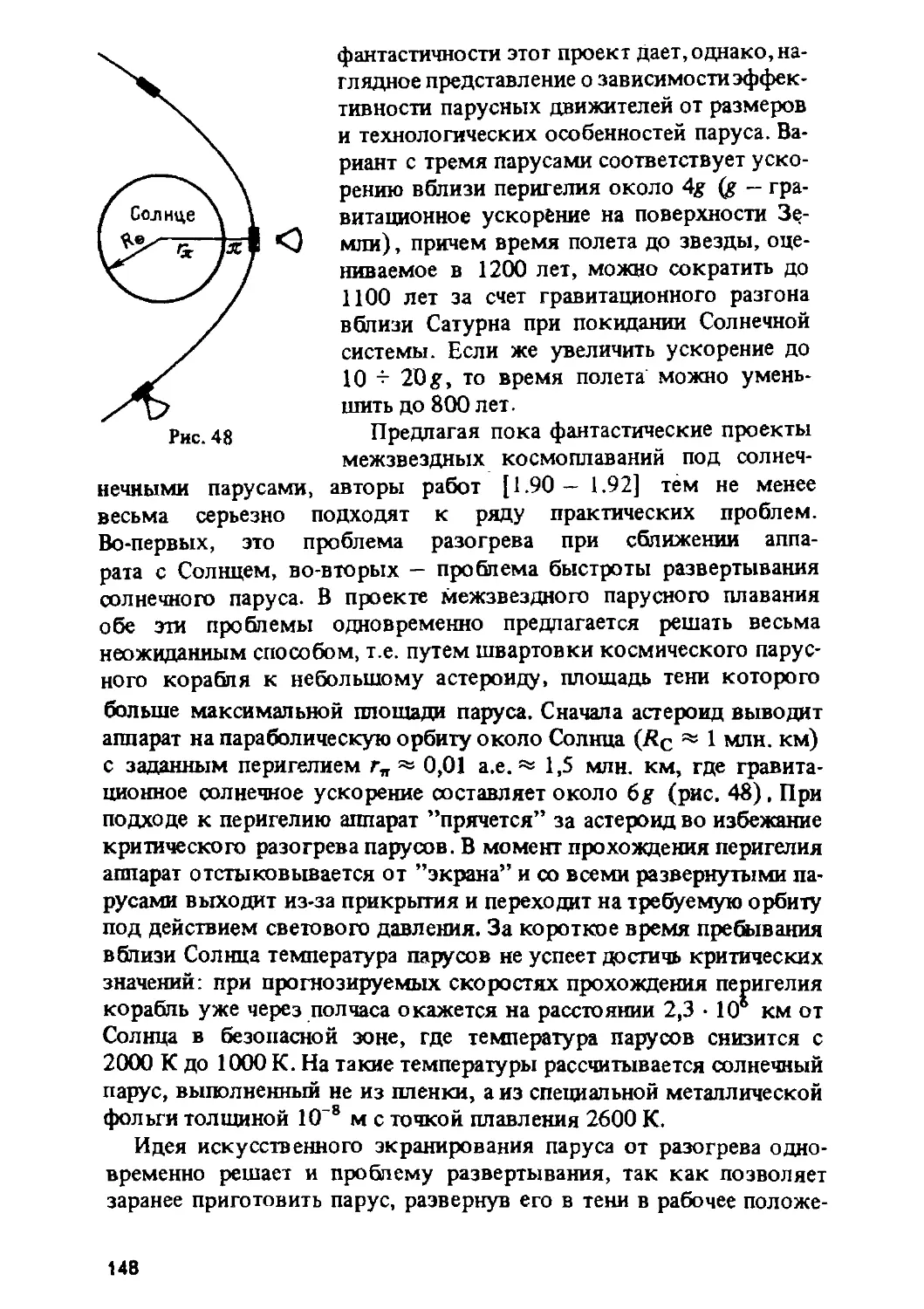
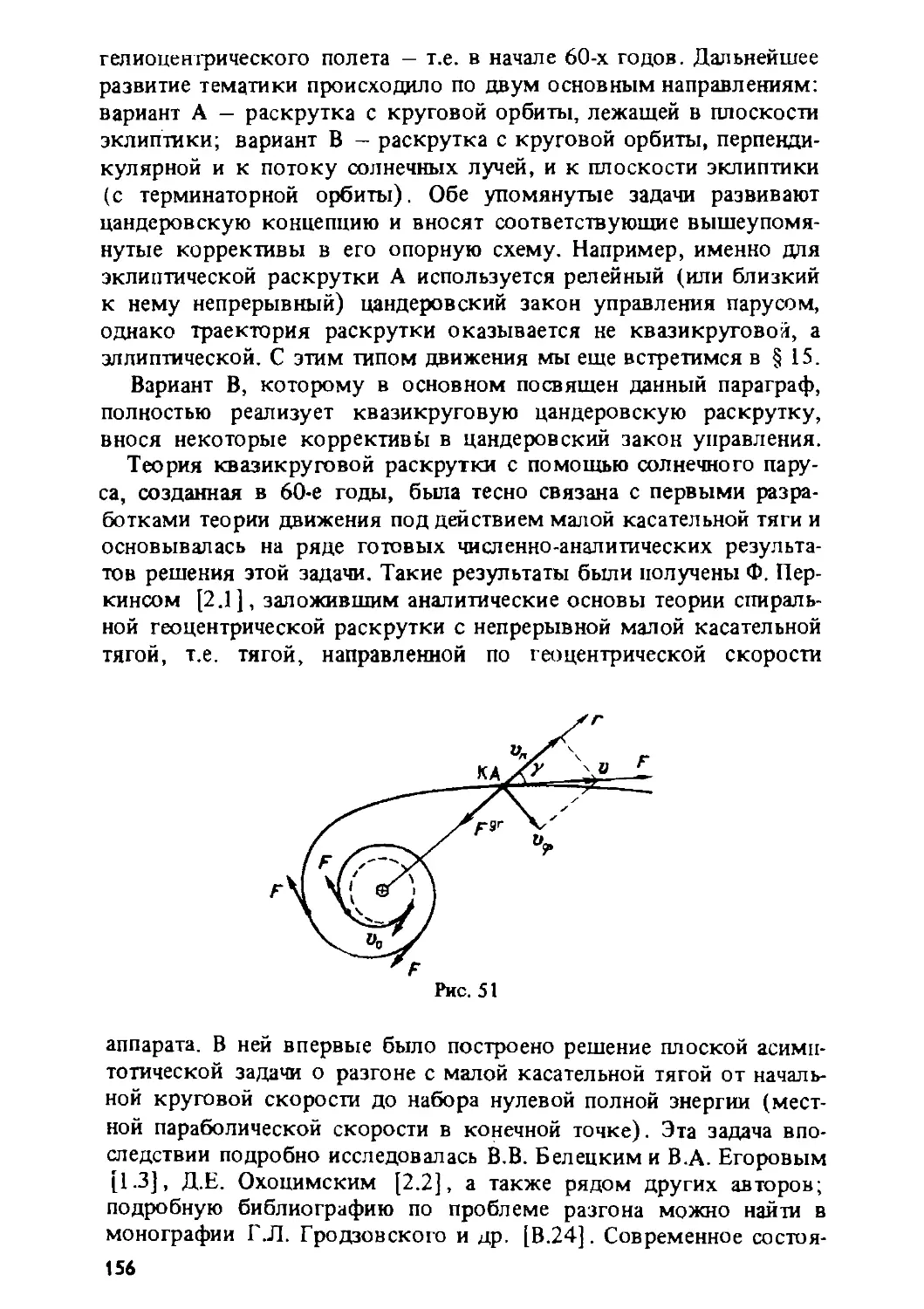
/

































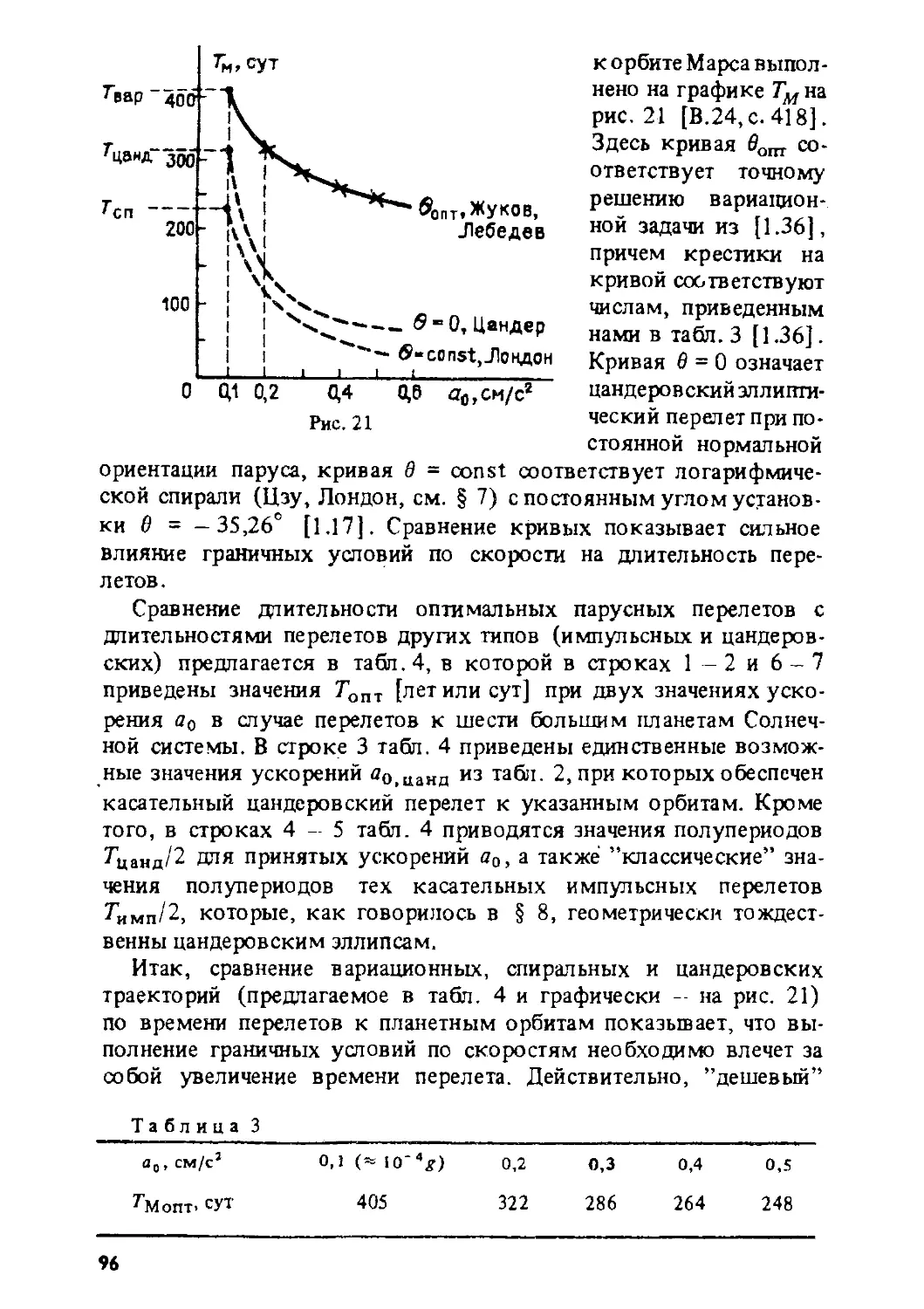











































































































Текст
Е. Н. Поляхова
КОСМИЧЕСКИ!
URSS
Е. Н. Поляхова
КОСМИЧЕСКИЙ
ПОЛЕТ
С СОЛНЕЧНЫМ
ПАРУСОМ
Под редакцией
В. А. Егорова
Издание второе,
дополненное
URSS
МОСКВА
ББК 22.21 22.6
Полякова Елена Николаевна
Космический полет с солнечным парусом / Под ред. В. А. Егорова.
Изд. 2-е, доп. — М.: Книжный дом «ЛИБРОКОМ», 2011. — 320 с.
В настоящей книге излагается теория космического полета с двигателем
особого типа — солнечным парусом, создающим малую, но непрерывно дейст¬
вующую тягу благодаря давлению на него солнечного света. Рассматриваются
полеты с солнечным парусом как в околоземном пространстве, так и в направ¬
лении планет Солнечной системы, например к Марсу, а также —- ближе к
Солнцу — к Венере и Меркурию. Описываются отечественные и иностранные
проекты перелетов и конструкций солнечного паруса.
Для специалистов в области космической техники и всех, кто интересуется
теорией космического полета.
Рецензент:
д-р физ.-мат. наук В. А. Егоров
Издательство «Книжный дом “ЛИБРОКОМ”».
117335, Москва, Нахимовский пр-т, 56.
Формат 60x90/16. Печ. л. 20. Зак. № 3991.
Отпечатано в ООО «ЛЕНАНД».
117312, Москва, пр-т Шестидесятилетия Октября, 11А, стр. И.
ISBN 978-5-397-01565-3 © Книжный дом «ЛИБРОКОМ», 2010
НАУЧНАЯ И УЧЕБНАЯ ЛИТЕРАТУРА
URSS
E-mail: URSS@URSS.ru
Каталог изданий в Интернете:
http://URSS.ru
Тел./факс (многоканальный):
+ 7 (499) 724-25—45
8933 ID 112791
785397
5653
Все права защищены. Никакая часть настоящей книги не может быть воспроизведена или
передана в какой бы то ни было форме и какими бы то ни было средствами, будь то элек¬
тронные или механические, включая фотокопирование и запись на магнитный носитель,
а также размещение в Интернете, если на то нет письменного разрешения владельца.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
КОСМИЧЕСКИЙ ПОЛЕТ С СОЛНЕЧНЫМ
ПАРУСОМ: идея Ф. А. Цандера и сто лет
ее последующего развития
Настоящая книга была задумана автором как монография,
посвященная 100-летию со дня рождения пионера отечественной
космонавтики Фридриха Артуровича Цандера (1887-1933).
Действительно, идея космоплавания с малой тягой солнечно¬
го паруса-зеркала была впервые высказана Ф. А. Цандером
в 1910—1912 гг., а воплощена им в первый инженерный проект
космического корабля с солнечным парусом лишь в 1924 г. Сама
идея движения под действием сил светового давления имеет до¬
вольно долгую историю в рамках истории физики, астрономии
и космонавтики. Скоро исполнится сто лет со времени этих пер¬
вых публикаций Ф. А. Цандера. За истекшее столетие развиваю¬
щаяся идея космического полета с малой тягой солнечного пару¬
са претерпела ряд неизбежных модификаций. Разнообразные
приложения предлагают парус либо в виде экологически чистого
движителя малой тяги, либо в роли элемента систем ориентации
космического аппарата или его орбитального контроля, либо в
роли рефлектора для освещения земной поверхности (орбиталь¬
ный эксперимент «Знамя» в 1993 г.) и т. п. Идея солнечного па¬
руса неизбежно связана не только с поисками и разработками но¬
вых видов энергии, но и с широкими горизонтами революцион¬
ных применений современных нанотехнологий в космосе.
III
В монографии был дан обзор развития идей Ф. А. Цандера
вплоть до настоящего времени, указаны основные направления
развития тематики с оценкой экологических аспектов ряда про¬
блем космоплавания. Был выполнен обзор современного состоя¬
ния отечественных и зарубежных разработок теорий парусных
перелетов и современных проектов конструкций парусов для по¬
лета к Луне, Солнцу, большим планетам, астероидам, кометам,
а также для выполнения различных космических маневров вбли¬
зи Земли.
Настоящая книга была создана не только трудом автора, но и
искренним энтузиазмом В. А. Егорова и В. И. Левантовского, ко¬
торые редактировали, исправляли и издавали текст. Их советы
и замечания немало способствовали его улучшению.
В 2005 г. Е. Н. Поляхова была награждена премией имени
Ф. А. Цандера по теоретической космонавтике Российской Ака¬
демии Наук (Постановление Президиума Российской Академии
Наук от 8 ноября 2005 за № 251) за монографию «Космический
полет с солнечным парусом». Эта книга Е. Н. Поляховой до сих
пор является единственной отечественной научной монографией
по проблеме космоплавания. Поскольку книга стала библиогра¬
фической редкостью, а тема космоплавания не потеряла своей
актуальности в аспекте базовых позиций: экология — энергосбе¬
режение — нанотехнологии, стал вопрос о ее переиздании.
В своей педагогической деятельности автор активно приме¬
нял эту монографию на астрономическом отделении математико¬
механического факультета Санкт-Петербургского государствен¬
ного университета в спецкурсах «Теория солнечного паруса» и
«Фотогравитационные задачи небесной механики», а также в кур¬
совых и дипломных работах. Являясь широким специалистом
в этой области динамики космического полета, Е. Н. Поляхова
в 2002 году выпустила популярную брошюру-пособие «Введение
в теорию солнечного паруса», Изд-во СПбГУ, 2002, задуманную
как установочная лекция по теме космоплавания и истории раз¬
вития идей Фридриха Артуровича Цандера в России и за рубе¬
жом. Как известно, цандеровская идея использования светового
давления солнечных лучей для создания движущей силы малой
тяги в космическом пространстве основана на создании экологи¬
чески чистого космического движителя, работающего от возоб¬
IV
новляющихся природных источников энергии. Эта концепция
солнечного паруса позволяет также проектировать космические
экраны, которые смогут защищать Землю от глобального потеп¬
ления.
В качестве вступительной статьи к новому изданию взят
текст автора, написанный им в научно-популярной форме. Этот
текст снова возвращает нас от формул и строгих расчетов к рет¬
роспективам отечественных и зарубежных приоритетов, к непро¬
стой истории вопроса, к гениальным фантазиям мечтателей, на¬
деявшихся на их будущее воплощение в реальность, и к строгой
чистоте науки о космосе!
Автор благодарит всех, кто в эти годы сотрудничал с ним по
проблемам космоплавания и по смежным вопросам механики кос¬
мического полета и фотогравитационной небесной механики. Под¬
тверждая все благодарности, упомянутые в предисловии к изда¬
нию 1986 года, автор отдает светлую дань памяти Бориса Викто¬
ровича Раушенбаха и Всеволода Александровича Егорова, неиз¬
менно поддерживавших энтузиазм автора в вопросах парусных
перелетов. Автор благодарит К. В. Холшевникова, А. С. Шмырова,
Л. Л. Соколова, В. В. Коблика, В. В. Дикарева, А. А. Пережогина
за плодотворное «парусное» сотрудничество и соавторство, на¬
деясь на дальнейшее продолжение совместных работ. Автор при¬
знателен В. В. Белецкому, А. Л. Куницыну, Л. Г. Лукьянову,
В. Н. Тхаю, И. И. Косенко, П. С. Красильнику, которые всегда ак¬
тивно поддерживали начинания автора в деле «парусных» и «фо-
тогравитационных» выступлений и публикаций.
Что касается зарубежных ученых, то автор всегда находил
активную поддержку своей работы и полезные советы, а также
сведения о новых публикациях в переписке по электронной поч¬
те, в которой его корреспондентами в разное время были: Louis
Friedman (USA), Jerome Wright (USA), Greg Matloff (USA), Robert
Forward (USA), Colin Mclnnes (Great Britain), Claudio Maccone
(Italy), Jorg Strobl (Austria), Manfred Leipold (Germany), Wolfgang
Seboldt (Germany), Bemd Dachwald (Germany) и ряд других спе¬
циалистов. Отдавая дань светлой памяти тех из них, кто ушел их
жизни, не дождавшись запусков предложенных ими парусных
перелетов (Jorg Strobl, Robert Forward), автор выражает им глубо¬
кую благодарность за неоценимую помощь и поддержку.
КОСМОПЛАВАНИЕ ПОД СОЛНЕЧНЫМ
ПАРУСОМ — ФАНТАСТИКА
МЕЧТАТЕЛЕЙ ИЛИ РЕАЛЬНОСТЬ
НЕДАЛЕКОГО БУДУЩЕГО?
В течение нескольких миллиардов лет существования Солнечной
системы лишь только пылевые частицы всегда перерабатывали даровую
энергию солнечного света в энергию поступательного движения. Извер¬
гаемые ядрами комет, они покидали орбиты родительских тел, выстраи¬
ваясь в длинные хвосты. Наиболее восприимчивые к световому давле¬
нию пылинки преодолевали силу притяжения Солнца и отправлялись
в межзвездное пространство. Однако технологический прогресс на пла¬
нете Земля сделал принципиально возможным появление искусствен¬
ных тел в миллиарды раз тяжелее пылинок, которые в скором времени
начнут бороздить просторы Солнечной системы, запрягая лучи цен¬
тральной звезды — Солнца — в узду многогектарных зеркальных сол¬
нечных парусов.
ФОТОННЫЙ пинг-понг
Принцип движения в космосе под солнечным парусом базируется
на эффекте светового давления (так называемом эффекте Лебедева),
который мы разберем на нескольких воображаемых примерах. Начнем
с довольно странного на первый взгляд мысленного эксперимента, ко¬
торый, тем не менее, даст нам базу для дальнейших иллюстраций. Пред¬
ставим себе абсолютно черный экран — парус, поглощающий весь па¬
дающий на него свет. Независимо от формы и ориентации к лучам та¬
кой парус всегда будет испытывать световое отталкивание: поглощая
все приходящие фотоны, парус заимствует их импульс, направленный
в сторону распространения света. Обратимся теперь к другой крайно¬
сти — пусть наш парус является зеркальным, т, е. обладает идеальными
VII
отражательными свойствами. Установим его в плоскость, перпендику¬
лярную солнечным лучам, или, как иногда говорят, поставим парус
«в полное раскрытие к лучам». И снова сила светового давления сол¬
нечных лучей окажется направленной вдоль их распространения. Набе¬
гающие фотоны дважды обменяются импульсом с парусом: первый
раз — при поглощении, как в случае с черным парусом, а второй раз —
при отражении в обратном направлении. Величина силы светового дав¬
ления при этом окажется вдвое больше, чем на черный парус равной
площади. Очевидно, что реальный парус отражает лишь часть падаю¬
щих на него лучей, поэтому его эффективность лежит где-то между
идеальным и черным парусами. А теперь повернем плоский зеркальный
парус под некоторым углом к лучам. Фотоны начнут отскакивать от
паруса подобно шарикам пинг-понга, брошенным под углом к столу.
Часть импульса, направленную параллельно парусу, фотоны сохранят у
себя, так что парусу достанется теперь меньше, чем в полном его рас¬
крытии к лучам. Величина светового давления уменьшится, а направле¬
ние этого давления будет совпадать с нормалью к парусу, отложенной с
его теневой стороны. Поворачивая парус, мы получаем возможность
управлять направлением тяги «солнечного движителя», однако за это
приходится иногда платить ее величиной: плоский парус, поставленный
параллельно лучам, вообще не даст никакой тяги.
Ускорение, которое сообщает космическому аппарату поток сол¬
нечных лучей, зависит от так называемой парусности аппарата, т. е. от¬
ношения площади паруса к массе всей конструкции при установке па¬
руса в «полное раскрытие» к лучам, т.е. когда угол установки паруса,
считаемый против часовой стрелки от направления луча к направлению
нормали к теневой стороне, равен нулю. Если этот угол увеличить и
сделать парус наклонным к лучам, то в выражении силы светового дав¬
ления появиться квадрат косинуса угла установки. Например, для дос¬
тижения ускорения 1 мм/с2 на расстоянии Земли от Солнца (150 млн км)
космическому аппарату массой 500 кг, потребуется парус площадью
5 гектаров в полном раскрытии к лучам (например, это может быть
квадрат со стороной 225 м). Для сравнения напомним, что гравитацион¬
ное ускорение от Солнца составляет на орбите Земли 6 мм/с2. Итак, па¬
русность предлагаемой нами конструкции оказывается равной
1000 см2/г. Особо отметим, что масса паруса должна входить в те самые
500 кг, которыми мы ограничили общую массу аппарата.
Итак, если космический аппарат несет какую-то полезную нагруз¬
ку, его парус должен быть изготовлен из очень тонкой пленки, хорошо
отражающей свет. Задача эта непростая, но в принципе решаемая на
современном уровне космических технологий.
VIII
Итак, с помощью мысленных экспериментов, результаты которых
могут быть проверены в лаборатории на Земле, мы разобрались с физи¬
ческим принципом работы солнечного паруса. Посмотрим теперь, как
световая тяга может быть использована для движения в космическом
пространстве.
КОСМИЧЕСКИЙ СЕРФИНГ
Будем считать, что наш космический аппарат со сложенным сол¬
нечным парусом уже доставлен на орбиту вокруг Земли или Солнца.
Начальная орбита может быть какой угодно. Успешное раскрытие пару¬
са обеспечит космический аппарат «двигателем» малой тяги, обладаю¬
щим практически неограниченным запасом «топлива» — солнечной
энергии. Однако есть у него один досадный недостаток, лишь вскольз
отмеченный в предыдущем разделе: в отличие от реактивных двигате¬
лей, мы не можем использовать его тягу в любом направлении с одина¬
ковой эффективностью. Необходимо назревает задача: как сориентиро¬
вать парус, чтобы добиться желаемого изменения орбиты. Забавно, но
здесь аналогия с морским парусом далеко не всегда оказывается верной.
В самом деле, ветер, постоянно дующий в одном и том же направ¬
лении, в принципе позволяет кораблю преодолеть любое расстояние
(для простоты, — в направлении ветра). Даже если морское течение и
сносит корабль в сторон}', то все равно ветер обеспечит какое-то движе¬
ние в собственном направлении. В космическом пространстве это не
так! Аппарат, однажды установивший парус в полное раскрытие к сол¬
нечным лучам, не сможет выйти «по спирали» за пределы Солнечной
системы, если, конечно, он не сделан таким легким, что световое давле¬
ние больше его веса в гравитационном поле Солнца. Раскрытие паруса
на круговой гелиоцентрической орбите приведет лишь к тому, что спут¬
ник станет «легче», или, если угодно, с его точки зрения уменьшится
масса Солнца. Но так как до раскрытия паруса спутник уже имел пер¬
вую космическую скорость, а «уменьшение массы» Солнца означает
еще и уменьшение первой космической скорости, то по отношению к
«облегченному» Солнцу спутник будет иметь скорость большую, чем
местная круговая. В результате перигелий новой орбиты будет совпа¬
дать с радиусом первоначальной круговой орбиты, а вот афелий ока¬
жется несколько дальше. Таким образом, сохраняемое простое распо¬
ложение паруса в полное раскрытие к лучам позволит спутнику за¬
браться чуть дальше от Солнца, но не более того.
Однако повернув парус под углом к солнечным лучам так, чтобы
фотоны отскакивали назад относительно направления орбитального
движения, мы получим небольшую движущую силу, направленную в
IX
сторону орбитального движения, причем под некоторым углом к на¬
правлению скорости. Эта сила постепенно ускоряет космический аппа¬
рат, который теперь сможет двигаться по раскручивающейся спирали от
Солнца. Правда, чем дальше парусник уйдет от Солнца, тем слабее бу¬
дет сила светового давления и тем менее эффективным движителем бу¬
дет солнечный парус. Зато при «спуске» к Солнцу эффективность пару¬
са будет неуклонно расти. Как вы уже догадались, для выхода на скру¬
чивающуюся спираль парус должен быть установлен так, чтобы отра¬
жать солнечный свет вперед, как будто «освещая» путь перед собой.
Тогда сила давления лучей на парус, направленная по нормали к тене¬
вой стороне, будет направлена против скорости аппарата. Соответст¬
вующее торможение приведет к скручиванию спирали к Солнцу.
Нетрудно догадаться, как изменять наклон орбиты спутника с по¬
мощью паруса: для этого необходимо отбрасывать парусом солнечный
зайчик перпендикулярно плоскости орбиты. Кроме того, вытянутую
орбиту можно «вращать» вокруг Солнца, например, чтобы сделать ее
похожей на орбиту астероида или кометы, сближение с которыми необ¬
ходимо произвести.
Еще более интересные маневры можно выполнять с помощью сол¬
нечного паруса в околоземном пространстве, так как направление рас¬
пространения светового излучения в этом случае не совпадает с направ¬
лением на центр тяготения — нашу планету. Кроме того, в течение года
Солнце совершает полный оборот на небесной сфере относительно Зем¬
ли, так что, запасшись терпением, можно дождаться оптимального для
маневра времени года и перевести с помощью паруса аппарат на желае¬
мую орбиту.
А вот пример космического полета, в котором парусная тяга ис¬
пользуется наряду с гравитационными маневрами. Эффективность па¬
руса максимальна около Солнца, где она может быть использована, на¬
пример, для выхода из Солнечной системы. Чтобы осуществить этот
замысел, необходимо сначала выполнить ряд гравитационных маневров
вблизи больших планет, погасить тем самым гелиоцентрическую ско¬
рость настолько, чтобы аппарат смог приблизиться к Солнцу на доста¬
точно малое расстояние, и только в момент максимального сближения с
Солнцем «поднять паруса». Световое давление скомпенсирует силу
притяжения Солнца и космический аппарат, до раскрытия паруса дви¬
гавшийся по замкнутой орбите, сможет одним махом перейти на гипер¬
болическую траекторию выхода из Солнечной системы. (Важно только
достаточно долго не убирать паруса, так как стоит лишь сделать это, как
к Солнцу «вернется» вся его масса и орбита может снова оказаться
замкнутой.) Энергии, набранной парусником в результате гравитацион¬
ных маневров и развертывания солнечных парусов, хватит не только
X
для вылета из Солнечной системы, но и для достижения им одной из
ближайших звезд.
ВЕСТИ С ВЕРФИ
Первые практические разработки солнечного парусника были на¬
чаты в США в семидесятых годах. Исследования проблемы использова¬
ния солнечного света в качестве движителя для космических аппаратов
пока не воплотились в реальную регату, но тем не менее многие прин¬
ципиальные проблемы, связанные с конструктивными особенностями
парусного движителя, уже разрешены. Сделалась очевидной относи¬
тельная дешевизна его исполнения.
Особенное оживление в американские разработки внесла намечав¬
шаяся на 1986 год перспектива полета космического аппарата под сол¬
нечным парусом для встречи с кометой Г аллея. Разработка началась с
проекта квадратного паруса со стороной 800 метров. Как выяснилось,
основная трудность состояла в упаковке гигантского полотнища в кон¬
тейнер для вывода в космос и в развертывании его в рабочее положение
уже на орбите. Более удачной и перспективной тогда была признана
альтернативная конструкция разрезного паруса наподобие вертолетного
винта, каждая лопасть которого раскатывается из контейнера радиаль¬
но. Трудностей с упаковкой и раскаткой лопасти в этом проекте не по¬
являлось. Так возник знаменитый проект «Гелиоротор» — солнечный
парус с двенадцатью лучами — лопастями длиной 7 км каждая, смонти¬
рованными в два яруса. Каждая лопасть может располагаться под неза¬
висимым углом к световому потоку, разворачиваться встречно к сосед¬
ней, а система ферм и распорок из легчайших синтетических материа¬
лов избавляет лопасть от перекрутки и перекосов. Сила тяги «Гелиоро¬
тора» примерно равнялась силе тяги упомянутого выше квадратного
паруса. Время от запуска на околоземную орбиту до выхода из поля
земного тяготения для этих двух моделей оценивалось одинаковым —
около четырех месяцев из полного времени полета к комете, равного
четырем годам.
В конце 80-х годов в США был объявлен конкурс проектов для не¬
обычайного космического мероприятия — гонок парусных яхт от Земли
к Луне и далее к Марсу, посвященных 500-летнему юбилею открытия
Америки. Христофор Колумб впервые ступил на этот континент 12 ок¬
тября 1492 года, и начало космических гонок намечалось соответствен¬
но на 1992 г. По замыслу устроителей гонок, сложенные в контейнеры
яхты будут выведены на высокую, сильно эллиптическую околоземную
орбиту (высота перигея около 1000 км, высота апогея — 36000 км), где
их паруса будут развернуты в рабочее положение. Ожидалось, что лишь
XI
через два-три месяца постепенной раскрутки яхты уйдут из поля земно¬
го тяготения, выполнят маневр около Луны и возьмут курс на Марс,
отправившись в 500-дневное путешествие к этой планете. Победитель¬
ницей первого этапа «Кубка космического паруса» должна была стать
яхта, которая ближе всех (но не дальше чем на 10 ООО км) подойдет к
поверхности Луны, победительницей второго этапа — яхта, выполнив¬
шая аналогичный маневр около Марса.
Хотя Юбилейная регата так и не состоялось в намеченные сроки,
эта смелая международная инициатива оказалась весьма полезной, вы¬
разив небывалый всплеск идей и конструкторских решений парусного
дизайна во многих странах. Работа над техническими предложениями
подтвердила опасения, что создание солнечного парусника является
гораздо более сложной научно-технической задачей, нежели это пред¬
ставлялось ранее. Здесь были отмечены три основных проблемы: раз¬
вертывание паруса площадью несколько гектар в рабочее положение,
жесточайший лимит на полную массу корабля и обеспечение требуемой
ориентации паруса по отношению к солнечным лучам в полете. Только
при условии разрешения всех перечисленных проблем можно было го¬
ворить о реальности космической регаты. Упомянутая острота весового
лимита означала, что при толщине полимерной парусной пленки всего в
4 микрона (а ее еще предстояло создать!) масса трехгектарного парус¬
ного полотнища должна была составить всего 300 кг, к которым следо¬
вало добавить массу необходимых элементов конструкции, аппаратуры
систем управления парусом и электропитания, терморегулирования,
навигации, радиоуправления и телеметрии. При этом предполагалось
обеспечить достаточно сложное управление парусом, чтобы корабль
мог идти левым или правым галсами, подставлял «солнечному ветру»
корму или шел ребром паруса навстречу «ветру». И так в течение двух
или трех лет!
Вообще, благодаря многочисленным исследованиям и разработ¬
кам, сегодня мы уже можем выбирать из огромного разнообразия ди¬
зайнов парусов. Это и сплошные плоские пленочные паруса (круглые,
квадратные, веерные), и паруса-парашюты, купола и надувные баллоны,
и разрезные паруса типа вертолетного винта, лепестковые паруса типа
«ромашка» и «подсолнух», паруса сотовой конструкции на базе отдель¬
ных зеркальных модулей, системы пленочных передаточных зеркал и
другие.
Среди парусов — систем зеркал особый интерес представляет кон¬
струкция так называемого «наилучшего», в смысле динамической эф¬
фективности, паруса. Такая эффективность обычных парусов всегда
связана с углом их ориентации к лучам. В системе же зеркал устанавли¬
вается такой ход лучей, чтобы направления падающего и отраженного
XII
световых потоков вообще не зависели друг от друга. Один из последних
вариантов такого проекта получил название «Thrustor».
Специфика солнечного паруса состоит во взаимосвязи поступа¬
тельного и вращательного движений всей конструкции. Чтобы управ¬
лять тягой, необходимо менять ориентацию паруса, что требует расхода
горючего реактивных микродвигателей. Наивыгоднейшей представля¬
ется конструкция паруса, которая сама обеспечивала бы контроль если
не за установкой ориентации, то хотя бы за ее удержанием. В этом пла¬
не одним из перспективных дизайнов солнечного паруса является дву¬
створчатая конструкция, предложенная недавно с участием одного из
авторов настоящей статьи (Е.Н.). Построив двустворчатое зеркало опре¬
деленных пропорций, мы получим саморегулирующуюся по ориентации
на Солнце конструкцию.
Разработка дизайна солнечного паруса — непростая техническая
задача, тем более что видимая простота формы и геометрии паруса да¬
леко не всегда означает простоту управления этой конструкцией в поле¬
те. Естественно, каждая конструкция имеет свои «за» и «против» при¬
менительно к конкретной задаче — цели полета и предстоящим манев¬
рам. Кроме того, нельзя упускать из виду длительность пребывания па¬
руса в условиях открытого космоса, которые влияют на поведение син¬
тетической пленки: происходит ее слипание под действием статическо¬
го электричества, плавление и перегрев в местах складок и заломов,
эрозия под действием жесткого космического излучения и другие вред¬
ные изменения.
ПАРУСНЫЕ ГРЕЗЫ
Тем не менее, решение этих проблем открывает интересные пер¬
спективы в космоплавании. Разумно управляя солнечным парусом,
можно разогнать космический аппарат около Земли, выйти в межпла¬
нетное пространство и отправиться в космическое путешествие. Мы
уже указывали, что маневры, которые космический аппарат может вы¬
полнить с помощью солнечного паруса, достаточно разнообразны. Од¬
нако, как правило, они повторяют спектр маневров, в принципе осуще¬
ствимых с помощью других двигательных установок малой тяги. Нас же
прежде всего интересуют уникальные свойства именно парусной тяги.
К ним в первую очередь следует отнести возможность функционирова¬
ния паруса в околосолнечных областях, даже в области солнечной ко¬
роны, где он одновременно может играть роль не только высокоэффек¬
тивной энергетической установки, но и надежного термостойкого экра¬
на, защищающего приборный отсек от перегрева. Такая конструкция
окажется незаменимой для проведения исследования физики околосол¬
XIII
нечного пространства и наблюдения солнечных пятен с близкого гелио¬
центрического расстояния — имеется в виду возможность «создания»
орбиты, синхронной с осевым вращением Солнца, но ниже гравитаци¬
онной гелиосинхронной орбиты. На такой орбите космический аппарат
как бы «зависает» над солнечным пятном по аналогии с полетом гео¬
стационарного спутника над одной и той же точкой Земли.
Возрастание динамической эффективности солнечного паруса
именно при приближении к Солнцу позволяет считать его перспектив¬
ным и выгодным именно на маршруте «к Солнцу». Актуальной может
оказаться идея использования контейнера, снабженного солнечным па¬
русом, для транспортировки к Солнцу радиоактивных отходов с Земли
и «захоронения» их в солнечной короне, причем уникальные свойства
парусных траекторий позволяют отправить контейнер по траектории,
проходящей над орбитами планет во избежание экологических проблем.
Что касается околоземных космических маневров, то здесь их
спектр еще более разнообразен. Например, уникальная роль паруса мо¬
жет состоять в его применении как сборщика космического мусора и
техногенных осколков с околоземных спутниковых орбит. Космический
«дворник» не только сможет подбирать мелкие осколки в контейнер, но
и транспортировать его или прекративший функционирование спутник
с густо населенной орбиты на более свободный «запасной путь». Про¬
блема «очистки» орбит давно уже является актуальной. Например, на
геостационарной орбите, где плотность «населения» уже приближается
к критической, именно солнечный парус сможет оказать неоценимую
услугу по ее очистке, вследствие отсутствия наней атмосферного сопро¬
тивления.
Обсуждая проекты солнечных парусов, нельзя обойти стороной
часто обсуждавшийся параллельно с ними так называемый «световой»
парус, движимый не природным солнечным светом, а давлением мощ¬
ного лазерного луча, источник которого установлен на планете или на
межпланетной станции. Если такой парус изготовлен из специальных
материалов, способных выдержать давление лазерного излучения, он
сможет работать и в удаленных от Солнца областях. Фокусировка ла¬
зерного излучения с помощью межпланетных линзовых установок по¬
зволит превратить световой парус в «звездный» и достичь соседних
звезд всего за несколько десятков лет. Но это уже, говоря словами
К.Э.Циолковского, «пока еще область фантазии».
В 1993 году парусная проблема неожиданно приобрела новый, бо¬
лее «земной» аспект, а именно — использование солнечного паруса не
как космического движителя, а как космического осветителя Земли,
движущегося по околоземной орбите.
XIV
Идея создания космических отражателей солнечного света в прин¬
ципе не нова. Однако, будучи связана с сооружением гигантских косми¬
ческих конструкций, она до сих пор не получила реального воплощения.
Технология таких крупногабаритных конструкций по существу еще
только зарождается. Однако перспективы применения орбитальных уст¬
ройств с зеркалами-прожекторами поистине безграничны. Прежде все¬
го, солнечные рефлекторы смогут ночью освещать большие города. Не
меньше нуждаются в дополнительном освещении заполярные регионы,
где населенность достаточно велика. Для таких регионов периодическая
подсветка не только сулит экономические выгоды, но и будет способст¬
вовать их социальному развитию. Это относится и к регионам Земли с
интенсивно развитыми промыслами и добычей полезных ископаемых.
Добрую службу в будущем может сослужить отраженный свет и в слу¬
чаях стихийных бедствий (землетрясений, ураганов и т.п.) или крупных
аварий, когда космическое освещение будет играть не менее важную
роль, чем оперативная связь, осуществляемая сегодня с помощью спут¬
ников. В области внешних экономических связей и международной
кооперации может появиться новый неожиданный «продукт» — достав¬
ка солнечного света из космоса.
Оценивая перспективы проекта космического осветителя нельзя не
упомянуть и о психологическом факторе его восприятия людьми. До
сих пор звезды и Луна украшали ночное небо, привлекая с глубокой
древности романтиков, астрономов и навигаторов. Теперь наступает
пора создания и эксплуатации искусственных «звезд», рукотворных
«светил», «Нового света», которые помогут человеку, освещая его ноч¬
ной путь.
Мы охарактеризовали основные свойства солнечного паруса и его
различные технические и маневренные возможности. Однако не следует
забывать, что космоплавание в световом потоке потребует долгих поис¬
ков сложных конструкторских решений и новых космических техноло¬
гий, прежде чем людям удастся надежно «оседлать» солнечный луч.
Мнения по поводу парусных перспектив пока еще никак нельзя при¬
знать единодушными. Однако в скорой неизбежности успешных парус¬
ных стартов мы, будучи энтузиастами солнечных парусов и оптимиста¬
ми, не сомневаемся нисколько!
Литература
Амнуэль П. Р. Звездные корабли воображения. — М. Знание. Научно-
попул. серия «Космонавтика. Астрономия». 1988.
Белецкий В. В. Очерки о движении космических тел. М.: Наука, 1977.
Изд. 3. М.: Издательство ЛКИ/URSS, 2009.
Банке В. А., Лесков Л. В., Лукьянов А. В. Космические энергосистемы. М.:
Машиностроение, 1990.
XV
Вернадский В. И. Размышления натуралиста. Научная мысль как планет¬
ное явление. Книга 2. М.: Наука, 1977.
Зайцев С. Ю., Кошелев В. А., Криволапова О. Ю., Мельников В. М. Свет из
космоса// Наука в России. 1994. Вып. 1. С. 29-31.
Поляхова Е. Н. Космический полет с солнечным парусом. Проблемы и
перспективы. М.: Наука, 1986.
Резников А. Е., Шварцбург А. А. Парусники эпохи гелиографических от¬
крытий // Природа. 1991. Вып. 5. С. 82-87.
Салахутдинов Г. М. Фридрих Артурович Цандер (К 100-летию со дня ро¬
ждения). Научно-попул. серия «Космонавтика. Астрономия». М.: Знание, 1987.
Севастьянов Н. Первый космический парусник // Авиация и Космонавти¬
ка. 1992. Вып. 3/4 . С. 46-^47.
Сыромятников В. С., Рябко Е. Н. «Знамя» над Землей // Земля и Вселен¬
ная. 1994. Вып. 1 .С. 13-22.
Поляхова Е. Н., Дикарев В. В. Космоплавание под солнечным парусом.
Звездочет. Ноябрь 2000 (2001) С. 12-16.
Поляхова Е. П. Введение в теорию солнечного паруса. Изд-во Санкт-
Петербургского университета (учебное пособие). 2002. 56 стр.
Поляхова Е. Н. К столетию фотогравитационной небесной механики.
Вестник Санкт-Петербургского ун-та. Сер. 1. Вып. 4. 2004. С. 89-118.
Поляхова Е. П., Дикарев В. В. Космоплавание под парусом-фантастика или
реальность недалекого будущего? Планетарий. 2005. Вып. 3-4. С. 4-6.
Мамонтов Д. И. На зеркальных парусах (Солнечные паруса-космические
фрегаты). Популярная механика. 2006. № 2 (40). С. 26-32.
Fogg М. J. Terraforming: Engineering Planetary Environments. Publ. by Soci¬
ety of Automative Eng. Warrendale. PA. USA. 1995.
Forward R. L. Future Magic / How today's science fiction will become tomor¬
row's reality / Avon Books. N. Y. 1988.
Friedman L. Star Sailing: Solar Sailing and Interstellar Travel. C. Wiley Sci.
Edition. N. Y. 1988. (Library of Congress call number T L 7839. F 75. 1987).
Mallove E. F., Matloff G. L. The Starflight Handbook. A Pioneer's Guide to In¬
terstellar Travel. C. Wiley Sci. Edition. N. Y. 1989.
Mclnnes C. R. Solar Sailing: Technology, Dynamics and Mission Applications.
Springer—Praxis Series in Space — Sci. and Technology. Berlin. 1999. (Library of
Congress Data: T L 783. 9. M. 39. 1999. ISBN: 1-85233-102-X).
Project Solar Sail, ed. by Arthur C. Clarke. Penguin Group. Penguin Books.
USA Inc. N. Y. N. Y. 1990 (ISBN: 0-^51^45002-7).
Souza D. M. Space Sailing. Lemer Publ. Co. Minneapolis. 1994 (Library of
Congress call number T L 783. 9. S. 68. 1993).
Wright J. L. Space Sailing. Gordon and Breach Science Publishers. Philadel¬
phia. 1992 (Library of Congress call number T L 783.9 W 75. 1992).
Уважаемые читатели! По техническим причинам далее в настоящем издании
пагинация книги приводится со страницы 3.
Посвящается 100-летию
со дня рождения
пионера советской
космонавтики Ф.А. Цандера
(1887-1933)
ПРЕДИСЛОВИЕ
Одна из наиболее сложных проблем конца XX века — проблема
обеспечения человечества энергией. Острота этой проблемы вызва¬
на резким увеличением потребности в энергии, сокращением запа¬
сов традиционных энергоресурсов и рядом других причин. Один из
путей экономии топлива — использование возобновляющихся,
’’вечных” источников энергии. К таким энергоресурсам в первую
очередь относится энергия солнечных лучей, как тепловая, так и
механическая. Эти ’’вечные” и к тому же экологически чистые
энергоресурсы не требуют также и затрат на транспортировку их
к месту потребления.
Сказанное затрагивает и космонавтику. Проблеме полной или
частичной замены энергии реактивных двигателей космического
аппарата ’’даровой” механической энергией светового давления,
способной создать хотя и малую, но вполне ощутимую силу тяги
в космическом пространстве, и посвящена эта книга. В ней расска¬
зывается, в каких случаях и какими способами разумно использо¬
вать в космосе механические свойства светового потока, чтобы
реализовать новый способ передвижения в космическом простран¬
стве — с помощью солнечного паруса. Дается описание ряда инте¬
реснейших задач динамики космического полета с солнечным
парусом, оцениваются перспективы использования механической
энергии солнечных лучей.
Приоритет в области разработки проекта межпланетного переле¬
та при помощи солнечного паруса-зеркала принадлежит замечатель¬
ному советскому ученому, одному из выдающихся основополож¬
ников теоретической и практической космонавтики - Фридриху
Артуровичу Цандеру, столетие со дня рождения которого будет
отмечаться в 1987 году. Свой проект Ф.А. Цандер разработал еще
в 20-е годы. С тех пор идея передвижения в космическом простран¬
стве с помощью давления солнечного света, сформулированная
и обоснованная в работах Ф.А. Цандера, неизменно привлекает
ученых сравнительной простотой ее реализации и ее перспектив¬
ностью для обеспечения маневренных возможностей космического
аппарата без существенных энергетических затрат. Например,
3
разумно управляя солнечным парусом, можно разогнать космичес¬
кий аппарат по спиральной траектории вокруг Земли и выйти в
межпланетное пространство, причем аппарат с парусом сможет и
далее двигаться под действием солнечных лучей, выполняя полет
как к Солнцу, так и от Солнца — в зависимости от закона управ¬
ления солнечным парусом. Солнечные паруса могут оказаться
пригодными не только для длительных межпланетных перелетов,
но и для вспомогательных космических маневров: около¬
земных межорбитальных переходов, корректирующих манев¬
ров и т.д.
При современном уровне развития техники и космической
технологии создание космических аппаратов, оснащенных обшир¬
ными солнечными парусами — космическими движителями, -
считается уже практически выполнимым, так как изготовление
тончайших полимерных пленок, необходимых для изготовления
самого солнечного паруса, уже находится на уровне современных
технических возможностей. Тем более реальным представляется
создание небольших солнечных парусов, предназначенных в качест¬
ве вспомогательных движущих средств для коррекции орбитально¬
го или стабилизации углового положения космического аппарата.
Возможно, уже в недалеком будущем появятся космические
корабли с простейшим из космических движителей — солнечным
парусом, приводимые в движение неиссякаемой энергией солнеч¬
ных лучей.
Неудивительно, что все эти соображения привлекают присталь¬
ное внимание исследователей, интересующихся проблемами созда¬
ния солнечных парусов будущего, перспективностью разумного
использования механических свойств светового потока, идущего от
Солнца. Ошибаются те, кто считает, что полет с солнечным пару¬
сом — это что-то из области научной фантастики. Дело обстоит
как раз наоборот.
Процесс ’’старения” идей в современной научно-фантастической
литературе вдет очень быстро, поскольку современная наука все
время догоняет научную фантастику и, образно говоря, ’’наступает
ей на пятки”. Поэтому писатели-фантасты вынуждены в своих
идеях все время опережать науку. Однако в отношении идеи
космического полета с солнечным парусом можно наблюдать
прямо противоположное: научные разработки парусных проектов
оказываются зачастую столь феерическими и захватывающи¬
ми воображение, что оставляют далеко позади фантазию пи¬
сателей.
Настоящая книга рассчитана на широкий круг читателей, интере¬
сующихся проблемой космического полета с солнечным парусом,
возникновением и развитием этой плодотворной научной идеи,
4
а также современным состоянием этой проблемы, характеризую¬
щимся созданием разнообразных проектов парусных перелетов
будущего. При работе над рукописью автор стремился суммиро¬
вать знания, накопленные в литературе по динамике полета с
солнечным парусом, тем более, что число публикаций на эту тему
достаточно велико. Материал излагается, как правило, в хроноло¬
гическом порядке, что позволяет уловить оттенки исторического
развития ’’парусной проблемы” как целого, а также сформулиро¬
вать ее перспективы.
Стремясь сделать чтение книги доступным для всех, кто интере¬
суется проблемой парусных перелетов, автор старался при изложе¬
нии вопросов теории избегать громоздких выводов, затрудняющих
наглядное изложение эволюции этой проблемы. Как кажется
автору, для восприятия предлагаемого теоретического материала
не требуется специальных знаний по динамике космического
полета, с малой тягой в частности, или по математическим методам
теории оптимизации космических маневров. В случае необходимо¬
сти читатель может почерпнуть все недостающие сведения в много¬
численных книгах по динамике космического полета, например в
книге Г .Л. Гродзовского, Ю.Н. Иванова, В.В. Токарева "Механика
космического полета: проблемы оптимизации” (М.: Наука, 1975),
где теоретические основы механики космического полета излага¬
ются с исчерпывающей полнотой.
Идея создания книги о солнечном парусе появилась как вполне
закономерный итог многочисленных полезных обсуждений вопро¬
сов динамики парусного движения в космосе, регулярно проводив¬
шихся на Чтениях, посвященных разработке научного наследия
и развитию идей Ф.А. Цандера, в работе которых автору неодно¬
кратно доводилось принимать участие. Эти обсуждения касались
не только объема и последовательности расположения материала
планируемого монографического обзора, но и целесообразности
завершения такой работы к столетниму юбилею выдающегося
ученого. В этой связи автор пользуется приятной возможностью
поблагодарить Б.В. Раушенбаха и М.С. Константинова за постоян¬
ное внимание к теме.
При работе над рукописью автор неоднократно советовался со
своими коллегами по кафедре небесной механики Ленинградского
государственного университета, а также с рядом специалистов, чьи
оригинальные публикации по проблемам парусных перелетов и
смежным с ними проблемам в той или иной степени нашли свое
отражение в рукописи. Всем им автор выражает свою признатель¬
ность. В частности, автор благодарен Л.К. Гриневицкой, Б.И. Мор-
кову, С.С. Лукьянову и А.М. Яншину за ряд полезных замечаний
по поводу изложения отдельных разделов книги и А.С. Шмырову
5
за критическим анализ и энтузиазм при обсуждении вопросов
управления солнечным парусом. Свою искреннюю благодарность
автор приносит также В.А. Егорову, взявшему на себя нелегкий
труд редактирования рукописи. Его критические замечания и
конкретные советы во многом способствовали улучшению
книги.
Автор будет рад узнать мнение читателей о книге и надеется,
что предлагаемая публикация послужит увеличению числа энту¬
зиастов и приверженцев идеи космического полета с солнечным
парусом в целях мирного освоения космоса.
ВВЕДЕНИЕ
§ 1. Открытие светового давления
Догадки о возможности существования светового давления
закрадывались в головы ученых уже несколько столетий назад, а
дискуссия по вопросу существования светового давления и его
возможной роли как динамического космического фактора имеет
более чем трехсотлетнюю давность. Еще в 1619 г. Иоганн Кеплер
в своей знаменитой ’’Opera omnia” высказал вполне определенно
гипотезу о том, что необычная характерная форма кометных хво¬
стов и их отклонение обязаны своим происхождением механичес¬
кому отталкивающему действию солнечных лучей, т.е. световому
давлению. От утверждал, что лучи света производят давление
на тела, на которые они падают, и стремятся двигать эти тела в
направлении распространения света [В. 1, с. 110].
Гипотеза И. Кеплера о давлении света, основанная на тогдашней
теории ’’испускания световых частичек”, т.е. на теории истечения
света, получила дальнейшее теоретическое обоснование в тех
представлениях о природе света, которые долгое время спустя —
вплоть до начала XIX столетия — считались основами физики.
Теоретические исследования, а также неоднократные эксперимен¬
тальные попытки обнаружения светового давления связаны с име¬
нами столь выдающихся ученых, как JI. Эйлер (1746 г.), А. Фре¬
нель (1825 г.), Ф. Бессель (1836 г.), В. Крукс (1874 г.) и др.
Известно, например, что Леонард Эйлер, будучи убежденным про¬
тивником ньютоновой эмиссионной теории света, приписывал
световому лучу силу давления, опираясь на волновую теорию света
X. Гюйгенса, и рассматривал световую волну как продольное
колебание. Однако лишь в 1873 г. английскому физику,Джеймсу
Максвеллу (1831 - 1879 гг.), основываясь на электромагнитной
волновой теории света, ставшей господствующей к тому времени,
удалось теоретически совершенно точно предсказать величину
светового давления. Именно Дж.Максвеллу принадлежит заслуга
теоретического обоснования динамической сущности этого явления
на основе разработанной им теории электромагнитного поля: в
своем знаменитом учебнике он устанавливает, что между яркостью
луча и производимым им давлением должно существовать вполне
определенное количественное соотношение [В. 2, с. 402].
7
В то же время все многочисленные попытки обнаружить пред¬
сказанное световое давление экспериментально и измерить его
величину опытным путем, предпринятые многими исследователями
в XVIII и XIX веках, оказались безуспешными. Впервые после
длительных поисков удалось подтвердить, опытом существование
светового давления и с достаточной степенью точности измерить
его весьма малую величину лишь замечательному русскому
ученому-физику Петру Николаевичу Лебедеву (1866 - 1912). В
1899 — 1900 гг. он впервые в лабораторных условиях осуществил
тонкий физический эксперимент, подтвердивший существование
светового давления на твердые тела, и подробно описал его в
работе ’’Опытное исследование светового давления” [В. 3, с. 121 —
147]. В 1909 - 1910 гг. П.Н. Лебедев решил еще более сложную в
техническом отношении задачу - обнаружил и измерил давление
световых лучей также и на молекулы газа. Он успешно использовал
это явление для завершения построения теории кометных форм
[В. 3, с. 381 — 408], подтвердив этим самым известную гипотезу
выдающегося русского астронома ФА. Бредихина о том, что
солнечные лучи действуют на хвост кометы ’’подобно ветру”.
Сам П.Н. Лебедев писал по этому поводу в 1912 г.: ’’Задача объяс¬
нить формы кометных хвостов световым давлением, которую
триста лет назад поставил себе Кеплер, в настоящее время для
метеорной пыли уже решена, а для газов близка к своему оконча¬
тельному решению, так же теоретические и экспериментальные
исследования, которые были сделаны до сих пор, дают достаточную
уверенность, что путь к ее решению найден” [В. 3, с. 408].
Широкое философско-физическое значение экспериментов
П.Н. Лебедева, доказавших существование механического действия
света, состоит в том, что они позволили классифицировать свет
как одну из форм материи. ’’Свет всегда исходит из вещества,
рождается в веществе и, поглощаясь, исчезает в веществе. Встреча
света с веществом всегда сопровождается взаимодействиями.
Существующий материальный мир — движущаяся материя —
представляется нам в двух основных формах — как вещество
и как свет”, — так писал позднее о свете академик С.И. Вавилов
[В. 4, с. 40] .
Открытие отталкивающего действия солнечных лучей подтвер¬
дило слова Ф. Энгельса в ’’Диалектике природы” [В. 5]:
”... притяжение и отталкивание столь же неотделимы друг от дру¬
га, как положительное и отрицательное, и поэтому уже на основании
самой диалектики можно предсказать, что истинная теория материи
должна отвести отталкиванию такое же важное место, как и притя¬
жению ...”
Эффект светового давления, обнаруженный опытами П.Н. Лебе¬
дева, сразу нашел широчайшую область приложений в астрономии:
8
благодаря ему удалось окончательно оформить механическую
теорию кометных хвостов, выявить основные закономерности в
движении метеорной пыли в межпланетном пространстве, решить
ряд проблем космогонического характера и тд. Кроме того,
интерес к этому явлению значительно вырос в свете тех задач,
которые появились при освоении космического пространства.
Здесь, с одной стороны, следует иметь в виду создание теорш
возмущенного движения искусственных небесных тел, учитываю
щих ’’вредное”, возмущающее действие светового давления. С
другой стороны, это исследование ’’полезных” динамических эф¬
фектов светового давления для передвижения в космическом
пространстве, нашедшее отражение в построении теорий будущих
космических перелетов с солнечным парусом, т.е. с использова¬
нием сил давления солнечных лучей. При этом необходимо отме¬
тить, что основы современных теорий перелетов с солнечным
парусом создавались задолго до начала эпохи выхода человека
в космическое пространство.
Действительно, после открытия П.Н. Лебедева [В. 3] идея
использования этой силы истинно космического характера неодно¬
кратно привлекала внимание как ученых, так и писателей-фанта-
стов. Авторы межпланетных фантазий не раз использовали впослед¬
ствии для путешествий своих героев давление солнечного света,
однако ученые сначала отнеслись к идее такого полета недоверчиво.
Например, в первой же книге, рассматривавшей возможность
полетов под действием недавно открытого солнечного давления, с
научной точки зрения, проект такого полета был отнесен к совер¬
шенно неосуществимым. Имеется в виду книга Я.И. Перельмана
’’Межпланетные путешествия” [В. 6], вышедшая первым изданием
в 1915 г., в которой полеты с помощью зеркал и отражающих экра¬
нов наряду с полетами, использующими гравитационные поля и
тд., были охарактеризованы как нереальные вследствие ничтожной
малости силы светового давления.
Однако совсем иное высказывание на эту тему мы находим у
К.Э.Циолковского в статье ’’Космический корабль”, датированной
в первом варианте 1924 годом, а во втором - 1925 годом [В,7].
Здесь он четко указывает на принципиальную возможность пере¬
движения космического корабля под действием малых сил солнеч¬
ного давления: ’’Давление солнечного света на расстоянии Земли не
более 0,0007 г/м2. Чтобы произвести давление в 10 т (допуская,
что снаряд весит только 1 т), нужна поверхность зеркала, не мень¬
шая 16 миллионов квадратных метров. Тогда ребро квадратного
параболического рефлектора должно иметь не менее 12,6 км. Нель¬
зя считать это осуществимым, особенно в настоящее время. Такой
способ получения скорости ставит ряд трудных вопросов. Но
9
давление солнечного света, электромагнитных волн и т.д. может
быть и сейчас применяемо в эфире к снарядам, успевшим уже побе¬
дить тяготение Земли и нуждающимся только в дальнейшем косми¬
ческом перемещении. Но все это пока область фантазии” [В.7, с. 116
или 159 по изданию 1925 г.]. Итак, отдавая себе отчет в техниче¬
ских трудностях проекта, К.Э.Циолковский тем не менее смотрит
весьма оптимистично на принципиальную возможность использова¬
ния светового давления в качестве движущей силы при космиче¬
ском полете. Как мы увидим далее, К.Э .Циолковский не обманул¬
ся в своем прозорливом научном предвидении, хотя разработать
теоретические основы концепции такого полета было суждено
другому выдающемуся советскому ученому, пионеру отече¬
ственной теоретической космонавтики, создавшему школу в об¬
ласти теории и конструирования космических аппаратов, -
Ф.А.Цандеру.
§ 2. Солнечный парус — идея Ф.А.Цандера
Имя Фридриха Артуровича Цандера (1887 — 1933 гг.) — замеча¬
тельного советского ученого' и инженера, энтузиаста межпланетных
полетов, крупнейшего теоретика космонавтики — по праву зани¬
мает видное место в истории отечественной и мировой ракетно-
космической науки и техники. Ему принадлежит также и первое
серьезное исследование проблемы космического полета с помощью
сил давления солнечных лучей, относящееся к 1924 - 1925 гг.
В трудах Ф.А.Цандера блестящая конкретизация этой многогран¬
ной идеи нашла свое воплощение в виде инженерного анализа воз¬
можности разработки теории межпланетных перелетов с помощью
зеркал и отражающих экранов как двигателей малой тяги. Доволь¬
но трудно судить о точной дате возникновения у Ф.А.Цандера идей
о различных способах применения солнечной энергии в межпланет¬
ных полетах. Однако установлено, что уже в 1908 г. он упоминал
об этом, а в 20-х годах уделял большое внимание идее исполь¬
зования для движения в космосе ’’даровой” энергии солнечного
излучения.
Уже в своей самой первой научной публикации по проблемам
космонавтики и ракетно-космической техники ’’Перелеты на дру¬
гие планеты” [В.8], которая появилась в 1924 г. и подводила итог
многолетних исследований ученого в области теоретической космо¬
навтики, Ф.АДандер пишет: ’’При желании перелететь на другие
планеты ... выгоднее будет лететь при помощи зеркал или экранов
из тончайших листов ... Зеркала не требуют горючего и не произво¬
дят больших напряжений в материале корабля” [В.8, с. 268].
Во второй своей статье под тем же названием [В.9], увидевшей
10
свет впервые лишь в 1947 г., Ф.А.Цандер четко конкретизирует
область применения в космосе движущей силы светового отталки¬
вания, разграничивая ее с областью необходимого применения
ракетного двигателя и тем самым развивая идею Циолковского:
’’Ракету с ее громадным расходом горючего и большой толкающей
силой следовало бы применять только для вылета из земной атмо¬
сферы и ускорения до скорости 8 км/с, а в дальнейшем — лишь для
быстрых изменений пути при облете метеорных потоков. А дальше
11
в межпланетном пространстве при его огромных расстояниях и
полной возможности применения малых толкающих сил гораздо
лучше воспользоваться даровым световым давлением или переда¬
чей световой энергии на расстояние с помощью тончайших зер¬
кал ... ” [В.9, с. 276].
Итак, Ф.А.Цандер, как и К.Э.Циолковский, приходит к необхо¬
димому выводу о разграничении областей применения ракетного и
парусного движителей. Он проводит [В.9] сравнительный анализ
ракетного полета (после достижения второй космической скоро¬
сти) и полета с помощью зеркал и устанавливает, что, используя
алюминиевое зеркало площадью 100000 м2 и толщиной 10_3 мм,
можно получить вес зеркала около 300 кг (а при серебряных пла¬
стинах - еще меньший вес). Все это, по его мнению, может дать
существенную экономию в весе аппаратов для перелетов, напри¬
мер, на Марс. Что касается толщины отражающих зеркальных лис¬
тов, то следует помнить, что Цандер опирался на технические дости¬
жения 20-х годов: тогда появились алюминиевые листы толщиной
около 4- Ю"3 мм, знаменитые никелевые листы 1600 м X 2 м тол¬
щиной 10-3 мм, изготовленные Эдисоном, и т.п. Неоднократные
упоминания о заманчивых перспективах движения с помощью све¬
тового давления мы находим и в большой работе Ф.А.Цандера
"Полеты на другие планеты (теория межпланетных путешествий) ”
[В.10], написанной им в 1924 — 1925 гг.
Подробная теоретическая разработка проблемы полета под дей¬
ствием давления солнечных лучей была приведена Цандером
в двух рукописях: ”0 применении тончайших листов для полетов
в межпланетном пространстве", датированной им самим 18 июня
1924 г., и "О давлении света на комбинированные зеркала”, обо¬
значенной 1925 годом. Много позднее на основе этих рукописей
М.К.Тихонравовым была подготовлена к печати и в 1961 г. опубли¬
кована статья Ф.А.Цандера под общим названием ”06 использова¬
нии силы давления света для полетов в межпланетном простран¬
стве” [В.11]. Именно в этих основополагающих работах Ф.А.Цан-
деру удалось не только разработать подробную теоретическую кон¬
цепцию полета, но и обрисовать инженерные особенности конструк¬
ции, известной в настоящее время под названием солнечный парус
(историческую оценку этих работ мы находим в обзорах [В. 12,
В.13]). В них он впервые в истории космической науки сумел
охватить широкий класс динамических проблем, связанных со све¬
товым давлением, большинство из которых позднее легли в основу
соответствующих направлений современной динамики космическо¬
го полета. Идеей полета под действием светового давления прони¬
заны многие отдельные высказывания Ф.А.Цандера, встречающиеся
также и в его неопубликованных заметках, статьях и письмах, под-
12
робное библиографическое описание которых можно найти в сбор¬
нике [В.14].
С первых же строк работы [В.11] ученый предлагает четкую
конкретизацию цели исследования и постановки задачи: ’’Использо¬
вание светового давления не требует расхода горючего, и поэтому
полет особенно дешев по сравнению с полетом при помощи ракеты.
Давление света на листы — чрезвычайно малая величина, но длина
путей, на которых это давление может действовать, а именно рас-
Ьтояния между планетами — огромны. Поэтому интересно исследо¬
вать вопрос о том, какой величины зеркала требуются в случае,
если необходимо развивать на протяжении этих огромных расстоя¬
ний скорости, соответствующие тем, которые дает ракета” [В.11,
с. 362]. Первая и основная по важности задача, решенная в этой
работе, — построение теории гелиоцентрических межпланетных
перелетов с помощью силы светового давления - была выполнена
Ф.А.Цандером на основе классической теории кеплерова движения
с учетом сил лучевого отталкйвания. Отмечая распространенность
этих сил в космосе, он попутно предостерегает исследователей от
чрезмерной переоценки их динамической роли в некоторых обла¬
стях пространства: ’’Имеется случай, в котором нельзя пользовать¬
ся малыми силами, а именно случай, в котором межпланетный
корабль, несмотря на действие малой силы на своем пути, попадает
близко к планете ... В таких случаях, вблизи опасных мест, необхо¬
димо применение ракеты, дающей большие толкающие силы. Но
эти случаи редки ... так что почти для всех передвижений в самой
Солнечной системе можно пользоваться весьма малыми силами”
[В.11, с. 362].
Второй задачей, также четко поставленной и изученной Ф.А.Цан-
дером, следует считать проблему управляемого геоцентрического
движения с помощью сил светового давления для ’’раскрутки”
около земного шара и преодоления земного тяготения. Полемизи¬
руя на страницах своей статьи [В.11] с Я.И.Перельманом по пово¬
ду четвертого издания (1923 г.) его книги ’’Межпланетные путе¬
шествия” [В.6] и высказываемых им в ней резко негативных суж¬
дений о возможности полета с зеркалами, Ф.А.Цандер отмечает, что
автор книги, ”к сожалению, не делает различия между вылетом
с Земли до возможности кружения вокруг земного шара и полетом
в самом межпланетном пространстве, когда с помощью зеркал воз¬
можно изменение скорости” [В.11, с. 361] *). Сам Ф.А.Цандер,
*) Действительно, в главе ”На волнах света” [В.6, с. 31 - 38 по 1-му изд.]
Я.И.Перельман, описав природу светового давления и историю его открытия,
справедливо замечает, что уйти из поля притяжения Земли с помощью зерка¬
ла не представляется возможным: ’’Точный учет безжалостно разрушает эту
13
напротив, ясно отдавал себе отчет в этом различии, понимая, что
реализовать ’’кружение”, т.е. достигнуть круговой скорости с по¬
мощью одних только сил давления, действительно невозможно.
Именно поэтому, разрабатывая теорию околоземной раскрутки
с помощью силы тяги отражающего экрана — паруса, — он подчер¬
кивает, что только после выхода в околоземное космическое
пространство, выполненного с помощью ракеты, уместно использо¬
вать силу тяги отражающего экрана, а там даже и это ничтожное
давление света, действующее, однако, длительное время, может
быть успешно использовано для разгона корабля от местной кру¬
говой скорости до параболической и более высоких скоростей
геоцентрического движения.
Третьим аспектом исследований Ф.А.Цандера в области примене¬
ния сил давления солнечных лучей следует считать разработку им
инженерных особенностей зеркальных конструкций и, особенно,
комбинированных систем зеркал и экранов, наиболее перспектив¬
ных, по его мнению, для реализации полета с солнечным парусом.
Об исторической значимости этих разработок Ф.А.Цандера писал
М.К.Тихонравов [В.15].
Ниже будет рассказано о том, как концепция полета под дейст¬
вием сил лучевого отталкивания, сформулированная гениальным
предвидением талантливого советского ученого, успешно разраба¬
тывалась впоследствии отечественными и зарубежными специалис¬
тами, о том, в каком аспекте конструктивные особенности созда¬
ния космического корабля с солнечным парусом — возможного
корабля будущего — неоднократно исследовались и обсуждались
в печати. В этих исследованиях солнечный парус выступал не толь¬
ко в ’’классической” роли простейшей маршевой силовой установ¬
ки, но и совсем в иной, но не менее важной новой роли — элемента
систем управления и ориентации космического аппарата. Библио¬
графические ссылки на соответствующие статьи будут приведены
в конце книги в списке литературы, причем, как правило, они
носят сугубо специальный характер. Если же обратиться к книгам,
то следует упомянуть ’’Механику космического полета в элемен¬
тарном изложении ” В.ИЛевантовского [В. 16] и ’’Очерки о движе¬
нии космических тел” В.В.Белецкого [В.17], в которых проблема
полета с солнечным парусом получила прекрасное многоплановое
освещение. Обе эти книги необходимо прочитать всем, кто интере¬
суется проблемой полета с солнечным парусом.
мечту, не оставляя и тени надежды на осуществление подобного проекта”.
Таким образом, речь идет о различии задач: ухода от Земли только с по¬
мощью светового давления и применения этого давления уже на орбите.
14
§ 3. Световое давление в Солнечной системе
Давление светового излучения является пригодным фактором,
противостоящим гравитационному притяжению, и все небесные
тела испытывают действие двух противоположных по направлению
сил от других излучающих небесных тел: гравитационного притяже¬
ния и отталкивания под действием, светового излучения. Однако
для большинства тел Солнечной системы гравитационные воздейст¬
вия несоизмеримо больше давления солнечных лучей, которое
лишь для определенного класса тел вызывает ощутимые возму¬
щающие эффекты.
Световым давлением называется механическое действие свето¬
вых лучей, производимое на облучаемые ими тела и вызываемое
взаимодействием между световым излучением и отражающим или
поглощающим свет телом. Величина этого давления зависит от
мощности излучения источника света и от свойств поверхностей
встречных тел. Теоретическое объяснение сущности эффекта свето¬
вого давления может быть дано на основе как электромагнитной,
так и квантовой теории света. Любое тело, абсолютная темпера¬
тура которого отлична от нуля, обладает электромагнитным
излучением, отталкивающим все тела, попадающие в поле этого
излучения. В равной степени это относится и к Солнцу, т.е. термин
давление солнечной радиации предполагает давление электромаг¬
нитного излучения Солнца любых длин волн, хотя солнечная радиа¬
ция воспринимается глазом как солнечный свет только в неболь¬
шом диапазоне длин волн.
Заметим, что электромагнитное излучение создает основной
энергетический поток в межпланетном пространстве, а видимый
свет занимает в нем лишь узкую полосу частот с длинами волн
400 - 760 нм (1 нм = 10“9 м), причем различным длинам волн
соответствуют разные цвета: 400 нм (4- 10-s см или 4000 А) —
фиолетовый цвет, 760 нм (7,6 10-5 см или 7600 А) — красный
цвет. Этим граничным длинам волн светового диапазона соответст¬
вуют частоты электромагнитных колебаний от 0,8 -1015 гц до
0,4-1015 гц. Электромагнитное излучение Солнца имеет максимум
интенсивности в видимой области спектра излучения на длине
волны примерно 5500 А. Звезды, в том числе и наше Солнце, излу¬
чают электромагнитные волны не только в видимой световой обла¬
сти. Многообразие физических процессов порождает электромаг¬
нитное излучение в огромном диапазоне длин волн - от сверхдлин-
ных радиоволн, у которых длина волны составляет сотни и тысячи
метров, до гамма-лучей, у которых длина волны измеряется мил¬
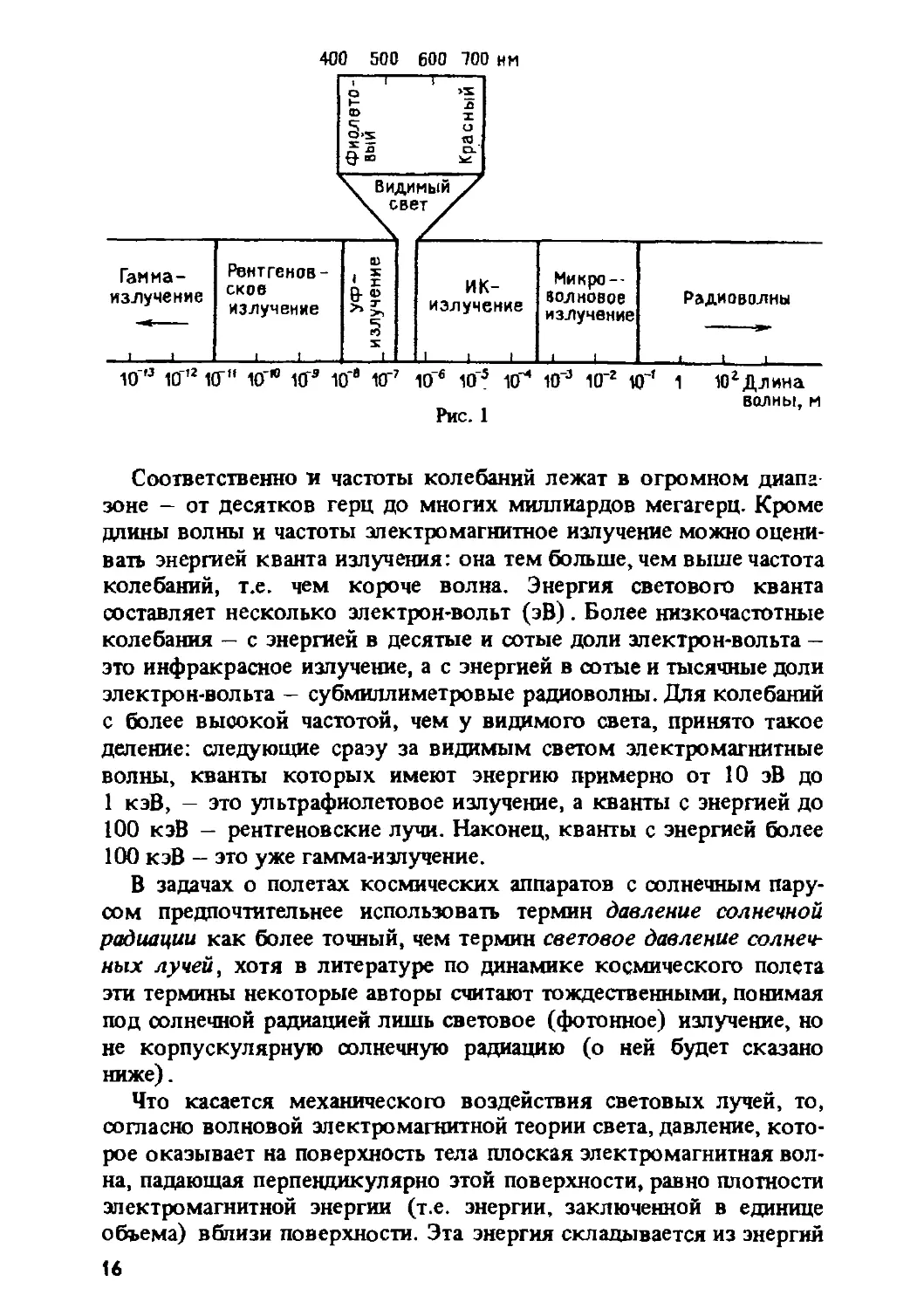
лионными долями нанометра. На рис. 1 [В.18, с. 56] изображен не¬
прерывный электромагнитный спектр (полный набор всевозмож¬
ных длин волн), разбитый на диапазоны.
15
400 500 600 700 нм
О
>х
О
с
.А
X
°*5
о
to
CL
Гамма-
Рентгенов¬
0)
1 f
излучение
ское
е-«
излучение
» >7
S
to
1 1
1 1 .. ..
з:
.-L-
ИК-
иэлучение
_|_
Микро--
вол новое
излучение
Радиоволны
10'
1(Га Ю';
10'6 10"5
Рис. 1
10 10 10'г 10 1
10гДлина
волны, м
Соответственно и частоты колебаний лежат в огромном диапа
зоне — от десятков герц до многих миллиардов мегагерц. Кроме
длины волны и частоты электромагнитное излучение можно оцени¬
вать энергией кванта излучения: она тем больше, чем выше частота
колебаний, т.е. чем короче волна. Энергия светового кванта
составляет несколько электрон-вольт (эВ). Более низкочастотные
колебания — с энергией в десятые и сотые доли электрон-вольта —
это инфракрасное излучение, а с энергией в сотые и тысячные доли
электрон-вольта - субмиллиметровые радиоволны. Для колебаний
с более высокой частотой, чем у видимого света, принято такое
деление: следующие сразу за видимым светом электромагнитные
волны, кванты которых имеют энергию примерно от 10 эВ до
1 кэВ, — это ультрафиолетовое излучение, а кванты с энергией до
100 кэВ — рентгеновские лучи. Наконец, кванты с энергией более
100 кэВ — это уже гамма-излучение.
В задачах о полетах космических аппаратов с солнечным пару¬
сом предпочтительнее использовать термин давление солнечной
радиации как более точный, чем термин световое давление солнеч¬
ных лучей, хотя в литературе по динамике космического полета
эти термины некоторые авторы считают тождественными, понимая
под солнечной радиацией лишь световое (фотонное) излучение, но
не корпускулярную солнечную радиацию (о ней будет сказано
ниже).
Что касается механического воздействия световых лучей, то,
согласно волновой электромагнитной теории света, давление, кото¬
рое оказывает на поверхность тела плоская электромагнитная вол¬
на, падающая перпендикулярно этой поверхности, равно плотности
электромагнитной энергии (т.е. энергии, заключенной в единице
объема) вблизи поверхности. Эта энергия складывается из энергий
16
падающих и отраженных от тела волн. Пусть мощность солнечной
электромагнитной волны, падающей на единицу поверхности, нахо¬
дящейся на гелиоцентрическом расстоянии г, равна Sr [Вт/м2 ],
а мощность соответствующей отраженной волны равна eSr , где
6 - коэффициент отражения. Тогда суммарная плотность лучистой
энергии падающих и отраженных волн составляет (1 +е)5г/с,
где с — скорость света, с = 3-10® м/с, а световое давление на пло¬
щадку, ориентированную нормально к потоку лучей, определяется
формулой Максвелла
Sr
Рг = (1+6)-
длина2
]•
сила .
(3.1)
Таким образом, зависимость силы светового давления от мощно¬
сти излучения Sr является линейной.
С точки зрения квантовой теории свет есть поток частиц — фото¬
нов, каждый из которых обладает энергией hv и импульсом hv/c,
где h — постоянная Планка, v - частота световых колебаний. Чис¬
ло фотонов, которое попадает на 1 м2 перпендикулярной к потоку
фотонов поверхности за 1 секунду, равно
tu>
Соответственно суммарный импульс, передаваемый фотонами еди¬
ничной площадке 1 м2 в течение 1 с, равен
Sr Lhv
с с
Именно этой величине и равно механическое воздействие фотонов
на полностью поглощающую поверхность. Если же поверхность
частично отражает свет, то число отраженных фотонов, уносящих
импульс обратного направления, равно L' • В результате по-
hvL' б5г
верхность получит дополнительный импульс —— = ——, а сум¬
марный импульс за 1 с, т.е. полное световое давление, составит
Рг = (1 + е)5г/с.
Таким образом, давление света на тело вызывается взаимодейст¬
вием между световым излучением источника и отражающим (или
поглощающим) свет телом. Все вышеприведенные формулы спра¬
ведливы в предположении, что гелиоцентрическая скорость облу¬
чаемого тела мала по сравнению со скоростью света. В релятивист¬
ском случае, когда скорость тела сравнима со скоростью светового
17
потока (этот случай в книге не рассматривается), к этим форму¬
лам добавляются аберрационные релятивистские поправки, оп¬
ределяющие так называемые динамические эффекты солнечной
радиации.
Если же теперь обратиться к динамическим свойствам светового
потока, то нельзя не согласиться с тем, что, как указывает
В.В.Радэиевский [В.19], от Солнца как бы ’’дует ураганный свето¬
вой ветер”, и не удивительно, что он наводит на мысль о возмож¬
ности использования солнечных парусов для космической навига¬
ции. Однако Земля, а тем более небольшая поверхность космиче¬
ского аппарата, перехватывает лишь ничтожную долю этого огром¬
ного, рассеиваемого в околосолнечное пространство количества
радиации. Потому световое давление на реальные тела в космиче¬
ском пространстве оказывается весьма малым по сравнению с сум¬
марной мощностью излучения такого источника, как Солнце. Мощ¬
ность солнечной радиации на расстоянии Земли от Солнца,
попадающая на площадку.. 1 м2 при ее нормальной ориентации
к лучам, называется солнечной постоянной S3 = 1,4 • Ю3 Вт/м2.
Поток энергии, излучаемый Солнцем, равен 3,86 ■ 1026 Вт.
Коэффициент отражения поверхности площадки е зависит от
отражательных свойств этой поверхности. В нашей книге мы всюду
(если это специально не оговорено) будем пользоваться моделью
геометрического отражения лучей, происходящего, как известно,
по закону косинуса. Тем самым мы принимаем поверхность сол¬
нечного паруса идеально гладкой, а не шероховатой, когда отраже¬
ние становится диффузным. В рамках модели геометрического
отражения принимаем, что для абсолютно черного, поглощающего
тела коэффициент е равен нулю, а для идеального зеркала —
единице. Так как для реальных, неидеалькых зеркал значения
коэффициента е всегда лежат внутри интервала значений 0 т 1, мы
в наших задачах о солнечном парусе будем принимать е < 1. В гра¬
ничных случаях поглощения и зеркального отражения световое
давление на единичную площадку следует определять по форму¬
лам, вытекающим из (3.1):
Известно, что для поглощающей поверхности на орбите Земли
(3.2)
рпотп = 0 464 _ ш-4 г/(см . с2) ;
(3.3)
а для зеркальной поверхности
Р°тр = 0,928 • 10-4 г/ (см • с2).
(3.3')
Эти значения могут быть получены из следующих соображений.
18
Сила светового отталкивания, как и сила тяготения, подчиняется
закону обратных квадратов, поскольку энергия излучения Солнца
в единицу времени равна энергии, проходящей через последователь¬
ность концентрических сфер, охватывающих Солнце, а поверхность
сферы радиуса г, как известно, равна 4яг2. Именно поэтому рас¬
сматриваемые нами величины мощности светового потока и созда¬
ваемого им светового давления изменяются обратно пропорцио¬
нально квадрату гелиоцентрического расстояния:
где г3 = 149,6-106 км — среднее расстояние от Земли до Солнца.
Этот закон означает, что в Солнечной системе для любых ее точек
выполняется соотношение
где Qc = 1,01 -1022 г-см/с2. Константа Qc есть импульс потока
полной энергии излучения Солнца в 1 секунду, деленный на 4л. Сам
импульс потока равен отношению полной энергии излучения
Солнца в 1 с, т.е. 3,86 • 1033 г-см2/с3, к скорости света 3-1010см/с.
На основе указанного закона с помощью (3.3) легко определить
величины давления #погл (е = 0) наорбитах некоторых планет: Мер¬
курий - 3,1 • КГ5; Венера - 8,9 ■ КГ6; Земля - 4,64 • 1(Г6; Марс -
2,0 • 1СГ6; Юпитер - 1,7 • 1СГ7 Па. (1 Па — 1 Н/м2 = 10 г/(см с2).)
Итак, фотонная солнечная радиация, оказывающая механическое
воздействие на тела, может создать ускорение этих тел. Какими
должны быть эти тела, чтобы это ускорение оказалось достаточным
для маневрирования в космическом пространстве, будет рассказа¬
но ниже, в § 4. Именно к фотонной радиации, способной ’’надуть
солнечные паруса”, относятся употребляемые иногда в научно-фан¬
тастической и научно-популярной литературе выражения ’’фотон¬
ный ветер”, ’’световой ветер”, ’’паруса, надутые солнечным вет¬
ром” и т.п. В той мере, в которой авторы, их употребляющие, от¬
дают себе отчет, что подобные выражения призваны служить лишь
некоторым художественным образом и что с физической точки
зрения речь идет именно о фотонном (электромагнитном)
давлении, художественный образ не противоречит научному
смыслу динамической проблемы и позволяет наглядно проиллюст¬
рировать аналогию с движением парусных океанских судов. Сле¬
дует заметить, однако, что при употреблении выражения ’’солнеч¬
ный ветер” может легко произойти подмена одного физического
понятия другим, что приводит к досадным недоразумениям
(и ошибкам) и дезориентирует читателей. Дело в том, что физики и
астрофизики, изучающие околосолнечное космическое простран¬
(3.4)
Ргг2 = Р3 r\ = (1 + e)Qc - const
(3.5)
19
ство, называют солнечным ветром вовсе не фотонную, а корпус¬
кул ярную солнечную радиацию, т.е. совсем другое физическое
явление. Корпускулярное излучение Солнца представляет собой
непрерывное истечение вещества из Солнца, являющееся естествен¬
ным следствием высокой температуры солнечной короны —
порядка миллиона градусов.
Природа солнечного (без кавычек!) ветра достаточно популяр¬
но описана в книге Д.Брандта [В.20]. Непрерывно истекающая из
Солнца высокотемпературная ионизованная плазма состоит из про¬
тонов, электронов, а также, в меньшем числе, ядер некоторых
элементов. Эти частицы движутся с почти постоянной гелиоцентри¬
ческой скоростью, составляющей десятки и сотни километров
в секунду. Поток частиц (в интервалах между хромосферными
вспышками) имеет на орбите Земли среднюю плотность q3 =
= 5 протон/м3, причем при практически постоянной скорости V
плотность потока уменьшается обратно пропорционально квадрату
гелиоцентрического расстояния. По этому же закону изменяется,
следовательно, и плотность кинетической энергии потока, опреде¬
ляющая механическое давление солнечного ветра на нормально
ориентированную к потоку единичную площадку.
Однако давление корпускулярного потока на несколько поряд¬
ков слабее давления электромагнитного излучения Солнца. Разу¬
меется, один только корпускулярный поток ’’истинного” солнечно¬
го ветра не может надуть никаких солнечных парусов. Однако
следует помнить, что солнечный ветер может представлять интерес
в задаче о полете с солнечным парусом как физический компонент
той межпланетной среды, в которой движется аппарат с парусом.
(Заметим, что именно корпускулярный солнечный ветер оказался,
например, ответственным за выталкивание кометного вещества
в хвост кометы. Это явление долгое время рассматривалось только
как эффект прямого фотонного давления солнечных лучей. Глав¬
ную роль солнечный ветер играет также в явлении отклонения и
искривления газово-пылевых кометных хвостов при приближении
комет к Солнцу.)
Таким образом, в задаче о полете с солнечным парусом никаких
эффектов, кроме прямого давления фотонной солнечной радиации,
учитывать не требуется. Такой упрощенной постановкой эта задача
динамики космического полета отличается от задачи о давлении
солнечной радиации на малые микрометеоритные частицы Солнеч¬
ной системы, на движения которых существенно могут влиять не
только прямые давления фотонной и корпускулярной солнечных
радиаций, но еще и релятивистские аберрационные эффекты. По¬
следние могут стать особенно существенными на космогонических
интервалах времени.
20
Вопрос о давлении солнечной радиации в динамике космическо¬
го полета возник впервые в связи с возмущенным движением
легких спутников-баллонов. Исследования в этой области нача¬
лись в СССР и в США вскоре после запусков первых спутников
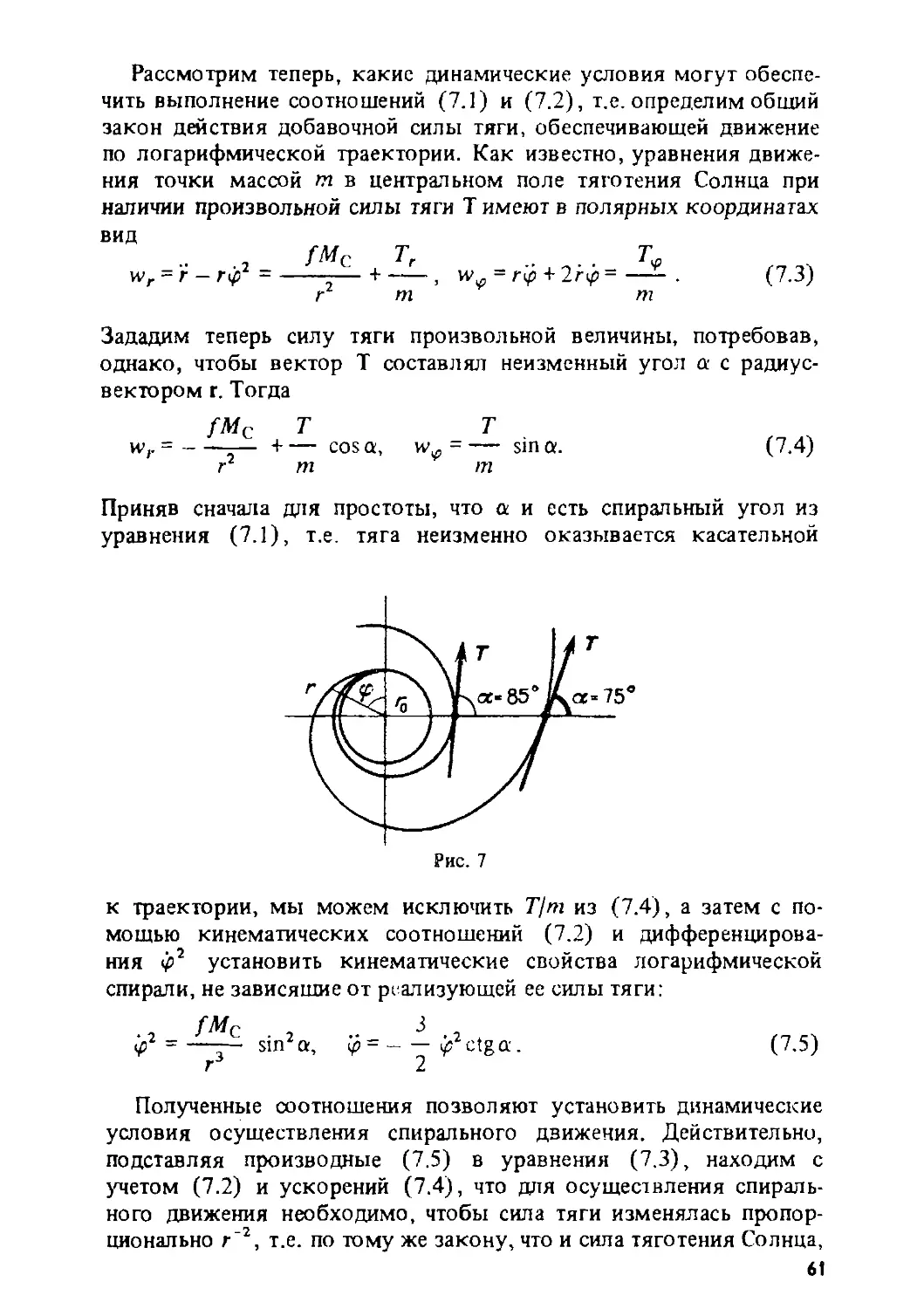
Земли и были связаны с неожиданными возмущениями орбит неко¬
торых спутников. Оказалось, что для спутников с высокой
парусностью (отношением эффективного поперечного сечения
к массе) силы светового давления могут стать существенным воз¬
мущающим фактором, влияющим на орбитальное движение.
Теоретические разработки в области радиационных спутниковых
возмущений начались с анализа аномалий в орбитальном движении:
оказалось, что теории движения некоторых спутников, учитываю¬
щие только гравитационные и атмосферные возмущения, не дают
должного согласия с наблюдениями. Именно необходимостью
объяснить это несоответствие были обусловлены тщательные ис¬
следования эволюции таких орбит. В результате были надежно
определены важнейшие возмущения от светового давления и уста¬
новлена из наблюдений величина возмущающего радиационного
ускорения. Было установлено также, что для круговых и близких
к ним орбит световое давление вызывает смещение геометрическо¬
го центра орбиты в ее плоскости в направлении, перпендикулярном
линии Земля — Солнце, так что уменьшается высота в той части
орбиты, в которой спутник движется ”от Солнца”. При первона¬
чальных расчетах попадание спутника в тень Земли не учитывалось,
а отражение лучей от поверхности спутника принималось строго
зеркальным.
Первым спутником, по движению которого были с достаточной
степенью точности определены радиационные возмущения орбиты,
был отражающий сферический баллон ”Эхо-1” радиусом 30 м, запу¬
щенный в 1960 г. в США для целей пассивной радиосвязи. Он был
выполнен из тончайшей полимерной алюминизированной пленки -
оболочки массой всего 68 кг, которая была запущена на орбиту
в сложенном виде и уже на орбите надута газом, образовавшимся
внутри оболочки вследствие разогрева Солнцем химически актив¬
ных порошков, напыленных на ее внутреннюю поверхность. Парус¬
ность надутого баллона составляла около 100 см2/г. В последую¬
щие годы именно таким способом были запущены в США и другие
баллоны; самыми крупными из них были ”Эхо-2” (50 см2/г) и
’’Пагеос” (130 см2/г).
В течение последующих двух десятилетий теории орбитального
движения спутников с учетом светового давления были доведены
до высокой степени точности. В них был уже учтен возмущающий
эффект земной тени, при прохождении которой исчезает возму¬
щающее ускорение. Было установлено, что влияние тени вносит
21
немаловажный вклад в общий энергетический баланс радиацион¬
ных возмущений, причем ее учет сопряжен с существенными анали¬
тическими трудностями. Были разработаны численные, аналитиче¬
ские и комбинированные численно-аналитические теории, позво¬
ляющие с учетом тени Земли определять в любых элементах
орбиты различные типы радиационных возмущений: вековые,
долгопериодические и короткопериодические. Кроме давления
прямого солнечного излучения в спутниковых задачах приходится
принимать в расчет еще и давление отраженной от Земли солнечной
радиации (главным образом, диффузно отраженной). Теории дви¬
жения идеально сферических баллонов были обобщены впослед¬
ствии на случай спутников сложной геометрии: высокой парусно¬
стью обладают не только баллоны, но и спутники, оснащенные
огромными отражающими антеннами или солнечными батареями.
Основные рабочие формулы для учета эффектов светового давле¬
ния приводятся, например, в справочном руководстве [В.21].
Разработка этих теорий продолжается и в настоящее время как
в аспекте орбитального, так и вращательного спутниковых движе¬
ний. По этому вопросу существует обширная научная литература.
Список работ, сопровождающий подробный библиографический
обзор по проблеме влияния светового давления Солнца на орби¬
тальное движение искусственных спутников Земли, можно найти
в обзоре [В.22].
Некоторые приемы и методы из спутниковых теорий возмущен¬
ного движения с учетом прямого светового давления нашли удач¬
ное применение и при разработке теорий движения космического
аппарата с солнечным парусом, особенно в геоцентрических зада¬
чах, имеющих много общего со спутниковыми. Однако всегда сле¬
дует помнить и о принципиальных различиях этих проблем. Ведь
в спутниковых задачах световое давление выступает как негатив¬
ный возмущающий фактор, который требуется заранее оценить
количественно и качественно с целью исключения его из наблюде¬
ний или, наоборот, учесть в вычислениях с целью наиточнейшего
прогнозирования движения по орбите. Наоборот, в парусных
задачах прямое световое давление выступает совсем в иной, пози¬
тивной, роли — в роли основной движущей и управляющей силы
(тяги) для полета в космическом пространстве. В наших дальней¬
ших рассмотрениях парусных задач мы будем всегда иметь в виду
только прямое давление солнечной радиации, пренебрегая всеми
остальными радиационными эффектами.
Говоря об объектах с высокой парусностью, испытывающих
влияние давления солнечных лучей, необходимо упомянуть о таких
естественных телах Солнечной системы, как мельчайшие пылевые и
микрометеоритные частицы. Известно, что для гравитационного
22
притяжения играет определяющую роль масса тела и, следователь¬
но, его объем, а для светового отталкивания - площадь освещен¬
ной поверхности тела. Масса тела пропорциональна кубу линейных
размеров, а поверхность — их квадрату, так что с уменьшением
размеров тела его масса уменьшается быстрее, чем площадь поверх¬
ности. Как образно писал Я.И .Перельман, происходит "состязание
кубов с квадратами” [В.6, с. 33]. Следовательно, для того чтобы
сила светового отталкивания оказалась больше силы тяготения,
нужно уменьшить размеры тела. Для тяжелых однородных сфери¬
ческих частиц радиусом р и плотностью 6 парусность а вычисляется
по формуле, использующей объем сферы (4/3) 7гр3, так что отно¬
шение поперечного сечения сферы к ее массе составляет
тгр2 яр2 3
а = —— = —г = • (3-6)
т (4/3)7гр 5 4рб
Например, ледяная микрометеоритная частица (6 = 0,9 г/см3)
радиусом р = 10-4 см обладает парусностью 104 см2/г, т.е. в
среднем на два порядка более высокой, чем парусность надувных
спутников-баллонов. Именно вследствие высокой парусности та¬
ких частиц орбиты их гелиоцентрического движения обладают
интересными динамическими особенностями, связанными с
движениями в фото гравитационных полях, о чем пойдет речь
ниже, в § 5 *)
§ 4. Сила тяги и ускорение тел под действием
давления солнечных лучей
Пусть плоский парус имеет площадь А и массу т. В частном слу¬
чае сохранения нормальной ориентации площадки к лучам ее па¬
русность определяется отношением А/т. Тогда сила тяги, дейст¬
вующая по лучу света, и ускорение аппарата, создаваемое этой
*) Любопытно заметить, что сопоставление между собой солнечных фото-
гравитационных эффектов на малые частицы и на обширные зеркала мы нахо¬
дим у Я.И.Перельмана, который пишет: ’’Мельчайшие бактерии счастливее
человека: они могут отдаваться увлекающему действию солнечных лучей
и уноситься с невообразимой быстротой в безграничный простор Вселенной.
Но не может ли и человек воспользоваться той же силою для межпланетных
путешествий? Для этого не надо было бы непременно уменьшиться до мик¬
роскопических размеров - достаточно устроить снаряд с таким же выгод¬
ным отношением поверхности и массы, как у мельчайших пылинок,
отталкиваемых лучами Солнца. Другими словами: озаряемая светом поверх¬
ность снаряда должна быть во столько же раз больше освещенной поверхности
пылинки, во сколько раз вес снаряда больше веса этой пылинки’’ (В.6, с. 36]
23
тягой, равны
FN = PrA=(\ +е)~А,
/г а * в <4Л>
г/v А Ьг А
wN = — = РГ—= (1+е) .
т т cm
В этих формулах предполагается, что сила тяги FN есть алгебраиче¬
ская сумма тяговых усилий, создаваемых падающим и отраженным
световыми потоками, т.е.
_ пад отр „пад °г сОТР - г л tл л\
fn=fN +fn ’ fn —А> fn ~е—А- (4-2)
с с
В частности, для идеально зеркальной площадки (е = 1)
F”“ - - A Af (4.21)
Рассмотрим теперь ту же площадку, ориентированную под ут¬
лом в к солнечным лучам (9 - угол падения лучей, т.е. угол между
направлением лучей и нормалью п к теневой стороне площадки)
(рис. 2,а). Напомним, что при этом omax =А/т, а рабочая (теку¬
щая) парусность площадки а(в) определяется формулой
А А m id
о(в) = cos в = — . (4.3)
т т
Здесь проекция A cos в выражает площадь поперечного к потоку
сечения площадки (’’миделя”), т.е. так называемую эффективную
Рис. 2
площадь Amid- Угол в будем называть углом установки солнечного
паруса. В рассматриваемом случае сила тяги, создаваемая световым
давлением, есть F„cas в, что непосредственно следует из сопостав¬
ления формул (4.1) и (4.3). Однако представляет интерес рассмот¬
реть отдельно случаи полного (зеркального) и неполного отраже¬
ния параллельного потока лучей от площадки, приняв, что отраже-
24
ние происходит строго по геометрическому закону, а не является
диффузным (рассеянным), как, например, для шероховатых по¬
верхностей. Здесь и в дальнейшем мы будем, как уже указывалось
в § 3, пользоваться только законом геометрического отражения
лучей от солнечного паруса (законом косинуса), т.е. оставаться в
рамках законов геометрической оптики, предполагая, что коэф¬
фициент е зеркального отражения поверхности паруса может быть
любым из интервала [0^-1].
На рис. 2,а изображена геометрия лучей для частного случая
зеркальной площадки, когда сложение сил происходит по закону
ромба. Действительно, имеем
Sr
е= 1, ^п8д = /готр = 4cos0. (4.4)
С
Тогда результирующая сила тяги, направленная строго по норма¬
ли п (п° - орт нормали), составляет
2 S
Ртяги =рпад +ротр = L,4coS20n0. (4.4')
С
Ускорение, приобретаемое такой зеркальной площадкой, со¬
ставляет
25г А , ,
cos 0. (4.5)
с т
Применив понятие рабочей и максимальной парусности в соответ¬
ствии с формулой (4.3), перепишем (4.5) в виде
25 25
r a(0)cos0= ■—— omaxcos20. (4.5')
с с
Силы, изображенные на рис. 2,а, определяются взаимодействием
потока светового излучения Солнца с поверхностью паруса, т.е.
изменением вектора количества движения потока фотонов. Собст¬
венно силой светового давления принято называть сумму проекций
всех сил на нормаль к площадке. Отсюда ясно, что для площадки,
нормально ориентированной к солнечным лучам, сила тяги при
любом коэффициенте отражения оказывается в точности равной
световому давлению FN из (4.1). Однако этот закон справедлив
и для зеркальной площадки, ориентированной произвольно к сол¬
нечным лучам. Действительно, если спроектировать силы (4.4) на
нормаль, получим
(Fnia)„ = (^отр)„ = — A cos2в,
25 (4.5")
(^пад),, +(FotP)„ = С0^в-
Легко видеть, что результат совпадает с величиной силы из (4.4').
25
Рассмотрим теперь более сложную геометрию сил, проявляю¬
щуюся в случае неполного геометрического отражения (0 < е < 1).
Из рис. 2,6 очевидно, что вектор силы тяги FT„rii располагается
между направлением орта нормали п° и направлением орта свето¬
вого потока i° (п° • i° = cos в) . По аналогии с формулами (4.2) по¬
лучим
^тяги — ^пад ^отр> (4-6)
5 5
^пад = A COS О, FOTp = € —!—А COS в. (4.7)
С С
Сложив компоненты (4.7) по правилу параллелограмма (см.
рис. 2,6), величина диагонали которого содержит множитель
\Л + е2 - 2е cos(ir — 20), получим:
Sr ,
Fтяги = А у/1 + е + 2е cos 20 cos ве°, (4.8)
с
где е° — орт переменного направления силы тяги, заключенного
между направлениями нормали к теневой стороне паруса и потока.
Вывод этой формулы можно найти также в статье А.А. Карымова
[В.23]. В частном случае полностью поглощающей поверхности
(е = 0) из (4.7) следует, что сила тяги всегда направлена строго по
лучу i° и это направление не зависит от угла установки в, как бы
ни был расположен парус, т.е.
с
_погл _ “г л. о , .
Ртяги " COS 0. . (4.8)
с
При полном зеркальном отражении (е = 1) сила тяги всегда направ¬
лена по нормали п° к теневой стороне экрана (см. рис.2,а), а ее
направление снова не зависит от угла установки:
5 25
^тяы = ~~Ау/2(1 + cos 20) cos в n° = —-A cos20n°. (4.8")
с с
Таким образом, мы пришли опять к формуле (4.4#) и показали,
что она как частный случай вытекает из более общей формулы
(4.8) . Ускорение, соответствующее этому случаю, дается формулой
(4.5) или (4.5 V На рис. 3 приведена диаграмма [В.24, с.61] за¬
висимости силы тяги зеркального паруса, направленной по нормали
к нему, от угла 0 установки паруса. Сила тяги паруса, изображен¬
ного на схеме, (Обозначена жирной стрелкой. Диаграмма соответ¬
ствует закону квадрата косинуса. При неполном отражении (е < 1)
вектор силы тяги отклоняется от нормали по направлению к пото¬
ку фотонов. Таким образом, специфической особенностью солнеч¬
ного паруса является зависимость величины создаваемой им тяги
от ее направления.
26
Формулы (4.4') и (4.8 м) представляют интерес именно приме¬
нительно к полету с солнечным парусом. Они показывают, что зер¬
кальный парус не только развивает максимальную по величине тя¬
гу, но и ее направление всегда жестко связано с нормалью к парусу.
Это обеспечивает принципиальную возможность, а также достаточ¬
ную простоту управления тягой. В силу вышесказанного зеркаль¬
ный парус можно считать наилучшим в классе плоских солнечных
парусов. Все современные исследования по динамике полета с
солнечным парусом, как правило, ограничиваются этим простей¬
шим случаем. Зеркальная модель плоского паруса вполне годится
для решения траекторных задач, не затрагивающих вопросов,
связанных с физическим состоянием самого паруса или с его конст¬
руктивными особенностями.
Рассмотрим теперь вопрос о касательных проекциях тяги, созда¬
ваемых световым давлением. Для анализа силовых воздействий на
парус используем рис. 4, на котором изображены те же силы, что
и на рис. 2, но спроектированные на нормальное и на касательное
к площадке направления. Например, вычислим проекции сил Fnan
и FOTp, определяемых формулами (4.7), на указанные направле¬
ния. Сумму проекций на нормаль Р мы будем называть собственно
световым давлением (см. рис. 4):
Sr
Р — Рпад ^ Ротр» ^пад — ^пац. 8 — A COS 8,
С
S S
Рот„ = F’oxpCOs в = е —- A cos2в, | Р j = Р- (1 + е) ——A cos2в.
с с
Аналогично находим и касательные проекции
sr
R — Ипад ^отр > ^пад “ ^пад SiH ® ~ A COS в sin 8 ,
С
Sr
R0Тр = FOTpsin в = е A cos в sin в,
с
Sr
| R | = R = (1 - е) — A cos в sin 8,
с
причем lim R = 0.
6 -* 1
Полную силу тяги найдем как сумму FTHrH = Р + R, величина
которой составляет
Sr , ,—
^тяги =— 4 уЧ + е + 2е cos 20 cos 0, (4.9)
с
что уже было найдено выше другим путем (см. рис. 2). Схема на
рис. 4 позволяет также определить угол \р, на который направление
силы тяги FT„ril отклоняется от нормали п:
(1 — e)sin в
sin \р = —■ - — ■ ■ -. (4.9 )
у 1 + е2 + 2е cos 28
Однако поскольку при близких к 1 значениях е касательные проек¬
ции не создают существенных тяговых усилий, то в наших модель¬
ных парусных задачах можно с достаточной степенью точности пре¬
небречь углом у отклонения силы тяги от нормали (возникающим
за счет касательных проекций) и принять, что для достаточно высо¬
кого коэффициента отражения паруса е(е < 1), т.е. для почти зер¬
кального (но не идеально зеркального) паруса сила тяги совпадает
по величине и направлению со световым давлением. В результате
в последующих динамических рассмотрениях мы будем (если зто
специально не оговорено) как для полного, так и для неполного
отражения пользоваться упрощенными рабочими формулами для
расчета силы тяги и ускорения аппарата с парусом:
S.
Fthi-и = Р = (1 + е) — А cos20n°,
с
н Р Sr А А
w =— = (1 + е) cos2 б = Pr cos в
т cm т
или
w rad ~ Рг а(в) COS в - Pr C7maxCOS20,
где Рг определяется по правилу (3.1), а <х(0) - по правилу (4.3).
2В
(4.10)
Заметим, что в частном случае зеркального отражения (е = 1)
можно использовать формулы
2S, , 25, А
Ртяги^Р^ .4 cos On , wrad= cos20, (4.11)
с с т
которые, в отличие от приближенных формул (4.10), являются
строгими, так как для е = 1 касательные проекции в точности ком¬
пенсируют друг друга: R = 0. Действительно, возвращаясь к рис. 2,
можно видеть, что если падающий световой поток создает тягу
Рпад. направленную по потоку лучей, то полностью отраженный
поток создает дополнительную тягу FOTp, равную FnaH по величине
и направленную симметрично относительно нормали. Поэтому ре¬
зультирующая сила тяги равна световому давлению Р и направлена
по нормали, а одинаковые касательные проекции компенсируют
друг друга. Последнее соображение еще раз подчеркивает эффек¬
тивность зеркального паруса, который защищен от вредных де¬
формирующих воздействий несимметричных касательных напря¬
жений. Таким образом, зеркальный парус как в тяговом отноше¬
нии, так и в отношении продольных эффектов оказывается на¬
илучшим из плоских парусов. Дополнительные возможности по¬
вышения эффективности паруса появятся, по-видимому, лишь при
конструировании комбинированных систем парусов-зеркал, уста¬
навливаемых под разными углами к световому потоку.
При вычислении светоного давления на тела сложной геометрии
можно пользоваться выведенными выше формулами, считая их
относящимися к элементарным силам dP и R. Полные силы Р и R
необходимо вычислять в таких случаях путем интегрирования по
полной освещенной поверхности тела или его частей. Сначала
определяются отдельные элементарные векторы тяги на разных
участках поверхности, а потом их общая векторная сумма. От¬
дельно следует отметить частный случай солнечного паруса - сферу.
Можно доказать упомянутым выше интегральным методом, что
световое давление на идеальную сферу, отражение лучей от которой
происходит строго геометрически (а не диффузно), вообще не
зависит от коэффициента отражения е (доказательство можно
найти, например, в [В. 25]). Тогда оказывается, что для любого е
ускорение сферы с площадью поперечного сечения А - прг, т.е.
с парусностью отах = А/т = яр2/т, равно
с т т
„погп ,
где константа г, определяется формулами (3.3) и (3.5).
Формула (4.12) удобна для вычисления возмущающего ускоре¬
ния баллона под действием светового давления. В той мере, в ко-
29
торой легкий отражающий сферический баллон может служить
солнечным парусом, прикрепляющимся к космическому аппарату,
эта формула оказывается полезной и в специальных парусных за¬
дачах. Хотя теоретически сила тяги баллона не зависит от коэффи¬
циента отражения, спутники-баллоны тем не менее всегда выпол¬
няются из отражающей, почти зеркальной алюминизированной
пленки. Это связано с требованиями видимости спутника при
оптических наблюдениях, а также с защитными мероприятиями
по избежанию перегрева и разрушения полимерной пленки. Кроме
того, в результате термических деформаций баллон может потерять
первоначальную сферическую форму, после чего его коэффициент
отражения может стать существенным с динамической точки зре¬
ния. Деформации сферической формы паруса-баллона могут быть
вызваны также пробоями его поверхности микрометеоритными
частицами; известно, например, что спутник-баллон "Пагеос”
(США) постепенно превратился из сферы в трехосный эллипсо¬
ид [В.22].
При характеристике динамических свойств баллона как объем¬
ного тела следует заметить особенность, существенную для геоцен¬
трического движения. Плоский парус, будучи ориентирован требуе¬
мым образом к солнечным лучам, может занимать любое положе¬
ние относительно Земли, тогда как эффективное сечение баллона
относительно направления на Землю всегда неизменно. Это разли
чие может приобрести значение, если кроме прямого излучения
Солнца необходимо учесть отраженное от Земли излучение Солнца,
собственное (инфракрасное) излучение Земли, а также солнеч¬
ное излучение, отраженное от Луны (влияние этих эффектов на
спутниковые движения описано в обзоре [В.22]). В околоземном
пространстве поток энергии излучения от Солнца составля¬
ет 1400 Вт/м2, диффузное излучение, рассеянное Землей, состав¬
ляет 120 Вт/м2, а рассеянное Луной — всего 10_3 Вт/м2. Собствен¬
ное излучение Земли, смещенное в инфракрасную область спект¬
ра, составляет 20 Вт/м2. Влияние других источников излучения
(звезд, планет) на динамику и тепловой режим паруса-баллона
пренебрежимо мало. Таким образом, любой из указанных выше
эффектов может стать временным источником возмущений в ди¬
намике и тепловом режиме как баллонов, так и плоских парусов.
В высокоточных динамических задачах парусного движения эти
эффекты следует иметь в виду также и во время прохождения
паруса через тень Земли или Луны, когда прямое световое давле¬
ние отсутствует вследствие экранирования.
Ч а с т ь I
ГЕЛИОЦЕНТРИЧЕСКИЕ ТРАЕКТОРИИ ДВИЖЕНИЯ
С СОЛНЕЧНЫМ ПАРУСОМ
§ 5. Закон Ньютона — Лебедева и динамика движений
в центральном фото гравитационном поле Солнца
Математическое сравнение сил ньютоновского тяготения и све¬
тового отталкивания было проведено П.Н. Лебедевым в 1891 г.,
т.е. еще до осуществления знаменитого опыта, позволившего экспе¬
риментально подтвердить существование светового давления.
В этом теоретическом сравнении состоит немалая заслуга ученого,
нисколько не уступающая по своему значению заслуге эксперимен¬
тального подтверждения упомянутого эффекта. Обе силы, ньюто¬
новское тяготение и лебедевское световое отталкивание (репуль-
сия), обладают рядом очевидных общих свойств. Действительно,
обе силы по величине обратно пропорциональны квадрату расстоя¬
ния от излучающего и гравитирующего тела и обе действуют по
одной прямой, в результате чего роль светового отталкивания
сводится к уменьшению (редукции) силы тяготения, т.е. как бы
к уменьшению ’'тяжелой” массы излучающего тела. (Напомним,
что гипотеза, касающаяся убывания отталкивающей силы солнеч¬
ных лучей пропорционально г"2, принадлежит астроному Ф. Бессе¬
лю (1836 г.) и была развита им применительно к теории форм
кометных хвостов.) Эти соображения и позволили П.Н. Лебедеву
описать действие обеих сил единой формулой, получившей впослед¬
ствии название закона Ньютона - Лебедева. Сам П.Н. Лебедев хоро¬
шо понимал огромное значение найденного им физического закона:
"Я, кажется, сделал очень важное открытие в теории движения
светил, специально комет. .. Найденный закон распространяется
на все небесные тела. . . Озадачен, даже ошеломлен его общностью,
которую сначала не предчувствовал. Выведенный мной закон
не есть дело минутного наития: около двух лет ношу я его
зачатки” [В.З].
Для центрального фотогравитационного поля Солнца, в котором
движется некоторое сферическое тело или частица массы т, закон
Ньютона - Лебедева может быть записан в форме, повторяющей
традиционную форму записи закона Ньютона для тяготения:
fM'm
F = - ~ 5— г°. (5.1)
г
Здесь г° - орт радиального гелиоцентрического направления,
31
г — гелиоцентрическое расстояние точки т, М' - редуцированная,
’’лебедевская”,-масса Солнца, как бы уменьшенная световым от¬
талкиванием его лучей по сравнению с его ’’тяжелой” массой
Мс = 2 • 1033г. Теперь М' < Мс, причем истинная, ’’тяжелая”,
масса Mq может интерпретироваться как неизменная масса грави¬
тирующего ’’темного” Солнца, более тяжелого, чем ’’яркое” Солнце
массой Мс-
Теоретическое значение редуцированной массы М1 зависит не
только от интенсивности излучения Солнца, но также и от таких
параметров самого облучаемого тела, как радиус и плотность,
определяющие массу тела т, входящую в формулу (5.1). Как
будет показано ниже, при определенных условиях масса т может
принимать нулевое или даже отрицательное значение.
Фотогравитационное поле, описываемое законом (5.1), остает¬
ся центральным, следовательно, этот закон применим для описа¬
ния только тех движений, при которых сила тяги направлена
строго вдоль гелиоцентрического радиус-вектора, т.е. равна свето¬
вому давлению. Это выполняется, во-первых, для тел идеально
сферической формы (искусственного или естественного происхож¬
дения) и, во-вторых, для плоской поверхности, отражающей сол¬
нечные лучи и неизменно ориентированной нормально к ним (сол¬
нечный парус). При этом если тела Обладают симметрией отража¬
тельных свойств относительно луча или эти свойства однородны,
то сила светового отталкивания хорошо вписывается в закон
всемирного тяготения *).
Установим теперь связь редукции солнечной массы за счет сил
светового отталкивания с рабочей парусностью облучаемых тел а,
определяемой как отношение текущей площади поперечного сече¬
ния (миделя) Amid к массе т. В частности, для плоского паруса
общей площадью А, как уже отмечалось в § 4, максимальная
парусность (см. (4.3))
A A m щ
»шах=— = const, а(в) = (5.2)
т т
Если тело имеет сферическую форму, то в случае, если оно полое
*) Сам ПЛ. Лебедев писал по этому Поводу: ”Те силы, с которыми дейст¬
вует яркий солнечный свет или концентрированный свет вольтовой дуги на
твердые и газообразные тела, нас окружающие, так малы по сравнению с си¬
лами тяготения, что только особыми приемами их удается обнаружить в
наших лабораториях. Но ц межзвездном пространстве силы светового давле¬
ния, действуя на тела с малыми массами, не только становятся соизмеримы¬
ми с силами тяготения этих масс, но могут и во много раз превосходить их
по величине. НаибоПре яркое проявление светового давления мы наблюдаем
на образованиях кометных хвостов” [В. 3, с. 399].
32
(сферическая оболочка радиусом р), неизменную парусность удоб¬
но вычислять так:
^mid пР /с
О тах= = = const, (5.3)
т т
а если оно сплошное и однородное радиусом р и плотностью 5, то
7гр2 3
^тах _ - • (5-4)
т 4ра
Запишем теперь уравнения плоского орбитального гелиоцентри¬
ческого движения центра масс облучаемого тела в фотогравита-
ционном поле Солнца
fM'cm fMcm
mwr = — = - -рг- + Fn> mw* = О-
где wr и Wy - радиальное и трансверсальное ускорения центра
масс, FN - центральная возмущающая сила, равная в данном слу¬
чае световому давлению на облучаемое тело или силе тяги нормаль¬
но ориентированного к лучам солнечного паруса. При расчете силы
Fщ можно также воспользоваться формулой (4.10), которая
для центральной силы (в = 0) снова показывает, что сила FN -
S r , F jy
= (1 + е) А, а соответствующее ускорение w = =
с т
Sr
= (1 + е) о, где а= 0тах — парусность тела. Теперь, пользуясь
с
формулами (3.1) и (3.5), запишем ускорение
VV
rad _ F^ _ 0 +е>0 ~ °
бс=-гбс. (5-5)
имея в виду, что радиационная константа Qc, входящая в Q
дается формулой (3.5). Окончательно суммарное радиальное уско¬
рение wу тела принимает вид
wr = w8r+wrad = -^ (5.5')
г т
причем легко видеть, что редукция
75 ("с-уе;), (5-5')
H=-~Qc = - (1+е)у(2с<0 (5-6)
действительно имеет размерность массы. Теперь, вводя вспомога¬
тельную безразмерную величину
Д обе _, Qc
которую мы, в отличие от редукции массы Солнца д, будем на¬
зывать редукцией гравитационного поля Солнца, перепишем за¬
кон Ньютона - Лебедева (5.1) в виде
f(Mc+p)m 0_ fMcm „ о
г2
fM 'm
F ~ — ;2 ■ г°=-—^~(1 -0)г" =
г2
г°, М’ = Мс(1-0). (5.8)
Замена истинной массы Солнца Мс на редуцированную массу
М < Мс означает одновременно замену гравитационного парамет¬
ра К = fMс (гравитационное A-поле) на параметр А = fM' (фо-
тогравитационное К ’-поле), причем
К' -fM' =ДМС + д) = /мс (1 - (?) = К{1 - (?) < К. (5,9)
д
Безразмерная величина 0 = - — > 0 из (5.7) является как бы
редукцией интенсивности гравитационного поля Солнца и показы¬
вает, что световое давление солнечных лучей на данное тело реду¬
цирует силу притяжения этого тела Солнцем в отношении (1 - 0).
Связь парусности объекта о с редукциями массы д и поля (( дается
формулой, вытекающей из (5.6) и (5.7) :
/ /Мс
0= „ = 0 , (5.Ю)
Ус Ус
где Qq~( 1 + е)Ус> Qc = 1,01 ' Ю22г - см/с2.
Так как силовая функция фотограви пшионного центрального
поля имеет вид
f(Mc+p)m fMc{\-P)m K'm
г Г г
1
то интеграл энергии — mv - U = h позволяет записать удвоен¬
ную полную энергию точки единичной массы, движущейся в
центральном фото гравитационном поле, в виде
~ , 2/Юс(1-0) , 2К ’
h = ” =и* . (5.11)
г г
На основании вышеприведенных формул можно заключить, что
в центральном фотогравитационном поле остаются справедливыми
все формулы кеплеровой задачи двух тел при условии, что вместо
параметра гравитационного поля К подставлен меньший параметр
фотогравитациоиного поля К’ < К. Соответственно изменятся и
энергетические характеристики движения.
34
/3-1 1/2</S<1
Рис. 5
Рассмотрим теперь, как изме¬
нится траектория материальной
точки, движущейся первоначаль¬
но в гравитационном поле Солнца
(’’темного”) по круговой орбите
радиусом г0 (круговая орбиталь¬
ная скорость v0 = y/Klr0), если
значение редукции (3 = 0 (соответ¬
ствующее Л"-полю) внезапно из¬
менить на значение Р > 0. Такое
изменение Р означает как бы вне¬
запный, ’’ударный” переход из
Af-поля в К '-поле излучающего
Солнца, который практически
может быть реализован лишь для тел с переменной парусностью. На¬
пример, если на космическом аппарате внезапно развернуть солнеч¬
ный парус и сориентировать его плоскость нормально к солнечным
лучам, то произойдет ’’ударное” увеличение парусности, влекущее
за собой мгновенное изменение теоретических значений величин
д, Р, М', К' в соответствии с формулами (5.6)-(5.9). Другим
примером может служить сферический парус-баллон, радиус кото¬
рого можно искусственным путем увеличивать во время движения
по орбите. Если его радиус увеличится, например, в два раза, то
сила тяготения для заданного на заданном расстоянии г от Солнца
вообще не изменится, а сила светового отталкивания, в соответ¬
ствии с формулой (5.2), возрастет вчетверо. Возрастание силы FN
интерпретируется как теоретический ’’переход” в новое, фотогра-
витационное поле. Аналогично можно осуществить и обратный
’’переход”.
Если в результате указанных операций равнодействующая сил
тяготения и отталкивания не перестает быть центральной, то движе¬
ния будут по-прежнему происходить по коническим сечениям, но
уже с измененными эксцентриситетами. Эволюция траекторий
кеплеровой задачи двух тел в зависимости от величины Р де¬
монстрирует принципиальную возможность практического исполь¬
зования силы светового давления для полета в космическом прост¬
ранстве. Действительно, зададимся несколькими значениями Р
(рис. 5) для первоначальной круговой орбиты:
1) если Р = 0, то редукции поля нет, изменения орбиты не про¬
исходит;
2) если 0 < р < 1/2, то при ’’переходе” из Х-поля в Х'-поле
ск' < К) начальная круговая скорость v = \К/г0 оказывается
больше значения круговой гелиоцентрической скорости v -
- у/к'/го в /С’-поле, так что по отношению к .К’-полю реальная ге-
35
лиоцентрическая скорость движения оказывается уже эллиптиче¬
ской, т.е. v > v'. Следовательно, при соответствующем увеличении
парусности аппарат перейдет на эллиптическую орбиту, лежащую
снаружи круговой, причем ее перигелием будет точка раскрытия
паруса;
3) если /3=1/2, то К'= К/2 и начальная скорость
v = yfWo = V2A7~о
оказывается в точности параболической в А'-поле. Теоретическое
значение круговой скорости в А'-поле составляет и = y/FJio =
= v/y/2, откуда заключаем, что и = и'уД й точка должна покинуть
А'-поле по параболе;
4) если 1/2 < /3 < 1, то v > и у/2 и точка покидает А'-поле по
ветви гиперболы, содержащей ’’яркое” Солнце в фокусе;
5) если /3 = 1, то в этом предельном случае наблюдается ’’гаше¬
ние” полей, когда сила радиационного отталкивания полностью
уравновешивает силу тяготения ’’темного” Солнца: А'-поле от¬
сутствует вовсе, т.е. точка будет двигаться равномерно и прямо¬
линейно в бессиловом пространстве со скоростью v = const > 0 по
касательной к первоначальной круговой орбите;
6) если /3 > 1, то сила отталкивания преобладает над силой тяго¬
тения — эффект получается такой, как будто центральное тело от¬
талкивает движущуюся точку; траекторией точки будет ветвь
гиперболы, содержащая ’’пустой” фокус, т.е. выпуклая ветвь на
рис. 5; с неограниченным увеличением /3 ветвь гиперболы будет
приближаться к гелиоцентрическому радиус-вектору.
Из интеграла энергии (5.11) следует, что при движении по вы¬
пуклой ветви гиперболы (/3 > 1) местная гиперболическая ско¬
рость монотонно возрастает, а при неограниченном удалении от
центра движение происходит равномерно по асимптоте гиперболы.
Если точка обладает нулевой начальной гелиоцентрической ско¬
ростью, то произойдет ее выброс из Солнечной системы по лучу
света с убывающим положительным ускорением, асимптотически
стремящимся к нулю (скорость при этом возрастает, асимптоти¬
чески стремясь к константе).
Итак, закон Ньютона — Лебедева замечательно расширяет класс
возможных движений в кеплеровой задаче двух тел. Действитель¬
но, если в гравитационной кеплеровой задаче двух тел движения
возможны только по трем типам конических сечений: эллипсу,
параболе и вогнутой ветви гиперболы (не считая вырожденных
траекторий соударений), то в фотогравитационной задаче двух тел
к этим сечениям добавляются прямая с фокусом вне ее и прямая
без фокуса, выпуклая ветвь гиперболы и точка (случай равновесия
36
сил при отсутствии скорости), т.е. теперь возможны движения по
любым коническим сечениям.
Световое отталкивание может соперничать с тяготением (и даже
превзойти его) для тел с высокой парусностью, таких как, напри¬
мер, легкие надувные баллоны или космические аппараты, снаб¬
женные огромными отражающими солнечными парусами. Однако,
как уже указывалось в § 3, не следует забывать, что в природе
существуют многочисленные естественные небесные тела, обладаю¬
щие высокой парусностью и вследствие этого подчиняющиеся
описанным выше законам движения в фотогравитационных
центральных полях, - пылевые и микрометеоритные частицы, па-
3
русность которых <7= ~Р& (см. формулы (3.7) или (5.4)) ока¬
зывается весьма высокой за счет ничтожно малых размеров их
радиусов р. Действительно, при любых комбинациях значений
радиуса р и плотности частицы 5, произведение которых составля¬
ет, например, КГ4г/см2, получаем парусность or = 104см2/г, т.е.
примерно в сто раз больше парусности огромных спутников-бал¬
лонов типа ’’Эхо”. К этим объектам относится и отмеченное выше
свойство ’’ударного” изменения их парусности (дробление или,
наоборот, слипание частиц при их столкновениях), вследствие
чего их орбиты подчиняются эволюционной схеме, изображенной
на рис. 5.
Гелиоцентрическое движение пылевых и микрометеоритных
частиц в Солнечной системе является примером природных движе¬
ний в центральном фото гравитационном поле, демонстрирующим
ряд полезных аналогий также и в аспекте движения космического
аппарата с солнечным парусом. Охарактеризуем вкратце основные
интересующие нас свойства этих движений [1.1]. Метеорное ве¬
щество, как известно, образует облако, концентрирующееся вбли¬
зи плоскости эклиптики, и в нем частицы движутся по произволь¬
ным эллиптическим орбитам, в результате чего неизбежно происхо¬
дят столкновения частиц между собой. Измельченная материя
переходит в разряд космической пыли, в орбитальную эволюцию
которой сразу вносит существенный вклад интересующая нас сила
светового давления солнечных лучей. Так, например, если микро-
метеоритная частица, движущаяся по эллиптической орбите с боль¬
шой полуосью а о, распадается без взрыва на две частицы разных
размеров (’’ударное” изменение парусности), то меньшая частица,
обладающая более высокой парусностью, сразу переходит на гелио¬
центрическую орбиту, лежащую снаружи орбиты большей частицы
и, тем более, снаружи прежней орбиты ’’родительской” частицы.
Большая полуось ах и эксцентриситете новой эллиптической орби¬
ты любой из вновь образовавшихся частиц могут быть определены
37
из интеграла энергии (5.11), выражающего неизменность гелио¬
центрической скорости точки до и после распада. Последнее пред¬
положение справедливо, так как обычно относительные скорости
отделения частиц малы по сравнению с их орбитальными гелио¬
центрическими скоростями.
В случае солнечного паруса мы тоже будем предполагать, что при
быстром раскрытии паруса не происходит никакого импульсного
изменения орбитальной скорости. Следовательно, интеграл (5.11)
примет вид
v2 - fMc (— -)=/А/с(1 -/3)(— - —
\ г0 а0 / \ г0 а, /
откуда
= (1 — Р)Гово(го — 2/Зл0) 1. (5.12)
Практический интерес формула (5.12) представляет для частного
случая схода при помощи солнечного паруса с круговой гелиоцент¬
рической орбиты радиусом г0 = а0 при исходной круговой ско¬
рости v - VfMc/a0. Тогда вместо (5.12) получим при |3 > О
(1 -Р)«о
(5-13)
причем ai при /3'*->- 1/2, что соответствует параболе на рис. 5.
Точка (космический аппарат) покидает орбиту со скоростью
> ivр, где vv - скорость в перигелии новой орбиты.
Помимо эволюции большой полуоси интересно проследить и из¬
менение эксцентриситета новой орбиты: как показано в [1.1],
новый эксцентриситет
/ 2/3-1 0
1 = у 1 +
е=у/1+- = . (5.14)
(1-/3)2 1-/3
Легко видеть, что е -*■ 0 при 0 -*■ 0 (окружность на рис. 5), е -> 1
при 0 -> 1/2 (парабола). Эту же формулу легко получить из закона
сохранения секториальной скорости при переходе на новую орбиту,
рассмотренную выше:
fMca{ 1 -e2)=fMc (1 -0)г„( 1+е).
Расчет редукции массы (5.6) и поля (5.7) для пылевых частиц
производится при е = 0 (поглощение), т.е. при Qq = Qc. К этому
же результату можно прийти, считая частицу идеальной сферой,
для которой значение отражательной способности е вообще не игра¬
ет роли, см. (4.12).
В отличие от объектов искусственного происхождения пылевые
и микрометеоритные частицы обладают отличительным свойством
38
постепенно увеличивать свою парусность при приближении к Солн¬
цу за счет испарения своего вещества при разогреве. После дости¬
жения ими некоторого минимального критического значения ра¬
диуса Ркрит они ’’выметаются” из Солнечной системы прямым
давлением солнечных лучей по параболической или близкой к ней
гиперболической орбите — вогнутой ветви на рис. 5, Выброс этих
небесных тел по прямой (0 = 1) или по выпуклой ветви гиперболы
при описанном непрерывном возрастании парусности, по-видимо¬
му, просто не успевает осуществиться. Возможно, что эти траекто¬
рии осуществимы для продуктов столкновений частиц при ’’удар¬
ном” возрастании парусности сразу на много порядков. Следует,
однако, помнить, что описанные выше механические свойства
движений в фотогравитационных полях вообще справедливы лишь
до тех пор, пока радиус частицы р не становится сравнимым с дли¬
ной волны солнечной радиации, равной 0,1 мкм.
Часто встречается неверное утверждение, что частицы выбрасы¬
ваются из Солнечной системы прямолинейно, по радиус-вектору,
как только достигается равновесие сил тяготения Солнца и свето¬
вого отталкивания его лучей, т.е. когда 0=1, fM'c =fMc(\ - j3) =
= 0 в формулах (5.9). На самом деле строго радиальное движение
возможно только для объектов, потерявших гелиоцентрическую
скорость (например, в результате взрыва или столкновения).
Тогда вследствие ’’гашения” скорости материальная точка будет
находиться в покое относительно Солнца и начнет падать на него
по прямой, если тяготение больше отталкивания, или покинет
околосолнечное пространство также по радиальной прямой, если
отталкивание больше тяготения (см. рис. 5). Для микрометеорит¬
ных частиц такое гашение скорости нехарактерно, а для объектов
искусственного происхождения — вообще неосуществимо. (В на¬
учно-популярной и научно-фантастической литературе утверждение
о равновесии упомянутых сил высказывается иногда именно в
связи с солнечно-парусным полетом.) Если же для частицы равно¬
весие сил все-таки окажется достигнутым, то при сходе с гелио¬
центрической круговой орбиты движение будет происходить по
прямой, перпендикулярной радиус-вектору (см. рис. 5). В дейст¬
вительности покидание нашей Солнечной системы пылевыми части¬
цами начинается раньше, чем достигается такое равновесие (0 ^ 1
для масс порядка т = 1СГ12г), и происходит по параболе уже при
^крит
0 = — • (первоначальная орбита круговая);
0 = — г0яо' (первоначальная орбита эллиптическая
2 (см. формулу (5.12))).
39
Для всех fi > 0крит уход совершается по гиперболе, для которой
равновесие сил тоже еще сохраняется. Таким образом, прямоли¬
нейные траектории выброса для пылевых частиц не характерны.
Пылевые и микрометеоритные частицы (микрометеороиды),
движущиеся в околосолнечном пространстве вследствие столкно¬
вений, дробления и испарения, оказываются, по-видимому, основ¬
ным источником частиц, покидающих околосолнечное пространст¬
во с гиперболическими скоростями. Последние получили название
(5-метеороидов в соответствии со ставшим традиционным обозна¬
чением редукции гравитационного поля 0 (см. формулы (5.7) —
(5.9)). Наблюдения, выполненные в последние годы с помощью
космических аппаратов, показали, что экраны приборов действи¬
тельно регистрируют в околосолнечном пространстве потоки
)3-метеороидов, летящих от Солнца с гиперболическими скоростя¬
ми. Именно для них четко прослеживается корреляция: чем мень¬
ше масса и радиус частицы, тем выше скорость ’’выметания” из
Солнечной системы и тем ближе направление скорости к гелио¬
центрическому радиус-вектору [1.1, 1.2].
Основные элементы динамики движений этих естественных не¬
бесных тел в фото гравитационном поле Солнца справедливы и
в прикладной задаче о полете космического аппарата с солнечным
парусом, ориентированным так, чтобы результирующая фотогра-
витационная сила оставалась центральной. Итак, назовем такой
”0-парус” цандеровским парусом и далее будем рассматривать
лишь наиболее близкую к реальности область эллиптических гелио¬
центрических движений, ограниченную траекторией параболи¬
ческого выброса, имея в виду, что применительно к динамике
космического полета с солнечным парусом основные положения
этой теории были развиты Ф.А. Цандером уже в 20-е годы на базе
обобщенного закона Ньютона — Лебедева.
§ 6. Задача Ф.А. Цандера о межпланетном перелете
по касательному гелиоцентрическому эллипсу
Ф.А. Цандер [В. 11] впервые применил закон Ньютона - Лебеде¬
ва к динамике космического полета, рассмотрев теоретически
межпланетный переход аппарата с парусом-зеркалом, неизменно
ориентированным нормально к солнечным лучам, выполняемый
по касательному эллипсу между круговыми компланарными
планетными орбитами. Эта задача по праву может называться за¬
дачей Цандера о касательном переходе с зеркалом. Основную ди¬
намическую концепцию полета под действием фото гравитационных
сил Ф.А. Цандер выражает так: ’’Движение межпланетного кораб¬
ля с зеркалом будет совершаться вокруг Солнца по кривым, по
которым двигаются небесные тела, т.е. по кругу, эллипсу, парабо-
40
ле или гиперболе, только для постоянной притяжения необходимо
применять уменьшенное значение. Получается своего рода кажуще¬
еся ослабление притяжения Солнца. . . Межпланетный корабль,
сохраняя скорость движения Земли вокруг Солнца, не будет оста¬
ваться на орбите Земли, что имело бы место без зеркала, а будет
вследствие ослабления притяжения Солнца двигаться по орбите,
афелий которой лежит от Солнца дальше орбиты Земли. Это делает
возможным достижение других планет” [В. 11, с. 372].
Именно эта цандеровская концепция полета с зеркальным пару¬
сом легла в основу дальнейших теоретических разработок, пред¬
принятых в этой области динамики космического полета. Сам
Ф.А. Цандер [В.11] развивает стройную динамическую теорию ком¬
планарного касательного перелета в фотогравитационном поле,
на базе которой ему удалось получить основные соотношения меж¬
ду орбитальными характеристиками переходной траектории от
орбиты Земли к круговым орбитам пяти внешних планет. При
этом он широко пользуется сравнениями полученных характе¬
ристик с соответствующими численными характеристиками им¬
пульсных касательных переходов между круговыми компланар¬
ными орбитами планет - теми самыми траекториями, которые
позднее получили название гомановских траекторий, хотя неоспо¬
рим приоритет Ф.А. Цандера также и в исследовании траекторий
этого типа.
Ф.А. Цандер приводит [В.11, с. 374] значения полупериодов эл¬
липтических движений для указанных выше перелетов с импульс¬
ной и парусной тягами по одной и той же траектории:
Таблица 1
Пол у период
Марс
Юпитер
Сатурн
Уран
Нептун
ЪТ
* имл»
лет
0,710
2,72
6,35
16,1
30,2
2
. сут
259
995
2210
5880
11020
ir
Г лет
0,780
3,52
8,13
2,22
42,0
2 зерю
[сут
284
1284
2970
8100
15310
Уточненные значения этих величин приведены ниже, в табл. 2,
строки 8, 9,12,13.
Прежде всего показательно сравнение полупериодов импульсно¬
го перехода, т.е. полета без зеркала, и полета с зеркалом по одному
и тому же эллипсу: движение в фотогравитационном поле происхо¬
дит медленнее, чем движение по кеплерову эллипсу с применением
41
импульса. Разность полупериодов возрастает по мере удаления
планетных орбит от Солнца. На первый взгляд такой результат
должен показаться парадоксальным — ведь световое давление
солнечных лучей при движении аппарата от Солнца, казалось бы,
должно ’’подгонять” аппарат, тем самым ускоряя полет. На самом
деле два упомянутых движения по одной и той же эллиптической
траектории, или, точнее, по двум совпадающим геометрически
(но не динамически) траекториям, происходят при принципиально
различных стартовых (начальных) условиях. Чтобы уяснить это,
рассмотрим подробнее динамические особенности движения в
парусной задаче Цандера на примере перелета к орбите Марса,
сравнив ее с траекторией импульсного перелета.
I. Импульсный касательный перелет без зеркала. Кеплерово
эллиптическое движение .аппарата начинается с круговой орбиты
Земли (орбита! на рис. 6) радиуса rt = r3 = 149,6 • 10® км и
заканчивается на круговой орбите Марса радиуса г2 - гм =
= 728,0 • 106 км. Первоначальная круговая гелиоцентрическая
скорость аппарата на орбите I равна орбитальной скорости круго¬
вого движения Земли и составляет
Для того чтобы афелий (ам) переходного кеплерова эллипса
оказался расположенным на орбите Марса, необходимо и достаточ¬
но, чтобы большая полуось переходного эллипса II была равна
Без учета тяготения Земли выход именно на такую переходную
траекторию можно обеспечить при условии, что начальная скорость
аппарата в перигелии орбиты II удовлетворяет интегралу энергии
орбитального кеплерова движения
Рис. 6
(6.1)
a =(j\ + r2)l2 = 188,8 • 10® км.
(6.2)
(6.3)
42
в котором гп = Гу = г3 - 149,6 • 106 км, а гравитационный параметр
Солнца составляет /Л/с = 1327 • Ш8 км3/с2. Начальная стартовая
скорость ия = | vn | на орбите II определяется как алгебраическая
сумма модулей двух коллинеарных векторов: круговой скорости
аппарата на орбите I, т.е. vj = v3 (переносной скорости), и вектора
положительного касательного импульса в перигелии орбиты и
(относительной скорости), необходимого и достаточного для
выхода на требуемый переходный эллипс II (см. рис. 6). При
вычислении скорости ип мы пока не прибегаем к использованию
понятия сферы действия Земли, считая, что сложение скоростей,
т.е. приложение импульса и, происходит в некоторой точке, услов¬
но совпадающей с центром масс Земли, движущимся по круговой
околосолнечной орбите. Таким образом,
причем для определения импульса и служит интеграл энергии (63),
преобразованный с помощью (6.4) к виду
Замечая, что коэффициент - у/Гу//Мс1гх = yj2v3 выра¬
жает гелиоцентрическую параболическую скорость точки на рас¬
стоянии гi =г3 от Солнца, равную 29,78 \/2 = 42,11 км/с, вычисля¬
ем импульс по формуле (6.6):
Этот же результат легко получить, если в правую часть уравнения
(6.5) сразу ввести круговую скорость Ui:
(см. также строки 1 — 5 в табл. 2). Подставляя числовые значения,
43
Vn = и, +и,
(6.4)
в котором на основании формулы (6.1) i>i = \//Мс/г3. Пользуясь
далее формулой (6.2), находим импульс
(6.6)
(и, + и)2 =vt(2-rl/a),
(6.7)
после чего импульс и выразится простой формулой
(6.8)
получим на основании (6.8):
11 = 2,95 км/с.
Теперь определим время перелета аппарата по орбите II (см.
рис. 6) до орбиты Марса, пользуясь третьим законом Кеплера и
выбирая за эталон круговую орбиту Земли I, приняв а3 = гt =
= 149,6 • 106 км, Т3 = 3653 сут. Записав третий закон Кеплера для
периодов и полуосей
(см. строки 6 — 9 в табл. 2), легко вычислить, что полный период
обращения по переходному эллипсу II составляет
а время полета до орбиты Марса равно 7'имп/2 = 257,6 сут. Это же
значение Гимп можно получить и без привлечения формул, исполь¬
зующих эталонную орбиту, а используя известную формулу для
средней угловой скорости орбитального движения по эллипсу
(среднего движения), также являющуюся следствием третьего
закона Кеплера:
Установим затем связь периода Тимп движения по орбите II
с величиной касательного перигелийного импульса и с помощью
формулы (6.7), позволяющей записать отношение
Подставив это отношение в закон (6.9) при г, =а3 и при круговой
скорости Vi .= и3 = 27iTj /Г3, получаем окончательно
Принимая, что и = 2,95 км/с, Т3 = 365,3 сут = 3,15 • 10-7 с, г, =
= 149,6 • 10® км, и вычислив отдельное слагаемое иТ3!иг^ = 0,197,
44
(6.9)
и = V fMc а~3!2.
Теперь
(6.10)
(6.11)
(6.12)
&
*
sc
a
>»
x
c
9
x
4>
CO
о*
я-
x
x
ю
О
В >4
&«
5 *
I*
X в
о
«
о
to
гч
00
о
O'
4t
о
гч
о
to
го
со
Ч*
гч
о
<0
о
со
о
о.
со
4t
ю
г-
ГЧ*4
оС
00
to
гч
•—t
ч>
о
о
я
го
to
о
00
to
оС
гч
4t
оГ
ч}-
00
Os
г-
со со
8-'
Os *
VO Tf
cO os
ro to v> oo
ч* — ч* Ю ч*
\fi ^ VO vi w
о ro ^ ^ ^
О о — —* VO
O' 00 O'
00 O' 00 O ^
q\ h M н -и
~ с>
о
о о
го
to гч
O' so О Р4 М
ОО ^ ГО Г* М
• го , “
*'и о
О О -н
гч «о so *“Ч
ГЧ O' оо о
СО ГЧ f-
. ч
00 СО to
ГЧ Оч O'
Os Ov ^
t-> О OS гч
о О N И
♦
о
<е
О
го
со
со
гч
OS
и
3
гч
гч
гч
art
00
VO
о
so
О
гч
о
to
00
о
о
гч
о
<- сч
гч
гч
to ГЧ
г-
о>
OS
со as ■—*_
оГ
«о
гч
гч
OS
о
2 со со
X
со
4t
г-
so
00
to
to
г-
so
so
O' Os
sO^
о
го со
гч"
со
о ^
4t
о
г-
о
о
чо
OS
о
го со
о
VO VO
со со
to «о
Os O'
гч гч
о
о
4t
о
Б
2
Os -
О гч
00 гч
о
00
O'
гч
VO
о
00
О
OS OS
OS Os
о о
со
Os
г-
s
гч
to
00
*+ £
Ov £
ГЧ ’'I
CO ^ to so r-
X
=> a
\ V
~ 3 l"
^3 + K
3 и « | ГЧ-
© »-t гч
0
u
1
о.
Таблица 2(окончание)
X
>ч
00 00
2h£h2v©'m*Q©,^>vo2'0.
£ *4 * Я Я 8 -i ? J « й ^
©©©aj»mn-»v»mtn©©^-ON©^H©
^ oo Z )9 ^
5; g °о rn гп
5
a
>»
*ч Ю
V) VO
N гч г- оо . ^
«чяttS2 п
О © О O' <П СП Uft
I I
ч* ГЧ
0\ 04
^ я.
У? Р £
^ с*> г- ~
Л сл © © сч ю ©
О On
-Г ©
X
a
>ч
Г** VO
* - 1Ж 00 Л ,-, -ft 00 »•*
pj VO «s. On 00
п ч. °i. 5 S; °г Я ~ <ч <ч R £ ч «г oo
OOOOOMN^nnOOHNOH©
n ГЧ 00
^ VO -4f
“ \*
vo
I
« о
©
- Зйооо^о®
. T О гч vo Л л. ой
oo r- * oo 00
£ о ^ ^
. . . ,?:«Л5овЧЧ?!»КЧЧЧ
OOOOaNNtN(SOO'OH©HO
I I
« ©
©
a
a
2
00
ft OO (S • .^f-vO'tfOOfSOOX
S2^S«:?S"^22S-'o^88
®Y “ 4 -ч rt ® м <s . . oo « . <4 -
©©©Г0-*^н-*-**-<О©Г'-ч*“©—<©
I I
X
4)
CQ
I I I I I I i I i I ! I 1 I
I
к
К о.
a n
4> , n
(4h
Ь с
в s
,*f-?
К W- 0
b (. b (. l< (. о о Л
кУ'С "С "С v~* i? v ‘-""ji'
> П " I S О з * . I ~Г
5u о и u о » „ ' J> ' -С
, ^ з
' РЧ •• n n tl V | " >w/ +
з. о о а ь b q q
' II
<EL '
С £
и
5 ^
5 °
I X
^ w> NO r~
uji' 000'OHM<n’t,0'0^000\0
2SU*SMNM(SNN(S(4M«fn
= 0/1-0 - 0,208 0.678 0,812 0,901 0,934
получаем снова
Т»мп = 365,3
1 -0,197 — — (0,197) 2
4
•3/2
515,1 сут.
Итак, мы установили взаимосвязь важнейших элементов кепле-
ровой переходной импульсной траектории И, касательной к круго¬
вым орбитам Земли и Марса.
II. Цандеровский перелет с зеркалом. Пусть первоначальное
движение аппарата с нераскрытым зеркалом-парусом происходит
по круговой орбите Земли (орбита I на рис. 6) с круговой скоро¬
стью Ui, определяемой формулой (6.1). В задаче Цандера предпо¬
лагается, что в некоторой точке круговой орбиты прикрепленный
к аппарату зеркальный парус раскрывается и затем в течение всего
времени движения сохраняет нормальную ориентацию к солнечным
лучам. Динамически раскрытие паруса означает мгновенный ’’пере¬
ход” в новое, фотогравитационное К '-поле с ослабленной (фотогра-
витационной) постоянной f(Mc + д) (см. § 5). Импульсного изме¬
нения скорости аппарата при раскрытии паруса, по нашему предпо¬
ложению, не происходит, так что абсолютная величина гелиоцентри¬
ческой скорости остается неизменной. Однако теперь эта скорость
по отношению к К '-полю оказывается уже не круговой, а эллипти¬
ческой. Вследствие этого аппарат совдет с круговой орбиты и
перейдет на эллиптическую орбиту, лежащую снаружи круговой
(случай 0 </3 < 1/2 на рис. 5), а точка раскрытия паруса на круго¬
вой орбите окажется перигелием л новой эллиптической орбиты II
(см. рис. 6). В перигелии величина эллиптической скорости в отли¬
чие от (6.4) удовлетворяет условию
=и3, (6.13)
а дальнейшее распределение скорости вдоль эллиптической орбиты
будет происходить в соответствии с орбитальным интегралом
энергии кеплерова движения при новом значении фотогравитацион-
ной постоянной f(Mc + д), д < 0. Именно такую траекторию косми¬
ческого полета при помощи зеркала, ориентированного нормально
к лучам, мы в § 5 назвали цандеровской.
Интеграл энергии, описывающий скорость движения в централь¬
ном фотогравитационном поле, для перигелия может быть записан
с помощью (5.10) в виде
V* =/(Мс +д/— -1)= /Мс( 1 -Р)(- - -V (6.14)
\г„ а I \гп а /
где = г3 = 149,6 • 106 км. Рассмотрим с помощью этого интегра¬
47
ла основные свойства цандеровской траектории с парусом-зерка¬
лом между круговыми орбитами Земли и Марса. Как показывает
формула (6.14), единственному значению скорости vn из формулы
(6.13) могут соответствовать различные пары значений редукции
массы д < 0 (или редукции поля 0 > 0) и большой полуоси цанде-
ровского эллипса а. Физически это означает, что при заданных
значениях расстояния гп и скорости перелет на более далекие
гелиоцентрические расстояния (увеличение а) можно реализовать
лишь при увеличении парусности аппарата, что соответствует
уменьшению величин Мс + д или 1 — 0 и определению парусности
по формуле (5.10). Если же зафиксировать а, например, по форму¬
ле (6.2), т.е. потребовать, чтобы афелий переходного цандеровско-
го эллипса находился именно на орбите Марса, то формула (6.14)
показывает, что заданными, гп и vv отвечает единственное значение
парусности аппарата а. Размеры и масса паруса при этом не фикси¬
руются. Соответственно для достижения других орбит различных
планет с орбиты Земли по цандеровскому эллипсу требуются
другие значения парусности, которые удобно определять по форму¬
ле (5.10), предварительно вычислив значение редукций д или 0
(рабочие формулы для вычисления редукций из динамических
соображений будут приведены ниже, в п. IV) .
Итак, интеграл энергии (6.14) фактически позволяет для
известных значений а, гп и vn определить значение параметра
фотогравитационного поля Солнца для траектории Цандера, т.е.
K'=fMc из формулы (5.9). Далее, с помощью формулы (5.9)
можно, воспользовавшись третьим законом Кеплера в форме
(6.11), найти также период движения по переходной цандеровской
траектории
2 гг 2 гг 2 гг
7’зерк= = -F= а =Я/2> (6.15)
Р «зерк >/f(Mc + *0 VfacO -»
где лзерк — среднее орбитальное движение аппарата с зеркалом по
эллиптической траектории в фотогравитационном поле. Именно с
помощью этой формулы вышсляются полупериоды Гзерк/2, приве¬
денные в табл. 1 наосновании данных Ф.А. Цандера из работы [В. 11 ].
Прежде чем приступить к сравнительному анализу движений
по импульсной траектории и по траектории Цандера ("зеркаль¬
ной”) , необходимо убедиться в том, что оба кеплерова эллипса
полностью геометрически совпадают и что в обоих случаях можно
рассматривать одну и ту же траекторию на рис. 6 (траектория И).
Действительно, если предположить, что раскрытие паруса происхо¬
дит в той же точке орбиты, что и приложение касательного импуль¬
са, то геометрическая тождественность соосных и софокусных
48
эллипсов очевидна сразу на основании равенств их перигельных гп
и афельных га расстояний, откуда также следует равенство их
эксцентриситетов е и фокальных параметров р:
^пнмп — ^тгзерк — — ^аимп — ^азерк ~ ^)>
Римп = Рзер к =в(1 -е2).
Хотя геометрическая тождественность двух орбит очевидна,
следует помнить о принципиальных динамических различиях движе¬
ний по ним и, прежде всего, о различии постоянных площадей этих
на первый взгляд совпадающих орбит, обусловленную тем, что
в ’’тяжелом” фокусе исследуемых эллипсов находятся различ¬
ные эффективные тяготеющие массы Мс и М'С=МС+ ц<Мс.
Отсюда следует (как будет показано ниже) и различие некоторых
динамических характеристик для двух типов движений в централь¬
ном поле: импульсного и зеркального цандеровского.
III. Сравнение периодов движений по импульсной и по цанде-
ровской траекториям. Сравнение периодов Тима из (6.11) и 7’зерк
из (6.15) показывает, что при одинаковой большой полуоси орби¬
ты импульсного и цандеровского перелетов а всегда выполняется
неравенство
^зерк ^ ^имп> (6.16)
причем с увеличением а возрастает и значение разности 7"зерк -
- 7'имп > 0. Именно это возрастание отмечалось выше для цанде-
ровских данных, приведенных нами в табл. 1. Эта закономерность
следует из тех очевидных соображений, что функция Тзерк из
(6.15) с ростом а возрастает быстрее функции Тимп из (6.11),
так как увеличение расстояния требует увеличения парусности,
что в свою очередь означает уменьшение знаменателя \/f(Mc + д) =
= V/Мс(1 —/3) в формуле (6.15). Из сравнения двух законов
следует простая формула связи периодов
7’зепк / Mr 1
_Л£ЕЛ £■, = > ! (6.17)
7’имп Мс+р VTTJ
а сравнение интегралов энергии (6.5) и (6.14) позволяет одно¬
временно установить еще и формулу связи начальных скоростей
двух рассматриваемых движений
UL 1
. -> 1. (6.18)
итгимп Мс + Д VI — ^
Сопоставление формул (6.16) — (6.18) показывает обратную
пропорциональность периодов и начальных скоростей
Так как 1>ЛЗерк =^i =v3,vnyiMn = v{ + «, то формулу (6.19) можно
представить в виде
Т
зерк
т
1 имп
= 1 +
и
> 1.
(6.20)
(см. строки 10 - 13 в табл. 2).
Эта формула с полным правом может называться формулой
Цандера [В. 11, с. 373]. Ее удобство состоит в том, что она позво¬
ляет определить величину периода Тзерк только с помощью извест¬
ных характеристик соответствующей ’’идентичной” импульсной
траектории касательного перелета, вообще не прибегая к вычисле¬
нию парусности аппарата с зеркалом. (Парусность, конечно, присут¬
ствует в данной задаче, но неявным образом: через большую
полуось цандеровского эллипса, однозначно связанную с редукцией
массы д с помощью (6.14) и участвующую в вычислении периода
7’имп по формуле третьего закона Кеплера (6.11).)
С помощью формулы Цандера (6.20) легко вычислить, что при
перелете к орбите Марса (касательный импульс, как было показано
выше, составляет и = 2,95 км/с) имеет место соотношение
показывающее, что всегда для идентичных орбит ^"зерк “ 1»! ^имп-
С увеличением расстояния планетных орбит от Солнца увеличива¬
ется величина касательного импульса, необходимого для достиже¬
ния этих орбит по схеме, изображенной на рис. 6; следовательно,
увеличивается и отношение периодов в табл. 1. Следует заметить,
что точные вычисления по формуле (6.20) приводят к некоторым
расхождениям с числами Ф.А. Цандера из табл. 1, так как он поль¬
зовался значениями гелиоцентрических расстояний до планетных
орбит, еще недостаточно точно определенными в те годы: так,
например, среднее расстояние от Земли до Солнца он принимал
равным 147 • 106 км, что соответственно дает для круговой ско¬
рости Земли значение 29,20 км/с, а не 29,78 км/с, соответствую¬
щее принятому в настоящее время значению астрономической еди¬
ницы: 1 а.е. = 149,6 • 106 км.
Итак, на основе приведенного выше сравнения двух типов дви¬
жения по одному и тому же эллипсу можно с уверенностью утверж¬
дать, что цандеровский касательный перелет с парусом-зеркалом
может оказаться в данном классе задач выгодным с энергетичес¬
кой точки зрения, так как реализует тот же эллипс, что и импульс¬
ный перелет, но не требует никаких топливных затрат (так как про¬
исходит целиком на ’’даровой” энергии солнечных лучей). Однако
50
следует помнить, что вопрос о быстродействии в этой задаче не воз¬
никает — периоды движения всегда больше, чем периоды импульс¬
ного движения, несмотря на геометрическую ’’идентичность”
траекторий.
IV. Рабочие формулы для редукций и парусности. Приведенная
выше формула (6.18) позволяет установить однозначную зависи¬
мость между скоростями двух описанных выше движений по сов¬
падающим траекториям и редукциями солнечной массы д или
поля /3. Кроме того, сравнивая (6.17) и (6.20), получим формулу
показывающую, в каком отношении редуцируется орбитальная
скорость в задаче Цандера по сравнению со скоростью движения
по импульсной траектории. Тогда редукция поля
причем для цандеровского перелета к орбите Марса (и t = и 3 =
= 29,78 км/с, и = 2,95 км/с) получаем, в частности, значение Р =
= 0,17, удовлетворяющее, как легко видеть, интервалу 0 < Р < 1/2
для траекторий на рис. 5.
С увеличением финальных гелиоцентрических расстояний воз¬
растает необходимый касательный импульс и. С другой стороны,
в § 5 было установлено, что покидание Солнечной системы по цан-
деровской параболе при помощи ’’^-паруса” соответствует случаю
/3=1/2. Легко убедиться, что это значение сразу вытекает и из
формулы (6.21). Действительно, если прилагаемый касательный
импульс достаточен для превращения круговой скорости и, = икр
в параболическую ипар = икр + и, то для цандеровского аналога
получаем /Зпар = 1/2. В частности, для старта с орбиты Земли на ге¬
лиоцентрическую импульсную параболу покидания должны осу¬
ществляться скорости: икр = 29,78 км/с, и= 12,33 км/с, ипар =
= 42,11 км/с.
Конкретное значение парусности аппарата, необходимое для дос¬
тижения заданной орбиты по цандеровской переходной траекто¬
рии, можно вычислить по любому из вариантов формулы (5.10).
В частности, зная, что
(6.21)
G*=(l+e)Gc, бс = 1.01 -Ю12 г-см/с2,
/=6,69 • 10"® см3/(г • с2 ),
/Мс = 1327 • 10* км3/с2 = 1,327 • 1026 см3/с2,
можно получить два варианта полезной расчетной формулы для
51
парусности аппарата, оснащенного плоским парусом:
о = —
— -JL- = —6,69 • Ю~30
& 1 + е
1 + е
(6.22)
или
Шс
= 1,327 • 104
(1 см2
(6.23)
о =
1 + е г
Связь солнечных редукций Р и м(г), как устанавливалось в § 5,
дается формулой Р = — д/Д/с > 0, а редукцию Р мы должны теперь
определить из динамических соображений. Для этого удобнее всего
воспользоваться связью Р со скоростями по формуле (6.21), объе¬
динив последнюю с (6.17), т.е.
(см. строки 14 — 16 в табл. 2) -
Например, выше с помощью формулы (6.21) было определено,
что для полета к Марсу парусность всегда вычисляется из значения
безразмерной редукции поля Р = 0,17, что соответствует размерной
редукции массы Солнца
д = — 0,17Мс = — 0,17(2 • 10ээ г) =- 0,34- 1033 (г).
С помощью формул (6.22) или (6.23) для случая зеркального па¬
руса (е! = 1) легко определить, что для полета к орбите Марса
аппарат должен обладать парусностью отах = 1150 см2/г. Сам
Ф.А. Цандер [В-11, с. 374] производил свои расчеты для е = 0,86,
вследствие чего использованное им значение парусности для полета
к орбите Марса составляет несколько меньшее значение. Расчеты
редукции д и д/(1 + е2) и двух пар значений парусности отах по
формулам (6.22) и (6.23) для е, = 1 (идеальное зеркало) и е2 =
= 0,86 (цандеровский экран) приведены в строках 17 —22 табл. 2.
Напомним, что значение парусности, соответствующее значениям
е = 1 и редукции поля Р= 1/2, т.е. параболе ’’покидания” в цанде-
ровском движении, составляет, как нетрудно убедиться с помощью
Эту парусность можно считать предельной в смысле осуществления
замкнутых эллиптических цандеровских орбит. При всех о> о*
траектории уже будут незамкнутыми: парабола, гипербола, прямая
гипербола с ’’пустым” фокусом и т.д. (см. рис. 5) и аппарат с сол¬
нечным парусом будет покидать Солнечную систему С этим пре¬
(6.23),
о" = 3,3 • 10э см2/г.
(6.24')
52
дельным значением а* мы еще встретимся при обсуждении спираль¬
ных траекторий гелиоцентрической раскрутки в § 7.
Во многих парусных задачах удобно пользоваться значением
возмущающего тягового ускорения wrad, приобретаемого аппара¬
том за счет парусной тяги на произвольном гелиоцентрическом
расстоянии г. Это текущее значение ускорения следует определять
по формуле (5.5), которую в этом случае удобно привести к тради¬
ционной энергетической константе Р§огл из (3.3) и представить
в виде
С1 + €)° „ __ „ , Qc 0
wrad=_JL=^ 0с=(1+е)
т г (rlr3y
= 0 + е)Р3огл (6.25)
(Фэ)
Константу />з°гл = 0,46 • 10-4 г/(см-с2)мы вычисляем с помощью
констант Qc = 1,01 • 1022 г- см/с2 и г3 = 1,496 • I013 см. Итак, на
орбите Земли (г =/"з) для нормальной ориентации паруса (а =
~ ашах) и для зеркальной его поверхности (е = 1) получим, обоз¬
начая wr3id =а0 и имея в виду, что атах =А/т:
do
см 1
= 0,92 - 10'4 - а. (6.25 )
с2
Например, парусность, требуемая для перелета к орбите Марса,
т.е. а= 103 см2/г, обеспечивает на орбите Земли тяговое парусное
ускорение а0 = 0,1 см/с2, а для ухода из Солнечной системы по цан-
деровской параболе, т.е. при о* = 3,3 • 103 см2/г, на орбите Земли
достаточно ускорения а0 - 0,3 см/с2 (ниже будет показано, что
это значение определяется именно как половина гравитационного
солнечного ускорения на орбите Земли, составляющего, как из¬
вестно, 0,6 см/с2).
Те же ускорения, wrad на произвольном расстоянии г и а0 на
орбите легко определить и по значениям редукции гравитацион¬
ного поля 0, связав эти ускорения тем самым с гравитационными
солнечными ускорениями. Соответствующая формула вытекает
из (6.25) после подстановки в нее (6.23):
,rad _ (* . . 0 _ fMc R
wrad =(1 + е)
3 (ГЫ2 r% (г/г3)2
Здесь коэффициент
fMc [ FgT \ 1,327 • 101 7 м3/с2
/ F*T \ 1,327 • 10 м /с
= ( } = — :— 0,6 см/с2, (6.26)
\ т Iз (1,496 • 1011 м)2
53
выражает гравитационное солнечное ускорение на орбите Земли.
Теперь тяговое ускорение на орбите Земли вычисляется через /3 по
простой формуле
ц0= 0,6/3, (6.26')
еще раз подтверждающей, что физический смысл редукции поля /3
состоит в ослаблении напряженности гравитационного поля Солн¬
ца в данной точке пространства.
Расчеты а0 для = 1 по формулам (6.25') и (6.26') приведены
в строках 23 — 24 табл. 2. Формула (6.26') снова показывает, что
для достижения орбиты Марса (р = 0,17) аппарат с парусом должен
на орбите Земли обладать тяговым ускорением а0 =0,1 см/с2, а
для параболического ухода из Солнечной системы (/3 = 1/2) — тяго¬
вым ускорением а0 =0,3 см/с2, т.е. половиной гравитационного.
V.Сравнение постоянных площадей. Если постоянная площадей
для первоначальной круговой орбиты составляет
ci =rivl = y/fMc7,, (6.27)
то для импульсной орбиты II (см. рис. 6) она составляет
Сними = т\ Ol +«)==cI(l + —)>Ci, (6.28)
причем одновременно
CII имп — \/ Шс Рц ~ >/ [Mq йц(1 — eii)- (6.28)
Рассмотрим теперь цандеровский эллипс II (см. рис. 6). С одной
стороны, следует иметь в виду его геометрическую тождествен¬
ность импульсной орбите II, что означает тождественность фокаль¬
ных параметров, больших полуосей и эксцентриситетов, а с другой
стороны — учитывать равенство постоянной площадей цандеровс¬
кого эллипса II и первоначальной круговой орбиты I. Итак, для фо-
тогравитационного поля с параметром/Mq (I — /3) имеем
сПзерк ~у/fMc(l -р)р и =V/Л/с(1 ~Р)ац( 1 -?}[), (6.29)
С11 зерк ~г1^1 ~^1- (6.29 )
Решая эти уравнения совместно и обозначив гх =гп и г2 =га,
получим
Ри = (б.зо)
еи =У1 rSZ. = JI - 2Г* < 1.
" *0-0) 0,+г2)(1-/3)
При 0 = 0, тг -*г, эти формулы описывают прежнее круговое дви¬
жение: р = г |, е = 0. При ^ = 1/2, а-*°° получаем параболу: р =
= 2rx, е = 1.
54
Эксцентриситет ец можно выразить через редукцию 0 и через
скорости и, ии. Действительно, из (6.28) и (6.28') находим фо¬
кальный параметр эллипса II:
с?, с? / и V (г^,)2 / и \2
Pu = -J%rL = (1+“) (1+~ ‘ (631)
fMс /Л/с ' vi ' /Л/с \ vi I
Сравнивая значение Рц из (6.31) с его значением из (6.30), ус¬
танавливаем формулу связи
1-0=/ —\ <1, (6.32)
\vl +и }
вытекающую также и из формул (6.21) и (6-24). Далее восполь¬
зуемся соотношением (6.12), переписав его в виде
. -2
j
а \ ^ + и ]
Вводя обозначение
fc =—-—< 1, (6.33)
Vt +и
получаем
тj _ 2к2 - 1
а к2
и
1 - к2
е= <1. (6.34)
Возвращаясь к редукции 0 > 0, приходим к искомым формулам
для с и а:
0
е= <1, 16.35)
1 -0
'1(1-0) '1
а = = * . (6.36)
1-е 1 - 20 2 — (1 — 0)
При 0 = 0 получим с = 0, а = г1. При 0 = 1/2 снова е = 1, а
формулы (6.35) и (6.36) уместно сравнить с формулами (5.13) и
(5.14), полученными нами для микрометеорных тел Солнечной
системы.
Если теперь в (6.34) вернуться к скоростям, получим
■1=(1+^г)!"1' (637)
55
Например, доя полета к Марсу получим по формулам (6.32) -
(6.37) следующие числа:
/ у, \2 1 -к2 0,17
Дм =0,17, к2= ——- =0,83, с = =0,225,
\ и, + н / к 0,83
а = . = j 25г, = 1,25 а.е.
2 - 1/0,83
С увеличением расстояния до орбит планет назначения растет и в
(6.37), убывает к в (6.33) и (6.34), растет Д в (6.35),т.е. по мере
удаления планетных орбит от Солнца эксцентриситет касательного
цандеровского эллипса увеличивается, стремясь к единице.
Если заданы расстояния — радиусы планетных орбит г t и г2
(исходной и конечной круговых орбит), то из формулы (6.36)
1
при а = — (^1 +г2) следует, что
г2 - г,
Д = — (6.38)
2 г2
(см. строки 25 — 27 в табл. 2) .
Кроме того, время перелета по цандеровскому эллипсу, опре¬
деляемое по формуле (6.17) в сочетании с (6.38), оказывается
равным
^имп
гр _ И»щ _ m /
*зерк ~ гг рг ~ ^имп V
V 1 -Д 'l ++2
Возвращаясь к формуле (6.38), необходимо заметить, что
именно по этой формуле сам Ф.А. Цандер вычислял [В.11] редук-
т2 -г,
ции гравитационных полей, обозначив £ , так что Д =
г2 + г,
2
—. Это цандеровское обозначение доя редукций поля, вы-
1 + 2
численных по формулам (6.24) и (6.38), используется в строках
25 —27 табл.2.Некоторое расхождение численных значений сравни¬
ваемых величин объясняется еще недостаточно точными определе¬
ниями значений радиусов планетных орбит, которыми пользовал¬
ся Ф.А. Цандер в 20-е годы. В строках 29 — 30 приведены значения
эксцентриситетов цандеровских эллипсов, вычисленные по фор¬
мулам (6.35) и (6.37) для перелета с зеркалом.
Конечная скорость в афелии цандеровского эллипса меньше
круговой гелиоцентрической скорости на орбите планеты назна¬
чения. Действительно, из сравнения формул (6.27) и (6.29*)
56
следует, что
^Tl зерк ~ “^1^1 ~^2^2зерк V* /Л/с Т j ,
(6.39)
откуда
Из (6.28) ,(6.39) и (6.40) следует, что и2зерк < ^имп. так как
С11имп='',(«1 +«) = едшп >С\ -
Последний результат означает, что полет по цандеровс-
кому эллипсу, так же как и по импульсной траектории, не обеспе¬
чивает выполнения граничных условий по скоростям без дополни¬
тельного применения импульса.
В заключение остановимся вкратце на вопросе, который был
задан в начале этого параграфа: в каком смысле и по отношению
к какому случаю можно говорить, что световое давление ”под-
гоняет” космический аппарат с солнечным парусом в его гелио¬
центрическом движении. Речь о подобной ситуации может идти
только при рассмотрении движений аппаратов, обладающих оди¬
наковой начальной скоростью, когда на одном из них раскрывает¬
ся цандеровский ”/3-парус”. Итак, если оба аппарата получили на
орбите Земли одинаковый касательный импульс и, то аппарат
без паруса переходит с круговой орбиты I на эллиптическую им¬
пульсную орбиту II (см. рис. 6), а аппарат с парусом сойдет с
орбиты 11 и будет двигаться по некоторой эллиптической орби¬
те III, лежащей снаружи орбиты II, т.е. по цандеровской траекто¬
рии в фотогравитационном поле, соответствующей новой пери-
гелийной скорости v„ = vt +и. Очевидно, что аппарат с парусом
быстрее достигнет орбиты Марса, чем аппарат без паруса, однако
его траектория не коснется орбиты Марса, а пересечет ее, т.е.
цандеровская схема перелета по касательному эллипсу будет
нарушена и афелий орбиты III окажется вне орбиты Марса. Одна¬
ко в принципе можно говорить о том, что в описанной ситуации
солнечные лучи ’’подгоняют” аппарат, летящий по орбите III,
по сравнению с аппаратом на орбите II.
Легко установить формулы связи элементов орбит II и III.
Так как аппараты проходят перигелии своих орбит с одинаковы¬
ми скоростями u„ = Ui + и, то оказываются равными и постоян¬
ные площадей орбит II и III:
сII,III “ (rn Vn) п = (rn vn)ui>
причем одновременно
сц, in = s/fM^pn = \/7 (Л/с + М) Рт,
57
где Рц=вп(1 -ед), Рш = аш(1 -*1н).Так как
тп =аи(1 -еи) = «ш(1 -еш),
то из (6.18) с помощью полученных формул можно вывести от¬
ношение
Мс = 1 _ Pm 1 + gm
Мс+д 1-/3 рн 1+е„
означающее, что еш > ец. Кроме того, увеличение парусности аппа¬
рата влечет за собой увеличение эксцентриситета цандеровского
эллипса II, поскольку импульсный эллипс здесь тождествен им-
е и+ 0
пульсному эллипсу II. Окончательно е1Н= ——-—, причем при
еи = 0, /3 = 1/2, снова получаем выход с круговой орбиты на пара¬
болическую, т.е. em = 1 (см. рис. 5). Заканчивая обсуждение цан-
деровских эллипсов, следует отметить, что фотогравитационная
задача не допускает реальных движений с солнечным парусом с
земной орбиты к орбитам, лежащим внутри нее: это теоретически
возможно лишь при ’’ударном” уменьшении парусности, что явля¬
ется малопривлекательной задачей в техническом отношении
(например, такая ситуация возможна при слипании пылевых частиц
в Солнечной системе, ведущем к уменьшению парусности [1.1] ).
Это не относится к перелетам с внешних орбит к орбите Земли:
действительно, достигнув орбиты Марса по цандеровскому эллип¬
су, можно, свернув парус, вернуться к орбите Земли. Импульсные
межпланетные перелеты, естественно, лишены этого ограничения.
VI. Цандеровский параболический перепет. По аналогии со срав¬
нительным анализом эллиптических кеплеровских и цандеровских
движений можно провести и сравнительный анализ динамических
особенностей движения по соответствующим параболам, которые
геометрически идентичны параболам с перигелийным расстоянием
г71=г3. Как известно, выход аппарата на кеплерову параболу
происходит с местной параболической скоростью в результате
импульса, превращающего в перигелии местную круговую ско¬
рость пм Кр = и3 в местную параболическую им пар = и^имп =
= х/2им.кр (убывающую вдоль траектории по закону ~ 1/л/Г). Вы¬
ход на цандеров скую параболу происходит вообще без приложения
импульса, т.е. со скоростью иЯзерк =и3’ являющейся параболичес¬
кой скоростью в фотогравитационном ноле (и также убывающей
по закону ~1 !\/г). Следовательно, скорость в любой точке цан-
деровской параболы численно равна местной круговой скбрости
кеплерова движения = \Ди^к. Этот вывод будет полезен
нам в дальнейшем, в § 8, при сравнении цандеровских и спираль¬
ных траекторий.
58
Время полета по кеплеровой параболе от перицентра до заданно¬
го расстояния г (например, до пересечения с планетной орбитой
радиуса г) можно вычислить по формуле
у/2 (г - г„)
тимп = (г + 2гп), (6.41)
зДм7
вытекающей из интеграла площадей = const при подстановке
в него уравнения параболы в полярных координатах. Соответствен¬
но время цандеровского перелета по той же геометрически иден¬
тичной дуге параболы составляет
V 2 (/-/•„)
(г+2гп).
•
2y/Wc{ 1 -0)
Так как для параболы редукция /3 = 1/2, то
2х/ГГ77
-г {г + 2r„) = у/2. тимп. (6.42)
Зу/Wc
Итак, параболический цандеровский перелет с зеркалом длится
в у/Т раз дольше, чем импульсный Уместно также напомнить,
что формулы (6.41) и (6.42) получаются в результате интегрирова¬
ния формулы r2\p=c (интеграл площадей), в которой, как пока¬
зано в п. V, постоянная площадей с принимает значения: симп -
= y/fMcP или сзерк = V/Me (1 — Р) р. Так как параболы двух
движений геометрически идентичны, т.е. р-2г7.=2г3, то при
/3 = 1/2 получаем постоянные площадей
Саерк у/f Мс Т з, Симп y/2fMc Тз у/2 *
Этот результат соответствует упомянутому выше свойству скорос¬
ти на цандеровской параболе. Заметим попутно, что поскольку
c=r„v„, то, следовательно, при наших скоростях ='У/^изерк
ПОЛУЧИМ СНОВа Симп = Г3 = уДС^рк ■
§ 7. Спиральные траектории межпланетных перелетов
Сформулированная и обоснованная Ф.А. Цандером в 20-е годы
концепция перелета с' солнечным парусом долгие годы после
смерти ученого находилась вне поля зрения исследователей, зани¬
мавшихся динамикой космического полета. К этому промежутку
времени относится лишь обзорная статья М.К. Тихонравова [В.15]*).
*)М.К. Тихонравов рассмотрел исследованный Ф.А. Цандером способ
движения в космосе и уточнил размеры необходимых для этой цели парус¬
ных экранов. При этом величина нормального давления солнечного света
59
Однако в 50-е и 60-е годы эта забытая проблема неожиданно полу¬
чает быстрое развитие в направлении исследования гелиоцентричес¬
ких траекторий нового типа — спиральных логарифмических
траекторий межпланетных перелетов с солнечным парусом. Эти
траектории осуществляются при полете плоского солнечного пару¬
са, ориентированного под некоторым постоянным углом к солнеч¬
ным лучам, не равным нулю в отличие от цандеровской неизменной
нормальной ориентации паруса. Этот угол (его называют углом
установки паруса) образуется нормалью к теневой поверхности
паруса и направлением потока солнечных лучей. Межпланетное
маневрирование аппарата с управляемым парусом рассматривалось
сначала для постоянного, а затем и для переменного в течение
времени полета угла установки паруса. Цандеровская задача о
траекториях в фотогравитационном поле Солнца вытекала из этих
исследований как частный случай постоянной нормальной ориента¬
ции паруса (при нулевом угле установки).
Прежде чем описать динамические свойства спирального гелио¬
центрического движения при помощи паруса, изложим вкратце
известные геометрические свойства логарифмической спирали и
покажем принципиальную возможность реализации этой некепле-
ровой траектории в поле сил тяготения и давления солнечной
радиации.
I. Логарифмическая спиральная траектория. Частный случай
касательной тяги. Известно, что логарифмическая спираль
есть кривая с асимптотической точкой в начале координат (в на¬
шей задаче — в центре Солнца), обладающая свойством неизмен¬
ности угла о между касательной и радиус-вектором, называемого
спиральным углом. На рис. 7 изображены две спирали с разными
углами а, но имеющие одинаковый радиус исходной круговой
орбиты г0, с‘которой начинается выход на спираль. Очевидно,
что при а->90° спираль превращается в окружность, при а-+0 —
в прямую, стремящуюся к гелиоцентрическому радиус-вектору
Неизменность спирального угла означает выполнение ряда
очевидных кинематических соотношений:
на расстоянии 1 а.е. от Солнца принималась М.К. Тихонравовым равной
0,791 мгс/м2 [В. 15, с. 109 (, что оказывается близким к величине давления,
рассчитываемого для коэффициента отражения паруса е = 0,7. Сам Ф.А. Цан¬
дер принимал значение нормальною давления равным 0,906 мгс/м2 [В. 11J.
(7.1)
vr ~ ^ctga, ctga =щ/Цр,
r = npctga, г = rcp2ctg2a +r'^ctga.
(7.2)
60
Рассмотрим теперь, какие динамические условия могут обеспе¬
чить выполнение соотношений (7.1) и (7.2), т.е. определим общий
закон действия добавочной силы тяги, обеспечивающей движение
по логарифмической траектории. Как известно, уравнения движе¬
ния точки массой т в центральном поле тяготения Солнца при
наличии произвольной силы тяги Т имеют в полярных координатах
вид
/Мс Tr Т
wr = 'r — rф —+ , w^ = rip + 2гф = . (7.3)
г m m
Зададим теперь силу тяги произвольной величины, потребовав,
однако, чтобы вектор Т составлял неизменный угол а с радиус-
вектором г. Тогда
fMc Т Т
wr = — + — cos a, = — sin a. (7.4)
r m m
Приняв сначала для простоты, что а и есть спиральный угол из
уравнения (7.1), т.е. тяга неизменно оказывается касательной
к траектории, мы можем исключить Tim из (7.4), а затем с по¬
мощью кинематических соотношений (7.2) и дифференцирова¬
ния ф7 установить кинематические свойства логарифмической
спирали, не зависящие от реализующей ее силы тяги:
•2 WC ■ 2 - 3 -2 ,
ф-—sin а, |^= — — i/rctga. (7.5)
г 2
Полученные соотношения позволяют установить динамические
условия осуществления спирального движения. Действительно,
подставляя производные (7.5) в уравнения (7.3), находим с
учетом (7.2) и ускорений (7.4), что для осуществления спираль¬
ного движения необходимо, чтобы сила тяги изменялась пропор¬
ционально Г2, т.е. по тому же закону, что и сила тяготения Солнца,
61
т.е. должно быть
Т fMc 1 ,
— = ccsa = — 1 Icosa. (7.6)
m 2т2 2
Значение постоянного спирального угла при этом зависит от вели¬
чины переменного тягового ускорения Т)т и определяется как его
отношение к местному центростремительному гравитационному
гелиоцентрическому ускорению (оба ускорения изменяются
как г~2):
L : fJl£ = 2(—\ ' /Мс
m г2 \ m } з . 3
cosa = 2 — ' —-— = 21 — I ' —-— = const. (7.7)
Здесь величина (Т/т)$ есть тяговое ускорение а0 на орбите Земли,
определяемое нами через парусность конструкции о по формуле
(6.25 ), а величина /Л/с/^з — солнечное гравитационное ускорение
на орбите Земли, вычисленное по формуле (6.26 ). Подставив эти
формулы в (7.7), получим:
cosa =« 3,3я0. (~.8)
Эта формула позволяет вычислить значение спирального угла для
перелета к заданной планетной орбите по заданному значению тя¬
гового ускорения а0 солнечного паруса на орбите Земли при его
нормальной ориентации к световому потоку, которое однозначно
связано с заданной парусностью по формуле (6.25 ). Эта формула
справедлива только для случая касательной тяги, развиваемой
парусом.
В предельном случае a = 0 уравнения движения аппарата (7.4)
принимают вид (сравнить с (5.5 ))
/Л#с Т
wr = г + — , = О,
г m
соответствующий цандеровскому случаю движения в центральном
фотогравитационном поле. Так как эти уравнения тождественны
уравнению (5.8), перепишем их в виде
/Л/с fMc( Tim \
показывающем, что справедливо обозначение
Т F*r
(7.9)
m m
еще раз выявляющее динамический смысл редукции поля 0 > 0
из задачи Цандера: /3 — это отношение тягового ускорения нормаль¬
но ориентированного к потоку паруса к местному гравитационно¬
му солнечному ускорению.
62
Подставим теперь (7.9) в (7.7), после чего получим формулу
cosa = 2/5, (7.10)
позволяющую однозначно определять значение спирального угла a
траектории раскрутки с касательной тягой по значению той цанде-
ровской редукции гравитационного поля Солнца, которая была
бы обеспечена, если бы парус оказался ориентированным нормаль¬
но к световому потоку. Формула (7.10) показывает также, что
спиральное движение существует только вплоть до тех заданных
значений парусности объекта, которые обеспечивают значение
редукции 0 = 1/2 и близкие к нему. Тогда cosa = 1, a=.0, а лога¬
рифмическая спираль вырождается в цандеровскую траекторию
параболического покидания при заданном начальном тяговом
ускорении а0 =0,3 см/с2, определяемом из (7.8). Напомним, что
формулы (7.8) и (7.10) относятся, так же как и все рассмотрение
задачи о спиральной траектории с касательной тягой, только к
полетам во внешние по отношению к орбите Земли области Сол¬
нечной системы, так как только для этих полетов имеет смысл
сравнение с задачей Цандера.
Итак, основной результат, который вытекает из формул (7.6) —
(7.10), состоит в том, что такой природный энерг етический фак¬
тор, как световое давление солнечных лучей (изменяющееся по
закону т“2), может с успехом заменить малую реактивную силу
тяги и обеспечить гелиоцентрическое движение по спиральной
траектории парусной раскрутки. Именно соотношение (7.6) и де¬
монстрирует принципиальную возможность парусных перелетов.
Сопоставление логарифмической спирали, осуществляемой при
помощи касательной тяги в предельном случае a = 0, с цандеров-
ской параболой покидания позволяет интерпретировать логариф¬
мическую спираль как возмущенное цандеровское движение, т.е.
как коническое сечение в фотогравитационном центральном поле,
возмущенное (’’закрученное’’) под действием постоянно действую¬
щей трансверсальной силы тяги. Это позволяет отнести спиральные
траектории к классу цандеровских, рассматривая их как обобще¬
ние последних на случай нецентральности фотогравитационного
поля Солнца.
Интересно отметить любопытное кинематическое свойство
спирального движения, вытекающее Из соотношений (7.5), под¬
ставленных в формулы (7.2):
. ПЩ
0 = v —г-
sin a, Vy=r i
тс
sin а.
(7.11)
г
,(1.1)
\r2 rx J
Они означают, что в любой точке спирали полная орбитальная
гелиоцентрическая скорость численно равна местной круговой
гелиоцентрической скорости и совершенно не зависит от спирально¬
го угла траектории, т.е. от числа оборотов, необходимых для дости¬
жения аппаратом заданной точки пространства, составляя всюду
u = V/Mc/r. (7.12)
Это свойство орбитальной скорости на спирали позволяет вычис¬
лить, например, работу силы тяги Т, определяемую в соответствии
с теоремой об изменении кинетической энергии:
1 , 1
— mu, - — mm = £г + £т,
2 2
причем Ес - fMcm{\\r2 - 1/г,) — работа силы тяготения Солнца.
Подставляя круговые скорости, определяемые формулой (7.12),
устанавливаем, что работа силы тяги паруса
£’т = - — /Мст\
оказывается положительной при удалении от Солнца (г2 > г,) и
отрицательной при приближении к нему {гг < Г]). Это свойство
силы тяги паруса еще раз наводит на мысль о возможности осу¬
ществления движения за счет антигравитационной природы силы
светового отталкивания.
Для определения времени полета до спирали следует проинтег¬
рировать первую из формул (7.11), предварительно подставив
в нее уравнение спирали (7.1), т.е. фактически проинтегрировать
уравнение
CtgO( / fMc
el chp-yj —-— since Л.
го
Оказывается, что для перехода между двумя любыми заданными
точками спирали требуется время
Т = — (г23/2 - гР ). (7.13)
Ъ\/ fMc cos а
Итак, время движения по спирали существенно зависит от величи¬
ны спирального угла а: чем больше а, т.е. чем сильнее закручена
спираль, тем дольше будет двигаться аппарат. Минимальным преде¬
лом времени полета между двумя заданными точками является
время ’’выброса” по параболе в фотогравитационном поле (cosa =
= 2/3 = 1,0 - 1/2 - редукция поля) :
^г„-^==(гР-гР).
Ъу/ТЩ
64
Если теперь в (7.13) положить гх = г3, а для cos а воспользоваться
формулой (7.7), получим
уГТЩХг^ -г%2)
3 {Tlm)r\
(7.13')
Эту предельную формулу уместно сравнить с формулой (6.42)
для времени перелета по цандеровской параболе в фотогравита-
ционном поле. Легко видеть,что формулы совпадают в пределе
при г-»00. Напомним, что цандеровская парабола - единственная
траектория центрального фотогравитационного поля, на которой
выполняется условие численного равенства скорости аппарата
теоретическому значению местной круговой скорости, присущее
логарифмической спирали с любым спиральным углом.
Итак, зависимость времени полета от силы тяги Т осуществля¬
ется через угол а, свяазнный с тяговым ускорением д0 на орбите
Земли формулой (7.8), а с цандеровской редукцией поля 0 —
формулой (7.10). Обе эти величины в свою очередь связаны с
парусностью объекта а формулами (6.23) и (6.23'). В нашем
случае о = А/т, поэтому приближенные рабочие формулы соот¬
ветствия парусности А/т, ускорения а0 и величины cos а имеют
(с учетом (3.3') и (4.2') для зеркального паруса) вид
А . А
з
До = 2Р3 — = 0,92 • 10"4 — см/с2,
т т
4
— = 1,01 • Ю4д0 = 3,3 • 103cosq см2/г,
т
. А
cosa= 3,3д0 = 3,3 • 10~4 — < 1.
т
Рассмотрим теперь модельный пример, задав a = 88° (спираль
близка к окружности). По приведенным выше формулам вы¬
числяем:
cosa = 0,035,
До = 0,01 см/с2,
А/т= 102 см2/г.
Для перелета с орбиты Земли (ri = 1,496 • 108 км) к орбите Марса
(г2 = 2,279 • 10ь км) потребуется время
т = 2(3>/1327 • 108 • 0,03)'1 [(2,279 • 108)3/2 -(1,496- 108)3/2| =
= 0,845 • 108 с ^ 978 сут 2,7 года.
При этом ’’путевой” угол, на который повернется за это время
гелиоцентрический радиус-вектор аппарата, составит на основании
65
формул(7.1) и (7.13)
3 ctg а I
2 • (1,496 • 108)3/2
)
= 11,30 рад « 650°,
т.е. аппарат, вследствие своей низкой парусности и малой эффек¬
тивности парусной тяги, вынужден совершить почти два гелио¬
центрических оборота, прежде чем соответствующая этой парус¬
ности спиральная траектория пересечет орбиту Марса. Уменьшить
время полета и число оборотов вокруг Солнца можно, только
увеличивая парусность конструкции, что позволит ’’распрямить”
спираль.
На основании выведенных выше рабочих формул можно заклю¬
чить, что вся эта теория годится лишь до а = 0, т.е. до
С этими числами мы уже встречались в § 6 (см. формулу (6.24'))
при обсуждении предельного значения парусности, соответствую¬
щего переходу от класса замкнутых цандеровских орбит к не¬
замкнутым. Итак, логарифмическая спираль с касательной па¬
русной тягой, пропорциональной г~2, существует только вплоть
до цандеровской параболы покидания и является ’’возмущенным”
вариантом цандеровских эллипсов в присутствии возмущающей
трансверсальной тяги, оказывающей на них ’’деформирующее”
действие. При парусностях а> ст* траектории спирального типа
(их практическое назначение делается, однако, в этом случае
сомнительным) должны описываться какими-то иными форму¬
лами, характеризующими эволюцию и деформацию цандеровских
парабол и гипербол в присутствии трансверсального возмущения.
Таковы вкратце основные свойства спиральной траектории
в модельной задаче полета для частного случая касательной тяги,
пропорциональной г~2 и составляющей неизменный угол с радиус-
вектором. Как легко видеть, это движение описывается в поляр¬
ных координатах системой функций
а = а0 = const.
0*S)max - °>3 см/с2, (А/т)тах = а* = 3,3 • 103 см2/г.
шах
'■0/’) = 'oexp((/>ctga),
2г / ^ \ I
т(#) = ■=— ехр( -= tp ctg а )- 1 ,
3 \/fMc cos aL \ / J
Г (</>) fMc cos a
w (</>) = = j exp(—2</> ctg a).
m 2 Tq
Эта система функций с точностью до обозначений совпадает с систе¬
мой, приведенной в [В.24, с. 617] и предлагаемой в качестве част¬
ного решения уравнений движения [В.24, с. 100] под действием
касательной силы тяги, пропорциональной г ~2, т.е. в нашем случае
dr dt г и sin a dv fMc T
— = г ctg a, — = , — cos a + —.
dtp dp и sin a r dtp r m
Легко видеть, что эти уравнения движения удовлетворяют приве¬
денным выше формулам п. 1. Следует напомнить, что логарифмиче¬
ская спираль является не единственным решением задачи о движе¬
нии с касательной тягой [В.24], однако остальные решения отно¬
сятся к реактивной малой тяге.
Итак, мы установили основные свойства спиральной логарифми¬
ческой траектории, пользуясь записью формул в плоских полярных
координатах. Если же за независимую переменную выбрать вре¬
мя f, то удобнее воспользоваться общими соотношениями для
малой силы тяги, полученными В.В.Белецким и В.А.Егоро-
вым [1.3].
На рис. 8 изображено произвольное направление малой сипы тя¬
ги Т, составляющей угол 9 с радиус-вектором г, и направление
скорости v, составляющее с радиус-вектором г угол а. Для записи
формуле [1.3] используется система безразмерных переменных:
1) безразмерное расстояние г * = г/г0;
67
2) безразмерная скорость и * = и /и,, где и i = s/gr0 = sjf M/rQ -
местная круговая скорость, g = /Mjr^ - гравитационное уско¬
рение;
3) безразмерное время г * = t \fg/r0 = tv ,/г0;
4) безразмерное тяговое ускорение Т * = T/mg.
В этих единицах легко определить полную орбитальную энергию
единичной массы, отнесенную к гравитационному параметру притя¬
гивающего центра, А * = h/fMm, а также безразмерную постоянную
площадей с* = (г *) 2ф, т.е. удвоенную секториальную скорость
г 2ф, отнесенную к г о . Для этих величин имеем сразу [1.3]
dh" . „ </с* . .
—- = 7'*u*cos(a-0), = Т г sin в. (7.15)
Дт* dr*
Напомним, что формула для dh* jdt* вытекает из того факта, что
для нашей задачи не выполняется интеграл энергии Arm 2—fMm/r =
= А = const, а, напротив, по теореме об изменении полной орбиталь¬
ной энергии имеем:
dh d ( i f Mm \
— = — I — m\2 I =
dt dt\2 r }
f Mm f Mm f Mm
— m\v + —-— r = — г v + T v + —-— r - Tv. (7.16)
г г т
Соответственно теорема об изменении кинетического момента
дает вместо классического интеграла площадей с = г2 ф = | г Xv 1 =
= const соотношение
d ч d(mc)
— (г X my) гХТ,
dt dt (7.17)
dc d(r ф) T
— = = г — sin в -
dt dt m
Итак, при положительных функциях Т*, и* и г* увеличение или
уменьшение функций А* = А * (г*) и с*= с*(г*) связано со знаком
тригонометрических функций в(7.15). Например,если в Е [0,90°],
то dc*fdr* > 0, dh'/dr* > 0. Это означает раскрутку и уход от
притягивающего центра. (Напомним, что для траектории, закручи¬
вающейся около притягивающего центра, полная орбитальная энер¬
гия всегда отрицательна (А* < 0), а набор нулевой полной энергии
А* = 0 соответствует достижению местной параболической ско¬
рости.)
68
Если теперь силу тяги Т направить по скорости v, то окажется
(см. рис. 7 и 8), что постоянные углы 0 и а равны. При этом си¬
стема уравнений движения аппарата (7.15) — (7.17) под действием
касательной тяги Т сводится к четырем уравнениям, которые для
полного определения траектории должны быть объединены с урав¬
нением для полярного угла $ (вторым из уравнений (7.14)). В эту
систему входят:
1) определение полной орбитальной энергии
1 2 1
h* = ^v* ~ ~рг> (7-18)
причем теперь
Г* \dT* /max
dh’
dr*
2) уравнение движения в проекции на v (касательное ускорение)
dv* cosa
— = Т* - (7.19)
dr г
3) определение радиальной скорости v*:
v* = = v* cos а; (7.20)
dr*
4) уравнение движения в проекции на нормаль к траектории.
Кроме приведенных формул удобно пользоваться формулами
для обобщенного фокального параметра
Р* = Р/г0,
где р = сг jfM, с - | г X v | = лу sin а, или
2 2
Р*~р/го=г* v* sin2 а.
Дифференцируя по т *, получим с помощью (7.19) и (7.20):
dp* 2 Т*р*
• (7-21>
dr v
Уравнения (7.18) и (7.21) показывают, что при раскрутке око¬
ло центра притяжения под действием касательной тяги орбитальная
энергия Л* и фокальный параметр р* монотонно увеличиваются.
Энергия Л* связана с величиной большой полуоси орбиты соотно¬
шением Л* =-1 /2а, при этом, конечно, a > 0, следовательно, h *< 0
(до тех пор пока не будет достигнута параболическая скорость,
69
т.е. пока энергия не достигнет нулевого значения h * = 0). Монотон¬
ное увеличение h* означает монотонное увеличение большой
полуоси орбиты а. Одновременное увеличение фокального пара¬
метра р* и полуоси а показывает, что размеры орбиты увеличи¬
ваются. При малых значениях ускорения Т * на одном витке траек¬
тории последняя будет слабо отличаться от кеплеровского эллипса,
который получился бы при Т* = 0. Поскольку dajdr* > 0 и
dp*/dr * > 0, этот эллипс от витка к витку увеличивается в разме¬
рах, в результате чего аппарат движется по раскручивающейся
спирали.
Рассмотрим движение по логарифмической спирали, для кото¬
рой, как было установлено выше, имеют место соотношения, выте¬
кающие из (7.6), т.е.
Т fMc
а = const, — = —— cos а,
m 2 г2
Л.
m ' го 2 г2
cos а,
1 Т0*
Т* I , = Т0* = -^cosa, Т* = ~.
' ~ ro Z rm
Подстановка этих соотношений в первое из уравнений (7.15) пока¬
зывает, что при а Ф 0 всегда имеем h * = — v * /2 < 0, т.е. параболи¬
ческая скорость на логарифмической спирали никогда не достигает¬
ся (ср. с формулой (7.12)).
П. Солнечный парус на логарифмической траектории. Рассмот¬
рим теперь, как изученная нами выше спиральная траектория
может быть реализована при полете с силой тяги зеркального сол¬
нечного паруса, ориентированного под некоторым неизменным
углом в (рис, 9) к потоку солнечных лучей. Пользуясь обозначе¬
ниями из § 4 и имея в виду формулу (4.6), определим угол в как
угол между направлением орта п° нормали к теневой стороне
паруса и направлением орта i° светового потока, всегда совпадаю¬
щим с направлением гелиоцентрического радиус-вектора г
объекта, т.е.
cos в = п° • i° . (7.22)
Это скалярное произведение однозначно определяет знак угла в,
например, на рис. 9 изображен угол в < 0. Предполагая, что сол¬
нечный парус является зеркальным с обеих своих сторон, примем,
что угол ориентации паруса в (угол управления) изменяется в ин¬
тервале
7Т 7Т
2 * + 2
, так что всегда cos в > 0.
70
Ускорение, развиваемое ап¬
паратом под действием силы
тяги паруса, в соответствии с
я
,0
формулами (3.3'), (3.4)
(4.5) равно
.3'
с т
Рис. 9
X cos20 см/с2.
Обозначив на основании формулы (6.25*) через д0[см/с2] =
= 0,92• 10"4 А/т ускорение паруса площадью А с парусностью
к солнечным лучам, будем в дальнейшем пользоваться краткой
формулой:
Итак, мы конкретизировали силу тяги, задав ее как силу тяги
паруса, направленную всегда по нормали к теневой поверхности
паруса и, следовательно, удовлетворяющую требованию неизмен¬
ности направления силы тяги по отношению к солнечным лучам,
т.е. к радиус-вектору, в силу формулы (7.23). Для вычисления
проекций тягового ускорения на радиальное и трансверсальное
направления следует пользоваться углом 0 (см. рис. 9). Уравнения
движения примут вместо (7.4) вид [В.24, с. 417]
где Ь0 = 0,6 см/с2 — гравитационное солнечное ускорение на орбите
Земли, вычисленное выше по формуле (6.26*).
В п. 1 мы пытались установить, какова должна быть тяга, позво¬
ляющая реализовать движение по логарифмической спирали, и
установили, что в классе сил, подчиняющихся закону г-2, ею в
частном случае может быть и касательная тяга. Однако существует
более общий класс движений, когда логарифмическая спираль осу-
А/т [см2/г] на орбите Земли при его нормальной ориентации
(7.23)
(7.24)
71
ществляется при тяге Т, не направленной по касательной к траек¬
тории, т.е. угол установки паруса (см. рис. 9) в общем случае не
совпадает со спиральным уголом а, а связан с ним некоторым
соотношением. Несовпадение этих углов в общем случае обуслов¬
лено тем, что тяга, как показывает формула (7.23), зависит не
только от в, но и от парусности Ajm. Поэтому при одном и том же
угле установки в мы можем получить различные значения Т, а
следовательно, и различные спиральные углы, определяемые фор¬
мулой (7.7). Устанавливая один и тот же парус под разными угла¬
ми, получим соответственно и разные траектории. Чтобы доказать,
что уравнения движения (7.24) позволяют аппарату двигаться дей¬
ствительно по логарифмической спирали, достаточно проинтегриро¬
вать их (хотя бы в первом приближении), определить проекции
скорости и показать, что выполняются основные геометрическое и
кинематическое свойства спирали, вытекающие из (7.2) и (7.11) и
означающие неизменность спирального угла а, т.е. угла наклона
вектора скорости v к гелиоцентрическому радиус-вектору г || i 0
(см. рис. 9):
1>Г
= const > 0,
а е
°,
«V
’ 2
Проблему интегрирования базовых уравнений (7.24) мы обсудим
несколько позже.
Теперь уместно ненадолго вернуться к истории вопроса и напом¬
нить об исследованиях 50-х годов, заложивших теоретические
основы цолета с солнечным парусом по логарифмическим траекто¬
риям. Зачинателем серии проектов космического парусного переле¬
та, обсуждавшихся в те годы, главным образом в США, следует
считать известного специалиста в области динамики космического
полета К.Зрике. Материалы его статей о сферическом парусе-бал¬
лоне, предназначенном для маневров в космосе [1.4 — 1.6] нашли
свое отражение также в [1.7], где проект сферического баллона
обсуждался с точки зрения его преимуществ, состоящих в том, что
он не требует управления ориентацией и может успешно совершать
гелиоцентрические кеплеровы движения (более подробное обсуж¬
дение преимуществ и недостатков парусов-баллонов мы прове¬
дем в § 12).
В 1950 г. Д. Форбс [1.8] представил математическое исследова¬
ние, результаты которого были применимы к анализу движения
ракеты в центральном поле сил при общем условии постоянной тя¬
ги, приложенной по касательной к траектории ракеты. Одной из
рассматриваемых траекторий оказалась логарифмическая спираль,
причем для ее установления требовалось ускорение, пропорцио¬
нальное г ~г, где г - расстояние от силового центра. Немного позд-
72
нее Р.Гарвин [1.9] опубликовал статью о движении с помощью
солнечного паруса, предлагая использовать его на практике в ка¬
честве движителя в пределах Солнечной системы. Когда были сопо¬
ставлены эти две, на первый взгляд не связанные между собою
статьи, стало очевидно, что существует новый космический маневр
и средство для его выполнения.
Итак, автором первого проекта парусного перелета при ориента¬
ции плоского паруса под некоторым постоянным углом к потоку
лучей был Р.Гарвин [1.9]. Именно он впервые ввел в строгую
научную литературу компактный термин солнечный парус, заимст¬
вованный им, по-видимому, из модного в то время в США научно-
фантастического бестселлера именно с таким названием [1.10], —
термин, который сразу завоевал себе широкую популярность и на
долгие годы обрел права гражданства в научных текстах *).
Итак, в [1.9] впервые было вычислено значение неизменного
угла ориентации паруса в, обеспечивающего максимум касательной
проекции силы тяги, и утверждалось, что траекторией полета будет
служить логарифмическая спираль, основные динамические свой¬
ства движения по которой были уже изучены ранее в [1.8] на базе
общих свойств траекторий с малой реактивной тягой. Работы
[1.9 — 1.12] положили начало изучению многочисленных спиралей
в качестве траекторий при постоянном угле установки паруса
(см. рис. 9).
Частное решение уравнений движения в форме (7.24) было
впервые найдено Т.С.Цзу [1.13, 1.14] приближенно, а именно без
учета в первом приближении компоненты Ьг =7 из радиального
ускорения. Тогда первое из уравнений становится алгебраическим
и появляется возможность также приближенно определить
*) Говоря о научной фантастике, которая неоднократно пользовалась
благодатной темой полета под действием солнечных лучей (о некоторых
научно-фантастических произведениях мы упомянем в § 11 и 14), следует
напомнить, что еще в 1915 г. Я.И.Перельман ссылался на один научно-фантас¬
тический сюжет, в котором герои перелетали на Венеру и другие планеты
в подобном снаряде. Они ’’соорудили каюту из легчайшего материала, снаб¬
женную огромным, но легким зеркалом, которое можно было поворачивать
наподобие паруса. Помещая зеркало под различными углами к солнечным
лучам, пассажиры небесного корабля, смотря по желанию, либо усиливали,
либо ослабляли отталкивающее действие света, либо же совсем сводили его
на нет, всецело отдаваясь притягательной силе. Они плавали взад и вперед
по океану Вселенной, посещая одну планету за другой”. По этому поводу
Я.И.Перельман заключает: ”В романе все выходит правдоподобно и заман¬
чиво. Но увы!.. ” [В. 6, с. 36 - 37). Однако современный читатель, пожалуй,
уже не увидел бы в этой фантастике никаких физических противоречий и
согласился бы с перспективностью идеи, возникшей, как оказалось, еще
в начале нашего столетия.
73
скорости
r0 2aosin0 cos2 в r0 / —
vr « — я- — \ bo — До cos3 0
s/7 s/bo - Д0 cos30 s/7
(7.26)
(ur = 0 при 0 = 90° - круговое движение без тяги), а затем и
компоненты ускорения
2 sin2 0 cos4 0
b0 - Д0 cos ®
/м2 (7‘27)
ц, = ( — ) До sin 0 cos2 0.
Формулы (7.26) удовлетворяют условию (7.25), чем и доказывает¬
ся, что в первом приближении траектория действительно оказы¬
вается логарифмической спиралью, причем спиральный угол а мо¬
жет быть легко найден как функция д0 и 0:
2 д0 sin б cos2 в
- const. (7.28)
ctg а -
b0 -До cos 0
Легко видеть, что постоянный спиральный угол а и постоянный
угол установки 0 совпадают лишь при 0 = 90е, а - 90°, т.е. в част¬
ном предельном случае кеплерова кругового движения в отсутст¬
вие тяги (0 =90°). Эти углы совпадают и в простейшем случае
касательной парусной тяги, когда уравнение логарифмической
спирали служит точным решением уравнений. Этот случай каса¬
тельной парусной тяги подробно исследован в работах [1.15, 1.16].
Время перелета по спирали, вычисленное с помощью интегри¬
рования формулы (7.26), при а Ф в составляет
j. dr _ 1 s/b0 -д0 c°s3 0 f3/2 -r0312
r0 vr 3 aosin0c.os20 r0
1 ГГ j tgo г3/2 -rP
= 7 J- J —7—7 • (7-29)
3 д0 sin 0 cos 0 r0
Время наискорейшего перелета определяется путем минимизации
коэффициента в (7.29) и устанавливается из условия
cos0 = ± V - (7-30)
До
Так как подкоренное выражение Ь0/а0 всегда положительно,
a cos 0 > 0 на основании задания области управления (7.22'), то
74
в (7.30) следует выбрать положительный корень. Условие (7.30)
выражает важнейшее с практической точки зрения свойство рас¬
сматриваемого класса траекторий — логарифмических спиралей
с парусной тягой произвольного направления, — свойство, отли¬
чающее их от рассмотренного выше (§ 7, п. I) класса логарифми¬
ческих спиралей с касательной тягой: оно почти в два раза рас¬
ширяет область задания тягового начального ускорения а0. Дейст¬
вительно, если для касательной тяги, в соответствии с формулами
А^опт.град
Лондон I ‘
ги,зу
(А ”90°-а)
0,1 0,15 0,342 а0,сп/с1
Рис. 10
(7.7) и (7.8), предельное значение а0 составляет 3,3 см/с2, то в
соответствии с формулами (7.28) и (7.30) предельное значение а0,
при котором в - 0, а = 0, составляет а0 - Ь0 ~ 0,6 см/с2.
График дополнительного спирального угла 0=90°— а (по
теории Цзу), выраженного в функции ускорения а0 для опти¬
мального значения угла установки паруса в из (7.30), изображен
на рис. 10 сплошными линиями [1.13] (обозначение 0 для допол¬
нительного спирального угла взято нами из основополагающей
работы [1.13], и его не следует путать с традиционным обозна¬
чением редукции гравитационного поля Солнца 0, использованным
нами в теории цандеровских орбит, изложенной в §5,6).
Полученные формулы позволяют установить еще одно интерес¬
ное свойство парусной спирали, состоящее в том, что отношение
скорости аппарата к скорости планеты назначения по прибытии
к орбите этой планеты одинаково для всех планет и не зависит
от г. Действительно, квадрат круговой скорости на орбите планеты
составляет
и
fMc_ fMc г2 г2
Ь(] —
кр
С другой стороны, полная орбитальная скорость на основании
формулы (7.26) равна
„2
.,2 - ..2
и2 + п2 =Ь0—(1 +jV(a0, bo, 0)),
г
75
где
д0cos3б + (allbo) cos4 б (4 sin2 б +cos26)
-a0cos3B
вследствие чего получим отношение
. 2
(“) =
\икр /
1 +N,
кр '
стремящееся к 1 при cos б ->-0 (б -*■90°), т.е. при нулевой тяге
[1.13]. Этот результат обобщает результат модельной задачи о
малой касательной тяге на спиральной траектории [1.13], для
которой получается только первый член записанного разложения,
соответствующий точному равенству величин скорости на спирали
и местной круговой скорости.
Таково было в общих чертах приближенное решение задачи
о полете под действием малой непрерывной силы тяги солнечного
я я
паруса при постоянном угле ориентации б из интервала - —, —
Это решение позволило определить параметры спирали и найти
оптимальную ориентацию солнечного паруса в полете. Однако
условие г = 0, одновременно означающее близость спивали к ок¬
ружности, т.е. малость дополнительных углов /3 = 90 — а (см.
рис. 9), превратило одно из уравнений (7.24) в алгебраическое,
вследствие чего произошла потеря двух постоянных интегриро¬
вания, а найденное решение оказалось лишенным общности — оно
соответствовало только одной возможной траектории, удовлетво¬
ряющей одной паре начальных условий (значениям радиальной
и трансверсальной скоростей в точке выхода на спираль).
Основываясь на работах Т.С. Цзу, точное решение системы
(7.24) без всяких упрощающих предположений позднее получил
Г. Лондон (1.17J, установив форму частного интеграла системы
(7.24). Для этого, подставив дважды продифференцированное
уравнение спирали (7,1) и кинематические соотношения (7.2) в
систему, решаемую с учетом всех слагаемых, и исключив ф, он
вывел промежуточное уравнение
. cos2в
g3^tg/3^2 _ ^ _ аoCOS2g (cos0 _ sjn 0 tg/3)]. (7.31)
Го
Дифференцирование (7.31) приводит нас снова к формуле ф =
3 2
= - — Ф tg/З, т.е. ко второй из формул (7.5) при tg/3= ctga.
Это доказывает, что решением уравнений движения (7.24) служит
уравнение логарифмической спирали. Подставляя две полученные
76
15 30 36,4 45 60 75 |в],град"
Рис. 11
формулы обратно в уравнения движения, можно после тождествен¬
ных преобразований получить формулу однозначной связи угла
установки паруса в и дополнительного спирального угла /3 =90° -а:
sin в cos Р sin 0 cos2 0
= — (7.32)
2 — sin Р (b0/a0) —cos в
При малых /J(sin2/3 -*0, cos/J -+1) эта формула переходит в фор¬
мулу (7.28) приближенной теории Т.С. Цзу для почти круговых
спиралей. Уравнение (7.32) было решено в [1.17] графически для
серии начальных условий из интервала значений ускорения (при
нормальной ориентации паруса на орбите Земли)
0,1 см/с2 < а0 < 0,5 см/с2
(см. рис. 10). Напомним, что рассматриваемая нами теория ’’рабо¬
тает” до значения ускорения а0 = Ь0 = 0,6 см/с2.
Графическое решение из [1.17] показало, что дляд0 < 0,342 см/с2
существуют верхняя и нижняя ветви решений (рис. 11), соответст¬
вующие большим и малым р, тогда как решение (7.28) дает только
нижнюю ветвь (см. рис. 10). Это означает, что при небольшой
парусности траекторией может быть сильно закрученная спираль
(малые /3), близкая к окружности, или, напротив, сильно развер¬
нутая спираль (большие Р). Постоянный угол установки в из
интервала [—л/2, +л/2] в обоих вариантах может быть любым,
он влияет на величину компонентов скорости (7.2) и на время
полета г, которое оказывается больше для квазикруговой спира¬
ли. При а0 = 0,342 см/с2 решение дает одну ветвь на рис. 11 для
любых Р и \в [ из интервала [0, 90°] (это значение выделено на
рис. 10). Для больших ускорений а0 > 0,342 см/с2, снова появ¬
ляются две ветви решений, допускающие любые углы /3, однако
77
для каждого ускорения а0 имеется область углов установки |0|,
в которой решения не существует вообще.
На рис. 10 штриховыми линиями изображены кривые |б(а0)1
и Р(а0) по Г. Лондону [1.17], полученные доя нижних ветвей
решения на рис. 11. Легко видеть, что различие приближенной
теории Т.С. Цзу (сплошные линии) и точной теории Г. Лондона
(штрихи) становится существенным лишь для больших а0.
Частный интеграл, полученный в [1.17], фактически сводится
к формулам для компонент скорости
Го
I>г=г= /(M,6o,ao)sin0,
^ (7.33)
г о
Цр -г<Р — /(Р, в, b0,a0)cosP,
sr
где
г=у/ь7
-a0cos2e (cosd - sinQtgP), (7.33')
удовлетворяющим условию (7.25) и, следовательно, обеспечи¬
вающим движение по спирали и позволяющим определить началь¬
ные условия выхода на спираль. Это значит, что движение по спи¬
рали с дополнительным спиральным углом Р вовсе не является
автоматическим результатом одной только установки солнечного
паруса под требуемым углом в к солнечным лучам. Оно осуществ¬
ляется только в том случае, если при этом еще и начальные зна¬
чения компонент орбитальной скорости будут удовлетворять
интегралу (7.33). (Формулы (7.33) легко получить, если выра¬
зить ф из (7.31) с учетом уравнения спирали (7.1), затем подста¬
вить ф в выражение г = гф tg Р из (7.2).)
Интегрируя первое из уравнений (7.33), получим время полета
2 г3'2 -го3/2 ’
т = - . (7.34)
3 / г0 sin /3
Если в f подставить уравнение связи углов (7.32), снова придем
к выражению (7.29) для т.
Решения Г. Лондона [1.17], как более общие по сравнению с
решениями Т.С. Цзу, оказались успешно применимы к более ши¬
рокой области изменения углов в и значений ускорения а0. Одна¬
ко эти решения также не учитывали влияния начальной скорости на
траекторию полета и были справедливы только при частных началь¬
ных условиях, так как однозначное задание и, и в функции Р,
в, а0 и г0 снова привело к потере в частном интеграле двух произ¬
вольных постоянных. Иными словами, исследование проблемы
начальных условий показывает, что у Т.С. Цзу начальные условия
78
согласуются с формулами
г0 2Сг го .—_
vr = -p-=, V-С.,
у/Т у-С, \fr
где С1 =aocos30 -йо> С2 = — a0sin flcos2fl. У Г. Лондона же они
согласуются с аналогичными, но более точными формулами, выте¬
кающими из (7.33):
иг = —sintfV-Ci — C2tg/3,
>fr
r0
tV = —— cos0V-Ci -Citg0.
Ф
III. Пути улучшения логарифмических спиральных решений.
Пути улучшения рассмотренных приближений рассмотрели А. Поц-
ци и Л. ди Сочо [1.18—1.20]. Задавая приближенное значение транс-
версальной скорости, равное круговой, т.е. удовлетворяющее
условию Vy/v^a ~ Vrolr, можно уравнение (7.24) представить в
виде, позволяющем после интегрирования получить явные форму¬
лы для скоростей vr и как функций начальных условий г0, Сх,
Сг, vrn и иу<ь а также констант интегрирования. Дальнейшие пути
улучшения данного приближения состоят в применении метода
итераций с использованием более широкого класса начальных
условий. Работы [1.18—1.20] существенно повысили точность
решения, однако исследование авторами было проведено для
интервалов начальных скоростей, не сильно отличающихся от
используемых в работах Т.С. Цзу и Г. Лондона. Поэтому требо¬
вались дальнейшие более широкие исследования влияния началь¬
ных условий на динамику движения по логарифмической спирали.
В последующие годы вопросы движения по спирали неодно¬
кратно затрагивались рядом авторов [1.21-1.27], однако наиболее
интересной работой, внесшей существенные дополнения в теорию
спирального движения при постоянном угле установки паруса,
следует считать работу В.В, Маланина и С.Е. Мительмана [1.27].
Исследование, проведенное ими для функции ±(sin<3) /(0, в, Ь0,
а0), где функция/(0, в, Ь0, ^о) определяется по (7.33') и связана
со временем перелета очевидным соотношением, вытекающим из
(7.34), а именно
/, = fsinfi = (3/2)тг0/(г3/2 - го3/2),
позволило яснее охарактеризовать движения по двум ветвям
логарифмической спирали из [1.17] (см. рис. 11). Оказалось, что
хотя время движения по верхней ветви (развернутая спираль)
меньше, чем по нижней, тем не менее для верхней ветви не сущест¬
79
вует решения задачи оптимального
быстродействия (кроме тривиаль¬
ного решения 0 = 0, соответствую¬
щего цандеровским движениям по
коническим сечениям при радиаль¬
ной установке паруса) , так как нет
возможности выделения изолиро¬
ванных минимумов приведенной
выше функции /1 =/sin0. Напро¬
тив, для нижней ветви (скрученная
спираль) имеется возможность оп¬
тимизации по углу управления 0,
причем минимальные величины функ¬
ции fi действительно расположены
вблизи угла установки 0 = 30°. Гра¬
фик /i (0) для нижней ветви изобра¬
жен на рис. 12 [1.27], причем зна¬
чения 0ОПТ для минимумов /) следует сравнить со значениями
на рис. 10 (штриховые линии на рис. 10 соответствуют нижним
ветвям на рис. 11).
Аналитические результаты работы [1.27] подтвердили правиль¬
ность эмпирического вывода Г. Лондона [1.17] о том, что в реаль¬
ных парусных задачах (а0 « 0,1 =0,3 см/с2) оптимальные решения
существенны и наиболее интересны именно для нижних ветвей
логарифмических решений на рис. 11, так как именно для них
компоненты требуемой начальной скорости космического аппа¬
рата, выходящего на сильно закрученную спираль, быстро увели¬
чиваются с увеличением спирального угла 0.
Интересным результатом из [1.27] является также условие
реализации круговой гелиоцентрической орбиты при постоянном
угле установки 0:
cos0 = V(1 - ^)/До (7.35)
(скорость отнесена к местной круговой, ускорение - к гравита¬
ционному ускорению на орбите Земли bQ). Область определения
компоненты трансверсальной скорости Ф 1 при а0 < 1 опреде¬
ляется соотношением
уД -а0 < v^< у/1 + до-
Тривиальный случай = 1 означает, что постоянная Круговая
(трансверсальная) гелиоцентрическая скорость сохраняется при
в = ±7г/2, т.е. когда зеркальный с обеих сторон парус повернут
ребром к Солнцу и не дает никакой тяги. При 0 = const > 0 аппарат
разгоняется, при 0 = const < 0 — тормозится.
80
30 60 (^оптЬград
Рис. 12
Итак, общая теория движения по логарифмической спирали
хотя и не всегда обладала достаточной строгостью решений урав¬
нений движения, но позволила наглядно охарактеризовать дина¬
мику движения при постоянном угле установки паруса и сформу¬
лировать основные принципиальные свойства движения. Была
разработана методика приближенного и точного определений
оптимального значения этого постоянного угла в приближенном
и точном случаях. Эта группа решений позволила также составить
первое представление о возможностях использования солнечного
паруса для спиральных прелетов между орбитами планет. Общую
характеристику спиральных парусных перелетов в плане развития
идей Ф.А. Цандера можно найти в обзорах [1.28, 1.29]. Пользуясь
изложенными выше основными свойствами движений, рассмотрим
теперь основные особенности межпланетных перелетов при по¬
стоянном угле установки солнечного паруса.
IV. Перелет к орбитам других планет. Если аппарат движется по
круговой орбите Земли, то для перехода к орбитам других планет
выгоднее всего так ориентировать парус, чтобы солнечный свет
”дул” почти в корму космического корабля. Конечно, сила давле¬
ния солнечных лучей на парус, ориентированный косо к лучам,
будет меньше, чем в случае его нормальной ориентации к свето¬
вому потоку; однако в случае косой ориентации силы тяги к по¬
току ее можно направить в требуемом направлении. Например,
на рис. 13 изображены два случая наклонной ориентации тяги Т
к потоку, т.е. к радиус-вектору космического аппарата г. В поло¬
жении 1 тяга дает положительную проекцию на трансверсаль,
совпадающую на начальной круговой орбите Земли с направлением
орбитальной скорости, а в положении 2 эта проекция направлена
Рис. 13
Рис. 14
81
против орбитальной скорости. Знак угла ориентации б в обоих
случаях диктуется правилом (7.22).
Рассмотрим сначала случай удаления от орбиты Земли. Тяга Т
в положении 1 направлена почти в сторону движения, и аппарат
начнет по логарифмической спирали двигаться к орбите Марса.
На основании формул (7.26) и (7.27) получим
б < 0, vr = г > 0, < 0.
Это означает, что аппарат удаляется от Солнца (рис. 14), а обе
компоненты скорости изменяются так, чтобы полная скорость
убывала по закону круговой скорости, т.е. как 1 /у/г. Именно
эту задачу (правда, в приближенном варианте, т.е. при vr = 0)
решил впервые Цзу [1.13] для перелета к Марсу по логарифми¬
ческой спирали и нашел оптимальный неизменный угол установ¬
ки б, соответствующий минимуму времени перелета до орбиты
Марса. Эту же задачу Лондон [1.17] решил в более общем виде
и уточнил время полета до орбиты Марса при неизменном угле
установ ки б.
На первый взгляд может показаться, что под солнечным пару¬
сом нельзя двигаться к планетам, расположенным внутри орбиты
Земли. Однако если ориентация паруса позволяет создать силу
тяги, тормозящую первоначальное круговое гелиоцентрическое
движение аппарата, то аппарат будет до спирали двигаться от
орбиты Земли к орбите Венеры (положение 2 на рис. 13). Здесь
трансверсальная проекция тяги направлена против скорости.
В этом случае для б >0 получим на основании (7.26) и (7.27)
б>0, иг = 7<0, йу > 0,
т.е. движение происходит к Солнцу (рис. 14), полная скорость,
как и круговая, увеличивается.
На рис. 14 штриховыми линиями
обозначены круговые орбиты Ве¬
неры (9), Земли (®) и Марса (3),
сплошными линиями — дуги лога¬
рифмических спиральных траек¬
торий перелетов с солнечным па¬
русом. Для каждого положения
паруса стрелкой изображается на¬
правление создаваемой им силы
тяги, действующей по нормали к
нему.
Расчеты показывают, что при
О 0,1 0,2 0,3 0,4 0,5 а0,см/сг а° * °>1 си!^ плоский круглый
Рис 15 ’ зеркальный парус диаметром
Земля - Марс
Земля - Венера
82
300 м, несущий полезный груз 500 кг, может достичь орбиты Марса
за 247 суток, а орбиты Венеры - менее чем за 100 суток. На рис. 15
[1.17] приводятся графики значений t время перелетов как функ¬
ций от значений начального тягового ускорения а0 на орбите Земли.
Современные исследования, как правило, ограничиваются
простейшим предельным случаем зеркального отражения пару¬
са (е = 1), когда тяговое ускорение направлено строго по норма¬
ли к парусу, а управление парусом есть управление нормалью,
составляющей угол в с потоком лучей. Однако при неполном
отражении (е< 1), как уже указывалось в § 4, направление си¬
лы Т тяги солнечного паруса площадью А располагается между
вектором п нормали к теневой стороне паруса и вектором свето¬
вого потока i (рис. 16). Величина тяги (см. (4.9), (4.9'))
Т = Р,А\/\ + е2 + 2ecos20 cos0.
Направление тяги составляет с нормалью п угол
<£=arcsin[(l —е) sin 0(1 + е2 + 2 е cos 2 0)-1''2 ],
знак которого определяется знаком скалярного произведения Тп.
Именно с помощью этих общих формул (т.е. с учетом касатель¬
ных напряжений) исследование траекторий полета с парусом
при постоянном угле установки провели И.А. и И.И. Меркуловы
и И.А. Хоромский [1.30- 1.32]. В этих работах исследованы пре¬
дельные классы траекторий околосолнечных движений с парусом:
движение, близкое к гелиоцентрической окружности (см. рис. 16),
и движение, близкое к прямолинейному движению по лучу све¬
та i. При рассмотрении траекторий первого типа выписывалось
выражение для проекции силы тяги Т на направление v скорости
паруса, составляющее малый угол а с трансверсалью (на рис. 16
83
стрелками показано направление отсчета углов в < О, ц> < 0):
— (Т, v) = 7т/2 - а - (в - iр),
Ту = Р0А у/Т + е2 + 2еcos 2 0 cos 0 sin (а + 8 - *р).
Для малых а получим выражение
Ту - Р0А \/i + е2 + 2ecos20 cos0 sin(0 — $).
Подставляя значение <р, приведенное выше, получаем выражение
для проекции, зависящей от отражательной способности паруса е:
Ту(е) = 2Р0А esin0 cos2в.
Для максимизации проекции тяги на направление скорости
в [1.30] составляется условие
= 2Р0А e(cos30 — 2 sin20 cos в) = 0,
dd
показывающее, что максимум проекции тяги достигается при
sine = >/3/3, в 35,26°.
С помощью этого результата из [1.30] в [1.31] и [1.32] опреде¬
ляются часовой и суточный приросты характеристической скорос¬
ти аппарата с парусом и другие величины. Приведенные в упомя¬
нутых работах формулы позволяют при заданном времени полета
и известных параметрах паруса произвести сравнительную весовую
характеристику солнечного паруса и ракетных двигателей.
§ 8. Сопоставление спиральных траекторий
с цандеровскими эллипсами и
с касательными импульсными траекториями
Авторы проектов полетов с солнечным парусом по спиральным
траекториям не могли не обратить внимания на тот факт, что в
частном случае нулевого угла установки (0=0), соответствую¬
щего неизменной нормальной ориентации паруса относительно
светового потока, теория спирального движения сводится к цан¬
деровской теории движения с парусом в центральном фотогравита-
ционном поле (§ 5, 6). Однако следует помнить, что цандеровское
движение, начинающееся с орбиты Земли, осуществимо лишь
к внешним, планетам, тогда как логарифмическая траектория
(см. § 7, п. II) позволяет двигаться с орбиты Земли и к внутрен¬
ним планетам. В § 6 мы детально рассмотрели задачу сравнения
цандеровской и импульсной траекторий межпланетного перелета.
Теперь представляет интерес сопоставить цандеровское движение
с логарифмическим в случае выхода на оба эти движения с кру-
84
говой орбиты Земли (г0 = гз, vKP = и3 = \/fMc/r3). Для фавнения
выберем вариант перехода к орбите Марса и используем следующие
данные из § 6:
г3 = 1,496 • 10® км, тм = 2,279 • 10® км,
1
а= 1,888 • 10® км, 0=0,17, — 7'имп= 259, 1 сут,
2
_1 fUWA = 1 Гзерк = 284 g
2 2
Сравнение этих данных с параметрами спирального движения
следует производить на основе уравнений движения в центральном
поле, вытекающих из уравнений (7.24) при в =0:
(-be = —*°(l “ ' VV’*’ = 0'
Сравнение уравнений (8.1) и (5.8) показывает, что Р~а0/Ь0, и
еще раз позволяет установить физический смысл редукции грави¬
тационного поля — отношение радиационного и гравитационного
ускорений на орбите Земли. В § 6 было вычислено,что Ь0 =0,6 см/с2
(см. формулу 6.26)), т.е. для полета к орбите Марса (соответст¬
вующая цандеровская редукция 0 = 0,17) необходимо начальное
тяговое ускорение в нормальной ориентации а0 =0,1 см/с2, соот¬
ветствующее парусности о = А/т= 103 см2/г (см. формулы (6.25')
и (6.26')).
В § 7 при обсуждении спиральных парусных траекторий с парус¬
ной тягой, отклоняющейся от касательного направления за счет
несовпадения спирального угла и угла управления, т.е. угла уста¬
новки паруса, было установлено, что такие траектории существуют
в силу условия (7.30) вплоть до тяговых ускорений а0 = Ь0 =
= 0,6 см/с2, т.е до значения цандеровской редукции 0 =a0jb0 = 1.
Теория спиральных траекторий с касательной тягой существует
до 0 = 1/2, т.е. до парусности о*= 3,3 • 103 см2/г (см. (6.24')); сле¬
довательно, как показывает формула (6.23), на этот раз для 0 = 1
получим предельное значение парусности о* * = 6,6-103 см2/г.
Если бы такой парус сохранял свою нормальную ориентацию
относительно лучей и далее, то он бы покинул Солнечную систему
по прямой, перпендикулярной радиус-вектору точки старта (см.
рис. 5 для случая 0 = 1— гашение полей тяготения и излучения,
покидание бессилового пространства по инерции). Ставя перед
собой более насущную практическую задачу достижения с по¬
мощью паруса орбит ближайших к нам планет, мы используем
увеличение парусности в указанных пределах, т.е. до 0 = 1, в целях
построения ’’закругленной” спиральной траектории межпланетного
85
перелета. Так как угол ориентации паруса всегда отличен от нуля,
то значение цандеровской редукции Р = 1 имеет для спирали только
теоретический, ’’эталонный” смысл. Пролетная прямолинейная
траектория малоинтересна практически вследствие направления
скорости движения по ней (этот вопрос будет обсуждаться ниже),
а если мы употребим преимущества паруса с высоким Р для по¬
строения скругленной траектории, да еще вдобавок сократим
время движения по ней, увеличивая парусность, выгодность ма¬
невра будет очевидна.
Впервые сравнение двух -траекторий полета с парусом — эллип¬
тической и спиральной — произвел Г. Лондон [1.17], обобщив
теорию эллиптического цандеровского движения на случай схода
с произвольной гелиоцентрической орбиты. Заметим, что исследо¬
вание движения с парусом, неизменно ориентированным нормально
к лучам, Г. Лондон дал через 40 лет после публикаций работ
Ф.А. Цандера. (Рабочие формулы для решения фото гравитацион¬
ной задачи двух тел приводятся также в книге [В.24, с. 535].)
Формулы для основных соотношений были даны в функции пара¬
метра к = Уз/цКр>1 — отношения орбитальной скорости Земли
к местной круговой гелиоцентрической скорости в точке выхода
на спираль. Соответствующие величины ускорений а0, необходи¬
мых для достижения орбит планет, внешних по отношению к ор¬
бите Земли, приведены на рис. 17 [1.17]. Соответствующие спи¬
ральные траектории для этих а0 исследовались графическим спосо¬
бом и рассматривалась нижняя часть ветви решений на рис. 11,
соответствующая малым дополнительным спиральным углам
Р = 90° - а. Для спиралей, близких к окружности и годящихся
для перелета к Марсу, в результате решения уравнения (7.32)
при д0 =0,1 см/с2 (см. точки А на рис. 10 и И) получилось
а = 81,5°, Р = 90° -- а = 8,5°, |0|=36,4°, гсп ~ 247 сут,
т.е. время спирального перелета, вычисленное по формуле (7.34),
оказалось меньше времени импульсного перелета и заведомо
меньше времени цандеровского перелета. Напомним, что это
сравнение производилось для геометрически идентичных каса¬
тельного импульсного и касательного цандеровского эллипсов,
а затем для спирального перелета с тем же значением ускорения д0.
что и для цандеровского эллипса.
Детальная теория цандеровских траекторий была развита позд¬
нее С.Н. Кирпичниковым [1.33] для гелиоцентрического движения
аппарата с солнечным парусом, выполненным в виде полого балло¬
на заданного радиуса, толщины и плотности, несущего полезный
груз. Технические параметры этого стационарного сферического
паруса были аналогичны предложенным К. Эрике в его проекте
[1.4—1.6]. Теория кеплеровых движений была представлена в
86
Рис. 17
Рис. 18
[1.33] в виде формул для оскулирующих элементов конических
сечений в фотогравитационном поле.
Сопоставление цандеровской траектории со спиральной можно
производить по времени прелета до заданной планетной орбиты
либо по степени несовпадения направления и величины скоростей
в точке пересечения спирали и орбиты планеты назначения (скорос¬
тей на этой орбите и на спирали). По времени преимущество спи¬
ральной траектории очевидно, причем если оно имеет место для
почти круговой спирали, то тем более очевидно, что это преиму¬
щество реализуется и для сильно развернутой спирали. Однако
ни одна из логарифмических парусных спиралей, как будет пока¬
зано ниже, не обеспечивает желаемого совпадения скоростей и в
этом смысле не имеет преимущества перед импульсной или цан¬
деровской парусными траекториями, которые тоже требуют им¬
пульсного выравнивая скоростей в конце полета. Следовательно,
речь может идти лишь о том, какая траектория является более
выгодной энергетически, т.е. требует меньшего импульса для вы¬
равнивания скоростей (поскольку ни в одном из двух случаев
парусных движений без импульса не обойтись).
Рассмотрение этого вопроса начнем с напоминания, что в задаче
перелета между сферами действия планет для выхода на цандеров-
ский эллипс с круговой орбиты Земли не требуется никакого
импульса, так как скорость в перигелии цандеровского эллипса
совпадает по величине и направлению с орбитальной скоростью
Земли, т.е. д^?анд = v3 = 29,78 км/с (рис. 18). В результате раскры¬
тия паруса аппарат перейдет на цандеровский эллипс, касательный
к орбитам Земли и планеты (см. § 6). Так как постоянная площа¬
дей цандеровского эллипса равна постоянной площадей орбиты
Земли (см. формулу (6.29’)), т.е. c=r3v3 =тац“анд, заключаем,
87
что афелийная скорость
цанд r3Vj /Wc Г3 [Wc 0
Va V V V (8-2)
^'3 ^ql ^ot *a
оказывается в r3/r раз меньше орбитальной скорости Земли и в
х/ г 3 [г а раз меньше местной круговой гелиоцентрической
скорости в афелии, т.е. орбитальной скорости кругового движения
планеты назначения. Для полета к Марсу (им = 24,13 км/с, и3 =
= 29,78 км/с, r3 = 1,496 • 108км, гм = 2,279 • 108км) получим
'з/'м =°,656. ’Лз/'м = 0,81,
^ианд _ 29 78 . о,бб = 19,54 км/с или
иданд = 24,1.3 • 0,81 = 19,54 км/с,
и данд = 24,13 - 19,54 = +4,59 км/с.
Итак, скорость в афелии цандеровского эллипса (8.2) во столь¬
ко раз меньше скорости Марса, во сколько раз круговая скорость
Марса меньше круговой скорости Земли. Так как цандеровский
эллипс является касательным к орбите Марса, то скорости уданд и
vM направлены в одну сторону. На рис. 18 точки приложения ско¬
ростей в афелии а цандеровского эллипса разнесены условно;
на траектории изображены три положения паруса и его силы тяги,
соответствующие сохранению неизменной нормальной ориентации
паруса к лучам. Для гашения скорости аппарата относительно Мар-
_ . цанд
са необходим положительный касательный импульс иа =
= +4,59 км/с. Соответственно для касательного импульсного пере¬
лета имеем для скоростей и выравнивающих импульсов следующие
числа:
и“мп = + 2,95 км/с, и”МП - 29,78 + 2,95 = 32,73 км/с,
имп имп гп .... _ , , ,
иа - и7Г — = 32,73 • 0,66 = 21,47 км/с,
га
цИМ" = 24ЛЗ _ 21 47 = + 2 66 км/с> Иимп/Иимп = од
Итак, касательный импульсный перелет характеризуется суммар¬
ным импульсом
и “МП + наИМП = + 2,95 + 2,66 = 5,61 км/с,
_ „ цанд
который оказывается больше, чем единственный импульс иа =
= 4,59 км/с для цандеровского перелета по эллипсу, что в смысле
энергетических затрат говорит в пользу цандеровского перелета.
88
Спиральная траектория выглядит с точки зрения энергетических
затрат несколько иначе. К моменту раскрытия паруса на орбите
о сп
Земли скорость аппарата Vj должна численно равняться скорости
сп с
и3, однако вектор vj теперь должен быть развернут относительно
вектора v3 на требуемый угол /3 = 90° - а (рис. 19). Пусть этот
дополнительный спиральный угол известен заранее: мы установили,
что его величина равняется /3 = 8,5°, что соответствует тому же
значению тягового ускорения а0 для паруса на спиральной траекто¬
рии, что и для паруса на цандеровской траектории. Зная угол пово¬
рота скорости, найдем импульс на орбите старта:
иГ = 2и3sin(j3/2) у3 0= 29,78 • 0,142 = 4,42 км/с. (8.3)
После приложения этого импульса, направление которого указано
на рис. 19, можно раскрыть парус, сориентировав его под таким
углом ориентации в < 0 к Дотоку.лучей, чтобы это значение в вмес¬
те со значениями ускорения а0 и спирального угла (3 удовлетворяли
условию (7.30). Теперь аппарат с парусом по логарифмической
спирали будет двигаться к орбите Марса со скоростью, которая в
каждой точке траектории численно близка к местной круговой.
Вблизи орбиты Марса потребуется совершить маневр перехода
на орбиту Марса. Рассмотрев на рис. 19 равнобедренный треуголь¬
ник скоростей vM ,и v2, аналогичный треугольнику для маневра
выхода на спираль, устанавливаем, что при орбитальной скорости
Марса им = 24,13 км/с и при требуемом спиральном угле /3 = 8,5°
необходим импульс
Насп = 2имsin03/2) яг им(3= 24,13 • 0,142= 3,58 км/с, (8.4)
направление которого очевидно из рис. 19. Легко убедиться в том,
что найденные импульсы (8.3) и (8.4) связаны соотношением
/5.„Л,
И! U3 Гм
89
а их сумма составляет
м,си + иГ = 4,42 + 3,58 = 8,00 км/с.
Итак, логарифмические траектории ни на одном конце не удов¬
летворяют граничным условиям по скоростям и, так же как и им¬
пульсные эллипсы, требуют приложения импульсов выравнивания
на обоих концах траектории, причем суммарный импульс для сни-
рали (8,00 км/с) оказывается выше, чем для касательного эллипса
(5,61 км/с). В смысле величины импульса спиральная траектория
еще сильнее "проигрывает” цандеровскому эллипсу, у которого
этот единственный импульс составляет всего 4,59 км/с. Итак,
преимущества спиралей перед цандеровскими эллипсами могут
состоять только в меньшем времени движения, но никак не в энер¬
гетике. Однако и при оценке этих преимуществ следует помнить,
что сокращение времени полета требует распрямления спирали,
а это в свою очередь влечет за собой соответственное увеличение
обоих импульсов. Напомним еще, что сравнение цандеровских и
спиральных траекторий имеет смысл лишь для полетов к внешним
орбитам (см. § 7). Именно эти характерные особенности спираль¬
ных парусных перелетов отмечает В.И. Левантовский. Обсуждая
вопрос о применении импульса скорости при выходе на спираль,
он справедливо замечает, что "весьма со инительно, может ли аппа¬
рат с солнечным парусом, стартовавший с околоземной орбиты,
выйти на границу сферы действия Земли со скоростью 4,4 км/с.
Эту скорость скорее всего придется добавить с помощью химиче¬
ского двигателя, но тогда уже проще добавить эту скорость в нуж¬
ном направлении и достичь Марса за гораздо более короткое
время” [В. 16, с. 347]. Таким образом, область применения траек¬
торий обоих описанных типов в практическом отношении весьма
ограничена и, чтобы до предела использовать энергетику солнечно¬
го паруса, необходимо искать другие типы траекторий (о чем
пойдет речь в § 9).
Характеризуя исследования в области парусных движений по
коническим сечениям, необходимо отметить уже упомянутую
выше работу И.И, Меркулова [1.30], в которой рассмотрен гипоте¬
тический случай движения при помощи паруса вдоль по лучу
света. Как указывалось в § 5, такое движение возможно как пре¬
дельный отучай "выброса” (см. рис. 5) при нулевой начальной ге¬
лиоцентрической скорости или как предельный случай движения
по асимптоте внешней ветви гиперболы при произвольной началь¬
ной скорости. В любом из этих случаев скорость точки сначала
возрастает, а затем асимптотически стремится к константе. Именно
для варианта прямолинейного "выброса” объекта, покидающего
Солнечную систему под действием сил лучевого давления, в [1.30]
предлагается удачная аналогия формулы для скорости движения
90
по лучу со знаменитой формулой К.Э. Циолковского для скорости
ракеты. Роль числа Циолковского в данной задаче играет величина
Z = mTljmrp - отношение массы солнечного паруса к массе груза,
т.е. ко всей остальной, массе аппарата. Эта величина легко вводится
в интеграл энергии типа (5.11) с учетом того, что световое давле¬
ние пропорционально поверхности паруса А, легко выражаемой
через его массу тп.
Действительно, интеграл энергии точки в фотогравитационном
поле, записанный в форме, выражающей закон сохранения удвоен¬
ной полной энергии орбитальной энергии единичной массы всей
конструкции (тк =тп + тгр) принимает вид
^ Л =со*.
г V 1 +Z /
Здесь К - физическая константа, содержащая Z - ’’парусное”
число Циолковского, выражение в скобках определяет редукцию
местной параболической скорости в фотогравитационном поле и
с точки зрения цандеровской теории ’’0-паруса” (см. § 5) удовлет-
Z
воряет равенству 0 = К -—— . Интеграл энергии, выраженный
через Z, позволяет получить формулу Циолковского для ско
рости прямолинейного ухода (0 > 1/2), а также определить равно¬
весное значение Z*, соответствующее 0=1, т.е. равновесию сил тя¬
готения и светового отталкивания. При Z = Z* точка остается в
относительном покое или движется равномерно по инерции в
бессиловом пространстве. (Преобладание силы светового давления
над тяготением означает 0 > 1.)
Мы рассмотрели общие черты, а также принципиальные геомет¬
рические и энергетические отличия сравниваемых цандеровских и
спиральных траекторий. Обсуждать спиральные траектории и пу¬
ти их ’’усовершенствования” мы будем еще неоднократно, рассмат¬
ривая вариационные теории спиральных движений с солнечным па¬
русом. Что же касается собственно цандеровских траекторий, то
для далеких межпланетных перелетов они кажутся пока мало¬
перспективными, более вероятна полезность применения нормаль¬
ной ориентации паруса для создания семейств гелиоцентрических
траекторий с удаляющимся от Солнца афелием. Именно в такой
постановке цандеровская задача достаточно часто встречается в
современных научных публикациях, посвященных орбитальным
маневрам (см. § 17).
По поводу сравнения энергетики паруса и энергетики реактив¬
ного двигателя заметим, что, по утверждению К. Эрике, ’’исполь¬
зование давления солнечного излучения является, по существу,
?1
идеальной формой реактивного движения, так как оно не требует
расхода массы космического аппарата и, следовательно, соответ¬
ствует бесконечному удельному импульсу” [1.7].
§ 9. Вариационные задачи оптимизации
спиральных гелиоцентрических траекторий
Когда в 60-х годах удалось доказать, что при определенной
программе изменения угла установки солнечного паруса можно
осуществить перелет между орбитами планет не по пролетной спи¬
ральной траектории, а по траектории с наперед заданными краевы¬
ми условиями, было положено начало решению вариационных
задач о парусных перелетах. Напомним, что выполнение крае .ых
условий по скоростям означает, что скорость аппарата с солнечным
парусом в начале и в конце траектории и по величине, и по направ¬
лению совпадает с соответствующими скоростями орбитальных
круговых движений планет. Это направление динамики косми¬
ческого полета с солнечным парусом следует и на сегодняшний
день считать наиболее перспективным, так как из всех траекторий,
удовлетворяющих краевым условиям, наилучшими естественно
считать траектории с наименьшим временем перелета (как наибо¬
лее эффективные в практическом отношении).
В вариационных парусных задачах оптимизации угол установки
солнечного паруса 9(t) является единственной управляющей функ¬
цией, а начальное ускорение аппарата а0 под действием сил свето¬
вого давления при нормальной ориентации паруса к лучам - по¬
стоянным параметром, однозначно связанным с парусностью аппа¬
рата, т.е. с полезной нагрузкой, и характеризующим возможности
управления парусом. Тогда задача оптимизации сводится к отыска¬
нию такого закона управления парусом (управления положением
нормали), который обеспечивал бы минимум времени Tmin при
заданном ускорении а0. После решения задачи быстродействия
можно получить решение более важной в техническом отношении
задачи об отыскании величины flomin. однозначно связанной с
парусностью и необходимой для реализации заданного времени
перелета. Впервые решения вариационной парусной задачи в смыс¬
ле минимума времени перелета 7’min при заданном ускорении а0
получили для вариантов перелетов Земля - Марс X, Кэлли [1.34]
в 1960 г., Дж. Кэвотти [1.35] в 1962 г., а для всех планет Солнеч¬
ной системы - А.Н. Жуков и В.Н. Лебедев [1.36] в 1964 г.
Как уже указывалось в § 8, сравнение спиральных траекторий
с импульсными позволило в свое время сделать вывод об относи¬
тельной энергетической невыгодности логарифмических спираль¬
ных траекторий, поскольку характеристические скорости, требуе¬
мые для выравнивания скоростей аппарата и планеты назначения,
92
оказываются для спирали больше, чем для импульсных траек¬
торий.
Из работ Т.С. Цзу [1.13] и Г.Лондона [1.17] с очевидностью
следует, что для перелета между орбитами Земли и Марса по лога¬
рифмической спиральной траектории при помощи солнечного пару¬
са, развивающего ускорение 0,1 см/с2, необходимо создать в начале
движения приращение скорости 4,5 км/с, а в конце траектории —
приращение 3,6 км/с, что дает в сумме 8,1 км/с. При этом продол¬
жительность перелета равна примерно 260 сут. Приблизительно
такое же время перелета получается и при двухимпульсном каса¬
тельном перелете между орбитами Земли и Марса, однако в этом
случае сумма двух приращений скорости оказывается существенно
Меньше - всего 5,7 км/с (2,95 км/с + 2,75 км/с). Именно поэтому
имеет смысл поставить задачу о поиске принципиально новой
траектории парусного перелета, вообще не требующей добавочных
импульсов, а сразу обеспечивающей нужные направления и величи¬
ны скоростей аппарата, а также минимизирующей функционал,
характеризующий временные или энергетические затраты.
В основу исследований и поисков такой траектории легла базо¬
вая задача об определении зависимости угла установки паруса от
времени б(г), обеспечивающей минимум времени перелета между
круговыми компланарными орбитами без фиксирования угловых
орбитальных переменных. В работе А.Н. Жукова и В.Н. Лебедева
[1.36] такая задача решалась с использованием принципа максиму¬
ма Понтрягина [1.37], что позволило свести ее к краевой задаче
для системы дифференциальных уравнений восьмого порядка.
Для поиска оптимальной траектории использовалась система
уравнений движения аппарата (7.24), записанная в безразмерных
переменных:
и2 а0сos30 - 1
r = iV, и, =—- + ,
Г Г 2 (9-0
V VrVf <7oSin0COS в
«г>=—£, = + —.
г г г2
Оптимальный закон управления парусом в (г) должен обеспечить
переход из точки (r0 = 1, vr = 0, = 1) в точку (г = rt, vr = 0,
v# - 1/V^ii) за минимальное время. Эти граничные условия и
соответствуют касанию искомой траектории орбит планет старта
и назначения, а также выражают тот факт, что скорость аппарата
в граничных точках равна местной круговой. Угловая дальность
полета за время перелета не фиксируется, т.е. угол поворота гелио¬
центрического радиус-вектора аппарата за время маневра может
быть любым.
93
Следуя принципу максимума, системе исходных уравнений (9.1)
следует поставить в соответствие сопряженную ей систему уравне¬
ний для вспомогательных переменных р. Для составления этой
системы используются формулы
азе . азе . азе . аж
рг = -—, р»=--г~' Р* = ~~Т~’ р^ = ~ т-■ (9-2)
or r 0Vr оу 'С О Vp
где Ж - функция Понтрягина. В соответствии с принципом макси¬
мума Понтрягина [1.37] искомый закон оптимального управления
углом установки паруса 6(f) должен доставлять абсолютный мак¬
симум функции Понтрягина для задачи быстродействия, в данном
случае имеющей вид
(А.
М г
к = рЛ— +
a0cos3 в -
/ игц. aosin0cos20\ у.
+ ч("“Г + ? урл'р,—- <9-3>
С помощью (9.3) составляем сопряженную систему для вспомо¬
гательных переменных р:
P^v*
v5 *
^’PvrV'fi P„Vr
“f Г
Pvrv% 2Pvr 2aoP„cos3e
Pv = — !, (9.4)
РГ
+
r3 r3
pv vrv^ 2a0pv Sin в cos2в
, <p
r2 r3
При этом в конечной точке выполняется условие трансверсаль¬
ности р^(Т) = 0, где Т - полное время перелета (Г= ^min)» угол у?
не задан. Равенство нулю переменной р очевидно и из уравнения
р^ = 0, откуда р^ = const = 0.
На основании принципа максимума в работе [1.36] было уста¬
новлено, что оптимальная программа управления в рассматривае¬
мой задаче быстродействия подчиняется закону
(±\/9pl+8pl -3d )
В этом законе следует выбрать знак +, т.е. определить угол в одно¬
значно на интервале [- тт/2, +тг/2], так как сила светового давле¬
ния всегда направлена от Солнца.
Подставив (9.5) в уравнения (9.1) и (9.4), получаем систему
семи дифференциальных уравнений, правые части которой являют¬
ся однородными функциями вспомогательных переменных р.
Итак, требуется найти решение этой системы для граничных
условий
/ = 0, IV = 0, и*=1, г=1, 0 = 0, pv =±\,
* (9.6)
t = t 1, vr = 0, u =l/vTi. r-fi (t i - не фиксировано),
т.е. вариационная проблема отыскания траектории наискорейшего
перелета свелась к краевой задаче для системы семи уравнений.
В [1.36] решение краевой задачи выполнялось посредством метода
Ньютона, что позволило свести ее к многократному численному
решению (численному интегрированию) задачи Коши при указан¬
ных граничных условиях (9.6), означающих, что
PVip~ + 1 при гх >г0 (перелет к орбите Марса),
ри = — 1 при г, < г0 (перелет к орбите Венеры).
Графическая иллюстрация выведенного в [1.36] закона управле¬
ния приведена на рис. 20. Здесь построены кривые 6{t/T), где //Г -
относительное время перелета, а Г - полное время перелета. Значе¬
ния Г для тягового парусного ускорения в начальной точке а0 =
= 0,2 см/с* оказались равными [1.36]: для Венеры — 164 сут и для
Рис. 20
Марса - 322 сут (см. также табл. 3 и 4, приведенные ниже). Кри¬
вые 9(t/T) для перелетов между орбитами Земли и указанных
планет строились для паруса, зеркального с одной стороны (в £
£ [- 7г/2, +тг/2]); сплошная кривая - перелет к орбите Марса,
штриховая - к орбите Венеры. Вертикальные линии соответствуют
повороту нормали на 180°, однако для паруса, зеркального с обеих
сторон, эти кривые - без изломов.
Сравнение времени перелета между планетными орбитами в за¬
висимости от величин начальных ускорений а0 на примере перелета
95
ти, сут
к орбите Марса выпол¬
нено на графике Тм на
рис. 21 [В.24,с. 418].
Здесь кривая вот со¬
ответствует точному
решению вариацион¬
ной задачи из [1.36],
причем крестики на
кривой соответствуют
числам, приведенным
нами в табл. 3 [1.36].
Кривая 0 = 0 означает
цандеровский эллипти¬
ческий перелет при по¬
стоянной нормальной
7"вар 4оо-
^Цанд зоб- ] J
0опт. Жуков,
Лебедев
I I
- I I
5 - 0, Цандер
5-const, Лондон
О 0,1 0,2 0,4
Рис. 21
0,6 а0,см/сг
ориентации паруса, кривая в - const соответствует логарифмиче¬
ской спирали (Цзу, Лондон, см. § 7) с постоянным углом установ¬
ки 0 = —35,26° [1.17]. Сравнение кривых показывает сильное
влияние граничных условий по скорости на длительность пере¬
летов.
Сравнение длительности оптимальных парусных перелетов с
длительностями перелетов других типов (импульсных и цандеров-
ских) предлагается в табл. 4, в которой в строках 1 - 2 и 6 - 7
приведены значения Гопт [лет или сут] при двух значениях уско¬
рения д0 в случае перелетов к шести большим планетам Солнеч¬
ной системы. В строке 3 табл. 4 приведены единственные возмож¬
ные значения ускорений До.цанд из табл. 2, при которых обеспечен
касательный цандеровский перелет к указанным орбитам. Кроме
того, в строках 4 — 5 табл. 4 приводятся значения полупериодов
анд/2 для принятых ускорений д0, а также ’’классические” зна¬
чения полупериодов тех касательных импульсных перелетов
ГИмп/2, которые, как говорилось в § 8, геометрически тождест¬
венны цандеровским эллипсам.
Итак, сравнение вариационных, спиральных и цандеровских
траекторий (предлагаемое в табл. 4 и графически - на рис. 21)
по времени перелетов к планетным орбитам показывает, что вы¬
полнение граничных условий по скоростям необходимо влечет за
собой увеличение времени перелета. Действительно, ’’дешевый”
Таблица 3
и0,см/с2 0,!(=l<rV) 0,2 0,3 0,4 0,5
Т’мопт. сут 405 322 286 264 248
96
Таблица
О
II
о
II
*■?
с с
L® L°
П К S
с >*
1 ^
$ 0
X с
97
безымпульсный перелет уступает по ’’быстродействию” даже цан-
деровскому эллиптическому перелету.
Если вкратце охарактеризовать методы исследования парусных
перелетов, то следует отметить, что вариационный метод, приме¬
ненный для решения краевой задачи в [1.36], не является единст¬
венным. Так, в те же годы X. Кэлли [1.34] решил аналогичную
парусную задачу, применив специальный градиентный метод в
пространстве управлений, называемый обычно методом наискорей¬
шего спуска и имеющий ряд преимуществ при решении краевой
двухточечной задачи численным методом. Иллюстрацией метода
градиентного спуска в пространстве управлений как рази служит
предлагаемый в [1.34] расчет задачи о перелете с солнечным пару¬
сом к орбите Марса. Вариационная проблема максимального быст¬
родействия при выполнении заданных концевых условий состоит
здесь, как и в [1.36], в определении оптимальной программы
управления 6(t), обеспечивающей минимальное время перелета
Tmin между круговыми орбитами. Уравнения и граничные условия
выглядят так (углы в берутся только положительными, перемен¬
ные взяты в безразмерном виде):
г = vr, г(0) = 1, г(Т) = гх,
= —f- I cos3© | + —^ , vr(0) = 0, vr(T) = 0,
г г г
Оо , 1
= — sin в cos в , цДО) = 1, и^(Г) = —— .
г г у/Г\
Угловое перемещение ^ не задано (метод удовлетворения краевых
условий изложен в [В.24, гл. 18, § 2]).
<?«■),град
Таблица 5
Номер по
Автор
Т, сут
I
(в0 = 0,1 см/с3 )
II
(а0 = 0,2 см/с2)
порядку
1
Т. Цзу (логарифми¬
ческая спираль)
250
118
2
Г. Лондон (логарифми¬
ческая спираль)
247
3
X. Капли (градиент)
412,5
4
X. Кэлли (уравнения
Эйлера)
412,5
5
А.Н. Жуков, В.Н. Ле¬
бедев (вариационный
метод)
405
322
6
Т. Джаяраман
445,5
355,4
Расчет, выполненный в [1.34] для гх = 1,52, а0 = 0,1 см/с2 (пе¬
релет к Марсу), проиллюстрирован графически на рис. 22, а. Здесь
представлены программы изменения угла 0(f). соответствующие
нулевому (0), первому (1), второму (2) шагам итерационного
процесса, а также окончательному (°°) решению задачи по методу
градиентного спуска в пространстве управлений. Характер соот¬
ветствующих траекторий перелетов к круговой орбите Марса по¬
казан на рис. 22, б. Кривые 0 и 00 пересекают орбиту Марса неза¬
долго до ее достижения в точке, где выполнится условие по ско¬
рости. Точками 0, 1, 2, 00 на орбите Марса обозначены финальные
точки всех четырех траекторий, причем траектории 1 и 2, не изобра¬
женные на рисунке располагаются между траекторией 0 и орбитой
Марса, не пересекая их.
Применение современных вариационных методов к проблеме
парусных перелетов между орбитами планет мы находим также у
Т. Джаярамана [1.38], использовавшего метод присоединенного
градиентного алгоритма, дающий лучшую сходимость к оптималь¬
ному решению, нежели градиентные методы. Сравнение результа¬
тов [1.36] для полета к орбите Марса с результатами нескольких
упомянутых выше исследований приведено в табл. 5. Действитель¬
но, если А.Н. Жуков и В.Н. Лебедев установили, что времена пере¬
лета к орбите Марса для двух значений а0 из табл. 5 составляют
405 и 322 дня соответственно, то более точный вариационный
метод, примененный в [1.38], дает (после 50 итераций) несколько
большие значения — 445 и 355 дней соответственно. Эти данные
сравниваются и с результатом X. Кэлли для меньшего числа итера¬
ций [1.34], причем расчеты с применением двух различных мето-
99
дов дали в [1.34] одина¬
ковый результат: 412,5
суток. Значения времен
перелетов по логариф¬
мическим спиралям
(Цзу, Лондон) приведе¬
ны для наглядности.
Графики углов уста¬
новки 9(t) солнечного
паруса в оптимальных
и неоптимальных слу¬
чаях из табл. 5 изобра¬
жены на рис. 23. Не
считая горизонтальной
штриховой прямой,вы¬
ражающей постоянное значение угла установки при движении по ло¬
гарифмической спирали (Цзу, Лондон), все оптимальные схемы уп¬
равления парусом по своему характеру похожи друг на друга. Циф¬
ры около кривых соответствуют строкам (фамилия исследователя)
и столбцам (значение ускорения а0) в табл.5. Изобразим схематич¬
но эту примерную программу управления парусом для перелета к
орбите Марса, учитывая, что угол в изменяется в области отрицатель¬
ных значений (рис. 24) . Как следует из рис. 13, в < 0 означает, что
отсчет от направления радиус-вектора к направлению силы тяги
производится против часовой стрелки. Таким образом, в нашем
случае вектор тяги Т на рис. 24 все время как бы идет впереди
радиус-вектора г. В начале движения тяга Т остается некоторое
время близкой к г, а затем поворачивается, и на большей части вре¬
мени полета к орбите Марса радиус-вектор г располагается впереди.
Развитие теории вариационных парусных траекторий мы нахо¬
дим далее в работе К.Г. Валеева [1.39] .исследовавшего локально¬
оптимальное управление углом установки паруса в задаче о поки¬
дании Солнечной системы, т.е. о выходе из гравитационного поля
Солнца. На рис. 25 показаны положения паруса в оптимальной
ориентации, обеспечивающие наибольшее приращение эксцентри¬
ситета исходной орбиты е0 = 0,5 за один гелиоцентрический оборот.
Угол установки паруса выбирался из условия максимума скорости
е изменения эксцентриситета оскулирующей орбиты в каждый
момент времени. При е = 1 аппарат покидает Солнечную систему
по параболической траектории. В работе И.И. Нарожного [1.40]
исследовалась оптимизация движения аппарата с комбинированной
тяговой системой, состоящей из солнечного паруса и добавочного
реактивного двигателя малой тяги (рассматривается плоский меж-
орбитальный перелет к Марсу). Кроме того, в работе В.В. Малани¬
на, С.Е. Мительмана [1.27] рассмотрена проблема оптимального
100
|?(П,г рад
Рис. 23
перехода между компланарными орбитами при малых ушах уста¬
новки в (г), когда система (9.1) принимает вид
^ . V1 а0 1 а0в
г=иг, </> = , ^ +— v[f = +——.
Эта система интегрируется в [1.27] приближенно с помощью соот¬
ношений для спирали с постоянным углом установки в = const.
В разное время теория вариационных траекторий перелетов
с оолнечным паруоом обсуждалась также в обзорных статьях
В.И. Левантовского [1.41], А. Тангея [1.15], Д.Я. Зильмановича
[1.42], а также в книгах В.И. Левантовского [В.16] и Г.Л. Грод-
зовского и др. [В.24]. В работе Г.Г. Полякова [1.43] была оха¬
рактеризована плоская задача о движении космического парусника
с переменной площадью паруса и одновременно с переменным
углом установки: описываются различные частные задания фикси¬
рованного направления скорости или ускорения, которые могут
понадобиться на отдельных участках управляемого полета с солнеч¬
ным парусом, и устанавливается, какой закон изменения площади
паруса может их обеспечить.
Существенное развитие теория построения оптимальных траек¬
торий получила затем в работах К. Зауера [1.44], который произ¬
вел расчеты оптимальных парусных перелетов к Марсу, бенере и
Меркурию и предложил траекторию облета астероида Эрос с после¬
дующим возвращением на Землю. Утверждая, что ускорения а0 =
= 0,05 -г- 0,2 см/с2 находятся на уровне современных технических
возможностей, он вычислил, что при а0 = 0,1 см/с2 космический
аппарат с солнечным парусом может доставить к Венере за 270 су¬
ток полезный груз весом 6,8 т, а за 200 суток — груз весом в 1,8 т.
Сам парус представляет собой квадрат 800 X 800 м, весящий око¬
101
ло 5 т. С помощью этого паруса проектируется доставить к орбите
Марса груз 5 - 7,5 т за 500 - 700 суток и доставить обратно около
200 кг марсианского грунта.
Приближенное аналитическое решение задачи об оптимальном
в смысле быстродействия перелете с солнечным парусом, впервые
учитывающее некомпланарность и эллиптичность планетных орбит,
построили А.Ю. Коган и В.А. Котин [1.45]. Аналитическое решение
краевой задачи им удалось получить благодаря использованию того
факта, что оптимальное решение вариационной задачи близко к ло¬
гарифмической спирали. Сравнение с результатами точных расчетов
показало близкое совпадение результатов. Это позволяет использо¬
вать полученное аналитическое решение краевой задачи не только
в качестве начального приближения для решения точной задачи,
но и для получения оперативных приближенных оценок при прог¬
нозировании траекторий.
§ 10. Пространственная задача
о квазикруговом спиральном межпланетном перелете
Выше рассматривались спиральные траектории межпланетных
перелетов с солнечным парусом (логарифмические или вариацион¬
ные) строго в плоскости эклиптики. Лишь в этом случае вектор
силы тяги паруса целиком располагается в плоскости орбиты, а
плоскость самого паруса перпендикулярна к орбитальной. Развитие
теории парусных перелетов шло, с одной стороны, по линии повы¬
шения точности спиральных решений, а с другой — по линии разра¬
ботки пространственного варианта гелиоцентрических спиралей,
отклоняющихся от плоскости эклиптики под действием отличной
от нуля компоненты силы тяги паруса, перпендикулярной пло¬
скости первоначальной орбиты. Для вывода уравнений про-
вдоль по направлению
странственного движе¬
ния под действием силы
тяги солнечного паруса
необходимо знать углы
ориентации нормали к те¬
невой стороне паруса,
г ^
о мы предполагаем, век¬
тор силы тяги. Введем
так называемую орби¬
тальную систему ортого¬
нальных осей, помещен¬
ную в центр масс
которой находится, как
Рис. 26
102
нашего космического аппарата С, и направим ось С?о по радиус-
вектору, ось Ст?о — по трансверсали в плоскости орбиты, ось Cf0 —
по нормали к плоскости орбиты (рис. 26). Как легко убедиться,
пространственная ориентация нормали п° в предлагаемой системе
определится поворотом на угол вх в плоскости орбиты и поворо¬
том на угол в2 перпендикулярно к плоскости орбиты. Поворот на
угол вх означает, что система C£0Wo£o поворачивается вокруг оси
Cfo и переходит в положение C£xtjifj, в котором оси С%х и Стд
располагаются в плоскости орбиты. Поворот на угол 92 означает,
что система затем поворачивается вокруг оси Ст)х и пере¬
ходит в положение С£2 т?2 Гг > причем ось С£2, с которой мы связы¬
ваем направление нормали п°, покидает плоскость орбиты. Теперь
можно записать направляющие косинусы нормали в системе
CfoPofo в виде
п° { п°, п°, п£}= п° {cos 0, cos в2, sin б, cos в2, - sin 02). (10.1)
В плоской задаче нормаль не выходит из плоскости орбиты, т.е.
02 = 0, а угол 01 совпадает с углом установки 0, которым мы поль¬
зовались в плоской задаче в § 7.
Пусть на солнечный парус площадью А и массой ш, находящийся
первоначально на орбите Земли в нормальной к потоку лучей
ориентации (см. формулы (3.3'), (4.2')), действует сила давления
FN = P33epKA = 2{S3fc)A, (10.2)
ооздающая нашему аппарату на орбите Земли тяговое парусное
ускорение
S3 А А см ,
а0 = 2 — — = 9,28 • 10'6 • (Ю.2')
cm тс
Отношение силы светового давления (10.2) к силе солнечного тя¬
готения, действующей на аппарат, или, что то же самое, отношение
тягового парусного ускорения (10.2') к гравитационному солнеч¬
ному ускорению на орбите Земли, составляет некоторую величину
253 А г\
к= . (10.3)
с т f'Mc
Зная, что солнечное ускорение на орбите Земли 0,6 см/с2 и задавая
парусность аппарата, например, А/т = 103см2/г, получим к = 0,16.
Следовательно, для небольших значений парусности величину к
можно считать некоторым малым параметром, что позволяет при¬
менять соответствующие методы решения уравнений движения в
пространственной задаче. Для оценки величины малого параметра
могут служить формулы
{1,57 • 10'4/4/ш, где А/т выражено в см2/г; ,
т •> (Ю.З)
1,57-10" А/т, где А/т выражено в м /кг.
103
Займемся теперь составлением выражений для компонентов
силы тяги паруса F = F {F^ ,FV,F^} по осям орбитальной системы
С%oPofo, учитывая, что на произвольном расстоянии г от Солнца
сила светового давления на парус с заданным с помощью (10.1)
направлением нормали п° создает ускорение
Компоненты этого тягового ускорения по осям орбитальной систе¬
мы С£0T?0fo мы обозначим через S, Т, W (рис. 27), используя тра¬
диционные небесно-механические обозначения для компонент
возмущающего ускорения по осям орбитальной системы. С по¬
мощью направляющих косинусов (10.1) и формулы (10.3) для
малого параметра эти компоненты ускорения из (10.4) могут
быть приведены к виду (п£ н= S *, п° = Т*, п° = W*):
В данной пространственной задаче динамики космического по¬
лета целесообразно использовать систему смешанных переменных:
часть переменных — полярные координаты в плоскости орбиты,
другие - оскулирующие переменные (оскулирующие орбитальные
элементы). Рассмотрим невращающуюся систему осей, помещен¬
ную в центр масс Солнца и имеющую плоскость эклиптики XOY в
качестве опорной плоскости; ось X направлена в точку весеннего
(10.4)
(10.5)
z
равноденствия. Пусть орби¬
та нашего космического ап¬
парата ориентирована под
Si0 оскулирующим углом ; к
плоскости эклиптики, а дол¬
гота оскулирующего восхо-
Рис. 27
у дящего узла отсчитывается
от точки весеннего равно¬
денствия и обозначена бук¬
вой 12. Пусть v * — оскули-
рующая истинная анома¬
лия аппарата, отсчитывае¬
мая от оскулирующего пе-
104
ригелия я; угол и> — угловое расстояние перигелия л от оскули-
руклцего узла, угол $ = со — оскулирующий аргумент широты,
v — истинная аномалия в невозмущенном движении.
Приняв радиус-вектор аппарата г и его истинную аномалию v
за полярные координаты, характеризующие движение в плоскости
орбиты, запишем соответствующие уравнения движения
г - rv2 = —^fC- + S, r'v + 2'ri>-T, (Ю-6)
имея при этом в виду, что орбитальный кинетический момент оп¬
ределяется соотношением
гЧ=у/гЩ£. (10.7)
где р = а(\ — е2) — фокальный параметр орбиты.
Для составления третьего уравнения движения в проекции на
перпендикуляр к плоскости орбиты установим, с какой угловой
скоростью со наша подвижная орбитальная система осей C£0Vo£o
вращается относительно неподвижной точки О — начала инерциаль-
ной системы, — совпадающей с Солнцем. Перенесем систему
С?oVoto параллельным переносом в точку О и рассмотрим нере¬
гулярную прецессию: угол — угол собственного вращения, 12 —
угол прецессии, / — угол нутации (пересечение орбитальной плос¬
кости с плоскостью эклиптики происходит по линии узлов). В со¬
ответствии с кинематическими формулами Эйлера проекции мгно¬
венной угловой скорости поворота подвижной системы со на
подвижные оси этой же системы таковы (см. рис. 27):
(10.8)
Вектор угловой скорости нутации coj- = i>, направленный перпен¬
дикулярно орбитальной плоскости, изображен на рис. 27.
При определении вектора абсолютной скорости аппарата
v{Uf, vn, Uj-} следует иметь в виду, что этот вектор не должен
содержать компоненты, перпендикулярной плоскости орбиты
(по определению оскулирующей орбиты) :
uf = v?0=0. (10.9)
'wt
с/12 di
sin sin i + •— cos <p
dt dt
«Ч
c/12 di
cos ф sin i sin ip
dt dt
."Г
dv c/12 dy
= cos i +
dt dt dt
Запишем абсолютную скорость точки на расстоянии г от Солнца в
105
виде суммы переносной и относительной скоростей
v = ve + \г = \0 + со X г + V,., (10.10)
где каждый вектор скорости имеет следующие проекции:
\0 = 0, V,. = vr {г, 0,0},
F° v° F0
СО X Г = СО£ COf = { 0, С0{Г, ~OJvr}.
г 0 0
Окончательно находим проекции абсолютной скорости (10.10) на
оси орбитальной системы:
v= = v{r, to$r, - сJ^r).
Сопоставив проекцию = -gjv г с условием оскуляции (10.9),
заключаем, что и)п = 0, т.е. вектор угловой скорости вращения
орбитальной системы около точки О не выходит из плоскости
(£о>?о)- При этом ci,,=0.
Абсолютное ускорение космического аппарата подчиняется тео¬
реме Кориолиса
w = we + w,. + 2<J X v,., (10.11)
где переносное, относительное и кориолисово ускорения опреде¬
ляются соотношениями
we=w0+cjXr + Z5Xve=coXr+c3XcoXr =
V
V0
Г°
1°
v°
О
t
=
“т,
й>{
-г
GJt
0
cof
г
0
0
0
и>{Г
-u>vr
(10.12)
wr = wr{ г, 0,0),
F°
2со X v, = 2 coj
г
Теперь, подставляя (10.12) в , (10.11), остается подсчитать проек¬
цию абсолютного ускорения на перпендикуляр к орбитальной
плоскости wf = щcoj-r = rvco*, после чего можно записать третье
уравнение движения:
V°
0
1
0
0
0
/ dSl
п>[ —
\ dt
di
sin р sin i + cos ip
dt
W,
(10.13)
где соответствующая компонента тягового ускорения W опреде-
106
ляется третьей из формул (10.5). Напомним, что rv -г \JfMcp
на основании (10.7).
Итак, мы записали все три уравнения пространственного движе¬
ния космического аппарата с солнечным парусом в гелиоцентри¬
ческом пространстве. Теперь приведем их к форме, аналогичной
форме классических уравнений Бине, для чего в полученных
уравнениях следует перейти к независимой переменной v.
Для удобства запишем сначала уравнения (10.6) в виде, показы¬
вающем зависимость тягового возмущающего ускорения от г (об¬
ратно пропорциональную г2), а также для наглядности содержа¬
щем малый параметр к в виде линейного множителя, т.е.
fMc fMcK-S* р
г~™ +—2 =-;г0-*■*•),
pnW (10.14)
rv + 2ri> = — , — ,
г г
где обозначения S*, Т*, W* очевидны из (10.5). Обозначив гра¬
витационный параметр Солнца fMc через р (не путать с обозначе¬
нием редукции массы Солнца из § 5) и зная, что r2v = yjpp,
перейдем к новым переменным v и и = г~1 с помощью формул
v^yfppu2, г=-^—,
dv
d2 и ри2 du dp
r=—ppu ,
dv 2 dv dv
/— 2/ “Vm dP „ /— du\
v=y/ppu M — — + 2 \Jpf и ~~ j .
\ 2у/p dv dv ]
Подставляя эти выражения в первые два уравнения (10.14),
получим
d2u p-kS* кТ* du dp 2кТ*
+ u= _ —= . (10.15)
dv pp ppu dv dv pu
В дополнение к полученным уравнениям для плоского движения
необходимо преобразовать к новой независимой переменной v —
истинной аномалии — еще и третье уравнение в (10.14). В качестве
новых переменных удобно выбрать компоненты вектора кинети¬
ческого момента, отнесенные к у/pp, которые мы обозначим
М = sin kp sin /, L = cos tp sin i, К = cos i.
dM d2M
Вычисляя производные , — и пользуясь приведенными
dV dV 107
выше соотношениями для угловых скоростей, придем после тож¬
дественных преобразований к двум уравнениям
заменяющим третье уравнение движения.
Таким образом, вместо трех уравнений (10.14) относительно
независимой переменной t мы пришли к системе четырех уравне¬
ний (два из них типа уравнений Бине), обладающей тем удобным
свойством, что первые два уравнения (10.15) для движения в
плоскости орбиты могут быть проинтегрированы независимо от
двух остальных (10.16). Напомним, что такое расщепление систе¬
мы осуществляется при любом законе изменения компонент воз¬
мущающего ускорения, лишь бы они не зависели от других пере¬
менных кроме и=г~' и невозмущенной истинной аномалии v.
Наши уравнения были выведены для частного случая компонент
ускорения, пропорциональных г-2, вследствие чего приведение
уравнений к форме Бине делается обоснованным. Аналогичные
уравнения пространственного движения, записанные для произволь¬
ных компонент ускорения, приводятся в [В.24, с. 104-105].
В уравнениях (10.15) - (10.16) нелинейным оказывается только
первое уравнение.
Присутствие в правых частях уравнений малого параметра к
позволяет применить для решения такой системы соответствующие
методы построения решений. Переходя к обсуждению проблемы
построения решений уравнений пространственного парусного дви¬
жения, обратимся к истории вопроса.
Впервые попытку построения аналитических решений уравнений
пространственного движения с солнечным парусом вблизи плос¬
кости эклиптики мы обнаруживаем в работе [1.46], где решения
строились в виде асимптотических рядов по степеням малого пара¬
метра и за первое приближение принималась плоская логарифми¬
ческая спираль. Наиболее полное развитие на сегодняшний день
задача о построении асимптотических решений по степеням малого
параметра (безразмерного модуля силы тяги паруса) для гелио¬
центрического движения по квазикруговым траекториям получила
в работах Дж. ван дер Ха и В.Моди [1.47, 1.48]. Здесь в качестве
первого приближения опять выбиралась плоская логарифмическая
спираль, а возмущение плоского движения предполагалось проис¬
ходящим за счет постоянной по величине компоненты силы тяги,
направленной по нормали к плоскости орбиты.
Выбор уравнения плоской спирали в качестве первого прибли¬
жения в процессе построения решений уравнений типа (10.15) —
(10.16) связан прежде всего с выполнением условий, налагаемых
108
d2M
kW'K dK kW* dM
dv2
+ M =
ppu ’ dv ppu dv
(10.16)
на скорость спирального движения, т.е. на величины ее радиальной
и трансверсальной проекций. Действительно, если искать решения
системы уравнений пространственного движения, задавая сначала
решения плоского движения в виде логарифмической спирали
r(v) = r0eCcnV = r0ev ct* “, (10.17)
то необходимо потребовать, чтобы радиальная и трансверсальная
скорости выхода подчинялись начальному условию
ГсЦ /оГ
г = сспу/ , rv= V . (10.18)
г г
Подстановка этих условий, преобразованных к форме ри =С=const
и du/dv = — сспм, в уравнения позволяет определить эти произволь¬
ные постоянные в виде рядов
ссп = 2кГ* [1 + к5* +К2(5‘а + 2Г*2) + ...],
(10.19)
С- 2кТ /ссп
и установить спиральные углы (см. § 7)
a =arcctgccn, 0 = 90° - а = arctgccn.
Решение уравнений пространственного движения, выполненное в
работе [147] на базе спирального решения (10.17) - (10.18),
имеет вид (с учетом обозначений В - к W* С"1 )
r(v) = 'о ехР (Ссп v)> P(v) = Cr(y),
M{v) = B( 1 + B2Jl [1 - cos(vTTfiT^)],
(10.20)
L(y) = Д(1 + В2 Г 1 sin (VI + B2v),
K(v) = ( \ + Я2)М[1 +52cos(Vl +B2t>)].
Первые два уравнения из (10.20) совместно с (10.19) показы¬
вают, что при Г> 0 спираль раскручивается наружу, а при Т< 0 —
закручивается внутрь. Три последние уравнения из (10.20) ха¬
рактеризуют ориентацию орбитальной плоскости в процессе спи¬
рального движения. Их можно представить в виде функций ис¬
тинной аномалии:
1 — 2В2 sin2!
^т)
i (у) = arccos
1 +В
П(и) = v — arctg
tg^/TTF- j
Vi +в2
(10.21)
109
Разложение П(у) по степеням малого параметра к ведет к соот¬
ношению
П(у) = — v + 0(к2), v £ [0, 2jt],
показывающему, что линия узлов прецессирует в сторону орби¬
тального движения с угловой скоростью, близкой к половине
орбитальной угловой скорости аппарата, т.е. Следова¬
тельно, через два квазикруговых спиральных оборота траектория
раскрутки снова вернется в плоскость эклиптики, заняв перво¬
начальное положение. Периодическим образом изменяется и на¬
клонение /: максимальное значение/т>х, как следует из(10.21),
достигается при значении истинной аномалии v =n/\J1 + Bi, т.е.
вблизи v - п, затем наклонение возвращается к начальному нуле¬
вому значению при v - 2я/\/1 + В 2.
Таким образом, в результате проведенного в [1.47] исследо¬
вания задачи о пространственной парусной раскрутке при неизмен¬
ной компоненте тягового ускорения W было установлено, что в
ориентации орбиты относительно эклиптики не появляется ника¬
ких вековых эффектов, т.е. в результате прецессии орбита перио¬
дически возвращается в исходное положение. Эта прецессия плос¬
кости раскрутки около плоскости эклиптики изображена на
рис. 28: плоскость эклиптики обозначена штриховой линией,
тремя сплошными дугами изображены три мгновенные положения
оскулирующей орбитальной плоскости раскрутки. Штриховая
прямая показывает направление, соответствующее экстремальным
значениям /:/ =0, i = fmах- Изображенный случай соответствует
углу в2<0 и направлению компоненты ускорения W вдоль по
положительному направлению оси OZ, т.е. ^>0 (эти направления
110
указаны на линии эклиптики стрелками). Как видно из схемы,
кинетический орбитальный момент К прецессирует около оси OZ,
направление движения К показано стрелкой: прецессия является
нерегулярной вследствие переменности угла нутации i (малая
окружность показывает раствор конуса нутации).
Исследование плоской траектории спиральной раскрутки, опи¬
сываемой первыми двумя уравнениями из (10.20), производилось
в [1.47] путем аппроксимации квазикруговой спирали (10.17)
некоторым эволюционирующим семейством оскулирующих эллип¬
сов. Уравнение этого семейства для текущего значения истинной
анамалии v = vt имеет вид
Cexp(ccni>)
(10.22)
1 +е, cos(i>i - со,)
где эксцентриситет и угловое расстояние соответствующего пери¬
гелия от узла подчиняются соотношениям
е, = х/ссп ехр(—2сспг,) + (1 - С)2,
(10 22)
со, = г, - л + arctg[ccn(l — Су1 ехр(—ccni>i)].
Если первоначально эксцентриситет оскулирующего эллипса яв¬
ляется величиной порядка малого параметра к , то с увеличением
аномалии v он медленно убывает: траектория раскрутки превра¬
щается в квазикруговую. Перигелий оскулирующего эллипса дви¬
жется в сторону орбитального движения аппарата, отставая от ап¬
парата на угол, значение которого лежит в интервале [ ir/2, я] при
Т> 0 и в интервале [я, Зтг/2] — при Т < 0. Таким образом, в пер¬
вом случае перигелий как бы отстает от аппарата, во втором — до¬
гоняет его. При v оказывается, что с*>, - v — п, т.е. перигелий
стремится расположиться напротив аппарата.
Задача об определении оптимальных углов в , и в2 установки
солнечного паруса в пространственной задаче решалась в [1-47]
как задача о максимальном радиальном удалении аппарата от на¬
чальной круговой орбиты за произвольное время. Оказалось, что
это требование выполняется для плоской траектории, когда в2 ~ 0,
W = 0. Оптимальное значение угла в ,, тождественного теперь углу
в для плоской задачи (см. рис. 9), определялось в результате мак¬
симизации по углу управления некоторого коэффициента ct из
выражения для гелиоцентрического радиус-вектора аппарата как
функции времени
'■(«') = '■о (1 + С,ГД2/2)2/3.
Оказалось, что оптимальное значение угла в, определяется из
условия [1.47]
ът* Г . у ; ;—;1Э5’
8КТ* • + \1-kS - \/(1-к5*)г-8к2Г*2 =0. (10.23)
Э0, L J Ъв,
111
Решение этого уравнения относительно в t было выполнено в
[1.471 в виде асимптотического ряда по степеням малого парамет¬
ра к:
01 -б,)0 +К01,1 ...
Подставляя этот ряд в (10.23) и производя разложения в ряд Тей¬
лора в окрестности в 10, авторы получили решение для угла уста¬
новки в плоском случае квазикругового спирального перелета в
виде многочлена, взятого с точностью до к3:
где К1, К2, К3 - коэффициенты, являющиеся функциями физи¬
ческих параметров паруса.
Подстановка решения (10.23') в выражения (10.19) позволила
вычислить постоянную ссп, а затем спиральный угол Р = arctgccn,
закон изменения которого может быть представлен непрерывной
функцией
где е - отражательная способность паруса, Q/ - коэффициенты.
Из (10.24) очевидно, что при е -* 0 (неотражающий парус), спи¬
ральный угол /3 -*■ 0 (а -*■ л/2), раскрутки не происходит и траекто¬
рия оказывается замкнутой. При малых к (небольшая сила тяги
паруса) значение угла установки в i асимптотически стремится к
постоянному значению в ■ = 35,26°. Небольшими к (см. формулу
(103')) можно считать к 0,15 для А/т = 1000 см2/г. Напом¬
ним, что значение - 35,26° было получено ранее И.И. Меркуло-
в 1 = arc sin
(10.23')
0 = KeQ1(l +kQ2 +к2£?з) + <?(к4),
(10.24)
вым в [1.30] из условия мак¬
симизации проекции силы
тяги на направление скорости
при малом эксцентриситете
траектории. Это значение явля¬
ется предельным для малых е,
соответствующих квазикруго-
вому движению.
Итак, плоская задача о
выборе спиральной траекто¬
рии рассматривалась здесь как
частный случай пространствен¬
ной задачи, причем для плос¬
кого решения предельным
оказался случай постоянного
угла ориентации, уже рассмот¬
ренный в § 7, т.е. |0| = 35,26°.
Соответственно и кривые, ил¬
люстрирующие решения, во многом идентичны по своему характе¬
ру ’’классическим” кривым для постоянного угла установки (см.
§ 7). Действительно, на рис. 29 в верхней части графика изображе¬
ны кривые значений 0ionT для плоской траектории (02 = 0, W= 0)
в виде функции малого параметра к (нижняя шкала) или соответ¬
ствующих значений полного ускорения аппарата а0 (верхняя шкала).
Четыре кривых соответствуют различным значениям отражающей
способности поверхности паруса е от 0,25 до 1. Легко видеть, что
предельное значение 0] =35,26° соответствует нулевому тяговому
ускорению паруса, т.е. замкнутой траектории и нулевому спираль¬
ному углу (0 = 0). Если ускорение а0 увеличивается, а с ним и
малый параметр к, то неограниченно увеличиваются значения спи¬
рального угла /3 (кривые внизу рис. 29). Очевидна смысловая
идентичность этих графиков с графиками из § 7, вх =0.
Спиральная квазикруговая плоская траектория гелиоцентри¬
ческой раскрутки для параметра к = 0,15 и зеркального отраже¬
ния паруса (е = 1) изображена на рис. 30. Точками на траектории
отмечены сроки (в годах) достижения гелиоцентрических расстоя¬
ний г (а.е.). Графики на рис. 31 показывают перспективность
применения квазикруговых спиралей для межпланетных перелетов
с малой тягой солнечного паруса в зависимости от величины к.
Например, даже при небольшой парусности А/т = 100 см2/г
(к = 0,015) аппарат достигает орбиты Марса за 9 лет, а орбиты
Венеры - за 4 года. Кривые для более высоких значений парус¬
ности, т.е. для больших к, показывают значительно более корот¬
кие сроки достижения планетных орбит.
113
Изложенные выше результаты относятся к плоским спиралям
(в2 = О, W = 0). Однако в [1.47] было доказано, что если про¬
странственная ориентация паруса определяется двумя углами
01 и 02, отличными от нуля, в результате чего появляется отлич¬
ная от нуля нормальная к плоскости орбиты компонента силы
тяги, то все вышеизложенные результаты относятся и к простран¬
ственным спиралям, но только в случае, если компонента W оста¬
ется неизменной по величине.
Вывод о прецессии оскулирующей орбиты, аппроксимирующей
пространственную квазикруговую траекторию раскрутки (см.
рис. 28), оказался негативным с точки зрения применимости
солнечного паруса для выполнения маневра разворота плоскости
траектории раскрутки на большие углы (маневра непрерывного
удаления этой плоскости от плоскости эклиптики). Для решения
этой задачи тем же способом малого параметра в [1-47] было пред¬
принято дополнительное исследование, позволившее установить,
каким должно быть управление парусом, т.е. углами 01 и 02,
чтобы уверенно обеспечить вековые изменения положения плоско¬
сти орбиты, не налагая одновременно никаких ограничений на про¬
странственное положение нормали к парусу п. Удалось установить,
что при выполнении ограничений на скорость (10.18), т.е. для
класса частных начальных условий, вековые изменения ориентации
плоскости орбиты достигаются при управлении парусом, обеспе¬
чивающим периодические переключения направления компоненты
W с ”+” на ” в упомянутых выше стационарных точках
vk = ктт/ + В2, к = 0, 1, 2, . . .
Тогда управление нормальной компонентой ускорения модели¬
114
руется по закону
w = f |W|, 02 < 0, v2j< v< v2j^i,
1-1^1, 02 >0, я2/+, < v< v2h2, / = 0,1,2,...,
(10.25)
т.е. угол 02 на рис. 32 в точке v2 ’’мгновенно” изменяется с — 02
на +02, причем угол в{ и компоненты силы тяги S и Г остаются
неизменными. При таком законе управления происходит непре¬
рывный поворот плоскости орбиты, а траектория конца прецес-
сирующего вектора кинетического момента представляет собой
серию незамкнутых полуокружностей на рис. 32. Линия узлов
мгновенной оскулирующей орбиты расположена на угловом рас¬
стоянии 90° от точек переключения и совершает малые колебания
около направления v = 7г/2 + О (к) = v2 — я/2 = я/v4 + В2 — я/2,
периодически возвращаясь в прежнее положение.
В задаче о попеременном переключении управления по закону
(10.25) удалось рассмотреть несколько случаев эволюции орбиты
спирального межпланетного перелета, однако наиболее интерес¬
ными в практическом отношении оказались следующие два:
1) задача о развороте плоскости исходной круговой гелио¬
центрической орбиты на 180° без изменения радиуса этой орбиты
с последующим выходом на исходную круговую орбиту при изме¬
ненном на противоположное направлении орбитального движения;
2) задача об аналогичном развороте, но с одновременным су¬
щественным радиальным удалением от первоначальной орбиты.
Первая задача формулируется как задача о фиксированном
угле установки паруса при выполнении условий
0,=О, 02=±arcsin(V^/3) = ±35,26°,
Т = 0, W= ivmax = const,
доставляющих максимум скорости разворота плоскости орбиты
при ее неизменном радиусе. Такую вырожденную пространствен¬
ную спираль, витки которой расположены на одинаковых гелио¬
центрических расстояниях, иногда называют ’’орбитой-махови¬
ком”. Расчеты [1.47J показывают, что для разворота плоскости
на 180°, т.е. перемены направления орбитального движения на
обратное, при г0 = 1 а.е. и к = 0,15 требуется 14 лет, а при
г0 = 0,5 а.е. и том же к - всего около 5 лет. (Именно такой ма¬
невр на еще меньших гелиоцентрических расстояниях будет опи¬
сан ниже в § 12, где будет охарактеризована ’’орбита-маховик”
аппарата с солнечным парусом, необходимая, например, для ма¬
невра перехода в плоскость кометной орбиты, имеющей обратное
по отношению к движению Земли гелиоцентрическое направле¬
115
ние орбитального движения.) Ход увеличения наклонения / к
плоскости эклиптики в процессе маневра разворота изображен
на рис. 33 для ряда значений к при одном из вариантов закона
управления (J0.26).
Вторая, более общая по своей постановке задача о кваэикру-
говом пространственном спиральном перелете с выполнением
маневра разворота плоскости орбиты при одновременном ради¬
альном удалении от Солнца с выполнением частных начальных
условий по скоростям может быть сформулирована двояким
способом. Это либо задача максимизации угла отклонения /' плос¬
кости орбиты от ее начального положения при фиксировании
требуемого радиального удаления от орбиты Земли, либо обрат¬
ная задача (задача о максимизации (или минимизации) гелио¬
центрического расстояния аппарата при фиксированных углах
установки вх и 02. обеспечивающих разворот плоскости орбиты
на требуемый угол /'). Оба эти варианта сводятся к задаче макси¬
мизации трансверсальной проекции тягового парусного ускоре¬
ния Т(0!, 02) при постоянной нормальной тяговой компоненте
IV = const, и наоборот. В обоих случаях, как показано в [1.47],
управление углами установки паруса обеспечивается при выпол¬
нении условия COS20)COS202 = 2/3.
Теория спиральных траекторий с фиксированными углами
установки паруса получила в [1.47] дальнейшее развитие в про¬
цессе построения более общей асимптотической теории парусной
раскрутки с по-прежнему фиксированными, но уже произвольны¬
ми углами установки и без ограничений на скорости, т.е. для про¬
извольных начальных условий выхода на траекторию раскрутки.
Полученные асимптотические решения [1.47] позволяют надежно
обеспечить долгопериодическое прогнозирование движения, осо¬
бенно для небольших эксцентриситетов.
Применение асимптотических методов для построения опти¬
мальных парусных траекторий, расположенных в плоскости эклип¬
тики, мы находим в работе тех же авторов [1.48]. Здесь урав¬
нение спирали не использовалось, а теория парусной раскрутки
строилась на базе уравнений эллиптического движения. Уравнения
движения принимались в форме (10.15), причем в целях избежания
особенностей при нулевых эксцентриситетах вводились новые,
медленно меняющиеся переменные — компоненты вектора Лапласа
h - е cos со, / = е sin со. В этих переменных инверсия радиус-вектора
и = г~1, входящая в уравнения (10.15), выразится в виде и(у) =
= р-1 (1 + Л cos у + / sin г). Если ввести обозначения
Ф(р) = hcoiv + hmv, ф(н) =hs\nv - Icosv, (10.27)
то вместо первого уравнения (уравнения Бине) из системы (10.15)
116
можно записать два автономных уравнения первого порядка
^Ф(п)
dv
= -Ф + 2к7’*,
d^iv)
dv
= Ф +
/ 7”Ф \
к (S’ + 1 •
\ 1+Ф /
В работе [1.48] эти уравнения приводились далее к двум пере¬
менным L = In д, /Г = —1/а (полная энергия), после чего были
поставлены и решены следующие две вариационные задачи локаль¬
но-оптимального управления углом установки паруса:
1) какое оптимальное управление парусом обеспечивает макси¬
мальный прирост большой полуоси, т.е. прирост полной орбиталь¬
ной энергии, за один гелиоцентрический оборот аппарата;
2) какое оптимальное управление парусом обеспечивает макси¬
мальный прирост фокального параметра оскулирующего эллипса,
т.е. максимальный прирост орбитального кинетического момента
за один оборот.
При решении обеих этих задач оптимальное управление отыски¬
валось в виде асимптотических рядов по степеням малого пара¬
метра
9 (у) = 90(у) + к 0 г (i^) + 0(к2). (10.28)
Здесь решение нулевого приближения по малому параметру нахо¬
дилось методом итерации, причем за принималось ’’клас¬
сическое” значение постоянного угла в на логарифмической спи¬
рали: 6%1) = 35,26°. Выражение для оптимального управления
Рис. 34
в нулевом приближении, найденное в [1.48], имеет вид (с учетом
обозначений (10.27))
1 . [(1 + Ф0)\/9^ + 8(1+Фо)2 )
0О (") = — arcsrn < f •
2 [ 3[Ф8+(1 +Ф0)2] i
Решение 6t(v) из [1.48] вследствие его громоздкости мы не при¬
водим. Использование предлагаемого в [1.48] оптимального управ-
117
ления (10.28) обеспечивает раскрутку с начальной круговой
орбиты Земли (е0 =0), при которой большая полуось орбиты
аппарата изменяется в соответствии с формулой
а(2п) =д0ехр|4,8368к + 0(к2)].
Иллюстрацией оптимального управления парусом в двух выше
сформулированных задачах локально-оптимального режима рас¬
крутки служат графики угла eonr(v) на Рис- 34, а (максими¬
зация приращения а) и на рис. 34, б (максимизация прираще¬
ния р) на одном гелиоцентрическом обороте траектории раскрутки
для схода с первоначальной орбиты различного эксцентриситета
(е0 = 0, с0 = 0,2). Как видно из графиков, различия в схемах
управления парусом растут по мере увеличения е0. Оптимизация
управления солнечным парусом позволяет также сделать вывод,
что, если не ставить целью решение вариационной задачи быстро¬
действия (см. § 9), а ограничиться задачами локально-оптималь¬
ного управления солнечным парусом, диктуемыми соображе¬
ниями наивыгоднейшей энергетики парусного движения, то ’’клас¬
сическое” оптимальное значение утла установки паруса на лога¬
рифмической спирали в = 35,26° (см. § 7) дает хорошее прибли¬
жение к оптимуму.
§ 11. От плоского паруса — к системе парусов-зеркал.
Износ солнечного паруса
Расчеты, проведенные Ф.А. Цандером [В. 11], относились к плос¬
ким зеркалам-дискам и были ориентированы на уровень разви¬
тия техники 20-х годов. Ф.А. Цандер предполагал, что эти диски
смогут быть изготовлены из тонких листов металлической фоль¬
ги, причем для химически чистого алюминия (плотность 2,6 г/см3)
предлагались толщины листов 10-3 мм (вариант I в табл. 6) и
10“4 мм (вариант II). Для них он вычислял площади и массы экра¬
нов-дисков при заданном начальном ускорении а0, необходимом
для достижения заданных орбит планет. Приведем некоторые
цандеровские параметры из [В.11, с. 374]:
Таблица 6
Физическая величина
Марс
Юпитер
Сатурн
Площадь паруса А, км’
0,1496
0,351
0,389
Радиус диска р, км
0,218
0,334
0,351
Масса паруса pij, кг
389
912
1013
Масса паруса /л^.кг
156
365
405
Угловая скорость осевого
7,90
5,12
4,86
вращения я, рад/мин
118
Ф.А. Цандер планировал транспортировать полезный груз около
1000 кг к орбите Марса, и в его проекте отношение поверх¬
ность/масса самого паруса
А 0,15 ■ 1010 см2 , см2
0,4 • 106 г
4• 103 СМ
а полная парусность конструкции
А 0,15 1010 см2 , см2
о = ■ — = — % 10 >
[m, + 1 • 10 ] г 1,4 • 106 г г
т.е. в четыре раза меньше. Эта парусность входит в формулу для
расчета ускорения, поэтому для зеркального отражения (е = 1)
получим
<7о=0,46 •10-4'^J (1 + е)а ~ = 0,92 • 10-4а *»0,1 ™
(сравнить с табл. 2 из § 6). Однако сам Ф.А. Цандер принимал
нагрузку на парус равной не 9,2 г/м2 (для е = 100%), а 6,8 г/м2,
исходя из того, что ’’давление равно лишь 0,75 от того, которое
дает вполне отражающее зеркало” [B.l 1, с. 371]. Это в свою оче¬
редь соответствует отражательной способности е = 0,48 < 50%
и ускорению а0 = 0,68 • Ю“4а = 0,075 см/с2. Именно с таким на¬
чальным ускорением на орбите Земли должен был по проекту
Ф.А. Цандера начать двигаться металлический парус-диск с диа¬
метром около 450 м, массой около 400 кг, площадью 0,15 • 106 м2,
толщиной 10"3 мм, чтобы транспортировать на орбиту Марса
полезный груз массой в 1000 кг. Для создания жесткости круг¬
лых зеркальных листов следовало приводить их во вращение,
так как, по замыслу Ф.А. Цандера, ’’экраны должны вращаться
вокруг центральных осей для придания им жесткости” [В.8, с. 268].
Предлагаемые [В-11 ] значения постоянных угловых скоростей
осевого вращения парусов-дисков п, предназначенные и достаточ¬
ные, по расчетам Ф.А. Цандера, для обеспечения жесткости, при¬
ведены в табл.6.
Сопоставляя расчеты Ф.А. Цандера с параметрами современ¬
ных парусных проектов, необходимо отметить, что хотя его рас¬
четы физических параметров парусов во многом представляют
сейчас уже исторический интерес в техническом отношении, од¬
нако значения парусностей и ускорений, необходимые для расче¬
тов цандеровских перелетов по эллиптическим траекториям,
остаются неизменными, так как они всецело диктуются динами¬
ческими соображениями. Следовательно, может идти речь только
о том, какими современными средствами и при каком техничес¬
ком вооружении можно реализовать нужные значения парусности.
119
Резко возросший в 60-х годах научный интерес к разработке
парусных проектов был обусловлен не только осуществлением
выхода человечества в космическое пространство и сопутствую¬
щими успехами в его освоении, но и существенными достиже¬
ниями в области химико-технологических процессов производства
синтетических полимерных пленок, которые, по мнению исследо¬
вателей, были единственным перспективным материалом для
изготовления солнечных парусов. Итак, на смену первым проек¬
там солнечных парусов — жестких металлических зеркал - пришли
проекты обширных пленочных конструкций различной формы.
Наипростейшая пленочная конструкция паруса, не требующая
каркаса, — шар-баллон, надувающийся газом на орбите, — была
предложена К. Эрике [1.4-1.6] еще в 1956 г. Однако, несмотря
на достаточную простоту исполнения, парус-баллон со стационар¬
ной геометрией обладает двумя основными недостатками - не¬
управляемостью и невозможностью регулировки силы тяги вслед¬
ствие стационарности формы. Эти недостатки означают динами¬
ческую пассивность паруса и потому его ограниченную пригод¬
ность для применения в качестве маршевой силовой установки
для межпланетных перелетов. Напомним, что поперечное потоку
света произвольное сечение паруса-баллона в динамическом отно¬
шении тождественно плоскому парусу в цандеровской ориентации,
выполняющему движение по кеплеровой орбите (’’адекватный”
парус).
Хотя пассивные сферические баллоны прекрасно зарекомен¬
довали себя в роли спутников-отражателей для целей радиосвязи
[1.49], однако проект паруса-баллона для целей межпланетных
перелетов больше уже не привлекал внимания исследователей.
Но спустя почти 20 лет после проекта К. Эрике идея паруса-бал¬
лона в модифицированном варианте ’’пульсирующего” баллона
(баллона с переменной геометрией) снова встречается в публика¬
циях. На этот раз речь идет об использовании баллона с перемен¬
ным радиусом для целей вспомогательных орбитальных маневров
или коррекции орбиты (более подробное обсуждение этих проек¬
тов будет приведено в § 16 и 17)*) .
*) Своеобразная и остроумная модель такого управляемого сферичес¬
кого паруса переменной геометрии нашла свое отражение также и в научной
фантастике, в романе французского писателя Пьера Буля’’Планета обезьян”
11.51]. Незаурядную изобретательность проявил герой этого романа - кос¬
моплаватель Джинн: ”На сферическом парусе его корабля располагалось
множество черных шторок, которые сворачивались или разворачивались
по воле рулевого: при каждом таком маневре отражающая способность опре¬
деленных секций паруса менялась, и одновременно менялось направление
равнодействующих сил световых потоков. Кроме того, эластичная сфера-
120
Начиная с конца 50-х годов прочные позиции на много лет
завоевывают проекты плоского (круглого или квадратного) зер¬
кального паруса, выполненного из тончайшей полимерной пленки,
натянутой на легчайшем жестком каркасе. Эти многочисленные
проекты являлись современными модификациями проекта цан¬
деровских листов-зеркал и удовлетворяли всем динамическим
требованиям, предъявляемым к управляемому солнечному парусу,
выполняющему роль силовой маршевой установки. При одинако¬
вой с баллоном парусности плоский парус, ориентированный нор¬
мально к солнечным лучам, развивает в два раза большую силу
тяги, нежели баллон. Большинство авторов научных статей по ди¬
намике полета с плоским солнечным парусом вообще не детали¬
зировали конструктивные особенности плоского паруса, решая,
по сути дела, только модельную задачу о движении под действием
силы тяги, развиваемой отражающей управляемой пластиной.
В действительности для обеспечения жесткости и устойчивости
пленочного экрана любой формы обязательно требуется пирами¬
дальная система стоек и растяжек, удерживающих каркас с на¬
тянутой на него пленкой. Все это усложняет конструктивные
особенности паруса, связанные с управлением по трем осям, т.е. с
точностью реализации требуемого закона ориентации паруса, а это
в свою очередь может оказать существенное влияние на динамику
орбитального движения с парусом.
Наиболее полная информация, касающаяся различных сторон
современного состояния проблемы постройки ’’солнечного па¬
русника” приводится К. Зауэром [1.44]. Он полагает, что на уров¬
не современных технических возможностей уже находится обеспе¬
чение тяговых ускорений а0 = 0,05 ^0,2 см/с2 при удельной на¬
грузке на парус около 7-8 г/м2. Упомянутый диапазон уско¬
рений вполне достаточен для выполнения полета к орбитам Марса
и Венеры, как предлагается К. Зауэром, с помощью квадратного
паруса, удерживаемого ферменной конструкцией площадью
0,64 - 10б м2 (размерами 800 X 800 м2), массой около 4700 кг
вместе с каркасом и аппаратурой, причем масса самой синтети¬
ческой пленки составляет около 2000 кг, аппаратуры - 500 кг
(поверхностная плотность паруса 0,033 г/см2). Двигаясь по ло¬
парус могла по команде растягиваться или сокращаться: так, если Джинн
хотел ускорить ход, он увеличивал диаметр оболочки до предела, тогда
огромная площадь паруса вздувалась под напором световых потоков, и яхта
устремлялась в глубь вселенной с безумной скоростью. Если же Джинн хо¬
тел замедлить ход, он нажимал другую кнопку. Сферический парус сжи¬
мался настолько, что в кабине можно было сидеть, лишь тесно прижавшись
друг к другу. Давление световых лучей почти не влияло на крохотный
шарик и, предоставленный самому себе, он словно повисал в пустоте на
невидимой нити” (см. также заметку 11.50]).
121
гарифмической спирали, такой космический аппарат способен
доставить на орбиту Венеры полезный груз в 7000 кг за 270 дней,
а 2000 кг - всего за 200 дней. Полет к орбите Марса с грузом
5000 — 7500 кг можно осуществить за 500 — 700 сут и доставить
на Марс посадочно-взлетный отсек массой 550 кг для забора грунта
с поверхности. Таким способом на Землю может быть доставлено
единовременно 160 кг марсианских пород. При увеличении сто¬
роны квадратного паруса до 2000 м на орбиту Марса за то же
время можно будет доставить 25 т груза и даже за 800 - 100С сут
реалиэоватышлотируемый полет. Расчет показывает, что отношение
поверхность/масса составляет А/т ^ 1,4 ■ 103 см2/г, а полная па¬
русность проекта для груза 5 т составляет [1.44] о =0,6 ■ 103 см2/г.
Сравнение этих цифр с приведенными выше цифрами, заимство¬
ванными из расчетов Ф.А. Цандера для металлических зеркал
[В.11], показывает близость соответствующих значений уско¬
рений. С одной стороны, это свидетельствует о размахе творческой
научной мысли замечательного ученого, предвосхитившего в свое
время прогресс космической техники на много лет вперед. С дру¬
гой стороны, это показывает, что технические возможности сегод¬
няшнего дня, связанные с успехами в технологии производства
эластичных пленок, несут с собой реальные возможности и пер¬
спективы для осуществления мечты Ф.А. Цандера.
Интересная сравнительная оценка эффективности солнечного
паруса и ионного двигателя была проведена в работах И.А. Мер¬
кулова и др. [1.30-1,32], где были установлены общие критерии,
позволяющие определить, какой из методов использования сол¬
нечной энергии для движения аппарата более предпочтителен
и в каких задачах: солнечный парус или солнечная батарея, пи¬
тающая электроракетный двигатель. В частности, обсуждался
вопрос [1.31] о сравнении весовых характеристик солнечного
паруса и ионного двигателя, развивающих одинаковые тяговые
усилия и имеющих источником энергии плоский солнечный экран
(парус или батарею). Ставилась задача [1.32] выявить влияние
параметров обоих типов солнечного экрана на преимущества
конструкции космического аппарата в весовом отношении при
одинаковых тяговых усилиях. Библиография и результаты ис¬
следований ряда авторов, сравнивавших в разное время длитель¬
ность полетов по оптимальным траекториям космических полетов
с солнечным парусом и с ионным двигателем, приведены в [1.38].
По сравнению с данными табл. 5 для разных вариантов парусных
перелетов (250—445 сут) перелет с ионным двигателем занял был
195—222 сут.
Цандеровская концепция ординарного плоского паруса-зкрана
предусматривала сложную схему управления этим экраном, т.е.
122
его ориентацией в пространстве, обеспечивающей выполнение
заданного траекторного маневра. Мысль исследователей затем
пришла к идее усиления динамической эффективности солнеч¬
ного паруса не за счет технологических улучшений его физических
параметров, а за счет постройки и проектирования комбинирован¬
ной системы отражающих парусов-зеркал. В этой последователь¬
ности развития идей повторилась логическая схема развития твор¬
ческой мысли самого Ф.А. Цандера, который от рассмотрения па¬
раметров ординарного паруса-экрана необходимо пришел к рас¬
смотрению связанной системы нескольких зеркал, смонтирован¬
ных на одной опорной конструкции. Его исследование ”0 давле¬
нии света на комбинированные зеркала”, включенное в публика¬
цию [В.11] и органически с нею связанное, содержит две основ¬
ных проблемы:
1) проблему зависимости эффективности системы зеркал от
геометрии установки, которая может быть угловой (совместной)
или раздельной (рис. 35 и рис. 36) ;
2) проблему ’’приближения к источнику света”, т.е. подбора
таких наклонов зеркал, чтобы результирующая сила давления,
как бы мала она ни оказалась, была направлена строго к источни¬
ку света.
Развитие первой цандеровской проблемы в современных иссле¬
дованиях мы находим в виде подробно разработанной схемы двух
раздельно установленных плоских солнечных парусов, предлагае¬
мой в работах, выполненных В.В. Маланиным с соавторами [1.52—
1.54]. Такая система зеркал, будучи шарнирно связанной, управля¬
ется с помощью вращения. Динамическое описание задачи дается
с учетом затемнения дальнего паруса DG (рис. 36) и действием
отраженного от него светового потока на ближний парус АС. На изо¬
браженной схеме [1.53] F — сила давления на ближний парус,
F, и F2 — силы давления на освещенные участки дальнего паруса,
в
Рис. 35
Рис. 36
123
F3 — сила давления отраженного потока. Одновременно для случая
постоянных углов установки зеркал рассматривается и собственно
цандеровская схема угловой установки зеркал (рис. 35).
Таким образом, исследования Ф.А. Цандера в 20-е годы по срав¬
нительной энергетике различных систем зеркал не только не поте¬
ряли к настоящему времени своей актуальности, но и позволили
на их базе выполнить расширенные современные исследования
параметров систем и принципов управления ими. Эти исследования
показали целесообразность усиления тяги паруса не за счет увели¬
чения размеров его поверхности, а за счет теоретически обоснован¬
ного подбора геометрической схемы отражения системы комбини¬
рованных зеркал. Весьма интересное исследование второй цанде-
ровской проблемы предлагается в работе А.П. Скопцова [1.55],
результаты которой нашли свое отражение в книге В.В. Белецко¬
го [В.17]. Здесь речь идет о комбинированной системе зеркал,
представляющей собой ’’наилучший” с энергетической точки зрения
парус. Однако наибблее существенный результат этого исследова¬
ния, непосредственно связанный со второй цандеровской пробле¬
мой, относится к анализу энергетики падающего и отраженного по¬
токов в случае произвольной конструкции ’’наилучшего” паруса.
Пусть Ki — главный вектор количества движения светового
потока, падающего на систему зеркал (рис. 37), К2 — тот же век¬
тор для отраженного от системы светового потока. Результирую¬
щая сила светового давления Р совпадает с направлением прира¬
щения
AK=Kt ~К2 =К, +(-Kj). (11.1)
Очевидно, что идеальной ’’наилучшей” комбинированной системой
парусов-зеркал произвольной конструкции, монтировки и формы
(плоских или выпуклых) является такая конструкция, при
которой выполняются условия:
1) I Ki | = ( К* | (отражение зеркальное);
2) величина количества движения |Kj| остается неизменной
независимо от того, куда направлен К2.
124
Итак, основное требование, предъявляемое к ’’наилучшему”
парусу, состоит в том, чтобы устранить главный недостаток плос¬
кого зеркала, сводящийся к тому, что любой поворот К2 относи¬
тельно Ki обязательно является следствием изменения паруснос¬
ти, т.е. изменения |Kt |, а это необходимо влечет за собой изме¬
нение | К21.
Установим теперь, какому закону должна подчиняться схема
отражения от системы зеркал, удовлетворяющая условиям 1) и 2).
Из геометрических соображений видно, что при повороте К2 (на¬
пример, по часовой стрелке на рис. 37) конец ДК скользит по ок¬
ружности радиусом I K.J I. Повернутое положение (—К2) и соот¬
ветствующий ему параллелограмм АА 'В ’В также изображены на
рис. 37. Итак, годографом вектора ДК, т.е. годографом силы тя¬
ги зеркальной парусной системы, служит окружность радиусом
АВ = ВС = IK, |, причем точка С достигается, если вектор К2 на¬
правлен строго к источнику света (предельное положение К2).
Далее из геометрических соображений также очевидно, что даже
в рассматриваемом предельном идеальном случае отражающей
зеркальной системы вектор ДК, а с ним и сила тяги системы Р не
могут иметь компоненты, направленной к источнику света. Кроме
того, следует иметь в виду, что закон сохранения энергии означа¬
ет, что |К21 < |К, |, т.е. система зеркал не может усилить поток
света, а может лишь направить его ’’наилучшим”, наивыгоднейшим
образом.
Рассмотрение равнобедренного треугольника со сторонами К!
и (—К2) (см. рис. 37), опирающегося на диаметр окружности,
показывает, что
| ДК | = 2 | К, | cos0, (11.2)
где в — уггл между направлением результирующей силы тяги
системы и направлением падающего потока. Так как |К( | = const,
то сила тяги системы меняется строго по закону косинуса в отли¬
чие от силы тяги плоского паруса, изменяющейся по закону квад¬
рата этого косинуса (см. § 4, формулу (4.5)). Как легко видеть,
125
угол в изменяется в пределах от —я/2 до +я/2, для которых ДК
обращается в нуль. Все это еще раз подтверждает вывод о невоз¬
можности получить компоненту силы тяги солнечного паруса,
направленную влево от точки А. Максимум силы тяги достигается,
очевидно, при 9 = 0, т.е. |ДК| = АС. Круговая диаграмма измене¬
ния силы тяги Р в зависимости от угла в [В.17] изображена на
рис. 38, где штриховой линией показана аналогичная диаграмма
для менее эффективного плоского паруса, работающего по закону
квадрата косинуса. Таким образом, предпринятое исследова¬
ние [1.55] дало негативный ответ на вопрос, связанный с решением
второй проблемы Ф.А. Цандера, и показало, что осуществить тре¬
бование о направлении не только всей результирующей сил давле¬
ния светового потока, но даже хотя бы ее доли ’’обратно к Солнцу”
не представляется возможным ни при каких законах управления
отдельными зеркалами или всей зеркальной системой в целом.
С помощью вариационного принципа максимума в [1.55] было
показано также, что конструкция, реализующая закон косинуса,
дает при любом фиксированном угле в максимально возможное
тяговое ускорение по сравнению с тем ускорением, которое при
том же значении 9 может дать любая из сравнимых парусных зер¬
кальных конструкций, но для которой закон косинуса не выпол¬
няется. В этом смысле закон косинуса является предельным — это
максимум того, что может дать теорема об изменении кинетическо¬
го момента светового потока, лежащая в основе любого закона
типа Р = Р(0).
Техническое воплощение конструкции ’’наилучшего” паруса
допускает, без сомнения, множество решений и вариантов. Так,
например, в [1-55] в качестве одной из возможных конструкций
такого паруса предлагалась и исследовалась система четырех иде¬
ально отражающих зеркал, смонтированных в одну конструкцию:
двух параболических и двух плоских (рис. 39). Два параболичес¬
ких зеркала А, иА7 предполагаются софокусными, причем фокус¬
ное расстояние зеркала А2 много меньше, чем у зеркала А,, кото¬
рое постоянно должно ’’смотреть на Солнце”. Параллельный поток
126
4
Рис. 39
света падает сначала на зеркало A t, а затем, отразившись, на зер¬
кало А2. От зеркала А2 идет узкий параллельный пучок света,
обладающий тем же количеством движения, что и поток, падающий
на зеркало A t, и через щель в А! попадает на систему плоских
передаточных зеркал А 3 и А 4. Эти зеркала, расположенные в тени
большого зеркала А |, позволяют направить отраженный поток
вообще в каком угодно направлении. Количества движения падаю¬
щего и отраженного потоков в этой конструкции равны между
собой по величине, причем направление отраженного потока никак
не связано с направлением падающего. Тем самым достигается
выполнение закона косинуса для системы зеркал.
В заключение, возвращаясь снова к трудам Ф.А. Цандера, необ¬
ходимо напомнить, что, производя многочисленные оценки малых
сил светового отталкивания, а также создаваемых ими малых
скоростей и ускорений, Ф.А. Цандер неоднократно высказывал
соображения о возможности усиления светового потока на экран
не только за счет построения сложной системы зеркал, но и за
счет своеобразного искусственного усиления мощности падающего
светового потока. Если, как было показано выше, усиление мощ¬
ности потока неизменного светового источника только за счет по¬
воротов зеркал является несовместимым с принципом сохранения
энергии и потому оказывается невозможным, то проблема искус¬
ственного усиления не связана с какими-либо физическими проти¬
воречиями*) .
Проблема искусственной передачи энергии световых потоков
не относится непосредственно к теме космического полета с сол¬
нечным парусом. Однако следует напомнить, что в 20-е годы увле¬
чение Ф.А. Цандера идеей передачи энергии на расстояние многим
казалось безосновательным, и даже, как отмечает Т.М. Мельку-
мов [1.56], сложилось предвзятое мнение, что, интересуясь свето¬
*) Эта проблема, сводящаяся к проблеме передачи энергии на расстояние,
неоднократно привлекала внимание ученых. Так, у К.Э. Циолковского мы
находим высказывание относительно искусственного создания светового
потока: ”... самый завлекательный способ... состоит в передаче энергии
снаряду извне, с Земли... Она ему передается с планеты в образе параллель¬
ного пучка электромагнитных лучей. Этот параллельный пучок лучей и сам
должен производить давление” [В.7, с. 115 или 158 по 2-му изд.]. В 1924 г.
Ф.А. Цандер также отмечает кумулятивные свойства светового давления и
предлагает своеобразные его усилители: "Для ускорения межпланетного
корабля можно воспользоваться давлением света или других лучей, дающих
лишь самые ничтожные ускорения, которые, однако, действуя в течение
длительного времени, могут разгонять межпланетный корабль до значитель¬
ных скоростей. Во-вторых, можно в межпланетном пространстве развернуть
огромной величины вогнутые вращающиеся зеркала, которые, собирая сол¬
нечные лучи, направляют пучок почти параллельных лучей на зеркала, соеди¬
ненные с межпланетным кораблем” [В. 10, с. 2861.
127
вым давлением как средством передвижения в межпланетном
пространстве, Ф.А. Цандер придавал такой энергетической систе¬
ме большее значение и приписывал ей большие возможности, чем
она реально может обеспечить. В век лазерного луча эта мысль
Ф.А. Цандера кажется особенно привлекательной и можно указать
на современные попытки рассмотреть космический парус и его ди¬
намику для случая движения не под действием природных лучей,
а под действием луча лазера [1.57]. Видимо, в этом случае сплош¬
ной пленочный отражающий солнечный парус выгоднее заменить
световым парусом волокнистой структуры, выполненным из тон¬
чайших прозрачных полимерных волокон, поскольку такая струк¬
тура светового паруса обеспечит нужную теплоотдачу паруса, не
вызывая одновременно его отклонения от направления лазерного
луча. Применение лазера для осуществления межзвездных парус¬
ных перелетов рассмотрено в [1.57-1.59].
Оригинальную разработку идеи Ф.А. Цандера о построении сис¬
темы парусов-зеркал мы находим также у Н.Д. Джуманалиева и
МЛ. Киселева [1.60], исследовавших возможность управления
орбитальным гелиоцентрическим движением аппарата с солнеч¬
ным парусом при помощи движущегося вблизи него другого
такого же аппарата с парусом. Оба паруса ориентированы нормаль¬
но к солнечным лучам. Если рассмотреть движение аппаратов в
центральном фотогравитационном поле с учетом полного или час¬
тичного затенения одного паруса другим, то можно [ 1.60] уста¬
новить условия синхронного орбитального движения обоих аппа¬
ратов или, например, их сближения. Если в линейном приближении
исследовать возмущения орбиты затеняемого паруса, движущегося
по внешней гелиоцентрической орбите, возникающие под действи¬
ем нагоняющего его второго затеняющего паруса, движущегося по
внутренней орбите, т.е. с большей угловой скоростью, то оказыва¬
ется, что ’’внешний” аппарат переходит на орбиту меньшего радиу¬
са, в пределе соприкасающуюся с орбитой ’’внутреннего” аппарата.
При построении теории таких гелиоцентрических маневров авто¬
ры использовали цандеровскую теорию движения в центральном
фотогравитационном поле с системой парусов-зеркал, применив
ее к задаче, в которой паруса одной системы оказываются как бы
разнесенными вдоль орбиты. Такая постановка задачи таит в себе
бесчисленные варианты гелиоцентрических маневров с помощью
двух или нескольких аппаратов, снабженных солнечными паруса¬
ми. К сожалению, эта интереснейшая задача с тех пор более никем
не разрабатывалась.
Все исследователи динамики парусных перелетов, как прави¬
ло, ограничиваются простейшим случаем идеально отражающей
парусной поверхности или поверхности с коэффициентом отраже¬
128
Видимое световое
излучение
Рис. 40
ния, несколько меньшим
единицы, принимая коэф¬
фициент отражения паруса
неизменным в течение все¬
го времени движения. На
самом деле это не так. По¬
степенное ухудшение оп¬
тических характеристик
паруса во время полета
происходит под действием
таких космических факто¬
ров, как высокий вакуум,
микрометеоритные про¬
бои, корпускулярные сол¬
нечные потоки, гамма-из¬
лучение высоких энергий
и т.п. Ухудшение оптичес¬
ких характеристик прюявляется в уменьшении коэффициента е от
первоначального значения е0 < 1 ив одновременном возрастании
прозрачности парусной пленки, эрозии, замутнении, потемнении
полимерного материала при одновременном нарушении баланса
теплоотдачи вследствие воздействия высоких температур при при¬
ближении к Солнцу. В задачах, учитывающих эти эффекты, коэф¬
фициент отражения е следует считать некоторой функцией коэффи¬
циентов строго зеркального, диффузного отражений, коэффициен¬
та прозрачности и температурных характеристик теневой и осве¬
щенной сторон паруса.
Действительно, простейшая модель силы давления солнечной
радиации, принимающая коэффициент отражения е равным 1 для
полностью зеркального отражения и 0 для абсолютно черного
тела, близка к реальности для металлических поверхностей (алю¬
миния и серебра) , применяемых как материалы или покрытия для
солнечного паруса: они обладают коэффициентом отражения све¬
тового солнечного излучения, близким к 1 (рис. 40) [В.24]. Это
оправдывает проведение предварительного анализа характеристик
солнечного паруса в идеальной постановке при е = 1. Толщины
парусов из алюминиевой фольги и из полимерной алюмикизирован-
ной пленки составляют 10~6 и 2,5 • 10~6 м [В.24, с. 62] (соот¬
ветствующее ускорение - около 3 • 10 3 м/с2). Однако дальней¬
шее существенное улучшение характеристик солнечного паруса
(как движителя) путем снижения толщины используемых пленок
лимитируется потерей зеркальных свойств поверхности при тол¬
щинах порядка длины волны светового излучения, а также учетом
сублимации в вакууме и микрометеоритной эрозии.
129
Кроме отличия реального коэффициента отражения парусной
пленки от единицы в модели силы давления, применяемой в точ¬
ных расчетах, еледует учитывать наряду с коэффициентом строго
зеркального отражения еще и коэффициент прозрачности пленки,
а также диффузное отражение и температурные характеристики
освещенной и теневой сторон паруса. Модель, учитывающая наибо¬
лее полно все отличия реального режима отражения от пленочных
поверхностей от идеальной постановки задачи, приведена
в [1.47, 1.48].
Здесь для силы светового давления предлагается интегральная
формула
F = 2РГ //1 и” - и" I {а, и" + [а2(и" • и") un]}dA,
А
где Рг = 0,46 • 10-4 г/(см - с2) - удельное давление на орбите
Земли, А — полная эффективная освещенная поверхность паруса,
и* — орт луча, и" — орт нормали, знак скалярного произведения
означает неотрицательность проекции тяги на орт луча. Если че¬
рез р обозначить коэффициент строго зеркального отражения,
а через г - коэффициент прозрачности пленки, то вспомогательные
коэффициенты ах и определятся в виде
а, =(1 -р - т)/2, а2 =±Pi[(l -p2) + fc(l -Pi -т)]/3,
причем р~ Р\Р2.
Пусть Pi — доля отраженных фотонов в полном потоке падаю¬
щей на парус радиации, (1 — Pi) — коэффициент поглощения,
р2 — доля из Pi отраженных строго геометрически (а не диффуз¬
но) фотонов, (1 - р2) — доля из Pi диффузно отраженных фото¬
нов, d - Pi (1 — р2) — коэффициент диффузного отражения (знак
в а2 определяется знаком скалярного произведения и" • и-1).Тем¬
пературный коэффициент солнечного паруса определяется как
функция температур Т{ и Ть нагрева соответственно передней
(освещенной) и задней (теневой) сторон паруса и соответствую¬
щих им коэффициентов излучения этих сторон Cf и еъ:
к = (t'f7>4 - еь Т*) (PfT* + еь Гь4)~'.
Легко видеть, что эта модель [1.47] при к = 0, г = 0 (непрозрач¬
ный парус с одинаково излучающими сторонами) сводится к
’’классической” формуле F = (1 + e)PrA\is (см. §4, форму¬
лу (4.1)), если положить 1 + е = 2(р + а, + а2). Напомним, что
сила светового давления на идеальную непрозрачную сферу с лю¬
бым коэффициентом отражения составляет F = Рг (я/?2) и1, т.е.
а 1 = 1/2, а2 = 0 (р Ф 0, но в формуле не участвует). Для непрозрач¬
ного плоского зеркала р-рх = р2 = 1, а, = а2 = 0, е = 1; для абсо¬
лютно черного тела р- рх - р2 - 0, ах = 1/2, е = 0.
130
Пользуясь физическими характеристиками непрозрачного пле¬
ночного паруса (т = 0) из синтетического полимерного материала,
приведенными в [1.47], легко подсчитать коэффициенты из приве¬
денной выше полной модели силы и коэффициент е для чаше
всего используемой приближенной физической модели паруса:
Pi = 0,88, 1 — Pi = 0,12, pi - 0,94,1 - Pi = 0,06, p = 0,83 (коэффи¬
циент зеркального отражения), d = 0,05 (коэффициент диффузно¬
го отражения), о у = 0,09, ef = 0,05, еь = 0,60, к - -0,85, о2 = -0,02,
р + (jj + а2 = 0,90, е = 0,80.
Итак, мы на численном примере убедились в том, что прибли¬
женный модельный коэффициент отражения е, используемый в
данной книге и в большинстве публикаций по солнечному парусу,
действительно близок к истинному физическому коэффициенту
отражения р из высокоточной модели [1.47]. Несовпадения этих
коэффициентов обусловлены различиями излучательных и переиз-
лучательных свойств освещенной и теневой сторон пленки при ра¬
зогреве в космосе, когда все тепловое излучение обеспечивается
через теневую сторону паруса. Вредные космические факторы (воз¬
действие высоких температур, нарушение баланса теплоотдачи,
пробои, воздействие жесткой солнечной и космической радиа¬
ций и т.п.), как указывалось выше, вызовут эрозию, эамутнение,
потемнение, а также увеличение прозрачности пленки, т.е. умень¬
шение коэффициентов рг, р2 и р, увеличение т (парус становится
полупрозрачным), уменьшение суммы (о^ + а2), а с нею и коэф¬
фициента € идеальной модели.
Если теперь обратиться к учету изменения физических характе¬
ристик солнечного паруса при расчете космической траектории
парусного перелета, т.е. к динамике орбитального парусного дви¬
жения, следует отметить приближенный анализ межорбитального
перелета с претерпевающим износ парусом, выполненный НД. Джу-
маналиевым и МЛ. Киселевым [1.61]. Исследовалось влияние
свойств пленочных парусов при их старении на динамику полета.
Оказалось, что с учетом изменения коэффициентов отражения и
прозрачности паруса со временем (полупрозрачный парус), а также
степени эрозии пленочной поверхности траектория полета оказы¬
вается спиралью с переменным убывающим шагом.
В упомянутой работе уравнения спирального парусного движе¬
ния были проинтегрированы для зависимости коэффициента
отражения от времени, но без введения явной функции, конкрети¬
зирующей этот закон. Поскольку указанные выше вредные косми¬
ческие факторы, вызывающие старение паруса, обычно связаны с
интенсивностью солнечного излучения в данной точке пространства,
представляется разумным предположить, что старение паруса,
как и все радиационные эффекты, подчиняется закону обратной
131
пропорциональности квадрату гелиоцентрического расстояния г.
Тогда простейший закон изменения е может быть представлен как
de б
— = г (б>0), (11.3)
dt г
причем коэффициент пропорциональности б [длина2/время] оп¬
ределяется из технологического эксперимента с пленкой в лабо¬
раторных условиях, приближенных к орбитальным. Предлагае¬
мый закон означает, что при движении аппарата с парусом по эллип¬
тической гелиоцентрической орбите коэффициент е оказывается
линейной функцией истинной аномалии аппарата у на орбите
dt б £ б ,
е = бо - 5 J— = б0 ~ = Со . :, (11.3 )
г \/}’М'ср уЩГр
где fM'c— фогогравитационный параметр Солнца, р — фокальный
параметр орбиты.
Влияние износа солнечного паруса, происходящего по закону
(11.3), на эволюцию орбитального движения было исследовано
автором [1.62] для цандеровского движения в центральном фото-
гравитационном поле. Как указывалось в § 5, редукция массы
Солнца д и редукция гравитационного поля /3 вычисляются по фор¬
мулам (5.6) — (5.7) при заданной парусности аппарата а = А/т =
- const и заданном коэффициенте отражения е. Из этих формул
видно, что изменение фотогравитационного параметра Солнца
fM'c- f (Mq + д) - 1 — |3) вследствие старения солнечного
паруса в нашей задаче происходит в соответствии с формулой
d(fM' ) t р \ 6 А'
dt dt \ 1+е0/г2 г2
где К > 0 и имеет размерность [длинаг/время3 ]. Так как цанде-
ровские траектории существуют только вне орбиты старта (в на¬
шей задаче — вне орбиты Земли), то г > г0.
Запишем уравнения эллиптического движения в центральном
поле Солнца с переменной интенсивностью поля (11.4) и усредним
их на одном гелиоцентрическом обороте. Получим скорости изме¬
нения элементов орбиты парусного движения в фото гравитацион¬
ном поле в невозмущенном случае:
K(l +el)
|.т] ■ -
И - -
(fMc)oPvy/l ~е%
Ке0
(.fMc) о Яо\А — ео
О,
< о.
132
ЬтЬ
Ksfr-e о
Wc)oa0
2
< 0. (11.5)
Таким образом, мы установили скорости изменения (.убывания)
большой полуоси, эксцентриситета и фокального параметра перво¬
начальной цандеровской орбиты. Одновременно с помощью (6.15)
можно установить скорость убывания периода цандеровского
движения
Г^иандТ 2лА:(2 + е§)
ца-н-д- = j=====: < 0, (11.6)
L dt J (fM'c)J(fM'c)0p0{\ -el)
соответствующее увеличению среднего орбитального движения
(вековое ускорение), а также скорость возрастания параметра
фотогравитационного поля
d(fM'c)
dt
К 2п К
/ dyp = —=Г > 0.
1ъа1п >/ро 0 а%\/ \ -е\
В качестве примера рассмотрим космический аппарат с солнеч¬
ным парусом (в цандеровской ориентации) при а-А/т = 103 см2/г,
обладающим отражающей способностью е0 = 1. Этих начальных
данных вполне достаточно, чтобы однозначно определить все редук¬
ционные и вспомогательные величины нашей задачи. Итак,
до = -3 - 1032 г, Мс = 2 • 1033 г, 0о = 0,15.
/Л*с = 1,327 • 1026 см3/с2, (fM’c)о = 1,125 • 1026 см3/с2.
Однозначно определяется и эксцентриситет цандеровской орбиты.
Действительно, пусть движение начинается на орбите Земли, где
раскрывается цандеровский солнечный парус (r„ = 1 а.е.), после
чего аппарат переходит на эллиптическую цандеровскую орбиту,
лежащую вне орбиты Земли (см. § 5). Формулы фотогравитацион-
ной задачи двух тел, в частности формула (5.14), показывают, что
единственное значение эксцентриситета цандеровской орбиты для
заданных редукционных величин составляет е0 = 0,178. Итак, но¬
вая орбита космического аппарата, которая в нашей задаче играет
роль первоначальной цандеровской орбиты, вследствие износа и
старения паруса будет претерпевать изменения, описанные форму¬
лами (11.5) — (11.6). Пусть за время, равное одному цандеров-
скому периоду 7'цанд) т.е. на дуге ^ £ [0, 2п], коэффициент отра¬
жения убывает от е0 = 1 до е = 0,5 по закону (11.3). Первоначаль¬
ная орбита характеризуется элементами: р0 - 1,165 а.е., га 0 =
= 1,44 а.е., 7'данд = 1,46 года. За это время параметр фотогравита
133
цио иного силового поля увеличится от начального значения {fM'c)0
на величину 4,5-1024 см3/с2, т.е. его приращение составит око¬
ло 4% первоначального значения. Уменьшатся элементы цандеров-
ской орбиты Да/а0 = —4,6%, Де/е0 = -4,0%, &га/га0 = -5,2%,
т.е. аппарат сходит с первоначальной цандеровской орбиты, возвра¬
щаясь к круговой орбите Земли. Таким образом, учет износа
паруса в динамических траекторных задачах оказывается необходи¬
мым, особенно при прогнозировании движений на длительных
интервалах времени. Изложенный метод [1.62] может быть приме¬
нен и к другим законам изменения коэффициента е, нежели закон
(11.3), а также к задаче о движении по цандеровской орбите с пере¬
менной парусностью при неизменном коэффициенте е. Действи¬
тельно, формула для изменения фотогравитационного параметра
поля на основании формул (5.7) — (5.9) может быть представлена
в виде
d(fM'c) d$
= -fMc
dt dt
dP_ Qc A de Qc
+ (1 + e)
dt fMc m dt fMc
dt\m J
В нашей задаче мы полагали о = A/m - const.
Заметим, что выведенные выше формулы для скоростей веко¬
вых изменений оскулирующих элементов цандеровской эллиптиче¬
ской орбиты (11.5) легко получить непосредственным интегриро¬
ванием уравнения Бине для цандеровской задачи с переменной
интенсивностью центрального фотогравитационного поля за счет
износа солнечного паруса. Вводя инверсию и = г~х и обозначая с0
постоянную площадей первоначальной цандеровской орбиты, рав¬
ную \/ (fMc)oPo, запишем равнодействующую сил тяготения и
светового отталкивания (обе силы центральные)
Fr = -/Мсти2 = -(/ Мс)0тиг — mu2KcSl<P, (И-7)
где fMc оказывается линейной функцией <р, и неизменный кинети¬
ческий момент единичной массы
c{y) = \[f Мср(у) = y/ffMc )оРо = c0 = const, (11.8)
после этого уравнение Бине в линейном относительно К/с0 прибли¬
жении примет вид
ги (/АГЬ)о
, + и =
dy2 cl
134
(fMc)oc0 J
Решением составленного уравнения служит оскулирующий цан¬
деровский эллипс г = р(1 + е cos у?) ~1 с элементами
Вычисление абсолютных и относительных возмущений элементов
за один цандеровский период (6.15) снова приведет нас к форму¬
лам (11.5), а (11.7) и (11.9) подтверждают выполнение (11.8).
В более общем случае, когда цандеровская орбита подвергается
еще и внешним возмущающим воздействиям, ее вековые возмуще¬
ния могут быть определены описанными выше способами с
участием на этот раз еще и возмущающих ускорений. Впрочем, ме¬
тод интегрирования уравнения Бине оказывается в таких задачах
менее гибким, нежели метод усреднения, и его удобно использо¬
вать для описания орбитальной эволюции лишь до тех пор, пока это
уравнение не перестает быть линейным.
§ 12. Современные проекты конструкций солнечных парусов
для гелиоцентрических перелетов
Первые практические лабораторные исследования по технологии
исполнения солнечного паруса и отыскания его наилучшей конст¬
рукции и конфигурации, начатые в США, относятся, по данным
обзоров [1.63 — 1.65], к 1969 — 70 гг. Фантастика постепенно при¬
ближалась к реальности. Парус перестал восприниматься как экзо¬
тический проект неугомонных фантастов, и стала очевидной его
относительная дешевизна в исполнении. За последующее десятиле¬
тие были разрешены почти все технические конструктивные и тех¬
нологические проблемы, связанные с постройкой солнечного пару¬
са. По мнению специалистов центра космических полетов NASA,
создававших проект полета совместно с Лабораторией реактивных
двигателей Калифорнийского технологического института (JPL,
Pasadena) и с рядом других научно-исследовательских учреждений
США, космический парусник в недалеком будущем сможет успеш¬
но соперничать с солнечно-электрическим двигателем малой тяги.
При выборе возможной конструкции солнечного паруса обсуж¬
дались многочисленные варианты его геометрии и пропорций, пред¬
лагаемые различными специалистами. Практически сразу, как недо¬
статочно надежные, были исключены из рассмотрения конструкции
типа вращающихся дисков, надувных баллонов и раскрытых пара¬
шютов. Реальной разработке (на уровне составления предваритель¬
ной технической документации) и подробному сравнительному
анализу подверглись два соперничающих между собой вплоть до
сегодняшнего дня проекта солнечного паруса: квадратный парус и
135
так называемый гелиоротор. Первоначально обе эти конструкции
исследовались с точки зрения возможной их посьитки к комете
Галлея. Хотя позднее проект этого полета был отклонен и к коме¬
там было решено отправлять аппараты, снабженные реактивными
иди солнечно-электрическими двигателями, представляет интерес
рассмотреть, почему траектория космического перелета к комете
привлекла внимание ученых как перспективная именно в смысле
парусного движения.
Дело в том, что плоскость орбиты кометы Галлея наклонена к
плоскости эклиптики на 162°, вследствие чего космическая траек¬
тория перелета к этой комете с целью ее длительного сопровожде¬
ния должна включать в себя этап маневра разворота плоскости
орбиты аппарата почти на 180°. Конечно, маневр желательно выпол¬
нить с минимальными энергетическими затратами. Долгое время
считалось, что двигатели малой тяги типа солнечного паруса или
солнечно-электрического двигателя вообще не в состоянии выпол¬
нить маневр такого гелиоцентрического разворота, пока в 1974 г.
Дж. Райт [1.66 — 1.68] не показал, что такой маневр динамически
вполне осуществим. Для этого нужно сначала отправить космиче¬
ский аппарат с таким движителем в близкие околосолнечные обла¬
сти, где он как бы зарядится солнечной энергией, достаточной для
выполнения маневра разворота плоскости орбиты, а затем вернется
обратно к орбите Земли для выполнения требуемых научных иссле¬
дований. Именно такая схема полета к ’’обратной” орбите кометы
изображена на рис. 41. Она в принципе пригодна для встречи с лю¬
бым другим небесным телом, движущимся по ’’обратной” (по
отношению к направлению орбитального движения Земли) траек¬
тории (астероида, космического аппарата).
Вариант полета к комете Галлея с энергетической ’’подзаряд¬
кой” вблизи Солнца [1,68] предполагал полетное время около
3-4 лет и состоял из трех основных этапов (см. рис. 41):
136
1) уход с орбиты Земли в прямом направлении (в сторону ее
орбитального движения) для выхода на околосолнечную гелиоцен¬
трическую орбиту (при полете с парусом длительность этапа оцени¬
вается примерно в 1 год при радиусе промежуточной круговой
орбиты 0,25 а.е.);
2) движение по круговой орбите (орбита-маховик) для тре¬
буемого разворота направления движения на обратное после не¬
скольких гелиоцентрических витков (длительность маневра разво¬
рота, выполняемого с помощью солнечного паруса, составляет тоже
около 1 года);
3) полет назад к орбите Земли для встречи с кометой в попут¬
ном движении с ней (длительность этапа возвращения для парус¬
ного варианта составляет 2,5 года при встрече с кометой на гелио¬
центрическом расстоянии 0,97 а.е.). Напомним, что динамика
маневра на орбите-маховике вкратце уже описана выше в § 11
Именно для осуществления полета по такой траектории с обяза¬
тельным разворотом на околосолнечной орбите-маховике и были
предложены в разное время два упомянутых варианта конструкции
солнечных парусов. Квадратный парус [1.66 - 1.69] представляет
собой огромный пленочный экран, натянутый на квадратный фер¬
менный каркас со сторонами 850 X 850 м, выполненный из
тончайшего алюми визированного подними дно го пластика каптон
толщиной не более 2,5 мкм при толщине алюминиевого покрытия,
не превышающем 0,1 мкм (рис. 42). Вся конструкция, напоминаю¬
щая воздушный змей, максимально облегчена, несущие мачты и
фермы смонтированы из жестких стержней, выполненных из облег¬
ченных материалов (сплавов). Каркас воспринимает силовые на¬
грузки, действующие на поверхность паруса, и крепится к аппарату
при помощи центральной штанги, подкрепленной растяжками. Вес
контейнера с приборами не превышает 800 кг, полный вес конст¬
рукции - 5000 кг. В зависимости от деталей проекта средняя на¬
грузка на такой парус не превосходит 40 — 60 г/м2, а создаваемое
таким парусом ускорение составляет 0,03 — 0,13 см/с2.
Так как траектория, изображенная на рис. 41, была первона¬
чально признана возможной для парусного полета к комете Галлея,
а автор траектории [1.66 — 1.68] предлагал для ее выполнения
именно квадратный парус, легко понять, почему разработка всего
проекта велась сначала с ориентацией именно на такой парус. В це¬
лом конструкция квадратного napyca-’’змея” была сразу признана
вполне жизнеспособной. Но в результате подробнейшего анализа
этого проекта и эскизной проработки деталей его конструкции
совместно с тщательными работами в области изыскания необходи¬
мых материалов, динамики управления полетом, принципов раз¬
вертывания паруса из контейнера на орбите, орбитальной механи¬
137
ки, навигации и терморегулирования проект квадратного паруса
был снят с дальнейшего рассмотрения в связи с его недостаточной
надежностью. После этого внимание конструкторов сосредоточи¬
лось на проекте паруса-гелиоротора.
Проект гелиоротора был предложен Р.Макнилом [1.70 — 1.72]
раньше проекта квадратного паруса, но поскольку он не был обес¬
печен собственной траекторией, то долгое время оставался вне сфе¬
ры внимания конструкторов. Позднее именно он был рекомендо¬
ван для осуществления полета по траектории, изображенной на
рис. 41, как единственная достаточно надежная и перспективная
движительная парусная установка для выполнения полета к орбите
с наклонением / > 90°. Этот вращающийся солнечный парус полу¬
чил название ’’Heliogyro” (гелиоротор, солнечный гироскоп, сол¬
нечная вертушка). По мнению конструкторов, именно этот парус
имеет наибольший шанс на полет в ближайшие десятилетия и,
вероятно, в недалеком будущем сможет успешно конкурировать
с предлагаемыми параллельно проектами ионно-плазменных и сол¬
нечно-электрических двигателей малой тяги. Обзор программы
технологической проработки проекта гелиоротора проведен в
[1,70 — 1.72] и в отчетах всей рабочей группы лаборатории JPL
[1.64, 1.65]. Проект гелиоротора наряду с другими проектами
нашел отражение на страницах научно-популярных журналов раз¬
ных стран [1.73 — 1.77] и на страницах советского журнала ’’Тех¬
ника-молодежи” [1.50,1.78].
Парус-гелиоротор — парус роторного типа. В этой связи уместно
вспомнить концепцию Ф.А.Цандера о вращении паруса [В.8, с. 268].
Принцип использования центробежных сил для придания отражаю¬
щей поверхности необходимой жесткости неоднократно использо¬
вался в проектах плоских парусов-дисков, вращающихся относи¬
тельно оси, направленной по нор¬
мали к поверхности в сторону
Солнца. Такая конструкция не
требует ферменного каркаса и
потому характеризуется значитель¬
но меньшей удельной массой,
чем квадратный парус. Однако и
в этой конструкции, несмотря на
очевидную простоту исполнения,
имеется ряд существенных недо¬
статков: необходимы сложные
приспособления для развертыва¬
ния светоотражающей поверхности
в космосе, заданная пространст¬
ве
венная ориентация этих парусов сопряжена с существенными трудно¬
стями вследствие больших размеров конструкции. Более совер¬
шенной конструкцией, также динамически основанной на враще¬
нии, следует считать парус роторного типа ’’Heliogyro” состоящий
из нескольких гибких лопастей, вращающихся в плоскости, перпен¬
дикулярной к направлению на Солнце. С целью детальной
конструктивной проработки были выбраны два варианта паруса
’’Heliogyro”: демонстрационная модель минимальных размеров,
предназначенная для полета по околоземной орбите продолжитель¬
ностью 1 год, и основная модель для гелиоцентрического полета к
комете. Первый вариант представляет собой четырехлопастную
конструкцию; в соответствии со вторым вариантом солнечный
ротор должен иметь 12 лопастей, исходящих из центральной части
аппарата и смонтированных в два яруса по 6 лопастей в каждом
(рис. 43). Лопасти будут выполнены из алюминизированной плен¬
ки, закрепленной в центральной части аппарата на легчайших на¬
правляющи*. В центре конструкции расположится отсек с прибо¬
рами (полезный груз). Весь гелиоротор вращается, причем центро¬
бежная сила обеспечивает как структурную жесткость лопасти, так
и первоначальное усилие для развертывания лопастей в космосе.
Использование 12 узких лопастей размером 7500 X 8 м каждая
обеспечит примерно ту же площадь отражающей поверхности, что и
квадратный парус размером 850 X 850 м. Лопасти ориентированы
вдоль своих продольных осей подобно лопастям вертолетного вин¬
та с переменным углом атаки, что позволяет управлять полетом,
изменяя углы установки парусов-лопастей.
Очень серьезной сопутствующей проблемой является выбор ме¬
тода разворачивания паруса после выведения на орбиту. В сложен¬
ном виде лопасти намотаны на бобины и занимают небольшой
объем, бобины закреплены на ступице, смонтированной на аппарате
(рис. 44). В развернутом виде лопасти гелиоротора обладают необ¬
ходимой жесткостью за счет центробежных сил вращения. Углы
атаки лопастей могут изменяться с целью регулирования тягово-
13?
Таблица 7
Физическая величина
Вариант I
Вариант 11
Диаметр в свернутом положении, м
1,3
4,3
Диаметр в развернутом положении, м
1200
15000
Размеры лопасти, м
0,7 X 600
8 X 7500
Удлинение лопасти
860
940
Число лопастей
4
12
Частота вращения, об/мин
1,3
0,3
Суммарная площадь поверхности, м2
1590
630000
Полная масса, кг
45
4800
Максимальная парусность, см‘ /г
400
1300
Минимальное расстояние от Солнца, а.е.
1,0
0,25
Максимальное тяговое ускорение, см/с2
0,03
0,16
го усилия, развиваемого парусом в пределах ±30% от максималь¬
ного значения, причем гелиоротор может работать как в режиме
с постоянным углом атаки лопастей, так и с переменным. На
рис. 44 изображена упрощенная конструктивная схема роторного
паруса: 1 — ступица (ферменная балка), 2 - устройство демпфиро¬
вания изгибающих моментов, 3 - крестовина, 4 - жесткий стер¬
жень, 5 - стойки, 6 - внешняя боковая кромка. 7 - светоотра¬
жающая пленка, 8 — поперечные распорки. Характеристики кон¬
струкций гелиоротора в соответствии с двумя упомянутыми ва¬
риантами запусков (вариант I — демонстрационная модель на
круговой геоцентрической орбите высотой 8000 км, вариант II -
гелиоцентрический перелет к комете по траектории, изображенной
на рис. 41, и доставка в зону встречи полезного груза около 1000 кг)
приведены в табл. 7 [1.64].
Вывод гелиоротора на орбиту будет производиться в несколько
этапов, причем раскрутка, необходимая для разворачивания пле¬
ночных лопастей, начнется лишь на последнем этапе маневра выво¬
да. Углы установки парусов-лопастей предполагается задать так,
чтобы максимизировать момент сил светового давления на лопа¬
сти, способствующий развертыванию парусов только под дейст¬
вием центробежных сил. Развертывание конструкции будет длиться
около двух недель, а поддержание режима равномерного вращения
обеспечит необходимую продольную жесткость всей конструкции,
причем чем выше угловая скорость вращения, тем сильнее натяже¬
ние пленочных лопастей. Таким образом, гелиоротором, как ут¬
верждают авторы проекта [ 1.64], будет легче управлять, чем квад¬
ратным парусом-”змеем”, стабилизированным по трем осям, или
сплошным вращающимся парусом-диском. Его огромное преиму-
140
щество перед другими парусными конструкциями состоит также
в эффекте центробежных сил, вследствие действия которых про¬
дольные направляющие не являются несущей конструкцией (как
фермы и растяжки квадратного паруса), а вместе с поперечными
направляющими служат плавным образом для управления углом
установки лопасти вдоль продольной оси и помогают избежать
перекручивания восьмикилометровой пленочной ленты.
По мнению авторов проекта, роторный парус обладает и рядом
других очевидных преимуществ перед прочими парусными конст¬
рукциями:
— конструкция гелиоротора поддается математическому моде¬
лированию, позволяющему предсказать его поведение в полете,
а также рассчитать динамические параметры, напряжения, деформа¬
ции и т.д.;
— массивный отсек с приборами (полезный груз) расположен
в геометрическом и динамическом центре симметричной кон¬
струкции, что позволяет избежать излишних возмущающих эф¬
фектов;
— процессы развертывания лопастей и ввода паруса в действие
можно частично отработать в наземных лабораторных условиях.
Наиболее важным компонентом солнечного паруса является
светоотражающая поверхность, которая изготавливается из высо¬
копрочной полимерной пленки [1.79 - 1.84]. Относительная масса
пленки составляет 30 — 60% массы всей конструкции, поэтому
пленка должна иметь малую удельную массу, что может быть до¬
стигнуто уменьшением толщины пленки и ее плотности. Далее,
пленка должна обладать высокой отражающей способностью, что
важно не только как динамический фактор в полете, но и как фак¬
тор поддержания заданного температурного режима солнечного
паруса; материал пленки должен быть стоек к жесткой радиации
в космическом пространстве. На основании этих требований к
пленке можно предположить, что наиболее подходящим материа¬
лом для изготовления солнечного паруса была бы полированная
металлическая фольга (из различных металлов), которая обладает
высокой стойкостью к воздействию вредных факторов космиче¬
ской среды и имеет высокую отражательную способность в широ¬
ком диапазоне частот спектра солнечного излучения. По-видимому,
именно о такой фольге-зеркале мечтал Ф.А.Цандер в 20-е годы.
Однако толщина такой пленки из-за ограничений по массе должна
быть чрезвычайно мала — 1 мкм и менее, что не является реальным
в настоящее время [1.80]. Возможно, в перспективе удастся полу¬
чить непосредственно в открытом космосе сверхтонкие металличе¬
ские пленки путем вакуумного напыления паров металла на осно¬
ву, удаляемую после напыления. Как указано в [1.80], этот про¬
141
цесс изготовления парусной фольги заслуживает дальнейшего ис¬
следования и разработки.
Достаточно хорошим материалом для изготовления светоотра¬
жающей поверхности может служить метал лизованная полимерная
пленка различного химического состава. Характеристики некото¬
рых сортов полимерной пленки приводятся в [1.65, 1.80].
По данным [1.80] преимущества по сравнению с другими мате¬
риалами в смысле рабочей температуры, плотности и стойкости к
радиации имеют пленки майлар и полиимидная пленка (каптон).
Пленка майлар прекрасно зарекомендовала себя при изготовлении
спутников-баллонов и сейчас хорошо освоена технология ее произ¬
водства в больших количествах при толщине 3,8 мкм. Полиимид-
ные же пленки выпускаются пока в ограниченных количествах и
толщиной не менее 8 мкм. Пленка майлар служит наиболее подхо¬
дящим материалом для изготовления демонстрационной модели
гелиоротора, предназначенной для геоцентрического движения,
так как при небольшой продолжительности полета (1 год) допусти¬
ма ее ограниченная стойкость к жесткой радиации, а разогрев на
геоцентрической орбите не превысит допустимую эксплуатацион¬
ную температуру 150° С. Однако пленка майлар уступает поли-
имидным пленкам в значениях коэффициента термического расши¬
рения: 2,5-10-5 °С у кантона вместо 5,3-10~s °С у майлара.
Максимальная рабочая температура вместо 150 С для майлара со¬
ставляет для каптона 350 ° С, вследствие чего именно полиимидной
пленке каптон следует отдать предпочтение при изготовлении сол¬
нечного паруса для межпланетного полета при существенном при¬
ближении к Солнцу. Кроме того, при продолжительности полета
в несколько лет весьма существенным окажется и более высокая
стойкость каптона к воздействиям космической радиации и потока
высокоэнергетических частиц: предельная мощность дозы радиа¬
ционного воздействия для каптона в полтора раза выше, чем для
майлара.
Поверхность пленки, обращенная к Солнцу, должна быть по¬
крыта слоем алюминия толщиной 100 нм (1000 А= 100 нм) , что
создает отражательную способность не менее 0,88 [1.70]. Противо¬
положная сторона пленки покрывается в целях терморегулирова¬
ния слоем хрома толщиной 12,5 нм (125 А) с коэффициентом из¬
лучения 0,63. При этих данных средняя температура лопасти при
приближении к Солнцу на расстояние 0,25 а.е. (см. рис. 41) состав¬
ляет 221 °С, причем за полный период изменения угла атаки
(465 с) температура лопастей будет изменяться от 203 ° С до
234° С при небольших углах атаки и в диапазоне от 192° С до
245 ° С — при больших углах атаки [1.65, 1.70].
142
Материалами для изготовления боковых кромок лопастей ге¬
лиоротора, воспринимающих растягивающие нагрузки, вызванные
действием центробежных сил, могут служить различные компози¬
ционные материалы на основе полимерных матриц, армированных
углеродными волокнами [1.80 — 1.81]. Эти материалы должны
также удовлетворять указанным выше требованиям к прочности на
растяжение, эластичности (при намотке лопасти на бобину), термо¬
стойкости и т.д. Для гелиоротора, например, предлагается компози¬
ционный материал с полиимидной матрицей, выдерживающей тем¬
пературу 245 °С. (Для изготовления поперечных распорок, обеспе¬
чивающих сохранение необходимой ширины лопасти при действии
на нее изгибающих и крутящих моментов, рекомендуется исполь¬
зовать графитно-полиимидную нить с сечением 1 X 1 мм . Элемен¬
ты каркаса изготавливаются из графитно-полиимидных трубок,
соединенных между собой титановыми узлами.) Указанные
в [1.80] материалы освоены промышленностью США, обладают
приемлемой стоимостью и в перспективе могут производиться
в необходимых количествех.
Продолжая обсуждение главной проблемы полета с парусом —
проблемы терморегулирования, — необходимо отметить, что эта
проблема касается прежде всего полетов к близким околосолнеч¬
ным областям, где воздействие солнечной радиации на паруса
возрастет в 15-20 раз. Вопросы нанесения на теневую сторону
паруса специального покрытия, увеличивающего излучательную
способность материала почти в два раза, обсуждаются в работах
[1.64, 1.83, 1.84]. Например, если одно алюминиевое покрытие
дает излучательную способность не более 0,34, то покрытие поли¬
мера слоемхрома толщиной
100- 120Аили окислом ин¬
дия (или олова) толщиной
ЮООАуже повышает излуча¬
тельную способность до 0£4,
что снижает максимальную
расчетную температуру разо¬
грева паруса на расстоянии
0,25 а.е. от Солнца с перво¬
начальных 370 °С до 260 °С.
На рис. 45 [1.64] даны гра¬
фики рабочих температур
полиимидной пленки каптон
для значений излучательной
способности паруса 0,2 и
0,65. Вертикальная черта со¬
ответствует орбите Земли.
143
Рис. 45
Требования, предъявляемые к терморегулированию паруса,
в равной степени относятся к опорной конструкции и к приборно¬
му отсеку. Определенные сложности в терморегулировании воз¬
никнут и при развертывании паруса на орбите Земли, что может
оказаться особенно существенным для квадратного или другого
плоского паруса. Поэтому [184] развертывание паруса у Земли
должно производиться при ориентации паруса боковой стороной
на Солнце, для избежания перегрева конструкции. Оказывается,
при прямом освещении Солнцем уже на этапе развертывания пару¬
са температура поверхности алюмикизированного покрытия может
достигнуть 400° С. Особенно следует избегать образования скла¬
док на поверхности, так как лабораторные эксперименты показа¬
ли, что вблизи царапин и складок пленки ее температура вследст¬
вие многократного отражения солнечных лучей и нарушения излу¬
чения с теневой стороны может оказаться на 75 - 100° С выше
расчетной. Повышенное теплопоглощение создается и в местах
склейки и сварки листов пленки.
Эти технические детали проблемы терморегулирования паруса
с ясностью показывают, что часто встречающаяся, в том числе и в
данной книге, постановка задачи о движении паруса, зеркального
с обеих сторон, является не более чем математической моделью,
удобной, но не имеющей реальных технических аналогий.
Конструкция гелиоротора к настоящему времени является пер¬
вой спроектированной во всех подробностях базовой конструк¬
цией солнечного паруса. Ее целевое назначание может быть весьма
разнообразным, однако, пожалуй, наиболее интересным ее приме¬
нением среди всех, предлагавшихся до сих пор, служит вариант
полета сначала к околосолнечным областям с целью ’’подзарядки”
и набора солнечной энергии, а оттуда - обратно к орбите Земли для
выполнения намеченных экспериментов. По предлагаемой схеме
намечаются также полеты с парусом к комете Энке (600 сут)
[1.64], облет кометы Энке с возвращением на Землю (4 — 5 лет),
полет к Марсу с возвращением (4 года), полет к Меркурию
(350 дней), к астероидам и т.д. Так как такие полеты едва ли смо¬
гут быть осуществлены ранее чем через 10 — 20 лет, то предла¬
гаемый проект гелиоротора также следует считать в значительной
степени предварительным. Разработанная конструкция за ближай¬
шие годы необходимо подвергнется модификациям и усовершенст¬
вованиям, прежде чем состоится ее первый запуск.
Не менее важными наряду с разработками гелиоротора являют¬
ся современные разработки квадратного и других конструкций
паруса, предназначенного для различных вариантов гелиоцентриче¬
ских и геоцентрических маневров и перелетов [1.85, 1.86]. Напри¬
мер, в [1.86] представлены результаты эскизного проектирования
144
пилотируемой экспедиции на Марс, все оборудование для работы и
снабжения которой будет заблаговременно доставлено к Марсу
с помощью 14 пусков грузовых космических кораблей, оснащен¬
ных солнечными парусами. Эта флотилия транспортных парусни¬
ков доставит с Земли суммарно более 400 т .груза .причем каждый
корабль предполагается оснастить парусом размерами 2X2 км и
массой около 20 т при грузоподъемности каждого парусника
около 30 т (толщина парусной пленки 2,5 мкм при удельной
массе 4,8 r/м2, что соответствует парусности 2• 103 см2/г).
Главным препятствием для перехода от эскизного проектирова¬
ния к завершающему этапу разработки солнечного паруса являет¬
ся, по мнению зарубежных ученых, финансовый риск, связанный
с невозможностью проведения полных наземных испытаний: сила
тяжести разрушит любую пригодную конструкцию и даже не позво¬
лит развернуть парус. Испытанию же на низкой орбите помешает
сопротивление разреженной атмосферы.
Не меньший интерес представляют и проекты изготовления сол¬
нечного паруса непосредственно в космосе. Например, способ, ко-
145
торый недавно предложил К.Дрекслер [1.87 - 1.89], обещает по¬
вышение эффективности солнечного паруса путем изготовления
синтетической пленки в невесомости, что позволит создать пленку
толщиной всего 100 нм (0,1 мкм) и даже тоньше. Ожидаемое уве¬
личение эффективности паруса в 20 — 80 раз превысит эффектив¬
ность парусов, построенных в наземных условиях. Если сейчас пре¬
дельные ускорения, находящиеся на уровне современных техниче¬
ских возможностей для парусов, построенных на Земле, составляют
0,05 - 0,2 см/с2, то ускорения, создаваемые парусом, смонтирован¬
ным непосредственно на орбите, достигнут 1 см/с2. Для монтажа
паруса на орбиту будет выведена в сложенном виде легкая решет¬
ка, разворачивающаяся в плоский шестиугольник, набранный на
основе множества треугольных ячеек (рис. 46). Диаметр решетки
может составлять от 0,5 км до 5 км. Вместе с решеткой монтирует¬
ся технологическое устройство, вырабатывающее до 3 • Ю7 м2 плен¬
ки в год. Пленка разрезается на треугольные пластины, вклеиваю¬
щиеся в ячейки. После изготовления паруса система ферм и растя¬
жек отсекается, и парус отправляется в самостоятельное путешест¬
вие. Масса такого паруса может достигать 13 т. Конструктивные
особенности проекта также предполагают реализацию цандеров-
ской идеи о вращении экрана около центральной оси - здесь, как
и в модели гелиоротора, радиальная жесткость конструкции
создается равномерным вращением.
Высокая скорость движения такого паруса создает заманчивые
перспективы для будущих полетов, которые пока остаются в рам¬
ках научной фантастики. Когда удастся производить непосредст¬
венно в космосе такие тончайшие солнечные паруса, они станут,
а б
Рис. 47
возможно, основным средством для полетов по Солнечной системе,
включая даже полеты человека. Однако едва ли не самым любопыт¬
ным из возможных представляется полет вне плоскости эклиптики
к полярным околосолнечным областям, исключительно
перспективный с точки зрения космических и астрономических ис¬
следований в этой неизученной области пространства. На рис. 47,.а
[1.87] изображена схема такого полета с возвращением на Землю:
146
А — точка старта с Земли, В — точка возврата на орбиту Земли,
С — точка максимального удаления от плоскости эклиптики. Штри¬
ховая окружность, проведенная через точку С, расположена внутри
орбиты Земли (имеет радиус, меньший 1 а.е.). На рис. 47,6 изобра¬
жена схема полетов от точки А на орбите Земли к северной и юж¬
ной полярным околосолнечным областям для создания длительно
функционирующей солнечной обсерватории (расстояния точек Л/
и S от Солнца также меньше 1 а.е.).
Для полетов к полярным областям потребуется движитель с тя¬
гой не менее 100 — 200 Н. Предполагается, что изготовленный
вышеуказанным способом солнечный парус обеспечит такую силу
тяги и сможет вывести на указанные траектории астрономическую
обсерваторию массой 15 — 30 т. Соответствующее управление пару¬
сом должно удержать обсерваторию в необходимом равновесном
положении в точках Nn S. Тяга около 100 Н окажется достаточной
для выполнения другого весьма фантастичного по своему замыслу
маневра - транспортировки к Земле небольших астероидов, со¬
стоящих из ценного рудного материала.
Не менее захватывающий полуфантастический проект парусного
перелета излагается в работе [1.90], посвященной описанию поле¬
та космического корабля с тремя солнечными парусами радиусом
200 км каждый за пределы Солнечной системы к звезде а Центавра.
Авторы проекта предполагают, что такой корабль, несущий на бор¬
ту колонию космонавтов численностью до тысячи человек, сможет
достичь этой звезды за 1200 лет. Главная опасность, по их мнению,
грозит космоплавателям со стороны высокотемпературных воздей¬
ствий, испытываемых парусным кораблем при близком к Солнцу
прохождении перигелия околосолнечного эллипса: температура
поверхности корабля достигнет 1500°С.В работе [1.91] предложе¬
ны алгоритмы вывода аппарата с парусом на эллиптическую или
гиперболическую орбиту вокруг достигнутой звезды а Центавра.
Там же обсуждается модификация двигательной установки, состоя¬
щая из комбинации солнечного паруса с ядерным двигателем.
Авторы проекта предлагают несколько вариантов космических
парусников, способных покинуть Солнечную систему. Так, чтобы
уйти из Солнечной системы, пройдя перигелий на гелиоцентриче¬
ском расстоянии 0,01 а.е. со скоростью, составляющей около
0,0014 скорости света, т.е. около 420 км/с, потребуются три сол¬
нечных паруса радиусом 200 км каждый при парусности
2-105 см2/г. Общая грузоподъемность такого космического ко¬
рабля составляет 107 кг (полезный груз и масса паруса с тросами).
Если же пользоваться менее эффективными парусами (парусность
105 см2/г, радиус 50 км), то маневр можно осуществить, снабдив
корабль уже не менее чем 76 такими парусами. При всей своей
147
фантастичности этот проект дает, однако,на¬
глядное представление о зависимости эффек¬
тивности парусных движителей от размеров
и технологических особенностей паруса. Ва¬
риант с тремя парусами соответствует уско¬
рению вблизи перигелия около Ag (g — гра¬
витационное ускорение на поверхности Зе-
*0 мли), причем время полета до звезды, оце¬
ниваемое в 1200 лет, можно сократить до
1100 лет за счет гравитационного разгона
вблизи Сатурна при покидании Солнечной
системы. Если же увеличить ускорение до
10 + 20 g, то время полета можно умень¬
шить до 800 лет.
Предлагая пока фантастические проекты
межзвездных космоплаваний под солнеч-
нечными парусами, авторы работ [1.90 — 1.92] тем не менее
весьма серьезно подходят к ряду практических проблем.
Во-первых, это проблема разогрева при сближении аппа¬
рата с Солнцем, во-вторых - проблема быстроты развертывания
солнечного паруса. В проекте межзвездного парусного плавания
обе эти проблемы одновременно предлагается решать весьма
неожиданным способом, т.е. путем швартовки космического парус¬
ного корабля к небольшому астероиду, площадь тени которого
больше максимальной площади паруса. Сначала астероид выводит
аппарат на параболическую орбиту около Солнца (Лс ^ 1 млн. км)
с заданным перигелием г„ =» 0,01 а.е. *=» 1,5 млн. км, где гравита¬
ционное солнечное ускорение составляет около бg (рис. 48), При
подходе к перигелию аппарат ’’прячется” за астероид во избежание
критического разогрева парусов. В момент прохождения перигелия
аппарат отстыковывается от ’’экрана” и со всеми развернутыми па¬
русами выходит из-за прикрытия и переходит на требуемую орбиту
под действием светового давления. За короткое время пребывания
вблизи Солнца температура парусов не успеет достичь критических
значений: при прогнозируемых скоростях прохождения перигелия
корабль уже через полчаса окажется на расстоянии 2,3 • 10 км от
Солнца в безопасной зоне, где температура парусов снизится с
2000 К до 1000 К. На такие температуры рассчитывается солнечный
парус, выполненный не из пленки, а из специальной металлической
фольги толщиной 10-8 м с точкой плавления 2600 К.
Идея искусственного экранирования паруса от разогрева одно¬
временно решает и проблему развертывания, так как позволяет
заранее приготовить парус, развернув его в тени в рабочее положе-
148
ние, готовое к полету. В проекте парусного звездоплавания речь
идет о ’’минутной готовности” вблизи перигелия, так как при ско¬
рости порядка 0,0014 скорости света опоздание в крайне трудоем¬
ком полном развертывании множества парусов на 1 минуту будет
означать ошибку в 25 ООО км при выходе на расчетную траекторию
(угловая ошибка 0,1°), а на расстоянии в 4 световых года соответ¬
ствующий промах достигнет 440 а.е. Движение аппарата, покидаю¬
щего Солнечную систему, будет происходить по гиперболе, обра¬
щенной к Солнцу своей выпуклостью, т.е. по цандеровской
траектории движения в центральном фотогравитационном поле
(см. рис. 5 и формулы из § 5). Авторы проекта указывают на
перспективность перелетов к другим звездам с помощью солнечно¬
го паруса в отдаленном будущем (через 4-109 лет) [1-92].
В заключение уместно остановиться на проблеме, общей для
любой конструкции солнечного паруса, — на проблеме возможно¬
сти пробоев материала паруса микрометеороидами (см. § 3). Не
обсуждая вопрос о крайне нежелательной (для столь хрупкой кон¬
струкции, как солнечный парус) встрече в космосе с достаточно
массивной частицей, которая может попросту сломать его или силь¬
но повредить (вероятность такого события всегда отлична от нуля),
займемся вопросом о возможности многократных встреч с мельчай¬
шими микрометеоритными и пылевыми частицами, населяющими
Солнечную систему. Эти частицы, получившие название микро¬
метеороидов, создают околосолнечный рой [1.2], причем средняя
плотность микрометеороидного вещества в Солнечной системе
составляет вблизи орбиты Земли 1,3 -10~2 2 г/смэ. Эта плотность
увеличивается вблизи Солнца и, наоборот, уменьшается к перифе¬
рийным областям Солнечной системы. Уменьшение плотности при
удалении от Солнца происходит неравномерно, есть области с повы¬
шенным и с пониженным содержанием частиц, причем эти области
геометрически не связаны с планетными орбитами: вероятно,
распределение частиц в значительной мере обусловлено космиче¬
скими электромагнитными силами.
На основании современных сведений о микрометеоритной и
пылевой материи [1.1, 1.2] можно заключить, что солнечный
парус будет неизбежно подвергаться бомбардировке микрометео¬
роидами. Так как наблюдается корреляция: чем меньше масса
частицы - тем выше ее скорость, то очевидно, что и самые мельчай¬
шие частицы, движущиеся с гиперболическими скоростями, смогут
повредить пленочную поверхность. Для защиты от пробоев пред¬
лагается, например [1.80], покрывать пленку армирующей сеткой,
чтобы ячеистая структура сетки помогала локализовать места
пробоев и избежать расползания повреждений. В этом плане весьма
перспективна также сотовая структура (см. рис. 46), предлагае-
149
мая в [1.87, 1.88]. Оценка опасности пробоев паруса выражается
по [1.80] в следующих цифрах: за 4 года предполагаемого полета
солнечного паруса уменьшение размеров его отражающей поверх¬
ности за счет пробоев составит вблизи орбиты Земли около 7%, а
в более близких к Солнцу областях — около 12%.
Проблема пробоя солнечных парусов микрометеороидами бес¬
покоит также и авторов проекта межзвездного парусного путе¬
шествия. В [1.90] приведен расчет силовых нагрузок на арми¬
рующие сетки противометеоритной защиты, возрастающих при
Рис. 49
приближении к внутренним областям Солнечной системы, так
как именно от Солнца движутся гиперболические потоки пылевых
и микрометеоритных частиц, покидающих Солнечную систему.
Схема армирующей сетки, наброшенной на парус парашютного
типа, изображена на рис. 49; в действительности эта сетка предпо¬
лагается очень мелкой, со стороной каждой ячейки около 8-10 см,
что позволит разделить поверхность паруса с 40-километровым
радиусом на 1012 элементов. Сетка будет состоять из волокон
диаметром Ю-5 м, причем масса сетки увеличит на 35% Maqcy
каждого паруса. Это снижает эффективность парусного корабля,
однако в меньшей степени, чем прогнозируемые пробои. В [1.90]
приведены расчеты силовых нагрузок и прочностных характерис¬
тик сеточного каркаса при полной массе парусника 5 • 106 кг и
максимальном ускорении при прохождении перигелия порядка25g.
Необходимо напомнить, что микрометеоритная опасность бес¬
покоила в свое время и Ф.А. Цандера [В.10, 1.93]; он напоминает
а ней и предлагает создание искусственных электростатических
полей для предохранения аппарата с парусом от столкновений
с мельчайшей пылью и частицами. В настоящее время в связи с
космическими экспериментами существенно улучшились наши
знания относительно свойств межпланетной среды и стало ясно,
что, хотя количественные рценки Ф.А. Цандера следует признать
устаревшими, но его идеи электростатической защиты заслужива¬
ло
ют серьезного внимания и пристального исследования. Учитывая,
что электризация поверхности паруса может способствовать до¬
полнительному притяжению пылевых частиц, движущихся в кос¬
мических электромагнитных полях, следует признать необходи¬
мым нанесение отражающих свет металлизованных покрытий,
способствующих одновременно устранению нежелательной элект¬
ризации паруса в космосе. Речь о снятии вредного статического
электричества с пленочных лопастей гелиоротора уже шла выше
[1.64], этой проблеме посвящено несколько статей, в частности
[1.94-1.96]. В них устанавливается ориентация дуговых разрядов
на парусной пленке майлар и их интенсивность в зависимости от
полимерной структуры пленки (при толщине 75 мкм [1.94]),
приводятся зарядовые характеристики космических диэлектри¬
ков: пленок из тефлона и полиимида (каптона) [1.95]. На поли¬
мерные пленки со стороны их освещенной поверхности рекомен¬
дуется наносить прозрачный токопроводящий слой окиси индия,
препятствующий возникновению электрических зарядов, которые
могут повысить потенциал парусной поверхности до 12000 В и
привести к электрическим разрядам с разрушительными последст¬
виями. Ряд интересных практических соображений о материалах для
парусных перелетов к ближайшим звездам приведен в [1.97-1.100].
Кроме идеи отклонения метеорных частиц мы находим у
Ф.А. Цандера также и некоторые другие практические рекоменда¬
ции по уменьшению метеорной опасности [В.10, с. 288], в частнос¬
ти выбор траекторий вне постоянных орбит метеорных роев,
разделение аппарата на ряд отсеков с автоматическим приспособ¬
лением для их отделения в случае пробоя и т.п. Практические
цандеровские рекомендации тех лет могут оказаться актуальными
и для современных парусных конструкций, например для перспек¬
тивной конструкции сотового паруса.
Таким образом, обеспечение высокой надежности космических
аппаратов в настоящее время становится одной из главных проблем
космонавтики. Основным фактором, определяющим надежность
работы систем и корабля в целом при его длительном функцио¬
нировании в космическом пространстве, является учет влияния
условий окружающей среды и принятие мер по защите приборов
и самого солнечного паруса от этих влияний. Некоторые идеи
Ф.А. Цандера, касающиеся учета воздействия определенных фак¬
торов космического пространства, в наше время получили широ¬
кое развитие, хотя иногда и в несколько иной интерпретации,
нежели были в свое время сформулированы им самим. О разви¬
тии этих идей в области защиты космических аппаратов интересно
рассказывает И.М. Коровин [1.101], справедливо отмечая, что
цандеровские идеи опередили даже наше время, когда современная
наука и техника лишь подошли к их практической реализации.
151
Часть II
ГЕОЦЕНТРИЧЕСКИЕ ТРАЕКТОРИИ ДВИЖЕНИЯ
С СОЛНЕЧНЫМ ПАРУСОМ
§ 13. Квазикруговые спиральные траектории раскрутки
с солнечным парусом вокруг Земли
Рассматривавшиеся в части I проекты гелиоцентрических меж¬
планетных перелетов с солнечным парусом ставили своей целью
теорию и расчет гелиоцентрической траектории вне сферы действия
планет старта и назначения. Как правило, предполагалось, что рас¬
крытие паруса происходит на орбите Земли уже после освобождения
космического аппарата от земного тяготения. Однако Ф.А. Цандер
(В.11] предлагал именно полную двухэтапную схему полета, при
которой сначала выполняется раскрутка аппарата с уже раскрытым
парусом по спирали вокруг Земли для выхода на требуемую старто¬
вую геоцентрическую траекторию, а затем уже осуществляется гелио¬
центрический межпланетный перелет, также с солнечным парусом.
С динамической точки зрения мы имеем дело здесь с двумя совер¬
шенно разными задачами. Кроме того, с очевидностью выступает
логическая преемственность двух указанных функциональных
этапов работы солнечного паруса, на протяжении каждого из
которых парус выступает как космический движитель малой тяги,
выполняющий, однако, принципиально различные в динамическом
отношении маневры.
Прослеживая развитие цандеровских идей в современной дина¬
мике космического полета [1.28] следует заметить, что эта полная
комплексная схема парусного перелета, к сожалению, так никогда
и не была полностью проанализирована и никто из исследователей
ни теоретически, ни численно не объединил оба эти этапа в одну
задачу. Это произошло, по-видимому, именно в силу упомянутых
динамических различий обеих задач. Кроме того, необходимо за¬
метить, что бурное развитие парусных задач началось в 60-е годы
сразу с гелиоцентрического этапа задачи, т.е. со второго цандеров¬
ского этапа движения. На первый взгляд представляется парадок¬
сальным, что столь ’’близкая” геоцентрическая задача о раскрутке
с солнечным парусом достаточно долго оставалась на втором плане,
уступая место зачастую полуфантастическим проектам далеких
межпланетных парусных плаваний. Несмотря на, казалось бы,
большую перспективность скорой технической реализации, эта
152
задача в те же годы удостоилась значительно более скромного
количества исследований.
Объяснить указанное нарушение преемственности и определен¬
ную диспропорцию научных интересов в этом случае нетрудно,
если учесть, что любая постановка задачи по построению косми¬
ческой парусной траектории сначала основывается на некоторой
небесно-механической базовой теории, а затем уже конкретизи¬
руется в плане разработки инженерных деталей проекта и обеспе¬
чения требуемого управления парусом. С этой точки зрения задачу
гелиоцентрического межпланетного перелета можно в некотором
отношении называть более легкой, так как она опирается на мо¬
дельную задачу о движении с парусной тягой в невозмущенном гра¬
витационном поле Солнца. Так как в этой задаче сила светового
давления солнечных лучей рассматривается как сила тяги (в отли¬
чие от задач классической небесной механики, где она рассматри¬
вается как возмущающая сила), то общую постановку гелиоцент¬
рической парусной задачи действительно можно считать невозму¬
щенной. Кроме того, в силу физических соображений (см. § 5, 6)
тяговое ускорение паруса частично (в виде радиальной составляю¬
щей) или даже полностью (цандеровские конические сечения)
удается удачно вписать в алгоритм ограниченной фотогравитацион-
ной задачи двух или даже трех тел. Именно вследствие этих сооб¬
ражений алгоритм невозмущенной гелиоцентрической задачи о
движении с солнечным парусом сразу привлек к себе внимание
исследователей своей сравнительной простотой и изяществом,
позволяющими четко выделить эффекты светового давления и
построить динамическое описание траектории межпланетного па¬
русного перелета.
С другой стороны, геоцентрическая задача о раскрутке (вокруг
Земли), начинающейся с низкой околоземной орбиты и выполняе¬
мой за счет малой силы тяги управляемого солнечного паруса, не
может рассматриваться как невозмущенная даже в самой грубой
модельной постановке; кроме того, эта задача отличается от гелио¬
центрической еще и изменением направления солнечных лучей по
отношению к центру тяготения. Оказываясь расширенной модифи¬
кацией спутниковой задачи, она должна уже в первом приближе¬
нии рассматриваться как возмущенная (имеются в виду гравита¬
ционные, атмосферные и теневые эффекты), что существенно
усложняет как процедуру численного интегрирования уравнений
движения, так и процедуру построения аналитических решений.
Именно поэтому разработка возмущенной геоцентрической
задачи о полете с управляемым парусом началось сравнительно
недавно, и эту задачу пока еще никак нельзя считать решен¬
ной.
153
Рис. 50
Основополагающая постановка задачи о геоцентрической рас¬
крутке, начинающейся с круговой околоземной орбиты, Ф.А. Цан¬
дером [В.11] была, конечно, сформулирована как невозмущенная -
в те годы она и не могла быть иной. Основная заслуга Ф.А. Цандера
в плане формулировки этой задачи состоит в том, что, во-первых,
он предложил простую и одновременно весьма выгодную энергети¬
ческую схему управления парусом [В.11, с. 368] (рис. 50): на том
участке, где солнечные лучи ’’дуют в корму” космического кораб¬
ля (участки BiB[, ВгВ'г и т.д.), плоскость отражающего паруса
должна быть строго перпендикулярна солнечным лучам, в тени
ориентация безразлична, а по выходе из тени, т.е. там, где корабль
движется навстречу свету (участки В[В2, В'2В^ и т.д.), парус сле¬
дует держать расположенным ребром к Солнцу или просто сверну¬
тым. Об этой схеме сам Ф.А. Цандер пишет [В.11, с. 367]: ”Мы
должны, кружась вокруг земного шара, при каждом облете поль¬
зоваться зеркалом от точек Вп через С„ к В'п> ставя на пути
B'nDnBn +1 зеркало так, чтобы лучи скользили по его поверхнос¬
ти, не производя действия”.
В качестве траектории раскрутки (в математическом смысле)
Ф.А. Цандер предлагал классическую раскручивающуюся (архи¬
медову) спираль, у которой каждый луч пересекает витки кривой
в точках, находящихся на одинаковом расстоянии друг от друга
(см. рис. 50). Принимая, что на каждом витке такой спиральной
траектории, начинающейся с круговой орбиты, средняя скорость
космического аппарата приближенно равна круговой орбитальной
скорости, Ф.А. Цандер так определяет время раскрутки до набора
параболической скорости: примерно 170 сут для модели зеркаль¬
ного паруса плбщадью 105 м2 и полной массой (вместе с полезным
154
грузом) около 1000 кг (парусность такой конструкции состав¬
ляет 103 см2/г).
Итак, основная заслуга ФА. Цандера в деле разработки геоцент¬
рической задачи состоит в формулировке общей исходной кон¬
цепции геоцентрической раскрутки и сводится вкратце к двум
основным положениям: 1) успешная аппроксимация траектории
квазикруговой спиралью, 2) энергетическое обоснование закона
управления парусом по релейной схеме переключения 0 или 1.
Последующие исследования режимов раскрутки в этой задаче
необходимо внесли некоторые незначительные коррективы в цан-
деровскую модельную схему, не нарушив, однако, ее логической
целостности. Анализируя эти коррективы, следует, например,
иметь в виду, что траектория, изображенная Ф.А. Цандером (см.
рис. 50), носит в значительной степени условно-иллюстративный
характер. Это связано с тем, что прохождение аппарата через тень
Земли, изображенное в виде луча с точками ’’включения” В\, . . .
...,В'п, не позволит обеспечить изображенное Ф.А. Цандером
неизменное расстояние между витками спиральной траектории.
Кроме того, в выполненных им расчетах траектории раскрутки
тень вообще в расчет не принималась. К обсуждению цандеровской
схемы квазикруговой раскрутки мы еще вернемся в § 17 при
обсуждении релейных схем управления парусом, предназначенных
для коррекции орбит.
Относительно цандеровского закона переключения по релейной
схеме 0 или 1 было в дальнейшем установлено, что хотя такое
управление заведомо не является оптимальным, т.е. обеспечивает
разгон до параболической скорости отнюдь не за минимальное вре¬
мя, оно тем не менее представляется весьма выгодным энергети¬
чески (см. § 15) в ряде задач о парусной раскрутке. Однако в
действительности это управление, как будет показано ниже в § 15,
обеспечивает траекторию, лучше аппроксимируемую семейством
кеплеровых эллипсов, нежели раскручивающейся квазикруговой
цандеровской спиралью. С другой стороны, предлагаемому Ф.А. Цан¬
дером для своего закона управления движению по квазикруговой
спирали на самом деле отвечает несколько иной закон управления,
имеющий релейный лишь в качестве своего первого приближения.
Имея в виду эти незначительные коррективы, следует заметить,
что они еще подчеркивают принципиальную правильность идей
Ф.А. Цандера, силой своего научного предвидения и высокоразви¬
той научной интуиции сразу верно сформулировавшего основной
принцип парусной геоцентрической раскрутки, подчиняющейся,
вдобавок, энергетически выгодной схеме управления.
Первые немногочисленные исследования геоцентрической па¬
русной раскрутки появились одновременно с исследованиями
155
гелиоцентрического полета — т.е. в начале 60-х годов. Дальнейшее
развитие тематики происходило по двум основным направлениям:
вариант А — раскрутка с круговой орбиты, лежащей в плоскости
эклиптики; вариант В - раскрутка с круговой орбиты, перпенди¬
кулярной и к потоку солнечных лучей, и к плоскости эклиптики
(с терминаторной орбиты). Обе упомянутые задачи развивают
цандеровскую концепцию и вносят соответствующие вышеупомя¬
нутые коррективы в его опорную схему. Например, именно для
эклиптической раскрутки А используется релейный (или близкий
к нему непрерывный) цандеровский закон управления парусом,
однако траектория раскрутки оказывается не квазикруговоя, а
эллиптической. С этим типом движения мы еще встретимся в § 15.
Вариант В, которому в основном посвящен данный параграф,
полностью реализует квазикруговую цандеровскую раскрутку,
внося некоторые коррективы в цандеровский закон управления.
Теория квазикруговой раскрутки с помощью солнечного пару¬
са, созданная в 60-е годы, была тесно связана с первыми разра¬
ботками теории движения под действием малой касательной тяги и
основывалась на ряде готовых численно-аналитических результа¬
тов решения этой задачи. Такие результаты были получены Ф. Пер¬
кинсом [2.1], заложившим аналитические основы теории спираль¬
ной геоцентрической раскрутки с непрерывной малой касательной
тягой, т.е. тягой, направленной по геоцентрической скорости
аппарата. В ней впервые было построено решение плоской асимп¬
тотической задачи о разгоне с малой касательной тягой от началь¬
ной круговой скорости до набора нулевой полной энергии (мест¬
ной параболической скорости в конечной точке). Эта задача впо¬
следствии подробно исследовалась В.В. Белецким и В.А. Егоровым
[1.3], Д.Е. Охоцимским [2.2], а также рядом других авторов;
подробную библиографию по проблеме разгона можно найти в
монографии Г.Л. Гродзовского и др. [В.24]. Современное состоя-
156
ние этой сложной динамической проблемы охарактеризовано
В.В. Белецким в очерке ”В космос по спирали” [В.17, с. 252-264].
Как показано в [2.1], геоцентрическая траектория раскрутки
в присутствии постоянной малой касательной тяги неизменно
оказывается развернутой спиралью (рис. 51), расположенной в
плоскости первоначальной орбиты и аппроксимируемой семейст¬
вом круговых орбит с увеличивающимся радиусом. Эта спираль
остается квазикруговой достаточно долго, вплоть до набора аппара¬
том нулевой полной орбитальной энергии, т.е. до момента покида¬
ния гравитационного поля Земли с местной параболической ско¬
ростью, когда спираль уже стремится развернуться в прямую. Энер¬
гетический баланс такой плоской раскрутки предполагает, что
средняя орбитальная скорость на любом витке спирали близка
к местной круговой скорости, т.е. к и и монотонно
убывает от витка к витку. Грубо приближенные формулы, опи¬
сывающие приращения радиус-вектора А г и орбитальной скорос¬
ти Ди в виде функций полярного угла у, вытекают из уравнений
орбитального движения после их линеаризации по эксцентриситету.
Они имеют вид
и описывают синусоидальные колебания, налагающиеся на общий
вековой ход. Здесь у — полярный угол аппарата на спирали (см.
рис. 51), г0 — радиус начальной круговой орбиты, v - местная
круговая скорость на первоначальной орбите. Тяга F считается
малой, если она составляет менее 1 % от силы тяготения на перво¬
начальной орбите. Закон убывания геоцентрической скорости со
временем t, установленный с точностью до периодических слагае¬
мых, имеет при этом вид
Формулы (13.1) и (13.Г) позволяют составить наглядное пред¬
ставление о характере раскрутки (увеличении г) и о немонотонном
(в линейном приближении) поведении скорости аппарата v до тех
пор, пока эта скорость не окажется равной местной параболической
скорости в конечной точке. Напомним, что и круговая, и параболи¬
ческая местные скорости убывают по закону ~1 jyjr с удалением
от центра притяжения. Здесь мы снова сталкиваемся с традицион¬
ным для динамики космического полета парадоксом состоящим
157
Ar-2 - (Ai^ - sin Д^),
i
(13.1)
F
Av
At.
(13.1')
т
в том, что сила, ускоряющая аппарат в строну движения, вызывает
постепенное убывание его орбитальной скорости. Физическая
природа этого парадокса также охарактеризована в упомянутом
выше очерке В.В. Белецкого.
Как легко видеть из формул (13.1), на монотонный ход изме¬
нения г к v накладываются некоторые периодические колебания.
Динамическое объяснение этого явления достаточно просто. Дейст¬
вительно, на первоначальной круговой орбите сила тяготения Зем¬
ли fM3mjr7 уравновешивается центробежной силой mv2 /г. При
непрерывном действии малой тяги максимальное возрастание
кинетической энергии аппарата достигается, как известно, путем
максимизации проекции тяги F на направление скорости v. Это
следует из теоремы об изменении полной орбитальной энергии
h = mv7/2 —fM3 т/г.
dh d / 1 fM3m \ t fM3m
— - — ( — mv J = m v v + —;—- r =
dt dt \ 2 r / r
j fM3m \ fM3m .
T~^r + T+^~'=Fv- (13-2)
В нашей задаче тяга F всегда направлена по касательной к траек¬
тории, следовательно, F 1 v и полная энергия И аппарата возрастает
с максимально возможной скоростью. Это возрастание влечет за
собой возрастание линейной скорости на данном участке (не путать
с общей тенденцией векового уменьшения средней круговой
скорости от витка к витку), а возрастание скорости в свою очередь
вызывает увеличение центробежной силы, превог .одящей теперь
силу тяготения (предполагаем, что рассматриваемый участок
круговой дуги мал и сила тяготения еще не успела измениться).
Именно поэтому аппарат постепенно набирает высоту, удаляясь
от Земли: переходит на новую равновесную орбиту.
158
Начальный характер убывания скорости изображен на рис. 52,а
[2.1]. На общий монотонный вековой ход убывания скорости v
накладываются малые периодические колебания, причем на неболь¬
шом интервале времени раскрутки (порядка нескольких часов на
рис. 52, а) вековое изменение скорости хорошо описывается ли¬
нейной функцией. Аналогичный характер носит и возрастание
высоты аппарата над Землей Н (рис. 52, б).
Задача о разгоне с касательным постоянным ускорением была
подробно исследована В.В. Белецким и В.А. Егоровым [1.3].
Ими показано, что в силу монотонного увеличения полной орби¬
тальной энергии h (а следовательно, большой полуоси а орбиты)
и фокального параметра р (удовлетворяющего уравнению dpjdt =
= IFpjv > 0) оскулирующая орбита непрерывно увеличивает свои
размеры, движение идет по развертывающейся спирали. Из-за уве¬
личения размеров орбиты оскулирующий период обращения будет
увеличиваться, а средняя за оборот скорость движения будет
уменьшаться вплоть до значения местной параболической скорости
на отрыве. Сделав какое-то число оборотов вокруг Земли по плос¬
кой развертывающейся спирали, аппарат с малой скоростью выхо¬
дит на конечный участок траектории раскрутки - на плавную дугу
траектории, уже не закручивающуюся вокруг Земли (рис. 53). На
этой дуге достигается нулевая полная орбитальная энергия аппарата
(точка h = 0). До этого его полная энергия была отрицательной, что
обозначено на траектории раскрутки по спирали на рис. 53 точками
h = —0,5 (начало движения) и h- —0,25. В точке И = 0 геоцентри¬
ческая скорость оказывается равной местной параболической ско¬
рости.
159
Если затем тягу выключить то дальнейший полет будет проис¬
ходить свободно, и тело покинет поле тяготения Земли по параболе
(схему сложения этой скорости с орбитальной скоростью Земли и
задачу дальнейшего гелиоцентрического движения аппарата мы
пока не рассматриваем). Если же тяга будет продолжать действо¬
вать по прежнему закону, то активное движение будет теперь про¬
исходить уже по траектории, асимптотически приближающейся к
геоцентрическому радиус-вектору, причем после точки Л = 0 ско¬
рость на траектории ухода будет в пределе увеличиваться линейно
[2.1,1.3,1.7]:
F . F 1 F ,
r~> V, V -*■ — t, v = — - const, r-+ X .
mm 2 m
Таким образом, на смену монотонному уменьшению средней
скорости от витка к витку (по закону ~1 l\/Fпри h < 0) приходит
монотонное увеличение скорости по линейному закону (при h > 0)
и начинается близкое к равноускоренному движение аппарата,
вследствие чего h при t График на рис. 54 [1.3] показы¬
вает характер изменения скорости v при раскрутке на длительных
интервалах времени, выраженной в долях начальной круговой
скорости и0 = 7,9 км/с: в окрестности точки h = 0 скорость имеет
абсолютный минимум, в левой части графика заметны периоди¬
ческие колебания, аналогичные тем, которые в более крупном
масштабе изображены на рис. 52. На участке графика, следующим
за точкой h = 0, скорость увеличивается почти линейно. Расчет
[1.3], на основании которого строились кривые на рис. 53 и 54,
производился для малых высот начальной круговой орбиты
(п « п0) и для тягового ускорения Fjm^ 0,01# (г - ускорение
силы тяготения на расстоянии г0 от центра притяжения). В нижней
части графика изображены кривые изменения безразмерной полной
орбитальной энергии h и отношения г/г0 при раскрутке ).
*)Расчеты, выполненные в [1.3], показали, что время разгона при ускоре¬
нии порядка 0,1 см/с’ с круговой орбиты с высоты 300 км над поверхностью
планеты составляет около 100 сут при движении вокруг Земли и 30 сут при
разгоне вокруг Марса. Те же времена потребуются для торможения с такими
же ускорениями от параболической скорости до круговой с выходом на кру¬
говую орбиту высотой 300 км. Для разгона с таким ускорением с околозем¬
ной орбиты с высотой над поверхностью Земли около. 6000 км потребуется
около 40 сут. При уменьшении величины F касательной тяги время разгона
увеличивается приблизительно какg/F, причем характер изменения парамет¬
ров сохраняется. Соответственно ускорение в диапазоне от 0,05 до 0,5 см/с2
обеспечивает разгон аппарата около Земли до параболической скорости (или
торможение от параболической до круговой) соответственно за время от
7 месяцев до 2 недель. Число витков всех этих траекторий до набора парабо¬
лической геоцентрической скорости хорошо представляется формулой
а = 0,04 £ /У
160
Возвращаясь к исследованию спиральных траекторий, выпол¬
ненному в [2.1], следует указать, что Ф.Перкинс, анализируя дан¬
ные точного численного решения уравнений разгона точки малой
касательной тягой, ускорение от которой постоянно по модулю,
подметил возможность универсального (не зависящего от малого
параметра) графического представления данных траектории разго¬
на — спирали. В качестве решения задачи ему удалось получить
обобщенные уравнения некоторой усредненной траектории рас¬
крутки с малой касательной тягой (универсальная траектория),
означающие, что все такие траектории с разными ускорениями
в некотором смысле мало отличаются одна от другой и одновре¬
менно мало отличаются от некоторой универсальной раскручиваю¬
щейся спирали, исходящей из гравитационного центра. Следова¬
тельно, в случае исходной круговой орбиты положение начальной
точки выхода на спираль оказывается несущественным для харак¬
теристики движения и решение будет применимо сразу ко всем
траекториям, т.е. не будет зависеть ни от начальных условий, ни от
значений величин, участвующих в вычислении отношения
q = —^ . (13.3)
fM3/rl
Эта величина, которая при необходимости может служить малым
параметром задачи (см. ниже § 15 - 18), вычисляется как отноше¬
ние начального тягового ускорения w0 = (F/m) 0 к гравитацион¬
ному ускорению /М^/г\ на начальной орбите, и ее можно назы¬
вать безразмерным тяговым ускорением.
Таким образом, универсальная траектория годится для любых
малых ускорений w0 и для любого соотношения гравитационного
параметра притягивающего центра /М3 и радиуса орбиты г0,
дающих фиксированное значение параметра Q. Результаты прибли¬
женной теории получили позднее всестороннее освещение и разви¬
тие в книге [1.7]. Точная асимптотическая теория разгона в цен¬
тральном поле под действием постоянного касательного ускорения
была разработана Д.Е.Охоцимским [2.2] для случая разгона не
только до параболических, но и до гиперболических скоростей
в рамках единой схемы движения. Несколько иной подход к мате¬
матической теории спирального разгона мы находим в работе
В.В.Ларичевой и Г.Б.Ефимова [2.3], где обсуждается разгон без
эксцентриситетных колебаний. Здесь уравнения многовиткового
разгона аппарата малой тягой трактуются как некоторая несиммет¬
рично колебательная система, решения которой осциллируют
около частного спирального решения, определяющего линию цен¬
тров колебаний в системе. Исследование проводится в амплитудно¬
161
фазовых переменных, отсчитываемых от спирального решения,
причем эти переменные эффективны для получения единого
асимптотического представления колебательных решений на боль¬
шом интервале аргумента всюду вплоть до спирали.
Итак, в начале 60-х годов уже существовало приближенное
численно-аналитическое описание спиральной траектории раскрут¬
ки под действием постоянной малой касательной силы тяги, пока¬
зывающее, что на небольшом удалении от Земли траектория
раскрутки хорошо аппроксимируется квазикруговой спиралью, а
на существенном удалении — логарифмической гиперболой. Отме¬
тим, что формы этих кривых не зависят ни от начальных условий,
ни от физических параметров задачи. Казалось бы, теперь получен¬
ные результаты можно было с успехом применить к задаче парус¬
ной раскрутки, однако первые же попытки сделать это потерпели
неудачу — выяснилось, что именно требование непрерывности
действия касательной тяги не позволяет автоматически перенести
полученные результаты на случай парусной тяги.
Действительно, условие непрерывности касательной тяги солнеч¬
ного паруса означало бы, что нормаль к теневой поверхности пару¬
са, по которой направлена тяга (см. § 4), постоянно должна
совпадать с направлением скорости аппарата в его орбитальном
Движении. Не говоря уже о том, что такое требование совершенно
не соответствует разумной энергетике паруса (см. цандеровскую
"стратегию” на рис. 50), это требование еще означало бы, что в точ¬
ке, где скорость направлена строго против лучей, сила тяги паруса
оказалась бы направленной к Солнцу, что вообще физически прин¬
ципиально невозможно для солнечного паруса, так как противоре¬
чит закону сохранения энергии (см. § 12). Таким образом, траек¬
тория раскрутки с парусом в плоскости эклиптики или близкой
к ней (вариант А) не удовлетворяет условию непрерывности тяги,
вследствие чего применить теорию универсальной траектории
к этой модели оказалось невозможным. Однако выяснилось, что
условие непрерывности парусной тяги может быть выполнено на
терминаторной орбите (вариант В), скорость на которой всегда
перпендикулярна солнечным лучам. С другой стороны, в отличие
от задачи [2.1], на этой орбите делается невыполнимым условие
направления тяги по скорости (направление нормали к парусу по
скорости означает, что парус не дает тяги). Как будет показано
ниже, на терминаторной орбите оказывается возможным реализо¬
вать такую схему управления непрерывной тягой солнечного пару¬
са, при которой эта тяга обладает хотя бы непрерывной и неизмен¬
ной проекцией на скорость. Когда такое свойство терминаторной
орбиты было установлено, оказалось возможным применить к ней
готовые численные решения из [2.1].
162
« € [-ж/2;Я/2]т«=о ^
^ 0;2^ Орбита А МММ!
Рис. 55 Рис. 56
Для зеркального солнечного паруса площадью А сила тяги
(см. § 4)
F = Р3Д(п.е)2п, (13.4)
где п - орт нормали к парусу, е - орт направления Солнце - Зем¬
ля, всегда расположенный в плоскости эклиптики (рис. 55). Оче¬
видно, что сила тяги паруса, ориентированного ребром к Солнцу,
равна нулю: nl е, п • е = О, F = 0, а сила тяги паруса, ориентиро¬
ванного нормально к лучам, — максимальна: n ||е, n-e= 1,
F = Fm а х. Ориентация паруса, обеспечивающего максимум произ¬
ведения F -v (мощности паруса) из (13.2), лежит между ориента¬
цией, при которой тяга максимальна (п || е), и ориентацией, при
которой тяга хотя и не максимальна, но зато целиком направлена
по скорости (п II v, n v = 1). Соответственно максимальная воз¬
можная скорость возрастания полной орбитальной энергии из
(13.2) зависит в конечном итоге от взаимной ориентации векто¬
ров v и е, т.е. от ориентации скорости, а следовательно, и плоско¬
сти орбиты относительно солнечных лучей.
Если рассмотреть два вышеупомянутых случая ориентации орби¬
ты: А (см. рис. 55) и В (рис. 56), то на первый взгляд орбита А
кажется более перспективной в смысле энергетики парусной рас¬
крутки. Действительно, на участке движения от Солнца происходит
интенсивный набор энергии, который (см. § 15) вызывает превра¬
щение круговой орбиты в эллиптическую, вследствие чего рас¬
крутка будет происходить не по квазикруговой спирали, а по квази-
эллиптической. Кроме того, расположение орбиты в плоскости
эклиптики означает, что поток солнечных лучей целиком распола¬
гается в плоскости орбиты, что весьма выгодно энергетически.
Однако существенным недостатком варианта А является система-
163
тическое прохождение аппарата через тень Земли, где тяга исчезает,
что сразу снижает скорость раскрутки. Другим недостатком ва¬
рианта А является и то, что на части орбиты, где аппарат движется
к Солнцу (верхняя часть орбиты на рис. 55), также происходит
уменьшение скорости изменения кинетической энергии, так как
тяга мала или отсутствует.
Орбита В, расположенная в плоскости земного терминатора,
лишена указанных недостатков орбиты А: она постоянно освещена
Солнцем (годичное движение Солнца мы пока не рассматриваем),
поэтому на ней возможно непрерывное увеличение кинетической
энергии на протяжении всего оборота. Однако скорость на этой
орбите всегда перпендикулярна солнечным лучам, вследствие чего
в данном случае едва ли удастся получить достаточно большую
проекцию тяги на скорость (на рис. 56 терминаторная орбита изо¬
бражена освещенной снизу, оси Ох и Оу лежат в плоскости орби¬
ты, сила тяги F расположена вне плоскости орбиты, что делает
задачу пространственной в отличие от задачи с орбитой А). Как
легко заключить из геометрических соображений, сравнив рис. 55
и рис. 56, сила тяги на орбите В обязательно будет обладать отлич¬
ной от нуля компонентой Fг , направленной вдоль перпендикуляр¬
ной плоскости орбиты оси Oz, совпадающей по направлению
с потоком солнечных лучей.
Парус на терминаторной орбите может оставаться зеркальным
только с одной стороны. Он должен вращаться с периодом, равным
периоду орбитального движения аппарата вокруг оси, перпендику¬
лярной плоскости орбиты, в нашем случае - вокруг оси Oz . Если
потребовать, чтобы нормаль к парусу п составляла с осью Oz неиз¬
менный угол <*1 (угол полураствора конуса, описываемого векто¬
ром п около оси Oz ), равный углу падения лучей на парус, то ока¬
жется, что на зеркальный парус, в соответствии с формулой (13.4),
будет действовать непрерывная сила тяги за счет светового дав¬
ления F = 2Р-$А cos2 ад п. Эта сила тяги имеет составляющую
Fz - 2РЭА cos3 ОС] в направлении оси Oz и составляющую Fху =
= 2F3 A cos2 a, sin ад в плоскости орбиты хОу. Этой непрерывной
составляющей Fxy мы можем распорядиться, как требуется. В дан¬
ном случае выгодно направить эту проекцию тяги целиком по ско¬
рости, чтобы обеспечить выполнение интересующего нас условия
неизменности модуля касательной проекции тяги F из (13.4) и
максимизации произведения Fv из (13.2). Продифференцировав
Fxy по О], можно легко найти значение од , дающее максимум
проекции Fv = Fxy. Оно оказывается равным а = 35,26°. На осно¬
вании этого значения можно установить, что предельное максималь¬
ное значение проекции силы тяги на плоскость ху составляет
РТуЯХ ~ РГХ ~ 0,77^3/4. При этом проекция Fz = \,0&Р3А,
164
тогда как /^max = 2Р-$А . Итак, величины проекций не зависят ни
от размеров соответствующего витка орбиты, ни от положения
аппарата на ней. Становится очевидным, что терминаторная орбита
удовлетворяет требованию неизменности касательной проекции тя¬
ги (без учета поворота плоскости движения).
В.Фимпл [2.4] первым попытался построить теорию квазикру-
говой парусной раскрутки с терминаторной орбиты. Он поставил
и решил задачу об определении энергетически оптимальной про¬
граммы управления парусом на терминаторной орбите, удовлетво¬
ряющей требованию максимизации проекции тяги F на скорость v.
Эта программа [В.24, с. 420] называется локально-оптимальной.
Она обеспечивает для текущего момента времени максимальную
скорость возрастания полной энергии аппарата, однако делает это
необязательно за минимальное время, т.е. не является оптимальной
в смысле быстродействия (напомним, что на траектории, раскручи¬
вающейся вокруг Земли, орбитальная энергия аппарата h всегда
отрицательна) . В этой связи уместно добавить, следуя В.В.Белецко
му и В.А.Егорову [1-3], что вектор ускорения в оптимальной про¬
грамме с постоянным по модулю ускорением в любой момент
времени лежит между двумя направлениями: трансверсальным и
касательным, совпадая с последним лишь в конечной точке манев¬
ра. Если ускорение малой тяги постоянно и направлено все время
касательно, то отличие времени выхода на значение h - 0 от мини¬
мального не превышает 0,5 %.
Хотя теорию [2.4] парусной раскрутки пришлось разрабатывать
целиком и полностью заново, в ее основу удалось положить
обобщенный метод универсальной траектории [2.1] и, основы¬
ваясь на свойстве неизменности проекции Fv, получить численно¬
аналитические решения, не зависящие ни от парусности аппарата,
ни от начальных стартовых условий выхода на спираль.
Для определения закона управления, реализующего перечислен¬
ные выше требования, в [2.4] предлагалось сначала записать силу
тяги в виде функции направляющих косинусов вектора,F относи¬
тельно трех ортогональных осей системы Ozxy.
з
F = 2Рз A cos2од 2 cosa,-ej, /=1,2,3, (13.5)
I = 1
где ai — угол, составляемый нормалью п к теневой стороне паруса
с осями Oz, Ох, Оу; е/ - орты этих осей. С помощью (13.5)
скалярное произведение, выражающее проекцию тяги на скорость,
можно представить в виде
з
Fv = 2PjAcos1ai 2 x,cosa,. (13.6)
i - 1
165
Теперь направляющие косинусы должны быть выбраны из локаль¬
но-оптимального условия максимума скорости приращения полной
энергии max(F-v). Максимизируя выражение (13.6) относительно
косинусов трех управляющих углов а,-, получим
cos ой = (3 cos р, + у/cos2 в, + 8),
(13.7)
cos а2>з = 2q-1 cos /32,з .
где 0/ = arccosu//|v | (i = 1, 2, 3) — направляющие косинусы
вектора скорости v, являющиеся функциями положения аппарата
на орбите, а величина q может быть найдена из условия:
= 6 cos2 /3, + 6 cos yjcos2 0i +8 + 12.
В нашем частном случае терминаторной орбиты скорость не име¬
ет составляющей вдоль оси Oz : и, = и, = 0, 0, = 90°. Подставляя
эти.значения в полученные выше формулы, находим
<*! = 35,26°, 0,=9О°, 005 0 2,3 = 0,577 005 02,3-
При такой программе управления аппарат ускоряется как в
плоскости исходной орбиты, так одновременно и перпендикулярно
ей, т.е. в направлении солнечных лучей. В начале раскрутки смеще¬
ние вдоль Oz мало и траектория раскрутки близка к плоской
квазикруговой спирали. Именно на этом участке В.Фимпл исполь¬
зовал [2.4] готовое приближенное численное решение из [2.1],
состыковав его с численным решением уравнений движения под
действием тяги (13.5)
AIR з\2 , 3 ,_3/2
Х[ - 2Р3—("/р”) cos “1 cos а<+/^3*i( S г,-) =0
m
= l
при локально-оптимальном управлении (13.7).
Применение методики универсальной траектории позволило
установить, что общий характер раскрутки с парусом с термина¬
торной орбиты и поведение траекторных параметров близки к изо¬
браженным на рис. 5 1 - 53 и не зависят ни от параметров паруса,
ни от стартовых условий выхода на спираль. С течением времени
гравитационная сила уменьшается и перестает компенсировать
действие неизменной компоненты ускорения вдоль солнечных лу¬
чей, в результате чего задача становится пространственной, что
требует дополнительных численных исследований.
В работе [2.4] ставилась цель не только исследовать задачу о
раскрутке с терминаторной орбиты, но и изучить ее недостатки и
преимущества по сравнению с раскруткой с орбиты А. Для сравне¬
ния локально-оптимальное управление без учета тени планеты было
166
построено и на орбите А. Для этого в плоскости орбиты оказалось
достаточным, записав проекцию тяги на скорость
F • v 2 .Рз А
Fv = = —. (х cos а+_)'cos a sin а), (13.8)
I v I Jk2 + у2
максимизировать ее относительно единственного управляющего
угла а установки паруса. Получилось, что в существенно плоской
задаче А (см. рис. 55), в которой нормаль к парусу п вообще не
выходит из плоскости эклиптической орбиты, локально-оптималь¬
ный закон управления парусом, зеркальным с обеих сторон, имеет
вид [2.4]:
cos а = V "jr (sin2 /3 + cos2 /3 -J 9 - sin2 /3 + 3),
у
P = arctg — = ф, a E
x
n ir
2’ 2
(13.9)
/3 e [0,2n],
где ф - полярный угол (см. рис. 55). Очевидно, что это локально¬
оптимальное управление парусом на орбите А не может обеспечить
неизменность проекции тяги на скорость, поэтому готовые числен¬
ные результаты из [2.1] здесь неприменимы. Численное моделиро¬
вание траектории раскрутки с орбиты, выполненное отдельно для
орбиты А в [2.4], дало результаты, зависящие и от парусности ап¬
парата, и от начальных условий ухода с первоначальной орбиты.
Итак, были получены две принципиально разные программы
управления парусом (13.7) и (13.9). Теперь можно было сравнить
обе задачи и установить, какая же из них обеспечит быстрейшее
удаление аппарата от Земли. Например, численные оценки показали,
что для орбиты А максимальное относительное приращение боль¬
шой полуоси за виток, определяемое в результате интегрирования
уравнений для оскулирующих орбитальных элементов в плоском
случае и в присутствии возмущающей силы тяги с касатель¬
ной и нормальной компонентами FT = F cos2 a cos2 (а — /3),
Fn = F cos2 а [ — sin (а — /3)] (см. также § 16), составляет
(Аа/а0)тах % 5,5 Q без учета тени Земли. В этих оценках исполь¬
зовано безразмерное тяговое ускорение Q, определяемое по фор¬
муле (13.3), в которой на этот раз величина w0 вычисляется как ра¬
диационное ускорение аппарата с солнечным парусом в случае
нормальной ориентации паруса к лучам. Для аппарата с заданной
парусностью мы будем величину радиационного ускорения w0 во
всех описываемых ниже геоцентрических задачах принимать по¬
стоянной (в отличие от гелиоцентрических парусных задач),
пренебрегая тем самым незначительным изменением величины
167
удельного светового давления в разных частях геоцентрической
орбиты за счет изменения гелиоцентрического расстояния аппара¬
та. Это изменение мы сразу полагаем пренебрежимо малым по
отношению к расстоянию от Земли до Солнца и принимаем, что
для зеркального паруса в формулах (13.4) — (13.8) коэффи¬
циент Р3 можно принять равным величине P3ip = 2S3/c из (3.3*),
а радиационное ускорение vv0 = w, входящее в параметр Q, рас¬
считывать по формуле, вытекающей из (4.11) при нормальной
ориентации:
2 53 А
w
А
- POTP -
3 т
т
где А — полная площадь паруса.
Таким образом, для паруса, обеспечивающего значение парамет¬
ра Q = 10~4 (эта величина зависит и от парусности и от радиуса
начальной круговой орбиты), достижение эксцентриситета е = 0,1
при раскрутке с круговой орбиты типа А (е0 = 0) обеспечивается
после 625 витков спирали — орбита А медленно превращается
в эллиптическую. Аналогичные приближенные числовые оценки
[2.4] были выполнены и для раскрутки с орбиты А с учетом тени
Земли: на рис. 57 для различных значений r0/R3 приведен график
Рис. 57
отношения (Да/йо) Q- С увеличением г0 ускоряется рост боль¬
шой полуоси за счет ослабевания эффекта тени с высотой и дости¬
гается вычисленный выше максимум.
Аналогичные оценки были выполнены и для орбиты В, причем
оказалось, что для терминаторной орбиты приращение большой
полуоси практически не изменяется при выходе с любого г0, т,е.
(Да/а0)/б ~ 4,83 (кривая В на рис. 57 расположена почти гори¬
зонтально) . Этот результат означает равномерное увеличение а в
процессе квазикруговой раскрутки от витка к витку, которые для
такой спирали располагаются почти на одинаковом расстоянии друг
168
от друга, - этим еще раз подтверждается правильность научной
интуиции Ф.А.Цандера, верно предсказавшего общий характер спи¬
ральной траектории раскрутки (см. рис. 50). ’’Равновесное” значе¬
ние радиуса первоначальной орбиты г0* = 2,25R3, отмеченное на
рис. 57, означает, что при раскрутке с этой высоты обе траекто¬
рии А и В, располагающиеся в разных плоскостях, эквивалентны
по скорости набора высоты. Для г0 < г0* раскрутку выгоднее
производить с терминаторной орбиты В, а для г0 > г0* - с эклип¬
тической орбиты А, для которой на больших высотах эффект тени
становится уже незначителен.
Все приведенные выше сравнительные оценки, так же как и сама
теория раскрутки с терминаторной орбиты, были получены [2.4]
без учета годичного движения Земли вокруг Солнца. Для эклипти¬
ческой орбиты А это движение не может изменить плоскости рас¬
крутки. Для терминаторной орбиты учет годичного движения
означает, что плоскость орбиты поворачивается относительно на¬
правления солнечных лучей (влияние сжатия планеты в этих зада¬
чах не учитывается). Этот поворот будет существенно влиять на
скорость набора нулевой полной энергии, так как тяга окажется
теперь функцией времени, что делает, неприменимыми изложенные
выше методы исследования. Орбита через некоторое время займет
положение, по-прежнему ориентированное перпендикулярно
плоскости эклиптики, но теперь уже вдоль светового потока.
Вблизи этого положения энергетический режим будет напоминать
режим раскрутки на орбите А.
В связи с вопросом о годичном движении плоскости перво¬
начально терминаторной орбиты необходимо отметить еще одну
работу тех лет - В.В.Шувалова [2.5]. В ней обсуждались преиму¬
щества терминаторной орбиты по сравнению с эклиптической орби¬
той, но не для локально-оптимального управления на последней, а
для управления с так называемым половинным углом, о чем пой¬
дет речь в § 15. Выводы относительно безусловной перспективно¬
сти раскрутки с терминаторной орбиты совпали с выводами [2.4],
однако в [2.5] была впервые выдвинута еще одна весьма интерес¬
ная и плодотворная идея, касающаяся поддержания неизменности
плоскости терминаторной орбиты в течение года, а также обсужда¬
лись варианты направления проекции силы тяги на плоскость
орбиты не по скорости, а по трансверсали в случае эллиптической
терминаторной орбиты.
Идея поддержания требуемой ориентации относительно солнеч¬
ных лучей в течение года основывалась на свойствах резонансных
околоземных орбит искусственных спутников, обладающих
соизмеримостью 1:1 между угловой скоростью движения Солнца
по эклиптике (около 1 град/сут) и угловой скоростью поворота
169
пинии узлов орбиты только под действием светового давления на
парус, т.е. под действием нормальной к плоскости орбиты компо¬
ненты силы тяги, направленной вдоль оси Oz на рис. 56. Рассмотре¬
ние, выполненное [2.5] для движения только в центральном грави¬
тационном поле Земли, показало, что эта, на первый взгляд’’вред¬
ная” компонента силы тяги может тем не менее помочь скомпенси¬
ровать другой нежелательный эффект — поворот плоскости относи¬
тельно направления на Солнце. Конечно, такую компенсацию
можно реализовать лишь при строго определенных значениях
парусности аппарата. Кроме того, сам режим раскрутки, т.е. рост
большой полуоси, будет нарушать этот баланс. Поэтому задача о
поддержании плоскости терминаторной орбиты на самом деле
оказывается гораздо более сложной, чем это может показаться на
основании выводов в [2.5], главным образом за счет необходимо¬
сти реально учитывать вековые эффекты ухода узла под влиянием
нецентральности гравитационного поля Земли, а также притяжения
Луны и Солнца (последний эффект увеличивается с высотой).
Так как наклон плоскости терминаторной орбиты к экватору
в течение года изменяется в пределах 90° ± 23,5°, т.е. орбита доста¬
точно близка к полярной, то можно заключить, что вековой уход
узла за счет гравитационных эффектов будет невелик (он равен
нулю для строго полярной орбиты и меняет знак при переходе /
через тг/2). Однако гравитационными эффектами сжатия и
’’третьих” тел пренебрегать нельзя (соответствующие числа приве¬
дены в § 16) и было бы интересно поставить и решить сначала спут¬
никовую задачу о пассивном поддержании ориентации орбиты
в плоскости земного терминатора за счет равенства угловых скоро¬
стей движения Солнца и движения узла под действием суммарного
эффекта гравитационных возмущений и светового давления, а
затем обобщить эту задачу на случай квазикруговой парусной рас¬
крутки. (Рабочие формулы для различных резонансных случаев
орбитального движения с учетом гравитационных эффектов и све¬
тового давления можно найти в работе автора [2.6]). Лишь после
решения такой точной задачи можно будет говорить о начальных
условиях, гарантирующих сохранение плоскости раскрутки относи¬
тельно солнечных лучей в процессе всего времени набора параболи¬
ческой скорости. На сегодняшний день, насколько автору известно,
эта задача в такой постановке еще не нашла ни своего развития, ни
окончательного решения. Известен пока лишь "классический”
пассивный (без применения тягового ускорения) способ обеспече¬
ния солнечно-синхронной орбиты эа счет компенсации движения
Солнца прецессией узла с учетом одних только гравитационных
эффектов [2.7]. Этот способ применяется при расчете движения
170
спутников, оснащенных солнечными батареями, которые должны
быть непрерывно освещены Солнцем, или при расчете условий не¬
прерывных визуальных наблюдений. Активные способы поддержа¬
ния солнечно-синхронной орбиты мы не рассматриваем.
Итак, исследования околотерминаторной орбиты позволили
признать ее вполне жизнеспособной и перспективной для раскрут¬
ки, несмотря на определенные трудности, связанные с переменно¬
стью ее плоскости. Однако, к удивлению (и сожалению) автора
настоящего обзора, интересная задача парусной терминаторной рас¬
крутки с тех лет вообще больше в научной литературе не обсужда¬
лась. По мнению автора, эта проблема заслуживает тщательного
численного и аналитического исследования с учетом возму¬
щающих эффектов и с применением методов современной теории
управления.
Заканчивая обсуждение квазикруговой теории раскрутки и
переходя к обсуждению геоцентрической раскрутки эллиптическо¬
го типа, уместно дать ответ на следующий вопрос: почему реше¬
нием гелиоцентрической задачи о перелете с парусом под действием
касательной тяги (см. § 7 - 8) опорной траекторией является
логарифмическая спираль, тогда как решением аналогичной геоцен¬
трической задачи служит некоторая квазикруговая спираль, ничего
общего с логарифмической не имеющая? Напомним, что логариф¬
мическая спираль или некоторая ее вариационная модификация
служит решением уравнений гелиоцентрического движения в слу¬
чае, когда обе силы, и центральная сила тяготения Солнца, и сила
тяги паруса (касательная или близкая к ней), подчинены одному и
тому же закону обратной пропорциональности квадрату гелиоцен¬
трического расстояния. Напротив, в задаче о движении в централь¬
ном поле тяготения Земли при наличии касательной или близкой
к ней парусной тяги мы пользуемся постоянной величиной удель¬
ного светового давления для заданного гелиоцентрического рас¬
стояния, полагая, что эта тяга в силу физических причин никак не
связана с изменением геоцентрического расстояния при раскрутке.
Таким образом, геоцентрического движения с парусом по логариф¬
мической спирали в этих предположениях никогда получить
не удается.
§ 14. Оптимизация геоцентрических траекторий раскрутки
с ”наилучшим” солнечным парусом
Плоский солнечный парус (см. § 13) , какому бы закону управ¬
ления он ни подчинялся, не может развить силу тяги, неизменно
направленную вдоль по скорости орбитального движения аппарата:
либо это требование удовлетворяется лишь на отдельных участках
траектории, либо тяга непрерывна, но всегда отклонена от направ-
171
ления скорости. Однако упомянутую в § 13 теорию движения с
касательной тягой, которую вследствие этого не удалось полностью
применить к плоскому парусу, удалось более успешно (хотя тоже
не целиком) применить к так называемому наилучщему парусу
(см. § 11). Этот парус представляет собой специальную систему
парусов-зеркал. Он обладает, в отличие от плоского паруса, важней¬
шей динамической особенностью, состоящей в независимости
направлений падающего и отраженного световых потоков, в ре¬
зультате величина компоненты полной силы тяги, возникающей
под действием падающего потока и потому всегда направленной по
лучу света, совершенно не связана с направлением другой ее ком¬
поненты, возникающей под действием отраженного потока и на¬
правленной произвольно в зависимости от взаимного расположе¬
ния зеркал этой сложной конструкции (рис. 35 — 39).
’’Наилучший” закон действия солнечного паруса был исследован
А.П.Скопцовым [1.55] и В.В.Белецким [В.17], показавшими, что
этот закон является законом косинуса угла падения (см. форму¬
лу (11.2)), а не законом квадрата этого косинуса, как в случае
плоского паруса (см. формулу (4.5)), причем в принципе’’наилуч¬
ший” парус может допускать различное конструктивное исполне¬
ние, а не только изображенное на рис. 39. Применение методов
современной теории управления к этой задаче показало, что
локально-оптимальное управление ’’наилучшим” парусом, дающее
максимум, приращения полной орбитальной энергии, в данной
задаче будет весьма близко к оптимальному по быстродействию
управлению.
Схема тяговых усилий, действующих на сложный парус, не зави¬
сит от его конструкции, и в любом случае сила тяги складывается
из двух сил Pj и Р2 (см. рис. 38). Сила Pj постоянна по величине
и всегда направлена по световому потоку, тогда как сила Р2 может
быть направлена по скорости. Пусть она образует с радиальным
направлением угол -у. Условие, что компонента силы тяги Р2, обу¬
словленная отраженным потоком, направлена по скорости v, озна¬
чает, что для радиальной и,- и трансверсальной и^ проекций скоро¬
сти выполняются соотношения (см. рис. 51) :
vr
7 = 7 (г), cos7 = —, sin 7 = — , v1 = v? + v*,. (14.1)
Таким образом, ’’наилучший” парус в любой момент времени и в
любой точке произвольной околоземной траектории сообщает
аппарату ненулевое касательное тяговое усилие, являющееся неко¬
торой частью полной силы тяги такого паруса Р (см. рис. 38).
Именно указанное выше свойство паруса, состоящее в независимо¬
сти направлений двух тяговых усилий Pt и Р2, позволяет распоря¬
172
диться выходящим потоком Р2 нужным нам способом и всегда
направлять его по скорости. В этом состоит очевидное преимуще¬
ство "наилучшего” паруса перед плоским, который (см. § 13) мо¬
жет обладать непрерывной касательной компонентой полной силы
тяги только на терминаторной орбите. Хотя непрерывность каса¬
тельной компоненты силы тяги ’’наилучшего” паруса имеет место
на орбите с любым наклоном к плоскости экватора, можно предпо¬
ложить, что в смысле эффективности раскрутки эклиптическая
орбита, как обладающая максимальной интенсивностью удельного
давления солнечной радиации, несмотря на, попадание в тень, будет
опять-таки иметь ряд динамических преимуществ.
Если удвоенную полную энергию орбитального движения пред¬
ставить в виде
2 fM3
h ~ vl + , (14.2)
то можно показать [1.55], что максимум производной dhjdt по
управлению 7(0 достигается на локально-оптимальном управле¬
нии, т.е. на таком, при котором, как уже указывалось выше, ком¬
понента силы тяги целиком направлена по скорости. Достаточно
сложное оптимальное в смысле быстродействия управление пару¬
сом [1.55] оказывается весьма близким к этому простому локаль¬
но-оптимальному управлению (14.1). Напомним (см. § 13), что
локально-оптимальным управлением (в нашем случае -углом
7(f)) является такое, при котором в каждой точке фазового про¬
странства осуществляется максимальный прирост функции h из
(14.2), т.е. максимальный прирост полной орбитальной энергии
(хотя и не обязательно за минимальное время), соответствующий
направлению компоненты Р2 в любой момент времени по скорости.
Задача о локально-оптимальном управлении солнечным парусом
допускает в данном случае простую и наглядную геометрическую
интерпретацию: она оказывается как бы суперпозицией двух уже
известных задач, описывающих движение под действием: 1) по¬
стоянного по величине и по направлению ускорения, создаваемого
падающим световым потоком Р|, и 2) постоянного по величине каса¬
тельного ускорения, создаваемого отраженным потоком Р2, прямо
противоположным направлению вектора скорости v. Абсолютные
величины этих двух ускорений в случае зеркального ’’наилучшего”
паруса одинаковы (см. формулу (11.1) для случая зеркального
отражения). При этом всегда обеспечивается монотонное возраста¬
ние энергии Л, гарантирующее достижение любого отрицательного
значения полной энергии h > И 0 на закручивающейся траектории и
нулевого значения полной энергии h = 0 в момент выхода на
параболу.
173
-Локально-оптиналь-
.... пая траектория
/
\
и/, ■
V- -;'Л,
/ ' ■
Рис. 58
Рис. 59
Численные исследования, произведенные [1.55] для раскрутки
в плоскости эклиптики с учетом эффектов тени и полутени, выпол¬
нялись для двух упомянутых законов управления. Удалось устано¬
вить, что на каждом из управлений при различных начальных усло¬
виях общий характер раскрутки примерно одинаков. Однако в
этой задаче раскрутка будет происходить не по квазикруговой
спирали (см. цандеровский вариант раскрутки с терминаторной
орбиты), а по квазиэллиптической спирали с четко выраженными
апогеем и перигеем. Эти траектории характеризуются тем общим
свойством, что достижение местной параболической скорости, озна¬
чающее преодоление поля тяготения Земли, происходит всегда на
полувитке перигей — апогей.
Подробное численное исследование обоих типов траекторий по¬
казало, что уже с первых витков локально-оптимальная траектория
раскрутки показывает Монотонное увеличение радиус-вектора
перигея до некоторого максимального значения, после чего радиус-
вектор перигея начинает столь же монотонно уменьшаться. Вслед¬
ствие этого на последних витках перед отрывом локально-опти¬
мальная траектория может не только -пересечь первоначальную
круговую орбиту, но даже ’’пересечь” поверхность Земли. Все это
предъявляет высокие требования к подбору начальных условий
выхода на спираль. Наоборот, оптимальная траектория оказывается
в этом смысле более спокойной и надежной: радиус-вектор перигея
изменяется незначительно, оставаясь всегда больше радиуса перво¬
начальной круговой орбиты. Эти геометрические свойства траекто¬
рий двух типов изображены на рис. 58 для последнего витка опти¬
мальной траектории (сплошная линия) и локально-оптимальной
траектории (штриховая линия) при раскрутке с орбиты радиусом
22,7 тыс. км. При выходе с более высоких околоземных орбит,
например с орбиты тип? геостационарной, описанного уменьшения
174
высоты перигея не наблюдается ни для какого управления. Перигей
всегда располагается выше перигея первоначальной орбиты, хотя
для оптимального управления высота перигея растет по-прежнему
быстрее, чем для локально-оптимального.
Расчеты [1-55] показали, что оптимальное управление дает
в среднем сокращение времени разгона на 1 - 27с по сравнению
с локально-оптимальным. Тот факт, что локально-оптимальное
управление дает хорошее приближение оптимального, особенно для
выхода с высоких орбит, наглядно проиллюстрирован диаграммой
на рис. 59 [1.55]. сплошные линии изображают силу тяги для опти-
мальн(}го управления, штриховые — для локально-оптимального.
Легко видеть, что вектор оптимальной силы тяги располагается
между вектором локально-оптимальной силы (штрихи) и векто¬
ром скорости, причем ближе к первому. Эти три вектора совпадают
по направлению лишь в перигее, а в апогее обе силы тяги обращают¬
ся в нуль (точка переключения). В случае плоского паруса эта про¬
грамма означала бы нормальнук) ориентацию к лучам в перигее и
ориентацию ребром к Солнцу - в апогее. В случае сложного паруса
это означает, что и ’’наилучший” парус также должен быть перпен¬
дикулярен лучам только в той точке орбиты, где их направление
точно совпадает с вектором скорости (точка л), и как бы постав¬
лен ребром к Солнцу в той точке, где он движется в точности
навстречу им (точка а). Здесь имеется в виду не реальная геомет¬
рическая ориентация зеркал, а результирующее направление силы
тяги, соответствующее воображаемой нормали плоского аналога.
В отличие от задачи о разгоне с реактивной тягой всякая геоцен¬
трическая парусная задача о выходе из поля тяготения обладает
одной особенностью, налагающей серьезные ограничения на началь¬
ные условия старта с круговой орбиты, — выход на траекторию
ухода в бесконечность обязательно должен происходить в направ¬
лении от Солнца. Это тем более важно, если требуется, чтобы свето¬
вое давление на парус продолжало выгодно действовать и после
выхода на участок с h >0. Весьма интересные с этой точки зрения
результаты расчетов траекторий раскрутки аппарата с ’’наилучшим”
парусом, начинающейся с геостационарной орбиты, приведены
В.И. Левантовским [В. 16]. Они наглядно демонстрируют зависи¬
мость параметров траектории (времени движения и величины
местной параболической скорости при отрыве) от угловой коорди¬
наты точки старта на начальной круговой орбите и показывают,
что положение точки набора нулевой полной энергии сильно зави¬
сит от положения точки старта. При этом наиболее выгодной
оказывается траектория, направление скорости аппарата на кото¬
рой вблизи точки отрыва ближе всего к направлению солнечных
лучей, — на такой почти прямолинейной траектории с линейно
175
12(128*)
Рис. 60
увеличивающейся скоростью движения по ней солнечный парус
может работать еще достаточно долго. Иллюстрацией к вышеска¬
занному служат траектории, изображенные на рис. 60 [В. 16] и
показывающие направление параболических скоростей для различ¬
ных начальных условий (номер стартовой точки на первоначальной
окружности соответствует номеру траектории). Расчеты проводи¬
лись без учета тени для старта с геостационарной орбиты при макси¬
мальном тяговом ускорении, близком к 0,001#. Для изображенных
траекторий имеем следующие значения времени разгона и местных
параболических скоростей: траектория 8, t = 89 ч, v= 1,7 км/с;
траектория 10, t = 121 ч, v = 1,41 км/с; траектория 11, t = 189 ч,
и = 1,38‘км/с; траектория 12, t = 128 ч, v = 4,15 км/с; траекто¬
рия 13, t = 100 ч, и = 3,15 км/с;траектория 16, t = 91 ч, и = 2,14 км/с.
Из конфигураций траекторий раскрутки на рис. 60 видно, что
наиболее выгодной траекторией в смысле направления ухода от
Земли оказывается траектория 12, огибающая Землю и вследствие
этого отнюдь не являющаяся оптимальной по времени раскрутки,
занимающей 128 ч. Однако набор нулевой энергии осуществляется
достаточно близко к Земле, на геоцентрическом расстоянии около
50 тыс. км (т.е. чуть выше геостационарной спутниковой орбиты),
с достаточно высокой местной параболической скоростью
4,15 км/с, что на почти прямолинейной траектории дальнейшего
176
движения позволит аппарату быстро увеличивать скорость. Если же
угловое положение точки старта выбрано неудачно (например,
траектория 11), то движение будет достаточно долго происходить
навстречу солнечным лучам, что существенно увеличит время
набора параболической скорости, причем последняя, будучи достиг¬
нута уже на значительном геоцентрическом расстоянии, оказывает¬
ся малой.
Принципы геоцентрической раскрутки с ’’наилучшим” солнеч¬
ным парусом нашли свое отражение в книге В.В. Белецкого [В. 17],
где свойства траекторий раскрутки, установленные А.П. Скопцо-
вым [1.55], были удачно использованы для анализа научно-фанта¬
стического рассказа А. Кларка ’’Солнечный ветер” [2.8] *).
В ’’Очерках. . .” траектории воображаемых парусников, участ¬
вующих в спортивных состязаниях, охарактеризованы именно с
точки зрения зависимости формы траекторий и времени разгона
от полярного угла точки старта, отсчитываемого от оси тени Земли.
Сама точка старта находится на стационарной орбите.
По замыслу А. Кларка, солнечная яхта обладает плоским
круглым парусом, поэтому расчеты, выполненные В.В. Белецким
[В. 17] для ’’наилучшего” паруса, должны были быть соотнесены
с плоским парусом. Очевидно, если сложный и плоский паруса
дают одинаковую максимальную силу тяги Р„, вычисленную для
случая нормальной ориентации плоского паруса к лучам, то для
плоского паруса текущее значение силы тяги P = Pncos2B, а для
сложного, ’’наилучшего”, паруса Р = Р„ cosfl, где в - угол падения
солнечных цучей на плоский парус или соответствующий и равный
ему угол между силами Р и ?! на рис. 38. Таким образом, ’’наилуч¬
шему” парусу всегда можно поставить в соответствие некоторый
плоский аналог, расположенный нормально к тяге Р ’’наилучшего
паруса. Тогда воображаемый плоский парус даст тягу в том же
направлении, что и ’’наилучший”, хотя, как это следует из приве¬
денных выше формул, величина силы тяги плоского аналога будет
несколько меньше силы тяги рассматриваемого ’’наилучшего”
паруса.
Локально-оптимальная траектория геоцентрической раскрутки
яхты с солнечным парусом для перелета к Луне с указанием вре-
*) Английский ученый Артур Чарльз Кларк - один из крупнейших
современных писателей-фантастов.Читателям научно-фантастической литера¬
туры хорошо известна его способность просто и увлекательно излагать
сложные научные проблемы наших дней. По художественному мастерству и
по серьезности подхода к научной стороне фантастики писатель, являющийся
энтузиастом и пропагандистом идеи космического полета бесспорно занима¬
ет выдающееся место среди представителей этого литературного жанра. Это
относится и к фантастическому описанию гонок яхт под солнечными паруса¬
ми от Земли к Луне.
12. Е.Н. Поляхова 177
мени раскрутки в часах изображена на рис. 61 [В. 17]. Расчеты
производились с учетом тени Земли для раскрутки с геостационар¬
ной орбиты, когда максимальное ускорение тяги равно 0,001#, а
диаметр плоского круглого паруса, аналогичного в указанном
выше энергетическом смысле ’’наилучшему” парусу, составляет
2,4 км. Эта траектория, начинающаяся с точки геостационарной
орбиты с угловой координатой \р = — 90°, аналогична траектории
раскрутки 12 на рис. 60 [В.16], хотя значения времени ухода на
на рис. 60 несколько другие за счет полной освещенности орбиты
и иного значения тягового ускорения. Заметим попутно, что в об¬
суждаемых вариантах перелета речь идет о первоначальной круго¬
вой орбите, не являющейся в строгом смысле геостационарной
(которая расположена в плоскости земного экватора), а лишь о
суточной (24-часовой) орбите, расположенной в плоскости эклип¬
тики. Предполагается, что плоскость орбиты Луны также совпадает
с плоскостью эклиптики.
В рассматриваемом случае раскрутка происходит за 110 ч. Годо¬
граф ускорений для различных значений углового положения аппа¬
рата относительно оси тени Земли (см. рис. 61) на одном витке
локально-оптимальной траектории раскрутки изображен на рис. 62
[1.55]. Направления вектора тягового ускорения изображены
совместно с положением нормального к нему воображаемого
плоского паруса, аналогичного ’’наилучшему” парусу, используемо¬
му для раскрутки. На большей части дуги годографа, соответствую¬
щей движению аппарата к Солнцу, т.е. для углов 240<i/j< 168°,
парус почти параллелен лучам,наклон кним не превышает 35 —45е.
Строго ребром к Солнцу парус-аналог расположен только в точке
= 96° (соответствующее положение аппарата изображено на
рис. 61 точкой А). Здесь тяговое ускорение обращается в нуль.
Предлагаемая программа [В. 17] локально-оптимального управле¬
ния ’’наилучшим” парусом, изображенная на рис. 62 для плоского
I ЯГ-90*
Рис. 61
178
паруса-аналога, показывает, что ’’стратегия” плоского паруса (также
локально-оптимальная) весьма близка к закону равномерного вра¬
щения плоского паруса вокруг оси, перпендикулярной плоскости
орбиты, с угловой скоростью, равной половине орбитальной угло¬
вой скорости аппарата. Это закон, который в § 15 будет назван
законом половинного угла.
Изображенная на рис. 61 110-часовая траектория раскрутки
может, как и аналогичная 128-часовая траектория 12 на рис. 60,
считаться удачной, поскольку стартовые условия обеспечивают
набор параболической скорости, достаточно большой по величине
и направленной как раз вдоль дуги движения от Солнца. В резуль¬
тате аппарат будет ускоряться для полета и достижения Луны.
Менее удачная 196-часовая траектория, начинающаяся с точки
<р= — 135°, близкая к 189-часовой траектории 11 на рис. 60, пока¬
зана на рис. 63 [В. 17]: движение происходит медленнее, чем в
предыдущем случае, так что время выхода существенно увеличи¬
вается. И, наконец, совсем неудачная петлеобразная траектория
изображена на рис. 64 [В. 17]. Она осуществляется, если раскрытый
парус постоянно держать нормально к солнечным лучам, в резуль¬
тате чего световое давление как бы сдует аппарат с таким парусом
в сторону, не дав ему выполнить ни одного витка вокруг Земли
за счет парусной тяги, — единственный реализуемый виток выпол¬
няется за счет гравитационного захвата, после чего световое давле¬
ние почти прямолинейно выбрасывает аппарат из поля земного
тяготения (сравните с цандеровской задачей движения в централь¬
ном фотогравитационном поле по коническим сечениям при неиз¬
менной нормальной ориентации паруса к лучам).
Заканчивая обсуждение различных типов траекторий раскрутки
при помощи солнечного паруса вокруг Земли, необходимо снова
остановиться на вопросе, который вскользь затрагивался нами
и ранее: как будет двигаться аппарат после набора геоцентрической
параболической скорости? Следует иметь в виду (см. § 13), что
179
рассмотренные выше различные траектории раскрутки могут с
достаточной степенью точности считаться геоцентрическими только
вплоть до границы так называемой сферы действия Земли, т.е.
воображаемой сферы, внутри которой гравитационное ускорение
от Земли может считаться основным, а гравитационные ускорения
от всех прочих тел (от Солнца, Луны, планет) — возмущающими.
Понятие сферы действия меньшей массы М2 относительно боль¬
шей массы М1 в ограниченной круговой задаче трех тел Mi ,М2 и ш
Рис. 63
впервые в рассмотрение ввел. П. Лаплас как М2-центрическую сфе¬
ру некоторого радиуса р. Внутри этой сферы целесообразно
принять массу М2 (планету) за центральное тело, а массу М2 (Солн¬
це) — за возмущающее. Он показал, что если взять р =гр2/5, где
г - расстояние планеты от Солнца, р = М2/М\ — отношение масс,
то на воображаемой границе сферы действия отношение возмущаю¬
щей силы к силе притяжения центрального тела не зависит от того,
какая из притягивающих масс принята за центральную. Сферой
действия меньшей массы М2 относительно большей Му и называ¬
ется область пространства около массы М2, в которой Fx jg2 <
<Fi/gi- Здесь gi и g2 — силы притяжения масс Мt и М2, a и
F2 — гравитационные возмущения от этих масс, налагающиеся
соответственно на силы g2 и gt. На границе сферы действия (на ее
поверхности) отношения сил удовлетворяют формуле Fl/g2 =
= Рг/gi < (4p)1/,s и убывают вместе с р [2.9, с. 47].
Радиус сферы действия Земли составляет примерно 930 тыс. км.
На ее границе остаточная геоцентрическая скорость аппарата
(играющая роль относительной скорости) векторно складывается
180
с переносной гелиоцентрической скоростью аппарата, движущегося
вокруг Солнца вместе со сферой действия Земли (рис. 65).
В парусных задачах можно считать эту переносную скорость посто¬
янной и численно равной средней орбитальной скорости Земли,
т.е. 1>з *^29,8 км/с. Пользуясь этой константой вместо переменной
переносной скорости аппарата, мы тем самым пренебрегаем эллип¬
тичностью орбиты Земли и разницей гелиоцентрических расстояний
аппарата в различных точках сферы действия, т.е. при рассмотрении
движения аппарата относительно Солнца мы считаем сферу дейст¬
вия точкой.
В этих предположениях рассмотрим сначала вариант движения,
когда солнечный парус нужен только для набора геоцентрической
параболической скорости вблизи Земли, а после набора движение
происходит свободно, без паруса (на рис. 65 точка набора обозна¬
чена крестиком). Итак, набрав параболическую скорость, аппарат
будет двигаться по геоцентрической параболе, и если на его пути
не встретится Луна (вариант гравитационного захвата мы не обсуж¬
даем) , то аппарат выйдет на границу сферы действия Земли с
небольшой остаточной граничной скоростью игр 0,9 км/с (ее
можно легко рассчитать с помощью интеграла энергии геоцентри¬
ческого движения). Начиная с границы сферы действия Земли,
движение аппарата можно уже рассматривать как гелиоцентричес¬
кое, принимая все остальные гравитационные эффекты за возму¬
щающие. Гелиоцентрическая абсолютная скорость аппарата va6c
определится теперь как геометрическая сумма векторов перенос¬
ной скорости аппарата, равной орбитальной скорости Земли v3,
и его относительной геоцентрической скорости vrp. Величина
абсолютной скорости зависит от направления остаточной скорости
по отношению к вектору орбитальной скорости Земли и колеблет¬
ся в пределах между алгебраическими суммой и разностью этих
величин.
181
Если вектор граничной скорости совпадает, например по направ¬
лению, с орбитальной скоростью Земли, то результирующая абсо¬
лютная скорость, равная сумме векторов, обеспечивает каса¬
тельный перелет по эллипсу, целиком лежащему вне орбиты
Земли.
В другом предельном случае, когда эти скорости направлены по
одной прямой, но в разные стороны, результирующая скорость,
равная разности скоростей и направленная в сторону орбитального
вращения Земли, обеспечивает касательный перелет по эллипсу,
целиком расположенному внутри орбиты Земли, не считая точки
касания. Во всех промежуточных случаях орбита гелиоцентричес¬
кого Движения аппарата будет частично расположена вне орбиты
Земли, частично - внутри нее.
Уже на примере этой простейшей модельной задачи видно, какое
огромное значение с точки зрения выполнения того или иного
гелиоцентрического маневра имеют два фактора, порождаемые
задачей о геоцентрической парусной раскрутке: плоскость раскрут¬
ки и направление скорости выхода из сферы действия (вариант
точечной сферы действия здесь не рассматриваем). Например,
раскрутка с терминаторной орбиты, перпендикулярной потоку
солнечных лучей и одновременно плоскости эклиптики, никогда не
позволит аппарату и вектору его результирующей скорости одно¬
временно расположиться в плоскости эклиптики.
Не менее существенное значение имеет направление выходной
граничной скорости vrp, близкое к направлению местной параболи¬
ческой скорости в момент набора нулевой полной геоцентрической
энергии (см. рис. 65). Если учесть, что направление орбитальной
скорости Земли v3 всегда перпендикулярно потоку солнечных
лучей, то делается ясным, что раскрутка с помощью солнечного
паруса, обеспечивающая параболический уход от Земли только в
сторону от Солнца, далеко не всегда может обеспечить требуемый
гелиоцентрический маневр, даже если вектор выходной скорости
расположен в плоскости эклиптики. Действительно, векторы гео¬
центрических параболических скоростей, изображенные на рис. 60,
почти все расположены в первой четверти, что соответствует выхо¬
ду с первоначальной круговой орбиты против часовой стрелки.
Если же направление этого выхода сменить на противоположное,
то картина будет зеркальной относительно горизонтальной оси и
почти все скорости расположатся в четвертой четверти. Если при¬
нять, что скорость орбитального движения Земли v3 вместе с ее
воображаемой сферой действия направлена на рис. 60 вертикально
вверх, то окажется, что возможное направление геоцентрической
скорости выхода на гелиоцентрическую траекторию всегда распо¬
ложено в правой полуплоскости, что значительно сужает маневрен¬
182
ность перелета с парусом по сравнению с маневренностью импульс¬
ных перелетов.
В какой бы точке правой полуплоскости на рис. 60 ни происхо¬
дил набор нулевой полной энергии, и по какой бы из парабол не
происходил дальнейший свободный полет аппарата, все значения
местной геоцентрической параболической скорости, различные для
начала свободного движения, достигнут одинакового значения
игр -^м.пар = 0,9 км/с на границе сферы действия Земли. Следо¬
вательно, на границе в сложении скоростей участвуют две неизмен¬
ные по величине скорости: орбитальная скорость Земли и3 =
= 29,8 км/с и местная геоцентрическая параболическая скорость
им.пар> направление которой может быть любым в правой полу¬
плоскости. В результате диагональ параллелограмма скоростей на
рис. 65, т.е. скорость va6c, будет по величине и по направлению
незначительно отличаться от орбитальной скорости Земли v3.
В соответствие каждой геоцентрической параболе на рис. 60 ока¬
жется поставлена некоторая близкая к круговой орбите Земли
эллиптическая гелиоцентрическая траектория, афелий которой а
расположен в воображаемой точке А на границе сферы действия
(см. рис. 65). Все такие эллипсы будут различаться величинами
и направлениями своих больших полуосей, поскольку в силу
интеграла энергии большая полуось кеплерова эллипса однозначно
определяется значением текущей скорости на заданном расстоянии
от центра притяжения (в данном случае — от Солнца), т.е. значе¬
нием va6c. Даже в предельном случае коллинеарности двух рассмат¬
риваемых скоростей v3 и vnpi практически неосуществимом для
солнечного паруса, касательный импульс 0,9 км/с в любом из двух
направлений не может обеспечить перелета ни к орбите Марса, ни
к орбите Венеры. Напомним, что для достижения орбиты Марса по
касательному эллипсу требуется импульс +2,95 км/с, а для дости¬
жения орбиты Венеры - отрицательный импульс (-2,43 км/с).
Таким образом, задача об ’’ограниченной” парусной раскрутке
(с последующим свободным движением) нужна лишь для анализа
близких гелиоцентрических маневров, однако она может
оказаться практически полезной в случае использования солнечно¬
го паруса с ограниченным рабочим временем, т.е. претерпевающего
быстрый износ,
Принципиально иную картину мы наблюдаем, если солнечный
парус продолжает работать и после набора нулевой полной энергии.
В этом случае стыковка геоцентрической и гелиоцентрической
задач выглядит сложнее. На каждой траектории набор местной
геоцентрической параболической скорости происходит на различ¬
ном удалении от Земли, в результате чего и значение достигнутой
параболической скорости в каждой точке оказывается различным
183
(см. рис. 60). Начиная с момента набора (крестик на рис. 65) и до
достижения границы сферы действия Земли солнечный парус
обязан работать на максимально возможное увеличение скорости
к моменту достижения этой границы. Движение будет теперь
происходить не по дуге параболы, как для варианта свободного
полета, а по почти прямолинейной траектории (см. § 13) , скорость
на которой будет увеличиваться почти линейно. Очевидно, чем
ближе траектория будет расположена к потоку солнечных лучей
(горизонтальная ось на рис. 60), тем большей скорости можно на
ней достигнуть за счет почти нормального расположения паруса
относительно солнечных лучей.
На других направлениях будут достигнуты несколько меньшие
ускорения, что обусловлено уменьшением угла падения лучей
на парус и снижения вследствие этого его тяги. Именно в течение
прямолинейного разгона огромное значение имеет начальная вели¬
чина скорости, которая далее будет увеличиваться, а не убывать,
как в случае свободного движения. (В действительности прямо¬
линейное движение в строгом смысле слова в поле тяготения
осуществиться не может, даже при наличии постоянно действующе¬
го неизменного тягового ускорения — речь может идти лишь о
движении по слабо искривленной траектории, аппроксимируемой
отрезком прямой. Кроме того, чем ближе к Земле будет обеспечен
набор параболической скорости, тем большей скорости можно
достичь к границе сферы действия.)
Итак, на этот раз значения граничных геоцентрических скоростей
будут уже не только больше остаточных граничных параболических
скоростей предыдущего варианта, но и существенно больше парабо¬
лических скоростей в точках набора нулевой полной энергии.
Направления же этих скоростей на границе сферы действия будут
примерно те же. Легко заключить, что теперь результирующая
гелиоцентрическая скорость va6c, определяемая диагональю
параллелограмма скоростей на рис. 65, будет и по величине, и по
направлению существенно отличаться от скорости Земли V3, что
делает на этот раз возможным исследование более удаленных от
орбит Земли областей простраства.
Мы рассмотрели два варианта энергетического режима выхода
на границу сферы действия: с почти погашенной выходной геоцен¬
трической скоростью и, наоборот, со скоростью, увеличивающейся
на почти прямолинейном участке геоцентрического пути. Если
теперь вернуться к концепции цандеровских эллипсов в гелиоцен¬
трическом фотогравитационном поле, то можно утверждать, что
первый вариант представляется перспективным, например, для
осуществления цандеровского движения (см. § 6). Действительно,
основным условием выхода на цандеровский эллипс является
184
ориентация солнечного паруса в положение, нормальное к солнеч¬
ным лучам, при почти полностью погашенной относительной гео¬
центрической скорости на границе. В этом случае парус работает
на двух этапах движения, между которыми происходит свободный
полет. Возражения в этой схеме может вызвать, с одной стороны,
нерентабельность цандеровского движения, а с другой стороны —
непроизводительный простой паруса на этапе свободного полета.
Во втором же варианте при соответствующей стратегии управления
солнечный парус работает без перерыва на всех трех этапах движе¬
ния (геоцентрической раскрутки, прямолинейного разгона, гелио¬
центрического спирального движения), выполняя на каждом из
трех этапов принципиально различные динамические задачи.
§ 15. Геоцентрические траектории раскрутки
при заданном угле установки солнечного паруса
Каким бы ни был заданный закон управления солнечным пару¬
сом (плоским или парусом - системой зеркал), если этот закон
выражается непрерывной функцией, то в его основе должен лежать
следующий основной принцип: парус должен работать и на том
участке орбиты, где аппарат движется навстречу солнечным лучам.
Только при этом условии полная орбитальная энергия аппарата
будет непрерывно возрастать. Оказалось, что такому условию
можно удовлетворить, если на слабо вытянутых витках почти
круговой орбиты равномерно поворачивать плоский парус относи¬
тельно солнечных лучей с угловой скоростью, равной половине
угловой скорости орбитального движения аппарата вокруг Земли.
(9 = 0
<р=л
Рис. 66
185
Закон такого равномерного вращения с так называемой половин¬
ной угловой скоростью предложил в 1961 г. Н. Сэндс [2.10].
Пусть орбита аппарата расположена в плоскости эклиптики и
первоначально является круговой. Солнечный парус представляет
собой зеркально отражающий с обеих сторон плоский диск,
перпендикулярный плоскости эклиптики и равномерно поворачи¬
вающийся вокруг оси эклиптики с угловой скоростью
dd 1 d<p
— (15.1)
dt 2 dt
где \p — полярный угол системы плоских орбитальных полярных
координат г и <р, отсчитываемый в прямом направлении от апекса
планеты, т.е. от оси, перпендикулярной направлению солнечных
лучей и направленной в сторону орбитального движения Земли
по v3 (рис. 66). Угол в — угол падения лучей на парус. Если
принять на рис. 66 и 67, что в положении ребром к Солнцу (верхнее
положение) нормаль к парусу N направлена к Земле (у> = 0, 90 =
= я/2,N = N0), то поворот радиус-вектора аппарата на угол $
(см. рис. 67) соответствует переходу нормали из положения 0 в
положение 1, т.е. ее повороту относительно лучей на угол <р[2. Из
геометрических соображений следует, что
я \й
в=— . (15.2)
2 2
За орбитальный период (^ = 2я) нормаль повернется так, что
в верхнем положении на рис. 67 нормаль N01 будет направлена от
Земли (бод = _ я/2), однако, приняв, что парус является зеркаль¬
ным с обеих сторон, будем рассматривать только промежуток
[0, я] для угла поворота нормали. На рис. 66 стрелками изображе¬
ны векторы сил тяги F, имеющие переменные значения: в нижней
186
точке — максимум, в верхней — тяги нет, в крайних положениях
значения одинаковы.
Ускорение аппарата с фиксированной поверхностью паруса для
нормального к солнечным лучам положения будем вычислять по
формуле (см. § 4)
А 2 „ г см
wo = — , Р*ерк = —- = 0,92 • 10 —— , (15.2')
J т J с с2
принимая значение постоянной Р^ерк неизменным для всех геоцен¬
трических задач. Поскольку (см. (4.5)) текущее значение тягового
I I I I 1 П t I I
Рис. 68
ускорения, развиваемого солнечным парусом, есть w = w0cos2 в,
то в случае нашего закона (15.2) получим зависимость
w = w о sm—
2
(15.3)
представляющую тяговое ускорение в виде функции полярного
угла Iр аппарата на орбите. Спроектировав ускорение на радиальное
и трансверсальное направления, получим проекции
<р sin <р/2 1 sin у
wr = — w cos— :— = w
2 j sin tfijl I 2 | sin sp/2
. 'P
sm —
2
которые с учетом зависимости (15.3) принимают вид
, ч>
1 I ур
w, = w01 sm -
2 I 2
sin if). Wf = Wo
sm
(15.3')
Таким образом, при выполнении закона (15.1) - (15.2) управле¬
ния парусом на космический аппарат будет действовать возмущаю¬
щая сила, трансверсальная компонента которой в любой точке
орбиты будет положительной величиной.
187
Уравнения движения аппарата интегрировались численно. [2.10]
в предположении о центральности гравитационного поля Земли и
об отсутствии иных возмущений кроме светового давления. Резуль¬
таты вычислений времени набора нулевой полной энергии показали
сильную зависимость длительности движения от начальных условий
при сохранении квазисимметрии плоской траектории раскрутки
относительно оси, перпендикулярной направлению солнечных лучей
(рис. 68), за исключением последних витков перед отрывом.
Квазиэллиптическая спиральная траектория раскрутки обладает
быстро удаляющимся от Земли апогеем и практически малопод¬
вижным перигеем (не считая последних витков). Эта квазисиммет¬
рия траектории относительно оси, связанной с апексом Земли, а
также ’’скольжение” апогея вперед по ходу орбитального движения
Земли объясняется [2.10] как следствие динамической симметрии
ориентации плоскости паруса относительно скорости v3 на одном
геоцентрическом витке (см. рис. 66), а также соответствующей
симметрией набора нулевой полной энергии. Как следствие этой
симметрии суммарный набор энергии за оборот можно интерпрети¬
ровать как приложенный ’’импульсивно” в перигее.
Модельный пример выхода с круговой орбиты радиусом г0 -
= 7200 км при парусности А/т = 105 см2/г (площадь паруса А =
= Ю10 см2, диаметр эквивалентного круга 1120 м, масса всей
конструкции т = 105 г) дает время выхода всего 112 сут. При этом
последний апогей расположен на геоцентрическом расстоянии
га = 610 000 км 88 /о, т.е. на расстоянии, почти вдвое превышаю¬
щем радиус орбиты Луны. Геометрическая картина раскрутки
дополняется графиком на рис. 69, показывающим изменение
радиус-векторов гп и га.
Отрыв в данном случае всегда происходит на дуге, следующей
за ’’последним” перигеем (см. рис. 69 и 70), причем Сэндс [2.10]
188
этому интересному явлению дает объяснение, основанное на анали¬
зе энергетического режима раскрутки, проиллюстрированного
графиком h на рис. 70. Здесь изображена кривая изменения безраз¬
мерной полной орбитальной энергии h(n) в процессе раскрутки
в виде функции числа п геоцентрических оборотов аппарата:
кривая, описывающая набор нулевой полной энергии, показывает,
что h является неубывающей функцией времени. Кроме того,
зигзагообразный характер кривой h(n) показывает, что хотя
теоретически набор нулевой энергии может произойти при любом
значении фазового угла у от начала раскрутки, но вероятнее всего,
что выход на нулевое значение произойдет вблизи перигея. Дейст¬
вительно, вблизи целых значений п кривая h (п) идет почти полого,
т.е. вблизи апогея набор энергии незначителен, тогда как в интерва¬
лах между целыми значениями п энергия растет почти линейно
(отсчет фазового угла производится от направления v3, т.е. от
апогея, см. рис. 68).
Критику ’’половинного” закона в том смысле, что он не являет¬
ся наилучшим по энергетике, мы находим в те же годы в работе
В.В. Шувалова [2.5]. Установив из (15.3') среднее значение транс-
версальной силы (создающей ускорение н^) за один орбитальный
период движения по круговой ррбите и вычислив (см. также
формулу (15.2')) среднее
где Р^ерк = 2S3/c — удельное давление на зеркальный парус, он
предложил другой закон, обеспечивающий максимум не трансвер-
сальной силы (при ’’половинном” законе), а максимум касатель¬
ной компоненты силы FT в любой точке круговой орбиты при
любом законе вращения паруса. Действительно, если записать
выражение для касательной компоненты силы тяги (см. рис. 55
при а = в, /3 = (/?)
и приравняло нулю dFTjd6 при у - const, то получим соотношение
между углами в и у, соответствующее максимуму силы FT и,
4
= — Р1ерк А = 0,425 Р1ерк А,
Зтг 3 3
(15.4)
FT = Р^ерк A cos2 в cos (в — iр)
(15.5)
189
следовательно, обеспечивающее
локально оптимальное управле¬
ние
в = ——^arcsin^— sin — ^J.
(15.5')
Подставляя в в (15.5) для силы
FT и усредняя за оборот, т.е. по
всем значениям ^ G [0, 2л] мож¬
но вычислить среднее
F* = 0,445 Р^еРкЛ.
Таким образом, был предложен локальнооптимальный закон
[2.5], дающий на круговой орбите некоторый энергетический
выигрыш (4 - 5%) по сравнению с ’’половинным” законом [2.10].
Одновременно [2.5] было высказано предположение, что этот
закон даст на эллиптической орбите еще более существенный
энергетический выигрыш, нежели на круговой, которое полностью
подтвердилось впоследствии (см. § 16).
Энергетика ’’половинного” закона, являющегося наипростейшей
аппроксимацией цандеровского релейного закона 0 или 1 непре¬
рывной функцией (см. § 13), обсуждалась также В.В. Белецким
[В.17] и В.И. Левантовским [В.16]. Например, если сравнить гра¬
фик значений полной орбитальной энергии А из области отрица¬
тельных ее значений для спиралей, огибающих Землю, для ’’поло¬
винного” закона управления [2.10] с соответствующей кривой
для ’’наилучшего” паруся, то энергетический режим раскрутки с
’’половинным” углом [В.17] весьма близок к локально оптималь¬
но му управлению, обеспечивающему максимальное приращение
орбитальной энергии. Общий характер локально-оптимального
управления сложным ’’наилучшим” парусом (см. § 13) очень бли¬
зок именно к такому наипростечшему непрерывному управлению
парусом, когда плоский парус равномерно вращается в ту же сто¬
рону, в которую движется аппарат по орбите, но с угловой
скоростью, вдвое меньше орбитальной угловой скорости. Для
круговой орбиты это вращение паруса оказывается равно¬
мерным.
Если в - угол падения, т.е. угол между нормалью к парусу и
направлением солнечных лучей, то локально-оптимальное управле¬
ние близко к следующему: 0 = л/4 + ^/2. Сравнение законов изме¬
нения углов установки ’’наилучшего” и ’’половинного” парусов
при управлении последним по этому закону изображено на
рис. 71 [В. 17]. Легко виде что отклонение не превышает 5%.
190
Закон в = я/4 + р/2 идентичен закону в = я/2 — р/2, если принять,
что в первом варианте отсчет полярного угла производится не
от перпендикуляра к лучам, а от направления светового потока.
Следовательно, справедлив вывод о том, что энергетический режим
раскрутки при управлении по закону (15.2), изображенный на
рис. 70, весьма близок к локально-оптимальному энергетическому
режиму, которым в свою очередь успешно аппроксимируется ре¬
жим раскрутки с ’’наилучшим” парусом. Следует заметить, что
направление вращения плоского паруса вокруг перпендикуляра
к плоскости эклиптики, происходящее в ту же сторону, что и ор¬
битальное движение аппарата, является единственно приемлемым
для раскрутки, так как только в этом случае проекция силы тяги
на скорость всюду оказывается положительной. В случае противо¬
положного направления вращения паруса направление тяги в ниж¬
ней точке на рис. 66 сохранилось бы прежним, тогда как во всех
остальных точках орбиты проекция силы тяги на скорость была
бы отрицательной, что сделало бы раскрутку принципиально невоз¬
можной.
Идея движения аппарата при ’’половинном” угле установки
солнечного паруса [2.10] получила дальнейшее развитие в рабо¬
тах Л.К. Гриневицкой совместно с автором настоящей книги
[2.11-2.19]. В работе [2.111 дифференциальные уравнения дви¬
жения аппарата в плоскости эклиптики с правыми частями (15.3')
решались аналитически, причем для построения общих решений
уравнений движения применялся метод малого параметра. За ма¬
лый параметр Q (см. § 13) выбиралось отношение неизменного
ускорения w0 = — от силы светового давления к гравита¬
ционному ускорению на начальной круговой орбите радиусом
г о, т.е.
Уравнения движения с правыми частями (15.3') записывались с
применением переменных Бине и, р в виде
где Ф! =/Л/3/с2; и = 1/г — инверсия радиус-вектора; Ф2, Ф3 —
некоторые функции [2.11] с = г2р = и~2р - переменная, превра¬
щающаяся в отсутствие светового давления (w0 = 0) в постоянную
с т
(15.7)
dc
= ОФзОа и, с),
191
площадей невозмущенного кеплерова движения г2ф = const.
Общее решение системы отыскивалось в виде сходящихся ря¬
дов по степеням малого параметра Q:
и =и0 +Gui(sp) +Q2u2(v) + . .. , (15 8)
с = с0 + QCiQfi) + G2c2(^) + ...
Решением нулевого приближения относительно Q служит в на¬
шей задаче невоэмущенное кеплерово движение:
и0 =д_,(1 +ecossP), с0 =V fMip. (15.9)
Подставляя решение нулевого приближения в исходную систему
(15.7) и выполняя разложение 2л-периодических правых частей
в ряды Фурье на полном обороте аппарата вокруг Земли, можно
получить систему первого приближения, имеющую явный вид
Я>
d2ut 1
—г— + «1 =/i(sp)=——
<V 2r0
dc\
sin
2
smy>,
(15.10)
d^
=/|(*)=>/ЖпГ
• 3 *
sin —
2
Так как условия существования строго периодических решений
для этой системы нарушены, то ее решение должно содержать
кроме периодических еще и вековые члены. Решение первого
приближения было найдено [2.11 ] в виде
и, = (1/2)6! (sin у - ip cos^j), С! = (1/2)а0^+ fli sby), (15.11)
причем коэффициенты рядов Фурье, входящие в решение, опре¬
деляются формулами разложений правых частей уравнений(15.10).
Найденное решение (15.11), будучи объединено с решением
(15.9) по правилу (15.8), позволяет представить плоскую траекто¬
рию эклиптической раскрутки в виде семейства оскулирующих
эллипсов с переменным (увеличивающимся) эксцентриситетом
е = е (<р), с переменным расстоянием перигея от полярной оси
а = а(<р), нарушающим симметрию семейства относительно оси,
но с неизменным (с точностью до первого приближения) фокаль¬
ным параметром p = r0 = const. Уравнение семейства этих эволю¬
ционных эллипсов имеет вид (рис. 68)
г = Р(&) (1 -e(y>)cos [<*>+а(¥>)]}-1, (15.12)
где р(р) =r0 = const, е(\р) =8w0r^(l + у2)112/\5п/Мг, aQp) =
= arcsin (1 + <р2)~. Формулы для изменения орбитальных эле¬
ментов (как функций числа оборотов аппарата вокруг Земли)
могут быть представлены в виде, позволяющим определить при¬
ближенные значения орбитальных элементов на произвольном п-м
192
витке раскрутки:
е„= Qn, а„ = arcsm(27rn)~!, p=r0 = const. (15 13)
г0 г0 г0
°п , ’ г<*п ~ ^ > гпп . _
1 - (£?«) 1 - 1 + Qn
Полученные простые формулы позволяют прогнозировать эво¬
люцию траектории раскрутки без применения численных методов.
Эксцентриситет увеличивается практически линейно, причем при¬
ращение е от витка к витку является величиной порядка малого
параметра Q. Угол а уже после нескольких оборотов превращает¬
ся в константу, что подтверждает вывод, сделанный в [2.10] от¬
носительно сохраняющейся квазисимметрии семейства эллипсов
относительно полярной оси, связанной с направлением v3 (см.
рис. 68), в результате чего большая полуось семейства почти все
время совпадает с полярной осью, не считая последнего витка.
Высота апогея растет существенно быстрее высоты малоподвиж¬
ного перигея и резко увеличивается перед обращением h в нуль
вблизи перигея.-Большая полуось а растет медленнее, чем га, вслед¬
ствие чего выполнение условия р = r0 = const может привести к
уменьшению радиус-вектора перигея /■„, который может стать
меньше радиуса Земли. Такие случаи требуют специального чис¬
ленного исследования с учетом зависимости траектории от началь¬
ных условий. Точность полученных решений (15.12)-(15.13)
в смысле первого приближения относительно малого параметра Q
оказалось [2.11, 2.12] вполне достаточной для прогноза, и реше¬
ний второго приближения не потребовалось. Хотя они были полу¬
чены, выяснилось, что существенного изменения точности расчета
траектории по сравнению с первым приближением для данной пос¬
тановки задачи они не дают.
Обобщение изложенной теории для ухода в бесконечность с
орбиты малого, а затем с орбиты произвольного эксцентриситета
было выполнено с участием тех же авторов [2.13, 2.14]. В этом
случае фокальный параметр уже не остается постоянным, а также
нарушается квазисимметрия траектории относительно полярной
оси. Выход с эллиптической орбиты оказывается ’’полезным” с
точки зрения сокращения времени раскрутки, определяемого как
время набора нулевой полной энергии. В этом случае время рас¬
крутки действительно сокращается по сравнению с выходом с
круговой орбиты радиуса г0, в чем можно убедиться в результате
численных расчетов [2.13, 2.14], если принять при сравнении, что
начальные значения фокального параметра и большой полуоси
эллиптической орбиты соотносятся с г0 как р = г0(1 + е0) и а0 =
= r0 (1 —е0)-1. В обоих случаях задания начальных эксцентриси¬
тетов определены элементы семейства эллипсов (15.12).
193
При использовании метода малого параметра в данных задачах
следует иметь в виду границы его применимости, определяемые
тем, что малый параметр Q из (15.6) при удалении аппарата от
Земли перестает быть малым за счет уменьшения гравитационного
ускорения, тогда как ускорение от светового давления w0 остает¬
ся неизменным. Если «к — номер конечного витка траектории
раскрутки, параметры которого с достаточной надежностью опреде¬
лены по формулам предлагаемой аналитической теории, а -
значение полярного угла для окончания раскрутки, то верхняя гра¬
ница промежутка [0, <рк) должна определяться из условия, что
отношение ускорения w0 к гравитационному ускорению в апогее
последнего, лк-го, оскулирующего эллипса, т.е. к величине
/Л^з/Гак. все еще остается малым. Формулы для границ рабочего
промежутка при использовании метода малого параметра, выведен¬
ные в [2.12] при исследовании оценок погрешности применяемого
метода для выхода с первоначально круговой орбиты, позволяют
определить полярный угол конечной точки и номер последнего
витка:
1Ас* 0,45 Qо1, як » 0,0700*
(Со —значатиеQ в начале промежутка).
Этот результат находится [2.12] в хорошем согласии с резуль¬
татами численных исследований.
Итак, метод справедлив на интервале времени t ~0'1. Вследст¬
вие переменности малого параметра прогнозирование с помощью
аналитического решения можно производить только вдоль каждо¬
го последовательного участка траектории, причем конечная точка
предыдущего участка должна служить начальной для следующего.
Метод малого параметра плохо прогнозирует движение вблизи
отрыва (Л = 0), вследствие чего встает вопрос о ’’стыковке”
предлагаемых решений с решениями, найденными с помощью
какого-нибудь другого метода, позволяющего увереннее исследо¬
вать переход h через нуль.
К сказанному заметим, что исследования, упомянутые в § 15,
имели дело с задачей возмущенного движения в единственном
смысле: возмущением является воздействие светового давления
на парус, т.е. возмущающее (с точки зрения небесной механики)
ускорение служит одновременно активным тяговым ускорением,
обеспечивающим раскрутку. Никаких других возмущений в этих
задачах не учитывалось — ни атмосферных, ни гравитационных.
Вопрос об учете тени Земли — особый. Собственно тень Земли не
создает никаких активных дополнительных возмущений невозму¬
щенного кеплерова движения (в рамках спутниковой задачи с
учетом светового давления). Она, однако, нарушает режим воз¬
194
действия постоянно действующего радиационного возмущения,
делая его нерегулярным, и потому сама служит возмущением.
(Влияние тени Земли мы будем обсуждать отдельно в § 16.) Если
же обратиться к упомянутым выше постоянно действующим воз¬
мущениям гравитационного или диссипативного свойства, вклю¬
чив возмущение от силы светового давления на парус (силу тяги
паруса) в режим невозмущенной, но теперь уже некеплеровой за¬
дачи, то следует сказать, что задача о парусной раскрутке в не¬
центральном поле тяготения Земли (хотя бы с точностью до вто¬
рой гармоники потенциала сжатия Земли) пока еще никем не была
рассмотрена. По крайней мере, строгие исследования, хотя бы
численные, не говоря уже об аналитических решениях, построение
которых с учетом нецентральности поля может оказаться весьма
трудоемким, автору настоящей книги не известны. Ряд сообра¬
жений по поводу влияния нецентральности гравитационного поля
на точность учета тени Земли были высказаны в работе [2.15] и
будут также обсуждаться ниже, в § 16.
Коснемся атмосферных воздействий. Если раскрутка при помо¬
щи паруса начинается с достаточно низких орбит, то на первых
витках траектории атмосферное сопротивление способно сущест¬
венно изменить характер движения, повлияв на весь ход орбиталь¬
ной эволюции (для начального радиуса круговой орбиты порядка
7000 км атмосферное сопротивление сравнимо с силой светового
давления). На больших высотах аэродинамическая теория, осно¬
ванная на анализе течения сплошной среды, перестает быть справед¬
ливой и следует применять теорию свободно-молекулярного дви¬
жения. Именно такая модельная задача была рассмотрена J1.K. Гри-
невицкой [2.16] для парусной раскрутки с ’’половинным” углом.
При подключении диссипативных эффектов в систему уравнений
плоского движения предполагалось, что плотность атмосферы
является убывающей функцией геоцентрического расстояния,
а для начальных слабо эллиптических витков ее можно приближен¬
но принять постоянной и не учитывать изменение плотности от
перигея к апогею.
Пусть к тяговому ускорению зеркального солнечного пару¬
са w добавляется возмущающее ускорение под действием сопро¬
тивления атмосферы
n'l = P(r)(Alm)vl sin2ф,
где А/т — парусность аппарата в нормальной к потоку ориентации
паруса, vc — орбитальная скорость центра масс аппарата (рис.72),
ф — угол атаки, р(г) — плотность атмосферы, являющаяся в нашей
задаче функцией геоцентрического расстояния аппарата на орбите
раскрутки и принимаемая, как указывалось выше, постоянной
195
на каждом отдельном витке траектории: р(г) = р(тт;п) = Ртах =
= const.
В нормальной к потоку лучей ориентации аппарат обладает
тяговым ускорением *v0 = 2Р3 (А/т), где Рз - удельное давле¬
ние солнечной радиации на орбите Земли (см. § 3). Ускорение *Vj
может быть выражено через w0, т.е.
w, = — р w0 Р31 ис sin2Ф ■
;2
Кроме того, для ’’половинного” закона управления парусом, т.е.
л
для в = (см. рис 67, где в — угол падения лучей на парус),
2 2
угол атаки Сможет быть представлен в виде ф=#+ ip/2 —л/2
(см. рис. 72). Угол # между вектором орбитальной скорости vc и
радиус-вектором г легко определить по формулам эллиптического
движения так же, как это легко сделать для текущего значения
скорости | vc | .
Если для предлагаемой модели построить решения первого при¬
ближения по малому параметру Q для раскрутки в плоскости
эклиптики с первоначальной круговой орбиты, то их можно пред¬
ставить в прежнем виде конического сечения (15.12). Однако на
этот раз формулы для р(<р),е (iр) и а (у) будут содержать некото¬
рый поправочный ’’атмосферный” множитель, в который плотность
атмосферы р будет входить линейно. При р = О ’’атмосферные”
формулы превращаются в формулы (15.12).
Расчеты показали, что если движение аппарата с парусом начи¬
нается с круговой орбиты высотой 800 км, то значение эксцентри¬
196
ситета увеличивается от е = 0 до е = 0,35 уже через 150 оборотов
без учета сопротивления и только через 200 оборотов - с учетом
сопротивления. При начальной высоте 700 км для достижения
того же эксцентриситета требуется уже 550 оборотов. Таким
образом, даже на достаточно больших высотах атмосфера оказы¬
вает немаловажное тормозящее действие на режим раскрутки
космического аппарата.
Пространственная задача о геоцентрической парусной раскрутке
впервые также была рассмотрена в работах [2.17-2.19] длявыхо-.
да на значение h = 0 с произвольно ориентированной круговой
первоначальной орбиты при условии отсутствия иных возмущаю¬
щих эффектов, кроме сил светового давления на солнечный парус.
Впервые методом малого параметра была решена (в виде функций
времени) общая система уравнений поступательно-вращательного
движения аппарата с солнечным парусом, состоящая из десяти
уравнений. Первые три описывают орбитальное движение центра
масс космического аппарата, С помощью формул приведения его
геоцентрических координат к переменным эллиптического движе¬
ния г (t), u{t) = [л*(т) + со (/) ], £2(f)> i (О (радиус-вектор, аргу¬
мент широты, долгота узла, наклонение) можно записать уравне¬
ния движения через эти переменные в прямоугольной орбитальной
системе координат Огуп (радиальное, трансверсальное и нормаль¬
ное к плоскости орбиты направления). Входящая в и величина
v*{t) - оскулирующая истинная аномалия, ниже буквой к будем
обозначать ее невозмущенное значение. В новых переменных урав¬
нения движения центра масс О (рис. 73) примут вид
г - ri>2 + Gt = wr, rv + 2rv + Сг = w^, G3=wn, (15.14)
причем функции Gi, C2, G3 зависят от переменных г, и, П, i,dijdt,
dvjdt ,dSljdt ,dijdt [2.17-2.19]:
dv dQ di dD.
- 2r — cos i + r sin 2и sin i,
dt dt dt dt
( d£l \2 dr d£l d}£l
G0 =r( ] sin и sin2 / cos и + 2 — cos/ + r — cos i -
\ dt / dt dt dt2
di dSl ... I di V .
— 2 r~— sin usini-H 1 sin U COS I,
dt dt \ dt }
dr d£L dv d£l
G-> = —2 cos и sin/ + 2r sin и sin / -
dt dt dt dt
197
Й dr di dv di
- r — cos и sin i + 2 sin и + 2r — — cos и +
dt dt dt dt dt
d2i
sin и cos i sin i + r —— sin u.
dt1
Компоненты возмущающего радиационного ускорения wr,
Wy, w„ в этой пространственной задаче являются функциями трех
направляющих косинусов линии Земля — Солнце относительно
осей системы Ог<рп, переменных эллиптического движения и трех
углов ориентации нормали к солнечному парусу по отношению к
ортогональной системе орбитальных координат Огуп (см. рис.73).
Углы ориентации соответствуют трем последовательным поворотам
5i,62,63, позволяющим совместить оси этой системы с осями
системы жестко связанной с плоским солнечным парусом:
ось 0\ идет по нормали к парусу N, оси От\ и Of расположены в
плоскости паруса (изображена волнистой чертой) и совпадают
с двумя главными центральными осями инерции. Начало коорди¬
нат О совпадает с центром масс солнечного паруса. Теперь положе¬
ние нормали N полностью определено двумя углами 5, и 62, а тре¬
тий угол б3 характеризует несущественное для создания тяги вра¬
щение плоского паруса около своей нормали №,положение ор¬
та которой характеризуется следующими направляющими косину¬
сами по отношению к осям Ощп:
На рис. 73 изображены также промежуточные положения осей г,
г',. .., п'\ соответствующие трем последовательным поворотам
на углы б,,52 и 63, необходимым для совмещения систем Огц>п
Ориентацию начальной орбиты относительно экватора примем
произвольной и определим ее наклонением i и долготой восходя¬
щего узла О, отсчитываемой от точки весеннего равноденствия У
(рис. 74). Положение Солнца относительно плоскости первоначаль¬
ной орбиты космического аппарата определим широтой b и долго¬
той /, связанными с экваториальными координатами Солнца 6С>
ас соотношениями [В.21]
cos Ъ cos I = cos (ас — £2 )cos5c >
cos b cos I = sin 8q sin i + cos 6C sin(ac — £2)cos i,
sin b = sin 6C cos i - cos 5C sin(ac — П) sin i.
При этом координаты 5^, ac связаны с наклоном эклиптики к
экватору е = 23,5° и со средней долготой Солнца на эклиптике Ас
198
N® = № {cos 5,cos62, sin 5, cos62, — sin 62} .
(15.15)
и 0£ 7?f
«с
Рис. 74
соотношениями
sin 5С = sin Хс sin е, tg ас = tg Хс cos е.
Из геометрических соотношений и формулы (15.15) косинус
угла между направлением солнечных лучей и нормалью к парусу,
т.е. угол падения лучей на парус, выражается через углы ориента¬
ции нормали 5,, 5 2, 5 з и координаты Солнца относительно орбиты
аппарата следующим образом (см. рис. 73 и 74):
(i°, №) = cos b cos 62 cos(u - / + 5,) + sin b sin 52,
где и - аргумент широты аппарата. Подставив эту формулу в выра¬
жение для силы тяги паруса, содержащее квадрат косинуса угла
падения, и переходя от углов b и I к экваториальным координа¬
там Солнца 5 с и ас> запишем выражения для правых частей систе¬
мы (15.14):
и и
wr = -w0R2(u, £2,/)cos — sgnsin —,
2 2
и и
w,„ = w0R (u, £2, /) sin — sgn sin —, (15.16)
2 2
w„ =0,
где и
R (и, £2, /) = cos — cos(ac ~ £2 ) cos 5C +
и
+ sin— [sin 5C sin / + cos 6C sin(ac — £2 )cos/].
Итак, мы составили систему уравнений орбитального движения
космического аппарата с солнечным парусом при заданном ’’поло-
199
винном” угле установки паруса. При этом ориентация орбиты
относительно экватора принималась произвольной. Теперь к трем
уравнениям орбитального движения центра масс (15.14) с правы¬
ми частями (15.16) следует добавить шесть уравнений вращатель¬
ного движения около центра масс, приняв, что плоский солнечный
парус обладает динамической симметрией, вследствие чего оказы¬
ваются равными нулю возмущающие моменты сил тяготения Зем¬
ли и светового давления. Они состоят из трех кинематических и
трех динамических уравнений Эйлера, причем в правых частях
последних стоят лишь моменты программного управления пару¬
сом по ’’половинному” закону, для которых принимаем
М"=М^=0, М”=В?/2, (15.17)
где В — момент инерции паруса вдоль главной центральной оси
Of (В = С). Так как на рис. 73 гО<$ — плоскость орбиты, а перпен¬
дикуляром к ней служит ось On, то задаваемое управление (15.17),
однозначно определяющее изменение всех трех углов 6j,52,53
в виде функций времени, не дает указания, как ось вращения па¬
руса связана с орбитальной системой осей (в отличие от плоского
случая орбитального движения, когда парус вращается вокруг
перпендикуляра к плоскости эклиптики).
Кинематические уравнения Эйлера, выражающие проекции аб¬
солютной угловой скорости паруса р, q,r на оси подвижной сис¬
темы 0%rjf, жестко связанной с нормалью к парусу N, составляют¬
ся с учетом сложения вращений
р = CJ* +С0|, = +шч, r = co£ + cjf,
где со|, со^, со£ — проекции на подвижные оси вектора <2 *,
т.е. вектора мгновенной угловой скорости вращения паруса отно¬
сительно орбитальной системы осей Опрп, а проекции со^, соп,
ojf — проекции на те же оси вектора со , т.е. вектора мгновенной
угловой скорости вращения орбитальной системы Огуп относи¬
тельно геоцентрической инерциальной системы осей. Если проек¬
ции со * легко выразить по эйлеровым кинематическим формулам
через углы ориентации 5 j, 62,53 и их производные, то проекции со
вдоль осей Or, 0<р, On следует выразить через элементы орбиталь¬
ного движения по классическим формулам поворота осей (10.8).
Когда шесть уравнений вращательного движения, составленные
с учетом перечисленных выше указаний, будут присоединены к
трем уравнениям (15.14), то к полученным девяти уравнениям
следует добавить еще одно уравнение связи поступательного и вра¬
щательного движений, так как число координат избыточно. Назо¬
вем это уравнение условием оскуляции, поскольку оно выражает
тот факт, что вектор скорости аппарата v всегда расположен в
200
орбитальной плоскости Ory, т.е. v n° = 0 (см. § 10, формулу
(10.9)). Третье уравнение движения центра масс удобно привести
к виду, содержащему орбитальные элементы. Вывод такого урав¬
нения приводится в § 10. С учетом используемых здесь обозначе¬
ний: u = v*+u> - аргумент широты аппарата (см. рис. 74), v * -
оскулирующая истинная аномалия, v - истинная аномалия в невоз¬
мущенном движении, запишем требуемое уравнение по аналогии
с (10.13):
mu>rri> = Fn
или
Построение общего решения системы десяти уравнений в нуле¬
вом (кеплеровом) приближении относительно ускорения w0 (т.е.
относительно малого параметра Q) дает при Q = 0 для начальной
круговой орбиты:
и ~ Cit, r-r0, £2 = const, i — const, Sy~u/2, 62=6з=0,
т.е. раскрутки не происходит. Решения первого приближения (мы
их не приводим вследствие громоздкости) показывают, что ско¬
рости увеличения радиус-вектора т центра масс аппарата и аргу¬
мента широты и = v* + со в процессе раскрутки зависят не только
от величины малого параметра Q, как в существенно плоской за¬
даче, но и от ряда вспомогательных параметров, характеризующих
ориентацию паруса относительно орбиты и солнечных лучей. Кроме
того, в процессе раскрутки с произвольно ориентированной гео¬
центрической орбиты первоначальная ориентация этой орбиты
сохраняется, т.е.
i - /0 = const, Si - Slg = const.
Исследование ориентации паруса в первом приближении отно¬
сительно Q показало, что нормаль к парусу, расположенная в ну¬
левом приближении (15.18) в плоскости орбиты Ог<р, и в первом
приближении не выйдет из этой плоскости и будет вращаться около
оси On (см. рис. 73) по ’’половинному” закону. Это значит, что
угловое положение паруса в пространственной задаче для произ¬
вольной ориентации орбиты подчиняется закону управления пару¬
сом в плоской эклиптической задаче. Этот вывод является глав¬
где
yJfM3p dSl
dSl du
= cos i + .
dt
(15.18)
201
ным результатом выполненных JI.K. Гриневицкой и Е.Н. Поляхо-
вой исследований [2.17—2.19]. Он расширяет возможности приме¬
нения аналитических методов расчета раскрутки по программе
плоской задачи применительно к орбитам, не лежащим в плоскости
эклиптики.
§ 16. Учет эффекта тени Земли
в геоцентрических парусных задачах
При исследовании геоцентрического движения космического
аппарата с солнечным парусом следует уделить пристальное внима¬
ние проблеме учета тени Земли, что особенно существенно на
первых низких витках траектории раскрутки. Не считая терми-
наторной орбиты (см. § 13), всегда освещенной Солнцем, все
геоцентрические орбиты космических аппаратов подвержены
теневому эффекту, который создает на орбите участок нулевой
парусной тяги и нарушает энергетический режим раскрутки. В па¬
русных задачах учет тени осложняется еще переменностью разме¬
ров теневого участка от витка к витку.
Реально тень Земли представляет собой конус высотой около
1,42 • 106 км, что более чем в 220 раз больше радиуса Земли.
Вследствие этого для низких орбит вполне уместно представление
конуса полной земной тени (без учета полутени) в виде прямого
кругового цилиндра, радиус основания которого равен радиусу
Земли, а ось совпадает с линией Солнце — Земля (рис. 75). Для
геометрической характеристики теневой части орбиты КХК2 Обыч¬
но пользуются угловым геоцентрическим расстоянием аппарата
от Солнца X, считаемым по большому кругу, причем угол опреде¬
лен на промежутке [0, я]. При X <я/2 (cos X < 0) аппарат нахо¬
дится в световом полупространстве, а при X > я/2 (cos X < 0) -
в теневом полупространстве, в котором он попадает в тень, как
только выполнится условие затмения
г sin X =rsin ^ <Д3. (16.1)
Рис. 75
202
Чертеж на рис. 75 изображает орбиту, лежащую в плоскости эклип¬
тики и потому содержащую в своей плоскости ось тени (смысл
углов X и \р очевиден из чертежа) . Если орбита имеет произвольное
наклонение, то ось тени не лежит в ее плоскости и линия ОС являет¬
ся проекцией оси тени на плоскость орбиты. Если модель цилиндри¬
ческой тени является слишком грубой, следует пользоваться кони¬
ческой моделью тени и полутени, учитывающей видимые размеры
диска Солнца и расстояние до него. Погрешности цилиндрической
модели обусловлены величинами полурастворов конуса тени
0,26° и конуса полутени 0,27° [2.20, 2.21].
Если круговая начальная орбита расположена в плоскости эк¬
липтики, то геоцентрический угол ф (см. рис. 75) оказывается
в данном случае половиной теневого угла и связан с высотой поле¬
та Н зависимостью = arcsin (R^j (R3 + Н)). Отношение макси¬
мального времени затмения /шах ко всему периоду обращения Р,
т.е. максимальное значение относительного времени пребывания
в тени (обозначим его через т), определится из отношения т =
= tmax/P = По третьему закону Кеплера Р = 2я\/(Л + Н)31ц3,
где цз гравитационный параметр Земли. Максимальное время
затмения составляет [2.22]
Р Яз
fmax = arcsin ~
203
Величины fmax, Р ит как функции начальной высоты полета Н0
для движения в плоскости эклиптики по круговой орбите изобра¬
жены на рис. 76 [2.22], где /тах = гт. При раскрутке аппарата с
солнечным парусом с такой первоначальной орбиты относительное
время пребывания аппарата в тени Земли т непрерывно уменьша¬
ется, несмотря на возрастание абсолютного времени затмения /тах,
начиная с высоты Н0 = 1450 км, где /тах = 35 мин. При режиме
парусной раскрутки в плоскости эклиптики по квазикруговой
спиральной траектории [2.4] (ниже эта схема будет обсуждаться
подробнее) ’’вредный” эффект тени Земли постепенно ослабевает.
При раскрутке по квазиэллиптической спирали, а также при движе¬
нии вне плоскости эклиптики рассматриваемые теневые эффекты
выглядят сложнее.
Действительно, обратимся к спутниковой задаче. Если в ней
пренебречь возмущениями орбиты, положение теневого участка
связано только с положением орбиты относительно Солнца. Не¬
обходимо сразу отметить, что качественно эффект тени проявляется
в систематических долгопериодических возмущениях первого по¬
рядка относительно возмущающего радиационного ускорения w0.
При этом наиболее существенными оказываются возмущения боль¬
шой полуоси орбиты [2.20] . Количественно возмущающий эффект
тени определяется не только длительностью пребывания спутника
в тени Земли, но и геометрической асимметрией теневой области
АГ[ К2 относительно линии апсид орбиты, т.е. зависит от того, какая
точка - вход или выход из тени — расположена ближе к Земле.
Все вышесказанное относится к спутникам с большой парусностью,
подверженным существенным возмущениям от сил светового
давления. Однако при построении теории геоцентрической раскрут¬
ки с помощью солнечного паруса надо иметь в виду не только
указанные выше свойства теневого эффекта, проявляющиеся в
спутниковых движениях, но и систематическое уменьшение тенево¬
го участка KtK2 от витка к витку, причем он может быть располо¬
жен асимметрично относительно линии апсид.
204
Например, весьма перспективная для парусной раскрутки эк¬
липтическая орбита, соответствующая при прочих равных условиях
максимуму силы светового давления на парус, оказывается, к
сожалению, крайне невыгодной с точки зрения попадания в тень
даже при больших начальных высотах. На рис. 77 показан характер
более выгодных условий освещенности высокой геостационарной
орбиты, расположенной в экваториальной плоскости: зона экрани¬
рования существует только 74 дня в году, причем интервал пребы¬
вания в тени на каждом 24-часовом обороте не превышает одного
часа. Все остальное время года геостационарный спутник непрерыв¬
но освещен Солнцем.
Способы учета тени Земли можно условно разделить на два
основных класса: численные и аналитические. Среди численных
методов следует в свою очередь различать два метода в зависи¬
мости от того, в какой небесно-механической задаче они исполь¬
зуются. Если уравнения орбитального движения интегрируются
численно, то учет тени Земли осуществляется путем проверки
условия затмения в процессе интегрирования. Необходимое и
достаточное условие затмения физически выражает тот факт, что
Солнце, наблюдаемое с космического аппарата, оказывается за
диском Земли. Именно это условие, как уже указывалось, может
быть записано в виде (16.1). В процессе численного интегрирова¬
ния это условие проверяется автоматически путем оценки значения
cos ф = — r~'\Jr2 — где г — геоцентрическое расстояние до
объекта, вычисляемое по текущим значениям его координат. Вто¬
рой из численных методов учета тени состоит в определении угло¬
вых координат теневого участка орбиты путем решения так назы¬
ваемого уравнения тени. Оно представляет отбой уравнение линии
пересечения двух плоских кривых: орбиты аппарата и эллипса,
которым является сечение прямого кругового цилиндра тени Зем-
лц плоскостью орбиты. Как правило, в теориях движений ИСЗ
пользуются уравнением тени в виде алгебраического уравнения
четвертой степени относительно тригонометрических функций
угловых переменных эллиптического движения. Для круговой
орбиты уравнение четвертой степени вырождается в биквадратное.
Существуют методы решения уравнения тени, вообще не требую¬
щие обращения к алгебраическому уравнению четвертой степени.
Аналитические методы учета тени Земли основаны на использо¬
вании в исходных уравнениях орбитального движения так называе¬
мой функции тени. Тогда аналитическое решение уравнений движе¬
ния производится с учетом этой функции тени, которая предвари¬
тельно представляется в виде некоторого разложения. Обычно
функцией тени называют какую-либо непрерывную функцию,
аппроксимирующую разрывный теневой множитель, вводимый
205
в уравнения из физических соображений и принимающий только
два возможных значения: О-в тени и 1 - на свету. Аппроксима¬
ция этого ’’релейного” множителя непрерывной и даже гладкой
функцией сопровождается обязательным разложением этой функ¬
ции в ряды специального типа: либо в ряды по сферическим функ¬
циям (полиномам Лежандра), либо в ряды Фурье, либо в сходя¬
щиеся тригонометрические ряды. Геометрические формы непре¬
рывной функции тени З'(^) изображены на рис.78 в виде функций
истинной аномалии ^ (сплошная кривая — разложение по сфери¬
ческим функциям, штриховая — разложение в ряды Фурье). На
рис. 79 изображена сглаженная функция тени (сплошная кривая),
определяемая на этот раз тригонометрическими разложениями.
Штриховая линия соответствует рядам Фурье, как и на рис. 78.
Общее свойство функций тени, аппроксимирующих разрывный
’’теневой” множитель 0 или 1, состоит в том, что чем больше слагае¬
мых берется в разложении, тем больше соответствующая производ¬
ная вблизи граничной точки разрыва, т.е. в области полутеней.
Существуют и другие модели непрерывных функций тени, хорошо
аппроксимирующих указанный переход, но вообще не требующие
разложения в ряды. Подробное обсуждение типов уравнений тени
и методов их решений, а также исследование различных функций
тени и их свойств приводится в обзорах [2.21, В.22].
Переходя к обсуждению эффектов тени Земли непосредственно
в парусных задачах, следует напомнить, что впервые учет теневой
области для траектории околоземной парусной раскрутки произ¬
вел В. Фимпл [2.4] для орбиты, лежащей в плоскости эклиптики
(см. § 13). Он принял приближенно, что на первых витках траекто¬
рии квазиэллиптической раскрутки, для которых эффект тени
особенно важен, так как размеры теневого участка орбиты отно-
206
сительно велики, движение можно принять близким к круговому.
С одной стороны, это означает, что для определения изменения
большой полуоси и эксцентриситета орбиты можно пользоваться
простыми уравнениями, предлагаемыми [2.4] в форме
da
dt
2 а
IV'т
de
dt
I COS Ip
sin Ip
Wn
v о at V0 v0
где v0 - круговая скорость в начале витка, wT и wn - проекции
ускорения аппарата под действием силы тяги паруса на касательное
и нормальное направления. Если vv0 — ускорение аппарата при его
нормальной ориентации к лучам, а - угол падения лучей, /3 - угол
ориентации вектора скорости к лучам (см. рис. 55, где счет поляр¬
ного угла <р ведется от нижнего положения), то для проекций уско¬
рения получим, имея в виду, что а = 0, j3 = ip:
wT = w0cos а cos (а - (?),
Я 7Г
Т ’ 1
; ч’о cos2a(- sin(o. - j3)),
/зе[о,2л].
С другой стороны, предположение о круговом движении позво¬
ляет пользоваться упрощением (см. рис. 55)
го , г0
dt = — dip ^ — d@.
v0 Vo
Окончательно, если для симметричного участка тени на круговой
орбите принять на основании (16.1), что угол ф - arcsin(/?з/г) =
= я — X составляет половину центрального угла, стягиваемого за¬
тененным участком круговой орбиты А (см. рис. 55), можно запи¬
сать относительное приращение большой полуоси за виток
в виде [2,4]:
Аа *
— = 2Q [ 2 / cos a cos(a
а о о
(3)d(3 - / cos2 a cos(a - /3)d/3 ]
Здесь Q — малый параметр, определяемый формулой (13.3).
Обсуждение влияния теневого эффекта на раскрутку по круго¬
вой эклиптической орбите мы находим в работе В.В. Шувалова
[2.5]. Здесь для ’’половинного” закона вращения солнечного пару¬
са вычисляется среднее за оборот значение трансверсальной силы
тяги (см. также (15.4))
F =
'Р
mw0
I
2Л (по свету)
sm
- dp:
mwQ
4л
Зтг
2
/ sin3
207
Здесь по-прежнему sin ф = Rslr, счет на круговой орбите ведется,
как показано на рис. 75. Интегрируя, находим
F* = 0,4257>зерк + 0,037Рзерк
где Р33ерк для зеркального паруса то же, что и в формуле (15.4).
В частности, оказывается, что при г = R3,г = 2Rj, г = 3/?з средняя
величина трансверсальной силы оказывается равной 0,21Рзбрк,
36DK 3CDK
0,37Р3 и 0,39Р3 соответственно. Отсюда ясно, что учет тени
Земли должен существенно изменить результаты численных иссле¬
дований, выполненных для полной освещенности.
Переходя к обсуждению ’’функций тени”, следует заметить, что
если в спутниковых задачах применение функций тени получило
широкое развитие, то в парусных задачах мы встречаемся с этим
приемом гораздо реже. Например, А.П. Скопцов [1.55] применил
функцию тени, не требующую разложения в ряды специального
типа. Эта функция аппроксимирует разрывный переход от 0 к 1
непрерывной плавной функцией, учитывающей наличие полутеней
вблизи точки разрыва (рис* 80), что соответствует конической
модели тени:
if(r, ip) = — + — arctg I a v 1 - ( j - cos a .
2 jt L \ r I
Параметр а определяет скорость возрастания S'(г, <p) от 0 до 1. С по¬
мощью этой функции была построена численно-аналитическая тео¬
рия раскрутки аппарата вокруг Земли и удалось исследовать влия¬
ние тени на режим раскрутки для моделей резкой и размытой тени.
Оказалось, что не только сам факт попадания в тень и относитель¬
208
ное время пребывания аппарата в тени, но и физические свойства
границ теневого участка оказывают влияние на режим раскрутки.
Асимметрия теневого участка орбиты относительно линии апсид
орбиты может существенно повлиять на характер изменения орби¬
тальных элементов. Если мы рассмотрим космический аппарат,
обладающий высокой парусностью, то легко заключить, что если
теневой участок KtK2 вырезается из той выгодной части орбиты,
где световое давление разгоняет аппарат в его движении ”от Солн¬
ца”, то в целом за виток произойдет уменьшение большой полуоси
и следующий апогей будет достигнут на меньшей высоте. Такая кон¬
фигурация изображена на рис. 81,а; переход на орбиту с мень¬
шей полуосью показан стрелкой. Эта ситуация является невыгод¬
ной с точки зрения раскрутки и удаления от Земли. Напротив,
когда имеет место конфигурация орбиты и ее теневого участка
КхКг, при которой последний вырезается из невыгодной дуги
траектории, где аппарат движется навстречу солнечным лучам, то
произойдет систематическое увеличение большой полуоси орбиты
аппарата от витка к витку (показано стрелкой на рис. 81, б). Если
аппарат обладает достаточно высокой парусностью, то силы свето¬
вого давления при наличии тени от Земли естественным образом
могут при указанной конфигурации обеспечить раскрутку аппарата
и его уход от Земли. Речь идет о том, как это интересное природное
свойство движения использовать наилучшим образом в рассматри¬
ваемых нами парусных задачах.
Анализ энергетики при прохождении через тень позволяет уста¬
новить следующие интересные закономерности, порождаемые асим¬
метрией: сближение большой полуоси с осью тени сопровождается
увеличением большой полуоси и уменьшением эксцентриситета.*)
Увеличение большой полуоси (нам интересен именно этот вариант
орбитальной эволюции) соответствует переходу на все более высо¬
кие орбиты, т.е. на все более низкие уровни полной орбитальной
энергии в смысле | h | [В.17, с. 107]. Однако следует помнить, что
только специальные исследования могут показать, при каких усло¬
виях это увеличение полуоси действительно будет бесконечно
велико.
Описанное выше свойство асимметричных теневых участков
изменять большую полуось орбиты наводит на мысль об искусст¬
венном расширении нужного, т.е. энергетически выгодного, тенево-
Подробное и наглядное описание энергетики орбиты при системати¬
ческом попадании в тень приводится В.В. Белецким [В.17, с. 105—109]:
. в принципе влияние тени может быть таким, что большая полуось уве¬
личится до весьма существенных размеров, а может быть, и до бесконечно
большого размера, и спутник улетит от Земли в космическое пространство!
По крайней мере теоретическая возможность этого не исключена”.
14. Е.Н. Поляхова 209
го участка путем применения плос¬
кого солнечного паруса или баллона
с переменной геометрией. Так на¬
пример, автором настоящей книги
была в свое время высказана идея
[2.20] создания искусственных те¬
невых участков, примыкающих к
участку природной тени Земли, пу¬
тем управления размерами радиуса
надувной эластичной сферы, т.е. па¬
руса-баллона. В результате участок
орбиты, на котором сложенный па¬
рус движется по освещенной час¬
ти орбиты, означает участок искусственной тени, участок дви¬
жения с развернутым парусом - участок, на котором активно
работает сила светового давления. Специальным образом подобран¬
ная ориентация искусственных теней, обоснованная с помощью
аналитической теории орбитальной эволюции в асимметричном
случае, позволяет получить более интенсивную раскрутку за счет
комбинации природного теневого эффекта с его искусственным
аналогом. Численные исследования [2.20], проведенные для раз¬
личных вариантов асимметрии, ориентации и размеров теневых
участков, показали, например, два крайних случая орбитальной
эволюции, изображенные на рис. 82. Здесь приведены графики
большой полуоси а орбиты типа геостационарной. Случай I соот¬
ветствует убыванию большой полуоси при условии, что баллон
работает только на половине витка круговой орбиты, причем
вторая половина орбиты, на которой баллон свернут, является
’’тенью” и обязательно совпадает с дугой, на которой движение
происходит ”от Солнца”. Случай II соответствует интенсивной
раскрутке, при которой баллон за один год покинет поле тяготения
Земли. В этом случае ’’тенью” служит половина орбиты, движение
на которой ориентировано против солнечных лучей.
Если обсуждать реальность создания искусственных теневых
участков как участков с минимальной или даже нулевой парус¬
ностью баллона переменной геометрии, то делается очевидным, что
в той степени, в которой эта процедура представляется осуществи¬
мой технически, можно предположить возможность создания таких
участков в заранее запланированном месте орбиты, вообще не свя¬
зывая их местоположение с физической тенью Земли. Итак, мы
приходим снова к идее цандеровского управления по релейной
схеме переключения, но не для плоского паруса-зеркала, которое
предлагал сам Ф.А. Цандер, а для баллона. Выше, в § 11, мы уже
упоминали, что идея полета в космос при помощи паруса-баллона
была впервые высказана в 1956 г. К. Эрике [1.4], который имел
210
а,тыс. км
Рис. 82
в виду гелиоцентрические движения, выполняемые надутым пару¬
сом-баллоном. Эта идея вспоследствии никем не была поддержана,
так как тяговая эффективность баллона (даже с переменной гео¬
метрией) весьма ограничена и для выполнения гелиоцентрических
межпланетных перелетов малоперспективна. Идея Эрике оказа¬
лась тем не менее перспективна для выполнения различных манев¬
ров как в гелиоцентрических, так и в геоцентрических задачах.
Не считая упомянутой выше работы автора [2.20] об искусствен¬
ных теневых участках, развитие идеи о переменной геометрии бал¬
лона для выполнения различных корректирующих маневров мы
находим и у других авторов, о чем поговорим подробнее в § 18
при обсуждении различных задач маневров парусной коррекции.
Вернемся к влиянию тени на энергетику околоземной раскрут¬
ки и обсудим эту задачу на примере эклиптической раскрутки
при ’’половинном” законе управления парусом. Если мы снова
рассмотрим геометрическую картину этой раскрутки, изображен¬
ную на рис. 68 на основании расчетов, которые выполнил Н. Сэндс
[2.10] без учета тени, и мысленно представим себе теневой участок
орбиты, ’’вырезаемый” цилиндром тени Земли (воображаемый ци¬
линдр на рис. 68 ориентирован вниз), то станет ясно, что в этой
задаче тень может играть только отрицательную роль в смысле эф¬
фективности раскрутки. Действительно, участок тени приходится
на дугу орбиты, по которой аппарат движется ”от Солнца”. Если
бы по такой траектории двигался аппарат с большой парусностью,
не обладающий управлением, но никакой раскрутки вообще бы
не получилось и большая полуось уменьшалась бы. Однако мы
решаем задачу о раскрутке с помощью управляемого плоского
паруса, который обеспечит раскрутку по изображенному семейст¬
ву эллипсов. При этом его ось симметрии перпендикулярна оси
тени, расположенной в данной задаче в плоскости орбиты. Поэтому
можно говорить лишь о том, что эффект тени несколько замедлит
темп раскрутки. Это видно еще и из того, что с геометрической
точки зрения мы имеем дело с эволюцией теневого участка от
первоначально симметричной конфигурации к асимметричной кон¬
фигурации (см. рис. 75, 81). Вредное влияние тени будет несколь¬
ко компенсироваться лишь тем, что с увеличением высоты над
Землей быстро уменьшаются относительные размеры теневого
участка и относительная длительность пребывания аппарата в тени.
Аналитически влияние цилиндрической тени Земли в указанной
выше задаче о раскрутке с помощью солнечного паруса с ’’половин¬
ным” углом управления было исследовано Л.К. Гриневицкой
совместно с автором настоящей книги в работе [2.15]. При по¬
строении аналитических решений уравнений движения применялся
метод малого параметра, уже описанный в § 15 применительно
211
к этой задаче. Применимость метода ограничивается областью, на
которой сам малый параметр еще можно с достаточной степенью
точности считать малым. Построение решений теневой задачи в
[2.15], так же как и в задаче о полной освещенности, выполнялось
с точностью до первого приближения по малому параметру.
Ограничиваясь цилиндрической моделью тени, легко установить,
что в нашей задаче границы тени имеют координаты
Зтг Зтг
Ч>1 =— Ф1, Ч>7 =— +^2,
причем углы принимают значения
= arcsin Лз/rj, ф2 = arcsiny?3/r2.
При решении системы первого приближения (15.10) с учетом тени
разложение в ряды Фурье выполнялось по освещенной части орби¬
ты, что соответствовало ’’релейной” схеме учета тени по закону
0 или I. Для симметричной теневой области круговой орбиты пре¬
делы tfii и if2 оставались бы постоянными, а функции fi($) и
из (15.10) были бы строго периодическими, вследствие чего эф¬
фект тени проявлялся бы только в изменении величин коэффи¬
циентов рядов Фурье по сравнению с их величинами для полностью
освещенной орбиты. В случае прохождения аппарата через тень
Земли эти функции перестают быть строго периодическими. Учиты¬
вая характер траектории раскрутки, представляющей собой се¬
мейство эллипсов с малоподвижным перигеем и быстро движу¬
щимся апогеем [2.10,2.11], можно ввести следующую простейшую
модель эволюции теневого участка: координаты г t mpi точки вхо¬
да в тень К1 считать в первом приближении неизменными, тогда
как координаты точки выхода из тени К2 считать переменными при
непрерывном убывании размеров теневого участка. Именно для
такой модели [2.15] был разработан приближенный численно-гра¬
фический метод определения коэффициентов рядов Фурье, позво¬
ляющий оценить их верхний предел, соответствующий переменной
границе выхода из тени К2. Полученные среднеинтегральные значе¬
ния коэффициентов рядов Фурье позволяют определить границы
г2п и Фт точки К2 на любом л-м витке траектории раскрутки.
Прохождение через тень, как уже указывалось выше, в данной
задаче оказывает тормозящее действие на режим парусной раскрут¬
ки, а численные исследования, выполненные с помощью охаракте¬
ризованного выше метода, позволяют установить также и коли¬
чественный эффект тени. Например, высота апогея орбиты, дости¬
гаемая за 140 оборотов, оказывается на 1000 км меньше, чем в
гипотетическом случае полной освещенности, а эксцентриситет
увеличивается вдвое медленнее, чем для освещенной орбиты.
212
При обсуждении теневых эффектов в парусной задаче необходи¬
мо иметь в виду, что рассмотренные выше методы учета 1ени
уместны лишь на небольших интервалах времени, на которых мож¬
но пренебречь движением Солнца по эклиптике (годичное движе¬
ние) и возмущающими гравитационными эффектами (атмосфер¬
ное сопротивление обсуждалось в § 15). Как правило, эти интерва¬
лы времени должны быть порядка нескольких десятков периодов
геоцентрических оборотов аппарата. При рассмотрении большего
числа оборотов учет тени при раскрутке в центральном поле тяготе¬
ния Земли без учета годичного движения Солнца теряет смысл,
так как в действительности указанные эффекты будут сдвигать
теневую область орбиты, принципиально изменяя первоначальное
расположение теневой области относительно линии апсид и линии
узлов орбиты.
Годичное движение Солнца (со скоростью около 1 град/сут)
соответствующим образом поворачивает ось тени, расположенную
в плоскости эклиптики. Эффекты несферичности Земли, а именно
возмущающее влияние второй гармоники в разложении геопотен¬
циала, вызывают вековые смещения перигея и узла орбиты. Вековое
смещение перигея равно нулю лишь для орбит с так называемым
критическим наклонением: около 64° и около 116°, а вековое
смещение узла отсутствует лишь у полярных орбит. Так или иначе
эклиптическая орбита обязательно будет подвергаться этим веко¬
вым эффектам, величину которых легко вычислить по известным
формулам (например, из [В.21]) и установить, как будут изме¬
няться эти величины в нашей задаче. Если, например, взять момент
старга и момент через 140 оборотов после старта, то [2.15] наша
траектория раскрутки с ’’половинным” углом характеризуется
следующими значениями среднего движения п, периода Т, векового
ухода перигея to и векового ухода узла й при г0 - 7000 км, еи =
= 0, w0 = 0,85 см/с2 :
Физическая величина
Старт
140-й оборот
п, град/ч
210
182
Г, ч
1,71
1,98
град/ч
0,55
0,42
й , град/ч
- 0,31
- 0,27
Игак, за время движения (около 250 ч) годичным движением
Солнца можно пренебречь (оно не превысит 10°) и считать ось тени
неподвижной. Однако перигей орбиты за это время повернется
уже на 120°, т.е. окажется на другой стороне орбиты, что сущест¬
венным образом изменит расположение линии апсид относительно
213
О 20 40 60 80 адыс.км
Рис. 83
оси тени, нарушив прежнюю асимметрию. За это же время узел
орбиты повернется почти на 90° и, хотя наклонение орбиты не из¬
менится и по-прежнему будет составлять 23,5°, но орбита выйдет
из плоскости эклиптики,и ее линия узлов уже не будет проходить
через точки равноденствий. Таким образом, нет смысла учитывать
тень Земли в приближенной задаче о раскрутке в центральном
поле, и наоборот, желая учесть как можно больше возмущающих
эффектов, следует прибегать не к приближенным оценочным фор¬
мулам, полученным на базе модельных задач, а к точному интегри¬
рованию уравнений геоцентрического движения аппарата с солнеч¬
ным парусом. При этом мы никогда не получим существенно плос¬
кого орбитального движения. Кроме того, хотя можно возразить,
что эффекты несферичности Земли убывают с высотой, необходи¬
мо помнить, что им на смену приходят вековые уходы узла и пери¬
гея под влиянием гравитационных лунно-солнечных возмущений,
которые как раз увеличиваются с высотой.
Сравнивая количественно оба класса гравитационных возмуще¬
ний (от ’’третьего тела”н от сжатия Земли), удобно воспользовать¬
ся наглядным критерием сравнения [2.23]. Лунно-солнечные воз¬
мущения в элементах орбиты имеют так называемый характерный
, m / а \ 3 ,
множитель е = 2— (—— ] , где m - масса Луны или Солнца,
m \ а J
m — масса Земли, а — большая полуось орбиты ИСЗ или космиче¬
ского аппарата, а' — большая полуось орбиты возмущающего тела.
Возмущающее ускорение, отнесенное к величине основного ускоре¬
ния от притяжения Земли, имеет примерно тот же порядок, что и е'.
Возмущения элементов на интервале одного оборота, обусловлен¬
ные притяжением Луны и Солнца, также имеют порядок е . На
рис. 83 приведены графики зависимости е’ от большой полуоси
214
орбиты ИСЗ для лунных и солнечных возмущений порознь, т.е.
для ес и ejj. Для сравнения на том же рисунке приведен аналогич¬
ный график для параметра есж, характеризующего величину возму¬
щений в элементах ИСЗ от сжатия Земли. Параметр есж определя-
R оз
ется по формуле есж = ЗУ2 -г т— , где /2 - коэффициент
а7( 1 - е2)
при второй зональной гармонике в разложении геопотенциала,
R0з — экваториальный радиус Земли, е — эксцентриситет орбиты.
Из графиков видно, что возмущения от Луны и Солнца возрастают,
а возмущения от сжатия убывают с ростом а. Одинаковый порядок
эти возмущения имеют при а «44 000 км.
Таким образом, геостационарный спутник, радиус орбиты кото¬
рого составляет 42 200 км, испытывает близкие по величине возму¬
щения совершенно различной природы, что необходимо иметь в
виду при обсуждении вопросов движения с солнечным парусом на
аналогичных высотах. В этом случае тяговое ускорение паруса
может оказаться по величине сравнимым с возмущающими грави¬
тационными ускорениями. В табл. 8 приводятся значения различ¬
ных ускорений для паруса-баллона с пятью различными значениями
парусности при движении на высоте геостационарной орбиты (на¬
помним, что ускорение сферического отражающего баллона от
силы светового давления составляет половину тягового ускорения
плоского зеркального адекватного (в смысле парусности) солнеч¬
ного паруса при его нормальной ориентации к солнечным лучам).
Случай 4) соответствует баллонам-спутникам, отучай 5) - солнеч¬
ным .парусам-движителям, предназначенным для выполнения гео-
и гелиоцентрических маневров.
Таблица 8
Эффекты
Ускорение, м/с2
Центральное гравитационное моле Земли
2,24 ■ 10-’
Jla (первая степень сжатия)
2,78 ■ 10“‘
Солнечное возмущение
< 4 • 10-7
Лунное возмущение
< 9 ■ 10-7
Возмущение от светового давления (поглощение,
^3 = 0,46 • 10"4 г/ (см • с2):
1) А/т = 0,1 см2/г = 0,01 м2/кг
5 • 10-8
2) А/т = 1 см2/г = 0,1 м2/кг
5 • 10-7
3) А/т = 10 см2 /г = 1 м2 /кг
5 •10'6
4) А/т = 100 см2/г = 10 м2/кг
5 - 10“*
5) А/т = 1000 см2/г= 100 м2/кг
5 ■ 10-4
215
В спутниковых задачах, когда речь идет о неизменяемых (с точ¬
ностью до спутниковой теории возмущений) орбитах, можно вести
поиски солнечно-синхронных орбит (см. § 13), перигеи или узлы
которых непрерывно движутся за Солнцем [2.7]. А в задаче об
эклиптической парусной раскрутке поиск таких орбит теряет
смысл ввиду больших интервалов времени раскрутки и неограни¬
ченного изменения орбитальных элементов. В § 13 мы обсуждали
подобную задачу для терминаторной орбиты, которая подвержена
таким же возмущениям. Итак, мы в настоящее время еще не распо¬
лагаем сколько-нибудь точной аналитической теорией геоцентри¬
ческой раскрутки с учетом вековых эффектов несферичности,
которая работала хотя бы на интервале порядка нескольких десят¬
ков суток - только в этом случае можно уверенно пренебречь
годичным движением Солнца.
Как уже упоминалось, автору настоящего обзора, к сожалению,
не известны работы, в которых гравитационные эффекты в парус¬
ной задаче учитывались бы, например, численно, не говоря уже о
построении соответствующей аналитической теории. При построе¬
нии такой теории хотя бы с точностью до первых степеней сжатия
Земли (эффектов второй грамоники) следует, по-видимому, взять
за основу какую-либо из спутниковых аналитических или численно¬
аналитических теорий с учетом светового давления (их библиогра¬
фическое описание можно найти в обзоре автора [В.22]). Следую¬
щим разумным приближением могло бы служить построение такой
теории на базе задачи двух неподвижных центров. Особенно инте¬
ресными и актуальными могут стать в такой возмущенней поста¬
новке задачи исследования случаев резонансного усиления интен¬
сивности раскрутки.
§ 17. Орбитальные маневры с помощью тяги
солнечного паруса
Современный взгляд на возможности парусных перелетов
позволяет заключить, что, по-видимому, наиболее вероятным в
ближайшее время явится использование солнечных парусов не для
длительных перелетов, а только для орбитальных маневров самого
различного назначения, выполняемых преимущественно на длитель¬
ных интервалах времени. Эти маневры могут быть как гелиоцен¬
трическими, так и геоцентрическими, причем сила тяги солнечного
паруса выступает в этих задачах не как сила тяги маршевого дви¬
жителя, а как вспомогательная сила тяги, предназначенная для
управления орбитальным движением (вопросы вращательного
движения будут затронуты в § 19). Возможно, именно в этой
скромной роли элемента системы орбитального управления солнеч¬
ному парусу будет суждено войти в историю космонавтики.
216
Рис. 84
Рис. 85
Орбитальные маневры, реально выполнимые с помощью солнеч¬
ного паруса, мы условно разделим на два класса: маневры орби¬
тальных парусных переходов с одной орбиты на другую и коррек¬
тирующие парусные маневры, целью которых является гашение
возникших орбитальных возмущений любого происхождения.
Корректирующие маневры мы охарактеризуем отдельно в § 18.
Впервые задача о возможности использования вспомогательной
парусной тяги для полета к Луне была поставлена и решена в 1962г.
Г. Коломбо {2.24]. В ней на базе ограниченной задачи трех тел
Земля — Луна, — космический аппарат численно исследовалась
траектория аппарата с солнечным парусом, тяга которого может
существенно уменьшить число геоцентрических оборотов аппарата
и ускорить его захват Луной. При раскрутке вокруг Земли давле¬
ние на управляемый парус может интенсивно увеличить большую
полуось орбиты, однако после захвата аппарата Луной солнечный
парус следует свернуть для обеспечения устойчивости селено¬
центрического движения. Одна из возможных геоцентрических
траекторий захвата аппарата Луной изображена на рис. 84. Значения
Td указывают время раскрутки аппарата с парусом от перицент¬
ра я, находящегося на высоте 6000- 7000 км над поверхностью
Земли, буквой L обозначены положения Луны, синхронные с поло¬
жением аппарата в указанные моменты времени. На рис. 85 изобра¬
жены два варианта соответствующей селеноцентрической траекто¬
рии, начиная с Т = 61d — последней точки на рис. 84. Сплошной ли¬
нией изображена нежелательная траектория аппарата, сохраняюще¬
го солнечный парус развернутыми после захвата Луной: световое
давление сначала уменьшает эксцентриситет селеноцентрической
217
орбиты, потом резко увеличивает его, в результате чего аппарат
после трех селеноцентрических оборотов падает на Луну (цифры
1, 2, 3 указывают последовательные витки траектории захвата).
Штриховой линией изображена спутниковая траектория, реализуе¬
мая при свернутом или сброшенном солнечном парусе. Позднее
Г. Коломбо рассмотрел аналогичную задачу для системы Солнце -
Юпитер [2.25] *).
Переходя к геоцентрическим переходным маневрам,- следует
обратить внимание на использование строго цандеровской поста¬
новки задачи в смысле переключения силы тяги паруса по релей¬
ной схеме 0 или I, которую мы находим в работах Д. Ван дер Ха
и В. Моди [1.47, 1.48]. При рассмотрении геоцентрической задачи
об орбитальном переходе эти исследователи сформулировали па¬
русную задачу не как самостоятельную задачу динамики косми¬
ческого полета, а как задачу, логически вытекающую из теории
возмущенного движения спутников Земли под действием сил
светового давления. Поэтому авторы [2.26, 2.27] сначала пред¬
приняли попытку решить задачу об орбитальном маневре в плос¬
кости эклиптики, а затем [2.28-2.30] - в пространственном случае.
Аппроксимировался объект парусом-пласгиной, неизменно ориен¬
тированным нормально к солнечным лучам. В такой постановке
парусная задача применима и к спутникам-баллонам, поперечное
сечение которых в два раза больше площади зеркальной пластины
в ее нормальной ориентации к лучам (см. формулы (4.5) и (4.12)).
Аналитическая теория геоцентрического движения с парусом
строилась [2.26, 2.27] при помощи метода малого параметра. В ка¬
честве первого параметра выбирался радиационный малый пара¬
метр по правилу (15.6), а в качестве второго - параметр, характе¬
ризующий медленное изменение долготы Солнца на эклиптике
по сравнению с изменением долготы аппарата на геоцентрической
орбите. Решения, описывающие изменения орбитальных элементов,
удалось построить в виде асимптотических рядов по степеням
обоих малых параметров. Казалось, что при сохранении нормаль¬
*1 Он численно исследовал гелиоцентрическую траекторию движения с
орбиты, расположенной почти перпендикулярно плоскости эклиптики, на
flpyryi , также внеэклиптаческую орбиту, перигелий которой расположен
в непосредственной близости от Солнца, где соответствующий термически
надежный солнечный парус может оказаться весьма динамически эффектив¬
ным. Для выполнения такого орбитального перехода предлагается дополни¬
тельно использовать гравитационный маневр вблизи Юпитера. На дуге движе¬
ния от Земли к Солнцу солнечный парус диаметром 100 - 200 м уверенно
обеспечит необходимый тормозящий эффект с целью уменьшения большой
полуоси гелиоцентрической переходной траектории, гарантирующего про¬
хождение перигелия на минимальном заданном расстоянии от Солнца (цан-
деровское торможение при нормальной ориентации паруса).
21В
I
<u
Рис. 86
ной ориентации паруса к лучам большая полуось его орбиты (при
отсутствии тени) не испытывает вековых изменений первого
порядка, а эксцентриситет колеблется долгопериодическим обра¬
зом с периодом, равным одному году, т.е. периоду обращения
Солнца. Соответственно высота перигея орбиты также меняется
долгопериодическим образом, и через год орбита возвращается
в первоначальное положение: на рис. 86 изображены три положения
орбиты (типа геостационарной) при начальном эксцентриситете
О, 1, занимаемые ею в течение года. Все результаты эти не были
новыми, они лишь совпали с известными результатами теории
возмущений орбит спутников под действием светового давления
[В.22], которые были получены ранее, в 60-е годы, на основе клас¬
сических методов теории возмущений. Однако этот результат
подтвердил надежность предлагаемого асимптотического метода,
который был затем сразу же применен авторами для решения
более общей парусной задачи о движении с управляемым парусом,
к которой классические методы теории возмущений уже не могли
быть применены.
Действительно, нормальная ориентация паруса-баллона не может
обеспечить ни геоцентрической раскрутки, ни межорбитального
геоцентрического перехода. Поэтому авторы приступили к иссле¬
дованию другого случая управления парусом, более перспективно¬
го, с их точки зрения, в смысле выполнения парусного орбиталь¬
ного маневра. Ориентация паруса к лучам оказывалась теперь
переменной, но при этом строго периодической, причем на наклоне¬
ние орбиты к эклиптике никаких ограничений не налагалось [2.28].
Главной особенностью этой задачи была ориентация паруса к лу¬
чам то одной, то другой своей стороной, причем эту особенность
ориентации предлагалось использовать для увеличения скорости
орбитальной раскрутки за счет нанесения на обе стороны паруса
219
отражающих покрытий с разными коэффициентами отражения
(эффекты вращательного движения здесь не рассматривались).
На рис. 87 изображены два положения солнечного паруса, опреде¬
ляемые ориентацией нормали п° относительно Солнца. Штрихами
изображена проекция светового потока на плоскость орбиты,
не совпадающую с плоскостью эклиптики. Положение нормали п°
определяется двумя поворотами паруса: на угол вх в плоскости
орбиты вокруг нормали к ней и на угол 02 вокруг оси симметрий
паруса.
л
Рис. 88
Пусть стороны паруса обладают различными отражательными
способностями (одна - темная, другая — светлая). Зафиксируем
нормаль п° к одной из сторон. Примем, что если нормаль направле¬
на внутрь орбиты, то парус обращен к Земле оборотной стороной;
противоположную сторону будем считать лицевой. На рис. 87
лицевой стороной будет светлая, отражающая, а оборотной — тем¬
ная, поглощающая. Исследовался [2.28] вариант зеркальной (е = 1)
и поглощающей (е = 0) сторон паруса для различных значений уг¬
лов в\ и в2. Графики относительного изменения большой полуоси
(в долях радиуса геостационарной орбиты г24 = 42 200 км) в трех
указанных в табл. 9 приведены на рис. 88 (в колонке е табл. 9 зна¬
чения коэффициента отражения указаны сначала для оборотной,
а потом для лицевой стороны) .
Таблица 9
Вариант
0°
с
Оборотная
Лицевая
I
90
0
1
0
II
0
0
1
0
Ш
90
0
0
1
220
Ориентации нормали и сторон паруса в случаях I и II изображены
на рис. 89 и 90. Случай ориентации нормали III аналогичен ориента¬
ции I, но с окраской сторон паруса ’’наоборот”. Во всех трех случа¬
ях нормаль к парусу расположена в плоскости орбиты (в2 = 0),
т.е. плоскость паруса перпендикулярна орбитальной плоскости,
причем в случаях I и III (см. рис. 89) парус имеет так называемую
гравитационную ориентацию (вытянут вдоль радиус-вектора),
а в случае II (рис. 90) - перпендикулярен радиус-вектору.
Сравнение кривых на рис. 88 [2.28] показывает, что изменение
ориентации паруса относительно радиус-вектора не оказывает столь
существенного воздействия на эволюцию орбиты, сколь оказывает
на нее изменение окраски при сохранении ориентации. Действитель¬
но, кривые I и II соответствуют разной ориентации нормали при
однотипной окраске сторон, а кривые I и III - одинаковой ориента¬
ции нормали и различной окраске. Таким образом, изменение
отражательной способности может принципиально изменить харак¬
тер орбитальной эволюции. В случае, если выполнены условия
требуемого изменения большой полуоси в смысле ориентации
орбиты по отношению к Солнцу, может быть обеспечено выполне¬
ние маневра орбитального перехода на более высокую или более
низкую околоземную орбиту.
Предложенный [2.28] метод выполнения орбитального около¬
земного парусного маневра за счет силы тяги паруса с периоди¬
чески меняющейся отражательной способностью может оказаться
весьма перспективным. Недостаток же этого метода состоите том,
что он плохо подвергается аналитическому описанию с точки зре¬
ния методов теории управления. Гораздо более эффективным с
этой точки зрения является метод переключения направления силы
тяги паруса по цандеровскому закону. При этом парус может иметь
только одну зеркальную отражающую сторону. Именно к релейной
цандеровской схеме переключения силы тяги по схеме 0 или 1
пришли Д. ван дер Ха и В. Моди [2.29, 2.30]. Они подвергли эту
схему управления тщательному аналитическому исследованию и
о
и
Рис. 90
I
Рис. 89
221
выявили новые возможности этой классической релейной схемы
в смысле ее применимости для околоземных парусных маневров.
При построении аналитических решений уравнений парусного
движения при релейном переключении силы тяги [2.29, 2.30]
применялся тот же метод построения асимптотических разложений,
что и в [2.28], т.е. разложения производились по двум малым па¬
раметрам: по радиационному и по параметру углового движения
Солнца по эклиптике. Сила давления солнечных лучей в релейной
цандеровской схеме принимает только одно из двух возможных
значений:
зерк _ .
r3 А-I А — зеркальный парус ориентирован
Р_ с нормально к лучам (см. формулы
(3.3'), (4.2'), (10.2)),
) - парус расположен вдоль потока
лучей.
Первый (радиационный) малый параметр выбирается по правилу
(15.6) как отношение силы светового давления (при нормальной
ориентации) к гравитационному ускорению на первоначальной
орбите, за которую [2.29,2.30] выбирается круговая геостационар¬
ная 24-часовая орбита, т.е.
253
к =
А :
/Л/3 т 25з А
rlo
т fM-i
(17.1)
При Р^рк = 253/с = 0,92
г24 = 42 200 км получаем
в Л
к = 4- 1СГ6 —
10“4 г/(см-с2), fM3 = 398600 км3/с2
т
если измерять в
см
к =4 - 10~5 —
т
если
т
измерять в
м
кг
]■
(17.1')
Для записи уравнений движения используется геоцентрическая
система прямоугольных координат, связанная с плоскостью эклип¬
тики и изображенная на рис. 91. Здесь инерциальная система осей
EXYZ помещена в центр Земли, ось ЕХ направлена в точку весен¬
него равноденствия Т, плоскость XEY совпадает с плоскостью
эклиптики, содержащей орт светового потока Uc- Обозначения
углов на рис. 91 частично совпадают с обозначениями на аналогич¬
ном рис. 27, изображающем гелиоцентрическую систему осей.
Направление радиус-вектора космического аппарата определяется
углом 12 и аргументом широты (ip*+cc), отсчитываемым от линии
222
узлов. Воспользуемся ортами орбитальной системы осей S0, Т°,
W0 (радиальное, трансверсальное и нормальное к плоскости орби¬
ты направления) и запишем выражение для силы тяги солнечного
паруса в виде F = F{5, 'Г, В7}. Так как в нашей геоцентрической
задаче парус в варианте ненулевой тяги всегда ориентирован нор¬
мально к потоку световых лучей, то и направление тяги F (совпа¬
дающее с направлением нормали п°) можно жестко связать с на¬
правлением орта светового потока
„о \ -- „о /„0 „о „о \
так что
Т = Р*ркАи°т, W = Р^ркАu°w. (17.2)
Направляющие косинусы орта направления светового потока и£
(см. рис. 91), расположенного в плоскости эклиптики, по осям
указанной орбитальной системы S°, Т°, VV° таковы [В.21]:
u°s = — [cos(i£*+cj)cos(\c — S2) + sin(^’+co)sin(\c - Г2) cos/'].
u°T= sin(i/;*+u;) cos(Xc - Q) - cos(i^*+co) cos(\c - £2) sin/', (17.3)
w^, = sin(\c - £2) sin /'.
Напомним, что в соответствии с рис. 91 орбитальные элементы
отнесены к плоскости эклиптики; формулы перехода к плоскости
экватора можно найти в [В.21].
Запись уравнений геоцентрического движения предлагалась
в [2.29, 2.30] в тех же переменных (радиус-вектор, истинная ано¬
малия), что и для гелиоцентрического (см. § 10), однако упроще¬
ние записи уравнений движения по сравнению с гелиоцентрической
задачей состоит в том, что релейная схема управления парусом
позволяет жестко связать силу тяги (в ненулевом варианте F II п°
с направлением орта и“ (см. рис. 91), т.е. с направлением светового
параллельного потока, и пользоваться формулами (17.2) и (17.3),
223
а не вычислять направляющие косинусы нормали к парусу при
непрерывном законе управления парусом с помощью формул
(10.1). В нашем случае вместо формул (10.5), (10.6) получаем
два уравнения движения аппарата в плоскости орбиты
fM3m
т(г — гф ) = - -—-— + S, т (гф + 2 гф) = Т,
. y/fM3P
которые с помощью (17.2) могут быть переписаны в виде, содер¬
жащем малый параметр к из (17.1) и направляющие косинусы
(17.3):
Щ / 253 А т*24 \ ГМ3
г2 \ с m fM3 ) г\4 S
ГЩ fM3 0
= - —+*-r-K°s, (17-4)
Г Г 24
/АГ3
гф + 2r ф= к —-— ит.
г 24
Здесь - истинная аномалия в невозмущенном движении.
Третье уравнение движения, описывающее движение аппарата по
нормали к плоскости орбиты, имеет тот же вид, что и уравнение
(10.13),т.е.
г*
d S2 di
—sin (^* + со) sin i + — cos(i^* + to)
dt dt
= W, (17.4')
где ip* — оскулируклцая истинная аномалия (см. § 15). Однако
на этот раз в его правой части стоит проекция ускорения Р^ркА и0^.
Система уравнений движения такого типа легко приводится (см.
§ 10) к форме Бине в независимой переменной у — невозмущен¬
ной истинной аномалии — и распадается на две пары уравнений.
Первая пара описывает движение в плоскости орбиты, вторая —
вне плоскости орбиты, причем во избежание особенностей при
малых эксцентриситетах уместен переход к ’’неособенным” пере¬
менным (см. (10.14) и (10.16)).
Если составление уравнений гелиоцентрического движения
(см. § 10) на этом этапе можно было считать законченным, то
для геоцентрического существует еще один малый параметр 5,
определяющий угловую скорость движения Солнца,
1
5 = = 0,00274,
365,2422
224
устанавливаемый из тех соображений, что период изменения дол¬
готы Солнца Хс составляет 1 год:
360 град . 2л 1
Хс = 52 1 или Хс = = 2лЬ.
365,2422 сут 365,2422 сут
Если воспользоваться теперь формулой р = r~2 р, то, пред¬
ставив Хс в виде, содержащем 6, т.е.
• (1 \с
Хс = —-— р=2 л8,
dp
можно записать
<Ас = 2тг г2 = 2л г1
dp 365,2422 yJfM3p '
Именно с помощью этого уравнения второй малый параметр 6
включается в общую схему решения системы уравнений возмущен¬
ного движения солнечного паруса с независимой переменной р -
невозмушенной истинной аномалией. Эта система насчитывает
семь уравнений: кроме уравнения (17.5) в нее входят шесть урав¬
нений для орбитальных элементов, вытекающих из выведенной
выше системы трех уравнений второго порядка (17.4) и (17.4'),
описывающих возмущенное движение аппарата по орбите, произ¬
вольно ориентированной к плоскости эклиптики.
Для решения полученной системы семи уравнений применяется
асимптотический метод, развитый ранее [2.26] применительно к
плоскому случаю движения в плоскости эклиптики. Метод основан
на предположении, что оба малых параметра, радиационный к и
’’солнечный” 6, оказываются близкими по порядку величинами.
Это, естественно, сужает применимость метода в смысле ограни¬
ченных интервалов значения парусности А/т, участвующей в фор¬
муле (17.1). Кроме ’’быстрой” фазовой переменной р в анализ
вводится вторая, ’’медленная”, переменная р = кр, после чего
строятся асимптотические ряды по степеням к, представляющие
разложения параметров а, под которыми подразумеваются шесть
орбитальных элементов и долгота Солнца, т.е.
а(р) = а0(р, р) + ка^р, р) + ... (17.6)
Подставляя ряды (17.6) в первоначальную систему уравнений
и применяя [2.26] асимптотический метод решения системы, мы
можем прийти к системе первого порядка по параметру к с неза¬
висимой ’’медленной” переменной р. Такую систему следует
решать численно, однако в [2.29, 2.30] удалось построить ее при¬
ближенные решения первого приближения по параметру к, при¬
225
годные на интервале, равном одному периоду. Напомним, что
ограничение на порядки величин малых параметров к и 5 означает
построение решений на интервалах времени порядка 5”1. Эти
решения первого приближения сначала были построены для сол¬
нечного паруса без точек переключения ориентации, а затем, путем
введения специальных функций, были обобщены на случай релей¬
ного переключения ориентации по схеме 0 или 1 на каждом витке
геоцентрического движения.
Общая идея релейного переключения, как указано в [2.29,2.30],
была заимствована из [2.31 ], где она применялась для обеспечения
спирального разгона в плоскости эклиптики. Здесь она была обоб¬
щена на случай пространственного .движения, причем построение
даже приближенных решений первого приближения в аналитичес¬
кой форме без привлечения численного интегрирования оказалось
для задачи переключения весьма затруднительно: в [2.29, 2.30]
такие решения были получены только для трех конкретных схем
релейного переключения. При этом следует помнить, что можно
добиться различных вариантов требуемой орбитальной эволюции,
подбирая различным образом координаты точек релейного пере¬
ключения силы тяги паруса в режиме 0 или 1 относительно Земли и
светового потока. Практические рекомендации относительно рас¬
положения этйх точек (рис. 92—94) для обеспечения требуемых
изменений того или иного орбитального элемента составляют ос¬
226
новной и интереснейший результат этих исследований. Авторы
численно и аналитически исследовали три варианта переключения
силы парусной тяги при к = 0,0002, т.е. при А/т = 50 см2/г (см.
формулу (17.1')).
Вариант А. Переключение в точках 1 и 2 (см. рис. 92) происхо¬
дит по линии Земля—Солнце. В этом случае происходит максималь¬
ное приращение фокального параметра орбиты р = а(1 —е2) неза¬
висимо от начального значения эксцентриситета е0. График изме¬
нения параметра р в долях радиуса геосинхронной орбиты тг4
изображен для выхода с последней на рис. 95,а (а0 =r24 = 1, е0 = 0;
0,5). Эксцентриситет при этом испытывает долгопериодические
колебания с периодом 1 год, налагающиеся на вековой ход убыва¬
ния или возрастания эксцентриситета.
Вариант Б. Переключение происходит в точках, где орбитальная
скорость перпендикулярна линии Земля—Солнце (точки 3 и 4 на
рис. 93). Этот вариант переключения обеспечивает максимальное
(по сравнению с другими схемами переключения) приращение
большой полуоси а при любых е0. Действительно, скорость изме¬
нения полной орбитальной энергии аппарата для варианта Б всегда
положительна для ’’включенного”, т.е. нормально ориентированно¬
го к потоку, паруса, так как, в отличие от варианта А (рис. 92),
положительна компонента силы тяги вдоль скорости v между
точками 3 к 4. Максимизация этой проекции (см. § 14) означает
весьма выгодное для раскрутки локально-оптимальное управление.
Графики увеличения большой полуоси для выхода с геостационар¬
ной орбиты (а0 =т-24 = 1) и с низкой орбиты (а0 = 0,34, h я=
~8000 км) изображены на рис. 95, б.
Вариант В. Точки переключения 5 и 6 совпадают с апсидами а
и я (см. рис. 94). Этот случай оказался значительно менее эффек¬
тивным для маневра, чем два предыдущих.
Взаимное расположение всех рассмотренных точек переключе¬
ния изображено на рис. 96. Стрелками показаны отклонения линий
переключения от направления светового потока. При обсуждении
а б
Рис. 95
227
результатов следует иметь в виду, что все предлагаемые решения
справедливы на интервале времени порядка к-1, т.е., например,
для к = 10~4 -НО"3 этот интервал времени, как показали расчеты,
составляет 1600-160 сут. Общие выводы упомянутых исследова¬
ний вкратце сводятся к следующему.
1. Цандеровская релейная схема переключения направления
силы тяги солнечного паруса по правилу 0 или 1 оказывается весь¬
ма эффективной для выполнения околоземных орбитальных ма¬
невров, причем особенно выгодной для маневра перехода на более
высокую орбиту.
2. Этот простейший закон управления оказывается весьма
надежным в реализации, так как легко осуществляется по коман¬
дам датчиков Солнца, в отличие от сложных законов непрерывного
поворота паруса (техническая реализация сложного непрерывного
закона управления может оказаться ’’дороже” преимуществ,
получаемых от парусного маневра без применения горючего).
3. Цандеровская схема переключения является весьма гибкой
и перспективной в смысле требуемого изменения одного из орби¬
тальных элементов (большой полуоси, фокального параметра,
эксцентриситета, высоты апогея или перигея и т.д.). Для этого
переключение должно производиться в строго определенных
точках, координаты которых определяются аналитически.
4. Раскрутка по цандеровской схеме весьма эффективна. На¬
пример, всего лишь для значения к = 0,0002 (см. графики на
рис. 95), что соответствует значению парусности А/т = 50 см2/г
(парусность, в два раза меньшая парусности ИСЗ ”Эхо-1”), фокаль¬
ный параметр и большая полуось изменяется за 5 лет более чем
в 10 раз. Следовательно, если достаточно тяжелый аппарат, снаб¬
женный солнечным парусом, запустить первоначально на неболь¬
шую высоту, то без дополнительных энергозатрат он может быть
постепенно поднят до высоты геостационарной орбиты. Перспек¬
тивен аналогичный маневр, например, для подъема космической
228
электростанции на высоту геосинхронной орбиты. Графики на
рис. 95,6 (а0 =0,34) показывают, что такой маневр можно реали¬
зовать за 5 лет с помощью цандеровской схемы переключений
при локально-оптимальном управлении (вариант Б).
5. Для круговой орбиты варианты переключений А и Б (см.
рис. 92 и 93) совпадают, а вариант В (см. рис. 94) не определен.
Однако при е =» 0 вариант Б близок к собственно цандеровской
схеме управления (предложенной самим Ф.А. Цандером [В.II]).
Действительно, Ф.А. Цандер предлагал осуществить раскрутку
за счет нормальной ориентации к лучам на дуге движения от Солн¬
ца и ориентации ребром к лучам на дуге движения к Солнцу (см.
рис. 50). Однако его рассмотрение относилось к круговой орбите
и к последующей раскрутке по квазикруговой спирали. Обобщение
на случай эллиптических орбит [2.29, 2.30] показало, что наиболее
близким к собственно цандеровскому закону оказывается слу¬
чай Б (рис. 94), так как только в этом случае ’’включенный”, т.е.
нормально ориентированный к потоку, парус всегда движется от
Солнца, тогда как в случаях А и В нормальная ориентация сохра¬
няется и на некоторых ’’ненужных”, тормозящих участках, т.е.
на дуге движения к Солнцу. Как было показано [2.30] аналитичес¬
ким способом, случай Б как раз и оказался наиболее перспектив¬
ным для увеличения большой полуоси вследствие реализации
локально-оптимального управления (напомним, что быстродейст¬
вие здесь не максимально, см. § 14). Все это означает, что Ф.А. Цан¬
дер, не располагая возможностью провести строгое аналитическое
исследование, интуитивно совершенно правильно предсказал
характер раскрутки при локально-оптимальном управлении.
§ 18. Задачи орбитальной коррекции
при помощи солнечных парусов
Итак, в § 17 обсужден вопрос о применении солнечного паруса
для выполнения орбитальных маневров первого типа — маневров
орбитальных переходов между геоцентрическими орбитами. Мы
рассматривали их главным образом на примере маневров рас¬
крутки, способствующих переходам на более высокие геоцентри¬
ческие орбиты. Ясно, что, изменив схему управления парусом,
можно осуществить маневр снижения орбиты над Землей. Можно
также осуществить маневр перехода с круговой орбиты на эллип¬
тическую или наоборот, а также маневр изменения наклонения
орбиты. Можно ставить задачу о выполнении этих маневров на
произвольном интервале времени или наоборот, вводя ограничение
на скорость выполнения маневра, исследовать задачу быстро¬
действия.
229
Наряду с задачей о парусном орбитальном переходном маневре
возникает обратная ей задача: как использовать солнечный парус
для поддержания неизменности элементов орбиты, т.е. для гашения
возникших возмущений орбиты и возвращения орбиты к прежне¬
му положению. Эту задачу о коррекции орбиты с помощью солнеч¬
ного паруса мы будем относить к орбитальному парусному манев¬
ру второго типа. При обсуждении задачи о корректирующем парус¬
ном маневре обязательно возникнет вопрос и о том, как нужно
управлять парусом, чтобы он выполнил необходимую коррекцию
именно за минимальное время, т.е. возникнет задача быстродейст¬
вия парусной коррекции.
Задачи гелиоцентрической парусной коррекции, пока еще немно¬
гочисленные, как правило, связаны с задачей применения паруса
для управления орбитальным положением космического аппарата
в окрестности точек либрации в ограниченной задаче трех тел
Солнце - планета — космический аппарат. Аналогичная задача
встречается и в геоцентрической постановке, т.е. для системы
Земля - Луна — космический аппарат. Начиная обсуждение задачи
парусной коррекции движения аппарата в окрестности той или
иной точки либрации, необходимо напомнить, что ограниченная
задача трех тел имеет пять равновесных решений (точки либра¬
ции), в окрестностях которых существует многообразие условно¬
периодических траекторий, не покидающих эти окрестности.
Поэтому дислокация на таких траекториях космических аппаратов
представляется с Практической точки зрения весьма заманчивой.
Однако для трех точек либрации — коллинеарных — движение
аппарата по таким траекториям оказывается неустойчивым, т.е.
при сколь угодно малом отклонении аппарата от условно-перио¬
дической траектории он быстро покидает окрестность коллинеар-
ной точки либрации. В этом случае уместно поставить и решить
задачу о коррекции траектории, в частности исследовать принци¬
пиальные возможности применения для коррекции солнечного
паруса.
Этой задаче посвящена серия работ С.С. Лукьянова [2.32 —
2.35], где исследованы различные схемы управления движением
центра масс аппарата с целью его удержания в течение длительного
времени в окрестности заданной условно-периодической орбиты,
’’привязанной” к одной из коллинеарных точек либрации. Была
показана и возможность использования в таких схемах солнеч¬
ного паруса, управление которым позволит решить задачу коррек¬
ции орбиты. При этом предлагается такой вариант парусной кор¬
рекции гелиоцентрического движения, в которой корректирующее
управление осуществляется лишь за счет изменения парусности
аппарата при его постоянной ориентации относительно Солнца.
230
Практически этому требованию могут удовлетворить специальные
парусные конструкции, например сферический парус переменного
радиуса, т.е, эластичный парус-баллон, или плоский парус с про¬
тивовесом, пассивно стабилизированный по направлению на Солн¬
це, и т.п.
Итак, в случае применения упомянутых парусных конструкций
отпадает необходимость создания специальной системы управления
ориентацией паруса. А оценки, полученные в работах [2.32—2.35],
точно указывают требуемые размеры паруса-баллона, обеспечи¬
вающего удержание аппарата в окрестности опорной условно-
периодической орбиты в течение заданного времени с заданной
вероятностью (с учетом влияния ошибок траекторных измерений
и отработки управления радиусом баллона). Решение задачи здесь
распространялось на случаи движения в системах Солнце—Земля
и Земля—Луна, а плоская круговая ограниченная задача трех тел
в обоих случаях решалась в линейной постановке с целью исследо¬
вания множества начальных фазовых состояний, из которых аппа¬
рат может быть переведен на заданную траекторию за данное
время: требуемое движение представляет собой плоское периоди¬
ческое движение по эллипсу с геометрическим центром в точке
либрации.
Закон управления парусом-баллоном, т.е. закон управления
его радиусом, обеспечивающий движение в малой окрестности
заданной опорной траектории, находится из решения задачи опти¬
мального быстродействия. Аналогичную задачу быстродействия
для использования аппарата с солнечным парусом в целях его
удержания в окрестности коллинеарной точки системы Земля-
Луна решили М.С. Константинов и В.А. Котин [2.36] для модели
плоского паруса постоянных размеров. Здесь мы встречаемся с
’’классической” схемой управления ориентацией паруса, что, естест¬
венно, приводит к большей универсальности. В частности, в этом
случае отсутствует зависимость областей управляемости от началь¬
ного направления па Солнце: эти области имеют несколько боль¬
шие размеры, нежели в случае паруса-баллона, в частности на 10—
15% для точек L! и L2 и около 45% — для точки L3. Однако
предлагаемая схема по сравнению со схемой управления радиусом
баллона оказывается менее экономичной, так как требует допол¬
нительных энергетических затрат на поддержание заданной ориента¬
ции плоского паруса.
086 рассмотренные схемы парусной коррекции орбит для удер¬
жания аппарата вблизи точки либрации, обладающие рядом пре¬
имуществ, рассматривались в рамках гравитационной задачи трех
тел, не учитывающей смешения самих точек либрации (равновес¬
ных решений) за счет сил светового давления на парус, фотограви-
231
тационная ограниченная задача трех
тел была решена А.А. Пережогиным
[2.37]. Им исследовалась устойчи¬
вость равновесных решений этой за¬
дачи и было установлено, насколько
Е положения точек либрации фотогра-
витационнной задачи для заданной
парусности отклоняются от соответ¬
ствующих положений, диктуемых за¬
дачей в строго гравитационной поста¬
новке.
Оказывается, что геометрическим
местом- устойчивых точек либрации фотогравитационной за¬
дачи служит окружность (рис. 97) радиусом ES (расстоя¬
ние Солнце (5) — Земля (7Г)) с центром в Е. С ростом
парусности аппарата соответствующая точка либрации
L4 смещается от ’’классической” лагранжевой точки L4 по направ¬
лению к Солнцу, двигаясь при этом по окружности L4S. Если гра¬
витационная точка L4, располагающаяся в вершине равносторон¬
него треугольника SLAb\ и симметричная ей лагранжева точка 15
являются единственной парой устойчивых положений в системе
Солнце — планета, то применение солнечного паруса значительно
расширяет область существования устойчивых точек либрации:
вместо пары точек получаем две дуги окружностей. Очевидны
преимущества парусных маневров для осуществления длительной
работы космических станций в таких точках. При этом преиму¬
щество таких станций заключается еще и в том, что без существен¬
ных энергетических затрат они могут функционировать на любом
гелиоцентрическом расстоянии, равном расстоянию планеты от
Солнца или меньшем.- Если эти точки сделать пунктами швартовок
космических станций [2.37], снабженных солнечным парусом-
баллоном с заданной парусностью, то можно добиться существен¬
ного приближения к Солнцу.
Например, зададим парусность баллона 103 см2/г. Воспользо¬
вавшись формулами (3.7) и (4.12) для паруса-баллона и, полагая
в формуле (6.23) € — 0, так как сила давления на баллон не зависит
от е (см. §4), получим /3 =0,075. С помощью формул из [2.37]
устанавливаем, что гелиоцентрическое расстояние новой точки
либрации подчиняется формуле
SLa =\ЛТ~0.
Таким образом, смещение' по направлению к Солнцу составляет
0,03 а.е. или 4,5 • 106 км. Это означает, что космическая станция,
снабженная солнечным парусом-баллоном с заданной выше парус¬
232
ностью, будет совершать устойчивое круговое гелиоцентрическое
движение, двигаясь не по орбите Земли, как точкаL4, а по окруж¬
ности, радиус которой на 4,5 млн. км меньше радиуса орбиты
Земли. Это перспективно как с точки зрения выполнения косми¬
ческих исследований в точках, расположенных ближе к Солнцу,
так и с точки зрения обеспечения устойчивого движения в случае,
если гравитационные точки Le, и Ls уже заняты другими косми¬
ческими аппаратами.
Немаловажным при осуществлении подобного проекта является
вопрос об ориентации станции-парусника по трем осям. Для этого
в [2.37] обосновывается выбор устойчивых равновесных ориента¬
ций таких станций в предположении, что парусность станции вооб¬
ще не зависит от ее ориентации как твердого тела. Последнее мож¬
но обеспечить, например, окружив станцию зеркальной пленочной
оболочкой — сферическим парусом, радиус которого можно ме¬
нять по командам соответствующих датчиков. Относительно
самого солнечного паруса предполагается, что он будет изготовлен
из настолько тонкой пленки, что необходимая коррекция парус¬
ности (т.е. радиуса баллона) не приведет к изменению соотношений
главных центральных моментов инерции космической станции-
парусника.
Что касается геоцентрических задач орбитальной коррекции,
следует заметить, что, как правило, это — задачи о коррекции
околоземных спутниковых орбит. Первые исследования в этой
области выполнил Д. Миллер с соавторами [2.38-2.40] еще в
1965—66 гг. Предлагались проекты конструкций обширных отра¬
жателей, позволяющие поддерживать определенное расстояние
на орбите между несколькими пассивными связными спутниками,
движущимися по низким круговым орбитам вблизи плоскости
эклиптики [2.38]. В [2.39] обсуждалась система спутников связи,
обеспечивающая обслуживание всей поверхности Земли при мини¬
мальном числе спутников. Задача об управлении орбитой и выпол¬
нении необходимых корректирующих маневров решалась с по¬
мощью солнечных парусов, смонтированных на спутниках систе¬
мы. Роль парусов, по замыслу авторов проекта, должны были
выполнять двояковыпуклые линзы, причем противоположные
части конструкций этих линз-отражателей должны быть покрыты
материалами с различными коэффициентами отражения. Диаметр
линзы составляет около 60 м при массе 530 кг, что обеспечивает до¬
статочную парусность. Удалось установить, что для широкого диа¬
пазона высот спутников системы изменение большой полуоси
орбиты любого из них, достигаемое за счет тяги дополнительных
парусов-линз, составляет до нескольких десятков метров за один
оборот спутника.
233
Идею использования парусных поверхностей с различной отра¬
жающей способностью мы находим также в [2-41], где обсуждает¬
ся возможность использовать световое давление для высокоточной
стабилизации относительного расположения на орбите трех искусст¬
венных спутников, предназначенных для интерферометрических
наблюдений с длинной базой. Здесь корректирующая орбиту
малая тяга парусов-панелей получается за счет установки панелей
различного цвета и с различными (в том числе и управляемыми)
коэффициентами отражения. В целом идея использования парус¬
ных конструкций и систем с различными по физическим свойствам
элементами отражающих панелей, а также парусных систем, преду¬
сматривающих зашторивание отдельных зеркальных поверхностей
по специальной программе, представляется весьма плодотворной
и заслуживает постоянного внимания исследователей. Мы уже
затрагивали вопросы практического применения подобных кон¬
струкций в § 11 при обсуждении различных систем парусов-зеркал,
в частности систем с переменной парусностью, предусматривающих
затенение одного паруса (или парусного элемента) другим. Мы
вернемся к этому вопросу в § 19 при обсуждении проблем приме¬
нения солнечных парусов в качестве систем управления ориента¬
цией, снабженных лопастями с переменной парусностью и перемен¬
ными коэффициентами отражения.
Весьма интересной оказывается и проблема коррекции орбиталь¬
ного положения геостационарного спутника с помощью парусной
тяги, связанная с различными особенностями геосинхроннрго дви¬
жения. Например, в 1969 г. М. Крокер с соавторами исследовали
проблему стабилизации по долготе гео синхронно го движения с
помощью сил светового давления [2.42, 2.43]. Для обеспечения
долготной парусной коррекции ими предлагался небольшой плос¬
кий солнечный парус, площадью не более 2 м2, с обеими отражаю¬
щими сторонами, вращающийся равномерно вокруг оси север—юг
с полусуточным периодом. Оказалось, что этот малый солнечный
парус способен обеспечить управление положением спутника мас-
234
сой 100 кг по долготе, т.е. компенсировать дрейф восток—запад с
достаточной точностью. Исследовались и другие конструкции кор¬
ректирующего паруса — более крупные модели с различными коэф¬
фициентами отражения обеих сторон. Разработку задачи оптималь¬
ного управления для гашения возмущений (гравитационных и
лунно-солнечных) в большой полуоси, наклонении или эксцентри¬
ситете геостационарной орбиты за минимальное время выполнил
С. Шривастава с соавторами [2.44—2.47]. Задача о наискорейшей
коррекции орбитальных элементов решалась для отражающей
панели-паруса, управляемой с помощью двух поворотов нормали
к парусу на углы 5 в орбитальной плоскости и 7 в поперечном
направлении (рис. 98). Орбитальная система Сх0у0г0 связана с
местной вертикалью Сх0 и перпендикуляром к плоскости орби¬
ты Cz0. Вторая, промежуточная система Cxxyxzx образуется из
первой путем поворота на угол Ь в плоскости орбиты вокруг
оси Сг0. Окончательное положение системы Сх2_г2г2, связанное
с направлением нормали к парусу N, получается из промежуточной
системы Cxxyxzx путем ее поворота на угол у вокруг оси Су х,
расположенной в плоскости паруса.
Для этих углов тангажа 5 и крена у отыскивался оптимальный
закон управления солнечным парусом, способный обеспечить
требуемые корректирующие максимальные изменения орбиталь¬
ных элементов. Коррекция предназначалась для изменения боль¬
шой полуоси а, обеспечивающего минимум удаления от номиналь¬
ной орбиты, и для одновременного изменения наклонения i и
долготы узла П в целях обеспечения движения в неизменной
плоскости. Оказалось, например, что для коррекции большой
полуоси геостационарной орбиты следует управлять парусом
по закону (оптимальное управление)
( 2,530 — 0,608(у> — Ас) при 0 < $ — < я,
^ ’ ( 1,848 — 0,392(^> — Хс) при я < \р — 'кс<' 2я,
где — истинная аномалия спутника (независимая переменная
Рис. 99
235
Рис. 100
задачи), Лс — долгота Солнца на эклиптике. При таком численном
законе управления вековые изменения в полуоси гасятся и превра¬
щаются в долгопериодические колебания с полугодовым перио¬
дом. В течение года отклонение спутника от номинальной геосинх-
ронной орбиты не превышает 9,6 км (рис. 99) при парусности всей
конструкции 10 см /г. Нормаль к парусу N при таком законе не
выходит из плоскости орбиты.
Коррекция по / и С2 выполняется при законе
у Ф 0, 6 = \с - *р,
при котором угол 5 (см. рис. 98) на небольших интервалах време¬
ни (пока Л с = const) изменяется практически линейно вместе
с истинной аномалией <р. Такой закон обеспечивает среднее откло¬
нение по наклонению i от номинальною (/ = 0) не более чем на
1,5° в течение года (рис. 100). Соответствующее среднее значение
для изменения долготы узла: ДГ2 = 3,7 град/год. Текущие измене¬
ния / и £2 представляют собой долгопериодические колебания
с полугодовым периодом. Нормаль N в этом случае отклонена от
плоскости орбиты на угол 7 Ф 0.
Упомянутое исследование коррекции геостационарной орбиты
с помощью солнечного паруса [2.44,2.46] С.Шривастава выполнил
для сравнительно небольшой парусности - около 10 см2/г, которая
оказывается достаточной для компенсации всех внешних нежела¬
тельных орбитальных возмущений геостационарной орбиты и
может неограниченно долго продлить время существования спут¬
ника на этой орбите. Естественно, что для тяжелых объектов такая
парусность может быть достигнута лишь при обширных парусных
конструкциях. Однако для осуществления коррекции по долготе
достаточной оказывается еще меньшая парусность — всего 0,1 см2/г.
Подробное описание корректирующих маневров и методов их вы¬
полнения с помощью сил светового давления можно найти в обзо¬
рах [2.45,2.47].
Движение по геостационарной 24-часовой орбите предъявляет
высокие требования к поддержанию строго экваториальной и
236
строго круговой орбиты радиусом 42240 км при сведении к мини¬
муму долготного дрейфа геостационарного *) спутника (период
такого кругового движения равен 1 звездным суткам, т. е.
23h56m04s) . Запуск на такую орбиту спутников, снабженных об¬
ширными солнечными батареями или отражающими антеннами, обя¬
зательно связан с появлением орбитальных возмущений и от сил
светового давления. Наиболее существенными эти возмущения
оказываются в эксцентриситете (полугодовое колебание) и в дол¬
готе (долготный дрейф). В зависимости от величины парусности и
от формы спутника разработаны различные практические методы
гашения этих радиационных возмущений в полете, дающие различ¬
ную точность коррекции по долготе, также зависящую от парусно¬
сти аппарата [2.47 - 2.49]. Например, оказалось, что гашение орби¬
тальных возмущений тяжелых отражающих платформ является
весьма сложной технической задачей несмотря на то, что возмуще¬
ния невелики. Даже применение вспомогательного электрического
двигателя может обеспечить точность коррекции по долготе, не
превосходящую одного градуса, тогда как для легких аппаратов
она достигает 0,1 °. Все эти соображения заставляют исследователей
не только серьезно задумываться о том, как избежать вредного
влияния светового давления на обширные конструкции, но и о том,
как заставить силу светового давления служить на пользу космо¬
навтике. В этом плане крайне интересной представляется задача осу¬
ществления так называемой цилиндрической геосинхронной орбиты.
Создание теории цилиндрической орбиты, о которой будет рас¬
сказано ниже, обусловлено практическими нуждами эксплуатации
геостационарной орбиты: к настоящему времени она уже настолько
перенаселена, что это мешает маневрированию, которое сопровож¬
дает выведение каждого нового стационарного спутника, и порож¬
дает опасность столкновения спутников между собой. Иными сло¬
вами, появляются реальные трудности размещения спутников по
*) По мере увеличения числа спутников, их мощности и разнообразия их
функций в качестве спутников связи, метеорологических или научных спут¬
ников увеличиваются требования к точности ориентации и поддержанию ста¬
ционарного положения спутника на орбите, а орбиты - в пространстве.
Дрейф на стационарной орбите вызывается в основном тремя факторами:
нецентральностью и, следовательно, неизотропностью поля притяжения Зем¬
ли, помеховымн влияниями притяжения Луны и Солнца, а также световым
давлением. Математические модели, описывающие влияние этих факторов,
показывают, что наиболее существенным является притяжение Луны и
Солнца, вызывающее дрейф по долготе в плоскости орбиты на 81 км и изме¬
нение наклона орбиты со скоростью 0,85° в год. Вариация гравитационного
поля Земли вызывает долгопериодическое колебание по долготе с амплиту¬
дой 33 км (период 841 день) и налагающееся на него короткопериодическое
суточное колебание с амплитудой около 1 метра [2.48, 2.49].
237
долготе. Разрабатываются даже различные практические способы
освобождения геосинхронной орбиты от спутников, уже прекратив¬
ших свою научную деятельность, но все еще движущихся по ней.
С учетом скорости возрастания числа геостационарных спутников
на основании их геометрических и энергетических характеристик
в [2.50] показано, например, что вероятность столкновения внутри
некоторого кольца в окрестности геостационарной орбиты между
функционирующими спутниками и прекратившими активное су¬
ществование в настоящее время существенно возрастает. Парал¬
лельно выдвигаются проекты (многие из них уже реализованы),
как создать движение по какой-либо орбите, близкой к геосин¬
хронной, свойства которого хотя бы частично повторяли свойства
гео синхронно го движения. Как правило, развитие теорий такого
псевдосинхронного движения идет по пути разработки 24-часовой
сильно эллиптической орбиты, апогей которой длительное время
расположен над соответствующей станцией наблюдения. Однако эти
суточные эллиптические орбиты не обеспечивают неизменности дол¬
готы подспутниковой точки, а радиосвязь со спутником не обла¬
дает свойством непрерывности. Например, использование солнеч¬
ного паруса для управления вращательным движением аппарата
около центра масс с целью контроля за орбитальным угловым
дрейфом при таком эллиптическом 24-часовом псевдосинхронном
движении будет описано в § 19.
Сейчас мы обсудим несколько иной вариант круговой псевдо-
синхронной орбиты, плоскость которой параллельна экваториаль¬
ной плоскости Земли, а центр круговой орбиты не совпадает с цен¬
тром Земли. Принцип подобного движения обсуждался А.Л.Куни-
цыным и Т.Мырзабековым [2.51]. Они показали, что для того,
чтобы спутник мог все время находиться над заданной точкой 'зем¬
ной поверхности, расположенной на произвольной широте, ему
необходимо сообщить дополнительное реактивное ускорение, век¬
тор которого должен располагаться в меридиональной плоскости
Земли и составлять некоторый постоянный угол с осью ее враще¬
ния. Тогда центр масс аппарата будет описывать круговую орбиту,
расположенную в плоскости, параллельной экваториальной. Тем
самым будет осуществлена геостационарная неэкваториальная
орбита для данной широты, период обращения по которой оказы¬
вается равным 24 ч. Проект осуществления подобного движения не
за счет реактивного ускорения, а за счет силы тяги солнечного
паруса мы впервые находим у Р.Форварда [2.52]. Он предлагает
вариант осуществления строго 24-часовой орбиты, названной им
цилиндрической.
Предположим, что аппарат первоначально запущен на строго эква¬
ториальную суточную орбиту, после чего на нем разворачивается
238
Рис. 101
1
солнечный парус, переводящий его на цилиндрическую орбиту и
корректирующий псевдосинхрОнное движение по ней. Пусть
плоский парус ориентирован под углом в к световому потоку
(рис. 101). Пусть плоскость паруса составляет угол |3 с плоскостью
экватора Земли, который, как легко установить из физических
соображений, оказывается заключенным между пределами
О ± 23,5°. В равноденствиях угол /3 совпадает с углом в, а
в солнцестояниях — максимально отклоняется от него. Угол /3
больше в, когда и Солнце, и аппарат находятся по одну и ту же сто¬
рону от экваториальной плоскости, и меньше в, когда они находят¬
ся по разные стороны. С динамической точки зрения реализации и
поддержания цилиндрической орбиты нас будет интересовать не
вся сила тяги солнечного паруса F, направленная по нормали к па¬
русу и численно равная
F = Fn sin в = Pg ер<А sin в ,
где F/v — давление на нормально ориентированный парус с зеркаль¬
ной поверхностью А, а лишь ее проекция на нормаль к эквато¬
риальной плоскости, т.е. меридиональная компонента силы тяги
F„, = F cos (3. Параллельная экватору компонента F/,= Fsin /3 в ди¬
намическом рассмотрении не участвует, однако следует помнить,
что она будет вызывать сдвиг орбиты относительно ее геометриче¬
ского центра, пропорциональный парусности аппарата для дан¬
ного /3. Только меридиональная компонента Fт (см. рис. 101) вы¬
зовет отклонение плоскости орбиты от экваториальной плоскости
на линейное расстояние h, определяемое парусностью аппарата.
Две аналогичные компоненты экваториальную mgh и меридио¬
нальную mgm, имеет сила тяготения Земли mg (см. рис. 101). Как
239
показано в [2.52], именно равновесие меридиональных компонент
обеих сил определит однозначно ту единственную равновесную вы¬
соту h, на которую в заданном полушарии новая цилиндрическая
орбита окажется ’’поднятой” над экваториальной плоскостью при
заданной парусности аппарата (орбиту можно осуществить как
в северном, так и в южном полушарии) .
В данной задаче программа управления углом установки паруса
для осуществления и коррекции предлагаемой орбиты существенно
зависит от времени года. Действительно, вычислив производную
dFmjd6 и приравняв ее нулю, легко установить, что в равноденст¬
виях оптимальные углы, обеспечивающие максимум подъема,
составляют
0 = 0 = 45е, sin 0 = cos 0 = 0,707,
вследствие чего при этих значениях углов меридиональная и эква¬
ториальная компоненты силы давления оказываются равными
между собой:
Fm "fh= (4)'зеРКЛ- где 7>ГК = 2Р3 = 2-0,46-Ю-4
В солнцестояниях картина оказывается несколько иной. На
рис. 101 изображена схема, соответствующая зимнему солнцестоя¬
нию, тогда как для варианта летнего солнцестояния цилиндриче¬
скую орбиту следовало бы изобразить ниже экваториальной
плоскости. Для зимнего солнцестояния Солнце и парус оказывают¬
ся по разные стороны от экватора, и решение уравнения dFm/d6
дает оптимальные углы для этого времени года:
0 = 56,75е, 0 = 0 - 23,5е = 33,25°.
В этом случае sin 0 = cos /3 = 0,836, так что меридиональная подъем¬
ная сила оказывается в 1,4 раза больше, чем в равноденствиях.
В летнем солнцестоянии Солнце и парус оказываются по одну
сторону от экватора. Оптимальные значения углов составляют:
0 = 33,25°, 0 = 0+ 23,5е = 56,75°.
Теперь sin0 = cos 0 = 0,548, т.е. меридиональная ’’подъемная” сила
составляет 0,6 значения силы в равноденствии. Таким образом,
в течение года изменение этого эффекта достигает 40%.
Для определения высоты h как функции парусности аппарата
А/т достаточно приравнять меридиональные проекции гравита¬
ционной и радиационной сил, т.е. F,„ = mgm . При этом для проек¬
ции силы тяготения fM^mh (R + h )~3 при h < R можно принять
/ Mjm h R~3. В работе [2.52] приравнивание компонент сил при¬
ближенно производится в предположении, что соотношение сил,
240
выполняющееся для равноденствий, неизменно в течение года.
Тогда 1Л/’зеркЛ =/Af3m ЛД~3, откуда находим
A R3
•см
А =0,46 ■ 10
.4 [li!
L с2
т fM3
как функцию парусности Ajm. Например, для парусности Ajm -
= 104 см2/г получим, подставляя величины R = 42 200 км (радиус
геостационарной орбиты), fM3 = 398 600 км3/с2, что высота А
составляет около 400 км. Нетрудно подсчитать, что эта высота над
экваториальной плоскостью позволит наземной станции наблюдать
такой псевдосинхронный спутник с отклонением а около 0,7° от
его строго геосинхронного аналога (57,3°-400 км : 35 800 км, где
последнее число означает высоту геостационарной орбиты над
экватором).
При построении строгой теории цилиндрических орбит необходи¬
мо иметь в виду два теневых эффекта. Первый из них связан с фи¬
зической тенью Земли. Действительно, дважды в год в равноден¬
ствиях и аппарат, и парус окажутся в тени Земли, вследствие чего
исчезнет подъемная сила паруса, и он начнет опускаться на строго
синхронную орбиту. Максимальное время пребывания в тени на
строго стационарной орбите составляет
t = DT/2itR = l,16h 70m,
где T — период стационарного движения, т.е. 23h56m 04s,
D = 2R з - диаметр тени Земли для цилиндрической теневой моде¬
ли, 2TtR — длина окружности стационарной орбиты. Если через d
обозначить линейное отклонение от высоты А цилиндрической
орбиты за время пребывания в тени, приближенно рассчитываемое
в [2.52] по формуле d = \{hgmt2, то оказывается, что относитель¬
ное снижение высоты d/z не зависит от А, т. е.
d D2
- = = 0,046,
г 2R
где г — текущее расстояние аппарата от экваториальной плоскости.
Эта оценка эффекта тени Земли показывает, что его в данной
задаче можно считать малым. Другой теневой эффект состоит в
том, что два раза в год Солнце расположится под прямым утлом
к линии Земля — парус, и парус, ориентированный на Солнце,
закроет собой антенну и контейнер с приборами. Эта особая
ситуация требует специальной технической проработки.
Интересные данные приводятся также [2.52] относительно рав¬
новесных высот цилиндрических орбит А и угловых отклонений
241
Задача более общего вида была поставлена и решена Б.И.Морко-
вым в цикле работ [2.53 - 2.56J. Целью этих работ явилось нахож¬
дение приближенно-оптимального управления углом установки
паруса, которое позволило бы осуществлять коррекцию во всех
орбитальных элементах геостационарного спутника, когда его воз¬
мущенная орбита лежит в плоскости эклиптики. Напомним, что
такой спутник правильнее называть 24-часовым, так как он не
обладает свойством геостационарное™ в смысле долготы подспут¬
никовой точки. Выбор орбиты, расположенной в плоскости эклип¬
тики, продиктован соображениями энергетической выгоды, так
как вектор ускорения от сил светового давления целиком распола¬
гается в плоскости орбиты.
Для упрощения анализа следует также предположить, что парус
является отражающим с обеих сторон, поток световых лучей —
параллельный и однородный (не зависит от расстояния Земля -
солнечный парус) и что эксцентриситетом орбиты Земли можно
пренебречь. Гравитационное поле Земли предполагается централь¬
ным, тень Земли в расчет не принимается, а единственной возму¬
щающей силой считается световое давление, тогда как возмущения,
требующие гашения, считаются заданными в начальный момент
времени (подразумевается их гравитационное происхождение
в смысле эффектов нецентральное™ и ’’третьего тела”, тогда как
атмосферные возмущения на геостационарной высоте можно не
учитывать). То обстоятельство, что силу тяги солнечного паруса
можно считать малой по сравнению с силой тяготения Земли,
позволяет рассматривать ее как возмущение и использовать клас¬
сические методы теории возмущений небесной механики и другие
асимптотические методы.
Для построения математической модели движения аппарата
с солнечным парусом вводится плоская система геоцентрических
эклиптикальных координат, ось ОХ которой направлена в точку
весеннего равноденствия Т (рис. 103). Положение Солнца на
244
эклиптике характеризуется средней долготой X, описывающей
в нашей модели равномерное годичное движение Солнца со средней
постоянной скоростью X = 5 = 1 град/сут. Пусть углы со и ^ озна¬
чают долготу перигея, отсчитываемую от Т, и истинную аномалию
аппарата. В формулах удобно пользоваться углом и - р + со. Пусть
у - угол установки солнечного паруса (рис. 104), изменяющийся
в пределах у С
7Г
+ т
так как сила светового давления
всегда направлена только от Солнца, i — орт лучей, п — орт норма¬
ли к теневой стороне паруса.
Сила тяги солнечного паруса как функция угла у определяется
формулами § 4. Вектор возмущающего ускорения целиком распо¬
лагается в плоскости орбиты, поэтому, обозначив через w0 ускоре¬
ние нормально ориентированного к лучам паруса, запишем в непод¬
вижной системе координат компоненты ускорения
w* = w0 cos у,
W,;
: w0 cos 7 sm у.
Переходя к подвижной орбитальной системе осей (радиаль¬
ное и трансверсальное направления), запишем соответствующие
компоненты
Иу = - w0 cos2 7 cos (и ~ у — X),
wт = w0 cos2 7 sin (и - 7 — X),
(18.1)
где X = Х0 + 8(t - f0), и = р + со.
Как уже указывалось, тяговое ускорение солнечного паруса в
данной задаче можно считать возмущающим, поэтому следует вос¬
пользоваться уравнениями метода Лагранжа для оскулирующих
элементов, причем в нашей задаче эти уравнения возмущенного
движения удобно выбрать
в форме, содержащей пра¬
вых частях компоненты
возмущающего ускорения
по осям орбитальной сис¬
темы [В .21] . Бели в такие
уравнения подставить про¬
екции ws, wT, то для пло¬
ского случая мы должны
выбрать четыре уравнения
для р, е, со и р. При этом
уравнения следует запи¬
сать в безразмерных пере¬
менных, выбрав в качест¬
ве характерной длины ра¬
диус орбиты г0 геостационарного спутника (процедура обезразме-
ривания была описана в § 7, формулы (7.15)). В правые части урав¬
нения будет входить величина и’0г§//Л/з, представляющая собой от¬
ношение тяги w0 нормально ориентированного паруса к центростре¬
мительному гравитационному ускорению fMj/гд. Обозначим это
отношение через Q.
При расчете орбит с малыми эксцентриситетами вместо элемен¬
тов е и со удобно пользоваться так называемыми лагранжевыми
неособенными элементами q и к:
q = е cos со, к-е since, е= \ q + к , Xgco=k/q.
Выбирая за основной аргумент угол и = у + со, придем окончатель¬
но к следующей системе уравнений возмущенного движения в
плоском случае:
dp psfp
— =2 Q cos у sin (и - у — А 1,
dt R
dq
= Q\fpR 1 cos2 7 {— R sin и cos (и - у - A) +
dt
+ [(1 +R)cosu +<7] sin(w - 7 - A)} ,
dk /— ,
=QvpR cos 7 {/? cos м cos(u - 7 — A) +
dt
+ [(1 + R)smu +k ] sin(w - 7 - A)},
du R2
(18.2)
dt p\fp > 6-const,
d\
dt
где R = 1 + <7cos и + к sin и. Пятое уравнение описывает равномер¬
ное движение Солнца по эклиптике.
Предположим теперь, что на длительном промежутке времени
известны приращения Ар, Aq, Ак, которые получили соответст¬
вующие элементы под действием возмущений. Необходимо отыс¬
кать такой закон управления углом у установки паруса, чтобы за
наименьшее время погасить эти возмущения элементов. Пусть
P(tg)= Ро> УПо)-<Уо, k{tg)-kg, А(/‘0) = А0 (18.3)
— значения возмущенных элементов исходной орбиты и средней
долготы Солнца в момент времени t - 10. Требуется найти такой
V 71
закон 7G ——-, — , чтобы перевести систему (18.2) из началь¬
246
ного состояния (18.3) в конечное состояние
р(Т) = р.г, q(T) = QT, к(Т) = кт (18.3')
за минимальное время Т= Т*. Таким образом, необходимо ис¬
следовать нелинейную систему дифференциальных уравнений пя¬
того порядка (18.2) с краевыми условиями (18.3) — (18.3').
Займемся теперь выбором малого параметра. При построении
асимптотического решения системы (18.2) в качестве малого па¬
раметра может быть использована величина Q = w0rllfM3,TdK как
ускорения »ги солнечного паруса, как уже многократно указыва¬
лось ранее, которые могут быть достигнуты на современном этапе
развития технологии, составляют от 0,5 • 10~3 до 2 • 10~3 м/с2.
Как видно из системы (18.2), орбитальные элементы р, q, к можно
считать ’’медленными” переменными, а аргумент широты и —
’’быстрой” переменной. Кроме того, заметим, что долгота Солнца X
изменяется существенно медленнее, чем и, но в некоторых задачах
быстрее, чем медленные переменные р,ц,к. Поскольку Хин входят
в тригонометрические функции правых частей (18.2), следует обсу¬
дить вопрос о времени, на котором будет рассматриваться решение
системы (18.2).
Очевидно, что между величиной малого параметра и промежут¬
ком времени, необходимым для коррекции, существует однознач¬
ная связь: чем больше площадь паруса, тем быстрее можно добиться
осуществления коррекции. Как показывают расчеты, существует
такое невыгодное положение орбиты относительно линии Земля —
Солнце, что на малых промежутках времени (порядка одного
витка) добиться гашения возмущений практически невозможно
вследствие малой эффективности тяги паруса. Для интервала вре¬
мени порядка нескольких суток эффективность возрастает, одна¬
ко и здесь требуемая парусность выходит пока за пределы совре¬
менных технических возможностей. Поскольку в работах
Б.И. Моркова [2.53-2.56] идет речь не о маневрах на орбите при
помощи паруса, а лишь о коррекции орбиты, то для решения пос¬
тавленной задачи практический интерес представляет достаточно
скромный по физическим параметрам солнечный парус, обеспе¬
чивающий коррекцию орбиты в течение нескольких месяцев. Пред¬
лагается модель движения суточного спутника на околокруговой
орбите при парусности 75,7 см2/г, что соответствует площади пару¬
са А = 87 X 87 м2 при полной массе конструкции т0 = 1000 кг.
Для такого паруса величина малого параметра Q оказывается при¬
ближенно равной величине 62 (представленное в безразмерном
виде 5 = 2л/365,24 — значение угловой скорости движения Солн¬
ца) . Поскольку
С^*2.
747
выберем величину б в качестве малого параметра и подставим б2
вместо Q в исходную систему (18.2).
Итак, построена система дифференциальных уравнений возму¬
щенного движения, которую для удобства анализа представляют
в виде
х = б2Дх, А, и, у),
А = б, (18.4)
й = W(x, и),
*Оо)=*о, “('o) = uo, A(f0) = А0.
Здесь х - ’’медленный” вектор, компонентами которого служат
элементы p,q,k\ и — ’’быстрая” скалярная переменная, изменяю¬
щаяся на неограниченном интервале времени; 7 (и) — скалярная
управляющая функция с указанным выше ограничением на управ¬
ление; t — время, t Е [/о, Т], Т — г0 ~ б-1, где б — малый пара¬
метр; А (г) = 6 (/ — f0) + Л о — медленно меняющаяся со временем
долгота Солнца; х0,и0, А0 — начальные значения соответствующих
величин. Через W (х,и) обозначена правая часть уравнения для
ciujdt; f i, /*2 > /*э} — вектор-функция, компонентами которой
являются правые части трех первых уравнений системы (18.2),
деленные на б2. Функции W и (г = 1,2,3) являются непрерыв¬
ными по всем аргументам, по фазовым переменным х обладают
непрерывными частными производными, относительно и — перио¬
дичны с периодом 2гг. Далее исходную систему следует исследовать
методом усреднения, который позволяет рассматривать решения
этой системы на интервале Т — t0 ~ б . Различные формы метода
усреднения применительно к задачам управления разработаны в
[2.57-2.59].
Применив теорему об управляемости исходной системы, кото¬
рая гарантирует возможность использования солнечного паруса
для коррекции орбиты космического аппарата за конечное время,
Б.И. Морков [2.53-2.561 для нахождения приближенно-оптималь¬
ного управления 7* (О и времени Т* исследовал исходную задачу
согласно необходимым условиям принципа максимума Понтряги¬
на и на основе выбранной им формы метода усреднения осущест¬
вил переход к более простой задаче — двухточечной задаче первого
приближения. При этом исходная управляемая система была пред¬
варительно приведена к виду, содержащему угол и в качестве не¬
зависимой переменной:
dp
= 822p3R 3cos27sin(u - 7 - Л),
du
dq
= 82p2R _3cos27 {-/?sin u cos(u - 7 - X) +
du
248
+ [(1 + /?)cosu +«/] sin(u - 7 — X)},
dk , , 3 2 (18-5)
=5 p R cos 7(/? cos u cos(u — 7 - X) +
du
+ [(1 + R) sin и + к] sin(u - у - X)} ,
dX r- ,
= Sp\TpR 2,
du
P(“o)~Po, d(“o) = Qo, k(u0) = k0, X(u0) = X0, u(t0) = u0.
Поскольку решение управляемой системы (18.5) рассматривается
на достаточно большом интервале времени Т — t0 ~б-1 и, кроме
того, движение происходит на околокруговой орбите, то можно
в первом приближении положить
t ~ to =pVp(u - U0) [1 +0(c2)]
и в дальнейшем рассматривать управление 7 в виде функции аргу¬
мента широты и. Эта замена означает, что задачу управления сле¬
дует теперь понимать как перевод системы из начальной точки в
конечную за минимальное количество витков космического аппа¬
рата по орбите.
Обозначив рассматриваемые орбитальные элементы через
х{ (/ =1, 2,3) и записав их изменение в виде
Xj(u, 5) =дс^°)(и, 5) + 5х^)(и, 5) + 82х^.2^(и, 5) + ... ,
можно, подставив эти выражения в систему и разложив получен¬
ные соотношения в ряд по степеням малого параметра, получить
систему первого приближения, описывающую движение управляе¬
мого объекта
dx;
~ =82fi(x, Х,7*(ы),ы),
du
(18.5')
dX
= 5 W(x, и)
du
с граничными условиями xt (и0) =xi0, Х(ы0) = Х0 и с ограничения¬
ми на управление —л/2 <7(и) <я/2. Если теперь для системы
(18.5') составить функцию Понтрягина
К(х, Х,ф,фх,у, и) =
= -1 + 52 2 IХ,7,ы) + IpKW(x, и), (18.6)
i=i
где — неопределенные множители Лагранжа, а затем
249
выписать сопряженную систему
<1ф/ f2 £ . Ц(х,\,у,и) dlV(x,u)
— =~S2 2 ф,- - Эфл •— ,
du i=i Эх, Эх,
<]\1>ь з Э/Дх, Х,7,м) (18-7)
= - 52 2 \£/.- ,
du j=i ЭЛ
то при фиксированных ’’медленных” переменных х,\,ф, фх опреде¬
лим управление у* (приближенно-оптимальное) как функцию
7*(и) = 7,(х.КФ,Ф\,и) (18.8)
из условия максимума функции (18.6):
max Ж(х, X, ф, фх.у,и) =
7
= Щх.\,Ф,Фк,Г(и),и) = Х\ (18.9)
Подставляя управление (18.8) в системы (18.5') и (18.7),
сведем решение оптимальной задачи к построению решения двух¬
точечной задачи для некоторой новой гамильтоновой системы,
содержащей у * (и):
dx: d\
= 57fi(x, Л, у* (и), и), =5 ЙДх, и),
du du (18.10)
Xj(u0)=xi0, Л(пи) = Л0, x,(i/r)=x,T, /=1,2,3;
к 2 v i df/(x,Ky'(u),u) dW(x,u)
—— = -62 2 ф-- — 8фх— ,
du /= i aXj ox,-
<*Ф\ r2 I , Э/Дх, Л,7*(Ц ),h)
= -52 2 Ф: ,
du /= i ЭЛ
ФД«o) = vt',-0, Ф\ (Ну) =0, /=1,2,3.
С помощью метода усреднения Б.И. Морков [2.53-2.56] ис¬
следовал асимптотическое решение полученной краевой задачи
(18.10) в первом приближении по малому параметру 5. Сначала
рассматриваемой краевой задаче ставится в соответствие усред¬
ненная краевая задача. Для этого при фиксированных медленных
переменных х, Л, ф, фх выполняется усреднение по и в соответствии
с формулами
1 2л
W = —- / W(x, u)du,
2л о
1 2л
/, = -— / /Дх. М. У* (х, Л, ф, фх,и)^и.
2л о
250
Итак, усредненная система имеет вид
~ fi(x> К 7* (Ф, Ф\, х, X)),
du
dX
=5W(x), (18.10')
du
х;(и0) = Х'о, x,{uT) = xiT, \(u0) = \0.
Рассмотрение этой системы с точностью до членов пер¬
вого порядка относительно 6 совместно с граничными условиями
позволяет получить множители Лагранжа ^,-(/ =1,2,3). Теперь
можно записать функцию Понтрягина
Jf (х, X, 7, и, а, /3) = -1 + 62cos27(/1 sin 7 + В cos 7), (18.11)
где
ф(а,Р)= ф(ф{, Ф2,Фъ),
А = А (х, X, и, а, 0), В = В(х, X, и, а, 0).
Здесь имеет место случай, когда функция имеет гладкий мини¬
мум в области изменения 7. Необходимым условием такого ми¬
нимума является обращение в нуль производной dK/dy, откуда
вытекает, что приближенно-оптимальное управление 7 * имеет вид
-ЗВ +\Г9ВГ+8А2
7* (х, X, а, /?, н) = arctg — . (18.12)
4 А
Из этого соотношения угол установки паруса 7*(x, X, а, 0, и)
определяется однозначно, так как сила светового давления всегда
направлена ”от Солнца”.
Если полученное приближенно-оптимальное управление (18.12)
подставить в усредненную систему первого приближения (18.10'),
то в результате придем к усредненной системе, которая в смысле
интегрирования предпочтительнее исходной, так как в ее правые
части не входит быстрая переменная и, за счет чего можно выбрать
больший шаг интегрирования. Не будем выписывать эту систе¬
му в явном виде вследствие ее громоздкости (см. [2.53—
2.56]). Заметим, что если бы ее удалось полностью проинтегриро¬
вать, выразив управление 7* в виде функций фазовых координат
р, q,k, то в первом приближении удалось бы решить задачу синтеза
управления. Однако в достаточно сложных задачах, как, например,
рассматриваемая, решение приходится искать численно. Но даже
и в случае интегрирования усредненной системы численным мето¬
дом он оказывается более простым, нежели интегрирование исход¬
ной системы (18.5), опять-таки вследствие возможности увеличить
шаг интегрирования. Например, в [2.53—2.56] интегрирование по
медленной переменной производилось с шагом и = 2тг&.
251
При исследовании окончательной усредненной системы удалось
проинтегрировать единственное уравнение, не содержащее урав¬
нения 7* и описывающее движение Солнца. Полученный частный
интеграл, соответствующий движению Солнца, будучи подставлен
в систему, позволил понизить ее порядок на единицу. Явная форма
этого частного интеграла физически выражает долготу Солнца на
эклиптике, измеренную в витках орбитального движения косми¬
ческого аппарата:
Для оценки влияния движения Солнца на орбитальные элементы
аппарата вводилась еще одна медленно меняющаяся независимая
переменная т = 6(и — и0), после чего численное интегрирование
окончательной усредненной системы, записанной для новой пере¬
менной, производилось с шагом, равным периоду оборота аппара¬
та по орбите, т.е. Т0 = 27Г. На каждом шаге интегрирования произ¬
водилось переопределение множителей Лагранжа, так как после
каждого оборота эти множители должны учитывать изменение
направления солнечных лучей относительно паруса на промежутке
времени, равном истекшему периоду оборота. В процессе числен¬
ного интегрирования определяются искомый оптимальный закон
установки паруса, а также наименьшее время движения, за кото¬
рое удается скорректировать орбиту при задании начальных возму¬
щенных значений орбитальных элементов.
В качестве простейшего примера составления усредненных урав¬
нений возмущенного движения и их решения интересно рассмот¬
реть движение суточного спутника с солнечным парусом, неизмен¬
но ориентированным нормально к лучам (7 = 0). Выполнив пере¬
ход от исходной системы уравнений к системе первого приближе¬
ния по малому параметру 5, можно составить усредненную сис¬
тему, которую далее следовало бы решать численно. Однако оказа¬
лось, что на промежутке времени (порядка периода оборота, на
котором можно еще считать, что Л = const, сохраняя при этом
точность первого приближения по 5, удается получить решение
в аналитической форме. Особенно просто это решение выглядит,
если ’’включение” солнечного паруса в положении, перпендикуляр¬
ном солнечным лучам, происходит на круговой орбите (е0 =0).
В этом случае эволюция орбитальных элементов описывается фор¬
мулами
(18.13)
252
Переходя к кеплеровым элементам е и со, получим
р(и, 8) = cos2 52п|, е =\/цг + к2 = | sin^— 52u^ j,
(-««*)-f
адах
(I8’") ‘«’(f*’»)
со = arctg — = arctgj -ctg X )= — + X
Я
и радиус-векторы в апсидах
„2
COS
rn =
1 + | sin^—52u^J 1 — | sin^—52h^|
Следовательно, большая полуось
„2 |
cos
a = — = = j
]~e 4,
1 - sin2(
(t8Ju)
остается неизменной. Этот вьшод для нормально ориентированного
к лучам паруса совпадает с известными данными из спутниковой
теории возмущений под действием светового давления [В.22].
Под действием светового давления линия апсид стремится занять
положение, перпендикулярное направлению лучей, а за один оборот
происходит перемещение геометрического центра орбиты перпен¬
дикулярно линии Земля-Солнце. В результате такого сдвига
уменьшится высота в той части орбиты, где проекция силы тяги
(возмущающего ускорения) на скорость максимальна, т.е. на той
части орбиты, где аппарат движется от Солнца. Эти соображения
относятся только к случаю полной освещенности орбиты.
Итак, чтобы произвести коррекцию орбитальных элементов,
нужно соответствующим образом найти точки переключения
управления. Эти же результаты можно получить, если в качестве
альтернативы использовать парус-баллон с управляемым радиусом,
например надуваемый и спускаемый в необходимые моменты
времени. В этом плане использование плоского поворачивающегося
паруса для коррекции орбиты становится более перспективным,
поскольку его очевидное преимущество перед баллоном с точки
зрения теории управления состоит в гибкости управления тягой.
253
Маневренные возможности плоского паруса для коррекции
орбиты легко установить и аналитически. Действительно, рассмот¬
рим первое уравнение (для параметра орбиты р) из системы (18.5).
Примем, что парус-баллон (у = 0) движется по эллиптической ор¬
бите, расположенной в плоскости эклиптики, а Солнце в рассматри¬
ваемый момент находится в точке весеннего равноденствия (Л = 0).
Тогда
dp , 2р3
— =5 ■—sinw >0, 0 < ы < я.
du R3
Так как тяга в течение всего оборота постоянна по направлению,
то на участке и£ [0, я], т.е. когда аппарат движется от Солнца,
невозможно добиться уменьшения фокального параметра орбиты.
Если рассмотреть то же уравнение дня плоского паруса (у Ф 0,
у G [-я/2, я/2]), т.е.
dp 2 р3
-— = —б —— cos у sin (у — и),
du R
то, чтобы добиться уменьшения параметра орбиты на той же дуге
и£ [0, я], достаточно положить у = м + я/2, чтобы имело место
dp
<0, и 6 [0, я].
du
Выше изложены особенности применения методики, развитой
Б.И. Морковым [2.53-2.56] для исследования возможности
парусной коррекции в плоской эклиптической задаче. Ниже мы
приведем результаты численных исследований, выполненных им
для задачи коррекции, однако, чтобы закончить обсуждение тео¬
рии, сформулируем вкратце основные этапы построения и решения
изложенной вариационной задачи.
Итак, если составить функцию Понтрягина и записать систему,
сопряженную управляемой системе (18.4), то решение сформули¬
рованной оптимальной задачи можно свести к построению решения
двухточечной краевой задачи для гамильтоновой системы, содер¬
жащей приближенно-оптимальное управление у*, определяемое из
условия максимума функции Понтрягина (18.9). Асимптотическое
решение полученной краевой задачи в первом приближении по
малому параметру б Б.И. Морков [2.53—2.56] исследовал с по¬
мощью метода усреднения. Рассматриваемой краевой задаче стави¬
лась в соответствие усредненная краевая задача, получаемая после
отбрасывания членов порядка б2 и усреднением по ’’быстрой”
переменной и при фиксировании ’’медленных” переменных. В пред¬
положении, что решение усредненной краевой задачи аппроксими¬
254
рует решение точной краевой задачи с погрешностью порядка h
на минимуме интервала времени коррекции, удалось получить
приближенно-оптимальное управление углом у* установки норма¬
ли к солнечному парусу. Так как в результате усреднения полу¬
чается весьма сложная система, то дальнейшее исследование про¬
водится численно-аналитическим методом.
Численные исследования суточной слабоэллиптической орбиты
показали, что учет движения Солнца и расположение линии апсид
относительно светового потока в начале коррекции имеют сущест¬
венное значение при решении поставленной задачи управления,
особенно для гашения накопления возмущений в эксцентриситете.
От этих факторов существенно зависит и время, необходимое для
коррекции. Всегда можно указать, при каком начальном положе¬
нии линии апсид относительно Солнца эффективно начинать кор¬
рекцию, а при каком — нет. Удалось показать, что эффективность
применения солнечного паруса для коррекции эксцентриситета
при указанных выше ограничениях на парусность существенно
зависит от взаимного расположения линии апсид и направления
солнечных лучей, т.е. от асимметрии орбиты относительно направ¬
ления на Солнце. Например, если большая ось первоначальной ор¬
биты расположена перпендикулярно потоку солнечных лучей, то
при начальном положении перигея, характеризуемым углом со0 =
= Зя/2 (рис. 105), для скругления орбиты за минимальное время
до нулевого эксцентриситета потребуется время коррекции, в
450 раз меньшее, чем для начального положения при ш(, = л/2
(рис. 106). Было еще установлено, что для высоких орбит (типа
геостационарных) и принятого нами значения парусности коррек¬
ция орбиты на интервале времени порядка нескольких суток
весьма затруднительна, а на интервале времени менее суток -
а
Рис. 105
Рис. 106
255
просто невозможна. С другой стороны, на промежутках времени
порядка нескольких месяцев эффективность применения паруса
для требуемого исправления орбитальных элементов резко воз¬
растает. Таким образом, эффективность коррекции жестко связана
со временем ее выполнения.
Вернемся теперь к схемам парусной коррекции на рис. 105 и
106, соответствующим движению аппарата по суточной или близ¬
кой к ней орбите с малым эксцентриситетом, и обсудим эффектив¬
ность этих схем. Принимая, что это начальное (в нашей постановке
задачи) значение эксцентриситета является возмущенным, поста¬
вим задачу орбитальной коррекции как задачу скругления орбиты
за минимум времени для восстановления требуемого нулевого
эксцентриситета и возврата аппарата на строго геостационарную
орбиту. На рис. 105 изображены стрелками направления силы тяги
корректирующего паруса (отсчет угла ш производится от точки
весеннего равноденствия Т). Оказалось, что в этом случае коррек¬
цию можно осуществить всего за 3 сут, причем изменением долго¬
ты Солнца (*^3°) за это время можно пренебречь (Солнце на
рис. 105 изображено в точке весеннего равноденствия). Ориентация
паруса (почти нормальная относительно лучей) меняется слабо,
а вектор тяги близок к направлению лучей, отклоняясь от них на
небольшой угол ±7, т.е. вектор тяги лишь ’’покачивается” относи¬
тельно направления светового потока (рис. 107). При таком непре¬
рывном законе управления парус в апсидах ориентирован нормаль¬
но к лучам, причем в апогее а тяга направлена строго по скорости,
а в перигее п — против нее. В результате скорость в апогее увели¬
чивается (максимальное увеличение), энергия возрастает и перигей
поднимается; соответственно, скорость в перигее, где аппарат
движется против Солнца, уменьшается и апогей опускается. Сила
тяги нигде в нуль не обращается. Осуществление округления
сопровождается смещением геометрического центра орбиты вдоль
перпендикуляра к направлению светового потока, в данном случае
вдоль линии апсид. Так как сила тяги изменяется плавно (см.
рис. 107), то коррекция может быть осуществлена с помощью
зеркального паруса, отражающего лучи только с одной стороны,
заштрихованной на рис. 105.
256
Предлагаемая схема коррекции принципиально отлична от цан-
деровской схемы раскрутки, ’’проигранной наоборот”, и близка
к схеме пассивного орбитального движения спутника-баллона,
который, как неоднократно указывалось выше, аналогичен (аде¬
кватен) некоторому плоскому парусу, сохраняющему нормальную
ориентацию. Известно, что большая полуось орбиты баллона при
полной освещенности орбиты вообще не испытывает вековых
возмущений первого порядка, а эксцентриситет испытывает долго¬
периодическое годичное колебание. Такое же колебание фокаль¬
ного параметра и радиус-векторов перигея и апогея вызывают
упомянутый геометрический сдвиг центра орбиты. Таким образом,
парус-баллон, малоэффективный с точки зрения раскрутки, неожи¬
данно оказывается полезен с точки зрения коррекции, хотя ни о
какой оптимизации речь, конечно, идти не может: два раза в год
происходит как бы ’’автоматическая” коррекция орбиты, так как
любой эксцентриситет такой орбиты каждые полгода возвращается
к своему начальному значению. Хотя управлять направлением силы
тяги баллона не представляется возможным, можно попытаться
управлять величиной силы тяги, управляя радиусом баллона.
О таком управлении уже рассказано выше применительно к за¬
дачам коррекции орбит около точек либрации.
Принципиально иная схема коррекции должна применяться
в случае конфигурации, изображенной на рис. 106 для со0 = я/2.
Так как сильно возрастает и время, требуемое для коррекции,
необходим учет движения Солнца. Расчеты показали, что при
учете движения Солнца время коррекции уменьшается: от не¬
скольких лет (для модельного примера с неподвижным Солнцем)
до 140 сут в реальном случае.
На рис. 106 плоскость паруса на большей части орбиты распо¬
ложена близко к направлению потока лучей, а угол ориентации
вектора тяги изменяется в интервале у Е [—л/2, л/2], так что
парус обязательно должен быть зеркальным с обеих сторон. Так
Рис. 108
257
как за время коррекции направление на Солнце повернется почти
на 180°, то Солнце на рис. 106 изображено в положении осеннего
равноденствия. На рис. 108 представлен соответствующий график
изменения угла установки у(и) и точки переключения, устанавли¬
ваемые здесь из условия [-cosw(ftn +sinw)] = 0. При прохождении
через четыре точки переключения (к0 >0): ut = arctg( — к0), и2 =
= я/2, м3 = я + arctg (— ^о) , = Зя/2, управление у(иу к0) меняется
непрерывно, так как обе стороны паруса зеркальные. При переходе
оту(2<) = п/2 к у (и) =—я/2 правые части системы уравнений (18.5)
не являются разрывными, так как значения тягового ускорения в
этих точках обращаются в нуль. Как легко убедиться, парус зани¬
мает такое положение (см. рис. 106), которое обеспечивает макси¬
мальное уменьшение скорости вблизи апогея и увеличение ее
вблизи перигея. В апсидах парус ориентирован всегда ребром к
потоку и не создает тяги, поэтому изменения скорости аппарата
в апсидах не происходит. На нижнем полувитке вектор тяги близок
к направлению скорости, что означает даже режим раскрутки, а
не скругления и для нашей задачи коррекции невыгодно. Таким
образом, предлагаемый режим оказывается неэффективным с
точки зрения гашения эксценгриситетных возмущений, поэтому
и время коррекции оказывается большим по сравнению с первым
случаем.
Сравнение этих двух случаев, а также другие расчеты показыва¬
ют, что наивыгоднейшие условия коррекции всегда выполняются
тогда, когда в апогее происходит движение аппарата от Солнца при
максимальном уменьшении перигейной скорости и при максималь¬
ном увеличении апогейной. Удалось показать [2.56], что в свою
очередь это выполняется, если начальное положение линии апсид
удовлетворяет условию oju £ [210°, 340°] (действительно, из
двух рассмотренных выше случаев только первый случай, со0 =
= 270°, удовлетворяет этому условию). При прочих вариантах
орбитальной ориентации парусная коррекция оказывается не¬
эффективной. Попутно следует заметить, что наилучшие условия
коррекции в смысле скругления орбиты должны быть как бы
обратны наилучшим условиям раскрутки. Как предсказывал
Ф.А. Цандер и как было подтверждено последующими исследова¬
ниями, наивыгоднейшие условия раскрутки соответствуют локаль-
но-опгималыюму управлению парусом, максимизирующему поло¬
жительную касательную проекцию силы тяги. При обратной ситуа¬
ции, т.е. при минимизации этой проекции, будут осуществляться
наилучшие условия скругления. Действительно, на рис. 105 тяга
целиком проектируется на скорость только в апогее, в остальных
же точках тяга имеет только малую положительную проекцию на
скорость или эта проекция отрицательна.
258
Эта теория геоцентрической парусной коррекции получила
дальнейшее развитие в работе [2.59] А.С. Шмырова, совместной с
автором настоящей книги, где было дано подробное аналитическое
обоснование применения метода усреднения к управляемым сис¬
темам типа (.18.4) и были получены соответственные дифферен¬
циальные оценки близости точных и усредненных управляемых
Рис. 109
систем на промежутках времени, определяемых интервалом при¬
менимости метода малого параметра в задачах управления пару¬
сом. Работы [2.53—2.56] и [2.59] относились к плоскому случаю
эклиптической орбиты аппарата, обобщение теории на случай
пространственного движения дано в работе [2.60], причем на этот
раз исследование выполнялось не для комбинаций кеплеровых
элементов, а для вектора орбитального кинетического момента.
Соответственно ставилась и решалась следующая задача об опти¬
мальном по быстродействию изменении вектора орбитального
кинетического момента аппарата на слабо эллиптической орбите,
ориентированной под произвольным углом к плоскости эклиптики.
Пусть х и х — векторы положения и орбитальной скорости
аппарата, с = хХх — вектор кинетического момента (рис. 109),
f = — х/11 х 11 + х X с - вектор Лапласа, направленный из динами¬
ческого центра в перигей орбиты и равный по величине ее эксцент¬
риситету. Пусть 1 — единичный вектор направления Земля—Солнце,
расположенный в плоскости эклиптики, п — единичный вектор
нормали к отражающему парусу. Запишем систему уравнений
управляемого орбитального движения и поставим ей в соответст¬
вие усредненную управляемую систему. Определим оптимальный
закон управления нормалью к парусу. Исследуя на оптимальность
функцию Понтрягина, устанавливаем, что для того, чтобы управ¬
ление п(х) было оптимально по быстродействию, необходимо,
чтобы оптимальный вектор п* (см. рис. 109) располагался в плос¬
кости, содержащей направление на Солнце 1 и некоторый вектор Ь,
259
определяемый по формуле
b = X X х + с X р + II сII 2 [ц X (с X f + I! хII 1 с X х) X х]. (16,14)
II XII + II v И Ф О,
Х/ + г; с = 0.
Обозначим через а угол между векторами b и 1, а через /? — угол
между п*и 1. Оптимальный закон изменения угла /3 имеет вид [2.60]
причем угол /3, определяющий отклонение нормали п*от направле¬
ния на Солнце 1, располагается в плоскости, содержащей векторы 1
и Ь. Полученный закон можно проиллюстрировать на примере
движения по круговой орбите (/ = 0). Если положить еще и р = 0
(случай, когда изменение вектора Лапласа f не входит в краевые
случай изображен на рис. 109, где круговая орбита аппарата произ¬
вольно ориентирована относительно направления 1 на Солнце.
Построение множества векторов X X х (вектор с ортогонален
к орбитальной плоскости, неизменный вектор X ориентирован
произвольно) показывает, что траекторией конца этого вектора
будет некоторый зллипс. Вектор X X х отклонен от 1 на угол а,
а нормаль п* - на угол /3, лежащий в плоскости, содержащей век¬
торы 1 и X X х. Кривая N изображает множество оптимальных
направлений нормали п* и является замкнутой пространственной
кривой, располагающейся на сфере единичного радиуса, - годо¬
графа конца п*.
Ряд предварительных оценок [2.60] позволил сделать важный
вывод: эффективность солнечного паруса в пространственных
корректирующих маневрах не снижается по сравнению с эффектив¬
ностью в маневрах, выполняемых с той же целью в плоскости
эклиптики (напомним, что речь идет об ’’исправлении” кинети¬
ческого момента). Точнее говоря, оказалось, что наихудший ва¬
риант граничных условий, при которых эффективность паруса
минимальна, содержится, как это ни парадоксально, именно в
плоском случае.
В заключение заметим, что закон (18.15), полученный А.С.Шмы-
ровым для эллиптической орбиты [2.60] как результат решения
в самом общем виде задачи быстрейшей коррекции, оказался в
точности ’’обратным” закону (15.5'), предложенному В.В. Шува¬
ловым [2.5] для раскрутки с круговой орбиты в качестве закона
Векторы Хит) такие, что
(18.15)
условия), то формула (18.14) примет вид b = X X х. Имений этот
260
локально-оптимального управления. Высказанное В.В. Шуваловым
еще в 1963 г. предположение (см. § 14), что на эллиптической
орбите этот закон даст еще более существенный выигрыш, нежели
на круговой, этим самым полностью подтвердилось. Тот факт, что
обратный корректирующий закон оказывается еще и оптимальным
по быстродействию, а не только локально-оптимальным, позволяет
заключить, что свойством оптимальности обладает также и закон
(15.5 ), предлагаемый в [2.5] для раскрутки. Этот результат, не
проанализированный своевременно его автором, в течение почти
двадцати последующих лет оставался без внимания исследователей,
занимающихся проблемой геоцентрической парусной раскрутки
и поисками соответствующего оптимального закона управления
солнечным парусом.
Итак, теоретические исследования задач оптимальной парусной
коррекции продолжаются в направлении построения теории кор¬
рекции для пространственного случая и поисков соответствующих
законов управления углом установки. Если обратить внимание
на общую форму законов управления в плоском случае движения
в плоскости эклиптики как в гелиоцентрической, так и в геоцент¬
рической постановках задачи, то следует отметить аналогию форм
закона (9.5), выведенного А.Н. Жуковым и В.Н. Лебедевым [1.36]
для вариационной гелиоцентрической задачи межпланетного пере¬
лета, и закона (18.12), установленного Б.И. Морковым [2.53,
2.56] для вариационной задачи геоцентрической коррекции. Однако
при сопоставлении этих формул необходимо иметь в виду, что
коэффициенты, входящие в правые части формул, совершенно
различны и определяются выражениями, соответствующими дина¬
мике гелиоцентрического или геоцентрического движений. Анало¬
гия формы записи законов связана с аналогиями в формах записи
радиальной и трансверсальной проекций силы тяги солнечного
паруса на околосолнечной .или околоземной орбите, когда поляр¬
ный угол отсчитывается от направления на Солнце. Легко убедить¬
ся, что соответствующие изменения в (18.1) не влияют на общий
вид функции Ж (18.11) , см. также [2.61 ].
Например, аналогичный закон управления (необходимые условия
оптимальности), удовлетворяющий принципу максимума, выписан
в [2.61], где на базе теории Шмырова—Моркова для частного слу¬
чая максимизации полной орбитальной энергии на одном витке
орбиты исследованы достаточные условия оптимальности с по¬
мощью второй вариации функционала, явно не зависящего от
управления. Здесь рассматривается задача об отыскании управле¬
ния для произвольного парусного геоцентрического маневра пере¬
хода между компланарными эклиптическими орбитами. Коэффи¬
циенты в ’’традиционном” варианте оптимального закона (18.12)
261
имеют для конкретной задачи максимизации полной энергии на
витке следующий простой вид:
1 1
А- —- (е cos и> + cos у?), В - (е cos ip + sin
yfp \fp
где с — эксцентриситет, р - фокальный параметр орбиты, у -
угловое расстояние аппарата от Солнца, остальные обозначения
видны из рис. 103 и 104. Найденное управление разрывно и имеет
в данной задаче для одного витка орбиты скачок вблизи апогея
в некоторой точке и = arccos ( — е cos со), где угол управления ме¬
няет значение с (+я/2) на (-я/2).
Заканчивая обсуждение вопросов парусной коррекции, изучае¬
мой с помощью современных методов теории управления, следует
хотя бы частично сопоставить эту задачу с задачами о парусной
геоцентрической раскрутке, освещенными нами ранее в § 13 — 15.
Это сопоставление касается вопросов эффективности выполнения
соответствующего парусного маневра, так как все задачи упомя¬
нутой парусной раскрутки ставились для заданного заранее закона
управления. Действительно, в [2.29] рассматривалась задача управ¬
ления спутником на заданной орбите при неизменной ориентации
паруса перпендикулярно направлению на Солнце (’’адекватный”
парус-баллон), а в работе [2.10], а затемв [2.11 —2.19] - раскрут¬
ка с так называемым ’’половинным углом”, также заданным
заранее. Выбор таких законов, продиктованный соображениями
локально-оптимального по энергетике управления, а также сообра¬
жениями простоты анализа при интегрировании и построении при¬
ближенных аналитических решений, не удовлетворяет необходи¬
мым условиям вариационной задачи быстродействия. Действитель¬
но, выбор ’’половинного” закона не обеспечивает осуществления
эффективного маневра ухода. Это объясняется главным образом
тем, что в течение большей части времени полета аппарат находится
вблизи апогея, где приращение полной энергии мало, даже для
рассматриваемого случая движения в плоскости эклиптики.
Более строгий подход к задаче выбора закона управления без
применения вариационных методов, а из общих динамических
соображений был дан в работе [2.4], а затем - в [2.44]. Фимплом
[2.4] определялась программа управления, состоящая в такой
ориентации паруса, чтобы был обеспечен максимум скалярного
произведения силы тяги и скорости F • v. Особенно интересен в
этом плане вариант раскрутки на терминаторной орбите. Посколь¬
ку плоскость начальной орбиты (см. рис. 56) остается неподвиж¬
ной относительно инерциальной системы координат, она повора¬
чивается в течение года вокруг линии Земля -Солнце. Ее ориента¬
ция относительно этой линии определяет максимальную возмож-
262
ную скорость возрастания анергии, а следовательно, и время выхо¬
да на ’’нулевое значение” полной энергии (отрыв). Таким образом,
в более строгой постановке задачи о выборе закона управления
закон установки паруса следует обязательно считать функцией не
только направления скорости, но и времени. Допущение, что изме¬
нение направления солнечных лучей можно не принимать в расчет,
годится только при прогнозировании раскрутки, выполнимой за
несколько суток, что требует такой парусности аппарата, которая
может оказаться не соответствующей современным техническим
возможностям.
§ 19. Проблема поддержания требуемой ориентации
солнечного паруса
Теория космического полета с солнечным парусом, какие бы
задачи, гелиоцентрические или геоцентрические, она не обсуждала,
неизменно связана с динамической проблемой обеспечения требуе¬
мой ориентации солнечного паруса по отношению к потоку лучей в
соответствии с тем законом управления, которому парус подчиня¬
ется. С одной стороны, это — задача теоретического исследования и
прогнозирования вращательного (ротационного) или колебатель¬
ного (либрационного) движения конструкции парус - аппарат под
действием возмущающих моментов сил светового давления, кото¬
рые необходимо действуют на обширную парусную конструкцию
и в качестве возмущающих моментов налагаются на моменты так
называемого программного управления. С другой стороны, это -
задача практического оснащения аппарата с парусом такой кон¬
струкцией систем управления (ориентации и стабилизации)*) ог¬
ромным парусом по трем осям в пространстве, которая надежно
обеспечила бы выполнение требуемого закона программного
управления этим парусом и одновременно компенсировала бы
все нежелательные возмущения вращательного движения парус¬
ной конструкции.
Задача теоретического исследования вращательного движения
космического аппарата под действием моментов сил светового
давления уже длительное время является одним из важнейших
*) Напомним, чю система управления угловым положением аппарата
относительно центра масс делится на две: систему предварительного успо¬
коения и систему стабилизации. Система ориентации ликвидирует большое
первоначальное отклонение, совмещая подвижную систему координат (свя¬
занную с аппаратом) с базовой. Система стабилизации - контрольная, кор¬
ректирующая система, ликвидирующая малые угловые отклонения под¬
вижной координатной системы от базовой , поставляемые датчиками ори¬
ентации.
263
разделов динамики движения около центра масс, ее можно с пол¬
ным правом считать классической. Вначале она имела в качестве
объекта исследования те спутники и космические аппараты, кото¬
рые в силу своих конструктивных особенностей подвергались
серьезному возмущающему влиянию радиационных моментов,
так как либо были оснащены протяженными солнечными бата¬
реями или отражающими антеннами и т.п., либо сами обладали
сильно отражающими поверхностями. В результате нежелательные
возмущающие моменты сил светового давления затрудняли работу
приборов и устройств, предназначенных для контроля ориентации.
Позднее из этой динамической проблемы выросла другая пробле¬
ма, по смыслу противоположная первой: какими должны быть
отражающие поверхности и управление ими, чтобы создаваемые
силой светового давления радиационные моменты можно было
успешно использовать для управления ориентацией аппарата в
пространстве. Так появилась задача об управлении ориентацией
с помощью сил светового давления, причем ее разработка сопро¬
вождалась практическими рекомендациями относительно того,
какими специально спроектированными для этой цели отражаю¬
щими панелями следует снабдить аппарат. Обширную библиогра¬
фию по всем упомянутым выше проблемам можно найти в моно¬
графическом обзоре В.А. Сарычева [2.62], а также у В.И. Попова
[2.63] и Л.И. Каргу [2.64].
Пассивные системы стабилизации делятся на несколько типов
и основываются на использовании либо гравитационного градиента,
либо аэродинамических или магнитных моментов, либо сил давле¬
ния солнечных лучей (эти системы могут быть основаны и на
стабилизации аппарата вращением около оси). Исследования
радиационных методов стабилизации, а также проектрирование
соответствующих устройств давно выделилось в отдельную тема¬
тику: эти исследования необходимо привели к разработке кон¬
струкций ’’малых солнечных парусов”, т.е. солнечных рулей,
выступающих в качестве исполнительных органов систем стабили¬
зации. Широкое развитие получили также методы разработки
комплексных систем, предполагающих использование сил свето¬
вого давления в комбинации с другими эффектами. Так были
разработаны различные комплексные схемы систем ориентации
для демпфирования либрационных колебаний аппаратов с грави¬
тационной стабилизацией, комбинированные магнитно-солнечные
или солнечно-аэродинамические системы стабилизации. Для них
также не требуется обширных парусов, а могут применяться более
скромные по размерам отражающие конструкции: пластины,
панели солнечных батарей, отражающие лопасти, используемые
в качестве солнечных рулей.
264
Моменты сил светового давления, как правило, имеют решаю¬
щее значение при полетах на высоте более 2000 км, так как на
меньших высотах солнечные рули будут испытывать сильное
атмосферное сопротивление. Соотношение радиационных и грави¬
тационных моментов в свою очередь зависит от элементов орбиты
и от конструктивных особенностей аппарата. Моменты сил свето¬
вого давления определяются не только размерами и формой облу¬
чаемой поверхности, но и расположением центра сил давления
относительно центра масс всей конструкции. (Простейшая схема
действия восстанавливающего радиационного момента изображена
на рис. 110). Момент сил равен, как известно, векторному произ¬
ведению двух сомножителей: давления солнечного излучения —
вектора F = (1 + е) Р$А п° (п — орт нормали, е — отражательная
способность, А — площадь облучаемой поверхности) и вектора
линейного расстояния гц д — центра давлений на поверхность А
от проекции центра масс на эту же поверхность А, т.е.
Создатели проектов обширных тяговых солнечных парусов не
могли не отдавать себе отчета в том, какие огромные возмущаю¬
щие моменты сил давления будут действовать на отражающий
парус, создавая вредные вращательные эффекты и мешая требуе¬
мому ’’программному” режиму вращения солнечного паруса
(т.е. вращения по заданному закону). Эти же возмущения будут
нарушать требуемую ориентацию приборного отсека, скрепленного
с парусом. Поэтому придется преодолеть серьезные технические
трудности, чтобы длительное время поддерживать требуемую ориен¬
тацию самого паруса, обеспечив надежное гашение всех посторон¬
них радиационных возмущающих моментов. Лишь в случае гаран¬
тированной ориентации можно говорить о том, что ’’программное”
управление, осуществляемое с помощью специальных устройств,
обеспечит создание парусной тяги требуемых величины и направ¬
ления.
Мы коснемся лишь нескольких частных задач динамики враще¬
ния около центра масс, имеющих непосредственное отношение
только к проблеме полета с солнечным парусом и поддержания
Рис. 110
М = — (F X гц д).
265
его ориентации. Попутно мы оста¬
новимся наописании некоторых наи¬
более интересных проектов ротор¬
ных парусов-вертушек, которым
оказывается под силу управлять
вращательным движением массив¬
ного аппарата.
Итак, применительно к солнечно¬
му парусу можно сформулировать
две основные задачи:
1) оценка возмущающего влия¬
ния моментов сил светового дав¬
ления, вызывающих помехи, т.е.
вредные ротационные или либраци-
онные движения паруса, влияющие
на запланированные орбитальное и
вращательное движения (по про¬
граммному закону);
2) конструктивное решение за¬
дачи обеспечения требуемой ориентации паруса в полете без
применения активных роторных устройств, т.е. только
за счет моментов сил светового давления. Такую ориен¬
тацию мы будем называть пассивной, осуществляемой
с помощью солнечных лучей, т.е. как бы собственными средства¬
ми. Развитие исследований по обеим этим проблемам начали
Н.Д. Джуманалиев и М.И. Киселев [2.65-2.67], рассмотревшие
влияние малых колебаний системы с солнечным парусом на ее
движение по гелиоцентрической орбите при цандеровской ориен¬
тации паруса, т.е. нормальной к потоку солнечных лучей.
Несколько раньше О.В. Гурко и Л.И. Слабкий [2.68] одними
из первых предложили схему радиационно-гравитационной стаби¬
лизации космического аппарата, основанную на применении солнеч¬
ного паруса, выполненного в форме отражающего конуса, направ¬
ленного раструбом к источнику света. Зеркальный стабилизатор
обладает следующим свойством: если ось минимального момента
инерции гантелеобразного аппарата отклонится от местной верти¬
кали (линия Oz на рис. 111) на угол тангажа у, то на поверхности
паруса-отражателя распределение светового давления будет нерав¬
номерным. Именно эта неравномерность, определяемая соотноше¬
нием Р - Pj (cos ^ cos и + sin sin a cos 5) ‘ (обозначения углов а
и 5 см. на рис. 111), создает восстанавливающий момент сил свето¬
вого давления. Разработка различных конструкций солнечных
стабилизаторов нашла свое отражение во многих отечественных и
зарубежных публикациях.
1 А
I 5Р\
! \
1 '
I
1
*
Рис. 111
266
Необходимо должен был привлечь внимание исследователей
и вопрос о колебаниях лопастей солнечного паруса-гелиоротора.
Этот парус был запроектирован в двух вариантах [1.64]: в де¬
монстрационном варианте для геоцентрического движения по эква¬
ториальной орбите с высотой 8000 км (4 лопасти размерами 0,7 X
X 600 м2 каждая, частота вращения 1,3 мин’1, парусность 400 см2 /с,
максимальное ускорение 0,03 см/с2) и в гелиоцентрическом ва¬
рианте (12 лопастей размерами 8 X 7500 м2 каждая, частота враще¬
ния 0,3 мин-1, парусность 1300 см2/г, максимальное ускорение
0,16 см/с2). Вопросы вращательного прецессионного движения и
устойчивости каждого из двух вариантов конструкции гелиоротора
исследовались [1.64] с точки зрения опасности динамической
неустойчивости и явления флаттера, причем были установлены
аналитические условия, налагаемые на частоты колебаний лопастей
во избежание этого вредного явления. Подробное аналитическое
исследование динамики произвольного роторного паруса предпри¬
нял А.Ю. Коган 12.69] в предположении, что гибкая лопасть испы¬
тывает вынужденные крутильные колебания (относительно своей
продольной оси), синхронные с вращением ротора.
Роторный парус представляет собой длинные ленты металлизи¬
рованной пленки, которые вращаются вместе с корпусом, удер¬
живаясь в растянутом состоянии центробежными силами. (Напом¬
ним, что принцип использования центробежных сил для придания
жесткости был предложен еще Ф.А. Цандером [B.l 1. с. 268].) С по¬
мощью устройства, аналогичного автомату перекоса вертолетного
винта, лопастям-лентам сообщаются крутильные колебания отно¬
сительно их продольных осей, синхронные с вращением ротора.
1ШШ
у
у
к
Рис. 112
Рис. ИЗ
267
Благодаря этому осуществляется управление вектором тяги и
положением оси вращения аппарата. Однако картина осложняется
тем, что в отличие от вертолетного винта, обладающего большой
изгибной жесткостью, пленочный солнечный парус испытывает
значительные деформации. Их учет необходим при составлении
алгоритмов управления парусом. Теоретическое исследование
некоторых видов деформационных колебаний роторного паруса,
в частности резонансных колебаний, возбуждаемых управлением,
позволили [2.69] установить равновесную форму ленты.
Перспективность роторных парусных конструкций отмечает
также Л.И. Каргу [2.64], описывая панельную парусную конструк¬
цию, выполненную из солнечных батарей, смонтированных в виде
ветряной мельницы (рис. 112, 113). В этом случае появляется
возможность использования солнечных батарей не только по
прямому энергетическому назначению, но и как приводов системы
стабилизации угловой скорости аппарата*). Световое давление в
этой жесткой конструкции используется для регулирования угло¬
вой скорости собственного вращения. Возможность создания
управляющего радиационного момента с помощью такой системы
малых парусов-отражающих панелей — демонстрируется на приме¬
ре следующего простого рассуждения. Пусть панели встречно раз¬
вернуты относительно плоскости xOz на угол а (см. рис. 112, 113).
Космический аппарат расположен в точке О. При отклонении пане¬
ли на угол а результирующая сила светового давления Р может
быть представлена в виде составляющих Р* и ?у, причем сила Р*
создает относительно оси Оу момент Му = РХ1, где / — расстояние
точки приложения С результирующей Р (центра давления) до
оси Оу. Так как панели развернуты на угол а встречно, а полный
момент закрутки, передаваемый космическому аппарату парой
панелей, будет равен 2Му, то для п пар панелей он будет равен
2пМу. Легко рассчитать, что
Рх - Р sina = Р0 sin a cos а,
Му = 2Рх nl = P0nlsin2ct,
где Ро - световое давление на панель, ориентированную нормаль¬
*) Солнечные батареи, используемые параллельно еще и в целях создания
управляющего радиационного момента, эффективны лишь на больших
высотах. Основным недостатком такой системы управления является то, что
эффективность солнечных батарей с энергетической точки зрения максималь¬
на только при их нормальной ориентации к набегающему световому потоку,
которая оказывается невыгодной с точки зрения парусного солнечного
управления. Например, если панели батарей развернуты встречно на угол
30° каждая, то энергетический эффект батарей снижается на 13 %.
268
но к солнечным лучам, расположенным в плоскости хОу. Сила Р0
направлена по нормали к панели при а = 0.
Известны другие различные конструкции паруса, предназначен¬
ные, например, для демпфирования колебаний с помощью сил
светового давления: в них корпус космического аппарата связан
не с солнечными батареями, а со вспомогательными парусами-
баллонами: давление света ориентирует баллон в пространстве
определенным образом. Недостатком такого рода систем, исполь¬
зующих солнечные батареи или специальные паруса-баллоны,
является потеря ими работоспособности в тени Земли. Поэтому
такие конструкции выгодно употреблять на возможно более
высоких орбитах. Вопросы управления положением космичес¬
кого аппарата с помощью малых солнечных парусов, дополнитель¬
но прикрепленных к солнечным батареям, мы находим в [2.70,
2.71]. Например, в [2.70] обсуждаются два возможных проекта
системы, каждый из которых имеет два ряда панелей солнечных
батарей и основной блок с тремя солнечными парусами.
Перейдем теперь ко второй важнейшей проблеме солнечного
паруса — проблеме обеспечения пассивной ориентации самого
паруса, т.е. к проблеме ориентации паруса нужным для выполнения
полета образом без применения специальных технических средств
(ориентацию с помощью этих средств, т.е., как правило, роторных
устройств, мы будем называть активной). Эта задача имеет при¬
кладной интерес главным образом для сплошных (круглых или
квадратных) парусов. Среди пассивных методов наибольшее
распространение получил комбинированный способ обеспечения
ориентации большого паруса с помощью нескольких или много¬
численных малых парусов — солнечных рулей. Этот метод успешно
соперничает с другими методами, использующими солнечные
стабилизаторы или другие жесткие управляющие устройства.
Парус
Рис. 114
269
Задача поддержания в космосе ориентации крупных пленочных
конструкций успешно исследована А.В. Лукьяновым (2.72—2.78].
Например, им был рассмотрен [2.74] круглый солнечный парус
(рис. 114), который вращается только под действием силы свето¬
вого давления с помощью наклоненных к солнечным лучам узких
пленочных лопастей-рулей, укрепленных радиально по периферии
паруса между двумя мягкими ободами, к которым они в свою
очередь прикрепляются с помощью коротких стержней. Лопасти
создают вращение, необходимое для устойчивости основного па¬
руса и натяжения пленки только за счет момента сил светового
давления. Здесь не требуется применения специальных активных
роторных устройств (типа применяемых для раскрутки паруса
’’Heliogyro” [1.64]), а для обеспечения вращения основного паруса
вспомогательные лопасти поворачиваются (по командам датчика
управляющих сигналов) и создают требуемые вращающие момен¬
ты только за счет сил светового давления. Именно эти вспомога¬
тельные паруса-лопасти обеспечивают требуемую ориентацию
круглого паруса по отношению к солнечным лучам.
Как правило, в современных конструкциях пленочных вра¬
щающихся или надувных концентраторов солнечной энергии связь
отражателя-паруса с приемником энергии — космическим аппара¬
том — осуществляется посредством жесткой оси с растяжками или
посредством иных жестких ферменных конструкций [2.79].
В конструкциях, предлагаемых в [2.72-2.78], связью отражателя
с аппаратом являются мягкие стропы, на которых этот аппарат
закреплен (см. рис. 114). Это позволяет таким конструкциям
служить одновременно и солнечными парусами, хотя такой сплош¬
ной парус не является плоским. Натяжение строп также возникает
под действием светового давления. Меняя длину строп по специаль¬
ной программе, удается управлять лопастями, создавать различные
раскручивающие и управляющие моменты, необходимые для
обеспечения вращения и поддержания требуемой ориентации
паруса.
Подобная система ориентации пассивного пленочного отражате¬
ля весьма эффективна на высоких круговых околоземных орбитах
(выше 12-часовых) при радиусе большого паруса около 100 м и
парусности около 200 см^/г. Такая схема своеобразного гелиоро¬
тора позволяет успешно производить одновременно также и кор¬
рекцию орбиты аппарата: появляющаяся сила тяги может не только
перевести отражатель с высоты около 1000 км над Землей на высо¬
ту геостационарной орбиты за 4 — 5 сут, но и осуществлять регу¬
лярную коррекцию орбиты, например во избежание ее ухода из
плоскости земного терминатора. Заманчивые перспективы возмож¬
ных применений крупномасштабных пленочных отражателей в
270
космосе, отмеченные А.В. Лукьяно¬
вым [2.72 -2.78|, поистине огром¬
ны. Они могут быть использованы
для облучения поверхности Земли
отраженным солнечным светом с це¬
лью освещения в ночное время, для
изменения климата и управления
погодными процессами. Они пер¬
спективны в качестве солнечных па¬
русов для межпланетных путешест¬
вий, для создания в космосе орби¬
тальных солнечных электростан¬
ций и т.п.
Ряд интересных конструктивных
решений, касающихся разработок
различных систем солнечных стаби¬
лизаторов, в том числе прямоуголь¬
ных, круглых, конических, пирами¬
дальных, мы находим в разное вре¬
мя в работах отечественных и иност¬
ранных ученых [2.80-2.89]. Напри¬
мер,на рис.115 [2.80] мы видим сол¬
нечный стабилизатор, состоящий из двух равноудаленных от центра
масс S аппарата плоских зеркал Рх и Р2, развернутых на разные углы
6i и 62относительнолучей.Властности,А.М.ЯншинымиС.М.Заблу-
дой [2.88] проведен сравнительный анализ различных форм солнеч¬
ных стабилизаторов и найдены оптимальные их формы из класса
тел вращения с произвольной гладкой образующей. При достаточно
общих предположениях относительно силовой схемы взаимодейст¬
вия потока радиации с поверхностью стабилизатора показано, что
оптимальными по форме оказываются стабилизаторы, выполнен¬
ные в виде прямых круговых конусов, причем критерием оптими¬
зации служит крутизна моментной характеристики. Однако с точки
зрения технологических и конструктивных особенностей иногда
может оказаться целесообразнее использование сферических
пленочных стабилизаторов - парусов, для которых осуществим
поддув на орбите.
Хотя эти разработки не обязательно относятся к парусной
задаче, многие из них могут быть использованы и для управления
ориентацией самих солнечных парусов. Так, Хибардом [2.81]
обсуждается конструкция, состоящая из штанги с отражающим
конусом, расположенным в фокусе параболического пленочного
паруса (рис. 116). Положение, когда ось симметрии направлена на
Солнце, оказывается наиболее устойчивым (солнечный балансир),
причем принцип работы восстанавливающего момента тот же, что
271
j I I I I
V
Mill
Штанга
К A
Рис. 116
Парус
Рис. 117
и на рис. 110. Параболическая форма пленки также достигается
только за счет действия светового давления: для этого приборный
отсек при помощи строп крепится к гибкому кольцевому шлан¬
гу, который создает в пленке требуемое поверхностное натяжение,
обеспечивающее ей параболическую форму. Принцип работы
системы состоит в идеальной фокусировке всех поверхностей,
причем от степени идеальности фокусировки зависят частоты
малых колебаний системы.
Упомянутый метод позволяет, однако, ориентировать парабо¬
лический парус только нормально к световому потоку и контро¬
лировать это единственное его рабочее положение. Это может
оказаться полезно для движения с цандеровским законом управ¬
ления парусом, обеспечивающим неизменную нормальную ориен¬
тацию паруса, однако для иных законов управления парусом
неприменимо. Кроме того, недостатком предлагаемого метода
оказалась опасность слишком большой плотности солнечной энер¬
гии, падающей на конус и способствующей его быстрому износу, а
также зависимость фокусного расстояния параболической отра¬
жающей пленки от натяжения этой пленки. Последний эффект
немаловажен еще и потому, что при межпланетных перелетах с
помощью солнечного паруса он означает зависимость величины
светового давления, а с ней и натяжения пленки от гелиоцентричес¬
кого расстояния аппарата. Вследствие этих технических особенно¬
стей проекта он в дальнейшем не получил развития и более в
литературе не освещался, надолго уступив место проектам малых
солнечных парусов, управляющих большими (о чем мы уже гово¬
рили выше).
Одним из первых был предложен пассивный метод осуществле¬
ния устойчивой ориентации паруса на Солнце с одновременной
272
стабилизацией его скорости вращения, основанный на использова¬
нии управляемых малых парусов-рулей [2.82]. Авторы проекта
предлагали установить на вращающемся солнечном парусе группу
уголковых отражателей или поглощающе-отражающих лопастей.
За счет давления света на лопасти возникает управляющий
момент, заставляющий ось вращения большого паруса прецесси-
ровать к направлению на Солнце (рис. 117). Для ориентации паруса
применяется две пары основных равномерно вращающихся пане¬
лей-лопастей, плоскости которых параллельны их осям вращения,
причем величина солнечного поглощения на одной стороне панели
выше, чем на обратной. Стабилизация и регулировка угловой
скорости вращения этих панелей обеспечивается за счет работы
дополнительных лопастей меньших размеров (на рис. 117 не
изображены), установленных под углом к оси вращения основных
панелей. Недостатком предлагаемого проекта оказывается слиш¬
ком большая площадь солнечных рулей. Например, для прецесси-
рования оси вращения главного паруса со скоростью 10 оборотов в
год при полной массе конструкции 103 кг и площади паруса 10s м2
(парусность 103 см2/г) при угловой скорости паруса 0,37 град/с
площадь рулевых панелей-лопастей должна составлять не менее
2- 103 м2. Кроме того, описанная система обеспечивает только нор¬
мальную ориентацию к световому потоку, что опять-таки сужает
область применения метода поддержания ориентации паруса в
космическом полете.
Идея использования поверхностей с различной отражающей
способностью уже обсуждалась нами в задачах коррекции орби¬
тального движения с помощью паруса в § 18. В задачах враща¬
тельного движения мы также часто встречаемся с предложениями,
относящимися к использованию отражающе-поглощающих
поверхностей в качестве элементов системы управления. А.П. Бли¬
новым [2.90,2.91] рассмотрена задача об оптимальной стабилиза¬
ции силами светового давления стационарного движения косми¬
ческого аппарата относительно центра масс, расположенного в
коллинеарной точке либрации системы трех тел Солнце - плане¬
та — космический аппарат (в точке относительного равновесия
сил тяготения и сил инерции). Для создания моментов сил свето¬
вого давления к космическому аппарату крепятся три штанги
(рис. 118), расположенные под углами 120°, на каждой из кото¬
рых смонтированы две управляемые лопасти: одна — абсолютно
черная, другая — зеркальная. Оптимальная схема управления
системой таких солнечных парусов [2.90, 2.91] с различными
коэффициентами отражения, примененная к задаче стабилизации
вращательного движения космического аппарата, интересна еще
и тем, что действующая на такую парусную систему результирую¬
273
ф
Рис. 118 Рис. 119
щая сила светового давления всегда остается коллинеарной
направлению светового потока. Именно это свойство результи¬
рующего выходящего светового потока означает, что здесь мы
встречаемся с разработкой еще одного типа парусной системы
(см. § 11), аналогичной по динамическим свойствам плоскому
парусу в нормальной ориентации или парусу-баллону, но значи¬
тельно более надежной в управлении. Такая парусная система
может оказаться перспективной и в роли маршевого движителя.
Еще раз возвращаясь к важной проблеме поддержания ориента¬
ции самого солнечного паруса (вариант плоского сплошного пару¬
са) в течение полета, следует указать, что принципиально новое
решение эта проблема получила в цикле работ В.И. Попова и
И.О. Янова [2.92 - 2.97]. Они подробно исследовали принципы
работы предлагавшихся ранее систем парусной ориентации и
провели сравнительный анализ управления ориентацией паруса с
помощью лопастей — солнечных рулей [2.85] и предлагаемого ими
метода управления ориентацией солнечного паруса, основанного
на смещении центра масс всей конструкции от плоскости паруса
посредством специальной штанги. Система ориентации с рулевым
солнечным управлением исследовалась в варианте плоского кресто¬
образного невращающегося паруса с четырьмя лопастями, снабжен¬
ными соответственно четырьмя дополнительными отражающими
лопастями-рулями, ориентированными под углами а, и а2 к плос¬
кости паруса. На рис. 119 [2.85] изображена проекция двух основ¬
ных лопастей с рулями. При изменении этих углов изменяется
угол ip ориентации паруса относительно светового потока. Считая
лопасти зеркально отражающими, можно воспользоваться условия¬
ми sin2 (р + <*1) cosc*! = sin2 (р — a2) cos a2 и определить собственную
274
частоту to малых колебаний около положения равновесия, характе¬
ризуемого выполнением этих условий. Решение задачи условного
экстремума функции со при выполнении указанных условий связи
углов позволило установить [2.95], что в оптимальном случае
изменение углов и а2 влечет за собой почти линейное
изменение угла р от 0 до 90°, причем собственная частота со колеба¬
ний системы меняется в 1,6 раза. Характер изменения со и углов
ориентации паруса и лопастей изображен на рис. 120 [2.95]. Таким
образом, система ориентации [2.85], аналитически исследованная
в [2.95], позволяет обеспечить ориентацию под любым углом к
световому потоку и с этой точки зрения имеет огромные преиму¬
щества перед многими системами, упомянутыми выше. В.И. Попов
и И.О. Янов [2.95] предложили систему, основанную только на
неидеальном отражении солнечных лучей от поверхности солнечно¬
го паруса и на смещении центра масс всей системы из плоскости
паруса при помощи штанги (рис. 121). В этом случае для измене¬
ния угла \р ориентации паруса к световому потоку от 10° до 90°
необходимо менять угол а наклона штанги к плоскости паруса
в пределах от 54° до 90°. Характер этой зависимости иллюстриру¬
ется графиком на рис. 122: собственная частота колебаний со систе¬
мы меняется лишь в 1,1 раза.
Заканчивая обсуждение проблем поддержания ориентации
огромных парусных конструкций, нельзя не упомянуть еще одну
идею Ф.А. Цандера, которая на практике уже неоднократно показа¬
ла свою жизнеспособность: идею нагрузки наружного края невра-
щающегося солнечного паруса "вложенной проволокой или утол¬
щением” [В. 11, с. 375]. Эту нагрузку невращающемуся парусу
следует создать для придания ему жесткости (за отсутствием
центробежных сил). Развитие этой цандеровской идеи мы находим
в виде различных конструктивных предложений. В качестве утол¬
щения может служить гибкий на¬
дувной шланг, покрытый вещест¬
вом (виниловым мономером), от¬
вердевающим (полимеризующим-
ся) в космосе [2.79], резиновые
кольца [2.72—2.78, 2.81] и т.д.
Напомним, что идея межпланет¬
ных перелетов с солнечным пару¬
сом предъявляет ко всем подоб¬
ным конструктивным особеннос¬
тям солнечного паруса еще и высо¬
кие термические требования.
Немаловажным фактором в
проблеме поддержания ориента-
275
ции солнечного паруса в полете является сила натяжения строп-кабе¬
лей, зависящая и от конструкции соединения паруса с полезным гру¬
зом, и от технологических параметров материалов, из которых вы¬
полнены удерживающие кабели. Аналитическое решение задачи о
напряжениях и растягивающих усилиях в стропах выполнено в рабо¬
те [1.90], где в качестве метода гашения соответствующих вредных
воздействий предлагается либо осуществление вращения солнечно¬
го паруса (рис. 123,а), либо монтаж дополнительного центрального
кабеля для поддержания первоначально сферической оболочки в
конфигурации, изображенной на рис. 123,6. Расчет предельных
напряжений на стропы выполнен здесь с применением теории
мембранных эффектов к конструкции солнечных парусов обшир¬
ных размеров. В модельных задачах предполагается, что длины
строп, в частности длину центрального кабеля, можно изменять
в полете, изменяя тем самым радиус кривизны паруса или отдель¬
ных его частей, а также изменяя расстояние полезного груза (или
кабины) от поверхности паруса. Обширную библиографию по
вопросу ориентации и управления космических аппаратов) снабжен¬
ных солнечными парусами-панелями, с помощью сил светового
давления мы находим также в обзоре [2.98].
276
Любительская группа при Пражской обсерватории и планетарии
предложила [2.99] проект бескаркасного паруса, стянутого попе¬
речным тросом длиной 200 м с грузами на концах. Ориентирован¬
ный по геоцентрическому радиусу-вектору, трос будет стабилизи¬
рован градиентом гравитации. По расчетам такой парус-парашют
будет пригоден для медленной перевозки космических грузов на
невысоких орбитах, например с высоты порядка 1000 км на высо¬
ту геостационарной орбиты при длительности полета порядка не¬
скольких месяцев.
Ряд особенностей влияния светового давления на режим ориен¬
тации и стабилизации космических аппаратов, снабженных солнеч¬
ными парусами или обширными отражающими панелями, осве¬
щается в книге Л.А. Васильева [2.100], а некоторые динамические
задачи, изложенные в книге В.В. Белецкого и А.М. Яншина [2.101 ],
могут быть использованы при исследовании влияния потока света
на вращательное движение тела в космическом пространстве. В
частности, это касается схем механического взаимодействия потока
с поверхностями космического аппарата при диффузном и диф¬
фузно-зеркальном отражениях. Вопросы ориентации солнечных
парусов при моделировании различных траекторных схем переле¬
тов затронуты в работах [2.102—2.105], из которых следует отме¬
тить [2.103], где получила дальнейшее развитие уже упомянутая
нами в § 18 идея построения космической станции, длительно
функционирующей в точке либрации при условии, что парусность
станции вообще не зависит от ее ориентации [2.37]. Это достигает¬
ся размещением станции внутри зеркального паруса-баллона, ра¬
диус которого можно изменять по заданной программе. В [2.103]
найдены две пары динамически эквивалентных положений отно¬
сительного равновесия корпуса пассивно гравитирующей станции,
расположенной в одной из треугольных точек либрации фотограви-
тационной задачи трех тел. Оказалось, что обнаруженные положе¬
ния относительного равновесия аппарата, заключенного внутрь
зеркального паруса-оболочки, а также и достаточные условия их
устойчивости существенно зависят от величины парусности стан¬
ции.
Заканчивая обсуждение вопроса о динамических проблемах,
возникающих в связи с ориентацией солнечных парусов в полете,
остановимся на проблеме поддержания ориентации лопастного сол¬
нечного паруса типа гелиоротора (см. § 12).
Солнечный парус типа гелиоротора не требует дополнительных
устройств для поддержания своей ориентации, и в этом его неос¬
поримое преимущество перед другими парусами. Выгодность такой
конструкции состоит в том, что первоначально намотанные на ка¬
тушки пластиковые ленты-лопасти развертываются и стабилизи¬
277
руются по форме вращением. Ориентация лопастей может изме¬
няться при затенении одной отражающей поверхности другой под
действием радиационных сил, а также при изменении угла накло¬
на лопастей относительно их продольных осей. Тогда силы и момен¬
ты радиационного давления можно регулировать с помощью распо¬
ложенного в центре паруса механизма.
Существует ряд факторов, приводящих к деформации лопастей
[2.106-2.112]. Для определения их точной формы необходим
подробный анализ динамики гибкой вращающейся лопасти, под¬
верженной действию гравитационных и радиационных сил. Имеют¬
ся три вида основных деформаций. Вертикальные, или маховые
отклонения образуют конус из лопастей и могут привести к обра¬
зованию прецессионных крутящих моментов. Плоскостные откло¬
нения приводят к возникновению горбообразных изгибов или к
закручиванию. Третий вид деформации — наклоны лопастей или их
перекручивание.
При каждом из этих трех видов деформации вращение является
основным способом обеспечения жесткости роторного паруса.
Жесткость при изгибах имеет существенное значение только в на¬
чальной стадии развертывания; для уже развернутых лопастей ее
можно не учитывать. Вместе с тем нельзя развивать слишком вы¬
сокую скорость вращения конструкции. Причиной этого является
сравнительно малая прочность парусных лопастей вместе с карка¬
сом, а также необходимость обеспечить надежную работу конст¬
рукции в течение длительного времени полета при наличии разру¬
шительного действия необходимо возникающих деформаций и
космических вредных воздействий на парус.
Нежелательными в такой конструкции оказываются также боль¬
шие углы конусности лопастей: конусность приводит к образова¬
нию устойчивых прецессионных крутящих моментов, воздействую¬
щих на космический аппарат. Кроме того, кривизна приводит к
возникновению механической связи между деформациями изгиба
и скручиванием.
Основной эффект изменения угла наклона лопасти заключается
в том, что он приводит к скручиванию лопасти по всей ее длине.
Если основание лопасти закреплено жестко, то около него угол
наклона в равен нулю, а к концу лопасти увеличивается по закону
[2.100]
в =4 P„lx/(a0bd),
где Рп — компонента давления, нормальная к поверхности, о0 —
напряжение, возникающее у основания лопасти при ее разверты¬
вании, 1,Ь и d - длина, ширина и толщина лопасти, х — смещение
центра давлений. Чтобы удерживать необходимый наклон лопас¬
278
тей, следует точно регулировать изгибные смещения центра давле¬
ния и центра масс. Лопасть будет также стремиться изогнуться
или скрутиться под действием перепадов температуры, причем
предотвратить скручивание вокруг продольной оси может только
жесткий каркас и распорки.
Что касается величины периода вращения паруса-гелиоротора,
то его оптимальное значение, установленное с учетом вышеописан¬
ных особенностей его поведения в полете, задается формулой
Т= nl\(p/2a0,
где р — плотность пленочного материала лопасти. Этот период
должен быть мал по сравнению со временем оборота аппарата даже
по геоцентрической орбите, не говоря уже о гелиоцентрических
орбитах. На геоцентрической орбите [2.100] близость значений
орбитального периода и периода роторного вращения может при¬
вести к возникновению нежелательных возмущающих сил, обус¬
ловленных градиентом гравитационных сил. Вращение роторного
солнечного паруса может быть использовано в космосе для реали¬
зации идеи К.Э. Циолковского о создании искусственной тяжести
за счет вращения протяженных космических конструкций. На¬
пример, как вычислено в [2.100], при радиусе лопасти 10 км
(напомним, что радиус паруса-гелиоротора в проекте [1.63—
1.76, 2.106—2.112] составляет 8 км) и для предельных напряже¬
ний у основания лопасти, равных 3 • 101 Н/м2, возникает искус¬
ственное гравитационное поле, создающее ускорение около 0,5^
при геоцентрическом орбитальном движении.
Если проект гелиоротора предполагает пересечение лопастей
в центре конструкции (см. рис. 43,44), то в проекте, исследо¬
ванном в [2.1001, предлагается парус-’’ромашка”, все лопасти
которого прикреплены к кольцу, которое, в свою очередь, при¬
крепляется к аппарату несколькими тросами, не связанными с от¬
ражающими лопастями. При этом радиус внутреннего кольца
оказывается переменным: изменение длины тросов позволяет
сдвигать парус относительно корпуса и изменять угол наклона
кольца и пленочных лопастей. Кольцо разделено на ряд сегментов,
каждый из которых закреплен на шарнирах и может вращаться.
Этим достигается возможность управления лопастями и поддержа¬
ния требуемой ориентации солнечного паруса в полете. В центре
каждого сегмента расположен электрический двигатель, обеспе¬
чивающий управление наклоном лопасти. Для устойчивости лопас¬
тей всему аппарату с помощью реактивных двигателей малой
тяги придается вращательное движение вокруг оси, перпендику¬
лярной плоскости кольца. После того как требуемое вращение
обеспечено, лопасти устанавливаются под необходимым углом и
создают дополнительный момент закручивания, ведущий к увели-
279
чению угловой скорости. Одновременно происходит дальнейшая
раскрутка лопастей из бобин (вытравливание) под действием
центробежных сил. Общее время развертывания конструкции
в рабочее полетное положение для паруса-”ромашки”, так же
как и для проекта гелиоротора, составляет несколько дней.
§ 20. Солнечный парус в околосолнечном пространстве
Полеты к внутренним планетам — Венере, Меркурию — или не¬
посредственно в околосолнечные области пространства выгодны
с точки зрения эффективности применения солнечного паруса
вследствие увеличения потока фотонов. Однако такие полеты
неизбежно будут лимитироваться способностью солнечного паруса
выдерживать высокие температуры облучения при сохранении
равновесного температурного режима всего космического аппара¬
та. Это требование, существенное именно для полетов к Солнцу,
присоединяется к неизменным требованиям, предъявляемым к
солнечному парусу в любом космическом полете: парус должен
обеспечивать хорошие оптические свойства, в первую очередь высо¬
коотражательные, должен быть достаточно прочным, чтобы выдер¬
живать нагрузки, возникающие в процессе вращения, иметь малую
массу на единицу площади и быть устойчивым к действию факто¬
ров космического пространства - глубокому вакууму, коротко¬
волновой радиации и корпускулярному излучению. Износ паруса
за счет этих факторов должен не превышать предела, обеспечи¬
вающего функционирование солнечного паруса по крайней мере в
течение нескольких лег. Ультрафиолетовое излучение неизбежно
будет приводить к ухудшению механических свойств синтетичес¬
кой пленки, особенно при высоком уровне напряжения материа¬
ла паруса. И корпускулярное, и ультрафиолетовое излучения
Солнца будут распылять алюминизированный ’’рабочий” слой
паруса, вызывая эрозию его поверхности, а действие микрометеор-
ных потоков неизбежно приведет к появлению отверстий в плен¬
ке и к микроэрозии поверхности, т.е. к изменению (уменьшению)
эффективной площади паруса. Математическое моделирование
таких процессов мы уже проводили в § 11.
Ультрафиолетовое излучение приводит к уменьшению среднего
по спектру черного тела коэффициента отражения материала па¬
руса, его действие сказывается не только на величине интеграль¬
ного коэффициента отражения, но и на распределении величины
коэффициента отражения по длинам волн. Таким образом, влияние
этого космического фактора различно для разных парусных мате¬
риалов и для различных диапазонов длин волн. Зеркальные отра¬
жающие поверхности изменяют свой коэффициент отражения на
280
0,1—0,2 при дозе облучения около 1015 электрон/см2. Аналогично
действует и протонное облучение солнечного паруса потоком
’’солнечного ветра”, изменяя коэффициент отражения примерно
на 0,1 - 0,2 при дозе облучения 2 ■ 1015 протон/см2 [2.100]. При
этом оказывается существенным и угол падения протонов (угол
установки солнечного паруса): для алюминизированной поверх¬
ности влияние протонного облучения тем больше, чем больше
угол падения (для других материалов это не всегда выполняется),
причем существенно возрастает доля диффузной составляющей
коэффициента отражения света от алюминизированной поверх¬
ности. Существенные изменения коэффициента отражения в этом
случае не зависят от температуры поверхности: они возрастают
как с уменьшением, так и с увеличением температуры материала
[2.113-2.116].
Весьма отличным от действия ультрафиолетового или корпус¬
кулярного излучения является влияние микрометеорных потоков.
В этом случае происходит более глубокое нарушение парусной
поверхности: на ней появляются кратеры, размер и форма которых
зависят от массы и скорости налетевшей частицы. Так как в реаль¬
ных космических условиях площадь таких кратеров мала по срав¬
нению со всей поверхностью паруса, можно принять, что изменение
коэффициента отражения солнечного паруса пропорционально
суммарной площади поврежденных участков его поверхности.
Таким образом, большинство парусных материалов необходимо
будет менять свои оптические свойства во время полета. Поэтому,
проектируя солнечные паруса, характеристики которых зависят
от оптических свойств парусного материала, необходимо не только
учитывать изменение этих свойств в космосе, но и подбирать (и
создавать) материалы, устойчивые к вышеописанным космичес¬
ким факторам и слабо меняющие свои физические характеристи¬
ки [2.116].
Интенсивность указанных космических факторов возрастает
по мере приближения к Солнцу, поэтому весьма сложным делом
становится моделирование таких условий в наземных лаборатор¬
ных установках. В связи с этим становится актуальным использо¬
вание солнечных парусов для экспериментальных полетов с целью
исследования поведения пробных образцов пленочных материалов
непосредственно в космосе, т.е. появляется новый аспект практи¬
ческого использования парусных геоцентрических и гелиоцентри¬
ческих полетов — предварительная отработка и исследование по¬
ведения физических характеристик парусов в реальных условиях
околосолнечного пространства, поиски оптимального парусного
материала. Одновременно такие пробные полеты позволят именно
с помощью солнечного паруса исследовать распределение межпла¬
281
нетного пылевого вещества, микрометеорных тел и другие явле¬
ния. Такой парус-лаборатория может быть без помехи для ма¬
териала паруса, находящегося под контролем датчиков, использо¬
ван в качестве мишени для оптических и радиолокационных наб¬
людений, а также в качестве дипольной и многоэлементной антен¬
ны для связи на низких частотах. Существуют проекты использо¬
вания большого количества отраженного от паруса солнечного
света при соответствующей ориентации его поверхности для осве¬
щения ночной стороны Земли и планет. Таким образом, запуск
пробных парусов для отработки образцов пленки может быть
разумно использован для параллельного проведения полезных
космических экспериментов [2.113,2.115].
Запуск пробных парусов будет полезен также и с точки зрения
отработки системы развертывания парусов-лопастей в конструк¬
циях роторных парусов. При этом такую отработку технических
устройств раскрутки лопастей из бобин можно удачно сочетать,
например, с одновременным проведением научного эксперимента,
связанного с перехватом космического вещества. Например, мож¬
но осуществить эксперимент, описанный в [2.100] и предназна¬
ченный для измерения скоростей потоков микрометеорных частиц
с помощью лопастей роторного паруса. Общая идея эксперимента
заключается в том, что в течение определенного времени лопасти
подвергаются воздействию потока микрометеорных тел, а затем
при сматывании лопастей происходит одновременное их сканиро¬
вание с помощью фотоэлектрических устройств, позволяющее
зафиксировать и подсчитать количество отверстий различных раз¬
меров в пленочной лопасти. Затем лопасти развертываются снова
и в последующий промежуток времени получают еще серию про¬
бойных отверстий. Вследствие малой толщины пленки фиксиро¬
ваться будет размер частиц, а не их масса. Так как суммарная пло¬
щадь лопастей роторного паруса велика, статистическое распреде¬
ление размеров частиц можно будет установить с высокой степенью
точности. Периодически свертывая и развертывая лопасти можно,
таким образом, не только надежно отработать двигательные ме¬
ханизмы раскрутки парусов-лопастей, но и получить полезную
научную информацию о распределении микрометеорного вещества
межпланетного и околосолнечного пространства по размерам в
зависимости от расстояния до Солнца. Информация, собранная
при измерении отверстий в пленке, будет одновременно исполь¬
зоваться для расчета распределения проникающей способности
частиц в эластичный парусный материал. А эти данные одновре¬
менно очень важны для прогнозирования минимального веса
парусной конструкции на основе критического значения толщины
пленки.
282
Все эти факторы должны быть приняты во внимание при проек¬
тировании полетов в околосолнечное пространство. Достижение
этих областей с помощью солнечного паруса весьма заманчиво
с двух точек зрения. Во-первых, с помощью ’’подзарядки” солнеч¬
ной энергией на близком гелиоцентрическом расстоянии аппарат
может осуществить разгон до высоких скоростей, обеспечивающих
выход на межзвездную траекторию [1.63—1.76]. Во-вторых, с по¬
мощью паруса, выдерживающего высокие температуры, мож¬
но произвести интереснейшие научные исследования самого
Солнца и солнечной короны. Обсудим вкратце обе эти пер¬
спективы.
В процессе разработки проекта выхода на межзвездную траекто¬
рию с помощью разгона вблизи Солнца при использовании солнечно¬
го паруса его авторы [1.63—1.76,2.106—2.112] сравнивают физичес¬
кие параметры и предельные температуры разогрева двух базовых
моделей солнечных парусов. Один вариант, упомянутый нами
в § 12, был предложен в работах [1.87-1.89] и [2.52]: тончай¬
шая однослойная алюминизированная пленка (толщина 30 нм),
напыленная в космосе. В качестве альтернативы этому варианту
однослойного паруса авторы проекта межзвездного перелета
предлагают двухслойный парус, основой которого служит перс¬
пективный композитный материал борон (уд. вес 2,34, точка
кипения 2300°С). Второй, высокоотражающий, слой выполнен
из бериллия также путем напыления в космосе (уд. вес 1,85,
точка кипения 1278°С). Толщина такого двухслойного паруса
30 нм. Достижимый коэффициент отражения 0,9, коэффициент
эмиссии через темную оборотную сторону 0,5 (за счет прозрач¬
ности), предельная температура 1500 К (в варианте передачи
тепла балластному устройству). Этот весьма эффективный парус
выдерживает удельную нагрузку 6 • 10~6 г/cw2, что соответст¬
вует высокой парусности 3 • 10s см2/г и обеспечивает на орбите
Земли ускорение 27 см/с2, тогда как однослойный парус дает
парусность 104 см2/г и ускорение 1 см/с2.
При маневре разгона вблизи перигелия предельная температура
солнечного паруса становится важнейшим динамическим факто¬
ром. В [1.64—1.66] эту температуру в кельвинах предлагается
вычислять по формуле
-[
217(1 -е)
1/4
К,
где е - коэффициент отражения, а - коэффициент эмиссии, -
перигелийное расстояние (а.е.). Ниже даны предельные рабочие
температуры паруса для коэффициента отражения е = 0,9 при раз-
283
личных о и гп:
о 0,9
0,9
0,5
0,5
0,9
0,9
г„ 0,030
0,031
0,040
0,041
0,041
0,042
Т. К 1023
1023
1026
1026
886
886
Таким образом, прозрачность боронового паруса с бериллиевым
отражающим напыленным слоем сильно влияет на рабочую тем¬
пературу паруса на заданном расстоянии от Солнца. Действительно,
коэффициент отражения вычисляется по формуле
е = €а(еа + aaf' =еа(1 -та)'\
где еа’ — коэффициент отражения падающих фотонов, усредненный
по всем длинам волн, аа - коэффициент прозрачности (пропуска¬
ния) для падающих фотонов, тс — коэффициент поглощения па¬
дающих фотонов. Связь этих коэффициентов пленки устанавли¬
вается формулой
+аа +та = 1,
откуда следует, что 1 — та - еа + аа —долясвета,задерживаемого
парусом. Все эти коэффициенты должны быть определены экспе¬
риментально в лабораторных условиях. Темная сторона паруса
вследствие прозрачности пленки обладает отличным от нуля коэф¬
фициентом эмиссии:
0 = 0 -те)0 -е<?)0 - Те €еУ1 ■
Здесь е, и ге - коэффициенты отражения и прозрачности для пе-
реизлученного пленкой света, причем снова ее + ае + те = 1,где
ае — коэффициент поглощения переизлученного света. Приведенная
выше формула для расчета температурного режима относится
к непрозрачному парусу; в случае прозрачного в ней вводятся
поправки на интенсивность ультрафиолетового и инфракрасного
излучений на заданном расстоянии от Солнца и на реакцию пле¬
ночного материала.
В зависимости от материала и физических параметров паруса
и от толщины пленки авторы проекта [1.64—1.66] приводят зна¬
чения предельных критических перигелийных расстояний, обес¬
печивающих выход на траекторию перелета к звезде а Центавра
(табл. 10).
Итак, двухслойный парус оказывается вследствие своих физи¬
ческих параметров гораздо более оперативным в смысле мини¬
мально допустимого приближения к Солнцу, а следовательно,
и в смысле скорости покидания Солнечной системы. Его приме¬
нение, как впрочем и любого солнечного паруса, эффективно глав¬
ным образом во время маневра приближения к Солнцу (например,
с использованием гравитационных полей планет) и во время ухода
284
Таблица 10
Материал
пленки
Толщина, нм
Эмиссия
Поглощение
'"крит* а е
30
0,10
0,07
0,045
А1
10
0,21
0,08
0,033
5
0,36
0,07'
0,025
30
0,44
0,43
0,019
Be
10
0,47
0,30
0,016
5
0,15
0,08
0,014
от Солнца для выхода на межзвездную траекторию, тогда как
при приближении к звезде под действием ее тяготения с целью
гашения скорости и входа в сферу тяготения предполагается при¬
менение электростатического торможения в потоке ионов меж¬
звездной среды. Заметим, что при расчете термического режима
солнечного паруса при сближении с Солнцем (см. табл. 10), даю¬
щем среднее значение критической температуры около 1000 К,
учитывается, что приборный отсек надежно заэкранирован, а
тросы, поддерживающие парус, выполнены из меди (плотность
8,5 • 103 кг/м3, коэффициент растяжения 3,7 • 1010 Н/м2) или из
материалов с параметрами того же порядка. Таким образом,
попытка авторов проекта [1.63—1.76, 2.106—2.112] отойти от
модели некоторого идеального солнечного паруса и рассмотреть
свойства реально существующих или запланированных к произ¬
водству в ближайшее время парусных материалов увенчалась
успехом и привела к разработке конструктивной и обоснованной
технологически теории реальных полупрозрачных парусных ма¬
териалов.
При обсуждении проектов космических путешествий авторы
предлагают повысить эффективность сложной парусной конструк¬
ции введением дополнительных парусов перфорированного типа,
т.е. парусов, использующих не сплошную пленку, а сверхтонкую
металлическую сетку или суспензию сферических частиц толщиной
в монослой в пластике. Хотя отражательная способность перфо¬
рированного паруса по отношению к солнечным лучам невелика,
однако во время длительного космического перелета он может
служить коллектором энергии двигательной установки, исполь¬
зующей межпланетную или межзвездную плазму в качестве рабо¬
чего тела (солнечно-электрический прямоточный двигатель).
Использование перфорированного паруса [1.64—1.66] позволит
разогнать космический аппарат до скорости, большей 0,001 скорос¬
ти света на расстоянии в несколько сотен астрономических единиц.
Концепцию светового паруса, изготовленного из нитей карбида
285
кремния и движущегося под действием реактивной энергии сильно
коллимированного луча микроволн, мы находим в [2.118], где
обсуждается перелет к звезде Барнарда за 60 лет. Другой, не менее
захватывающий проект межзвездного перелета с использованием
световых парусов описан в [2.117]. Здесь обсуждается движение
светового паруса под действием лазерного излучения, фокусируе¬
мого на межзвездное расстояние с помощью линз Френеля диа¬
метром 1000 км. Такой парус диаметром 3,6 км сможет доставить
1 т груза к звезде а Центавра за 40 лет при толщине алюминизи¬
рованной пленки 1,6 нм и рабочей температуре до 600 К. Перфо¬
рированный парус в варианте металлической сетки может также
иметь вполне реальные преимущества над сплошным при развер¬
тывании в земной атмосфере. Таким образом, развитие косми¬
ческой техники неизбежно расширяет область применимости
солнечных и световых парусов в разработке различных двига¬
тельных систем (см. § 12).
Вторым и, по-видимому, гораздо более важным и актуальным
в ближайшие десятилетия аспектом эффективного использования
полетов КА с солнечным парусом станет изучение физики Солнца
и околосолнечных областей пространства. Особенный интерес
представляет исследование полярных областей Солнца, так как
весьма заманчивым делается применение ’’даровой” энергии сол¬
нечных лучей для осуществления маневра выхода космического
аппарата из плоскости эклиптики, тогда как достижение этих
областей с помощью импульсных траекторий оказывается весьма
трудоемкой в энергетическом отношении задачей.
Электромагнитный спектр Солнца охватывает весь интервал
длин волн (см. Введение), причем излучение разных длин волн
оказывает различное действие на встречные тела. Длинноволновое
излучение приводит к нагреву тел, а ультрафиолетовое, и особенно
рентгеновское излучение, приводит к ионизации атомных частиц
и к выбиванию частиц с поверхности солнечного паруса. Вследст¬
вие этого, как уже указывалось выше, будут изменяться оптичес¬
кие свойства поверхности — коэффициент отражения и индикат¬
риса рассеяния.
Космический полет с парусной тягой к близким околосолнеч¬
ным областям даст ценные сведения для понимания природы наи¬
более важного небесного тела в нашей Солнечной системе и приро¬
ды звездных явлений вообще, поскольку Солнце представляет
собой желтую звезду средней величины. Научное значение зонди¬
рования околосолнечных областей пространства невозможно
оценить даже приблизительно.
266
СПИСОК ЛИТЕРАТУРЫ
К введению ( § 1—4)
В. 1. Keplerl. De Cometis. -Opera omnia. V.7/Ed. Frisch.-Francoforti am/M.,
1867.
B. 2. Maxwell J.C. Treatise on electricity and magnetism. V. 2. - Oxford, 1873.
B. 3. Лебедев П.Н. Собрание сочинений. — М.: Изд-во АН СССР, 1963.
В. 4. Вавилов С.И. Глаз и Солнце. - М.: Наука, 1981.
В. 5. Энгельс Ф. Диалектика природы. - М.: Госполитиэдат, 1950.
В, 6. Перельман Я.М. Межпланетные путешествия: Полеты в мировое
пространство и достижение небесных светил. - 1-е изд. - Петроград,
1915 (или 4-е изд. - Ленинград, 1923).
В. 7. Циолковский К.Э. Космический корабль (1924 г.) - В кн.: Циолков¬
ский К.Э. Исследование мировых пространств реактивными прибора¬
ми. - М.: Машиностроение, 1967., 113 - 125 (или Собранение сочине¬
ний. - М.: Изд-во АН СССР, 1954,154 - 178).
В. 8. Цандер Ф.А. Перелеты на другие планеты (статья первая). - В кн.:
Цандер Ф.А. Проблема. полета при помощи реактивных аппаратов:
Межпланетные полеты. - 2-е изд. - М.: Оборонгиз, 1961, 267 - 270.
В. 9. Цандер Ф.А. Перелеты на другие планеты (статья вторая). - Там же,
271 - 279.
В.10. Цандер Ф.А. Полеты на другие планеты (Теория межпланетных путе¬
шествий) . - Там же, 285 - 360.
В.11. Цандер Ф.А. Об использовании силы давления света для полетов в
межпланетном пространстве. - Там же, 361 - 381.
В.12. А.Ф. Цандер и современная космонавтика/Под ред. акад. В.П. Миши¬
на. — М.: Наука, 1976.
В.13. Мишин В.П. О роли Ф.А. Цандера в развитии современной ракетно-кос¬
мической техники. — В кн.: Исследования по истории и теории разви¬
тия авиационной и ракетно-космической науки и техники. - М.:
Наука, 1981,69 - 76.
В. 14. Рукописные материалы Ф.А. Цандера в Архиве АН СССР. Научное
описание/Под ред. акад. В.П. Мишина. - М.: Наука, 1980.
В.15. Тихонравов М.К. Пути использования лучистой энергии для космичес¬
кого полета. — В кн.: Реактивное движение, № 2. - М.; J1.: ОНТИ, 1936.
В.16. Левантовский В.И. Механика космического полета в элементарном
изложении. - 3-е изд. - М.: Наука, 1980.
В.17. Белецкий В.В. Очерки о движении космических тел. - 2-е изд. - М.:
Наука, 1977. Изд. 3. М.: Издательство ЛКИ/URSS, 2009.
В.18. Никольсон Н. Тяготение, черные дыры и Вселенная: Пер. с англ./Под
ред. Н.В. Мицкевича. - М.: Мир, 1983.
В.19. Радзиевский В.В. Световое давление в Солнечной системе. - Земля и
Вселенная, 1966, №3,51 - 57.
В.20. Брандт Д. Солнечный ветер: Пер. с англ. - М.: Мир, 1973.
287
В.21. Справочное руководство по небесной механике и астродинамике/Под
ред. Г.Н. Дубошина. - 2-с изд. - М.: Наука, 1976.
В.22. Поляхова Е.Н. Возмущающее влияние светового давления Солнца на
движение ИСЗ. -- В кн.: Движение искусственных спутников Земли:
Итоги науки и техники. Сер.: Исследование космического простран¬
ства. - М.: ВИНИТИ, 1980,т. 15, 82 - 113.
В.23. Карымов А.А. Определение сил и моментов светового давления, дейст¬
вующих на тело в космическом пространстве. - ПММ, 1962, т. 26,
№ 5,867 - 876.
В.24. Гродзовский Г.Л., Иванов Ю.Н., Токарев В.В. Механика космического
полета: Проблемы оптимизации. - М.: Наука, 1975.
В.25. Georgevic R.M. The solar radiation pressure force and torques model. -
J. Astronaut. Sci., 1973, v. 20, № 5, 257 - 274.
К части I( § 5 — 12)
1.1. Поляхова Е.Н. Роль эффектов солнечной радиации в теории гелиоцен¬
трических движений пылевых частиц. - В кн.: Астрометрия и небесная
механика. - Сер.: Проблемы исследования Вселенной. Вып. 7.-М.; Д.:
ВАГО, 1978,295 - 307.
1.2. Bums J.A., Lamy P.L., Soter S. Radiation forces on small particles in the
solar system. - Icarus, 1979, v. 40, №1,1 - 48.
1.3. Белецкий B.B., Егоров В.А. Разгон космического аппарата в сфере
действия планеты. - Космич. исслед., 1964, т. 2, № 3, 392 - 407.
1.4. Ehricke К. The solar powered space ship. - ARS Paper, 1956, №310,
56 - 70.
1.5. Ehricke K. On the application of solar power in space flight. - 7 Int. Astro¬
naut. Congr., Rome, 1956, 195 - 214.
1.6. Ehricke K. Instrumented comets — astronautics of solar and planetary pro¬
bes. - 8 Int. Astronaut. Congr., Barcelona, 1957, 286 - 295.
1.7. Эрике К. Космический полет: Пер. с англ. Т. 11, ч. II. — М.: Наука, 1970.
1.8. Forbes G.F. The trajectory of a powered rocket in space. - J. Brit, lnterpl.
Soc., 1950, v. 9,№ 2, 75 - 79.
1.9. Garwin R.I.. Solar sailing - a practical method of propulsion within the solar
system. - Jet Propulsion, 1958, № 2, 188 - 190.
1.10.-Sanders Russell Clipper ships of space. - Astrounding Science fiction,
1951, №5, 135.
1.11. Bacon R.H. Logarithmic spiral - an ideal trajectory for the interplanetary
vehicle. - Amer. J. Phys., 1959, v. 27, № 3, 12 - 18.
1.12. Powell B. Solar sail - key to interplanetary voyaging? - Spaceflight, 1959,
v. 30, № 2, 198 - 200.
1.13. Tsu T.S. Interplanetary travel by solar sail. - ARS J., 1959, v. 29, №6,
422-427. (Рус. пер. Uy T.C. Межпланетный полет с помощью солнеч¬
ного паруса. - Механика: Сб. переводов, № 1.-М.: 1961, 3 - 15.)
1.14. Tsu T.S. Straight-line flight to Mars. - Advances Astronaut. Sci., 1961, v. 6,
№4,49 - 56.
1.15. Тангей A.P. Маневры в космосе. - В кн.: Космические траектории. -
М.: ИЛ, 1963, 120 - 162.
1.16. Hock D.C., McMillan F.N., Tanguay A.R. Cosmic ships with photon
thrust. - Proc. IRL, 1960, v. 48, № 4, 492 - 496. (Рус. пер.: Хок Д.,
Макмиллан Ф , Тэнгей А. Космические корабли с фотонным двигате¬
лем. - В кн.: Использование солнечной энергии при космических
исследованиях. - М.: Мир, 1964,402 - 413.)
288
1.17-London H.S. Some exact solution of the equation of motion of a solar sail
with constant sail setting. - ARS J., 1960, v. 30, №2, 198 - 200. (Pyc.
пер.: Лондон Г.С. Некоторые точные решения уравнений движения
космического корабля с солнечным парусом при постоянном угле
установки паруса. - В кн.: Механика: Сб. переводов, № 1. -М.: 1962,
55 -61.)
1.18. Pozzi A., Socio /,. Some remarks on solar sail. - ARS J., 1961, v. 31, № 8,
16 - 28.
1.19. Socio L. La navigazione con vela solare. - Missili, 1961, t. 3, № 3, p. 5 - 11.
(Рус. пер.: Сочо Л. Плавание под солнечным парусом. - Вопросы
ракетной техники: Сб. переводов, № 10.-М.: ИЛ, 1962, 38 - 44.)
1.20. Pozzi A. Su un mctodo di soluzionne del problema della vela solare. - Missili,
1961, t. 3, № 6, 1 - 12.
\.2\.Jahsman W.E. Mass consideration in ring supported by solar sail.- ARS J.,
1960, v. 30, №3,287 - 288.
1.22. Rowell L.N. A method for determining initial condition for solar sailing. -
J. Astronaut. Sci., 1964, v. 10, № 1, 20 - 25.
1.23. Kiefer J. W. Feasibility considerations for a sail pOwered multi-mission solar
probe. - Proc. 15 Int. Astronaut. Congr., 1964, Warszava, v. I, Paris, 1965,
383 - 416.
1.24.Edwards D.K. Radiation stresses on real surfaces. - AIAA J., 1965, v. 5,
№3, 1 - 7.
1.25.Naumann H.D. Strahlungsdruck und Raumflugtechnik. - Astron. und
Raumfahrt, 1967, №3,68 - 74.
1.26.Matsuo Hiroki. Orbital characteristic of solar sail. - J. Jap. Soc. Astronaut,
and Space Sci., 1973, №2, 21 -26.
1.27.Маланин В.В., Мителъман С.Е. К движению аппарата с солнечным пару¬
сом в центральном гравитационном поле. - Учен. зап. Перм. ун-та,
1971, № 239, 263 - 273.
1.28. Гриневицкая Л.К., Ноляхова Е.Н. Развитие идей Ф.А.Цандера о полете
аппарата с солнечным парусом в современной динамике космического
полета. — В кн.: Тр. 3-х Чтений, посвящ. разраб. науч. наследия и разви¬
тию идей Ф.А. Цандера. Секция ’’Астродинамика”. -М., 1975,
37 -44.
1.29.Гриневицкая Л.К., Поляхова Е.Н. Космический полет с солнечным па¬
русом: приоритет Ф.А.Цандера и современное состояние проблемы. -
В кн.: Тр. 6-х Чтений, посвящ. разраб. науч. наследия и развитию идей
Ф.А.Цандера. Секция ’’Исследование научного творчества Ф.А.Цанде¬
ра”. М., 1981, 27 - 35.
1.30.Меркулов. И.И. Уравнения движения космического аппарата с солнеч¬
ным парусом. - В ки.: Тр. 10-х Чтений, посвящ. разраб. науч. наследия
и развитию идей К.Э.Циолковского. Секция ’’Проблемы ракетной и
космической техники”. М., 1975, 141 - 149.
\.Ъ\. Меркулов И.А. К сравнительной оценке эффективности солнечного
паруса и ионного двигателя. - В кн.: Тр. 2-х Чтений, посвящ. разраб.
науч. наследия и развитию идей Ф.А.Цандера. Секция ’’Теория и кон¬
струкция двигателей”. - М., 1974, 46 — 54.
1.32.Меркулов И.А., Хоромский И.А. Влияние параметров экрана на оцен¬
ку эффективности солнечного паруса. - В кн.: Тр. 2-х Чтений, посвящ.
разраб. науч. наследия и развитию идей Ф.А.Цандера. Секция ’’Теория и
конструкция двигателей”. - М.. 1974, 55 - 63. См. также: Ф.А.Цавдер
и современная космонавтика. - М.: Наука, 1976, 100 — 105.
1.33.Кирпичников С.Н. Энергетически оптимальные полеты с учетом влия¬
ния светового давления. - Вестн- ЛГУ, 1965, № 7, 144 - 156.
289
1.34.A'e//cr H.J. Gradient theory of optimal flight path. - ARS J., 1960, v. 30,
№10' 59 - 64.
1.35. Cavotti G.R. Numerical solutions of the astronomical problem for optimum
solar sail transfer. - General Llectric Co. Rap., 1962, № 2627 - 62, 13 - 18.
1.36.Жуков A.H.. Лебедев B.H. Вариационная задача о перелете между ге¬
лиоцентрическими круговыми орбитами с помощью солнечного па¬
руса. - Космич. исслед., 1964, т. 2, № 1, 46 - 50.
1.37 Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
Математическая теория оптимальных процессов. - М.: Физматгиз,
1961.
1.38.Jayaraman T.S. Time-optimal orbit transfer trajectory for solar sail space¬
craft. - J. Guidance and Contr., 1980, v. 3, №6, 536 - 542.
1.39.Валеев К.Г. Качественные исследования дифференциальных уравнений
полета при помощи солнечного паруса. - Прикл. математика й техн.
физика, 1964, № 2, 120 - 129.
\А0.Нарожный И.И. Применение комбинации градиентного метода и урав¬
нений Эйлера для оптимизации траекторий аппаратов малой тяги. -
Весгн. ЛГУ, 1972, № 1, 116 - 123.
УАЗ.Левантовский В.И. Под солнечным парусом в космосе. - Авиация и
космонавтика, 1962, № 11,26 — 31
У.42. Зильманович Д.Я. Солнечный парус - идея Цандера. - Природа. 1966,
№8, 100 - 105.
I АЗ.Поляков Г.Г. Обратные задачи при движении космического парусника
с переменной площадью солнечного паруса. - В кн.: Тр. 4-х Чтений,
посвящ. разраб науч. наследия и развитию идей Ф.А.Цандера. Секция
’’Астродинамика”. - М., 1978, 102 - 110.
1.44.Sauer C.G. Optimum solar sail interplanetary trajectories. - AIAA Pap.,
1976, № 792,1 - 8. (Сокр. рус. пер.: Cayep К. Оптимальные межпла¬
нетные траектории движения с солнечным парусом. - Экспресс-инфор¬
мация: Астронавтика и ракетодинамика. - М.: ВИНИТИ, 1977, № 27,
1-8.)
1.45.Коган А.Ю., Котин В.А. Об оптимальных траекториях аппарата е сол¬
нечным парусом. - В кн.: Тр. Объед. науч. Чтений, посвящ. памяти
выдающихся сов. ученых - пионеров освоения космич. пространства.
Москва, 1979. Секция ’’Прикл. небесная механика и управление дви¬
жением". - М., 1979, 173 - 181.
1.46. Wesselitig P. A two-variable asymptotic solution for three-dimensional solar
powered low-thrust trajectories in the vicinity of the ecliptic plane. -
Astronaut, acta, 1967, v. 1 3, № 4, 431 - 440.
1.47. Van dcr Ha J.C., Modi V.J. Long-term evaluation of three-dimensional
heliocentric solar sail trajectories with arbitrary fixed sail setting. - C’elest,
Mech., 1979, v. 19, №2, 113-138.
1.48. Van der Ha J.C., Modi V.J. On the maximisation of orbital momentum and
energy usins solar radiation pressure. - J. Astronaut. Sci., 1979, v. 17, № 1.
63 - 84.
1.49. Wilson A. A history of balloon satellites. - J. Brit. Int. Soc., 1981, v. 34,
№ 1, 10 - 22.
1.50. Федоров Ю.А. Под солнечным парусом. - Техника - молодежи, 1969,
№ 8, 18.
1.51./гуль П. Планета обезьян: Пер. с фр. - М.: Молодая гвардия, 1967.
т. 13. - (Библиотека современной фантастики).
1.52.Маланин В.В., Мительман С.Е., Репьях А.В., Репьях Н.А. Некоторые
случаи движения аппарата под действием светового давления. - Учен,
зап. Перм. ун-та, 1971, № 262, 30 - 37.
290
1.53.Маланин В.В., Репьях А.В. К движению аппарата с двумя солнечными
парусами. - В кн.: Проблемы механики управляемого движения. -
Пермь, 1974, № 5, 99 - 108.
1.54.Маланин В.В., Репьях А.В. Вращательное движение аппарата с двумя
солнечными парусами. - В кн.: Сб. науч. тр. Перм. политехи, ин-та,
1975, № 170, 107 - 112.
1.55.Скопцов А.П. Вариационная задача о выходе космического аппарата
с солнечным парусом из сферы притяжения Земли. - В кн.: Проблемы
механики управляемого движения. - Пермь, 1971, № 1, 216 - 234.
1.56.Л/ельк.ул*ов Т.М. Основные идеи Ф.А.Цандера в области ракетных дви¬
гателей. — В кн.: Ф.А.Цандер и современная космонавтика. - М.:
Наука, 1976, 17 — 21.
1.57.Бутхов А.Н. О космическом парусе. - В кн.: Тр. 7-х Чтений, посвящ.
разраб. науч. наследия и развитию идей К.Э. Циолковского.
Секция ’’Проблемы ракетной и космической техники”. - М., 1974,
19 - 23-
1.58.Marx G. Interstellar vehicle propelled by terrestrial laser beam. - Nature,
1966, №211, 22 - 23.
1.59. Forward R.L. Round-trip interstellar travel using laser-pushed lightsails. -
J. Spacecraft and Rockets, 1984, v. 21, №2, 187 - 195.
1.60. Джуманалиев Н.Д., Киселев М.И. О связанном движении космических
аппаратов с солнечными парусами. - Тр. Кирг. ун-та. Серия фиэ. наук,
1973, №2, 143 - 147.
1.61.Джуманалиев Н.Д., Киселев М.И. Приближенный аналитический расчет
межорбитального перелета с претерпевающим износ солнечным пару¬
сом. - Тр. Фрунз. политехи, ин-та, 1975, № 90, 142 - 145.
1.62. Поляхова Е.Н. Парусная гелиоцентрическая задача с переменной ре¬
дукцией гравитационного поля. - Вестн. ЛГУ, 1984, № 19, 63 - 68.
1.63. Solar sailing. - Spaceflight, 1977, v. 19, №4, 124 - 128.
I.164.Friedman L.D., MacNeal R.H. a.o. Solar sailing - the concept made realis¬
tic. - AIAA Pap., 1978, N 82, 1 - 16. (Сокр. рус. пер.: Солнечный
парус - идея становится реальностью. - Экспресс-информация: Астро¬
навтика и ракетодинамика, № 38. - М.: ВИНИТИ, 1978, 11 - 19.)
1.65 .Friedman L.D. Solar sail development program (Final Report). - Jet Propul¬
sion Laboratory Rep., Pasadena, Ca., 1978, v. 1, № 720, 9 - 20.
1.66. Wright J.L. Solar sailing: evaluation of concept and potential. - Battelle
Memor. Inst. Rep., 1974, № 11, 74 —81.
1.67. Wright J.L. Physical principle of solar sailing. - Proc. Solar Sail Small Sym-
pos., AAS - J.P.L., 1977, 13 - 18.
1.68. Wright J.L., Warmke T. Solar sail mission applications. - AIAA Pap., 1976,
№ 808, 1 - 6. (Сокр. рус. пер.: Экспресс-информация: Астронавтика и
ракетодинамика, № 27. - М.; ВИНИТИ, 1977, 1 - 8.)
\A9.Hughes D.W. Visiting Hailey’s Comet. - Nature, 1977, v, 268, № 5620,
468 - 488.
1.70.MacNeal R.H. The Heliogyio, an interplanetary flying machine. — NASA C.
Rep., 1967,№6, 15 - 19.
1.71. MacNeal R.H. Structural dynamics of the Heliogyro. - NASA C. Rep., 1971,
№1,7 - 11.
1.72.MacNeal R.H. Comparison of the solar sail with electric propulsion system. -
NASAC. Rep., 1972, №2, 26 - 28.
V.Ti.Taitte R. L’Heliogyro - voilier spatial. - Sci. et vie, 1977, v. 129, №718,
47 - 51.
1.74.Designing a ’’Space yacht”. - Spaceflight, 1977, v. 19, №6, 209 - 210.
1.75. NASA’s solar sail concept. - Interavia Air Lett., 1977, №8791, 7.
291
1.76. NASA chooses Heliogyro as sail candidate for Hailey mission. - Aerospace
Daily, 1977, v. 85, №38, 300.
1.77.Rhea T. Study advanced planetary missions. - Ind. Res., 1977, v. 19,
№3,24.
1.78 Аксенов С. Под парусами в космос. - Техника - молодежи, 1978,
№ 1, 26 - 27.
1.79. Polyimid top candidate for solar sails. - Plast. World, 1977, v. 35, №9, 10.
1.80.Steuer W.H. Material problems in solar sail development.- AIAA Pap.,
1980, №315,1 -9. (Сокр. рус. пер.: Экспресс-информация: Астронав¬
тика и ракетодинамика, № 47. - М.: ВИНИТИ, 1980, 4 - 13.)
1.81. Boundy R.A. Advances composites: future space applications. - Adv. Com¬
pos. Technol. Conf. Pap., El Segundo, Ca., 1978, 197 - 215.
1.82.Breton R.G. Discussion meeting on Gossamer spacecraft (ultralight-weight
spacecraft): Final Rep. - Sci. and Tcchn. Aerospace Repts., 1980, v. 18,
№ 17, 2235.
1.83. Rowe W.M., Luedke E.E., Edwards D.K. Thermal radiative properties of
solar sail film materials. - AIAA Pap., 1978, №852, 1 - 8.
1.84.Rtimpson L.D., a.o. Thermal control of a solar sail. - AIAA Pap., 1978,
№885, 1 - 9.
1.85. Private space group plans solar sail mission. - Aerospace Daily, 1982, v. 118,
№30,240.
1.86.S/<zeWe R.L. An expedition to Mars employing Shuttle-era systems, solar sail
and aerocapture. - J. Brit. Int. Soc., 1982, v. 35, №7, 327 - 335.
1.87. Drexler K.E. High performance solar sails and related relfecting devices. -
AIAAPap.,1979,№1418,1 -7.
1.&&.Drexler K.E. Lightsail update. - ”L-5” News, 1979, v. 4, № 11, 1 - 2.
1.89.Drexler K.E. Design of high performance solar sail system. - Mass Inst.
Technol., Space Systems l.ab. Rep., 1979, №5,4 - 10.
1.90.Matloff G.L., Mallove E. Solar sail starships: the clipper ships of the
Galaxy. - J. Brit. Int. Soc., 1981, v. 34, № 9, 371 - 380.
1.91. Matloff G.L,, Mai lore E. The interstellar solar sail - optimization and
further analyses. - J. Brit. Int. Soc., 1983, v. 36,№5, 201 - 209.
1.92.Matloff G.L., Mautner M. Solar sails and red giants: the final fate of a
type II civilization. - Bull, of the American Astronom. Soc., 1979, v. 11,
№2,456 -459.
1.93.Цандер Ф.А. Об отклонении метеоров и их задерживании действием
электростатического электричества. - В кн.: Проблема полета при
помощи реактивных аппаратов: Межпланетные полеты. - М.: Оборон-
гиз, 1961,429 - 435.
1.94. Gossland М., Balmain K.G., Treadaway M.J. Surface flashover arc orienta¬
tion on mylar film. - IEEE Trans. Nud. Sci., v, 28, №6, 4535 - 4540.
1.95 Jlezelton R.C. a.o. Effect of material parameters on the charging characteris¬
tics of irradiated dielectrics. - IEEE Trans. Nucl. Sci., 1981, v. 28, № 6,
4541 - 4546.
1.96.Bouton F. Reficcteurs solaires souples. Etude en vue d’ameliorcr la stabilite
en ambiance spatial. - Spacccr. Mater. Sp. Environ., Paris, 1982, 13 - 20.
1.97.Matloff G.L. Beyond the thousand-year arc: further study of non-nuclear
interstellar flight. - i. Brit. Int. Soc., 1983, v. 36, № 11, 483-489.
1.98. Matloff G.L. Interstellar solar sailing: consideration of real and projected sail
materials. - J. Brit. Int. Soc., 1984, v. 37, № 3, 201 - 209.
1.99. Matloff G.L. Interstellar solar sailing: consideration of real and projected sail
materials. - I. Brit. Int. Soc., 1984, v. 37, 135 - 141.
1.100.Matloff G.L. The state of the art solar sail and the interstellar precursor
mission. - J. Brit. Int. Soc., 1984, v. 37, 491 - 494.
292
1.101. Ко/ювин ИМ. Развитие идей Ф.А.Цандера в области защиты космиче¬
ских кораблей от воздействия внешней среды. — В кн.: Ф А.Цандер и
современная космонавтика. - М.: Наука, 1976, 178 - 183.
К части 11 ( § 13—19)
2.1. Perkins F.M. Flight mechanics of low-thrust spacecraft. - J. Aerospace Sci.,
1959, v. 26, №5, 22 - 26.
2.2. Охоцимский Д.Е. Исследование движения в центральном поле под дей¬
ствием постоянного касательного ускорения. - Космические исследо¬
вания, 1964, т. 2, № 6, 817 - 842.
2.3. Ларичева В.В., Ефимов Г.Б. Применение асимптотики несимметричных
колебаний в задачах разгона точки малой тяги в центральном поле при¬
тяжения. -- Препринт Ин-та прикл. мат. АН СССР, 1983, № 108.
2.4. Fim pie W.R. A generalized three-dimensional trajectory analysis of planetary
espacc by solar sail. - ARS J., 1962, v. 32, №6, 833 - 887. (Рус. пер.:
Фимпл В.P. Обобщенный анализ пространственной траектории выхода
из поля тяготения планеты с помощью солнечного паруса. - В кн.:
Вопросы ракетной техники: Сб. переводов, № 6. - М., 1962, 14 - 22.)
2.5. Шувалов В.В. Световое давление как динамический фактор в движе¬
нии искусственных небесных тел. - Учен. зап. Яросл. гос. пед. ин-та,
1963, №56, 189 - 240.
2.6. Поляхова Е.Н. О некоторых частных случаях эволюции орбит легких
спутников Земли. ~ Всстн. ЛГУ, 1971. № 19, 133 - 139.
2.7. Hough М.Е. Sun-synchronous orbits near critical inclination. - Cclcst.
Mech., 1981, №25, 137 - 157.
2.8. Кларк А. Солнечный ветер. - Библиотека современной фантастики,
т. 6, - М.: Молодая гвардия, 1966.
2.9. Егоров В.А., Гусев Л.И. Динамика перелетов между Землей и Лу¬
ной. - М.: Наука, 1980.
2.10. Sands N. Escape from planetary gravitational fields by use of solar sail. -
ARSJ., 1961, v. 31,№4,527 - 531.
2.11. Гриневецкая Л.К., Поляхова Е.Н. Построение приближенного решения
уравнений геоцентрического движения космического аппарата е сол¬
нечным парусом. - Вести. ЛГУ, 1973, № 7, 134 - 143.
2.12. Гриневецкая Л.К., Поляхова Е.Н. Оценка погрешностей аналитическо¬
го метода расчета геоцентрических траекторий аппарата с солнечным
парусом. - Вестн. ЛГУ, 1979, № 7, 95 - 98.
2.13. Гриневицкая Л.К., Поляхова Е.Н. Задача о движении с солнечным
парусом в случае слабо эллиптической начальной орбиты. - В кн.:
Тр. 5-х Чтений, посвящ. разраб. науч. наследия и развитию идей
Ф.А.Цандера. Секция "Астродинамика”. - М., 1978, 71 - 80.
2.14. Гриневицкая Л.К., Макаров Б.Г., Поляхова Е.Н. Построение прибли¬
женных решений уравнений геоцентрического движения с солнечным
парусом при выходе с орбиты произвольного эксцентриситета. -
В кн.: Идеи Ф.А.Цандера и вопросы астродинамики. Тр. 7-х Чтений,
посвящ. разраб. науч. наследия и развитию идей Ф.А.Цандера. - М .
1982,62 - 64.
2.15. Гриневицкая Л.К., Поляхова Е.Н. Влияние тени Земли на движение
космического аппарата с солнечным парусом. - Вестн. ЛГУ. 1976,
№ 1, 133 - 141.
2.16. Гриневицкая Л.К., Поляхова Е.Н. Движение космического аппарата
с солнечным парусом в атмосфере Земли. — В кн.: Тр. Объед. науч.
Чтений, посвящ. памяти ученых - пионеров освоения космич. прост¬
293
ранства, Москва, 1979. Секция ’’Прикл. небесная механика и управле¬
ние движением”. - М., 1979, 182-189.
2.17. Гриневицкая Л.К., Поляхова Е.Н. Построение решения уравнений дви¬
жения центра масс аппарата с солнечным парусом по произвольно
ориентированной геоцентрической орбите. - Космич. исслед,, 1976,
т. 14, № 3, 343 - 347.
2.18. Гриневицкая Л.К,, Поляхова Е.Н. Пространственная задача о движении
с помощью солнечного паруса. - В кн.: Астрономия и геодезия. -
Томск, 1977, № 6, 76 - 83.
2.19. Гриневицкая Л.К., Поляхова Е.Н. Общая постановка задачи оботыска-
нии решений уравнений геоцентрического движения космического
аппарата с солнечным парусом. - В кн.: Тр. 4-х Чтений, посвящ.
разраб. науч. наследия и развитию идей Ф.А.Цандера. Секция ’’Астро¬
динамика”. - М., 1978, 102 - 110.
2.20. Поляхова Е.Н. Влияние теневых эффектов на движение искусственных
спутников Земли. - Вестн. ЛГУ, 1972, № 1, 138 - 144.
2.21. Поляхова Е.Н. О методах учета возмущающего влияния тени Земли. -
Депонир. в ВИНИТИ 29 июня 1977 г., № 2670-77. Деп., Редкол. журн.
Вестн. ЛГУ. Мат., мех., астрон., Л., 1977. 42 с. Реф. опубл.: Вестн.ЛГУ,
1977, № 19, с. 158.
2.22. Журин Б.А. Оценка времени затмения спутников Земли. - В кн.:
Современные проблемы небесной механики и астродинамики. —
М.: Наука, 1973, 119 - 122.
2.23. Емельянов Н.В. Влияние притяжения Луны и Солнца на движение
ИСЗ. - В кн.: Движение искусственных спутников Земли: Итоги
науки и техники. (Серия "Исследование космического простран¬
ства”.) - М.: ВИНИТИ, 1980, т. 15, 44 - 63.
2.24. Colombo G.J. On some singular orbits of the F.arth. - Moon satellite with
high area - mass ratio. - Smith Astrophys. Obs. Sp. Report, 1962, №107,
1 - 24.
2.25. Colombo G.J. Evolution of a mission concept from a solar probe to a solar
orbiter. - Instabilities. Dyn. Syst. Symp., Dordrecht e.o., 1979, 278 - 279.
2.26. Van der Ha J.C., Modi V. J. Long term’orbital behaviour of a satellite in the
ecliptic plane under the influence of solar radiation. - 27-th Intern. Astro¬
naut. Congr., Anaheim, Ca., 1976, Paper № 76-00 006.
2.27. Van der Ha J.C., Modi V. J. Long-term solar radiation effects upon an orbit
in the ecliptic. - Acta Astronaut., 1977, v. 4, № 7 - 8, 813 - 831.
2.28. Van der Ha J.C.,Modi V. J. Analytical evaluations of solar radiation induced
orbital perturbations of space structures. - J. Astronaut. Sci., 1977, v. 25,
№4,293 - 306.
2.29. Van der Ha J.C., Modi V. J. Solar pressure induced orbital perturbations and
control of a satellite in an arbitrary orbit. - AIAA Paper, 1977, № 32, 1-9.
(Сокр. рус. пер.: Экспресс-информация: Астронавтика и ракетодина-
мика, № 44, - М.: ВИНИТИ, 1977, 16 - 25.)
2.30. Van der На J.C., Modi V.J. Orbital perturbations and control by solar ra¬
diation forces. - J. Spacecraft and Rockets, 1978, v. 15, № 2, 105 - 112.
2.31. Cohen M.J., Freestone M.M. Spiral trajectories in the plane of the ecliptic
using solar sails. - Proc. 15 Int. Astronaut. Congr., 1964, Warszava, v. 1.
Paris, 1965, 363 - 382.
2.32. Лукьянов С.С. Задача об управлении движением космического аппара¬
та силами светового давления в окрестности коллинеарной точки
либрации. - Препринт Ин-та прикл. мат. АН СССР, 1979, № 112, - 31.
2.33. Лукьянов С.С. Об управлении движением космического аппарата
в окрестности коллинеарной точки либрации силами светового давле¬
294
ния. - В кн.: Тр. Объед. науч. Чтений, посвящ. памяти выдающихся
сов. ученых - пионеров освоения космич. пространства. - М., 1980,
45 - 56.
2.34. Лукьянов С.С. Управление движением космического аппарата в ок¬
рестности коллинеарной точки либрации круговой задачи трех тел
с помощью светового давления. - Космич. исслед., 1981, т. 19, № 4,
518 - 527.
2.35. Лукьянов С.С. Стохастический анализ управления движением космиче¬
ского аппарата в окрестности коллинеарной точки либрации с по¬
мощью сил светового давления. - Препринт Ин-та прикл. мат.
АН СССР, 1982, № 130,31 с.
2.36. Константинов М.С., Котин В.А. Об управлении космическим аппаратом
с солнечным парусом в окрестности коллинеарных точек либрации. -
В кн.: Идеи Ф.А.Цандера и вопросы астродинамики. Тр. 7-х Чтений,
посвящ. разраб. науч. наследия и развитию идей Ф.А.Цандера. - М.,
1982,56 -61.
2.37. Пережогин А.А. Исследование устойчивости движения в некоторых
задачах небесной механики с учетом светового давления. - Кандидат¬
ская диссертация, М., Моск. авиац. ин-т, 1982.
2.38. Buckingham А.С., Lim У.С., Miller J.A. Orbit position control using solar
pressure. - J. Spacecraft and Rockets, 1965, v. 2, № 2, 863 - 867.
2.39. Miller J.A., Laprade R.H., Worley S.J. Orbit position control for passive
communications satellites. - Commun. Satellite Syst. Technology, Acad.
Press, 1966, 847 - 870.
2.40. Miller J.A., Laprade R.H., Worley S.J. Satellite station - keeping by solar
radiation pressure. - Space Aeronaut., 1967, v. 47, №4, 114 - 117.
2.41. Labeyrie A., Savaria h\, Schumacher G. 1'lute or Trio: different approaches
to optical arrays in space. - Adv. Space Res., 1983, v. 2, №4, 11 - 22.
2.42. Black W.L., Crocker M.C., Swenson E.H. Station-keeping a 24-th satellite
using solar radiation pressure. J. Spacecraft and Rockers, 1968, v. 5, № 3,
335 - 337.
2.43. Crocker M. A simulation of automatic station-keeping for synchronous
satellite. - J. Spacecraft and Rockets, 1969, v. 6, № 6, 616 - 619.
2.44. Shrivastara S.K., Rajashingh C.K. Optimum orbital control using solar radia¬
tion pressure. - J. Spacecraft and Rockets, 1975, v. 12, № 8, 616 - 619.
2.45. Shrivastava S.K. Kffccts of solar radiation pressure and aerodynamics forces
on satellite - attitude dynamics and their utilisation for control: a survey. -
J. Indian Instit. of Sci., 1976, №58, 391 -411.
2.46. Shrirastava S.K.,Hablani II.B., Gopinath N.S. SPACTS: semi-passive attitude
control and trajectory stabilization of geostationaty satellite. - .1. Brit.
Interpl. Soc., 1977,№30,63 - 71.
2.47. Shrivastava S.K. Orbit perturbations and station-keeping of communications
satellites. - J. Spacecraft and Rockets. I 978, v. 15, №2. 67 - 78. (Pyc.nep.:
Illpueacraea Ul.K. Возмущения орбит спутников связи и управление их
положением над Землей. - Ракетная техника и космонавтика. 1978,
т. 16, №8, 131 - 146.)
2.48. Ganrell С.С. Simultaneous eccentricity and drift rate control. - J. Guidance
and Contr., 1981, v. 4, №3,310 - 315.
2.49. Kamel A., Wagner C.A. On the orbital eccentricity control of synchronous
satellites. - S. Astronaut. Sci., 1982, v. 30, №1,61 — 73. (Сокр. рус. пер.:
Управление эксцентриситетом орбит синхронных ИСЗ. - Экспресс-ин¬
формация: Астронавтика и ракстодинамика, № 46. - М.: ВИНИТИ,
1982, 1 - 9.)
295
2.50. Van der Ha J.C., Hechler M. Tlie collision probability of geostationary satel¬
lites. - 32 Congr. Intern. Astronaut. Led., Rome, 1981, 208 - 209.
2.51. Куницын A.J1., Мырзабеков Т. Регулярная прецессия стационарного
орбитального корабля. - Тр. 7-х Чтений, посвящ. разраб. науч. насле¬
дия и развитию идей К.Э.Циолковского. Калуга. Секция "Механика
космич. полета”. М., 1974, 90 - 96.
2.52. Forward R.L. Light-levitated geostationary cylindrical orbits. - J. Astro¬
naut. Sci., 1981, v. 29, №1,73- 80.
2.53. Марков Б.И. Управление орбитальным движением космического
аппарата с помощью солнечного паруса: Кандидатская диссертация. -
Л.: ЛГУ, 1978.
2.54. Марков Б.И. Об управляемости орбитальным движением с помощью
солнечного паруса. - В кн.: Вопросы механики и процессов управле¬
ния. Вып. 2. Управление динамическими системами. - Л.: Изд-во ЛГУ,
1978, 142 - 147.
2.55. Морков Б.И. О приближенно-оптимальном управлении орбитальным
движением аппарата с солнечным парусом. - В кн.: Вопросы механики
и процессов управления. Вып. 3. Механика управляемого движения. -
Л.: Изд-во ЛГУ, 1979, 84 - 90.
2.56. Морков Б.И. К вопросу о движении космического аппарата с помощью
солнечного паруса. - Редколл. журн. ’’Вестн. ЛГУ. Мат., мех., астрон.”,
1979, 28, депонир. в ВИНИТИ 11.06.79, № 2084-79 Деп. Реф. опубл.:
Вестн. ЛГУ, 1979, № 7, 124.
2.57. Акуленко Л.Д., Черноусько Ф.Л. Метод осреднения в задачах опти¬
мального управления. - Журн. вычисл. мат. и мат. физики, 1975,
т. 15, №4, 12 - 18.
2.58. Плотников В.А. Асимптотические методы в задачах оптимального
управления: Докторская диссертация. - Одесса: Одес. гос. ун-т, 1979.
2.59. Поляхова Е.Н., Шмыров А.С. Об оптимальном управлении орбиталь¬
ным геоцентрическим движением космического аппарата при помощи
солнечного паруса. - Тр. Объед. науч. Чтений, посвящ. памяти выдаю¬
щихся сов. ученых - пионеров освоения космич. пространства. -
Москва, 1980. Секция "Прикл. небесная механика и управление движе¬
нием”. М., 1980, 37 — 44.
2.60. Морков Б.И., Поляхова Е.Н., Шмыров А.С. Определение управления
солнечным парусом для гашения возмущений геоцентрической ор¬
биты. - В кн.: Тр. 6-х Объед. науч. Чтений по космонавтике, посвящ.
памяти выдающихся сов. ученых - пионеров освоения космич. прост¬
ранства. Секция "Проблемы механики и управления движением”. -
М., 1983, 72 - 78.
2.61. Никандров А.В. Оптимизация геоцентрической орбиты поворотом сол¬
нечного паруса по методу второй вариации. - Вестн. ЛГУ, 1982, № 7,
16 - 22.
2.62. Сарычев В.А. Вопросы ориентации искусственных спутников. - В кн.:
Итоги науки и техники. Серия ’’Исследование космического простран¬
ства", т. 11. — М.: ВИНИТИ, 1978.
2.63. Попов В.И. Системы ориентации и стабилизации космических аппара¬
тов. - М.: Машиностроение, 1977.
2.64. Каргу Л.И. Системы угловой стабилизации космических аппаратов. -
2-еизд. - М.: Машиностроение, 1980.
2.65. Джуманалиев Н.Д., Киселев М.И. О малых колебаниях черно-белых
тел, стабилизированных световым давлением. - Космич. исслед., 1967,
т. 5, № 4, 636 - 637.
296
2.66. Джуманалиев Н.Д., Киселев М.И. О малых колебаниях систем с солнеч¬
ным парусом. - Космич. исслед., 1970, т. 8, № 1, 148 - 151.
2.67. Джуманалиев Н.Д., Киселёв М.И., Кречетников О.В. О солнечном
руле. - Космич. исслед., 1971, т. 9, № 4, 613-61,5.
2.68. Гурко О.В., Слабкий О.В. Использование силовых влияний гравита¬
ционного и светового полей Солнца для с, иентации космических ап¬
паратов. - В кн.: Искусственные спутники Земли, вып. 16. - М.:
Изд-во АН СССР, 1963, 34 -45.
2.69. Коган А.Ю. Динамика роторного солнечного паруса. - В кн.: Тр.
Объед. науч. Чтений, посвящ. памяти выдающихся сов. ученых -
пионеров освоения космич. пространства. Москва, 1979. Секция
’’Прикл. небесная механика и управление движением”. — М., 1979,
134 - 141.
2.70. Модц В.Дж., Панде К.К., Кумар К. Оптимальное управление угловым
положением космического аппарата, использующее давление солнеч¬
ной радиации. — В кн.: Управление в пространстве. Т. 2. - М.: Наука,
1976,21 - 29.
2.71. Stuck B.W. Solar pressure three-axis attitude control. - J. Guidance and
Contr., 1980, v. 3, № 2, 132 - 139.
2.72. Лукьянов A.B. К теории пленочных отражателей. - Космич. исслед.,
1969, т. 7, №6, 952 -953.
2.73. Лукьянов А.В. Пленочные отражатели в космосе. - М.: Изд-во МГУ,
1977.
2.74. Luk’yanov A.V. Superlight rotating reflectors in space. — Acta Astronaut.,
1981, v. 8, №4, 349 - 360.
2.75. Luk’yanov A.V. Space sail linear. - 32 Congr. Int. Astronaut. Fed., Abstrs.
Pap. - Rome, 1981, 19.
2.76. Лукьянов A.B. Космический парусный лайнер. - М., 1981, 18 с. (Руко¬
пись деп. в ВИНИТИ 25.12.81, № 5857-81 Деп.)
2.77. Лукьянов А.В. Перспективы применения и возможности создания кос¬
мических солнечных отражателей. - В кн.: Космическая индустрия,
Тр. 15-х Чтений, посвящ. разраб. науч. наследия и развитию идей
К.Э.Циолковского. Секция ’’К.Э.Циолковский и проблемы освоения
космического пространства”. - М.: 1981,96 - 101.
2.78. Luk’yanov A.V. Space sail linear. - Acta Astronaut., 1982, v. 9, №6,
359 - 364.
2.79. Хит Г., Гофман М. Современное состояние разработки солнечных кон¬
центратов. - В кн.: Вопросы ракетной техники: Сб. переводов, №3. -
М.: Мир, 1968, 31 - 38.
2.80. Pande К.С., Venkatachalam R. Optimal solar pressure attitude control of
spacecraft. I, II. - Acta Astronaut., 1982, v. 9, 533 - 540, 541 - 545.
(Сокр. рус. пер.: Экспресс-информация: Астронавтика и ракетодина¬
мика. - М.: ВИНИТИ, 1982, № 46, 1 - 9.)
2.81. Hibbard D. Attitude stabilization using focused radiation pressure. — ARS J.,
1961, v. 31, № 11, 844 - 845.
2.82. Ule L.A. Orientation of spinning satellites by radiation pressure. - AiAA J.,
1963, v. 1, № 7, 1575 - 1579.
2.83. Галицкая Э.Б., Киселев М.И. О радиационной ориентации космических
аппаратов. - Космич. исслед., 1965, т. 3, № 3, 391 - 394.
2.84. Crocker М., Chandler С.М. Attitude control of a sun pointing spinning
spacecraft by means of solar radiation pressure. - J. Spacecraft and Rockets,
1970, v. 7, №3, 357 - 359.
2.85. Nicklas T.C.,Acord J.D. a.o. Attitude control for spacecraft.-Патент США,
№ 3, 304, 028 кл. 244-1, опубл. 14.02.67.
2.86. Kenner U. Attitude control by solar sailing - a promising experiment with
OTS-2. - ESA J., 1979, v. 3, № 1, 35 - 40.
2.87. Renner U. One year of solar sailing with OTS. - ESA Bull., 1982, №31,
75 - 79.
2.88. Заблуда CM..Яншин A.M. Оптимальные формы солнечных и аэродина¬
мических стабилизаторов. - В кн.: Тр. 5-х Объед. науч. Чтений по кос¬
монавтике, посвящ. памяти выдающихся сов. ученых - пионеров
освоения космич. пространства. Секция ’’Прикл. небесная механика и
управление движением”. - М., 1981, 147 - 158.
2.89. Заблуда СМ., Яншин А.М. Оптимальные формы солнечных и аэродина¬
мических стабилизаторов при заданной площади. - В кн.: Тр. 6-х
Объед. науч. Чтений по космонавтике, посвящ. памяти выдающихся
срв. ученых - пионеров освоения космич. пространства. Секция
’’Проблемы механики и управления движением”. - М., 1983,
118-126.
2.90. Блинов А.П. Об оптимальной стабилизации стационарного движения
космического аппарата относительно центра масс силами светового
давления. - В кн.: Тр. 6-х Объед. науч. Чтений по космонавтике,
посвящ. памяти выдающихся сов. ученых - пионеров освоения космич.
пр-ва, Москва, 1982. Секция ’’Проблемы механики и управления дви¬
жением”. М., 1983, 127 - 135.
2.91. Блинов А.П. Об оптимальной стабилизации стационарного движения и
переориентации космического аппарата силами светового давления. -
Космич. исслед., 1983, т. 21, № 5, 675 - 684.
2.92. Попов В.И., Янов И.О. Динамика радиационно-ориентированного кос¬
мического аппарата с учетом теплового изгиба стабилизатора. - В кн.:
Тр. 6-х Чтений, посвящ. разраб. науч. наследия и развитию идей
К.Э.Циолковского. Секция ’’Механика космического полета”. - М.,
1973, 103 - 112.
2.93. Попов В.И., Янов И.О Динамика вращающегося радиационно-ориенти¬
рованного космического аппарата. — В кн.: Тр.-8-х Чтений, посвящ.
разраб. науч. наследия и развитию идей К.Э.Циолковского. Секция
’’Механика космического полета”. - М., 1973, 85 - 95.
2.94. Попов В.И.. Янов И.О. Устойчивость движения радиационно-стабилизи¬
рованного тела с учетом затенения. — Тр. МВТУ, 1973, № 173, 62 - 64.
2.95. Попов В.И., Янов И.О. Ориентация солнечного паруса. - В кн.: Тр. 2-х
Чтений, посвящ. разраб. науч. наследия и развитию идей Ф.А. Цан¬
дера. Секция ’’Астродинамика”. - М., 1974, 57-66. (См. также:
Ф.А. Цандер и современная космонавтика. - М.: Наука, 1976,
137 - 142.)
2.96. Попов В.И., Янов И.О. Использование солнечного давления для управ¬
ления ориентацией вращающегося космического аппарата. - Космич.
исслед., 1976, т. 14, № 3, 359 - 365.
2.97. Попов В.И., Янов И.О. Повышение точности пассивной системы солнеч¬
ной ориентации космического аппарата. - В кн.: Тр. 5-х Чтений,
посвящ. разраб. науч. наследия и развитию идей Ф.А.Цандера. Секция
’’Астродинамика”. -М., 1978, 106 - 115.
2.98. Shrivastava S.K., Modi V.J. Satellite attitude dynamics and control in pre¬
sence of environmental torques - a brief survey. - J. of Guidance, Control
and Dynamics, 1983, v. 6, № 6, 461 - 471. (Рус. пер.: Аэрокосмическая
техника, 1984, т. 2, № 12, 133 - 147.)
2.99. Svitck Т. Solar sail as OTV/solar sail concept study: Phase II Report. - A1AA
Paper, 1983, № 1347, 1 - 8.
298
2.100. Васильев Л.А. Определение давления света на космические летатель¬
ные аппараты. - М.: Машиностроение, 1985, 208 с.
2.101. Белецкий В.В., Яншин А.М. Влияние аэродинамических моментов сил
на вращательное движение искусственных спутников. - Киев: Науко-
ва думка, 1984,186 с.
2.102. Лукьянов А.В. Большие парусные космические корабли. - Тр. 17 Чте¬
ний К. Э. Циолковского, 1982, Калуга, Секц.: ”К.Э. Циолковский и
проблемы освоения космического пространства”. - М., 1983, 91-98.
2.103. Пережогин АЛ. Об устойчивости положений относительного равнове¬
сия космической станции в треугольных точках либрации фото-
гравитационной задачи трех тел. - Косм, исслсд., 1985, № 5,
676-683.
2.104. Поляхова Е.Н. Влияние износа зеркальной пленки под действием
космических факторов на динамику движения солнечного паруса
в цандеровской ориентации по гелиоцентрической орбите. - Гагарин¬
ские научные Чтения по космонавтике и авиации 1983-1984 гг., М.,
1985, с. 6 2.
2.105. Поляхова Е.Н., Шмыров А.С. Об оптимальном управлении орбиталь¬
ным геоцентрическим движением космического аппарата при полете
с солнечным парусом. - В кн.: Научные пробл. авиации и космонавти¬
ки. История и современность. М., 1985, 147-151.
2.106. Hedgepeth J.M.. Benton M.D. Analysis of planetary fly by using the Helio-
gyro solar sailer. - Astro Res. Corp. Rep., 1968, № 296.
2.107. MacNeal R.H., Hedgepeth J.M., Shtterch H. V. Heliogyro solar sailer summa¬
ry report. - NASA C. Rep., 1969, № 1329.
2.108. Cotter T.P. An encomium on solar sailing. - Los Alamos Scient. Lab. Rep.,
1973,№5231-MS.
2.109. Uphoff C.W. Solar sailign: potential for future mission. - JPLRep., 1977,
№760-164.
2.110. Sauer C.G. Comparison of solar-sail and ion-drive trajectories foraHalley’s
comet rendez-vous. - AAS/AIAA Astrodyn. Conf., 1977, 20-25.
2.111. MacNeal R.H. et al. Heliogyro solar sail summary report - NASA C. Rep.,
1969, №1329.
2.112. Wright J., Sauer C.G., Chen-wan- Yen. Solar sail concept and applications. -
JPL Rep., 1980,1-49.
2.113. Lippman M.E. In-epace fabrication of thin-film structure. -- Astron. Res.
Corp. Rep., 1972,№410.
2.114. Ross J.H. Superstrength fiber applications. - Astronaut, and Aeronaut.,
1977,15,№12,44-50.
2.115. Rowe W.M. ed. Sail film materials and supporting structure for a solar
sail: a preliminary design. - JPL Rep., 1978, № 720-9,4.
2.116. Frisch B. Composites and the hard knocks of space. - Astronaut, and
Aeronaut., 1983, 21,№5, 83-88.
2.117. Forward E.L. Round-trip interstellar travel using laserpushed light sails. -
J. Spacecraft and Rockets, 1984, 21,№2,187-195.
2.118. Jones E.M. A manned interstellar vessel using microwave propulsion:
Dyson ship. - J. Brit, lnterpl. Soc., 1985,38,№6, 270-273.
2.119. Matloff G.E., Mallove E.F. The first interstellar colonization mission. -
J. Brit. lnterpl. Soc., 1980,33, № 2,84-88.
2.120. Matloff G.L. On the potential performance of non-nuclear interstellar
arks. - J. Brit, lnterpl. Soc., 1985, 38, №4,113-119.
2.121. Matloff G.E., Mallove E.F. Non-nuclear interstellar flight: application of
planetary gravitational assists. - J. Brit. lnterpl. Soc., 1985, 38, № 4,
133-136.
299
ИМЕННОЙ УКАЗАТЕЛЬ
Белецкий В.В. 14,67, 124, 156-159,
165, 172, 177, 190, 209, 278
Бессель Ф. (Bessel F.) 7, 31
Блинов А.П. 273
Бредихин Ф.А. 8
БульП. 120
Вавилов С.И. 8
Валеев К.Г. 100
Васильев Л.А. 278
Гарвин P. (Gaiwin R.L.) 73
Гриневецкая Л.К. 191, 195, 202,211
Гродзовский Г.Л. 5, 101, 156
Гурко О.В. 266
Гюйгенс X. (Huygens) 7
Джаяраман Г. (Jayaiaman T.S.) 99
Джуманалиев Н.Д. 128, 131, 266
Дрекслер К. (Drexler К.Е.) 146, 243
Егоров В.А. 67, 156, 159, 165
Ефимов Г.Б. 161
Жуков А.Н.92, 93, 99, 261
Заблуда С.М. 271
Зауер К. (Sauer C.G.) 101, 121
Иванов Ю.Н. 5, 101,156
Каргу Л.И. 264, 268
Кеплер И. (Kapler I.) 7, 8
Кирпичников С.Н. 86
Киселев М.И. 128, 131, 266
Кларк A. (Clarke А.) 177
Коган А.Ю. 102, 267
Коломбо Г. (Colombo GJ.) 217, 218
Константинов М.С. 231
Коровин И.М. 151
Котин В.А. 102, 131
Крокер М. (Crocker М.) 234
Крукс В. 7
300
Куницын А.Л. 238
Кэвотти Дж. (Cavotti G.R.) 92
Кэлли X. (Kelley H.J.) 92, 98, 99
Ларичева В.В. 161
Лебедев П.Н. 8, 31, 32
Лебедев В.Н. 92, 93, 99, 261
Левантовский В.И. 14, 90, 101, 175,
190
Лондон Г. (London H.S.) 76, 78, 80,
82, 86, 93
Лукьянов А.В. 230, 270, 271
Макнил P. (MacNeal R.H.) 138
Максвелл Дж. (Maxwell J.C.) 7
Маланин В.В, 79, 100,123
Мелькумов Т.М. 127
Меркулов И.А. 83
Меркулов И.И. 83, 90, 112, 122
Мительман С,Е. 79, 100
Моди В. (ModiVJ.) 108,218
Морков Б .И. 244-254, 261
Мырзабеков Т. 238
Нарожный И.И. 100
Охоцимский Д.Е. 161
Пережогин А.А. 232
Перельман Я.И. 9, 13, 23, 73
Перкинс Ф. (Perkins F.M.) 159, 161
Поляков Г.Г. 101
Поляхова Е.Н. 191, 202, 210, 211
Попов В.И. 264, 274,275
Поици A. (Pozzi А.) 79
Радзиевский В.В. 18
Райт Дж. (Wrjght 3.L.) 136,242
Сарычев В.А. 264
Скопцов А.П. 124, 172, 177, 208
Слабкий Л.А. 266
Сочо Л. ди (Socio L.) 79
Сэндс Н. (Sands N.) 186, 211
Тихонравов М.К. 12,14, 59
Токарев В.В. 5,101, 156
Тэнгей A. (Tanguay A.R.) 101
Фимдл В. (Fimple W.R.) 165, 206,
262
Форбс Д. (Forbes G.F.) 72
Форвард P. (Forward R.L.) 238
Френель A. (Fresnel) 7
Ха Дж. ван дер (van der На J.C.) 108,
218
ХибардД. (Hibbard D.) 271
Хоромский И.А. 83
Цандер Ф.А. 3, 10-14, 40,41,48, 52,
56, 59, 81, 86, 118, 119, 122-124,
127, 138, 150, 151, 154, 155, 169,
210,229, 258,267, 275
Цзу T.C.(Tsu T.S.) 73, 75, 78, 82, 93
Циолковский К.Э. 9,10, 127, 280
Шмыров А.С. 259, 260
Шривастава С. 235, 236
Шувалов В.В. 169, 189, 207, 260
Эдисон Т. (Edison Т.) 12
Эйлер Л. 7 (Euler L.) 7
Эрике К. (Ehrflce К.) 72, 86, 91,120,
210, 211
Янов И.О. 277, 275
Яншин А,М. 271, 278
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Астероиды 101, 147
Атмосфера, воздействие на солнеч¬
ный парус 195
Баллои см. Парус-баллон
Возмущения атмосферные траекто¬
рии паруса 195
- радиационные орбит спутников
21
Время затмения паруса 203—205
Выметание пыли из Солнс. jй сис¬
темы 39
Гелиоротор 138, 267, 270, 277
Давление световое 7, 15, 16, 27
- солнечной радиации 15, 16
Деформация паруса 30
Дрейф геостационарного спутника,
парусная коррекция 234, 237
Задача вариационная оптимизации
спиральных траекторий 92
- трех тел 217, 230, 231, 277
Задача Цандера о касательном пе¬
реходе с зеркалом 40
Закон Ньютона-Лебедева 31
- переключения релейный 155
- половинного угла 179
Затмение паруса, максимальное вре¬
мя 203 и д.
Захват паруса Луной 217
Излучение солнечное 15
, рассеянное Землей 30
—, - Луной 30
Интеграл энергии в фотогравита-
ционном поле 35
Кометы 7, 90, 136, 144
Корпускулярный поток 20
Коррекция парусная 229
— в окрестности точки либрации
230
геостационарной орбиты 234
Коэффициент отражения 18
— прозрачности пленки 130
Лазер 128
301
Максвелла формула 17
Маневр парусный орбитальный 216
и д.
корректирующий 229 и д.
в окрестности точки либра¬
ции 230
переходный геоцентрический
217 ид.
Масса Солнца редуцированная ("ле¬
бедевская”) 32
Метод наискорейшего спуска 98
Микрометеороиды 22, 39
Ньютона-Лебедева закон 31
Орбита в фотогравитационном поле
36
- геосинхронная цилиндрическая
237, 238 и д.
- с критическим наклонением 213
- солнечно-синхронная 170, 216
- терминаторная старта паруса 156,
162 и д., 170
- эллиптическая псевдосинхронная
238
Орбита-маховик 115
Ориентация паруса 263
- активная 269
- пассивная 269
- пассивная с помощью паруса 266
"Пагеос” 21, 30
Парабола покидания цандеровская
52,63. 65
Парадокс разгона с малой тягой 157,
158
Парус лазерный 128, 286
- солнечный 10, 12
двухслойный 283
- из полимерной пленки см.
Пленка полимерная
квадратный 137, 242, 277
малый (рулевой) 264
наилучший 172, 124-127, 172
параболический 272
перфорированный 285
, проекты конструкций 135 ид.
роторный см. Гелиоротор
с переменной парусностью 120,
231, 234
с сотовой структурой 149
сферический см. Парус-Баллон
> ухудшение характеристик 129,
281
цандеровский ((3-парус) 40
Парус-баллон 29, 120, 231, 269, 277
- в фотогравитационной точке либ¬
рации 232, 233
- корректирующий 235
- пульсирующий (раздувающийся)
35, 120,231
Парус-гелиоротор 138, 267, 270, 277
Парусность 21, 34, 63
- переменная 130, 231, 234
- при цандеров ском перелете 51
предельная 52
- солнечных батарей 264, 268
Парус-парашют 277
Парус-ромашка 280
Перелет цандеровский 47, 52
Переменные оскулирующие 104
Период движения по цандеровской
траектории 48, 49
Пленка полимерная 120, 121, 141
и д.
, изготовление в невесомости
146
- - параболическая вращающаяся
272
Площадь эффективная 24
Подъем геоцентрической орбиты
217 и д., 229
Поле фотогравитационное 32
Полет в ближайшую окрестность
Солнца 218, 280
- вне плоскости эклиптики 146,
286
- к астероиду Эрос 101
- к Венере 101
- к звезде Барнарда 286
- к комете Галлея, 136
Энке 144
- к Луне 177
- к Марсу 12, 101, 145
гомановский импульсный 44
цандеровский 50
- к Меркурию 101
- к околополярным окрестностям
Солнца 146
- к а Центавра 147, 285
- экспериментальный 281
Поток корпускулярный 20, 281
Пробой паруса микрометеороидами
149, 281
Радиация см. Излучение . ..
Развертывание паруса 144, 148
Разгон парусный с терминаторной
орбиты 156, 162 и д.
302
Разгон с малой касательной тягой
156-162
Раскрутка 152 и др. (см. также
Траектория раскрутки)
- терминаторная 156, 164 и д.
Редукция гравитационного поля 36,
51,62
- массы Солнца 32
Рули солнечные 264, 269
Сила светового давления 25
- тяги 26, 28, 29
Система ориентации 263 и я
- парусов 123, 172
с затенением 28
с переменной парусностью 28,
234
Солнечные батареи, парусность 264,
268
Солнечный ветер 20
Спираль логарифмическая 60, 63,
66,171
- раскручивающаяся геоцентричес¬
кая 154 и д.
Стропы солнечного паруса 276
Стыковка геоцентрической и гелио¬
центрической траекторий 181 —
185
Сфера действия Земли 180
Тень Земли 202 и д.
, годичный поворот 213
искусственная 28, 210
Терморегулирование паруса 143
Точки либрации в фотогравитацион-
ной задаче 232
Траектория геоцентрическая спи¬
ральная раскручивающаяся 153
ид.
- гомановская 41, 42
- после набора параболической ско¬
рости 179 и д., 183
- раскрутки 153 и д.
локально-оптимальная 174
оптимальная 174
при заданном угле установки
паруса 185 и я
- спиральная вариационная 92 и д.
Траектория спиральная квазиаллип-
тическая 188
, краевая задача 92
логарифмическая 60,66, 171
как возмущенная цандеров-
ская 63
пространственная квазикруго-
вая 102 и д.
- цандеров ская 40, 47, 149
Транспортировка астероидов 147
Угол спиральный 61
- установки паруса 24, 60
Управление гелиоротором 268
- локально-оптимальное 165, 172,
173, 190
- релейное (цандеровское) 218,
221, 226, 228
- с половинной угловой скоростью
186
Ускорение тяговое безразмерное
161
Условие оскуляции 200
Уход спутника от Земли из-за тени
209
Формула Максвелла 17
- Цандера 50
Фотогравитационное поле 32
Функция тени 205 и д.
Хвост кометы 20
Частицы метеороидные 22, 37, 39
Экранирование паруса астероидом
(от разогрева) 148
Экспедиция на Марс 145
Эксцентриситет цандеровской траек¬
тории 55
Электризация поверхности паруса
151
Электростанция орбитальная солнеч¬
ная 228, 229
’’Эхо” 21, 228, 247
0-метеороид 40
0-парус 40
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию
Космический полет с солнечным парусом: идея Ф. А. Цандера
и сто лет ее последующего развития 111
Космоплавание под солнечным парусом — фантастика
мечтателей или реальность недалекого будущего? VII
Предисловие 3
Введение 7
§ 1. Открытие светового давления 7
§ 2. Солнечный парус — идея Ф.А. Цандера 10
§ 3. Световое давление в Солнечной системе 15
§ 4. Сила тяги и ускорение тел под действием давления солнечных
лучей 23
Часть!. Гелиоцентрические траектории движения с солнечным
парусом 31
§ 5. Закон Ньютона - Лебедева и динамика движений в централь¬
ном фотогравитационном поле Солнца 31
§ 6. Задача Ф.А. Цандера о межпланетном перелете по касательному
гелиоцентрическому эллипсу 40
§ 7. Спиральные траектории межпланетных перелетов 59
§ 8. Сопоставление спиральных траекторий с цандеровскими эллип¬
сами и с касательными импульсными траекториями 84
§ 9. Вариационные задачи оптимизации спиральных гелиоцентри¬
ческих траекторий 92
§ 10. Пространственная задача о квазикруговом спиральном межпла¬
нетном перелете 102
§ 11. От плоского паруса - к системе парусов-зеркал. Износ солнеч¬
ного паруса 118
8 12. Современные проекты конструкций солнечных парусов для
гелиоцентрических перелетов 135
Часть II. Геоцентрические траектории движения с солнечным
парусом 152
§13. Квазикруговые спиральные траектории раскрутки с солнечным
парусом вокруг Земли 152
8 14. Оптимизация геоцентрических траекторий раскрутки с "наилуч-
шим” солнечным парусом 171
815. Геоцентрические траектории раскрутки при заданном угле
установки солнечного паруса 185
8 16. Учет эффекта тени Земли в геоцентрических парусных задачах . 202
8 17. Орбитальные маневры с помощью тяги солнечного паруса .... 216
§ 18. Задачи орбитальной коррекции при помощи солнечных парусов 229
§ 19. Проблема поддержания требуемой ориентации солнечного па¬
руса 263
§ 20. Солнечный парус в околосолнечном пространстве 280
Список литературы 287
Именной указатель 300
Предметный указатель 301
URSS.ru URSS.ru UWSS.ru URSS.ru URSS.ru
шм
ru
URSS.ru
URSS.ru
URSS
Другие книги нашего издательства:
Серия «Синергетика: от прошлого к будущему»
Пенроуз Р. НОВЫЙ УМ КОРОЛЯ. О компьютерах, мышлении
и законах физики. Пер. с англ.
Майнцер К. Сложносистемное мышление: Материя, разум, человечество.
Новый синтез. Пер. с англ.
Хакен Г. Информация и самоорганизация. Пер. с англ.
Кпимонтович Ю. Л. Турбулентное движение и структура хаоса.
Неймарк Ю. И., Ланда П. С. Стохастические и хаотические колебания.
Ланда П. С. Нелинейные колебания и волны.
Малинецкий Г. Г. Математические основы синергетики.
Малинецкий Г. Г., Потапов А. Б. Нелинейная динамика и хаос: основные понятия.
Малинецкий Г. Г., Потапов А. Б., Подлазов А. В. Нелинейная динамика.
Лнищенко В. С. Сложные колебания в простых системах.
Анищенко В. С. Знакомство с нелинейной динамикой.
Арнольд В. И. Теория катастроф.
Алексеев Ю. К., Сухорукое А. II. Введение в теорию катастроф.
Безручко Б. II. и др. Путь в синергетику. Экскурс в десяти лекциях.
Данилов К). А. Лекции по нелинейной динамике. Элементарное введение.
Чернавский Д. С. Синергетика и информация (динамическая теория информации).
Князева Е. II.„ Курдюмов С. П. Основания синергетики. Кн. 1,2.
Редысо В. Г. Эволюция, нейронные сети, интеллект.
Трубецков Д. И. Введение в синергетику. В 2 кн.: Колебания и волны; Хаос и структуры.
Быков В. И. Моделирование критических явлений в химической кинетике.
Тюкин И. Ю., Терехов В. А. Адаптация в нелинейных динамических системах.
Васильков Г. В. Эволюционная теория жизненного цикла механических систем.
Долгоносое Б. М. Нелинейная динамика экологических и гидрологических процессов.
Баранцев Р. Г. Синергетика в современном естествознании.
Пригожий И. Неравновесная статистическая механика.
Пригожий И., Стенгерс И. Время. Хаос. Квант. К решению парадокса времени.
Пригожий И., Стенгерс И. Порядок из хаоса. Новый диалог человека с природой.
Пригожий И., Гленсдорф II. Термодинамическая теория структуры, устойчивости
и флуктуаций.
Суздалев И. П. Нанотехнология: физико-химня нанокластеров, наноструктур
и наноматериалов.
Тел./факс:
+7(499)724-25-45
(многоканальный)
E-mail:
URSS@URSS.ru
http://URSS.ru
Наши книги можно приобрести в магазинах:
«Библио-Глобус» (и. Лубянка, ул. Мясницная, 6. Тел. (495) 625-2457)
«Московский дон книги» (м. Арбатская, ул. Новый Арбат, 8. Тел. (495) 203-8242)
«Молодая гвардия» (м. Полянка, ул. Б. Полянка, 28. Тел. (495) 238-5001,
780-3370)
«Дон научно-технической книги» (Ленинский пр-т, 40. Тел. (495) 137-6019)
«Дон книги на Ладожской» (и. Бауианская, ул. Ладожская, 8, пр. 1. Тел. 267-
0302)
«Гнозис» (н. Университет, 1 гун. корпус МГУ, кони. 141. Тел. (495) 939-4713)
«У Нентавра» (РГГУ) (н. Новослободская, ул. Чаянова, 15. Тел. (499) 973-4301)
«СПб. дон иниги» (Невский пр., 28. Тел. (812) 448-2355)
URSS.ru
URSS.ru
URSS.ru
URSS.ru!
UJ SSUH nj'SSUH nj-ssun UJ-SSUR UJ'SSHH « nj'ssun
IIRSS.ru URSS.ru URSS.ru URSS.ru URSS.ru URSS.ru
HRSS.ru
URSS.ru
URSS.ru
URSS.ru
Уважаемые читатели! Уважаемые авторы!
Наше издательство специализируется на выпуске научной и учебной
литературы, в том числе монографий, журналов, трудов ученых Россий¬
ской академии наук, научно-исследовательских институтов и учебных
заведений. Мы предлагаем авторам свои услуги на выгодных экономи¬
ческих условиях. При этом мы берем на себя всю работу по подготовке
издания — от набора, редактирования и верстки до тиражирования
и распространения.
Среди вышедших и готовящихся к изданию книг мы предлагаем Вам следующие:
Поляхова Е. И. Сборник задач по аналитической механике.
Поляхова Е. Н. Сборник задач по динамике точки в поле центральных сил.
Циолковский К. Э. Труды по ракетной технике.
Белецкий В. В. Очерки о движении космических тел.
Чернин А. Д. Звезды и физика.
Куликовский П. Г. Справочник любителя астрономии.
Ефремов Ю. Н. Вглубь Вселенной. Звезды, галактики и мироздание.
Кононович Э. В., Мороз В. И. Общий курс астрономии.
Бааде В. Эволюция звезд и галактик.
Кинг А. Р. Введение в классическую звездную динамику.
Бочкарев П. Г. Основы физики межзвездной среды.
Бочкарев П. Г. Магнитные поля в космосе.
Сажин М. В. Современная космология в популярном изложении.
Хлопов М. Ю. Космомикрофизика.
Левитан Е. П. Физика Вселенной: экскурс в проблему.
Сурдин В. Г. Астрономические задачи с решениями.
Николаев О. С. Физика и астрономия: Курс практических работ для средней школы.
Ипатов С. И. Миграция небесных тел в Солнечной системе.
Дорофеева В. А., Макалкин А. Б. Эволюция ранней Солнечной системы.
Кусков О. Л. и др. Системы Юпитера и Сатурна.
Тверской Б. А. Основы теоретической космофизики.
Розенблат Г. М., Паншина А. В., Козлова 3. П. Теоретическая механика в решениях
задач из сборника И. В. Мещерского. Кн. 1-3.
Чуркин В. М. Теоретическая механика в решениях задач из сборника
И. В. Мещерского. Кн. 1-2.
Калошин А. М. и др. Наземная отработка космических аппаратов.
Филин В. М. и др. Оптимизация диагностики космического разгонного блока.
Кузьмина Р. П. Математические модели небесной механики.
Жуковский Н. Е. Механика системы. Динамика твердого тела.
Жуковский Н. Е. Аналитическая механика.
Жуковский Н. Е. Кинематика, статика, динамика точки: университетский курс.
Чаплыгин С. А. Исследования по динамике неголономных систем.
Арнольд В. И. Математические методы классической механики.
Арнольд В. И. и др. Математические аспекты классической и небесной механики.
Полак Л. С. Вариационные принципы механики: Их развитие и применения в физике.
По всем вопросам Вы можете обратиться к нам:
тел. +7 (499) 724—25—45 (многоканальный)
или электронной почтой URSS@URSS.ru
Полный каталог изданий представлен
в интернет-магазине: http://URSS.ru
Научная и учебная
литература
URSS.ru URSS.ru URSS.ru URSS.ru
URSS.ru URSS.ru URSS.ru IIII URSS.ru URSSJuf ! lli URSS.ru
НОВОЕ НАУЧНОЕ
ОТКРЫТИЕ!
+7(499)724-25-45
(многоканальный)
ФИРМЕННЫМ
КНИЖНЫЙ
МАГАЗИН
Открытие осенью 2010 года
Следите за объявлениями на сайте URSS.ru
Об авторе
Елена Николаевна ПОЛЯХОВА
Кандидат физико-математических наук, доцент. Работает на
кафедре небесной механики Санкт-Петербургского государст¬
венного университета с 1965 г., читает общий курс теорети¬
ческой механики на астрономическом отделении математико¬
механического факультета СПбГУ, а также спецкурсы «Теория
солнечного парусах и «Фотогравитационная небесная ме¬
ханика». Научно-исследовательская работа Е. Н. Поляховой
связана с небесной механикой тел переменной массы, фото-
гравитационной небесной механикой, динамикой космиче¬
ского полета с солнечным парусом и теорией возмущенного
движения искусственных спутников под действием светового
давления. В 2005 г. награждена премией имени Ф. А. Цандера Российской академии
наук. Член Международного астрономического союза. Е. Н. Поляхова — автор 180
научных работ, в том числе учебно-методических пособий «Сборник задач по ана¬
литической механике» (2-е изд. М.: URSS, 2009) и «Сборник задач по динамике точки
в поле центральных сил» (2-е изд. М.: URSS, 2010).
j. Як-.
{t
Ь-.1
Наше издательство предлагает следующие книги:
Ыш.
•
M l V.
СБОРНИК
a 3V1A4
АйМИСКОИ
Ин \uimm
»* 1
1
1
Новый
УМ-. '
1 КОРОЛЯ
8933 ID 112791
785397 015653
Пабые отзывы о настоящем издании,
а тзклв обнаружежье отачатти присылайте
по адрес/ URSS@URSS ru
Ваши замечания и лредлсжеиия 6/дут уленн
и отражены на мебстраиице этой книти
E-mail:
URSS@URSS.ru
Каталог изданий
в Интернете:
> в нашем нчтсрнст-магззнтс Mtp A'URSS пт URSS http://URSS.ru
URSS
НАШИ НОВЫЕ +7(499)724-25-45
КООРДИНАТЫ 117292. Москва, Нахимовский пр-т, 56