/







































Автор: Ланген А.М. Красник В.В.
Теги: текстильная промышленность производства легкой промышленности промышленность электрооборудование предприятий
ISBN: 5-7088-0341-X
Год: 1991


Текст
А.М.Ланген
В.В.Красник
ЭЛЕКТРО-
ОБОРУДОВАНИЕ
ПРЕДПРИЯТИЙ
ТЕКСТИЛЬНОЙ
ПРОМ ЫШЛЕННОСТИ
Допущено Государственным комитетом СССР
по народному образованию в качестве
учебника для студентов технологических
специальностей текстильных вузов
Москва
Ле г промбыти здат
1991
I.I.h Л/'.’З
JI ??.
У/IK (.77 05 83(075.8)
Рецензенты: кафедра электротехники ИвТИ им. М. В. Фрунзе, д-р техн,
наук А. А. Грищенко-Меленевский (МТИЛП)
Ланген А. М., Красник В. В.
Л 22 Электрооборудование предприятий текстильной
промышленности: Учеб, для вузов.— М_: Легпром-
бытиздат, 1991.— 320 с.: ил.— ISBN 5-7088-0341-X.
Описаны аппаратура управления и защиты электротехнических
устройств, автоматизированный электропривод текстильного оборудо-
вания. Приведены характеристика и расчет осветительных сетей. Рас-
смотрено электроснабжение текстильных предприятий, а также учет
и экономия электроэнергии на них.
Для студентов неэлектротехнических специальностей текстильных
вузов
Г Б1’Т НОТИСА
3002000000 - 086 . , г! о
044(01")—91" I твнс1 . з > итут»
ББК 37.23
ISBN 5-7088-0341-X
© Ланген А. М., Красник В. В..
1991
ПРЕДИСЛОВИЕ
Энергетика и электрификация являются основой техни-
ческого прогресса во всех отраслях народного хозяй-
ства. Рост электровооруженности сопровождается глу-
бокими качественными изменениями, повышением эф-
фективности производства, улучшением технико-эконо-
мических и эксплуатационных показателей.
Легкая промышленность, включающая 28 подот
раслей, потребляет около 24-109 кВт-ч электроэнергии
в год. Наиболее энергоемка текстильная промышлен-
ность, потребляющая около 60 % этой электроэнергии.
Самым массовым видом электрооборудования на пред-
приятиях текстильной промышленности является асин-
хронный электропривод, отличающийся от подобного
вида привода в других отраслях промышленности не
только конструкцией, установленными и потребляемыми
мощностями, способами защиты от воздействия окру-
жающей среды, но и условиями и режимами его работы.
Эксплуатируемые на предприятиях текстильной про
мышленности электроприводы представляют собой в
основном маломощные асинхронные двигатели (АД),
работающие в сложных режимах с неблагоприятными
параметрами окружающей среды (увеличенные влаж-
ность, запыленность и температура, наличие химически
активных веществ и др.). Текстильные АД должны
иметь повышенные вращающие моменты и стойкость
к перегревам, закрытое исполнение, а также ряд других
особенностей для исключения аварийных режимов ра-
боты и непредусмотренного снижения их технико-
экономических показателей.
Приводные АД в текстильной промышленности по-
требляют порядка 90 % активной мощности, используе-
мой всеми видами электродвигателей, и 80 % общей
реактивной мощности (РМ), потребляемой в отрасли.
На предприятиях легкой промышленности эксплуа-
тируется свыше 2 млн электродвигателей, 4 млн светиль-
ников, 75 тыс. вентиляционных установок, 11 тыс. сило-
вых трансформаторов с общей присоединенной мощ-
ностью свыше 7 млн кВ-А. Средняя установленная
мощность электродвигателей на предприятиях отрасли
составляет 3,3 кВт, электрических аппаратов — 5 кВт,
силовых трансформаторов — 800 кВ-А.
Основным потребителем электрической энергии на
предприятиях текстильной промышленности является
электропривод технологического оборудования, по-
1* 3
требляющий около 81 % всей электроэнергии; примерно
14 % потребляемой электроэнергии приходится на
освещение и оставшиеся 5 % ее распределяются на
электротехнологию и потери в сети. В текстильной
промышленности высокая по сравнению с другими
отраслями легкой промышленности электровооружен-
ность труда (5500 кВт-ч на I рабочего) и самый
высокий коэффициент электрификации силовых процес-
сов, т. е. доля мощности электродвигателей в общей
мощности всех двигателей (около 83 %).
С 1987 г. легкая промышленность работает в новых
условиях хозяйствования. Новый экономический метод
охватил все службы, в том числе и электроэнерге-
тическую, поскольку эффективность ее работы оказы-
вает значительное влияние на производительность и
качество товаров легкой промышленности, экономию и
рациональное использование энергоресурсов, улучше-
ние условий труда и технику безопасности. В новых
условиях хозяйствования важное значение приобрели
вопросы совершенствования организации технического
обслуживания и ремонта электрооборудования, изыска-
ние резервов экономии энергии, автоматизация и мо-
дернизация электроприводов текстильного оборудо-
вания.
Настоящий учебник подготовлен в соответствии с
программой курса для студентов неэлектротехнических
специальностей 1007, 1707, 2103, 2203, 2202, 2802 и
2804 текстильных вузов страны, изучающих основы
автоматизированного электропривода текстильных
машин и электротехнику с основами электроники.
4
1. АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ
ЭЛЕКТРОТЕХНИЧЕСКИХ УСТРОЙСТВ
1.1. КЛАССИФИКАЦИЯ ЭЛЕКТРОАППАРАТУРЫ
К электрическим аппаратам относятся все электротехнические
устройства, предназначенные для включения и отключения,
управления, регулирования и защиты электрических цепей, а
также для контроля и регулирования неэлектротехнических про-
цессов.
Электрические аппараты различаются по назначению, роду
тока и уровню рабочего напряжения, по степени защиты от
воздействия окружающей среды и ряду других факторов.
По назначению (основной функции, выполняемой аппаратом)
электрические аппараты делятся на следующие группы:
коммутационные — для включения и отключения элек-
трических цепей (выключатели, разъединители, рубильники, кон-
такторы, магнитные пускатели, отделители, кнопки, короткозамы-
катели и др.);
защитные — для защиты электроустановок от токов корот-
кого замыкания (предохранители), перегрузок (тепловые реле),
перенапряжений (разрядники);
измерительные — для изоляции измерительных приборов
от высокого напряжения путем преобразования измеряемых
величин тока и напряжения до стандартных, удобных для
измерения значений (измерительные трансформаторы тока и
напряжения);
п у с к о р е г у л и р у ю щ и е — для пуска и регулирования
скорости, тока и напряжения электроприемников, рассчитанные
на частые включения и отключения;
контролирующие — для контроля заданных электриче-
ских и неэлектрических параметров (регуляторы частоты вра-
щения, температуры, тока, напряжения и др ).
В зависимости от рабочего напряжения электрические ап-
параты разделяются на аппараты для электроустановок на-
пряжением до 1 кВ и аппараты для электроустановок напряже-
нием 1 кВ и выше.
Каждый электрический аппарат обтекается рабочим током, а
в аварийных режимах может обтекаться перегрузочным или током
5
короткого замыкания (КЗ), что вызывает выделение тепла и
нагревание аппарата. При этом температура аппарата и его дета-
лей не должна превышать допустимых для них значений при
номинальных режимах, а возникающие термические и динами-
ческие перегрузки не должны вызывать остаточных неблаго-
приятных явлений.
Кроме того, изоляция электрических аппаратов должна вы-
держивать возможные перенапряжения, т с. иметь определенный
запас электрической прочности.
Все электрические аппараты должны быть механически проч-
ными и удобными в обслуживании, иметь минимальные мас-
согабаритные показатели, быстродействие и электрическую из-
носостойкость.
Металлические основания выдвижных аппаратов, предназна-
ченные для встраивания в какое-либо устройство, электрически
не связанное с токоведущими частями, должны иметь электри-
ческое соединение основания с заземляемой частью устройства,
в которое аппарат встраивается.
По конструкции аппараты могут быть контактными и бес-
контактными. Контактные аппараты предназначены в основном
для коммутации больших токов. Они имеют контактно-дугога-
сительные системы с подвижными элементами. Бесконтактные
аппараты коммутируют меньшие токи и напряжения. Они не
имеют подвижных систем и осуществляют переключения путем
изменения своих электрических параметров.
1.2. ПРОЦЕССЫ, ВОЗНИКАЮЩИЕ
ПРИ РАЗМЫКАНИИ КОНТАКТОВ
В ЭЛЕКТРИЧЕСКОЙ ЦЕПИ
При размыкании контактов сила нажатия уменьшается, возра-
стает переходное сопротивление, вследствие чего быстро нагре-
ваются точки касания. В момент разъединения контактов темпе-
ратура в точке касания достигает температуры плавления и
между контактами возникает мостик из жидкого металла. При
увеличении расстояния между контактами мостик обрывается
и в зависимости от параметров отключаемой цепи возникает
либо дуговой, либо тлеющий разряд.
Для существования дугового разряда величины напряжения
и тока должны быть больше соответственно 12—20 В и 0,4—
1 А (в зависимости от материала контакта). Если ток в цепи
меньше указанных значений, то при напряжении цепи 270—
330 В возникает тлеющий разряд или искра. Если контакты
разрывают токи от долей ампера до нескольких ампер, тлею-
щий разряд или искру можно устранить путем использования
схемных методов.
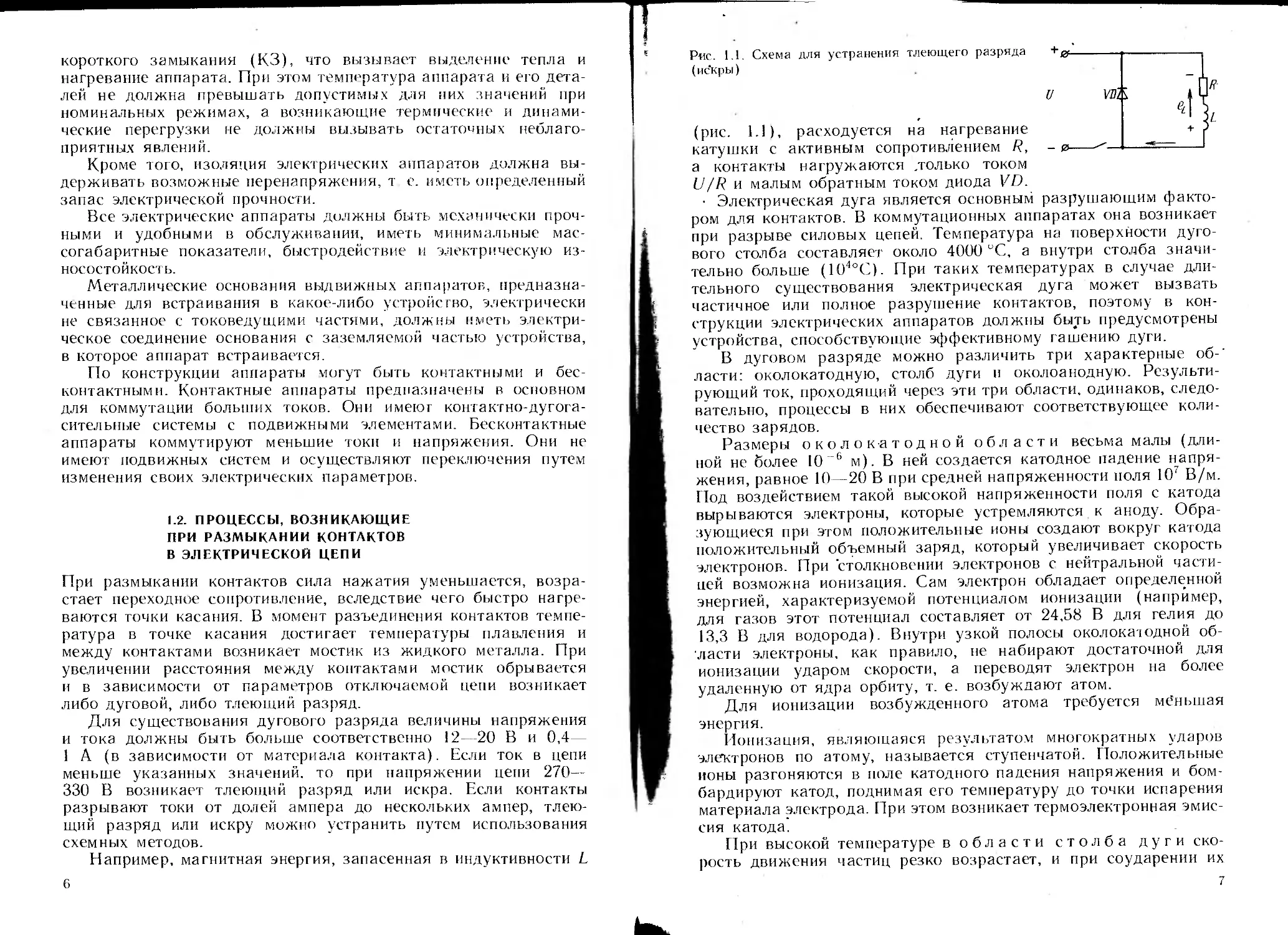
Например, магнитная энергия, запасенная в индуктивности L
6
Рве. 1.1. Схема для устранения тлеющего разряда +0---------
(искры) I
U |
(рис. 1.1), расходуется на нагревание + ?
катушки с активным сопротивлением /?, - ——=£= 1
а контакты нагружаются .только током
U/R и малым обратным током диода VD.
Электрическая дуга является основным разрушающим факто-
ром для контактов. В коммутационных аппаратах она возникает
при разрыве силовых цепей. Температура на поверхности дуго-
вого столба составляет около 4000 иС, а внутри столба значи-
тельно больше (104оС). При таких температурах в случае дли-
тельного существования электрическая дуга может вызвать
частичное или полное разрушение контактов, поэтому в кон-
струкции электрических аппаратов должны быть предусмотрены
устройства, способствующие эффективному гашению дуги.
В дуговом разряде можно различить три характерные об-'
ласти: околокатодную, столб дуги и околоанодную. Результи-
рующий ток, проходящий через эти три области, одинаков, следо-
вательно, процессы в них обеспечивают соответствующее коли-
чество зарядов.
Размеры около катод ной области весьма малы (дли-
ной не более 10 6 м). В ней создается катодное падение напря-
жения, равное 10—20 В при средней напряженности поля 10' В/м.
Под воздействием такой высокой напряженности поля с катода
вырываются электроны, которые устремляются к аноду. Обра-
зующиеся при этом положительные ионы создают вокруг катода
положительный объемный заряд, который увеличивает скорость
электронов. При столкновении электронов с нейтральной части-
цей возможна ионизация. Сам электрон обладает определенной
энергией, характеризуемой потенциалом ионизации (например,
для газов этот потенциал составляет от 24,58 В для гелия до
13,3 В для водорода). Внутри узкой полосы околокатодной об-
ласти электроны, как правило, не набирают достаточной для
ионизации ударом скорости, а переводят электрон на более
удаленную от ядра орбиту, т. е. возбуждают атом.
Для ионизации возбужденного атома требуется мёньшая
энергия.
Ионизация, являющаяся результатом многократных ударов
электронов по атому, называется ступенчатой. Положительные
ионы разгоняются в поле катодного падения напряжения и бом-
бардируют катод, поднимая его температуру до точки испарения
материала электрода. При этом возникает термоэлектронная эмис-
сия катода.
При высокой температуре в области столба дуги ско-
рость движения частиц резко возрастает, и при соударении их
с атомами происходит ионизация последних, так называемая
термическая ионизация, которая является основным источником
ионизации в столбе дуги. Степень ионизации связана с давле-
нием газа обратной пропорциональностью: чем выше давление,
тем ниже степень ионизации. В дуговом столбе одновременно
с ионизацией происходит деионизация вследствие процессов
рекомбинации и диффузии.
Рекомбинация—нейтрализация частиц за счет соединения ионов с заря-
дами противоположных знаков - реализуется при соединении двух противополож-
но заряженных ионов (а не иона с электроном). Рекомбинация резко
возрастает при снижении температуры.
Диффузия — выравнивание плотности заряженных частиц вследствие их
теплового движения - уменьшает число частиц в столбе дуги, т. е. увеличи-
вает сопротивление дугового столба.
Таким образом, скорость ионизации в столбе дуги равна скорости возникно-
вения зарядов за счет термической ионизации минус скорость убывания
заряженных частиц за счет рекомбинации и диффузии
Поток электронов из столба дуги устремляется к аноду, созда-
вая вблизи него, в так называемой околоанодной обла-
с т и, отрицательный объемный заряд (анод при дуговом разряде
не излучает положительных ионов, способных нейтрализовать
электроны). Этот заряд вызывает появление околоанодного паде-
ния напряжения, которое обычно составляет 5—10 В.
Электроны, разгоняемые полем анода и отрицательным объ-
емным зарядом, соударяются с анодом и разогревают его до
очень высокой температуры. Однако эта температура, как и вся
околоанодная область, не оказывает существенного влияния
на условия существования дугового разряда.
Эффективное гашение дуги может быть достигнуто в том
случае, когда будут устранены или значительно уменьшены при-
чины ее возникновения, т. е. ликвидирована частично или пол-
ностью ионизация.
Основными мероприятиями по гашению дуги являются:
увеличение скорости расхождения контактов, способствующее
быстрому падению напряженности поля, а следовательно, и кине-
тической энергии электронов, и замедлению образования новых
частиц;
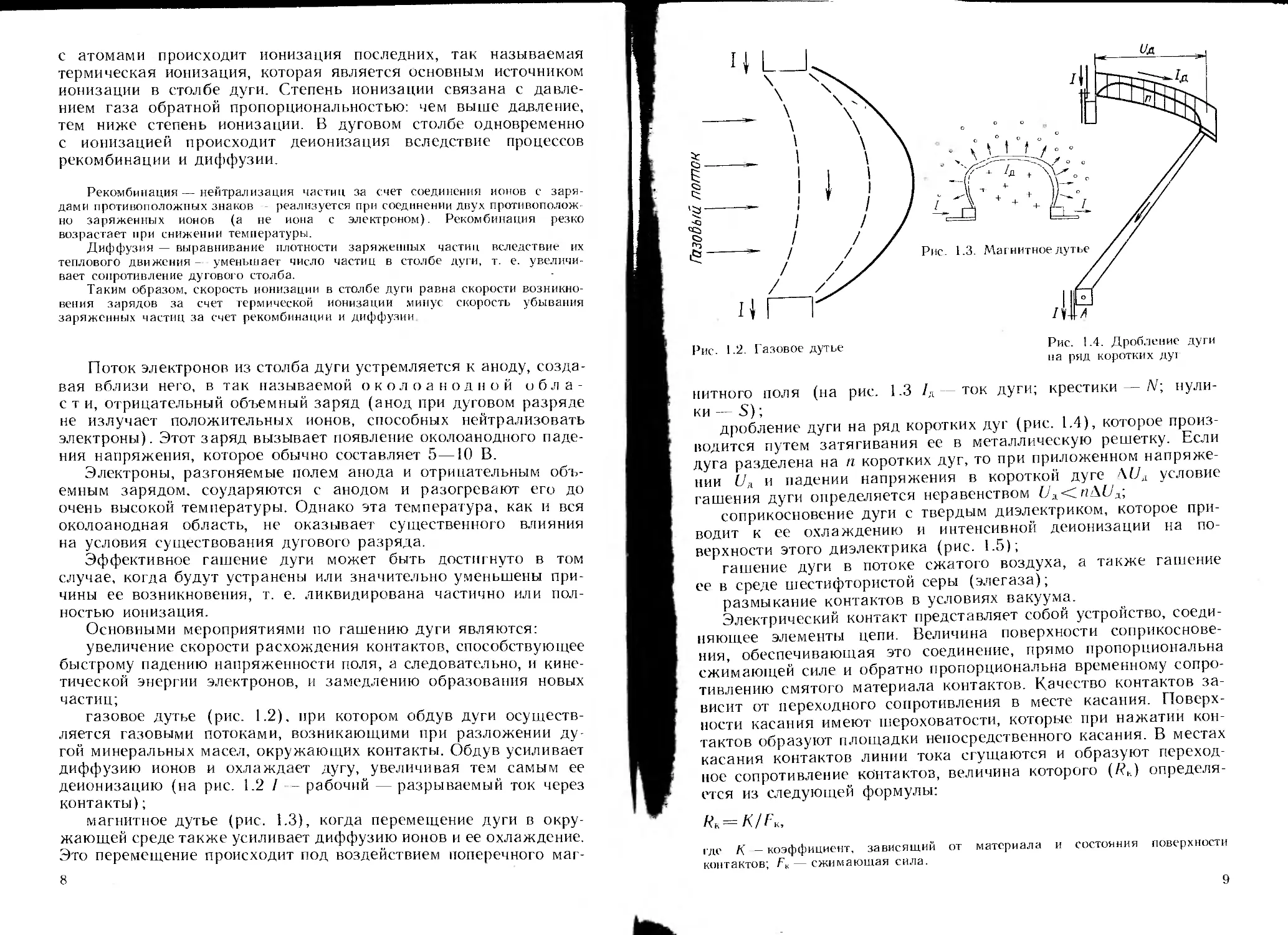
газовое дутье (рис. 1.2), при котором обдув дуги осуществ-
ляется газовыми потоками, возникающими при разложении ду-
гой минеральных масел, окружающих контакты. Обдув усиливает
диффузию ионов и охлаждает дугу, увеличивая тем самым ее
деионизацию (на рис. 1.2 / - рабочий — разрываемый ток через
контакты);
магнитное дутье (рис. 1.3), когда перемещение дуги в окру-
жающей среде также усиливает диффузию ионов и ее охлаждение.
Это перемещение происходит под воздействием поперечного маг-
8
нитного поля (на рис. 1.3 /д—ток дуги; крестики — N; нули-
ки — S);
дробление дуги на ряд коротких дуг (рис. 1.4), которое произ-
водится путем затягивания ее в металлическую решетку. Если
дуга разделена на п коротких дуг, то при приложенном напряже-
нии Uл и падении напряжения в короткой дуге \UA условие
гашения дуги определяется неравенством Ux<Zn\U
соприкосновение дуги с твердым диэлектриком, которое при-
водит к ее охлаждению и интенсивной деионизации на по-
верхности этого диэлектрика (рис. 1.5);
гашение дуги в потоке сжатого воздуха, а также гашение
ее в среде шестифтористой серы (элегаза);
размыкание контактов в условиях вакуума.
Электрический контакт представляет собой устройство, соеди-
няющее элементы цепи. Величина поверхности соприкоснове-
ния, обеспечивающая это соединение, прямо пропорциональна
сжимающей силе и обратно пропорциональна временному сопро-
тивлению смятого материала контактов. Качество контактов за-
висит от переходного сопротивления в месте касания. Поверх-
ности касания имеют шероховатости, которые при нажатии кон-
тактов образуют площадки непосредственного касания. В местах
касания контактов линии тока сгущаются и образуют переход-
ное сопротивление контактов, величина которого (/?,.) определя-
ется из следующей формулы:
А?к = К/Ек,
где К — коэффициент, зависящий от материала и состояния поверхности
контактов; F* — сжимающая сила.
9
Рис 1.5. Соприкосновение
дуги с твердым диэлек-
триком
Рис. 1.6. Система параллельных контактных пар
Чем больше переходное сопротивление контактов, тем больше
потерь и больший нагрев этих контактов. При увеличении тем-
пературы нагрева более 150 °C может произойти сильное окисле-
ние поверхности и проводимость контактной пары снизится
до нуля.
Кроме окисления на контактную пару действуют электродина-
мические силы (особенно при КЗ), которые стремятся ослабить
силу нажатия контактов или полностью разорвать их соприкосно-
вение. Эти силы возникают вследствие искривления линий тока
в местах касания контактов. Их нейтрализуют путем подбора
соответствующей силы нажатия контактов.
, Эффективным средством поддержания малого переходного со-
противления контактов является система параллельных контакт-
ных пар — главной ГК и дугогасительной ДГК (рис. 1.6). Дуго-
гасительные пары выполняются из тугоплавких материалов,
менее подверженных плавлению при горении дуги. При отклю-
чении цепи сначала размыкаются главные контакты, а потом
дуго гасительные.
1.3. КОММУТАЦИОННАЯ И ЗАЩИТНАЯ
АППАРАТУРА НАПРЯЖЕНИЕМ ДО 1 кВ*
К основным коммутационным аппаратам напряжением до 1 кВ
относятся рубильники, пакетные выключатели и переключатели,
контакторы, магнитные пускатели, автоматические выключатели
(автоматы), контроллеры.
Рубильники являются наиболее простыми по конструкции
аппаратами и служат для ручного включения и отключения элек-
трических цепей постоянного тока напряжением до 440 В и пере-
менного тока напряжением до 500 В. Они изготовляются с цен-
* Написано совместно с В. В. Красником.
10
Рис. 1.7. Общий вид пакетного выклю-
чателя
Р ис. 1.8. У стр о и ст во од в о пол ю с ног о
контактора
тральной или боковой рукояткой, а также могут быть с рычажным
приводом в одно- или двухполюсном исполнении. Наибольшее
распространение получили рубильники с боковой рукояткой
типов РБ, РБП. Рубильники с центральной рукояткой находят
ограниченное применение для отключения лишь обесточенных
« цепей с целью создания видимого разрыва при проведении работ
в электроустановках. Рубильники с рычажным приводом при-
меняются для отключения номинальных гоков, если они снабжены
дутогасительной камерой, и токов до 0,2—0,3 от номинального
й при ее отсутствии.
При выключении из неподвижных контактов сначала выходит
главный нож. Электрическая дуга не возникает, поскольку ток
продолжает протекать по моментному ножу, на котором возни-
кает дуга. Пружина создает увеличенный момент отключения,
К что способствует улучшенному гашению дуги.
ЯГ Для повышения надежности работы в рубильниках уста-
if навливают простейшие дугогасительные камеры. Пластинами
К дугогасительной решетки дуга делится на несколько самостоя-
тельных дуг и быстрее гаснет (см. рис. 1.4).
5 П а кет н ые в ы к л ю ч а г е л if и пере к л ю ч а т е л и отли-
чаются от рубильников тем, что имеют несколько систем кон-
тактов и коммутирующих положений и служат для осуществле-
ния достаточно сложных переключений одновременно в несколь-
ких электрических цепях. Их изготовляют на токи до 400 А при
напряжении 220 В и до 250 А при напряжении 380 В.
Выключатель представляет собой набор колец — пакетов
(рис. 1.7) из изолирующего материала, внутри полостей кото-
рых расположены контактные устройства. Контактное устрой-
11
ство состоит из неподвижных контактов 6, закрепленных на
корпусе 8, и подвижных контактов 5, жестко связанных с поворот-
ным пакетом. Все ножи перемещаются вертикальным валиком 4
при помощи рукоятки 1. Пакеты стягиваются вместе стяжными
шпильками 9. В крышке 2 размешен пружинный механизм 3
мгновенного переключения и фиксации положения рукоятки /.
Дуга гасится в закрытой камере, образованной пакетами и
снабженной дугогасительными газогенерирующими шайбами.
Для изоляции служат диски 7.
По сравнению с рубильниками пакетные выключатели и пере-
ключатели имеют меньшие габаритные размеры, более удобны для
монтажа и имеют преимущество в том, что гашение дуги про-
исходит в замкнутом объеме. Но эти аппараты имеют ограни-
ченный срок службы, рассчитанный на 10 тыс. операций в обычных
цепях и 5 тыс. операций в сильноиндуктивных цепях.
Контакторы и магнитные пускатели применяются
для дистанционного и автоматического управления электропри-
емниками в цепях постоянного и переменного тока.
Контакторы — это выключатели с электромагнитным управле-
нием. Они не защищают электрические цепи от перегрузок или
КЗ, а служат лишь для частых включений и отключений
электрических цепей. На рис. 1.8 показано устройство однополюс-
ного контактора. При замыкании ключом 1 цепи, удерживающей
катушки 2, якорь 3 притягивается к ее сердечнику и контакты 4
контактора замыкаются. Контакторы обычно снабжаются дуго-
гасительными решетками 5 с пластинами из дугостойкого мате-
риала. Гибкий медный провод 6 осуществляет связь между под-
вижными контактами и электрической цепью.
Магнитные пускатели — это трехполюсные контакторы со
встроенными тепловыми реле и вспомогательными контактами,
служат в основном для управления трехфазными электродвига-
телями. Магнитные пускатели могут иметь до четырех замыкаю-
щих и размыкающих вспомогательных контактов.
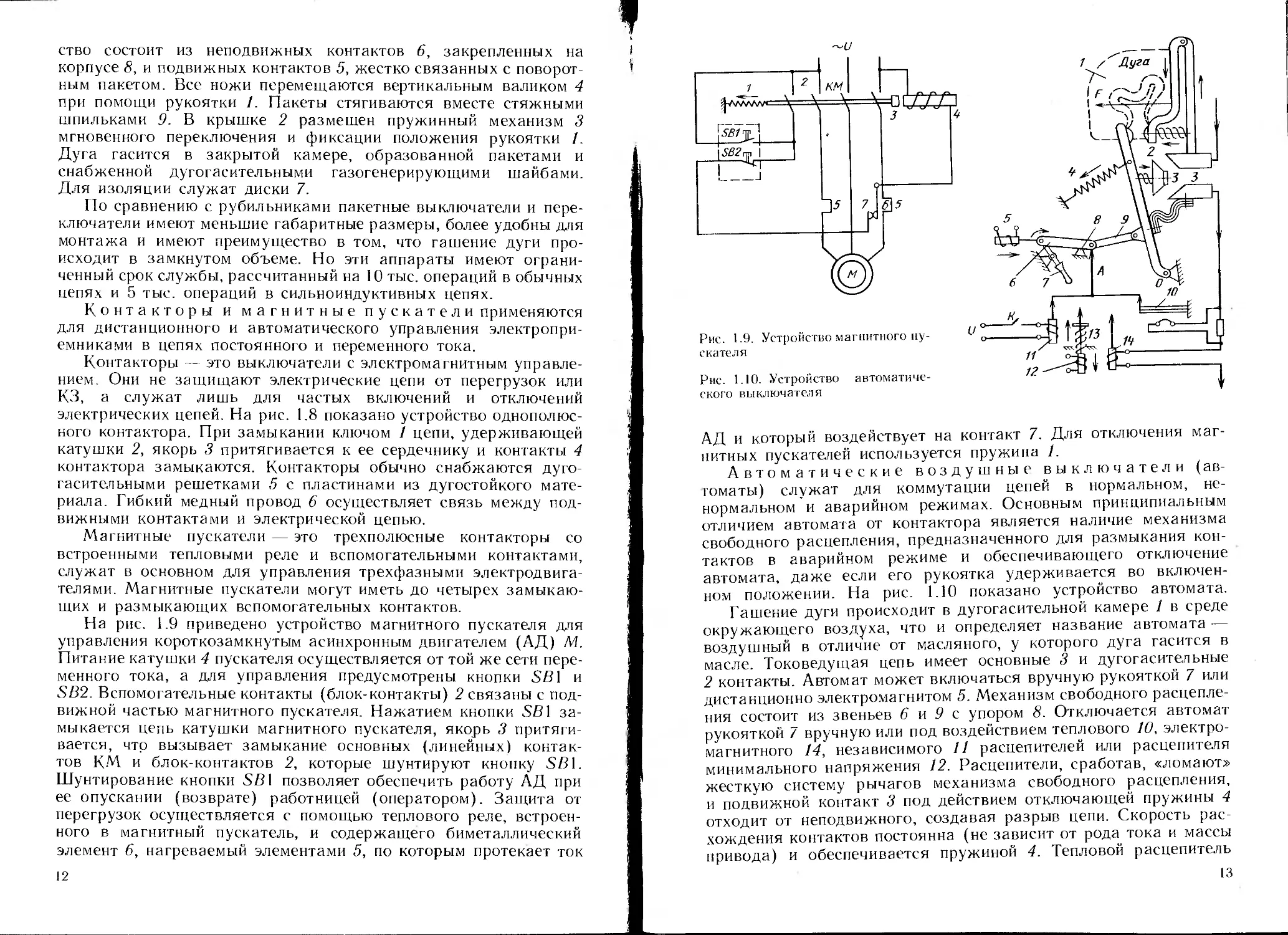
На рис. 1.9 приведено устройство магнитного пускателя для
управления короткозамкнутым асинхронным двигателем (АД) М.
Питание катушки 4 пускателя осуществляется от той же сети пере-
менного тока, а для управления предусмотрены кнопки SB1 и
SB2. Вспомогательные контакты (блок-контакты) 2 связаны с под-
вижной частью магнитного пускателя. Нажатием кнопки SB] за-
мыкается цепь катушки магнитного пускателя, якорь 3 притяги-
вается, что вызывает замыкание основных (линейных) контак-
тов КМ и блок-контактов 2, которые шунтируют кнопку SB1.
Шунтирование кнопки SB1 позволяет обеспечить работу АД при
ее опускании (возврате) работницей (оператором). Защита от
перегрузок осуществляется с помощью теплового реле, встроен-
ного в магнитный пускатель, и содержащего биметаллический
элемент 6, нагреваемый элементами 5, по которым протекает ток
12
Рис. 1.9. Устройство магнитного пу-
скателя
Рис. 1.10. Устройство автоматиче-
ского выключателя
АД и который воздействует на контакт 7. Для отключения маг-
нитных пускателей используется пружина 1.
Автоматические воздушные выключатели (ав-
томаты) служат для коммутации цепей в нормальном, не-
нормальном и аварийном режимах. Основным принципиальным
отличием автомата от контактора является наличие механизма
свободного расцепления, предназначенного для размыкания кон-
тактов в аварийном режиме и обеспечивающего отключение
автомата, даже если его рукоятка удерживается во включен-
ном положении. На рис. 1.10 показано устройство автомата.
Гашение дуги происходит в дугогасительной камере 1 в среде
окружающего воздуха, что и определяет название автомата —
воздушный в отличие от масляного, у которого дуга гасится в
масле. Токоведущая цепь имеет основные 3 и дугогасительные
2 контакты. Автомат может включаться вручную рукояткой 7 или
дистанционно электромагнитом 5. Механизм свободного расцепле-
ния состоит из звеньев 6 и 9 с упором 8. Отключается автомат
рукояткой 7 вручную или под воздействием теплового 10, электро-
магнитного 14, независимого 11 расцепителей или расцепителя
минимального напряжения 12. Расцепители, сработав, «ломают»
жесткую систему рычагов механизма свободного расцепления,
и подвижной контакт 3 под действием отключающей пружины 4
отходит от неподвижного, создавая разрыв цепи. Скорость рас-
хождения контактов постоянна (не зависит от рода тока и массы
привода) и обеспечивается пружиной 4. Тепловой расцепитель
13
обеспечивает защиту от перегрузок за счет изгибания нагретой
биметаллической пластины с последующим воздействием на меха-
низм свободного расцепления.
Электромагнитный расцепитель обеспечивает защиту от корот-
ких замыканий за счет притягивания якоря к сердечнику с
воздействием на механизм свободного расцепления.
Независимый расцепитель обеспечивает дистанционное от-
ключение автомата со щита управления за счет того, что при за-
мыкании кнопки Л' якорь электромагнита притягивается к сердеч-
нику и воздействует на механизм свободного расцепления.
Расцепитель минимального напряжения обеспечивает защиту
при понижении напряжения в сети на 20—30 % номинального
значения. При снижении напряжения якорь под воздействием от-
ключающей пружины /,? отпадает и воздействует на механизм
свободного расцепления.
Автоматы имеют различное исполнение, что определяется их
назначением, параметрами электрической цепи и условиями экс-
плуатации. Так, автоматы типов АП-25 и АП-50 (т. е. на номи-
нальные токи 25 и 50 А) предназначены для работы в сетях по-
стоянного и переменного тока и снабжены электромагнитными
токовыми (в обозначении буква М), тепловыми (в обозначении
буква Т) расцепителями и расцепителями минимального на-
пряжения (в обозначении буква Н). Например, тип автомата
АП-50-2Т означает, что это двухполюсный автомат с тепловой
защитой на номинальный ток 50 А. Ток срабатывания автомата
в среднем в 6—10 раз больше номинального, а время отключения
составляет порядка 0,01-0,7 с.
Воздушные автоматы АВ выпускаются на номинальные токи от
400 до 2000 Айв обозначении могут иметь следующие буквы:
Б — без выдержки времени, В — выдвижное исполнение, С —
избирательный с выдержкой времени при перегрузке и коротком
замыкании, Н неизбирательный с выдержкой времени. Напри-
мер, тип АВ20Н означает автомат воздушный на номинальный
ток 2000 А неизбирательный с выдержкой времени.
Установочные автоматы типа А3100 служат для коммутации
в сетях постоянного тока напряжением 220 В и переменного тока
напряжением 380 и 500 В и имеют лишь ручной привод.
Автоматы типа АК.50К служат для коммутаций в сетях постоян-
ного тока напряжением до 220 В и переменного тока напря-
жением до 380 В. Выпускаются на номинальные токи от 0,6 до
50 А и могут быть оборудованы электромагнитным расцепи-
телем (в обозначение добавляется буква М), электромагнитным
расцепителем с гидравлическим замедлителем срабатывания
(добавляются буквы МГ), независимым расцепителем (добавля-
ется буква Д).
Предохранители являются наиболее простыми электри-
ческими аппаратами, служащими для защиты электроустановок
14
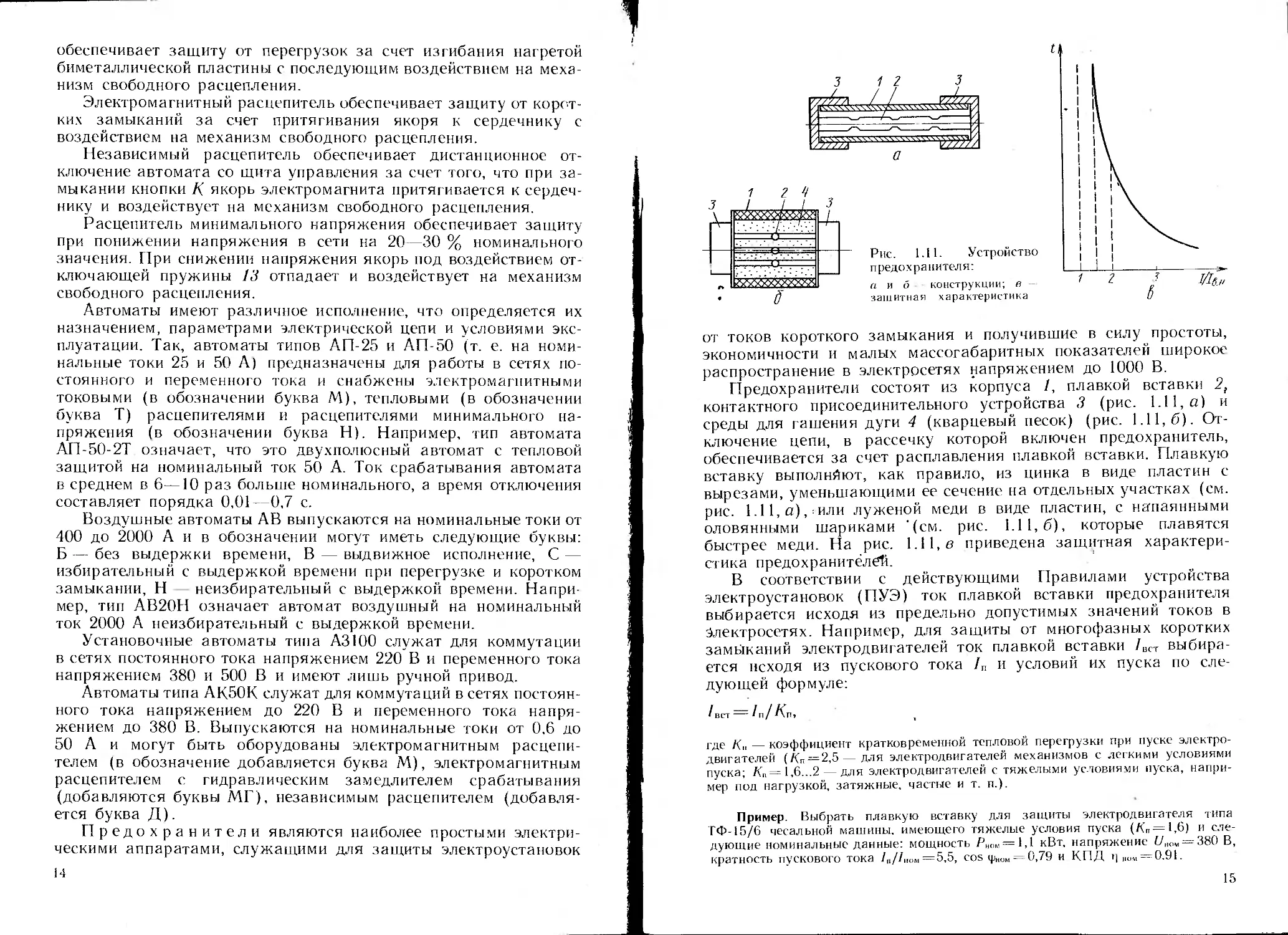
Рис. 1.11. Устройство
п редо х ра нител я:
а и б конструкции; в —
защитная характеристика
от токов короткого замыкания и получившие в силу простоты,
экономичности и малых массогабаритных показателей широкое
распространение в электросетях напряжением до 1000 В.
Предохранители состоят из корпуса /, плавкой вставки 2,
контактного присоединительного устройства 3 (рис. 1.11, а) и
среды для гашения дуги 4 (кварцевый песок) (рис. 1.11,6). От-
ключение цепи, в рассечку которой включен предохранитель,
обеспечивается за счет расплавления плавкой вставки. Плавкую
вставку выполняют, как правило, из цинка в виде пластин с
вырезами, уменьшающими ее сечение на отдельных участках (см.
рис. 1.11, а), - или луженой меди в виде пластин, с напаянными
оловянными шариками ’(см. рис. 1.11,6), которые плавятся
быстрее меди. На рис. 1.11, в приведена защитная характери-
стика предохранителей.
В соответствии с действующими Правилами устройства
электроустановок (ПУЭ) ток плавкой вставки предохранителя
выбирается исходя из предельно допустимых значений токов в
Электросетях. Например, для защиты от многофазных коротких
замйканий электродвигателей ток плавкой вставки /нст выбира-
ется исходя из пускового тока /„ и условий их пуска по сле-
дующей формуле:
/ВСТ === Iп/Ап,
где К„ — коэффициент кратковременной тепловой перегрузки при пуске электро-
двигателей (/<„ = 2,5— для электродвигателей механизмов с легкими условиями
пуска; /<„=1,6...2— для электродвигателей с тяжелыми условиями пуска, напри-
мер под нагрузкой, затяжные, частые и т. п.).
Пример. Выбрать плавкую вставку для защиты электродвигателя типа
ТФ-15/6 чесальной машины, имеющего тяжелые условия пуска (Л’„=1,6) и сле-
дующие номинальные данные: мощность Р„„„ = 1,1 кВт, напряжение {/„„„ = 380 В,
кратность пускового тока /,,//„ом =5,5, cos <рнО„ = 0,79 и КПД 1) „„„ = 0.91.
15
Решение. 1. Находим номинальный ток электродвигателя: /„о„ = Р„Ом/
(л'3(/„<)4,cos/ноч=1.1/(у'З-0,38-0,79-0,91) =2,5 А.
2. Наименьшее значение номинального тока плавкой вставки /Вст = 5,5/„„»,/
1.6; /вст = 5,5-2.5/1,6 =8.6 А.
3. Выбираем ближайшее большее (стандартизированное) сечение плавкой
вставки на ток 10 Л.
Предохранители бывают с закрытым разборным патроном
без наполнителя (типов ПР-2), с мелкозернистым наполните-
лем из кварцевого песка (типов ПН-2), инерционные и безынер-
ционные.
Предохранители типа ПР-2 изготовляют на напряжение
220 В (габарит I) и 500 В (габарит II) с номинальными токами
плавких вставок от 6 до 1000 А. Предохранители типа ПН-2
имеют более совершенные характеристики по сравнению с пре-
дохранителями ПР-2. Инерционные предохранители служат
для защиты цепей электродвигателей от пусковых токов.
Кон г р о л леры служат для одновременного переключения
в нескольких цепях с целью пуска, останова и регулирования
частоты вращения электрических машин. Контроллеры по кон-
структивному исполнению бывают барабанные, кулачковые и
плоские.
Барабанные контроллеры имеют подвижные медные или
бронзовые контакты в виде сегментов, расположенные на изоля-
ционном барабане. Неподвижные пружинные контакты, к ко-
торым подключают провода, крепятся на изолированной рейке.
Замыкание соответствующих неподвижных и подвижных кон-
тактов осуществляется при вращении барабана. Необходимая
схема соединения во внешней цепи достигается за счет опреде-
ленного расположения на барабане сегментов-контактов и вы-
полнения их различной длины. Эти контроллеры имеют неболь-
шую частоту переключения контактов (до 150—200 переклю-
чений в час).
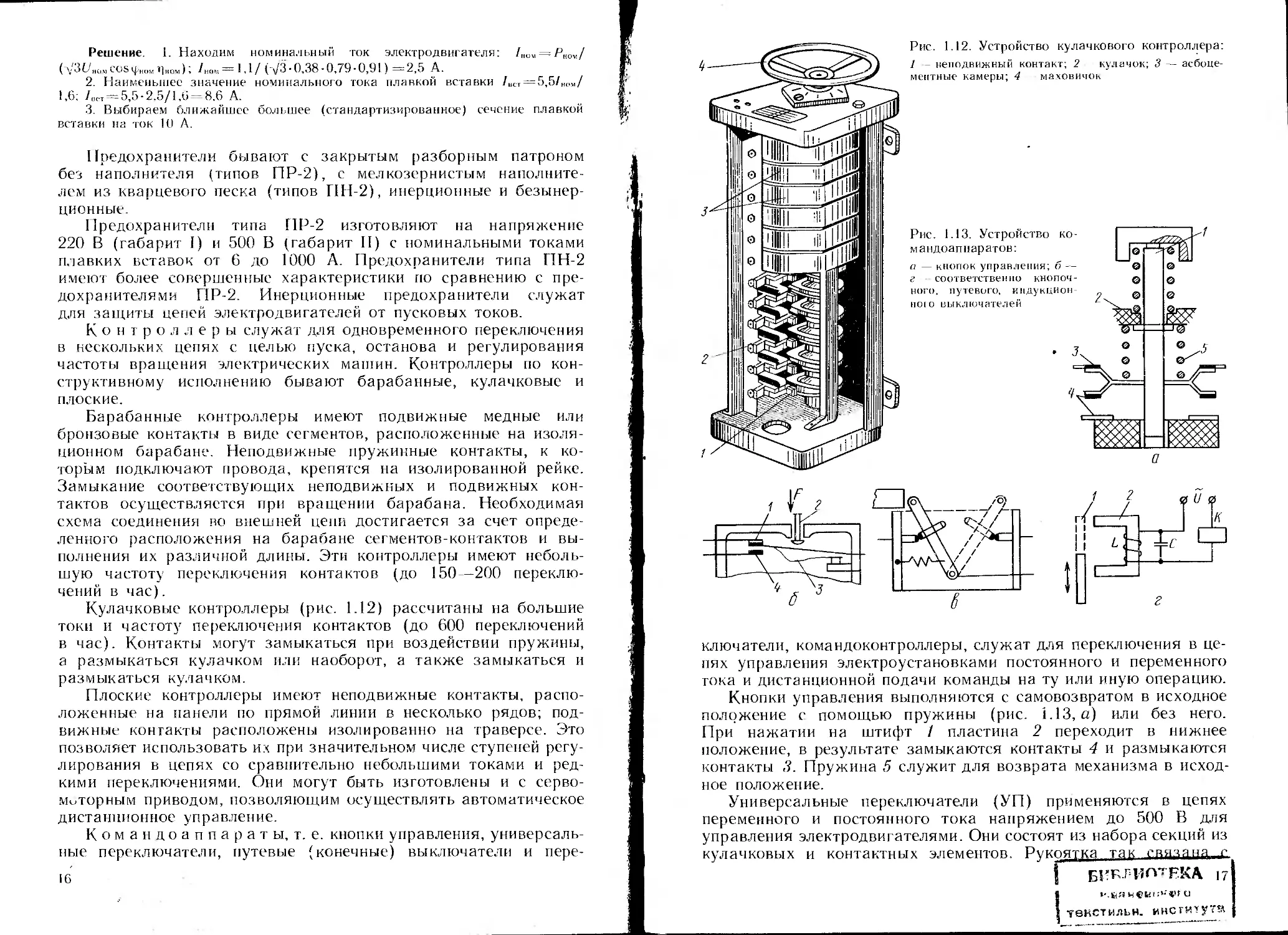
Кулачковые контроллеры (рис. 1.12) рассчитаны на большие
токи и частоту переключения контактов (до 600 переключений
в час). Контакты могут замыкаться при воздействии пружины,
а размыкаться кулачком пли наоборот, а также замыкаться и
размыкаться кулачком.
Плоские контроллеры имеют неподвижные контакты, распо-
ложенные на панели по прямой линии в несколько рядов; под-
вижные контакты расположены изолированно на траверсе. Это
позволяет использовать их при значительном числе ступеней регу-
лирования в цепях со сравнительно небольшими токами и ред-
кими переключениями. Они могут быть изготовлены и с серво-
моторным приводом, позволяющим осуществлять автоматическое
дистанционное управление.
К о м а н д о а п п а р а т ы, т. е. кнопки управления, универсаль-
ные переключатели, путевые (конечные) выключатели и пере-
16
Рис. 1.12. Устройство кулачкового контроллера:
1 - неподвижный контакт; 2 кулачок; 3 — асбоце-
ментные камеры; 4 маховичок
г
ключатели, командоконтроллеры, служат для переключения в це-
пях управления электроустановками постоянного и переменного
тока и дистанционной подачи команды на ту или иную операцию.
Кнопки управления выполняются с самовозвратом в исходное
положение с помощью пружины (рис. i.13, а) или без него.
При нажатии на штифт / пластина 2 переходит в нижнее
положение, в результате замыкаются контакты 4 и размыкаются
контакты 3. Пружина 5 служит для возврата механизма в исход-
ное положение.
Универсальные переключатели (УП) применяются в цепях
переменного и постоянного тока напряжением до 500 В для
управления электродвигателями. Они состоят из набора секций из
кулачковых и контактных элементов. Рукоятка так связана -г
I БИВ.ГНГП ЕКД 17
1 м. ня нфш.'»*'«>> и
текстильн. института
кулачковым элементом, что при ее повороте замыкаются и размы-
каются соответствующие контакты. По такому же принципу скон-
струирован и универсальный пакетный ключ управления.
. Кнопочные выключатели ограничения движения (рис. 1.13.6)
применяются при малых ограниченных перемещениях механиз-
мов (микропереключатели). При воздействии механизма на кноп-
ку 2 система контактов 4 замыкается, а система контактов 1
размыкается. Возврат в исходное положение осуществляется пру-
жиной 3.
Путевые (конечные) выключатели и переключатели служат для
переключения электрической цепи управляемым механизмом в за-
висимости от его положения или пройденного пути (рис. 1.13, в).
При их срабатывании осуществляются требуемые операции в
цепях управления (ограничение движения механизма, его вклю-
чение и отключение).
Роль путевого выключателя может исполнять и индукцион-
ный датчик, срабатывающий без механического воздействия про-
изводственного механизма. При положении якоря 1, указанного
на рис. 1.13, г сплошной линией, магнитопровод 2 разомкнут.
Индуктивность катушки L незначительна, и через нее проходит
ток, обеспечивающий притяжение якоря реле К. При передвиже-
нии якоря / в положение, указанное на рисунке пунктиром,
магнитопровод замыкается, что приводит к резкому увеличению
его индуктивного сопротивления, вследствие чего ток в цепи
снижается. В результате реле К срабатывает, подавая сигнал
в схему управления.
Командоконтроллеры представляют собой малогабаритные ку-
лачковые механизмы, служащие для-переключен и я в цепях управ-
ления, например, для управления реверсивными двигателями,
работающими в повторно-кратковременных режимах. Их уста-
навливают взамен кнопочных станций. По положению рукоятки
командоконтроллера можно судить о режиме работы и направле-
нии вращения электродвигателя.
Реле представляет собой электрический аппарат, в котором
при плавном изменении управляющей (входной) величины про-
исходит скачкообразное изменение управляемой (выходной) ве-
личины. Из двух величин хотя бы одна должна быть электри-
ческой.
Реле выполняют функции управления и защиты цепей. По
принципу действия они разделяются на электромагнитные, пневма-
тические, электронные, тепловые, механические и др.
По способу воздействия на аппараты главной цепи реле раз-
деляются на реле прямого действия, воздействующие непосред-
ственно на расцепители приводов (например, выключателя),
и реле косвенного действия, воздействующие на привод посред-
ством промежуточных аппаратов цепи управления.
По величине контролируемого параметра реле делятся на
18
максимальные и минимальные. Первые реагируют на превышение
показателей работы устройства установленного значения (на-
пример, реле максимального тока, максимального напряжения),
вторые — на уменьшение показателей (например, реле минималь-
ного напряжения).
Реле разделяются по признаку времени их срабатывания на
реле мгновенного действия и реле с выдержкой времени.
В теории релейной защиты введены специальные термины,
связанные со спецификой работы реле:
уставка — отрегулированная величина параметра срабатыва-
ния (например, уставка реле тока представляет собой ток, при
котором срабатывает реле). Для реле времени уставкой, на-
пример, является длительность выдержки времени, отсчитанной
от момента подачи сигнала до момента срабатывания контак-
тов реле;
ток срабатывания /ср — наименьший ток реле тока, при кото-
ром приходит в движение исполнительная система;
ток возврата /вр — наибольший ток реле тока, при котором
исполнительная система возвращается в исходное положение;
коэффициент возврата по току — отношение тока возврата
к току срабатывания:
Кв I === Iвр/I ср-
Для реле максимального тока КВ1<1, для реле минималь-
ного тока Л'в,> 1; чем ближе к единице, тем совершеннее
реле.
Реле косвенного действия не воздействует непосредственно на привод
выключателей. Контакты реле находятся во вспомогательных цепях и коммути-
руют цепи управления выключателями, указательными реле, устройствами сигна-
лизации и т. п. Ток цепей управления, с помощью которого производится
коммутация в цепях защиты, автоматики и сигнализации, называется опера-
тивным током.
Для питания вспомогательных цепей используется постоянный или пере-
менный оперативный ток.
Оперативный постоянный ток применяется главным образом на электро-
станциях и мощных подстанциях.
Источником постоянного тока служит аккумуляторная батарея с зарядным
устройством в виде генераторов постоянного тока или полупроводниковых пре-
образователей. Цепи оперативного постоянного тока секционируются по участ-
кам. питающим раздельно системы защиты и сигнализации. Они считаются на-
дежными, но имеют ряд недостатков, связанных с надзором и обслуживанием
аккумуляторных батарей.
Оперативный переменный ток применяется на предприятиях, в том числе и
текстильной промышленности, для управления сравнительно простым оборудо-
ванием. Источником оперативного переменного тока служат измерительные транс-
форматоры тока и трансформаторы напряжения, а также трансформаторы
собственных нужд подстанций.
В схемах управления электроприводами и систем электро-
снабжения применяются следующие виды реле:
19
измерительные — реле контроля и защиты (максимального
тока и минимального напряжения), тепловые, газовые. Реле
контроля устанавливают соответствие показателя в цепи задан-
ному значению, а реле защиты отключают цепь при отклоне-
нии показателя от заданного (нормального) значения;
логические — реле времени, которые создают регулируемую
выдержку времени замыкания или размыкания пары контактов
или нескольких пар контактов с различными выдержками вре-
мени для каждой пары (программное реле); реле счета импуль-
сов, контакты которых замыкаются после отсчета заданного числа
импульсов, подаваемых на систему управления;
промежуточные, которые передают команды из одной электри-
ческой цепи в другую, размножают сигналы и увеличивают
их мощность.
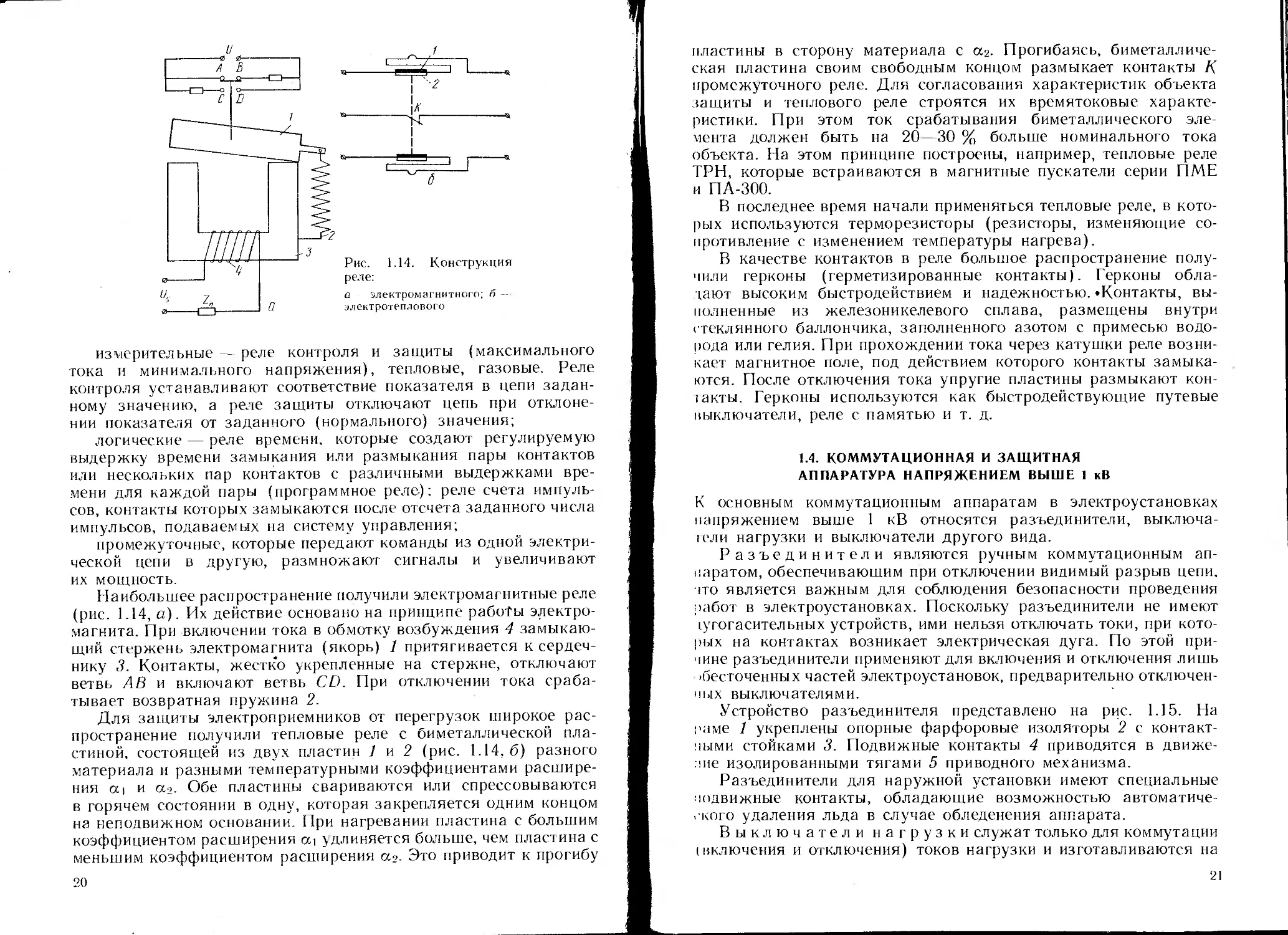
Наибольшее распространение получили электромагнитные реле
(рис. 1.14, а). Их действие основано на принципе работы электро-
магнита. При включении тока в обмотку возбуждения 4 замыкаю-
щий стержень электромагнита (якорь) 1 притягивается к сердеч-
нику 3. Контакты, жестко укрепленные на стержне, отключают
ветвь АВ и включают ветвь CD. При отключении тока сраба-
тывает возвратная пружина 2.
Для защиты электроприемников от перегрузок широкое рас-
пространение получили тепловые реле с биметаллической пла-
стиной, состоящей из двух пластин 1 и 2 (рис. 1.14,6) разного
материала и разными температурными коэффициентами расшире-
ния а, и а-2- Обе пластины свариваются или спрессовываются
в горячем состоянии в одну, которая закрепляется одним концом
на неподвижном основании. При нагревании пластина с большим
коэффициентом расширения оц удлиняется больше, чем пластина с
меньшим коэффициентом расширения а2. Это приводит к прогибу
20
пластины в сторону материала с «2- Прогибаясь, биметалличе-
ская пластина своим свободным концом размыкает контакты А
промежуточного реле. Для согласования характеристик объекта
защиты и теплового реле строятся их времятоковые характе-
ристики. При этом ток срабатывания биметаллического эле-
мента должен быть на 20 30 % больше номинального тока
объекта. На этом принципе построены, например, тепловые реле
ТРИ, которые встраиваются в магнитные пускатели серии ПМЕ
и ПА-300.
В последнее время начали применяться тепловые реле, в кото-
рых используются терморезисторы (резисторы, изменяющие со-
противление с изменением температуры нагрева).
В качестве контактов в реле большое распространение полу-
чили герконы (герметизированные контакты). Герконы обла-
тают высоким быстродействием и надежностью. «Контакты, вы-
полненные из железоникелевого сплава, размещены внутри
стеклянного баллончика, заполненного азотом с примесью водо-
рода или гелия. При прохождении тока через катушки реле возни-
кает магнитное поле, под действием которого контакты замыка-
ются. После отключения тока упругие пластины размыкают кон-
1акты. Герконы используются как быстродействующие путевые
выключатели, реле с памятью и т. д.
1.4. КОММУТАЦИОННАЯ И ЗАЩИТНАЯ
АППАРАТУРА НАПРЯЖЕНИЕМ ВЫШЕ 1 кВ
К основным коммутационным аппаратам в электроустановках
напряжением выше 1 кВ относятся разъединители, выключа-
юли нагрузки и выключатели другого вида.
Разъединители являются ручным коммутационным ап-
паратом, обеспечивающим при отключении видимый разрыв цепи,
по является важным для соблюдения безопасности проведения
работ в электроустановках. Поскольку разъединители не имеют
(угогасительных устройств, ими нельзя отключать токи, при кото-
рых на контактах возникает электрическая дуга. По этой при-
чине разъединители применяют для включения и отключения лишь
юесточенных частей электроустановок, предварительно отключен-
ных выключателями.
Устройство разъединителя представлено на рис. 1.15. На
гаме 1 укреплены опорные фарфоровые изоляторы 2 с контакт-
ными стойками 3. Подвижные контакты 4 приводятся в движе-
ние изолированными тягами 5 приводного механизма.
Разъединители для наружной установки имеют специальные
подвижные контакты, обладающие возможностью автоматиче-
ского удаления льда в случае обледенения аппарата.
Выключатели нагрузки служат только для коммутации
(включения и отключения) токов нагрузки и изготавливаются на
21
Рис. 1.15. Устройство разъединителя
напряжения би 10 кВ с номинальными
токами соответственно на 200 и 400 Л.
Дугогасительные камеры этих выключа-
телей рассчитаны на гашение только
маломощной дуги, возникающей при
отключении токов нагрузки, но не дуги
от возникновения токов короткого замы-
кания.
На рис. 1.16 показано устройство вы-
ключателя нагрузки, основу которого состав-
ляет трехполюсный разъединитель с при-
строенными к нему отключающими пружинами 1 и дугогаситель-
ными камерами 2. Подвижный контакт выключателя выполнен
в виде двухполосного ножа (рабочие контакты 5), который
в рабочем положении охватывает контактную стойку 3. Дугога-
сительный нож 4 закреплен между рабочими контактами и при
включении входит в щель дугогасительной камеры, врубаясь в не-
подвижные дугогасительные контакты. Затем уже при замкнутой
дугогасительной цепи замыкаются и рабочие контакты.
При отключении, наоборот, сначала размыкаются рабочие кон-
такты, а затем дугогасительные, между которыми и возникает
дуга. Высокая скорость расхождения контактов 5 обеспечивается
отключающими пружинами 1. Для защиты от коротких замыка-
ний используются пристроенные предохранители 6.
Включение и отключение выключателей осуществляется при
помощи специальных ручных (например, типов ПРА, ПРБА) или
пружинных (например, типов ППМ-10, ПП-67) приводов, которые
представляют собой механизм, предназначенный для включения
выключателя, удержания его во включенном положении и его от-
ключении. В электросетях напряжением 6 или 10 кВ для управле-
ния выключателями применяются также и электромагнитные при-
воды, например, тина ПЭ-11.
В распределительных устройствах (РУ) на 6—10 кВ широкое
применение находят горшковые маломасляные выключатели, так
как они по своим параметрам лучше всего подходят для под
станций промышленных предприятий. Маломасляные выключа-
тели содержат масло только в дугогасящей камере. Поэтому
они имеют относительно небольшие габариты, что позволяет укреп-
лять их на стенах. Наибольшее распространение на напряжение
10 кВ имеют подвесные выключатели ВМП-10 и горшковые
выключатели ВМГ-10.
На рис. 1.17 схематически представлена конструкция мало-
масляного выключателя. На раме 3 укреплены фарфоровые изо-
22
ляторы 2, на которых смонтированы три (по числу фаз сети)
цилиндрических блока /. Каждый блок содержит контактную
систему 4, дугогасительное устройство (ДУ) 5 и привод кон-
тактов. Контактная система розеточного типа размещена в нижней
части цилиндра. Она имеет неподвижный контакт в виде ро-
зетки, облицованный металлокерамикой для уменьшения обгора-
ния, и подвижный контакт-свечу б, связанный с приводным
механизмом системой изолированных рычагов. ДУ размещено в
средней части цилиндра /. Оно собирается из пластин фибра и
етинакса. В пластинах вырезаны полости и каналы для гаше-
ния дуги. Принцип гашения электрической дуги — газовое дутье.
При расхождении контактов возникающая дуга разлагает масло.
!> цилиндре образуются газы, которые выходят под высоким
давлением через зигзагообразный канал в верхней части головки
блока.
23
Достоинством маломасляных выключателей являются малые
габариты и невысокая стоимость. Недостатком являются их
взрыво- и пожароопасность.
Особенно эффективны элегазовые выключатели.
Свойства элегаза (шестифтористая сера), па которых основывается действие
элегазовых выключателей, приведены ниже:
электрическая прочность в 2,5 раза bi.. чем у воздуха, при давлении
0,2 МПа прочность элегаза приближается к прочности трансформаторного
масла;
высокая удельная объемная теплоемкость (почти в 4 раза выше, чем у
воздуха), позволяющая увеличивать нагрузку токоведущих частей и уменьшить
массу меди в выключателях;
дугогасяшая способность камеры продольного дутья в 5 раз выше, чем камеры
с воздухом;
малая напряженность поля в столбе дуги, вследствие чего резко сокра-
щается износ контактов;
использование инертного газа, не вступающего в реакцию с кислородом
и водородом.
Недостатком элегаза является высокая температура сжижения (при давле-
нии 1,31 МПа из газообразного состояния элегаз переходит в жидкое при темпе-
ратуре 0 °C; при давлении 0,35 МПа при температуре 40''С).
Наиболее эффективно используется дугогасяшая способность
элегаза тогда, когда струя газа с большой скоростью омывает
горящую дугу. Применяются следующие конструктивные испол-
нения:
автопневматическое дутье (принудительное дутье подается
энергией отключающих пружин);
электромагнитное дутье (движение дуги происходит за счет ее
взаимодействия с магнитным полем);
система с двойным давлением (гашение дуги происходит за
счет интенсивного дутья при переходе газа из резервуара с высо-
ким давлением в резервуар с низким давлением).
Принципиальная схема дугогасительного устройства с авто-
пневматическим дутьем показана на рис. 1.18.
При отключении дуга возникает между неподвижным / и
подвижным 2 контактами. Вместе с контактом 2 движутся сопло
3 из изоляционного материала (фторопласта), перегородка 4 и
Рис. 1.18. Дутогасительное устройство элегазового выключателя с авто-
матическим дутьем
24
цилиндр 5; поршень 6 неподвижен. Элегаз сжимается и его по-
ток, проходя через сопло, продольно омывает дугу и обеспечи-
вает условия для эффективного гашения.
Дугогасительное устройство располагается в герметическом
баке с добавлением газа 0,2—0,28 МПа.
1.5. БЕСКОНТАКТНАЯ АППАРАТУРА
Невысокая надежность контактной аппаратуры управления и
ограниченный срок ее службы объясняют необходимость исполь-
зования бесконтактной аппаратуры с полупроводниковыми при-
борами.
Системы управления с бесконтактными электрическими аппа-
ратами отличаются высокой чувствительностью и надежностью.
Достоинством бесконтактных аппаратов является отсутствие у них
размыкающихся контактов, к недостаткам можно отнести наличие
гальванической связи в цепи управления и нагрузки.
Изменение состояния силовой цепи (коммутация) осуществля-
ется силовыми элементами аппарата типа тиристоров. Управление
аппаратами строится на логических элементах. Схемы системы
управления могут составляться из типовых узлов или проектиро-
ваться различными методами логического синтеза. Однако для
серийных установок целесообразно использовать комплектные
бесконтактные устройства, например серии «Логика-М», и про-
граммируемые контроллеры. Основной элементной базой бескон-
тактных устройств служат приборы цифровой электроники, про-
стейшими из которых являются транзисторный ключ и триггер.
Транзисторный (полупроводниковый) ключ. Полупроводнико-
вый ключ (или выключатель) имеет два состояния: запертое
(рис. 1.19, а) и открытое (рис. 1.19,6), или соответственно
выключенное и включенное.
Запертое состояние транзистора р — п — р обеспечивается
положительным потенциалом на базе U,-, , = 0,5—1 В по отноше-
нию к эмиттеру. При этом Ua^Uu, а До ,^ДН; Да -
напряжение эмиттер-коллектора; (7„ - номинальное напряжение
высокого уровня; U6 э напряжение между базой и эмиттером
транзистора; Uu — номинальное напряжение низкого уровня.
Полностью открытое состояние транзистора должно быть при
Дб.э^Да, тогда Да^Д„ при условии, ЧТО ТОК- /fi>/K/P (/к —
ток коллектора; (3 — коэффициент усиления).
Таким образом, ключ обеспечивает либо высокий уровень
состояния схемы, когда он заперт, либо низкий, когда он открыт.
Значения Д„ и Д„ зависят от типов применяемых полупро-
водников.
Триггеры. Триггер является двухпозиционным переключателем
с двумя устойчивыми состояниями, который формирует прямо-
угольные импульсы заданной длительности или неопределенно
25
Рис. 1.19. Схема транзисторного ключа с
пневмати чески м дутьем
Рис. 1.20. Схема симмет-
ричного триггера
долго находится в состоянии 7/в или е„. Триггер объединяет
два каскада со взаимной положительной обратной связью, обес-
печивающей практически мгновенное переключение его состояния
под действием внешнего сигнала управления.
Сх'ема симметричного триггера изображена на, рис. 1.20.
Поясним принцип работы триггера. При подаче управляющего
импульса на вход 5 открывается транзистор ГЛ и потенциал
точки А падает. Падение потенциала точки А вызывает уменьше-
ние тока базы транзистора 4'7’2 и, следовательно, увеличение
потенциала точки В. Повышение потенциала точки В увеличи-
вает ток через резисторы RA и /?2, а значит, и ток базы транзистора
Г71, который его полностью открывает и вводит в режим на-
сыщения. Транзистор VT2 при этом оказывается запертым, а
транзистор ГЛ будет открыт до тех пор, пока внешний поло-
жительный импульс, поданный на вход сброса R, не выведет
его из этого состояния.
«Логические устройства электроавтоматики. В системах автома-
тического управления промышленным 'оборудованием широко
применяются релейно-контактные (дискретные) схемы управле-
ния, построенные на базе логических устройств.
Эти устройства имеют только два состояния: состояние логи-
ческой единицы, которому соответствует, допустим, замкнутое
положение контактов, и состояние логического нуля, кото-
рому соответствует разомкнутое положение контактов.
Простейшим исполнением релейно-контактной схемы является
цепь обмотки реле, в которой состояние обмотки (функция У)
определяется положением ключа в этой цепи V (аргумента).
Если полагать Л' независимой переменной, то
Г-НА’).
Включение элемента Л’ в схеме (рис. 1.21, а) вызывает вклю-
чение обмотки реле, размыкание — отключение обмотки. Такую
логическую связь называют повторением:
У=Л.
Рис. 1.21. Логическое изо-
бражение цепи обмотки
реле
Рис. 1.22. Примеры реа-
лизации логических опе-
раций:
а логическое сложение —
функция «ИЛИ»; б— логи-
ческое умножение — функ-
ция «И»
Включение элемента X в схеме на рис. 1.21, б вызывает
отключение обмотки реле, так как в цепи обмотки теперь на-
ходится размыкающий контакт, и, наоборот, отключение элемен-
та А' приводит к включению обмотки.
Такое сочетание операций называется логическим отрица-
нием — инверсией. Формально инверсия описывается выражением
ТА.
Если состояние Y определяется многими аргументами, то
Y=f (X,. Х2, ..., Х„).
Операция над переменными производится в соответствии с
законами алгебры логики (или алгебры Буля). Основными дей-
ствиями булевой алгебры являются: логическое сложение (дизъ-
юнкция) — функция „ИЛИ"; логическое умножение (конъюнк-
ция) — функция „И“; логическое отрицание (инверсия) —функ-
ция „НЕ“.
Логическое сложение обозначается знаками « + » или \/.
Логическая сумма равна единице, когда одно или несколько
слагаемых равны единице
14-0=1; 1 4-1 ++ 1 = Г 04-0 = 0.
Примером реализации функции „ИЛИ“ являются параллель-
но включенные контакты, замыкающие одну и ту же цепь. До-
статочно замыкания одной пары, чтобы цепь оказалась замкну-
той (рис. 1.22, а).
27
Логическое умножение обозначается знаками • или Д (или
вообще не обозначается).
Логическое произведение равно единице, если все множимые
равны единице:
1 1 -...-1 = 1; 1 -0 = 0; 0-0 = 0.
Примером реализации функции „И“ являются последовательно
включенные контакты в одной цепи. Цепь будет замкнута только
тогда, когда будут замкнуты все контакты этой цепи (рис. 1.22, б).
Логическое отрицание (инверсия) обозначается чертой над ар-
гументом.
Логическое отрицание равно величине, обратной данной. Ин-
версия единицы будет равна нулю:
0=1; Т=0; 0 = 0; Т=1.
Примером реализации функции „НЕ“ является размыкание
размыкающих контактов при включении обмотки реле (см.
рис. 1.21,6).
Основные законы алгебры Буля:
переместительный
аb = bст, ab = ba;
сочетательный
ф-с = а-|- (6-|-с); (ab) с = а(Ьс) -,
распределительный
а(Ь -ф с) =ab +ас; а -\-Ьс= (аф-с);
закон отрицания
a-{-b = ab\ ab= а-]-Ь.
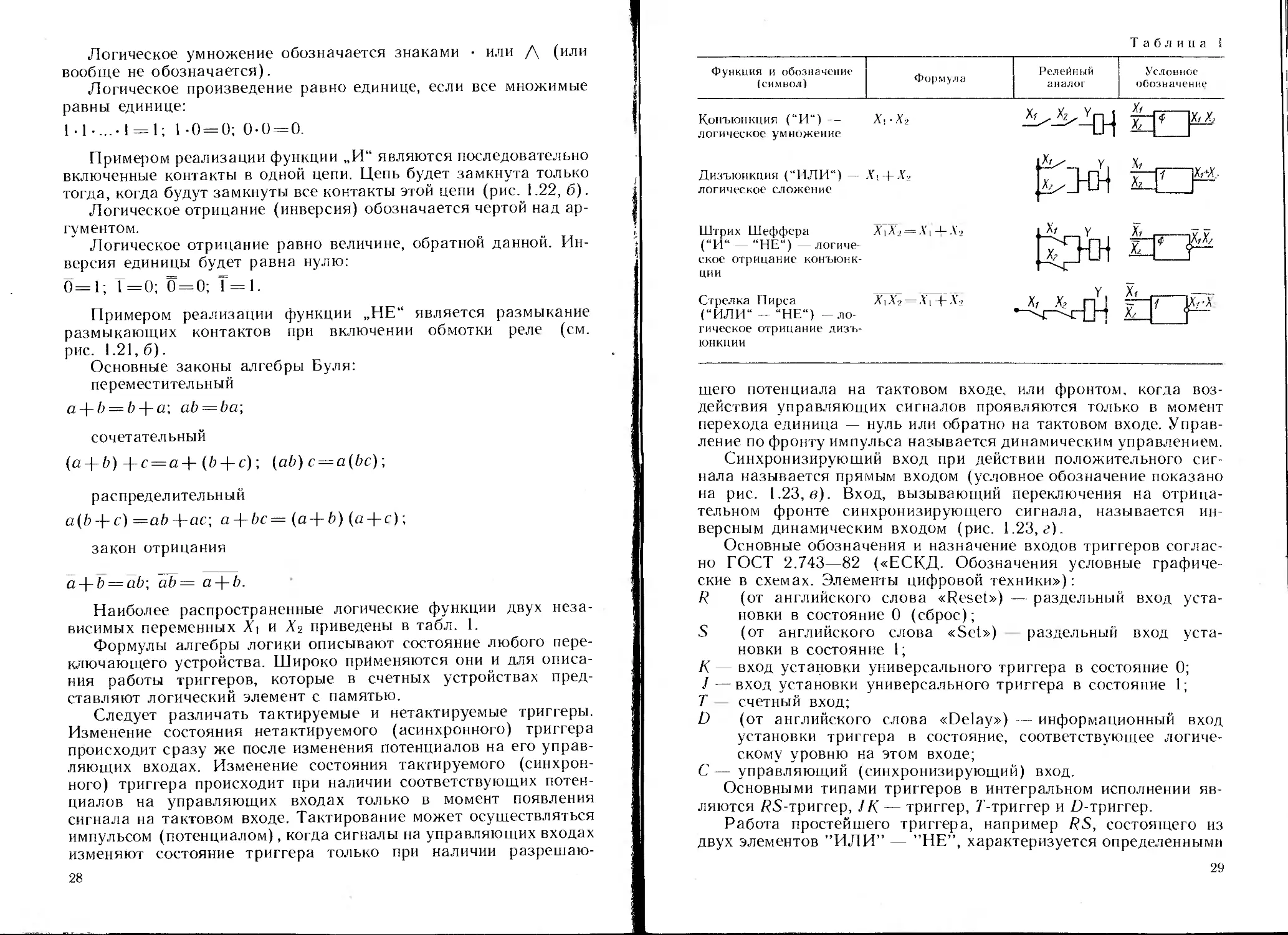
Наиболее распространенные логические функции двух неза-
висимых переменных Х, и Х2 приведены в табл. 1.
Формулы алгебры логики описывают состояние любого пере-
ключающего устройства. Широко применяются они и для описа-
ния работы триггеров, которые в счетных устройствах пред-
ставляют логический элемент с памятью.
Следует различать тактируемые и нетактируемые триггеры.
Изменение состояния нетактируемого (асинхронного) триггера
происходит сразу же после изменения потенциалов на его управ-
ляющих входах. Изменение состояния тактируемого (синхрон-
ного) триггера происходит при наличии соответствующих потен-
циалов на управляющих входах только в момент появления
сигнала на тактовом входе. Тактирование может осуществляться
импульсом (потенциалом), когда сигналы на управляющих входах
изменяют состояние триггера только при наличии разрешаю-
28
Таблица 1
Функция и обозначение (символ) Формула Релейн ни аналог Условное обозначение
Конъюнкция (“И") -- А.-А':> Y[~| 1 ~Х~ логическое умножение LJ] —— 1 7, X/
х,х,
Дизъюнкция (“ИЛИ") — Л'.-|-АД , 1 ГЦ т— логическое сложение , ГЕГ] £1— Xi+X_-
Штрих Шеффера А'|А’? = A',-J-А-> X/ у Д (“И“ — “НЕ“) — логиче- ~'"ГТД“Ъ| скос отрицание конъюнк- , Д- Г~1—Г| —— ции Y у7 р
Стрелка Пирса Х\А-2^Лi —Л*> X? X? 1—I 1 ~— (“ИЛИ“ - “НЕ") -—.по- 1 J ХГА
гическое отрицание дизъ- юнкции
щего потенциала на тактовом входе, или фронтом, когда воз-
действия управляющих сигналов проявляются только в момент
перехода единица — нуль или обратно на тактовом входе. Управ-
ление по фронту импульса называется динамическим управлением.
Синхронизирующий вход при действии положительного сиг
нала называется прямым входом (условное обозначение показано
на рис. 1.23, в). Вход, вызывающий переключения на отрица-
тельном фронте синхронизирующего сигнала, называется ин-
версным динамическим входом (рис. 1.23, г).
Основные обозначения и назначение входов триггеров соглас-
но ГОСТ 2.743—82 («ЕСКД. Обозначения условные графиче-
ские в схемах. Элементы цифровой техники»):
R (от английского слова «Reset») — раздельный вход уста-
новки в состояние 0 (сброс);
S (от английского слова «Set») раздельный вход уста-
новки в состояние 1;
К — вход установки универсального триггера в состояние 0;
J — вход установки универсального триггера в состояние 1;
Т счетный вход;
D (от английского слова «Delay») — информационный вход
установки триггера в состояние, соответствующее логиче-
скому уровню на этом входе;
С— управляющий (синхронизирующий) вход.
Основными типами триггеров в интегральном исполнении яв-
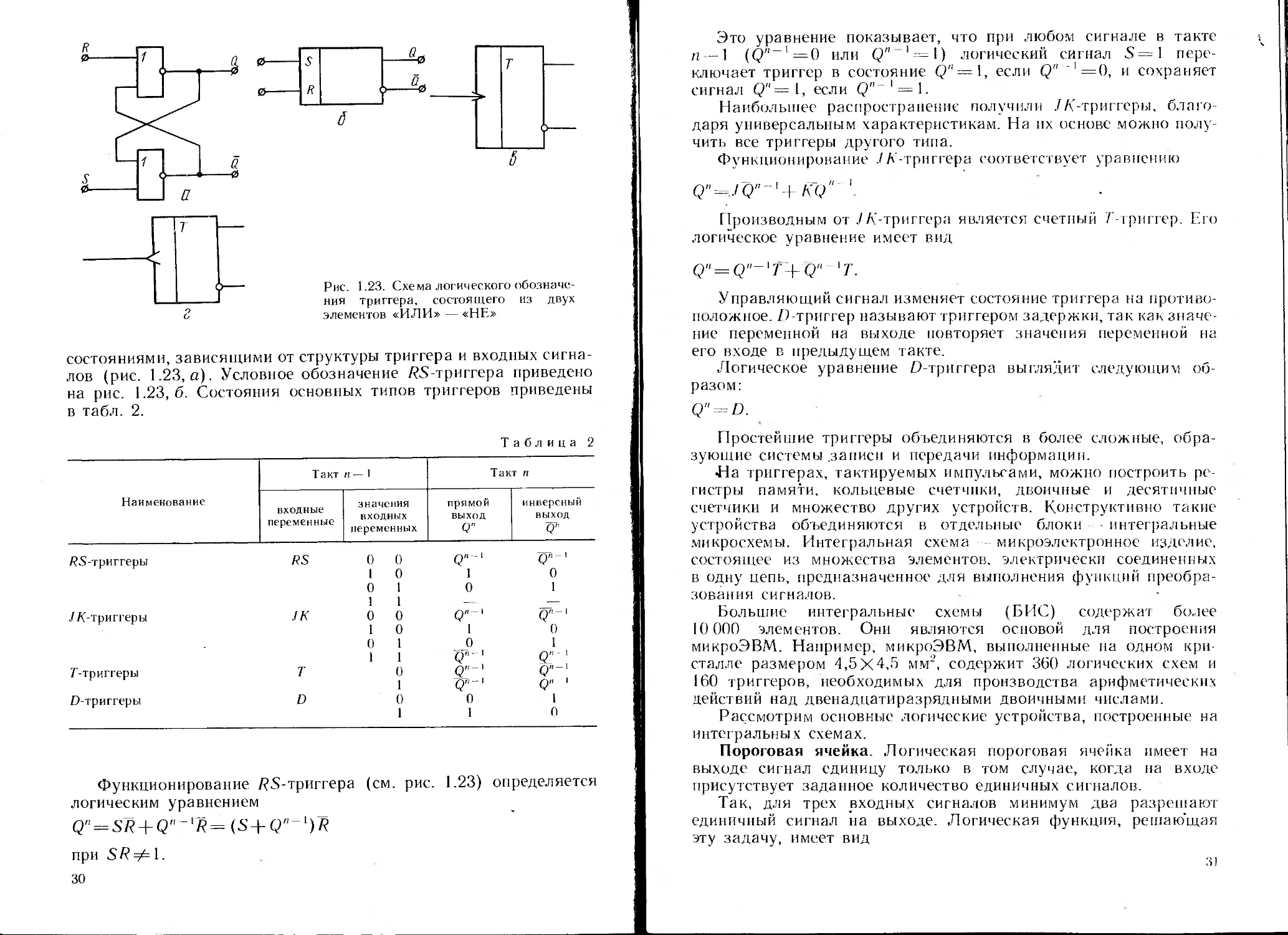
ляются RS-триггер, 1К — триггер, 7-триггер и О-триггер.
Работа простейшего триггера, например RS, состоящего из
двух элементов ’’ИЛИ” — ”НЕ”, характеризуется определенными
29
состояниями, зависящими от структуры триггера и входных сигна-
лов (рис. (.23, а). Условное обозначение /^-триггера приведено
на рис. 1.23,6. Состояния основных типов триггеров приведены
в табл. 2.
Таблица 2
Наименование Такт п — 1 Такт я
входные переменные значения входных переменных прЯМОЙ ВЫХОД Q" инверсный выход Qn
/?Х-триггеры DS 0 0 Q"' (/-'
1 0 1 0
0 1 0 1
1 1 — —
//(-триггеры JK 0 0 Q"-' Q"-'
1 0 1 0
0 1 0 1
1 1 Q" Q" 1
/-триггеры Т 0 Q"-1
1 Q""1 Q" 1
D-триггеры D 0 0 1
1 1 0
Функционирование /?5-триггера (см. рис. 1.23) определяется
логическим уравнением
Q" = SR + Qn lR = (S+Qn~')R
при SR=^ 1.
зо
Это уравнение показывает, что при любом сигнале в такте
и -1 (Q" ’=0 или Q" ' = !) логический сигнал S--1 пере-
ключает триггер в состояние Q" = l, если Q" '=(), и сохраняет
сигнал Q"= 1, если Q"~ 1 = 1.
Наибольшее распространение получили /Л'-триггсры, благо-
даря универсальным характеристикам. На их основе можно полу-
чить все триггеры другого типа.
Функционирование ./Л-триггера соответствует уравнению
Q"-=.JQ" ' + KQ" '
Производным от ./Л'-триггера является счетный Г-триггер. Его
логическое уравнение имеет вид
Управляющий сигнал изменяет состояние триггера на противо-
положное. /7-триггер называют триггером задержки, так как значе-
ние переменной на выходе повторяет значения переменной на
его входе в предыдущем такте.
Логическое уравнение /7-триггера выглядит следующим об-
разом:
Q” = D.
Простейшие триггеры объединяются в более сложные, обра-
зующие системы .записи и передачи информации.
На триггерах, тактируемых импульсами, можно построить ре-
гистры памяти, кольцевые счетчики, двоичные и десятичные
счетчики и множество других устройств. Конструктивно такие
устройства объединяются в отдельные блоки интегральные
микросхемы. Интегральная схема - микроэлектронное изделие,
состоящее из множества элементов, электрически соединенных
в одну цепь, предназначенное для выполнения функций преобра-
зования сигналов.
Большие интегральные схемы (БИС) содержат более
10 000 элементов. Они являются основой для построения
микроЭВМ. Например, микроЭВМ, выполненные на одном кри-
сталле размером 4,5X4,5 мм2, содержит 360 логических схем и
160 триггеров, необходимых для производства арифметических
действий над двенадцати разрядными двоичными числами.
Рассмотрим основные логические устройства, построенные на
интегральных схемах.
Пороговая ячейка. Логическая пороговая ячейка имеет на
выходе сигнал единицу только в том случае, когда на входе
присутствует заданное количество единичных сигналов.
Так, для трех входных сигналов минимум два разрешают
единичный сигнал на выходе. Логическая функция, решающая
эту задачу, имеет вид
Рис 1.24. Схема пороговой ячейки
Рис. 1.25. Схема полусумматора
Рис. 1.26. Схема сумматора
F = X|X2 + X2X.< + X3X|,
где Л'|, Л.., А'з - входные сигналы.
Схема, реализующая пороговую ячейку, представлена на
рис. 1.24.
Полусумматоры. Полусумматор (HS) вырабатывает сигналы
суммы (S) и переноса (Р) при сложении двух двоичных чисел
(а и Ь). Сумма будет равна единице, когда одно слагаемое
равно единице, а другое нулю. Если оба слагаемых равны еди-
нице, то сигнал переноса равен единице, а сумма равна нулю..
Логическая функция
S=ab -\-ab; Р=аЬ.
На рис. 1.25 приведена схема полусумматора.
Сумматоры. Сумматор в отличие от полусумматора воспри-
нимает три входных сигнала: два слагаемых и сигнал пере-
носа с предыдущего разряда (рис. 1.26).
Сумматор может быть построен на двух полусумматорах
и одной ячейке «ИЛИ» (рис. 1.26). Первый полусумматор,
суммируя числа а, и 6„ вырабатывает промежуточные сигналы
S' и Р'. Второй полусумматор складывает сумму S' и перенос
с предыдущего разряда Р,_ ( и образует на выходе сигналы суммы
S, и второго промежуточного переноса Р,"_ Общий сигнал пере
носа является суммой сигналов Р' и Р''. Схемы сумматоров
могут быть построены и по другому принципу.
Регистры. Регистры предназначены для хранения одного
многоразрядного числа, представленного в двоичной системе
счисления. Для хранения «-разрядного двоичного числа регистр
должен содержать п триггеров.
32
Рис. 1.27. Схемы регистров:
а — четырехразрядный регистр памяти на базе S/? триггера;
б — регистр сдвига, построенный на /^-триггерах
Различают два вида регистров: параллельные и последо-
вательные. В параллельном регистре предназначенное для хране-
ния число подается одновременно всеми разрядами, т. е. в парал-
лельной форме (параллельный код). В последовательном реги-
стре ввод числа производится путем последовательной во времени
подачи цифр, т. е. в последовательной форме (последователь-
ный код). Последовательные регистры могут выполнять и другие
функции, например, сдвигать хранимое в регистре число на опре-
деленное число разрядов влево или вправо. Регистры памяти
целесообразно строить на D-триггерах.
На рис. 1.27, а представлена схема четырехразрядного реги-
стра памяти. Он состоит из четырех тактируемых потенциалом
D-триггеров. Если на тактовые входы триггеров подан потен-
циал С — 1, то информация со входов D/— /^.устанавливает
триггеры Т1 — Т4 в соответствующие состояния. Если на тактовых
входах С=0, триггеры хранят информацию независимо от того,
какие потенциалы имеются на входах D1 —D4.
Регистры памяти представляют собой простейшие оперативные
запоминающие устройства (ОЗУ).
Регистры сдвига преобразуют последовательный код в парал-
лельный и обратно. Они также строятся на D-триггерах. На
рис. 1.27,6 показан регистр сдвига, построенный на D-триггерах,
тактируемых фронтом. При воздействии тактового импульса,
записанная в регистре информация перемещается на один раз-
ряд вправо (или влево), так как выход Q предыдущего раз-
ряда присоединен ко входу D последующего. Каждый тактовый
импульс устанавливает последующий триггер в состояние, в кото-
ром до этого находился предыдущий. Информация в виде после-
довательного кода подается на вход D первого разряда. Запись
2 А. М. Ланген, В. В. Красник
33
параллельного кода может быть произведена через тактируемые
установочные входы Q1 — Q4. С выхода Q4 снимается последо-
вательный выходной код.
Счетчики. Счетчик — цифровое устройство, осуществляющее
счег числа появления на входе определенного логического уровня
(обычно числа переходов от логического нуля к уровню логиче-
ской единицы). Если для регистрации двоичного числа в счетчике
используется п триггеров, то максимальное значение числа, до
которого может вестись счет N = 2"—1. Так, при /?=3 (V = 7.
В суммирующем двоичном счетчике поступление на вход
очередного импульса увеличивает на единицу хранимое в нем
число.
Суммирование числа с единицей производится по обычным
правилам выполнения операции сложения в двоичной системе
счисления. Например,
переносы 11
исходное число 10110 10011
результат Д- If I
10 111 10 100
Наряду с операцией счета, т. е. сложения импульсов, счет-
чики могут выполнять и операции вычитания и запоминания
числа импульсов, поступающих на их счетный вход.
Счетчики делятся по распределению отсчета во времени на
асинхронные с последовательной передачей сигнала от предыду-
щего триггера к последующему, и синхронные с одновременным
срабатыванием всех триггеров. По виду операции они делятся на
реверсивные, обеспечивающие только сложение или только вычи-
тание сигналов, и реверсивные, обеспечивающие как сложение,
так и вычитание входных сигналов. По коэффициенту пере-
счета они делятся на двоичные, десятичные, двоично-десятич-
ные и др.
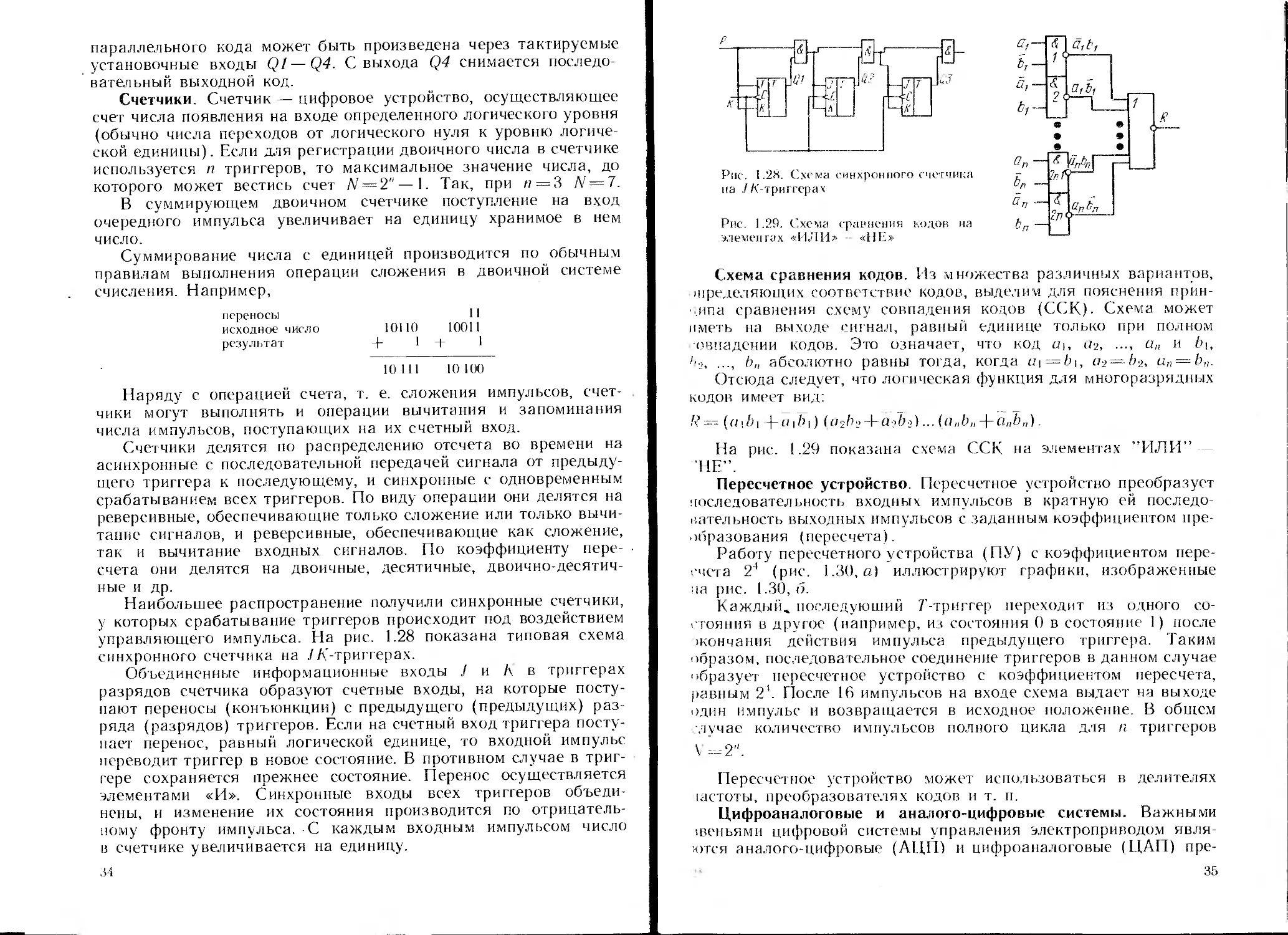
Наибольшее распространение получили синхронные счетчики,
у которых срабатывание триггеров происходит под воздействием
управляющего импульса. На рис. 1.28 показана типовая схема
синхронного счетчика на /Л'-триггерах.
Объединенные информационные входы J и Л в триггерах
разрядов счетчика образуют счетные входы, на которые посту-
пают переносы (конъюнкции) с предыдущего (предыдущих) раз-
ряда (разрядов) триггеров. Если на счетный вход триггера посту-
пает перенос, равный логической единице, то входной импульс
переводит триггер в новое состояние. В противном случае в триг-
гере сохраняется прежнее состояние. Перенос осуществляется
элементами «И». Синхронные входы всех триггеров объеди-
нены, и изменение их состояния производится по отрицатель-
ному фронту импульса. С каждым входным импульсом число
в счетчике увеличивается на единицу.
34
Рис. 1.28. Схема синхронного счетчика
на /Л'-триггерах
Рис. 1.29. Схема сравнения кодов на
элементах «ПЛИ» «НЕ»
Схема сравнения кодов. Из множества различных вариантов,
шределяющих соответствие кодов, выделим для пояснения прин-
ципа сравнения схему совпадения кодов (ССК). Схема может
иметь на выходе сигнал, равный единице только при полном
(впадении кодов. Это означает, что код щ, </2, ..., а„ и /ц,
!--2, ..., Ь„ абсолютно равны тогда, когда Ц|==/.ц, о2 = /?2, а„ = Ь„.
Отсюда следует, что логическая функция для многоразрядных
кодов имеет вид:
R=-~ 1(цЬ\ фО|/м)
На рис. 1.29 показана схема ССК на элементах ’’ИЛИ” —
НЕ”.
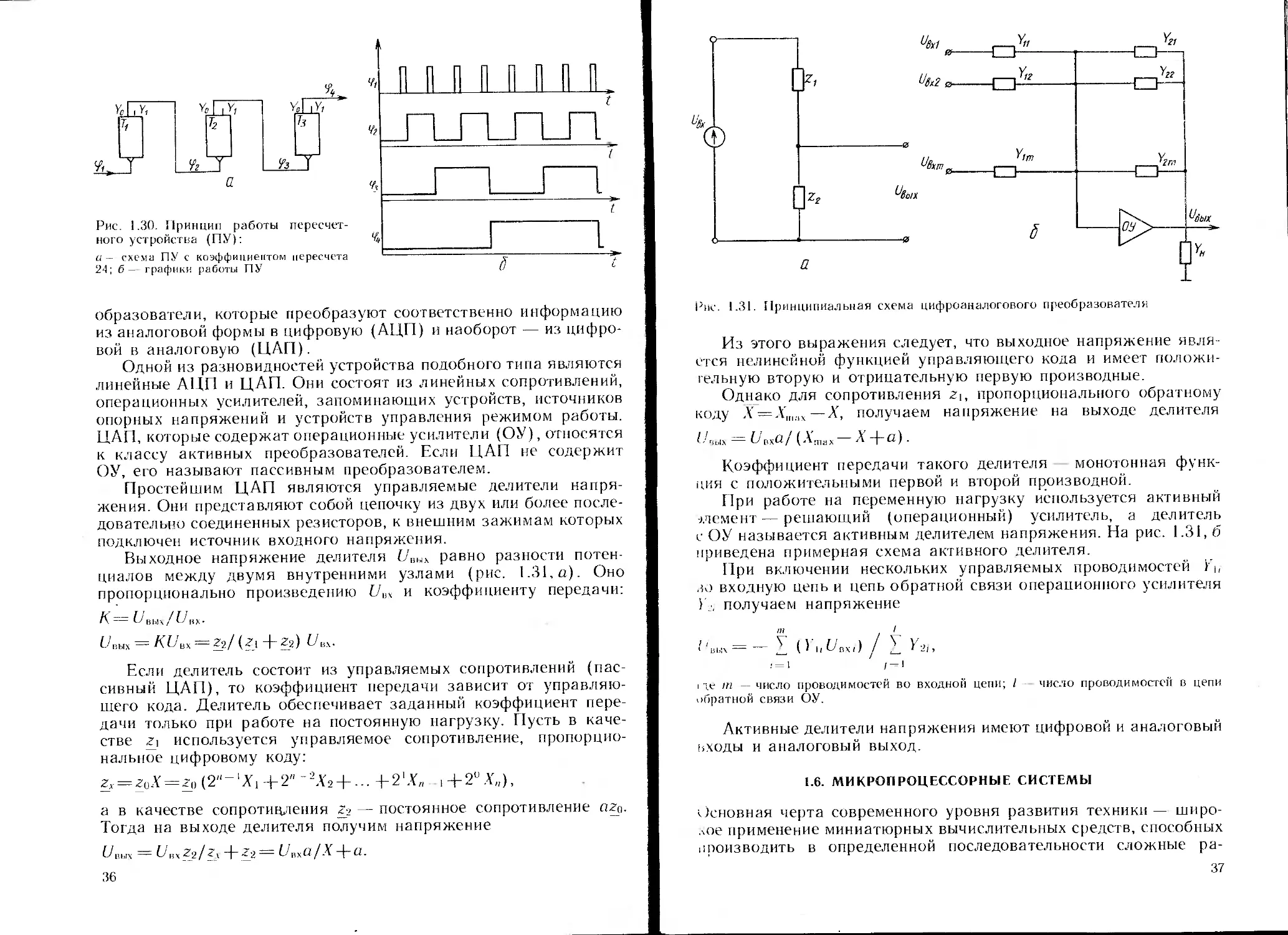
Пересчетное устройство. Пересчетное устройство преобразует
последовательность входных импульсов в кратную ей последо-
вательность выходных импульсов с заданным коэффициентом пре-
образования (пересчета).
Работу пересчетного устройства (ПУ) с коэффициентом пере-
счета 24 (рис. 1.30,0) иллюстрируют графики, изображенные
на рис. 1.30, (5.
Каждый, последующий /’-триггер переходит из одного со-
стояния в другое (например, из состояния 0 в состояние 1) после
жончания действия импульса предыдущего триггера. Таким
образом, последовательное соединение триггеров в данном случае
образует пересчетное устройство с коэффициентом пересчета,
равным 2*. После 16 импульсов на входе схема выдает на выходе
один импульс и возвращается в исходное положение. В общем
лучае количество импульсов полного цикла для п триггеров
V —-2".
Пересчетное устройство может использоваться в делителях
щетоты, преобразователях кодов и т. и.
Цифроаналоговые и аналого-цифровые системы. Важными
щеньями цифровой системы управления электроприводом явля-
ются аналого-цифровые (АЦП) и цифроаналоговые (ЦАП) пре-
35
Рис. 1.30. Принцип работы пересчет-
ного устройства (ПУ):
а — схема ПУ с коэффициентом пересчета
24; б— графики работы ПУ
образователи, которые преобразуют соответственно информацию
из аналоговой формы в цифровую (АЦП) и наоборот — из цифро-
вой в аналоговую (ЦАП).
Одной из разновидностей устройства подобного типа являются
линейные АЦП и ЦАП. Они состоят из линейных сопротивлений,
операционных усилителей, запоминающих устройств, источников
опорных напряжений и устройств управления режимом работы.
ЦАП, которые содержат операционные усилители (ОУ), относятся
к классу активных преобразователей. Если ЦАП не содержит
ОУ, его называют пассивным преобразователем.
Простейшим ЦАП являются управляемые делители напря-
жения. Они представляют собой цепочку из двух или более после-
довательно соединенных резисторов, к внешним зажимам которых
подключен источник входного напряжения.
Выходное напряжение делителя Ц„ых равно разности потен-
циалов между двумя внутренними узлами (рис. 1.31, а). Оно
пропорционально произведению Um и коэффициенту передачи:
К-— E|ih!4/£7кх.
ПВь,х = АИвх = (г, + г2) Пвх.
Если делитель состоит из управляемых сопротивлений (пас-
сивный ЦАП), то коэффициент передачи зависит от управляю-
щего кода. Делитель обеспечивает заданный коэффициент пере-
дачи только при работе на постоянную нагрузку. Пусть в каче-
стве г, используется управляемое сопротивление, пропорцио-
нальное цифровому коду:
zA. = ZoA' = zp(2"-|X1+2"-2X24-... +2Х 4-2°.¥„),
а в качестве сопротивления — постоянное сопротивление nz0.
Тогда на выходе делителя получим напряжение
Двых == ПвхД?/^у “Е £2 ==- Ч-О.
36
рис. 1.31. Принципиальная схема цифроаналогового преобразователя
Из этого выражения следует, что выходное напряжение явля-
ется нелинейной функцией управляющего кода и имеет положи-
тельную вторую и отрицательную первую производные.
Однако для сопротивления Z\, пропорционального обратному
коду А=А„,.,Х—X, получаем напряжение на выходе делителя
рых === ОрхП/ (А:пах А ~|- а).
Коэффициент передачи такого делителя монотонная функ-
ция с положительными первой и второй производной.
При работе на переменную нагрузку используется активный
элемент—решающий (операционный) усилитель, а делитель
с ОУ называется активным делителем напряжения. На рис. 1.31, б
приведена примерная схема активного делителя.
При включении нескольких управляемых проводимостей щ,
во входную цепь и цепь обратной связи операционного усилителя
1 л получаем напряжение
т I
У ()„(/„,) / У y2i,
:=i I- I
। те in — число проводимостей во входной цепи; I число проводимостей в цепи
обратной связи ОУ.
Активные делители напряжения имеют цифровой и аналоговый
входы и аналоговый выход.
1.6. МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ
Основная черта современного уровня развития техники — широ-
лое применение миниатюрных вычислительных средств, способных
производить в определенной последовательности сложные ра-
37
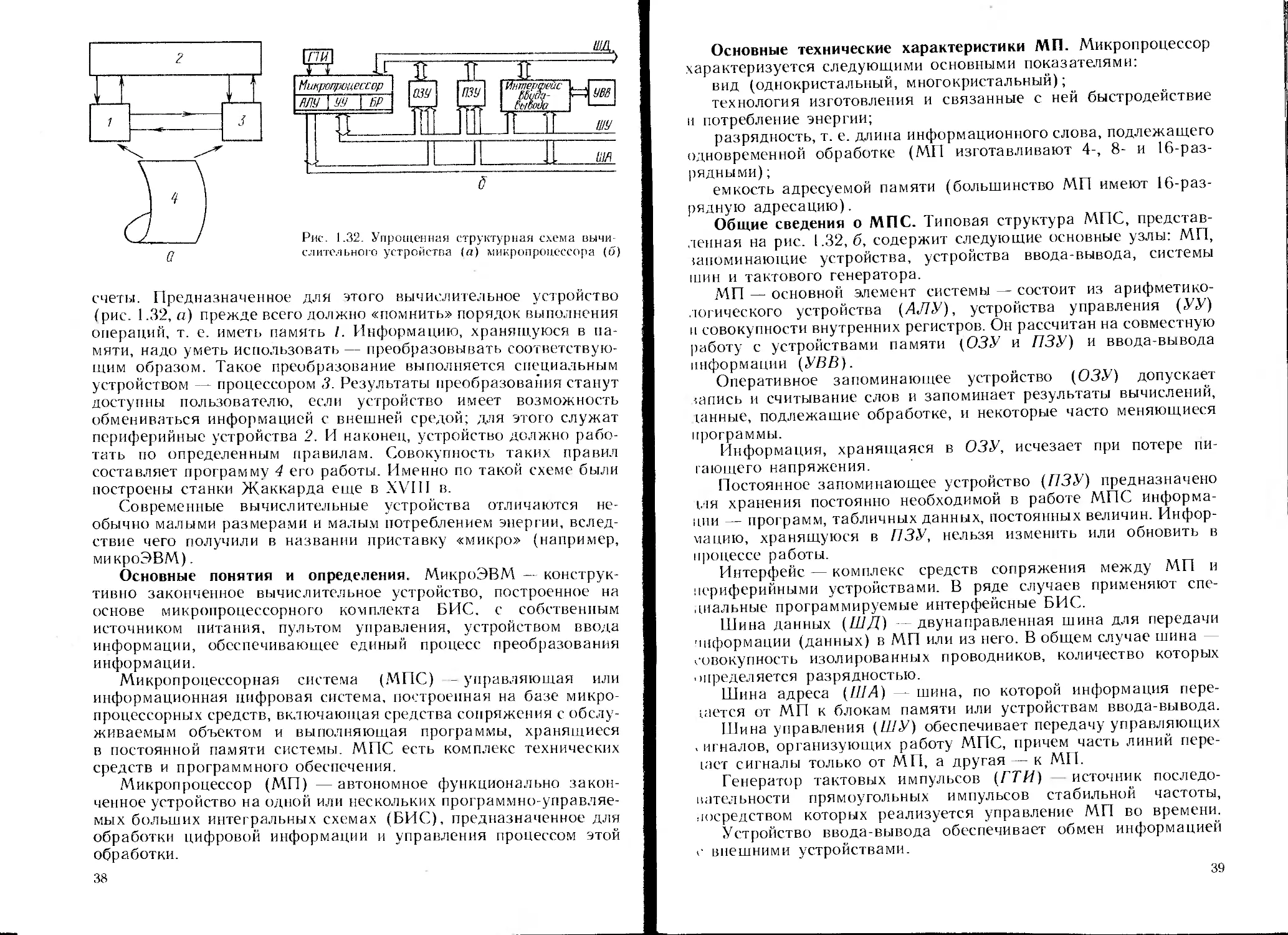
счеты. Предназначенное для этого вычислительное устройство
(рис. 1.32, а) прежде всего должно «помнить» порядок выполнения
операций, т. е. иметь память /. Информацию, хранящуюся в па-
мяти, надо уметь использовать — преобразовывать соответствую-
щим образом. Такое преобразование выполняется специальным
устройством — процессором 3. Результаты преобразования станут
доступны пользователю, если устройство имеет возможность
обмениваться информацией с внешней средой; для этого служат
периферийные устройства 2. И наконец, устройство должно рабо-
тать по определенным правилам. Совокупность таких правил
составляет программу 4 его работы. Именно по такой схеме были
построены станки Жаккарда еще в .XVIII в.
Современные вычислительные устройства отличаются не-
обычно малыми размерами и малым потреблением энергии, вслед-
ствие чего получили в названии приставку «микро» (например,
микроЭВМ).
Основные понятия и определения. МикроЭВМ — конструк-
тивно законченное вычислительное устройство, построенное на
основе микропроцессорного комплекта БИС. с собственным
источником питания, пультом управления, устройством ввода
информации, обеспечивающее единый процесс преобразования
информации.
Микропроцессорная система (.МПС) - управляющая или
информационная цифровая система, построенная на базе микро-
процессорных средств, включающая средства сопряжения с обслу-
живаемым объектом и выполняющая программы, хранящиеся
в постоянной памяти системы. МПС есть комплекс технических
средств и программного обеспечения.
Микропроцессор (МП) —автономное функционально закон-
ченное устройство на одной или нескольких программно-управляе-
мых больших интегральных схемах (БИС), предназначенное для
обработки цифровой информации и управления процессом этой
обработки.
38
Основные технические характеристики МП. Микропроцессор
характеризуется следующими основными показателями:
вид (однокристальный, многокристальный);
технология изготовления и связанные с ней быстродействие
и потребление энергии;
разрядность, т. е. длина информационного слова, подлежащего
одновременной обработке (МП изготавливают 4-, 8- и 16-раз-
рядными);
емкость адресуемой памяти (большинство МП имеют 16-раз-
рядную адресацию).
Общие сведения о МПС. Типовая структура МПС, представ-
ленная на рис. 1.32, б, содержит следующие основные узлы: МП,
запоминающие устройства, устройства ввода-вывода, системы
шин и тактового генератора.
МП — основной элемент системы — состоит из арифметико-
логического устройства (АЛУ), устройства управления (УУ)
и совокупности внутренних регистров. Он рассчитан на совместную
работу с устройствами памяти (ОЗУ и ПЗУ) и ввода-вывода
информации (УВВ}.
Оперативное запоминающее устройство (ОЗУ) допускает
запись и считывание слов и запоминает результаты вычислений,
щнные, подлежащие обработке, и некоторые часто меняющиеся
программы.
Информация, хранящаяся в ОЗУ, исчезает при потере пи-
тающего напряжения.
Постоянное запоминающее устройство (ПЗУ) предназначено
ня хранения постоянно необходимой в работе МПС информа-
ции — программ, табличных данных, постоянных величин. Инфор-
мацию, хранящуюся в ПЗУ, нельзя изменить или обновить в
процессе работы.
Интерфейс — комплекс средств сопряжения между МП и
периферийными устройствами. В ряде случаев применяют спе-
циальные программируемые интерфейсные БИС.
Шина данных (ШД) —двунаправленная шина для передачи
информации (данных) в МП или из него. В общем случае шина -
совокупность изолированных проводников, количество которых
определяется разрядностью.
Шина адреса (ША) — шина, по которой информация пере-
шется от МП к блокам памяти или устройствам ввода-вывода.
Шина управления (ШУ) обеспечивает передачу управляющих
. игналов, организующих работу МПС, причем часть линий пере-
щет сигналы только от МП, а другая — к МП.
Генератор тактовых импульсов (ГТИ} — источник последо-
вательности прямоугольных импульсов стабильной частоты,
посредством которых реализуется управление МП во времени.
Устройство ввода-вывода обеспечивает обмен информацией
с внешними устройствами.
39
Микропроцессор. Основными узлами МП. как отмечено выше,
являются арифметико-логическое устройство (АЛУ), блок ре-
гистров (БР) и устройство управления (УУ).
Арифметико-логическое устройство (АЛУ) совершает ариф-
метические операции сложения и вычитания и сдвиговые опе-
рации, логические операции сложения («ИЛИ») и умноже-
ния («И»), исключающие «ИЛИ», инверсию и пр.
Устройство управления (УУ) координирует работу всех внут-
ренних узлов МП и синхронизирует прием и передачу потоков
информации. По команде очередной сигнал извлекается из ре-
гистра команд, определяются необходимые действия с данными,
а затем генерируется последовательность действий для выполне-
ния очередной команды. Блок регистров имеет регистры спе-
циального и многоцелевого назначения. К специальным регистрам
относятся аккумулятор, счетчик команд, регистры признака и
команд и др. Многоцелевые регистры — регистры общего на-
значения (РОН) — используются программистом по его усмотре-
нию. Регистры общего назначения часто называются сверхопе-
ративным запоминающим устройством (СОЗУ), поскольку из
них могут поступать операнды непосредственно в АЛУ. В РОН
хранятся информационные слова, подлежащие обработке в АЛУ,
результаты обработки информации в АЛУ. Эти регистры допус-
кают хранение, считывание и запись информации.
Микропроцессор выполняет в определенной последователь-
ности и определенных временных интервалах команды. Времен-
ные интервалы делятся по их длительности на такты, машинные
циклы. Такт МП задается периодом следования синхроимпульсов
от ГТИ и имеет наименьшую длительность.
Машинный цикл (МЦ) время выполнения одной операции
обращения к памяти или устройству ввода-вывода. Каждый МЦ
состоит из 3—5 тактов.
1.7. ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
Контроль и регистрацию множества неэлектрических величин,
играющих важную роль в различных технологических процес-
сах, удобно производить посредством электрических приборов.
Необходимым элементом таких приборов является измеритель-
ный преобразователь — устройство, преобразующее контроли-
руемую физическую величину в другую физическую (чаще всего
электрическую) величину, удобную для передачи на большие
расстояния. В целях обеспечения минимальной ошибки преобра-
зования измерительные преобразователи (датчики) должны
отвечать ряду требований:
воспроизводимости и стабильности заданных характеристик
преобразователя;
40
максимальному приближению к линейной зависимости выход-
ной и входной величин (линейность характеристик облегчает
унификацию выходного сигнала для использования совместно
с цифровыми системами);
минимальному времени переходного процесса, неизбежного
в приборах, обладающих элементами, запасающими энергию
(подвижные детали, конденсаторы, катушки индуктивности и др.).
Параметрические измерительные преобразователи. Парамет-
рические преобразователи весьма разнообразны по устройству
и областям применения. Выходной величиной у них является, как
правило, один из параметров электрической цепи (R. L, С).
Использование пассивных элементов для измерения вызывает
необходимость в дополнительном источнике питания. Рассмот-
рим преобразователи в порядке перечисленных параметров.
Реостатные преобразователи (R) в простейшем
случае представляют собой реостат (рис. 1.33), положение движка
которого является функцией измеряемой величины. Каркасы
преобразователей выполняются из диэлектриков (пластмассы,
керамики), проволока для обмотки — из константана или ни-
хрома. Измерение сопротивлений производится мостовыми
схемами.
Достоинствами реостатных преобразователей являются вы-
сокая точность, простота конструкции.
Недостатками — наличие скользящего контакта, потребность
в специальном приводе для перемещения движка.
Тензочувствительные преобразователи
Иензорезисторы) имеют вид, представленный на рис. 1.34.
Измерение сопротивления проводника под действием меха-
нического напряжения и деформации называется тензоэффектом.
1 )тносительное изменение сопротивления проводника
\R/R = SrM/l,
.teSr- коэффициент тензочувствительносги; \1/1 — относительная деформация
|р< (ВОЛОКИ
Тензорезпсторы изготовляются обычно из константановой
проволоки 1 диаметром 0,02—0,05 мм (коэффициент тензочувст-
чительности ST = 1,9...2,1). Сопротивление константана мало
швисит от температуры, что выгодно отличает его от других ма-
щрналов, так как изменение сопротивления от температуры
нередко соизмеримо с изменением сопротивления от деформации.
Подложкой 2 служит тонкая бумага (0,02—0,05 мм), пленка
|.эка или клея; 3 — контакты.
Связующими между проволоками и подложкой служит клей
ЬФ-2, БФ-4 и др.
При наложении преобразователя на детали продольная ось
проволочной решетки должна совпадать с направлением дефор-
мации.
41
Рис. 1.34. Тензорезнстор
Рис. 1.33. Реостатный
преобразователь
Рис. 1.35. Схемы преобразователей:
а — индуктивных, б емкостных; в — термо-
электрических; г индукционных
Характеристики тензорезисторов и методы их определения
регламентированы ГОСТ 21616—76 («Тензорезисторы. Общие
технические условия»). Погрешность тензорезисторов находится
в пределах ± I %.
Тензорезисторы просты по конструкции, имеют малые габа-
ритные размеры и линейную функцию преобразования, однако
чувствительность их недостаточна.
5 Индуктивные преобразователи (L) также
относятся к параметрическим.
Индуктивность и взаимоиндуктивность катушек являются
функциями числа их витков и магнитного сопротивления маг-
нитопровода, которое в свою очередь является функцией его
геометрии и магнитного состояния. Следовательно, изменением
сечения магнитопровода S или длины воздушного зазора можно
изменять магнитное сопротивление R,,. а значит, индуктивность
или взаимоиндуктивность. Эта зависимость лежит в основе
принципа действия индуктивного преобразователя. Наиболее
42
простыми являются преобразователи с переменной длиной воз-
душного зазора (рис. 1.35, а) и переменным сечением воздушного
зазора. Первые используются при малых перемещениях (0,01 —
5 мм). Они имеют нелинейную зависимость от зазора, хотя
обладают высокой чувствительностью. Вторые используются для
относительно больших перемещений (до 15 мм), но имеют мень-
шую чувствительность и линейную зависимость
Измерение индуктивности в преобразователях осуществля-
ется, как правило, мостовыми схемами. Основное назначение
таких преобразователей - измерение перемещения, зазоров
и других неэлектрических величин, которые могут быть пре-
образованы в перемещение (давление, момент и т. п.).
Индуктивные преобразователи отличаются значительной мощ-
ностью выходного сигнала, простотой и надежностью в работе.
Недостатками их являются малая полоса пропускаемых частот
вследствие инерционности якоря, обратное влияние электро-
магнита на якорь.
Емкостные преобразователи (С) также являются разно-
видностью параметрических преобразователей.
Емкость плоского конденсатора прямо пропорциональна
шэлсктрической проницаемости tv, площади его пластин S и
обратно пропорциональна расстоянию d между ними.
Следовательно, изменением S и d можно изменять емкость
конденсатора.
Наиболее простыми являются преобразователи с изменяю-
щимся зазором d (рис. 1.35,6) и преобразователи с переменной
активной площадью пластин. Первые используются для изме-
рения малых перемещений (до 1 мм). Они имеют нелинейную
функцию преобразования, обладают высокой чувствительностью.
Вторые используются для измерения больших перемещений
(более 1 мм). В них легко реализовать линейную функцию пре-
образования путем профилирования пластин, однако чувстви-
(ельность таких преобразователей невысока. Цепи с емкостными
преобразователями питаются токами высокой частоты (десятки
мегагерц).
К достоинствам емкостных преобразователей относятся вы-
сокая чувствительность и малая инерционность, а к недостат-
кам — заметное влияние внешних электрических полей, темпера-
гуры, влажности.
Генераторные измерительные преобразователи. Принципиаль-
ным отличием генераторных преобразователей от параметрических
является то обстоятельство, что в них используется активный
элемент (т. е. источник ЭДС или тока). Таким образом, они не
нуждаются в дополнительном источнике питания.
43
Термоэлектрические преобразователи осно-
ваны на известном термоэлектрическом эффекте возникновения
ЭДС в точках соединения двух проводников из разных материа-
лов при разности температур этих точек.
Прибор, основанный на термодинамическом эффекте, назы-
вается термопарой. Схема включения термопары представлена
на рис. 1.35, в.
Рабочие концы термопары 3 укрепляются в исследуемой
точке тела, свободные концы 1 и 2 присоединяются к электро-
измерительному прибору. В целях однозначности показаний
термопары температура свободных концов должна быть по-
стоянной. При градуировке термопары эта температура должна
быть равна О °C.
Достоинствами термоэлектрических преобразователей можно
считать простоту и надежность конструкции, возможность изме-
рения в точке исследуемого объекта. Недостатками их являются
относительно высокая инерционность, невысокая точность изме-
рения температур.
Индукционные преобразователи действуют
но принципу электромагнитной индукции. Этот тип преобразо-
вателей позволяет производить различные измерения, характе-
ризующие линейные и угловые перемещения. Действительно,
ЭДС, индуктированная в катушке, пропорциональна скорости
изменения потока, т. е. скорости перемещения объекта (рис. 1.35. г).
Электрическое интегрирование сигнала дает перемещение, а
электрическое дифференцирование определяет ускорение объекта.
Принцип электромагнитной индукции используется в тахогене-
раторах постоянного и переменного тока, в виброметрах и аксе-
лераторах.
К достоинствам индукционных преобразователей относятся
простота и надежность конструкции, высокая чувствительность,
к недостаткам—ограниченный частотный диапазон вследствие
инерционности подвижного элемента преобразователя.
Пьезоэлектрические преобразователи дей-
ствуют с использованием пьезоэлектрического эффекта возбуж-
дения зарядов на поверхности некоторых кристаллов под воз-
действием механических напряжений.
Наиболее ярко выражен пьезоэффект в кристаллах кварца.
Кроме того, кварц обладает высокой механической прочностью,
стабильностью характеристики при изменении температуры среды
и хорошими изоляционными качествами. Эти качества определили
преимущественное использование кварца в преобразователях.
Кварцевые преобразователи имеют нелинейную зависимость
между давлением и зарядом на поверхности, а следовательно,
и разность потенциалов (при постоянной емкости преобразователя
и емкости соединительных проводов).
Достоинствами пьезоэлектрических преобразователей явля-
4'1
ются высокая чувствительность, простота и надежность кон-
струкции, недостатками — возможность измерения только быстро-
меняющихся величин, так как заряд быстро «стекает» с поверх-
ности преобразователя.
Электрические методы измерения неэлектрических величин
в текстильной промышленности. При выработке текстильной
продукции приходится сталкиваться с неоднородностью обраба-
тываемого продукта (сырье, пряжа, ткани), которую необходимо
измерить и по возможности устранить.
Существуют специальные методы измерения и устранения
неровноты ленты, ровницы, пряжи.
В целях контроля и регулирования в ряде случаев необхо-
димо измерять натяжение нитей, перемещения, скорости и уско-
рения узлов машин, усилия, моменты, вибрации, действующие
на отдельные детали, влажность продукта и другие неэлектри-
ческие величины.
Все элементы измерительного канала от датчика неэлектри-
ческой величины до регистрирующего прибора должны без иска-
жения воспринять, преобразовать и зарегистрировать полезный
сигнал, чтобы его можно было использовать в целях управления
процессом.
Рассмотрим принципы действия некоторых приборов, исполь-
зующихся в текстильном производстве.
Определение неровноты нитей по линей-
ной плотности производится прибором с емкостным дат-
чиком. Упрощенная схема такого прибора венгерской фирмы
ФАМ приведена на рис. 1.36.
Колебательные контуры генераторов (И и G2 образованы
конденсаторами переменной емкости С1 и С2 и индуктивностями
L1 и L2. Емкость конденсатора С1 изменяется в функции тол-
щины введенной между его обкладками нити. Емкость конден-
сатора С2 регулируется изменением положения пластин.
Частота колебания контура зависит от емкости конденса-
тора С1, которая является функцией толщины нити. Разность
частот генераторов С/ и С2 измеряется частотомером и преобра-
$уется в напряжение, которое после интегрирования выражает
коэффициент неровноты нити или аналогичные показатели. Уста-
новка стрелки измерительного прибора в нулевое положение
обеспечивается подстроечным конденсатором С2.
Исследование прочности текстильных ма-
териалов производится на различных разрывных машинах.
В качестве чувствительного элемента используются тензодат-
чики (модель ТМ-М прибора Инстрон, США).
Тензодатчики включаются по мостовой схеме, получают пи-
тание от источника частоты 390 Гц. Напряжение от датчиков
после двухкаскадного усиления и фильтрации подается на само-
писец, регулирующий натяжение материала.
45
Рис. 1.36 Схема прибора с ем
костным датчиком
Рис. 1.37. Схема тахогенератора
постоянного тока
Д л я измер е н и я н а т я ж е н и я (измерения переме-
щения, неровноты линейной плотности продукта, влажности
продукта и т. д.) целесообразно использовать тензодатчики,
емкостные датчики и др.
Методы измерения неэлектрических и электрических величин
в электроприводе. Б автоматизированном электроприводе при
меняется четыре вида датчиков: скорости, положения, тока и
напряжения.
Т а х о г е н е р а т о р ы являются наиболее распространен
пыми датчиками скорости. Тахогенераторы бывают постоянного
и переменного напряжения с возбуждением от постоянных маг-
нитов. Они отличаются от обычных электрических машин повы-
шенной точностью изготовления и некоторой спецификой кон-
струкции. обеспечивающей снижение уровня различного рода
помех.
Основные требования, предъявляемые к тахогенераторам:
линейность характеристики, малая механическая мощность по-
требления, малый момент инерции, высокая крутизна нарастания
выходного напряжения с ростом измеряемой скорости.
В электроприводе применяются различные тахогенераторы.
Схема малогабаритного тахогенератора постоянного тока
представлена на рис. 1.37.
Упрощенная зависимость выходного элемента напряжения
тахогенератора постоянного тока от частоты вращения имеет
л ине й ны й характер:
и1; = С1Фп/(\ +/?,//?„),
где С,- постоянная; Ф -магнитный поток; /?,, /?„ сопротивление обмотки
соответственно генератора и нагрузки; п частота вращения, мин '.
46
Асинхронные тахогенераторы представляют собой обычные
двухфазные асинхронные машины с полым немагнитным ротором.
Одна обмотка подключается к сети и называется обмоткой воз-
буждения £1; с другой обмотки L2 — выходной (генераторной) -
снимается напряжение тахогенератора (рис. 1.38, а).
Выходные характеристики асинхронного тахогенератора
нелинейны. Они имеют погрешность не только по амплитуде,
но и по фазе (отклонение фазы выходного напряжения от фазы
базового напряжения).
Синхронные тахогенераторы — однофазные синхронные ге-
нераторы с ротором в виде постоянного магнита -- звездочки
(рис. 1.38,6). ЭДС ротора такого генератора прямо пропор-
циональна частоте вращения. Иногда синхронные тахогенераторы
работают на выпрямительные устройства. В этих случаях стре-
мятся увеличить частоту выходного напряжения в целях сни-
жения его пульсации.
Импульсные датчики перемещения применя-
ются, если к электроприводу предъявляются высокие требования
по точности регулирования.
Импульсные датчики преобразуют перемещение (угол по-
ворота) рабочего органа исполнительного механизма в число
импульсов, а угловую скорость — в частоту импульсов.
Наибольшее распространение получили фотоэлектрические
и индуктосинные датчики.
Фотоэлектрический датчик (ФЭД) основан на
модуляции светового потока, падающего на фотоприемник, диском
с прорезями, который вращается на валу электродвигателя или
другого объекта.
17
Рис. 1 39. Схема одного канала
фотоэлектрического датчика
Рис. 1.41. Схема индика-
торной системы синхрон-
ной связи для дистанцион-
ной передачи угла
Рис. 1.40. Ицдуктосинный
импульсный датчик
Обычно датчики содержат два источника света, в качестве
которых используются светодиоды и два фотоприемника — фото-
диода, сдвинутых в пространстве друг относительно друга на
/\-г‘/4 шага (Л'-- натуральное число). Кроме того, в ФЭД
входит кодирующее устройство — металлический модуляцион-
ный диск со смещенными на тот же шаг прорезями.
На рис. 1.39 показан один канал ФЭД. Входной сигнал от
фотодиода 1 поступает через операционный усилитель 2 на фор-
мирователь импульсов 3. Выходной сигнал представляет собой
последовательность прямоугольных импульсов (150 на один
оборот вала).
И н д у к т о с и н н ы й датчик (ИД) включает собственно
индуктосин и схему измерения. Индуктосин состоит из двух
изоляционных дисков — ротора и статора, на которых печатным
способом нанесены проводники в радиальном направлении. Воз-
буждение индуктосина осуществляется с обмотки ротора напря-
жением питания ±12 В. На один оборот ротора датчика при-
ходится 150 импульсов. Статор имеет две обмотки, сдвинутые
на ‘/4 шага обмотки.
Структурная схема индуктосинного импульсного датчика
приведена на рис. ! .40.
Выход генератора возбуждения / подключен к статорной
обмотке 2 поворотного воздушного трансформатора 3, роторная
обмотка 4 которого соединена с обмоткой возбуждения 5 индукто-
сина 6. Выходной сигнал с обмоток статора 7 индуктосина по-
48
Рис. 1.42. Схема цифрового датчика
положения
Рис. 1.43. Блок-схема преобразователя
напряжения в код
дается на первые входы фазочувствительных усилителей 8, 9 и 10,
где сравнивается с напряжением генератора возбуждения /
(являющимся в данном случае опорным), поданным на вторые
входы усилителя 8, 9 и 10.
Кроме импульсных в качестве датчиков перемещения не-
редко используются системы синхронной связи на базе однофазных
сельсинов в индикаторном режиме.
Простейшая индикаторная система для дистанционной пере-
дачи угла представлена на рис. 1.41.
Обмотки возбуждения L1 и L2 обоих сельсинов подключены
к однофазной сети переменного тока. Концы фаз роторов соеди-
нены между собой. Переменный ток обмоток возбуждения
возбуждает магнитный поток, индуктирующий в обмотках
синхронизации (ротора) ЭДС, являющуюся функцией углового
положения фазы этой обмотки. Если угловое положение ротора
сельсина-датчика ссд отличается от положения ротора сельсина-
приемника ап, то в обмотках синхронизации возникают различные
ЭДС, создающие в них токи и, следовательно, момент, стремя-
щийся привести роторы в согласованное положение.
Цифровые датчики положения (ЦДП). или
позиционно-кодовые преобразователи (АЦП-l), преобразуют
угловое или линейное перемещение механизма в код.
Основными элементами преобразователя являются кодирую-
щий диск, источники света с формирователями светового луча
и фоточувствительные устройства (рис. 1.42).
Кодирующий диск / имеет концентрические окружности по
числу элементов кода, разделенные на чередующиеся в порядке
следования в каждом разряде участки. Каждому положению
кодирующего диска относительно светового луча соответствует
определенное число в цифровом коде, поэтому угол поворота
вала определяется по разности начального и конечного положе-
ния диска тоже в цифровом коде.
Наиболее распространенным является код Грея, так как в нем
комбинации соседних чисел отличаются только в одном элементе.
Использование двоичного кода может вызвать существенные
49
ошибки при неточности изготовления диска или его вибрации
в виде сбоя информации на границе предельных чисел шкалы
(вместо 11111 (31) будет 00000(0), т. е. максимально 31 единица,
граничащих с нулем комбинаций].
Кодирующий диск / имеет прозрачные и затемненные участки
на концентрических окружностях. Источники света -- полупро-
водниковые светодиоды с линзами 2 — формируют световые лучи,
которые через диафрагмы 3 направлены на фотоприемники 4
(кремниевые фотодиоды). Когда луч света проходит через про-
зрачные участки диска, то попадает на фотодиод. На выходе
его формируется логический сигнал единица, когда путь свето-
вому потоку закрыт непрозрачным участком, на выходе фото-
диода сигнал отсутствует, что соответствует логическому нулю.
Преобразователи напряжения или тока
в код (АЦП-2) получили наибольшее распространение. Среди
них выделяются преобразователи с времяимпульсным кодирова-
нием (без обратной связи) и преобразователи компенсацион-
ного типа (с обратной связью).
Первые реализуются простыми схемами и имеют высокое
быстродействие, однако вероятная нестабильность генераторов
импульсов может вызвать погрешность измерения.
Принцип действия преобразователей с времяимпульсным
кодированием заключается в определении числа импульсов задан-
ной частоты, прошедших в течение заданного отрезка времени:
N=ft.
Если f=const, а время / = Д', Uf линейно зависит от входного
напряжения, то преобразователь называется АЦП-2. Если
/—const, a f—K-iUs, т. е. частота генератора линейно зависит от
входного напряжения, то имеем преобразователь АЦП-3.
Рассмотрим принцип действия АЦП-2. Кодируемое напряже-
ние поступает на вход времяимпульсного преобразователя (ВИП)
и превращается в импульс длительностью /. Генератор стабиль-
ной частоты (ГИ) в течение времени I вырабатывает импульсы,
число которых пропорционально интервалу /, т. е. напряже-
нию Сосчитанное число импульсов преобразуется счетчиком
в двоичный код. Блок-схема устройства приведена на рис. 1.43.
Распределитель импульсов поочередно проверяет наличие
сигналов на счетчике и в случае одновременного появления
сигналов на распределителе и счетчике направляет их в преобра-
зователь импульс — код.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
I. Какие последствия вызывает дуга в коммутационных аппаратах и какие
мероприятия способствуют се гашению?
2. В чем разница по назначению и конструктивному исполнению между
контактором и магнитным пускателем?
50
3. Какие функции выполняет расцепитель автоматических выключателей?
4. По каким условиям выбирается предохранитель?
5. Каковы принципы действия электромагнитного и электротеплового реле?
6. Опишите устройство и принцип действии разъединителя.
7. Составьте таблицу функционирования /Л'-триггера и D-триггера но
формулам.
8. Что такое регистр памяти?
9. В чем заключается различие между синхронным и асинхронным счетчи-
ками?
10. Какова типовая структура микропроцессора?
11. В чем заключаются преимущества индуктивного преобразователя?
12. Для чего служат импульсные датчики перемещения, а также индукто-
синные, фотоэлектрические и цифровые датчики?
13. Каково назначение тензорезистора, термопары?
2. ОСНОВЫ ТЕОРИИ
АВТОМАТИЗИРОВАННОГО
ЭЛЕКТРОПРИВОДА
2.1. КЛАССИФИКАЦИЯ И ХАРАКТЕРИСТИКА
АВТОМАТИЗИРОВАННЫХ ЭЛЕКТРОПРИВОДОВ
Производственный агрегат, предназначенный для выполнения
определенных технологических процессов, включает в себя при-
водной двигатель (с регулируемым или нерегулируемым источ-
ником питания), передаточный механизм и машину—орудие,
преобразующее механическую энергию в полезную работу.
Приводной двигатель и передаточный механизм объединены
общим названием «привод». Исторически по мере развития
производительных сил один вид привода сменял другой. Так,
конный привод (тяга) заменил ручной; паровой привод пришел
на смену механическому. В настоящее время главенствующая
роль принадлежит электроприводу. Этому способствовали эконо-
мические преимущества электроэнергии. В короткие сроки
электродвигатель вытеснил другие виды двигателей.
Установленная мощность электродвигателей составляла в
1890 г. 5 %, в 1927 г.— 75. а в настоящее время — примерно 99 %
по отношению к установленной мощности двигателей всех типов.
Электропривод представляет собой электромеханическое
устройство, посредством которого приводятся в движение рабо-
чие органы машин, т. е. электрическая энергия преобразуется
в механическую и осуществляется электрическое управление
преобразоваиной механической энергией.
Современный электропривод состоит из следующих основных
частей: силовой части, включающей электродвигатель и устрой-
ства для передачи механической энергии рабчему органу; источ-
ника питания; системы управления источником питания и электро-
двигателем.
Электропривод выполняет различные задачи — от простых
(вращение механизма с постоянной частотой) до весьма сложных
51
Рис. 2.1. Структурные схемы систем
автоматического управления электро-
приводом:
а - разомкнутые системы; и — замкнутые
системы; S — задающее устройство; UZ —
преобразователь энергии (источник пита-
ния, усилитель и т. п.); М -электро-
двигатель; Пр — передача; Мх - исполни-
тельный механизм
(программное управление станками и другими производствен-
ными агрегатами).
Разнообразию задач, решаемых с использованием электро-
приводов, соответствует и разнообразие их типов, которые клас-
сифицируются по следующим признакам:
по назначению (силовой электропривод, передающий движе-
ние рабочим органам машины, и вспомогательный, выполняющий
функции управления, так называемый сервопривод);
по количеству электродвигателей (однодвигательный, в ко-
тором рабочая машина приводится в действие одним электро-
двигателем, и многодвигательный, в котором несколько электро-
двигателей одновременно приводят в движение различные рабочие
органы производственного агрегата);
по количеству ступеней преобразования энергии (односту-
пенчатый, в котором электрическая энергия сети преобразуется
в электродвигателе непосредственно в механическую, и много-
ступенчатый, когда энергия одного вида преобразуется в энергию
другого вида и только потом в механическую);
по роду питающего напряжения или тока (электроприводы
постоянного и переменного тока);
по структуре системы привода (разомкнутые и замкнутые
системы).
Разомкнутая система не использует информацию о точности
исполнения задающей команды. Ее структурная схема изобра-
жена на рис. 2.1, а.
Система отрабатывает команды задающего устройства, не
учитывая степень соответствия выходной координаты подаваемым
командам, что может вызвать значительную погрешность. Ра-
зомкнутые системы получили распространение в таких устрой-
ствах, где главными факторами являются простота исполнения и
невысокая стоимость, а точность существенного значения не
имеет.
Замкнутые системы характеризуются наличием обратной
связи, т. е. возможностью коррекции входных сигналов управ-
ления по результатам сравнения их с выходными сигналами.
Структурная схема замкнутой системы изображена на рис. 2.1,6.
Здесь кроме элементов разомкнутой системы введена обратная
связь в виде сигналов измерительного преобразователя (дат-
чика), которые вычитаются в узле сравнения из управляющего
52
сигнала. Разница сигналов, пропорциональная ошибке отработки
управляющего сигнала, поступает на регулятор А, компенсирую-
щий измеренную ошибку.
Замкнутые системы применяются в тех случаях, когда тре-
буется повышенная точность, быстродействие и т. п.
Современная технология любого производства, в том числе
и текстильного, немыслима без применения на предприятиях
автоматизированного электропривода или привода с автомати-
ческим управлением.
Системы автоматического управления (САУ) призваны вы-
полнять различные операции, которые по степени сложности
можно расположить в следующем порядке:
1) автоматический разгон, торможение, реверс, а также ста-
билизация управлением координаты (скорость, положение)
с ограниченной точностью;
2) автоматическое задание и стабилизация частоты вращения
или другой переменной (момента, тока и т. д.) с определенной
точностью в статическом и динамическом режимах. Эту функцию
обычно выполняют замкнутые САУ;
3) слежение за управляющими сигналами. Системы, выпол-
няющие функцию слежения, называются следящими системами
или следящим приводом. Они также имеют замкнутую систему
(структуру);
4) те же функции, что и в первой позиции, но по заданной
программе;
5) автоматическое управление промышленными механизмами
и комплексами машин, обеспечивающее автоматический выбор
целесообразных режимов работы. Эта функция выполняется
адаптивными (самоприспосабливающимися) САУ.
Решение всех технологических задач обеспечивается обору-
дованием с электроприводом двух типов: приводом регулирования
скорости и приводом регулирования положения (так называемым
позиционным приводом). Каждый из указанных типов может
работать в любом из трех режимов: программном, следящем
и стабилизации.
2.2. МЕХАНИКА ЭЛЕКТРОПРИВОДА
Механическая часть системы электропривода состоит из инер-
ционных масс электродвигателя, передачи и производственного
механизма (рабочей машины). Порядок соединения этих эле-
ментов определяется кинематической схемой механической части.
Различным типам электроприводов соответствует разнообра-
зие кинематических схем. Простейшую схему образует соединение
производственного механизма непосредственно с валом электро-
двигателя при помощи соединительных муфт.
53
Рис. 2.2. Кинематическая
схема сновальной машины
С-140-1
Все элементы такой системы имеют одну частоту вращения.
На практике в большинстве случаев частоты вращения электро-
двигателя и механизма не совпадают. Тогда для согласования
частот вращения вводится передача (ременная, зубчатая и др.).
Кинематическая схема при этом усложняется и включает в себя
различные инерционные массы (шкивы, соединительные муфты
и др.», связанные упругими звеньями (цепями, ремнями, вало-
проводами и т. д.).
Отдельные элементы кинематической схемы вращаются с
различной частотой вращения, поэтому моменты инерции этих
элементов непосредственно нельзя сравнивать между собой.
На рис. 2.2 приведена для примера кинематическая схема
сновальной машины С-110-1, в которой движение от электро-
двигателя / передается клиновыми ремнями 2 валу 8 и коробке
передач 4. Она имеет три пары шестерен 5, обеспечивающих
соответственно три скорости снования — 200, 300 и 400 м/мин.
Движение от параллельного вала 6, на котором жестко закреп-
лены три шестерни 7, передается пластинчатой фрикционной
муфтой 9 и клиновыми ремнями 10 сновальному барабану 8. Сно-
вальный вал 11 получает движение от барабана 8 за счет сил
трения между ними.
Как правило, многие текстильные машины имеют еще более
сложные кинематические схемы. Анализ условий их движения
требует определения результирующих моментов сопротивления
и моментов инерции, приведения частоты вращения каждого
элемента к одной частоте вращения.
Введем некоторые понятия теории электропривода. Механи-
ческая характеристика механизма — зависимость частоты вра-
щения исполнительного механизма от момента сопротивления
на его валу.
Механическая характеристика машин, в том числе и текстиль-
ных, различна ио своему характеру. Моменты сопротивления,
возникающие как реакция механизма на активный воздействую-
щий момент электродвигателя, называются реактивными момен-
тами. Они меняют направление (знак) и величину при изменении
направления (знака) частоты вращения.
54
“Типичным представителем такого класса моментов являются
моменты сухого трения.
Моменты сопротивления, не зависящие от направления (знака)
частоты вращения, называются активными (потенциальными).
Примером такого класса моментов является момент сил тя-
жести вертикально перемещаемых грузов.
Особую группу моментов составляют инерционные моменты.
Они возникают только при изменении скорости механизмов и
всегда стремятся (в соответствии с законом Ньютона) сохранить
начальное значение скорости.
По характеру изменения момента сопротивления во времени
различают механизмы: с длительным режимом работы при по-
стоянной нагрузке; с длительным режимом работы при перемен-
ной нагрузке; с пульсирующей нагрузкой; с ударной нагрузкой;
с кратковременной нагрузкой; с повторно-кратковременной на-
грузкой.
Множество механических характеристик различных механиз-
мов описывается следующей обобщенной формулой:
Л1С = Л10 + ( Л/сн — Л/,.) (<о/юНОч) ”,
где Л), — момент сопротивления механизма при угловой скорости <о; Л1С„ — тот же
момент при номинальной угловой скорости ЛТ0 — момент потерь (момент
холостого хода механизма); п — показатель степени, определяющий вид харак-
теристик, приведенных на рис. 2.3.
При п == — 1 имеем нелинейно-падающую характеристику
(кривая /). Такие кривые характерны для расточных и фрезерных
станков, подъемно-транспортных устройств, моталок.
При п = 0 момент сопротивления не зависит от частоты вра-
щения (кривая 2). Характеристики подобного рода имеют меха-
низмы, у которых определяющей нагрузкой являются силы или
моменты трения, например грузоподъемные механизмы, кон-
вейеры, средний момент ткацких станков.
Рис. 2.3. Механические ха-
рактеристики производствен-
ных механизмов
55
При п= 1 нагрузка линейно зависит от скорости (прямая 5).
Такая зависимость свойственна силам и моментам вязкого трения.
В текстильной промышленности характеристиками подобного
вида обладают прядильные машины.
При п = '2 имеем так называемую вентиляторную нагрузку
(кривая 4). Характеристикой подобного рода обладают, например,
вентиляторы, центробежные насосы.
Расчетные схемы механической части. Все элементы кине-
матической схемы представляют собой реальные детали и узлы,
имеющие конечную жесткость, определенную массу и вращаю-
щиеся с различными частотами вращения.
В расчетной кинематической схеме все эти реальные узлы
заменены эквивалентными, имеющими массу, жесткость и частоту
вращения, приведенные к одной базовой частоте вращения.
Такое же преобразование сил и масс необходимо и для по-
ступательно движущихся частей механизма. Обычно за базовую
принимается частота вращения электродвигателя.
Формулы приведения основываются на законе сохранения
энергии. Приведение момента инерции /г-го элемента схемы, вра-
щающегося с угловой скоростью «ц, к угловой скорости со, про-
изводится по формуле
/„piioi/2 = /ft(o/./2
или
/Пр, — Jk( оц./со ।) “ = J ki |’;
где = - передаточное число от вала приведения к /г-му валу.
Приведение поступательно движущейся массы nil произво-
дится по формуле
Лф — Щ/сЧ/мт = Щ/pf,
где |>| - радиус приведения поступательно движущегося элемента к ско-
рости звена приведения <»,.
Передаточное число используется и для приведения углового
перемещения:
Радиус приведения для поступательного движения
Ч ир, ~ S//pi,,
где S, - поступательное перемещение.
Если жесткость /г-го упругого элемента определить отношением
С/,. = Л/кр1./\<|7;,
где Л/к|)( и — крутящий момент и соответствующая деформация k го упругого
элемента,
56
и полагать ее постоянной, не зависящей от нагрузки величиной,
то из равенства запасов потенциальной энергии следует выра-
жение для приведенной жесткости:
^пр*== ^*/гЦ-
Аналогично для упругой связи между поступательно дви-
жущимися массами:
^npz >
где Ci = Fi/\Si—жесткость линейного упругого элемента; Fi - сила, прило-
женная к /-му элементу.
Из условия равенства элементарной работы для момента Mk
мпр,. = Mk/i\
и для силы Ft
Чр=Лр1(-
По заданным силам, моментам, геометрии используемых
материалов и кинематической схеме можно рассчитать эквива-
лентные жесткости и моменты инерции отдельных звеньев.
Учет параметров всех звеньев привода, даже в сравнительно
простых кинематических схемах, вызывает серьезные трудности
при анализе движения системы. Поэтому в целях упрощения
анализа многомассовых систем целесообразно учитывать в пер-
вую очередь наибольшие массы и наименьшие жесткости.
Согласно многочисленным исследованиям различные произ-
водственные механизмы с достаточной точностью описываются
тремя вариантами расчетных схем: трехмассовой (рис. 2.4, а),
двухмассовой (рис. 2.4, б) и одномассовой — жестким приведен-
ным механическим звеном. Параметрами этих схем являются
суммарные приведенные моменты инерции и эквивалентные
жесткости.
Для трехмассовой системы имеем моменты инерции /i,
и жесткости G 2, С > .< и Сз i, для двухмассовой — J2 и Ct2 и
одномассовой
В качестве первой инерционной массы обычно выбирается
ротор электродвигателя, промежуточная масса соответствует
передаче, а третья масса — исполнительному механизму.
Одномассовая система представляет собой жесткое звено с
суммарным моментом инерции и абсолютной жесткостью, в ко-
торой не могут возникнуть автоколебания, и является наиболее
простым расчетным вариантом. Здесь учитывается только момент
электродвигателя, момент сопротивления и инерционные моменты.
В многомассовых системах к каждой инерционной массе
может быть приложен момент сопротивления, состоящий из
активной, реактивной (моменты сопротивления) и периодической
57
Са Сгз Lk
u b
Рис. 2.4. Расчетные схемы систем
составляющей нагрузки. Механические потери от трения присут-
ствуют в каждом механизме. Они учитываются в расчетах в виде
постоянной составляющей.
Для одномассовой системы момент сопротивления
Л1С = Ш +Л1„,
где \Л1, --суммарный приведенный момент потерь устройства; Л1п приведенный
момент полезной нагрузки.
Определение потерь на трение в механизме представляет
трудноразрешимую задачу, поэтому в расчетах используется
понятие КПД, который выбирается для каждого варианта схемы
по опыту известных или аналогичных конструкций. Учет КПД
вызывает изменение формул приведения.
Момент сопротивления, приведенный к валу электродвигателя,
А/СО) | = А1мех Юмех/Пмех »
или
А1С = ЛКехДоб Г]ыех ,
где I] — КПД; z„6=z'iZ2/.i...— общее передаточное число от электродвигателя
к рабочему органу машины.
Для поступательно движущегося рабочего органа
Afc == Рмех р/Имех -
Для обратного потока энергии, когда ее источником служит
механизм, совершающий вращательное движение,
Мс = Л'1мех ПмехДоб,
поступательное движение
А1Г = F мехРПмех*
Уравнения движения электропривода. В соответствии с основ-
ным законом динамики алгебраическая сумма моментов, воз-
действующих на каждое z-e звено вращающейся системы,
At., + + М ИН| — /VIВН1 = О,
где М„. — потенциальный момент (или момент упругого взаимодействия между
массами); Л1 - диссипативный момент (или момент вязкого трения); Л11И11—
инерционный момент; Л1ВН, — суммарный внешний момент, действующий на z-e
звено.
Потенциальный момент возникает благодаря деформации
элемента под воздействием внешнего момента. Согласно закону
Гука
58
Л!,-, =Л1„=С,_1.,Л<р,
где С, i., коэффициент жесткости; \ц. = т,-1— <р,— угловая деформация.
Диссипативный момент характеризует потери на внутреннее
трение в элементе. Он приближенно пропорционален разности
угловых скоростей упругого элемента:
МЛ = Ь, \м,
где Ь, - коэффициент вязкого трения /-го звена; \ы=о>,_1—ы,
В общем случае при переменном моменте инерции
При постоянном моменте инерции вторая составляющая суммы
равна нулю и выражение упрощается:
Л1И|| ~ Jiduh/dt.
Внешний момент в зависимости от назначения звена, к кото-
рому он приложен, может быть или электромагнитным моментом
электродвигателя ЛП, или моментом нагрузки Л1е.
Исследования реальной системы целесообразно начинать с
жесткого приведенного звена — одномассовой системы. Уравнение
движения такого звена при постоянном моменте инерции
Л1, — Me=Jdw/dt. (2.1)
Уравнение (2.1) позволяет наиболее просто найти основные
законы движения механизма. Однако жесткое механическое
звено дает упрощенное представление о реальной механической
системе, так как исключает все внутренние степени свободы
механизма.
Более достоверное представление о характере процессов,
протекающих в механизме при работе, дает двухмассовая си-
стема. Наиболее простым примером такой системы (см. рис. 2.4, б)
является электродвигатель, соединенный с маховиком через упру-
гий элемент (например, пружину). Такая система описывается
уравнениями, полученными из общего уравнения движения. Если
пренебречь диссипативной составляющей, то справедливы сле-
дующие уравнения:
Л1, — Л112 ~- J । d~<['i / dt~\
Л1] 2 — Л1С = Jzd'iy-i/dt,
где <; । и i|-_. углы поворота на концах упругого элемента; Л и Д—моменты
инерции соответственно ротора электродвигателя и маховика: Л1, ? - момент
упругого взаимодействия.
Трехмассовая система с достаточной точностью описывает
большинство применяемых в текстильной промышленности меха-
59
низмов. Это предельное число степеней свободы, которое иеле- :
сообразно применять в практических расчетах. t
Так, для трехмассовой системы ч
— Л1С1— М1 2 Jii/toi/dij
Л1, , — М,, - М > , -=- J 2dM2/d t; I
ЛД-,— }dun/dt, i
где Л1, — электромагнитный момент электродвигателя (управляющее воздей-
ствие); Л1с , Л1С>, Л/С) — моменты нагрузки (возмущающие воздействия); щ,,
«л» угловые скорости масс; ,М|4, М> ,— моменты упругого взаимодействия
между массами; .!>, J-, — моменты инерции масс. ,
Найдем эквивалентную кинематическую схему сновальной
машины (см рис. 2.2). Если полагать, что жесткости валов и ба-
рабанов значительно выше жесткости ременных передач, то схема i
сновальной машины эквивалентна трехмассовой системе (см.
рис. 2.4, а). Здесь .4 - момент инерции ротора; /2 — приведенный
момент инерции коробки передач;/3— момент инерции барабана
и сновального вала; Ct 2 и С\> , — соответственно жесткости кли-
ноременных передач.
Трехмассовая система с достаточной точностью отражает
физические процессы, возникающие в сновальной машине.
2.3. ЭЛЕКТРОМЕХАНИЧЕСКОЕ
ПРЕОБРАЗОВАНИЕ ЭНЕРГИИ
Принцип действия электрической машины основан на взаимо-
действии магнитных полей, создаваемых различными катушками
индуктивности, благодаря которому возникает электромагнитный
момент (или сила), стремящийся изменить взаимное располо-
жение этих катушек. Свойства электрической машины как основ-
ного исполнительного механизма системы электропривода оказы-
вают существенное влияние на характеристики этой системы в
целом, и поэтому теория рабочих процессов в электрической
машине занимает важное место в общей теории электропривода.
Частота вращения и момент электродвигателя тесно связаны
с его электромагнитными величинами. Зависимость угловой
скорости от тока называется электромеханической (скоростной)
характеристикой, а зависимость угловой скорости от момента —
механической характеристикой электродвигателя.
В разомкнутых системах эти характеристики совпадают с
характеристиками всего электропривода.
Процессы преобразования энергии по отношению к времени
разделяются на динамические и статические.
Динамический режим характеризуется непрерывным изме-
нением возмущающих моментов и скорости (dM4/dl^0; d^/dt=/=
# 0). В тех случаях, когда эти изменения происходят периоди-
чески, режим называют квазиустановившимся.
60
Поведение электродвигателя в динамических режимах опи-
сывается системой дифференциальных уравнений, а зависимость
угловой скорости в динамическом режиме <ид от электродинами-
ческого момента Л4ЭЛ — динамической механической характе-
ристикой:
Юд=/ (Л1Эд).
Степень влияния динамической нагрузки на мгновенную
угловую скорость электродвигателя оценивается динамической
жесткостью:
|0л1 = АЛЕ./Аоъ,
где А.М„,— амплитуда колебаний электродинамического момента; ампли-
туда колебаний угловой скорости.
Статический режим характеризуется постоянными моментами
и угловой скоростью — 0; г/ы/Л =0), а также равенством
Л1-, = Л4С, /
где \1,. — момент сопротивления механизма.
Изменение Л1С, связанное с выполнением какой-либо техноло-
гической операции, вызывает соответствующее изменение момента
и частоты вращения электродвигателя. Степень влияния изме-
нения статической нагрузки на угловую скорость электродвига-
теля оценивается статической жесткостью механической харак-
теристики:
0c = tMf9/t/(o.
Установившийся режим электропривода, как всякое состояние
равновесия, может быть устойчивым и неустойчивым.
Если при выводе механической системы из состояния равно-
весия возникает динамический момент, стремящийся возвратить
ее в исходное состояние, то система устойчива.
Для электропривода условие устойчивости можно сформу-
лировать следующим образом: необходимым и достаточным
условием устойчивости является противоположность знаков
приращения скорости и динамического момента:
АЛЕд/Лсо < 0. (2.2)
Выражение (2.2) можно привести к виду
(Е-(Е.<0,
где — жесткость механической характеристики исполнительного механизма.
На рис. 2.5 приведены примеры устойчивого (точка /) и не-
устойчивого (точка 2) равновесия.
61
Рис. 2.5. Механические
характеристики элек-
тродвигателя и про
и зводствсиного меха-
низма
В точке 1 положительное приращение момента соответствует
отрицательному приращению угловой скорости и наоборот
отрицательному приращению момента - положительное прира-
щение скорости, т. е.
В точке 2 положительному (отрицательному) приращению
момента соответствует положительное (отрицательное) прира-
щение скорости, т. е. \А1,,;>().
Механические характеристики электродвигателей, соответ-
ствующие номинальным (паспортным) данным при отсутствии
каких-либо дополнительных резистивных и реактивных элементов
в схеме включения обмоток статора или ротора, называются
естествен н ы ми ха р а кт ер и ст и ка ми.
При введении дополнительных элементов в схему включения
электродвигателя или отклонении напряжения питания от номи-
нального получаются искусственные характеристики.
Часто процесс управления электроприводом требует экстрен-
ного торможения электродвигателя или изменения направления
его вращения (реверса). Каждая электрическая машина обра-
тима, т. е. может работать как в режиме двигателя, так и в режиме
генератора. Так, при увеличении угловой скорости ротора выше
угловой скорости идеального холостого хода машина переходит
в режим генератора (направление Л1, меняется на обратное,
а направление угловой скорости не меняется). Такой режим по-
лучил название режима рекуперативного торможения, или гене-
раторного режима работы параллельно с сетью.
При изменении направления вращения ротора, но сохранении
направления момента Л1, (когда Л1„<.И) машина потребляет
энергию одновременно из сети и со стороны вала за счет кине-
тической энергии, запасенной вращающимися массами механиз-
ма и развивает при этом значительный тормозной момент. Такой
режим называется торможением противовключением, или гене-
раторным режимом последовательно с сетью. В этом режиме
машина потребляет недопустимо большие токи, многократно
превышающие номинальные значения.
Особое место в семействе тормозных характеристик занимает
характеристика торможения при отключенном питании сети.
Машина работает в режиме автономного генератора или режиме
динамического торможения, при котором механическая энергия
вращающихся масс преобразуется в электрическую энергию
и выделяется в виде тепла на резисторах силовой цепи.
62
2.4. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТ РОДВ ИГАТ ЕЛ Е Й
Построение или выбор системы электропривода в значительной
мере зависит от типа применяемого электродвигателя, точнее от
его механической характеристики. Статические режимы работы
в общем случае чередуются с динамическими, поэтому анализ
системы должен учитывать механические характеристики и стати-
ческого, и динамического режимов.
Аналитическую зависимость момента от угловой скорости для
установившегося и переходного режимов можно получить из
основного уравнения обобщенной электрической машины.
Механические характеристики двигателей постоянного тока.
Динамическая характеристика двигателей постоянного тока
(ДПТ) описывается системой уравнений:
UB = RBiK + LadiB/dR (2.3а)
Ня = ТяФя/dt гЕ'. (2.36)
'М,=рц L12АЙ11 (2.Зв)
где U„ - напряжение па якоре; i„ — ток якоря; и R^ — соответственно индук-
тивность и активное сопротивление (суммарное) цепи якоря; + Ay;
Rk сопротивления соответственно обмотки дополнительных полюсов и ком-
пенсационной обмотки; и 1в соответственно напряжение на обмотке возбуж-
дения и ток обмотки возбуждения; /.« и R, соответственно индуктивность и
активное сопротивление обмотки возбуждения; L, > — взаимоиндуктивность обмо-
ток якоря и возбуждения; р„ — число пар полюсов.
В практических расчетах обычно используется поток машины
Ф и ЭДС Е:
Е = o)-,L 1о/„ = )
Л/ = СФ/Я, J
где С =/?„Л!/2лс; — конструктивная постоянная; N число последовательно
соединенных проводников; а число параллельных ветвей
Для ДПТ независимого возбуждения после некоторых пре-
образований уравнений (2.3) и при допущении, что магнитный
поток 0 = const и Л1,^/я, получим следующее уравнение дина-
мических характеристик:
ДДЛ1,/dt + Мэ = ЕнСФ/R^. - С“ф-<о//?1и .
После несложных преобразований получим
ы=ия/СФ-~~ф- -ЕТ„р) Мэ, (2.4)
где АЯу активное сопротивление цепи якоря; Т„ — электромагнитная постоян-
ная времени Гя = 7-я//?я,. якорной цепи двигателя; p=d/dt— символ дифферен-
цирования.
63
Рис. 2.6. Схема включения и режимы работы ДИТ независимого воз-
буждения
Для установившегося режима работы (р = 0) уравнение (2.4)
принимает вид
ы = и/Сф— Л1, = w<> — Aw, (2.4')
С Ф
т. е. имеем линейную зависимость угловой скорости от момента.
Из выражения (2.3в)
U=R„J„+E.
На рис. 2.6, а приведена упрошенная (без дополнительных
обмоток) схема включения ДНТ независимого возбуждения.
В квадранте / (рис. 2.6,6) w = F(Al,) имеем режим двига-
теля: w> 0; Л/,> 0 и ток якоря:
/я=(П-Е)//?Я1.
Статическая жесткость механической характеристики ДПТ
независимого возбуждения
(Зс = dM,/dio = — C2&2/R^ .
Эта величина постоянна для данного сопротивления цепи
якоря и постоянного потока. Подведенная из сети электрическая
мощность преобразуется за вычетом потерь в обмотке якоря
в механическую:
UE = RJ* + El^
Е1К — Л43а>.
Если частота вращения ДПТ больше частоты вращения
идеального холостого хода, машина переходит в режим реку-
перативного торможения, а механическая характеристика, со-
ответствующая этому режиму, располагается в квадранте II
(см. рис. 2.6, б). При этом w> 0, а Л(,<С0 и
Д=(Е-Д)//?ЯХ.
Подведенная со стороны вала механическая мощность A4,w
64
за вычетом потерь в якоре преобразуется в электрическую, пере-
даваемую в сеть:
- Л1эю = £/Я =RKJl +1У1Я.
В режиме противовключения (о><0; Л1Э> 0) ток якоря
l„=-(U + E)/R^
Механическая характеристика для этого режима располага-
ется в квадранте IV, а мощность, подведенная со стороны вала,
и мощность сети преобразуется в электромагнитную мощность
/?/н, которая в свою очередь выделяется в виде тепла на сопротив-
лении /?ж_, т. е.
Elя = R„'Ih.
В режиме динамического торможения тормозной момент
развивается машиной за счет запаса кинетической энергии, на-
копленной вращающимися частями электропривода. Напряжение
сети при этом равно нулю, а ток
IK = E/R„.
Механическая характеристика режима динамического тормо-
жения располагается в квадрантах // и /Г (см. рис. 2.6,6).
Мощность, преобразуемая в тепло, определяется равенством
ElK=RKjl
Машина при этом работает автономным генератором, т. е.
якорная цепь замкнута на внешнее сопротивление (см. рис. 2.6, в).
Механическая характеристика ДПТ с независимым возбуж-
дением может быть построена по паспортным данным. Для этой
цели следует использовать приближенное равенство (при условии
равенства потерь в меди и потерь в стали)
/?«v=0,5( 1 — Ином) П//„Ом,
где и Чмом соответственно номинальные ток якоря и КПД.
Механическая характеристика ДПТ независимого возбужде-
ния строится по двум точкам: номинальной, заданной паспортными
данными (Л1„оч и г]н<>м), и точкой идеального холостого хода <о0.
Последняя определяется из выражения, вытекающего из урав-
нения (2.4'):
*.0() —; П(|)цом/ ( U /?я,,Люм)-
Расчеты проверяются по точке короткого замыкания, для
которой должно быть справедливо соотношение
Л4К ™ Л4ПОМ/К//ном,
где /„={///?„, ток короткого замыкания.
3 А. М. Ланген, В.'В. Красник* ^5
Рис. 2.7. Схема включения и режимы работы ДПТ последовательного
возбуждения
Отношение моментов Л1К/Л1|ЮМ и токов IK/iuov приводится в пас-
порте машины.
Схема включения ДПТ последовательного возбуждения пред-
ставлена на рис. 2.7, а. Свойства ДПТ последовательного возбуж-
дения определяются способом возбуждения: магнитный поток
в ней создается рабочим током цепи якоря. В целях упрощения
предположим, что магнитная цепь не насыщена, т. е.
Ф=КЛ
где Л',, — коэффициент пропорциональности.
Момент такой идеальной машины
М3=СКЛ
а ток соответственно
Уравнение механической характеристики ДПТ последова-
тельного возбуждения приводится к виду
у/СКрМ, СКц -\1М;
Следовательно, идеальная механическая характеристика пред-
ставляет собой гиперболу, асимптотически приближающуюся
к бесконечности при Л1 0 (так называемый разнос двигателя)
и при о> = 0 к
Mn=U-/(R^CK,)-
Механическая характеристика ДПТ последовательного воз-
буждения представлена на рис. 2.7, б.
Действительные (с учетом насыщения магнитной цепи) харак-
теристики заметно отличаются от идеальных. Пусковой момент
меньше момента, определенного по формуле (2.5), а скорость
66
Рис. 2.8. Схема включения ДПТ со смешанным воз-
буждением
идеального холостого хода имеет конечное
значение. Обычно естественные харак-
теристики приводятся в паспортных дан-
ных. Двигатель последовательного воз-
буждения имеет всего два режима тор-
можения: противовключение и динамиче-
ское торможение.
Широкое распространение в технике получили ДПТ со сме-
шанным возбуждением. Схема такого ДПТ приведена на рис. 2.8.
Электромеханические свойства ДПТ со смешанным возбуж-
дением определяются отношением потоков от последовательной
обмотки и параллельной обмотки возбуждения, а его электро-
механические характеристики занимают промежуточное поло-
жение между характеристиками ДПТ независимого и последо-
вательного возбуждения.
Механические характеристики асинхронного двигателя. Ис-
следование переходных режимов АД связано с решением системы
нелинейных уравнений и возможно только при использова-
нии ЭВМ.
Уравнения статических режимов АД значительно проще. Из
схемы замещения АД (рис. 2.9, а) видно, что они могут быть
представлены в комплексной форме:
Йф — /? 1 /' । ~Т / Л ! /1 + ( — Ё\);
(2.6)
где t-ф - фазное напряжение на обмогке статора АД; Ё\ и — ЭДС обмотки
статора и приведенная ЭДС обмоткй ротора; х = (<щ—<i>)/i»i — скольжение;
«>,==<>>0/рп; 1и() = 2л/'; Ri и R'>— активные сопротивления обмоток статора и ротора
(приведенное сопротивление), А’, и А’»—индуктивные сопротивления рассеяния
обмоток статора и ротора (приведенные к виткам обмотки статора); Ei = E'2 =
А’,. (Л>); А'„— сопротивление взаимоиндукции.
Решая систему уравнений (2.6), получим выражение для тока:
/. __---------------------
x^ + RQs-r + X'i
и для момента
у _______inL/‘jR2/s_______
(х)=МД, (х),
W i Л и
(2.7)
(2.7')
|дс m — число фаз; Л'к— суммарное сопротивление рассеяния; А'к = .¥, -f-A’2;
AJ(i=3{/|/(wlA'„) --базовый момент; (s) =p2/s/[(р,+()2/-s)" +Д| ; (>i = /?i/A'„;
V2=R'2/X„. хк = Л,(/А'„.
;Г
67
Рис. 2.9. Схема включения и режимы работы АД
Для АД номинальной мощностью до 15 кВт имеем пределы
pi ж р-2 = 0.02—0,06; zKssO, 1 0,2.
Функция /) (s) имеет экстремум, определяемый обычным путем.
Критическое скольжение, соответствующее максимальному мо-
менту,
$к = ± R'i/ \ Ri + Лк = ±{>•>/+ Хк•
(2.8)
Максимальный момент АД
мк=A J4__________,.Иб________________.
2 <О|Л,, #|+^М4”Лк 2 (>| ± урт 4-Хк
В выражении (2.8) знак «Д» соответствует режиму дви-
гателя, а знак « — » — режиму генератора.
Пусковой момент АД определяется из выражения (2.7') при
скольжении х=1:
Л1И = Л1б(>г/ ((pi Д рг)~ Дх;;].
В практических расчетах применяется формула момента в
функции скольжения [в относительных единицах (о. е.)]
М 2 (1 -|-а5к) (29)
s/s« 4~ sK/.s 4~ 2tzsk
где
В ряде случаев эту формулу можно упростить, полагая nsK~0,
тогда
Л1/Л1к=р=----------
S/SK 4~Sk/5
(2.9')
Механическая характеристика, построенная по формуле (2.7'),
имеет вид, показанный на рис. 2.9, б. В отличие от характеристики
ДПТ независимого возбуждения она существенно нелинейна.
68
Рабочая область ограничена пределами 0 — sK. Статическая
жесткость в данном случае определяется только для рабочей
области и при условии s/sK«O, т. е. линеаризации статической
характеристики,
|3 = 2Alh/(u.|SK). (2.10)
Линеаризованная дина.мическая электромеханическая харак-
теристика описывается уравнением
( Гэр+ 1 ) |13= Р («)| — ш),
где Т, = 1/—электромагнитная постоянная времени.
Динамическая жесткость
Из уравнений (2.7) и (2.10) следует аналогия статических
характеристик в рабочей части АД и ДПТ независимого возбуж-
дения.
При превышении частотой вращения ротора частоты вращения
магнитного поля асинхронная машина переходит в генераторный
режим или режим рекуперативного торможения. При этом сколь-
жение ротора становится отрицательным. Ток АД определяется
по уравнению (2.7) при х<0.
Рекуперативный режим АД реализуется или путем переклю-
чения числа пар полюсов (если двигатель имеет полюсопереклю-
чаемые обмотки), или изменением направления момента сопро-
тивления. Оба варианта редко встречаются на практике.
При условии Mr> А1„ АД переходит в режим противовключе-
ния. Скольжение в режиме противовключения s> 1. Двигатель
потребляет недопустимо большие токи, однако в отличие от ДПТ
независимого возбуждения не развивает большого тормозного
момента. Режим противовключения экономически нецелесо-
образен и широкого применения в практике не нашел.
Наиболее эффективным способом торможения является дина-
мическое торможение АД. Оно реализуется путем переключения
обмоток статора от сети переменного тока на сеть постоянного
тока. Электромеханическая характеристика динамического тор-
можения аналогична характеристике Al=f(s), но «опрокинута»
относительно оси ординат на 180° (рис. 2.9, е).
Механическую характеристику АД можно построить по пас-
портным данным, которые позволяют определить четыре точки
характеристики (см. рис. 2.9,6):
1 —точка холостого хода w, = 2л//рп; А4=0; 5 = 0;
2 — точка номинального момента wHoM = 2nHilOM/60; А1)|ОМ =
— Рном/ГОпом,
3—точка максимального момента Мк = цкА1ном. Из уравне-
ния (2.9') можно найти отношение
69
Sk/-Siiom — Цк ± Д'Цк 1
и по уточнённой формуле (2.9) определить
s к /.S но м = ( |Л К + V Р к — I ) / D |,
где D, = 1 4-2.s„P„ (1 —|Лк);
4 — точка пускового момента
X — 1 i Л1П === Цп'^ном-
2.5. ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМАХ
Наступлению установившегося режима, отличного от первона-
чального процесса работы электропривода, предшествует, как
правило, переходный режим, при котором частота вращения и
момент двигателя непрерывно меняются во времени по опреде-
ленному закону. Непрерывность изменения частоты вращения
следует из закона сохранения энергии.
Каждая система электропривода обладает некоторой массой
(моментом инерции), находящейся в состоянии покоя или дви-
жения. Скачкообразное изменение скорости означало бы, что
системе сообщили бесконечно большой импульс мощности или
она сама выделила такой импульс, что физически невозможно.
Поведение системы в переходных режимах описывается диф-
ференциальными уравнениями, устанавливающими зависимость
координат состояния объекта от возмущающих воздействий.
Решение системы дифференциальных уравнений в общем
случае представляет сложную задачу. Для ее упрощения огра-
ничимся исследованием процессов пуска жесткого приведенного
звена при постоянных моменте инерции, моменте сопротивления
и напряжении сети, и не будем учитывать электромагнитные
процессы в двигателе.
Для определения законов движения системы используем
уравнение (2.1).
Рассмотрим процесс пуска ДПТ независимого возбуждения.
Представим для этого момент в функции угловой скорости:
ЛД = Л1П (1 — о>/соо),
где .И„— пусковой момент; a>/<on = v.
Подставим это выражение в уравнение движения:
J (1ы / d t = М п (1 — го /ыо) — М с,
или в безразмерной форме
jMo/M„dv/dt ~s — jic,
где v=l— s; s= 1 — <о/ы(>; p.<. = AT//Vfrl.
70
Рис. 2.10. Характеристики переходного процесса
для ДПТ
Обозначим величину /юо/Л1„ = —
электромеханическая постоянная ДПТ
независимого возбуждения. Тогда урав-
нение движения
T^ds/dt+s = щ.
Решение этого уравнения даст
s=s)CT-f- (хнач —5yeT)e",''r' = s,ia.Ie“'/r"4-Sycr (1 —е-'"7’”).
где Sy<r = M<; — начальное значение скольжения.
Зависимость скольжения от времени легко преобразуется
в зависимость относительной скорости от времени:
v(/)=vlia4e Л Г“ 4~ Vycr (1—е 1Т'').
Обычно переходный процесс заканчивается за три-четыре Г,,.
На рис. 2.10 представлены кривые \- = f(t) для ДПТ мощностью
до 20 кВт в о. е. Для определения скорости в о. е. нужно знать
лишь начальные ее значения vHa4 и постоянную времени. Постоян-
ные времени ДПТ независимого возбуждения небольшой мощ-
ности находятся в пределах 0.1—0,5 с.
Расчет зависимости угловой скорости АД от времени непо-
средственно в процессе пуска АД является сложным, так как
уравнение его движения нелинейно. В данном случае целесооб-
разно искать обратную зависимость /п = /(о>).
Уравнение момента АД (2.7') выразим в функции угловой
скорости и приведем его к безразмерному виду:
! _____mU1 _____________R-i/s ______________ (1 —у) уС
+ + с-2 + 2Лу + В2 ’
(2.11)
где т = (й/(0)^; у= (П/Пном)2;
Цп — ш(7ном/ (Л„ О)] )*
* ' ' Н||ОМ 1 ном '
. Rl + RdK+Xl „2 (Rx + Rtf+Xl r Ri . v , _
.4 =------------ В —-------------; С 1 ——--------д- , V — 1 — -S .
tf+Xl R't + X'i R2,+Xi
Обычно А'к и без большой погрешности можно
принять .'Iftl.
Уравнение движения (2.1) для АД в о. е. имеет вид
где C = CiA„; |1. = Л1(./Л1Й; Г„ = /<»|/Л/6.
71
I
Решение уравнения (2.12) ищем путем разделения переменных:
d/ v2 —' 2А v —Z)2 , /о
— Ис=—5--------------—5----------dv. (2.13)
В Р+ССу/ве-2Л) v+(B2-Cy/M
Введем новые постоянные
Су/р,- — ЧА—р\ В1—С'у/р. =q.
Обозначив .¥ = v2 + pv + <y, получим уравнение (2.13) в виде
7„ л-2 — 2Av+B2 ,
—------------dv = dt.
Bl ¥
Интегрируя обе части равенства и опуская промежуточные
преобразования, запишем решение уравнения (2.12) для случая
4«/>р2:
1±/ = у + А-1п'Х| +А)_2--arctg-^+^-M/. (2.14)
7» V4«—Г V4<7~ Р'
где К=-Су/(2^)-
Це 2 Це 7
при/ = 0ит = 0 Н= — ( К\п\q\+D— 2 arctg— р .
V4'/-/’2 у4<?-/>2
Если р2> 4q, решение имеет вид
Ем = v 4- D In | Х| + D , 1 In
О yp2 — 4 q
2v 4- p — yp2 — 4q
2v + p + y/p2 — 4q
+ H.
(2.15)
где при / = 0 и v = 0 H =—(Kln|^l +— D In——
^lp'2 — 4q p+\lp’ — 4q
Полученные зависимости / = /(v) менее удобны для расчетов
переходного процесса, чем прямая зависимось v = /(/), однако
последнюю вывести сложно, так как выражения (2.14) и (2.15)
являются трансцендентными уравнениями.
Пример. По исходным параметрам АД в соответствии с равенством (2.11)
находим постоянные А = 1; В =1,4; С, = 1,7; нагрузку рс=0,85. При номиналь-
ном напряжении (у=1) промежуточные постоянные: р = 0; д = |,4— 2=—0,6;
0 = 2; Л'=-1
Определим время достижения двигателем относительной скорости v = 0,9.
для чего используем уравнение (2.15) (так какр2> 4q); A=v2—0,6=0,81 —0,6 =
= 0,21; In 0,21 = — 1,56; In 0,078=—2,55; //= — 0,5;
— // 7„ = (0,9 — 0,5 + 1.56 - 2/1,54 • 2.55) / 0.85 = 1,6.
Таким образом, АД достигает относительной скорости 0,9 за 1,6 постоянных
времени.
Изменяя заданную скорость v,. можно найти соответствующее время пуска,
после чего по нескольким найденным значениям построить зависимость v = /(Z).
72
2.6. ЭЛЕКТРОМАГНИТНЫЕ
ПРЕОБРАЗОВАТЕЛИ ЭНЕРГИИ
Основным видом электроэнергии, вырабатываемой энергосисте-
мами и потребляемой в текстильной промышленности, является
переменный ток промышленной частоты. Наряду с ним на пред-
приятиях отрасли в системах электропривода используется энер-
гия на постоянном токе, а также энергия переменных токов
повышенной и пониженной частот. Эти виды энергии произво-
дятся соответствующими преобразователями переменного тока
в постоянный — выпрямителями, постоянного тока в перемен-
ный — инверторами, переменного тока пониженной или повы-
шенной частоты из переменного тока стандартной часто-
ты — преобразователями частоты с непосредственной связью
(ПЧНС).
Неуправляемый выпрямитель. Если постоянное напряжение
на выходе устройства связано с переменным напряжением
на его входе постоянным коэффициентом пропорциональности Д',
то такое устройство называется неуправляемым выпрямителем.
и0=ки2,
где U-, — напряжение вторичной обмотки трансформатора.
Неуправляемый выпрямитель, как правило, состоит из трех
основных частей: трансформатор, собственно выпрямитель и
сгл а ж и в а ю щ и й фи л ьтр.
Трансформатор преобразует напряжение сети в выходное
напряжение ^.соответствующее выпрямленному напряжению С7о,
и обеспечивает электрическую развязку между сетью и потреби-
телем. Выпрямитель преобразует переменный ток в пульсирующий
ток одного направления. Сглаживающий фильтр уменьшает
амплитуду пульсации выпрямленного напряжения или (и) тока
до значения, заданного техническими условиями устройства.
В ряде случаев выпрямитель выполняется без трансформатора
и без сглаживающего фильтра.
В зависимости от способа соединения вентилей различают два
основных типа схем выпрямителей: лучевой и мостовой.
Характерным признаком первого типа схем является после-
довательное соединение вторичных обмоток трансформатора,
вентилей и нагрузки. На каждую фазу трансформатора прихо-
дится один вентиль.
Мостовые схемы (соответственно названию) имеют соеди-
нение вентилей по схеме моста. На каждую фазу трансформатора
приходится, два вентиля.
В зависимости от числа выпрямленных полупериодов, при-
ходящихся на полный период переменного тока, различают: одно-
полупериодное (однотактное) выпрямление (рис. 2.11, а) и двух-
полупериодное (двухтактное) выпрямление (рис. 2.11,6).
73
Рис. 2.12. Однофазное двухполупериодное выпрямление:
а - схема включения выпрямителя; б — графики работы выпрямителя
Однотактные схемы не нашли широкого применения вслед-
ствие большой пульсации выпрямленного напряжения.
Рассмотрим принцип однофазного двухполупериодного вы-
прямления.
Трансформатор 7'1/, питающийся от однофазного напряже-
ния Оь имеет две вторичные обмотки (рис. 2.12, а), напряжения
которых сдвинуты по фазе относительно общей точки на 180°.
и, = — й2.
В течение положительного полупериода 0^ы/^л вентиль
VD1 будет находиться под действием прямого напряжения и
в цепи ACDOA будет проходить положительная полуволна тока.
Полагая вентиль идеальным, а нагрузку активной, можем считать,
что форма полуволны тока повторяет форму полуволны напря-
жения.
При л^ю/^2л вентиль VD2 будет находиться под действием
отрицательной полуволны напряжения и в цепи BCDOB будет
проходить ток, который на нагрузке имеет то же направление,
что и ток в первом полупериоде. Графики на рис. 2.12, б иллюстри-
руют работу выпрямителя.
74
Рис, 2.13. Мостовые схемы выпрямления
Таким образом, за период преобразуемого напряжения каждая
фаза вторичной обмотки работает один раз. Суммарное напря-
жение на нагрузке имеет форму непрерывной последовательности
полусинусоид одного знака. Сглаживающий фильтр выделяет
постоянную составляющую t/() (см. рис. 2.12,6).
Наибольшее распространение получили мостовые схемы вы-
прямления. Принцип действия их показан на примере однофазной
двухтактной схемы (рис. 2.13, а). В отличие от лучевой схемы
вторичная обмотка трансформатора TV здесь — однофазная.
К ней подключены четыре вентиля. Общая точка соединения
катодов одной пары вентилей служит отрицательным полюсом
нагрузки, общая точка соединения анодов другой пары венти-
лей — положительным полюсом.
Работа схемы описывается теми же графиками, что и на
рис. 2.12,6. В течение положительного полупериода выпрям-
ляемого напряжения ток от точки а (см. рис. 2.13, а) через вен-
тиль VD1 проходит по нагрузке к вентилю VD3 и возвращается
во вторичную обмотку трансформатора. При отрицательном
полупериоде процесс повторяется с той разницей, что ток от
точки в проходит через вентили VD2 и VD4 и через точку а воз-
вращается в обмотку трансформатора. На нагрузке проходит
пульсирующий ток одного направления.
При положительной полуволне напряжения вентили VD2 и
VD4 (см. рис. 2.13, а), а при отрицательной—вентили VDI и
VD3 находятся под воздействием обратного напряжения.
Принцип действия «/-фазного выпрямителя (///^2) подобен
принципу действия однофазного, однако каждая пара вентилей
действует в течение 2л/tn периода.
Так, для трехфазной двухтактной схемы (рис. 2.13,6) в пре-
делах каждых 60° открыты следующие пары вентилей: VD1 и VD4,
VD2 и VD5, VD3 и VD6. Состояние вентиля (открытый или за-
крытый) определяется величиной приложенного напряжения:
открытое состояние имеют вентили, к которым приложено наи-
большее в данный момент линейное напряжение.
Коммутация тока с одного вентиля на очередной в следующей
75
Рис. 2.14. Зависимость среднего выпрямленного
напряжения от угла открывания тиристора а
группе происходит в моменты равен-
ства напряжений смежных фаз вторич-
ной обмотки трансформатора (рис.
2.13, в).
Например, для времени /| наиболь-
шее положительное напряжение прило-
жено к вентилю VD1, а отрицатель-
ное — к VD4. Следовательно, в это мгновение проводят ток вен-
тили VD1 и VD4. Пульсации выпрямленного напряжения на
нагрузке в трехфазной схеме меньше, чем в однофазной.
Управляемый выпрямитель. При необходимости регулирования
выходного выпрямленного напряжения используют управляемые
выпрямители. Наиболее экономичным является способ регулиро-
вания напряжения изменением времени открытия вентилей.
Этот способ реализуется на тиристорах.
Зависимость среднего выпрямленного напряжения П() от
угла открывания тиристора а иллюстрирует рис. 2.14. Среднее
значение выпрямленного напряжения
Ц>„ = £Л>„,/2л$ sin (<оО dt = £Л>( 1 -j-cos а.) /2.
где Ui. — Uin/л— максимальное выпрямленное напряжение.
Принципы построения схем неуправляемых и управляемых
нреобразов ателей подоб н ы.
Рассмотрим преобразование постоянного то-
ка в переменный.
Для питания регулируемого асинхронного электропривода
напряжением переменной частоты, питания электропечей и других
промышленных целей используются преобразователи постоян-
ного тока в переменный. Наибольшее распространение получили
статические преобразователи частоты (СПЧ) — инверторы.
Инверторы на небольшую мощность (до 5 кВт) выполняются
на транзисторах, а инверторы на большие мощности и высокие
напряжения — на тиристорах.
Принцип преобразования постоянного напряжения в пере-
менное заданной частоты состоит в периодическом замыкании
и размыкании ключей в цепи постоянного тока, включенной па
нагрузку. В момент включения цепи АС ключом А.7 (рис. 2.15, а)
размыкается ключ К'4 и на нагрузке появляется положительный
прямоугольный импульс напряжения. Через промежуток вре-
мени \1 (рис. 2.15, б) ключ Л7 размыкает цепь АС, ключ Л'2 вклю-
чает цепь СВ и на нагрузке появляется отрицательная волна
76
Рис. 2.15. Принцип преобразования постоянного напряжения в перемен-
ное:
а схема включения периодически замыкающих и размыкающих ключей; б -гра-
фик выходного напряжения во времени
напряжения. Изменением длительности интервала Л/ можно
менять частоту переменного напряжения.
Промышленный СПЧ, преобразующий постоянный ток, состоит
обычно из трех основных частей: трансформатора, предназна-
ченного для согласования постоянного напряжения на входе и
переменного напряжения на выходе устройства; коммутирующего
узла, преобразующего постоянное напряжение в переменное;
фильтров напряжения и тока, формирующих синусоидальный
закон изменения выходных величин.
Статический преобразователь частоты классифицируется по
двум основным признакам: структуре коммутирующего узла,
а также расположению и схеме фильтров в системе преобразо-
вателя.
По этим признакам различают два типа СПЧ: инвертор тока
и инвертор напряжения.
Если на входе преобразователя последовательно с коммути-
рующим узлом включена индуктивность, стабилизирующая вход-
ной постоянный ток, то такой СПЧ относится к классу инверторов
тока. Если на входе преобразователя параллельно коммутирую-
щему узлу включена емкость, стабилизирующая входное постоян-
ное напряжение, то такой СПЧ называется инвертором напря-
жения.
Регулируемый электропривод переменного тока получает
питание от трехфазных инверторов различного типа.
Для примера рассмотрим простейший тиристорный преобра-
зователь частоты (ТПЧ) со звеном постоянного тока, преобра-
зующий напряжение промышленной частоты в напряжение регу-
лируемой частоты.
77
Преобразователь состоит из грех основных частей: управ-
ляемого выпрямителя, обеспечивающего на выходе регулируемые
напряжения постоянного тока; фильтра ЛпСп для устранения
пульсаций напряжения постоянного тока; автономного инвертора
напряжения, преобразующего постоянное напряжение в перемен-
ное, регулируемой частоты и амплитуды.
Упрощенная схема ТПЧ представлена на рис. 2.16, а. Управ-
ляемый выпрямитель и автономный инвертор собраны по мосто-
вой схеме. Инвертор работает по принципу фазовой коммутации,
т. е. такой коммутации, при которой каждая его фаза переключа-
ется отдельно. Каждый из силовых тиристоров VS1—l'S6' открыт
в течение */з периода выходной частоты.
Формирование управляющих импульсов для выпрямителя
производится в блоке управления выпрямителем (БУ В), а в инвер-
торе— блоком управления инвертором (БУИ).
Коммутирующие конденсаторы С1— С6 предназначены для
своевременного запирания тиристоров. Возвратный диодный мост
VD1—VD6 служит путем для циркуляции отстающих индуктив-
ных токов нагрузки. Для пояснения действия коммутирующих
конденсаторов рассмотрим схему коммутации тиристоров на
рис. 2.16,6.
В момент поступления управляющего импульса на тиристор
VS1 последний открывается и пропускает ток нагрузки через
резистор R1 и зарядный ток конденсатора С через резистор R2.
В момент /2 второй управляющий импульс подается на тиристор
V'S2 и разрядный ток конденсатора с указанной на рис. 2.16,6
полярностью напряжения на конденсаторе открывает тиристор
VS2 и закрывает VS1.
При отсутствии промежуточного этапа преобразования энер-
78
Рис. 2.17. Трехфазный преобразователь частоты с
непосредственной связью:
а - схема; б — график
гии переменного тока в постоянный получается преобразо-
ватель частоты с непосредственной связью
(ПЧНС). В этом случае достигается относительно высокий КПД.
Принцип действия трехфазно-однофазного ПЧНС поясняет
рис. 2.17, а. При подаче управляющих импульсов на левую группу
вентилей к нагрузке приложены положительные полуволны
напряжения. Среднее значение напряжения на нагрузке
UH = Uо cos а,
где Uo— напряжение на нагрузке при а = 0; а— угол включения вентилей.
При подаче управляющих импульсов на правую группу вен-
тилей к нагрузке приложены отрицательные полуволны напря-
жения. На нагрузке формируется однофазное напряжение более
низкой, чем в сети, частоты (рис. 2.17,6). Изменением перио-
Рис. 2.18. Тиристорные регуляторы напряжения:
«--схема включения тиристоров; б— зависимость выходного напряжения 11 от угла
открывания тиристоров сс
79
дичности следования управляющих импульсов можно менять
частоту питающего напряжения, а изменением угла открывания
тиристоров — напряжение на нагрузке.
Трехфазно-трехфазный преобразователь построен по анало-
гичному принципу, он имеет 18 тиристоров (по шесть на каждую
фазу).
Изменением угла открывания тиристоров в схеме со встречно-
параллельным включением двух тиристоров в каждой фазе трех-
фазной цепи (рис. 2.18. о) можно изменять в широких пределах
напряжение на нагрузке. Этот принцип положен в основу тири-
сторных регуляторов напряжения (ТРИ), по-
строенных на разных схемах.
Зависимость выходного напряжения U от угла открывания
тиристоров а представлена на рис. 2.18,6. ТРИ широко приме-
няются в схемах управления АД.
2.7. РЕГУЛИРОВАНИЕ ЧАСТОТЫ
ВРАЩЕНИЯ ЭЛЕКТРОПРИВОДА
Принудительное, независимое от момента на валу изменение
скорости механизмов называется ее регулированием. Такое ре-
гулирование необходимо для многих производственных процес-
сов в текстильной промышленности. Оно реализуется специаль-
ным воздействием на приводной электродвигатель или систему
передач.
Способы управления скоростью разделяются на два основных
класса: параметрическое управление, когда заданный уровень
скорости обеспечивается соответствующей установкой какого-либо
параметра электродвигателя, определяющего вид механической
характеристики; автоматическое управление, когда заданный уро-
вень скорости обеспечивается специальной системой регули-
рования.
Качество регулирования оценивается тремя показателями:
диапазоном регулирования, т. е. отношением максимальной
скорости <1>маК1- к минимальной (оМии(Д = о>чак(./<ом1,н), которое обес-
печивает данная система привода. Диапазон выражается в числах
(например, Д = 4:1 или Д= 100:1);
плавностью регулирования, т. е. количеством дискретных ступе-
ней скорости в данном диапазоне регулирования, что оценивается
коэффициентом плавности К11Л = <о,/со,_ i (со, и си, ।—угловые
скорости на соседних ступенях регулирования, причем чем больше
ступеней, тем выше плавность регулирования);
точностью регулирования, т. е. возможными отклонениями
скорости под влиянием возмущений (например, изменение мо-
мента нагрузки) или несовершенства системы управления от за-
данного значения. Оценка точности регулирования производится
80
Рис. 2.19. Методы регулирования ча-
стоты вращения электропривода:
U - напряжение. Ф — поток; П - пара-
метры; В величина; Д— длительность
приложения А — асимметрия
ПО отношению 6 = Л(0мак1/<0зад
( A(oMilhe — максимальное откло-
нение угловой скорости от
заданного значения (o!3J).
11огрешность регулирования
в ряде случаев может быть
оценена по статизму механиче-
ской характеристики х„, т. е. по
отношению разности угловых
скоростей идеального холостого
хода и номинальной (Ao>HOU)
к скорости идеального холосто-
го хода (»„ на заданной регулировочной характеристике:
$м= \o>u<ni/<"0-
Методы регулирования строятся на зависимости угло-
вой скорости электрической машины от различных показателей.
Для наглядности эти методы можно объединить диаграммой
(рис. 2.19).
Каждый показатель машины может меняться по величине,
длительности приложения и асимметрии в пространстве или
времени.
Любой метод регулирования должен обеспечить полную на-
грузку электродвигателя в заданном диапазоне регулирования,
так как недогрузка ведет к ухудшению его энергетических пока-
зателей (КПД и коэффициента мощности) и недостаточному
использованию электродвигателя но тепловому режиму.
Параметрические методы регулирования частоты вращения
электрических машин постоянного и переменного тока. Одним
из методов является резне т орное регулирование ДПТ
независимого возбуждения. Это регулирование можно
осуществить изменением добавочного резистора /?ср в цепи якоря
(см. рис. 2.6, а). Изменение частоты вращения, как следует из
формулы (2.4),
А(о/а>о = (Ruy. Д /?<р) Д/Д,
т. е. пропорционально суммарному сопротивлению цепи якоря.
Частоту вращения на искусственной характеристике «>„ при за-
данном /?яч. можно найти по известной естественной характери-
стике (ое=71/„) (т. е. при /<р = 0):
<о,- /в)
О) и —---------------•
81
На рис. 2.20, а показаны три механические характеристики
с различным суммарным сопротивлением цепи якоря. Наименьшей
жесткостью обладает характеристика с наибольшим
При малых моментах нагрузки резисторное регулирование
неэффективно, так как \<о меняется незначительно даже при
больших /?ср (прямая тп на рис. 2.20, а). Введение в цепь
якоря заметно увеличивает потери и снижает КПД, и потому
данный способ неэкономичен. Аналогичную оценку можно дать
и другому резисторному способу регулирования — включению
резисторов /?пр параллельно цепи якоря (см. рис. 2.6, а).
ЛАетод регулирования потоком возбуждения
реализуется изменением сопротивления регулировочного резисто-
ра в цепи возбуждения. Современные электрические машины
выполняются, как правило, с насыщенной магнитной цепью, и до-
биться заметного увеличения потока весьма трудно. Следователь-
но, остается только возможность увеличения частоты вращения
путем уменьшения потока возбуждения. Поскольку поток прямо
пропорционален моменту и обратно пропорционален частоте вра-
щения, то одновременно с повышением частоты вращения нужно
снижать допустимую нагрузку обратно пропорционально этой
частоте, т. е.
Л11П11 = СФ„/„=(1/со) (Дн-/?яДн)/н. (2.16)
Управление резистором в цепи возбуждения экономично, так
как ток возбуждения обычно составляет несколько процентов
тока якоря и изменение регулировочного сопротивления не
82
вызывает заметного изменения потерь. Обычные пределы регу-
лирования ослаблением потока составляют от 2:1 до 8:1.
При сильно ослабленном магнитном потоке в электродвигателе
могут возникнуть периодические колебания частоты вращения.
Вероятной причиной этого явления представляется размагничи-
вающее действие якоря, которое ослабляет уменьшенный регу-
лированием основной поток, а значит, и момент электродвигателя.
Если А1,<А1, то частота вращения резко падает. Одновремен-
но уменьшается ток якоря и реакция якоря, тогда возрастает
основной поток и момент электродвигателя может стать больше
А1(. Возникают устойчивые колебания, избежать которые можно
правильным выбором диапазона регулирования частоты вращения
при данном допустимом моменте Л1Г.
ES отличие от рассмотренных выше метод регулирования
часто г ы в р а щ е н ня на пряжеии с м и ст о ч ника п и -
та и ия допускает широкие диапазоны регулирования (более
1000: 1) при постоянной жесткости механических характеристик.
Реализация этого метода возможна лишь при питании от ис-
точника с регулируемым напряжением, как, например, электро-
машинный генератор, трехфазная сеть с магнитным усилителем
и выпрямителем, вентильные преобразователи н др.
Достоинством способа регулирования напряжением является
его экономичность, так как изменение напряжения достигается
изменением тока или напряжения в цени управления при малых
затратах энернш.
Механические характеристики представляют собой семейство
параллельных прямых, изображенных на рис. 2.20, 6. Диапазон
регулирования обычно делится на два поддиапазона: в нервом -
регулирование от пуля до (0|Н,м осуществляется при Ф„о« и Л411О«
и переменной мощности, во втором - изменением тока возбужде-
ния при R,IOM и E' = const.
Регулирование частоты вращения для ДПТ последователь-
ного и смешанного возбуждения. Принципы резисторного
р е г у л и р о в а н и я ДПТ всех типов аналогичны. Для определе-
ния частоты вращения ДПТ последовательного возбуждения па
искусственной характеристике можно использовать выражение
(2.16). Зависимость \о> —| (R^) линейна для всех типов ДПТ.
Способ регулирования потоком возбуждения
широко распространен для ДПТ последовательного возбуждения.
Увеличение потока достигается включением резистора Rpi па-
раллельно цепи якоря, а снижение потока — включением резисто-
ра /?|)2 параллельно цепи обмотки возбуждения (см. рис. 2.7, а).
Ток якоря определяется в основном моментом сопротивления.
При параллельном соединении обмотки возбуждения и резистора
токи в ветвях /в = RPJ„/ (/?„+-/<,Д; /,„ = RJ«/ 4-Я|>г)
Изменение Rp2 приводит к изменению /в в широких пределах,
что и вызывает изменение угловой скорости w.
83
магничивапия при возрастании нагрузки и уменьшать при ее
снижении. Диапазон регулирования с реактором без подмагни-
чивания ограничен величиной 1,3—1,5, а с реактором с подмагни-
чиванием достигает 5—8; КПД не меняется, а коэффициент
мощности снижается по сравнению с резисторным регулиро-
ванием.
Регулирование частоты вращения АД переключением
обмогкп статора на разное число п о л ю с о в проис-
ходит в соответствии с выражением частоты вращения магнитного
поля:
ил = 2л///»„
и обеспечивает се дискретное изменение.
Переключение числа полюсов достигается либо двумя незави-
симыми обмотками с разными числами полюсов, либо изменением
схемы соединения катушек одной обмотки. В последнем случае
наиболее удачной по минимуму переключения контактов является
схема «треугольник двойная звезда». Такое регулирование осу-
ществляется с одинаковым критическим скольжением при оди-
наковой мощности на обеих частотах вращения:
'ДОН /ЛДО1Г
где /\ и /V, - допустимые мощности соответственно при соединении в
'ДОН ЛЛД()П - г
«треугольник» и «двойную звезду».
Регулирование данным способом экономично, однако низкая
плавность регулирования ограничивает области его применения.
Принцип регулирования изменением напряжения
вытекает из зависимости
.М = U2.
Снижение напряжения уменьшает не только ЛК, но и жесткость
механических характеристик, так как критическое скольжение
при этом способе остается неизменным.
Энергетические показатели при таком способе регулирования
сравнительно более высокие, чем при рассмотренных выше.
Изменение напряжения осуществляется автотрансформатором
с переменным коэффициентом трансформации или ТРН, обеспе-
чивающим плавное изменение напряжения в широких пределах.
Принцип регулирования импульсным напряжением
аналогичен принципу регулирования напряжением с той разницей,
что изменение действующего напряжения на обмотках статора
(или ротора) создается их периодическим подключением с боль-
шой частотой к источнику питания. Соотношение времени включен-
ного состояния обмоток и пауз в одном такте определяет дейст-
вующее значение напряжения. В течение паузы электродвигатель
работает за счет запаса кинетической энергии вращающихся
частей и запаса электромагнитной энергии в обмотках машины.
86
Рис. 2.22. Механические характеристи-
ки АД при частотном регулировании
частоты вращения
Недостатком такого метода
регулирования являются по-
вышенные вибрации, обуслов-
ленные периодичностью вклю-
чения напряжения.
Метод регулирования
в системе СПЧ — АД пред-
полагает изменение частоты
питающего напряжения, что вы-
зывает пропорциональное изме-
нение частоты вращения АД.
Одновременно пропорциональ-
но частоте меняются индук-
тивные сопротивления обмоток
машины, что при постоянном
напряжении вызывает измене-
ние тока, а следовательно, и
момента, развиваемого АД. Для поддержания тока статора
близким к номинальному напряжение на обмотках статора изме-
няют по закону (принимая приближенно Ri =0)
Д50/ ^г=/5(>//п\'Л1с(<'>5<))/ [Л1С((ОП) ] ,
где индекс 50 относится к величинам при частоте 50 Гц, а индекс п — к величинам
при переменной частоте.
Этот закон обеспечивает примерно постоянную кратность
перегрузки:
2. = Л1 к/ Л = const.
Механические характеристики при частотном регулировании
смещаются пропорционально частоте сети параллельно характе-
ристике при номинальной частоте (рис. 2.22).
Регулируемые электроприводы переменного тока целесообразно использовать
в тех производствах отрасли, где по условиям окру жающей среды нет возможности
использовать двигатели постоянного тока. Поэтому и становится важной проблема
разработки частотно-регулируемых электроприводов на базе тиристорных СПЧ.
Поскольку при преобразовании напряжения сети в постоянное возникают
несинусоидальные токи, вызывающие ложное срабатывание защит, нарушение
характеристик систем автоматики и др., то СПЧ целесообразно выполнять на
входе с нерегулируемым выпрямителем. Регулирование напряжения на статоре
АД в таком электроприводе осуществляется в автономном инверторе напряжения
(АПН) широтноимпульсными способами. При этом появляется возможность
обмена активной мощностью между отдельными АПН одной группы. Кроме
того, мощность, отдаваемая в источник постоянного тока АД в тормозном режиме,
может быть потреблена электродвигателями, работающими в двигательном
режиме.
87
В Ивановском энергетическом институте им. В. И. Ленина проведена
технико-экономическая оценка современных систем электропривода, по которой
выявлена целесообразность использования регулируемых электроприводов пере-
менного тока малой мощности на базе СГ1Ч с общим звеном постоянного тока
на группу индивидуальных автономных инверторов с широтно-импульсным регу-
лированием напряжения в каждом с диапазоном регулирования частоты вра-
щения 15:1. Их применение обеспечивает уменьшение стоимости и повышение
надежности работы электропривода, а также снижение влияния на питающую сеть.
2.8. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Системы электропривода с автоматическим управлением анализируются обычными
методами теории автоматического управления (ТАУ). При анализе автоматические
системы разбивают на отдельные динамические звенья и составляют уравнение
каждого звена в отдельности. Совокупность уравнений звеньев образует матема-
тическую модель системы в целом. Ее можно преобразовать к одному уравнению,
исключив для этого промежуточные переменные.
Любое устройство, процессы в котором описываются дифференциальными
уравнениями, называется динамическим звеном. Динамические звенья классифи-
цируются по виду дифференциальных уравнений.
Позиционные (или статические) звенья имеют линейную связь между
входной и выходной величиной:
У=А'Л,
где К — коэффициент пропорциональности, называемый коэффициентом передачи
звена.
Интегрирующие звенья имеют линейную связь производной выходной вели-
чины dY/dt и входной величины в установившемся режиме:
dY/dt=KX.
Для установившегося режима справедливо равенство
Y=K\.Xdl.
по которому данное звено и получило свое название.
Дифференцирующие звенья имеют линейную связь производной входной
величины с выходной величиной в установившемся режиме:
Y=KdX/dt.
Законы регулирования. Алгоритм или функциональная связь, которая
формирует управляющее устройство и качество сигналов управления объектом в
функции ошибки задающего и возмущающего воздействия, называется законом
регулирования:
«(/) =E(.V, г/, f)-
где X — ошибка; г/ — задающее воздействие; / - возмущающее воздействие.
Рассмотрим только регулирование в функции ошибки Д'. Пропорциональное
регулирование имеет вид
ц(/)=Л',А(/).
Пропорциональное (или статическое) регулирование не исключает, а только
уменьшает вероятную ошибку.
При интегральном регулировании скорость изменения регулирующего воз-
действия пропорциональна ошибке, т. е.
du /dt = К'Х.
88
Рис. 2.23. Характеристика пе-
реходного процесса в си-
стеме автоматического регу-
лирования
Изодромное (пропорционально-интегральное) регулирование с ПИ-регулято-
ром реализуется соответственно закону
и = KiX \-\KiXdt.
Оно сочетает быстродействие пропорционального регулирования и высокую
точность интегрального регулирования. Интегральная составляющая обеспечи-
вает возможность полной компенсации ошибки (астатическое регулирование).
Регулирование по производным реализуется только в переходных процессах,
когда ошибка является функцией времени:
u = KtdX/dt.
Определение запаса устойчивости и быстродействия по переходной характе-
ристике. Качество САУ можно оценивать по характеру переходных процессов
при регулировании. Обычно рассматривается переходный процесс от единичного
скачка на входе системы. Возникающий при этом процесс представляется
переходной характеристикой.
Склонность системы к колебаниям характеризуется максимальным значением
регулируемой величины. В относительных единицах перерегулирование опреде-
ляется отношением
а=|Г,а«-У(оо)] 100/У(оо),
где )'(оо)=А0 установившееся значение регулируемой величины (рис. 2.23).
Быстродействие системы определяется длительностью переходного режима,
которое находится как время между приложением единичного скачка до момента
установления статического режима. Этот момент находится из следующего ра-
венства:
|У(0 -У(оо)| = Л,
где А—заданная малая постоянная (допустимая ошибка).
2.9. ПРИНЦИПЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ
В ЗАМКНУТОЙ СИСТЕМЕ
ПРЕОБРАЗОВАТЕЛЬ — ДВИГАТЕЛЬ
Изменение напряжения на зажимах двигателя в широких пределах
реализуется различного типа преобразователями. Наибольший
диапазон изменения обеспечивает тиристорный или транзисторный
управляемый выпрямитель (УВП) в электроприводе постоянного
тока и СПЧ в электроприводе переменного тока.
Системы преобразователь — двигатель решают сложные зада-
чи автоматического управления скоростью и положением меха-
низма (программное управление станками, отработка задающих
сигналов с высокой точностью и др.). Они выполняются замкнуты-
89
Рис. 2.25. Структура САУ с промежу-
Рис. 2.24. Типовая структурная схема точным усилием
системы регулирования:
S задающее устройство; АIV' сумматор; .4 регулятор; UV - датчики напряжения
и датчики обратной связи; U7. — преобразователь; И двигатель; //Л передаточное
устройство: ИМ - - исполнительный механизм; В1 по скорости после передачи со.
В2 ио скорости двигателя
ми по скорости, напряжению или току и могут работать по прин-
ципу компенсации отклонения или возмущения.
Введение обратных связей в систему расширяет диапазон
регулирования, повышает его плавность, улучшает статические
и динамические свойства системы, повышает точность отработки
сигналов задания, а также устойчивость и быстродействие системы
электропривода.
Главной является внешняя отрицательная обратная связь
по скорости, вспомогательными — внутренние связи по току и
напряжению.
Типовая структурная схема системы регулирования (стаби-
лизации) скорости приведена на рис. 2.24.
Сумматор АIV' сравнивает сигналы С, и (70 < и посылает сигнал
управления Uy = U3—Uo.c на регулятор А. Выходной сигнал регу-
лятора поступает на вход преобразователя UZ, изменяя его выход-
ное напряжение, а следовательно, момент двигателя.
Системы автоматического управления электроприводом под-
разделяются: по принципу действия на непрерывные (аналоговые)
и прерывистые (дискретные); по принципу регулирования на ста-
тические (ошибка не равна 0) и астатические (ошибка рав-
на 0), по структуре — с промежуточным (суммирующим) усили-
телем, с независимым регулированием параметров, с подчиненным
регулированием параметров.
Структура автоматической системы управления определяет
порядок взаимодействия отдельных звеньев и поэтому имеет
большое значение для качества регулирования.
В структуре с промежуточным усилителем сигналы задания и
обратных связей суммируются на входе общего усилителя, ко-
торый одновременно выполняет задачу усиления управляющих
сигналов до требуемого уровня (рис. 2.25).
Одновременное действие сигналов различных обратных связей
может вызвать неустойчивую работу системы, особенно в тех
случаях, когда эти сигналы действуют с противоположными
знаками. Так, регулирование скорости требует увеличения жест-
90
Рис. 2.26. Трехконтурная
система подчиненного ре-
гулирования:
и — структурная схема; б —
схема контуров но подчинен
ноет и
кости механических характеристик, а регулирование момента
снижает эту жесткость. Для повышения устойчивости в систему
вводят элементы отсечки, отключающие ту обратную связь,'
в которой регулируемый параметр меньше порогового напряжения
этого элемента, называемого напряжением отсечки (7оге.
Системы имеют ограниченные возможности формирования тре-
буемых статических и динамических характеристик электропри-
вода и потому не нашли широкого применения.
При независимом или параллельном регулировании (рис.
2.26, а) каждому параметру соответствует свои регулятор и свой
сигнал задания. В каждый данный момент времени регулируется
только одна переменная. Такой режим работы обеспечивается
логическим переключающим устройством {LPU), подключающим
на вход системы выход того регулятора, воздействие которого
является определяющим.
В отечественном электроприводе эта система не нашла при-
менения из-за сложности реализации LPLJ.
По сравнению с этой системой более широкое применение
нашел принцип последовательной коррекции, или подчиненное
регулирование. Согласно этому принципу объект регулирования
представляется последовательностью звеньев, выходные пара-
метры которых являются координатой объекта (ток, напряжение,
магнитный поток, скорость, положение).
Каждая координата управляется регулятором, образующим
с каким-либо звеном объекта контур, замкнутый обратной связью.
Регуляторы соединяются последовательно так, что выход одного
является входом другого. На рис. 2.26, б показана трехконтурная
система подчиненного регулирования. Звенья At, А2, АЗ являются
регуляторами, а звенья Wl, W'2, ЖЗ принадлежат объекту регу-
лирования. Звенья U’7 —Al образуют внутренний контур, 1Г2 -
А2—промежуточный, а звенья W3—АЗ внешний контур.
Выходной сигнал каждого внешнего контура является задающим
для последующего заключенного внутри него контура, т. е. каж-
дый внутренний контур подчинен внешнему контуру регулиро-
вания.
91
Рис. 2.27. Аналоговая система подчиненного регулирования скорости тирп-
сюриого электропривода постоянного тока
Система подчиненного регулирования имеет два преимуще-
ства. Первое состоит в упрощении наладки системы. Каждый
контур включает в себя регулятор со стандартными характе-
ристиками, которые обеспечиваются соответствующим выбором
его параметров. Настройка начинается с внутреннего контура.
Ее качество оценивается по результатам сравнения реакции
контура на скачок управляющего воздействия со стандартной
характеристикой. Второе состоит в удобстве ограничения пре-
дельных значений промежуточных координат системы: ограниче-
ние выходной координаты внутреннего контура обеспечивается
предельным значением выходного сигнала регулятора внешнего
контура.
Недостатком системы подчиненного регулирования является
снижение быстродействия по сравнению с системами с парал-
лельной коррекцией. Это следует из того, что быстродействие
каждого внешнего контура будет ниже быстродействия внутрен-
него контура.
Это обстоятельство ограничивает число последовательно
включенных контуров. Обычно оно не превышает трех.
Для примера рассмотрим аналоговую систему подчиненного
регулирования скорости тиристорного электропривода постоянно-
го тока (рис. 2.27). Она содержит два контура регулирования:
тока и скорости, из которых первый подчинен второму; устройство
ввода задания (УВЗ) и задатчик интенсивности ввода (ЗИВ).
Основным элементом регуляторов является операционный усили-
тель (ОУ). Регулятор тока (АТ) выполняется, как правило, про-
порционально-интегрального (ПИ) типа, поэтому в цепи обратной
связи ОУ включена цепочка /?„ ТСО ,, которая выполняет функции
интегрирования сигнала. Сигнал обратной связи, пропорциональ-
ный току, снимается с резистора RU1 в цепи якоря ДПТ (Л1) и после
преобразований в соответствующее напряжение в датчике тока
UB2 направляется на вход регулятора тока, где сравнивается с
задающим сигналом на В зависимости от требований к точ-
ности регулятор скорости выполняется пропорционального (П)
92
или пропорционально-интегрального (ПИ) типа. В данном случае
имеем П-регулятор.
По структуре регулятор скорости АС аналогичен регулятору
тока. Различие между ними состоит в том, что в ОУ регулятора
скорости введен блок ограничения БО1, задача которого состоит
в ограничении максимальной скорости электропривода. Датчиком
обратной связи по скорости служит тахогенератор (в данном
случае постоянного тока), сигнал с которого (7В| на резисторе
Rc сравнивается на входе ОУ с сигналом задания скорости на
резисторе R3 с.
Контуром скорости управляет устройство ввода задания
(УВЗ), которое в простейшем варианте представляет собой рези-
сторный делитель напряжения (потенциометр), подключенный к
зажимам эталонного напряжения U3. Сигнал управления пред-
ставляет собой напряжение, пропорциональное заданному значе-
нию скорости. Скорость изменения управляющего сигнала и, сле-
довательно, скорость изменения электропривода в целом регули-
руются задатчиком интенсивности сигнала (ЗИС) 2, который
обычно состоит из трех ОУ (3, 4, 5), работающих соответственно
в ключевом, линейном и интегрирующем режимах.
Рассмотрим работу системы. При подаче напряжения с УВЗ 1,
пропорционального заданной скорости, на выходе ОУ-3 3 появится
практически мгновенно напряжение ограничения (74. Интегратор
ОУ-4 4 преобразует напряжение задания (7J C в линейно меняю-
щееся во времени напряжение:
Нз.с= U3 ct /1 ОУЗ,
где Гоуз = С.)„7?зи.
С появлением напряжения U'3C на входном резисторе /?зс
на выходе АС появится напряжение U лс, создающее на выходе
АТ напряжение U лт. Это напряжение определяет угол отпирания
тиристоров. В цепи якоря возникает ток, а значит, и момент М3,
приводящий систему в движение. По мере увеличения U'3 с ско-
рость электропривода будет возрастать с заданным темпом
изменения. При достижении электродвигателем скорости ш,
равной заданной со.,, сигналы
\Ue=U'3.e~ UflC И \иГ=и.^~ Уот
будут равны нулю и напряжение на выходе АТ и АС будут по-
стоянны, т. е. будет постоянной и скорость.
Случайное изменение момента сопротивления или напряжения
сети изменит скорость электродвигателя; тогда появятся сигналы
обратной связи UBI и UB2 на выходе и fi2, отличные от U3.c
и U3 т. Соответственно появившиеся АС/с и Д{/т противодействуют
изменению скорости.
Система легко реализуется на серийной аналоговой универ-
93
сальной блочной системе регуляторов УБСР-А. Она обеспечивает
быстродействие с временем регулирования около 0.3 с и точность
при ПИ-регуляторе 0.1—0,5 % и П регуляторе 2 5 %.
2.10. ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Возрастающие требования технологических процессов к точности
выполнения операций, обусловленные повышением качества про-
дукции, вызвали широкое внедрение управляющих ЭВМ в системы
автоматизированного электропривода.
В зависимости от уровня сложности задач разработка цифро-
вых систем ведется в трех направлениях:
центральные управляющие машины для сложных объектов
(самолеты, прокатные станы, ракеты и т. п.); ЭВМ должна иметь
в этом случае большой объем памяти, высокое быстродействие,
возможность диалогового режима;
цифроаналоговые комбинированные системы для управления
объектами, требующими высокого быстродействия и точности
отработки задания; обычно в этих системах составляющие закона
регулирования (управления), обеспечивающие статическую точ-
ность, вычисляются в цифровой форме, а составляющие, форми-
рующие динамические характеристики,- в аналоговой форме;
микроЭВМ, микропроцессоры или другие простые вычислитель-
ные средства (сумматоры, интеграторы, логические цепи и т. д.),
помещаемые в каждом канале управления для сравнительно
простых систем.
Системы первого направления весьма сложны, и их описание
выходит за рамки данного учебника. Рассмотрим кратко работу
двух других систем.
Принцип действия цифроаналоговых способов управления
поясняется на примере одномерной системы, изображенной на
рис. 2.28, а. Входной задающий сигнал q через преобразователь
непрерывной величины в код (АЦП) в цифровой форме qn подает-
ся на УВМ (точнее ее процессор), куда подается также в цифровой
форме через другой АЦП управляемая величина У|(. Выходная
величина УВМ в цифровой форме Ао==^()— У'о преобразуется
в цифроаналоговом преобразователе в аналоговую величину X,
которая поступает на вход непрерывной части системы, куда
относятся объект управления, исполнительные устройства и т. д.
Таким образом, для перехода от аналоговой системы к цифро-
вой следует заменить аналоговые блоки на соответствующие
цифровые. Аналоговые устройства ввода задания заменяются
на цифровые (ЦУВЗ) (рис. 2.28,6), задатчик интенсивности —
на цифровой задатчик интенсивности (ЦЗИ), интегральные ре-
гуляторы — на цифровые интеграторы и т. д.
Цифроаналоговая система регулирования угловой скорости
обычно выполняется с однократно интегрирующим аналоговым
94
Рис. 2.28. Одномерная система при цифроаналоговом способе управления'.
а аналоговые устройства ввода задания; 6 - цифровые устройства ввода гадания
контуром регулирования тока, подчиненным цифровому регулято-
ром скорости (в частном случае—цифровому интегратору).
ЦУВЗ задает скорость электродвигателя в виде числа N\ v,
которое через цифровой задатчик интенсивности поступает на
сумматор С1. Одновременно генератор эталонной частоты (ГЭЧ)
через делитель частоты Д посылает эталонные сигналы /п на
счетчик импульсов, куда приходят и импульсы [л <• датчика ско-
рости 1BJ.
В счетчике сравниваются сигналы и /д и разность их через
регистр Р2 поступает на сумматор С1, определяя таким образом
сигнал ошибки АД. Этот сигнал преобразуется в аналоговый
сигнал ошибки, который является сигналом задания для контура
тока. Для осуществления пропорционально-интегрального регули-
рования ПИ-регулятором скорости в структурную схему дополни-
тельно включается накапливающий сумматор СЗ и регистр памяти
РЗ. Сумматор С2 осуществляет последовательное алгебраическое
суммирование текущих значений отклонения скорости Л\. Про-
порциональная \\ и интегральная Л/„ составляющие сигнала
регулирования скорости суммируются на С2, и суммарный сигнал
Nx поступает в ЦАП.
Возрастающая сложность регулируемых электроприводов, со-
держащих аналоговую часть (двигатель, передачу, рабочий меха-
низм, цифровые устройства, устройства передачи и преобразова-
ния информации), необходимость выполнения функции диагности-
ки неисправностей и защиты выдвигает задачу разработки новых
средств управления электроприводом. Таким средством стала
микропроцессорная техника.
95
шд
Рис. 2.29. Упрощенная
структурная схема микро-
процессорного управления
Рассмотрим совместную работу специализированной мик-
роЭВМ и тиристорного электропривода (ТЭП). На рис. 2.29 при-
ведена упрощенная структурная схема микропроцессорного управ-
ления. Скорость электродвигателя регулируется изменением угла
открывания тиристоров преобразователя. Информация о скорости
двигателя поступает с тахогенератора BR, укрепленного на валу
двигателя, через фильтр низкой частоты ФНЧ 1 и аналого-цифро-
вой преобразователь А ЦП поступает на вход МП. Кроме централь-
ного процессора система включает оперативное запоминающее
устройство ОЗУ, постоянное запоминающее устройство ПЗУ,
блок дискретно управляемых временных задержек БДЗ. Связь
датчиков системы с блоками МП осуществляется шиной адреса
ША, а передача команд исполнительным устройствам — шиной
данных ШД.
Синхронизация системы производится сигналами прерывания
частотой 50 Гц, поступающими на вход микропроцессора. В микро-
процессоре сравнивается истинное значение скорости, измеренное
тахогенератором, с заданным и по величине рассогласования
корректируется сигнал управления тиристорным преобразовате-
лем. Кроме того, МП выдает информацию о состоянии узлов
системы и, в частности, значения тока якоря, который измеряется
шунтирующим резистором R и через ФНЧ 2 поступает на АЦП.
2.11. СТАНКИ С ЧИСЛОВЫМ ПРОГРАММНЫМ
УПРАВЛЕНИЕМ
Автоматизация промышленности, в том числе и текстильной,
предусматривает широкое использование различных агрегатов со
сложными законами движения исполнительных органов по не-
скольким координатам. Управление такими агрегатами произво-
дится по специальным программам.
Решение задачи программного движения исполнительных орга-
нов можно условно разделить на следующие три этапа:
подготовка исходных данных для программирования на осно-
ве геометрической и технологической информации, задаваемой
в виде рабочего чертежа и технологической карты;
96
подготовка программы в форме физической модели, копир-
чертежа или в виде изменяющихся по заданному закону токов и
напряжения или в числовом коде;
воспроизведение программы в форме требуемых перемещений
исполнительного органа системы с числовым программным управ-
лением (ЧПУ).
Основная особенность ЧПУ состоит в том, что информация
о заданном законе движения заложена в последовательность
чисел или цифр, нанесенных в закодированном виде на программо-
носитель (перфоленты, перфокарты, магнитные ленты и др.). Про-
грамма, записанная на программоносителе, обеспечивает высокую
точность отработки задания; она не связана непосредственно
с размерами обрабатываемой детали, как это имеет место в шабло-
нах, копирах, кулачках и других носителях аналоговой инфор-
мации, вследствие чего изготовлять ее значительно легче, быстрее
и экономичнее других видов программ.
Переналаживание станков с одной на другую программу осу-
ществляется проще и быстрее в том случае, если они записаны
на программоноситель.
Система ЧПУ состоит из двух основных частей:
вычислительно логического устройство (ВЛУ), конструктивно
оформленного в виде отдельного блока (шкафа);
автоматической системы управления электроприводом
(АСУЭП), размещаемой на станке.
По структуре, функциям 1! объему информации ВЛУ системы
ЧПУ можно разделить на две группы:
система с жесткой структурой, заданными алгоритмами управ-
ления и ограниченной памятью (NC — Numerical control);
системы с гибкой структурой, встроенными мини-ЭВМ или
микропроцессорами (CNC — computer Numerical control). Они
имеют большой объем памяти, возможность быстрой смены
алгоритмов, подключения по каналам связи внешних устройств.
По виду закона управления приводами подач системы ЧПУ
делятся на позиционные и контурные.
Позиционные (координатные) системы обеспечивают переме-
щение инструмента относительно детали в заданную точку про-
странства с необходимой точностью (например, сверлильные,
координатно-росточные и другие станки).
Контурные системы обеспечивают перемещение инструмента
относительно детали по заданной траектории (например, фре-
зерные, токарные и другие станки). Форма траектории может
быть и криволинейной, поэтому точность обработки задания
зависит от степени согласованности скорости подач одновременно
по нескольким координатам.
Контурные системы ЧПУ можно использовать вместо пози-
ционных, однако сложность управления первыми и их стоимость
делают эту задачу нецелесообразной.
4 А. М. Лаигеп, В. В Красник
97
Рис. 2.30. Структурная схема систем с ЧПУ:
й система с ла с т ко я cipyiaypon А-С; б — система с гибкой структурой CNC
Большинство современных систем с ЧПУ выполняются уни-
версальными, т. е. контурными и позиционными.
По форме задания программы системы с ЧПУ делятся на
дискретные, где задание и воспроизведение программы осущест-
вляется в дискретной форме (системы с шаговыми двигателями),
и дискретно-аналоговые, где программа задается в дискретной,
а воспроизводится в аналоговой форме.
В течение короткого времени системы с ЧПУ превратились
в сложное оборудование с широкими технологическими возмож-
ностями.
Рассмотрим общую структуру систем с ЧПУ. Каждая система
получает информацию о движении исполнительного органа (ИО)
по определенной траектории и выполнении различных технологи-
ческих ко?ланд из программы, записанной на программоносителе.
В вычислительно-логическом устройстве системы NC (рис. 2.30, а)
числовая программа посредством блока воспроизведения про-
грамм (БВП) через блок ввода (БВ), где производится усиление
сигнала, поступает в блок декодирования (БД). Этот блок рас-
шифровывает кодовые символы и направляет программные
команды либо в устройство управления (УУ), обеспечивающее
взаимодействие блоков ВЛУ, либо в блок технологических команд
(БТК), который служит для управления режимами объекта,
включения и отключения механизмов.
Система NC реализует программу параллельно разными бло-
ками по командам, вводимым с пульта управления станком (ПУС)
и пульта управления устройства числового управления (/7УУ).
Изменение функций системы достигается введением новых блоков.
98
В системе CNC основные алгоритмы работы задаются про-
граммой и могут изменяться при изменении функций установки.
Блок ВЛУ системы CNC (рис. 2.30, б) содержит арифметико-логи-
ческое устройство (АЛУ), которое производит необходимые
расчеты для управления исполнительным органом. Программа
вводится в АЛУ через БВП и блок ввода-вывода БВВ.
В постоянном запоминающем устройстве (ПЗУ) хранится по-
стоянная память программы и некоторые постоянные, в оператив-
ном запоминающем устройстве (ОЗУ) — управляющие про-
граммы, текущие значения параметров, информация для коррек-
ции траектории. Все операции по реализации программ выполняет
АЛУ поочередно по командам от различных блоков. Это обстоя-
тельство предъявляет к АЛУ высокие требования к быстро-
действию.
2.12. ТИПОВЫЕ СХЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПУСКОМ И ТОРМОЖЕНИЕМ
ЭЛ F КТРОД В И Г АТЕЛ Е И
Обычно ДПТ и АД средней и большой мощности не допускают
прямого пуска, так как возникающие при этом броски тока пре-
вышают допустимые значения по условиям нагрева или коммута-
ции тока на коллекторе. Пусковые токи ДПТ средней мощности
превышают в 5 —7 раз допустимый ток.
Пусковые токи ограничивают введением дополнительного ре-
зистора в цепь якоря ДПТ или в цепь ротора АД с контактными
кольцами. Обычно резистор (пусковой реостат) разбивают на
несколько ступеней, сопротивления которых рассчитываются по
известной методике.
Рассмотрим процесс пуска ДПТ независимого возбуждения.
Наибольшее распространение для пусковых режимов этих
двигателей получила схема с последовательным выключением
трех ступеней пускового резистора. В общем случае количество
ступеней резистора и их сопротивления характеризуются пусковой
диаграммой. Для ее построения должны быть заданы допустимый
гок якоря 7„л и отношение предельных токов переключения Д и /2,
или число ступеней.
Введем относительные величины:
'я== /я//яним; ря„, /?я,,;/Дяном;
- 1 Tl | 2/IIOV , /2 7ном,
где — q -число ступеней резистора; 0 — целое число;
\ — <о/ши.
Зададимся допустимыми токами переключения в о. е. «Я1 и i„2
(рис. 2.31, а). Значения и 7Я2^/Д.
i“ 99
Рис. 2.31. Пуск ДПТ:
а — скоростные характеристики при ступен-
чатом пуске; б — схема включения ДПТ;
в - график процесса пуска во времени
Уравнение скоростной характеристики в о. е. имеет вид
v= 1 Ря„/я.
Для первой скорости
V| = 1 Ря|1я2 И V1 == 1 Ря2^Я|-
Следовательно,
Ря 1^Я2 == ряо^я J •
Для второй скорости v2 можно записать аналогичное урав-
нение:
Ря 1 я 1 Рй2^я2’
где ря =
Откуда
Ря|/ря = (/я| Дя2) =^,
где л = (Я1/(„2.
В общем случае для количества ступеней q
ря|/(>я — 'К4-
Для заданного количества ступеней q
/р? = V(pT+рГ)7рГ> (2.17)
где рп = Ря। Ря.
Для заданного отношения токов Z можно определить число
ступеней:
g=lg (ри + р,.)
Ря /
100
Полученное значение q округляется до целого числа и уточ-
няется по условию (2.17).
Значения остальных сопротивлений для q ступеней
Рн^ —РяЛ; рЯ(/_,=р,Д , рЯ|=Ря7.1.
По относительным значениям сопротивлений и токов /Я] и i„2
нетрудно перейти к действительным величинам.
После расчета ступеней резистора можно перейти к формирова-
нию автоматической схемы пуска. Широкое распространение полу-
чила схема, изображенная на рис. 2.31,6.
При подключении электродвигателя к сети, но еше неподвиж-
ном якоре, ЭДС равна нулю, а пусковой ток /п максимален, т. е.
!п = U / ( /?Яч. + £ 1.2. 3 ) Л,
где — полное сопротивление пускового резистора.
По мере ускорения электродвигателя растет ЭДС и умень-
шается до нижнего предела /2 ток якоря:
/я=(П-£|)/(/?Я5+/?1,2.з)>/2.
При этом контактор КМЗ замыкает первую ступень резистора
R1 и ток статора достигает значения Ц:
/я=(С/-£|)/(^+£1.2)</1.
Вращающий момент возрастает, и электродвигатель продол-
жает увеличивать частоту вращения. При достижении скорости
ток якоря
Д-(£-£2)/(/?„, + /?!,2) >/2
и контактором КМ4 замыкается следующая ступень резистора.
Аналогично выводятся остальные ступени резистора, и якорь
достигает заданной частоты вращения. Процесс пуска во времени
изображен на рис. 2.31, в.
Применяется также метод пуска ДПТ с заданным временем.
Этот метод предполагает использование реле времени, которое от-
считывает заданное для каждой ступени ускорения (или замедле-
ния при торможении) время изменения частоты вращения электро-
двигателя. Для трехступенчатого пуска предусмотрены реле
времени КТI—КТЗ (рис. 2.32).
При включении напряжения на схему управления и обмотку
возбуждения ток /в создает номинальный магнитный поток.
Одновременно ток в обмотке реле времени КТ1 размыкает кон-
такт КТ1 в цепи обмоток управления контакторов КМ2—КМ4.
При нажатии пусковой кнопки SB2 замыкается цепь обмотки кон-
тактора КМ1, в результате чего замыкаются его контакты в цепи
обмотки якоря ДПТ, а также контакты в цепях обмоток управле-
ния контакторов КМ2—КМ4, в цепи, параллельной кнопке SB2,
101
живает обмотку контактора КМ1
Рис. 2.32. Схема трехступенчатого пу-
ска ДПТ при номинальном магнитном
потоке с заданным временем
и размыкается его контакт в
цепи катушки реле времени
КТ1, что приводит к включению
цепи якоря на напряжение сети
через резистор R3R2R1. Возни-
кающий ток якоря создает
электромагнитный момент и
ДПТ «приходит во вращение».
При этом включаются катушки
реле времени КТ2 и КТЗ, кото-
рые размыкают свои контакты
в цепях обмоток управления
контакторов КМЗ и КМ4.
Контакт КМ1, включенный
параллельно кнопке SB2, удер-
во включенном состоянии. Раз-
мыкающий контакт контактора КМ1 в цепи обмотки управления
реле времени КТ1 размыкает эту цепь, и реле времени КТ1 с
выдержкой времени В замыкает свой размыкающий контакт в цепи
обмотки управления контактора КМ2. Этот контактор замыкает
цепь реле времени КТ2 и часть пускового резистора R1. Ток
якоря изменится скачком до Л;=Л, и двигатель будет увеличивать
частоту вращения до тех пор, пока ток якоря не достигнет значе-
ния тока переключения 1>.
После этого контакт реле времени КТ2 с выдержкой времени
замыкает цепь обмотки управления контактора КМЗ, замыкающий
контакт которого замыкает вторую ступень резистора R2. Ток
якоря примет прежнюю величину Л, что вызовет дальнейшее
повышение частоты вращения и снижение тока.
В цепи обмотки управления контактора КМ4 замыкается с
выдержкой времени К размыкающий контакт реле времени КТЗ
и замыкающий контакт контактора КМ4 замыкает третью часть
пускового резистора R3. Ток опять достигает значения Л и посте-
пенно уменьшается до установившегося значения.
Отключение ДПТ производится кнопкой SB1. Она разрывает
цепь контактора КМ1, который, отключаясь, разрывает своими
замыкающими контактами цепь обмотки якоря и цепь управления
контакторов КМ2—КМ4. Для быстрого останова электродвига-
теля применяется метод динамического торможения.
Рассмотрим схему, обеспечивающую автоматический пуск и
динамическое торможение электродвигателя (рис. 2.33).
Принципиально схема пуска аналогична предыдущей, за
исключением того, что пусковой резистор выполнен одноступен-
102
Рис. 2.33. Схемы пуска (и) и динамического торможения (б) ДПТ
чатым, а в цепи катушки контактора КМ2 включен не размыкаю-
щий контакт реле времени, а замыкающий контакт КТ и, сле-
довательно, в двигательном режиме этот контакт будет замкнут.
При нажатии на кнопку SB1 выключается контактор КМ1,
замыкающий контакт которого отключает цепь якоря от источника.
Одновременно замыкается размыкающий контакт контактора КМ1
и включается контактор КМ2, который своим замыкающим кон-
тактом подключает обмотку якоря к тормозному резистору R2.
Двигатель переходит в режим автономного генератора, и его
электрическая энергия преобразуется в тепло на резисторе R2.
Продолжительность действия электромагнитного торможения
определяется временем выдержки реле времени КТ. По истечении
этого времени замыкающий контакт реле времени размыкает
цепь обмотки управления контактора КМ2 и последний отключает
резистор R2 от обмотки якоря.
Пуск АД с короткозамкнутым ротором малой и средней мощ-
ности на напряжение до 1000 В осуществляется прямым подклю-
чением обмотки статора в сеть (рис. 2.34). Включением рубильни-
ка QS подается напряжение на цепь обмотки статора и цепь
\правления. При нажатии пусковой кнопки SB2 включится кон-
тактор КМ, что вызовет замыкание его силовых контактов в
цени обмотки статора и блок-контакта, шунтирующего кнопку
SB2. Обмотка статора подключается к сети, и АД переходит
в рабочий режим.
Остановка АД осуществляется нажатием на кнопку «Стоп»
SB1, которая разрывает цепь обмотки управления контактора
КМ и отключает обмотку АД от сети.
При длительном превышении рабочим током АД допустимых
пределов срабатывают тепловые реле КК, которые размыкают
контакты в цепи контактора КМ с последующим отключением
обмотки статора АД от сети,. Защита от коротких замыканий
осуществляется предохранителями FU.
Динамическое торможение АД реализуется путем подключе-
ния обмоток статора к источнику постоянного тока через доба-
вочное сопротивление R^. На рис. 2.35 приведена схема пуска и
динамического торможения АД с короткозамкнутым ротором.
Торможение АД осуществляется нажатием кнопки SB1, которая
103
отключает контактор КМ1 и включает контактор КМ2. Двигатель
отключается от сети переменного тока и подключается к сети
постоянного тока. Отключение сети постоянного тока производится
реле времени КТ, которое с выдержкой времени разрывает цепь
контактора КМ2, а следовательно, и обмотки статора. Схема
возвращается в исходное состояние.
АД с фазным ротором обычно включается по схеме с шунтовым
резистором в цепи ротора. Принцип выполнения ступеней пуско-
вого резистора аналогичен принципу действия схемы пуска ДПТ.
Управление моментом при пуске АД с фазным ротором осущест-
вляется по программе с заданным временем (аналогично соот-
ветствующему методу пуска ДПТ).
2.13. ТИПОВЫЕ СХЕМЫ РЕГУЛИРУЕМОГО
ЭЛЕКТРОПРИВОДА
Электропривод постоянного тока. Одной из первых систем, не
утратившей до сих пор практического применения, в текстиль-
ной промышленности являются система генератор — двигатель
(Г—Д), принципиальная схема которой приведена на рис. 2.36, о.
В системе Г—Д генератор G питает двигатель постоянного тока
Ml, приводящий в движение рабочий механизм. Обмотки якорей
обеих электрических машин G и Ml соединены друг с другом
непосредственно без регулировочных или пусковых реостатов.
Обмотки возбуждения генератора LG и двигателя постоянного
тока LM1 питаются от отдельного возбудителя М2. Генератор
и возбудитель вращаются с постоянной частотой вращения от
так называемого тонного АД (М3), с которым они механически
104
a
Рис. 2.36. Схемы регулируемого элек-
тропривода постоянного тока:
а система генератор — двигатель; 6 —
система магнитный усилитель двигатель
связаны одним валом. Уменьшение напряжения на щетках гене-
ратора G можно получить небольшим снижением его тока возбуж-
дения, что исключает необходимость в пусковых реостатах. Для
обеспечения реверса ДПТ изменяется полярность обмотки воз-
буждения генератора LG. что приводит к изменению полярности
на щетках генератора и ДПТ и к изменению его направления
вращения.
Пределы регулирования (6:1) — (8:1) достигаются измене-
нием напряжения генератора. Эти пределы могут быть увеличены
за счет изменения тока возбуждения двигателя Ml в отношении
2:1. Следовательно, общие пределы регулирования частоты вра-
щения в системе Г- Д могут достигать значения (12:1) — (16:1).
Механические характеристики системы Г—Д имеют меньшую
жесткость, чем естественные характеристики ДПТ. Введение об-
ратных связей повышает жесткость характеристик и диапазон
регулирования, а также точность стабилизации.
Недостатками системы Г — Д являются низкий КПД (40—
50%), большие габарит и масса, значительная инерционность
управления, т. е. ограниченное быстродействие.
В связи с появлением мощных полупроводниковых диодов
получила распространение система магнитный усилитель — дви-
гатель (МУ — Д), упрощенная схема которой приведена на
рис. 2.36, б. Регулирование напряжения на ДПТ (ЛД в этой си-
стеме производится изменением внутреннего сопротивления рабо-
чей обмотки МУ (/Д71), которая соединена последовательно
с якорем ДПТ. Это внутреннее сопротивление изменяется при из-
менении подмагничивания магнитного сердечника постоянным то-
ком. В схеме на рис. 2.36, б LU2 является управляющей обмоткой
МУ.
105
Стабилизацию частоты вращения при колебаниях нагрузки
можно осуществить введением жесткой отрицательной обратной
связи по скорости или ЭДС якоря ДПТ.
Привод по системе МУ —Д имеет высокий коэффициент уси-
ления, обладает высокой надежностью работы, обусловленной
конструкцией статических магнитных усилителей и полупроводни-
ковых диодов, но его энергетические показатели сравнительно
низкие.
Динамические характеристики не имеют особых преимуществ
перед системой Г — Д, однако введение обратных связей суще-
ственно повышает их качество, увеличивается жесткость харак-
теристик, быстродействие, а диапазон регулирования достигает
20:1.
Внедрение в технику мощных управляемых тиристоров стало
причиной быстрого распространения тиристорных преобразова-
телей, и на их базе систем тиристорный преобразователь —дви-
гатель (ТП — Д). Принципиальная схема ТП—Д приведена
на рис. 2.37. Регулирование напряжения на выходе ТП осуще-
ствляется изменением угла открывания тиристоров VS1— VS6.
При введении обратных связей диапазон регулирования частоты
вращения достигает 2000:1 при высокой точности и быстродей-
ствии. К недостаткам системы ТП - Д следует отнести необхо-
димость введения специальной быстродействующей защиты ти-
ристоров от коротких замыканий. Дроссель служит для сглажива-
ния пульсаций выпрямленного напряжения.
Электропривод переменного тока. Распространенные в про-
мышленности АД имеют жесткие механические характеристики.
Изменение напряжения на этих двигателях лишь незначительно
меняет их частоту вращения и в разомкнутых системах это изме-
нение приводит к регулированию вращающего момента (Л1Ч =
^).
Изменение напряжения реализуется тиристорными регулято-
рами напряжения (ТРИ).
С целью получения системы регулирования частоты враще-
ния следует замкнуть систему ТРИ — АД обратной связью по ско-
рости (рис. 2.38, а). Механические характеристики в этом случае
расположатся горизонтально, т. е. получат достаточную жест-
кость (пунктирные кривые 3 на рис. 2.38, б), так как напряжение
на АД пропорционально ошибке по скорости. Механические ха-
рактеристики разомкнутой системы представлены на рис. 2.38, б —
кривая 2, естественной системы — кривая 1. Диапазон регулиро-
вания может достигать 10:1.
Наиболее экономичной с широким диапазоном регулирования
и высоким быстродействием является система АД — статический
преобразователь частоты (СПЧ-АД).
В настоящее время известно множество различных вариантов
систем управления, основанных на принципе частотного регули-
106
Рис. 2.37. Схема электропривода по-
стоянного тока тиристорный преобразо-
ватель — двигатель
Рис. 2.38. Тиристорные регуляторы на-
пряжения но системе ТРН — АД:
а — схема включения ТРН в фазы обмотки
статора АД, б механические характе-
ристики систем тиристорного регулятора
частоты вращения АД
Рис. 2.39. Схема частотного ре-
гулирования скорости электро-
привода переменного тока по
схеме СПЧ — АД:
UZ2 — инвертор; BR - датчик ско
рости; BV— датчик напряжения,
UZ1 — выпрямитель: FP — функ-
циональный преобразователь в ка- ---->
нале связи частоты и напряжения;
(•’. - задающее напряжение кана-
ла регулирования частоты и
(/»«,— задающее напряжение ка-
нала регулирования напряжения,
.-1IV7. A W2. ДЮ - сумматоры
рования. Принципиальная схема одного из них приведена на
рис. 2.39.
Сигнал обратной связи по скорости (7,., сравнивается в сумма-
торе A U”1 с задающим сигналом (Л,.,, и разница подается на
частотный вход U3f управления инвертором UZ.2. Для стабили-
зации потока имеется внутренний контур, задающими сигналами
в котором являются напряжение канала регулирования часто-
ты Utt и датчика напряжения BU— U,i. Выходной сигнал L'r
через выпрямитель UZA управляет напряжением инвертора.
Система регулирования имеет широкий диапазон регулирова-
ния и высокое быстродействие.
Системы с электромагнитными муфтами. Устройства, транс-
формирующие механическую мощность, развиваемую при одной
скорости, в мощность при другой скорости, называются муфтами.
Наибольшее распространение получили муфты с электромаг-
нитным управлением, которые обладают высоким коэффициентом
усиления, т. е. регулируют большую выходную мощность при не-
значительных затратах мощности управления.
Название «электромагнитная муфта» относится к широкому
классу устройств с различными способами передачи движения.
Эти устройства можно разделить по принципу действия на муфты
с механической связью и муфты с электромагнитной или магнит-
ной связью. Наибольшее распространение получили муфты сколь-
жения с электромагнитной связью (ЭМС).
Электромагнитная муфта скольжения состоит из трех основных
частей: индуктора / (рис. 2.40, а) или магнитопровода, обмотки
возбуждения 2 и якоря 3. Ток обмотки возбуждения создает маг-
нитный поток в индукторе. При вращении индуктора относительно
якоря магнитный поток индуктирует в последнем ток. Момент,
возникающий от взаимодействия потока с током якоря, увлекает
его вслед за индуктором. Механические характеристики муфты
с массивным якорем M = f (s) представлены на рис. 2.40, б (сплош-
ная линия), где s— скольжение якоря относительно индуктора.
Рис. 2.40. Система регулирования частоты вращения АД с применением
электромагнитных муфт скольжения:
а — конструкция электромагнитной муфты, б — механические характеристики электро-
магнитной муфты; в—система автоматического регулирования с ЭМС с отрицательной
обратной связью по скорости
108
Регулирование частоты вращения электропривода посредством
ЭМС. Незначительная жесткость механических характеристик
ЭМС не позволяет использовать их в разомкнутых системах
управления. Простейшая САР с ЭМС с отрицательной обратной
связью по скорости представлена на рис. 2.40, в. Якорь ЭМС укреп-
лен на валу приводного АД, а ее индуктор жестко связан с испол-
нительным механизмом. Регулирование частоты вращения осу-
ществляется изменением напряжения на обмотке возбуждения
муфты, которое сравнивается с напряжением тахогенератора.
Разность напряжений подается на вход усилителя, выходное
напряжение которого подается на обмотку возбуждения. Диапа-
зон регулирования таких систем достигает 40:1. Механические
характеристики системы приведены на рис. 2.40 б (пунктирные
линии).
2.14. ЗАЩИТА ЭЛЕКТРОДВИГАТЕЛЕЙ
НАПРЯЖЕНИЕМ ДО 1 кВ
ТЕКСТИЛЬНОГО ОБОРУДОВАНИЯ*
Наиболее массовым видом электрооборудования на предприятиях
текстильной промышленности является асинхронный электропри-
вод, основной силовой частью которого являются сравнительно
маломощные АД с короткозамкнутым ротором. На предприятиях
отрасли имеет место значительный выход электродвигателей из
строя, что приводит к снижению производительности обору-
дования, ухудшению качества продукции, к излишним затратам
на ремонт поврежденных и приобретение чрезмерного излишка
новых электрических машин, а также в ряде случаев к пожарам
и травмам персонала.
Усиление работы по профилактическому обслуживанию элек-
тродвигателей и предупреждению их отказов (т. е. устранению де-
фектов, при которых еще не произошел отказ) не исключает не-
обходимость установки защитных устройств (в частности, для
особо ответственных механизмов). Поскольку наибольший про-
цент отказов в текстильной промышленности приходится на
АД номинальной мощностью не более 5 кВт, то схемы их защиты
должны быть достаточно просты (с минимальным числом элемен-
тов и с обеспечением возможности их контроля, обслуживания,
настройки, замены). В то же время эти схемы должны обеспе-
чивать эффективность и надежность срабатывания.
Основными факторами выхода электродвигателей из строя на
предприятиях отрасли являются выпадение одной из фаз, техно-
логические перегрузки, повреждение подшипников, а причинами
их возникновения могут быть влияние параметров окружающей
среды, износ и старение изоляции обмотки АД, витковые замы-
кания и т. д.
Написано В. В. Краспиком.
109
Рис. 2.41. Комплексная
электроде и гател я
зашита
В этих условиях целе-
сообразно для АД ответ-
ственных механизмов при
менять комплексную защиту,
одновременно конт рол и ру ю •
щую несколько параметров и
составленную из отдельных
блоков разного назначения.
На рис. 2.11 представлен
один из вариантов комплекс-
ной защиты электродвига-
телей, когда контролируются
ток обмоток, напряжение
сети, ток утечки и момент на
валу АДМ. Основным эле-
ментом такой защиты явля-
ется типовой магнитный пус-
катель КМ, в который встраивают блоки контроля за указанны ми
параметрами. Блок зашиты от неволнофазных режимов, состоит
из диодов ИЦ/ — ГДЗ, резисторов Rl, R2 и магнитного пуска-
теля Л'ЛТ Элементы R3, RF HL служат для индикации аварийного
состояния. Конденсаторы С1 — СЗ служат для защиты от пере-
напряжения. Защита от короткого замыкания осуществляется
с помощью автоматического выключателя QF или предохра-
нителем FU.
В защите от неполнофазных режимов контролируемым пара-
метром является выпрямленное трехфазное напряжение, а пороги
вым элементом — магнитный пускатель. При обрыве одной из
фаз напряжение на катушке КМ снижается, а его замыкающие
контакты КМ отключают АД от сети. Для предотвращения лож-
ных срабатываний при симметричном напряжении сети (на-
пример, при пуске смежных АД) резистор R2 выбирают таким,
чтобы в трехфазном режиме напряжение отключения соответство-
вало уровню напряжения отключения типовых КМ.
При такой настройке электродвигатель с нагрузкой более 25 %
при обрыве фазы отключается от сети, а при загрузке менее 25 %
остается в работе. Такая настройка целесообразна с точки зре
ния сохранения непрерывности технологического процесса приво-
димой рабочей машины А.
Резистором RI регулируются напряжение срабатывания и пус-
ковой ток катушки КМ. При включении в сеть АД с пониженным
сопротивлением изоляции (из-за ее старения, увлажнения и т. п.1.
может произойти отказ АД. Так как снижение сопротивления
изоляции обмотки АД может произойти и за короткий отрезок
времени, то контроль и измерение этой величины целесообразно
производить перед каждым его включением. В данной схеме такой
контроль осуществляется с помощью индикатора аварийного
состояния, что позволяет предотвратить, например, выход АД из
строя при пуске.
Принцип действия такого индикатора заключается в оценке
изоляции по току утечки. Источником питания является сеть, к
которой подключен АД. Для индикации тока служит неоновая
лампа HL, имеющая нелинейную характеристику зажигания,
благодаря которой лампа является одновременно и пороговым
элементом, регистрирующим критическое (аварийное) значение
тока утечки.
Принцип работы индикатора заключается в следующем. После
размыкания контактов магнитного пускателя КМ обмотка одной
из фаз АД оказывается присоединенной к сети через ограничи-
вающий R3 и эталонный R4 резисторы. Под действием фазного
напряжения между всей обмоткой и заземленным корпусом АД
через изоляцию, а следовательно, и резисторы R3 и R4 протекает
ток утечки. Если сопротивление изоляции больше 0,5 МОм
(т. е. соответствует норме), то ток утечки мал, и падение напря-
жения на резисторе R4 меньше напряжения зажигания неоно-
вой лампы /II., лампа на светится, что свидетельствует об исправ-
ном состоянии изоляции обмотки АД.
Если же сопротивление изоляции любой из фаз (или всех фаз
вместе) относительно корпуса АД уменьшается, то ток утечки
возрастает. Эталонный резистор выбран так, что при превышении
критической величины тока, определяемой минимально допу-
стимым сопротивлением изоляции, лампа HL загорается, сигна-
лизируя о неисправности. Такой контроль осуществляется в пе-
риоды технологических пауз и информирует о состоянии АД перед
каждым его включением. Индикатор можно разместить в удоб-
ном для наблюдения месте.
Данную схему можно выполнить и так, чтобы устройство
отключало АД при снижении сопротивления его изоляции. Шун-
тирование контактов КМ резисторами R3 и R4 не противоречит
правилам техники безопасности для заземленного электрооборудо-
вания при занулении его корпуса, отключаемого от сети предохра-
нителем или автоматическим выключателем.
Проходные конденсаторы С1 — СЗ образуют фильтр, который
срезает амплитуду импульсов атмосферных или коммутационных
перенапряжений до безопасного уровня
Защита от заклинивания и перегрузок АД основана на конт-
роле за моментом сопротивления на его валу. Пороговым элемен-
том является металлический калиброванный штифт III, с помощью
которого вал АД соединяется с муфтой (шкивом, рабочим орга-
ном и т. д.). При перегрузке или заклинивании рабочей машины
штифт срезается и АД, оказавшийся от нее отсоединенным, вра-
щается вхолостую. После устранения причин аварийной ситуации
ill
Рис. 2.42. Упрощенная зашита АД от ра-
боты на двух фазах
вставляется новый штифт, и АД
со всей системой привода вновь
готов к работе.
Защита от КЗ обеспечивается
обычным предохранителем или
автоматическим вы к л ю ч а тел е м.
Все рассмотренные блоки за-
щиты просты по конструкции и
легко встраиваются . в типовой
магнитный пускатель.
На ряде предприятий отрасли
внедряются упрощенные защиты
АД (без дополнительных реле,
магнитных пускателей и т. д.). На
рис. 2.42 приведен один из вари-
антов упрощенной защиты АД от
работы на двух фазах. Принцип действия такой защиты основан
на применении дополнительной обмотки 2 в катушке магнитного
пускателя КМ, подключенной одним концом к нейтральной точке
обмотки АД, а другим — к земле. Дополнительная обмотка 2
на катушке КМ подключается так, что она при обрыве одной из
фаз в цепи АД создает магнитный поток, равный по величине
основному потоку катушки / и направленной навстречу ему.
Пуск АД производится обычным образом. При обрыве любой
из фаз в нейтральной точке звезды обмотки АД появляется напря-
жение небаланса и по дополнительной обмотке 2 проходит ток,
который создает магнитный поток, равный по величине основному
магнитному потоку и направленный навстречу ему. Результирую-
щий магнитный поток становится равным нулю, и АД отключается
от сети при таком аварийном режиме.
Пример. Для КМ типа ПМЕ-200 число витков сеч =2600, напряжение
Ui=220 В, диаметр провода без изоляции <7. =0,27 мм. Определить число
витков и диаметр /!• дополнительной обмотки.
Решение. I. Число витков дополнительной обмотки
к.'2 = к',7/2/ Д; о..2 = 2600-70/220 =820,
где (7, = 70 В — напряжение небаланса при обрыве одной из фаз.
2. Сечение провода дополнительной обмотки
<?2 = <7i С|/7б = лС|Д|/(4(Л>):
3,14 - 0,272-220 п1о 2
д2 = —-----Д--------= 0,18 ММ .
4-70
3. Диаметр провода дополнительной обмотки
2 -у г/з/л . rf2=2 уО.18/3,14 =0,48 мм.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Из каких основных частей состоит современный электропривод?
2. Как производится приведение сил исполнительного механизма к пара-
метра м электродвигателя?
3. В чем состоит разница между динамической и статической жесткостью?
4. Сравнить механические характеристики ДПТ различного типа возбуждения
и АД в различных квадрантах координат Л1п>
5. В чем заключается принцип преобразования постоянного тока в переменный?
6. По каким принципам строятся системы регулирования частоты вращения
электродвигателей?
7. Как производится пуск ДПТ средней мощности?
8. Как рассчитать сопротивления ступеней пускового резистора?
9. В каких случаях целесообразно применять ПИ-регулятор?
10. В чем заключается принцип подчиненного регулирования?
11. Описать действие системы автоматического и^ска и динамического тормо-
жения АД.
3. АВТОМАТИЗИРОВАННЫЙ
ЭЛЕКТРОПРИВОД МАШИН
ПРЯДИЛЬНОГО ПРОИЗВОДСТВА
3.1. ХАРАКТЕРИСТИКА ЭЛЕКТРОПРИВОДА
МАШИН ПРЯДИЛЬНОГО ПРОИЗВОДСТВА
Прядильное производство включает в себя приготовительный отдел с разрыхли-
тельно-трепальными агрегатами, чесальными, ленточными и ровничными маши-
нами и прядильный отдел с прядильными и крутильными машинами.
Для современного прядильного производства характерна тенденция к созда-
нию машин с высокими технологическими параметрами (увеличенные мощно-
сти, скорости, вытяжки 11 паковки). Примером тому moivt служить новые модели
чесальных (например. ЧММ-450-4), ленточных (например, ЛШ-1АТ и ЛШ-1А) и
прядильных (например, безверетенные пневмомеханические машины БД-200,
ППМ-120-МС) машин.
Особенностью электропривода машин прядильного производства является
его высокая энергоемкость по сравнению с электроприводами, применяемыми
в других производствах отрасли (при меньшем количестве эксплуатируемых в
прядильном производстве приводных электродвигателей их средняя установленная
мощность является наибольшей по сравнению с установленной мощностью элек-
тродвигателей в других производствах отрасли).
Электропривод прядильного производства характеризуется наличием срав-
нительно больших маховых масс и значительных пусковых моментов (например,
маховые массы чесальных машин ЧММ в 100—310 раз больше маховых моментов
роторов приводных электродвигателей); высокими частотами вращения; работой
в условиях запыленной окружающей среды. От электропривода большинства
прядильного оборудования требуется обеспечение плавного пуска и автоматиче-
ского останова (например, при наработке съема или обрыва ленты на ровничных
машинах).
Силовая часть электропривода машин прядильного производства в основном
состоит из приводных АД с короткозамкнутым ротором закрытого исполнения,
обдуваемых, как правило, серии ДОТ. В последние годы на предприятия тек-
стильной промышленности поставляются АД серии 4А. В силу присущих им не-
достатков (пониженная надежность в условиях агрессивной среды предприятий
отрасли, неремонтопригодность в условиях децентрализованного ремонта и др.)
они не нашли широкого применения в отрасли
ИЗ
На предприятиях текстильной промышленности стали появляться модифици-
рованные АД на базе серин 4А для технологического оборудования текстильной
промышленности серии АНН номинальной мощностью 0.75—II кВт с повышен-
ным крутящим моментом (2,5 I* номинального) и частотой вращения 1000-
3000 мин
В прядильном производстве отсутствуют электроприводы постоянного тока,
коллекторные по системе Г - Д, по схеме вентильного каскада и т. п.
3.2. ЭЛЕКТРОПРИВОД МАШИН
ПРИГОТОВИТЕЛЬНОГО ОТДЕЛА
ПРЯДИЛЬНОГО ПРОИЗВОДСТВА
На рис. 3.! приведена схема технологического процесса в при-
готовительном отделе прядильного производства. Конечная задача
прядильного производства заключается в выработке равномер-
ной пряжи определенной линейной плотности и прочности из во-
локна, которое поступает на фабрику в виде первичного мате-
риала (например, хлопка), плотно спрессованного в кипы /.
С этой целью кипы хлопка, проходящие через питатели-смесите-
ли, смесительную решетку и головной питатель, вначале подвер-
гают разрыхлению и трепанию на разрыхлительном агрегате 2
и однопроцессных трепальных машинах 5 (от разрыхлительного
агрегата 2 кипы поступают на трепальные машины 5 через пнев-
матический распределитель 3 и быстроходный конденсер 7).
Конечным продуктом на трепальных машинах являются холсты 6,
которые поступают на холстовой вал 7 чесальной машины, а за-
тем через главный 8 и съемный 9 барабаны в виде обработанного
продукта — ленты — в специальный таз 10.
Тазы 10 с лентой поступают на ленточную машину, где 6—
10 лент складываются в одну и утоняются. На рис. 3.1 условно по-
казан один таз с лентой. Каждая лента, выходя из таза, для умень-
114
шенкя скрытой вытяжки и удсбова обслуживания поступает на
рамку с направляющими роликами II. Ленты проходят через на-
правляющую планку /2, питающий цилиндр 13 и вал 14, поступают
на вытяжной роликовый прибор 15 Полученная лента уклады-
вается в таз 16.
Тазы 16 с лентой для у гонения примерно в 200 раз и получения
ровницы посту паки на ровничную машину. Лен гы из тазов 16 оги-
бают направляющий вал 17, поступают в вытяжной прибор 18.
Выходящая из вытяжного прибора мычка .скручивается вере-
теном 19, превращаясь п ровницу, и наматывается на катушку 20.
Катушки 20 yctaiiiiB;).шлются на прядильную машину. Ров-
ница проходит через вытяжной прибор 21, под действием быетро-
вра шлющегося веренна 25 скручивается, проходит направляю-
щий крючок 22. бегунок 23 и на.мгнывеичея на н.лулю 24. надетую
на веретено 25.
Электропривод разрыхлительно-трепальных агрегатов. Раз-
рыхлительно-трепальные агрегаты служат для измельчения и
рыхления спрессованных пластов хлопка или шерсти с последую-
щим их трепанием шламн треда шных машин, при мои материал
одновременно перт яешнв<>епш и получаются холсты.
Разрыхлнтельчо тренальный агрегат яыяек-я исходным (на-
чальным) звеном в технологии прядильного производства и со-
стоит из целого рчта мчшпн, число которых зависит от сорта и
степени засоренноегн обрабатываемого материала. Ниже приведен
перечень машин и состав их электрг.щшве,:;. для разрыхлительно-
трепального агрегата но обработку хлопковой о волокна.
.4«1.м<ч!н"с.',-.е.- <.а г<« ге','1-ыч1ч;\1 иые ,н Ml К 250-2
Тля ра '.рыхления но.1<.1о-а . снр< < с‘«а! Четыре АД и и>м чис к два АД типа
них кип и иит.-чия рпх.нчымм кч иж ЛОТ-'Ч-(’> для разрыхлительного ба
ном последующих майны раиана, один АД гипа ЛОТ-4‘2-6 для
кj ыержиа-.рчпих цилиндров в один
А Ч irua ДОТ ад д, д ;и выводите! о кон-
вейера
II,i га' ела-. «шали ДС-2
Длл первичного рг 1рь1х.'е;н!' < хоеа апл >, О.ип АД тина АОТ-42-6 (или
на пкип его ,МРШ-шчпня и частичной ЛОГ
очистки
«и,ила.<. /7У-2
Для равномерны о .набавлен и» в ку Одна АД типа ЛОГ-И-о
отходов »1 paooiанпиго воды.», и и» -и
стачного разрыхления
1 плавные •<<< u.i’i, ill > ПГ-И 112 !i\
Для разрыхления iwiuilnmuiM. ч.в .'!’> I!o >чч<'хч АД •!!’!.•. AO'S 4l 6 на ка;к-
ной пчисн.и и равномерной позане <о.-ы,ч„ А.,ц |!и; лг.и,
/1а ш «,«. a-WH i.al РЦ а
Дтя питания головного иитате.'-. волы.- Один .АД пи,а \С)Т-42Д>
."ом. получаемою с шмате а-,’.- ,кчиie ie,i
115
Быстроходный конденсср КБ-3
Для пневмотрапспортировки волокна с ча- Один АД типа АОТ-52-6
стнчпым удалением из пего пыли, пуха и
сорных примесей
Циклонный очиститель ОН-3
Для частичного разрыхления и очистки Один ЛД типа АОТ-41-6
волокна после питателя смесителя ПС-2
Наклонный очиститель ОН-5-1
Для разрыхления и очистки волокна в Один АД тина АО-42-4
свободном состоянии
Колкопый разрыхлитель-очиститель РЧК-1
Для разрыхления волокна в свободном Три АД, и том числе ио одному АД
состоянии и едаления из него примесей типа АОТ-42-4 для приводов колкового
после первичного рыхления и ножевого барабанов н один АД типа
АОТ-4 1-6 для привода узла питания
Осевой чиститель 40
Для очистки волокна в свободном со- Один АД типа АОТ2-42-6
стоянии и дополнительного его разрых-
ления
Горизонтальный разрыхлитель с быстроходным
конденсером ГР-6
Для разрыхления и очистки волокна Три АД, в том числе по одному АД
типа АОТ-42-4 для приводов ножевого
барабана и конденсера и один АД типа
АОТ-41-6 для привода органов пи-
тания
Вертикальный разрыхлитель ВРП-1
Для разрыхления и очистки хлопка от Один АД типа АОТ-52-6
остатков семян
Фильтр двухступенчатый ФТ-2
Для обеспыливания воздуха, поступаю- Три АД, в том числе по одному АД
щего от конденсеров, вентиляторов тре- типа АОТ-41-6 для приводов сетчатого
пальных машин и т. д. барабана и встряхивающего механиз-
ма и один АД типа АОТ-52-4 для
привода вентилятора
Смеситель непрерывного действия СП-1
Для смешивания разрыхленного волокна Шесть АД, в том числе по одному
АД типа АОТ-42-6 для приводов кон-
денсера и игольчатой решетки, по од-
ному АД типа АОТ-41-6 для приводов
каретки, раскладчика полотна и пита-
ющего конвейера, один АД типа
АОТ-51-4 для привода вентилятора
Пневматический распределитель волокна РВП-2-1
Для равномерного распределения волокна Один АД типа АОТ-52-4
по трепальных! машинам, питателям и т. д.
116
Однопроцессная трепальная машина Т-16 или Т-30
Для разрыхления и очистки волокна, по- Восемь АД, в том числе по одному
ступающего с разрыхлительного агрегата, АД типа АОТ-42-4 для приводов но-
с последующим формированием разрых- жевого барабана и конденсора, по
ленной массы в равномерный холст одному АД типа АОТ-42-6 для приво-
дов планочного трепала и автосъема,
один АД типа АО-42-4 для привода
игольчатого трепала, один АД типа
АОТ-52-6 для привода холстоскаты-
вающего прибора и по одному АД
типа АОТ-41-6 для привода питающих
органов
Для управления автоматизированным электроприводом аг-
регата используются специальные комплектные станции управ-
ления типов MCK-IM, МСК-2М, МСК-4М, МСК-6М и др., выпол-
ненные из стального бескаркасного пыленепроницаемого шкафа
с панелью, на которой смонтирована аппаратура управления
и защиты.
Эти станции управления обеспечивают однокнопочный пуск
всего агрегата и раздельный пуск электродвигателей его питаю-
щих и рабочих органов с независимой выдержкой времени, защиту
каждого АД от перегрузок и коротких замыканий, автоматический
останов агрегата при срабатывании защиты, сигнализацию о
недостатке волокна в питателях-смесителях и ряд других функ-
ций управления в соответствии с требованиями технологиче-
ского процесса.
Из приведенного выше перечня видно, что электропривод
разрыхлительно-трепального агрегата состоит из обычных АД
с короткозамкнутым ротором, к которым не предъявляется каких-
либо особых требований в отношении автоматизации и высоких
показателей регулирования.
Для предотвращения выхода АД из строя, что может слу-
читься при переполнении бункера волокном или вынужденном
останове одной из машин агрегата, в схеме электропривода пре-
дусмотрена каскадная блокировка, обеспечивающая автоматиче-
ское отключение от сети электродвигателей всех основных техно-
логических машин. Кроме того, в схеме автоматического управ-
ления предусмотрена система сигналов для указания персоналу
на степень загрузки бункера волокном.
В качестве примера на рис. 3.2 приведена схема управления
электроприводом машин агрегата, куда входят следующие ма-
шины: горизонтальный, вертикальный и наклонный разрыхлители,
головной питатель и питатель ПУ, питатель-смеситель, питаю-
щие решетки, трепальная машина.
В этой схеме линейные магнитные пускатели для привода:
КМ1 — ножевого барабана горизонтального разрыхлителя,
КМ2 — вертикального разрыхлителя, КМЗ — редуктора (питаю-
щего цилиндра), КМ4 — рабочего органа головного питателя,
117
Рис. 3.2. Схема управления электроприводом
разрыхлительно-трепального агрегата
КМ5 — конденсера головного питателя, КМ6, КМ7 — питателя
ПУ, КМ8 — питающего органа основного питателя, КМ9 —
питателя-смесителя, КМ10 — конденсера горизонтального раз-
рыхлителя, КМ И — КМ14 — наклонных разрыхлителей, КМ15 —
КМ 19 — питающих, решеток смесителей; HL1 — HL23— сиг-
нальные лампы, установленные на пульте; HL24 — HL30 —
сигнальные лампы, установленные в трепальном цехе.
Для запуска агрегата в работу следует включить тумблер SA2,
в результате сигнальная лампа HL.12 даст предупредительный
для рабочих трепального цеха сигнал. Затем тумблером S.43
включается магнитный пускатель КМ1 ножевого барабана гори-
зонтального разрыхлителя и конденсер горизонтального разрых-
лителя с реле времени КТ1, контакты которого включают цепь
агрегата. Тумблером SA4 включается магнитный пускатель КМ2
вертикального разрыхлителя, а тумблером S/15 — цепь редуктора
(питающего цилиндра). Однако редуктор не включится до тех
пор, пока не будет вызова с трепальной машины Т16 питателя-
конденсера. Питатель-конденсер трепальной машины своими за-
мыкающими контактами SA24, SA25 или SA26 включит реле
118
времени КТ2 и соответственно магнитный пускатель КМЗ ре-
дуктора.
При включении питателя трепальной машины Т16 загорится
сигнальная лампа HL9, означающая выход хлопка к трепальной
машине. При всех включенных тумблерах 54/—SA20 агрегат
будет работать не полностью. При пустой камере питающего
органа граблями-противовесом включается микропереключатель
SA2I, включающий магнитные пускатели головного питателя КМ5,
двух питателей ПУ КМ6 и КМ7 и питающего органа КМ8. Кон-
денсер головного питателя работает постоянно, высасывая хлопок
из питателей-смесителей в головной питатель. Его магнитный
пускатель 1\М5 включает реле времени КТЗ, контакты которого
включают цепь питателей с магнитными пускателями КМ10-
КМ15. работающими постоянно. При уменьшении или полном
отсутствии хлопка граблями на головном питателе включается
микропереключатель SA22 и соответственно реле времени КТ4,
контакты которого включают питатели (решетки). При включении
головного питателя (магнитным пускателем КМ5) начинает
поступать эмульсия для увлажнения хлопка.
При заполнении хлопком головного питателя грабли размы-
кают микропереключатель SA22 и магнитные пускатели КМ15—
КМ19 отключают питатели-смесители, в результате чего прекра-
щается подача хлопка. На трепальной машине Т16 при напол-
нении камеры хлопком отключается конденсер-питатель, в резуль-
тате контакты SA24, SA25 или 5.426 размыкаются: реле времени
КТ2 и редуктор (питающий цилиндр) отключаются.
При выработке хлопка из камеры трепальной машины Т16
•цикл включения агрегата в работу происходит автоматически.
Электропривод чесальных машин. Чесальные машины пред-
назначены для очесывания, выравнивания, значительного (в 100—
150 раз) утонения и очистки от примесей хлопкового волокна,
шерсти, ваты, химических волокон с последующей укладкой сфор-
мированной ленты в таз. Это один из наиболее распространенных
видов текстильных машин и занимает более 50 % производствен-
ной площади в прядильном производстве.
В настоящее время применяется значительное число моделей
чесальных машин, в том числе и модернизированные модели
типов ЧММ.
Основной частью чесальной машины являются главный и
съемный барабаны, которые имеют значительную массу, а следо-
вательно, и повышенный маховой момент, превышающий более
чем в 100 300 раз маховые моменты приводных электродвига-
телей. Силовая часть электропривода чесальных машин выпол-
нена в виде АД с короткозамкнутым ротором в основном типов
АОТ, АОТ2, ТФ (ТФМ).
Эти АД работают в тяжелых режимах. Большие маховые массы
не только создают на валу приводных АД значительные пере-
119
грузки, но и недопустимо затягивают время их пуска (до 15 -
20 с для электроприводов с фрикционной муфтой и до 70—90 с для
электроприводов с жесткой муфтой и клиновидной ременной
передачей). Кроме того, перегрузка этих АД возникает и при заби-
вании гарнитуры в процессе переработки хлопкового волокна,
шерсти и др. В итоге приводные АД чесальных машин работают
при значительных (более чем в три раза) перегрузках в пусковых
режимах и при очесывании и с малой потребляемой мощностью
в установившемся режиме.
Электропривод чесальных машин должен обеспечивать:
начальный пусковой момент не менее 2—2,5 номинального,
а также надежное реверсирование машины, требуемое для за-
точки карды;
повышенный класс изоляции обмотки у приводных АД из-за
повышенных перегрузок и их закрытое исполнение вследствие
повышенной запыленности окружающей среды, а также надеж-
ную блокировку при открывании ограждения машины и ленто-
укладчика;
пуск с рабочего места, а останов — со стороны питания ма-
шины хлопком и выпуска ленты, а также автоматический останов
машины при обрыве ленты или ее утонении на входе в лентоуклад-
чик и утонении холста или попадании в него посторонних пред-
метов.
Рассмотрим в качестве примера управление электроприво-
дом малогабаритной модернизированной чесальной машины
ЧММ-450-4 в пневмомеханическом варианте (рис. 3.3).
Для привода машины используется один АД типа АОТ2-41-4
номинальной мощностью 3 кВт, работающий в режиме реверсиро-
вания. В схему управления электроприводом входят: пусковая
кнопка SB3 с толкателем черного цвета и кнопки останова SB1
и SB2 с толкателями красного цвета в цени управления линей-
ного магнитного пускателя КМ2 электродвигателя; штепсельные
разъемы А и В в качестве реверсивной вставки; сигнальные
лампы Н1.2—HL5, сигнализирующие о наличии напряжения и
срабатывании холстов; микропереключатели SQ2 и SQ3 и путевые
выключатели SQ7, SQ4 и SQ5, а также рычажный переключатель
SA2; электромагнит золотника YA/, включающий систему про-
граммного управления удаления отходов; электромагнит отклю-
чения YA2; понижающий трансформатор 7’1' типа ТБС2-0,25 на
380/127/12 В; штепсельная розетка Е.
Пуск электродвигателя М возможен только при выведенной
рукоятке управления муфтой главного барабана, т. е. в момент,
когда горит сигнальная лампа HL4. После включения автомати-
ческого выключателя QF1 катушка магнитного пускателя КМ1 по-
лучает питание, а его контакты шунтируют тепловое реле КК
на время пуска машины до момента полного входа рукоятки
управления муфтой главного барабана, когда срабатывает выклю-
120
Рис 3.3. Схема управления электроприводом ма-
шины ЧММ-450-4
чатель SQ5. При нажатии пусковой кнопки SB3 срабатывает
магнитный пускатель КМ2, замыкающие контакты которого под-
ключают к сети электродвигатель М. С вводом рукоятки фрик-
ционной муфты конечный выключатель SK5 обесточивает маг-
нитный пускатель КМ I и сигнальную лампу HL5. При этом магнит-
ный пускатель КМ1 своими замыкающими контактами отключает
блокировку теплового реле и замыкающими контактами разры-
вает пусковую цепь электродвигателя М (для предотвращения
повторного пуска при включенной муфте главного барабана).
При этом разрывается цепь питания промежуточного реле К/,
замыкающие контакты которого обесточивают катушку электро-
магнита останова У.42. обеспечивая тем самым работу системы
питание — выпуск.
Чтобы остановить машину, необходимо нажать на стопорную
кнопку SB2. При этом отключается магнитный пускатель КМ2
и электродвигатель М останавливается. Последующий пуск ма-
шины возможен лишь после возврата на себя рукоятки фрик-
ционной муфты. Реверс электродвигателя М осуществляется с по-
мощью переключателя SA2.
Модернизированная машина ЧММ-450-4М имеет двухдвига-
тельный привод: АД типа АОТ2-41-4 номинальной мощностью
3 кВт для приводов главного и приемного барабанов, вентилятора
и гребенной коробки и трехскоростной АД типа АО2-32-6/4/2
номинальной мощностью 1,1/1,3/1,7 кВт для привода системы пи-
121
тание — выпуск. Трехскоростной АД имеет на статоре две обмотки
(одно- и двухскоростную) и обеспечивает заправочную и рабо-
чую скорости машины. Схема управления электроприводом ма-
шины обеспечивает: пуск и реверсирование электродвигателя
главного барабана, работу системы питание — выпуск на рабочей
или заправочной скорости, автоматическое отключение трех-
скоростного АД при нарушении технологического процесса
(например, при утонении или обрыве ленты перед лентоуклад-
чиком, при открывании крышки лентоукладчика или при забива-
нии лентой пространства между лентоводом и плющильными
валами), аварийный останов машины и ручной останов обоих
эл е кт р од в и г а т ел ей кнопками.
На рис. 3.4 представлена схема автоматизированного элект-
ропривода одной из распространенных на предприятиях отрасли
двухбарабанной чесальной машины ЧМД-4. Привод машины
(рис. 3.4, о) является трехдвигательным и включает: электро-
двигатель М2 типа АОТ2-42-4 (или 4А132М4УЗ) номинальной
мощностью 4 кВт для привода первого главного барабана; элект-
родвигатель М2 типа АОТ (или 4А10054УЗ) номинальной мощ-
ностью 3 кВт для приводов второго главного и промежуточ-
ного барабанов; трехскоростной электродвигатель М3 типа
АО2-32-6/4/2 с номинальными мощностями 1,1/1,3/’.7 кВт для
привода системы питание— выпуск с использованием низшей ча-
стоты вращения.
Схема управления электроприводом данной машины преду-
сматривает: пуск и реверс электродвигателей М1 и М2 главных
барабанов; пуск и плавный разгон электродвигателя М3 на запра-
вочную и перевод на рабочую частоту вращения (перевод на
рабочую частоту вращения производится лишь после работы АД
на заправочной частоте вращения); рабочий и аварийный остано-
вы электродвигателей, их защиту от перегрузок и короткого за-
мыкания и световую сигнализацию (о наличии напряжения, о раз-
решении на включение системы питание — выпуск, срабатывании
холстов, при обрыве или утонении ленты п при забивании
лентовода).
Пуск машины производится следующим образом. Включением
автоматического выключателя SF (рис. 3.4, а) подается напряже-
ние на схему управления; при этом загораются сигнальные лампы
HLI (рис. 3.4. (5) наличия напряжения и лампа А7.5 останова
системы питание — выпуск машины.
При закрытии ограждения машины и расторможенных элек-
трических барабанах реле К7 отключено, так как контакты конеч-
ных выключателей SQ3 - SQ7 должны быть разомкнуты. Вклю-
чается реле К13 и магнитный пускатель КМЗ, шунтирующий теп-
ловую защиту электродвигателей Mi и М2 на время разгона глав-
ных барабанов; при этом загорается сигнальная лампа HL2.
сигнализирующая о готовности машины к пуску.
Рис. 3.4. Схема управле-
ния электроприводом
двухбарабанной чесаль-
ной машины ЧМД-4:
а — силовая часть электро-
привода; б - схема управ-
лен ия
Нажатием кнопки SB1 «Вперед» включаются в работу элек-
тродвигатели Ml и М2 главных барабанов. При этом разры-
вается цепь питания промежуточного реле К13, которое начи-
нает отсчитывать выдержку времени тепловых реле КК1 и КК2
на разгон главных барабанов. Продолжительность выдержки 4—
5 мин достигается за счет энергии разряда конденсатора СЗ. По
окончании выдержки времени магнитный пускатель КМЗ отклю-
чается, после чего снимается шунт с реле времени, в резуль-
тате появляется возможность включения системы питание —
выпуск машины на заправочную скорость (контакт КМЗ в цепи ка-
122
123
тушки промежуточного реле К8). При-, этом гаснет сигнальная
лампа HL2.
Нажатием на кнопку SB2 «Заправка» включаются реле К8,
магнитный пускатель КМ4 и промежуточное реле К12, в результате
чего электродвигатель М3 начинает работу на заправочной
частоте вращения. При этом промежуточное реле К9 отключено,
так как при закрытых крышках лентоукладчика и механизма
валичного съема прочеса контакты микропереключателей SQ8 и
SQ9 разомкнуты.
При нажатии на кнопку SB3 «Быстро» магнитный пускатель
КМ4 отключается и своим замыкающим контактом разрывает
цепь катушки реле К12, а размыкающим контактом включает маг-
нитный пускатель КМ5, переводя электродвигатель М3 на рабочую
частоту вращения. При этом одна фаза обмотки электродви-
гателя М3 питается через дроссель L (см. рис. 3.4, а), позволяю-
щий осуществить плавный переход на рабочую частоту вращения.
Время включения дросселя L равно 3—5 с и обусловлено энер-
гией заряда конденсатора С2 (см. рис. 3.4, б). Реле К12 замыкает
свой контакт в цепи катушки магнитного пускателя КМ6. Пу-
скатель КМ6 своим замыкающим контактом шунтирует дрос-
сель L (см. рис. 3.4, а), а другим контактом повторно включает
реле К12 (см. рис. 3.4,6). На этом пуск машины в работу закан-
чивается.
При обрыве, утонении ленты или при забивании лентовода
в процессе работы машины включается промежуточное реле К9
и своим размыкающим контактом отключает промежуточное реле
К8, контакты которого отключают магнитные пускатели КМ4 и
КМ5 (см. рис. 3.4, а), в результате чего электродвигатель М3
останавливается и при этом загорается сигнальная лампа HL3
(см. рис. 3.4, б).
При срабатывании холста включается реле КЮ и загорается
сигнальная лампа HL3. Реле КЮ своим размыкающим контактом
отключает магнитные пускатели КМ5 и КМ6 (см. рис. 3.4, а) и
через 3—5 с реле К12 (см. рис. 3.4, б) своим контактом вклю-
чает магнитный пускатель КМ4 (см. рис. 3.4, а), осуществляя
автоматический переход электродвигателя М3 на заправочную ча-
стоту вращения. Кроме того, реле КЮ (см. рис. 3.4, б) включает
своим замыкающим контактом реле KI 1, которое своим контак-
том отключает реле КЮ, и сигнальная лампа HL3 гаснет. Через
2—3 с (время заряда конденсатора С4) реле КЮ снова вклю-
чается и зажигает сигнальную лампу HL3, а затем вновь отклю-
чается контактом реле /<//. Так повторяется до момента замены
холста.
При снятии любого ограждения или при включении тормоза
барабанов на ходу машины включается реле К7, которое своим
контактом обесточивает схему управления. Для аварийного
останова машины необходимо нажать аварийную кнопку «Стоп».
124
Рис. 3.5. Схема управления электроприводом машины ЛНС2-51-2М
Электропривод ленточных машин. Ленточные машины пред-
назначены для выравнивания чесальных лент путем их сложения
с распрямлением и параллелизациеп волокон за счет их вытяги-
вания. Основной характеристикой ленточных машин является
число выпусков и количество сложений лент.
В прядильном производстве работает большое количество
видов ленточных машин, в том числе скоростные ленточные ма-
шины (типа ЛНС), высокоскоростные (типа ЛАТ), с регулятором
развеса (типа ЛШ), ленточные червячные машины (типа ЛЧ),
машины для переработки шерсти и ее смеси с химическими
волокнами по гребенной системе прядения (типа ЛМШ-220-1АК),
ленточно-разрывные машины (типа ЛР-400-ИС), импортные лен-
точные машины и др.
В общем случае для электропривода ленточных машин при-
меняют обычные АД с короткозамкнутым ротором, которые рабо-
тают в сравнительно простых условиях, определяемых техно-
логическими процессами установившегося режима работы ма-
шины.
Рассмотрим в качестве примера ряд электрических схем уп-
равления электроприводами ленточных машин.
На рис. 3.5 приведена электрическая схема управления элек-
троприводом модернизированной скоростной ленточной машины
ЛНС2-51-2М, который содержит два приводных АД: один М2
с номинальной мощностью 3 кВт для привода главной машины,
125
другой — Ml i- номинальной мощностью 0,6 кВ г для привода
пневмоотсоса (для удаления коротких волокон и пыли от вытяж-
ного прибора).
Верхние и нижние коробки пнев.мосистемы в процессе работы
периодически соприкасаются с цнлиндиими и валами, что способ
ствует лучшей их очистке ог пыли и пуха.
В схеме имеются световая сигнализация па сигнальных лам-
пах ///./ — HL11 и система этектроосгановов, срабатывающие при
обрыве ленты на птании. наматывают ее па цилиндры или на
валы вытяжного прибора, при наработке ленты заданной длины,
при забивании верхней воронки, открывании ограждений, нама-
тывании на плющильные валы, зяпшнчшц трубки верхней та-
релки.
Головной автоматический выключатьзь Q! в схеме (типа
АП-50-ЗМТ) служит не только для коммутаций, но и для защиты
АД от аварийных режимов рибозы, Перед началом работы вклю-
чаются автоматический вы ключа гель QZ . пакетный выключатель
S.-1 (загорается сигнальная тамла HU Напряжение*) и машину
заправляют нажатием на кнопку « Голчок» (кнопки S/З/ SB НУ]
Пуск машины осушествляегей пусковыми кнопками SBI SB6,
и через контакты реле К1 и малинный пускатель КМ1 пускают оба
АД; при этом включается тормозной эл<ктромаышт.
При нарушении технологической' процесса спабатываюг тех-
пологические контакты SQ1 SQ6 (заюрается одна из сигналь-
ных ламп HL3, HL5, Ш.7, 111.9, Hill}, включается промежуточ-
ное ['еле К2 и размыкает свой размыкающий контакт, отключая
реле АД, что вызывает останов машины и появление на световом
табло одного из следующих сигналов: «Наличие напряжения».
«Таз полный». «Питающая рамка правая», «Питающая рамка
левая». «Питающий цилиндр», «Вытяжной прибор», «Плющиль-
ный вал». При наработке ленты заданной глины срабатывает
счетчик, в результате чею машина останавливается с одно-
временным сигналом светового табло о наработке газа. Для
продолжения работы машины следует вернуть механизм счетчика
в исходное положение.
При обрыве ленты замыкается один из технологических
контактов SQ1 - SQ6, заюрается одна из соответствующих сиг-
нальных ламп и происходит аналогично описанному выше оста-
нов машины. При срабатывании счетчика загорается сигналь-
ная лампа 1IL13 «Съем» и машина останавливается в той же
последовательности. При нажатии кнопок «Сток» SB 11 SB14
или при разомкнутых конечных выключателях SQ7 и SQA прекра-
щается подача напряжения в цепь управления и также проис-
ходит останов машины.
Схемы электроприводов ленточных машин постоянно совер-
шенствуются, в том числе взамен тормозного электромагнита
используются современные схемы электродинамического тормо-
126
жения с применением тиристорных регуляторов, улучшаются
конструкции вентилятора пневмоотсоса и др.
На рис. 3.6,с приведена схема автоматизированного электро-
привода ленточно-разрывной машины ЛР-400-ИС с питанием от
сети переменного тока напряжением 380 В; цепи управления
и сигнализации питаются от трансформатора напряжения TV.
Питание на машину подается автоматическим выключателем
QTI (типа АЕ2046-10РУЗ, 380 В, 50 А). Питание нагревательных
плит F.K1 — ЕК32 (рис. 3.6,6) осуществляется через автомати-
ческий выключатель QF2 (типа АЕ2036-10РУЗ, 380 В, 25 А).
Схема предусматривает толчковый пуск главного привода М3
(см. рис. 3.6, а) на низкой частоте вращения; управление электро-
двигателями главного привода .М3 и вентилятора М2 с четырех
кнопочных постов; автоматический съем наработанного таза без
останова машины; регистрацию наработанного количества мет-
ров ленты в смену и общее ее количество; сигнализацию и
останов машины при технологических неисправностях и при от-
крытых ограждениях; автоматическое регулирование нагрева
плит.
Для пуска машины необходимо включить автоматический вы-
ключатель QFI. При этом получают питание силовые цепи и цепи
управления. Загораются сигнальные лампы HL1 и HL2, сигнализи-
рующие о наличии напряжения. Толчковый пуск электродвига-
теля главного привода М3 на низкой частоте вращения произво-
дится нажатием на одну из кнопок SB6 — SB9 (для заправки
машины). Включение электродвигателя М3 на низкой частоте
вращения производится нажатием на кнопку SB 10. При этом
включаются магнитные пускатели КМ4 и КМ5. Главными 'кон-
тактами магнитный пускатель КМ4 включает электродвигатель
вентилятора М2. Замыкающим контактом по цепи 12—18 магнит-
ный пускатель КМ5 становится на самоблокировку, а другим за-
мыкающим контактом по цепи 13—18 включает магнитный пуска-
тель 1\М1 главного привода. Размыкающим контактом по цепи
43—0 магнитный пускатель КМ4 включает сигнальные лампы
HL1 и HL2, и надпись на табло «Напряжение» гаснет. Магнитный
пускатель КМ1 главными контактами включает электродвигатель
главного привода М3. Размыкающий контакт КМ! размыкается
в цепи 19—20 магнитных пускателей КМ2 и КМЗ высокой частоты
вращения.
Для включения электродвигателей на высокую частоту вра-
щения необходимо нажать на кнопку SB1I. При этом размы-
кающий контакт кнопки разрывает цепь питания магнитного пу-
скателя КМ1 низкой частоты вращения. Замыкающий контакт
кнопки SB 11 включает магнитные пускатели КМ2 и КМЗ высокой
частоты вращения и электродвигатель М3 включится на эту
частоту вращения. При наработке определенного количества
метров ленты в таз срабатывает микропереключатель отсечного
127
кии
КК1
QF1
3-----
КМ1
кк
ккз
ккг
FU TV
SB5 ЗВ4 STM SQ3
12^11^10^9 9 8
5Q1 SB е.л п
_ 3 Sfi 2
КМЗ
SS6
,5В7
Уве
'зБ9
/4 КМ2 15 КМЗ fB ККЗ 17 р]
КМ5
II _гЧ.
I! SB11 „м? КМ2
18 jb 10 КМ1 20 ™3 КК9 21 г2
КМ5
SB12
28
SQ5
9
КМЗ
KV1
KVfy
23
КМ7
кмз
s/> к кг г‘,
кмо
КМ5
КМ6
27
9 SQ6 КМЗ $q КК1
КМ7
31
S%33 ^39
КМЗ
35 35
КМ9
а
Рис. 3.6. Автоматизированный электропривод ма-
шины ЛР-400-ИС:
а схема управления; б — схема терморегулирования
36е и
110В
О
12В
4/
-П
КМ9
92
HL2
... ^ЗО1..Ш
HLJ Лд<р
HL 4
HL7*.
HLB
№9^
нИк
HL11
ниС
KV1
95
VD1
~§и
SP1
47
SP1
1^Р2
'«W
да '
<1Г/
12^
52)^
HL15 /ДШ
~t№.
J т
VB7 г.
Лк’
сг
механизма SQ5, который включает магнитные пускатели КМ(> и
КМ7. Магнитный пускатель КМ7 включает электродвигатель ав-
тосъема Ml. а размыкающий контакт КМ7 обесточивает цепь
питания магнитного пускателя КМ8.
Каретка при своем движении воздействует на микропере-
ключатель SQ6, который размыкающим контактом размыкает цепь
питания магнитного пускателя КМ7. а замыкающим контактом по
цепи 12—34 включает магнитный пускатель КМЗ. Замыкающим
контактом по цепи 12—32 магнитный пускатель КМ7 самоблоки-
руется. что приводит к движению каретки назад. Дойдя до исход-
ного положения, каретка воздействует на микропереключатель
SQ7. который размыкающим контактом включает магнитный пус-
катель КМЗ. в результате чего электродвигатель Ml останавли-
вается.
При отсутствии пустого таза реле К\ '4 отключено. При нара-
ботке таза срабатывает магнитный пускатель КМ6, замыкающие
контакты которого по цепи 51 —52 включают реле KV1, размы-
кающий контакт KV1 отключает цепь питания 18- 23 магнитных
пускателей главного привода и вентилятора, что приводит к оста-
нову машины.
Для ручного останова машины необходимо нажать на одну
из кнопок SB1 — SB5; при этом обесточивается цепь управ
ления.
Машина имеет самоостановы при технологических наруше-
») А М. Лашей. В В Красник
129
ниях, при которых срабатывает реле КVI через соответствую-
щий диод, отключающий по цепи 18-.-23 магнитные пускатели КМ4
и КМ5. Магнитный пускатель КМ5 отключает цепь магнитного
пускателя КМ! или КМ2 и КМЗ, в результате чего и происходит
останов машины. При открытых дверцах ограждений обесточи-
вается цепь управления и загораются сигнальные лампы Н 1.3 и
111.4 «Ограждения».
Работа электрической схемы системы терморегулирования осу-
ществляется следующим образом (рис. 3.6, б).
При включении автоматического выключателя QF2 в систему
терморегулирования подается напряжение. Термосопротивления,
установленные в плитах, имеют температуру ниже заданной.
При этом срабатывают исполнительные реле регуляторов темпе-
ратуры АА. Замыкающие контакты рабочих регуляторов А! —
А4 включают цепи управления тиристоров VS12—VS 19, которые
открываются и подают напряжение, в результате чего плиты на-
греваются и загораются зеленые сигнальные лампы «Меньше».
Пятый контрольный регулятор температуры при включении
своим размыкающим контактом выходного реле отключает маг-
нитный пускатель КМ9. На контрольном регуляторе температура
регулирования устанавливается на 60—80 °C ниже необходимой.
При достижении установленной температуры выходное реле конт-
рольного регулятора включает своим размыкающим контактом по
цепи 12—35 магнитный пускатель КМ9, который своими размы-
кающими контактами отключает цепи управления (цепочки 73—
74, 81—82, 89—90, 97—98) тиристоров l'S/3. VS15, VS17, VS19.
В дальнейшем прогрев плит происходит половиной подаваемого
напряжения. Мощность, потребляемая плитами, уменьшается
в четыре раза и вследствие этого первоначальный выброс тем-
пературы получается минимальным. При достижении заданной
температуры выходное реле регуляторов отключает цепи управле-
ния тиристоров VS12, VS14, VS16, VS18 и нагреватели обесточи-
ваются. Зеленая сигнальная лампа «Меньше» гаснет и включается
сигнальная лампа «Больше»; температура плит становится больше
заданной, в результате чего происходит постепенное охлаждение
плит. При понижении температуры плит ниже заданной регуля-
торы включаются и происходит подогрев плит половиной пода-
ваемого напряжения. Таким образом и осуществляется автома-
тическое регулирование температуры плит.
В схеме сигнальные лампы фиксируют: HL5 и HL6 (см.
рис. 3.6, а) —работу питающей рамки, HL7 и HL8 работу
питающих валов, НL9 и HL10 — работу вытяжных валов, HI.11 и
HL12 — работу выпуска, Н L13 и HL14 — работу лентоукладчика,
HL15 и HL16 — отсутствие таза.
На рис. 3.7 приведена схема автоматизированного электропри-
вода ленточной резалы-ю-штапелирующей машины ЛРШ-70, ко-
торая предназначена для однопроцессной переработки жгутовых
130
Рис. 3.7. Схема управлении ачектропрнводо.м машины ЛРШ-7:)
химических во.юкин в штане.тированпую ленту с заданной длиной
резки полок на от 74 до 110 мм.
Для привода машины применяется двухскоростной АД с корот-
козамкнутым ротором Ml типа АО2-62-8/4 номинальной мош
ностыо 10,5/7 кВ). Для привода пневмоотсоса применен электро-
двигатель Л12 тина ЛОЛ 12-2 номинальной мощностью 1.1 кВт.
Питание на схеме управления подается через понижающий транс-
форматор 7’1/ 380'1’0/12 В.
Схема работает следующим образом. Для подготовки машины
к пуск', необходимо закрыть все дверки ограждений и включить
автоматический выключатель QF1. При этом загорится световое
табло «Включено» (лампы HIM и HL4), что сигнализирует о
roTOBHOCin машины к пуску
Заправка машины производится на низкой скорости нажатием
одной и.з кнопок «Толчок» SHIV - SB15 Пуск машины произво-
дится одной из пусковых кнопок SB 16—SB 18. При нажатии
па пусковую кнопку замыкается цепь питания магнитного пуска-
теля вентилятора К.М4, его замыкающий контакт включает цепь
магнитного пускателя малой скорости главного привода К.М1,
131
а размыкающий контакт КМ! отключает световое табло «Вклю-
чено» (HL3 и HL4) и включает сигнальные лампы HL1 и HL2.
Размыкающий контакт КМ1 размыкается, исключая возможность
одновременного включения главного привода на низкой и высо-
кой скоростях. При переходе на высокую скорость необходимо
нажать на одну из кнопок SB7—SB9. Размыкающие контакты
отключают цепь питания магнитного пускателя КМ!. Размыкаю-
щий контакт КМ! замыкается, включая магнитный пускатель
КМЗ, контакты которого подключают обмотку Ml по схеме «звез-
да» Замыкающий контакт КМЗ включает магнитный пускатель
КМ2. Размыкающие контакты КМ2 и КМЗ в цепи магнитного
пускателя КМ! размыкаются, а главные контакты КМ2 подклю-
чают другую обмотку Ml, что приводит к работе машины на вы-
сокой скорости.
Останов машины производится кнопками SB! — SB6. При
этом отключается питание цепи управления и магнитные пуска-
тели отключаю! электродвигатели. При технологических остано-
вах соответствующие микропереключатели, технологические кон-
такты, электроконтактные манометры замыкают цепь питания реле
самоостанова К5, подавая на его катушку напряжение, выпрям-
ленное одним из диодов VD! - VD9. Реле К5 отключает размы-
кающие контакты /\;Ш, в результате чего происходит останов
машины и загорается соответствующее световое табло, сигна
лизирующее о причине останова.
При открывании ограждений микропереключатели SQ22—
SQ28 размыкают цепь управления, .магнитные пускатели отклю-
чают электродвигатели и машина останавливается.
Сигнальные лампы Н 1.5 и Н L6 сигнализируют о наличии
давления, HL7 и HL8 - о работе рамки питания, IIL9 и HL10 -
о работе узлоуловителя, HL1! и HL12 — о наличии питания,
HL13 и HL14— о работе ножевого вала, IIL15 и UL16 — о ра-
боте разделительных цилиндров, HL17 и HL18 — о работе вытяж-
ных цилиндров, IIL!9 и HL.20 -- о работе лентоукладчика, HL21 и
! 11.22 — о работе съема.
Электропривод ровничных машин. Ровничные машины пред-
назначены для вытягивания (утонения) и укрепления ленты
с последующим формированием из нее ровницы за счет кручения и
наматывания полученной ровницы на катушку. Применяются раз-
личные виды ровничных машин, отличающиеся количеством и диа-
мором веречен, ассортиментом (например, на машине РЛ 192
можно получать подкрученное волокно, близкое к ленте, а на ма-
шине Р 192—ИМ — крученую, предварительно вытянутую ленту
из химических волокон).
В качестве силовой части электропривода ровничных машин
применяются обычные АД с короткозамкнутым ротором, по-
скольку машина работает в установившемся режиме с постоян-
ной частотой вращения.
132
FU
\sb2,sb8
\SB3,3fl9
/S3 W ЛЗ\K6\K7 ЛУ №
i 5Ы6
T
155/'/
\5B15
SO! 5Q2 SQ3 SQv S(?5 SUB 5Q7
Рис. 3.8. Схема управления электроприводом машины Р-192 И
Рассмотрим в качестве примера схему управления электро-
приводом ровничной машины Р-192-И (рис. 3.8).
Электропривод этой машины имеет АД типа АОТ2-32-4 номи-
нальной мощностью 2,2 кВт (при 8—60 веретенах), АД типа
АОТ2-2-6 номинальной мощностью 3 кВт (при 66—84 веретенах) и
АД типа АОТ2-51-6 номинальной мощностью 4 кВт (при 90
102 веретенах). В одну из фаз АД включен дроссель I. (из расчета
на АД мощностью до 4,5 кВт) для обеспечения плавного пуска
машины. Напряжение на схему подается переключателем SAJ,
а напряжение в цепь управления подается с понижающего транс-
форматора 7 Г 500-380-220/36/12 В (в цепь управления 36 В, а
в цепь сигнализации и автоматического останова при обрыве или
окончании ленты— 12 В).
Схема управления электроприводом данной машины позволяет:
осуществлять плавный пуск машины и ее останов кнопками
SBI — SB10 (расположенными с передней стороны машины) и
SB11 —SB16 (расположенными с задней ее стороны);
обеспечивать при помощи конечного выключателя SQ7 авто-
матический останов машины при наработке съема;
осуществлять пуск машины толчком с помощью специальных
кнопок «Толчок» (расположенных с передней стороны машины);
производить останов машины конечным выключателем SQ5
при аварийной работе замка и при обрыве ремня коноидов;
исключить пуск машины при открытых дверцах головной
рамы (SQ3), ограждения вытяжной передачи (SQ4), задних
раздвижных щитов замкового пролета, моторного и коноид-
ного пролетов (SQ/ и SQ2);
производить останов машины за счет срабатывания промежу-
точных реле /<3 — Кб при обрыве ленты;
обеспечивать световую сигнализацию любых режимов работы
машины при помощи сигнальных ламп HL1 — HL14.
Напряжение на схему управления подается пакетным пере-
ключателем SA2 на первичную обмотку понижающего транс-
форматора TV. При нажатии пусковой кнопки (если закрыты все
ограждения и дверцы машины) подается напряжение на катушки
реле времени КТ и промежуточного реле Л7, которые срабаты-
вают. Размыкающие контакты реле К1 размыкаются, включая
дроссель L в одной из фаз АД, а магнитный пускатель КМ, замы-
кая свои главные контакты, включает АД, который плавно начи-
нает разгоняться. Примерно через 4—5 с срабатывает реле
времени КТ, размыкая свои контакты в цепи катушки реле К1 и
замыкая их в цепи АД, тем самым шунтируя дроссель L. При этом
отключается и реле времени КТ. Таким образом, для обеспечения
плавного пуска в схеме используются только реле времени КТ.
промежуточное реле К1 и дроссель L. При выходе из строя лю-
бой из катушек КТ, К1 пли КМ пуска электродвигателя не произой-
дет.
При замыкании технологического контакта срабатывают реле
КЗ — Кб и своими контактами включают промежуточное реле
КЗ, которое отключает катушку магнитного пускателя КМ, в ре-
зультате чего электродвигатель отключится от сети. Аналогично
машина останавливается и при разрыве контакта в цепи блоки-
ровки безопасности. Сигнальные лампы HL1 — HL4 показывают
зону повреждения ровницы, а сигнальные лампы HL5 — HL11 —
вид нарушения блокировки безопасности; лампа EL является под-
свечивающей.
Для защиты АД от аварийных режимов работы в схеме исполь-
зуются предохранители FU и тепловые реле КК, встроенные в
магнитные пускатели.
3.3. ЭЛЕКТРОПРИВОД ПРЯДИЛЬНЫХ
И ПРЯДИЛЬНО-КРУТИЛЬНЫХ МАШИН
Прядильные и прядильно-крутильные машины являются заклю-
чительным звеном в прядильном производстве и предназначены
для выработки пряжи из ровницы.
Существует множество видов прядильных машин, освоение
которых продолжается отечественной промышленностью. Одним
134
из основных видов прядильных машин являются кольцевые пря-
дильные машины (с кольцевыми веретенами), осуществляющие
непрерывное вытягивание, кручение и наматывание пряжи. Освоен
выпуск новых видов высокопроизводительных машин, в том числе
ПЛ-76-6М и ПЛ-76-7М для выработки пряжи непосредственно
из ленты и из ровницы; ПЛ-76-ИГ для камвольного прядения;
прядильно-крутильных машин ПК-100М; современных кольцевых
прядильных машин П-114-Ш4 и Г1-132-Ш для выработки аппарат-
ной пряжи и др. В настоящее время все более широкое применение
в прядильном производстве предприятий отрасли находят пневмо-
механические прядильные машины безверетенпого прядения типа
БД-200 и ей подобные. Пневмомеханическая прядильная машина
БД-200 предназначена для выработки пряжи из хлопкового и вис-
козного волокон длиной до 40 мм или из их смесей. Питание ма-
шины осуществляется лентами из тазов или холстиками.
Электропривод прядильных машин и установленных на них
вентиляторов мычкоуловителей осуществляется от обычных АД
с короткозамкнутым ротором.
Так как в процессе прядения натяжение нитей должно оста-
ваться постоянным, необходимо изменять частоту вращения вере-
тена, что достигается послойным или базисном регулированием
главного привода машины. Базисное регулирование обеспечи-
вает снижение частоты вращения при наработке гнезда и початка
и ее увеличение при наработке тела початка, а послойное
регулирование обеспечивает необходимое регулирование за время
намотки одного слоя.
Серийно кольцевые прядильные машины выпускаются отече-
ственной промышленностью только с базисным регулированием,
а для послойного регулирования требуются специальные ре-
гуляторы прядения.
Мощность, потребляемая прядильными машинами, зависит от
их конструктивных элементов и технологических параметров,
в том числе: от числа веретен и их частоты вращения, расстояния
между веретенами, диаметра кольца и подъема планки, напол-
нения початка и линейной плотности пряжи и т. д.
Рассмотрим ряд схем управления электроприводов некоторых
видов прядильных машин.
Электропривод кольцевой прядильной машины П-114-Ш.
В схеме управления электроприводом данной машины учтены
следующие особенности:
так как при пуске машины наблюдается наибольшая обрыв-
ность, то вентилятор мычкоуловителя должен включаться раньше,
чем главный привод машины; при этом электропривод машины
должен включаться лишь после разгона вентилятора мычкоуло-
вителя, когда разрежение в воздуховоде достигнет значения, при
котором возможно качественное улавливание мычки, или макси-
мально установившегося значения разрежения;
135
Рис. 3.9. Схема управления электропри-
водом машины II-I14-1U
с целью недопущения на-
матывания оборвавшейся мыч-
ки на рабочие органы машины
при ее останове мычкоулови-
тель должен выключаться лишь
после останова рабочих органов
машины, т. е. разрежение в си-
стеме должно быть не ниже
минимально допустимого
вплоть до останова рабочих
органов;
в схеме электропривода дол-
жна быть предусмотрена за-
щита от аварийных режимов
работы (обрыва фазы, коротких
замыканий, технологических пе-
регрузок и др.), а также обес-
печена возможность аварий-
ного останова машины.
С целью осуществления оп-
тимального пуска (более мед-
ленный пуск приводит к браку
и снижению производительно-
сти машины, а более быстрый
пуск — к повышенной обрывно-
сти) в момент, когда разреже-
ние в воздуховоде достигнет
минимально допустимого зна-
чения, при котором происходит
качественное улавливание мыч-
ки, в схему введен сигнализатор предельного разрежения (СИР).
В качестве СПР можно использовать отечественные приборы
(например СДБ-11) или изготавливать их силами энергослужбы.
На рис. 3.9 приведена схема управления автоматизированным
электроприводом кольцевой прядильной машины П-1 14-Ш.
Принцип работы схемы заключается в том, что при включении
автоматического выключателя QF (тип А311) напряжение через
понижающий трансформатор TV 380/127 В (мощностью 60 Вт)
подается на схему управления. При нажатии пусковой кнопки
SBI (SB2 и SB3) напряжение через цепь стопорных кнопок SB4
(SB5 и SB6) и контакты тепловых реле КК1 и КК2 подается на
катушку промежуточного реле К!, замыкающий контакт кото-
рого через диод VD (тип Д226В) подает напряжение на промежу-
точное реле К2, контакт которого включает магнитный пускатель
136
(тип ПМЕ-212) КМ1 электродвигателя Ml вентилятора мычко-
уловителя (АД типа АО2-32-2 номинальной мощностью 4 кВт).
При достижении необходимого разрежения в воздуховоде контак-
ты СИР замыкаются и напряжение 127 В подается на катушку
магнитного пускателя КМ2 (тип ПАЕ-300) электродвигателя М2
(АД типа АОТ2-63-4 номинальной мощностью 10 кВт) привода
машины, запуская ее в работу. Останов машины производится
нажатием стопорных кнопок SB4 (SB5. SB6); при этом цепь пита-
ния промежуточных реле /<7. /<2 и магнитного пускателя КМ2
обесточивается, что и влечет за собой отключение привода с оста-
новом машины. Одновременно с этим начинается разряд конден-
сатора С1 (тип К50-3 200X200) через катушку реле К2. При
достижении напряжения на конденсаторе, равном напряжению
отпускания катушки реле К2, оно отключается и его контакты
отключают катушку магнитного пускателя КМ1, что приводит
к останову АД вентилятора Благодаря наличию конденсатора
С1 происходит задержка отключения вентилятора примерно на 2 с,
что позволяет мычкоуловителю выполнить свою функцию и после
останова машины.
Электропривод прядильно-крутильной машины ПК-100. Пря-
дильно-крутильная машина ПК-100 осуществляет одновременно
прядение и кручение пряжи. Электропривод этой машины имеет
два АД: Ml - типа ЛОТ номинальной мощностью 2.8 —10 кВт
в зависимости от числа веретен для привода машины и М2 — типа
АО-32-2 номинальной мощностью 1,7 кВт (или АОЛ2-22-2 номи-
нальной мощностью 2,2 кВт) для привода вентилятора мычко-
уловителя.
Е1а рис. 3.10 приведена схема автоматизированного электро-
привода машины ПК-100. Пуск и останов вентилятора мычкоуло-
вителя осуществляется кнопками SB1, SB2 и SB3, которые распо-
лагаются в головной и хвостовой рамах.
Для изменения направления вращения основного АД (Ml)
служит конечный выключатель SQ4, установленный на головной
раме, а конечные выключатели SQ2 и SQ3, установленные в го-
ловной части машины, служат для блокировки дверец и кожуха
головной рамы.
Напряжение на схему управления после включения рубильника
QS через понижающий трансформатор TV 380/36 В подается
пакетным выключателем S.4. При нажатии кнопок SB1 и SB2
срабатывает магнитный пускатель КМ2 и включается АД венти-
лятора мычкоуловителя. Необходимое время для его разгона
(5 10 с) выдерживается в нажатом состоянии кнопкой SB1
(или SB2). При этом цепь магнитного пускателя КМ1 разомкнута
и главный АД (/VI/) не включен. Этот магнитный пускатель сра-
ботает при нажатии кнопки SB1 или SB2, в результате чего и вклю-
чится АД привода машины. При открывании дверей оба АД оста-
навливаются с помощью конечных выключателей SQ1, SQ2 и
1.37
SQ3. Ручной останов АД осуществляется стопорной кнопкой SB4
или аварийно тепловыми реле Л7</ — КК4. На машине преду-
смотрен реверсивный режим работы АД главного привода за
счет переключения конечным выключателем SQ4.
Электропривод пневмопрядильных машин БД-200.М69. Пря-
дильная машина БД-200.М69 предназначена для прядения
хлопка пневмомеханическим способом.
На рис. 3.11 приведена схема автоматизированного электро-
привода прядильной машины БД-200.М69. Силовая часть элек-
тропривода этой машины состоит из пяти сравнительно энерго-
емких АД, в том числе: двух АД номинальной мощностью по
7,5 кВт для приводов прядильных камер левой стороны и редукто-
ров Ml и прядильных камер правой стороны М2, двух АД номи-
нальной мощностью по 2,2 кВт для приводов расчесывающих
барабанчиков (М3 и М4) и одного АД номинальной мощ-
ностью 1,5 кВт для приводов питающих цилиндров, натяжных
роликов и роликов намотки бобин.
Напряжение на схему подается автоматическим выключателем
SF1 через обмотки трех трансформаторов TVI — TV3 (220/12 В).
Затем включается тормозная система из электромагнитных тор-
мозов механизма регулировки заправки, останова питающего
вала, останова выпускных и мотальных валов, обратного и пря-
мого хода; автоматические выключатели SF2, SF3, SF4 и SF5
подготавливают цепи включения электродвигателей Ml — М4.
Пуск машины осуществляется нажатием на кнопку SBI, при
этом срабатывают магнитные пускатели КМ1, КМ2, соединяю-
138
щие обмотки АД по схеме «звезда» для облегчения условия пуска
электродвигателей. Затем включаются магнитные пускатели КМЗ
и КМ4, подающие с выдержкой времени, необходимой для их
разгона, питание на АДМ/ и М2. Выдержка времени определяется
установкой реле времени КТ, которое, срабатывая, отключает маг-
нитные пускатели КМ1 и КМ2-, при этом включаются магнит-
ные пускатели КМ5 и КМ6, соединяющие обмотки АД по схеме
«треугольник» для обеспечения рабочего режима электродвига-
телей. После этого нажатием кнопки SB2 «Зарядка» включаются
магнитные пускатели КМ7 и КМ8 и соответственно электродви-
гатели привода расчесывающих барабанчиков М3 и М4.
Промежуточное реле К подает питание на электромагнитные
муфты включения отводящих валов. Трансформаторы TV 1 —
ТУЗ и диоды VD1 — \ D12 обеспечивают подачу постоянного
напряжения для питания электромагнитных муфт. Останов маши-
ны производится стопорными кнопками SB4 — SB6. Блокировка
ограждений осуществляется конечными выключателями SQ1—
SQ9.
Защита и коммутация электродвигателей осуществляются с
помощью автоматических выключателей SF1—SF5.
Электропривод кольцевой прядильной машины РН-2А. Коль-
цевая прядильная машина РН-2А предназначена для выработки
139
гребенной пряжи 19—50 текс длиной 50 —200 мм из скрученной
или ссученной ровницы из шерсти, ее смеси с .химическими
волокнами или чистым .химическим волокном.
Электропривод машины включает четыре АД (рнс 3 12).
в том числе: Ml — электродвигатель главного привода, М2 --
электродвигатель мычкоуловителя, М3 - элекродвигятеть охлаж-
дающего вентилятора и М4 — электродвигатель щеточной тра-
версы .
Пуск машины осуществляется автоматическим выключателем
SF с последующим нажатием пусковой кнопки SB1 или SB2
«Мычкоуловитель»; магнитными пускателями производится вклю-
чение электродвигателей; КМ5 — мычкоуловителя И 2. охлаждаю-
щего вентилятора М3. С нажатием кнопки SB3 или SB4 сраба-
тывает вспомогательный магнитный пускатель КМ1 или КМ2
(обороты вправо или влево) и осуществляется пуск главного
привода Ml. При этом вспомогательный магнитный пускатель
KMI или КМ2 вызывает включение основного магнитного пу-
скателя КМЗ или КМ4 для пуска электродвигателя Ml главного
привода.
Примененная в схеме блокировка замыкания контактов КМ2
предотвращает возможность пуска электродвигателя Ml главного
привода в том случае, если не включены электродвигатели
мычкоуловителя М2 и охлаждающего вентилятора М3. Магнит-
ные пускатели КМ7 и КМ8 предназначены для переключения
электродвигателя щеточной траверзы М4 вправо и влево при уве-
личении или уменьшении оборотов электродвигателя Ml глав-
но
ного привода. При включении электродвигателя щеточной тра-
верзы загорается сигнальная лампа HL1, что свидетельствует
об изменении частоты вращения электродвигателя Ml главного
привода. Сигнальная лампа HL2 сигнализирует о работе машины
на уменьшенных (0—25 % заданных) оборотах, которые необ
ходи.мы для образования основания и вершины паковки.
Останов машины осуществляется путем нажатия стопорной
кнопки SB5 или SB6. одна из которых расположена на передней
головке, а вторая на задней головке машины. Конечные яыклю
чатели служат: SQ/—для дверной блокировки. SQ3 и SQ4 -
для опускания планок, SQ5 и SQ6 — для блокировки. SQ7 и
SQ8— для максимума и минимума хода щеточной траверсы.
SQ2 -- для фиксирования верхнего положения кольцевой планки
и SQ9 — для обеспечения световой сигнализации
Электропривод прядильной самокруточной машины ПСК-225ИИ.
На рис. 3J3 приведена схема автоматизированного электропри-
вода прядильной самокруточной машины ПСК-225ШГ, питающе-
гося от сети переменного тока напряжением 380 Б через автомат
ческий выключатель SF; цепи управления и сигнализации пи-
таются от понижающего трансформатора IV.
На. машине предусмотрено регулирование скорости, которое
обеспечивается однофазным тиристорны м электроприводом
ЭТ1Е2-12У4 с электродвигателем Ml типа ПБС-32 номинальной
мощностью 1.2 кВт, его обмоткой возбуждения LM и блоком
регулирования U.
Электрооборудование включает регулируемый привод рабо-
чих частей машины, привод вентилятора (электродвигатель М2
номинальной мощностью 0,75 кВт), релейно-контакторную аппа-
ратуру защиты, кнопки и тумблеры управления, устройства конт-
роля обрыва нити, электропневмоклапаны и аппаратуру сигнали-
зации.
Схема управления электроприводом обеспечивает: пуск ма-
шины на заправочную скорость кнопкой SB4\ пуск машины на
рабочую скорость кнопкой SB5; останов машины при ее работе кик
на заправочной, так и на рабочей скорости кнопкой «Стоп» SB3
(при открывании ограждений срабатывает конечный выключатель
SQ2. при срабатывании реле давления замыкается контакт мик-
ровыключателя SB6); автоматический останов машины при ра-
боте на рабочей скорости и случае обрыва нити на любом вы-
пуске; автоматическое управление асинхронным твигатечем М2
привода вентилятора; защиту электродвигателей и аппаратуры
цепи управления от перегрузок и токов коротких замыканий; руч-
ное и автоматическое управление работой электропневмокла-
панов; сигнализацию наличия напряжения в цепи управления;
автоматический контроль выпуска пряжи.
Работа электрооборудования схемы происходит следующим
образом. При включении автоматического выключателя 81 на-
I
Рис. 3.13. Схема управления электроприводом машины ПСК-225ШГ
пряжение подается в силовую цепь, а при включении переклю-
чателя S/1 — на трансформатор TV. В цепи управления исполь-
зуется напряжение 22 В — для питания сигнальных ламп, 24 В —
для питания датчиков контроля обрыва нити, 110 В - для питания
катушек реле, магнитных пускателей и электропневмоклапанов.
Для пуска машины необходимо закрыть дверь ограждения
(должен быть замкнут контакт SQ2) и в пневмосистеме обе-
спечить требуемое давление сжатого воздуха, для чего контакт
микровыключателя реле давления SB6 должен быть замкнут.
Для пуска машины на заправочную скорость надо включить кноп-
ку SBI, при этом загорается сигнальная лампа HL1, указываю-
щая наличие напряжения: через контакты SB1I— SB14 напря-
жение подается на электропневмоклапаны рычагов нагрузки
Y1 —/— Y1— 4. Затем нажатием кнопки SB4 «Заправка» вклю-
чается магнитный пускатель КМ1, отключающий цепь питания
реле Кб и подающий напряжение на блок регулирования приводом
электродвигателя Ml, который пускается на малую частоту вра-
щения, определяемую делителем напряжения RI и R3 и регули-
руемую резистором R7. Контактом КМ1 замыкается также цепь
питания электропневмоклапанов Y3—1 — Y3—4.
Пуск на рабочую скорость во избежание обрыва пряжи произ-
водится только с заправочной скорости. Для этого необходимо
нажать кнопку SB5 «Работа», в результате чего включается
магнитный пускатель КМ2, реле К4 и реле времени КТ5. Контак-
том КМ2 пускается электродвигатель М2, а контактом К4 шун-
тируется кнопка SB5, отключается резистор R1 и подключается
резистор R3, регулирующий частоту вращения электродвигателя
Ml. Кроме того, контакт К4 отключает зеленую сигнальную лампу
HL1 и включает синюю сигнальную лампу HL2, сигнализирую-
щую о работе машины, а также замыкает цепь питания реле
Кб (но так как кнопки SB7 — SB10 разомкнуты, то реле Кб не
включится).
Останов машины может произойти по следующим причинам:
из-за нажатия на кнопку SB3 «Стоп», вследствие открытия ограж-
дений, по причине снижения давления ниже допустимого, из-за
обрыва нити.
При нажатии на кнопку SB3 снимается питание с магнит-
ных пускателей КМ/, КМ2, реле К4 и реле времени КТ5, в резуль-
тате чего электродвигатели Ml и М2 останавливаются.
При этом гаснет сигнальная лампа HL2 и загорается лампа
HL1, напряжение с катушек электропневмоклапанов снимается
с задержкой времени реле КТ5.
При открывании ограждения машины срабатывает конечный
выключатель SQ2 и происходит останов машины аналогично
описанному выше. При снижении давления срабатывает микро-
143
выключатель SB6 реле давления, в результате чего отключаются
магнитный пускатель КМ2, реле К4 и реле времени Л'7’5. Про-
исходит аналогичный процесс останова машины, но уже через
замкнутый контакт SB6\ при этом загорается зеленая сигнальная
лампа HL4, что и является сигналом о снижении давления
ниже нормы.
При обрыве пряжи срабатывает один из датчиков контроля
обрыва нити, который замыкает контакты SB7 — SB10, вклю-
чает реле Л'б и отключает магнитные пускатели, в результате
чего происходит останов машины; при этом контактом Кб вклю-
чается сигнальная лампа HL3, сигнализирующая об обрыве
пряжи.
Автоматический выключатель SF, плавкие предохранители FU
и тепловые реле КК служат для защиты от перегрузок и коротких
замыканий.
Электропривод безверетенной прядильной машины ПП АА-120-МС.
Прядильная машина ППМ-120-МС предназначена для получения
пряжи из хлопка с вискозными и синтетическими волокнами.
На рис. 3.14, а приведена схема силовой части электропривода.
Электропривод машины имеет шесть АД, в том числе: Ml но-
минальной мощностью 1 1 кВт для привода крутильной камеры
левой стороны и редукторов, М2 - номинальной мощностью
11 кВт для привода крутильной камеры правой стороны; М3 и
М4 номинальной мощностью по 2,2 кВт для приводов дискрета
зирующих барабанчиков; М5 и Мб номинальной мощностью по
2,2 кВт для привода вентилятора отсоса сорных примесей и вен-
тилятора нитеотвода.
Вводным автоматическим выключателем QF1 напряжение
380 В подается на понижающие трансформаторы TV 1 и TV2 и
дроссели L, напряжение 19 В с трансформатора 7’1 1 (см.
рис. 3.14, а) подается на трехфазный выпрямитель VD1—VD6,
который преобразует его в постоянное напряжение 24 В. Перемен
ное напряжение 110 В с трансформатора TV2 (рис. 3.14,6)
подается в схему управления магнитными пускателями КМ6 —
КМ11, КМ 14, КМ 15 и реле времени КТ 12, КТ 13, а напряжение
36 В — в схему форсировки па диод VI) 18 и конденсатор СЮ
(рис. 3.14, в). В цепи напряжением 110 В получает питание
магнитный пускатель КМ6 через замыкающий контакт реле К4
и реле времени КТГ2. Постоянное напряжение 24 В подается в
схему управления реле К1 — К5 (см. рис. 3.14, в) электромагнит-
ными муфтами YC2, YC1, YC7 и на шинопровод для питания дат-
чиков прядильных устройств. В цепи постоянного напряжения
24 В получают питание сигнальные лампы контроля изоляции
HL2 и HL3 (делят его пополам и горят в полнакала), реле К4 и
Л'5, конденсаторы С6 - СУ, Cl 1 — С21, С35 и тормозные муфты
YC4 и YC5
Пуск привода крутильных камер машины осуществляется на-
144
Рис 3 14. Схема управления электроприводом машины Г1ПМ-120-МС:
и силовая часть электропривода; о схема управления машитпыми пускателями
и реле времени; в схема форсирования и управления электромагнитными муфтами
жатием кнопки SB3 «Привод» (см. рис. 3.14,6); при этом полу-
чают питание магнитные пускатели КМ7 и КМ8. которые блоки-
руют кнопку SB3 и отключают реле КТ 12. Пневмоустройство на-
чинает отсчет времени и через 9—12 с магнитными пускателями
КМ7 и КМ8 через дроссели /. (см. рис. 3.14, а) получают питание
электродвигатели Ml и М2, обеспечивая плавный разгон пря-
дильных камер.
После разгона реле КТ 12 (см. рис. 3.14, б) включается магнит-
ный пускатель КМ9, который шунтирует дроссели L (см.
рис. 3.1 I, а) и обеспечивает на электродвигатели подачу полного
линейного напряжения 380 В. Магнитный пускатель КМ9 вклю-
чает сигнальную лампу 111.4 («Разгон») (рис. 3.14, в), размыкает
цепь разрядки конденсатора и подготавливает к включению
цепь реле времени КТ13 (см. рис 3.14,6).
Пуск машины в работу осуществляется нажатием на кнопку
SB4, при этом получает питание реле КТ 13, которое в течение
4 —10 с обеспечивает блокировку кнопки SB4 и контакта магнит-
ного пускателя КМ9, а также отключает магнитные пускатели
КМ7 — КМ9. С этого момента начинается спад частоты вращения
прядильных камер до 30-10’ мин" ' Магнитный пускатель КМ7
включает реле времени КТ 12, и при достижении установленного
времени спада частоты вращения крутильных камер включаются
магнитные пускатели КМ 10 и КМ11, которые включают электро-
двигатели дискретизирующих барабанчиков М3 и М4 (см. рис.
3.14, а), готовят цепь реле К1 (см. рис. 3.14, в), отключают от
обмоток электродвигателей тормозной блок, включают электро-
двигатель Мб (см. рис. 3.14, а) вентилятора отвода сорных при-
месей, отключают сигнальную лампу HL4 (см. рис. 3.14, в), источ-
ник 24 В от реле КЗ и конденсаторов С8 и С9.
Реле К5 после разряда конденсаторов С8 и С9 (0,8—1 с)
отключается и своим контактом включает реле К.1 (рис. 3.14, в),
обеспечивая задержку на разгон электродвигателей М3 и М4
(см. рис. 3.14, а). Кроме того, это реле включает электромагнит
зарядки, готовит цепь реле КЗ (см. рис. 3.14, в) через геркон ЕЮ,
отключает тормозные муфты YC4 и YC5 и включает муфту обрат-
ного хода YC6 на питание от напряжения форсировки 48 В, кото-
рая и обеспечивает подачу концов пряжи в крутильные камеры на
присучивание и поворот кулачка. Кулачок, повернувшись до
взаимодействия постоянного магнита с герконом Е8, замыкает его
и включает реле К2, которое включает магнитный пускатель КМ 15
(см. рис. 3.14,6) и соответственно электромагниты прядильных
устройств, обеспечивающих подачу ленты.
Поворачиваясь далее, кулачок магнитом воздействует на гер-
кон ЕЮ (см. рис. 3.14, в) и включает реле КЗ, которое отключает
реле К4 с конденсатором СП от источника 24 В; реле переходит
на питание от конденсатора СП, который обеспечивает задержку
отключения на 0.8—1 с, а также отключает муфту обратного хода
146
YC6 от источника форсированного напряжения 48 В и подклю-
чает муфту рабочего хода \С7 к этому источнику. Кроме того,
реле Д'*7 отключает магнитный пускатель ЛЛ46, блокирует контакт
магнитного пускателя КМ11, а при останове .машины обеспечи-
вает отключение реле КЗ при воздействии магнита на геркон Е9
и включает магнитные пускатели /\Л47 и КМЗ (см. рис. 3.11,6).
Эти пускатели через дроссели подключают вращающиеся по
инерции электродвигатели Ml и М2 (см. рис. 3.14, и), которые
начинают плавно набирать обороты до номинальных, и отклю-
чают реле КТ 12 (ем. рис. 3.14,6), освобождающее пневмоустрой-
ство, которое ведет установленный отсчет времени 9- 12 с, после
чего включают магнитный пускатель КМ9, контакты которого
шунтируют дроссель.
Магнитный пускатель КМ6, отключаясь, снимает напряжение
с электромагнитных датчиков, при этом поводки прядильных
устройств входят в контакт с пряжей и начинается процесс конт-
роля работы прядильного устройства, а также подключает
цепь зарядки конденсаторов от источника форсированного на-
пряжения 48 Ви отключает форсированное напряжение с муфты
УС/ (см. рис. 3.14, в), которая переходит на питание 24 В. С этого
момента электрическая схема машины находится в рабочем ре-
жиме.
Перед съемом бобин в рабочем процессе нажатием кнопки
SB5 («Вентилятор») (см. рис. 3.14,6) включается вентилятор
нитеотвода, при этом получает питание магнитный пускатель
КМ14. контакты которого включают электродвигатель М5 (см.
рис 3.14.0) вентилятора нитеотвода, блокируют кнопку SB5
(см. рис. 3.14,6) и включают сигнальную лампу. После оконча-
ния съема вентилятор нитеотвода отключается кнопкой SB6.
Останов машины производится кнопками SRI, SB2, SB7, SB8,
при этом отключаются магнитные пуска гели КМ7 — КМ 10,
КМ12, КМ13, которые отключают электродвигатели Ml — М4,
Мб (см. рис. 3.14,а).
Магнитный пускатель КМ10 (см. рис. 3.14.6) включает блок
юрможенпя электродвигателей М3 и М4 (см. рис. 3.14. а) на
диодно-емкостный мост в отключает реле К! и К2 (см. рис. 3.14, в),
с результате чего подготавливается цепь тормозных муфт ) С4,
) СЗ и отключается шинопровод, обеспечивая прекращение
подачи ленты.
Электромагнит зарядки поворачивает кулачок по часовой
стрелке до момента воздействия магнита на геркон Е9, который
включает на мгновение реле К4. Это реле отключает реле КЗ
и соответственно электромагнит зарядки, в результате чего
кулачок возвращается в исходное положение. Кроме того, отклю-
чается муфта рабочего хода У С7 и включаются тормозные муфты
YC4 и У С5 вытяжных и мотальных валов. Если же сеть
обесточнтся, го торможение осуществляется от конденсаторной
147
батареи С21 — С35, при этом конденсаторная батарея CI2 —
С20 будет работать на реле КЗ и электромагнитные муфты.
В момент останова машины за счет инерции электродвига-
теля и дискретизирующих барабанчиков происходит их вращение
до 10 с; в это время наблюдается вычесывание отдельных воло-
кон и их выброс в прядильную камеру. Это дает удлине-
ние тонкого конца, что снижает процент массовой запрядки при
пуске машины.
С целью сокращения вычесывания волокон дискретизирую-
щими барабанчиками в схему введен блок торможения, который
работает по принципу замыкания электродвижущей силы (ЭДС)
самоиндукции электродвигателей М3 и М4 (см. рис. 3.14, а)
на диодно-емкостный мост после отключения магнитного пуска-
теля КМ7. Инерция вращения особенно резко спадает в началь-
ный момент, что в значительной степени сокращает вычесывание
волокон в момент останова машины.
Для обеспечения аварийного останова машины в случае вы-
хода из строя предохранителей имеется спаренная цепь с кон-
тактами промежуточных реле К2 и Кб (см. рис. 3.14, в). В момент
пуска машины питание цепей аппаратуры напряжением 1 10 В
обеспечивается через контакт реле Кб; после выхода их на рабочий
режим замыкается контакт реле К.2, при этом контакт реле Кб
размыкается.
Аналогичную схему управления и тот же принцип действия
имеет схема автоматизированного электропривода пневмопря-
дильной машины ППМ-240Ш.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Какова особенность электропривода оборудования прядильного производ-
ства на предприятиях текстильной промышленности?
2. Какие требования предъявляются к автоматизированному электроприводу
чесальных машин? Перечислите блокировки в схеме автоматизированного элек-
тропривода чесальных машин.
3. Какие требования предъявляются к автоматизированному электроприводу
ленточных машин? При каких технологических нарушениях наблюдается са-
моостанов ленточной машины?
4. Какие требования предъявляются к автоматизированному электроприводу
ровничных машин? Как обеспечивается плавный пуск ровничной машины?
5. Какие требования предъявляются к автоматизированным электроприво-
дам прядильных и прядильно-крутильных машин?
6. Какие существуют виды регулирования главного привода прядильных
машин для обеспечения постоянства натяжения нитей в процессе прядения?
7. С какой целью электропривод кольцевой прядильной машины должен
включаться лишь после разгона вентилятора мычкоуловителя?
8. Какие типы и исполнения приводных электродвигателей применяются для
привода кольцевых прядильных и пневмонрядильных машин?
9. От каких параметров зависит мощность, потребляемая кольцевыми пря-
дильными и пневмопрядильными машинами?
10. Б чем заключается различие электроприводов прядильных машин
ППМ-120 и ППМ- 120-МС?
148
4. АВТОМАТИЗМ РОВАН НЫ И
ЭЛЕКТРОПРИВОД МАШИН
ТКАЦКОГО ПРОИЗВОДСТВА
4.1. ЭЛЕКТРОПРИВОД МАШИН
ПРИГОТОВИТЕЛЬНОГО ОТДЕЛА
ТКАЦКОГО ПРОИЗВОДСТВА
Основная цепочка в приготовительном отделе ткацкого производ-
ства включает в себя мотальные, сновальные и шлихтовальные
машины. Общая кинематическая цепочка этого звена изображена
на рис 4 1 и состоит из кинематической схемы мотальной машины
' рн> l.l.oi, сновальной (рис. 4.1,6) и шлихтовальной машины
(рис. 1.1, в).
От двух электродвигателей / (см. рис. 4.1, о) через клиноре-
менную передачу 2 получают движение мотальные валы 3. на
которых укреплены мотальные барабанчики 4, приводящие во
149
вращательное движение бобины. От электродвигателя 8 через
шестерни движение передается валам 7, на которых расположены
эксцентрики 5 механизма самоостанова бобины. От этого же
электродвигателя через коническую передачу 6 движение пере-
дается ленточному конвейеру 9, который доставляет освободив-
шуюся тару для намотки пряжи в ящик. Причем от этого же
электродвигателя движение сообщается эксцентрику 10 прерыва-
теля 11.
Напряжение трехфазного переменного тока подается на маг-
нитный усилитель 12 (см. рис. 4.1,6); выпрямленный диодами
ток подается на электродвигатель 13 постоянного тока, который
через клиноременную передачу вращает сновальный вал 14.
Мерильный вал 15 получает вращение от нитей 16, наматывае-
мых на сновальный вал. Увеличение диаметра сновального вала
за счет наматываемых на него нитей приводит к увеличению ча-
стоты вращения мерильного вала и соединенного с ним тахогене-
ратора BR17. Напряжение на зажимах тахогенератора возра-
стает по отношению к ранее заданному. Это приводит к увеличе-
нию тока в обмотках управления магнитного усилителя, умень-
шению напряжения на выходе рабочих обмоток и снижению
частоты вращения электродвигателя. В результате линейная
скорость нитей, наматываемых на сновальных вал, остается
постоянной. Для усиления токов, снимаемых с тахогенератора,
применяется тороидальный магнитный усилитель 18, обеспечи-
вающий необходимую мощность обмоткам управления основного
магнитного усилителя.
На рис. 4.1, в в кинематической схеме шлихтовальной машины
за основу взят базовый вариант привода машины ШБ-140. Элек-
тродвигатель 19 рабочего хода через клиноременную передачу 20,
вариатор 21 и ременную передачу 22 передает движение глав-
ному валу 23. Вариатор служит для изменения скорости шлихто-
вальной машины, которую можно регулировать, воздействуя на
маховик 24. Электродвигатель тихого хода 25 передает движение
вариатору через червячный редуктор 26. От главного вала через
конические шестерни 27 движение получают большой 28 и малый
29 сушильные барабаны. Тянульный 30 и отжимной 31 валы полу-
чают движение от главного вала через задний уравнительный
механизм 32 и конические шестерни 33. Уравнительный механизм
служит для регулирования натяжения основы. Выпускной вал 34
получает движение от главного вала через шестерни 35, передний
уравнительный механизм 36 и конические шестерни 37. Ткацкий
навой 38 также приводится в движение от главного вала через
шестерни 35, 39, 40 и дифференциальный фрикцион 41. Дифферен-
циальный фрикцион поддерживает постоянную скорость движения
основы, несмотря на изменение ее диаметра.
Электропривод мотальных машин и автоматов. Мотальные
машины служат для перемотки пряжи с прядильных початков в
150
бобины для сновальных машин. На поверхности мотального
барабанчика имеется замкнутая винтовая канавка, благодаря
которой обеспечивается крестовая раскладка нити по поверхности
бобины. Именно при крестовой намотке витки равномерно распре-
деляются по поверхности бобины, а поэтому и легко разматы-
ваются при последующем переходе на сновальной машине.
Мотальные машины отличаются между собой в основном
числом барабанчиков и линейной скоростью перематывания.
Электропривод мотальных машин выполняется из обычных
АД с короткозамкнутым ротором и .должен обеспечивать: одина-
ковую скорость наматывания нити в бобины, что достигается ме-
ханическими средствами; постоянство натяжения нити в процессе
наматывания бобины, правильность ее формы и строения, что
также обеспечивается механическими средствами; периодическое
изменение угловой частоты вращения мотальных барабанчиков,
которое вызывает скольжение между ними и бобинами и гаран-
тирует рассеивание витков, что обеспечивается импульсным ре-
гулированием частоты вращения приводных АД; возможность
изменения средней скорости, что также обеспечивается импуль-
сным регулированием частоты вращения приводных АД.
В состав электропривода мотальных машин обычно входит
три АД, два из которых служат для привода валов на каждой
из двух сторон машины (номинальной мощностью 1,7—2,8 кВт),
а один номинальной мощностью 0,6 кВт — для привода конвейера
электропрерывателя и 'самоостанова.
Два основных АД с целью обеспечения равномерной кресто-
вой намотки (рассеивания витков) работают в режимах импульс-
ного регулирования частоты вращения, увеличивая частоту вра-
щения при замыкании и уменьшая ее при размыкании контактов
прерывателя. В результате этого электропривод мотальных ма-
шин работает в тяжелых повторно-кратковременных режимах
с повышенным (около 2500 в час) числом включений и отклю-
чений.
В этих случаях помимо проверки приводных АД на необходи-
мый запас мощности они должны быть проверены на допустимое
число включений в час (/гдол). Для этого пользуются эмпирической
формулой
^ДОП = 3720 [(АРНОМ АРУ) е + ₽АРном (1 -Е)]/(АЛ+АЛ),
где ДРНОМ и ДРУ — потери активной мощности соответственно при номинальной
и установившейся нагрузке, кВт; е — коэффициент продолжительности вклю-
чения, e = tp- IOO/(/P-|-Zn); /р — время работы, ч; /„— время паузы, ч; р— коэф-
фициент ухудшения теплоотдачи АД, зависящий от условий вентиляции (на-
пример, у АД с независимой вентиляцией коэффициент р = 1); ДАП и ДАТ—
потери электроэнергии соответственно при пуске и торможении АД, кВт-ч.
Допустимое число включений нельзя повысить за счет возрас-
тания установленной мощности АД, так как при такой мере уве-
151
Рис 4.2. Схема электропривода
мотальной машины с тиристор-
ным управлением
Рис. 4.3. Схема управления элек-
троприводом машины М-150-1
личиваются пусковые и тормозные потерн активной мощности и
энергии из-за увеличения времени пуска и торможения.
Для увеличения частоты включения АД мотальных машин
можно применить следующие способы:
использовать независимую вентиляцию вместо самовенти-
ляции;
заменить АД на электродвигатель той же мощности, но другой
серии, обладающей большей допустимой частотой включения;
применить более нагревостойкую изоляцию в обмотках АД;
применить АД с повышенным скольжением (типов АС и АОС).
Значительная частота включений и отключений контактно-
го прерывателя приводит к тому, что по их контактам и обмоткам
АД протекают динамические токи, превышающие номинальный
ток и вызывающие перегорание контактов прерывателя, аварий-
ные режимы работы АД, форсированный износ и старение изоля-
ции их обмоток и др.
Для защиты АД мотальных машин от аварийных режимов
работы применяются как предохранители и тепловые реле, так
и специальные схемы включения контактных прерывателей с ис-
пользованием тиристорных регуляторов.
152
Если, например, не изменяя схемы электропривода моталь-
ной машины, вместо контактов прерывателя КП в две фазы сило-
вой цепи статора электродвигателя М включить встречно-
параллельные тиристоры VS1—VS4 (тип Т25) по схеме, изо-
браженной на рис. 4.2, то ток, протекающий через контакты
прерывателя, снизится от 15—20 А до 0,2—0,3 А, т. е. через
контакты прерывателя SQ будет протекать только ток управления
углом открывания тиристоров. Такая схема резко увеличит надеж-
ность работы и срок службы контактов прерывателя и соответст-
венно электродвигателей мотальных машин. В схеме рис. 4.2
резистор /? = 2,2 кОм, конденсатор С—1 мкФ.
На рис. 4.3 приведена схема автоматизированного электро-
привода мотальной машины М-150-1. Силовая часть электро-
привода машины состоит из трех АД, два из которых Ml и М2
типа /^ОТ2-32-4 номинальной мощностью по 3 кВт (по одному
на каждую сторонку) приводят в движение мотальные барабан-
чики, а третий М3 типа АТТ-41-6 номинальной мощностью 0,6 кВт
приводит в движение валы самоостанова, конвейер пустых шпуль
и электропрерыватель. Управление электродвигателями Ml и М2
осуществляется пусковыми кнопками SB1 и SB2 и стопорными
кнопками SB4 и SB5. Каждый электродвигатель включается и
отключается независимо друг от друга магнитными пускателями
КМ1 и КМ2, но пуск их возможен только при работающем вспо-
могательном магнитном пускателе 1\МЗ и соответственно электро-
двигателе М3.
Питание к основным электродвигателям подается через кон-
такты электропрерывателя тока, укрепленные на пластине, ко-
торая с помощью штанги соединена с рычагом. На конце рычага
укреплен ролик, прижимаемый пружиной к эксцентрику, который
приводится во вращение от вспомогательного электродвигателя
М3. При этом электродвигатели Ml и М2 то подключаются к
сети, то отключаются от нее, т. е. работают в импульсном режиме
регулирования частоты вращения.
При замыкании контактов прерывателя основные электро-
двигатели Ml и М2 увеличивают, а при их размыкании умень-
шают частоту вращения, т. е. работают в режимах ускорения и
замедления, изменяя угловую скорость мотальных барабанчи-
ков, что и обеспечивает равномерное рассеивание витков, исклю-
чая жгутовую намотку нити на бобины.
На рис. 4.4 приведена схема автоматизированного электро-
привода мотальной машины М-150-2, включающая четыре АД
с короткозамкнутым ротором, в том числе два АД (по схеме М2
и М3) номинальной мощностью по 2,2 кВт для привода моталь-
ных барабанчиков (по одному с каждой стороны машины); третий
АД (Ml) номинальной мощностью 0,6 кВт для привода конвейе-
ра пустых шпуль и четвертый АД (М4) номинальной мощностью
0,6 кВт для привода вентилятора пухоотсоса’.
153
Рис. 4.4. Схема управления
электроприводом машины
М-150-2
Питание на схему управления осуществляется автоматиче-
ским выключателем QF через понижающий трансформатор ТУ
380/36 В; на наличие напряжения в схеме управления указывает
сигнальная лампа НТ.
Для запуска машины следует нажать пусковую кнопку SB1,
в результате чего магнитным пускателем КМ1 включится электро-
двигатель Ml конвейера. Для пуска барабанчиков следует на-
жать пусковые кнопки SB2 и SB3, включающие соответственно
магнитные пускатели 1\М2 и КМЗ и промежуточные реле 1\1 и
К2. Для включения вентилятора пухоотсоса следует нажать пус-
ковую кнопку SB4, в результате чего включается магнитный
пускатель КМ4 и соответственно электродвигатель М4.
Останов электродвигателей осуществляется стопорными кноп-
ками SB5—SB12.
Электропривод уточно-перемоточного автомата. Уточно-
перемоточный автомат модели УА-ЗОО-ЗМ1 предназначен для
перематывания хлопчатобумажной пряжи с бобин на уточные
шпули, применяемые на автоматических и механических ткацких
станках.
Автомат приводится в движение от индивидуального АД
типа АОЛ2-32-6 номинальной мощностью 2,2 кВт (рис. 4.5).
Электроаппаратура управления и защиты располагается в
шкафу у бункера. Цепь управления получает питание от понижаю-
154
Рис. 4.5. Схема управления электро-
приводом автомата УА-ЗОО-ЗМ1
щего трансформатора TV
380/36 В; защита от короткого
замыкания осуществляется пре-
дохранителями FU, а от пере-
грузок — тепловыми реле Д7\
типа ТРИ. Управление привод-
ным электродвигателем М осу-
ществляется кнопками SBI,
SB2 и SB3. Электромагнит 1.4
управляет пальцевой муфтой,
которая отключает вертикаль-
ный конвейер подачи шпуль.
Управление электромагнитом осуществляется микропереключа-
телем SQI автоматически и пневмоэлектрическим реле вре-
мени КТ, которое позволяет производить регулировку подачи
шпуль из короба бункера в диапазоне 0.4 180 с Микровыклю
чатель SQ2 осуществляет блокировку дверей электрошкафа.
Останов вертикального конвейера вручную осуществляется
выключением SA. Магнитные пускатели К,Ml (типа ПМЕ-112)
и КМ2 (типа ПМЕ-111) служат соответственно для включения
и отключения электродвигателя А4 и электромагнита Е.4 (типа
МИС-3100).
Рубильником QS подается питание на схему электропривода
Электропривод сновальных машин. Сновальные машины слу-
жат для перематывания пряжи с бобин на сновальные валы.
На предприятиях текстильной промышленности широкое
распространение получили барабанные сновальные машины типа
С-140 и С-177 и безбарабанные высокопроизводительные сно-
вальные машины типа СВ-140 и СВ-180 или марок СТ (для сно-
вания основ тяжелых технических гканей).
Электропривод сновальных валов, машин СВ-140 и СВ 180
осуществляется обычно электродвигателями постоянного тока
(ДПТ), а у барабанных машин — обычными АД с короткозам
кнутым ротором.
К электроприводу сновальных машин предъявляются следую-
щие требования:
одинаковое натяжение перематываемых нитей (между натя-
жением нитей и скоростью снования имеется линейная зависи-
мость) ; натяжение нитей при сновании имеет большое значение
для последующих цепочек в технологии ткацкого производства -
чрезмерное натяжение нитей вызывает большую вытяжку и при-
водит к увеличению обрывности, а неодинаковое их натяжение
снижает качество готовой продукции;
одинаковая плотность намотки;
155
Рис. 4 6. Схема управления элек-
троприводом машины ( 140-1
плавность пуска (с целью
исключения обрыва нитей);
пуск должен быть по возмож-
ности кратковременным и
осуществляться с постоян
ным ускорением;
быстрое торможение (за
время не более 0,5 с) при
обрыве нити или окончании
процесса снования (нара-
ботки сновального вала);
плавное изменение часто-
ты вращения в диапазоне
3:];
дистанционное \правде
нне машиной;
наличие сигнализации и
автоматический останов ма
шины при обрыве нити или
при окончании наработки
сновального вала.
Рассмотрим ряд схем
эл е кт р о и р и в од а сновальных
машин.
На рис. 4.6 приведена схема автоматизированного электро-
привода барабанной сновальной машины С-140-1.
Силовая часть электропривода включает три электродвига-
теля. АД главного привода Л// типа АОТ42-4 номинальной
мощностью 1,7 кВт, АД смены сновального вала, работающего
по реверсивной схеме управления (типа АТТ41-6 номинальной
мощностью 0,6 кВт) М2 и однофазный АД привода вентилятора
для обдувки раздвижного ряда М3.
Пуск АД главного привода Ml осуществляется пакетным
выключателем QS1. Пуск АД М2 осуществляется магнитными
пускателями Д'Л1/ (или при реверсе — КМ2) переключением
выключателей SB1 (SB2). От электродвигателя Ml движение
передается валу коробки скоростей клиноременными ремнями.
Три ступени скорости снования (200, 300 и 400 м/мин) обеспе-
чиваются при помощи трех жестко закрепленных на параллель-
ном валу шестерен и блока трех шестерен, установленного на
скользящей шпонке. От коробки скоростей движение передает-
ся сновальному барабану при помощи пластинчатой фрикцион-
ной муфты и клиновидных ремней. Сновальный вал прижимается
поверхностью намотки под действием своей тяжести и дополни-
тельно прижимным устройством к поверхности сновального ба-
156
рабана. Это обеспечивает необходимую плотность наматывания,
а также сокращает время разгона сновального вала и время
торможения. Плавный пуск обеспечивает фрикционная муфта.
Напряжение на схему управления подается через понижающие
трансформаторы TV1 и TV2 (220/127/36 В) включением рубиль-
ника QS. Промежуточное реле X, включенное в цепь электрон-
ной лампы VL1, срабатывает и, размыкая свои контакты, отклю-
чает электромагнит останова У А. Лишь после этого возможно
включение фрикционной муфты привода.
Осветительные лампы EL служат для освещения сновального
вала и барабана. Включение барабана машины (после пуска
электродвигателя Ml) осуществляется нажатием ногой на пуско-
вую педаль. Останов барабана и сновального вала осущест-
вляется вручную или автоматически (при обрыве нити или при ее
наработке на сновальный вал). При останове барабана электро-
двигатель Ml продолжает работать.
При обрыве нити падает крючок и замыкается соответствую-
щий технологический контакт SQ, в результате чего на сетку
соответствующего тиратрона VL2—VL4 подается положитель-
ный потенциал, что вызывает его зажигание и подачу на сетку
лампы VL1 отрицательного потенциала. Это приводит к прекра-
щению протекания тока через лампу и обесточиванию цепи
катушки промежуточного реле К с последующим замыканием
цепи электромагнита останова У А и отключением фрикционной
муфты привода, а контакт реле К, размыкаясь, исключает воз-
можность зажигания остальных тиратронов.
При наработке на сновальный вал нити заданной длины за-
мыкается контакт счетчика В и машина останавливается. Пре-
дохранительный контакт S необходим для предотвращения слу-
чайного пуска при смене сновального вала.
При ручном останове электродвигателя Ml поворотом ру-
коятки микропереключателя SA замыкается цепь электромаг-
нита )71 и фрикционная муфта отключается. Электродвигатель
М2 для смены сновального вала включается взаимно сблоки-
рованными кнопками «Съем» и «Установка», а однофазный АД
М3 привода вентилятора включается пакетным выключателем
QS2. Резисторы R предназначены для обеспечения требуемого
уровня напряжения ламп.
Электроприводу сновальных машин С-140-1 присущи следую-
щие недостатки:
отсутствие возможности плавного изменения частоты вра-
щения в диапазоне 3:1;
недостаточно плавный пуск и довольно длительное время
торможения, поскольку отключающий магнит воздействует на
фрикционную муфту через механическую передачу;
наличие холостого хода АД при останове машины в момент
обрыва нити;
157
наличие чрезмерного количества технологических контактов;
громоздкость кинематической схемы передачи движения от
АД к сновальному барабану;
относительно низкая скорость снования и др.
В настоящее время схемы автоматизированного электро-
привода барабанных сновальных машин совершенствуются в
направлении ограничения холостого хода приводных АД, обес-
печения их более плавного пуска и интенсивного торможения,
равномерности натяжения перематываемого материала (ни-
тей) и др.
На рис. 4.7 представлена схема автоматизированного элек-
тропривода высокоскоростной сновальной машины СВ-140, кото-
рая обеспечивает скорость снования до 800 м/мин.
В качестве главного привода сновального вала применяется
двигатель постоянного тока (ДНТ) типа П-51 (Ml) номиналь-
ной мощностью 6 кВт с частотой вращения 1500 мин“' при на-
пряжении на якоре ПО В; для приводов укатывающего вала и
перемещения пинолей применяются два АД типа А-31-4 номи-
нальной мощностью по 0,6 кВт (М2 и М3); электродвигатель
158
М4 в схеме служит для механического поворота бобинодержа-
телей шпулярника (рис. 4.7, а).
Напряжение переменного тока автоматическим выключа-
телем QF1 через понижающий трансформатор TV 1 подается
на магнитный усилитель LU1, и выпрямленное напряжение че-
рез кремниевые диоды (50 А) подается на ДПТ Ml, который
через клиноременную передачу вращает сновальный вал.
От нитей, наматываемых на сновальный вал, получает вра-
щение мерильный вал. Увеличение диаметра сновального вала
по мере наматывания на него нитей приводит к увеличению час-
тоты вращения мерильного вала и связанного с ним тахогене
ратора BR. В результате увеличивается напряжение на тахо-
генераторе, что приводит к увеличению тока в обмотках управле-
ния LU1, снижению напряжения на выходе рабочих обмоток и
к снижению частоты вращения электродвигателя Ml. Этим до-
стигается постоянство скорости нитей, наматываемых на сно-
вальный вал. Для усиления токов в цепи BR применяется торо-
идальный магнитный усилитель LU2, обеспечивающий требуе-
мую мощность обмоткам управления LU 1.
Реле обрыва поля К1, катушка которого включена последо-
вательно с независимой (шунтовой) обмоткой возбуждения L,
служит для предохранения электродвигателя Ml от разноса в
случае исчезновения тока в обмотке возбуждения.
Параллельно якорю Ml через установочный резистор R2,
которым устанавливается необходимая скорость снования, вклю-
чена катушка промежуточного реле КЗ, замыкающий контакт
которого включает электромагнит останова YA машины при
превышении напряжения на якоре электродвигателя Ml более
110 В. Напряжение же на якоре электродвигателя Ml может
увеличиваться во время работы машины из-за возникновения
обрыва в цепях BR или LU2. При изменении напряжения на об-
мотке LU2 переменным резистором R3, рукоятка которого на-
ходится на пульте управления, устанавливается определенное
насыщение силового LU1, от которого питается электродвига-
тель Ml с требуемой частотой вращения.
Тумблер А Л 2 (рис. 4.7, б) имеет два положения («Снование»
и «Обкатка»), и переключатель управления АЛ (см. рис. 4.7, а)
может быть также установлен в два положения («Снование» или
«Заправка»). Положение SA «Заправка» обеспечивает работу
кнопочных станций SB1—SB4 и магнитных пускателей КМЗ—
КМ6, которые дают возможность для прямого и обратного вклю-
чения электродвигателей М2 и М3.
Машина снабжена унифицированным следящим приводом
Н-11-70, обеспечивающим бесступенчатую установку постоянной
скорости снования посредством тахогенератора: по току — с по-
мощью обмотки 1 усилителя LU 1 и по напряжению — с помощью
обмотки 3 и обмотки 4 усилителя LU2.
159
Напряжение на схему ’управления подается автоматическим
выключателем QF2 через понижающий трансформатор TV2
380/127/36 В. Пуск машины осуществляется нижней педалью,
которая включает конечные выключатели SQ1 и SQ2 соответст-
венно, один из которых магнитным пускателем КМ1 включает
двигатель постоянного тока Ml, а другой зажигает тиратрон
|/jL2 (см. рис. 4.7, б) с последующим включением промежуточ-
ного реле К4. Размыкающий контакт реле К4 обесточивает ка-
тушку тормозного электромагнита YA (см. рис. 4.7, а), а его за-
мыкающий контакт подготавливает к включению сеточные цепи
тиратронов VL (см. рис. 4.7, б). Для повышения устойчивости
работы тиратронов выпрямленное напряжение стабилизируется
газовым стабилитроном VL1.
При обрыве наматываемых на сновальный вал нитей преду-
смотрен как ручной, так и автоматический останов машины.
Для ручного останова машины поворачивается верхняя штанга,
которая нажимает на микропереключатель SA3 (см. рис. 4.7, а),
включающий тормозной электромагнит YA. Кроме того, конечный
выключатель SQ1 обесточивает катушку магнитного пускателя
КМ1 и включает катушку магнитного пускателя КМ2, что со-
здает режим динамического торможения электродвигателя Ml
за счет отключения его якоря от сети и замыкания его на тормоз-
ное сопротивление.
На рис. 4.7, б приведена схема автоматического останова
машины при обрыве нити. При обрыве нити замыкается соответ-
ствующий технологический контакт SQ, что приводит к зажига-
нию тиратрона VL и отключению промежуточного реле К2 с по-
следующим отключением промежуточного реле К4, размыкающий
контакт которого включает тормозной электромагнит YA (см.
рис. 4.7, а).
Принципы действия и схемы управления электроприводом
сновальных машин СВ-180 и СВ-140 аналогичны.
Одним из недостатков существующих схем электроприводов
сновальных машин является ложная сигнализация сигнальных
ламп, загорающихся не только при обрыве нитей, но и при их про-
висании. Этих недостатков лишена, например, схема автоматиче-
ского останова машины с применением тиратронов с холодным
катодом, приведенная на рис. 4.8.
Принцип действия данной схемы заключается в том, что кон-
тактные крючки, поддерживаемые натянутой нитью в поднятом
состоянии, при обрыве нити падают и замыкают цепь управляю-
щей сетки тиратрона — «плюс» выпрямителя UZ1 — замыкаю-
щий контакт промежуточного реле К — крючок — технологиче-
ский контакт SQ1 — резистор R2 — тиратрон VL1 — кнопка
SB3 — «минус» выпрямителя UZ1. Этот ток создает на резисторе
падение напряжения, которое усиливается электронным усили-
телем UZ2 и вызывает срабатывание реле К- В результате раз-
160
Рис. 4.8'. Схема автоматического останова сно-
вальной машины
мыкается размыкающий контакт ре-
ле К й управляющие сетки остальных
тиратронов, в группах которых не было
обрыва нитей, отключаются.
Если же при останове машины воз-
никает провисание нитей, то это не
вызывает зажигания других тиратро-
нов, т. е. в данной схеме работает только
тот тиратрон, в группе которого воз-
никает обрыв нити.
Останов машины происходит в том
случае, когда размыкающий контакт
реле К размыкает цепь катушки маг-
нитного пускателя КМ электродвига-
теля сновальной машины. Пуск и руч-
ной Останов машины производятся со-
ответственно кнопками SB1 и SB2.
Напряжение на схему управления
подается через понижающий трансфор-
матор TV.
Для гашения работающего тира-
трона после ликвидации обрыва нити
следует нажать на стопорную кнопку
SB3, что вызовет разрыв анодных цепей
всех тиратронов.
Рассмотренная схема отличается надежностью и эффектив-
ностью работы, состоит из серийных элементов, и ее приме-
нение позволяет значительно сократить продолжительность про-
стоев сновальных машин, повысить качество подготовки основ,
сократить число пороков и снизить нерациональный расход
электроэнергии.
Схемы автоматического останова сновальных машин постоян-
но совершенствуются, как, например, схемы, разработанные в
Барнаульском НИИ текстильной промышленности, во Всесоюз-
ном институте повышения квалификации руководящих работ-
ников и специалистов легкой промышленности и др.
Перспективным направлением развития электропривода сно-
вальных машин является применение тиристоров по схеме ТП—Д,
которая сокращает время торможения при строгом ограничении
допустимого значения динамического момента и обеспечивает
более плавный пуск, что приводит к понижению обрывности при
пусках машины.
Электропривод шлихтовальных машин. Шлихтовальные ма-
шины служат для снижения шероховатости основной пряжи за
6 А. М. Ланген, В. В. Красник •
161
счет приклеивания к ее стволу выступающих волокон специаль-
ным составом (шлихтой) с последующим высушиванием и на-
виванием на ткацкий навой.
В зависимости от устройства сушильной части шлихтоваль-
ные машины разделяются на машины барабанной, камерной
и комбинированной сушки. В машинах барабанной сушки (типа
ШБ) основа просушивается за счет соприкосновения ее с горя-
чей поверхностью барабана, в машинах камерной сушки
(типа ШК) — нагретым воздухом в камерах, а в машинах комби-
нированной сушки применяются оба принципа высушивания
навоя.
Барабанные шлихтовальные машины обычно применяют для
шлихтования суровых основ хлопчатобумажных тканей, а камер-
ные машины—для шлихтования льняных, шерстяных и цвет-
ных хлопчатобумажных основ.
Электропривод шлихтовальных машин применяется в раз-
личных исполнениях, в том числе:
однодвигательный с применением обычных АД с коротко-
замкнутым ротором как с механическим регулированием частоты
вращения, так и с гидравлической муфтой;
однодвигательный с применением трехфазных коллекторных
двигателей или АД с фазным ротором;
двухдвигательный с применением обычных АД с коротко-
замкнутым ротором с механическим регулированием частоты
вращения;
двухдвигательный с применением двигателей постоянного
тока;
многодвигательный, когда каждый узел шлихтовальной ма-
шины имеет самостоятельный электродвигатель.
К электроприводу шлихтовальных машин предъявляются
следующие требования:
плавный пуск за время не более 4—5 с, поскольку при более
быстром разгоне увеличивается натяжение нитей и повышается
их обрывность;
постоянство натяжения нитей, так как их повышенное натя-
жение увеличивает обрывность в ткачестве, а чересчур слабое
натяжение приводит к их захлестыванию и запутыванию;
регулирование в диапазоне 4 : 1—5 : 1 рабочих скоростей;
так как заправочная скорость должна составлять ’/is средней
рабочей скорости, общий диапазон регулирования скорости дол-
жен быть 60 : 1—75 : 1, а на новых машинах — 200 : 1.
Регулирование частоты вращения АД механическим путем
осуществляется с помощью вариаторов, а у электродвигателей
постоянного тока — по системе генератор—двигатель. Послед-
ний вид регулирования частоты вращения упрощает механиче-
ские связи и с этой точки зрения является прогрессивным видом
регулирования, но, с другой стороны, требует наличия громоздкой
162
Рис. 4.9. Схема управления электроприводом машины ШБ-140-3:
а — силовая часть; б — схема управления
системы управления, снижает экономичность и надежность ра-
боты, усложняет обслуживание и создает определенные неудоб-
ства в работе (шум, возникновение пыли при запуске генерато-
ра и др.).
По условию технологического процесса шлихтования данная
машина должна иметь два диапазона скоростей — один для
заправки машины (тихий ход), а другой для рабочей скорости
шлихтования.
На рис. 4.9 в качестве примера приведена схема автомати-
зированного электропривода шлихтовальной машины ШБ-140-3.
6*
163
Силовая часть электропривода машины (рис. 4.9, а) включа-
ет пять АД с короткозамкнутым ротором, в том числе Ml —
номинальной мощностью 4,5 кВт для привода рабочего хода
машины; М2 — номинальной мощностью 0,08 кВт для привода ис-
полнительного механизма вариатора АГ, М3 — номинальной мощ-
ностью 1,1 кВт для привода тихого хода машины; М4 — номи-
нальной мощностью 3 кВт для привода вытяжного вентиля-
тора; М5 — номинальной мощностью 0,6 кВт для съема
навоя.
Цепи управления (рис. 4.9, б) получают питание напряже-
нием 127'В через понижающий трансформатор TV, а цепи регу-
ляторов влажности основы и регулирования температуры шлих-
ты в корыте питаются от другой обмотки этого трансформатора
напряжением 220 В (зажимы а—Ь); местное освещение получает
питание напряжением 12 В с третьей обмотки этого трансфор-
матора (зажимы с—d).
Скорость рабочего хода машины регулируется в диапазоне
6 : 1 цепным вариатором А1 с дистанционным управлением.
Перед пуском машины нажимается кнопка «Сигнал», вклю-
чающая звонок НА и реле времени КТ, один из замыкающих кон-
тактов которого шунтирует кнопку «Сигнал», а другой с выдерж-
кой времени 15—20 с подготавливает к включению цепи катушек
магнитных пускателей КМ1 и КМЗ и промежуточные реле KL1
и KL2. При этом загораются сигнальные (зеленого цвета) лампы
HL, показывая готовность машины к пуску.
В зависимости от необходимой скорости движения нажа-
тием кнопок «Рабочий ход» или «Тихий ход» осуществляется
пуск машины. При этом срабатывают соответственно магнит-
ные пускатели КМ1 или КМЗ, подключая соответственно электро-
двигатель Ml или М3 к сети. Наличие размыкающих контактов
кнопок «Рабочий ход» или «Тихий ход» позволяет осуществить
переход с заправочной скорости на рабочую и наоборот без оста-
нова машины. При пуске машины отключаются размыкающими
контактами реле KL1 и KL2 звонок и сигнальные лампы зеле-
ного цвета. Поскольку электродвигатель М2 включен после сило-
вых контактов магнитного пускателя КМ1, его пуск возможен
лишь при работе электродвигателя Ml главного привода. Бла-
годаря замыкающему контакту реле KL1, пуск электродвигателя
М4 вытяжного вентилятора производятся одновременно с пус-
ком машины на рабочую скорость. Для включения вытяжной
вентиляции при остановленной машине предусмотрен автоном-
ный пуск и останов электродвигателя М4 кнопками соответствен-
но SB2 и SB5.
Пуск электродвигателя М5 съема навоя производится кноп-
ками SB3-B или SB3-H, замыкающими соответственно цепи
магнитных пускателей КМ5-В или КМ5-Н. Останов этого электро-
двигателя осуществляется в крайних положениях навоя конеч-
164
ними выключателями SQ5 или SQ6, а в промежуточном положе-
нии навоя — стопорной кнопкой SB6.
Влажность основы регулируется изменением скорости ма-
шины. Импульс от регулятора влажности основы (РВО) А2
подается в цепи катушек пускателей КМ2-В или КМ2-Н, что при-
водит к включению электродвигателя М2, который воздействует
на исполнительный механизм вариатора скорости А1. Скорость
контролируется указателем скорости Р (см. рис. 4.9, а) включен-
ным на выход тахогенератора BR.
В схеме имеются следующие блокировки:
блокировка главного привода съема навоя с механизмом
фиксации навоя, заключающаяся в том, что если навой закреп-
лен и конечные выключатели не нажаты, то их размыкающие
контакты замкнуты, а замыкающие — разомкнуты и в этом слу-
чае пуск главного привода возможен, а пуск привода съема навоя
исключен;
блокировка подачи пара в сушильные барабаны с главным
приводом машины, заключающаяся в том, что при пуске машины
на рабочую скорость замыкающий контакт реле K.L1 (см.
рис. 4.9, б) подключает к сети катушку электропневмэтического
реле К, которое, срабатывая, открывает доступ сжатого воздуха
на пневматический мембранный привод парового клапана. При
останове машины и переходе ее на тихий ход это реле перекры-
вает подачу сжатого воздуха к паровому клапану, который пере-
крывается. Для предварительного разогрева сушильных ба-
рабанов при остановленной машине предусмотрено в цепи реле
К управление паровым клапаном от кнопок SB1 и SB4\
блокировка для останова машины при снятии ограждения
с жала тянульного или выпускного вала, заключающаяся в том,
что при снятии ограждения упоры конечных выключателей SQ1
и SQ2 освобождаются от нажатия, их контакты размыкаются,
магнитные пускатели КМ 1 или КМЗ теряют питание и элект-
родвигатели Ml или М3 (см. рис. 4.9, а) отключаются от
сети.
Дальнейшее развитие регулируемого электропривода шлих-
товальных машин проводится в направлении использования
тиристорных регуляторов.
Так, в МТИ им. А. Н. Косыгина разработан один из вариантов
системы регулируемого электропривода постоянного тока с тири-
сторными преобразователями.
В Каунасском политехническом институте создан однодвига-
тельный электропривод переменного тока с плавно регулируе-
мой частотой вращения по схеме АВК с широтным управлением
прбтивоЭДС инвертора для шлихтовальной машины ШВ-155-И.
За рубежом, например в ПНР, применяется тиристорный
привод для шлихтовальной машины, йзготовляемый по лицен-
зии фирмы Hibert (Англия).
165
4.2. ЭЛЕКТРОПРИВОД ТКАЦКИХ СТАНКОВ
Ткацкие станки служат для выработки ткани определенных плот-
ности, переплетения и ширины и являются основным видом обо-
рудования в ткацком производстве.
Парк ткацких станков в отрасли превысил полмиллиона
единиц, а отечественные машиностроительные заводы выпуска-
ют порядка 60 видов различных ткацких станков,, в том числе
автоматические одно- и многочелночные, бесчелночные, гидрав-
лические, плоские и круглые. Эти станки отличаются между со-
бой как принципом прокладки нити, так и конструкцией, а также
типоразмерами, числом ремизок и челноков, шириной заправки
по берду, шириной станка, установленной и потребляемой мощ-
ностью приводных электродвигателей и др.
Ткацкие станки имеют сложную нагрузочную диаграмму
из-за наличия в кинематике станка кривошипного механизма.
С каждым оборотом главного вала момент сопротивления стан-
ка периодически изменяется. Если статический момент сопротив-
ления нагрузки ткацкого станка практически постоянен, то его
динамический момент знакопеременен. Возвратно-поступательное
движение батана и челнока создает знакопеременную пульси-
рующую нагрузку, в результате чего приводной АД такого ткац-
кого станка работает каждый период два раза как генератор
(при замедлении батана) за счет созданного ранее запаса ки-
нетической энергии и два раза в режиме двигателя. Таких пуль-
саций динамической знакопеременной нагрузки может быть в
течение суток около миллиона, что увеличивает потери электро-
энергии и снижает надежность работы приводных АД.
Электропривод ткацких станков выполнен из обычных АД
с короткозамкнутым ротором закрытого исполнения, модифи-
цированных для текстильной промышленности, в основном ти-
пов ТТ, ТТМ, АОТ, ТО. .
К электроприводу ткацкого станка предъявляются следую-
щие требования:
мгновенный пуск (первый удар по челноку должен быть до-
статочно сильным, чтобы разгон станка был осуществлен за пер-
вую половину оборота главного вала станка и была обеспечена
нормальная работа боевого механизма);
равномерность хода станка (колебания скорости изменяют
плотность тканей, увеличивают обрывность основных нитей и
ускоряют разладку отдельных его механизмов; в основном на
неравномерность хода ткацкого станка влияют батанный и бое-
вой механизмы);
быстрый останов станка при помощи ленточных, колодочных
тормозов или электрического самоостанова при обрыве нити с
тем, чтобы челнок не застревал в основе; .
соответствие электромеханических характеристик приводных
166
АД электромеханическим свойствам ткацких станков, в против-
ном случае возникает перегрузка приводных АД по току, несмот-
ря на то что полезная нагрузка не превысит 80 % номинальной
мощности, и т. д.
В силу этого приводные АД автоматических ткацких стан-
ков должны иметь: повышенный (в 2—2,5 раза больше номиналь-
ного) пусковой момент; повышенный КПД (для снижения по-
терь электроэнергии); усиленные подшипники для устойчивости
работы при ударных нагрузках; по возможности уменьшенные
пики моментов сопротивления не более 2/з критического момен-
та АД (возникающие при максимальной нагрузке станка), что
необходимо для улучшения нагрузочной диаграммы станка.
Для выравнивания нагрузки АД может быть применен ма-
ховик (хотя его применение усложняет привод и увеличивает
время работы станка) или можно использовать АД с более мяг-
кой механической характеристикой за счет снижения магнит-
ной индукции или повышения скольжения.
У пневматических ткацких станков челнок от-
сутствует, и разница заключается лишь в способе прокладывания
уточной нити через зев (уточная нить прокладывается посред-
ством струи сжатого воздуха на одну заранее отмеренную про-
кидку). В остальном сохранены обычные механизмы ткацкого
станка.
В итоге нагрузочная диаграмма пневматического ткацкого
станка лучше диаграммы автоматического ткацкого станка, так
как приводной АД не переходит в генераторный режим и в мо-
мент прибоя утка нагрузка несколько возрастает. Такие особен-
ности достигаются еще и облегченным батаном, а также Отсут-
ствием боевого механизма и использованием эластичной клино-
ременной передачи.
Рассмотрим ряд вариантов схем электроприводов автомати-
ческих челночных и бесчелночных ткацких станков.
На рис. 4.10 приведена схема автоматизированного электро-
привода а в т о м,а т и ч е с к о г о станка АТ-120-5, предназна-
ченного для выработки хлопчатобумажной ткани.
Схема управления проста, она осуществляет пуск, работу
и останов станка. Для привода станка служит обычный АД типа
ТО-З/бф номинальной мощностью 0,8 кВт, пуск которого осу-
ществляется ручной кнопкой SB1 (типа ПНВ). Через штепсель-
ный контакт ХР включены контакты основонаблюдателя SQ.
В процессе работы станка эти контакты разомкнуты и через ка-
тушку промежуточного реле К проходит небольшой по величине
ток. При обрыве нити контакты SQ замыкаются, шунтируя тем
самым дополнительный резистор R, вследствие чего ток увели-
чивается, что и вызовет срабатывание реле К. Замыкающий
контакт этого реле включает электромагнит останова YA1, ко-
торый расщепляет фрикцион и приводит к останову станка. Дру-
167
Рис. 4.10. Схема управления электро-
приводом ткацкого станка АТ-120-5
гой контакт К этого реле шун-
тирует дополнительный резис-
тор R и контакты осново-
наблюдателя SQ.
При замыкании кнопки SB2
включается катушка реле вре-
мени КТ и электромагнит оста-
нова ножниц YA2; при этом кон-
такт КТ1 реле времени шунти-
рует кнопку SB2. По истечении
определенного времени контакт
КТ2 реле времени отключает
электромагнит останова Y А2
ножниц.
Несмотря на простоту и надежность работы данной схемы
управления, она имеет ряд недостатков, в том числе: полное от-
сутствие какой-либо зашиты приводного электродвигателя от
аварийных режимов (за исключением защиты от коротких за-
мыканий), так как в цепи АД имеются лишь рубильник QS, пред-
охранители FU и ручная кнопка SB1-, неодинаковую частоту
вращения приводных АД (от 930 до 970 мин1), что приводит
в ряде случаев к отставанию на 3—5 ударов батанного меха-
низма; частое загрязнение ламельных контактов, приводящее
к останову станка.
В последние годы в нашей стране и за рубежом изысканы
новые способы и созданы новые конструкции ткацких станков
(пневматические, гидравлические, бесчелночные и др.), из ко-
торых наибольшее распространение в текстильной промышлен-
ности получили бесчелночные пневморапирные
ткацкие станки АТПР, рапирные ткацкие станки СТР, бес-
челночные автоматические станки СТБ и бесчелночные пневма-
тические станки П-105.
Внедрение этих высокоскоростных станков с принципиаль-
но новыми способами прокладывания уточной нити позволило
повысить производительность ткацкого оборудования и труда,
улучшить качество продукции, высвободить определенное коли-
чество рабочих и улучшить условия труда.
В то же время увеличилась установленная мощность электро-
привода этих станков, усложнилась автоматика. Каждый станок
оснащен индивидуальным АД с короткозамкнутым ротором.
В автоматику станка могут входить электронный контроллер
уточной нити, сигнализатор причин останова, сигнализатор зоны
обрыва основы, механизм розыска раза, механизм скоростной
ремизоподъемной каретки, накопители уточной нити и другие
168
Рис. 4.11. Схема управления электро-
приводом ткацкого станка АТПР-100
Рис. 4.12. Схема управления электро-
приводом ткацкого станка АТПР-100-4'
устройства по мере совершенствования конструкции этих
станков.
Каждый из указанных разновидностей станков имеет свою
гамму типов, например АТПР-100, АТПР-120, АТПР-140,
АТПР-160 (где цифры указывают ширину по берду в сантимет-
рах); СТР6-180, СТР8-250 (с заправкой шириной 180 и 250 см
на 6 и 9 цветов по утку); СТБ-2-175, СТБ-2-216, СТБ-2-250,
СТБ-2-330 (на два цвета утка с заправочной шириной по берду
соответственно 175, 216, 250 и 330 см).
На рис. 4.11 приведена схема автоматизированного электро-
привода автоматического пневморапирного станка АТПР-100,
предназначенного для выработки хлопчатобумажных тканей.
Данный станок отличается от других ткацких станков новым
способом введения уточной нити в зев, который заключается
в применении двух рапир; правая из них под действием сжатого
воздуха проносит уточину, а левая ее уносит за счет эжекции.
Станок приводится в движение от индивидуального АД (Ml)
типа АОЛ2-32-6 (или 4А100 6УЗ) номинальной мощностью
2,2 кВт, а привод индивидуального пухоотсоса осуществляется
от АД (М2) типа АОЛ-21-2 (или 4АА63А) номинальной мощ-
ностью 0,37 кВт.
Напряжение на цепь управления поступает через автомати-
ческий выключатель QF2 и понижающий трансформатор TV
380(220)/127, 24 В, а включение или отключение производится
169
автоматическим выключателем QF1, с которым последовательно
включается катушка линейного контактора (пускателя) КМ1
и движением пусковой рукоятки включается пускатель КМ2 и
соответственно АД' (44/). Электромагнит останова станка YA
мгновенно подводит стойку пусковой рукоятки под ударник и
станок затормаживается. Предварительно электромагнит оста-
нова YA включается через промежуточное реле KL от кнопок
управления SQ1 (контроллер опушки), SQ2 (электрический
основонаблюдатель) и SQ3—SQ5. Контакт SQ/ контроллера
опушки замыкается при неполной прокладке уточной нити, а кон-
такт SQ2— при ее обрыве. Одновременно с процессом тормо-
жения станка конечный выключатель SQ3 обесточивает цепь
магнитного пускателя КМ2 и всю пусковую и контрольную
электроаппаратуру.
Практика эксплуатации станков АТПР показывает, что их
приводные АД работают с предельно допустимой нагрузкой в
неустановившихся режимах, обусловленных периодическими
ударами батана.
На рис. 4.12 приведена схема автоматизированного электро-
привода ткацкого автоматического пневморапирного станка
АТПР-100-4, предназначенного для выработки хлопчатобумаж-
ных и штапельных тканей полотняного, сатинового и саржево-
го переплетений.
Особенностью станков такого типа является новый способ
введения уточной нити в зев при помощи двух рапир: в правой
рапире нить прокладывается при помощи струи сжатого воздуха,
а в левой — за счет создания разрежения в рапире. Уточина
обрезается с правой стороны у кромки ткани. Определенная
длина уточины отмеривается специальным механизмом с бобины.
Рабочая скорость станков при выработке тканей с коэффициен-
том связности, близким к предельному по характеристике стан-
ка, выбирается ниже максимальной частоты вращения (не выше
360 мин1).
Станок приводится в движение от индивидуального асин-
хронного двигателя М типа 4A100S4Y3 номинальной мощно-
стью 3 кВт, укрепленного на специальном кронштейне с наружной
стороны правой рамы. Передача движения осуществляется че-
тырехручьевой клиноременной передачей на два свободно вра-
щающихся шкива, от которых через фрикционную муфту движе-
ние передается главному валу станка. Электропривод и автома-
тика станка обеспечивают его работу от сети переменного тока
напряжением 220/380 В. Останов станка осуществляется меха-
низмом останова и тормозом станка.
Электрический основонаблюдатель по высоте и глубине станка
устанавливают в соответствии с технологическими требованиями
к вырабатываемой ткани. Для розыска ламели при обрыве основ-
ной нити необходимо пользоваться специальными рукоятками.
170
Рис. 4.13. Схема управ-
ления электроприводом
ткацкого станка С ГБ
При обрыве нити ламель опускается и своим нижним концом
заходит в рамку. Рамку следует устанавливать так, чтобы при
небольшом провисании не было ложного останова. Для сниже-
ния ложных остановов служат решетки, которые ограничивают
раскачивание ламели.
Понижающий трансформатор TV 380/110/24 В обеспечивает
работу цепей управления и защиты с напряжением 110 и 24 В.
Питание на схему управления подается выключателем QS и ав-
томатическим выключателем QF. При движении пусковой рукоят-
ки от себя в первоначальный момент замыкается замыкающий
контакт SQ5 и включается электродвигатель привода М через
контакт магнитного пускателя КМЗ. При дальнейшем движении
пусковой рукоятки замыкается контакт конечного выключателя
SQ7, катушка КМЗ становится на самопитание, а выключатель
SQ6 переключается и размыкающим контактом подает напря-
жение на схему контроля и сигнализации.
При ручном останове станка от кнопок останова SB1 и SB2
срабатывает электромагнит останова YA и конечный выключа-
тель SQ7 обесточит электродвигатель привода М через магнит-
ный пускатель КМЗ. В электроаппаратном шкафу предусмотрена
блокировка дверки конечным выключателем SQ3.
Автоматический останов станка при обрыве уточной нити
осуществляется замыканием контактов SQ1 уточной вилочки
или SQ2 — контроллера опушки. Замыкание этих контактов вы-
зывает срабатывание реле К1 и останов станка. При обрыве ни-
тей основы замыкаются контакты SQ4, срабатывает реле К2 и
станок останавливается. Контроль за обрывом уточной нити осу-
ществляется с помощью уточной вилочки и контроллера опушки.
Остальные элементы схемы рис. 4.12 имеют аналогичное с
элементами схемы рис. 4.11 значение.
На рис. 4.13 приведена схема автоматизированного электро-
привода автоматического бесчелночного ткацкого станка СТБ,
предназначенного для выработки хлопчатобумажных, шерстяных,
шелковых и льняных тканей. При том же порядке операций фор-
171
мирования ткани, что и на челночных ткацких станках, станки
СТБ отличаются способом прокладки утка в зев. В зависимости
от исполнения станки могут быть оснащены электронным конт-
роллером уточной нити, сигнализатором причин останова, сигна-
лизатором зоны обрыва основы, скоростной ремизоподъемной
кареткой, накопителями уточной нити и другими устройствами.
Для привода каждого станка применяется индивидуальный
АД с короткозамкнутым ротором (на схеме Ml) номинальной
мощностью 1,5 кВт, а для привода разоискателя АД— номиналь-
ной мощностью 0,6 кВт (на схеме М2). Напряжение питания на
рейки однозонного основонаблюдателя подается через штепсель-
ный разъем ХР (штепсельная вилка вставляется в отверстие
оси крепления реек), а в схему управления напряжение подает-
ся пакетным переключателем QS.
Принцип действия схемы управления заключается в следую-
щем. С помощью пусковой рукоятки замыкается конечный вы-
ключатель SQ1, подключающий вторичную обмотку понижаю-
щего трансформатора TV (380/110/12 В) к сети. При этом сраба-
тывает катушка магнитного пускателя КМ1, подключающая к
сети электродвигатель Ml. При дальнейшем повороте рукоятки
включается фрикцион, который приводит в действие все механиз-
мы станка.
Экстренный останов станка осуществляется вручную стопор-
ной кнопкой SB с грибовидным толкателем красного цвета или
автоматически при обрыве основы. В последнем случае ламель
электрического основонаблюдателя опускается, замыкая кон-
такты электромагнита останова УА, приводящие к срабатыва-
нию промежуточного реле Д', которое своим контактом включает
электромагнит УА. Станок останавливается расцеплением фрик-
ционной передачи. Электродвигатель разоискателя М2 включа-
ется нажатием конечного выключателя SQ2 через магнитный
пускатель КМ2. Одновременно получает питание электромаг-
нитная муфта, и вращение от электродвигателя передается на
наборный вал товарного регулятора. После одного оборота на-
борного вала, когда ремизки устанавливаются в положение раза
(т. е. в положение, когда в открытом зеве будет последняя уточ-
ная нить), под действием пружины рукоятка возвращается в
исходное состояние. При этом размыкается контакт SQ2, обе-
сточивается катушка КМ2, электродвигатель М2 и электромаг-
нитная муфта отключаются.
На рис. 4.14 приведена схема автоматизированного электро-
привода пневматического ткацкого станка П-105 (ЧСФР), рабо-
тающего по принципу прокладки заранее отмеренной на одну
прокидку уточной нити посредством струи сжатого воздуха.
Этот высокопроизводительный станок предназначен для выработ-
ки хлопчатобумажных тканей из пряжи малой и средней плот-
ности и рассчитан на скорость до 400 прокидок в минуту.
172
Рис. 4.14. Схема управления электроприводом ткацкого станка П-105
Электрическая часть станка расположена на левой раме ста-
нины. Электропривод станка включает два АД с короткозамкну-
тым ротором — один номинальной мощностью 1,1 кВт для при-
вода станка, а другой номинальной мощностью 0,25 кВт для отса-
сывания утка.
При включении главного выключателя QS подается питание
на схему управления станка. При нажатии кнопки SB1 включа-
ется цепь катушки магнитного пускателя КМ1, который включа-
ет через защитные автоматы QF1 и QF2 электродвигатели Ml
и М2. Вспомогательный контакт магнитного пускателя КМ1 шун-
тирует контакт кнопки SB1.
Электродвигатели защищаются от перегрузок и коротких
замыканий автоматами QF1 и QF2. Останов электродвигателей
осуществляется стопорной кнопкой SB2.
На первичной обмотке трансформатора TV предусмотрено
несколько ступеней ответвлений, допускающих переключение
трансформатора согласно рабочему напряжению. Переключаю-
щая кнопка (ход — останов) SA отключает цепи остановов и
в том случае, если после удаления дефекта следует пуск станка;
в этом случае контакты реле К2 и КЗ размыкаются раньше, чем
включается контакт реле KF Останов станка произойдет или
непосредственно от рычага машины, или от стопорной кнопки
SB4, расположенной на левом держателе ремизок, причем ма-
шина остановится в тот момент, когда батан займет свою верх-
нюю мертвую точку.
В случае обрыва нити основы включаются лампа VT (триод
VT4), резистор R6 и цепь управляющего электрода тиристора
1AS6, который включает цепь реле К2. Контакты реле К2 (два
контакта) включают цепь магнита останова YA1, который останав-
ливает станок в верхней мертвой точке батана. Цепь реле К1
размыкается, обесточивая цепь тормозного магнита YA1. По-
173
средством контакта Л'2 включаются сигнальные лампочки жел-
того цвета HL1 и HL2, которые горят до возобновления пуска
машины.
При обрыве нити основы, уменьшении длины уточной нити
или при пропуске утка станок останавливается, причем дефект
утка сигнализируется зеленым светом, а дефект основы — жел-
тым светом; наработка предварительно установленного метража
ткани по счетчику метров сигнализируется белым непрерывным
светом. Сигнальные лампочки зеленого и желтого цветов про-
должают гореть даже после устранения дефекта, но гаснут при
повторном пуске машины.
В отдельных цепях остановов переменное управляющее на-
пряжение 24 В выпрямляется диодом VD1 и сглаживается кон-
денсатором С1. Постоянное напряжение стабилизируется диода-
ми (стабилитронами) VD2, VD3, VD4 и при помощи регулиро-
вочного резистора R2.
Пуск станка осуществляется с помощью рычага управления.
Включается реле К1, которое включает цепь остановов и при-
водит в готовность цепь тормозного магнита YA1.
При обрыве перевивочной нити ротационного кромкоуплотни-
теля происходит включение контакта щупа SQ5 или SQ6 и оста-
нов машины в ее верхней мертвой точке по аналогии с обрывом
основной нити; при этом загорается сигнальная лампочка жел-
того цвета. Кнопка ХЛЗ должна срабатывать в момент раскрытия
зева нитей основы, а именно на 90° по делению шкалы на станке.
Этим обеспечено то, что основонаблюдатель «следит» за нитями
основы лишь в момент их наибольшего натяжения, так что не
может быть случая самопроизвольного останова станка из-за
провисания краевых нитей основы, которые в данный момент
всегда вытянуты. Кнопка SA4 осуществляет контроль нитей
основы.
В случае недолета утка или обрыва уточной нити станок ос-
танавливается в верхней мертвой точке батана посредством фо-
тоэлектрического останова — щупа ЭЛОП. Этот дефект сигнали-
зируется сигнальной лампочкой зеленого цвета.
При наработке куска ткани заданной длины контакты, нахо-
дящиеся внутри счетчика, включают нестабильную опрокидываю-
щую цепь, которая с помощью реле К4 прерывисто включает и
отключает сигнальные лампочки белого цвета HL5 и HL6, не
останавливая станок. Свет горит до тех пор, пока счетчик не будет
переставлен снова на нуль. Опрокидывание нестабильной цепи
определяется разрядом конденсаторов С2 и СЗ через резисторы
R4 и R5. Емкость С4 служит для замедления срабатывания реле
К1, а емкость С5 является защитной от помех.
Величина тока, протекающего через стабилитроны VD2,
VD3 и VD4, устанавливается при помощи переменного резисто-
ра R2.
174
С целью более удобного удаления утка из зева машина обо-
рудована устройством для обратного движения ремизок; реверс
контролируется пневмоэлектрическим вентилем. При нажатии
кнопки «Реверс» через контакт К1 замыкается цепь электропнев-
мовентиля, который пропускает сжатый воздух в цилиндр, осу-
ществляя обратный ход ремизок. Однако при неработающем
станке реверс ремизок нельзя осуществить, так как цепь блоки-
рована контактом К1, который находится в разомкнутом состоя-
нии во время хода станка.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Какие требования предъявляются к автоматизированному электропри-
воду мотальных машин и автоматов?
2. С какой целью приводные АД мотальных машин проверяются на допусти-
мое число их включений в час? Каким образом можно повысить частоту включе-
ний этих АД?
3. Какие требования предъявляются к автоматизированному электропри-
воду сновальных машин? Укажите принципы обеспечения автоматического ос-
танова сновальных машин при обрыве нитей и при их полной наработке на сно-
вальный вал.
4. Какие требования предъявляются к автоматизированному электропри-
воду шлихтовальных машин? Указать способы регулирования частоты враще-
ния приводных электродвигателей шлихтовальных машин.
5. Какова особенность нагрузочной диаграммы приводных электродвига-
телей ткацких станков?
6. Какие требования предъявляются к автоматизированному электропри-
воду ткацких станков?
7. Перечислите основные элементы автоматики электропривода бесчел-
ночных ткацких станков?
8. В каких случаях необходим автоматический останов ткацких станков?
9. Дать энергетический баланс мощности, расходуемой ткацкими стан-
ками типов СТБ и АТПР.
10. Какие виды защиты от аварийных режимов работы имеет электропривод
ткацких станков?
5. АВТОМАТИЗИРОВАННЫЙ
ЭЛЕКТРОПРИВОД АГРЕГАТОВ
ОТДЕЛОЧНОГО ПРОИЗВОДСТВА
5.1. ХАРАКТЕРИСТИКА ЭЛЕКТРОПРИВОДА
МАШИН ОТДЕЛОЧНОГО ПРОИЗВОДСТВА
Характер операций технологических процессов в отделочных
производствах текстильной промышленности крайне сложный и
зависит от многих факторов, в том числе от структуры и свойств
ткани, ее назначения, ассортимента и т. д.
В общем виде схема технологического процесса отделки
ткани включает ее подготовку к отделке (опаливание, стрижка,
ворсование, контроль сортности, клеймение)-, химическую обра-
ботку (отварка, беление, мерсеризация), крашение и промывку,
печатание, .нанесение рисунка, высушивание и заключительную
175
отделку (аппретирование и каландрование). Многообразие опера-
ций обусловливает применение большого количества машин и
оборудования, состав которого зависит от вида обработки, назна-
чения и ассортимента ткани, требований по диапазону регули-
рования рабочих скоростей, обеспечение плавного пуска и быст-
рого торможения машин и т. д.
Необходимость регулирования рабочих скоростей является
одной из важных особенностей отделочного производства. По-
этому в данном производстве имеются почти все типы регулируе-
мых электроприводов, а именно с применением двигателей по-
стоянного тока (ДПТ), АД с фазным и короткозамкнутым ро-
тором (в закрытом, защищенном, взрывозащищенном и других
исполнениях), трехфазных коллекторных двигателей, а также
с применением тиристорных регуляторов.
Особенностью многих машин отделочного производства яв-
ляется сравнительно небольшая частота вращения рабочих ва-
лов машин, что усложняет конструкции агрегатов, так как вы-
зывает необходимость в установке промежуточных механизмов
с большими передаточными числами для связи приводных элект-
родвигателей с машинами. Поэтому сочетание зубчатых, клино-
ременных и червячных передач является характерным для машин
отделочного производства.
В отделочном производстве распространяется использова-
ние поточных линий, интенсифицируется агрегирование произ-
водственных машин, широко применяется механизация и автома-
тизация технологических процессов. В данном производстве на-
ряду с устаревшим оборудованием находятся в эксплуатации
современные машины и аппараты, в том числе и целый ряд машин
импортного производства.
Электропривод машин отделочного производства работает
в тяжелых условиях: при повышенных относительной влаж-
ности и температуре окружающей среды; наличии химически
активных и взрывоопасных веществ; возможных значительных
технологических и тепловых перегрузочных режимов.
Рассмотрим некоторые варианты электроприводов, распрост-
раненных в отделочном производстве машин, выполненных по
различным принципам управления.
5.2. ЭЛЕКТРОПРИВОД С ПРИМЕНЕНИЕМ АД
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Электропривод с использованием АД с короткозамкнутым ро-
тором применяется на каландрах, зрельниках и ряде других ма-
шин отделочного производства.
На рис. 5.1 представлена схема автоматизированного элект-
ропривода отделочного каландра КО-120, который служит для
окончательной отделки и термообработки хлопчатобумажных
176
Рис. 5.1. Схема управления электроприводом отделочного каландра КО-120
и льняных тканей, а именно для придания им гладкой поверхности
за счет уплотнения их между валами.
Силовая часть электропривода включает два АД с коротко-
замкнутым ротором: Ml номинальной мощностью 17 кВт в каче-
стве главного привода и М2 номинальной мощностью 10 кВт для
привода гидравлического насоса. Схема управления получает
питание от рубильника QS через понижающий трансформатор
TV1 380/110 В.
Перед началом работы выключателем SA через блок-контакт
электроконтактного термометра ВК включается магнитный пус-
катель КМЗ, подающий напряжение на теплоэлектронагрева-
тели (ТЭНы), что фиксируется сигнальной лампой HL5. По до-
стижении заданной температуры поверхности вала 150—180 °C
каландр готов к пуску. Перед запуском главного электродвига-
теля Ml кнопкой SB1 включается звонок НА, и цепь магнитного
пускателя КМ1 оказывается подготовленной к работе. Нажатием
кнопки SB2 пускается электродвигатель Ml главного привода.
Только после включения главного привода появляется возмож-
ность запуска электродвигателя гидравлического насоса М2
магнитным пускателем КМ2. Защита электродвигателей Ml й
М2 от перегрузок осуществляется тепловыми реле КК, а от ко-
177
ротких замыканий — предохранителями FU. Для визуального
контроля за работой электродвигателей главного вала и гидро-
насоса используются сигнальные лампы HL2 и HL3.
Нажатием кнопки SB4 включается промежуточное реле К1
и электромагнитный клапан УА, который, открываясь, подает
масло в цилиндры гидросистемы прижима валов, в результате
чего каландр запускается в работу. Его останов осуществляется
нажатием стопорных кнопок SB5 и SB6, которые отключают
магнитные пускатели КМ1 и КМ2 и соответственно электродви-
гатели Ml и М2; электроклапан перекрывает доступ масла в
цилиндры, давление в них падает, и валы отжимаются. Ручное
отключение электродвигателя М2 и электромагнитного клапана
УА производится стопорными кнопками соответственно SB7
и SB8.
Для более эффективного торможения электродвигателя Ml
и исключения выхода некаландрированной ткани применяется
его дополнительное торможение. Это достигается подачей пони-
женного напряжения 12 В постоянного тока в обмотку статора
электродвигателя Ml через выпрямительный мостик из четырех
диодов VD от понижающего трансформатора TV2. Процесс тор-
можения начинается в момент отключения магнитного пускате-
ля КМ1 и промежуточного реле К2. При этом срабатывают реле
времени КТ и магнитный пускатель КМ4, который подает на-
пряжение постоянного тока в обмотку статора электродвигателя
Ml. Реле времени КТ настраивается на время 1—1,5 с, по исте-
чении этого времени электродвигатель Ml останавливается и
контакт реле КТ обесточивает катушку магнитного пускателя
КМ4, отключая постоянный ток от обмотки статора Ml. Этим
и достигается эффективный останов электродвигателя Ml глав-
ного привода и исключается наработка ткани пониженного ка-
чества. ,
На рис. 5.2 приведена схема автоматизированного электро-
привода восстановительного зрельника, предназначенного для
дозревания кубовых красителей, нанесенных на хлопчатобумаж-
ные и штапельные ткани во влажной паровой среде при темпера-
туре 102—106 °C.
Восстановительный зрельник используется в печатных цехах
предприятий текстильной промышленности.
Электропривод зрельника включает два АД с короткозам-
кнутым ротором: четырехскоростной АД типа АО-2-71 номиналь-
ной мощностью 3,3/4,5/5,8/8,5 кВт с частотой вращения
480/710/930/1420 мин1 (на схеме Ml) и АД с короткозамкну-
тым ротором М2 типа АО2-42-4 номинальной мощностью 5,5 кВт.
Питание на схему управления осуществляется через однофаз-
ный понижающий трансформатор TV типа ТБСЗ 380/127 В.
Сигнал о наличии напряжения • контролируется сигнальной
лампой HL1.
178
Рис. 5.2. Схема управления электроприводом восстановительного зрельника:
а — силовая часть; б — схема управления
Подача напряжения на силовые цепи и цепи управления
производится включением рубильника QS. При достижении в
камере зрельника заданной температуры нажатием пусковой
кнопки SB1 включается катушка магнитного пускателя К.М и
электродвигатель Ml подключается к сети. Одновременно за-
горается сигнальная лампа HL2, указывающая о работе электро-
двигателя главного привода Ml. При нажатии пусковой кнопки
SB2 получает питание катушка магнитного пускателя КМ7 и
электродвигатель вентилятора М2 подключается к сети, о чем
сигнализирует сигнальная лампа HL3.
Останов электродвигателя главного привода Ml осущест-
вляется нажатием стопорной кнопки SB3. Останов электродви-
гателя вентилятора М2 осуществляется нажатием стопорной
кнопки SB4.
Защита электродвигателей и цепей управления производит-
ся предохранителями FU от коротких замыканий и тепловыми
реле КК1—КК4 от перегрузок.
Магнитные пускатели КМ1—К,Мб и соответствующая защит-
ная аппаратура с переключателем S’<4 обеспечивают четыре ско-
ростных режима электродвигателя главного привода Ml. В схе-
ме через сетевой выпрямитель предусмотрен контроль темпера-
туры.
На рис. 5.3 приведена схема автоматизированного электро-
179
Рис. 5.3. Схема управления электроприводом
<f/l ту 6 9
12В
\KT1
SB2
КМ5 КТЗ
------|I>
КП SB3
КТ1
$63 SB2
КТ2 КМ5
красильной барки КЛПШ-1
КГ2
привода красильной барки КЛПШ-1, предназначенной для кра-
шения материалов. Циркуляция раствора в ней предусмотрена
от периферии к центру и от центра к периферии путем реверса
приводного АД типа АОЛ2-22-4 номинальной мощностью 0,4 кВт.
Напряжение на схему подается пакетным выключателем
SA1. Переключателем SA2 в схеме предусматривается ручное
или автоматическое управление электроприводом. Питание на
цепи управления и сигнализации подается через понижающий
трансформатор TV типа ТБСЗ-0,4 380/110/12 В.
Ручной останов красильной барки осуществляется стопор-
ной кнопкой SB1. Кнопкой SB2 обеспечивается работа схемы
в ручном режиме на циркуляцию от центра к периферии, а кнопкой
SB3—ее работа на циркуляцию от периферии к центру. При
ручном управлении нажатием кнопки SB2 включается катущка
реле времени КТ1, контакт которого включает цепь магнитного
пускателя КМ5 и соответственно электродвигатель М. При на-
жатии кнопки SB3 ее размыкающим контактом обесточивается
реле времени КТ1, которое отключает магнитный пускатель КМ5
и соответственно электродвигатель М, в результате чего прекра-
щается циркуляция от центра к периферии.
При переключении переключателя SA2 схема переходит на
автоматический режим за счет попеременного включения реле
времени КТЗ и КТ4.
При падении температуры раствора ниже заданной реле К
замыкает свои контакты в цепи электромагнитного клапана
подачи пара YH. При достижении необходимой температуры
отключением контактов реле К клапан YH закрывается.
Защита цепи электродвигателя М, а также цепей управления
и электромагнитного клапана от токов коротких замыканий осу-
ществляется предохранителями FU, а от перегрузки М—тепло-
вым реле КК-
180
Рис. 5.4. Схема управления электроприводом машины ММ-200
На рис. 5.4 приведена схема автоматизированного электро-
привода мойно-материальной машины ММ-200, предназначенной
для промывки холодной или горячей водой хлопчатобумажных
тканей двумя параллельными натянутыми жгутами с'поверх-
ностной плотностью 85—170 г/м2, а также для их пропитки
растворами щелочи, пероксида водорода и серной кислоты.
Электропривод мойно-матернальной машины и моторизован-
ного блочка осуществляется от электродвигателей Ml с коротко-
замкнутым ротором (для привода машины номинальной мощ-
ностью 10 кВт) и М2 (для привода моторизованного блочка
номинальной мощностью 1,5 кВт). Питание цепей управления
осуществляется через понижающий трансформатор TV, который
подключен к сети через рубильник QS.
Вся пускорегулирующая аппаратура установлена в станции
управления, а аппаратура ручного управления, контроля и сиг-
нализации — в пульте управления; все остальное электрообо-
рудование установлено непосредственно на машине.
Схемой предусматривается два режима работы машины:
«Работа» и «Заправка».
Перед пуском машины рукоятка пакетного выключателя SA1
ставится в положение «Включено», а затем включается рубиль-
ник QS. Пуск машины в режиме «Заправка» осуществляется
толчком путем нажатия на кнопки SB1 «Вперед» и SB2 «Назад».
При этом получает питание катушка магнитного пускателя КМ2
(или КМЗ), которая подключает электродвигатель Ml к сети.
181
При работе машины в режиме «Работа» должен быть включен
выключатель SA2. Пуск машины в этом режиме осуществляется
нажатием кнопки SB3. При этом включается магнитный пу-
скатель КМ1 и соответственно электродвигатель М2 моторизо-
ванного блочка. Одновременно включается и магнитный пуска-
тель КМ2 и соответственно электродвигатель Ml. Останов
машины осуществляется стопорными кнопками SB4 и SB5.
Сигнальная лампа HL сигнализирует о наличии напряже-
ния в цепях управления. Защита электродвигателей и цепей
управления от токов короткого замыкания осуществляется пре-
дохранителями FU, а от перегрузок — тепловыми реле КК.
На рис. 5.5 приведена схема автоматизированного электро-
привода резальной' машины «Бефама» (Польша), предназна-
ченной для резки отходов лоскута и путанки пряжи из натураль-
ных и синтетических волокон с целью их восстановления.
Силовая часть электропривода включает три АД с коротко-
замкнутым ротором, в том числе: Ml — номинальной мощно-
стью 11,5 кВт для привода резального барабана, М2 номиналь-
ной мощностью 2,2 кВт для привода транспортера и М3 номиналь-
ной мощностью 0,55 кВт для привода шлифования ножей.
При включении автоматического выключателя QF подается
питание от сети напряжением 380 В на понижающий трансфор-
матор TV и силовые контакты магнитных пускателей КМ1—КМ5.
Переключатель скоростей резального барабана SA находится
в положении / или 2. При закрытом боковом и верхнем огражде-
нии микровыключатели SQ1—SQ4 замкнуты. При нажатии на
кнопку SB2 «Включено» пускатель КМ1 или КМЗ (в зависимости
от положения переключателя SA) получает питание, что вызы-
182
Рис. 5.6. Схема управле-
ния электроприводом
центрифуги
вает включение электродвигателя Ml. При этом кнопка блоки-
руется блок-контактом КМ1 или КМ2. Одновременно через блок-
контакт КМ1 или КМ2 подается питание на реле времени КТ2
для задержки включения подающего транспортера «Вперед»
и на блок детектора металлических включений (металлоиска-
тель) В, на котором загорается неоновая лампочка HL, сигнали-
зирующая о готовности резальной машины к работе.
Нажатием кнопки SB3 подается питание на катушку магнит-
ного пускателя КМ4, в результате чего включается электродви-
гатель М2 «Транспортер вперед», а кнопка SB3 блокируется
блок-контактами КМ4. При попадании металлических частиц
срабатывает металлоискатель В и своими контактами размыкает
цепь питания катушки КМ4, в результате чего транспортер
останавливается и загорается сигнальная лампа «Металл» на
корпусе детектора. Нажатием кнопки SB5 «Задний ход» подает-
ся питание на катушку магнитного пускателя КМ5. В случае об-
наружения металлического включения нажимается кнопка
«Сброс», в результате замыкаются контакты В, сигнальная лам-
па «Металл» гаснет, и цепь пуска транспортера вперед готова
к работе.
Электродвигатель М3 для привода шлифования ножей вклю-
чается с помощью разъединителя QS, который своими блок-
контактами блокирует микровыключатели SQ1 и SQ2. Это дает
возможность точить ножи при открытом боковом'ограждении.
На рис. 5.6 приведена схема автоматизированного электро-
привода центрифуги, которая служит для удаления жидкости
из обрабатываемого продукта (пряжи, ткани). После удаления
воды на центрифуге пряжа или ткань проходит сушку на сушил-
ках. Следовательно, чем больше удалено влаги при центрифу-
гировании, тем быстрее и качественнее протекает процесс сушки
и меньше при этом расходуется пара, т. е. эффективнее исполь-
зуются сушилки.
183
Для привода центрифуги служит АД с короткозамкнутым
ротором М типа АО2 номинальной мощностью 10 кВт.
Принцип действия центрифуги заключается в том, что барабан
с заложенной в него продукцией вращается с высокой частотой.
Под действием центробежной силы жидкость, находящаяся в
обрабатываемом материале, отбрасывается к стенкам барабана
и удаляется через специальные щели. После отжатия центри-
фуга затормаживается и продукция выгружается. Таким обра-
зом, работа центрифуги происходит в следующем порядке: за-
грузка центрифуги, ее раскрутка, нормальное вращение, тормо-
жение и выгрузка продукции.
Для включения тормоза предусматривается тяговый электро-
магнит YA с тяговым усилием 8 кг и ходом якоря 30 мм для вклю-
чения тормоза. Конечные выключатели SQ/ и SQ2, ртутный
выключатель SQ3 и электромагнит УА установлены на машине.
Включение схемы осуществляется автоматическим выключате-
лем QF. Питание цепей управления осуществляется от понижаю-
щего трансформатора TV 380/220/127 В.
Схемой предусмотрено как. автоматическое, так и ручное
управление. При автоматическом управлении универсальный
переключатель SA ставится в положение «Пуск крышкой»,
для чего замыкают контакты КЗ. Перед пуском при помощи
рукоятки тормоза движением ее сверху вниз до отказа растор-
маживают тормоз. При этом замыкающий контакт конечного
выключателя SQ1 замыкается. Затем закрывают крышку цен-
трифуги, что ведет к замыканию конечного выключателя SQ2.
При этом включается катушка промежуточного реле КЗ и его
контакт КЗ шунтирует кнопку SB2. В результате включается
катушка магнитного пускателя КМ и электродвигатель М под-
ключается к сети. Одновременно замыкается контакт КЗ в цепи
реле времени КТ, размыкается контакт в цепи катушки промежу-
точного реле К1 и замыкается контакт КМ в цепи катушки К4.
Реле К4 срабатывает и замыкает один из своих контактов в цепи
катушки реле К1, а другой для шунтирования КМ.
По истечении заданного времени, необходимого для процесса
центрифугирования, замыкается с выдержкой времени контакт
реле времени КТ, что ведет к срабатыванию реле К1, которое
размыкает свой контакт в цепи КМ, в результате чего электродви-
гатель Л4 отключится от сети. Одновременно с этим обесточивается
катушка промежуточного реле КЗ; его контакт, блокирующий
кнопку SB2, и контакт в цепи реле времени КТ размыкаются,
и оно под воздействием пружины принимает исходное положение.
Контакты реле К1 и электромагнит У А подключаются к сети.
Втягиваясь, электромагнит освобождает защелку, чем тормозит
корзину. Защелка размыкает замыкающий контакт конечного
выключателя SQ1, реле К1 и КЗ, и электромагнит УА отключает-
ся от сети. Как только корзина остановится, ртутный выключа-
184
тель SQ3 замкнется и загорится сигнальная лампа HL. При руч-
ном управлении замыкаются контакты R2, и пуск электродвига-
теля производится нажатием кнопки SB2. Как и в предыдущем
случае, пуск АД возможен лишь при закрытой крышке и растор-
моженной центрифуге.
5.3. ЭЛЕКТРОПРИВОД ПО СИСТЕМЕ
ГЕНЕРАТОР — ДВИГАТЕЛЬ
Данный вид электропривода получил широкое распростране-
ние в отделочных производствах предприятий текстильной про-
мышленности из-за возможности обеспечения плавного регули-
рования частоты вращения в достаточно больших диапазонах
(12:1) — (16:1).
Принцип действия и принципиальная электрическая схема
этой системы изложены в гл. 2 (см. рис. 2.38, а).
Особенностью применения системы Г—Д для привода отде-
лочных агрегатов является то, что один генератор осуществля-
ет питание и управление несколькими ДПТ различной мощности
(от 2 до 20 кВт), что усложняет и без того сложную систему.
Система Г—Д в отделочном производстве применяется для
привода печатных машин, сушильных агрегатов и др. Рассмотрим
работу данной системы на примере электропривода крахмально-
сушильного агрегата КА-186-9, состоящего из плюсовки и су-
шильных барабанов (рис. 5.7).
Данный электропривод включает в себя: электродвигатель
Ml (рис. 5.7, а) постоянного тока номинальной мощностью
3,2 кВт для привода плюсовки, электродвигатель М2 постоян-
ного тока номинальной мощностью 10 кВт для привода сушиль-
ных барабанов, АД М3 номинальной мощностью от 16 до 20 кВт
в качестве тонного двигателя и два АД (М4 и М5) номинальной
мощностью соответственно 2,8 и 4,5 кВт для привода вытяж-
ных вентиляторов.
Напряжение на цепи управления подается через понижаю-
щий трансформатор TV2 380/127 В (рис. 5.7,6). Регулирование
скорости агрегата в диапазоне 1:3 осуществляется изменением
напряжения на зажимах генератора G (см. рис. 5.7, а) за счет
введения в его обмотку возбуждения LG реостата RP2. Согласо-
вание скоростей плюсовки и сушильных барабанов осуществля-
ется реостатом компенсатора RP4, а подрегулирование скоро-
сти — реостатами сопротивлений RP3 и RP5 вручную.
Подготовка схемы к работе осуществляется включением ру-
бильника QS и автоматического выключателя SF1. При заправке
рукоятку универсального переключателя SA1 (см. рис. 5.7, 6)
устанавливают в положение «Заправка». При этом замыкаются
контакты универсального переключателя SA2, в результате чего
включается катушка промежуточного реле R1. При нажатии на
185
Рис. 5.7. Схема управления электроприводом агрегата КА-186-9
пусковую кнопку SB1 магнитный пускатель КМ1 подключает
к сети гонный двигатель М3 (см. рис. 5.7, а), что вызывает вра-
щение механически связанных с ним генератора G и возбуди-
теля В. При этом включенное реле нулевой защиты KV1 замы-
кает свой контакт.
Затем нажатием на кнопку SB8 «Сигнал» (см. рис. 5.7, б)
извещают звонком НА персонал о пуске агрегата. При этом вклю-
чается промежуточное реле КЗ. Пуск плюсовки и сушильных
барабанов осуществляется соответственно автоматическими
выключателями SF2 и SF3 (см. рис. 5.7, а) и кнопкой SB7 (см.
рис. 5.7,6). При этом получает питание катушка промежуточ-
ного реле К2. Контакты магнитного пускателя КМ2 подключают
обмотку возбуждения генератора LG1 (см. рис. 5.7, а) к возбуди-
телю В, в результате чего на зажимах генератора G появляется
напряжение, что вызывает вращение электродвигателей Ml и
М2. В схеме LG2 и LB2— сериесные обмотки генератора и дви-
гателя, a LG3 и LB3 — соответственно их дополнительные об-
мотки. При полностью введенном реостате RP2, т. е. при минималь-
ной скорости, возможен лишь пуск агрегата. С целью повышения
скорости рукоятка реостата RP2 перемещается в сторону умень-
шения сопротивления; при этом возрастает ток возбуждения и
напряжение на зажимах генератора, что и вызывает увеличение
частоты вращения двигателей Ml и М2.
186
I
Останов агрегата осуществляется кнопкой SB2 (см. рис. 5.7,6).
При этом промежуточное реле К2 теряет питание, его контакты
отключают магнитный пускатель КМ2 и переключают обмотку
возбуждения генератора с возбудителя на якорь генератора.
При этом меняется полярность обмотки, что вызывает торможе-
ние электродвигателей Ml и М2 (см. рис. 5.7, а).
Электродвигатели вентиляторов М4 и М5 включаются маг-
нитным пускателем КМ1 (см. рис. 5.7,6).
Электроимпульсный счетчик PC в схеме, получающий пита-
ние через трансформатор ТVI, диодный мостик и импульсы от
контактного датчика BV, служит для измерения проходящего
через агрегат количества ткани. Контактный датчик BV уста-
новлен в начале агрегата.
На рис. 5.8 приведена кинематическая схема с расчетными
данными модернизированной (сагрегированной) машины
МЮ-120 (рис. 5.8, о); включающая трехвальную плюсовку /,
первую секцию 2 и вторую секцию 3 сушилки. Для привода трех-
вальной плюсовки применен двигатель постоянного тока типа
П-51 номинальной мощностью 4,5 кВт, напряжением 220 В и
частотой вращения 1500 мин-1, а для привода роликов воздуш-
ной сушилки — двигатель постоянного тока типа П-52 номиналь-
ной мощностью 6 кВт с теми же напряжением и частотой вра-
щения. Эти двигатели являются звеном системы Г—Д, куда
дополнительно входят: тонный АД серии АО2 номинальной мощ-
ностью 17 кВт и частотой вращения 1450 мин-1 и генератор G
типа П-62 номинальной мощностью 11,5 кВт, напряжением 230 В
и частотой вращения 1450 мин-1. Обмотки возбуждения генера-
тора и двигателя постоянного тока получают питание от возбу-
дителя типа П-41 номинальной мощностью 2,7 кВт, напряжением
230 В и частотой вращения 1450 мин ', установленного на од-
ном валу с гонным АД и генератором.
На рис. 5.8, б приведена силовая часть схемы управления
автоматизированным электроприводом сагрегированных машин.
Для пуска АД вытяжных М3 и М4 и циркуляционных М5 и Мб
вентиляторов применены магнитные пускатели КМ2—КМ4 типа
ПАЕ-300, а для пуска тонного АД (Ml) — магнитный пускатель
КМ1 типа ПА-500.
Напряжение на схему управления (рис. 5.8, в) подается
через понижающий трансформатор TV1 380/110 В марки
1БС2-0,25. Защита всех электродвигателей от коротких замыка-
ний осуществляется предохранителями FU, а от перегрузок —
тепловыми реле КК- Визуальный контроль за работой узлов ма-
шины осуществляется сигнальными лампами HL1—HL9 (типа
Щ 10-10 с сигнальной арматурой АС-ПО).
Для учета выработки продукции притенен датчик импульсов
BV (см. рис. 5.8, 6) и счетчик электромагнитных импульсов PC,
шкала которого отградуирована для отсчета каждого метра вы-
187
Л- , , , ...__
E-—--------г—-Г—Г-
№l’\ \...
mi
они
задающим двигателем М8. Через делитель напряжения R3 на-
пряжение тахогенератора подается на измерительный вольт-
метр PV3. Контроль нагрузки осуществляется амперметром РА,
а контроль напряжения— вольтметром PV1 и PV2.
Перед запуском машины в течение 15—20 мин производится
ее разогрев, для чего выключателем SA2 (см. рис. 5.8, в) вклю-
чается промежуточное реле К4 и электромагнитный клапан YH
подачи пара в воздухонагреватели камеры сушилок. По дости-
жении температуры 90—95 °C включаются вытяжные вентиля-
торы с приводным АД М3—Мб (см. рис. 5.8,6).
Пусковой кнопкой SB1 (см. рис. 5.8, в) запускается от магнит-
ного пускателя КМ1 гонный АД Ml (см. рис. 5.8,6). Генератор-
возбудитель с самовозбуждением G2 выдает напряжение постоян-
ного тока для питания обмоток возбуждения LG1 генератора,
электродвигателей М7 и М8 (LM7 и LM8). Пуск машины воз-
можен только в том случае, если шунтовый реостат RG1 генера-
тора G1 полностью введен и его контакт SQ (см. рис. 5.8, в) в
цепи реле Кб замкнут. В этом случае на зажимах генератора
G1 (см. рис. 5.8, 6) при включении машины напряжение и ее ско-
рость будут минимальными.
Затем пусковой кнопкой SB3 (см. рис. 5.8, в) подается сигнал
перед включением машины в работу, а кнопкой SB2 включают-
ся промежуточное реле К1 и контактор КМ8 (см. рис. 5.8,6),
который подает напряжение на обмотку возбуждения LG1 гене-
ратора; на зажимах генератора G1 появляется напряжение, и
включаются электродвигатели М7 и М8 на малую частоту вра-
щения. Одновременно с включением машины получают питание
от магнитных пускателей КМ5 и КМ6 две секции теплоэлектро-
нагревателей. Ими в процессе работы достигается температура
145—150 °C. Регулирование заданной температуры осуществля-
ется электроконтактным термометром ВК (см. рис. 5.8, в) путем
периодического отключения второй секции ТЭНов.
Останов машины осуществляется стопорными кнопками
SB9—SB11. Кроме того, при нарушении автоблокировки или
прохождении жгута предусмотрен аварийный останов машины.
При ее останове автоматически отключаются и ТЭНы. С целью
ограничения длительного холостого хода тонного АД Ml (см.
рис. 5.8, 6) после останова машины в схеме применено реле вре-
мени КТ (см. рис. 5.8, в) с выдержкой времени 5—7 мин, размы-
кающий контакт которого установлен в цепи магнитного пуска-
теля КМ1. По истечении заданного времени после останова ма-
шины система Г—Д полностью отключается от сети.
Регулирование частоты вращения двигателей постоянного
тока М7 и М8 (см. рис. 5.8,6) осуществляется.изменением под-
водимого к якорю напряжения. В цепи обмотки возбуждения
LG1 генератора G1 установлен шунтовый реостат RG1 — регу-
лятор возбуждения мощностью 800 Вт. При изменении сопротив-
«'ll
KM5'
nth
. «?
мг
PA >-K
—О-----\ J --------~[fl/?
Qf, ^/f7PM9 ПГ
PU
6
~v=‘ Л1 nW
_____ZZ>Z
SA3
S? ^fHto
JS~7KfT
m ^тугДДз
У>30п
PC^
Рис. 5.8. Модернизированная сагре-
гированная машина МТО-120:
а — кинематическая схема; б — сило-
вая часть электропривода; в — схема
управления
пускаемой ткани при периодическом замыкании контакта BV.
Этот счетчик импульсов питается через отдельный понижаю-
щий трансформатор TV2 типа ТБС2-0.1 и диодный мостик UZ
(на диодах типа Д226).
С целью контроля за скоростью движения ткани применен
тахогенератор BR типа ТМГ-ЗОП, который жестко соединен с
189
188
ления регулятора меняется и напряжение на обмотке возбужде-
ния, что приводит к изменению напряжения на зажимах гене-
ратора и частоты вращения приводных двигателей постоянного
тока в диапазоне 6:1. Это позволяет изменять скорость ткани
в пределах 10—60 м/мин.
Синхронизация частот вращения электродвигателей осуще-
ствляется при помощи роликового компенсатора, с валом
которого связан регулятор возбуждения LM7 с сопротивлением
165 Ом. Ручная подрегулировка частот вращения в диапазоне
(2:1) — (3:1) возможна при помощи установочных резисторов
R4 и R5 (типа РСП-3 на ток 1,4 А и сопротивление 165 Ом) в цепи
обмоток возбуждения электродвигателей, что достаточно для
обеспечения синхронной работы электродвигателей.
Динамическое торможение двигателей постоянного тока в
данной схеме состоит в том, что при останове машины обмотка
возбуждения генератора контактором КМ8 отключается от сети
постоянного тока и энергия, запасенная в ней, гасится через
цепочку R1—VD1, в результате чего на зажимах генератора
исчезает напряжение. Якори двигателей постоянного тока замы-
каются на дополнительное сопротивление обмотки якоря генера-
тора, и, переходя в режим динамического торможения, двигатели
резко останавливаются. Их обмотки возбуждения LM7 и LM8
в это время находятся под напряжением, т. е. остаются присо-
единенными к сети постоянного тока. Ускорения времени тормо-
жения можно добиться автоматическим переключением обмотки
возбуждения генератора с зажимов возбудителя на зажимы
генератора с обратной полярностью. На машине установлены
конечные выключатели SQ1—SQ13 (см. рис. 5.8, в).
На предприятиях текстильной промышленности проводится
большая работа по агрегированию машин отделочного производ-
ства, что повышает производительность оборудования, экономит
материалы и трудозатраты, снижает расход энергии.
5.4. ЭЛЕКТРОПРИВОД С ТИРИСТОРНЫМ
УПРАВЛЕНИЕМ
Применение тиристорных регуляторов позволяет повысить КПД
электропривода и исключить коммутирующие конденсаторы
(поскольку коммутация происходит естественным путем).
Специальные схемы тиристорного электропривода для агре-
гатов отделочного производства разрабатывает, в частности,
Ивановский энергетический институт. Например, им разработан
тиристорный электропривод промывной машины, который рабо-
тает на Ивановском камвольном комбинате им. В. И. Ленина.
Схема данного электропривода приведена на рис. 5.9; она вклю-
чает четыре приводных двигателя постоянного тока, в том числе:
Ml номинальной мощностью 11 кВт для привода сушильно-ши-
190
Рис. 5.9. Схема управления тиристор-
ным электроприводом промывной ма-
шины
их разность подается на вход
рильной машины, М2—М4 но-
минальной мощностью по
3,8 кВт для привода отжимных
валов мойных ванн.
От силового трансформа-
тора TV получает питание трех-
фазный несимметричный вы-
прямительный мост, представ-
ляющий собой тиристорный
преобразователь с тремя тирис-
торами VS1—V'S3 и тремя дио-
дами VD1—VD3. На выходе
выпрямителя с целью стабили-
зации напряжения применена
обратная отрицательная связь
по напряжению, заключаю-
щаяся в том, что напряжение
обратной связи, снимаемое с
реостата RP1, сравнивается
с задающим напряжением и
промежуточного усилителя UZ2. Серводвигатель М5, переме-
щающий ползунок задающего потенциометра RP2, служит для
регулирования частоты вращения электродвигателей. Этим дости-
гается изменение скорости ткани от 4 до 40 м/мин. Регулирование
скорости производится с помощью роликовых компенсаторов,
которые соединены с ползунками шунтовых реостатов RP3—RP6.
Питание обмоток возбуждения всех двигателей постоянного тока
осуществляется от сети трехфазного тока через полупроводни-
ковые вентили (выпрямительный мост UZ1).
Контактами SA1—SA4 электродвигатели отключаются от
преобразователя и переводятся в режим динамического тормо-
жения. При этом обмотки возбуждения всех двигателей постоян-
ного тока находятся под полным напряжением, а их якорные
цепи остаются соединенными между собой.
Для защиты от токовых перегрузок и коротких замыканий
(КЗ) в схему введен блок токоограничения UZ3. От коммута-
ционных перенапряжений защита осуществляется цепочками
RC, подключенными параллельно каждому тиристору. Защита
диодов и тиристоров от перенапряжений при коммутациях сило-
вого трансформатора TV осуществляется блоком (JZ5.
На рис. 5.10 приведена схема автоматизированного электро-
привода барабанной сушильной машины СБ-180, предназначен-
ной для сушки различной продукции текстильной промышлен-
191
Рис. 5.10. Схема управления электроприводом машины СБ-180:
а — схема управления силовой частью; б — схема управления рабочим режимом'
сушки; в — схема контроля напряжения по осуществлению быстрого останова
машины
ности. Привод осуществляется от двигателя постоянного тока
независимого возбуждения М номинальной мощностью 14 кВт,
частота вращения которого регулируется изменением напряже-
ния при помощи управляемого выпрямителя на диодах VD5 и
VD6 и тиристорах VS1 и VS2 (рис. 5.10, а). Для обеспечения
безопасности при пуске машины предусмотрена подача звукового
сигнала от звонка НА (рис. 5.10,6). Для защиты двигателя
от чрезмерного разгона имеется защита в цепи возбуждения.
Электропитание силовых цепей и цепей управления осущест-
вляется от сети напряжением 380/220 В через понижающие
трансформаторы TV 1 (см. рис. 5.10, а) и TV2 (см. рис. 5.10,6).
С включением автоматического выключателя SF2 подается пита-
ние на цепь управления через трансформатор TV2. После за-
правки сушильной машины замыкается контакт SQ в цепи реле
Ki, которое включается путем нажатия на кнопку «Сигнал»
SB3 и подготавливает к включению реле К2, включаемое кноп-
кой SB1. Это реле замыкает цепь подачи питания на катушку
контактора КМ, который подает питание на схему управления
и к силовым цепям, обмотку якоря и обмотку возбуждения.
Включением автоматического выключателя SF1 (см. рис. 5.10, а)
подается напряжение на трансформатор TV1, предназначенный
для питания электронной схемы управления тиристором. Тири-
сторы VS1 и VS2, диоды VD5 и VD6 используются в качестве
выпрямителя для якорной цепи двигателя М. При включении
автоматического выключателя SF1 включается мостовая схема
из диодов VD12—VD15 (рис. 5.10, в). Автоматический выклю-
чатель SF3 через трансформатор TV3 включает вольтметр PV
для контроля напряжения и реле напряжения KV, предназна-
ченное для размножения контактов, чтобы ток, протекающий
после отключения цепи в обмотке возбуждения LM, замыкался
через сопротивление RJ0 и диод VD16 для быстрого останова.
Помимо рассмотренных выше систем электроприводов в от-
делочных производствах применяются еще и электроприводы с
использованием индукторных муфт скольжения (например, для
приводов ширильной машины, каландра), вольтодобавочных
трансформаторов (например, для красильно-отделочных агрега-
тов типа АК-120), коллекторных электродвигателей типа Шраге
(например, на агрегатах импортного производства) и др.
5.5. ЭЛЕКТРОПРИВОД ПЕРЕМАТЫВАЮЩИХ
УСТРОЙСТВ*
В процессе изготовления полупродукт (нить на приемно-нама-
тывающих устройствах, жгут на агрегатах производства химиче-
ского волокна и др.) или ткань на отделочных машинах много-
кратно подвергается перематыванию, в процессе которого упругая
* Написано совместно с А. М. Лангеном.
7 А. М. Лаиген, В. В. Красник
193
нить или ткань либо подается на приемную паковку, либо нама-
тывается с паковки.
При транспортировке и обработке продукт испытывает тех-
нологические и механические воздействия, которые вызывают
его удлинение или усадку. Практически на всех этапах изготов-
ления перематывание должно производиться при постоянном
натяжении, так как колебание натяжения ухудшает качество
продукта. Стабилизация натяжения и скорости при перематы-
вании осуществляется автоматическими системами. Имеется
определенная разница в процессе перематывания нитей и жгутов
и процессе перематывания ткани в расправленном виде. Эта
разница отражается и на структуре систем регулирования.
Перематывающие устройства классифицируются по разным
признакам: по структуре — разомкнутые, замкнутые, комбиниро-
ванные; по виду управляемых координат — управление по натя-
жению, удлинению, по линейной скорости перемещения и т. д.;
по способу получения информации — прямым измерением и кос-
венным определением координат.
Простейшая кинематическая схема перематывающего устрой-
ства (рис. 5.11) состоит из механизма протягивания продукта
и приводного электродвигателя Л1.
Если момент электродвигателя приложен непосредственно к
ведущему валу, на котором укреплена паковка 1 с наматываемым
продуктом 2, то
где F — натяжение; гп — радиус паковки.
При F= const M = rn.
Угловая скорость электродвигателя при постоянной линейной
скорости v
co = vi/rn,
где i — передаточное число редуктора.
При этом диапазон регулирования скорости равен диапазону
изменения радиуса паковки.
Устройство перематывания, обеспечивающее постоянство
скорости и натяжения перематываемого продукта, работает в
режиме постоянства мощности. Регулирование привода постоян-
ного тока реализуется при этом условии по принципу одновре-
менной стабилизации тока якоря путем регулирования напряже-
ния преобразователя и ЭДС электродвигателя ел — путем регу-
лирования потока возбуждения.
Так как
w = vi/rn и ел = СлыФ,
где Сд = const,
194
Рис. 5.11. Упрошенная кинематическая
схема перематывающего устройства
Рис. 5.12. Упрошенная схема электро-
привода наматывающего устройства
то при
ед=1СдФи/гп
поток изменяется пропорционально радиусу рулона:
Ф = Фппхгп/г„
max "max’
где /"пщах — максимальный радиус рулона; Фтах— максимальный поток.
Упрощенная схема электропривода наматывающего устройства приведена
на рис. 5.12. В структуре системы заложен принцип пропорциональности потока
возбуждения радиусу рулона, который реализуется регулированием ЭДС при
условии постоянства натяжения материала.
В системе предусмотрены два канала: стабилизации натяжения и стабили-
зации скорости.
Стабилизация натяжения осуществляется регулятором натяжения, который
сравнивает сигналы датчика натяжения В (НТ) и задатчика натяжения S(HT)
и подает результирующий сигнал на вход суммирующего усилителя A W1. Выход-
ной сигнал с A W1 является задающим для регулятора типа Л(Т). В А(Т) про-
изводится сравнение этого сигнала с выходным сигналом В(Т) датчика тока,
и результат сравнения является заданием для контура регулятора напряже-
ния А (Н). Последний в свою очередь регулирует напряжение на тиристорном
преобразователе QI, т. е. на ДПТ.
Стабилизация и управление скоростью перематывания осуществляются
системой регулирования ЭДС.
Сигнал на входе регулятора ЭДС (ЛЭ), пропорциональный в процессе
перематывания потоку возбуждения, т. е. радиусу рулона, является задающим
для регулятора потока, который учитывает с помощью функционального преобра-
зователя эффект насыщения магнитной цепи ДПТ. В регуляторе ЭДС, который
состоит из суммирующего усилителя AW2 и интегратора И, сравниваются сигналы
датчика ЭДС (ВЭ) Нъ,3 с задающим напряжением U3, пропорциональным ско-
рости перематывания, и интегрируются в аналоговом или цифровом интегра-
торе И. Интегратор «запоминает» значение радиуса рулона. Таким образом,
вне зависимости от режима работы (разгон, рабочий режим, выключенное со-
стояние ит. д.) поток возбуждения пропорционален радиусу рулона. В непод-
вижном состоянии задание начального потока осуществляется специальной
системой.
7*
195
Стабилизация натяжения ткани в поточных линиях. Транспор-
тировка продукта на текстильных машинах осуществляется
одинарными или парными валками, которые получили название
приводных точек. Приводные точки получают движение от при-
водного устройства. Как правило, к поточным линиям предъявляют
общие для всех механизмов следующие требования: стабилиза-
ция скорости или натяжения или скорости и натяжения одновре-
менно; стабилизация соотношения скоростей отдельных приводных
точек, обеспечивающая заданное натяжение материала; плавное
регулирование скорости движения ткани при одновременной
регулировке скоростей отдельных секций.
Уровень выполнения этих требований зависит от конструкции
приводных точек.
По видам связей поточные линии можно разделить на следую-
щие типы:
все приводные точки имеют жесткую механическую связь и
приводятся в движение от общего электродвигателя; в зависимо-
сти от упругих свойств натяжение ткани на разных участках
различается (рис. 5.13, а);
движение приводных точек осуществляется от индивидуаль-
ных электродвигателей; ткань между этими точками образует
свободную петлю; скорость задается ведущей (последней по
ходу технологического процесса) приводной точкой, остальные
подстраивают скорость в зависимости от размеров петли
(рис. 5.13, б);
движение приводных точек осуществляется от индивидуальных
электродвигателей; ткань между ними образует петлю, натяже-
ние в которой стабилизируется роликовыми компенсаторами
(рис. 5.13, в), скорость линии задается также ведущей точкой,
скорости других точек регулируются в зависимости от размеров
петли при стабилизации и натяжения роликовыми компенса-
торами;
связь приводных точек осуществляется непосредственно через
ткань путем регулирования (согласования) скоростей каждой
точки; такую возможность регулирования обеспечивают электро-
двигатели с мягкой характеристикой (рис. 5.13, а).
Из перечисленных наибольшее распространение в отрасли по-
лучила система с роликовыми компенсаторами.
Рассмотрим схему двухпетлевого роликового компенсатора
с противовесом с силой его тяжести Gnp, массой тпр и уравно-
вешенной цепью (рис. 5.14, а).
Ткань, проходя через систему подвижных и неподвижных
роликов 1—5, перемещает каретку компенсатора с линейной
скоростью vK. В ветвях петель под действием каретки возникают
натяжения (F,—F4 — натяжения в ветвях петель компенсатора,
Fo и F5 — натяжения ткани соответственно на входе и выходе
компенсатора), величины которых определяются скоростью протя-
196
1
1
Рис. 5.13. Классификация поточных линий по видам связей
гивания ткани и режимом работы компенсаторов; Z\ и z2 — опор-
ные шестерни.
В последнее время получают распространение однопетлевые
роликовые компенсаторы (рис. 5.14, б), где / и 3 — неподвижные,
2 — подвижной ролики, ci и S2 — относительное удлинение (на-
тяжение) ткани на входе и выходе компенсатора, ei,2 и е2,з — то же
в ветвях компенсатора, vpl—ср3 — окружные скорости роликов
197
о
Gop~ тПпрЦ
V
Рис. 5.14. Схемы роликовых компенсаторов:
а — двухпетлевого с противовесом; б — однопетлевого
компенсатора, vK — скорость движения каретки, Ml и М2 — элек-
тродвигатели ведомой и ведущей приводных точек, щ и ц2 — ско-
рости движения ткани на ведомой и ведущей приводных точках.
Применение компенсаторов дает возможность осуществлять
автоматически компенсацию рассогласования линейных скоростей
ткани на рабочих органах машины, процессы пуска, останова и
регулирования скорости ведомых машин, а также останов по-
точных линий.
Регулирование частоты вращения ведомого электродвигателя
в системе управления количеством ткани в технологической
машине оказывает значительное влияние на производительность
и качество текстильной продукции.
198
Исследования, проведенные в Ивановском энергетическом институте
им. В. И. Ленина, показали, что с ростом диапазона регулирования частоты
вращения ведомого электродвигателя расширяются пределы изменения коли-
чества ткани в технологической машине, причем разность между максимальным
и минимальным значениями при этом стремится к максимальной длине куска
ткани. Установлено, что диапазон регулирования частоты вращения ведомого
вала в системе управления количеством ткани в технологической машине дол-
жен выбираться с учетом параметров обрабатываемого материала и допустимой
ошибки стабилизации его количества.
Предложен принцип контроля по частоте следования меток, нанесенных на
ткань, на входе в машину и выходе из нее. Можно в качестве таких естествен-
ных меток использовать швы, образующиеся в результате сшивания отдельных
кусков ткани в непрерывное полотно.
Электропривод намытывающего устройства сушильно-шириль-
ной стабилизационной машины «Элитекс» (ЧСФР). Наматываю-
щее устройство ткани сушильно-ширильной машины «Элитекс»
обладает следующими особенностями:
ткань наматывается с постоянно заданным натяжением;
отсутствует кинематическая связь с приводом самой сушильно-
ширильной машины, т. е. с приводом цепи, транспортирующей
ткань в машине;
наматывание ткани предусмотрено в двух вариантах: на валы
большого диаметра, устанавливаемые на тележках (рис. 5.15, а),
и на валики небольшого диаметра, устанавливаемые на раме
самой стабилизационной машины (рис. 5.1.5, б);
В первом случае наматывание осуществляет вал А (см.
рис. 5.15, а), имеющий постоянный диаметр и приводимый в
движение от двигателя М39 постоянного тока независимого
возбуждения. Поэтому для получения постоянного заданного натя-
жения двигатель М39 должен создать и постоянный вращающий
момент независимо от диаметра вала.
Во втором случае (см. рис. 5.15,6) двигатель М39 приводит
во вращение вал В, на который наматывается ткань. Поэтому
диаметр вала В при наматывании ткани увеличивается и для
поддержания натяжения постоянным вращающий момент дви-
гателя М39 необходимо увеличивать пропорционально диаметру
вала В.
Скорость ткани в сушильной машине может меняться в широ-
ких пределах, в зависимости от этого меняются и потери мощ-
ности на трение наматывающего устройства.
Вращающий момент для двигателя постоянного тока пропор-
ционален току якоря, поэтому для регулирования вращающего
момента двигателя необходимо регулировать его якорный ток.
Для питания якорной цепи двигателя М39 применен управ-
ляемый тиристорный выпрямитель типа IRO 130.1 с некоторыми
изменениями для обеспечения четкой регулировки тока якорной
цепи.
На рис. 5.15, в приведена электрическая схема управления при-
водом наматывающего устройства. Управляемый выпрямитель
199
Рис. 5.15. Наматывающее устройство машины «Элитекс»:
а — наматывание ткани иа валы большого диаметра; б — то же на валы небольшого
диаметра; в — электрическая схема управления электроприводом наматывающего
устройства
UZ питается напряжением 220 В, но включается он только тогда,
когда будет подано напряжение на схему управления всей ма-
шины, т. е. когда на цепи 55 и 56 будет подано напряжение 220 В.
Выпрямитель возбуждения двигателя (цепи 537 и 538) получает
питание через контакт реле КЗ (цепи 1090, 1091), который вклю-
чается при пуске основного привода машины. Якорь (цепи 532 и
536) и возбуждение (цепи 537 и 538) двигателя подключены
непосредственно к управляемому выпрямителю без коммутацион-
ной аппаратуры.
Регулирование тока якоря двигателя М39 начинается только
после включения реле К90, которое своими замыкающими
контактами (цепи 534 и 535) подает питание регулирующим
блокам управляющего выпрямителя, и поэтому выходной ток до
включения реле К90 отсутствует. Реле К90 включается поворот-
ным выключателем SA66, установленным на правом пульте ма-
шины (цепь 56—544), однако включение реле К90 сблокировано
200
с пуском основного привода замыкающим контактом реле К17
(цепь 544—543).
После включения реле К90 двигателя М39 на его якорной цепи
пройдет ток, величина которого зависит от суммы напряжений,
поступающих на вход управляемого выпрямителя по цепям 540,
545 и 553. По цепи 540 от потенциометра R21 подается управляю-
щее напряжение такой величины, чтобы ток в якорной цепи дви-
гателя М39 создал вращающий момент, который компенсировал
бы механические потери наматывающего устройства, не завися-
щие от скорости.
По цепи 545 от тахогенератора BR2, вращаемого от привод-
ного двигателя М39, напряжение через резистор R20 и потен-
циометр R19 подается на вход управляемого выпрямителя и
с помощью потенциометра R19 подбирается такой величины,
чтобы с увеличением частоты вращения наматывающего устрой-
ства приращение тока в якорной цепи двигателя М39 вызывало
приращение вращающего момента, необходимого для компенса-
ции механических потерь, возрастающих с увеличением частоты
вращения устройства.
Задатчиком необходимого натяжения ткани служит потенцио-
метр R18, установленный в правом пульте управления машины.
Величина максимально задаваемого натяжения ограничивается
регулируемым резистором R97. При наматывании на вал боль-
шого диаметра, установленного на тележке, включается рычаг,
соединяющий двигатель с валом А (см. рис. 5.15, а), который,
замыкая цепь 56—547 (см. рис. 5.15, в), включает реле КЗО. Это
реле своим замыкающим контактом соединяет цепь 551—553,
и на вход управляемого выпрямителя поступает напряжение от
движка потенциометра R18. Это напряжение создает в якорной
цепи ток, необходимый для поддержания постоянного вращаю-
щего момента, и тем самым обеспечивает требуемое натяжение
наматываемой ткани.
Когда ткань наматывается на вал малого диаметра, устанавли-
ваемого на машине, с увеличением диаметра наматываемой
ткани необходимо увеличивать вращающий момент двигателя.
С этой целью ось рычага планочного расширителя С (см.
рис. 5.15, б), следящего за диаметром наматываемого материала,
соединена с движком потенциометра R23. В этом режиме работы
реле КЗО (см. рис. 5.15, в) отключено и через его размыкающий
контакт (цепь 552—553) напряжение с движка потенциометра
поступает на вход управляемого выпрямителя. С увеличением
диаметра наматываемой ткани увеличивается управляющее на-
пряжение.
Работа реле КЗО, которое включается концевым выключа-
телем SQ71, сблокирована с положением рычага планочного
расширителя С (см. рис. 5.15,6), фиксируемого в верхнем поло-
жении. В это положение рычаг устанавливается при заправке
201
в начале наработки ткани на вал. Этим исключается быстрый
разгон вала, так как, хотя движок потенциометра и находится в
верхнем положении, сработавшее реле КЗО (см. рис. 5.15, в)
своими замыкающими контактами на вход управляющего выпря-
мителя подает пониженное напряжение с резистора R22. Вклю-
чившись, реле КЗО самоблокируется через свой замыкающий
контакт (цепь 555—556), замыкающий контакт (цепь 547—556),
реле R90 и размыкающий контакт концевого выключателя SQ72
(цепь 56—555).
Концевой выключатель SQ72 нажимается при опускании
планочного расширителя в нижнее положение, т. е. после за-
правки ткани на вал. Контакты выключателя SQ72 размыка-
ются (цепь 56—555), реле КЗО отключается и не будет в даль-
нейшем включаться с увеличением диаметра (т. е. когда концевой
выключатель SQ72 будет отжат и его контакты в цепи 56—555
замкнутся), так как замыкающие контакты реле КЗО разомкнуты
(цепь 555—556).
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Перечислите основные виды регулируемых электроприводов, применяемых
в отделочных производствах предприятий отрасли.
2. На каких машинах отделочного производства применяется электропривод
по системе Г—Д? Какова особенность применения системы Г—Д для привода
отделочных агрегатов?
3. Дайте сравнительный технико-экономический анализ тиристорных электро-
приводов и электроприводов по системе Г—Д для привода отделочных агрегатов.
4. Какие требования предъявляются к автоматизированному электроприводу
перематывающих устройств?
5. По какому принципу обеспечивается постоянство скорости и натяжения
перематываемого продукта в перематывающих устройствах?
6. Какие требования предъявляются к автоматизированным электроприво-
дам поточных линий? Как различаются поточные линии по видам связи?
6. ОСВЕТИТЕЛЬНЫЕ УСТАНОВКИ
6.1. СИСТЕМЫ И ВИДЫ ЭЛЕКТРИЧЕСКОГО ОСВЕЩЕНИЯ
На промышленных предприятиях применяют следующие системы
электрического освещения:
общее освещение, предназначенное для освещения рабочих по-
верхностей в цехе, на участке, площадке и т. д. (светильники
освещают всю площадь освещения как занятую оборудованием и
рабочими местами, так и вспомогательную);
местное освещение, служащее для дополнительного локаль-
ного освещения рабочих мест (предназначено для определенного
рабочего места и не создает требуемой освещенности даже при
прилегающих к нему площадках);
комбинированное освещение, совмещающее применение об-
щего и местного освещений.
202
По целевому назначению различаются следующие виды осве-
щения: внутреннее (для создания искусственного освещения
внутри зданий и помещений), наружное освещение вне зданий,
аварийное (для создания возможности временного продолжения
работ или для обеспечения безопасной эвакуации людей из поме-
щения) , рекламное, охранное, дежурное и ряд других специальных
видов.
Доля осветительной нагрузки на предприятиях системы Мин-
легпрома СССР непрерывно растет, является значительной и на
некоторых предприятиях и в объединениях отрасли (например,
на ткацких, швейных и др.) достигает 30 % общей установленной
мощности электроприемников. Работы в основных цехах предприя-
тий текстильной промышленности отличаются высокой зритель-
ной напряженностью на протяжении почти всей рабочей смены,
так как это связано с малыми размерами рассматриваемых из-
делий (нити, узлы, пороки ткани и т. п.), с различной их окраской
и необходимостью правильной цветопередачи и другими при-
чинами.
На промышленных предприятиях отрасли для питания све-
тильников общего освещения в целом применяется напряже-
ние 220 В. Для питания светильников местного стационарного
освещения с лампами накаливания должно применяться напря-
жение не выше 220 В в помещениях без повышенной опас-
ности и не выше 42 В в помещениях с повышенной опасностью
и особо опасных. Светильники с люминесцентными лампами
на напряжение 127—220 В допускается применять для местного
освещения при условии недоступности их токоведущих частей для
случайного прикосновения.
Питание ручных переносных светильников осуществляется
на напряжение не выше 42 В.
Светильники аварийного освещения должны быть присоеди-
нены к источнику питания независимо от рабочего освещения или
автоматически на него переключаться.
Длительное снижение напряжения у наиболее удаленных ламп
внутреннего (рабочего) освещения должно быть не более 2,5 %,
а у наиболее удаленных ламп наружного и аварийного освеще-
ния — не более 5 % (в сетях напряжением до 42 В — не более
10%).
Наибольшее напряжение на лампах не должно быть более
105 % номинального напряжения ламп.
Основными элементами схемы электроснабжения системы
освещения являются источник питания (например, вводный щит
напряжением до 1000 В), магистральный щиток (устанавливае-
мый в местах разветвления питающей сети), осветительные
групповые щитки с аппаратами управления и защиты, линии
групповой сети от групповых щитков до источников света, све-
тильники.
203
6.2. РАСЧЕТНЫЕ ХАРАКТЕРИСТИКИ
И МЕТОДЫ РАСЧЕТА ЭЛЕКТРИЧЕСКОГО
ОСВЕЩЕНИЯ
Основной расчетной, а в промышленности нормируемой харак-
теристикой (величиной) является освещенность Е, которой оце-
нивается уровень освещения. Освещенностью называется вели-
чина, измеряемая отношением светового потока Ф к площади
поверхности S, на которую' он падает, т. е.
£ = ф/£. (6.1)
Единицей освещенности является люкс (лк) — это освещен-
ность поверхности площадью 1 м2 световым потоком 1 лм (лм/м2).
Уровень освещенности на промышленных предприятиях явля-
ется нормируемой величиной и зависит от системы освещения,
типа и мощности светильников, их размещения, технического
состояния осветительной установки. С увеличением уровня осве-
щенности растет производительность труда, улучшается качество
продукции, снижается ее брак.
Мощность электромагнитного излучения характеризуется све-
товым потоком Ф, единицей измерения которого является лю-
мен (лм). Интенсивность излучения светового потока характе-
ризуется силой света
/ = ф/ю, (6.2)
где ю — телесный угол, в пределах которого распространяется световой по-
ток Ф, стерадиан (ср), равный to = S//?2 (S — площадь, вырезанная из сферы
радиуса R, м2).
Единицей силы света является кандела (кд) — это световой
поток в 1 лм, испускаемый точечным источником в телесном угле
1 ср (лм/ср).
Единицей яркости является кандела на квадратный метр
(кд/м2).
Строя элементарный телесный угол </<о, опирающийся на
элементарную площадь dS и считая, что в этом угле излучается
поток dF, получим, что освещенность E = dF/dS.
Поскольку из формулы (6.2) dF—ldio, то
d(f> = dS cos а//2,
где а — угол между лучом и нормалью к поверхности в точке падения луча;
/ — расстояние от источника света до точки, м.
Окончательно получим следующую формулу освещенности,
применяемую наряду с формулой (6,1) для расчетов:
E=/coscc//2. (6.3)
Для практических целей эту формулу преобразуют примени-
тельно к случаю освещенности для горизонтальной поверхности
204
Рис. 6.1. Схема освещенности горизонтальной по- _ N
верхности 5 П Г j (
(рис. 6.1). когда положение точки опре-
деляется координатами d (горизонтальное X.
расстояние) и h (расчетная высота). х.
В этом случае формула (6.3) примет вид
E=/Xf2 — J2/г3 =/а cos3 а/Л2. (6.3')
В расчетах используются еще такие ----------------------X
показатели, как световая лучеиспускае- А
мость (лм/м2), коэффициенты яркости,
отражения, пропускания и поглощения, а также показатель
светимости, равный отношению светового потока, отражаемого
или пропускаемого поверхностью, к ее площади.
При использовании формулы (6.1) расчет освещенности про-
водится по методу коэффициента использования, применение
которого позволяет обеспечить среднюю освещенность горизон-
тальной поверхности с учетом всех падающих на нее прямых и
отраженных потоков. Поэтому данный метод применяется для
расчета общего равномерного освещения горизонтальных поверх-
ностей, а также для расчета наружного освещения в случаях,
когда нормирована средняя освещенность.
При использовании формулы (6.3) расчет освещенности про-
водится по так называемому точечному методу, позволяющему
обеспечить заданное распределение освещенности на как угодно
расположенных поверхностях, но лишь приближенно учесть свет,
отражаемый поверхностями помещения.
Данный метод применяется для расчета общего равномер-
ного и локализованного освещения помещения и открытых про-
странств, а также для расчета местного освещения.
Метод коэффициента использования более прост, но для боль-
ших производственных помещений желательно использовать то-
чечный метод, позволяющий обеспечить не только заданную
наименьшую освещенность, но и провести анализ распределения
освещенности по всей освещаемой поверхности.
В ряде случаев, например для расчета освещения негори-
зонтальных поверхностей, когда отраженный свет играет значи-
тельную роль, применяется комбинированный метод расчета с
использованием общих методов.
Ниже приводится сокращенное изложение обоих методов
расчета.
Метод коэффициента использования. Если в помещении нахо-
дится N светильников с потоком ламп в каждом из них Ф, то это
не значит, что весь поток Л/Ф падает на освещаемую поверхность,
поскольку имеются потери потока в светильниках, на стенах и
потолках помещения.
205
Полезным является поток с учетом коэффициента использо-
вания /(и, равного отношению потока, падающего на освещаемую
поверхность, ко всему потоку ламп, т. е. величина КнМФ. Значе-
ние К» табулируется.
Распределяясь по площади S, этот поток создает на ней сред-
нюю освещенность:
Ecp=KKN®/S.
Так как на практике необходим расчет на минимальную осве-
щенность, то, введя коэффициент минимальной освещенности
2 ^^Еср/ЕМин»
получим
Е'мин = /СЛФ/(5г).
С учетом коэффициента запаса К для обеспечения нормирован-
ной освещенности окончательно
£ = КЛФ/(£гК).
Из этой формулы при необходимости можно получить значения
потока
<X)=ESzK/(K„N)
или числа светильников
А = Е$2К/(ФКИ). (6.4)
Коэффициент z зависит от расстояния между светильниками,
размеров и формы помещения, коэффициента отражения его по-
верхностей и характеристик светильника. При расчете средней
освещенности z не учитывается.
Порядок расчета зависит от размеров и формы помещения,
что учитывается характеристикой — индексом помещения
t=S/[ft(A + £)], (6.5)
где h — расчетная высота; А и В — стороны помещения.
Точечный метод. Расчет по точечному методу в основном про-
водится с использованием графиков и таблиц. Например, про-
ведем расчет с использованием кривых относительной освещен-
ности по методу Р. А. Сапожникова. Освещенность точки А го-
ризонтальной поверхности (см. рис. 6.1) выражается форму-
лой (6.3).
Освещенность рассчитывается не вообще, а для лампы 1000 лм.
Если же требуется найти освещенность для лампы с любым зна-
чением Ф, то дополнительно вводится множитель Ф/1000 и фор-
мула (6.3) примет вид
£ = Ф/асоз3 а/(1000/?2). (6.6)
206
Рис. 6.2. График освещенности для
светильника УПД ДРЛ
Предположим, что числи-
тель формулы (6.6) является
относительной освещенностью е,
т. е. эта величина численно со-
ответствует освещенности точ-
ки а (см. рис. 6.1), расположен-
ной на том же луче, что и точка
А, но на плоскости, по отноше-
нию к которой высота установки
светильника равна 1 м. В этом
случае формула (6.6) примет
вид
е=е/Л2,
где е = /а cos3 а.
Относительная освещен-
ность выражена графически
кривыми в функции отношения
d'.h, что соответствует абсциссе
точки а на рис. 6.1. Иногда аргумент заменяют на отношение h-.d.
Пример графика для светильника УПД ДРЛ (пригодного для
ламп мощностью от 250 до 700 Вт) показан на рис.' 6.2.
Пример. Определить освещенность горизонтальной поверхности в точке,
лежащей посередине между двумя светильниками УПД ДРЛ с лампами мощ-
ностью по 250 Вт, имеющими поток 11 000 лм, подвешенными на высоте 5 м на
расстоянии 12 м друг от друга.
Решение. 1. При высоте /г = 5 м и расстоянии точки от светильников по 6 м в обе
стороны h : d = 5 : 6=0,83.
2. По нижней ветви графика (см. рис. 6.2) определяем е=34 лк.
3. По формуле (6.6) определяем освещенность: £=11 000-2-42/(1000-52) =
= 37 лк.
При расчете по точечному методу могут быть использованы пространствен-
ные изолюксы условной горизонтальной освещенности, разработанные А. А. Тру-
хановым. Они позволяют упростить расчет из-за устранения промежуточных
операций по определению аргумента d : h (или h-.d) и операции деления на Л2.
В этом случае относительная освещенность е (т. е. освещенность, создаваемая
на конкретной поверхности от светильника с лампой в 1000 лм) при заданном
светораспределении изображена изолюксами (кривыми равных значений), по-
строенными в координатной плоскости d = h.
Известны расчетные графики под названием «условные изолюксы», разра-
ботанные Г. М. Кноррингом, которые предназначены для определения относи-
тельной освещенности от светильников с некруглосимметричным светораспре-
делением, когда рассмотренные выше графики не могут быть применены.
Па предприятиях текстильной промышленности широко применяется лю-
минесцентное освещение. Для такого освещения целесообразно вести так назы-
ваемый расчет освещенности от светящихся линий, т. е. от излучателей длиной
более 0,5 высоты их установки. По данному методу для практических расчетов
можно воспользоваться выражением
£ = ф'е/(1000/г),
207
где Ф' — удельный поток, т. е. световой поток ламп в линии, отнесенный к единице
длины этой линии.
Учитывая, что контрольная точка может освещаться несколькими линиями,
которые создают в ней суммарную относительную освещенность е, получим, что
Ф' = 1000£Л/1/(р.Хе)
и
£ = Ф'р.2е/ (1 OOOkh),
где k — коэффициент запаса; р, — коэффициент дополнительной освещенности.
6.3. ХАРАКТЕРИСТИКА И КЛАССИФИКАЦИЯ
ЛАМП И СВЕТИЛЬНИКОВ
В осветительных установках имеется возможность широкого при-
менения различных источников света и светильников. Рассмотрим
основные из них.
Характеристика и выбор ламп. Различают лампы накаливания,
диодно-ртутные (ДРЛ, ДРИ), ксеноновые и др.
Лампы накаливания выпускаются основной серией на
мощности от 15 до 1500 Вт для напряжений 127 и 220 В и имеют
следующую маркировку: В — вакуумные, Г — газонаполненные,
К — с криптоновым наполнением, Б — биспиральные лампы.
Широкое распространение имеют лампы местного освещения
на напряжение 12, 24, 36 В мощностью до 100 Вт, а также лампы
специального назначения. Данный источник света является на-
дежным и имеет простую схему включения, включается непо-
средственно в сеть, устойчив к изменениям условий внешней
среды, но чрезвычайно чувствителен к отклонениям напряжения.
Применение наиболее эффективных типов ламп накаливания
обеспечивает снижение расхода электроэнергии в сетях предприя-
тий. Простота конструкции и удобство в эксплуатации ламп
накаливания является причиной широкого их применения на про-
мышленных предприятиях.
В табл. 3 приведены сравнительные данные о световом потоке
ламп накаливания.
Люминесцентные лампы являются основными источ-
никами света на предприятиях текстильной промышленности и по
своим характеристикам резко отличаются от ламп накаливания.
Люминесцентные лампы разделяются на лампы белого света
(ЛБ), холодно-белого света (ЛХБ), дневного света (ЛД), днев-
ного света улучшенной цветопередачи (ЛДЦ), тепло-белого
света (ЛТБ) и холодно-белого света улучшенной цветопере-
дачи (ЛЕ или ЛХБЦ).
Для зажигания и горения лампы необходимо включение по-
следовательно с ней пускорегулирующей аппаратуры (ПРА),
которая включается по разным схемам (например, по схемам,
приведенным на рис. 6.3). Это вызвано тем, что газоразрядные
208
Таблица 3
Мощность лампы, Вт Световой поток, лм, лампы типа
НБ-127 НБК 127 НГ-127 НБ-220 НБК-220 НГ-220
40 440 490 370 430 —
60 740 820 — 620 700 —
75 960 1030 — 840 950 —
100 1400 1560 — 1240 1360 —
150 — — 2300 2050 — 1900
200 — — 3200 — — 2700
300 — — 5150 — — 4350
500 — — 9100 — — 8100
750 — — 14250 — — 13100
1000 — — 19590 — — 18200
1500 — — 29500 — — 28000
лампы обладают падающей вольт-амперной характеристикой: при
увеличении тока лампы напряжение на ней уменьшается. В связи
с этим включение лампы непосредственно в сеть привело бы к
резкому неограниченному росту тока и перегоранию лампы.
Различаются стартерные аппараты УБ (рис. 6.3, а) и бесстар-
терные АБ (рис. 6.3,6). В аппаратах УБ подогрев электродов
обеспечивается кратковременным замыканием контактов стартера,
включенного параллельно лампе, а в аппаратах АБ — подачей
напряжения от специальных витков дроссельной катушки. Кроме
того, по своим характеристикам ПРА разделяются на индуктив-
ные (И), емкостные (Е) и компенсированные (К), а также на
аппараты с нормальным, пониженным (П) и особо низким (ПП)
уровнем шума и ряд других специальных ПРА.
В качестве стартера (пускателя) S на рис. 6.3, а используется
неоновая лампочка с биметаллическим электродом, в которой
при включении в сеть возникает тлеющий разряд, нагревающий
биметаллический электрод. Этот электрод изгибается и касается
второго электрода стартера, в результате чего цепь замыкается
и возникает ток, который и прогревает электроды люминесцент-
Рис. 6.3. Электрические схемы ПРА 1 |[-
люминесцентных ламп:
а — стартерных ПРА; б — бесстартер- д
ныхПРА (аппарат типа 1АБИ-80/220В) О
209
ной лампы HL. Когда биметаллический электрод остывает, что
имеет место после прекращения тлеющего разряда вследствие
замыкания электродов стартера, то он выпрямляется и разрывает
цепь тока. В момент разрыва этой цепи в дросселе L, представ-
ляющем собой катушку со стальным сердечником, за счет резкого
изменения тока возникает импульс напряжения, достаточный для
пробоя дугового столба люминесцентной лампы, которая зажи-
гается и шунтирует стартер. Поэтому в стартере при горении
лампы тлеющий разряд не возникает.
При работе люминесцентных ламп с некомпенсированным
ПРА их коэффициент мощности равен 0,35—0,5 в зависимости от
мощности ламп, а с компенсированным ПРА — 0,85—0,92.
Формы люминесцентных ламп могут быть прямыми (на мощ-
ность 4—150 Вт), U-образными (8—80 Вт), W-образными (30 Вт)
и кольцевыми (20—40 Вт).
При выборе люминесцентных ламп надо учитывать, что наибо-
лее экономичными и универсальными для применения являются
люминесцентные лампы типа ЛБ, которые имеют световой поток
больше на 5—10 %, чем у ламп типа ЛХБ; на 16—22 %, чем у
ламп типа ЛД, и на 28—38 %, чем у ламп типа ЛДЦ.
Люминесцентные лампы находят широкое применение в цехах
предприятий текстильной промышленности в силу их экономич-
ности по расходу электроэнергии, что позволило в 2—3 раза повы-
сить нормы освещенности, не увеличивая доли расхода электро-
энергии.
Лампы дуговые ртутные четырехэлектродные
(ДРЛ) высокого давления с люминофорным покрытием на колбе
выпускаются в пределах мощности 80—2000 Вт. Эти лампы вклю-
чаются через одноламповые индуктивные ПРА с коэффициен-
том мощности порядка 0,5.
Лампы предназначены для работы в наружной сети напряже-
нием 220 В (кроме ламп мощностью 2000 Вт). Они компактны
при высокой единичной мощности, но имеют плохую цветопередачу
излучения. Продолжительность разгорания ламп после включения
составляет 5—7 мин. Они надежно работают при температуре
до —25 °C и при напряжении не менее 90 % номинального.
Металлогалогенные (ДРИ) и натриевые лампы
высокого давления (ДНаТ), разработанные сравнительно
недавно, очень перспективны. Лампы ДРИ являются результатом
совершенствования ламп ДРЛ за счет добавления в разрядную
трубку галоидных соединений различных металлов. Они выпуска-
ются на мощности 250, 400, 700, 1000 и 2000 Вт.
Лампы ДНаТ имеют самую высокую световую отдачу (до
180 лм/Вт), но желтый цвет, и применяются лишь в специальных
случаях, например для освещения загородных автострад. Эти лам-
пы включаются в сеть также через однофазные индуктивные ПРА
со средним коэффициентом мощности 0,5.
210
Ксеноновые лампы, выпускаемые на большие мощности
(5000—100 000 Вт), используются в осветительных сетях (с огра-
ниченным применением).
Соответствующий подбор ламп имеет существенное значение
для эффективности текстильного производства и экономного рас-
ходования электрической энергии в осветительных сетях.
Так, световая отдача газоразрядных ламп значительно пре-
восходит световую отдачу ламп накаливания, что видно из следую-
щих показателей:
Лампы
Накаливания
Дуговые ртутные типа ДРЛ
Ксеноновые
Люминесцентные
Металлогаллогенные типа ДРИ
Световая отдача,
лм/Вт
10—20
35—55
20—32
42—62
64—90
.Пампы накаливания имеют более низкий КПД по сравнению с
газоразрядными лампами. Так, если видимое излучение их состав-
ляет не более 6 % потребляемой мощности, то у газоразрядных
ламп оно превышает 17 %.
Ниже приведена ожидаемая экономия электроэнергии за счет
перехода на более эффективные источники света.
Заменяемые источники
света (лампы)
Люминесцентные на металлогало-
генные
Ртутные на
л юм инесцентные
металлогалогенные
натриевые
Накаливания на
ртутные
люминесцентные
металлогалогенные
натриевые
Ожидаемая эконо-
мия электроэнер-
гии, %
— 1...-Ч-43
-3... + 42
22...56
26...59
23...57
40...60
55...75
57...76
Характеристика светильников. Светильники предназначены для
освещения на расстоянии не более 30 м и состоят из источников
света (ламп) и комплекса устройств для распределения светового
потока источника света, предохранения его от загрязнения и меха-
нических повреждений и защиты глаз от излишней яркости. Вся
совокупность этих устройств называется осветительной арматурой.
Перераспределение светового потока неизбежно связано с по-
терями светового потока, что характеризуется КПД светильника,
т. е. отношением потока светильника к потоку установленной в
нем лампы. Другими характеристиками светильников являются
защитный угол и светораспределение (кривые распределения силы
света). Излучаемый световой поток может быть различно распре-
211
делен в пространстве. Его распределение по отдельным направле-
ниям пространства характеризуется кривыми силы света.
Различают следующие основные типы кривых силы света:
К — концентрированная, Г — глубокая, Д — косинусная, Л —
полуширокая, М—равномерная, Ш — широкая, С — синусная.
По ГОСТ 14255—69 («Аппараты электрические на напряже-
ние до 1000 В. Оболочки. Степени защиты») светильники клас-
сифицируются по степени защиты от пыли (открытые, перекрытые
с неуплотненной светонепроницаемой оболочкой, пылезащищен-
ные, с ограниченной зоной пылезащиты только в пределах
расположения контактных частей, пыленепроницаемые и с
ограниченной зоной пыленепроницаемости) и воды (незащищен-
ные, каплезащищенные, дождезащищенные, брызгозащищенные,
струезащищенные и др.).
Кроме того, светильники классифицируются по климатиче-
скому исполнению — для умеренного климата У, тропического
климата Т и др.
В настоящее время в промышленности созданы принципиально
новые светильники, так называемые щелевые светильники-свето-
воды (ЩСС). Принцип действия ЩСС заключается в том, что
лучи, падающие на поверхность зеркальной трубы со щелью
(труба имеет высокий коэффициент отражения), будут отра-
жаться, идти по трубе дальше, опять отражаться и т. д. При этом
часть светового потока будет попадать в щель и выходить из нее.
Условиями нормальной работы ЩСС, заключающимися в
выходе значительной части светового потока через щель и равно-
мерно распределяемого по всей ее длине, являются высокий
коэффициент отражения зеркальной поверхности трубы и строго
подобранная (рассчитанная) структура светового потока.
Щелевые светильники-световоды целесообразно применять для
обеспечения нормированной освещенности на больших площадях,
для чего в II ICC необходимо вводить очень большие потоки.
Поэтому наиболее подходящими для ЩСС источниками света
являются лампы ДРИ. В настоящее время начали применяться
вводные устройства по 8 ламп (3500 Вт) в каждом с односторон-
ними (с торца трубы) или двусторонними (в рассечку двух труб)
вводами.
Система ЩСС представляет собой комплексное осветитель-
ное устройство, состоящее из специальных камер с вводными
устройствами, электроаппаратуры для питания и управления
источниками света. Питание ЩСС возможно осуществить также
и от сети напряжением 6—10 кВ по схеме «глубокого» ввода.
Применение ЩСС является перспективным; их трубы, выпол-
ненные из тонких пленочных материалов, являются эстетически
более предпочтительными по сравнению с существующими све-
тильниками; они экономичны и просты в обслуживании, электро-
и взрывобезопасны.
212
Светильники могут иметь как собственное наименование
(Люцетта, Астра), так быть и со специальной маркировкой
(ПВЛ — пыле- и влагозащищенный люминесцентный). Например,
ЛВП06-2Х80-013-УЗ: Л — люминесцентный (Н—лампа нака-
ливания, И — галогенные лампы КГ, Р — лампы ДРЛ, Г — лампы
ДРИ, Ж—натриевые лампы, К — ксеноновые лампы); В —
встраиваемые (С — подвесные, П — потолочные, Б — настенные,
Н — настольные, Т — напольные, К — консольные и др.); П —
светильник для промышленных предприятий (О — для обществен-
ных зданий, У — для наружного освещения и др.); 06 — номер
серии; 2X80 — число и мощность ламп (цифра 1 в обозначении
не указывается) ; 013 — номер модификации; УЗ — климатическое
исполнение и категория размещения.
В настоящее время имеется большой выбор сортамента и
порядка 1000 типоразмеров светильников различных модифика-
ций. Одни из них снабжены рассеивателями, другие — экрани-
рующими решетками, которые не только создают необходимый
защитный угол, но и улучшают внешний вид светильника. Име-
ются светильники с призматическими стеклами, создающие свето-
распределение, используя явление преломления света, и резко
ограничивающие слепящую силу света.
В текстильной промышленности наиболее широкое примене-
ние в качестве основных источников света имеют люминесцент-
ные лампы. Особенностью зрительной работы на предприятиях
отрасли является необходимость различать цветовые оттенки
как полуфабриката, так и готовой продукции, а также мелкие
пороки ткани, обрывы нитей, складки и замины на ткани и т. п.
Все это связано с большим напряжением зрения. Поэтому норми-
рованные значения уровней освещенности в производственных
цехах предприятий текстильной промышленности высокие и для их
обеспечения наиболее предпочтительными являются люминесцент-
ные лампы. Кроме того, люминесцентные лампы как более удоб-
ные и безопасные по сравнению с лампами накаливания широко
используются на предприятиях отрасли для подсветки ткани в
качестве местного освещения.
Лампы накаливания в основном применяются для освещения
подвалов, туннелей, помещений вентустановок и т. п., там, где
нет необходимости длительного пребывания людей.
6.4. ВЫПОЛНЕНИЕ ОСВЕТИТЕЛЬНЫХ СЕТЕЙ
Сети освещения имеют наиболее широкое распространение, так
как проложены во всех основных и вспомогательных зданиях и
помещениях. Выполнение электрических сетей строго регламенти-
руется действующими Правилами устройства электроустановок
(ПУЭ) и Строительными нормами и правилами (СНиП).
Проводка электрической сети освещения может быть выпол-
213
1
Рис. 6.4. Секция закрытого шинопровода с ее деталями
йена открытой, открытой в трубах или скрытой. Предпочтение
отдается более эстетичным скрытым проводкам, которые обладают
еще рядом преимуществ: сокращенные объем и сроки монтажа,
более высокая долговечность из-за меньшей подверженности
влиянию окружающей среды и др. Открытая проводка исполь-
зуется в деревянных зданиях и помещениях. Она имеет ряд отли-
чительных от скрытой проводки достоинств, а именно: позволяет
обеспечить замену проводов, вносить изменения и дополнения в
схему, удобна для обслуживания.
В качестве проводников в осветительных сетях применяются
как провода, так и кабели. Соединения и ответвления этих про-
водов и кабелей выполняются в специальных проходных, кре-
стовых или тройниковых коробках. „
Кабели и провода могут быть проложены непосредственно по
стенам и потолкам с креплениями скобами на дюбелях, в спе-
циальных лотках по общей трассе с креплением полосками-стяж-
ками, в стальных водогазопроводных и винипластовых трубах,
в виде тросовых проводок с креплением к струне бандажными
скобками из проволоки-катанки, а также в виде шинопроводов.
Отечественные заводы серийно выпускают шинопроводы трех-
фазные четырехпроводные типа ШОС на токи 26, 63 и 100 А,
в комплекте которых содержатся детали для подвески шино-
провода и соединения, а также контактные разъемные соедине-
ния для подключения светильников. Шинопроводы обычно выпол-
няются секциями длиной, как правило, 6 м с ответвлениями
через I м.
На рис. 6.4 представлена секция закрытого шинопровода 1 с
ее деталями: 2 — короб, 3 — шина, 4 — изолятор-камера, 5 —
изоляторы концевые в обойме.
Шинопроводы являются удобным средством проводки, так как
позволяют по мере необходимости увеличивать, уменьшать или
переставлять светильники.
Наружные сети освещения выполняются кабелями в траншеях,
кабельных сооружениях или воздушными линиями в виде голых
алюминиевых проводов на изоляторах по опорам.
Линии аварийного освещения зданий и помещений проклады-
ваются, как правило, отдельно от линий рабочего освещения.
Их прокладка допускается по внешней поверхности корпусов
шинопроводов рабочего освещения, по общим с линиями осве-
щения тросам и струнам при расстоянии от них в свету не менее
214
20 мм, а также совместно с проводами рабочего освещения, но при
невозможности соприкосновения с ними, в коробах для подвески
люминесцентных светильников и в их специальных полостях,
предназначенных для прокладки проводов.
Все проводники осветительных сетей выбираются по току на-
грузки и рассчитываются по потере напряжения.
Для защиты осветительных сетей от аварийных режимов (ко-
ротких замыканий, недопустимых перегрузок и др.) применяются
предохранители (пробочные или трубчатые) и автоматические
выключатели с тепловыми, электромагнитными или комбиниро-
ванными расцепителями. Аппараты защиты должны устанавли-
ваться на отходящих от вводных щитов и групповых осветитель-
ных щитков линиях, в местах присоединения осветительной сети
к силовым магистралям, на вводах в здания и помещения при
питании от отдельно стоящих подстанций или подстанций, не
обслуживаемых персоналом, со стороны высшего и низшего на-
пряжения силовых трансформаторов напряжением 12—36 В,
а также в местах изменения сечения линии. Эти аппараты
должны устанавливаться во всех фазах (полюсах), а на нулевых
проводах они устанавливаются только в двухпроводных линиях
взрывоопасных помещений соответствующей категории.
Все лампы и ПРА перед установкой, как правило, проверяются
на специальном стенде. Для определения неисправности отдельных
элементов осветительной установки с люминесцентными лампа-
ми, включенными по стартерной схеме, можно пользоваться проб-
ником-зажигателем и испытателем, общий вид и схема которых
приведены на рис. 6.5.
Пробник-зажигатель (рис. 6.5, а) представляет собой дере-
вянную ручку, на торце которой укреплены накоротко замкнутые
штырьки. Испытатель (рис. 6.5, б) выполняется в виде трубки из
пластмассы или гетинакса, по длине точно соответствующей раз-
Рис. 6.5. Пробник-зажигатель:
а — деревянная ручка; б — испытатель; в — обший вид и схема испытателя
люминесцентных ламп, работающих в бесстартерных схемах
215
Рис. 6.6. Внешний вид
проверочного стенда для
светильников с люмине-
сцентйыми лампами
меру люминесцентной лампы. На концах трубки в деревянные
пробки заделано по два штырька аналогично штырькам на цо-
колях лампы. Штырьки соединены между собой накоротко и
присоединены к контрольным лампам HL мощностью по 75—
100 Вт напряжением 127 В. Вставляя пробник-зажигатель в цепь
пусковых нитей (на место стартера) и вынимая оттуда, можно
установить исправность стартера. Если при включении и отключе-
нии пробника лампа не зажглась, это свидетельствует о том, что
стартер неисправен и его необходимо заменить новым.
Если же лампу пробник не зажег, это указывает на возмож-
ность неисправности лампы или дросселя, или обрыва в цепи
питания.
Для установления причин неисправности установки в данном
случае удобно пользоваться испытателем. Испытатель устанавли-
вают на место негорящей лампы.
Если схема в порядке, обе контрольные лампы испытателя
зажигаются в полнакала, а при обрыве проводника в схеме пита-
ния или в обмотке дросселя контрольные лампы не загорятся.
При коротком замыкании дросселя лампы загораются полным
накалом.
Для проверки состояния изоляции проводов приборов схемы
пользуются щупом 1.
Для проверки люминесцентных ламп, работающих в схемах
быстрого зажигания (без стартера), можно пользоваться испы-
тателем иной конструкции. Общий вид и схема такого испытателя
приведены на рис. 6.5, в. Штырьки испытателя не соединены
накоротко, а присоединены к двум дополнительным лампам (типа
автомобильных) HL1 и HL2 напряжением 12 В, ток 0,5 А. В цепь
216
испытателя включен вольтметр PV и последовательно через вы-
ключатель две лампы накаливания (75—100 Вт, 127 В) HL3u HL4.
После установки испытателя вместо люминесцентной лампы по
накалу малых контрольных ламп определяется исправность
накальных обмоток или цепи питания накального трансформатора.
По вольтметру определяют величину зажигающего напряжения.
Включением больших контрольных ламп проверяется авто-
регулировка напряжения накала (накал малых контрольных
ламп должен резко уменьшиться). По накалу больших контроль-
ных ламп судят о состоянии сети питания дросселя и годности
люминесцентных ламп согласно приведенному выше описанию.
На предприятиях, где установлено большое количество све-
тильников с люминесцентными лампами, рекомендуется обору-
довать проверочный стенд, внешний вид которого приведен
на рис. 6.6.
6.5. РАСЧЕТ ЭЛЕКТРИЧЕСКОЙ СЕТИ
ОСВЕЩЕНИЯ
Целью расчета является выбор марки и сечения питающих про-
водов по расчетному току нагрузки с проверкой их на потерю
напряжения. Расчетная мощность электрической сети освещения
Рр, кВт,
Рр = 2РномАс,
где — суммарная номинальная (установленная) мощность сети освещения
с учетом мощности всех ламп, номинальных мощностей трансформаторов напря-
жением 12—42 В и потерь в ПРА, кВт; Кс — коэффициент спроса, учитывающий,
что даже в часы максимума нагрузки могут работать не все лампы; Кс=0,8...1 —
для линий питающей сети; Кс=1 —для аварийного, наружного и всех линий
групповой сети освещения.
Расчетный ток, А,
/р= 1000 Рр/ (-\/3coscp) —для трехфазных линий;
/р= 1000 Рр/ (б/фсоэфф) — для однофазных линий.
Для обеспечения пожарной безопасности и долговечности изо-
ляции проводов их ограничивают по температуре, и допустимая
величина тока в зависимости от сечения проводников табули-
руется в справочниках и каталогах.
Одним из важных показателей работы осветительных сетей
является поддержание необходимого уровня напряжения ламп.
Напряжение на зажимах ламп отличается от номинального вслед-
ствие падения его в питающих проводах. Это отклонение не
должно превышать предельно допустимых значений (т. е. более
чем на 2,5 %).
На рис. 6.7 приведена векторная диаграмма для одной фазы
трехфазной сети, на которой обозначено: — фазное напряже-
217
с
Рис. 6.7. Векторная диаграмма одноли-
нейной схемы трехфазной сети
ние в начале линии, — фазное напряжение в конце линии,
угол <р — угол, на который ток / отстает от напряжения в силу
того, что нагрузка в осветительной сети имеет активно-индук-
тивный характер.
При расчете осветительной сети практическое значение имеет
потеря напряжения, т. е. арифметическая разность напряжений
ДП=П|ф—t/гф, которую необходимо отличать от падения напря-
жения, т. е. геометрической разности:
lZ=U 1 ф-- б^2ф.
Потеря напряжения на векторной диаграмме представлена
отрезком ad, а для упрощения расчетных формул — отрезком
ае, который является проекцией вектора падения напряжения на
продолжение вектора Д2ф.
Из векторной диаграммы рис. 6:7 следует, что потеря напря-
жения
Д67 = ae — af-\-fe = Ir cos ф + /х sin <р.
Так как при расчетах за величину тока принимается его расчет-
ное значение /р и пользуются сопротивлением линии на 1 м ее
длины, то получаем следующую формулу, %:
ДП= 100/р/(г cos ф + х sin ф)/67ф, (6.7)
где / — длина линии в один конец, м; г и х — соответственно активное и реактивное
сопротивления, отнесенные к I м длины линии, Ом/м.
Учитывая практически малые значения х и sin. ф и заменяя
величину г через удельную проводимость у, а значение тока /р
выражая через мощность Р (кВт), преобразуя формулу (6.7),
получаем соответственно для трехфазной и однофазной линий
W=10"Pp//(^n2V(?);|
ДП = 2-10“Рр//(П2у<7), J
где q - сечение провода, мм2.
Для удобства расчетов по формулам (6.8) выразим произведе-
ние Р1 (по методике Г. М. Кнорринга) через так называемый
момент нагрузки М (кВт-м), величина которого табулируется в
справочных данных. Остальные величины в формулах (6.8),
кроме сечения q, выразим через 1/С, в результате чего получаем
следующую формулу: .
ДП = М/(С<7). (6.9)
218
Значения коэффициента С зависят от напряжения, числа фаз
сети и рода проводникового материала. Например, для алюми-
ниевых проводников эти значения приводятся в табл. 4.
Таблица 4
Род линии Напряжение сети, В Значение коэффициента С
Трехфазная 380/220 44
Из двух фаз и нулевого провода 380/220 19,5
Однофазная 220 7,4
» 36 0,198
.» 24 0,088
» 12 0,022
Пример. В швейном цехе трикотажной фабрики установлено 563 светильника
типа ПВЛМ-ДР-2Х 80 с лампами типа ЛХБ-80-4 напряжением 220 В; коэффи-
циент, учитывающий потери в ПРА An=l,25; costp=0,92; наибольшее число
светильников в одной группе равно 15; всего 40 групп светильников. Выполнить
расчет освещения швейного цеха.
Решение. 1. Суммарная мощность всех светильников
ХР„о„ = Рс/гАп; 2РНОМ = 2-80-536-1,25=107,2 кВт.
2. Ток одного светильника
lc=Pc/(U cos <р); /с = 2-80-1,25/(220-0,92) =0,99 А.
3. Ток наибольшей группы светильников
/гр = hjc; /гр = 15 • 0,99 = 15 А.
4. Для питания светильников выбираем провод марки АПВ-500 (алюми-
ниевый с поливинилхлоридной изоляцией) сечением 4 мм2, для которого допу-
стимый ток по условиям нагрева составляет 28 А.
5. Для подключения рядов светильников выбираем распределительные
пункты серии ПР-9000 с автоматическими выключателями АЗ 100 в навесном
защищенном с уплотнением исполнением типа ПР9232-208 с одним вводным
автоматом А3120 и 12 линейными автоматами А3161. Для подключения всех
40 групп требуется четыре распределительных пункта. На два распределитель-
ных пункта предусматривается один питающий кабель.
Общая мощность рядов, подключаемых к распределительным пунктам на
один питающий кабель (т. е. к двум распределительным пунктам с количеством
28-4 и 27-6 светильников), составит
Рр= (28-4-J-27-6)2-80-1,25 =55,4 кВт.
6. Ток в питающем кабеле
cos <р) = 55 400/(^3-380-0,92) =91,5 А.
7. Выбираем кабель марки АВРГ (алюминиевый с резиновой изоляцией
в поливинилхлоридной герметической оболочке) сечением 4X70 мм2, для кото-
рого длительно допустимый ток по условиям нагрева в воздухе равен 126 А.
В нулевом проводе сечение выбрано той же величины, что и в фазных проводах.
8. Проверяем потерю напряжения, используя формулу (6.9):
для первого участка Д{7| = 2,8-22/(7,4-4) =2,01 %;
для второго участка АПг = 55,4-26/(44-70) =0,47 %,
219
Гриппобыешиты
щт f/SjuZ Т~\
Ряд сбетильткоб
П8ЛМ-2х80 14шт.
L2^26n 55,4 квтпЪ=22н.
(г,вквп1)
380/2208
"[ г\
I
wzJsS
&Ui______
ли
О
&Ui
РП1
/%Л Г
QF3\QM\
(83161) J.
. Л с-.
of8\
2208
2208
РМ\ 1
QF9\0F1O\
Рис. 6.8. Расчетная схема осветитель-
ной сети:
а — в планировочном виде; б — электри-
ческая схема
0 0 О'
/7/7 J1
0 0 0
где 2,8 и 55,4 — расчетные нагрузки соответственно на первом и втором участ-
ках (см. расчетную схему на рис. 6.8), кВт; 22 и 26 — длины рассчитываемых
участков, м; 7,4 и 44 — коэффициенты, определяемые из табл. 4 соответственно
для первого и второго участка; 4 и 70 — сечения соответственно первого и
второго участка, мм2.
9 Общая потеря напряжения \U = 2,01 +0,47 = 2,48 %, что не превышает
допустимые 2,5 %.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Какие системы электрического освещения используются на промышлен-
ных предприятиях?
2. Какое напряжение должно применяться для питания светильников
местного стационарного освещения в производственных цехах предприятия?
Допускается ли применять для местного освещения светильники с люминесцент-
ными лампами на напряжение 127 и 220 В?
3. Какова допустимая величина длительного снижения напряжения у наибо-
лее удаленных ламп рабочего освещения и у наиболее удаленных ламп наружного
и аварийного освещения?
4. Дайте характеристику и приведите формулы для определения основных
показателей в системе освещения: освещенности, мощности электрического осве-
щения, светового потока и интенсивности его излучения.
5. В чем заключается суть расчета освещенности по методу коэффициента
использования?
6. В чем заключается суть расчета освещенности по точечному методу?
7. Что собой характеризует и от каких параметров зависит индекс по-
мещения?
8. Какие источники света применяются в системах общего освещения на
предприятиях текстильной промышленности? Дайте характеристики и методы
выбора ламп.
9. В чем заключается конструктивное исполнение и принцип действия
щелевых светильников-световодов?
10. Дайте полное название светильника ЛВПО6-2Х 40-УЗ.
11. По каким условиям производится выбор и расчет проводников в осве-
тительных сетях?
12. Каковы причины мигания новой люминесцентной лампы при включении
ее в сеть и каковы меры по устранению этих причин?
13. Приведите способы экономии электрической энергии в осветительных
сетях за счет рационального подбора источников света.
14. Дайте сравнительный анализ и области применения существующих
способов расчета освещенности.
220
7. ЭЛЕКТРОСНАБЖЕНИЕ ПРЕДПРИЯТИЙ
7.1. ЭЛЕКТРОУСТАНОВКИ И СИСТЕМЫ
ЭЛЕКТРОСНАБЖЕНИЯ ПРЕДПРИЯТИЙ*
Общие сведения. Электрооборудованием именуют обору-
дование, предназначенное для производства, передачи, преобра-
зования, распределения или использования электрической энергии.
Установки, в которых применено электрооборудование для осу-
ществления одной или нескольких из перечисленных функций,
являются электроустановками. К их числу относятся
электрические станции, подстанции, линии электропередачи, рас-
пределительные сети, осветительные установки, электроприводы
машин и др.
Выполнение электроустановок должно отвечать требованиям
Правил устройства электроустановок (ПУЭ), являющихся союз-
ным директивным документом, обязательным для всех ведомств
страны. В соответствии с ПУЭ все электроустановки разделяются
на электроустановки напряжением до 1000 В и электроустановки
напряжением выше 1000 В. К числу первых относятся уста-
новки с номинальным линейным напряжением 220, 380 и 660 В,
к числу вторых — с напряжением 3, 6, 10, 35, 110 кВ и более.
Первые обычно именуют установками низкого напряжения (н. н.),
вторые — установками высокого напряжения (в. н.).
Электроснабжение — это обеспечение потребителей
электроэнергией. Оно осуществляется с помощью системы
электроснабжения (СЭС), т. е. совокупности источников
питания, устройств преобразования и распределения электри-
ческой энергии. Электроснабжение предприятий текстильной про-
мышленности осуществляется, как правило, от электрических
систем народного хозяйства, поскольку эти предприятия обычно
расположены в районах, где имеются сети электрических си-
стем. Питание СЭС предприятий от электрических систем, а не
от собственных электростанций, является наиболее целесообраз-
ным, так как обеспечивает высокие экономичность и надежность.
Электрическая система — это совокупность генерато-
ров параллельно работающих электростанций и питающихся
от них электрических сетей. Электрическая система совместно с
тепловыми установками и тепловыми сетями составляют энер-
госистему. На электростанциях вырабатывается электрическая
или электрическая и тепловая энергия за счет преобразования
других видов энергии (химической энергии топлива на тепловых
электростанциях, энергии падающей воды на гидравлических,
ядерной энергии на атомных электростанциях). В зависимости от
вида вырабатываемой энергии электростанции энергосистем
разделяются на два типа:
Написано А. А. Грищенко-Меленевским.
221
Б-ЮкВ
2
<
) ) t- -*-Н о у —
зво/гвов 35-цвкв в-юкв
3
Рис. 7.1. Системы электроснабжения предприятий:
а — I типа; б — II типа
теплоэлектроцентрали (ТЭЦ), вырабатывающие комбиниро-
ванно электрическую и тепловую энергию. Они размещаются в
городах, так как тепловая энергия не может быть передана на
большое расстояние. Ввиду близости потребителей передача
электроэнергии от ТЭЦ осуществляется на генераторном напря-
жении 6,1 кВ;
районные электростанции (тепловые ГРЭС, гидравличе-
ские ГЭС, атомные АЭС), вырабатывающие только электро-
энергию и обеспечивающие ею крупные районы. Ввиду значи-
тельной удаленности их от мест потребления передача электро-
энергии осуществляется на повышенном напряжении 35, НО кВ
и более.
Характер СЭС промышленного предприятия в основном зави-
сит от общей потребляемой предприятием мощности и от тер-
риториального расположения потребляемой электроэнергии. Это
обусловлено тем, что выбор экономически целесообразного на-
пряжения для линий электропередачи и распределительных
сетей зависит прежде всего от расстояния и передаваемой мощ-
ности и осуществляется по данным расчетов для заданных конкрет-
ных условий. Однако для ориентировочной оценки по опыту проек-
тирования можно полагать экономически целесообразным исполь-
зование напряжения из расчета 1 кВ на 1 км расстояния при
передаваемой мощности 300—500 кВт на 1 кВ напряжения.
В соответствии с этим СЭС предприятий текстильной промыш-
ленности можно разделить на два типа: I и II.
Потребляемая мощность и территориальное расположение
СЭС типа I таковы, что питающие их линии могут быть выпол-
нены на напряжении 6 или 10 кВ. Поскольку предприятия, как
правило, размещены в городах, то питающие линии обычно выпол-
няются кабельными (применение воздушных линий электропере-
дачи в городах нежелательно по архитектурным соображениям).
Питающие кабельные линии 6—10 кВ присоединены к одной или
нескольким ближайшим подстанциям электрической системы.
На рис. 7.1,а представлена принципиальная схема СЭС типа I
в однолинейном изображении, при котором три фазы цепи пока-
заны одной линией.
Электроприемники предприятий обычно рассчитаны на напря-
жение 380/220 В. Поэтому на'предприятиях необходимы пони-
жающие подстанции 6—10/0,38 кВ с трансформаторами, мощ-
ность которых обычно не превышает 1000 кВ-А. Такие подстан-
222
ции 2 получили наименование трансформаторных пунктов (ТП).
Применение на ТП трансформаторов мощностью более 1000 кВ-А
нежелательно из-за больших токов и необходимости применения
громоздкой электрической аппаратуры на стороне 380/220 В.
Для электроснабжения предприятия обычно необходимо
несколько ТП. Если их много, то для удобства распределения
электроэнергии между ними на территории предприятия соору-
жают дополнительно подстанцию 1, называемую распределитель-
ным пунктом (РП), который представляет собой распредели-
тельное устройство 6—10 кВ (РУ в. н.). Соответственно распреде-
лительные устройства низкого напряжения (РУ н. н.) выполняются
в составе ТП на стороне 380/220 В.
Сравнительно большая мощность, потребляемая СЭС
типа 11, не всегда может быть получена от близко расположенных
подстанций электрической системы. В таком случае для упомя-
нутых предприятий оказывается экономически оправданным при-
менение повышенного напряжения питающих линий — 35 кВ и
даже 110 кВ. Такие линии обычно бывают воздушными, так как
они значительно дешевле кабельных.
Если используются питающие линии 35 или 110 кВ, то обычно
на территории предприятия сооружают подстанцию 3 — главную
понизительную подстанцию (ТПП) 35—110/6—10 кВ, от которой
питают ряд ТП для электроснабжения цехов предприятия
(рис. 7.1,6). В этом случае РУ 6—10 кВ ТПП служит для рас-
пределения электроэнергии между ТП.
Если вблизи предприятия имеются подстанции электрической
системы, способные обеспечить требуемой мощностью на напря-
жении 6—10 кВ, то необходимость в ГПП отпадает и для пред-
приятия используется СЭС типа I. Таким образом, особенностью
СЭС типа II является наличие в ней ГПП.
Количество питающих линий в СЭС и трансформаторов на
ГПП и ТП предприятия зависит прежде всего от требуемой надеж-
ности электроснабжения потребителей. В зависимости от нее в
ПУЭ установлено три категории потребителей:
1-я категория — электроприемники, нарушение электроснаб-
жения которых может повлечь за собой опасность для жизни
людей, повреждение оборудования, массовый брак продукции,
расстройство сложного технологического оборудования;
2-я категория — электроприемники, перерыв в электроснабже-
нии которых связан с массовым недоотпуском продукции, про-
стоем рабочих, механизмов и промышленного транспорта;
3-я категория — все остальные электроприемники, не подхо-
дящие под определение 1-й и 2-й категорий.
В соответствии с требованиями ПУЭ питание потребителей
1-й категории должно осуществляться от двух независимых
источников электроэнергии и перерыв электроснабжения этих
потребителей может быть допущен лишь на время автомати-
223
ческого ввода резервного питания. Для потребителей 2-й катего-
рии должно предусматриваться питание от двух независимых
источников электроэнергии, но перерывы электроснабжения допу-
скаются на время, необходимое для включения резервного питания
действиями дежурного персонала. Потребители 3-й категории
могут получать питание от одного источника электроэнергии,
при этом перерывы электроснабжения допускаются на время,
необходимое для ремонта или замены электрооборудования, но
не более одних суток.
По характеру электроприемников предприятия текстильной
промышленности могут быть отнесены к потребителям 2-й кате-
гории. Поэтому питание ГПП или РП предприятий должно осу-
ществляться по двум линиям от разных подстанций электрической
системы. Соответственно распределение электроэнергии между ТП
предприятия может осуществляться по двум линиям, а ТП могут
выполняться с двумя трансформаторами.
Режимы работы нейтрали в электроустановках предприятий..
Электроснабжение предприятий текстильной промышленности
повсеместно осуществляется трехфазным током. Режим работы
нейтрали трехфазной сети определяется способом соединения
нейтрали с землей. В соответствии с этим нейтрали генераторов
и трансформаторов в сетях могут быть изолированными, компен-
сированными или глухозаземленными. Выбор режима нейтрали в
сетях высокого и низкого напряжений осуществляется по-разному.
Сети напряжением выше 10 00 В всегда трехпроводные,
в них находят применение все перечисленные выше режимы работы
нейтрали.
Сеть с изолированной нейтралью показана на рис. 7.2, а.
Каждая из трех фаз сети обладает емкостью по отношению к земле.
Через эти емкости стекают на землю небольшие симметричные
токи, при этом напряжения фаз относительно земли U3 равны
фазным [/ф.
При однофазном замыкании на землю, например замыкании
фазы А, напряжения неповрежденных фаз В и С относительно
земли [)3 оказываются равными линейному U„, т. е. (73=д/3(/ф.
Вследствие этого изоляцию фаз относительно земли необходимо
выполнять не на фазное, а на линейное напряжение, что приводит
к ее’ удорожанию. При напряжениях до 35 кВ включительно такое
удорожание считается приемлемым. Поэтому в СССР для сетей
6, 10 и 35 кВ используется изолированная нейтраль.
Однофазное замыкание на землю в сети с изолированной
нейтралью не является коротким замыканием, оно не сопровож-
дается протеканием больших токов и искажением линейных или
фазных напряжений. Поэтому ПУЭ допускают продолжительное
существование такого замыкания при работе сети (до 2 ч). Однако
при этом через место замыкания на землю (точка К на рис. 7.2, а)
течет емкостный ток замыкания на землю /3, пропорциональный
224
с
Рис. 7.2. Режимы работы нейтрали в электрических сетях:
а — сеть в. н. с изолированной нейтралью; б — сеть в. н. с компенсированной
нейтралью; в — сеть в. н. с глухозаземленной нейтралью; г — четырехприводиая сеть
н. н. с глухозаземленной нейтралью; д — трехприводная сеть н. н. с изолированной
(гл ухозаземленной) нейтралью
напряжению сети и емкости фаз относительно земли, которая в
свою очередь пропорциональна суммарной протяженности линий
сети /, т. е. 13 = К1Л.
С ростом тока 13 возникает опасность появления электри-
ческой дуги в месте замыкания фазы на землю. Вследствие нали-
чия в сети не только емкости, но и индуктивности процесс горения
дуги может носить колебательный характер («перемежающаяся
дуга»), из-за чего могут возникать перенапряжения с амплиту-
дой до (4...6) UHOU, которые создают опасность пробоя изоляции
сети. Поэтому ПУЭ ограничивают допустимую величину тока /3
значениями 30, 20 и 10 А соответственно для сетей 6, 10 и 35 кВ.
При большой общей протяженности линий сети ток /3 может
оказаться больше допустимого. В этом случае применение изоли-
рованной нейтрали исключено и ток /3 должен быть снижен до
допустимого значения за счет компенсации при помощи так назы-
ваемой дугогасящей катушки L, через которую нейтраль соеди-
няется с землей. Сеть с компенсированной нейтралью показана
на рис. 7.2, б.
При однофазном замыкании на землю через катушку L течет
индуктивный ток IL. Поскольку емкостный ток /с, стекающий с
неповрежденных фаз на землю, и индуктивный ток IL находятся
в противофазе, то результирующий ток, протекающий через место
повреждения, 73 = /с— /£. Благодаря этому достигается компенса-
ция, т. е. снижение тока замыкания на землю, и предотвращается
возникновение «перемежающейся дуги».
В электроустановках напряжением НО кВ и выше стоимость
изоляции высока, поэтому экономически выгоднее ее выполнять
995
8 А. М. «Панген, В. В. Красник
не на линейное, а на фазное напряжение. Во избежание повыше-
ния напряжения фаз относительно земли при однофазных замы-
каниях на землю в сетях 110 кВ и выше применяют глухое за-
земление нейтрали (рис. 7.2, в), т. е. присоединяют нейтрали
трансформаторов к рабочему заземлению, имеющему малое
сопротивление растеканию тока в земле (не выше 0,5 Ом). Тогда
всякое однофазное замыкание на землю является коротким замы-
канием (КЗ), которое сопровождается протеканием большого
тока, но не вызывает повышения напряжения неповрежденных
фаз относительно земли. Под влиянием большого тока КЗ устрой-
ство защиты производит быстрое отключение поврежденной
линии. Отключение линий при однофазных КЗ, сложность и высо-
кая стоимость рабочего заземления являются недостатками
электроустановок с глухим заземлением нейтрали.
Сети напряжением до 1 000 В бывают трех-и четырехпровод-
ные; в них находят применение изолированная и глухозаземлен-
ная нейтрали.
Четырехпроводная сеть (рис. 7.2, г) позволяет питать от
одного трансформатора трехфазные электроприемники на линей-
ном напряжении (обычно силовые нагрузки на 380 В) и одно-
фазные электроприемники на фазном напряжении (обычно осве-
тительные нагрузки на 220 В), что является важным достоин-
ством такой сети.
По требованиям ПУЭ в этой сети допускается применение
только глухозаземленной нейтрали. Это обусловлено следующими
основными причинами. При эксплуатации трехфазных сетей сохра-
нение нейтрального провода изолированным весьма затрудни-
тельно, так как случайные замыкания его на землю ничем себя
не обнаруживают и остаются незамеченными. Контроль изоляции
нейтрального провода сложен и потому не оправдав. Опыт
эксплуатации четырехпроводных сетей показал, что если не выпол-
нить преднамеренного заземления нейтрального провода, то со
временем оно возникает самопроизвольно. Поэтому оказалось
целесообразным принять преднамеренное заземление нейтрали.
В этом случае при однофазных замыканиях на землю предот-
вращается появление на нейтральном проводе напряжения отно-
сительно земли, равного фазному и опасного для обслуживаю-
щего персонала. Такое напряжение неизбежно появляется при
изолированном нейтральном проводе. Отметим, что заземленный
нейтральный провод именуют нулевым. Характерно, что в сетях
низкого напряжения стоимость изоляции не влияет на выбор
режима работы нейтрали, так как она остается одинаковой вне
зависимости от этого режима.
Следует иметь в виду, что вынужденное глухое заземление
нейтрали влечет за собой ряд недостатков: прикосновение к любой
фазе сети опасно для обслуживающего персонала вследствие
действия фазного напряжения через землю; однофазные замыка-
226
ния на землю здесь являются короткими замыканиями и обуслов-
ливают отключение линий под действием устройств защиты; из-за
наличия рабочего заземления увеличивается стоимость электро-
установок.
В трехпроводной сети (рис. 7.2, д) для питания электроприем-
ников может быть использовано только линейное напряжение,
что является ее существенным недостатком по сравнению с четы-
рехпроводной сетью
В соответствии с ПУЭ в этой сети допускается применение как
изолированной, так и глухозаземленной нейтрали. Выбор режима
работы нейтрали в этой сети производится прежде всего из условия
электробезопасности.
В сети с изолированной нейтралью важным критерием для
оценки электробезопасности является величина тока однофазного
замыкания на землю /3, которая обусловлена полным сопротив-
лением изоляции фаз относительно земли Z„3.
Если сеть малоразветвленная, то ее полное сопротивление фаз
относительно земли Zll3 велико. Поэтому при прикосновении
человека к одной из фаз через его тело течет малый, не опасный
для жизни ток. В этом случае целесообразно применение изоли-
рованной нейтрали.
С ростом разветвленности и общей протяженности сети ее
сопротивление ZH3 снижается, а опасность поражения током чело-
века при касании одной из фаз возрастает. Следовательно, в
разветвленных сетях применение изолированной нейтрали не обес-
печивает электробезопасности. Больше того, при изолированной
нейтрали в сети может длительно существовать однофазное
замыкание на землю (точка К на рис. 7.2, д), что повышает вероят-
ность попадания человека под линейное напряжение при случай-
ном прикосновении к одной из фаз. Вследствие этого в разветвлен-
ных сетях применяют заземленную нейтраль как обладающую
большей электробезопасностью.
Питание электрических сетей низкого напряжения осуществля-
ется через понижающие трансформаторы. Для обеспечения элект-
робезопасности в случае пробоя изоляции трансформатора с
обмотки высокого напряжения на обмотку низкого напряжения
необходимо последнюю заземлять. Если нейтраль обмотки низко-
го напряжения в трансформаторе заземлена, то это условие
выполняется само собой. При изолированной нейтрали трансфор-
матора его обмотку соединяют с землей через пробивной предо-
хранитель FV, в котором электроды разделены малым воздушным
промежутком. При появлении на обмотке низшей стороны транс-
форматора высокого напряжения происходит пробой воздушного
промежутка, электроды под действием электрической дуги свари-
ваются и обмотка оказывается заземленной.
Короткие замыкания в электроустановках предприятий. Ко-
роткими замыканиями называют замыкания между фа-
227
Рис. 7.3. Трехфазное КЗ в сети с ис-
точником неограниченной мощности:
а — схема цепи трехфазного КЗ; б — из-
менение токов в фазе в процессе трех-
фазного КЗ
зами, а в сетях с глухозаземленными нейтралями также замыка-
ния фаз на землю или нулевой провод. В зависимости от коли-
чества замкнутых накоротко фаз различают трех-, двух- и
однофазные КЗ.
Короткие замыкания сопровождаются протеканием больших
токов и резким снижением напряжения в сети. Термическое и
электродинамическое действие токов КЗ могут быть причиной
повреждения электрооборудования и токоведущих частей, по
которым они протекают. Поэтому при выборе электрооборудования
оно должно быть проверено расчетом на действие токов КЗ и
обладать термической и электродинамической стойкостью. Рез-
кое снижение напряжения при КЗ может привести к нарушению
работы электроприемников, особенно электродвигательных, по-
скольку вращающий момент асинхронных двигателей пропорцио-
нален квадрату напряжения. Для обеспечения устойчивой работы
электрооборудования в эксплуатации оно должно быть проверено
на действие токов КЗ соответствующими расчетами. Указанные
расчеты могут быть выполнены при наличии сведений об ожидае-
мых значениях токов КЗ.
Наиболее опасными обычно являются трехфазные КЗ, поэтому
в большинстве случаев их принимают в качестве расчетного
вида КЗ.
Питание СЭС предприятий текстильной промышленности,
как правило, осуществляется от электрических систем, мощность
которых несоизмеримо больше мощности электрооборудования
предприятий. Поэтому при расчете токов КЗ в сети предприятия
можно рассматривать электрическую систему как источник энер-
гии неограниченной мощности Sc=oo, для которого характерны
отсутствие сопротивления zr = 0 и постоянство напряжения при
любых режимах работы, в том числе и при КЗ в сети (рис. 7.3, а).
В общем случае элементы короткозамкнутой цепи между источ-
ником питания и местом повреждения содержат активное сопро-
тивление RK и индуктивность LK.
Известно, что при наличии в электрической цепи индуктив-
228
ности ток в этой цепи не может изменяться мгновенно, так как
сцепленный с ним магнитный поток индуктирует в цепи ЭДС,
которая по правилу Ленца препятствует изменению тока. Поэтому
при внезапном КЗ ток в цепи принимает новое установившееся
значение не мгновенно, а лишь после завершения переходного
процесса. Тогда в начальный момент t = 0 процесса КЗ ток в цепи
сохраняет свое прежнее значение. Это имеет место благодаря
возникновению в цепи КЗ свободного апериодического
тока t'a наряду с периодическим током 1П, обусловленным сину-
соидальным напряжением источника питания.
и = Urn sin (to/ + ф) ,
где (7ni = const— амплитуда напряжения; ф— его начальная фаза.
Если в момент времени / = С) мгновенное значение тока пред-
шествующего режима цепи равно io, то мгновенные значения сла-
гающих тока КЗ связаны с ним равенством
й)=/Пс+С0-
Так как ток КЗ обычно во много раз превосходит величину
нагрузочного тока предшествующего режима, то для упрощения
анализа последним обычно можно пренебречь to = O. Тогда началь-
ные мгновенные значения слагающих тока КЗ равны (рис. 7.3, б):
Апериодическая слагающая тока КЗ затухает во времени по
закону экспоненциальной функции e—t/T*, где T& — Lk/RK —
постоянная времени КЗ. Мгновенное значение полного тока КЗ
для произвольного момента t может быть представлено как сумма
слагающих тока КЗ:
U=in,+ia,==ia,+i^~t'T‘=in—i^t/T' = ^nt/zK sin (со/ + ф + фк) —
— Дт/гк sin (ф —<pK)e_(/r, = /nJsin (to/ + ф — tpK) — sin (ф —
— <Рк)е-//г'],
где ек = -\(Й+(“/-«)2 —полное сопротивление цепи КЗ; <;„— фазный угол
сдвига между током КЗ и напряжением; 1Пт — амплитуда периодической сла-
гающей тока КЗ.
Величина полного тока КЗ зависит от начальной фазы напря-
жения ф, т. е. от момента начала процесса КЗ. При ф = фк апе-
риодическая слагающая тока КЗ не возникает, а при ф = фк-(-л/2
она имеет наибольшую величину, в результате чего полный
гок КЗ через полпериода после начала КЗ, т. е. при со/=л, до-
стигает своего максимального мгновенного значения (см.
рис. 7.3, б), именуемого ударным током:
'у=Ч«=/п„(1+е-^’)=Ку/Пт,
где Ку= 1—ударный коэффициент, изменяющийся от 2 (при /?к=
= 0) до 1 (при /?K»coLK) и характеризующий степень участия апериодической
слагающей тока КЗ в образовании ударного тока.
229
Кроме ударного тока для начального режима КЗ различают
еще следующие значения тока КЗ: сверхпереходный ток и дейст-
вующее значение полного тока КЗ за первый период.
Сверхпереходный ток Г' — это действующее значение
периодической слагающей тока КЗ за первый период. Поскольку
периодическая слагающая тока КЗ является синусоидальной,
то сверхпереходный ток
/" = 4„/л/2.
При принятом условии питания цепи КЗ от источника неогра-
ниченной мощности амплитуда периодической слагающей тока
КЗ Достается неизменной в течение всего процесса КЗ, посколь-
ку напряжение источника питания сохраняется постоянным.
Ударный ток обычно выражают через сверхпереходный:
гу=л/2Ку/".
Для установок высокого напряжения в качестве среднего зна-
чения ударного коэффициента принимают Ку=1,8. Тогда iy =
— 2,55 Г'. Для установок низкого напряжения обычно Ку^1,3
из-за влияния активного сопротивления элементов цени КЗ.
Полный ток КЗ в течение переходного процесса является
несинусоидальным вследствие наличия апериодической слагаю-
щей (см. рис. 7.3,6). Поэтому действующее значение
полного тока КЗ за первый период
= f(Ky - 2 = W1 + 2 (ЛУ- 1) 2,
где (Ку — —iy — 1Пт — среднее значение апериодической слагающей за
первый период.
При Ку= 1,8 получаем /у = 1,52/".
После завершения переходного процесса апериодическая сла-
гающая исчезает и полный ток КЗ становится равным устано-
вившемуся току /„, который представляет собой только пе-
риодическую слагающую. Последняя при питании цепи КЗ от
источника неограниченной мощности не изменяется в процессе КЗ,
поэтому
При трехфазном КЗ все фазы цепи находятся в одинаковых
условиях, поэтому расчет токов ведется на одну фазу и р а с -
четная схема (рис. 7.4, а) выполняется в однолинейном изо-
бражении. В расчетную схему вводятся все элементы цепи между
источником питания и местом КЗ с указанием их номинальных
параметров. Для вычисления токов КЗ расчетная схема должна
быть представлена эквивалентной схемой замещения
(рис. 7.4, б), в которой все элементы связаны между собой электри-
чески и представлены своими сопротивлениями.
230
Unr const ГПП ТП
Ow4JE>H-^GD i > 4
Xc^O.Sc-^ йк%.$ном ц Uk7°,Shoh
Рис. 7.4. Схемы к расчету токов трехфазного КЗ:
а — расчетная схема; б — эквивалентная схема замещения
Обычно индуктивное сопротивление элементов цепи КЗ значи-
тельно превышает их активное сопротивление, поэтому последним
пренебрегают. Исключение составляют лишь элементы распреде-
лительных сетей низкого напряжения, активное сопротивление
которых соизмеримо с индуктивным, вследствие чего его учиты-
вают при точных расчетах токов КЗ.
В электроустановках предприятий цепь КЗ в общем случае
может включать воздушные линии 35—ПО кВ, кабельные ли-
нии 6—10 кВ и 0,4 кВ, трансформаторы 35—110/6—10 кВ и
6—10/0,4 кВ, сопротивления которых должны быть представлены
в схеме замещения. Поскольку электрическая система рассматри-
вается как источник неограниченной мощности, то ее сопротивле-
ние принимается А'с = 0.
В расчетах токов КЗ обычно принимают средние значения
индуктивных сопротивлений единицы длины линий Хо, которые со-
ставляют: для воздушных линий 35—110 кВ 0,4 Ом/км, кабельных
линий 6—10 кВ 0,08 Ом/км, кабельных линий до 1 кВ 0,07 Ом/км.
Тогда индуктивное сопротивление линии
ХЛ = ХО/,
где / — длина линии, км.
Для трансформаторов в каталогах обычно приводится значе-
ние не сопротивления, а напряжения короткого замы-
кания ик, %, представляющего собой отношение первичного
напряжения UK при номинальном токе /ном и замкнутой накоротко
вторичной обмотке (опыт короткого замыкания) к первичному
номинальному напряжению
Дном: Ни=-^100.
Поскольку
Ик == д/З/ном^т»
полное сопротивление трансформатора
231
„ , _ UНОМ
Х-Т------------.
100 ./з /
Если пренебречь активным сопротивлением, индуктивное со-
противление трансформатора
Uном
Т—' 100 S„o„ ’
где SHO„ — номинальная полная мощность трансформатора.
Вычисление параметров схемы замещения и токов КЗ может
производиться двумя методами: в именованных и относительных
единицах. Ниже рассмотрен расчет в именованных единицах.
Для составления схемы замещения по расчетной схеме, в ко-
торой имеются трансформаторные связи, необходимо сопротивле-
ния всех элементов привести к одной ступени напряжения, имену-
емой базисной, поскольку в схеме замещения все элементы должны
быть электрически связанными. Для этого используется известная
формула приведения сопротивления вторичной обмотки трансфор-
матора к первичной, в соответствии с которой приведенное сопро-
тивление
х = К2х,
где К — коэффициент трансформации.
Если в схеме имеется несколько последовательных трансфор-
маторных связей, то х=К?/<2---КлХ. С целью упрощения расчетов
обычно не учитывают различия в величинах напряжений начала
и конца линий электропередачи, а используют средние номи-
нальные напряжения [7ср, шкала которых следующая:
0,23; 0,4; 6,3; 10,5; 37; 115 кВ. Благодаря этому при приведении
сопротивлений к базисной ступени напряжения все промежуточ-
ные коэффициенты трансформации взаимно сокращаются. Тогда
приведенное сопротивление
X — X U ср. б/ Д ср,
где Оер.с —среднее номинальное напряжение базисной ступени, в качестве кото-
рой обычно выбирают ступень, где находится расчетная точка КЗ; Оср — сред-
нее" номинальное напряжение ступени, где находится истинное сопротивление х.
После приведения сопротивлений к базисной ступени по схеме
замещения определяют результирующее приведенное сопротивле-
ние цепи хрез относительно точки КЗ и по нему — сверхпереходный
ток КЗ в этой точке:
1"= ^ср.б/Сд/ЗХрез).
Другие значения тока КЗ (iy, /у, /„) определяются через
сверхпереходный ток I" по формулам, полученным выше.
232
Электрические схемы распределительных устройств и транс-
форматорных подстанций. Электрическая схема — это чертеж, на
котором в условном изображении показаны элементы электри-
ческой цепи (установки) в той последовательности, в которой они
соединены в действительности. Электрические схемы трехфазных
цепей могут быть одно- и трехлинейные. В однолинейных схемах
все провода трехлинейной цепи (три фазы и нейтральный про-
вод) изображаются одной линией, в трехлинейных схемах —
тремя или четырьмя линиями (при наличии нейтрального про-
вода).
Принципы построения электрических схем установок рассмот-
рим на примерах схем распределительных пунктов (РП), транс-
форматорных пунктов (ТП) и главных понизительных подстан-
ций (ГПП), применяемых в СЭС предприятий текстильной про-
мышленности.
Схемы распределительных пунктов. Распределительный пункт
(РП) —это распределительное устройство (Р.У) 6—10 кВ, пред-
назначенное только для распределения электроэнергии без ее
трансформации. В общем случае РУ включает в себя два основ-
ных элемента: сборные шины и линейные присоединения (рис. 7.5).
Сборные шины — это токоведушие части, предназначенные
для сбора и распределения электрической энергии. Они выпол-
няются обычно в виде металлических полос (медных, алюминие-
вых или стальных) на изоляторах. В РУ СЭС предприятий обычно
используется одна система сборных шин, которая может быть
несекционированной или секционированной при помощи коммута-
ционного аппарата — разъединителя или выключателя (см.
рис. 7.5). Секционирование, т. е. разделение сборных шин на две
секции коммутационным аппаратом, обеспечивает электроуста-
новке ряд важных достоинств:
возможность поочередного ремонта электрооборудования сек-
ций сборных шин без прекращения питания потребителей 1-й и
2-й категорий, так как электроснабжение их осуществляется по
двум линиям, присоединенным к разным секциям;
при КЗ на сборных шинах аварийно отключается защитой
только одна из секций, так как в нормальном режиме работы
секционный выключатель находится в отключенном положе-
нии (см. ниже).
Рис. 7.5. Однолинейная схема распре-
делительного пункта 6—10 кВ
233
Линейные присоединения — это присоединения к сборным ши-
нам питающих и отходящих линий. Линейные присоединения
могут выполняться разными способами в зависимости от приме-
няемых для них электрических аппаратов (см. рис. 7.5).
При присоединении линии через выключатель и разъедини-
тели выключатель Q служит для оперативных включений и отклю-
чений линии под нагрузкой. Шинный и линейный разъедини-
тели QS1 и QS2 используются при ремонтах выключателя для
снятия с него напряжения и создания видимого разрыва цепи,
что необходимо для обеспечения безопасности работ. Так обычно
выполняется присоединение питающих линий.
Все выключатели периодически должны подвергаться ре-
монту и осмотру, так как при отключениях цепи на их контакты
воздействует электрическая дуга. При выводе выключателя в ре-
монт должна строго соблюдаться требуемая последовательность
операций: сначала должен быть отключен выключатель для раз-
рыва тока, затем — разъединители для снятия напряжения-. При
вводе выключателя в работу последовательность операций .обрат-
ная. Нарушение указанной последовательности может повлечь
тяжелую аварию и электротравмы, так как разъединитель не
способен разрывать ток.
Если к выключателю может подаваться напряжение только с
одной стороны, то ограничиваются применением только одного
разъединителя. Такое присоединение чаще применяется для отхо-
дящих линий — здесь перед выключателем QF сохранен лишь
шинный разъединитель QS (см. рис. 7.5). На отходящих линиях
должна быть непременно предусмотрена релейная защита для
аварийного отключения линий при КЗ, в то время как на питаю-
щих линиях она обычно предусматривается только на питающем
конце.
При присоединении линии через выключатель нагрузки и
плавкие предохранители выключатель нагрузки QL используется
только для оперативных включений и отключений линии под
нагрузкой. Для защиты ее от КЗ предусматриваются плавкие
предохранители высокого напряжения FU. Они же могут быть
использованы для снятия напряжения с выключателя нагрузки
при выводе его в ремонт путем вынимания патронов предохрани-
теля из контактных стоек. Для этого используются специальные
изолирующие клещи (разумеется, вынимание патронов допустимо
только после отключения выключателя нагрузки). Заметим,
что на схеме (см. рис. 7.5) показаны разнотипные присоединения
отходящих линий с выключателем и выключателем нагрузки
условно. В действительности обычно используются в РУ однотип-
ные присоединения отходящих линий с целью унификации обору-
дования,- К каждой секции сборных шин может быть присоединено
по нескольку отходящих линий.
Присоединение секционного выключателя QF1 (см. рис. 7.5)
234
осуществляется с применением разъединителей с двух сторон для
обеспечения вывода его в ремонт при работе обеих секций. Нор-
мальным режимом секционного выключателя обычно является его
работа в отключенном положении. Это вызвано необходимостью
исключить параллельную работу питающих линий, при которой
возможен переток мощности питающих источников через сборные
шины РП, что недопустимо.
Исчезновение напряжения на одной из питающих линий вслед-
ствие ее повреждения или других причин при отключенном сек-
ционном выключателе влечет за собой прекращение питания
одной из секций сборных шин. Для быстрого восстановления
напряжения на ней от другой питающей линии применяют устрой-
ство автоматического включения резервного питания (АВР) на
секционном выключателе. Устройство АВР в этом случае автома-
тически отключает выключатель поврежденной питающей линии
и включает секционный выключатель, благодаря чему питание
обеих секций сборных шин осуществляется от исправной питающей
линии.
При присоединении трансформаторов напряжения TV (см.
рис. 7.5) они служат для измерения напряжения на секциях
сборных шин, обеспечивая при этом изоляцию измерительных
приборов от цепи высокого напряжения. Поскольку нормально по
ним от сборных шин протекает очень малый ток, то присоедине-
ние их к секциям сборных шин осуществляют при помощи разъеди-
нителей, которые допускают разрыв такого тока. Для защиты
цепи трансформатора напряжения от токов КЗ последовательно с
разъединителем QS устанавливают специальные плавкие предо-
хранители высокого напряжения FU специального исполнения
(типа ПКТ).
Для обеспечения безопасности ремонта электрооборудования
сборных шин и присоединений к ним необходимо токоведущие
части заземлять. С этой целью разъединители и выключатели
могут быть снабжены заземляющими ножами, которые на схеме
рис. 7.5 не показаны.
Разнообразие встречающихся на практике схем РП возникает
вследствие различного сочетания рассмотренных линейных при-
соединений.
Схемы трансформаторных пунктов. Трансформаторный
пункт (ТП) —это понизительная подстанция со вторичным
низким напряжением. ТП обычно используются для электро-
снабжения цехов предприятия, поэтому их также именуют цехо-
выми подстанциями. По количеству принятых трансформаторов
различают одно- и двухтрансформаторные ТП. Поскольку на
предприятиях текстильной промышленности основу электро-
потребления составляют нагрузки 2-й категории, то для них
обычно используются двухтрансформаторные и реже однотран-
сформаторные ТП. По своему положению в сети высшего на-
235
Рис. 7.6. Однолинейная схема транс-
форматорного пункта
пряжения (6—10 кВ) ТП могут
быть тупиковые и проходные.
От тупиковых ТП другие под-
станции по сети 6—10 кВ пита-
ния не получают. Проходные ТП
обеспечивают передачу элек-
троэнергии транзитом по сети
6—10 кВ к другим подстанциям.
Поэтому проходные ТП приме-
няются в магистральных сетях,
в то время как тупиковые ТП —
в радиальных (см. п. 7.2).
В общем случае ТП состоит из РУ 6—10 кВ, трансформаторов
и распределительного устройства низкого напряжения. Нали-
чие РУ 6—10 кВ необходимо только на проходных ТП, и электри-
ческая схема такого РУ аналогична рассмотренной выше схе-
ме РП. На тупиковых ТП обычно РУ 6—10 кВ не предусматри-
вается и применяется более экономичное устройство блока ли-
ния — трансформатор.
При использовании на тупиковом ТП блока линия — транс-
форматор сборные шины высшего напряжения отсутствуют,
каждая из питающих кабельных линий присоединена к своему
трансформатору через коммутационный и защитный аппараты
(рис. 7.6). В качестве коммутационного аппарата здесь обычно
применяют разъединитель как наиболее дешевый и вполне надеж-
ный аппарат. Следует, однако, иметь в виду, что разъединителем
допустимо отключать только ток холостого хода трансформатора,
который весьма мал, и совершенно недопустимо отключать ток
нагрузки. Последний может быть отключен только на стороне
низкого напряжения автоматом QF3. Защита трансформатора от
токов КЗ и перегрузки наиболее просто выполняется плавкими
предохранителями высокого напряжения FU типа ПК-
На ТП находят применение силовые масляные трансформа-
торы обычно мощностью не выше 1000 кВ - А во избежание затруд-
нений в выборе аппаратуры низкого напряжения из-за больших
номинального тока и тока КЗ. Обмотка высшего напряжения,
как правило, соединяется «в звезду», поскольку при этом необхо-
дима более низкая электрическая прочность фазной изоляции,
чем при соединении «треугольником». Вторичная обмотка транс-
форматора соединена «в звезду» с выведенной нейтралью, так
как от нее получает питание четырехпроводная сеть низкого
напряжения, позволяющая одновременно обеспечивать силовую и
осветительную нагрузки. Если сеть низкого напряжения трехпро-
водная, то вторичная обмотка должна быть соединена «треу-
гольником».
236
Распределительное устройство низкого напряжения
(380/220 В), служащее для распределения энергии между потре-
бителями, выполняется только с одной системой сборных шин,
состоящей из трех фазных полос и одной нулевой полосы (при
питании четырехпроводной сети). На двухтрансформаторных
подстанциях сборные шины непременно секционируются обычно
при помощи автомата с использованием на нем устройства АВР.
Присоединение трансформатора Т к сборным шинам выполня-
ется через автомат QF3 и рубильник с центральной рукояткой
QS1, предназначенной для снятия напряжения с автомата при его
ремонте. Со стороны трансформатора рубильник у автомата
QF3 не устанавливается, так как напряжение может быть снято
разъединителем QS с первичной стороны трансформатора.
Присоединение отходящих линий к сборным шинам может
выполняться через автомат QF1 и рубильник с центральной руко-
яткой QS1 или через рубильник с рычажным приводом Q1 и
плавкие предохранители FU1. Рубильник Q1 в отличие от ру-
бильника QS1 служит для коммутации нагрузочного тока при
оперативных включениях и отключениях линии, поэтому он должен
быть снабжен рычажным приводом. Рубильник QS1 последова-
тельно с автоматом QF1 в ряде случаев не предусматривают,
имея в виду ремонт автомата осуществлять в периоды вывода в
ремонт соответствующей секции сборных шин.
Присоединение секционного автомата QF2 осуществляют с
использованием двух рубильников с центральной рукояткой
QS2 ремонтного назначения. В нормальном режиме секционный
автомат находится в отключенном положении. Поэтому каждая из
питающих линий обеспечивает своих потребителей независимо.
При аварийном исчезновении напряжения на одной из секций
сборных шин устройство АВР отключает автомат QF3 этой секции
и включает секционный автомат QF2, вследствие чего полностью
восстанавливается напряжение на сборных шинах, но питание
обеих секций осуществляется только по одному из блоков ли-
ния — трансформатор. Если в этом режиме произойдет КЗ на
какой-либо отходящей линии или сборных шинах, то защита авто-
матов QF1, QF2 и QF3 обеспечивает селективное избиратель-
ное отключение поврежденного участка вследствие нарастающей
трехступенчатой выдержки времени этих автоматов в области
токов КЗ: ЛС/гС/з-
Присоединения конденсаторных батарей С предусмотрены для
компенсации реактивной мощности на каждой секции сборных
шин. Конденсаторные батареи обеспечивают повышение коэффи-
циента мощности до требуемых значений. Конденсаторы в батарее
соединяются всегда по схеме «треугольник», так как конденсаторы
выпускаются только на линейные напряжения (этим обеспечи-
вается более высокая их удельная реактивная мощность). Для
присоединения батареи конденсаторов к сборным шинам могут
237
быть использованы автомат QF4 либо рубильник с рычажным
приводом Q2 и плавкие предохранители FU2.
Схемы главных понизительных подстанций. Главная понизи-
тельная подстанция (ГПП) — это подстанция со вторичным
высоким напряжением (6—10 кВ), которая обеспечивает электро-
снабжение всего предприятия через ряд цеховых подстанций.
ГПП сооружают лишь тогда, когда питание предприятия от
электрической системы осуществляется на повышенных напряже-
ниях (35 кВ и выше). В соответствии с этим ГПП состоит из
РУ 35—ПО кВ, трансформаторов и РУ 6—10 кВ.
Поскольку предприятия текстильной промышленности отно-
сятся к потребителям 2-й категории, то для них ГПП выполняют
двухтрансформаторными и питание их от системы осуществляют
по двум (обычно воздушным) линиям. Если ГПП является тупи-
ковой подстанцией, что чаще всего бывает, то в целях экономии
РУ 35—110 кВ выполняют упрощенными, без сборных шин, исполь-
зуя блоки линия — трансформатор (рис. 7.7). Присоединение пи-
тающих линий к трансформаторам может быть выполнено при по-
мощи выключателя QF с разъединителем ремонтного значения QS
либо более просто — через разъединитель коммутационного на-
значения QS в сочетании со стреляющими плавкими предохрани-
телями FU типа ПСН. Оба варианта схем блока линия — транс-
форматор условно показаны на схеме одной ГПП (см. рис. 7.7).
Реально в пределах одной подстанции обычно применяются одно-
типные блоки. При использовании блока с выключателем он
должен снабжаться устройством релейной защиты трансформа-
тора от повреждений и ненормальных режимов работы. Разу-
меется, такой вариант блока
сложнее и дороже, но обладает
большей гибкостью и надеж-
ностью, так как разъединителем
можно размыкать только ток
холостого хода трансформа-
тора, но не нагрузочный ток.
Поскольку сеть 6—10 кВ
всегда является трехпроводной,
масляные трансформаторы Т
имеют соединение обмоток
«звезда» — «треугольник». РУ
6—10 кВ выполняют по схеме,
аналогичной схеме РП; с при-
менением секционированной
одной системы сборных шин и
с устройством АВР на секци-
Рис. 7.7. Однолинейная схема главной
понизительной подстанции
238
инном выключателе. В трансформаторном присоединении между
выключателем и трансформатором разъединитель не предусмат-
ривается из-за возможности снятия напряжения с выключателя
па первичной стороне трансформатора.
Конструкции распределительных устройств и трансформатор-
ных подстанций. По конструктивному выполнению распредели-
тельные устройства и трансформаторные подстанции делятся на
шкрытые и открытые. Закрытыми являются такие, оборудова-
ние которых расположено в здании, открытыми — если все или
основное оборудование размещено на открытом воздухе. Закры-
тые РУ и подстанции применяются обычно при напряжениях
до 10 кВ; при напряжениях 35 кВ и выше, как правило, исполь-
,уются открытые РУ и подстанции. Типичными для промышлен-
ных предприятий являются открытые — РУ первичного напря-
жения ГПП и закрытые — РУ вторичного напряжения ГПП и це-
ховые подстанции (ТП). Применение открытых РУ уменьшает
стоимость и сокращает сроки сооружения подстанций. Однако
обслуживание их сложнее, чем закрытых, и для размещения их
необходима большая территория.
Открытые и закрытые РУ могут быть комплектными или сбор-
ными. Комплектными являются такие РУ, оборудование которых
поставляется заводом-изготовителем в собранном виде или пол-
ностью подготовленном для сборки крупными узлами. Оборудо-
вание сборных РУ подлежит полной или частичной сборке на
месте его установки. Ниже рассмотрены комплектные РУ как
наиболее распространенные на подстанциях предприятий.
Закрытые распределительные устройства высокого напряже-
ния. Конструктивно всякое РУ высокого напряжения состоит из
ряда соединенных ячеек, в каждой из которых размещено устрой-
ство одного из присоединений к сборным шинам. В закрытых
распределительных устройствах (ЗРУ) ячейки выполняются в виде
камер или шкафов, которые размещаются в помещении РУ в
один или два ряда (рис. 7.8). Перед фронтом ряда ячеек преду-
сматривается коридор управления оборудованием ячеек. Сборные
шины прокладываются вдоль рядов ячеек и размещаются обычно
в верхней части камер или шкафов.
Существует два основных типа ячеек ЗРУ: камеры со стацио-
нарно установленными в них аппаратами (тип КСО) и шкафы,
в которых выключатель установлен на выкатной тележке (тип
КРУ). На рис. 7.9 представлены вид спереди и вертикальные
поперечные разрезы таких камеры и шкафа.
Камеры типа КСО (рис. 7.9, а) разделены сплошными пере-
городками на три отсека: верхний отсек со сборными шинами /,
установленными на изоляторах, и шинным разъединителем 2;
средний — с малообъемным масляным выключателем <?; нижний—
с линейным разъединителем 6 и воронкой кабельного присоеди-
нения 7. Между средним и нижним отсеками установлены про-
239
a
Рис. 7.8. Компоновка закрытых
распределительных устройств высо-
кого напряжения:
а — однорядное расположение ячеек;
б — двухрядное расположение ячеек
Рис. 7.9. Конструкции ячеек комплектных распределительных устройств
внутренней установки:
а — камера типа КСО; б - шкаф типа КРУ
годные трансформаторы тока 5, а на лицевой стороне камеры
расположен привод 4 к выключателю, приводы к разъединителям,
тмерительные приборы и реле. Приводы к выключателю и разъ-
единителям механически сблокированы между собой так, что
операции с разъединителями возможны только при отключенном
выключателе. Разделение камеры на отсеки повышает безопас-
ность при ремонте выключателя и надежность ее работы, так
как повреждение аппаратов при КЗ локализуется рамками одного
отсека. Обслуживание оборудования камер (управление, ремонт,
осмотр) осуществляется с их лицевой стороны, поэтому они имену-
ются камерами одностороннего обслуживания. Недостатком РУ
гппа КСО является необходимость отключения линии на все время
ремонта или ревизии выключателя.
Шкафы типа КРУ (рис. 7.9, б) разделены на четыре отсека:
отсек сборных шин / и шинных штепсельных разъемов 3; отсек
выкатиой гележки 6 с установленными на ней малообъемным
масляным выключателем 5 и приводом к нему 4, отсек линейных
штепсельных разъемов 7, трансформаторов тока 9 и кабельного
присоединения 8;’ отсек измерительных приборов и реле 2.
б
241
Размещение выключателя с приводом на выка.тной тележке
обеспечивает возможность производить его ремонт без длитель-
ного отключения линии. Для этого тележку с подлежащим ремон-
ту выключателем выкатывают из шкафа и на ее место устанавли-
вают резервную тележку с выключателем. Использование
выкатной тележки позволяет производить удобный и безопасный
осмотр и наладку выключателя. В шкафах этого типа взамен
типовых шинного и линейного разъединителей используются
специальные штепсельные разъемы, автоматически снимающие
напряжение с выключателя при выкатывании тележки из шкафа.
Во избежание неправильных операций в шкафу предусмотрен ряд
блокировок, в том числе блокировка, исключающая возмож-
ность перемещения тележки при включенном выключателе.
Для безопасности обслуживания отверстия для штепсельных
разъемов автоматически закрываются шторками при выкатыва-
нии тележки. Шкафы типа КРУ более компактны и совершенны,
чем камеры типа КСО, но стоимость их выше. Их применяют
обычно при частом использовании выключателя и связанными с
этим регулярными осмотрами и его техническим обслуживанием.
Для прокладки кабелей питающих и отходящих линий под
ячейками РУ предусматривают кабельный канал. Помещения РУ
обычно выполняют без окон, чем повышается их надежность.
В соответствии с этим в помещениях РУ предусматривают искус-
ственное освещение и вентиляцию. Согласно требованиям ПУЭ
выходные двери закрытых РУ должны быть самозапирающимися,
но в целях безопасности не должны препятствовать свободному
выходу людей из помещения РУ.
Закрытые трансформаторные подстанции. Цеховые подстан-
ции (ТП) выполняются обычно, как закрытые подстанции, все
оборудование которых размещается в помещениях. Они могут
выполняться отдельно стоящими, встроенными в здание цеха или
пристроенными к нему. В общем случае закрытая подстанция
(рис. 7.10) включает следующие основные помещения: РУ высо-
кого напряжения 2, камеры 1 трансформаторов и РУ низкого
напряжения 3. Взаимное расположение этих помещений (компо-
новка) показано на примере закрытой встроенной двухтрансфор-
маторной цеховой подстанции (ТП).
В РУ высокого напряжения (6—10 кВ) чаще всего применя-
ются ячейки из камер или шкафов комплектных распределитель-
ных устройств. Это РУ предусматривается в составе лишь про-
ходных подстанций или в случае, когда с цеховой подстанцией
совмещен РП. На тупиковых ТП, где обычно сборные шины 6—
10 кВ не предусматриваются, аппаратуру ввода питающих ли-
ний (разъединитель, плавкие предохранители) размещают не-
посредственно в камерах трансформаторов — на стене над транс-
форматором. , Поэтому в их составе РУ высокого напряже-
ния нет.
242
Рис 7.10. Компоновка оборудования
трансформаторного пункта
Рис. 7.11. Поперечный разрез камеры
трансформатора
ч---
Рис. 7.12. Конструкция панели распре-
делительного щита одностороннего об-
служивания
Применяемые на ТП масляные выключатели устанавли-
вают в отдельных камерах 1 (см. рис. 7.10) с несгораемыми полом,
стенами, перекрытием и с выходом наружу или в несгораемое
помещение. Такие ограничения по установке масляных трансфор-
маторов обусловлены их пожаро- и взрывоопасностью. По той же
причине в камерах трансформаторов должны предусматриваться
меры по задержанию масла, вытекающего из трансформатора
при авариях и неисправностях. Размеры трансформаторной
камеры (рис. 7.11) делают такими, чтобы между выключате-
лем 1 и стенами было свободное пространство для обеспечения
его охлаждения и размещения питающего кабеля 3, отходящих
шинок 2 к РУ низкого напряжения, а в случае отсутствия РУ высо-
243
кого напряжения также разъединителя и плавких предохрани-
телей питающей линии.
Для отвода выделяющегося из выключателя тепла должна
производиться вентиляция камеры. С этой целью предусматри-
ваются вентиляционные нижний канал 4 и верхний проем 6, снаб-
женные жалюзи во избежание проникновения в камеру животных
и птиц. Дополнительно выполняются жалюзи на дверях 5. Метал-
лические двери камеры должны открываться наружу для удобства
выкатывания трансформатора при ремонтах или его замене.
Под трансформатором помещают маслоприемник в виде
приямка, рассчитанного на удержание 20 % масла, содержаще-
гося в трансформаторе (при количестве масла в трансформаторе
менее 600 кг допускается отсутствие маслоприемника). Трансфор-
матор устанавлирают в камере преимущественно так, чтобы к
двери он был обращен стороной низкого напряжения. Этим обеспе-
чивается большая безопасность при осмотре трансформатора,
находящегося под напряжением.
РУ низкого напряжения 3 (см. рис. 7.10), цеховой подстан-
ции (ТП) представляет собой распределительный щит, состоящий
из ряда соединенных панелей, в каждой из которых размещены
аппараты и токоведущие части одного или нескольких присоеди-
нений к сборным шинам. Сборные шины размещены вдоль распре-
делительного щита обычно в верхней части панелей. Поперечный
разрез одной из линейных панелей распределительного щита
представлен на рис. 7.12. Она содержит четыре присоединения
отходящих кабельных линий. Несущей конструкцией панели явля-
ется металлический каркас, закрытый с лицевой стороны обшив-
кой из листовой стали. Сборные шины 1 установлены на изоля-
торах вверху каркаса панели. Внутри каркаса смонтированы
рубильники 2, плавкие предохранители 3 и концевые разделки 5
кабельных линий. На лицевой стороне панели размещены ры-
чажные приводы 4 рубильников и над ними измерительные при-
боры.
Панели выполнены из расчета одностороннего обслуживания
(с лицевой стороны) расположенного в них оборудования. Для
доступа к установленным внутри панелей элементам оборудова-
ния на лицевой стороне их предусмотрены двери. Распредели-
тельные щиты одностороннего обслуживания устанавливают непо-
средственно у стены, чем обеспечивается экономия площади
помещения. Количество линейных присоединений, размещаемых
на одной панели, зависит от размеров принятых для этих присоеди-
нений аппаратов или, другими словами, от номинальных токов
линий. При малых номинальных токах линий на одной панели
удается разместить электрические аппараты по нескольку штук
в горизонтальном ряду и в несколько ярусов по высоте. По мере
роста номинального тока линий количество линейных присоеди-
нений на панели уменьшится. Под распределительным щитом
244
предусматривается кабельный канал, в котором укладываются
кабели питающих и отходящих линий.
Вместо рубильников и предохранителей в панелях могут быть
установлены автоматы. Панели с автоматами выполняются ана-
логично, но количество линейных присоединений с автоматами,
размещаемых на одной панели, может быть больше, так как при
прочих равных условиях автомат занимает меньше места в панели,
чем рубильник и предохранитель.
По исполнению распределительные щиты могут быть стацио-
нарного й выдвижного типа. В первом из них все аппараты крепят-
ся к каркасу стационарно. Рассмотренная выше панель относится
к щиту стационарного типа. В распределительном щите выдвиж-
ного типа коммутационные аппараты (обычно автоматы) выпол-
няются выдвижными из каркаса для удобства обслуживания и
ремонта. Щиты выдвижного типа входят в состав комплектных
трансформаторных подстанций низкого напряжения. Они комп-
лектуются из шкафов с двусторонним обслуживанием. Поэтому
между тыльной стороной щита и стеной помещения необходим
проход для обслуживания. Кроме того, щиты выдвижного типа
сложнее по конструкции и дороже. Поэтому, несмотря на ряд
преимуществ (компактность, удобство эксплуатации и др.),
они применяются значительно менее широко, чем щиты стацио-
нарного типа.
В состав РУ низкого напряжения цеховой подстанции (ТП)
часто входит конденсаторная батарея для компенсации реактив-
ной мощности. Она может быть размещена в специальной конден-
саторной панели, входящей в состав распределительного щита,
или может быть использована отдельная комплектная конденса-
торная установка, устанавливаемая вне щита.
В общем случае к числу распределительных устройств низкого
напряжения кроме распределительных щитов относятся также
распределительные пункты низкого напряжения, которые слу-
жат для распределения электроэнергии между отдельными элект-
роприемниками и получают питание по линиям от распредели-
тельного щита. В соответствии с указанным назначением их
размещают вблизи от электроприемников, т. е. в производствен-
ных и вспомогательных помещениях, но не в помещении под-
станции. По конструкции такой распределительный пункт пред-
ставляет собой настенный или напольный шкаф с электрическими
аппаратами (общим рубильником и плавкими предохраните-
лями в отходящих линиях или автоматами) для присоединения
линий от электроприемников. Применение распределительных
пунктов низкого напряжения позволяет уменьшить расход кабеля
и проводов, а также сократить объем распределительного щита на
цеховой подстанции.
Открытые распределительные устройства и трансформаторные
подстанции. Обычно РУ 35 кВ и выше выполняются открытыми
245
(ОРУ), так как при повышенных напряжениях размеры ЗРУ
оказываются большими, что обусловливает большие капиталь-
ные затраты. Поскольку ГПП предприятий на стороне высшего
напряжения (35—ПО кВ) обычно оборудуются ОРУ, то ГПП
вследствие этого являются открытыми подстанциями. В каче-
стве примера выполнения ГПП на рис. 7.13 показана открытая
комплектная трансформаторная подстанция 35/6—10 кВ.
В общем случае открытая подстанция включает ОРУ высшего
напряжения 35—ПО кВ, масляные трансформаторы и РУ низшего
напряжения 6—10 кВ. В открытых РУ все токоведущие части
должны быть расположены на безопасной от случайного прикосно-
вения высоте. Поэтому все электрические аппараты распола-
гаются на металлических или железобетонных основаниях (сту-
льях) надлежащей высоты. Для соединений между аппаратами
используются неизолированные алюминиевые или медные шины,
которые могут быть гибкими из многопроволочных проводов или
жесткими из труб. Жесткие шины из полос прямоугольного сече-
ния в ОРУ обычно не используются из-за их коронирования (сте-
кания электронов) на гранях под воздействием высоких напря-
жений электрического поля. Гибкие шины, а также провода под-
ходящих и отходящих воздушных линий крепятся с помощью
подвесных изоляторов (гирлянд) на порталах; жесткие шины —
при помощи опорных изоляторов на железобетонных или метал-
лических стойках.
Для перевозки оборудования по территории ОРУ предусмат-
риваются дороги с твердым покрытием. При этом должны соблю-
даться минимально допустимые расстояния от токоведущих ча-
стей ОРУ до габаритов транспортируемого оборудования и
машин. Для защиты ОРУ от прямых ударов молнии применя-
ются молниеотводы в виде вертикальных стальных заземленных
стержней, укрепляемых на опорах или порталах. Открытое рас-
пределительное устройство должно быть ограждено.
Представленная на рис. 7.13 открытая двухтрансформаторная
комплектная подстанция 35/6—10 кВ снабжена простейшим
ОРУ 35 кВ, поскольку для нее принята схема с двумя блоками
линия — трансформатор и сборные шины 35 кВ отсутствуют.
В каждом из блоков предусмотрены разъединитель 2 и стреляю-
щий предохранитель 3, которые установлены на стальном портале.
Ошиновка между этими аппаратами и отвод цепи к выводам
35 кВ трансформатора выполнены жесткими шинами. Провода
питающей воздушной линии 1 присоединены непосредственно к
входным зажимам разъединителя 2. При срабатывании стреляю-
щих предохранителей 3 факел выбрасываемых раскаленных газов
и выстреливаемый контактный трос опасны для обслуживающего
персонала. Поэтому вокруг портала со стреляющими предохрани-
телями выполнено ограждение 8 в дополнение к общей ограде 7
подстанции.
246
7.13, Конструкция открытой комплектной трансформаторной подстанции
20000
На открытых подстанциях применяют только масляные транс-
форматоры, поскольку лишь они пригодны для работы на открытом
воздухе. Масляные трансформаторы 4 установлены на железо-
бетонных фундаментах. Чтобы при повреждении трансформато-
ров масло не растекалось и не создавалась угроза возникнове-
ния и распространения пожара, под ними в соответствии с ПУЭ
должны выполняться маслоприемники на полный объем масла,
если в трансформаторе содержится более 1000 кг масла. Такое
количество масла содержится обычно в трансформаторах мощ-
ностью 630 кВ-А и более. Маслоприемник должен выступать за
габариты трансформатора и быть сверху перекрыт металлической
решеткой со слоем гравия или щебня не менее 0,25 м для локализа-
ции пожара. Если в ОРУ используются многообъемные масляные
выключатели, то на их установку распространяются те же требо-
вания, что и на масляные трансформаторы.
В качестве РУ низшего напряжения (6 -10 кВ) на открытых
подстанциях могут быть использованы закрытое РУ или комплект-
ное распределительное устройство наружной установки (КРУН).
В составе комплектных подстанций применяют только КРУН.
Аналогично комплектным распределительным устройствам внут-
ренней установки КРУН имеют два конструктивных исполнения:
стационарное и выкатное. В последнем выключатель установлен
на выкатной тележке. Принципиальная особенность КРУН состоит
р том, что оно рассчитано для открытой установки вне помеще-
ний, вследствие чего шкафы КРУН снабжены крышей и уплотне-
ниями, защищающими размещенное в них оборудование от атмос-
ферных воздействий и пыли. В некоторых из типов шкафов КРУН
предусмотрены нагревательные элементы для улучшения условий
работы аппаратов при низких температурах. В составе открытой
комплектной подстанции (см. рис. 7.13) предусмотрено КРУН 6 с
отходящими воздушными линиями 5. При необходимости к шка-
фам КРУН могут быть присоединены кабельные линии вместо
воздушных. Присоединено КРУН к трансформаторам жесткими
шинами.
Выбор электрических аппаратов для распределительных уст-
ройств. Электрические аппараты в процессе эксплуатации должны
надежно работать в длительном рабочем режиме и кратковре-
менном режиме КЗ. Поэтому они должны быть выбраны по усло-
виям рабочего режима и проверены по условиям КЗ.
Выбор электрических аппаратов по условиям рабочего режима
состоит в том, что они должны отвечать роду установки (внутрен-
няя или наружная), а их номинальное напряжение UHO» и ток
/Нрм должны быть не ниже номинального напряжения установки
Суп и максимального рабочего тока /ргбп../
[ 1 \ тJ . I \ J
'-'ном '-уст> 'ном
Проверка электрических аппаратов по режиму КЗ произво-
248
дится по их электродинамической и термической устойчивости,
а отключающие и защитные аппараты должны быть проверены
также по их отключающей способности при КЗ.
Электродинамическая устойчивость — это способность аппа-
рата противостоять без повреждений кратковременным усилиям,
возникающим между токоведущими элементами аппарата при
протекании токов КЗ. Наибольшие усилия возникают при проте-
кании ударного тока КЗ z‘y, поэтому проверка производится
по нему или по действующему значению полного тока КЗ за первый
период /у в зависимости от указанного заводом-изготовителем
амплитудного гдин или действующего /дин значения тока электро-
динамической устойчивости аппарата: -
/дин =5^ /у ИЛИ /дин /у*
Термическая устойчивость характеризуется током термической
устойчивости /т, который аппарат может выдержать без повреж-
дений в течение времени /т. Эти параметры указываются в инфор-
мации заводом-изготовителем. Поскольку количество выделяю-
щегося в проводнике тепла пропорционально квадрату тока, то
условием проверки термической устойчивости является
/т2/Т>Вк,
где Вк — тепловой импульс тока КЗ за время действия КЗ.
Определение Вк затруднено тем. что полный ток изменяется
в процессе КЗ. Для упрощения задачи заменяют действитель-
ный ток КЗ установившимся /„, полагая, что он действует в
течение некоторого фиктивного времени /ф и создает такой же
тепловой эффект, как и действительный изменяющийся ток /к в
течение действительного времени t действия КЗ. Тогда тепловой
импульс тока КЗ
l)K = \i2dt=I2OQ /ф.
В соответствии с этим условие обеспечения термической устой-
чивости аппаратов выражается так:
/?/т>/2„/ф.
Поскольку полный ток КЗ равен сумме периодической и апе-
риодической слагающих, то фиктивное время /ф выражают также
как сумму фиктивных времен этих слагающих тока КЗ:
/Ф = /Ф„ + ^Ф.-
При условии питания цепи КЗ от источника неограниченной
мощности периодическая слагающая тока не изменяется в про-
цессе КЗ, поэтому 1^=1", а фиктивное время периодической сла-
гающей /фп равно действительном} времени t действия КЗ: t^ — t.
Фиктивное время апериодической слагающей /ф1 относительно
249
мало: для установок в. н. /фи«0,05 с, для установок н. н. им можно
пренебречь. Действительное время протекания тока КЗ в уста-
новках в. н. определяют с учетом времени действия защиты /защ
и времени отключения выключателя tB яз 0,15 с:
t == Гзащ —F 61-
Проверка отключающей способности коммутационных и за-
щитных аппаратов производится по сверхпереходному току трех-
фазного КЗ:
I '> I"
1 ОТКЛ ,
где /откл— предельный ток отключения аппарата, т. е. наибольший ток, который
может быть отключен аппаратом без повреждения.
Этот ток указывается заводом-изготовителем.
7.2. ЭЛЕКТРИЧЕСКИЕ СЕТИ ПРЕДПРИЯТИЙ
И ИХ ЗАЩИТА
Внутрицеховые (распределительные) сети должны обеспечивать
надежность электроснабжения цеховых электроприемников при
минимальных затратах проводниковых материалов, быть удоб-
ными в эксплуатации, соответствовать условиям окружающей
среды и иметь достаточную механическую прочность. Надеж-
ность питания в первую очередь обеспечивается правильным выбо-
ром схемы электроснабжения электроприемников. На предприя-
тиях текстильной промышленности схемы распределения электро-
энергии, как правило, имеют две ступени: от пункта приема элект-
роэнергии (ГПП, ЦРП, РП) до цеховых распределительных ТП —
межцеховые питающие сети, и от цеховых РП до электроприем-
ников — распределительные сети.
На первой ступени распределения электрические сети обычно
выполняются на напряжение 35, 20, 10 и 6 кВ.
На второй ступени распределения электроэнергии, т. е. для
внутрицеховых распределительных сетей, применяется в основном
напряжение 380/220 В трехфазного переменного тока, а для
сетей постоянного тока — 440 и 220 В. В шкалу стандартных
номинальных напряжений включено и напряжение 660 В, при-
меняемое уже в некоторых отраслях отечественной промышлен-
ности.
Внутреннее и внешнее электроснабжение потребителей элект-
роэнергии осуществляют радиальными, магистральными и сме-
шанными (радиально-магистральными) схемами питания.
Радиальные схемы передают непосредственно электроэнер-
гию от источника Питания к потребителю без ответвлений на пути
для снабжения других потребителей. Они имеют большое коли-
чество отключающей аппаратуры и предназначены для питания
достаточно мощных потребителей. Малое количество групп при-
250
Рис. 7.14. Схемы электро-
снабжения потребителей
электроэнергии:
а — радиальная схема пита-
ния; б и в — магистральные
схемы питания; г — присо-
единение электропрнемников
для радиальной схемы к шка-
фам, д — подсоединение
электроприемников к шка-
фам цепочкой
емников обеспечивает радиальным схемам повышенную надеж-
ность электроснабжения (выход из строя радиальной линии
лишает питания незначительное число приемников). Однако
надежность окупается значительными затратами на сооружение
сети, протяженность которой больше, чем в магистральных схемах.
Цеховая ТП 6—10/0,4—0,69 кВ при радиальной схеме пита-
ния обычно имеет присоединение к линии 6—10 кВ по схеме,
приведенной на рис. 7.6. Пример выполнения радиальной схемы
показан на рис. 7.14, а. К ТП / подключены четыре распредели-
тельных пункта 2, к каждому из которых подключены электро-
приемники 3.
Крупные одиночные электроприемники могут получать пита-
ние непосредственно от шин низшего напряжения ТП, а не от
распределительных пунктов или шкафов.
Магистральные схемы (рис. 7.14, б) передают электроэнергию
к подстанциям не непосредственно, а с ответвлениями на пути для
питания других потребителей. Обычно такие схемы обеспечивают
питание не менее пяти-шести приемников малой и средней мощ-
ности, равномерно распределенных по длине пролетов цеха
(рис. 7.14, в). Магистральные схемы имеют меньшее число отклю-
чающих аппаратов, меньшую протяженность линий и потому
дешевле радиальных, но зато имеют пониженную надежность
(авария в магистрали лишает питания многих подключенных к
ней потребителей). При магистральной схеме трансформатор
цеховой ТП в большинстве случаев присоединен через коммута-
ционные аппараты.
Широкое распространение получили смешанные (радиально-
магистральные) схемы, когда отдельные приемники большой мощ-
ности питаются от ТП по радиальной схеме, а распределитель-
ные шкафы питаются от общей магистрали.
251
Распределительные шкафы следует располагать в центре пита-
ния нагрузок в местах, удобных для обслуживания как самих
шкафов, так и технологического оборудования.
Присоединение электроприемников для радиальной схемы к
самим шкафам показано на рис. 7.14, г.
Электродвигатели и другие электроприемники подсоединяются
к распределительным шкафам 1 через самостоятельные выклю-
чатели 2 или цепочкой по нескольку электродвигателей, но, как
правило, не более трех под один выключатель (рис. 7.14, д'). Пита-
ние цепочкой применяется для электродвигателей малой мощно-
сти. При наличии равномерно распределенной нагрузки питание
осуществляется по схеме, приведенной на рис. 7.14, д.
Распространена также экономичная система внутрицехового
распределения электроэнергии блок трансформатор — магистраль
(рис. 7.15). При этой системе отпадает необходимость устанавли-
вать на подстанции распределительный щит низкого напряжения.
В системе блок трансформатор — магистраль от трансформа-
тора 1 выходит прямо в цех питающая магистраль, выполнен-
ная шинопроводом 2, к которому в необходимых местах подсое-
диняются распределительные шинопроводы 3 и далее электро-
приемники или для отдельных удаленных групп электроприем-
ников — распределительные шкафы 4. Отдельные крупные элект-
роприемники могут присоединяться непосредственно к питающему
шинопроводу. В тех случаях, когда в цехе сооружается несколько
ТП, в местах сближения питающих магистралей соседних под-
станций сооружают резервирующие перемычки, которые в нор-
мальном режиме работы разомкнуты. Пропускная способность
перемычки рассчитывается на 30—100 % мощности трансформа-
тора. В многопролетных цехах при большом числе внутрицехо-
вых ТП применяется соединение магистралей всех подстанций в
одно нормальное разомкнутое кольцо. На перемычках между
соседними подстанциями обычно устанавливаются разъединители
или рубильники с предохранителями.
Устройство электрических сетей. В соответствии с ПУЭ для канализации
электроэнергии применяются электропроводки, токопроводы, кабельные и воз-
душные линии.
Электропроводкой называется совокупность проводов и кабелей
с относящимися к ним креплениями, поддерживаемыми защитными кон-
струкциями и деталями. Электропроводки разделяются на открытые и скрытые.
Открытая электропроводка — это электропроводка, проложенная по поверх-
ности стен, потолков, по фермам и другим строительным элементам зданий и
Рис. 7.15. Схема внутрицехового
распределения электроэнергии
252
сооружений, по опорам и т. п. При открытой электропроводке применяются
прокладки проводов и кабелей непосредственно по поверхности стен, потолков
и т. п., на струнах, тросах, роликах, изоляторах, в трубах, коробах, гибких метал-
лорукавах, на лотках, в электротехнических плинтусах и наличниках, а также <
свободной подвеской и т. п. Открытая электропроводка может быть стационарной,
передвижной и переносной.
Скрытая электропроводка — это электропроводка, проложенная внутри кон-
структивных элементов зданий и сооружений (.в стенах, полах, фундаментах,
перекрытиях), а также по перекрытиям в подготовке пола, непосредственно под
съемным полом и т. п. При скрытой электропроводке применяются прокладки
проводов и кабелей в трубах, гибких металлорукавах, коробах, замкнутых кана-
лах и пустотах строительных конструкций, в заштукатуриваемых бороздах, под
штукатуркой, а также замоноличиванием в строительные конструкции при их
изготовлении.
Электропроводка может быть наружной (открытой и скрытой), т. е. проло-
женной по наружным стенам зданий и сооружений, под навесами и т. п., а также
между зданиями на опорах (не более четырех пролетов длиной до 25 м каждый)
вне улиц, дорог и т. п.
В стальных и других механически прочных трубах, рукавах, коробах, лотках
и замкнутых .каналах строительных конструкций зданий допускается совместная
прокладка проводов и кабелей (за исключением взаиморезервируемых) всех
цепей одного агрегата; силовых и контрольных цепей нескольких машин, пане-
лей и щитов, связанных технологическим процессом; цепей, питающих сложный
светильник; цепей нескольких групп одного вида освещения с общим числом про-
водов в трубе не более восьми, осветительных цепей напряжением до 42 В с
цепями выше 42 В при условии заключения проводов цепей напряжением 42 В
в отдельную изоляционную трубу. Прокладка фазных и нулевых проводников
в стальных трубах должна осуществляться в одной общей трубе. Допускается
прокладывать их в отдельных трубах, если длительный ток нагрузки в проводни-
ках не превышает 25 А. Соединения и ответвления проводов и кабелей должны
выполняться в соединительных и ответвительных коробках, в изоляционных
корпусах, в специальных нишах, где необходимо предусмотреть их запас. При
выборе вида электропроводки и способа прокладки проводов и кабелей наряду
с требованиями ПУЭ должны учитываться требования электро- и пожаробезо-
пасности.
Следует учесть, что при повышенной запыленности в цехах предприятий
текстильной промышленности не рекомендуется применять способы прокладки,
при которых на элементах электропроводки может скапливаться пыль, а удале-
ние ее затруднительно. Не допускается применение проводов и кабелей с алюми-
ниевыми жилами для присоединения к электрооборудованию, установленному
непосредственно на виброизолирующих опорах или подверженных вибрации
(например, к приводу ткацких станков).
Открытую проводку в помещениях с повышенной опасностью и помещениях
особо опасных при напряжении выше 42 В, какими являются производственные
цехи предприятий отрасли, следует выполнять на высоте не менее 2,5 м от уровня
пола или площадки обслуживания. Для стационарных электропроводок должны
применяться преимущественно провода и кабели с алюминиевыми жилами.
В коробах провода и кабели допускается прокладывать многослойно с упо-
рядоченным и произвольным (россыпью) взаимным расположением. Сумма их
сечений, включая изоляцию и наружные оболочки, не должна превышать 35 %
сечения короба в свету для глухих коробов и 40 % для коробов с открываемыми
крышками.
Токопроводом называется устройство, предназначенное для передачи
и распределения электрической энергии, состоящее из неизолированных или изо-
лированных проводников и относящихся к ним изоляторов, защитных оболочек,
ответвительных устройств, поддерживающих и опорных конструкций.
В зависимости от вида проводника токопроводы разделяются на гибкие
(при использовании проводов) и жесткие (при использовании шин). Жесткий
253
токопровод напряжением до 1 кВ заводского изготовления, поставляемый комплект-
ными секциями, называется шинопроводом.
В зависимости от назначения различают шинопроводы:
магистральные (для присоединения распределительных шинопроводов и си-
ловых распределительных пунктов, щитов и мощных электроприемников);
распределительные (для присоединения электроприемников);
троллейные (для питания передвижных электроприемников);
осветительные (для питания светильников и электроприемников небольшой
мощности).
Кабельной линией (КЛ) называется линия для передачи электро-
энергии или отдельных импульсов ее, состоящая из одного или нескольких
параллельных кабелей с соединительными, стопорными и концевыми муфтами
(заделками) и крепежными деталями.
Различают прокладку кабелей в кабельных сооружениях, туннелях, шахтах,
этажах, блоках, эстакадах и др.
Проектирование и сооружение КЛ производится на основе технико-эконо-
мических расчетов с учетом развития сети, ответственности и назначения КЛ,
характера трассы, способа прокладки, конструкции и т. д. Над подземными КЛ
в соответствии с правилами охраны электрических сетей устанавливаются охран-
ные зоны' в определенных размерах площадки над кабелями.
Каждая КЛ должна иметь свой номер или наименование. Открыто проложен-
ные кабели и все кабельные муфты снабжаются бирками с обозначением марки
кабеля, напряжения, сечения, номера или наименования линии, номера муфты,
даты ее монтажа.
Воздушной линией (ВЛ) электропередачи напряжением выше
1000 В называется устройство для передачи электроэнергии по проводам, распо-
ложенным вне помещения и прикрепленным при помощи изоляторов и арматуры
к опорам или кронштейнам и стойкам на инженерных сооружениях (мостах,
путепроводах и т. п,).
Защита электрических сетей. Аппаратом защиты называется
аппарат, автоматически отключающий защищаемую электриче-
скую цепь при аварийных режимах. Аппараты защиты по своей
отключающей способности должны соответствовать максималь-
ному значению тока КЗ в начале защищаемого участка электри-
ческой сети.
В качестве аппаратов защиты в цепях напряжением до 1 кВ
применяются автоматические выключатели или предохранители.
Выбор предохранителей для всех точек сети должен обеспе-
чивать .избирательность (селективность) их действия. Это озна-
чает, что при повреждении какого-либо электроприемника либо
участка сети первым должен расплавиться ближайший- к месту
повреждения предохранитель. Считается, что избирательность в
работе предохранителей обеспечивается убыванием не менее чем
на две ступени по направлению потока энергии номинальных
токов плавких вставок.
Надежное отключение поврежденного участка сети обеспечи-
вается, если отношение наименьшего расчетного тока КЗ к номи-
нальному току плавкой вставки предохранителя или расцепителя
автоматического выключателя будет не менее значений, приведен-
ных в ПУЭ.
Сети внутри помещений, выполненные открыто проложенными
проводниками с горючей наружной оболочкой (изоляцией), долж-
254
ны быть защищены от перегрузок (сюда же относятся силовые
сети с возможным возникновением длительных технологических
перегрузок). В таких сетях проводники выбираются по расчетному
току так, чтобы кратность была обеспечена аппаратами защиты
по отношению к длительно допустимым токовым нагрузкам не бо-
лее установленной ПУЭ (не более 80—125 % для номинального
тока соответствующих аппаратов защиты).
Аппараты защиты напряжением до 1 кВ целесообразно уста-
навливать в местах сети, где сечение проводника уменьшается
(по направлению к месту потребления электроэнергии) или где это
необходимо для обеспечения селективности защиты.
В электроустановках напряжением выше 1 кВ применяется
релейная защита (с действием на сигнал или отключение) гене-
раторов, трансформаторов, линий электропередачи, шин, синхрон-
ных компенсаторов с целью автоматического отключения повреж-
денного элемента от остальной неповрежденной части электро-
установки с помощью выключателей, а также реагирования на
опасные, ненормальные режимы работы элементов электрической
системы (перегрузку, повышение напряжения и т. д.).
Устройства релейной защиты выполняются так, чтобы обеспе-
чивалось селективное и наименьшее возможное время отключения
КЗ в целях бесперебойной работы неповрежденной части системы
(например, устойчивая работа электрической системы и электро-
приемников и т. д.). Действия релейной защиты фиксируются
указательными реле, встроенными в реле указателями, счетчи-
ками числа срабатывания или другими устройствами.
Для ВЛ и КЛ в сетях напряжением 20 и 35 кВ с изолированной
нейтралью предусмотрены устройства релейной защиты от много-
фазных замыканий в двухрелейном исполнении и от однофазных
замыканий на землю с действием на сигнал и с использованием
устройства контроля изоляции. Для ВЛ и КЛ в сетях напряжением
3—10 кВ с изолированной нейтралью предусмотрены устройства
релейной защиты от многофазных замыканий и однофазных замы-
каний на землю в одно-, двух- или трехрелейном исполнений в за-
висимости от требований чувствительности и надежности.
Для силовых трансформаторов с обмоткой высшего напряже-
ния (3 кВ и выше) предусмотрены релейные защиты от многофаз-
ных и однофазных замыканий в обмотках и на выводах, витковых
замыканий, токов КЗ и перегрузок.
7.3. ТЕЛЕМЕХАНИКА И АВТОМАТИКА
В ЭЛЕКТРИЧЕСКИХ СЕТЯХ
Телемеханика применяется в электрических сетях для диспетчер-
ского управления территориально рассредоточенными электро-
установками, связанными общим режимом работы, и их контроля.
Телемеханизацию следует применять лишь в случаях ее частого
255
и эффективного использования, когда она дает возможность су-
щественно улучшить ведение режима электроснабжения, устано-
вить оперативный контроль за поддержанием нормируемых элек-
трических параметров (напряжение, частота, нагрузка и т. д.),
ускорить ликвидацию аварий, снизить численность обслуживаю-
щего персонала.
Основанием для применения средств телемеханики является
их технико-экономическая целесообразность с учетом повышения
экономичности и надежности работы электроустановок, снижения
численности эксплуатационного персонала, отказа от постоянного
дежурства персонала и т. п. При примерно равных затратах
и технико-экономических показателях предпочтение должно отда-
ваться автоматизации перед телеуправлением.
Телеуправление обычно предусматривается в объеме, необхо-
димом для централизованного решения задач по установлению
надежных и экономически выгодных режимов работы электро-
установок, работающих в сложных сетях, если эти задачи не мо-
гут быть решены средствами автоматики.
Телесигнализация предусматривается для отображения на
диспетчерских пунктах положения и состояния основного комму-
тационного оборудования, имеющего существенное значение для
режима работы системы энергоснабжения, а также для ввода ин-
формации в вычислительные машины и для передачи аварийных
и предупредительных сигналов.
Телеизмерения обеспечивают передачу основных электриче-
ских или технологических параметров (характеризующих режимы
работы отдельных электроустановок), необходимых для установ-
ления и контроля оптимальных режимов работы всей системы
энергоснабжения в целом, а также для предотвращения или лик-
видации возможных аварийных процессов.
В качестве каналов телемеханики используются обычно при-
меняемые для других целей или самостоятельные проводные
(кабельные и воздушные) каналы, высокочастотные каналы
по ВЛ и распределительные сети, радио и радиорелейные каналы
связи.
Питание устройств телемеханики на диспетчерских и конт-
ролируемых пунктах осуществляется совместно с питанием
аппаратуры каналов связи и телемеханики.
Объем средств телемеханики (телеуправление, телесигнализа-
ция, телеизмерение, самопишущие приборы с ускорением автома-
тической записи в аварийных режимах, автоматические осцилло-
графы, фиксирующие приборы — амперметры, вольтметры и ом-
метры и другие подобные устройства) должен соответствовать
требованиям ПУЭ.
Схемы диспетчерских связей на предприятиях средней мощ-
ности имеют более ограниченный объем телемеханизации, включая
лишь сигнализацию и телеизмерение по вызову.
256
Самозапуск электродвигателей. При отсутствии самозапуска
электродвигателей в момент кратковременного нарушения
электроснабжения произойдет их массовое отключение, что вызо-
вет срывы технологических режимов и соответственно выпуск
бракованной продукции.
Самозапуск состоит в том, что при восстановлении электро-
снабжения после кратковременного перерыва электродвигатели
автоматически восстанавливают свой режим работы, как правило,
вращаясь под нагрузкой. Такое положение является допустимым
как для механизмов, так и для электродвигателей. При этом одно-
временно запускается группа электродвигателей. При самозапуске
возникают дополнительные потери напряжения и уменьшаются
вращающие моменты электродвигателей.
Производственные механизмы, участвующие в самозапуске,
можно разделить на следующие две группы:
механизмы с постоянным моментом сопротивления, не зави-
сящим от скорости, например грузоподъемные механизмы, кон-
вейеры, ряд типов ткацких станков;
механизмы с переменным моментом сопротивления, зависящим
от частоты вращения, например вентиляторы, центробежные
насосы и т. д., у которых момент сопротивления нелинейно возра-
стает с ростом частоты вращения. Самозапуск для них обеспечи-
вается легче, чем для механизмов с постоянным моментом сопро-
тивления.
При отсутствии возможности обеспечить самозапуск всех
электродвигателей необходимо для обеспечения самозапуска
ответственных механизмов отключить временно часть неответст-
венных.
Обеспечение возможности самозапуска АД сводится к решению
следующих двух задач:
выявление достаточности момента вращения АД с учетом по-
ниженного напряжения;
определение дополнительного нагрева АД вследствие увеличе-
ния продолжительности времени разгона.
При расчете самозапуска определяются (в специальной ли-
тературе) : выбег за период нарушения электроснабжения; сопро-
тивления сети и электродвигателей; напряжение и избыточный
момент асинхронного двигателя, его дополнительный нагрев и
время самозапуска.
Для обеспечения самозапуска релейная защита и автоматика
должны иметь минимальное время отключения при КЗ и дей-
ствия АВР. С целью создания благоприятных условий для само-
запуска целесообразно применение синхронных двигателей с фор-
сированием возбуждения для повышения напряжения, а также
секционирование распределительных устройств для уменьшения
общей мощности одновременно участвующих в самозапуске
электродвигателей.
257
9 А. М. Ланген, В. В. Красник
7.4. ПОКАЗАТЕЛИ КАЧЕСТВА ПОТРЕБЛЯЕМОЙ
ЭЛЕКТРОЭНЕРГИИ
Для обеспечения нормальной работы электроприемников электро-
энергия, потребляемая ими, должна быть определенного качества.
Показатели качества потребляемой электроэнергии регламенти-
руются существующим только в Советском Союзе ГОСТ 13109—87
(«Электрическая энергия. Нормы качества электрической энергии
у ее приемников, присоединенных к электрическим сетям общего
назначения»).
К основным показателям качества электрической энергии
относятся: отклонение напряжения \'t, колебание напряжения б|/,
коэффициент пульсации, несимметрия напряжения основной
частоты, несинусоидальность формы кривой напряжения, откло-
нение частоты от номинального значения.
Отклонение напряжения V, оценивается разностью между фак-
тическим Ut и номинальным (7НОМ значениями напряжения в дан-
ный момент времени t, кВ,
К=17/-ПНОМ1
или, %,
V(=(l7f-l7HOM)/UHOM-100.
Для приборов рабочего освещения производственных и обще-
ственных зданий допускаются отклонения напряжения в нормаль-
ном режиме в пределах — 2,5...+ 5 % номинального, для электро-
двигателей и их пусковых аппаратов —5...+ 10 % и для осталь-
ных электроприемников —5...+ 5 %. В послеаварийном режиме
допускается дополнительное понижение напряжения на 5 %.
Значения отклонения напряжения должны находиться в ука-
занных пределах с интегральной вероятностью 0,95 за период
времени Т:
для предприятий с пятидневной рабочей неделей — в течение
одних рабочих и одних нерабочих суток;
для предприятий с непрерывным производством — в течение
одних суток и во всех остальных случаях — в течение двух рабочих
и одних нерабочих суток.
Указанное допущение означает, что можно не считаться с от-
дельными превышениями нормируемых значений, если ожидаемая
общая продолжительность таких превышений составит менее 5 %
за период времени Т.
Колебания напряжения 6К оцениваются следующими двумя
показателями: размахом 6V и средней частотой F.
Размах колебания напряжения есть разность между следую-
щими друг за другом наибольшими (7тах и наименьшими (7min зна-
чениями напряжения, кВ,
258
или, %,
Средняя частота есть количество т резких изменений напря-
жения с размахом более 0,5 % и скоростью изменения более 1 %
в секунду за время Т, т. е. F=m/T.
Допустимые значения колебаний напряжения на зажимах ламп
накаливания определяются, например, по следующей формуле:
6С=1+6/н=1+А//Ю,
где п — число колебаний в 1 ч; Д/ — средний за 1 ч интервал между последующими
колебаниями, мин.
Значения колебания напряжения в промышленных сетях
должны находиться в допустимых пределах с интегральной ве-
роятностью 0,95 в течение суток; в бытовых сетях — в течение 1 ч.
Коэффициент пульсации р постоянного (выпрямленного)
напряжения выражается в процентном отношении действующего
значения всех гармонических составляющих выпрямленного на-
пряжения к постоянной составляющей этого напряжения или в от-
ношении амплитуды основной (первой) гармоники Um, к выпрям-
ленному напряжению С/Н Ср, т. е.
Р = ^ni|/^H.cp-
Несимметрия трехфазной системы напряжений характеризу-
ется величиной напряжения, обратной последовательности основ-
ной частоты по абсолютной величине:
</=1/3|Дл + а2(7в + оДс|,
или в относительном выражении
U/UKOK=\00/^3U НОМ I + a2UB + ayc\.
Относительное значение (J/UK(m допускается в пределах
ю 2 % на зажимах любого трехфазного симметричного электро-
приемника. Оно должно находиться в указанных пределах с ин-
тегральной вероятностью 0,95 для трехфазных электроприемников
в течение суток.
В приведенной формуле а—векторный оператор фазы, рав-
ный а= — 1/2+/3/2; а2= -1/2—/3/2.
Несинусоидальность формы кривой напряжения на зажимах
любого электроприемника длительно допустима, если коэффициент
несинусоидальности Ккс не превышает 5 %, т. е.
К не —
£/?/1/но>.-100<5%,
где п — номер последней из учитываемых гармоник; t/v — действующее значение
напряжения v-й гармоники.
()*
259
Несинусоидальность формы кривой напряжения должна нахо-
диться в указанных пределах с интегральной вероятностью 0,95
в течение суток.
Отклонение частоты от номинального значения в нормальном
режиме, усредненное за 10 мин, допускается в пределах ±0,1 Гц.
Колебания частоты не должны превышать 0,2 Гц сверх отклоне-
ния частоты. Отклонения и колебания частоты при расчетах систем
электроснабжения предприятий, как правило, не учитываются,
так как они обусловлены в основном режимами нагрузки энерго-
систем.
7.5. ЭЛЕКТРИЧЕСКИЕ НАГРУЗКИ
ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ*
От правильного определения электрических нагрузок промышлен-
ных предприятий зависит рациональное построение их системы
электроснабжения (СЭС), поскольку электрические нагрузки кла-
дутся в основу выбора мощности источников питания и выбора
электрических аппаратов и токоведущих частей СЭС.
Каждый из электроприемников предприятия характеризуется
номинальной мощностью, которая указывается в паспорте электро-
приемника и соответствует длительной предельно допустимой тем-
пературе нагрева его изоляции. Для всех электроприемников,
кроме электродвигателей, номинальная мощность определяется
по потребляемой ими мощности. Номинальная мощность электро-
двигателей соответствует мощности на их валу в номинальном
режиме работы. Для токоведуших частей понятие номинальной
мощности отсутствует. Однако температура их нагрева в процессе
работы электроустановки также ограничивается; она зависит
от протекающего по ним тока и от площади сечения этих токове-
дущих частей.
Выбор мощности источников питания в СЭС предприятия и вы-
бор сечения токоведущих частей производится по так называ-
емой расчетной нагрузке Рр — расчетной активной мощности
(рис. 7.16). Как правило, потребление энергии электроприемни-
ками является неравномерным во времени. Пример такого нерав-
номерного эдектропотребления за время смены показан на графике
нагрузки (см. рис. 7.16), где по оси ординат отложены значения
средней активной мощности за каждые полчаса. Интервалы вре-
мени в полчаса выбраны для усреднения мощности вследствие
того, что примерно за такое время наступает установившийся
тепловой режим токоведущих частей. В соответствии с этим рас-
четной нагрузкой является максимальная из средних получасовых
активных мощностей за наиболее загруженную смену.
Для одиночного электроприемника расчетной нагрузкой явля-
ется его номинальная мощность, по которой производится расчет
Написано А. А. Грищенко-Меленевским.
260
Рис. 7.17. Диаграмма коэффициентов максимума в зависимости
от приведенного числа электроприемников для различных коэф-
фициентов использования
сечения проводов питающей его линии. Для группы из п электро-
приемников сумму их номинальных мощностей принято называть
установленной мощностью:
Р у = £Р ном •
I
Однако расчетная мощность группы электроприемников не
равна установленной мощности; она, как правило, меньше и лишь
в пределе равна ей: Рр^.Ру. Это обусловлено тем, что в период
максимального электропотребления не все электроприемники груп-
пы могут быть включены, а включенные могут быть загружены
не полностью.
Для определения расчетной нагрузки известно несколько рас-
четных методов, применяемых при проектировании СЭС предприя-
тий. К числу их относятся прежде всего метод коэффициента ис-
пользования, именуемый также методом упорядоченных диаграмм
показателей графиков нагрузки и метод коэффициента спроса.
В методе коэффициента использования (упорядоченных
диаграмм) для определения расчетной нагрузки применяется
средняя активная мощность группы электроприемников Рс (см.
рис. 7.16) за наиболее загруженную смену. Эта средняя мощность
вычисляется через установленную активную мощность Ру группы
электроприемников и коэффициент использования /<и:
Д = ЛИРУ.
Коэффициент использования К„<1 учитывает неодновремен-
ность работы электроприем пиков в группе и возможную их непол-
261
ную нагрузку; его значения лежат в пределах 0,1—0,8. Сведения
о значениях коэффициентов использования однотипных групп
электроприемников приводятся в отраслевых справочниках. Эти
сведения получают обычно на основании экспериментального
исследования электропотребления типовых электроприемников.
Как следует из рис. 7.16, расчетная мощность Рр всегда больше
средней за смену Рс (только при неизменной нагрузке в течение
всей смены они равны). При вычислении расчетной мощности это
обстоятельство учитывается коэффициентом максимума активной
мощности:
Рр — ^тахРс-
Коэффициент максимума Ктах представляет собой отношение
расчетной активной мощности к средней нагрузке за наиболее
загруженную смену, его значения лежат в пределах 1—3,5. Он
является функцией приведенного числа электроприемников в груп-
пе п„ и зависит от коэффициента использования К„ для этих
электроприемников (рис. 7.17). Зависимость Ктах от количества
электроприемников очевидна — при большем количестве неравно-
мерность их графика нагрузки уменьшается и, следовательно,
Ктах также уменьшается.
Однако номинальные мощности отдельных электроприемников
в группе могут быть различными, что также влияет на неравно-
мерность графика нагрузки: при большем различии номинальных
мощностей отдельных электроприемников в большей степени про-
является неравномерность графика нагрузки и Ктах растет. Для
учета этого фактора в расчете используется приведенное число
электроприемников /г„ вместо действительного п. В соответствии
с этим под приведенным числом электроприемников понимается
такое число однородных по режиму работы приемников одинако-
вой мощности, которое обусловливает ту же расчетную нагрузку,
что и действительное количество различных по номинальной мощ-
ности и режиму работы электроприемников.
Приведенное число электроприемников в группе определяется
из отношения
nn = P*/SP?OH,
1
где Ру — установленная мощность всей группы электроприемников; PHOM — номи-
нальная мощность каждого из электроприемников; п — действительное количе-
ство электроприемников в группе.
Из этой формулы следует, что при одинаковой мощности всех
электроприемников п„ = п. Если приемники имеют различные номи-
нальные мощности, то нп</г.
При большом количестве разных по мощности электроприем-
ников в группе использование этой формулы трудоемко. Однако
применение ее важно прежде всего при малом числе электропри-
емников, так как с увеличением их числа пп->/г. Так, при п^200
во всех случаях пп = п. Для упрощения расчетов можно при
определении значения п исключать мелкие электроприемники сум-
марной мощностью до 5 % общей установленной мощности элект-
роприемников группы Ру.
Зная Ру и Рс, выражаем расчетную мощность
РР = Кта^Ру.
Таким образом, приняв по справочным данным значение Кк
и определив по диаграмме рис. 7.17 значение Л'П1ах, вычисляем рас-
четную мощность в зависимости от Ру. Из диаграммы рис. 7.17
видно, что хотя Хгаах> 1, во всех случаях /Стах/(и^ 1, так как
Ки < 1 - Это подтверждает отмеченное выше соотношение, что
всегда Рр^Ру.
Из диаграммы рис. 7.17 также видно, что с увеличением пп ко-
эффициент Ктах уменьшается и стремится к 1 —1,2.
Из изложенного следует, что рассмотренный метод коэффици-
ента использования (упорядоченных диаграмм) целесообразно
применять прежде всего там, где имеется относительно небольшое
число разных по номинальной мощности электроприемников.
В соответствии с этим применение его рекомендуется для опре-
деления расчетных нагрузок для групп силовых электроприемни-
ков в цеховых электросетях предприятий.
В методе коэффициента спроса для определения расчетной
активной мощности Рр используется непосредственно установлен-
ная активная мощность группы электроприемников Ру:
Pv = KcPy,
где Кс — коэффициент спроса данной характерной группы электроприемников,
принимаемый по'справоч ным материалам.
Из сравнения формул для определения расчетной мощности
по двум методам расчета видно, что Кс = КтахКн- Это означает,
что расчеты по методу коэффициента спроса менее трудоемки.
Однако точность их ниже, особенно при малом количестве электро-
приемников в группе, так как коэффициент спроса не позволяет
учитывать число электроприемников в группе. В справочной лите-
ратуре значения коэффициента спроса приводятся без учета числа
электроприемников.
В соответствии с этим применение метода коэффициента спро-
са допустимо для ориентировочных расчетов либо там, где число
электроприемников относительно велико. Поэтому этот метод нахо-
дит применение для осветительной нагрузки и может применяться
для ориентировочных расчетов на высших ступенях электроснаб-
жения предприятий (начиная с шин цеховых трансформаторных
подстанций и кончая линиями, питающими предприятие).
Определение расчетных реактивной Qp и полной Sp мощностей
263
11
группы электроприемников осуществляется по вычисленному зна-
чению расчетной активной мощности Рр на основе .известных
соотношений:
QP=/’ptg<₽;
где tg <р — коэффициент реактивной мощности, отвечающий характерному для
данной группы коэффициенту мощности cos ср, определяемому по справочным
материалам.
7.6. ВЫБОР СЕЧЕНИЯ ПРОВОДОВ И КАБЕЛЕЙ
При выборе сечения проводов и жил кабелей должны быть учтены
следующие технико-экономические факторы:
нагревание проводов и кабелей от длительного выделения теп-
ла рабочим током или от кратковременного выделения тепла то-
ком короткого замыкания;
потери напряжения в проводах и кабелях от проходящего по
ним тока;
экономические соображения, обусловленные так называемой
экономической плотностью тока.
Кроме того, необходимо учитывать и механическую прочность
выбираемых проводов и кабелей.
Поскольку при выборе сечения проводов или жил кабелей ори-
ентируются на минимально допустимое сечение по нагреву, а по
потере напряжения следует выбирать ближайшее большее
сечение, то порядок расчета должен быть следующим. Сначала
выбирают сечение проводов или жил кабелей, учитывая нагре-
вание расчетным током или током КЗ, а в ряде случаев исходя
из экономических соображений, а затем проверяют выбор по
потере напряжения.
Для выбора сечения проводов или жил кабелей по нагреванию
расчетным током определяют по известным выражениям величину
рабочего тока /р и по справочным таблицам ПУЭ выбирают
стандартное сечение, соответствующее ближайшему большему
току.
Величину длительно допустимых нагрузок /н для привода (или
кабеля) уточняют по следующей формуле, А:
/н = А//р,
где Ki — поправочный коэффициент; при температуре окружающей среды 35 °C
Ki = 0,82...0,87, при температуре 15°С К, = 1...1,15, при температуре — 5 °C
К, = 1,14. ..1,41.
При прокладке рядом в земле нескольких кабелей величину их
токовых нагрузок уточняют по следующей формуле;
Д = Кп/р,
где Кп — поправочный коэффициент; при двух кабелях /<„ = 0,9, при трех кабелях
Кп = 0,85, при четырех кабелях Л'п=0,8.
264
При прокладке в коробах, трубах и лотках одновременно пуч-
ков проводов (более 5) электропроводки вводятся поправочные
коэффициенты, равные 0,68 для 5—6 проводников, 0,63 для 7—
9 проводников и 0,6 для 10-—12 проводников.
Для выбора термически устойчивого сечения проводов или жил
кабелей по току короткого замыкания необходимо определить его
установившееся значение и время прохождения (ориентируясь
на выдержку времени уставок зашиты) .
Экономически целесообразное сечение Хэ, мм2,
Хэ=/ $//э,
где /р — расчетный ток, А; /, — экономическая плотность тока, А/мм2; j3 — вели-
чина постоянная и равная, например, для кабелей с алюминиевыми жилами
1,2 А/мм2.
При проверке выбранного сечения проводов или жил кабелей
по потерям напряжения ориентируются на допустимые отклонения
напряжения у электроприемников, которые установлены ГОСТ
13109—87.
Потери напряжения в линии можно определить по формуле
(6.7) или, пренебрегая реактивным сопротивлением, по упрощен-
ной формуле, В:
А£7=Л/3 /Р/ cos <р/(уХ),
где /р—расчетный ток в линии, А; I — длина линии, м; cos q>—коэффициент
мощности в конце линии; у — удельная электрическая проводимость про-
вода, м/(Ом-мм2); S—выбранное сечение провода или жилы кабеля, мм2.
Рассчитанное значение АД сравнивают со стандартной вели-
чиной.
В соответствии с указанным ГОСТ 13109—87 допускаются
следующие отклонения напряжения:
на зажимах приемников рабочего освещения в производствен-
ных помещениях и общественных зданиях, а также в прожектор-
ных установках наружного освещения от —2,5 до 5 % номиналь-
ного;
на зажимах электродвигателей коммутационных аппаратов —
от — 5 до + 10 % номинального;
на зажимах остальных электроприемников — в пределах
±5 % номинального.
7.7. КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ
При расчетах электрических цепей переменного тока исполь-
зуются активная Р (кВт), реактивная Q (квар) и полная X (кВ-А)
мощности, которые связаны между собой соотношением
X=V^+Q2-
265
Активная мощность генерируется только генераторами элект-
рических станций. Реактивная мощность (РМ) генерируется как
генераторами электростанций, так и дополнительными источни-
ками: синхронными компенсаторами, синхронными двигателями,
конденсаторными установками, емкостью воздушных и кабельных
линий.
Потребителями РМ являются все электроприемники, у кото-
рых кривая синусоидального тока отстает от кривой синусоидаль-
ного напряжения на фазовый угол <р. Из всех потребителей РМ
наиболее значительная ее доля приходится на АД и сварочные
агрегаты.
Потребление РМ сопровождается увеличением тока / в сети,
потерь активной мощности АР и потерь напряжения АП, что видно
из следующих формул:
/=л^ + е2/(^);
ар=з/2р= (P2+Q2)/U2R.
Так как в соответствии с выражением (6.7) потери напряжения,
В, A7/ = -y/3/(Pcos <p-|-%sin q), то
\U= (PR+QX)/U,
где R и X — соответственно активное и реактивное сопротивление, Ом.
Данное обстоятельство ухудшает пропускную способность
сетей и связано с дополнительными затратами на увеличение се-
чения проводов и строительство новых магистралей; приводит
к росту дополнительной нагрузки и повышенному расходу элект-
роэнергии; связано со снижением частоты вращения приводных
электродвигателей и уровня освещенности рабочих поверхностей.
Все это вызывает необходимость компенсации РМ. Помимо
общеизвестных и обязательных в промышленности способов есте-
ственной компенсации РМ, широко применяется ее искусственная
компенсация, заключающаяся в том, что в электросетях предприя-
тий устанавливаются местные источники реактивной мощности
(синхронные двигатели, конденсаторные установки и др.).
В настоящее время из-за повышенного отношения реактивной
мощности к активной (т. е. повышенного tg ср) и наличия услож-
ненных и переменных во времени графиков электрических нагру-
зок сама по себе компенсация РМ не может обеспечить необхо-
димого эффекта, а в ряде случаев приводит к ущербу, связанному
с нехваткой или избытком РМ, возникновением излишних потерь
активной и реактивной мощности и электроэнергии, а также со
значительным ростом напряжения со всеми вытекающими отсюда
последствиями.
Рациональная компенсация РМ в промышленных электросетях
включает в себя следующий комплекс вопросов:
расчет и выбор компенсирующих устройств;
266
оптимальное размещение их в распределительных сетях пред-
приятий;
ключевые вопросы автоматического регулирования работы
компенсирующих устройств.
Условия потребления РМ задаются промышленным потреби-
телям энергосистемой в виде эффективных (оптимальных) мощ-
ностей в часы максимума Q3i и минимума Q32 ее нагрузок . (для
потребителей с присоединенной мощностью 750 кВ-А и выше)
или в виде экономической мощности КУ QP (для потребителей
с присоединенной мощностью до 750 кВ • А).
Контроль за соблюдением этих требований предусмотрен Пра-
вилами пользования электрической энергией в виде штрафных
надбавок к тарифу или премиальных скидок с тарифа на оплачи-
ваемую потребителем электроэнергию.
Так, для потребителей первой группы надбавка Н, %,
Н = 30+ 20 - 2,
РФ РФ
где @ф2 и Рф — фактические значения соответственно РМ в часы максимума
и минимума нагрузок и активной мощности.
Для потребителей второй группы значение надбавки (Н со
знаком « + ») или скидки (Н со знаком « —») определяют по сле-
дующей шкале в зависимости от коэффициента К, равного
K=Qk.*. 100/^к.э,
где QK ф — фактическая мощность установленного КУ, квар; QK , — экономиче-
ская мощность КУ, задаваемая энергосистемой, квар.
К, % 30 30— 50 50—70 70—90 90—110110—130 130 и
более
Н, % +50 +30 +10 0 —5 +10 +50
Необходимость в автоматическом регулировании РМ вызвана
стремлением не только снизить потери активной мощности в ре-
жиме перекомпенсации, но и тем, что при круглосуточной рабо-
те КУ чрезмерно повышается напряжение сети. Такое повышение
напряжения недопустимо как для электроприемников (особенно
ламп накаливания), так и для самих конденсаторов, которые
при превышении напряжения более чем на 10 % от номинального
значения выходят из строя.
Существуют различные способы и средства автоматического
регулирования РМ в электросетях предприятий. Одни из них
серийно выпускаются отечественной электропромышленностью
(например, комплектные конденсаторные установки серии УКБН-
0,38-50 или УКЛ(П)-0,38), другие зарубежного производства и,
кроме того, внедряются автоматические регуляторы РМ в тех слу-
чаях, когда нерегулируемые конденсаторы самостоятельно комп-
267
лектуются на предприятиях в батареи. В последнем случае автома-
тическое регулирование РМ может осуществляться в различных
функциях, а именно: по cos <р, току нагрузки, уровню напряжения,
времени суток, характеру реактивной нагрузки (индуктивная или
емкостная) и др. Выбор той или иной функции регулирования
и числа секций регулируемой батареи конденсаторов оказывает,
существенное влияние в целом на эффективность компенсации РМ.
При выборе ступеней регулирования необходимо учитывать, что
с уменьшением их количества снижаются дополнительные затраты
на аппараты в цепях управления, упрощается схема управления,
повышается надежность ее работы и уменьшаются потери электро-
энергии от реактивного тока. С увеличением ступеней регулирова-
ния повышается плавность и точность регулирования РМ, расши-
ряются пределы ее регулирования.
7.8. ОСНОВНЫЕ ЗАЩИТНЫЕ МЕРОПРИЯТИЯ
ПО ЭЛЕКТРОБЕЗОПАСНОСТИ
Наиболее распространенным примером поражения людей электри-
ческим током является однофазное прикосновение. Величина тока,
проходящего через тело человека в этом случае (при прочих рав-
ных условиях) зависит от вида электросети — выполнена она
с изолированной или глухозаземленной нейтралью трансфор-
матора.
При глухозаземленной нейтрали (рис. 7.18, а) ток, проходящий
через тело человека /чел, будет равен, А:
Лел — Uff/(/?Чел 4“ Rn 4~ Ro 4“ Rt) Ufy/Rnen-
Сопротивления пола R„, заземления нейтрали Ro и обмотки
трансформатора /?т по сравнению с сопротивлением тела человека
/?чеЛ малы, и ими можно пренебречь.
Следовательно, если человек, имея сопротивление своего тела,
равное как минимум 1000 Ом, коснулся фазного провода и попал
под напряжение 220 В, то через него пройдет ток /чел = 220/1000 =
=0,22 А, что в 2,2 раза больше смертельного тока (0,1 А) для
человека.
При изолированной нейтрали трансформатора (рис. 7.,18, б)
существенное значение на величину тока, проходящего через тело
человека, который коснулся одной из фаз, оказывают сопро-
тивления изоляции (активные и емкостные) двух других фаз
(Яиз И Х< ).
Активное сопротивление .изоляции провода зависит от состоя-
ния изоляции, в которой могут появиться проводящие частицы
и создать так называемые пути утечки из-за старения и порчи изо-
ляции (рис. 7.18, в).
Емкостное же сопротивление Хс= 1 //а>С зависит от емкости
провода С относительно земли. На рис. 7.18,' в показана схема
268
Рис. 7.18. Пути тока, проходящего через тело человека:
а — при глухозаземленной нейтрали в установках н. н.; б — при изолированной
нейтрали в установках н. н.; в — схема замещения изоляции провода с прохо-
дящим через нее током утечки
замещения изоляции провода с проходящим через нее током
утечки.
Величина тока фазы А (см. рис. 7.18,6), проходящего по
цепи: фаза А — тело человека — земля — проводимость фаз В и
С, определяется по формуле
/чел=т///,
или
/чел = f/ф/УТ |/?чел +1/(1 //?„з + В’>С) ] .
Из этой формулы видно, что состояние (сопротивление) изоля-
ции имеет существенное значение на поражаемость человеческого
тела. При этом велика роль емкости, величина которой у прово-
дов и кабелей в промышленных электросетях значительна относи-
тельно земли. С увеличением емкости снижается емкостное сопро-
тивление, что влечет за собой возрастание тока, проходящего
через тело человека.
Пример. Предположим, что активное сопротивление изоляции кабеля Rm
соответствует нормативам и в первом приближении весьма велико (т. е. /?из« °°),
а емкость жил кабеля относительно земли составляет С' = 0,15 мкФ/км (что
наблюдается при сечении кабеля 10 мм2 в сетях напряжением 1000 В). Длина
кабельной цепи, питающей электродвигатель, составляет 1=0,5 км, а сопротив-
ление тела человека, коснувшегося корпуса электродвигателя, равно 1000 Ом.
Электродвигатель подключен к сети по схеме «звезда» на линейное напряжение
380 В. Определить ток, проходящий через тело человека.
Решение. 1. Емкость жилы всего кабеля относительно земли
С=С'1\ С=0,15-0,5= 0,075 мкФ =0,075-.Ю-6 Ф.
269
2. Ток, проходящий через тело человека,
/чеЛ = 3£/фА/9/&л+ (1/шС)* /
1.,^ = 3 • 220/ v'9 • 1 0002-Ь [ 1 / (314 - 0,075-10—6) ] г== 0,02 А.
Из приведенной формулы видно, что с увеличением протяженности сети
возрастает величина емкости С, вследствие чего и увеличивается ток, проходящий
через тело человека
Анализ приведенных выше возможных аварийных ситуаций
в электроустановках приводит к необходимости выполнения в про-
мышленных электросетях следующих основных мероприятий по
электробезопасности.
Защитное заземление, зануление и защитное отключение
в электроустановках. В зависимости от вида электросети выпол-
няется защитное заземление или зануление в электроустановках.
В трехфазных трехнроводных сетях с изолированной нейтралью
трансформатора выполняется защитное заземление, в ’четырех-
проводных сетях с глухозаземленной нейтралью — зануление.
Защитным заземлением называется преднамеренное электриче-
ское соединение с землей или ее эквивалентом металлических
нетоковедущих частей, которые могут оказаться под напряжением.
Занулением (недопустим термин «защитное зануление») на-
зывается преднамеренное электрическое соединение с нулевым
защитным проводником металлических нетоковедущих частей, ко-
торые могут оказаться под напряжением.
Защитным отключением называется срабатывание быстродей-
ствующей защиты, обеспечивающей автоматическое отключение
электроустановки при опасности поражения током.
Конструктивное исполнение, принцип действия и области при-
менения устройств заземления в электроустановках достаточно
подробно приведены не только в Правилах устройства электро-
установок, в ПТЭ и ПТБ при эксплуатации электроустановок
потребителей, но и в технической и справочной литературе. Сле-
дует лишь отметить, что их конструктивное исполнение и принцип
действия значительно различаются между собой.
Если, например, защитное заземление имеет целью снижение
величины напряжения прикосновения, т. е. напряжения в цепи
тока замыкания между двумя точками, которых одновременно
коснулся человек при пробое (касании) фазы на корпус электро-
оборудования, то зануление в такой аварийной ситуации имеет
целью мгновенного (за время не более 0,1 с) отключения токо-
приемника, корпуса которого коснулся провод.
При невозможности использования защитного заземления
(например, в случае «тяжелых» почв — вечномерзлых, песчаных,
каменистых и т. п.) или зануления (например, при значительном
удалении электрооборудования от подстанции), а также исходя
из экономических соображений применяется защитное отклю-
чение.
270
Рис. 7.19. Схема разделительного
трансформатора
В качестве устройств защитного отключения применяются
специальные быстродействующие (порядка 0,05 с) токовые реле,
которые встраиваются в магнитные пускатели, контакторы, авто-
матические выключатели и на их работу не влияют. Выполняя
свои главные функциональные операции, эти коммутационные
аппараты срабатывают и при возникновении аварийных ситуаций
в электроустановках, защищая участок, подключенный к ним.
Раздельное питание электроприемников. С целью электро-
безопасности при пользовании каким-то электроприемником при-
меняют специальный разделительный трансформатор 1 (рис. 7.19)
с коэффициентом трансформации 1:1, который отделяет этот при-
емник 2 от общей электросети и сети заземления (рис. 7.19),
т. е. электрическая связь заменяется магнитной.
Вторичную обмотку разделительных трансформаторов не за-
земляют, а корпус их, наоборот, заземляют.
При использовании разделительного трансформатора случай-
ное прикосновение человека к проводу в его вторичной цепи не
создает опасности поражения электрическим током из-за того, что
протяженность вторичной цепи, а следовательно, и токи утечки
чрезвычайно малы.
С целью предотвращения двойного замыкания и опасности
попадания под линейное напряжение для каждого электроприем-
ника рекомендуется отдельный разделительный трансформатор и
короткая электропроводка. Заземления корпуса электроприемника
в этих случаях не требуется, а соединение его с сетью зануления
не допускается.
Разделительные трансформаторы нашли широкое применение
при работах в особо опасных помещениях, на стройплощадках,
в быту и др.
Контроль изоляции проводов. Износ и старение изоляции про-
водов являются наиболее распространенными причинами возник-
новения аварийных ситуаций в электроустановках. Даже в нор-
мальных условиях изоляция стареет, теряя свои первоначальные
свойства. При неблагоприятном стечении ряда факторов, таких,
как повышенные относительная влажность и температура окру-
жающей среды, перегрузка электроприемников и т. д., возникает
форсированный износ и старение изоляции с ухудшением ее элек-
трических свойств. В результате ее сопротивление резко падает,
что вызывает непропорциональный рост токов утечки, а в ряде
271
случаев ее пробой на корпус или возникновение короткого за-/
мыкания. I
Например, для изоляционных материалоЕЗ с классом нагрево-
стойкости А (из хлопчатобумажных, шелковых тканей, пряжи,
бумаги и картона) при каждом приращении температуры на 8 °C
срок службы изоляции С сокращается вдвое, что может быть
выражено следующей формулой:
С = 2 8 ,
где т— фактическое превышение температуры, °C; тн — нормативная предельная
температура нагрева для изоляции класса А, °C.
Так, если средний срок службы изоляции обмотки асинхрон-
ного двигателя при нормативной температуре 105 °C составляет
примерно 7 лет, то при ее превышении на 8 °C он сократится в 2 ра-
за и составит 3,5 года, а при превышении на 16 °C — в 4 раза
и составит уже 1,75 года и т. д.
Чтобы поддержать диэлектрические свойства изоляции, необ-
ходимы профилактические меры, осмотры, соответствующие испы-
тания и при необходимости своевременная замена изоляции.
Нормы сопротивления изоляции в электроустановках приве-
дены в табл. 5.
Таблица 5
Оборудование электроустановок Напряжение мегомметра, В Наименьшее допустимое сопротивление изоляции, МОм
Силовые и осветительные электропроводки, распре- 1000 0,5
делительные щиты и токопроводы Вторичные цепи управления, защиты и измерения 500—1000 1
Шинки на щите управления (при отсоединенных цепях) 500—1000 10
Катушки контакторов, магнитных пускателей и автоматических выключателей 800—1000 0.5
Сопротивление изоляции измеряют мегомметром, испытывают
повышенным напряжением, осуществляют так называемый непре-
рывный контроль без отключения напряжения (т. е. когда сопро-
тивление изоляции измеряется под напряжением), используя при
этом специальные схемы.
Для непрерывного контроля изоляции в сетях с изолированной
нейтралью (равно как и в сетях постоянного тока) широко при-
меняется способ контроля изоляции при помощи вольтметров
(рис. 7.20, а) или промежуточных реле К, включенных в нейтраль-
ный провод (рис. 7.20, б). На рис. 7.20, б показана схема прибора,
272
Рис. 7.20. Схема непрерывного контроля изоляции в сетях с изолированной
нейтралью:
а — при помощи вольтметров; б — с промежуточным реле; в — асимметр их трех
активных сопротивлений
работающего при асимметричной нагрузке фаз (асимметра), кото-
рый содержит три конденсатора С и реле К. Ток через катушку
реле проходит лишь при замыкании одной или двух фаз сети па
землю.
Вместо конденсаторов можно использовать асимметр из трех
активных сопротивлений R (рис. 7.20, в). Резистор Ro является
подстроечным (для настройки асимметра), а омметр PR регистри-
рует несимметрию значения сопротивления изоляции Ry (сопро-
тивление утечки).
Маркировка проводов и прозвонка жил кабелей. С целью вы-
полнения правильного подключения электроустановок и исключе-
ния аварийных ситуаций в процессе их работы производится
маркировка и прозвонка (проверка начала и конца) проводов
и жил кабелей. Эти операции производятся с помощью специаль-
ных приборов (пробники, жилоискатели, гальванометры и др.).
Имеются и упрощенные способы маркировки, нашедшие широкое
практическое применение.
Например, если у асинхронного двигателя с шестью вывод-
ными концами необходимо выполнить их маркировку, а у персона-
ла имеется лишь один вольтметр, мегомметр или контрольная
лампа, то их маркировку можно произвести следующим образом
(рис. 7.21).
Сначала мегомметром определяют маркировку пары выводов
каждой фазы обмотки и в одной ее фазе произвольно обозначают
начало Н1 и конец К1 обмотки. Вывод Л.7 присоединяется к одному
из выводов второй фазы. Получают две последовательно соединен-
ные фазы, к концам которых подводят пониженное до 10 %
(от номинального значения) напряжение, а к выводам третьей
фазы подключают вольтметр или контрольную лампу.
Если вольтметр покажет напряжение, примерно равное подве-
денному, то это говорит о том, что направление результирующего
273
грамма
Рис. 7.21. Маркировк.
проводов (выводных кон
цов) АД: j
а — схема
вольтметра;
подключения
б — диаграмма
магнитных потоков при со
единении двух фаз Н1 —
К1 — Н2— в — диа-
магнитных
потоков
при соединении двух
HL — K1—K2 — H2
фаз
магнитного потока Фрез совпадает с осью третьей фазы (рис.
7.21, б) и выводы обмоток первых двух фаз соединены следующим
образом: H1—KJ—H2—K2.
Если вольтметр не дает никаких показаний, то результирующий
магнитный поток направлен перпендикулярно оси третьей фазы
(рис. 7.21, в), а выводы первых двух фаз соединены следующим
образом: HI—Hl—К2—Н2. Затем с первой фазой соединяют
третью фазу обмотки, вольтметр подключают к выводам второй
фазы и проводят аналогично весь процесс измерений.
Применение малых напряжений. Малым (по ГОСТ 12.1.009—
76 «ССБТ. Электробезопасность. Термины и определения»), не-
допустимо безопасным называется номинальное напряжение не
более 42 В, применяемое в целях уменьшения опасности пораже-
ния электрическим током.
Эти уровни напряжения (от 12 до 42 В) используются при
работах с ручными переносными светильниками, электрифициро-
ванным инструментом, паяльниками и т. п.
Как правило, значения малых напряжений обеспечиваются
от понижающих трансформаторов, вторичные обмотки и корпус
которых должны быть заземлены в целях защиты от случайного
перехода высокого напряжения на обмотку низкого напряжения
(аналогичную роль для силовых трансформаторов имеют пробив-
ные предохранители). Для этого в однофазных трансформаторах
заземляется один из выводов (рис. 7.22, а), а для трехфазных —
нейтральная точка при соединении схемы трансформатора
Рис. 7.22. Схемы понижающих трансформаторов:
а — однофазный трансформатор с заземленным одним выводом; б — трехфазный
трансформатор с выведенной нейтральной точкой; в — трехфазиый трансформатор
с заземленной фазой
274
«в звезду» (рис. 7.22, б), или одна из фаз при соединении транс-
форматора «в треугольник» (рис. 7.22, в).
В трехпроводных сетях с изолированной нейтралью транс-
форматора корпус понижающего трансформатора подключают к
магистрали защитного заземления специальным проводником,
а в четырехпроводных сетях с глухозаземленной нейтралью его
соединяют с зануляющим проводником.
Дополнительная, двойная и усиленная изоляция. В соответ-
ствии с ГОСТ 12.1.009—76 различают рабочую, дополнительную,
двойную и усиленную изоляцию.
Рабочей называется электрическая изоляция токоведущих
частей электроустановки, обеспечивающая ее нормальную работу
и защиту от поражения электрическим током.
Дополнительной называется электрическая изоляция, преду-
смотренная дополнительно к рабочей изоляции для защиты от по-
ражения электрическим током в случае повреждения рабочей
изоляции.
Двойной называется электрическая изоляция, состоящая из
рабочей и дополнительной изоляции.
Усиленной называется улучшенная рабочая изоляция, обеспе-
чивающая такую же степень защиты от поражения электрическим
током, как и двойная изоляция.
При применении, например, двойной изоляции повреждение
одной из ее ступеней (основной или дополнительной) не приведет
к появлению потенциала на доступных для прикосновения частях
Таблица 6
Электроустановки напряжением до 1000 В Электроуста новки напряжением выше 1000 В
основные дополнительные основные дополнительные
Изолирующие
штанги
Изолирующие и
электроизмери-
тельные клещи
Указатели напря-
жения
^электрические
перчатки
Слесарно-монтаж-
ный инструмент с
изолирующими ру-
коятками
Диэлектрические
галоши
Диэлектрические
коврики
Переносные за-
земления
Изолирующие
подставки и на-
кладки
Оградительные
устройства
Плакаты и знаки
безопасности
Изолирующие
штанги
Изолирующие и
электроизмери-
тельные клещи
Указатели напря-
жения
Изолирующие
устройства и при-
способления для
работ на ВЛ
Диэлектрические пер-
чатки
Диэлектрические бо-
ты
Диэлектрические ков-
рики
Экранирующие комп-
лекты
Изолирующие под-
ставки и накладки
Диэлектрические кол-
паки
Переносные заземле-
ния
Оградительные
устройства
Плакаты и знаки
безопасности
275
электрооборудования, поскольку каждая из ее ступеней должна/
выдерживать номинальное рабочее напряжение данной электро?
установки.
Примером широкого использования двойной изоляции явля-
ются переносные светильники и ручной электроинструмент, в ко-
торых первой ступенью является рабочая изоляция токоведущих
частей, а второй ступенью — корпус, изготовленный из нетокопро-
водящего материала (пластмассы, волокна и т. п.).
Электрозащитные средства, используемые в электроустанов-
ках. Электрозащитными называются средства, служащие для
защиты людей, работающих с электроустановками, от поражения
электрическим током, от воздействия электрической дуги и
электромагнитного поля. Электрозащитные средства делятся на
основные и дополнительные. Основными называются средства
защиты, изоляция которых длительно выдерживает рабочее на-
пряжение электроустановок и которые позволяют прикасаться к
токоведущим частям, находящимся под напряжением. Дополни-
тельными называются средства защиты, которые сами по себе не
могут при данном напряжении обеспечить защиту от поражения
током, а применяются совместно с основными электрозащитными
средствами.
По характеру применения бывают средства коллективной
и индивидуальной защиты.
В табл. 6 приведен перечень основных и дополнительных
электрозащитных средств.
На рис. 7.23 приведены плакаты и знаки безопасности: знаки
и плакаты предупреждающие (номера 1—5), служащие для
предупреждения об опасности приближения к токоведущим
частям, находящимся под напряжением; плакаты запрещающие
(номера 6—8), служащие для запрещения действия с коммута-
ционными аппаратами, при ошибочном включении которых может
быть подано напряжение на место работ; плакаты предписываю-
щие (номера 9 и 10), служащие для разрешения определенных
действий только при выполнении конкретных требований безопас-
ности труда и указания местонахождения различных объектов;
указательный плакат (номер 11), служащий для напоминания
о принятых мерах.
Порядок пользования средствами защиты, требования к от-
дельным их видам, правила испытания защитных средств и т. п.
подробно указаны как в действующих правилах ПТЭ и ПТБ при
эксплуатации электроустановок потребителей, так и соответст-
вующей технической литературе.
Следует отметить, что в электроустановках необходимо вести
журналы учета и содержания защитных. средств, в которых
указывают наименование, инвентарные номера, местонахождение,
даты периодических испытаний и осмотров. Средства защиты,
находящиеся в индивидуальном пользовании, также должны быть
276
Рис. 7.23. Плакаты
10
и знаки безопасности в
электроустановках
9
8
зарегистрированы в журнале учета и содержания средств защиты
с указанием даты выдачи и с подписью лица, получившего их.
Рассмотренными выше мероприятиями не ограничиваются за-
щитные меры в электроустановках. К ним необходимо отнести
и ограждения токоведущих частей, выравнивание потенциалов,
блокировки, звуковую и световую сигнализацию, окраску голых
шин и проводов в отличительные цвета и др.
Применение всех рассмотренных защитных мероприятий в электроустановках
является недостаточным без глубокого знания и строгого соблюдения действую-
щих Правил технической эксплуатации электроустановок потребителей и Правил
техники безопасности при эксплуатации электроустановок потребителей
(ПТЭ и ПТБ), Правил устройства электроустановок (ПУЭ), Правил пользования
и испытания средств защиты, используемых в электроустановках, и Правил
оказания первой помощи пострадавшим от электрического тока. За основу выпол-
277
нения требований по обеспечению электробезопасности, соблюдению необходи-
мых терминов и определений необходимо взять систему стандартов безопасности
труда (ССБТ), которая устанавливает требования и нормы по видам опасных
и вредных факторов, требования безопасности к изделиям, оборудованию, про-
изводственным процессам и средствам защиты работающих. Она создана впервые
в мировой практике и призвана объединить выпущенные ранее разрозненные
нормативные, документы с требованиями безопасности к оборудованию, произ-
водственным процессам, защитным средствам.
Если ранее при выполнении требований безопасности акцентировалось внима-
ние в основном на эксплуатации оборудования, то теперь согласно указанию
ССБТ эти требования подлежат выполнению на всех стадиях: проектирования,
изготовления, эксплуатации и ремонта.
Согласно ГОСТ 12.0.001—82 (ССБТ. Основные положения) система содержит
шесть взаимосвязанных классификационных групп:
0 — основополагающие стандарты — это государственные стандарты, которые
охватывают фундаментальные вопросы этой системы стандартов в целом
и служат основой для всей системы стандартов;
1 — стандарты общих требований и норм по видам опасных и вредных произ-
водственных факторов;
2 — стандарты общих требований безопасности к производственному обору-
дованию;
3 — стандарты общих требований безопасности к производственным процес-
сам;
4 — стандарты требований безопасности к средствам зашиты;
5 — стандарты требований безопасности к зданиям, сооружениям и строи-
тельным объектам.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Перечислите основные источники электрической энергий в СЭС.
2. Что называется комплектным распределительным устройством?
3. Как осуществляется питание трансформаторных подстанций?
4. Как классифицируются потребители электрической энергии по степени
надежности электроснабжения?
5. Как связана надежность СЭС с режимами работы нейтрали?
6. Как осуществляется защита электрических сетей от аварийных режимов
работы?
7. Какие средства самозапуска АД применяются на предприятиях текстиль-
ной промышленности?
8. Какими показателями характеризуется качество электроэнергии?
9. Каков порядок выбора и расчета сечений проводов и кабелей?
10. С какой целью необходимо компенсировать реактивную мощность в элект-
росетях предприятий?
11. Какие существуют способы компенсации реактивной мощности?
12. Как определить возможный ток, проходящий через тело человека? Какая
величина тока считается смертельной для человека?
13. В чем суть и какова область применения зануления в промышленных
электроустановках?
14. В каких случаях целесообразно применение разделительных трансфор-
маторов для зашиты человека от поражения электрическим током?
15. В чем заключается различие между радиальной и магистральной схе-
мами электроснабжения предприятий?
16. В чем суть и какова область применения защитного отключения в электри-
ческих сетях?
17. Дайте классификацию и область применения плакатов и знаков безопас-
ности в электроустановках.
18. Какими действующими Правилами Главгосэнергонадзора СССР руко-
водствуется в своей работе персонал электроэнергетических служб предприятия?
278
8. УЧЕТ И ЭКОНОМИЯ
ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
НА ПРЕДПРИЯТИЯХ ТЕКСТИЛЬНОЙ
ПРОМЫШЛЕННОСТИ
8.1. УЧЕТ ПОТРЕБЛЯЕМОЙ ЭЛЕКТРИЧЕСКОЙ
ЭНЕРГИИ
Потребители электрической энергии должны обеспечить ее учет
в соответствии с требованиями действующих Правил устройства
электроустановок и Правил пользования электрической и тепловой
энергией. Для промышленных и приравненных к ним потреби-
телей электрической энергии с присоединенной мощностью
750 кВ-А и выше организуется расчетный учет как активной, так
и реактивной энергии. Поскольку такие потребители основную
плату по двухставочному тарифу оплачивают за заявленную
(абонированную) мощность, участвующую в максимуме нагрузки
энергосистемы, то для них организуется также учет, фиксирующий
нагрузку в часы суточных максимумов активной нагрузки энерго-
системы.
Помимо расчетного учета электроэнергии для осуществления
денежных расчетов с энергосистемой на предприятиях устанавли-
вается технический (контрольный) учет по усмотрению энерго-
службы предприятия для контроля за расходованием электро-
энергии и выполнения удельных норм ее расхода отдельными це-
хами, производствами и участками предприятия.
Учет расходования электроэнергии осуществляется специаль-
ными счетчиками или автоматизированными информационно-вы-
числительными системами учета и контроля электроэнергии
ИИСЭ1-48, или ИИСЭ2-96 (соответственно на 48 или 96 каналов
учета), или ИИСЭЗ, основой которой является крейт с 25 ячейками
со вставляющимися модулями.
Использование возможностей устройств ИИСЭ в накоплении
и выдаче информации в АСУ предприятия или энергоснабжающих
организаций позволяет рассматривать ее как подсистему учета
электроэнергии в системе энергоиспользования наряду с другими
подсистемами АСУП. В этом случае наряду с коммерческим уче-
том электроэнергии системы выполняют функции сбора и предва-
рительной обработки информации о расходах энергоресурсов
по цехам, агрегатам и процессам и обеспечивают этой инфор-
мацией все подсистемы АСУП, АСУ энергосистемы, энерго-
сбыта и т. д.
Действующим ГОСТ 6570—75 («Счетчики электрические ак-
тивной и реактивной энергии индукционные. Общие технические
условия») установлены следующие типы трехфазных счетчиков:
САЗ (СРЗ) — счетчики активной (реактивной) энергии непо-
средственного включения или трансформаторные трехпроводные;
279
СА4 (СР4) —счетчики активной (реактивной) энергии непо-
средственного включения или трансформаторные четырехпро-
водные;
САЗУ (СРЗУ) — счетчики активной (реактивной) энергии
трансформаторные универсальные трехпроводные;
СА4У (СР4У) — счетчики активной (реактивной) энергии
трансформаторные универсальные четырехпроводные.
В сетях с изолированной нейтралью трансформатора (т. е. в
трехпроводных сетях) применяются трехпроводные двухэлемент-
ные счетчики, а в сетях с глухозаземленной нейтралью трансфор-
матора (т. е. в четырехпроводных сетях) — четырехпроводные
трехэлементные счетчики.
На рис. 8.1, а, б приведена схема включения трехфазного двух-
элементного счетчика активной энергии (тип САЗ) для непосред-
ственного включения (рис. 8.1, а) в трехфазную трехпроводную
сеть. Из схемы рис. 8.1, б видно, что токовая цепь первого измери-
тельного элемента 1 счетчика включена в фазу А, при этом генера-
торный зажим Г присоединен со стороны питания, а цепь напря-
жения этого элемента включена на линейное напряжение между
фазами А и В с присоединением ее однополярного зажима Г
к фазе А, а 2' к фазе В. На схеме однополярные выводы катушек
счетчика обозначены звездочкой.
Токовая цепь второго элемента 2 включена генераторным кон-
цом (со стороны питания) к фазе С, а цепь его напряжения включе-
280
на между фазами С и В с присоединением ее однополярного за-
жима к фазе С.
Из векторной диаграммы рис. 8.1, в видно, что вращающий
момент первого измерительного элемента пропорционален мощ-
ности Pi = IAUABcos а, а второго элемента Р^ = 1 CU CBcos <р(3.
Алгебраическая сумма этих двух мощностей равна мощно-
сти трехфазной системы без нулевого провода при любой на-
грузке фаз.
Так как при равномерной нагрузке UAB = UCB= U и 1А=1С = Ц
то из векторной диаграммы видно, что суммарный момент счетчика
пропорционален мощности нагрузки:
Р = Р1 + Рг= Ш\ cos (30° + ф) + cos (30° — ф) ] =
— ‘ZUI cos 30° cos ф = д/317/ cos <p.
Электросчетчики, включаемые через измерительные трансфор-
маторы тока и трансформаторы напряжения, можно заранее отгра-
дуировать для работы через эти трансформаторы. Такие счетчики
называются трансформаторными, и на их табличке имеется
надпись с указанием коэффициентов трансформации трансформа-
торов тока и трансформаторов напряжения, для которых они
отградуированы. Например, если на табличке счетчика указано
3-6000 В/100, 3-100 А/5, это значит, что он предназначен для
включения в трехфазную сеть с измерительными трансформато-
рами напряжения 6000/100 В и трансформаторами тока 100/5 А.
Если счетчики не отградуированы для работы с измеритель-
ными трансформаторами тока и трансформаторами напряжения,
то они включаются в сеть с любыми измерительными трансфор-
маторами с последующим пересчетом фактически потребленных
киловатт-часов электроэнергии. На табличке таких счетчиков ука-
зываются номинальный ток и напряжение, например: 3X5 А;
3X220 В.
Если трансформаторные счетчики включены в сеть через изме-
рительные трансформаторы тока и напряжения с коэффициентами,
соответствующими градуировке приборов учета, то счетчик указы-
вает непосредственный расход электроэнергии.
Если же трансформаторные счетчики включены в сеть через
измерительные трансформаторы тока и напряжения, коэффици-
енты которых не соответствуют коэффициентам градуировки при
боров учета, то для получения фактического расхода электро-
энергии необходимо разность показаний счетчика умножить на
расчетный коэффициент:
Асч)
Пример. Электроснабжение фабрики осуществляется через силовой транс-
форматор напряжением 10 кВ, на стороне высшего напряжения которого уста-
новлены трансформаторы тока 200/5 А и трансформаторы напряжения
10 000/100 В. Установленный счетчик имеет на табличке следующие коэф-
281
п.
фициенты: 3-6000 В/100, 3-100 А/5. Определить расчетный коэффициент Кр
для определения фактического расхода электроэнергии.
Решение. Расчетный коэффициет ’
200/5-10 000/100 „„
Л п = —---------------— 0,0.
Р 100/5-6000/100
Если же электросчетчики включены через измерительные трансформаторы
тока и напряжения с любыми коэффициентами трансформации, то расчетный
коэффициент для определения фактического расхода электроэнергии =
Например, если универсальный счетчик включен через трансформаторы тока
300/5 А и трансформаторы напряжения 6000/100 В, то величина расчетного
коэффициента Др = (300/5) (6000/100) =3600.
Для измерения максимальной нагрузки потребителя в часы
суточных максимумов нагрузок применяются специальные счет-
чики (обычно фирмы «Ганц-прибор», Венгрия), которые позво-
ляют учитывать расход электроэнергии (кВт-ч) и фиксировать
средневзвешенный максимум нагрузки (кВт) за каждые 30 мин
в часы суточных максимумов нагрузки энергосистемы. Счетчик
венгерского производства представляет собой обычный трехфаз-
ный счетчик индукционной системы, дополненный специальными
часами с контактным регулирующим устройством
(программ
ное
устройство) для фиксирования максимальной нагрузки потре-
бителя электроэнергии.
Все электросчетчики включаются по типовым схемам, в кото-
рых необходимо соблюдать полярность выводов, а именно: концы
от источника питания
с индексом Г
(генераторные
концы)
а концы, отходящие к нагрузке,— с индексом Н (на схеме должны
находиться справа от генераторных). В качестве примера на
рис. 8.2 показаны типовые схемы включения трехпроводного
двухэлементного счетчика активной энергии PI через трансформа-
торы тока ТА и трансформаторы напряжения TV (рис. 8.2, а)
и четырехпроводного трехэлементного счетчика Р1 через транс-
форматоры тока ТА (рис. 8.2,6).
Рис. 8.2. Типовые схемы включения счетчиков активной энергии:
а — трехпроводного двухэлементного; б — четырех проводного трехэлементного
282
В соответствии с Правилами технической эксплуатации элект-
роустановок потребителей и Правилами техники безопасности при
эксплуатации электроустановок потребителей вторичные обмотки
и корпуса этих трансформаторов должны быть заземлены, при-
чем заземление должно быть выполнено на их одноименных зажи-
мах — входящих или выходящих. В целях соблюдения мер элект-
робезопасности (например, при испытании изоляции обмоток
измерительных трансформаторов) вторичные обмотки трансфор-
маторов тока ТА должны быть замкнуты через измерительные
приборы или закорочены. Во вторичных цепях ТА предохранители
FU отсутствуют, так как их наличие снижает надежность учета.
8.2. ЭКОНОМИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
НА ПРЕДПРИЯТИЯХ ТЕКСТИЛЬНОЙ
ПРОМЫШЛЕННОСТИ
Экономия и рациональное использование топливно-энергетических
ресурсов является одной из наиболее важных государственных
задач, отраженных в решениях партийных съездов КПСС, Пле-
нумов ЦК КПСС и постановлениях ЦК КПСС и Совета Мини-
стров СССР.
Энергетическая программа СССР, разработанная на длитель-
ную перспективу, ставит в число первоочередных задач совершен-
ствование структуры энергетического баланса и экономии топлива
и энергии путем широкого внедрения энергосберегающей техно-
логии, а также расширения использования вторичных и нетради-
ционных возобновляемых источников энергии. В соответствии
с Энергетической программой СССР потребность в топливно-энер-
гетических ресурсах в нашей стране должна быть существенно
уменьшена за счет осуществления мероприятий по их экономии,
причем 40 % объема экономии должно быть получено за счет
внедрения энергосберегающей технологии, около 10 % экономии
может быть получено за счет повышения использования вторичных
энергоресурсов; до 25 % экономии можно достичь благодаря осу-
ществлению относительно недорогих организационно-технических
мероприятий и совершенствованию уровня эксплуатации оборудо-
вания и оставшиеся 25 % экономии должно быть обеспечено
за счет совершенствования внутриотраслевой структуры произ-
водства.
В целях осуществления энергосберегающей политики на пред-
приятиях легкой промышленности была разработана отраслевая
комплексная долгосрочная программа по повышению эффектив-
ности использования топлива и энергии на 1986—1990 гг., которая
предусматривает следующие основные направления экономии
энергоресурсов: внедрение энергосберегающей технологии и высо-
копроизводительного технологического оборудования, повышение
технического уровня энергохозяйств, улучшение структуры топ-
283
ливного баланса, совершенствование нормирования и учета рас-
хода топливно-энергетических ресурсов, использование вторичных
энергоресурсов.
Наибольший эффект по выявлению резервов экономии электро-
энергии может быть получен по основной статье ее расхода в тек-
стильной промышленности — электроприводе технологического
оборудования. По электроприводу нормируется свыше 92 %
общего ее расхода и утверждаются на уровне союзного министер-
ства нормы по восьми видам продукции, на производство которых
затрачивается свыше 74 % нормируемого потребления электро-
энергии.
Таким образом, к резервам экономии электроэнергии отно-
сятся: ее экономия за счет совершенствования и модернизации
электрооборудования предприятий отрасли, реконструкции и
автоматизации осветительных сетей, снижения потерь активной
мощности в электросетях предприятий отрасли.
К таким мероприятиям относятся ограничение холостых режи-
мов работы электрооборудования, устранение простоя веретен
на прядильных машинах из-за обрыва тесьмы, выравнивание
разрежения воздуха в системе мычкоуловителя, перевод чесальных
машин на бесхолстовое (бункерное) питание, замена системы
Г—Д на более экономичные и эффективные тиристорные электро-
приводы в отделочных производствах отрасли, подбор ламп,
светильников и источников света, автоматизация цехового осве-
щения, компенсация реактивной мощности, упорядочение режи-
мов работы силовых трансформаторов и др.
В качестве примера приводится ряд общих мероприятий по
экономии электрической энергии за счет совершенствования тех-,
нологических процессов, модернизации и автоматизации оборудо-
вания. Одной из таких мер является ограничение холостых режи-
мов работы электрооборудования, что возможно, если межопера-
ционная пауза превышает 10 с. Для ограничения холостого хода'
(XX) машин и станков применяется ряд вариантов различных
схем, один из которых представлен на рис. 8.3. Принцип действия
этой схемы заключается в том, что для ограничения XX электро-
двигателя переключатель &4 устанавливается в положение 1—2,
в результате чего через понижающий трансформатор TV подается
питание на промежуточное реле KL, контакт которого включает
магнитный пускатель КМ, и АД(А4) подключается к сети.
В момент XX, т. е. при расцеплении коробки передач станка, замы-
кается связанный с ней специальный контакт SQ, вследствие
чего получает питание катушка реле времени КТ, и после заданной
выдержки времени контакт размыкается, отключая АД от сети.
Если переключатель находится в положении 3—4, то устройство
автоматического отключения АД на холостом ходу выключено.
Значительная экономия достигается и при ограничении напря-
жения холостой работы, например у промышленных утюгов
284
Рис. 8.3. Схема ограничения холостого
хода электродвигателя
Рис. 8.4. Схема ограничения напряже-
ния холостой работы утюгов:
1 — вилка; 2 — розетка; 3 — утюг; 4 —
спираль утюга; 5 — отключающий элемент
при установке утюга на подставку
с 220 В на 156 В за счет применения одного диода VD (типа Д304),
включенного по схеме рис. 8.4. В момент межоперационной паузы,
когда работница ставит утюг на подставку, на утюг по схеме по-
дается напряжение 156 В, поскольку диод VD «срезает» второй
полупериод переменного напряжения 220 В. При таком значении
напряжения утюг в периоды пауз не успевает остыть и находится
в горячем (рабочем) состоянии. Емкость С в схеме (4 мкФ, 600 В)
служит для защиты диода.
Если мощность промышленного утюга при напряжении 220 В
Р= 1000 Вт, то потребляемый ток I в рабочие периоды / =
= 1000/220 = 4,54 А, при этом сопротивление спирали утюга
R= U//—220/4,54 — 48,4 Ом. В момент паузы при напряжении
U' = 156 В ток Г = U'/R = 156/48,4 = 3,21 А. Мощность, потреб-
ляемая утюгом в периоды пауз, составит Р'= U'I' = 156-3,21 =
=500 Вт.
В результате экономия электроэнергии \Э, кВт-ч, за счет
применения такой схемы ограничения напряжения холостой ра-
боты утюгов составит
УЭ=(1— 0,5)п1 = 0,5пТ,
где п — число утюгов на фабрике (в цехе); Т — общий годовой фонд продолжи-
тельности нерабочих периодов, ч.
Аналогичный эффект достигается при ограничении напряжения
XX сварочных трансформаторов при использовании автоматиче-
ских регуляторов, включенных по схеме рис. 8.5. В этой схеме пер-
вичная обмотка трансформатора TV подключена к сети через
тиристоры VS1 и VS2. Последовательно с каждым из них соеди-
нены обмотки реле К так, что их магнитодвижущие силы направ-
лены согласно. Наиболее целесообразно использовать герконовые
реле. Параллельно цепи тиристоров подключен резистор R1, после-
285
Рис. 8.5. Схема ограничения напряже-
ния при холостой работе сварочных
трансформаторов
довательно с которым через
диодный мостик из диодов
VD1—VD4 соединена третья
обмотка реле К. Контакт реле
последовательно с резистором
R2 включен в цепь управляю-
щих электродов тиристоров.
В режиме XX тиристоры выключены и обмотка трансформа-
тора подсоединена к сети через резистор R1, в результате напряже-
ние ограничивается до значения 12 В. При касании электродом
металла ток в цепи резистора' R1 увеличивается, контакт реле К
замыкается и включает тиристоры KS/ и VS2. Напряжение на об-
мотке сварочного трансформатора увеличивается до рабочего зна-
чения. При обрыве дуги реле отключается с выдержкой времени,
определяемой закороченной диодами третьей обмоткой реле.
При напряжении сети 380 В следует использовать тиристоры
PS/ и VS2 не ниже 6-го класса. Резистор R2 типа МЛТ-0,5 выби-
рается из условия R — 380 \/2/ [ (4 — 5)/у], где /у— номинальный
ток управления используемых тиристоров. Величина резистора R1
ориентировочно составляет 2—3 кОм и подбирается такой, чтобы
напряжение-XX составляло около 12 В.
Годовая экономия электроэнергии, кВт-ч, от внедрения одного
ограничителя напряжения XX сварочных трансформаторов
\Э = (ДРХ — ДР') TRcп (1 - ПР/100),
где АР, — потери активной мощности при полном напряжении 60 В XX сварочных
трансформаторов (по справочным данным это значение составляет 0,65 кВт
с добавлением потерь активной мощности от перетоков реактивной мощности,
равных 0,4 кВт, т. е. ДР, =0,65+ 0,4= 1,05 кВт); ДР,— потери активной мощ-
ности при ограниченном до 12 В напряжении XX сварочных трансформаторов
(ДР, = 0,04 кВт); Т—годовой баланс рабочего времени при односменной рабо-
те, ч; Ас — средний коэффициент сменности; п — число сварочных трансфор-
маторов на предприятии, шт.; /7Р = 60 % —режим работы сварочных трансфор-
маторов.
Таким образом,
ДЭ = 0,477(cn.
Модернизация электроприводов оборудования. В каждом из
производств текстильной промышленности имеются резервы эконо-
мии электроэнергии за счет модернизации электроприводов обо-
рудования. Рассмотрим их на примерах по отдельным производ-
ствам.
Прядильное производство. Одной из причин непроизводитель-
ного расхода электроэнергии является простой веретен из-за обры-
286
Рис. 8.6. Схема установки
конусных диффузоров в
системе мыч коулов ител я
прядильной машины
dj d? d3 с1л d$ d§
ва тесьмы, который на кольцевой прядильной машине вызывает
простой одновременно четырех веретен. При этом происходит не-
рациональное потребление электроэнергии на освещение данного
участка, работу вытяжного прибора и отсос мычки в волокно-
сборник. Для устранения этих недостатков на ряде предприятий
текстильной промышленности была осуществлена модернизация
прядильной машины, заключающаяся в следующем.
На прядильной машине дополнительно нашивается тесьма че-
рез каждые две четверти веретен. Для того чтобы запасная тесьма
не мешала при работе, ее закладывают в зазор между главным ба-
рабаном и корпусом, охватывающим этот барабан; кольцо при-
крепляют винтом к корпусу машины. При обрыве тесьмы работ-
ница снимает с кольца запасную тесьму и заправляет ее в барабан
и блочки веретен. В этом случае работница затрачивает на устра-
нение обрыва около 2 мин, что на 0,5 % снижает выход пряжи
в отходы и уменьшает непроизводительный расход электроэнергии
примерно до 200 кВт-ч на одну прядильную машину.
На ряде предприятий текстильной промышленности проведена
модернизация по выравниванию разрежения воздуха во всех точ-
ках системы мычкоуловителя с помощью установки конусных
диффузоров (шайб) в начале системы и шайб увеличенного
диаметра в ее конце. В каждой системе было установлено по шесть
ступеней шайб (рис. 8.6) с диаметрами, размеры которых указаны
ниже. Там же приведены сравнительные значения давления (раз-
режения) при использовании шайб и без них.
Участок воздуховода диа-<й = 16 г/г = 18 йз = 20 d4=22 d5=24 d6=26
метром, мм
Разрежение воздуха, Па
при использовании 196 194 193 192 191 190
шайб
без шайб 392 323 255 187 117 49
Видно, что до модернизации разрежение воздуха в конце систе-
мы в восемь раз меньше, чем в начале, в то время как использова-
ние шайб позволило выравнять разрежение. Такая мера позволила
снизить обрывность на 20 % и уменьшить мощность, потребляемую
электроприводом, примерно на 25 %.
287
Рис. 8.7. Приспособление для
отсоса мычки с приводом от
основного электродвигателя пря-
дильной машины
Рис. 8.8. Упрощенная схема динамиче-
ского торможения электродвигателя
ленточной машины
На ряде предприятий отрасли в целях экономии электроэнер-
гии ликвидируют приводной электродвигатель вентилятора мычко-
уловителя, а для отсоса мычки используют специальное приспо-
собление с приводом от основного электродвигателя прядильной
машины. Это возможно при условии, если основной электродвига-
тель имеет запас мощности. На рис. 8.7 приведена схема такого
приспособления, устанавливаемого на той же плите 1 с щербин-
кой 8, что и электродвигатель вентилятора мычкоуловителя. Для
установки подшипников 5 применяют два фланца 2, которые стя-
гивают четырьмя затяжными болтами 3. Кроме того, изготовляют
два фланца 7, закрывающих подшипники. Для текстропной пере-
дачи на основной электродвигатель изготовляют шкив 6. Все при-
способление собирают на валу 4 и устанавливают на прядильную
машину.
Имеются резервы экономии и на других машинах прядильного
производства. Так, применение схемы электродинамического тор-
можения электропривода ленточных машин позволяет повысить
эффективность их работы и снизить нерациональный расход ,
электроэнергии. На предприятиях отрасли внедрено несколько ва-
риантов схем динамического торможения, из которых наиболее
простой является схема, приведенная на рис. 8.8.
Принцип действия этой схемы заключается в том, что при
отключении магнитного пускателя КМ замыкаются его дополни- j
тельные контакты, что приводит к включению реле времени КТ, j
настроенного на требуемую для останова электродвигателя М
выдержку времени. Контакты реле времени включают катушку
промежуточного реле KL (типа МКУ-48), замыкающие контакты
которого подают напряжение на первичную обмотку трапсформа-
288
тора TV (220/36 В). Выпрямленное диодным мостиком из четырех
диодов VD1—VD4 (типа Д226) напряжение подается через кон-
такты промежуточного реле в две фазы обмотки статора электро-
двигателя М, чем и обеспечивается его эффективное торможение.
Отключение схемы осуществляется реле времени ДТ с настроенной
выдержкой времени.
Применяемый ранее для торможения электромагнитный тормоз
сравнительно быстро терял эксплуатационные качества, что вызы-
вало необходимость в его систематической регулировке. В резуль-
тате не обеспечивался быстрый останов ленточной машины, что
приводило к снижению качества ленты и нерациональному расхо-
ду электроэнергии.
Одной из эффективных мер по экономии сырья, материалов
и электроэнергии, улучшения условий труда и сокращения рабочей
силы на трепальных и чесальных машинах является их перевод
на бесхолстовое (бункерное) питание. Это позволяет исключить
ряд электродвигателей на трепальном агрегате, что приводит к эко-
номии электроэнергии, материалов и трудовых ресурсов.
На рис. 8.9 приведена схема управления бункерным питанием
чесальных машин ЧМД-4, согласованная с трепальной машиной
Т-16, принцип действия которой заключается в следующем.
При подаче питания в схему управления загорается сигналь-
ная лампа HL3 (рис. 8.9, а), свидетельствующая о наличии напря-
жения в цепи управления, и лампа HL4, свидетельствующая
о том, что хлопок не подается. После получения сигнала о разре-
шении на пуск с трепального цеха (о чем сигнализируют сигналь-
ная лампа HL1 и звонок НА1) и из чесального цеха (о чем
сигнализируют сигнальная лампа HL2 и звонок НА2) нажатием
пусковой кнопки SB1 производится пуск электродвигателя венти-
лятора магнитным пускателем КМ1\ при этом загораются сигналь-
ные лампы HL6 и HL7 (фотосопротивления, BL1 и BL2 —
рис. 8.9, б). Затем нажатием пусковой кнопки SB2 (см. рис. 8.9, а)
магнитным пускателем КМ2 включается электродвигатель ноже-
вого барабана, а нажатием кнопки SB3 магнитным пускателем
КМЗ включается электродвигатель трепала. При замкнутом
микропереключателе SA1 или тумблере SA2 магнитным пускате-
лем КМ4 включается электродвигатель конденсера, а нажатием
кнопки SB4 магнитным пускателем КМ5 включается электродви-
гатель фильтра.
У электродвигателя питающих органов имеется два режима:
ручной и автоматический. В ручном режиме переключатель уста-
новлен в положение Р и кнопкой SB5 магнитным пускателем КМ6
включается электродвигатель питающих органов. При заполнении
бункеров на чесальных машинах стопорной кнопкой SB6 вручную
этот электродвигатель останавливается.
В автоматическом режиме переключатель установлен в поло-
жение А. Сигнал о заполнении бункеров чесальных машин хлоп-
10 А. М. Ланген, В. В. Красник 289
Рис. 8.9. Схема управления бункерным
питанием чесальных машин:
а — схема бункерного питания; б — схема
автоматического останова электродвига-
теля
ком подает фотореле на фоторезисторах BL1 и BL2 типа ФС-К1
(см. рис. 8.9, б). В этом случае открывается тиристор VS типа
КУ 201 и срабатывает промежуточное реле KL, которое своими
контактами отключает цепь магнитного пускателя КМ6 (см.
рис. 8.9, а), производя автоматический останов электродвигателя
питающих органов. При израсходовании хлопка фотореле сраба-
тывает и цикл повторяется.
Данная схема предусматривает одновременную работу одной
трепальной машины с пятью чесальными. В схему введены бло-
кировки на случай нарушения последовательности пуска электро-
двигателей. В схеме рис,. 8.9, б емкость С (типа К50-6 2000X50)
служит для создания выдержки времени отпадания катушки
реле KL в целях обеспечения плавности периодического пуска
электродвигателя питающих органов. В схеме используются ре-
зисторы Rl, R2 и R3 соответственно МЛТ-1 (13 кОм), МЛТ-1
(13 кОм) и МЛТ-4 (2,5 кОм).
Расход электроэнергии в прядильном производстве можно
уменьшить, упорядочив систему смазки оборудования за счет при-
менения специальных присадок и использования менее вязких ма-
290
сел. Так, применение в качестве присадок к индустриальным
маслам № 12 и 20 серы (0,5 %) и хлорпарафина (10 %) снижает
расход энергии на чесальных машинах до 15 %. Такой же эффект
дает использование для высокоскоростных веретен менее вязких
масел. Например, при использовании масла вязкостью 1,34 вместо
масла вязкостью 1,93 снижается превышение температуры гнезд
трения веретен примерно на 25 %, что приводит к уменьшению рас-
хода электроэнергии.
Аналогичный эффект достигается при предварительном уда-
лении отработанной смазки перед вводом свежей. Например, на
прядильной машине расход электроэнергии уменьшается на 3 %
при предварительном удалении отработанной смазки перед
вводом свежей и увеличивается на 4 %, если смазка проводится
без удаления из гнезд веретен прядильной машины.
На ряде предприятий отрасли с целью экономии электроэнер-
гии и повышения производительности труда внедрен специальный
светотехнический прибор для местного освещения нитей на пря-
дильных машинах всех типов. Прибор состоит из корпуса, лампы
типа ДрШ-250, пускорегулирующей аппаратуры (ПРА) ДБИ-400,
трансформатора, обеспечивающего импульсное напряжение 500 В,
линзы типа П83-7014-9 и зеркальной системы. Прибор обеспечи-
вает освещенность нитей в рабочей зоне прядильщицы от 1100 лк
и выше, что удовлетворяет нормам освещенности прядильного
производства. Слепящего действия от прибора не наблюдается.
Использование таких приборов позволяет отключать примерно
350 кВт осветительной установки сети общего освещения в пря-
дильном цехе, увеличить зону обслуживания прядильщицы и вести
эффективный визуальный контроль качества выпускаемой ленты
в прядильном производстве.
Ткацкое производство. Отличительной чертой ткацкого произ-
водства является значительное число приводных электродви-
гателей сравнительно малой мощности, что обусловливает
пониженные технико-экономические показатели и соответственно
повышенные потери активной мощности и напряжения в распре-
делительных электросетях. Это обстоятельство усугубляется
наличием холостых режимов работы оборудования.
Например, на сновальных машинах С-140, СВ-140 и им подоб-
ных к нерациональному расходу электроэнергии приводит возник-
новение холостого хода (XX) электродвигателей при обрыве нити
и останове машины.
На предприятиях отрасли применяются устройства по ликвида-
ции XX и обеспечению самоостанова электродвигателя сноваль-
ной машины при обрыве нити (см., например, схему рис. 4.8).
На рис. 8.10 изображены упрощенные схемы самоостанова. На
рис. 8.10, а тиристоры VS1 и VS2 включены непосредственно
в цепь электромагнита YA. Замыкание технологических контактов
SQ1, SQ2 и SQ3 приводит к подключению первичной обмотки
10* 291
Рис. 8.10. Упрощенные схемы автоматического останова сновальной машины
при обрыве нити
дополнительного трансформатора TV2 (36/10 В), что вызывает
включение тиристоров VS1 и VS2. В схеме рис. 8.10, б используется
двухобмоточный трансформатор TV2, поскольку цепь управления
тиристора VS2 включается непосредственно от напряжения 36 В.
Перспективной является схема, изображенная на рис. 8.10, в,
где используется малогабаритное герконовое реле К, получающее
питание от вспомогательного выпрямителя UD. Рассмотренные
схемы отличаются надежностью и наличием серийно выпускаемых
элементов.
Имеется и ряд других вариантов эффективных схем останова
сновальных машин при обрыве нити, разработанных, например,
в Барнаульском научно-исследовательском институте текстильной
промышленности, Всесоюзном институте повышения квалифика-
ции руководящих работников и специалистов легкой промышлен-
ности и др.
На ткацких станках нерациональный расход электроэнергии
происходит, например, при отказе электрического устройства кон-
троля обрыва нитей основы, когда электродвигатель работает на
XX. Так, на ткацких станках ТКП-11У в схеме контроля обрыва
нитей основы (рис. 8.11) катушка реле KL последовательно
соединена с сигнальными лампами HL1—HL12. Перегорание или
отсутствие сигнальной лампы по данной схеме приводит к полному
обрыву нитей основы и браку выпускаемой продукции. На рис. 8.11
показана модернизированная схема, в которой питание сигналь-
ных ламп стало осуществляться через замыкающие контакты
реле KL и технологические контакты SQ1—SQ12, что и обеспечило
останов станка при отсутствии или перегорании сигнальных ламп
в схеме управления.
292
Рис. 8.11. Схема контроля обрыва нити
на ткацких станках
На ткацких станках П-125
(ЧСФР) при обрыве утка или
нитей основы станок останав-
ливается, а электродвигатель
продолжает работать вхолостую
до прихода ткачихи и устра-
нения обрыва утка или основы.
Вследствие большой зоны об-
служивания (свыше 40 стан-
ков) холостая работа электро-
двигателя продолжается до 5—
7 мин до устранения неисправ-
ности.
С целью ликвидации этого
на ряде предприятий отрасли
провели модернизацию схемы электропривода ткацкого станка
П-125:
вместо пусковой кнопки был установлен микровыключатель
таким образом, что при пуске станка рычагом включения сцепле-
ния микровыключатель сначала включает электродвигатель,
а затем (по ходу движения рычага) сцепление. В случае обрыва
утка или основы автоматически сбойкой выключается сцепление,
рычаг идет в исходное положение и тем самым выключает микро-
выключатель в цепи'питания катушки магнитного пускателя с по-
следующим отключением электродвигателя. Однако при таком
устройстве следует чаще производить ревизию магнитного пуска-
теля, так как его контакты работают в более интенсивном режиме
включения и отключения.
Смазка ткацких станков с добавлением в масло олеиновой
кислоты (1,5 %) дает до 8—10 % экономии электроэнергии.
Отделочное производство. Характерной чертой отделочного
производства является разнообразный и сложный комплекс само-
стоятельных технологических процессов, обусловливающий разно-
образный по роду тока, форме исполнения, установленной и по-
требляемой мощностям электропривод машин.
В качестве электроприводов отделочных машин применяют
электродвигатели переменного и постоянного тока, АД с фазным
ротором и короткозамкнутые (в закрытом, защищенном, взрыво-
защищенном и других исполнениях), комбинированные системы
Г—Д (генератор — двигатель), коллекторные электродвигатели,
а также большое количество импортных электродвигателей.
Перспективным направлением по изысканию резервов эконо-
мии электроэнергии в электроприводах отделочного производства
293
является их модернизация с применением тиристорных регулято-
ров, в том числе:
замена электропривода по системе Г—Д (имеющего низкий
КПД, повышенный расход электроэнергии, громоздкий, неудобный
в эксплуатации, требующий тщательного ухода, создающий шум
и дополнительную запыленность окружающей среды) тиристорным
приводом;
применение тиристорных кромководчиков на сушильно-ши-
рильных, браковочных и им подобных машинах;
усовершенствование способов синхронизации скоростей элек-
тродвигателей машин отделочного производства;
автоматизация и модернизация электроприводов наматываю-
щих устройств и др.
Экономия электроэнергии за счет снижения потерь активной
мощности в электросетях предприятий. Одним из эффективных
мероприятий по экономии электроэнергии за счет снижения потерь
активной мощности является компенсация РМ. В этом случае сни-
жение потерь электроэнергии, кВт-ч,
ДЭ=/Д^а( tg <Р1 — tg ф2),
где К — экономический эквивалент РМ, примерно равный: 0,12 — при питании
предприятия через три ступени трансформации; 0,08—при питании через две
ступени трансформации; 0,05 — при питании через одну ступень трансформации;
0,02 — при питании от шин генераторного напряжения; Ж — активная электро-
энергия, потребленная за расчетный период, кВт-ч; tg <р, и tg <ра — тангенсы угла
(так называемые коэффициенты реактивной мощности) соответственно до и после
компенсации РМ.
При компенсации РМ конденсаторными установками приме-
нение автоматического отключения разрядных сопротивлений
(выполняемые обычно в виде ламп накаливания) позволит сэконо-
мить электроэнергии, кВт-ч, j
&Э=0,85пРно„Т,
где 0,85 — коэффициент, принимаемый при соединении разрядных сопротивлений
«треугольником» для напряжения 380 В; п — число ламп (сопротивлений) на одну
конденсаторную батарею; Рном — номинальная мощность разрядного сопротивле-
ния (лампы), кВт; Т — время, при котором разрядные сопротивления отключены, ч.
Перевод внешних и внутренних электросетей предприятия на
повышенное напряжение сокращает потери электроэнергии про-
порционально квадрату отношения напряжения сети до и после
перевода на повышенное напряжение. В этом случае экономия
электроэнергии, кВт-ч,
ЛЭ = О.ООЗр/Г (Л/q, - /1/q2),
где р — удельное сопротивление материала провода при температуре 20 °C,
Ом-мм2/м (для алюминия р —0,026, для меди р = 0,0175, для стали р==0,1); I —
длина участка сети, на котором осуществляется перевод на повышенное напряже-
ние, м; /i и /2 — среднее значение токов в каждом проводе сети соответственно при
294
низшем и высшем напряжении, А: щ и q? — сечения проводов соответственно при
низшем и высшем напряжении, мм2.
Экономию электроэнергии обеспечивает и включение под на-
грузку резервных линий электропередачи, так как потери электро-
энергии прямо пропорциональны активному сопротивлению прово-
дов. Так, при включении под нагрузку резервной линии потери
электроэнергии снизятся в 2 раза при условии, что длина, сечение
проводов и нагрузки основной и резервной линий равны при одних
и тех же схемах включения.
Целесообразно отключать один из работающих силовых транс-
форматоров одинаковой мощности, когда коэффициент загрузки
достигает значения
Р <л/(п-1)(АА + KAQJ / [ п (bP* + /<AQk) ],
где п — число работающих трансформаторов; ЛРХ и ЛР„ — соответственно потери
активной мощности XX и КЗ трансформатора (даны в каталоге), кВт; AQX и
\QK — соответственно потери реактивной мощности XX и КЗ трансформатора
(даны в каталоге), квар.
Годовые потери электроэнергии, кВт-ч, постоянно подключен-
ного к сети трансформатора
АЭ = АРЛ • 8760 + ДРК (Smax/SHOM) 2т,
где Smax — максимально зафиксированная нагрузка силового трансформатора,
кВ-А; т — время максимальных потерь в трансформаторе, ч.
Имеются резервы экономии электроэнергии и в электросвароч-
ных установках за счет правильного подбора способа электросвар-
ки. Одним из таких резервов является переход от ручной электро-
сварки на постоянном токе к сварке на переменном токе. При таких
переходах, как показано ниже, удельный расход электроэнергии
на 1 кг наплавленного металла снижается.
Способ электросварки
Удельный расход
электроэнергии,
кВт-ч/кг
Переменный ток
Ручная дуговая по схеме
однофазной
трехфазной
Автоматическая и полуавтоматическая под флюсом
Электрошлаковая
3,5—3,8
2,65—3
2,8—3,5
1,8—2,4
Постоянный ток
Ручная дуговая
однопостовая
многопостовая
Автоматическая и полуавтоматическая под флюсом
Автоматическая и полуавтоматическая в среде угле-
кислого газа
5—6,5
8—9
4,2—6
2,2—3,2
295
Очевидно, что замена ручной дуговой электросварки на автома-
тическую под слоем флюса обеспечивает снижение удельного рас-
хода электроэнергии на 1 кг наплавленного металла при перемен-
ном токе на 0,3—0,7 кВт-ч/кг и при постоянном токе на 0,5—
0,8 кВт-ч/кг.
Несмотря на то что замена ручной дуговой сварки на точечную
контактную сварку требует изменений конструкций свариваемых
изделий и установки специальных сварочных машин, данный
перевод обеспечивает значительное снижение (в 2—2,5 раза) рас-
хода электроэнергии и повышение производительности труда.
При шовной контактной электросварке затраты на электроэнер-
гию в 1,2 раза ниже, чем при ручной электросварке на постоянном
токе, но в 1,5—2 раза выше, чем при полуавтоматической сварке.
Применение при ручной дуговой сварке электродов с толстым
покрытием, в которое введен железный порошок, существенно
увеличивает силу сварочного тока, что снижает удельный расход
электроэнергии примерно на 7 % и повышает производительность
сварочных работ. Применение рутиловых электродов снижает
удельный расход электроэнергии на 10 %, повышает производи-
тельность труда на 12 % и улучшает качество сварочного шва.
Замена электродной сплошной проволоки на порошковую снижает
удельный расход электроэнергии на 8—12 % и повышает произво-
дительность труда на 10—15 %.
Имеются резервы экономии электроэнергии и за счет рациона-
лизации эксплуатации вентиляционных установок.
Так, замена вентиляторов старых типов с низким КПД на со-
временные вентиляторы с номинальным КПД до 86 % (типов
Ц4-70 и Ц4-76) дает экономию электроэнергии, кВт-ч,
ДД = HQ (т]2 — Ц 1) 77 (102т] 1 т]2Т]эПс) -
где Н — напор, Па; Q — производительность вентилятора, м3/мин; Т — расчетный
период времени, ч; щ — КПД электродвигателя вентилятора; i]c — КПД сети.
Улучшение работы вентилятора с изменением частоты враще-
ния вала, угла установки лопаток на рабочем колесе, поворотом
лопаток направляющего аппарата и т. п. позволяет получить эко-
номию электроэнергии, кВт-ч,
ЛЭ= (Qi^itii — QzHzr&T/ (Ю2т]|Г]2Т]э11сг]п),
где Qi и Qa—производительность вентилятора соответственно до и после изме-
нения режима его работы, м3/с; Hi и Hi — напор вентилятора соответственно до
и после изменения режима его работы, Па; 102—коэффициент пересчета еди-
ницы мощности из Н-м/с в Вт; щ и Ча— КПД вентилятора соответственно до
и после изменения режима его работы; т]с и t]„ — КПД сети и передачи.
Внедрение высокоэкономичных радиальных вентиляторов
с загнутыми вперед лопатками вместо радиальных вентиляторов
аэродинамической схемы 0,7—37° повышает КПД установки на
296
10—12 % и снижает соответственно расход электроэнергии при
одновременном расширении диапазона работы вентилятора.
Примёнение многоскоростных электродвигателей вместо регу-
лирования шиберами в напорной линии может дать до 30 % эко-
номии электроэнергии.
Регулирование вытяжной вентиляции шиберами на рабочих
местах вместо регулирования на нагнетание может дать до 10 %
экономии электроэнергии.
Блокировка вентилятора воздушных завес с механизмом
открывания ворот может дать до 70 % экономии электроэнергии
и теплоэнергии, а блокировка индивидуальных вытяжных систем
с рабочими механизмами снижает расход электро- и теплоэнергии
до 25—30 %.
Автоматическое регулирование вентиляционных установок
в зависимости от температуры наружного воздуха может дать
до 10—15 % экономии электро- и теплоэнергии.
Отключение вентиляционных установок в обеденный перерыв,
пересменки и т. п.; спрямление и расширение боровов и воздухо-
водов, шиберов; снижение скоростей за счет увеличения сечения
воздуховодов дает значительную экономию электроэнергии.
Ощутимую экономию электроэнергии, кВт-ч, обеспечивает
замена устаревших насосов насосами с высоким КПД:
Д5 = 0>00272/7Q7’/ [рд ( т]н - Пет) ],
где Н — напор, Па; Q — производительность насоса, м3/ч; Т — число часов работы
насоса в год; т)д — КПД электродвигателя насоса; и т]ст — КПД соответственно
нового и заменяемого насоса.
Экономию электроэнергии обеспечивает замена клиноременных
передач плоскими ремнями с поперечными зубцами. Последние не
нуждаются в систематической регулировке для устранения про-
скальзывания, которое возможно из-за натяжения и попадания
масла и грязи на поверхности шкивов. Зубчатые плоские рамки
имеют значительно больший срок службы и обеспечивают при-
мерно в 3—4 раза более быстрый пуск при меньших затратах элек-
троэнергии (расход ее уменьшается примерно до 6%).
Экономия электроэнергии в осветительных сетях. В осветитель-
ных сетях предприятий текстильной промышленности имеются
резервы экономии электроэнергии. В одних случаях ее экономия
достигается за счет совершенствования уровня эксплуатации
осветительных сетей, поддержания и регулирования напряжения
на зажимах источников света и т. д., в других — за счет специаль-
ных мероприятий, таких, например, как реконструкция и автома-
тизация сетей освещения.
Необходимо знать, что при перенапряжениях электросети
возрастает потребление электроэнергии (табл. 7).
Окраска в светлые тона стен и потолков производственных по-
~297
Таблица?
Лампы Увеличение потребляемой мощности, % номинальной мощно- сти ДР/Рном при перенапряжении At//UHOM (%)
1 2 3 5 7 10
Накаливания 1,6 3,2 4,7 8,1 11,5 16,4
Люминесцентные 2 4 6 10 14 20
Ртутные 2,2 5 7 12 18 24
мещений в соответствии с рекомендациями строительных норм
повышает коэффициент использования светового потока примерно
от 8 до 18 % и может дать до 10 % экономии электроэнергии.
Такой же эффект обеспечивает регулярная протирка остеклений
производственных помещений, которая при двухсменной работе
предприятия может сократить продолжительность горения ламп
не менее чем на 15 % в зимнее время и на 90 % в летнее время.
Чистка остеклений должна проводиться не реже 2 раз в год для
помещений с незначительным выделением пыли и не реже 4 раз
в год для производственных помещений со значительными выде-
лениями пыли.
Своевременная чистка светильников и замена изношенных ламп
увеличивают освещенность помещений, поскольку световой поток
ламп к концу срока их службы уменьшается: для ламп накалива-
ния на 15 %, для люминесцентных ламп на 40—45 %, для ламп
типа ДРЛ на 30 %.
Чистка светильников общего освещения помимо их системати-
ческого обмахивания должна проводиться с применением моющих
средств в следующие сроки: в помещениях с большим выделением
пыли 1 раз в месяц; в помещениях со средним выделением пыли
1 раз в 2 мес; в помещениях с малым выделением пыли 1 раз
в 3 мес.
Значительную экономию электроэнергии в осветительных сетях
можно достичь за счет их автоматизации. Отечественная электро-
промышленность серийно выпускает ряд устройств автоматиче-
ского управления осветительными установками. Например, Риж-
ским опытным заводом средств механизации выпускаются свето-
регуляторы СР-01 и СР-03 для регулирования светового потока
ламп накаливания; саранским заводом «Электровыпрямитель»
выпускаются ограничители напряжения ТОН-3-220 (с током на 63
и 100 А на фазу), а тираспольским заводом «Электромаш» вы-
пускаются стабилизаторы напряжения типа СТС (мощностью
от 10 до 100 кВт) и т. д.
Однако перечисленные устройства в условиях работы освети-
тельных установок предприятий текстильной и легкой промыш-
ленности не всегда могут найти применение в силу сложности схем,
невозможности одновременно работать в сетях напряжением 220
298
Рис. 8.12. Схема автоматического
включения и отключения цехового
освещения
и 380 В, и др. Поэтому на пред-
приятиях текстильной и легкой
промышленности разрабатыва-
ются и внедряются упрощенные
и эффективные схемы автомати-
ческого управления осветитель-
ными установками.
Например, на ряде пред-
приятий отрасли внедрена упро-
щенная схема автоматического
включения и отключения цехо-
вого освещения с использованием
типа 2РВМ. Принцип действия установки, приведенной на рис. 8.12,
заключается в том, что в соответствии с режимом работы цехового
оборудования с учетом обеденных перерывов, начала и окончания
рабочей смены отключаются силовыми контакторами /<7И/, КМ2,
КМЗ по две фазы, оставляя включенным лишь дежурное освеще-
ние, распределенное равномерно по фазам А, В и С. Тумблер SB
предназначен для ручного включения. Программное реле КТ пред-
назначено для автоматического управления двумя независимыми
электрическими цепями путем замыкания и размыкания этих це-
пей по суточным программам; имеет цикл работы 24 ч с интерва-
лами уставок через 15 мин. Задание программы осуществляется
установкой штифтов в соответствующие резьбовые отверстия про-
граммного диска.
Для включения освещения в цехе срабатывают замыкающие
контакты этого реле, включающие катушку линейного контакто-
ра КМ1 и осветительную сеть. За счет каскадной блокировки про-
исходит включение контакторов КМ2 и КМЗ на последующих
участках сети. Для отключения освещения на время перерывов
и окончания работы реле КТ размыкает контакты.и отключает
линейные контакторы.
Для автоматического включения и отключения наружного ос-
вещения применяются специальные автоматы, разработанные как
отечественной электропромышленностью (например, Саранским
заводом «Электровыпрямитель»), так и силами предприятий и объ-
единений (например, производственным объединением «Союзэнер-
голегпромавтоматика»). . Применение этих схем позволит исклю-
чить потери электроэнергии в дневное время.
Одним из путей экономии электроэнергии в осветительных
сетях является их реконструкция, например применение вместо
линейного, так называемого «пакетного», способа расположения
светильников, внедренного на ряде предприятий отрасли.
299
Обычно цеховая осветительная арматура выполнена в виде
отдельных линий, расположенных вдоль цеха. При таком способе
освещения для обеспечения норм освещенности требуется значи-
тельное количество светильников, что связано с повышенным рас-
ходом электроэнергии. Кроме того, в обеденный перерыв зачастую
в цехе помощники мастера производят ремонт или профилактику
одной-двух машин, для чего включается освещение почти всего
цеха. При пакетном способе освещения светильники располагают
пакетами над машиной (например, в ткацком цехе располагают
по три светильника над одним ткацким станком). При тех же
видах ремонта освещение включается только над одним-двумя
необходимыми станками.
Практика показала, что один и тот же уровень освещенности
соблюдается при пакетном способе расположения с числом све-
тильников в два раза меньше по сравнению с их количеством при
линейном способе расположения. Например, при светильниках
типа ПЛВМ 2X80 экономический эффект для ткацкого цеха
с 80 ткацкими станками составит около 230 тыс.кВт-ч в год при
трехсменной работе.
Значительный эффект обеспечивает и диспетчеризация (ди-
станционное управление) производственного освещения в цехах
предприятий отрасли, позволяющая наряду с экономией электро-
энергии сократить персонал, занятый ручным включением и отклю-
чением светильников на всех многочисленных участках осветитель-
ной цеховой сети предприятия.
При нормировании расхода электрической энергии ее расход
на освещение
Госв=^осв.р + 2Госв. д + Wосв. м»
где 1Г’()СВ р — расход электрической энергии на общее освещение в рабочее время,
кВт-ч; UJ’ocb-д— суммарный расход электрической энергии на аварийное (дежур-
ное) освещение в нерабочее время и освещение в выходные дни, кВт-ч; „ —
расход электрической энергии на местное освещение, кВт-ч.
Расход электроэнергии, кВт-ч, на общее освещение в рабочее
время определяется по формуле
№осв. р = Р7’,
где Р — мощность, потребляемая всеми лампами общего освещения, кВт; Т —
продолжительность работы осветительных установок, ч.
Суммарный расход электроэнергии на аварийное, дежурное
освещение и освещение в выходные дни для упрощения расчетов
принимается равным 10% И7ОСВ р.
Расход электроэнергии на местное освещение, кВт-ч,
300
где п — число светильников или их групп; — мощность, потребляемая све-
тильниками местного освещения. кВт; — продолжительность работы светиль-
ников местного освещения, ч.
При определении потребляемой мощности люминесцентных
ламп необходимо учитывать ее потери в ПРА, составляющие
20 % мощности ламп при стартерной и 30—35 % при бесстартер-
ной схеме.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Что входит в основную плату двухставочного тарифа потребляемой
электроэнергии?
2. Какова цель технического (контрольного) учета потребляемой электро-
энергии?
3. Какими расчетными параметрами характеризуются приборы учета элект-
рической энергии? Дайте методы их определения.
4. В чем суть и каковы задачи Энергетической программы СССР, разрабо-
танной на длительную перспективу? Каковы этапы ее реализации?
5. Какова структура электропотребления в текстильной промышленности?
Укажите основную статью ее расхода в отрасли.
6. Перечислите основные направления работ по выявлению резервов эконо-
мии электроэнергии на предприятиях отрасли.
7. В каких случаях целесообразно ограничивать холостые режимы работы
электрооборудования?
8. Чему равна годовая экономия электроэнергии от внедрения одного огра-
ничителя напряжения холостого хода сварочных трансформаторов?
9. Во сколько раз сократятся потери электроэнергии, если электросеть
предприятия будет переведена с напряжения 220 В на напряжение 380 В?
10. Каковы экономические недостатки системы Г—Д? Укажите оборудование
отделочного производства, электропривод которого, выполненный по системе
Г—Д, целесообразно заменить тиристорным приводом.
ПРИЛОЖЕНИЯ
ГРАФИЧЕСКИЕ И БУКВЕННЫЕ
ОБОЗНАЧЕНИЯ В ЭЛЕКТРИЧЕСКИХ
СХЕМАХ
П. 1. УСЛОВНЫЕ ГРАФИЧЕСКИЕ ОБОЗНАЧЕНИЯ
В ЭЛЕКТРИЧЕСКИХ СХЕМАХ
Современный уровень развития электроэнергетики предполагает широкое исполь-
зование автоматики и телемеханики, микропроцессорной техники наряду с тради-
ционной релей но-контакторно й аппаратурой. Усложнение систем электроэнерге-
тики вызывает существенное усложнение чертежей и схем, которые их описывают,
что создает определенные трудности быстрого и свободного чтения этих схем.
В зависимости от видов элементов схемы могут быть кинематическими, пнев-
матическими, гидравлическими, электрическими и др.
Графические обозначения должны четко определять назначение того или
иного элемента в схеме, быть наглядными и простыми. Ниже рассмотрены услов-
ные графические обозначения в принципиальных электрических схемах, требо-
вания к правильности изображения которых регламентируются Единой системой
конструкторской документации (ЕСКД). В соответствии с ЕСКД используются
символы общего применения для обозначения различных линий, направления
движения и т. д., и отдельные обозначения конкретных электротехнических
устройств (например, электрических машин).
Обозначения общего применения. Такие обозначения изображают род тока
и напряжения, вид соединения обмоток, элементы электропривода и т. д.
На рис. П.1 приведены обозначения рода тока и напряжения.
Рис. П.1. Условные графические обозначения рода тока, напряжения и об-
моток:
о — постоянный ток; б—переменнытй ток; в — переменный ток с указанием числа
фаз, частоты и напряжения; г — однофазная обмотка; д — трехфазная обмотка
Линии электрической связи (провода, кабели, шины) обозначаются сплош-
ной тонкой линией (см. П.2).
Наряду со сплошными применяют штриховые линии. Ими обозначаются
механические связи, линии аварийного и дежурного освещения, экранирование,
совокупность элементов, составляющих устройство и т. п. (рис. П.З).
Обозначения электрических машин. Установлено три способа обозначения
электрических машин и трансформаторов: упрощенный однолинейный, упрощен-
ный многолинейный (форма /) и развернутый (форма II).
Упрощенное однолинейное обозначение устанавливает изображение обмоток
статора и ротора одной линией, пересекаемой наклонными черточками, число
которых соответствует числу обмоток.
302
Рис. П.2. Условные графические изображения линий электрической связи:
а — линии электрической связи; б — соединение линии с другой линией; в — пере-
сечение линий; г — групповая связь; дне — многопроводная связь
_ + у 4. _l |||
а б 5 г д е ж
Рис. П.З. Условные графические обозначения механических связей:
а — одна линия групповой связи; б — одна линия групповой связи с ответвлениями;
в — то же с пересечениями; г — слияние линий электрической связи в групповую (под
углом 90 или 45°); д и е — заземление линий электрической связи; ж — линии экра-
нирования
Рис. П.4. Условные графические обозначения асинхронных машин:
а и б — упрошенные однолинейные изображения АД соответственно с коротко-
замкнутым и с фазным ротором; виг — упрощенные многолинейные изображения
АД с короткозамкнутым и с фазным ротором; д и е — развернутые изображения об-
мотки статора, упрощенное — обмотки ротора; ж — развернутое изображение обмотки
ротора, упрошенное — обмотки статора
303
Рис. П.5. Условные графические обозначения синхронных машин:
а и б — синхронная трехфазная машина с обмоткой возбуждения на явно полюсном
роторе; в и г — то же на неявно полюсном роторе; д и е — то же прн наличии
на роторе короткозамкнутой пусковой обмотки (демпферной клетки)
Рис. П.6. Условные графические обозначения машин постоянного тока:
а — якорь с обмоткой добавочных полюсов; бив — якорь с обмотками последо-
вательного возбуждения; г — якорь с обмоткой параллельного возбуждения; д и
е — якорь с обмотками независимого возбуждения
Все электрические машины обозначаются окружностью, внутри которой
указывается вид машины (М — двигатель, G — генератор). В упрощенных одно-
линейных обозначениях статор и ротор изображаются двумя концентрическими
окружностями, из которых наружная соответствует статору, а внутренняя — ро-
тору; при этом число подходящих к статору и ротору линий равно числу фаз их
обмоток (рис. П.4, а, б).
На рис. П.4, в изображен по форме / асинхронный двигатель (АД) с коротко-
замкнутым ротором, а на рис. П.4, г — с фазным ротором по схеме «треуголь-
ник». В развернутых обозначениях обмотки статора и ротора изображают в виде
цепочек полуокружностей с учетом сдвига фаз (рис. П.4, д) и без него (рис.
П.4, е), а обмотку ротора — в виде окружности. Если на роторе имеется фазная
обмотка, то от окружности отходят отрезки линий по числу его фаз (рис. П.4, ж).
На рис. П.5 изображена синхронная трехфазная машина с обмоткой возбуж-
дения на явно полюсном (рис. П.5, а, б) и неявно полюсном (рис. П.5, в, г) роторе
и обмоткой статора, соединенной соответственно «в звезду» или «в треугольник».
При наличии на роторе короткозамкнутой пусковой обмотки она изображается,
как у асинхронных машин (рис. П.5, д, е).
Общее обозначение машин постоянного тока для обмотки якоря — окружность
со щетками (т. е. с двумя примыкающими прямоугольниками), а для обмотки
возбуждения — цепочки полуокружностей, число которых определяет вид обмотки.
Так, двумя полуокружностями изображают обмотку добавочных полюсов
(рис. П.6, а), тремя — обмотку последовательного возбуждения (рис. П.6, б, в),
четырьмя - - обмотку параллельного (рис. П.6, г) и независимого (рис. П.6, д, е)
возбуждения.
304
Рис. П.7. Условные графические обозначения трансформаторов:
а — упрощенное однолинейное изображение; б — упрощенное многолинейное изображе-
ние; в — з — развернутые изображения соответственно однофазных и трехфазных
трансформаторов н автотрансформаторов; е — многолинейное изображение автотранс-
форматора; и — упрощенное изображение трансформатора тока; к — развернутое изо-
бражение трансформатора тока
Рис. П.8. Условные графические обозначения катушек индуктивности, дрос-
селей, реакторов, магнитных усилителей:
а — г — катушки индуктивности; д — катушка индуктивности с дополнительными от-
водами; е — реактор; ж — магнитный усилитель; з и и — дроссели с подмагничива-
нием
Упрощенное однолинейное изображение трансформаторов показано на
рис. П.7, а, упрощенное многолинейное — на рис. П.7, б. «Звезда» и «треугольник»
в окружностях первичной и вторичной обмоток указывают на схему их соединения.
Развернутые обозначения двухобмоточных однофазных и трехфазных трансфор-
маторов с соединением обмоток «звезда» — «звезда» и «звезда» — «треугольник»
соответственно приведены на рис. П.7, г, д.
Автотрансформатор изображается окружностью с примыкающей к ней дугой
(рис. П.7, е), подчеркивающей электрическую связь обмоток высшего и низшего
напряжений. Развернутые обозначения однофазного и трехфазного автотрансфор-
маторов приведены на рис. П.7, ж, з. На рис. П.7, и, к. показаны упрощенное и раз-
вернутое изображения трансформатора тока.
На рис. П.8, а показана линейная индуктивность — катушка индуктивности
с намагнитным сердечником, на рис. П.8, б, в — катушка индуктивности со сталь-
ным сердечником, на рис. П.8, г — с магнитоэлектрическим сердечником. Катушка
305
Рис. П.9. Условные графические обозначения коммутационных устройств и кон-
тактных соединений:
а — е — соответственно замыкающий, размыкающий и переключающий контакты; ж и
з — замыкающий и размыкающий контакты для коммутаций в силовой сети с меха-
нической связью; и — л — соответственно замыкающий, размыкающий и переключаю-
щий контакт с добавлением точки у подвижных контактов
индуктивности с дополнительными отводами показана на рис. П.8, д, дроссель
или реактор (индуктивность для больших токов) — на рис. П.8, е. На рис. П.8, ж
показан магнитный усилитель с двумя рабочими включенными последовательно
обмотками и двумя встречно включенными секциями управляющей обмотки. Дрос-
сели с подмагничиванием представлены на рис. П.8, з, и.
Обозначения коммутационных устройств и контактных соединений. Нормаль-
ным положением контактов принято считать исходное, поэтому и обозначаются
они в нормальном положении. Общие обозначения замыкающего, размыкающего
и переключающего контактов приведены на рис. П.9, а—е соответственно. Направ-
ление движения подвижных контактов не регламентируется. Замыкающие и раз-
мыкающие контакты для коммутаций силовой цепи с механической связью даны
на рис. П.9, ж, з. Допускается показывать подвижные контакты с добавлением
точки (рис. П.9, и, к, л).
На рис. П.10 показаны выключатели (с точкой в основании подвижного
контакта) однополюсные (рис. П.10, а), многополюсные в однолинейном (рис.
П.10, б) и многолинейном (рис. П.10, в) исполнениях. Автоматический выклю-
чатель изображается с указанием типа расцепителя: однополюсные максималь-
ного тока (рис. П. 10, г) или трехполюсный минимального тока (рис. П.10, д'). В за-
висимости от вида выключателя на его контакте указывается вид воздействия:
например, выключатель кнопочный (рис. П.10, е,ж), выключатель путевой соот-
ветственно с замыкающим и размыкающим контактами (рис. П.10, з, и).
На рис. П.11,с показаны замыкающие и размыкающие контакты для ком-
мутации силовых цепей, а на рис. П. 11, б — дугогасительные контакты. Замыкаю-
щие и размыкающие контакты, работающие с замедлением при срабатывании
и возврате показаны на рис. П.11,в, г; замыкающий контакт электротеплового
реле показан на рис. П. 11,6.
Обозначения воспринимающих частей электромеханических устройств. Общее
обозначение катушек электромеханических устройств изображается в виде пря-
моугольника. Дополнительный участок внутри этого прямоугольника предназначен
для помещения в нем уточняющих знаков (например, ~, /, U, /> , 1/<, соответ-
ственно указывающих, что это электромагнит переменного тока, обмотка тока,
обмотка напряжения, обмотка максимального тока или минимального напря-
жения). На рис. П.12, а показана катушка реле с одной обмоткой, на рис. П. 12, б —
с обмоткой трехфазного тока, на рис. П.12, в, г — с указанием контролируемого
306
Рис. П.10. Условные графические обозначения выключателей:
а — однополюсный выключатель; б и в — выключатели соответственно в однолинейном
и многолинейном исполнении; гид — выключатели с указанием типа расцепителя;
е и ж — выключатели кнопочные соответственно пусковой и стопорный; з и и — вы-
ключатели путевые, соответственно замыкающий и размыкающий
Рис. Г1.11. Условные графические обозначения контактов для силовых цепей:
а и б — контакты контакторов соответственно без дупогашения и с дугогашением; в и
г—контакты реле времени, работающие с замедлением соответственно при срабаты-
вании и при возврате; д — размыкающий контакт электротеплевого реле
Рис. П.12. Условные графические обозначения воспринимающей части электро-
механических устройств:
а и б — одно- и трехфазные катушки реле; в и г — катушки реле тока и напряжения;
д и е — устройства, работающие соответственно с замедлением при срабатывании
и при отпускании; ж — катушки электротеплевого реле; з— воспринимающая часть
электромагнитной муфты
параметра. Катушки реле, имеющие механическую блокировку, представлены
на рис. П.12, д, е. На рис. П. 12, ж показаны обозначения воспринимающей части
электротеплового реле.
Обозначения резисторов и конденсаторов. На рис. ПЛЗ показаны обозначе-
ния резисторов соответственно общее (рис. ПЛЗ, а), с одним и двумя дополнитель^
ными отводами (рис. ПЛЗ. б, в), измерительного шунта (рис. ПЛЗ, г), перемен-
ные резисторы с плавным (рис. ПЛЗ, д, е), ступенчатым (рис. ПЛЗ, ж), нели-
307
Рис. ПЛЗ. Условные графические обозначения резисторов:
а—г — резисторы, общее изображение соответственно с одним и двумя дополнитель-
ными отводами измерительного шунта; д — и—переменные резисторы соответственно
с плавным, ступенчатым, нелинейным и подстроечным регулированием; к — общее изобра-
жение переменного резистора
Рис. ПЛ4. Условные графические обозначения конденсаторов:
а — общее изображение; бив — соответственно полярный и неполярный электро-
литический конденсатор; гид — соответственно переменная емкость и подстроечный
конденсатор
Рис. ПЛ5. Условные графические обозначения электроизмерительных приборов:
а — г — общее изображение соответственно показывающего, регистрирующего, инте-
грирующего и комбинированного прибора; д — к — соответственно гальванометр, син-
хроноскоп, осциллографические гальванометры тока (напряжения) и мощности, счетчика
импульсов и .термопары; л — п — измерительные механизмы, соответственно ампер-
метр, вольтметр, ваттметр, омметр и частотомер
308
Рис. П.16. Условные графические обозначения полупроводниковых приборов:
а — е — соответственно диод (общее изображение), туннельный, односторонний и дву-
сторонний стабилитроны, варикап и фотодиод; ж— м—тиристоры, соответственно
диодный, симметричный, триодный, запираемый в обратном направлении, управляемый
по аноду, по катоду и симметричный; н — р — транзисторы, соответственно р — п — р-
типа, однопереходный с «-базой, полевой с каналом n-типа и с изолированным
затвором с p-каналом; с — у — фоторезисторы соответственно солнечного фотоэлемента,
солнечной фотобатареи и солнечной фотобатареи с п элементами
нейным (рис. П.13, з) и подстроечным (рис. П.13, и) регулированием; на
рис. П.13, к — общее изображение переменного резистора.
Общее обозначение конденсаторов — это два параллельных отрезка (рис.
П.14, а) дополняется различными знаками в зависимости от их назначения.
На рис. П.14, б, в дано обозначение полярного и неполярного электролитического
конденсатора, на рис. П.14, г, д—переменной емкости и подстроечного конден-
сатора.
Обозначения электроизмерительных приборов. Общее обозначение показываю-
щего (рис. П.15, а), регистрирующего (рис. П.15, б), интегрирующего
(рис. П.15, в), например электросчетчика, комбинированного (рис. П.15, г);
например показывающего и регистрирующего, являются основными символами
для всех приборов.
Для указания назначения прибора в эти общие символы вписывают буквен-
ные обозначения единицы измерения: А — амперметр, mA — миллиамперметр;
V — вольтметр, kV — киловольтметр, W — ваттметр, Wh — электрический счетчик.
Кроме того, характеристика отсчетного устройства может быть представлена
в виде стрелки или отрезков линий. Наклон стрелки в ту или иную сторону указы-
вает направление движения подвижной части прибора (рис. П.15, й).
Обозначения гальванометра, синхроноскопа, осциллографических гальвано-
метров тока (напряжения) и мощности, счетчика импульсов и термопары пока-
заны на рис. П.15, д—к.
309
Обозначения измерительных механизмов амперметра, вольтметра, ваттметра,
омметра и частотомера показаны на рис. П.15, л—п.
Обозначение полупроводниковых приборов. Обозначения диода общее и диода
туннельного, одностороннего и двустороннего стабилитронов, варикапа и фотодио-
да показаны на рис. П.16, а—е, тиристоров диодного, запираемого в обратном
направлении, симметричного и триодных, запираемых в обратном направлении,
управляемого по аноду, по катоду и симметричного— на рис. П.16, ж—м. Обозна-
чения транзисторов р—п—р типа, однопереходного с n-базой, а также полевых
с каналом n-типа показаны на рис. П.16, н—р. Обозначения фоторезистора,
солнечного фотоэлемента и солнечной фотобатареи с п солнечных элементов
приведены на рис. П.16, с—у.
П. 2. УСЛОВНЫЕ БУКВЕННЫЕ ОБОЗНАЧЕНИЯ
В ЭЛЕКТРИЧЕСКИХ СХЕМАХ
Обязательной частью позиционного обозначения являются буквенные обозначе-
ния элементов. Элементы можно обозначать одной буквой — обязательно первой
буквой кода. Для уточнения вида элемента применяется многобуквенный код.
Так, в трехбуквенном коде первой буквой S обозначают выключатель в цепи управ-
ления, двухбуквенный код SB указывает, что это кнопочный выключатель (кнопка),
а трехбуквенные коды SBT и SRC означают, что это соответственно кнопки отклю-
чения и включения.
Буквенные коды наиболее распространенных видов элементов по ГОСТ
2.710—81 («ЕСКД. Обозначения буквенно-цифровые в электрических схемах»)
приведены в табл. 8.
Таблица 8
Первая буква кода (обяза- тельная) Группа видов элементов Двух- и трехбуквенный код Вид элемента
А Устройство АА А К AKS Регулятор тока Блок реле Устройство АПВ
В Преобразователи не- электрических величин в электрические (кроме генераторов и источни- ков питания) или наобо- рот вк В Тепловой датчик Фотоэлемент
С Конденсаторы СВ CG Силовая батарея конден- саторов Блок конденсаторов за- рядный '
D Интегральные схемы, микросборки DA DD Интегральная схема ана- логовая Интегральная схема циф- ровая, логический эле- мент
Е Элементы разные ЕК EL Нагревательный элемент Осветительная лампа
F Разрядники, предохра- нители, устройства за- шиты FA Дискретный элемент за- щиты по току мгновен- ного действия
310
Продолжение табл. 8
Первая буква кода (обяза- тельная) Группа видов элементов Двух- и трехбуквенный код Вид элемента
G Генераторы FP FU FV GB Дискретный элемент за- щиты по току инерцион- ного действия Плавкий предохранитель Разрядник Батарея аккумуляторов
И Устройства индикацион- GC GE НА Синхронный компенсатор Возбудитель генератора Прибор звуковой сигна-
К ные и сигнальные Реле, контакторы, пус- HG HL HLA HV КА лизации Символьный индикатор Прибор световой сигна- лизации Сигнальное табло Индикаторы ионные и по- лупроводниковые Токовое реле
L катели Катушки индуктивно- КН КК км КТ KV KL ксс кст LL Указательное реле Электротепловое реле Контактор, магнитный пускатель Реле времени Реле напряжения Промежуточное реле Реле команды включения Реле команды отключе- ния Дроссель люминесцент-
М сти, дроссели Двигатели LR LG LE LM ного освещения Реактор Обмотка возбуждения ге- нератора Обмотка возбуждения возбудителя Обмотка возбуждения электродвигателя
Р Приборы, измеритель- РА Амперметр
ное оборудование PF PI РК PR РТ PS PV PW PC Частотомер Счетчик активной энер- гии Счетчик реактивной энер- гии Омметр Часы, измеритель вре- мени Регистрирующий прибор Вольтметр Ваттметр Счетчик импульсов
311
Продолжение табл. 8
Первая буква кода (обяза- тельная) Группа видов элементов Двух- и трехбуквенный код Вид элемента
PG Осциллограф
Q Включатели и разъеди- нители в силовых це- QF Автоматический выклю- чатель
пях (электроснабжения. QK Короткозамыкатель
питания оборудования QS Разъединитель
и т. д.) QR QW QSG Отделитель Выключатель нагрузки Заземляющий разъеди- нитель
R Резисторы RK RP RS RU Терморезистор Потенциометр Шунт измерительный Варистор
RR Реостат
S Устройства коммутаци- онные в цепях управле- SA Выключатель или пере- ключатель
ния, сигнализации и из- мерительных (обозначе- SF Автоматический выклю- чатель
ние применяют для ап- SB Кнопочный выключатель
паратов, не имеющих контактов в силовых SL Выключатель, срабаты- вающий от уровня
цепях) SP SQ SR SK То же, срабатывающий от давления Путевой выключатель То же, срабатывающий от частоты вращения То же, срабатывающий от температуры
Т Трансформаторы, авто- ТА Трансформатор тока
трансформаторы TS TV TL Электромагнитный ста- билизатор Трансформатор напря- жения Промежуточный транс- форматор
и Преобразователи элек- трических величин в UD Выпрямительный преоб- разователь
электрические, устрой- ства связи (кроме транс- UZ Инверторный преобразо- ватель
форматоров) UG UF Блок питания Преобразователь часто- ты
V Приборы электроваку- VD Диод, стабилитрон
умные, полупроводнико- вые VL VT VS Электровакуумный при- бор Транзистор Тиристор
W Линии электропередачи — —
312
Окончание табл. 8
Первая буква кода (обяза- тельная) Группа видов элементов Двух- и трехбуквенный код Вид элемента
X Контактные соединения ХА ХР XS XW Токосьемник, скользя- щий контакт Штырь Г нездо Высокочастотный соеди-
XT хв XG XN нитель Разборное соединение Накладка, контактная перемычка Испытательный зажим Неразборное соединение
Y Устройства механиче- ские с электромагнит- ным приводом YA YAB YAC YAT YB YC YH Электромагнит Замок электромагнитной блокировки Электромагнит включе- ния Электромагнит отключе- ния Тормоз с электромагнит- ным приводом Муфта с электромагнит- ным приводом Электромагнитный пат- рон или плита
z Оконечные устройства ZL ZA ZV ZF ZQ Ограничитель Фильтр тока » напряжения » частоты » кварцевый
В ряде случаев в позиционном обозначении достаточно одной буквы, присвоен-
ной группе видов элементов. Если по однобуквенному коду нельзя определить
вид обозначенного элемента, то следует применять двух-, трехбуквенные коды,
ные коды.
Например, буквой Q обозначают выключатели и разъединители в силовых
цепях. Для позиционного обозначения в схемах целесообразно использовать двух-
буквенные коды QF — выключатель автоматический, QS — разъединитель, QW —
выключатель нагрузки и т. д.
313
СПИСОК ЛИТЕРАТУРЫ
Автоматический контроль и регулирование развеса текстильных материалов/
В. П. Хавкин, А. С. Молчанов, К. П. Сергеев и др. М., 1975.
Балашов Е. П., Пузанков А. В. Микропроцессоры и микропроцессорные
системы. М., 1981.
Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприво-
дами. Л., 1982.
Быстров А. М., Глазунов В. Ф. Многодвигательные автоматизированные
электроприводы поточных линий текстильной промышленности. М., 1977.
Грищенко-Меленевский А. А., Лизогубов А. Н. Электрооборудование и электро-
снабжение предприятий легкой промышленности. МТИЛП, 1982.
Кнорринг Г. М. Осветительные установки. Л., 1981.
Красник В. В. Повышение экономичности работы электрооборудования на
предприятиях легкой промышленности. М., 1985.
Основные положения Энергетической программы СССР на длительную пер-
спективу. М., 1984.
Правила пользования электрической и тепловой энергией/Под ред. С. И. Ве-
селова. М., 1982.
Правила технической эксплуатации электроустановок потребителей и Прави-
ла техники безопасности при эксплуатации электроустановок потребителей/Под
ред. Ю. В. Копытова. М., 1988.
Правила устройства электроустановок/Под общ. ред. С. Г. Королева. М.,
1985.
Смолов В. Б., Фомичев В. С. Аналого-цифровые и цифроаналоговые нелиней-
ные вычислительные устройства. М., 1974.
Справочник по автоматизированному электроприводу/Под ред. В. А. Елисе-
ева, А. В. Шинянского. М., 1983.
Справочник по проектированию электроснабжения/Под. ред. В. И. Крунови-
ча, Ю. Г. Барыбина, М. Л. Самовера. М., 1980.
Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного
электропривода. М., 1979.
Чунихин А. А. Электрические аппараты. М., 1975.
Шмелев А. Н., Шишло К. С. Электрооборудование промышленных предприя-
тий текстильного производства. М., 1975.
Электротехника/Под ред. В. Г. Герасимова. М., 1985.
Электрические измерения/Под ред. А. В. Фремке, Е. М. Душина. Л., 1980.
314
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматическое включение резерва
(АВР) 235
Аппарат бесконтактный 25
— высоковольтный 21
— защитный 5
— измерительный 5
— контролирующий 5
— пускорегулируюший 5
Выключатель воздушный автоматиче-
ский 13
— кнопочный 18
— масляный 23
— нагрузки 21
— пакетный 11
— путевой 18
— элегазовый 24
Выпрямитель неуправляемый 73
— управляемый 76
Генератор — двигатель (Г — Д) 104
Датчик импульсный 47
— индуктосинный 48
— фотоэлектрический 47
— цифровой 49
положения 49
Двигатель переменного тока асинхрон-
ный 67
— постоянного тока 63
------независимого возбуждения 63
------последовательного возбужде-
ния 66
------смешанного возбуждения 67
Диапазон регулирования 80
Дизъюнкция 27
Дуга электрическая 7
Дутье газовое 8
— магнитное 8
Жесткость характеристики 69
Заземление защитное 270
Зануление 270
Защита электрических сетей 254
— электродвигателей 109
Инверсия 27
Интенсивность излучения светового
потока 204
Ключ транзисторный 25
Командоаппарат, командоконтрол-
лер 16
Контакт 9
Контактор 12
Контроллер кулачковый 16
— барабанный 16
Конъюнкция 27
Короткое замыкание (КЗ) 6, 227
Лампа дуговая ртутная 210
— ксеноновая 211
— люминесцентная 208
— металлогалогенная 210
— накаливания 208
— натриевая высокого давления 210
Линия воздушная 254
— кабельная 254
Микропроцессор 39
Метод коэффициента использова-
ния 206
— точечный 206
Мощность активная 265
— реактивная 265
— электрического освещения 217
Нагрузка электрическая 260
Нейтраль 224
Ограничение напряжения 285
Ограничение холостых режимов работы
оборудования 284
Освещенность 206
Отключение защитное 270
Переключатель 11
— универсальный 17
Показатель качества электроэнергии
258
Полусумматор 32
Пороговая ячейка 31
Поток световой 204
Предохранитель 14
Преобразователь генераторный 43
— индуктивный 42
— индукционный 44
— напряжения 50
реостатный 41
тока 50
— частоты 77
Пускатель магнитный 12
Разъединитель 21
Регистр кода операции 33
Регулятор памяти, сдвига 33
Реле 18
Рубильник 10
315
Самозапуск двигателей 256
Световоды щелевые 212
Сеть электрическая 224
Система автоматического регулирова-
ния 90
управления дискретная 90
— электроснабжения (СЭС) 222
— энергетическая 221
- цифроаналоговая и аналого-цифро-
вая 35
Скольжение 69
Станки с ЧПУ 97
Сумматор 32
Счетчик асинхронный 34
— логический 34
— реверсивный 34
— синхронный 34
— трансформаторный 281
— универсальный 281
Тахогенератор асинхронный 47
— постоянного тока 46
- синхронный 47
Телемеханика 255
Тензорезистор 41
Токопровод 253
Торможение динамическое 103
Трансформаторная подстанция (ТП)
233
Триггер 25
Устройство логическое 26
— распределительное (РУ) 237
Учет расходования элекроэнергии 279
Шинопровод 214
Шкаф распределительный 247
Экономия электроэнергии 279
Электропривод 51
Электроснабжение 221
Электроустановка 221
Ячейка 242
ОГЛАВЛЕНИЕ
Предисловие (Л. М. Ланген, В. В. Красник) 3
1. АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ ЭЛЕКТРОТЕХНИЧЕСКИХ
УСТРОЙСТВ (А. М. Ланген) 5
1.1. Классификация электроаппаратуры 5
1.2. Процессы, возникающие при размыкании контактов в электри-
ческой цепи 6
1.3. Коммутационная и защитная аппаратура напряжением
до 1 кВ 10
1.4. Коммутационная и защитная аппаратура напряжением
выше 1 кВ 21
1.5. Бесконтактная аппаратура 25
1.6. Микропроцессорные системы 37
1.7. Информационно-измерительные преобразователи 40
Контрольные вопросы и задания 50
2. ОСНОВЫ ТЕОРИИ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
(А. М. Ланген) 51
2.1. Классификация и характеристика автоматизированных элек-
троприводов 51
2.2. Механика электропривода 53
2.3. Электромеханическое преобразование энергии 60
2.4. Механические характеристики электродвигателей 63
2.5. Переходные процессы в электромеханических системах 70
2.6. Электромагнитные преобразователи энергии 73
2.7. Регулирование частоты вращения электропривода 80
2.8. Некоторые сведения из теории автоматического управления 88
2.9. Принципы автоматического управления частотой вращения
в замкнутой системе преобразователь — двигатель 89
2.10. Цифровые системы управления 94
2.11. Станки с числовым программным управлением 96
2.12. Типовые схемы автоматического управления пуском и тормо-
жением электродвигателей 99
2.13. Типовые схемы регулируемого электропривода 104
2.14. Защита электродвигателей напряжением до 1 кВ текстиль-
ного оборудования 109
Контрольные вопросы и задания 113
3. АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД МАШИН ПРЯДИЛЬНОГО
ПРОИЗВОДСТВА (В. В. Красник) 113
3.1. Характеристика электропривода машин прядильного про-
изводства 113
3.2. Электропривод машин приготовительного отдела прядильного
производства 114
3.3. Электропривод прядильных и прядильно-крутильных машин
134
Контрольные вопросы и задания 148
4. АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД МАШИН ТКАЦКОГО
ПРОИЗВОДСТВА (В. В. Красник) 149
4.1. Электропривод машин приготовительного отдела - ткацкого
производства 149
4.2. Электропривод ткацких станков 166
Контрольные вопросы и задания 175
317
5. АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД АГРЕГАТОВ ОТДЕЛОЧ-
НОГО ПРОИЗВОДСТВА (В. В. Красник) 175
5.1. Характеристика электропривода машин отделочного произ-
водства 175
5.2. Электропривод с применением АД с короткозамкнутым
ротором 176
5.3. Электропривод по системе генератор — двигатель 185
5.4. Электропривод с тиристорным управлением 190
5.5. Электропривод перематывающих устройств 193
Контрольные вопросы и задания 202
6. ОСВЕТИТЕЛЬНЫЕ УСТАНОВКИ (В. В. Красник) 202
6.1. Системы и виды электрического освещения 202
6.2. Расчетные характеристики и методы расчета электрического
освещения 204
6.3. Характеристика и классификация ламп и светильников 208
6.4. Выполнение осветительных сетей 213
6.5. Расчет электрической сети освещения 217
Контрольные вопросы и задания 220
7. ЭЛЕКТРОСНАБЖЕНИЕ ПРЕДПРИЯТИЙ (В. В. Красник) 221
7.1. Электроустановки и системы электроснабжения предприя-
тий 221
7.2. Электрические сети предприятий и их защита 250
7.3. Телемеханика и автоматика в электрических сетях 255
7.4. Показатели качества потребляемой электроэнергии 258
7.5. Электрические нагрузки промышленных предприятий 260
7.6. Выбор сечения проводов и кабелей 264
7.7 Компенсация реактивной мощности 265
7.8. Основные защитные мероприятия по электробезопасности 268
Контрольные вопросы и задания 278
8. УЧЕТ И ЭКОНОМИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ НА ПРЕДПРИЯТИЯХ
ТЕКСТИЛЬНОЙ ПРОМЫШЛЕННОСТИ (В. В. Красник) 279
8.1. Учет потребляемой электрической энергии 279
8.2. Экономия электрической энергии на предприятиях текстиль-
ной промышленности 283
Контрольные вопросы и задания 301
Приложения. ГРАФИЧЕСКИЕ И БУКВЕННЫЕ ОБОЗНАЧЕНИЯ В ЭЛЕКТРИ-
ЧЕСКИХ СХЕМАХ (А. М. Ланген, В. В. Красник) 302,
П.1. Условные графические обозначения в электрических схе-
мах 302
П.2. Условные буквенные обозначения в электрических схемах 310
Список литературы 314
Предметный указатель (А. М. Ланген) 315
У’пГнкн- издание
АЛtКСЛНДР МИХАЙЛОВИЧ ЛАНГЕН
КАЛИНИН ВИКТОРОВИЧ КРАСНИК
•>лск 1 дооборудование предприятий
rem ильной промышленности
I’t- iMkiup // Б. Нилова
Ч\/|ит<*‘ । псиный редактор Л. К. Овчинникова
I • мнгкч кий редактор Т. П. Астахова
Кир|м*|\к)р1>| Н. П. Багма и Т. М. Родичева
III. № IBS
’ ifiiHD п набор 28.03.90. Подписано в печать 19.10.90. Формат 60Х88'/|б. Бумага книжно
Гарнитура литературная. Офсетная печать. Объем 20,0 п. л. Усл. и. л. 19,6.
vi ’I hp oil. 19,6. Уч.-изд. л. 20,96. Тираж 6900 экз. Зак. 1637.Цена I руб.
II Ын и* и i.r ню «Легкая промышленность и бытовое обслуживание». 113035, Москва,
I кц/ипнриский пер., д. 12.
I оно с диапозитивов Ленинградской типографии №2 головною предприятии
ори-и« I рудового Красного Знамени Ленинградского объединения «Техническая книги»
нм I in гции Соколовой Государственного комитета СССР по печати, 198052, г Ленинград,
'I fiy 11 шпйловский пр., 29 в Ленинградской типографии № 4 ордена Грудового
Kpihiinio Знамени Ленинградского объединения «Техническая книга» Государе!ценного
Ю1М1НГ1 । СССР по печати. 191126, г. Ленинград, Социалистическая ул., Id