин «центробарический» был впервые введен Мёбиусом.
[”] Если Vj выражена как функция f, v, Z, а, р, у, то
3V1
8x,t
,П-1),
<?У1
8xtn
[во] Относительная конфигурация 2(п—1) начальных и конечных положений пла-
нет определяется бп— 12 взаимными расстояниями, и, кроме того, мы имеем три коорди-
наты любой из планет относительно Солнца.
ПРИМЕЧАНИЯ
893
[81] Уравнение (S3) легко сводится к хорошо известной форме теоремы Ламберта.
•См. Уиттекер, Аналитическая динамика.
[88] Этот специальный случай теоремы Ламберта был дан Эйлером в 1742 г. Miscell.
Berolin, т. VII.
[83] Это представляет собой соотношение, связывающее расстояния пяти точек в про-
странстве. Оно может быть написано более симметрично в форме детерминанта :
0 1 1 1 1 1
1 0 ^2 «1
1 S2 0 ^3 «3 dl
1 ^3 0 S5
1 S3 0 d4
1 Sx dl s5 0
[81] 2 2 nu + mn T{r} = v m ' mn ' (f2 + V2 + c2) =
2 v m 1
=т' - т‘тк - &>2 +•••].
2
-----2, тг Т',г> + 2 2, Т<г> =
тп 11 '
2 1
= ЪГ 1Пг} Т' + 2Т~^Г^' т‘,Пк [(£ -Ю2 +...].
flln ГПп * J
[85] Уравнения (V5), (X5) получаются путем приравнивания нулю частных произ-
водных V по произвольным постоянным gm. Относительно этого метода получения
характеристической функции см. прим. 129, стр. 899.
[86] Из (X1), стр. 198, мы имеем:
2, т£'=
2 m
mn
SV,
и отсюда
1 SV, 1 v SV,
ini S£i mn ~' SI
Следовательно, выражение (69) для T, дает:
1 v 1 Г бу, у 1
2 *" шД J + 2тп
бУ, V
6fJ и
т. д.
[87] Тл образуется из (D6) путем замены V, на V,v Для бинарной системы, состоящей
из точек mi, тп, имеем:
2 Т<‘> = (йг + ,'2 + С<2) t = mi±Jn+ w<\
mi + mn ' mi + mn
ЭУ;° = гщт„ , . _ Эи'(*>
9f mi + m,,1 ’ dli
Из уравнения (X1), стр. 198, имеем, следовательно :
2 Т(,4) -
mj + тп (f ЭУ^у Г ЭУ(,4)у ( ЭУ’Ду)
т, тп Ц dSt ) + ( Qi]i J + t d^i J j
mi mn
mt + mn
894
ПРИМЕЧАНИЯ
где
т‘ + тп tfU (<)
т/тп ' к ’
1 т/ + тпЦ ЭУ«>у , ( , Г ЭУ</>у]
'г~ 2 т(тп [I 9& J +( &ц ) +l dt/ JJ +
1 ( ЭГ',4’ 9V(,*> ЭГ‘, дУ*’ ЭГ<’ ЭГ(,*’ ]
mn^'\dSi dSk + ~дт д^к ЭС< 9Cfc J
1 v mt mn dw(i> V f Эи/° V Г 0iv(!>
2 mt + mn 11 dSt J + I diji ) + I 9ft- J J +
v ___________тцпк ( Эш<4) Эи/*’ Эи/4’ Эи/*’ Эи/4’ Эи/*’1
m" ~' (тп + mi) (тп + тк) ( Э& Э& + дг]/ Ьцк % ЭСл )
= тп У, m/fty + Н,+ ... , Т,= £ т, mkf‘'k‘ 4- Н, и т. д.
[м] Интегрируя по частям.
[39] Иначе мы получили бы одно или более уравнений, связывающих начальные
и конечные точки. Конечно, когда мы подставляем точные значения, то $/, гц, %/ обозна-
чают фактические координаты в момент времени t.
["] Мы имеем -= t, но и1'*’ зависит от начальных и конечных координат, а также-
(5®ц/*э <5ц/^
от g'*’.Таким образом, отсюда следует - W8 ft/*’ + <5, = Л; (L7) следует непосред-
ственно отсюда же и затем получаем (К7) путем суммирования. Уравнение (М7) полу-
чается путем нахождения частной производной (В7) по §•'*’.
[91] Чтобы получить (N7), рассмотрим V,г =2, т/ mk W(i,k>, где 1Т<4,*> задано посред-
ством (Т9).
„ 1 <5У,
Три группы членов получаются из выражения — $а‘ :
TUk
1) Из интегрированной части IV’4'*’ получаем-----—5--. Это слагаемое пренебре-
/Пп OCLfi
жимо мало по сравнению с первым членом в Jft уравнения (J7).
2) Из (К7), где t явно встречается на верхней границе интеграла, получаем :
<5/ (<52нХ9 Vi ( <5W4’ t ' риг’ <5f ' f^wV1
да/ ~mi UgW4 I da/dg44’ )h' mr^FJ И 1Н, /~'"4<5g2 J ’
Поскольку Jf = > мы видим по (M7), что зта группа членов уничтожается членами,
включающими At.
3) Из остальных членов, которые встречаются в (О7).
["] да'< = _ 92W(t) = да', = _ ЭМ’ = ЭуГ
dfit да/ 9ft да, ’ dyt ду/ да/ да/
[93] Если мы задаем вариации Аа/, Afi/, Ау/„ то, поскольку
<5|84' _ ёа) __ <52и><4)
- <5а/ <5ft ба/ 6(1/ ’
новые вариации а\, y't будут иметь вид
. , , ба/ .. , да’/ да', , да/ лп dyt .
Аа/ + -д— Аа/ + Jft 4. -j— Ау/, или Аа/ + -г— Jft 4- Ау/,
octi opi oyi oaj ооц
где Аа’/ и т.д. представляют собой значения, данные в(О7). Давая значения Аа/, Ар/, Ау/-
в (Т7), мы получаем значения Аа) в той же группе уравнений. Сравнение методов Ла-
гранжа, Пуассона и Гамильтона в теории возмущений см. Lovett, Quarterly journal
of Mathematics, т. XXX (1899), стр. 47—149.
[94] На этой стадии Гамильтон заметил неудобство появления Н в характеристической,
функции ; поэтому он преобразовал эту функцию в другую, которая в качестве перемен-
ной содержала t вместо Н. Преобразование, которое необходимо произвести, очевидно из.
ПРИМЕЧАНИЯ
895-
следующего уравнения:
ё V = т (х' ёх — а' ёа + у' ёу — Ь' ёЬ J- х’ ёг — с' ёс) + t ёН,
следовательно, ё (V — Ht) = £ т(х' dx — a' da 4- • • •) — Нё1.
[’«] Статья «Second Essay on a General Method in Dynamics» была опубликована в.
«Phil. Trans. Roy. Soc.», ч. 1, 1835, стр. 95—144. Перепечатана в книге : W. R. Н a m i 1-
t о п, Math. Pap., т. 2, Cambridge, 1940, стр. 162—212.
["] Lagrange, M6moire sur la th6orie g6n6rale de la variation des constantes arbi-
traires, Oeuvres, т. VI, Paris, 1873, стр. 771—809.
Poisson, Sur la variation des constantes arbitraires dans les questions de m6canique,
Journ. de I’Ecole Polytechn., т. VIII, 1809, стр. 266.
[”] Краткое изложение этой теории см. на стр. 763 настоящей книги.
["] Еще в 1809 г. Пуассон ввел функцию JT qi pt —Т, рассматриваемую как функция
qi и pi, и вывел половину гамильтоновых1 уравнений.
Лагранж в 1809 г., рассматривая варьирование элементов орбит, установил систему
уравнений в гамильтоновой форме, в которые вместо функции Н входила пертурбацион-
ная функция R.
Во втором издании «Аналитической механики» Лагранж приводит следующие урав-
нения :
dai _ dR dst _ dR
dt ~~ dsi ' dt ~ dai ’
dT
где ai — начальные значения координат, s, — начальные значения = pt.
Это — простейший пример системы канонических элементов*).
Возьмем консервативную механическую систему, имеющую л степеней свободы и
находящуюся в постоянном и консервативном поле сил. Ее движение может быть выра-
жено дифференциальными уравнениями различной формы. Среди них уравнения, вве-
денные Гамильтоном, имеют прежде всего преимущество симметрии. В гамильтоновом
методе состояние механической системы с л степенями свободы определяется л коорди-
натами qi, которые фиксируют конфигурацию системы и л соответствующих импульсов
Pi. Координаты qi могут быть выбраны различными способами, в частном случае это могут
быть декартовы координаты х, у, х, цилиндрические или сферические координаты. Во всех
случаях всякое изменение qt вызывает изменение р/.
В консервативном поле имеем Т = U -{-const в течение действительного движения.
Т определяется л значениями qi и л значениями pt, a U — только л значениями qt. Отсюда
видно, что полнаяэнергия системы будет выражаться некоторой комбинацией из л коор-
динат qi и л импульсов р,. Такое выражение полной энергии называется гамильтоновой
функцией и обозначается Н (qi, pt). Построение гамильтоновой функции для данной
механической системы не вызывает затруднений. Точный вид этой функции зависит, од-
нако, от особенностей как рассматриваемой механической системы, так и поля, в котором
она движется, а следовательно, и от выбора л координат qi.
Удачный выбор qi может сильно облегчить решение задачи; особенно просто
решается динамическая проблема, если можно выбрать л координат д, так, что Н будет
функцией только р,.
Для консервативной системы с л степенями свободы движение выражается 2л диф-
ференциальными уравнениями первого порядка простого вида :
Уравнения Гамильтона пишутся в такой форме только для консервативных систем
и в таком виде они неприменимы в случае полей, не имеющих потенциала, и в случае
неголономных связей.
Интересно отметить, что Гамильтон не дал каноническим уравнениям какого-либо
применения и был более заинтересован в сведении всей своей работы к рассмотрению
одной функции и к выполнению приближений с ее помощью.
*) При изучении канонических систем обычно прибегают к геометрическому пред-
ставлению, в котором 2л канонических переменных р н q рассматриваются как коорди-
ната линейного пространства 2л измерений. Это пространство, следуя Гиббсу, называют
фазовым.
В этом пространстве всякое решение р = р (t), q— q(t) канонической системы изобра-
жается интегральной кривой.
896
ПРИМЕЧАНИЯ
Он, однако, сразу заметил, что общий метод, развитый им в динамике, может быть
значительно расширен.
[”]
АСУ V. А - , « V 9Н Л- V ЪН Л
<58 = F <5со + со 9 -^=- — 2 ~х=- осо — 2 .г аг)
\ дш 9со / 9со 91]
[1001
ЪТ
dt]'
ЪТ
9г]
[Ю1] $ = V — Ht, Q — —S +Jf (г]ш
Dynamics, 1905, п. 487.
рог] Теперь более принято писать S =
с (29) и (30)
dS 98 98 de 98
----- = ----1_ V и -
dt3--9t0-----9е dt0-------dt0
Следовательно, два уравнения в частных
98 Г 98 98
dt + ( 9г/, ’ 9% ’ ’
98 < 98 98
9t0 I 9е, ’ Эе2
— ер). Ср. также Routh, Advanced Rigid
t
ПУ co -5=—:— H\dt, и мы имеем по аналогии
9со J
to
( ЭН0 „ ] , 9Н0 „
= “ ~Эр~ “ H°J + Р~др~ ~ Н° ’
производных будут:
95 / 1 п
]=о,
, <?,, е2, ..., Cgn, to I >
если даже Н не является постоянной. Легко видеть, что эти уравнения эквивалентны (С),
когда Н является постоянной. Якоби (Crelle, т. XXVII, стр. 97—162) показал, что урав-
нения (С) сохраняют свою силу, когда U явно содержит t; там также даны и соот-
ветствующие уравнения для функции V.
роз] род F' подразумевается частная производная F по .
и е или <582 через
[1М] Задача состоит в том, чтобы выразить S2 в терминах г]
г], <51^, е> $е-
[losj qt уравнения (47) берется частная производная по ек,
сохраняются постоянными.
S2H
ров] Легко показать, что в (64) и (65) коэффициенты и -
причем величины г]
82Н1
равны нулю.
ОСОц ОШг
4.4. ^Н1
Кроме того, если мы поменяем местами индексы в коэффициенте , этот член
взаимно уничтожится с соответствующим членом (65).
[io?] Отсюда следует, что в невозмущенном движении а являются постоянными, в
чем и состоит теорема Пуассона.
[1°8] эт0 легче всего можно увидеть из следующего. Если бы ar.s, выраженное через
к, явно содержало t, то оно не оставалось бы постоянным во время невозмущенного
движения, что противоречило бы (D1).
[109] Взяв t = 0 в (70), мы получаем Фг (0, elt..., езп, plt..., рзп) = 0 для всех зна-
чений е и р. Отсюда следует (71).
[110] С и Е представляют собой производящие функции для контактных преобразо-
ваний от р, е к А, к.
[ш] Метод рассуждения здесь такой же, как при выводе уравнения (D).
[1121 С = 2 (кА — ер) — Е .
дС
[из] эти уравнения в частных производных имеют вид---
4 + =
О,
[114] vers обозначает функцию (1 — cos <р).
[116] Приближение S2 (136) представляет собой решение уравнения в частных произ-
водных
<582 , 8S, <582 , <58, <582 , <58, <582
<5/ <517, <5% 8г]2 8т]2 <5% 8г]г 2
ПРИМЕЧАНИЯ
897
Это должен быть полный интеграл, имеющий произвольные постоянные е1( е2, ез и аДДи-
тивную постоянную. Метод, применяемый Гамильтоном в подобных случаях, состоит
в следующем. Значение S2 находится посредством интегрирования вдоль пути:
dS dS
Р1=— , р? = — -И-, Рз = —Т~- Тогда S2 является функцией t, еи е2, е3, plt р2, р3.
О£« О&2 Осо
(5S
Если мы заменим р, через----- и т. д., то S2 будет теперь удовлетворять уравне-
нию в частных производных ввиду того, что часть, возникающая при дифференциро-
вании р, исчезает благодаря соотношениям вида
др '^5, др dSt др <5SX др =
St д>/, дт)3 <5% <5% 9%
[116] S, и S2 строго определяются посредством
1 v f 9SX j2
-ЦГ+ 2 - CM
dSg . v Э5Х Э52
dt ~ 9i;x dp, 2
(')
(ii)
В (143)означает + 2.’ -2—, где S = 5х + 52 + 53, и таким образом пре-
' ' dt dt di]1 mp
вращается в
9S3 ' f ЭХ, 9S2 9S3 ) 9S3 , 1 ( 9S2 V 1 / 9S3 A2 .
=0; (1!1)
мы сразу видим, что сумма трех уравнений (i), (ii), (iii) дает :
ЭХ 1
91’ + 2
[117] Если мы в правой части (150) и (151) подставим ех, е2, е3, рх, р2, р3 вместо /с,, к.
к3, ^i> ^2, в качестве первого приближения, то интегрирование дает:
*i = «1 + 2 + у Piz) > к = Pt~ [«1 + у Pt •
Если же мы подставим эти значения в те же уравнения с последующим интегриро-
ванием, то получим уравнение (162).
[чз] х„ = х„ — и т- д’
[119] Под центробарической скоростью понимается скорость относительно среднего
центра:
х.: — Хп = (х; - О + (х; — хп) = й — У, т s'! у т = х'/(.
[12°] Историю обозначения обратных тригонометрических функций см. С a j о г у,
History of Mathematical Notations, т. II, стр. 275—278.
C/0 w
[I21] берется из формы — ygy3/2- > где у остается ограниченной; следовательно,
(Л-—берется из формы - . , где / ограничено в интервале интегриро-
' г2 q2) dp, т Vr — q
вания. Отсюда следует, что
1У(^-4Ь^0’когдаг^-
я
[122] Пусть f = г cos I cos Ф, г) = г cos I sin Ф ; С = г sin I, а главная функция S
удовлетворяет уравнению
95 , М + т
~dt 4 2 М~'
I/ 9S]2 [ 95 V Г 95
Ц dr J + ( г 97 J + I rcosl 9Ф .
- М / (г) = 0 .
57 Вариационные принципы механики
898
ПРИМЕЧАНИЯ
Полный интеграл Якоби может быть представлен в форме
5 = _/*/ + (Л-Л)ф + у И*»
(к-Хр
cos21
dl +
+ /лГТ7Г (2^ + 2M-Hr) - f* 1 + -J-}1 dr + const>
, , „ dS ds
где Л, Я, ц — произвольные постоянные. Далее мы легко получим= сч —г,
ок ол
= — т. Следовательно, по теореме Донкина (см. Routh, Advanced Rigid Dyna-
mics, II, 496) (к, — a>), (Я, v), (ц, г) образуют каноническую группу констант и, следова-
тельно, соотношения (R2) имеют место.
раз] Чтобы вывести (213) из §§ 13, 14, нужно иметь в виду следующее. Мы имеем
(так как Hj остается константой невозмущенного движения):
dH1 __ ЪНХ drjs dki 9НХ dais dkt _ v ( drjs , 9cos A 9H,_____________________________
dt ~ 'd-T/s dki dt ~ da>s dki 'dt ~ I 9^s dki dais dkt J dkj
= v f 9Hi , QHt Scost f dki dkj _ dki dkj 1 ЭН8
Ji“ I drjs dki dais dki J I dijt dait d'ait drjt J dkj
drjs dki dkj drjs dki dkj)
dki drjt doit dki dait drjt |
dH1 ( dais dki dkj dais dki dkj 11
+ dots ( dki drjt dait dki dan drjt J J r
drjs dki л „ drjs dki n dais dki n „ dais dki Л .
HO 2 ~aT- ~a— = &st, 2 -5=- = 0,2; -7Г,-----5— = о , У -------= dst, где <5it
dkt drjt dki dan dki drjt dki dtot
dH2
dkj
равно 1 или нулю соответственно тому, s равно или не равно t.
[124] Чтобы вывести (V2) из (Q2), рассмотрим выражение
(rjz' — t у')2 + (С х' — £ 2')2 = кг - (к — Я)2 = (2 к Я - Я2),
имеем
г] z' — £ У' = У2 к Л — Я2 sin v, Sz' — £ х' = }г2 к Я — Я2 cos v;
следовательно,
У2 ЛЯ — Я2 (f sin v — г] cos v) (Л — Я) £ = 2 ((rj z' — £ у') = 0 ,
то есть
f . Л —Я .
S sin v — п cos v = — .____=- С
У2ЛЯ-Я2
и
|2 + гр = Г2 — С2 .
Следовательно,
I cos v + п sin v = |r2 - С2 - -£k ? 1* = fr2 - 2 k\ Цу)* -
к t
Из (W2) и (Q2) мы видим, что = r sin (0 — v), и поэтому
у 2 к Я — Я2
|sin v — rj cos v = —1 + -уJ г sin (0 — v), § cos v 4- j?sin v = r cos (0 — v),
откуда следует немедленно (V2).
[125] Две статьи М. НоиёРа, представленные в Facult6 des Sciences de Paris (1885),
довольно интересны.
В первой он использует главную функцию, чтобы доказать различные известные
теоремы относительно планетных возмущений, а во второй применяет этот метод для
тщательных вычислений возмущений Юпитера. Полная библиография работ, относя-
щихся к динамическим методам Гамильтона, до работ НоиёРа была дана Cayley (Brit.
Ass. Report, 1857, стр. 40).
[126] Статья Гамильтона «On the application to Dynamics of a general Mathematical
Method previously applied to Optics» была напечатана в «Report of the Fourth Meeting of
ПРИМЕЧАНИЯ
899
the British Association for the Advancement of Science» held at Edinburgh in 1834», London,
1835, стр. 513—518; перепечатана в «The Mathematical Papers», t. 2, Dynamics, Cam-
bridge, 1940, стр. 212—216.
Во втором очерке Гамильтон заменяет название «вспомогательная» функция на
«главная».
[127] Строгая формулировка принципа Гамильтона такова (Р. Курант и
Д. Гильберт, Методы математической физики, т. I, ГТТИ, 1934, стр. 234): в течение
промежутка времени между моментами f0 и движение системы происходит так, что
функции qt (/) делают стационарным интеграл
б
I = (• (Т - U) л
i,
по сравнению с такими достаточно близкими функциями qt (f), для которых qi (f0) = qt (t0)
и ?/(fi) = q, (fi), или, другими словами: при действительном движении интеграл I имеет
стационарное значение по сравнению со всеми достаточно близкими возможными дви-
жениями, при которых система в течение заданного промежутка времени перемещается
из того же начального положения в то же самое конечное положение, как и для дей-
ствительного движения.
После того как дифференциальные уравнения движения написаны на основании
вариационного принципа Гамильтона, возникает вопрос об их фактической интеграции.
Для этой цели Гамильтоном и Якоби развита специальная теория. Эта теория имеет
особое значение для небесной механики и для классической теории атома Бора—Зом-
мерфельда. Построение этой теории должно было заключать в себе три последовательных
этапа. Прежде всего необходимо было найти возможно более простую форму дифферен-
циальных уравнений движения. Эта форма была найдена в канонических уравнениях
Гамильтона. Затем надо было установить общие законы таких преобразований этих
дифференциальных уравнений, при которых они сохраняли бы свою форму. Такими зако-
нами оказались канонические преобразования и теория важнейших их инвариантов. На-
конец, надо было развить собственно теорию интегрирования систем канонических урав-
нений. Решение этой задачи привело к установлению и интегрированию уравнения в част-
ных производных Гамильтона—Якоби.
Первое систематическое изложение этих вопросов дал К. Якоби в своих замечатель-
ных «Лекциях по динамике».
раз] 'герМИн «Marks of position» см. прям. 74.
[129] Если мы имеем динамическую систему с N степенями свободы, координатами
xv х„,..., х и функцией Гамильтона Н (хъ..., xN, plt..., />, t), то мы знаем, что уравне-
ния движения имеют вид
dxr = dpr _ _ ЪН
dt ~ Ърг ’ dt — Эхг
и что связанное с системой гамильтоново уравнение в частных производных будет;
(2)
Если мы знаем полный интеграл этого уравнения, то можем легко вывести основную
функцию Гамильтона.
Пусть / (хх,..., xN, t, а1г..., ах) + aN+i является полным интегралом (2) и положим:
S = / (х, t, а) — / (х«, г», а), (3)
где х“, tB — данные значения xr, t. С уравнением (3) сочетаем уравнения
9S = Э/______________9/о = 0
даг даг да,'
в которых для краткости /(х°, t°, а) заменено на /0. Число уравнений (4) как раз достаточно
для того, чтобы выразить а через х,-, t и х", t°, и, подставив эти значения в (3), мы получим
S как функцию переменных xr, t, х°, t°. Сначала покажем, что i есть интеграл уравнения
(2), который мы назовем интегралом Гамильтона.
Непосредственно имеем :
9S df dS дат df
дГ dt + дат dt ~ dt ’
dS _ df dS dam __ df
dxr dxr dam dxr ~ dxr '
57*
900
ПРИМЕЧАНИЯ
где повторяющийся индекс т обозначает суммирование от 1 до N. Поскольку / (х, t, а)
удовлетворяет (2), заключаем, что
т. е. что S также есть интеграл. 5 есть полный интеграл, зависящий от N + 1 произволь-
ных постоянных >7, t°.
Покажем далее, что интеграл Гамильтона
8 (х, t, х°, /°)
есть гамильтонова главная функция.
Рассмотрим уравнения
Э/ Э/О
даг даг ’ (5)
в которых а — произвольные постоянные. Так как /(х, t, а) есть полный интеграл, то
детерминант
I 97 I
| Эа,- Эх5 |
отличен от нуля, и уравнения (5) могут быть решены относительно хг:
хг = хг (/, /°, х°, а). (6)
Кроме того, из (5) очевидно, что xr = х?, t = t° удовлетворяют этим уравнениям и
поэтому в уравнении (6) хг приводится к х)?, когда t = t°. Если мы также положим
и соединим последнее уравнение с уравнением (6), то получим следующую систему урав-
нений:
х- = xr (t, t°, х», а), )
, (
pr = pr (t, х°, х°, а). J
Покажем, что (8) есть общее решение уравнений движения (1). Из уравнения (5)
следует:
Но мы имеем :
-J + H(x,pJ) = 0, Рг=^~ (10)
О? ОХг
для всех значений а. Поэтому
+ _9Т_=0, (11)
da, dt + dps dardxs ’ ' ’
и из уравнений (9) и (11) получим,
dxr _ дН
dt дрг
Также из уравнения (7) получим :
dpr = _Э7_ , 'Э2/ dxs = эу Э2/ ЭН
dt dxrdt dxrdxs dt dxrdt 9xr9xs dps
Если мы возьмем частную производную от (10) по хг, то получим :
Отсюда
Э2/ ЭН ЭН Э2/
дхг dt + Эхг dps ' дхг dxs
dpr _ _ ЭН
dt ~ Эхг
ПРИМЕЧАНИЯ
901
Мы, следовательно, подтвердили, что (8) есть общее решение уравнений движения, так
как оно содержит требуемое число произвольных постоянных. Оно описывает все свобод-
ные движения, проходящие через конфигурацию х? в момент времени t°.
Теперь гамильтонова главная функция определена как интеграл
р
рассмотренный вдоль естественного движения, проходящего через конфигурации хг, х"
в соответствующие моменты времени /, t°, и выраженный с помощью начальных и конеч-
ных переменных х?, t° и xr, t.
Это естественное движение определяется уравнением (8) для соответствующих зна-
чений постоянных аг или эквивалентными уравнениями (5) и (7).
Мы имеем, следовательно,
J -") “ - f (* т - «)« -1 (£ тг + 4) «-'<* ' *> - “> 112>
е t‘ t‘
и выражаем интеграл через xr, t и х?, t°, исключая а при помощи уравнения (5). Это в точ-
ности соответствует определению 8 (х, t, х°, t°), и мы, таким образом, отождествили инте-
грал Гамильтона с гамильтоновой главной функцией.
Если / (х, t, а) + a.v+i есть полный интеграл гамильтонова уравнения в частных
производных, то гамильтонова главная функция получается путем исключения аг из
уравнений
S = / (x,t, а) — / (x°,t«, а), (13)
Э/ (х, t, а) _ df (х°, t°, а)
даг да г
Чтобы найти геометрическую интерпретацию такого построения гамильтоновой
главной функции, рассмотрим пространство N + 2 измерений с координатами xr, t, V.
В этом многообразии уравнение V = V(xr, t) представляет гиперповерхность, и если
V удовлетворяет уравнению в частных производных (2), мы называем ее интегральной
гиперповерхностью.
Если /(х, t, а) + ам+х есть полный интеграл (2), то V = /(х, t, а) + аы+i есть семей-
ство интегральных гиперповерхностей, зависящих от N + 1 параметров аъ..., a v+i.
Выберем из этого семейства интегральные гиперповерхности, проходящие через точку
(х?, t°, 0). Условием этого является
/ (х°, t°, а) + aN+1 = 0 ,
и новое семейство будет иметь вид
V = / (х, I, а) — / (х°, 1°, а) (14)
и зависеть от N параметров. Огибающая этого семейства определяется путем исключения
а из уравнения (14) и N уравнений
Э/ Э/р _
да, да,
Но это исключение приводит к гиперповерхности
V = 8 (х, t, x°,t°). (15)
Мы, следовательно, доказали следующую известную теорему:
Если S (х, I, х°, t°) есть гамильтонова главная функция, то гиперповерхность
V S (х, /, х°, t°) есть огибающия N-связного бесконечного семейства интегральных
гиперповерхностей гамильтонова уравнения в частных производных, которые все про-
ходят через точку (х°, t°, 0).
[iso] Статья С. G. J. Jacobi «Note sur I’intGgration des Equations diff6rentielles
de la dynamique.; опубликована впервые в «Comptes Rendus», т. V, 1837, стр. 61—67;
перепечатана в книге : С. G. J. Jacobi, Gesammelte Werke, Berlin, 1886, т. IV,
стр. 130—136.
902
ПРИМЕЧАНИЯ
[121] Для голономной системы со связями, независимыми от времени, вводим про-
странство п измерений, в котором величины q представляют самые общие координаты.
В этом пространстве условно определим линейный элемент ds:
ds2 = У апк dqn dqk , (1)
Я = 1
*=1
где апк суть такие функции от q, конечные и непрерывные вместе со своими первыми и
вторыми производными, что квадратичная форма в правой части будет положительной.
Пространство, для которого установлено мероопределение (1), называется, как известно,
метри еским многообразием.
Воспользовавшись соотношением, имеющим место для физического пространства
ds2 = 2Т dt2, мы можем ввести его вообще для изображающего пространства конфигу-
раций. Тогда кривая в этом пространстве, соединяющая две конечные конфигурации
системы и в случае одной точки тождественная с соответствующей траекторией в физи-
ческом пространстве, называется динамической траекторией.
Динамическая траектория естественного движения между конечными конфигура-
циями при заданном значении энергии будет некоторой кривой метрического многообра-
зия, для которой криволинейный интеграл А = [ У2 (U + Е) ds имеет стационарное (или
минимальное, если обе конфигурации достаточно близки) значение. Обратная теорема
также имеет место.
[132] Статья «Sur un nouveau principe de la mGcanique analytique» опубликована в
«Comptes Rendus de I’AcadGmie des Sciences de Paris», т. XV, 1842, стр. 202—205 и поме-
щена в 4-м томе «Oesammelte Werke», Berlin, 1886, стр. 291—294.
Эта статья в основном представляет собой краткое изложение относящихся к дина-
мической проблеме результатов, полученных Якоби в его большой работе «Theoria novi
multipiicatoris systemati aequationum differentialum vulgarium applicandi».
рзз] Лекции по динамике (прочитанные в зимний семестр 1842/43 г.) К. Г. Якоби
были записаны Борхардтом и впервые изданы Клебшем в 1866 г. в Берлине под назва-
нием «Vorlesungen fiber Dynamik», а затем помещены во втором исправленном издании
Jacobi С., Gesammelte Werke, Suppl., изд. Э. Лотнера, Берлин, 1884. Русский перевод
вышел в 1936 г. под ред. Н. С. Кошлякова в издании ОНТИ под названием «Лекции по
динамике». Публикуемые тексты взяты из этого издания. Перевод выполнен О. А. Поло-
сухиной. Якоби рассматривает «принцип наименьшего действия» в шестой, седьмой, вось-
мой и частично в следующих лекциях.
Первое опубликованное сообщение Якоби о его форме принципа наименьшего дей-
ствия
<5 J Уг (U +Т) УJ’ mt dsT = 0'
содержится в его «Note sur I’intGgration des Gquations diff6rentielles dela dynamique» (Comp-
tes Rendus, t. V, 1837, стр. 61—67; J а с о b i C., Ges. Werke, т. IV, стр. 129—136, ср.
особенно стр. 132—134). См. также стр. 2->9 настоящей книги.
Форма, которую придал Якоби принципу наименьшего действия, выражает собой
тот факт, что траектория консервативной, склерономной, голономной системы является
геодезической линией в многообразии конфигураций с линейным элементом действия.
Уравнения движения будут иметь, следовательно, вид
Исследование движения консервативной системы с линейным элементом действия
содержит в себе глубокое сходство с изучением движения соответствующей системы с
кинематическим элементом, не находящимся под воздействием сил, так как траектория,
соответствующая движению без воздействия, сил, представляет собой геодезическую
линию кинематического линейного элемента.
Именно принцип Якоби вошел во многие учебники XIX в. как единственная форма
принципа наименьшего действия, например G. Darboux, Lecons sur la thGorie g6n6-
rale des surfaces, т. II, Париж, 1889, стр. 491—500; P. Appell, Trait£ de m6canique
rationrelle, изд. 2-е, т. II, Париж, 1904, стр. 425—429; G. A. M a g g i, Principii della theo-
ria mathematica del movimento dei corpi, Милан, 1896, стр. 394—396.
[134] To есть законы сохранения центра тяжести, площадей и живой силы.
рз»] о понятии вариации. Значение функции у = <р (х) может изменяться при воз-
растании dx (ради краткости мы пользуемся здесь обозначением дифференциального
исчисления), независимой переменной х, так что дифференциал dy будет:
dy = tp (х + dx) — tp (x).
ПРИМЕЧАНИЯ
903
Значение у может также изменяться без изменения х благодаря вариации формы
функции <р (т. е. от <р (х) до
Ч>1 (х) = q> (х) + Е q> (х) ,
где <р(х) есть любая функция, а е — бесконечно малое положительное число); таким
образом, мы приходим к вариации ду, то есть
ду = <Pi (х) — ч> (х).
Обозначение «вариация» целесообразно будет ограничить лишь изменением формы д>, так
что в целом изменение Dy для у будет:
Dy = dy + ду.
Мы имеем дх = 0, то есть независимая переменная не варьируется, но и не является
неизменной, и к тому же еще
d!'y _ dndy
° ~dxp — dxn ’
Тем не менее, Лагранж («Oeuvres», т. I, стр. 337,345) варьировал также и независимые
переменные и, основываясь частично на этом, считал свой метод более общим, чем метод
Эйлера. Изложение Лагранжей основ вариационного исчисления кажется недостаточно
понятным, однако несомненно, что в принципе наименьшего действия он считает t пере-
менным.
Другие математики в основном приняли то понятие вариации, которое дано Эйлером
в его более поздней статье о методе Лагранжа. Это понятие заключается в следующем:
«вариация» функции имеет место, когда заключенные в ней параметры претерпевают
изменение. Якоби в своих «Лекциях по динамике», например, утверждает что вариация
dqv заключает в себе лишь те изменения qv, которые проистекают от изменений содержа-
щихся в qv произвольных постоянных. В соответствии с этим он делает вывод, что неза-
висимые переменные не варьируются, так что dt = 0. Ср. подобные взгляды на природу
«вариации» <р(х) Эйлера, Лагранжа, Лакруа, Г. В. Штрауха, М. Ома, Коши и Штегмана,
изложенные в книге: J. Todhunter, A History of the Progress of the Calculus of
Variations during the Nineteenth Century, Кембридж и Лондон, 1861, стр. 2, 8, 11, 13, 17,
20, 31, 377, 378, 402, 413, 480, 481.
А. Майер (1877 г.) присоединился к точке зрения Якоби, что dt = 0.
Поскольку Лагранж не отбрасывает t, то Майер считает, что принцип Лагранжа не
имеет смысла и что Лагранж имел в виду то, что составляет так называемый принцип
Гамильтона:
д J (Т + U) dt = 0 .
Такое предположение было уже ранее высказано М. В. Остроградским («Мемуар о
дифференциальных уравнениях проблемы изопериметров», Мёт. de 1’Acad. de St.-Pdtersb.,
зёг. 6, Sc. Math, et Phys., т. IV, 1850, стр. 385—517. Читано 29 ноября 1848 г. Этот том —
4-й по матем. и физич. наукам и 6-й по матем., физич. и естественным наукам. Ср. Т о д-
гунтер, указ, соч., стр. 350—352, 482—483. См. стр. 315 настоящей книги), а также
Ф. А. Слудский, Nouv. Ann. de Math. (2), т. XVIII, 1879, стр. 193—200. Об этих ра-
ботах и о работах Родригеса, Рауса, Гельмгольца, Рети, Гёльдера и Журдена, которые
установили основное различие между принципом наименьшего действия и принципом
Гамильтона, см. Е. В. Jourdain, Math. Ann., т. LXV, 1908, стр. 513—517.
[13в] Здесь U имеет то же значение, что у Родригеса V, а у Лагранжа П.
[13?] Общий закон вариационного исчисления, — принцип наименьшего действия
Якоби является лишь частным случаем этого закона, — выведен А. Майером (A. Mayer,
Der Satz der Variationsrechnung, welcher dem Prinzipe der kleinsten Wirkung in der Mecha-
nik entspricht, Math. Ann., t. 2, 1564, стр. 143—149).
[133] Что интеграл J Г dt есть действительный минимум —это для динамики не име₽
существенного значения.
Здесь требуется только, чтобы
д J Т dt = 0.
Об исследованиях знака второй вариации, представляющих лишь чисто математи-
ческий интерес, то есть о доказательстве, что здесь речь идет действительно только о
минимуме для достаточно малых интервалов, см. J. A. S е г г е t, Comptes Rendus,
т. LXV, 1871, стр. 697 или Bull. d. Sc. Math., т. II, 1871, стр. 97; G. D a r b о u x, Lemons
sur la tb^orie gёnёrale des surfaces, т. II, Париж, 1896, стр. 480; Д. Бобылев, Прило-
жение к LXI тому Записок Академии наук, № 5, СПб., 1889.
Данный Раусом вывод предложения, что при действительных движениях V всегда
будет минимум, поскольку V может постоянно увеличиваться, а Т никогда не может быть
отрицательным, содержит ту же ошибку, что и старые доказательства так называемого
принципа Дирихле.
[13в] то есть предложенный Д’Аламбером принцип в вариационной форме при пред-
положении существования силовой функции U.
904
ПРИМЕЧАНИЯ
[м°] Вариационное исчисление устанавливает эквивалентность интеграла вида
<5 J L dt = 0 и группы дифференциальных уравнений. Этот метод приложим в том случае,
когда дана функция трех переменных / и требуется определить кривую х — x(f) такую,
что вариация, возникающая при переходе от интеграла
dt, взятого по
этой
кривой, к интегралу, взятому по соседней кривой, равна нулю. Искомая кривая пред-
полагается проходящей через две закрепленные точки (хъ tj, (х2, /2), и интеграл берется
между этими двумя точками.
Необходимое и достаточное условие того, чтобы кривая обладала этим вариационным
свойством, состоит в том чтобы она удовлетворяла дифференциальному уравнению
d I_____df_ А
dt „ f dx V
# = 0.
ox
(1)
Пусть, далее, имеем несколько зависимых переменных х, у,... и функцию /от х, у,...
’ ’ ’ пусть также даны две закрепленные точки (хи у1;..., Z,), (хг, у2,..., Z2), и
мы должны подчинить интеграл J / dt, взятый между этими точками, вариационному
условию. Уравнения кривой будут иметь вид
(А)
Если мы имеем несколько независимых переменных s, t, ... и несколько зависимых
переменных х, у,..., то вопрос несколько усложняется. Исходя из функции
f[x, у, ..
Эх Эх
05 ’ dt
ду ду
3s ’ dt
мы ставим перед собой задачу отыскать функции
X = X (5, t, . . .) , у = У (s, t, . . .) ,
для которых интеграл
, ( дх дх Ьу ду
...,S,t,...]dsdt
стационарен по отношению к малым изменениям х, у,... Интеграл берется по закреплен-
ной области независимых переменных, а значения зависимых переменных на границах
области рассматриваются как фиксированные. Дифференциальные уравнения этой проб-
лемы будут иметь вид
L / э/ , 8 / Ъ1 \ _ э/ = о
9s „ ( dxА "Г dt „ ( dx А ' ’ ’ ’ Эх
О —- II о------I
\ I ds ) ) \ \ dt J I
9 / 9/ А Э ( df \ _ Э/
9s э ИИ + 8z 8 ду
\ [ds J ' ' [ dt J J
Для принципа Гамильтона уравнения (А), которые являются условиями стационарности
интеграла J L dt, представляют собой уравнения Лагранжа движения системы.
Уравнения Эйлера—Лагранжа (1) выражают необходимые условия стационарности
некоторого интеграла относительно вариации переменных, входящих в его подынте-
гральную функцию. Если интеграл является инвариантом относительно преобразования
координат, то соответствующие уравнения Эйлера—Лагранжа выражают условия, кото-
рые не могут зависеть от выбора координат, иначе говоря, уравнения Эйлера—Лагранжа
являются ковариантными дифференциальными уравнениями.
[141] Работа М. В. Остроградского «Мётойе sur les equations diffdrentielles relatives
aux problemes des isopdrim£tres» была прочитана на заседании Российской Академии
наук 29 ноября 1848 г. и опубликована в «Мётойев de ГАсайёпйе 1трёпа1е des Sciences
ПРИМЕЧАНИЯ
905
de Saint-P£tersbourg», VI ”” s6rie, sciences math£matiques, physiques et naturelles, т. VI, pre-
miere partie: sciences math£matiques et physiques, т. IV, Saint-P6tersbourg, 1850, стр.
385—517.
Предположим, что V есть функция независимых переменных х„ и t, примем хп пред-
ставляют собой функции t и производных этих функций по времени. Предположим, далее,
что V включает производные каждой из хп до п-го порядка. Если J V dt должен быть
максимумом или минимумом, то <5 J V dt = 0. Это приводит согласно правилам вариа-
ционного исчисления к т дифференциальным уравнениям, каждое из которых порядка
2п. Остроградский показал, что зти дифференциальные уравнения эквивалентны некото-
рой группе 2тп уравнений в частных производных первого порядка. Значительно позже,
в 1858 г., зто же показал Клебш в работе «On those problems in the Calculus of Variations
which involve only one independent variable» (Crelle Mathematical Journal, t. 55, 1858,
стр. 335—355).
Далее Остроградский подробно рассматривает вопрос об интегрировании этих по-
следних уравнений и о некоторых их замечательных свойствах.
Статья Остроградского очень трудна и изобилует опечатками, которые мной по воз-
можности исправлены.
[U2] ла СТр 33g и сл Остроградский делает несколько замечаний по поводу той
части «Аналитической механики», в которой Лагранж выводит уравнение движения
механики из принципа наименьшего действия в связи с принципом живых сил. Остроград-
ский считает ход рассуждений Лагранжа неточным (стр. 336). Он основывает свои воз-
ражения на том, что на основании уравнения живых сил существует зависимость между
некоторыми вариациями, которые Лагранж считает независимыми.
[us] на стр. 472—480 Остроградский прилагает свою общую теорию к некоторым
примерам. Он опускает дальнейшие примеры, так как, по его словам, обнаружил, что
можно обобщить и упростить эти приложения; работы об атом он не опубликовал.
[М4] Важное значение этой работы Остроградского состоит также в следующем.
Обычные проблемы механики приводят к лагранжианам, которые не содержат произ-
водных выше, чем первые. В общем же случае вариационной проблемы в подынтеграль-
ной величине могут быть производные п-го порядка. Однако и такая задача может быть
приведена к нормальному виду с помощью канонических интегралов, так что канониче-
ские уравнения Гамильтона, как показал Остроградский, могут рассматриваться как
нормальная форма, в которую могут быть преобразованы дифференциальные уравнения,
возникающие при рассмотрении вариационной проблемы; это преобразование требует
только дифференцирований и исключений.
[146] Помещаемая статья Ф. А. Слудского впервые опубликована в Математичес-
ком сборнике, издававшемся Моск, матем. обществом, т. 4, вып. 3, Москва, 1870,
стр. 225—230.
[14в] Помещаемая статья О. И. Сомова впервые опубликована в Математическом
сборнике, издававшемся Моск, матем. обществом, т. 5, вып. 4, Москва, 1872, стр.
303—322.
[147] Статья «Die Storungstheorie und die Beriihrungstransformationen» была напеча-
тана в Arch, for Math., т. 2, вып. 2, Kristiania, 1877, стр. 129—156 ; перепечатана в книге:
Sophus Lie, Oesammelte Abhandlungen, Leipzig—Oslo, 1922, в первой части 3-го
тома, в которой помещены «Abhandlungen zur Theorie der Differentialgleichungen», стр.
295—317.
Для работы Софуса Ли характерно глубокое развитие понятия непрерывной группы.
Первоначально понятие непрерывной (топологической) группы возникло в связи с рас-
смотрением групп непрерывных преобразований.
Такая группа представляет с логической точки зрения соединение двух основных
математических понятий — группы и топологического пространства. Если при рассмо-
трении группы мы изучаем в наиболее чистом виде алгебраическую операцию умножения,
то при изучении топологического пространства изучаем операцию предельного перехода.
В непрерывной группе объединены обе зти операции. Группа Ли является конкрет-
ным понятием теории топологических групп, в котором уже в определении заключено
условие дифференцируемости функций, дающих операцию перемножения элементов
группы.
Ли подробно изучил такие непрерывные группы преобразований. Элементом непре-
рывной группы является преобразование, переводящее каждую точку n-мерного про-
странства в другую такую же точку. Таким образом, каждое преобразование задается
системой п функций от п переменных
x'i = ti (х1( х2, ..., Хп) (f = 1,2, ..., п).
Различные элементы группы отличаются значениями параметров, входящих в функции,
выражающие преобразование:
xi = fi (xn х2, .. ., Хп ; аг, а.2, аг) .
906
ПРИМЕЧАНИЯ
Существенным свойством группы является то, что два преобразования, последова-
тельно проделанных над пространством, равносильны одному преобразованию той же
группы.
Оказалось, что вопрос об интегрируемости дифференциальных уравнений в квадра-
турах связан с вопросом о структуре группы преобразований, которые не изменяют дан-
ного уравнения. Для того чтобы уравнение интегрировалось в квадратурах, необходимо
и достаточно, чтобы эта группа обладала особыми структурными свойствами, принадле-
жала к числу так называемых интегрируемых (или разрешимых) групп.
[14в] Софус Ли везде обозначает частную производную через d; мы везде заменили
это обозначение на 9.
[149] В подлиннике в этом выражении опущен член (F, Р,).
[16°] Статья «О начале наименьшего действия» была доложена Московскому мате-
матическому обществу 1/III 1879 г. и впервые напечатана в Матем. сб., т. IX, 1879; пере-
печатана в Собр. соч. Н. Е. Жуковского, т. I, Общая механика, математика, астрономия,
ОГИЗ, М.—Л., 1948, стр. 51—57. .
[Ш] Статья «L.eber die physikalische Bedeutung des Prinzips der kleinsten Wirkung»
опубликована впервые в «Borchardt-Crelle Journal fur Mathematik», t. 100, 1886, стр. 137—
166 и 213—222; перепечатана в «Wissenschaftliche Abhandlungen von H. v. Helmholtz»,
t. 3, Leipzig, 1895, стр. 203—248.
[162] Указанные Гельмгольцем работы Мопертюи и Гамильтона см. стр. 23, 41, 175
настоящей книги.
[163] «Гальваническое сопротивление» по современной терминологии «сопротивление
постоянному току».
[164] Как известно, уравнения электродинамики могут быть выведены из вариацион-
ного принципа, аналогично тому, как уравнения механики выводятся из принципа наи-
меньшего действия. Потребуем стационарности интеграла
с
_[ (Жм - Жэл) dt,
t0
где Wm и Жэл — соответственно магнитная и электрическая энергии, a L = — ИЛэл
при условии, что выполняются уравнения
divs.E = 4jrp, rot Н= еЕ + (j = р v). (О)
Предположим, что на бесконечности поля и их вариации обращаются в нуль и что интер-
вал времени остается наименьшим. Тогда
«И!
dt dt = 0.
(А)
Теперь необходимо допустить существование зависимости между Е и Н, потому что
в противном случае из (А) нельзя было бы ничего вывести. Тогда
^(ео Е)] = 0 .
<3 div е Е = 0 ,
<3 rot Н
(В)
Умножим теперь четыре соотношения (В) на произвольные множители <р, — А,
— Ау, — Аг и объединим их с (А):
-e0\;Ei6Ei ч- е0<р<3 2,’-4ДГ_
, dxi
I V дх
дНг ЪНу ]
J
ду
дЕх
8t
дН2 ] . дЕу
Тг-----
. дЕг'
“£»д^Г
= 0.
ПРИМЕЧАНИЯ
907
Проинтегрируем по частям каждый из прибавленных членов следующим образом:
Г,
f j <5 dx j dy dz dt = \ \ tp dEx dy dzdt — f f J dEx dx dy dz dt. (C)
T t„
Здесь первый интеграл равен нулю, так как интегрирование производится по беско"
нечно удаленной поверхности, а дЕх равно нулю на бесконечности.
Аналогично, например,
_Э«5Нх
даст
— дН?
'дАх
бу
а ае.
даст
ЭД:
— оЕх —г—
и т. п.
Поэтому из (С) получим:
Е + grad <р
ЭА
а/
rot А)«5Н} drdt = O.
Это условие должно удовлетворяться для произвольной вариации <5£ и дН и, следо-
вательно,
. 9Л 1
= -grad<p--?, |
Е
(D)
/ла И = rot А .
Таким образом, векторы Е и н удовлетворяют уравнениям Максвелла, и следова-
тельно, мы доказали, что уравнения (О) вместе с вариационным принципом в форме
а ('(1Ум— 1ТЭл) dt — 0 эквивалентны четырем уравнениям Максвелла (О) и (D).
[х“] Формулы (ld): Ра = — s = — U = Н — w см. Н. Helmholtz,
дра dp др
Studien zur statik monocyclischer systeme I, Sitzungsber. d. Akad. d. Wiss. zu Berlin, 1884,
стр. 159—177 ; Wiss. Abh., t. 3, 1895, стр. 119 и сл.
[15в] Статья «Ueber den Mittelwert des kinetischen Potentials» впервые напечатана в
Записках Математического отделения Новороссийского общества естествоиспытателей,
т, 8, 1888, на немецком языке (см. Н. Е. Жуковский, Собр. соч., т. 1, ГТТИ, 1948
стр. 207).
[167] Настоящий отрывок представляет собой § 75 книги Н. Helmholtz, Vor-
lesungen fiber die Dynamik diskreter Massenpunkte, Leipzig, 1911, стр. 356—361; изд. 1-е
вышло в 1898 г. Эта книга является 1-м томом «Vorlesungen fiber theoretische Physik»
Гельмгольца.
[lee] Второй отдел четвертой части (стр. 303—318) посвящен принципам движения,
а именно принципу Д’Аламбера, принципу Гамильтона и лагранжевым уравнениям
движения 2-го рода.
[169] В §60 рассматривается принцип возможных перемещений; в §65 — лагранжевы
уравнения движения 2-го рода.
Уравнение (Ь) п. 154 имеет вид
<5 (— Ф Д Ха Ха) = 0 ,
а
где ха — координаты n-й массы, Ф — потенциальная энергия, Х'а — компоненты резуль-
тирующей внешних сил по направлению координатных осей.
Написанное уравнение есть обобщение условия равновесия консервативной системы
д Ф = 0.
[х«о] уравнение (а) п. 153 дает условие равновесия консервативной системы <5Ф = 0.
[Ш] Публикуемые отрывки взяты из книги: L. Boltzmann, Vorlesungen fiber
die Prinzipe der Mechanik, II часть, § 35, стр. 135—139 и §§ 42—54, стр. 162—211, Leipzig
1922. Вторая часть этой книги была опубликована в 1904 г. Она посвящена принципу
действия, лагранжевым уравнениям и их применениям. Предисловие Больцмана к этой
книге имеет следующий эпиграф :
, Erst hab’ich die Motto aus Goethe gewahlt,
Dann selber eines zusammengestellt;
Nun las ich die Dichtungen Heines
Doch Motto fand ich drin keines.
f1*2] (Принципом стационарного действия» Больцман называет принцип Гамильтона.
908
ПРИМЕЧАНИЯ
[i«3] Больцман ссылается на свою статью dJeber die Unentbehrlichkeit der Ato-
mistik in der Naturwissenschaft», Wied. Ann. Phys., t. 60, 1897.
[1в4] реономные системы — системы, подчиненные переменным связям. В случае по-
стоянных связей мы имеем дело с системой склерономной. Для склерономных систем
лагранжевы уравнения движения допускают первый интеграл в форме
у; Pi qi — L = Е ,
который может быть интерпретирован как закон сохранения энергии, если мы определим
левую часть этого уравнения как полную энергию системы. Для обычных задач дина-
мики Pi qi есть удвоенная кинетическая энергия. В этом случае получаем Т + V — Е.
[ice] § 41 посвящен рассмотрению примера с ортогональной вариацией. В этом слу-
чае при условии варьирования энергии имеет место уравнение
Л/7 __
<5 In [ Г2 (/!-/0)21 ,
где Т = ----т- I Т dt — средняя кинетическая энергия, аЕ—полная энергия. Для срав-
‘1 ‘о О
ниваемых движений берутся последовательно движения, отличающиеся на дЕ,. В качестве
нижней границы для каждого последующего интеграла выбирается то время, когда точка
на варьированной траектории проходит плоскость, перпендикулярную к мгновенному
направлению движения точки на предшествующей траектории в момент, который также
является верхним пределом интеграла по этой предшествующей траектории.
[1М] См. прим. 165.
[1в7] Больцман имеет в виду выражение для принципа наименьшего действия
б й
2<5 | Tdt = | dEdt+ J (qi^-q^dp^).
.' > h-i.
to to
[les] уравнение (238), на которое ссылается Больцман, таково :
ЯЧЙГ
to то
[169] уравнение (63)
dp-T
dpp
dqT
dpn ’
где T = i У У Chk qn qk , dp- и dq обозначают частные производные, взятые при постоян-
2 h к
ных р' и q соответственно, рп — обобщенные координаты.
[ио] уравнение (60):
аг у аг dpi
dqt, f dpi dqn
так как
dpi „ . / dpn
= 2 qk ~~~~ = У qk bki, = pi, = -~л -
k dqk к dt
[171] Уравнение Лагранжа 1-го
dqn =
' dt ~
p’h = bhk qk
к
рода (50):
Э (Г — V)
dpk
Зп
где Л> = / (рп, t), V — силовая функция, riff =
h i,
системы имеет вид
fc=i
, dxk
> причем уравнение связей
[172] Уравнение (220):
Зп
dt + 2’ St dxk = 0 .
k = l
V = F-2'Рь Рь ,
h
где F — силовая функция, Ph = Ph (/) — действующая сила.
ПРИМЕЧАНИЯ
909
[1?з] Третье уравнение (121) такое же, как уравнения (123) и (124) § 21, посвящен-
ного общим уравнениям вращения тяжелого тела вращения вокруг неподвижной точки.
[174] Публикуемый отрывок представляет собой часть гл. XXIX книги <<Les methodes
nouvelles de la Mecanique celeste» par H. Ротсагё, membre de 1’Institut, professeur a la
faculty des sciences, t. III. Invariants int£graux. — Solutions p^riodiques du deuxifeme genre.
Solutions doublement asymptotiques. Paris. Gautier—Villars, Imprimeur—Libraire du Bu-
reau des Longitudes de 1’lScole Polytechnique, 1899, стр. 249—272.
[176] А. Пуанкаре обозначает частные производные через d; в данном случае мы со-
хранили это обозначение, так как оно не вызывает недоразумений.
fj7e] Статья Ф. Клейна «Uber neuere englische Arbeiten zur Mechanik» представляет
собой краткое изложение доклада, сделанного Клейном на собрании Немецкого общества
естествоиспытателей и врачей в Галле в 1891 г. Напечатана впервые в «Jahresbericht der
Deutschen Mathematiker-Vereinigung», т. 1, перепечатана в книге Клейна «Gesammelte
mathematische Abhandlungen», изданных в Берлине в 1922—1923 гг., во 2-м томе, стр.
601—602. Развитие идей Ф. Клейна см. Ю. Б. Рум ер, Исследования по 5-оптике,
ГТТИ, 1956.
[177] Публикуемые отрывки взяты из книги Г. Герца «Die Prinzipien der Mechanik in
neuem Zusammenhange dargestellt», опубликованной в 1894 г. и перепечатанной в книге
Герца «Gesammelte Werke», т. 3, изд. 2-е, Leipzig, 1910. Нумерация разделов и пара-
графов на полях заменяет указание страниц.
[17в] В п. 100 указывается, что путь системы представляется тем, что координаты по-
ложений на этом пути задаются как функции одного и того же произвольного перемен-
ного. В п. 106 кривизна пути выражается через изменение прямоугольных координат
вдоль пути
зп
тс2 = mv х'.2.
г = 1
„ de . _
Здесь с = ----- , где de—угол, образуемый направлениями пути в начале и конце элемента
пути ds.
В п. 128 записываются уравнения связей материальной системы
зп
21 XLvdx, = 0 (L = 1, 2. ... , () ,
1'1
где XLr — непрерывные функции xv.
[179] В п. 72 наклон перемещения в прямоугольных координатах выражается для
координаты х„ через Зп изменений dxr.
[18°] В п. 108 кривизна пути выражается через изменения обобщенных координат р„
системы вдоль пути. В п. 130 уравнения связей записаны в обобщенных координатах
2’ Рхв dpo = 0 (у. = 1,2, ... , к).
e-i
В п.Ч55 дифференциальные уравнения прямейшего пути выражаются в прямоуголь-
ных координатах системы.
[181] О п. 108 см. прим. 180. В п. 156 устанавливается, что уравнение
х" _1_ V х, С. — Q
т ” + Lv ' ”
является необходимым и достаточным условием того, чтобы путь был прямейшим (Si —
неопределенный множитель для <-го уравнения).
[!В2] Q п lQg см Прим 180.
[1вз] В п. 114 утверждается, что между двумя возможными положениями всегда
можно провести возможный путь. В п. 115 определяется, в каком случае связь системы
можно называть непрерывной. В п. 121 определяется материальная система как такая
система материальных точек, которая подчинена только непрерывным связям.
[1М] В п. 99 определяется понятие пути системы в некотором ее определенном по-
ложении как направление смежного элемента пути в этом положении.
[ив] Легко видеть, что основной закон Герца есть обобщение закона инерции Нью-
тона путем замены прямого (прямолинейного) пути последнего прямейшим путем.
[188] В п. 298 устанавливается метод определения продолжительности времени с
помощью хронометра числом биений маятника.
[187] В п. 161 доказано, что из данного положения в данном направлении возможен
один и только один прямейший путь.
[188] В п. 192 формулируется следствие из теоремы п. 190. Для голономных систем
каждый прямейший путь есть геодезический и наоборот. Следствие гласит : в голономной
910
ПРИМЕЧАНИЯ
системе между двумя какими-нибудь возможными положениями возможен по крайней
мере один прямейший путь.
[199] В п. 167 указывается, что между двумя положениями возможно несколько крат-
чайших путей, кратчайший из которых называется абсолютно кратчайшим путем. В
п. 172 говорится, что каждый кратчайший путь между двумя положениями есть геодези-
ческий путь. В п. 176 указывается, что геодезический путь есть всегда кратчайший путь
между любыми двумя достаточно близкими соседними его положениями, находящимися
на конечном удалении друг от друга. О п. 190 см. прим. 188.
190 О п. 116 см. прим. 189. О п. 190 см. прим. 188.
191] В п. 171 определяется геодезический путь материальной системы как любой
такой путь, длина которого между двумя любыми положениями отличается лишь на
величину, бесконечно малую высшего порядка, от длины любого другого бесконечно
близкого соседнего пути между теми же положениями. О п. 190 см. прим. 188.
[192] В п. 194 дано следствие: если система не является голономной, то каждый гео-
дезический путь, вообще говоря, не является в то же время прямейшим.
[193] О п. 155 см. прим. 180.
[194] В п. 158 дифференциальные уравнения прямейшего пути материальной системы
выражаются в обобщенных координатах.
[19в] В п. 277 решается задача: представить компоненты ускорения fe системы вдоль
обобщенных координат через производные по времени от этих координат.
[19в] В п. 140 говорится, что свободная координата не входит в дифференциальные
уравнения и, наоборот, всякая координата, которая не входит в дифференциальные урав-
нения системы, есть свободная координата. Свободными координатами называются такие
координаты системы, изменения которых независимы от изменений остальных координат.
В п. 144 устанавливается, что в голономной системе все возможные положения можно
представить через свободные координаты.
[197] В п. 289 устанавливается, что импульсы qe системы вдоль координаты ре можно
выразить посредством частных производных энергии системы по скоростиям изменения
др Е
координат qe — .
О Ро
[19В] О п. 289 см. прим. 197- В п. 290 устанавливается, что скорости рв могут быть
представлены как частные производные энергии системы по соответствующим импульсам.
В п. 292 отмечается, что если мы изменим координату рт дважды на одну и ту же беско-
нечно малую величину, сохраняя при этом первоначальные значения в одном случае
скоростей изменения координат, а в другом случае импульсов вдоль координат, то энер-
гия системы получит равные и противоположные изменения.
[199] Статья О. Гёльдера (in Tubingen) «Ueber die Prinzipien von Hamilton und Mau-
pertuis» доложена Ф. Клейном, напечатана в <<Nachrichten von der K.6n. Ges. der Wissen-
schaften zu Gottingen», Math.-Phys. KI. 1896, вып. 2, стр. 122—157.
[2oo] Статья А. Фосса «Ueber die Prinzipien von Hamilton und Maupertuis» доложена
Ф. Клейном, напечатана в «Nachrichten von der Коп. Ges. der Wissenschaften zu Gottingen»,
Math.-Phys. KI., 1900, стр. 322—32 .
[2oi] Статья П. Аппеля «Sur une forme g£n6rale des fiquations de la dynamique et sur
le principe de Gauss» (par M. P. Appell a St. Germain sur Laye) напечатана в «Journal fflr
die reine und angewandte Mathematik», t. 122, Berlin, 1900, стр. 205—208.
[2°2] Книга M. Планка «Acht Vorlesungen fiber theoretische Physik, gehalten an der
Columbia University in the City of New York im Friihjahr 1909» издана в Лейпциге в 1910 г.
Русский перевод вышел в том же году под названием «Теоретическая физика». Седьмая
глава этой книги носит название : Общая динамика. Принцип наименьшего действия.
[208] Можно сделать попытку обозреть основные этапы развития аналитической дина-
мики до середины XIX в. Первым шагом явилось установление лагранжевой формы урав-
нений движения, затем лагранжева теория вариации произвольных постоянных, а также
теория Пуассона. Следующим этапом явились: во-первых, представление Гамильтоном
интегральных уравнений посредством единственной характеристической функции, опре-
деляемой a posteriori посредством интегральных уравнений, предполагаемых известными,
или посредством условия, что она одновременно удовлетворяет двум дифференциальным
уравнениям в частных производных, и, во-вторых, установление канонических уравнений
движения. Вслед за тем Якоби свел интегрирование дифференциальных уравнений к
проблеме нахождения полного интеграла единственного уравнения в частных производ-
ных и дал общую теорию связи интегрирования систем обыкновенных дифференциальных
уравнений и уравнения в частных производных первого порядка. Наконец, была разра-
ботана теория систем канонических интегралов.
Надо отметить, что дифференциальные уравнения динамики являются только одним
из классов дифференциальных уравнений, изучаемых математиками. Якоби особенно
много сделал в этой области и, в частности, изучил так называемую изопериметрическую
систему дифференциальных уравнений, т. е. систему, возникающую при изучении любой
проблемы вариационного исчисления. Если рассмотреть общую теорию систем дифферен-
ПРИМЕЧАНИЯ
911
циальных уравнений и затем исследовать обобщенную гамильтонову систему как част-
ный случай этой теории, то можно показать, что обобщенная лагранжева форма диффе
ренциальных уравнений динамики может быть преобразована в гамильтонову форму,
хотя именно лагранжевы уравнения должны рассматриваться, собственно говоря, как
частный случай изопериметрической системы дифференциальных уравнений.
[2М] Статья <<Das Prinzip der kleinsten Wirkung» опубликована впервые в сборнике
♦Die Kultur der Oegenwart», т. 1, Physik, 1915; перепечатана в 1949 г. в книге Планка
«Vortrage und Erinnerungen», стр. 95—105. См. также М. Планк, Физические
очерки, ГИЗ, 1925.
[205] Статья Д. Гильберта «Die Orundlagen der Physik» доложена в заседании 20/XI
1915 г. и напечатана в «Nachrichten von der Коп. Oes. der Wissenschaften zu Gottingen»,
Math.-Phys. KI., 1915, Heft 3, стр., 395—407. Позднее эта статья была в значительной сте-
пени переработана Гильбертом с учетом работ А. Эйнштейна, Г. Вейля, Ф. Клейна,
Э. Нетер и была опубликована в 1924 г. в Math. Annalen, т. 92, стр. 1—32 (см. также
D. Hilbert, Gesammelte Abhandlungen, т. 3, 1935, стр. 258—289). Изложение 1916 г., хотя
и менее строгое, чем в статье 1924 г., однако имеет более оригинальный характер; по-
этому мы помещаем здесь первый опубликованный вариант этой статьи.
[2ов] Статья Эйнштейна <<Hamiltonsches Prinzip und allgemeine Relativitatstheorie»-
напечатана впервые в «Sitzungsberichte der Preuss. Akademie der Wissenschaften», 1916,
стр. 1111; русский перевод под редакцией В. К- Фредерикса и Д. Д. Иваненко был опу-
бликован в 1935 г. в книге «Принцип относительности» (сборник работ классиков реляти-
визма!, ОНТИ, стр. 306—314.
[2°7] Статья «Invarianten beliebiger Differentialausdrflcke» представлена Ф. Клейном,
напечатана в «Nachrichten von der Коп. Ges. d. Wissenschaften zu G6ttingen», Math.-Phys.
KI-, 1918, Heft 1, стр. 37—44.
[гое] Координаты Римана определяются как произведения единичных векторов
касательных к геодезическим линиям данного пространства, проходящим через начало
координат, на путь 8: х‘ — 8 (/ = 1, 2,..., п). В этих координатах уравнение геодези-
ческих линий имеет простой вид: d2x</dS2 = 0, причем ковариантные производные от
тензоров сводятся к обы ным производным. Подробнее см. П. К. Р а ш е в с к и й, Вве-
дение в риманову геометрию и тензорный анализ, изд. 1-е, ОНТИ, 1935, стр. 95.
[209] См. Курант Р. и Гильберт Д., Методы математической физики, т. 1,
ГТТИ, 1934.
[21°] В современной литературе для тензорных величин, преобразующихся как диф-
ференциалы координат, употребляется обычно термин «ковариантные величины».
[211] Понятие «ковариантная производная» понимается здесь в более общем смысле,
чем в тензорном анализе, h' называется ковариантной производной ввиду того, что она
обладает теми же трансформационными свойствами, что и h.
[212] Разложением Клебша—Горбана называется правило, позволяющее эффективно
выразить систему инвариантов представления, которое является прямым произведением
двух представлений той же группы, через инварианты этих представлений.
Г213] Статья Emmy Noether, Invariante Variationprobleme напечатана в «Nach-
richten von der KOn. Ges. der Wissenschaften zu Gottingen,, Math.-Phys. K1-, 1918, вып. 2,
стр. 235—258. В знаменитой Эрлангенской программе Ф. Клейна был впервые четко сфор-
мулирован принцип, неявно имевшийся уже в геометрии Евклида. Клейн высказал утвер-
ждение, что любая геометрия (элементарная, аффинная, проективная, топологическая и
т. д.) задается системой инвариантов относительно некоторой группы преобразований,
причем изоморфные группы, заданные на множествах различных геометрических объек-
тов, соответствуют одной геометрии. Так, например, для римановых геометрий основ-
ным инвариантом является скалярное произведение, заданное симметричным тензором
g к. С другой стороны, теория непрерывных групп, развитая Софусом Ли, установила
связь между интегралами дифференциальных уравнений и инвариантами непрерывных
групп. Отсюда, очевидно, следует, что уравнения механики, записанные в лагранжевом
или в гамильтоновом формализме, могут быть интерпретированы в терминах непрерыв-
ной группы и ее инвариантов. Иными словами, гамильтониан и другие константы дви-
жения, обращающие скобки Пуассона в нуль, являются инвариантами группы Ли.
Как известно, Кант *) обосновывал свой взгляд на пространство как на форму чув-
ственности следующим примером: две фигуры, являющиеся зеркальными изображениями
друг друга**), неконгруэнтны, т. е. неэквивалентны с точки зрения группы конгруэнций,
являющейся инвариантной подгруппой автоморфизмов **), несмотря на метрическую
тождественность. Отсюда Кант заключал, что пространство не связано с внутренними свой-
ствами тел и является априорной формой чувственного восприятия. Этот пример, поло-
женный Кантом в основу созданной им системы трансцендентального идеализма, разъяс-
няется с точки зрения Клейна, суммирующей все достижения геометрии XIX в. от Л оба.
*) И. Кант, Пролегомены, ОГИЗ, М.—Л., 1934.
**) Группой автоморфизмов называется группа отображений некоторого множества
на себя.
912
ПРИМЕЧАНИЯ
чевского до Ли. Действительно, парадокс может быть разъяснен указанием на то, что
евклидова геометрия задается полной ортогональной группой преобразований, сохраня-
ющих расстояние: х* + х2 +. • • + и включающей наряду с непрерывными преобразо-
ваниями (вращения) преобразования отражения, переводящие х1( х2,..., х,,..., хп в — х„
— х2,...,— X,-,..., — х„. Иными словами, понятие тождественности зависит от выбора
той или иной группы преобразований. В математике такой выбор совершенно произволен,
в физике же диктуется самой природой наблюдаемого явления, что лишает смысла идеа-
листический взгляд Канта на пространство.
На возможное возражение, что группа сама по себе является априорным понятием,
можно указать, что понятие группы является результатом абстрагирования от различ-
ных подвижных инструментов: циркуль, линейка и т. д., являющихся орудием геомет-
рического исследования*). Напомним, что уже в геометрии Евклида неявно предполага-
лось, что все геометрические построения следует проводить с помощью только циркуля
и линейки. Смысл этого требования становится ясен только с точки зрения программы
Клейна. Геометрические свойства тел выражаются, таким образом, в терминах инвариан-
тов группы и допускают изоморфную подстановку элементов пространства, в котором
реализуется группа, и, следовательно, совершенно не зависят от самих геометрических
объектов. Укажем, например, на реализацию геометрии Лобачевского на плоскости, пред-
ложенную А. Пуанкаре. Приведенный пример указывает на большую методологическую
ценность программы Клейна. Аналогичный подход возможен также и в физике, где раз-
личные законы сохранения интерпретируются как свойства симметрии относительно
различных групп. Основными группами современной физики являются: группа Лоренца,
заданная в пространстве Минковского, и группа непрерывных преобразований, заданная
в криволинейном пространстве общей теории относительности, коэффициенты метриче-
ской формы которого определяют поле гравитации. В релятивистской квантовой меха-
нике мы переходим от группы Лоренца к ее представлениям, определяющим преобразо-
вания волновых функций. Как было показано П. Дираком, два числа I и S, задающих
неприводимое представление группы Лоренца, можно интерпретировать как константы
движения: угловой момент и внутренний момент частицы (спин). Иначе говоря, опера-
торы, соответствующие этим инвариантам, перестановочны с гамильтонианом (квантовые
скобки Пуассона от гамильтониана и этих операторов равны нулю). Числа, обладающие
этими свойствами, называются квантовыми числами. В работах Э. Нетер дается общий
алгоритм, позволяющий найти полную систему инвариантов любой физической теории,
формулируемой в терминах лагранжева или гамильтонова формализмов. В основу алго-
ритма положена указанная выше связь между инвариантами группы Ли и константами
движения уравнений Гамильтона или Лагранжа. В качестве простейшего примера рас-
смотрим вывод закона сохранения углового момента механической системы, заданной ла-
гранжианом Г(х, х, t). Вводим непрерывную группу вращения, заданную системой инфи-
нитезимальных операторов Хк = х/ -=--- xj (i,j, к = 1, 2,3), удовлетворяющих ком-
uXj OXi
мутационным соотношениям [х3х1] = х2; [х1х2]=х3; [х2х3] = х1. Тогда из условия
инвариантности L' = L получаем х, — xj = 0. Отсюда с помощью уравнений
Лагранжа выводятся уравнения сохранения углового момента Mk = PiXj — x.pj = const,
где индексы i, j, к образуют циклическую подстановку I, j, к = 1, 2, 3. В современной
физике теорема Нетер играет особо важную роль при математической интерпретации раз-
личных вариантов классификации элементарных частиц. Наиболее успешной из этих схем
является классификация Гельмана**), в которой вводится наряду со спином, изотопи-
ческим спином***) и орбитальным моментом новое квантовое число «странность», по кото-
рому проводится классификация элементарных частиц. Правила отбора по «странности»
хорошо согласуются с экспериментальными данными по временам жизни элементарных
частиц. В работе D’Espagna и J. Prentki****) было показано, что «странность» можно полу-
*) Напомним, что любое геометрическое построение с помощью циркуля и линейки
может быть интерпретировано как некоторая алгебраическая операция или комбинация
алгебраических операций.
**)См. сборник переводов «Новейшие проблемы современной физики» за 1956 г., Эле-
ментарные частицы.
***) Изотопи еским спином называется оператор, устанавливающий связь между
различными элементарными частицами в гипотетическом пространстве изотопического
спина. Так, например, протон и нейтрон можно рассматривать как два состояния неко-
торой частицы «нуклона» с значениями изотопического спина х/2 и —У2. Изотопический
спин, являющийся обобщением понятия «заряд частицы», можно рассматривать как инва-
риант представления группы вращений в трехмерном «пространстве» изотопического
спина.
****) D’Espagna and J. Prentki, Nuclear Phys., 1, 33 (1955).
ПРИМЕЧАНИЯ
913
чить, потребовав инвариантности лагранжиана взаимодействия различных элементарных
частиц относительно отражений в пространстве изотопического спииа, которые можно
рассматривать как калибровочные преобразования 1-го рода. Таким образом, требуя
инвариантности лагранжиана, включающего все возможные взаимодействия между
элементарными частицами относительно вращений и отражений в пространстве Мин-
ковского и в пространстве изотопического спина, можно получить полную систему инва-
риантов, с помощью которых осуществляется классификация элементарных частиц по
представлениям группы Лоренца и группы вращений и от]:ажений пространства трех-
мерного изотопического спина. Указанная работа является лишь частным случаем при-
менения одного из наиболее эффективных и общих алгоритмов современной теоретиче-
ской физики, созданного в замечательных работах Э. Нетер. Следует отметить, однако,
некоторую ограниченность метода, которая мешает использованию его в ряде проблем,
представляющих большой интерес. Дело в том, что развитый Э. Нетер алгоритм приме-
ним лишь к непрерывным преобразованиям, к конечным же преобразованиям он может
быть применен только в тех случаях, когда эти преобразования являются частным слу-
чаем непрерывных. Так, например, в рассматриваемой выше работе D’Espagna и Prentki
конечные преобразования инверсии в пространстве изотопического спииа рассматри-
ваются как фазовые преобразования у' = е‘ау>, которые образуют группу Ли, ввиду чего
оказывается возможным применить теорему Нетер, причем при а = л. фазовые преобра-
зования переходят в преобразования инверсии. В тех случаях, когда это невозможно,
теорема Нетер не может быть применена.
[214] о соотношениях дивергенции см. ниже, стр. 615.
[216] mod Div означает, что к правой части без нарушения равенства можно добавить
сумму любых дивергенций.
[21в] Имеется в виду процесс преобразования, осуществляемый с помощью линейных,
независимых от времени выражений.
[217] Статья «Tentative Theory of Light Quanta» опубликована в «Phil. Mag. and Journ.
of Science», t. XLVII, № CCLXXVIII, 446 (1924).
[218] Эта первая опубликованная работа де Бройля по теории квантов имеет не-
сколько сумбурный характер, но уже в ней намечены основные результаты, полученные
им в его опубликованной позднее основной работе (см. стр. е41 настоящей книги).
[219] Замечание о конечной, не равной нулю массе фотона неправильно, так как про-
тиворечит условию калибровочной инвариантности.
[22°] Статья «Recherches sur la tt^orie des quanta» напечатана в «Ann. d. Phys.», t. Ill,
dixieme serie, 1925, стр. 22—128. При переводе нами опущены разделы 4—7 этой статьи,
как не представляющие интереса для нашего сборника.
[221] Статья де Бройля представляет собой блестящий пример роли физической интуи-
ции. Логическая структура этой работы, представляющей развитие идей предыдущей
статьи (см. стр. 631), во многом неудовлетворительна, например: переход от равенства
Oi=~Ji к равенству О =—J, получение нерелятивистских соотношений из реля-
тивистских и т. п. Несмотря на это (а может быть, именно благодаря этому), де Бройль
получил правильные результаты, открывшие новую эпоху в развитии физики.
Существенно отметить, что отсутствие достаточных экспериментальных данных и
сколько-нибудь разработанных теоретических предпосылок и понятий, невозможность
построить логически замкнутую схему атомной теории, исходя из принципов класси-
ческой макроскопической физики, привели к одной специфической черте работы
де Бройля: содержащийся в ней исторический обзор имеет своей задачей не столько
осветить развитие и состояние вопроса, сколько в какой-то степени обосновать ана-
лизом историко-научных данных основные идеи работы де Бройля и их математи-
ческую формулировку.
Так как такого рода историко-научный подход к физическим проблемам, по суще-
ству говоря, есть весьма интересный и своеобразный вариант столь широко применяемого
в физике метода аналогий, то и с этой точки зрения в полном смысле слова неповторимая
работа де Бройля представляет особый интерес.
[222] Статья «Quantisierung als Eigenwertproblem» (erste Mitteilung) опубликована в
«Ann. d. Phys.», vierte Folge, t. 79, № 4, 1926, стр. 631, перепечатана в книге Е. Schro-
dinger, Abhandlungen zur Wellenmechanik, Barth., Leipzig, изд. 2-e, 1928 (английское
издание под названием «Collected Papers on Wave Mecanics»).
[223] Таким образом, уже на второй странице своего первого сообщения Шредингер
написал уравнение для стационарной задачи электрона, известное под его именем и во-
шедшее как основное в волновую механику атома. Для полного совпадения с обычным
видом уравнения Шредингера, как оно фигурирует во всех курсах квантовой механики,
достаточно положить к2 = (/1/2л)2.
[224] Все эти рассуждения полностью сохранили свое значение и в настоящее время.
[226] По этому поводу см. второе сообщение Шредингера (стр. 679 настоящей книги)-
где он дает более правильное освещение вопроса.
58 Вариационные принципы механики
914
ПРИМЕЧАНИЯ
[22в] См. для сравнения изложение так называемой полуклассической теории в книге
Л. Ландау и Е. Лившица «Квантовая механика».
[227] Статья «Quantisierung als Eigenvertproblem» (zweite Mitteilung) опубликована в
♦Ann. d. Phys.», vierte Folge, t. 79, № 6, 1926, стр. 489—527 (поступило 23/П 1926 г.).
[228] Как известно, волновой пакет расползается с течением времени. Это было пока-
зано самим Шредингером.
[229] Проблема геометризации основных соотношений динамики, вытекавшая из глу-
бокого внутреннего родства теории поверхностей и проблемы отыскания динамических
траекторий для различных механических систем, вызвала многочисленные исследования.
Теория относительности отнюдь не является первой теорией, геометризующей дина-
мику. Теория относительности в этом смысле была лишь первой теорией, проводившей
геометризацию в пространстве-времени.
Уже в классической механике, придав принципу наименьшего действия подходя-
щую формулу, геометризовали общую задачу динамики.
Дарбу (см. его лекции по общей теории поверхностей), исходя иэ работ Якоби, Том-
сона и Тэта, Лиувилля, Липшица, развил геометризацию проблем динамики, рассматривая
среди всех возможных движений с силовой функцией U такие, которым отвечает одно и
то же значение постоянной закона сохранения энергии h или, что то же самое, одна и та
же полная энергия. Вот ход его рассуждений.
Возьмем в качестве основной формы
2 Т dt2 = atk dqi dqk ,
введем импульсы
Pi = aij qj ,
отсюда получим:
2T = aikPiPk.
Тогда уравнение в частных производных Якоби запишется так:
a^™2{U + h}.
dqt dqk
Пусть 6 — полный интеграл этого уравнения и 6lt 02, •.., 6n-i — частные интегра-
лы линейного в F уравнения
Согласно Липшицу имеем:
2 (U -|- й) aik dqt dqk = d62 + / (d^1, ... , d6n-1).
Отсюда для действительного движения, при котором
dei = dOi= ... = d0n_! = 0,
имеем:
бр2(П + й) atk dqi dqk = 0 .
Таким образом, с помощью этого выражения принципа наименьшего действия опре-
деление траектории тела сводится к отысканию геодезической линии ds2;
ds2 = 2 (U + й) aik dqt dqk .
рз»] установить единое правило для строгого решения дифференциального урав-
нения Гамильтона—Якоби невозможно. Однако во многих случаях можно найти решение
благодаря теореме о том, что S представляет сумму функций, каждая из которых в отдель-
ности зависит от координаты q (и, кроме того, от постоянных интегрирования а/):
S = Sx (q^ + ... + Sf (qf).
Тогда уравнение в частных производных
......<А>
ПРИМЕЧАНИЯ
915
распадается на / обыкновенных дифференциальных уравнений
Fk
Цк = ак
as
или, разрешая относительно , получим
QSk р , .
-^Р^ак).
В этом случае говорят, что (А) решается разделением переменных.
В уравнении Гамильтона переменными, которые определяют движение механической
системы, являются обобщенные координаты q и обобщенные моменты р. Гамильтонова
функция Н (р, q), которая входит в гамильтоновы уравнения, обычно является функцией
обеих этих переменных. Если мы преобразуем переменные q и р в новые переменные qu р
посредством какого-либо произвольного преобразования, общая форма гамильтоновых
уравнений изменится. Однако Якоби показал, что существует некоторое преобразование,
отличающееся тем свойством, что оно оставляет форму этих уравнений неизменной. Так
как уравнения Гамильтона часто называются каноническими уравнениями динамики, то
указанным преобразованиям было дано наименование канонических преобразований.
Канонические преобразования представляют собой специальный случай касательного
преобразования. Касательное преобразование в трехмерном пространстве определяется
так :
х' = /(X,у,Z, рх\,Ру), у' = <p(x,y,z,px, ру), z' = y(x,y,z,px, ру).
В том случае, когда ни х', ни у' не зависят от z и только z' зависит от этой переменной,
причем z' = z + /(х, у, рх, Ру), мы имеем каноническое преобразование.
Предположим, что мы произвели некоторое каноническое преобразование гамиль-
тоновых уравнений некоторой данной задачи. Уравнения сохранили их форму, но гамиль-
тонова функция Н (q, р) превратилась в функцию Н (q, р) новых переменных q и р. Если
мы умеем интегрировать новые гамильтоновы уравнения, то решение исходных уравнений
будет немедленно найдено и задача тем самым решена. В общем случае новые уравнения
могут не иметь никаких преимуществ перед исходными в отношении интегрируемости.
Но Якоби показал, что если можно построить такое каноническое преобразование, которое
преобразует гамильтонову функцию H(q,p) в Н(р), содержащую только переменные р,
то полученные уравнения Гамильтона могут быть немедленно проинтегрированы и, сле-
довательно, динамическая задача решена. Таким образом, метод Якоби состоит в замене
прямого интегрирования уравнений Гамильтона отысканием соответствующего канони-
ческого преобразования. Этот метод Якоби для интегрирования уравнений Гамильтона
является примером преобразования одной математической проблемы в другую. Вместо
попыток прямо интегрировать уравнения Гамильтона, мы ищем решение совершенно
другого рода уравнения. Подобная же картина имеет место для случая связи между
конформными преобразованиями и задачей Дирихле.
[231] Необходимо отметить, что и в настоящее время мы имеем в квантовой механике
два внутренне связанных аспекта (или представления): волновой и матричный.
[аза] Публикуемая статья П. А. Дирака <Оп generalized Hamiltonian Dynamics» была
напечатана в «Canadian Journal of Mathematics», т. П, № 2, 1950, стр. 129—148.
Критический период, переживаемый современной теоретической физикой, заставляет
особенно внимательно относиться ко всем попыткам выхода за рамки современного фор-
мализма релятивистской квантовой механики и квантовой теории поля.
Одним из наиболее заметных дефектов ряда работ, в которых приводятся различные
уравнения, обобщающие уравнения Дирака и Максвелла, является отсутствие адекват-
ного математического формализма. Может быть, не будет преувеличением сказать, что
наша эпоха напоминает предньютоновский период в физике, когда несовершенство мате-
матического аппарата сильно затрудняло формулировку принципов динамики, физиче-
ский смысл которых становился все более ясным. В этом отношении большой интерес пред-
ставляют работы (подобные предлагаемой читателю работе одного из величайших физи-
ков современности П. Дирака), в которых разрабатывается аппарат, отвечающий потреб-
ностям будущей физики.
В современной физике ведутся оживленные дискуссии о том, по каким направлениям
должно идти обобщение современных теорий. Одним из наиболее интересных направле-
ний являются попытки создания нелинейной квантовой теории поля. Существуют серьез-
ные основания полагать, что теория поля, основанная на нелинейных уравнениях Дирака
и Максвелла, будет лишена тех органических трудностей (расходимости собственной массы
и собственной энергии элементарных частиц), которые привели к кризису современной
физики.
916
ПРИМЕЧАНИЯ
Есть основания полагать также, что нелинейное уравнение Дирака +
+1 [V+ V>] V = 0 *) сможет дать спектр масс элементарных частиц, причем уравнения всех
других полей будут сводиться к этому нелинейному уравнению. Один из наиболее серьез-
ных аргументов в пользу нелинейного обобщения содержится в работе Борна и Инфель-
да**). В этой работе авторы исходят из лагранжиана, заданного двумя инвариантами, со-
ставленными из компонентов антисимметричного тензора электромагнитного поля:
g— (Е2 — Я2) = Д, (ЕН)2 = /2. То, что из компонентов антисимметричного тензора можно
составить только два фундаментальных инварианта, вытекает из того, что тензор поля
задается одним из неприводимых представлений группы Лоренца. Инвариант /1; взятый
в качестве L, задает обычные уравнения Максвелла. Борн и Инфельд показали, что полу-
ченное ими нелинейное обобщение уравнений Максвелла лишено классических расходи-
мостей.
Это дает основание надеяться, что и квантовый вариант нелинейной электродина-
мики Борна—Инфельда будет лишен трудностей современной теории поля.
К сожалению, квантование нелинейных уравнении также сталкивается с рядом труд-
ностей. Одна из них заключается в том, что нелинейная электродинамика сформулирована
в лагранжевой форме, для квантования же необходимо исходить из формализма Гамиль-
тона***). В предлагаемой работе Дирака рассмотрен наиболее общий случай связи гамиль-
тонова и лагранжева формализмов. Автор отказывается от неявно содержащейся к клас-
сических формулировках принципов Лагранжа и Гамильтона предпосылки, что импуль-
сы — независимые функции этих скоростей. Считая, что координаты и импульсы q и р =
Э L
= связаны рядом дополнительных соотношении, автор варьирует гамильтониан вида
н = 5) + vm Фт, где Фт — 0 — дополнительные условия, a vm — некоторые коэффи-
циенты. Иными словами, в этой работе разыскивается не абсолютный, а относительный
экстремум действия. Аналогично проводятся рассуждения в случае, если исходной точ-
кой является гамильтониан. В этом последнем случае автор приходит к обобщенным
уравнениям Лагранжа, являющимся своеобразным гибридом уравнений Лагранжа 1-го
и 2-го рода (как известно, уравнениями Лагранжа 1-го рода называются алгебраические
уравнения, задающие относительный экстремум потенциала).
В работе рассматриваются два типа равенств: сильные и слабые. Слабые равенства
образуют топологически незамкнутое множество, так как они перестают удовлетворять-
ся после варьирования. Сильные равенства образуют замкнутое множество и задаются
в г-окрестности ЗА-мерного пространства координат q, q и р, содержащей 2А-мерную
область, в которой выполняются слабые равенства. Следует отметить, что ряд вопросов,
например вопрос о покрытии (2А -— Л4)-пространства A-окрестностями и о топологии,
которой подчиняются зти окрестности, не получил в работе строгого математического
освещения.
р33] терМИН «нарушаться с точностью до...» разъяснен выше и означает, что правая
и левая .части уравнения после варьирования отличаются на какую-то величину.
[234] Это равенство известно в механике и в теории непрерывных групп как тождество
Якоби.
[236] То есть все детерминанты порядка выше В, составленные из строчек и столбцов
этой матрицы, равны нулю в слабом смысле.
[2зв] «фрОНТОм» в [2] называется трехмерная гиперповерхность в пространстве-вре-
мени, заданная плоской волной, движущейся со скоростью с.
рз?] Коммутирующие операторы ta и ta' приводятся к диагональному виду.
[гав] Памфлет Вольтера перепечатан в «Oeuvres de Voltaire avec prefaces avertisse-
ments» notes etc. par Beuchot, т. XXXIX ; IV^lange, t. Ill a Paris chez Lefevre-Librairie,
MDCCCXXX.
Все данные о первоначальной публикации отдельных частей этого памфлета приве-
дены в примечаниях его издателя Beuchot, которые мы полностью воспроизводим непо-
средственно в тексте.
[239] Письмо П. Ферма де ла Шамбру (Cureau de la Chambre) помещено в «Oeuvres de
Fermat», т. 2, Paris, 1894, стр. 457—463.
I240] La Lumifere a Monseigneur i’Eminentissime Cardinal Mazarin par le Sieur De la
Chambre, conseiller du Roy en ses Conseils et son M£dicin ordinaire, Paris, 1657, 446 стр.
I241] Марциал, Epigr., I, II, 5.
[212] Помещенные здесь письма Эйлера к Мопертюи опубликованы впервые в книге
*) Уравнение Дирака в такой форме предложено В. Гейзенбергом.
**) Proc. Roy. Soc. А 144, 425 (1934).
***) Попытка проквантовать уравнения Борна—Инфельда содержится в работе моло-
дого польского физика Суфчинского, Acta Phys. Polon. 13, № 4, стр. 291—299 (1954).
ПРИМЕЧАНИЯ
917
Р. Brunet, Etude historique sur le principe de la moindre action, Paris, Hermann, 1938,
61—78.
[24э] речь Идет 0 мемуаре Мопертюи, помещенном в настоящем сборнике, стр. 41.
[244] Дата этого письма сомнительна. Первая фраза из публикуемого отрывка указы-
вает, что письмо следует датировать 1748 г., так как в течение этого года был издан том
мемуаров Берлинской Академии за 1746 г., где помещен мемуар Мопертюи о «Законах
движения и покоя, выведенных из метафизического принципа».
Напротив, намеки на ссору с Кёнигом должны определять это письмо как относя-
щееся к периоду после 1751 г., но тогда трудно согласовать подобную хронологию с
предыдущим контекстом, ибо нельзя себе представить, о каком другом мемуаре могла
идти речь.
Во всяком случае, 1758 г. не согласуется с биографией Мопертюи, если только речь
не идет о философском рассмотрении доказательства существования бога, использован-
ном в очерке о космологии («Examen philosophique de la preuve de 1’existence de Dieu dans
1’Essai de cosmologie», Мем. Берлинск. Академии, 1756 г.).
[245] рабОта Гамильтона «Problem of Three Bodies by my Characteristic Function»
(1833) впервые опубликована в 1940 г. в. «The Mathematical Papers of Sir W. R. Hamil-
ton», t. 2, Cambridge, стр. 1—102. Содержание этой опубликованной теперь рукописи
Гамильтона таково:
Общая постановка проблемы: Солнце, Юпитер, Сатурн в центробарических коорди-
натах. Введение функции V и ее вариации <ЗУ. Решение приближенных уравнений. Воз-
мущения Юпитера, полученные и сравненные с результатами Лапласа. Возмущения
Сатурна. Приближенное выражение восьми элементов орбиты через начальные коорди-
наты и скорости. Выражения для живой силы. Выражения для возмущений. Выражения
для вариации постоянных. Характеристическая функция для эллиптического движения
f ± ]/L_±______L
J Г r + rQ + x 4 а
-х
Уравнение -д^- = t. Общее его доказательство. Исследование различных вопросов возму-
щенного движения. Доказательство, что дифференциальные уравнения
имеют общее решение. Распространение V на различные законы действия силы. Различ-
ные преобразования уравнений в частных производных.
Нами публикуется отрывок, посвященный основной и доставившей Гамильтону
ЭР
больше всего труда проблеме—установлению соотношения = t. См. стр. 818. на-
стоящей книги.
[24в] Уравнение (510)
Уравнение (512)
г + г0 = 2 a 11 — е cos —-Г—® Cos —~~- !.
Уравнение (514)
., V— ( О и + ип и — и0)
Р, = \ a hi — u0 + 2 е cos-—- cos-?— 1.
[247] Уравнение (523)
Г <3РгV fJVi)2 = 2 _ 1_
[ <3r J I г <30 J г а
(г, г0 — конечные и начальные расстояния планет от их общего центра тяжести).
918
ПРИМЕЧАНИЯ
J*18] Уравнение (300) имеет вид
0 = 2/г +
т д'1 т' а'-1
1 + т 1 + т' '
Заметка Гамильтона «Calculus of Principal Relations» напечатана в 1836 г. в
«British Association Report», ч. II, стр. 41—44. Перепечатана в «Mathematical Papers», т. 2,
Dynamics, Cambridge, 1940, стр. 408^—412. В этой заметке Гамильтон рассматривает обоб-
щение своего метода: попытки такого обобщения он делал многократно.
£“°] Письмо Дж. Гершелю опубликовано в первом томе книги Graves, Life of
Sir William Rowan Hamilton, т. 1, Dublin, 1882. Письмо датировано 17/Ш 1834 г.
[261J Помещаемые нами письма Остроградского проф. Брашману впервые напечатаны
в Матем. сб., издаваемом Моск, матем. общ., т. I, 1866, стр. XXVI—XXXI.
[262] Помещаемый отрывок представляет собой введение к книге Н. Р о i п с а г ё,
Electricit6 et Optique. La lumiere et les th6ories 61ectrodynamiques, Paris, 1901, Introduction,
стр. Ill—X. В этом введении проанализированы некоторые трудности, возникающие при
попытках построить механическую картину мира с помощью вариационных принципов
и аналитической механики. Идеалистическая философия Пуанкаре, проявляющаяся и в
отдельных местах помещаемого отрывка, подвергнута глубокой критике В. И. Лени-
ным в книге «Материализм и эмпириокритицизм».
I233] Публикуемый отрывок представляет собой § 7 статьи А. Зоммерфельда «Das
Plancksche Wirkungsquantum und seine aligemeine Bedeutung fflr die Molekularphysik»,
напечатанной в «Physikalische Zeitschrift», 24, Dezember 1911, стр. 1062. Он представляет
интерес как одна из первых робких попыток связать вариационный принцип классичес-
кой физики с квантовым характером процессов в микрокосмосе.
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ*)
Адамар Ж. (Hadamard Jacques Salomon), род. 1865,
французский математик, профессор в Коллеж де Франс и Политехнической школе,
член Парижской Академии наук. Важнейшие исследования в области математики
по вопросам теории целых аналитических функций, теории дифференциальных
уравнений, а в механике — по исследованию проблем устойчивости равновесия.
Аппель П.-Э. (Appell Paul Emile), 1855—1930,
французский математик. С 1885 г. — профессор теоретической механики в Париже,
с 1892 г. — член Парижской Академии наук. Автор многочисленных работ по
механике, геометрии, теории аналитических функций и капитального пятитом-
ного труда по теоретической механике.
Баджере Дж. (Burgers Johannes Martinus), род. 1895,
голландский физик, профессор в Гарлеме и Дельфте, автор ряда исследований в
области волновой теории света и теории турбулентного движения.
Беглен Н. (Beguelin Nicolas), 1714—1789,
швейцарский физик, ученик Йог. Бернулли. Профессор в Иоахимштале, с 1764 г.
— воспитатель принца Фридриха Вильгельма, с 1786 г. — директор Берлинской
Академии наук. Автор многочисленных статей по теории чисел, по исследованию
света и цвета.
Бертран Ж. (Bertrand Joseph Louis Francois), 1822—1900,
французский математик, член Парижской Академии наук, с 1874 г. —постоянный
Секретарь Академии. Автор многочисленных статей по физике и математике.
Бобылев Дмитрий Константинович, 1842—1917,
русский механик и физик, профессор Петербургского университета. Член-коррес-
пондент Петербургской Академии наук. Основные работы в области механики и
гидродинамики.
Больцман Л. (Boltzmann Ludwig), 1844—1906,
немецкий физик, профессор экспериментальной, а затем теоретической физики в
университетах в Граце, Мюнхене, Вене, Лейпциге. В последние годы жизни читал
лекции по философии природы в Венском университете. Больцману принадлежит
ряд замечательных исследований в различных областях теоретической физики.
Создатель классической статистической физики, он раскрыл физический смысл
энтропии, применил методы теории вероятностей к физическим задачам и т. д.
Исследования Больцмана по теории излучения послужили основой для совре-
менной теории излучения.
Бонфиоли A. (Bonfioli Alphonsus Malvezzi), 1730—1804,
итальянский- математик, член Болонской Академии, член-корреспондент Париж-
ской Академии наук с 1773 г.
Бор Н. (Bohr Niels), род. 1885,
датский физик. Обучался в университете в Копенгагене. Работал в лабораториях
в Кембридже и Манчестере у Резерфорда. С 1916 г. — профессор в Копенгагене,
где он создал и возглавил Институт теоретической физики. Почетный член Ака-
демии наук СССР. Бор является одним из создателей современной квантовой
физики. Основные его исследования посвящены квантовой теории строения ато-
мов, молекул и атомных ядер, а также принципиальным вопросам волновой меха-
ники. Создал модель атома, названную именем Резерфорда—Бора. С именем Бора
связана «классическая» квантовая теория атома (1913—1925 гг.). Бор является
руководителем так называемой «Копенгагенской школы».
Брассин Ф. (Brassine Philippe Emile), 1805—1894,
французский математик, профессор в Тулузе. Исследования Б. относятся главным,
образом к аналитической геометрии, теории дифференциальных уравнений, прин-
ципу наименьшего действия, баллистике.
*) Составлен Ю. X. Копелевич.
920
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
Брашман Николай Дмитриевич, 1796—1866,
русский математик, адъюнкт в Казанском университете и с 1834 г. — профессор
Московского университета. Член-корреспондент Академии наук. Основные работы
относятся к гидромеханике и принципу наименьшего действия.
Бриллюэн Л. (Brillouin Бёоп Nicolas), род. 1889,
французский физик, профессор в Сорбонне, в Коллеж де Франс и в Колумбийс-
ком университете в США. Основные исследования — по теории металлов, по
распространению электромагнитных волн в радиоволноводах и по квантовой
статистике.
Бриоски Ф. (Brioschi Francesco), 1827—1897,
итальянский математик и физик, профессор в Падуе, Милане, член Академий наук
в Турине, Неаполе, Болонье и др., с 1882 г. — президент Академии деи Линчеи
в Риме. Автор многочисленных исследований по геометрии поверхностей, теории
дифференциальных уравнений, теории эллиптических функций, аналитической
механике.
Бройль Л. де (Broglie Louis Victor de), род. 1892,
французский физик, обучался в Париже, преподавал в Сорбонне и затем был про-
фессором теоретической физики в Парижском университете. Работы Б. в области
волновой механики заложили основу современной теории строения атома. Сочи-
нение Б. по квантовой теории (1924 г.) было удостоено Нобелевской премии по
физике в 1929 г.
Брунс Г. (Bruns Ernst Heinrich), 1848—1919,
немецкий математик и астроном, в 1872—1873 гг. — вычислитель в Пулковской
обсерватории, в 1873—1876 гг.— наблюдатель в обсерватории в Дерпте (Тарту),
затем профессор в Берлине и с 1882 г. — директор обсерватории в Лейпциге. Автор
ряда фундаментальных работ о фигуре Земли и о различных вопросах астрономии
и оптики.
Бур Ж. (Bour Jacques Edmond Emile), 1832—1866,
французский математик и физик, профессор в Политехнической и Горной школах
в Париже, автор фундаментальных курсов по различным разделам механики и
ряда статей по анализу, геометрии поверхностей, небесной механике.
Вейлер Иоганн Август (Weiler Johann August), 1827,
учитель математики в Дармштадте и Маннгейме, автор многочисленных статей
в «Astronomische Nachrichten» и других журналах по теоретической механике, в
том числе нескольких статей по проблеме трех тел, по астрономии, теории диффе-
ренциальных уравнений.
Вентцель Г. (Wentzel Gregor), род. 1898,
немецкий физик, профессор в Лейпциге и Цюрихе. Основные работы — по из-
учению фотоэффекта и квантовой механике.
Вольтер Ф.-М. (Voltaire Francois Marie), 1694—1778,
французский литературный и общественный деятель. Наряду с многочисленными
публицистическими и литературными произведениями опубликовал ряд философ-
' ских трактатгв. Активно сотрудничал в Энциклопедии наук, искусств и ремесел.
Вольф X. (Wolff Christian), 1679—1754,
немецкий философ и математик. Обучался в Иене и в Лейпциге, где стал учеником
Лейбница. С 1704 г. занимал кафедру математики и естествознания в Галле. Высту-
пал главным образом как популяризатор и комментатор учения Лейбница. В 1723 г.
был изгнан из Пруссии по обвинению в ереси и поселился в Магдебурге. В годы
основания Петербургской Академии наук оказывал ей содействие в приглашении
профессоров из различных стран Европы; позднее принимал участие в обучении
русских студентов, в том числе Ломоносова. Сочинения Вольфа относятся к общим
вопросам математики, логики, метафизики, теологии, космологии.
Воронец Петр Васильевич, 1871—1923,
русский математик, профессор математики в Киевском университете. Основные
работы — в области теоретической механики: преобразования уравнений дина-
мики, неголономные системы и др.
Вранцеану Г. (Vranceanu Gheorghe), род. 1900,
румынский математик и физик, с 1930 г. — профессор в Черновицах. Основные
работы — по неголономным системам.
Гамель Г. (Hamel Georg), 1877—1954,
немецкий математик, профессор в Брюнне, Аахене, с 1919 г. — в Шарлоттенбурге.
Член Берлинской Академии наук. Известен рядом исследований по теоретической
механике.
Гамильтон У. (Hamilton William Rowan), 1805—1865,
английский математик. С 1827 г. — профессор астрономии в Дублинском уни-
верситете, директор университетской астрономической обсерватории. Президент
Ирландской Академии наук. Почетный член Петербургской Академии наук. По-
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
921
строенная им своеобразная система гиперкомплексных чисел, так называемых кватер-
нионов, послужила одним из источников векторного анализа. Важной заслугой Г.
являются открытый им принцип и применение вариационного метода в механике.
Гаусс К. (Gauss Karl Friedrich), 1777—1855,
немецкий математик. Учился в Геттингене. С 1799 г. — доцент в Брауншвейге, с
1807 г. — профессор и директор обсерватории в Геттингене. Основополагающие
математические исследования Г. сыграли огромную роль в развитии высшей ал-
гебры, теории чисел, дифференциальной геометрии. Разработанный им метод
вычисления эллиптических орбит планет до настоящего времени лежит в основе
такого рода вычислений (способ наименьших квадратов). Работы по геодезическим
съемкам Ганноверского королевства привели Г. к созданию так называемой «выс-
шей геодезии». Г. является также создателем абсолютной системы электромагнит-
ных единиц. В области теоретической физики ему принадлежат исследования по
теории капиллярности, по принципу наименьшего принуждения и др.
Гейзенберг В.-К. (Heisenberg Werner Karl), род. 1901,
немецкий физик. Обучался в Мюнхене. Профессор в Берлине, Лейпциге, Геттин-
гене. С 1948 г. — президент Геттингенской Академии наук. Является одним из
создателей квантовой механики. Разработал ряд вопросов теории ферромагне-
тизма. Ему принадлежит так называемый принцип неопределенности.
Гельмгольц Г. (Helmholtz Hermann Ludwig Ferdinand), 1821—1894,
немецкий естествоиспытатель. Получил медицинское образование в Берлине.
Профессор физиологии в Кенигсберге, Бонне и Гейдельберге. С 1871 г. — профес-
сор физики в Берлине и позднее директор Государственного физико-технического
института в Берлине. Гельмгольцу принадлежит первая математическая трак-
товка закона сохранения энергии. Он впервые доказал применимость принципа
наименьшего действия к тепловым, электромагнитным и оптическим явлениям.
Разработанная им теория вихревого движения жидкости сыграла значительную
роль в развитии гидродинамики и аэродинамики. В области физиологической
акустики Гельмгольцу принадлежит разработка физической теории слуха. Соз-
дал офтальмоскоп и ряд других оригинальных приборов и новых методов физио-
логического исследования.
Герц Г. (Hertz Heinrich Rudolph), 1857—1894,
немецкий физик, обучался в Мюнхене и Берлине, с 1883 г. — приват-доцент тео-
ретической физики в университете в Киле, с 1885 г. — профессор физики в Карлс-
руэ, а затем в Бонне. Герцу принадлежат фундаментальные исследования
в области экспериментального обоснования электромагнитной теории света
Максвелла. Открытые Г. электромагнитные волны послужили исходным пунк-
том для развития радиотехники. В своей известной работе «Die principien der
Mechanik» (1894 г.) Г. сделал попытку построить механику без применения
понятия силы.
Гёльдер Л. (Holder Ludwig Otto), род. 1859,
немецкий математик, профессор в Геттингене, Тюбингене, Кенигсберге и Лейпциге.
Автор ряда важных работ в области математики и аналитической механики.
Гиббс Дж. (Gibbs Josiah Willard), 1839—1903,
американский математик и физик, профессор в Нью-Хейвене, один из основателей
химической термодинамики и статистической механики. Г. разработал теорию
термодинамических потенциалов и приложил ее к общим проблемам термодинами-
ческого равновесия, а также к термодинамике газов, кристаллов, жидкостей.
Развитая Г. система статистической механики дает истолкование введенных им
термодинамических функций с атомистической точки зрения.
Гильберт Д. (Hilbert David), 1862—1943,
немецкий математик, обучался в Кенигсберге, там же стал профессором, с 1895 г.
— профессор в Геттингене. Фундаментальные работы Г. по теории инвариантов и
по теории алгебраических чисел оказали огромное влияние на развитие соответ-
ствующих областей математики. Г. принадлежит также решение задача Дирихле
и ряда проблем вариационного исчисления, исследования по теории дифферен-
циальных и интегральных уравнений, разработка .оснований геометрии, основ
математической физики, логических оснований математики.
Горак 3. (Horak Zdenck Frantisek Karel), род. 1898,
чешский физик, профессор в Праге. Основные работы — по механике, неголоном-
ным системам, принципу Гамильтона.
Гравезанд Вильгельм Яков (Storm van Gravesande Wilhelm Jacob), 1688—1742,
голландский математик и физик, профессор в Лейдене. Один из издателей «Journal
litt6raire>>. Автор двухтомного сочинения «Physices elementa mathematica, experi-
ments confirmata, sive introductio ad philosophiam Newtonianam», вышедшего
тремя изданиями (1720—1721, 1725, 1742 гг.), и других книг и статей по матема-
тике, механике, философии.
922
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
Д’Аламбер Ж. (D’Alembert Jean le Rond), 1717—1783,
французский математик и философ, член Парижской Академии наук, почетный
член Петербургской и других академий. Один из создателей «Энциклопедии наук,
искусств и ремесел». Математические исследования Д. относятся главным образом,
к теории дифференциальных уравнений. Д. впервые сформулировал общие пра-
вила составления уравнений движения любых материальных систем и применил
этот принцип для решения конкретных задач механики (принцип Д’Аламбера).
Дарбу Ж.-Г. (Darboux Jean Gaston), 1842—1912,
французский математик, член Парижской Академии наук, член-корреспондент
Петербургской Академии наук. Автор ряда исследований в'области дифферен-
циальной геометрии, теории поверхностей. Важные результаты получены им также
по различным вопросам интегрирования дифференциальных уравнений.
Д’Арси П. (d’Arcy Patrie), 1725—1779,
французский инженер и математик, бригадный генерал, участник многих воен-
ных походов. С 1763 г. целиком посвящает себя научной работе. Избран членом
Парижской Академии наук. Труды Д’Арси посвящены различным вопросам
астрономии и механики, в том числе и принципу наименьшего действия (1749—
1752 гг.). Автор нескольких сочинений по артиллерии и статьи об электричестве
(1749 г.), содержащей описание электрометра.
Дебай П. (Debye Petrus Josephus Wilhelmus), род. 1884,
немецкий физик, профессор в Цюрихе, Утрехте, Геттингене, директор физического
института в Лейпциге. Основные работы посвящены теории удельной теплоемко-
сти на основе квантовой теории, теории твердого тела, изучению дисперсии света,
теории молекулярного диполя и электропроводимости жидкостей. Заложил ос-
новы метода рентгеноструктурного анализа (дебаеграмма).
Дирак П. (Dirac Paul Adrien Maurice), род. 1902,
английский физик, с 1932 г. возглавил кафедру физики в Кембриджском универси-
тете, является одним из основателей квантовой механики. Разработанная им
квантовая теория излучения положила начало развитию квантовой электродина-
мики. Д. сформулировал законы статистической механики системы электронов и
построил релятивистскую теорию движения электрона, применив в квантовой
механике соотношения теории относительности. Им установлено уравнение дви-
жения электрона, удовлетворяющее требованиям специальной теории относитель-
ности —- «уравнение Дирака».
Дюпен Ф. (Dupin, Francois Pierre Charles), 1784—1873,
французский математик, морской инженер и политический деятель. Автор ряда
трудов по социологии. Математические и физические исследования Д. относятся
главным образом к аналитической геометрии и к геометрической оптике.
Ермаков Василий Петрович, 1845—1892,
русский математик, профессор Киевского университета, член-корреспондент Петер-
бургской Академии наук. Основные исследования — в области математического
анализа и вариационного исчисления.
Жергони Ж. (Gergonne Joseph), 1771—1859,
французский математик. Профессор в Ниме и Монпелье. С 1810 по 1831 г. издавал
математический журнал. Член-корреспондент Парижской Академии наук. Автор
многочисленных статей по анализу, механике, гидродинамике, небесной механике.
Жуковский Николай Егорович, 1847—1921,
русский математик и механик, один из основоположников современной гидро- и
аэромеханики. Обучался в Московском университете. С 1886 г. — там же профес-
сор по кафедре механики, с 1905 г. — президент Московского математического
общества. С 1894 г. — член-корреспондент Петербургской Академии наук. Экспе-
риментальные исследования Ж. в созданной им аэродинамической лаборатории и
разработка им теоретических основ гидроаэродинамики сыграли решающую роль
в развитии отечественной авиации и авиационной науки.
Зоммерфельд A. (Sommerfeld Arnold), 1868—1951,
немецкий физик, профессор математики в Клаустале, профессор механики в Аахене
и с 1906 г. — профессор теоретической физики в Мюнхене. Работы 3. сыграли зна-
чительную роль в развитии квантовой теории. 3. принадлежит разработка многих
важнейших вопросов теоретической физики, в том числе решение задачи об излу-
чении вертикального диполя, помещенного на границе двух сред, разработка
теории тормозного излучения электронов, электронной теории металлов и др.
Карно Л. (Carnot Lazare Nicolas Marguerite), 1753—1823,
французский математик, публицист и государственный деятель. Обучался в школе
военных инженеров в Мезьере. В годы революции был избран в Законодательное
собрание, а затем в Конвент и в 1793 г. стал членом комитета «Общественного спа-
сения». Во время «Ста дней» был министром внутренних дел. После вторичной рестав-
рации Бурбонов был изгнан из Франции и последние годы прожил в Магдебурге.
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
923
Ему принадлежат труды по анализу и геометрии, в которых К. подготовлял соз-
дание проективной геометрии. К. издал также ряд работ по прикладной механике и
фортификации.
-Картан Э. (Cartan Elie Joseph), 1869—1951,
французский математик, преподавал в Лионе, Нанси, с 1912 г. — в Парижском
университете. С 1931 г. — член Парижской Академии наук. Автор многочислен-
ных статей по теории непрерывных групп, по голономным системам, по теории
относительности, по теории спиноров.
Кетлё Л. (Quetelet Lambert Adolph Jaques), 1796—1874,
бельгийский математик, профессор и директор обсерватории в Брюсселе, непре-
менный секретарь Бельгийской Академии наук. Автор ряда работ по аналитической
геометрии, астрономии и нескольких фундаментальных исследований по статистике
и демографии.
-Кирхгоф Г. (Kirchhoff Gustav Robert), 1824—1887,
немецкий физик, член Берлинской Академии наук. Обучался в Кенигсбергском
университете. Профессор физики в университете в Бреславле и Гейдельберге,
с 1875 г. — профессор математической физики в Берлинском университете.
В своих исследованиях установил закономерности распределения электричес-
кого тока в разветвленных цепях, распространения электрических возмущений
вдоль проводов. В области механики К. исследованы теория деформаций, дви-
жения и равновесия упругих тел. К. является одним из создателей спектраль-
ного анализа.
Клаузиус Р. (Clausius Rudolf), 1822—1888,
немецкий физик, обучался в Берлине, профессор физики в Цюрихе, Вюрцбурге и
Бонне, член-корреспондент Французской Академии наук. В работах К. по термо-
динамике изложено обоснование механической теории теплоты. Ему принадлежит
важнейшая роль в разработке второго закона термодинамики и кинетической
теории газов. К. принадлежит также ряд работ по механике, оптике, теории элек-
тричества и магнетизма.
Клейн Ф. (Klein Felix), 1849—1925,
немецкий математик, обучался в Бонне, профессор математики в Эрлангене, Мюн-
хене, Лейпциге и Геттингене, в течение 40 лет — редактор Mathematische Annalen.
Автор ряда фундаментальных работ по неевклидовой геометрии, теории непре-
рывных групп, теории эллиптических функций и различным вопросам геометрии.
В своей работе (1892 г.), известной под названием «Эрлангенская программа»,
К. разрабатывал общую систему геометрического исследования. Эта работа
оказала большое влияние на дальнейшее развитие геометрии.
Крамере X. (Kramers Hendrik Antony), род. 1894,
голландский физик, профессор в Утрехте, Лейдене, Дельфте, Роттердаме. Автор
многочисленных исследований по атомной физике, квантовой теории. Впервые рас-
считал на основе теории Бора модель атома гелия. Соавтор известных работ Бора—
Крамерса—Слэтера о виртуальном поле излучения.
Куртиврон Г. (Courtivron Gaspard de), 1715—1785,
французский военный деятель и ученый, член Парижской Академии наук. Автор
ряда статей по математическому анализу, механике и монографии по оптике.
Лагранж Ж. (Lagrange Joseph Louis), 1736—1813,
французский математик и механик. Преподавал в артиллерийской школе в
Турине, с 1766 г. — в Берлинской Академии наук. В 1787 г. переехал в Париж,
где был профессором Нормальной школы и Политехнической школы. Почетный
член Петербургской Академии наук. Основные работы Л. относятся к области
математики и теоретической механики. Л. развил основные понятия вариацион-
ного исчисления и предложил общий аналитический метод для решения вари-
ационных задач. Ему принадлежит также ряд выдающихся исследований по
математическому анализу, теории чисел, алгебре, математической картографии,
астрономии и др.
Лаплас П. (Laplace Pierre Simon), 1749—1827,
французский математик и физик, член Парижской Академии наук. Профессор
Парижской военной школы, один из организаторов Нормальной и Политехни-
ческой школ, один из руководителей Бюро долгот. Основные работы Л. отно-
сятся к области небесной механики. Ему принадлежит также ряд фундаменталь-
ных работ по дифференциальным уравнениям и по математической теории вероят-
ностей. Исследования Л. по физике касаются в основном вопросов о скрытой теп-
лоте плавления тел, теории капиллярности, вопросов акустики.
Лармор Дж. (Larmor Joseph), 1847—1942,
английский физик и математик, профессор в Кембридже. Важнейшие работы — в
области электронной теории, где ему принадлежит открытие «прецессии Лармора»
Автор ряда работ по классической электродинамике.
924
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
Леви-Чивита Т. (Levi-Civita Tullio), 1873—1942,
итальянский математик и механик, профессор в Падуе и Риме. Автор исследований
по теории дифференциальных уравнений, небесной механике, гидродинамике;
им разработан тензорный анализ, особый метод решения задачи трех тел, обосно-
вание теории адиабатических инвариантов; ему принадлежат работы по реляти-
вистской механике и механике и'геометрии неголономных систем.
Лейбниц Г. (Leibniz Gottfried Wilhelm), 1646—1716,
немецкий математик и философ. Учился в Лейпциге и Иене. Служил в качестве
юриста и библиотекаря в Майнце и Ганновере. Член Лондонского Королевского
общества и Парижской Академии наук. Был основателем Научного общества в
Берлине (1700 г.). В многообразном научном творчестве Л. значительное место
занимают его работы по математике, в которых он выступает наряду с Ньютоном
как создатель дифференциального и интегрального исчислений.
Ли Софус (Lie Marius Sophus), 1842—1899,
норвежский математик, профессор университетов в Христиании (Осло) и Лейп-
циге. Основной заслугой Л. в математике являются созданная им замечательная
теория непрерывных групп преобразований и исследование приложения этой
теории в различных областях математики, в частности в неевклидовой геометрии.
Липшиц Р. (Lipschitz Rudolph Otto Sigismund), 1832—1903,
немецкий математик, профессор в Бреславле и Бонне. Основные работы в области
теории дифференциальных уравнений, теории рядов, многомерной геометрии,
теории чисел и теории функций.
Лиувилль Ж. (Liouville Joseph), 1809—1882,
французский математик и инженер. Профессор в Политехнической школе и Кол-
леж де Франс. Член Парижской Академии. Автор так называемой теоремы
Лиувилля. Исследования Л. относятся главным образом к алгебраическому ана-
лизу, небесной механике и теоретической механике.
Лоренц Г. (Lorentz Hendrik Antoon), 1853—1928,
голландский физик, профессор в Лейдене, директор исследовательского института,
в Гарлеме. Создал электронную теорию, на основании которой дал объяснение
многим явлениям электричества, магнетизма и оптики. Разрабатывал также элек-
тродинамику движущихся сред. Автор известных формул преобразования Лоренца-
Майер A. (Mayer Andreas), 1716—1782,
ученик Хр. Вольфа, астроном, физик и математик, профессор в Грейфсвальде.
Максвелл Дж. (Maxwell James Clerk), 1831—1879,
• английский физик, обучался в Эдинбурге и Кембридже, профессор Абердинского,
университета в Шотландии, профессор физики в Лондоне и Кембридже. М. при-
надлежит ряд фундаментальных исследований по электромагнетизму, механике,,
оптике, молекулярной физике, астрономии. В области кинетической теории газов
им установлен закон распределения молекул по скоростям. М. является создателем
теории электромагнитного поля и электромагнитной теории света.
Малюс Э. (Malus Etienne Louis), 1775—1812,
французский физик. Инженер французской армии. С 1801 г. — преподаватель.
Политехнической школы. Член Парижской Академии наук. Основные исследо-
вания М. относятся к области оптики. Ему принадлежит открытие явления поля-
ризации света.
Меран Жан Жак де (Mairan Jean Jaques d’Ortous de), 1678—1771,
французский физик, член Парижской Академии с 1718 г., секретарь АН с 1741 г..
Основные работы — по оптике, механике, кораблестроению, исследованию тепла
и холода (его диссертации «Sur le glace» премированы Академией в Бордо), акустике,,
астрономии, небесной механике и др.
Ми Г. (Mie Gustav Adolf Teodor Wilhelm Ludwig), род. 1868,
немецкий физик, профессор в Грейфсвальде, Галле. С 1924 г. — директор физиче-
ского института в Фрейбурге. Известен главным образом работами по классической
электродинамике, теории относительности и теории тяготения.
Миндинг Фердинанд Готлибович, 1806—1885,
русский математик, профессор Дерптского университета (Тарту), почетный член
Петербургской Академии наук. Важнейшие работы — по интегрированию диффе-
ренциальных уравнений первого порядка, по теории поверхностей в частности,
теории поверхностей постоянной кривизны.
Мопертюи П. (Maupertuis Pierre Louis Morreau de), 1698—1759,
французский физик и астроном. Член Парижской Академии наук. Почетный член
Петербургской Академии наук. В 1736—1737 гг. возглавил организованную Па-
рижской Академией наук экспедицию для проведения градусных измерений в
Лапландии. С 1745 г. — президент Берлинской Академии наук. Автор ряда работ
по астрономии и космологии. М. принадлежит первая формулировка принципа
наименьшего действия.
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
925
Нейман К. (Neumann Karl Gottfried), 1832—1925,
немеций математик, профессор в Галле, Базеле, Тюбингене, Лейпциге. Основные
работы — по теории дифференциальных уравнений с частными производными, по
теории логарифмического потенциала.
Нейман Ф. (Neumann Franz Ernst), 1798—1895,
немецкий физик, математик и минералог, профессор в Кенигсберге. Член-коррес-
пондент Петербургской Академии наук. Основные исследования — в области
теоретической оптики, электричества и магнетизма. В 1845 г. дал первое математи-
ческое выражение закона индукции.
Нейман Э. (Neumann Ernst Richard), род. 1875,
немецкий математик, профессор в Марбурге. Продолжил работу своего дяди Карла
Неймана по исследованию теории вероятностей. Работал также в области теории
относительности.
Нетер Эмми (Noether Amalie Emmi), 1882—1935,
немецкий математик. С 1922 г. — профессор математики в Геттингене. Основные
работы — по высшей алгебре, по теории групп и инвариантов.
Оствальд В. (Ostwald Wilhelm), 1853—1932,
немецкий физико-химик. Обучался в Дерптском университете (Тарту). Профессор
в Риге, Лейпциге. Член-корреспондент Петербургской Академии наук. Основные
работы посвящены теории электролитической диссоциации. Основал физико-
химический журнал и издание «Классики точных наук».
Остроградский Михаил Васильевич, 1801—1862,
русский математик, учился в Харьковском университете и в Париже. Профессор
Морского кадетского корпуса, Главного педагогического института, Главного
артиллерийского училища и других учебных заведений Петербурга. Член Петер-
бургской Академии наук. Основные работы — в области математического анализа,
математической физики, теоретической механики. Получил важные результаты в
исследованиях о распространении тепла в твердых телах и жидкостях, в теории
дифференциальных уравнений, в разработке вариационных принципов механики.
Паули В. (Pauli Wolfgang), 1900—1958,
швейцарский физик, профессор в Цюрихе. Автор исследований по квантовой
механике, квантовой теории волновых полей, релятивистской квантовой электро-
динамике.
Планк М. (Planck Max Karl Ernst Ludwig), 1858—1947,
немецкий физик, обучался в Мюнхене и Берлине. Профессор в Киле, а затем в
Берлине. Член Берлинской Академии наук. Наиболее важные работы П. относятся
к термодинамике и, в частности, к термодинамической теории теплового излучения;
П. ввел представление о квантовом характере обмена энергией между излучающими
системами и полем излучения, что послужило основой для развития квантовой
теории. Ему принадлежат также важные работы по различным вопросам теории
относительности, по механике, оптике, электричеству.
Пуанкаре А. (Ротсагё Jules Henri), 1854—1912,
французский математик. Обучался в Политехнической и Горной школах в Париже.
С 1886 г. — профессор Парижского университета. Член Парижской Академии
наук. П. принадлежат исследования по теории дифференциальных уравнений,
труды об устойчивости движения, разработка теории автоморфных функций. Он
является также одним из основателей специальной теории относительности. Иссле-
дования П. охватывают почти все области математики и математической физики.
Пуассон С. (Poisson Simeon Denis), 1781—1840,
французский математик и физик. Обучался в Политехнической школе в Париже.
Профессор Парижского университета. Член Парижской Академии наук. В области
небесной механики исследовал вопрос об устойчивости солнечной системы и задачу
возмущенного движения. Ему принадлежит также ряд исследований по теории
упругости, гидродинамике, баллистике, по теории электростатики и магнетизму,
разработке теории дифференциальных уравнений с частнымй производными, теории
вероятностей. Автор ряда основных работ в области теоретической механики.
Пфафф Иоганн Вильгельм (Pfaff Johann Wilhelm Andreas), 1774—1835,
преподаватель в Тюбингене, с 1803 по 1809 г. — профессор математики в Дерпте,
затем — в Нюрнберге, Вютцбурге и Эрлангене. Автор многочисленных статей по
астрономии и астрономической оптике.
Пфафф Иоганн Фридрих (Pfaff Johann Friedrich), 1765—1825,
профессор математики в Гельмштедте, с 1810 г. — в Галле. Член Берлинской
Академии наук. Основные работы — по анализу, астрономии.
Рассел Б. (Russel Bertrand), род. 1872,
английский философ, преподавал в Кембридже, в Калифорнийском университете,
в Нью-Йорке. Член Лондонского Королевского общества. Автор огромного числа
работ по математической логике, в которых он пытается разрешить парадоксы
926
КРАТКИЙ .БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
теории множеств посредством так называемой теории типов. Созданная Р. теория
«логического атомизма» явилась одним из источников логического позитивизма —
разновидности субъективного идеализма в современной философии.
Раус Э. (Routh Edward John), 1831—1907,
английский математик, работал преподавателем в университетах в Лондоне, Кем-
бридже и др. Член Лондонского Королевского общества. Автор ряда монографий и
статей по механике и высшей математике.
Рахманинов Иван Иванович, 1826—1897,
русский математик, профессор в университете в Киеве. Автор ряда работ по гео-
метрии поверхностей, по теоретической и прикладной механике.
Рети М. (Rethy Moritz), 1846—1925,
венгерский математик и физик, профессор в Клаузенбурге и Будапеште. Основные
работы посвящены аналитической геометрии и теоретической механике.
Родригес О. (Rodrigues Beniamin Olinde), 1794—1851,
французский математик и экономист, сторонник идей утопического социализма
Сен-Симона. Преподавал математику в Политехнической школе. После смерти
Сен-Симона основал журнал «Producteur» (1825—1826 гг.).
Серре Ж. (Serret Joseph Alfred), 1819—1885,
французский математик, обучался в Политехнической школе, был офицером артил-
лерии, а затем, посвятив себя научной работе, преподавал высшую алгебру в Сор-
бонне ; с 1861 г. — профессор небесной механики в Коллеж де Франс. С 1860 г.
— член Парижской Академии наук. Автор ряда работ по теоретической механике,,
курсов высшей алгебры, дифференциального и интегрального исчисления. С 1867
по 1877 г. издавал сочинения Лагранжа.
Синдж Дж. (Synge John Lighton), род. 1897,
английский математик и физик, с 1930 г. — профессор в Торонто (Канада), затем,
в Дублине. Работает главным образом в области теоретической механики.
Скаутен Я. (Scouten Jahn Albertus), род. 1883,
голландский математик, профессор математики в Дельфтах.
Слудский Федор Алексеевич, 1841—1897,
русский механик и геодезист. Обучался в Московском университете. С 1866 г. —
там же профессор по кафедре механики. Известен созданным им курсом теорети-
ческой механики и рядом работ по механике, высшей геодезии, фигуре Земли.
Соколов Иван Дмитриевич, 1812—1873,
русский механик, профессор Харьковского университета, впоследствии ректор
Новороссийского университета, помощник попечителя Казанского университета.
Сомов Осип Иванович, 1815—1876,
русский математик. Обучался в Московском университете. С 1856 г. — ординарный
профессор Петербургского университета. С 1862 г. — член Петербургской Ака-
демии наук. Работы С. по анализу и оптике трижды награждались Демидовской
премией. В изданиях Российской Академии наук опубликованы его многочислен-
ные статьи по высшей алгебре, анализу, теоретической механике и др.
Суслов Гавриил Константинович, 1857—1935,
русский математик, обучался в Петербургском университете, профессор механики
в Киевском университете, Киевском Политехническом институте, с 1920 г. — рек-
тор Одесского Политехнического института. Автор многочисленных статей по тео-
ретической механике и курса теоретической механики для высших технических
школ (1921 г.).
Талызин Матвей Иванович, 1819—?*),
русский математик и физик, преподаватель Александровского лицея в Петербурге
и с 1858 г. — профессор Киевского университета. Основные работы — по теории
магнетизма и по принципу наименьшего действия.
Тетенс И. (Tetens Johann Nicolaus), 1737—1807,
датский ученый и государственный деятель, профессор философии и математики
в Киле и других университетах. Издал ряд сочинений по весьма разнообразным,
научным вопросам: философии, истории языка и письменности, механике.
Томсон Дж. Дж. (Thomson Joseph John), 1856—1940,
английский физик. Обучался в Тринити-колледже Кембриджского университета.
С 1884 г. — профессор и с 1919 г. — руководитель того же колледжа. С 1915 по-
1920 г. — президент Лондонского Королевского общества. Ему принадлежат важ-
ные исследования по прохождению электрического тока сквозь разреженные газы.
Т. является также одним из основоположников электронной теории металлов.
Автор огромного числа исследований по экспериментальным и теоретическим,
вопросам электронной теории. Ему принадлежит также известная (1907 г.) модель.
атома.
*) Год смерти не удалось установить.
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
927
Томсон У. (лорд Кельвин) (Thomson William), 1824—1907,
английский фнзнк, обучался в колледже в Глазго и Кембридже, с 1846 г. — про-
фессор теоретической физики в Глазго, с 1890 г. — президент Лондонского Коро-
левского общества. Автор многочисленных фундаментальных исследований в об-
ласти математической физики, термодинамики, гидродинамики, теории волн, теории
упругости, динамической геологии. Теоретические и экспериментальные работы
Т. дали возможность осуществить телеграфирование через Атлантический океан.
Т. принадлежит изобретение многих физических инструментов и приборов.
Тэт П. (Tait Peter Guthrie), 1831—1901,
английский математик и физик, профессор математики в колледже в Белфасте и
позднее профессор натуральной философии в Эдинбурге. Ряд работ Т. посвящен
вопросам термодинамики, теории света и общим вопросам молекулярной физики.
Уильсон У. (Wilson William), род. 1875,
английский физик, профессор в Лондоне. Важнейшие работы — по квантовой
теории и теории относительности. В 1916 г. развил теорию квантования фазовых
интегралов.
Уиттекер Э. (Whittaker Edmund Taylor), 1873—1956,
английский математик и физик. Преподаватель математики в Тринити-колледже,
Кембридже. С 1906 по 1912 г. — королевский астроном в Ирландии. С 1912 г. —
профессор математики в Эдинбурге. Автор многочисленных статей по теоретической
механике, оптике, электромагнетизму и др.
Ферма П. (Fermat Pierre), 1601—1665,
французский математик, получил юридическое образование и был советником.
Тулузского парламента. Ф. почти не публиковал своих математических исследо-
ваний, и они известны главным образом из его переписки. Большая часть его
сочинений погибла. Ф. сделал ряд открытий в области приложений дифференциаль-
ного и интегрального исчисления и теории чисел. Ф. принадлежит принцип крат-
чайшего времени (принцип Ферма), задача Ферма и т. п.
Феррере Н. (Ferrers Norman Makleod), 1829—1903,
английский математик, преподаватель в Кембридже, член Лондонского Коро-
левского общества. Автор многочисленных статей по аналитической геометрии
и теоретической механике.
Ферстерлинг К. (Forsterling Karl), род. 1885,
немецкий физик, профессор в Иене, Кельне. Основные работы посвящены вопросам
распространения электромагнитных волн, различным разделам оптики, термо-
динамики.
Фосс A. (Voss Aurel Edmund), 1845—1931,
немецкий математик, обучался в Геттингене и Гейдельберге, профессор в Дарм-
штадте, Дрездене, Мюнхене, Вюрцбурге. Важнейшие работы Ф. относятся к ана-
литической геометрии и аналитической механике.
Френкель Яков Ильич, 1894—1952,
советский физик, член-корреспондент Академии наук СССР. Ф. принадлежит
огромное число работ, относящихся к самым разнообразным отраслям физики,
геофизики и астрофизики. Основные работы посвящены молекулярной теории
кристаллов и жидкостей, физике атомного ядра, теории электронных свойств ди-
электриков и полупроводников.
Хельм Г. (Helm Georg), 1851—1923,
немецкий физик и математик, профессор в Дрездене. Автор ряда работ по механике,
теории вероятностей и демографии.
Чаплыгин Сергей Александрович, 1869—1942,
русский математик, член Академии наук СССР, с 1921 г. — руководитель Цент-
рального аэрогидродинамического института. Его работы по исследованию дви-
жения газа при скоростях, близких к скорости звука, заложили основы газовой
динамики. Предложенные им методы исследования в области аэродинамики боль-
ших скоростей сыграли важную роль в развитии современной авиации.
Чили К. (Szily Coloman), 1838—1924,
венгерский математик, обучался в Пеште, профессор Пештского политехникума
и член Венгерской Академии наук, с 1889 по 1904 г. — генеральный секретарь
Академии, редактор математического журнала Академии и журнала политехни-
кума; автор ряда работ по теоретической механике, теплотехнике.
Шварцшильд К. (Schwarzschild Karl), 1873—1916,
немецкий астроном, профессор и директор обсерватории в Геттингене, с 1909 г. —
директор астрофизической обсерватории в Потсдаме. Автор фундаментальных
работ по математической физике, небесной механике и астрофизике.
Шредингер Э. (Schrodinger Erwin), род. 1887,
немецкий физик, профессор в Штутгарте, Цюрихе, с 1927 г. — в Берлине. Член
Академии наук в Берлине, Риме и др. Автор основополагающих работ по квантовой
928
КРАТКИЙ БИОГРАФИЧЕСКИЙ УКАЗАТЕЛЬ
(волновой) механике. Уравнение Шредингера играет основную роль в нереляти-
вистском приближении квантовой механики. Ему принадлежат также важные
работы по изучению спектров, теории цвета и т. п. В 1933 г. покинул Германию
в знак протеста против преследований ученых неарийцев. в настоящее время
работает в Дублинском университете.
Штурм Ф. (Sturm Friedrich Otto Kudolf), 1841—1919,
немецкий математик, профессор в Мюнстере, Бреслау. Основные работы —• по
аналитической геометрии, дифференциальным уравнениям. Автор теории
дифференциальных уравнений Штурма—Лиувилля.
Эддингтон A. (Eddington Arthur Stenley), 1882—1944,
английский физик и астроном, профессор в Кембридже, с 1914 г. — там же дирек-
тор обсерватории. Известен своими работами в области астрофизики, изучением
внутреннего строения звезд. Автор ряда работ по теории относительности и грави-
тационной теории.
Эйлер Л. (Euler Leonard), 1707—1783,
великий математик, астроном и физик. Обучался в Базельском университете.
В 1727 г. приехал в Россию в качестве адъюнкта Петербургской Академии наук,
где в 1730 г. получил профессуру по физике и в 1733 г. — по математике. С 1741 г.
служил в Берлинской Академии наук профессором и директором математического
класса, оставаясь деятельным членом Петербургской Академии наук. В 1766 г.
возвратился в Россию и служил в Петербургской Академии наук до конца жизни.
Э. принадлежит ряд основополагающих работ по математическому анализу, диф-
ференциальной геометрии, теории чисел, теоретической механике, математической
физике, астрономии, теории корабля и др.
Эйнштейн A. (Einstein Albert), 1879—1955,
великий физик-теоретик, обучался в Швейцарии, профессор в Берне и Цюрихе,
с 1914 г. — в Берлине, с 1933 г. — в США. Член многих академий и почет-
ный член Академии наук СССР. Создал в 1905 г. основы специальной теории отно-
сительности. В 1916 г. разработал общую теорию относительности и теорию тяго-
тения. Ему принадлежат также фундаментальные исследования по квантовой
теории света, по теории фотоэлектрического эффекта, броуновского движения,
теории удельной теплоемкости твердых тел и т. д. Разрабатывал единую теорию
поля.
Энгельгард Н. (Engelhard Nicolaus), 1696—1765,
профессор философии в Дуйсбурге с 1723 г., с 1728 г. — профессор математики и
философии в Гренингене. В 1738 и 1739 гг. выступил в полемике с Мушенброком
по поводу его «Начал естествознания». В 1732 г. опубликовал свои «Institutiones
philosophiae theoreticae». Автор ряда статей по химии и физике.
Эпштейн П. (Epstein Paul Sophus), род. 1883,
физик-теоретик, с 1909 по 1913 г. — приват-доцент Московского университета.
С 1921 г. живет в Калифорнии. Основные работы •— по атомной физике, изучению
давления света, фотоэффекту, теории эффекта Штарка. Работы Эпштейна сыграли
важную роль в разработке математического аппарата теории Бора.
Эренфест П. (Ehrenfest Paul), 1880—1933,
австрийский физик, профессор в Лейдене. Автор ряда исследований по квантовой
теории, теории гравитационного поля и др. Эренфесту принадлежат (совместно
с Афанасьевой-Эренфест) важные исследования в области термодинамики: прин-
цип адиабатической недостижимости, теория адиабатических инвариантов и т. п.
Якоби К. (Jacobi Karl Gustav Jacob), 1804—1851,
немецкий математик, обучался в Берлинском университете, там же читал лекции
в качестве приват-доцента. С 1827 г. — член Берлинской Академии наук. В своих
лекциях по динамике и в ряде исследований по теории эллиптических и ультра-
эллиптических функций Я. решил ряд важнейших вопросов чистой и прикладной
математики, усовершенствовал предложенный Гамильтоном метод интегриро-
вания дифференциальных уравнений динамики (механика Гамильтона—Якоби).
УКАЗАТЕЛЬ ИМЕН
Ампер A. (Ampere АпОгё Marie) 437,
642, 806
Аппель П. Э. (Appell Paul Emile) 568, 848,
849
Араго Д. (Arago Dominique Francois)
788, 802, 806
Аристотель 42, 48, 97, 99
Баджере Дж. (Burgers Johannes Martinus)
860
Бауэр Э. (Bauer Alexander Anton Emil)
645
Бельтрами E. (Beltrami Eugenio) 841,
849, 861
Беркли Дж. (Berkeley Georg) 805
Бернулли Д. (Bernoulli Daniel) 43, 106,
128, 304, 788
Бернулли И. (Bernoulli Johann) 11, 12,
94, 95, 582, 746, 781—783, 785, 788
Бернулли H. (Bernoulli Nicolaus) 66
Бернулли Я. (Bernoulli Jacob) 782, 787,
788
Бертран Ж. (Bertrand Joseph Louis
Frangois) 162, 167, 402
Бобылев Д. К. 834
Боголюбов H. Н. 863
Больцман Л. (Boltzmann Ludwig) 432,
444, 466, 570, 585, 586, 641, 643, 850—
852, 859
Бор Н. (Bohr Niels) 631, 635, 637, 639,
644, 652, 660, 662, 664, 666, 675, 677,
691, 827, 859, 860, 861, 865, 866
Борн М. (Born Мах) 589, 643, 691, 694
Бошкович Р. (Boscovich Roger Joseph)
798
Брашман Н. Д. 393, 402, 403, 770
Брэгг У. (Bragg William Henry) 644
Бриллюэн Л. (Brillouin L6on Nicolas)
638, 645, 649, 666, 861
Бройль Л. де (Broglie Louis Victor de)
631, 641, 676, 683, 685, 691, 860, 861,
875
Бройль M. де (Broglie Maurice de) 644,
645
Брунс Г. (Bruns Ernst Heinrich) 816, 861
Буняковский В. Я. 817
Бур Ж. (Bour Jacques Edmond Emile)
404, 423, 424
Бэкон Ф. (Bacon Francis) 805, 806
Валлис Дж. (Wallis John) 49
Ван-ден-Брек X. (Broek Hendvik Johan-
nes van den) 644
Вариньон П. (Varignon Pierre) 21
Вебер В. (Weber Wilhelm Eduard) 433,445
Вейлер И. (Weiler Johann August) 416
Вейль Г. (Weyl Claus Hugo Hermann)
611, 669
Вентцель Г. (Wentzel Gregor) 861
Видебург О. (Wiedeburg Otto) 575
Вильсон У. (Wilson William) 662, 859
Вин В. (Wien Wilhelm Carl Werner) 633,
677
Винер Л. (Winer Ludwig Christian) 636,
637
Вольта A. (Volta Alexandre) 642
Вольтер Ф. (Voltaire Frangois Marie) 723,
724—727, 732, 734, 735—737, 738, 750,
785, 786, 794
Вольф X. (Wolff Christian) 97, 98, 103,
110, 111, 735, 747, 750, 787
Воронец П. В. 848
Вранцеану Г. (Vranceanu Gheorghe) 841
Врен X. (Wren Christopher) 49
Галилей Г. (Galilei Galileo) 7, 15, 16,
175, 271, 583,' 588, 745, 781, 782, 793,
866, 870
Гамель Г. (Hamel Georg) 611, 872
Гамильтон У. (Hamilton William Rowan)
175, 177, 234, 235, 268, 271, 284—287,
290, 292, 296, 307, 308, 392, 399, 402,
405, 416, 430, 435, 452—455,457, 458,
460, 462—465, 500, 503, 507, 508, 513,
536, 538—541, 544, 547—550, 560, 564,
565, 585, 587, 589, 590, 599, 641,
653, 654—656, 662, 669, 678, 679, 682—
684, 686, 687, 689, 690, 693, 694, 705,
708, 709, 710, 759, 763, 764, 766, 767,
779, 795, 796, 800, 804—827, 829—838,
840—846, 848—852, 854—861, 863—
873, 877, 878
Гарнак A. (Harnack Carl Gustav Axel)
584
Гаусс К. (Gauss Karl Friedrich) 170, 540,
568, 570, 572, 579, 582, 799, 800, 803,
843, 849
Гейзенберг В. (Heisenberg Werner Karl)
691, 694, 696, 720, 814, 822
Гёльдер О. (Holder Ludwig Otto) 538,
564, 565, 586, 836
Гельмгольц Г. (Helmholtz Hermann Lud-
wig Ferdinand) 430, 432, 433, 437,
442—445, 451, 455, 460, 462, 466, 470,
471, 473, 485, 486, 488, 491, 493, 495,
496, 543, 545, 548, 564, 572, 574, 576,
584, 586, 587, 779, 800, 837, 844, 849,
852, 853, 855, 856
59 Вариационные принципы механики
930
УКАЗАТЕЛЬ ИМЕН
Герглотц Г. (Herglotz Gustav) 611
Германн Я. (Hermann Jacob) 114, 784
Герои 806
Герц Г. (Hertz Heinrich Rudolph) 471,
474, 489, 490, 491, 515, 538—540, 542,
549, 550, 554, 555, 558, 564, 570, 582,
586, 642, 680, 840, 841, 849, 850, 857,
869, 870
Гершель В. (Herschel Friedrich Wilhelm)
794
Гершель Дж. (Hershel John Frederik
William) 275, 763, 817, 820
Гиббс Дж. У. (Gibbs Josiah Willard) 431,
466, 570, 641, 678
Гильберт Д. (Hilbert David) 589, 599,
614, 627, 628, 630, 695, 858, 863
Гольбах П. (Holbach Paul Henri de) 793,
795, 798, 799
Горак 3. (Horak Zdenek Frantisek Karel)
841
Гордая П. (Gordan Paul Albert) 609
Гравезанд В. Я. (Storm van Gravesande
Wilhelm Jacob) 97, 98, 104, 105, 737
Гюйгенс X. (Huyghens Christian) 13, 17,
24, 49, 170, 513, 641, 642, 657, 679, 682,
683, 690, 737, 782, 793, 803, 806, 807,
808, 831, 841, 874
Д’Аламбер Ж. (D’Alembert Jean le Rond)
61, 109, 143—145, 170, 171, 539, 540,
544—548,566, 572, 582, 785, 786, 791,
794, 795, 798, 801, 802, 837, 838, 849,
864, 869
Дарбу Ж. Г. (Darboux Jean Gaston) 162,
840, 841
Д’Арси П. (D’Arcy Patrie) 128, 129, 785,
787
Дебай П. (Debye Petrus Josephus Wilhel-
mus) 514, 639, 643, 644, 667, 683, 686,
861
Декарт P. (Descartes Ren6) 7, 8, 12, 23—
26, 28, 44, 49, 50, 97, 99, 100, 101, 641,
742, 743, 786, 810, 811
Де ла Шамбр M. (Lachambre Marin
Cureau de) 13, 742
Джинс Дж. (Jeans James Hopwood) 638,
642, 644
Джоуль Д. (Joule James Prescott) 574
Дидро Д. (Diderot Denis) 786, 795, 799
Дильс О. (Diels Otto) 584
Дирак П. (Dirac Paul Adrien Maurice)
691, 694, 705, 710, 718, 722, 814, 822,
833
Дирихле Г. (Dirichlet Gust. Peter Lejeune)
832
Дюбуа-Раймонд E. (Du-Bois-Reymond
Emil) 584
Дюгем П. (Duhem Pierre) 431, 432
Дюлонг П. (Dulong Pierre Lois) 643
Дюпен Ф. (Dupin Francois Pierre Charles)
806
Дюринг E. (Diihring Eugen) 800
Дюфе Ш. (Dufay Charles Francois de
Cisternay) 794
Евклид 8, 9, 736, 742
Ермаков В. П. 834
Жергонн Ж. (Gergonne Joseph) 806
Жуковский Н. Е. 425, 460, 834
Зееман П. (Zeeman Pieter) 644, 691
Зоммерфельд A. (Sommerfeld Arnold)
514, 635, 644, 645, 662—666, 678, 679,
683, 690, 698, 700, 703, 778, 827, 850,
858—861
Иордан Е. (Jordan Ernst Pascual) 691,
694
Кабанис Ж. (Cabanis Georges) 795
Кант И. (Kant Immanuel) 805
Кантор М. (Cantor Moritz) 584
Карно Л. (Carnot Lazare Nicolas Mar-
guerite) 432, 472, 474, 803, 804
Кассини Д. (Cassini Giovanni Domenico}
730
Карман T. (Karman Theodor) 643
Картан Э. (Cartan Elie Joseph) 643, 845,
Кастилиано К. (Castigliano Carlo Alberto)
842
Кельвин (Kelvin) см. Томсон У.
Кёниг С. (Koenig Samuel) 96—99, 103—107,
114, 115, 116, 584, 723, 724, 731, 733,
734, 736, 737, 741, 784, 785, 789, 847
Кеплер И. (Kepler Johann) 663, 676, 793
Кетле Л. (Quetelet Lambert Adolph
Jacques) 806
Кирхгоф Г. (Kirchhoff Gustav Robert)
402, 549, 558—560, 585, 690, 802, 849,
864
Клаузиус P. (Clausius Rudolf) 431—433,
444, 468, 469, 471, 472, 586, 641, 850—
852
Клебш A. (Clebsch Rudolf Friedrich
Alfred) 558, 609, 830
Клейн Ф. (Klein Felix) 513, 514, 604, 611,
614, 623, 626, 627, 630, 679, 799, 807,
809, 814, 816, 841, 861, 863
Клеро A. (Clairaut Alexis Claude) 24,
61, 150
Клерселье К. (Clerselier Claude) 13
Клингенштерн C. (Klingenstjerna Samuel)
788
Кнезер Г. (Kneser Hans Otto) 611
Комптон A. (Compton Arthur Holly) 631,
639, 644, 667
Кондильяк E. (Condillac Etienne de) 795
Кондорсе A. (Condorcet Antoine Nicolas
de) 795, 798
Коши О. (Cauchy Augustin Louis) 773,
806, 826
Крамере X. (Kramers Hendrik Antony)*
677, 860
Кристофель Э. (Christoffel Elwin Bruno)
605
Кулон Ш. (Coulomb Charles Auguste)
777, 794
Курант P. (Courant Richard) 695
Куртиврон Г. (Courtivron Gaspard de)
115, 785
Лаггер Э. (Laguerre Edmond Nicolas) 698
Лагранж Ж. (Lagrange Joseph Louis)
117, 159, 167, 175, 176—178, 180, 181,
189, 192, 235, 236, 239, 247, 281, 285,
УКАЗАТЕЛЬ ИМЕН
931
289, 290, 291, 297, 303—305, 307, 311,
317, 334—337, 340, 352, 388, 389, 392—
395, 401, 402, 417, 425, 428, 430—436,
444, 451, 452, 455, 463, 464, 465, 492,
493, 495, 496, 501, 535, 536, 548, 549,
564, 568, 569, 570, 572, 583, 585, 590,
605, 606, 613—617, 623, 625, 628, 653,
655, 656, 662, 679, 680, 683, 705, 708,
710, 718, 763—772, 775, 776, 791,
793—804, 812, 813, 817, 818, 821, 822,
828, 830, 833—837, 842—845, 848, 853,
854, 856, 858, 862, 864, 868
Лаланд Ж. (Lalande Joseph Jdrome) 789,
794, 795
Ламберт Ж. (Lambert Jean Henri) 794
Ламеттри Ж. (La Mettrie Julien de) 795
Ланде A. (Lande Alfred) 645
Ланжевен П. (Langevin Paul) 645, 652
Лармор Дж. (Larmor Joseph) 587, 807,
856, 857
Лаплас П. (Laplace Pierre Simon) 170, 176,
177, 181, 291, 297, 642, 670, 671, 680,
699, 773, 794, 800, 802—804, 818, 852
Лауэ M. (Laue Max fon) 644, 686
Леви-Чивита T. (Levi-Civita Tullio) 841
Лежандр A. (Legendre Adrien Marie) 289,
860, 876
Лейбензон Л. C. 842
Лейбниц Г. (Leibniz Gottfried Wilhelm)
12, 13, 26, 28, 29, 30, 45, 96, 98, 101,
102, 103, 111, 112, 114, 115, 581—584,
723, 727—731, 747, 750, 782—788, 793
Ленин В. И. 852, 857
Ленц Э. X. 449, 853
Ли Софус (Lie Marius Sophus) 404, 410,
558, 611, 612, 615, 616, 618, 621, 623,
629,814, 823, 830, 831, 833, 841, 863,
877
Линдеман Е. (Lindemann Eduard) 643
Липшиц Р. (Lipschitz Rudolph Otto Si-
gismund) 605, 840, 841, 849, 861
Лиувилль Ж. (Liouville Joseph) 367 394
632, 823, 840, 841
Ллойд Г. (Lloyd Gemphry) 816
Лопиталь Г. (L’Hopital Guillaume Fran-
cois de) 782
Лоренц Г. (Lorentz Hendrik Antoon)
587, 599, 611, 630, 634, 639, 642, 643,
644, 646, 647, 648, 650, 652, 656, 663,
667, 705, 863, 870
Майер A. (Mayer Christian Adolph) 416,
547, 548, 551, 554, 558, 570, 584
Майкельсон A. (Michelson Albert Abra-
ham) 642, 643, 870
Мак-Куллох Д. (Mac Culloch John) 856
Максвелл Дж. (Maxwell James Clerk)
433, 470, 493, 579, 591, 596, 638, 639,
641, 642, 667, 773, 774, 776, 777, 796,
816, 853, 856
Мальбранш H. (Malebranche Nicolas de)
45, 49, 97, 98
Малюс E. (Malus Etienne Louis) 806, 810
Маркс К. (Marx Karl) 793, 799, 801
Max Э. (Mach Ernst) 570, 575
Менделеев Д. И. 644
Меран Ж. (Mairan Jean Jacques d’Ortous
de) 26, 28, 730, 734, 737
Ми Г. (Mie Gustav Adolf Teodor Wilhelm
Ludwig) 589, 590, 596, 598, 857
Минковский Г. (Minkowski Hermann)
650, 666, 858
Мозли Г. (Moseley Henry Gwyn Jeffreys)
644
Монж Г. (Monge Gaspard) 802
Мопертюи П. (Maupertuis Pierre Louis
Morreau de) 18, 23, 29, 41, 56, 57,
62, 65, 76, 78, 80, 81, 82, 84, 85 86, 92,
96, 98, 99, 102—106, 111—116, 159,
170, 297, 430, 433, 465, 500, 501, 504,
507, 508, 509, 533, 538, 548, 550, 564,
583, 584, 585, 587; 635, 640, 641, 648,
652, 653, 654, 656, 658, 659, 663 664,
666, 682, 723—727, 731, 733—738, 746,
782, 784—787, 789, 790, 792, 798, 801,
803, 804, 835, 836
Морлей E. (Morley E.) 642
Нейман К. (Neumann Karl Gottfried) 548,
550, 557, 560, 561, 585
Нейман Ф. (Neumann Franz Ernst) 402,
431, 433, 776
Нернст Г. (Nernst Hermann Walter) 637,
643
Нетер Э. (Noether Amalie Emmi) 604,
611, 863, 864
Ноллэ Ж. (Nollet Jean Antoine) 794
Ньютон И. (Newton Isaac) 24, 42, 43, 44,
175, 176, 280, 290, 294, 297, 430, 438
463, 464, 582, 636, 641, 642, 667 730
781, 782, 785, 786, 791—795, 800, 807,
866, 867, 869
Оствальд В. (Ostwald Wilhelm) 575
Остроградский M. B. 315, 388, 390, 392,
393, 394, 402, 403, 425/ 428, 429, 564,
770, 772, 812, 817, 822,'825, 829 830,
833, 834, 843, 848
Пельтье Ж. (Peltier Jean Charles Athanase)
450
Перрон Ж. (Perrin Jean) 645
Планк M. (Planck Max Karl Ernst Ludwig)
571, 580, 633, 637, 638, 639, 643, 644,
645, 646, 662, 666, 667, 778, 779, 854,
855, 858, 859
Полак Л. C. 804
Поп A. (Pope Alexandre) 46
Пратусевич Я. A. 842
Пти A. (Petit Alexis Therese) 643
Птолемей 29, 99
Пуанкаре А. (Ротсагё Jules Henri) 497,
644, 645, 671, 672, 773, 844, 846, 847,
848, 857, 859, 867
Пуансо Л. (Poinsot Louis) 866
Пуассон C. (Poisson Sim6on Denis) 173,
181, 235, 247, 281, 297, 303, 367, 381,
385, 388, 389, 536, 585, 708, 709 711,
714, 716, 717, 719, 720, 721, 803, 804,
821, 823, 832, 833, 848
Пфафф Ф. (Pfaff Johann Friedrich) 422, 423
Райт E. (Wright Edward) 841
Ранкин В. (Rankine William John Mac-
quorn) 400, 470
Раус Дж. (Routh Edward John) 566, 834,
835, 843, 844, 848, 854
932
УКАЗАТЕЛЬ ИМЕН
Резерфорд Э. (Rutherford Ernest) 644
Рентген К. (Roentgen Konrad fon) 644
Рети М. (Rethy Moritz) 835
Риман Б. (Riemann Bernhard) 591, 594,
605, 606, 608, 841
Риччи Г. (Ricci-Curbastro Gregorio) 604,
605, 841
Робинс Б. (Robins Benjamin) 736
Родригес О. (Rodrigues Olinde) 166, 167,
392, 393, 395, 547, 834
Румовский С. 790
Рунге И. (Runge Iris) 514, 683, 861
Рэлей Д. (Rayleigh John William) 634,
Р42, 643, 649
Серре Ж. (Serret Joseph Alfred) 425, 544,
788, 833
Сильвестр Д. (Sylvester James Joseph) 863
Синдж Дж. (Synge John Lighton) 841
Скаутен И. (Scouten Jahn Albertus) 841
Слудский Ф. A. 388, 834
Слэтер Д. (Slater John Clarke) 677
Снеллиус В. (Snel van Royen Willebrord)
23
Соколов И. Д. 834
Сольвей Е. (Solvav Ernest) 644
Сомов О. И. 392, 834
Суслов Г. К. 834
Талызин М. И. 834
Томсон Дж. Дж. (Thomson Johann John)
642, 853, 854
Томсон У. (Thomson William) [лорд Кель-
вин (Kelvin)] 437, 457, 585, 642, 840,
841, 854, 856
Тэт П. (Tait Peter Guthrie) 585, 840, 841,
854
Уиттекер Э. (Whittaker Edmund Taylor)
679, 822
Фарадей M. (Faraday Michael) 433, 642,
850, 856, 863
Ферма П. (Fermat Pierre) 7, 12, 13, 21,
23—28, 100, 101, 103, 584, 634, 636,
640, 641, 648, 652, 653, 657, 658, 659,
664, 666, 679, 682, 683, 742, 745, 780—
782, 803, 806, 808, 810, 814, 816, 860, 861
Фиц-Джеральд Дж. (Fitzgerald George
Francis) 643
Формей Ж. (Formey Jean Louis Samuel)
732, 740
Фосс A. (Voss Aurel Edmund) 539, 546,
547, 550, 553, 554,555, 564, 566, 586, 835
Франклин Б. (Franklin Benjamin) 794
Френель О. (Fresnel Augustin Jean) 642,
657, 667, 690, 774, 776,‘806, 807
Фридрих II (Friedrich II) 583, 724 ,731, 785
Фусс H. И. 817
Хельм Г. (Helm Georg) 575
Хенци (Henzy) 115, 730
Цицерон 41, 42
Чаплыгин С. A. 848, 849
Чили К. (Szily Coloman) 850, 851
Шварцшильд К. (Schwarzschild Karl)
587, 644, 690, 859, 860
Шеринг E. (Schering Ernst) 823
Шефлер A. (Scheffler August Christian
Wilhelm Hermann) 570
Шеффер (Scheeffer Ludwig) 554
Ширков Д. В. 863
Шлезингер И. (Schlesinger Josef) 669
Шлёмильх О. (Schlomilch Oscar Xaver)
570
Шредингер Э. (Schrodinger Erwin) 669,
679, 720, 814, 822, 861, 870
Штарк И. (Stark Johannes) 644, 704, 859
Штауд К. (Staud Karl Georg Christian)
860
Эддингтон A. (Eddington Arthur Stenley)
870
Эйлер Л. (Euler Leonhard) 26, 28, 31, 41,
56, 78, 96, 112, 114, 117, 123, 128, 129,
158, 159, 290, 291, 295, 297, 303, 304,
431, 548, 549, 558, 583, 584, 654, 709,
735, 736, 737, 746, 785—794, 797—801,
813, 834, 836, 842, 843, 862, 865
Эйнштейн A. (Einstein Albert) 587, 589,
590, 596, 598, 599, 623, 631, 632, 633,
635, 639, 640, 643—646, 648, 650, 652,
663, 666, 676, 683, . 684, 698, 701, 858
Эллис В. (Ellis William) 644
Энгель Ф. (Engel Friedrich) 625
Энгельс Ф. (Engels Friedrich) 793
Энгельгард H. (Engelhard Nicolaus) 104
Эразм Роттердамский 733
Эренфест П. (Ehrenfest Paul) 860
Эрмит Ш. (Hermite Charles) 695, 697, 698
Эпштейн П. (Epstein Paul Sophus) 644,
663, 690, 704, 859, 860
Юнг T. (Young Thomas) 637, 642, 803,
807, 808
Якоби К. (Jacobi Carl Gustav Jacob) 162
289. 294. 297. 367. 392. 394. 402. 404
405, 416, 417, 419,
430, 431, 452, 455,
549, 570, 585, 663,
797, 820, 822, 823,
840, 841, 848, 850,
869, 870, 875
423, 424, 427, 429,
457, 513, 532, 548,
686, 689, 690, 693,
825—833, 836, 837,
859—861, 863, 867,