/










Текст
Электропневмоавтоматика
Основной курс ТР 201
Учебник
FESTO
Название: Обозначение: E.PNEUM.GS.LBH D.LB-TP201-D
Версия: 02/1998
Графика: Макет. Редактор: Д. Шварценбергер 23.01.98, М. Шварц Ф. Эбель
Авторы: Г. Преде, Д. Шольц
Перевод: С. В. Сулига
Компьютерная верстка: В. С. Сулига, С. В. Сулига
© 1998 by Festo Didactic GmbH & Co., RechbergstraBe 3,
D-73770 Denkendorf
© Перевод на русский язык, ООО "Фесто-РФ", Москва, 2003.
Копирование, распространение и коммерческое использование этого документа,
а также передача его содержания другим лицам без разрешения запрещены.
Нарушители будут принуждены к возмещению ущерба. Все права защищены,
в частности право на патентование, регистрацию использования макета или
дизайна оформления.
Часть этой учебной документации может быть скопирована исключительно
в цепях учебного процесса персоналом, имеющим на то разрешение.
ISBN 966-8353-02-1
Содержание
Глава 1—Введение...............................................5
1.1 Применение пневматики ...................................6
1.2 Основные термины техники управления......................8
1.3 Пневматические и электропневматические системы управления . 14
1.4 Преимущества электропневматических систем..............17
Г лава 2 — Основы электротехники .............................19
2.1 Постоянный и переменный ток.............................20
2.2 Закон Ома ..............................................22
2.3 Принцип работы соленоида ...............................24
2.4 Принцип работы емкости .................................26
2.5 Принцип работы диода ...................................27
2.6 Измерения в электрических цепях ........................28
Глава 3 — Элементы и блоки подсистемы обработки
электрических сигналов........................................35
3.1 Электрический блок питания..............................36
3.2 Электрические кнопки и переключатели....................37
3.3 Датчики перемещения и давления..........................39
3.4 Реле и контакторы......................................49
3.5 Программируемые логические контроллеры..................55
3.6 Общая структура процессорной части системы..............56
Глава 4 — Распределители с электромагнитным управлением .... 59
4.1 Функции................................................60
4.2 Конструкция и принцип работы...........................62
4.3 Типы и характеристики пневматической части распределителей. . 74
4.4 Технические характеристики электромагнитных катушек ... 83
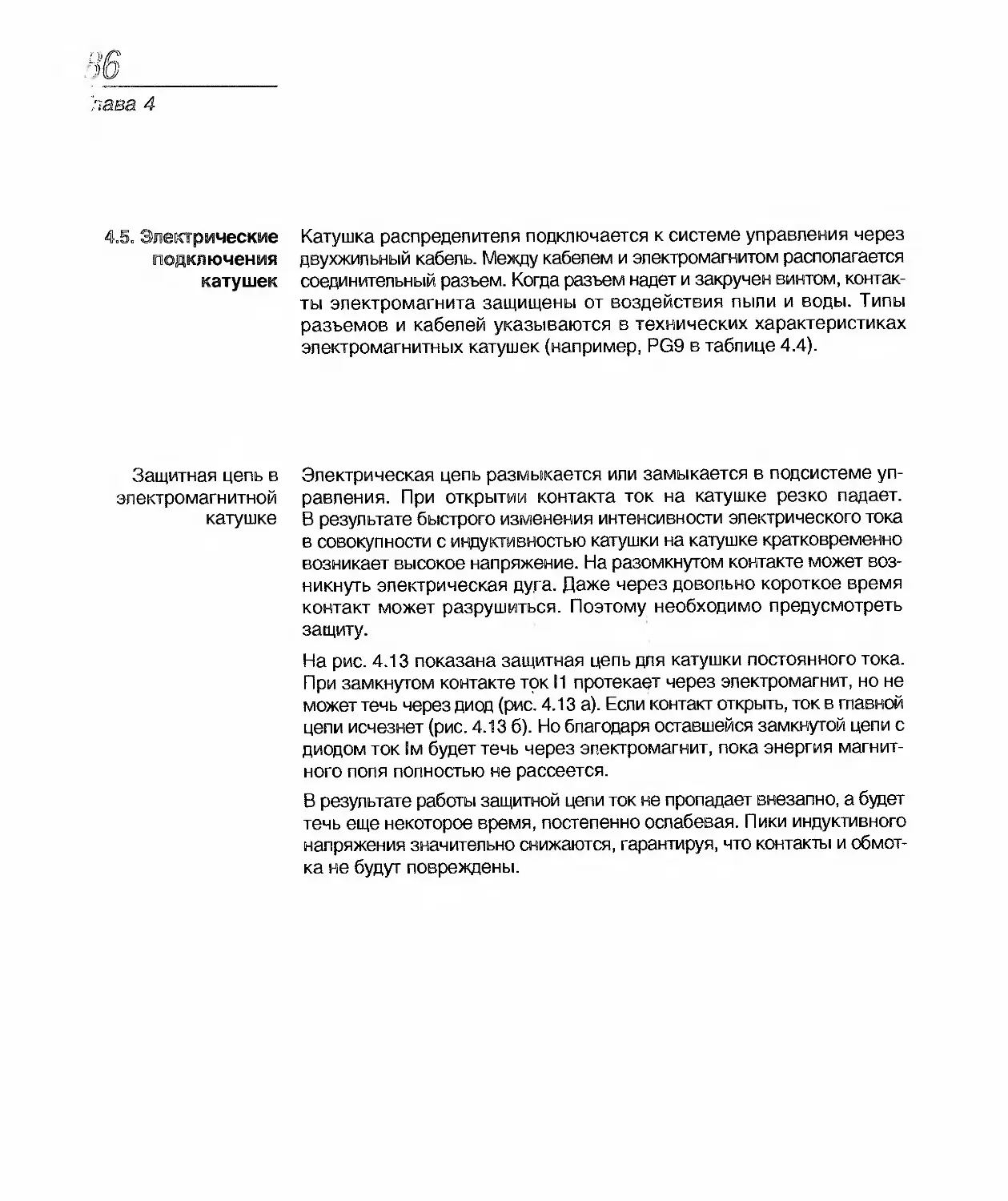
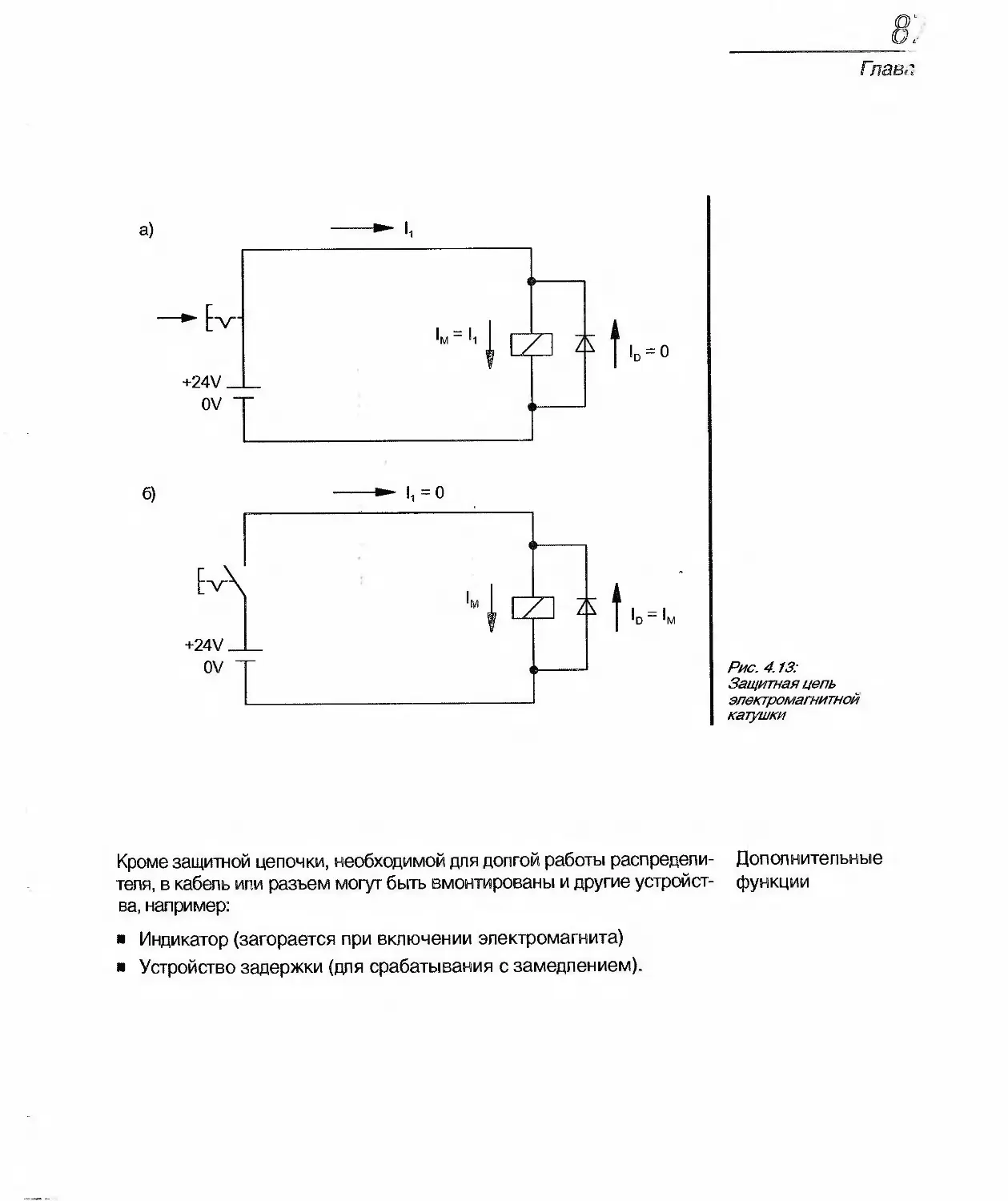
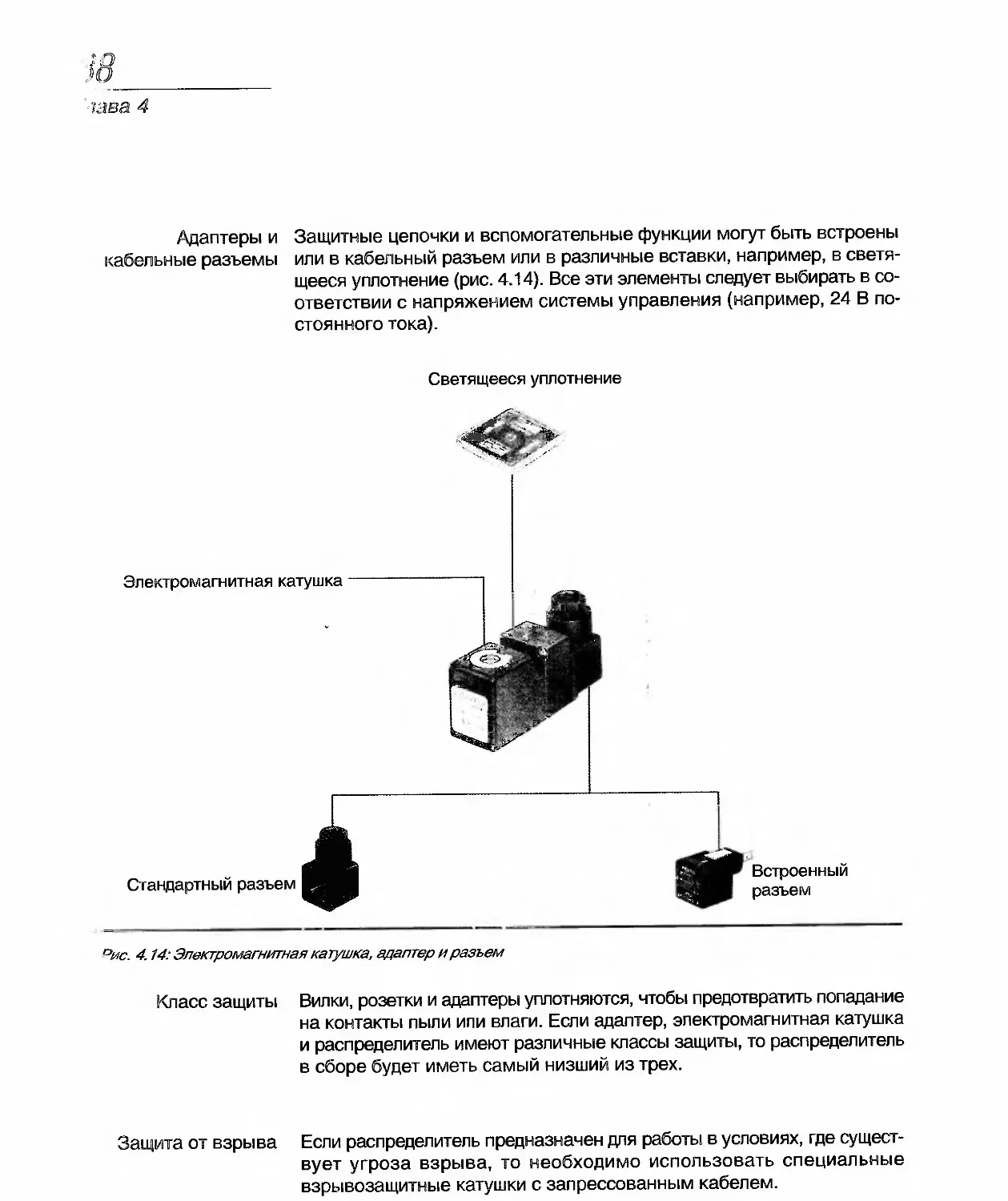
4.5 Электрические подключения катушек..................... 86
Глава 5 — Проектирование электропневматических систем управления . 89
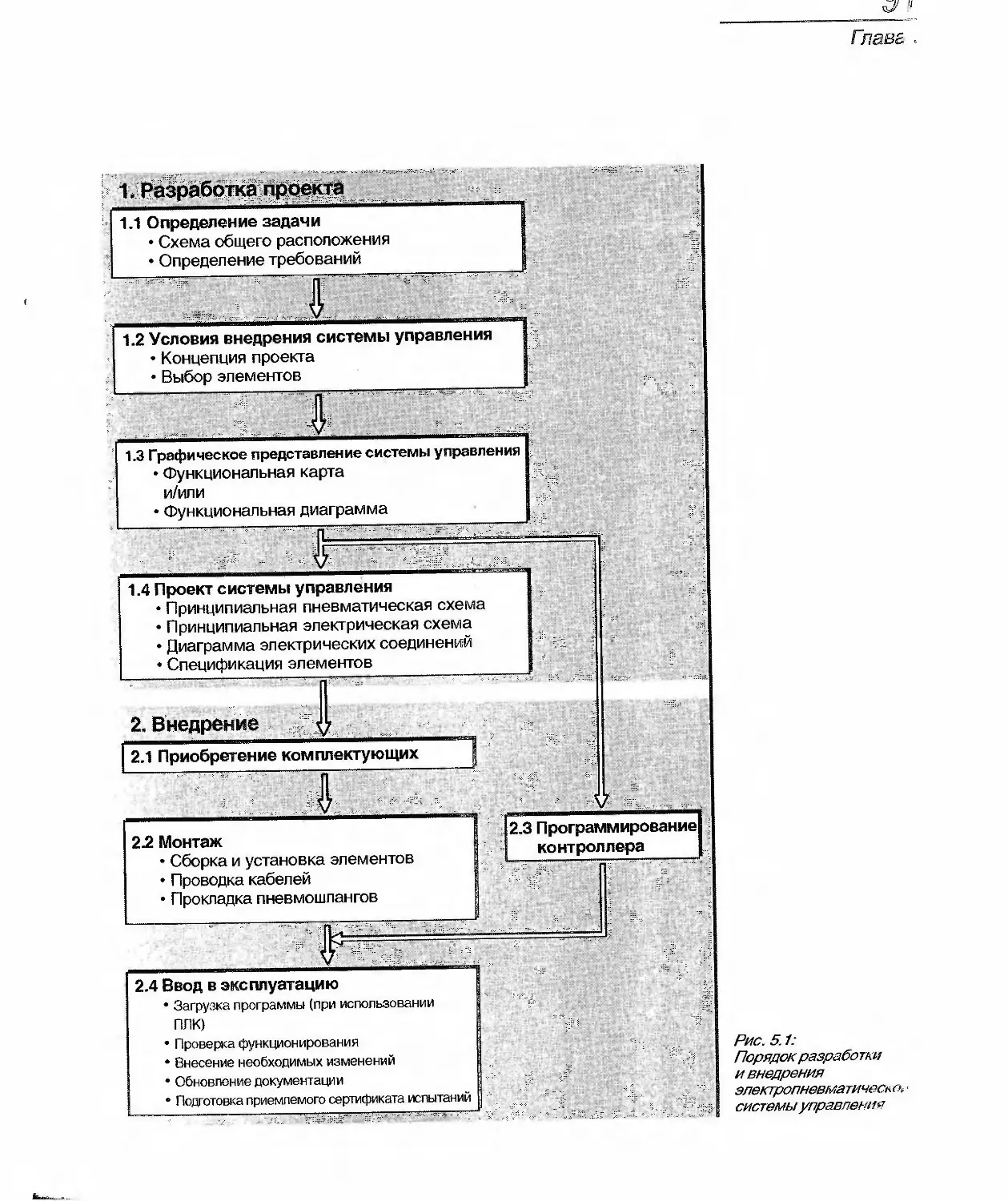
5.1 Порядок разработки системы управления...................90
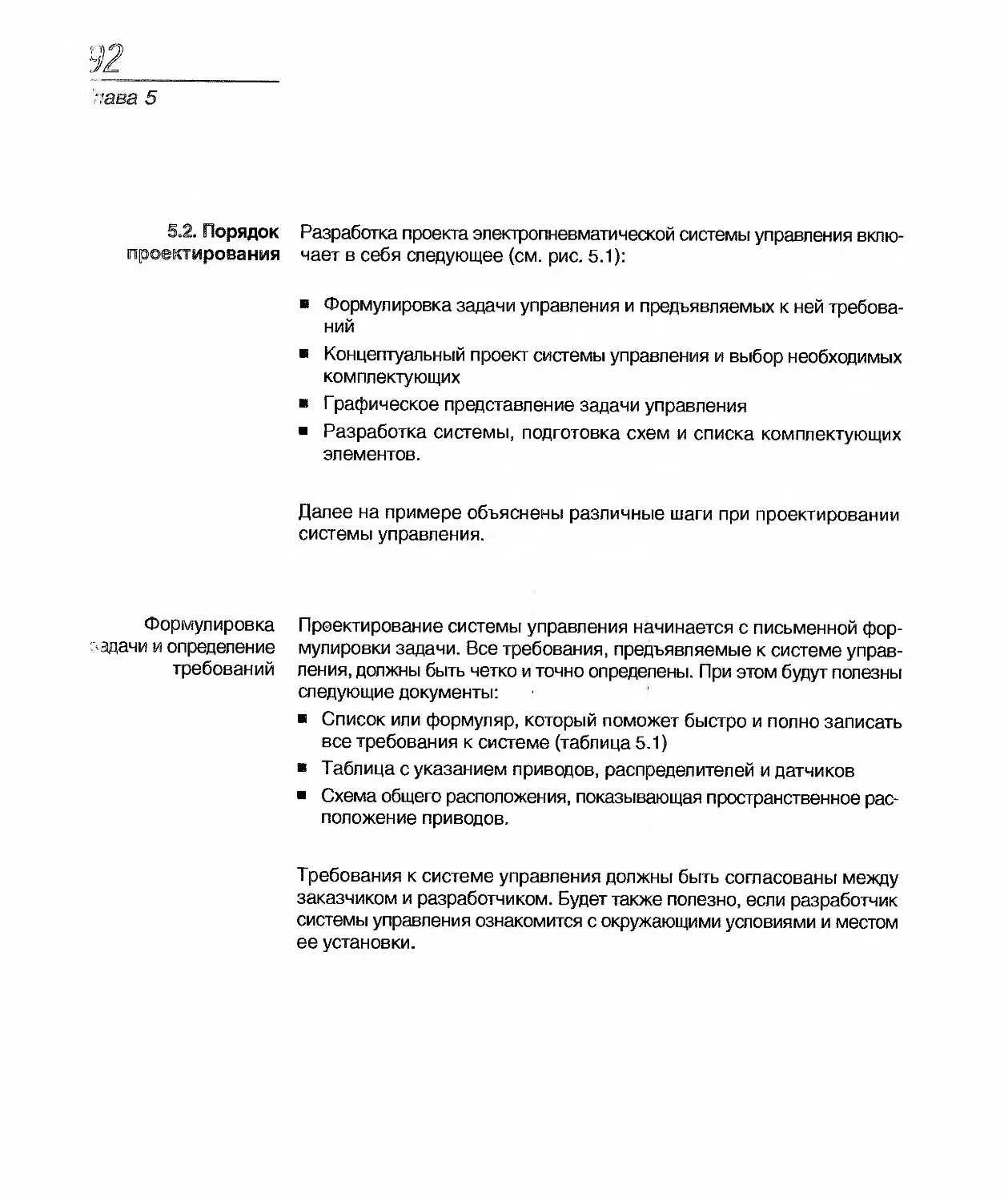
5.2 Порядок проектирования..................................92
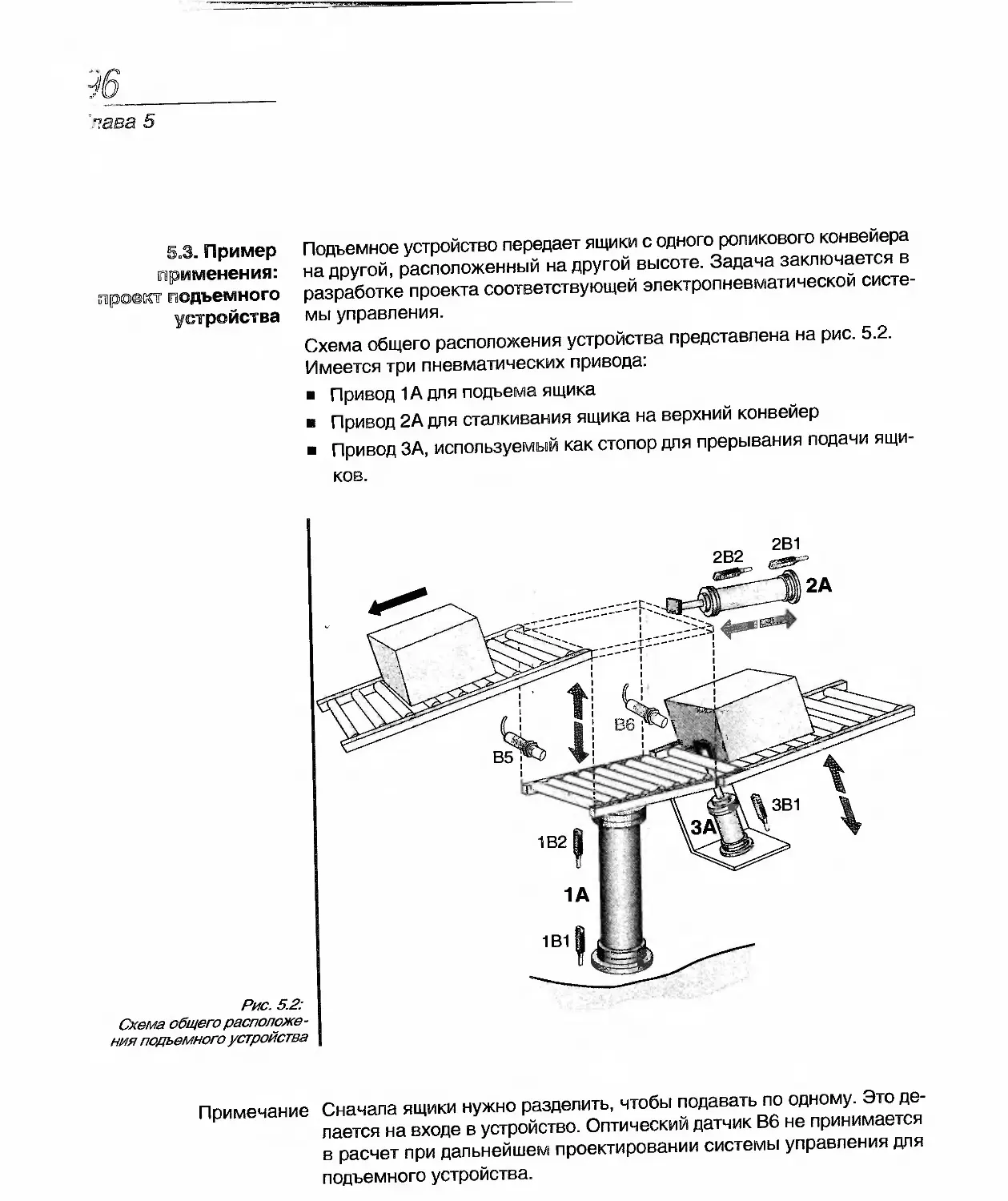
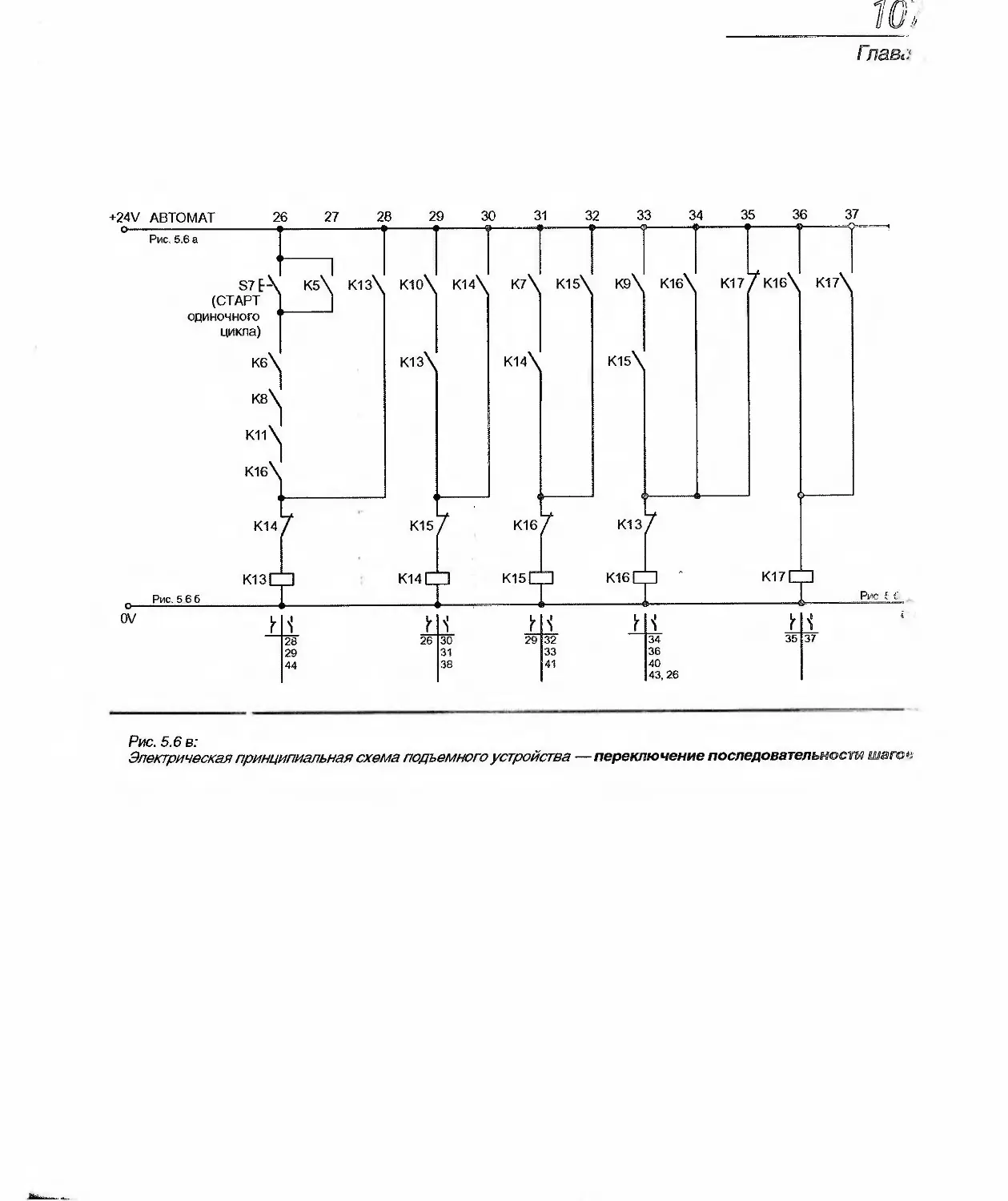
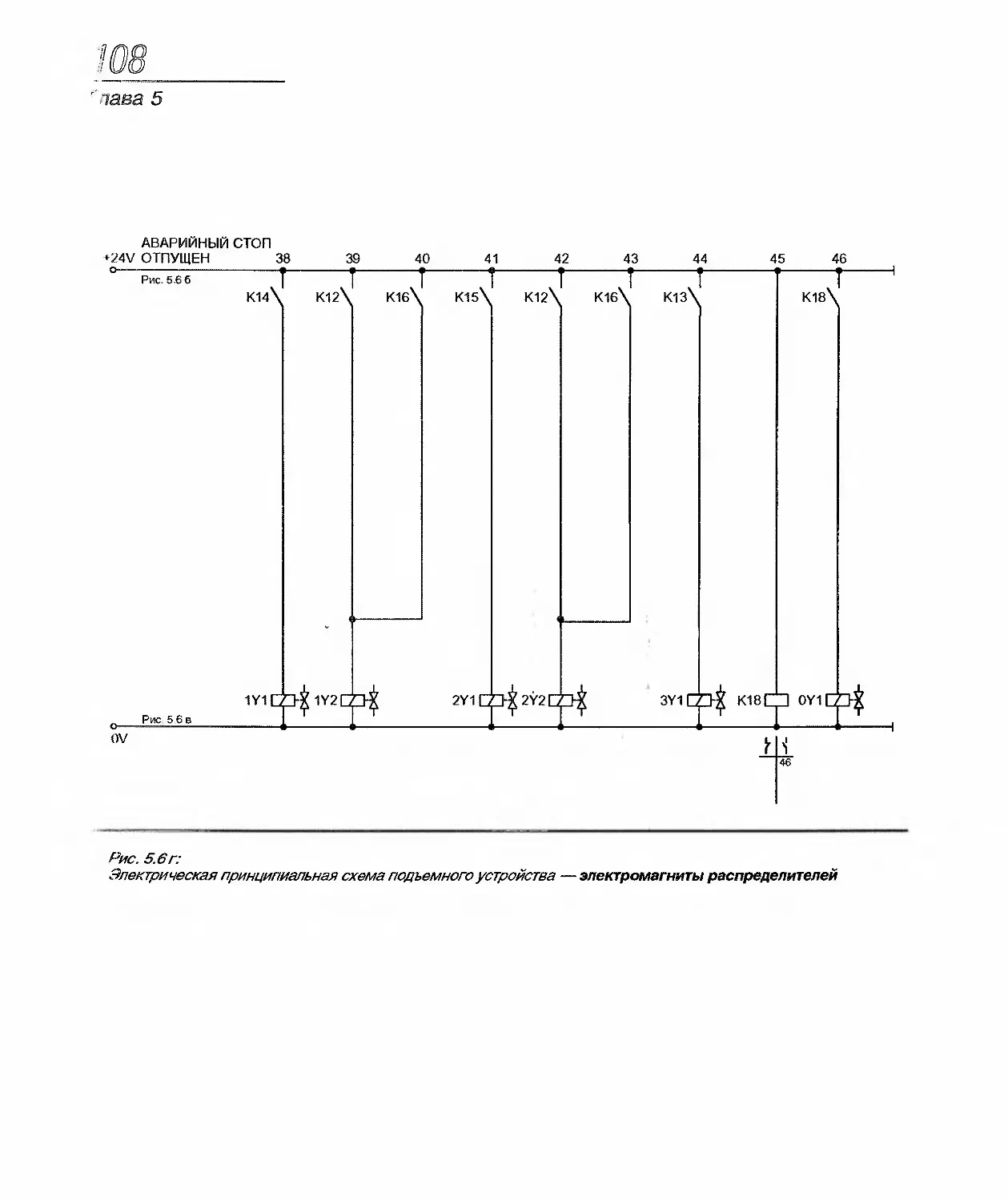
5.3 Пример применения: проект подъемного устройства .... 96
5.4 Порядок ввода системы управления в эксплуатацию........109
„одержание
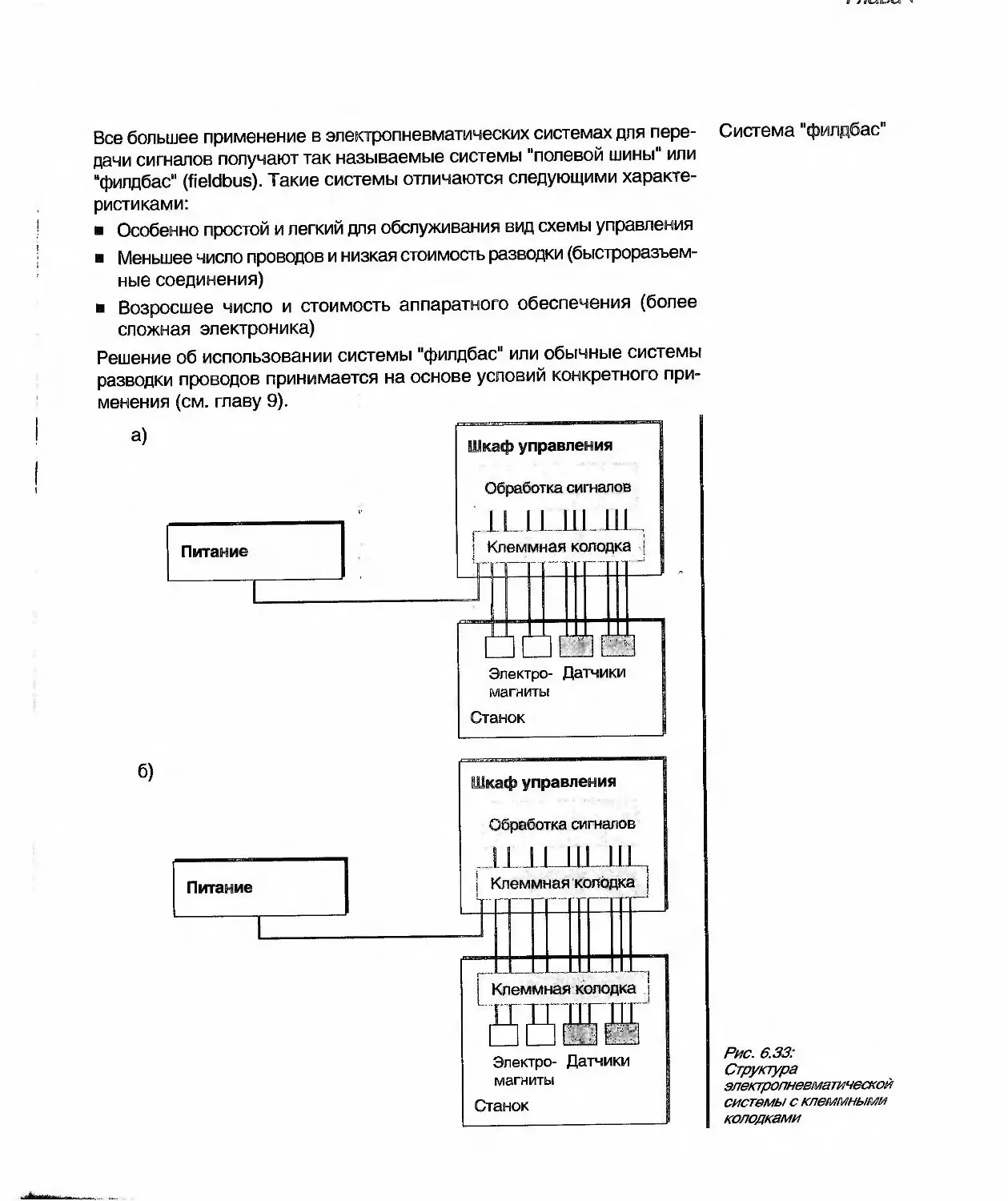
Глава 6— Документация для
электропневматической системы..........................113
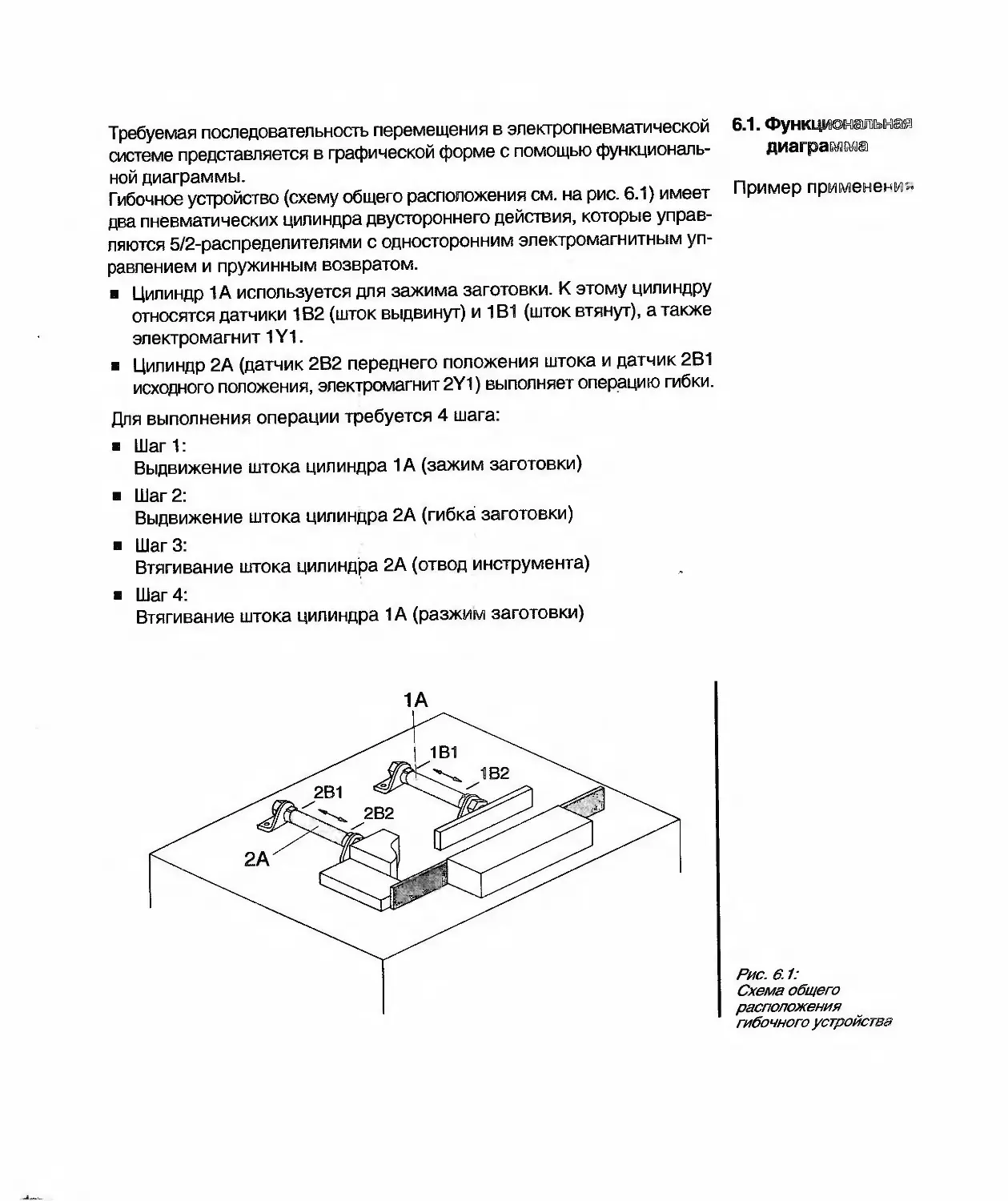
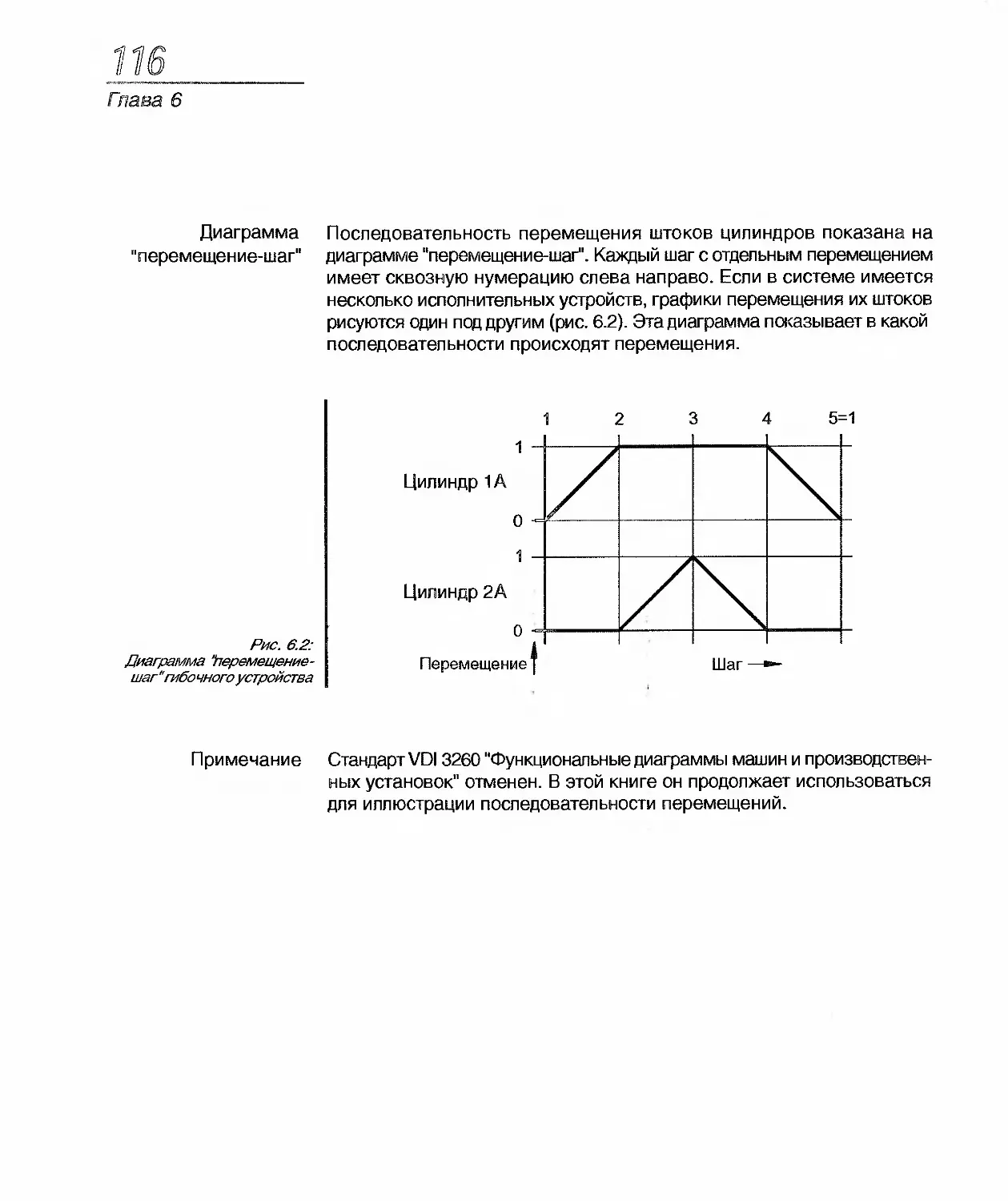
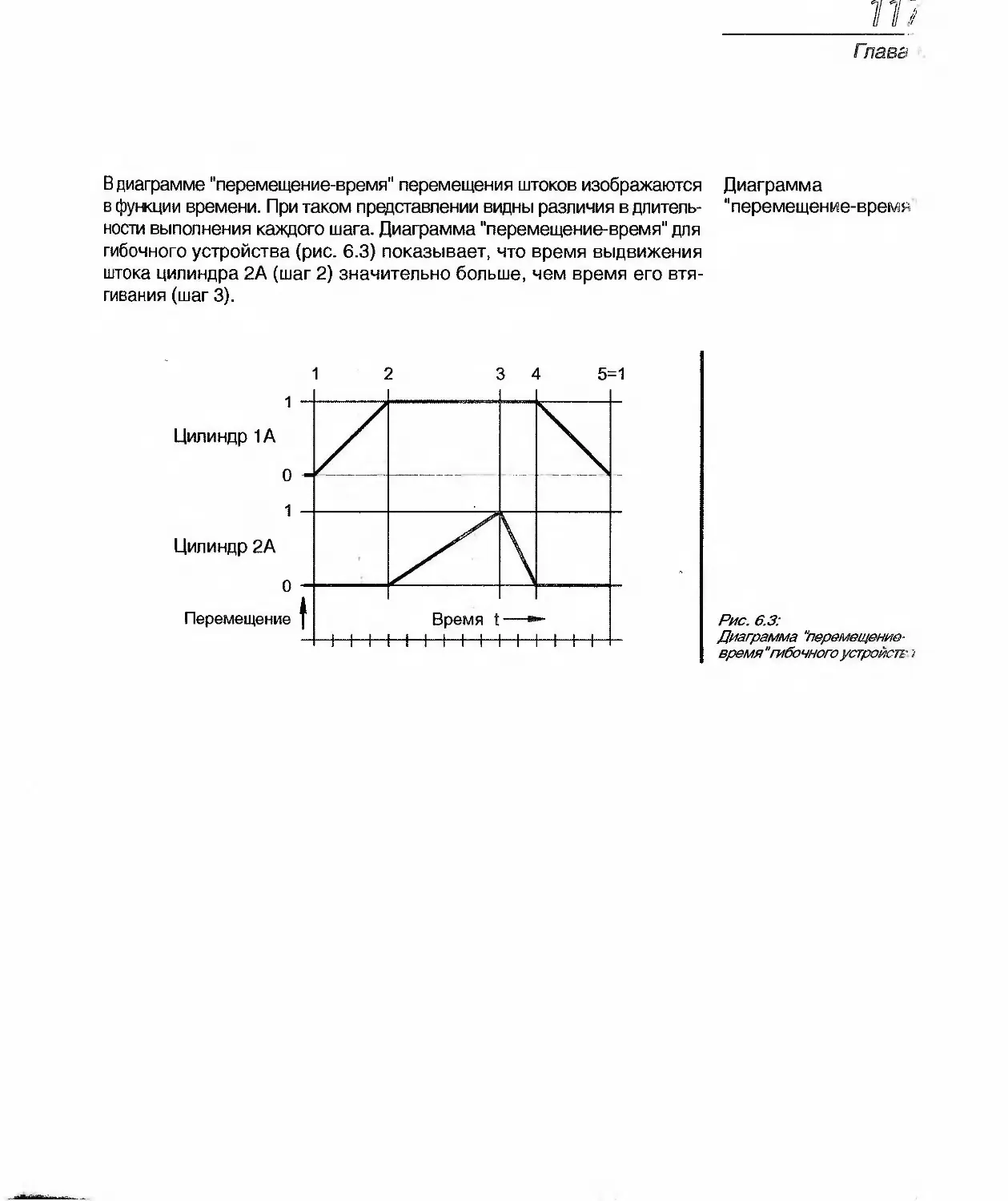
6.1 Функциональная диаграмма........................115
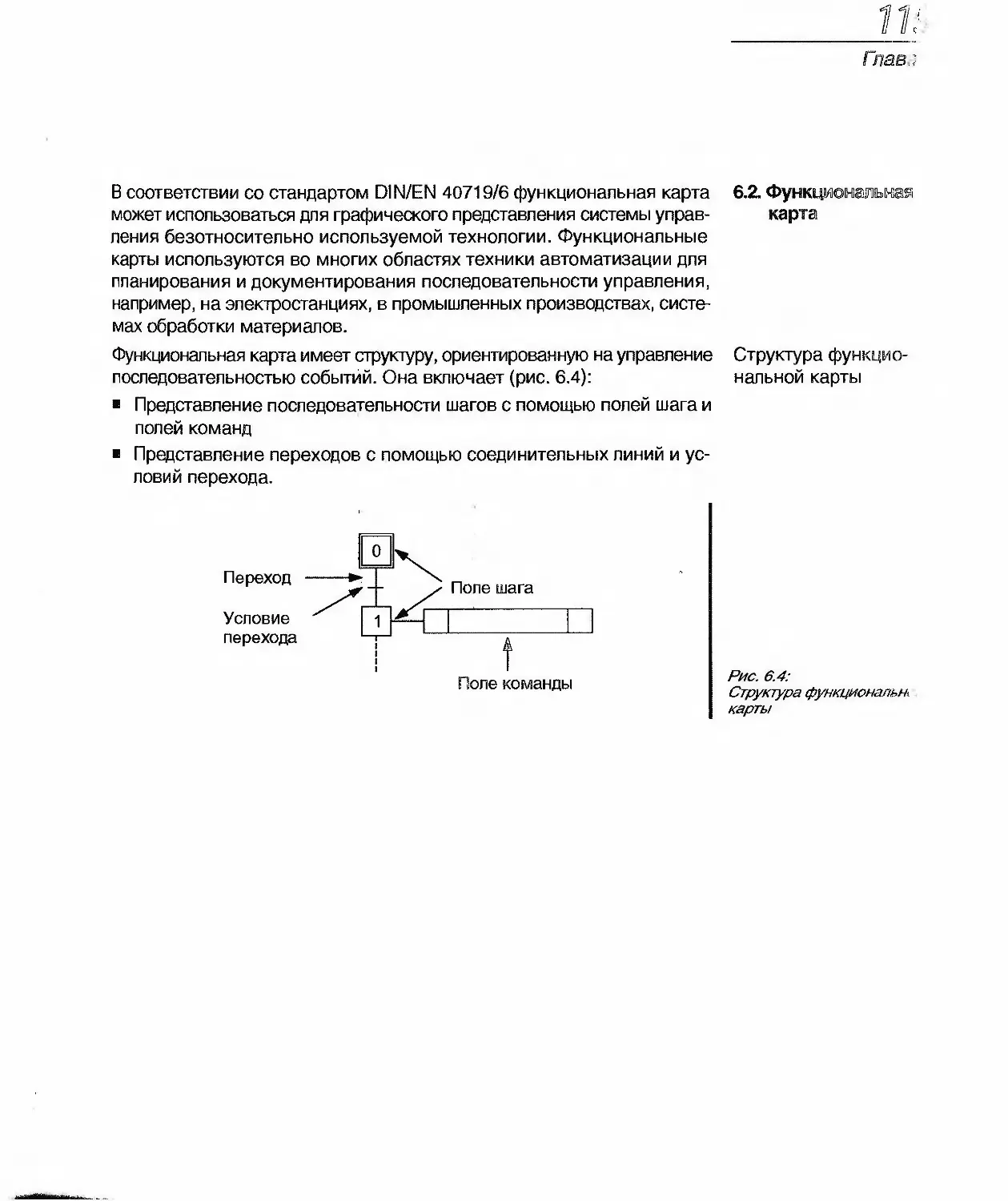
6.2 Функциональная карта............................119
6.3 Пневматическая принципиальная схема............ 127
6.4 Электрическая принципиальная схема..............144
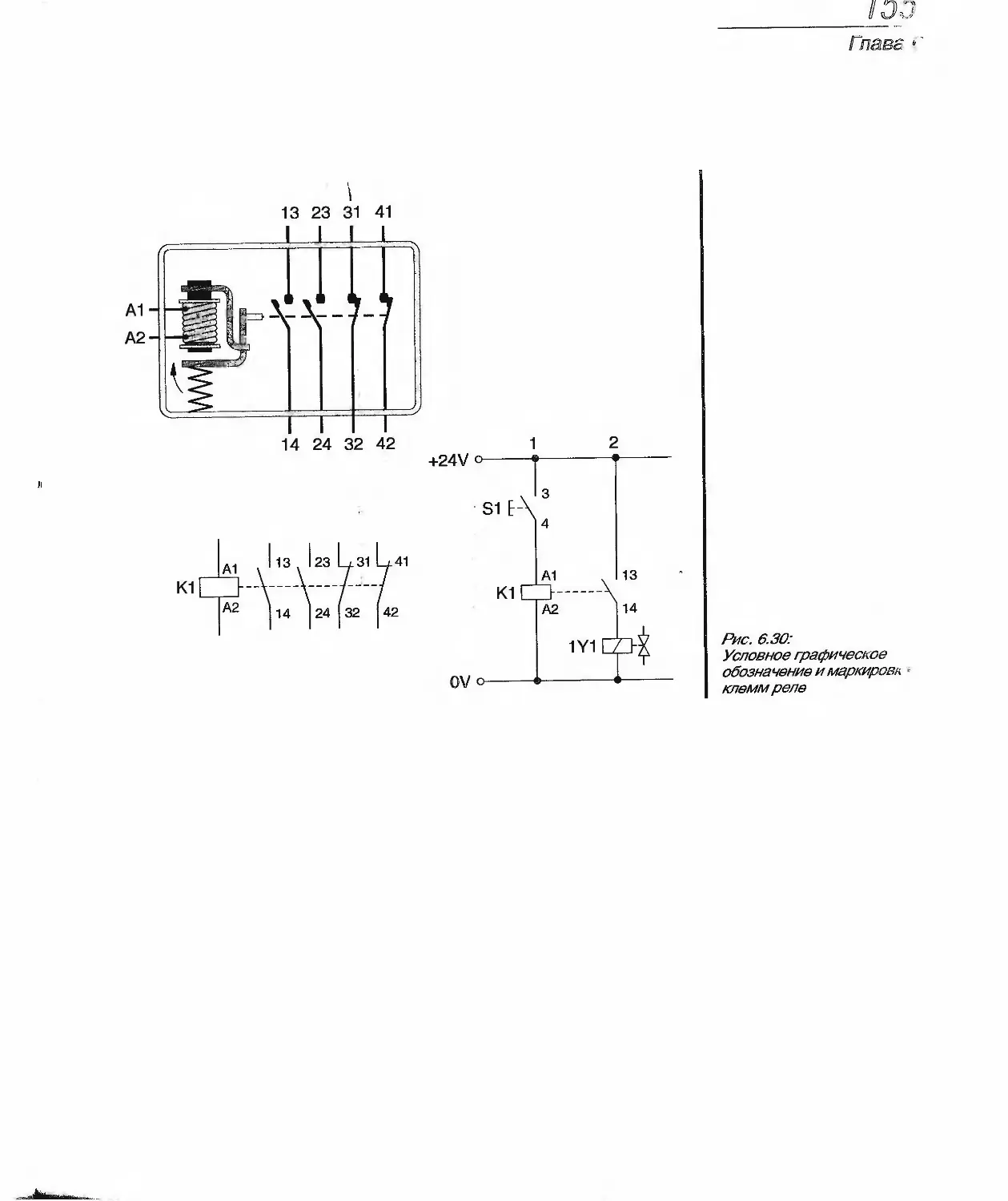
6.5 Диаграмма электрических соединений............. 158
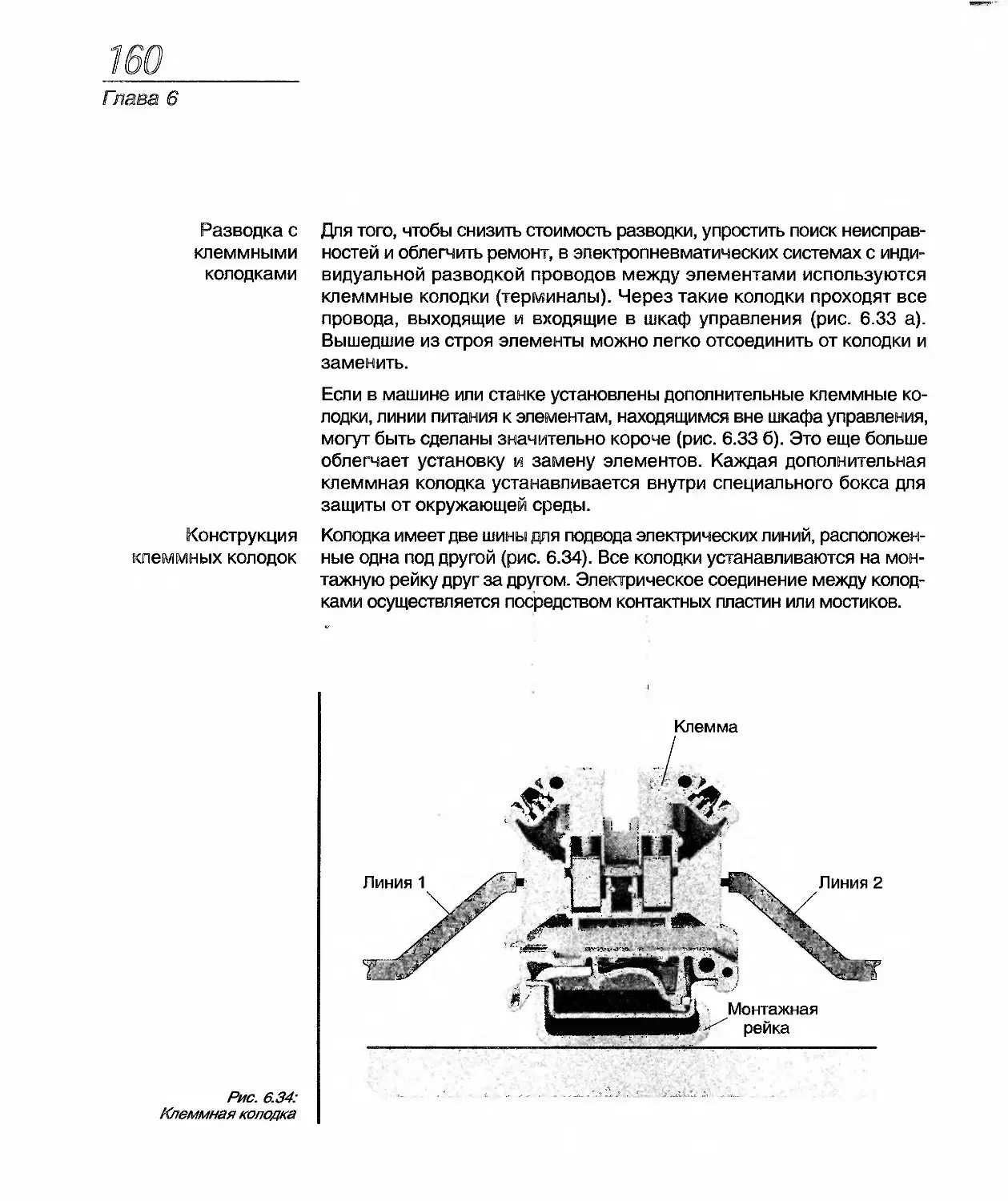
Глава 7 — Техника безопасности в
электропневматических системах управления . . 169
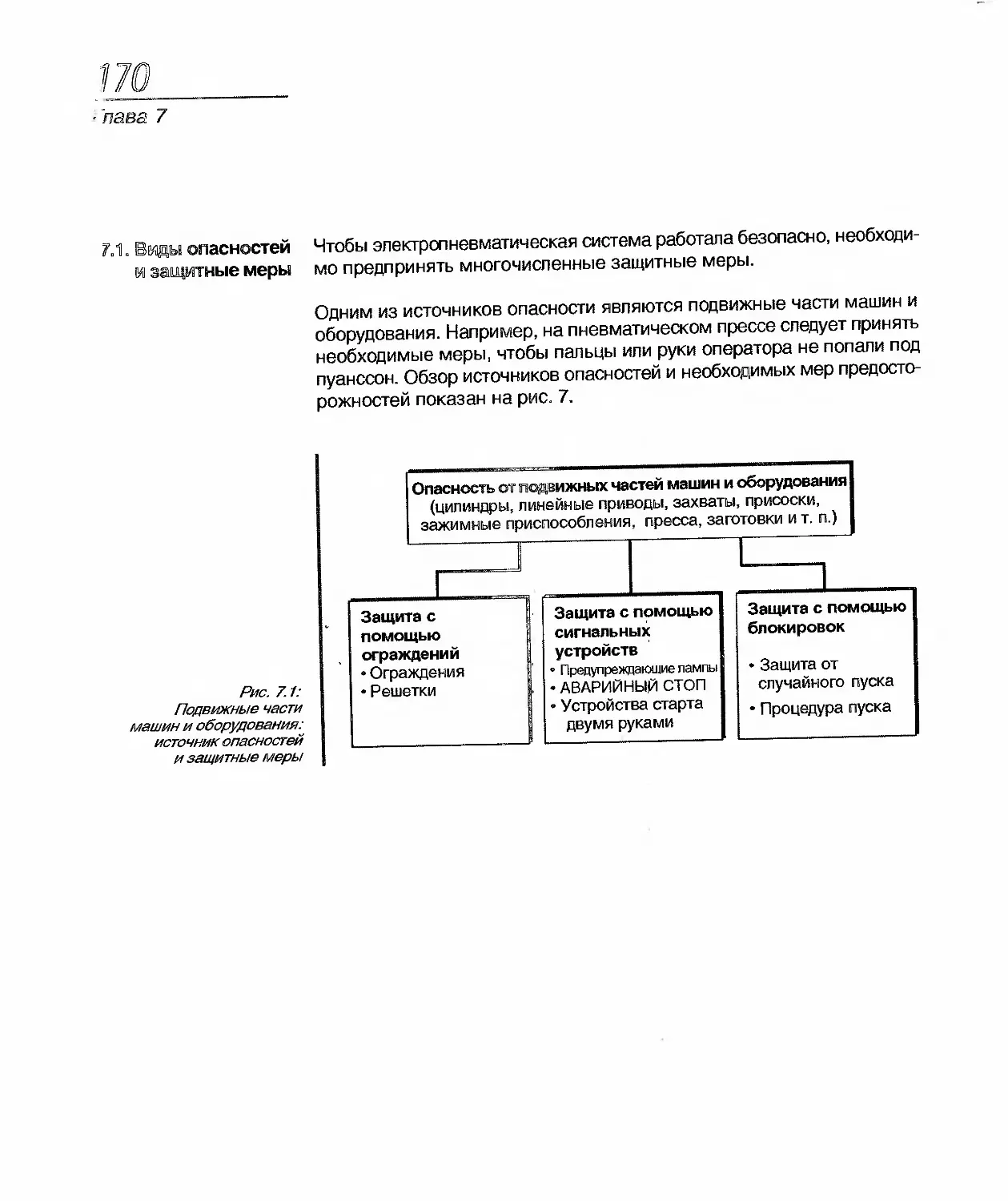
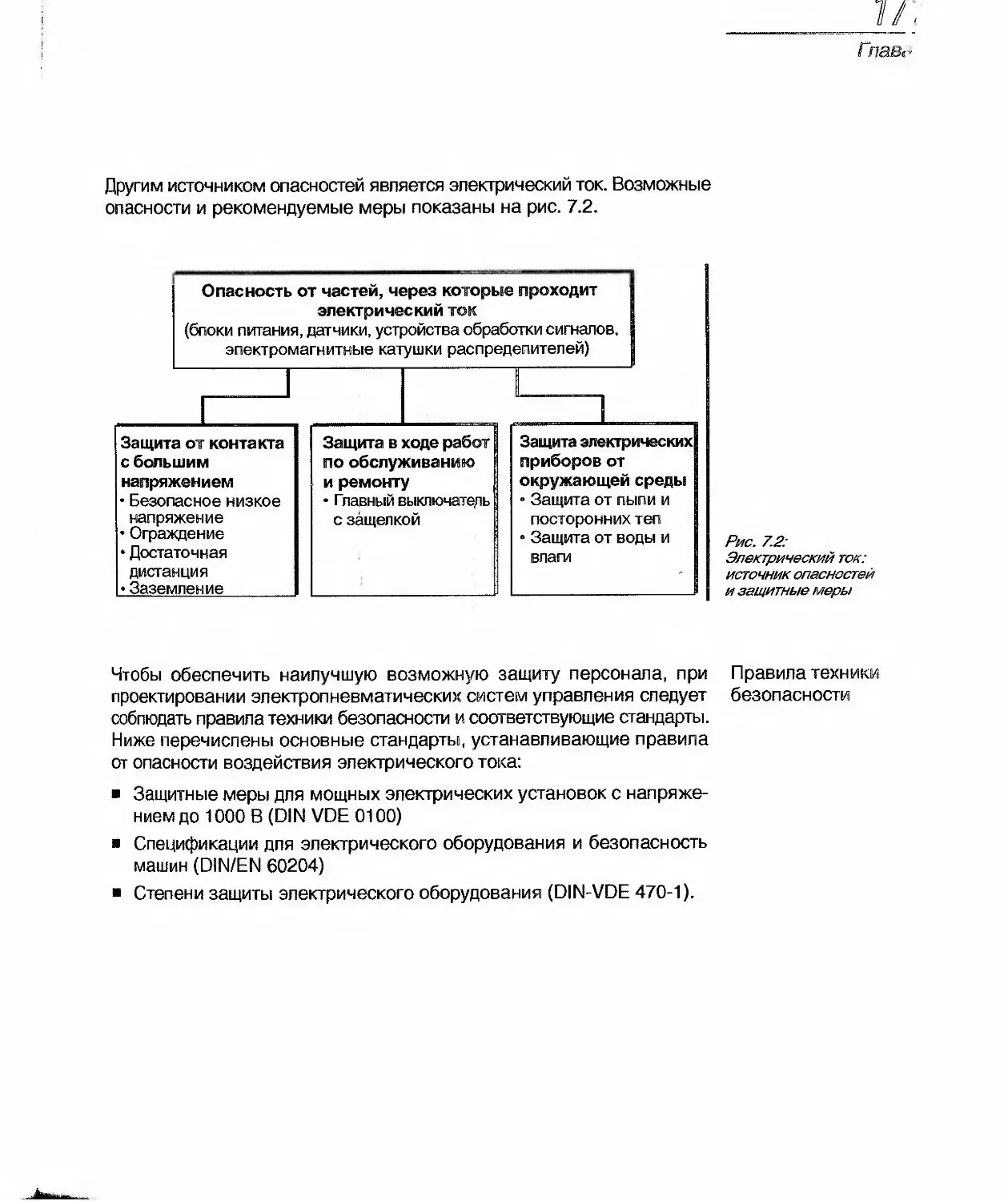
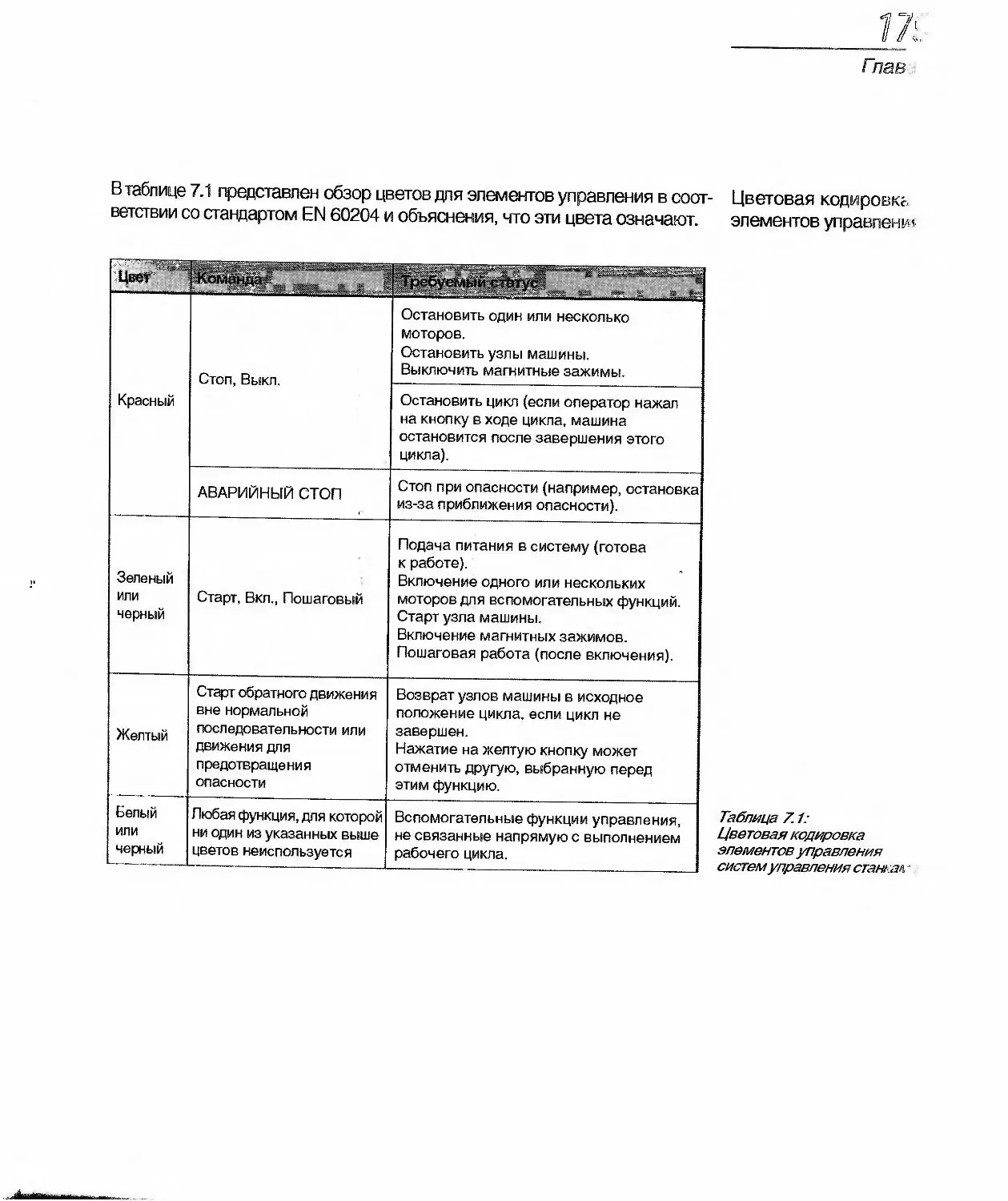
7.1 Виды опасностей и защитные меры.................170
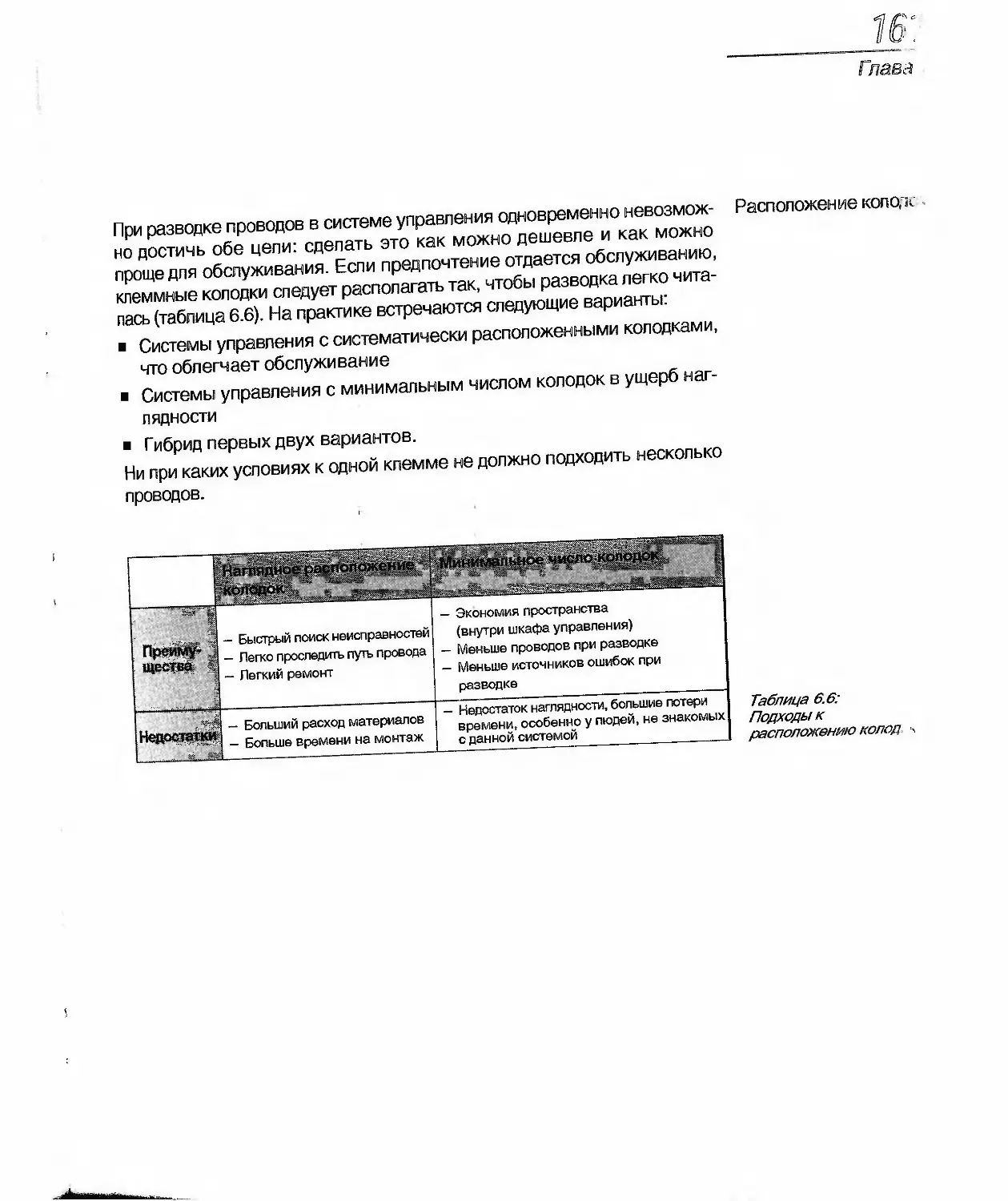
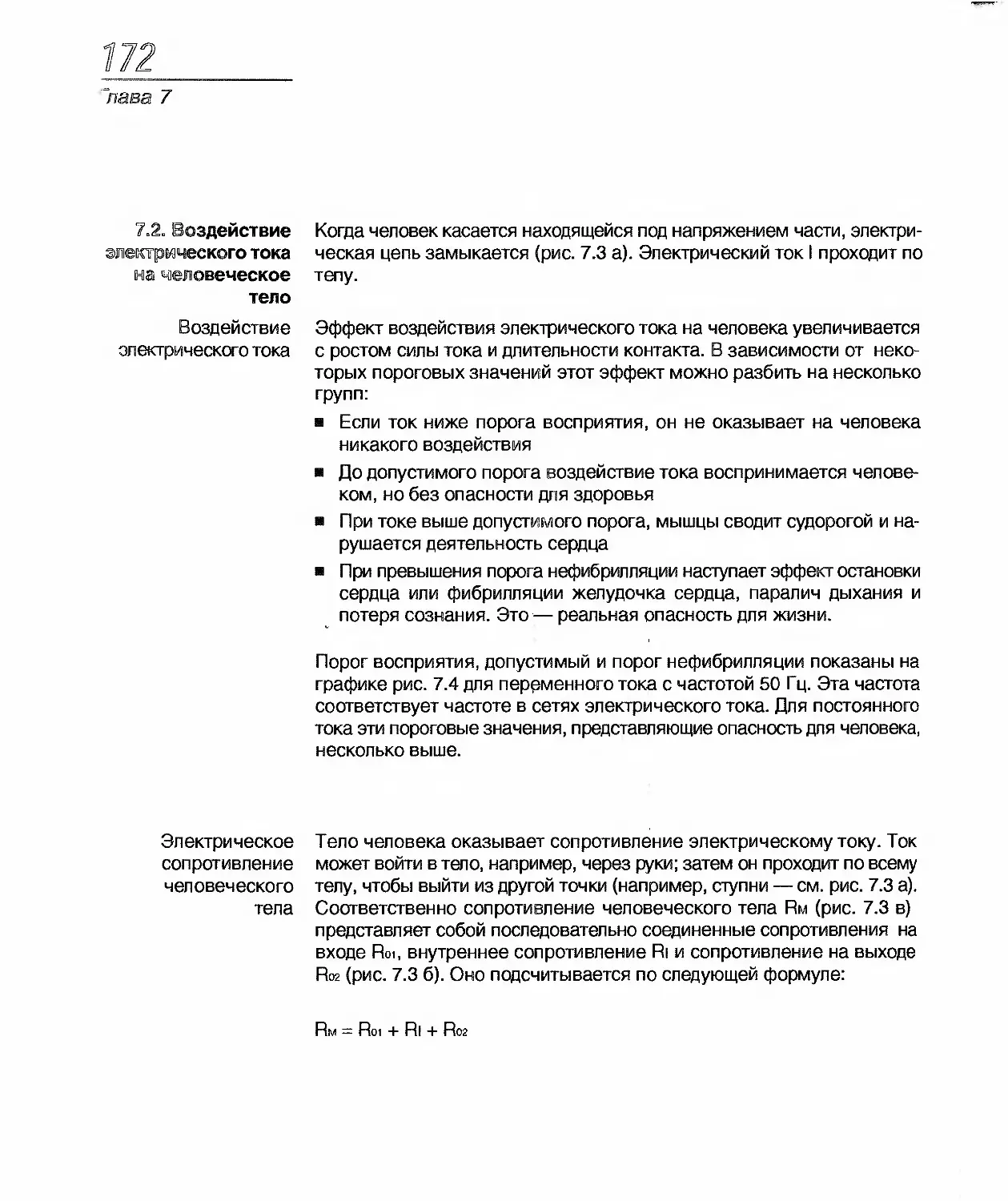
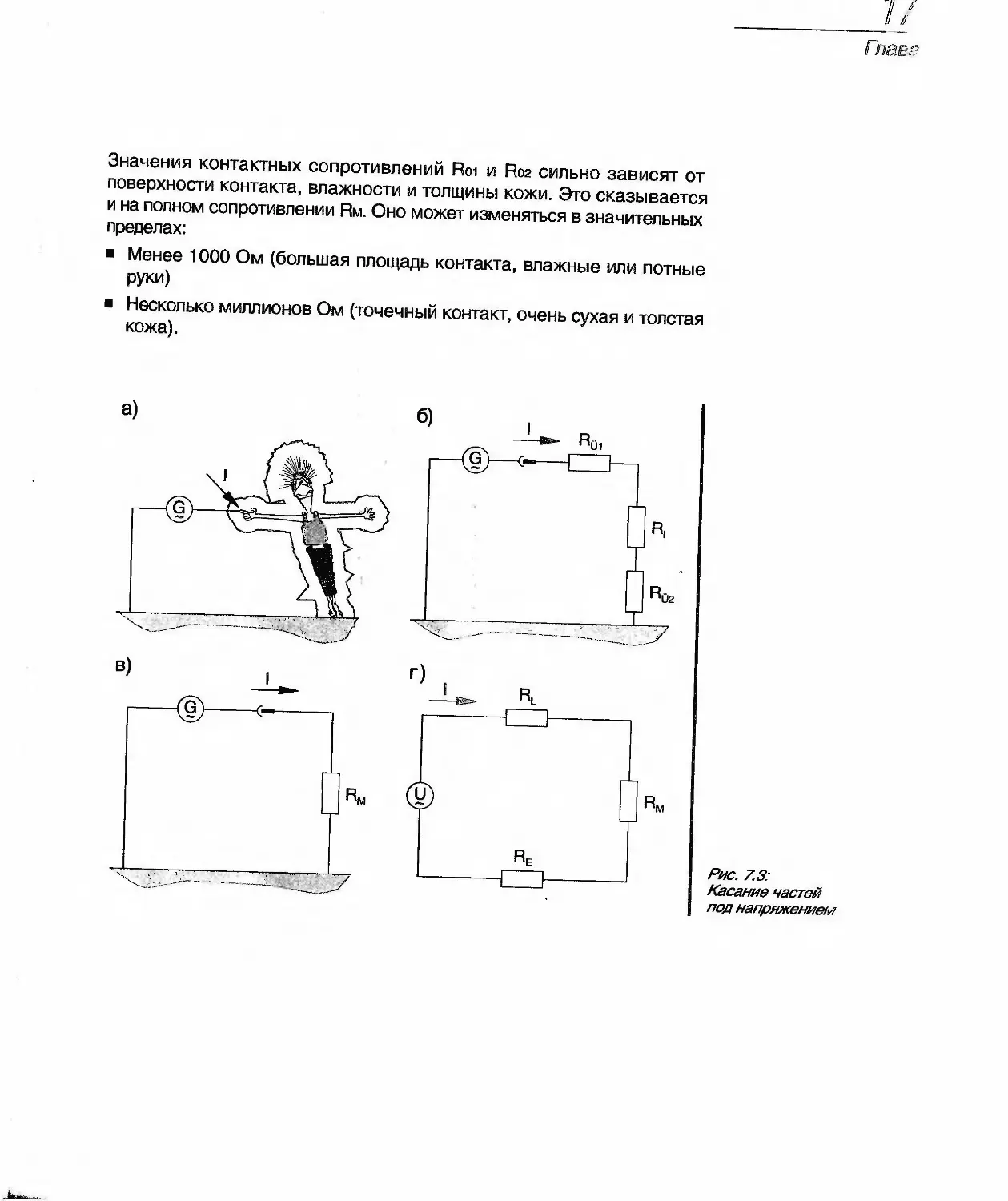
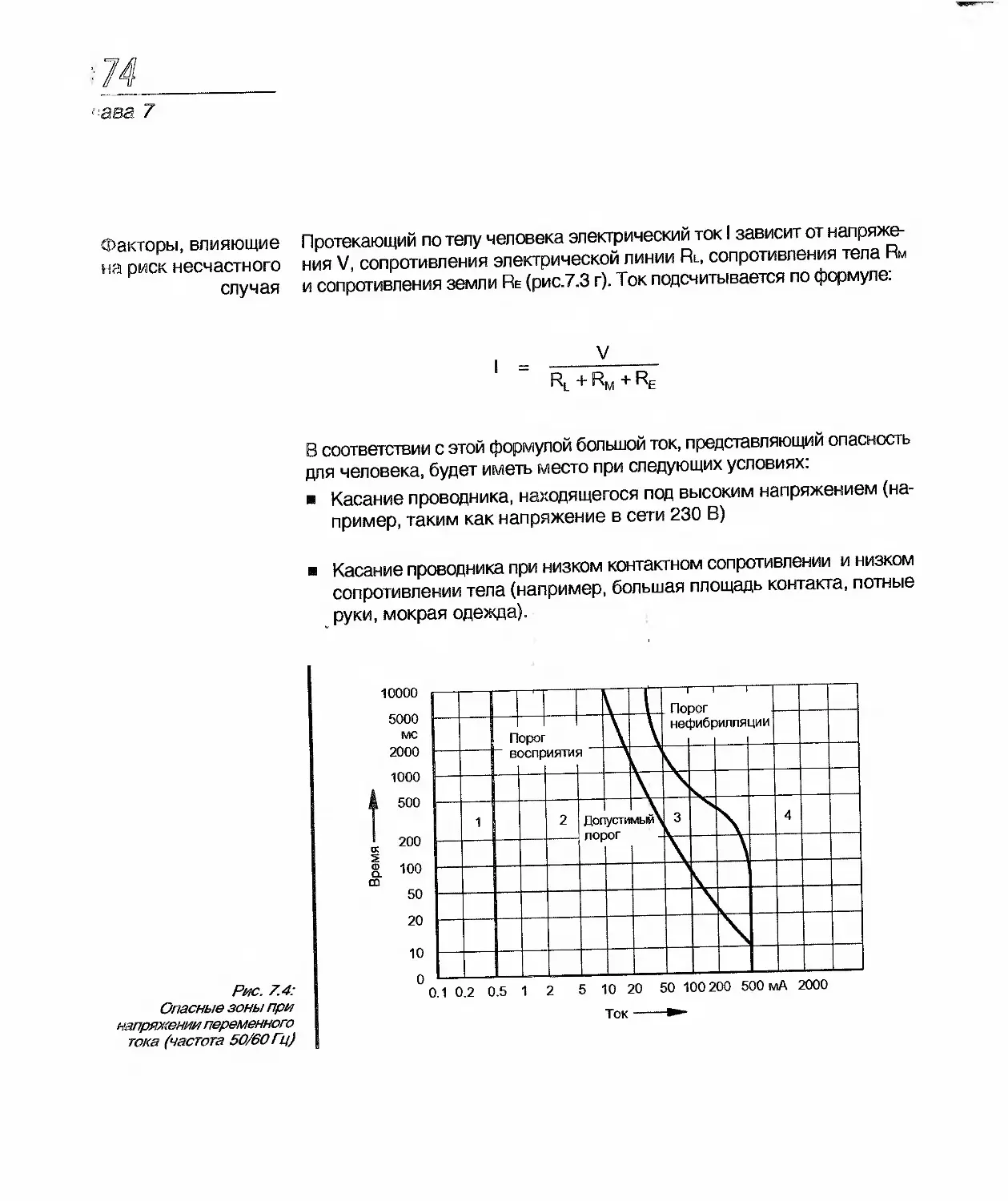
7.2 Воздействие электрического тока
на человеческое тело.................................172
7.3 Меры защиты от поражения
электрическим током..................................175
7.4 Панель управления и индикаторы..................176
7.5 Защита электрического оборудования
от воздействия окружающей среды......................181
Г лава 8 — Релейные системы управления................185
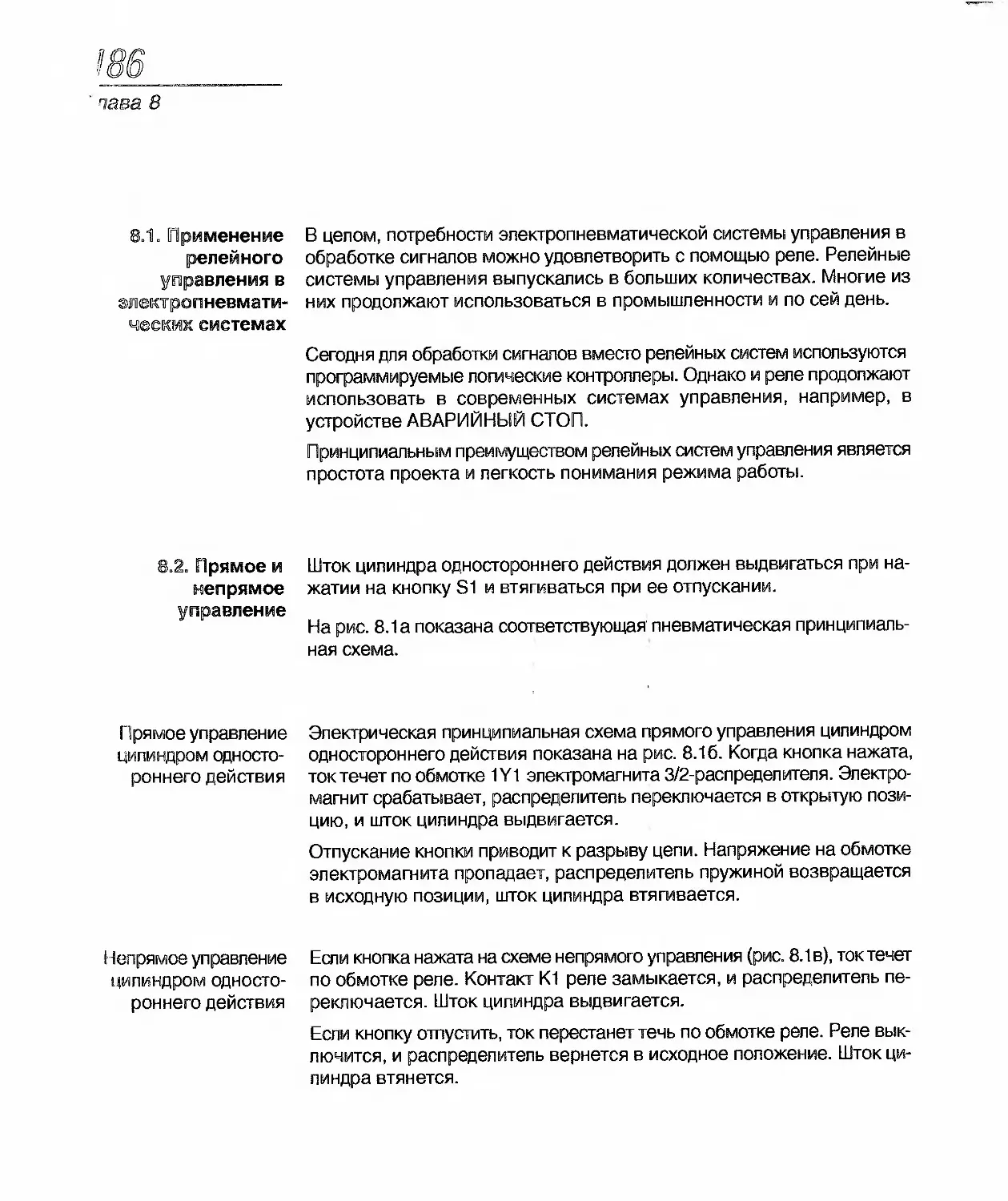
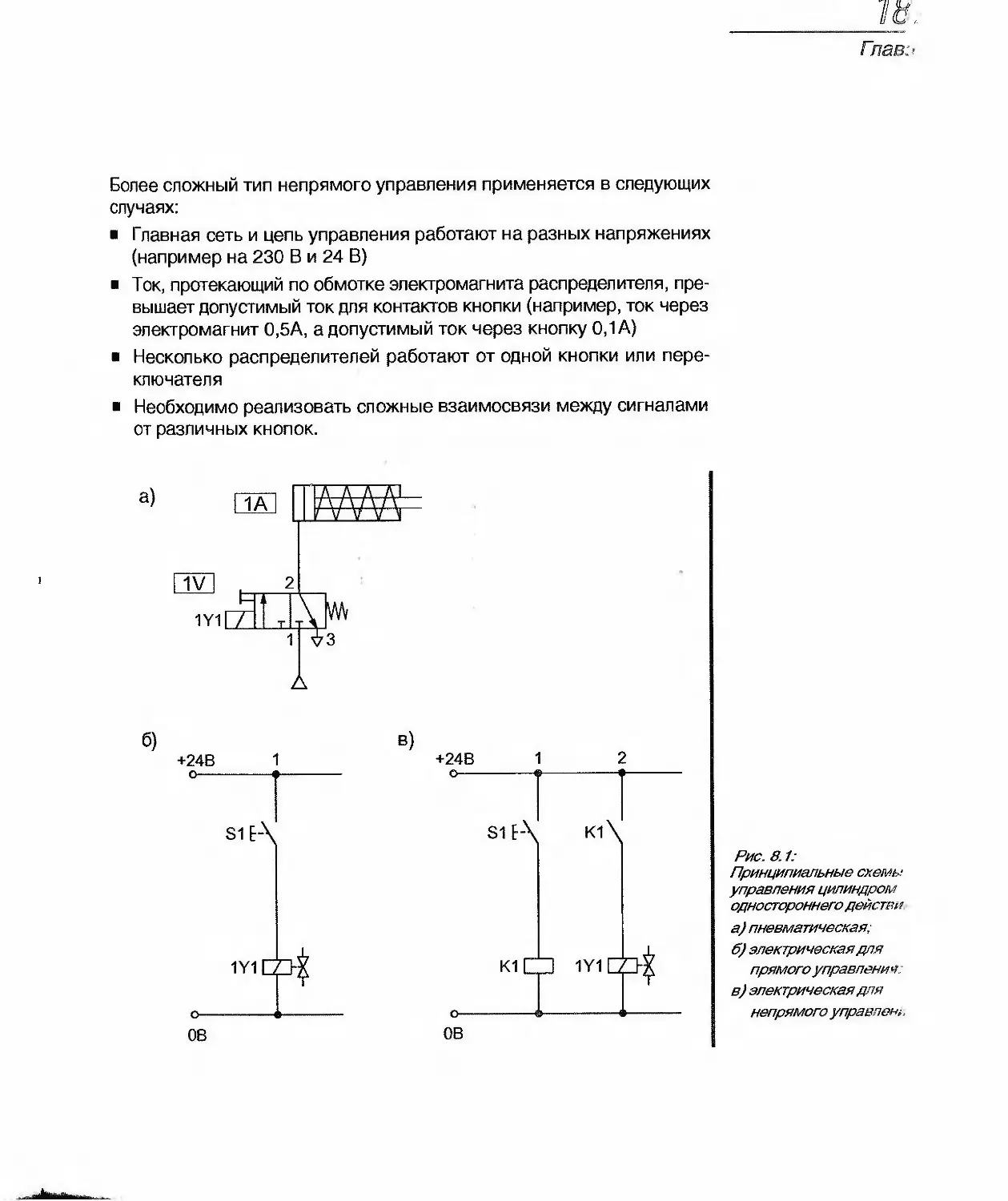
8.1 Применение релейного управления в
электропневматических системах..................186
8.2 Прямое и непрямое управление....................186
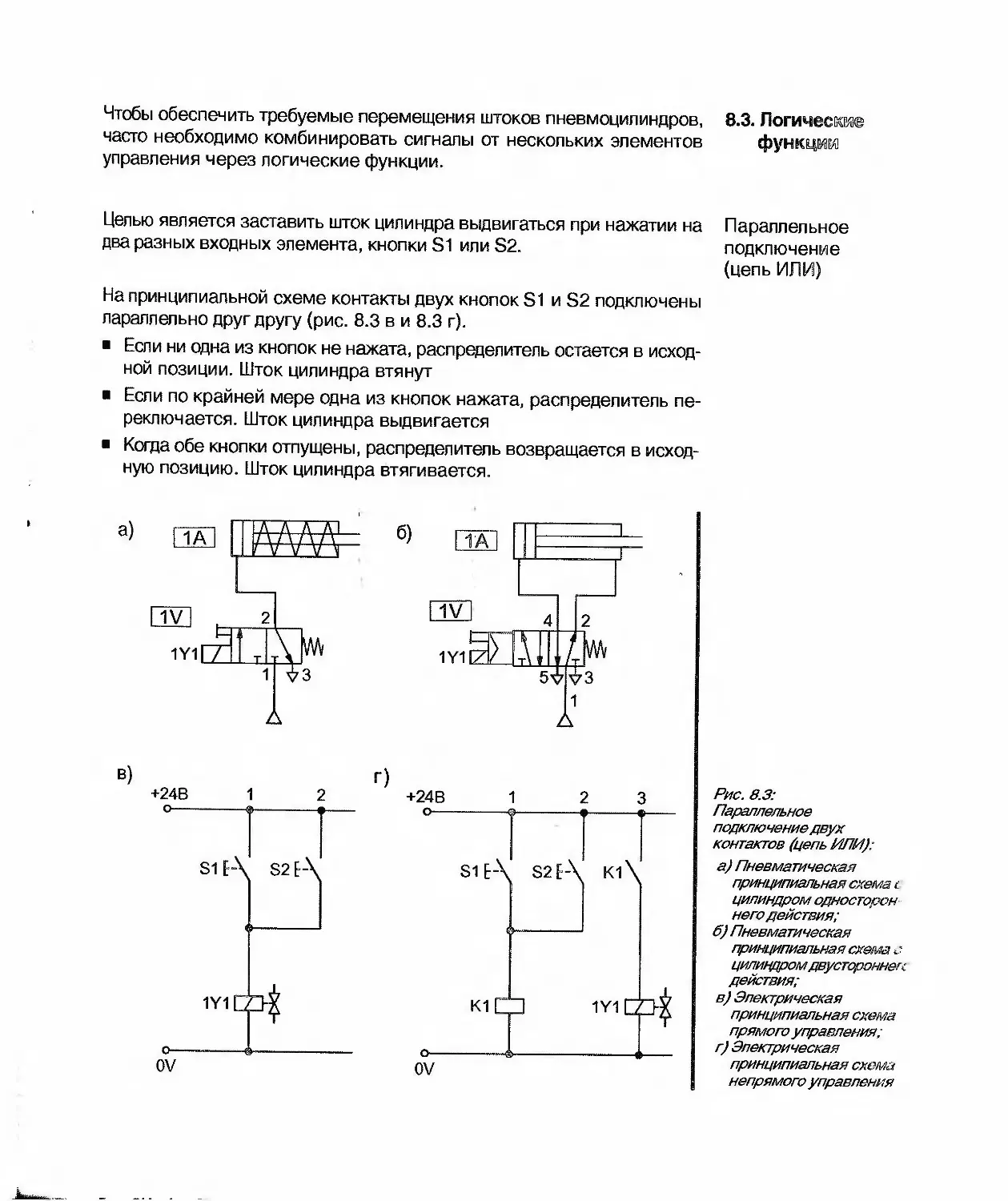
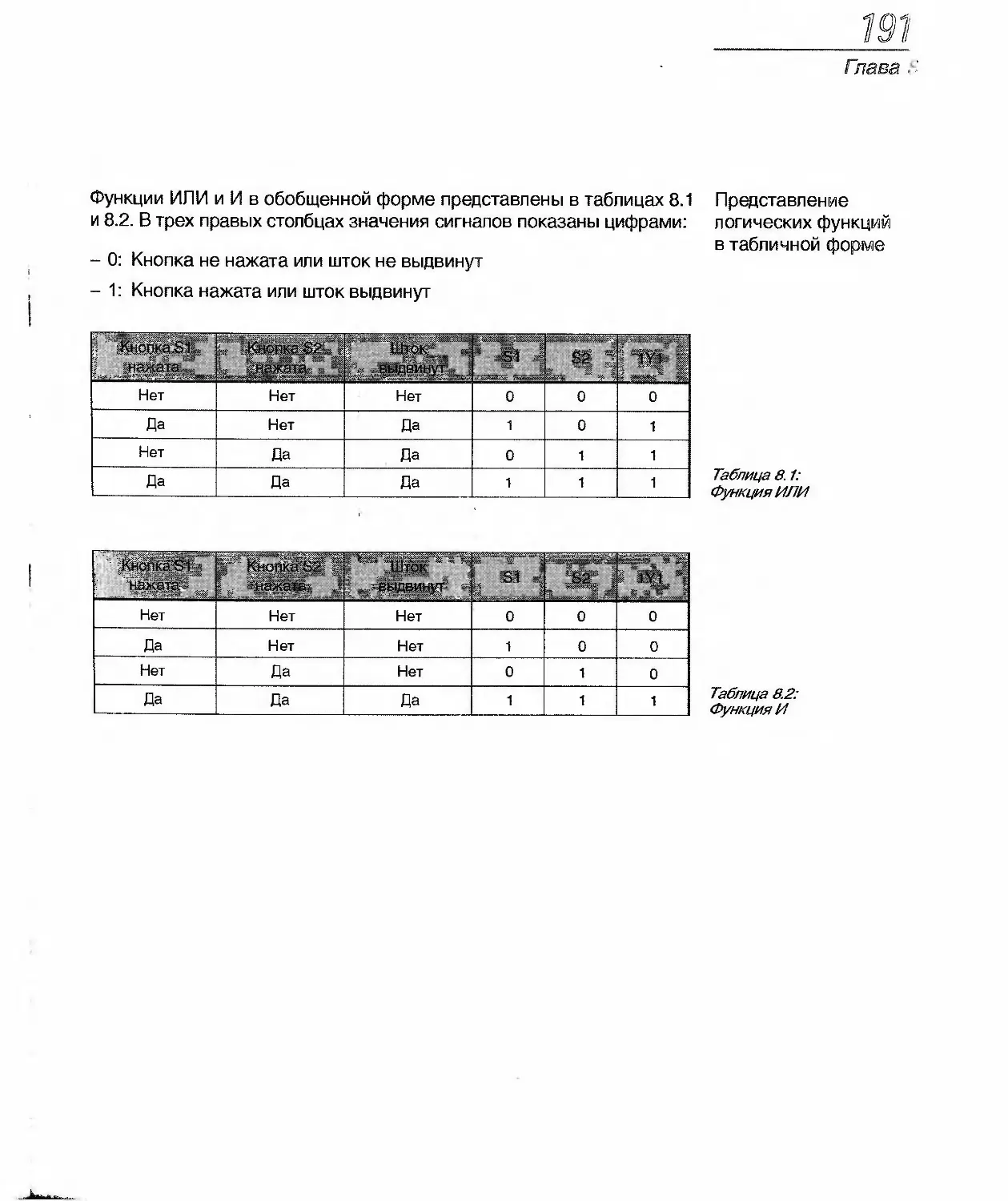
8.3 Логические функции.......................... . . 189
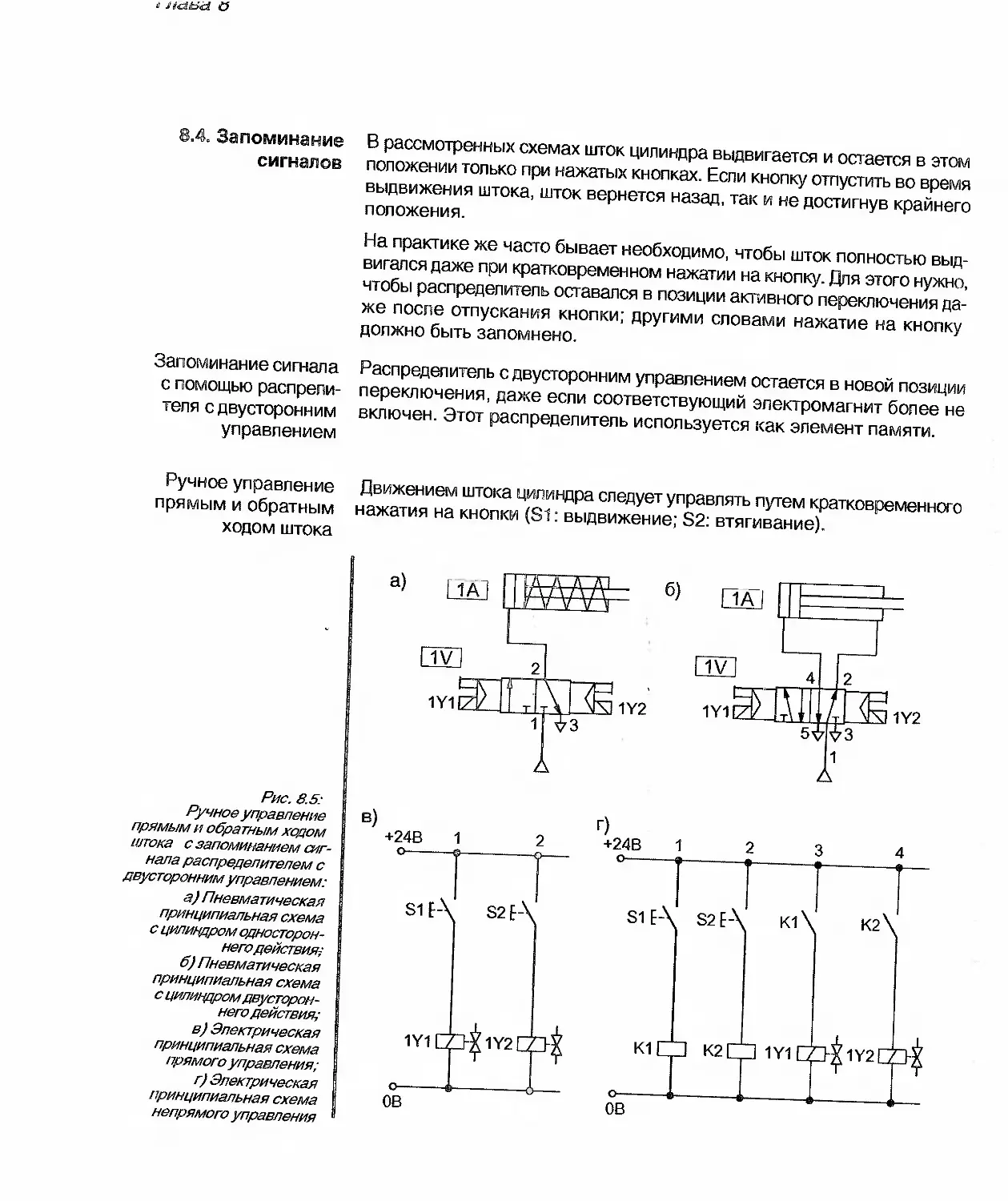
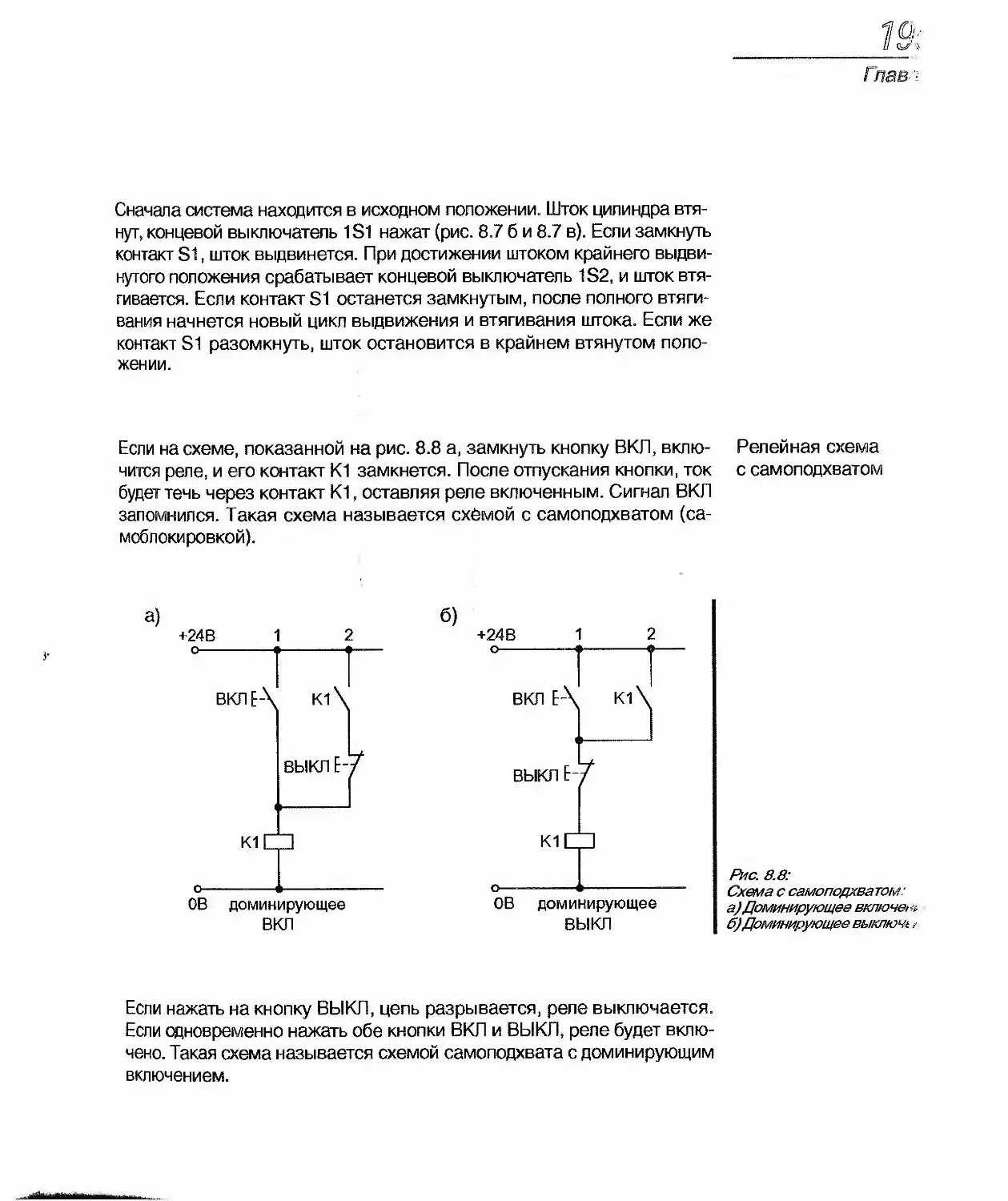
8.4 Запоминание сигналов............................192
8.5 Задержка...................................... 198
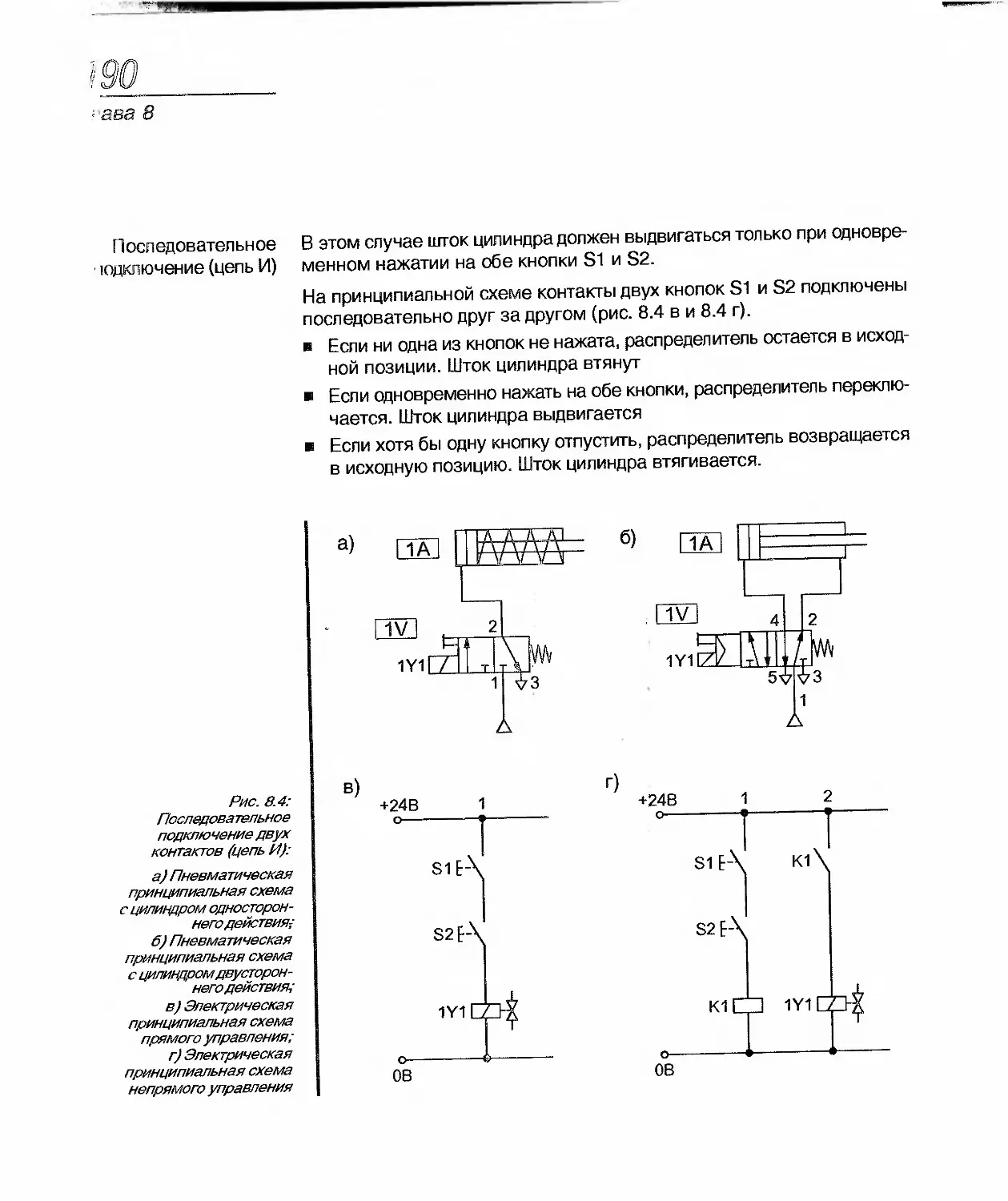
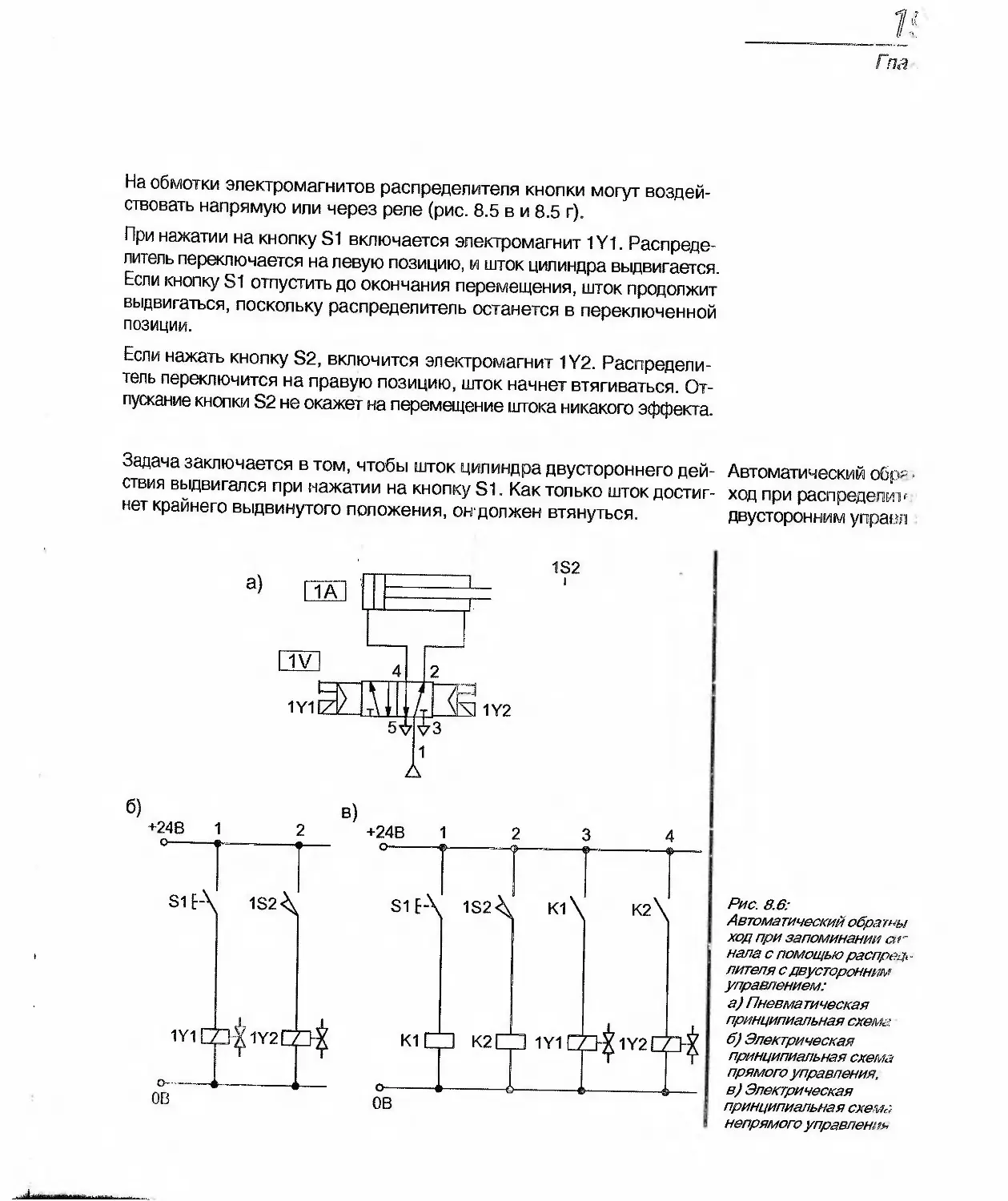
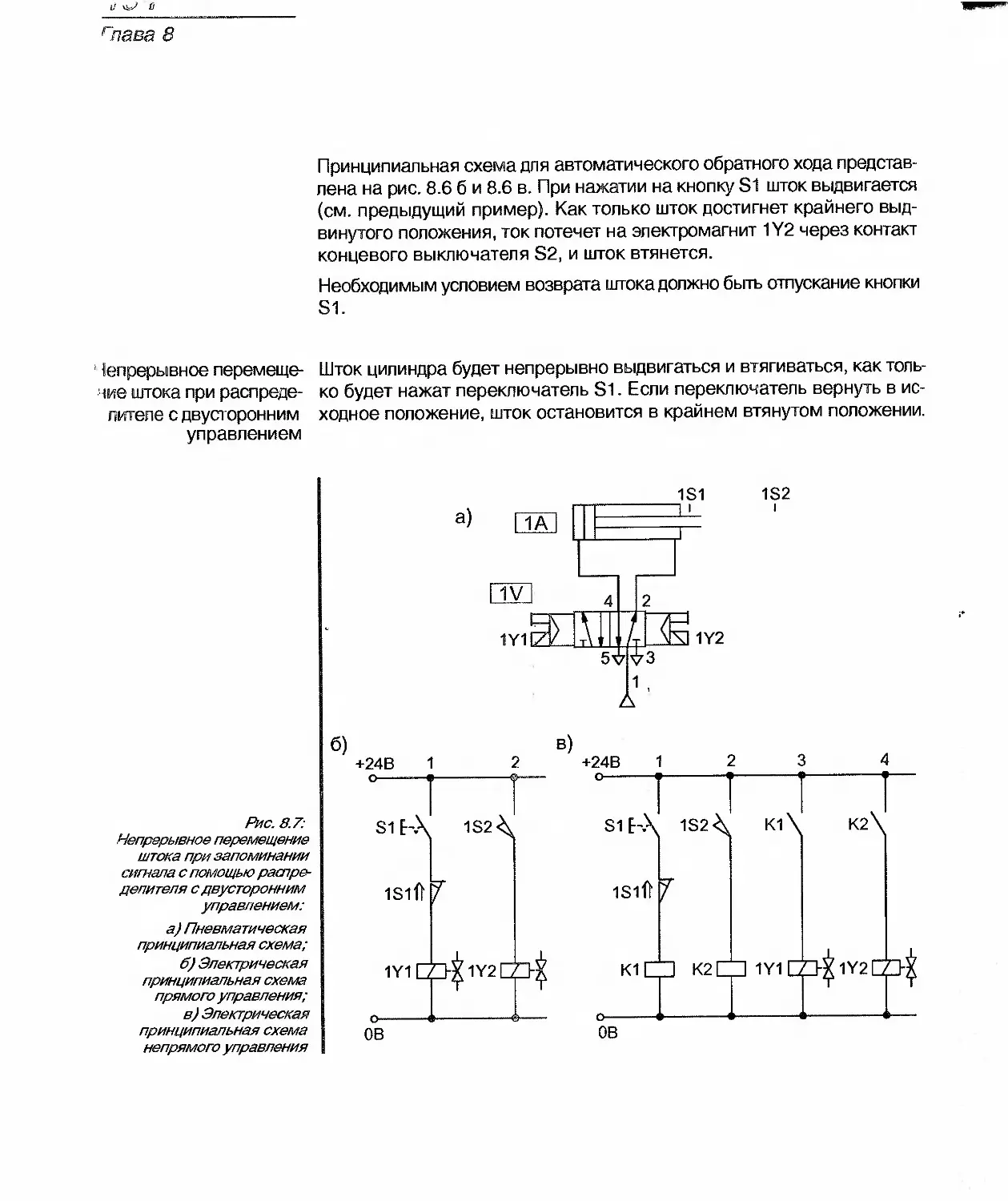
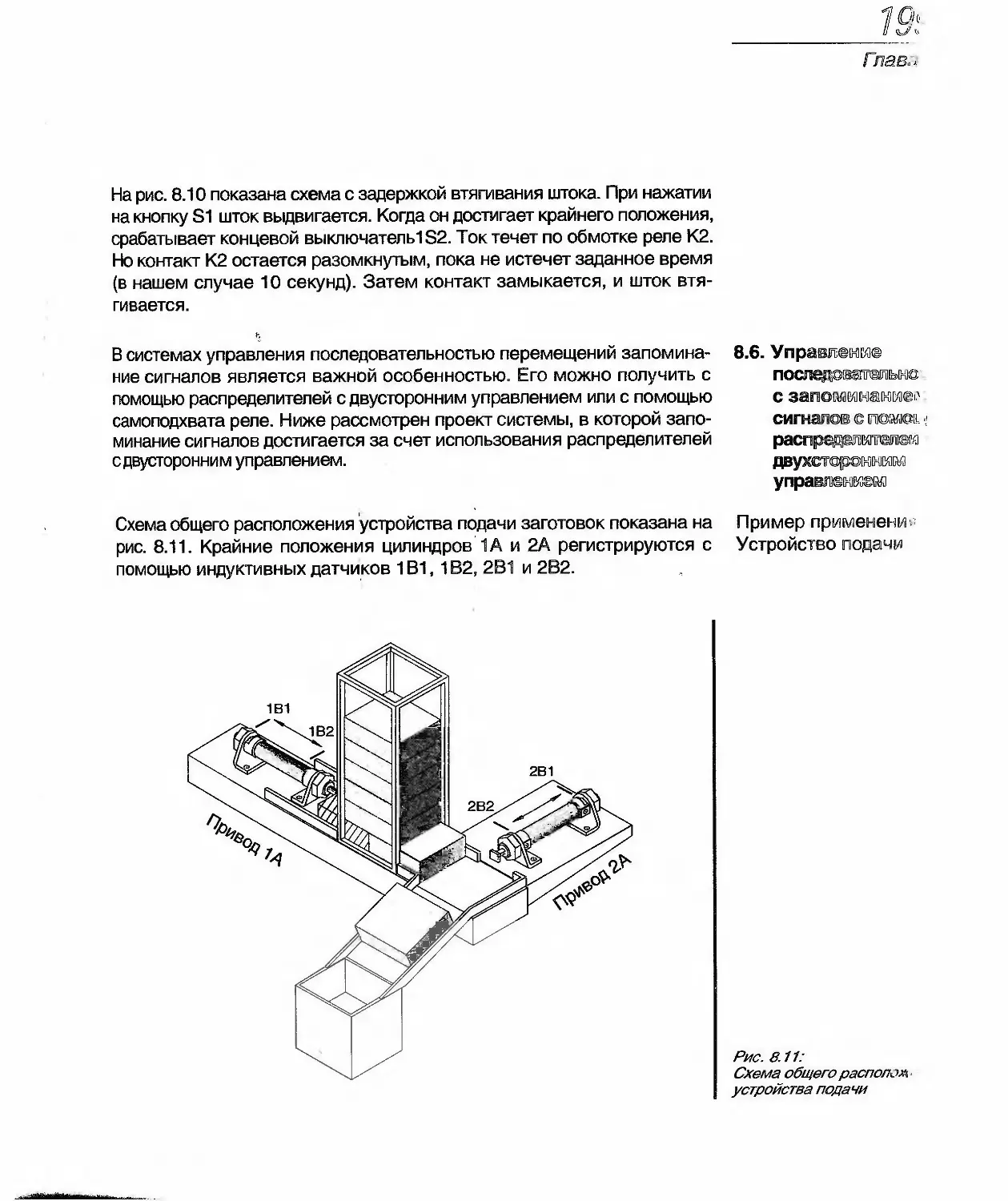
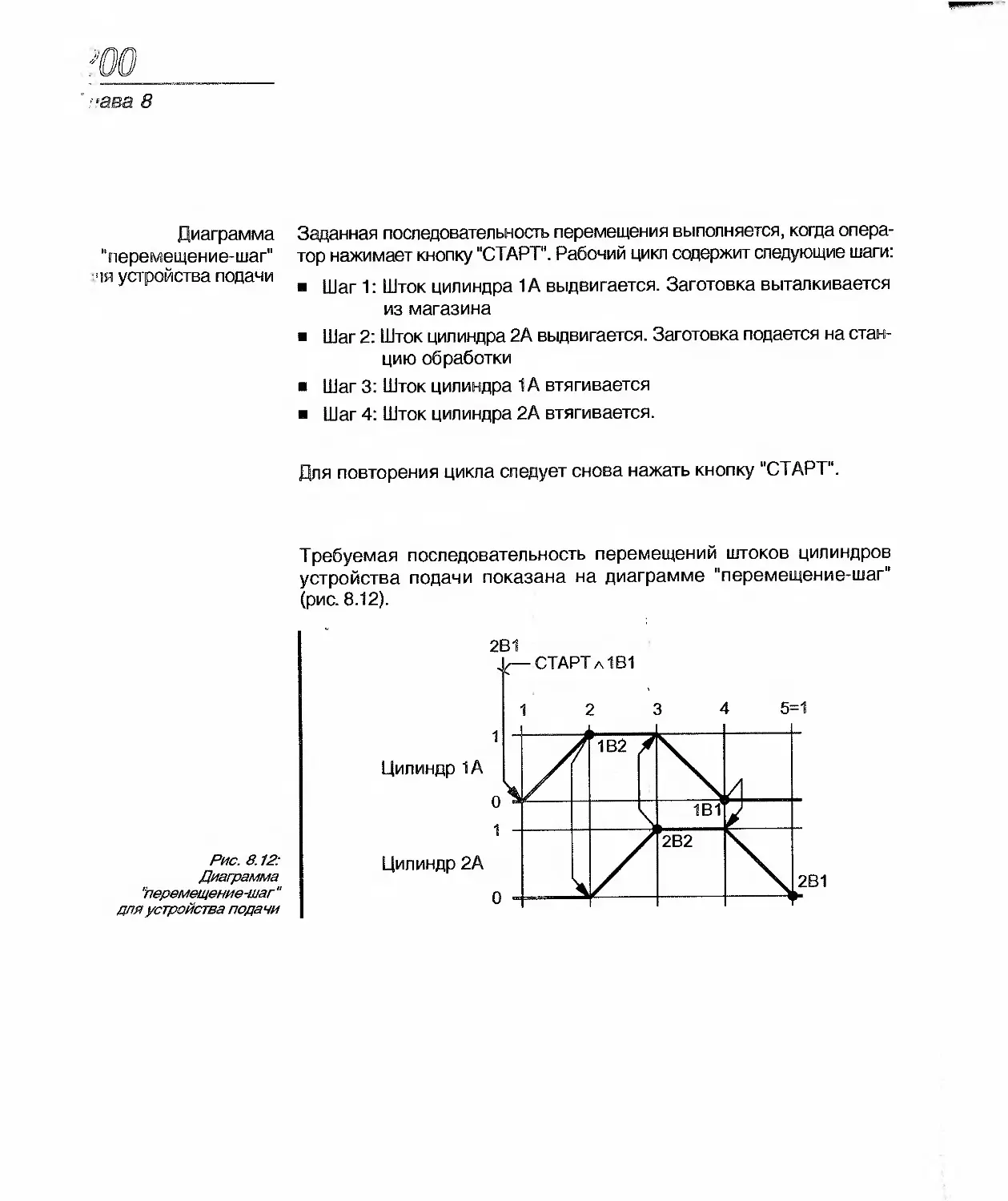
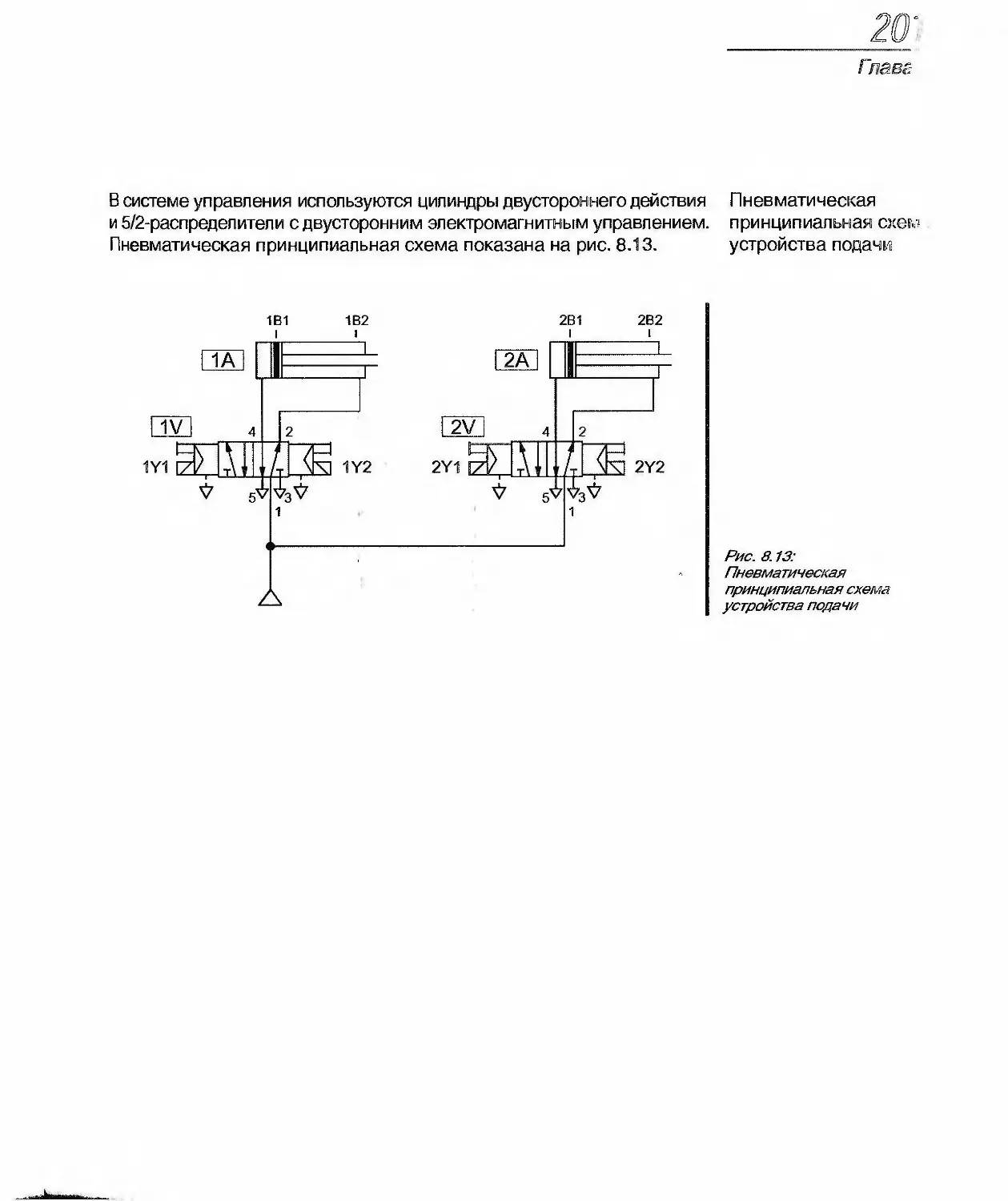
8.6 Управление последовательностью с запоминанием сигналов
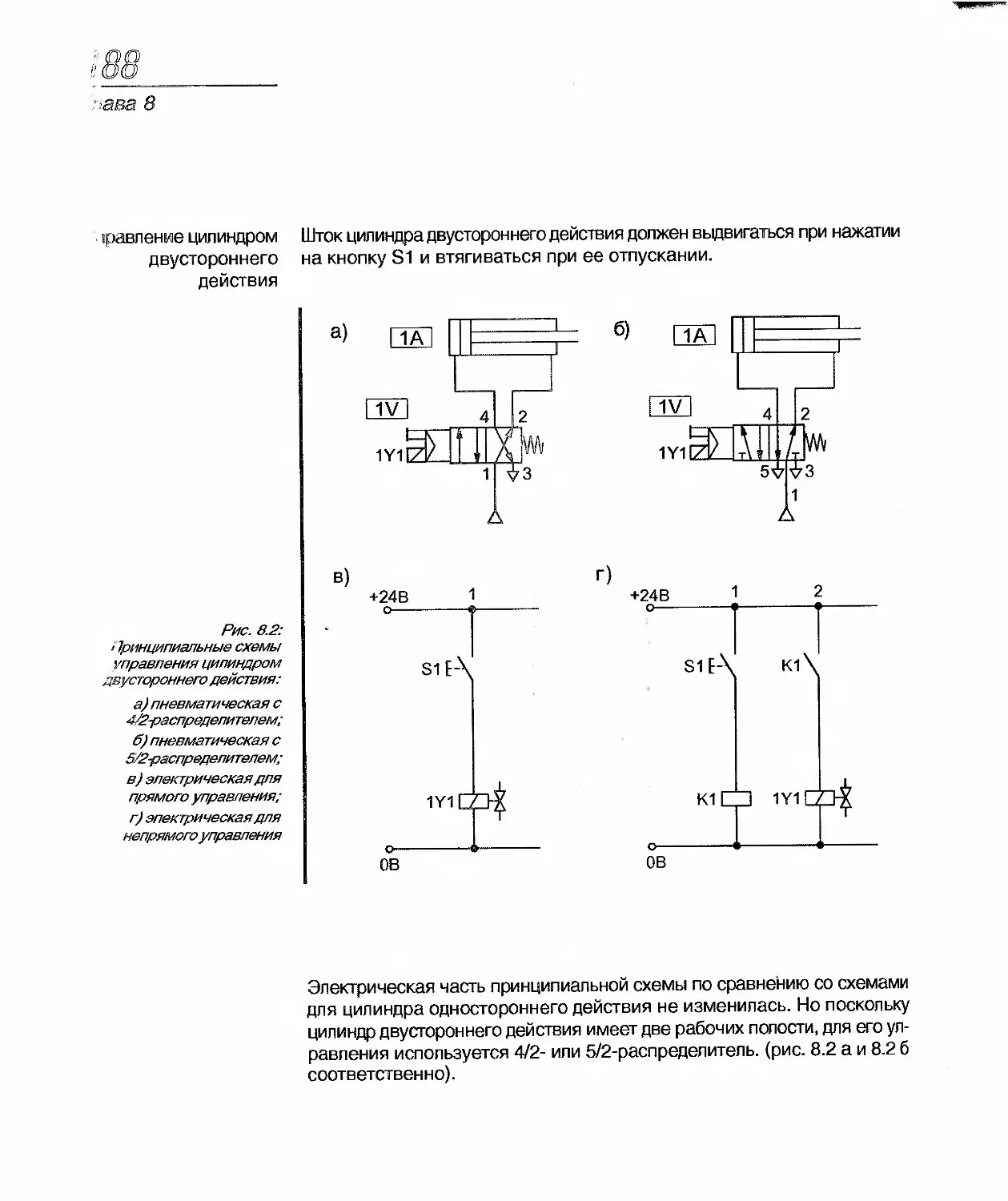
с помощью распределителей с двухсторонним управлением. 199
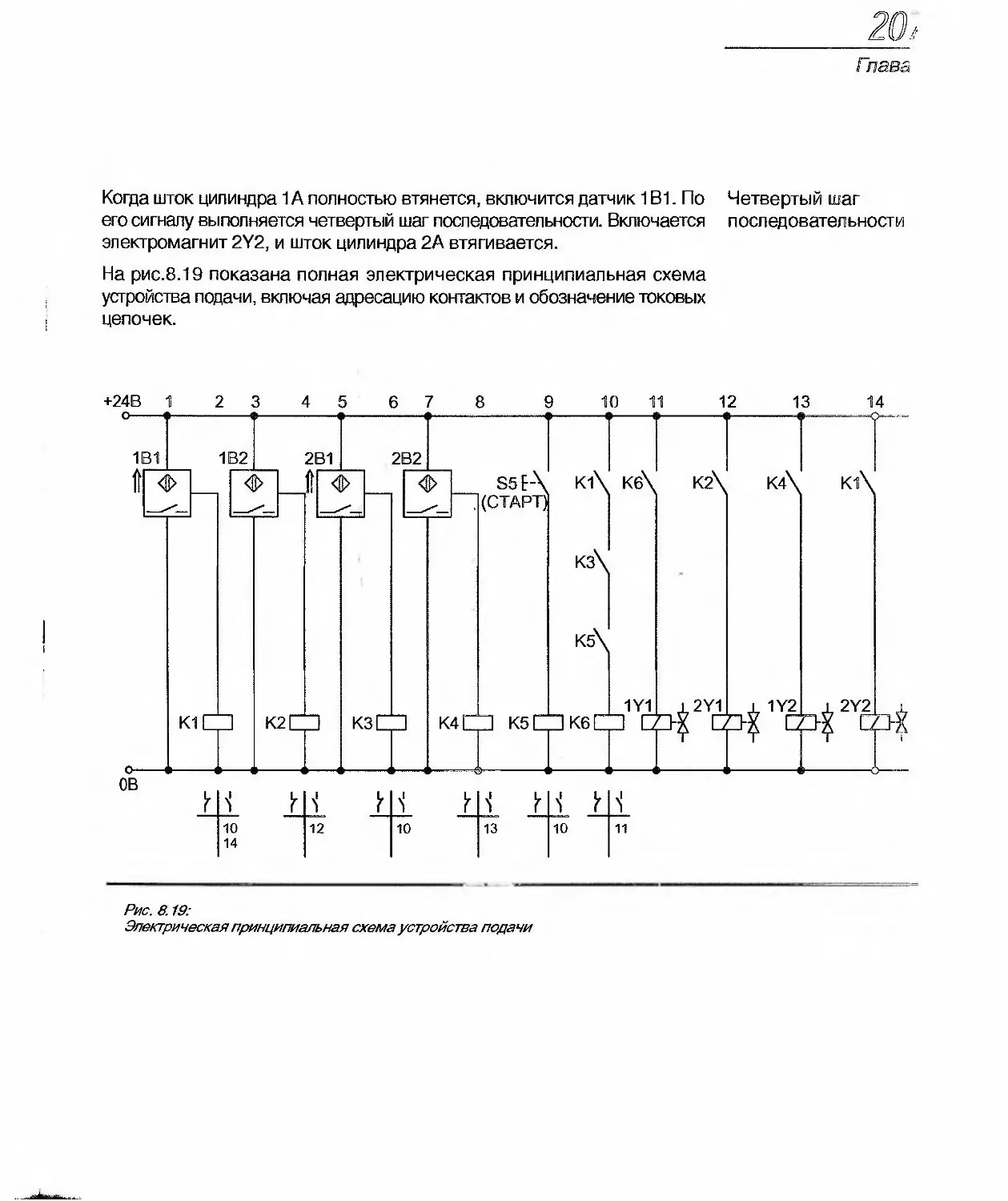
8.7 Схема подключения элементов управления......... 208
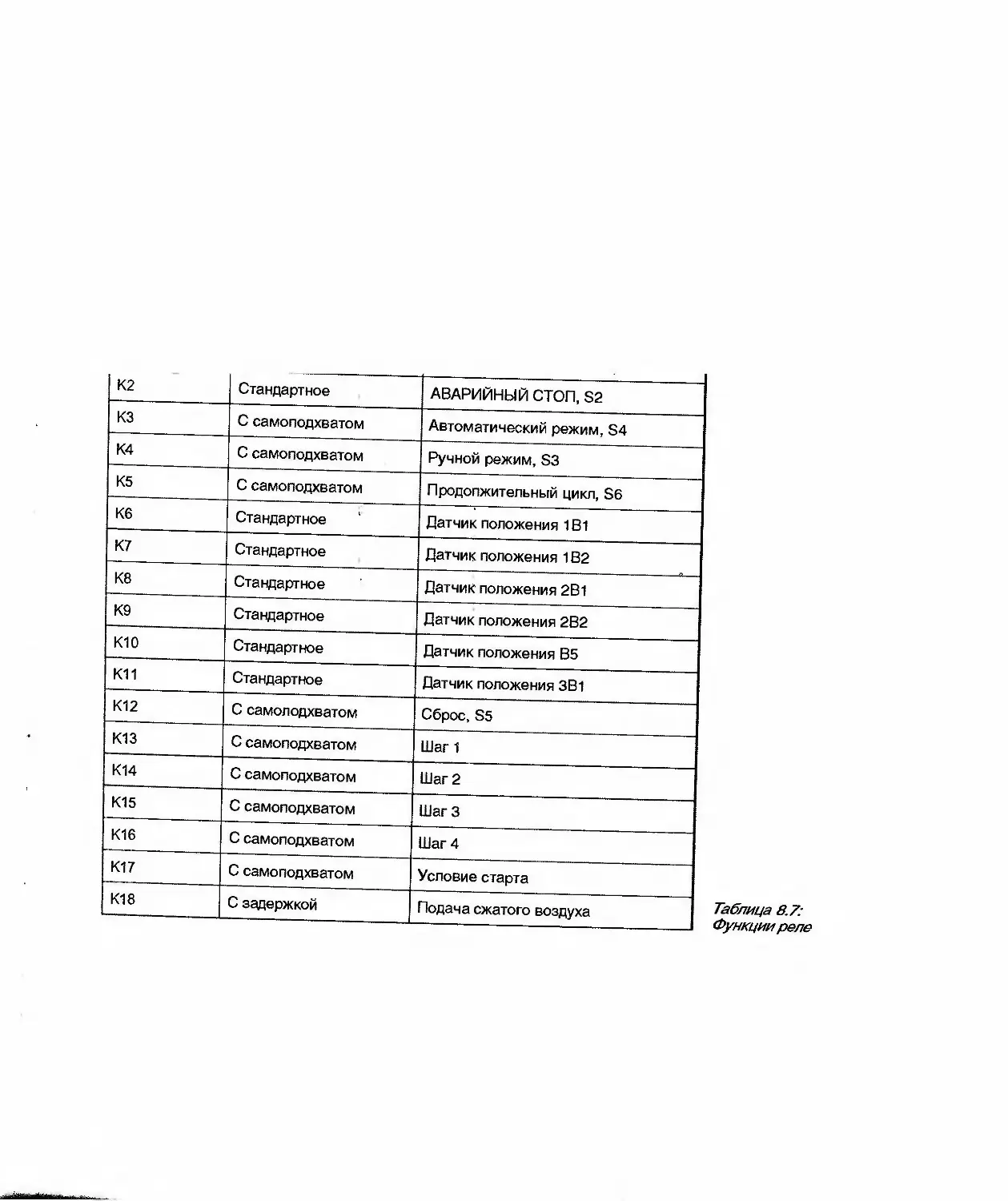
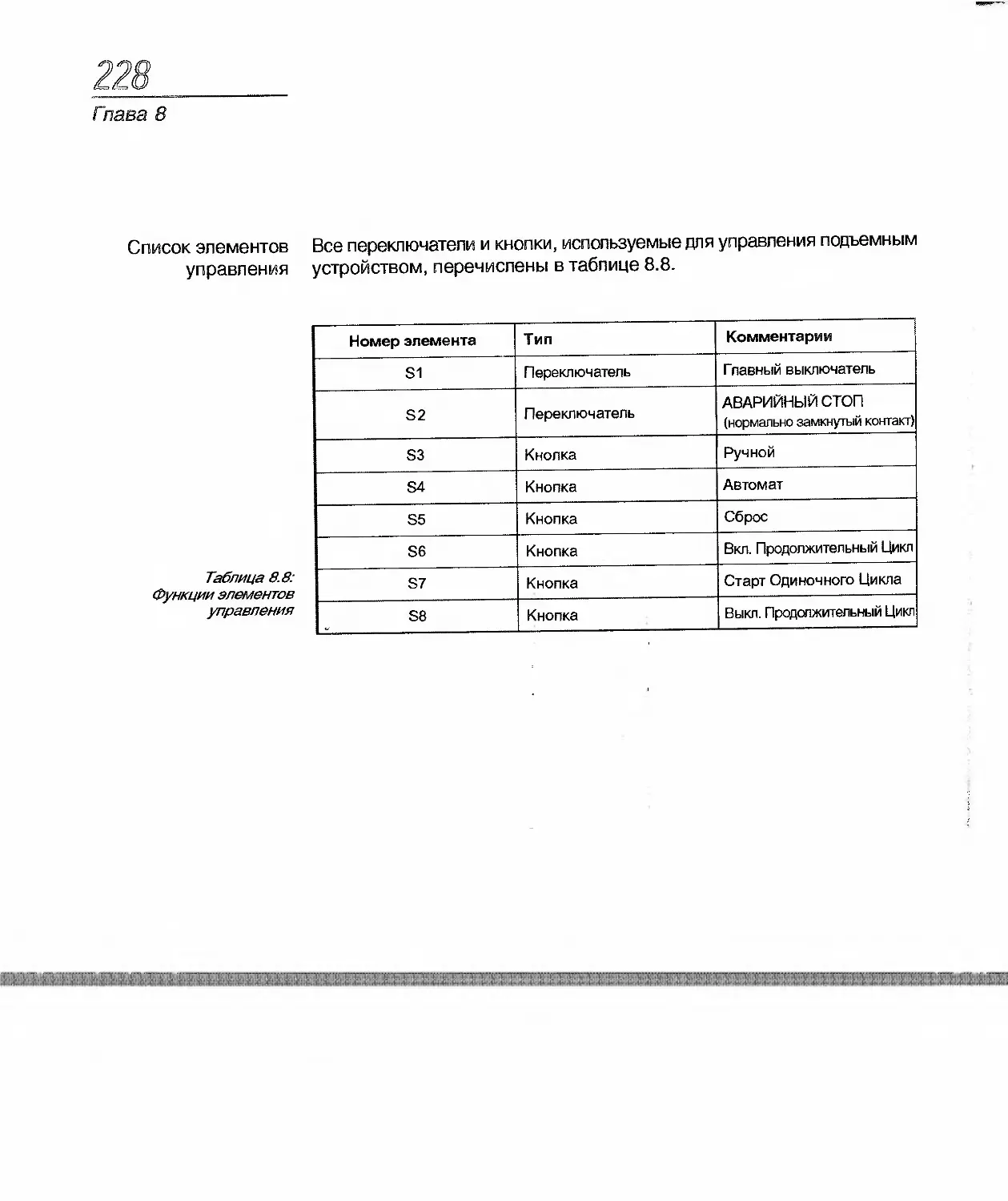
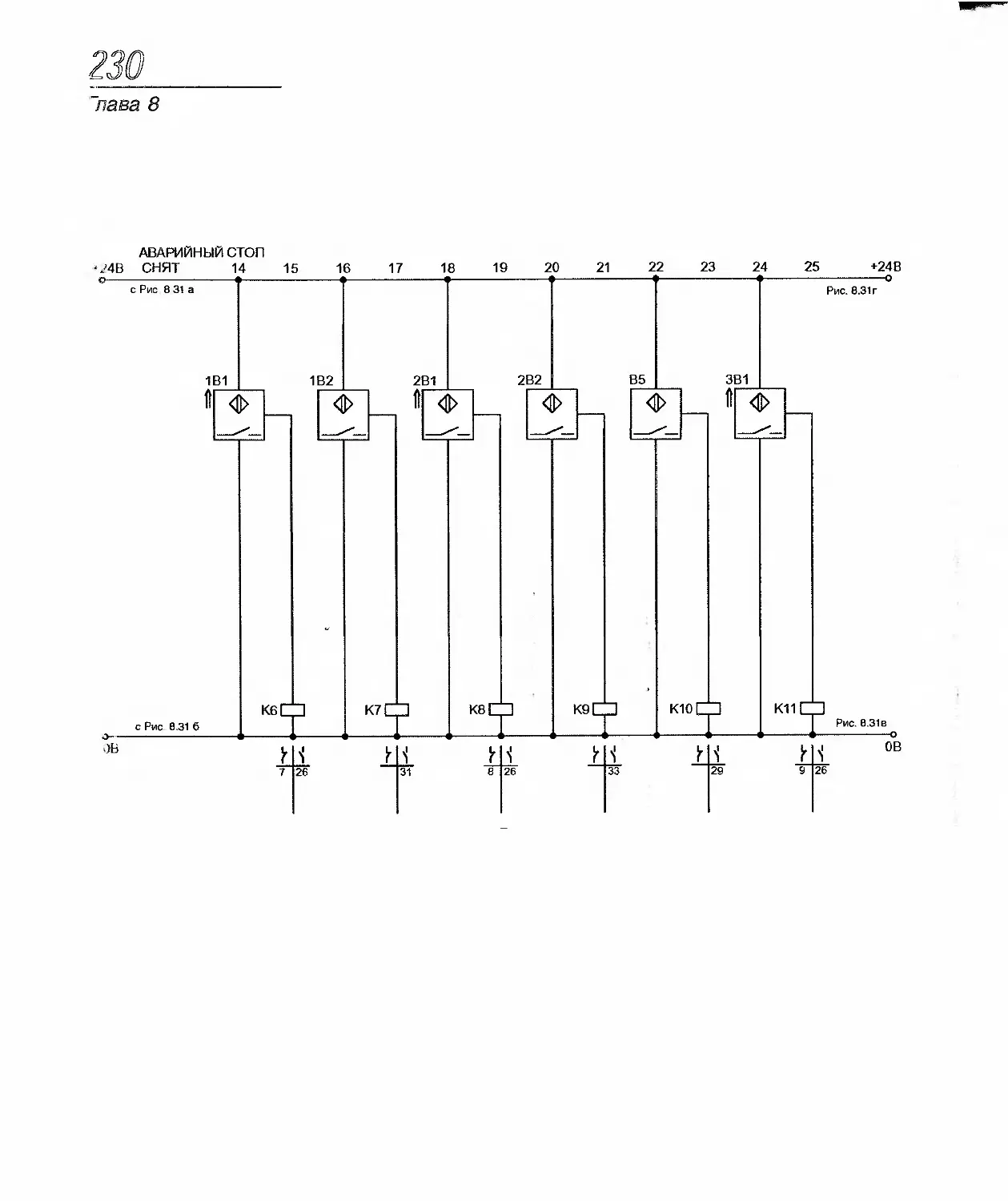
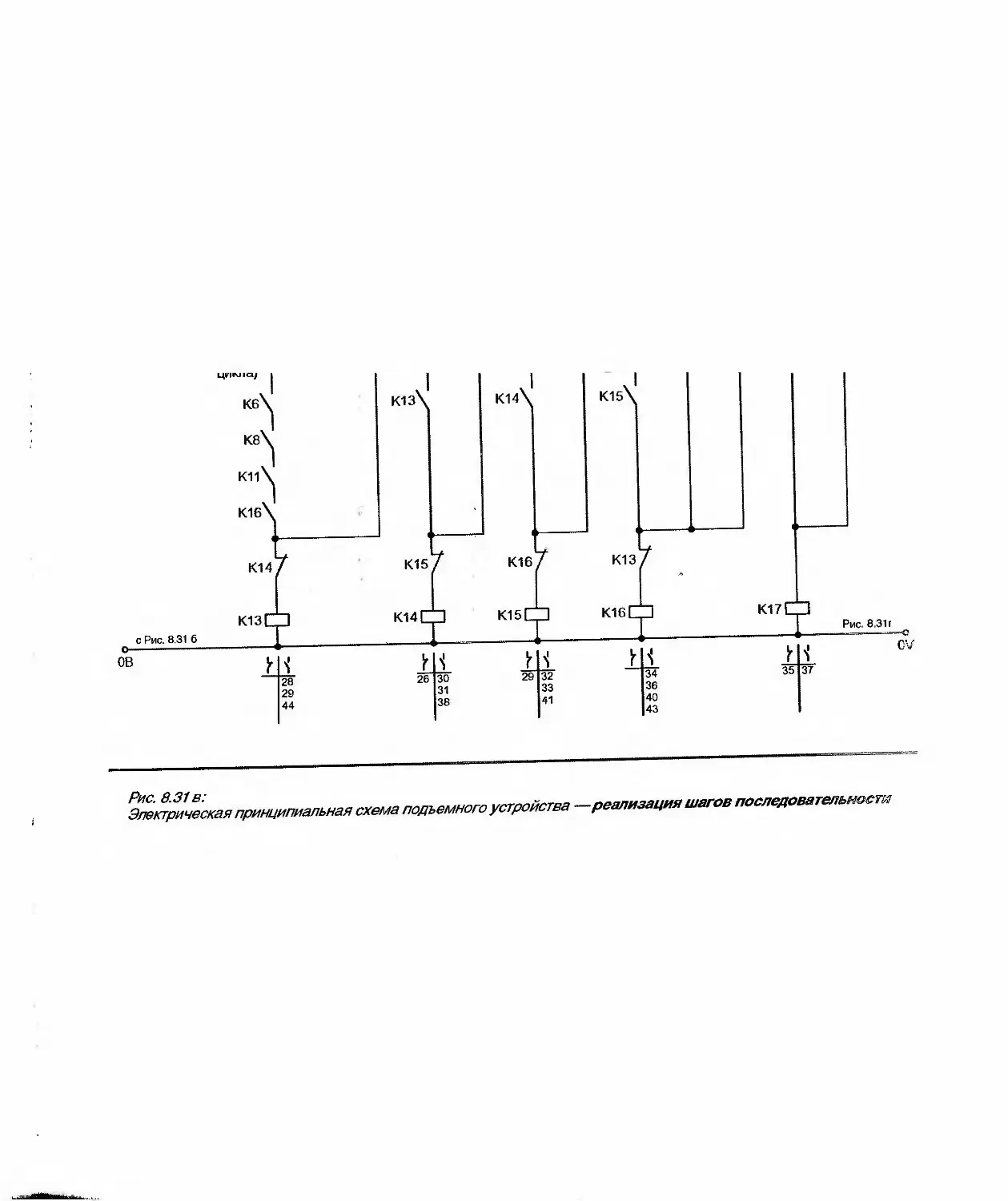
8.8 Пример применения: Управление подъемным устройством. 211
__________ J
Содержание
Глава 9 — Современные электропневматические системы
управления..............................................235
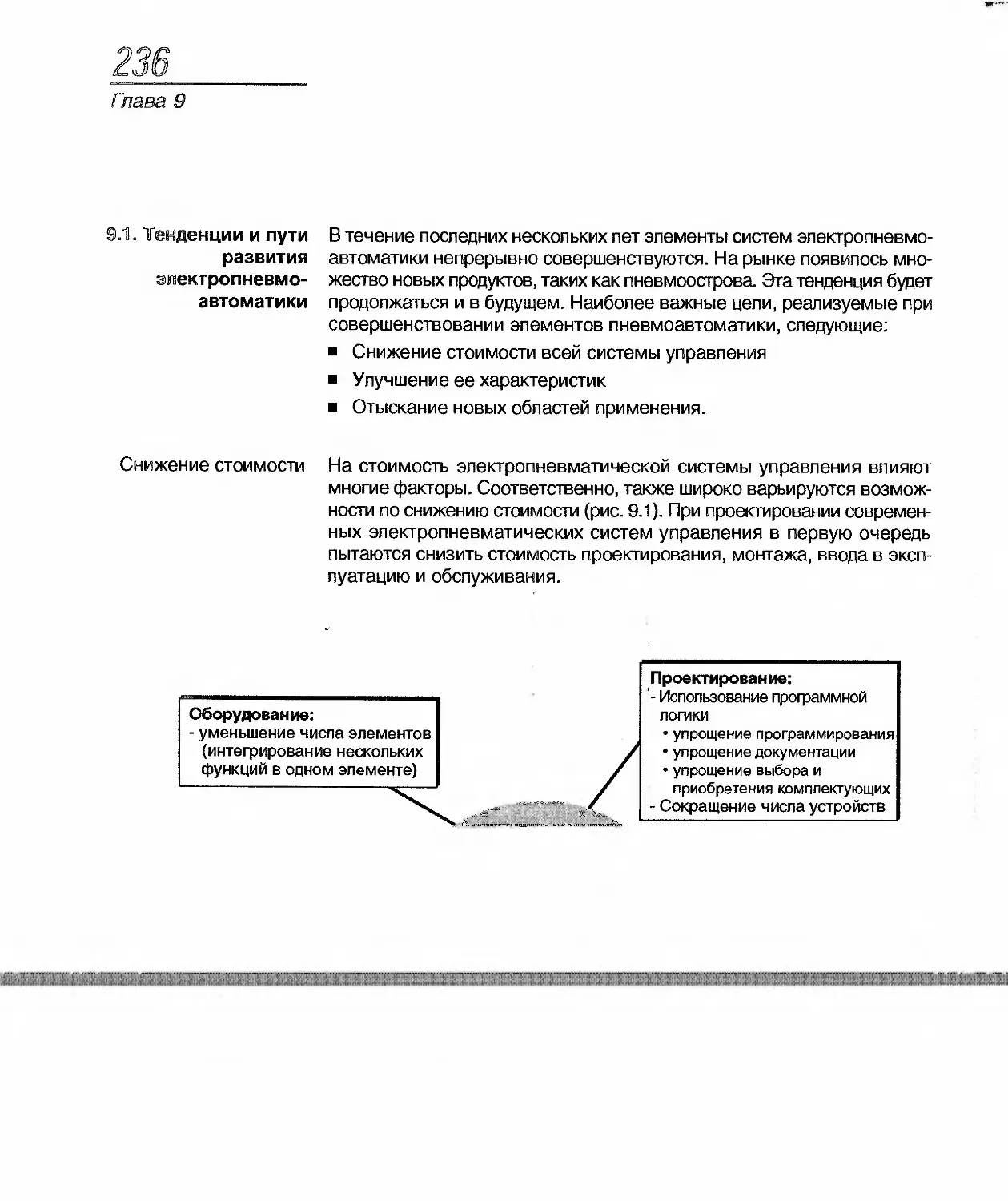
9.1 Тенденции и пути развития
электропневмоавтоматики...........................236
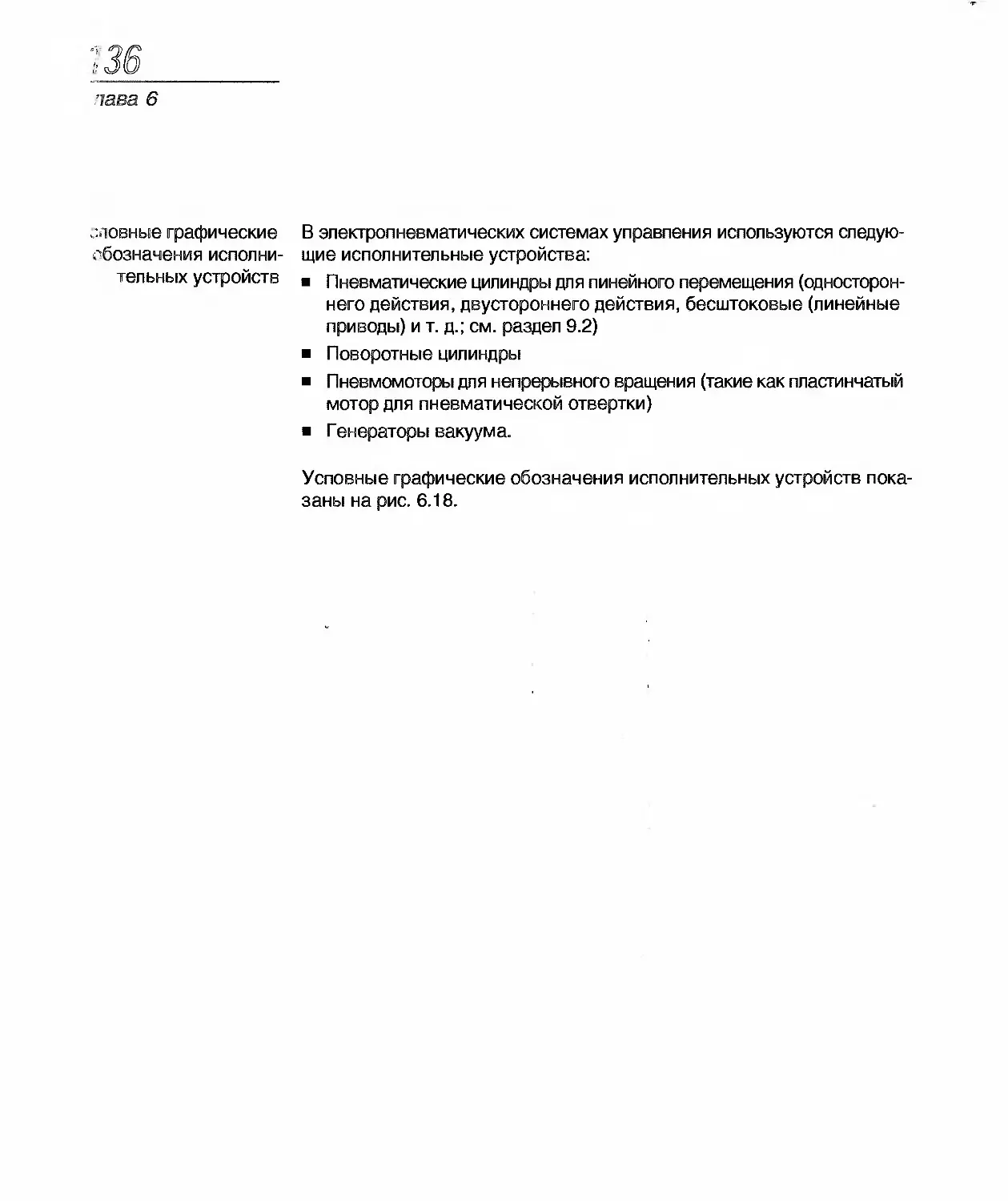
9.2 Пневматические исполнительные устройства.........237
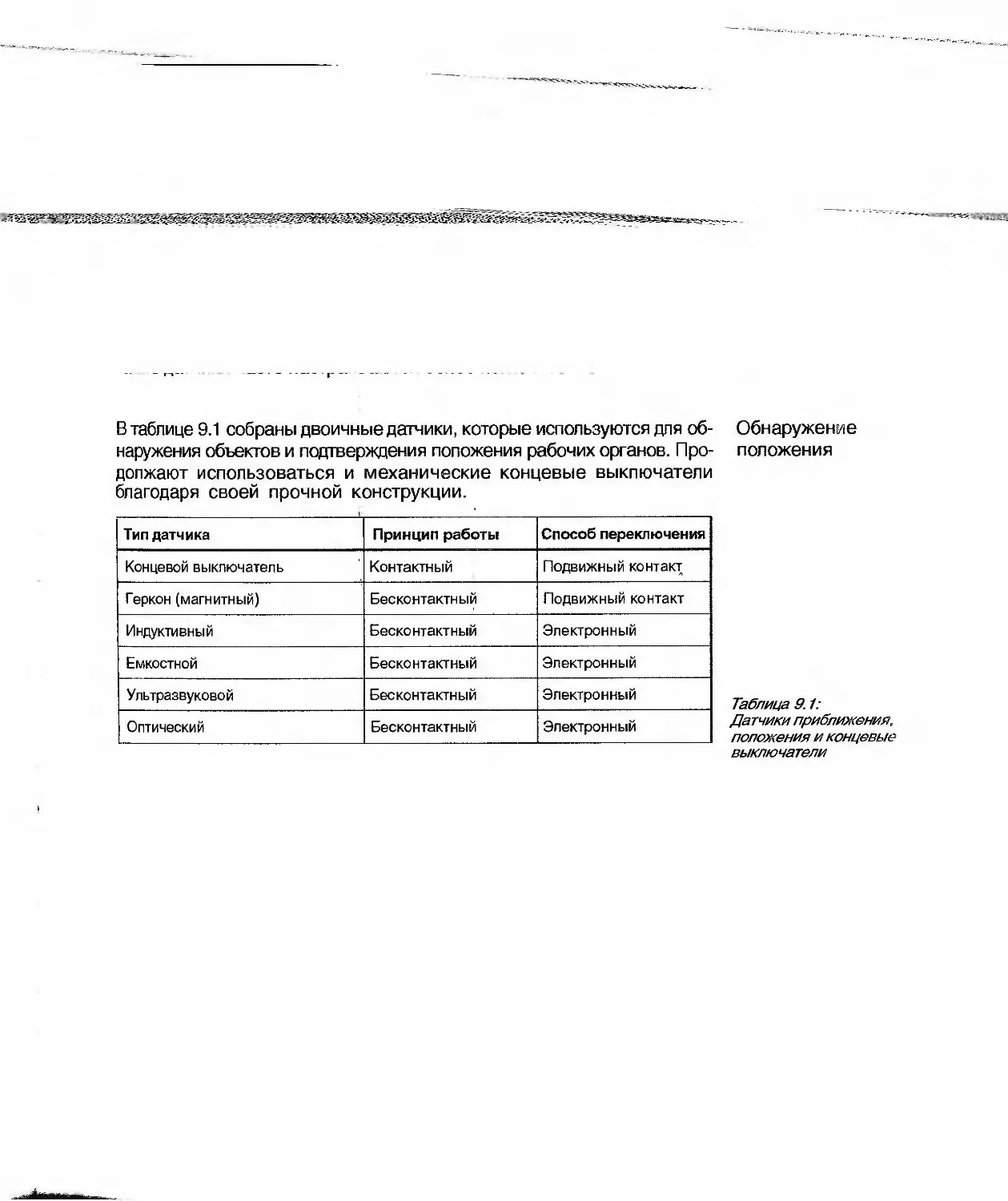
9.3 Датчики..........................................245
9.4 Обработка сигналов...............................246
9.5 Распределители...................................247
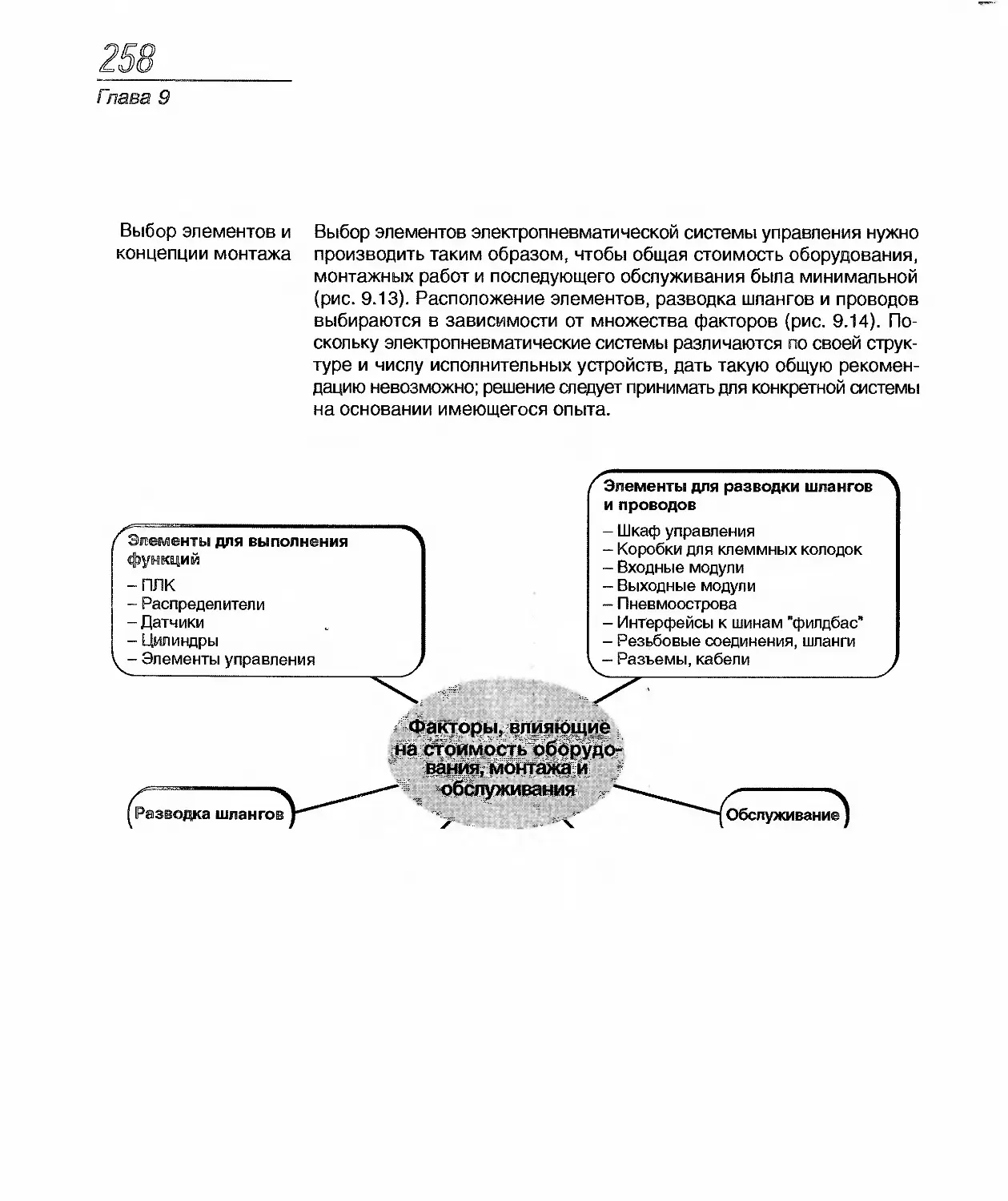
9.6 Современные концепции монтажа....................251
9.7 Уменьшение числа трубопроводов. ,............ . 261
9.8 Уменьшение числа электропроводов.................261
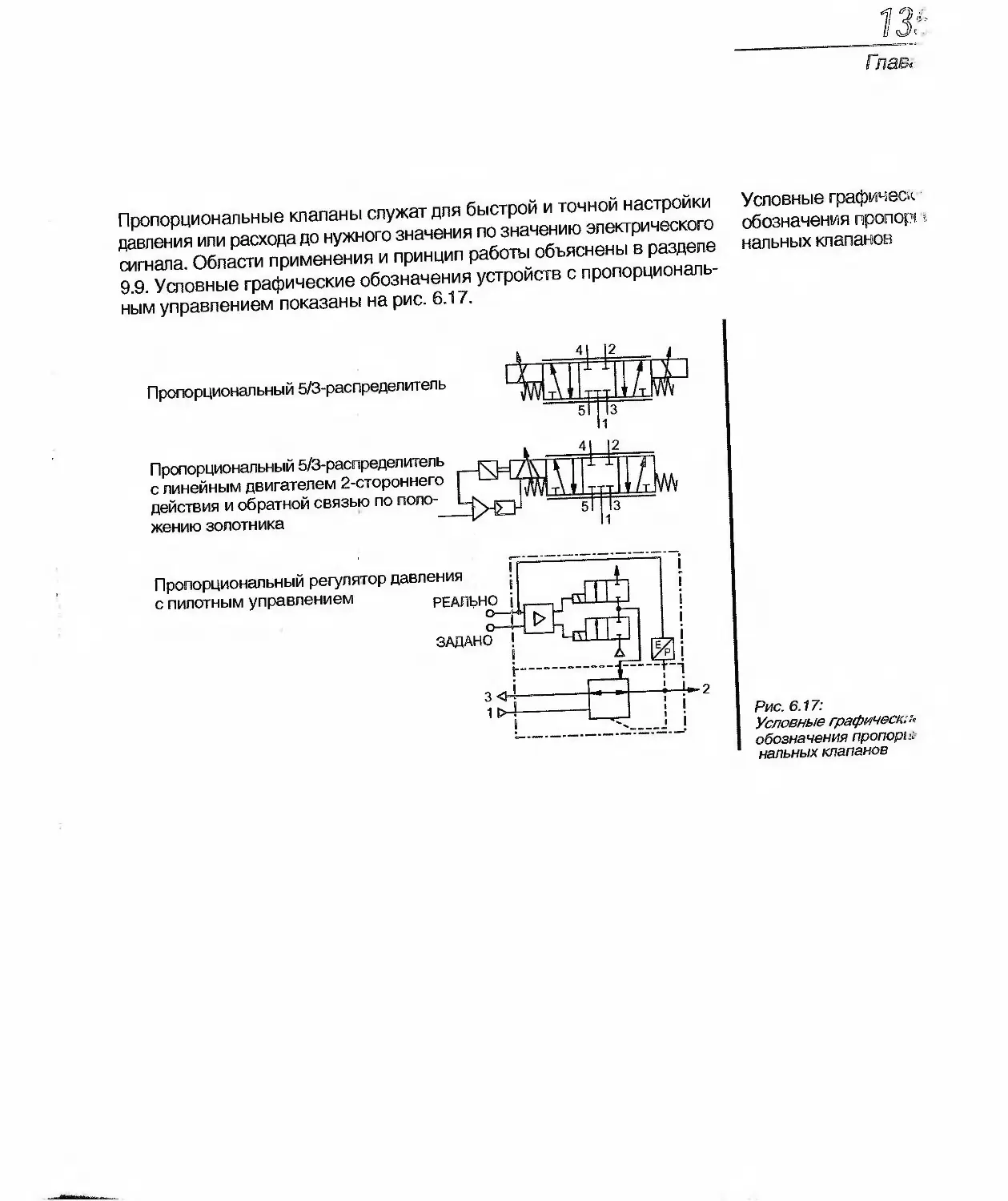
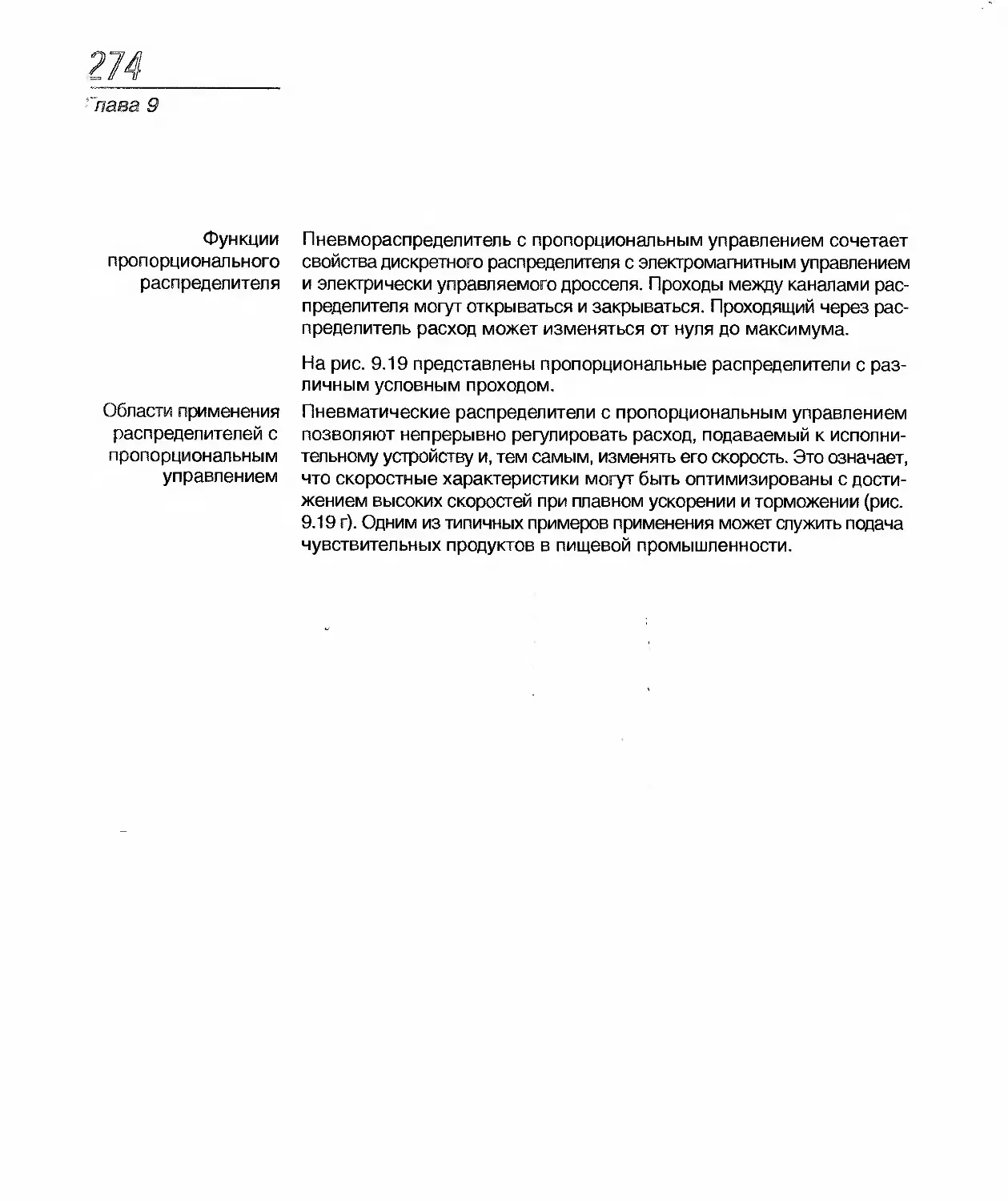
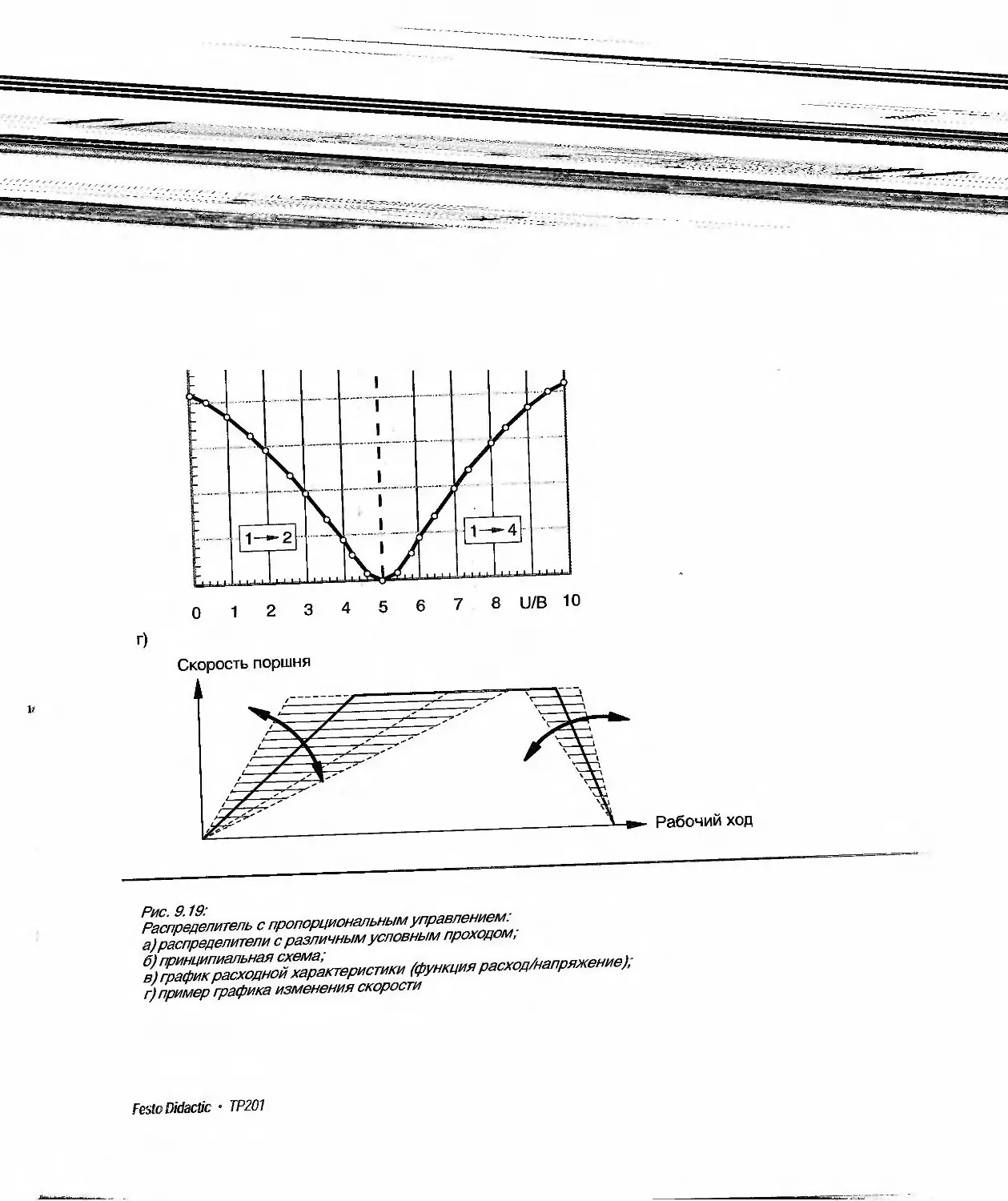
9.9 Пропорциональная пневматика......................270
Приложение..............................................279
Индекс .................................................281
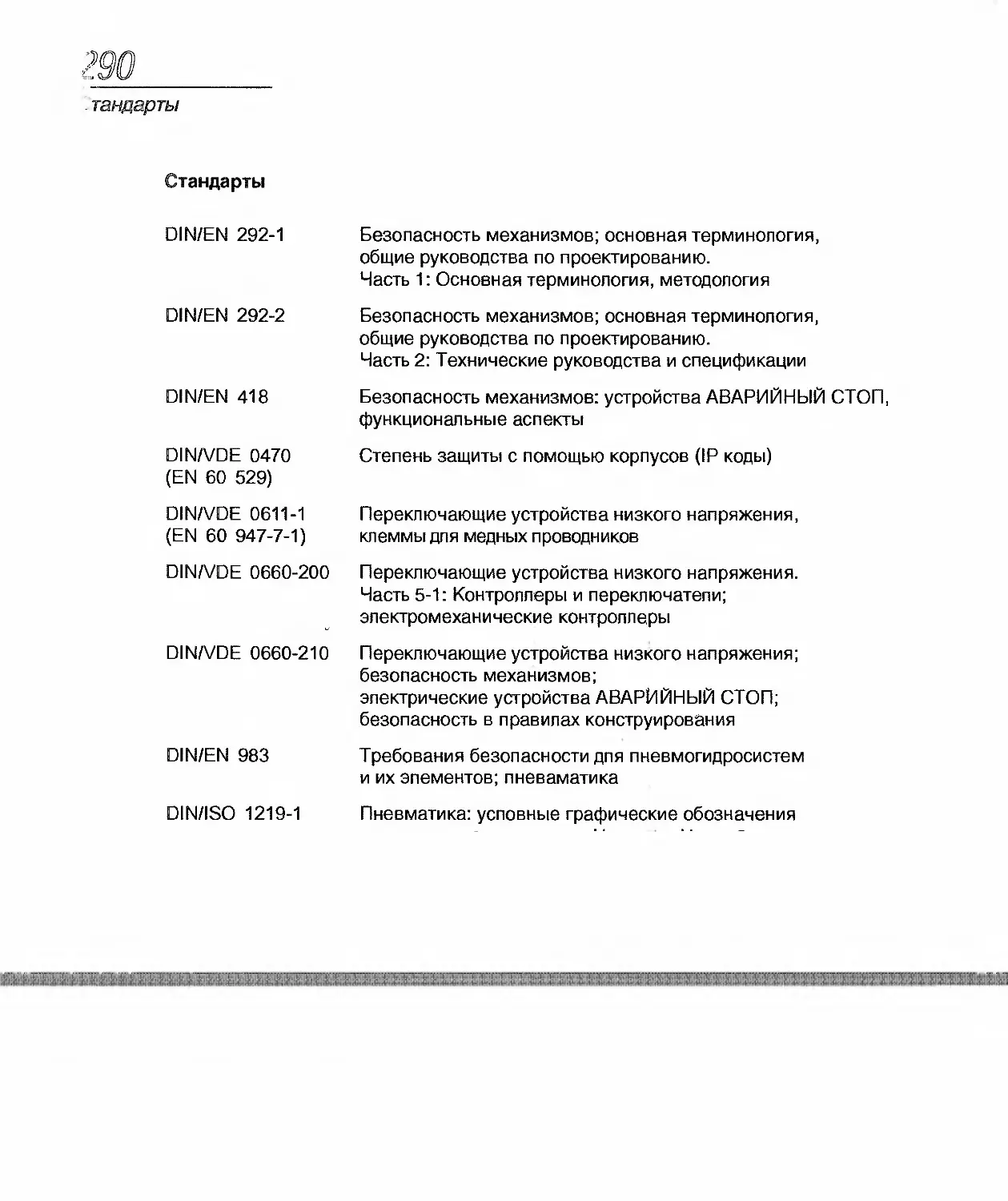
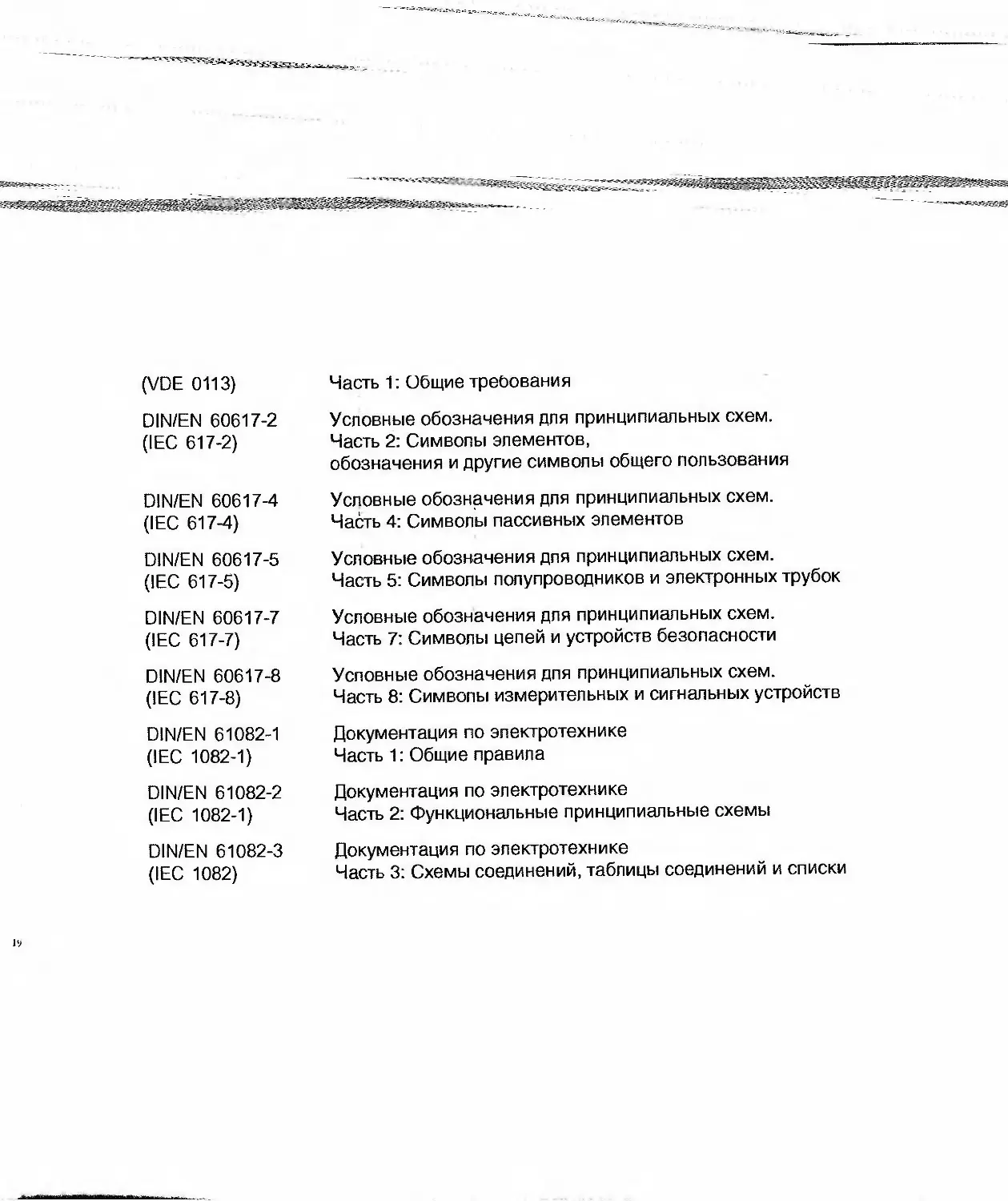
Стандарты...............................................290
4
i предисловие
Предисловие
Электропневмоавтоматика уже многие годы успешно используется во многих
отраслях промышленности. Во всем миру машины и системы по производству
различной продукции, сборке и упаковке реализованы наэлементах электро-
пневмоавтоматики.
Изменения в требованиях к технологическому оборудованию и технический
прогресс заметно сказались на системах управления. В части обработки сиг-
налов релейные системы все больше вытесняются свободно программируе-
мыми контроллерами, которые лучше соответствуюттребованиям гибкости.
Чтобы лучше удовлетворить потребности современной промышленной
практики, новые концепции внедрены и в исполнительную часть. Примерами
этому могут служить пневмоострова, шинная технология в управлении и
пропорциональная пневматика.
Во вводной части учебника сначала будет показана структура и принцип
работы отдельных устройств, входящих в электропневматические системы.
Вгоследующих главах на реальных примерах будет показан подход к проек-
тированию таких систем и их вводу в эксплуатацию. И, наконец, в последней
главе будет рассказано о тенденциях развития электропневмоавтоматики.
Мы приветствуем любые ваши комментарии поданной книге и обязательно
рассмотрим ваши предложения и идеи по ее улучшению.
Ноябрь, 1997
Авторы
Глава
Г лава 1
Введение
"нава 1
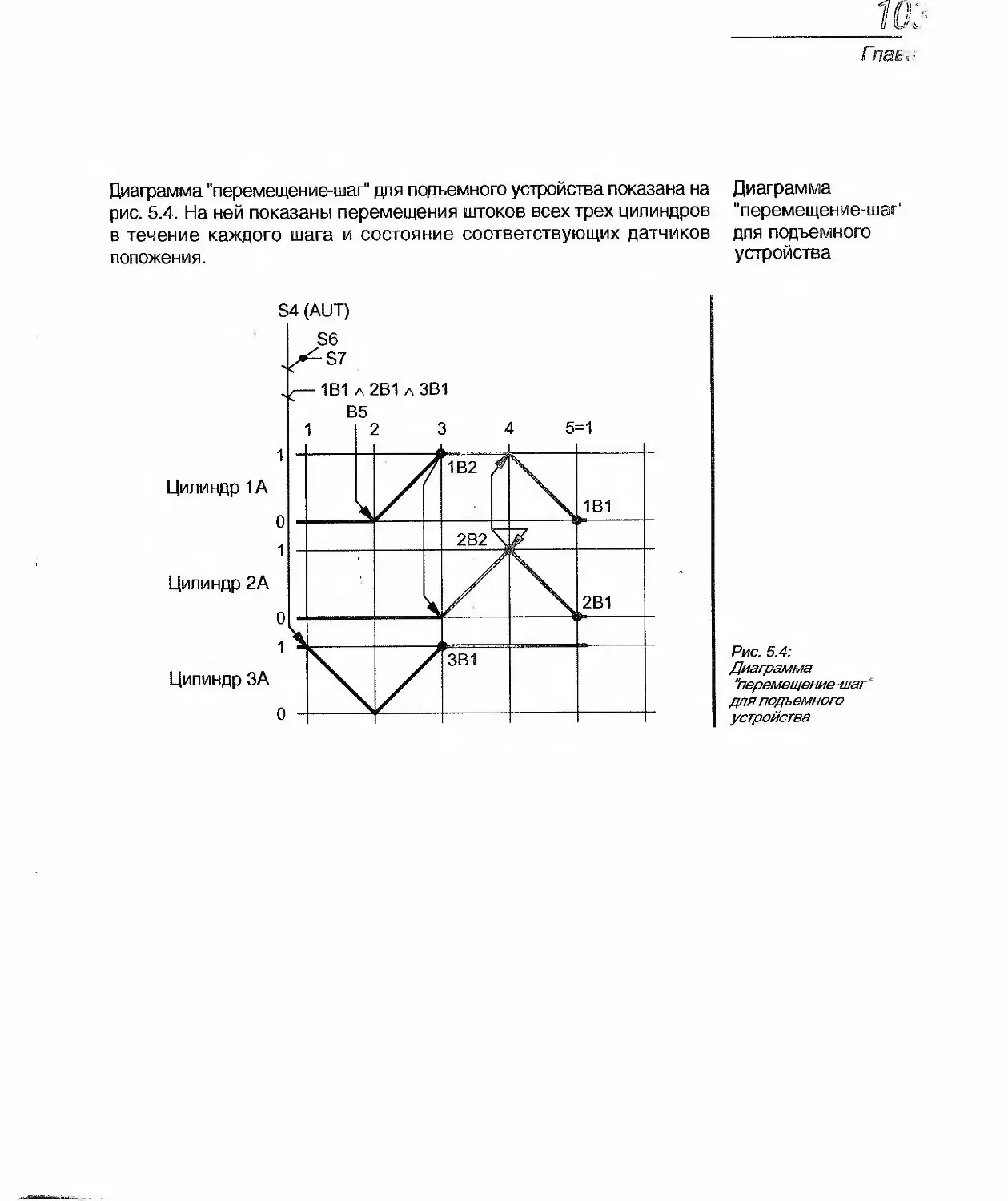
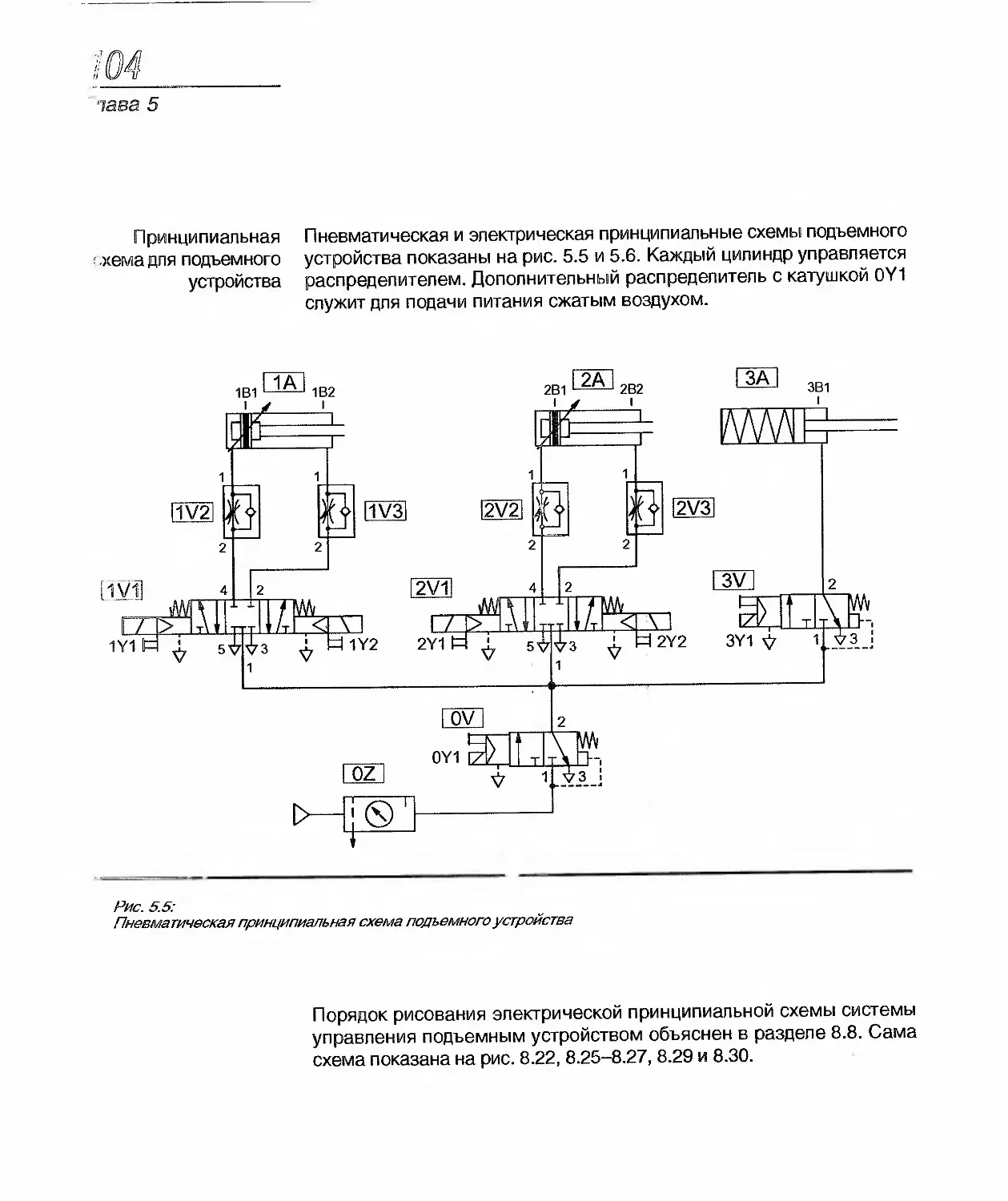
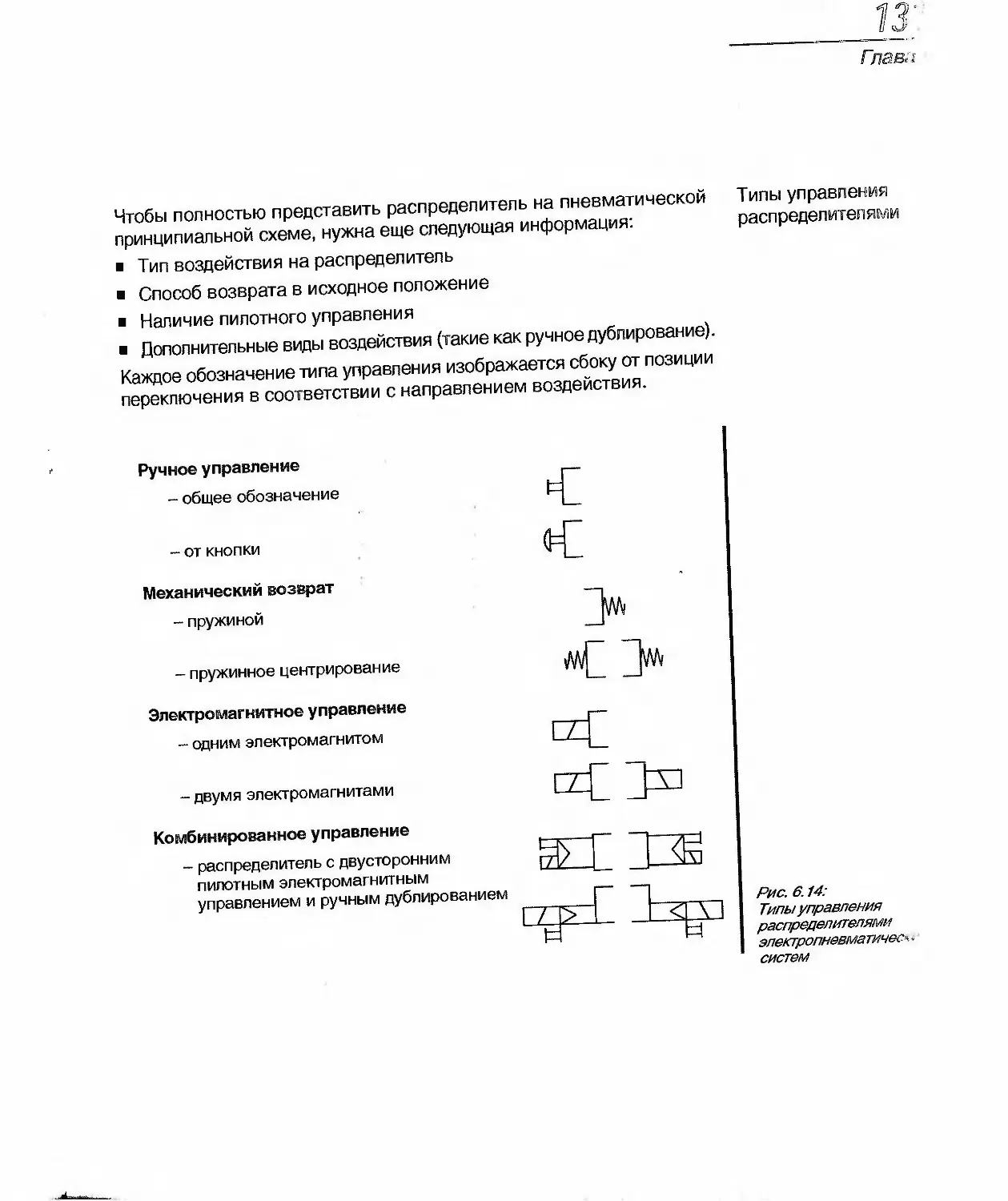
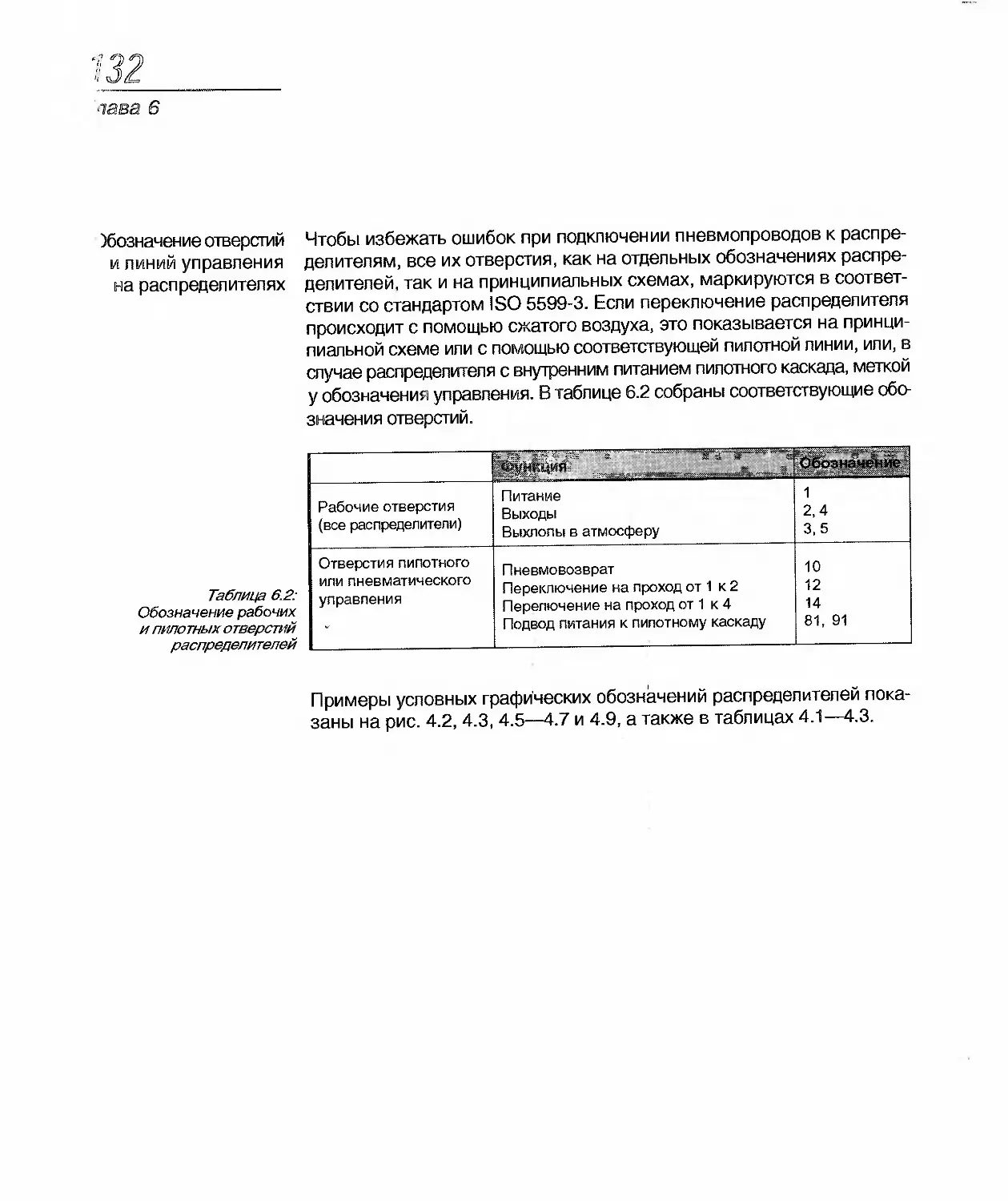
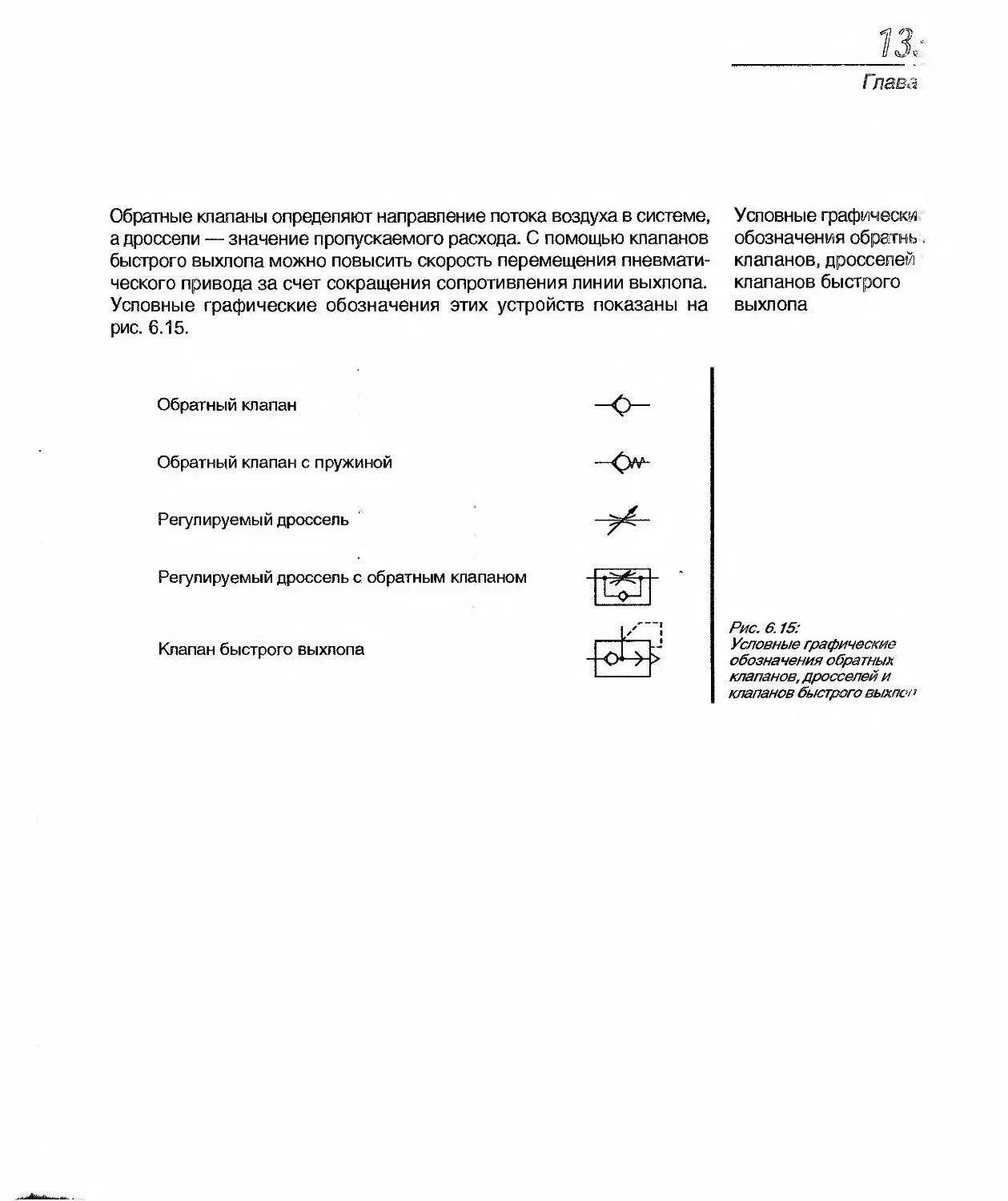
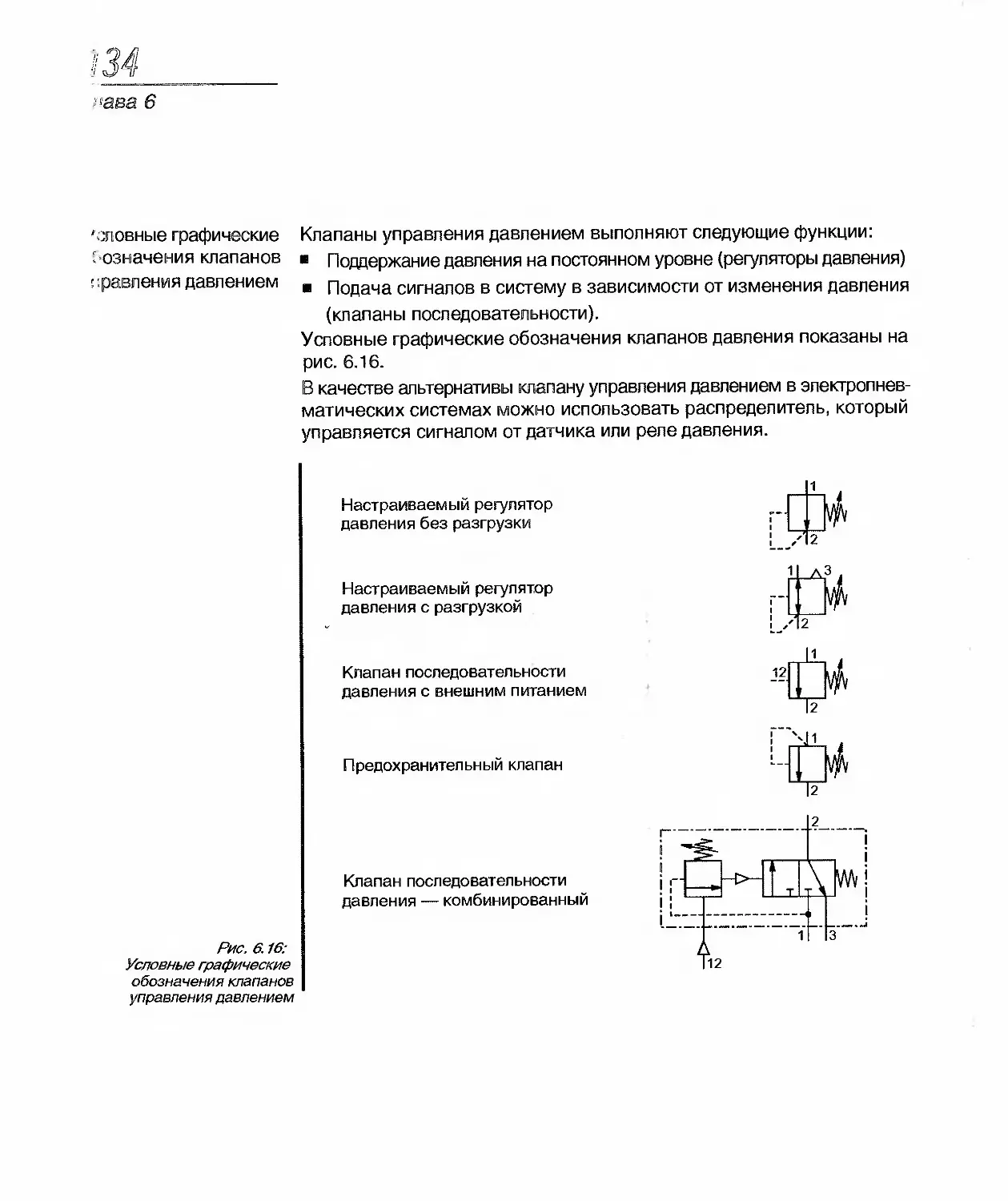
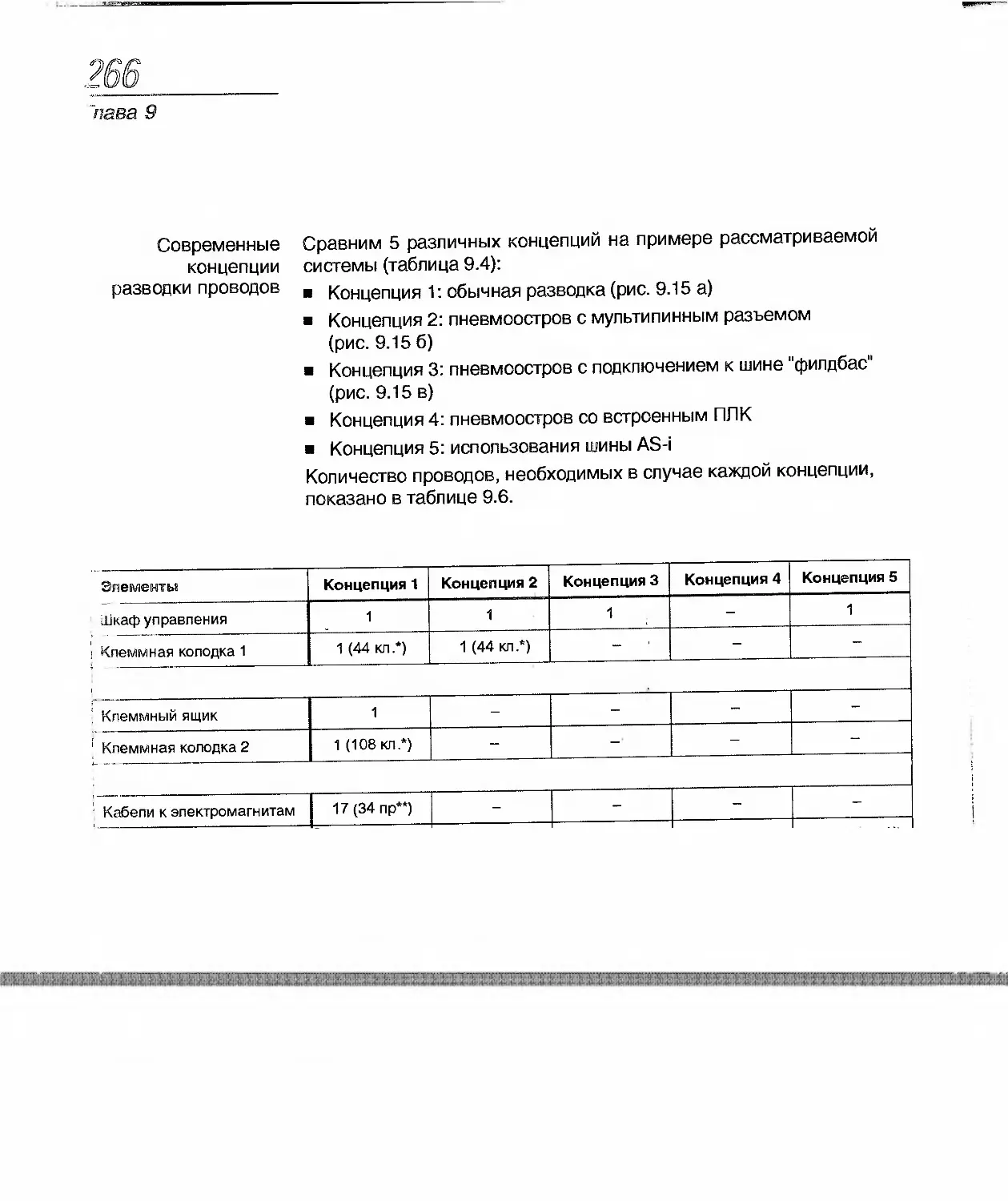
Применение
пневматики
Пневматика — это область техники, использующая сжатый воздух. Более
точно, сжатый воздух используется для выполнения механической работы —
то есть для производства перемещения и развития усилия. Пневматические
приводы имеют задачу преобразовать энергию, содержащуюся в сжатом
воздухе, в движение.
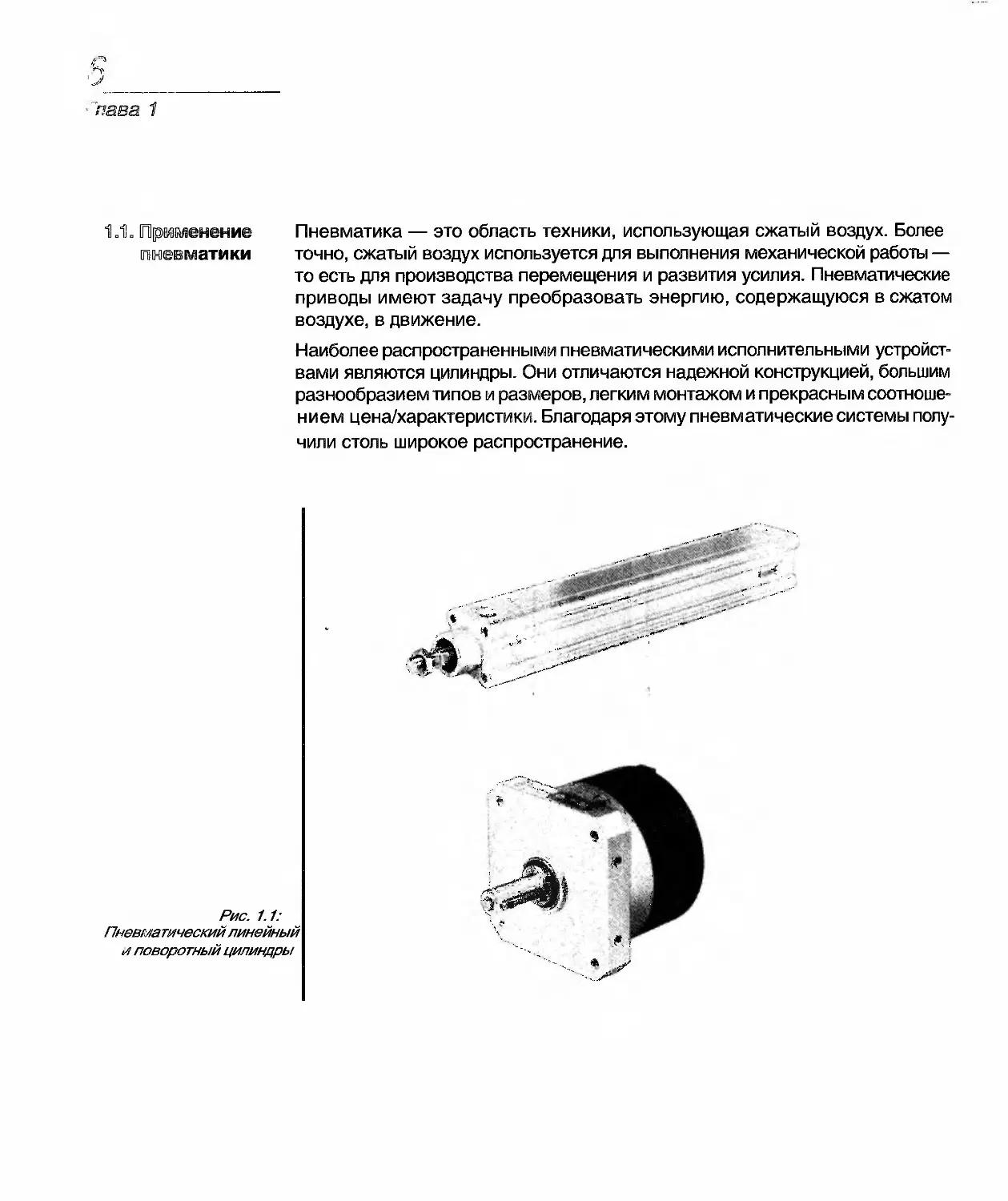
Наиболее распространенными пневматическими исполнительными устройст-
вами являются цилиндры. Они отличаются надежной конструкцией, большим
разнообразием типов и размеров, легким монтажом и прекрасным соотноше-
нием цена/характеристики. Благодаря этому пневматические системы полу-
чили столь широкое распространение.
Рис. 1.1:
Пневматический линейный
и поворотный цилиндры
Гпаи
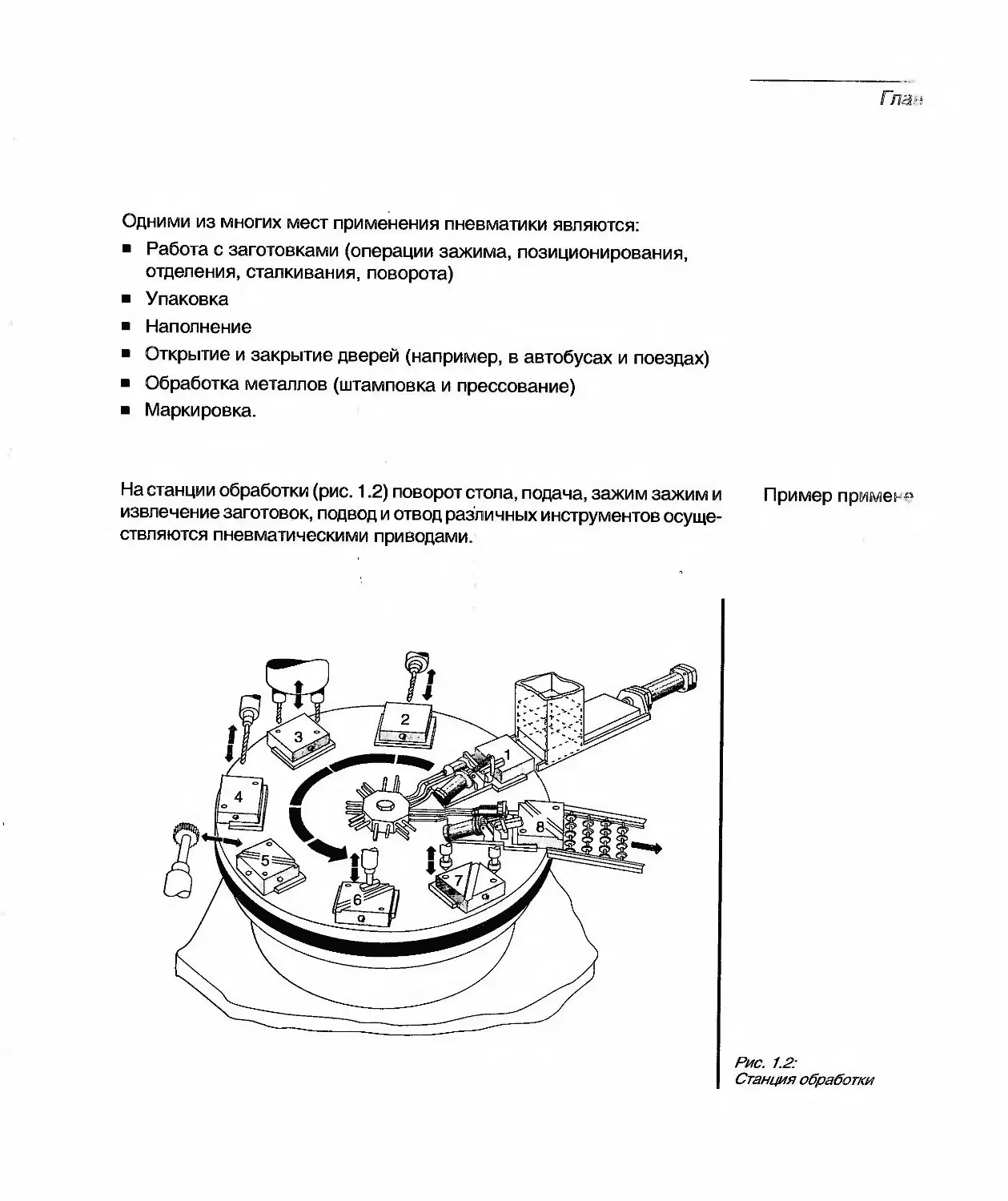
Одними из многих мест применения пневматики являются:
Работа с заготовками (операции зажима, позиционирования,
отделения, сталкивания, поворота)
Упаковка
Наполнение
Открытие и закрытие дверей (например, в автобусах и поездах)
Обработка металлов (штамповка и прессование)
Маркировка.
На станции обработки (рис. 1.2) поворот стола, подача, зажим зажим и
извлечение заготовок, подвод и отвод различных инструментов осуще-
ствляются пневматическими приводами.
Пример примен и
Рис. 1.2:
Станция обработки
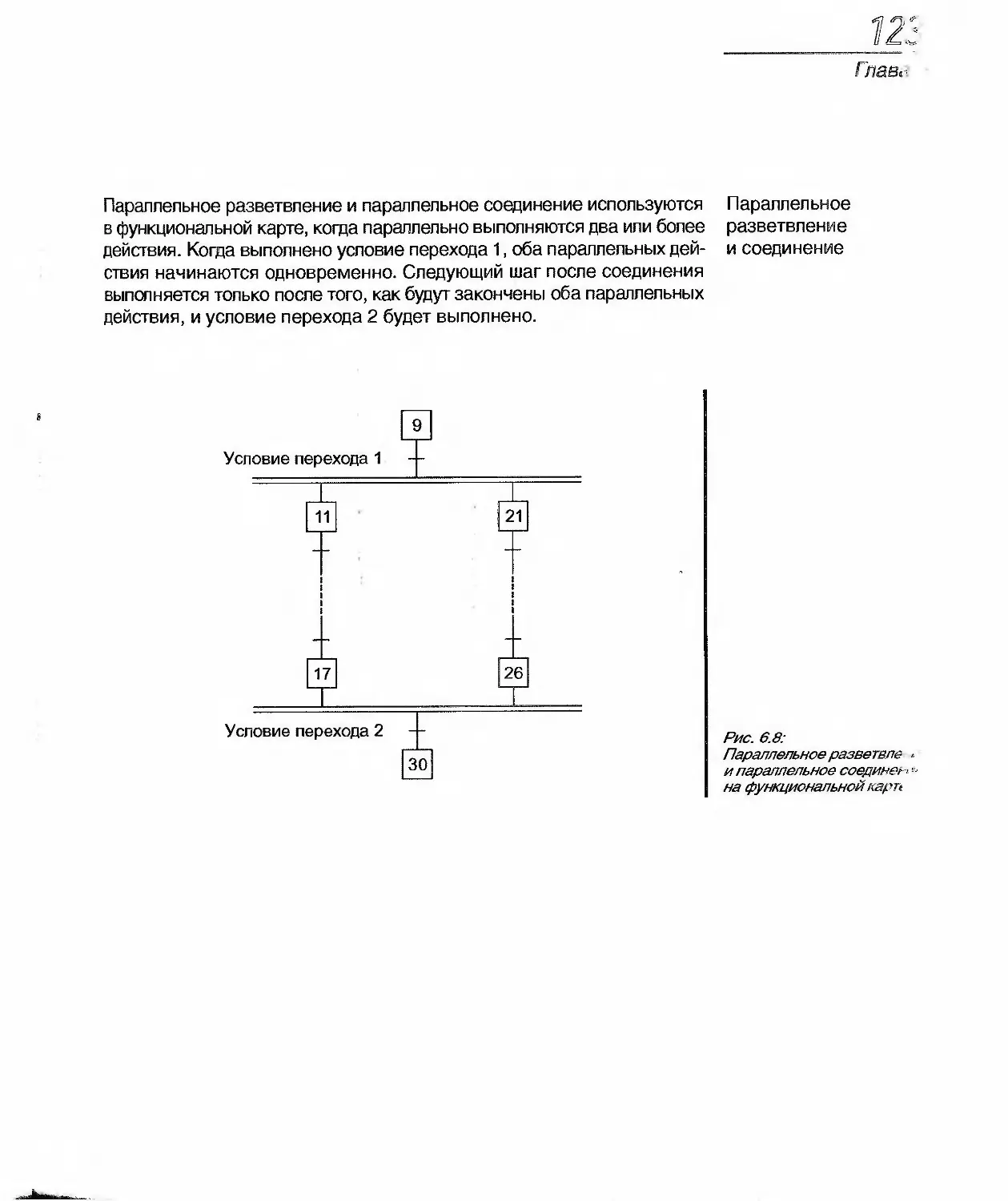
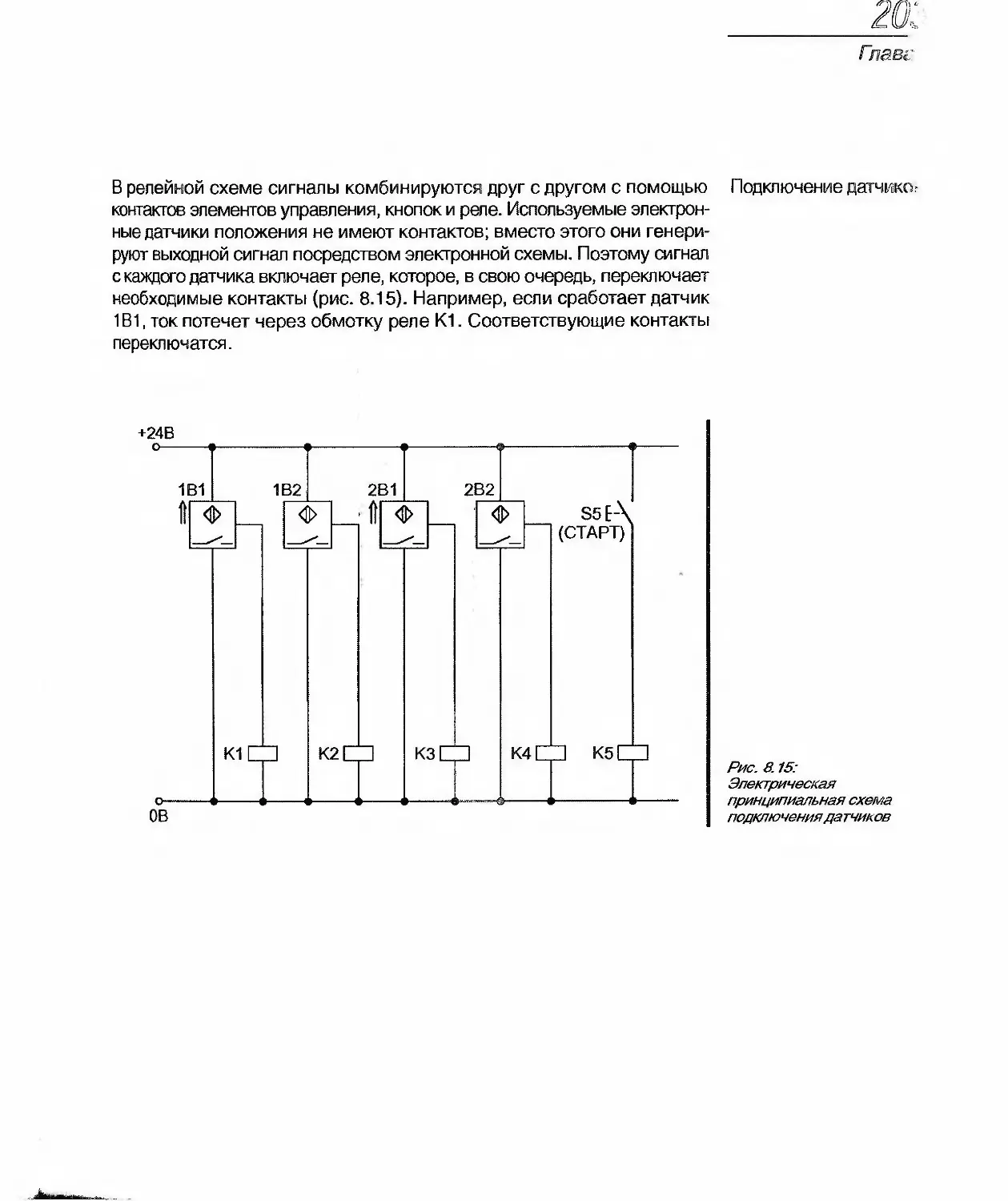
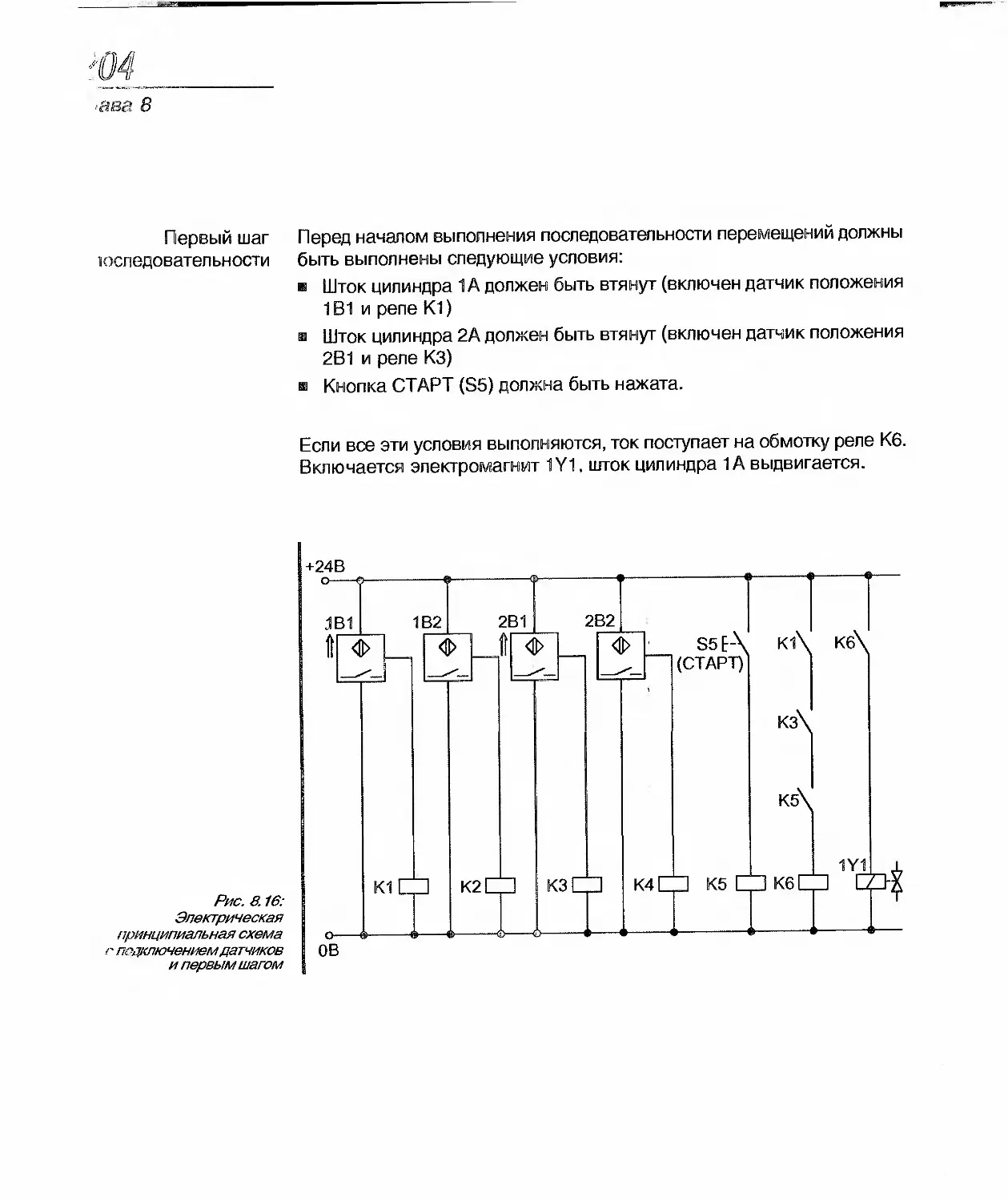
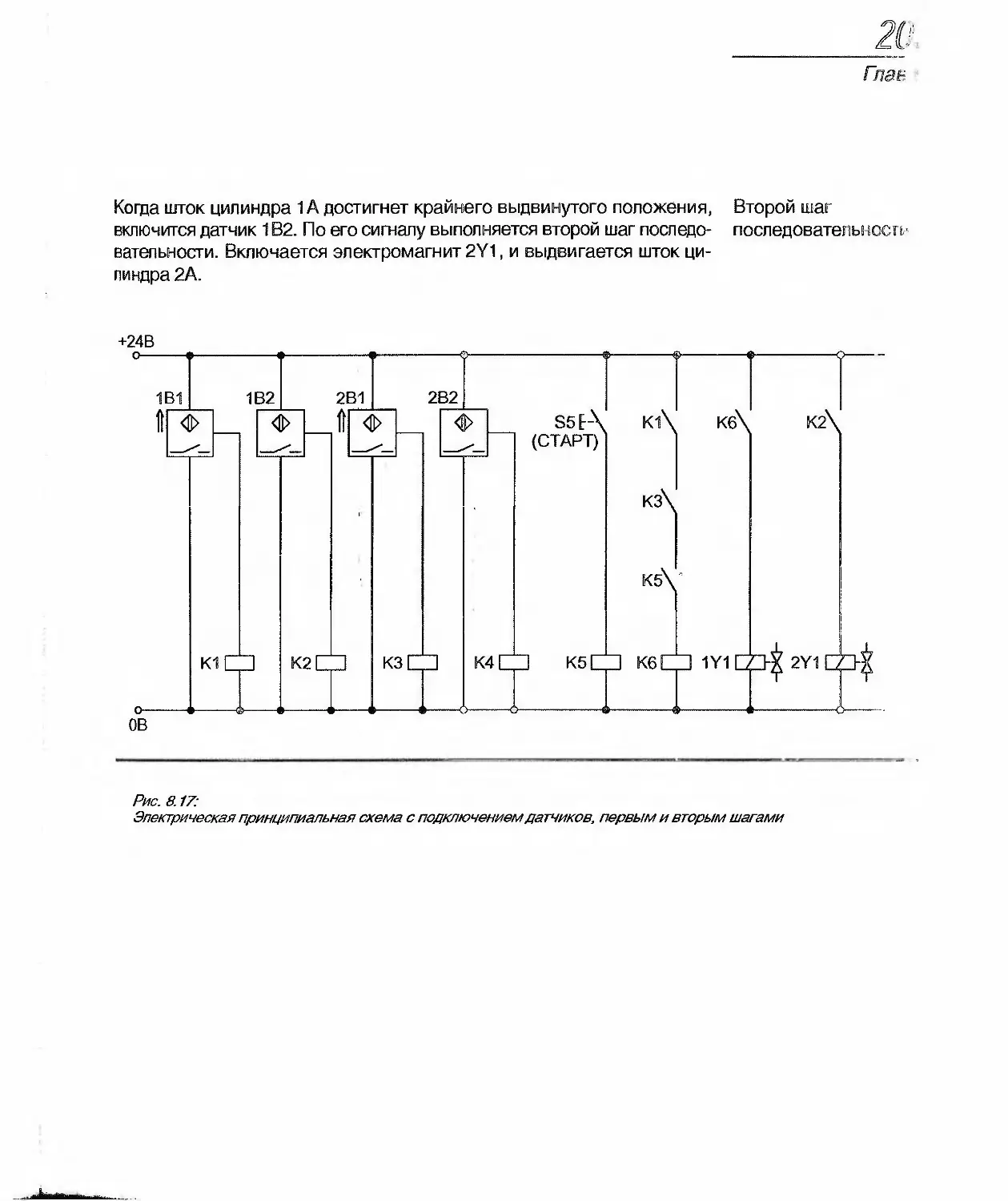
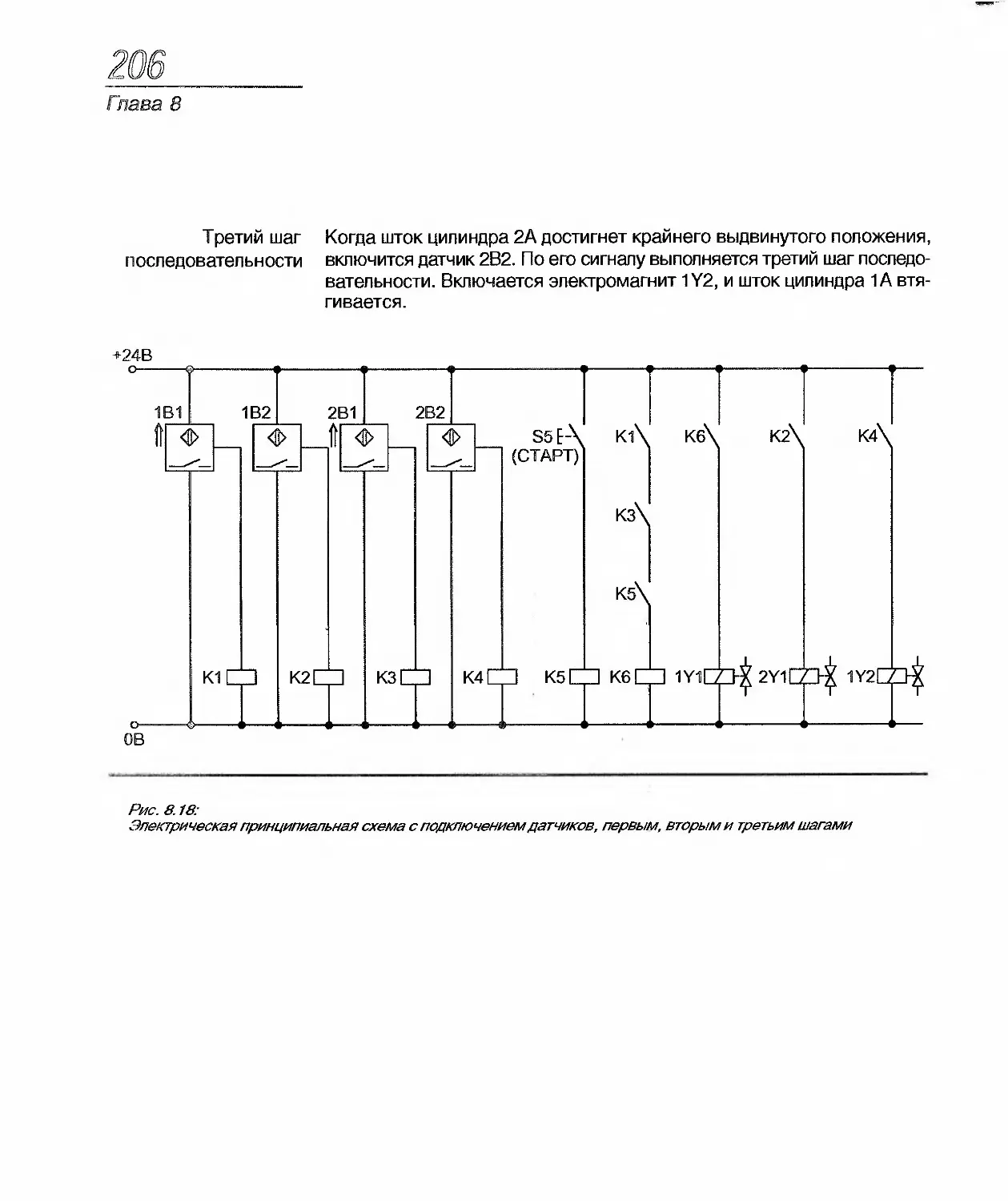
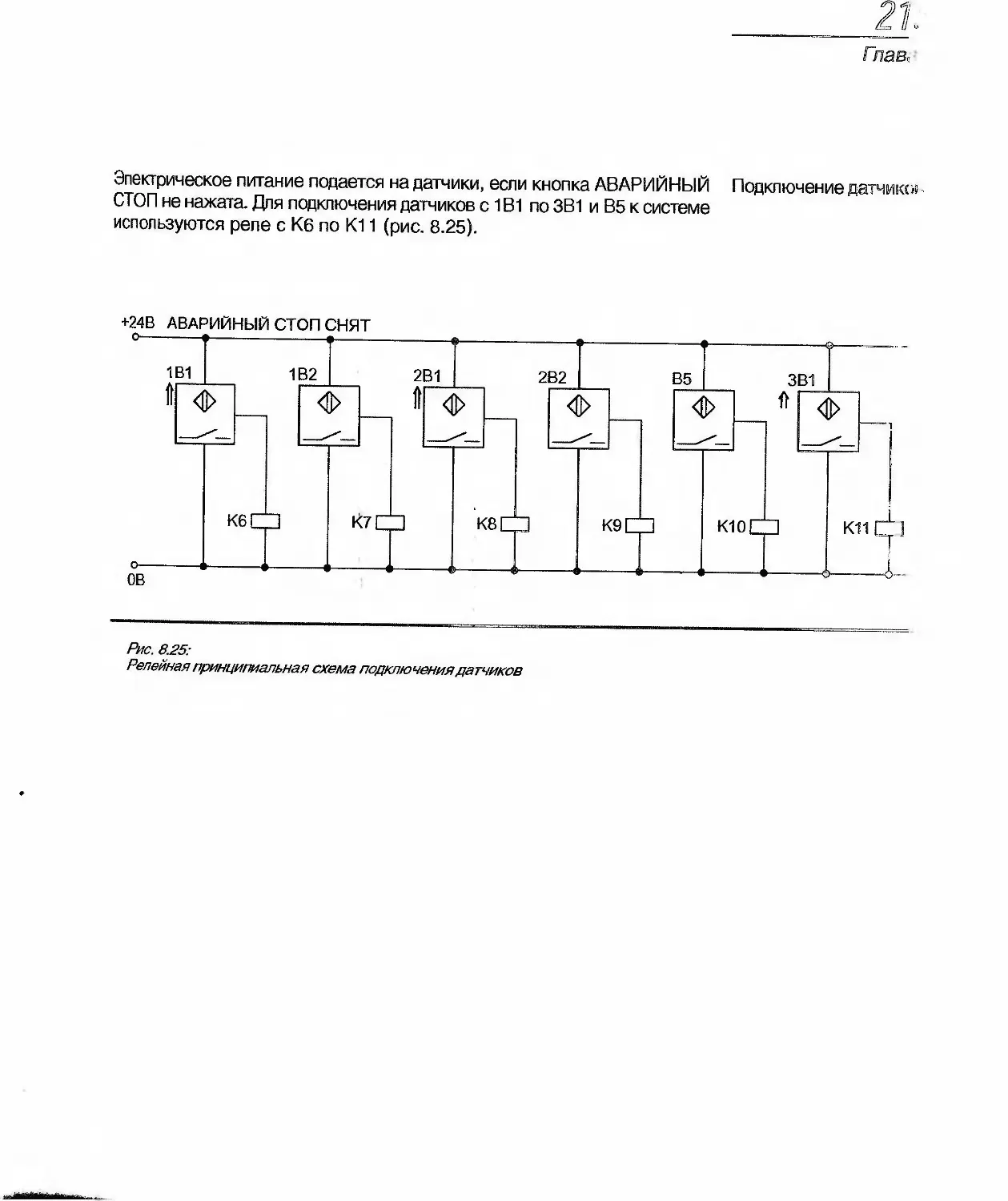
ановньне термины техники управления Работа, выполняемая пневматическими приводами, будет полезной только в том случае, если их перемещения точны и выполняются в строгой последова- тельности и в нужное время. Координация последовательности перемещений является функцией системы управления. Техника управления как раз и имеет дело с проектированием систем управления. Ниже даны основные используемые технические термины.
Управление н. DIN 9226, Часть!) Управление — или управление по разомкнутому контуру—это процесс, имею- щий место в системах, когда одна или несколько переменных в виде входных сигналов оказывает влияние на другие переменные в виде выходных сигналов с помощью законов, которые характеризуют данную систему. Отличительной особенностью управления по разомкнутому контуру является открытая по- следовательность действий через отдельные передаточные элементы в це- почке управления. Термин "управление по разомкнутому контуру" широко используется не только для описания отдельного технологического процесса, но и для завода в целом.
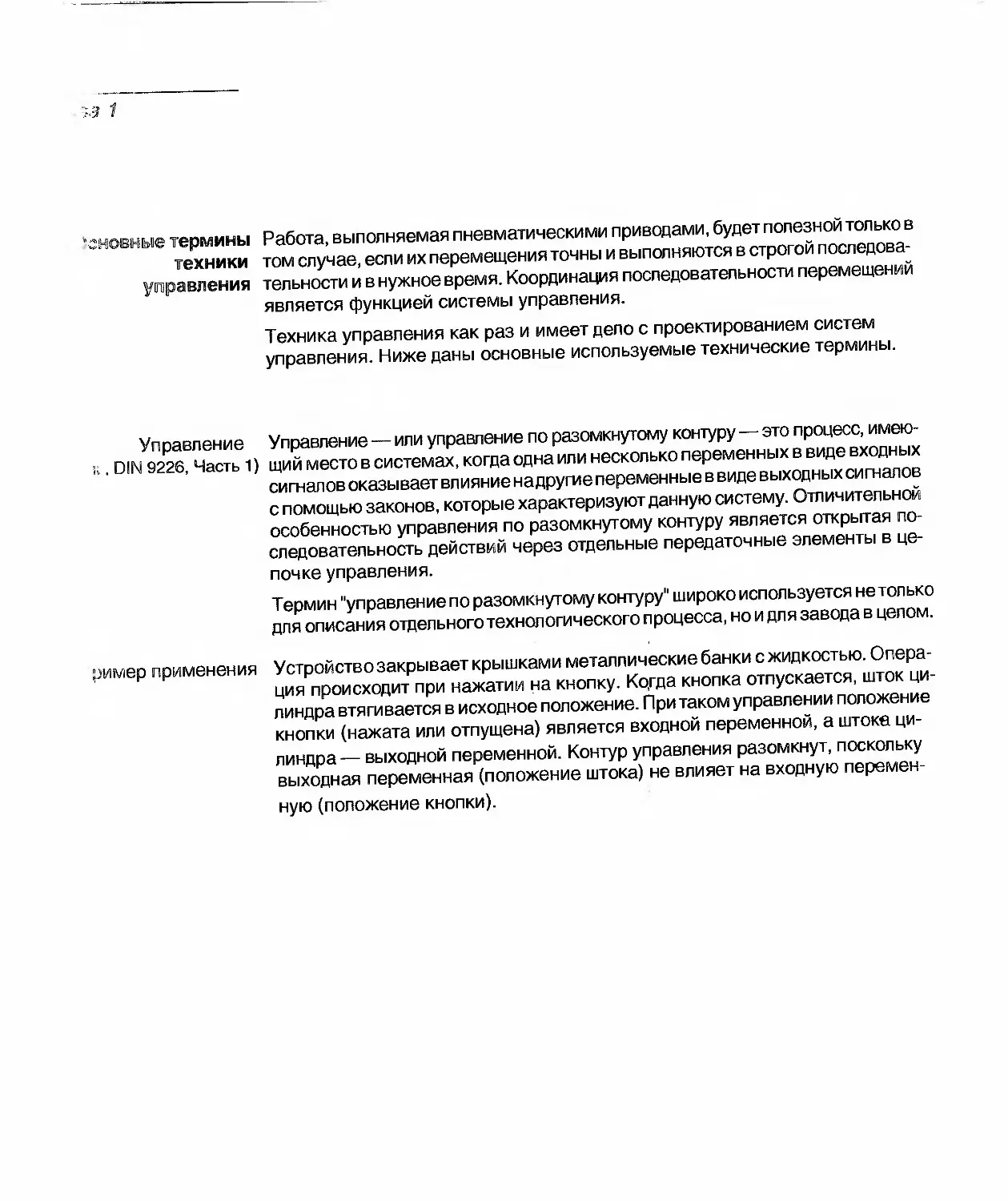
ример применения Устройство закрывает крышками металлические банки с жидкостью. Опера- ция происходит при нажатии на кнопку. Когда кнопка отпускается, шток ци- линдра втягивается в исходное положение. При таком управлении положение кнопки (нажата или отпущена) является входной переменной, а штоке ци- линдра — выходной переменной. Контур управления разомкнут, поскольку выходная переменная (положение штока) не влияет на входную перемен- ную (положение кнопки).
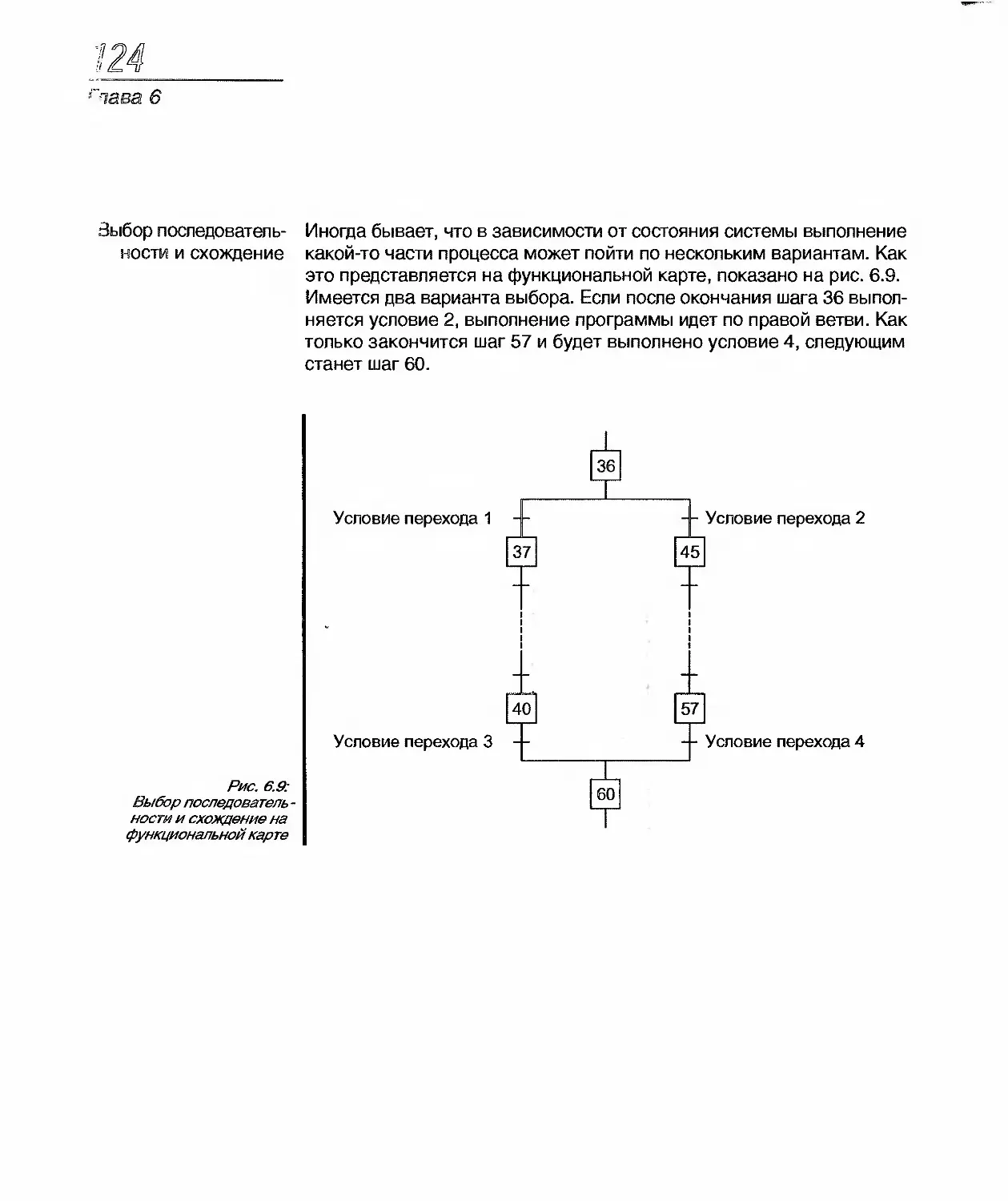
Гпавл
Рис. 1.3:
Сборочное устройство
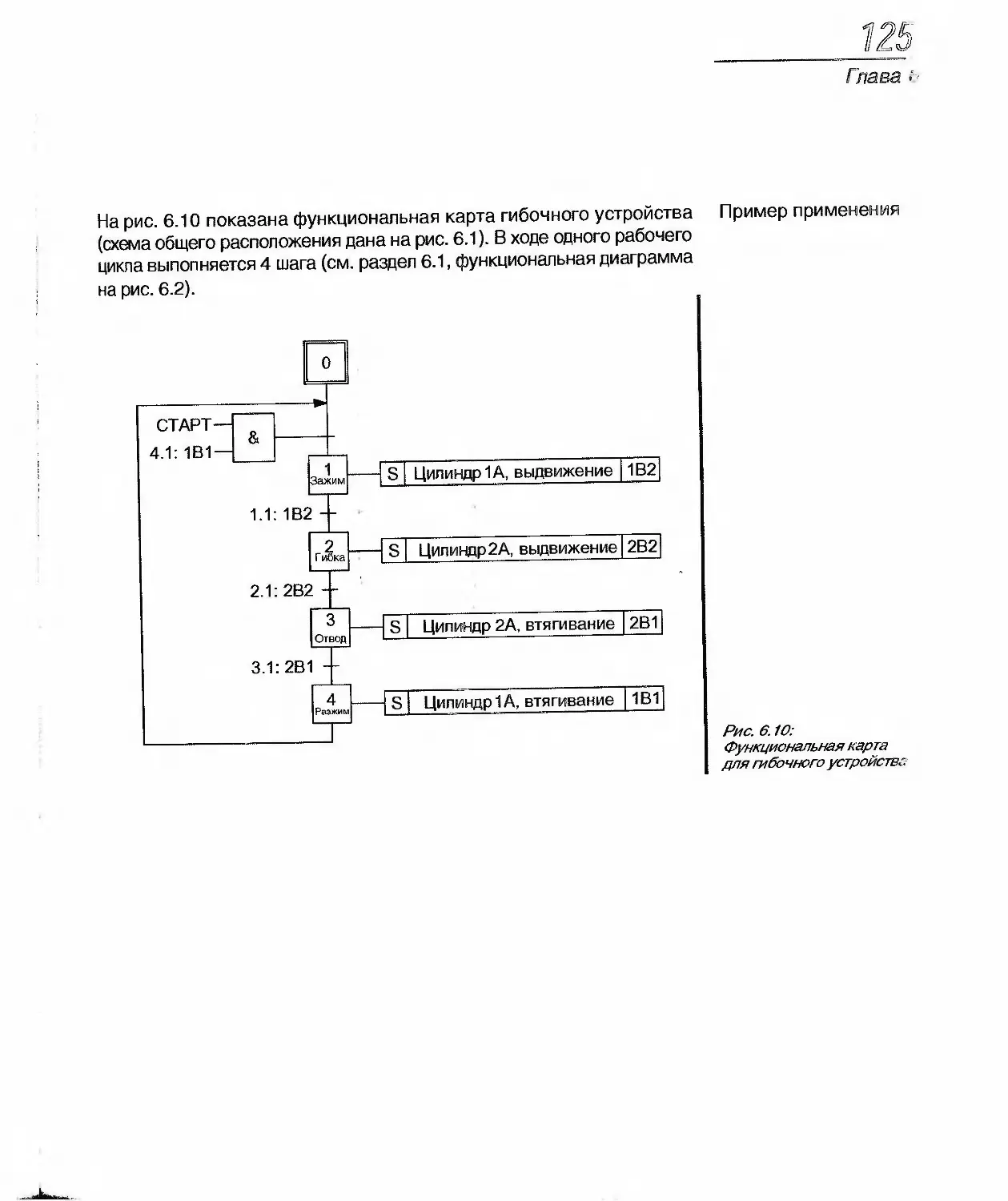
для надевания
крышек на банки
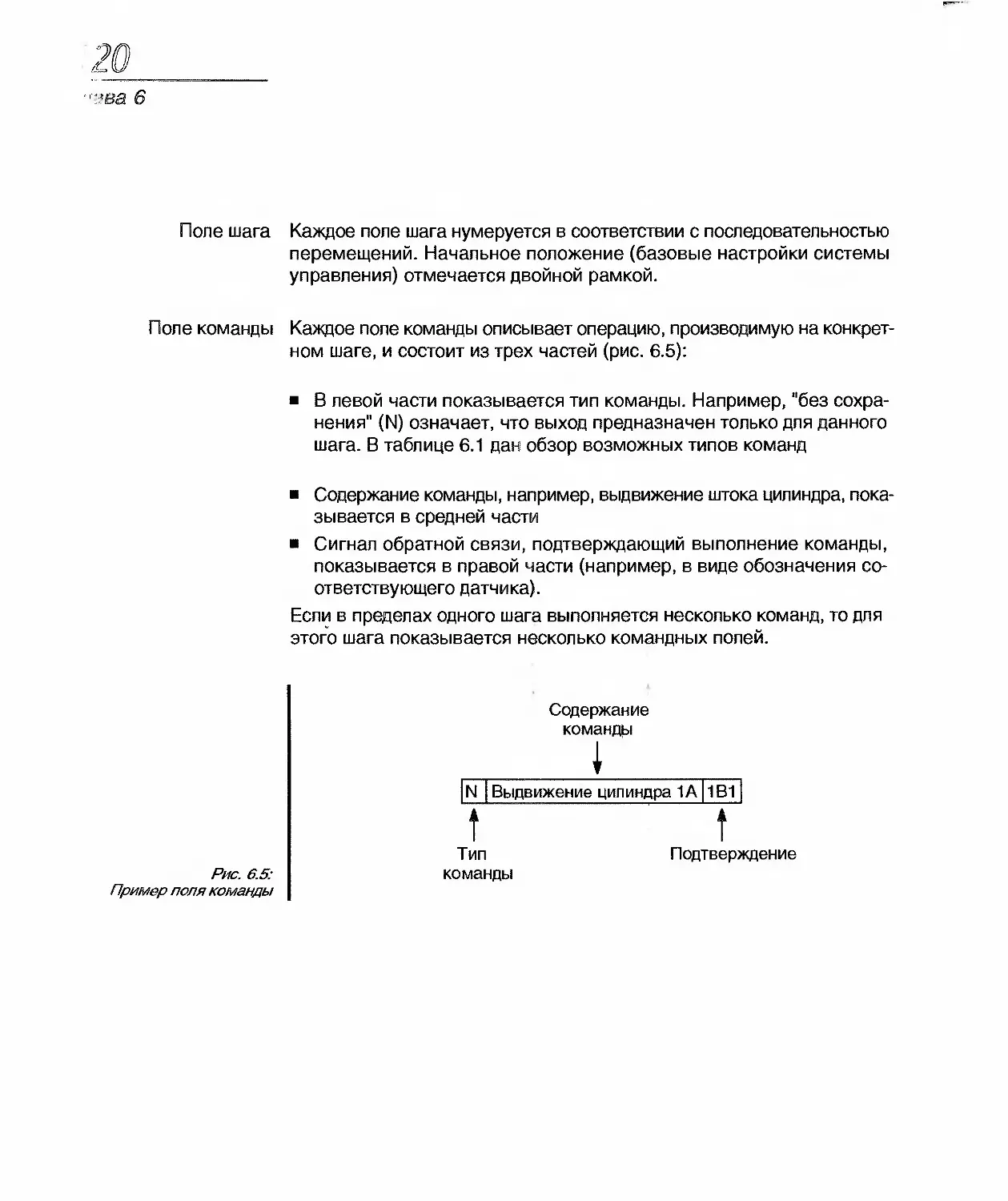
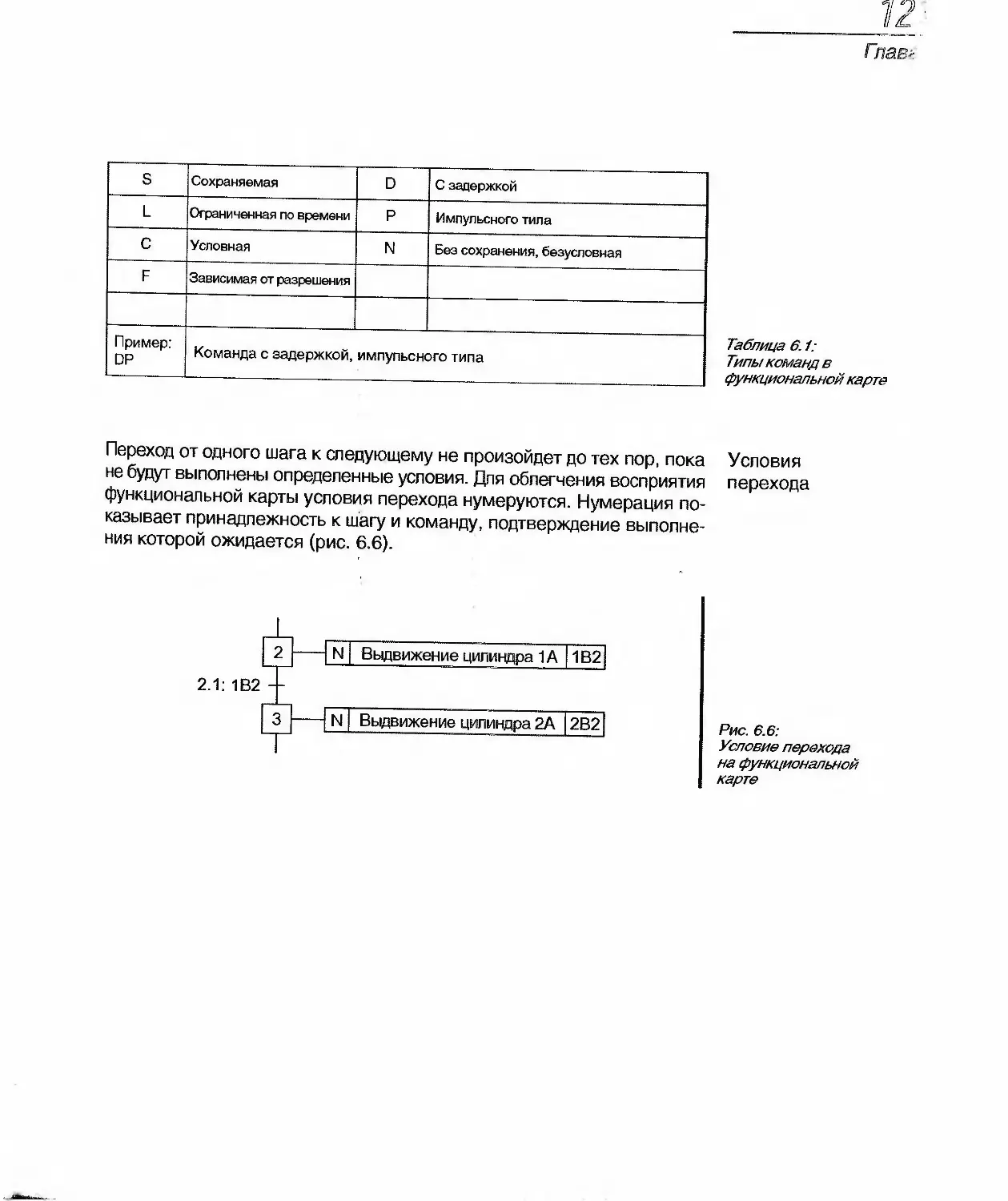
Система управления должна оценивать и обрабатывать информацию
(например, кнопка нажата или не нажата). Эта информация пред-
ставляется в виде сигналов.
Сигнал — это физическая переменная, например, такая как:
Давление в какой-то точке пневматической части системы
Напряжение в какой-то точке электрической части системы.
iпава 1
Сигнал/Физическая переменная
Информация
а) Аналоговый
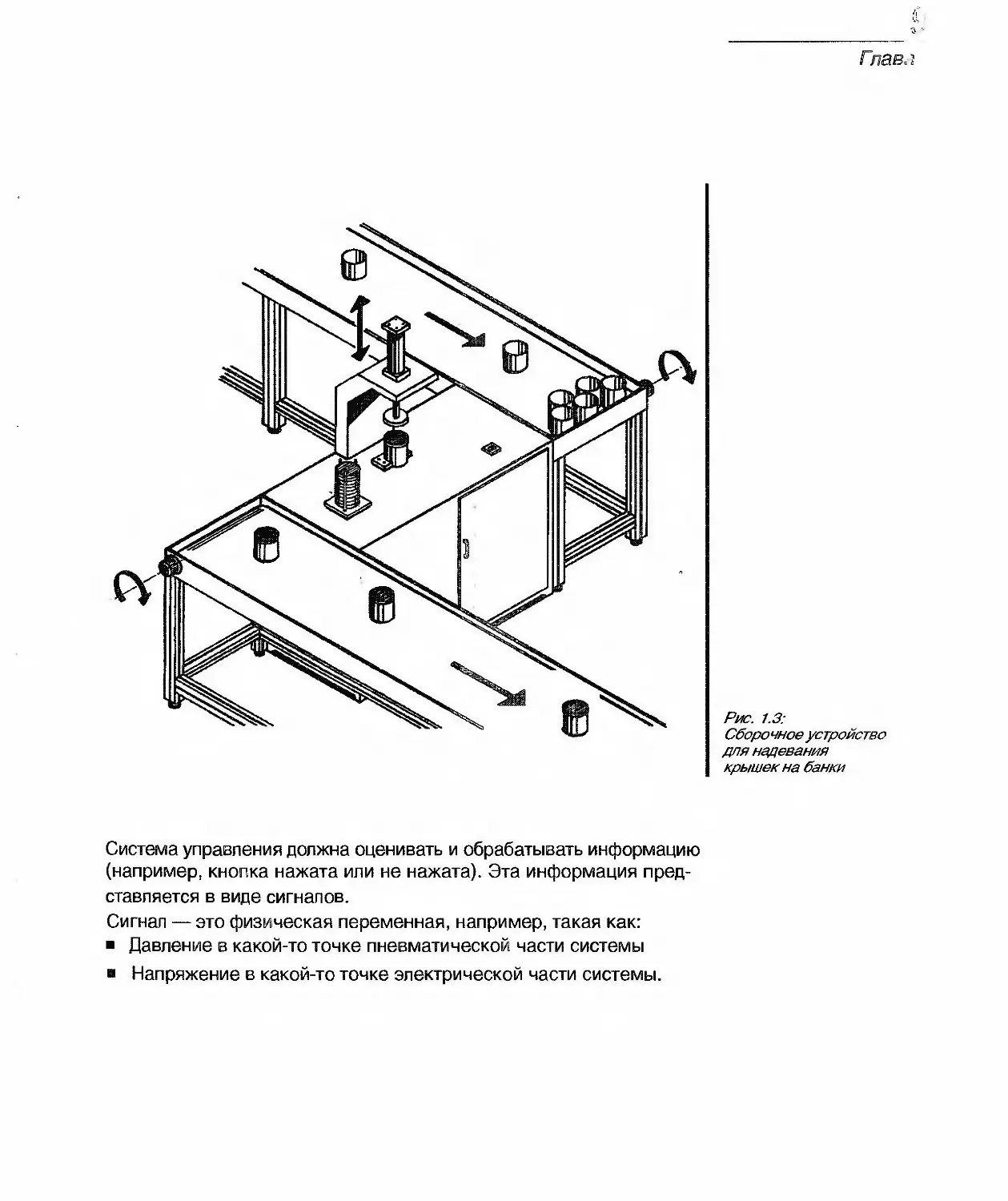
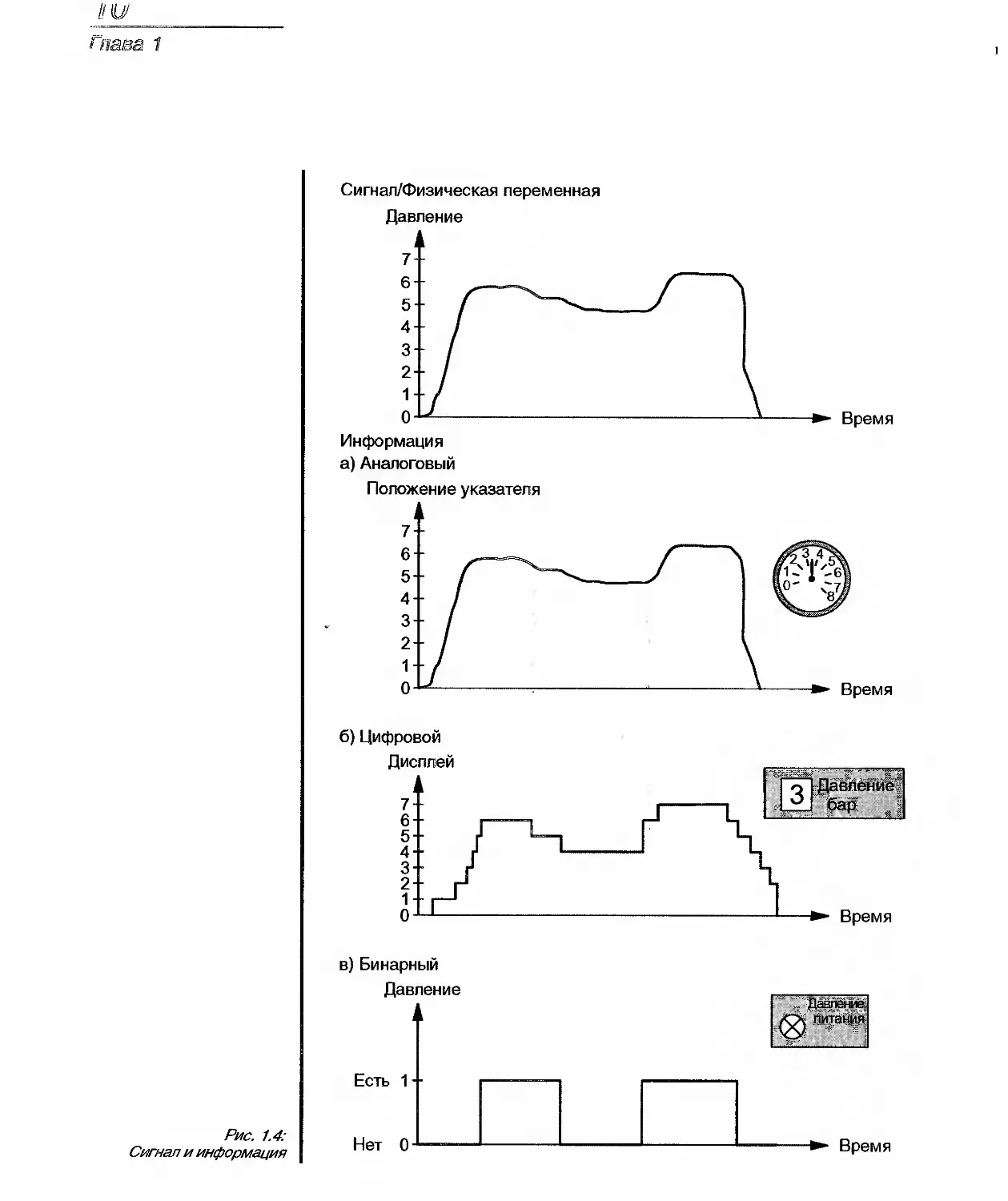
Рис. 1.4:
Сигнал и информация
в) Бинарный
Гпав?
Сигнал является представлением информации, которое может выражать-
ся посредством значения или рядом значений физической переменной.
Аналоговый сигнал — это сигнал, в котором информация непрерывно
изменяется от точки к точке на всем протяжении значений параметра
сигнала (DIN 19226, Часть 5).
На манометре каждое значение давления (информационный параметр)
отображается стрелкой на непрерывной шкале. Если сигнал растет
или падает, информация изменяется непрерывно.
Аналоговый сигнал
Пример применение
Цифровой сигнал — это сигнал с конечным числом значений информа-
ционного параметра. Каждое значение несет определенную информацию
(DIN 19226, Часть 5).
Система по измерению давления с цифровым дисплеем показывает
повышение давления с шагом 1 бар. Для диапазона давления до 7 бар
у дисплея имеется всего 8 значений (от 0 до 7). Эти восемь значений
охватывают весь диапазон изменения информационного параметра.
Если сигнал растет или падает, информация изменяется ступенчато.
Цифровой сигнал
Пример применена
Бинарный (двоичный) сигнал — этот сигнал только с двумя значениями
для информационного параметра. Обычно они обозначаются как "О" и "1"
(DIN 19226, Часть 5).
Сигнальная лампа показывает подается ли в систему сжатый воздух
под нужным давлением. Если давление питания (=сигнал) ниже 5 бар
лампа выключается (статус 0). Если давление выше 5 бар — лампа
включается (статус 1).
Бинарный сигнал
Пример применена:
"пава 1
лассификация систем
управления по типу
представления
информации
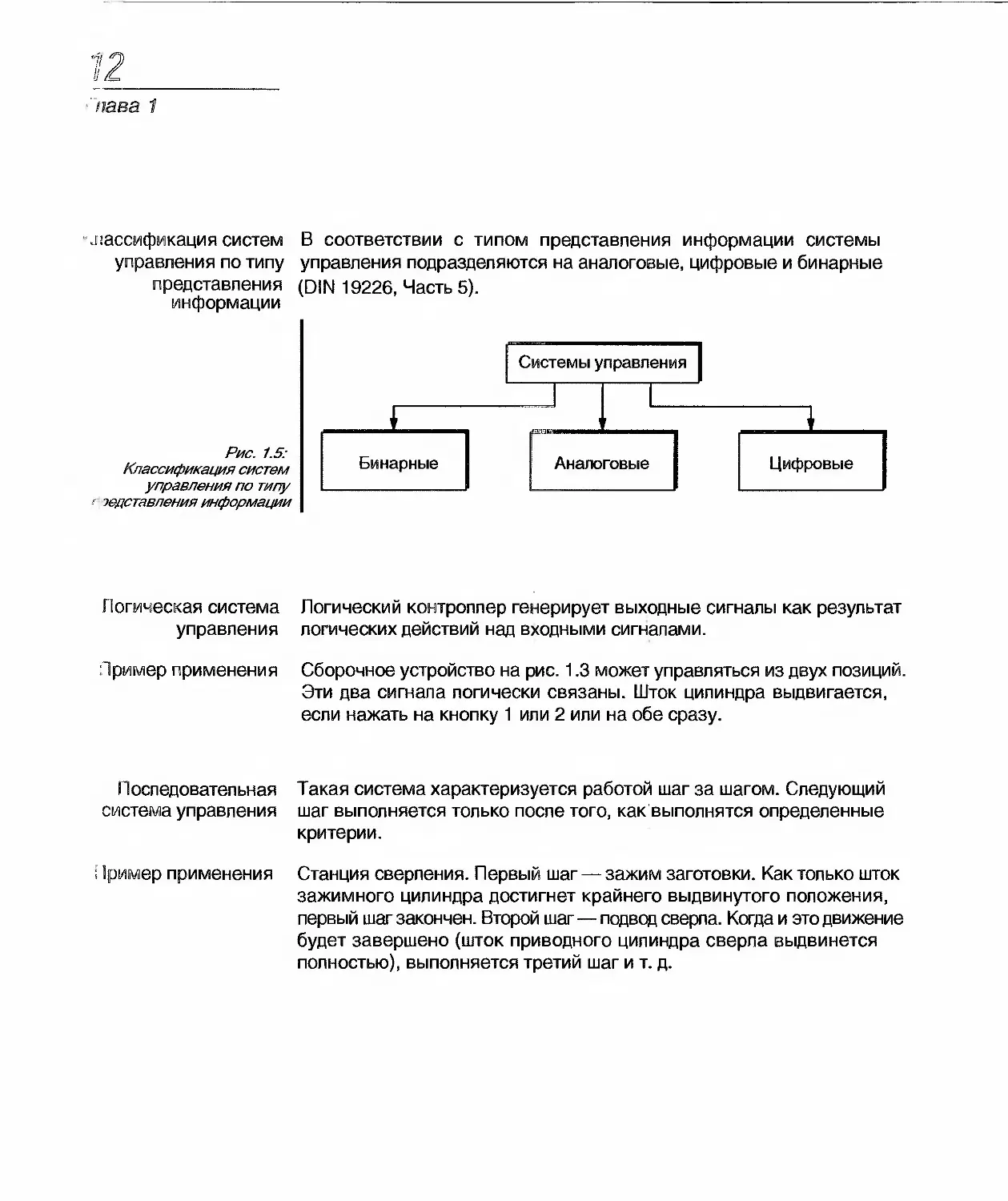
В соответствии с типом представления информации системы
управления подразделяются на аналоговые, цифровые и бинарные
(DIN 19226, Часть 5).
Рис. 1.5:
Классификация систем
управления по типу
эедставления информации
Логическая система
управления
Пример применения
Логический контроллер генерирует выходные сигналы как результат
логических действий над входными сигналами.
Сборочное устройство на рис. 1.3 может управляться из двух позиций.
Эти два сигнала логически связаны. Шток цилиндра выдвигается,
если нажать на кнопку 1 или 2 или на обе сразу.
Последовательная
система управления
Такая система характеризуется работой шаг за шагом. Следующий
шаг выполняется только после того, как выполнятся определенные
критерии.
Е Пример применения
Станция сверления. Первый шаг — зажим заготовки. Как только шток
зажимного цилиндра достигнет крайнего выдвинутого положения,
первый шаг закончен. Второй шаг—подвод сверла. Когда и это движение
будет завершено (шток приводного цилиндра сверла выдвинется
полностью), выполняется третий шаг и т. д.
Глава
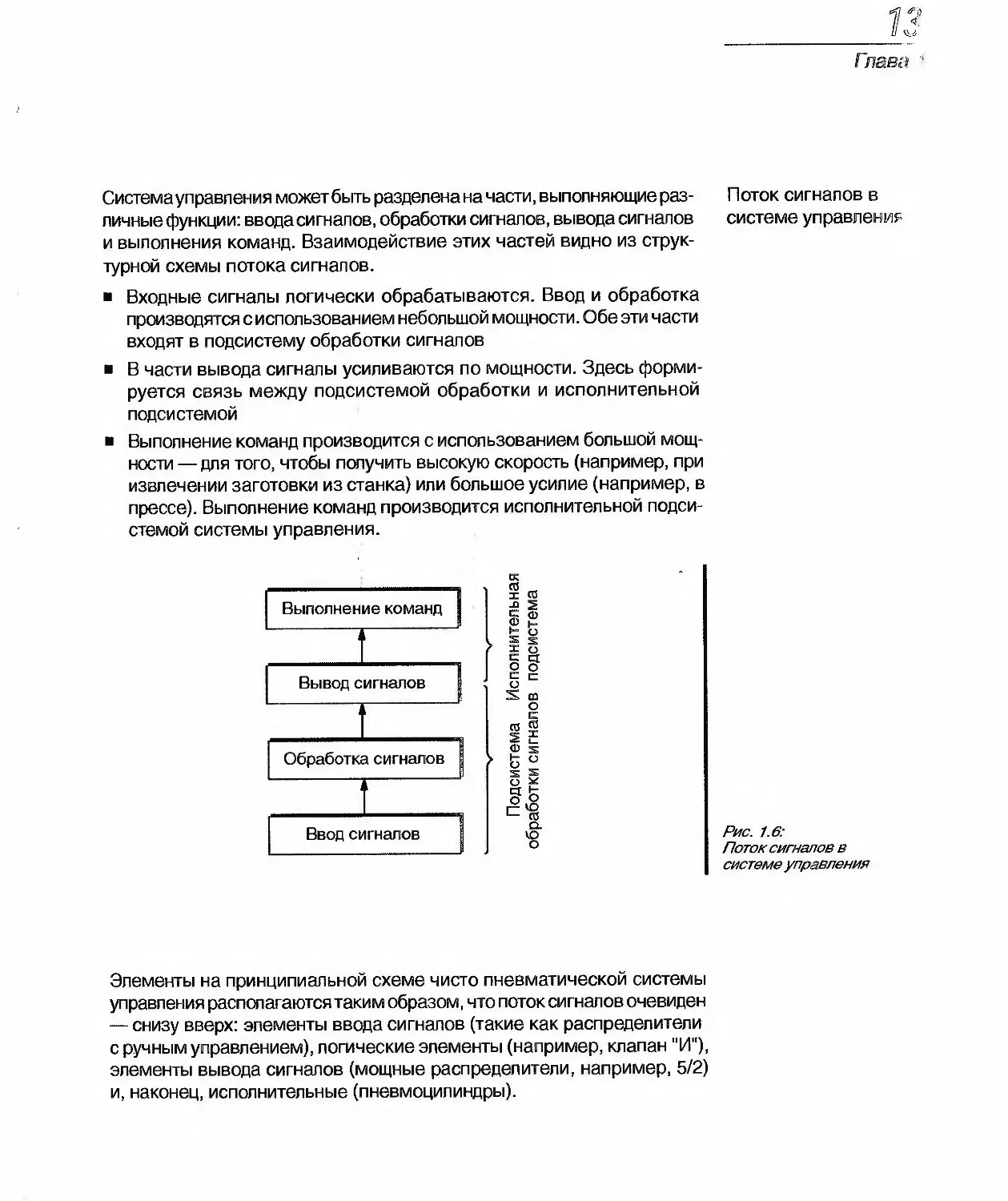
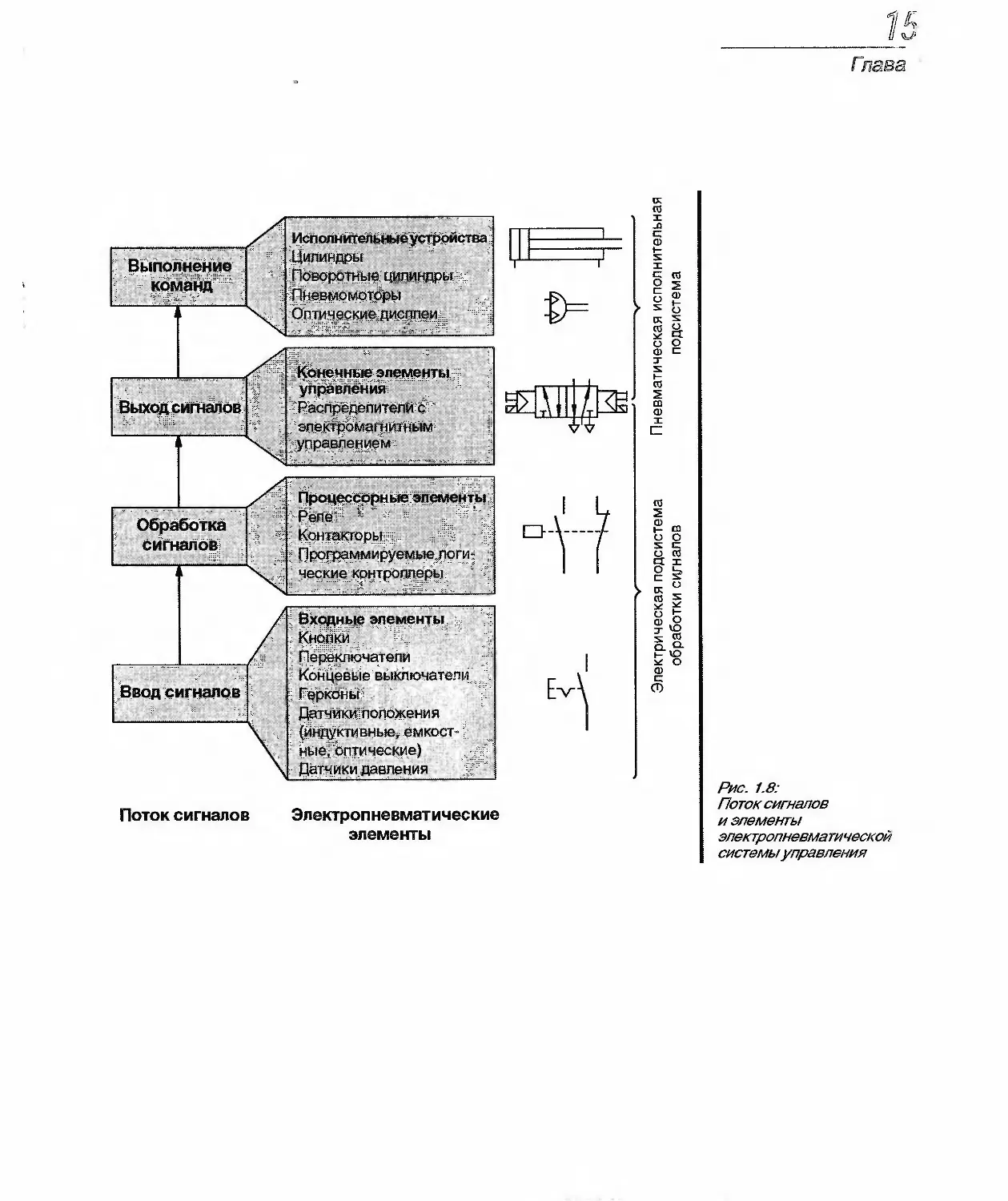
Система управления может быть разделена на части, выполняющие раз-
личные функции: ввода сигналов, обработки сигналов, вывода сигналов
и выполнения команд. Взаимодействие этих частей видно из струк-
турной схемы потока сигналов.
Входные сигналы логически обрабатываются. Ввод и обработка
производятся с использованием небольшой мощности. Обе эти части
входят в подсистему обработки сигналов
В части вывода сигналы усиливаются по мощности. Здесь форми-
руется связь между подсистемой обработки и исполнительной
подсистемой
Выполнение команд производится с использованием большой мощ-
ности — для того, чтобы получить высокую скорость (например, при
извлечении заготовки из станка) или большое усилие (например, в
прессе). Выполнение команд производится исполнительной подси-
стемой системы управления.
Поток сигналов в
системе управления
Рис. 1.6:
Поток сигналов в
системе управления
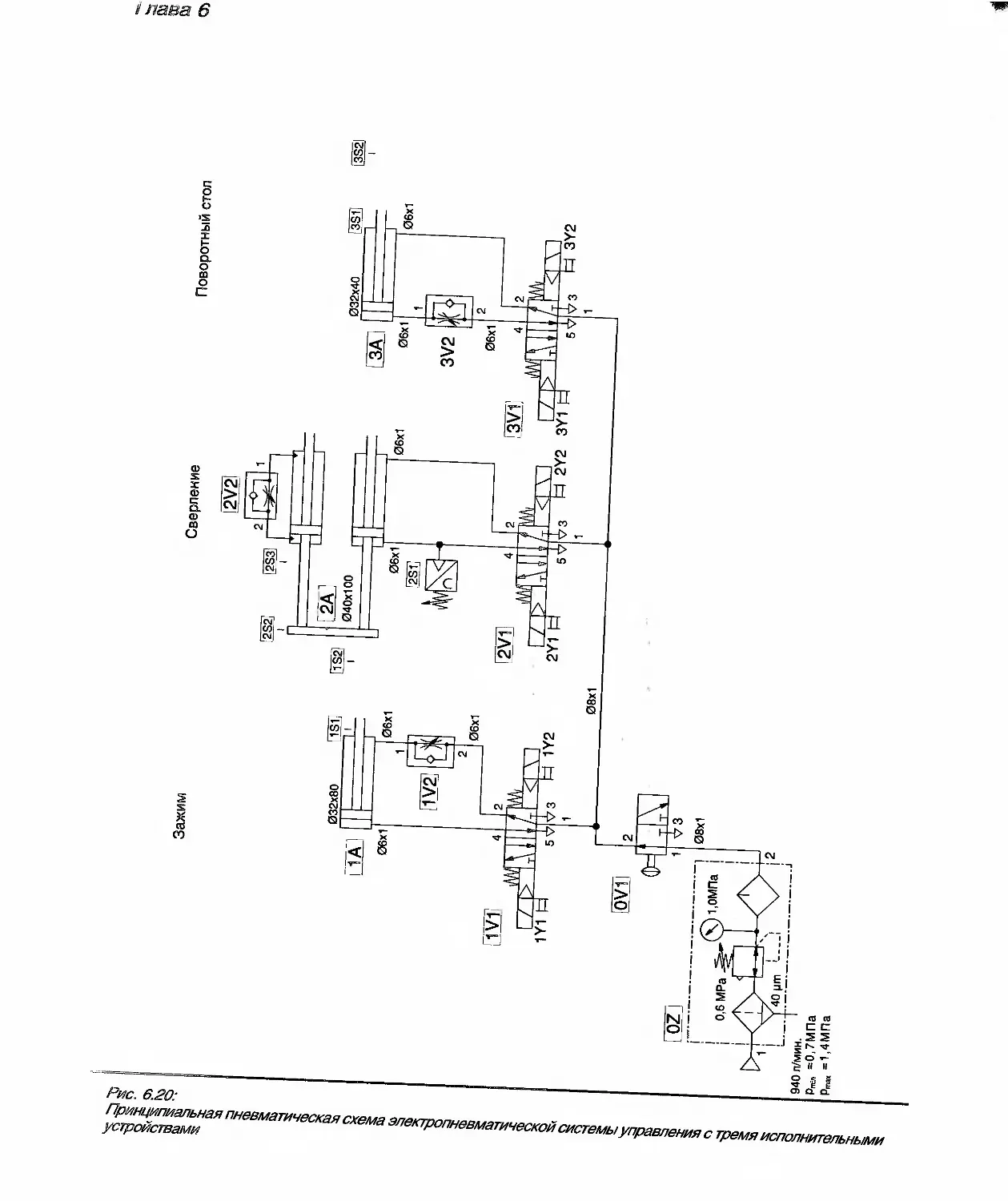
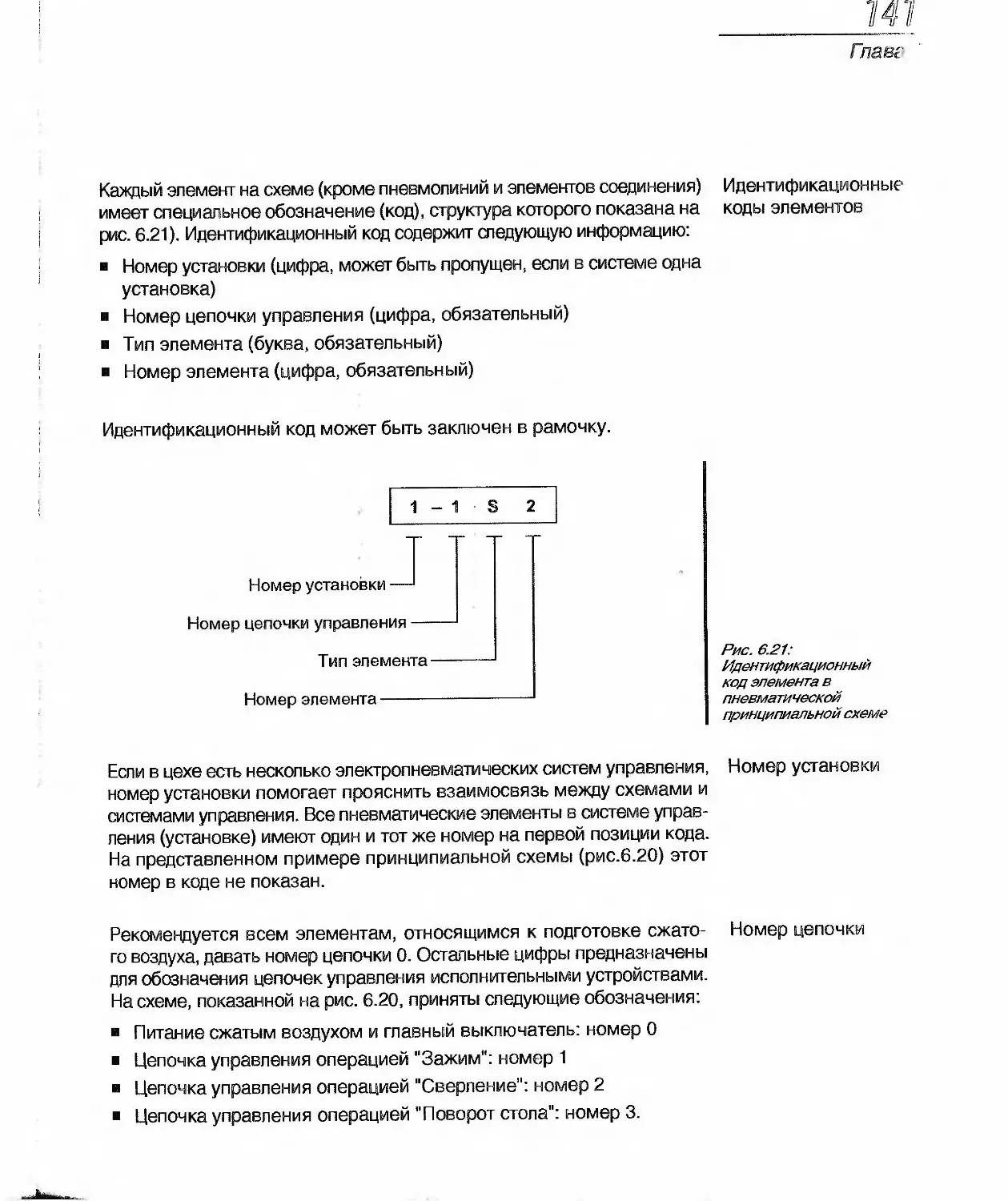
Элементы на принципиальной схеме чисто пневматической системы
управления располагаются таким образом, что поток сигналов очевиден
— снизу вверх: элементы ввода сигналов (такие как распределители
с ручным управлением), логические элементы (например, клапан "И"),
элементы вывода сигналов (мощные распределители, например, 5/2)
и, наконец, исполнительные (пневмоцилиндры).
Гпава 1
1.3. Пневматические
и электро-
пневматические
системы управления
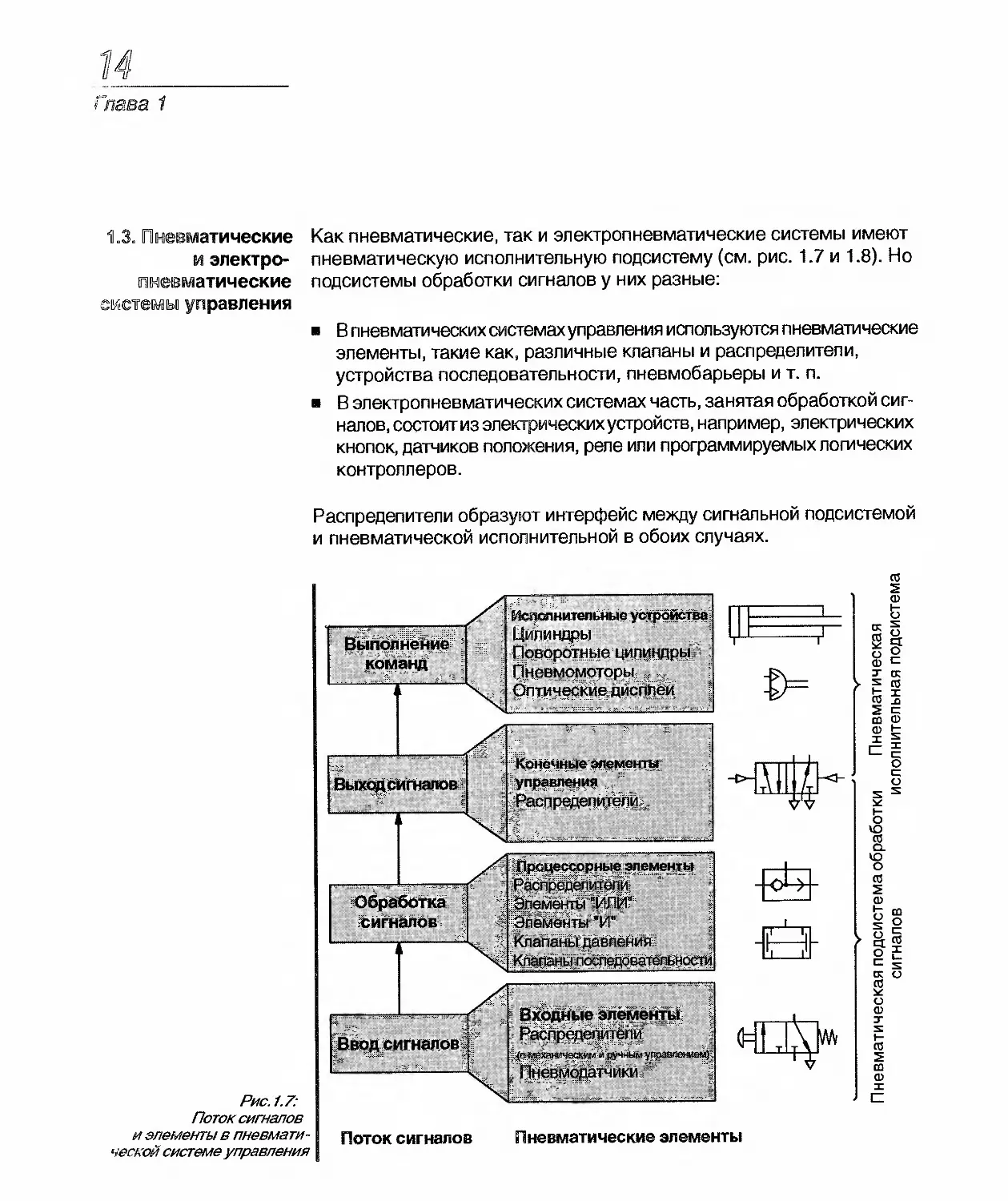
Как пневматические, так и электропневматические системы имеют
пневматическую исполнительную подсистему (см. рис. 1.7 и 1.8). Но
подсистемы обработки сигналов у них разные:
В пневматических системах управления используются пневматические
элементы, такие как, различные клапаны и распределители,
устройства последовательности, пневмобарьеры и т. п.
В электропневматических системах часть, занятая обработкой сиг-
налов, состоит из электрических устройств, например, электрических
кнопок, датчиков положения, реле или программируемых логических
контроллеров.
Распределители образуют интерфейс между сигнальной подсистемой
и пневматической исполнительной в обоих случаях.
Рис. 1.7:
Поток сигналов
и элементы в пневмати-
ческой системе управления
Поток сигналов Пневматические элементы
Глава
Поток сигналов Электропневматические
элементы
Рис. 1.8:
Поток сигналов
и элементы
электропневматической
системы управления
t /ава i
В отличие от чисто пневматической системы управления, электро-
пневматическая система не может быть изображена на одной прин-
ципиальной схеме, а требует наличия двух — одной пневматической
и другой электрической. Поэтому поток сигналов нельзя проследить
непосредственно на одной схеме.
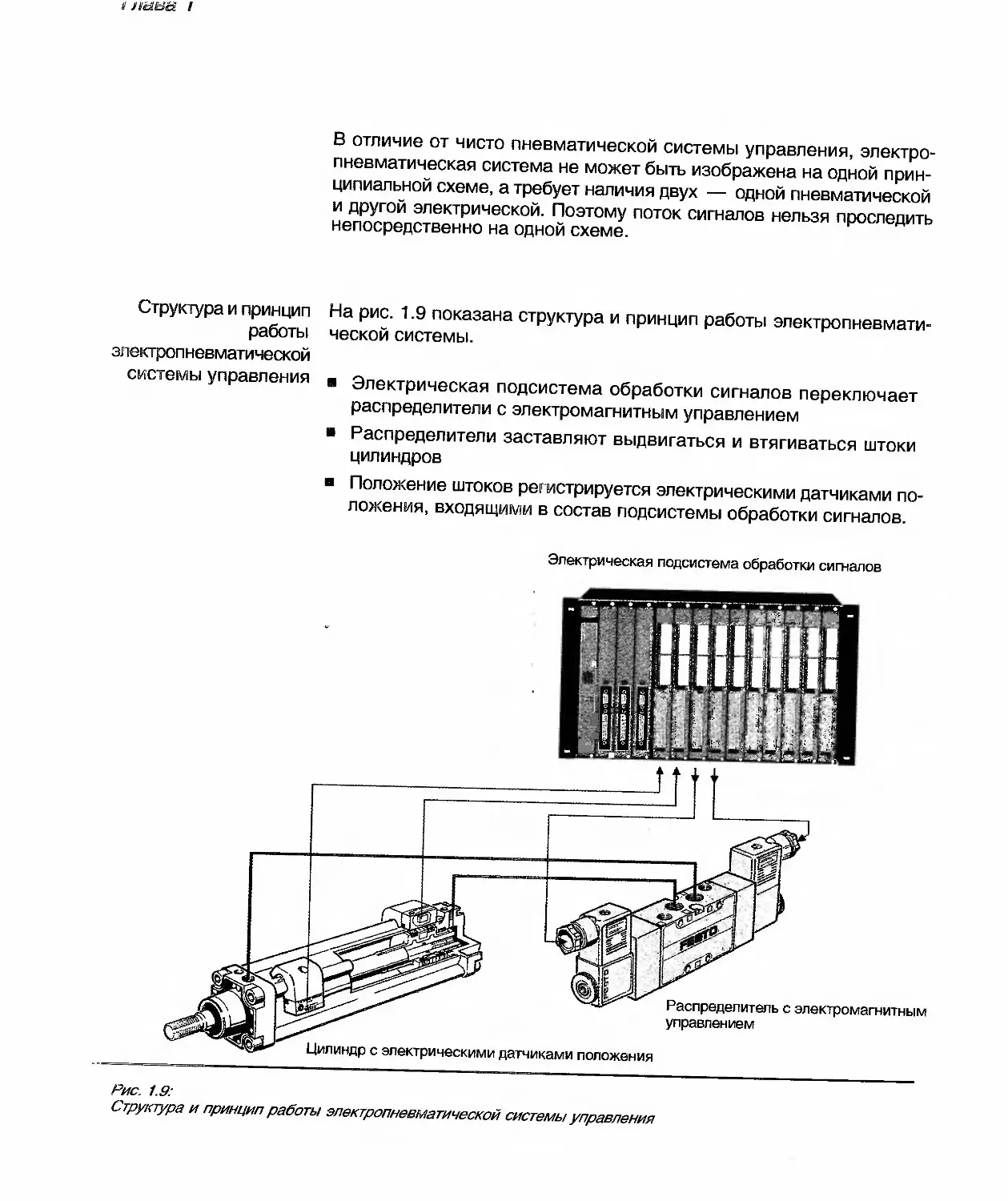
Структура и принцип
работы
электропневматической
системы управления
На рис. 1.9 показана структура и принцип работы электропневмати-
ческой системы.
Электрическая подсистема обработки сигналов переключает
распределители с электромагнитным управлением
Распределители заставляют выдвигаться и втягиваться штоки
цилиндров
Положение штоков регистрируется электрическими датчиками по-
ложения, входящими в состав подсистемы обработки сигналов.
Электрическая подсистема обработки сигналов
Рис. 1.9:
Структура и принцип работы электропневматической системы управления
Гпава
Электропневматические системы имеют над чисто пневматическими 1.4. Преимуидества
следующие преимущества: электролмевма-
тическик систем
Большая надежность (меньше подвижных частей, подверженных
износу)
Меньшая стоимость проектирования и ввода в эксплуатацию, особенно
в случае сложных систем
Меньшие расходы на монтаж, особенно при использовании совре-
менных элементов, таких как пневмоострова
Более простой обмен информацией между несколькими системами
управления.
Электропневматические системы сейчас более широко применятся в
промышленной практике, а пневматические используются ограниченно,
в основном в специальных применениях.
Глава 1
Глава
Глава 2
Основы электротехники
Глава 2
2.И. Постоянный и
переменный
ток
Простейшая электрическая система состоит из источника напряжения,
нагрузки и соединительных проводов.
Физически заряженные частички — электроны — бегут по электрической
сети через проводники от отрицательного полюса источника напряжения
к положительному. Это движение заряженных частиц называется
электрическим током. Ток может протекать, только если цепь замкнута.
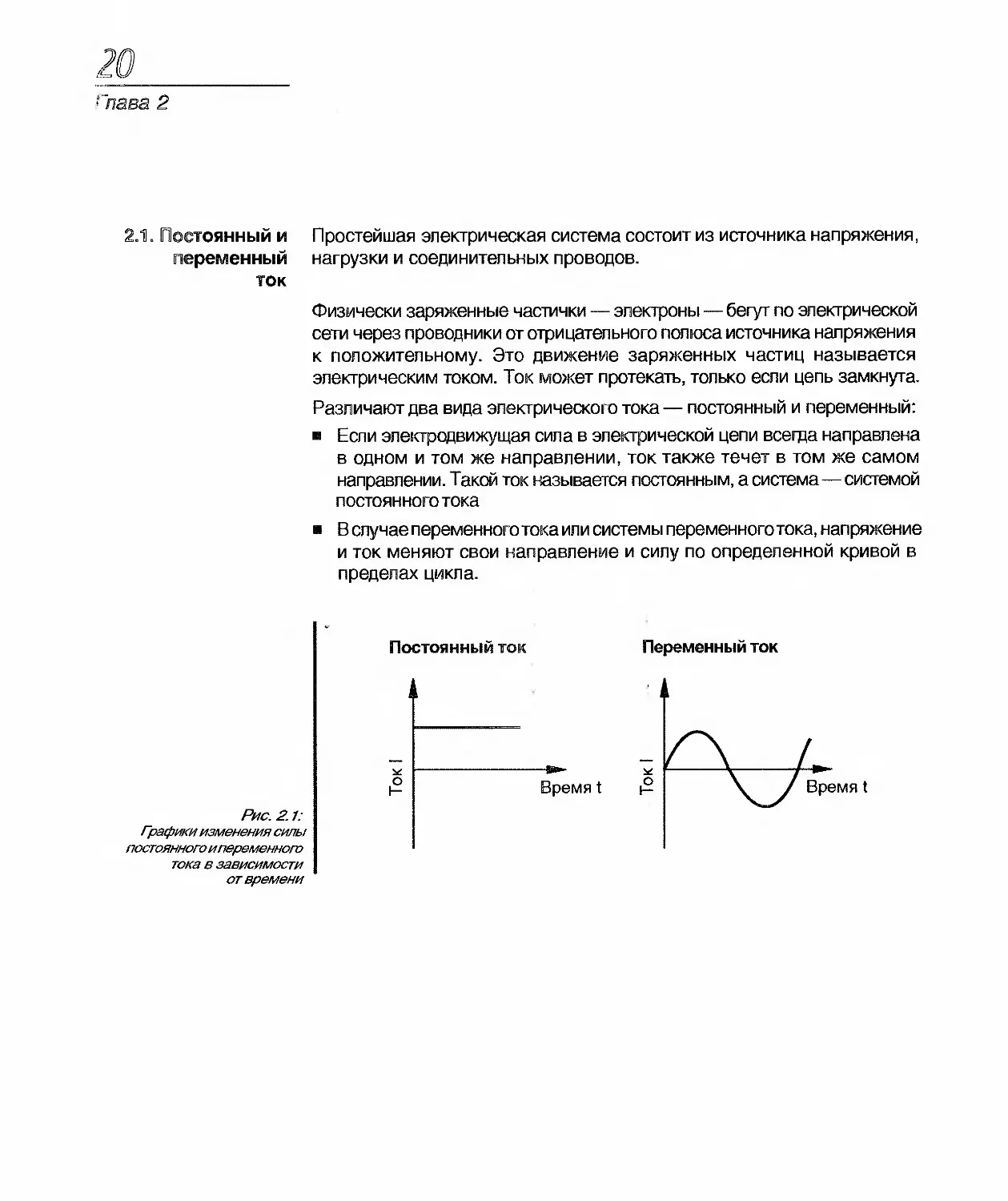
Различают два вида электрического тока — постоянный и переменный:
Если электродвижущая сила в электрической цепи всегда направлена
в одном и том же направлении, ток также течет в том же самом
направлении. Такой ток называется постоянным, а система—системой
постоянного тока
В случае переменного тока или системы переменного тока, напряжение
и ток меняют свои направление и силу по определенной кривой в
пределах цикла.
Рис. 2.1:
Графики изменения силы
постоянного и переменного
тока в зависимости
от времени
Постоянный ток
Время t
Глава
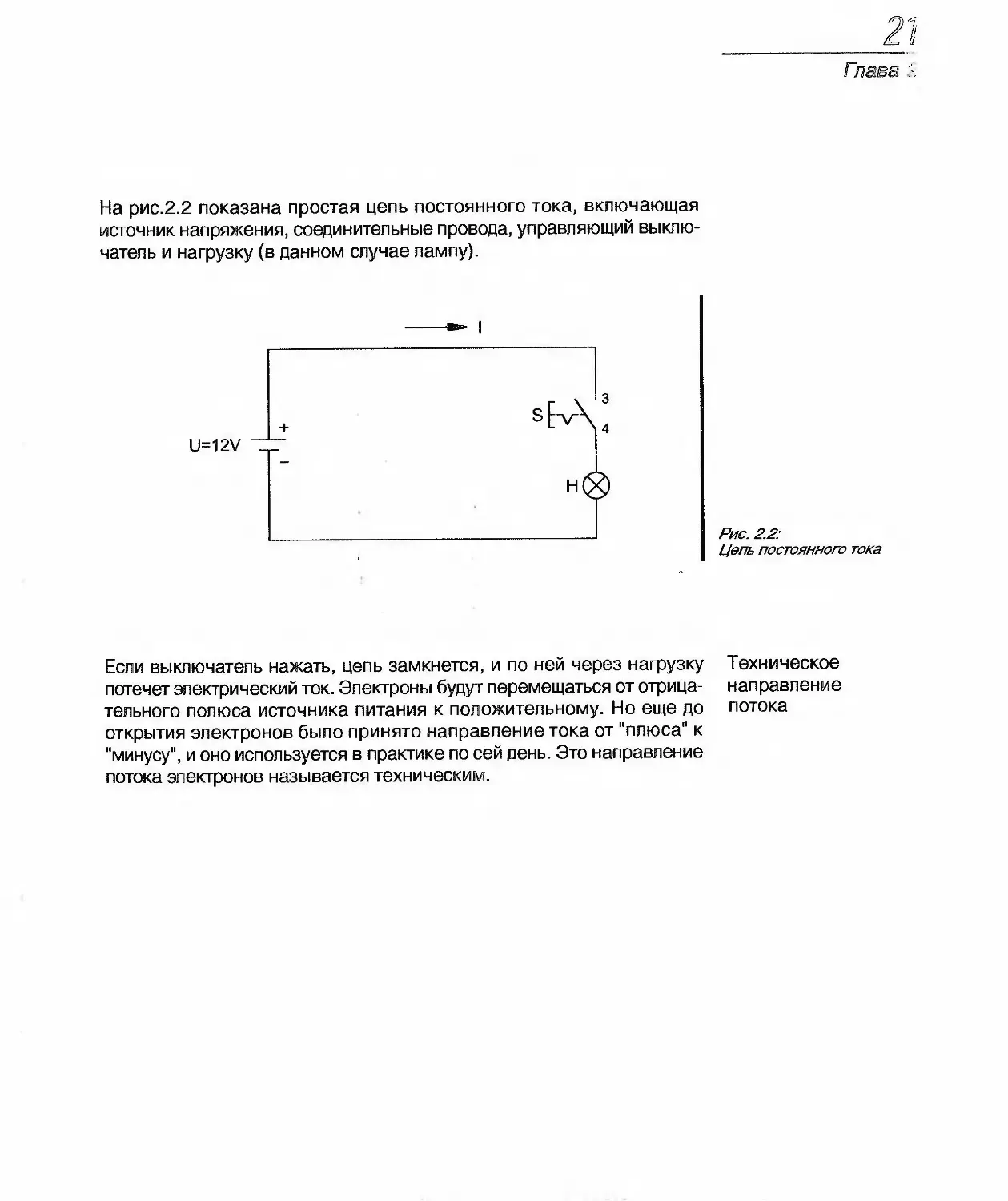
На рис.2.2 показана простая цепь постоянного тока, включающая
источник напряжения, соединительные провода, управляющий выклю-
чатель и нагрузку (в данном случае лампу).
Рис. 2.2:
Цепь постоянного тока
Если выключатель нажать, цепь замкнется, и по ней через нагрузку Техническое
потечет электрический ток. Электроны будут перемещаться от отрица- направление
тельного полюса источника питания к положительному. Но еще до потока
открытия электронов было принято направление тока от "плюса" к
"минусу", и оно используется в практике по сей день. Это направление
потока электронов называется техническим.
^ава 2
2.2. Закон Ома Электрический ток представляет собой поток заряженных частиц в
Электрические проводники одном направлении. Протекать ток может только через те материалы, в которых имеется достаточно свободных электронов. Материалы, отвечающие этому требованию, называются электрическими проводни- ками. Особенно хорошими проводниками являются металлы, такие как: медь, алюминий и серебро. В технике управления в качестве провод- ников чаще всего используется медь.
Электрическое сопротивление Каждый материал оказывает сопротивление протекающему по нему току. Это является результатом столкновения свободно перемещаю- щихся электронов с атомами материала проводника. В проводниках сопротивление небольшое. Материалы с особенно высоким сопротив- лением называются изоляторами. Материалы на основе резины и пластиков используются для изолирования электрических проводов и кабелей.
Э. д. с. источника Отрицательный полюс источника питания имеет переизбыток элект- ронов, а положительный испытывает их недостаток. Из этой разницы возникает э. д. с. источника тока (электродвижущая сила).
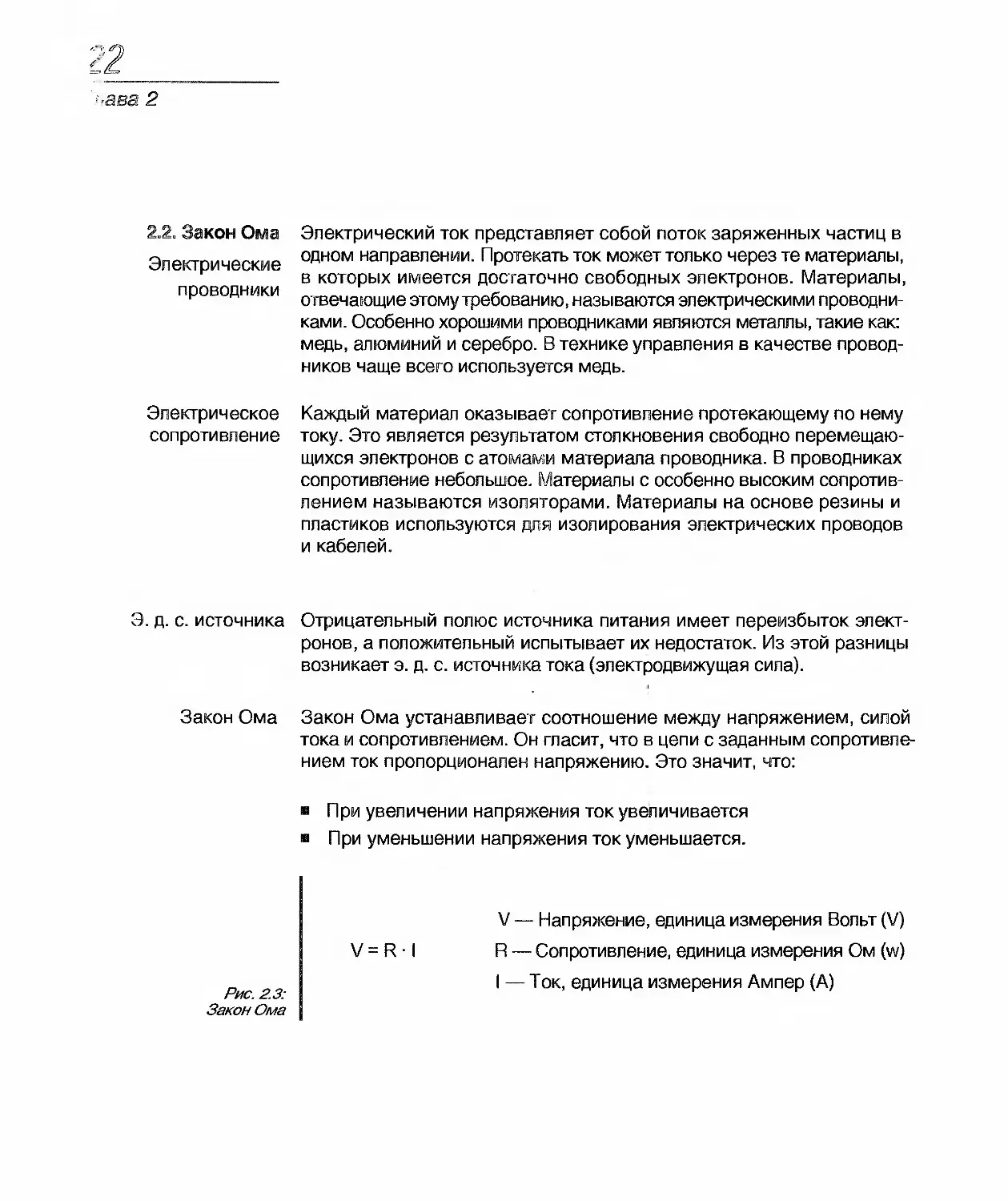
Закон Ома Закон Ома устанавливает соотношение между напряжением, силой тока и сопротивлением. Он гласит, что в цепи с заданным сопротивле- нием ток пропорционален напряжению. Это значит, что: При увеличении напряжения ток увеличивается При уменьшении напряжения ток уменьшается. V — Напряжение, единица измерения Вольт (V) V = R 1 R — Сопротивление, единица измерения Ом (w)
Рис. 2.3: Закон Ома 1 — Ток, единица измерения Ампер (А)
^1:
Гпаве.
В механике мощность может быть определена через совершенную Электрическая мощ1»
работу. Чем быстрее выполняется работа, тем большая мощность нуж-
на. Поэтому мощность это "работа, деленная на время".
В случае работы в электрической цепи электрическая энергия прео-
бразуется в кинетическую (например, электрический мотор), в свет
(электрическая лампочка) или тепло (обогреватель, та же лампа). Чем
быстрее энергия преобразовывается, тем выше электрическая мощность.
Поэтому и в этом случае мощность означает энергию, деленную на
время. Мощность тем выше, чем выше ток и напряжение.
Электрическую мощность нагрузки также называют входной мощностью.
Р = V • I
Р — Мощность, единица измерения Ватт (W)
V — Напряжение, единица измерения Вольт (V)
I —Ток, единица измерения Ампер (А)
Мощность электромагнитной катушки
Рис. 2.4:
Электрическая мощнссъ
Пример применения
Электромагнитная катушка 5/2-распределителя работает на напря-
жении 24 В постоянного тока. Сопротивление ее обмотки равно 60 Ом.
Какова мощность катушки?
Ток подсчитываем по закону Ома:
I = V/R = 24 / 60 = 0,4 А
Электрическая мощность пропорциональна току и напряжению:
Р = V • I = 24 0,4 = 9,6 W
1зва 2
2.3. Принцип
работы
соленоида
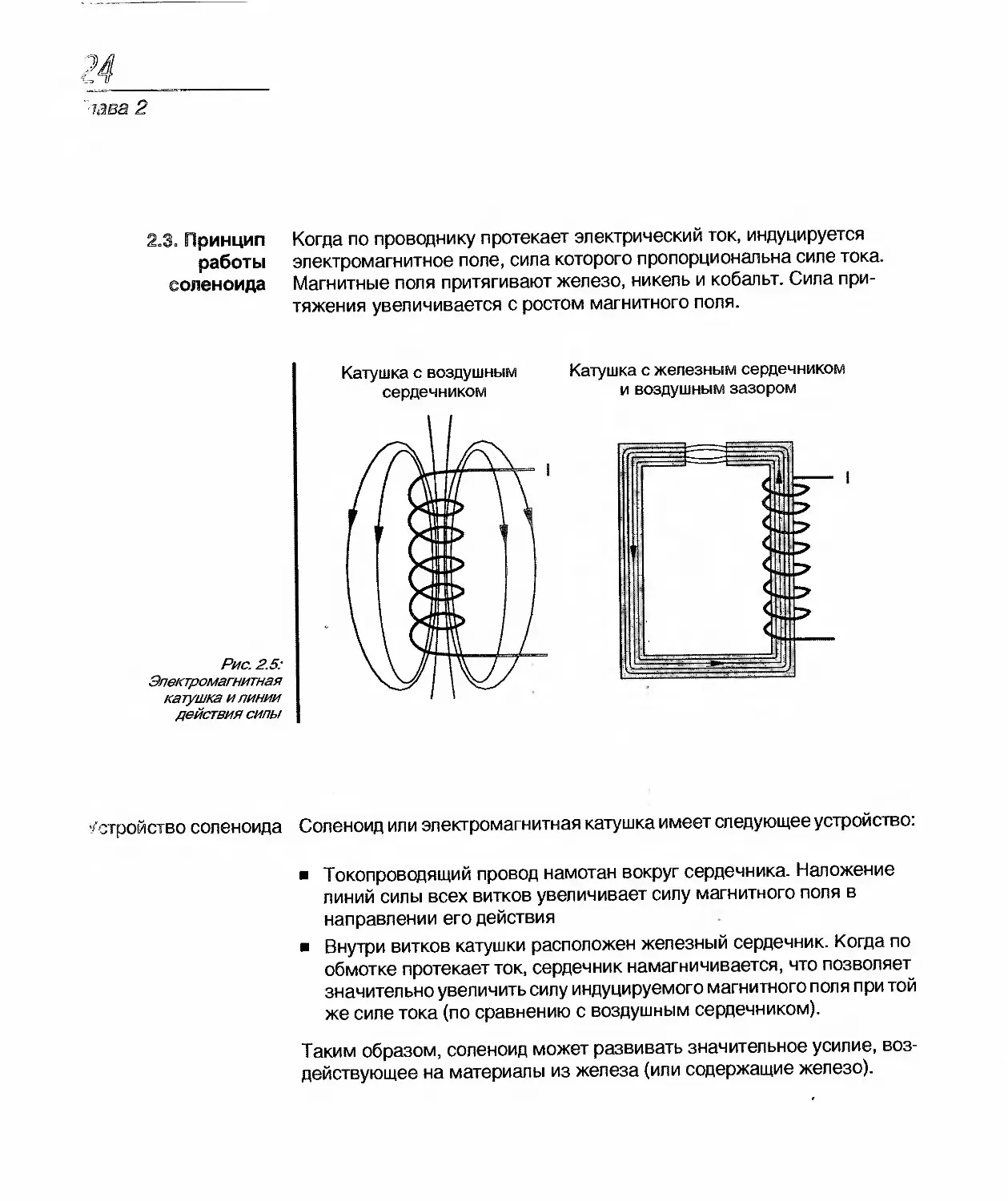
Когда по проводнику протекает электрический ток, индуцируется
электромагнитное поле, сила которого пропорциональна силе тока.
Магнитные поля притягивают железо, никель и кобальт. Сила при-
тяжения увеличивается с ростом магнитного поля.
Рис. 2.5:
Электромагнитная
катушка и линии
действия сипы
Катушка с воздушным Катушка с железным сердечником
сердечником и воздушным зазором
Устройство соленоида
Соленоид или электромагнитная катушка имеет следующее устройство:
Токопроводящий провод намотан вокруг сердечника. Наложение
линий силы всех витков увеличивает силу магнитного поля в
направлении его действия
Внутри витков катушки расположен железный сердечник. Когда по
обмотке протекает ток, сердечник намагничивается, что позволяет
значительно увеличить силу индуцируемого магнитного поля при той
же силе тока (по сравнению с воздушным сердечником).
Таким образом, соленоид может развивать значительное усилие, воз-
действующее на материалы из железа (или содержащие железо).
В электропневматических системах соленоиды (катушки) чаще всего
используются для управления распределителями, реле или контакто-
рами. Это может быть продемонстрировано на примере распредели-
теля с электромагнитным управлением и возвратной пружиной:
Когда ток протекает по обмотке катушки, затвор клапана переме-
щается, сжимая пружину
После снятия напряжения с катушки, пружина возвращает затвор
в исходное положение.
Применение
соленоидов
Если на катушку подать переменное напряжение, по обмотке потечет
переменный ток (см. рис. 2.1). Направление тока и магнитного поля будут
постоянно меняться. Изменение магнитного поля индуцирует ток в
катушке, который будет действовать против тока, который индуцирует
поле. По этой причине катушка представляет "сопротивление"
переменному току, которое называется реактивным. Реактивность
возрастает с ростом частоты колебаний напряжения и индуктивности
обмотки. Индуктивность измеряется в Генри (Н).
Реактивность в цеп.
переменного тока
1Н = 1— = 1.Qs
А
В цепях постоянного тока ток, напряжение и магнитное поле изменя-
ются только при включении. Поэтому реактивность проявляется толь-
ко при замыкании цепи (подача тока).
В добавление к реактивному сопротивлению обмотка имеет омиче-
ское сопротивление. Это сопротивление имеет место как в цепях пере-
менного, так и постоянного тока.
Реактивность в це”
постоянного тока
‘ава 2
2А Принцип
работы
емкости
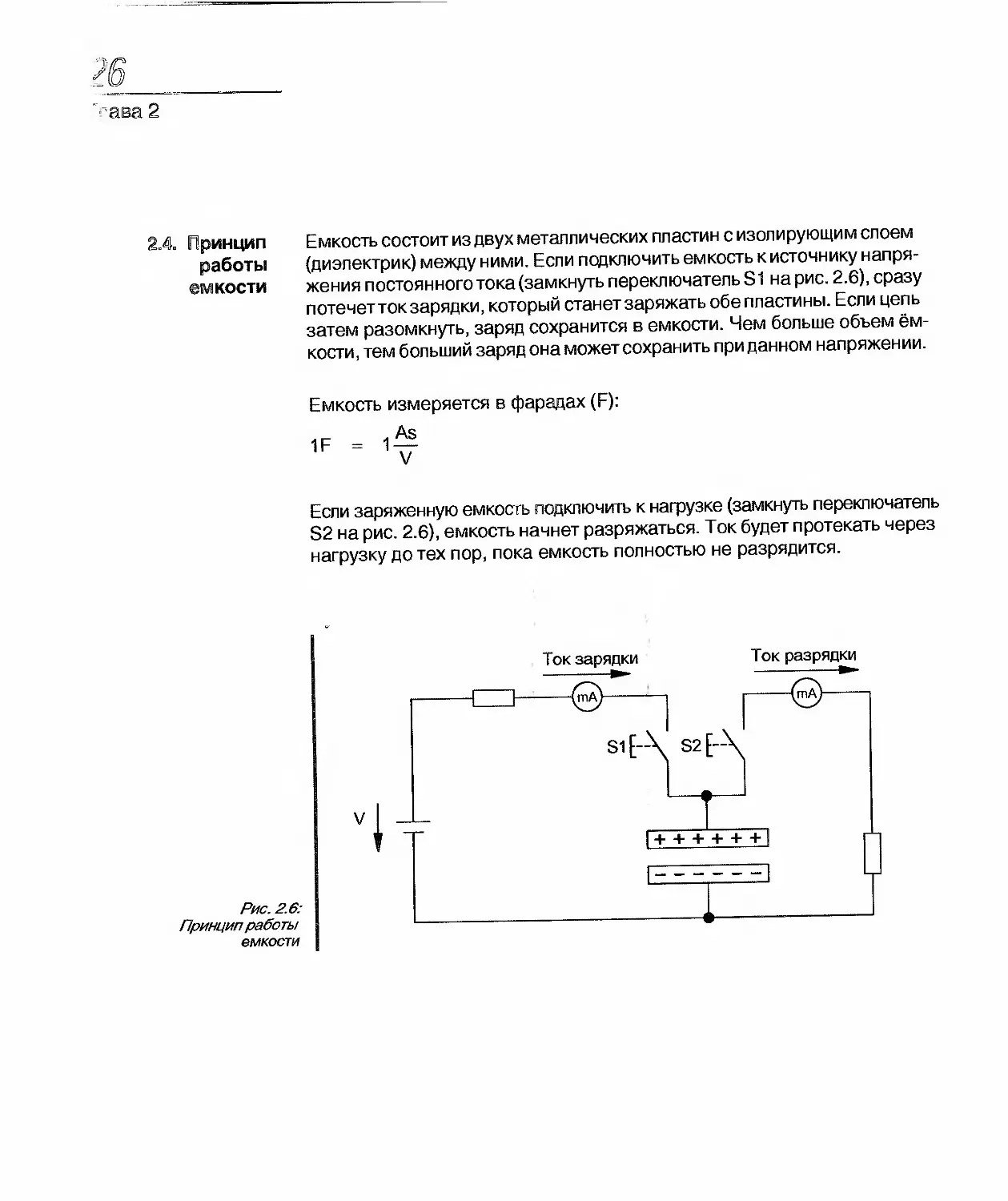
Емкость состоит из двух металлических пластин с изолирующим слоем
(диэлектрик) между ними. Если подключить емкость к источнику напря-
жения постоянного тока (замкнуть переключатель S1 на рис. 2.6), сразу
потечет ток зарядки, который станет заряжать обе пластины. Если цепь
затем разомкнуть, заряд сохранится в емкости. Чем больше объем ём-
кости, тем больший заряд она может сохранить приданном напряжении.
Емкость измеряется в фарадах (F):
- -
Если заряженную емкость подключить к нагрузке (замкнуть переключатель
S2 на рис. 2.6), емкость начнет разряжаться. Ток будет протекать через
нагрузку до тех пор, пока емкость полностью не разрядится.
Рис. 2.6:
Принцип работы
емкости
Гпава:
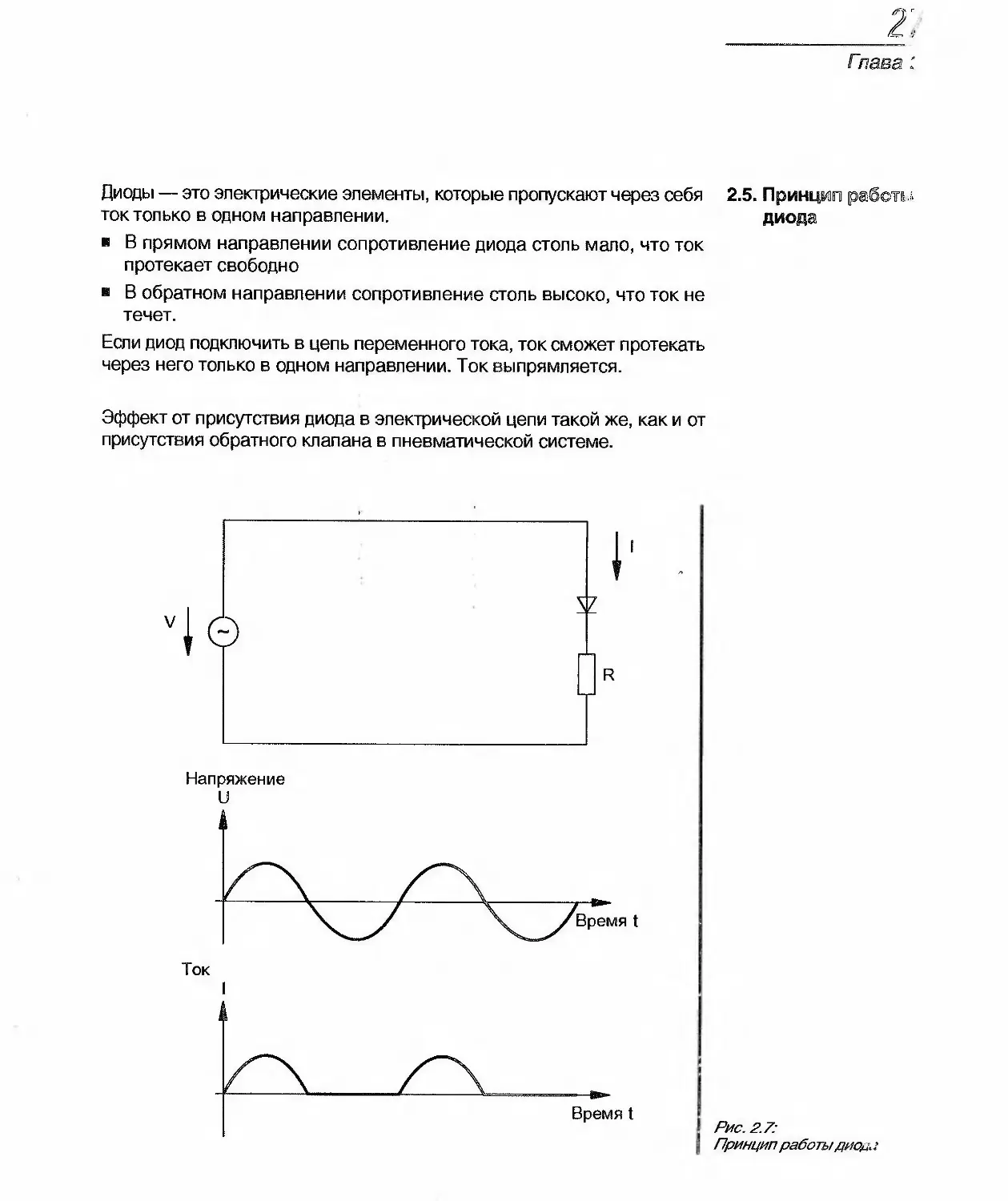
Диоды — это электрические элементы, которые пропускают через себя
ток только в одном направлении.
В прямом направлении сопротивление диода столь мало, что ток
протекает свободно
В обратном направлении сопротивление столь высоко, что ток не
течет.
Если диод подключить в цепь переменного тока, ток сможет протекать
через него только в одном направлении. Ток выпрямляется.
Эффект от присутствия диода в электрической цепи такой же, как и от
присутствия обратного клапана в пневматической системе.
2.5. Принцип работ».»
диода
Напряжение
Рис. 2.7:
Принцип работы диода
~пава 2
2.6. Измерения в
электрических
цепях
Измерение
Измерение означает сравнение неизвестной переменной величины
(например, длины пневматического цилиндра) с известной величиной
(такой как шкала измерительной линейки). Измерительное устройство
(такое как линейка) позволяет делать такие измерения. Результат —
измеренная величина — выражается в цифровых значениях и в единицах
измерения (например, 30,4 см).
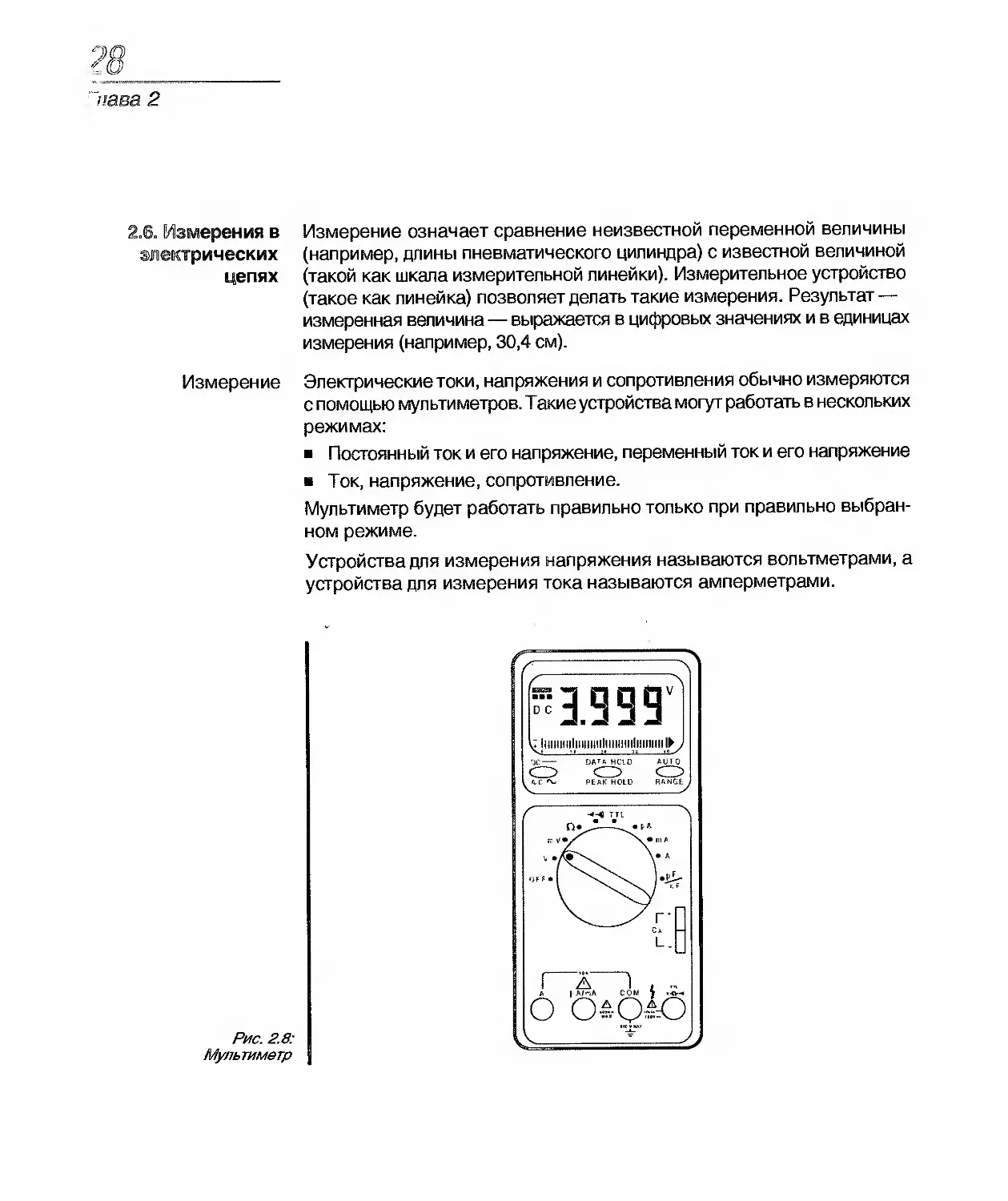
Электрические токи, напряжения и сопротивления обычно измеряются
с помощью мультиметров. Такие устройства могут работать в нескольких
режимах:
Постоянный ток и его напряжение, переменный ток и его напряжение
Ток, напряжение, сопротивление.
Мультиметр будет работать правильно только при правильно выбран-
ном режиме.
Устройства для измерения напряжения называются вольтметрами, а
устройства для измерения тока называются амперметрами.
Рис. 2.8:
Мультиметр
Глава
Перед проведением измерений убедитесь, что напряжение в цепи, с
которой вы работаете, не превышает 24 вольт! Измерения в тех участках
системы, где напряжение более высокое (такое как 230 В), могут
производиться только персоналом, прошедшим специальное обучение
или инструктаж. Неправильные методы измерения могут нести опас-
ность для жизни. Пожалуйста, прочитайте рекомендации по безо-
пасности в главах 3 и 7!
Внимание!
При проведении измерений в электрических цепях выполните следующие Порядок измерения
шаги: в электрических
цепях
Выключите источник напряжения
Настройте мультиметр на желаемый режим (вольтметр или амперметр,
постоянный ток или переменный, сопротивление)
Проверьте настройку нуля прибора. При необходимости подрегу-
лируйте
При измерении переменного напряжения или тока соблюдайте
полярность (контакт"+" прибора к положительному полюсу источника
питания)
Выберите диапазон измерения
Включите источник напряжения
Отметьте показания прибора и перейдите на меньший диапазон
Запишите результат для самого большого отклонения стрелки
(наименьший диапазон измерения)
При использовании стрелочных приборов смотрите на шкалу строго
перпендикулярно во избежании эффекта параллакса.
; лава 2
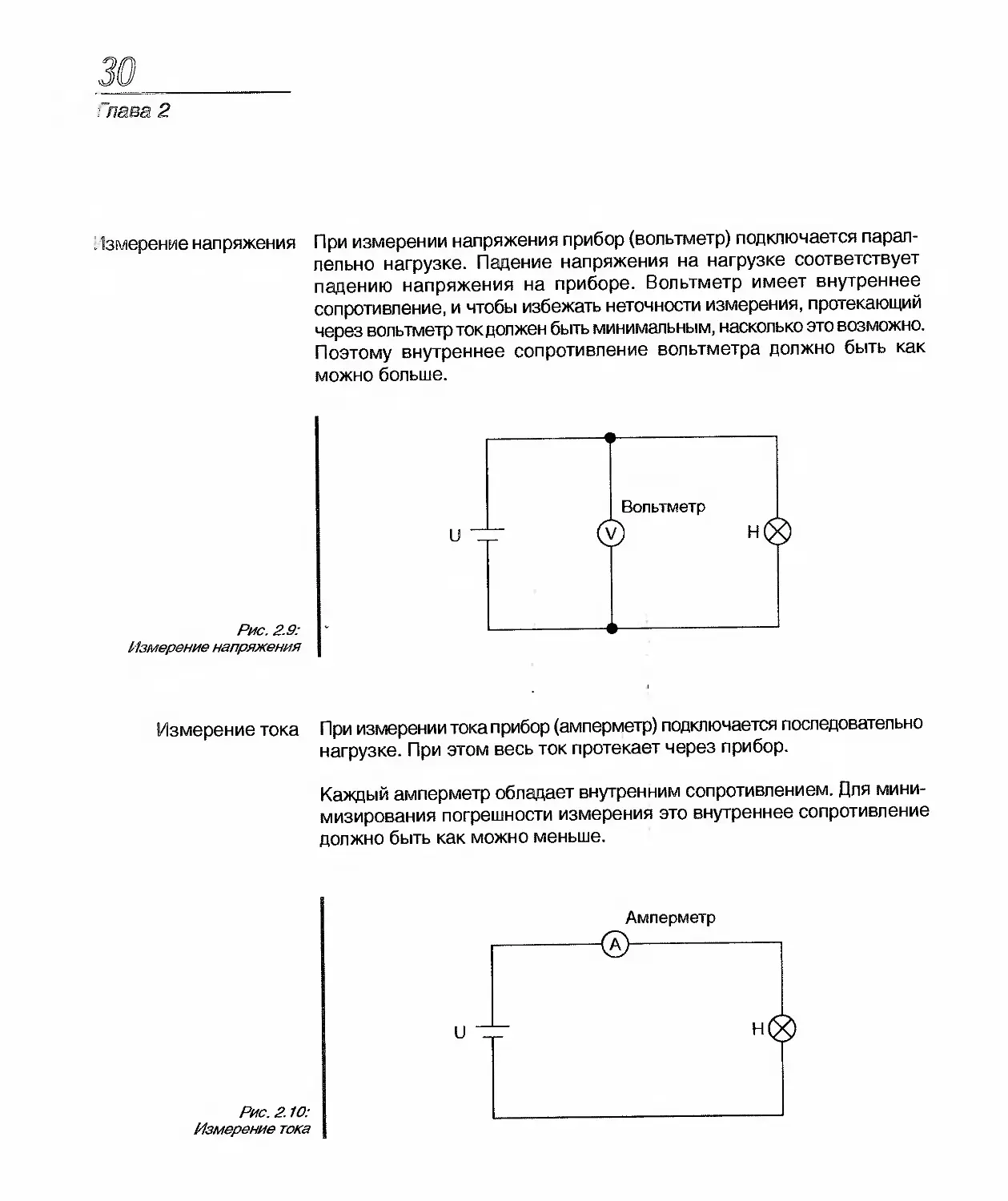
Измерение напряжения
При измерении напряжения прибор (вольтметр) подключается парал-
лельно нагрузке. Падение напряжения на нагрузке соответствует
падению напряжения на приборе. Вольтметр имеет внутреннее
сопротивление, и чтобы избежать неточности измерения, протекающий
через вольтметр ток должен быть минимальным, насколько это возможно.
Поэтому внутреннее сопротивление вольтметра должно быть как
можно больше.
Рис. 2.9:
Измерение напряжения
Измерение тока
При измерении тока прибор (амперметр) подключается последовательно
нагрузке. При этом весь ток протекает через прибор.
Каждый амперметр обладает внутренним сопротивлением. Для мини-
мизирования погрешности измерения это внутреннее сопротивление
должно быть как можно меньше.
Рис. 2.10:
Измерение тока
Гпава
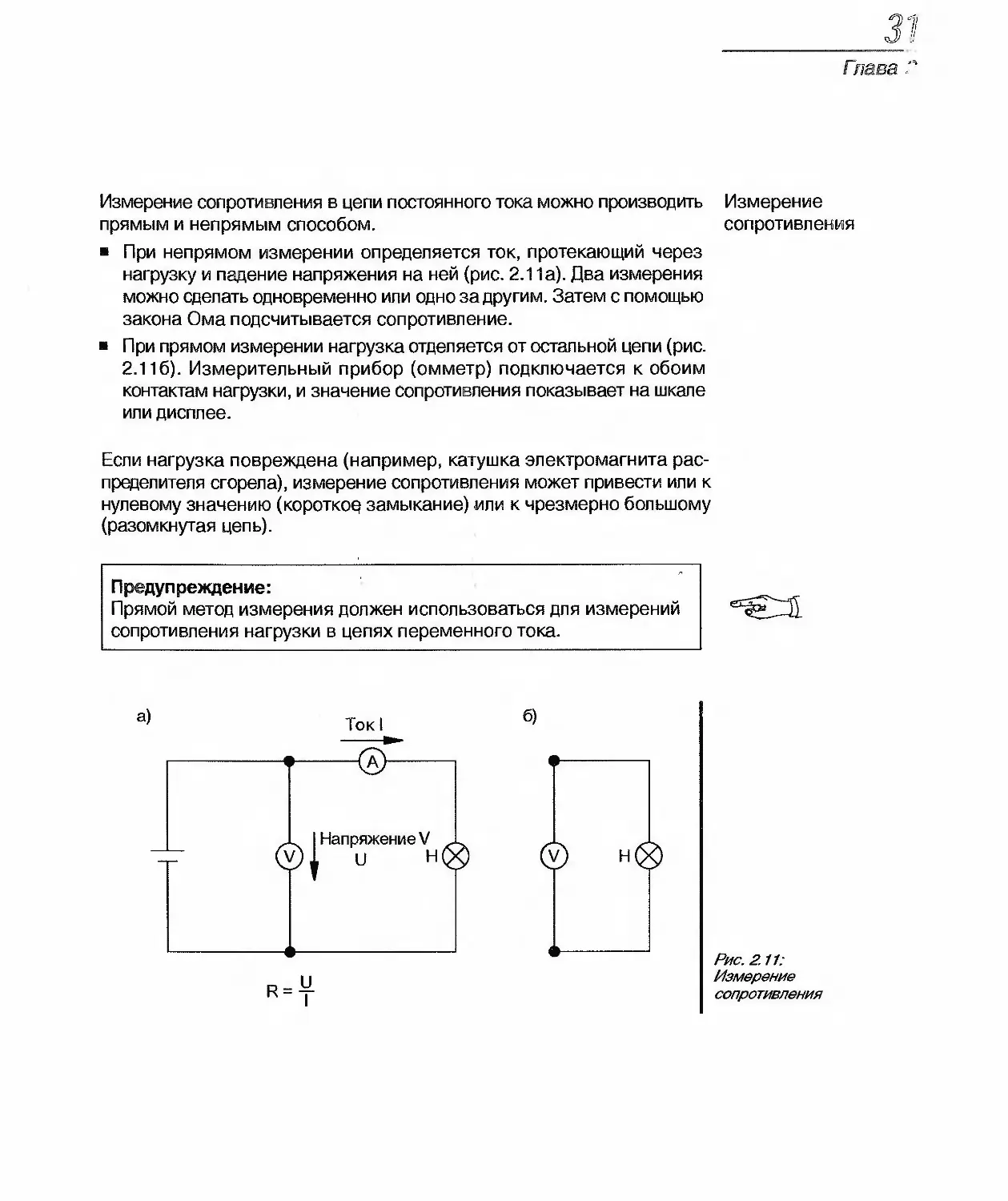
Измерение сопротивления в цепи постоянного тока можно производить
прямым и непрямым способом.
При непрямом измерении определяется ток, протекающий через
нагрузку и падение напряжения на ней (рис. 2.11а). Два измерения
можно сделать одновременно или одно за другим. Затем с помощью
закона Ома подсчитывается сопротивление.
При прямом измерении нагрузка отделяется от остальной цепи (рис.
2.116). Измерительный прибор (омметр) подключается к обоим
контактам нагрузки, и значение сопротивления показывает на шкале
или дисплее.
Измерение
сопротивления
Если нагрузка повреждена (например, катушка электромагнита рас-
пределителя сгорела), измерение сопротивления может привести или к
нулевому значению (коротко^ замыкание) или к чрезмерно большому
(разомкнутая цепь).
Предупреждение:
Прямой метод измерения должен использоваться для измерений
сопротивления нагрузки в цепях переменного тока.
Рис. 2.11:
Измерение
сопротивления
"пава 2
Источники ошибок
: 1ример применения
Измерительный прибор не может измерять напряжение, ток и соп-
ротивление с любой желаемой точностью. Сам прибор влияет на цепь,
в которой производит измерение, и ни один прибор не может показать
точное значение. Допустимая погрешность измерения указывается
на приборе в виде процента от верхнего значения эффективного диа-
пазона измерения. Например, у прибора с точностью 0,5 погрешность
показаний не должна превышать 0,5% от верхнего значения
измеряемого диапазона.
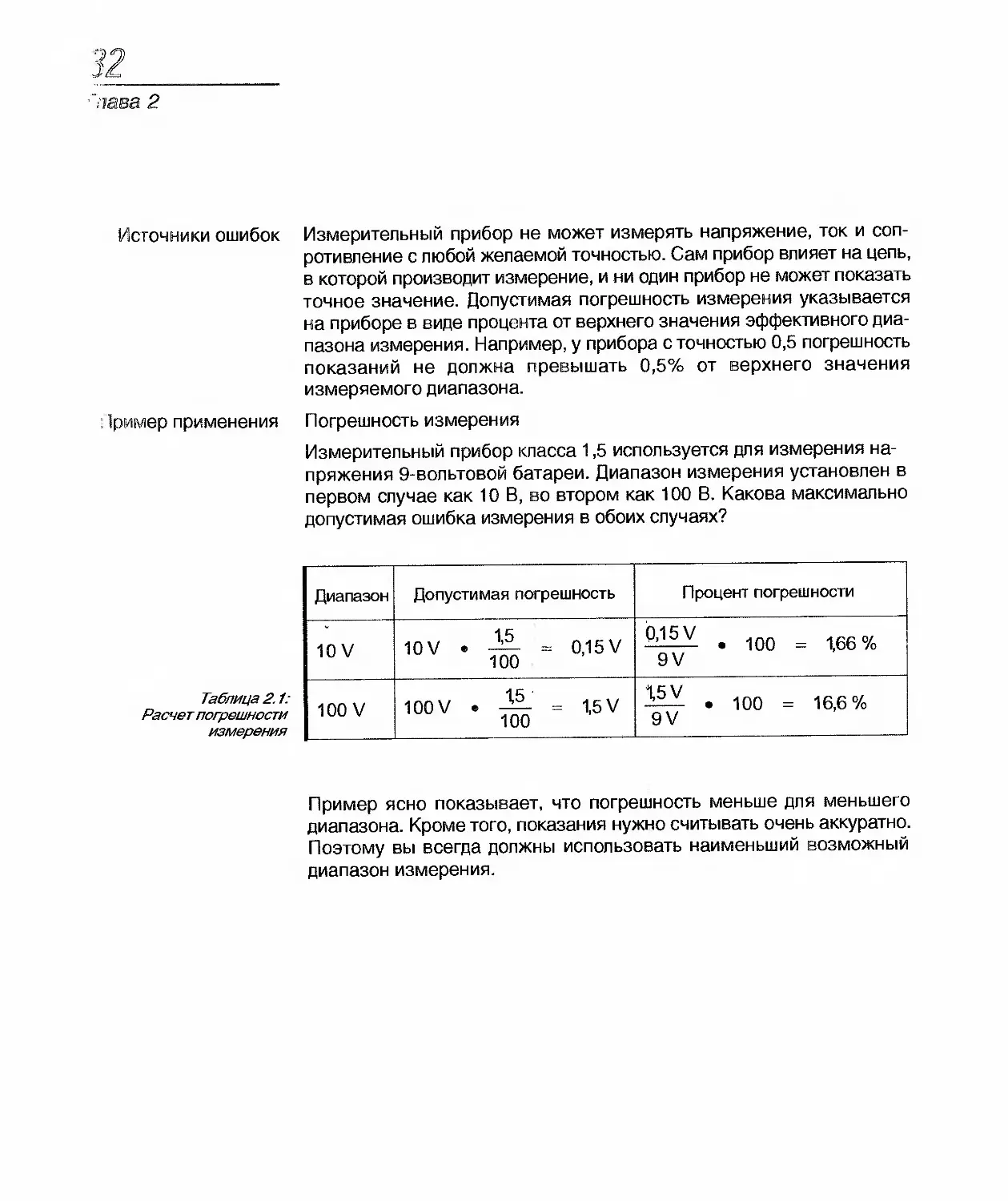
Погрешность измерения
Измерительный прибор класса 1,5 используется для измерения на-
пряжения 9-вольтовой батареи. Диапазон измерения установлен в
первом случае как 10 В, во втором как 100 В. Какова максимально
допустимая ошибка измерения в обоих случаях?
Таблица 2.1:
Расчет погрешности
измерения
Диапазон Допустимая погрешность Процент погрешности
10V 15 10V • — = 0,15V 100 . -too = 1,66% 9V
100 V 100 V • = 1,5 V 100 15 V • 100 = 16,6% 9V
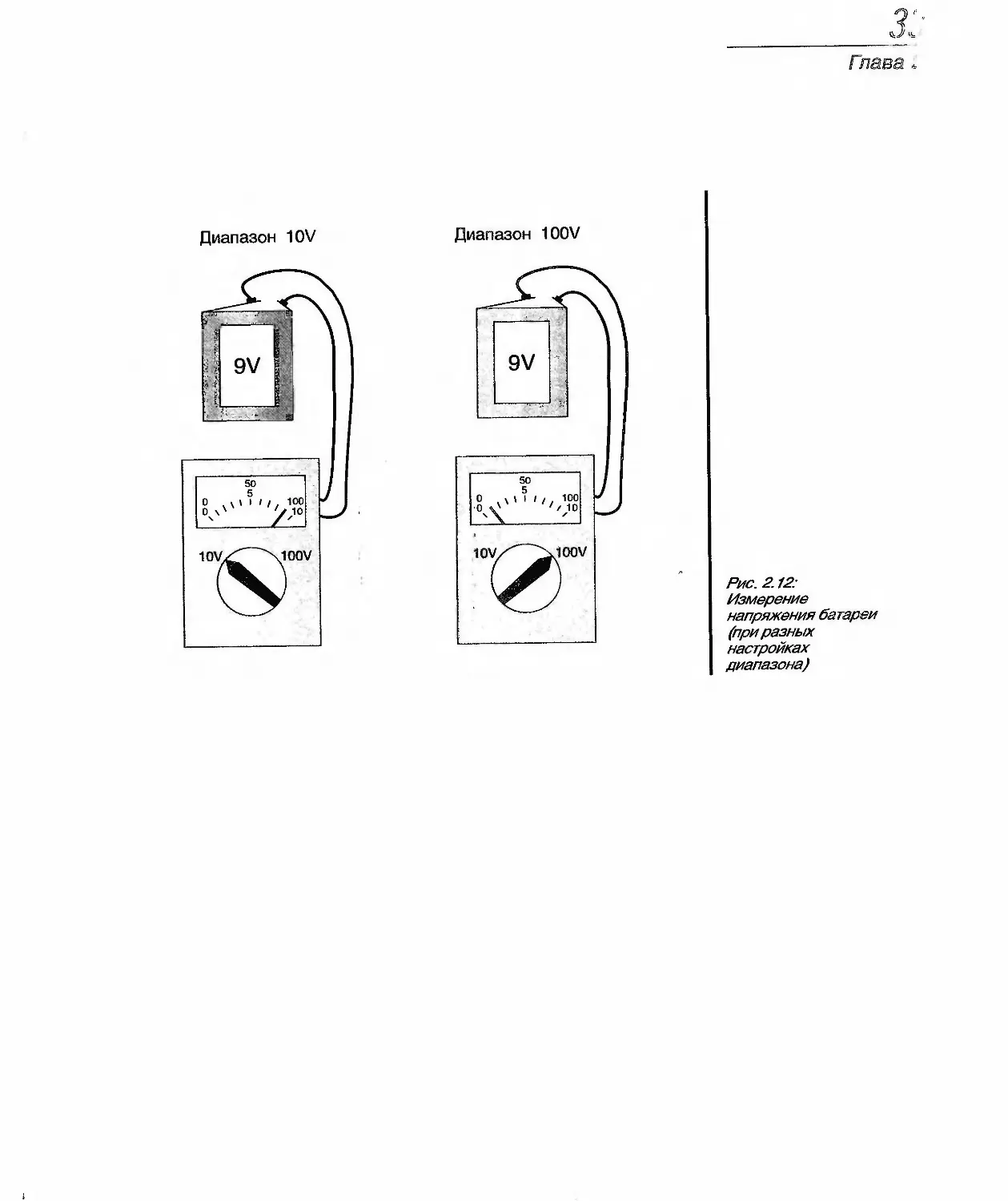
Пример ясно показывает, что погрешность меньше для меньшего
диапазона. Кроме того, показания нужно считывать очень аккуратно.
Поэтому вы всегда должны использовать наименьший возможный
диапазон измерения.
Диапазон 10V
Диапазон 100V
Рис. 2.12-
Измерение
напряжения батареи
(при разных
настройках
диапазона)
Глава 2
Г лава 3
Элементы и блоки подсистемы
обработки электрических сигналов
' 'пава 3
3.1. Электрический
блок питания
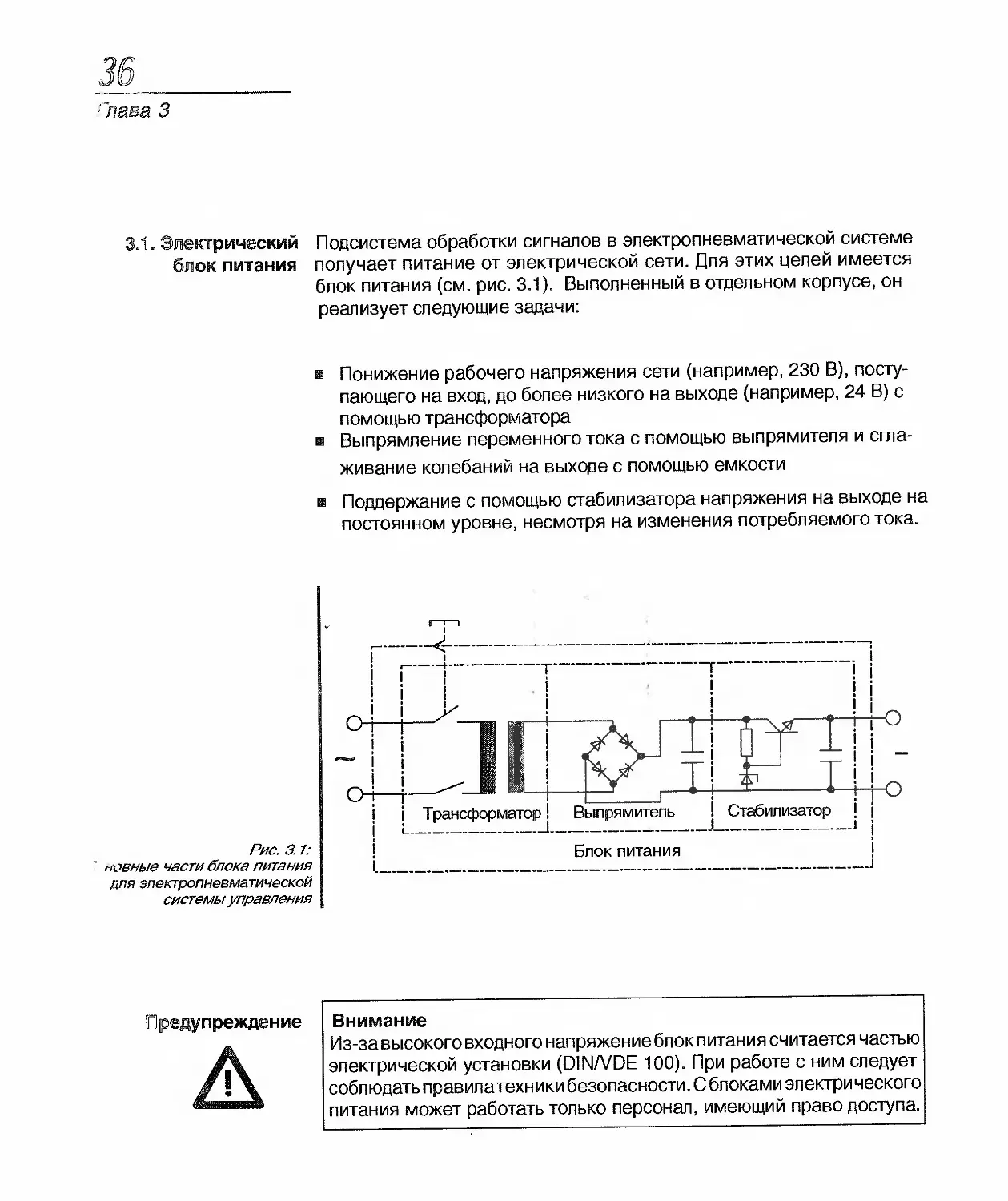
Подсистема обработки сигналов в электропневматической системе
получает питание от электрической сети. Для этих целей имеется
блок питания (см. рис. 3.1). Выполненный в отдельном корпусе, он
реализует следующие задачи:
Понижение рабочего напряжения сети (например, 230 В), посту-
пающего на вход, до более низкого на выходе (например, 24 В) с
помощью трансформатора
и Выпрямление переменного тока с помощью выпрямителя и сгла-
живание колебаний на выходе с помощью емкости
Поддержание с помощью стабилизатора напряжения на выходе на
постоянном уровне, несмотря на изменения потребляемого тока.
Предупреждение
Внимание
Из-за высокого входного напряжение блок питания считается частью
электрической установки (DIN/VDE 100). При работе с ним следует
соблюдать правилатехники безопасности. Сблоками электрического
питания может работать только персонал, имеющий право доступа.
Гпав:1
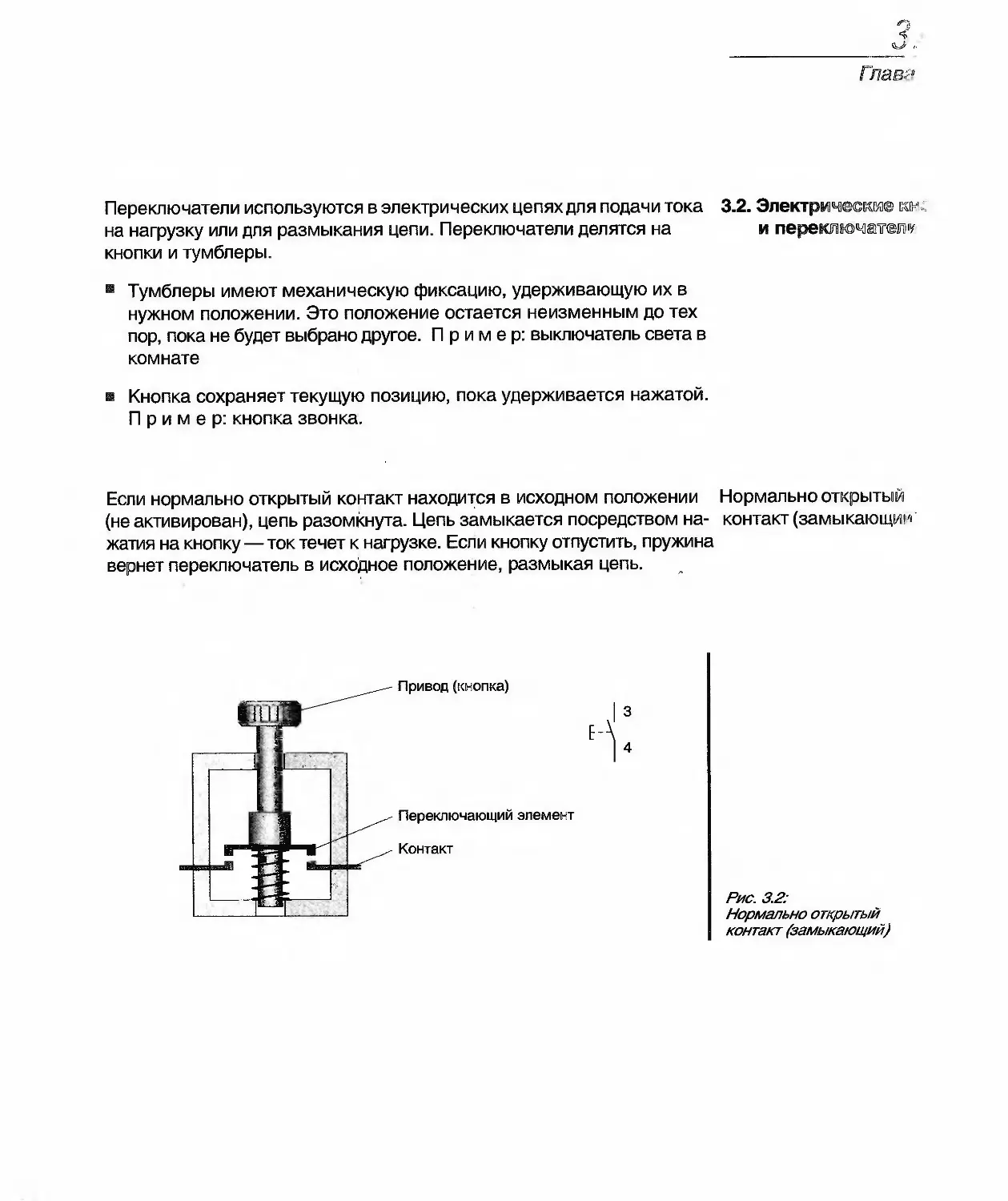
Переключатели используются в электрических цепях для подачи тока
на нагрузку или для размыкания цепи. Переключатели делятся на
кнопки и тумблеры.
3.2. Электрические №..
и переключателе
“ Тумблеры имеют механическую фиксацию, удерживающую их в
нужном положении. Это положение остается неизменным до тех
пор, пока не будет выбрано другое. Пример: выключатель света в
комнате
Кнопка сохраняет текущую позицию, пока удерживается нажатой.
Пример: кнопка звонка.
Если нормально открытый контакт находится в исходном положении Нормально открытый
(не активирован), цепь разомкнута. Цепь замыкается посредством на- контакт (замыкающим
жатия на кнопку — ток течет к нагрузке. Если кнопку отпустить, пружина
вернет переключатель в исходное положение, размыкая цепь.
Рис. 3.2:
Нормально открытый
контакт (замыкающий)
Гпав<?
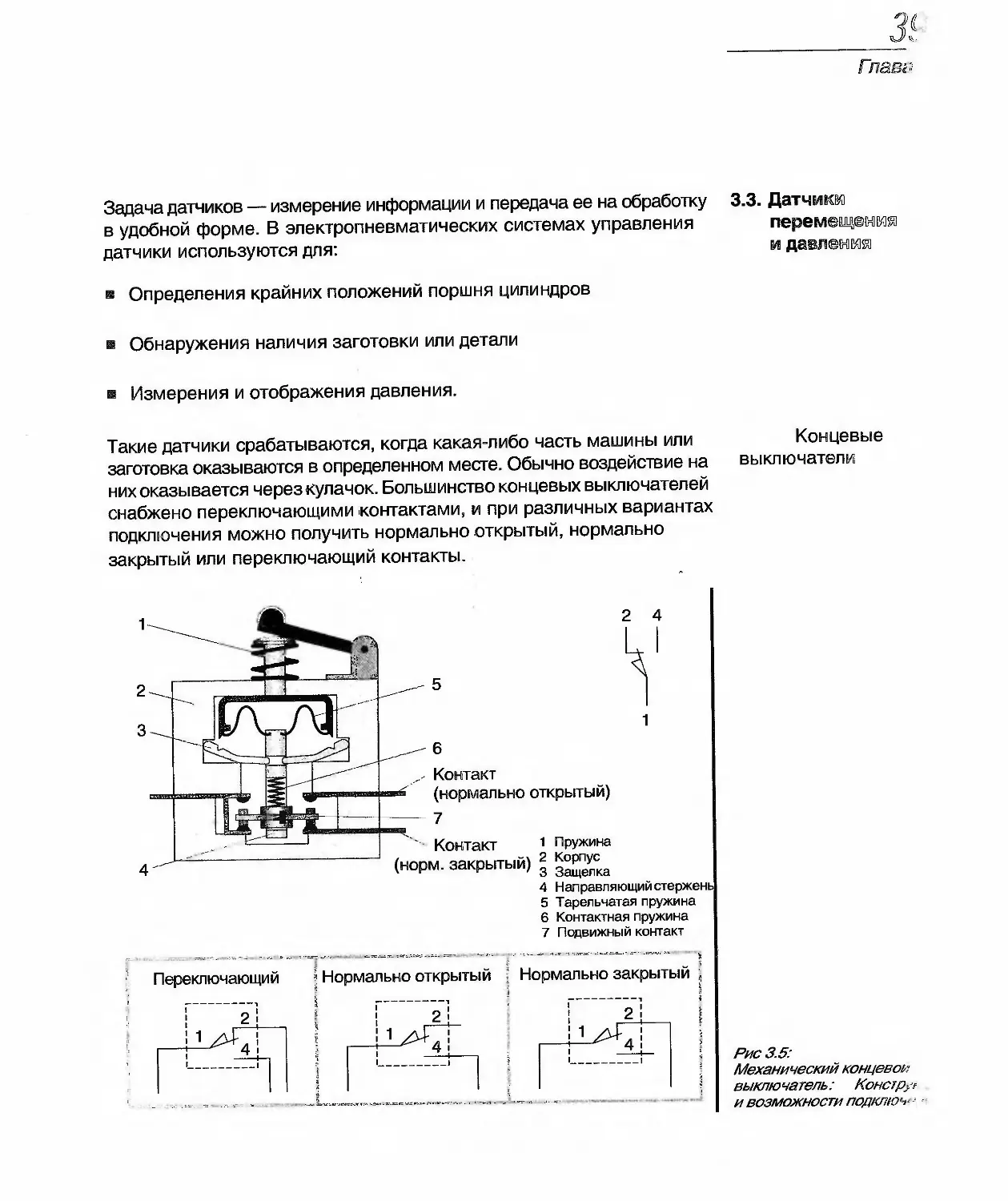
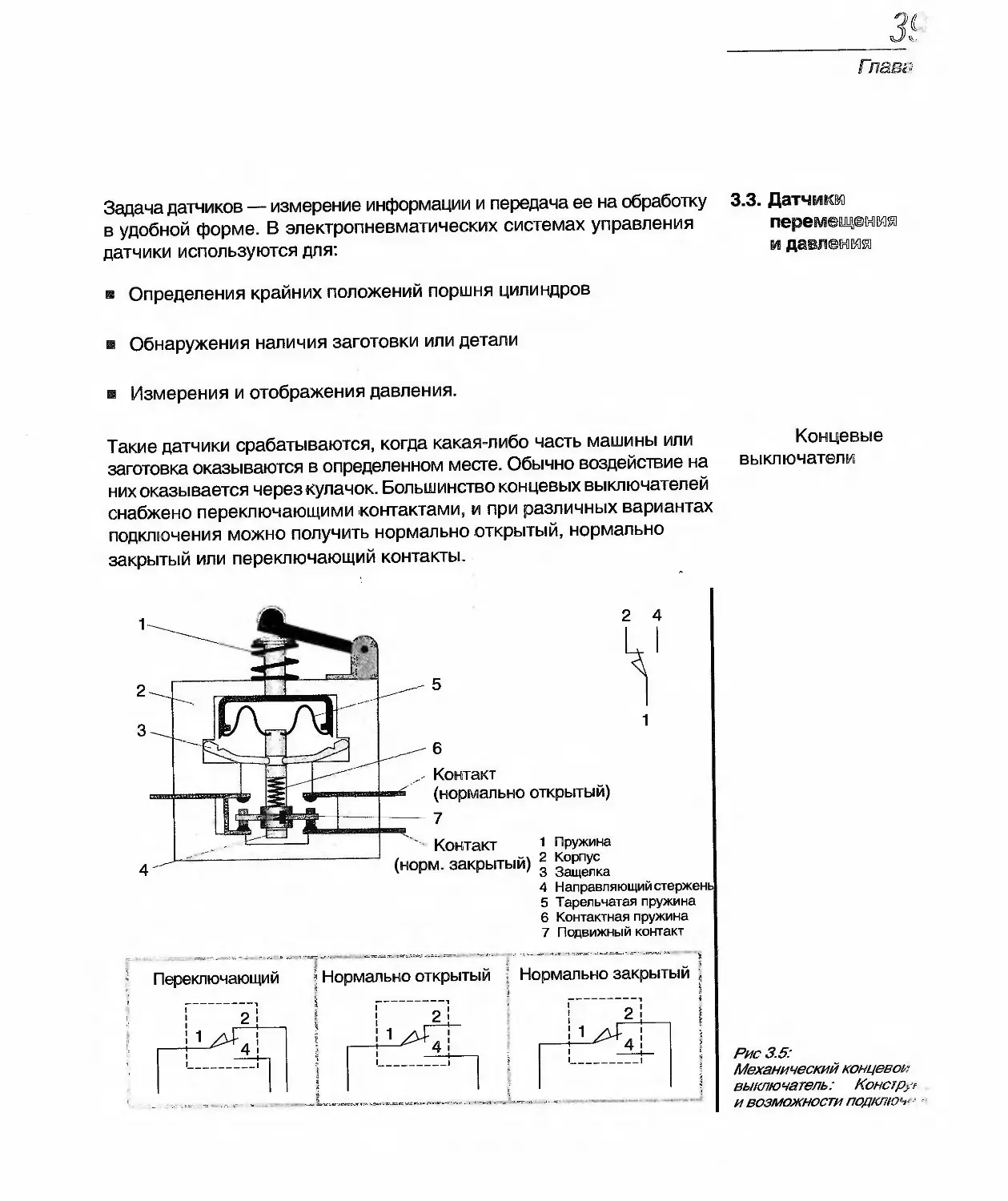
Задача датчиков — измерение информации и передача ее на обработку
в удобной форме. В электропневматических системах управления
датчики используются для:
3.3. Датчики
перемещения
и давления
в Определения крайних положений поршня цилиндров
и Обнаружения наличия заготовки или детали
Измерения и отображения давления.
Такие датчики срабатываются, когда какая-либо часть машины или
заготовка оказываются в определенном месте. Обычно воздействие на
них оказывается через кулачок. Большинство концевых выключателей
снабжено переключающими контактами, и при различных вариантах
подключения можно получить нормально открытый, нормально
закрытый или переключающий контакты.
Концевью
выключатели
4 Направляющий стержень
5 Тарельчатая пружина
6 Контактная пружина
7 Подвижный контакт
Рис 3.5:
Механический концевой
выключатель: Констрр
и возможности ПОДКЛЮЧ'
Гпав<?
Задача датчиков — измерение информации и передача ее на обработку
в удобной форме. В электропневматических системах управления
датчики используются для:
3.3. Датчики
перемещения
и давления
в Определения крайних положений поршня цилиндров
и Обнаружения наличия заготовки или детали
Измерения и отображения давления.
Такие датчики срабатываются, когда какая-либо часть машины или
заготовка оказываются в определенном месте. Обычно воздействие на
них оказывается через кулачок. Большинство концевых выключателей
снабжено переключающими контактами, и при различных вариантах
подключения можно получить нормально открытый, нормально
закрытый или переключающий контакты.
Концевые
выключатели
4 Направляющий стержень
5 Тарельчатая пружина
6 Контактная пружина
7 Подвижный контакт
Рис 3.5:
Механический концевой
выключатель: Констрр
И ВОЗМОЖНОСТИ ПОДКЛЮЧ'
лава 3
стейки приближения В отличие от концевых выключателей датчики приближения обычно бесконтактные, и для их переключения не нужно прикладывать меха- ническое усилие. В результате такие датчики имеют большой срок службы и высокую надежность переключения. Различают следующие типы датчиков при- ближения: Магнитные (герконы) Индуктивные Емкостные Оптические.
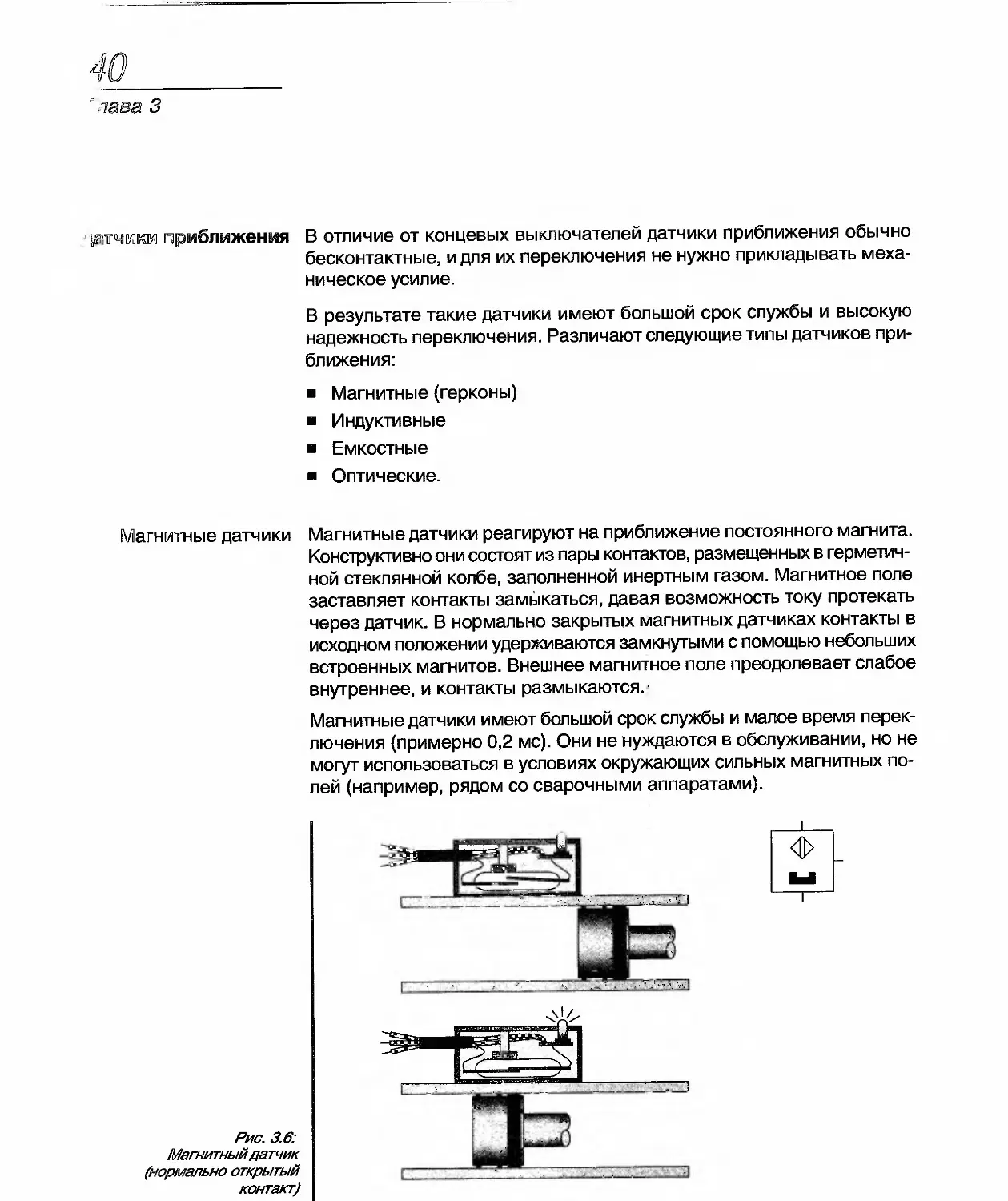
Магнитные датчики Магнитные датчики реагируют на приближение постоянного магнита. Конструктивно они состоят из пары контактов, размещенных в герметич- ной стеклянной колбе, заполненной инертным газом. Магнитное поле заставляет контакты замыкаться, давая возможность току протекать через датчик. В нормально закрытых магнитных датчиках контакты в исходном положении удерживаются замкнутыми с помощью небольших встроенных магнитов. Внешнее магнитное поле преодолевает слабое внутреннее, и контакты размыкаются. Магнитные датчики имеют большой срок службы и малое время перек- лючения (примерно 0,2 мс). Они не нуждаются в обслуживании, но не могут использоваться в условиях окружающих сильных магнитных по- лей (например, рядом со сварочными аппаратами).
I
Рис. 3.6:
Магнитный датчик
(нормально открытый
контакт)
Индуктивные, емкостные и оптические датчики являются электронными
устройствами. Обычно они имеют три электрических контакта (три
провода):
Контакт для подачи питания
и Контакт для ноля
Контакт для выходного сигнала.
В этих датчиках отсутствует подвижный механический контакт. Вместо
этого выходной провод электрически подключается к шине питания или
к нолю (= выходное напряжение О В).
Электронные датчи*
Относительно полярности выходного напряжения различают два типа
электронных датчиков:
и В датчиках с положительным переключением выходное напряжение
равно нолю, если поблизости нет объекта. Если же объект (часть
машины или заготовка) приблизятся к датчику, он переключается,
и на выходе появляется напряжение.
В датчиках с отрицательным переключением выходное напряжение
равно напряжению питания, если поблизости нет объекта. Если же
объект (часть машины или заготовка) приблизятся к датчику, он
переключается, и на выходе напряжение упадет до О В.
Датчики с положитель п
или отрицательным
переключением
!'лава 3
Индуктивные
датчики приближения
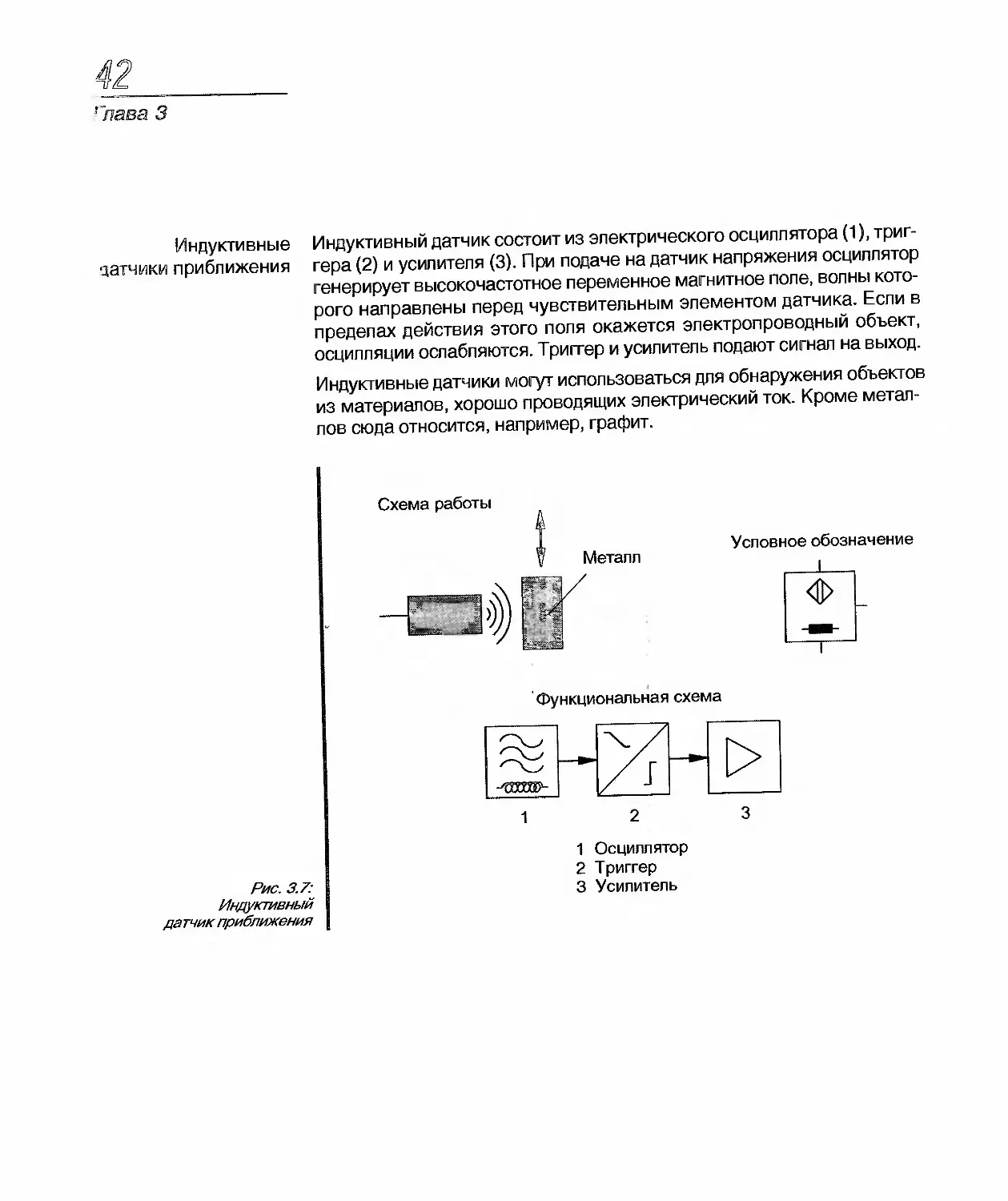
Индуктивный датчик состоит из электрического осциллятора (1), триг-
гера (2) и усилителя (3). При подаче на датчик напряжения осциллятор
генерирует высокочастотное переменное магнитное поле, волны кото-
рого направлены перед чувствительным элементом датчика. Если в
пределах действия этого поля окажется электропроводный объект,
осцилляции ослабляются. Триггер и усилитель подают сигнал на выход.
Индуктивные датчики могут использоваться для обнаружения объектов
из материалов, хорошо проводящих электрический ток. Кроме метал-
лов сюда относится, например, графит.
Схема работы
Металл
Условное обозначение
Функциональная схема
1 2 3
1 Осциллятор
2 Триггер
3 Усилитель
Рис. 3.7:
Индуктивный
датчик приближения
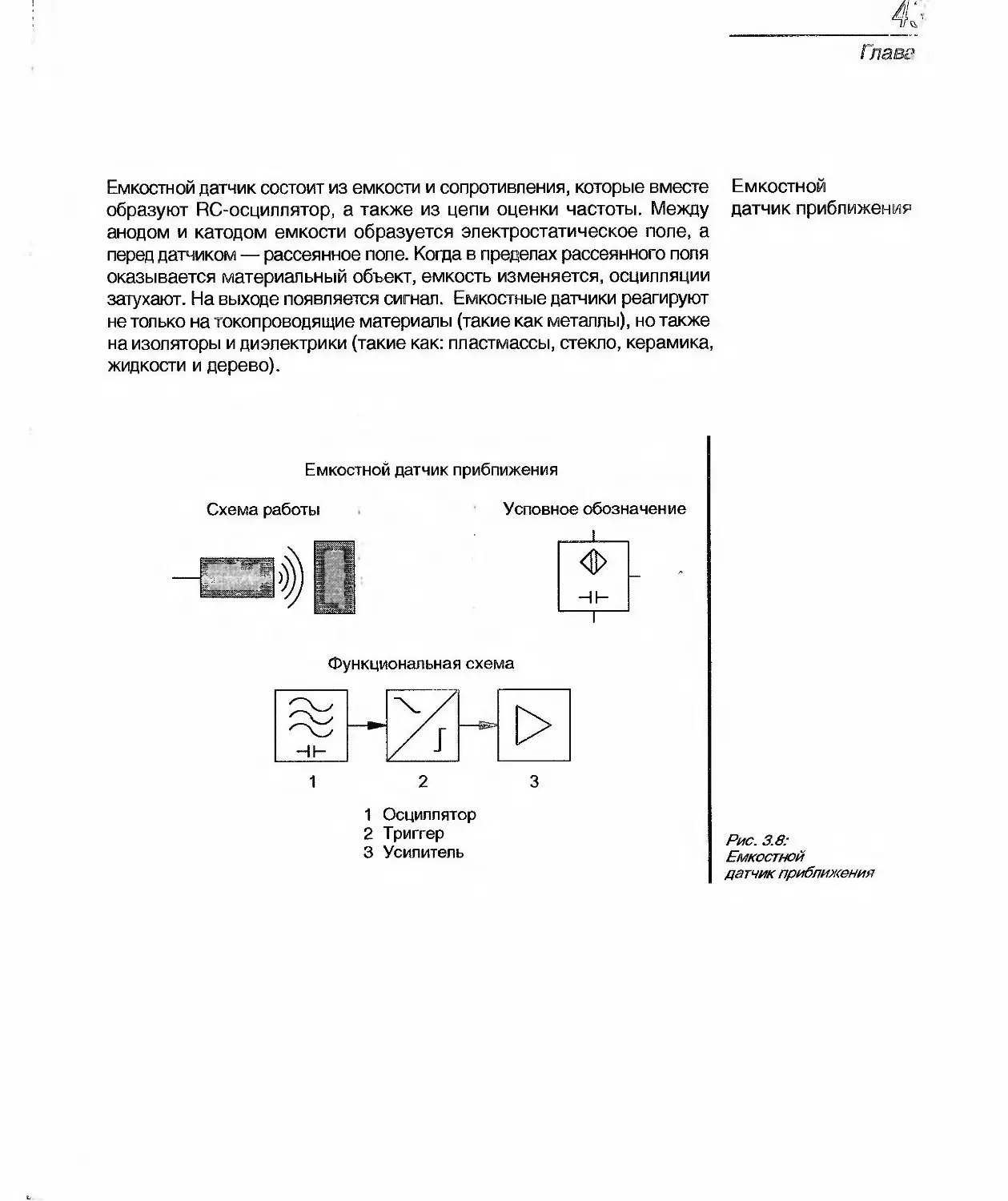
Емкостной датчик состоит из емкости и сопротивления, которые вместе
образуют RC-осциллятор, а также из цепи оценки частоты. Между
анодом и катодом емкости образуется электростатическое поле, а
перед датчиком — рассеянное поле. Когда в пределах рассеянного поля
оказывается материальный объект, емкость изменяется, осцилляции
затухают. На выходе появляется сигнал. Емкостные датчики реагируют
не только на токопроводящие материалы (такие как металлы), но также
на изоляторы и диэлектрики (такие как: пластмассы, стекло, керамика,
жидкости и дерево).
Емкостной
датчик приближения
Емкостной датчик приближения
Условное обозначение
Схема работы
Функциональная схема
1 2 3
1 Осциллятор
2 Триггер
3 Усилитель
Рис. 3.8:
Емкостной
датчик приближения
'"пава 3
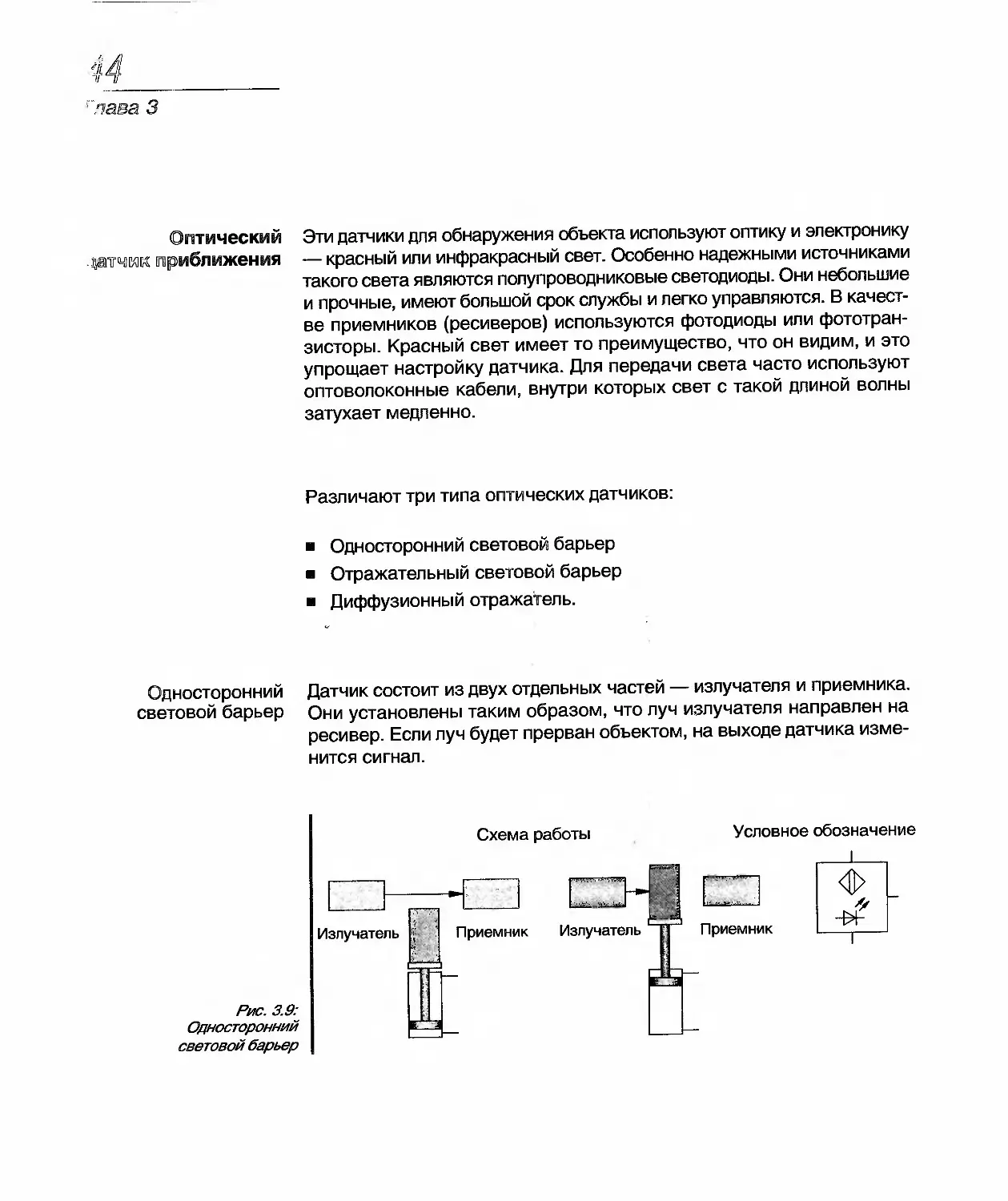
Оптический
. датчик приближения
Эти датчики для обнаружения объекта используют оптику и электронику
— красный или инфракрасный свет. Особенно надежными источниками
такого света являются полупроводниковые светодиоды. Они небольшие
и прочные, имеют большой срок службы и легко управляются. В качест-
ве приемников (ресиверов) используются фотодиоды или фототран-
зисторы. Красный свет имеет то преимущество, что он видим, и это
упрощает настройку датчика. Для передачи света часто используют
оптоволоконные кабели, внутри которых свет с такой длиной волны
затухает медленно.
Различают три типа оптических датчиков:
Односторонний световой барьер
Отражательный световой барьер
Диффузионный отражатель.
Односторонний
световой барьер
Датчик состоит из двух отдельных частей — излучателя и приемника.
Они установлены таким образом, что луч излучателя направлен на
ресивер. Если луч будет прерван объектом, на выходе датчика изме-
нится сигнал.
Рис. 3.9:
Односторонний
световой барьер
Схема работы
Условное обозначение
Гпава
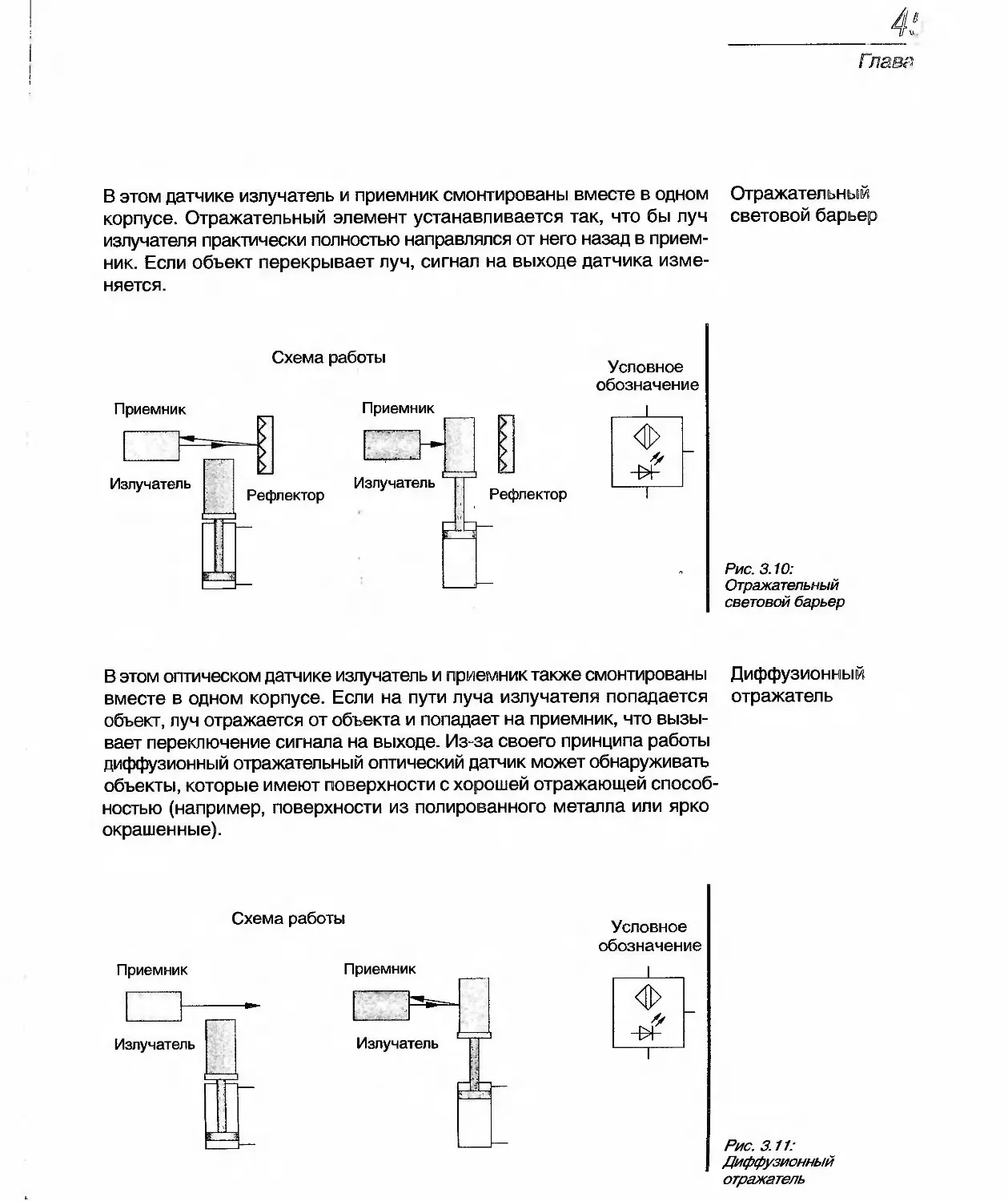
В этом датчике излучатель и приемник смонтированы вместе в одном
корпусе. Отражательный элемент устанавливается так, что бы луч
излучателя практически полностью направлялся от него назад в прием-
ник. Если объект перекрывает луч, сигнал на выходе датчика изме-
няется.
Отражательный
световой барьер
Схема работы
Условное
обозначение
Рис. 3.10:
Отражательный
световой барьер
В этом оптическом датчике излучатель и приемник также смонтированы Диффузионный
вместе в одном корпусе. Если на пути луча излучателя попадается отражатель
объект, луч отражается от объекта и попадает на приемник, что вызы-
вает переключение сигнала на выходе. Из-за своего принципа работы
диффузионный отражательный оптический датчик может обнаруживать
объекты, которые имеют поверхности с хорошей отражающей способ-
ностью (например, поверхности из полированного металла или ярко
окрашенные).
Схема работы
Условное
обозначение
Рис. 3.11:
Диффузионный
отражатель
Глава 3
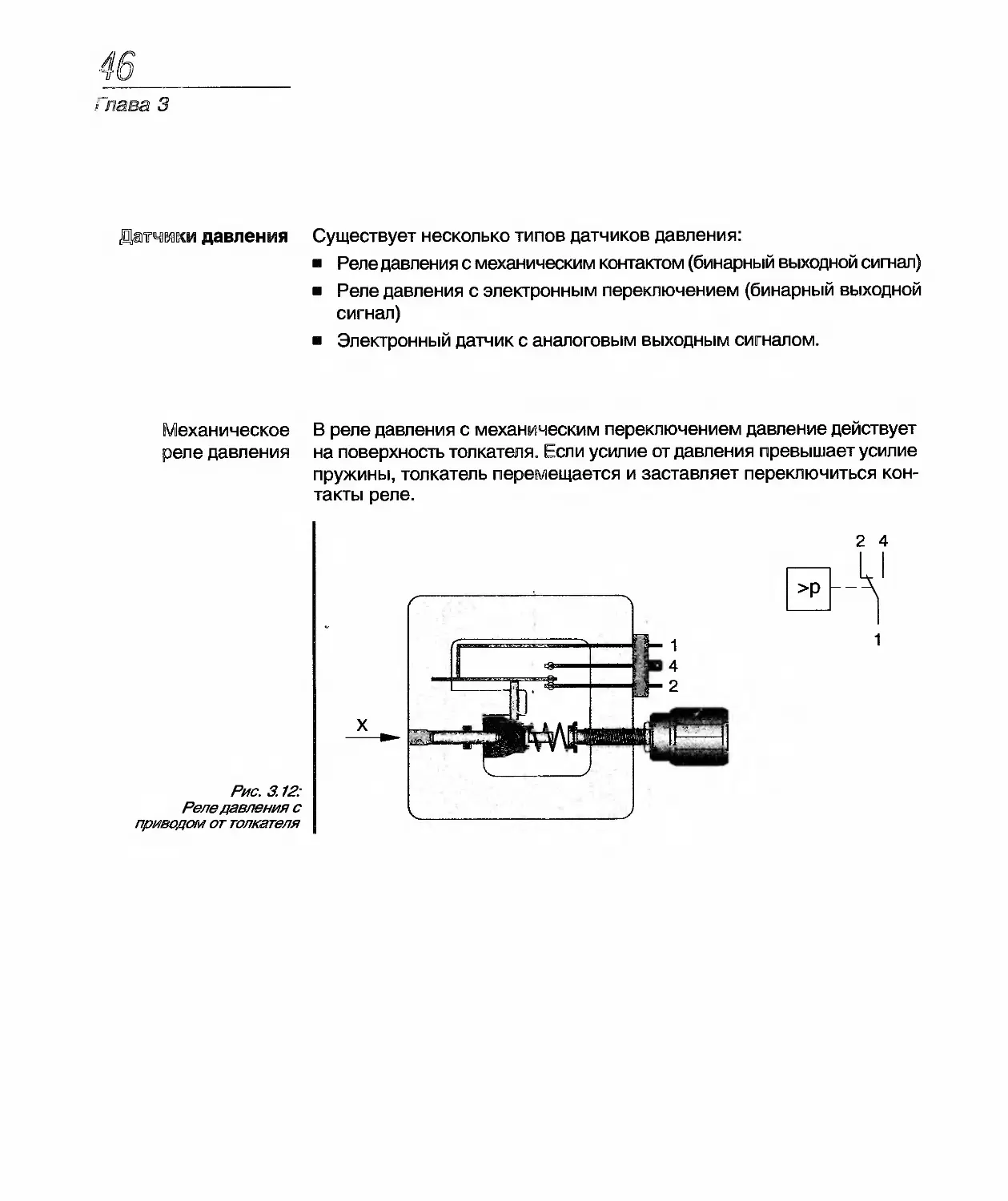
Датчики давления
Механическое
реле давления
Существует несколько типов датчиков давления:
Реле давления с механическим контактом (бинарный выходной сигнал)
Реле давления с электронным переключением (бинарный выходной
сигнал)
Электронный датчик с аналоговым выходным сигналом.
В реле давления с механическим переключением давление действует
на поверхность толкателя. Если усилие от давления превышает усилие
пружины, толкатель перемещается и заставляет переключиться кон-
такты реле.
Рис. 3.12:
Реле давления с
приводом от толкателя
Глявс'
Диафрагменные (мембранные) реле давления стали применяться более
широко. В них нет механического воздействия на контакт, а выход
переключается электронным способом. С мембраной, которая воспри-
нимает давление, связан датчик давления или датчик усилия, сигнал с
которого оценивается электронной схемой. Как только давление пре-
вышает установленное значение, сигнал на выходе реле изменяется.
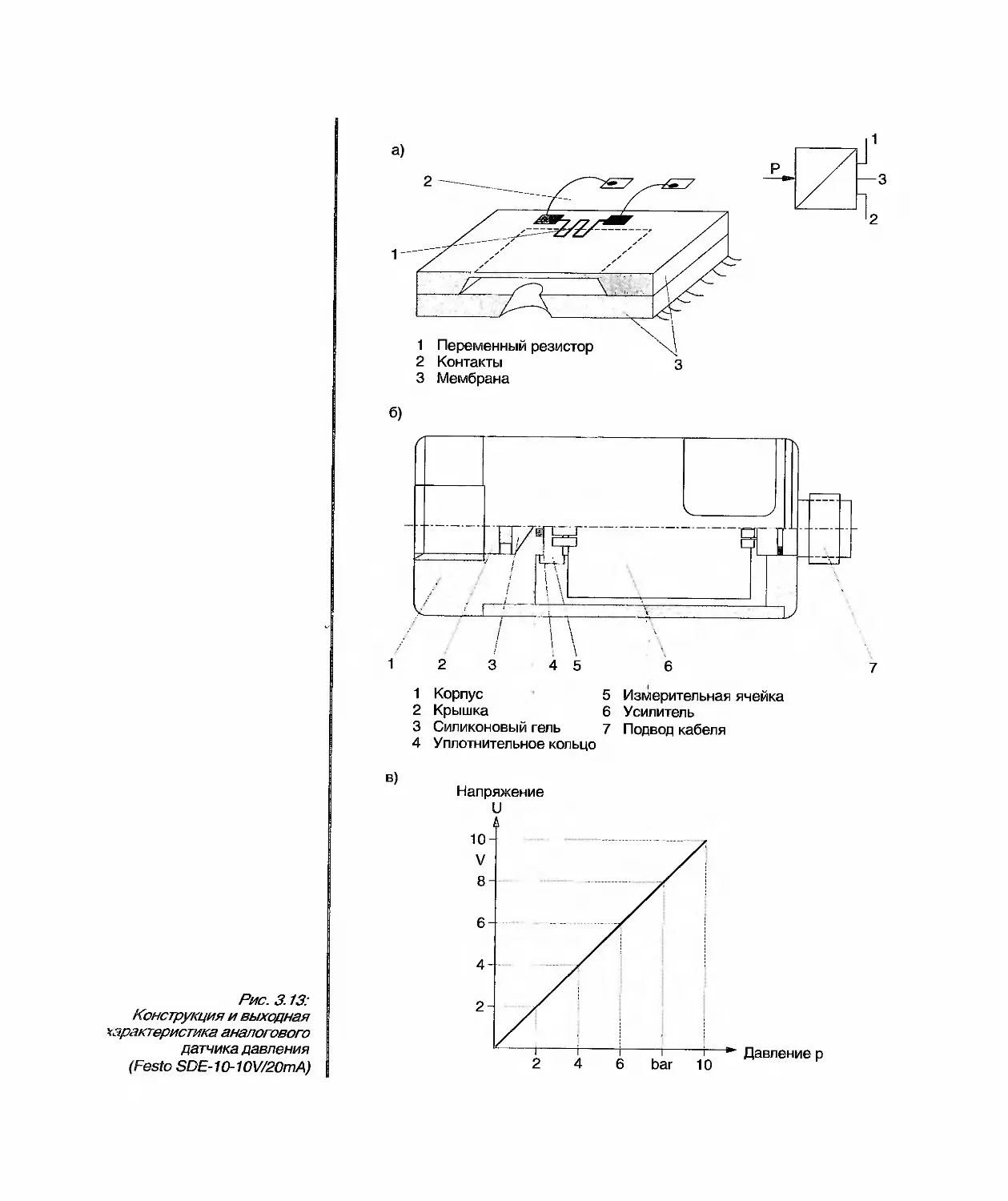
Конструкцию и принцип работы аналогового датчика давления рас-
смотрим на примере датчика фирмы Festo SDE-10-10V/20mA.
На рис. 3.13 а показана пьезорезисторная измерительная ячейка датчика
давления. Переменный резистор 1 меняет свое значение, когда на
мембрану начинает действовать давление. Через контакты 2 резистор
подключен к электронному блоку оценки, который и вырабатывает
выходной сигнал.
На рис. 3.13 6 показана конструкция всего датчика.
На рис. 3.13 в дана характеристика датчика, представляющая зависи-
мость выходного электрического сигнала от входного давления. Уве-
личение давления приводит к увеличению напряжения на выходе
датчика. Давлению 1 бар соответствует напряжение 1 В, давлению
2 бара — напряжение 2 В и т. д.
Электронные
реле давления
Аналоговые
датчики давления
1 Корпус 5
2 Крышка 6
3 Силиконовый гель 7
4 Уплотнительное кольцо
Измерительная ячейка
Усилитель
Подвод кабеля
Рис. 3.13:
Конструкция и выходная
характеристика аналогового
датчика давления
(Festo SDE-10-10V/20mA)
Давление р
4
: &
Глав* г
3.4. Реле и №нтгктого«
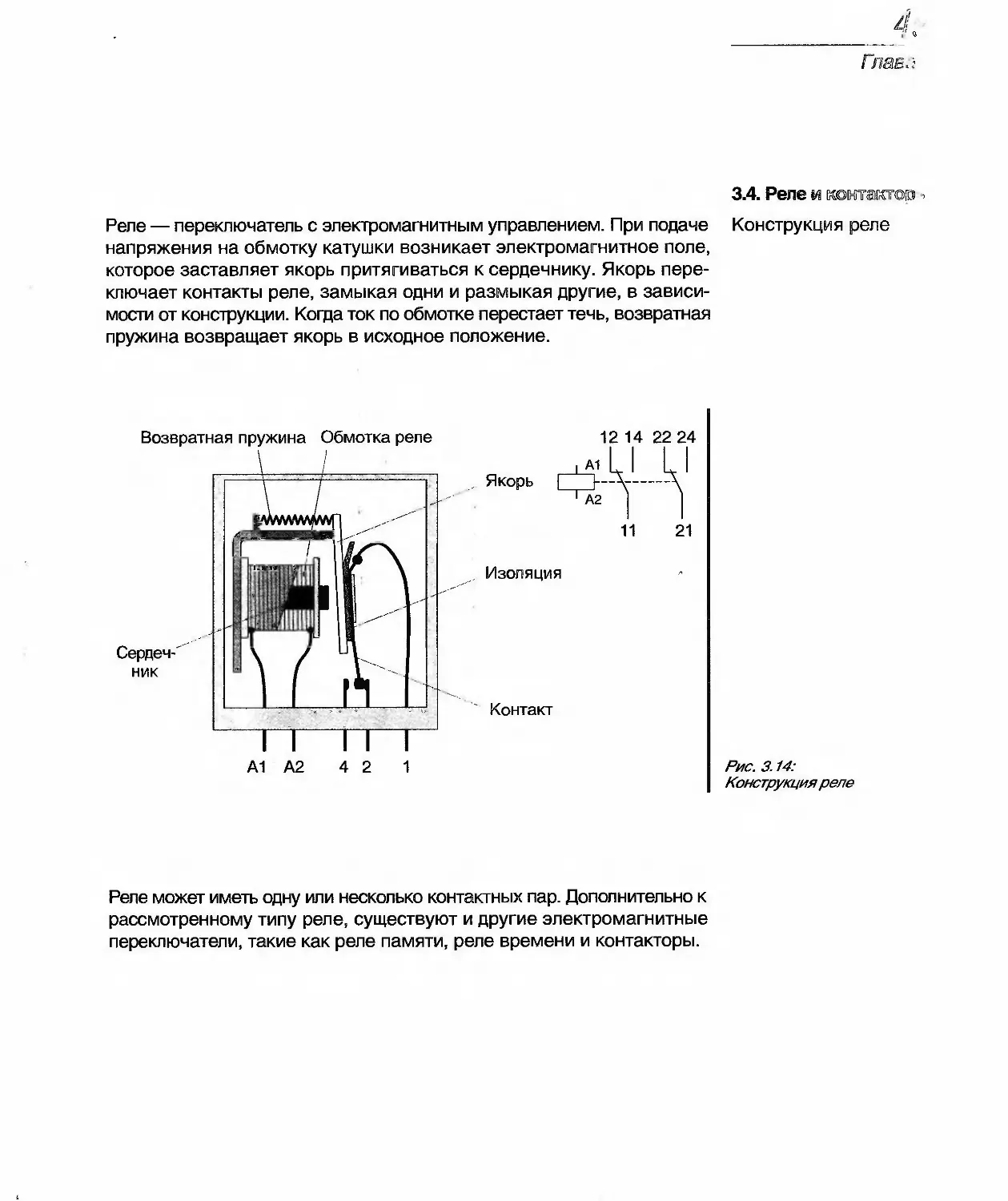
Реле — переключатель с электромагнитным управлением. При подаче
напряжения на обмотку катушки возникает электромагнитное поле,
которое заставляет якорь притягиваться к сердечнику. Якорь пере-
ключает контакты реле, замыкая одни и размыкая другие, в зависи-
мости от конструкции. Когда ток по обмотке перестает течь, возвратная
пружина возвращает якорь в исходное положение.
Конструкция реле
Рис. 3.14:
Конструкция реле
Реле может иметь одну или несколько контактных пар. Дополнительно к
рассмотренному типу реле, существуют и другие электромагнитные
переключатели, такие как реле памяти, реле времени и контакторы.
50___
• пава 3
Применение реле В электропневматических системах управления реле используются для выполнения следующих функций: в Размножение сигналов q Задержка и преобразование сигналов и Сбор информации и Отделение цепи управления от главной сети. В чисто электрических системах управления репе еще используются для изоляции цепей постоянного и переменного тока друг от друга.
'' те памяти Репе памяти переключается импульсами электрического тока: □ При подаче положительного импульса якорь перемещается □ При подаче отрицательного импульса якорь возвращается обратно □ При отсутствии входного сигнала реле сохраняет последнюю позицию якоря (запоминает). Поведение реле памяти аналогично поведению пневматического рас- пределителя с двусторонним пневмоуправлением, который реагирует на импульсы давления.
Гпав-i
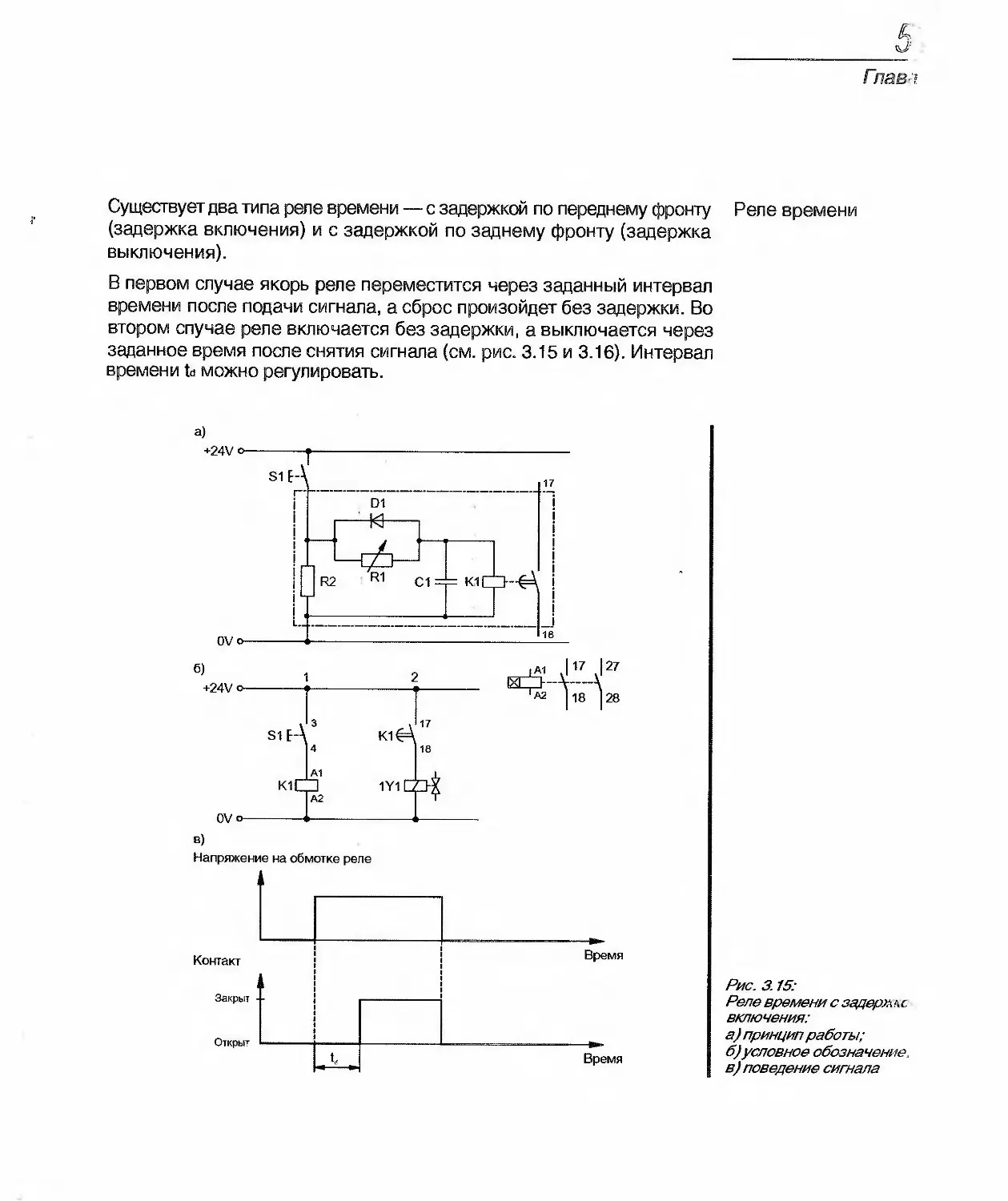
Существует два типа реле времени — с задержкой по переднему фронту
(задержка включения) и с задержкой по заднему фронту (задержка
выключения).
В первом случае якорь реле переместится через заданный интервал
времени после подачи сигнала, а сброс произойдет без задержки. Во
втором случае реле включается без задержки, а выключается через
заданное время после снятия сигнала (см. рис. 3.15 и 3.16). Интервал
времени to можно регулировать.
Реле времени
Контакт
Закрыт
Открыт
Время
Время
Рис. 3.15:
Реле времени с задерж нс
включения:
а) принцип работы;
б)условное обозначение
в) поведение сигнала
Гпава 3
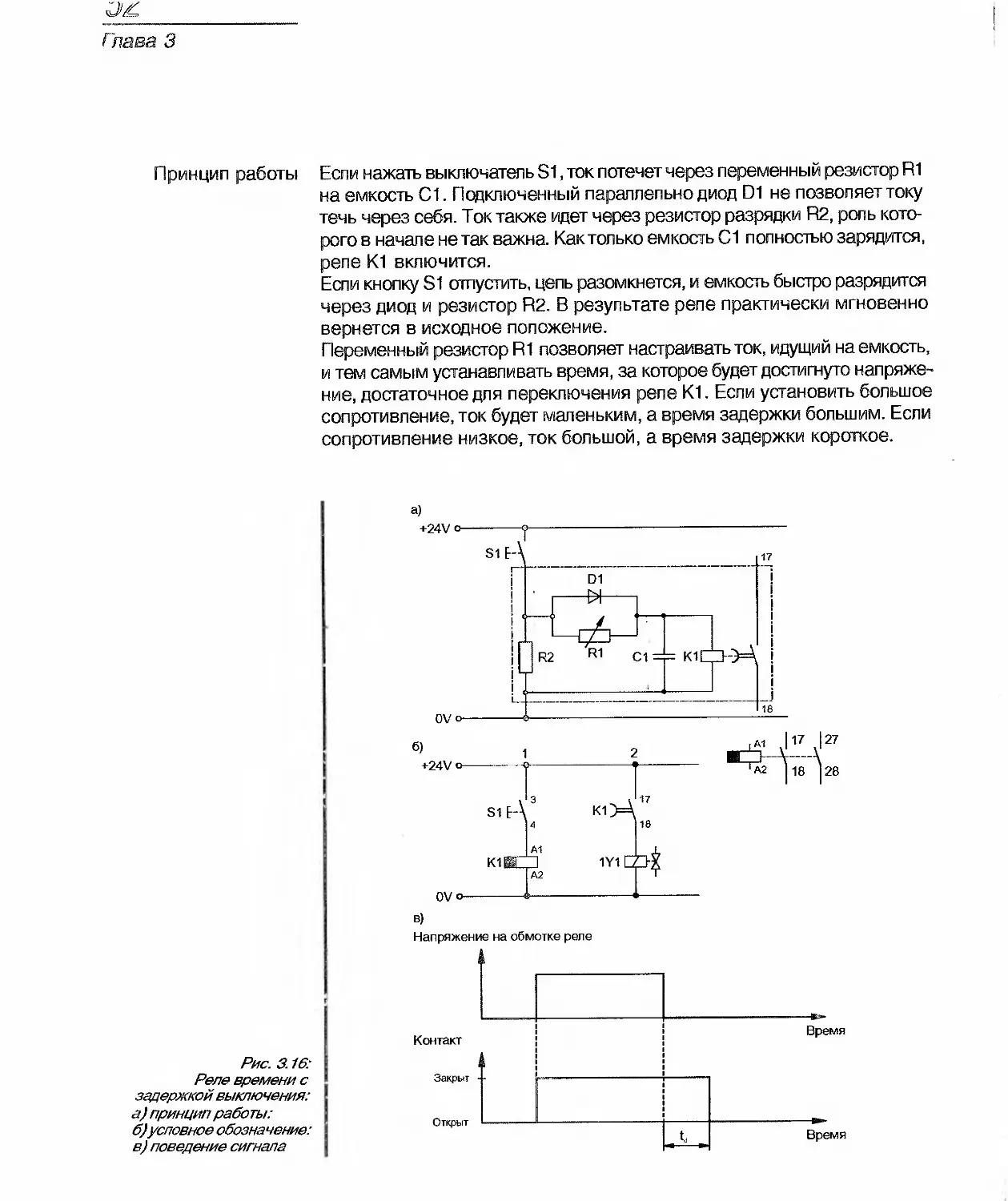
Принцип работы
Если нажать выключатель S1, ток потечет через переменный резистор R1
на емкость С1. Подключенный параллельно диод D1 не позволяет току
течь через себя. Ток также идет через резистор разрядки R2, роль кото-
рого в начале не так важна. Как только емкость С1 полностью зарядится,
репе К1 включится.
Если кнопку S1 отпустить, цепь разомкнется, и емкость быстро разрядится
через диод и резистор R2. В результате репе практически мгновенно
вернется в исходное положение.
Переменный резистор R1 позволяет настраивать ток, идущий на емкость,
и тем самым устанавливать время, за которое будет достигнуто напряже-
ние, достаточное для переключения реле К1. Если установить большое
сопротивление, ток будет маленьким, а время задержки большим. Если
сопротивление низкое, ток большой, а время задержки короткое.
Рис. 3.16:
Реле времени с
задержкой выключения:
а) принцип работы:
б)условное обозначение:
в) поведение сигнала
Напряжение на обмотке реле
Контакт
Закрыт
Открыт
Время
t.
-во-
время
Гпава
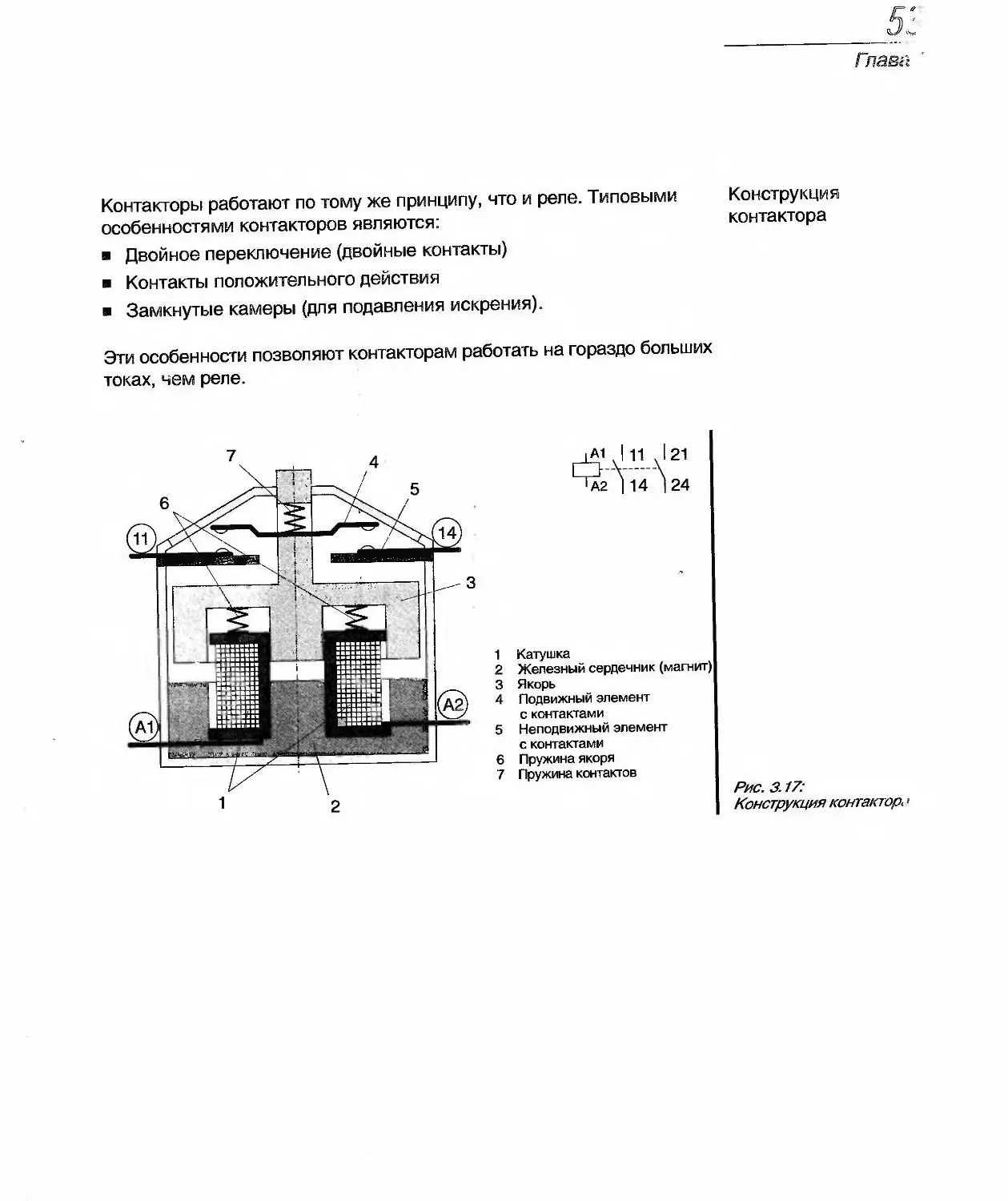
Контакторы работают по тому же принципу, что и реле. Типовыми
особенностями контакторов являются:
Двойное переключение (двойные контакты)
Контакты положительного действия
Замкнутые камеры (для подавления искрения).
Конструкция
контактора
Эти особенности позволяют контакторам работать на гораздо больших
токах, чем реле.
1 Катушка
2 Железный сердечник (магнит)
3 Якорь
4 Подвижный элемент
с контактами
5 Неподвижный элемент
с контактами
6 Пружина якоря
7 Пружина контактов
|А1 111 121
L[A2 114 124
Рис. 3.17:
Конструкция контактор.. >
tea 3
Применение
контакторов
Контактор имеет многоконтактные переключающие элементы, обычно
на 4... 10 контактных пар. Как и в реле, существуют контакты нескольких
типов в различных комбинациях: нормально открытые и нормально
закрытые, переключающие, нормально закрытые с задержкой и т. д.
Контакторы, которые переключают только вспомогательные контакты
(управляющие), называются контакторными реле. Контакторы с главными
и вспомогательными контактами называются главными или мощными
контакторами.
Контакторы используются в следующих случаях:
и Замыкание цепей с током мощностью от 4 до 30 кВт (главные кон-
такты)
и Функции управления и логические функции (вспомогательные кон-
такты).
В электропневматических системах управления используемые ток и
мощность низкие. По этой причине используются только вспомогательные
контакторы. Мощные или главные контакторы не требуются.
Гпава
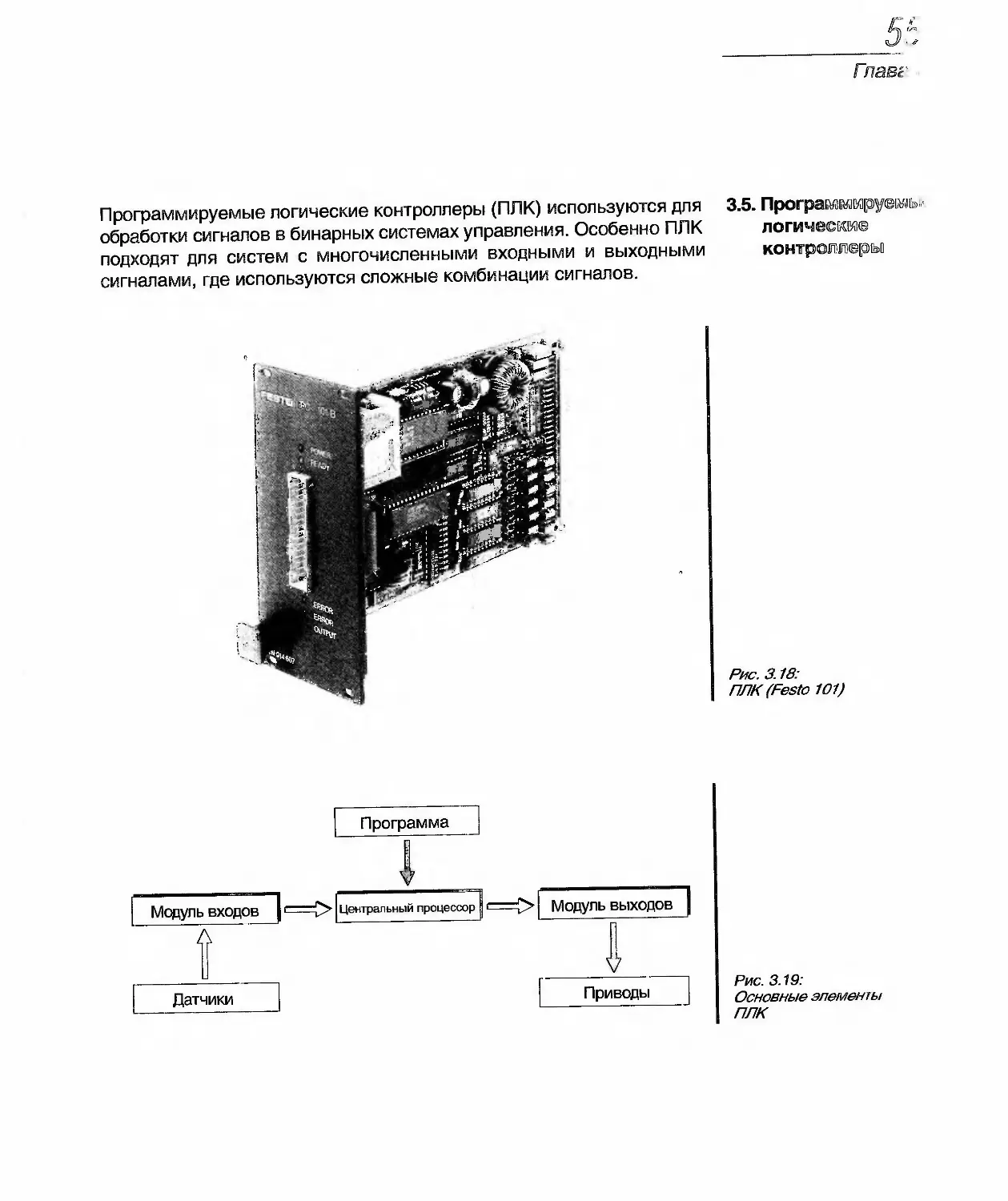
Программируемые логические контроллеры (ПЛК) используются для
обработки сигналов в бинарных системах управления. Особенно ПЛК
подходят для систем с многочисленными входными и выходными
сигналами, где используются сложные комбинации сигналов.
3.5. nporpaMMwpiyeiib'Jbii-
логически®
контроллеры
Рис. 3.18:
ПЛК (Festo 101)
Рис. 3.19:
Основные элементы
ПЛК
ж
пава 3
Структура и режим работы ПЛ К На рис. 3.19 в форме структурной схемы показаны основные блоки ПЛК. Главный элемент (ЦП) является микропроцессорной системой. Программирование микропроцессоров определяет: ® Какие входы (И, I24 и т. д.) следует читать и в каком порядке и Каким образом эти сигналы нужно обработать Какие выходы (01,02 и т. д.) получают результаты обработки. Поэтому поведение контроллера определяется не аппаратурой (провода), а программой.
1.6. Общая структура процессорной масти системы Процессорная часть эпектропневматической системы управления состоит из трех функциональных блоков, структура которых показана на рис. 3.20. Вход сигналов происходит через датчики, кнопки или выключатели. На рис. 3.20 для ввода сигналов имеется два датчика приближения и Обработка сигналов обычно производится реле или контроллером. Остальными системами можно пренебречь. На рис. 3.20 показана релейная схема управления и Выходные сигналы подаются на электромагнитные катушки пневма- тических распределителей.
Глава
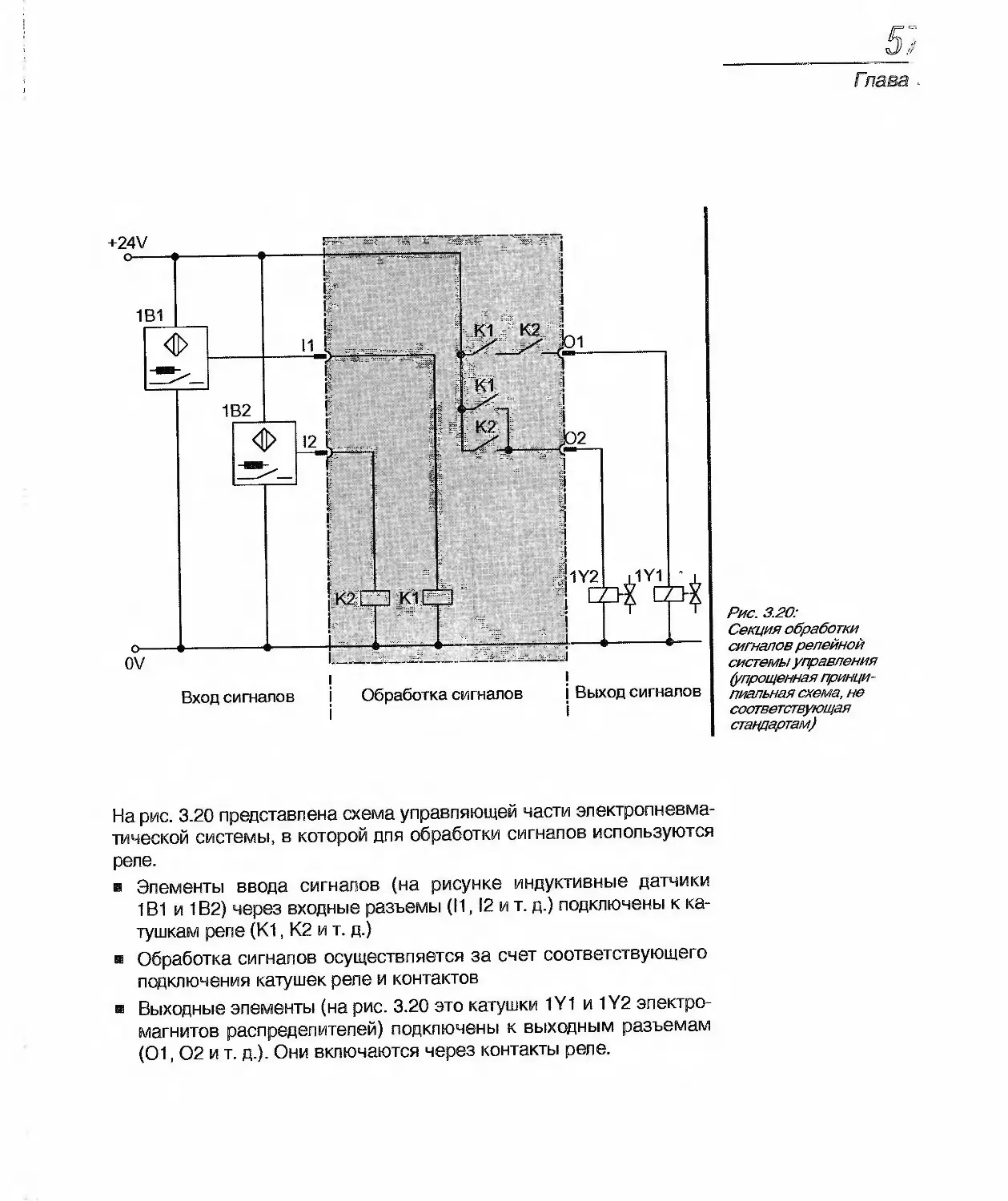
Рис. 3.20:
Секция обработки
сигналов релейной
системы управления
(упрощенная принци-
пиальная схема, не
соответствующая
стандартам)
На рис. 3.20 представлена схема управляющей части электропневма-
тической системы, в которой для обработки сигналов используются
реле.
и Элементы ввода сигналов (на рисунке индуктивные датчики
1В1 и 1В2) через входные разъемы (И, I2 и т. д.) подключены к ка-
тушкам реле (К1, К2 и т. д.)
® Обработка сигналов осуществляется за счет соответствующего
подключения катушек реле и контактов
и Выходные элементы (на рис. 3.20 это катушки 1Y1 и 1Y2 электро-
магнитов распределителей) подключены к выходным разъемам
(01,02 и т. д.). Они включаются через контакты реле.
лава 3
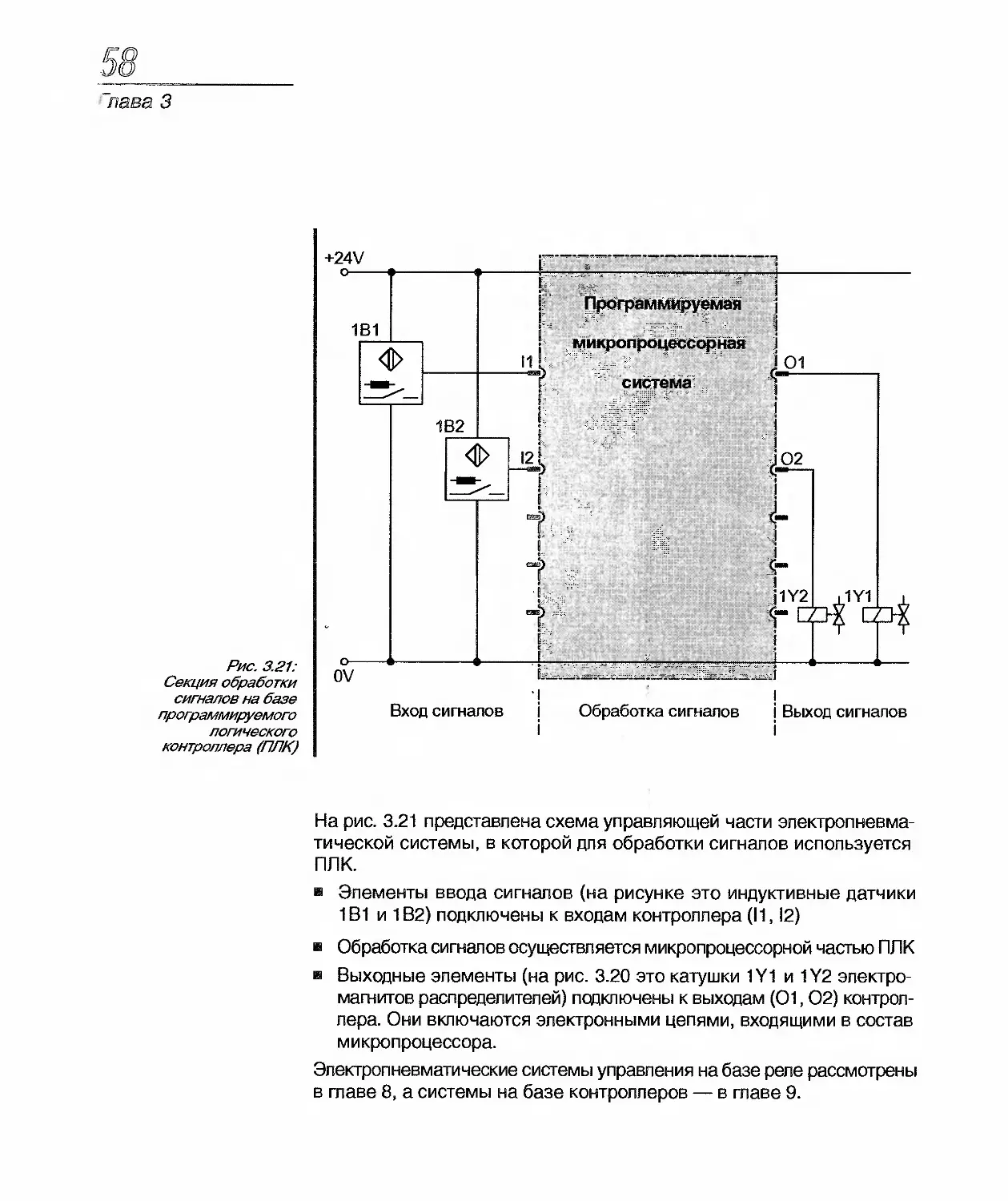
Рис. 3.21:
Секция обработки
сигналов на базе
программируемого
логического
контроллера (ПЛК)
На рис. 3.21 представлена схема управляющей части электропневма-
тической системы, в которой для обработки сигналов используется
ПЛК.
Элементы ввода сигналов (на рисунке это индуктивные датчики
1В1 и 1В2) подключены к входам контроллера (11,12)
Обработка сигналов осуществляется микропроцессорной частью ПЛК
Выходные элементы (на рис. 3.20 это катушки 1Y1 и 1Y2 электро-
магнитов распределителей) подключены к выходам (01,02) контрол-
лера. Они включаются электронными цепями, входящими в состав
м и кропроцессора.
Электропневматические системы управления на базе реле рассмотрены
в главе 8, а системы на базе контроллеров — в главе 9.
Глава
Г лава 4
Распределители с электромагнитаьж
управлением
:ава 4
4.1. Функции Электропневматическая система использует два вида энергии: Электрическую в подсистеме обработки сигналов Пневматическую (энергию сжатого воздуха) в исполнительной под- системе. Интерфейс между двумя частями электропневматической системы образуют пневматические распределители с электромагнитным управлением. Они переключаются выходными сигналами и заставля- ют перемещаться рабочие органы исполнительных устройств за счет открытия или закрытия трубопроводов. Гпавными задачами таких рас- пределителей являются: Включение и выключение питания сжатым воздухом Перемещение рабочих органов приводов.
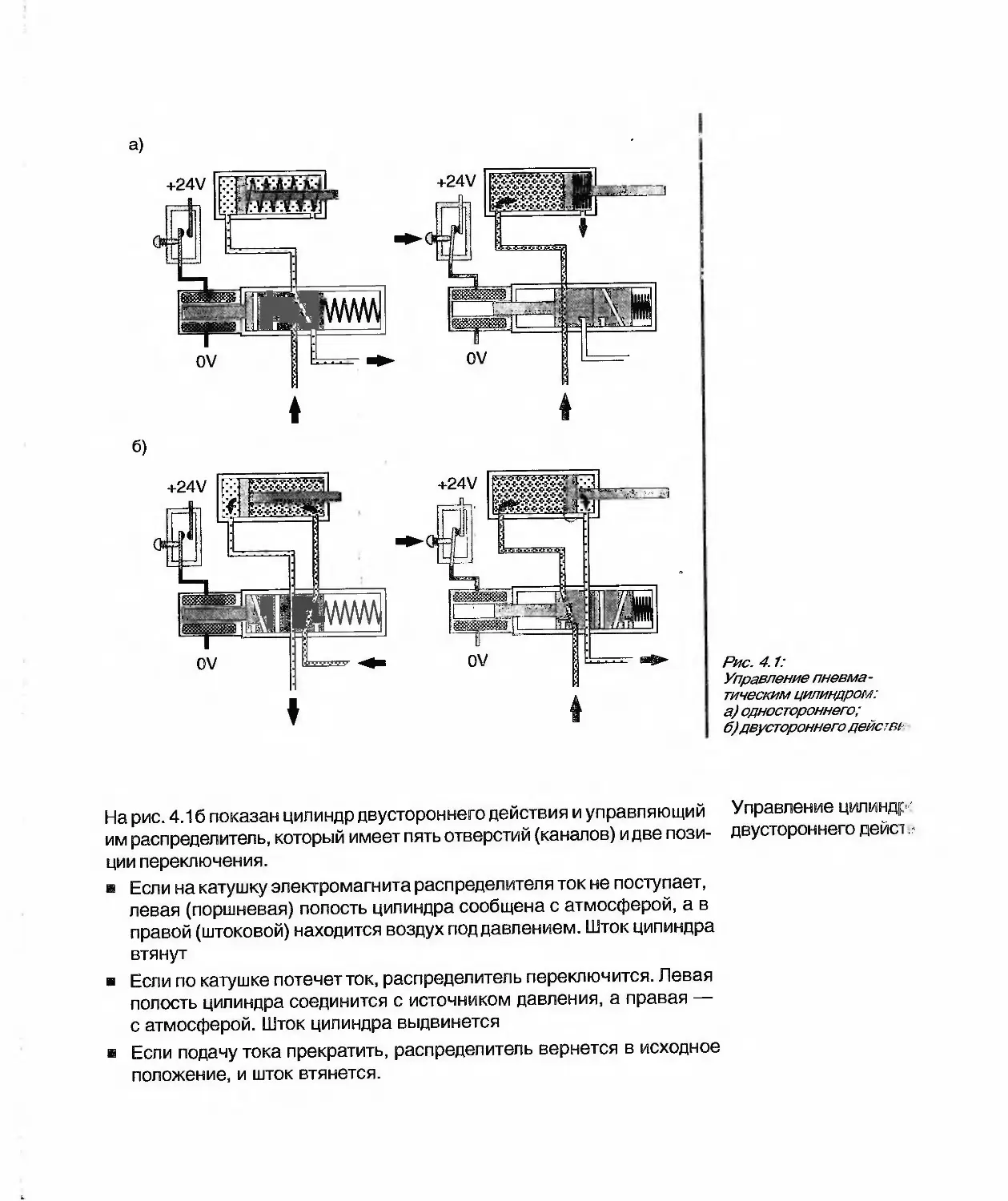
'правление цилиндром одностороннего действия На рис. 4.1а показан электропневматический распределитель, который управляет перемещением штока цилиндра одностороннего действия. Распределитель имеет3 отверстия (канала) и 2 позиции переключения. Если на катушку электромагнита распределителя ток не поступает, рабочая полость цилиндра сообщена с атмосферой. Шток цилиндра втянут Если по катушке потечет ток, распределитель переключится и сое- динит полость цилиндра с источником давления. Шток цилиндра вы- двинется Если подачу тока прекратить, распределитель вернется в исходное положение. Полость цилиндра снова сообщится с атмосферой, и его шток втянется.
a)
Рис. 4.1:
Управление пневма-
тическим цилиндром:
а) одностороннего;
б) двустороннего действ*
На рис. 4.16 показан цилиндрдвустороннего действия и управляющий Управление цилиндр
им распределитель, который имеет пять отверстий (каналов) и две пози- двустороннего дейст.?
ции переключения.
и Если на катушку электромагнита распределителя ток не поступает,
левая (поршневая) полость цилиндра сообщена с атмосферой, а в
правой (штоковой) находится воздух под давлением. Шток цилиндра
втянут
и Если по катушке потечет ток, распределитель переключится. Левая
полость цилиндра соединится с источником давления, а правая —
с атмосферой. Шток цилиндра выдвинется
Если подачу тока прекратить, распределитель вернется в исходное
положение, и шток втянется.
"лава 4
4.2. Конструкция и принцип работы Распределители в электропневматических системах переключаются с помощью электромагнитов (соленоидов). Они делятся на две группы: в Распределители с односторонним управлением и пружинным воз- вратом, остающиеся включенными пока действует сигнал управления Распределители с двусторонним управлением, остающиеся в послед- ней позиции переключения даже после снятия сигналауправления.
Исходное положение В исходном положении ток на электромагниты распределителей не по- дается, распределители с односторонним управлением удерживаются в исходной позиции пружиной, а распределители с двусторонним управ- лением не имеют четкой исходной позиции, и их положение определя- ется последним поступившим на них сигналом управления.
Обозначение отверстий Распределителитакже различаются по числу отверстий (каналов) для под- вода и отвода сжатого воздуха и по числу возможных позиций переклю- чения. В обозначении распределителя первая цифра показывает число отверстий, вторая — число позиций. Например, о' 3/2-распределитель с пружинным возвратом и 5/2-распределитель с двусторонним электромагнитным управлением. В главе рассмотрены примеры конструкций и принципа работы основ ных типов распределителей.
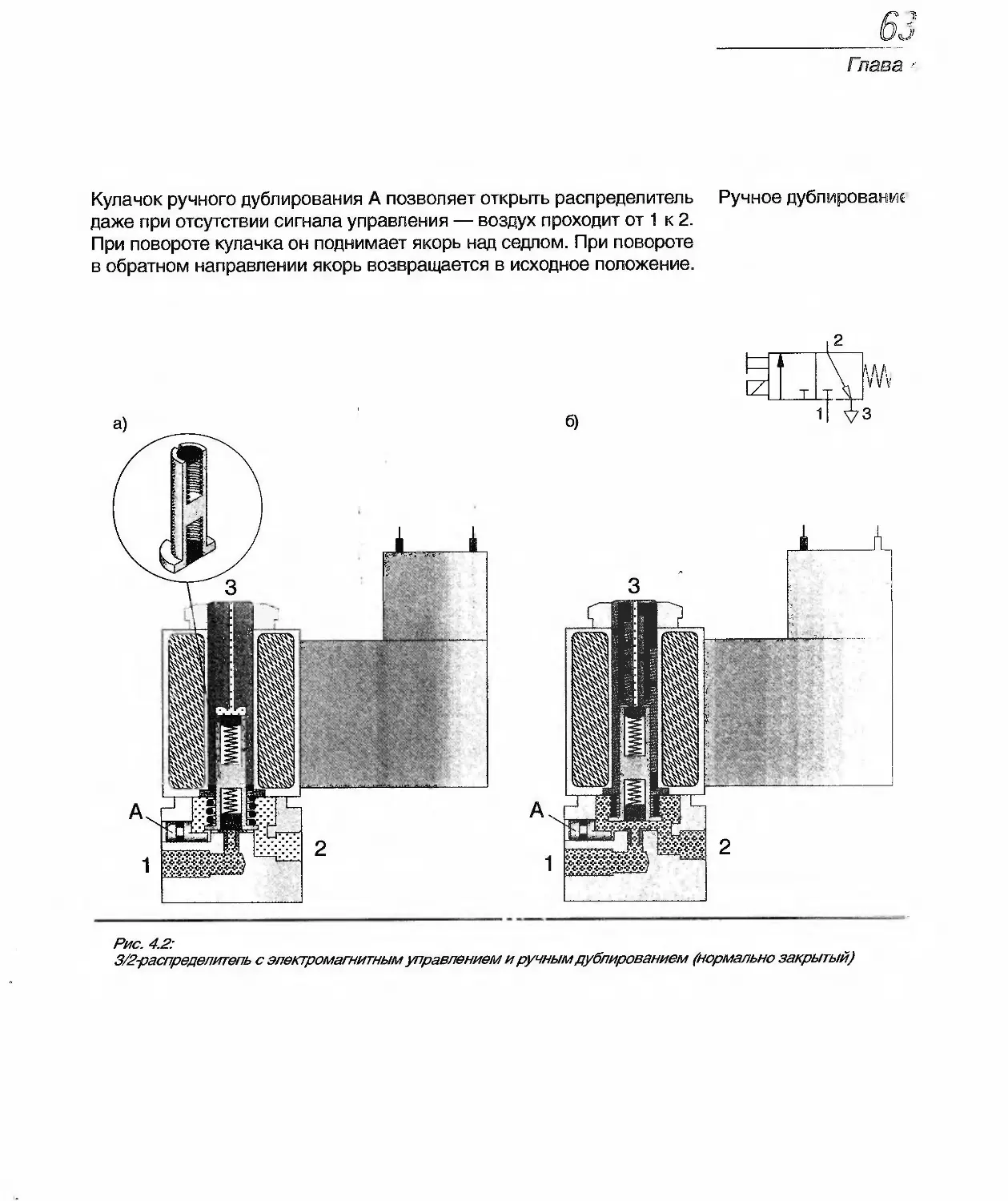
. распределитель с рямым управлением На рис. 4.2 показаны два поперечных разреза 3/2-распределителя с прямым электромагнитным управлением. в В исходном положении рабочее отверстие 2 соединено с выхлопным отверстием 3 через проточки в якоре (см. вставку на рис. 4.2а) и Если на электромагнит подать ток, возникающая электромагнитная сила заставит якорь перемещаться вверх против действия пружины (рис. 4.26). Нижнее седло открывает проход сжатому воздуху из канала питания 1 на выход 2. Верхнее седло закрывает выхлоп в атмосферу 3 ® Если сигнал с катушки убрать, якорь возвратной пружиной возвра- щается в исходное положение (рис. 4.26). Выход 2 сообщается с атмосферой 3, а проход между 1 и 2 перекрывается. Сжатый воздух выходит через проточки в якоре.
Гпава <
Кулачок ручного дублирования А позволяет открыть распределитель
даже при отсутствии сигнала управления — воздух проходит от 1 к 2.
При повороте кулачка он поднимает якорь над седлом. При повороте
в обратном направлении якорь возвращается в исходное положение.
Ручное дублирование
Рис. 4.2:
3/2-распределитепь с электромагнитным управлением и ручным дублированием (нормально закрытый)
б)
1ава 4
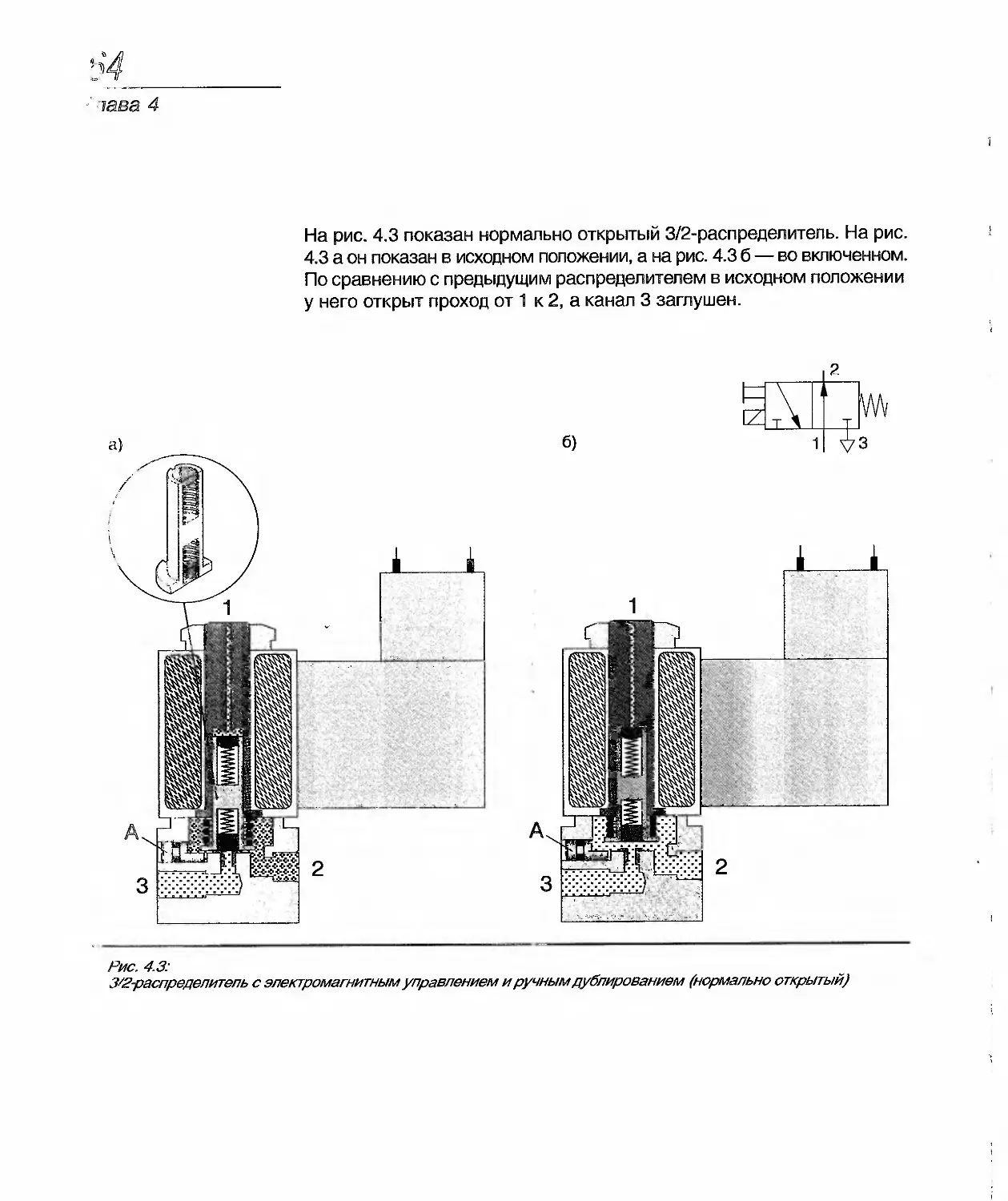
На рис. 4.3 показан нормально открытый 3/2-распределитель. На рис.
4.3 а он показан в исходном положении, а на рис. 4.3 б — во включенном.
По сравнению с предыдущим распределителем в исходном положении
у него открыт проход от 1 к 2, а канал 3 заглушен.
2
Рис. 4.3:
3/2-распределитепь с электромагнитным управлением и ручным дублированием (нормально открытый)
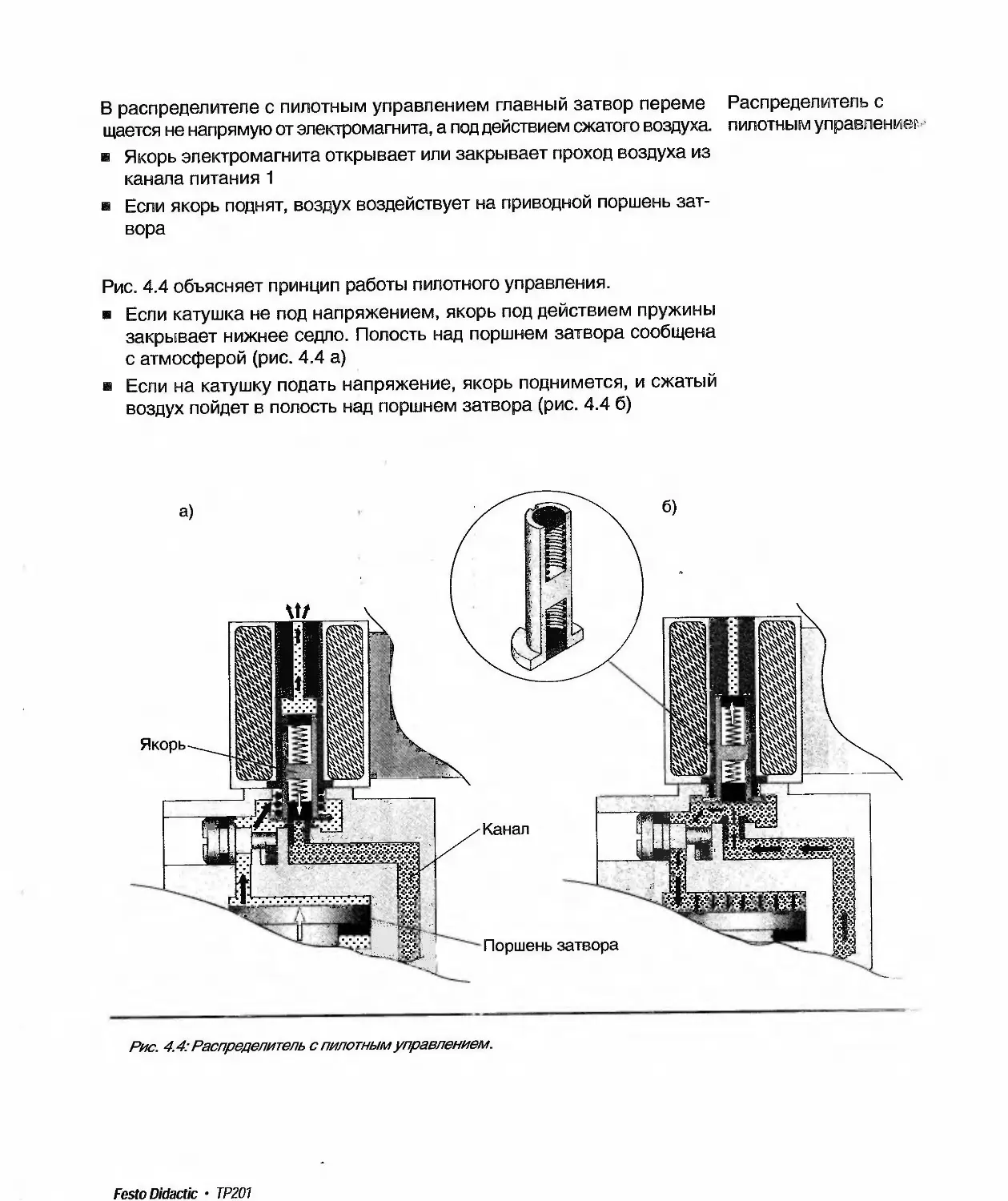
В распределителе с пилотным управлением главный затвор переме Распределитель с
щается не напрямую от электромагнита, а под действием сжатого воздуха, пилотным управление!4
Якорь электромагнита открывает или закрывает проход воздуха из
канала питания 1
Если якорь поднят, воздух воздействует на приводной поршень зат-
вора
Рис. 4.4 объясняет принцип работы пилотного управления.
Если катушка не под напряжением, якорь под действием пружины
закрывает нижнее седло. Полость над поршнем затвора сообщена
с атмосферой (рис. 4.4 а)
Если на катушку подать напряжение, якорь поднимется, и сжатый
воздух пойдет в полость над поршнем затвора (рис. 4.4 б)
Рис. 4.4: Распределитель с пилотным управлением.
Festo Didactic • ТР201
66______________
гпава 4
3/2- распределитель с
' 'плотным управлением
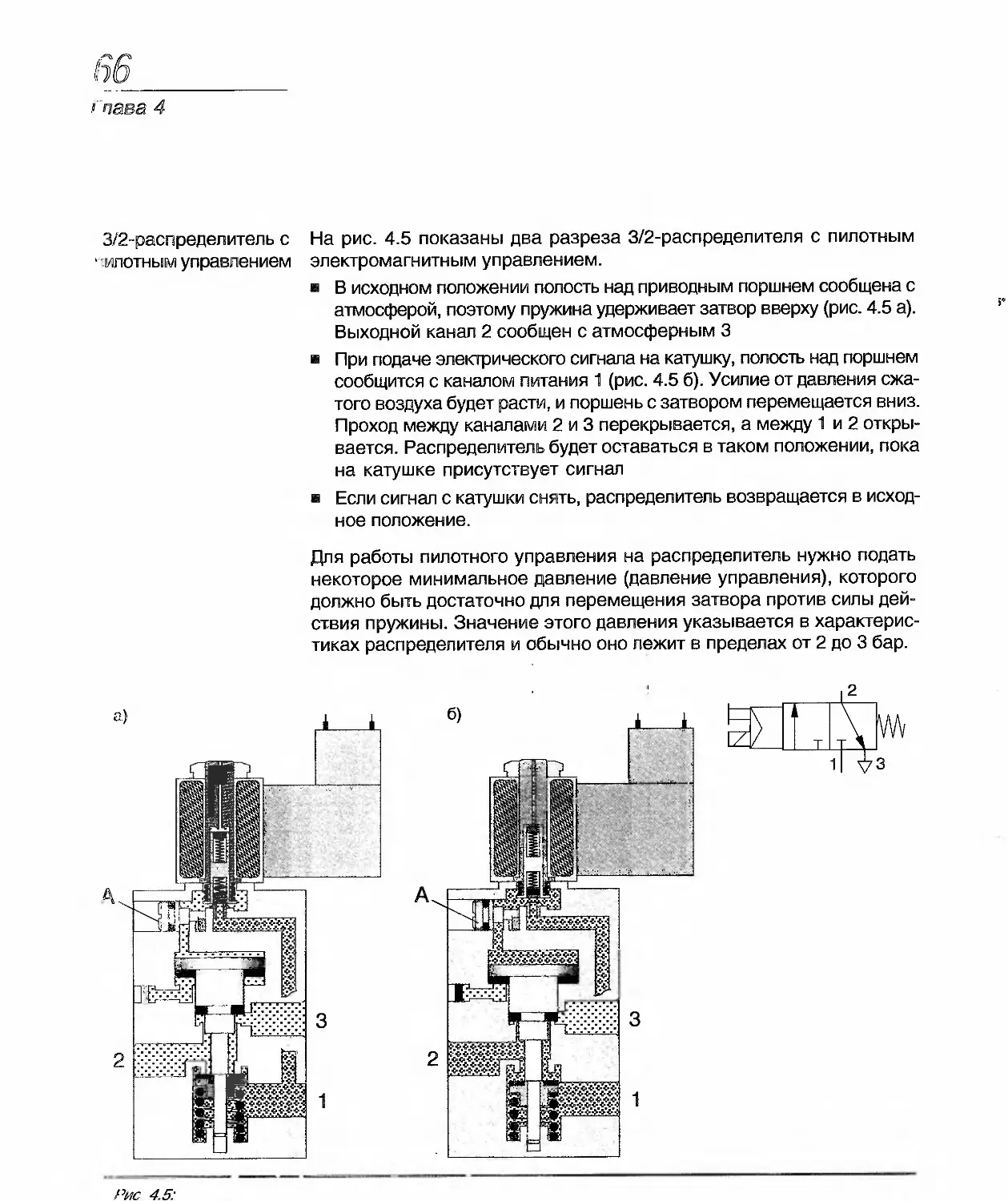
На рис. 4.5 показаны два разреза 3/2-распределителя с пилотным
электромагнитным управлением.
В исходном положении полость над приводным поршнем сообщена с
атмосферой, поэтому пружина удерживает затвор вверху (рис. 4.5 а).
Выходной канал 2 сообщен с атмосферным 3
При подаче электрического сигнала на катушку, полость над поршнем
сообщится с каналом питания 1 (рис. 4.5 б). Усилие от давления сжа-
того воздуха будет расти, и поршень с затвором перемещается вниз.
Проход между каналами 2 и 3 перекрывается, а между 1 и 2 откры-
вается. Распределитель будет оставаться в таком положении, пока
на катушке присутствует сигнал
Если сигнал с катушки снять, распределитель возвращается в исход-
ное положение.
Для работы пилотного управления на распределитель нужно подать
некоторое минимальное давление (давление управления), которого
должно быть достаточно для перемещения затвора против силы дей-
ствия пружины. Значение этого давления указывается в характерис-
тиках распределителя и обычно оно лежит в пределах от 2 до 3 бар.
Рис 4.5:
Глаг'г.
Чем больше условный проход распределителя, тем больший расход
сжатого воздуха он пропускает.
В распределителе с прямым управлением воздух к потребителю про-
ходит через отверстие, закрываемое и открываемое якорем электро-
магнита (рис. 4.2). Чтобы обеспечить достаточный расход, площадь это-
го отверстия следует делать как можно больше, что влечет за собой
увеличение размеров якоря. Это, в свою очередь, требует большой
возвратной пружины, против которой должен будет действовать электро-
магнит. В результате размеры распределителя растут, как и потребляе-
мая им электрическая мощность.
В распределителе с пилотным управлением потоком сжатого воздуха,
идущим к потребителю, управляет главный затвор (рис. 4.5). А приводной
поршень затвора управляется^ пилотным каскадом. Здесь достаточно не-
большого расхода, поэтому и размеры якоря могут быть относительно не-
большими при небольшом развиваемом усилии. Следовательно, размеры
электромагнита могут быть намного меньше, чем у распределителя с
прямым управлением. Также меньше потребление электроэнергии и
выделение тепла.
Эти преимущества в размерах, потреблении энергии и выделении тепла
привели к тому, что в электропневматических системах используются,
в основном, распределители с пилотным управлением.
Сравнение между г а
пределителями с пуг
и пилотным управл-jt
пава 4
э/2-распределитель с
уютным управлением
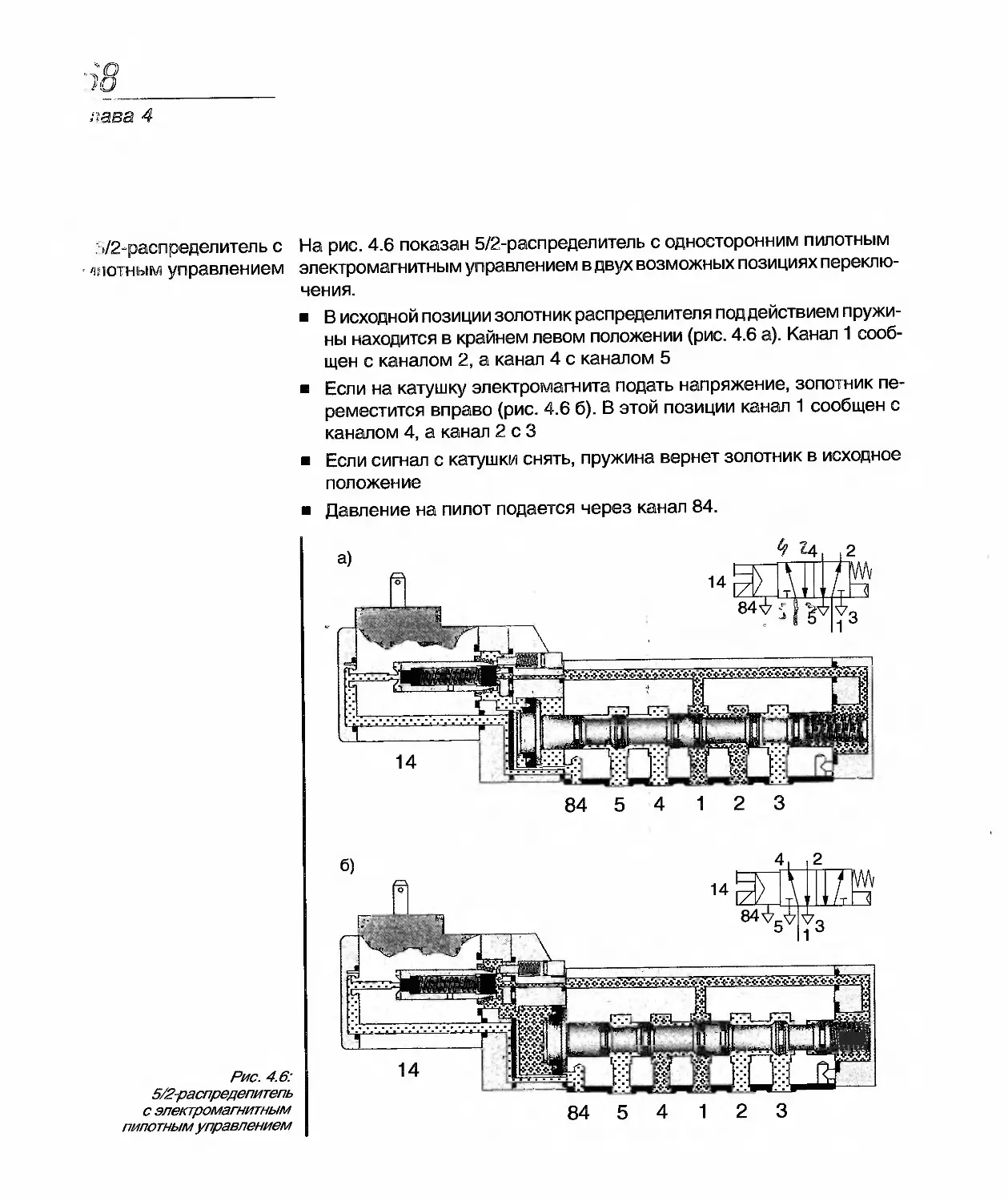
На рис. 4.6 показан 5/2-распределитель с односторонним пилотным
электромагнитным управлением в двух возможных позициях переклю-
чения.
В исходной позиции золотник распределителя под действием пружи-
ны находится в крайнем левом положении (рис. 4.6 а). Канал 1 сооб-
щен с каналом 2, а канал 4 с каналом 5
Если на катушку электромагнита подать напряжение, золотник пе-
реместится вправо (рис. 4.6 б). В этой позиции канал 1 сообщен с
каналом 4, а канал 2 с 3
Если сигнал с катушки снять, пружина вернет золотник в исходное
положение
Давление на пилот подается через канал 84.
Рис. 4.6:
5/2распредепитепь
с электромагнитным
пилотным управлением
84 5 4 1 2 3
Гпав.1
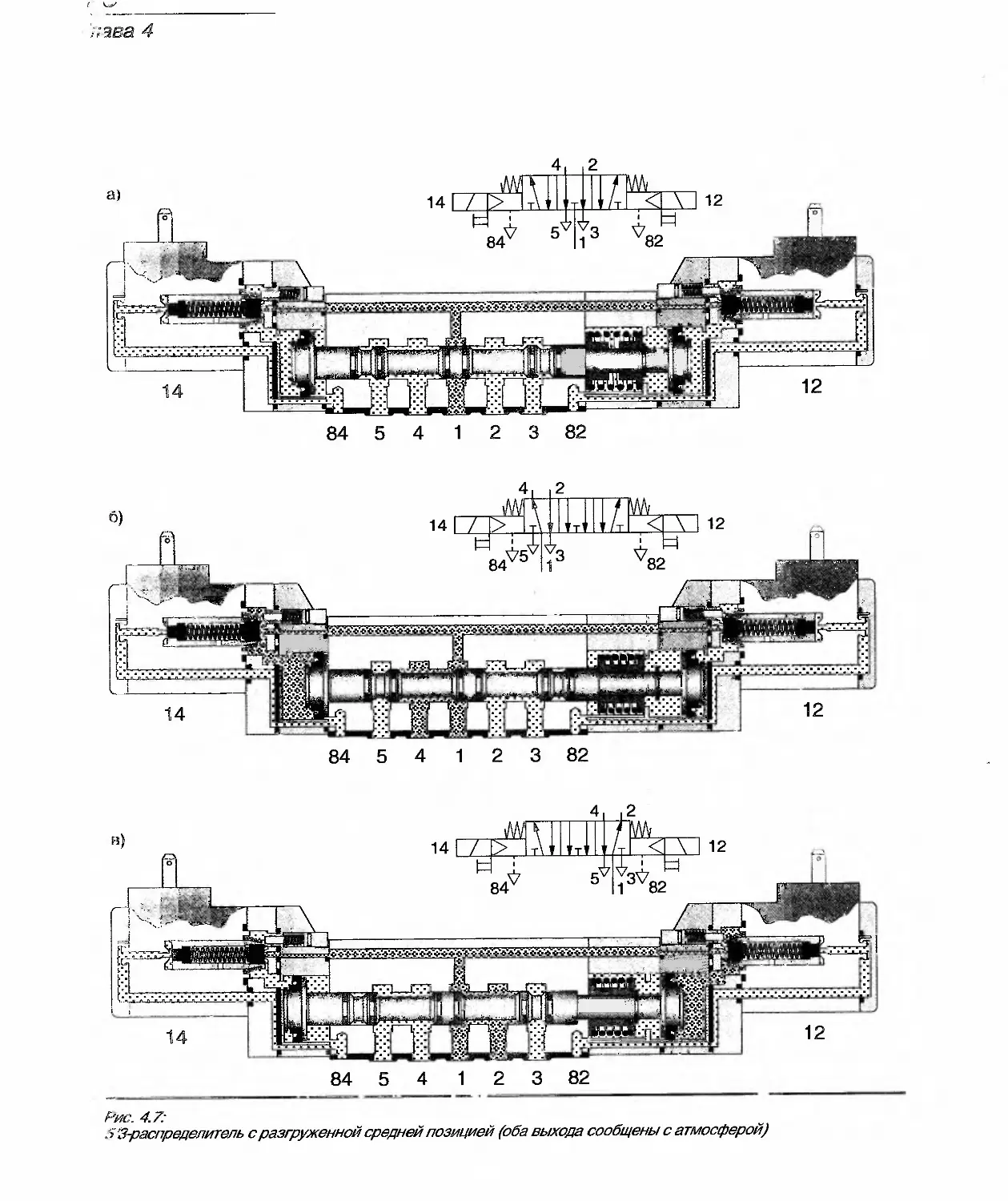
На рис. 4.7 показаны три позиции 5/3-распределитепя с пилотным
электромагнитным управлением.
В исходной позиции обе катушки обесточены, и золотник удержи-
вается в среднем положении двумя центрирующими пружинами
(рис. 4.7 а). Оба выходных канала 2 и 4 сообщены с атмосферными
каналами 3 и 5, а канал питания 1 перекрыт
При подаче напряжения на левую катушку золотник перемещается
вправо до упора (рис. 4.7 б). При этом каналы 1 и 4, а также 2 и 3 со-
единяются
При подаче напряжения на правую катушку золотник перемещается
на левый упор (рис. 4.7 в), соединяя друг с другом каналы 1 и 2, а
также 4 и 5
Распределитель остается в крайней позиции, пока присутствует
сигнал на соответствующем электромагните. Если сигналов нет,
распределитель возвращается в среднюю исходную позицию.
5/3-распределитель
с разгруженной
средней позицией
"азва 4
Рис. 4.7:
5 ’3-распределитель с разгруженной средней позицией (оба выхода сообщены с атмосферой)
/
Гпава
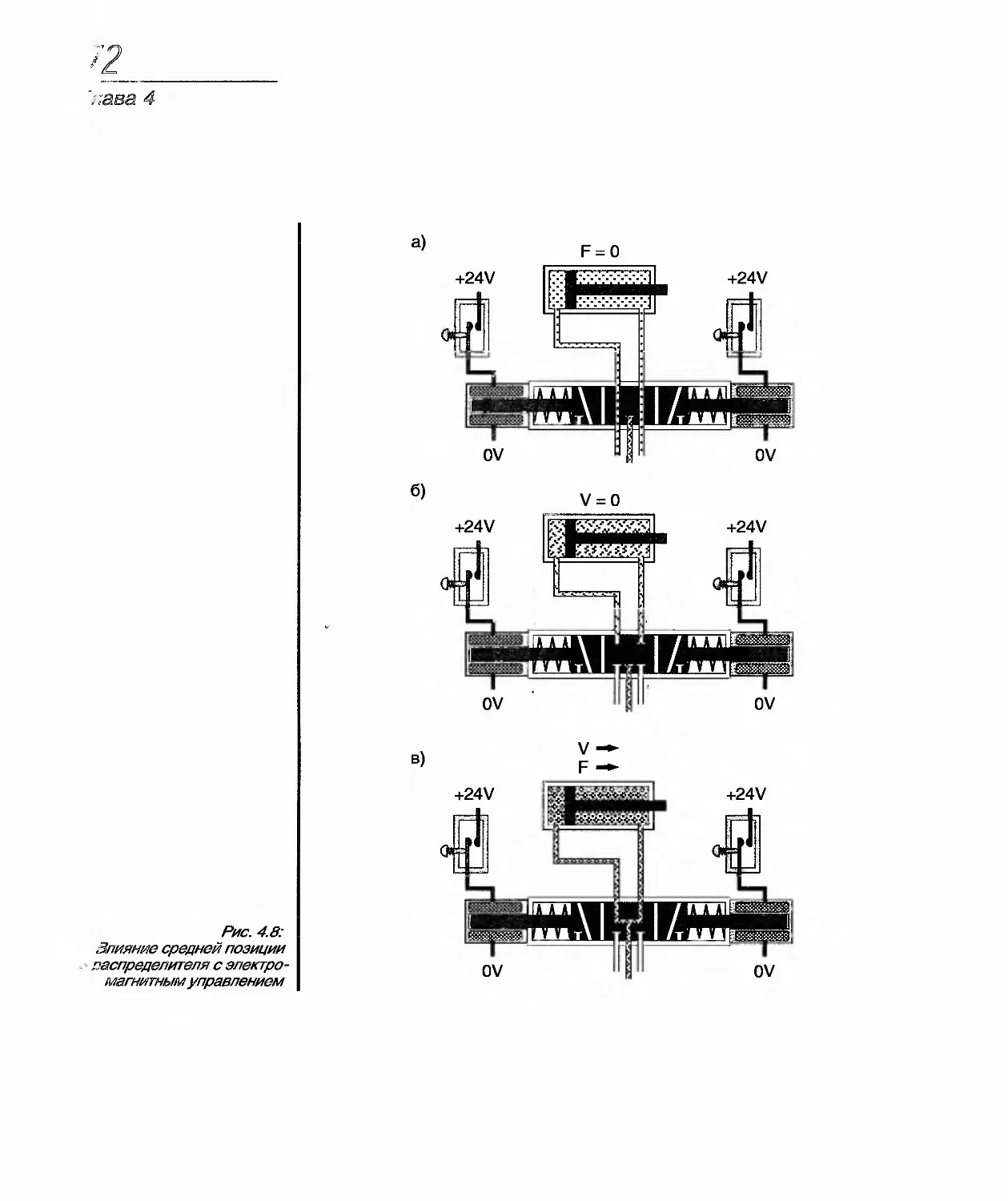
Распределители с двумя позициями переключения (такие как 3/2 и 5/2) Влияние
заставляют шток цилиндра выдвигаться или втягиваться. Распреде- средней позиции
лители с третьей средней позицией (такие как 5/3) дают дополнитель-
ные возможности для управления цилиндром. Это можно продемонстри-
ровать на примере 5/3-распределителей с различными средними по-
зициями. Рассмотрим поведение цилиндра, когда 5/3-распределитель
находится в средней позиции.
Если используется 5/3-распределитель, у которого в средней пози-
ции оба выхода сообщены с атмосферой, поршень цилиндра не ис-
пытывает воздействие сил давления. Шток можно легко переме-
щать (рис. 4.8 а)
Если используется 5/3-распределитель, у которого в средней позиции
выходные каналы перекрыты (в полостях цилиндра сохраняется дав-
ление), поршень цилиндра удерживается в промежуточном положе-
нии (рис. 4.8 б)
Если используется 5/3-распределитель, у которого в средней пози-
ции оба выходных канала сообщены с питанием, шток будет выдви-
гаться, но с меньшим усилием и скоростью (рис. 4.8 в).
":;ава 4
Рис. 4.8:
Злияние средней позиции
распределителя с электро-
магнитным управлением
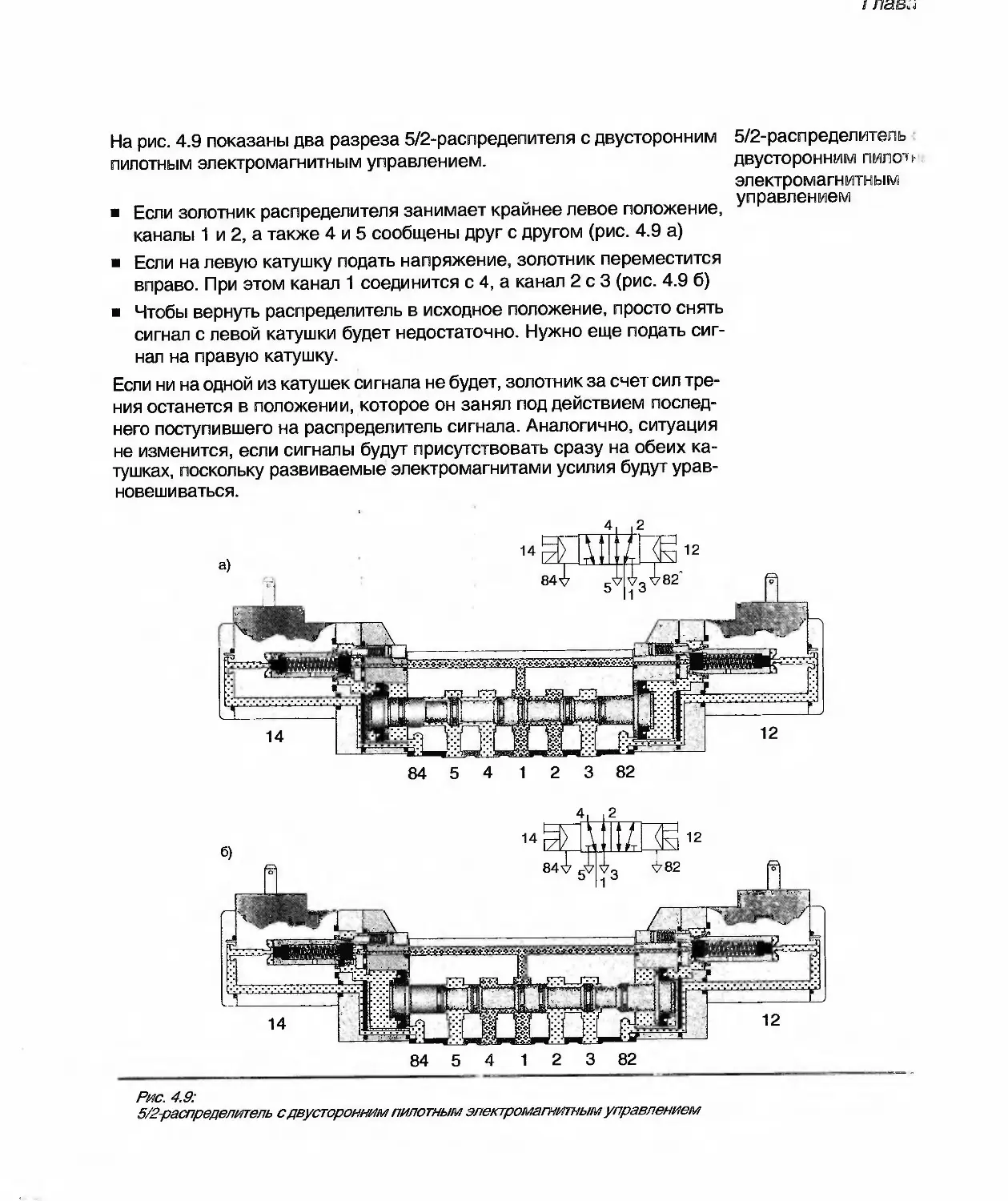
На рис. 4.9 показаны два разреза 5/2-распредепителя с двусторонним
пилотным электромагнитным управлением.
Если золотник распределителя занимает крайнее левое положение,
каналы 1 и 2, а также 4 и 5 сообщены друг с другом (рис. 4.9 а)
5/2- расп редел ител ь
двусторонним ПИЛОТ f-
электромагнитным
управлением
Если на левую катушку подать напряжение, золотник переместится
вправо. При этом канал 1 соединится с 4, а канал 2 с 3 (рис. 4.9 б)
Чтобы вернуть распределитель в исходное положение, просто снять
сигнал с левой катушки будет недостаточно. Нужно еще подать сиг-
нал на правую катушку.
Если ни на одной из катушек сигнала не будет, золотник за счет сил тре-
ния останется в положении, которое он занял под действием послед-
него поступившего на распределитель сигнала. Аналогично, ситуация
не изменится, если сигналы будут присутствовать сразу на обеих ка-
тушках, поскольку развиваемые электромагнитами усилия будут урав-
новешиваться.
84 5 4 1 2 3 82
84 5 4 1 2 3 82
Рис. 4.9:
5/2-распределитель с двусторонним пилотным электромагнитным управлением
з. Типы и характерно- Распределители с электромагнитным управлением выпускаются с ши-
irwiM пневматической роким разнообразием конструкций и размеров, чтобы полнее отвечать
гсти распределителей различным требованиям промышленности.
При выборе нужного распределителя лучше придерживаться следую-
щей пошаговой процедуры:
Сначала определите тип распределителя, исходя из поставленной
задачи, с учетом его поведения в случае аварии электропитания
(например, 5/2-распределитель с односторонним управлением)
Затем, используя каталог фирмы-производителя, подберите нужные
технические характеристики при минимальной стоимости. Здесь
следует учитывать не только стоимость самого распределителя, но
и расходы на его установку, обслуживание, запасные части и т. п.
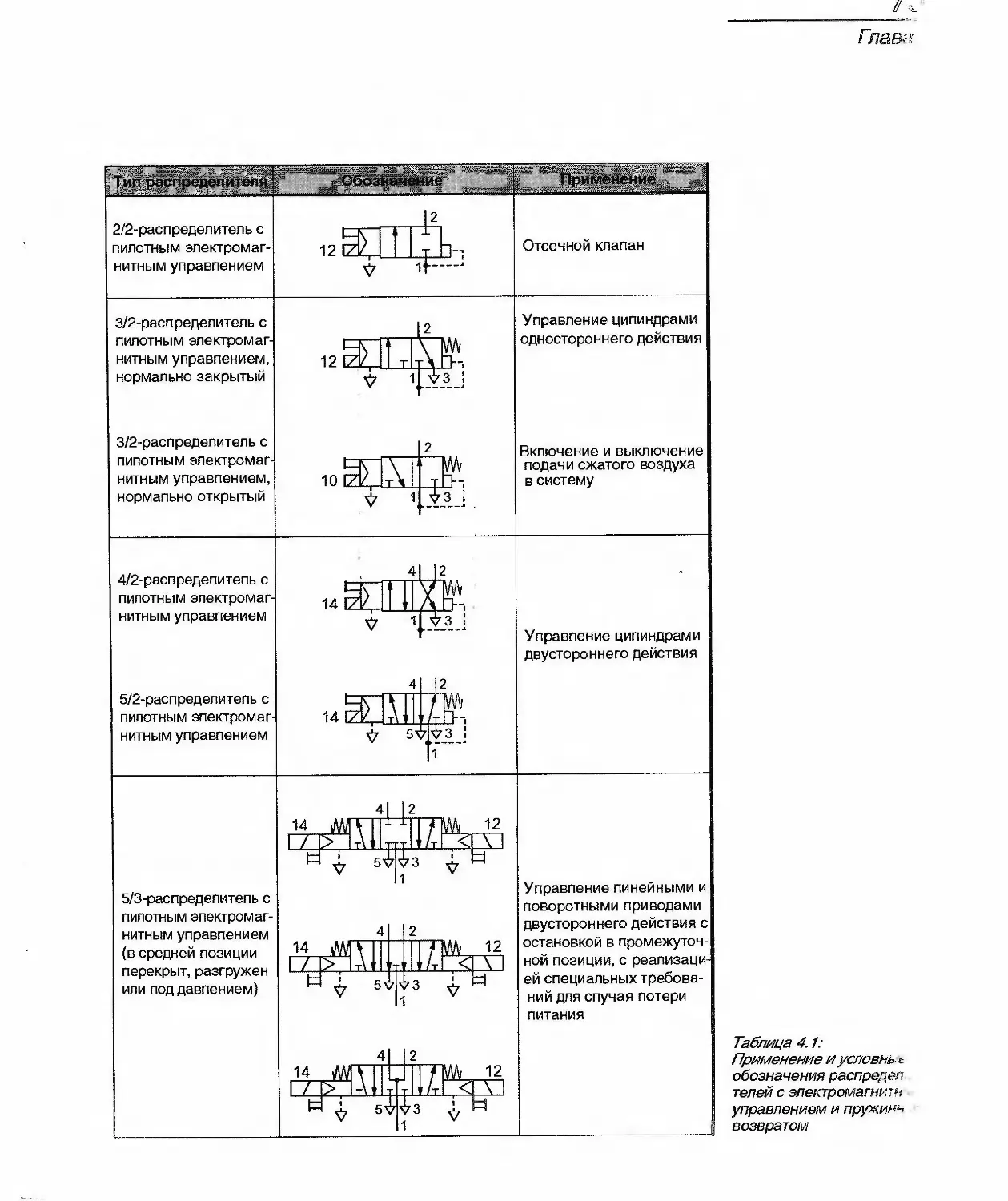
В таблицах 4.1 и 4.2 собраны наиболее часто используемые типы рас-
пределителей с указанием их условных графических обозначений и
областей применения.
Гпав;?
I .L — пн
2/2-распределитель с пилотным электромаг- нитным управлением Г Отсечной клапан
12 IZ Г" Т_“Н
If '
3/2-расп ределитель с пилотным электромаг- нитным управлением, нормально закрытый 3/2-распределитель с |2 Управление цилиндрами одностороннего действия Включение и выключение
12 IZ г т \ m т\ т--,
ч| v3 :
2
|1ипо1ныМ элекфома!- нитным управлением, нормально открытый 10 IZ > т\ Wv t}-, подачи сжатого воздуха в систему
1 v_3 J
4/2-распредепитепь с пилотным электромаг- нитным управлением 5/2-распредепитепь с пилотным электромаг- нитным управлением 4I |2 Управление цилиндрами двустороннего действия
L“ 14 IZ ЕЕ у WV
1ртз J 4| I2
14 [Z > X •-Li--,
❖ 5'Я'^_3 J
5/3-распредепитепь с пилотным электромаг- нитным управлением (в средней позиции перекрыт, разгружен или под давлением) 14 Й4 2 'TWV,, 12 Управление линейными и поворотными приводами двустороннего действия с остановкой в промежуточ- ной позиции, с реализаци- ей специальных требова- ний для случая потери питания
/ > /т ,<д \ ।
5^ 1 4 3 v 2
14 М х:х ~ТЩ- 12,
/ > 7т ,<q \ I
И 1 V 1 4| I 3 ” 2
14 М 1 V тГт TW 12
7т <1X1
1 3 ч? н
Таблица 4.1:
Применение и условии е
обозначения распредел
телей с электромагнит
управлением и пружиня
возвратом
Гпава 4
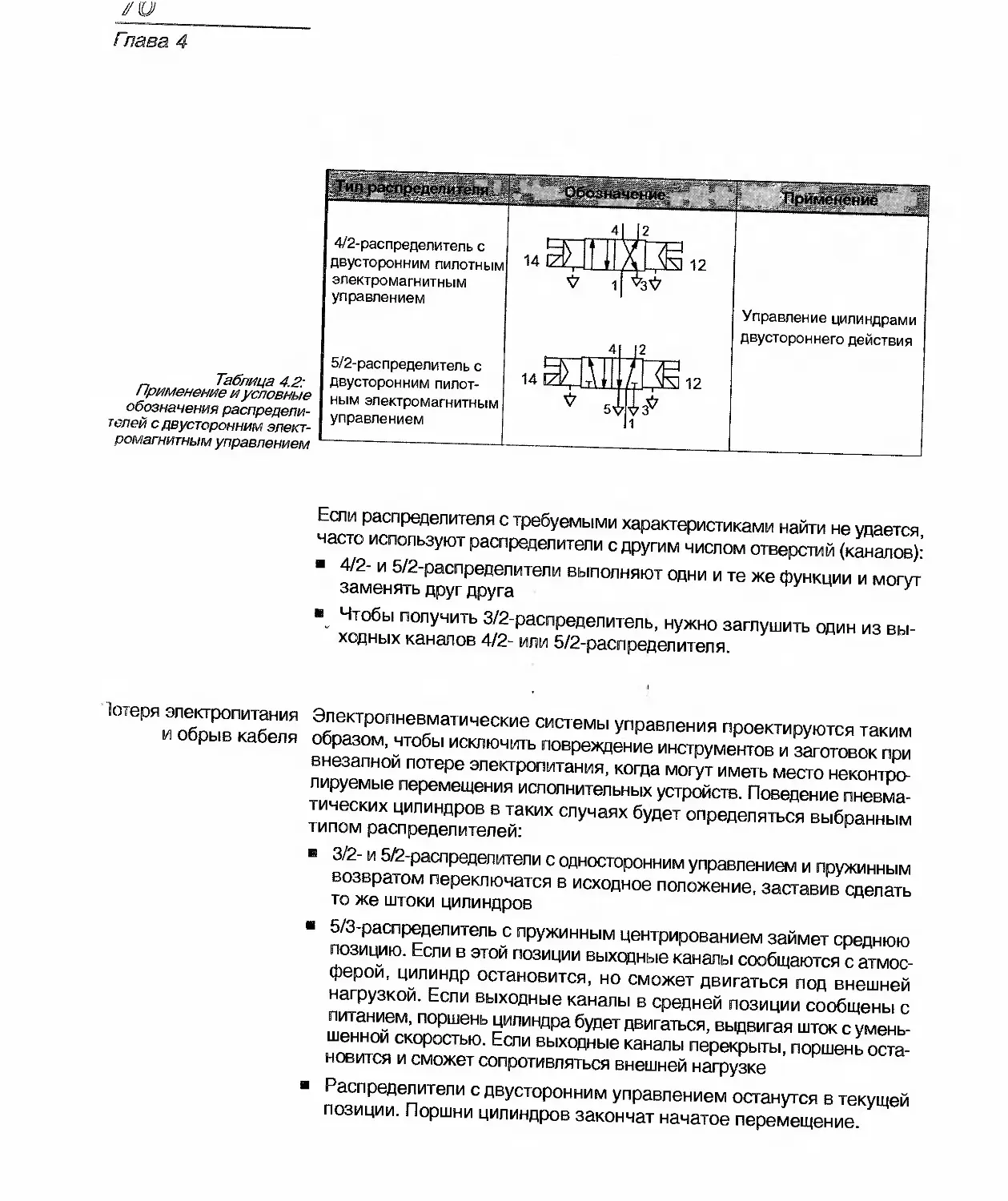
Таблица 4.2:
Применение и условные
обозначения распредели-
телей с двусторонним элект-
ромагнитным управлением
Обозначение ''
4/2-распределитепь с двусторонним пилотным электромагнитным управлением 5/2-распределитель с двусторонним пилот- ным электромагнитным управлением 4| _|2 Управление цилиндрами двустороннего действия
14 е! > т А. < 3 12
V 1| 4 V;
14 Е > 7 S 12
❖ 5V 1
Если распределителя с требуемыми характеристиками найти не удается,
часто используют распределители с другим числом отверстий (каналов):
4/2- и 5/2-распредепители выполняют одни и те же функции и могут
заменять друг друга
Чтобы получить 3/2-распределитепь, нужно заглушить один из вы-
ходных каналов 4/2- или 5/2-распределителя.
Потеря электропитания Электропневматические системы управления проектируются таким
и обрыв кабеля образом, чтобы исключить повреждение инструментов и заготовок при
внезапной потере электропитания, когда могут иметь место неконтро-
лируемые перемещения исполнительных устройств. Поведение пневма-
тических цилиндров в таких случаях будет определяться выбранным
типом распределителей:
и 3/2- и 5/2-распределители с односторонним управлением и пружинным
возвратом переключатся в исходное положение, заставив сделать
то же штоки цилиндров
5/3-распределитель с пружинным центрированием займет среднюю
позицию. Если в этой позиции выходные каналы сообщаются с атмос-
ферой, цилиндр остановится, но сможет двигаться под внешней
нагрузкой. Если выходные каналы в средней позиции сообщены с
питанием, поршень цилиндра будет двигаться, выдвигая шток с умень-
шенной скоростью. Если выходные каналы перекрыты, поршень оста-
новится и сможет сопротивляться внешней нагрузке
Распределители с двусторонним управлением останутся в текущей
позиции. Поршни цилиндров закончат начатое перемещение.
Гпава
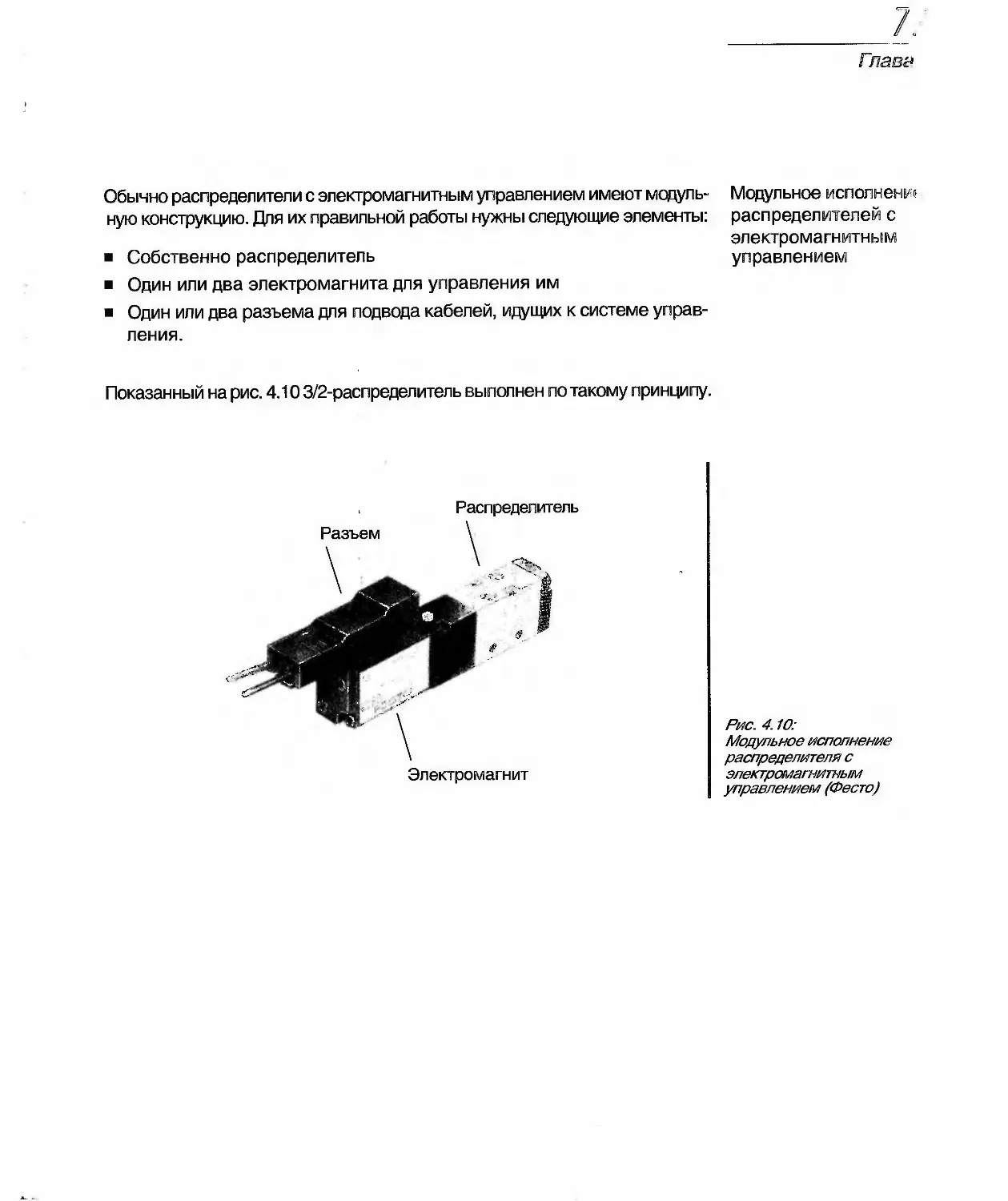
Обычно распределители с электромагнитным управлением имеют модуль-
ную конструкцию. Для их правильной работы нужны следующие элементы:
Собственно распределитель
Один или два электромагнита для управления им
Один или два разъема для подвода кабелей, идущих к системе управ-
ления.
Модульное исполнение
распределителей с
электромагнитным
управлением
Показанный на рис. 4.10 3/2-распределитель выполнен по такому принципу.
Рис. 4.10:
Модульное исполнение
распределителя с
электромагнитным
управлением (Фесто)
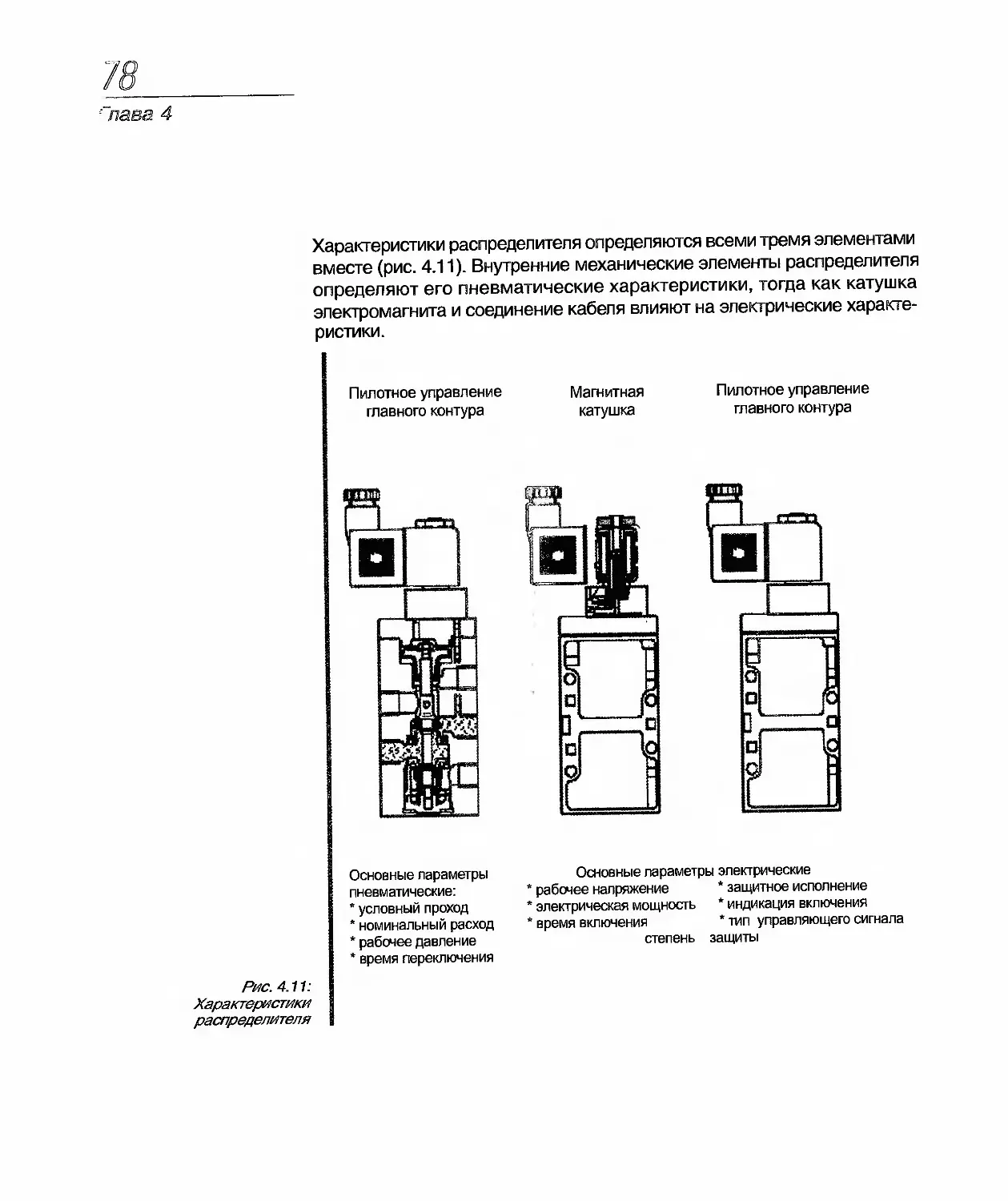
Характеристики распределителя определяются всеми тремя элементами
вместе (рис. 4.11). Внутренние механические элементы распределителя
определяют его пневматические характеристики, тогда как катушка
электромагнита и соединение кабеля влияют на электрические характе-
ристики.
Пилотное управление
главного контура
Магнитная
катушка
Пилотное управление
главного контура
Основные параметры
пневматические:
* условный проход
* номинальный расход
* рабочее давление
* время переключения
Основные параметры электрические
* рабочее напряжение * защитное исполнение
* электрическая мощность * индикация включения
* время включения * тип управляющего сигнала
степень защиты
Рис. 4.11:
Характеристики
распределителя
Для расширения возможностей монтажа распределители с электро-
магнитным управлением имеют два различных варианта расположения
отверстий:
Резьбовой (или трубный), когда все отверстия имеют резьбу, с,по-
мощью которой непосредственно в распределитель могут быть ввер-
нуты штуцеры, глушители, дроссели и т. п. Распределители могут
устанавливаться индивидуально, но можно и несколько распреде-
лителей расположить на общем коллекторе
Стыковой, когда все отверстия (без резьбы) выведены на одну плос-
кость, которой распределитель стыкуется с монтажной плитой с
помощью винтов. Плиты распределителей могут быть индивидуаль-
ными или групповыми.
Расположение
отверстий подвода/'
отвода воздуха
''“лава 4
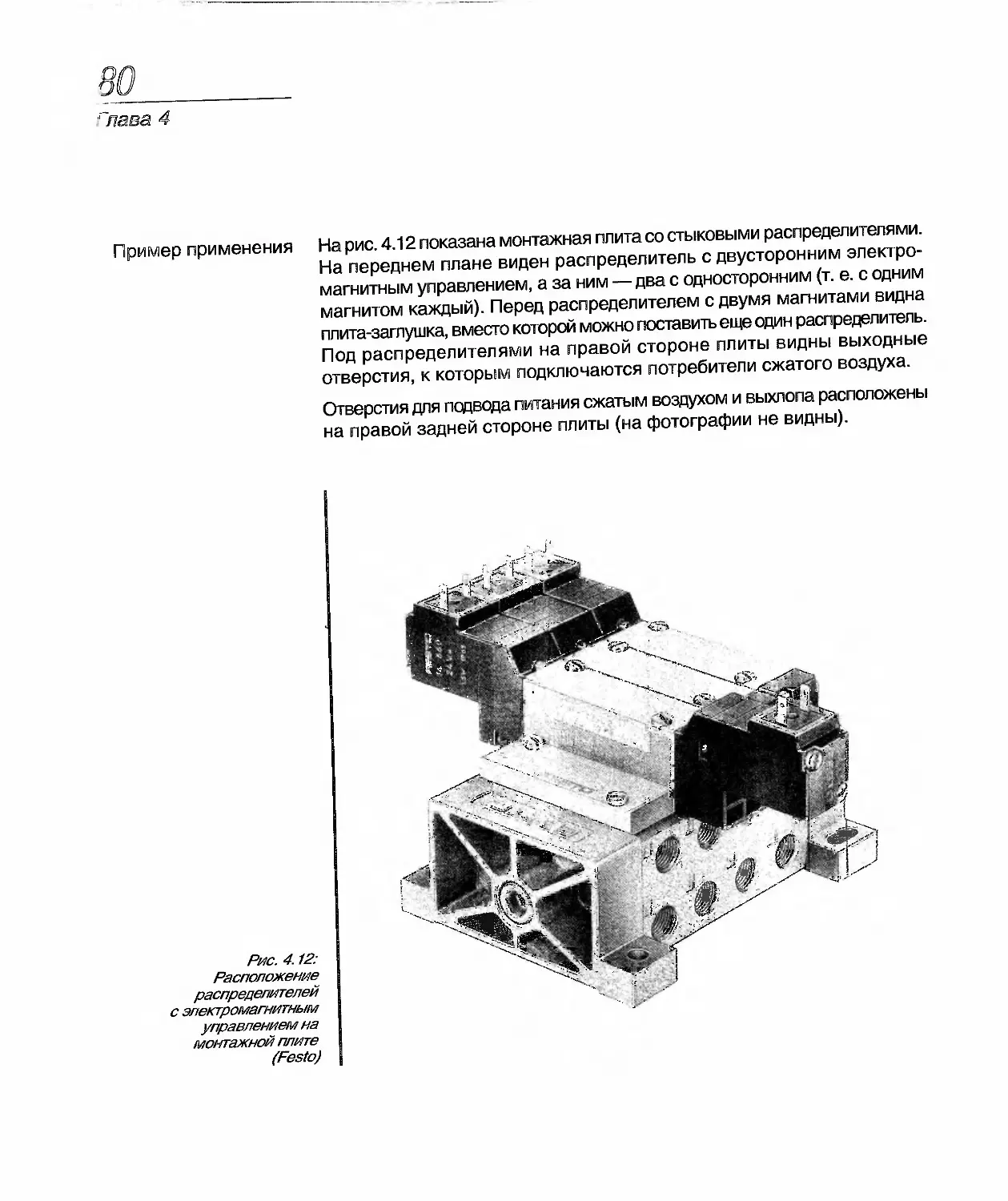
Пример применения
На рис. 4.12 показана монтажная плита со стыковыми распределителями.
На переднем плане виден распределитель с двусторонним электро-
магнитным управлением, а за ним — два с односторонним (т. е. с одним
магнитом каждый). Перед распределителем с двумя магнитами видна
плита-заглушка, вместо которой можно поставить еще один распределитель.
Под распределителями на правой стороне плиты видны выходные
отверстия, к которым подключаются потребители сжатого воздуха.
Отверстия для подвода питания сжатым воздухом и выхлопа расположены
на правой задней стороне плиты (на фотографии не видны).
Рис. 4.12:
Расположение
распределителей
с электромагнитным
управлением на
монтажной плите
(Festo)
Гпавл
Некоторые распределители стыкового исполнения с точки зрения раз-
меров стыковой поверхности и расположения на ней отверстий выпол-
няются в соответствии с международными стандартами ISO. Это поз-
воляет сделать распределители разных фирм-производителей взаимо-
заменяемыми.
Часто бывает выгодно использовать не стандартизированные распре-
делители, особенно в тех случаях, когда требуются небольшие габариты
или более дешевое решение.
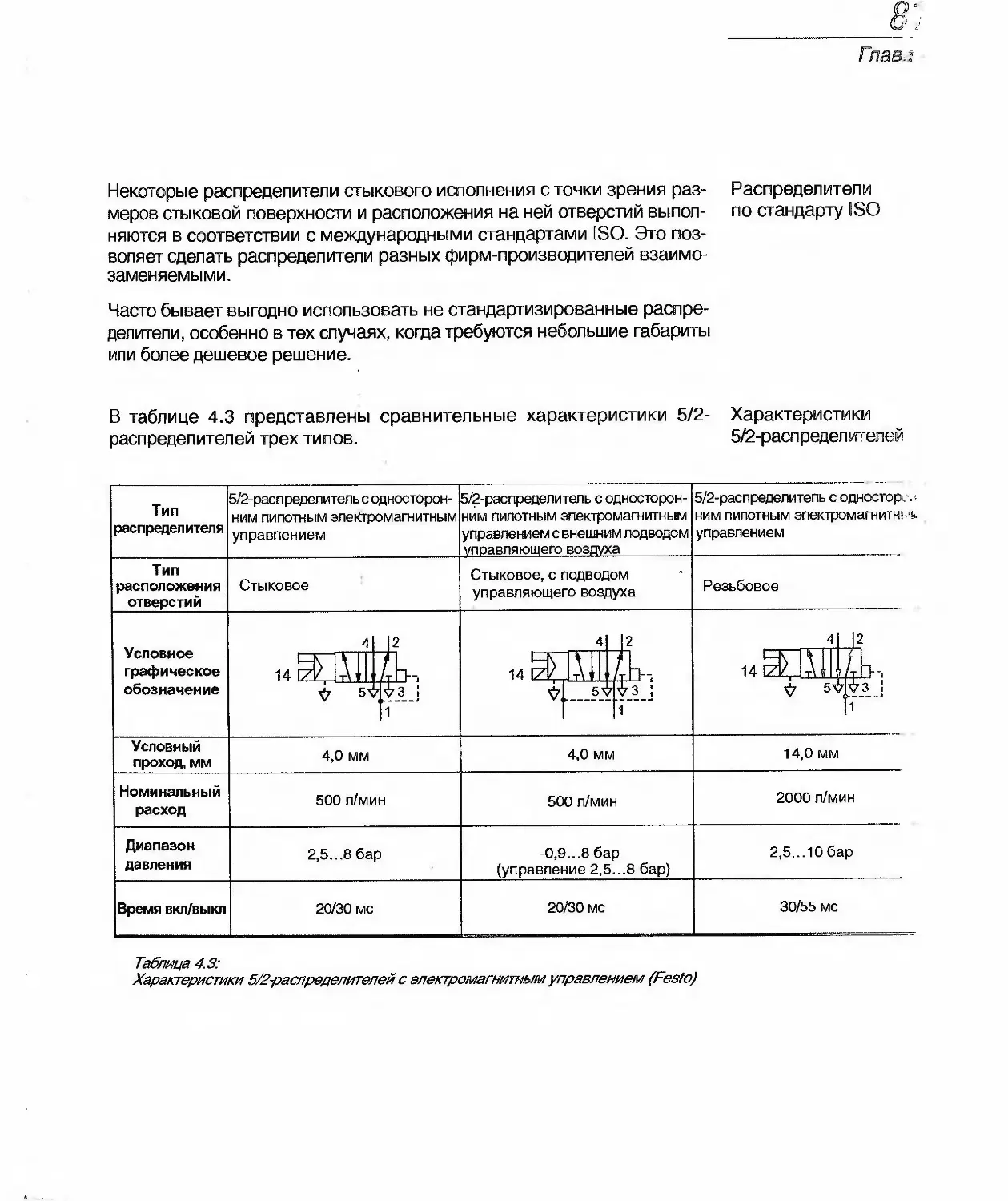
В таблице 4.3 представлены сравнительные характеристики 5/2-
распределителей трех типов.
Распределители
по стандарту ISO
Характеристики
5/2-распределителей
Тип распределителя 5/2-распределитель с односторон- ним пилотным электромагнитным управлением 5/2-распределитель с односторон- ним пилотным электромагнитным управлением с внешним подводом управляющего воздуха 5/2-распределитепь с одностор. .< ним пилотным электромагнитные управлением
Тип расположения отверстий Стыковое Стыковое, с подводом управляющего воздуха Резьбовое
Условное графическое обозначение 4 |2 4 |2 4 I2
14 IZ^ X Jr Zb 14 IZ^ I 4 ZH 14lzXXL i/pZH
Г1 5? 'X3..' 1 51 Ж/з I |1
Условный проход, мм 4,0 мм 4,0 мм 14,0 мм
Номинальный расход 500 л/мин 500 л/мин 2000 л/мин
Диапазон давления 2,5...8 бар -0,9...8 бар (управление 2,5...8 бар) 2,5...Юбар
Время вкл/выкл 20/30 мс 20/30 мс 30/55 мс
Таблица 4.3:
Характеристики 5/2-распределителей с электромагнитным управлением (Festo)
Условный проход и номинальный расход То, с каким номинальным расходом, большим или малым, должен быть выбран распределитель, зависит от используемого цилиндра. Цилиндр с большой площадью поршня или с высокой скоростью пере- мещения требует применения распределителя с большим пропускаемым расходом. Для цилиндра с малой площадью поршня или небольшой скоростью его перемещения достаточен будет распределитель с неболь- шим расходом. В качестве меры пропускаемого распределителем расхода используются условный проход и номинальный расход. При определении условного прохода распределителя берется минимальная площадь поперечного сечения внутреннего тракта, по которому протекает сжатый воздух. Диаметр такого же по площади круглого сечения и называется условным проходом. Больший условный проход означает и больший расход, который может протекать через распределитель, а меньший диаметр — меньший расход. Номинальный расход распределителя измеряется при определенных условиях. Давление перед распределителем устанавливается на уровне 6 бар, а давление на выходе — 5 бар. В соответствии со своими характеристиками распределители, приведен- ные в таблице 4.3 и имеющие условный проход 4 мм, могут использоваться для управления цилиндрами с диаметром поршня до 50 мм. С другой стороны, распределитель с условным проходом 14 мм может исполь- зоваться для управления цилиндрами большего диаметра или там, где необходимо получить более высокие скорости перемещения поршня.
Диапазон давления Диапазон давления — это границы давления питания, при котором рас- пределитель может работать. Верхний предел зависит от прочности конструкции распределителя, а нижний определяется каскадом пилотного управления (см. раздел 4.2). В тех случаях, когда распределитель работает на исполнительное устройст- во с низким давлением (таким как вакуумный захват) и этого давления не достаточно для работы пилотного каскада, используют распределители с внешним подводом управляющего давления.
ГПЗЕ i
Под временем срабатывания понимается отрезок времени между за-
мыканием (размыканием) контакта при подаче сигнала на катушку и
переключением распределителя в новое положение.
В распределителях с односторонним управлением и пружинным возвра-
том время включения обычно короче, чем время выключения.
Большее время срабатывания распределителей ухудшает характеристики
элекгропневматической системы управления, поскольку процессы на-
полнения полостей цилиндров сжатым воздухом и их опорожнение в ат-
мосферу задерживаются на время срабатывания.
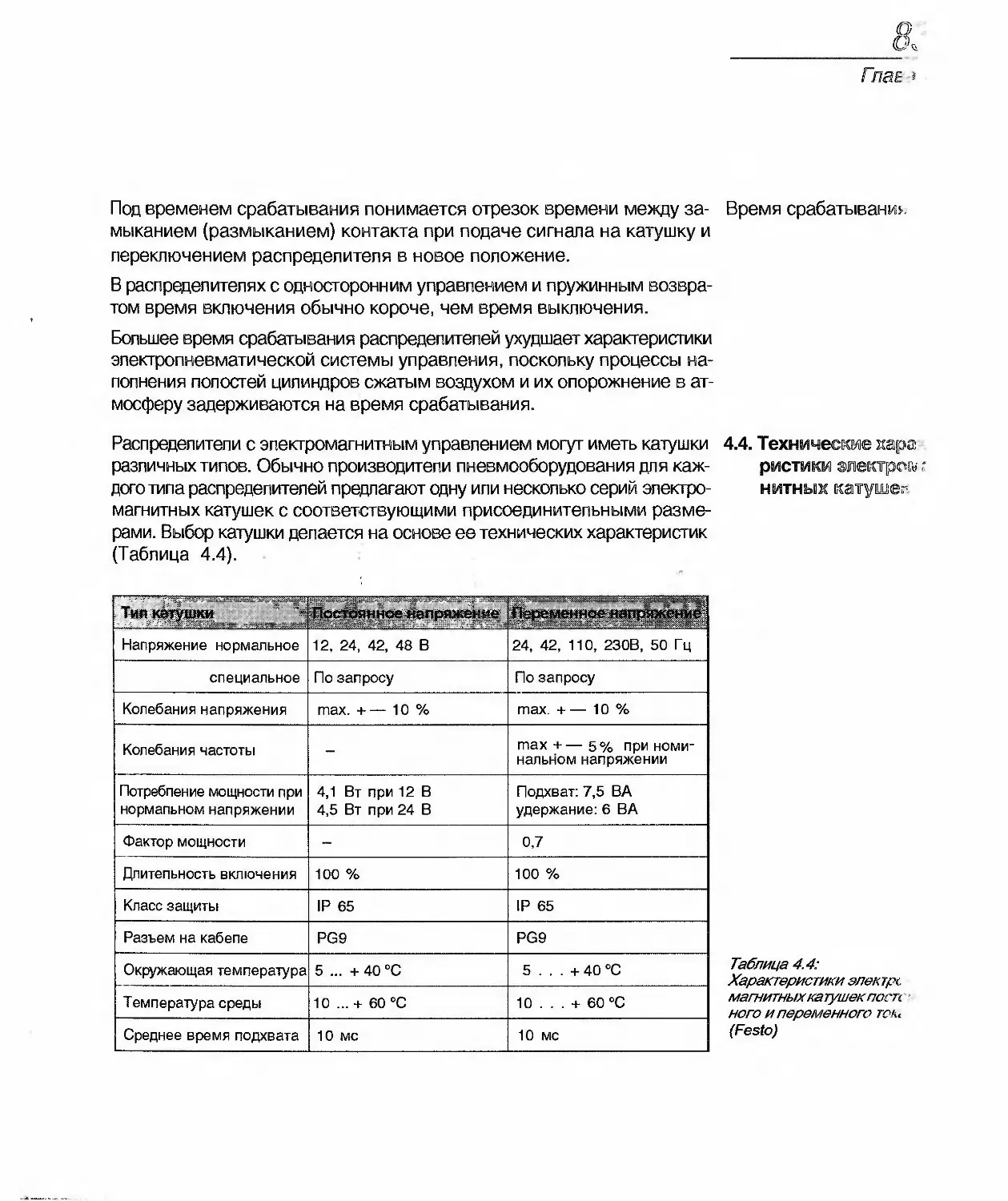
Распределители с электромагнитным управлением могут иметь катушки
различных типов. Обычно производители пневмооборудования для каж-
дого типа распределителей предлагают одну или несколько серий электро-
магнитных катушек с соответствующими присоединительными разме-
рами. Выбор катушки делается на основе ее технических характеристик
(Таблица 4.4).
Время срабатывание
4.4. Технические кара
ристики электрсад .*
нитных катушек
Тмя катушки В № ' § *Ж й 1 11 i Й !<•; Переменное напряжений
Напряжение нормальное 12, 24, 42, 48 В 24, 42, 110, 230В, 50 Гц
специальное По запросу По запросу
Колебания напряжения max. +— 10 % max. +— 10 %
Колебания частоты - max +—5% при номи- нальном напряжении
Потребление мощности при нормальном напряжении 4,1 Вт при 12 В 4,5 Вт при 24 В Подхват: 7,5 ВА удержание: 6 ВА
Фактор мощности - 0,7
Длительность включения 100 % 100 %
Класс защиты IP 65 IP 65
Разъем на кабеле PG9 PG9
Окружающая температура 5 ... + 40 °C 5 . . . + 40 °C
Температура среды 10 ... + 60 °C 10 . . . + 60 °C
Среднее время подхвата 10 мс 10 мс
Таблица 4.4:
Характеристики электрс
магнитных катушек посте
ного и переменного ток,
(Festo)
•два 4
Определение Указанное в таблице 4.4 напряжение относится к напряжению, пода-
г абочего напряжения ваемому на катушку. Катушка выбирается для работы с сигналами системы управления. Если система управления работает, например, на напряжении 24 В постоянного тока, то и катушку следует выбрать по этому напряжению. Чтобы гарантировать правильную работу катушки, подаваемое на нее напряжение не должно выходить за определенные пределы. Для катушки, предназначенной для работы на 24 В постоянного тока, эти пределы следующие: Минимальное напряжение: Vmin= 24 В • (1 оо% - 10%) = 24 • 0,9 = 21,6 В. Максимальное напряжение: Vmax= 24 В • (100% + 10%) = 24 • 1,1 = 26,4 В. Если система управления работает на переменном напряжении, то и катушку следует выбрать такого же типа, а частота в сети должна быть в установленных пределах. Для катушек переменного тока, представленных в таблице, допустимые пределы указаны как 5% над и 5% под номиналь- ным значением 50 Гц; иными словами частота в сети должна колебаться в пределах от 47,5 до 52,5 Гц.
Электрическая мощность Характеристики мощности (потребление энергии и фактор мощности) следует принимать в расчет при выборе источника питания для электри- ческой части системы управления. Разумно выбрать такой источник питания, который не был бы перегружен даже в случае одновременного срабатывания всех катушек, входящих в систему.
Глзвй
Когда электромагнит включен, по его катушке течет ток. Из-за омиче-
ского сопротивления температура катушки растет. Продолжительность
включения показывает максимально допустимый процент рабочего
времени, в течение которого катушка может оставаться под напряже-
нием. Катушка с продолжительностью включения 100% может быть
включена в течение всего времени работы.
Если этот показатель меньше 100%, катушка при непрерывной работе
может перегреться. Изоляция может расплавиться, и катушка будет
уничтожена. Продолжительность включения указывается для времени
работы 10 минут. Так, если разрешенная продолжительность включения
равна 60%, то катушка может находиться под напряжением не более
6 минут в течение каждых 10 минут.
Класс защиты показывает, насколько хорошо электромагнит защищен
от воздействия пыли и воды. Катушки из таблицы 4.4 имеют класс защиты
IP 65, то есть они пыленепроницаемы и могут работать под брызгами
воды. Подробно классы защиты рассмотрены в главе 7.
Тип подводящего к катушке кабеля должен соответствовать имеющейся
розетке (см. раздел 4.5).
Катушка будет надежно работать только в том случае, если указанные в
ее характеристиках диапазоны температур окружающей и рабочей
среды (в данном случае сжатого воздуха) будут соблюдаться.
Когда на катушку подается сигнал, ее магнитное поле и, следовательно,
развиваемая мощность, растут, но с некоторой задержкой. Среднее
время подхвата показывает промежуток времени между подачей тока
на катушку и перемещением якоря. Обычно это время равно от 10 до
30 мс.
Чем больше время подхвата, тем медленнее срабатывает распреде-
литель.
Продолжительность
включения (VDE 53 '
Класс защиты и
разъем на кабеле
Температура
Среднее время
подхвата
пава 4
4.5. Электрические
подключения
катушек
Защитная цепь в
электромагнитной
катушке
Катушка распределителя подключается к системе управления через
двухжильный кабель. Между кабелем и электромагнитом располагается
соединительный разъем. Когда разъем надет и закручен винтом, контак-
ты электромагнита защищены от воздействия пыли и воды. Типы
разъемов и кабелей указываются в технических характеристиках
электромагнитных катушек (например, PG9 в таблице 4.4).
Электрическая цепь размыкается или замыкается в подсистеме уп-
равления. При открытии контакта ток на катушке резко падает.
В результате быстрого изменения интенсивности электрического тока
в совокупности с индуктивностью катушки на катушке кратковременно
возникает высокое напряжение. На разомкнутом контакте может воз-
никнуть электрическая дуга. Даже через довольно короткое время
контакт может разрушиться. Поэтому необходимо предусмотреть
защиту.
На рис. 4.13 показана защитная цепь для катушки постоянного тока.
При замкнутом контакте ток И протекает через электромагнит, но не
может течь через диод (рис. 4.13 а). Если контакт открыть, ток в главной
цепи исчезнет (рис. 4.13 б). Но благодаря оставшейся замкнутой цепи с
диодом ток 1м будет течь через электромагнит, пока энергия магнит-
ного поля полностью не рассеется.
В результате работы защитной цепи ток не пропадает внезапно, а будет
течь еще некоторое время, постепенно ослабевая. Пики индуктивного
напряжения значительно снижаются, гарантируя, что контакты и обмот-
ка не будут повреждены.
Гпава
Рис. 4.13:
Защитная цепь
электромагнитной
катушки
Кроме защитной цепочки, необходимой для долгой работы распредели- Дополнительные
теля, в кабель или разъем могут быть вмонтированы и другие устройст- функции
ва, например:
Индикатор (загорается при включении электромагнита)
Устройство задержки (для срабатывания с замедлением).
Адаптеры и
кабельные разъемы
Защитные цепочки и вспомогательные функции могут быть встроены
или в кабельный разъем или в различные вставки, например, в светя-
щееся уплотнение (рис. 4.14). Все эти элементы следует выбирать в со-
ответствии с напряжением системы управления (например, 24 В по-
стоянного тока).
Светящееся уплотнение
Электромагнитная катушка
Стандартный разъем
Встроенный
разъем
аис. 4.14: Электромагнитная катушка, адаптер и разъем
Класс защиты
Вилки, розетки и адаптеры уплотняются, чтобы предотвратить попадание
на контакты пыли или влаги. Если адаптер, электромагнитная катушка
и распределитель имеют различные классы защиты, то распределитель
в сборе будет иметь самый низший из трех.
Защита от взрыва
Если распределитель предназначен для работы в условиях, где сущест-
вует угроза взрыва, то необходимо использовать специальные
взрывозащитные катушки с запрессованным кабелем.
Гпав;
Глава 5
I
Проектирование
электропневматических
систем управления
ива 5
5.1. Порядок
разработки
системы
управления
Область применения электропневматических систем простирается
от частично автоматизированных рабочих станций до полностью
автоматизированных производств с большим количеством станций.
Поэтому и проекты таких систем сильно отличаются друг от друга.
Каждая электропневматическая система управления проектируется
индивидуально в соответствии с требованиями конкретного объекта.
Работы по созданию такой системы включают:
Разработку проекта (подготовка необходимых чертежей и докумен-
тации)
Выбор и приобретение пневматического и электрического обору-
дования
Внедрение (наладка и ввод в эксплуатацию).
Систематический подход, шаг за шагом, позволяет избежать ошибок.
Он также позволяет оставаться в рамках бюджета и временного гра-
фика. На рис. 5.1 показан алгоритм разработки системы управления.
Глава
Рис. 5.1:
Порядок разработки
и внедрения
электропневматичесл о>
системы управления
5,2. Порядок проектирования Разработка проекта электропневмати ческой системы управления вклю- чает в себя следующее (см. рис. 5.1): Формулировка задачи управления и предъявляемых к ней требова- ний Концептуальный проект системы управления и выбор необходимых комплектующих Графическое представление задачи управления Разработка системы, подготовка схем и списка комплектующих элементов. Далее на примере объяснены различные шаги при проектировании системы управления.
Формулировка здачи и определение требований Проектирование системы управления начинается с письменной фор- мулировки задачи. Все требования, предъявляемые к системе управ- ления, должны быть четко и точно определены. При этом будут полезны следующие документы: Список или формуляр, который поможет быстро и полно записать все требования к системе (таблица 5.1) Таблица с указанием приводов, распределителей и датчиков Схема общего расположения, показывающая пространственное рас- положение приводов. Требования к системе управления должны быть согласованы между заказчиком и разработчиком. Будет также полезно, если разработчик системы управления ознакомится с окружающими условиями и местом ее установки.
Л cl Bi:
Необходимые элементы управления
Необходимые режимы работы
Индикаторы, дисплеи, предупреждающие пампы
h •£•. Число приводов
Для каждого привода: - функция - необходимое усилие - необходимый ход - какую скорость перемещения следует развивать? - торможение - расположение в пространстве - дополнительные функции (такие как наличие направляющей) - исходное положение
Поспелова- | тел ьн ость перемещений Порядок перемещения
Число шагов в рабочем цикле
Условия выполнения шага
Необходимое время ожидания
Необходимое время цикла
Связь с другими системами управления
Датчики?" сигналы Необходимые датчики положения
Необходимые датчики и реле давления
Другие датчики
Другие входные и выходные сигналы
Окружающие условия Пространство для установки
Поведение при потере питания
Поведение при аварийной остановке
Поведение при прочих неисправностях
Окружающие условия (температура, пыль, влага)
Необходимые меры защиты
Другие требования
Табпица 5.1:
Список требований,
которым должна
отвечать система
управления
'лава 5
‘•-.онцептуальный проект юктропневматической системы управления Электропневматическая система управления может быть спроектирована в соответствии с различными концепциями. Например: С контроллером или реле для обработки сигналов С отдельно стоящими распределителями или с распределителями, объединенными в пневмоостров Со стандартными цилиндрами или с цилиндрами, имеющими дополни- тельные функции (такие как направляющая, демпфирование в конеч- ных положениях, щели для монтажа). Выбор концепции оказывает решающее влияние на стоимость дальней- ших работ, т. е. стоимость планирования, разработки, сборки и ввода в эксплуатацию системы управления. Мерами, снижающими расходы, могут быть: Модульное проектирование системы управления (использование похожих схем и программ для систем различной конфигурации) Использование комплексных решений и продуктов, поставляемых в собранном виде (таких как шинная технология, пневмоострова; см. главу 9).
Выбор элементов После определения концепции системы необходимо выбрать необхо- димые комплектующие элементы. В их число входят: Пневматические приводы Пневматические распределители Элементы управления Датчики положения, датчики давления и прочие Контроллер или реле определенного типа.
04i
Глава
Перед разработкой принципиальных схем следует прояснить некоторые Графическое
моменты: представление
задачи управления
Сколько шагов следует иметь в циклограмме перемещений
Сколько приводов будет работать на каждом шаге
Сигналы с каких датчиков или какую задержку времени следует по-
лучить, чтобы выполнить следующий шаг.
Изображение последовательности перемещений лучше всего делать
графически, например, с помощью диаграммы "перемещение-шаг" или
"перемещение-время", функциональной диаграммы или функциональной
карты. Различные методы объяснены в разделах 6.1 и 6.2.
На последней стадии инженерного проектирования происходит разра-
ботка всей документации, необходимой для сборки системы.
Документация включает:
Слисок элементов (спецификация)
Принципиальную пневматическую схему
Принципиальную электрическую схему
Диаграмму электрических соединений.
Проектирование
системы управления
схемы и спецификации
Рисование принципиальных схем и диаграмм соединений в соответствии
с действующими стандартами объяснено в разделах с 6.3 по 6.7. В главе 8
рассматривается проектирование системы управления с использованием
реле.
пава 5
5.3. Пример
применения:
проект подъемного
устройства
Подъемное устройство передает ящики с одного роликового конвейера
на другой, расположенный на другой высоте. Задача заключается в
разработке проекта соответствующей электропневматической систе-
мы управления.
Схема общего расположения устройства представлена на рис. 5.2.
Имеется три пневматических привода:
Привод 1А для подъема ящика
Привод 2А для сталкивания ящика на верхний конвейер
Привод ЗА, используемый как стопор для прерывания подачи ящи-
ков.
Рис. 5.2:
Схема общего расположе-
ния подъемного устройства
Примечание
Сначала ящики нужно разделить, чтобы подавать по одному. Это де-
лается на входе в устройство. Оптический датчик В6 не принимается
в расчет при дальнейшем проектировании системы управления для
подъемного устройства.
Глав.!
Цилиндр 1А должен иметь рабочий ход 500 мм и развивать усилие не
менее 600 Н, цилиндр 2А — соответственно 250 мм и 400 Н, а цилиндр
ЗА — 20 мм и 40 Н. Скорости выдвижения и втягивания штока для ци-
линдров 1А и 2А должны регулироваться. Система управления должна
обеспечивать мягкое торможение цилиндров 1А и 2А.
Чтобы исключить возможность повреждения ящиков и самой установки,
в случае потери электрического питания поршни цилиндров 1А и 2А
должны остановиться и удерживаться в текущем положении. При этом
шток цилиндра ЗА должен быть выдвинут.
Последовательность перемещений цилиндров подъемного устройства
описана в таблице 5.2 (см. рис. 5.2). Она состоит из четырех шагов:
Приводы для
подъемного
устройства
Цикл перемещения. ;
подъемном устройс •
Шаг Перемещение штока цилиндра!А Перемещение штока цилиндра 2А!\ Перемещение Штока цилиндра:ЗА Конец шага—условие выполнения | KoMMg;>frgJ5HW 1 .. У5. jS
1 Нет Нет Втягивание Датчик В5 (ящик есть) Впуск ящика
2 Выдвижение Нет Выдвижение 1В2 включен Подъем ящика
3 Нет Выдвижение Нет 2В2 включен Сталкивание
4 Втягивание Втягивание Нет 1В1,2В1 включены Приводы вернулись в исходное положение
Таблица 5.2:
Цикл перемещения в подъемном устройстве
98
Гпава 5
Место оператора
Система управления подъемным устройством должна обеспечивать
работу в режиме продолжительного цикла. Но режим одиночного цикла
также необходим, например, для отладки.
Оборудование места оператора должно соответствовать действующим
стандартам (см. раздел 7.4). Панель управления для подъемного уст-
ройства показана на рис. 5.3.
При управлении подъемным устройством оператор должен иметь
возможность выполнять следующие функции:
"Аварийный Стоп": при нажатии на эту кнопку должна прекратиться
подача не только электропитания, но и подача сжатого воздуха
"Сброс": нажатие на эту кнопку приводит систему в исходное положе-
ние. Т. е. штоки цилиндров 1А и 2А втягиваются, шток цилиндра ЗА
выдвигается
"Выкл. Продолжительный Цикл": эта кнопка прерывает режим про-
должительного цикла. Если при этом в устройство поступил очередной
ящик, он будет передан на верхний конвейер. Штоки цилиндров 1А и
2А втянутся, и устройство окажется в исходном положении.
Рис. 5.3:
Панель управления
подъемным устройством
Подъемное устройство используется в производственном помещении,
где температура колеблется в пределах от 15 до 35 градусов Цельсия.
Пневматические элементы исполнительной подсистемы и электрические
соединения распределителей должны быть пыленепроницаемы и защи-
щены от брызг. Электрические устройства подсистемы обработки сиг-
налов будут установлены в шкафу управления и должны отвечать
соответствующим стандартам безопасности (см. главу 7).
В наличии имеются следующие источники питания:
сеть сжатого воздуха (р = 0,6 МПа = 6 бар)
электрическая сеть (U - 230 В переменного тока).
Подсистема обработки сигналов должна работать на напряжении 24 В
постоянного тока. Поэтому необходимо предусмотреть соответствующий
блок питания.
Для данной системы выбрана концепция обработки сигналов с помощью
реле. Принимая во внимание небольшое число цилиндров, выбраны
распределители резьбового исполнения, которые будут стоять отдельно
друг от друга.
Поскольку направляющие для подъемного и сталкивающего цилиндров
являются частью конструкции установки, сами цилиндры могут не иметь
внутренних направляющих. В качестве цилиндров 1А и 2А выбираем
цилиндры двустороннего действия, а стопорный цилиндр ЗА может быть
одностороннего действия.
Окружающие
условия
Питание энергией
Общий
концептуальный
проект системы
управления
Выбор цилиндров Цилиндры выбираются на основании требований по усилию и ходу из каталога производителя пневматического оборудования. Исходя из требуемого усилия, поршень цилиндра 1А должен иметь диа- метр не менее 40 мм, а поршень цилиндра 2А — не менее 32 мм. Чтобы гарантировать мягкое торможение в конце хода, следует выбрать цилиндры с регулируемым двусторонним демпфированием. Например, подошли бы следующие варианты: Цилиндр 1А: Festo DNGUL-40-500-PPV-A Цилиндр 2А: Festo DNGUL-32-250-PPV-A В качестве ЗА можно выбрать стопорный цилиндр, который при потере питания имеет шток выдвинутым. Этому требованию, например, соответствует цилиндр фирмы Festo типа STA-32-20-P-A.
Выбор распределителей Чтобы обеспечить требуемое поведение цилиндров 1А и 2А в случае отказа питания, в качестве управляющих распределителей следует выбрать 5/3-распределители с закрытой средней позицией. Поскольку скорость перемещения поршней относительно небольшая, достаточно будет распределителей с небольшим условным проходом, например, выходной резьбой на 1/8 дюйма. Для управления цилиндрами 1А и 2А выбираем распределители фирмы Festo типа MEH-5/3-G-1/8. Для стопорного цилиндра ЗА подойдет распределитель фирмы Festo типа МЕН-3/2-1/8.
Подача давления питания на все три исполнительных устройства должна
быть прекращена, как только произойдет потеря электрического питания
или будет нажата кнопка "Аварийный Стоп". Поэтому нужен еще один
3/2-распределитель с электромагнитным управлением и пружинным
возвратом, который будет обеспечивать подачу сжатого воздуха в
систему только при правильной работе электрического питания и при
отжатой кнопке "Аварийный Стоп". Чтобы гарантировать достаточный
расход сжатого воздуха, в данном случае выбираем распределитель
Festo типа CPE-14-M1H-3GL-1/8.
Скорость прямого и обратного хода штоков цилиндров 1А и 2А регули-
руется за счет изменения расхода вытекающего из их полостей в
атмосферу сжатого воздуха. Для этих целей используются дроссели с
обратным клапаном ввертного типа, которые вворачиваются непосред-
ственно в цилиндры, что позволяет уменьшить число штуцеров. Эти
дроссели с обратным клапаном регулируют расход протекающего
через них воздуха только в одном направлении, а в обратном направ-
лении воздух проходит без сопротивления. Из программы поставок фирмы
Festo выбираем дроссели с обратным клапаном типа GRLA-1/4 для цилинд-
ра 1А и типа GFLA-1/8 для цилиндра 2А.
Для получения информации о приходе поршня в крайние положения
нужно использовать концевые выключатели, в качестве которых будет
использовать датчики положения с положительным включением. На-
пример, индуктивные типа SMTO-1-PS-K-LED-24 для цилиндров 1А и 2А
типа SMT-8-PS-KL-LED-24 для цилиндра ЗА.
Для реализации требуемой последовательности перемещений на ци-
линдрах 1А и 2А должно быть по два датчика: один подтверждает поло-
жение полностью выдвинутого, а другой — полностью втянутого штока.
В случае с цилиндром ЗА достаточно иметь один датчик для контроля
полностью выдвинутого штока.
Для обнаружения ящиков перед стопорным цилиндром или на подъемной
платформе можно использовать оптические датчики фирмы Festo,
например, типа SOEG-RT-M18-PS-K.
Клапан подачи
давления
Регулирование
скорости
Выбор концевых
выключателей
~пава 5
! аблица состояний для Процесс проектирования значительно облегчается, если представить
тодъемного устройства все шаги последовательности перемещений в таблице с указанием
состояния всех цилиндров, электромагнитов, датчиков, элементов
управления и индикаторов (таблица 5.3). Все элементы, входящие в
состав данной цепочки управления, показываются в одной строке
таблицы.
Дат^ик’Л<Ый!Ж€ния Элемент управления I Комментарии (
Выд- винут Втянут Проч. Выд- винут Втянут Проч.
Цил.1А 1Y1 1Y2 - 1В2 1В1 Цепочка управления 1
Цип.2А 2Y1 2Y - 2В2 2В Цепочка управления 2
! 1ил. ЗА 3Y - ЗВ1 Цепочка управления 3
'.'.ж. воздух 0Y1 Клапан подачи давления
В5 Ящик на платформе
S1 Главный выключатель
S2 АВАРИЙНЫЙ СТОП
S3 Ручной
S4 Автомат
S5 СБРОС
S6 Продолжительный Цикл/Вкл
S7 СТАРТ одиночного Цикла
S8 Продолжительный Цикп/Выкл
Таблица 5.3:
Таблица состояний для подъемного устройства
ГПЭЕР
Диаграмма "перемещение-шаг" для подъемного устройства показана на
рис. 5.4. На ней показаны перемещения штоков всех трех цилиндров
в течение каждого шага и состояние соответствующих датчиков
положения.
Диаграмма
"перемещение-шаг'
для подъемного
устройства
Рис. 5.4:
Диаграмма
"перемещение -шаг"
для подъемного
устройства
чава 5
Принципиальная
-.хемадля подъемного
устройства
Пневматическая и электрическая принципиальные схемы подъемного
устройства показаны на рис. 5.5 и 5.6. Каждый цилиндр управляется
распределителем. Дополнительный распределитель с катушкой 0Y1
служит для подачи питания сжатым воздухом.
ГГУ2]
I 1д I
1B1 1В2
2
Рис. 5.5:
Пневматическая принципиальная схема подъемного устройства
1
О
Порядок рисования электрической принципиальной схемы системы
управления подъемным устройством объяснен в разделе 8.8. Сама
схема показана на рис. 8.22, 8.25-8.27, 8.29 и 8.30.
+24V
о—
1 2
К1
(Г павный
выключатель)
ПИТАНИЕ
3 4 СИСТЕМЫ
S2by
(АВАРИЙНЫЙ
СТОП)
К2 АВАРИЙНЫЙ СТОП
ОТПУЩЕН 5 6
7
8
9
10 11
12 13
(РУЧНОЙ)
К4\ К4\
Рис S- й
РУЧНОЙ
АВТОМА!
S4FA
(АВТОМАТ)
К4
Цикл
ВКЛ)
S8E-7
(Продопж,
Цикл
ВЫКЛ)
; K1d К2Р р □ К12Е р > Рис •? f
0V к Jd 2 К и 4 10 LL 1 6 7 Н 1] 8 5 39 42 IL H 11 12 1 13 27
Рис. 5.6а:
Электрическая принципиальная схема подъемного устройства — элементы управления
АВАРИЙНЫЙ СТОП
Рис. 5.66:
Электрическая принципиальная схема подъемного устройства —датчики
Гпав(:<
Рис. 5.6 в:
Электрическая принципиальная схема подъемного устройства ~~ переключение последовательности шаток
пава 5
АВАРИЙНЫЙ СТОП
Рис. 5.6г:
Электрическая принципиальная схема подъемного устройства — электромагниты распределителей
Гпави
При вводе системы управления в эксплуатацию необходимо сделать 5.4. Порядок ввода
следующее: системы управлени
Л в эксплуатацию
Закупить необходимые комплектующие
Смонтировать систему
Запрограммировать контроллер (если используется ПЛК)
Ввести систему в эксплуатацию.
Перед началом работ необходимо иметь следующее: Порядок монтажа
системы управлен^ч
Полные принципиальные схемы и схемы соединений
Все необходимые элементы в соответствии со спецификацией.
Для предотвращения ошибок при монтаже, подключении пневмошпангов
и проводов, работы следует вести в строго определенной последователь-
ности. Например, подключать шланги для каждой цепочки управления в
направлении от питания через распределители к исполнительному
устройству.
Если используется программируемый логический контроллер (ПЛК),
последовательность выполнения шагов задается программой. Основой
для написания программы контроллера является функциональная диа-
грамма или функциональная карта. Разработка программы может
происходить параллельно со сборкой системы.
Программирование
контроллера
Глава 5
В качестве инструмента программирования может использоваться
персональный компьютер или программатор. Процедура программи-
рования состоит из следующих шагов (рис. 5.7):
Разработка программы
Ввод программы в персональный компьютер или программатор
Перевод программы
Проверка программы (сначала в режиме симуляции, если возможно,
т. е. на персональном компьютере или программаторе).
Любую ошибку в программе, обнаруженную при переводе или проверке,
следует исправить. После этого все последующие шаги нужно повторить.
Процесс следует повторять до тех пор, пока все ошибки не будут исправ-
лены (рис. 5.7).
Рис. 5.7:
Разпабтка
Глава :
Окончательная проверка программы выполняется только после сборки
всей системы управления и отладки ее отдельных частей. Когда сис-
тема собрана, законченная программа загружается в память контрол-
лера. Теперь электропневматическая система управления готова к
вводу в эксплуатацию.
Ввод в эксплуатацию имеет три главные цели:
Проверка работы системы управления при всех условиях, возмож-
ных на практике
Проведение всех необходимых настроек (положение датчиков,
регулировка дросселей)
Исправление обнаруженных ошибок в системе управления.
Сначала нужно проверить пневматическую исполнительную подсистему
на пониженном давлении. Это снижает риск повреждения оборудова-
ния и/или нанесения вреда персоналу (например, если два штока
цилиндров столкнутся) в случае оставшихся ошибок в системе управ-
ления.
Чтобы завершить процедуру ввода системы в эксплуатацию, необхо-
димо внести изменения в документацию. Это означает:
Указание текущих значений настроек параметров
Внесение исправлений в принципиальные схемы и схемы соединений
Распечатка, при необходимости, переделанной программы ПЛК.
Ввод в эксплуатацию
Глава 5
Ознакомление
обслуживающего
персонала и получение
сертификата
испытаний
После проверки функционирования системы управления, когда оператор
убеждается, что все работает правильно, этап проектирования завер-
шен. Перевод системы в долговременную эксплуатацию требует следую-
щего:
Декларации соответствия
Ознакомления с системой обслуживающего и ремонтного персонала
Передачи обслуживающему персоналу документации, необходимой
для обслуживания и ремонта
Подготовки сертификата испытаний, который подписывается ответст-
венными представителями разработчика системы и пользователя.
Рис. 5.8:
Документация для
обслуживания и ремонта
электропневматической
системы управления
Обслуживание
и ремонт
Поломки и сбои в системе управления обходятся довольно дорого,
поскольку процесс производства прерывается. Чтобы свести риск
поломок к минимуму следует регулярно проводить определенные
процедуры по обслуживанию системы. В качестве превентивной меры
элементы, подверженные износу, следует заменять через указанные
промежутки времени. Если, несмотря на это, неисправность все же
произошла, вышедшие из строя элементы нужно отремонтировать или
заменить. Обслуживание, поиск неисправностей и ремонт можно
облегчить, если элементы системы легко доступны.
Глава
Глава 6
Документация для
электропневматической системы
'пава 6
Минимальное время простоя является основным требованием для
экономичной работы электропневматической системы. Поэтому все
входящие в нее элементы проектируются надежными и с большим
сроком службы. Тем не менее, работы по регулярному обслуживанию и
ремонту остаются необходимыми, и они должны выполняться с мини-
мальными потерями времени. Для этого обслуживающий персонал
нуждается в полной и точной технической документации. Такая деталь-
ная информация нужна, конечно, и при проектных работах, чтобы можно
было правильно выбирать, какие элементы лучше использовать.
Систематическое сопровождение всех стадий проектных работ соот-
ветствующей документацией позволяет сокращать расходы при раз-
работке системы управления. Особенно это касается этапов монтажа
и испытания системы.
В набор документации к электропневматической системе входят:
а Функциональная диаграмма или функциональная карта (представ-
ление последовательности перемещений, разделы 6.1 и 6.2)
и Пневматическая и электрическая принципиальные схемы (представ-
ление взаимодействия всех элементов системы, разделы 6.3 и 6.4)
и Схемы соединений (представление разводки проводов, клемм, кон-
тактов на соединительных колодках, раздел 6.5)
и Спецификация (список элементов)
и Схема общего расположения.
Наиболее существенным для обслуживающего и ремонтного персонала
является наличие принципиальных схем и схем соединений, которые
позволяют быстро обнаружить и устранить неисправность. Во многих
случаях поиск неисправности облегчается, если имеются функциональ-
ная диаграмма, схема общего расположения и спецификация. Поэтому
все эти документы должны сопровождать любую систему управления.
Вся документация должна быть выполнена в соответствии с действую-
щими правилами и стандартами. Это единственный путь сделать до-
кументацию понятной и легкочитаемой.
Требуемая последовательность перемещения в электропневматической
системе представляется в графической форме с помощью функциональ-
ной диаграммы.
Гибочное устройство (схему общего расположения см. на рис. 6.1) имеет
два пневматических цилиндра двустороннего действия, которые управ-
ляются 5/2-распределителями с односторонним электромагнитным уп-
равлением и пружинным возвратом.
Цилиндр 1А используется для зажима заготовки. К этому цилиндру
относятся датчики 1В2 (шток выдвинут) и 1В1 (шток втянут), а также
электромагнит 1Y1.
Цилиндр 2А (датчик 2В2 переднего положения штока и датчик 2В1
исходного положения, электромагнит 2Y1) выполняет операцию гибки.
Для выполнения операции требуется 4 шага:
Шаг 1:
Выдвижение штока цилиндра 1А (зажим заготовки)
Шаг 2:
Выдвижение штока цилиндра 2А (гибка заготовки)
ШагЗ:
Втягивание штока цилиндра 2А (отвод инструмента)
Шаг 4:
Втягивание штока цилиндра 1А (разжим заготовки)
6.1. Функциомамыи,®^
диаграмм®
Пример применения
Рис. 6.1:
Схема общего
расположения
гибочного устройства
Гпава 6
Диаграмма
"перемещение-шаг"
Последовательность перемещения штоков цилиндров показана на
диаграмме "перемещение-шаг". Каждый шаг с отдельным перемещением
имеет сквозную нумерацию слева направо. Если в системе имеется
несколько исполнительных устройств, графики перемещения их штоков
рисуются один под другим (рис. 6.2). Эта диаграмма показывает в какой
последовательности происходят перемещения.
Рис. 6.2:
Диаграмма "перемещение-
шаг" гибочного устройства
Примечание
Стандарт VDI3260 "Функциональные диаграммы машин и производствен-
ных установок" отменен. В этой книге он продолжает использоваться
для иллюстрации последовательности перемещений.
Гпава
В диаграмме "перемещение-время" перемещения штоков изображаются
в функции времени. При таком представлении видны различия в длитель-
ности выполнения каждого шага. Диаграмма "перемещение-время" для
гибочного устройства (рис. 6.3) показывает, что время выдвижения
штока цилиндра 2А (шаг 2) значительно больше, чем время его втя-
гивания (шаг 3).
Диаграмма
"перемещение-время
Рис. 6.3:
Диаграмма “перемещение-
время" гибочного устройств 1
7/В_____
Гпава 6
Преимущества и
недостатки
функциональной
диаграммы
Функциональная диаграмма очень наглядно представляет режим работы
эпектропневматической системы. Хотя такие диаграммы больше не
стандартизированы, на практике их продолжают часто использовать.
Особенно они подходят для простых систем с небольшим числом испол-
нительных устройств.
Логические связи и взаимное влияние отдельных цепочек управления друг
на друга в пределах функциональной диаграммы могут быть показаны
в виде линий и стрелок. Для рассматриваемого примера удобнее по-
казать только последовательность перемещения штоков на диаграмме
"перемещение-шаг" или "перемещение-время". Логические связи и после-
довательность сигналов лучше представлять другими средствами, напри-
мер, с помощью функциональной карты (раздел 6.2).
Глав л
В соответствии со стандартом DIN/EN 40719/6 функциональная карта
может использоваться для графического представления системы управ-
ления безотносительно используемой технологии. Функциональные
карты используются во многих областях техники автоматизации для
планирования и документирования последовательности управления,
например, на электростанциях, в промышленных производствах, систе-
мах обработки материалов.
Функциональная карта имеет структуру, ориентированную на управление
последовательностью событий. Она включает (рис. 6.4):
Представление последовательности шагов с помощью полей шага и
полей команд
Представление переходов с помощью соединительных линий и ус-
ловий перехода.
6.2. Функциональная
карта
Структура функцио-
нальной карты
Переход
Условие
перехода
Поле команды
Рис. 6.4:
Структура функционален
карты
ва 6
Поле шага
Поле команды
Рис. 6.5:
Пример поля команды
Каждое поле шага нумеруется в соответствии с последовательностью
перемещений. Начальное положение (базовые настройки системы
управления) отмечается двойной рамкой.
Каждое поле команды описывает операцию, производимую на конкрет-
ном шаге, и состоит из трех частей (рис. 6.5):
В левой части показывается тип команды. Например, "без сохра-
нения" (N) означает, что выход предназначен только для данного
шага. В таблице 6.1 дан обзор возможных типов команд
Содержание команды, например, выдвижение штока цилиндра, пока-
зывается в средней части
Сигнал обратной связи, подтверждающий выполнение команды,
показывается в правой части (например, в виде обозначения со-
ответствующего датчика).
Если в пределах одного шага выполняется несколько команд, то для
этого шага показывается несколько командных полей.
Содержание
команда
I
N Выдвижение цилиндра 1А 1В1
t t
Тип Подтверждение
команды
I лзв<
S Сохраняемая D С задержкой
L Ограниченная по времени Р Импульсного тала
С Условная N Без сохранения, безусловная
F Зависимая от разрешения
Пример: DP Команда с задержкой, импульсного типа
Таблица 6.1:
Типы команд в
функциональной карте
Переход от одного шага к следующему не произойдет до тех пор, пока Условия
не будут выполнены определенные условия. Для облегчения восприятия перехода
функциональной карты условия перехода нумеруются. Нумерация по-
казывает принадлежность к шагу и команду, подтверждение выполне-
ния которой ожидается (рис. 6.6).
Рис. 6.6:
Условие перехода
на функциональной
карте
) -asa 6
Логические
условия перехода
Логические связи между условиями перехода могут быть представлены
в текстовой форме, в выражениях Булевой алгебры, логическими сим-
волами или условными графическими обозначениями (рис. 6.7).
Контакт К2 ИЛИ
контакт КЗ замкнут
И контакт К1
замкнут
----Текстовое выражение
К1 л (К2 v КЗ) —
Выражение Булевой
алгебры
Рис. 6.7:
Средства представления
условий перехода в
функциональной карте
Логические символы
Условные графические
обозначения
Глава
Параллельное разветвление и параллельное соединение используются
в функциональной карте, когда параллельно выполняются два или более
действия. Когда выполнено условие перехода 1, оба параллельных дей-
ствия начинаются одновременно. Следующий шаг после соединения
выполняется только после того, как будут закончены оба параллельных
действия, и условие перехода 2 будет выполнено.
Параллельное
разветвление
и соединение
Рис. 6.8:
Параллельное разветвле
и параллельное соединен
на функциональной карт.
Выбор последователь-
ности и схождение
Иногда бывает, что в зависимости от состояния системы выполнение
какой-то части процесса может пойти по нескольким вариантам. Как
это представляется на функциональной карте, показано на рис. 6.9.
Имеется два варианта выбора. Если после окончания шага 36 выпол-
няется условие 2, выполнение программы идет по правой ветви. Как
только закончится шаг 57 и будет выполнено условие 4, следующим
станет шаг 60.
Рис. 6.9:
Выбор последователь -
ности и схождение на
функциональной карте
Условие перехода 1
Условие перехода 3
Гпава
На рис. 6.10 показана функциональная карта гибочного устройства
(схема общего расположения дана на рис. 6.1). В ходе одного рабочего
цикла выполняется 4 шага (см. раздел 6.1, функциональная диаграмма
на рис. 6.2).
Пример применения
Рис. 6.10:
Функциональная карта
для гибочного устройстве.
Глава 6
реимущества и недостатки функциональной карты С точки зрения планирования и процедуры поиска неисправностей функциональная карта имеет следующие преимущества: Режим работы подсистемы обработки сигналов может быть пред- ставлен очень подробно Ключевые характеристики системы управления наглядно представ- лены в графическом виде (особенно важно при проектировании сложной системы) Последовательно ориентированная структура облегчает определе- ние условий выполнения каждого шага и наличие необходимых вы- ходных сигналов С помощью подробной функциональной карты система управления разрабатывается с минимальными финансовыми издержками. Главным недостатком функциональной карты является отсутствие гра- фического представления порядка перемещений приводов. В результате визуально функциональная карта воспринимается хуже, чем функцио- нальная диаграмма. Поэтому часто бывает полезно дополнительно к функциональной карте подготовить диаграмму "перемещение-шаг" и "перемещение-время".
Гпава t
На принципиальной пневматической схеме показано, как различные
пневматические элементы соединяются друг с другом и как они взаимо-
действуют. Условные графические обозначения элементов располага-
ются таким образом, чтобы схема легко читалась и чтобы в ней как
можно меньше было пересекающихся линий. Поэтому принципиальная
схема не имеет ничего общего с реальным расположением элементов
в пространстве.
Элементы на принципиальной схеме изображаются с помощью услов-
ных обозначений (символов), определенных в стандарте DIN/IS01219-1.
Из условного обозначения элемента должно быть понятно:
Тип воздействия на элемент
Число отверстий для подвода/отвода воздуха и их обозначение
Число позиций переключения.
На следующих страницах представлены условные обозначения только тех
элементов, которые чаще всего используются в электропневматических
системах.
6.3. Пневматическая
принципиальная
схема
ювные обозначения
элементов питания
сжатым воздухом
Система питания сжатым воздухом может быть представлена обо-
значениями отдельных элементов, комбинированным обозначением
или упрощенным (рис. 6.11).
Питание
- Компрессор с постоянным рабочим объемом
- Аккумулятор или ресивер
- Источник давления
Устройства подготовки воздуха
- Фильтр Фильтрация
твердых частичек
- Впагоотделитепь, с ручным отводом конденсата
- Впагоотделитепь, с автоматическим отводом
- Маспораспылитель Распыляет капельки масла
в потоке воздуха
- Регулятор давления Настраиваемый,
с разгрузочным отверстием
Комбинированные обозначения
- Блок подготовки воздуха, в составе
влагоотдел ителя,
фильтра,
регулятора давления,
манометра и
маспораспылитепя
Рис. 6.11:
Условные графические
обозначения элементов
питания сжатым воздухом
Упрощенное обозначение
блока подготовки воздуха
Упрощенное обозначение
блока подготовки воздуха
без маспораспылитепя
ТР207 • Festo Didactic
Гпаво
Условные обозначения распределителей и клапанов состоят из одного
или нескольких квадратов (рис. 6.12).
Условные графически,
обозначения клапане
Позиция переключения обозначается квадратом
Число квадратов соответствует числу возможных
позиций переключения
Линии внутри показывают пути прохода воздуха,
а стрелки — направление потока
Закрытые отверстия показываются двумя короткими
линиями, перпендикулярными друг другу
Линии подвода и отвода сжатого воздуха рисуются
снаружи квадрата
Рис. 6.12:
Блоки для создания
условных графических
обоз на чений клапанов
' пава 6
/ зловные графические
обозначения
распределителей
Рис. 6.13:
Распределители:
отверстия и позиции
переключения
На графических обозначениях распределителей показываются число
позиций, число отверстий и направление потоков сжатого воздуха (рис.
6.13). У распределителей с электромагнитным управлением отверстия
и линии подвода/отвода воздуха показываются у позиции, которую рас-
пределитель занимает при отсутствии сигнала управления.
--- Число отверстий (линий, портов)
।-- Число позиций переключения
2/2 - распределитель, нормально открытый
3/2 -распределитель, нормально закрытый
- 3/2 - распределитель, нормально открытый
4/2 - распределитель,
проход от1 к2иот4кЗ
5/2 - распределитель
проход от1 к 2 и от 4 к 5
5/2 - распределитель
закрыт в средней позиции
Гпав..
Чтобы полностью представить распределитель на пневматической Типы управления
принципиальной схеме, нужна еще следующая информация: распределителями
Тип воздействия на распределитель
Способ возврата в исходное положение
Наличие пилотного управления
Дополнительные виды воздействия (такие как ручное дублирование).
Каждое обозначение типа управления изображается сбоку от позиции
переключения в соответствии с направлением воздействия.
Ручное управление - общее обозначение - от кнопки ф: Механический возврат - пружиной |w - пружинное центрирование Электромагнитное управление - одним электромагнитом | / - двумя электромагнитами | / Комбинированное управление - распределитель с двусторонним пилотным электромагнитным управлением и ручным дублированием 1 l/.z.L п __4з Рис. 6.14: •С \ I Типы управления распределителями электропневматичес-. систем
)бозначение отверстий
и линий управления
на распределителях
Чтобы избежать ошибок при подключении пневмопроводов к распре-
делителям, все их отверстия, как на отдельных обозначениях распре-
делителей, так и на принципиальных схемах, маркируются в соответ-
ствии со стандартом ISO 5599-3. Если переключение распределителя
происходит с помощью сжатого воздуха, это показывается на принци-
пиальной схеме или с помощью соответствующей пилотной линии, или, в
случае распределителя с внутренним питанием пилотного каскада, меткой
у обозначения управления. В таблице 6.2 собраны соответствующие обо-
значения отверстий.
Таблица 6.2:
Обозначение рабочих
и пилотных отверстий
распределителей
Рабочие отверстия (все распределители) Питание Выходы Выхлопы в атмосферу 1 2,4 3, 5
Отверстия пилотного или пневматического управления Пневмовозврат Переключение на проход от 1 к 2 Перелючение на проход от 1 к 4 Подвод питания к пилотному каскаду 10 12 14 81, 91
Примеры условных графических обозначений распределителей пока-
заны на рис. 4.2, 4.3, 4.5—4.7 и 4.9, а также в таблицах 4.1—4.3.
Гпава
Обратные клапаны определяют направление потока воздуха в системе,
а дроссели — значение пропускаемого расхода. С помощью клапанов
быстрого выхлопа можно повысить скорость перемещения пневмати-
ческого привода за счет сокращения сопротивления линии выхлопа.
Условные графические обозначения этих устройств показаны на
рис. 6.15.
Условные графически
обозначения обратнь,
клапанов, дросселей
клапанов быстрого
выхлопа
Обратный клапан
Обратный клапан с пружиной
Регулируемый дроссель
Регулируемый дроссель с обратным клапаном
Клапан быстрого выхлопа
Рис. 6.15:
Условные графические
обозначения обратных
клапанов, дросселей и
клапанов быстрого выхлоп
пава 6
-ровные графические
/означения клапанов
' .равнения давлением
Клапаны управления давлением выполняют следующие функции:
Поддержание давления на постоянном уровне (регуляторы давления)
Подача сигналов в систему в зависимости от изменения давления
(клапаны последовательности).
Условные графические обозначения клапанов давления показаны на
рис. 6.16.
В качестве альтернативы клапану управления давлением в эпектропнев-
матических системах можно использовать распределитель, который
управляется сигналом от датчика или реле давления.
Настраиваемый регулятор
давления без разгрузки
Настраиваемый регулятор
давления с разгрузкой
Клапан последовательности
давления с внешним питанием
Предохранительный клапан
Клапан последовательности
давления — комбинированный
Рис. 6.16:
Условные графические
обозначения клапанов
управления давлением
I “ЛЗБс
Пропорциональные клапаны служат для быстрой и точной настройки
давления или расхода до нужного значения по значению электрического
сигнала. Области применения и принцип работы объяснены в разделе
9.9. Условные графические обозначения устройств с пропорциональ-
ным управлением показаны на рис. 6.17.
Условные графическ
обозначения пропори
нальных клапанов
Пропорциональный 5/3-распределитель
Пропорциональный 5/3-распределитель
с линейным двигателем 2-стороннего
действия и обратной связью по поло-
жению золотника ~
Рис. 6.17:
Условные графически
обозначения пропори
нальных клапанов
пава 6
г.ловные графические обозначения исполни- тельных устройств В электропневматических системах управления используются следую- щие исполнительные устройства: Пневматические цилиндры для линейного перемещения (односторон- него действия, двустороннего действия, бесштоковые (линейные приводы) и т. д.; см. раздел 9.2) Поворотные цилиндры Пневмомоторы для непрерывного вращения (такие как пластинчатый мотор для пневматической отвертки) Генераторы вакуума. Условные графические обозначения исполнительных устройств пока- заны на рис. 6.18.
Гпава I
Функция Описание Условное
Цилиндр одностороннего действия Выдвижение штока под действием сжатого воздуха. Втягивание с помощью пружины.
Цилиндр двустороннего действия Выдвижение и втягивание штока под действием сжатого воздуха. " г 1
Цилиндр двустороннего действия То же, плюс регулируемое демпфирование в крайних положениях. Г- :
Цилиндр двустороннего действия с зажимным модулем Механический зажимной модуль с пневматической разблокировкой. 1 I LhpU
Цилиндр двустороннего действия с гидравлическим успокоительным цилиндром Цилиндр совершает работу под действием сжатого воздуха. Гидравлический цилиндр обеспечивает плавное перемещение. — u Е~ ।—
У Г. J __х_
г1
Бесштоковый цилиндр с регулируемым демпфированием в крайних положениях Обычно имеет большой рабочий ход. Мощность на каретку передается с помощью постоянных магнитов. —
[ / 1
1 J i
Бесштоковый цилиндр с регулируемым демпфированием в крайних положениях Передача мощности на каретку осуществляется механически. В "/Г
0 J
1
Пневматический пластинчатый поворотный двигатель Поворотный привод с ограниченным углом поворота.
Пневматический мотор Мотор, работающий на сжатом воздухе с постоянной скоростью и направлением вращения.
Пневматический мотор Пневмомотор с двумя направлениями вращения.
Г енератор вакуума Создает вакуум с помощью эжектора. 1 н>
Рис. 6.18:
murhuua^ua г>йп<шячнния исполнительных устройств
; 7ава 6
Выхлопное отверстие без возможности подключения
Выхлопное отверстие с присоединительной резьбой
Глушитель
Тройник
Пересечение трубопроводов
Манометр
Пневмоиндикатор (пневмолампа)
Реле давления (ПЭ-преобразователь)
Рис. 6.19:
Другие условные графи-
ческие обозначения
пневматических и
электрических элементов
Реле давления, настраиваемое, с переключающимся контактом
Датчик давления (аналоговый выходной электрический сигнал) —
Гнавь
Общий вид пневматической принципиальной схемы, расположение на
ней отдельных обозначений элементов, их идентификация и нумерация
должны соответствовать стандарту DIN/ISO 1219-2. Для электропневма-
тических систем установлен следующий порядок расположения элемен-
тов на принципиальной схеме:
Исполнительные устройства в верхней части
Под ними — устройства регулировки скорости (дроссели, обратные
клапаны, клапаны быстрого выхлопа)
Еще ниже — основные распределители, управляющие исполнитель-
ными устройствами
В самом низу слева размещаются элементы подачи питания.
Если в системе несколько исполнительных устройств, они располагаются
рядом на одном уровне, а обозначения соответствующих распредели-
телей — под исполнительными устройствами (рис. 6.20).
Все элементы на пневматической принципиальной схеме показываются
в позиции, соответствующей отсутствию электрических сигналов. Это
означает:
Электромагнитные катушки распределителей выключены.
и Цилиндры и другие приводы находятся в исходном положении.
Расположение
условных
обозначений на
принципиальной схем?
Позиции цилиндров
и распределителей
i шва 6
940 л/мин. 1
Ра» =0,7МПа
Рта« = 1,4МПа
Рис. 6.20:
Принципиальная пневматическая схема электропневматической системы управления с тремя исполнительными
устройствами
_________№
Гпаве
Каждый элемент на схеме (кроме пневмолиний и элементов соединения) Идентификационные
имеет специальное обозначение (код), структура которого показана на коды элементов
рис. 6.21). Идентификационный код содержит следующую информацию:
Номер установки (цифра, может быть пропущен, если в системе одна
установка)
Номер цепочки управления (цифра, обязательный)
Тип элемента (буква, обязательный)
Номер элемента (цифра, обязательный)
Идентификационный код может быть заключен в рамочку.
Рис. 6.21:
Идентификационный
код элемента в
пневматической
принципиальной схеме
Если в цехе есть несколько электропневматических систем управления,
номер установки помогает прояснить взаимосвязь между схемами и
системами управления. Все пневматические элементы в системе управ-
ления (установке) имеют один и тот же номер на первой позиции кода.
На представленном примере принципиальной схемы (рис.6.20) этот
номер в коде не показан.
Рекомендуется всем элементам, относящимся к подготовке сжато-
го воздуха, давать номер цепочки 0. Остальные цифры предназначены
для обозначения цепочек управления исполнительными устройствами.
На схеме, показанной на рис. 6.20, приняты следующие обозначения:
Питание сжатым воздухом и главный выключатель: номер 0
Цепочка управления операцией "Зажим": номер 1
Цепочка управления операцией "Сверление": номер 2
Цепочка управления операцией "Поворот стопа": номер 3.
Номер установки
Номер цепочки
пава 6
Идентификация и
номер элемента
Каждый элемент в электропневматической системе управления имеет
код типа (таблица 6.3) и номер в схеме. В пределах цепочки управления
элементы одного и того же типа нумеруются снизу вверх и слева напра-
во. Поэтому клапаны в цепочке "Зажим" (цепочка 1 на схеме, представ-
ленной на рис. 6.20) имеют следующую структуру обозначения:
Распределитель: 1V1 (цепочка 1, код элемента V, номер элемента 1)
Дроссель с обратным клапаном: 1V2 (цепочка 1, код элемента V, но-
мер элемента 2).
Таблица 6.3:
Идентификационные
коды элементов на
принципиальной
пневматической схеме
‘ .. ..... „ж ... .. й
Компрессоры с
Исполнительные устройства А
.Приводные двигатели М
Датчики S
Клапаны (всех типов) V
Электромагниты клапанов Y*
Другие элементы Z**
* национальное дополнение в немецком стандарте ** или любая другая буква, не включенная в данный список
Гпава ?.
Чтобы облегчить монтаж системы управления и замену элементов в
ходе обслуживания, некоторые элементы на принципиальной пневмати-
ческой схеме могут сопровождаться дополнительной информацией
(см. рис. 6.20):
Цилиндры:
Диаметр поршня, ход и функция (например, "Зажим")
Элементы питания сжатым воздухом:
Диапазон рабочего давления в мегапаскалях или барах, номинальный
расход в л/мин.
Фильтры:
Номинальный размер ячейки в микронах
Шланги:
Внутренний диаметр в миллиметрах
Манометры:
Диапазон измерения давления в мегапаскалях или барах.
Техническая
информация
144
;пава 6
6Л. Электрическая принципиальная схема Принципиальная электрическая схема системы управления показывает, как электрические элементы соединены друг с другом и как они взаимо- действуют. В соответствии со стандартом DIN/EN 61082-2 в зависимости от поставленной задачи можно использовать следующие типы принци- пиальных схем: Обзорная схема » Функциональная диаграмма Принципиальная схема.
Обзорная схема Обзорная схема представляет обзор электрических аппаратов в отно- сительно большой системе, например, в упаковочной машине или сбо- рочной линии. Она показывает только основные взаимозависимости. Различные подсистемы подробно представляются на других схемах.
Функциональная диаграмма Функциональная диаграмма иллюстрирует отдельные функции системы. Без учета того, как эти функции выполняются.
Принципиальная схема Принципиальная схема подробно показывает проект системы, монтаж- ные элементы, аппаратуру и т.д. Она включает: Условные графические обозначения элементов оборудования Соединения между этими элементами Идентификацию оборудования Идентификацию клеммников Другую информацию, необходимую для прослеживания путей (иден- тификация сигналов, примечания по расположению элементов).
Гпак
Если на принципиальной схеме используется консолидированное предс-
тавление, каждое устройство представляется в виде отдельного согла-
сованного символа, даже репе, которое имеет более одного нормально
разомкнутого и нормально замкнутого контакта.
Если используется распределенное представление, отдельные элементы
устройства могут быть показаны на схеме в различных местах. Они рас-
полагаются таким образом, чтобы дать наиболее ясное представление о
связях в системе с максимальным использованием прямых линий при
минимуме пересечений. Нормально замкнутые и нормально разомкнутые
контакты одного репе, например, могут распределяться по всей принци-
пиальной схеме.
В электропневмоавтоматике используются принципиальные схемы с
распределенным представлением. И только если система управления
очень большая, дополнительно подготавливаются обзорная схема и
функциональная диаграмма.
На практике термин "электрическая принципиальная схема электро-
пневматической системы управления" всегда означает принципиальную
схему в соответствии со стандартом DIN/EN 61082-2.
Консолидированное
или распределенное
представление на
принципиальной схем
Электрическая
принципиальная схем;
электропневматичесм
системы
пава 6
словные графические
обозначения
электрических
элементов
На принципиальной схеме электрические элементы представляются с
помощью графических обозначений, установленных стандартом DIN
40900. Наиболее часто используемые обозначения показаны на рис.
6.22—6.27.
Постоянный ток, постоянное напряжение
Переменный ток, переменное напряжение
Выпрямитель {блок питания)
Постоянный магнит
Резистор, общее обозначение
Рис. 6.22:
Лрафические обозна чения
основных функций
Катушка (индуктивность)
Индикатор (пампа, светодиод)
Емкость
Заземление, общее обозначение
Гпава
Основная функция С автовозвратом
Без автовозврата
Нормально
разомкнутый
контакт
J
Нормально
замкнутый
контакт
Переключа-
ющий контакт
ч
ч
Задержка
включения
Задержка
выключения
Задержка включения,
Задержка выключения
Нормально
разомкнутый
контакт
•ч
Нормально
замкнутый
контакт
Рис. 6.23:
Графические обозначена
контактов:
основные функции
и задержка
а
Глава 6
Кратковременный
переключатель
Нормально разомкнутый контакт, р-Х
с ручным управлением
Переключатель с
фиксацией
Нормально разомкнутый контакт,
с ручным управлением нажатием
Нормально замкнутый контакт,
с ручным управлением оттягиванием
Рис. 6.24:
Графические обозначения
переключателей с ручным
управлением
Нормально разомкнутый контакт,
с ручным управлением поворотом
Рис. 6.25:
! рафические обозначения
электромеханических
приводов
Общее обозначение
- Электромеханический привод
Управление реле и контакторами
- Электромеханический привод с
2 параллельными обмотками
- Электромеханический привод с
2 противоположными обмотками
- Электромеханический привод с
задержкой включения
- Электромеханический привод с
задержкой выключения
- Электромеханический привод с
задержкой включения и выключения
- Электромеханический привод
реле переменного тока
- Электромеханический привод
реле памяти
Приводы распределителей
- Электромеханический привод
распределителя
Ф^
Реле
- Реле с 3 нормально разомкнутыми и
1 нормально замкнутым контактом
- Реле с задержкой выключения
- Реле с задержкой включения
- Реле памяти
- Сигнальное реле
Контактор
- Контактор с одним нормально разомкнутым
и 1 нормально замкнутым контактом
5/мин!
Когда напряжение подается на клеммы обмотки, обозначенные*, пепестки подвижных
контактов переключаются в положение, обозначенное*.
Рис. 6. 26:
Графические обозначение
реле и контакторов
(консолидированное
представление)
il^U
’ пава 6
Концевые выключатели
- Нормально разомкнутый контакт
- Нормально замкнутый контакт
Датчики приближения
- Датчик приближения, устройство,
реагирующее на приближение
- Датчик приближения (нормально
разомкнутый контакт), переключаемый
магнитом (стандартизованное)
- Датчик приближения оптический
- Датчик приближения индуктивный
Рис. 6.27:
рафические обозначения
датчиков
- Датчик приближения емкостной
Реле давления, датчики давления
- Реле давления электромеханическое
- Реле давления электронное
Il
Глзвв '
На принципиальной схеме условные графические обозначения электри-
ческих элементов, требуемые для реализации логических операций и
последовательностей перемещения, рисуются последовательно сверху
вниз и слева направо. Катушки реле и электромагнитов распределителей
всегда рисуются под контактами (рис. 6.28).
Принципиальная схема
электропневматическ®
системы управления
Чтобы схема читалась легко, рекомендуются следующие меры:
Деление на отдельные токовые цепочки
Обозначение устройств и контактов цифрами и буквами
Деление схемы на управляющую и исполнительную части
Подготовка таблиц контактов.
Токовые цепочки изображаются на схеме параллельно друг другу и
имеют сквозную нумерацию. Так, принципиальная схема, показанная
на рис. 6.28, имеет десять токовых цепочек. Цепочки с 1 по 8 принад-
лежат управляющей части, а цепочки 9 и 10 — исполнительной.
Токовые цепочки
^ава 6
S1 = главный выключатель
S2 = кнопка “Старт"
S3 = подтверждающий выключатель
1S1/1S2 = концевые выключатели
1В1 = реле давления
Рис. 6.28:
Электрическая принципиальная схема электропневматической системы управления
Примечание: все реле имеют переключающие контакты.
I лавт*
Все электрические элементы на принципиальной схеме обозначаются
буквой в соответствии с таблицей 6.4. Элементы одного типа далее
обозначаются цифрами (например, 1S1,1S2 и т. д.). Датчики и электро-
магниты распределителей должны быть показаны как на пневматической,
так и на электрической принципиальных схемах.
Чтобы избежать двусмысленности и сделать схемы легко читаемыми,
одни и те же элементы на обоих схемах должны быть обозначены одина-
ково. Например, если датчик на пневматической принципиальной
схеме обозначен как 1S1, это же обозначение он должен иметь на
электрической принципиальной схеме.
Идентификация
элементов
Типэлемента ~ \ ЛЛ,
Концевой выключатель s
Ручной переключатель, входной элемент s
Геркон в
Электронный датчик приближения в
Датчик давления в
Индикатор н
Реле к
Контактор к
Электромагнит распределителя Y
Таблица 6.4:
Обозначения алеман i
на электрических
принципиальных cxei *.
(DIN40719-2)
Элементы на принципиальной схеме (рис. 6.28) обозначены следующим
образом:
Пример
идентификации
элементов
Ручные переключатели S1, S2 и S3
Концевые выключатели 1S1 и 1S2
Датчик давления 1В1
Реле К1, К2, КЗ и К4
Электром агн ит 1Y1
Лампа Н1.
’"пава 6
Обозначение клемм
контактов и реле
Чтобы избежать ошибок при разводке проводов, все обозначения при-
соединений на элементах и в принципиальных схемах должны быть обоз-
начены одинаково. Каждая клемма контакта имеет функциональный
номер. Функциональные номера для различных типов контактов пере-
числены в таблице 6.5. Если переключатель, реле или контактор имеют
более одного контакта, они обозначаются цифрами по порядку, стоящи-
ми перед функциональным номером (рис. 6.29). На рис. 6.30 показан
разрез реле с обозначением всех клемм. Клеммы катушки обозначены
А1 и А2.
Таблица 6.5:
Функциональные
номера для контактов
g ;
Нормально замкнутый 1,2
Нормально разомкнутый 3, 4
Нормально замкнутый с задержкой 5, 6
Нормально разомкнутый с задержкой 7,8
Переключающий 1,2,4
Переключающий с задержкой- 5,6,8
4
Направление воздействия
1
Рис. 6.29:
Обозначение клемм
контактов с помощью
функциональных и
последовательных
номеров
Нормально Нормально Переключа-
замкнутый разомкнутый ющий контакт
контакт контакт
ГИЗ Ba
Рис. 6.30:
Условное графическое
обозначение и маркировк
клемм реле
1 лава 6
Пример обозначения
клемм реле
Таблица контактов
На принципиальной схеме, представленной на рис. 6.28, клеммы репе К1
обозначены следующим образом:
Обмотка (токовая цепочка 2): А1, А2
Нормально разомкнутый контакт (цепочка 3): 11,14
Нормально разомкнутый контакт (цепочка 10): 21,24.
Все контакты, которые приводятся в действие обмоткой репе или контак-
тора, указываются в таблице контактов. Эта таблица располагается
под токовой цепочкой, в которой находится обмотка реле. Таблица
контактов может быть представлена в упрощенном или подробном виде
(рис. 6.31).
Рис. 6.31:
Таблица контактов реле
в упрощенном и
подробном виде
Упрощенный
----------►- 7
Нормально
замкнутый
контакт в
цепочке 7
3
/] ......
6 Нормально
разомкнутый
контакт в
цепочке 4
Подробный
Гпавя
На принципиальной схеме, показанной на рис. 6. 28, имеется всего
4 таблицы контактов:
Токовая цепочка 2: таблица контактов для реле К1
Токовая цепочка 4: таблица контактов для реле К2
Токовая цепочка 5: таблица контактов для реле КЗ
Токовая цепочка 8: таблица контактов для реле К4.
Принципиальная схема рисуется в состоянии, соответствующем отсутст-
вию электрического питания. Если при этом какие-то концевые выклю-
чатели активированы (нажаты), они отмечаются стрелочкой (рис. 6.32).
Соответствующие контакты также показываются в активированном
положении.
Примеры таблиц
контактов
Активированные
контакты и датчики
Обозначение
Активированный нормально
замкнутый контакт
Активированный нормально
разомкнутый контакт
Рис. 6.32:
Обозначение
активированных
контактов на
принципиальной схеме
Глава 6
<5.5. Диаграмма электрических соединений В электропневматической системе управления датчики, элементы управления, устройства обработки сигналов и электромагниты рас- пределителей должны быть соединены друг с другом посредством электрических проводов. Особое внимание следует обратить на рас- положение различных элементов: Датчики часто монтируются в труднодоступных частях машины или станка Устройства обработки сигналов (реле, программируемые логические контроллеры) обычно устанавливаются в шкафу управления. Однако в последнее время контроллеры часто встраиваются в пневмо- острова Элементы управления устанавливаются или на лицевой панели шкафа управления или на отдельной консоли управления Распределители с электромагнитным управлением монтируются в блоках в шкафу управления, в пневмоостровах или индивидуально поблизости от исполнительных механизмов. Большое число элементов в электропневматической системе и большие расстояния между ними делают разводку электропроводов довольно дорогостоящей.
Требования к разводке проводов Система разводки проводов в электропневматической системе должна удовлетворять следующим требованиям: Быть эффективной по цене (использование элементов, позволяющих производить быстрое подсоединение проводов и имеющих хорошее отношение цена/качество, оптимизирование схемы по числу проводов, использование элементов с меньшим числом клемм) Простой поиск неисправностей (доступная и понятная разводка при наличии всей необходимой документации) Быстрый ремонт (легкая замена элементов с помощью разъемов и розеточных соединений, отсутствие пайки).
Все большее применение в электропневматических системах для пере-
дачи сигналов получают так называемые системы "полевой шины" или
“филдбас" (fieldbus). Такие системы отличаются следующими характе-
ристиками:
Особенно простой и легкий для обслуживания вид схемы управления
Меньшее число проводов и низкая стоимость разводки (быстроразъем-
ные соединения)
Возросшее число и стоимость аппаратного обеспечения (более
сложная электроника)
Решение об использовании системы "филдбас" или обычные системы
разводки проводов принимается на основе условий конкретного при-
менения (см. главу 9).
Система "филдбас"
Рис. 6.33:
Структура
электропневматической
системы с клеммными
колодками
Гпава 6
Разводка с
клеммными
колодками
Конструкция
клеммных колодок
Для того, чтобы снизить стоимость разводки, упростить поиск неисправ-
ностей и облегчить ремонт, в электропневматических системах с инди-
видуальной разводкой проводов между элементами используются
клеммные колодки (терминалы). Через такие колодки проходят все
провода, выходящие и входящие в шкаф управления (рис. 6.33 а).
Вышедшие из строя элементы можно легко отсоединить от колодки и
заменить.
Если в машине или станке установлены дополнительные клеммные ко-
лодки, линии питания к элементам, находящимся вне шкафа управления,
могут быть сделаны значительно короче (рис. 6.33 б). Это еще больше
облегчает установку и замену элементов. Каждая дополнительная
клеммная колодка устанавливается внутри специального бокса для
защиты от окружающей среды.
Колодка имеет две шины для подвода электрических линий, расположен-
ные одна под другой (рис. 6.34). Все колодки устанавливаются на мон-
тажную рейку друг за другом. Электрическое соединение между колод-
ками осуществляется посредством контактных пластин или мостиков.
Рис. 6.34:
Клеммная колодка
Клемма
Гпава
При разводке проводов в системе управления одновременно невозмож-
но достичь обе цели: сделать это как можно дешевле и как можно
проще для обслуживания. Если предпочтение отдается обслуживанию,
клеммные колодки следует располагать так, чтобы разводка легко чита-
лась (таблица 6.6). На практике встречаются следующие варианты:
Системы управления с систематически расположенными колодками,
что облегчает обслуживание
Системы управления с минимальным числом колодок в ущерб наг-
лядности
Гибрид первых двух вариантов.
Ни при каких условиях к одной клемме не должно подходить несколько
проводов.
Расположение колол
' ^1 Преиму- 1 щества | - Быстрый поиск неисправностей — Легко проследить путь провода — Легкий ремонт — Экономия пространства (внутри шкафа управления) — Меньше проводов при разводке — Меньше источников ошибок при разводке
— Больший расход материалов — Больше времени на монтаж — Недостаток наглядности, большие потери времени, особенно у людей, не знакомых с данной системой
Таблица 6.6:
Подходы к
расположению колод ,
Глава 6
Структура диаграммы электрических соединений Расположение колодок документируется в диаграмме электрических соединений. Диаграмма состоит из двух частей: принципиальной схемы и таблицы назначений. В принципиальной схеме каждое подключение обозначается кружочком (рис. 6.37). Каждая клемма обозначается буквой X и нумеруется в соот- ветствии с расположением в колодке (например, Х1, Х2 и т. д.). Если колодок несколько, то используется двухзначное обозначение (например, Х2.6, что означает 6-я клемма во 2-й колодке). Таблица назначений содержит список всех клемм и подключений в одной колодке. Если в системе несколько колодок, то должно быть и несколько таблиц — по одной на каждую. Таблицы используются при монтаже сис- темы, поиске неисправностей (измерение сигнала на клеммах) и ре- монте.
Подготовка диаграммы электрических соединений Основой для подготовки диаграммы является исходная электрическая принципиальная схема без нанесения на ней мест подключений. Разработка диаграммы соединений идет в два этапа: 1. Нанесение клемм и их нумерация на принципиальной схеме. 2. Составление таблицы назначений.
Пример применения В следующем примере показана процедура подготовки диаграммы соединений в системе с большой степенью наглядности. Для начала работ имеются: и Исходная электрическая принципиальная схема (рис. 6.35) и Заготовка таблицы назначений (рис. 6.36).
Главе
К2\ 11
14
1S2/ 1
2
1S2
5
24
0V о-
3 4
5
Рис. 6.35:
Пневматическая и
электрическая
принципиальные схемы
электропневматическои
системы управления
Обозначение элемента Назначение
Обозначение подключения
о о 0 о о о О 0 0 о 0 О о 0 о О О о О О Соединительный мостик
го о со со —л -А СП -л СП 4^ 6Э ю —л О со со СП СП -Ьь W ю —л Колодка №Х...
Обозначение элемента Назначение
Обозначение подключения
Глав
Клеммы отмечаются на принципиальной схеме и нумеруются в воз-
растающем порядке. Процедура заполнения таблицы назначений вы-
полняется в три этапа:
1. Питание для всех токовых цепочек (клеммы Х1-1...Х1-4 на схеме
рис. 6.37).
2. Ноль для всех токовых цепочек (клеммы Х1-5...Х1-8 на схеме
рис. 6.37).
3. Подключение всех элементов, находящихся вне шкафа управления,
в соответствии со следующей системой:
По порядку токовых цепочек
Сверху вниз по каждой токовой цепочке
Для контактов в порядке функциональных номеров
Для электронных элементов в следующем порядке: питание, выход
(если есть), ноль.
На схеме, показанной на рис. 6.37, все элементы подключены к клеммам,
обозначенным от Х1 -9 до Х1 -17.
Нумерация клемм
Рис. 6.37:
Принципиальная схема
с обозначением подключен
Wi'”""
>;ава 6
Заполнение таблицы
назначений
Таблица заполняется в следующем порядке:
1. В левой части указывается обозначение элементов и их подключения
с принципиальной схемы, находящиеся вне шкафа управления.
2. В правой части указывается обозначение элементов и подключений
внутри шкафа.
3. Рисуются в соответствующих местах соединительные мостики внутри
колодки (например, клеммы с Х1-1 по Х1-4 для питания +24 В, клем-
мы с Х1 -5 по Х1 -8 для ноля).
4. Заполняются ячейки, показывающие взаимное соединение клемм.
Рис. 6.38:
Таблица назначений
для примера системы
управления
Станок Шкаф управления
Назначение < *= с а < с С i Колодка № X... Назначение
Обозначение элемента Обозначение , подключения Обозначение элемента Обозначение подключения
+24V (j 1 Х1 9
( ) 2 Х1 12
( ) 3 Х1 14
d ь 4 К2 21
0V <j 5 Х1 11
< ) 6 К1 А2
< ) 7 К2 А2
d 8 Х1 17
1В1 + о 9 Х1 1
1В1 _п_ о 10 К1 А1
1В1 - о 11 Х1 5
S1 3 о 12 Х1 2
S1 4 о 13 К1 11
1S2 1 о 14 Х1 3
1S2 2 о 15 К2 11
1Y1 о 16 К2 24
1Y1 о 17 Х1 8
о 18
о 19
о 20
Структура таблицы назначений основана на конструкции клеммной
колодки. Поэтому разводка в электропневматической системе управле-
ния производится по этой таблице (рис. 6.38):
Все провода, идущие вне шкафа управления, подключаются к клем-
мной колодке слева в соответствии с таблицей назначений
Разводка проводов в
электропневматическо
системе управления
Все провода, идущие к элементам внутри шкафа, подключаются
к колодке справа
Соседние клеммы, между которыми следует установить мостики,
соединяются друг с другом.
Провода, соединяющие два элемента вне шкафа управления, не идут
через клеммную колодку. Поэтому их не включают в таблицу назна-
чений, а разводятся они в соответствии с принципиальной схемой.
Гпава
Глава 7
Техника безопасности в
электропневматических системах
управления
пава 7
7.1. Виды опасностей
м защитные меры
Чтобы электропневматическая система работала безопасно, необходи-
мо предпринять многочисленные защитные меры.
Одним из источников опасности являются подвижные части машин и
оборудования. Например, на пневматическом прессе следует принять
необходимые меры, чтобы пальцы или руки оператора не попали под
пуанссон. Обзор источников опасностей и необходимых мер предосто-
рожностей показан на рис. 7.
Рис. 7.1:
Подвижные части
машин и оборудования:
источник опасностей
и защитные меры
______?л
Гпаве-
Другим источником опасностей является электрический ток. Возможные
опасности и рекомендуемые меры показаны на рис. 7.2.
Рис. 7.2:
Электрический ток:
источник опасностей
и защитные меры
Чтобы обеспечить наилучшую возможную защиту персонала, при
проектировании электропневматических систем управления следует
соблюдать правила техники безопасное™ и соответствующие стандарты.
Ниже перечислены основные стандарты, устанавливающие правила
от опасности воздействия электрического тока:
Защитные меры для мощных электрических установок с напряже-
нием до 1000 В (DIN VDE 0100)
Спецификации для электрического оборудования и безопасность
машин (DIN/EN 60204)
Степени защиты электрического оборудования (DIN-VDE 470-1).
Правила техники
безопасности
172
~лава 7
7.2. Воздействие
электрического тока
на человеческое
тело
Воздействие
электрического тока
Когда человек касается находящейся под напряжением части, электри-
ческая цепь замыкается (рис. 7.3 а). Электрический ток I проходит по
тепу.
Эффект воздействия электрического тока на человека увеличивается
с ростом силы тока и длительности контакта. В зависимости от неко-
торых пороговых значений этот эффект можно разбить на несколько
групп:
Если ток ниже порога восприятия, он не оказывает на человека
никакого воздействия
До допустимого порога воздействие тока воспринимается челове-
ком, но без опасности для здоровья
При токе выше допустимого порога, мышцы сводит судорогой и на-
рушается деятельность сердца
При превышения порога нефибрилляции наступает эффект остановки
сердца или фибрилляции желудочка сердца, паралич дыхания и
потеря сознания. Это — реальная опасность для жизни.
Порог восприятия, допустимый и порог нефибрилляции показаны на
графике рис. 7.4 для переменного тока с частотой 50 Гц. Эта частота
соответствует частоте в сетях электрического тока. Для постоянного
тока эти пороговые значения, представляющие опасность для человека,
несколько выше.
Электрическое
сопротивление
человеческого
тела
Тело человека оказывает сопротивление электрическому току. Ток
может войти в тело, например, через руки; затем он проходит по всему
телу, чтобы выйти из другой точки (например, ступни — см. рис. 7.3 а).
Соответственно сопротивление человеческого тела Rm (рис. 7.3 в)
представляет собой последовательно соединенные сопротивления на
входе Roi, внутреннее сопротивление Ri и сопротивление на выходе
R02 (рис. 7.3 б). Оно подсчитывается по следующей формуле:
Rm = R01 + Rl + R02
Значения контактных сопротивлений R01 и R02 сильно зависят от
поверхности контакта, влажности и толщины кожи. Это сказывается
и на полном сопротивлении Rm. Оно может изменяться в значительных
пределах:
Менее 1000 Ом (большая площадь контакта, влажные или потные
руки)
Несколько миллионов Ом (точечный контакт, очень сухая и толстая
кожа).
Рис. 7.3:
Касание частей
под напряжением
‘-ава 7
Факторы, влияющие
на риск несчастного
случая
Протекающий по телу человека электрический ток I зависит от напряже-
ния V, сопротивления электрической линии Rl, сопротивления тела Ям
и сопротивления земли Re (рис.7.3 г). Ток подсчитывается по формуле:
В соответствии с этой формулой большой ток, представляющий опасность
для человека, будет иметь место при следующих условиях:
Касание проводника, находящегося под высоким напряжением (на-
пример, таким как напряжение в сети 230 В)
Касание проводника при низком контактном сопротивлении и низком
сопротивлении тела (например, большая площадь контакта, потные
руки, мокрая одежда).
Рис. 7.4:
Опасные зоны при
напряжении переменного
тока (частота 50/60Гц)
Существует довольно большой выбор мер по защите оператора электро-
пневматической системы от риска поражения электрическим током.
Меры защиты против контакта частей под напряжением предписаны
как для высокого, так и для низкого напряжений. Такая защита может
обеспечиваться:
Изоляцией
Ограждением
Достаточной дистанцией.
Все элементы, до которых может коснуться человек, должны быть за-
заземлены. Если по заземленному корпусу потечет ток, в результате
будет иметь место короткое замыкание, и сработает защитное предо-
хранительное устройство, прерывающее цепь подачи питания. Для
такой защиты используются различные устройства:
Предохранители
Прерыватели питания
Прерыватели, срабатывающие при неправильном токе
Прерыватели, срабатывающие при неправильном напряжении.
При касании проводника, который находится под напряжением примерно
до 30 В, никакой опасности для жизни человека не возникает, потому
что по телу потечет маленький ток.
По этой причине электропневм этические системы управления обычно
проектируются на напряжение сети 24 В постоянного тока, но не на
напряжение сети (такое как 230 В переменного тока). Понижение на-
пряжения производится с помощью блока питания, который имеет изо-
лированный трансформатор (см. раздел 3.1).
Внимание:
Несмотря на это, напряжение в проводах, идущих от сети к блоку
питания, остается высоким.
_____________Т7:
Глав,
7.3. Меры защиты
от поражения
электрическим
током
Защита против
прямого контакта
Заземление
Безопасное экстра
низкое напряжение
Глава 7
7 А. Панель управления и индикаторы Элементы управления и индикации должны проектироваться таким образом, чтобы гарантировать безопасную и быструю работу системы управления. Функции, расположение и цветовая кодировка элементов управления и ламп индикации стандартизированы. Это позволяет исполь- зовать общие рабочие процедуры для разных систем управления и быстро предотвращать возможные ошибки.
Главный выключатель Каждая машина или установка должна иметь главный выключатель. Он используется для выключения электрического питания на время чистки, обслуживания и ремонта на относительно длительное время. Главный выключатель должен управляться вручную и иметь две по- зиции: "0" (Выкл.) и "1" (Вкл.). Позиция "Выкл." должна иметь блокировку, чтобы предотвратить несанкционированное включение вручную или дистанционно. Если в установке имеется несколько систем подачи электропитания, главные выключатели должны иметь взаимную блоки- ровку, чтобы ни какой опасности для обслуживающего персонала не возникало.
АВАРИЙНЫЙ СТОП Выключатель (кнопка) АВАРИЙНЫЙ СТОП активируется оператором в опасных ситуациях. Устройство АВАРИЙНЫЙ СТОП в случае ручного управления должно иметь большую грибовидную кнопку с фиксацией. Допускается исполь- зование педали или вырывание провода. Если на установке имеется несколько рабочих станций или панелей управления, каждая из них должна иметь свое устройство АВАРИЙНЫЙ СТОП. Цвет приводного эле- мента устройства АВАРИЙНЫЙ СТОП должен быть заметным — крас- ным. Поверхность под ним должна быть контрастного желтого цвета. При активации устройства АВАРИЙНЫЙ СТОП все приводы должны быть остановлены как можно быстрее, а вся система управления должна быть изолирована от подачи электричества и сжатого воздуха, где это осуществимо. Однако нужно соблюдать следующие ограничения: и Если освещение необходимо, его выключать нельзя и Вспомогательные блоки и тормозные устройства, обеспечивающие остановку приводов, не должны становиться неэффективными и Зажатые заготовки не должны быть отпущены Активация устройства АВАРИЙНЫЙ СТОП должна инициировать обратные перемещения там, где это необходимо. Однако такие перемещения не должны стать источником опасности.
Глава 1
Электропневматическая система, кроме главного выключателя и кнопки
АВАРИЙНЫЙ СТОП, имеет и другие элементы управления. На рис. 7.5
представлен образец панели управления.
Главный выключатель
Элементы управления
электропневматической
системы
АВАРИЙНЫЙ СТОП
Захват Открыть
Ручной
Сброс
Пошаговый
Захват Закрыть
Рис. 7.5:
Панель управления
электропневматической
системы
Гпава 7
Существует два различных режима работы электропневматической системы управления: и Ручной и Автоматический, т. е. работа по заданной программе.
Ручной режим В ручном режиме задействованы следующие элементы управления: "Сброс": система возвращается в исходное положение и "Пошаговый": при каждом нажатии на эту кнопку система выполняет один шаг последовательности и Индивидуальные перемещения: Привод срабатывает при нажатии на соответствующую кнопку или переключатель (пример на рис. 7.5: “Захват Открыть" или "Захват Закрыть").
Автоматический режим При автоматической работе системы возможны следующие режимы: Одиночный цикл: полная последовательность перемещений выпол- няется один раз и Продолжительный цикл: последовательность выполняется раз за разом. При нажатии на кнопку "Продолжительный Цикл Выкп." (или кнопку "Стоп") система останавливается. Остановка происходит или на дан- ном шаге или после завершения цикла. Главный выключатель и кнопка АВАРИЙНЫЙ СТОП эффективны на всех режимах работы системы. Они должны присутствовать во всех электропневматических системах наряду с кнопками "Ручной", "Автомат", "Старт", "Стоп" и "Сброс". Остальные элементы управления выбираются в зависимости от инди- видуальных требований системы.
Гпав -
В таблице 7.1 представлен обзор цветов для элементов управления в соот-
ветствии со стандартом EN 60204 и объяснения, что эти цвета означают.
Цветовая кодировка
элементов управпен|л»
j . > \--’Г 1 . ” *’ ' . » ж.
Цвет
Красный Стоп, Выкл. Остановить один или несколько моторов. Остановить узлы машины. Выключить магнитные зажимы.
Остановить цикл (если оператор нажал на кнопку в ходе цикла, машина остановится после завершения этого цикла).
АВАРИЙНЫЙ СТОП Стоп при опасности (например, остановка из-за приближения опасности).
Зеленый или черный Старт, Вкл., Пошаговый Подача питания в систему (готова к работе). Включение одного или нескольких моторов для вспомогательных функций. Старт узла машины. Включение магнитных зажимов. Пошаговая работа (после включения).
Желтый Старт обратного движения вне нормальной последовательности или движения для предотвращения опасности Возврат узлов машины в исходное положение цикла, если цикл не завершен. Нажатие на желтую кнопку может отменить другую, выбранную перед этим функцию.
Белый или черный Любая функция, для которой ни один из указанных выше цветов неиспользуется Вспомогательные функции управления, не связанные напрямую с выполнением рабочего цикла.
Таблица 7.1:
Цве товая кодировка
элементов управления
систем управления станкам
ава 7
.Цветовая кодировка
индикаторных памп
Для того, чтобы обслуживающий персонал быстро понимал операцион-
ный статус системы, особенно в аварийных и опасных ситуациях, инди-
каторным лампам в соответствии со стандартом EN 60204 присвоены
определенные цвета. Цвета индикаторов и их значения представлены в
таблице 7.2.
Таблица 7.2:
Цветовая кодировка
индикаторных ламп
систем управления
станками
Статуе ны Пример прммеиени»_____ , jjj
Красный Ненормальное состояние Показывает, что станок остановлен защитным устройством (например, из-за перегрузки, превышения пробега или другой ошибки). Требуется быстро остановить станок (например, из-за перегрузки)
Желтый Внимание Значение параметра (ток, температура) приближается к допустимому пределу или Сигнал для автоматического цикла
Зеленый Станок готов к старту Станок готов к старту. Вспомогательные функции могут выполняться. Узлы в исходном положении, давление или напряжение сети достигли заданного значения. Рабочий цикл завершен, станок готов к новому старту.
Белый (бесцвет- ный) Сеть под напряжением. Нормальный статус работы Главный выключатель в позиции "Вкл.“. Выбор скорости или направления вращения. Работают отдельные приводы или вспомогательные устройства. Станок работает.
Г олубой Любая функция, для которой ни один из указанных выше цветов не используется
Гпав,.
Электрические устройства, особенно такие, как датчики и контроллеры,
чувствительны к воздействию различных факторов окружающей среды.
К числу факторов, которые могут стать причиной сбоев в работе такого
оборудования, относятся пыль, влага и посторонние объекты.
В зависимости от условий монтажа и окружающих условий электрическое
оборудование может быть защищено корпусами и уплотнениями. Такие
меры также предотвращают ненужный доступ персонала к оборудованию.
Идентификатор степени защиты в соответствии со стандартом DIN-VDE
470-1 состоит из двух букв IP (что значит "Международная Защита'1) и
двух цифр. Первая цифра показывает степень защиты по доступности
пыли и твердых частиц, вторая — по доступности влаги и воды. Классы
защиты и необходимые пояснения представлены в таблицах 7.3 и 7.4.
7.5. Защита
электрического
оборудования
от воздействие
окружающей
среды
Определение
степени защиты
>ва 7
Таблица 7.3:
Защита от касания, пыли
и посторонних тел
Первая цифра Степень защиты
Обозначение Объяснение
0 Нет защиты Нет специальной защиты персонала от случайного касания частей под напряжением или подвижных узлов. Нет защиты оборудования от воздействия посторонних твердых частиц.
1 Защита от посторонних частиц большого размера Защита от случайного касания больших внутренних поверхностей, находящихся под напряжением или в движении, которых можно коснуться руками, но нет препятствия против намеренного доступа к ним. Защита от воздействия посторонних твердых частиц с диаметром более 50 мм.
2 Защита от посторонних частиц среднего размера Защита от возможного касания пальцами внутренних частей, находящихся под напряжением или в движении. Защита против воздействия посторонних твердых частиц с диаметром более 12 мм.
3 Защита от посторонних частиц малого размера Защита от возможного касания внутренних частей, находящихся под напряжением ипи в движении, инструментом, проводом или другим объектом толщиной более 2,5 мм? Защита от воздействия посторон- них твердых частиц с диаметром более 2,5 мм.
4 Защита от посторонних гранулирован- ных частиц Защита от воздействия посторонних твердых частиц с диаметром более 1 мм.
5 Защита от собирания пыли Полная защита от касания внутренних частей, находящихся под напряжением или в движении. Защита от вредного собирания пыпи. Полной защиты от воздействия пыли нет, но она не может собираться в таких количествах, которые могли бы помешать работе.
6 Защита от воздействия пыли Полная защита от касания внутренних частей, находящихся под напряжением или в движении. Защита от воздействия пыли.
Глава
Вторая цифра Степень защиты
Обозначение Объяснение
0 Нет защиты Нет специальной защиты.
1 Капающая вода Падающие вертикально капли воды не должны оказывать вредного эффекта.
2 Капли воды под углом 15° Падающие вертикально капли воды не должны оказывать вредного эффекта, если корпус наклонять до угла 15° в любую сторону от вертикали.
3 Мелкие брызги воды (спрей, аэрозоль) Вода, разбрызгиваемая под углом до 60° с любой стороны от вертикали, не должна оказывать вредного эффекта.
4 Крупные брызги воды Вода, направляемая на корпус с любого направления, не должна оказывать вредного эффекта.
5 Струи воды Струи воды из сопла, направляемые на корпус с , любого направления, не должны оказывать вредного эффекта.
6 Сильные струи воды Сильные струи воды из соппа, направляемые на корпус с любого направления, не должны оказывать вредного эффекта.
7 Периодическое погружение Вода не должна проникать в корпус в опасных для работы количествах, если корпус периодически погружать в воду при определенных значениях давления и времени.
8 Продолжительное погружение Вода не должна проникать в корпус в опасных для работы количествах, если корпус продолжительно погружать в воду при условиях, оговоренных между производителем и пользователем. Но условия должны быть бопее жесткими, чем для класса 7.
Таблица 7.4:
Защита от влаги и воды
34
гва 7
Пример 1: Программируемый логический контроллер заключен в металлический
плк корпус со щелями для охлаждения. Степень защиты указана как IP 20. Это означает: Первая цифра 2: защита от воздействия посторонних частиц с диа- метром более 12 мм, части под напряжением защищены от касания пальцами Вторая цифра 0: нет защиты от воздействия воды или влаги.
Пример 2: Электроника датчика заключена в закрытый корпус, а подвод кабеля
Индуктивный датчик приближения уплотнен. Степень защиты датчика IP65. Это означает: Первая цифра 6: пыленепроницаемый Вторая цифра 5: не проницаем для разлитой воды.
Главг
Глава 8
Релейные системы управления
ж
‘пава 8
8.1. Применение релейного управления в этесстропневмати- ческих системах В цепом, потребности электропневматической системы управления в обработке сигналов можно удовлетворить с помощью реле. Релейные системы управления выпускались в больших количествах. Многие из них продолжают использоваться в промышленности и по сей день. Сегодня для обработки сигналов вместо релейных систем используются программируемые логические контроллеры. Однако и реле продолжают использовать в современных системах управления, например, в устройстве АВАРИЙНЫЙ СТОП. Принципиальным преимуществом релейных систем управления является простота проекта и легкость понимания режима работы.
8.2. Прямое и непрямое управление Шток цилиндра одностороннего действия должен выдвигаться при на- жатии на кнопку S1 и втягиваться при ее отпускании. На рис. 8.1а показана соответствующая пневматическая принципиаль- ная схема.
Прямое управление цилиндром односто- роннего действия Электрическая принципиальная схема прямого управления цилиндром одностороннего действия показана на рис. 8.16. Когда кнопка нажата, ток течет по обмотке 1Y1 электромагнита 3/2-распределипгеля. Электро- магнит срабатывает, распределитель переключается в открытую пози- цию, и шток цилиндра выдвигается. Отпускание кнопки приводит к разрыву цепи. Напряжение на обмотке электромагнита пропадает, распределитель пружиной возвращается в исходную позиции, шток цилиндра втягивается.
Непрямое управление цилиндром односто- роннего действия Если кнопка нажата на схеме непрямого управления (рис. 8.1 в), ток течет по обмотке реле. Контакт К1 реле замыкается, и распределитель пе- реключается. Шток цилиндра выдвигается. Если кнопку отпустить, ток перестанет течь по обмотке репе. Реле вык- лючится, и распределитель вернется в исходное положение. Шток ци- линдра втянется.
Глав:!
Более сложный тип непрямого управления применяется в следующих
случаях:
Главная сеть и цепь управления работают на разных напряжениях
(например на 230 В и 24 В)
Ток, протекающий по обмотке электромагнита распределителя, пре-
вышает допустимый ток для контактов кнопки (например, ток через
электромагнит 0,5А, а допустимый ток через кнопку 0,1 А)
Несколько распределителей работают от одной кнопки или пере-
ключателя
Необходимо реализовать сложные взаимосвязи между сигналами
от различных кнопок.
б) в)
Рис. 8.1:
Принципиальные схемы
управления цилиндром
одностороннего деистви
а) пневматическая:
б) электрическая для
прямого управлений:
в) электрическая для
непрямого у правлени
правление цилиндром
двустороннего
действия
Шток цилиндра двустороннего действия должен выдвигаться при нажатии
на кнопку S1 и втягиваться при ее отпускании.
Рис. 8.2:
i 1ринципиальные схемы
управления цилиндром
двустороннего действия:
а) пневматическая с
4/2распределителем;
б) пневматическая с
5/2-распределителем;
в) электрическая для
прямого управления;
г) электрическая для
непрямого управления
Электрическая часть принципиальной схемы по сравнению со схемами
для цилиндра одностороннего действия не изменилась. Но поскольку
цилиндр двустороннего действия имеет две рабочих полости, для его уп-
равления используется 4/2- или 5/2-распределитель. (рис. 8.2 а и 8.2 б
соответственно).
Чтобы обеспечить требуемые перемещения штоков пневмоцилиндров,
часто необходимо комбинировать сигналы от нескольких элементов
управления через логические функции.
8.3. Логически®
функции
Целью является заставить шток цилиндра выдвигаться при нажатии на
два разных входных элемента, кнопки S1 или S2.
Параллельное
подключение
(цепь ИЛИ)
На принципиальной схеме контакты двух кнопок S1 и S2 подключены
параллельно друг другу (рис. 8.3 в и 8.3 г).
Если ни одна из кнопок не нажата, распределитель остается в исход-
ной позиции. Шток цилиндра втянут
Если по крайней мере одна из кнопок нажата, распределитель пе-
реключается. Шток цилиндра выдвигается
Когда обе кнопки отпущены, распределитель возвращается в исход-
ную позицию. Шток цилиндра втягивается.
Рис. 8.3:
Параллельное
подключение двух
контактов (цепь ИЛИ):
а) Пневматическая
принципиальная схема с
цилиндром односторон
него действия;
б) Пневматическая
принципиальная схема с
цилиндром двусторонне’:
действия;
в) Электрическая
принципиальная схема
прямого управления;
г) Электрическая
принципиальная схема
непрямого управления
ава 8
11оспедовательн ое
подключение (цепь И)
В этом случае шток цилиндра должен выдвигаться только при одновре-
менном нажатии на обе кнопки S1 и S2.
На принципиальной схеме контакты двух кнопок S1 и S2 подключены
последовательно друг за другом (рис. 8.4 в и 8.4 г).
в Если ни одна из кнопок не нажата, распределитель остается в исход-
ной позиции. Шток цилиндра втянут
в Если одновременно нажать на обе кнопки, распределитель переклю-
чается. Шток цилиндра выдвигается
в Если хотя бы одну кнопку отпустить, распределитель возвращается
в исходную позицию. Шток цилиндра втягивается.
Рис. 8.4:
Последовательное
подключение двух
контактов (цепь И):
а) Пневматическая
принципиальная схема
с цилиндром односторон-
него действия;
б) Пневматическая
принципиальная схема
с цилиндром двусторон-
него действия;
в) Электрическая
принципиальная схема
прямого управления;
г) Электрическая
принципиальная схема
непрямого управления
Гпава : ‘
Функции ИЛИ и И в обобщенной форме представлены в таблицах 8.1
и 8.2. В трех правых столбцах значения сигналов показаны цифрами:
- 0: Кнопка не нажата или шток не выдвинут
Представление
логических функций
в табличной форме
- 1: Кнопка нажата или шток выдвинут
Кнопка S1 нажага ! Кнопка S2 ЫШжЗЗ Шт°к_ ВЫДВИНУ! ( . f S2- 1Y1
Нет Нет Нет 0 0 0
Да Нет Да 1 0 1
Нет Да Да 0 1 1
Да Да Да 1 1 1
Таблица 8.1:
Функция ИЛИ
" ,.Кй^тка’ед[!« 4 Кнопка S2 " • • Шток 1 . ВЫДВИНУТ? Й ¥ЙЯ5Й¥ЙК Й’ЛТЙЯКЖКК :й i в J й 1 S2 ^.V X ж « rff и i W
Нет Нет Нет 0 0 0
Да Нет Нет 1 0 0
Нет Да Нет 0 1 0
Да Да Да 1 1 1
Таблица 8.2:
Функция И
8.4. Запоминание
сигналов
Запоминание сигнала
с помощью распрепи-
тепя с двусторонним
управлением
Ручное управление
прямым и обратным
ходом штока
В рассмотренных схемах шток цилиндра выдвигается и остается в этом
положении только при нажатых кнопках. Если кнопку отпустить во время
выдвижения штока, шток вернется назад, так и не достигнув крайнего
положения.
На практике же часто бывает необходимо, чтобы шток полностью выд-
вигался даже при кратковременном нажатии на кнопку. Для этого нужно,
чтобы распределитель оставался в позиции активного переключения да-
же после отпускания кнопки; другими словами нажатие на кнопку
должно быть запомнено.
Распределитель с двусторонним управлением остается в новой позиции
переключения, даже если соответствующий электромагнит более не
включен. Этот распределитель используется как элемент памяти.
Движением штока цилиндра следует управлять путем кратковременного
нажатия на кнопки (S1: выдвижение; S2: втягивание).
Рис. 8.5:
Ручное у прав пение
прямым и обратным ходом
штока с запоминанием сиг-
нала распределителем с
двусторонним управлением:
а) Пневматическая
принципиальная схема
с цилиндром односторон-
негодействия-;
б) Пневматическая
принципиальная схема
с цилиндром двусторон-
него действия;
в) Электрическая
принципиальная схема
прямого управления;
г) Электрическая
принципиальная схема
непрямого управления
На обмотки электромагнитов распределителя кнопки могут воздей-
ствовать напрямую или через реле (рис. 8.5 в и 8.5 г).
При нажатии на кнопку S1 включается электромагнит 1Y1. Распреде-
литель переключается на левую позицию, и шток цилиндра выдвигается.
Если кнопку S1 отпустить до окончания перемещения, шток продолжит
выдвигаться, поскольку распределитель останется в переключенной
позиции.
Если нажать кнопку S2, включится электромагнит 1Y2. Распредели-
тель переключится на правую позицию, шток начнет втягиваться. От-
пускание кнопки S2 не окажет на перемещение штока никакого эффекта.
Задача заключается в том, чтобы шток цилиндра двустороннего дей-
ствия выдвигался при нажатии на кнопку S1. Как только шток достиг-
нет крайнего выдвинутого положения, он должен втянуться.
Автоматический обра,
ход при распределит <-
двусторонним управл
Рис. 8.6:
Автоматический обратны
ход при запоминании at-
нала с помощью распред
лителя с двусторонним
управлением:
а) Пневматическая
принципиальная схема
б) Электрическая
принципиальная схема
прямого управления,
в) Электрическая
принципиальная схема
непрямогоуправления
гпава 8
Принципиальная схема для автоматического обратного хода представ-
лена на рис. 8.6 б и 8.6 в. При нажатии на кнопку S1 шток выдвигается
(см. предыдущий пример). Как только шток достигнет крайнего выд-
винутого положения, ток потечет на электромагнит 1Y2 через контакт
концевого выключателя S2, и шток втянется.
Необходимым условием возврата штока должно быть отпускание кнопки
S1.
1епрерывное перемеще-
ние штока при распреде-
лителе с двусторонним
управлением
Шток цилиндра будет непрерывно выдвигаться и втягиваться, как толь-
ко будет нажат переключатель S1. Если переключатель вернуть в ис-
ходное положение, шток остановится в крайнем втянутом положении.
Рис. 8.7:
Непрерывное перемещение
штока при запоминании
сигнала с помощью распре-
делителя с двусторонним
управлением:
а) Пневматическая
принципиальная схема;
б) Электрическая
принципиальная схема
прямого управления;
в) Электрическая
принципиальная схема
непрямого управления
Глав-
Сначала система находится в исходном положении. Шток цилиндра втя-
нут, концевой выключатель 1S1 нажат (рис. 8.7 б и 8.7 в). Если замкнуть
контакт S1, шток выдвинется. При достижении штоком крайнего выдви-
нутого положения срабатывает концевой выключатель 1S2, и шток втя-
гивается. Если контакт S1 останется замкнутым, после полного втяги-
вания начнется новый цикл выдвижения и втягивания штока. Если же
контакт S1 разомкнуть, шток остановится в крайнем втянутом поло-
жении.
Если на схеме, показанной на рис. 8.8 а, замкнуть кнопку ВКЛ, вклю-
чится реле, и его контакт К1 замкнется. После отпускания кнопки, ток
будет течь через контакт К1, оставляя реле включенным. Сигнал ВКЛ
запомнился. Такая схема называется схёмой с самоподхватом (са-
моблокировкой).
Релейная схема
с самоподхватом
а)
б)
ВЫКЛ
Рис. 8.8:
Схема с самоподхватом:
а)Доминирующее включен/,
б)Доминирующее выклющ :
вкл
Если нажать на кнопку ВЫКЛ, цепь разрывается, реле выключается.
Если одновременно нажать обе кнопки ВКЛ и ВЫКЛ, реле будет вклю-
чено. Такая схема называется схемой самоподхвата с доминирующим
включением.
Гпава 8
Схема на рис. 8.86 работает так же как и схема на рис. 8.8а, если
рассматривать раздельное нажатие кнопок ВКЛ и ВЫКЛ. Но если обе
кнопки нажать одновременно, схема ведет себя по-другому. Реле не
включается. Такая схема называется схемой самоподхвата с домини-
рующим выключением.
Ручное управление
прямым и обратным
ходом штока с запо-
минанием сигнала с
При нажатии на кнопку S1 реле включается и самоподхватывается
(рис. 8.9в). Электромагнит распределителя включается через еще один
контакт реле. Когда цепь самоподхвата прерывается путем нажатия
на кнопку S2, шток цилиндра втягивается. Таким образом, запоминание
помощью самоподхвата
сигнала происходит за счет самоподхвата реле.
Рис. 8.9:
Ручное управление
прямым и обратным
кодом штока с запомина-
нием сигнала с помощью
самоподхвата реле:
а) Пневматическая
принципиальная схема
с цилиндром односторон-
него действия:
б) Пневматическая
принципиальная схема
с цилиндром двусторон-
него действия:
в) Электрическая
принципиальная схема
Глав '
Поскольку показана схема с доминирующим выключением, при
одновременном нажатии на обе кнопки шток втянется или останется
в крайнем втянутом положении.
Запоминание сигнала можно реализовать в исполнительной части
схемы, если используется распределитель с двумя электромагнитами,
(бистабильный) или в управляющей части с помощью самоподхвата
реле. Эти схемы ведут себя по-разному при одновременном присутствии
двух сигналов противоположного значения, при потере электрического
питания ипи обрыве провода (таблица 8.3, см. раздел 4.3).
Сравнение схем
запоминания сигнала
помощью бистабильнс
распределителя или
самоподхвата репе
СИТУАЦИЯ Распределитель с двусторонним управлением Распределитель с односторонним управлением в комбинации с самоподхватом реле
доминирующее включение доминирующее - выключение
Два сигнала противоположных одновременно Позиция распределителя не изменится Распределитель включится Распределитель в исходном положении
Потеря электрического питания 1 Позиция распределителя не изменится Распределитель в исходном положении Распределитель в исходном положении
Таблица 8.3:
Сравнение различных
схем запоминания
сигнала
Гпава 8
8.5. Задержка
Управление
цилиндром с
задержкой времени
Часто бывает необходимо, чтобы шток цилиндра оставался в определен-
ном крайнем положении какое-то время. Например, в прессе, который
должен сжимать две склеиваемые детали до засыхания клея.
Для решения таких задач используются реле времени с задержкой
включения или репе времени с задержкой выключения.
При кратковременном нажатии на кнопку 1, шток цилиндра выдвигается,
остается в крайнем выдвинутом положении 10 секунд, после чего
автоматически возвращается.
Рис. 8.10:
Обратный ход с задержкой
(реле времени с задержкой
включения, запоминание
сигнала с помощью
распределителя с
двусторонним управлением):
а) Пневматическая
принципиальная схема;
б) Электрическая
принципиальная схема
Глав.:.
На рис. 8.10 показана схема с задержкой втягивания штока. При нажатии
на кнопку S1 шток выдвигается. Когда он достигает крайнего положения,
срабатывает концевой выключателЫ S2. Ток течет по обмотке реле К2.
Но контакт К2 остается разомкнутым, пока не истечет заданное время
(в нашем случае 10 секунд). Затем контакт замыкается, и шток втя-
гивается.
В системах управления последовательностью перемещений запомина-
ние сигналов является важной особенностью. Его можно получить с
помощью распределителей с двусторонним управлением или с помощью
самоподхвата реле. Ниже рассмотрен проект системы, в которой запо-
минание сигналов достигается за счет использования распределителей
с двусторонним управлением.
Схема общего расположения устройства подачи заготовок показана на
рис. 8.11. Крайние положения цилиндров 1А и 2А регистрируются с
помощью индуктивных датчиков 1В1, 1В2, 2В1 и 2В2.
8.6. Управленм®
ПОСП^ЙЭ®îЙЬ>М@
с заломим®»®.'
СИГНаЛОВ О ПОМО1! '<
распрадвлетталт
двухстороммим
управлением
Пример применение
Устройство подачи
Рис. 8.11:
Схема общего располоа
устройства подачи
‘ава 8
Диаграмма
“перемещение-шаг"
тя устройства подачи
Заданная последовательность перемещения выполняется, когда опера-
тор нажимает кнопку “СТАРТ". Рабочий цикл содержит следующие шаги:
Шаг 1: Шток цилиндра 1А выдвигается. Заготовка выталкивается
из магазина
Шаг 2: Шток цилиндра 2А выдвигается. Заготовка подается на стан-
цию обработки
Шаг 3: Шток цилиндра 1А втягивается
Шаг 4: Шток цилиндра 2А втягивается.
Для повторения цикла следует снова нажать кнопку "СТАРТ".
Требуемая последовательность перемещений штоков цилиндров
устройства подачи показана на диаграмме "перемещение-шаг"
(рис. 8.12).
Рис. 8.12:
Диаграмма
"перемещение-шаг "
для устройства подачи
ГШВ8
В системе управления используются цилиндры двустороннего действия
и 5/2-распределители с двусторонним электромагнитным управлением.
Пневматическая принципиальная схема показана на рис. 8.13.
Пневматическая
принципиальная схем
устройства подачи
Рис. 8.13:
Пневматическая
принципиальная схема
устройства подачи
Гпава 8
Проектирование
релейной
принципиальной схемы
При проектировании электрической принципиальной схемы с исполь-
зованием реле следует использовать систематический подход. Начинать
нужно с датчиков положения и кнопки "СТАРТ". Затем в схему можно
добавлять те части, которые отражают отдельные шаги последователь-
ности рабочего цикла. Этапы проектирования представлены на рис. 8.14.
Рис. 8.14:
Процедура проектирования
релейной принципиальной
схемы для устройства
подачи
Гпава
В релейной схеме сигналы комбинируются друг с другом с помощью
контактов элементов управления, кнопок и реле. Используемые электрон-
ные датчики положения не имеют контактов; вместо этого они генери-
руют выходной сигнал посредством электронной схемы. Поэтому сигнал
с каждого датчика включает реле, которое, в свою очередь, переключает
необходимые контакты (рис. 8.15). Например, если сработает датчик
1В1, ток потечет через обмотку реле К1. Соответствующие контакты
переключатся.
Подключение датчиког
Рис. 8.15:
Электрическая
принципиальная схема
подключения датчиков
>ава 8
Первый шаг
1оследовател ьн ости
Перед началом выполнения последовательности перемещений должны
быть выполнены следующие условия:
Шток цилиндра 1А должен быть втянут (включен датчик положения
1В1 и репе К1)
Шток цилиндра 2А должен быть втянут (включен датчик положения
2В1 и реле КЗ)
в Кнопка СТАРТ (S5) должна быть нажата.
Если все эти условия выполняются, ток поступает на обмотку реле Кб.
Включается электромагнит 1Y1, шток цилиндра 1А выдвигается.
Рис. 8.16:
Электрическая
принципиальная схема
г подключением датчиков
и первым шагом
Глав
Когда шток цилиндра 1А достигнет крайнего выдвинутого положения,
включится датчик 1В2. По его сигналу выполняется второй шаг последо-
вательности. Включается электромагнит 2Y1, и выдвигается шток ци-
линдра 2А.
Второй шаг
последовательность'
Рис. 8.17:
Электрическая принципиальная схема с подключением датчиков, первым и вторым шагами
Глава 8
Третий шаг
последовательности
Когда шток цилиндра 2А достигнет крайнего выдвинутого положения,
включится датчик 2В2. По его сигналу выполняется третий шаг последо-
вательности. Включается электромагнит 1Y2, и шток цилиндра 1А втя-
гивается.
Рис. 8.18:
Электрическая принципиальная схема с подключением датчиков, первым, вторыми третьим шагами
Гпава
Когда шток цилиндра 1А полностью втянется, включится датчик 1В1. По
его сигналу выполняется четвертый шаг последовательности. Включается
электромагнит 2Y2, и шток цилиндра 2А втягивается.
На рис.8.19 показана полная электрическая принципиальная схема
устройства подачи, включая адресацию контактов и обозначение токовых
цепочек.
Четвертый шаг
последовательности
Рис. 8.19:
Электрическая принципиальная схема устройства подачи
iaea 8
8.7. Схема подключения «цементов управления Электропневматические системы управления, рассмотренные в раз- делах 8.2—8.6, должны выполнять еще ряд функций. Пропущены такие важные элементы как главный выключатель и кнопка "АВАРИЙНЫЙ СТОП" (см. 7.4).
Процедура проектирования схемы управления Стандартная схема подключения элементов управления обычно ложится в основу проекта релейной системы. Затем в нее добавляются специ- фические для данного применения функции, такие как управление после- довательностью и логические функции.
Релейная схема для элементов управления Уже упоминалось, что для реализации функций выключения питания и "АВАРИЙНЫЙ СТОП" должны использоваться переключатели с фик- сацией. Все остальные элементы управления могут быть обычными кнопками или переключателями. На схеме, представленной на рис. 8.20, функции "Ручной", "Сброс", "Автомат", "Вкл. Продолжительный Цикл", "Выкл. Продолжительный Цикл" и "Старт Одиночного Цикла" выполняются с помощью кнопок, так же как и реализация отдельных перемещений.
Рис. 8.20:
Проект релейной системы управления с выбором режимов с помощью кнопок
+24В 1 2
ОТ БЛОКА ПИТАНИЯ
РУЧНОЙ
Главный выкпючател
вкпвыкл ЕА К1
Сброс
14
РУЧНОЙ
КЗ
АВТОМАТ
К4
СТАРГА
АВАРИНЫЙ Ev
стоп
ПИТАНИЕ СИСТЕМЫ
АВАРИЙНЫЙ СТОП
6 7 8 9 10 11 АВАРИЙНЫЙ СТОП СНЯТ
п
ВЫКЛ.
Продолжит. .
Цикл Е"
Вкл.
ОДИНОЧНЫЕ _
ПЕРЕМЕЩЕНИЯ
1А+Е-
СТАРТ
Одиноч
Цикла
г
Кб = Управление
первым шагом
210
Гпава 8
Главный выключатель Если контакт главного выключателя замкнут, включено реле К1. Через контакт К1 на всю управляющую часть системы подается питание.
АВАРИЙНЫЙ СТОП Если кнопка "АВАРИЙНЫЙ СТОП" нажата, реле К2 выключается и его контакты возвращаются в исходное положение. в Линия "АВАРИЙНЫЙ СТОП" подключена к питанию через нормально замкнутый контакт К2. В эту линию, например, можно подключить аварийную лампу Линия "АВАРИЙНЫЙ СТОП СНЯТ" обесточивается, прерывая подачу питания на управляющую часть схемы. Пока кнопка "АВАРИЙНЫЙ СТОП" нажата, все элементы управления, кроме главного выключа- теля, работать не могут.
Ручной режим Если нажать кнопку "Ручной", включается реле К4, которое становится на самоподхват. Линия, обозначенная на принципиальной схеме "РУЧ-
и НОЙ", подключена к питанию. Если включено реле КЗ, реле К4 выклю- чается. Линия, обозначенная "РУЧНОЙ", отключается от питания.
Сброс, одиночные перемещения Эти функции доступны только в ручном режиме. Поэтому питание по- дается на соответствующие контакты и реле через линию, обозначен- ную "Ручной".
Автоматический режим Если нажата кнопка "АВТОМАТ", включается реле КЗ, которое ста- новится на самоподхват. Линия, обозначенная "АВТОМАТ', подключается к питанию. Если включится реле К4, реле КЗ выключается, и линия “АВТОМАТ" отключается от питания.
Гпаг,
Эти функции доступны только в автоматическом режиме. Поэтому
питание подается на соответствующие реле и контакты через линию
"АВТОМАТ".
Если выбран автоматический режим (реле КЗ включено) и нажата
кнопка "Вкл. Продолжительный Цикл" (включено реле Кб), система на-
чинает работать в продолжительном режиме. Это означает, что сразу
после окончания рабочего цикла автоматически начинается новый цикл.
При нажатии на кнопку "Выкл. Продолжительный Цикл" реле Кб вык-
лючается. После окончания последнего шага рабочего цикла система
остановится.
Когда нажата кнопка "Старт Одиночного Цикла", рабочий цикл выпол-
няется полностью только один раз.
Здесь будет проведено проектирование системы управления с четко
определенными требованиями к панели оператора, рабочими характе-
ристиками и поведением в случае аварии. В качестве примера рас-
смотрим подъемное устройство. Все требования, которым оно должно
удовлетворять, перечислены в разделе 5.3.
Репейную схему будем проектировать в следующем порядке:
Питание
Подключение датчиков
Элементы управления
Заданная последовательность перемещений
Подключение электромагнитов.
Алгоритм проектирования показан на рис. 8.21.
Поскольку принципиальная схема очень большая, она будет показана
шестью фрагментами на рис. 8.22, 8.25—8.27, 8.29 и 8.30.
Вкл. Продол житель-г
Цикл, Выкл. ПрОДОГп.'
тельный Цикл,
Старт Одиночного 1>
8.8. Пример приме-*1
Управление
подъемным
устройством
Гпава 8
Рис. 8.21:
Процедура проектирования
релейной принципиальной
схемы для подъемного
устройства
$ Последовательность перемещений
! ч
s
Исполнительная часть схемы: электромагниты 1—6
Управляющая часть схемы: шаг 1
Управляющая часть схемы: шаг 2
Управляющая часть схемы: шаг 3
Управляющая часть схемы: шаг 4
Глав,:
По сравнению со стандартной схемой, показанной на рис. 8.20, под-
ключение главного выключателя и кнопки АВАРИЙНЫЙ СТОП можно
упростить, поскольку сигнал АВАРИЙНЫЙ СТОП нужен только в ин-
версной форме. Возможная схема подключения показана на рис. 8.22.
Главный
выключатель (S1)
и кнопка АВАРИЙНЫ"
СТОП (S2)
Рис. 8.22:
Релейная принципиальна
схема для подключения
главного переключателя
и кнопки АВАРИЙНЫЙ СР
пава 8
S4 (АВТО)
Рис. 8.23:
Диаграмма
“перемещение-war"
подъемного устройства
Глав,
Электрическое питание подается на датчики, если кнопка АВАРИЙНЫЙ
СТОП не нажата. Для подключения датчиков с 1В1 по ЗВ1 и В5 к системе
используются реле с Кб по К11 (рис. 8.25).
Подключение датчике»!
Рис. 8.25:
Репейная принципиальная схема подключения датчиков
‘ "лава 8
Кнопки "Ручной" (S3) и "Сброс" (S5) Схема подключения кнопок "Ручной" и "Сброс" показана на рис. 8.26. Подключение кнопки "Ручной" произведено в соответствии со стандарт- ной схемой (рис. 8.20). При нажатии на кнопку S3 реле К4 включается и самоподхватывается (рис. 8.26). При нажатии на кнопку АВАРИЙНЫЙ СТОП штоки цилиндров 1А и 2А останавливаются в той позиции, где их застал этот сигнал. Чтобы привести систему управления в определенное состояние, все приводы нужно вернуть в исходное положение. Это и делается с помощью кнопки "Сброс". Если выбран ручной режим и нажата кнопка "Ручной" (реле К4 включе- но), нажатие на кнопку "Сброс" (S5) приведет к включению реле К12. Процесс сброса закончится, когда штоки цилиндров займут следующее положение: и Цилиндр 1А: полностью втянут (работает датчик 1В1, включено реле Кб) и Цилиндр 2А: полностью втянут (работает датчик 2В1, включено реле К8) и Цилиндр ЗА: полностью выдвинут (работает датчик ЗВ1, включено реле К11). Когда все эти три условия выполняются, цепь самоподхвата реле К12 прерывается с помощью нормально замкнутых контактов Кб, К8 и К11.
Глав* :
Рис. 8.26:
Релейная принципиальна •
схема подключения кноп
‘Ручной"и ’Сброс"
Глава 8
Кнопки "Автомат" (S4),
‘ Вкл. Продолжительный
Цикл" (S6) и "Выкл.
Продолжительный
Цикл" (S8)
Подключение кнопок "Автомат", "Вкл. Продолжительный Цикл" и "Выкл.
Продолжительный Цикл" производится в соответствии со стандартной
схемой (рис. 8.20). Сигнал "Вкл. Продолжительный Цикл" запоминается
за счет самоподхвата реле К5 (рис. 8.27).
+24В АВАРИЙНЫЙ СТОП СНЯТ
О------ --------------
S4E-X кз\ кз\
АВТО
АВТОМАТ
S6E-X
Вкл.
Кб\
Продолжительный ,
Цикл
Шаг Перемещение штока цилиндра ГА . _____— штока \ цилиндра 2А ? »ПерМеЩенйе= штока ‘ * ! цилиндраЗА Т’1ПГШТИ“ ' --г В Подтверждающий з эд .5 1 .7< I ж
1 Нет Нет Втягивание В5 (ящик есть) Пропустить
2 Выдвижение Нет Выдвижение 1В2 Подъем
3 Нет Выдвижение Нет 2В2 Стапкивание
4 Втягивание Втягивание Нет 1В1, 2В1 Возврат в исходное положение
Таблица 8.4:
Процесс перемещения в подъемном устройстве
Принцип работы схемы с самоподхватом и сбросом поясним на примере Блокировка шагов
шага 2.
Если предыдущий шаг закончен (в данном случае шаг 1, нормально ра-
зомкнутый контакт реле К13 закрыт) и выполнены другие условия для
шага 2, включается репе К14, которое становится на самоподхват. Цепь
самоподхвата реле К13 при этом размыкается с помощью нормально
замкнутого контакта реле К14. Теперь выполняется второй шаг, а реле,
отвечающее за выполнение первого шага, выключено.
Поскольку в режиме продолжительной работы за шагом 4 следует снова
шаг 1, нормально замкнутый контакт К13 используется для разрыва
цепочки самоподхвата реле К16.
'"лава 8
Условия старта Чтобы запустить выполнение последовательности перемещений, следует завершить 4-й шаг (реле К16). Поэтому при переключении на автома- тический режим нужно включить это реле К16 с помощью линии "Автомат" и нормально замкнутого контакта К17. После этого реле К16 включается и становится на самоподхват. Ток идет на обмотку реле К17 через нор- мально разомкнутый контакт К16, после чего реле К17 включается и самоподхватывается. Теперь через нормально замкнутый контакт К17 ток не идет. Реле с К1 по К12 заняты датчиками и элементами управления.
Рис. 8.28:
Принципиальная схема последовательного самоподхвата и сброса реле
Гпава 8
Условия
выполнения шага
Условия для выполнения каждого из четырех шагов цикла показаны
в таблице 8.5. Чтобы гарантировать выполнение заданной последова-
тельности, ни один из шагов не может быть выполнен без срабатывания
реле предыдущего шага.
Таблица 8.5:
Условия выполнения
четырех шагов цикла
Переход Режим работы эл-тов управления Активированный датчик(и) и соответствующее реле Активный шаг с соответствующим реле
Старт шага 1 S7 или К5 1В1 (Кб) и 2В1 (К8) и 3B1 (К11) 4 (К16)
С шага 1 на шаг 2 Нет условия В5 (К10) 1 (К13)
С шага 2 на шагЗ Нет условия 1В2 (К7) 2 (К14)
С шага 3 на шаг 4 Нет условия 2В2 (Ё9) 3 (К15)
S7E-\ (СТАРТ одиночного цикла) । Кб\ К8\ KTl\ К1б\ К5\ К1з\ кю\ К14\ К7\ К15\ К9\ К1б\ К17 /К1б\ К17\
К13\ К14\ К15\
К14 t К15 7 К16 7 К13 7
К13Е о □ К14Е □ К15Е □ К1бЕ К17Е < □ —
OB
Рис. 8.29:
Релейная принципиальная схема для реализации 4 шагов поспедовательности
лава 8
Старт первого шага Чтобы состоялся первый шаг, должны быть выполнены следующие условия: Шток цилиндра 1А должен быть полностью втянут (включено реле Кб) Шток цилиндра 2А должен быть полностью втянут (включено реле К8) Шток цилиндра ЗА должен быть полностью выдвинут (включено реле К11) Шаг 4 должен быть активным (включено реле К16) Нажата кнопка включения продолжительного цикла (реле К5 на самоподхвате) или кнопка "Старт Одиночного Цикла" (S7). При выполнении всех этих условий реле К13 включится и станет на само- подхват, а первый шаг станет активным.
Переход с первого шага на второй Если во время активности первого шага поступит сигнал с оптического датчика В5, то условия для выполнения второго шага будут выполнены. Этот шаг активируется включением реле К14. Реле К14 становится на самоподхват, размыкая цепь самоподхвата реле К13 с помощью нор- мально замкнутого контакта К14.
Переход со второго Если во время активности второго шага сработает концевой датчик 1В2,
'лава 8
Старт первого шага Чтобы состоялся первый шаг, должны быть выполнены следующие условия: Шток цилиндра 1А должен быть полностью втянут (включено реле Кб) Шток цилиндра 2А должен быть полностью втянут (включено реле К8) Шток цилиндра ЗА должен быть полностью выдвинут (включено реле К11) Шаг 4 должен быть активным (включено реле К16) Нажата кнопка включения продолжительного цикла (реле К5 на самоподхвате) или кнопка "Старт Одиночного Цикла" (S7). При выполнении всех этих условий реле К13 включится и станет на само- подхват, а первый шаг станет активным.
Переход с первого шага на второй Если во время активности первого шага поступит сигнал с оптического датчика В5, то условия для выполнения второго шага будут выполнены. Этот шаг активируется включением реле К14. Реле К14 становится на самоподхват, размыкая цепь самоподхвата реле К13 с помощью нор- мально замкнутого контакта К14.
Переход со второго Если во время активности второго шага сработает концевой датчик 1В2,
гпава 8
Подключение электромагнитов показано на рис. 8.30.
К2 Стандартное АВАРИЙНЫЙ СТОП, S2
КЗ С самоподхватом Автоматический режим, S4
К4 С самоподхватом Ручной режим, S3
К5 С самоподхватом Продолжительный цикл, S6
Кб Стандартное Датчик положения 1В1
К7 Стандартное Датчик положения 1В2
К8 Стандартное Датчик положения 2В1
К9 Стандартное Датчик положения 2В2
К10 Стандартное Датчик положения В5
К11 Стандартное Датчик положения ЗВ1
К12 С самоподхватом Сброс, S5
К13 С самоподхватом Шаг 1
К14 С самоподхватом Шаг 2
К15 С самоподхватом ШагЗ
К16 С самоподхватом Шаг 4
К17 С самоподхватом Условие старта
К18 С задержкой Подача сжатого воздуха
Таблица 8.7:
Функции реле
Глава 8
Список элементов
управления
Все переключатели и кнопки, используемые для управления подъемным
устройством, перечислены в таблице 8.8.
Таблица 8.8:
Функции элементов
управления
Номер элемента Тип Комментарии
S1 Переключатель Главный выключатель
S2 Переключатель АВАРИЙНЫЙ СТОП (нормально замкнутый контакт)
S3 Кнопка Ручной
S4 Кнопка Автомат
S5 Кнопка Сброс
S6 Кнопка Вкл. Продолжительный Цикл
S7 Кнопка Старт Одиночного Цикла
S8 Кнопка Выкл. Продолжительный Цикл
......................V...........................................................................;..............-.................................... "...............т..........;................у............................. 'г
.......................... ...........................:
Главный
выключатель
3
4 ПИТАНИЕ СИСТЕМЫ
S2 Лу
АВАРИЙНЫЙ
СТОП
К2 АВАРИЙНЫЙ СТОП
СНЯТ 5 6
7
8
9
10 11
12 13
--------о
Рис 8 3V
(РУЧ)
S4E-
(АВТ)
РУЧНОЙ
ЦИКЛ
ВКЛ)
S8f-7
(Прод.
цикл
ВЫКЛ)
ABTOMAI
Рис в
1 1 2
К4
К12
2
Рис 8 31
10
н н 6 7 Н 1J 8 5 39 42 и 1] 11 12 1 13 27
Рис. 8.31 а:
Электрическая принципиальная схема подъемного устройства —элементы управления
"лава 8
АВАРИЙНЫЙ СТОП
Рис. 8.31 в:
Электрическая принципиальная схема подъемного устройства —реализация шагов последовательности
1 лава 8
АВАРИЙНЫЙ СТОП
1 лава 8
АВАРИЙНЫЙ СТОП
лава 8
системы управления
Гпава 9
9.1. Тенденции и пути
развития
электропневмо-
автоматики
В течение последних нескольких лет элементы систем электропневмо-
автоматики непрерывно совершенствуются. На рынке появилось мно-
жество новых продуктов, таких как пневмоострова. Эта тенденция будет
продолжаться и в будущем. Наиболее важные цели, реализуемые при
совершенствовании элементов пневмоавтоматики, следующие:
Снижение стоимости всей системы управления
Улучшение ее характеристик
Отыскание новых областей применения.
Снижение стоимости
На стоимость электропневматической системы управления влияют
многие факторы. Соответственно, также широко варьируются возмож-
ности по снижению стоимости (рис. 9.1). При проектировании современ-
ных элекгропневматических систем управления в первую очередь
пытаются снизить стоимость проектирования, монтажа, ввода в эксп-
луатацию и обслуживания.
еще недавно системы, в которых нужно оыло носюянно меня1ь и оюо-
ражать с помощью электрической системы управления позицию, скорость
и усилие, реализовывались на базе электрики и гидравлики. Сегодня же
разработка дешевых пропорциональных клапанов и датчиков давления
позволила во многих случаях использовать пневматику. В результате
рынок применения пневматических систем расширился. Хотя доля про-
порциональной пневматики в общем объеме рынкка пока невелика, она
постоянно растет.
। юиск новых ииластеи
применения
пневмоавтоматики
Наряду со стандартными пневмоцилиндрами, которые остаются деше-
выми и разносторонними исполнительными элементами, постоянно раз-
виваются и цилиндры специального назначения. Часто в таких приводах
используются встроенные дополнительные элементы, такие как направ-
ляющие и элементы крепления. Это позволяет уменьшить занимаемое
пространство и вес. А снижение используемого материала, объема
проектных и монтажных работ позволяет заметно снизить стоимость.
9.2. Пневматические
исполнительные
устройства
еще недавно системы, в которых нужно оыло носюянно меня1ь и оюо-
ражать с помощью электрической системы управления позицию, скорость
и усилие, реализовывались на базе электрики и гидравлики. Сегодня же
разработка дешевых пропорциональных клапанов и датчиков давления
позволила во многих случаях использовать пневматику. В результате
рынок применения пневматических систем расширился. Хотя доля про-
порциональной пневматики в общем объеме рынкка пока невелика, она
постоянно растет.
। юиск новых ииластеи
применения
пневмоавтоматики
Наряду со стандартными пневмоцилиндрами, которые остаются деше-
выми и разносторонними исполнительными элементами, постоянно раз-
виваются и цилиндры специального назначения. Часто в таких приводах
используются встроенные дополнительные элементы, такие как направ-
ляющие и элементы крепления. Это позволяет уменьшить занимаемое
пространство и вес. А снижение используемого материала, объема
проектных и монтажных работ позволяет заметно снизить стоимость.
9.2. Пневматические
исполнительные
устройства
Встроенные линии питания, например для захватов и вакуумных
присосок.
Линейно-поворотный
привод
Линейно-поворотный привод (рис. 9.3) может быть использован, напри-
мер, для перемещения деталей. Направляющий узел привода спроекти-
рован на противостояние большим поперечным нагрузкам. Привод
имеет много вариантов монтажа, например, на переднем фланце или с
помощью специальных гаек, вставляемых в щели на корпусе. При необ-
ходимости сжатый воздух для захвата и вакуум к присоске можно под-
вести через полый шток привода.
1....................................................................................................................................................................................................................................................................................................................
Рис. 9.4:
Пневматические захваты
а) параллельный;
б) угловой;
в) радиальный;
г) 3-точечный
Гпава 9
На рис. 9.5 а показан поперечный разрез углового захвата с рис. 9.4 б.
Пальцы захвата приводятся в движение пневмоцилиндром двусторон-
него действия. На рис. 9.5 б показано, как к такому захвату можно
крепить подходящие для конкретной детали губки и установить датчики
положения.
Выбор типа и размера захвата, а также формы его губок зависит от
формы и веса детали.
Рис. 9.5:
Угловой захват:
принцип работы,
губки и датчики
Рис. 9.6:
Принцип работы электропневматического генератора вакуума:
а) принцип эжекции; б) режим “всасывания"; в) режим “сброса"
Гпава 9
Генератор вакуума Работа генератора вакуума основана на принципе эжекции, что де- монстрируют рис. 9.6 б и 9.6 в. На рис. 9.6 б показан режим "всасывания". 2/2-распределитепь 1 с электромагнитным управлением открыт. Сжатый воздух поступает в канал 1, затем проходит через струйное сопло в глу- шитель 3. В результате в канале 2 создается частичный вакуум, и деталь с помощью присоски захватывается. На рис. 9.6 в показан режим "сброса". Открыт 2/2-распределитель 2, и сжатый воздух из канала 1 напрямую идет в канал 2, быстро сбрасывая деталь, удерживаемую присоской.
В таблице 9.1 собраны двоичные датчики, которые используются для об-
наружения объектов и подтверждения положения рабочих органов. Про-
должают использоваться и механические концевые выключатели
благодаря своей прочной конструкции.
Обнаружение
положения
Тип датчика Принцип работы Способ переключения
Концевой выключатель Контактный Подвижный контакт
Геркон (магнитный) Бесконтактный Подвижный контакт
Индуктивный Бесконтактный Электронный
Емкостной Бесконтактный Электронный
Ультразвуковой Бесконтактный Электронный
Оптический Бесконтактный Электронный
Таблица 9.1:
Датчики приближения,
положения и концевые
выключатели
пава 9
9.4. Обработка
сигналов
Преимущества
программируемых
логических
контроллеров
Управляющая часть электропневматической системы может быть реа-
лизована двумя способами: с жесткой логикой (например, на реле) или с
программируемой (с помощью ПЛК).
По сравнению с релейными системами управления программируемые
логические контроллеры имеют ряд существенных достоинств:
Большая надежность и срок службы благодаря отсутствию подвиж-
ных контактов
Менее трудоемкая проектная работа, поскольку для различных ре-
жимов работы и настроек можно использовать проверенные програм-
мы и подпрограммы, тогда как в репейной системе управления сле-
дует менять разводку проводов и затем проводить проверку
Более быстрая разработка системы управления, поскольку програм-
мирование и разводку проводов можно проводить параллельно
Упрощенный контроль состояния системы, поскольку контроллер
легко и быстро может обмениваться информацией с главным ком-
пьютером.
Если рассматривать не только стоимость оборудования, но и стоимость
проектных, монтажных работ, ввода в эксплуатацию и последующего
обслуживания, то сегодня ПЛК окажется более эффективным по цене
решением. Поэтому почти все современные электропневматические
системы управления комплектуются контроллерами.
диитчь меикильку|му| iiy 1 ими.
Катушки электромагнитов получают разные обмотки с пониженной
индуктивностью. В результате при включении распределителя уве-
личение силы тока, протекающего по обмотке, происходит быстрее, и
усилие для переключения первого каскада появляется быстрее. После
переключения распределителя встроенная электроника уменьшает
ток в обмотке до уровня, достаточного лишь для удержания пилотного
клапана в данном положении против силы возвратной пружины. Это
позволяет значительно снизить потребляемую мощность на этой
фазе. Поскольку фаза удержания значительно дольше фазы переклю-
чения, экономия электроэнергии получается значительная
Конструкция распределителей оптимизируется в сторону уменьшения
вредных объемов, усилий перемещения, массы, что также позволяет
сократить время переключения
Внутренняя часть корпуса распределителей перепроектируется для
получения максимальной пропускной способности по расходу
Толщина стенок корпуса уменьшается для снижения размеров и
веса.
Оптимизация распределителей с электромагнитным управлением дает
следующие преимущества:
Улучшенные динамические характеристики (благодаря меньшему
времени переключения и большему пропускаемому расходу)
Сокращение потребления сжатого воздуха (за счет уменьшения вред-
ных объемов между распределителем и приводом)
Уменьшение стоимости блока питания (меньший расход энергии)
Меньшее занимаемое пространство и минимальный вес.
Преимущества от
оптимизации
отдельных
распределителей
гпава 9
Оптимизация
распределителей
блочного монтажа
Блоки или батареи распределителей, показанные на рис. 9.76 и 9.7в,
характеризуются более простым и эффективным подводом и выхлопом
воздуха, компактностью и хорошим соотношением цена/качество. Блок
может состоять из следующих частей:
Модулей самих распределителей
Модулей для пневматических подключений
Модулей для электрических подключений.
На рис. 9.7 а показан модуль распределителя, оптимизированный для
блочного монтажа. Несколько таких модулей заключаются между кон-
цевыми плитами. Сжатый воздух подается к одной из концевых плит
(рис. 9.7 б) или к присоединительному модулю снизу (рис. 9.7 в).
а)
ты подключаются через общий разъем внутри блока, т. е. пневмо-
острова (рис. 9.8 б, см. раздел 9.6).
3. Модуль для подключения к "филдбас" (полевая шина): все электро-
магниты подключаются к интерфейсу "филдбас" внутри пневмоострова
(рис. 9.8 в, см. раздел 9.6).
4. Модуль для подключения к AS-i ("актуатор-сенсор" интерфейс или
интерфейс "привод-датчик"): все электромагниты подключаются к
двум интерфейсам для соединения с шиной "привод-датчик" внутри
пневмоострова (рис. 9.8 г, см. раздел 9.6).
Гпава 9
Рис. 9.8:
Электрические подключения
блоков распределителей
и пневмоостровов:
> Индивидуальное подключение
с отдельным разъемом для
каждого электромагнита;
б) Мультипинное подключение;
в) подключение к "филдбас";
г) AS-интерфейс
позволяет объединять распределители в лневмоострова. Контакты
электромагнитов напрямую выводятся к соединительным розеткам на
пневмоострове (рис. 9.8). Датчики подключаются к входному модулю
через разъемы: входной модуль может стоять отдельно или быть встроен-
ным в пневмоостров. При этом получаем следующие преимущества:
Нет необходимости в клеммных блоках и колодках (рис. 9.15 б и
9.15в)
Неисправные распределители и датчики могут быть заменены без
разъединения проложенных электрических линий
Сокращается процедура разводки проводов.
На рис. 9.9 показаны два примера современных элементов управле-
ния.
На рис. 9.9 а показан пневмоостров и отдельный входной модуль, к
которому через разъемы подключаются датчики. Оба элемента под-
ключены друг к другу через линию "филдбас"
На рис. 9.9 б показан лневмоостров, в котором объединены распре-
делители, подключения датчиков и ПЛК.
современных
концепций монтажа
Элементы управлени-
для уменьшения
монтажных работ
Глава 9
Остров
распределитель/
датчик
Пневмоостров с дополнительными функциями (такими как встроенный
ПЛК или встроенный модуль подключения датчиков) называют пневмо-
остров "распределитель/датчик" (valve/sensor terminal). В дальнейшем
будем использовать более общее название "пневмоостров", которое
относится ко всем типам таких устройств.
Рис. 9.9:
Элементы управления
для уменьшения
На рис. 9.10 показана структура системы "филдбас", широко используе-
мой сейчас в электропневмоавтоматике.
Программируемый логический контроллер и каждый пневмоостров имеют
интерфейс, посредством которого они подключаются к шине "филдбас".
Каждый интерфейс состоит из цепи передатчика и приемника
Шина "филдбас" осуществляет обмен информацией между ПЛК и
п невмоостровами.
Структура
системы "филдбас"
Рис. 9.10:
Структура
системы "филдбас"
в электропневмоавтомати
Питание для работы распределителей и датчиков подается по тому
же самому кабелю.
Гпава 9
Принцип работы системы "филдбас" Обмен информацией между ПЛК и пневмоостровами происходит сле- дующим образом: Если, например, нужно включить электромагнит какого-то распре- делителя, ПЛК посылает последовательность бинарных (двоичных) сигналов по шине "филдбас". По этой последовательности сигнал пневмоостров понимает, какой электромагнит следует включить, и выполняет эту команду Если меняется состояние датчика, пневмоостров или блок подклю- чения датчиков посылает последовательность сигналов на ПЛК. Контроллер распознает изменение и принимает его в расчет при выполнении программы. Кроме состояния входов и выходов по шине "филдбас" передается и другая информация, например, разведение по времени передачи сиг- налов с ПЛК и пневмоострова или с двух пневмоостровов. Также возможно через шину "филдбас" объединить в общую сеть кон- троллеры двух систем управления, так чтобы два ПЛК могли обмени- ваться информацией.
Типы шин "филдбас" Существует множество типов шин "филдбас", отличающихся следую- щими особенностями: Кодировкой и декодировкой информации Электрическими подключениями Скоростью передачи сигналов. Системы "филдбас" делятся на специфические каждой компании-
При использовании системы "филдбас" нет необходимости в клеммных
блоках и колодках (см. рис. 9.1$ в).
Этот интерфейс представляет собой специальную систему “филдбас",
которая разработана для облегчения подключения проводов между
элекгроуправляемыми распредёлителями, датчиками и маломощными
электрическими приводами.
На рис. 9.11 показан распределитель, который подключен к AS-интерфей-
су через комбинированный разъем. Оба электромагнита распредели-
теля включаются через этот интерфейс. Кроме того, два дискретных
(бинарных) датчика получают питание и подают свои сигналы через
этот же интерфейс.
Электропневматическая система управления с AS-интерфейсом проек-
тируется следующим образом:
Длинный двухжильный кабель (желтого цвета, т. е. плоский светлый
кабель на рис. 9.11) соединяет ПЛК с датчиками и распределителями.
Этот кабель подает питание на все подключенные к шине элементы
и одновременно служит для передачи сигналов
Элементы подключаются к кабелю непосредственно с помощью зажи-
мов с протыканием: не требуется никаких соединений (рис. 9.11).
Если элемент на шине требует подачи питания после нажатия кнопки
АВАРИЙНЫЙ СТОП, или если к шине подключаются распределители с
большим потреблением энергии, требуется дополнительное питание. Оно
обеспечивается с помощью черного плоского кабеля, показанного на
рис. 9.11. В режиме АВАРИЙНЫЙ СТОП подача питания по желтому
кабелю отключается.
Разводка проводов в
системе AS-интерфейс
пава 9
Рис. 9.11:
Распределитель с
AS-интерфейсом
AS-интерфейс спроектирован только для подключения небольших устройств.
На одно соединение AS-i можно подавать до четырех входных или вы-
ходных сигналов. В таблице 9.2 приведены различные типы пневмо-
Благодаря интенсивным работам над новыми конструкциями пневмо-
островов и системами шин сейчас существуют различные способы
расположения и подключения элементов электропневматических систем
управления. Основные варианты показаны на рис. 9.12.
Расположение и
подключение
элементов управление
Рис. 9.12:
Варианты расположения и подключения элементов управления
Гпава 9
Выбор элементов и
концепции монтажа
Выбор элементов электропневматической системы управления нужно
производить таким образом, чтобы общая стоимость оборудования,
монтажных работ и последующего обслуживания была минимальной
(рис. 9.13). Расположение элементов, разводка шлангов и проводов
выбираются в зависимости от множества факторов (рис. 9.14). По-
скольку электропневматические системы различаются по своей струк-
туре и числу исполнительных устройств, дать такую общую рекомен-
дацию невозможно; решение следует принимать для конкретной системы
на основании имеющегося опыта.
Элементы для разводки шлангов
и проводов
''Элементы для выполнения
функций
-ПЛК
- Распределители
- Датчики
- Цилиндры
i - Элементы управления
Факторы, влияющие
на стоимость оборудо
вания, монтажа и
' обслуживания *
- Шкаф управления
- Коробки для клеммных колодок
- Входные модули
- Выходные модули
- Пневмоострова
- Интерфейсы к шинам "филдбас"
- Резьбовые соединения, шланги
- Разъемы, кабели
Разводка шлангов
Обслуживание
Рис. 9.14:
Критерии принятия решения при определении оптимального расположения элементов, разводки шлангов и проводе
W*’”"
чава 9
Пример управления
Чтобы продемонстрировать преимущества передовой техники монтажа
и процедуру выбора элементов, на следующих страницах дано сравнение
различных концепций. В качестве примера рассмотрим устройство
укладки палет. Система имеет всего 12 пневматических цепочек управ-
ления, в 10 из которых используются цилиндры двустороннего действия
а в двух — одностороннего. Перечень элементов электропневматиче-
ской системы управления представлен в таблице 9.3.
Таблица 9.3:
Элементы системы
управления
Элемент Кол-во
Цилиндры Двустороннего действия 10
Одностороннего действия 2
Распределители с электромагнитным управлением 3/2-распределитель для подачи сжатого воздуха 1
5/2-распределители с односторонним ЭМУ (для цилиндров двустороннего действия) 5
5/2-распределители с двусторонним ЭМУ (для цилиндров двустороннего действия) 5
3/2-распределители с односторонним ЭМУ (для цилиндров одностороннего действия) 2
Электрические элементы Датчики положения 24
Контроппер 1
блочного монтажа распределителей.
Элементы Индивиду- альный монтаж ' распре- делителей Блочный монтаж (коллектор или пневмо- остров) Экономия
Шланги
Число шлангов питания к распредели- телю подачи сжатого воздуха 1 1 -
Число коллекторов 1 0 1
Число шлангов подачи воздуха к коллектору 1 0 1
Число шлангов подачи воздуха к распределителям цилиндров 12 1 11
Число шлангов между распределите- лями и цилиндрами 22 22 -
Глушители
Число глушителей распределителя питания 1 1 -
Число глушителей у распределителей цилиндров 22 2 20
Таблица 9.4:
Уменьшение числа
шлангов в системе
управления при
использовании блочного
монтажа распределителен
’пава 9
Разводка шлангов в
системе управления,
распределенной в
пространстве
Несмотря на очевидные преимущества, блочный монтаж распределите-
лей дает нежелательные побочные эффекты, когда цилиндры распо-
ложены достаточно далеко от пневмоострова и друг от друга.
Шланги между распределителями и цилиндрами становятся длин-
ными. Это приводит к задержке прохождения сигналов давления
(например, при шланге длиной 10 м примерно на 30 мс). Цилиндры
реагируют медленнее, и вся система управления работает недос-
таточно быстро
Большой объем шлангов между цилиндрами и распределителями
приводит к увеличенному потреблению сжатого воздуха
Наличие большого числа длинных шлангов загромождает систему.
В случае необходимости замена шлангов будет дорогостоящей.
Поэтому распределители следует монтировать вместе только тогда, когда
соответствующие цилиндры расположены достаточно близко или когда
указанными выше недостатками можно пренебречь.
I и
Рис. 9.15:
Структура электропнеематической системы управления:
а) блоки распределителей с обычной разводкой проводов (концепция 1);
б)пневмоострова с мупьтипиннымразъемом (концепция 2);
в)пневмоострова с подключением к "филдбас"(концепция 3)
Разводка внутри Подача электропитания и подключение входов и выходов к ПЛК произ-
шкафа управления водится с одной стороны клеммной колодки 1 (клеммная колодка внутри
шкафа управления). Соединительный кабель к клеммному ящику под-
водится с другой стороны.
Соединение между шкафом управления От шкафа управления к клеммному ящику проходят следующие провода:
и клеммным ящиком По одной линии на каждый входной сигнал ПЛК (датчики) По одной линии на каждый выход ПЛК (электромагниты распределителей) Один кабель заземления Одна линия для питания датчиков.
Разводка в
клеммном ящике
“ Провода, идущие с клеммной колодки ,в шкаф управления, подключаются
к другой стороне клеммной колодки 2 (клеммная колодка в ящике).
Провода к электромагнитам, датчикам и дополнительным выходам
подключаются с другой стороны. По три клеммы нужно на каждый датчик
и по две на каждый электромагнит.
Клеммная колодка 1, всего 44 клеммы
Кабель от шкафа управле- ния к клеммному ящику Кабель между клеммными колодками 1 и2 1 кабель или 1 жгут из 44 проводов
Клеммная колодка 2 (в клеммном ящике) 24 датчика по 3 провода на каждый датчик 72 клеммы
18 электромагнитов по 2 провода на каждый 36 клемм
Клеммная колодка 2, всего 108 клемм
Кабель к распределителям и датчикам Подключение электромагнитов 18 кабелей, по 2 провода
Подключение датчиков 24 кабеля, по 3 провода
Таблица 9.5:
Количество проводов, необходимых для рассматриваемой системы управления (обычная разводка)
пава 9
Современные
концепции
разводки проводов
Сравним 5 различных концепций на примере рассматриваемой
системы (таблица 9.4):
Концепция 1: обычная разводка (рис. 9.15 а)
Концепция 2: пневмоостров с мультипинным разъемом
(рис. 9.15 б)
Концепция 3: пневмоостров с подключением к шине "филдбас"
(рис. 9.15 в)
Концепция 4: пневмоостров со встроенным ПЛК
Концепция 5: использования шины AS-i
Количество проводов, необходимых в случае каждой концепции,
показано в таблице 9.6.
Элементы Концепция 1 Концепция 2 Концепция 3 Концепция 4 Концепция 5
Шкаф управления 1 1 1 - 1
Клеммная колодка 1 1 (44 кл .*) 1 (44 кл .*) -
Клеммный ящик 1 - - - -
Клеммная колодка 2 1 (108 кл.*) - — -
Кабели к электромагнитам 17(34 пр**) - - - —
Отпадает необходимость в клеммной колодке шкафа управления.
При использовании пневмоострова со встроенным контроллером можно
обойтись без шкафа управления. Расходы на разводку становятся мини-
мальными (таблица 9.6). Систему управления можно собрать очень
быстро и дешево, особенно, если все распределители и подключения
датчиков объединены в один остров.
Пневмоостров со встроенным контроллером также называют програм-
мируемым пневмоостровом.
Если исполнительные устройства электропневматической системы рас-
пределены на приличном расстоянии друг от друга, распределители груп-
пируются в небольших пневмоостровах или вообще устанавливаются
индивидуально. В таких условиях часто предпочтительным оказывается
применение AS-интерфейса (AS-i). По сравнению с другими "шинными"
системами в данном случае облегчается работа с кабелями, поскольку
все станции подключаются непосредственно к одной непрерывной
линии.
Характеристики и области применения различных систем разводки в
сравнении друг с другом представлены в таблице 9.7. Чтобы получить
оптимальное по цене решения для конкретного случая, следует под-
считать общую стоимость систем управления с разными концепциями
разводки и сравнить их друг с другом.
Концепция разводки 4:
Пневмоостров
со встроенным
контроллером
Концепция разводки 5:
AS-интерфейс
Области применения
различных концепций
разводки
268
Глава 9
Преимущества Недостатки Главные области применения
Концепция 1: Обычная " разводка Низкая стоимость элементов Большие затраты на разводку Все чаще заменяются современными системами
Обслуживание требует боль- ших затрат денег и времени
; Концепция 2: Пневмоостров с ' мульта тайным разъемом Меньше затраты на разводку Выше стоимость элементов Чаще используются в системах управления с небольшим числом распределителей и датчиков
Проще обслуживание
Концепция 3: Пневмоостров с шиной "филдбас" Очень малые затраты на разводку Значительно большая стоимость элементов Системы управления с многочисленными распреде- лителями и датчиками, особен- но если их можно объединить в небольшое число пневмоостровов
Проще обслуживание
. Концепция 4: ! Пневмоостров со 1 встроенным ПЛК Еще меньшие затраты на разводку При использовании нескольких островов значительно растет стоимость оборудования Для систем управления, где достаточно одного пневмо- острова: лучше, чем концеп- ция 3; в остальных случаях нужно тщательно взвешивать
Проще обслуживание Имеются только для огра- ниченного числа типов ПЛК
Не нужен шкаф
Концепция 5: AS-интерфейс Минимальная стоимость разводки Не боПее 4 бинарных входов или выходов на подключение к шине Системы управления с распре- деленными в пространстве приводами; подходит как для простых, так и для сложных систем
Проще обслуживание Высокая стоимость элементов
Интерфейс к шинным системам особенно
AS-lnterface
Рис. 9.16:
Пример электро-
пневматической системе,
с использованием
AS-lnterface
пава 9
i. Пропорциональная пневматика Пропорциональная пневматика находит применения прежде всего в следующих случаях: Непрерывная подстройка давлений и усилий Непрерывная подстройка расходов и скоростей Позиционирование с помощью приводов с числовым управлением, таких как приводы роботов.
Функция пропорционального регулятора давления Пропорциональный регулятор давления преобразует входной сигнал в виде напряжения в выходной сигнал в виде давления. Давление на выходе, поступающее к потребителю, можно непрерывно регулировать в пределах от 0 бар до максимального, например, 6 бар. На рис. 9.18 а показаны пропорциональные регуляторы давления на различные условные проходы.
Использование пропорци онал ьн ого регулятора давления На рис. 9.17 а представлена установка для испытаний офисных кресел. Чтобы проверить долговечность подпружиненной спинки кресла, ее нагружают периодически изменяемым усилием. Максимальная нагрузка и характеристика ее изменения в функции времени может регулиро- ваться в пределах различных испытательных циклов. Две возможные характеристики усилия в функции времени показаны на рис. 9.17 б.
Рис. 9.17:
Установка для испытаний офисных кресел:
а) общий вид;
б) характеристика усилия в функции времени
Электропневматическая система управления установки для испытаний
кресел работает в соответствии со следующими принципами:
Программируемый логический контроллер с аналоговым выходом
задает необходимые значения давления в форме напряжения
Управление
испытательной
установкой
Пропорциональный регулятор давления генерирует на выходе сигнал
давления, пропорциональный входному напряжению (низкое напря-
жение = низкое давление, высокое напряжение = высокое давле-
ние)
Сжатый воздух под нужным давлением поступает в полость пнев-
моцилиндра. Высокое давление на выходе регулятора означает боль-
шое усилие, развиваемое штоком цилиндра, а низкое давление озна-
чает меньшее усилие.
~лава 9
Когда напряжение на выходе ПЛК возрастает, возрастает и давление
сжатого воздуха, который пропорциональный регулятор подает в полость
цилиндра. Усилие на штоке увеличивается. Когда напряжение на вы-
ходе ПЛК падает, регулятор снижает давление в полости цилиндра.
Усилие на штоке уменьшается.
deg ‘гс
рОИСТВО-ПОТрбОИТбЛЬ, ПрбООразуб1СЯ в cuicuiui uddivi лicnipn-rovnnn
сигнал, который подаотся на вход для сравнения с заданным.
Давление на выходе измеряется с помощью датчика давления. Измерен-
ное значение сравнивается с заданным (уставкой).
Если уставка давления оказывается выше, чем реальное значение
давления на выходе регулятора, переключается распределитель В
(рис. 9.18 б). Давление в верхней части балансира возрастает. В ре-
зультате канал питания соединяется с выходным каналом. Сжатый
воздух идет к потребителю. Давление на выходе увеличивается и
балансир уравновешивается, возвращаясь в исходное положение.
Когда заданное значение давления на выходе будет достигнуто, ре-
гулятор закрывается
Если уставка давления оказывается ниже реального давления на
выходе регулятора, открывается распределитель А. Давление в верх-
ней части балансира падает. Выходной канал сообщается с выхлоп-
ным, и давление в нем падает. Балансир давления возвращается в
исходное положение.
На рис. 9.18 в показана характеристика давления в выходном канале
для трех различных значений входного напряжения в зависимости от
расхода, протекающего через регулятор воздуха. Давление на выходе
поддерживается постоянным практически во всем диапазоне расходов.
И только при больших расходах выходное давление падает.
Принцип действия
пропорционального
регулятора давления
лава 9
Функции Пневмораспредепитель с пропорциональным управлением сочетает
пропорционального распределителя свойства дискретного распределителя с электромагнитным управлением и электрически управляемого дросселя. Проходы между каналами рас- пределителя могут открываться и закрываться. Проходящий через рас- пределитель расход может изменяться от нуля до максимума. На рис. 9.19 представлены пропорциональные распределители с раз- личным условным проходом.
Области применения распределителей с пропорциональным управлением Пневматические распределители с пропорциональным управлением позволяют непрерывно регулировать расход, подаваемый к исполни- тельному устройству и, тем самым, изменять его скорость. Это означает, что скоростные характеристики могут быть оптимизированы с дости- жением высоких скоростей при плавном ускорении и торможении (рис. 9.19 г). Одним из типичных примеров применения может служить подача чувствительных продуктов в пищевой промышленности.
Рис. 9.19:
Распределитель с пропорциональным управлением:
а) распределители с различным условным проходом;
б) принципиальная схема;
в) график расходной характеристики (функция расход/напряжение);
г) пример графика изменения скорости
Festo Didactic • ТР201
''лава 9
Принципиальная схема
распределителя с
пропорциональным
управлением
Расходная
характеристика
распределителя с
пропорциональным
‘правлением в функции
входного сигнала
На рис. 9.19 б показана принципиальная схема 5/3-распределителя с
пропорциональным управлением. В соответствии с аналоговым электри-
ческим входным сигналом распределитель может занимать различные
положения:
Входной сигнал менее 5 В: каналы 1 и 2, а также 4 и 5 соединены
друг с другом
Входной сигнал равен 5 В: распределитель закрыт (среднее положение)
Входной сигнал выше 5 В: каналы 1 и 4, а также 2 и 3 соединены друг
с другом.
В зависимости от значения входного сигнала проходное сечение рас-
пределителя также может изменяться. График зависимости расхода,
протекающего через распределитель, в зависимости от значения вход-
ного сигнала показан на рис. 9.19 в.
Входной сигнал О В:
Каналы 1 и 2 соединены, максимальный расход
.Входной сигнал 2,5 В:
Каналы 1 и 2 соединены, уменьшенный расход
Входной сигнал 5 В:
Распределитель закрыт
Входной сигнал 7,5 В:
Каналы 1 и 4 соединены, уменьшенный расход
Входной сигнал 10 В:
Каналы 1 и 4 соединены, максимальный расход.
.. г;.ИТГО:.....ГГГКПГГ.........................................-.....
Рис. 9.20:
Использование
пневматического
привода позиционирования
Пневматический привод позиционирования состоит из следующих
элементов:
Цифровой системы управления
Распределителя с пропорциональным управлением
Пневматического цилиндра двустороннего действия
Датчика перемещения.
Конструкция
пневматического
привода
позиционирования
278
Гпава 9
рч;гт;гг-д7--.....-......-........................................................................................................... '........
280
Приложения
am
управлением............................................... 68
5/3-распределитель, средние позиции....................... 71
5/3-распределитель с двусторонним пилотным электромагнитным
управлением............................................... 69
А....
AS-интерфейс, разводка с ним..........'...................255
АВАРИЙНЫЙ СТОП........................................176; 210
автоматическая работа. . . ...........................178,210
активированные контакты и датчики.........................157
аналоговый сигнал..........................................11
Б
безопасное экстра низкое напряжение.......................175
бинарный сигнал......................................... 11
В
вакуумный генератор.......................................244
ввод в эксплуатацию.......................................111
ввод в эксплуатацию системы управления....................109
ввод сигнала...........................................13; 56
влияние окружающей среды................................ 181
воздействие электрического тока...........................172
время срабатывания.........................................83
выбор концепции монтажа................................. 258
выбор последовательности..................................124
выбор элементов...........................................258
вывод сигнала..........................................13; 56
выполнение команды.........................................13
выпрямитель................................................36
Г
геркон.....................................................40
главный выключатель...................................176; 210
Индекс
давления, репе и датчик..................................46
датчик приближения, емкостной............................43
датчик приближения, индуктивный..........................42
датчик приближения, оптический...........................44
датчики..............................................39; 245
датчики перемещения......................................40
датчики, электрические...................................41
диаграмма "перемещение-время"...........................117
диаграмма "перемещение-шаг".............................116
диапазон давления................................... . . 82
диод................................................... 27
диффузионный отражательный оптический датчик.............45
документация.........................................112; 113
доминирующее ВКЛ/ВЫКЛ (схема самоподхвата)..............195
Е
емкость................................................ 26
3 _______ _____________
ш&й j/йг ?-йЖ «т® s-йй && Ж
задержка................................................198
заземление..............................................175
запоминание сигналов....................................192
запоминание сигналов с помощью бистабильных
распределителей ....................................... 192
запоминание сигналов с помощью самоподхвата.............195
индуктивность..............................................25
ИСО-распределители.........................................81
исполнительная часть.......................................14
источник питания...........................................36
источник э. д. с...........................................22
исходное положение.........................................62
К
кнопка электрическая......................................37
контактор.................................................53
концевой выключатель......................................39
концепции разводки.......................................266
Л
линейно-поворотный привод................................240
логическая система управления.............................12
логические операции......................................189
логические операции, параллельное подключение............189
логические операции, последовательное подключение........190
М
многопозиционный цилиндр.................................238
монтаж, концепции/затраты.................................251
мощность..................................................23
мультипинное соединение...................................253
Индекс
Н
sass «os ж«х -w^zt
номер установки........................................141
номер цепочки управления...............................141
номер элемента.........................................142
номера клемм...........................................165
номинальный расход......................................82
нормально-замкнутый контакт.............................38
нормально-разомкнутый контакт...........................37
О
- йО&да» r.®S&
обзорная схема.........................................144
обозначение контактов и реле...........................154
обозначение отверстий...................................62
обработка сигналов...............................13; 56; 246
обрыв кабеля............................................76
одиночные перемещения..................................210
одиночный цикл.........................................211
опасные зоны при переменном напряжении.................174
определение позиции....................................245
отверстия распределителя................................79
отражательный световой.барьер . . .....................45
П
панель управления......................................176
параллельное разветвление..............................123
параллельное соединение................................123
переключатели...........................................37
принципиальная схема......................................
принципиальная схема, пневматическая.....................127
принципиальная схема, электрическая......................144
проводник.................................................22
программируемый логический контроллер (ПЛК)...............55
продолжительный цикл ВКЛ/ВЫКЛ............................211
проектирование...........................................92
проектирование подъемного устройства, пример применения . . 96
выбор датчиков положения..............................101
выбор распределителей ................................100
выбор цилиндров...................................... 100
диаграмма "перемещение-шаг"...........................103
клапан последовательности давления....................101
место оператора........................................98
окружающие условия................................... 99
питание энергией.......................................99
пневматическая принципиальная схема...................104
регулирование скорости................................101
пропорциональная пневматика............................ 270
пропорциональный распределитель..........................274
пропорциональный регулятор давления......................270
Р
развитие электропневмоавтоматики.........................236
разводка проводов в системах управления..................167
разводка проводов........................................263
разводка с клеммными колодками........................160
разводка с шиной "филдбас"............................255
требования............................................158
разводка трубопроводов...................................261
разработка системы управления.............................90
расположение элементов управления........................257
распределители.........................................60; 62
распределители, виды управления..........................131
распределители, оптимизация..............................247
распределители для блочного монтажа......................248
Индекс
распределитель, модульный................................77
распределитель, обозначение каналов.....................132
реактивное сопротивление.................................25
регулятор напряжения.....................................36
реле.....................................................49
реле времени.............................................51
репе памяти..............................................50
релейная система управления.............................186
робототехника...........................................239
ручное дублирование......................................63
ручной режим.........................................178; 210
С
самоподхват.............................................195
сброс...................................................210
световой барьер, односторонний...........................44
сигналы: аналоговые, цифровые, бинарные..................11
система управления........................................8
система управления, ввод в эксплуатацию.................109
система управления, поток сигналов.......................13
система управления, разработка . . ......................90
система управления, электропневматическая................16
снижение стоимости......................................236
сопротивление............................................22
средняя позиция..........................................72
степень защиты, идентификация...........................181
схема И.................................................190
мим
1 on
релейная схема реализации последовагельнии1и
перемещения.............................................223
условия выполнения шага.................................222
условия старта..........................................220
функции реле............................................227
элементы управления............................213; 216; 218
управление цилиндром двустороннего действия...............188
управление цилиндром одностороннего действия..............186
условия перехода.........................................121
условия перехода, логические..............................122
условные графические обозначения..........................127
датчиков................................................150
дросселей...............................................133
исполнительных устройств................................136
клапанов и распределителей..............................129
клапанов быстрого выхлопа...............................133
контактов...............................................147
обратных клапанов.......................................133
питания сжатым воздухом.................................128
пневматических элементов................................127
пропорциональных клапанов...............................135
распределителей ....................................... 130
регуляторов давления....................................134
реле и контакторов......................................149
электрических основных функций..........................146
электромеханических приводов............................148
элементов и реле давления...............................138
условный проход............................................82
устройство подачи, диаграмма "перемещение-шаг"............200
устройство подачи, пневматическая принципиальная схема . . 201
устройство подачи, подключение датчиков...................203
устройство подачи, пример применения......................199
устройство подачи, релейная схема.........................202
ндекс
устройство подачи, шаги последовательности................204
Ф
филдбас система......................................159; 253
филдбас система, разводка.................................255
филдбас, типы.............................................254
функциональная диаграмма.............................115; 144
функциональная карта......................................119
X
O§S»SR • . ЙжЖ 1Мв&&> 5Ж&ЯЖ- . .)№»№«»
характеристики.............................................78
характеристики 5/2-распределителей.........................81
н
цветовая кодировка индикаторных ламп......................180
цветовая кодировка элементов управления...................179
цилиндр двустороннего действия, принцип работы.............61
цилиндр одностороннего действия, принцип работы............60
цифровой сигнал............................................11
Э _____
эжектор...................................................243
электрическая схема........................................20
электромагнитные катушки...................................83
вспомогательные функции.................................87
защита от взрыва........................................88
класс защиты.......................................85; 88
тандарты
Стандарты
DIN/EN 292-1 Безопасность механизмов; основная терминология, общие руководства по проектированию. Часть 1: Основная терминология, методология
DIN/EN 292-2 Безопасность механизмов; основная терминология, общие руководства по проектированию. Часть 2: Технические руководства и спецификации
DIN/EN 418 Безопасность механизмов: устройства АВАРИЙНЫЙ СТОП, функциональные аспекты
DIN/VDE 0470 (EN 60 529) Степень защиты с помощью корпусов (IP коды)
DINA/DE 0611-1 (EN 60 947-7-1) Переключающие устройства низкого напряжения, клеммы для медных проводников
DINA/DE 0660-200 Переключающие устройства низкого напряжения. Часть 5-1: Контроллеры и переключатели; электромеханические контроллеры
DINA/DE 0660-210 Переключающие устройства низкого напряжения; безопасность механизмов; электрические устройства АВАРИЙНЫЙ СТОП; безопасность в правилах конструирования
DIN/EN 983 Требования безопасности для пневмогидросистем и их элементов; пневаматика
DIN/ISO 1219-1 Пневматика: условные графические обозначения
........:...:.......................................:...........................................................................................................................................................................................................................................................................................................................................................................................................................................................
(VDE 0113) Часть 1: Общие требования
DIN/EN 60617-2 (IEC 617-2) Условные обозначения для принципиальных схем. Часть 2: Символы элементов, обозначения и другие символы общего пользования
DIN/EN 60617-4 (IEC 617-4) Условные обозначения для принципиальных схем. Часть 4: Символы пассивных элементов
DIN/EN 60617-5 (IEC 617-5) Условные обозначения для принципиальных схем. Часть 5: Символы полупроводников и электронных трубок
DIN/EN 60617-7 (IEC 617-7) Условные обозначения для принципиальных схем. Часть 7: Символы цепей и устройств безопасности
DIN/EN 60617-8 (IEC 617-8) Условные обозначения для принципиальных схем. Часть 8: Символы измерительных и сигнальных устройств
DIN/EN 61082-1 (IEC 1082-1) Документация по электротехнике Часть 1: Общие правила
DIN/EN 61082-2 (IEC 1082-1) Документация по электротехнике Часть 2: Функциональные принципиальные схемы
DIN/EN 61082-3 (IEC 1082) Документация по электротехнике Часть 3: Схемы соединений, таблицы соединений и списки
ШЕЕК
Новое издание учебника "Электропневматика" — это в высшей степени удачное и
впечатляющее сочетание опыта компании Festo Didactic, накопленного за многие
годы создания и проведения обучения, с одной стороны, и потребностей тренингов
для промышленности и учебных заведений, с другой.
Книга описывает основоположные принципы устройства и эксплуатации
современного простого в обслуживании оборудования. Исчерпывающие
объяснения многочисленных возможных способов последовательности движения
под давлением и состояния управления гарантирует быстрое понимание зачастую
очень сложных схем, используемых в этой области.
Подробные примеры применения компонентов обеспечат получение знаний,
необходимых для проектирования и практического применения
электропневматических схем.