/

































































Текст
Профессор В. В. ШИРКОВ
РАСЧЕТ
АНТЕННО ГОНИОМЕТРИЧЕСКОЙ
СИСТЕМЫ
ПЕЛЕНГАТОРОВ
ТИПА ЭДКОК
Профессор В. В. ШИРКОВ
^«тальный зал
РАСЧЕТ
АНТЕННО-ГО НИОМЕТРИЧЕСКОЙ
СИСТЕМЫ ПЕЛЕНГАТОРОВ
ТИПА ЭДКОК
ПОСОБИЕ
ДЛЯ ИНЖЕНЕРОВ И СЛУШАТЕЛЕЙ
ВОЕННЫХ АКАДЕМИЙ
библиотека
Киевский
ГВф I
Военное Издательство
Министерства Вооруженных Сил Союза ССР
Москва —1947
' - Л.
Настоящий труд представляет собой пособие по расчету основных вариан-
тов пеленгатора типа Эдкок со слуховым индикатором. Первая глава посвя-
щена постановке основных вопросов рационального расчета.
В главах II—IV рассматривается методика расчета основных размеров н
параметров пеленгаторных устройств: разноса приемных проводов, действую-
щей высоты и реактивного сопротивления антенво-фидерной системы.
В главах V и VI кратко изложены некоторые выводы работ автора по
количественному анализу .антенного* и „ночного эффекта* пеленгаторов типа
Эдкок и приведен сделанный на их основе вывод ряда расчетных формул.
В главе VII приводится метод расчёта роторной цепи.
Глава VIII посвящена определению параметров схем для „выбора стороны11
и компенсации антенного эффекта.
В заключительной главе IX приводятся общие методические указания отно-
сительно порядка расчета и формулы для вычисления погонной емкости при-
емных проводов и фидеров различных типов.
ОТ АВТОРА
Более тридцати лет наземный радиопеленгатор остается
одним из самых распространенных средств радионавигации. Его
основные преимущества сохранят за ним еще в течение многих
предстоящих лет значение простого и надежного резерва но-
вых, более совершенных средств радионавигации. Как метод
военной разведки радиопеленгация продолжает оставаться не-
заменимой. Сказанным объясняется интерес и внимание, про-
являемые к развитию и усовершенствованию пеленгаторного
дела в армии и флоте.
Несмотря на многолетнее развитие пеленгаторной техники,
вопросы рационального расчета радиопеленгаторов „без ночно-
го эффекта" не находили сколько-нибудь заметного освещения
в распространенной радиотехнической литературе. Это обсто-
ятельство побудило автора еще в 1936 г. обработать для печа-
ти свои первые попытки в этом направлении.
Дальнейшие работы над усовершенствованием пеленгаторов,
которые вел автор до последнего времени, позволили не толь-
ко углубить расчетную проработку отдельных вопросов про-
ектного характера, но и значительно расширить ее рамки, охва-
тив все основные варианты слуховых пеленгаторов типа Эдкок
и детали их схем.
Интерес, который проявлял к этой работе ряд наших спе-
циалистов радиопеленгаторного дела, послужил причиной, заста-
вившей автора обработать все относящиеся к ней материалы,
изложив их в форме пособия как для военных специалистов,
работающих над усовершенствованием пеленгаторов в полевой
обстановке в частях Красной Армии, так и для инженеров про-
мышленности.
3
Предполагая, что эта книга найдет применение также и
в высших учебных заведениях, как военных, так и граждан-
ских, автор ввел в отдельных местах краткие пояснения и
дополнения, облегчающие усвоение материала начинающими
специалистами.
Автор
Военно-Воздушная
Инженерная Академия
нм. проф. Н. Е. Жуковского
1947
ВВЕДЕНИЕ
ПОНЯТИЕ О РАСЧЕТЕ ПЕЛЕНГАТОРА
Наземный радиопеленгатор, представляющий собой старей-
шее радионавигационное средство, является до сих пор одним
из наиболее широко распространенных устройств для слепого
вождения самолетов.
Основные преимущества пеленгации: большие дальности при
хорошей точности, отсутствие специального оборудования на
самолете и одновременное обслуживание его прямой радиосвя-
зью, заставляют еще долгое время смотреть на пеленгацию как
на основное или надежное вспомогательное средство радиовож-
дения.
Пеленгаторы типа Эдкок (Adcock) запатентованы в 1919 г.,
но включают по существу все виды современных наземных пе-
ленгаторов, которые имеют один общий признак—прием только
на вертикальные провода.
К настоящему времени насчитываются десятки модифика-
ций пеленгатора Эдкока. Они могут быть систематизированы в
виде нескольких групп, различающихся признаками, которые
должны быть названы не только существенными, но и принци-
пиальными.
Пеленгация имеет свою большую литературу, в которой,
однако, не приводится сведений относительно методики расче-
та этого наиболее распространенного вида пеленгаторов.
Несколько разрозненных указаний, выраженных не всегда
достаточно ясно отдельными исследователями, касаются лишь
трех-четырех частных вопросов.
Опубликованная автором в 1938 г. работа (Труды НИИС ГВФ,
вып. 4), касающаяся первых разработанных им моделей пелен-
гаторов, содержит предложенную им методику расчета в том
ее виде, какой она имела десять лет назад.
Работы, проведенные автором в предвоенные и военные го-
ды, позволили значительно развить методы расчета, распро-
странив их на все наиболее известные типы пеленгаторов Эдкока
и придав им более полный и систематический характер. Раз-
работанная таким образом методика расчета излагается в на-
стоящем пособии. Объектом расчета считается при этом пелен-
гатор, работающий по методу установки на минимум интенсив-
5
ности сигнала, но приводимый материал может почти целиком
быть использован и при иных способах индикации.
Требования, которые предъявляет к пеленгаторным устрой-
ствам авиация, наложили свой отпечаток и на излагаемый ма-
териал, который может быть применен и не только к авиа-
ционным пеленгаторам. Общая система расчета, основные форму-
лы и многое другое могут быть использованы при проектиро-
вании пеленгаторов различного назначения.
Приведенные способы расчета могут быть использованы для
проектирования как коротковолновых, так и средневолновых
пеленгаторов. Однако все частные указания и примеры отно-
сятся к диапазону коротких и промежуточных волн.
В книге принят следующий порядок изложения. Глава I по-
священа схеме построения расчета пеленгатора, выводу основ-
ной расчетной формулы и предварительным указаниям. В главе
II рассматривается расчет одного из основных размеров пелен-
гатора— расстояния приемных проводов от центра пеленгато-
ра. Этот вопрос, разрешаемый независимо от выбранного вариан-
та антенно-фидерной системы, может быть выделен и решен
в первую очередь, исходя из общих тактико-технических тре-
бований, предъявляемых к проектируемому пеленгатору.
В главах III и IV приведены расчетные формулы двух основ-
ных электрических параметров антенно-фидерной системы: дей-
ствующей высоты и реактивного сопротивления.
Расчет пеленгатора характерен тем, что, Добиваясь получе-
ния оптимальной чувствительности, конструктор должен суметь
избежать ряда „опасных соотношений" геометрических и элек-
трических параметров, при которых незначительные неточно-
сти изготовления деталей и монтажа могут вызвать резкое ухуд-
шение качества пеленгации. Эти соотношения используются
для вывода расчетных формул некоторых конструктивных раз-
меров и параметров пеленгатора. Таким путем определяются
индуктивность статорных обмоток, индуктивность обмоток транс-
форматоров для трансформаторных вариантов пеленгатора и
длина приемных проводов.
Теоретические обоснования и вывод формул приведены в
главах V и VI. Расчет цепи ротора, представляющий до извест-
ной степени обособленный вопрос, излагается отдельно в гла-
ве VII.
Многообразие исходных предпосылок и теоретических обо-
снований вывода расчетных формул не позволяет рассматривать
их в том порядке, в каком эти формулы используются во время
расчета.
Это обстоятельство заставило посвятить главу IX изложе-
нию наиболее удобного порядка расчета, а также вспомогатель-
ным формулам преимущественно для вычисления погонной
емкости. . -
Оптимальные параметры схем для выбора стороны и ком-
пенсации антенного эффекта обычно подбираются эксперимен-
6
тально. Это объясняется сложностью изменения по диапазону
всех относящихся сюда соотношений параметров пеленгаторной
схемы.
Однако автор считает, что предварительное ориентировоч-
ное определение оптимальных электрических величин может
значительно сократить и упростить экспериментальный подбор
элементов и дать правильную оценку пригодности той или иной
специальной схемы в каждом отдельном случае.
Вывод расчетных формул для схем, выбор стороны и ком-
пенсации антенного эффекта и указания, относящиеся к их при-
менению, приведены в главе VIII.
Предварительное ознакомление — перед расчетом — со всей
книгой, по мнению автора, необходимо. Оно предохранит кон-
структора от возможных недоразумений и облегчит ему выбор
оптимальных путей решения отдельных вопросов.
ГЛАВА I
СОДЕРЖАНИЕ И СХЕМА РАСЧЕТА
1. Дефекты пеленгации и задача расчета
Отсчет пеленга по угловой шкале гониометра производится
пои минимуме силы сигнала в головном телефоне оператора.
Поворачивая ручку гониометпа, оператор определяет границы
„угла равной слышимости" (УРС), в пределах которых он не
замечает изменения интенсивности сигнала. Биссектриса этого
угла принимается за направление минимума, и ее положение,
отсчитанное по угловой шкале, дает пеленг.
Чем шире УРС, тем более расплывчата его граница. Погреш-
ность в определении границ УРС является одновременно и по-
грешностью определения его биссектрисы, а следовательно, и
пеленга.
Поддерживая самые строгие требования к точности изгото-
вленияи прецизионности шкалы гониометра, мы полагаем, что
ошибки этого происхождения не должны превосходить в сумме
0,1°, что позволяет не придавать им сколько-нибудь существен-
ного значения.
Таким образом, можно заключить, что ошибка пеленга состо-
ит из двух основных компонент:
1) отклонения биссектрисы УРС от правильного положения,
что мы будем называть „смещением пеленга", и
2) ошибки определения направления биссектрисы УРС, за-
висящей от ширины этого угла.
Погрешность определения границ УРС. а следовательно, и
положения биссектрисы при УРС порядка 3—5° можно считать
равной — УРС. При значительном расплывании пеленга, когда
УРС достигает 25—35°, эта погрешность может достигать
4- УРС.
о
Переходим к краткому обзору причин смещения и расплы-
вания пеленга.
К первой группе таких причин мы относим все те, возник-
новение и эффект воздействия которых не зависят от того,
насколько удачно спроектирован и выполнен пеленгатор. Сюда
должны войти дефекты пеленгации, вызываемые рассеянным
8
отражением от ионосферы, береговой рефракцией, воздей-
ствием переизлучателей и т. и.
Причинами смешения пеленга, зависящими только от самого
пеленгатора, следует считать искажение диаграмм направлен-
ности связанное с конечным расстоянием между приемными
проводами пеленгатора, и конструктивные дефекты его антенно-
фидерной системы или гониометра.
Первое обстоятельство, подробно рассмотренное в главе II,
используется для вывода расчетных формул „разноса" прием-
ных проводов, т. е. расстояния их от центра пеленгатора.
Конструктивные и монтажные дефекты могут быть учтены
при расчете лишь косвенно—путем выбора варианта пеленгато-
ра, наименее подверженного этим дефектам.'Сюда же следует
отнести дефекты, вносимые электрической асимметрией пелен-
гатора, т- е. „антенный эффект", борьба с которым оказывает
существенное влияние на ход расчета. „Опасные соотношения"
параметров пеленгатора и частоты, при которых вредные по-
следствия антенного эффекта резко возрастают, служат источ-
никами для вывода некоторых расчетных формул, позволяю-
щих избежать этих соотношений (гл. V).
„Антенный эффект" служит также причиной расплывания угла
равной слышимости. Поэтому устранение его оправдывается
вдвойне.
При пеленгации на луче, отраженном от ионосферы, возника-
ют дополнительные источники смешения и расплывания пелен-
га. Для этого случая существуют свои „опасные соотношения".
Необходимость удаления их за ппеделы рабочего диапазона
тоже учитывается в расчете (гл. VI).
Надо также указать, что повышение чувствительности пелен-
гатора как приемного устройства является одной из мер борь-
бы с этими явлениями — типа „ночного эффекта", так как чув-
ствительность пеленгатора к воздействию вертикальных и гори-
зонтальных компонент поля определяется не одними и теми
же факторами.
Пеленгация по минимуму слышимости сигнала, естественно,
весьма подвержена воздействию помех всякого рода. При на-
ложении помех на сигнал УРС расширяется и точность пелен-
гации падает.
Борьба с помехами, поступающими на вход приемника нор-
мальным путем — через антенно-фидерную систему, осущест-
вляется мерами увеличения избирательности по всем трактам
приемника, начиная с входного контура, т. е. цепи ротора.
Атмосферные помехи, играющие основную роль в средне-
волновой пеленгации, при коротких волнах отступают на второй
план. Они заметно сказываются только при особо сильных ат-
мосферных разрядах.
Помехи индустриального происхождения и сходные с ними
при переходе от средних к коротким волнам проявляются тоже
значительно слабее. Кроме того, с ними может вестись доста-
точно эффективная борьба организационными мерами.
Помехи радиостанций, работающих на соседних частотах, или
гармоник радиовещательных станций большой мощности часто
являются серьезной угрозой для работы пеленгатора. Помимо
рациональных методов распределения частот между службами и
станциями и ограничения излучения на гармониках, с этими поме-
хами можно бороться только особо тщательным выбором волн
для пеленгации и возможностью их изменения во время связи.
Повышение приемной чувствительности пеленгатора может
лишь косвенно помочь в борьбе с помехами последней группы,
облегчая выбор средств для повышения избирательности.
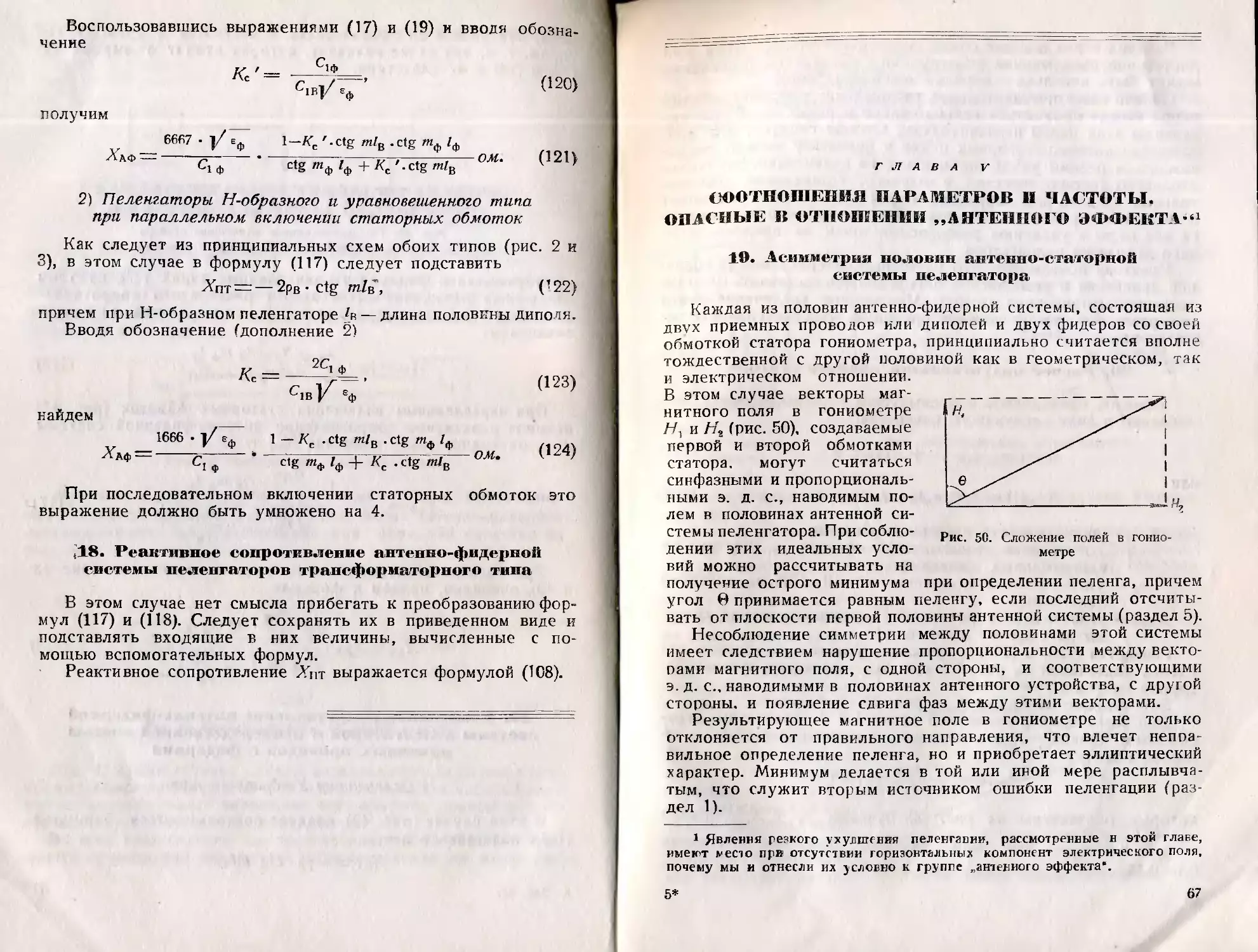
Рис. 1. Построение угла равной слышимости
Собственные шумы приемника оказывают весьма существен-
ное влияние на точность работы пеленгатора. Особенно это
относится к коротковолновым пеленгаторам, вообще малочув-
ствительным к помехам атмосферного происхождения.
Экспериментальные исследования автора1 показали, что то-
нальный сигнал исчезает на фоне шума приемника, когда
1 1 г-
напряжение сигнала составляет—-^-напряжения шума. Счи-
таясь с тем, что тон сигналов самолетных радиостанций не бы-
вает безупречно чистым, принимаем, что отношение напряже-
ния сигнала в момент его исчезновения к напряжению шума
составляет 1:3.
На рис. 1 изображена полярная диаграмма изменения напря-
жения сигнала Uc на входе приемника как функция угла пово-
п 1
рота ротора. Проведя окружность радиусом, равным -л- напря-
жения шума приемника 67Ш в принятом масштабе, и проведя
1 В. В. Ширков, Влияние собственного шума приемника на угол молча-
ния пеленгатора. Труды отд. № 1 НИИ ГВФ, вып. Ns 12, 1940.
10
прямые ОА и ОБ, найдем величину угла равной слышимости
УРС. Из этого построения следует
УРС — 2 arc sin Ьгтт-2—) (!)
\ ** тах у
УРС в этом случае имеет величину порядка 5—10 . Заме-
няя синус его аргументом и выражая УРС в градусах, найдем
УРС = 38,2- градусов, (2)
Uс max
где Ос шах — напряжение сигнала при установке ротора на мак-
симум звука.
Напряжение собственных шумов приемника Ош , отнесенное
к управляющей сетке первой лампы, может.быть вычислено.
Максимум напряжения сигнала Сетах, отнесенное к той же
сетке, может быть непосредственно связано с вертикальной
компонентой напряженности электрического поля Е:
истах=Нэ-Е, (3)
где Нэ — множитель пропорциональности, имеющий размерность
длины, который именуется далее „эквивалентной высотой11 и
измеряется в метрах.
„Эквивалентная высота*1, характеризующая приемную чувст-
вительность пеленгатора, является основным показателем его
качества, так как отрицательное действие шумов приемника на
точность пеленгатора, играющее решающую роль, особенно в
диапазоне коротких волн, может быть ослаблено только уве-
личением эквивалентной высоты.
Кроме того, как было отмечено ранее, ее величина отра-
жается на подверженности пеленгатора явлениям „ночного
эффекта*1.
Защита пеленгатора от этих явлений, так же как и от „ан-
тенного эффекта*1, служит источником второй особенности рас-
чета пеленгатора — необходимости исключения „опасных соот-
ношений*1, принуждает конструктора к пробным расчетам и пе-
ресмотру часто многочисленных комбинаций.
Эта задача представляет тем большие трудности, чем шире
диапазон частот пеленгатора. Существенное облегчение вносит
отказ от непрерывности диапазона, что в ряде случаев может
быть допущено для избежания использования каких-либо спе-
циальных мер, обычно отрицательно отзывающихся на других
качествах пеленгатора.
2. Типы пеленгаторов
Излагаемые далее методы расчета относятся к шести основ-
ным вариантам гониометрического пеленгатора типа Эдкок.
Их принципиальные схемы приведены на рис. 2—7, причем во
всех случаях для ясности чертежа показана лишь одна поло-
11
вина антенно-фидерной системы со своей статорной обмоткой
гониометра St.
Обмотка ротора R и приемник изображены только на рис. 2.
На остальных для простоты они опущены.
Пеленгатор, показанный на рис. 2, называется в силу своей
геометрической формы Н-образным.
Рис. 2. Н-образный пеленгатор
Рис. 3. «Уравновешенный»
пеленгатор
Такое же название носит
рис. 6. Различие между ними
емных проводов с фидерами.
и пеленгатор, изображенный на
заключается в способе связи при-
Аналогичные сходство и различие существуют между двумя
вариантами: „уравновешенного** и „балансного** пеленгатора
Рис. 4. У-образный пеленгатор
Рис. 5. «Простой трансформаторный»
пеленгатор
(рис. 3 и 7), где в обоих случаях четырехугольник Zn изобра-
жает блок, схема которого имеет с большой степенью точно-
сти тот же импеданц Zn , что и приемный провод.
Пеленгаторы, изображенные на рис. 2 и 3, могут быть на-
званы „пеленгаторами с непосредственной связью** проводов с
12
Лидерами, а их аналоги (рис. 6 и 7)- „пеленгаторами с транс-
Лооматорной связью". Третий вариант пеленгатора этого вида
(рис 5) будет называться „простым трансформаторным", что
вполне отвечает его схеме.
Несколько особняком стоит У-образный пеленгатор, показан-
ный на рис. 4. Он имеет однопроводный экранированный фидер,
Рис. 6. Н-образный трансформаторный
пеленгатор
Рис, 7. «Уравновешенный трансформа-
торный» пеленгатор
защищенный от воздействия горизонтальных компонент элек-
трического поля экраном и главным образом слоем влажной
почвы.
Свойства и особенности приведенных здесь различных вари-
антов пеленгатора Эдкока известны. Поэтому ограничиваемся
лишь краткой их характеристикой.
Н-образный пеленгатор с непосредственной связью (рис. 2)
применяется преимущественно для передвижных установок, так
как не требует заземления. Н-образный трансформаторный пе-
ленгатор (рис. 6) может применяться в тех же случаях. Транс-
форматорная связь дает ему преимущество перед показанным
на рис. 2, заключающееся в значительно меныпей подверженно-
сти явлениям типа „ночного эффекта" (гл. VI).
Неудобство Н-образных пеленгаторов заключается в необ-
ходимости поднимать гониометр и приемник довольно высоко
над поверхностью земли. Это требует сооружения высокой под-
ставки для пеленгаторного помещения и специальных мер за-
щиты от переизлучателей, каковыми являются провода связи
и электропитания, поднимающиеся от уровня земли до стола
радиооператора.
Применение наклонных фидеров, как показано на рис. 8,
устраняет это неудобство, но влечет за собой другие недостат-
ки: добавочную паразитную индуктивную связь фидеров с ниж-
ними проводами диполей и удлинение фидеров. Это понижает
13
чувствительность пеленгатора и, внося асимметрию, делает его
в большей степени подверженным влиянию „антенного11 и „ноч-
Рис. 8. Н-образный пеленгатор
с наклонными фидерами
„Простой трансформаторный11
перед „трансформаторно-уравновешенным11 в том, что он ли-
шен сложных деталей—балансных схем Zn. Однако применение
его ограничивается редкими
случаями исключительно вы-
сокой проводимости почвы и
возможности расположить
трансформаторы на уровне
земли.
В противном случае про-
вода, заземляющие экраны,
обладают реактанцем, доста-
точным для того, чтобы потен-
циалы экранов существенно
отличались от нуля.
У-образный пеленгатор
(рис. 4) обладает большей
чувствительностью и благода-
ря последовательному вклю-
чению статорной обмотки в
фидеры лучше других вари-
антов защищен от „антенного статорной обмотки
эффекта" (раздел 25).
Применение этого варианта ограничено почвой весьма высо-
кой проводимости или требует искусственных мер для поддер-
жания последней.
ного“ эффектов (гл. V и VI).
„Уравновешенный11 пелен-
гатор с непосредственной
связью имеет удобства в кон-
структивном отношении, так
как* фидеры и гониометр с
приемником располагаются
близко к поверхности земли,
но этот вариант пеленгатора
более других подвержен воз-
действию „антенного эффекта11
(раздел 26).
„Трансформаторно-уравно-
вешенный11 пеленгатор (рис. 7)
лишен недостатка только что
описанного варианта и яв-
ляется одним из лучших ва-
риантов пеленгатора типа
Эдкок.
вариант имеет преимущество
Рис. 9. Н-образный пеленгатор
с последовательным включением
Следует заметить, что последовательное включение статор-
ных обмоток в фидеры может быть использовано и в других
14
вариантах пеленгатора Эдкока. Пример показан на рис. 9. По-
ловины каждой статорной обмотки Sty и 5А2 включены отдельно
и последовательно с одним из фидерных проводов. Магнитные
поля обеих половин обмотки внутри гониометра направлены в
одну сторону. Это включение статорных обмоток, которое мы
будем называть „последовательным", принципиально не изменя-
ет чувствительности пеленгатора, но менее подвергает его
вредным последствиям случайных нарушений симметрии антен-
но-фидерной системы (гл. V) и облегчает расширение его ра-
бочего диапазона.
Разделение статорных обмоток на две симметрично вклю-
чаемые половины ставит тяжелые требования к конструкции
гониометра, несоблюдение которых может вызвать резкое ухуд-
шение работы пеленгатора за счет явлений типа „ночного
эффекта". ’
Расчет пеленгаторов с поворотной системой антенн здесь не
приводится, но многое из излагаемого материала может быть
для этой цели использовано. Ряд полезных указаний можно
найти в упомянутой ранее работе автора1.
3. Формула ,,»квпвалептной высоты46 пелевгаторн
По принятому определению (раздел 1)
(4)
где На— эквивалентная высота;
t/c max — напряжение на управляющей сетке первой лампы при
положении ротора, соответствующем максимуму силы
сигнала;
Е — вертикальная компонента напряженности электриче-
ского поля.
Чтобы выразить Нэ через основные параметры пеленгатора,
сделаем некоторые преобразования2.
Так как Uc шах пропорционально э. д. с., наводимой в обмотке
ротора, когда ее цепь разомкнута, то можно положить
f/c max —Qr * (714], со Is^ —|— 714о idls?)max , (5)
где Qr — „множитель вольтажа ротора", учитывающий парамет-
ры его цепи и параметры антенно-статорных цепей, пе-
речисленных в цепь ротора;
о) — угловая частота;
и Is2 — токи в первой и второй обмотках" статора (при разо-
мкнутой обмотке ротора);
Му и ТИ2—взаимная индуктивность между каждой из этих об-
моток и обмоткой ротора.
1^Труды НИИС ГВФ, № 4, 1938.
2 Автор предполагает, что элементарная теория гониометрического пелен-
гатора читателю известна.
15
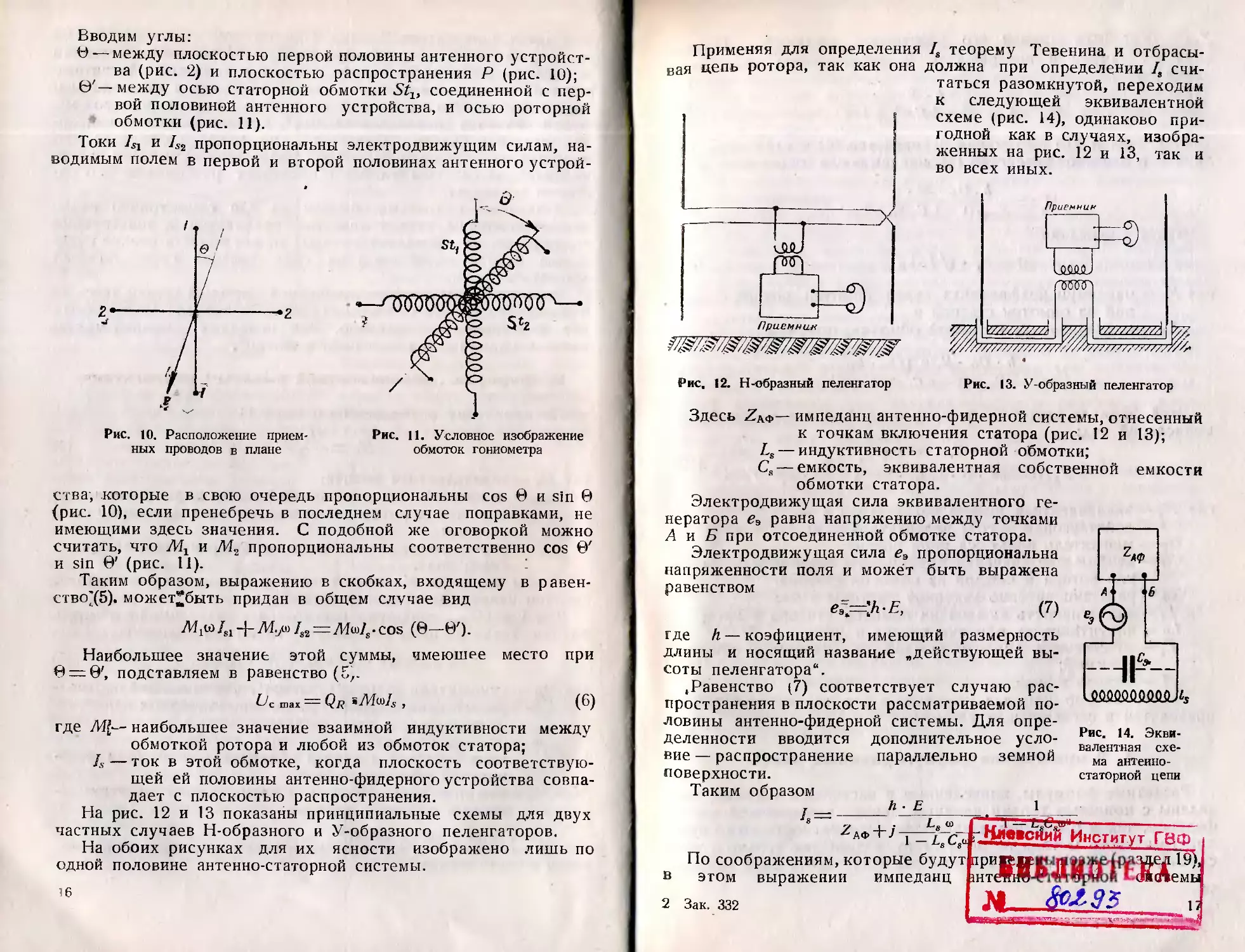
Вводим углы:
0 — между плоскостью первой половины антенного устройст-
ва (рис. 2) и плоскостью распространения Р (рис. 10);
©'—между осью статорной обмотки соединенной с пер-
вой половиной антенного устройства, и осью роторной
обмотки (рис. 11).
Токи /51 и Л2 пропорциональны электродвижущим силам, на-
водимым полем в первой и второй половинах антенного устрой-
Рис. 10. Расположение прием-
ных проводов в плане
Рис. 11. Условное изображение
обмоток гониометра
ства, которые в свою очередь пропорциональны cos 0 и sin 0
(рис. 10), если пренебречь в последнем случае поправками, не
имеющими здесь значения. С подобной же оговоркой можно
считать, что и Л12 пропорциональны соответственно cos 0'
и sin 0' (рис. 11).
Таким образом, выражению в скобках, входящему в равен-
ство'(5). может^быть придан в общем случае вид
41 + 4,2 = Mwls- cos (0—0').
Наибольшее значение этой суммы, имеющее место при
0 — 0', подставляем в равенство (37.
Uс max = Qr »MmIs , (6)
где ЛЦ— наибольшее значение взаимной индуктивности между
обмоткой ротора и любой из обмоток статора;
Is — ток в этой обмотке, когда плоскость соответствую-
щей ей половины антенно-фидерного устройства совпа-
дает с плоскостью распространения.
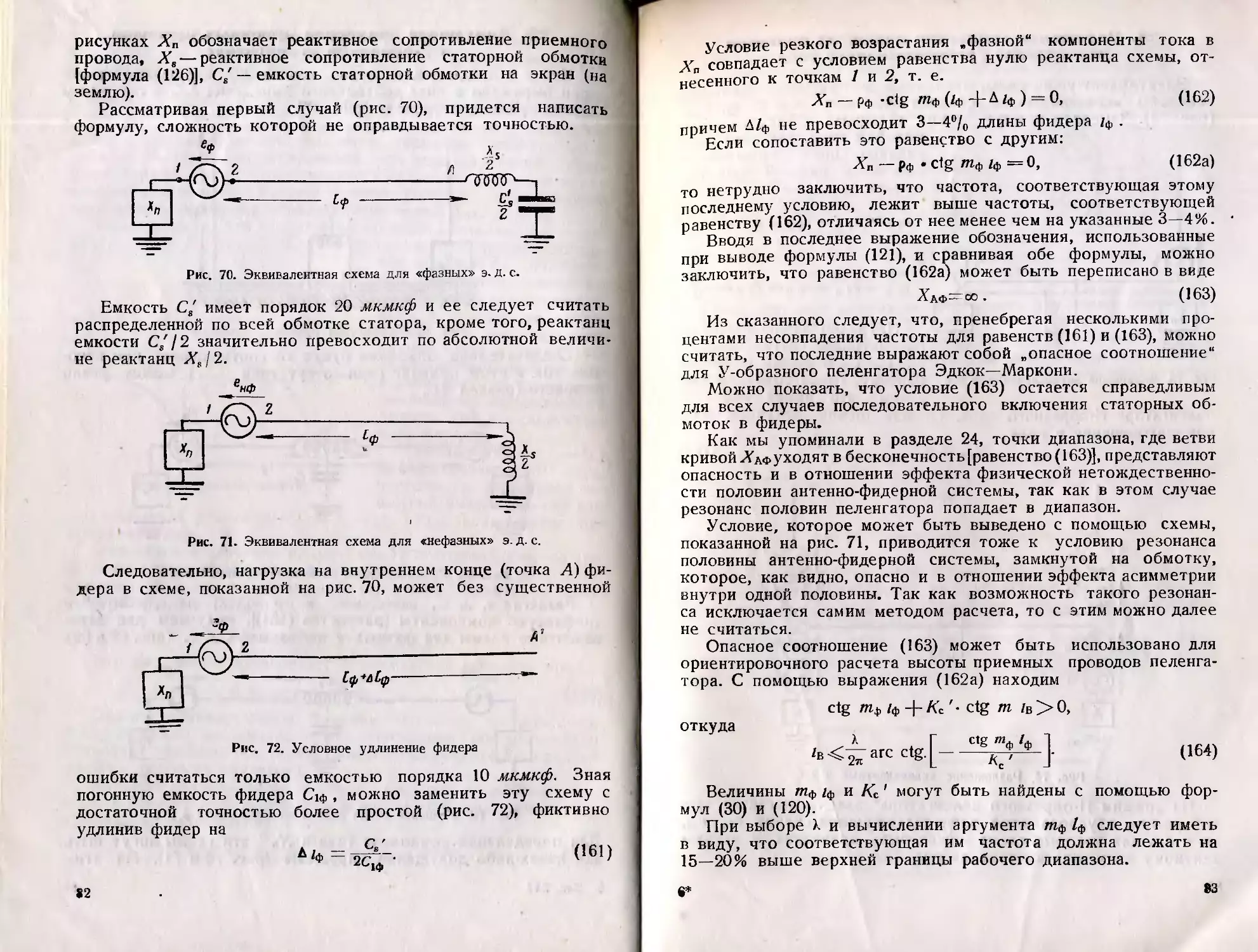
На рис. 12 и 13 показаны принципиальные схемы для двух
частных случаев Н-образного и У-образного пеленгаторов.
На обоих рисунках для их ясности изображено лишь по
одной половине антенно-статорной системы.
16
Применяя для определения /8 теорему Тевенина и отбрасы-
вая цепь ротора, так как она должна при определении Is счи-
Приемнин
Рис. 12. Н-образный пеленгатор
таться разомкнутой, переходим
к следующей эквивалентной
схеме (рис. 14), одинаково при-
годной как в случаях, изобра-
женных на рис. 12 и 13, так и
во всех иных.
Рис. 13. У-образный пеленгатор
Здесь ZA<s— импеданц антенно-фидерной системы, отнесенный
к точкам включения статора (рис. 12 и 13);
Ls — индуктивность статорной обмотки;
Ся— емкость, эквивалентная собственной емкости
обмотки статора.
Электродвижущая сила эквивалентного ге-
нератора е3 равна напряжению между точками
А и Б при отсоединенной обмотке статора.
Электродвижущая сила е3 пропорциональна
напряженности поля и может быть выражена
равенством
<=:А-£, (7)
где Л — коэфициент, имеющий размерность
длины и носящий название „действующей вы-
соты пеленгатора11.
.Равенство (7) соответствует случаю рас-
пространения в плоскости рассматриваемой по-
ловины антенно-фидерной системы. Для опре-
1<№ООО.ОШД
деленности вводится
вне — распространение
дополнительное усло-
параллельно земной
Рис. 14. Экви-
валентная схе-
ма антеино-
поверхности.
Таким образом
статориой цепи
В
h Е__
к»™
1
tri — L.O.UH --------------
Ниевснии Институт ГВФ
По соображениям, которые будут гри^изю ч jj.bc раздел
этом выражении импеданц штетгн0-т'.’Г1*1}’Иий отА<
Ji &к95
HIT ИГ JB' “W~ 1 ”
.ef 19),
юмы
2 Зак. 332
и
Z^ может быть заменен его реактивной частью Произ-
водя эту замену и возвращаясь к действующим значениям,
получаем
/ ----------? Л _________ /с\
* ~ * АФ • о - L Х>?) + Кг • ’
Подставляя это выражение в равенство (6) и найденную ве-
личину в основное равенство (4), найдем после сокращения на Е
___ h . QK М ш
* — хДф.(1-ьх>2) +*•»<>' (9)
Вводя выражение
М = К (10)
где Кг — максимум коэфициента связи обмотки ротора с каж-
дой из обмоток статора и
Lr — индуктивность роторной обмотки, получим
Нэ = (11)
9 хаф (1 — КР* “2) +
Этой формуле может быть придан иной, более удобный для
вычислений вид:
Л • Qr. Кг • ~ Г
и __________д г у * & (12)
9 ХАФ(1-4Яг ./2 • LSCS • 10-6) + 2к/. L,’ V ’
где Н3 — эквивалентная высота пеленгатора в м\
h—действующая высота пеленгатора в м\
Qr — множитель вольтажа цепи ротора;
Кт —наибольшее значение коэфициента связи между обмот-
кой ротора и каждой из обмоток статора;
Лаф — реактанц антенно-фидерной системы в ом-,
^ — индуктивность каждой из обмоток статора в мкгн\
Lr — индуктивность обмотки ротора в мкгн-,
Cs — собственная емкость каждой из статорных обмоток
в мкмкф-,
f — частота в мггц.
Расчетные формулы для входящих в это выражение величин
приводятся в последующих главах.
4. О применении формул длинных линий
Расчетные формулы, приведенные в настоящем пособии, вы-
ведены с помощью теории длинных линий, примененной как к
фидерам, так и к приемным проводам. Правильность этого рас-
пространенного метода не подвергается сомнению только в том
случае, если частота тока и напряжения достаточно низка,
18
чтобы их распределение сказывалось незаметно на распреде-
ленных параметрах проводов.
Предназначая излагаемый метод расчета пеленгаторов пре-
имущественно для диапазона коротких волн, полезно предва-
рительно разрешить вопрос о возможности исходить при этом
из теории длинных линий.
С этой целью автор произвел серию сравнительных расче-
тов действующей высоты и реактивного сопротивления для не-
скольких вертикальных проводов, дополнив это измерениями
последней величины.
Вычисления производились как с помощью формул длинных
линий, так и с помощью выражений, представляющих практи-
ческие выводы из наиболее общей и полной теории излучаю-
щего провода, принадлежащей Халлену. Были использованы две
системы расчетных формул этого происхождения, приведенные
Кингом и Блейком1, а также Магнусом и Оберхеттингером2.
Сопоставление результатов, полученных всеми указанными
путями, показало, что в тех случаях, когда длина провода (или
половина диполя) не превосходит примерно */с длины волны,
точность формул длинных линий не выходит за пределы, до-
пустимые в технических расчетах. Совместное влияние погреш-
ностей вычисления действующей высоты и реактанца прово-
да на окончательный результат, т. е. на величину эквивалент-
ной высоты, может выразиться при этом условии цифрой по-
рядка 15%.
В практических случаях проектирования коротковолновых
авиационных пеленгаторов мы можем встретиться с отношени-
ем длины провода к длине волны больше х/6 сравнительно редко
и притом лишь вблизи верхней границы диапазона рабочих
частот.
Приведенные выводы позволяют основывать излагаемые ме-
тоды расчета на теории длинных линий, не прибегая к значи-
тельно более сложным и менее удобным для анализа формулам,
не обещающим при этом практически существенного выигрыша
в точности.
Ниже приведено несколько формул длинных линий, исполь-
зованных далее для получения расчетных формул. Во всех слу-
чаях сделано возможное допущение, — что провод и фидер ли-
шены потерь.
1) Волновое сопротивление фидера. Волновое сопротивле-
ние фидера рф выражается формулой
1 R. К i п g, F- В 1 a k е, The Seif-Impedance of a Symmetric; 1 Antenna. Pro-
ceed. Inst. Rad. Eng. 1942, July.
s W. Magnus, F. Oberhettinger, Hochfrequenz. u Elektroakustik.
1941, Bd. 57, H. 4.
2* 19
где L\ ф— индуктивность единицы длины фидера для прямого и
обратного путей тока ДБ и ВГ, как пояснено на рис. 15 и 16
для симметричного двухпроводного и коаксиального фидеров.
В случае многопроводного фидера каждый из отрезков ДБ и ВГ
Рис. 15. Отрезок двухпро-
водного фидера
Рис. 16. Отрезок коаксиального фидера
состоит из нескольких проводов, включенных параллельно. Для
распространенных четырехпроводных фидеров каждый из про-
водов ДБ и ВГ следует считать состоящим из двух, как то
показано в поперечном сечении фидера на рис. 17.
Погонная емкость фидера Ci& опре-
Рис. 17. Сечение четырех-
проводного фидера
творно
деляется как результат деления заря-
да противолежащих элементов прово-
дов фидера на разность потенциалов
между ними. Уподобляя противолежа-
щие элементы проводов фидера единич-
ной длины обкладкам конденсатора, мы
должны такими обкладками считать для
двухпроводного фидера элементы ДБ
и ВГ (рис. 15), для четырех проводного—
пары элементов ДБ и ВГ (рис. 17) и для
коаксиального фидера—отрезок провода
ДБ и элемент оболочки ВГ (рис. 16).
Как будет показано, уменьшение
погонной емкости фидера С1ф благо-
сказывается на свойствах пеленгатора. Это заставляет
помимо иных конструктивных мер по возможности уменьшать
количество изоляции в фидере и стремиться к наименьшему
значению ее диэлектрической константы. Тем не менее сред-
нее значение этой величины для фидера заметно отступает от
единицы, составляя 1,4 —2,0.
Можно считать, что
С1ф —С1ф • еф,
где С1ф' — погонная емкость фидера, которую он имел бы в том
случае, если бы его провода разделяла только пустота;
£ф — среднее значение диэлектрической константы изоля-
ции фидера.
Подставляя это выражение в формулу (13), после простого
преобразования находим
РФ=И_£1? (14)
Чф
ВО _______t
ГЛф-С1ф' = - (15)
где с — скорость света1.
Из выражений (14) и (15) следует
Выражая сопротивление в ом, а Сдф в мкмкф1м, полу-
чаем удобную расчетную формулу
3333 |/-6ф
РФ = - г—~ ом
С1Ф
(17)
2) Волновое сопротивление провода. Исходной формулой
служит выражение, аналогичное приведенному в предыдущем
случае:
d8)
где Lx—-индуктивность единицы длины провода;
Cj — емкость единицы длины провода (относительно точки
нулевого потенциала или земли).
Преобразование этого выражения приводит к расчетной
формуле
причем погонная емкость Сх выражается в мкмкф(м.
Если провод представляет собой пучок проводов, включен-
ных параллельно, например „колбасу", то Сх есть емкость еди-
ницы длины всего пучка.
Для случая диполя волновое сопротивление, вычисленное по
формуле (19), относится к каждой из его половин порознь2.
При вычислении С, принимается во внимание расстояние до
земли. В случае диполя Сх вычисляется для верхней его поло-
вины.
Причина этого поясняется далее (раздел 40).
1 Подразумевается, что провода фидера ферромагнитными свойствами не
облада ют.
2 Иногда, при уподоблении диполя фидеру с разведенными проводами,
под Сх понимают погонную емкость между противолежащими элементами про-
водов. В этом случае р представляет условное волновое сопротивление диполя,
рассматриваемого как фидер.
21
п
I
Ой
X
Рис. 18.
Приемный
провод
3) Реактивное сопротивление разомкнутого фидера. Реак-
тивное сопротивление фидера, противоположный конец кото-
рого разомкнут, выражается формулой
Лфс = — Рф ctg тф /ф . (20)
Здесь Рф — волновое сопротивление, вычисляемое по фор-
муле (17);
/ф —длина фидера в м\
, (21)
где X — длина волны в эфире в м\
бф — средняя диэлектрическая константа изоляции фидера.
4) Реактивное сопротивление короткозамкну-
того фидера. Реактивное сопротивление фидера,
противоположные концы проводов которого соеди-
нены друг с другом накоротко, выражается Фор-
мулой
= Рф tg тлф /ф ом, (22)
где использованы те же обозначения, что и в
предыдущем случае. ‘
5) Реактивное сопротивление провода. Под
реактивным сопротивлением провода понимается
реактанц, измеренный между концом провода и зе-
млей, т. е. между точками В и Г (рис. 18). В этом
случае применяется формула, подобная выраже-
нию (20):
Л™ = — р ctg ml ом. (23)
6
Здесь р — волновое сопротивление провода, найденное с по-
мощью формулы (19);
I — длина провода в м\
Чк
т =—г->
К
где X —длина волны в .эфире в м.
Эти формулы приме-
няются независимо от на-
правления провода отно-
сительно поверхности
земли.
6) Реактивное сопро-
тивление провода с за-
земленным концом. Ко-
нец провода К (рис. 19)
считается накоротко соединенным с землей. Реактивное сопро-
тивление соответствует измеренному между точками В и Г.
(24)
к
<5
9Г
Рис. 19. Горизонтальный провод
22
Искомый реактанц может быть найден по формуле
AnK = p-tg ml, (25)
где приняты те же обозначения, что и в выражении (23).
7) Реактивное сопротивление фидера с реактивной нагруз-
кой. Фидер замкнут на реактивное сопротивление Агк (рис. 20).
/ •-
Рис. 20. Нагруженный фидер
Формула реактивного сопротивления между
имеет вид
Афх — рф
Рф+*к-С{§ ™ф'ф
РФ ctg '"ф 'ф —
точками В и Г
(26)
где применены те же обозначения, что и в выражении (20).
8) Реактивное сопротивление провода с реактивной нагруз-
кой. Конец провода К длиной I заземлен через реактивное
л Г
•в
Рис. 21. Нагруженный горизонтальный
провод
сопротивление Хк (рис. 21). Реактанц между точками Ви Г
определяется формулой
. _ p+AK.ctgOTZ
Лчк — р- p ctg ml-XK ’ (27>
Здесь использованы те же обозначения, что и в формуле (23).
Рис. 22. Фидер
9) Напряжения на конце разомкнутого фидера. В начале
фидера поддерживается тем или иным способом напряжение
23
(рис. 22). Напряжение на другом, разомкнутом, конце опре-
деляется соотношением:
причем т$ выражается формулой (21).
10) Формулы для вычисления аргументов ml и тф /ф . Фор-
мулы (21) и (24) могут быть заменены другими, часто более
удобными для вычислений:
ml— градусов, (29)
т$ 1ф = 1,2-y^JT-f-l$ градусов, (30)
где f — частота в мггц-
1тл 1$ — длины в м-,
Е<ь—средняя диэлектрическая константа изоляции фидера.
11) Формула средней диэлектрической константы фидера*
Для крепления фидеров и фиксирования взаимного расстояния
их проводов применяются диски, пластинки, кольпаи цилиндры
из изолирующих материалов.
Так как их диэлектрическая константа заметно превосходит
единицу, то мы имеем дело по существу со скачкообразным
изменением погонной емкости фидера по его длине. Более или
менее точный учет нарушения однородности фидера приводит
к усложнению расчетных формул обычно при незначительном
выигрыше в точности расчета.
Вполне удовлетворительный рез ультат может быть получен
введением „средней диэлектрической константы" фидера еф.
Порядок вычисления этой константы показан на нижесле-
дующем примере.
Пример. На каждый погонный метр длины фидера прихо-
дится изолирующих колец толшиной д, см из материала с
диэлектрической константой е, и N2 колец толщиной см с
константой е2. Обозначим через С,ф погонную емкость фидера,
а через С1Ф' — ту же величину, но при условии, что ej = es=l.
Очевидно,
С1Ф [100 — (»1 + «г)] + (A^iSjej -j- А'г^г)
Еф “ V wo
или
____| |----------Се1 — 1) + ^2*2 (е2 — 1) /О1 у
еФ — И jog --. (31)
Чем меньше еф, тем выше чувствительность пеленгатора
что должно быть учтено при конструировании фидера.
Обычно еф —1.4 — 2,0.
ГЛАВА И
РАСЧЕТ РАССТОЯНИЯ 'МЕ5КДУ ПРИЕМНЫМИ
ПРОВОДАМИ
5. Исходные соотношения
Основной и необходимой предпосылкой принципа работы
гониометрического пеленгатора служит допущение, что поляр-
ная диаграмма приема (в горизонтальной плоскости) каждой из
половин антенно-фидерной системы представляет две касатель-
ные окружности. Однако диаграмма такой формы не является
органически присущей приемному эффекту антенны в виде
двух разнесенных проводов (или рамки).
Замена истинной полярной диаграммы двумя окружностями
тем более допустима, чем меньше отношение поперечных раз-
меров антенного устройства к длине волны.
С другой стороны, его действующая высота и вместе с этим
приемный эффект находятся также в прямой зависимости от
величины взаимного разноса
приемных проводов. При обыч-
ных размерах пеленгаторов, ког-
да сохраняется близость поляр-
ной диаграммы к двум касатель-
ным окружностям, напряжение
на входе приемника почти про-
порционально расстоянию между
приемными проводами.
Необходимость удовлетво-
рить в достаточной мере обоим
противоречашим друг другу тре-
бованиям заставляет дать коли-
чественное обоснование выбора
поперечных размеров антенной
системы пеленгаторов. Если ди-
апазон пеленгатора захватывает
сравнительно короткие волны (короче 35—40 м), то положение
обостряется еще следующим, чисто практическим обстоятель-
ством.
Допустимое с точки зрения формы диаграммы расстояние
между приемными проводами получается столь небольшим,
25
/
что последние располагаются слишком близко к стенкам прме-
щения пеленгатора, следствием чего может явиться нарушение
электрической симметрии и существенное ухудшение качества
его работы.
На рис. 23 показана схематически в плане 1антенно-фидер-
ная система пеленгатора типа Эдкок.
Приемные провода обозначены цифрами 1, 2, 3 и 4, а фидеры
показаны однопроводными, как то имеет место в пеленгаторах
У-образного типа. Ход расчета показывает, что его результа-
ты остаются справедливыми и для всех иных систем гонио-
метрических пеленгаторов типа Эдкок. Вектор Р, лежащий в
плоскости распространения, совпадает с его направлением. В
общем случае при пеленгации на луче, отраженном от ионо-
сферы, вектор Р составляет с горизонтальной плоскостью угол,
не равный нулю и обозначаемый в формулах буквой а.
Азимутальные углы 0, определяющие положение плоскости
распространения, отсчитываем для удобства выкладок от плос-
кости пары приемных проводов /—5 (рис. 23).
Разность хода в радианах вдоль пути распространения
между центром пеленгатора и приёмными проводами выражает-
ся равенствами
tf! — -f- tnlr cos a - cos 8
cp2 _ ml, cos a • sin 0
<f>8 ——mlr cos a • cos©
<f>4 = — mlr cos a • sin 0
(32)
Здесь принято обычное обозначение
2 л , .
т = -Т~, (33)
где К —длина волны.
Предположив, что пятый фиктивный приемный провод, ана-
логичный четырем остальным, расположен в центре устройства
и что начальная фаза наводимой в нем электродвижущей силы
(э. д. с.) равна нулю, найдем, что равенства (32) изображают
начальные фазы э. д. с„ наводимых соответственно в проводах
1, 2, 3 и 4.
Очевидно, те же взаимные фазовые соотношения сохраня-
ются и для компонент тока в статорных обмотках, Создавае-
мых этими э. д. с.
Так как напряженности машитного поля в гониометре про-
порциональны токам в соответствующих обмотках, то можно
написать
Hrit = Кп
H<ut — Кп
[sin (w tcpj — sin (ш 14- <p3)]}
[sin (<u 14- <f>2) — sin (w 14- a>4)];
(34)
26
где H13t и Hitr —мгновенные значения напряженности магнит-
ного поля, создаваемого обмотками статора
2—3 и 2—4 (рис. 23);
— коэфициент пропорциональности.
Подвергнув равенства (34) элементарным преобразованиям
и подставив вместо углов ® их значения (32), получим
Hlsi —2Ка sin (znZr cos а • cos 0) • cos o> t'
Hut — IKn sin (mZr cos а • sin 0) • cos ш 7 J °
Как видно, напряженности поля обеих обмоток синфазны и
их суммарное значение может быть найдено с помощью гео-
метрического сложения.
Нетрудно заключить, что зависимость каждой из величин
Hist и H2it от угла 0 не может быть точно изображена диа-
граммой в виде двух касательных окружностей, так как в
этом случае равенства (35) должны были бы иметь вид
Hlst — Кп cos 0 • cos ш ty
= Лп' - sin 0 cos w t {
где Kn ' — новый коэфициент пропорциональности.
На рис. 24 показаны идеализированная диаграмма АОБ
в виде двух окружностей и реальная диаграмма Aj ОгБ, имею-
щая очертание двух сплющенных окружностей.
(36)
Рис. 24. Полярная диаграмма приема пары
проводов
Точная форма окружностей может быть получена только
в том случае, если величина /nZr ничтожно мала и синусы,
входящие в равенства (35), могут быть заменены аргументами,
причем мы можем получить:
Л/13/ =z 2 Кп mlr cos а • cos 0 • cos со t ‘
= 2 ЛГП mlr cos а • sin 0 • cos co t{
Приняв направление поля, создаваемого обмоткой 7—3, за
начальное из выражений (35), найдем, что вектор суммарного
27
магнитного поля Ht составляет с ним угол ф (рис. 25), опреде-
ляемый равенством
. . sin (mlr cos a • sin 0)
® ' sin (mlr cos a • cos 0)
Только при ничтожно малых значениях mlt оно переходит
в выражение
tg ф — tg 0 или ф — 0. (39)
Устанавливая ротор в положение мини-
мума слышимости сигнала, мы совмещаем
плоскость витков его обмотки с направ-
лением Ht. составляющим угол ф с напра-
влением Hrit, принятым условно за на-
чальное.
Отсюда можно заключить, что ошибка
определения пеленга, зависящая от вели-
чины разноса приемных проводов, может
быть изображена равенством
.sin (mlr cos a - sin 0) ,.Л.
ДА = e _ arc tg e)_ (40)
Рис. 25. Сложение
магнитных полей
статорных обмоток
или
(38)
„ sin (mlr cos a sin 0)
ip- 0____________________'
s sin (mlr cos a - cos 0)
sin (mlr cos a - sin 0) i
sin (mlr cos a - cos0)
Приняв, что величина mlT не может считаться ничтожно
малой, но что она, однако, весьма невелика, найдем, что си-
нусы, входящие в последнее выражение, могут быть заменены
двумя первыми членами их разложения в ряд Маклорена:
ДА — arc tg
(41)
, . , . z-.\ , , гч nfllr2 COS3 a sin3 0
sin (mZr cos a sin vj^mlr cos a sin A —
6
- X > z->\ » а т*1 Г3 COS® а COS3 0
sin (mlT cos a cos A) « mlT cos a cos A-----------g—------.
Подстановка этих выражений в равенство (41) и элементар-
ные преобразования позволяют придать ему вид
л о _ , т2 /г2 cos2 a • sin 4 0
аге tg 24 — 4 m2~Zr2 • (cos4 0-Rsin4"©)- COS2 a’
Пользуясь далее равенством
r\ I -io 3 -4- cos 4 0
cos 0 sin4 0 = —!-------------
(42)
4
и производя дальнейшие преобразования, получим
sin 4 ©
24
ДА — — arc tg
т21г2 cos2 a
cos 4 0
(44)
28
Так как ДУ имеет порядок 1 — 3°, то, не внося сколько-
нибудь заметной неточности, можно упростить это выражение,
придав ему вид
Д0 = -
Sln 4 «
7 24 \ '
I » , ,---5— — 3 I — cos 4 0
I Z« 2 Д2 COS2 a ]
(45)
Обычно отношение J не превосходит 1/8—1/10. Следова-
тельно, выражение в скобках, стоящее в знаменателе, превос-
ходит cos 4 О примерно в 5U — 60 раз. Это позволяет, умножив
числитель и знаменатель выражения (45) на
24
т2 /г2 cos2 а
3]-ГсО5 4 0,
привести его к виду
д 0 =-----2Г------sin 4 w—~7—h--------лsin 8 °- (46)
m2 /г 2 COS2 а ~ 3 2 \Уп2 — 3 J
Кривая ошибок представляет собой синусоиду, слегка
деформированную наложением второй гармоники, амплитуда
которой меньше одной сотой амплитуды основной гармоники.
За полный цикл изменения пеленга от и до 360° величина
д(3 восемь раз переходит через нуль при значениях угла У,
кратных 45°.
Это вполне очевидно и без математической формулировки,
так как при этих значениях пеленга направление суммарного
вектора магнитного поля в гониометре не зависит от формы
полярной диаграммы половин антенно-фидерной системы.
Для практических целей представляет интерес зависимость
Д 0 не от пеленга У, а от отсчета по шкале гониометра,
т. е. от угла
Подставляя в равенство (46) выражение
0 = ^4-Д0 (47j
и пользуясь малостью угла Д0, позволяющей считать, что
sin 4 0 ~ sin 4 ф -f- 4 Д О cos 41
cos 4 0 cos 4 ф — 4AH-sin4^j (48^
находим из уравнения (45) после подстановки в него выра-
жений (48)
А« =----------2~ ""’Л------------- (49)
(—. ~3 J + 3 4 t
Преобразуя это выражение тем же порядком, как и равен-
ство (45), получаем
д 0 = - ----------ГЛ. sin 4 ф + -24^-----у sin 8 Ф• (50)
у m2 Zr2 cos2 а 3 ) у т' Zr2 cos2 а 3 /
29
Кривая зависимости ошибки определения пеленга Д0 от
отсчета пеленга ф по шкале имеет тоже октантальный харак-
тер и тоже вид немного искаженной синусоиды. Максимумы
этой кривой незначительно сдвинуты вперед, а минимумы на-
зад по сравнению с основной гармоникой.
Считаясь с тем, что выражение (—— з) имеет порядок
не менее 60, можно в технических расчетах пренебречь вто-
рым слагаемым и придать выражению для А 0 следующий вид
Л0 °~ “ Щ202 / 'х’1 y~f ' sln4')J гРаДУсов- (51)
/г2 \ COS а )
Наибольшие абсолютные значения ошибки, очевидно, опре-
деляются формулой
А0тах°= у 202—— градусов. (52)
/г* y cos “ J '
Пример. Найти наибольшее значение ошибки, зависящей
от разноса приемных проводов, для /г=5 м и наиболее ко-
роткой волны диапазона Хш1п = 40 м при пеленгации на назем-
ном луче, т. е. для а = 0.
С помощью формулы (52) находим
А0шах°
или
19,3
~ 0 >202 (_40
1 v 5; -1
градусов
А 0щах° = 1 °36'.
6. Ориентировочный расчет угла наклона фронта а
(52), увеличение угла наклона
фронта уменьшает ошибку. Это
обстоятельство в известных
условиях допускает увеличение
горизонтальных размеров пе-
ленгатора, облегчающее разре-
шение конструктивных задач
и дающее некоторый выигрыш
в чувствительности.
Рассмотрим отражение от
условной нижней границы иони-
зированного слоя, считая, что
Как показывает формула
Рис. 26. Схема распространения
отраженной волны
она обладает свойствами зер-
кала.
Такое упрощенное предста-
вление здесь вполне допустимо, так как оно соответствует обще-
принятому понятию высоты ионизированного слоя Нс (рис. 26).
30
Передатчик находится в точке /, пеленгатор в точке 2.
Расстояние между ними вдоль поверхности земли обозначим
буквой d, а средний радиус земного шара, равный 6368 км,
ЧеРЙз треугольника ОА2 следует
отсюда
(53)
cos (а + 2^Г~) _R^ _,
COS а А’з -J- Ис
Для расстояний менее 700—800 км это выражение может
быть упрощено после подстановки в него приближенных выра-
жений
а также
/?з __, Нс
Дз -|- Нс Rs
В этом случае
. I 2 Нс d \
а = arc fg
На предельном расстоянии
rflim = 2 /?з arc cos х %- == 1^8 R3 Нс
Кз j "с
(54)
(55)
(56)
угол наклона фронта уменьшается до нуля.
На расстояниях больше до пеленгатора достигают
только отраженные лучи, претерпевающие многократное
отражение.
При Нс — 300 км
dlim = V 8-6368-300 = 39 Ю км.
Практические задачи пеленгации редко затрагивают рас-
стояния этого порядка. Следовательно, при расчете пеленгато-
ров можно ограничиться формулами (53) и (55), справедливыми
для случая однократного отражения.
Значение высоты отражающей поверхности Нс выбирается
в соответствии с длиной волны и условиями распространения,
насколько они могут быть уточнены при расчете, причем сле-
дует останавливаться на сочетаниях, дающих запас в опреде-
лении /г> т. е. наименьшее ее значение.
31
"3. Расчет величины для случая пеленгация
без введения поправки
Решая уравнение (э2) относительно величины /г, получаем
0,45- ( — ) , _
! _______\ COS а ) Ш|П (о 7)
/19,1 ’
Д0тах° + 1
где 1г —расстояние о г центра пеленгатора до приемных про-
водов в м\
X —длина волны в м\
^в1Пах°— допустимое наибольшее значение октантальной ошиб-
ки в градусах.
Пример 1. Рабочий диапазон пеленгатора 36 — 151) м.
Пеленгатор предназначен для работы на расстояниях от 0 до
1 oOJ км. Допустимое значение наибольшей октантальной
ошибки Дб°=1°.
Определить величину /г .
Намечаем комбинации х и а, при которых дробь —мо-
жет иметь наименьшее значение.
1. Предположив, что на наименьших расстояниях, когда
(cos а)ш„х=1, волны короче 75 м не применяются, получаем
первый вариант:
( ——) =75.
\ COS а / min
2. Считая, что на наибольших расстояниях пеленгация про-
изводится на самой короткой волне диапазона, т. е. приняв
Х=30 м и выбирая для высоты слоя F наименьшее значение
Нс =250 км, получим по формуле (53)
/ 1500 \ 6368
cos ( 2-бЗьб I 6368-I-25U
а — arc tg------------------!--
/ 1эии \
sln \ Т-6368 )
ИЛИ
а= 14°20' и cos а = 0,969,
откуда
(___\ — 31
\ COS a /gin 0,9бУ
Как видно, при расчете lt следует исходить из второго
случая. Подставляя последнюо величину и заданные ци^)ры в
выражение (57), найдем
. 0,45-31 „ .,
I, —г_____*- — — 3,11 м.
Приняв далее, что минимальное расстояние между прием-
ными проводами и наружными выступающими частями пелен-
32
гаторного здания должно быть неменее 1,5 ж, получаем
внешние размеры здания в плане 3,2><3,2 м. Это позволяет
получить площадь пола примерно 2,2 X А2 л/, которая не всегда
может оказаться достаточной для размещения персонала и
^'п^ри^е р 2. Рабочий диапазон пеленгатора 40— 150 м.
Пеленгатор предназначен для работы на расстояниях от 0 до
1000 км- AQO
Допустимое значение АН не должно превосходить 1°.
Рассматривая возможные варианты ( —s а ^т.п, первым из них
сохраним тот же, что и в предыдущем примере, т. е.
( — -) = 75.
V COS a /min
Второй вариант, очевидно, соответствует дальности:
(Z= 1000
Нс = 250 км;
Х = 40 м.
Пользуясь формулой (53), находим в этом случае
1000 \ 6368
2-6368 ' 6368 4- 250
/ 1000 X ’
s,n \ 2-6368 /
а = 23° 40' и cos а = 0,9159;
Беря последнюю пифру за исходную, находим с помощью
формулы (57)
, 0,45-43,6 . •
/г = - = 4,37 м.
if 19,1 .
V -Т-+1
Этот результат значительно более благоприятен в отноше-
нии габаритов пеленгаторного помещения, чем полученный в
предыдущем примере.
Пример 3. Рабочий диапазон и дальность действия опре-
деляются заданием примера 1. Для получения плошади пелен-
гаторного помещения, достаточной для размещения персонала
и аппаратуры, наружные габаритные размеры пеленгаторного
здания в плане должны быть не менее чем 5X5 м. Найти
наибольшее значение октантальной ошибки.
Выбирая расстояние между приемными проводами и край-
ними точками здания равным 2 м, находим, что
/г = 2,5 + 2 = 4,5 м. ,
3 Зак. 332
33
Имея в виду воспользоваться формулой (52), заимствуем
из примера 1 наибольшее значение
\ COS ct /min
Подставляя полученные цифры в указанную формулу, на-
ходим
детах°= n 9J9,1---= 2°14'.
-7^-312—1
Полученная цифра наибольшей ошибки довольно высока,
если иметь в виду, что она определяет лишь одну из соот-
ветствующей суммарной ошибки пеленгатора. Эта цифра мо-
жет быть снижена за счет сокращения расстояния между
приемным проводом и зданием до 1,5 м и уменьшения площади
пеленгаторного помещения.
Как можно заключить по приведенным примерам, размер
1Г получается близким к */10 наиболее короткой волны диапа-
зона.
Для средневолнового пеленгатора, когда эта волна равна
500—600 м, величина /г может составлять до 50—60 м. Однако
использование этой возможности преимуществ не дает, так как
и при меньшем значении 1Г размеры здания практически не
оказываются ограниченными. С другой стороны, увеличение до
50—60 м при обычной высоте приемных проводов около 30 м
нецелесообразно. Чем больше длина горизонтальных проводов
пеленгатора по сравнению с длиной вертикальных приемных
проводов, тем больше опасность влияния .ночного эффекта"
(гл VI).
Из сказанного следует, что в случае средневолновой
пеленгации можно исходить из наибольшей октантальной
ошибки порядка 1/4 — */з °.
8. Расчет величины /г для случая пеленгации
с введением поправки
Поправка на октантальную ошибку, как показывает форму-
ла (51), является функцией угла наклона фронта а, который
остается неизвестным радиооператору пеленгатора. Это исклю-
чает возможность компенсации октантальной ошибки введением
поправки и увеличения размера Zr . Можно говорить лишь об
уменьшении октантальной ошибки за счет введения .средней
поправки".
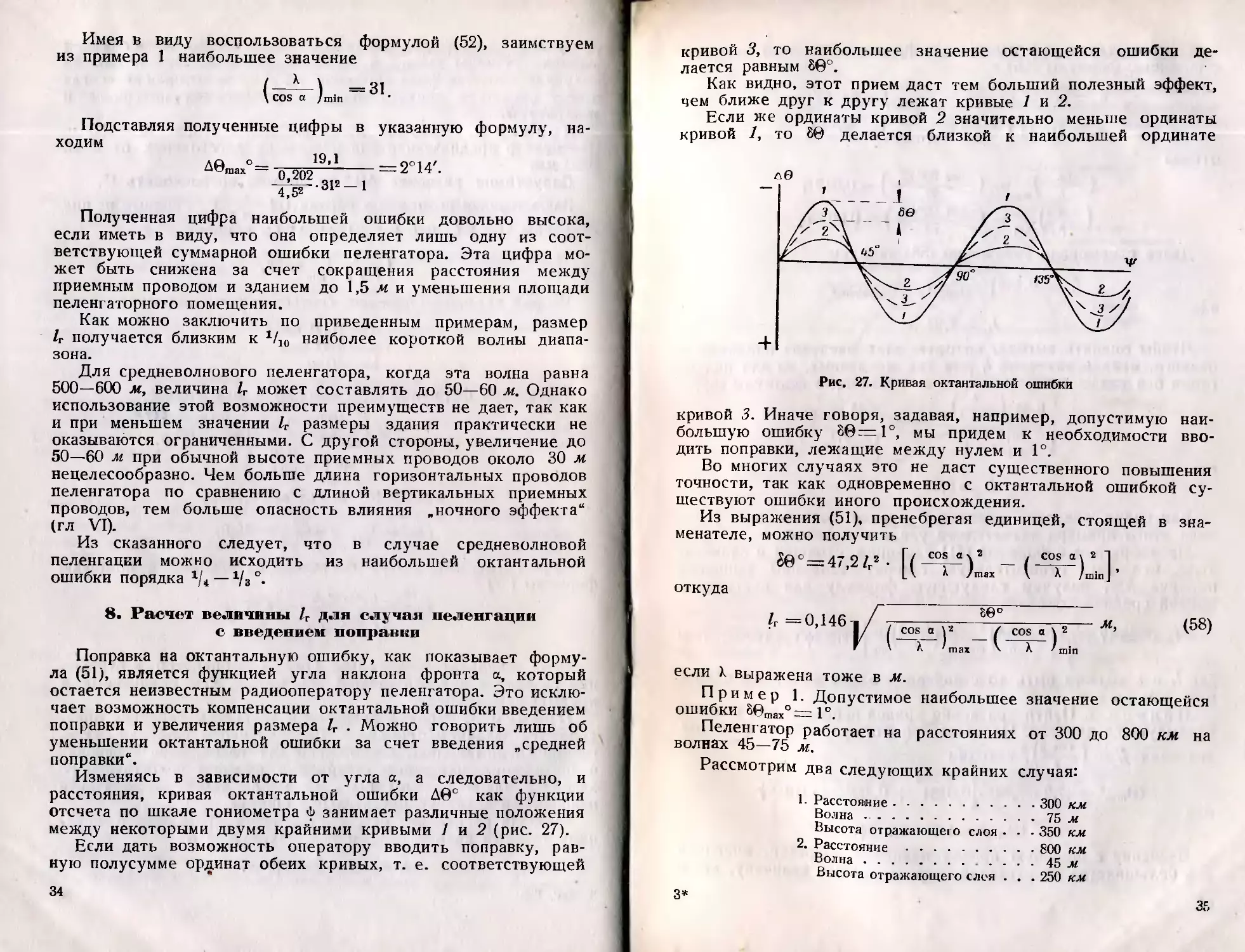
Изменяясь в зависимости от угла а, а следовательно, и
расстояния, кривая октантальной ошибки Д0° как функции
отсчета по шкале гониометра б занимает различные положения
между некоторыми двумя крайними кривыми 1 и 2 (рис. 27).
Если дать возможность оператору вводить поправку, рав-
ную полусумме ординат обеих кривых, т. е. соответствующей
34
кривой 3, то наибольшее значение остающейся ошибки де-
лается равным 8в°.
Как видно, этот прием даст тем больший полезный эффект,
чем ближе друг к другу лежат кривые 1 и 2.
Если же ординаты кривой 2 значительно меньше ординаты
кривой /, то 60 делается близкой к наибольшей ординате
Рис, 27. Кривая октантальной ошибки
кривой 3. Иначе говоря, задавая, например, допустимую наи-
большую ошибку 60=1°, мы придем к необходимости вво-
дить поправки, лежащие между нулем и 1°.
Во многих случаях это не даст существенного повышения
точности, так как одновременно с октантальной ошибкой су-
ществуют ошибки иного происхождения.
Из выражения (51), пренебрегая единицей, стоящей в зна-
менателе, можно получить
se°=47,2zr2. [7-^pV
[\ А /шах \ Л /min]
откуда
Zr =0,146. А-------Sez°---------=--- м, (58)
I/ ( cos а V ( cos а 2 v 7
г У X ^max V X ^min
если X выражена тоже в м.
Пример 1. Допустимое наибольшее значение остающейся
ошибки 80тах°—1°.
Пеленгатор работает на расстояниях от 300 до 800 км на
волнах 45—75 м.
Рассмотрим два следующих крайних случая:
1. Расстояние................ 300 км
Волна -....................75 м
Высота отражающего слоя . - - 350 км
2. Расстояние ................ 800 км
Волна......................45 м
Высота отражающего елея . . . 250 км
3*
3!
Соответствующие углы наклона фронта могут быть найдены
с помощью формулы (55)
“=агс'в(Лй?-4в) = зо°42'.
откуда
(-^) - ( COi g"*2' ) = 0,0191;
0,00526.
' Л / Ш1П ' /о I
Далее с помощью выражения (58) находим
/г = 0,146|/ (0i0191)2_(0i00526)2
или
1Г 7,94 м.
Чтобы оценить выгоду, которую дает введение поправки в
пеленги, найдем значение 4 для тех же данных, но для пелен-
гации без введения поправки, т. е. с помощью формулы (57):
Д - 0,45 ( cos min _ 0,45 0,0191
1 / 19ф1 ~ ~ 1 /19,1 .
1 д©° +1 у 1 +1
или
/г —5,25 м.
Как видно, введение средней поправки позволило в усло-
виях этого примера значительно увеличить размер /г.
Пренебрегаем в формуле (51) единицей, стоящей в знамена-
теле, что даст относительную ошибку величины поправки
порядка 5%, получим следующую формулу для построения
кривой средней поправки:
йвте/ =47,2Л2
- sin 46 градусов,
(59)
где /г и X должны быть подставлены в одних и тех же едини-
цах, обычно в м.
Пример 2. Найти уравнение кривой поправки для условий
предыдущего примера. Подставляя в формулу (59) полученные
значения /г и —Г/’ нах°Дим
80med° = 47,2 • 7,942 -[о,О1912 -ф- 0, 0053* | • sin 4ф
или
80шеао = 1,2° • sin 46.
Введение с помощью кривой подобной поправки, имеющей
для большинства направлений незначительную величину, пред-
36
ставляется довольно утомительным и не всегда себя оправды-
вающим процессом. t
Поэтому следует прибегнуть к известному полуавтомати-
ческому методу, когда кривая поправки в полярных координа-
тах наносится внутри лимба гониометра, а ее масштаб на
прозрачной пластинке указателя (рис. 28).
Рис. 28. Полуавтоматический метод коррекции пеленга
Метод введения средней поправки может быть упрощен
следующим образом.
Вычислив кривую ошибок для наиболее неблагоприятного
сочетания К и а, т. е. для минимального значения (—-—)
V cos а/ ,
и построив с помощью уравнения (51) соответствующую, кри-
Рис. 29. Упрощенная кривая поправок пеленга
37
вую ошибок (рис. 29), вводим поправки, руководствуясь лома-
ной линией АБВГДЕЖ, ординаты которой по абсолютной
величине равны половине наибольшего значения Д0С. Остаю-
щаяся ошибка не превосходит этой же величины.
Расстояние 4 , очевидно, может быть найдено из равенства
(57) после подстановки в него вместо Д0тах° величины 2Д0гаах°,
понимая здесь под Д0тах° наибольшее значение угловой ошиб-
ки. Следовательно, при введении „ступенчатой" поправки
(60)
Пример 3. Найти величину 1Г для случая введения сту-
пенчатой поправки и задания примера 1.
Подставляя в формулу (60) найденные и заданные в указанном
примере цифры, получим
°’45’ 0,0191
= 7,65 м.
Мы получим результат, незначительно отличающийся от
найденного в предыдущем примере для случая введения по-
правки более сложного вида.
При „ступенчатой" кривой Д0° поправка равна по величине
допустимому значению остающейся ошибки, т. е. Д0гаах°, и
составляет в примере 3 один градус. Она вводится со знаком минус
при пеленге, лежащем в секторах 0 — 45°, 90—135°, 180—225°
и 270—315°. В остальных секторах они имеют ту же величину,
но со знаком плюс. Для напоминания радиооператору знака
поправки указанные секторы могут иметь двухцветную раз-
метку.
Этот метод очень прост в эксплоатационном отношении и
может дать существенный выигрыш в величине 4.
Его недостаток заключается в том, что, когда навигация
происходит при значительно большем отношении ( c0^'q) чем
подставленное в формулу (60) для вычисления 1Т, введение
поправки может ухудшать результат пеленгации, хотя вводи-
мая при этом ошибка не превосходит допустимой.
Этот недостаток может быть в значительной мере ослаблен
инструктивным ограничением введения поправки лишь опреде-
ленной частью диапазона пеленгатора.
Пример 4. Наиболее короткая волна пеленгатора равна
16 м. Предельный радиус пеленгации задается равным 2000 км.
Наибольшее значение допустимой октантальной угловой ошиб-
ки Д0шах° =1°.
38 i
Угол наклона фронта для этого случая очень близок к
нулю, т. е. cos а»1.
Пользуясь формулой (57), находим
Минимально допустимое расстояние между приемными про-
водами и пеленгаторным помещением, принятое равным 1,5 ж,
явно не может быть соблюдено.
Предположим, что дело касается полевого пеленгатора,
причем аппаратура его размещается в палатке, площадь кото-
рой не может быть меньше 1,6 X 1,6 м.
Из сказанного нетрудно заключить, что в последнем случае
нужно, чтобы /г = 1,5 + ^- =2,3 м.
Определяем наибольшее значение октантальной ошибки по
формуле (52)
ЛА о____________19Д________ _ _ 19,1
max 0,202 / X \ 2 0,202 / 16
/г 2 \ cos а/min-1 2,32 \ 1 } ~ 1
ИЛИ
дегаах° = 2,2о.
Эта цифра более чем вдвое превосходит заданную. Вводя
„ступенчатую" поправку +1° описанным ранее порядком,
уменьшим наибольшую октантальную ошибку до 1,2°, т. е.
практически до заданной нормы.
Введение этой поправки теряет, очевидно, смысл в услови-
ях пеленгации, когда величина Д0Шах°, рассчитанная по фор-
муле (52), не превосходит нормы, т. е. 1°. Нетрудно с по-
мощью той же формулы убедиться, что это будет иметь
место для волн длиннее 24 м.
Следовательно, в инструкции по обслуживанию пеленгатора
должно быть указано, что „ступенчатая" поправка вводится
при пеленгации на волнах от 16 до 24 м.
Г Л А В A Hl
ДЕЙСТВУЮЩАЯ ВЫСОТА ПЕЛЕНГАТОРА
О. Общие указания и основные формулы
Как показано в разделе 3, действующая высота антенно-фи-
дерной системы является одним из основных параметров,
характеризующих чувствительность пеленгатора.
Она входит в формулу (12) эквивалентной высоты, в значитель-
ной мере определяя ее величину и изменение по диапазону.
Вывод расчетных формул действующей высоты основывает-
ся на ее определении, приведенном и поясненном в разделе 3,
причем принимается, что:
1) радиоволны распространяются параллельно земной по-
верхности и в плоскости одной пары приемных проводов, ко-
торая представляет вместе с соответствующей парой фидеров
половину всей антенно-фидерной системы пеленгатора гонио-
метрического типа (или всю систему целиком в случае пелен-
гатора поворотного типа);
2) волна нормально поляризована, т. е. вектор напряженно-
сти электрического поля лежит в плоскости распространения
и в данном случае направлен вертикально;
3) вычисляется величина напряжения между выходными
клеммами антенно-фидерной системы при отсоединении от них
статорных обмоток;
4) модуль отношения напряжения, упомянутого в пред-
шествующем пункте, к напряженности электрического поля
равен действующей высоте пеленгатора. Чтобы упростить тех-
нику вывода формул действующей высоты для многочисленного
ряда вариантов гониометрического пеленгатора Эдкока, пред-
варительно найдем несколько соотношений общего характера.
Выясним соотношение действующих высот любой антенно-
фидерной системы при двух различных способах включения
статорных обмоток или входных трансформаторов (раздел 2)
параллельного (рис. 2) и последовательного (рис. 9). Рас-
смотрение проведем на примере Н-образной системы, которое
остается действительным и для всех иных типов пеленгатора
Эдкока.
В случае параллельного включения предстоит найти напря-
жение между точками А и Б (рис. 30), в случае же последо-
вательного включения — сумму напряжений между точками В
и Г и точками и Л (рис. 31).
40
Предположив, что система разрезана на^ две половины
правую и левую, т. е. так, как это показано на рис. 31,
обозначим напряжения, появляющиеся при этом между точка-
ми В и Л, через Un , а между точками 1 и Ж через Ua .
Рис. 30. Н-образный пеленгатор
с параллельной схемой
В Г
GiW—-
п ж
Рис. 31. Н-образный пеленгатор
с последовательной схемой
Очевидно, что при последовательном включении (рис. 31)
действующая высота пеленгатора определяется равенством
ил — Un
Е
(61)
где Е — действующее значение напряженности электрического
поля волны.
Выразим напряжение 6\б между точками А и Б (рис. 30)
через те же напряжения ил и Un .
Применяя теорему Тевенина, найдем, что компонента £Аб,
зависящая от Un , может быть найдена с помощью эквивалент-
ной схемы, показанной на
рис. 32, где приняты сле-
дующие обозначения:
•t/л
в — э.д. с., равная
Z—входной импеданц
каждой из половин схемы,
показанной на рис. 31, т. е.
импеданц, измеренный ме-
ждуточками Ви Л или Г и Ж.
Очевидно, что иско
мая компонента напряже-
ния /7аб:
г > __9 Бл Z
и абл — ~ * 22
Рис. 32. Эквивалентная схема воздей-
ствия поля на один из приемных прово-
дов (диполей)
41
мли
(62)
По аналогии компонента напряжения икъ, зависящая от
величины Ua t может быть написана в виде
иБП = --^- (63)
инус объясняется скрещением фидерных
Появление знака м
проводов (рис. 30).
Очевидно,
, . _ С/л - Un
С'АВ — 2
откуда
(64)
___i.T’i, что действую-
включении превосходит
С/л-t/n I
2£ |
Сопоставляя формулы (61) и (64), находим
щая высота при последовательном еу.люорн
вдвое ту же величину для схемы параллельного включения.
Переходим к выводу общих выражений действующей высо-
ты пеленгатора. Предварительно введем ряд обозначений.
ft)
Рис. 33. Варианты включения приемного провода (диполя)
н
Рис- 33 показан ряд схем включения одного из при-
антенно-фидерной системы пеленгатора. К
1, 2, *3 и 4) присоединяются
точке М (рис. 33,
А. _
На
емных проводов
точкам М и Н (рис. 33, случаи
входные концы симметричного фидера, а к точке ivi
случаи 5 и 6) входной конец подземного однопроводного фи-
дера, условно показанного расположенным над земной поверх-
ностью.
Четырехугольники Т изображают трансформатор или другую
• схему, связывающую приемный провод с фидером. Четырех-
угольник Б представляет собой схему „баланса", электрически
42
уравновешивающую приемный провод. Введем следующие
обозначения.
Z пт — импеданц, измеренный между точками М и Н в пер-
вых четырех случаях или между точкой Ж и землей в двух
последних случаях. Иначе говоря, ZnT — выходной импеданц
приемного провода, измеренный непосредственно или в общем
случае через схему его связи с фидером.
(7ПЛ-—напряжение между точками М и Н (случаи 1, 2, 3
и 4) или точкой М и землей (случаи 5 и 6). Буква Л в значке
обозначает, что рассматривается провод, „левый" по отноше-
нию к центру пеленгатора.
£7ПП — аналогичная величина, но для правого провода.
Необходимые для дальнейших выводов формулы теории
длинных линий, а также вспомогательные формулы и обозна-
чения, приведенные ранее (разделы 3 и 4), будут считаться в
дальнейшем читателю известными.
Здесь и везде далее мы считаем фидеры лишенными потерь,
что вполне можно допустить для относительно коротких пе-
ленгаторных фидеров, так как потери в них значительно мень-
ше потерь в приемных проводах.
Если присоединить к точкам М и Н (случаи 1, 2, 3 и 4,
рис. 33) или к точке М (случаи 5 и 6) отрезок фидера, пред-
назначенный для связи этих точек с входными цепями пелен-
гаторной аппаратуры, но пока разомкнутый на другом конце,
подобно тому, как это показано на рис. 31, тогда напряжение
на входе левого и правого фидеров может быть выражено
следующими общими формулами:
^пп — ^пп
^Пт + ^фо
*фо
Z ПТ “Г Л'фо
Пользуясь равенствами (65), (20) и (28), находим
у ______ .__________________^пл_____________
Л / Рф z пт - Sin /Иф /ф — j РФ • COS /Иф /ф
О'пП
(65)
(66)
Z пт -sin тф /ф — / рф -cos/иф/ф
Напряжения 67пл и (7ПП взаимно отличаются лишь начальны-
ми фазами и могут быть выражены следующими формулами:
Ц1Л “ ПО lJmlr I (gyj
Цш = Цю-1 I
Это является непосредственным следствием формул (32),
примененных для принятых здесь условий (раздел 9).
43
Подставляя выражение (67) в равенства (66), а эти послед-
ние в формулу (64), с помощью известного соотношения
Эйлера
If ml,. _i-fmit sin ml, (68)
найдем для схем с параллельным включением следующее об-
щее выражение
h = | рф • An
для действующей высоты пеленгатора:
sin ml.
(69)
Для случая
находим
Z Пт sin тф /ф — jрф • cos тф 1ф
последовательного включения соответственно
h= 2 рф • An •
sin ml.
Z пт sin /Пф /ф — урф • cos тф
: /Пф/ф I’
| и представляет
провода или
(70)
Ц1О
Е
собой действующую высоту самого приемного
диполя.
По соображениям, изложенным в разделе 19,
за
техническом ее
Это позволяет
соответствую-
Обозначение|Ап заменяет отношение
но-фидерная система с входными цепями,
особых случаев, является ненастроенной и при
расчете можно пренебречь потерями в ней.
заменить в формулах (69) и (70) импеданц Zm
щим реактанцем, т. е. положить
2шт «s/Хпт
Сделав такую подстановку, найдем для
включения
А = Ап ' •
sin ml,
* • cos тф 1ф---— . sin гпф/ф
РФ
для последовательного включения
sin ml.
fi — •
cos тф Гф--------nT sin тф /ф
РФ
гл. V, антен-
исключением
(71)
параллельного
(72)
(73)
В последних двух формулах:
ВЪо — действующее значение напряжения между
с'по — действующее значение напряжения между точками
М и Н (рис. 33, случаи 1, 2, 3, 4) или между точкой
М и землей (там же, случаи 5 и 6);
Лпт — реактивное сопротивление между теми-же точками;
F — действующее значение напряженности поля, удовлет-
воряющее условиям, поставленным в начале этого
параграфа;
/г — расстояние между каждым из приемных проводов и
центром пеленгатора в плане;
1ф—длина одного фидера.
Все длины обычно выражаются в м.
44
Подставив в формулы (72) и (73) вместо Mio, -^пт и р$ их
выражения, соответствующие различным типам и вариантам
пеленгатора, получим расчетные формулы действующей вы-
соты.
10. Действующая высота Н-образного пеленгатора
с непосредственной связью
А. Основная формула
Применение теории длинных линий позволяет найти сле-
дующую формулу для „действующей длины"1 диполя:
, 2(1—cosm/в) . .
Здесь /в — длина половины диполя. Аргумент т1в может
быть вычислен с помощью формулы (29). Вывод этой формулы
изложен в дополнении 1.
Величина Лит является в данном случае реактивным сопро-
тивлением диполя. С помощью равенства (23) она может быть
представлена в следующем виде:
А'пт — — 2 рв ctg mlB, (75)
где рв — волновое сопротивление провода.
Подставляя выражения (73) и (75) в формулу (72), находим
___________________2 sin ml, (1 — cos m/в ) ,?g,
m (sin mln -cos тф /ф + Kc ccswjj • sin тф /ф) ' '
или
(77)
, mlB
2 s п ml, tg—s—
L _ ________________________________
т (cos тф 1ф Кс ctg m/в sin тф 1ф )
Соответственно для случая последовательного включения
статорных обмоток с помощью исходного равенства (76) найдем
для h выражение, которое может быть получено из (77) заме-
ной множителя 2 на 4.
Коэфициент Кс, входящий в обе последние формулы, опре-
деляется равенством
2 Рв
Рф
(78)
* или
2 Схф
(79)
фидера на единицу его длины;
приемного провода относительно земли на
длины;
где Схф — емкость
Схв — емкость
единицу
— средняя диэлектрическая константа изоляции фидера2.
Еф
1 Здесь термин .действующая длина* заменяет выражение .действующая
высота*. Он является более подходящим, и значение последнего сохраняется.
2 См. дополнение 2.
45
Б. Упрощенная формула
Когда размеры антенно-фидерной системы пеленгатора малы
по сравнению с длиной волны, формула (77) может быть упро-
щена.
Для этого заменяем тригонометрические величины их при-
ближенными значениями
sin mlr tnlr
, ml в nil В
tg ~Г Г
cos /ф «= 1
ctg mlB ts-
а mis
(80)
sin тф /ф » Шф /ф
Подстановка этих выражений в равенство (77) дает
,, ml г /в
Подставляя сюда вместо Кс его выражение (79), оконча-
тельно находим для схемы параллельного включения статор -
ных обмоток
h' =
mlR It
1+4—
1 Св
(81)
Здесь Сф — статическая емкость одного фидера, равная С1ф ;
Св — статическая емкость половины диполя относи-
тельно земли, т. е. Cib • /в -
Представляется необходимым ориентироваться в вопросе
частотных границ, в пределах которых приближенная формула
(81) может заменить основную, т. е. (77).
С этой целью рассмотрим следующий частный случай,
когда
Zp — /ф Zb и £ф — 1.
Преобразование выражений (76) и (81) с помощью равенств
mlc mle 1ф и Кс =
дает для этого случая
г._ 2 I cos mlc 1 IQQX
т ‘ cos mlr ’ 2Сф : '
1 + т ~
Св
" = <83>
1+ Св
Относительная ошибка применения формулы (#3) вместо
(82), т. е. величина
дй = 100-Ц^-%, (84)
46
после подстановки в это равенство обеих названных формул
приобретает следующий вид:
ДЛ=100
m2 /г 2
2~
cos mlr
1 — cos mh
(85)
Числовые значения А*. вычисленные для нескольких значе-
ний отношения Zr/k, приведены в табл. 1.
Таблица 1
/г /А 0,05 0,06 0,07 0,08
Ал % 3,9 6.1 7,8 10,8
Интерполируя с помощью этих цифр, находим, что при
размерах /г, /ф и /в, имеющих порядок 0,05 длины волны,
ошибка составляет около 5%. Она достигает 10% при разме-
рах около 0,08 длины волны. Этими примерными соотношения-
ми можно руководствоваться при выборе расчетной формулы.
Аналогичные преобразования и выводы могут быть сделаны
и для формул последовательного включения.
11. Действующая высота пеленгатора уравновешенного
тина с непосредственной связью
А. Основные формулы (1-й случай)
Воздействие поля на приемный провод может быть замене-
но включением у его основания эквивалентного генератора с
нулевым внутренним импеданцем и электродвижущей силой
e=hnE, (86)
где Ап—действующая высота провода;
Е — напряженность поля (рис. 34).
Очевидно, что замена этого генератора четырьмя генерато-
рами с электродвижущими силами ех, ev е3 и физической
картины не меняет, если
е
ег,— е2 — es — ^4 — ~2
и их направления соответствуют стрелкам (рис. 35). Линейные
свойства схемы позволяют рассмотреть отдельно действие
пары электродвижущих сил ег и es и пары г2 и е^. Последняя
пара создает одинаковые и одного направления токи в прово-
дах фидера. Следовательно, при последовательном включении
47
половин статорных обмоток создаваемые ими магнитные потоки
внутри гониометра оказывают на обмотку ротора взаимнооб-
ратные и компенсирующие действия.
При параллельном включении статорных обмоток эта пара
э. д. с. не будет создавать в них тока вовсе, так как возника-
ющие при этом потенциалы противолежа-
щих точек фидерных проводов по всей
длине одинаковы.
Таким образом, в обоих случаяхэ.д.с.
и е4 никакого приемного эффекта не
вызывают.
Электродвижущие силы ех и ев соз-
дают в точках В и Г равные по вели-
Рис. 35. Схема включе-
ния эквивалентных э. д. с.
Рис. 34. Схема уравновешенного
приемного провода
чине, но взаимно противоположные по знаку потенциалы и
нормальное симметричное распределение соответствующих им
компонент потенциала и тока в проводах фидеров.
Возникающие при этом в статорных обмотках токи и обу-
словливают работу пеленгатора.
Г' Разность потенциалов между точками В и Г при отсоеди-
ненном фидере, очевидно, равна сумме (o-j-e.J, т. е. величине
е, определяемой равенством (86). Отсюда следует, что дейст-
вующая высота провода сохраняет для дальнейшего рассмот-
рения свою величину Ап , которая выражается общеизвестной
формулой1
, 1 — cos twZb
/?П ---- ---г-т-------
т - sin zwZb
(87)
1 См. дополнение 1.
48
Реактанц приемного провода и уравновешивающей его схе-
мы (баланса), включенных последовательно, т. е. величина Апт.
входящая в равенство (72) и (73), очевидно, может быть выра-
жен той же формулой (75), что и в случае Н-образного пе-
ленгатора.
Сопоставляя выражения (87) и (74), нетрудно заключить,
что формулы действующей высоты пеленгатора рассматривае-
мого типа могут быть получены из выражения (77) делением
ее на 2.
Таким образом, действующая высота пеленгатора уравнове-
шенного типа с непосредственной связью выражается формулой
(при параллельном включении обмоток статора)
ZZZ/R
sin mlc .tg —---
m (cos тф 1ф-\-Кс - ctg /и/в sin т$1ф) ^8)
Величина /в представляет собой длину приемного провода.
Остальные величины имеют те же значения, что и ранее.
Б. Основные формулы (2-й случай)
Этот случай отличается от предыдущего тем, что точки В
и Г присоединения фидера к приемному проводу находятся не
непосредственно у поверхности земли,
а на некоторой высоте над ней
(рис. 36). Это представляет известные
удобства. Удаление фидеров от по-
верхности земли способствует сохра-
нению электрической симметрии их
проводов.
Поднятие фидеров на высоту 1,5 —
1,8 м освобождает проход вокруг пе-
ленгаторного здания и облегчает за-
дачу их внутренней проводки.
Схема включения эквивалентных
генераторов для данного случая, оче-
видно, будет иметь вид, показанный на
рис. 37.
Электродвижущая сила верхнего
эквивалентного генератора ев выра-
жается, очевидно, формулой
е^ — hn • Е,
Рис. 36. Частично урав-
новешенный провод
(89)
где действующая высота верхнего провода hn может быть
изображена равенством (87).
Электродвижущая сила нижнего эквивалентного генератора
может быть найдена следующим порядком. Она равна потен-
циалу, появляющемуся в точке Г, если отсоединить от нее
провод фидера.
4 Зак. 332
49
Уравновешивающая схема Б должна иметь тот же импе-
данц, что и верхняя часть приемного провода ЖК (рис. 38),
иначе говоря, импеданц, который может быть найден измере-
нием, если измерительный прибор будет включен между точ-
кой Ж и землей, а отрезок провода ВЖ удглен.
Рис. 37. Схема
включения эквива-
лентных э. д. с.
Рис. 38. Условное деление
частично уравновешенного
провода
Рассмотрим антенну, которая получится из одного только
верхнего провода, если он будет согнут в точке Ж под пря-
мым углом (рис. 39).
- ШШт
Рис. 39. Приведение к Г-образной форме
03
Очевидно, что под действием нормального поляризованного
поля с вертикальным фронтом в точке М возникает потенци-
ал, равный потенциалу точки Г (рис. 38), но имеющий обрат-
ный знак.
Из всего сказанного следует, что
ен = + Л- • Е, (90)
где h,r —действующая высота Г-образной антенны, показан-
ной на рис. 39. Она выразится с помощью общеизвестной
формулы для рассматриваемого случая в следующем виде:
д __ ccs т (ZB — ZH) —cos W/B
т sin mlr.
(91)
Схема, изображенная на рис. 40, вполне эквивалентна схеме-,
показанной на рис. 35, если
е — ев + ен
1 2
Р --- ев ~е н
-----2----
р — ев + е Н
8 - ------2----
~ев+ен
(92)
4*
51
Условные направления этих э. д. с. обозначены стрелками.
Пара э. д. с., обозначенных через ег и е±, очевидно, как и
одноименные э. д. с. в предшествующем случае (рис. 35), не
создают приемного эффекта. Схема (рис. 40) без ущерба для
последнего может быть заменена изображенной на рис. 41.
Потенциалы точек В и Г, очевидно, могут быть изображены
так:
£/в — — Cjj
Ur=e3
выражение
(94)
приемного
(95)
(96)
сравнению
и разность потенциалов этих точек
£7вг = + вз- (93)
С помощью равенств (92), (89) и (90) последнее
приобретает вид
t/вг = (Ап Ч~ Аг ) • Е.
Отсюда следует, что действующая высота всего
провода L и ' I г,
Ап = Ап -f- hT .
Подставляя сюда выражения (86) и (91), получим
h ___ 1 -|- cos т ( /в —/н ) — 2 cos mlB
П т • sin mlB
Во многих случаях длина /ц незначительна по
с длиной наиболее короткой волны диапазона. В этом случае
выражение (91) может быть с помощью приближенных равенств
типа (80) преобразовано следующим порядком:
__cos mlB cos mlH + sin mlB . sin mlH — cos mlB
r m • sin mlB
cos mlB • 1 -|- mlH • sin mlB — cos mlB
' m • sin mlB ~ ’
Следовательно, действующая высота приемного провода в
этом случае приобретает выражение
1 — cos miK
07)
Относительная погрешность этой формулы при малой дли-
не /н по сравнению с длиной наиболее короткой волны весь-
ма незначительна.
Пример. Наиболее высокая частота диапазона пеленгатора
равна 15 мггц. Размеры приемного провода /в = 4 м и /н = 1,5 м.
Найти погрешность формулы (97).
С помощью формулы (29) находим
т1ь= 1,2 • f • /г = 1,2 15 • 4 = 72°
и
т (lB— /H)=l,2-f -(/в — /н)=1,2- 15 • (4 — 1,5) = 45е.
По формуле (24)
2 г: _____________ 2г _ г, 91 /
m="“=^ = 0’314-
Подставив эти цифры в выражение (96), получим
1 4- cos 45° - 2 cos 72° _ 1+0,707-2 . 0,309 _ о fi4
Ап =-----6,314 • sin 72° ~ 0,314 • 0,951
Пользуясь упрощенной формулой (97), находим
= „,544”^ +1,5 - 2.31 + 1,5 = 3,81.
Как видно, погрешность составляет
1ЛЛ Ап' —Лп 3,81—3,64
100 п. _п-_ = юо. -2_—-1— = 4,7%
Лп 3,64
и формула (97) дает практически приемлемую точность.
Реактанц приемного провода, т. е. тот, который может
быть найден измерением между точками В и Г (рис. 38), со-
храняет здесь прежнее значение, соответствующее формуле
(75).
В. Упрощенные формулы
При малых размерах пеленгатора относительно длины вол-
ны, пользуясь тем же методом, что и при выводе равенства
(81), можно получить следующее упрощенное выражение:
т • ZB 1Г
" — ' НС
св
Формула (98) относится к случаю параллельного включения
статорной обмотки. При последовательном включении это
выражение должно быть умножено на 2.
2-
При выводе этой фор-
мулы было принято, что
нижний провод имеет дли-
по
(98)
Рис. 42. Размеры У-образного
пеленгатора
защищенными от воздействия
ну, незначительную
сравнению с длиной волны.
12. Действующая высо-
та У-образного пелен-
гатора
На рис. 42 представлена
одна принципиальная схема
У-образного пеленгатора
с однопроводными фидерами,
горизонтальных компонент электрического поля слоем влаж-
ной почвы, а также металлической оболочкой фидера.
Подставляя в равенство (73) вместо Ап выражения (87), по-
лучим после простых преобразований
_ mlB
2 • sin mlt • tg
k m (cos тф 1ф -f-К/ . ctg mlB .sin тф 1ф ) ’
(99)
52
53
где
Яс' =
С1ф
С1В V еф
(100)
и сохранены те же обозначения, что и в предыдущих разде-
лах.
Упрощенные формулы, подобные приведенным в разделах
10 и 11 для Н-образной и уравновешенной систем, имеют
для У-образной системы следующий вид:
Погрешность этой
4 1Г и <в 16“ и
,, т1й 4
А „ «
1 +
СВ
формулы составляет около 5% при
около 10% при 4 и /в -С-Л-’
ои Ли
Вследствие этого применение упрощенной формулы дейст-
вующей высоты в диапазоне коротких и промежуточных волн
ограничивается лишь узкой полосой наиболее низких рабочих
частот.
13. Зависимость действующей высоты пеленгатора от
величины размеров и погонных параметров его аптенно-
фидерпой системы
Как было уже отмечено ранее, действующая высота являет-
ся одним из основных параметров пеленгатора, определяющих
его чувствительность.
Уточнение зависимости этой величины от геометрических
и электрических данных антенно-фидерной системы может
оказаться весьма полезным для выбора вариантов при проек-
тировании пеленгатора.
Сравнивая все приведенные выше формулы действующей
высоты, можно установить единообразие ее зависимости от
длины приемных проводов /в, расстояния их от центра пелен-
гатора /г и коэфициентов Кх. или Кс, определяющих влияние
погонных емкостей приемных проводов и фидеров.
Это обстоятельство позволяет ограничиться анализом од-
ной из этих формул, например (88), относящейся к пеленгато-
ру уравновешенного типа при параллельном включении, кото-
рую мы повторяем здесь:
sin mlr • tg т1в
>: h “ т (cos даф /ф + Дс ctg mlB . sin тф 1ф)
где
Лс-С1в /7?'
(Ю1)
(Ю2)
54
Придадим равенству (101) несколько иной вид:
1 sin mlr *g 2
h = пГ ' sin тф /ф ' "ctg тф /ф -f- Кс ctg mlB (103J
1 Аргументы mlr и тф 1Ф для пеленгаторов Н-образного
неуравновешенного типа близки друг к другу, особенно при
горизонтальных фидерах. В случае наклонных фидеров эта
разница несколько больше. Наибольшей величины она дости-
гает у пеленгатора У-образного типа с подземным однопро-
водным фидером, когда /ф может превосходить 1Г примерно в
два раза (рис. 4).
, Имея в виду, что mlc обычно не превосходит 35 — 40° и
тф 1ф не достигает 90°, можно без существенной ошибки счи-
тать, что второй множитель формулы (103), т. е. отношение
—sln т1,-- , в незначительной мере зависит от размера /г.
sin тф/ф ’ г г г
Третий множитель той же формулы, т. е.
от/в
ctg /ф + -ctg "г/в * ' '
показывает, что увеличение /г , а следовательно, и /ф ведет к
возрастанию действующей высоты. Однако увеличение длины
приемных проводов ZB имеет следствием значительно больший
эффект в том же направлении, так как здесь мы встречаемся
не только с убыванием знаменателя, но и с возрастанием чис-
лителя. Кроме того, уменьшение величины ctg mlB оказывает-
ся больше, чем убывание ctg тф1ф , так как всегда Кс > 1.
Если вспомнить, что возрастание размера 1Г имеет следст-
вием увеличение октантальной девиации, то нетрудно заклю-
чить, что при прочих одинаковых обстоятельствах увеличения
/в значительно выгоднее увеличения Zr.
Гак как оба слагаемые знаменателя выражения (104) обычно
положительны, то возможное уменьшение коэфициента Кс
очень выгодно. Как следует из выражения (102), во всех слу-
чаях необходимо стремиться к повышению погонной емкости при-
емных проводов Cjb и уменьшению погонной емкости фидеров
Сдф . При этом следует отметить необходимость предельного
уменьшения средней диэлектрической константы фидера .
Присутствие этой величины в знаменателе выражения (102)
этому не противоречат, так как она входит в первой степени
в величину С1Ф.
Уменьшение величины Кс или Кс дает тем больший эф-
фект, чем больше ctg mlB относительно ctg тф 1Ф , иначе го-
воря, чем меньше отношение 1в[1ф .
Средняя диэлектрическая константа фидера еф , как показы-
вает формула (27), входит в выражение тф 1Ф . Однако влия-
ние ее изменения на знаменатель формулы (103) мало, как не-
посредственно следует из вида этой формулы.
55
Пример 1. Пеленгатор уравновешенного типа с диапазо-
ном 1 = 40—140 м имеет размеры /г=4.и и iB = 8 м при по-
гонной емкости фидера С1ф = 16 мкмкф!м и = 1,2.
Надо установить зависимость действующей высоты пелен-
гатора от погонной емкости приемных проводов С,в, величина
которой может быть выбрана в пределах 8 — 32 мкмкф/м.
'н
-3
Рис. 43. Кривые действующей высоты
Результаты вычислений изображены в виде кривых на
рис. 43.
Как видно, по мере роста погонной емкости CtB рост дей-
ствующей высоты замедляется. Это обстоятельство весьма
существенно для практики. Повышение погонной емкости при-
емных проводов дается ценой борьбы с конструктивными труд-
ностями, которые быстро возрастают по мере увеличения
заданной погонной емкости.
Выбранное в примере наибольшее значение, равное 3‘2.мкмкф!м,
лежит на границе практически достижимого даже для стаци-
онарных моделей пеленгаторов.
Переход от 24 мкмкф/м к 32 мкмкф/м, значительно
усложняющий конструкцию приемных проводов, дает весьма
несущественный выигрыш в действующей высоте.
56
В табл. 2 приведены относительные значения выигрыша в
действующей высоте в процентах, причем за 100% принята
величина, равная действующей высоте при Qb = 8 мкмкф{м.
Таблица 2
Зависимость возрастания h от С1В и Кс в 0/0
С1В мкмкф!м 8 16 24 32
Кс 3,33 1,67 1,11 0,83
X — 40 м 0 33,5 50,8 61,0
70 м 0 46,7 73,0 91,5
100 м 0 48,6 75,6 94,6
130 м 0 51,8 80,0 100,0
Выигрыш тем больше, чем длиннее волна, но с некоторого
ее значения он становится незначительным.
У пеленгаторов уравновешенного типа и У-образных пелен-
гаторов с однопроводными фидерами отношение длины прием-
ных проводов к длине фидеров обычно значительно больше,
чем у пеленгаторов Н-образного типа. Отсюда, как показывает
выражение (104), следует, что уменьшение величины коэфици-
ента Кс в пеленгаторах этого типа дает больший эффект в
первых двух случаях.
Кривые, показанные на рис. 43, позволяют решить еще
один интересный вопрос, разобранный в следующем примере.
Пример 2. В отношении пеленгатора, рассмотренного в
предыдущем примере, поставлен вопрос: во сколько раз надо
увеличить его габаритные размеры, сохраняя геометрическое
подобие формых, чтобы получить для волны 80 м и С1Г =
— 8 мкмкф1м то же возрастание действующей высоты, что и
при увеличении С, в до 32 мкмкф)м.
Формулы действующей высоты показывают, что пропорци-
ональное увеличение размеров пеленгатора (zr, 1ф и /в') в а0
раз вызывает возрастание его действующей высоты, в ао раз
большее, чем укорочение рабочей волны в то же число раз
при прежних размерах2.
1 Кроме поперечных размеров проводов.
2 Делая этот вывод, мы допустим сохранение неизменности погонных
емкостей.
57
Как показывает рис. 43, повысив С1В с 8 мкмкф]м до
32 мкмкф\м, перейдем от точки Б к точке А.
Обозначив действующие высоты, соответствующие точкам
А, Б и В, через , Лб и Ав , найдем, что увеличение разме-
возрастание действующей
ОБ1
ров в отношении „D, повлечет
1 Ud
высоты в отношении
Ав ОБ'
hb ' ОБ1 ~
hx
Лб ’
иначе говоря, в заданном отношении.
Для рассматриваемого примера размеры должны быть уве-
личены в 1,2 • -gg- — 1,55 раза.
Следует иметь в виду, что увеличение габаритов пеленга-
тора на 29% сопровождается не только усложнением конструк-
тивной задачи, но и влечет за собой возрастание октантальной
ошибки (гл. II), а также приближение к так называемым „опас-
ным соотношениям" (гл. V и VI), вызывающим резкое пониже-
ние точности пеленгации.
Уменьшение множителя Кс, благоприятно отражающееся
на действующей высоте пеленгатора, достигается, как показы-
вает формула (102), за счет увеличения С\в и уменьшения C1(j>.
Стремление к большой погонной емкости приемных прово-
дов приводит к конструированию их в виде металлических
колонн большого диаметра (до 200 мм и более) в случае ко-
ротковолновых пеленгаторов и в виде железных решетчатых
мачт для средневолновых пеленгаторов.
Обе конструкции практически применимы только в У-образ-
ных или уравновешенных пеленгаторах. В пеленгаторах Н-об-
|разного типа столь массивные провода-мачты мало пригодны
главным образом из-за конструктивных затруднений, связанных
с взаимной изоляцией обеих половин диполей.
Электрический расчет проводов-колонн показывает, что
трудно получить Схв больше 25 — 30 мкмкф^м для пеленгаторов
У-образного и уравновешенного типа и больше 16—20 мкмкф/м
в Н-образном варианте.
Погонная емкость фидеров четырехпроводной конструкции
или в виде двухпроводной экранированной линии вряд ли
может быть ниже 12 — 14 мкмкф[м.
Погонная емкость однопроводных радиочастотных экрани-
рованных кабелей обычно довольно высока: 25 — 50 мкмкф)м и
более. Кабели специальной конструкции с изоляцией в виде
коротких стаканчиков, образующих шаровые шарниры, имеют
погонную емкость порядка 15 мкмкф/м. Этой же цифры мож-
но достичь, изготовляя фидеры в виде провода, заключенного
в металлическую трубу с внутренним диаметром 40 — 50 мм, с
минимумом изоляции.
Величина средней диэлектрической константы изоляции
•фидера может ориентировочно определяться расчетом с по-
.58
мощью формулы (31) или может быть найдена расчетно-экспе-
риментальным методом.
< Для четырех-проводных неэкранированных фидеров еф =1,4—2
в зависимости от сорта и объема изолирующего диэлектрика.
Того же порядка цифры, но с более значительными затрудне-
ниями можно получить
и для однопроводного
экранированного фидера.
4 Вычислив с помощью
формулы (102) величину
коэфициента Кс для раз-
личных сочетаний вхо-
дящих в формулу ве-
личин, найдем, что наи-
меньшее значение Кс рав-
но примерно единице и
может достичь 2 — 2,5 и
даже более высокой
цифры, что, однако, дол-
жно считаться призна-
ком неудачного конст-
руирования пеленгатора.
Пример 3. Найти
зависимость действую-
щей высоты
тора уравновешенного
типа от длины приемных
проводов.
Задано: /г = 4 м\
= 1; = 1,2.
Задано, что длина
приемных проводов /в
может изменяться в пре-
делах 6—12 м. Вычис-
ление проводится для
трех волн: 40, 70 и 140 м.
Пользуясь формулой (86), находим ряд значений действую-
щей высоты, позволяющих построить кривые, показанные на
рис. 44. Ход этих кривых подтверждает сделанные ранее за-
ключения.
Пример 4. Определить зависимость действующей высоты
пеленгатора уравновешенного типа от разноса приемных про-
водов.
Задано: = 8 м- Кс = 1; )ЛЕФ = Ь2- Расстояние приемных
пеленга-
Рис. 44. Кривые действующей высоты
проводов от центра пеленгатора может изменяться в пре-
делах zr = 3 — 6 м. Вычисление производится для волн 40,
70 и 140 м.
Результаты изображены в виде кривых на рис. 45.
/>Af
Рис. 45. Кривые действующей высоты
14. Сравнение по действующей высоте трех типов
пеленгаторов с непосредственной связью
Проводим сравнение действующих высот пеленгаторов Н-об-
разного, У-образного и уравновешенного типа с непосредствен-
ной связью и общими габаритными размерами. Размер /г, так
же как коэфициент Кс, считаем одним и тем же во всех трех
случаях.
Длина полудиполя /в в первом случае, естественно, должна
быть примерно в два раза меньше длины приемных проводов
/в в двух остальных случаях.
Пример. Задано для всех трех случаев: 1Г = 4 м\ для
Н-образного варианта zb = 4 м; для У-образного и уравнове-
шенного типов 1В = 8 м; Кс — Кс' = 1.
Длину фидера У-образного пеленгатора принимаем равной
/ф — 8 м.
Результаты вычисления приведены на рис. 46.
Наибольшей действующей высотой обладает У-образный
вариант, что объясняется как последовательным включением
статорных обмоток, так и относительной близостью антенно-
фидерной системы к резонансу.
Последним обстоятельством, а также более выгодным соот-
ношением емкостей приемных проводов и фидеров объясняет-
ся преобладание действующей высоты уравновешенного пелен-
гатора над той же величиной Н-образного варианта.
60
₽ 15н
Рис. 46. Кривые действующей высоты
' 15.' Действующая высота пеленгаторов
с трансформаторной связью
Чтобы воспользоваться далее равенствами (72) и (73), най-
дем предварительно выражения для величин Ап и Алт, входя-
щих в эти формулы, применительно к трансформаторной схеме.
Рассмотрим параллельно все три основных варианта этой
схемы (рис. 5, 6 и 7).
Заменяем приемный провод или диполь, включенный через
трансформатор, его эквивалентной схемой (рис. 46а). Электро-
движущая сила эквивалентного генератора
e = hn"-E, (Ю5)
где hn" —действующая высота
самого провода или
диполя;
Е — напряженность элек-
трического поля.
Рассматривая в общем слу-
чае ненастроенную цепь прием-
ного провода или диполя, мы
не вводим в расчет активных
е
Рис. 46а. Эквивалентная схема
включения приемного провода
через трансформатор
61
сопротивлений. Буквой Ап' обозначено реактивное сопротив-
ление приемного провода или диполя, буквами £а и £ф — ин-
дуктивности первичной и вторичной обмоток трансформатора,
a Alj изображает их взаимную индуктивность.
Очевидно, искомые величины Ап " и Апт' должны быть отне-
сены к точкам 7 и 2.
„Действующая высота" Ап", равная напряжению между эти-
ми точками при Е=1, выражается формулой, происхождение
которой не требует пояснений:
(106)
где Ап*—действующая высота самого приемного провода или
диполя.
Для величины реактивного сопротивления Ап/ получаем
выражение
Ап/ — £ф ш или у , Ч» [Хп' Апт - л где К — - - ' (Ю7) *n + la “ ’ п + la “ ' ' Л)т 1 (1091
Лт 1
—коэфициент связи обмоток трансформатора (при параллельном
присоединении статорных обмоток к фидерам);
А — Ап
sin tniT
cos тф /ф--------Т- . sin тф /ф
РФ
(ПО)
При последовательном включении статорных обмоток это
выражение должно быть умножено на 2.
Приведенная действующая высота приемного провода или
диполя Ап изображается формулой (106).
При одиночном приемном проводе (рис. 5 и 7)
X mla
(HD
Для Н-образного варианта (рис. 6)
X mlR
Ап"= — 1g-/- (112)
Для вычисления реактивного сопротивления Ап' имеем
тоже две формулы:
для простого трансформаторного варианта (рис. 5)
Хп' = — рв • ctg mlg, ; (113)
для Н-образного и уравновешенного вариантов (рис. 6 и 7)
Ап ' = — 2рв • ctg mlR . (114)
62
При расчете действующей высоты по приведенным форму-
лам считаются заранее известными следующие величины:
/г — расстояние приемных проводов (или диполей) от центра
пеленгатора. Этот размер определяется методом, опи-
санным в гл. II;
/в —длина приемного одиночного провода или половины ди-
поля. Она задается на пробу не большей ’/6 наиболее
короткой волны рабочего диапазона;
/ф — длина фидера от центра пеленгатора до трансформатора.
При прямолинейных горизонтальных фидерах эта величи-
на совпадает с 1Г. В остальных случаях она определяется
общей конструкцией пеленгатора и превосходит величи-
ну /г;
С1В — погонная емкость приемных проводов или диполей отно-
сительно земли, вычисляется по конструктивным разме-
рам приемных проводов, выбираемым с целью получения
наибольшего, практически удобного значения Схв ;
Стф—погонная емкость фидера. Определяется намеченной,
конструкцией фидера, причем учитывается необходи-
мость иметь возможно меньшее значение С\ф ;
/Ст — коэфициент связи обмоток трансформатора надо выби-
рать возможно большим. Это следует непосредственно
из вида расчетных формул. Для трансформаторов с же-
лезными сердечниками. /Ст может достигать 80 — 85%.
Не применяя железа, можно рассчитывать на 60—65%;
£а и Ьф — индуктивности обмоток трансформатора, получаются
как результат расчета методами, приведенными в
разделе 24.
Это обстоятельство не позволяет вести вычисление дейст-
вующей высоты пеленгаторов трансформаторного типа ранее,
чем рассчитаны оптимальные параметры трансформатора.
Взаимная индуктивность обмоток трансформаторов может
быть найдена по формуле
Мт — /Ст КлаАф. (115)
Эту, как и прочие индуктивности, удобно выражать в мик-
рогенри. Следует помнить, что, выражая сопротивления в омах,
а индуктивности в микрогенри, надо в выражение со =
частоту подставлять в мегагерцах.
В выражениях (111) и (112) длина волны 1 должна быть вы-
ражена в м, так как Ап ', Ап и Л тоже удобно выражать в м.
Приведенные выше расчетные формулы охватывают шесть
основных вариантов пеленгатора трансформаторного типа.
Подстановка вспомогательных выражений (106) — (108) в основ-
ную расчетную формулу (ПО) не позволяет сделать какие-либо,
упрощения, облегчающие расчетную работу.
ГЛАВА IV
РЕАКТИВНОЕ СОПРОТИВЛЕНИЕ АНТЕННО-
ФИДЕРНОЙ СИСТЕМЫ ПЕЛЕНГАТОРА
16. Общие указания и основные формулы
Реактивное сопротивление антенно-фидерной системы пелен-
гатора Адф играет существенную роль, как это следует из вида
формулы эквивалентной высоты (12), определяющей чувстви-
тельность этой системы.
ши
Рис. 47. Параллельное включение статора
Величина ^ДфТ должна быть отнесена к точкам присоедине-
ния статорной обмотки. Эквивалентная схема антенно-фидерной
системы может быть изображена при этом, как показано на
рис. 47.
ши
Рис. 48. Последовательное включение статора
Рис. 47 соответствует случаю параллельного включения ста-
торных обмоток. На рис. 48 и 49 показаны общий и частный слу-
чаи последовательного включения этих обмоток, причем рис. 49
соответствует У-образному пеленгатору.
Во всех трех случаях Хпт представляет собой реактанц при-
емного провода или диполя или непосредственно на входе фи-
64
или вместе со схемой связи, в частности с трансформа-
тором т. е. это та же величина, которая входит в выражения
(72) и’(73) и их следствия.
Рис. 49. Последовательное включение статора
в коаксиальный фидер
Обращаясь к формуле теории длинных линий (27), находим
следующее выражение для входного реактивного сопротивле-
ния одного фидера, нагруженного на конце реактивным сопро-
тивлением :
А"вх — рф
Рф -ф -^пт • Ctg ,Иф ^ф
Рф • ctg тф ^ф — -^пт
(116)
При параллельном включении статорных обмоток (рис. 47)
искомое реактивное сопротивление антенно-фидерной системы
Ааф, очевидно, равно половине Хвх, т. е.
(И7)
При последовательном включении статорных обмоток (рис. 48
и 49), очевидно, придем к формуле
-^пт
1 + • ctg тф 1ф
Хаф = 2Рф---------Рф------- —. (118)
Ахггт
ctg тф 1Ф — ——
17. Реактивное сопротивление антенно-фидерной
системы пеленгаторов с непосредственной связью
приемных проводов с фидерами
1) Пеленгатор У-образного типа
В этом случае (рис. 49) следует воспользоваться формулой
(118), подставив в нее
Хпт — —-рв • ctg mlB. (119)
5 Зак. 332
65
Воспользовавшись выражениями (17) и (19) и вводя обозна-
чение
у ' — С,ф
~ wr <120>
получим
6667 • )/ еф 1-KC '.ctg т1ъ .ctg тф 1ф
ЛкФ =-----74----• -—-—, г-у,-/—7------,--ом. (121)
G ф ctg тф 1ф + Кс -ctg т,в
2) Пеленгаторы Н-образного и уравновешенного типа
при параллельном включении статорных обмоток
Как следует из принципиальных схем обоих типов (рис. 2 и
3), в этом случае в формулу (117) следует подставить
-Хит = — 2рв • ctg m/в’, ( 22)
причем при Н-образном пеленгаторе (р, — длина половины диполя.
Вводя обозначение (дополнение 2)
С = 717Г’ <123>
'1В у еф
найдем
1666 • }/ Еф 1 - Кс .ctg т1ъ .ctg тф /ф
%АФ~ С1ч> ‘ ctg тф/ф--РХ .ctgmfB ОМ* )
При последовательном включении статорных обмоток это
выражение должно быть умножено на 4.
18. Реактивное сопротивление антенно-фидерной
системы пеленгаторов трансформаторного типа
В этом случае нет смысла прибегать к преобразованию фор-
мул (117) и (118). Следует сохранять их в приведенном виде и
подставлять входящие в них величины, вычисленные с по-
мощью вспомогательных формул.
Реактивное сопротивление Лпт выражается формулой (108).
ГЛАВА V
СООТНОШЕНИЯ ПАРАМЕТРОВ II ЧАСТОТЫ.
ОПАСНЫЕ В ОТНОШЕНИИ „АНТЕННОГО ЭФФЕКТА-41
19. Асимметрия половин антенпо-статорной
системы пеленгатора
Каждая из половин антенно-фидерной системы, состоящая из
двух приемных проводов или диполей и двух фидеров со своей
обмоткой статора гониометра, принципиально считается вполне
тождественной с другой половиной как в геометрическом, так
и электрическом отношении.
В этом случае векторы маг-
нитного поля в гониометре
Нл и Ht (рис. 50), создаваемые
первой и второй обмотками
статора. могут считаться
синфазными и пропорциональ-
ными э. д. с., наводимым по-
лем в половинах антенной си-
Рис. 50. Сложение полей в гонио-
метре
стемы пеленгатора. При соблю-
дении этих идеальных усло-
вий можно рассчитывать на
получение острого минимума при определении пеленга, причем
угол 0 принимается равным пеленгу, если последний отсчиты-
вать от плоскости первой половины антенной системы (раздел 5).
Несоблюдение симметрии между половинами этой системы
имеет следствием нарушение пропорциональности между векто-
рами магнитного поля, с одной стороны, и соответствующими
э. д. с., наводимыми в половинах антенного устройства, с другой
стороны, и появление сдвига фаз между этими векторами.
Результирующее магнитное поле в гониометре не только
отклоняется от правильного направления, что влечет непра-
вильное определение пеленга, но и приобретает эллиптический
характер. Минимум делается в той или иной мере расплывча-
тым, что служит вторым источником ошибки пеленгации (раз-
дел 1).
1 Явления резкого ухудшения пеленгании, рассмотренные н этой главе,
имеют место при отсутствии горизонтальных компонент электрического поля,
почему мы и отнесли их условно к группе „антенного эффекта*.
5*
67
Разница в импеданцах обеих антенно-статорных цепей при
достаточно продуманной конструкции и тщательном выполнении
может быть невелика — порядка нескольких омов.
Однако даже незначительное расхождение в параметрах этих
цепей может проявиться весьма сильно и резко, если сами им-
педанцы этих цепей незначительны. Отсюда следует, что при-
ближение антенно-статорных цепей к резонансу должно сопро-
вождаться резким ухудшением качества пеленгации. Это обсто-
ятельство хорошо известно и изучено. Применение дополни-
тельных средств для коррекции параметров цепей усложняет
и замедляет процесс пеленгации. Поэтому обычно принимают-
ся все меры к удалению резонансных точек за пределы рабо-
чего диапазона пеленгатора.
Практика показывает, что частотный интервал между грани-
цей диапазона и резонансной точкой должен составлять 10—15%
пограничного значения частоты. Чрезмерное увеличение этого
интервала без нужды снижает приемную чувствительность пе-
ленгатора.
20. Расчет индуктивности обмоток статора
Условие, приведенное в предыдущем параграфе, может быть
записано в виде следующего равенства:
eV®—|-Лафр = 0 (125)
или
А'дфр (1 — Ls Cs wp2) 4- Ls wp =0. (126)
Здесь Ls— индуктивность статорной обмотки;
Cs — собственная емкость этой обмотки с учетом со-
единительных проводов;
«р —угловая частота, лежащая на 10—15% за границей
диапазона;
Аафр — реактивное сопротивление антенно-фидерной систе-
мы на этой же частоте.
Равенства (125) и (126) выражают условие резонанса для
схемы, показанной на рис. 51, где Хдф — реактанц антенно-фи-
дерной системы.
Это условие изображено на рис. 52 графически.
Две возможные резонансные точки 7 и 2 образованы пере-
сечением кривой —Алаф с вариантами кривой реактанца ста-
торной обмотки
у___ Ls«»
е— 1 — L8C,^ ’
которые обозначены на рис. 52 буквами А/ и А/', причем
-1-- р- и —5 как было указано, должны составлять
0,1—0,15.
68
Обратившись к выражению эквивалентной высоты (раздел 3,
гл. I), дадим сравнительную оценку обоих вариантов: „нижне-
го" и „верхнего резонанса".
Нижний резонанс (точка 7) приводит к большему [значению
индуктивности статора, а следовательно, и к большей взаим-
на
Рис. 51. Условный
контур статорной
обмотки
нои индуктивности гониометра, стоящей в числителе выраже
ния (9).
В этом отношении вариант точки 2 кажется менее выгодным.
Чем больше разность ординат кривых XJ или X" и кривой
— Хаф, изображаемая левой частью равенства (125), тем боль-
ше знаменатель выра-
жения (1 1) эквивалент- ц
ной высоты. Как видно
из хода кривых (рис.
52), в последнем отно-
шении преимущество
находится на стороне
верхнего резонанса
(точка 2).
Опыт большого чи-
сла расчетов показы-
вает, что нижний
резонанс является бо-
лее выгодным, так как
кривая изменения экви-
валентной высоты по
диапазону в этом слу-
чае указывает на ме-
69
нее резкое изменение чувствительности в его пределах
чем в случае верхнего резонанса (рис. 53). Последнее объяс-
няется тем обстоятельством, что действующая высота пелен-
гатора h, входящая в числитель выражения (И) для Н3 , воз-
растает почти пропорционально частоте.
Кроме всего указанного, следует считаться еще с одним
обстоятельством. При выборе варианта „верхнего резонанса"
расчетная величина индуктивности статорной обмотки может
оказаться настолько незначительной, что обмотка делается
трудно осуществимой. Роль проводов, соединяющих эти обмот-
ки с фидерами, становится слишком большой и проявляется
как в виде дополнительного фактора асимметрии, так и в виде
нарушения правильной картины магнитного поля в гониометре.
Решая уравнение (126), находим
Л = -Т-?-т;--.,-7 А<^--г- 1, ~7К мкг> (127)
s ^/р •(! -2к/р Хафр.С8.10-6)
где Ls — выражено в мкг-,
Az. — в ом;
fv — в мггц\ к
Cs — в мкмкф.
Опыт испытания пеленгаторов показал, хотя и не с исчер-
пывающей достоверностью, что при работе на собственной ча-
стоте статорной обмотки наблюдается ухудшение качества пе-
ленгов. Отсюда следует, что эта частота не должна лежать в
пределах рабочего диапазона. Таким образом, найдя с помощью
формулы (52) величину Ls, следует убедиться, что это условие
соблюдено.
Уподобление статорной обмотки безъемкостной катушке,
замкнутой на сосредоточенную емкость, допустимо лишь в том
случае, если рабочая частота раза в три меньше собственной
частоты статорной обмотки.
Отсюда следует, что, определяя собственную частоту ста-
торной обмотки, следует прибегать к непосредственному ее
измерению, так как применение формулы
/=-----1-----
2t#£s Cs
может дать неточный результат.
2Т. Опасные соотношения, зависящие от асимметрии
в пределах одй'ой половины антенно-фидерной
системы. Метод решения задачи
Исследование количественных соотношений между дефек-
тами пеленгации и нарушением симметрии антенно-фидерной
системы пеленгатора представляет собой крупную и сложную
задачу1, изложение которой во всей полноте не представляет-
1 Ь. В. Ширксв, Труды научной конференции ВВИА им. Жуковского, 1945.
70
„обходимым для целей расчета. Поэтому здесь приводятся
СЯ которыми пояснениями лишь выводы, относящиеся к „опас-
с не« в отношении качества пеленгации соотношениям пара-
метров пеленгатора, которые ввиду этого не должны быть до-
пущены при проектировании.,
J Нарушение симметрии антенно-фидерной системы пеленга-
тора может быть сведено к появлению в той или иной цепи
дополнительного импеданца и дополнительной э. д. с. Увели-
чение активного сопротивления или емкости одного из прием-
ных проводов вследствие неодинаковых расстояний до опор
или различия в электрических свойствах почвы под провода-
ми и т. п. могут рассматриваться как появление дополнитель-
ного импеданца AZn в цепи приемного провода около точки
его присоединения к фидеру и как некоторое изменение его
действующей высоты. Нетрудно показать, что к подобной же
эквивалентной замене можно притти в случае появления актив-
ной или реактивной утечки в фидере вблизи места присоеди-
нения приемных проводив.
Детальный анализ показывает, что эффект кажущегося из-
менения действующей высоты не может дать резкого ухудше-
ния пеленгации на' каких-либо определенных частотах, т. е.,
иначе говоря, это не может служить источником „опасных со-
отношений".
Появление же дополнительного импеданца может служить
причиной резкого нарушения работы пеленгатора, как это сле-
дует из приводимого ниже пояснения.
Согласно теореме компенсации изменения тока в звеньях
линейной схемы, имеющие место при появлении в одном из них
дополнительного импеданца AZn, могут рассматриваться как
эффект появления в этом звене одновременно с дополнительным
импеданцем дополнительной э. д. с., определяемой выражением
Де = ДДя-^7по, (128)
где 7П0— ток, протекавший в точке включения дополнительного
импеданца AZ„ до его появления.
Возвращаясь к схеме пеленгатора, заключаем, что наруше-
ние симметрии вызывает появление добавочной э. д. с. Де,
которая влечет за собой появление добавочного тока в соот-
ветствующей статорной обмотке, а следовательно, и дополни-
тельного магнитного поля в гониометре. В зависимости от ха-
рактера нарушения симметрии и связанной с этим фазы допол-
нительного магнитного поля результат асимметрии проявится
в виде смещения или расплывания пеленга или того и другого
одновременно.
Сказанное, а также вид равенства (128) показывают, что даже
небольшой добавочный импеданц AZn , т. е. небольшое нару-
шение симметрии, может вызвать большой вредный эффект,
если велико значение 7ПО-
71
Таким образом, всякое соотношение параметров антенно-
фидерной системы и частоты, при котором 1по резко возраста-
ет, является „опасным11 в рассматриваемом здесь отношении.
Этим устанавливается метод обнаружения „опасных 'соотноше-
ний“, который и будет далее использован.
22. Нарушение симметрии в Н-образном пеленгаторе
Предположим, что в силу тех или иных причин импеданц
левого верхнего провода отличается от импеданцев всех осталь-
ных проводов Хна AZn (рис. 54).
Рис. 54. Эквивалентная схема нару-
шения симметрии приемных проводов
Ссылаясь на сказанное в предыдущем разделе, будем искать
условие, при котором ток в основании этого провода при не
нарушенной симметрии может резко возрасти.
Рис. 55. Эквивалентная схема Н-образного пеленгатора
Заменяем обычную схему эквивалентной (рис. 55).
Здесь Azn—реактивное сопротивление диполя;
ел — э. д. с., наводимая в левом диполе;
еп — то же в правом.
72
Рассматривая для простоты волну с вертикальным фронтом,
напишем фазовые соотношения для этих э. д. с. при распро-
странении волны под углом 0 к плоскости обоих диполей Л и П
(рис. 56).
Рис. 56. Падение волны иа пару приемных
проводов
Приписывая нулевую фазу центру пеленгатора, находим
сл —е-ел |
—л । ’
еп = е е >
(129)
где
2л
? = у-'г cos 0. (130)
Разлагаем каждую из э. д. с. на „фазную" еф и „нефазную"
£Нф компоненты:
ел = сф -фу енф и еп = еф —]е„ф, (131)
где
/ 2к/ \
еф z=£-C0SI ----COS 0 ; (132)
\ X /
/ 2п/_ \
сНф=е-51п (—-—cos 0 г (133)
Разделение электродвижущих сил на „фазную" и „нефазную"
компоненты позволяет разделить и искомый ток 1ПО на две со-
ответствующие им компоненты, которые будут условно назы-
ваться тоже „фазной" и „нефазной*.
На рис. 57 и 58 показано отдельно направление фазных и
нефазных компонент э. д. с. Очевидно, фазные компоненты
(рис. 57) не создают тока в статорной обмотке и разность по-
тенциалов между точками А и Б равна нулю. Следовательно,
схема, показанная на рис. 57, может быть заменена более про-
стой (рис. 59).
73
В схеме, изображенной на рис. 58, статорная обмотка питает-
ся совершенно симметрично с двух сторон. Отсюда следует,
что при определении тока, протекающего через Хп , эта схема
может быть заменена тоже более простой (рис. СО).
Во всех случаях Хе обозначает реактивное сопротивление
статорной обмотки, т. е.
L, • ы
2= Г3д8(134)
где Lr — индуктивность, а (^ — собственная емкость статорной
обмотки.
Рис. 59. Эквивалентная схема для «фазных»
Э. д. с.
Обращаясь к последним двум схемам, можно заключить, что
мы придем к двум опасным соотношениям, при которых общий
реактанц системы, отнесенный к точкам включения генерато-
74
павен нулю. Эти условия, очевидно, соответствуют рез-
Р-ому возрастанию фазной и нефазной компонент тока /пс,а
следовательно, и всего тока в целом.
рассмотрим первое соотношение (рис. о9). Оно, как показы-
вает равенство (22), будет иметь вид
АГИ ~j~ Рф ^Ф = (13о)
Подставляя вместо АГ., его выражение (75)
Ха = — 2рв ctg mle, (136)
найдем
1 — Кс -ctg mla - ctg тиф 1$ = 0.
Сопоставляя это равенство с выражением (120), находим
опасное соотношение в следующем виде;
Хаф = 0. (137)
Аналогичный анализ второй схемы (рис. 60) приводит к урав-
нению
АГаф4-Х, = 0, (138)
Рис. 60. Эквивалентная схема для «нефазных»
э. Д. С.
которое соответствует резонансу всей цепи половины антенно-
статорной системы, включая обмотку статора. Это соотноше-
ние, которое мы отнесли к группе „опасных" по другим сооб-
ражениям (раздел 19), исключается самим методом расчета
(раздел 20) и может далее во внимание не приниматься. Таким
образом, в рассмотренном случае мы нашли, что в пределах
рабочего диапазона не должно соблюдаться равенство (137).
Подтвердим существование этого „опасного соотношения"
другим, менее строгим, но более наглядным рассуждением.
Электродвижущая сила, наводимая током, протекающим по
статорной обмотке, в обмотке ротора пропорциональна напря-
жению, которое существует между концами статорной обмотки.
Это последнее пропорционально в свою очередь напряжению
75
между точками А и Б присоединения статорной обмотки (рис.
61), если последняя будет отсоединена. Опираясь на это сооб-
ражение, можно провести намеченное рассуждение.
Рис. 61. Обозначение приемных
диполей
Напряжение между точками
А и Б представляет собой сумму
напряжений, созданных э. д. с.,
наводимыми полем в левом ди-
поле Л и правом диполе 77.
Первое слагаемое, очевидно,
равно падению напряжения в
правой части схемы, создавае-
мому током, вызываемым э. д. с.,
наводимой в левом диполе.
Применяя теорему Тевенина,
мы можем преобразовать рас-
сматриваемую схему для этого
случая в следующую (рис. 62k
Здесь Хл и Лп — реактанцы ле-
вой и правой половин антенно-
фидерной системы, при наличии
асимметрии не равные друг
другу.
Электродвижущие силы эквивалентных генераторов равны
в сумме напряжению, которое появится между точками А и Б,
Рис. 62. Эквивалентная схема для
«левых» э. д. с.
Рис. 63. Левая часть’ половины
антенно-фидерной системы
если антенно-фидерная система будет разрезана пополам (рис. 63).
Очевидно, искомая компонента напряжения между точками
А и Б (рис. 62)
О\бл = еАвл • • (139)
Ап +Ал
Нетрудно заключить, что компонента того же напряжения,
создаваемая э. д. с., наводимой в правом диполе:
Оабп — — е абп
(140)
76
Знак минус обусловлен встречным включением диполей.
В итоге мы получаем
еАВЛ ~ *п f АБП - Ли
(Ml)
Если система симметрична и Хп = Хл, то, очевидно,
АБ —
еАБЛ — ®АБП
(142)
Это равенство является непосредственным следствием из тех
допущений, на которых покоится принцип действия пеленгатора.
При наличии асимметрии реактивное сопротивление антенно-
фидерной системы
При приближении к равенству (137), очевидно, либо Хл , либо
Хп может оказаться равным нулю. В этом случае, как следует
из равенства (141):
6/аб Сабл либо 77аб—~^абп-
(144)
Эти значения Е’аб сильно отличаются по величине и фазе от
его нормального значения, изображенного формулой (142). Это
отличие полностью распространяется
и на э. д. с., наводимые в обмотке
ротора. Отсюда следует возможность
резкого ухудшения качества пелен-
гации.
Фидеры
Статорная
l_0Q0Q обмотка
Полезно отметить, что последнее
рассуждение распространяется на все Рис. 64. параллельное
типы гониометрических пеленгаторов
Эдкока с присоединением статорных
включение статорной
обмотки
обмоток параллельно проводам фи-
деров (рис. 64). Это положение может быть строго доказано.
23. Исключение опасного соотношения Хаф - О
в случае Н-образного и уравновешенного пеленгаторов
с непосредственной связью
Как было показано в предыдущем параграфе, для пеленга-
торов с параллельной схемой (рис. 64) в пределах рабочего диа-
пазона должно соблюдаться неравенство
Адф Ф 0.
(145)
Обращаясь к выражению (124), придаем этому неравенству
следующий вид:
(146)
или
1 tp Z.
Zb =#-arc ctg --(147)
m Ac '
Это неравенство при расчете используется в виде равенства,
соответствующего частоте, лежащей на 10—15% выше верхней
пограничной частоты диапазона, что отмечено значком 0:
1в =--arc ctg —g—*• - (148)
24. Расчет индуктивности обмоток трансформаторов
для пеленгаторов с трансформаторной связью
Рассмотрим три распространенных варианта” пеленгаторов
с трансформаторной связью: простой (рис. 5), Н-образный (рис. 6)
и уравновешенный (рис. 7).
Предварительно рассмотрим изменение реактивного сопротив-
ления антенно-фидерной системы по диапазону.
Таким образом, анализу должны быть подвергнуты формулы
(108) и (117). АА
Построив кривые изменения А’пт от частоты ] (рис. 65), не-
Рис. 65. Построение кривой реактанца
пает опасное соотношение Агаф = 0, не должна лежать в рабо«
чем диапазоне. Ветви кривой АГаф, уходящие в — оо, тоже пред-
ставляют опасность, так как в этом случае вблизи точек Р и R
может оказаться, что А'аф удовлетворяет условию резонанса
половины антенно-фидерной системы с ее статорной обмоткой,
т. е. равенству (125). Из сказанного можно сделать вывод, что
рабочий диапазон должен занимать участок PQ (отрицательная
ветвь Ааф) или участок QR (положительная ветвь АДФ). Опыт
78
проектирования показывает, что работа на других участках кри
вых Хаф дает менее удачные решения.
Ход кривых Лаф и расположение их характерных точек опре-
деляются не только размерами и электрическими параметрами
антенно-фидерной системы, но и параметрами трансформаторов.
Это обстоятельство облегчает расчет пеленгатора, менее свя-
зывая проектирующего в выборе размеров приемных проводов.
При расчете индуктивности обмоток трансформаторов мы
исходим из необходимости уложить рабочий диапазон в один из
двух указанных участков. Предположим, что рабочий диапазон
задается частотами ft и fa а точки Р и Q соответству-
ют частотам f и f", причем и образуя достаточ-
ные защитные полосы (Л — f') и (/"— f2). Сказанное позволяет
с помощью равенств (1С8) и (117) написать следующие исходные
уравнения для определения искомых индуктивностей и £А:
Ш"[ХП"+ и <о"(1 - Кт ’)] = - с- Рф„ . (Хп "+и <»"); (149)
с о 'ф
/-Ф '+‘А ««'(1 — А'т2)] = Рф -ctg /лф (Хп '-|-£а «»') • (150)
В этих уравнениях значки (') соответствуют частоте f' (точ-
ка Р), а значки (") — частоте f" (точка Q).
Обозначения, входящие в эти равенства, пояснены в разде-
ле 15.
Совместное решение уравнений (149) и (150) дает
.....
где
А = <«'.<»".(1-Дт 2)-UH-ctg /иФ ' 'ф -ctg /иф % ); (152}
Б = [(1 — Kt “)ctg Щф " 1$ ctg Шф ' 1ф рХп " «>'-+-
4- [Д+ (1 — Д'»:2) -ctg " 1ф ctg тф ' 1ф ] • Х„ ' ш";
В = Хг. ’-X*"- (Д + ctg тф ’ 1ф ctg тф " /ф ),
причем
д=
(153)
(154)
(155)
Получив £а , находим £ф с помощью выражения, представ-
ляющего собой решение уравнения (149) относительно £ф :
рФ •(*>"+ ______
’Ч^А “"(1 2)] ‘СФ тф'' ^ф
(156)
Переходим к рассмотрению второго варианта — работы на
положительной ветви Х&Ф, т. е. между точками Q и R. Обозна-
чим частоту точки Q попрежнему через f, а частоту точки R—
через f', причем рабочий диапазон с защитными полосами по-
мещается в интервале f—f".
79
Очевидно, как исходные уравнения, так и решения будут
иметь тот же вид, что и в предыдущем случае, причем в этом
случае величина
Д = (157)
При выборе варианта отрицательной ветви Ааф индуктив-
ность статорной обмотки находится порядком, изложенным в
разделе 20. Одним из затруднений при проектировании транс-
форматорных пеленгаторов является получение более или менее
широкого диапазона. В связи с этим полезно отметить одну
особенность работы на отрицательной ветви А'аф.
Предположим, что — нижняя граница диапазона, а f — ча-
стота точки Р (рис. 66). Собственная частота антенно-статор-
Рис. 66. Нижний резонанс
жет оказаться равной 20—25 % flt
бочий диапазон.
нои системы тр , при кото-
рой соблюдается равенство
(125), должна лежать между
ними и притом не очень
близко к f, так как в этом
случае точка S будет рас-
положена очень высоко. Это
в свою очередь приведет к
уменьшению эквивалентной
высоты, как это следует из
вида формулы (11).
Так как интервал (fj— fp )
должен составлять 10—15%
частоты то ширина за-
щитной полосы (fj — f') мо-
то существенно сузит ра-
Оптимальное значение индуктивности статорной обмотки при
работе на положительной ветви определяется из других сооб-
ражений. Выделим из выражения (11) для Н3 множитель, обо-
значаемый здесь F (LK):
F (D— -_______^—s-----—— • (158)
Это выражение приобретает максимальное значение при
Ls = л-------------• 0 59)
(1 — 2£аф-С8ю).ю
Оно представляет собой функцию частоты, но максимум
F (Ls) выражен достаточно тупо- Последнее обстоятельство
позволяет пользоваться равенством (159) для некоторой средней
частоты рабочего диапазона.
Выражая индуктивность в мкгн, емкость в мкмкф, ЛАф
в ом и частоту в мггц, придаем формуле (159) следующий вид,
удобный для вычисления:
L.=
ЛАФ
2к/ . (1-2п/ хАФ. с; 10-Ь) мкгн-
(160)
80
25. Нарушение симметрии приемных проводов
в У-образном пеленгаторе
Как и в предыдущем случае (раздел 22), нарушение симме-
трии выражено в виде добавочного импеданца AZn в основании
левого приемного провода (рис. 67).
Рис. 67. Асимметрия приемных проводов
Следовательно, опасными будут те соотношения, при кото-
рых ток в этом приводе (при отсутствии AZn) может резко
возрасти (раздел 21).
Рис. 68. Условная схема включения «фазных» э. д. с.
Разлагая э. д. с., наводимые в проводах, на „фазную" и
„нефазную“ компоненты [равенства (131)], получаем две экви-
валентные схемы для фазных и нефазных э. д. с. (рис. 68 и 69).
Рис. 69. Условная схема включения «нефазных» э. д. с.
Для определения компонент тока в Хп " эти схемы могут быть
Для каких-либо допущений упрощены (рис. 70 и 71). На этих
6 Зак. 332 81
рисунках лп обозначает реактивное сопротивление приемного
провода, Хе— реактивное сопротивление статорной обмотки
[формула (126)], С/ — емкость статорной обмотки на экран (на
землю).
Рассматривая первый случай (рис. 70), придется написать
формулу, сложность которой не оправдывается точностью.
Рис. 70. Эквивалентная схема для «фазных» э. д. с.
Емкость С/ имеет порядок 20 мкмкф и ее следует считать
распределенной по всей обмотке статора, кроме того, реактанц
емкости С'/2 значительно превосходит по абсолютной величи-
не реактанц Xs / 2.
Рис. 71. Эквивалентная схема для «нефазных» э. д. с.
Следовательно, нагрузка на внутреннем конце (точка Л) фи-
дера в схеме, показанной на рис. 70, может без существенной
Рис. 72. Условное удлинение фидера
ошибки считаться только емкостью порядка 10 мкмкф. Зная
погонную емкость фидера С1ф , можно заменить эту схему с
достаточной точностью более простой (рис. 72), фиктивно
удлинив фидер на
Л/ф = 2^'-. (161)
2С1Ф
82
Условие резкого возрастания .фазной" компоненты тока в
Y совпадает с условием равенства нулю реактанца схемы, от-
несенного к точкам 1 и 2, т. е.
X, — рф -ctg тф (/ф + А /ф ) = 0, (162)
причем А/ф не превосходит 3—4®/0 Длины фидера /ф .
Если сопоставить это равенство с другим:
Xi — Рф • ctg /пф /ф = 0, (162а)
то нетрудно заключить, что частота, соответствующая этому
последнему условию, лежит выше частоты, соответствующей
равенству (162), отличаясь от нее менее чем на указанные 3—4%.
Вводя в последнее выражение обозначения, использованные
при выводе формулы (121), и сравнивая обе формулы, можно
заключить, что равенство (162а) может быть переписано в виде
Хаф^оо. (163)
Из сказанного следует, что, пренебрегая несколькими про-
центами несовпадения частоты для равенств (161) и (163), можно
считать, что последние выражают собой .опасное соотношение"
для У-образного пеленгатора Эдкок—Маркони.
Можно показать, что условие (163) остается справедливым
для всех случаев последовательного включения статорных об-
моток в фидеры.
Как мы упоминали в разделе 24, точки диапазона, где ветви
кривой ЛАфуходят в бесконечность [равенство (163)], представляют
опасность и в отношении эффекта физической нетождественно-
сти половин антенно-фидерной системы, так как в этом случае
резонанс половин пеленгатора попадает в диапазон.
Условие, которое может быть выведено с помощью схемы,
показанной на рис. 71, приводится тоже к условию резонанса
половины антенно-фидерной системы, замкнутой на обмотку,
которое, как видно, опасно и в отношении эффекта асимметрии
внутри одной половины. Так как возможность такого резонан-
са исключается самим методом расчета, то с этим можно далее
не считаться.
Опасное соотношение (163) может быть использовано для
ориентировочного расчета высоты приемных проводов пеленга-
тора. С помощью выражения (162а) находим
ctg /Пф /ф + Л'с' • ctg т /в > О,
откуда
X Г ctg /и. 1
zb arc ctg. [-------J- (164)
Величины тф /ф и Кс' могут быть найдены с помощью фор-
мул (30) и (120).
При выборе к и вычислении аргумента тф 1Ф следует иметь
в виду, что соответствующая им частота должна лежать на
15—20% выше верхней границы рабочего диапазона.
в* 83
26. Нарушение симметрии приемных проводов
пеленгатора уравновешенного типа
Электродвижущие силы, наводимые в приемных проводах,
заменены эквивалентными сосредоточенными э. д. с. ел и еп'
(рис. 73). Заменяем каждую из них четырьмя эквивалентными,
подобно тому, как это было
сделано при переходе от
рис. 34 к рис. 35 (рис. 74),
причем
Рис. 73. Включение эквивалентных э. д. с.
б л = Й л = £з л = ^4 л = —2~
И
Cl п — ^2 п — ^3 п — ^4 п г,' *
Нетрудно заключить, что,
рассматривая систему э. д. с.
ein, еЯл, £in и <?зп, мы получаем
картину, точно совпадающую
с тем, что имеет место в
пеленгаторе Н-образного типа. Отсюда можно получить опас-
ное соотношение в виде
^аф — 0. (165)
Рис. 74. Разложение эквивалентных э. д. с.
На „режим Н-образного пеленгатора" здесь налагается вто-
рой режим, обусловленный электродвижущими силами е2л, в4л,
е2п и e4n, для которых схема может быть приведена к эквива-
лентному виду, показанному на рис. 75.
84
Очевидно, что в рассматриваемом режиме потенциалы взаим-
но противолежащих точек проводов фидера одинаковы и токи
в соответствующих сечениях равны и направлены в одну и ту же
Рис. 75. Условная схема включения э. д. с.
сторону. Это дает возможность заменить эту схему более про-
стой, показанной на рис. 76.
Соединение объединенных точек А—Б с емкостью С/ осуще-
ствляется через обмотку статора и должно обладать индуктив-
ностью. Но, так как половины статорной обмотки оказываются
Рис. 76. Приведенная «одиотактная» схема
включенными при этом параллельно и в отношении магнитных
полей навстречу друг другу, то результирующая индуктивность
будет весьма невелика и ее реактивным сопротивлением можно
пренебречь перед реактанцем емкости С/.
Рассматривая порознь эффект фазных и нефазных компо-
нент ел и еп и пользуясь равенствами (131), последнюю схему можно
заменить двумя более простыми (рис. 77 и 78).
Рис. 77. Эквивалентная однотактная схема
для <фазной» э. д. с.
85
^Фидер длиной попрежнему /ф следует здесь считать прин-
ципиально однопроводным и представляющим собой пучок па-
раллельно включенных проводов.
Рис. 78. Эквивалентная однотактная схема
для «нефазных» э. д. с.
Продолжая пользоваться и в этом случае теоремой компен-
сации (раздел 21), мы должны найти условия, при которых ток,
протекающий через основание приемного провода, может резко
возрасти. Перенося это на эквивалентную схему (рис. 75), сле-
дует иметь в виду ток, протекающий через реактивные сопро-
тивления Хп .
> Что же касается схем, показанных на рис. 76, 77 и 78, то
здесь ток, протекающий через Лп / 2, равен удвоенному иско-
мому току.
Таким образом, „опасные соотношения" могут быть найдены,
приравнивая нулю реактивное сопротивление обеих последних
схем, отнесенное к точкам 1 и 2. При этом получаются сле-
дующие два уравнения:
X, — 2рф ' • ctg /п/ф' = 0; (166)
Хп + 2рф ' • tg /п/ф =0. (167)
Здесь Рф ' — волновое сопротивление фидера как пучка па-
раллельно включенных проводов;
/ф' —длина фидера, фиктивно увеличенная с целью
учета емкостной нагрузки на конце Cs/2.
Так как диэлектрическая константа фидера не имеет при
этом существенного значения, то множитель т, входящий в
аргументы, соответствует формуле (24).
По аналогии с формулой (19) волновое сопротивление рф '
может быть найдено по формуле
3333 /.„„х
рф = с, ф'‘ ОМ’ (,bs)
где С1ф' — погонная емкость „однопроводного" фидера относи-
тельно земли в мкмкф{м.
Подставив в уравнения (166) и (167) вместо Хп его выраже-
ние, найденное с помощью равенства (23):
Х„ = — рв • ctg miB, (169)
.86
получим ctg m/в =—2• ctg иг/ф(170)
гВ
ctg m/B —2-^— tg m/ф . (171)
Рв
Эти уравнения представляют дополнительные „опасные со-
отношения", свойственные пеленгаторам уравновешенного типа.
Задаваясь частотой, лежащей на 10—15% выше верхней гра-
ницы рабочего диапазона, из уравнений (170) и (171) могут быть
найдены предельные значения высоты приемных проводов
/вС-~агс ctg Г—ctg m/ф ' 1; (172)
/в < — arc ctg —tg m/ф
2к Рв
(173)
Если величина С//2 более или менее точно не известна, то
ее можно ориентировочно считать равной емкости 1 м погонной
емкости „однопроводного" фидера, т. е. величине Иначе
говоря, можно считать, что
/ф — /ф + 1 м.
Так как аргумент т1ф обычно не превосходит 40°, то нетруд-
но заключить, что второе условие (173) больше ограничивает
выбор /в , чем первое (172).
Пример. Положим рф'«рви /ф = где Xmin —наибо-
лее короткая волна рабочего диапазона.
Приняв, что условие (173) должно быть соблюдено для волны
короче Xmin на 10%, получим
/в<-’9 2*Ш1П- arc ctg [2 tg 36°],
откуда находим
/В<0,С86 Amin.
Это ограничение чрезвычайно стеснительно для коротковол-
нового пеленгатора, так как при столь малых размерах прием-
ного провода очень снижается приемная чувствительность пе-
ленгатора.
Ограничение в выборе /в, обусловленное опасным соотноше-
нием (173), представляет собой слабое место коротковолновых
пеленгаторов уравновешенного типа.
27. Нарушение симметрии фи дерой
Асимметрия фидеров пеленгатора сводится преимущественно
к местному нарушению изоляции и появлению утечки или к
местному возрастанию емкости между проводами фидера вслед-
ствие провисания проводов, наличия свободных концов, остав-
ленных при небрежном монтаже, и т. п.
Утечка — емкостная или проводимости — не нарушит симме-
трию, если она появится между точками А и Б (рис. 79).
87
Чем ближе к фидеру будет расположена утечка, тем силь-
нее проявится ее асимметрирующий эффект. Рассматривая по-
следний случай, представим его как включение импеданца Z
параллельно левому диполю (рис. 79). Эквивалентная схема за-
шунтированного диполя показана на рис. 80, где использованы
обычные обозначения.
Под действующей высотой диполя понимается напряжение
между точками D и Ж (рис. 79) при отсоединенном фидере в
напряженности электрического поля, равной единице.
WW/WWW
Рис. 79. Эквивалентная схема при
нарушении симметрии фидера
Рис. 80. Включение «эквива-
лентного» импеданца
Распространяя это на случай утечки, с помощью эквивалент-
ной схемы (рис. 80) найдем
2
Ап ' = hn • z_^2Xn’ (174)
где hn' — искомая условная действующая
наличии утечки;
hn — действующая высота диполя в
этого термина.
Полное сопротивление левого диполя
очевидно, выражаться формулой
высота диполя при
обычном понимании
при утечке будет,
Таким образом, роль утечки
щениям действующей высоты и
Ahn — hn
=
ЧХп • Z
2Xn+Z
может быть сведена к
импеданца диполя
™n
2An-tZ'
(175)
прира-
(176)
(177)
88
Как упоминалось ранее (раздел 21), приращение действую-
щей высоты как результат асимметрии не сопровождается по-
явлением опасных соотношений, при которых дефекты пелен-
гации резко возрастают.
Нарушение же симметрии, которое сводится к возрастанию
импеданца одного диполя или приемного провода, подвержено,
воздействию опасных соотношений, которые были рассмотрены
в предыдущих разделах настоящей главы.
В рассматриваемом случае возрастание импеданца &Z„ [выра-
жение (177)] распределяется поровну между верхним и нижним
проводами диполя, что никакого влияния на результат анализа
не окажет.
Подобным же образом и с аналогичными выводами могут
быть подвергнуты рассмотрению нарушения симметрии фидеров
в пеленгаторах Эдкока иных типов.
ГЛАВА VI
ОПАСНЫЕ СООТНОШЕНИЯ ПАРАМЕТРОВ
И ЧАСТОТЫ, СВЯЗАННЫЕ С ЯВЛЕНИЯМИ
„НОЧНОГО ЭФФЕКТА“
28. Постановка вопроса
Под классическим „ночным эффектом" понимается явление
резкого ухудшения пеленгации, наблюдаемое на пеленгаторах
'С замкнутыми антеннами при работе на средних волнах в су-
меречное и темное время суток1. В пеленгаторах типа Эдкок
замкнутой антенне могут быть уподоблены с большой натяж-
кой только фидеры. Однако расчет показывает, что эффект
непосредственного воздействия горизонтальных компонент элек-
трического поля на фидеры вполне исправного пеленгатора
настолько невелик, что не может явиться в какой-либо мере
причиной наблюдаемого, в некоторых случаях, низкого качества
пеленгации.
Как было показано в предыдущей главе, причиной послед-
него может служить нарушение симметрии антенно-фидерной
системы пеленгатора, причем поле может и не содержать го-
ризонтальных электрических компонент.
В этой главе будет показано, что при наличии таких ком-
понент поля нарушение симметрии антенно-фидерной системы
может явиться причиной второго, независимого, отрицательного
эффекта, также выражающегося в смещении и расплывании
пеленгов.
Так как в этом случае, как и при обычном „ночном эффек-
те", одной из причин является присутствие горизонтальных
слагаемых электрического поля, то в применении к описыва-
емому явлению сохранен этот термин, хотя и без большого на
то права.
Существенное и принципиальное отличие „ночного эффекта"
пеленгаторов с замкнутыми антеннами от явлений этого типа
в пеленгаторе Эдкока заключается в том, что в последнем слу-
чае они могут наблюдаться только при асимметрии антенно-
1 При пеленгации на коротких волнах „ночной эффект' имеет место круг-
лые сутки, что исключает применение рамочных пеленгаторов в этом диапа-
зоне на расстояниях, превышающих дальность действия поверхностного луча.8
Э0
фидерной системы, причем аномалия поляризации поля не яв-
ляется необходимым условием. Достаточно наличие наклона
фронта волны.
Анализ явлений „ночного эффекта" в пеленгаторе Эдкока
делает вполне очевидными преимущества трансформаторных
вариантов этого пеленгатора.
29. Опасные соотношения для пеленгаторов II-образного
и уравновешенного типа с непосредственной связью
Рассматривая фидеры пеленгатора как горизонтальные пучки
параллельно соединенных проводов, подверженные воздействию
горизонтальных компонент электрического поля, можно заклю-
чить, что в антенно-фидерной системе появляются дополнитель-
ные токи, направления которых условно показаны стрелками
на рис. 81 для случая Н-образного пеленгатора. Асимметрия
антенно-фидерной системы представлена в виде эквивалентного
импеданца AZn •
При отсутствии асимметрии, т. е. при AZn = 0, между проти-
волежащими точками проводов фидеров, очевидно, не возни-
Рис. 81. Асимметрия приемных проводов
кает дополнительной разности потенциалов1. Следовательно,
горизонтальные компоненты электрического поля не вызывают
тока в статорной обмотке.
При нарушении же симметрии, т. е. при AZn ¥= 0, эквипо-
тенциальность точек А и Б (рис. 81) исчезает и в статорной
обмотке появляется дополнительный ток, служащий непосред-
ственной причиной дефектов пеленгации.
1 Приведенное выше указание на ничтожность нормального приемное»
эффекта фидеров позволяет не считаться здесь с разностью фаз э. д. с., на-
водимых в противолежащих элементах фидерных проводов.
91
Воспользовавшись здесь снова теоремой компенсации (раз-
дел 21), считаем, что дополнительный ток в обмотке статора
создается фиктивным эквивалентным генератором, включаемым
вместо AZ„ (рис. 81). Электродвижущая сила этого генератора
равна произведению AZn на ток /0, показанный на рис. 81, при-
чем его величина (и фаза) должна соответствовать ненарушен-
ной симметрии. Идя этим путем, можно не только установить
качественную сторону всех соотношений, но и вывести расчет-
ные формулы для количественной оценки углов смещения и
расплывания пеленга1.
Примерные расчеты показывают, что при симметрии поряд-
ка, который в настоящее время далеко не является исключе-
нием, эти углы могут достигать десятков градусов.
АБ
Рис. 82. Условная схема для э. д. с. «горизонтального» поля
В настоящей книге приводятся сведения только относитель-
но тех „опасных соотношений", которые имеют непосредствен-
ное отношение к расчету пеленгаторов.
„Опасное соотношение" параметров антенно-фидерной систе-
мы и частоты, при котором обнаруживается резкое возраста-
ние дефектов пеленгации, должно, очевидно, соответствовать
резкому же возрастанию упомянутого ранее тока /0.
Для определения условий, при которых это может произой-
ти, рассмотрим схему антенно-фидерной системы в эквивалент-
ном для этого случая виде (рис. 82).
Фидеры, превратившиеся в „однопроводные", представляю-
щие собой пучки параллельно соединенных проводов, изобра-
жены здесь в виде одиночных проводов D—АБ и АБ—}К-
Верхний и нижний провода каждого диполя оказываются
включенными параллельно (между концами „однопроводных"
фидеров и землей), представляя в каждом случае реактанц • 4~»
где Хп — реактанц диполя? в обычной (схеме включения.
Емкость статорной обмотки на землю С/ должна бы быть по-
казана присоединенной через половины статорной обмотки.
Однако они оказываются при этом включенными параллельно и
1 В. В. Ширков, Труды научной конференции [ВВИА им. Жуковского,
1945.
92
навстречу друг другу в отношенидагнитного поля, вследствие
чего их реактанцем можно пренебречь.
Рассмотрим воздействие любой горизонтальной компоненты
электрического поля на „однопр®одный“ ФиДеР D—АБ—^К
(рис. 82).
Фронт волны и направление распространения считаем' ори-
ентированными в пространстве произвольно. Примем, что пло-
скость, параллельная фронту и преходящая через центр пелен-
Рис. 83. Эквивалентная схема для «фаз-
®ых» Э.Д.С-
гатора АБ, соответствует нулевой начальной фазе рассматрива-
емой компоненты поля.
Электродвижущие силы, наводные в элементах фидера dz,
равноотстоящих от точки АБ, могут быть выражены равенствами
den = de* фу^нф | ?
de„ ~de$ —у'Ф<ф / ’
наводимая в левом элементе;
в правом;
(174а)
где de„ — э. д. с.,
den — то же
de& — „фазная“ компонента 9.Д. с. (с начальной фазой,
равной нулю);
Л?„Ф— „нефазнья" компонента э. д. с. (сдвинутая по фазе
относительно de$ на Ь0с).
Рис. 84. Эквивиентная схема
для «нефазви» э. д. с.
Разделение э. д. с. на компоненты позволяет заменить экви-
валентную схему, показанную на рис. 82, двумя более просты-
ми, соответствующими отдельными слагаемыми обеих элементар-
ных э. д. с. (рис. 83 и 84), причем длина фидера /ф может до-
стигать примерно г/10—*/7 длины волны.
93
Компоненты искомого тока /п(рис. 81) условно называем
также „фазной" /|1ф (рис. 83) и „нефазной" (рис. 84). Они
могут быть получены интегрированием вдоль провода выраже-
„ Хп хп
нии элементарных компонент тока в —или —g—, создаваемых
соответственно э. д. с.: de$ и deB$.
Для поставленной здесь задачи достаточно найти условие
резкого возрастания токов /пф и /пфн. Это соответствует, оче-
видно, нулевому реактанцу схем, отнесенному к этим точкам.
Пользуясь формулами теорий длинных линий (25) и (23), най-
дем для рис. 83
А„ 4-4рф '-tg miq =0 (175а)
и для рис. 84
— 4pl})'-ctg т/ф0. (176а)
Здесь рф '—волновое сопротивление „однопроводного" фи-
дера, т. е. пучка параллельно соединенных проводов, вычисляе-
мое по формуле, аналогичной (19):
3333
рФ ' = СфТ ом, (177а)
где Сф/ — погонная емкость этого пучка (относительно земли)
в мкмкф!м.
Условная длина фидера входящая в уравнение (176а),
несколько превосходящая его реальную длину /ф , введена для
учета оконечной емкости С/ / 2 (рис. 84). Длина /ф ' может быть
достаточно точно определена с помощью выражения
/ф ' = (178)
где длины /ф ' и /ф выражаются в м, а С1ф' — соответственно
в мкмкф и мкмкф1м.
Множитель аргументов
2л
т = — (179)
не содержит средней диэлектрической константы изоляции
фидера, так как при работе его в качестве „однопроводного"
она сколько-нибудь заметной роли не играет.
Вводя вместо Ап его выражение
Ап =— 2рв ctg пив, (180)
уравнения (175а) и (176а) можно привести к более удобному для
использования виду:
ctg zn/B = 2--— tg 7П/Ф ; (181)
Рв
ctg /и/в=—2 ^-ctg ттг/ф(182)
Рв
Уравнения (175а) и (176а) сохраняют свой вид для пеленгато-
ров „уравновешенного0 типа также, если под Ап понимать
удвоенный реактанц приемного провода. Уравнения же (181) и
(182) остаются пригодными для этого случая без оговорок.
94
Сопоставляя их с уравнениями (171) и (170), мы находим'
полное совпадение, указывающее на своеобразие „уравновешен-
ной” схемы пеленгатора, особенно подверженной опасности
„однотактных резонансов".
Из уравнений (181) и (182) могут быть выведены формулы
для предельных значений длины приемных проводов
/в < — arc ctg tg ;
2r [ рв J
zB < — arc ctg — 2p*_ctg '
2л I pB
(183)
(184)
Оба эти неравенства должны соответствовать частотам,
лежащим выше верхней границы рабочего диапазона не менее
чем на 10—15% ее величины.
Выражения (183) и (184), совпадающие с выражениями (173)
и (172), показывают, что для пеленгаторов „уравновешенного41
типа возможность защиты их от явлений „ночного эффекта44
весьма затруднена, как это следует из примеров, приведенных
в разделе 26.
В отношении пеленгаторов Н-образного типа положение
несколько более благоприятно, хотя и не всегда.
Пример. Н-образный пеленгатор, верхняя граница диапа-
зона которого равна 6 мггц, имеет размеры /в — /ф = 4 м. По-
гонные емкости (относительно земли) составляют: для прием-
ных проводов С1в = 14 мкмкф )м. и для „однопроводного" фи-
дера C)<t/ = 10 мкмкф 1м.
Емкость статорной обмотки на землю: С' = 20 мкмкф.
В условиях этого примера решение уравнения (181) не тре-
бует интерполирования, так как при /в = /ф оно может быть пре-
образовано к виду
т1й— arc ctgl/ 2-^-. (185)
У Рв
Пользуясь соотношением
Рф ' ^1В
Рв С1фХ
(186)
и подставляя в уравнение (185) цифровые значения и решая
его относительно длины волны, находим
4 • 2г.___
k = -. / ьГ ’
arc ctg у 2 • -не-
откуда
к —46,6 м.
Как видно, опасная полоса лежит хотя и вне рабочего диа-
пазона, но довольно близко к его границе.
95
Второе уравнение (182), равно как и вытекающее из него
•неравенство (184), ставит менее стеснительное условие. Поль-
зуясь формулой (178), находим
. 20
/ф — 4 -(- '2 _ IQ-б м.
Подставляя в уравнение (182) числовые значения входящих в
него величин, найдем
. /360 - 4 \ 2-14 / 360 - 5 \
с!ч—)=—)
sи далее
19 м.
Как видно, уравнение (182) и неравенство (184) могут во
внимание не приниматься.
30. Опасные соотношения для пеленгаторов
с трансформаторной связью
Пеленгатор с трансформаторной связью в простом вариан-
те (рис. 85) может применяться только в тех случаях, когда
электрические экраны между обмотками трансформаторов могут
практически полностью нарушить электрическую связь между
этими обмотками. Это требует не только удачной конструкции
Рис. 85. Схема «простого» трансформаторного
пеленгатора
самих экранов, но и возможности соединить их действительно
„накоротко" с точками нулевого потенциала, что представляет
чрезвычайно трудную задачу при коротких волнах.
Допустив, что эти требования удовлетворены, мы встре-
чаемся с полным иммунитетом против явлений „ночного эффек-
та", описанных в предыдущем разделе.
Во всех иных случаях следует считаться с той или иной,
хотя и небольшой, емкостью между обмотками трансформато-
ров. Токи, вызванные горизонтальными компонентами электри-
ческого поля в пучке проводов фидера, будут переходить в
приемные провода по путям, показанным на рис. 86 и 87.
96
Эти токи проходят частично по обмоткам трансформаторов,
но так как их пути взаимно противоположны и симметричны,
то индуктивность последних весьма невелика и играет второ-
степенную роль. Рассматривая вопрос тем же порядком, что и
Рис. 87. Электрическая
схема приемного провода
с фидером
Рис. 86. Токи смещения
в трансформаторе
предыдущую задачу (раздел 29), мы придем к эквивалентным
схемам, совпадающим с показанными на рис. 82, 83 и 84,
Хп
за исключением величины которая в настоящем случае
должна быть заменена суммой ( -|ХСТ ), причем Хст— реак-
танц межобмоточной емкости трансформаторов, выражаемый
формулой
V 10е
2vf.c;0M’ (187)
где f — частота в мггц-,
Ст — межобмоточная емкость в мкмкф.
Вместо равенств (175) и (176) получаем
Хп 4- 4 (рф z-tg /и/ф -ф-Хст) = 0; (188)
Хп — 4 (рф ' • ctg Ш1ф' — Хст)= 0. (189)
Подставляя в эти уравнения
Хг =— 2pBctg miB (190)
и решая их относительно /в, получаем выражения для пре-
дельных значений !в:
) / о г 9Х \
arc ctg/ f* к т1ф+ ^- ; (191)
\ Рв р в /
7 Зак. 332
97
Zb < arC Ctg ( --pf-ct£ т1Ф'+ )’ (192)
Эти неравенства должны соблюдаться на частотах, лежа-
щих за верхней границей диапазона не менее чем на 10—15%
ее величины.
Пример 1. Рассматривается „уравновешенный" пеленга-
тор с непосредственной связью фидеров с приемными прово-
дами. Задано 1ф = 4 и, CjB = 14 мкмкф!м, = 10 мкмкф/м,
верхняя граница диапазона 7,5 мггц (X.,lin = 40 м). Найти предель-
ное значение длины приемных проводов /в.
Пользуясь равенствами (183) и (186) и подставляя в нера-
венство X = 0,9 Xmjn — 36 м, находим
, / 36 . / 2 - 14 . 2п • 4 \
1В < — arc ctg |---tg----- .
откуда 2л ё \ ю ё 36 /
/в <2,3 м.
Столь малый размер приемных проводов приведет к весьма
малой приемной чувствительности пеленгатора и низкой точно-
сти его работы.
Пример 2. Исходя из тех же данных, что и в предыду-
щем примере, но введя трансформатбрную связь уравновешен-
ных приемных проводов с фидерами, найдем снова предельное
значение (в . Дополнительно задано
:СТ = 14 мкмкф.
Для волны X = 36 м (/ = 8,33 мггц) с помощью формул (187)
и (19) находим
2ХСТ= 2-106.14 = п
РВ 14- 2г 8,33 • 3333 ’
Подставляя в формулу (191) все цифровые значения, находим
, . 36 , / 2 • 14. 2п-4 ,,
/в<—arc ctg —— tg —---------11,42 ,
\ 10 об /
откуда ZB < 17,3 м.
Полученная цифра предельной высоты приемного провода
должна вполне устроить конструктора.
Сравнивая уравнения (188) и (189) с уравнениями (175а) и (176а),
нетрудно заключить, что при малых значениях межобмоточной
емкости трансформаторов собственные частоты „однотактных
резонансов", т. е. частоты, при которых соблюдаются перечис-
ленные равенства, значительно повышаются с переходом к
трансформаторной схеме и могут быть вынесены далеко за
пределы рабочего диапазона. В этом и заключаются основное
достоинство и смысл применения трансформаторных схем пе-
ленгаторов.
ГЛАВА VII
РАСЧЕТ ЦЕНИ РОТОРА
31. Простая схема цепи ротора
Очень часто цепь ротора образует простой контур, состоя-
щий в основном из последовательно включенных емкости и
индуктивности. Теория действия гониометра пеленгатора осно-
вана на предположении, что между обмоткой ротора и обмот-
ками статора или, иначе говоря, между искателем и полевыми
катушками существует только индуктивная связь. Доя устра-
нения электрической (емкостной) связи, которая нарушает не-
обходимую закономерность связи между цепями статора и ро-
тора, принимаются некоторые меры. Например, размеры ро-
торной обмотки делаются небольшими, что позволяет увеличить
зазор между проводниками обмоток статора и ротора. Другой,
более действительной мерой служит электрическое экраниро-
вание ротора. Ротор покрывается сеткой из изолированных
заземленных проводов, не образующих замкнутых витков.
Первый прием — сокращение размеров ротора — заставляет
уменьшать коэфициент связи между статором и ротором Кт,
входящий в числитель формулы эквивалентной высоты (И), что
понижает этот основной показатель качества пеленгатора.
Применение экрана позволяет значительно увеличить раз-
меры ротора, а вместе с этим и коэфициент связи Кг. Однако
вместе с этим экран повышает потери в контуре ротора, т. е.
уменьшает его множитель вольтажа Q«, стоящий в числителе
той же формулы (11) для Нэ .
Оптимальное решение вопроса достигается испытанием не-
скольких пробных моделей и одним расчетом найдено быть не
может. Эта задача непосредственно не связана с проектирова-
нием антенно-фидерной системы и поэтому в общем расчете
можно задаться средними, наиболее вероятными значениями
Qr и Кт , предоставив опыту конструктора достижение более
высоких цифр.
При экранированном роторе можно в среднем принять Q# =
= 50 и Кт = 0,3 — 0,35. Введением в формулу эквивалентной
высоты (11) множителя Qr учитывается также и влияние по-
терь в антенно-статорных цепях.
Как будет показано далее, величина Qr в случае идеального
гониометра не зависит от угла поворота ротора. Практически
7*
99
она колеблется при этом столь незначительно, что ее можно
считать от этого не зависящей.
Заменяя каждую из половин антенно-статорной системы
пеленгатора эквивалентными им активным Ras и реактивным
Xas сопротивлениями, находим следующее выражение для им-
педанца контура ротора Zr с учетом параметров /?Аф и ЛАф(
пересчитанных на этот контур:
Zr = (Rr + £ RAS) (X? — В Xis), (193)
где Rr — активное сопротивление самого роторного контура с
учетом потерь на входе первого каскада приемника;
Xr —- собственное реактивное сопротивление этого же кон-
тура;
Е— коэфициент пересчета параметров антенно-статорной
цепи на цепь ротора.
Считаясь с зависимостью взаимной индуктивности между
этими цепями от угла поворота ротора (раздел 3), можно на-
писать
е М2 0)2 COS2 6[ -|- Д42 co2 sin2 6|
= Ras* + Xas2
или
Е _ М2 а>2
W +
Вид формул (193) и (194) показывает, что активная и реак-
тивная компоненты импеданца ротора не зависят от угла его
поворота, откуда следует независимость от этого же угла и
множителя вольтажа Q/? .
Рис. 88. Схема
гониометра
Переходим к расчету индуктивности об-
мотки ротора (рис. 88).
Возможность настройки на всем диапа-
зоне выражается условием
соблюдаемым для всех частот диапазона пе-
ленгатора.
С помощью обозначений, приведенных на
рис. 88, и формулы (191) находим, пренебрегая
величиной Ras* перед Xas* (раздел 20):
(Лй + £о)ш-т±_-^-=0. (195)
Катушка, индуктивность которой обозначена Ld, служит для
связи с дополнительными цепями пеленгатора, предназначенны-
ми для компенсации антенного эффекта и выбора стороны
(гл. VIII). Во время определения пеленга включается первая из
этих двух цепей. Ее реактанц, пересчитанный на контур рото-
ра, незначителен и в уравнение (195) поэтому не введен.
100
Поисутствие катушки Ld ослабляет связь ротора со статором,
так как оно заставляет соответственно уменьшать величину Lr .
При общем расчете пеленгатора удобно ввести коэфициент,
определяемый равенством
—° =В, (196)
Lr + Ld '
причем можно задавать р = 0,1—0,2.
Подставляя в уравнение (195) выражение для Ld .найденное
из равенства (196), и решая уравнение (195) относительно Lr ,
находим
=<’97)
cr 0)2 v 1 - ₽ Xas /
Так как реактанц антенно-статорной си-
стемы, пересчитанный на обмотку ротора,
не зависит от угла поворота ротора, то
при определении Xas можно рассматривать
случай максимальной связи ротора с одной
из обмоток статора.
Эквивалентная схема антенно-статорной
цепи для этого случая будет иметь вид,
показанный на рис. 89. С ее помощью
находим
^=^• + 1^X5-.' <1S8>
Рис. 89. Эквива-
лентная схема
антенно-статорной
цепи
Подставляя это выражение в равенство
(197) и переходя к удобным для расчета
единицам, получаем * s
4 "2 СК Г=1
мкгн, (199)
2 я f г I _______Хаф_________
s । 1—2 тс/. 10-6 cs Хаф
где Lr — искомая индуктивность обмотки ротора в мкгн',
f — частота в мггц;
Ls индуктивность статорных обмоток в мкгн-,
Лаф — реактанц половины антенно-фидерной системы пелен-
гатора в ом-
Cs.— собственная емкость статорных обмоток в мкмкф-,
Cr — емкость контура ротора в мкмкф.
Величина Хаф вычисляется с помощью формул, приведенных
в главе IV. Метод расчета Ls приведен в разделах 20 и 24.
Емкость Cs задается равной 20 — 30 мкмкф (для коротко-
волновых пеленгаторов).
Емкость контура ротора Cr состоит из нескольких слагае-
мых. Сюда входят емкость конденсатора, собственная емкость
обмотки ротора, емкость монтажа и входная емкость первого
каскада приемника.
101
Перед вычислением Lr выбирается конденсатор переменной
емкости, начальная и наибольшая емкости которого после это-
го считаются известными. Остальные три постоянные слагае-
мые емкости контура задаются, исходя из опытных данных.
Можно считать, что они в сумме составляют примерно 40 —
60 мкмкф.
Добавляя к этой величине начальную емкость конденсато-
ра, получаем — минимальное значение емкости контура
ротора. Аналогичным порядком находится С/?гаах — наибольшее
значение этой емкости. При вычислении Lr по формуле (199)
вместо Cr подставляется величина, равная примерно 9/10 Сдтах,
a f принимается равной нижней границе рабочего диапазона.
Отношение CRmax /G?min не дает возможности судить о
перекрытии диапазона, так как реактанц антенно-статорных
цепей, перечисленный на цепь ротора, существенно влияет на
настройку.
Поэтому найдя величину Lr , указанным выше порядком,
надо проверить ее на перекрытие по формуле, которая пред-
ставляет собой решение уравнения (199) отнесительно Cr :
Сд =----------г—।----------— f —---------------мкмкф,
4^fi.Lp. -J_____________Ч _______________1
9 * f г - + Хаф_________ (200)
1— 2 r.f -10~6Сх .Xa0j
где сохранены те же обозначения и единицы, что и в форму-
ле (199).
Если перекрытие имеет место, то подстановка в выражение
(200) найденного ранее значения Lr , а вместо f — верхней гра-
ницы диапазона рабочих частот даст величину Cr , которая
должна превосходить CRtnin раза в полтора по крайней мере.
Если проверка этим порядком не дает удовлетворительного
результата при достаточно большом по приблизительной оцен-
ке отношении Сдтах/Сд ты, то причину следует искать в чрез-
мерно большой реакции антенно-статорных цепей на ротор.
Это выражается в слишком большой величине вычитаемого,
стоящего в прямоугольных скобках выражения (199). Обнару-
жив этот дефект, следует пересчитать величину Ls, несколько
уменьшив частоту fR, входящую в формулу (127). Это указа-
ние относится к случаю „нижнего резонанса" (раздел 20) и
соответствует удалению резонансной точки 1 от нижней гра-
ницы рабочего диапазона (рис. 52).
Если это средство оказывается неудобным, приводит к
слишком большим значениям Ls, то приходится уменьшать
размеры ротора, ослабляя связь между ним и обмотками ста-
тора. Это выражается в уменьшении коэфициента связи Кг,
входящего в выражение (199).
Если электрическая связь роторной обмотки со статорными
теми или иными мерами устранена и вся цепь ротора надежно
заэкранирована, то нет причин опасаться непосредственного
102
приема на эту цепь или ее асимметрирующего воздействия на
антенно-статорные цепи. Однако опыт показывает, что харак-
тер цепи ротора и конструктивное размещение ее элементов
сказываются на качестве работы пеленгатора. Причину этого
надо искать в том несовершенстве экранирования, которое
всегда в той или иной мере имеет место.
Можно рекомендовать по возможности сохранять симметрию
цепи ротора. Это относится в первую очередь к входу первого
каскада приемника' и включению конденсатора. Хорошие ре-
зультаты дают пушпульный вход и замена одного конденсато-
ра двумя последовательно включенными (рис. 90). При несим-
метричном входе приемника можно проиграть на эквивалент-
Рис. 90. Симметричная
схема включения ротора
Рис. 91. Вариант несим-
метричного включения
ной высоте пеленгатора (рис. 91), так как в этом случае напря-
жение на сетке первой лампы равно половине напряжения на
емкости контура ротора. Вследствие этого в знаменатель
формулы эквивалентной высоты (11) и (12) следует в этих слу-
чаях вводить добавочный множитель, равный 2.
Можно прибегнуть также к включению лампы через транс-
форматор или промежуточный контур, но это значительно
усложняет схему и может заметно снизить чувствительность.
32. Расширение диапазона цепи ротора
Нежелательные последствия сложной коммутации обычно
не позволяют иметь более двух гониометров в одном пеленга-
торе. Поэтому при большом числе поддиапазонов приходится
прибегать к переключениям в цепи ротора.
Переходом от простого контура ротора (рис. 92), у которого
почти вся индуктивность £/? сосредоточена в обмотке послед-
103
него, к схеме, показанной на рис. 93, достигается понижение
рабочих частот. Последняя схема невыгодна, так как выделе-
ние индуктивностей из ротора не позволяет связать их со ста-
торными обмотками.
Расчет этой схемы производится тем же порядком, что и
простой, с той разницей, что в формулах (199) и (200) на месте
должна стоять сумма (Lr 4- 2Ld ), причем Lr считается из-
вестным и найденным при расчете простой схемы (рис. 92).
При вычислении же эквивалентной высоты в числитель фор-
мул (11) и (12) подставляется только Lr (рис. 93).
Рис. 94. Параллель-
ное включение допол-
нительной катушки
Рис. 92. Контур
ротора
Рис. 93. Контур
ротора
Перекрытие двух поддиапазонов на одном гониометре до-
стигается с большей выгодой в отношении чувствительности
при сочетании схем, показанных на рис. 92 и 94.
Первая из них (рис. 92) рассчитывается порядком, указан-
ным в предыдущем разделе для поддиапазона более низких
частот, причем определяется индуктивность роторной обмот-
ки Lr .
Расчет второй схемы заключается в определении индуктив-
ности £п (рис. 94), при которой перекрывался бы поддиапазон
более высоких частот. При этом Lr и Cr считаются известны-
ми. Расчетная формула может быть получена с помощью ра-
венства (199). Подставляя в него вместо ( — 2nf Cr ) реактив-
ную
ных
Ln ,
проводимость емкости Сд и индуктивности £п , включен-
параллельно, и решая полученное уравнение относительно
находим
где
Lr W
£п lr Cr 10-е . w—i мкгн,
(201)
2 тс/ “ Lq Кг 2
(202)
2л/ L1 + 1 - 2 itf - Cs Хаф 10-6
Входящие в эти равенства обозначения имеют те
чения и выражены в тех же единицах, что и в предыдущих
же зна
-Л'ЛФ
104
равенствах. При вычислении £п в формулы (201) и (202) под-
ставляются наибольшее значение Cr и вместо f примерно
э/ нижней границы частот рассматриваемого поддиапазона.
1 Затем то же повторяется для наименьшего значения С/? и
частоты, примерно на 5% превышающей верхнюю частотную
границу диапазона. Если результат даст цифру, не меныпую
найденного значения £п , то весь поддиапазон будет перекрыт.
Для простой схемы роторной цепи (рис. 92) нами было ре-
комендовано пользоваться ориентировочным значением множи-
теля вольтажа Qr , равным 50, причем этой цифрой учитывают-
ся и потери в антенно-статорных цепях (раздел 31).
Для схемы, показанной на рис. 93, может быть выбрано
немного большее значение Qr— порядка 60 — 70, так как до-
полнительные катушки Ld могут обладать более высоким
качеством, чем обмотка ротора с подходящими к ней прово-
дами.
Более сложным представляется выбор величины Q/? Для
схемы, изображенной на рис. 94.
Она является функцией активных и реактивных сопротивле-
ний катушек Lr и Ln (рис. 94) и выводится далее. При этом
делается ряд упрощающих предположений. Более строгий вы-
вод бесцелен, так как в его основе лежит ориентировочное
задание числовых значений множителей вольтажа обмоток ро-
тора Lr и дополнительной Ln.
Указанные упрощающие предположения таковы: реактивным
сопротивлением антенно-статорной системы, пересчитанным на
обмотку, можно пренебречь и потери в конденсаторе С и на
входе первого каскада весьма малы.
Очевидно, при настройке контура в этом случае
» _£п_ — Lr
Ln
где In — ток в катушке Ln ;
Ir — ток в обмотке ротора.
Обозначая активное сопротивление катушки Ln через Rn,
найдем его величину, пересчитанную на обмотку ротора:
Rn ' — Rn • ; '
'r
Реактивное сопротивление емкости С и индуктивности Ln,
включенных параллельно, имеет при настройке, очевидно, ем-
костный характер. Поэтому комбинация из Ln и С может рас-
сматриваться как емкость, образующая с обмоткой ротора Lr
простой последовательный контур (рис. 92).
Множитель вольтажа всей цепи Qr , входящий в формулы
(11) и (12) для Яэ, может быть найден в рассматриваемом
случае с помощью равенства
Lr, ш
Qr = р-1/г '•
Kr -|-«п
(203)
105
где Rr — активное сопротивление, эквивалентное всем потерям
в обмотке ротора и антенно-статорной системе пеленгатора.
Преобразуя это выражение с помощью двух предшествую-
щих равенств, находим
Qp'
Qr = " <204>
1 + ^П
где Qr ' — множитель вольтажа обмотки ротора, учитывающий
и потери в антенно-статорной системе;
Qn — множитель вольтажа дополнительной катушки Ln .
Как видно, Qr < Qr '
Если частоты второго поддиапазона превосходят соответст-
вующие частоты первого поддиапазона в п раз, то
откуда
LR 2 1
-г-—- =п2 — 1
'п
(205)
(206)
Пример 1. Задано: п — 2, Qr ' = 50 и Qn — 150. Найти Q₽ .
Пользуясь формулами (205) и (204), находим
-Л = 22 - 1 = 3;
гп
50
Q« — 50 — 25.
1+3‘ 150
Если сравнивать качества рассматриваемой схемы (рис. 94)
с качествами простой схемы для одного и того же поддиапа-
зона, то надо исходить из числового значения величины
Qr • ’ входящей множителем в числитель формул для Нэ
(И) и (12).
Введя значки 1 для простой схемы (рис. 92) и 2 для слож-
ной схемы (рис. 94), с помощью формул (204), (205) и (206)
найдем
_ 5
---------—
Причем мы предположили, что в обоих случаях множитель
вольтажа катушки ротора один и тот же.
Пример 2. Найти отношение эквивалентных высот для
сложной (рис. 94) и простой схем (рис. 92) для одного и того
же поддиапазона при п — 2, QR ' = 50 и Qn = 150.
106
Пользуясь формулой (207). находим
Qr а • V Ln 2 __________2_______
| l + (22-l) . -go-
пример показывает, что Нэ в обоих вариантах сохраняет
свой порядок.
Вариант сложной схемы (рис. 94) имеет то преимущество,
что на роторе имеется большее число витков; это при корот-
ких волнах- облегчает равномерное размещение обмотки и
уменьшает паразитное влияние подводящих проводов.
В настоящем разделе мы не учитывали необходимость до-
полнительной катушки для связи со схемами компенсации
антенного эффекта и выбора стороны. Эт'о объясняется незна-
чительностью ее индуктивности и приближенным характером
полученных формул.
ГЛАВА VIH
УКАЗАНИЯ ПО ОПРЕДЕЛЕНИЮ ПАРАМЕТРОВ СХЕМ
ДЛЯ ВЫБОРА СТОРОНЫ II КОМПЕНСАЦИИ
АНТЕННОГО ЭФФЕКТА
33. Метод выбора стороны. Общие указания
При методе пеленгации с установкой ротора на минимум
слышимости сигнала (и некоторых иных методах) радиоопера-
тор находит два угла, разнящиеся на 180°, из которых один
представляет собой пеленг.
Процесс, с помощью которого оператор производит выбор
одного из этих двух углов, носит название „выбора стороны".
Классический метод выбо-
рке. 95. Расположение указателей
ротора
ра стороны заключается в сле-
дующем. На рис. 95 пока-
зана диаграмма, выражающая
зависимость э. д. с., наводи-
мой в обмотке ротора маг-
нитным полем в гониометре,
от угла поворота ротора.
Здесь Ф — вектор магнит-
ного поля в гониометре;
R—обмотка ротора (вид
сверху);
<р —угол между направле-
нием магнитного потока Ф и
перпендикуляром к плоскости
витков роторной обмотки.
Электродвижущая сила, наводимая магнитным потоком Ф в
обмотке ротора, пропорциональная cos <р, может быть изобра-
жена в некотором масштабе вектором Er.
При вращении ротора, с которым этот вектор надо считать
жестко связанным, его конец скользит по двум касательным
окружностям А и Б.
Когда ротор занимает положение, соответствующее нулево-
му приему, т. е. Er —Q, плоскость его витков совмещается с
вектором Ф. Наличие двух таких положений приводит к дву-
значности определения пеленга, так как нет признака, по кото-
108
рому оператор мог бы судить о том, в каком из двух возмож-
ных положений находится ротор относительно вектора магнит-
ного поля. Указатель может оказаться расположенным как
в направлении ОФ, так и в прямо ему противоположном.
Наибольшей силе сигнала соответствуют также два поло-
жения ротора, не отличимых для оператора, так как э. д. с.,
наводимые при этом в роторе, разнятся только по фазе. Фазы
этих э. д. с. для двух положений указателя — в направлениях
ОВ и ОГ—отличаются друг от друга на 180°. Это обстоя-
тельство, не обнаруживающее себя на выходе приемника
непосредственно, используется в описываемом методе выбора
стороны.
Схема гониометра усложняется добавлением ненаправленной
приемной антенны, цепь которой связывается с цепью ротора,
благодаря чему в последней наводится добавочная э.д. с.
Рис. 96. Диаграмма приема в виде кардиоиды
Принимаются меры к тому, чтобы ее фаза совпадала с фа-
зой основной э. д. с., наводимой в обмотке ротора и соответ-
ствующей одной из половин ее полярной диаграммы, например,
отмеченной знаком плюс (рис. 95).
По величине добавочная э. д. с. должна равняться наиболь-
шим значениям основной э. д. с., т. е. диаметру окружностей,
изображенных на рис. 95.
Обе упомянутые э. д. с. оказываются введенными в цепь
ротора последовательно и могут быть алгебраически просум-
мированы для каждого положения ротора (рис. 96).
Суммарная э.д. с. изображается вектором Е^, конец кото-
рого скользит по кривой, имеющей форму „кардиоиды". Укреп-
109
ляя указатель У2 с той или другой стороны ротора, выбираем
одно из этих двух положений с таким расчетом, чтобы при уста-
новке ротора на наибольшую слышимость сигнала 1 указатель У2
был обращен в сторону правильного из двух отсчетов пе-
ленга, сделанных по лимбу гониометра при приеме на „вось-
мерку".
Таким образом, найдя два возможных значения пеленга,
оператор переходит к выбору стороны, включив схему для по-
лучения добавочной э. д. с. Поворачивая ротор на 90° в ту и
другую сторону от его первоначального положения, оператор
выбирает в качестве пеленга тот из двух ранее сделанных от-
счетов, на который указывает У2 в положении наиболее силь-
ного приема. Расплывчатость* максимума не имеет значения,
так как при этой операции приходится лишь выбирать один из
двух предварительно точно определенных углов.
Чтобы избежать необходимости вращения ротора в обе
стороны, что задерживает операцию получения пеленга, на
Рис. 97. Схема кардиоидного
приема
роторе помещают вторую доба-
вочную обмотку. Плоскость ее
витков располагается перпен-
дикулярно плоскости витков
основной обмотки.
При выборе стороны ротор
остается неподвижным. Опера-
тор включает вместо основной
обмотки добавочную и, пере-
ключая ее концы, останавли-
вается на том положении пере-
ключателя, которое соответст-
вует более сильному приему.
Указатель У2 отсутствует, а
указатель yt (рис. 95) допол-
няется вторым, направленным в
противоположную от У, сто-
рону. Разметка этих указателей
и положений переключателя
концов добавочной обмотки соответствующими цветами позво-
ляет выбрать правильный из двух отсчетов пеленга.
На рис. 97 показана одна из возможных схем выбора сто-
роны методом перехода на прием по кардиоиде. Основная
э. д. с. наводится в обмотке ротора Lr, добавочная э. д. с.—в
катушке Ld . Остальные элементы цепи ротора [не показаны,
так как согласование этих э.£д. с. по величине и фазе при
разомкнутой цепи ротора, какой она показана на рис. 97, со-
храняется и при включении всех ее элементов.
1 Это условие обычно принимается в настоящее время. Прежде было
принято при выборе стороны устанавливать ротор на мш имум слышимости
сигнала.
ПО
В этой схеме показаны два элемента для регулировки вели-
чины и фазы добавочной э. д. с.: переменная связь катушек Лд
и Ld и конденсатор переменной емкости С. Только при нали-
чии двух органов регулировки можно рассчитывать на получе-
ние диаграммы, близкой к кардиоиде. Необходимость двух
дополнительных операций, задерживающих получение пеленга,
с чем приходится считаться особенно в
авиации, делает „классический" метод кар-
диоиды в чистом виде мало пригодным.
К нему можно прибегать лишь в тех ред-
ких случаях, когда более простые методы
оказываются неприменимыми.
Векторная диаграмма основной Er и
добавочной Ed э. д. с. для описанного
метода имеет вид, показанный на рис^ 98.
В случае 1 эти э. д. с. совпадают по фазе
и их сумма соответствует максимуму кар-
диоиды (рис. 96). Нулю кардиоиды соответ-
ствует расположение векторов Er и Ed. пока-
занное на диаграмме 2.
Рассмотрим случай, когда Ed в неко-
торой, не слишком значительной мере от-
fy
(И
(2)
Рис. 98. Сложение
основной и доба-
ступает от необходимого для кардиоиды войной э. д. с.
соотношения с Er по величине и фазе. На
рис. 99 и 100 изображены два таких примера.
На первом рисунке показан случай, когда добавочная э. д. с.
несколько меньше основной. Суммарное значение обеих э. д. с.
изменяется в пределах от £а>ат ДО Erm, причем интснсив-
Рис. 99. Сложение э. д. с. при
квазикардиойде
ность сигнала нулевого зна-
чения не достигает. Сходный
с этим результат получается
и в другом случае, показан-
ном на рис. 100. Добавочная
э. д. с. Ed немного больше
основной Er.
В этом случае результи-
рующее значение э. д. с. тоже
не достигает нулевого, ме-
няясь ОТ Erk\ ДО Erki.
Добавочная э. д. с. в обоих
случаях соответствует поляр-
ной диаграмме приема в виде
окружности.
Построение полярной диа-
граммы суммарной э. д. с. Ere.
облегчается, если добавочная
э.д. с. будет предварительно
разложена на две: „фаз-
ную“ДоФ, т. е. совпадающую
111
по фазе с Д# , и „нефазную" Донф, отличающуюся от нее по
фазе на 90е (рис. 99 и 100).
Для каждого направления вектор диаграммы суммарной
_э. д. с. может быть найден с помощью выражения
ДЛК = К(Дд + Доф)2 + £2онф • <208)
Рис. 100. Сложение э. д. с. при
квавикардиоиде
Плюс в скобках соответ-
ствует случаям 1, а минус — слу-
чаям 2, показанным на обоих
рисунках.
Построение полярных диа-
грамм изображено на рис. 101
и 102. Проследив ход построе-
ния, легко уяснить влияние
неравенства величин Ец и До
и их дефазирования.
Выбирая сторону описанным
ранее методом и производя пе-
реход от более сильного к менее
сильному приему, радиоопера-
тор не получает в последнем
случае исчезновения слыши-
мости. Однако он производит
не определение пеленга, а толь-
ко выбор между двумя пелен-
гами, найденными ранее. Он
будет иметь возможность это
Рис. 101. Диаграмма приема в виде квазнкардиоиды
112
сделать, если сигналы, соответствующие Ецщ и Е/>К2, будут
без труда различимы по интенсивности.
Эксплоатапионный опыт показывает, что в условиях практи-
ки это имеет место, если отношение большего значения сум-
марной э.д. с. к ее меньшему значению составляет не менее
трех. Если это не соблюдается по всему диапазону, то помехи и
усталость оператора могут привести к тому, что он переста-
нет „выбирать сторону1*, опасные последствия чего не требуют
пояснения.
Таким образом, задача расчета схемы для выбора стороны
свозится к необходимости не дать отношению наибольшего
действующего значения суммарной э.д. с. к ее наименьшему
значению опуститься ниже заданного уровня. Необходимость
сохранять по всему диапазону заданные амплитудные и фазо-
вые соотношения порознь, даже в форме неравенств, отпада-
ет. Это позволяет пользоваться схемами для выбора стороны,
не требующими регулировки.
Сложная зависимость от частоты основной,'.э. д. с., т. е. на-
водимой в роторе магнитным полем гониометра, весьма затруд-
няет расчет и служит причиной того, что конструкторы обык-
новенно ограничиваются экспериментальным подбором элемен-
тов схемы.
Считаясь с непрактичностью в этом случае большой и
кропотливой расчетной работы, далее излагается несколько
8 Зак. 332
113
упрощенных методов расчета, результаты которых надо рас-
сматривать как полезную ориентировку перед лабораторной
разработкой схемы.
Предлагаемые методы применены к двум схемам. Однако
читатель, уяснивший суть этих методов, без больших затруд-
нений сумеет распространить их и на другие схемы выбора сто-
роны.
Редко удается сохранить одни и те же параметры схемы
для выбора стороны в более или менее широком диапазоне
частот. В таком случае приходится их изменять, производя
переключения при переходе от одного поддиапазона пеленга-
тора к другому. Добавочных переключений, отдельно в схеме
выбора стороны, следует избегать.
34. Первый метод расчета схемы для выбора стороны
Устанавливая начало отсчета фазовых углов, принимаем,
что начальная фаза напряженности поля в центре пеленгатора
равна нулю. Начальные фазы напряженности поля вблизи при-
емных проводов (диполей) одной и той же половины антенно-
фидерной системы, равные по величине, взаимно обратны по
знаку начальной фазы, которая не превосходит обычно 30 40°
(гл. II).
Напряжения, развиваемые между выходными концами при-
емного провода М и И (рис. 33, случаи 1 и 3), находятся в
фазе или противофазе с полем, если провод удален от резо-
нанса, что и принимается в данном случае.
Нетрудно проследить далее, что напряжение, создаваемое
между точками А и Б присоединения статорной обмотки (рис.
103), и электродвижущая сила, развиваемая в одном из прием-
ных проводов (диполей), находятся также в фазе или противо-
фазе с напряженностью поля около этого провода (диполя),
если антенно-фидерная система удалена от резонанса.
Результирующее напряжение между упомянутыми точками
А и Б присоединения статорной обмотки представляет собой
разность напряжений, создаваемых между теми же точками—
электродвижущими силами, наводимыми в левом и правом при-
емных проводах (диполях). Сопоставив все сказанное, можно
построить векторную диаграмму, изображенную на рис. 104.
Здесь Е — напряженность поля в центре пеленгатора;
Ел — то же около левого приемного провода (диполя);
Еп — то же охоло правого приемного провода (диполя);
Z/абл — напряжение между точками А и Б (рис. 103), со-
здаваемое э. д. с., наводимой в левом проводе;
67абп — то же, создаваемое э.д. с., наводимой в правом
проводе;
£/аб —результирующее значение напряжения между точ-
ками А и Б.
114
Построение этой диаграммы показывает, что напряжение
£7аб во всех случаях сдвинуто по фазе на 90° относительно
напряженности поля в центре пеленгатора Е.
Рис. 103. Половина антенно-
фидерной системы
Рис. 104. Суммирование
выходных напряжений
Статор
НЖГ)
^р
Рис. 105. Схема «выбора
стороны»
Как было пояснено ранее (разделы 19 и 20), цепи, состоя-
щие из половин антенно-фидерной системы и соответствующих
статорных обмоток, должны быть не настроены. Следователь-
но, токи, протекающие по статорным
обмоткам, сдвинуты по фазе относи-
тельно напряжений б7дв (рис. 104) на
90°, а электродвижущие силы, наводи-
мые этими токами в обмотке ротора,
находятся в фазе или противофазе
с UAE.
Из всего .сказанного следует, что
основная э.д. с., т. е. наводимая в об-
мотке ротора магнитным полем ста-
торных обмоток, сдвинута по фазе от-
носительно напряженности поля в цен-
тре пеленгатора на 90°. Направление
сдвига, т. е. запаздывание или опере-
жение, для дальнейшего рассмотрения
роли не играет.
К началу расчета схемы для выбора
стороны проектирующий уже распо-
лагает окончательными расчетными
данными для эквивалентной высоты Нэ
во всем рабочем диапазоне пелен-
гатора. Поэтому для упрощения расчета
разить основную э.д.с., т. е. наводимую
через Нэ .
Обратившись к выводу формулы эквивалентной высоты
(раздел 3), нетрудно заключить, что основная э.д. с. для на-
целесообразно вы-
в обмотке ротора,
8*
115
пряженности поля, равной единице, равна
, где QR —мно-
^R
житель вольтажа цепи ротора (гл. VII).
Рассмотрим простую и довольно распространенную схему
для выбора стороны (рис. 105).
Добавочная э.д. с. наводится в катушке Ld током, протека-
ющим по катушке La
Органов регулировки эта схема не имеет.
Как было показано, э.д. с., наводимая в обмотке ротора,
сдвинута по фазе на 90° относительно напряженности поля в
центре пеленгатора. Ту же начальную фазу может иметь доба-
вочная э.д. с., наводимая в катушке Ld , только в том случае,
если цепь антенны настроена на рабочую частоту. Таким образом,
это условие, необходимое для получения правильной кардиоиды,
может быть соблюдено только в одной точке диапазона.
Роль сопротивления R заключается в приближении началь-
ной фазы добавочной э.д. с. к фазе основной э.д. с. Чем
больше R, тем ближе к синфазности оказываются основная и
добавочная э.д. с. Но увеличение R уменьшает ток в цепи
антенны и вместе с этим величину добавочной э.д.с., которая
может оказаться недостаточной для получения диаграммы,
пригодной для выбора стороны.
Задача выбора R облегчается тем больше, чем ближе цепь
антенны к резонансу и чем больше связь между катушками
La И Ld (рис. 105).
При напряженности поля, равной единице, выражение для
добавочной э.д. с., наводимой в катушке Ld , имеет вид
_ i М ш h\
Ed — —~— ------------
R +J (Xr + Х/а )
Здесь Ла—действующая высота добавочной ненаправленной
антенны;
М — взаимная индуктивность между катушками;
Ха — реактивное сопротивление антенны;
о> — угловая частота;
(210)
где La — индуктивность катушки, имеющей то же обо-
значение (рис. 105).
Как было пояснено, основная э.д. с., т. е. наводимая в ро-
торе может быть изображена так:
р _
R~J' Q«
(211)
Из равенств (209) и (211) следует, что суммарное значение
обеих э. д. с. выражается равенством
Err=j + -J м ------------ (212)
J Qr — R+j (Xr+ XLa) v '
116
Двойной знак перед вторым слагаемым связан с двумя слу-
чаями взаимной направленности рассматриваемых э.д.с.
Производя шаблонные преобразования, находим отношение
действующих значений этой э.д. с., соответствующих первому
и второму из этих двух знаков, которое обозначаем буквой S:
S — 1 2 • (Ла ~4~ -Хд я )л -j- R Ч~ Qr ш Ла )2 (213)
V Hai (Ла + Xz.«)24~(^ Я — QRM^hN^'
Задача подбора параметров схемы заключается в том, что-
бы эта величина в пределах всего рабочего диапазона не опу-
стилась ниже приемлемого минимума.
Сложная зависимость На от частоты, делающая невозможным
сколько-нибудь удобный расчет, заставляет прибегать к искус-
ственным упрощающим приемам.
Зависимость эквивалентной высоты Нэ от частоты в боль-
шинстве случаев выражается кривыми, имеющими вид, ^пока-
занный на рис. 106.
Расчетная кривая 2, соответствующая случаю . „нижнего
резонанса" (раздел 20), в действительности имеет 'не совсем
такой вид. Подъем ее от точки
А к точке Б обусловлен при-
ближением к резонансу антен-
но-статорной системы. Это же
обстоятельство должно одно-
временно вызывать уменьше-
ние множителя вольтажа ротор-
ной цепи > так как его вели-
чина зависит от потерь как в
этой цепи, так и в антенно-ста-
торных цепях. Можно с боль-
шой степенью уверенности пред-
полагать, что левая часть этой
кривой имеет вид, показанный
Рис. 106. Кривые эквивалентной
высоты
пунктиром.
Для упрощения формулы (213)
поступаем следующим образом.
Предварительно кривую На (Г),
если она имеет вид кривой 2 — 2 (рис. 106), заменяем прибли-
женно построенной кривой 2 — 2. Кривую Нэ примерно па-
раболической формы (рис. 107) заменяем далее прямой 0—4,
проходящей через начало координат и одну из точек:/ или 2.
Выбирается та из двух этих точек, для которой прямая 0—4
располагается выше. Буквами и /2 обозначены нижняя и
верхняя границы рабочего диапазона пеленгатора.
117
Заменяем далее Нэ ее приближенным выражением, соот-
ветствующим прямой^О— 4'-
Нэ = Рэ -2 тс/, (214)
причем
(2'5)
где Нэъ — значение! эквивалентной высоты, в данном случае
для верхней границы диапазона. Частоты подставляются в мггц.
Рис. 107. Спрямление кривой эквивалентной
высоты
Подстановка выражения (214) в равенство (213) позволяет
получить
Рэ 2 • (Ха Ч Xfn)2 Ч~ (Р9Р Ч~ Qr М ИкУ _ ™ T9161
Рэ 2 •(ла+х£й)2 + (РэР-ОдмЛа)2- 1 ’
Реактанц антенны имеет обычно емкостный характер.
Стремясь по указанным ранее соображениям к наименьшим
значениям реактанца антенной цепи, вводим для определения
в дальнейшем индуктивности La следующее дополнительное
условие: величина (Хь Xia)2 должна иметь на границах под-
диапазона одно и то же значение Х182.
Очевидно, при обычно встречающейся ширине поддиапазо-
на, внутри его границ (Xr -\-Xia)2 меньше Л^2.
Так как добавочная антенна представляет в большинстве
случаев короткий вертикальный стержень или провод, то мож-
но приближенно считать, что ее действующая высота Аа не
зависит от частоты.
Вид выражения (216) показывает, что с возрастанием Р3 ве-
личина S падает, так как обычно
Рэ R Qr М Ад .
118
Отсюда нетрудно заключить, что, подобрав условия для по-
лучения заданного значения 5 на пограничных частотах, внутри
поддиапазона 5 будем иметь более высокие значения, что со-
ответствует большей разнице интенсивностей сигнала при
выборе стороны.
Переходим к определению R и М, отвечающих поставлен-
ному условию.
Оптимальное значение R должно, очевидно, соответство-
вать максимуму 52 * * * * * при постоянном М на пограничных частотах.
Производя намеченную подстановку в выражение (216), по-
лучим для пограничных частот
Рэ8 Х122 + (Рэ -р + С^Л^а)2 ~2 6217)
Рэ 2-Х„а4-(Рэ •/? —<?«Л4Ла )2 ‘ 1 ’
Рассматривая это выражение как функцию R, найдем его
максимум и соответствующие ему значения R и S2:
/ Р2- +
R~ Рэ
--------------------I
V Рэ2 х,2г + <?^2м2Лл 2 + <?/г
К Рэ2 • Х122 Н~ Сд 2 М2 й а 2 — Qr • М • Иь
Рассматривая это равенство как уравнение
мулу для М-.
(218)
= S2. (219)
, находим фор-
(220)
Подстановка этого выражения в равенство (218) приводит
к расчетной формуле для R'.
R = Ц? -|Л2|- (221)
В обе последние формулы Х12 подставляется в ом (см.
далее). Переходим к определению индуктивности La и выводу
формулы для Х12.
Согласно принятому условию
La о>2 + ХА 2 = - (Аа ш1 + ХА ,), (222)
где ХА J и ХА 2 — значения реактанца антенны при угловых
частотах а\ и <в2.
Из равенства (222) находим
ьа =—<223)
z к 1 । J 2)
Реактанц антенны в виде вертикального провода или стерж-
ня может быть вычислен по формулам
v 3333 ,
ХА j =-----ctg тх /а ом, (224)
119
2 =----— Ctg /п2 /А ом. (225)
Здесь С1А — погонная емкость антенны в мкмкф/м-
Za—длина антенны в м-,
m1if, — 1,2 - fj /А градусов !
m2zA -- 1,2 • /2г Za градусов [ (226)
В формулах (223) и (226) ft и f2 — пограничные частоты —
выражаются в мггц, a ZA — в м.
Найдя La с помощью формулы (223), можно определить Л12,
пользуясь равенством
Л12 — 2г. • ft -’La Ла 1 ом. (227)
Здесь fj — нижняя пограничная частота в мггц-,
Аа — в мкгн-
1 — реактанц антенны, найденный по формуле (224),
в ом.
Действующая высота антенны йА может быть найдена по
формуле
Л* = -у- м’ (228)
где X — длина волны в м\
mih — 1,2 • f • /А градусов, (229)
причем f выражается в мггц, а /А — в м.
Как было указано ранее (раздел 31), индуктивность катуш-
ки связи Ld (рис. 105) целесообразно выбирать возможно
меньшей.
Это можно сделать, если определить Ld по известным зна-
чениям La и М с помощью формулы
, №
Ld — мкгн, (230)
задавшись возможно большим значением коэфициента связи К,
которое может достигать 60 — 65%.
К началу расчета должны быть известны следующие вели-
чины:
и /2 — задаются;
Нэ —из расчета пеленгатора;
Q#—из расчета пеленгатора;
Za — выбирается из конструктивных соображений;
СА1—вычисляется по заданной величине Za и диаметру
антенны;
К— задается;
S — задается. Обычно S = 3.
J20
Вычисления удобно проводить в следующем порядке.
Вычислить:
Xai и Ха2 по формулам (224) и (225);
La по формуле (223);
Х12 по формуле (227);
R по формуле (221);
Ла по формуле (228);
Рэ по формуле (215) после преобразования кривой Нэ;]
М по формуле (220);
Ld по формуле (230).
Если все найденные параметры реальны и удобны для осу-
ществления, то производится проверочный расчет 5 для ряда
частот диапазона по формуле (213), причем в нее подставля-
ются значения Нэ , найденные не по формуле (214), а с по-
мощью кривой, выражающей зависимость Нэ от частоты.
Если все полученные при этом значения 5 не будут лежать
ниже заданного минимального значения, то расчет может счи-
таться законченным и может быть положен в основу лабора-
торной разработки. В противном случае конструктор, руковод-
ствуясь приведенными соотношениями, корректирует выбран-
ные и вычисленные параметры, после чего снова проводит
проверку по формуле (213) для ряда частот диапазона. Эти
операции повторяются до получения удовлетворительного
результата.
Если ход На по диапазону резко отличается от приведен-
ного на рис. 106, то этот метод не может быть использован.
Пример. Схема для выбора стороны рассчитывается для
поддиапазона, ограниченного частотами fj = 3,5 мггц и
72 = 7,5 мггц.
Кривая изменения Нэ имеет вид, показанный на рис. 107,
причем НЭ2=з14 м, Qk = 50, /д = 6 м.
Вычислением по известному диаметру провода антенны и
ее длине (раздел 40) найдено: СА1 = Ю мкмкф1м, задано:
/С =0,6; 5 = 3.
С помощью формул (224) —(226) находим
/а =1,2 • 3,5 -6 = 25° 12',
/п2/а = 1,2 • 7,5-6 = 54°,
Xai = — • ctg 25° 12' = — 708 ом,
ХА2 ----- Ctg 54° = — 242 ом.
По формуле (223)
, — 708 — 242 , „ „
‘а ~ 2-(3,5+7,5) — 13,8 мкгн.
Па формуле (227)
Х12 = 2к • 3,5 • 13,8 — 708 = — 404 ом.
12V
По формуле (221)
R = 404 = 672 ом.
Так как длина приемной антенны очень мала по сравнению
-с длиной волн, то можно, отказавшись от вычисления по фор-
муле (228), положить, что
Лд «s —|— = 3 м.
По формуле (215)
Рз = 7,5 = °’29"-
По формуле (220)
32— 1 404 • 0,297 .
/14 = . 3 • —’— =1,06 мкгн.
По формуле (230)
, 1.062 noQ
Ld ~ o' 6Д • 13 8 = мкгн.
Если индуктивность ротора имеет порядок 5—10 мкт, то
индуктивность Ld может быть увеличена до 0,5—1,0 мкгн
(раздел 31). Это целесообразно, так как осуществление очень
малой индуктивности заданной величины может оказаться за-
труднительным. Еще более сложным может оказаться полу-
чение заданной сильной связи (/<=0,6) между катушками со
столь различными индуктивностями, какими являются найден-
ные значения La и Ld •
Увеличению Ld должно сопутствовать соответствующее
уменьшение коэфициента связи К, что само по себе является
положительным фактом, так как при этом уменьшается влия-
ние цепи антенны на цепь ротора, вызывающее в той или
иной мере изменение настройки. Закончив вычисление приве-
денных величин, надо перейти к проверочному вычислению ве-
личины 5 для ряда частот в рабочем диапазоне.
35. Второй метод, расчета схемы для выбора стороны
Изменение эквивалентной высоты Нэ в пределах диапазона
или поддиапазона может не следовать тому закону, который
был положен в основу вывода расчетных формул предыдущего
раздела. Вообще ход кривой Нэ по частоте может не давать
ключа к приемлемой замене Нэ более или менее простой
^функцией частоты.
Приводимый здесь метод, который является скорее мето-
дом подбора элементов схемы, нежели расчета, может помочь
конструктору ориентироваться в этом вопросе в случаях слож-
ной зависимости Нэ от частоты.
Рассмотрим ту же схему, которая была приведена в преды-
дущем разделе (рис. 105). Как было отмечено, увеличение со-
122
противления /?, способствующее правильному фазированию доба-
вочной э.д. с., наводимой в катушке Ld , имеет отрицательное
влияние на величину этой э.д.с., вызывая ее уменьшение.
Компромиссное решение приводит обыкновенно к случаю, когда
R> Qr- (23J)
Нэ
При этом условии, как показывает формула (213), при воз-
растании Нэ величина S стремится к единице.
Из сказанного следует, что сохранение S на заданном
уровне тем труднее, чем больше На .
Приближение к нулю суммарного реактанца (Лд + Xia) спо-
собствует возрастанию величины S'.
Отсюда следует сделать вывод, что выбор элементов схемы
может быть облегчен, если собственная частота цепи антенны
будет близка к той частоте диапазона, на которой На имеет
наибольшее значение.
Приступая к подбору элементов схемы, первую пробу целе-
сообразно сделать, положив для этой частоты (н :
XA+X£a = 0. (232)
Подставив это значение в выражение (213), находим
п__S + 1 _ 2г/ц • Л? • Он Л д , (2331
S - 1 “ Нэ шах ’ 1 '
где Нашах — наибольшее значение На в ж;
йА — выражено в м\
fn — в мггц-,
М — в мкгн.
Пользуясь формулами, аналогичными (224) — (226), находим
значение Хк для частоты fn и далее величину индуктивности La
по формуле
La = — мкгн, (234)
2тсйн ’
где Хк выражено в ом, fн — в мггц.
Задав индуктивность Ld (раздел 31) и коэфициент связи К
между катушками La и Ld (рис. 105), реализация которого
затруднений не представит, вычисляем взаимную индуктивность
по известной формуле
М — К • La • Ld мкгн, (235)
выражая для удобства все индуктивности в мкгн.
Действующая высота антенны ЛА может быть найдена с
помощью формулы (228). Множитель вольтажа цепи ротора Qr
намечается перед расчетом пеленгатора.
Зная числовые значения всех упомянутых величин, можно
подставить их в выражение (233) и найти ориентировочное
значение R.
123
Затем надо перейти к проверочному вычислению величины S
для ряда частот диапазона с помощью формулы (213).
В зависимости от результатов проверки значения La , R и
М могут подвергнуться корректировке с последующей новой
проверкой и т. д.
36. Пример схемы для выбора стороны с электронной
* лампой
На рис. 108 показана простая схема для выбора стороны,
не требующая пояснений.
Сопротивление R может быть взято настолько большим,
а емкость между управляющей сеткой и землей может быть
настолько незначительной,
Рис 108. Схема «выбора стороны»
что напряжение на упра-
вляющей сетке может быть
вычислено по формуле
UD = hK , (236)
где Ад — действующая вы-
сота антенны, а напряжен-
ность поля принята равной
единице.
Считая цепь ротора ра-
зомкнутой (раздел 33), на-
ходим следующее выраже-
ние для добавочной э. д. с.,
наводимой в катушке Ld’.
j р. Ла М ш
-j- j La <о
(237)
где р — коэфициент усиления лампы;
Ri — ее внутреннее сопротивление;
М — взаимная индуктивность между катушками La и LD ,
которая может быть заменена выражением
М-К
La • Ld ,
(238)
где R'—коэфициент связи.
Пользуясь этим выражением и зная, что обычно Rt ^§>La«>,
преобразуем равенство (237), придавая ему вид
Ed = J
La Ld • <o
(239)
124
Как видно, Ed находится в фазе (или противофазе) с основ-
ной э. д. с., наводимой в обмотке ротора (раздел 34), равной
Очевидно,
5 =
(240)
откуда получаем
т (s-Da
“ ~ 4п2 • (S + 1 )2
Нэ2 Rt2
о«а-кг-йА2- 1е-ьо -р мкгн'
(241)
Зависимость полученного выражения от частоты выра-
жается множителем •
Если Нэ близка к пропорциональности частоты, то эта за-
висимость выражается слабо и вычисление La можно произво-
дить для любой частоты диапазона.
Если Hs пропорциональна частоте в степени выше первой,
то вычисление La надо производить для верхней границы ча-
стот диапазона.
При иной зависимости Нэ от частоты рассмотренная здесь
схема вряд ли может оказаться пригодной вообще.
Индуктивность Ld выбирается, исходя из соображений,
приведенных в разделе 31, и выражается в мкгн. Коэфициент
связи К зависит от намеченной конструкции анодного транс-
форматора. Частота подставляется выраженной обычно в мггц.
Величина 5 может быть принята равной 3.
После вычисления La следует сделать проверочное вычисле-
ние величины S для ряда частот во всем диапазоне пеленгато-
ра, воспользовавшись формулой, которая следует из
ва (240):
ф 2я Qr La Lp hb • f
Rt — 2tc Qr P--K V La I'D • Ла • f
равенст-
(242)
причем рекомендуется подставлять:
Ri в ом, высоты в м, индуктивности в мкгн и частоту
в мггц.
37. Схема для компенсации антенного аффекта
Антенный эффект (гл. V) выражается в виде смещения и
расплывания пеленга.
Первое зависит от появления в обмотке ротора „фазной" допол-
нительной э. д. с., т. е. находящейся в фазе с основной э. д. с.
125
Рис. 109. Схема компен-
сации «антенного эффек.
та»
Расплывание пеленга, т. е. возрастание угла „равной слыши-
мости" (УРС), обусловлено второй—„нефазной" дополнительной
э. д. с., которая также наводится в обмотке ротора, но сдвину-
та по фазе на 90° относительно основной э. д. с.
Компенсация „фазной" дополнительной э. д. с. затрудняется
отсутствием у оператора критерия для суждения о наличии
компенсации.
Для компенсации „нефазной" дополнительной э. д. с., вызы-
ваемой антенным эффектом и являющейся его основным вред-
ным последствием, условия более благоприятны.
Вводя в цепь ротора компенсацион-
ную э. д. с., оператор регулирует ее
дозу и выбирает правильное из двух ее
направлений, стремясь получить наибо-
лее острый минимум, т. е. наименьший
угол равной слышимости. Это удается тем
лучше, чем меньше сказываются при
этом явления типа „ночного эффекта"
(гл. VI), вызывающие аналогичные и при-
том нестабильные явления.
Таким образом, задача „компенсации
антенного эффекта" заключается в подбо-
ре схемы, позволяющей создавать в цепи
ротора добавочную э. д. с., сдвинутую по
фазе на 90° относительно основной э.д. с.,
с возможностью изменения ее направле-
ния и регулировки по величине от нуля
до заданного предельного значения.
Рассмотрим довольно простую схему
компенсации „антенного эффекта", пока-
занную на рис. 109.
Цепь антенны должна быть в пределах диапазона удалена от
резонанса. В этом случае ток в ней сдвинут по фазе почти на
90° относительно э. д. с., наводимой в добавочной антенне, а
следовательно, и относительно напряженности поля в центре
пеленгатора. Добавочная э. д. с., наводимая в катушке Ld , на-
ходится в фазе (или противофазе) с этой напряженностью и
дефазирована на 90° относительно основной э. д. с., наводи-
мой в роторе, так же как и дополнительная „нефазная" э. д. с.,
создаваемая в нем же антенным эффектом.
Примем, что эта э. д. с. по величине должна достигать
наибольшего значения основной э. д. с., наводимой в роторе,
умноженной на коэфициент а, равный нескольким сотым (0,05—
0,10). Отсюда следует, что при наибольшей связи между ка-
тушками La' и Ld должно соблюдаться равенство
Лд Л1ш Н3
---------------— а------
| + XLa'+ Хса |
(243)
126
Здесь Лд — реактанц антенны;
Аа—действующая высота антенны;
(244)
XLc'= £„'«>; (245)
Лсв= — . (246)
Антенна и катушка связи La' и Ld используются обычно те
же, что и для выбора стороны.
Если принять во внимание, что коэфициент а может быть
задан только с весьма грубым приближением, то можно заклю-
чить о возможности замены равенства (243) приближенным,
позволяющим упростить расчет.
В знаменателе левой части слагаемое играет незначи-
тельную роль, будучи по абсолютной величине много меньше
слагаемого Хса-
При определении реактанца антенны ее можно считать
сосредоточенной емкостью Са.
Сказанное позволяет придать равенству (243) следующий
вид:
W Нэ
1 , 1 Qr ‘ (244а)
са + Са
Решение этого уравнения относительно Са дает
«НЭ.СА
с а = -—--------------------мкмкф. (245а)
47:5/2Сд М ЛА Qr .10 — а-нэ
Емкости Са и Сд выражены здесь в мкмкф, М — в мкгн,
f — в мггц.
Емкость Са, вычисленная по формуле (245а), представляет
наибольшее значение емкости конденсатора Са (рис. 109).
Взаимная индуктивность М считается известной и вычислен-
ной при расчете схемы для выбора стороны, так же как и дей-
ствующая высота антенны hA . Величины Н3 и QR заимствуются
из общего расчета пеленгатора.
Вычисление по формуле (245а), как было указано, должно
дать наибольшее значение Са Следовательно, частота, для ко-
торой производится вычисление, не безразлична и связана с
зависимостью от нее величины Нэ . Чтобы не сделать при этом
существенного промаха, полезно вычислить Са для нескольких
частот: для пограничных частот диапазона, а также для частот,
соответствующих наибольшим значениям Нэ.
Иногда величина Са получается настолько малой (десятые
доли мкмкф), что ее реализация весьма усложняет конструкцию
конденсатора Са. В подобных случаях рекомендуется переход
к схеме, показанной на рис. 110.
127
Считая попрежнему антенну при определении ее реактанца
сосредоточенной емкостью Сд , получаем следующую эквива-
лентную схему ее цепи (рис. 111). Электродвижущая сила экви-
валентного генератора
Сд = Ад (246а)
для напряженности поля, равной
Рис. 110. Схема компенсации «антен-
ного эффекта» с дополнительным
конденсатором
единице.
Напряжение точки А от-
носительно земли при отсо-
единенной ветви Са — La пред-
ставляет собой,очевидно, при-
веденную величину действу-
ющей высоты Лд , которая
может быть найдена по фор-
муле
ЛА' = Лд • г С* . (247)
Рис. 111. Эквивалентная схема
с дополнительным конденсатором
128
Приведенная емкость антенны выразится ъ виде-
СА ' = СА д- CD. (248)
Нетрудно заключить, что вывод выражения для Са приведет
к формуле, совпадающей с (245а) при условии, что и Сд за-
меняются соответственно выражениями (247) и (248). Емкость
конденсатора Со задается на пробу обычно превосходящей СА
в 10—20—30 раз, после чего производится вычисление емко-
сти Са.
При конструировании цепи для компенсации антенного эф-
фекта следует принимать все меры к тому, чтобы сдвиг по фазе
тока в ней по отношению к э. д. с., наводимой в антенне, был
возможно ближе к 90°, т. е. активное сопротивление ее цепи
было возможно меньше. В противном случае в катушке Ld на-
ряду с компенсационной наводится еще э. д. с. Е'ф , находя-
щаяся в фазе (или противофазе) с основной э. д. с., наводимой
в обмотке ротора. Полярная диаграмма приема приобретает
форму улитки Паскаля, и появляется излом оси минимумов на
некоторый угол ф (рнс. 112). По мере усиления компенсацион-
ной э. д. с. одновременно возрастают СЪф и угол ф. Это явле-
ние известно под названием „увода пеленга".
9 Зак. 332
ГЛАВА IX
УКАЗАНИЯ ОТНОСИТЕЛЬНОГО ПОРЯДКА
РАСЧЕТА ПЕЛЕНГАТОРА.
ВСПОМОГАТЕЛЬНЫЕ ФОРМУЛЫ
38. Порядок расчета пеленгатора с непосредственной
связью приемных проводов с фидерами
Пеленгатор рассчитывается на основе тактико-технических
требований, входящих в задание на проектирование.
Первой задачей конструктора является выбор типа и кон-
структивных вариантов пеленгатора, которые должны быть под-
вергнуты расчету и сравнению по его результатам для выбора
окончательного варианта (разделы 2 и 28).
Далее следует перейти к установлению поперечных размеров
пеленгатора, рассчитав расстояние между приемными провода-
ми и его центром (гл. П) и согласовав его с размерами пелен-
гаторного помещения.
Сделав затем предварительный геометрический эскиз антенно-
фидерной системы, конструктор намечает ориентировочную дли-
ну приемных проводов и фидеров, что позволяет ему перейти
к расчету их погонной емкости (разделы 39 и 41). При этом надо
иметь в виду соображения об оптимальном соотношении этих
емкостей (раздел 13). Одновременно вычисляется также и по-
гонная емкость фидера как пучка параллельно включенных про-
водов.
Найденные значения погонной емкости имеют приближенный
характер, так как длины, входящие в расчетные формулы, на-
мечаются для этого ориентировочно.
Полученные значения погонной емкости используются
далее для вычисления предельной длины приемных проводов
(гл. V и VI).
Найдя окончательные размеры антенно-фидерной системы,
конструктор уточняет величины погонных емкостей, для расчета
которых должна быть известна длина провода (раздел 40).
После этого конструктор переходит к вычислению действую-
щей высоты пеленгатора (гл. 111) и реактивного сопротивления
антенно-фидерной системы (гл. IV). Для той и другой величины
вычисляется ряд значений для 10—15 частот рабочего диапазо-
130
на, причем вычисление реактивного сопротивления распростра-
няется и на полосы, лежащие за границами диапазона, шириной
15—20% значения соответствующей пограничной частоты.
Далее намечается разбивка на поддиапазоны и вычисляются
индуктивности статорных и роторной обмоток (раздел 20, гл. V
и VII), после чего конструктор переходит к определению
эквивалентной высоты пеленгатора (раздел 3) для 10—15 значе-
ний рабочей частоты. Сопоставляя кривые изменения эквива-
лентной высоты по диапазону, найденные для различных вариан-
тов, конструктор выбирает лучший из них и вносит в него
коррективы, если видит в том необходимость, уточняя расчет.
После этого может быть окончательно уточнена и рассчи-
тана цепь ротора (гл. VII) и произведены выбор и расчет вспо-
могательных цепей лля выбора стороны и компенсации „антен-
ного эффекта" (гл. VIII).
Число витков статорных и роторных обмоток может быть
приближенно найдено с помощью формул для расчета индук-
тивности катушек прямоугольного сечения. Однако это приво-
дит к довольно сложным вычислениям весьма невысокой точ-
ности. Поэтому рекомендуется экспериментальный подбор на
макетах гониометра.
39. Особенности расчета пеленгаторов
трансформаторного типа
Расчет пеленгаторов с трансформаторной связью в первой
своей части следует порядку, изложенному в предыдущем раз-
деле. После того как с помощью расчетных формул предель-
ных размеров приемных проводов (гл. VI) будут установлены
окончательные размеры и значения погонных емкостей, конструк-
тор переходит к вычислению индуктивности трансформаторных
обмоток (раздел 24).
Затем расчет следует порядком, изложенным в предыдущем
разделе, с той лишь особенностью, что при вычислении индук-
тивности статорных обмоток проектирующий следует указа-
ниям раздела 24.
40. Формулы для вычисления погонной емкости
приемных проводов
Принятые обозначения:
I — длина проводов в м\
d — диаметр проводов в м\
С\ — погонная емкость в мкмкф/м\
Н — высота над землей в м.
1) Вертикальный одиночный провод
„ 24,16
= 57-----мкмкф/м. (249)
lg-zr~Ki
9*
131
Величина Kt берется из табл. 1 или 2 после предварительного
Н I II
вычисления отношения — или —, где п—расстояние между
нижним концом провода и землей.
При вычислении погонной емкости диполя под I понимается
длина его половины, а под Н высота -над землей нижнего кон-
ца верхнего полудиполя. Нижний полудиполь при регулировке
электрической симметрии соответствующим образом укорачи-
вается.
Таблица 1
н 1 Кх 0,02 0,403 0,04 0,384 0,06 0,369 0,08 0,356 0,10 0,345 0,15 0,323 0,20 0,305
в 1 к, 0,25 0,291 0,30 0,280 0,40 0,261 0,50 0,247 0,60 0,236 0,70 0,227 0,80 0,219
>1 «- 5 0,90 0,212 1,0 0,207 — — — — —
Таблица 2
1 н Ki 1,0 0,207 0,9 0,202 0,8 0,196 0,7 0,190 0,6 0,184 0,5 0,177
i н 0,4 0,170 0,3 0,162 0,2 0,153 0,1 0,144 0 0,133
2) Вертикальный сложный провод („колбаса")
\ = 24,^6'п мкмкф\м;
V = lg-^-4 L тг + °>434
& d i=i V Di I )
Di =Asin i —-.
n
(250)
(251)
(252)
Здесь n — число одиночных параллельных проводов, из ко-
торых состоит сложный провод;
d~диаметр одиночного провода в м\
132
Л —диаметр цилиндра, по образующим которого раз-
мещены одиночные провода, в м\
Z — длина провода в м\
Ki — определяется с помощью табл. 1 или 2 после вы-
числения отношения —- или —, где Н- высота ниж-
I И
него конца провода над землей в лг,
/ — целые положительные числа от 1 до (и—1).
3) Горизонтальный сложный провод („колбаса")
мкмкф/м; (253)
IZ= lg -yd-е" ' J(lg 2~ + 0,434^) - ц./<а; (254)
Di = Д-sin i~> (255)
где п — число одиночных параллельных проводов;
d — диаметр одиночного провода в м\
Z — длина провода в м’,
Д — диаметр цилиндра, по образующим которого размеще-
ны одиночные провода, в ж;
/ — целые числа от 1 до (п—1);
//—высота оси сложного провода над землей в м, причем
/7»Д;
К, — определяется с помощью табл. 3 или 4 после вычисле-
I 2Н
ния отношения — или-----.
2/7 /
Таблица 3
2/7 1 0 0 0,1 0,042 0,2 0,082 0,3 0,121 0,4 0,157 0,5 0,191
7Н 1 0,6 0,223 0,7 0,254 0,8 0,283 0,9 0,310 1,0 0,336 —
Формула (253) применяется при определении погонной емко-
сти фидера как пучка параллельно соединенных проводов от-
носительно земли (раздел 8 и гл. VI).
133
Таблица 4
1 2/7 А"г 1,00 0,336 0,95 0,350 0,90 0,364 0,85 0,379 0,80 0,396 0,75 0,414 0,70 0,435
1 2Н 0,65 0,457 0,60 0,482 0,55 0,510 0,50 0,541 0,45 0,576 0,40 0,617 0,35 0,664
1 ЧН 0,30 0,721 0,25 0,790 0,20 0,874 0,15 0,990 0,10 1,155 0,05 1,445
41. Формулы для вычисления погонной емкости фидеров
Приводимые здесь формулы дают в мкмкф/м погонную
емкость фидеров в обычном понимании этого термина, т. е.
емкость между противолежащими частями фидерных проводов.
Формулы не содержат диэлектрической константы изоляции,
которая предполагается равной единице. Для получения дей-
ствительного значения погонной емкости результат вычисления
по приводимым ниже формулам умножается на еф (раздел 4).
7) Концентрический фидер
Рис. 113, Сечение коаксиаль-
ного фидера
24,16 мкмкф1м. (256)
,g4
Здесь d — диаметр внутрен-
него провода (рис. 113);
D — внутренний диаметр обо-
лочки.
н
Рис. 114. Сечение двухпроводного
фидера
134
2) Двухпроводный, фидер
Сг* = —гд2,08 МКМКФ1М-
lg ~d~ ~ "8Н2
(257)
Размеры показаны на рис. 114.
3) Четырехпроводный фидер
—
24,16
мкмкф/м.
(258)
Размеры показаны на рис. 115.
Рис. 115. Сечение четырех-
проводного фидера
Рис. 116. Сечение двухпроводного экраниро-
ванного фидера
Размер D считается ничтожно малым по сравнению с рас-
стоянием до земли и заземленных предметов.
4) Двухпроводный фидер в металлической трубе
Провода расположены симметрично относительно оси
нирующей трубы
Г ' 12,08 Л.1
С1ф — - 2 (02 —’ Д2).Д М1<мкф1м.
'^(О2+Д2).<7
Размеры показаны на рис. 116.
Погонная емкость имеет минимальное значение при
Д = 0,486 D
и выражается в этом случае формулой
/ 12,08 ,,
С1ф =----—-------- мкмкф\м.
Ig —-0,221
экра-
(259)
(260)
(261)
135
ДОПОЛНЕНИЯ
/. Вывод формулы действующей длины диполя
Под действующей длиной диполя (рис. 117) мы понимаем ве-
личину, равную действующему значению напряжения между
точками А и Б, деленному на действующее значение напряжеи-
Рис. 117.
Диполь
Рис. 118.
Приемный про-
вод
ности электрического поля волны. При этом принимается, что
эта напряженность направлена параллельно проводам диполя.
Следовательно,
Лп=|Га-~--б-, (262)
I Б
где Ап — действующая длина диполя;
А/д и Ue — потенциалы точек А и Б.
В силу симметрии
А/б = -А7а, (263)
что позволяет равенству (262) придать вид
Ап = I (264)
Рассматривая воздействие поля на элемент длины верхнего
провода диноля, воспользуемся схемой, показанной на рис. 118.
В элементе dx развивается э. д. с. de — Edx.
Сила тока, протекающего через этот элемент под действием
этой э. д. с., выражается равенством
jj __ __________Edx_________
х Рв c‘g m(ZB — А') + Рв ctg тх ' (265)
При этом было допущено, что активное сопротивление про-
вода очень мало по сравнению с реактивным. Последнее для
136
обоих отрезков провода, лежащих выше и ниже элемента dx,
определяется формулами, аналогичными выражению (23).
Потенциал нижней точки элемента dx
dUxH = -f-рв ctg тх-dlx ,
(266)
где рв — волновое сопротивление провода.
Подстановка в это равенство выражения (265) дает
dUXH =________Ectg.mx-dx___ (267)
хн ctgm(/B — X)+с t g тх
В результате воздействия поля на элемент dx в точке А
появится потенциал dL\ , который может быть выражен через
потенциал dUxH, подобно тому как UK выражается через в
формуле (28), т. е.
,,, __ _______E-ctg tnx-dx______.
А cos тх (ctg m(lB — х) + ctg тх]
Элементарное преобразование позволяет придать этому ра-
венству более простой вид:
dUA = -^^Z^dx.
sin ml
Интегрируя это выражение в пределах от х — 0 до x—Ir,
находим
Е (1 — cos mlB )
Uх =----------:—,---.
т - sin 1В
Подставляя это выражение в равенство (264), находим фор-
мулу действующей длины диполя
2 (1 - cos mlB)
n m-sin mlB
(269)
2. Вывод формулы коэфициента Кс
Волновое сопротивление приемного провода
рв =
(270)
где Лв и С1в — погонные индуктивность и емкость провода.
Равенство (270) последовательно преобразуется следующим
образом:
Рв — У си? ________x_t
^IB CIB’c
где с —скорость света.
137
Для волнового сопротивления фидера картина несколько
усложняется:
откуда
(272)
Символом С1ф' обозначена погонная емкость, которую имел
бы фидер, если бы его изоляция имела диэлектрическую кон-
станту, равную единице.
Подстановка выражений (271) и (272) в равенство (78) при-
водит к формуле
(273)
ОГЛАВЛЕНИЕ
Стр.
От автора . ................................................ 3
Введение. Понятие о расчете пеленгатора .......................... 5
Глава I. Содержание и схема расчета
1. Дефекты пеленгации и задача расчета . . . •.............. 8
2. Типы пеленгаторов....................................... 11
3. Формула .эквивалентной высоты' пеленгатора ........ 15
4. О применении формул длинных линий....................... 18
Глава П. Расчет расстояния между приемными проводами
5. Исходные соотношения.................................... 25
6. Ориентировочный расчет угла наклона фронта а............ 30
7. Расчет величины/г для случая пеленгации без введения поправки 32
8. Расчет величины /г для случая пеленгации с введением поправки 34
Глава III. Действующая высота пеленгатора
9. Общие указания и основные формулы .................... 40
10. Действующая высота Н-образного пеленгатора с непосредствен-
ной связью................................................ 45
11. Действующая высота пеленгатора уравновешенного типа с не-
посредственной связью ..................................... 47
12. Действующая высота У образного пеленгатора.............53
13. Зависимость д< йствующей высоты пеленгатора от величины раз-
меров и погонных параметров его антенно-фидерной системы. 54
14. Сравнение по действующей высоте трех типов пеленгаторов с
непосредственной связью...............................• . . 60
15. Действующая высота пеленгаторов с трансформаторной связью 61
Глава IV. Реактивное сопротивление антенно-фидерной
системы пеленгатора
16. Общие указания и основные формулы....................... 64
17. Реактивное сопротивление антенно-фидерной системы пеленга-
торов с непосредственной связью приемных проводов с фиде-
рами ..................................................... 65
18. Реактивное сопротивление аитенно-фидерной системы пеленга-
торов трансформаторного типа............................... 66
Г л в в а V. Соотношения параметров и частоты, опасные в отношении
„антенною эффекта'
19. Асимметрия половин антеппо-статорной системы пеленгатора 67
20. Расчет индуктивности обмоток статора.................... 68
139
2($ cmp'
21. Опасные соотношения, зависящие от асимметрии в пределах
одной половины антенно-фидерной системы. Метод решения
задачи................................................... 70
22. Нарушение симметрии в Н-образном пеленгаторе......... 72
23. Исключение опасного соотношения Адф —0 в случае Н-образ-
ного и уравновешенного пеленгаторов с непосредственной связью 77
24. Расчет индуктивности обмоток, трансформаторов для пеленга-
торов с трансформаторной связью.......................... 78
25. Нарушение симметрии приемных проводов в У-образном пелен-
гаторе .................................................. 81
26. Нарушение симметрии приемных проводов пеленгатора урав-
новешенного типа......................................... 84
27. Нарушение симметрии фидеров - ..................... 87
Глава VI. Опасные соотношения параметров и частоты,
связанные с явлениями „ночного эффекта"
28. Постановка вопроса................................... 90
29. Опасные соотношения для пеленгаторов Н-образного и уравно-
вешенного типа с непосредственной связью................. 91
30. Опасные соотношения для пеленгаторов с трансформаторной
связью.................................................. 96
Глава VII. Расчет цепи ротора
31. Простая схема цепи ротора................... ........ 99
32. Расширение диапазона цепи ротора ....................103
Глава VIII. Указания по определению параметров схем для выбо-
ра стороны и компенсации антенного эффекта
33. Метод выбора стороны. Общие указания..................108
34. Первый метод расчета схемы для выбора стороны.........114
35. Второй метод расчета схемы для выбора стороны.........122
36. Пример схемы для выбора стороны с электронной лампой - . 124
37. Схема для компенсации антенного эффекта...............125
Глава IX. Указания относительного порядка расчета пеленгатора.
Вспомогательные формулы
38. Порядок расчета пеленгатора с непосредственной снязью при-
емных проводов с фидерами.................................130
39. Особенности расчета пеленгаторов трансформаторного типа . . 131
40. Формулы для вычисления погонной емкости приемных проводов —
41. Формулы для вычисления погонной емкости фидеров .... 134
Дополнения. 1. Вывод формулы действующей длины диполя . 136
2. Вывод формулы коэфициента /<с..........................137
Редактор инженер-полковник Усик А. И.
Технический реаактор Карпов И. И. Корректор Смирнова 3. В
Г-86253 Подписано к печати 16.4.47 с. Изд. № 9/33. Зак. 332
Объем 83/4 п. л. 8 уч.-изд. л. В 1 п. л. 48.000 тип. зь.
3-я типография Управления Военного Издательства МВО СССР