/





























































































































































































Автор: Герц Е.В. Кудрявцев А.И.
Теги: инженерное дело техника в целом автоматика машиностроение пневмопривод
Год: 1981




Текст
ПНЕВМАТИЧЕСКИЕ
УСТРОЙСТВА
И СИСТЕМЫ
в машиностроении
СПРАВОЧНИК
Под общей редакцией
д-ра техн, наук Е. В. ГЕРЦ
МОСКВА ’’МАШИНОСТРОЕНИЕ'' 1981
ББК 32.965.2
ПИ
УДК 62.85
Рецензент д-р техн, наук О. Н. Трифонов
П11 Пневматические устройства и системы в машинострое-
нии: Справочник/Е. В. Герц, А. И. Кудрявцев, О. В. Лож-
кин и др. Под общ. ред. Е. В. Герц — М.: Машинострое-
ние, 1981. — 408 с., ил.
В пер.: 2 р. 20 к.
В справочнике приведены классификация, конструкции, основные тех-
нические данные пневматических устройств, изготовляемых отечественными
предприятиями. Рассмотрены типовые схемы пневматических систем управле-
ния станками, прессами, манипуляторами и другими машинами, а также спо-
собы и схемы очистки сжатого воздуха и смазки пневматических устройств.
Приведены методы динамических расчетов и проектирования пневматических
приводов и устройств.
Для инженерно-технических работников, занимающихся проектированием
и эксплуатацией пневматических приводов и систем управления.
ББК 32.965.2
6П5.7
© Издательство «Машииостроеиие», 1981 г.
ПРЕДИСЛОВИЕ
С ростом темпа технического прогресса все большее внимание уделяется проблеме
энергетики. Поэтому создание новых видов высоко экономичных машин имеет
особое значение. В этой связи выбор оптимальных по энергозатратам типов при"
водов требует точных аналитических исследований и количественных оценок.
При проектировании и расчете приводов и систем управления справочные
материалы помогают инженерам правильно выбрать структурные схемы н кон-
струкции приводов и элементов систем управления, а также их рациональные
параметры из условий энергоемкости и обеспечения заданного быстродействия.
В справочнике приведено большое число конструкций пневматических
устройств различных типов, выпускаемых нашей промышленностью, даны све-
дения о рациональных областях их применения, а также показаны в виде примеров
некоторые типы приводов зарубежных фирм. Предложены методы динамического
расчета времени рабочего цикла различных пневматических устройств и выбора
нх параметров по сводным графикам и справочным материалам, полученным
с помощью ЭЦВМ. Графики представлены в безразмерных параметрах, что
позволяет охватить широкий диапазон используемых па практике устройств.
Для случаев, когда параметры проектируемого привода выходят за рамки пара-
метров указанных графиков, в справочнике приведены расчетные уравнения,
по которым инженер сможет составить программу расчета на ЭЦВМ для решения
конкретно поставленной задачи.
В справочнике изложены современные методы проектирования систем управ-
ления, разработанные на основе общих методов кибернетики, применительно
к классу пневматических устройств с учетом особенностей последних. Описаны
схемы и элементы пневмоавтоматики, изготовляемые в нашей стране и за рубежом.
Чл. корр. АН СССР К. В. Фролов
1»
ВВЕДЕНИЕ
Пневматические системы управления (ПСУ) наряду с электрнческнмн и гидравли-
ческими системами являются одним из наиболее эффективных средств автомати-
зации и механизации производственных процессов. Достаточно сказать, что
в наиболее развитых капиталистических странах около 30% всех автоматизиро-
ванных процессов оснащено ПСУ.
Оснащение ПСУ машин и оборудования составляет (от общего выпуска):
упаковочных машин до 90%; сварочных и литейных машин до 70%; автоматиче-
ских манипуляторов до 50%; кузнечно-прессовых машин более 40%; угледобы-
вающих машин более 30%; прачечного оборудования до 40%; текстильных и
обувных машин, деревообрабатывающего и пищевого оборудования 20% [42].
Преимущества ПСУ особенно проявляются при механизации и автоматизации
следующих наиболее массовых операций: зажима деталей, их фиксации, канто-
вании, сборке, контроле линейных размеров, транспортировании, упаковке
н других, что позволяет исключить или свести до минимума участие человека
в тяжелых н монотонных работах, при этом производительность труда на этих
операциях возрастает в 1,5—4 раза.
Широкому внедрению ПСУ в машиностроении способствуют их положитель-
ные качества: относительная простота конструкции н эксплуатационного обслу-
живания, а следовательно, низкая стоимость и быстрая окупаемость затрат;
надежность работы в широком диапазоне температуры, высокой влажности и за-
пыленности окружающей среды; пожаро- и взрывобезопасность; большой срок
службы, достигающий 10 000—20 000 ч (10—50 млн. циклов); высокая скорость
перемещения выходного звена пневматических исполнительных устройств (ли-
нейного до 15 м/с, вращательного до 100 000 об/мин); легкость получения и отно-
сительная простота передачи энергоносителя (сжатого воздуха), возможность
снабжения им большого количества потребителей от одного источника; отсут-
ствие необходимости в защитных устройствах при перегрузке (пневмодвигатели
могут быть заторможены до полной остановки без опасности повреждения и
могут оставаться под нагрузкой практически без потребления энергии).
К основным недостаткам ПСУ следует отнести сравнительно малую скорость
передачи сигнала на значительные расстояния, сложность обеспечения плавного
перемещения рабочих органов пневматических исполнительных устройств при
колебаниях нагрузки н относительно высокую стоимость энергоносителя (сжа-
того воздуха). Однако для большинства автоматизируемых объектов в машино-
строении параметры ПСУ приемлемы, кроме того, указанные недостатки могут
быть частично или полностью устранены путем применения комбинированных
пневмоэлектрнческих или пневмогидравлических систем управления.
В отечественном машиностроении используются системы, реализованные
на пневматической технике трех уровней давления: высокого 0,2—1,6 МПа,
среднего 0,1—0,25 МПа и низкого 0,001—0,01 МПа.
Характерной чертой развития ПСУ в современном машиностроении является
использование пневматических устройств не только в силовых приводах, но
4
н в системах управления для программирования, контроля н управления рабо-
чими процессами в автоматических линиях, манипуляторах и других машинах.
Поэтому важно, чтобы широкий круг работников, занимающихся проектирова-
нием и эксплуатацией автоматических систем, имел четкое представление о вы-
пускаемом отечественными предприятиями пневмооборудовании н о методах
расчета и проектирования его основных элементов. Вместе с тем, несмотря на то
что публикуется большое число статен и монографий, посвященных описанию
отдельных пневматических устройств, их применению н расчету [1—4, 13, 20,
23, 27, 32—42], почти полностью отсутствуют справочники, необходимые кон-
структору в его работе. Цель настоящей работы — ознакомить инженерно-
технических н научных работников, занимающихся вопросами автоматизации
в машиностроении, с пневматическими устройствами н приводами, с их возмож-
ностями решать задачи автоматизации производственных процессов.
Авторы стремились снабдить инженеров-конструкторов практическими дан-
ными по выбору и эксплуатации схем н конструкций пневматических устройств,
их расчету и проектированию, т. е. такими материалами, которые они могли бы
использовать непосредственно в повседневной работе. Поэтому из всего много-
образия разработанных и опубликованных методов расчета пневмоприводов
[2, 10, 12, 21, 30, 31, 40] были выбраны такие, результаты которых оформлены
в виде различного рода справочных материалов, графиков и номограмм. Одиако
и в этом случае при описании методов расчета авторы старались избежать повто-
рения уже опубликованных данных. Так в гл. 11 помещены новые расчеты, гра-
фики, таблицы и другие материалы, а на опубликованные работы со справочными
материалами даны ссылки [6, 9]. Этим обстоятельством объясняется некоторая
неравномерность распределения материала между описаниями методов расчета
различных пневматических устройств: новые сведения изложены в большем
объеме, чем уже известные. Приведено много расчетных графиков времени сра-
батывания пневматических устройств с пневмовозвратом, которые ранее совсем
не рассматривались.
Вместе с тем не описаны методы расчета пневмоприводов и линий нх связи,
рассмотренные в работах [7, 11, 15, 16] с учетом протекающих в них волновых
процессов, т. е. как системы с распределенными параметрами. Это объясняется
тем, что указанные методы, в результате использования которых разработан
пакет программ расчета на ЭЦВМ, пока еще сложно применить в повседневной
работе обычного КБ. В справочнике не изложены методы расчета высокоскорост-
ных ударных пневмоприводов [5, 8, 22, 35, 39] и приводов вращательного движе-
ния [18, 19, 28], что объясняется отсутствием в указанных работах справочных
материалов, охватывающих широкий диапазон параметров применяемых
устройств.
Вопросами теории и расчета дискретных пневмоприводов и систем управле-
ния занимаются сотрудники Института машиноведения им. А. А. Благонравова,
ВНИИГидропривода и др. [3, 7—9]. Теоретическим и экспериментальным иссле-
дованиям следящих пневмоприводов и автоматизации процессов проектирования
и динамического расчета систем управления посвящены работы ученых Тульского
политехнического института, МАИ, МВТУ им. Баумана и др. [12, 26, 28]. Про-
ектированием систем управления низкого и среднего уровня давлений, разработ-
кой оригинальных схем и конструкций элементов струйной н мембранной тех-
ники занимаются Институт проблем управления, ЭНИМС, НИИТеплоприбор
[14, 17, 28, 29, 33] и др.
Поскольку пневматические системы управления являются одним из много-
численных видов систем управления (электрических, электронных, механических,
гидравлических н т. п.) при структурном синтезе этих систем используют общие
методы теории управления [17, 24, 25, 37, 42]. Вместе с тем специфические осо-
бенности элементов пневмоавтоматики позволяют выделить нх в отдельный
класс, для которого на базе общих методов разработаны методы структурного
синтеза. Эти методы изложены здесь только применительно к этому классу систем
управления.
Справочник состоит нз двенадцати глав, в которых описаны пиевматнческне
устройства, являющиеся составными элементами пневмоприводов современных
машин. Пневматические устройства делят на следующие основные группы.
5
Исполнительные устройства, предназначенные для преобразования энергии
сжатого воздуха в механическую энергию выходного звена привода, воздейству-
ющего на рабочий орган машины. В машиностроении исполнительными устрой-
ствами в большинстве случаев являются пневмодвигатели. Конструкции пневмо-
двигателей и их технические характеристики описаны в гл. 2 (гл. 1 посвящена
общим сведениям о рабочем теле, пневмоприводах и их составных элементах).
Методы динамического расчета пневмодвигателей изложены в гл. 11. Эти методы
могут быть применены также и для расчета ряда элементов привода, например
распределителей, управляющих устройств и др.
Распределительные устройства, предназначенные для изменения направле-
ния потоков сжатого воздуха в линиях (трубопроводах и каналах), соединяющих
устройства в приводе. Различные типы распределительной и направляющей
аппаратуры описаны в гл. 4 и 5, а пневмолинии — в гл. 7.
Управляющие устройства, предназначенные для обеспечения заданной
последовательности перемещения исполнительных устройств в соответствии с за-
данным законом их движения. Совокупность управляющих устройств, т. е. логи-
ческих элементов и элементов обратной связи (ЭОС) составляет пневматическую
систему. Описанию систем элементов пневмоавтоматики среднего и низкого уров-
ней давления посвящены гл. 8 и 9, а вопросам структурного синтеза ПСУ — гл. 10.
Так как системы управления реализуют на элементах автоматики различных
типов (электрических, гидравлических и пневматических), то необходимыми эле-
ментами в некоторых системах являются преобразователи (см. гл. 3). Для герме-
тизации элементов привода применяют уплотнительные устройства (см. гл. 6).
Вопросам очистки сжатого воздуха, смазывания подвижных деталей и сни-
жения шума систем посвящена гл. 12.
В справочнике применены единицы Международной системы единиц (СИ).
Так как ряд приборов (манометры, барометры и др.), используемых при эксплуа-
тации пневмоприводов, выпускают со шкалой в единицах устаревших систем
(МКГСС и др.), в справочнике приведены таблицы перевода некоторых наиболее
употребляемых единиц.
Государственные стандарты приведены по состоянию на 1.01.1981 г.
СПИСОК ЛИТЕРАТУРЫ
1. Алимов О. Д., Гохберг М. М. Пневмопривод и пневмоавтоматика с нестандарт-
ными схемами. Фрунзе: Илим, 1970. 264 с.
2. Анализ конструкций самоходных буровых агрегатов. Фрунзе; Илим, 1975.
217 с.
3. Артоболевский И. И. Механизмы в современной технике. Пневмогидравлические
механизмы. Т. 5. М.: Наука, 1976. 848 с.
4. Артоболевский И. И. Теория механизмов и машин. М.: Наука, 1975. 638 с.
5. Ашавский А. М., Вольперт А. Я., Шейнбаум В. С. Силовые импульсные системы.
М.: Машиностроение, 1978. 200 с.
6. Герц Е. В. Пневматические приводы. М.: Машиностроение, 1969. 359 с.
7. Герц Е. В., Гогричиани Г. В. Динамика пневматических систем машин с развет-
вленными линиями. — Механика машин, 1978, № 54, с. 53 — 58.
8. Герц Е. В., Долженков Б. С. Выбор параметров быстродействующего пневмопри-
вода. — Станки и инструмент, 1977, № 4, с. 15 — 17.
9. Герц Е. В., Крейнин Г. В. Расчет пневмоприводов. М.: Машиностроение, 1975.
272 с.
10. Гидропривод и гидропневмоавтоматика. Киев; Техника. 1971—79. Вып. 1 — 12.
1000 с.
И. Гогричиани Г. В. Динамика пневматических систем машин. — В кн.: Механика
машин. Наука. 1978, № 53, с. 58 — 66.
12. Динамика и долговечность машин. Томск, 1979. 173 с. (Труды Томского универ-
ситета).
13. Динамика и, точность функционирования тепломеханических систем. Тула.:
ТПП, 1971 — 1978. 800 с.
14. Дмитриев В. Н., Градецкнй В. Г. Основы пневмоавтоматики. М.: Машинострое-
ние, 1973. 360 с.
15. Елимелех И. М. Струйные устройства ввода информации. Л.: Судостроение.
1972. 219 с.
16. Залманзон Л. А. Теория элементов пневмоиики. М.: Наука, 1969. 507 с.
17. Залманзон Л. А. Специализированные аэрогидродинамические системы автома-
тического управления. М.: Наука, 1978. 464 с.
18. Зеленецкий С. Б., Рябков Е. Д., Микеров А. г» Ротационные пневматические
двигатели. Л.: Машиностроение. 1978. 239 с.
6
19. Зиневич В. Д., Ярмолейко Г. 3., Калита Е. Г. Пневматические двигатели гориык
машин. М.: Недра, 1975. 344 с.
20. Казинер Ю. Я., Слободкин М. С. Пневматические исполнительные устройства
в системах автоматического управления. М.: Энергия, 1972. 72 с.
21. Кожевников С. Н., Пешат В. Ф. Гидравлический и пневматический приводы
металлургических машин. М.: Машиностроение, 1973. 359 с.
22. Крейнин Г. В., Матвиенко И. В. Выбор параметров пневматической встряхиваю-
щей машины с амортизацией ударов. — Литейное производство, 1978, № 5, с. 10—13.
23. Козловский А. А., Эйдермаи Б. А. Пневмоприводы конвейеров и вспомогатель-
ных механизмов. М.: Машиностроение, 1971. 167 с.
24. Лазарев В. Г., Пийль Е. И. Синтез управляющих автоматов. М.: Энергия, 1970.
400 с.
25. Левитская О. Н., Левитский Н. И. Курс теории механизмов и машин. М.; Выс-
шая школа, 1978. 269 с.
26. Мамонтов М. А. Трехконтактная термодинамика. Тула; ТПИ, 1976. 307 с.
27. Петрокас Л. В. Производительность машин-автоматов и синтез их систем. М.:
МИХМ, 1979. 80 с.
28. Пневматика и гидравлика. Приводы и системы управления. М.: Машинострое-
ние, 1979. Вып. 1—8. 2000 с.
29. Пневматические приводы и системы управления. М.; Наука, 1971. 298 с.
30. Погорелов В. И. Газодинамические расчеты пневматических приводов. Л.:
Машиностроение, 1977. 183 с.
31. Попов Д. Н. Динамика и регулирование гндро- и пневмосистем, М.; Машино-
строение, 1977. 278 с.
32. Юдицкий С. А., Тагаевская А. А., Ефремова Т. К. Проектирование дискретных
систем автоматики. М.: Машиностроение, 1980. 232 с.
33. Симкин Е. Л. Пневматические ручные машины в судостроении. М.; Судострое-
ние, 1970. 394 с.
34. Andersen В. W. The analysis and design of pneumatic system N. I. Wiley, 1967.
363 S.
35. Artobolevski I. I., Herz E. V. Analysis and syntesis of a High Speed Pneumatic
machine Drive Mechanism and Machine Theory. Print in Great Britain, 1978, v. 13, p. 293 —
300.
.. 36. Entwiklung fluidlscher Antriebe und Sleueruiigen Berikte von der Pachtagung
Olhydraulik und Pneumatik. Mainz, Krauskopf-Verl, 1971. 205 S.
37. Halm L., Marton I. Pneumatishe Logikelelemente. Budapest Akad. Klado, 1970.
120 S.
38. Multrus V. Pneumatische Logikelelemente und Sleuerumgsystcme. Mainz, Kraus-
kopf-Verl.. 1970. 247 S.
39. Pneumatik handbook. 2 ed. Morden, England Trade and Techn. Press. 1968. 616 p.
40. Principles and theory of penumatics. Dublin, England. Trade and Techn. Press,
109 p.
41. Zoebl H. Angewandte Stromungslehre in Olhydraulik und Pneumatik. Mainz,
Krauskopf, 1970. 200 S.
42. Hydraulics and Pneumatics, 1972 — 1980.
Глава 1 ОБЩИЕ СВЕДЕНИЯ
------ О ПНЕВМАТИЧЕСКИХ
УСТРОЙСТВАХ И СИСТЕМАХ
1.1. СВОЙСТВА ВОЗДУХА
Рабочим телом в пневматических системах управления является сжатый воздух,
представляющий собой механическую смесь азота, кислорода (по объему при-
мерно 78 и 21% соответственно) и других газов, содержащихся в небольшом коли-
честве (аргон, углекислый газ и т. д.), а также водяного пара.
Воздух, содержащий водяные пары, характеризуется абсолютной и относи-
тельной влажностью. Абсолютная влажность определяется количеством водяного
пара в единице объема воздуха. Отношение абсолютной влажности к максималь-
ному количеству пара, которое могло бы содержаться в единице объема воздуха
при тех же температуре и давлении, называют относительной влажностью. На
практике при термодинамических расчетах используют параметры сухого воз-
духа. Поправку на влажность вносят только при особых требованиях к точности.
Основными и наиболее распространенными параметрами, характеризующими
состояние сжатого воздуха, являются давление, температура и удельный объем
(или плотность).
Давление р представляет собой силу, действующую по нормали к поверхности
тела н отнесенную к единице площади этой поверхности. Атмосферным давлением
условно принято считать давление, которое уравновешивается столбом ртути
высотой 760 мм, что соответствует среднему давлению атмосферы на уровне моря.
Давление, отсчитываемое от величины атмосферного давления, называют избы-
точным или манометрическим. Его измеряют манометрами и указывают в техни-
ческих характеристиках пневматических устройств.
В теоретические зависимости всегда подставляют абсолютное давление,
которое равно сумме избыточного и атмосферного (барометрического) давлений
и является параметром состояния газа.
В системе СИ единицей измерения давления служит паскаль (Па). Паскаль
равен давлению, вызываемому силой в 1 Н (ньютон), равномерно распределенной
по нормальной к ней поверхности площадью 1 м2. 1 Па = 1 Н/мг.
Соотношение между основными единицами давления приведены в
табл. 1.1 [1].
Параметром состояния газа является также абсолютная температура Т,
отсчет которой ведут от абсолютного нуля, лежащего на 273° ниже нуля по шкале
Цельсия, т. е. Т = 1° + 273°, где t° — температура в градусах Цельсия. Абсо-
лютную температуру Т измеряют в кельвинах (К). Эта величина входит во все
термо- и газодинамические зависимости.
Для измерения температуры наибольшее распространение получила между-
народная стоградусная шкала — шкала Цельсия (в которой 0 °C — точка плав-
ления льда, а 100 °C — точка кипения воды при атмосферном давлении), приме-
няют н другие шкалы (см. табл. 1.2) [3].
Удельный объем представляет собой объем, занимаемый единицей массы
вещества (м3/кг)
v = Vim,
где V и m — соответственно объем и масса газа
8
Таблица 1.1
Соотношение между единицами измерения давления
Единица измерения Единица измерения
Па КГС/СМ2 бар psi мм рт. ст. ММ вод. ст.
1 Па (Н/м2) . . . 1 1,02 • 10"’ 10~5 1.45-Ю”* 7.5-10-’ 0,102
1 кгс/см2 ... 9,81 • 1 (У* 1 0,98 14.22 ?35.6 104
1 бар 106 1,02 1 14,5 750 1,02-10*
1 psi (фунт-сил а/кв. дюйм) 6,9-10s 0,07 0,069 1 51,71 703
1 'мм рт. ст. . . 133,3 1,36-10-’ 1,33-10-’ 19,34-10-’ 1 13,6
1 мм вод. ст. . , 9,81 10~4 9,81 • 10-» 1,42-10“3 7,36* 10“2 1
Величину, обратную удельному объему, называют плотностью
р = 1/v = m/V.
Иногда используют понятие удельного веса, под которым понимают вес вещества
в единице его объема
7= РЯ-
где g—ускорение свободного падения.
Параметры состояния газа р, v, Т однозначно связаны между собой уравие»
нием состояния, вид которого в общем случае зависит от свойств газа:-.
F (р, р, Т) = 0.
Законы идеального газа. Сжатый воздух обычно рассматривают как идеаль-
ный газ, т. е. газ, у которого отсутствуют силы сцепления между молекулами,
а молекулы являются материальными точками, не имеющими объема. Идеальный
газ подчиняется следующим законам.
Закон Бойля—Мариотта: при постоянной температуре газа pV = const.
Закон Гей-Люссака: при постоянном давлении V/T — const.
Закон Шарля: при постоянном объеме газа р/Т ~ const.
Все эти уравнения объединены в одно, которое является уравнением состоя-
ния идеального газа и называется уравнением Клайрпеона pV — mRT, или для
единицы массы газа pv = RT.
Таблица 1.2
Соотношения между температурными шкалами
Шкала Шкала
Кельвина, К Цельсия, °C Фаренгейта, °F Реомюра, ®R
Кельвина, К 1 t °С4-273 ^ + 273 1.25/ °R +273
Цельсия, °C t °К —273 1 / °F—32 м 1,25/ °R
Фаренгейта, °F 1.8/ °К—459 1,8/ °С4-32 1 q 4- / OR 4- 32 4
Реомюра, °R 0,8/ °К—218 0,8/ °C 9 — (/ °F—32) 1
9
*!':W
Коэффициент пропорциональности 7? называется удельной газовой посто-
янной идеального газа массой 1 кг, совершающего работу 1 Дж при повышении
температуры на 1 К. Его значение зависит только от свойств газа. Для сухого
воздуха 7? = 287 Дж/(кг-К).
Реальный газ отличается от идеального в основном наличием сил внутрен-
него трения. Чем выше плотность реального газа, тем более он отличается от иде-
ального. Динамический коэффициент вязкости т]д, Па-с, который определяется
силами внутреннего трения, связан с кинематическим коэффициентом вязкости
vK, м2/с, следующей зависимостью:
VK = Лд/р-
Вязкость воздуха зависит от температуры следующим образом:
где г|д1 — динамический коэффициент вязкости при температуре 273 К (О °C).
1.2. ТЕРМОДИНАМИЧЕСКИЕ ПРОЦЕССЫ
Термодинамическим процессом называют последовательное изменение параметров
газа при переходе его из одного состояния в другое.
При описании термодинамических процессов используют такие величины,
как теплоемкость, внутренняя энергия, энтальпия, энтропия.
Теплоемкость (Дж/К) есть количество теплоты, необходимое для нагревания
тела на 1 °C. Удельная теплоемкость — теплоемкость единицы массы или объема
вещества. Теплоемкость зависит от характера процесса. Различают удельную
теплоемкость при постоянном давлении (ср) и при постоянном объеме (сг,), при этом
ср — со + R ®Дж/(кг-К).
Отношение теплоемкостей представляет собой показатель степени адиаба-
тического процесса
Й Ср/Су.
Теплоемкость зависит также от температуры, однако в пневмоприводах
колебания температуры относительно невелики и теплоемкость приближенно
можно считать величиной постоянной.
Внутренняя энергия U представляет собой сумму кинетической и потенциаль-
ной энергий молекул (атомов, ионов,'электронов). В термодинамических расчетах
используют не абсолютное значение внутренней энергии, а изменение этого
значения в различных процессах. Внутреннюю энергию единицы массы вещества
и называют удельной внутренней энергией. Внутренняя энергия идеального газа
состоит только из кинетической энергии его молекул и зависит”от "температуры
dU = CvdT. В системе СИ единицей измерения внутренней энергии является
джоуль (Дж).
Энтальпией I системы называют термодинамическую функцию, равную
сумме внутреиией энергии и произведения давления иа объем газа
7 = U+ pV
или для единицы массы газа
i = и + pv.
Энтальпию измеряют в джоулях.
Энтропия 'S системы есть функция ее состояния. Изменение энтропии яв-
ляется признаком обмена энергией системы с окружающей средой в форме теплоты
dS = d<b/T,
где QT — теплота.
Энтропию измеряют в джоулях на градус Кельвина.
Первый закон термодинамики представляет собой закон сохранения и превра-
щения энергии применительно к термодинамическим процессам и формулируется
следующим образом: подведенная к системе теплота Q (или отведенная от нее)
10
Характеристика термодинамических процессов
Изменение энтропии As = с0 !п As = ср In -Ь- As = R In i 0 = SV J н ьЪ i c c II < 7 e O 4
Уравнения первого закона термодина- мики | dq — du | j dq — du dl S и du = — dl j dq = du -j- dl
Теплота <N II sT 1 11 II <3- О II •4 X (T„ ~ Ti)
Внешняя работа о II S 1 QJ 11 D 1 «5. II I = R'l In plOl In = ₽2 P2 , =2,3P1O1lg~ Pi II I ' 1 ° "U ~ a *1 ь 1 777? 1 a b 1 ~ 7 —- * 1 । и * “ > 1 II II ~ II l = <Pi°i ~ Рг0»> = Г «-11 i II “1 c 2 1 ^1^ ь T J? - —1 e dT ii ex|e 11
। Зависимость 1 между параметрами 1 Ф II el| й ь^|ьС II a ] a -1« »I a II а] Й II D|“ i‘|a « V J Л V'
55 » Т О ОТ — 00 [ до 4-00
Процесс Изохорический V — const Изобарический p = const Изотермический pv ~ const Адиабатический b , pv = const Политропиче- ский pvn = const
11
расходуется на изменение внутренней энергии U системы и на Совершение ра-
боты L
dQi == dU dL
или в удельных величинах dq = du + dl Дж/кг, где dl = pdv; I — внешняя
работа газа. Из уравнения первого закона термодинамики как частные случаи
могут быть получены уравнения всех основных элементарных процессов, харак-
теристика которых приведена в табл; 1.3. Эти процессы протекают при постоян-
ном значении теплоемкости, причем наиболее общим случаем является политро-
пический процесс, характеризуемый постоянным показателем политропы
п = (ср — с)/(си — с).
В уравнении адиабаты pok = const показатель адиабаты для воздуха k « 1,4.
В уравнении политропы pvn = const показатель политропы п для различных
процессов может принимать любые числовые значения, но в каждом конкретном
процессе является постоянной величиной.
В большинство приведенных зависимостей входят величины, отнесенные
к единице массы газа, при этом предполагается, что в ходе процесса масса не
меняется. Это необходимо иметь в виду, так как в пневматических системах имеют
место процессы с переменной массой воздуха и при их рассмотрении необходимо
ее учитывать так же, как и энергию, которая подводится (отводится) с поступа-
ющим (вытекающим) воздухом.
1.3. ОСНОВНЫЕ ЗАКОНОМЕРНОСТИ ТЕЧЕНИЯ ГАЗОВ
Уравнение неразрывности потока: при установившемся движении газа массовый
расход одинаков во всех сечениях канала
G = pwf = const,
где w — скорость течения газа; f — площадь поперечного сечения канала.
Уравнение Бернулли: для любых сечений потока при установившемся движе-
нии сохраняется сумма напоров — скоростного ш2/2, пьезометрического р/р,
статического gz и потерянного на трение hTP, т. е.
w'j , г», wi , р, , , ,
z l’i z 1’2
где zt и г2 высота центра тяжести поперечного сечения потока в сечениях 1 и 2.
Ввиду малой плотности воздуха статический напор обычно не учитывается.
Если пренебречь теплообменом газа с окружающей средой, трением между
стенками канала и газом и внутри газа, то получим адиабатическое движение,
в котором отсутствуют внешний теплообмен и внутреннее тепловыделение. В этом
случае энтропия не меняется и движение называют изоэнтропическим.
Истечение газа из неограниченного объема. При изоэнтропическом движе-
нии газа при условии истечения из неограниченного объема (начальная скорость
равна нулю) массовый расход воздуха определяют по формуле, которой часто
пользуются при расчетах пневмосистем,
/ г т ~k+r~'
7гЛ«Т7.(7г)*-(^-) ' .•
где Pi и р2 — давление газа в неограниченном объеме и в некотором сечении ко-
роткого канала, куда истекает газ; р — коэффициент расхода.
Коэффициент расхода представляет собой отношение действительного рас-
хода воздуха к теоретическому. Он учитывает изменение расхода вследствие при-
нятых допущений, и обычно определяется экспериментально.
12
( 2 \~
U + 1 /
При k = 1,4
достигает максимального значения
При определенном отношении давлений, называемом критическим, расход
Ра \
Pi /.
(для воздуха) 0.528.
Процесс истечения газа при отношении давлений, большем чем критическое,
называют подкритическим, и расход определяют по приведенной выше формуле.
Если отношение давлений меньше критического, то процесс называют надкрити-
ческим и расход определяют по формуле
6-=>1'(тттГ7Г ’
Для воздуха
G* = 0,0404р./р1//7\,
1/____
К (k+l}RT
где G — в кг/с, f — в м2, pt — в Па, Tt — в К.
Различают два вида течения: ламинарное (слои потока движутся равномерно,
не смешиваясь) и турбулентное (частицы движутся в поперечном направлении,
приводя к перемешиванию потока). Переход от одного вида течения к другому
наступает при определенных условиях, характеризуемых числом Рейнольдса
Re = 2300
D 4ггш 4ггшр
Ко --------—---------,
*к Пд
где w — средняя по сечению канала скорость течения; г, — гидравлический ра-
диус, т. е. отношение площади поперечного сечения канала к его периметру.
Для каналов круглого сечения Re = te>pd/r]Tj, где d — диаметр канала.
При Re < 2300 имеет место ламинарный вид течения, при Re> 2300 —
турбулентный.
Числовые значения основных параметров воздуха приведены в табл. 1.4.
и 1.5.
Числовые значения основных параметров воздуха
Таблица 1.4
Параметр Условия Числовые значения
Плотность р, кг/м3 Удельный вес у, Удельный объем и, м3/кг р ~ 1,013-105 Па (760 мм рт. ст.), t = 20 °C 1,207 11,82 0,83
Газовая постоянная Я,Дж/(кг«Ю Сухой воздух Влажный воздух, относительная влажность 80 % 287 289
Коэффициент динамической вяз- кости Лд Н • с/м2 t = 20 °C 18,4-10~6
Теплоемкость Ср при постоянном давлении, Дж/(кг-К) При температуре 0—100 °C тепло- емкость практически постоянна 1,01-10s
Теплоемкость cv при постоянном объеме, Дж/(кг-К) 0,72-10’
13
Таблица 1.5
Плотность р воздуха при различных давлении и температуре
Давле- ние Плотность воздуха, кг/м3, прн температуре, °C
р. 10s, Па 0 10 20 30 40 50 60 70 80 90 100
0,98 1,25 1,21 1,17 1,13 1,09 1,06 1,03 1,00 0,97 0,94 0,92
1,96 2,51 2,42 2,33 2,26 2,19 2,12 2,05 1,99 1,94 1,88 1,83
2,94 3,76 3,62 3,50 3,38 3,27 3,18 3,08 2,99 2,91 2,83 2,75
3,43 4,39 4,23 4,08 3,95 3,83 3,71 3,60 3,49 3,39 3,30 3,21
3,92 5,01 4,83 4.67 4,51 4,37 4,24 4,11 3,99 3,88 3,77 3,67
4,41 5,64 5,44 5,25 5,07 4,92 4,77 4,62 4,49 4,36 4,24 4,13
4,90 6,26 6,04 5,84 5,64 5,46 5,30 5,14 4,99 4,85 4,71 4,59
5,39 6,89 6,64 6,42 6,20 6,01 5,82 5,65 5,49 5,33 5,18 5,04
5,88 7,52 7,25 7,00 6,77 6,56 6,35 6,16 5,98 5,81 5,65 5,50
6,37 8,14 7,85 7,59 7,33 7,10 6,88 6,68 6,48 6,30 6,13 5,96
6,86 8,77 8,46 8,17 7,90 7,65 7,51 7,19 6,98 6,78 6,60 6,42
7,35 9,40 9,06 8,75 8,46 8,20 7,94 7,70 7,48 7,28 7,07 6,88
7,85 10,02 9,66 9,34 9,02 8,74 8,47 8,22 7,98 7,75 7,54 7,34
8,33 10,55 10,27 9,92 9,60 9,29 9,00 8,73 8,48 8,24 8,00 7.80
8,83 11,28 10,88 10,51 10,46 9,84 9,53 9,25 8,98 8,72 8,48 8,25
9,32 11,90 11,48 11,09 10,72 10,38 10,06 9,76 9,47 9,21 8,95 8,71
9,81 12,53 12,09 11,67 11,29 10,93 10,59 10,27 9,97 9,69 9,47 9,17
1.4. СТРУКТУРА ПНЕВМАТИЧЕСКИХ СИСТЕМ
И УСТРОЙСТВ
В соответствии с ГОСТ 17752—72 пневматическая система — это техническая
система, состоящая нз устройств, находящихся в непосредственном контакте
с рабочим газом (воздухом).
Энергию сжатого воздуха промышленных пневматических систем используют
для приведения в движение механизмов и машин, автоматического управления
технологическими процессами, пескоструйной очистки, перемешивания растворов,
распыления красок, транспортирования сыпучих материалов, дутья в доменные
печн н т. п. Наибольшее применение энергия сжатого воздуха получила в пневмо-
приводах.
Классификация промышленных пневмоприводов по различным признакам
приведена на рис. 1.1. В компрессорном пневмоприводе сжатый воздух подается
Рис. 1.1. Классификация пневмоприводов
14
Рис. 1.2. Основные элементы пневмопривода
15
в пневмодвигатель компрессором, В аккумуляторном приводе сжатый воздух
поступает в пневмодвигатели из пневмоаккумулятора, предварительно заряжен-
ного от внешнего источника, не входящего в состав привода. Наиболее широкое 1
распространение в промышленности нашлн магистральные пневмоприводы, I
в которых сжатый воздух подается в пневмодвигатели от пневмомагистрали I
(заводской, цеховой и т. п.), не входящей в состав привода. Пневмоприводы, |
в которых сжатый воздух из пневмодвигателя поступает в атмосферу, называют (
приводами с разомкнутой циркуляцией. В пневмоприводах с замкнутой циркуля-
цией сжатый воздух из пневмодвигателя поступает во всасывающую пневмолинию.
Основные элементы, входящие в состав пневмоприводов, приведены
на рис. 1.2.
1.5. ОСНОВНЫЕ ПАРАМЕТРЫ
ПНЕВМАТИЧЕСКИХ УСТРОЙСТВ
К основным параметрам пневматических устройств относятся условный проход, ?
диапазон давления, расходная характеристика, параметры управляющего воз-
действия, параметры выхода, утечки, время срабатывания, допускаемая частота
включений, показатели надежности, размер, масса. f
Условный проход характеризует внутреннее проходное сечение пневматиче-
ского устройства. Ряды условных проходов и соотношение между условными про-
ходами и внутренними проходными сечениями устанавливаются СТ СЭВ 522—77. (
В пневмоприводах наиболее широко применяют устройства с условными
проходами 2,5—40 мм. При этом по СТ СЭВ 522—77 числовой ряд следующий, мм:
2,5; 3; 4; 5; 6; 8; 10; 12; 16; 20; 25; 32; 40. Для базовых моделей, как правило,
условный проход выбирают из ограниченного ряда, мм: 2,5; 4; 6; 10; 16; 25; 40.
Условный проход — параметр, удобный для выбора размера пневмоаппара-
тов различного функционального назначения из имеющихся размерных рядов.
Для пневмоаппаратуры многих зарубежных фирм основным размерным пара-
метром является размер присоединительной резьбы. Отметим, что условный про-
ход и размер присоединительной резьбы — понятия неоднозначные: при одина- >
ковой присоединительной резьбе аппараты могут иметь разные условные проходы. |
Условный проход аппарата неоднозначно определяет его расходную харак-
теристику, которая в зависимости от вида и величины местных внутренних сопро-
тивлений может быть различной при одинаковых условных проходах.
Диапазон давлении определяется минимальным и номинальным (максималь-
ным) значениями. Ряд значений и понятие номинального давления определены
в ГОСТ 12445—80. Под номинальным давлением понимают наибольшее мано-
метрическое давление, при котором оборудование должно работать в течение
установленного срока службы с сохранением параметров в пределах установлен-
ных норм.
Устройства высокого давления общепромышленного назначения рассчитаны
в основном на номинальное давление 0,63 и 1 МПа. Минимальное давление зави-
сит от конструктивного исполнения устройств. В устройствах могут применять
эластичные уплотнения, для герметизации которых требуется определенный
перепад давления или усилие прижатия к уплотняемой поверхности. Определен-
ное минимальное давление требуется также для преодоления сил трения при
перемещении распределительного элемента, преодоления усилия возвратных
упругих элементов и т. п.
Для пневматических устройств высокого давления минимальное давление
составляет 0,05—0,35 МПа.
Расходная характеристика проточного пневматического устройства опреде-
ляет количество (массу илн объем) воздуха, проходящего через него в единицу
времени в зависимости от величины и соотношения давлений на входе и выходе
устройства. Расходная характеристика пневматических устройств является одним
из основных параметров, определяющих быстродействие и величину потерь
давления в пневмосистемах.
В настоящее время применяют три способа задания расходных характе-
ристик:
16
1) величиной расхода при определенном перепаде давления и давлении на
входе или перепадом давления при определенных величинах расхода и давлении
на входе;
2) графиком, выражающим зависимость расхода от перепада давления при
определенном давлении на входе, илн серией графиков для различных значений
давления на входе;
3) параметром, характеризующим гидравлическое сопротивление устройства.
При первом способе определяют расходную характеристику только в одной
точке, причем обычно для разных устройств при различных условиях, что затруд-
няет сравнение и выбор устройств.
При втором способе расходную характеристику устройства определяют
достаточно полно, но при этом требуется большой объем экспериментальных
работ и данные получают в неудобной для практических расчетов форме.
При третьем способе параметр, задающий расходную характеристику,
удобен при выборе н сравнении пневматических устройств, пересчете величины
расхода для любых условий по простым формулам и определяется эксперимен-
тально достаточно простыми способами. В качестве такого параметра принимается
пропускная способность Ко, представляющая собой расход жидкости, м3/ч,
с плотностью, равной 1000 кг/м3, прн перепаде давления на устройстве 0,098 МПа
(ГОСТ 14691—69).
Зарубежные фирмы задают расходную характеристику параметрами Cv
। и fv, которые являются аналогами пропускной способности Ко, но выражены
в американской и британской системах единиц соответственно.
Правила экспериментального определения пропускной ‘способности Ко
регламентированы ГОСТ 14768—69 н в части требований к определению Ко
полностью открытых устройств применимы для проточных пневматических эле-
ментов (аппаратуры, трубопроводов и т. п.).
В соответствии с ГОСТ 14768—69
Ко = Qs/V"Kp,
где Qb — объемный расход воды, м3/ч; Ар — перепад давления, Па.
! Существуют следующие зависимости между пропускной способностью Ко,
перепадом давления и объемным расходом воздуха, приведенным к нормальным
условиям по СТ СЭВ 521—77, т. е. к температуре 293 К (20 °C) н давлению
101 325 Па:
для подкритического режима течения
< Q = СКо V(Рг — р2) р2,
для надкритического режима течения
Q = СКо pj^,
где Pi и р2 — абсолютное давление сжатого воздуха соответственно на входе
и выходе, Па; С— постоянная (С = 4,70 при Q в м3/мин н Kv в м3/ч; С= 284
при Q и Ко в л/мин).
Приведенные значения С определены при допущении, что температура на
входе в устройство равна 293 К. При изменении температуры на 10 °C ошибка
t расчетов не превышает 2%.
’ Этот способ определения расходной характеристики позволяет находить
любую величину из четырех Q, Kv, Pi, р2. Например, на практике часто возникает
задача определения падения давления (рх—р2) на устройстве прн заданных давле-
нии р2 на выходе н расходе Q. Если известно Ко устройства, то
Pi-P2 = Q2C2/(^2)-
Другой типовой задачей является выбор пневмоаппарата, например распре-
делителя, с требуемой пропускной способностью, если известны Q, pt н р2. В этом
случае определяют
1г Q
1\у ----- .
с V (Pi — р2) р2
17
и выбирают аппарат с требуемым значением Kv. Последнее выражение может быть
использовано для экспериментального определения путем измерения величин
расхода Q воздуха и давления рх и р2.
Пропускная способность Kv цепи, состоящей из проточных устройств (уча-
стков, каждое из которых характеризуется пропускной способностью Kvt (i =
= 1, 2, .... п), определяется следующим образом: при параллельном соединении
Kv — Kvi + KV2 + • • • + К,.п и при последовательном соединении
Величины С„ и fv характеризуют расход воды через устройство соответственно
в галлонах США и английских галлонах в 1 мин при перепаде давления
В 1 фунт-сила на кв. дюйм.
Соотношение между Ко, Cv и fv приведены в таблице 1.6.
В расчетах пневматических устройств расходную характеристику выражают
также через эффективную площадь проходного сечення устройства f3 = [if,
где р, — коэффициент расхода устройства; f— геометрическая площадь проход-
ного сечения устройства.
Эффективную площадь, м2, обычно определяют экспериментально
гЭ_________Q_______
~ О,454р,(р (р^) ’
где Q— объемный расход воздуха, приведенного к нормальным условиям (м3/мин);
Pi и р2 — абсолютное давление на входе и выходе устройства, Па; (р (pjpi) —
расходная функция, значения которой приведены на рис. 11.4 и в приложении
работы [2].
Числовой коэффициент в выражении для f3 определен при допущении, что
температура на входе в устройство равна 293 К (20 °C). При изменении темпе-
ратуры на 10 °C погрешность расчетов не превышает 2%.
Если при работе устройства отношение p2/pi изменяется в широких пределах,
то для уменьшения погрешности расчетов с использованием расходной функции
<р (p2/pi) данного вида рекомендуется [2] вводить поправочный коэффициент 0,95
сэ______0>95Qmax
~ 0,454p1<p (p2/pj) ’
где Ушах — наибольшее прн данном р, значение расхода (соответствующее над-
критическому режиму течения); ф (Р2У1) = 0,2588.
Выражения для определения эффективной площади f проходного сечения
цепи последовательно и параллельно соединенных устройств аналогичны при-
веденным выше выражениям для пропускной способности Kv. Пропускная спо-
собность, м3/ч, и эффективная площадь, м2, связаны между собой выражением
Таблица I.
Соотношение между Kv, Cv и fv
Пара- метр Мэ/Ч CV галло- нов США в минуту англий- ских галло- нов в минуту
1 0,85 1,03
Cv 1,17 1 1,20
fv 0,97 0,83 1
К» = 5- Ю4Л
Иногда расходные характери-
стики задают длиной эквивалентного
трубопровода, т. е. длиной трубопро-
вода, эквивалентного по пропускной
способности данному устройству.
Для приведения объемного рас-
хода сжатого воздуха к заданным
условиям по давлению и температуре
используют зависимости
Qu — Q Р/Рн
или
QH = Q ,
Рп>
18
где Qa, ри, рн и Та — объемный расход, плотность, абсолютное давление и тем-
пература воздуха при заданных условиях; Q, р, р и Т — то же при рабочих
условиях.
Объемный расход воздуха, который указывается в технических данных
пневматических устройств (при отсутствии специальных оговорок) представляет
собой объем, который заняла бы данная масса воздуха при нормальных условиях.
Под параметрами управляющего воздействия понимают: минимальную вели-
чину усилия, необходимого для переключения устройства при механическом
управлении и управлении от оператора; величину давления управления при пнев-
матическом управлении; параметры электрического тока и мощность электро-
магнита при электромагнитном и электропневматическом управлении.
Величина минимального усилия переключения распределительного элемента
(минимального давления управления) складывается из усилия, необходимого
для преодоления трения, и усилия, вызванного действием давления на нераз-
груженные площади распределительного элемента. В частности, в распредели-
телях с пневматическим возвратом давление управления должно преодолеть
действие давления питания, подведенного к противоположной, меньшей по пло-
щади стороне поршня привода распределительного элемента. В этом случае
в технических данных указывается, что давление управления не должно быть
меньше давления питания, или приводится зависимость первого от второго.
Параметры управляющего воздействия можно выразить также в виде допу-
скаемого диапазона или номинальных значений давления, расхода, перемеще-
ния, длительности входного сигнала и др.
Параметры выхода определяют состояние выходного сигнала в зависимости
от состояния входов, изменения давления питания, настройки и т. п. (например,
изменение давления на выходе при изменении давления на входе или расхода
воздуха для редукционных пневмоклапанов; задержка пневматического сигнала
для пневмоклапанов выдержки времени, длительность выходного импульса для
импульсатора и др.).
Утечки воздуха в пневматических устройствах в соответствии
с ГОСТ 18460—73 допускаются только в подвижных соединениях, например, где
уплотнение осуществляется за счет малого зазора (в притертых золотниковых
парах). Величину утечек (расход через уплотнительные устройства) можно выра-
жать в единицах расхода воздуха (в случае непосредственного измерения коли-
чества вытекаемого воздуха) или характеризовать величиной падения давления
(в случае, когда утечку воздуха определяют косвенным методом по падению его
давления в определенном объеме).
Под временем срабатывания пневматических устройств обычно понимают
промежуток времени от момента приложения управляющего воздействия (напри-
мер, начала роста давления в полости управления) до момента полного переклю-
чения рабочего органа или до достижения заданного давления в определенном
объеме, подсоединенном к выходу пневматического устройства. Время срабаты-
вания устройства зависит от многих факторов (конструкции, размера, нагрузки,
длины и сопротивления линий управления, давления и др.) и в зависимости от
них может иметь значения от тысячных долей до нескольких секунд.
Время срабатывания пневматических устройств, как и их расходная харак-
теристика, имеет большое значение, особенно для высокопроизводительного
оборудования (манипуляторов, прессов, машин точечной сварки и др.).
Частота включений обычно связана с временем срабатывания (зависит от
тех же факторов) и может достигать 40 Гц.
Надежность привода — это свойство привода выполнять заданные функции,
сохраняя свои эксплуатационные показатели в заданных пределах в течение тре-
буемого промежутка времени или требуемой наработки. Надежность привода
обусловливается безотказностью, ремонтопригодностью, соохраняемостью, дол-
говечностью.
Показателями безотказности привода являются: вероятность безотказной
работы, средняя наработка до отказа или на отказ, параметр потока отказов,
интенсивность отказов. Основным показателем ремонтопригодности привода слу-
жит вероятность восстановления в заданный период времени или среднее время
восстановления. Основным показателем сохраняемости привода является гамма-
19
процентный срок сохраняемости, основными показателями долговечности —
средний срок службы, средний ресурс, гамма-процентный ресурс.
Определения этих показателей даны в ГОСТ 13377—75 и СТ СЭВ 878—78.
Надежность пневматических устройств высокого давления обычно выра-
жается двумя показателями: гамма-процентной наработкой до отказа и гамма-
процентным ресурсом. В зависимости от принципа действия пневматических
устройств, имеющих циклический (например, у распределителей, логических
элементов) или нециклический (у фильтров, редукционных клапанов) характер
работы, наработка на отказ и ресурс выражается в циклах и часах соответственно.
Для пневматических устройств циклического действия ресур обычно находится
в пределах от 3—5 до 10—20 млн. циклов в зависимости от назначения и кон-
струкции; для устройств нециклического действия — от 5000 до 12 000 ч.
Размеры и масса для большинства пневматических устройств являются
одними из наиболее общепринятых показателей качества. На практике часто
оценивают не абсолютные их значения, а удельные показатели, представляющие
собой отношение объема (массы) устройства к основному параметру (расходной
характеристике, развиваемому усилию н т. п.).
1.6. РАБОЧЕЕ ДАВЛЕНИЕ И РАСХОД СЖАТОГО ВОЗДУХА
Давление. Выбор оптимального рабочего давления сжатого воздуха для пневма-
тических устройств и систем является одним из важнейших условий их эффектив-
ной эксплуатации. Повышение уровня давления позволяет уменьшить размер
силовых исполнительных устройств при неизменном развиваемом усилии, что
в некоторых случаях имеет решающее значение. Однако, при повышении давле-
ния увеличивается расход сжатого воздуха в системах управления и возрастает
шум.
На основании опыта эксплуатации и технических характеристик пневмати-
ческих устройств рекомендуются следующие значения давления на входе: для
пневмоприводов различных машин и систем механизации станков, прессов и т. д.
0,6—1 МПа и выше, если размер исполнительных механизмов играет решающую
роль (например, у пневмоприводов многоэлектродных сварочных машин); для
пневматических систем автоматического управления (построенных на устройствах
высокого давления) 0,4—0,6 МПа; для ручного инструмента, трамбовок, вибра-
торов 0,4—0,6 АШа; для форсунок, пескоструйных аппаратов, краскораспыли-
телей, обдувочных сопел, распушающих устройств 0,2—0,4 МПа.
При значительном количестве потребителей воздуха с разным уровнем давле-
ния целесообразно иметь сети высокого 0,7—1 МПа и выше, и низкого 0,2—
0,4 МПа давлений, что дает экономию энергетических затрат на производство
сжатого воздуха. Для снабжения потребителей сжатого воздуха давлением свыше
0,8 МПа обычно применяют индивидуальные или дожимающие компрессоры.
При выборе давления необходимо принимать во внимание возможные его
колебания в заводской сети при одновременном подключении большого числа
потребителей и потери давления при транспортировании воздуха по трубопро-
воду от компрессорной до потребителя. В правильно построенных пневмосетях
предприятий колебания давления обычно не превышают 0,05 МПа, а потери давле-
ния 5—10% от рабочего давления.
Расход. При определении расхода сжатого воздуха обычно применяют сле-
дующий порядок расчета. По каталожным или расчетным данным определяют
расход воздуха для единицы оборудования каждого типа и размера. Для практи-
ческих целей можно пользоваться средними значениями расхода воздуха для
различных потребителей, приведенными в табл. 1.7 [6] и учитывающими увеличе-
ние утечек в процессе эксплуатации, которое может привести к увеличению
первоначального расхода воздуха на 20—30% и более. Расход воздуха, потребляе-
мый пневмоцилиндром, определяют по данным, приведенным в гл. 2.
Для каждой группы однотипных потребителей определяют коэффициент
использования
7%: = ^оп/^к>
20
Где ton— оперативное время работы оборудования; tK — календарное время за
учетный период (за смену, сутки и т. п.), состоящее из оперативного времени
н времени простоев и пауз в рабочее время.
Общий расход воздуха по цеху или участку определяют за календарное
время /к
1=1
где Zi — число потребителей одного типа и размера; qi — номинальный расход
воздуха на единицу однотипного оборудования (см. табл. 1.7) за время /к; ф; —
коэффициент, учитывающий непроизводительные расходы в результате утечек,
периодического заполнения и опорожнения трубопроводов и т. п. (обычно ф(- =
= 1,1 — 1,3); п—число различных потребителей.
Таблица 1 7
Средние значения расхода воздуха и коэффициента использования
для различных потребителей
Потребитель Характеристика Давле- ние, МПа Расход воздуха, м3/мин Коэффи- циент использо- вания к и
Ковочные и штам- повочные молоты Усилие, кН: 7 10 15 20 30 50 100 120 150 0,6 10,0 13,0 16,5 20,0 24,0 30,0 40,0 55,0 60,0 65,0 0,65 — 0,75 0,60 — 0,70 0,60 — 0,70 0,60 — 0,70 0,60 — 0,70 0,60 — 0,70 0,50 — 0,65 0,40 — 0,50 0,40 — 0,50 0,40 — 0,50
Молотки: рубилъио-че- канные клепальные Мощность, кВт: 0,37 — 0,51 0,12 — 0,74 0,5 —0,6 0,6—0,8 0,7 —1,5 0,40 — 0,50 0,30 — 0,45
Сверлильные ма- шины Наибольший диаметр сверления, мм: 8 10 13 22 0,5 —0,6 0,5 —0,8 0,6 —0,9 0,7—1,0 0,9 —1,7 0,50 — 0,60 0,50 — 0,60 0,50 — 0,60 0,30 — 0,50
Шлифовальные машины Наибольший диаметр круга, мм: 25 50 125 150 0,5-0,6 0,6 —0,8 1,0—1,3 1,6-2,1 1,7 —2,2 0,40 — 0.80
Гайковерты и клю- чи Наибольший диаметр резьбы, мм: 12 — 14 20 — 22 28 — 32 0,5 —0,6 0,3 —0,7 1,2—1.5 1,3 —2,5 0,30 — 0,60
Напильники Мощность 0,15 кВт 0,5 —0,6 0,2 —0,3 0,30 — 0,60
21
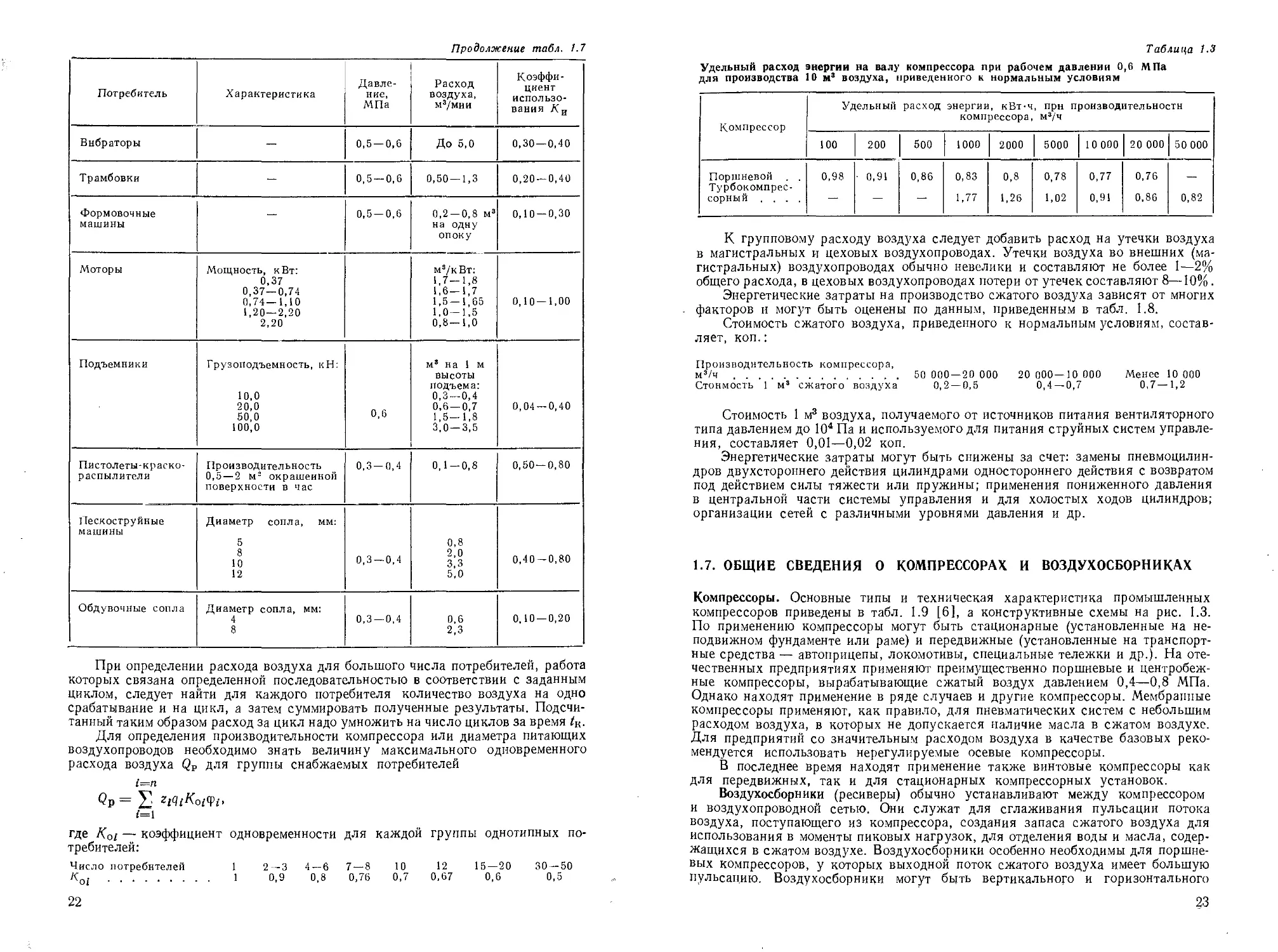
Продолжение табл. 1.7
Потребитель Характеристика Давле- ние, МПа Расход воздуха, м3/мии Коэффи- циент использо- вания Ки
Вибраторы 0,5 —0,6 До 5,0 0,30 — 0,40
Трамбовки — 0,5 —0,6 0,50 — 1,3 0,20 — 0,40
Формовочные машины 0,5 —0,6 0,2 —0,8 м3 на одну опоку 0,10 — 0,30
Моторы Мощность, кВт: 0,37 0,37—0,74 0,74—1,10 1,20—2,20 2,20 м3/кВт: 1,7—1,8 1,6—1,7 1,5—1,65 1,0—1,5 0,8—1,0 0,10—1,00
Подъемники Грузоподъемность, кН: 10,0 20,0 50,0 100,0 0,6 м8 на 1 м высоты подъема: 0,3 —0,4 0,6 —0,7 1,5—1,8 3,0 —3,5 0,04 — 0,40
Пистолеты-краско- распылители Производительность 0,5 — 2 м2 окрашенной поверхности в час 0,3 —0,4 0,1 —0,8 0,50 — 0,80
Пескоструйные машины Диаметр сопла, мм: 5 8 10 12 0,3 —0,4 0,8 2,0 3,3 5,0 0,40 — 0,80
Обдувочные сопла Диаметр сопла, мм: 4 8 0,3 —0,4 0,6 2,3 0,10 — 0,20
При определении расхода воздуха для большого числа потребителей, работа
которых связана определенной последовательностью в соответствии с заданным
циклом, следует найти для каждого потребителя количество воздуха на одно
срабатывание и на цикл, а затем суммировать полученные результаты. Подсчи-
танный таким образом расход за цикл надо умножить на число циклов за время /к-
Для определения производительности компрессора или диаметра питающих
воздухопроводов необходимо знать величину максимального одновременного
расхода воздуха QP для группы снабжаемых потребителей
1=п
Qp = £
Г=1
где Koi — коэффициент одновременности
требителей:
Число потребителей 1 2 — 3 4 — 6
Ко[ ..................... 1 0,9 0.8
для каждой группы однотипных по-
7 — 8 10 12 15 — 20 30 — 50
0,76 0,7 0,67 0,6 0,5
22
Таблица 1.3
Удельный расход энергии на валу компрессора при рабочем давлении 0,6 МПа
для производства 10 м3 воздуха, приведенного к нормальным условиям
Компрессор Удельный расход энергии, кВт*' компрессора , прн производительности м3/ч
100 200 500 1000 2000 5000 10 000 20 000 50 000
Поршневой . . Турбокомпрес- 0,98 0,91 0,86 0,83 0,8 0,78 0,77 0,76 —
сорный .... — — — 1,77 1,26 1,02 0,91 0,86 0,82
К групповому расходу воздуха следует добавить расход на утечки воздуха
в магистральных и цеховых воздухопроводах. Утечки воздуха во внешних (ма-
гистральных) воздухопроводах обычно невелики и составляют не более 1—2%
общего расхода, в цеховых воздухопроводах потери от утечек составляют 8—10% .
Энергетические затраты на производство сжатого воздуха зависят от многих
факторов и могут быть оценены по данным, приведенным в табл. 1.8.
Стоимость сжатого воздуха, приведенного к нормальным условиям, состав-
ляет, коп.:
Производительность компрессора,
м3/ч.......................... 50 000 — 20 000 20 000—10 000 Менее 10 000
Стоимость 1 м3 сжатого воздуха 0,2 —0,5 0,4 —0,7 0,7—1,2
Стоимость 1 м3 воздуха, получаемого от источников питания вентиляторного
типа давлением до 104 Па и используемого для питания струйных систем управле-
ния, составляет 0,01—0,02 коп.
Энергетические затраты могут быть снижены за счет: замены пневмоцилин-
дров двухстороннего действия цилиндрами одностороннего действия с возвратом
под действием силы тяжести или пружины; применения пониженного давления
в центральной части системы управления и для холостых ходов цилиндров;
организации сетей с различными уровнями давления и др.
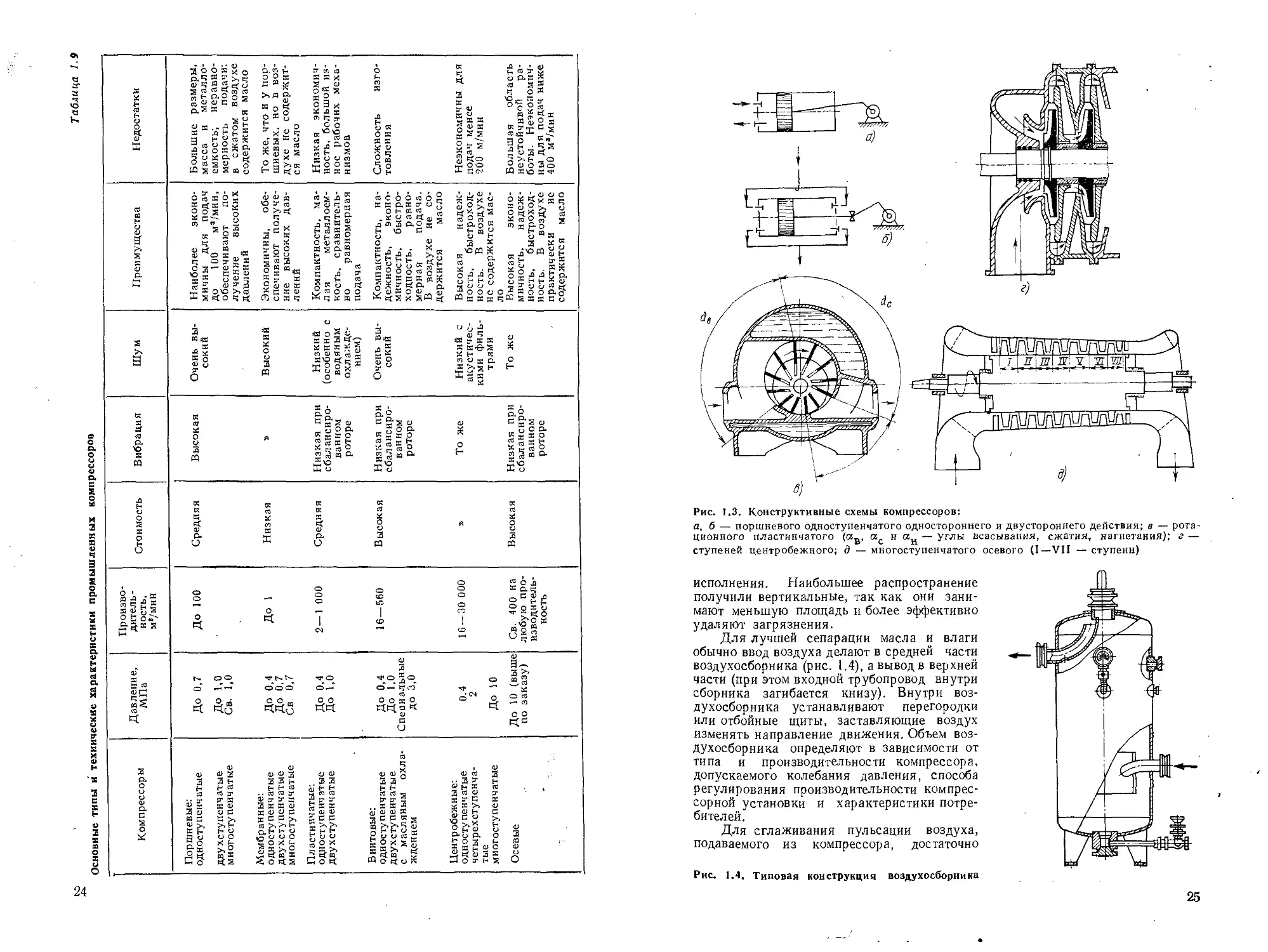
1.7. ОБЩИЕ СВЕДЕНИЯ О КОМПРЕССОРАХ И ВОЗДУХОСБОРНИКАХ
Компрессоры. Основные типы и техническая характеристика промышленных
компрессоров приведены в табл. 1.9 [6], а конструктивные схемы на рис. 1.3.
По применению компрессоры могут быть стационарные (установленные на не-
подвижном фундаменте или раме) и передвижные (установленные на транспорт-
ные средства — автоприцепы, локомотивы, специальные тележки и др.). На оте-
чественных предприятиях применяют преимущественно поршневые и центробеж-
ные компрессоры, вырабатывающие сжатый воздух давлением 0,4—0,8 МПа.
Однако находят применение в ряде случаев и другие компрессоры. Мембранные
компрессоры применяют, как правило, для пневматических систем с небольшим
расходом воздуха, в которых не допускается наличие масла в сжатом воздухе.
Для предприятий со значительным расходом воздуха в качестве базовых реко-
мендуется использовать нерегулируемые осевые компрессоры.
В последнее время находят применение также винтовые компрессоры как
для передвижных, так и для стационарных компрессорных установок.
Воздухосборники (ресиверы) обычно устанавливают между компрессором
и воздухопроводной сетью. Они служат для сглаживания пульсации потока
воздуха, поступающего из компрессора, создания запаса сжатого воздуха для
использования в моменты пиковых нагрузок, для отделения воды и масла, содер-
жащихся в сжатом воздухе. Воздухосборники особенно необходимы для поршне-
вых компрессоров, у которых выходной поток сжатого воздуха имеет большую
пульсацию. Воздухосборники могут быть вертикального и горизонтального
23
Основные типы и технические характеристики промышленных компрессоров
Недостатки ioo’So О-5Н iron о Е £ «а-Й о ° я хх« >- 5 о о-в с » a S о g я «а оЗк » '§=|| sS O«g £Й= Л я», r?sh - 1^ IsiOl h'a§ P рЛ* xF» As S&SaS И 2 <y S в о H a ef о Л x x x О f- X c cv Й s £ X Ч’
Преимущества о « я о _ i ф д s s Ь 5 я с 6 6 я 6 2 х ef 5! <□ A « к ej X к § 'О X го S Ф Ч 5 X к о. К =Г о 5 X о О 5.® 5 X rf ll 40 ч 03 X Ь. * О Ф св X о X 3 X з х 3J«oS « 528 £ = £g §s25§s §S;L “ . я «ggSgSg S - й 2s =* 'О В с?,<и я ® IS С J3 Е $ 2 ° 2 о 5 О J3 л n о ° j£ J3 н о. sSg'gETS ф5§£ Sgggg Sgsg £«й wS gggw Sgg&s
Шум «« » sssSo “« e?§s s л® О £555*5 д S = =-&s s —> “ f i л Ф X св я я X £ Ь* св 58 з 5 й.® & 2. Z ' « х 8 S * Ж 5 S’®н н О ° “ ° О ’о®
i Вибрация । Высокая » Низкая при сбал ансиро- ванном роторе Низкая при сбалансиро- ванном роторе То же Низкая при сбалансиро- ванном роторе
Стоимость к 0» к х к X св СК л св Я g Я £ £ < ет еС О л О Ф S Ф О о &• *г- сь S 3 О х О Щ и
1 I Произво- 1 дитель - ность, I м8/мин ! До 100 До 1 | 2—1 000 । 16 — 560 16 — 30 000 Св. 400 на любую про- изводитель- ность
1 Давление, МПа 1 о £ 3 5 ь- о о Ч Т° Т.°5® «=> и 2 o' o'о’o' О—Г О«—Гч<*3 -ч* ’'-'£ О О m О О - о 0 О о S о <=>см о 2 2 « «3 адЗ «ч чч=« 4 о 5
Компрессоры (в О) <х> 5 > <1> о) й> з <у <х> з о> ф о) о) q о> св з 3 2 ь 3 3 н 3 3 S3 'л (-• f“ 1- Н св t- t- t- f- Ф fr« X св Св св . . Св Св 3" £ св св ГО ГО >5 ЗГОФу • • • у pr S Фз-ЕяЛуй. «Т ST S s S' Е к ф я s ф 2 х я ф а я х .. я я f £Я>»ф 2 ф Ф С ЯФФС «ФФ d) Ф Ф X ?, ф н с ЙЕ Е>> X с с >> я с с 3 С с ’S £с° >> ££ &S £.&но S&& §&’Ё’5й °_&S S а ди со Л, <j о о ^>фо 2 ф о го ® P-ось о 2 ~ О К 5 О X и га о и 5 О X 2 “ Ь о 3 и Д р- X >. ° Я X X О 5 X Е S >, 3 Е S Й Ф О ф г2 < ик £ < и Я ДеГад 5 е* и 5 Д < ф 3 Я ф Со fits <ot(2 Сс< CQ О е£ О X Cosi-2 О
24
Рис. 1,3. Конструктивные схемы компрессоров:
а, б — поршневого одноступенчатого одностороннего и двустороннего действия; в — рота-
ционного пластинчатого («в, «с и — углы всасывания, сжатия, нагнетания); г —
ступеней центробежного; д — многоступенчатого осевого (I—-VII — ступени)
исполнения. Наибольшее распространение
получили вертикальные, так как они зани-
мают меньшую площадь и более эффективно
удаляют загрязнения.
Для лучшей сепарации масла и влаги
обычно ввод воздуха делают в средней части
воздухосборника (рис. 1.4), а вывод в верхней
части (при этом входной трубопровод внутри
сборника загибается книзу). Внутри воз-
духосборника устанавливают перегородки
или отбойные щиты, заставляющие воздух
изменять направление движения. Объем воз-
духосборника определяют в зависимости от
типа и производительности компрессора,
допускаемого колебания давления, способа
регулирования производительности компрес-
сорной установки и характеристики потре-
бителей.
Для сглаживания пульсации воздуха,
подаваемого из компрессора, достаточно
Рис. 1.4. Типовая конструкция воздухосборника
25
Таблица 1.10
Сравнительные данные для выбора системы управления
Критерий сравнения Система
пневматическая гидравлическая электрическая
Общий КПД силовой си- стемы Потерн энергии при пе- редаче Максимальная скорость передачи сигнала Размер систем: логическ нх силовых Скорость исполнительных механизмов Плавность перемещений н точность останова в любом положении Удары в конце хода Чувствительность к пе- регрузкам исполнитель- ных механизмов Логические элементы: частотные х ар акте- ристики, Гц срок службы, цикл Редко превышает 30 % Меньше, чем в гидравли- ческой До 360 м/с Меньше чем у гидравли- ческой, сравнимы с размером эл ектр оконта ктно й Как правило, больше, чем гидравлической Высокая Практически ие обеспечи- вается без применения спе- циальных устройств Сравнительно большой удар. Обычно демпфирующие уст- ройства встроены в цилиндры При значительных перегруз- ках останавливаются без по- ломок Высокого давления до 40, среднего до 18, низкого до 250 Высокого давления (10—20) 10*. среднего (1 — 10) 10е, низкого св. 10® Менее 70 % Большие 1000 м/с Большой Наименьший при высоком давлении Ниже, чем у пневматических и электрических Высокая и легко регули- руемая Практически отсутствуют То же, что и у пневмати- ческой, но перегрузки вызы- вают повышенный нагрев жидкости и расход энергии До 100 До 5-10® Менее 90 % Наименьшие 300 000 м/с Наименьший при электронных Большой по сравнению с гидравлической и пневматической Ниже, чем у пневматической Лучше по сравнению с пневматической, но хуже, чем у гидравлической Сравнительно большой удар. Необходима установка демпфирующих устройств Чувствительна. Длительные перегрузки вы- водят из строя двигатели Электроконтактиая до 200, электронная до 10? Электроконтактиая 5• 10*—2*10®, электрон- ная — практически неограничен
Продолжение табл. 1.10
Критерий сравнения Система
пневматическая гидравлическая электрическая
стоимость, руб. Высокого давления 4-—12, среднего 1—4, низкого 1 — 2,5 8 — 20 Э лектроконтактная 1,5—17, электронная 0,5—12
размер Низкого давления меньше по сравнению с системами среднего и высокого давле- ния Больше по сравнению с пневматической Электроконтактиая сравнима с пневмати- ческой, наименьший у электронной
Время срабатывания вы- ходных устройств 0,02—0,1 0,06 — 0,1 0,05—0,15
Пожаро- и взрывоопас- ность Применима для работы в по- жаро- и взрывоопасных условиях Пожаро- и взрывобезопасна при использовании в качест- ве рабочей среды негорючих жидкостей Требуется применение устройств в пожаро- и взрывобезопасном исполнении, что увели- чивает стоимость в 2 — 3 раза
Влияние запыленности и влажности окружающей среды Практически ие влияют на р аб ото спо со бн о сть Приводят к загрязнению ра- бочей жидкости при разгер- метизации бака. Требуется периодическая замена рабо- чей жидкости Влияет на работоспособность. Требуется специальное исполнение аппаратуры
Влияние магнитных по- лей Не влияют иа работоспособность Могут в ызвать ложные срабатывания
Влияние концентрирую- щего излучения Может вывести из строя устройства, содержащие резинотехни- ческие изделия Выводит из строя элементы, нарушает свойства изоляционных материалов
Накопление энергии Обеспечивается установкой простых емкостей Обеспечивается установкой достаточно сложных и гро- моздких гидропневмоаккуму- ляторов Обеспечивается установкой громоздких электрических аккумуляторов
Монтаж, демонтаж и эксплуатация линий пе- редачи энергии Не вызывает трудностей. Возвратные трубопроводы обычно не требуются Гораздо сложнее, чем пневмосистем, так как при негерметичности вытекшее масло загрязняет рабочее по- мещение и создает опасность взрыва. Возвратные трубопро- воды необходимы Не вызывает трудностей, однако имеется опасность поражения током при поврежде- нии изоляции
установить воздухосборник, объем которого в 25—40 раз превышает объем
цилиндра компрессора. Для компенсации пиковых расходов в момент одновремен-
ной работы наибольшего числа потребителей объем воздухосборника необходимо
принимать'болыпим, от 1/120 до 1/60 часовой производительности компрессора.
Приведенные данные являются ориентировочными. Более точно, применительно
к конкретным условиям, объем воздухосборника можно определить расчетом
[5]. Назначение, технические требования, основные параметры и размеры воз-
духосборников приведены в ГОСТ 9028—76 и в работе [4].
1.8. СРАВНИТЕЛЬНАЯ ОЦЕНКА ПНЕВМАТИЧЕСКИХ
И ДРУГИХ СИСТЕМ УПРАВЛЕНИЯ
При автоматизации технологических процессов и оборудования проектировщик
часто сталкивается с проблемой выбора оптимальной — по заданным условиям —
системы управления (СУ) и устройств для ее реализации. Для выбора СУ можно
использовать данные табл. 1.10.
Пневматические СУ значительно уступают по скорости передачи сигналов
электрическим и гидравлическим СУ, но превосходят по сроку службы электро-
контактные и электрогидравлические. Гидравлические СУ превосходят электри-
ческие и пневматические по точности и диапазону регулирования скорости испол-
нительных механизмов. Для более полного использования достоинств различных
устройств автоматики в СУ целесообразно в ряде случаев сочетать пневматические
устройства с гидравлическими или электрическими. Так, недостаточные плавность
перемещения пневматических исполнительных механизмов и уровень передавае-
мой мощности могут быть устранены применением пневмогидравлического при-
вода, а недостаточную скорость передачи пневматического сигнала, особенно
при большой протяженности цепей управления, можно при необходимости ком-
пенсировать использованием электропневматических и электронных СУ.
СПИСОК ЛИТЕРАТУРЫ
1. Бурдун Г. Д. Справочник по Международной системе единиц. М.: Издательство
стандартов. 1977. 232 с.
2. Герц Е. В., Крейнин Г. В. Расчет пневмоприводов. М.: Машиностроение, 1975.
272 с.
3. Кириллин В. А., Сычев В. В., Шейндлин А. Е. Техническая термодинамика. М.:
Энергия, 1974. 447 с.
4. Правила устройства и безопасной работы сосудов, работающих под давлением.
М.: Металлургия, 1971. 80 с.
5. Френкель М. И. Поршневые компрессоры. Теория, конструкции и основы проек-
тирования. Л.: Машиностроение, 1969. 744 с.
6. Pneumatic Handbook. 4 th edition. Trade and Technical Press Ltd., Morden, Surrey,
England, 564 p.
Глава 2
ПНЕВМОДВИГАТЕЛИ
В пневмодвигателях энергия сжатого воздуха преобразуется в энергию движения
выходного звена. Они предназначены для приведения в движение рабочих орга-
нов машин, выполнения различных вспомогательных операций и т. п. Различают
пневмодвигатели с поступательным движением выходного звена; поворотные
с ограниченным углом поворота выходного звена; пневмодвигатели с неограни-
ченным вращательным движением выходного звена (пневмомоторы).
Основные типы пневмодвигателей, их назначение и области применения при-
ведены в табл. 2.1 [1—13].
Пневмодвигатели с поступательным движением выходного звена разделяют
на поршневые, мембранные, сильфонные, камерные и шланговые. Наибольшее
распространение получили поршневые пневмодвигатели, которые называют также
пневмоцилиндрами. Различают двухпозиционные и многопозиционные двигатели.
Поворотные пневмодвигатели могут быть поршневыми или пластинчатыми.
Пневмомоторы по конструктивным признакам разделяют на поршневые, мембран-
ные, пластинчатые, винтовые и турбинные (см. табл. 2.1).
Остановимся подробнее на некоторых наиболее распространенных типах
двигателей.
2.1. ПОРШНЕВЫЕ ПНЕВМОДВИГАТЕЛИ
В пневмоцилиндрах происходит преобразование потенциальной энергии сжатого
воздуха в механическую энергию поршня.
В пиевмоцилиидрах одностороннего действия давление сжатого воздуха
действует на поршень только в одном направлении, в другую сторону поршень
со штоком перемещается под действием внешних сил (рис. 2.1) или пружины
(рис. 2.2). Такие пневмоцилиндры с пружинным возвратом обычно используют
для выполнения небольших перемещений (0,8—1,5) D, так как встроенная пру-
жина, сжимаясь, значительно снижает усилие, развиваемое поршнем.
В пиевмоцилиидрах двустороннего действия перемещение поршня со штоком
под действием сжатого воздуха происходит в двух противоположных направле-
ниях. Пневмоцилиндры этого типа нашли наибольшее применение в промышлен-
ности. В зависимости от предъявляемых требований их различают как по кон-
структивным параметрам, так и по схемам соединения с пневматической системой
и атмосферой.
Пневмоцилиндры двустороннего действия изготовляют с ходом поршня от
нескольких миллиметров до 6—7 м. Ход поршня следует принимать из ряда по
ГОСТ 6540—68. Пневмоцилиндры с ходом поршня более (8—10) D обычно изго-
товляют по индивидуальным заказам, так как для обработки гильз цилиндров
и штоков необходимо специальное оборудование.
На пиевмоцилиндры двустороннего действия без торможения (рис. 2.3, а)
и с торможением (рис. 2.3, б) диаметром 25—400 мм разработан и утвержден
29
Таблица 1.1
Основные типы пневмодвигателей, их назначение и области применения
Двигатели Схема двигателя Область применения
1. Пневмодвигатели с поступательным движением выход- ного звена Поршневые (пиев- моцилиндры) Одностороннего действия t Подъемники и механизмы, в ко- торых движение в одну из сто- рон производится под дейст- вием внешних снл или собствен- ного веса. Величина перемеще- ний до (8 — 10) D и усилий до 30 кН
1 -Г-1
Одностороннего действия с пру- жинным возвра- том —1 Зажимные, фиксирующие, пе- реключающие и другие устрой- ства. Величина перемещений до (0,8 —1,5) D и усилий 0,04 — 6 кН
Дву сторон него действия с одно- сторонним штоком _J 1 Транспортирующие, погрузоч- но-разгрузочные, зажимные и другие устройства. Величина перемещений до (8 — 10) D н усилий до 45 кН
.... 1,
Двустороннего действия с дву- сторонним штоком 1 L_ Устройства с требованиями ра- венства развиваемых усилий в обе стороны или управления конечными выключателями с нерабочей стороны штока. Ве- личина перемещений до (8 — 10) D и усилий до 30 кН
1
1
Сдвоенные (одно- илн двустороннего действия) Зажимные устройства с ограни- чением радиального размера цилиндров. Величина переме- щений до (0,8 —1,5) D и усилий до 60 кН
1 —-*-
Телескопические (одно- нли двусто- роннего действия) 1 J7I , Устройства со значительной ве- личиной перемещения рабочего органа при ограниченном осе- вом размере цилиндра в исход- ном положении
30
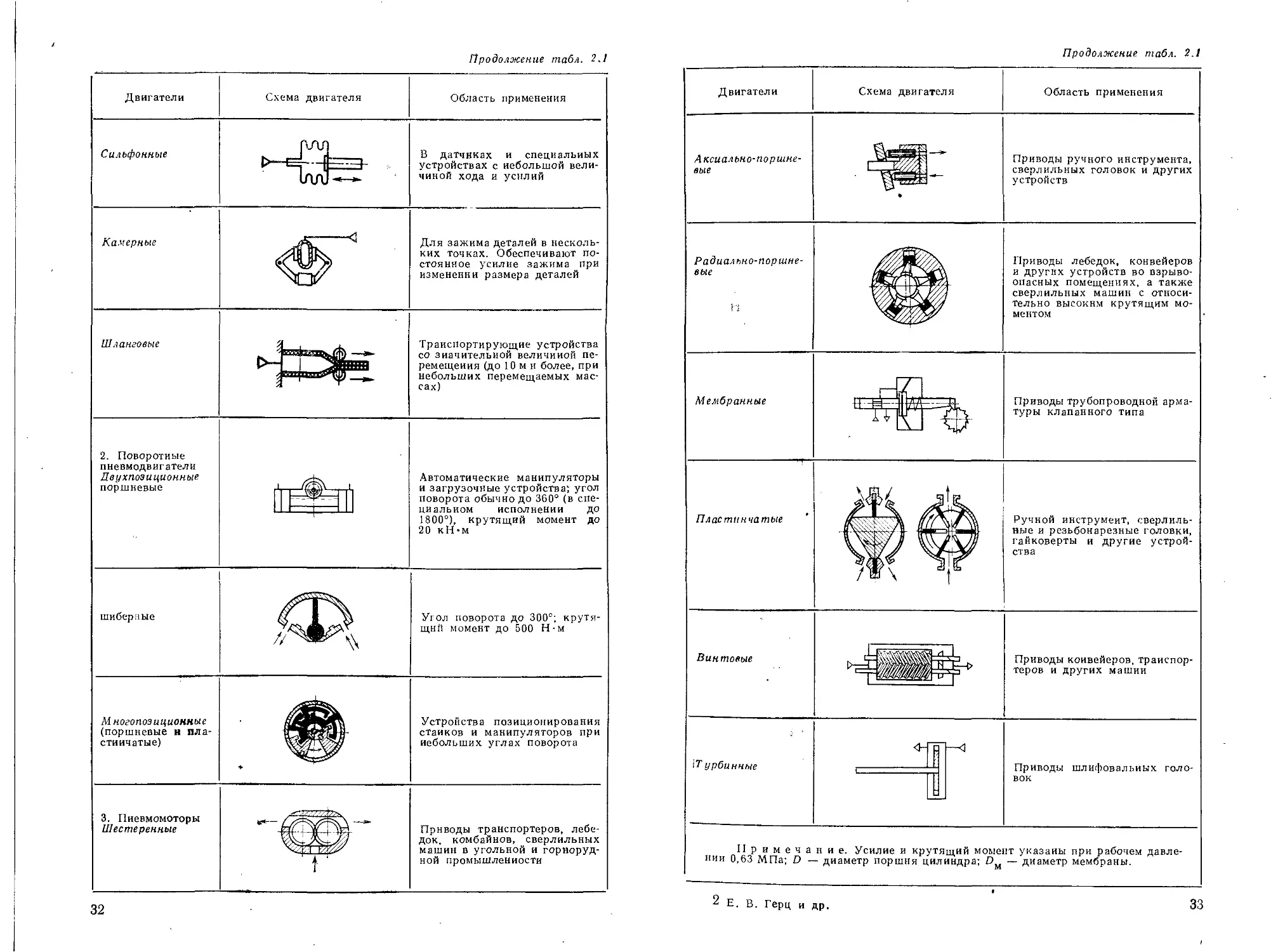
Продолжение табл. 2.1
Двигатели Схема двигателя Область применения
М ногопозиционные пневмоцнлиндры: двухпоршне- вые у1"-1 1 1 Устройства позиционирования, переключения передач и дру- гие. Обеспечивают несколько фиксированных положений ра- бочего органа
однопоршневые с отверстиями в гильзе 1 L 1 1 1 Y n 1 I
миогопоршие- вые 1 J
5 MI л Ф
Пневмоцилиндры со встроенным ре- сивером L _JZ_ Прошивочные, штамповочные, маркировочные, чеканочные и другие устройства. Обеспе- чивают высокую скорость в одном или обоих направлениях
Пневмоцилиндры с гибким штоком _J L_ Транспортирующие устройства со значительными перемеще- ниями и требованиями к мини- мальному размеру цилиндра. Величина перемещений до 20D и усилий до 45 кН. Трудно обе- спечить уплотнения гибкого штока.
Z
к
Вращающиеся пиевмоцилиндры одно- нли двусто- роннего действия: с полым и сплошным штоком Зажимные устройства станков для обработки пруткового ма- териала и штучных заготовок
сдвоенные То же, при необходимости обе- спечения усилий зажима свы- ше 45 кН или ограничении раз- мера по диаметру цилиндров
1 Мембранные (одно- i или двустороннего £ действия) [ Устройства зажимные, фикси- рующие и другие с ограничен- ной величиной перемещения 0,1£>м для плоских мембран и 0,25£>м для мембран с гофром. Величина усилий до 30 кН
31
Продолжение табл. 2J
Двигатели Схема двигателя Область применения
Сильфонные 1лл В датчиках и специальных устройствах с небольшой вели- чиной хода и усилий
Камерные Для зажима деталей в несколь- ких точках. Обеспечивают по- стоянное усилие зажима при изменении размера деталей
Шланговые ✓ Транспортирующие устройства со значительной величиной пе- ремещения (до 10 м н более, при небольших перемещаемых мас- сах)
2. Поворотные пневмодвигатели Двухпозиционные поршневые Автоматические манипуляторы и загрузочные устройства; угол поворота обычно до 360° (в спе- циальном исполнении до 1800°), крутящий момент до 20 кН*м
1
шиберные Угол поворота до 300°; крутя- щий момент до 500 Н-м
М но го позиционные (поршневые н пла- стинчатые) * Устройства позиционирования станков и манипуляторов при небольших углах поворота
3. Пиевмомоторы Шестеренные ннг 1 1 Приводы транспортеров, лебе- док, комбайнов, сверлильных машин в угольной и горноруд- ной промышленности
32
Продолжение табл. 2.1
Двигатели Схема двигателя Область применения
Аксиально-поршне- вые * Приводы ручного инструмента, сверлильных головок и других устройств
Радиально-поршне- вые tl Приводы лебедок, конвейеров и других устройств во взрыво- опасных помещениях, а также сверлильных машин с относи- тельно высоким крутящим мо- ментом
Мембранные н ' Приводы трубопроводной арма- туры клапанного типа
Пластинчатые мОь ж /Ж\ Ручной инструмент, сверлиль- ные и резьбонарезные головки, гайковерты и другие устрой- ства
Винтовые Приводы конвейеров, транспор- теров и других машин
ITурбинные <Н" Приводы шлифовальных голо- вок
II р и м е ч а иии 0,63 МПа; D - н и е. Усилие и крутящий момент указаны при рабочем давле- - диаметр поршня цилиндра; £>м — диаметр мембраны.
2 Е. В. Герц и др.
33
Рис. 2.1. Пневмоцилиндр одностороннего дей-
ствия без пружины
Рис. 2.2. Пневмоцилиидр одностороннего дей-
ствия с пружинным возвратом
ГОСТ 15608—70. Стандарт преду-
сматривает изготовление пневмо-
цилиндров со следующими видами
крепления: на удлиненных стяж-
ках, на лапах, на переднем и зад-
нем фланцах, на проушине и на
цапфах. Стандартом также преду-
смотрено исполнение штоков с внут-
ренней и наружной резьбой на
конце и отверстий для подвода воз-
духа с метрической и конической
резьбой.
Пневмоцилиндры по ГОСТ
15608—70 серийно изготовляют
Орджоникидзевский опытный завод
пневмооборудования и ряд заводов
отраслей машиностроения. В по-
мощь предприятиям, изготовля-
ющим пневмоцилиндры, ВНИИГид-
роприводом разработан альбом
чертежей [15].
Основные параметры пневмо-
цилиндров по ГОСТ 15608—70
приведены в табл. 2.2. Теоретиче-
ское усилие на штоке определено
как произведение избыточного дав-
ления на площадь поршня (толка-
ющее) или на разность площадей поршня и штока (тянущее). Конструкция
поршневого пневмоцилиндра с двусторонним штоком приведена на рис. 2.3, в.
Сдвоенные пневмоцилиндры. В том случае, когда диаметр пневмоцилиндра
ограничен из-за недостатка места, рекомендуют использовать два цилиндра или
более последовательно соединенных между собой и работающих на один шток.
В результате этого усилия сжатого воздуха, действующие на поршни, склады-
Техническая характеристика пневмоцилиндров (ГОСТ 15608-70)
Таблица 2.2
Диаметр, мм Усилие на штоке. -1
Теоретическое Действительное (не менее)
Q а толка- тяну- толка- тяну- толка- тяну- толка- тяну-
ющее щее Ющее щее ющее щее ющее щее
Я го S я Давление, МПа
s £ 3 0,63 | 1,0 0, 63 | 1,0
25 10 310 260 490 410 240 200 390 320
32 -Ю 500 450 800 720 400 360 640 570
40 12 790 720 1 260 1 140 630 570 1 000 910
50 16 1 250 1110 1 960 1 760 990 880 1 560 1 400
63 16 1 960 1 830 3110 2 910 1 560 1 460 2 480 2 320
80 25 3 170 2 860 5 030 4 540 2 780 2 510 4 420 3 990
100 25 4 950 4 640 7 850 7 360 4 350 4 080 6 900 6 470
125 32 7 730 7 230 12 270 1 1 470 6 800 6 360 10 790 10 090
160 40 12 670 И 870 20 1 10 18 850 11 650 10 920 18 500 17 340
200 50 19 790 18 560 31 420 28 460 18 200 17 070 28 900 27 100
250 63 30 920 28 960 49 090 45 970 28 440 26 640 45 160 42 290
320 80 50 660 47 500 80 420 75 390 46 600 43 700 73 980 69 350
360 80 64 120 60 960 101 780 96 760 60 910 57 910 96 690 91 920
400 90 79 160 75 150 125 660 1 19 300 75 200 71 390 119 370 1 13 330
34
Рис. 2.3. Пневмоцилиидры двустороннего действия:
о — без торможения; б — с торможением; в — с двусторонним штоком; е -* сдвоенный
2* 35
Рис. 2.4. Пневмоцилиндры вращающиеся со сплошным (а) и полым (б) штоками
ваются. Конструкция сдвоенного пневмоцнлиндра представлена на рис. 2.3, г.
В этой конструкции могут быть использованы нормализованные детали цилиндров
по ГОСТ 15608—70, кроме штока н промежуточной крышки. Недостатком сдвоен-
ных пневмоцнлнндров является увеличение длины цилиндра приблизительно
в том же соотношении, в каком увеличивается усилие.
Вращающиеся пневмоцилиндры применяют в качестве силового привода
патронов, оправок и других приспособлений, осуществляющих зажим штучных
заготовок н пруткового материала на токарных, токарно-револьверных и других
станках.
Эти пневмоцилиндры подразделяют на следующие типы: одностороннего
действия, двустороннего действия и сдвоенные. В зависимости от исполнения
штока вращающиеся цилиндры бывают со сплошным или полым штоком.
Вращающийся пневмоцилиндр со сплошным штоком (рис. 2.4, а) имеет
муфту 1 подвода воздуха, предохранительное устройство 2 и собственно цилиндр 3.
При сообщении через пневмораспределитель входного канала А с магистралью,
а канала Б с атмосферой, сжатый воздух через канал Г, шариковый клапан 6
и канал Д поступает в штоковую полость цилиндра. Отработанный воздух из
штоковой полости проходит по каналу Е, открытому штоком поршня 5 предохра-
нительного устройства шариковому клапану 4, каналы Ж, Б и через распреде-
литель выбрасывается в атмосферу.
При подаче сжатого воздуха из магистрали к каналу 5 сжатый воздух по-
ступает в бесштоковую полость. Штоковая полость через канал А и распредели-
тель сообщается с атмосферой. Предохранительное устройство 2 обеспечивает
автоматическое отсечение (запирание) штоковой и бесштоковой полостей при па-
дении давления на входных каналах А н Б, что предотвращает разжим детали прн
вращающемся шпинделе станка.
Техническая характеристика отечественных конструкций одинарных П-ЦВ
и сдвоенных П-ЦВС вращающихся цилиндров по ГОСТ 21821—76 приведена
в табл. 2.3.
Конструктивная схема вращающегося пневмоцилиндра с полым штоком
приведена на рис. 2.4, б. В этой конструкции сжатый воздух в полости цилиндра
также подводится через муфту 1 подвода воздуха, клапаны 2 и 4 предохранитель-
ного устройства. Шток поршня 3 выполнен полым, что позволяет пропускать
через цилиндр прутковый материал к зажимной цанге.
Поршневые позиционеры. Пневмоцилиндры можно использовать в каче-
стве позиционеров, если не требуется высокая точность отработки положения
(позиции) и если число позиций невелико.
На рис. 2.5, а—в показаны схемы соединения двух пиевмоцилиндров для по-
лучения трех (I, II, III) и четырех (I, II, III, IV) фиксированных положений,
причем, четыре позиции получают соединением двух пневмоцилиндров с различ-
ной длиной хода (рис. 2.5, в).
Конструкция трехпозициоииого пневмоцнлиндра, в котором могут быть
использованы нормализованные детали цилиндров по ГОСТ 15608—70, показана
36
29 600 46 600 29 000 45 600 57 500 86 350 57 600 90 600 33>3 (2000)
Техническая характеристика вращающихся пневмоцилиндров
37
Рис, 2.5. Поршневые позиционеры
иа рис. 2.5, г. Шток цилиндра 1 закреплен, а шток цилиндра 2 является исполни-
тельным. При подаче сжатого воздуха в бесштоковую полость цилиндра /, испол-
нительный шток перемещается вместе с корпусом цилиндра 1, а при подаче сжа-
того воздуха в бесштоковую полость цилиндра 2 исполнительный шток переме-
щается в следующую позицию. Таким образом обеспечиваются три фиксированных
положения исполнительного штока. Несколько иная конструкция позиционера
(рис. 2.5, д), представляющего собой трехпозиционный пневмоцилиндр. Здесь
среднее положение штока обеспечивается при подаче сжатого воздуха в оба
воздухоподводящих отверстия 1 и 2, при соединении подводного отверстия 1
с атмосферой шток втягивается, а при соединении отверстия 2 с атмосферой и от-
верстия 1 с источником давления шток выдвигается.
Пиевмоцилиндры с гибким штоком. На рис. 2.6 показан пневмоцилиндр,
в котором шток выполнен из стального троса 2 с нейлоновым покрытием. Ци-
линдры этого типа позволяют получать большую длину хода, так как исключается
деформация штока, свойственная цилиндрам с большими ходами. Трос 2 прикреп-
лен к поршню ,3 цилиндра и переброшен через ролики /, установленные в крышках
цилиндра. Для уплотнения поршня и троса служат манжеты V-образного типа.
К концам троса прикреплена каретка 4, служащая для соединения с перемещае-
мыми механизмами. Пневмоцилиндры с гибким штоком можно применять для
различных операций перемещения, хонингования, шлифования, полирования
ит. п., особенно в том случае, когда ограничено место для выдвижения длинного
штока.
Пневмогидравлические цилиндры. Для получения стабильной скорости
перемещения штока, что особенно важно в приводах подач режущего инструмента
станков, применяют пневмогидрав-
лические цилиндры (рис. 2.7), со-
стоящие из двух цилиндров: пнев-
матического 1 и гидравлического 2.
Сжатый воздух подается в пневмо-
цилиндр, поршень которого через
шток передает усилие на поршень
Рис. 2.6. Поршневой пневмоцилиидр
с гибким штоком
38
гидроцилиндра; последний, перемещаясь, выдавливает масло из одной полости
в другую по трубопроводу 3. Скорость перемещения поршней регулируют дроссе-
лем с обратным клапаном 4. Скорость регулируется только при прямом ходе.
Для предотвращения перетечек воздуха в полость гидроцилиндра, а масла в по-
лость пневмоцилиндра, в промежуточной общей крышке рекомендуется преду-
сматривать дренажные отверстия, облегчающие выход воздуха и масла, перете-
кающих через уплотнения штока, н позволяющие обнаружить утечки.
Ударные пневмоцилиидры. В промышленности нашли применение следующие
типы ударных пневмоцилиндров:
одностороннего действия со встроенным ресивером (рис. 2.8, а), со встроен-
ным ресивером, концентрично расположенным, и золотниковым распределением
(рис. 2.8, б); двустороннего действия (рис. 2.8, в).
Конструкция ударного пневмоцилиндра со встроенным ресивером [17]
показана на рис. 2.8, г. Цилиндр имеет ресивер /, поршень 3 со встроенным клапа-
ном, бесштоковую 2 и штоковую 4 полости. В исходном положении поршень
давлением воздуха в штоковой полости прижат к седлу, закрывая доступ сжатого
воздуха из ресивера в бесштоковую полость цилиндра. До начала хода поршня
бесштоковая полость соединена с атмосферой через клапан. Для выполнения
движения необходимо штоковую полость цилиндра соединить через клапан с атмо-
сферой. В ресивере, предварительно соединенном с магистралью, давление равно
магистральному.
Движение поршня начнется тогда, когда давление в штоковой полости
упадет до уровня, близкого к атмосферному. На начальном участке хода давление
в бесштоковой полости поддерживается близким к магистральному, а в штоко-
вой полости продолжает уменьшаться, приближаясь к атмосферному. На этом
участке хода обеспечены нанлучшие условия для разгона поршня и связанных
39
е ним частей механизма: магистральное давление по одну сторону поршня и атмо-
сферное по другую. Вследствие этого поршень быстро разгоняется до скорости
4—7 м/с. При дальнейшем движении поршня давление в ресивере и бесштоковой
полости падает, а в штоковой начинает возрастать. Скорость поршня уменьшается,
ход заканчивается сравнительно плавно, без удара о переднюю крышку. Для
возврата поршня в исходное положение сжатый воздух подают в штоковую по-
лость цилиндра, а ресивер соединяют с атмосферой.
В пневмоцилиндре со встроенным концентрично расположенным ресивером
(см. рис. 2.8, б) рабочая полость сообщается с резервуаром посредством кольцевой
щели 1 в гильзе цилиндра. В исходном положении поступлению сжатого воздуха
из ресивера в рабочую полость препятствует уплотнительное кольцо 2 и воздух
поступает только через дроссель 3. Когда поршень сдвигается с места и открывает
щель 1, то через нее поступает воздух и поршень.цилиндра разгоняется.
Рассмотренные типы ударных пневмоцилиндров обеспечивают высокую
скорость движения поршня только в одном направлении. Показанный на
рис. 2.8, в ударный пневмоцилнндр имеет высокую скорость перемещения поршня
в обоих направлениях. Но в отличие от пневмоцилиндра, изображенного на
рис. 2.8, а, в нем нельзя обеспечить эффективное торможение в конце хода из-за
большого объема вредного пространства выхлопной полости.
Расчет пневмоцилиндров подразделяют на проектный и поверочный. При
проектном расчете по заданной нагрузке, магистральному давлению, массе пере-
мещаемых деталей, скорости перемещения поршня определяют диаметр поршня,
штока и подводящих отверстий, расход воздуха и пропускную способность пневмо-
линии [6]. При поверочном расчете [3, 6] определяют время срабатывания
пневмоцнлиндра и возможность торможения поршня (для цилиндров с тормо-
жением).
Пневмоцилиндры в зависимости от характера применении условно разделяют
на две группы: 1) зажимные цилиндры (подпружинивающие, фиксирующие,
прижимные и др.), которые обеспечивают передачу заданного усилия после за-
вершения хода или при весьма малых перемещения поршня с «ползучей» ско-
ростью, и 2) транспортирующие цилиндры, развивающие требуемое усилие на
всем пути перемещения поршня.
Диаметр поршня зажимных цилиндров без учета их быстродействия опреде-
ляют, исходя из заданного усилия Р2 (при зажиме или транспортировании).
Результирующая сила, преодолеваемая силами давления, в общем случае
равна сумме значений вредного Рг (сила трения), полезного Р2 сопротивления,
веса Р3 поршня и перемещаемых частей привода (при вертикальном положении
цилиндра), а также силы Ро предварительного натяжения пружины
Р = Pi+ Р2+ Рз+ Р0.
Диаметр зажимного цилиндра одностороннего действия без пружины
в = 1,1з1/ Р*-+Рг + Рз ,
У 0,9Рм Ра
где рм — минимальное абсолютное давление в магистрали или на выходе редук-
ционного клапана; ра — атмосферное давление.
Диаметр зажимного цилиндра одностороннего действия с пружинным воз-
вратом
D = 1,13 ]/ Р^р.Гз + Р° + ^
У 0,9ры — Ра
где сп — жесткость пружины; s — ход поршня. Здесь для создания запаса при-
нято, что усилие зажима создается при давлении 0,9рм. При вертикальном по-
ложении зажимного цилиндра нужно учитывать вес Ра.
Иногда силу трения учитывают посредством коэффициентов, как это пока-
зано ниже, при расчете транспортирующих цилиндров.
40
Диаметр транспортирующего цилиндра определяют по следующим фор-
мулам:
для горизонтально расположенных цилиндров
для вертикально расположенных цилиндров
D = 1,13 l/ —>
’ ХРм 0 ^тр)
где X — безразмерный параметр нагрузки; #ТР — коэффициент, учитывающий
потери на трение в цилиндре.
Ориентировочные значения feT[, для различных величин полезной нагрузки
при уплотнении манжетами по ГОСТ 6678—72 и магистральном давлении 0,5—
0,6 МПа приведены ниже:
Р2, кН...............До 0,60 0,60—6,0 6,0—25 25 — 60
*ТР................ 0,5 —0,2 0,2 — 0,12 0,12 — 0,08 0.08 — 0,05
Большие значения &тр принимают для меньших диаметров пневмоцилиндров.
Безразмерный параметр нагрузки
Р
pMF ’
где F — площадь поршня.
Для транспортирующих пневмоцилиндров оптимальное значение X = 0,4-8-
-т-0,5, при Х> 0,5 время срабатывания цилиндра значительно возрастает, малые
значения X (—0,1—0,2) свидетельствуют о неэффективном использовании пневмо-
цилиндра, но могут быть необходимы для получения максимальной скорости
срабатывания [3, 6].
Максимально допустимые значения Хпмх
рм. МПа ..................... 0.3 0,4 0,5 0.6 —1,0
%п1ах ....................... 0,6 0,65 0,7 0,75
Расчетное значение диаметра поршня округляют до ближайшего по
ГОСТ 6540—68 значения. Рекомендуется округлять в большую сторону, однако,
если расчетный диаметр поршня отличается от стандартного не более чем на 5%,
то можно принимать меньшее значение. По полученному расчетному диаметру
и ГОСТ 15608—70 определяют основные конструктивные параметры пневмо-
цилиндра.
При расчете специальных пневмоцилиндров основные конструктивные
параметры выбирают следующим образом. Ход поршня определяется в основном
требуемым значениям перемещения рабочего органа, детали и т. п., но при выборе
максимального хода следует учитывать технологичность изготовления гильзы
и штока, устойчивость штока в максимально выдвинутом положении и др.
Максимальное значение хода пневмоцилиидров двустороннего действия реко-
мендуют ограничивать 8—10 диаметрами поршня. Если требуется ход, значение
которою превышает десять диаметров поршня, то необходимо рассчитать шток на
устойчивость, определяя по формуле Эйлера критическую силу, выводящую
шток из устойч ивого положения
р _ n2E/min'
Кр (&)* ’
где Е — модуль упругости материала штока: /тщ — минимальный момент инер-
ции сечения штока; I — максимальная длина выдвинутой части штока; р —
коэффициент приведенной длины, зависящий от способа закрепления стержня
и места приложения сжимающей нагрузки.
41
Если шток не соединен с нагрузкой, то он работает как стержень, жестко’
закрепленный одним концом, и ц = 2. При соединении штока с нагрузкой и пере-
мещении нагрузки по направляющим допускаемая критическая сила возрастает,
так как в этом случае шток работает как стержень, закрепленный с двух сторон,
для которого ц имеет меньшее значение и лежит в пределах 0,5—2 в зависимости
от способа закрепления конца штока и вида направляющих [14].
Диаметр штока £>ш определяется условиями его прочности в наиболее опас-
ном сечении и возможным выходом его из устойчивого положения:
где Р — максимально возможное усилие на штоке; ] — допускаемое напря-
жение материала штока на разрыв.
Определив диаметр штока в наиболее опасном сечении, конструктивно выби-
рают способ крепления и посадочный диаметр под поршень. Искомый диаметр
штока принимают несколько большим посадочного диаметра, округляя его до*
ближайшего по ГОСТ 6540—68 значения.
Диаметр присоединительных отверстий цилиндров определяется скоростью’
перемещения поршня, объемным расходом, размером крышек и т. п. Существуют
рекомендации по выбору диаметра dn этих отверстий в зависимости от диаметра
поршня D; для максимальной скорости поршня 0,3—0,5 м/с принимают da =
= 0,10.
Так как предельные скорости движения поршня на практике встречаются
сравнительно редко, нет необходимости во всех случаях устанавливать трубо-
проводы и соединения номинального размера. В некоторых случаях этот размер
можно уменьшить, что даст экономию металла.
Расход воздуха, приведенного к нормальным условиям, определяют по
следующим формулам:
для цилиндра одностороннего действия с бесштоковой рабочей полостью
Q = 0,785D2s пя;
Ра
для цилиндра двустороннего действия
Q = 0,785 (2D2 —D2 ) s.
' ' Ра
где «д — число двойных ходов.
Заданный закон движения поршня пневмоцилиндра (например, плавное
нарастание скорости, безударный останов в конце хода, равномерное или равно-
ускоренное движение и т. п.), заданное быстродействие или минимальные размеры
цилиндра обеспечиваются выбором диаметра поршня, проходных сечений напор-
ной и выхлопной линий, начального объема полостей пневмоцилиндра и др.
Методика выбора параметров цилиндров двустороннего действия для без-
ударного останова и высокой скорости перемещения поршня из условия обеспе-
чения заданного или наибольшего быстродействия приведена в гл. 11 ив ра-
боте [6].
Методика выбора параметров цилиндров одностороннего и двустороннего
действия для обеспечения закона движения с плавным нарастанием скорости
перемещения поршня до конца хода или для его движения с торможением в конце
хода приведена в работах [3, 5, 6, 13].
Методика выбора параметров различных пневмоприводов с установившимся
и неустановившимся движением поршня рассмотрена в работе [6].
Время срабатывания пневмоприводов с выбранными или заданными пара-
метрами рассчитывают по методике, приведенной в работах [3, 6] и гл. 11.
Методика расчета пневмоприводов с торможением (со встроенными в крышки
или установленными на трубопроводах тормозными устройствами) приведена
в работах [6, 12], а ударных пневмоцилиндров — в работах [5, 13].
42
2.2. МЕМБРАННЫЕ ПНЁВМОДВИГАТЕЛИ
Мембранные пневмодвигатели применяют в зажимных, фиксирующих, переклю-
чающих, тормозных, прессующих устройствах станков, прессов, сварочных
и других машин, в приводах арматуры с тяжелыми условиями работы, обуслов-
ленными загрязненностью окружающей среды, низким качеством очистки сжа-
того воздуха от механических частиц и влаги. Преимущества мембранных ци-
линдров — малая трудоемкость при изготовлении, высокая герметичность ра-
бочей полости, отсутствие необходимости в подаче распыленного масла и низкие
эксплуатационные расходы; недостатки — малая величина хода, непостоянство
усилия по ходу, относительно низкая долговечность мембран.
Мембранные двигатели применяют преимущественно одностороннего дей-
ствия с пружинным возвратом и без него, реже двустороннего действия. Мем-
браны могут быть эластичные (из резины, резинотканевых и синтетических мате-
риалов) и металлические (из специальных сортов стали, бронзы и латуни толщи-
ной листа 0,2—1,5 мм). В пневмоприводах станков, прессов и других машин
применяют, как правило, эластичные мембраны, которые в зависимости от формы
поперечного сечения разделяют на плоские и фигурные.
Плоские мембраны’при работе на поверхности не имеют изгибов сечения,
достигающих 180°, а фигурные имеют, что дает им возможность сворачиваться
при ходе штока с поверхности опорного диска на внутреннюю цилиндрическую
поверхность камеры, при этом обеспечивается относительно больший ход с высо-
ким механическим КПД. Конструкции мембранных цилиндров с плоской и фи-
гурной мембраной приведены на рис. 2.9.
Диаметр мембраны (в месте заделки) определяют по следующим формулам:
при толкающем усилии
DM = 1,95 I —-----------—у---->
у + ₽1 + ₽1) Рм
при тянущем уснлнн
| / р + °’785Р«°2Ш
У (14-₽г + Р?)Рм
давление; Dm — диаметр штока (Р и Dm
где Р — заданная сила сопротивления на штоке; рм — избыточное магистральное
" - - определяют так же, как для поршневых
Рис, 2.9. Мембранные пневмо-
двигатели одностороннего дей-
ствия с плоской мембраной (а)
и двустороннего действия с фи-
гурной мембраной (б)
43
Таблица 2. 4
Максимальный ход штока двигателей с плоскими мембранами
Мембранный двигатель Ход штока при магистральном давлении, МПа
0,4 0,5 0,6 0,8
Одностороннего действия 0,08£>м о,юом 0,12Ом 0.15ОМ
Двустороннего действия 0,06Рм 0,080м 0.1 ООм 0,12Ом
цилиндров); Pi = DjD„—коэффициент; Do—диаметр опорного диска; DM—
диаметр мембраны в месте заделки.
Коэффициент обычно принимают в пределах 0,6—0,8. При меньших зна-.
чениях рг усилие, развиваемое мембранным цилиндром, более равномерно в пре-
делах хода штока, но эффективная площадь мембраны и развиваемое усилие
на штоке уменьшаются.
Не рекомендуется выбирать рх > 0,8, так как это приводит к уменьшению
хода штока и увеличению нелинейности статической характеристики мембраны.
Толщина плоских резиновых мембран без гофра [7]
6 = 0,175
[Тер]
где [тСр] — допускаемое напряжение на срез.
Для листовой резины с прочностью на разрыв 5 МПа при использовании
ее с одной тканевой прокладкой можно принимать значения [тСР 1 в зависимости
от толщины резиновых мембран, приведенные ниже:
б, мм........................... 2,7 5,0 7,0
[т ], МПа ...................... 3,0 2,4 2,1
Величину хода штока определяют в зависимости от допустимого прогиба
плоской мембраны. Чрезмерное увеличение прогиба приводит к снижению уси-
лия, снимаемого со штока вследствие потерь давления на растяжение, и сниже-
нию долговечности мембраны.
В табл. 2.4 даны рекомендуемые значения максимального хода штока мем-
бранных цилиндров с плоскими мембранами в зависимости от избыточного ма-
гистрального давления.
Для плоских штампованных мембран с гофром максимальное значение про-
гиба рекомендуется принимать не более (0,20—0,25) DM.
Камеры с фигурными мембранами можно рассчитывать по формулам, при-
веденным для поршневых цилиндров со следующими дополнениями.
Диаметр мембраны
Рм = Рк + 2 (6 + г),
где В к — активный диаметр мембраны; 6 — толщина мембраны; г — внутрен-
ний радиус перегиба фигурной мембраны. Активный диаметр мембраны опре-
деляют по формулам для диаметра D поршневого цилиндра. Толщина фигурных
мембран с тканевой прослойкой из нейлона, дакрона, стекловолокна и других
равных им по прочности материалов обычно равна 0,5—1 мм для давления до
1,0 МПа. Радиус г принимают 0,9—1 мм для мембран диаметром в месте заделки
до 60 мм и толщиной 0,45 мм; г= 1,54-1,75 мм — для мембран диаметром
заделки от 100 мм и более и толщиной 0,55—1,0 мм.
Диаметр опорного диска
Во = Рк - 2 (6 + г).
14
Максимальное значение хода штока устройства с фигурными мембранами
приближенно определяют в соответствии с активной частью высоты мембраны
по формуле
h = Н — h3 — nr,
где Н — общая высота мед<браны; h3 — часть высоты мембраны, находящаяся
в заделке.
Уточненные методы расчета мембранных двигателей приведены в работах
13, 6].
2.3. СИЛЬФОННЫЕ ПНЕВМОДВИГАТЕЛИ
На рис. 2.10, а и б представлены конструктивные схемы сильфонных пневмо-
двигателей с внешним и внутренним подводом сжатого воздуха. В пневмодвигате-
лях первого типа (см. рис. 2.10, а) сжатый воздух через входной канал А корпуса
цилиндра 1 поступает в полость Б, вызывая осевое перемещение сильфона за
счет сжатия его гофрированной части. В пневмодвигателях второго типа (см.
рис. 2.10, б) сжатый воздух через входной канал А опорного диска 1 цилиндра
поступает во внутрь сильфона (полость 5), вызывая осевое перемещение за счет
растяжения его гофрированной части. При соединении полости Б с атмосферой
сильфоны возвращаются в исходное положение в результате упругих свойств
материала, из которого они изготовлены. При использовании сильфонов, изго-
товленных из материала с низкой упругостью (резины, пластиков и др.), для
возврата сильфона в исходное положение требуется установка пружин.
Сильфонные пневмодвигатели применяют для получения относительно не-
больших перемещений при высокой герметичности. Они обладают значительной
работоспособностью в сравнительно широком диапазоне температуры окружа-
ющей среды. Рекомендуемая величина максимального перемещения в одну сто-
рону: металлических сильфонов 5—15% его свободной длины, резиновых сильфо-
нов — до 50%. При повышенных требованиях к долговечности изменение длины
сильфонов должно быть в 2—2,5 раза меньше максимально допустимой дефор-
мации.
В сильфонах с внешним подводом сжатого воздуха допустимое давление на
25—30% выше, чем у сильфонов с внутренним нагружением [2]. Сильфоны из-
готовляют из латуни, коррозионно-стойкой стали и других металлов, а также
из резины и упругих синтетических материалов. В пневматических сильфонных
двигателях нашли применение сильфоны с наружным диаметром от 16 до 100 мм.
Усилие, которое может развить сильфон при своем перемещении,
где гв и гн — внутренний и наружный ра-
диусы сильфона; р — давление сжатого
воздуха, воздействующее на сильфон;
— жесткость сильфона; h — текущее
значение перемещения сильфона.
Жесткость сильфонов сх, выпуска-
емых отечественной промышленностью,
приведена в технических условиях.
2.4. ПОВОРОТНЫЕ
ПНЕВМОДВИГАТЕЛИ
Поворотные пневмодвигатели предназна-
чены для поворота на ограниченный угол
рабочих органов автоматизируемых объек-
тов [9, 10]. В зависимости от конструкции
Рис. 2.10. Сильфонные пневмодвига-
тели
45
Рис, 2.11. Двухпозиционный поворотный Пневмодвигатель типа ПДП1
рабочей камеры их подразделяют на поршневые и пластинчатые. По коли-
честву фиксированных положений выходного вала они могут быть двух- или
многопозиционными.
Поршневые поворотные пневмодвигатели. В’отечественнон и зарубежной
промышленности нашли применение поршневые пневмодвигатели с передаточ-
ными механизмами следующих типов: реечными, рычажными, винтовыми и цеп-
ными.
На рис. 2.11 представлена конструкция двухпозиционного поршневого по-
воротного двигателя типа ПДП, который состоит из двух пневмоцилиндров
с рейкой 1 на штоке, находящейся в зацеплении с зубчатым колесом 2, установ-
ленным в блоке 3.
Поворотное движение колеса 2 осуществляется при подаче сжатого воздуха
в поршневые полости. Наличие демпфирующих устройств исключает удары порш-
ней о крышку цилиндров в конце хода. Техническая характеристика пневмо-
двигателей типа ПДП приведены в табл. 2.5 (изготовитель — Симферопольское
НПО «Пневматика»),
В многопозицнонном поворотном двигателе (рис. 2.12) зубчато-реечная
передача 1 приводится в движение многопозиционными цилиндрами 2 и 3, при
этом обеспечивается поворот вала на заданный угол.
Пневмодвигатели с передаточным механизмом рычажного типа по конструк-
ции аналогичны двигателям с реечным механизмом, но реечное зацепление в них
заменено поворотным рычагом, что делает пневмодвигатели этого типа проще
и дешевле. Однако пневмодвигатели последнего типа не допускают углов по-
ворота выходного вала свыше 90—100°.
Рис. Я. 12. Многопозиционный поворотный пневмодвмгатель
46
Таблица 2.5
Техническая характеристика поворотных пневмодвигателей
типа ПДП (номинальное давление 1,0 МПа)
Параметр
Крутящий момент на 10 20 32 63 80 80 160 160 250 250 400 400
валу двига- теля при номинальном давлении воздуха, Н • м Угол пово- 180 180 180 180 180 270 180 270 180 270 180 270
рота вала двигател я, град Масса, кг 4,5 11 8 18 12 18 28 32 20 25 35 42
Размеры, мм: длина 300 300 370 370 518 642 518 642 635 795 635 795
ширина 115 180 132 193 166 165 224 224 200 200 270 270
высота 55 65 70 80 80 80 90 90 118 118 128 128
На рис. 2.13 приведена конструкция пневмодвигателя с рычажным меха-
низмом, предназначенного для дистанционного управления запорными и регу-
лирующими механизмами. Он состоит из закрытого крышками 1 и 4 корпуса 6
с запрессованными гильзами 5, в которых перемещается поршень 7. Головки
поршня уплотнены резиновыми манжетами 8. При подаче сжатого воздуха в ра-
бочие камеры поршень приводит в движение рычаг 3, который вращает выход-
ной вал 2.
В пневмодвигателях с винтовым механизмом (рис. 2.14) поступательное дви-
жение поршня 2 преобразуется во вращательное движение вала 1 посредством
обычной ходовой винтовой пары. Угол поворота вала зависит от величины хода
поршня и, как правило, не превышает 360°. Проворачивание поршня устра-
няется установкой направляющих стержней 3.
Имеются конструкции пневмодвигателей, в которых винтовая пара вынесена
за рабочие камеры цилиндра, а трение скольжения заменено на трение качения.
В пневмодвигателях с цепным механизмом (рис. 2.15) преобразование дви-
жения поршня во вращение выходного вала происходит с помощью цепной пере-
дачи. В корпусе пневмодвигателя помещены поршни 2 и 4, соединенные цепью ].
При подаче сжатого воздуха к отверстию А, поршень 2, имеющий большую
площадь, чем поршень 4, движется вправо, перемещает цепь и вращает звез-
дочку 5 с выходным валом по часовой стрелке. При реверсировании сжатый
воздух подается к отверстию В, поршень 2 перемещается влево, проворачивая
выходной вал против часовой стрелки. Поршень 4 предназначен для гермети-
зации полостей А и В.
Шиберные поворотные пневмодвигатели. На рис. 2.16 схематично представ-
лен поворотный двигатель с одной пластиной. Вал, выполненный заодно с пласти-
ной, установлен на двух опорах в крышках. Между крышками находится корпус,
выполненный в виде кольца. В корпусе между крышками расположена неподвиж-
ная перегородка, ограничивающая поворот лопасти, а следовательно, и выход-
ного вала двигателя. В зазорах по контуру пластины выполнены специальные
уплотнения.
Конструкция пластинчатого пневмодвигателя с двумя пластинами приведена
на рис. 2.17. Крутящий момент в конструкциях этого типа вдвое больше, чем
47
Рис. 2.13. Поршнерычажный поворотный пневмодвигатель
Рис. 2.15. Поршнецепной поворотный пневмодвигатель
Рис. 2.16, Схема пластинчатого поворотного двигателя с одной пластиной
48
Рис. 2.17. Пластинчатый поворотный дви-
гатель с двумя пластинами
в одношиберных, однако угол пово-
рота выходного вала не превышает
130—140°. Шиберные пневмодвигатели
имеют значительно меньшие размеры
и массу по сравнению с поршневыми,
но более сложны в изготовлении.
Конструкция многопозиционного
поворотного двигателя со специаль-
ными шиберами показана на рис. 2.18.
Шибер 2 соединен с цилиндром, а ши-
бер 5 — с валом 1. Уплотнение ши-
беров обеспечивается манжетами 6.
В исходном положении сжатый воз-
дух подводится через отверстие 7, при этом шибер 5 вместе с валом
поворачивается против часовой стрелки до тех пор, пока не будет выбран
зазор между шиберами. Для обеспечения поворота на заданный угол сжатый
воздух подается к отверстиям 8, 9, 10. Например, при подаче рабочего давле-
ния питания (его величина должна быть больше величины давления подпора)
в отверстие,8 шибер 3, а вместе с ним шиберы 4, 5 и вал 1 повернутся по ча-
совой стрелке на угол <рх; в отверстие 9 — на угол <р2, в отверстие 10 — на
угол <р3; в отверстия 8, 9 и 10 одновременно — на угол равный + <р2 + <ps
(такое положение изображено на рисунке) и т. д. В зависимости от конструкции
максимальный угол поворота вала может быть равен 70—120°, при числе по-
зиций до 32.
2.5. ПНЕВМОМОТОРЫ
Пневмомоторы предназначены для преобразования энергии сжатого воздуха во
вращательное движение выходного вала. По виду рабочего элемента моторы под-
разделяют на шестеренные, пластинчатые, поршневые, мембранные, винтовые
и турбинные. В зависимости от возможности получения вращения выходного
49
Рис. 2.19. Схема шестеренного пнев-
момотора
вала в обе стороны или в одну моторы соот-
ветственно разделяют на реверсивные и не-
реверсивные.
Шестеренные моторы. По способу
зацепления зубьев шестеренные моторы под-
разделяются на моторы с наружным зацеп-
лением, с внутренним зацеплением и проме-
жуточным серповидным элементом, с внут-
ренним зацеплением без промежуточного
элемента (героторные). Моторы последних
двух типов встречаются крайне редко.
В шестеренном моторе (рис. 2.19) сжа-
тый воздух с давлением поступает через
входной канал А к зубчатым колесам. Зубья
колес, касаясь друг друга в точке Ь, не
дают воздуху пройти в полость канала В.
Давление сжатого воздуха воздействует на
зубья колес, которые имеют два неуравнове-
шенных участках ab и de, равные участку Ьс.
На этих участках возникают неуравновешен-
ные силы, равные произведению давления
сжатого воздуха на площадь неуравновешен-
ных участков зубьев. Эти силы создают
крутящие моменты, вращающие колеса в направлениях, показанных стрелками.
Отработанный воздух во впадинах между зубьями выходит в полость выхлоп-
ного канала В с давлением р2. Поскольку площадь участков ab и Ьс постоянно
меняется, крутящий момент, развиваемый мотором, является пульсирующим.
На рис. 2.20 изображена типичная конструкция шестеренного пневмомотора
без редуктора. Он состоит из корпуса 5, крышек 4 и 7 и коробки управления 8.
В расточках корпуса на роликоподшипниках вращаются зубчатое колесо 1
с выходным валом 2 и колесо 3. В коробке управления находятся регулятор
скорости, распределитель и автоматическая масленка 9, подающая в сжатый
воздух распыленное масло для смазывания зубчатых колес. Центробежный
регулятор 12 приводится во вращение от вала зубчатого колеса 1 и в зависимости
от величины расхождения грузов перемещает поршневую заслонку И, умень-
шая или увеличивая расход сжатого воздуха, поддерживая постоянной частоту
вращения вала при изменении нагрузки на выходном валу мотора. Регулятор
скорости обычно настроен на поддержание постоянной номинальной частоты
вращения.
Моторы выпускают с регуляторами скорости, обеспечивающие две различ-
ных частоты, независимых от нагрузки. Вместо регулятора скорости может быть
встроено автоматическое выключающее устройство, срабатывающее при нару-
шениях в пневматических системах.
Моторы можно снабжать встроенным остановочным тормозом, который при
пуске автоматически отжимается под давлением сжатого воздуха, а при оста-
нове тормозит вал усилием пружины. Наличие встроенного тормоза избавляет
от необходимости устанавливать на транспортерах, лебедках и т. д. обычные
тормоза.
Распределительный золотник 13 обеспечивает реверсирование вала мотора
путем изменения направления подачи сжатого воздуха. К коробке управления
сжатый воздух подводится через патрубок 14. Воздух проходит через фильтру-
ющую сетку 10, поршневую заслонку И, распределительный золотник 13 и по
одному из каналов В поступает в полость рабочих колес мотора. Отработанный
воздух через канал В, распределительный золотник, канал Б и далее по каналам,
расположенным вдоль стенок мотора, через выхлопную трубу 6 отводится в атмо-
сферу. Такое решение отвода выхлопного воздуха позволяет снижать шум без
установки специальных глушителей. При необходимости дополнительного сни-
жения уровня шума на моторе вместо выхлопной трубы устанавливают глуши-
тель. Управление распределительным золотником может быть ручным или ди-
станционным (пневматическим).
50
Рис. 2.20. Шестеренный пневмомотор без редуктора
Моторы с наружным зацеплением изготовляют с прямыми, косыми и шеврон-
ными зубьями. Моторы с прямыми и косыми зубьями работают без расширения
сжатого воздуха и без обратного сжатия. Их реверсируют изменением направле-
ния подачи сжатого воздуха или механическим путем.
Моторы с шевронными зубьями работают с частичным расширением сжатого
воздуха и без обратного сжатия. Реверсирование этих моторов выполняют, как
правило, механическим путем, так как при воздушном реверсировании разви-
вается противодавление во впадинах зубьев, что резко снижает КПД. Моторы
с шевронными зубьями, работающие с расширением сжатого воздуха, имеют бо-
лее высокий КПД, меньшие размеры (при равной мощности), чем моторы пре-
дыдущих двух типов, и не имеют осевого усилия. Адиабатический КПД моторов
с шевронными зубьями может быть поднят до 0,55—0,6 путем правильного вы-
бора степени расширения сжатого воздуха, угла наклона'зубьев и окружной ско-
рости колеса. Адиабатический КПД прямозубых и косозубых моторов не превы-
шает 0,4.
> Недостаток моторов с шевронными зубьями, не позволяющий им полностью
вытеснить прямозубые и косозубые моторы, — относительная сложность их
изготовления.
51
Таблица 2.6
Основные параметры шестеренных пневмомоторов
Мотор Номинальная мощность (предельное отклонение + 12 %), кВт Номинальная частота вращения выходного вала, с'1 (об/мин) Номинальный удельный расход воздуха, м3/мнн кВт Условный проход при- соединяемой арматуры, мм
Косозубый 2,2 50 (3000) 1,4 25
З.о
4,0 16,7 (1000); 25 (1500); 32 (1920) 1.3 40
5,5
7.5 1,2 50
10,0
11,0
15,0 1.13
18,5
22,0 1,1 63
30,0
Шевронный 15,0 12,5 (750); 16,7 (1000); 25 (1500); 50 (3000) 1,0 50
18,5
22,0 0,97 63
30,0
37,0
45,0 0,9 80
55,0
52
В табл. 2.6 приведены основные пара-
метры шестеренных пневмомоторов по ГОСТ
10736—71 при давлении сжатого воздуха на
входе в пневмомотор 0,4 МПа без глушителя
шума на выхлопе.
Для пневмомоторов со встроенным воз-
духораспределителем реверса допускается
снижение мощности до 8% и увеличение
удельного расхода воздуха до 12%; для
пневмомоторов с редукторами (кроме червяч-
ных) допускается снижение мощности и уве-
личение удельного расхода воздуха до 5%
номинальных значений.
Пластинчатые (ротационные) моторы
работают с частичным расширением сжатого
воздуха и частичным обратным сжатием.
На рис. 2.21 показана схема самой рас-
пространенной конструкции пластинчатого
мотора. Он состоит из^ксцентрично располо-
женных статора 1 и ротора 2. В продоль-
ных пазах ротора перемещается несколько
Рис. 2.21. Схема пластинчатого
пневмомотора
пластин 3. Статор с торцов
закрывается крышками, в которых имеются отверстия для подвода и выхлопа
воздуха. Участок ВВ' является впускным, а участок СС — выхлопным. При
движении пластины а от точки А по направлению к впускному отверстию она
преодолевает сопротивление сжатого воздуха. Как только пластина а пройдет
кромку В, давление по обе ее стороны уравнивается и сохраняется до тех пор,
пока она не пройдет кромку В'. Тогда давление сжатого воздуха на пластину
с рабочей стороны (со стороны впускного отверстия) начинает превышать давле-
ние с другой стороны, и усилие, возникшее вследствие разности давлений, соз-
дает крутящий момент, направленный по часовой стрелке.
На рис. 2.22 показана конструкция, а в табл. 2.7 приведены основные пара-
метры нереверсивных пластинчатых пневмомоторов по ГОСТ 16850—71 при
давлении сжатого воздуха на входе 0,4 МПа и выхлопе отработанного воздуха
из мотора в атмосферу (без глушителя). Значения параметров моторов при дру-
гих значениях давления на входе и противодавления на выхлопе указаны
в табл. 2.8.
Статор 3 пневмомотора (см. рис. 2.22) закрыт с торцов крышками 2 и 5,
в которых установлены шарикоподшипники, являющиеся опорами ротора 1
с выходным валом. В пазах ротора перемещаются текстолитовые пластины 4.
Принудительное поджатие пластин к статору обеспечивается центробежными
Рис. 2.22. Нереверсивный пластинчатый пиевмомотор:
I — начало впуска; II — конец впуска; III — начало выхлопа; IV — конец выхлопа
53
Таблица 2.7
Основные параметры нереверсивных пластинчатых пневмомоторов
при давлении воздуха на входе 0,4 МПа
Номи- нальная мощ- ность, кВт (предель- ное от- клонение -Ю %) Число плас- тин, шт. Частота враще- ния, с”1 (предель- ное от- клонение ±15 %) Расход воздуха, ма/мни (предель- ное от- клонение + 10 %) Номи- нальная мощ- ность, кВт (предель- ное от- клонение -ю %) Число плас- тин, шт. Частота враще- ния, с“* (предель- ное от- клонение ±15 %) Расход воздуха. м3/мин. (предель- ное от- клонение + 10 %)
0,09 284 0.2 4 150
0,12 2G7 0.3 1,10 5 133 1,4
0,18 4 250 0,4 6 117
0,25 234 0,5 4 133
4 216 1,50 5 117 1,7
0,37 о 200 0,6 6 100
4 192 4 117
0,55 5 175 0,8 1.80 5 100 1.9
4 167 6 83
0,75 150 1,0 4 100
6 133 2,20 5 92 2.1
4 158 6 4 83 83
0,9 о 142 1,2 2,65 5 75 2,4
6 125 6 67
силами и давлением сжатого воздуха, подводимым через специальные каналы,
просверленные в роторе. Подвод воздуха к рабочей камере может быть боковым
(в плоскости, перпендикулярной оси статора) и торцовым (канал со стороны
торца мотора). Боковой подвод воздуха предпочтительнее, так как сечение впуск-
ных каналов в этом случае больше, что значительно снижает потери давления
при подаче сжатого воздуха в рабочую камеру [14].
Таблица 2.8
Основные параметры реверсивных пластинчатых пневмомоторов
при разных значениях давления воздуха на входе
Давление (ма- нометрическое) на входе, МПа Противодавле- ние (маноме- трическое) на выхлопе, МПа Мощ- ность Ча- стота вра- щения Рас- ход воз- духа * Противодавле- ние (маноме- трическое) на выхлопе, МПа Мощ- ность Ча- стота вра- щения Рас- ход воз- духа
Давление нометриче I на входе,
% н оминаль начени$ кого % И оминаль наченн? кого
О.з 0 0,05 60 40 80 65 75 65 0.5 0 0,05 0,1 0,15 140 110 90 70 по 100 90 80 120 110 100 90
0.4 0 0,05 0.1 100 75 60 100 85 75 100 90 85 0,63 0 0,05 0.1 0,15 220 190 170 150 140 120 100 80 165 150 140 130
54
Рис. 2.23. Схема радиально-поршневого мотора
Рис. 2.24. Пятицилиндровый поршневой мотор
Пластинчатые моторы обладают рядом достоинств по сравнению с другими
типами моторов: высокой энергоемкостью (при одинаковой мощности пластинча-
тые моторы имеют меньшую массу и меньшие размеры), простотой конструкции,
плавностью крутящего момента. Недостатки пластинчатых моторов: значитель-
ные утечки; повышенное трение, в связи с этим быстрый износ пластин; сильный
шум и большой расход смазочного материала.
Указанные качества четко определили область применения пластинчатых
моторов: они выгодны лишь там, где крайне ограничены размеры и масса. По-
этому наиболее широко их используют для привода ручного пневматического
инструмента: сверлильных машин, ключей, гайковертов, щеток напильников,
ножниц и др. Моторы применяют как с редуктором, так и без него, в зависимости
от того, какая нужна выходная скорость инструмента. Пластинчатые моторы
используют также для привода пневматических талей и других подъемных
устройств.
Поршневые моторы подразделяют на радиально-поршневые с поршнями,
движущимися перпендикулярно оси выходного вала, и аксиально-поршневые
с поршнями, движущимися параллельно оси выходного вала. Наибольшее рас-
пространение получили радиально-поршневые моторы.
Обычная схема радиально-поршневого мотора (рис. 2.23) представляет собой
кривошипно-шатунный механизм с поршнем 2, движущимся в рабочем цилин-
дре 1, шатуном 3 и коленчатым валом 4, являющимся выходным звеном. В рабо-
чий цилиндр сжатый воздух подается распределительным золотниковым меха-
низмом 8, который приводится в движение от выходного вала через шестерни 5,
6 и шатун 7. Сжатый воздух через золотник поступает в цилиндр и перемещает
поршень вниз. Распределитель выполнен таким образом, что примерно на 5/8
длины полного хода поршня полость цилиндра разобщается с впускным кана-
лом. После «отсечки» поршень перемещается вследствие расширения замкнутого
объема воздуха. При обратном ходе поршня золотник сообщает рабочую полость
с атмосферой. В момент, когда поршень находится на некотором расстоянии от
конца хода, золотник перекрывает выходной канал и при дальнейшем движении
поршня происходит сжатие оставшегося воздуха. Таким образом, поршневой
мотор работает с частичным расширением сжатого воздуха и с частичным обрат-
ным сжатием. Поршневой мотор можно изготовить с переменной степенью напол-
нения, что позволяет регулировать величину крутящего момента. Это дости-
гается изменением фазы распределения (подачи сжатого воздуха) в рабочую
55
камеру. В поршневых моторах приме-
няют распределители двух типов —
золотниковые и осевые (крановые).
Поршневые моторы, как правило,
изготовляют многоцилиндровыми. По
способу расположения цилиндров
они подразделяются на: звездообраз-
ные — с расположением цилиндров по
радиусам в одной плоскости; рядные —
с расположением цилиндров парал-
лельно друг другу; V-образные —
с расположением цилиндров под углом
друг к другу. Получили также рас-
пространение моторы с поршнями дву-
стороннего действия, в которых сжатый
воздух подводится к обеим сторонам
поршня. Одноцилиндровый мотор дву-
стороннего действия можно рассмат-
ривать как двухцилиндровый мотор
одностороннего действия, у которого
совмещены оба цилиндра и поршни.
На рис. 2.24 приведена конструк-
ция пятицилиндрового поршневого
мотора. В радиальных расточках кор-
пуса 9 установлены пять (в других
моделях — четыре) рабочих цилиндра 7.
Каждый поршень 6 имеет уплотни-
тельные кольца и палец 10, на кото-
ром смонтирована головка шатуна 5.
Нижняя часть шатуна на роликах
посажена на шейку кривошипа,
Таблица 2.9
Основные параметры радиально-
поршневых пневмомоторов при давлении
сжатого воздуха на входе 0,4 МПа н
номинальной частоте вращения
выходного вала 750 с”1
Номинальная мощность (предельное отклонение + 12 %), кВт Номиналь- ный удель- ный расход воздуха, м3/мин кВт Услов- ный про- ход при- соедини- тельной армату- ры, мм
3,0 1,20 20
4,0 25
5,5 1,16
7, 5 40
11,0
15,0 50
18,5
22,0 1,08 63
остальные шатуны шарнирно связаны
с шатуном 5. Коленчатый вал мотора состоит из кривошипа 11, выходного вала 12
и противовеса 2, соединенных с кривошипом сегментными шпонками. Опорами
коленчатого вала служат три шарикоподшипника. С противовесом 2 с помощью
штифта 3 соединена распределительная ось 4. Трущиеся поверхности мотора
смазываются маслом, которое заливается в картер через отверстие, закрытое
пробкой 1, и разбрызгивается вращающимся кольцом 8.
В табл. 2.9 приведены основные параметры радиально-поршневых моторов
по ГОСТ 10736—71 при давлении сжатого воздуха на входе 0,4 МПа без глуши-
теля шума на выхлопе.
Типичная конструкция аксиально-поршневого мотора с одноступенчатым
редуктором представлена на рис. 2.25. В расточках блока цилиндров 2 поме-
щены поршни 3, связанные шатунами 4 с наклонной шайбой 5. Распределитель-
ная ось выполнена за одно целое с крышкой 1, имеющей отверстия подвода и
отвода воздуха. Сжатый воздух по одному из каналов А подводится в рабочие
цилиндры. Усилие от давления сжатого воздуха на поршни через шатун пере-
дается на наклонную шайбу 5. Тангенциальная составляющая этого усилия за-
ставляет шайбу и блок поворачиваться, при этом вращается вал 8, который свя-
зан фланцем с блоком цилиндров и силовым карданом 9 с наклонной шайбой.
Отработанный воздух из рабочих камер выходит через второй канал А в распре-
делительной оси, а также через канал Б в блоке цилиндров. На конце вала 8
нарезаны зубья, находящиеся в зацеплении с зубчатыми колесами 6 планетар-
ного редуктора. Водило 7 редуктора является выходным валом пневмо-
мотора.
Выпускаются также пневмомоторы с двуступенчатым редуктором.
Поршневые моторы по сравнению с другими типами моторов обладают рядом
достоинств: имеют малую утечку воздуха, легко реверсируются изменением
направления потока сжатого воздуха, допускают перегрузку, позволяют изме-
нять степень наполнения.
56
Поршневые моторы применяют для привода машин, лебедок, конвейеров
во взрывоопасных цехах и участках, а также для привода сверлильных машин.
Мембранные моторы (рис. 2.26). Сжатый воздух, подводимый к каналу А
распределительного устройства 1 проходит через выточки золотника 2 в канал Б
и поступает в рабочую камеру. Мембранный узел 3 перемещается, проворачивая
при помощи храпового механизма 4 колесо 5. Водило 6, жестко связанное с мем-
бранным узлом, в конце перемещения переключает золотник 2, сообщая рабо-
чую камеру через канал В с атмосферой. Происходит выхлоп отработанного
воздуха. Мембранный узел 3 усилием пружины 7 возвращается в исходное поло-
жение, переключая золотник на подачу сжатого воздуха. Цикл повторяется.
На рис. 2.27 представлена зависимость мощности Мо и крутящего момента Ма
мембранного мотора от частоты вращения. Моторы этого типа тихоходны, но
способны развивать высокий крутящий момент. Так, при одинаковом расходе
сжатого воздуха мембранные моторы развивают крутящий момент примерно
в 800 раз больший чем шиберные, и в 40 раз больший, чем радиально-поршневые
моторы. Как и поршневые моторы, они могут быть выполнены с переменной сте-
пенью наполнения.
Имеются конструкции с двумя и тремя мембранными приводами, переда-
ющими усилие на общий выходной вал. Высокий крутящий момент при низкой
скорости вращения и резкое падение его при увеличении скорости вращения пре-
допределили области использования моторов этого типа. Мембранные моторы
Рис. 2.26. Мембранный мотор
Рис. 2.27. Зависимость мощности No н крутящего момента Мо от частоты вращения л0
для мембранных моторов
57
5
Рис. 2.28. Элементы конструкции винтового мотора
широко применяют в приводах клапанной арматуры, где максимальные усилия
необходимы в начальный момент открытия клапана (затем усилие подъема зна-
чительно снижается в результате выравнивания давления).
Винтовые моторы представляют собой корпус с расточкой в виде «вось-
мерки», двух торцовых крышек, двух (или более) находящихся в зацеплении
винтов, оси которых расположены параллельно, н синхронизирующих шестерен.
Винты установлены на подшипниках качения, смонтированных в крышках.
В сечении, перпендикулярном оси, винты представляют собой находящиеся
в зацеплении шестерни с зубьями специальных профилей. Однако если в шесте-
ренных моторах сжатый воздух перемещается по окружности зубчатых колес,
то в винтовых он движется в осевом направлении вдоль спиральных зубьев к по-
лости выхлопа. Выступы одного винта плотно входят во впадины другого и в не-
скольких местах (в зависимости от того, насколько длина винта больше его шага)
отделяют полость давления от выхлопа. Давление сжатого воздуха воздействует
иа зубья и создает крутящий момент.
На рис. 2.28 показаны рабочие элементы одной из конструкций моторов
этого типа. Винт 1 с выходным валом — четырехзаходный, профиль его зубьев
образован выпуклыми полуокружностями; винт 2 имеет шесть зубьев, профиль
которых выполнен в виде вогнутых полуокружностей. Синхронизирующие косо-
зубые колеса 3 и 4 предохраняют от силового контакта между винтами, что пре-
дотвращает их износ, при этом можно не предъявлять высоких требований к ка-
честву их смазывания.Вследствие спирального расположения зубьев процесс
взаимодействия винтов протекает непрерывно, поэтому развиваемый крутящий
момент является плавным, без пульсаций. Вибрации при работе мотора отсут-
ствуют .
Винтовые моторы подобно шестеренным с шевронными зубьями работают
с частичным расширением сжатого воздуха. Отсутствие силового контакта, отно-
сительно малый диаметр винтов, применение подшипников качения обеспечи-
вают частоту вращения до 250 с-1 (15 000 об/мин). Винтовые моторы долговечны,
компактны, быстроходны, развивают плавный крутящий момент, имеют относи-
тельно высокий КПД, не требуют смазывания при работе и высокой очистки
сжатого воздуха, однако высокая сложность их изготовления и, как следствие,
высокая стоимость, сдерживают широкое применение моторов этого типа в про-
мышленности.
Турбинные моторы отличаются от объемных тем, что в них кинетическая
энергия потока воздуха непосредственно превращается в механическую работу.
В турбинных моторах сжатый воздух входит в суживающееся сопло с начальным
давлением, затем, расширяясь, выходит из сопла с большой скоростью прямо
на рабочие лопатки мотора. Направление струи воздуха, проходящего по кана-
лам между рабочими лопатками, изменяется, в результате чего развивается сила,
приложенная к лопаткам и создающая крутящий момент, таким образом, сжатый
воздух отдает часть своей энергии турбинному колесу.
На рис. 2.29 изображен турбинный пневмомотор, предназначенный для
встраивания в качестве привода в ручные шлифовальные машины и силовые
58
Рис. 2.29. Турбинный пневмомотор
Рис. 2.30. Зависимость мощности Л;о и крутя-
щего момента Мо от частоты вращения п9 для
турбинных пневмомоторов
головки. Рабочее колесо 4 с выходным валом 1 вращается на двух шарикопод-
шипниках, встроенных в корпус 2. Лопатки рабочего колеса охватываются бан-
дажным кольцом 5. Сжатый воздух поступает в полость А и через отверстия Б
в сопловом аппарате 3 подается на лопатки рабочего колеса.
Типичные кривые зависимости мощности и крутящего момента Мо от
частоты вращения п0 для турбинных пневмомоторов показаны на рис. 2.30.
Турбинные моторы могут быть одноступенчатыми — с одним рабочим коле-
сом и одним венцом лопаток или двухступенчатыми — с одним рабочим колесом
и двумя венцами лопаток. Двухступенчатые моторы обычно изготовляют как
специальные на большие мощности.
Достоинства турбинных моторов: малые масса на единицу мощности и раз-
меры; высокая скорость выходного вала; возможность регулирования мощности
изменением числа сопел.
Недостатки этих моторов: низкий КПД при малой мощности; сложность
реверсирования; понижение КПД при резком изменении режима работы; неустой-
чивость работы при малой частоте вращения.
Турбинные моторы можно применять там, где требуется высокая частота
вращения и постоянный режим работы. Моторы используют для привода пнев-
мошпинделей и ручного инструмента — малых высокоскоростных шлифоваль-
ных машин для тонкой обработки.
Выбор типа пневмомотора. Ни один из рассмотренных типов моторов не яв-
ляется безукоризненным, пригодным для любого случая. Каждый из них имеет
свои достоинства и недостатки, и выбор типа мотора в каждом конкретном слу-
чае должен сопровождаться всесторонней оценкой его особенностей. Не послед-
нюю роль играет в этом экономический анализ: иногда бывает выгодно потерять
в КПД, но выиграть в массе и размерах, или же проиграть в размерах, но вы-
играть в долговечности и т. п.
В табл. 2.10 представлены основные параметры пневмоторов различных
типов. Рабочее давление для всех типов моторов примерно одинаково: 0,3—
0,6 МПа.
Самую большую частоту вращения способны развивать турбинные моторы,
меньшую пластинчатые, винтовые и шестеренные. Мембранные и радиально-
поршневые моторы являются самыми тихоходными. Радиально-поршневые мо-
торы рекомендуется применять при рабочих скоростях вращения ниже 25—30%
скорости холостого вращения, так как при этой скорости вращения они лучше
регулируются и меньше потребляют воздуха.
Пластинчатые, винтовые и турбинные моторы развивают стабильный крутя-
щий момент, а у мембранных, поршневых и шестеренных моторов момент пуль-
сирующий.
Наиболее высокий адиабатический КПД (наименьшие утечки сжатого воз-
духа) имеют поршневые и мембранные моторы; КПД пластинчатых и шестеренных
моторов гораздо ниже из-за значительных утечек. Снижает КПД также установка
глушителей шума. КПД турбинных моторов высок лишь при больших мощностях.
Расход воздуха на единицу мощности меньше у тех моторов, которые работают
С частичным расширением сжатого воздуха, поэтому расход воздуха для прямо-
59
О
Основные параметры пиевмомоторов различных типов
винтовой турбинный 0,3 —0,6 3 — 50 0,03 — 2 До 250 До 2 000 (15 000) (120 000) 83—133 330 — 1 330 (5 000— (20 000 — 8 000) 80 000) 50 — 60 75 — 90 1,0—1,5 1,1 —1,4 1 6 — 12 2,5 — 6 ।
пластин- 1 чатый 0,05 — 15 До 330 (20 000) 33 — 250 (2 ODO- 15 000) 45 — 55 1,0 —2,0 1,5 — 4
Мотор мембранный . 1 9*0 — 50*0 До 1,7 (100) 0 — 0,3 (0 — 20) 20 — 25 СО 7 о 1,1-1,6 Свыше 20
I поршневой 1 радиальный аксиальный со I 0,2 — 25 0,1—3 1 До 50 До 100 (3000) (6000) 10 — 25 20 — 50 (600—1500) (1200 — 3000) 50 — 65 0,9 —2,0 1,1—2,0 । 91— 9
шестеренный 1 Прямо- зубые и Шеврон- косо- ные ше- зубые стерни шестерни 0,3 —0,6 2 — 60 До 50 (3000) 25 зз (1500 — 2000) 50 — 60 1,1 —1,4 0,8—1,2 1 8 — 15
параметр ' i Рабочее давление, МПа Мощность, кВт Частота вращения: максимальная (без на- грузки и редуктора), с-1 (об/мин) рабочий диапазон, с”1 (об/мин) соответствующая мак- симальной мощности, % максимальной Удельный расход воздуха, м8/мии иа 1 кВт Коэффициент расширения воздуха Относительная масса, кг/кВт
Рис. 2.31. Зависимость крутящего мо-
мента /Ио (/) и мощности (2) от частоты
вращения для двух различных давлений
зубых и косозубых шестеренных
моторов превышает расход для
других типов. Велик расход воз-
духа для турбинных моторов ма-
лой мощности.
Масса на единицу мощности
наиболее низка у пластинчатых,
турбинных и аксиально-поршне-
вых моторов, вследствие чего они
являются основными типами для
привода ручного инструмента.
Турбинные и пластинчатые
моторы отличаются от мембранных,
поршневых, шестеренных и винто-
вых минимальными размерами. Регулирование крутящего момента можно осу-
ществлять в мембранных, поршневых и турбинных моторах: в первых двух —
изменением степени наполнения; в последнем — изменением числа сопел.
Все типы моторов, кроме мембранных и шестеренных с шевронными зубьями,
могут быть выполнены реверсивными путем перемены направления подачи воз-
духа. Однако моторы с реверсированием менее мощны и потребляют больше
воздуха, но характеризуются лучшим стартовым крутящим моментом и более
быстрым достижением полной скорости. Так, реверсивный пластинчатый мотор,
не соединенный с инерционными приводными механизмами, набирает полную
скорость примерно за пол-оборота, а поршневой — за доли секунды. При выборе
типа мотора следует знать также основные параметры его характери-
стики.
На рис. 2.31 показаны типичные кривые мощности No и крутящего момента Мо
мотора для двух рабочих давлений. Мощность мотора при постоянном давлении
на входе изменяется от нуля при остановленном моторе до максимума при частоте
вращения, доведенной до определенного предела. Затем мощность снова умень-
шается до нуля прн скорости холостого хода (ненагруженного мотора). Крутя-
щий момент имеет максимальное значение при остановленном моторе (тормоз-
ной крутящий момент) и уменьшается почти линейно до нуля при скорости хо-
лостого хода. Стартовый крутящий момент (снимаемый с вала мотора) состав-
ляет приблизительно 75% тормозного крутящего момента. Максимальная мощ-
ность моторов, как правило, достигается при работе их на частоте вращения,
составляющей приблизительно 50% скорости холостого хода для конструкций
моторов без регулятора скорости и 80% — для конструкций с регуляторами
скорости. При значительном изменении нагрузки на ведомом приводе применяют
моторы с регуляторами скорости, что позволяет поддерживать частоту вращения,
близкую к номинальной, снижая непроизводительный расход воздуха. Однако
сложность конструкций и стоимость их выше, по сравнению с конструкциями
регулятора скорости.
Все моторы легко и просто регулируются изменением рабочего давления
на входе. Каждое изменение давления дает изменение рабочих характеристик
мотора — новую пару кривых мощности и крутящего момента.
Так как в каталогах заводов-изготовителей мощность моторов может быть
указана при разных давлениях, то для сравнения двух моторов по мощности их
приводят к одной и той же величине рабочего давления, принимая, что изменение
давления на 0,05 МПа дает приблизительно 10% изменения мощности. Моторы
не имеют жесткой характеристики и при изменении нагрузки изменяют частоту
вращения. Они могут быть остановлены под нагрузкой на любое время без опас-
ности повреждения или нагрева их деталей.
Часто применяют моторы с шестеренными редукторами, что повышает кру-
тящий момент на величину передаточного отношения и уменьшает эффект влия-
ния изменения нагрузки иа частоту вращения.
6J
Для прикидочных расчетов расход воздуха при давлении 0,6 МПа и работе
двигателя на максимальной мощности может быть определен, исходя из эксплуа-
тационных средних данных расхода на 1 кВт мощности, приведенных ниже:
N, кВт................................ 1 1—3 Св. 3
Q, м*/мин на 1 кВт................ 1,5 — 2 1,2 —1,5 0,9 —1,2
Расход воздуха Q в режиме холостого хода двигателей без регулятора ско-
рости составляет приблизительно 130%, а при 25%-ной скорости холостого
хода — приблизительно 60% расхода воздуха в режиме максимальной мощности.
Для определения расхода воздуха при любой промежуточной частоте вращения
двигателя по указанным выше данным определяют расход при максимальной
мощности, 25%-ной скорости и скорости холостого хода. Через эти точки про-
водят плавную кривую в системе координат, где на одной оси указывается ча-
стота вращения, а на другой — расход воздуха. По этой кривой определяют
расход при любой частоте вращения.
Пневмомоторы выбирают на основании механических характеристик, да-
ющих зависимость движущего момента М на валу мотора, его мощности N и
расхода Q сжатого воздуха от установившейся скорости w или частоты враще-
ния п (см., например, рис. 2.31). Механические характеристики могут быть
получены экспериментально или теоретически [4, 9, 10].
Точное определение расхода воздуха для моторов различного типа весьма
сложно, поэтому для приближенных расчетов можно воспользоваться следующими
упрощенными формулами.
Для шестеренных моторов с двумя зубчатыми колесами
Q — 6,5Онояг6/гмт]об ,
Ра
где Duo — диаметр начальной окружности; т — модуль; b — ширина зубча-
того колеса; пм — частота вращения вала мотора; т]об — объемный КПД; ра —
абсолютное атмосферное давление.
Для пластинчатых моторов [9]:
< 2 =е21гямг]об (-J- + °>5) — 2 + 1) cos (<₽о + -у) sin“§- +
+ 4- cos (2<р0 + у) sin у] Ра ,
z J Ра
где е — эксцентриситет ротора мотора; I — длина ротора; г — число пластин;..
у — угол между двумя соседними пластинами ротора,
у = 2л/г = 360°/г;
Го — радиус ротора; <р0 — угол поворота ротора, соответствующий концу зоны
впуска (см. рис. 2.21).
Для поршневых моторов:
радиально-поршневых одноходовых
Q = А ПЧгпПоб P1 tPa- >
радиально-поршневых двухходовых
< 2 = лО%гШ]об Pl Ра ;
Ра
аксиально-поршневых с односторонним расположением поршней
< 2 = -г- D2znDa tg ух P1
* p&
62
аксиально-поршневых с двусторонним расположением поршней
Q = -^-D2znDntg У1Л±^ ,
z Ра
где D — диаметр поршней; z — число поршней; Da — диаметр окружности,
на которой расположены оси цилиндров; — угол между осью цилиндрового
блока и наклонной шайбой.
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И. И. Механизмы в современной технике. Т. 5. М.: Наука, 1976,
с. 848.
2. Башта Т. М., Зайченко И. 3., Ермаков В. В., Хаймович Е.^М. Объемные гидрав-
лические приводы. М.; Машиностроение, 1969. 628 с.
3. Герц Е. В. Пневматические приводы. Теория и расчет. М.: Машиностроение,
1969. 359 с.
4. Герц Е. В., Бозров В. М. Механические характеристики пластинчатых пневмо-
моторов. — В кн.; Пневматика и гидравлика. Приводы и системы управления. Вып. 7.
М.: Машиностроение, 1979, с. 241 —245.
5. Герц Е. В., Долженков Б. С. Выбор параметров быстродействующего пневмопри-
вода. — Станки и инструмент, 1977, № 4, с. 15 — 17.
6. Герц Е. В., Крейнии Г. В. Расчет пневмоприводов. М.: Машиностроение, 1975.
272 с.
7. Гуревич Д. Ф. Расчет и конструирование трубопроводной арматуры. Л.: Маши-
ностроение, 1969. 887 с.
8. Дегтярев В. И», Мялковский В. И., Борисенко К- С. Шахтные пневмомоторы.
М.: Недра, 1979. 190 с.
9. Зеленецкий С. Б., Рябков Е. Д., Микеров А. Г. Ротационные пневматические дви-
гатели. Л.: Машиностроение, 1976. 239 с.
10. Зиневич В. Д., Ярмоленко Г. 3., Калита Е. Г. Пневматические двигатели горных
машин. М.: Недра, 1975, 344 с.
11. Кожевников С. Н., Пешат В. Ф. Гидравлические и пневматические приводы
металлургических машин. М.: Машиностроение, 1973. 359 с.
12. Крейнин Г. В., Солнцева К. С. Воспроизведение заданного закона движения ме-
ханизмов с пневмоприводом. — Машиностроение, 1971, № 3, с. 35—41
13. Перельцвайг М. И. К расчету ударного пневматического поршневого привода. —
В кн.: Теория машин-автоматов и пневмоприводов. М.: Машиностроение, 1966, с. 203 — 211.
14. Справочник металлиста. Том 1. М.; Машиностроение. 1976. 768 с.
15. Цилиндры пневматические на номинальное давление 10 кгс/см2 по ГОСТ 15608 —
70. Конструкция и исполнительные размеры. Ч. I и ч. II.. 2-е изд. Харьков: 1974, 150 с.;
149 с. (ВНИИГидропривод).
16. Pneumatlsche Steuerungsgerate. Martonair Druckluftsteuerungen GmBH, 1976,
S. 2.3. 115.
Глава 3
ПНЕВМОПРЕОБРАЗОВАТЕЛИ
Пневмопреобразователи предназначены для преобразования энергии потока
сжатого воздуха в энергию потока рабочей жидкости, выдачи электрического
командного сигнала по достижении в пневматической системе заданного давле-
ния, сигнализации о наличии давления на различных участках системы. В эту
группу устройств входят: пневмовытеснители, пневмогидропреобразователи,
пневмогидронасосы, пневмогидроаккумуляторы, реле давления и пневмоэлектро-
преобразователи, индикаторы давления.
3.1. ПНЕВМОВЫТЕСНИТЕЛИ
Пневмовытеснители предназначены для передачи давления сжатого воздуха
гидравлической жидкости без изменения величины давления. По конструктив-
ному признаку пневмовытеснители могут быть: без разделителя сред и с порш-
невым и мембранным разделителями. Пневмовытеснители без разделителя сред
представляют собой закрытый сосуд, верхняя часть которого сообщена с пневма-
тической системой через распределитель, а нижняя — с гидроциляндром. К не-
достаткам пневмовытеснителей этого типа следует отнести растворение воздуха
в жидкости; быстрое окисление масла; невозможность установки их в любом
положении. Эти недостатки устранены в пневмовытеснителях с разделителями
сред, лучшими из них являются те, в которых разделители сред выполнены в виде
фигурной мембраны. Отсутствие перепада давления между рабочими средами
позволяет применять тонкие эластичные фигурные мембраны, что практически
исключает потери давления на деформацию мембраны при вытеснении рабочей
жидкости.
На рис. 3.1 представлена схема пневмовытеснителя 2 мембранного типа,
применяемого для обеспечения перемещения поршня гидроцилиндра 3 одно-
стороннего действия с пружинным возвратом. При включении распределителя 1
сжатый воздух подается в полость А и рабочая жидкость из полости Б вытес-
няется в бесштоковую полость гидроцилиндра. Поршень цилиндра возвращается
в исходное положение при сообщении полости А с атмосферой.
Рне. 8Л. Схема пиевмоеы-
тесяителя мембранного шва
64
Рис. 3.2. Пневмогидропреобразователи последовательного действия
3.2. ПНЕВМОГИДРОПРЕОБРАЗОВАТЕЛИ
Пневмогидропреобразователи предназначены для преобразования энергии сжа-
того воздуха в энергию рабочей жидкости с другими значениями давления. По
принципу действия различают пневмогидропреобразователи прямого действия,
передающие рабочей жидкости гидравлической системы высокое давление с мо-
мента подачи сжатого воздуха в полость пневмоцилиндра, и последовательного
действия, передающие в гидравлическую систему вначале низкое давление рабо-
чей жидкости, а затем высокое. По конструктивному признаку пневмогидропре-
образователи можно подразделить на поршневые, мембранные и комбинирован-
ные.
На рис. 3.2, а показан поршневой пневмогидропреобразователь последова-
тельного действия. В корпусе 6 помещен поршень 7 пневмоцилиндра с плунжером 5
гидроцилиндра. В промежуточ-
ной плите 8 и стакане 9 смон-
тирован корпус 3 гидроцилиндра
высокого давления.
В верхней части корпуса 3
расположено клапанное устрой-
ство 1. Сжатый воздух, подво-
димый к каналу 4, по трубке 2
поступает в верхнюю полость
камеры А. В ней создается дав-
ление, под действием которого
жидкость по трубке 10 посту-
пает в клапанное устройство и
затем в гидроцилиндр 11. Пор-
шень гидроцилиндра переме-
щается и создает усилие пред-
варительного зажима. При по-
даче сжатого воздуха в по-
лость В пневмоцилиндра пор-
шень 7 с плунжером 5 переме-
Рис. 3.3. Пневмогидропреобразова-
тели пр ямого^ действия поршневого
типа (а), мембранного типа (7)
3 Е. В. Герц и др.
щается вверх, прижимая клапан к седлу, вытесняя жидкость в гидроцилиндр
и^развивая необходимое усилие зажима на штоке гидроцилиндра. Для возврата
поршня и плунжера в исходное положение сжатый воздух подается в полость Б.
Недостаток этой конструкции — наличие непосредственного контакта сжатого
воздуха с жидкостью (обычно минеральным маслом), что приводит к ее окислению
и насыщению воздухом.
На рис. 3.2, б приведена конструкция пневмогидропреобразователя ком-
бинированного типа, в котором имеется разделительная мембрана, исключающая
непосредственный контакт сжатого воздуха с рабочей жидкостью.
Конструкция поршневого пневмогпдропреобразователя прямого действия
фирмы «Мэкман» (Швеция) показана на рис. 3.3, а [5]. Он состоит из пневмо-
цилиндра 1 и камеры 2 усиления давления. Жидкость в гидросистему подается
при сообщении полости А пневмоцилиндра с магистралью, а возвращается в ис-
ходное положение при подаче сжатого воздуха в полость 5. Пневмогидропре-
образователь мембранного типа (рис. 3.3, б) состоит из корпуса 1, крышки 6,
двух мембран 3 и 5, плунжера 2 и втулки 4. Сжатый воздух, подводимый в по-
лость А, ограниченную фигурной мембраной 3, перемещает плунжер 2, который
вытесняет жидкость из полости Б в гидроцилиндр.
Основные достоинства конструкции — надежная герметичность и невысокие
требования к очистке сжатого воздуха и рабочей жидкости.
3.3. ПНЕВМОГИДРОНАСОСЫ
Пневмогидронасосы предназначены для нагнетания рабочей жидкости в гидро-
систему. По конструктивному признаку различают пневмогидропасосы одно-
стороннего и двустороннего действия.
В насосе одностороннего действия (рис. 3.4, а) сжатый воздух от пневмо-
распределителя 1 попеременно подается в поршневую и штоковую полости пнев-
моцилиндра 2. При подаче сжатого воздуха в поршневую полость рабочая жид-
кость из камеры нагнетания А вытесняется через нагнетательный клапан 3 в ги-
дросистему. При обратном ходе поршня пневмоцилиндра рабочая жидкость
из гидробака 4 через всасывающий клапан 5 поступает в камеру нагнетания —
происходит цикл всасывания. Недостатками насосов этого типа являются значи-
тельная пульсация подачи и большой расход сжатого воздуха.
В пневмогидронасосах двустороннего действия (рис. 3.4, б) расход воздуха
на единицу объема нагнетаемой жидкости уменьшается в 2 раза по сравнению
с расходом воздуха в насосах одностороннего действия, так как подача рабочей
жидкости в гидросистему происходит при перемещении поршня пневмоцилиндра
в любую сторону. Это позволяет также значительно снизить и пульсацию подачи.
В целях увеличения производительности пневмогидронасосов устройство
автоматического реверса поршня пневмоцилиндра часто встраивают непосред-
ственно в корпус цилиндра.
Рис. 3.4. Пневмогидронасосы одностороннего (а) и двустороннего (5) действия
66
Рис. 3.5. Расчетные схемы пневмогид-
роаккумулятора
3.4. ПНЕВМОГИДРО-
АККУМУЛЯТОРЫ
Пневмогидроаккумуляторы пред-
назначены для аккумулирования
энергии рабочей жидкости, находя-
щейся под давлением, и выдачи ее
в гидросистему в период резкого
увеличения расхода рабочей жид-
кости. Аккумулирование энергии
рабочей жидкости происходит в пе-
риод отсутствия или незначительного потребления гидравлической энергии
в гидросистеме.
Из рис. 3.5, поясняющего принцип действия ппевмогидроаккумулятора,
видно, что аккумулирование и возврат энергии рабочей жидкости происходят
в результате сжатия и расширения газа.
Пневмогидроаккумулятор представляет собой емкость, заполненную сжатым
газом с начальным давлением зарядки Р] (см. рис. 3.5, а). При поступлении в ем-
кость рабочей жидкости из гидросистемы происходит сжатие и повышение
давления газа до максимального значения давления в гидросистеме р2 (см.
рис. 3.5, б). При разрядке рабочая жидкость вытесняется из емкости вследствие
расширения газа до давления р3 (см. рис. 3.5, в). Такие аккумуляторы обычно
изготовляют с разделителями рабочей жидкости и газа, что исключает возмож-
ность растворения газа в жидкости и полную разрядку при неработающей гидро-
системе. Пневмогидроаккумуляторы объемом несколько сот литров изготовляют
без разделителя сред с датчиками сигнализатора уровня рабочей жидкости.
В зависимости от вида разделителя сред пневмогидроаккумуляторы могут
быть поршневыми и мембранными. В конструкции поршневого типа (рис. 3.6, а)
полость А аккумулятора заполняется газом, а полость Б — сообщается с гидро-
системой. Герметизация полости А от полости Б обеспечивается эластичными
уплотнениями поршня 1 и крышек 2 и 3. К недостаткам пневмогидроаккумуля-
торов поршневого типа необходимо отнести значительные потери давления на
преодоление сил трения уплотнений поршня и возможность утечек газа в местах
уплотнений поршня и крышки 2.
В конструкции мембранного пневмогидроаккумулятора (рис. 3.6, б) для
разделения рабочих сред использована мембрана 1, периметр которой зажат
между разъемными корпусными полусферами 2 и 3. Отверстие Б сообщает рабо-
чую полость аккумулятора с гидросистемой, а отверстие А предназначено для
подзарядки газовой полости сжатым воздухом или инертным газом. Конструкция
Рис. 3.6. Пневмогидроаккумуляторы
3*
67
мембранного пневмогидроаккумулятора с разделителем рабочих сред в виде
эластичного баллона представлена на рис. 3.6, в.
Для изготовления мембран обычно применяют вулканизированную резину
высокой плотности.
При расчете пневмогидроаккумуляторов определяют полную емкость акку-
мулятора Рк, полезную емкость рабочей жидкости Уп, работу, совершаемую при
разрядке, а также проверяют на прочность детали аккумулятора [1]. Полная
емкость аккумулятора равна начальному объему газа (Ёк = Vx) до заполнения
аккумулятора рабочей жидкостью (см. рис. 3.5, а). При условии полного вытес-
нения рабочей жидкости из аккумулятора при разрядке полезная емкость рабо-
чей жидкости V'lI равна разности объемов газа до заполнения и в конце запол-
нения V2
V'n-V1-V2 ИЛИ v'n = I/K (1 - -g-) .
Если разрядку аккумулятора не доводят до конца в в нем остаетсянекоторый
запас Е.з рабочей жидкости, а давление газа при этом будет р3, то полезная ем-
кость
Полученные выражения справедливы для изотермического режима расшире-
ния и сжатия газа, т. е. при значении показателя политропы n~ 1.
При политропическом процессе изменения состояния газа (n> 1) выраже-
ния для Еп примут следующий вид:
Показатель политропы процесса расширения и сжатия газа зависит от дли-'
тельности протекания процесса и давления зарядки и разрядки аккумулятора.
Значения показателя политропы п — 1 характерны для работы аккумулятора
в режиме компенсации утечек в гидросистеме в случае длительной выдержки
какого-либо изделия под давлением при отключенном насосе.
При работе аккумулятора для покрытия мгновенных больших расходов ра-
бочей жидкости в гидросистеме (длительность процесса менее 1 мин) показатель
политропы принимают п= 1,3-5-1,4. Температурные изменения, происходящие
при изменении состояния газа (п> 1), могут снизить полезную емкость аккуму-
лятора.
При разрядке аккумулятора вытесняемая рабочая жидкость совершает ра-
боту, равную работе расширения газа от максимального давления р2 др давления
газа р3 = в конце разрядки. Работу, совершаемую при разрядке аккумулятора,
можно определить по выражениям:
для изотермического цикла
лп = Р1Ук In ,
Pi
для политропического цикла
Рассчитывать пневмогидроаккумулятор на прочность следует по следующим
формулам.
Толщина стенок цилиндра
S __ Р Г 1 f М + Рг О — 2Р) __ |
2 [К [а]-р2(1+|х)
68
где D — внутренний диаметр цилиндра; [а] — допускаемое напряжение на
разрыв; p-z — давление в конце зарядки; (х — коэффициент Пуассона (для стали
(1 = 0,3, для латуни р. = 0,35).
Толщина донышка (крышек) цилиндра:
плоского
б. 0,4050 1/
/ [<И
сферического
S - P^D
1 41а] ’
По последней формуле можно рассчитать также толщину полусфер шарового
аккумулятора.
3.5. РЕЛЕ ДАВЛЕНИЯ
Реле давления предназначены для выдачи электрического командного сигнала
при достижении в пневматической системе заданного давления (или разности
давлений). Различают реле давления измерительного и дифференциального ти-
пов. Первое реагирует на избыточное давление (разность между изменяющимся
давлением в системе н атмосферным), второе — на разность между давлениями
в двух частях пневматической системы (например, в штоковой и поршневой по-
лостях пневмоцилиндра).
Контролируемое давление, или разность давлений, воспринимается чувстви-
тельным элементом (поршнем, мембраной, сильфоном, трубкой Бурдона). На-
стройка реле давления на заданное значение контролируемого параметра осуще-
ствляется изменением усилия нагрузочного элемента, обычно винтовой пружины.
Когда контролируемый параметр достигнет заданного значения, перемещение
чувствительного элемента достигнет значения, необходимого для замыкания или
размыкания электрического контактного устройства.
Электрические контактные устройства могут быть прямого или мгновенного
действия. Контакты прямого действия при медленном нагружении чувствитель-
ного элемента подвергаются сильному дугообразованиго, что приводит к их
быстрому износу. Реле давления с контактами прямого действия применяют
только как аварийные сигнальные устройства.
На рис. 3.7, а изображено реле давления измерительного типа с сильфонным
чувствительным элементом и ртутным контактным устройством. Газ под давле-
нием подводится к штуцеру 8. Если величина давления ниже заданной, колба 2
с ртутью занимает положение, при кагором оба контакта 3 касаются ртути и
замкнуты через нее (как показано на рисунке). При повышении давления тол-
катель 7 сильфона 6 перемещается вверх и, растягивая пружину 5, через систему
рычагов поворачивает колбу с ртутью в направлении, противоположном ходу
часовой стрелки. При достижении заданного давления колба наклоняется влево
настолько, что контакты размыкаются (не касаются поверхности ртути). На-
стройка реле давления осуществляется изменением длины пружины 5 с помощью
винта 1. Стрелка 4 показывает на шкале давление настройки.
Диапазон изменения рабочего давления 0—0,1 МПа.
Использование ртутного контактного устройства делает возможным приме-
нение реле этой конструкции только в строго неизменном положении на стацио-
нарных машинах при отсутствии вибрации. Кроме того, ртутные контакты, как
и все контакты прямого действия, нс рекомендуется применять при пульсации
давления газа, потому что их перемещение связано линейной зависимостью с пере-
мещением чувствительного элемента. Ртутные контактны не обеспечивают при
этом точности срабатывания из-за инерционности ртути, а контакты прямого дей-
ствия, изготовленные из твердых металлов, быстро выходят из строя вследствие
дугообразования.
69
1
г)
На рис. 3.7, б представлена конструктивная схема пневматического реле
давления с мембранным чувствительным элементом и электрическим контактным
устройством мгновенного действия. Газ под давлением подводится к присоеди-
нительному отверстию в крышке 5. Усилие от действия давления на мембрану 4
снизу уравновешивается усилием пружины 3. При определенном давлении,
устанавливаемом с помощью регулировочного винта 1, толкатель 2, воздействуя
на штифт электрического микропереключателя, переключает его контакты.
На рис. 3.7, в изображено реле давления дифференциального типа с поршне-
вым чувствительным элементом и с электрическим контактным устройством мгно-
венного действия, выпускаемое фирмой «Барксдейл вэлвз» (США) (4]. Реле
давления реагирует на разность давлений в двух полостях, связанных с отвер-
стиями А и Б. К. отверстию А подводится газ низкого давления, к отверстию Б—
высокого. При достижении заданной разности давлений поршень 6 сжимает
пружину 5 и перемещается вверх, нажимая на штифт микропереключателя 4,
связанного с пружинами / и 3. Разность давлений, при которой срабатывают элек-
трические контакты, определяется положением микропереключателя, изменяе-
мым с помощью винта 2.
Реле давления поименяют для контполя разности давлений в диапазоне
0,035—1,0 МПа.
На базе этой конструкции фирма выпускает реле давления измерительного
типа (рис. 3.7, г), реагирующее на избыточное давление в пределах 0,1—2,1 МПа,
отличающееся от предыдущего только устройством корпуса 7 и поршня 6 (см.
рис. 3.7, в). Точность — в пределах 2%. Обе конструкции предназначены для
работы на сжатом воздухе, газах, воде и масле.
Важным достоинством поршневого чувствительного элемента являются его
демпфирующие свойства (вследствие трения в уплотнении), в результате чего
70
снижается реакция контактного устройства на Пульсацию. В то же время, тре-
ние, создаваемое уплотнением поршня, приводит к увеличению зоны нечувстви-
тельности реле.
Реле давления измерительного типа применяют, как правило, для выклю-
чения машины в случае падения давления в воздушной сети ниже допустимого
уровня. Применять реле давления измерительного типа для обеспечения работы
исполнительных механизмов в определенной последовательности не рекомендуется
по следующей причине. Реле давления дает команду на начало хода второго
цилиндра, реагируя па повышение даления в рабочей полости первого цилиндра,
когда его поршень доходит до упора в конце хода. Для надежной работы схемы
с реле давления измерительного типа необходимо, чтобы повышение давления
происходило лишь в конце хода поршня. Однако в связи с тем, что давление
в выхлопной полости снижается не мгновенно, требуется довольно высокое дав-
ление газа в рабочей полости, чтобы поршень стронулся с места; поэтому при
небольшом запасе давления возможен ложный командный сигнал пуска второго
цилиндра, отданный раньше, чем стронулся с места поршень первый. Если при-
менить реле давления дифференциального типа, а в качестве сигнала о заверше-
нии хода поршня первого цилиндра использовать увеличение разности между
давлением в рабочей и выхлопной полостях цилиндра, то вероятность появле-
ния ложного сигнала уменьшится, так как достаточная для переключения реле
разность давления достигается лишь в конце хода поршня.
Реле давления, в которых отсутствует возможность регулирования величины
давления, при котором происходит переключение электрического контактного
устройства, принято называть пневмоэлектропреобразователями. <
Конструктивно пневмоэлектропреобразователи аналогичны реле давления
с настраиваемых значением контролируемого давления, однако отсутствие ус-
тройства для регулирования усилия нагрузочного элемента позволяет значительно
упростить конструкцию и уменьшить размер пневмоэлектропреобразователей.
3.6. ИНДИКАТОРЫ ДАВЛЕНИЯ
Индикаторы давления предназначены для визуального контроля наличия давле-
ния воздуха на различных участках пневматических систем. Принцип действия
индикаторов давления заключается в преобразовании энергии сжатого воздуха
в механическое перемещение индицирующего элемента (поршня, мембраны,
жидкости и т. д.). По способу индикации давления индикаторы можно разделить
на штоковые, типа ламп и табло.
У штоковых индикаторов типа В52-11 (рис. 3.8, а) признаком наличия
давления является шток /, выдвинутый из корпуса на 4—6 мм. Индикатор этого
типа представляет собой миниатюрный пневмоцилиндр одностороннего действия
с подпружиненным поршнем 2. Наличие эластичных уплотнений поршня требует
относительно высокого уровня переключающего давления, что ограничивает
область применения штоковых индикаторов.
Индикаторы типа ламп функционально аналогичны электрическим сигналь-
ным лампам и поэтому должны обеспечивать четкую индикацию наличия и от-
сутствия давления в системах, размещенных в помещениях с нормальной осве-
щенностью без использования подсветки. Для этой цели в них используют подвиж-
ные детали, окрашенные в цвета с высокой отражательной способностью, появ-
ляющиеся в поле зрения при наличии давления. Применяют конструкции инди-
каторов давления поршневого, мембранного и жидкостного типов.
На рис. 3.8, б приведена конструкция индикатора давления типа П-ИДС,
индицирующий элемент которого выполнен в виде поршня 1 с окрашенным кони-
ческим углублением. Конфигурация линзы 2 и поршня обеспечивает четкую
индикацию наличия и отсутствия давления в системах низкого давления. Для
работы индикатора необходимо, чтобы его входы были подключены к двум взаим-
ноинверсным выходам струйного элемента.
В индикаторе типа РУС-1 с мембранным приводом (рис. 3.8, в) при подаче
газа под давлением мембранный узел 1 перемещается совместно с шайбой, имеющей
фигурный вырез, и приводит во вращение винтовой шток 2, поворачивая на 90°
окрашенный флажок 3.
71
Рис. 3.8. Индикаторы давления
В индикаторе типа ИП-1 (рис. 3.8, г) сжатый’воздух, поступающий на вход,
растягивает окрашенную в яркие цвета эластичную мембрану 1. Мембрана раз-
двигает секторные участки шторки 2, которые расходятся по окружности и ло-
жатся на нижнюю часть стекла 3. Мембрана выкладывается по профилю стекла
и изменяет его окраску. Цвет мембраны хорошо виден как с лицевой, так и с бо-
ковой стороны индикатора. При снятии управляющего сигнала мембрана под
действием сил упругости возвращается в исходное положение, и шторки схо-
дятся.
Индикатор типа ИПЗ-1 (рис. 3.8, д) обеспечивает сигнализацию и запоми-
нание в течение 2 ч наличия давления. Это достигается с помощью обратного
клапана 1. При подаче и последующем снятии сигнала мембрана не возвращается
в исходное положение, так как в индикаторе давление будет сохраняться до тех
пор, пока нажатием на кнопку 2 камера не будет соединена с атмосферой.
В жидкостных индикаторах используют свойство жидкости точно повторять
фигурные поверхности, что дает хороший визуальный эффект.
На рис. 3.9, а приведена конструкция пневматического индикатора, в кото-
ром использована непрозрачная жидкость в качестве шторки, изолирующей
индицирующий элемент от прозрачного экрана. При подаче воздуха под давле-
нием мембрана / перемещает поршень 4 и жидкость 3 вытесняется в кольцевую
проточку 2. При соприкосновении поршня с прозрачным стеклом становится
видимым индикационный знак на его торце.
Окрашенная жидкость может быть использована и в качестве индицирующего
элемента. В индикаторе давления (рис. 3.9, б) в полости между мембраной 1
72
Рис. 3.9. Индикаторы давления жидкост-
ного типа
и стеклом 2 в выточке находится
жидкость ,3. При появлении пневмати-
ческого сигнала мембрана вытесняет
жидкость из выточки на поверхность
линзы, в результате чего она окра-
шивается в цвет жидкости.
Аналогично электрической сиг-
нальной арматуре в пневматических
индикаторах давления’ используют
красный и зеленый цвета, реже —
желтый и голубой. В ряде случаев
наносят знаки, цифры или надписи. Для удобства наблюдения и контроля на-
личия командных сигналов, поступающих в систему, применяют групповые
индикаторы. Каждый индицирующий элемент в них пронумерован и соответ-
ствует определенной команде.
3.7. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СЕРИЙНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
В пневмогидропреобразователе типа ПГП (рис. 3.10) камера низкого давле-
ния / заполнена минеральным маслом до определенного уровня. В нижней части
штока 7 встроен клапан 5. Камера высокого давления 4 через клапан 5 сообщена
с камерой низкого давления, а через отводное отверстие — с рабочей полостью
гидроцилиндра. Управление пневмогидропреобразователем производится с по-
мощью кранового пневмораспределптеля последовательного действия типа
В71-33. При подаче сжатого воздуха в камеру 1 происходит заполнение рабочей
полости гидроцилиндра минеральным маслом под низким давлением. Затем после
переключения пневмораспределителя 3 сжатый воздух подается в полость 8
пневмоцилиндра, что приводит к вытеснению рабочей жидкости из камеры вы-
сокого давления 4 и заготовка окончательно зажимается гидроцилиндром. Кла-
пан 5 при этом отсекает камеру 4 от камеры 1.
Возврат поршня 2 в исходное положение и заполнение камер 4 и 1 рабочей
жидкостью происходят при подаче сжатого воздуха в полость 6 пневмоцилиндра.
Техническая характеристика пневмогидропреобразоват^лей типа ПГП
Номинальное давление воздуха, МПа ...................... 0,63
Номинальное давление рабочей жидкости, МПа:
при предварительном зажиме ...................... 0,63
при окончательном зажиме.............................. 16
Объем рабочей полости жидкости,
низкого давления .................................... 1 000
высокого давления ............................... 63
Коэффициент усиления ............................... 25
90%-ный ресурс, цикл................................. 250 000
90%-ная наработка до первого отказа, цикл............ 50 000
Масса, кг, не более.................................. 36
Поршневой пневмогидроаккумулятор типа АР (рис. 3.11) состоит из цилин-
дра 2, поршня 3 и крышек 1 и 4. Уплотнение поршня и крышек обеспечивается
резиновыми кольцами. Заряжают аккумулятор через узел 5, отверстие Б ко-
торого предназначено для подключения к источнику нагнетания газа при зарядке,
а отверстие А —для подключения манометра, контролирующего давление газа.
Крепление крышек к корпусу выполнено с помощью разрезных колец и винтов.
Технические характеристики аккумуляторов типа АР приведены ниже,
а полезные обьемы аккумуляторов различных типоразмеров в зависимости
от изменения давления масла при отборе его из аккумулятора в)гидросистему
могут быть определены по графикам, приведенным на рис. 3.12 и 3.13 [2]. Из
73
Рис. 3.10. Пневмогидропреобразова*
тель типа ПГП
Рис. 3.11. Поршневой пневмэгидроак*
кумулятор типа АР
двух точек на оси абсцисс, соответствующих максимальному и минимальному
давлениям жидкости рж в гидросистеме, проводят вертикальные прямые до пере-
сечения с кривой выбранного давления рг зарядки газа, затем из точек пересе-
чения проводят горизонтальные прямые до пересечения с ординатами объемов V?
и соответствующего типоразмера аккумулятора. Разность между двумя получен-
ными значениями на оси ординат соответствует объему масла Рж, который будет
подаваться гидроаккумулятором в гидросистему.
Рис. 3.12. График для выбора полезного объема пиевмогидроаккумулятора при адиаба-
т ическом процессе
74
Рис. 3.13. График для выбора полезного объема пиевмогидроаккумулятора при изотер-
мическом процессе
Техническая характеристика пиевмогидроаккумулятора типа АР
Рабочая среда
Полость газа — технический азот второго сорта
(ГОСТ 9293 — 74)
Номинальное давление
Полость
жидкости — минеральное масло
Рекомендуемое давление за-
рядки ......................
Перепад давления для страги-
вания поршня ...............
Диапазон температуры рабочей
жидкости....................От
Р1НОМ
Р2И0М
= 16
32
МПа
МПа
ОДЗрраб шах ^зар 0,94) Рраб min
^движ °’2
МПа
— 30 до 4-90 °C (допустимая температура масла
аккумуляторе)
в
Реле давления (ГОСТ 19486—74). Давление сжатого воздуха воздействует
через ме.мбрану 1 и грибок 2 на толкатель 3 (рис. 3.14). Если усилие, развивае-
мое давлением воздуха на грибок 2, станет больше усилия пружины 4 (пружина
настраивается с помощью поводка 5, передающего вращение гайке 6), то толка-
тель 3 переместится и через штифт 7 вызовет срабатывание микропереключателя 8.
При понижении контролируемого давления пружина 4 возвращает толкатель 3
в исходное положение, а пружина микропереключателя вызывает его обратное
переключение.
75
Техническая характеристика реле давления [3]
Номинальное давление, МПа ........................................... 1,0
Диапазон контролируемых давлений (давление замыкания илн размыкания
электрических контактов при изменении давления), МПа............... 0,15 — 1,0
Зона нечувствительности (разность между давлением срабатывания микро-
переключателя н давлением возврата в исходное положение), МПа , . 0,03 — 0,06
Параметры микропереключателя:
номинальный ток, А.............................................. 2,5
напряжение, В:
переменного тока..................................................... До 380
постоянного тока..................................................... До 220
Долговечность, цикл ............................................’ 5* 10е
Индикатор давления типа В52-11 (рис. 3.15) представляет собой миниатюр*
иый пневмоцилиндр одностороннего действия с пружинным возвратом. В кор"
пусе 7 перемещается поршень 2, уплотняемый манжетой. При отсутствии давле"
ния на контролируемом участке пневматической системы поршень под действием
пружины 3 удерживается во втянутом положении. При появлении давления пор-
шень 2, сжимая пружину 3, перемещается влево. Выдвинутый шток сигнализи-
рует о наличии давления на участке системы.
Техническая характеристика индикатора давления
типа В52-11 1*3 ]
Давление, МПа:
номинальное ............................................ 0,63
минимальное ............................................ 0,25
Наибольшее допустимое числи срабатываипГ.. j-пкл''мин . , . 230
Долговечность, цикл........................................... 10е
Масса, кг ................................................. 0,020
Рис. 3.16. Индикатор давления типа
п-ид
Рис. 3.17. Малогабаритный индика-
тор давления типа П-НД!
Индикатор давления тина П-ИД (рис.
3.16) состоит из поршня 2 с возвратной
пружиной 4, уплотненного в корпусе 3
резиновой манжетой, и линзы 1. Линза
выполнена в виде конуса, обращенного
вершиной внутрь корпуса, а поршень
имеет соответствующее коническое углуб-
ление под линзу, поверхность которого
окрашена в нужный цвет. При отсутствии
входного давления пружина удерживает
поршень в исходном положении; при пода-
че давления поршень перемещается к
линзе и коническая (окрашенная) по-
верхность его становится видимой.
В малогабаритном индикаторе давле-
ния типа П-ИД1 (рис. 3.17) в качестве
индицирующего элемента используют
выступающую при наличии входного
давления часть штока поршня. Поршень
Рис. 3.18. Пневмоэлектро-
преобразователь тина
П-ПЭ-С
уплотнен резиновым кольцом. Возврат поршня в исходное положение при отсут-
ствии входного давления — пружинный.
Техническая характеристика индикаторов давления [3 1
П-ИД П-ИД1
Давление входных сигналов. МПа .... 0,14 — 0,63 0,16 — 0,63
Угол обзора, град ..................... 140 180
Активный диаметр линзы, мм............. 16 —
Размеры выступающей части индицирующе-
го элемента, мм ............................. — 03X3
Долговечность, цикл........................ 5*10* 5* 10е
Масса, кг .................................. 0,13 0,027
Пневмоэлектропреобразозатель типа П-ПЭ-С предназначен для преобразо-
вания пневматического сигнала в дискретный электрический сигнал. Пневмо-
электропреобразователь (рис. 3.18) состоит из основания 1, в котором располо-
жен подпружиненный поршень 2 с манжетой, кронштейна 3, на котором крепится
электрический конечный выключатель, и защитного кожуха 4. Переключение
электрических контактов происходит при нажатии перемещающегося под дей-
ствием входного давления поршня на толкатель конечного выключателя.
Регулировка конечного выключателя относительно поршня обеспечивается
за счет зазоров, образованных отверстиями в корпусе выключателя и винтами 5
крепления выключателя к кронштейну. Отверстие А в основании предназначено
для подвода пневматического сигнала, отверстие 5 — для вывода электрических
проводов конечного выключателя. Между кожухом и основанием предусмотрена
прокладка для защиты электрических контактов от загрязнений.
Техническая характеристика пневмоэлектропреобразователя типа
П-ПЭ-С [3]
Давление входных сигналов, МПа............. 0,14—0,63
Тип конечного выключателя..................... МП 1101 нсп, 1
Время, мс, не более;
включения............................ 20
выключения ... •................. 25
Долговечность, цикл ....................... 10е
Масса, кг................................ 0,35
СПИСОК ЛИТЕРАТУРЫ
I. Башта Т. М.. Зайченко Н. 3., Ермаков В. В.. Хаймович Е. М. Обьемпые гидрав-
лические приводы. М.: Машиностроение, 1969. 628 с.
2. Гидропневмоаккумуляторы типа АР. М. 1972. 6 с. (НИИМАШ).
.3 . Элементы и устройства пневмоавтоматики высокого давления. Каталог. М. 1978.
155 с. (НИИМАШ).
4. Fluid power Handbook Directory. 1968 —1969. Industrial publishing Co. Cleveland,
5. Mecman News, N. 42, November, 1969, 8 p.
Глава 4
НАПРАВЛЯЮЩАЯ
ПНЕВМОАППАРАТУРА
Направляющая пневмоаппаратура предназначена для изменения направления
потока сжатого воздуха путем полного открытия пли закрытия рабочего про-
ходного сечения.
К этой группе ппевмоустройств относятся пневмораспределители, обратные
пневмоклапаны, пневмоклапаны быстрого выхлопа, последовательности, вы-
держки времени, логические (ИЛИ; И).
4.1. ПНЕВМОРАСПРЕДЕЛИТЕЛИ
Пневмораспределители предназначены для изменения направления или пуска
и останова потоков сжатого воздуха в двух или более внешних пневмолиниях
в зависимости от внешнего управляющего воздействия. Под внешними пневмо-
линиями понимают воздухопроводы и каналы для течения воздуха (в том числе
и отверстия для связи с атмосферой), соединяемые в определенных сочетаниях
при различных положениях распределительного органа.
Число внешних линий определяет линейность распределителя. Применяют
в основном двух-, трех-, четырех- и пятилинейные распределители. Распреде-
лители для специальных целей, а также крановые применяют и с большим числом
линий.
По числу фиксированных положений распределительного органа различают
двух-, трех- и миогопозиционные распределители. Последний тип (за исключе-
нием крановых распределителей) применяют редко и его относят к специальным.
Наибольшее применение получили двухпозиционные распределители, распре-
делительный орган которых может занимать одно из двух крайних положений.
Распределительный орган трехпозиционных пневмораспределителей при отсут-
ствии управляющего воздействия занимает среднее положение. Иногда исполь-
зуют распределители, состоящие из двух двухпозиционных пневмораспредели-
телей. Такие распределители относятся к четырехпозиционным, хотя могут вы-
полнять функции трехпозициоиных, если не используется одна позиция.
Двухпозиционные пневмораспределители могут иметь одностороннее и дву-
стороннее управление (трехпозиционные — только двустороннее). Под односторон-
ним понимают такой вид управления, при котором для переключения распреде-
лительного элемента управляющее воздействие прикладывается только к одному
чувствительному элементу и в одном направлении, а возврат в исходное положе-
ние происходит после снятия управляющего воздействия под действием сил
механической или пневматической пружины. При двустороннем управлении,
чтобы распределительный элемент привести в заданное состояние, необходимо
управляющее воздействие приложить к соответствующему чувствительному
элементу (если их два) или изменить направление действия.
На рис. 4.1 приведена схема пятилинейного двухпозиционного распредели-
теля с односторонним управлением. Управляющее отверстие обозначается двумя
78
2
2
Рис. 4.1. Схема пятплииейиого двухпозиционного распределителя с односторонним уп-
равлением
цифрами. Вторая цифра указывает отверстие, которое будет соединено с отвер-
стием 1 при подаче единичного сигнала к управляющему отверстию.
К двух- и трехлинейным распределителям с односторонним управлением
относятся «нормально закрытые» (при отсутствии управляющего воздействия
питание «закрыто», т. е. сжатый воздух не проходит к выходному каналу распре-
делителя) и «нормально открытые» (при отсутствии управляющего воздействия
питание «открыто»).
Двухпозиционные распределители с двусторонним управлением можно
использовать как устройства памяти.
Число внешних линий и позиций, а также характер управления (односторон-
нее или двустороннее) определяют схему исполнения пневмораспределителя.
Наибольшее применение в промышленности получили схемы исполнения, приве-
денные в табл. 4.1 и 4.2 [1].
Крановые распределители применяют также со специальными схемами ис-
полнений по числу позиций и линейности, в частности трехпозиционный шести-
линейный распределитель — для последовательного управления двумя цилин-
драми (рис. 4.2, а), шестипозиционный восьмилинейный распределитель (шести-
позиционный переключатель, рис. 4.2, б) — для обеспечения подачи давления
поочередно к каждому из шести выходных каналов, при этом остальные выход-
ные каналы соединяются с атмосферой.
Важным функциональным признаком распределителей является вид управ-
ления.
Схема классификации основных видов управления изображена на рис. 4.3.
Условные обозначения видов управления соответствуют ГОСТ 2.721—74.
Известны также механическое управление с малым усилием (рычаг управ-
ляет вспомогательным клапаном, приводящим в действие обычный механизм
пневматического управления, рис. 4.4, а) и механическое бесконтактное управ-
ление, достигаемое обычно механическим воздействием на струю сжатого воздуха
(рис. 4.4, б). Наиболее широкое распространение в промышленной практике полу-
чили следующие конструкции распределительных устройств: клапанные, с ци-
линдрическим золотником, с плоским золотником и крановые.
Принцип клапанного распределения без «короткого замыкания» ясен из
рис. 4.5. Обозначение присоединительных отверстий: 1 — вход (питание); 2 —
выход (к потребителю); 3— выход в атмосферу. Обозначение управляющего
отверстия содержит две цифры, указывающие сообщаемые при подаче управля-
ющего сигнала присоединительные отверстия; цифра 0 показывает, что присо-
единительное отверстие перекрыто. В исходном положении, обеспечиваемом
двумя возвратными пружинами, выходное отверстие 2 через полый толкатель
сообщено с выходом в атмосферу. При подаче управляющего сигнала к от-
верстию 12 вначале выходное отверстие 2 разобщается с отверстием 3, а затем
сообщается с входным отверстием.
а) л)
Рис. 4.2. Примеры схем исполнения крановых распределителей
79
Таблица 4,{
Основные пневматические схемы двухлинейных
и трехлинейных распределителей
Число позиций распредели- тельного элемента Управление Схема соеди- нения пиевмо- линии в исход- ной позиции Число внешних пневмо- лииий Условное графи- ческое обозначение по ГОСТ 2.781 — 68
2 Односто- роннее Нормально открытая 2 2 7
3 Z
!А1Д} 3 1
Нормально закрытая 2 тс> 7
3 2 S
д L л
1 1 J 7
Двустороннее — 2 2
f
1 /
3 Z
£
( J /
. 3 То же С закрытым центром 3 2 1 1 1
К | ±
1 } 1 т— 1 3 7 :
80
Таблица 4.2
Основные пневматические схемы четырехлинейных
и пятилинейных распределителей
Число позиций распредели- тельного эле- мента Управление Возврат в исходное поло/кение Число внешних пиевмо- линнй Условное графи- ческое обозначение по ГОСТ 9.781— 68
2 Односто- роннее Пружинный 4 3 2 4 7
5 24 Ш
J7
Пневматический 4 5 2
У1 I □-1
5 .24
Двустороннее — 4 2
J
5 24 3 7 5
3 То же — 4 2 4 ЮТ 3 7
5 2 4 ио ' J ’ .7
81
Виды управления
пневморо спреде лит елями
с механическим управлением
Рис. 4.5. Трехлинейный клапан-
ный распределитель без «корот-
кого замыкания»
Рис. 4.4. Распределители
Рис. 4.G. Трехлинейный клапан-
ный распределитель с «коротким
замыканием»
82
Как видно из рис. 4.5, трехлинейный клапанный пневмораспределитель
образуется комбинацией двух пар клапан—седло. Для двухлинейного распреде-
лителя достаточно одной пары, а для четырех- или пятилинейного необходимы
четыре пары; обычно четырехлинейные клапанные распределители образуются
из двух (нормально открытого и нормально закрытого) трехлинейных распреде-
лителей, размещенных в общем корпусе параллельно или соосно.
В распределителях клапанных с «коротким замыканием» (рис. 4.6) в мо-
мент переключения (перемещения клапанного узла из одного крайнего положения
в другое) все каналы (питания, выхода и атмосферный) соединены между собой.
Такие распределители несколько проще, но при их переключении возникает
колебание давления, возможно появление ложных сигналов в системе управ-
ления, увеличивается расход воздуха. Кроме того, такая схема не применима при
ручном и механическом управлении, когда перемещение клапанного узла мо-
жет быть медленным.
Распределители с цилиндрическим золотником наряду с клапанными широко
применяют в промышленности вследствие простой и технологичной конструк-
ции, широким функциональным возможностям и удобной компоновке.
Распределители этого типа в качестве распределительного элемента имеют
цилиндрический золотник, перемещающийся вдоль оси в корпусе или во втул-
ках, помещенных в корпусе. Проточки (пояски) золотника в разных фиксирован-
ных положениях сообщают или запирают разные проточки (отверстия) корпуса
(втулок). Основная проблема при конструировании — уплотнение золотника —
решается путем использования эластичных уплотнений или малого зазора. Эла-
стичные уплотнения работают в тяжелых условиях, так как при каждом ходе
золотника проходят кромки проточек или отверстии, и тем не менее они должны
удовлетворять требованиям герметичности в течение длительного срока службы,
измеряемого миллионами и даже десятками миллионов циклов. Поэтому в распре-
делителях с эластичными уплотнениями применяют уплотнения повышенной
точности или особой конструкции, используя при этом специальные способы их
установки. Распределители с малым зазором требуют изготовления прецизион-
ной пары.
Эластичные уплотнения можно устанавливать в корпусе или на золотнике.
Обычно применяют такие конструкции, в которых зазор между корпусом и зо-
лотником уплотняется за счет не столько предварительного натяга уплотнитель-
ного кольца, сколько его прижатия к уплотнительным поверхностям под дей-
ствием давления воздуха. Поэтому при проходе кольцевой канавки на уплот-
няемой цилиндрической поверхности возможно выдавливание уплотнительного
кольца из своего гнезда. Чтобы избежать этого, в конструкциях распределите-
лей с кольцевыми проточками применяют уплотнительные кольца и посадочные
места такой геометрической формы, которая исключает выдавливание кольца.
Вместо кольцевой проточки, например, во втулке, помещенной в корпус, по
окружности делают ряд отверстий небольшого диаметра или ряд продольных
пазов на торцах втулок или на золотнике, суммарное сечение которых обеспечи-
вает необходимый проход, а взаимное расположение позволяет сохранить по
окружности часть цилиндрической поверхности, которая обеспечивает нормаль-
ное перемещение уплотнительных колец.
Примеры конструкций уплотнительных устройств приведены на рис. 4.7.
На рис. 4.8 показана конструкция пятилинейного пневмораспределителя
с цилиндрическим золотником и пневматическим управлением. Золотник уплот-
нен специальными Т-образными уплотнениями, которые монтируют с помощью
набора втулок. Две крайние втулки являются направляющими и имеют дрос-
сели в виде отверстий малого диаметра для создания воздушной подушки в це-
лях демпфирования ударов в конце хода золотника. Обозначение присоедини-
тельных отверстий: 1 — питание; 2 и 4 — выходы (к пневмоцилиндрам); 3 и
5 — выходы в атмосферу. Обозначение управляющего отверстия содержит две
цифры, указывающие сообщаемые при подаче управляющего сигнала присоеди-
нительные отверстия. На основе цилиндрического золотника легко получить
распределители с различными функциональными схемами и модификациями по
способу монтажа. Так, трехпозиционные пятилинейные распределители с закры-
тым центром (в нейтральной позиции все пневмолинии закрыты) получаются наи-
83
Рис. 4.7. Примеры конструкций уплотнительных узлов
более просто; для реализации этой же схемы с клапанным распределением тре-
буются два трехлинейных и два двухлинейных распределителя. Трехлинейный
распределитель с цилиндрическим золотником без каких-либо изменений в кон-
струкции может быть нормально открытым или нормально закрытым; для измене-
ния схемы достаточно поменять местами трубопроводы питания и выхлопа. Пяти-
лииейные распределители с цилиндрическим золотником обеспечивают раздель-
ный выхлоп каждой полости пиевмоцилиндра, что позволяет применять весьма
простые дроссельные устройства. Для получения четырехлинейного распреде-
лителя из пятилинейного достаточно объединить выхлопные линии.
В распределителях с плоским золотником (рис. 4.9) потоки сжатого воздуха
распределяются парой плоский золотник—плита, причем отверстия для про-
хода воздуха выведены на плоскую.тщательно обработанную поверхность плиты,
по которой перемещается золотник с канавкой, попарно сообщающей между собой
упомянутые отверстия. Золотник перемещается относительно плоскости с отвер-
стиями с помощью привода, наиболее часто — пневматического, хотя для распре-
делителей малых размеров используют ручное, механическое и другие виды управ-
ления. При пневматическом приводе давление управления действует на поршне-
вое или плунжерное устройство. Обозначение распределительных отверстий то
же, что и на рис. 4.8.
Среди крановых распределительных элементов наибольшее распространение
получил плоский поворотный золотник (рис. 4.10). Обычно крановые распре-
делители имеют ручное управление.
Клапанные и золотниковые распределители применяют с различным управ-
лением: ручным, механическим, пневматическим, электромагнитным или элек-
тропневматическим. Причем обычно различные виды управления достигают уста-
новкой разных видов приводов на базовую модель распределителей при макси-
мальной возможной унификации деталей.
Выбор и расчет пиевмораспределителей. Наибольшую сложность при проек-
тировании пневматических систем представляет выбор распределителей с тре-
буемыми расходными характеристиками и быстродействием.
2 4
Рис. 4.8. Пятилинейный распределитель с цилиндрическим золотником и эластичными
уплотнениями
84
Определение требуемой расходной характеристики распределителя — слож-
ная задача, так как необходимо учесть (применительно к пневмоприводу возврат-
но-поступательного действия) размер цилиндра, внешнюю нагрузку, перемещае-
мую массу, закон изменения скорости перемещения и его время, а также сопро-
тивление подводящей и выхлопной пневмолиний, в которые входит распредели-
тель. Эту задачу решают методами динамического анализа и синтеза, которые
достаточно полно изложены в справочном пособии [1].
Для приближенного выбора требуемой пропускной способности распреде-
лителя, управляющего работой пневмоцилиндра при постоянном коэффициенте
нагрузки на штоке и минимальном сопротивлении потоку в трубопроводах и
их соединениях, можно воспользоваться формулой
к = 127Fsp
V ts 1ЛДр (р — &р)
где Л'а— пропускная способность распределителя, м3/ч; F— площадь поршня,
м2; s— ход поршня, м; ts — заданное время перемещения поршня, с; р — абсо-
лютное рабочее давление, МПа; Др — перепад давления на распределителе, МПа.
Предполагается, что площадь поршня выбрана из условия
% = Pl pF = 0,5,
гДе X — безразмерная нагрузка на штоке; Р — постоянная сила сопротивления
перемещению поршня.
Значение Др для определения Л',. рекомендуется выбирать из следующих
соображений: в большинстве случаев следует принимать Др = 0,03 МПа; если
уменьшение размера и массы имеет первостепенное значение, можно увеличить
Др до 0,08 МПа, а когда Ка выбирают с запасом — уменьшить до 0,015 МПа.
Обычно пропускную способность распределителя выбирают с некоторым запасом,
особенно при высоких средних скоростях перемещения поршня, когда требуется
его торможение в конце хода, и при длинных трубопроводах.
Расходные характеристики распределителей отечественных конструкций
приведены в табл. 4.3, где кроме пропускной способности Kv 11 эффективной
85
Таблица 4.3
Расходная характеристика пиевмораспределителей
Распреде- литель 1 Условный проход Dy, мм 1 Проп\скная способность, A v, М3/ч Эффективная площадь проход- ного сечения f3, мм2 Длина эквивалент- ного трубопровода (при dT = Dy) '-=> м
Пита- ние- выход Выход— атмо- сфера Пита- ние- выход Выход- атмо- сфера Пита- ние— выход Вы> од— атмо- сфера
П-РОЗП 2,5 0,11 0,12 2,28 2,56 0,46 0,33
П-Р515П 2,5 0,12 0,11 2,40 2,20 0,39 0,48
В63-11 4,0 0,20 0,21 4,00 4,20 2,10 1,90
В76-21 4,0 0,33 0,18 6,60 3,60 0,50 2,10
п-эпк 4,0 0,19 0,19 3,80 3,80 2,40 2,40
В63-13 12,0 1.30 1,30 26,00 26,00 10,30 10,30
В63-23М 12,0 1,30 1,20 26,20 24,00 10,30 12,40
В63-14М 16,0 2,24 2,00 44,80 41,00 15,00 18,00
В63-24 16,0 2,15 2,11 43,00 42,00 16,50 16,50
Б В64-14М 16,0 2,54 2,39 50,80 48,00 11,50 12,40
В64-24М 16,0 2,36 2,15 47.20 43,00 13.80 16.50
В63-15М 20,0 4,90 4,76 98,40 95,00 9 10 9,70
В63-25 415255 0080 20,0 4,30 5,41 86,20 108,00 12, 10 7,30
415255 0081 415255 0082 8 1,22 1,27 24,0 25,0 1,3 1.1
415255 0083 10 1,23 1,28 25,0 24,0 4.5 3,9
415255 0100 415255 0101 12 2,65 2,60 53,0 51,8 2,1 2,2
415255 0102 16 3,20 3,20 63,0 64,6 6,8 6,8
415255 0103 415255 0120 20 3,50 3,80 70,2 76,8 25,3 15,5
415255 0121 25 11,70 11,50 233,0 230,0 4,1 4,8
415255 0122 32 13,60 13,00 271,0 259,0 11,7 13,7
415255 0123 40 14,30 13,40 285,0 269,0 34,4 41,3
площади указана длина эквивалентных трубопроводов L.. удобная для опре-
деления общей расходной характеристики цепи последовательно соединенных
элементов [1]. Расходные характеристики, приведенные в табл. 4.3, получены
во ВНИИГидроприводе экспериментально путем проливки водой и продувки
сжатым воздухом.
Задача определения времени срабатывания на практике возникает чаще
всего применительно к распределителям с пневматическим, электромагнитным
и электропневматическим управлением; при ручном, ножном и механическом
управлении время срабатывания зависит ог скорости воздействия на механизм
управления.
Наибольший интерес представляет определение времени срабатывания
распределителей с пневматическим управлением, так как они могут приводиться
в действие пневматическими сигналами от распределителей малого проходного
сечения (называемых в этом разделе управляющими устройствами) с ручным,
ножным, механическим, пневматическим и электромагнитным управлением,
причем распределители с электропневматическим управлением удобно рассма-
тривать как распределители с пневматическим управлением и встроенным управ-
ляющим устройством, имеющим электромагнитное управление.
Расчет времени срабатывания пиевмораспределителей приведен в гл. 11.
Экспериментальные данные ВНИИГидропривода о времени срабатывания
для некоторых типов пиевмораспределителей приведены в табл. 4.4 и 4.5.
86
Таблица 4.4
Время срабатывания распределителей с электрическим
и электропневматическим управлением
Распреде- литель Время, мс Р,п опреде- литель Время, мс
включе- ния выключения включе- ния выключения
Давление п ит.ания. МПа Давление п итания, МПа
0,4 0,63 0,4 0.63 0.4 0,63 0.4 0,63
П-ЭПК 18 20 12 12 415255 0090 40 36 — —
БВ64-13М БВ64-14М 80 75 — — 415255 415255 0110 0130 50 125 40 110 — —
БВ64-15М 200 200 — — 4(5255 415255 415255 0091 45 40 60 100 340 63 110 350
В64-23М В64-24М 115 110 160 160 0111 0131 80 240 75 210
Таблица 4.5
Время срабатывания распределителей с пневматическим управлением
Распреде-
литель
Время, мс
вклю- выклю-
чения чения
Давление питания,
МПа
0,4 0,63
МВ76-21 1 16 12
3 34 28
10 136 105
В63-13М 1 60 45
В63-14М 3 76 72
10 175 170
В63-15М I 95 100
3 145 150
10 300 310
В63-23М 1 83 80
0.4 0,63
28 32 В63-24М
160 180
590 686 В63-25М
— —
—
— — 415255 0100
— —
415255 0101
86 90
Распреде-
литель
на трубопровода в ии управления /т, м Вгемя, мс
вклю- чения выклк- чения
Давление питания, МПа
5 = X я ч 0.4 0,63 0.4 0,63
3 10 1 3 10 1 3 10 1 3 10 110 275 92 140 290 72 100 200 90 125 260 120 280 85 140 300 65 80 175 90 120 250 145 405 140 215 480 90 140 350 150 440 158 215 500 95 150 380
Примечание. Время измеряли при следующих условиях: 1) давление
питания управляющего устройства равно давлению питания распределителя;
2) внутренний диаметр трубопровода в линии управления dT ~ 4 мм; 3) в качестве
управляющего устройства для МВ76-21 использован П-ЭПК, для остальных —
МВ76-21, управляемый от П-ЭПК.
4.2. ПНЕВМОКЛАПАНЫ ОБРАТНЫЕ
Обратные пневмоклапаны предназначены для пропускания сжатого воздуха
только в одном направлении. По исполнению запорного элемента пневмоклапаны
выпускают с конусным, плоским и сферическим элементами (рис. 4.11, а, б, в).
Обратные пневмоклапаны с конусным и сферическим запорными элементами
обеспечивают меньшее гидравлическое сопротивление потоку сжатого воздуха,
но более трудоемки в изготовлении по сравнению с пневмоклапанами с плоским
87
Рис. 4.11. Обратные клапаны с конусным (а), плоским (б) и сферическим (в) запорными
элементами
запорным элементом. Подъем запорного элемента обычно выполняют в пределах,
обеспечивающих (0,6 —• 1) FT, где Ft — площадь сечения подсоединяемого
трубопровода. Обратные пневмоклапаны без пружины обычно изготовляют для
больших проходных сечений (Оу > 25 мм) в целях уменьшения гидравлического
сопротивления. Пневмоклапаны без пружины рекомендуется устанавливать
вертикально, седлом запорного элемента вниз, что повышает герметичность и
сокращает время закрытия клапана. Иногда обратные пиевмоклапаны изготов-
ляют без пружин для небольших типоразмеров (с малыми проходными сечениями),
что позволяет уменьшить их размеры. Запорные элементы в этих конструкциях
выполняют из резинового шарика или мембраны. Для обеспечения надежной
герметичности уплотнения в пневмоклапанах этого типа необходимо давление
ие менее 0,05—0,07 МПа.
4 .3. ПНЕВМОКЛАПАНЫ БЫСТРОГО ВЫХЛОПА
Пневмоклапаны быстрого выхлопа служат для повышения быстродействия пнев-
моприводов путем уменьшения сопротивления выхлопной линии.
Схема применения клапана быстрого выхлопа, приведенная на рис. 4.12, а,
обеспечивает увеличение скорости втягивания штока пневмоцилиндра 1 под
действием пружины. При включении пневмораспределителя 5 сжатый воздух
проходит через клапан быстрого выхлопа 3, который беспрепятственно пропу-
скает его в поршневую полость цилиндра по трубопроводу 2, обеспечивая
перемещение поршня вправо. Прн выключении пневмораспределителя 5 дав-
ление в трубопроводе 4 падает, клапан быстрого выхлопа 3 переключается,
обеспечивая быстрый выпуск воздуха из полости пневмоцилнндра непосред-
ственно в атмосферу, минуя трубопровод 4 и пневмораспределитель 5.
Применение клапанов быстрого выхлопа (при условии установки их в не-
посредственной близости от опорожняемой полости) позволяет увеличивать
Рис. 4.12. Клапан быстрого выхлопа:
а — схема применения; б — пример конструкции
88
Рис. 4.13. Клапан быстрого выхлопа с летающей
мембраной н резьбовым атмосферным отверстием
скорость срабатывания иневмоцилиндров
(особенно значительно, если объем опорож-
няемой полости существенно превышает
объем сокращаемой части выхлопной линии)
или же (при определенных соотношениях
параметров схемы) дает возможность исполь-
зовать трубопроводы и распределители
с уменьшенным проходным сечением, что
способствует уменьшению массы и размера
привода и сокращает потери сжатого воз-
духа-
Как правило, размер резьбы клапана быстрого выхлопа для соединения
с пневмораспределителем соответствует размеру резьбы распределителя. Размер
проходных сечений отверстий для присоединения к цилиндру и для выхода в атмо-
сферу, а также проходные сечения внутри клапана быстрого выхлопа обычно
делают на одну-две ступени выше (в 1,5—2 раза больше) для уменьшения сопро-
тивления потоку воздуха, выходящего в атмосферу. Соответственно длина трубо-
провода, соединяющего клапан с опорожняемой полостью, должна быть мини-
мальной.
На рис. 4.12, б изображена конструкция клапана быстрого выхлопа : за-
щемленной мембраной. Отверстие А служит для соединения с распределителем,
отверстие Б — с цилиндром, а ряд сверлений В — для выхода воздуха в атмо-
сферу. В этой конструкции не предусмотрена возможность присоединения глу-
шителя. В некоторых случаях применение глушителей является обязательным,
и тогда необходимо применять клапаны быстрого выхлопа, конструкция которых
обеспечивает резьбовое присоединение глушителя к атмосферному отверстию
(рис. 4.13).
Сжатый воздух от распределителя подводится к отверстию А корпуса 2.
Под давлением сжатого воздуха перемещается н прижимается летающая мем-
брана 3 к атмосферному каналу В крышки /, сообщая полость цилиндра через
отверстие Б с распределителем. При снятии давления мембрана потоком воздуха,
выходящего из полости цилиндра, отбрасывается вниз и воздух через канал В
и глушитель выходит в атмосферу.
4.4. ПНЕВМОКЛАПАНЫ ПОСЛЕДОВАТЕЛЬНОСТИ
Пневмоклапан последовательности предназначен для контроля рабочего цикла
по давлению (разности давлений) в пневматических системах управления путем
выдачи пневматического сигнала при возрастании контролируемого давления
(разности давлений) до заданной величины. Такие пневмоклапаны применяют
также для переключения пневматически управляемых узлов в системах в тех слу-
чаях, когда нельзя использовать для этой цели конечные выключатели (напри-
мер, при переменной длине хода поршня).
На рис. 4.14, а приведена конструкция активного клапана последователь-
ности типа В62-21. Чтобы избежать ложного сигнала до начала и в процессе дви-
жения поршня цилиндра, предусмотрен дифференциальный поршень /, полости
которого сообщаются с напорной (отверстие //н) и выхлопной (отверстие Ца)
полостями цилиндра. Так как до начала движения и в процессе движения порш-
ня цилиндра разность давлений в его полостях меньше, чем после окончания
хода, дифференциальный поршень 1 надежно удерживается в верхнем положении
пружиной 2, настраиваемой с помощью винта 3, и давлением в выхлопной по-
лости, действующим на большую площадь поршня /.
После прихода поршня цилиндра в крайнее положение и его останова дав-
ление в напорной полости становится равным давлению в магистрали, а в выхлоп-
ной полости — атмосферному. Вследствие этого поршень 1, преодолевая действие
89
Рис. 4.14. Активный (а) и пассивный (б) клапаны последовательности
пружины 2, перемещается вниз и через толкатель 4 перемещает клапан 5, тем
самым соединяя его выход 0 с каналом питания П. На выходе образуется пнев-
матический сигнал, который может использоваться либо для реверсирования этого
же пневмоцилиндра, либо для управления работой других элементов схемы.
После реверсирования пневмоцилиндра поршень / под действием пружины 2
и разности давлений в полостях перемещается вверх, и выход сообщается с ат-
мосферой через отверстие А.
Пневмоклапан последовательности пассивного типа изображен на
рис. 4.14, б. В положении, показанном на рисунке, конический клапан 4 уси-
лием пружины / прижат к седлу. Выходное отверстие Б сообщается с атмосферой
через отверстие А. Когда усилие от давления сжатого воздуха, подведенного
к каналу Г, на площадь конического клапана преодолеет усилие пружины /,
клапан оторвется , от седла, и
давление начнет действовать на
большую площадь, так как
выходу воздуха из полости В
препятствует пружина 6, при-
жимающая втулку 5 к поверх-
ности клапана 3. Вследствие
этого обеспечивается быстрый
и четкий прижим уплотнения 2
к седлу, и отверстие Б отсе-
Рис. 4.15. Схема автоматического
управления цилиндром с использо-
ванием клапанов последовательно-
сти
90
кается от атмосферы. Под действием давления в полости В втулка опускается,
и сжатый воздух проходит к отверстию Б.
На рис. 4.15 показан пример схемы управления цилиндром с использова-
нием клапанов последовательности.
4.5. ЛОГИЧЕСКИЕ ПНЕВМОКЛАПАНЫ
Логический клапан ИЛИ предназначен для выдачи выходного пневматического
сигнала при подаче одного или двух входных сигналов. Логический клапан И
предназначен для выдачи входного пневматического сигнала только при наличии
двух входных сигналов.
В промышленности нашли применение пневмоклапаны с распределительными
элементами шарикового, клапанного, золотникового и мембранного типов.
На рис. 4.16, а показана конструкция пневмоклапана ИЛИ с шариковым рас-
пределительным элементом, выполненным нз резины. При подаче сжатого воздуха
к отверстию В, шарик прижимается к седлу, отсекая отверстие А от выхода (от-
верстия 5), который сообщается с пневмолннией В, находящейся под давлением.
При подаче сжатого воздуха к отверстию А и сообщении отверстия В с атмо-
сферой шарик займет правое крайнее положение, отсекая атмосферу, а сжатый
воздух пройдет к отверстию Б.
На рис. 4.16, б показан пневмоклапан ИЛИ с клапанным распределитель-
ным элементом, а на рис. 4.16, в с золотниковым.
На рис. 4.17 показан пневмоклапан И с клапанным распределительным
элементом. При подаче сжатого воздуха к отверстию А и сообщении отверстия В
с атмосферой сжатый воздух не может пройти к выходному отверстию Б, так как
распределительный элемент отсекает его от давления. То же самое произойдет
при подаче давления к отверстию В и сообщении отверстия А с атмосферой.
При подаче сжатого воздуха к отверстиям А и В поток сжатого воздуха пройдет
к выходному отверстию Б, так как распределительный элемент выполнен таким
образом, что он не может одновременно перекрыть выход от входных отверстий
А и В.
91
a)
Рис. 4.18. Пневмоклапаны выдержки вре-
мени с регулируемой емкостью (а) и
с регулируемым дросселем (б)
4.6. ПНЕВМОКЛАПАНЫ
ВЫДЕРЖКИ ВРЕМЕНИ
Пневмоклапаны выдержки времени
предназначены для изменения направ-
ления или пуска и останова потока
сжатого воздуха через заданный про-
межуток времени после подачи управ-
ляющего сигнала. Современные кон-
струкции таких пневмоклапанов со-
держат инерционное звено, состоящее
из пневмоемкости и пневмодросселя,
пневмоклапан последовательности и
пиевмораспределитель, встроенные в
корпус. Имеются конструкции, в ко-
торых пневмоклапан последователь-
ности или распределитель отсутствует.
Инерционное звено позволяет ре-
гулировать темп изменения давления
путем настройки проходного сечения
дросселя или объема пневмоемкости.
Пневмоклапан последовательности по достижении заданного уровня давления
в емкости формирует дискретный пневматический сигнал, который используется
для переключения распределителя или как выходной сигнал устройства.
На рис. 4.18, а представлен клапан выдержки времени конструкции ЗИЛа. ,
Сигнал управления подается к отверстию А. Под действием давления сжатого
воздуха дифференциальный золотник 2 пятилинейного распределителя переме-
щается вправо, изменяя направление проходящих через него потоков воздуха,
что соответствует началу отсчета времени. Сжатый воздух проходит через отвер-
стие малого диаметра в детали I и заполняет емкость Б. Так как площадь правого
торца золотника 2 больше площади левого торца, возрастание давления в ем-
кости Б приводит к переключению золотника в исходное положение и выдаче
в систему сигнала об окончании времени выдержки. Время выдержки настраи-
вается изменением объема емкости Б, определяемого положением поршня 3.
Пневмоклапан выдержки времени конструкции ЭНИМС показан на
рис. 4.18, б. Пневматический входной сигнал подается к отверстию У, располо-
женному в плите 1, поступает в полость б и проходит по каналу Г к мембране 9.
Под давлением сжатого воздуха мембрана 9 прижимается к седлу корпуса 8
и закрывает выход в атмосферу. Одновременно сжатый воздух через металло-
керамический фильтр 4 и дроссель 7 поступает в надпоршневую полость в. В на-
чальный момент давление под поршнем 6 превышает давление над ним вследствие
92
потери давления на дросселе 7. При увеличении давления в полости в над порш-
нем до определенного значения поршень 6 начинает движение вниз. Как только
клапан 12 отрывается от седла И, подпоршневая полость сообщается с атмосфе-
рой, давление в ней резко падает, что обеспечивает быстрое перемещение поршня
вниз. При этом связанный с поршнем 6 толкатель 10 закрывает выхлопной канал
(центральное отверстие внутри толкателя 10) н перемещает клапан 2, открыв
проход сжатому воздуху из отверстия из П к отверстию 0.
Время от подачи входного сигнала до момента появления выходного сиг-
нала является временем выдержки, которое определяется настройкой дросселя
и объемом дополнительной емкости, подсоединяемой к отверстию D.
В нижнем положении вкладыш 5 отсекает подпоршневую полость от атмо-
сферы, упираясь в седло 11. В этом положении пневмоклапан выдержки оста-
ется до момента снятия входного сигнала. При снятии входного сигнала мем-
брана 9 отжимается от седла корпуса и сообщает надпоршневую полость с ат-
мосферой через отверстие Xj. Под действием пружины 13 и остаточного давления
в подпоршневой полости поршень 6 возвращается в исходное положение. Пру-
жина 14 и давление возвращают клапан 2 в первоначальное положение и при-
жимают его к седлу 3. При этом отверстие 0 разобщается с отверстием П и сооб-
щается с отверстием А.
4.7. КОНСТРУКЦИЯ и ТЕХНИЧЕСКИЕ ДАННЫЕ
СЕРИЙНОЙ НАПРАВЛЯЮЩЕЙ ПНЕВМОАППАРАТУРЫ
Пневмораспределители типа В76-2 представляют собой двухпозиционные трех-
линейные клапанные нормально закрытые распределители. По виду привода вы-
пускают следующие конструкции.
С путевым управлением: В76-21 (с роликом), БВ76-21 (с толкателем),
ИВ76-21 (со штифтом), КВ76-21 (с ломающимся рычагом).
С ручным управлением: ГВ76-21 и ГВ76-22 (с кнопкой), ДВ76-21 (с ру-
кояткой, имеющей два фиксированных положения).
С пневматическим управлением: МВ76-21.
В пневмораспределителе толкатель 1 при отсутствии воздействия на ро-
лик 2 под действием пружины 3 находится в положении, показанном на рис. 4.19.
При этом клапан 4 прижимается к седлу усилием пружины 5 и давлением сжатого
воздуха. Канал П перекрывается, выход 0 соединяется с атмосферным кана-
лом А. При нажатии на ролик 2 толкатель 1 вначале упирается в клапан 4 и от-
деляет выход 0 от канала А, а затем при дальнейшем движении открывает
клапан 4 от седла и соединяет выход 0 с каналом П. При освобождении ролика 2
подвижные части возвращаются в исходное положение под действием пружин 3
и 5. Штифт 6 служит для ограничения хода рычага.
На рис. 4.20 показаны исполнения пневмораспределителей с другими видами
управления. В пневмораспределителе исполнения МВ76-21 с пневматическим
управлением (см. рис. 4.20, е) на толкатель 1 воздействует поршень 2, переме-
щающийся под действием давления сжатого воздуха, подводимого через резь-
бовое отверстие в крышке 3.
Пневмораспределитель типа
ГВ76-22 (рис. 4.21), в отличие
от ГВ76-21 имеет присоедини-
тельную резьбу в отверстии для
выхода в атмосферу и больший
условный проход.
Техническая характери-
стика пневмораспределителей
приведена в табл. 4.6 [2],
Рис. 4.19. Пневмораспределитель i z 4 5
типа В76-21 ' и
93
Рис. 4.20. Исполнения пиевмораспределигелей типа В76-2 по видам управления:
а — с толкателем; б — со штифтом;в — с ломающимся рычагом; г — с кнопкой;^ — с ру-
кояткой; с. — с пневматическим управлением
Пневмораспределители типа П-ЭПК (клапаны электропневматические)
представляют собой трехлинейные двухпозиционные пневмораспределители
с электромагнитным управлением. К отверстию П (рис. 4.22) присоединяют
линию питания, к отверстию 0— линию потребителя, к отверстию А — атмо-
сферную линию. При обесточенной катушке 1 электромагнита якорь-клапан 2
усилием пружин 3 прижимается к седлу 4, перекрывая отверстие П и соединяя
0
отверстие А с 0. При подаче
напряжения на катушку 1
якорь-клапан 2, преодолевая
усилие пружин 3, подни-
мается, перекрывает отвер-
стие А и соединяет отверстия
/7 и 0. Пневмораспредели-
тель имеет специальное ус-
тройство 5 для ручного пере-
ключения при обесточенной
катушке электромагнита.
Рис. 4.21. Пиевмораспределитель
типа ГВ76-22
Предусмотрены исполнения пневмораспределителей с нормально открытой
схемой и для различного напряжения.
Техническая характеристика пневмораспределителей типа П-ЭПК
Условный проход, мм .............................. 4
Номинальное давление, МПа ................... 1,0
Пропускная способность, Л^( л/мин .... 3
Режим работы..............................Длительный и по-
вторно-кратковре-
менный
Наибольшее число включений, цикл/мин........... 1500
Время срабатывания, с, не более
при включении..........................• .... 0,020
при выключении................................. 0,012
Род тока.......................................Постоянный
Напряжение, В....................................... 24
Долговечность, цикл ............................. 22,5-10®
Maccaf кг, не более................................. 0,6
95
Таблица 4.6
Техническая характеристика пневмораспределителей
Параметры
Условный проход, мм
Номинальное давление,
МПа..................
Диапазон давления
управления, МПа . .
Расход воздуха при дав-
лении 0,4 МПа, м3/мии
Потеря давления при
указанном расходе, не
более, МПа ..........
Пропускная способ-
ность К л/мин . . .
Наибольшее допускае-
мое число включений,
цикл/мин ............
Усилие, необходимое
для открытия клапана
при номинальном дав-
лении, Н, не более . .
Долговечность, цикл
Масса, кг..............
8
0,63
0,25
0,03
10
30
1 • 10е
0,16
Пневмораспределитель типа В74-21. Сжатый воздух подводится к присоеди-
нительному отверстию П (рис. 4.23) и поступает под плоский золотник /, который
вместе с плунжером 2 может занимать одно из двух крайних положений. Одно
положение обеспечивается воздействием усилия на ролик 3, а другое после сня-
тия усилия с ролика — подачей в отверстие У пневматического сигнала, воз-
действующего на плунжер 2. В левом крайнем положении золотника отверстие Цг
сообщается с отверстием П подвода сжатого воздуха, а отверстие Ц2 — с атмо-
сферным отверстием А; в правом крайнем положении сообщаются отверстия Ц2
с П, а Цг — с А.
Техническая характеристика пневмораспределителя
типа В74-21 [2]
Условный проход, мм ..................................
Давление, МПа:
номинальное ......................................
минимальное ......................................
Диапазон давления управления, МПа ....................
Расход воздуха при давлении 0,4 МПа, м3/мин...........
Потеря давления при указанном расходе, МПа, не более
Пропускная способность К , л/мии......................
Утечки воздуха из-под золотника при номинальном давле-
нии, не более, см3/мин............................
Наибольшее допустимое число срабатываний, цикл/мин
Усилие, необходимое для перемещения ролика при номи-
нальном давлении, Н, не более ........................
Долговечность, цикл...................................
Масса, кг.............................................
4
0,63
0,25
0,25 — 0,63
0,063
0,015
3,5
21
1 • 10е
0,62
Пневмораспределитель типа В79-11. Сжатый воздух подводится к присоеди-
нительному отверстию П в плите 1 (рис. 4.24), попадает в полость а корпуса
и далее через дроссель 9 в полость в корпуса. В положении, изображенном на
рисунке, клапан 2 перекрывает сопло 10 и вследствие равенства давлений с обеих
сторон поршня 3 пружина 4 удерживает поршень с плоским золотником в край-
нем правом положении. При этом соединяются отверстия: Ц± и П1г а Ц2 с А.
96
При воздействии на ролик 5 рычаг 6, преодолевая усилие пружины 7, открывает
клапан 2. Сжатый воздух из полости в через сопло 10 выходит в атмосферу, дав-
ление в полости падает, и поршень 3 с плоским золотником 8 под действием дав-
ления с правой стороны перемещается влево. В этом положении золотника со-
общаются отверстия: Ц2 с П, а Ц± с А. После прекращения воздействия на
ролик клапан 2 перекрывает сопло 10, давление сжатого воздуха с обеих сторон
поршня выравнивается, и поршень с золотником под действием пружины 4 воз-
вращается в исходное крайнее правое положение.
Техническая характеристика пневмораспределитсл.ч
типа В79-11 [2 ]
Условный проход, мм ................................. 4
Давление, МПа:
номинальное....................................................... 0,63
минимальное......................................................... 0,25
Расход воздуха при давлении 0,4 МПа, м3/мин ......................... 0,063
Потеря давления при указанном расходе, МПа, не более .................. 0,025
Пропускная способность, л/мии ....................................... 2
Утечка воздуха из-под золотинка при номинальном давлении, см’/мин, не бо-
лее ....................................................................... 100
Наибольшее допустимое число срабатываний, цнкл/мии ........................ 250
Усилие, необходимое для перемещения ролика при номинальном давлении, Н,
не более................................................................ 2
Долговечность, цикл....................................................... 1 • 10е
Масса, кг............................................................... 0,66
Пневмораспределители типов 4152550100 и 4152550101 представляют собой
пятилинейные распределители с цилиндрическим золотником и эластичными
уплотнениями с двусторонним (рис. 4.25) и односторонним (рис. 4.26) пиевмо-
управлением. Распределители имеют пять отверстий 1, 2, 3, 4 и 5 для присо-
единения внешних линий и отверстия 12 и 14 для присоединения линий управ-
ления. Все резьбовые присоединительные отверстия выполнены в монтажной
плите, на которой устанавливается распределитель, уплотняемый с плитой Со-
образными кольцами. Распределитель содержит золотник с набором уплотнений
и втулок, размещенных в корпусе, закрытом крышками или управляющими уст-
ройствами в виде цилиндра с поршнем. Сжатый воздух подводится к отверстию /.
4 Е. В. Герц и др. 97
98
Таблица 4.7
Техническая характеристика распределителей типов 4152550100 и 4152550101
Параметр 4152550...
...100—01 ...100 — 03 ...101 — 01 ...101 — 03
Условный проход, мм Присоединительная резьба по ГОСТ 6111—52 Номинальное давление, МПа Рабочее давление минимальное, МПа Вид управления 12 К 3/8" 0,( Двустс 16 К 1/2" 0, )5 роииее 12 К 3/8" 10 0 Одиост 16 К 1/2" 25 ороииее
Давление управления минимальное, МПа Пропускная способность Kv: м3/ч л/мии Время срабатывания, с; включения выключения Наибольшая допускаемая частота вклю- чений, вкл/мии Масса, кг 0,25 2,36 I 2,8 40 1 46 0,063 2 3,3 | 3,2 0,1 + 0,6р 2,36 I 2,8 40 | 46 0,125 0,080 )0 3,7 | 3,6
К отверстиям 2 и 4 присоединяются линии, ведущие к исполнительным устрой-
ствам, а отверстия 3 и 5 сообщаются с атмосферой.
При подаче управляющего сигнала к отверстию 12 соединяются отверстия 1
и 2 (4 и 5). При подаче управляющего сигнала к отверстию 14 соединяются от-
верстия 1 и 4 (2 и 3).
В распределителях с односторонним управлением исходное положение зо-
лотника поддерживается постоянным подпором давления под его торцом; при
этом соединены отверстия 1 и 4 (2 и 3).
Техническая характеристика распределителей приведена в табл. 4.7, она
соответствует ГОСТ 21251—75.
Пневмораспределители типов 4152550110 и 4152550111 представляют собой
пятилинейные распределители с цилиндрическим золотником и эластичными
уплотнениями с двусторонним (рис. 4.27) и односторонним (рис. 4.28) электро-
пневматическим управлением. Распределители имеют пять отверстий 1, 2, 3,
4 и 5 для присоединения внешних линий. Присоединительные отверстия выпол-
4'
99
££ Д-Д
Рис. 4.28. Пмевмораспределнтель типа 41525501'1
йены в монтажной плите, на которую устанавливают распределитель, уплотня-
емый с плитой О-образными кольцами. Распределитель содержит золотник с на-
бором уплотнений и втулок, размещенных в корпусе, закрытом крышками, или
управляющими устройствами в виде цилиндра с поршнем. На распределителе
устанавливают управляющие трехлинейные пиевмораспределители с электро-
магнитным управлением типа П-ЭПК.
Сжатый воздух подводится к отверстию 1. Отверстия 2 и 4 соединяются с ис-
полнительными устройствами, отверстия 3 и 5 —с атмосферой. При подаче
напряжения на электромагнит, расположенный со стороны отверстия 3, соеди-
няются отверстия 1 и 2 (4 и 5). При подаче напряжения на электромагнит,
расположенный со стороны отверстия 5, соединяются отверстия 1 и 4 (2 и 3).
В распределителях с односторонним управлением исходное положение золотника
поддерживается постоянным подпором давления под его торцом, при этом соеди-
нены отверстия 1 и 4 (2 и 3).
Пневмораспределители можно выполнить с выводом проводов через саль-
ник или со штепсельным разъемом.
Пневмораспределители с условным проходом 12—20 мм комплектуют плитой
с резьбовыми присоединительными отверстиями, а с условным проходом 20 мм —
также плитой (рис. 4.29) для стыкового монтажа с цилиндрическими отверсти-
ями 1—5, расположенными в шахматном порядке н уплотняемыми О-образными
резиновыми кольцами.
Техническая характеристика распределителей приведена в табл. 4.8
(ГОСТ 21251—75), параметры электромагнитов — в табл. 4.9.
Пиевмораспределители типов В63-1 и ПВ63-1 изготовляют соответственно
с резьбовым и стыковым присоединениями.
Рис. 4.29. Плита
делителей типов
и 4152550111-0 6
пневмораспре-
4152550110-06
100
Таблица 4. 8
Техническая характеристика распределителей типов 4152550110 и 4152550111
Параметры 4152550...
...110-03 ...110—06 ...111-03 ...111-06
Условный проход, мм 16 20 16 20
Присоединительная резьба К 1/2" — К 1/2" —
(ГОСТ 6111—52)
Номинальное давление, МПа 1.0
Рабочее давление минимальное, МПа 0,25
Вид управления Двустороннее Одностороннее
Пропускная способность К :
м’/ч 2,80 3,15 2,80 3,15
л/мин 46 53 46 53
Время срабатывания, с:
включения 0,063 0,100
выключения 0,125
Наибольшая допустимая частота включе- 200
ний, вкл/мин
Масса, кг 4,6 4,4 4,5 4,3
Таблица 4.9
Параметры электромагнитов
Параметры Значения пара- метров при токе
постоян- ном пере- менном
Напряжение, В Частота, Гц Мощность, не более 24 12 Вт 220 50 15 В-А
Поршень 1 (рис. 4.30 и 4.31)
вместе с плоским золотником 2 может
заниглать одно из двух крайних поло-
жений. Золотник из одного крайнего
положения в другое перемещается под
давлением сжатого воздуха, подводи-
мого поочередно под торцы поршня 1
через отверстие У. В одном из край-
них положений золотника сообщаются
отверстия: Цг с 77, а Ц« с А, в дру-
гом крайнем положении золотника —
Цг с А, а Ц2 с П.
Распределитель со стыковым при-
соединением показан на рис. 4.32.
Техническая характеристика распре-
делителей приведена в табл. 4.10 [2].
Пиевмораспределители типов В63-2 и ПВ63-2 изготовляют соответственно
с резьбовым и стыковым присоединением.
Рис. 4.30. Пиевмораспределитель тира В63-11
А
А П
101;
и,цг
Рис. 4.31. Пневмораспределнтель типа В63-1
Таблица 4 10
Техническая характеристика пневмораспределнтелей типов ВбЗ-1 и ПВ63-1
Параметры 1 1 В63-11 1 В63-13М ПВ63-13М В63-14М ПВ63-14М В63-15М ПВ63-15М
Условный проход, мм . . Присоединительная резьба Давление, МПа: номинальное минимальное Диапазон давления управ- ления, МПа ....... Расход воздуха при давле- нии 0,4 МПа, м3/мин . . Потеря давления прн ука- занном расходе, не более, МПа Пропускная способность Kv, л/мин Утечка воздуха из-под зо- лотника при номинальном давлении, не более, см3/мин Время срабатывания при давлении 0,4 МПа, не бо- лее, с Наиб ольшее допустимое чи- сло срабатываний, цикл/мин . . Долговечность, цикл . , Масса, кг 4 К 1/8" 0,2 0,2 — 0.63 0,063 0,015 3,0 200 10е 0,72 12 К 3/8 "1 0,4 20 2,75 | 5 О'1 2.5 16 К 1/2"| 0,63 0,25 0,25 — 0 0,8 0,02 36 00 250 5 10е 3,2 | ,63 3,1 К 3/4 6,3 20 "1 1,6 80 1000 0,2 6,3
Рис. 4.32. Пневмораспределитель типа ПВ63-1
102
Видк
Рнс. 4.33. Пневмораспределитель типа В63-2
При подаче сжатого воздуха к отверстию /7 и соответственно в полость б
дифференциальный поршень 1 вместе с плоским золотником 2 займет положе-
ние, показанное на рис. 4.33, и соединит отверстия Цл с П, а Ц2 через отверстие А
с атмосферой. При подаче сжатого воздуха через отверстие У под торец поршня 1
последний с золотником 2 переместится влево и соединит отверстия: Цг с А,
а Ц2 с П. При сообщении отверстия У с атмосферой поршень с золотником под
давлением сжатого воздуха, находящегося в полости б, возвратится в исходное
положение.
Техническая характеристика пневмораспределителей приведена в табл. 4.11
[2].
Пневмораспределители типов БВ64-1 и ПБВ64-1 изготовляют соответственно
с резьбовым и стыковым присоединениями.
Сжатый воздух подводится (рис. 4.34) через отверстие П к внутренней по-
лости а и далее через дроссельные отверстия б поступает в полости в и г под
торцы поршня 3. Положение поршня с плоским золотником определяется состо-
янием клапанов, управляемых электромагнитами 6 и 1. На рисунке правый
электромагнит 6 включен, а левый электромагнит 1 выключен. При включении
Рис. 4.84. Пневмораспрсделнтель типа БВ64-1 и ПББ61-'.
103
Таблица 4.11
Техническая характеристика пневмораспределителей типов В63-2 и ПВ63-2
Условный проход, мм . .
Присоединительная резьба
Давление, МПа:
номинальное .............
минимальное . . . .
Диапазон давления управ-
ления, МПа...............
Расход воздуха при давле-
нии 0,4 МПа, м8/мнн . .
Потеря давления при ука-
занном расходе, не более
МПа .....................
Пропускная способность '
Kv, л/мин................
Утечка воздуха из-под зо-
лотника прн номинальном
давлении, не более, сма/мин
Время срабатывания прн
давлении 0,4 МПа, не бо-
лее, с...................
Наибольшее допустимое
число срабатываний,
цикл /мии................
Долговечность, цикл . . .
Масса, кг................
12
К 3/8" | —
0,4
20 |
500
0,1
3,0 I 2,9 I
16
К 1/2" | -
0,63
0,25
0,25-0,63
0,8
0,02
36
250
5-10»
20
К 3/4" | -
1,6
80
1000
0,2
6,5 I 6,3
якорь электромагнита 6 нажимает на стержень 5 клапана управления 4, который
отодвигается влево и выпускает в атмосферу из полости г сжатый воздух через
отверстие д. Это вызывает уменьшение давления в полости г, перемещение пор-
шня 3 с золотником 2 в правое положение и соединение отверстий: Ц1 с П,
а Ц2 с А. Поршень 3 кольцевым выступом упирается в резиновый вкладыш 7
и закрывает выход сжатому воздуху через отверстие д в атмосферу в течение
всего времени, пока электромагнит включен. При выключении электромагнита
клапан 4 возвращается в исходное положение. Если включить левый электро-
магнит 1, то аналогичным образом полость в соединится с атмосферой, поршень
с золотником переместится влево, соединив отверстия Ц2 с 77, а Ц-i с А.
Техническая характеристика распределителей приведена в табл. 4.12 [2]. ‘
Пневмораспределители типов В64-2 и ПВ64-2 изготовляют соответственно
с резьбовым и стыковым присоединениями.
На рис. 4.35 электромагнит 1 изображен в выключенном положении, по-
лость б соединяется с атмосферой. Вследствие наличия результирующей силы,
направленной вправо, дифференциальный поршень 2 с золотником 3 занимает
правое крайнее положение и соединяет отверстия: Ц± с П, а Ц2 с А. При
включении электромагнита 1 его якорь втягивается, открывает клапан 4, сооб-
щает полость б с давлением и отсекает выход в атмосферу. Изменяется направле-
ние результирующей силы, действующей на поршень, который вместе с золот-
ником 3 переместится влево и соединит отверстия: Ц1 с А, а Ц2 с П.
Техническая характеристика распределителей приведена в табл. 4.13 [2].
Пневмораспределнтели крановые (ГОСТ 18467—73) представляют собой двух-
позиционные четырехлинейные пневмораспределители с плоским поворотным зо-
лотником с ручным управлением. Распределители выпускают двух исполнений:
с присоединительными отверстиями на торце основания и с присоединительными
отверстиями на боковых сторонах основания. Сжатый воздух подается через от-
верстие 77 (рис. 4.36) во внутреннюю полость а н по пазу б в золотнике 1 прохо-
дит к одному из отверстий Цг или Ц2, другое из них в это время по другому пазу
104
Таблица 412
Техническая характеристика пневмораспределителей типов БВ64-1 и ПБВ64-1
Параметры
Условный проход, мм , .
Присоединительная резьба
Давление, МПа:
номинальное .........
минимальное . . . .
Расход воздуха прн давле-
нии 0,4 МПа, м’/мин . .
Потеря давления при ука-
занном расходе, МПа, не
более ...................
Пропускная способность
К , л/мин ........
Утечка нз-под золотника
при номинальном давлении,
м3/м.нн, не более........
Время срабатывания при
давлении 0,4 МПа, с, не бо-
лее . . .................
Наибольшее допустимое
число срабатываний,
цикл/мин ................
Напряжение катушки
электромагнита, В ... .
Потребляемая мощность,
Вт .......................
Д' лговечность, никл . . .
Масса, кг.................
16
К 1/2" |
0.63
0,25
0,8
500
о,1
-127
-220
-380
20
К 3/4" | -
I
1,6
80
1000
0,2
7,6
Рис. 4.35. Пневмораспределитель типа В64-2 и ПВ64«2
105
Таблица 4.13
Техническая характеристика пиевмораспределителей типов В64-2 и ПВ64-2
Параметры j В64-23М 1 В64- м j ПВ64-24М В64-25М ПВ64-25М
Условный проход, мм . . Присоединительная резьба 12 К 3/8" | - К 1/2" 6 20 К 3/4" | -
Давление, МПа: номинальное минимальное .... Расход воздуха при давле- нии 0,4 МПа, м3/мин . . Потеря давления при ука- занном расходе, МПа, не более Пропускная способность Kv, л/мин Утечка воздуха из-под зо- лотника при номинальном давлении, ие более, см3/мин Время срабатывания при давлении 0,4 МПа, не бо- лее, с Наибольшее допустимое число срабатываний, цикл/мин Напряжение катушки электромагнита, В . . . . Потребляемая мощность, Вт Долговечность, цикл . . . Масса, кг 0,63 0,25 0,4 | 0,8 0,02 20 36 500 0,1 80 — 127 -220 -380 45 3- 10е 3,5 | 3,7 | 4,25 | 3,7 1,6 80 1000 0,2 7,1
Таблица 4 /4
Техническая характеристика крановых распределителей
Параметры 08—11, 08—21 12—11, 12 — 21 16—11, 16—21
Условный проход, мм 8 12 16
Присоединительная резьба К 1/4" К 3/8" К 1/2"
Номинальное давление, МПа 1,0
Расход воздуха при давлении 0,4 МПа, м3/мии Потеря давления при указанном расходе, МПа, не 0,2j 0.63 1,0
более ... 0,02
Пропускная способность л/мин, не менее Утечка воздуха из-под золотника при номинальном 10 25 40
давлении, ие более, см3/мии Усилие переключения при номинальном давлении, 350 500 500
ие более, Н . . 30
Долговечность, цикл 9.J0»
в золотнике сообщается с атмосферой через отверстие Д. Золотник поворачивают
рукояткой 2.
Техническая характеристика приведена в табл. 4.14.
Пиевмораспределители крановые последовательного включения типа В71-33
представляют собой трехпозиционные шестилинейные распределители с ручным
управлением. Сжатый воздух подводится через отверстие П (рис. 4.37) к вну-
тренней полости крана. Плоский поворотный золотник 3 прижимается к зеркалу
крышки давлением сжатого воздуха и пружиной 4. Золотник 3 поворачивается
106
Рис. 4.36, Пневмораспределитель крановый по’ГОСТ 18467 — 73
с помощью валика 5 и рукоятки 6, имеющих три фиксированных положения,
которые обеспечивают сообщение отверстий Ц^, Ц2, Ц3 и с И или с атмо-
сферным отверстием А в порядке, указанном на рис. 4.37.
Такие распределители служат для изменения направления потоков сжатого
воздуха в пневмоприводах и могут быть использованы для управления последо-
вательной работой двух пневмоцилиндров двустороннего действия.
Техническая характеристика кранового распределителя
типа В71-33 [2 ]
Условный проход, мм...................................... 12
Присоединительная резьба ................................ К 3/8"
Номинальное давление, МПа ............................... 0,63
Расход воздуха прн давлении 0,4 МПа, м3/мнн.............. 0,4
Потеря давления при указанном расходе, МПа, не более . . 0,02
Пропускная способность К , л/мин......................... 14
Утечка воздуха из-под золотника при номинальном давлении,
см3/мин, не более........................................... 500
Усилие переключения, Н, ие более............................ 30
Долговечность, цикл...................................... 1 • 1 0*
Масса, кг ................................................... 2,5
Пневмораспределитель крановый (переключатель многопозиционный)
типа ППМ. Переключатель представляет собой шестипозиционный восьмилиней-
ный распределитель с ручным управлением.
Давление питания подается к центральному отверстию корпуса 1 (рис. 4.38)
и по каналам в распределителе 2 поступает в одно из шести выходных отверстий.
Распределитель 2 поворачивают рукояткой 3, при этом фиксируется в определен-
ной позиции с помощью шарика 4 и пружины 5. Уплотнение подвижного соеди-
нения обеспечивается плоским золотником 6, который прижимается к плоскости
107
«о чэ
Рис.; 4.37. Пневморгспределитель крановый последователь* Рис. 4.38. Пневморзспределители крановые (переключатели многопози-
ного включения типа В71-33 ционные) типа ППМ:
а — с присоединительной резьбой Мб: б — с присоединительной резь-
. . бой К 1/8"; в — условное обозначение
108
корпуса J пружиной 7. Выходные отверстия, кроме того, в которое подводится
сжатый воздух в данной позиции, через зазоры между корпусом 1 и распредели-
телем 2, распределителем 2 и проставкой 8 и через отверстия в проставке соеди-
няются с атмосферой.
Техническая характеристика переключателя типа ППМ
Условный проход, мм ............................ 4
Максимальное число позиций...................... 6
Число выходов .................................. 6
Давление питания, МПа:
номинальное............................... 1,0
минимальное........................... 0,002
Пропускная способность, К , м*/ч .... 0,18
Утечка воздуха, м’/мин, ие более............ 2-Ю-1
Момент переключения, Н-см ............... 63
Долговечность, цикл . .............. 1-10е
Масса, кг .................................... 0,36
Пневмораспределители типов П-РОЗ, П-Р515 с пневматическим управлением
предназначены для построения центральной (логической) части пневматических
систем управления.
Пневмораспределители с ручным управлением (пневмокнопки и пневмо-
тумблеры) предназначены для ручного ввода в системы управления пневматиче-
ских сигналов — кратковременных с помощью пневмокнопок и длительных
с помощью пневмотумблеров. Пневмораспределители с механическим управлением
предназначены для выдачи пневматического сигнала при достижении подвижным
органом объекта управления заданного положения. Указанные пневмораспреде-
лители предназначены также для непосредственного управления небольшими
по расходу исполнительными механизмами.
Номенклатура пневмораспределителей типов П-РОЗ и П-Р515 приведена
в табл. 4.15. Распределители типов П-РОЗ и П-Р515 являются частью комплекса
устройств миниаппаратуры, объединенных едиными монтажпокоммуникацион-
ными параметрами, и предназначены для построения пневматических систем
управления.
На рис. 4.39 показан трехлинейный пневмораспределитель с односторонним
пневматическим управлением типа П-Р03П1-С. Распределительным органом
Рис. 4.39. Пневморас-
пределитель типа
П-Р03П1-С
109
Таблица 4.1 S
Номенмятура пневмораспределителей типов П-РОЗ; П-Р515
Пневмораспределители Шифр Условное обозначение по ГОСТ 2.781-68
Трехли- нейные С односторонним пневма- тическим управлением П-Р03П1-С - L Ah N
С двусторонним пневмати- ческим управлением П-Р03П2-С - L А
С нормальным толкателем П-Р03Р13
С утопленным толкателем П-Р03Р14 (t=
С грибовидным толкателем П-Р03Р15 L тА
С защищенным толкате- лем П-Р03Р16
С управлением рычагом П-РОЗФ
С управлением толкателем П-РОЗМИ
С управлением роликом П-Р03М12
АЛ _L
С управлением ломающим- ся рычагом П-Р03М13 д А.
С бесконтактным управле- нием П-Р03М16
W/xL 1 о- г
Пятили- нейные С односторонним пневма- тическим управлением П-Р515П1-С Г//|\ &
С двусторонним пневмати- ческим управлением П-Р515П2-С -L.LJ L!
а ж
НО
Продолжение табл. 4.15
Пневмораспределнтели Шифр Условное обозначение п© ГОСТ 2.781—68
С нормальным толкателем П-Р515Р13
С утопленным толкателем П-Р515Р14
С грибовидным толкателем П-Р515Р15
С защищенным толкателем П-Р515Р16
С управлением рычагом
П-Р515Ф
Пятили-
иейиые
С управлением штоком
П-Р515МИ
С управлением роликом П-Р515М12 “О
С управлением ломающим- ся рычагом П-Р515М13 <1
служит цилиндрический золотиик 3 диаметром 8 мм, расположенный в корпусе
4 с зазором 2—6 мкм. В корпусе выполнены кольцевые проточки, с которыми
соединены отверстия для подвода и отвода воздуха.В крышке 1 и втулке 2 выпол-
нены каналы для управляющего сигнала, а в крышке 5 — канал, соединяющий
полость пружины с атмосферой через фильтр 6, который установлен для предо-
твращения попадания загрязнений из окружающей среды внутрь распределителя.
Каналы в полости управления задросселированы, что позволяет исключить
жесткие удары золотника о крышку. Распределитель установлен на унифици-
рованной плате 7 (отверстие 10 в данном случае не используется) и уплотняется
кольцами 8. Распределитель может работать как в нормально открытом, так и
в нормально закрытом режиме.
Трехлинейный распределитель с двусторонним пневматическим управлением
типа П-Р03П2-С (рис. 4.40) отличается от распределителя с односторонним пне-
вматическим управлением наличием устройства удержания золотника в оп-
ределенном положении при отсутствии управляющих сигналов. Устройство вклю-
чает хвостовик 2, закрепленный в золотнике 1, и эластичное кольцо 3. Сила тре-
ния, возникающая из-за предварительного натяга между наружной поверхно-
стью хвостовика 2 и внутренней поверхностью кольца 3, удерживает золотник
в определенном положении.
111
Рнс. 4.40. Пмевмораспределитель типа П-Р03П2-С
Конструкция пятилинейных распределителей с пневматическим управлением
типов П-Р515П1-С и П-Р515П2-С аналогична трехлинейным н отличается только
числом каналов и проточек в золотнике.
Трех- и пятилинейные пиевмораспределители с ручным управлением по-
строены на базе распределителей с односторонним пневматическим управлением.
На рис. 4.41, а и б показана конструкция трех- и пятилинейной кнопки (рас-
пределителя) с нормальным толкателем. Резьбовые отверстия для присоединения
гибких трубок выведены на торец платы 1,
Другие виды ручного управления (утопленным толкателем, грибовидным
толкателем, защищенным толкателем и рычагом) приведены на рис. 4.42, при-
чем одни и те же механизмы управления используются для трех- и пятилинейных
распределителей. В кнопке с защищенным толкателем (см. рис. 4.42, в) рези-
новая мембрана / предохраняет полость нажимного устройства от попадания за-
грязнений, что позволяет использовать ее в тяжелых условиях.
Для обеспечения четкого функционирования тумблера необходимо обеспе-
чить перебег нажимной детали 2 (см. рис. 4.42, а), что достигается соединением
последней с золотником через компенсирующее устройство 3.
На рис. 4.43 приведена конструкция трехлинейного пневмораспределителя
управляемого толкателем /. В конструкции использованы корпус 6, золотник 5,
крышка 7 трехлинейного пневмораспределителя с односторонним пневматиче-
ским управлением и компенсирующее устройство 4 тумблера, плата 8 пневмо-
распределителей с ручным управлением. Оригинальными деталями являются
крышка 3 и резиновый защитный колпачок 2, предохраняющий внутренние по-
лости распределителя от загрязнений. Компенсирующее устройство 4 обеспе-
чивает дополнительный ход толкателя на 1,5 мм.
Принцип построения н конструкция трехлинейного и пятплинейного рас-
пределителей с механическим управлением аналогичны.
Схемы механического управления распределителей представлены на
рис. 4.44. На рис. 4.45 показан трехлинейный пиевмораспределнтель с бескон-
тактным механическим управлением, для переключения которого, в отличие от
112
Рис. 4.41. Трехлинейные (а) и пятилинейные (б) пиевмораспределители с ручным управ-
лением
Рис. 4.42. Схемы ручного управления пневмораспределителей.
а — утопленным толкателем; б — грибовидным толкателем; в — защищенным толкателем;
г — рычагом (тумблер)
Рис. 4.43. Пневмораслределнтель типа П-РОЗМН
Риг. 4.44. Схемы механического управления рас-
пределителей:
а — штоком; б — роликом; в — ломающимся ры-
чагом
из
а 5 д
Рнс. 4.45. Пневмораспределитель типа
П-Р03М1Б
других распределителей с механическим
управлением, не требуется непосред-
ственного механического контакта под-
вижного органа объекта управления с на-
жимным механизмом распределителя.
Для этой цели служит бесконтактный
струйный пневматический конечный вы-
ключатель 1, который управляет пнев-
мораспределителем с односторонним пнев-
матическим управлением и пружинным
возвратом. Между конечным выключате-
лем и распределителем установлена пли-
та 2, через которую проходят толкатель
мембранного привода золотника и канал
питания выключателя. Все коммуника-
ционные каналы выполнены в плате 4,
имеющей стыковую плоскость, общую
для корпуса 3 и плиты 2.
Принцип действия выключателя 1
состоит в следующем. Сжатый воздух
подается к питающему соплу а и к прием-
ному соплу в. При отсутствии заслонки
в пазу б поток воздуха из сопла а про-
ходит через паз б, блокирует приемное со-
пло в и выход г в атмосферу; давление
в полости над мембраной возрастает,
и золотник распределителя перемещается
вниз. Если же заслонка прерывает поток
воздуха от сопла а к соплу в, то воздух
из камеры над мембраной выходит в атмо-
сферу через канал г и сопло в.
Принцип действия струйного выключателя и его конструктивные особенности
существенно уменьшают засорение сопла в и позволяют при необходимости про-
чищать его без демонтажа и разборки устройства. Конечный выключатель пред-
назначен для работы в нормально открытом режиме.
Техническая характеристика распределителей приведена в табл. 4.16.
Пневмоклапаны обратные типа В51-1 и по ГОСТ 21324—75. В обратном кла-
пане типа В51-1 клапан 1 (рис. 4.46) усилием слабой пружины 2 прижимается
к коническому седлу в штуцере 3. Стык уплотнен резиновым кольцом 4. Сжатый
воздух, подводимый к присоединительному отверстию в штуцере 3 преодолевает
усилие пружины 2 и, отжимая от седла клапан 1, проходит по его каналам
Б к отверстию в корпусе 5. При изменении направления движения потока воз-
духа на обратное клапан 1 прижимается к седлу усилием пружины 2, давле-
нием сжатого воздуха и перекрывает путь потоку в обратном направлении.
Обратные пневмоклапаны по ГОСТ 21324—75 (рис. 4.47) отличаются от
клапанов В51-1 тем, что для увеличения пропускной способности направлиющий
Рис. 4.46. Обратный пневмоклапан типа В51*1
114
Техническая характеристика пневмораспределителей типов П-РОЗ и П-Р515
aiweod-u 0,25—0,63 0,035 1,1 0.127 * 0,32
ElWSISd-U £IW£0d-U to |<A 1 1 I °! Л. o Io о
SlW91Sd-U SIW£0d-U 1 - 1 1 : 0,25 1 0,35
I IWSISd-lI IIW£0d-U 1 16 i 0,22 1 0,32 1
OSISd-LI Феосрц 325 ,3 3- ю6 I 0,26 । 0,35 ггеля. [инейного.
9ldSlSd-LI 9IdS0d-d 0,63 0,04 0,( 1 Ю07 ! 25 1 0,25 0,32 ) ВЫКЛЮЧс е — пятил
SldSlSd-H SId£0d-U 2 0 — 0,0 : 0,26 । 0,34 струйногс 1аменател1
HdSISd-U Hd£0d-LI 8 1 0,25 1 । 0,33 ;ез сопло теля, в зь
EldSISd-n £Id£0d-U 1 0,25 1 0,33 1схода чер а определи
Э-ZUSISd-U Э-ZUEOd-U 14 32 45 ! 10 107 1 _0'24 0,30 нику и рг нейного р
Э-IUSISd-U O-IU£0d-U 0, о,1 1,- 10 15 I __ 2 • 0,22 0,28 ! 1 К ПО ЗОЛОТ1 сса трехли
Параметры Условный проход, мм . . Давление питания, МПа . . . Минимальное давление управ- ления, МПа Расход воздуха при давлении 0,4 МПа, м3/мин Потеря давления прн расходе воздуха 0,04 м3/мин, МПа, не более Пропускная способность К&, л/мин, не менее Утечки воздуха при давлении 0,4 МПа, м3/мин, не более Время включения, мс, не более Время выключения, мс, не бо- лее Усилие переключения, И, не более Долговечность, цикл .... Масса, кг ** * Приведена сумма утече ** В числителе указана ма
115
Рис» 4.47. Обратный пневмо-
клапан по ГОСТ 21324 — 75
хвостовик клапана выполнен в виде цилиндрического хвостовика 1 небольшого
диаметра. Центрирование клапана выполняется с помощью хвостовика 1, про-
ходящего через проставку 2, имеющую каналы А для прохода воздуха.
Технические характеристики обратных пневмоклапанов приведены в
табл. 4.17.
Пневмоклапаны последовательности типов В62-21 н П-КМ. Конструкция
клапана последовательности типа В62-21 описана выше (с.м. рис. 4.14, а).
На рис. 4.48 показан клапан последовательности типа ГТ-KM, входящей в
в комплекс устройств миниаппаратуры. В исходном положении сжатый воздух
подводится к присоединительному отверстию А, которое закрыто клапаном 10.
Канал выходного отверстия Б через паз и отверстие в клапане 6 и через паз в кры-
шке 4 соединен с атмосферой.
Заданное давление срабатывания настраивают вращением винта 3, при этом
гайка /, перемещаясь в осевом направлении, изменяет усилие пружины 2.
Сжатый воздух под контролируемым давлением подается через канал при-
соединительного отверстия в в камеру а, где вследствие разности эффективных
площадей мембран создается усилие, которое при достижении заданного дав-
ления, преодолевая сопротивление пружины 2, перемещает мембранный узел.
Под действием давления сжатого воздуха клапан 10 открывается, и воздух по-
ступает в выходной канал, а также, создавая дополнительное усилие на мем-
брану 0, обеспечивает скачкообразный эффект включения, при этом выход в ат-
мосферу перекрывается уплотнением 5 клапана 6. При использовании клапана
Техническая характеристика обратных пневмоклапанов
Таблица 4.17
Параметры см ео U5 08-1К 12-1К 16-1К 20-1К 25-1К
В51 CQ В51 1 В51 по ГОСТ 21324-75
Условный про- код, мм 8 10 16 20 8 12 16 20 25
Присоединитель- ная резьба Номинальное Давление, МПа К 1/4" К 3/8" 0, К 1/2" 33 К 3/4" К 1/4" К 3/8" К 1/2" 1,0 К 3/4" К 1"
Расход воздуха при давлении 0,63 МПа, м’/мия Потеря давле- ния при ука- занном расходе воздуха, МПа, не более 0,36 0 0,58 06 1,16 0 2,3 05 0.4 0,04 0,8 1,6 0, 2,5 03 4,0
Пропускная спо- собность Kv, л/мин Долговечность, ч 7 11 5( 23 00 46 9 20 104 (8 40 । 60 млн. цикл.) 100
Масса, кг 0,13 0,22 0,45 0,5 0,17 0,35 0,33 0,32 0.54
116
последовательности в дифференциальном режиме второй поток сжатого воздуха
подается через канал присоединительного отверстия Г в камеру б, при этом из-за
разности эффективных площадей мембран 7 и 8 возникает усилие, препятству-
ющее включению клапана последовательности.
При применении клапана последовательности для контроля по давлению ци-
кла работы системы управления сжатый воздух из рабочей и выхлопной полостей
цилиндра подводится к присоединительным отверстиям В и Г соответственно.
Пневмоклапан последовательности устанавливают на унифицированную
плату.
Техническая характеристика пневмоклапанов последовательности приведена
в табл. 4.18.
Техническая характеристика пневмоклапаиов последовательности
Таблица 4.18
Параметры В62-21 п-км
Условный проход, мм Давление, МПа: 4 2,5
номинальное 0,63 0,63
минимальное . . 0,3 0,14
Колебание давления срабатывания. МПа, не более . . ±0,01 0,008
Расход воздуха при давлении 0,4 .МПа, м8/мии , . . 0.063 0.04
Потеря давления при указанном расходе, МПа . , 0.02 0,02
Пропускная способность, л/мнн Утечка воздуха в выходной канал при номинальном 2.2 1,45
давлении, см’/мин, не более 500 —
Долговечность, цикл 10е 3- 10s
Масса, кг 1,26 0,22
Пиевмоклапаны ИЛИ типов В67-11 и П-КЧ. На рис. 4.49 показан пневмо-
клапан ИЛИ типа В67-11. При подаче пневматического сигнала к отверстию Пг
или П2 поршень перемещается в крайнее правое или крайнее левое положение.
В этом случае отверстие, которое в данный момент сообщено с атмосферой, пере-
крывается, а пневматический сигнал поступает к отверстию 0. Таким образом,
117
о
Рис. 4.40. Пневмоклапан ИЛИ типа В67-11
клапан позволяет питать линию, присоединенную к отверстию 0, от двух источ-
ников питания.
На рис. 4.50 показана конструкция пневмоклапана ИЛИ типа П-КЧ. При
подаче сжатого воздуха в одной из двух входных отверстий клапана ИЛИ (на
рисунке входные отверстия крайние) клапан с резиновыми кольцами перемеща-
ется, закрывая противоположный вход и обеспечивая прохождение сигнала
к выходному отверстию (центральное на рисунке) непосредственно или через
лыски на наружной цилиндрической поверхности клапана. При наличии одно-
временно двух входных сигналов на выход проходит больший по величине сигнал
(клапан закрывает входное отверстие со стороны меньшего сигнала), при их
равенстве — частично оба (клапан находится в нейтральном состоянии).
Техническая характеристика пневмоклапанов ИЛИ приведена в табл. 4.19.
Таблица 4.19
Техническая характеристика пневмоклапанов ИЛИ
Параметры В67-11 п-кч
Условный проход, мм Давление, МПа: 4 2,5
номинальное 0,63 0,63
минимальное 0,25 0,14
Расход воздуха при давлении 0,4 МПа, м8/мин . . . Потеря давления при указанном расходе, МПа, не более 0,032 0,04
0,02 0,025
Пропускная способность Kv, л/мин 1,2 1,3
Долговечность, цикл 10е 2 * 107
Масса, кг 0,16 0.025
Пневмоклапан И типа П-КИ-4/10. На рис. 4.51, а показана конструкция
пневмоклапана И резьбового исполнения типа П-КИ-4/10. Клапанный узел со-
состоит из двух клапанов, которые своими хвостовиками свободно входят в на-
правляющую, имеющую иа наружной поверхности лыски для прохода воздуха.
Линейные размеры деталей клапанного узла таковы, что при подаче сжатого
воздуха в оба входных канала оба клапана закрыться не смогут. При сбросе дав-
ления воздух из выходного канала проходит к входным каналам, при этом
клапаны расходятся и упираются в крышки, иа поверхности которых располо-
жены пазы для прохода воздуха.
На рис. 4.51, б показана конструкция пиевмоклапана И стыкового испол-
нения типа П-КИ-4/10-С, который можно комплектовать монтажной плитой
118
S)
Рис. 4.51. Пневмоклапан И резьбового исполнения типа П-КИ-4/10 (а) и стыкового ис-
полнения типа П-КИ-4/10-С (б)
Рис. 4.52. Пневмоклапав выдержки времени типа П-КВВ
с резьбовыми присоединительными отверстиями иа нижней плоскости платы
(тип П-КИ-4/10-1С) или иа боковых поверхностях (тип П-К.И-4/10-2С).
Техническая характеристика приведена в табл. 4.20.
119
Техническая характеристика пневмоклапаиов И
Таблица 4.2 0
Таблица 4.2 1
Техническая характеристика пневмоклапаиов выдержки времени
Параметры В61-21 П-КВВ-4/10 ПП-КВВ-4/10
Условный проход, мм Давление, МПа: номинальное минимальное Минимальное давление управления, МПа Пропускная способность, л/мин Время выдержки, с Изменение времени выдержки при постоянном давлении на входе (колебания давления не более 0,002 МПа), %, не более Долговечность, цикл Масса, кг 4 0,63 0,25 0,3 1,12 0,5-6 ±2 5- 10s 1,42 4 1,0 0,25 0,25 4 0,5-15 ±2 3 - 10е 0,7/1,0
Пневмоклапаны выдержки времени типов П-КВВ и В61-21. Конструкция
пневмоклапана типа П-К.ВВ-4/10 резьбового исполнения показана на рис. 4.52.
Пневматический входной сигнал подводится к поршню 1 в левую от мембраны 2
полость и через дроссель 3 (настройка которого определяет время выдержки)
в правую полость, которая отсекается от атмосферы поршнем 1. При определе-
нном соотношении давления в правой и левой полостях поршень 4, перемещаясь
влево, соединяет левую полость с атмосферой, открывает клапан 5, и на выходе
появляется сигнал.
На базе резьбового исполнения построен клапан выдержки времени стыко-
вого исполнения типа ПП-КВВ-4/10.
Принципиальная конструкция пневмоклапана выдержки времени типа
В61-21 описана выше (см. рис. 4.18, б).
Техническая характеристика пневмоклапаиов выдержки времени приведена
в табл. 4.21,
СПИСОК ЛИТЕРАТУРЫ
1. Герц Г. В., Крейннн Г. В. Расчет пневмоприводов. М.: Машиностроение, 1975.
272 с.
2. Элементы и устройства пневмоавтоматики высокого давления. Каталог. М.:
197S. 155 с. (НИИМАШ).
Глава 5
РЕГУЛИРУЮЩАЯ
ПНЕВМОАППАРАТУРА
Регулирующая пневмоаппаратура предназначена для изменения давления и
расхода сжатого воздуха путем регулирования величины открытия проходного
сечения. К этой группе пневмоаппаратуры относятся: пневмодроссели, редукци-
онные и предохранительные пневмоклапаны.
5.1. ПНЕВМОДРОССЕЛИ
Пневмодроссели предназначены для изменения расхода путем создания местного
гидравлического сопротивления потоку сжатого воздуха. Различают дроссели
постоянные (нерегулируемые), сопротивление которых (величина проходного
сечения, форма или длина канала) не может быть изменено в процессе эксплуата-
ции, и переменные (регулируемые), сопротивление которых можно изменять
настройкой. Дроссели используют главным образом для регулирования скорости
пневмодвигателей и скорости заполнения или опорожнения емкостей в целях
создания временных задержек.
Дроссели обычно выполняют в виде отдельных регулируемых устройств
и часто снабжают обратным клапаном, устанавливаемым параллельно дроссе-
лирующему узлу. В последнем случае эти устройства называют дросселями с об-
ратным клапаном; они дросселируют поток воздуха только в одном направлении,
а поток воздуха противоположного направления пропускают с небольшим сопро-
тивлением, создаваемым обратным клапаном.
Разновидностью пневмодросселей являются выхлопные дроссели, характер-
ная особенность которых заключается в том, что их ввертывают непосредственно
в присоединительное отверстие распределителя, из которого воздух выходит
в атмосферу. Выходное отверстие выхлопного дросселя может быть без присоеди-
нительной резьбы или с резьбой для ввертывания глушителя. При этом полость
между дросселирующим узлом и резьбой под глушитель в выхлопном дросселе
может быть негерметичной.
Регулируемые дроссели применяют с ручным и механическим управлением.
В дросселях с ручным управлением расход воздуха (сопротивление дросселя)
устанавливают в период наладки оборудования и он остается неизменным при
рабочем цикле. В дросселях с механическим управлением (называемых также
тормозными дросселями) расход воздуха зависит от величины перемещения уп-
равляющего элемента (штока, ролика), определяемого обычно профилем копира
или кулачка, установленного на выходном звеие пневмодвигателя, или на под-
вижной части автоматизируемого объекта. Таким образом, выбирая необходи-
мый профиль копира, можно изменять сопротивление пневмодросселя на всей
длине перемещения выходного звена пневмодвигателя (например, штока цилин-
дра), обеспечивая заданный закон движения, т. е. требуемую зависимость между
скоростью и перемещением выходного звена.
Нерегулируемые дроссели, как правило, являются частью других устройств.
Когда необходимо точно обеспечить заданную величину сопротивления, дроссели
121
Рис. 5.1. Пневмодроссели без обратного (а) и с обратным (б) клапанами
выполняют в виде калиброванных отверстий в деталях простой формы типа вту-
лок или шайб, которые при необходимости можно легко заменить.
В пневмоавтоматике, использующей устройства малых проходных сечений
(Оу < 2 мм), широко применяют цилиндрические и щелевые дроссели. Первые
из них имеют канал цилиндрической формы и, как правило, не регулируются.
Под щелевыми дросселями понимают переменные дроссели, канал которых об-
разован двумя концентрически расположенными цилиндрическими или кониче-
скими поверхностями. Их называют соответственно щелевыми цилиндрическими
или щелевыми коническими дросселями.
В приводах применяют также дроссели типа конус—отверстие, шарик —от-
верстие и др.
На рис. 5.1, а представлена типичная конструкция дросселя, а на рис. 5.1, б—
дросселя с обратным клапаном, причем конструктивно обратный клапан и дрос-
селирующий элемент совмещены. Для обеспечения плавности и точности регули-
рования игла дросселя имеет угол конуса 10—15°, резьбу выполняют с мелким
Рис. 5.1, Тормозной пневмодроссель
шагом и соосно с дросселирующим от-
верстием.
На рис. 5.2 показана конструкция
тормозного дросселя. Принцип работы
дросселя при торможении цилиндра за-
ключается в следующем. Отверстия А
и Б сообщаются соответственно с по-
лостью цилиндра и с распределителем.
При ненажатом ролике (как показано
на рисунке) воздух из выхлопной по-
лости цилиндра свободно проходит через
зазор между проточкой золотника 1 и
втулкой 4. При нажатии на ролик этот
путь перекрывается и воздух проходит
к распределителю через только дрос-
сель 3. При противоположном направле-
нии потока воздуха открывается обрат-
ный клапан 2.
Основными параметрами дросселя
являются расходная и настроечная харак-
теристики. Расходной характеристикой
дросселя называют зависимость между
122
расходом сжатого воздуха через дроссель и соотношением давлений до дросселя
и после него. Расходная характеристика дросселей, как и других пневматических
устройств, существенно зависит от режима течения — ламинарного или турбу-
лентного. Ламинарный режим характеризуется прямолинейностью траекторий
частиц жидкости, которая может существовать лишь на достаточном удалении
от входного сечения; ламинарный режим имеет место при малых значениях числа
Рейнольдса Re < Rerp. При турбулентном режиме движение частиц имеет не-
упорядоченный характер и Re> Rerp.
Число Рейнольдса можно определить по формуле
Re = 4ггшр'т]д,
гДе гг — гидравлический радиус сечения канала (отношение площади попереч-
ного сечения к его периметру); w — средняя по сечению канала скорость течения
сжатого воздуха; р — его плотность; г|д — коэффициент динамической вязкости,
определяемый по диаграмме (рис. 5.3, а).
Формулы для определения г и w, а также коэффициента сопротивления £тр
для ламинарного режима течения воздуха через дроссели с различной формой
сечения канала приведены в табл. 5.1 [1], где I — длина канала дросселя; 6,
Ь и h — указаны на чертежах.
Расход воздуха через щелевой конический дроссель с малым углом конуса
можно определить по формулам для щелевого цилиндрического дросселя, если
вместо D использовать среднее и по длине значение среднего диаметра щели.
Массовый расход G можно получить умножением объемного расхода Q на
плотность сжатого воздуха при среднем давлении, определяемом как рСР =
= р2 + Ар/2, где р2 — давление на выходе из дросселя.
При равных площадях проходного сечения отношение массовых расходов
Сщ 26
через щелевой цилиндрический и через цилиндрический дроссели -д— ~ -дд-
[3]. Так как обычно D 2> 6, то практически расход через цилиндрический дрос-
сель может быть в десятки раз больше, чем через щелевой дроссель. Засоряемость
щелевых дросселей при этом больше, чем засоряемость цилиндрических, так как
поперечный размер проходного сечения (щели, имеющей большой периметр)
меньше. Это относится к дросселям типов конус—отверстие, шарик—отверстие
и другим с аналогичной формой проходного сечения. Применение дросселей с ма-
лыми проходными сечениями требует тщательной очистки воздуха не только от
твердых загрязнений, но и от влаги.
Из условия обеспечения постоянства расходной характеристики во времени,
по данным харьковского завода ОКБ «Теплоавтомат»,целесообразно применять по-
стоянные дроссели с поперечным размером канала не менее 0,3—0,4 мм.
123
Параметры ламинарного течения воздуха в прямом осесимметричном канале
124
Переменные дроссели могут иметь каналы меньших поперечных размеров
так как их можно поднастраивать и прочищать перемещением подвижного эле-
мента без разборки.
Особенностью щелевых дросселей является^ более высокий, чем у цилиндри-
ческих дросселей, граничный перепад давления АрГР, при котором в дросселе
происходит переход ламинарного режима течения в турбулентный. В этом со-
стоит одно из преимуществ щелевых дросселей, когда требуется получить лами-
нарный режим при сравнительно высоком значении Ар.
Для турбулентного режима течение воздуха по гладким каналам [1] сред-
няя по сечению скорость w = Q/f, где Q — объемный расход воздуха; f — пло-
щадь поперечного сечения; потеря давления
где гг — гидравлический радиус (см. табл. 5.1).
Коэффициент сопротивления £ТР, характеризующий потери на трение при
движении жидкости, при Rerp <С Re < 105 определяют по формуле Блазиуса
£тр =0,314 Re'0’25,
а при 105 <Re < 108 по формуле Никурадзе
£тр = 0,00332 + 0,221 Re'0,237 ;
полный коэффициент сопротивления дросселя , .
£ = + ^TTpl/d,
где £вх — коэффициент местных потерь на входе в дроссель, определяемый по
графикам (рис. 5.4); d — диаметр канала.
Массовый расход воздуха определяется по приближенным формулам
для докритического истечения
г *\ 1 2
125
Рис. 5.5. Расчетные схемы регулируемых дросселей:
а — щелевого цилиндрического; б — щелевого конического
и для надкритического истечения
г
° ]^RT2 ’
где [I — коэффициент расхода воздуха, определяемый из выражения р =
= 1/К1 + $ или по графику (рис. 5.3, б); f — площадь поперечного сечения ка-
нала дросселя; pj и р2 — абсолютное давление воздуха на входе и выходе дрос-
селя; R— газовая постоянная; Т2— температура воздуха на выходе из дрос-
селя.
Граничное число Rerp для каналов круглого и прямоугольного сечений
различных размеров лежит в пределах 800—1200 (уменьшается с уменьшением
размера сечения) [1], а для щелевых цилиндрических и щелевых конических —
1100 [2, 3].
Для дросселей с ламинарным течением воздуха характерны небольшие
размеры поперечного сечения, большая длина каналов (lid > 10) и докритические
перепады давления. При большом значении lid и малом Re преобладающее зна-
чение имеют потери на трение в канале дросселя, а сопротивлением на входе
в канал можно пренебречь и считать t, = £тр. К таким типам дросселей можно
отнести щелевые цилиндрические, щелевые конические, цилиндрические дрос-
сели (капилляры), дроссели с винтовыми каналами и др.
Дроссели с турбулентным течением воздуха имеют относительно большой раз-
мер сечения канала при его малой длине. Поэтому преобладающее значение имеет
сопротивление на входе в канал, т. е. можно принять $ = $вх. К этим дросселям
можно отнести дроссели типа конус—отверстие, шарик—отверстие, отверстия
с малым значением lid и др.
Настроечная характеристика дросселя представляет собой зависимость
расхода от перемещения дросселирующего элемента.
Настроечная характеристика щелевого цилиндрического дросселя
(рис. 5.5, a) G—C^l, где Сх =——— Др— коэффициент пропорциональ-
12т1д
иости.
Настроечная характеристика щелевого конического дросселя [3] с малым
, - - л „ s3 _ лОра3 . „
углом конуса (рис. 5.5, о) G = С2 , где С2 = —— Др; и — сред-
не—s 1д11д
иее значение среднего диаметра щели; а — угол наклона образующей к оси
конуса, s и 10 — указаны на чертеже.
Для дросселей типа конус—отверстие настроечная характеристика имеет
вид G = С3 (Do — s cos a sin a) s, где Do — диаметр отверстия; С3 = рл sin а х
। / До _ . Pi
X у RT~ДЛЯ докРитического режима и С3 = рл sm a для над-
критического режима истечения через дроссель.
Характеристики пневматических дросселей различных типов подробно рас-
смотрены в работах [1, 2, 3].
126
5.2. РЕДУКЦИОННЫЕ ПНЕВМОКЛАПАНЫ
Применяемые в пневмоприводах редукционные пневмоклапаны (регуляторы дав-
ления), различают по следующим основным признакам: по типу нагрузочного
элемента (пружина, давление — с управлением от вспомогательного регулятора);
по степени разгружеиности редуцирующего клапана (со сбалансированной и не-
сбалансированной площадью клапана); по возможности сброса избыточного вы-
ходного давления воздуха (с клапаном сброса и без клапана сброса); по виду
уплотнения редуцирующего клапана по седлу (с эластичным уплотнением, с ме-
таллическими уплотняющими поверхностями); по типу чувствительного элемента
(мембранные и поршневые).
Схемы редукционных пневмоклапаиов основных типов приведены на
рис. 5.6.
При выборе типа редукционного клапана следует учитывать давление воз-
духа в сети, необходимый диапазон регулирования выходного давления воздуха
и его допустимые колебания; диапазон изменения расхода воздуха; возможность
превышения давления воздуха сверх заданного и необходимость перенастройки
с большего давления на меньшее путем сброса сжатого воздуха через редукцион-
ный пневмоклапан; необходимость дистанционного управления.
Наибольшее применение получили редукционные пневмоклапаны с пружин-
ным нагрузочным элементом. Так как с увеличением условного прохода размер
редукционных пневмоклапаиов, площадь чувствительного элемента, а следо-
вательно, и усилие пружины возрастают, пружинные редукционные пиевмокла-
паны с условным проходом более 25 мм применяют редко. Увеличение усилия,
а следовательно, и жесткости пружины (при сохранении приемлемого размера),
отрицательно влияет на точность редукционного клапана. Это объясняется тем,
что при изменении параметров потока воздуха на входе или выходе редукцион-
ного клапана (по сравнению с теми, которые были в момент настройки) чувстви-
тельный элемент, реагируя на изменение, обеспечивает соответствующее пере-
мещение редукцирующего клапана. При этом изменяется длина пружины и,
следовательно, в новом установившемся состоянии усилие, развиваемое пружиной,
будет отличаться от усилия в условиях настройки на величину, определяемую
ходом редуцирующего клапана и жесткостью пружины, что вызовет соответству-
ющее изменение выходных параметров потока воздуха.
Редукционные пневмоклапаны с нагрузкой давлением сжатого воздуха
(при дистанционном управлении от вспомогательного редукционного клапана
малого условного прохода) имеют условные проходы 16— 40 мм и более, и обе-
спечивают лучшую стабилизацию давления, чем клапаны с пружинным нагру-
зочным элементом.
Редукционные клапаны с несбалансированным редуцирующим клапаном
наиболее просты и их применяют при относительно постоянном давлении в воз-
душной сети или при сравнительно невысоких требованиях к точности стабили-
зации выходного давления. Редукционные клапаны со сбалансированным реду-
Рис. 5.6. Схемы редукционных клапанов основных типов:
а — с пружинной нагрузкой, с несбалансированной площадью клапана, без клапана
сброса; б — с пружинной нагрузкой, с несбалансированной площадью клапана, с кла-
паном сброса; в — с пружинной нагрузкой, со сбалансированной площадью клапана,
с клапаном сброса; г — с нагрузкой давлением сжатого воздуха;со сбалансированной пло-
щадью клапана, с клапаном сброса
127
Рем, МПа
Рис. 5.7. Регулировочные характеристики редукционного клапана при различном давлении
настройки и расхода
Рис. 5.8. Расходные характеристики редукционного клапана
цирующим клапаном обеспечивают большую (в сравнении с указанными выше
клапанами) точность поддержания выходного давления при изменении входного
давления сжатого воздуха.
Показателями точности редукционных пневмоклапанов являются изменение
выходного давления при изменении входного давления сжатого воздуха (регули-
ровочная характеристика) и изменение выходного давления при изменении рас-
хода воздуха через пневмоклапан (расходная характеристика).
Типичные регулировочные характеристики приведены на рис. 5.7, расходные
характеристики — на рис. 5.8.
5.3. ПРЕДОХРАНИТЕЛЬНЫЕ ПНЕВМОКЛАПАНЫ
Превышение давления в пневмосети выше допустимого может нарушить нор-
мальную работу пневмоприводов и систем управления или привести к аварии.
Обычно пневмосеть предприятий предохраняют путем установки необходимых
устройств на компрессорных станциях, однако в ряде случаев это требуется и
на отдельных участках сети.
Устройство, открывающееся для сброса сжатого воздуха в атмосферу при
превышении установленного давления воздуха и закрывающееся при восстанов-
лении его до величины, близкой к заданной, называется предохранительным кла-
паном. Принцип действия клапана основан на уровновешивании усилием пру-
жины (или весом груза) давления воздуха, действующего на запорно-чувствитель-
ный элемент.
Применяемые в пневмосистемах предохранительные клапаны различают
по следующим основным признакам: по виду нагрузочного элемента — пружин-
ного типа и грузового типа; по исполнению запорно-чувствительного элемента —
с шариковым, коническим, плоским, мембранным элементом; по характеру уп-
равления открытием клапана для сброса избыточного давления воздуха—клапаны
прямого действия, в которых запорный элемент выполняет также роль чувстви-
тельного элемента, и клапаны с сервоуправлением, в которых основной клапан
открывается по сигналу от вспомогательного клапана, воспринимающего давление
в пневмосистеме.
Принято также подразделять предохранительные клапаны по высоте подъ-
ема запорного элемента и ряду других конструктивных признаков. В промышлен-
ных пиевмосистемах нашли применение предохранительные клапананы пря-
128
0)
Рис. 5.9. Предохранительные клапаны:
а — с плоским запорным элементом н эластичным уплотнением; б —t с коническим запор-
ным элементом н металлическими уплотняющими поверхностями; в — со сферическим за-
порным элементом; г — с мембранным запорным элементом
мого действия пружинного типа (здесь не рассматриваются предохранительные
клапаны для компрессорных установок) с условным проходом до 25 мм.
На рис. 5.9, а изображен предохранительный клапан с плоским запорно-
чувствительным элементом, имеющим эластичное уплотнение 4. нагру-
женным пружиной 2. Когда давление воздуха в системе достигает пре-
дельного значения, запорно-чувствительный элемент отрывается от седла, и
воздух выпускается через отверстие А в колпачковой гайке 1. При понижении
давления воздуха в системе пружина прижимает клапан к седлу. Регулируют
давление в системе гайкой 1, которую затем стопорят контргайкой 3.
Конструкция предохранительного клапана, изображенного на рис. 5.9, б,
отличается от предыдущей только конической формой запорно-чувствительного
элемента 1 и отсутствием эластичного уплотнения. Для обеспечения надежного
уплотнения элемент 1 направляется по цилиндрической поверхности в корпусе 2.
Элемент 1 изготовлен из коррозионно-стойкой стали, а корпус 2 — из бронзы.
На рис. 5.9, в показан предохранительный клапан со сферическим запорным
элементом — стальным шариком 5, центрируемым с помощью штампованного
поршня 4. Заданное давление воздуха в системе настраивают с помощью разрез-
ной гайки 2, которую стопорят винтом 1.
В предохранительном клапане с мембранным запорно-чувствительным эле-
ментом (рис. 5.9, е) сжатый воздух подводится в полость Б под мембраной 3.
При достижении заданного давления воздуха пружина 2, усилие которой настра-
ивают с помощью винта /.сжимается, мембрана отрывается от седла, и сжатый
воздух через отверстие А сбрасывается в атмосферу.
К предохранительным клапанам предъявляются следующие основные тре-
бования [4].
1. При достижении предельного давления воздуха клапан должен безот-
казно открываться.
2. В открытом состоянии клапан, при установленном давлении воздуха
должен обеспечивать сброс сжатого воздуха в количестве, равном производитель-
ности источника питания.
3. Клапан должен закрываться прн давлении воздуха, минимально отлича-
ющемся от рабочего.
5 Е. В. Герц н др.
129
4. В закрытом состоянии клапана утечка воздуха должна быть мини-
мальной.
Высокая надежность срабатывания является обязательным условием при
оценке пригодности предохранительного клапана.
Величину настройки предохранительного клапана устанавливают в соответ-
ствии с правилами [5] на максимальное избыточное давление для сосудов: при
рабочем давлении до 0,3 МПа ртах < р + 0,05 МПа; свыше 0,3 до 6 МПа ршах С
С 1,15р; при рабочем давлении свыше 6 МПа ртах с 1,1 р.
5.4. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕРИЙНОЙ
РЕГУЛИРУЮЩЕЙ ПНЕВМОАППАРАТУРЫ
Редукционные пиевмоклапаны. На рис. 5.10 представлен редукционный пневмо-
клапан типа В57-16. Сжатый воздух подводится к присоединительному отверстию
П, стабилизированный по давлению воздух отводится через отверстие 0. Настра-
ивают пневмоклапан с помощью винта 1, действующего через пружину 2 и тол-
катель 3 на редуцирующий клапан 4. Выходное давление воздуха, действующее
на мембрану 5 снизу, уравновешивается усилием пружины 2. При понижении
выходного давления воздуха указанное равновесие нарушается, мембрана 5
прогибается и через толкатель 3 отжимает редуцирующий клапан 4, увеличивая
проход для воздуха и, тем самым, расход и давление. При повышении давления
воздуха на выходе пружина 2 сжимается, редуцирующий клапан 4 прикрыва-
ется, что приводит к уменьшению расхода и давления.
Пневмоклапаны типа БВ57-1 (рис. 5.11) имеют дополнительный клапан
сброса воздуха в .атмосферу. При повышении давления воздуха на выходе выше
настройки сжатый воздух поступает в подмембранную полость и вызывает подъем
мембраны 1 с клапаном 2. В результате сжатый воздух через отверстие в клапане 2
и отверстие А выпускается в атмосферу, снижая давление на выходе до величины,
определяемой настройкой пружины 3.
Наличие клапана сброса позволяет обеспечивать перестройку пневмоклапана
с высокого давления воздуха на выходе на низкое прн отсутствии расхода
воздуха через редуцирующий клапан.
В пневмоклапанах типа БВ57-3 (рис. 5.12) редуцирующий клапан выполнен
разгруженным от действия давления воздуха на входе (сбалансированный реду-
Рис. 5.10. Редукционный пневмоклапан ти-
па В57-16
Рис. 5.11. Редукционный пневмоклапан ти-
на БВ57-1
130
Рис. 5.13. Редукционный пневмоклапаи ти-
па П-КР (ГОСТ 18468—79)
цирующий клапан). Подклапанная полость А изолирована от входного отверстия
П и соединена отверстиями в теле редуцирующего клапана с надклапанной
полостью Б. Редукционные клапаны со сбалансированным редуцирующим кла-
паном обеспечивают большую точность поддержания давления воздуха на выходе
по сравнению с пневмоклапанами с несбалансированным редуцирующим кла-
паном.
Редукционные пневмоклапаны типа П-КР обладают всеми конструктивными
особенностями описанных выше клапанов и имеют аналогичную конструкцию.
На рис. 5.13 приведена конструкция пиевмоклапана типа П-КР со сбаланси-
рованным редуцирующим клапаном
и с клапаном сброса. Для получения
мидификации с несбалансированным
редуцирующим клапаном удаляют
уплотнительное кольцо 3 и не вы-
полняют отверстий в толкателе 4
для связи подклапанной А и
надклапанной Б полостей. Модифика-
ция без клапана сброса обеспечивается
заменой клапана сброса 1 обычным
упором.
У пневмоклапанов типа П-КРК
(рис. 5.14) настроечное усилие на мем-
брану 1 обеспечивается давлением сжа-
того воздуха, подаваемого в камеру
управления Г через отверстие У. Кла-
пан сброса 2 установлен между толка-
телем 3 и клапаном 4. Воздух от кла-
пана сброса 2 отводится через отвер-
стие в редуцирующем клапане.
Рис. 5.14. Редукционный пневмоклапан
типа П-КРК
5*
131
Таблица 6.2
Техническая характеристика редукционных пневмоклапанов
типов БВ57-1, В57-16 и типа БВ57-3 [2]
Параметры БВ57-13 БВ57-33 БВ57-Ы БВ57-34 В57-16 БВ57-36
Условный проход, мм 12 16 25
Присоединительная резьба К 3/8" К 1/2" К 1"
Номинальное давление, МПа Диапазон регулирования дав- ления на выходе (давление на- 0,63 1,0 0,63 1,0 0,63 1,0
стройки), МПа Номинальный расход при дав- лении на выходе 0,4 МПа, 0,1-0,5 0,1-0,9 0,1-0,5 0,1-0,9 0,1—0,5 0,1—0,9
м8/мин Снижение давления на выходе прн изменении расхода возду- ха от нуля до поминальной 0,4 0,63 0,8 1,0 2,5
величины, МПа, не более . . Увеличение давления на выхо- де при снижении давления на входе от номинального значе- ния до давления настройки, 0,03 0,05 0,07
МПа, не более Превышение давления на вы- ходе над давлением настройки, при котором открывается кла- 0,04 0,015 0,05 0,025 0,07 0,035
пан сброса, МПа, не более Долговечность, ч 0,18 0,06 0,18 0,06 — 0,06 .
5000 6000 5000 6000 5000 6000
| Масса, кг 1,4 1,7 1,4 1,7 2,1 2,5
Редукционные пневмоклапаны типа П-КРП так же, как и клапаны типа
П-КРК, имеют дистанционную настройку.
Технические характеристики редукционных пневмоклапанов приведены
в табл. 5.2—5.4 [6].
Пневмодроссели с обратным клапаном. На рис. 5.15 представлена конструк-
ция пневмодросселя с обратным клапаном типа В77-1. При подводе сжатого воз-
духа к присоединительному отверстию в штуцере 1 клапан 2, преодолевая усилие
слабой пружины 3, отжимается от конического седла в штуцере 1 и пропускает
сжатый воздух к присоединительному отверстию в корпусе 4. При изменении
Рнс. б. 16. Пиевмодроссели с обратным клапаном типа В77-1
132
Техническая характеристика редукционных пиевмоклапаиов типа П-КР (ГОСТ 18468—79)
>5 I" X2,0 | 0,02 — 0,4 50 0,07 0,1 1
I J-SZd'M-U к мзз I 0,05 — 0.9 1 2, 0,06 0,03 0,06 | 0,084 2,70
д/1б-ог<пгц !0 3/4" I X2,0 | ' 1 | 0,02 — 0,4 60 0,07 • 1 1 1
ll-0Sd31-U 2 к ; М2 7 0.05—0,9 J 1, 0,06 0,03 0,06 0,084 1 1
Z/SS-91d'M-n 1/2" 1 X 1,5 | ,0 0,02 — 0,4 00 0,05 i 0,07 I 1,50 |
п-эиу-ц 1 К M22 t 0,05 — 0,9 | 1, 0,04 0,02 1 0,06 1 0.084 8000 i 1л5 !
Мъъ-ъ Id5i-U 2 3/8" X1.5 0,02 — 0,4 ,63 0,04 0,07 1,50 1
I l-Zld>I-U 1 К MIS 0,05 — 0,9 | 0, ! 0,02 0,015 0,06 0,084 i M5 1
д/гг-eodX-u 1/4" X1.5 । 0,02—0,4 ,25 0,03 0,03 1 - 1 !’35 1
Jl-aoO-U ( К 1 M14 I 0,05—0,9 °' 0,015 0,01 0,06 0,084 1,30
Параметры i 5 i 5 S 6 6 ж И s « к f- я r; 5 я x • « •• (5 ’ ш X X •В<Я2Х^’КХО<-'’о2д=--» s ft . .g • <я <я О . •K^O^SSP- ч я ® ‘ • • tig • a 'SS-go = • • s‘ и Й -Ss S E.S “ 5 5 a ? “S»“S«5$c • • °5 я £ o . аз « s § g н § g «в о g: я «g s g к з «S . Sa® .g -p »g •SbsS£c»£«;s Sgg. = ®-r “ - s о я xg « 2 5 a g-o 3 g-c,^ я Oto H o> ° J
133
Техническая характеристика редукционных клапанов типа П-КРП и П-КРК-40/10
I
i
134
Рис. 5.16. Пневмодроссель с обратным кла-
паном типа В77-26
Рис. 5.17. Пневмодроссель с обратным кла-
паном по ГОСТ 19485 — 74
направления потока клапан 2 запирается усилием пружины 3 и сжатого воздуха.
В этом случае сжатый воздух проходит через канал в корпусе 4, эксцентричную
расточку и кольцевую проточку в гильзе 5 и отверстия в штуцере 1. Расход сжа-
того воздуха через аппарат зависит от взаимного расположения фрезеровки в кор-
пусе 4 и эксцентричной расточки в гильзе 5 и регулируется поворотом гильзы.
Для более плавного регулирования расхода воздуха при малом проходном се-
чении на поверхности корпуса 4 в конце канала выполнена эксцентричная ка-
навка треугольного сечения (усик).
Конструкция пневмодросселя с обратным клапаном типа В77-26 показана
на рис. 5.16. При подводе сжатого воздуха к левому присоединительному от-
верстию в корпусе 1 клапан 2, преодолевая сопротивление слабой пружины 3,
отжимается от конического седла, и поток сжатого воздуха свободно проходит
через аппарат. При изменении направления потока сжатого воздуха клапан 2
прижимается к седлу пружиной 3 и давлением сжатого воздуха. Для обеспечения
возможности прохода сжатого воздуха через аппарат в этом направлении не-
обходимо вывинчивать маховиком 4 шпиндель 5. Шпиндель 5, перемещаясь вверх,
первоначально открывает проход для воздуха по каналу треугольного сечения,
обеспечивая тонкую регулировку малого расхода, а при дальнейшем вывинчи-
вании поднимает клапан 2 над седлом.
Конструкция пневмодросселей с обратным клапаном по ГОСТ 19485—74
(рис. 5.17) отличается от рассмотренных выше наличием отдельного дроссельного
устройства, состоящего из игольчатого
дросселя 1, перемещающегося по резьбе
во втулке 2, которая закреплена вин-
тами на корпусе 3. Расход воздуха ре-
гулируется вращением маховичка 4.
Для фиксирования определенного поло-
жения дросселя 1 служит контргайка 5.
Пневмодроссель с обратным кла-
паном типа П-ДК-С (рис. 5.18) со-
стоит из параллельно соединенных
обратного клапана 1 и дроссельной
пары, включающей цилиндрическое
отверстие в корпусе 2 и конус регу-
лировочного винта 3. При подаче
сжатого воздуха в центральное при-
соединительное отверстие обратный
клапан под действием пружины и дав-
ления воздуха перекрывает свободный
проход в боковое присоединительное
отверстие, в которое воздух попадает
Рис. 5.18. Пневмодроссель с обрШтиым кла
паном типа П-ДК-С
135
Техническая характеристика пневмодросселей с обратным клапаном
136
через регулируемый зазор в дроссельной паре. При обратном направлении дви-
жения потока воздуха обратный клапан под действием давления воздуха, прео-
долевая сопротивлением слабой пружины, открывается и пропускает основ-
ной поток воздуха к центральному отверстию (при этом небольшое количество
воздуха проходит также и через зазор в дроссельной паре).
Пневмодроссель с обратным клапаном входит в комплекс пневматической
миниаппаратуры и монтируется на унифицированной плате.
Ниже и в табл. 5.5 приведены технические характеристики пневмодросселей
с обратным клапаном.
Техническая характеристика пневмодросселя
с обратным клапаном типа П-ДК-С [6 ]
Условный проход, мм .................................................... 2,5
Давление, МПа:
номинальное......................................................... ОЛЗ
минимальное......................................................... 0,14
Расход воздуха при р — 0,4 МПа, м8/мин.................................. 0,04
Потеря давления при расходе воздуха 0,04 м3/мин через открытый обратный
клапан (дроссель полностью закрыт), МПа, не более...................... 0,035
Потеря давления при расходе воздуха 0,04 м3/мии, пропускаемого через пол-
ностью открытый дроссель при закрытом обратном клапане, МПа, не более 0,055
Долговечность, цикл .................................................. Ю’
Масса, кг ............................................................ 0,15
Тормозные пневмодроссели типа П-ДТ. При ненажатом ролике 3 (рис. 5.19)
воздух из опорожняемой полости цилиндра через отверстие П в корпусе 1 и от-
крытый клапан 5 проходит в полость б, через отверстие 0 и основной пневморас-
пределитель в атмосферу. Шток цилиндра перемещается со скоростью, определя-
емой начальным положением клапана 5, настраиваемым с помощью винта 6.
Нажатие на ролик 3 вызывает перемещение клапана 5, что приводит к уменьшению
проходного сечения и к плавному торможению поршня цилиндра. Плавность
торможения и его продолжительность определяются длиной и профилем упора,
воздействующего на ролик 3. При полностью закрытом клапане 5 воздух из опо-
рожняемой полости цилиндра вытесняется только через регулируемый дроссель 2.
При переключении основного пневмо-
распределителя сжатый воздух из ма-
гистрали подается через отверстие 0 в по-
лость б. Преодолевая усилие пружины 4,
сжатый воздух открывает клапан 5 и про-
ходит в полость а, откуда через отвер-
стие П по трубопроводу поступает в ци-
линдр. Таким образом, обеспечивается
беспрепятственное наполнение полости
цилиндра сжатым воздухом, несмотря
на то что ролик 3 еще остается в тече-
ние некоторого времени нажатым.
Тормозные пневмодроссели целесооб-
разно применять вместо тормозных уст-
ройств, встроенных в крышки цилинд-
ров, когда требуется значительная длина
торможения.
Техническая характеристика тор-
мозных пневмодросселей приведена
в табл. 5.6 [6].
Предохранительные пневмоклапаны
по OCT 2.В58-1—78. При превышении
заданного давления, определяемого на-
стройкой пружины 7 (рис. 5.20), клапан 2
отходит от седла 3, обеспечивая свобод-
ный выход воздуха в атмосферу. При-
способление для принудительного откры-
тие. 5.19. Тормозной пневмодроссель
типа П-ДТ
137
Таблица 5.6
Рис. 5.20. Предохранитель-
ный пневмоклапан по
OCT 2.В58-1— 78
Техническая характеристика тормозных
пневмодросселей типа П-ДТ
Параметры П-ДТ8/10 1 К П-ДТ16/10 > । П-ДТ25/10
Условный проход, мм Присоединительная резьба 8 16 25
К 1/4" К V2" К 1”
Давление, МПа: номинальное минимальное Расход воздуха при давлении 0,63 МПа, м’/мии 0,4 1,0 0,2
Потеря давления прн указанном рас- ходе воздуха через обратный клапан при полностью за- крытом дросселе, МПа, не более Пропускная спо- собность Kv, л/мин 8 0,04 32 80
Утечка воздуха при номинальном дав- лении через обрат- ный клапан при полностью закры- том дросселе и на- жатом рычаге, м8/мин 0,0005 0,0010 0,0030
Усилие, необходи- мое для перемеще- ния ролика при но- минальном давле- нии, Я, не более Долговечность, цикл Масса, кг .... 0,5 100 5-10’ 0,6 1,5
Техническая характеристика предохранительных пневмоклапаиов
по ОСТ 2. В58-1—78
Таблица 5-7
Параметры 16-11 16-21 16-31 25-13 25-23 25-33
Условный проход, мм , . Присоединительная резьба Номинальное давление, МПа 0,4 16 5424X 1,5 0,63 1,0 0,4 25 5433X2,0 0,63 1.0
Пределы настройки давле- ния воздуха, МПа .... 0,2 —0,5 0,5-0,7 0,7-1,0 0,2 —0,5 0,5 —0,7 0,7—1,0
Расход воздуха при номи- нальном давлении. м*/мин 0,8 2,5 4,0 2,5 6,3 10
Долговечность, Масса, кг 6 000 ч 0.350 (25 000 . рабатываннй) 0,900
138
тия дает возможность проверить продувкой исправность клапана. При прило-
жении усилия к кольцу 4 пружина 1 сжимается и клапан 2 освобождается от
ее воздействия. Если клапан не заклинен, то он отходит от седла, обеспечивая
выход сжатому воздуху. Для исключения возможности перенастройки клапана
без нарушения пломбы применен защитный колпачок 5.
Исполнения пневмоклапаиов на различные номинальные давления при
одних н тех же условных проходах обеспечивается сменными пружинами.
Техническая характеристика предохранительных пневмоклапаиов приведена
в табл. 5.7.
СПИСОК ЛИТЕРАТУРЫ ,
1. Богачева А. В. Пневматические элементы систем автоматического управления.
М.: Машиностроение. 1966. 240 с.
2. Дмитриев В. Н., Градецкий В. Г. Основы пневмоавтоматики. М.: Машиностроение.
1973. 360 с.
3. Залмаизон Л. А. Теория элементов пиевмоннки. М.: Наука, 1969. 507 с.
4. Кондратьева Т. Ф. Предохранительные клапаны для компрессорных установок.
М. — Л.: Машгнз, 1963. 179 с.
5. Правила устройства и безопасной эксплуатации сосудов, работающих под давле-
нием. М.: Металлургия, 1976. 104 с.
6. Элементы и устройства пневмоавтоматики высокого давления. Каталог. М.:
1978. 155 с. (НИИМАШ).
Глава 6
УПЛОТНИТЕЛЬНЫЕ УСТРОЙСТВА
Надежность работы, потери энергии и другие эксплуатационные характеристики
пневмоустройств в значительной мере зависят от качества применяемых в них
уплотнительных устройств. Уплотнительные устройства обеспечивают герметич-
ность пневмоустройств. Под герметичностью пневмоустройств понимают непро-
ницаемость сжатого воздуха через соединения деталей, находящихся в состоянии
движения или покоя относительно друг друга.
В зависимости от требований уплотнительные устройства должны обеспе-
чивать полную герметизацию пневмоустройств или значительно уменьшать
утечку сжатого воздуха. Как правило, утечка сжатого воздуха не допускается
в неподвижных соединениях деталей пневмоустройств и ряда ответственных уплот-
нительных соединений подвижных деталей, где утечка может привести к аварии
или несчастным случаям. Для большинства уплотнительных устройств, разделя-
ющих полости пневмоустронств, находящихся под разным давлением, а также
для уплотнительных устройств подвижных соединений допускается незначитель-
ная утечка сжатого воздуха.
Герметичность пневматических устройств обеспечивается устранением за-
зора или созданием малого зазора между поверхностями соединяемых деталей.
По характеру уплотняемых соединений уплотнительные устройства подразделяют
на следующие виды: для соединений неподвижных деталей; для соединений де-
талей, имеющих относительное возвратно-поступательное движение; для соеди-
нений деталей, имеющих относительное вращательное движение.
6.1. ГЕРМЕТИЗАЦИЯ НЕПОДВИЖНЫХ СОЕДИНЕНИЙ
Герметизация неподвижных соединений пневматических устройств обеспечи-
вается: неразборных — сваркой, пайкой, склеиванием, заливкой эпоксидными
смолами, герметиками и красками, развальцовкой; разборных — кольцами и
манжетами, прокладками, лентой ФУМ, набивками.
В табл. 6.1 приведены основные виды герметизации неразборных соединений
[1 ] и области применения их в пневматических устройствах. Примеры конструк-
тивных схем герметизации неразборных соединений устройств приведены на
рис. 6.1.
Разборные неподвижные соединения пневматических устройств чаще всего
уплотняют резиновыми кольцами круглого сечения по ГОСТ 9833—73 илн ре-
зиновыми и синтетическими прокладками. Набивки и металлические прокладки,
как правило, применяют для пневматических устройств, работающих при высо-
ких давлениях, в широком диапазоне температур или при агрессивном воздействии
окружающей среды. Ленту ФУМ применяют для уплотнения резьбовых соеди-
нений.
Резиновые кольца круглого сечения. На рис. 6.2 приведены способы установки
резиновых колец в неподвижных соединениях пневматических устройств. При
140
Таблица 6.1
Неразборные соединения пневматических устройств
Метод соединения Соединяе- мые мате- риалы Рабочее давление, МПа Рабочая темпе- ратура, °C Область применения в устройствах
Сварка (электродуго- вая, аргоииая, атомио- водородная) Металлы 30-150 500 Фланцевые соедине- ния, трубопроводы, корпусные детали и т. п.
Сварка (электросты- ковая, точечная, шов- ная) 10
Сварка (игнитронная, газовая) 30 — 50
Сварка тепловоздуш- ная Синтетиче- ские мате- риалы 1-2 75 Трубопроводы и де- тали из синтетических материалов
Пайка с припоем (серебряным, медно-цинковым, оловянно-свннцовым) Металлы 30 20 10 500 250 100 Фланцевые соедине- ния, трубопроводы и детали из цветных ме- таллов
Склеивание клеем БФ-2, БФ-4, № 88, карбин ал ьным, баке- литовым, эпоксидным Металлы и пласт- массы 0,5 —0,8 80 — 200 Изготовление комму- тационных плат, струй- ных элементов н моду- лей, деталей из орг- стекла
Склеивание клеем ВС-ЮТ, ИП-9, Д1 200 — 250
Заливка эпоксидных смол ЭД-5, ЭД-6 и герметиков КГ-206, КГ-207 1 — 2 100—150 Исправление литей- ного брака корпусных деталей
Комбинированный (резьбы со склеива- нием, резьбы с за- ливкой суриком или шеллаком, растворен- ным в спирте) 2 100 Резьбовые соединения пневмоустройств с вы- сокими требованиями по герметичности и ра- боте при высоких тем- пературах
Комбинированный (резьбы с пайкой и сваркой) Металлы 30 — 50 150 — 450
Завальцовка Металлы и синтети- ческие ма- териалы 0,5 —1,0 1 00-“ 200 Трубопроводные сое- динения
141
д) е)
Рис. 6.1. Конструктивные схемы герметизации неразборных соединений:
а — сварка трубопроводов,* б — сварка фланцевого соединения; в — сварка корпусных
деталей; г — пайка сильфонных уплотнений; д — склеивание коммутационных плат; е —
склеивание струйных элементов; ж — комбинированная (резьба со сваркой); з — заваль-
цовка
конструировании и изготовлении неподвижных соединений с использованием
резиновых колец круглого сечения рекомендуется обеспечивать следующие ос-
новные требования. Предельные отклонения диаметров сопрягаемых деталей не-
подвижных соединений не должны превышать значений, указанных в табл. 6.2
(ГОСТ 9833—73). Шероховатость рабочих поверхностей под уплотнение должна
быть не ниже указанной на рис. 6.3.
При давлении более 10 МПа кольца следует предохранять от выдавливания
в уплотняемый зазор защитными шайбами, устанавливаемыми со стороны, про-
тивоположной направлению давления, а при двустороннем давлении — с обеих
сторон кольца (см. рис. 6.2). В качестве материала для защитных шайб и колец
рекомендуется использовать: капролон BL; фторопласт 4 марки Н для работы при
температуре не более 70°С и давлении до 10МПа; текстолит ПТК, полиамидную
Рис. 6.2. Герметизация неподвижных соединений кольцами круглого сечеиня:
а — д — торцовые соединения; е, ж — цилиндрические соединения без защитных шайб*
з — с защитными шайбами
142
Таблица 6.2
Предельные отклонения диаметров сопрягаемых деталей
для неподвижных соединений
Уплотняемый диаметр, мм Допускаемые отклонения уплотняемых диаметров при давлении, МПа
до 5 5—10 10
Отвер- стие Вал Отвер- стие Вал Отвер- стие Вал
3-6 6 — 10 10—18 18 — 30 30 — 50 50 — 80 80 — 120 120—180 Свыше 180 НЮ е9 ню е9 ню «9
Н8
Н8 Н8 hS (7
А8 118
смолу 68Н или 68С „о ГОСТ 10589—73. Толщина цельных защитных шайб из
фторопласта должна быть не менее 1_0 t мм. Наружный диаметр защитных шайб
выполняют равным диаметру уплотняемых поверхностей с предельным'отклоне-
нием по наружному диаметру Н8 и внутреннему — /18. Для любой конструкции
посадочного места величина деформации кольца рекомендуется в пределах 17—
35%. При ремонтных работах группу резины колец для изготовления в зависи-
мости от фактического зазора в сопрягаемых деталях рекомендуется выбирать
по табл. 6.3.
Манжеты. В ряде случаев неподвижные соединения пневмоустройств реко-
мендуется уплотнять манжетами. Так, если имеется опасность раскрытия стыка
сопрягаемых поверхностей в значительных пределах, кольца круглого сечения
не обеспечивают надежной герметизации соединений. В этом случае применяют
уплотнения манжетного типа. На рис. 6.4 приведены конструкция манжеты
П-образного сечения и рекомендации по ее установке. Размеры резиновых ман-
жет П-образиого сечения приведены в табл. 6.4. Ширину канавки в деталях
(см. рис. 6.4) рекомендуется выполнять на 0,3—0,5 мм меньше ширины Ь манжеты
[11-
Прокладки. Герметичность соединения при применении прокладок обеспе-
чивается заполнением поверхностей сопрягаемых деталей легко деформируемым
прокладочным материалом. При этом контактное давление в соединении должно
превышать давление уплотняемой среды. В качестве прокладок используют
различные эластичные материалы. Материал прокладок выбирают с учетом дав-
Таблица 6.3
Рекомендуемые группы резины для уплотнительных
колец
Давление, МПа Величина зазора на сторону (мм) для резины группы
2 3 4
0-5 0,15 — 0,10 0,20 — 0,10 0,25 — 0,15
5 — 10 0,10 —0,06 0,15 — 0,08 0,15 — 0,10
10— 1G 0,06 — 0,03 0,08 — 0,06 0,08 — 0,01
16 — 20 0,03 — 0,02 0,03 — 0,02 0,08 — 0,05
Рис. 6.3. Шероховатость рабо-
чих поверхностей под уплотне
ния:
а — цилиндрическое неподвиж-
ное |соедииение; б — торцовое
соединение
143
Рис. 6.4. Конструкция и способы ус-
тановки уплотнительных манжет
П-образного сечення:
а — уплотнительная манжета П-об-
разного сечения; б — конструктив-
ная схема установки манжеты во
фланцевом соединении; в — конст-
руктивная схема установки манже-
ты для пневмоустройств стыкового
исполнения
ления и температуры уплотня-
емой среды. Рекомендуется при
pt < 102 (где р — давление
уплотняемой среды, МПа и t —
температура, °C) применять
неметаллические прокладки, а
при более высоких значениях pt—металлические [4]. Из неметаллических
прокладок в пневмоустройствах нашли применение резина по ГОСТ 7338—77,
полихлорвиниловый пластикат, фторопласты 3 и 4, паронит по ГОСТ 481—80.
капрон; из металлических—медные прокладок марки Ml и М3 по ГОСТ 859—78,
алюминиевые по ГОСТ 11069—74, стальные.
К недостаткам металлических прокладок относятся: необходимость высоких
контактных давлений для обеспечения герметизации; высокие требования к ше-
роховатости обработки уплотняемых поверхностей; высокие, по сравнению с ана-
Размер уплотнительных манжет П-образного сечения, мм
Таблица 6.4
d D Ь
Номиналь- ный I Предельное отклонение Номиналь- ный _ _ 1 Предельное ' отклонение । Номииаль- । иый | Предельное отклонение 1 Номииаль* ный Предельное отклонение 1 Номиналь- ный 1 Предельное отклонение
8 10 12 14 16 18 20 22 25 28 30 32 34 38 40 42 46 48 50 52 + 0,20 15 18 20 22 24 28 30 32 36 40 42 45 48 52 54 56 60 62 64 70 — 0.10 — 0,15 11 14 16 18 20 23 25 27 30 33 35 38 40 44 46 48 52 54 56 60 + 0,24 4 + 0,20 0,7 — 0.10
+ 0,24 —0,15 — 0,30
+ 0,28
+ 0,28
-0,20 -0,35 б 1,0 — 0,20
+ 0,34
+ 0,34
+ 0,40 6
+ 0,40 7 + 0,30 1,5
II Риме ч а н и е. Буквенные обозначения см. на рис. 6.4.
i
144
Рис. 6.5. Конструктивные схемы применения прокладок в пневмоустройствах
логичными неметаллическими прокладками, требования к точности изготовления
уплотнения. Для снижения контактного давления в последнее время применяют
смазку контактных поверхностей герметиками.
Конструктивные схемы применения прокладок приведены на рис. 6.5.
При расчете прокладочных уплотнений определяют контактное давление NK0,
достаточное для внедрения материала прокладки в микронеровности уплотня-
емых поверхностей на величину, при которой обеспечивается герметичность при
малых значениях (близких к нулю) давления в рабочих полостях, и контактное
давление УКР, при котором обеспечивается герметичность под давлением рабочей
среды [1, 3]. Так как NKP может быть меньше или больше NK„, необходимое уси-
лие затяжки прокладок производят по большему из них. Для неметаллических,
а также плоских, овальных, восьмигранных и гребенчатых металлических про-
кладок (рис. 6.6) усилие обжатия при их установке определяют по формуле
Уо ' 3iDY[Bq0,
где Da — средний диаметр прокладки; В — ширина прокладки; qo — удельное
давление на прокладку. Удельное давление зависит от материала, размеров и
формы прокладки.
Для прокладок из паронита, картона и фторопласта
<7о = ?уС/У26/В;
для прокладок из резин твердых и средней твердости, пластиката
<?о = ?УС/К 26;
145
Рис. 6.6. Типы прокладок:
а — плоские; б — линзовые;
в — гребенчатые; г — оъълъ-
иые; о — восьмигранные
д)
для плоских, гребенчатых
и овальных металлических прокладок
4о —
где 6 — толщина прокладки, мм; В в см; qy и С — коэффициенты, рекомендуе-
мые значения которых приведены в табл. 6.5 и 6.6. Усилие обжатия, обеспечи-
вающее герметичность в рабочих условиях определяют по формуле
#р=лРпЛ7р + (1 —
где qP — удельное давление на прокладку в рабочих условиях; т] — коэффициент
разуплотнения (для металлических прокладок т] = 0, для неметаллических про-
Таблица 6.5
Значения коэффициентов q^, С и m для соединений металлическими прокладками
146
Таблица'’S. I
Значения коэффициентов qu< С, m н ц для соединений
неметаллическими прокладками при В > 4 мм, в < 4 мм
Параметр Пароиит Капрой Резина Пласти- кат Фторо- пласт
мягкая средней твердо- сти
<7у, 10~5 Па 200 100 20 40 40 100 — 350
С 1+ол У
m 4,5 3 1,5 — 2
и 0,10 — 0,15 — 0,95 — 0,9 0,05
Примечание. Dn в см.
кладок значения т] указаны в табл. 6.6); N — pnD^/4 — усилие, возникающее
от действия давления рабочей среды; р — давление рабочей среды.
Для неметаллических прокладок
qp =mpl ИдУ В
где 6 — в мм, В — в см;
для плоских и гребенчатых металлических прокладок
<7р = mpiV В;
для овальных и восьмигранных прокладок qP = tnp.
Для линзовых прокладок усилие обжатия определяют по формуле
Np = lOKD2a, Н,
где Dn — диаметр окружности соприкасания прокладки с фланцем, см; К —
коэффициент, зависящий от давления рабочей среды (при р = 0,6 МПа К =
= 240; при р = 10 МПа А = 290; при р ~ 32 МПа К = 450; при р — 70 МПа
Л = 750).
Герметизирующие замазки. Для герметизации неразборных соединений
пневматических устройств иногда используют замазки. Основным материалом
замазок являются резина, синтетические смолы, продукты дистиляции дегтя и
асфальта; пластификатором — вода, керосин или высыхающие масла, наполни-
телем — порошковый асбест, бумага, текстильные отходы, металлические поро-
шки [7]. Имеются замазки, изготовленные из синтетических смол. Для работы
в широком диапазоне температур применяют замазки из силикона и фторсили-
кона.
6,2. УПЛОТНИТЕЛЬНЫЕ УСТРОЙСТВА ДЛЯ СОЕДИНЕНИЙ
С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ
Для герметизации соединений деталей пневматических устройств, имеющих
относительное возвратно-поступательное движение (поршней, штоков, золот-
ников, толкателей, клапанов), используют контактные и щелевые уплотнительные
147
Рис. в. 7. Разновидности уплотнительных колец:
а — круглые; б — прямоугольные; » — Х-образные
устройства и устройства с гибкими раздели-
телями. Контактные уплотнительные устрой-
ства подразделяют на следующие основные
типы: кольцевые, манжетные и сальниковые.
Герметизация кольцами. Уплотнения этого
типа обеспечивают наименьший размер уплот-
нительного узла. В зависимости [от профиля
. а л поперечного сечения различают следующие
разновидности уплотнительных колец: круг-
лые, прямоугольные и Х-сбразные (рис. 6.7).
Материалом для изготовления колец служат резиновые смеси, металлы, ком-
бинации резины с пластмассами.
В пневматических устройствах нашли применение резиновые кольца двух
типов: с созданием натяга по уплотняемому диаметру при сборке и без натяга.
Герметизация рабочей среды в соединениях с кольцами первого типа обеспечи-
вается при нулевом давлении обжатием его поперечного сечения по высоте, ко-
торое затем повышается под действием давления рабочей среды (рис. 6.8).
Круглые кольца второго типа («плавающие» кольца) при сборке практически
не подвергаются поперечному сжатию по высоте (рис. 6.9), вследствие чего они
не обеспечивают полной герметизации при нулевом и малом (до 0,02 МПа) давлении
рабочей среды. Герметизация этими кольцами обеспечивается только при пре-
вышении определенного значения давления.
Уплотнение кольцами круглого сечения с созданием натяга по уплотняемому
диаметру наиболее распространены в пневматических устройствах.
На рис. 6.10 приведены конструктивные схемы установки уплотнительных
колец круглого сечения по ГОСТ 9833—73 в устройствах. При применении ука-
занных колец необходимо обеспечить выполнение следующих основных требо-
ваний.
Допускаемые отклонения диаметров уплотняемых устройств должны соот-
ветствовать данным табл. 6.7.
Деформация колец круглого сечения по ГОСТ 9833—73 независимо от кон-
струкции посадочного места рекомендуется в пределах 12—25%. Для предохра-
нения уплотнений от выдавливания в зазор при давлении свыше 10 МПа необхо-
димо применять защитные шайбы. Шероховатость поверхности сопрягаемых де-
талей с учетом покрытий должна быть не ниже указанной на рис. 6.11. На по-
верхности не допускаются забоины, риски и другие повреждения. Для повышения
долговечности резиновых колец рекомендуется покрытие поверхностей штоков
и гильз цилиндров: стальных — твердое хромирование; из алюминиевых спла-
вов — хромово-кислое анодирование или другие методы поверхностного упрочне-
ния. К трущимся поверхностям уплотнительного соединения с круглыми коль-
цами необходимо обеспечивать подачу смазочного материала.
Уплотнение плавающими» кольцами круглого сечения. Кольца этого типа уста-
навливают в канавку (см. рис. 6.9) с зазором по торцам и дну уплотнительной
канавки, т. е. кольцо может перемещаться («плавать») в осевом направлении
под действием давления рабочей среды. Наружный диаметр кольца несколько
Рис. 6.8. Схема, поясняющая действие резиновых колец круглого сечения с радиальным
обжатием
Рис. 6.9. Схема, поясняющая действие «плавающих» резиновых колец круглого сечения
148
Рис. 6.10. Конструктивные схемы установки уплотнительных колен круглого сечения:
а — без защитных колец; б — с защитными кольцами
больше внутренней расточки уплотняемого устройства, что вызывает внешнее об-
жатие кольца при его сборке в уплотнительном узле. Плавающие кольца обеспе-
чивают снижение трения покоя и движения, повышают срок службы по сравне-
нию с уплотнительными кольцами по ГОСТ 9833—73. Высокие требования к точ-
ности и качеству изготовления плавающих колец ограничивают их применение
в отечественной практике. К недостаткам колец этого типа относится также
потеря герметичности при давлении рабочей среды ниже 0,015—0,025 МПа.
Уплотнение кольцами прямоугольного сечения. Герметизация соединения
кольцами прямоугольного сечения при малом давлении рабочей среды обеспечи-
вается за счет предварительного сжатия кольца при сборке уплотнительного узла.
Рекомендуется радиальное обжатие кольца принимать равным 0,Г—0,2 мм.
При наличии давления рабочей среды на одной из сторон кольца оно смещается
Таблица 6.7
Допускаемые отклонения диаметров уплотняемых устройств
Диаметр, мм Допускаемые отклонения прн давлении, МПа
ДО 5 5—10 10 — 20
Отвер- стие Вал Отвер- стие Вал Отвер- стие Вал
4 — 6 Н8 е9 Н8 е9 ню е9
6-10
10—18
18-30
30 — 50 f 7 f 7
50 — 80 Н7
80—120 f 7 g 6
120—180
180 — 400 i 6 Н7 h 8
149
Рис. 6.11. Шероховатость рабочих поверхностей'^под кольца в подвижных соединениях
Рис. 6.12. Схема, поясняющая действие резиновых колец прямоугольного сечения
к боковой стенке канавки, обеспечивая герметичность соединения плотным кон-
тактом по трем поверхностям (рис. 6.12). Размеры колец, используемых в пнев-
матических устройствах, обычно равны: ширина 3—6 мм, высота 5—8 мм. Раз-
мер колец и канавок выбирают из расчета обеспечения бокового зазора в пределах
0,2—0,25 мм при сборке кольца (без обжатия).
Для снижения силы трения колец в ряде конструкций уменьшают ширину
пояска, контактирующего с уплотняемой поверхностью, снятием фасок. Это
позволяет значительно повысить долговечность колец при рабочем давлении до
1,0 МПа. Требования к точности и качеству сопрягаемых поверхностей, смазы-
ванию трущихся поверхностей в основном аналогичны приведенным для колец
круглого сечения.
Уплотнение кольцами А-образного сечения. Кольщ. этого типа (см. рис. 6.7)
по своим характеристикам превосходят кольца круглого и прямоугольного
сечений. Они меньше, чем круглые кольца, подвержены спиральному скручива-
нию, имеют меньшее трение, чем кольца круглого и прямоугольного сечения,
обеспечивают надежную герметизацию при меньшем значении поперечного об-
жатия кольца. Полость кольца между его двумя контактными кольцевыми полос-
ками способна удерживать смазочный материал, что снижает трение при трога-
нии и движении кольца по уплотняемой поверхности. Требования к точности и
шероховатости сопрягаемых поверхностей для колец этого типа ие отличаются от
требований, приведенных для колец круглого сечения.
К недостаткам колец Х-образного сечения относится технологическая слож-
ность изготовления прессформ^ для их производства. Однако высокая долговеч-
ность и другие преимущества, указанные выше, свидетельствуют о перспектив-
ности применения колец этого типа.
Уплотнение кольцами из металла и пластических^материалов. Герметиза-
ция соединения кольцами этого типа обеспечивается плотным контактом их
с поверхностью цилиндра и стенками канавок поршня, а также лабиринтным
действием набора колец. Контактное давление на уплотняемые поверхности
кольца создается за счет деформации его при установке в уплотняемое соединение
и давления рабочей среды (рис. 6.13). В свободном состоянии кольца имеют раз-
мер, больший размера диаметра уплотняемого цилиндра и прорези (замки).
В канавку поршня кольцо устанавливают с торцовым зазором. Число поршневых
колец в соединении рекомендуется выбирать с учетом разности давлений, воспри-
нимаемой уплотнением поршня [8]:
Число колец............................ 2 2 — 3 3 3 — 4 4 — 5 5 — 6
Разность давлений,
МПа . До 0,4 0,4 — 0,63 0,63—1,0 1,0 —1,6 1,6 —2,5 2,5 —4,0
Число колец............................ 6 — 7 7 — 8 8—10 10 — 12 12 — 15
Разность давлений,
МПа.................................. 4,0 —6,3 6,3—10 10 — 16 16 — 25 25—40
Прорези в кольцах выполняют прямой формы при давлении до 5 МПа, ко-
сой — при давлении до 20 МПа, ступенчатой — при давлении свыше 20 МПа
(рис. 6.14) [1]. Долговечность колец определяется выбором материала для их
изготовления и условиями эксплуатации. Материалом для изготовления колец
служат сплавы чугуна, бронзы, гетинакс, текстолит и пластмассы. Лучшими ма-
150
Рнс. 6.13. Схема, поясняю-
щая действие колец из ме-
талла н пластмасс
териалами для колец являются, как правило, пластмассы, срок службы которых
превышает 25 000 ч, при этом значительно уменьшается износ уплотняемой по-
верхности цилиндра, [8].
К недостаткам колец этого типа необходимо отнести следующие: невозмож-
ность обеспечения полной герметичности; высокие требования к точности и ка-
честву изготовления рабочих поверхностей уплотняемого соединения и самих
колец; относительно большой осевой размер поршня для высокого давления ра-
бочей среды.
Размеры и основные характеристики стандартных поршневых колец регла-
ментированы OCT 2А54-1-72.
Уплотнение кольцами комбинированного типа. Одной из основных тенден-
ций повышения качества уплотнительных устройств является применение колец
комбинированного типа. На рис. 6.15 приведена конструкция, а в табл. 6.8 —
размеры применяемого в отечественной промышленности резино-фторопласто-
вого уплотнения. В этом уплотнении круглое резиновое кольцо обеспечивает
необходимое контактное давление по уплотняемым поверхностям соединения,
а П-образная манжета из фторопласта-4 — снижение сил трения. В пневмати-
ческих устройствах резино-фторопластовые уплотнения снижают силы трения
в 4—6 раз [1] и обеспечивают надежную работу в условиях иедостаточиого
смазывания трущихся поверхностей. Так, при испытании пневмоцилиндров
с диаметром поршня до 40 мм во ВНИИГидроприводе (г. Харьков) уплотнения
этого типа обеспечивали надежную работу до 200 тыс, цикл, без дополнительной
подачи смазочного материала (поверхности смазывали пластичной смазкой
только при сборке цилиндров).
К недостаткам резино-фторопластового уплотнения относятся сложность
обеспечения высокой герметичности из-за жесткости фторопластовой манжеты
(особенно при малом давлении рабочей среды) и повышение трудоемкости изго-
товления уплотнения.
Герметизация манжетными уплотнениями. В уплотнениях манжетного типа
первоначальная (при малом давлении) герметизация обеспечивается контактной
поверхностью за счет ее деформации при сборке уплотнительного узла. При
повышении давления рабочей среды в уплотняемом узле контактное давление
и площадь контакта увеличиваются (рис. 6.16).
Манжетные уплотнения получили наиболее широкое применение в пневма-
тических устройствах вследствие их высокой долговечности и герметичности,
а”также менее’жестких требований „к точности и качеству обработки уплотняемых
поверхностей по сравнению с резиновыми кольцами. К недостаткам манжетных
уплотнений относятся их относительная сложность изготовления и большой
размер уплотнительного узла.
Рис. 6.14. Формы прорезей уплотнительных колец из металла и пластмасс:
а — прямая; б — косая; в, г — ступенчатая
151
Рис. 6.15. Резино-фторопластовые уплотнения
Таблица 6.8
Размеры резино-фторопластовых уплотнений, мм
Диаметр уплот- няемых поверх- ностей с предель- ным отклонением Диаметр сечения кольца ^2 Манжета Канавка
D (Н7) Г) ш (f7) S 4- 0,1 ^спр С 4-0,1 Е wcnp Ъ ±0,2
10-15 6—11 1.9 0,15 0,95 2,5 0,1 1,65 2,5
16 — 25 12 — 20 2,5 1,15 3,2 2,15 3,2
26 — 45 21 — 38 3,6 0,25 1,55 4,5 0,2 3,25 4,5
46—70 40—60 4,6 0,3 1,8 5,7 4,3 5,7
72—100 62 — 88 5,8 7,0 5,3 7,0
102-145 90 — 130 7,5 1,83 9,0 6,8 9,0
150 — 250 135 — 245 8,5 2,4 10,0 7,8 10,0
Примечание. Буквенные обозначения см. рис. 6.15.
152
Рис. 6.16. Схема, поясняющая действие ман-
жетных уплотнений U-образного профиля: Q
ь
а — манжета до монтажа; б — манжета при
монтаже; в — манжета под давлением
В табл. 6.9 приведены основные
типы, области применения и характери-
стики манжетных уплотнений, применя-
емых в отечественной и зарубежной прак-
тике. На рис. 6.17 показаны конструктив-
ные схемы установки манжет для уплот- ...
нения по наружному диаметру, а на Я) ' 0) О)
рис. 6.18— по внутреннему диаметру по-
движных соединений устройств.
Уплотнение манжетами V-образного профиля. В отечественной практике
наиболее распространены манжеты по ГОСТ 6678—72, предназначенные для
эксплуатации в условиях, указанных в табл. 6.10.
Технические требования к сопряженным деталям уплотнительного узла
должны соответствовать требованиям, приведенным ниже:
Шероховатость поверхности трения Ra ................................. 1,25
Шероховатость посадочного места Ra.................................... 2,5
Допускаемые отклонения уплотняемых диаметров ...........................НИ; ЛИ
Поверхность уплотняемого цилиндра или штока должна быть изготовлена из
коррозионно-стойкого материала или иметь антикоррозийное покрытие. К тру-
щимся поверхностям необходимо обеспечить подачу смазочного материала.
Уплотнение манжетами других профилей. На рис. 6.19, а изображена ман-
жета чашечного типа, применяемая для уплотнения поршней пневмоцилиндров.
Для обеспечения хорошей герметичности при низком давлении рекомендуется
применять распорные пружинящие кольца (рис. 6.19, б, в), изготовляемые из
листовой пружинной стали или жесткой латуни. Материалом для изготовления
манжет чашечного типа может быть резина, прорезиненная ткань и кожа. Раз-
меры манжет этого типа [7]: высота при диаметре до 50 мм— 12—15 мм, при
диаметре от 50 до 100 мм — не более 16 мм, при диаметре от 100 до 150 мм —
18 мм и при диаметре от 150 до 250 мм — 25 мм. В устройствах обычно уста-
навливают по одной мантеже с каждой стороны поршня.
На рис. 6.20 изображена манжета уголкового типа, используемая для уплот-
нения штоков пневмоцилиндров.
С целью повышения герметичности и надежности уплотнительного узла в оте-
чественной и зарубежной практике все шире применяют манжеты специальных
Рис. 6.17. Конструктивные схемы установки манжет для уплотнения по наружному диа-
метру подвижных соединений
153
Характеристика и область применения манжетных уплотнений, используемых в пневматических устройствах
общепромышленного применения
Область применения Пневмоцилиндры и пневмоаппара- тура Пневмоцнлнндры (уплотиенне поршня) Пневмоцилиндры (уплотнение што- ка) 1 Пневмоцилиндры | и пневмоаппара- тура Пневмоаппаратура Пневмоцилиндры и пневмоаппара- тура Пневмоаппаратура
Трудоем- кость изго- товления манжеты Средняя Низкая * о 1 Относительно । высокая О То же Средняя
Уплот- няющее действие Односто- роннее То же То же о к >> X со о То же То же То же
Скорость переме- щения уплотняе- мой поверхности, м/с Для диаметров до 160 мм — до 1,0; свыше 160 мм — до 0,5 До 0,5 До 0,5 До 0,5 ! До 2 Не оговорено i До 2 1
Диапазон диаме- тров уплотняемых поверхностей, мм Золотников н што- ков 5 — 200, ци- линдров 10 — 400 Цилиндров до 200 Штоков до 50 Золотников н што- ков 5 — 360, ци- ; линдров 16 — 400 ! 6 а Я я s ~ Ч ~ я §aS gS 1 s°°a 5 ® о O O Q. со « к Золотников н што- ков до 50, цилин- дров до 200 Золотников и што- ков 5—16
Рабочая температура. От —65 до Н-100 ОЭ + о к ю ОЭ От —45 до 4 1 00 От —30 до +120 Не оговорено То же
О
Рабочее давление, МПа До 1,0 До 1,0 До 1,0 До 1,0 До 1.0 о До 0,5
Тип манжеты U-образного профиля Чашечный Уголковый S-образного профиля Т-образного профиля Л-образного профиля Ф-образного профиля
154
Рис. 6.18. Конструктивные схемы установки манжет для уплотнения по внутреннему диа-
метру подвижных соединений
профилей (рис. 6.21). К преимуществам этих манжет необходимо отнести высокую
долговечность, небольшую величину трения, малогабаритность; к недостаткам —
повышенную сложность изготовления.
Сальниковые уплотнения, предназначенные для герметизации рабочей среды
в соединениях с возвратно-поступательным движением, изготовляют с ручным
регулированием усилия затяжки набивки уплотнения (рис. 6.22, а) и автомати-
ческим при помощи пружины (рис. 6.22, б, в). К недостаткам сальниковых уплот-
нений без пружин относятся: большие потери на трение и сложность обеспечения
надежной герметичности из-за трудности контроля усилия затяжки; необходи-
мость частой подтяжки в процессе работы; малый срок службы.
Установка пружины в сальниковом уплотнении позволяет частично устра-
нить указанные недостатки. Пружина может быть смонтирована как со стороны
давления, так и с противоположной стороны (см. рис. 6.22). Сальниковые уплот-
нения с пружиной, установленной со стороны набивки, противоположной давле-
нию, рекомендуется применять при рабочем давлении до 1,0 МПа, а с пружиной
со стороны давления — свыше 1,0 МПа [6].
Высокую надежность в работе показали сальники с коническими элемен-
тами, изготовленными нз композиций на основе фторопласта-4 с различными на-
полнителями: графитом, стекловолокном, коксом [8]. Для повышения анти-
фрикционных качеств вводят в состав идвухсернистый молибден. На рис. 6.23
показана конструкция сальникового уплотнения завода «Борец» (г. Москва)
с коническими уплотняющими кольцами
/, изготовленными из композиций на
основе фторопласта-4. Каждый элемент
уплотнения состоит из двух уплотня-
ющих колец /, помещенных между на-
жимными кольцами 2, промежуток между
[Таблица 6.10
Эксплуатационные условия для
манжет по ГОСТ 6678—72
Группа резины манжет по ГОСТ 6678—72 Рабочее давление, МПа Темпера- тура, *С
1 2 0,005—1,0 От — 27 до +70 От —55 ДО +70
Примечание. Мак- симальная скорость возвратно- поступательного движения уплотняемой поверхности для цилиндров с диаметром до 150 мм — до 1 м/с, свыше 150 мм — до 0,5 м/с.
Рис. 6.19. Конструктивная схема установки ча-
шечной манжеты с распорной пружиной:
а — чашечная манжета; б — схема установки;
в — распорная пружина
155
Рнс. 6.20. Манжета уголкового типа
Рис. 6.21. Манжетные уплотнения специального профиля:
а S-образные; б — Т-образные; в — Л-образные; г — Ф-образные
Рис. 6.22. Конструктивные схемы сальниковых уплотнений:
а — с ручной затяжкой набивки; б — с подтяжкой набивки пружиной со стороны, про-
тивоположной давлению; в — с подтяжкой набнвки пружиной со стороны давления
Рис. 6.23. Сальник с уплотняющими элементами, изготовленными иэ комноэицми на основе
фторопласта-4
156
которыми перекрыт кольцом 4 нз маслостойкой резины. Первоначальное уплот-
нение обеспечивается поджатием колец 1 пружинами 3, затем к этому усилию
добавляется усилие от давления рабочей среды на неразгруженную часть саль-
никового уплотнения. Число уплотняющих элементов зависит от давления рабо-
чей среды. Сальниковые уплотнения этого типа применяют в компрессорах для
давления до 60 МПа и обеспечивают ресурс до 5000 ч.
В качестве материала для изготовления колец сальниковых уплотнений
используют также графитовые, асбестовые и полуметаллические материалы.
Значительные габариты, относительно низкая долговечность и большие потери
энергии на трение ограничивают область применения этого типа уплотнений
в устройствах (поршневых компрессорах, пневмоцилиндрах для работы в усло-
виях высоких температуры и давления).
Уплотнения щелевого типа (за счет малых зазоров) в основном применяют
для герметизации золотниковых пар пневмораспределителей. На рис. 6.24 при-
ведена конструктивная схема уплотнения этого типа для пневмораспределителей
с плоским золотником, а на рис. 6.25 — с круглым (цилиндрическим) золотни-
ком. Щелевые уплотнения не обеспечивают полной герметичности. Обеспечение
приемлемой для практики герметичности достигается высокой точностью и малой
шероховатостью обработки сопрягаемых золотниковых пар. Для плоских золот-
ников — неплоскостность поверхности не более 0,005 мм (только вогнутость),
шероховатость поверхности 7?а=0,16мкм. Для цилиндрических золотников
необходимо обеспечить диаметральный зазор между золотником и корпусом
(втулкой) в пределах 0,002—0,006 мм при шероховатости поверхности Ra =
= 0,08 мкм.
Герметизация гибкими разделителями. Гибкие разделители применяют при
необходимости создания высокой герметичности. Эти разделители могут быть
мембранного или сильфонного типов. Материалом для изготовления гибких
разделителей служат резины, резиноткани, синтетические материалы и металлы.
Мембраны. В пневматических устройствах нашли применение мембраны
плоского (рис. 6.26, а), плоского с гофрами (рис. 6.26, б) и фигурного
(рис. 6.26, е) типов.
По исполнению полей под заделку мембраны изготовляют: с плоскими по-
лями; с плоскими полями и утолщением под заделку (рис. 6.27).
Диапазон применяемости мембран в устройствах: плоских без гофра — для
Цилиндров диаметром 10—630 мм (при толщине мембран 0,2—10 мм); плоских
с гофром — для цилиндров диаметром 16—500 мм (при толщине мембран 0,2—
6 мм и высоте изгиба поперечного сечения 1,5—90мм), фигурных мембран—для
цилиндров диаметром 25—200 м.м (при толщине мембран 0,2—1мм и высоте
Ю—150 мм). Максимальный ход мембран обычно рекомендуется принимать:
плоских без гофра — не более 7—15% диаметра заделки мембраны; плоских
Рнс. 6.24. Конструктивная схема щелевого уплотнения с плоским золотником
Рнс. 6.25. Конструктивная схема щелевого уплотнения с круглым золотником
157
Рнс. 6.26. Мембраны:
а — плоские; б — плоские с гофром; в — фигурные
с гофром—до 20—25% диаметра заделки мембраны, но не более двойной высоты
гофра; фигурных мембран — на 20—25% меньше удвоенной высоты мембраны.
Тканевую прослойку мембран выполняют из найлона, дакрона, тефлона,
стекловолокна и хлопчатобумажных
Рис. 6.27. Конструктивные схемы за-
делки мембран
тканей, пропитанных акриловой или сили-
коновой резиной, бутил-каучуком.
Металлические мембраны изготов-
ляют из тонких (0,1—0,5 мм) листов спе-
циальных сортов коррозионно-стойкой
стали и бронзы. Металлические мембраны
применяют для устройств, работающих
при низкой и высокой 'температурах
или агрессивном воздействии окружа-
ющей среды.
На рис. 6.28 изображены конструк-
тивные схемы установки незащемленной
мембраны.
Эффективная площадь мембраны
приближенно определяют по формуле
FK = 0,9£)з, где Do — диаметр опорного
диска.
Рабочий ход мембраны sc 0,8 (Я—6),
где Н — высота расточки; 6 — толщина
мембраны. Угол расточки а не должен
превышать 60° для ! приводов двусторон-
него действия; 90° для приводов одно-
стороннего действия.
Отношение диаметров расточки
Dj/D = 0,75-5-0,8 (D и Г)1 см. рис. 6.28).
При отношении диаметром менее 0,75
расточка должна образовываться двумя
отдельными деталями, что значительно
облегчает монтаж мембраны. Диаметр
опорных шайб d выполняют иа 2—3 мм
меньше внутреннего диаметра расточки Dt.
158
a)
Рис. 6.28. Конструктивные схемы установки незащемленных мембран:
а — двустороннего действия; б — одностороннего действия
Наружный диаметр мембраны изготовляют примерно на 1% больше наружного
диаметра расточки D. Угол заострения кромки мембраны принимают (см.
рис. 6.28) Р = (0,554-0,65) а.
Край кромки мембраны должен иметь скругление радиусом 0,5—1 мм.
На рис. 6.28, б приведена конструктивная схема установки мембраны этого типа
в пневмоприводах типа В26-4.
Сильфоны. В пневматических системах сильфоны нашли применение как
силовой элемент ряда приборов (манометров, датчиков, регуляторов); уплотни-
тельное устройство штоков и толкателей; сальник для гибкого соединения труб.
Сильфоны, как и мембраны, обеспечивают высокую герметичность, однако вели-
чина осевого перемещения их незначительна. Сильфоны изготовляют из томпака,
латуни, фосфористой и бериллиевой бронзы, антикоррозионных сортов стали,
резины и синтетических материалов. Наибольшее перемещение обеспечивают
сильфоны из резины — до 50% полной его длины в свободном состоянии в каж-
дую сторону. Рекомендуемая максимальная величина перемещения металличе-
ского сильфона составляет 25% его свободной длины (15% иа сжатие и 10% на
растяжение) [7]. При высоких требованиях к долговечности величина переме-
щений сильфона не должна превышать 7—12%.
Долговечность сильфона из коррозионно-стойкой стали в циклах до раз-
рушения может быть определена из выражения [7]:
N = (11 200/s/)3’5,
где N — число циклов (деформаций до разрушения); st — амплитуда колебания
напряжения, МПа.
Металлические сильфоны изготовляют однослойными и многослойными
с наружным диаметром от 5 до 250 мм. Номинальное давление сильфонов зависит
от конструктивных параметров и материала, из которого они изготовлены. Так,
допускаемое давление для однослойных сильфонов малого диаметра составляет
до 3 МПа, большого диаметра — до 0,2 МПа. Многослойные сильфоны исполь-
зуют в пневматических системах с более высоким рабочим давлением.
fl) - 5) Q
Рис. 6.29. Конструктивные схемы заделки сильфонов;
а резиновый сильфон для защиты штока; б — металлический сильфон для мщнты
штока; в — металлический сильфон в роли силового элемента
159
На рис. 6.29 приведены конструктивные схемы заделки сильфонов.
К преимуществам металлических сильфонов следует отнести работоспособ-
ность в широком диапазоне температур окружающей и рабочей среды. Так,
сильфоны из специальных сортов коррозионно-стойкой стали работают при тем-
пературе от —240 до +650 °C [7].
6.3. УПЛОТНИТЕЛЬНЫЕ УСТРОЙСТВА
ДЛЯ ВРАЩАЮЩИХСЯ СОЕДИНЕНИЙ
Герметизацию вращающихся соединений пневматических устройств обеспечи-
вают контактными и бесконтактными уплотнительными устройствами. К кон-
тактным устройствам относятся: радиальные кольцевые, манжетные, сальнико-
вые и торцовые уплотнения. К. бесконтактным — щелевые, лабиринтные и не-
которые типы других специальных уплотнений. В пневматических устройствах
общепромышленного применения наибольшее распространение получили кон-
тактные уплотнительные устройства. Бесконтактные уплотнительные устройства
нашли применение в компрессорах, пневмотурбинках и специальных пневмати-
ческих устройствах. Однако они не обеспечивают полной герметизации соеди-
нения.
Контактные уплотнения радиального типа. Резиновые кольца круглого
сечения рекомендуют для герметизации вращающихся соединений (поворотных
пневмодвигателей и соединений) пневматических устройств кратковременного
действия с небольшой окружной скоростью.
На рис. 6.30 показано поворотное соединение с резиновыми кольцами. При
более высоких окружных скоростях (выше 0,5 м/с) или длительной работе на кон-
тактной поверхности развиваются высокие температуры, что приводит к выводу
уплотнения из строя. Рекомендуемая величина радиального сжатия кольца не
должна превышать 5—6% при размещении кольца в канавке, расположенной
перпендикулярно оси вращения, и 9—11% при расположении колец в канавке
под некоторым углом к плоскости, перпендикулярной к оси вращения [2, 6].
Угол а, (рис. 6.31) обычно принимают равным 3—4°. Наклонное расположение
кольца по отношению к оси вращения значительно улучшает отвод теплоты от
поверхности трения и подвод смазочного материала, что снижает коэффициент
трения и повышает надежность работы уплотнительного узла. Рекомендуется
[2] размеры кольца и вала подбирать так, чтобы кольцо можно было монтировать
на вал без растяжения, для чего наружный диаметр кольца в свободном состо-
янии должен быть на 5—8% больше диаметра донышка канавки. Это обеспечивает
контакт кольца с уплотняемой поверхностью вала только за счет окружного
и поперечного сжатия кольца без его растяжения. Шероховатость поверхности
вала должна быть не выше Ra= 0,25—0,1 мкм, овальность не более 0,01 мм,
радиальное биение вала не более 0,05 мм и осевое биение не более 0,3—0,5 мм.
Для поворотных пневмодвигателей и соединений не предъявляются высокие
требования к долговечности уплотнений, поэтому требования к точности и шеро-
ховатости обработки менее жесткие.
Манжеты. Герметизацию вращающихся соединений устройств манжетами
в основном применяют при давлении рабочей среды до 0,6 МПа. Как и для уплот-
Рис. 6.30. Поворотное соеди-
нение
Рис. 6.31. Конструктивная
схема установки круглого
кольца в канавке под углом
к плоскости, перпендику-
лярной к осн вращения
160
Рис. 6.32. Конструктивные схемы уста-
новки манжет по ГОСТ 8752—79 без ко-
нусного (а) н с конусным (б) упорами
скорости вращения вала. Сложность обеспе-
нительных соединений с кольцами
круглого сечения, основной причи-
ной выхода из строя уплотнитель-
ных соединений манжетного типа
является высокая температура
в месте контакта манжеты с по-
верхностью вала. Эта температура
повышается при увеличении давле-
ния рабочей среды и окружной
чения подачи смазочного материала к месту контакта манжеты с поверхностью
вала и отвода теплоты ограничивают использование манжет для герметизации
устройств с высокой окружной скоростью (как правило, не выше 10 м/с).
Конструктивная схема установки манжет по ГОСТ 8752—79 приведена
на рис. 6.32. При давлении рабочей среды выше 0,05 МПа рекомендуется уста-
новка конусного упора (см. рис. 6.32, б) для предохранения рабочей кромки
манжеты от выворачивания. Манжету следует устанавливать на вал с натяже-
нием, при котором внутренний диаметр уплотняющих кромок увеличивается
на 5—8% [2]. На практике внутренний диаметр манжеты в свободном состоянии
обычно выбирают на 1—2 мм меньше диаметра вала. Материалом для изгото-
вления манжет служат различные сорта резин и кожа.
Технические требования к деталям, сопряженным с уплотнениями манжет-
ного типа приведены в табл. 6.11 [5]. Перед монтажом необходимо правильно
собрать и смонтировать пружину на манжетах по ГОСТ 8752—79. Пружина,
свернутая в кольцо, должна ложиться на плоскость, при этом допускаемый
просвет не должен быть более 2 мм. Смонтированная на манжете пружина должна
равномерно облегать сжимаемую кромку манжеты. Манжета должна быть плотно
установлена в корпусе, исключающем ее проворачивание или осевое переме-
щение.
Сальниковые уплотнения. Этот тип уплотнений применяют для защиты вну-
тренних полостей устройств от пыли и влаги, герметизации рабочей среды,
а также предотвращения утечки смазочного материала из подшипниковых узлов
пневматических устройств. На рис. 6.33 приведены основные конструктивные
схемы сальниковых уплотнений. Наиболее просты сальниковые уплотнения,
предназначенные для защиты внутренних полостей устройств от попадания пыли
н влаги (см. рис. 6.33, а). Это уплотнение не обеспечивает герметизацию избыточ-
ного давления. Материалом для набивки сальникового уплотнения этого типа
Таблица 6.11
Технические требования к деталям, сопряженным
с уплотнениями манжетного типа
Показатели Вал Отверстие
Шероховатость поверхности Твердость поверхности трения для стали НЯС, не менее Квалитет по СТ СЭВ 145 — 75 Радиальное биение (мм, не более) при ча- стоте вращения вала, с-1 (об/мин): до 8,3 (до 500) св. 8,3 до 25 (св. 500 до 1500) . . Несоосность посадочного места относи- тельно оси вала (мм, ие более) при диа- метре посадочного гнезда: до 80 се. 80 до 150 Ra ~ 0,63 — 0,16 мкм 30 10 0,20 0,15 На = 2,5 — 1,25 мкм 8 0,12 0,15
6 Е. В. Герц и др.
161
Рнс. 6.33. Конструктивные
схемы сальниковых уплот-
нений для соединений с вра-
щательным движением
служат фетровые и войлочные кольца. Аналогично сальниковым уплотнениям
для соединений с возвратно-поступательным движением, их разделяют на уплот-
нения с ручной и пружинной затяжкой набивки (см. рис. 6.33, б, в).
Повышение надежности и герметичности сальниковых уплотнений дости-
гается подбором материалов с хорошими антифрикционными свойствами и тепло-
проводностью. Наиболее полно этим требованиям отвечают графитовые и полу-
металлические набивки. Для обеспечения самосмазывания сальникового уплот-
нения в набивках используют графит, баббит и другие антифрикционные мате-
риалы. В устройствах сальниковые уплотнения применяют, как правило, во вра-
щающихся соединениях с рабочим давлением до 1,0 МПа и окружной скорости
вращения вала до 10 м/с. Из-за малой долговечности и значительных размеров
этот тип уплотнений не нашел широкого применения в пневматических устрой-
ствах общемашиностроительного применения. Вопросы расчета сальниковых
уплотнений подробно освещены в работе [6].
Торцовые уплотнения в последнее время все шире используют для гермети-
зации вращающихся соединений пневматических устройств. К их преимуществам
относятся высокая долговечность, надежная герметизация при работе (враще-
нии) соединения, работоспособность в широком диапазоне температуры, возмож-
ность работы без дополнительной подачи смазочного материала и незначительные
потери мощности на трение. На рис. 6.34 показаны конструктивные схемы не-
разгруженного и разгруженного торцового уплотнения. У неразгруженных
торцовых уплотнений на запирающих поверхностях устанавливается отношение
давлений р'/р > 1, у разгруженных р'/р < 1 [6], где р' — среднее контактное
давление на запирающих поверхностях от усилий поджатия; р — давление ра-
бочей среды.
Торцовое уплотнение состоит из уплотнительного кольца 1, поджимаемого
пружиной 2 к торцу опорного кольца 3. Уплотнительное кольцо 1 имеет свободу
перемещения в осевом направлении, что дает возможность пружине 2 создать на
контактных поверхностях уплотнительного узла давление, достаточное для
обеспечения герметичности при давлении рабочей среды, близком к нулю. При
возрастании давления к усилию пружины 2 добавляется усилие давления рабо-
чей среды иа неразгруженную площадь уплотнительного кольца. Это приводит
к возрастанию контактного давления. С целью исключения вращения уплотни-
тельного кольца в конструкции должна быть предусмотрена механическая связь
Рнс. 6.34. Конструктивные схемы торцовых уплотнений:
а — неразгруженного типа; б — разгруженного типа
162
Рис. 6.35. Конструкции торцовых уплотнений:
а —с сильфоном; б —с эксцентричным расположением уплотнительного кольца; » —
со свободно плавающим графитовым уплотнительным кольцом
его с корпусом (шпонкой, штифтом, пайкой к сильфону и т. п.). Герметизация
зазора между корпусом и валом обеспечивается установкой резиновых колец,
манжет или сильфонами. У разгруженного торцового уплотнения снижение
контактного давления на площадь уплотнительного кольца 1 достигается частич-
ной разгрузкой его от давления рабочей среды. Площадь кольца f = -j- № — as)>
на которую действует давление рабочей среды (см. рис. 6.34, б), выбирают меньше
площади контакта пары F = (d^ — d|). Отношение f/F — называют коэффи-
циентом уравновешивания [3]. Подбором отношения f/F можно обеспечить пол-
ную разгрузку уплотнительного кольца от давления рабочей среды. На прак-
тике всегда производят только частичную разгрузку, что повышает герметичность
соединения при хороших показателях долговечности. Отсутствие или недостаточ-
ная подача смазочного материала к поверхностям контакта торцового уплотне-
ния, характерная для пневматических устройств, приводит к необходимости
применять разгруженные торцовые уплотнения даже при рабочем давлении
0,6—1,0 МПа.
При высоких требованиях к герметичности соединения торцовые уплот-
нения применяют в сочетании с сильфонами (рис. 6.35, а, в). При высоких да-
влениях рабочей среды применяют двойное торцовое уплотнение с принудитель-
ной циркуляцией жидкости для подачи смазочного материала к поверхностям
трения и отвода теплоты, возникающей при трении [7]. Давление жидкости
принимают на 0,1—0,2 МПа выше давления запираемой рабочей среды. Не ре-
комендуется применение торцовых уплотнений для высоких давлений газа без
принудительной подачи смазочного материала и отвода теплоты от контактных
поверхностей.
На рис. 6.35, б показано оригинальное торцовое уплотнение, которое со-
стоит из неподвижного уплотнительного кольца 1, эксцентрично установленного
относительно вала 2. Это значительно улучшает условия подачи смазочного
материала и отвода теплоты от мест контакта трущихся деталей [6]. Уплотня-
ющая кромка имеет очень малую ширину (0,125 мм) й является частью гибкой
мембраны, что обеспечивает малую силу трения и предохраняет место контакта
от загрязнений. Данное уплотнение показало высокую работоспособность при
высоких давлениях рабочей среды и больших скоростях вращения, хорошую
температуроустойчивость, коррозиоииостойкость и долговечность. На рис. 6.35, в
приведена конструкция торцового уплотнения со свободно плавающим кольцом,
что позволяет уменьшить скорость скольжения уплотняемого кольца в месте
контакта [2]. Плавающее кольцо в этом уплотнении изготовляют из графита
или пластмассы, а сопряженные с ним кольца из стали.
На рис. 6.36, а изображена головка подвода воздуха с одним подводом и
с торцовым уплотнением. Стальной шпиндель 1 установлен в корпусе 2 на двух
6* 163
Рис. 6.36. Головки подвода воздуха
радиальных шарикоподшипниках. Уплотнение вращающегося шпинделя дости-
гается применением втулки 3 из графитовой бронзы, поджимаемой к торцу шпин-
деля усилием пружины и давлением сжатого воздуха. На рис. 6.36, б изображена
головка с двумя подводами воздуха и торцовыми уплотнениями 1 и 3 из графи-
товой бронзы, поджатыми пружиной 2. Значительное влияние на работоспособ-
ность торцового уплотнения оказывает выбор ширины пояска уплотнительного
кольца. Исследования различных материалов уплотнительного соединения
(сталь — бронза, сталь — фторопласт, сталь — бронзографит, сталь — же-
лезографит, сталь — графит, сталь — текстолит различных марок) для муфт
подвода воздуха к вращающимся пневмоцилиндрам станков, проведенные во
ВНИИГидроприводе, показали, что лучшие результаты обеспечивает пара сталь—
текстолит марки ПТК. При диаметрах уплотнительного кольца до 50 мм и ши-
рине пояска 1,5—2 мм торцовое уплотнение с этой парой обеспечивало надежную
работу при давлении сжатого воздуха до 1,0 МПа и частоте вращения 50 с-1
(3000 об/мин). Для обеспечения высокой надежности работы торцовых уплотне-
ний необходимо обеспечить определенные требования при изготовлении уплот-
няемого и опорного колец.
Величина торцового биения для колец с диаметром до 50 мм и частоте вра-
щения вала до 50 с-1 (3000 об/мии) не должна превышать 0,02 мм. Неперпенди-
кулярность плоскости уплотнительного пояска кольца к оси вала, при указан-
ных выше значениях диаметра кольца и частоте вращения вала, не должна пре-
вышать 0,01—0,02 мм. Неплоскостность уплотняющих поверхностей колец не
должна превышать 1—2 мкм. Малые значения неплоскостности улучшают гер-
метичность, однако условия отвода теплоты ухудшаются. Допуски на точность
изготовления уплотняемого и опорного колец могут быть снижены при примене-
нии уплотнительных колец со сферическими контактными поверхностями [2].
Рнс. 6.37. Муфта подвода воздуха с щелевым уплотнением
164
Рис. 6.38. Разновидности ла-
биринтного уплотнения с
расположением гребней:
a — односторонним; б —
двусторонним
Шероховатость рабочих поверхностей уплотнительного и опорного колец должна
быть Ra = 0,160—0,080 мкм.
Бесконтактные уплотнительные устройства. Из существующих типов бескон-
тактных уплотнительных устройств в пневматических устройствах нашли при-
менение уплотнения щелевого и лабиринтного типов.
Уплотнения щелевого типа не обеспечивают полной герметичности. Величина
утечек через уплотнение зависит от давления рабочей среды, геометрических
размеров щели и режима истечения воздуха. С целью снижения утечек зазор
в сопрягаемых деталях стараются делать возможно меньшим, а длину щелевого
зазора большей.
Изображенная на рис. 6.37 муфта подвода воздуха к вращающимся пневмо-
цилиндрам по МН 3453—62 с использованием щелевого уплотнения (между вра-
щающимся шпинделем 1 и втулкой 2) предназначена для работы при давлении
сжатого воздуха до 0,6 МПа и частоте вращения 20 с'1 (1200 об/мин). Известны
конструкции муфт, обеспечивающие работу при частоте вращения 67 с-1
(4000 об/мин). Втулка 2 муфты изготовлена из материала с высокими антифрик-
ционными свойствами. Смазочный материал подается через масленку, которая
ввинчивается в отверстие А. Кольцевые проточки на втулке служат для сбора
загрязнений, попавших в кольцевой зазор, что предохраняет вращающее соеди-
нение от заклинивания. Щелевые уплотнения имеют незначительные потери
энергии от трения, однако высокие требования к их изготовлению, утечка рабочей
среды, чувствительность к наличию загрязнений и температурным деформациям
ограничивают области их применения в устройствах.
В уплотнениях лабиринтного типа рабочая среда герметизируется за счет
дросселирования ее при движении через последовательно расположенные суже-
ния. Как и щелевые уплотнения, они не обеспечивают полной герметичности.
По виду движения потока рабочей среды в лабиринтном уплотнении их разделяют
на уплотнения с односторонним расположением гребней (рис. 6.38, а), в которых
движение потока прямолинейное, и с двусторонним (рис. 6.38, б) — с поворотом
потока на 180°.
Рис. 6.39. Варианты кольцевых выточек лабиринтного уплотнения
165
Таблица 6. ]2
Физико-механические свойства материалов уплотнения
Материал Модуль упругости Е. 10'5, Па Предел прочности, а. 10“5, Па Твердость Относительное удлинение при разрыве, % Теплостойкость по Мартенсу, °C Теплопровод- ность. кДж/(м. ч • К) Коэффициент линейного рас- ширения Коэффициент трения по стали Коэффициент Пуассона Пористость. % по отноше- нию к массе Предельная рабочая тем- пература. °C
на сжатие на рас- тяжение на изгиб без смазки при смазке
Резниа 30 — 70 — 100—140 — 55-70 (по ТМ-2) 140 — 300 __ 0,42 — 0,84 12-Ю-5 0,8 0,02 — 0,08 0,45 — 8—120
Фторопласт-4 1700 120 160 110 — 140 НВ 3 — 4 250 — 500 — 0,84 (8—21) 10“5 0,07 — 0,1 0,06 — 195—250
Полнкапро- лактам (капрон) 8000 600 — 650 700 — 800 900 НВ 10—12 150 — 200 i 50 — 55 0,924 (11-14) 10-» 0,106 0,092 80 — 90
Графит (4,7 —7,5) 10’ 1 260 — 2 590 70—210 260 — 910 HSh 30 — 100 — — 336 — 672 (2,7 —3,6) 10-’ 0,23 0,04 — 4 — 20 * 315 — 340
Сталь 2,1 •10е 4 000 — 10 000 — НВ 100 — 300 17 — 40 — 168 — 210 1210-“ 0,18—0,5 0,09 0,25 — 0,3 — 480
Бронза (0,63—1,05) 10' — 4 600 — — 20 — 30 1 — 231 18-10-“ 0,18 0,1 0,32 — 0,35 — 260
Чугун (0,7 — 1,25) 10’ 6 DOO- 14 000 1 400 — 2 500 — — — — — (10,8—14,4) 10-“ 0,15 — 0,18 0,1 0,23 — 0,27 — 340 — 370
Полиэтилен нд (5-8) 10s — 200 — 400 200 — 380 70—120 (по Джонсону) 150 — 800 125 1,43 ю-‘ 0,045 0,032 — — —
Полиамид П-68 12 000 400 — 500 800 — 1 000 800 — 850 НВ 14 — 15 100 60 (11 — 12) 10-* 0,098 0,091 — — 120 — 160
Текстолит птк (4-6,5) 10’ 1 500- 2 500 1 000 1 600 НВ 35 1 125 0,63 (2 — 4) 10-’ 0,25 — 0,4 0,Ol- О. 05 — — —
* Для непропнтаиных графитов.
166
167
0,2-DJMM
Рис. 6.40. Конструктивная схема установки лабиринт-
ного уплотнения
Размеры канавок и зазоры лабиринтных
уплотнений рекомендуется подбирать методом,
изложенным в работе [6]. Форма кольцевых
выточек лабиринтного уплотнения оказывает
малое влияние на качество герметичности уплот-
нения этого типа. Из различных вариантов
форм выточек для сжатого воздуха рекомен-
дуется вариант, изображенный на рис. 6.39, д,
обеспечивающий лучшие результаты по герме-
тичности и технологичности изготовления [6]. Лабиринтные уплотнения обла-
дают высокой надежностью, имеют небольшие потери энергии на трение
в уплотнительном узле, однако утечка рабочей среды в них относительно ве-
лика. Конструктивная схема установки лабиринтного уплотнения приведена
на рис. 6.40.
6.4. МАТЕРИАЛЫ УПЛОТНЕНИЙ
Материал уплотнений выбирают с учетом следующих факторов: характера уплот-
няемого соединения (неподвижное, возвратно-поступательное или вращательное);
режима работы (скорости и интенсивности рабочих движений); давления рабочей
среды; температуры окружающей и рабочей среды, требований к герметичности
и долговечности; конструктивных параметров соединения и др.
В табл. 6.12 приведены физико-механические свойства различных матери-
алов уплотнений [6].
Ниже приведен ряд рекомендаций, составленный на основании работ [1, 2,
6, 7, 8], которые необходимо учитывать при выборе материала уплотнений.
Резиновые уплотнения обеспечивают надежную работоспособность в отно-
сительно узком интервале температуры. Их долговечность снижается при по-
вышенных давлениях рабочей среды и недостаточном смазывании трущихся
поверхностей. Быстрому выходу из строя резиновых уплотнений способствует
прилипание их к поверхности металлических изделий, при этом значительно воз-
растает усилие, необходимое для страгиваиия подвижных частей пневматиче-
ских устройств, и повреждаются рабочие кромки уплотнений. Наиболее эффек-
тивным методом борьбы с прилипанием является создание на резиновых деталях
уплотнений защитных покрытий из фторопласта или других материалов,
не склонных к прилипанию, применение комбинированных кольцевых уплот-
нений или покрытие металлических поверхностей.
Фторопласт-4 рекомендуется применять в пневматических устройствах,
где от материала уплотнений требуется высокая тепловая и химическая стойкость.
При этом следует иметь в виду увеличение его мягкости с повышением темпера-
туры и текучесть на холоде.
Недостаток эластичности фторопласта обычно компенсируют комбинацией
его установки с резиной или поджатием пружиной. Из-за этого недостатка фторо-
пласт-4 ие рекомендуется для изготовления самоуплотняющихся уплотнений при
невысоких давлениях. Уплотнения из фторопласта при сборке рекомендуется
смазывать, что снижает коэффициент трения. Как правило, уплотнения из фторо-
пласта-4 не обеспечивают надежной герметизации при длительной эксплуатации
из-за нарушения геометрических размеров.
К недостаткам фторопластовых уплотнений относится также плохой отвод
теплоты от места контакта (это особенно характерно для пневматических уст-
ройств с вращательным движением уплотнительного узла), что приводит к пере-
греву трущейся поверхности уплотнения и быстрому износу.
Графит можно применять как в чистом виде, так и после его пропитки мас-
лами, синтетическими смолами, медью, свинцом, баббитом и другими легкоплав-
кими сплавами металлов. Вследствие того что графит является инертным матери-
алом, хорошо рассеивает теплоту, выдерживает термические напряжения и обла-
168
дает самосмазывающими свойствами, уплотнения иа его основе нашли приме-
нение для особо тяжелых условий работы (высокие давления и скорости, широкий
диапазон рабочих температур окружающей или рабочей среды).
Для изготовления манжет обычно используют кожу, обработанную дубиль-
ными веществами и пропитанную воском или синтетическими резинами. Уплот-
нения из кожи рекомендуется применять при температуре не выше 80—85 °C.
Кожа обладает свойством фитильной смазки, что снижает коэффициент трения.
Однако при хорошей подаче смазочного материала, коэффициент трения уплот-
нений, изготовленных из-кожи, выше коэффициента трения уплотнений, изгото-
вленных из резины.
Композиционные материалы рекомендуются для режимов работы с высокими
требованиями к надежности герметизации и долговечности. В настоящее время
стали применять композиционные материалы на основе фторопласта и наполни-
телей из графита.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамов Е. И., Колесниченко К. А., Маслов В. Т. Элементы гидропривода. Киев:
Техника, 1977. 320 с.
2. Башта Т. М. Машиностроительная гидравлика. Справочное пособие. М.: Маши-
ностроение, 1971. 664 с.
3. Гуревич Д. Ф. Расчет н конструирование трубопроводной арматуры. Л.: Машино-
строение. 1969. 887 с.
4. Детали машин. Расчет и конструирование. Под ред. Н. С. Ачеркана. Т. 2. М.:
Машиностроение, 1969. 432 с.
5. Кисельников в. Б. Пневматические приводы и аппаратура электросварочного
оборудования. Л.: Машиностроение, 1978. 200 с.
6. Макаров Г. В. Уплотнительные устройства. Л.: Машиностроение, 1973. 232 с.
7. Башта Т. М., Зайченко И. 3., Ермаков В. В., Хаймович Е. М. Объемные гидравли-
ческие приводы. М.: Машиностроение, 1969. 628 с.
8. Френкель М. И. Поршневые компрессоры. Теория, конструкции и основы проекти-
рования. Л.: Машиностроение. 1969. 743 с.
Глава 7
ПНЕВМОЛИНИИ
Пневмолинин предназначены для транспортирования сжатого воздуха в пневма-
тических системах. В состав пневмолиний входят трубопроводы и соединения,
обеспечивающие разветвление пневмолиний, присоединение трубопроводов к аг-
регатам, устройствам и элементам пневматических систем, соединения участков
трубопроводов между собой.
7.1. ТРУБОПРОВОДЫ
Выбор типа и материала трубопровода зависит от рабочего давления, темпера-
туры и агрессивности окружающей и рабочей сред, вида соединений труб, усло-
вий гибки и монтажа, массы и стоимости труб. Трубопроводы могут быть гибкими
и жесткими. Необходимость в применении гибких трубопроводов возникает в тех
случаях, когда нужно подвести сжатый воздух к пневматическим устройствам,
закрепленным на узлах и механизмах, имеющих относительное перемещение,
или поочередно к различным потребителям от одного источника. Гибкие трубо-
проводы удобнее для монтажа, особенно в труднодоступных местах.
В качестве жестких трубопроводов применяют обычно металлические трубы.
Трубы из меди, медных сплавов, латуни и алюминиевых сплавов отличаются
высокой гибкостью, удобны для применения на коротких участках со сложными
изгибами и при необходимости подгонки в процессе монтажа. Эти преимущества
в наибольшей степени проявляются при небольших диаметрах, поэтому такие
трубы применяют большей частью до диаметров 20—25 мм. Трубы из цветных
металлов не требуют специальных покрытий против коррозии, однако стоимость
их достаточно высока. Стальные трубы применяют обычно для больших диаме-
тров. Трубы из углеродистой стали необходимо предохранять от коррозии по-
крытием цинком, медью и т. д.
В качестве гибких трубопроводов применяют резинотканевые рукава, трубки
из синтетических материалов (полиэтилена, полихлорвинила и др.), пневмати-
ческие кабели, содержащие определенное число синтетических трубок. Преиму-
ществом гибких трубопроводов из синтетических материалов является их высо-
кая стойкость против коррозии, небольшая стоимость, малая масса и удобство
монтажа.
Расчет трубопроводов. Размер трубопроводов в определенной мере определяет
качественные характеристики пневматических систем, особенно в части непроиз-
водительных потерь (потерь давления), быстродействия и т. п.
Трубопроводы следует рассчитывать в такой последовательности: а) опре-
делить ориентировочную величину внутреннего размера трубопровода по задан-
ному расходу; б) определить потери давления по длине трубы и потери давления
на местных сопротивлениях; в) суммарные потери давления сравнить с допусти-
мыми, при значительном расхождении соответственно изменить диаметр трубы
и сделать перерасчет (выбранный диаметр трубопровода корректируют по сорта-
менту); г) рассчитать (проверить) на прочность.
170
Внутренний диаметр трубопровода определяют по формуле:
Г ям р ’
где Q — расход воздуха; ш — скорость воздуха; р0; р — плотность воздуха соот-
ветственно при нормальном атмосферном давлении и при давлении в трубопро-
воде.
Оптимальная скорость движения воздуха в трубопроводах зависит от многих
факторов, в том числе от их размеров и назначения.
В магистральных трубопроводах в зависимости от их протяженности, рабо-
чего давления и расхода воздуха скорость воздуха рекомендуется принимать
от 6 до 12 м/с. Для предприятий с относительно малой протяженностью маги-
стральных трубопроводов (до 300 м) при давлении до 0,6—0,7 МПа скорость
воздуха допускается принимать выше 10—15 м/с. Величина потерь давления
в магистральных трубопроводах при прохождении сжатого воздуха от компрес-
сора до потребителя не должна превышать 5—10% рабочего давления.
Для подводящих трубопроводах, соединяющих элементы пневмопривода,
рекомендуемые максимальные скорости движения воздуха составляют 16—40 м/с.
Меньшие значения скорости принимают при более высоких рабочих давлениях.
Уменьшение скорости воздуха при тех же величинах расходов может привести
к увеличению проходных сечений трубопроводов, пневмоаппаратуры и устройств
и неоправданному увеличению размеров и массы всей системы. Приближенно
потери давления в жестких трубопроводах и в резиновых рукавах можно
определить по номограммам (рис. 7.1, 7.2) [4]. Пример пользования номограм-
мой на рис. 7.1 показан штриховой линией. Если расход Q = 2 м3/мин, а давле-
ние р = 0,4 МПа, то при внутреннем диаметре трубопровода dr = 19 мм потеря
давления составит 0,002 МПа. В правой части номограммы на рис. 7.2 даны по-
тери давления на 1 м длины резиновых руковов при давлении воздуха 0,4 МПа.
Левая часть номограммы дает возможность определить потерю давления для
рукавов длиной 1—30 м при давлении воздуха 0,1—0,8 МПа. Например, если
при давлении 0,4 МПа расход воздуха Q = 2 м3/мин, а внутренний диаметр
рукава с/т = 19 мм, то потеря давления на 1 м длины рукава составит примерно
0,0018 МПа (см. штриховую линию на рис. 7.2). Перенеся точку, определяющую
потерю давления, в левую часть номограммы до вертикальной линии, соответ-
ствующей давлению р — 0,4 МПа, и перемещаясь по наклонной линии, можно
определить потерю давления для других условий (для р = 0,6 МПа Ар =
= 0,0011 МПа). При длине рукава I = 20 м и давлении 0,7 МПа Ар = 0,02 МПа.
Потери давления на местных сопротивлениях можно приближенно опре-
делить по номограмме на рис. 7.1, если пользуясь данными табл. 7.1 заменить
каждое из местных сопротивлений длиной трубопровода, эквивалентной ему по
сопротивлению.
Таблица 7.1
Длина трубопроводов, эквивалентная величине местных сопротивлений
Вид местного сопротивления Длина трубопровода (м) при условном проходе трубопровода, мм
8 10 12 16 20 25 32 40 50 100 150 200
Нормальное ко- лено г -- 4d Тройник Задвижка Вентиль нор- мальный: угловой проходной 2 3,5 3 4 3,5 4,5 4 5 4,5 5,5 0,2 2 0,3 6 0,3 2,6 0,4 6,5 9,0 0,35 3,2 0,5 8,0 12,0 0,4 4 0.7 10 15 1,0 10 1,5 20 35 1,7 17 32 60 2,4 24 3,5 45 65
171
Рис. 7.1. Номограмма для определения потери давления на 1 м длины жестких воздухо-
проводов
Общая величина потерь давления равна сумме потерь давления на прямых
участках трубопроводов и в местных сопротивлениях
Др Дрт Дрм.
При выборе труб по прочностным характеристикам следует исходить не
только из величины передаваемого давления, но и из возможности механического
повреждения труб, условий гибки, конструкции соединений и т. п. В основном
применяют трубы, для которых отношение наружного диаметра трубы D к тол-
щине стенки 6 менее 16. В этом случае прочность прямых отрезков трубопрово-
дов, нагруженных внутренним статическим давлением, может быть определена
следующим образом [2].
172
0,2 0,5 1 2 5 10 20 50 100 200 500 1000
173
Таблица 7.2
Характеристика металлических трубопроводов
Внд трубопроводов | Размер, мм Давление Материал Примечание
Трубы стальные во- Условный проход 6—150; Г ндравлнческое давление Сталь по ГОСТ 380 — 71 Трубы можно изготовлять
догазопроводные (ГОСТ 3262—75): наружный диаметр 10,2 — 165 Толщина стенкн: испытания, МПа: без покрытия илн с цин- ковым покрытием наруж- ной и внутренней по- с резьбой н в комплекте с муфтами; без резьбы и муфт; без резьбы в ком-
легкие обыкновенные усиленные 1,8—4,0 2,0—4,5 2,5—5,5 2,5 2,5 3,2 5 — по заказу по- требителя верхностен трубы плекте с муфтами
Трубы стальные бес- Наружный диаметр 25 и Давление прн нспыта- Сталь Ст2сп; Ст4сп; По заказу потребителя
шовные горячек ата- выше ниях без осевого подпо- Ст5сп, Стбсп; 10, 20, 35, трубы можно поставлять
ные, ГОСТ 8732 — 78 Толщина стенки не ме- нее 2,5 ра определяют по фор- муле где d и б — внутренний диаметр и минимальная толщина стенкн; R^ — допускаемое напряжение при испытаниях 45, 10Г2, 20Х, 40Х, ЗОХГСА, 15ХМ, ЗОХМА, 12ХН2 термически обработан- ными
Трубы из нержавею- Наружный диаметр 8— Гидравлическое давление Сталь 04Х18Н10, Трубы поставляют в тер-
щей стали электро- 102 испытания р — 6 МПа, 08Х18Н10Т, 12Х18Н10Т, мнчески обработанном со-
сварные (ГОСТ 11068—64) Толщина стенкн 1—4 но не более: 2бЯ„ р _ - (7?н равно 40 % времен- ного сопротивления раз- рыву). По требованию потребителя давление можно увеличить, но не выше полученного по формуле 08Х18Н12Т, 12Х18Н12Т, 10Х17Н13М2Т, 10X17H13M3T, 08Х22Н6Т, 12Х21Н5Т, 06ХН28МДТ стояния По требованию потребителя трубы можно поставлять без термиче- ской обработки
Трубы бесшовные хо- лодно- и теплодефор- мнрованные из кор- розионно-стойкой ста- ли (ГОСТ 9941—72) Наружный диаметр 5 — 250, толщина стенки 0,2 — 22 Сталь 08Х17Т, 08X13, 12X17, 15Х25Т, 04Х18Н10, 08Х20Н14С2, 08Х17Н13М2Т, 08Х18Н12Б, 10Х23Н18, 08Х18Н10, 08Х18Н10Т, 08Х18Н12Т, 08Х17Н16МЗТ, 12Х18Н10Т, 12Х18Н12Т, То же
Трубы бесшовные го-
рячедеформированные
из коррозионно-стой-
кой стали
(ГОСТ 9940—72)
Трубы бесшовные осо-
ботонкостеиные из
коррозионно-стойкой
стали
(ГОСТ 10498—63)
Трубы стальные пре-
цизионные
(ГОСТ 9567—75)
Горячекатаные
Холоднокатаные и хо-
лоднотянутые
Трубы стальные элек-
тросварные холодно-
тянутые и холодно-
катаные
(ГОСТ 10707 — 73)
Трубы стальные бес-
шовные холоднодефор-
мнрованные
(ГОСТ 8734—75)
Наружный диаметр
325, толщина стенки
3,5 — 32
Наружный диаметр 4 —
120, толщина стенкн
0,2 — 1
Наружный диаметр 25 —
325, толщина стенки
2,5—50
Наружный диаметр 5 —
710, толщина стенкн
0,2 — 32
Гидравлическое давление
испытания
2б«н
равно 40 % времен-
ного сопротивления раз-
рыву)
Гидравлическое нлн
пневматическое давление
прн испытаниях: для
труб диаметром до
20 мм — не менее
0,5 МПа; для труб диа-
метром более 20 мм —
не менее 1,0 МПа
Давление при испыта-
ниях без осевого под-
пора
2б*н
Наружный диаметр 5 — 110, толщина стенкн 0,5 — 5 Давление ниях без при осевого испыта- подпора
Наружный диаметр 5 — 250, толщина стенкн для особотонкостенных 0,3 — 4; для тонкостенных 0,6—16; для толстостен- ных 1.6 — 24 Р d
09Х14Н18В2БР,
12Х18Н9, 17Х18Н9,
08Х22Н5Т
Сталь 08X13, 08Х17Т,
12X13, 12X17, 15X28,
15Х25Т, 04Х18Н10,
10Х23Н18,
08Х17Н15МЗТ,
08Х18Н10, 08Х18Н10Т.
12Х18Н9. 12Х18Н10Т.
12Х18Н12Т,
09Х14Н19В2БР,
17Х18Н9. 08Х22Н6Т
Сталь 06Х18Н10Т,
09Х18Н10Т, 13Х13С2М2,
06Х16Н15МЗБ,
04Х16Н15МЗБ,
ОЗХ16Н15МЗБ
Сталь Ст2сп, Ст4сп,
Ст5сп, Стбсп, 10, 20, 35,
45, 10Г2, 20Х, 40Х,
ЗОХГСА, 15ХМ, ЗОХМА,
12ХН2
Сталь 10. 20. 35. 45.
10Г2, 15Х, 20Х, 40Х,
ЗОХГСА, 15ХМ
Сталь 10, 20, 35, 45,
10Г2, 15Х, 20Х, 40Х.
ЗОХГСА. 15ХМ
Сталь 10, 20, 35, 45,
10Г2, 15Х, 20Х, 40Х,
ЗОХГСА, 15ХМ
Термообработку труб про-
водят по требованию по-
требителя
В зависимости от заказа
трубы можно поставлять
с травленной, шлифован-
ной, полированной или
электрополированной на-
ружной поверхностью, а
также с травленной или
электрополированной
внутренней поверхностью
Трубы поставляют в тер-
мически обработанном со-
стоянии
По заказу потребителя
трубы можно поставлять
термически обработан-
ными
Трубы изготовляют тер-
мически обработанными.
Без термообработки изго-
товляют трубы, у кото-
рых отношение наружно-
го диаметра к толщине
стенкн 50 и более, и по за-
казу потребителя
То же
Продолжение табл. 7.2
Примечание 1 * Трубы изготовляют мяг- кими (отожженными) (М); । полутвердыми (ПТ), твер- j ! ДЫМИ ( 1 ) 1 Трубы изготовляют мяг- кими (М) и полутверды- 1 ми (ПТ) Трубы изготовляют отож- женными, закаленными и естественно состаренны- ми (Т), закаленными и искусственно состарен- ными (Т1), нагартованны- ми (Н) । Трубы изготовляют зака- ленными и естественно со- старенными, отожженны- ми, без термообработки
Материал 1 J Медь Ml, М1Р, М2, М2Р, , М3, МЗР, томпак Л96 1 Латунь Л63, Л68 I Латунь Л60, Л63, ЛС-59-1, 1 ЛЖМЦ59-М Алюминий АДО, АД1, алюминиевые сплавы АМц, АМг2, АМгЗ, । АМго, АМгб, АВ, Д1, 1 Д16 Алюминий АДО, АД1, АД, алюминиевые спла- 1 вы АМц. АМг2, АМгЗ, АМгб, АМгб, АД31, АВ, Д1, Д16, АК6, В95, | 1915, 1925
Давление j 1 Гидравлическое давление испытания 03 с S §|-о II а. Испытания на герметнч- i ность проводят прн гид- равлнческом давлении | 5 МПа 1 Временное сопротивление разрыву 60 — 520 МН/м2 в зависимости от марки материала, термообработ- ки и размеров
3 — генкн 2 'енки 1 = > * X <и 1 ем генки 6— генкн 18 — генки
Размер, мм жный диаметр толщина ci 7жный диаметр о К! X X е» О гжный диаметр толщина ci 10 сх О S X 3 X я X X сч <жный диаметр толщина сп •10 гжнын диаметр толщина сп 40
7 Ь. сх О 1 1
«о о X 00 х2о X —Г Х2О- , Нг I 34i : U 1
Вид трубопроводов 1 Трубы медные (ГОСТ 617—72) Тянутые и холоднока- таные трубы Прессованные трубы j Трубы латунные (ГОСТ 494 — 76) Тянутые и холодно- катаные 1 Прессованные Трубы алюминиевые (ГОСТ 18475 — 73) 1 п- Трубы прессованные 1 из алюминия и алю- миниевых сплавов (ГОСТ 18482 — 79)
176
Таблица 7.3
Характеристика рукавов и трубок резиновых
Вид трубопроводов Размер, мм Давление Примечание
Рукава резино- вые напорные с нитяным уси- лением неармн- рованные (ГОСТ 10362 — 76) Внутренний диаметр 4—25 Предельное ра- бочее давление 0,1 —2,5 МПа Рукава работоспособны в рай- онах умеренного и тропиче- ского климата при температу- ре от —50 до +90 °C, в райо- нах с холодным климатом — при температуре от —60 до +90 °C. Температура рабо- чей среды (воздух, нейтраль- ные газы) от —50 до +60 °C
Рукава резино- вые напорные с текстильным каркасом (ГОСТ 18698 — 79) Внутренний диаметр 10—63 Рабочее давле- ние (стати- ческое) 1,0 МПа Рукава работоспособны в рай- онах умеренного (температу- ра от —35 до + 50 °C) н тропи- ческого климата (температура от —20 до +55 °C), а также в районах с холодным клима- том при температуре от —50 до +50 °C. Температура рабо- чей среды (воздух и инертные газы) от —35 до +50 °C
Рукава резино- вые напорно- всасывающие с текстильным каркасом неарми- рованяые, ГОСТ 5398 — 76 Внутренний диаметр 16—325 Рабочее давле- ние 0,3 — 0,5 МПа Рабочий вакуум 0,08 МПа Температура работоспособ- ности в районах с умеренным климатом от —35 до +90 °C, с тропическим климатом от — 10 до +90 °C, с холодным климатом от —50 до +70 °C
Трубки резино- вые технические, ГОСТ 5496-78 Внутренний диаметр 2 — 40, толщина стенки 1,3 — 8 Условная проч- ность прн рас- тяжении 4 — 5 МПа Температура от —45 до + 90 °C
Пластмассовые трубопроводы
Таблица 7.4
Внд трубопроводов Размер, мм Давление Примечание
Трубы напорные из полиэтилена (ГОСТ 18599 — 73) Наружный диа- метр 10 — 630, толщина стенки 2 — 25 для труб из полиэтилена высо- кой плотности; на- ружный диаметр 10—160, толщина стенки 2 — 20 для труб нз полиэти- лена низкой плот- ности Максимальное дав- ление воды, МПа, прн температуре 20 °C для труб ти- па: Л — легкого — 0,25 СЛ — среднелег- кого — 0,4 С — среднего — 0,6 Т — тяжелого — 1,0 Предел текучести при растяжении не менее 20 МН/м2 для труб из полиэтиле- на высокой плот- ности; 9,5 МН/м2 для труб нз поли- этилена низкой плотности
177
Продолжение табл. 7.4
Вид трубопроводов Размер, мм Давление Примечание
Трубки из поливи- нилхлорида ПБ-2 ТУ6-05-021-204-73 Внутренний диа- метр 2 — 50, тол- щина стенки 0,8— 5,3 Номинальное дав- ление эксплуата- ции для трубок с внутренним дна- метро.м до 12 мм — 0,6 МПа, свыше 12 мм — 0,2 МПа. Допу- скается кратковре- менное повышение в 1,5 раза номи- нального давления трубок при экс- плуатации Внутреннее дав- ление при разры- ве при 20 °C для трубок с номиналь- ным давлением 0,6 МПа — 4 МПа, для трубок с номи- нальным давле- нием 0,2 МПа— 1,4 МПа Трубки предназна- чены для смазоч- ных и смазочно- охлаждающих си- стем металлорежу- щих станков, рабо- тающих в климати- ческих зонах СССР и в районах с тро- пическим клима- том
Характеристика пневмокабеля
Таблица 7.5
Марка Пневмокабель Наруж- ный диа- метр и толщина стенки труб, мм Применение
тпо Из полиэтиленовых труб в поливинилхлоридной обо- лочке 6X1 8X1 8Х 1,6 В условиях повышенной влажности, механических ко- лебаний и вибраций
тпоп Из полиэтиленовых труб в поливинилхлоридной обо- лочке в оплетке из сталь- ных оцинкованных проволок 6X1 8X1 8Х 1,6 В условиях повышенной влажности, при наличии лег- ких механических воздействий
ТПОБ Из полиэтиленовых труб в поливинилхлоридной обо- лочке, в броне из стальных лент с противокоррозионной защитой 6X1 8X1 8Х 1,6 Для виутреииих и наружных открытых проводок на трассах с большим числом мест воз- можных механических воздей- ствий и при отсутствии в окру- жающей среде веществ, раз- рушающих броню
ТПОБО Из полиэтиленовых труб в поливинилхлоридной обо- лочке, в броне из стальных лент в поливинилхлоридной оболочке 6X1 8X1 8Х 1,6 В условиях вредных сред, по- вышенной влажности, при на- личии большого числа мест возможных механических воз- действий
ТПББГ Из полиэтиленовых труб, обмотанных лентами из ка- бельной бумаги, в броне из стальных лент с противо- коррозионной защитой 8Х 1,6 Для внутренних и наружных проводок, в местах возможных механических воздействий и при отсутствии в окружающей среде веществ, разрушающих броню
ТПВБГ Из полиэтиленовых труб, обмотанных поливинилхло- ридными лентами, в броне из стальных лент с противо- коррозионной защитой 8Х 1,6 Для внутренних и наружных проводок, во взрыво- и пожа- роопасных помещениях, в ме- стах возможных механических воздействий, при отсутствии в окружающей среде веществ, разрушающих броню
Примечание. В пиевмокабеле ТПВБГ 7 труб, в остальных 7, 12.
178
Минимальное разрушающее давление в трубе
Ств(т+1)
2 \ 6 ) + 6 +
где d — внутренний диаметр трубопровода; ов — временное сопротивление
разрыву.
Рабочее давление
Рраб = Рф/Ч-й’
где рр — минимальное разрушающее давление; па — запас прочности.
Запас прочности выбирают в зависимости от назначения трубопровода
(обычно в пределах 3—6) [1].
Для тонкостенных труб (0/6 16) минимальное разрушающее давление
__ 26св
Рр~ d •
Основные данные, характеризующие трубопроводы, приведены в табл.
7.2—7.5.
7.2. СОЕДИНЕНИЯ
Неразъемные соединения имеют преимущества для трубопроводов, не требующих
демонтажа. Их выполняют сваркой встык (газовой для стальных труб с толщиной
стенки менее 3,5 мм и электросваркой для стальных труб с толщиной стенки
более 3,5 мм) и пайкой (для медных и латунных труб). Применяют также соеди-
нения со специальными втулками с прямым и косым обрезом, с раздачей конца
'Одной трубы на двойную толщину стенки трубы (рис. 7.3). Использование втулок
с косым обрезом предпочтительнее вследствие понижения напряжения в поверх-
ностном слое трубы за счет распределения их на большую длину. Трубы монти-
руют во втулке с зазором между торцами, равным толщине стенки трубы. Длина
втулки обычно равна 50—80 мм, длина раструба при раздаче трубы примерно
50—60 мм.
На рис. 7.3, г показана схема одного из возможных соединений труб пайкой
с применением самофлюсующегося припоя в среде аргона. В конусных концах
муфты выполнены отверстия, против которых на внутренней цилиндрической
поверхности муфты проточены кольцевые канавки, в которые закладывается
припой. Диаметральный зазор между муфтой и трубой выбирают в пределах
0,05—0,1 мм. Подлежащие пайке концы труб зачищают и вводят в муфту, затем
место соединения нагревают в среде аргона до температуры плавления припоя.
Для этого применяют индукционный нагрев в высокочастотном поле, вследствие
чего зона нагрева может быть сведена к минимальной величине. Для замены уча-
стка трубопровода в эксплуатационных условиях соответствующие муфты нагре-
вают до расплавления припоя, после чего поврежденную секцию удаляют и впа-
ивают новую, используя те же муфты.
Применение неразъемных соединений позволяет значительно уменьшить
массу трубопроводов в сравнении с разъемными соединениями.
Рис. 7.3. Схемы неразъемных соединений труб: •
а, б — со втулкой с обрезом соответственно прямым и косым; в — с раздачей одного
конца трубы; г — с применением самофлюсующегося припоя
179
40 мм. С увеличением диаметоа повышаются силы
Рис. 7.4. Соединение фланцевое
по ГОСТ 18535 — 74 (тип I —
соединение концевое, тип 2 —
соединение промежуточное)
Разъемные соединения
трубопроводов различают по
типу применяемого соеди-
нения (резьбовые и фланце-
вые), крепления трубопро-
вода к деталям соединения
(с механическим креплением,
с использованием сварки или
пайки) и по способу герме-
тизации разъема (обжатием
трубы, обжатием деталей со-
единений, с использованием
прокладки).
Соединения резьбового
типа обычно применяют для
труб с диаметром до 30—
I, необходимые для затяжки
(особенно при соединении по наружному конусу и с торцовым уплотнением),
поэтому для труб большего диаметра используют фланцевые соединения, которые
просты в изготовлении и монтаже, а также не требуют высокого класса точности
и чистоты поверхностей. Сменные уплотнительные прокладки позволяют делать
практически неограниченное число переборок. Для жесткой связи трубы с флан-
цем применяют фланцы плоские приварные и приварные встык. Если при монтаже
необходим разворот фланцев нли труб, то используют фланцы свободные на при-
варном кольце или с буртом.
Все виды фланцевых соединений требуют применения прокладок, уплотия-.
ющих место соединения. Материал и конструкцию прокладок выбирают в зависи-
мости от давления и температуры сжатого воздуха. Обычно для фланцевых со-
единений пневматических систем используют мягкие прокладки из паронита,
резины или картона. Толщину картона для прокладок берут в пределах 1—
3 мм, резины в пределах 3—5 мм. Качество картонных прокладок повышается,
если картон, предварительно вымоченный в воде и высушенный, пропитывают
олифой. При установке таких прокладок утечка значительно уменьшается. При
использовании паронитовых прокладок их необходимо предварительно выдер-
жать в горячей воде, а затем смазать поверхность прокладки смесью из графита
и масла. При изготовлении прокладок их внутренний диаметр необходимо делать
на 2—3 мм больше внутреннего диаметра трубы, а внешний — равным диаметру
прижимного кольца для возможности контроля правильности установки про-
кладки.
На рис. 7.4 показано фланцевое соединение по ГОСТ 19535—74. Для уплот-
нения трубопроводов могут быть использованы также фланцы стальные с шейкой
на резьбе на давление 0,1—1,6 МПа по ГОСТ 12826—67, ГОСТ 1245—67; плоские
приварные на давление 0,1—2,5 МПа по ГОСТ 12827—67, ГОСТ 1255—67,
ГОСТ 12828—67; стальные приварные встык на максимальное давление 4, 10,
20 МПа по ГОСТ 12829—67—12835—67; стальные свободные на приварном
кольце на давление 0,1—2,5 МПа по ГОСТ 1268—67, ГОСТ 12834—67; стальные
свободные на отбортованной трубе на давление 0,1; 0,25; 0,6 МПа по
ГОСТ 1272—67.
На концах трубопроводов могут быть установлены фланцевые заглушки
по ГОСТ 12836—67—12839—67. При необходимости продолжения трубопровода
заглушки снимают и устанавливают на глухой конец нового участка трубопро-
вода.
Фланцевые замковые соединения (рис. 7.5) удобны для переносных трубо-
проводов, подвергающихся частому демонтажу. Их применяют для труб диа-
метром до 150 мм. Конструкция этих соединений позволяет не отворачивать
180
гайки полностью, а только ослаблять их с тем, чтобы можно было повернуть
фланец с прорезями.
Наиболее простым резьбовым соединением является муфтовое (рис. 7.6).
Этот вид соединений требует применения уплотняющих материалов, например
в виде пеньки, смазанной свинцовым суриком или белилами.
На рис. 7.7 приведена конструкция шаровой соединительной муфты, которую
применяют в тех случаях, когда трубопроводы не могут быть проложены по пря-
мой линии с необходимым числом опор или подвесок. Шаровые муфты допускают
угловое смещение соединяемых труб до 15° без нарушения уплотнения и без
дополнительного напряжения от изгиба в стыках.
Соединения по наружному конусу с развальцовкой трубы (рис. 7.8) при-
меняют в широком диапазоне давления, они хорошо работают в условиях вибра-
ции, компактны, легки. Такие соединения используют для труб, изготовленных
из различных материалов, их можно многократно демонтировать. Так как для
развальцовки пригодны только тонкостенные бесшовные трубы, то рабочее давле-
ние ограничивается прочностью трубы и с увеличением диаметра трубы сни-
жается. Развальцовку трубы можно выполнять с помощью переносного приспо-
собления, что позволяет делать стыковку непосредственно на изделии и облег-
чает ремонт трубопроводов.
Соединения по внутреннему конусу (рис. 7.9) применяют для тонкостенных
и толстостенных труб с использованием сварки или пайки. Требования к точности
монтажа соединений по внутреннему конусу значительно ниже, чем по наруж-
ному. При сферическом ниппеле допускается перекос соединяемых трубопрово-
дов до 5°. Моменты затяжки соединений по внутреннему конусу в 1,5—2 раза
меньше моментов затяжки соединений по наружному конусу.
Соединения с врезающимся кольцом (рис. 7.10, а) не требуют сварки или
пайки. При стягивании соединения врезающееся кольцо обжимается и его кромка
внедряется в трубу. При применении такого соединения предъявляются повы-
шенные требования к точности диаметра и шероховатости поверхности трубы.
Соединение с врезающимся кольцом и радиальным монтажом (рис. 7.10, б)
совмещает в себе принципы соединения с врезающимся кольцом и соединения
с торцовым уплотнением. В отличие от остальных резьбовых соединений, в кото-
рых обязательным является осевое смещение деталей при сборке, это соединение
выполняют без осевого смещения, что позволяет производить радиальный мон-
таж жестких трубопроводов. Такое соединение является более сложным и состоит
из большего числа деталей, чем остальные рассматриваемые соединения. Труба
закрепляется в соединении в результате внедрения в нее кромки врезающегося
кольца, которое осаживается на корпусе штуцера или нажимного кольца при за-
тяжке гайки. При первой сборке для нормального врезания кольца соединение
рекомендуется затянуть полностью, затем разобрать, проверить закромку на
трубе и собрать вновь, сделав, когда кольцо сядет на место, от г/е до V3 оборота.
При соединении тонкостенных труб следует применять оправку, которая вста-
вляется внутрь трубы и препятствует ее смятию в месте врезания кольца. Раз-
борка и сборка соединения не влияют на его качество.
Соединения с торцовым уплотнением (рис. 7.11) выполняют по государствен-
ным стандартам — ниппельные по ГОСТ 4340—77, ГОСТ 4341—77 и штуцерио-
торцовые по ГОСТ 5890—78. Прокладки обычно применяют медные или паро-
нитовые. В условиях повышенной вибрации более надежными являются про-
кладки из резиновых колец. Для выполнения соединений требуется строгая
соосность труб.
На рис. 7.12 показано соединение с конусными муфтами. Характеристика
стандартизованных и нормализованных соединений для металлических труб
приведена в табл, 7.6.
Для пластмассовых трубопроводов применяют соединения, конструкция
которых учитывает механические свойства пластических масс.
Для пластмассовых трубопроводов применяются соединения по наружному
конусу с наконечником (рис. 7.13, а), с уплотняющей гайкой (рис. 7.13, б) на
давление до 0,6 МПа; с обжимным кольцом па давление 0,14 МПа (рис. 7.13, в);
безрезьбовое соединение для резиновых труб на давление 0,14 МПа (рис. 7.13, г).
Этот вид соединения можно использовать не только для резиновых трубок, по
. - 181
Рис. 7.5. Фланцевое замковое соединение
Рис. 7.6. Муфтовые соединения труб:
а — без контргайки; б — с контргайкой
Рис. 7.7. Шаровая соединительная
муфта
Рис. 7.8. Соединение труб по наружному конусу с развальцовкой конца трубы:
а —- с проходником ввертным; б — с угольником ввертным; в — с тройником
Рис. 7.9. Соединения по внутреннему конусу:
а — концевое; б — проходное
Рис. 7.10. Соединение с врезающимся кольцом (л) и врезающимся кольцом и радиальным
монтажом (б)
Рис. 7.11. Соединение с торцовым уплотнением
182
Рис. 7.12. Соединение с конусными муфтами
Рис. 7.13. Соединения для эластичных
трубопроводов:
а — по наружному конусу с наконечни-
ком; б — по наружному конусу с уплот-
няющей гайкой; в — с обжимным кольцом;
г — безрезьбовое
и для других эластичных трубопроводов при небольших давлениях. Конфигура-
ция уплотнительной поверхности при этом может быть различной.
Известны и другие конструкции соединений для пластмассовых трубопро-
водов (рис. 7.14). Оригинальным является бесштуцерное соединение
(см. рис. 7.14, в), в котором эластичная труба уплотняется резиновым кольцом
и удерживается в отверстии кольцевым выступом цанги. При демонтаже цангу
необходимо подать вглубь отверстия и вынуть трубу.
Монтаж рукавов в зависимости от геометрических размеров рукава, рабо-
чего давления и других условий эксплуатации может быть выполнен в каждом
конкретном случае различными способами.
Для небольших давлений (до 0,3 МПа) рукава монтируют на ниппеле с коль-
цевыми проточками и обжимают хомутами (рис. 7.15, а). Рукава, рассчитанные
на давление до 10 МПа, зажимаются между ниппелем и резьбовой муфтой
(рис. 7.15, б). Для систем с рабочими давлениями свыше 10 МПа рукав зажимают
между ниппелем и муфтой, которая обжимается в специальном приспособлении
(рис. 7.15, в).
Быстроразъемные соединения позволяют быстро и легко сообщать и раз-
общать рабочие полости потребителей с магистралью сжатого воздуха. Соедине-
ния содержат замковые устройства, которые обеспечивают механическое соеди-
нение частей трубопроводов и уплотнение стыка. Соединения могут быть без
перекрытия потока при разъеме, с односторонним или двусторонним перекры-
тием.
На рис. 7.16, а показано быстроразъемное соединение без перекрытия по-
тока. Фиксация осуществляется с помощью шариков, уплотнение — с помощью
Рис. 7.14. Соединения для эластичных трубопроводов:
а — с фигурным ниппелем и уплотнительной гайкой; б — с ниппелем и торцовым уплот-
нением; в — с цаигой
183
Оо
Таблица 7.6
Характеристика соединений
| Вид соединения ГОСТ, нормаль Размер Материал Примечание
По наружному ко- нусу ГОСТ 13954 — 74 — ГОСТ 13974 — 74, ГОСТ 13976—74 — ГОСТ 13977—74 ГОСТ 20188—74 — ГОСТ 20200 — 74 Наружный диаметр присое- диняемых труб 3 — 38 мм. Присоединительная резьба коническая от К 1/10" до К 1 1/2", метрическая от Мб до М45 X 1,5 Сталь 45, ЗОХГСА, 14Х17Н2, 12Х18Н9Т, 15Х12Н2ВМФ, алю- миниевый сплав Д16Т, АК6, бронза БрАЖМц 10-3-1,5 Угол развальцовки трубы 74°. Детали соединений должны быть термообработаны. В но- менклатуру входят проходим- ки прямые, ввертные; пере- ходники прямые, ввертные; угольники проходные, вверт- ные переходные; тройники и крестовины проходные, пере- ходные, ввертные; заглушки. Температура от —60 до 4-500 °C, давление до 106 МПа в зависимости от материалов труб и арматуры
Нормаль станкострое- ния С91-С92 Наружный диаметр присое- диняемых труб 4 — 28 мм. Присоединительная резьба трубная 1/8 — 1", коническая 1/8 — 1" Сталь 35, А12 Угол развальцовки трубы 68°. В номенклатуру входят соединения прямые концевые и промежуточные; угловые концевые; тройниковые кон- цевые и промежуточные. Дав- ление для медных труб до 6,3 МПа, для стальных до 12,5 МПа
С конусными муфтами ГОСТ 9112 — 67 — 9122 — 67 Наружный диаметр присое- диняемых трубопроводов 3— 20 мм. Присоединительная резьба коническая К 1/16 — К 3/4" Сталь А12, латунь ЛС59-1, Л62 В номенклатуру входят сое- динения с ввертным н про- ходным штуцерами, с вверт- ным и проходным угольника- ми, с ввертным и проходным тройниками. Максимальное давление 6,4 МПа
С врезающимся коль- цом с радиальным монтажом ГОСТ 18544 — 79 — ГОСТ 18560 — 79 Наружный диаметр присое- диняемых труб 10 — 38 мм. При соеди н ител ьн а я р езь ба трубная 3/8—1 1/2", метри- ческая от М16Х1.5 до М48Х 2 Сталь 35, А12, 45, АЗО, 40Х, 12ХНЗА, 1 Окп В номенклатуру входят сое- динения проходные, переход- ные, концевые. Угловые про- ходные и концевые; тройни- ковые проходные, переходные и концевые; крестовины про- ходные, переходные, конце- вые. Давление до 25 МПа. Температура от —40 до 4-120 °C
Ниппельное ГОСТ 4340 — 77 ГОСТ 4341 — 77 Условный проход 3—20 мм. Наружный диаметр присое- диняемых труб 8—30 мм Материал деталей сое- динений по ГОСТ 4361—77 В номенклатуру входят сое- динительные муфты, тройни- ки, крестовины. Максималь- ное давление 25 МПа, темпе- ратура от —50 до 4~50 °C
С врезающимся коль- цом ГОСТ 15764 — 70— — ГОСТ 15781 — 70; ГОСТ 15802 — 76; ГОСТ 15803 — 76 Условный проход 3—25 мм. Наружный диаметр присое- диняемой трубы 6 — 38 мм. Присоединительная резьба метрическая от М12Х1.5 до М48Х2, трубная от 1/4" до 1 1/2" Сталь 35, 45, А12, АЗО, 40Х, 12ХНЗА, Юкп В номенклатуру входят сое- динения проходные, переход- ные, концевые; угловые про- ходные, концевые; тройнико- вые проходные, переходные, концевые; крестовые проход- ные, переходные, концевые. Давление 40 МПа. Темпера- тура от —40 до 4-120 °C
По внутреннему ко- нусу с шаровым нип- пелем ГОСТ 20969 — 75 — ГОСТ 20986 — 75; ГОСТ 15763—75 Условный проход 3—25 мм. Присоединительная резьба метрическая от М12Х1.5 до М48Х2, трубная 1/4—1 1/2" То же То же
Нормаль станкострое- ния Г91 Условный проход 8—40 мм. Присоединительная резьба трубная 1/4—1 1/2", кони- ческая К 1/4— К 1 1/2" Сталь 35, А12 В номенклатуру входят сое- динения прямые концевые, промежуточные, угловые кон- цевые, проходные, тройнико- вые. Предусмотрены исполне- ния на давление до 20 и до 32 МПа
Продолжение табл. 7.6
Примечание В номенклатуру входят про- ходиики, переходники; уголь- ники проходные, ввертные; тройники проходные, пере- ходные, ввертные; крестови- ны проходные, переходные; заглушки. Температура от — 60 до 4-500 °C. Давление до 65 МПа в зависимости от применяемых материалов ' В номенклатуру входят шту- церы проходные и ввертные. Давление до 10 МПа. Темпе- ратура до 400 °C ' Соединения изготовляют двух типов: концевые и промежу- точные. Давление 6,3— 32 МПа. Температура от —40 до 4-100 °C Температура проводимой сре- ды не выше 175 °C. Давление 1,6 МПа прн условных про- ходах не более 40 мм и 1,0 МПа при условных проходах 50 — 100 мм. В номенклатуру вхо- дят угольники, тройники, кресты прямые и переходные, муфты короткие, длинные, пе- реходные, ниппели, гайки, пробки Температура до 175 °C. Дав- ление 1,6 МПа. В номенкла- туру входят муфты, ниппели, контргайки, сгоны 1
Материал Сталь 25, 45, 38ХА, 12Х18Н9Т, 13Х11Н2В2МФ 1 Сталь 25, 08Х18Н10Т, латунь ЛМц58-2, , бронза АМц9-2 1 i g 6 3 S 6 5 S £ § CJ G5 X ffl ® 3* s X s x С О s GJ ?. Л и» S ° s S л S 1 Л ДЭ 2d. 5 a 2 £ e g'go x y? x •>, л 2u ® ® x u s 2 ЭРиозЗ 5S-3S
Размер Наружный диаметр присое- диняемых труб 6 — 38 мм. Присоединительная резьба от М10 до М48Х 1,5 1 Условный проход 3 — 32 мм. Присоединительная резьба от Ml 8x1,5 до М56Х2 Условный проход 25 — 200 мм Условный проход 8—100 мм, резьба трубная цилиндриче- ская 1 Условный проход 8 — 150 мм. Резьба трубная цилиндри- ческая
ГОСТ, нормаль ГОСТ 16039 — 70 — 16078 — 70 1 ГОСТ 5890—78 ГОСТ 19535—74 .... 1 1 Ю lb Ю Ю Ю Ю 777"! 77 со -Г СО со Ю О -Г -Г <О СО СО о о ОО СО СО СО 00 со hhHh hh UUUU UU OOOO OO
Вид соединения 1 По внутреннему ко- нусу со сферически- ми и полусфериче- скими ниппелями Штуцерно-торцовые фланцевые с уплот- нением резиновыми кольцами Муфтовые: Соединительные ча- сти нз ковкого чу- гуна Соединительные ча- сти стальные
186
Рис. 7.15. Присоединение рукавов:
а — с ниппелем н хомутом; б — с резьбовой муфтой; в — с обжимной муфтой
эластичной прокладки. Для рассоединения трубопроводов необходимо пере-
мещать втулку, преодолевая сопротивление пружины, до тех пор, пока шарики
получат возможность выйти в кольцевую выточку во втулке.
На рис. 7.16, б показано соединение с односторонним перекрытием потока.
При рассоединении трубопроводов клапан с эластичным уплотнением под дей-
ствием пружины и давления воздуха перекрывает выход воздуха из трубопро-
вода в атмосферу.
На рис. 7.16, в показано соединение с двусторонним перекрытием потока,
имеющее два клапана с эластичными уплотнениями.
Поворотные соединения предназначены для подвода сжатого воздуха к кача-
ющимся пневматическим механизмам. Во многих случаях они могут заменить
гибкие рукава.
На рис. 7.17 показаны прямое и угловое поворотные соединения, они не
рассчитаны на большую скорость вращения. Так, соединение, приведенное на
рис. 7.17, б, допускает максимальную частоту вращения до 10 об/мин [3].
Вращающиеся соединения применяют для подвода воздуха к вращающимся
пневмоцилиндрам, мембранным камерам, пневматическим муфтам. Такие соеди-
нения обычно называют муфтами (головками) подвода воздуха. Их подразделяют:
по числу подводов — с одним (для цилиндров и камер одностороннего действия)
и с двумя (для цилиндров и камер двустороннего действия)подводами; по типу
уплотнительного элемента — с мягкими уплотнениями, с уплотнением за счет
малой величины зазора, с торцовым уплотнением.
На рис. 7.18, а изображена муфта с одним подводом. Уплотнение враща-
ющегося шпинделя достигается применением втулки из графитовой бронзы, под-
жимаемой к торцу шпинделя усилием пружины и давлением сжатого воздуха.
Муфта, показанная на рис. 7.18,6, имеет два подвода и торцовое уплотнение.
Вращающиеся уплотнительные текстолитовые втулки, посаженные на резиновых
кольцах, своими торцовыми уплотнительными поверхностями обеспечивают
Рис. 7.16. Быстроразъемные
соединения:
а — без перекрытия потока;
б — с односторонним пере-
крытием потока; а — с дву-
сторонним перекрытием по-
тока
Рис. 7.17. Прямое (а) н угло-
вое (б) поворотные соедине-
ния
187
Рис. 7.18. Муфты подвода воздуха:
а — с одним подводом; б с двумя подводами
герметизацию полостей муфты в месте контакта с неподвижными стальными
дисками.
На рис. 7.19 приведена воздухоподводящая головка по ОСТ 2КП92-1—72,
предназначенная для подачи сжатого воздуха в полость вращающихся пневмо-
Рис. 7.19. Воздухоподводящая головка по
ОСТ 2КП92-1 — 72
муфт при включении н быстрого вы-
броса воздуха из полости пневмомуфт
в атмосферу прн отключении, для чего
в головку встроен клапан быстрого
выхлопа.
При включении сжатый воздух
по центральному каналу через отвер-
стия в металлическом диске поступает
на диафрагму, отгибает ее, закрывая
отверстия во фланце, и через отвер-
стия в диафрагме поступает в полость
пневмомуфты. При отключении воз-
дух, выходя из полости муфты, при-
жимает диафрагму к диску, закрывая
входные отверстия в нем и проходит
через открытые отверстия во фланце
в выточку, затем через отверстия (на
рисунке не показаны) в полость под
кожух и через сетку кожуха в атмо-
сферу, минуя центральный канал, под-
водящий трубопровод и распредели-
те
тельное устройство. Сопротивление выхлопной линии через клапан быстрого
выхлопа существенно меньше сопротивления выхлопу через линию подвода и
следовательно меньше время опорожнения полости пневмомуфты.
Пневморазъемы служат для одновременного соединения механическим путем
и герметизации пневматических контактов определенного числа трубопроводов.
В пневморазъемах типа РПУ (рис. 7.20, а) на давление до 0,4 МПа пневма-
тические контакты уплотняют введением конических поверхностей штуцеров
в цилиндрические отверстия в резиновой прокладке. Металлические втулки,
помещенные в отверстия резиновой прокладки, ограничивают перемещение шту-
церов при соединении частей пневморазъема, предотвращая повреждение резины.
Пневморазъем снабжен цангой и муфтой для закрепления пневмокабеля.
В пневморазъемах типа П-ШРК для струйных систем управления
(рис. 7.20, б) пневматические контакты уплотняют поджатием части штуцера,
выполненной в виде цилиндрического сопла, к резиновой проставке при соеди-
нении разъема. Для предотвращения самоотвинчивания гайки предусмотрено
стопорное пружинное кольцо.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамов Е. И., Колесниченко К. А., Маслов В. Т. Элементы гидропривода. Киев:
Техника, 1977. 320 с.
2. Башта Т. М. Машиностроительная гидравлика. Справочное пособие. М.: Машино-
строение, 1971. 671 с.
3. Савин И. Ф. Гидравлический привод строительных машин. М.: Стройиздат, 1974.
240 с.
4. Элементы и устройства пневмоавтоматики высокого давления. Каталог. М.;
1978. 155 с. (НИИМАШ).
Глава 8
ПНЕВМАТИЧЕСКИЕ
ЭЛЕМЕНТЫ И УСТРОЙСТВА
СРЕДНЕГО УРОВНЯ
ДАВЛЕНИЯ
Пневмоавтоматика среднего (нормального) уровня давления нашла широкое
применение в отечественной промышленности в 60-х годах. Это стало возможным
вследствие создания универсальной системы элементов промышленной пневмо-
автоматики (УСЭППА), которая по своим функциональным и монтажно-комму-
тационным данным близка к современной промышленной электротехнике. Но-
менклатура УСЭППА состоит из устройств центральной части, входных, выход-
ных, вспомогательных устройств и монтажно-коммутационных деталей.
Информация через входные устройства — от рабочих органов объекта и дат-
чиков, а также от устройств автоматического ввода программы — поступает
в центральную часть системы. Центральная часть перерабатывает эту информа-
цию и реализует заданную последовательность работы исполнительных механиз-
мов автоматизируемого объекта, выдавая им команды и информацию оператору
через выходные устройства. Номенклатура устройств УСЭППА является функ-
ционально полной, что позволяет реализовать на ее базе релейные, аналоговые
(непрерывные) и аналогово-релейные схемы.
Важной особенностью устройств УСЭППА является высокая унификация
деталей и стыковой монтаж элементов, при котором коммутация межэлементных
входов и выходов обеспечивается при помощи каналов, выполненных в платах.
В газовой промышленности широкое применение нашли элементы СКВ
Газприборавтоматики, которые обеспечивают надежную работу при температуре
окружающей среды от —40 до +50 °C и относительной влажности до 95% .
Из других устройств пневмоавтоматики среднего давления следует отметить
агрегатную унифицированную систему (АУС), АУС ЭДД Северодонецкого фи-
лиала ОКБА, системы ЦИКЛ, ПЭРА и пневматические устройства для автома-
тического измерения линейных размеров деталей завода «Калибр».
В ГДР изготовляют систему Дрелоба, которая по основным параметрам,
номенклатуре и функциональным возможностям является лучшей из устройств
пневмоавтоматики среднего давления в зарубежной промышленности.
Рассмотрим конструкции основных устройств пневмоавтоматики среднего
давления, используемых в системах управления отечественной промышленности.
8.1. ВХОДНЫЕ УСТРОЙСТВА
Входные устройства предназначены для ввода в систему управления внешних
заданий (команд), информации о состоянии и положении исполнительных меха-
низмов или рабочих органов объекта управления, о величине параметров кон-
тролируемых процессов и т. п. Ввод внешних заданий обеспечивается устрой-
ствами ручного или автоматического ввода информации. Внешние сигналы,
поступающие в систему в виде сигналов другого вида энергии, например элек-
трические, преобразовываются в пневматические сигналы с помощью соответству-
ющих преобразователей. Информация о состоянии параметров процесса и поло-
190
Рис. 8.1. Устройства ручного ввода информации:
а — пневмокиопка; б — пиевмотумблер; в — переключатель
жеиии исполнительных механизмов (сигналы обратной связи) поступает от ко-
нечных выключателей и датчиков. Преобразование аналоговых сигналов обрат-
ной связи в дискретные обеспечивается выключателями граничных значений
(реле давления, элементами сравнения и т. п.).
Устройства ручного и автоматического ввода информации. К устройствам
ручного ввода информации в УСЭППА относятся пневмокнопки и пневмотум-
блеры, обеспечивающие ввод в систему пневматических единичных или нулевых
сигналов кратковременных (с помощью пиевмокнопок) и длительных (с помощью
пневмотумблеров). Пневмокнопки и пневмотумблеры аналогичны по конструкции
и отличаются только исполнением нажимного органа, который обеспечивает
два положения распределительного элемента.
На рис. 8.1, а показана конструкция пневмокнопки, которая состоит из
корпуса 5, подвижного узла 4, пружины 6, клапана 2 и крышек 1 и 3. Между
корпусом 5 и крышкой 3 защемлена мембрана подвижного узла. Сжатый воздух
подводится в камеру А, которая в исходном положении не соединена с камерой
выхода Б. При нажатии на кнопку стержень подвижного узла разъединяет ка-
меры Б и В, открывает клапан 2 и соединяет систему с питанием через камеру Б.
При отпускании кнопки клапан под действием пружины закрывается, а воздух
из системы через камеры Б и В выходит в атмосферу.
Пневмотумблер (рис. 8.1, б) состоит из рычага 1, гайки 2, мембранного узла
3, пружины 4. клапана 5, корпуса 7, крышек 6 и 8. Детали мембранного узла 3
имеют каналы для соединения системы с атмосферой (когда на узел не воздей-
ствует рычаг /). Накидная гайка 2 предназначена для крепления тумблера на
панели. При переводе рычага 1 тумблера влево мембранный узел перемещается
вниз, открывая клапан 5. Сжатый воздух, подводимый в камеру А, поступает
в камеру Б и далее в систему. Перевод рычага тумблера в исходное положение
приводит к запиранию камеры питания и сообщению выхода, а следовательно,
и системы с атмосферой.
Для обеспечения последовательного включения групп каналов (одновремен-
ной подачи нескольких сигналов в систему) используют многопозиционные пере-
ключатели. В системе элементов СКВ Газприборавтоматикн эту роль выполняют
переключатели со сменными кулачками типов ПП-4 и ПП-5. На рис. 8.1, в изоб-
ражен переключатель типа ПП-4, который состоит из корпуса 3, конечных выклю-
чателей 2, валика 1, снабженного съемными кулачками, и рукоятки 4. Программа
замыкания контактов переключателя задается установкой кулачков соответству-
ющего профиля. Поворотом рукоятки на фиксированные позиции включаются
заданные контакты. Предусмотрена возможность установки кулачков с замыка-
нием контактов трех типов: в одном фиксированном положении рукоятки; в двух
соседних фиксированных положениях рукоятки; трех соседних фиксированных
191
Рис. 8.2. Командоаппарат с перфолентой и обратным контактным считыванием
положениях рукоятки. Таким образом, переключатель является малогабаритным
командоаппаратом с ручным приводом. Устройства автоматического ввода команд-
ных сигналов (командоаппараты) обеспечивают последовательный автоматический
ввод в систему управления программы, зафиксированный на программоносителе.
Командоаппараты различаются по характеру движения программоносителя,
типу программоносителя, способу управления командоаппаратом и др. (см.
стр. 283).
На рис. 8.2 показана конструктивная схема командоаппарата с перфолентой
и контактным способом считывания, используемого в системах среднего уровня
давления. Покадровое перемещение перфоленты осуществляется пневмоприводом
3 с зубчатым механизмом. В кадре может быть помещено информации до 200 бит
(8 дорожек и 25 строк), считываемой и вводимой одновременно в систему. Счи-
тывающее устройство состоит из неподвижной 1 и подвижной 2 головок, между
которыми проложена перфолента. При считывании подвижная головка переме-
щается и прижимает ленту к нижней головке. Сжатый воздух через дроссели 4
подводится к каналам нижней головки. При наличии отверстий в перфоленте
на выходах сигналы отсутствуют (обратный метод считывания).
Командоаппараты из универсальных блоков реализуются на базе логических
элементов. Каждому такту последовательности работы в командоаппаратах этого
типа соответствует универсальный блок, состоящий из элемента памяти и логи-
ческих элементов. Последовательное соединение блоков позволяет строить ч
командоаппарат на любое число выходов. В ка-
честве элементов памяти в командоаппаратах
применяют триггеры с раздельными вхо-
дами.
Функциональные схемы командоаппаратов
из универсальных блоков приведены в гл. 10,
с. 286, а реализация памяти на элементах
УСЭППА — с. 297.
Пневматические конечные выключатели обе-
спечивают контроль положения исполнитель-
ного механизма или рабочего органа машины и
выдают командный сигнал по достижении ими
заданного положения.
На рис. 8.3 представлена конструкция
одного из выключателей, входящих в систему
элементов СКВ Газприборавтоматика. Выклю-
чатель состоит из корпуса 1, клапана 2, пру-
жин 3, 4 и 10, штока 5, подвижного узла 9,
секций 6, 7 и 8. В подвижной узел входят
Рис. 8.3. Конечный выключите»
192
Рис. 8.4. Датчики температуры (а) и уровня жидкости (6)
две мембраны, соединенные жестким центром, имеющим канал, и защемленные
между секциями.
При подаче сжатого воздуха в камеру А на выходе сигнал отсутствует. Ме-
ханическое воздействие на шток 5 перемещает через пружину 4 подвижной узел,
который открывает клапан 2. На выходе (камера Б) появляется сигнал. При сня-
тии механического воздействия на шток подвижной узел возвращается в исходное
положение и выход сообщается с атмосферой. При подаче сжатого воздуха в ка-
меру В воздух через канал в подвижном узле поступает в камеру Б и к выходу.
Воздействие на шток приводит к перемещению мембранного узла и соединению
выхода с атмосферой. При снятии механического воздействия на шток на выходе
снова появляется сигнал. Пружина 4 обеспечивает дополнительный ход штока 5,
вследствие чего значительно снижаются требования к точности положения по-
движного элемента, воздействующего на шток 5.
Датчики и преобразователи. Втдискретных системах управления величины
параметров управляемого процесса контролируют с помощью датчиков, которые
преобразуют входной изменяющийся параметр (давление, температуру, уровень
жидкости и т. п.) в пневматический сигнал при достижении заданного значения
параметра. В качестве чувствительного элемента в датчиках используют мемб-
раны и сильфоны, нагруженные пружиной, а выходной элемент датчика обычно
строят на базе конечных выключателей, на которые воздействует чувствительный
элемент.
Датчик температуры типа РТП-1 (рис. 8.4, а) предназначен для выдачи
командного сигнала при достижении заданной температуры в контролируемой
среде. Принцип действия датчика основан на зависимости изменения давления
наполнителя, заключенного в термобаллоне 4, от изменения температуры контро-
лируемой среды. Давление в термобаллоне, дей-
ствующее на сильфон 3, уравновешивается пружи-
ной 2. При изменении температуры давление в тер-
мобаллоне также изменяется, что приводит к на-
рушению равновесия, и шток сильфона 3, действуя
на нажимной элемент переключателя 1, замыкает
или размыкает пневматический контакт датчика,
который подает сигнал на управление пневмореле.
Датчик температуры настраивают регулированием
Усилия пружины 2.
Датчики уровня жидкости по принципу дей-
ствия аналогичны датчикам давления мембран-
ного типа. Принцип действия их заключается
в следующем. При превышении заданного кон-
тролируемого уровня жидкости в баке 3 (рис. 8.4, б)
резинотканевая мембрана 2 прижимается к соплу 1,
что приводит к возрастанию давления в канале А
и появлению пневматического сигнала на выходе,
который затем усиливается и подается в систему.
Рис. 8.5. Электропиевмопре-
образователь
7 Е. В. Герц и др.
193
При понижении уровня жидкости мембрана отделяется от седла и канал пита-
ния сообщается с атмосферой, при этом пневматический сигнал на выходе исче-
зает. Обычно датчики уровня изготовляют с возможностью настройки на сра-
батывание при повышении или понижении контролируемого уровня жид-
кости .
Преобразование сигналов одного вида энергии в другой выполняется с по-
мощью различного вида преобразователей, например электропневмопреобразова-
телей. В корпусе 1 электропневмопреобразователя, входящего в УСЭППА
(рис. 8.5) расположен клапан 2, соединенный с якорем 6. В корпусе 1 и крышке 4
выполнены седла, которые перекрываются клапаном 2. В исходном положении,
когда катушка электромагнита обесточена, клапан 2 пружиной 3 прижат к седлу
корпуса 1 и сжатый воздух, подводимый к каналу в крышке 4, проходит в выход-
ной канал А. При подаче напряжения на электромагнит 5 якорь 6 перемещает
клапан до упора в седло крышки 4. Выходной канал А при этом через зазор между
корпусом 1 и штоком клапана сообщается с атмосферой.
8.2. УСТРОЙСТВА ЦЕНТРАЛЬНОЙ ЧАСТИ
Основным элементом дискретной части УСЭППА является трехмембранное реле,
предназначенное для выполнения логических и счетных операций с дискретными
сигналами.
Пневмореле типа П1Р.1 (рис. 8.6, а) и П1Р.З (рис. 8.6, б) состоит из двух
частей 1 и 5 корпуса, двух промежуточных секций 2 и 3 и мембранного узла 4,
состоящего из трех мембран, соединенных с помощью жесткого центра. Торцы
жесткого центра и сопла в корпусах 1 и' 5 образуют два пневматических контакта
типа сопло—заслонка. Реле П1Р.З отличается от реле П1Р.1 наличием пру-
жины 6, удерживающей мембранный блок в определенном положении, и поэтому
носит название «реле с фиксированным нулем». Мембранный блок реле П1Р.1
при отсутствии командных сигналов находится в неопределенном положении,
отчего реле носит название «реле с неопределенным нулем».
Сигналы команды в виде воздуха под давлением подаются в камеры А и £
реле П1Р.1 (см. рис. 8.6, а). Обычно один из сигналов поддерживается постоян-
ным (давление подпора), а другой принимает одно из двух дискретных значений
О или 1, соответствующих избыточному давлению 0 или 0,14 МПа. При подаче
командного сигнала в камеру А или Б мембранный блок под действием резуль-
тирующего усилия от давления подпора в одной камере и давления воздуха в дру-
гой перемещается вверх или вниз, открывая один контакт и закрывая другой.
Значение давления подпора выбирают в зависимости от условий работы:
если под действием подпора пневматический контакт должен быть закрыт, то
Рис. 8.Й. Пиевмореле П1Р.1 (а) и П1Р(3 1
194
Рис. 8.7. Логический элемент И
подпор устанавливают равным 0,6рпит, а если открыт-— 0,ЗрПит- В реле ГПР.З
(см. рнс. 8.6, б) одновременно могут подаваться два командных сигнала, так как
давление подпора в нем не требуется (роль подпора выполняет пружина).Схемы
реализации основных логических функций с помощью реле П1Р.1 и П1Р.З при-
ведены в п. 5, гл. 10.
Логический элемент (рис. 8.7) предназначен для реализации функции «конъ-
юнкция» (И) двух переменных. Элемент состоит из корпуса 1, двух одинаковых
резиновых дисков 2 и 6, штока 3 и пробок 4 и 5. При подаче сигнала в камеру А
резиновый диск перемещается вправо перекрывая выход воздуха в канал Б,
и одновременно шток 3 перемещает диск 6. Сжатый воздух, подаваемый в камеру
В по зазору между корпусом и диском, поступает в выходную камеру Б. Анало-
гично работает элемент при подаче сжатого воздуха в камеру В, а затем в ка-
меру А. Таким образом, выходной сигнал имеется лишь при наличии двух вход-
ных сигналов.
Клапан перекидной (логический элемент ИЛИ) системы элементов СКВ
Газприборавтоматика, предназначенный для реализации логической функции
ИЛИ, показан на рис. 8.8. Клапан состоит из корпуса 2, мембранного узла 3
и крышек 1 и 4. При подаче входного сигнала в камеру А или Б мембранный
узел перемещается вверх или вниз и уплотнениями на тарелках жесткого центра
перекрывает одно из сопел в корпусе 2. Через второе сопло сжатый воздух посту-
пает на выход клапана. При одновременной подаче двух входных сигналов мемб-
ранный блок находится в неопределенном положении, и на выход проходит один
входной сигнал или оба одновременно.
На рис. 8.9 приведена конструкция обратного клапана, состоящего из двух
частей 1 и 4 корпуса, мембранного узла 3 и пружины 2.
При наличии сжатого воздуха на входе мембранный узел преодолевает уси-
лие пружины, и воздух из камеры А через канал в мембранном узле проходит
в камеру Б. При подводе сжатого воздуха в обратном направлении, т. е. в ка-
меру Б, клапан мембранного узла плотно прижимается к уплотнению в корпусе 4,
перекрывая проход воздуха в камеру А.
8.3. ЭЛЕМЕНТЫ УСЭППА
НЕПРЕРЫВНО-ДИСКРЕТНОГО
ДЕЙСТВИЯ
Элементы этой группы предназначены для не-
прерывно-дискретных преобразований, алгеб-
раических и временных операций и ряда других
операций. Группа элементов непрерывно-дискрет-
ного действия состоит из двух- и четырехвхо-
Рис. 8.9. обратный клапан
7'
195
Рис. 8.10. Элемент типа П2ЭС.1:
а — конструкция; б, в — схема включения
в режимах сравнения и повторителя
довых усилителей (элементов сравнения), работающих в режиме сравнения
двух и более величии, повторителей, пневмосопротивлеинй (пневмодросселей)
и пиевмоемкостн.
Усилители. На рис. 8.10, а приведена конструкция усилителя, обеспечиваю-
щего сравнение двух непрерывных сигналов и получение на выходе дискретного
сигнала при рассогласовании сравниваемых давлений. Элемент состоит из двух
частей 3 и 7 корпуса, крышек 1 и 9, секций 5 и 6, мембранного узла 4. Мем-
бранный узел собран из трех резинотканевых мембран, связанных с жестким
центром, он имеет полированные торцы, которые вместе со втулками 2 и 8 обра-
зуют две пары контактов типа сопло — заслонка. Положение сопел регулируют
винтами 10 и 11, что обеспечивает высокую точность настройки.
По схеме сравнения давлений (рис. 8.10, б) сжатый воздух из сети поступает
в камеру А, а камера Г сообщается с атмосферой. Если давление в камере Б пре-
высит давление в камере В, то на выходе появится сигнал. Камеры А п Г имеют
внешнюю связь. Усилитель может быть включен также в режиме повто-
рителя (рис. 8.10, в).
На рис. 8.11 показана схема четырехвходового усилителя, обеспечивающего
сравнение четырех непрерывных сигналов ръ рг, рл и pt.
Повторители. Набор повторителей УСЭГША состоит из двух маломощных
и двух мощных (низкой и высокой точности) повторителей. Маломощный повтори-
тель П2П. 1 предназначен для выдачи мало-
Рис. 8.11. Схема четырехвходового
усилителя типа П2ЭС.З
мощного сигнала, равного по давлению вход-
ному сигналу. Повторитель П2П.1 (рнс.
8.12, а) состоит из корпуса 1, мембраны 2
(служащей заслонкой), выпускного сопла 3,
сообщающегося с атмосферой, и крышки 4.
Схема включения повторителя показана на
рис. 8.12, б. Входной сигнал поступает в ка-
меру А. При подаче в камеру Б через посто-
янный дроссель (конструктивно ие входящий
в П2П.1) сжатого воздуха в ней устанавли-
вается давление, равное давлению в камере А.
При изменении входного давления
равновесие мембраны нарушается, н она
устанавливается в новое положение равно-
весия, а избыток сжатого воздуха через
196
Рис. 8.12. Повторитель типа П2П.1:
а — конструкция; б — схема включения
зазор в паре сопло — заслонка сбрасывается в атмосферу. Мощный повтори-
тель-усилитель П2П.7 предназначен для усиления сигнала по мощности с коэф-
фициентом усиления по давлению, равным единице. Корпус повторителя П2П.7
(рис. 8.13) состоит из четырех частей 1, 2, 3 и 4, между которыми защемлены
две гибкие мембраны 9 и мембрана с жестким'центром 8. В части 1 корпуса смон-
тирован клапан шарикового типа, состоящий из седла 6, шарика 7 и пружины 5.
Сжатый воздух подается в камеру Е и через постоянный дроссель поступает в ка-
меру Г, управляющую набором выходного давления. Под действием давления на
входе в камеру Б мембраны 9 раздвигаются, перекрывая сопла в частях 2 и 4
корпуса. При этом давление в камере Г повышается, шариковый клапан откры-
вается и на выходе появляется сигнал. При повышении давления на выходе
верхняя мембрана 9 отжимается от сопла, открывая выход в атмосферу, и давле-
ние на выходе падает. Камера А сообщается с атмосферой, а камеры В и Д обра-
зуют проточную междроссельную камеру.
Дроссели (сопротивления). На рис. 8.14, а приведена конструктивная схема
постоянного дросселя, который состоит из корпуса 2 и винта 1 с капилляром 3.
Корпус и винт уплотнены резиновым кольцом 4. Дроссель снабжен фильтром тон-
кой очистки 5 для защиты капилляра от засорения.
На рис. 8.14, б показан регулируемый дроссель. Сжатый воздух поступает
в подмембраниую камеру и через регулируемый конический дроссель, состоящий
из иглы 3 и втулки 2, проходит в систему. Зазор (т. е. сопротивление) между иг-
лой 3 и втулкой 2 регулируют винтом 1. При ввинчивании винта зазор умепь-
Рис. 8.13. Повторитель-усилитель мощ-
ности типа П2П.7
Рис. 8.14. Дроссели: постоянный (а)
и регулируемый (б)
а)
197
Рис. 8.15. Пневмоемкость типа ПОЕ.50
шается (т. е. повышается сопротивление), при вы-
винчивании винта игла 3 под действием пружины 4
перемещается вверх, увеличивая зазор (т. е. умень-
шая сопротивление).
Пневмоемкость типа ПОЕ.50. Пневмоемкость при-
меняют в схемах автоматического управления для
регулирования постоянных времени в дифференциру-
ющих и интегрирующих приставках, инерционных
звеньях н т. п. Пневмоемкость (рис. 8.15) представляет
собой замкнутый объем, состоящий из двух стака-
нов, которые соединены между собой с помощью
резьбы на клею. В торце одного нз стаканов выпол-
нены отверстия для крепления пневмоемкости и под-
соединения ее к системе.
В табл. 8.1 приведены примеры реализации ряда алгебраических операций
на элементах УСЭППА [2].
8.4. ВЫХОДНЫЕ УСТРОЙСТВА
Выходные устройства предназначены для управления исполнительными меха-
низмами и выдачи сигнала о событиях, происходящих в системе управления.
К выходным устройствам в УСЭППА относятся усилители, пневмоэлектропре-
образователи, индикаторы давления и т. п.
Усилители. На рис. 8.16 приведена конструктивная схема усилителя типа
УП-2 СКВ Газприборавтоматики, предназначенного для управления потоком
газа высокого давления. Усилитель состоит из корпуса 1 с двумя седлами, кла-
пана 2, пружины 5, мембранного узла 3 и крышки 4.
Сжатый воздух подводится в камеру А. При подаче управляющего сигнала
в камеру Г клапан под действием усилия на мембранный узел 3 перемещается,
открывая выход сжатому воздуху из камеры А в канал Б. Снятие командного
сигнала приводит к возврату плапана 2 под действием пружины 5 в исходное
положение. Выходная линия через камеру В сообщается с атмосферой.
Пневмоэлектропреобразователи. На рис. 8.17 показан пневмоэлектрический
дискретный преобразователь П1ПР.4, входящий в УСЭППА, который состоит из
корпуса 7, крышки 3, мембраны 6, микропереключателя 1, смонтированного
на кронштейне 2, и гайки 4. С помощью гайки регулируют натяжение пружины 5,
определяющей давление, прн котором срабатывает микропереключатель. Прн
повышении давления мембрана, преодолевая сопротивление пружины, проги-
бается и толкателем переключает контакты микропереключателя, замыкая элек-
198
Таблица 8.1
Примеры выполнения алгебраических операций иа элементах УСЭППА
Операции Реализуемая формула Схема включения
Алгебраическое сум- мирование: иа дросселях иа дросселях с по- вторением на мембранном че- тырехвходовом усилителе р = felpl + k2pt k а • k - р 1 а + ₽ • а + Р — ft Г—' 1 ft
д / «|1| Л ф р
Р ~ Pl — Р2 + Рз л=_£1±р». • ft ь nWn р
РЛ> — р&—F I т р
Повторение давления и усиление расхода и МОЩНОСТИ р = Pi д>- уз у О Ре ~р
Умножение на посто- янный коэффициент: на двухвходовом усилителе с сумма- тором на дроссе- лях k > 1 на четырехвходо- вом усилителе с сумматором на дросселях + А if + r|w W ? -&1 'ИА ‘sAv т р
+ _ -и й|тв II -II + /Л ? Д Ys. у* П-Г-as- J р -
Р — (1 4 (Р1 — Рг) 4' Рз 1 JL = k- k > 1 ‘ а л р,ъ—а At> !=!~ Рз* г г Lbz р Z
Примечание. /? — коэффициент усиления; а, |3 — проводимость
дросселя.
199
Рис. 8.18. Реле указательное с запомина-
нием положения типа РУЗ-1
трическую цепь. При понижении дав-
ления мембрана под действием пру-
жины возвращается в исходное поло-
жение и контакты микропереключателя
размыкают электрическую цепь.
Индикаторы давления. Индикатор
ИП-1, входящий в УСЭППА, описан
в гл. 3. Реле указательное с запомина-
нием положения СКВ Газприборавто-
матика (рис. 8.18) состоит из кор-
пуса 10, ползуна 9, кнопки 3, мем-
бранного узла 8 со штоком, пружин 7
и 4, шторки 2, экрана 1, фигурной
пружинной скобы 5 и крышки 6. При
подаче сжатого воздуха на вход реле
мембранный узел 8 перемещается, вы-
зывая выход головки штока из рас-
ширения паза ползуна. Под действием
пружины 4 ползун перемещается вме-
сте со шторкой 2 вверх, выталкивая
в исходное положение. При перемеще-
прорезями на экране. На лицевой сто-
i одновременно кнопку 3 возврата шторки
нии шторки ее белые полосы совпадают с
роне реле появляются чередующиеся черные и белые полосы, сигнализируя о на-
личии давления. После снятия командного сигнала ползун удерживается в том
же положении — сигнал «запоминается». Для приведения реле в исходное поло-
жение следует нажать на кнопку 3. Тогда мембранный узел под действием воз-
вратной пружины вернется в исходное положение, а головка штока войдет в про-
резь на ползуне 9, удерживая экран во взведенном положении. Реле крепят на
щите фигурной пружинной скобой 5.
8.5. ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
К вспомогательным устройствам в УСЭППА относятся задатчики и фильтры.
Задатчики. Устройства этого типа предназначены для создания стабильного
давления, подаваемого в глухие камеры приборов. На рис. 8.19 приведена кон-
струкция маломощного задатчика, который состоит из корпуса 6, крышки 2,
мембранного узла 5, пружины 4, винта регулирования 1 и ползуна 3. Заданное
давление устанавливают винтом 1, при вращении которого изменяется натяжение
пружины 4. Мембранный узел устанавливается в положение равновесия при
выходном давлении, пропорциональном силе сжатия пружины. Для подачи
сигнала на значительное расстояние (до 150 м) в УСЭППА рекомендуется исполь-'
зовать мощный задатчик П23Д.4.
Рис. 8.20. Фильтр типа
ПОФЛ
Рис. 8.19. Задатчик мало-
мощный типа П23Д.З
200
Таблица 9.2
Техническая характеристика серийно выпускаемых элементов УСЭППА
Элемент (тип) Техническая характеристика Размеры, мм
Емкость постоянная (ПОР. 50) 7 = 50 см3, масса 140 г 0 40, h — 60
Сопротивление: постоянное (П-1127) регулируемое со шка- лой (П2Д.1) регулируемое без шкалы (П2Д.2) 0 0,18 мм ) , , t _ 0 0,3 мм ) * - 11>5 мм» масса 15 г • Шкала в относительных единицах; масса 208 г Масса 70 г 22X9X21 36 X 45 X 50 24X24X49
Делитель (П2С. 1) Сопротивление постоянное и регулируе- мое без шкалы; масса 120 г 30X30X 49
Делитель (П2С.2) Сопротивление постоянное и регулируемое со шкалой, оцифрованной в относительных единицах, масса 225 г 36X45X50
Усилитель: двухвходовой (П2ЭС.1) двухвходовой грубый (ПЭС.2) четыре.кв ходовой (П2ЭС.З) Наибольшая разность давления в момент срабатывания 5*Ю2 Па; гарантийное чи- сло срабатываний 200 000 в течение 18 мес, масса 300 г Наибольшая разность давления в момент срабатывания 2«108 Па; масса 100 г Наибольшая разность давления в момент срабатывания не более 1 • 10® Па; гаран- тийное число срабатываний 25 000 в тече- ние 18 мес, масса 340 г 40X 40X74 30X30X60 40X40X84
Повторитель: маломощный (П2П. 1) маломощный со сдви- гом (П2П.2) мощный грубый (П2П.З) мощный точный (П2П.7) Класс точности 0,25; масса 40 г Класс точности 1,0 при сдвиге =*= 17 • 10s Па, масса 75 г Основная погрешность не более 3%; мас- са 230 г Погрешность повторения сигнала гыэ,5% от рВх max*’ максимальный собственный расход воздуха 100 л/ч; масса 140 г 30X30X34 30X30X51 40 X40X27 40X40X34
Пневмореле: универсальное (ГИР.1) с пружиной (ГНР.З) без короткого замы- кания (РУГММ) Петля гистерезиса (0,33—0,14) *рпит; га- рантийное число срабатываний 2 • 10е; мас- са 60 г Петля гистерезиса (0,33 — 0,14) • РПЙТ, га- рантийное число срабатываний 2 • 10е; мас- са 90 г Гарантийное число срабатываний 10е, мас- са 100 г 30X30X35 30X30X41 30X30X40
Элемент ИЛИ (КЗК.5) Масса 20 г 20Х20Х 16
Пневмоклапан (ПЗК.1) Гарантийное число срабатываний 5-10е; масса 55 г 30X30X30
Пневмокнопка (П1КН.З) Масса 60 г 20 X 20X 44
Пневмотумблер (П1Т.2) Гарантийное число срабатываний 15 000, масса 45 г 20 X 20X 60
Пневмоэлектропреобразо- ватель (П1ПР.4) Ток постоянный (0,5 — 4) А; нагрузка оми- ческая, номинальное напряжение 30 В; гарантийное число срабатываний 2-105; масса 60 г 24X24 X43
Электропневмопраобразо- ватель (П1ПР.5) ДО Рабочее напряжение 24jjj В постоянного тока; сопротивление катушки 220 Ом; га- рантийное число срабатываний 2 • 105 40 X40X76
201
Продолжение табл. 8.2
Элемент (тнп) Техническая характеристика Размеры, мм
Задатчик: маломощный (П23Д.З) мощный (П23Д.4) Фильтр (П0Ф.2) Вентиль (П0В.1) Индикатор (ИП.1) Погрешность настройки не более =±=0,5% максимального выходного давления; мас- са 70 г Погрешность =±=0,5%; задатчик обеспечи- вает передачу сигнала на 150 м при диа- метре трассы 4 мм; масса 200 г Масса 37 г Масса 40 г 30X30 X 46 40X 40 X 117 24X20 ХЗО 24X24 X 46 0 24, h = 26
Примечание. Питание элементов — сжатый воздух р = 1,4• 105 Па
(± Ю %). Элементы работают при температуре окружающей среды, изменяю-
щейся от 4-10 до 4~50 °C, и относительной влажности до 80 %. Элементы пред-
назначены для стыкового монтажа и имеют унифицированный ключ. В элементах
непрерывного действия применяют резинотканевые мембраны толщиной б =
— 0,2 мм. релейного действия — б == 0,3 мм. Диаметр подводящих каналов у
большинства элементов 2 мм.
Таблица 8.3
Техническая характеристика приборов системы СТАРТ
Прибор Пределы измерения, настройка Расход воздуха, л/мин
Позиционный регулятор (ПР1.5) То же, с настраиваемой зоной чувствительности (ПР1.6) Пропорциональный регу- лятор (ПР2.5) Пропорционально-инте- гральный регулятор (ПР3.21, ПР3.22) Пропорционально-инте- гральный регулятор со- отношения (ПР3.23, IIP3.24) Прибор прямого предва- рения (11Ф2.1) Прибор обратного предва- рения (ПФ3.1) Пропорционально-инте- грально-дифференциаль- ный регулятор ПР3.25 Пропорциональный регу- лятор с линейной стати- ческой характеристикой (ПР2.8) Пропорционально-инте- гральный регулятор с ли- нейной статической ха- рактеристикой (ПР3.31) Порог чувствительности 0,2* 10Б Па Зона возврата (0,05=0,8) 106 Па Пределы пропорциональности 5 < б < < 3000 %, = 100/6. 0,03 < Кр < 20 Пределы пропорциональности 5 < б < < 3000 % Время интегрирования Ти = — 0,05=100 мин Предел пропорциональности 5 < 6 < < 3000 % Время интегрирования Ти = — 0,05-мОО мин Коэффициент соотношения от 1 : 1 до 1 : 10 Время предварения 7'Пр = 0,05-f-l0 мин Время предварения TQ пр = 0,05=10 мин Пределы пропорциональности 5 < б < < 3000 %. Время интегрирования Ти = = 0,5—100 мин. Время предварения Trip — 0.05-г-Ю мин Предел пропорциональности 2 < 6 < < 100 % и 100 % < б < 3000 %. Нели- нейность статиче скнх характеристик — 1 % при 6 = 100 % н ±3 % при дру- гих значениях 6; 0,03 < Кр < 50 Предел пропорциональности 2 < 6 < <100 % и 100 % <6 < 3000 %. Время интегрирования Ти = 0,05=100 мин. Не- линейность статических характеристик — 1 % при 6 = 100 % и ==3 % при дру- гих значениях 6 3,0 4,2 3,6 4,0; 5,0 4,0; 5,0 2,0 1,8 5,0 7,0 7,0
202
Продолжение табл. 8.3
Прибор Пределы измерения, настройка Расход воздуха, л/мин
Автоматический оптими- затор с запоминанием максимума (АРС-2-0) Автоматический шаговый оптимизатор (АРС-2-ОИ) Автоматический шаговый оптимизатор с недоходом до максимума (минимума) (АРС-1-ОН) Прибор простейших алгебраических операций (ПФ1.1) Прибор селактирования (ПФ4/5.1) Прибор ограничения (ПП11.1) Прибор умножения на постоянный коэффициент (ПФ1.9) Прибор извлечения квад- ратного корня ПФ1.17 Усилитель ( ПП1.5) Интегрирующий прибор (ПВ9.4П) Многоточечные обегаю- щие устройства с уско- рителем приема сигнала (УМО-8, УМО-16, БП-8) Пневматическая релейная управляющая машина РУМП Показывающий прибор (ПВ1.3, ПВ2.2) Показывающий прибор с датчиком (ПВ2.3) То же, со станцией управления (ПВ3.2) Прибор контроля: ПВ4.2П (Э) ПВ4.3П (Э) То же со станцией управления (ПВЮ.1П(Э) Зона нечувствительности б = 1,5-103± -4-6 • 103 Па. Время задержки импульса ре- верса 1 с — 30 мин; скорость поиска 2-102—6* 10* Па/мии Зона нечувствительности 6 = 1,5’10s— 6’103 Па. Диапазон длительности импуль- сов 1—60 мин; диапазон длительности сравнения 5—60 с. Приращение выходно- го давления за один шаг 2 • 103 —15 103 Па Зона нечувствительности 61 — 1,5 НО3 — 6-Ю3 Па; зона нечувствительности 62 = — 1-Ю3—6-Ю3 Па. Диапазон длитель- ности импульсов 1—60 мин; диапазон дли- тельности периода сравнения 10 — 60 с. Приращение давления за один шаг 2 103 — 15-103 Па Производная постоянная ±(0 —103) Па Ограничения по максимуму (0,5—1,0) X X 105 Па; ограничения по минимуму (0,7 —0,2) 10б Па Коэффициент усиления /< -- 0,2 — 0,95; 1,05 — 5,0 Диапазон входных сигналов (0,3—1) X X 105 Па; 0,3-Ю® < pt < 0,9-Ю6 Па; 0,2-Ю5 < р2 < 1,0 • 105 Па Время шага импульса от 30 до 300 с Число тактов 12; число рабочих каналов в такте 1 — 12: продолжительность тактов от 10 — 12 с до 2 ч Зона чувствительности сигнального уст- ройства (0,04 — 0,8) 106 Па 8,0 10 15 ' 3,6 5,0 3,6 9,0 3,6 1,8 7,2 5 (10)4-2 65 2,4 6,0 3,0 4.2 4.0 (2,0) 4.2 (2,4) 6,0 (4.0)
Примечание. Приборы питаются сжатым воздухом давлением 1,4-16& Па ±10 %. Непрерывным сигналам соответствует давление, изменяю- щееся в диапазоне 2-Ю4 —1-105 Па. Дискретным двоичным сигналам со значе- ниями 0 н 1 соответствуют два уровня давления 0 н Рпнт. Приборы работают при температуре окружающей среды, изменяющейся от 4-5 до 4-50 °C. и относитель- ной влажности до 80 %. Привод диаграммы вторичных приборов от синхронного двигателя СД, напряжение 127/220 В. Скорость движения диаграммы 20 мм/ч. Вторичные приборы выпускают в прямоугольном корпусе с размером по фасаду 160x 200 мм. Погрешность всех приборов (кроме ПР1.6 и ПП1.5, для которых погрешность ±1,5%) составляет ±1 % при / — 20±5 °C.
203
Фильтры. В УСЭППА фильтры обеспечивают очистку сжатого воздуха иа
отдельных линиях пневматической системы. На рис. 8.20 показан фильтр П0Ф.2,
который состоит из корпуса 2, сменных войлочных дисков 3 и винта 1. Сжатый
воздух, подаваемый к входному штуцеру, проходит через войлочные диски 3,
очищается от загрязнений и поступает к выходному штуцеру. К. недостаткам
указанного фильтра следует отнести низкую эффективность и пылеемкость, а
также значительное сопротивление.
В комплект монтажных деталей УСЭППА входят различные типы штуцеров,
соединительных трубок, заглушек, прокладок и уплотнительных колец. Техни-
ческие характеристики серийно выпускаемых элементов УСЭППА и типовых
приборов системы СТАРТ приведены в табл. 8.2 и 8.3 [5].
Подробные сведения об устройстве УСЭППА, схемах типовых узлов, при-
боров и систе?л пневмоавтоматики, а также о современных методах построения
различных систем управления в промышленности на базе устройств среднего
уровня давления можно найти в работах [1—4].
8.6. АГРЕГАТНО-МОДУЛЬНАЯ СИСТЕМА СРЕДСТВ
ЦИКЛИЧЕСКОЙ АВТОМАТИКИ ЦИКЛ
Система ЦИКЛ разработана институтом проблем управления (автоматики
и телемеханики) и заводом «Тизприбор». Аппаратурно-элементная база системы
ЦИКЛ состоит из логических струйных модулей, работающих в пассивном ре-
жиме, и из активных мембранных элементов (усилителей), которые служат для
повышения уровня сигналов.
Входные сигналы логических ячеек имеют стандартный уровень давления —
0 либо (1,4+ 0,2) 10» Па. Так как для уменьшения расхода воздуха давление
в самих струйных элементах существенно ниже стандартного уровня, то на вхо-
дах в ячейки для понижения давления устанавливают нормализующие пневмо-
сопротивления. Уровень выходных сигналов струйных модулей должен быть
не ниже 3000 Па. Эти сигналы усиливаются по давлению (до стандартного уровня)
и по мощности.
Набор пассивных логических элементов и принципиальные схемы усилите-
лей мощности и давления, применяемых в струйно-мембранной технике, при-
ведены на рис. 8.21 [1]. Элемент, представленный на рис. 8.21, а, реализует
логическую функцию И. На рис. 8.21, б приведен элемент, реализующий логи-
ческую функцию ЗАПРЕТ, а на рис. 8.21, в— функцию ИЛИ.
Рис. 8.21. Схемы струй-
ных логических элемен-
тов и усилителей мощ-
ности и давления:
а, б, в — элементы, реа-
лизующие функции И,
ЗАПРЕТ, ИЛИ; г, д —
усилители, работающие
по схеме повторения и
отрицания
0)
204
Представленный на рис. 8.21, г усилитель работает по схеме повторения.
При подаче на вход 1 усилителя сигнала низкого давления, с выхода 2 снимается
сигнал, усиленный по мощности и давлению. Давление питания, равное (1,4 ±
± 0,2) 103 Па, подается через входы 3 и 4 соответственно к первому и второму
каскаду усилителя. При сообщении входа 1 усилителя с атмосферой, давление
в проточной камере 5 из-за наличия сопротивления 6, близко к нулю. В этом слу-
чае жесткий центр 7 под действием давления сжатого воздуха и пружины 8 за-
нимает верхнее положение, перекрывая сопло 9 и открывая сопло 10. При этом
выход 2 сообщается с атмосферой. При подаче на вход 1 сигнала низкого давления
мембрана 11 перемещается вниз и закрывает сопло 12. Давление в камере 5 воз-
растает, и жесткий центр- перемещается вниз, перекрывая сопло 10 и открывая
сопло 9. На выход 2 поступает сигнал стандартного уровня давления.
Представленный на рис. 8.21, д усилитель, работающий по схеме отрицания,
отличается расположением сопел на втором каскаде усиления (они расположены
навстречу друг другу). При отсутствии давления на входе 1 жесткий центр 7
занимает верхнее положение и выход 2 сообщается с питанием через вход 4.
Подача на вход сигнала низкого давления приводит к перемещению жесткого
центра 7 вниз, что вызывает отсечение выхода от питания и сообщение его с атмо-
сферой.
Система ЦИКЛ состоит из восьми функциональных блоков.
1. Блок командно-циклический предназначен для реализации циклических
последовательностей, содержащих до восьми тактов. Более сложные схемы ком-
плектуют из нескольких блоков.
2. Блок обегания предназначен для преобразования последовательности им-
пульсов в восьмиразрядное число в унитарном коде. Разрядность увеличивается
в результате последовательного или каскадного соединения нескольких блоков.
3. Блок матрица предназначен для записи, хранения и выдачи восьми чисел,
каждое из которых содержит восемь двоичных разрядов.
4. Блок отсчета времени предназначен для реализации четырех временных
задержек.
5. Блок дешифратор предназначен для преобразования четырехразрядного
числа в двоичном коде в унитарный код.
6. Блок универсальной логики предназначен для реализации восьми логи-
ческих функций различной сложности; комплектуется восемью типовыми струй-
ными модулями в любом сочетании.
7. Блок усилителей предназначен для реализации 16 двухвходовых логи-
ческих функций (ДА, НЕ, И, ЗАПРЕТ).
8. Блок усилителей вспомогательного назначения используют для усиления
пневматических сигналов по мощности в 16 каналах. Возможно инвертирование
сигнала по любому каналу.
К достоинствам системы ЦИКЛ необходимо отнести: относительно низкие
требования к характеристикам струйных элементов; возможность применения
стандартных датчиков, кнопок, тумблеров, аналоговой ветви УСЭППА и испол-
нительных механизмов, работающих на стандартном уровне пневмоавтоматики;
возможность применения агрегатно-модульного принципа построения систем
управления циклическими процессами из типовых модулей.
К недостаткам струйно-мембранной техники системы ЦИКЛ следует отнести:
повышенный расход воздуха по сравнению с мембранной релейной техникой;
низкое быстродействие по сравнению со струйной техникой и некоторую избы-
точность при построении ряда схем.
СПИСОК ЛИТЕРАТУРЫ
I. Агрегатное построение пневматических систем управления/ С. А. Юдицхий,
А. А. Тагаевская, Т. К. Ефремова н др. М.: Энергия, 1973. 112 с.
2. Дмитриев В. Н., Градецкий В. Г. Основы пневмоавтоматики. М.: Машинострое-
ние, 1973. 360 с.
3. Пневмоавтоматика. Под ред. А. А. Таля. М.: Наука, 1974. 241 с.
4. Построение дискретных управляющих устройств на базе аппаратуры ЦИКЛ/
т. К. Берендс. Т. К- Ефремова, А. А. Тагаевская и др. М.: 1973. 101 с. (Ин-т проблем
управления).
5. Элементы и схемы пневмоавтоматики/Т. К. Берендс, Т. К- Ефремова, А. А. Та-
гаевская, С. А. Юдицкий. М..^Машиностроение, 1976. 246 с.
Глава 9
ЭЛЕМЕНТЫ И УСТРОЙСТВА
СТРУЙНОЙ ТЕХНИКИ
9.1. СТРУЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В настоящее время во многих областях техники используют струйные системы
управления (СУ). Появление струйной пневмоавтоматики, быстродействие эле-
ментов которой превышает быстродействие пневматических элементов с подвиж-
ными частями и электромагнитных релейных элементов, определило дальнейшее
расширение областей применения элементов и устройств пневмоавтома-
тики.
Высокое быстродействие, надежность и малые размеры струйных элементов
позволяют строить сложные комбинационные и цифровые устройства для управ-
ления станками, промышленными роботами и другими машинами.
Простота конструкции элементов, возможность изготовления их методом
печатных плат из различных материалов, способность работы струйных СУ
в условиях радиации, электромагнитных полей, вибрационных и ударных на-
грузок, высоких и низких температур, а также в пожаро- и взрывоопасных
условиях, отсутствие движущихся механических частей и возможность широкого
выбора материалов для изготовления струйных элементов — все это приводит
практически к неограниченно,му сроку службы струйных устройств и их ши-
рокому применению.
Для питания струйных элементов используют промышленную воду, мине-
ральные масла, выхлопные газы двигателей. Однако наибольшее распростра-
нение получили пневматические струйные элементы, что связано с рядом пре-
имуществ, получаемых при использовании воздуха в качестве рабочей среды.
В разработке и использовании струйных элементов и СУ в народном хозяй-
стве СССР достигнуты значительные успехи. Областями применения струйной
автоматики являются машиностроение, энергетика, нефтехимия, горнорудная,
деревообрабатывающая и легкая промышленности и другие отрасли народного
хозяйства. Особенно высокий экономический эффект (по сравнению с электри-
ческими и другими системами управления) обеспечивается при использовании
струйных систем для управления машинами, работающими в пожаро- и взрыво-
опасных условиях и при наличии электромагнитных и радиационных полей.
В станкостроении струйные системы целесообразно применять для управ-
ления стайками, промышленными роботами, в которых в большей степени ис-
пользуются пневматические и гидравлические исполнительные механизмы.
В этом случае эффект достигается в результате упрощения обслуживания, сок-
ращения простоев и увеличения надежности. Использование струйной авто-
матики целесообразно также в станках, прессах и промышленных роботах с на-
пряженным циклом.
В США фирмы SPEEDFAM и BURDON'S & OLIVER выпускают станки со
струйными системами управления. В Италии струйные элементы фирмы IMPER-
IAL—RIV используют в автомобилестроительной промышленности, и в част-
ности в системах контроля на ВАЗе в г. Тольятти. В Японии струйные СУ при-
меняют в станкостроении, роботостроении, судостроении, рыболовстве и дру-
гих областях.
206
Высокая надежность и низкая стоимость струйных логических элементов
определяют их широкое использование для построения сложных управляющих
устройств, содержащих сотни и тысячи логических элементов.
Ниже описан накопленный волжским филиалом ВНИИАШ значительный
опыт по созданию и промышленному применению элементов и устройств струй-
ной пневмоавтоматики, а также приведены данные о внешних и других устрой-
ствах струйной автоматики, разработанных ЭНИМСом, ВНИИГидроприводом
и другими организациями.
Принцип действия основных элементов систем управления. В элементах
струйных СУ используются в основном следующие гидромеханические явления:
1) изменение сопротивления истечению потока из канала (на рис. 9.1, а
показан элемент типа сопло-заслонка, у которого выходное давление р& увели-
чивается при уменьшении зазора s л уменьшается при увеличении зазора);
2) силовое воздействие рабочей среды (воздуха) на твердое тело, например
на мембрану, поршень и др. (на рис. 9.1, б), сигнал рУПР) поступающий с выхода
струйного логического элемента на вход усилителя мощности, воздействует
иа верхнюю управляющую мембрану, заставляя ее прикрыть сопло; в резуль-
тате давление в полости иад нижней (силовой) мембраной возрастает и обеспе-
чивает переключение клапана усилителя; иа выход рв поступает сжатый воздух
высокого давления;
207
3) прерывание струи (этот способ используется в элементах типа сопло—
приемный канал, в элементах с встречными потоками; в путевом струйном вы-
ключателе, схема которого приведена на рис. 9.1, в, выходной сигнал рв ста-
новится равным нулю, когда заслонка прерывает струю; в выключателе, при-
веденном на рис. 9.1, а, соударение встречных питающих потоков воздуха под
давлением рп препятствует засорению выходных отверстий и паза выключателя
твердыми частицами; когда заслонка опускается, соударение встречных потоков
прекращается, давление рв на выходе выключателя понижается, в результате
чего переключается присоединенный струйный логический элемент; при отводе ф
заслонки в исходное положение давление рв повышается и элемент переключается
в первоначальное состояние);
4) создание потоков в результате соударения истекающих струй и потоков
(используется в струйных измерительных кольцевых датчиках (рис. 9.1,5) и
элементах с несколькими соударяющимися под углом струями);
5) изменение режима течения среды (имеет место в акустических элементах
и турбулентных усилителях; при отсутствии управляющего сигнала ру у турбу-
летного усилителя, приведенного на рис. 9.1, е, ламинарная струя под давлением
питания рп обеспечивает на выходе сигнал рв, поступающий на вход струйного
дискретного или аналогового элемента; при наличии управляющего сигнала ру
ламинарная струя турбулизуется и сигнал рв становится равным нулю);
6) отклонение струи вследствие соударения струй (рис. 9.1, ж) и в резуль-
тате притяжения струи к стенке (см. рис. 9.1, з, и).
Часто в одном и том же элементе струйной СУ используются несколько
гидромеханических явлений. В путевом выключателе (рис. 9.1, к), например,
используются эффекты соударения струй и прерывания струи твердым телом.
Рабочий процесс струйных логических элементов системы «Волга» основан на
эффектах соударения струй, притяжения струи к твердой стенке и внутренней
обратной связи.
. Принципы действия струйных дискретных и аналоговых элементов «Волга».
Картина течений в рабочей камере струйного дискретного элемента изображена
на рис. 9.2, а. Силовая струя, вытекая из канала питания 3 в камеру элемента,
ограниченную стенками 1 и 2, эжектирует среду из окружающего пространства,
поэтому в зоне между силовой струей и стенками давление ниже атмосферного.
Положение струп становится неустойчивым и струя отклоняется к одной из1
стенок. При этом пространство для прохода эжектируемой среды по одну сто-
рону от силовой струи уменьшается. Давление с этой стороны струи падает, что
приводит к увеличению кривизны струи. Процесс искривления струи нарастает
лавинообразно до тех пор, пока струя не притянется к стенке 1. Давление рг
в полости у стенки 1 уменьшается, а давление р2 в полости у стенки 2
возрастает и струя удерживается у стенки 1 за счет поперечного перепада
давлений /\р = р2 — рг. При этом часть силовой струи, называемая отражен-
ным потоком, отсекается дефлектором 4 и направляется в область между
струей и стенкой 2, в результате чего со стороны стенки 2 давление достигает
величины, равной Pj + Ро. с, где р0. с—давление потока обратной связи,
определяемое величиной отраженного потока и геометрическими параметрами
камеры элемента.
Увеличение расхода воздуха, подаваемого в управляющий канал 5, приводит
к отклонению струи в сторону стенки 2. При этом отсекаемая дефлектором 4
208
часть струи растет, что приводит к увеличению в полости у стеики 2 давления,
препятствующего отклонению струи, т. е. возникает отрицательная обратная
связь. Этот процесс продолжается до тех пор, пока не будет достигнуто крити-
ческое взаимное положение струи и разделителя, при котором изменится режим
обтекания дефлектора. При этом возникает отраженный поток с противополож-
ной стороны дефлектора, обратная связь становится положительной и процесс
переключения струи к стенке 2 происходит лавинообразно. Аналогично проте-
кает процесс переключения струи от стенки 2 к стенке 1. Давления в управляю-
щем канале, при которых происходит смена режимов обтекания дефлектора и
переключение струи, называют давлением срабатывания и давлением отпускания.
Работа струйных аналоговых усилителей основана на соударении управ-
ляющей и силовой струй, направленных под углом друг к другу. В результате
их соударения возникает результирующий поток, направление которого не
совпадает с направлением взаимодействующих струй. Для двух струй, соуда-
ряющихся под прямым углом (рис. 9.2, б) угол отклонения а результирующего
потока в первом приближении
22 Рубу
tg « = — - У-ТУ- ,
2 1 Рп®п
где Jlt J2 — количества движения соударяющихся струй, ру и рп — давление
в управляющем и питающем каналах; Ьу и 6П — ширина управляющего и пи-
тающего каналов.
Требования, предъявляемые к элементам струйной техники. Для характери-
стики элементов струйной техники основными являются следующие показа-
тели: быстродействие; потребляемая мощность; логические возможности; поме-
хоустойчивость; надежность; температурный диапазон; стоимость.
Хорошие значения этих показателей у элементов струйной техники делают
целесообразным применение струпных систем управления для автоматизации
в различных отраслях народного хозяйства, в том числе и в машиностроении.
Конструктивное оформление. В связи с тем, что функции и области приме-
нения струйных систем управления различны, к настоящему времени выявлено
несколько видов конструктивного оформления струйных элементов.
1. Функциональные модули, предназначенные для построения вычисли-
тельных устройств, представляют собой платы, на которых выполнены несколько
(два и более) логических элементов и коммуникационные каналы. Такое конструк-
тивное решение обеспечивает максимальную плотность монтажа, т. е. наиболь-
шее число элементов на единицу объема устройства.
2. Струйные элементы, предназначенные для сборки в пакеты. Плотность
монтажа ниже, чем в первом случае, поскольку на каждой функциональной плате
выполнен только один элемент.
3. Струйные элементы и модули, имеющие штуцеры и предназначенные для
монтажа как гибкими шлангами, так и с помощью печатных плат. Преимущества
таких элементов — простота технологического процесса их производства и,
простота обслуживания построенных на их базе струйных СУ. Элементы данного
типа являются основными в комплексе струйных элементов «Волга».
Характеристики. Работу струйных дискретных и аналоговых элементов,
а также внешних устройств струйной техники оценивают с помощью статических
и динамических характеристик.
К статическим характеристикам относятся:
входная (рис. 9.3, а), представляющая собой зависимость входного рас-
хода Qy от входного давления ру в управляющем канале; входная характери-
стика позволяет оценить входные расходы элемента при различных режимах
его работы и, следовательно, дает возможность правильно согласовать источник
сигнала (струйный путевой выключатель, струйный элемент и др.) с управляю-
щими входами элементов;
выходная (рис. 9.3, б), представляющая собой зависимость расхода QB
в выходном канале от давления рв в этом же канале; по выходной характери-
стике определяют нагрузочную способность элемента (датчика, путевого выклю-
чателя и т. п.) при работе его с логическими элементами или другими устрой-
ствами;
209
Рис. 9.3. Характеристики дискретных элементов
характеристика переключения (рис. 9.3, в), представляющая собой зави-
симость давления (расхода) на выходе элемента от давления (расхода) на любом ,
из его входов. По характеристике переключения определяют порог срабатыва-
ния элементов, помехоустойчивость при их совместной работе.
На рис. 9.3, г приведена схема для снятия динамических характеристик
элемента, к которым, в частности, относится показанная на рис. 9.3, д зави-
симость пропускаемой частоты от давления на входе. Это давление зависит от <.
нагрузки, т. е. от числа элементов, подключенных к выходу элемента, и от со-
противления линий связи.
Работа аналоговых усилителей описывается статической характеристикой
(рис. 9.4, а, б), которая показывает зависимость разности давлений на выходах
от разности давлений на управляющих входах . Отношение
Руз Ру1 “Ру
Рис* 9в4. Характеристики аналоговых усилителей
210
А,
Л
0,7
0,0
0,5
0,0
Ц5
о.о
VI
Ф
V/ 0,2
Pi,
Л
разности выходных давлений к разности давлений управления называется ко-
эффициентом усиления по давлению. Введение отрицательной обратной связи
в аналоговом усилителе обеспечивает его работу в релейном режиме. Харак-
теристика переключения и схема релейного усилителя, который часто называют
триггером Шмитта, показаны на рис. 9.4, в, г.
Быстродействие. Основным показателем быстродействия струйного эле-
мента считают среднее время задержки распространения сигнала на один эле-
мент при его включении и отключении, иначе говоря время от момента подачи
сигнала «1» на вход до момента, когда выходной сигнал достигнет значения «1».
Быстродействие устройств оценивается временем задержки и информации как
в элементах, так и в линиях связи, а быстродействие счетных триггеров опре-
деляется максимальной частотой счета входных импульсов.
Наибольшее быстродействие имеют струйные элементы, построенные с ис-
пользованием соударения струй: эффекта Коанда и эффекта внутренней обрат-
ной связи. У турбулентных усилителей быстродействие ниже. Обычно время
переключения струйных логических элементов не превышает одной миллисе-
кунды и зависит от геометрических размеров струйных элементов, давления пи-
тания и других факторов.
Потребляемая мощность. Мощность, потребляемая одним струйным элемен-
том, мала и обычно не превышает сотых или десятых долей ватта. Однако при
построении больших управляющих устройств потребляемая мощность может
оказаться значительной. Поэтому комплекс элементов «Волга» имеет в своей но-
менклатуре как элементы большого размера, предназначенные для построения
несложных устройств струйной автоматики, так и элементы малого размера с ма-
лой потребляемой мощностью для более сложных управляющих устройств.
Элементы первого типа отличаются большим сечением питающего и других кана-
лов и поэтому они менее требовательны к очистке питающей среды.
Уменьшение мощности, потребляемой элементами, достигается: снижением
уровня давления питания струйных элементов при оптимальных проходных се-
чениях каналов; у элементов «Волга» минимальное давление питания равно 1,5—
2 кПа; уменьшением проходного сечения канала питания струйных элементов;
приемлемое минимальное сечение канала питания зависит как от технологиче-
ских возможностей, так и от условий работы управляющих устройств (от сте-
пени очистки питающей среды и ряда других факторов); кроме того, снижение
потребляемой мощности может быть обеспечено при проектировании управляю-
щего устройства путем определения минимального числа логических и других
элементов, входящих в управляющее устройство, и выбора рационального источ-
ника питания.
Для струйных СУ с большим числом элементов чаще всего наиболее эконо-
мичным источником питания является вентилятор. Но в качестве источника
питания сети низкого давления можно использовать и обычную заводскую сеть
сжатого воздуха. В этом случае необходимо обеспечить хорошую очистку воз-
духа от влаги и механических частиц, а также использовать эжекторы, которые
за счет подсоса воздуха из окружающей среды (точнее из выхлопного коллектора
струйного управляющего устройства) позволяют существенно уменьшить потреб-
ление сжатого воздуха.
Логические возможности для систем струйных элементов определяются сле-
дующими показателями: числом входов; нагрузочной способностью; наличием
двух взаимно инверсных выходов, что позволяет снимать одновременно как
прямое, так и инверсное значение логической функции; числом логических функ-
ций, реализуемых одним элементом; возможностью объединения элементов в схемы
для реализации различных логических функций и цифровых устройств; совме-
стимостью по уровням сигналов с другими системами элементов; наличием эле-
ментов, способных работать при длинных линиях связи, наличием индикатор-
ных и других устройств.
У системы струйных элементов «Волга» все перечисленные показатели на-
ходятся на современном уровне.
Помехоустойчивость характеризует максимально допустимые давление
помехи на входе, при которых не нарушается работа элемента (не происходит
изменение состояния элемента). Причинами возникновения давления помех
211
в струйных системах управления являются остаточные давления на выходах и
входах логических элементов, выходах внешних устройств, перетечки в комму-
никационных платах и др. Помехи могут возникать и при совместной работе
элементов в схемах, что связано с некоторыми особенностями рабочего процесса,
протекающего в струйных элементах. Величина давления помех должна быть
обязательно ниже величины давления отпускания струйного моностабильного
(имеющего одно устойчивое состояние) элемента. Наряду с помехами большой
длительности (когда время действия помех больше времени переключения эле-
мента) при соединении элементов в схемы возможно также возникновение помех,
время действия которых равно или меньше времени переключения элемента.
Струйные элементы с невысоким быстродействием менее подвержены влиянию
таких помех.
В системе струйных элементов «Волга» приняты все меры по устранению
причин, приводящих к возникновению помех при соединении элементов в схемы.
В струйных элементах «Волга» отсутствуют остаточные давления на выходах и
сведены к минимуму остаточные давления на входах, которые являются одной
из основных причин, определяющих величину помех. Помехи от входных устройств
чаще всего являются следствием низкого качества изготовления или неправиль-
ной эксплуатации их (например, когда заслонка конечного выключателя непол-
ностью перекрывает струю).
Температурный диапазон. Исследования показали, что в зависимости от
материала, из которого изготовлены струйные элементы, они могут успешно
работать при температуре окружающей среды от —100 °C до +1000 °C и более.
Температурный диапазон работы элементов «Волга», изготовляемых из ударо-
прочного полистирола, лежит в пределах —20 ч—р50 °C. При изготовлении эле-
ментов из полиамида или стеклонаполненного полистирола диапазон шире —50<
<+50 °C.
Долговечность струйных элементов целиком определяется долговечностью
материалов, из которых они изготовлены. В процессе работы элементы никаким
механическим нагрузкам не подвергаются. Из принципа работы элемента сле-
дует, что число переключений не может оказать какого-либо влияния на его
долговечность. Авторам известны пластмассовые струйные элементы, сохранив-
шие работоспособность после 12 лет непрерывной работы. Поэтому можно ут-
верждать, что элементы, изготовленные из коррозионно-стойкой стали или из
керамики, будут иметь практически неограниченную долговечность.
Надежность струйных управляющих устройств определяется надежностью
не только струйных логических элементов, но и внешних устройств, элементов
монтажа и др. Таким образом, надежность устройств в целом будет зависеть от
его сложности, качества изготовления, подготовки питающей среды и других
факторов.
Структура струйной системы управления, как правило, не отличается
от структуры систем, реализованных на базе других технических средств. В со-
став системы входят управляющее устройство, состоящее из струйных логиче-
ских элементов и элементов монтажа (монтажных блоков, трубопроводов, ар-
матуры), а также внешние устройства, к которым относятся: источник питания;
элементы ввода информации (путевые выключатели, датчики и другие устройства
контроля технологических операций, аппаратура ручного управления, устрой-
ства задания программы и др.); входные н выходные преобразователи одного
вида энергии в другой; усилители мощности; индикаторы.
Таким образом, струйная СУ представляет собой комплекс, состоящий из
управляющего устройства и внешних устройств.
9.2. ЭЛЕМЕНТЫ И КОНСТРУКЦИЯ
УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Струйные дискретные и аналоговые элементы. Элементы комплекса «Волга»
предназначены для построения логических и цифровых устройств струйных си-
стем циклового и числового программного управления станками, промышленными
роботами и другим оборудованием, а также для построения систем контроля и
212
Рис. 9.5. Рабочий профиль струйно-
го дискретного элемента
воздуха проходит в выходной
автоматического регулирования. Наиболь-
шее применение нашли струйные элементы
однотипной конструкции двух размеров.
Элементы первого (большого) размера имеют
площадь сечения канала питания 1 мм2, эле-
менты второго (малого) размера 0,25 мм2.
Общим для элементов обоих размеров яв-
ляется то, что монтируют их в управля-
ющих устройствах способом штекерного
разъема. Базовым для элементов большего
размера является элемент ИЛИ—НЕ ИЛИ,
типа СТ41, а для элементов малого раз-
мера — элемент ИЛИ—НЕ ИЛИ типа СТ55.
На рис. 9.5 показан рабочий профиль
элемента типа СТ41. Как и у других элемен-
тов большого размера, глубина этого про-
филя равна 1,3 мм. У элементов малого
размера глубина профиля равна 0,7 мм. Струя
воздуха, вытекающая из канала питания 1
при отсутствии управляющих сигналов в ка-
налах 2, 3 и 6 примыкает к стенке а и идет
в выходной канал 4. При наличии управ-
ляющих сигналов в канале 2 или 3 (или
в обоих одновременно) струя питающего воз-
духа отклоняется к стенке б и идет в вы-
ходной канал 5. При одновременной подаче
управляющего сигнала в один из каналов
(2 или 3) и в канал 6 струя питающего
канал 4.
Рабочую плату элемента, на которой выполнен рабочий профиль, склеивают
с крышкой, образуя функционально законченную единицу — струйный дискрет-
ный элемент, или аналоговый усилитель. На крышке и плате элементов указы-
вают цифровые обозначения входов и выходов, модель элемента и его условное
обозначение в схемах.
Для питания струйных элементов большого размера рекомендуется воздух,
очищенный не грубее 5-го класса загрязненности по ГОСТ 17433—72, для эле-
ментов малого размера — ие грубее 3-го класса. Показатели надежности для
элементов: наработка на отказ 1-10® ч, средний срок службы 12 лет.
В табл. 9.1 приведена характеристика дискретных элементов больших и
малых размеров. Характеристики переключения, условные обозначения в схе-
мах и другие сведения по отдельным элементам комплекса «Волга» приведены
ниже.
Струйный дискретный элемент типа СТ41. Взаимно инверсные выходы 4
и 5 элемента (рис. 9.6, а, в) могут быть подключены как к глухой камере, так
и к входам других элементов. Возможно одновременное использование обоих
выходов. Элемент не чувствителен к нагрузке на выходах. При работе в режиме
«Запрет» давление на запрещающем входе 6 должно составлять не менее 150%
давления на управляющем входе. Из приведенной на рис. 9.6, в характеристики
переключения видно, что если выход элемента присоединен к глухой камере
(Qb = 0), то давление на выходе элемента может достигнуть более 35% давления
питания. Если к выходу элемента присоединяются управляющие входы двух
элементов того же типа, то давление на выходе понижается примерно до 26%
давления питания. Из характеристики переключения видно также, при каких
значениях давления ру управляющего сигнала (в процентах от давления пита-
ния ра) происходит как срабатывание элемента, так и его отпускание — возврат
в исходное состояние.
Триггер с раздельными входами типа СТ42 в отличие от элемента типа СТ41
имеет два устойчивых состояния. Элемент (рис. 9.6, а, г) предназначен для
построения устройств, в которых требуется запоминание сигналов (память).
Запоминание двух управляющих сигналов обеспечивается одним элементом СТ42,
213
Таблица 9.1
Техническая характеристика струйных дискретных элементов
(давление питания 2,5 — 10 кПа, номинальное давление 4 кПа)
Диск- ретные элементы Логические функции Расход воздуха прн номи- нальном давлении питания, м3/с Мощ- ность при но- миналь- ном дав- лени и питания, Вт Рекомен- дуемая нагру- зочная способ- ность элемен- тов того же типа, шт. Масса, кг
СТ41 ИЛИ—НЕ ИЛИ на два входа с запретом по одному из входов 7,5-10-“ 0,32 2 0,01
СТ42 Память
СТ43 И—НЕ И на два входа
СТ44 ИЛИ —НЕ ИЛИ на три входа
СТ45 ИЛИ—НЕ ИЛИ на два входа с кнопочным управлением по одному из входов (ключ) 10 -10-* 0,4
. СТ53 ИЛИ — НЕ ИЛИ на шесть входов 7,5 10~Б 0,32 1 0,02
GT54 ИЛИ на 12 входов (пас- сивный) 610~5 — — 0,01
СТ55 ИЛИ —НЕ ИЛИ на два входа с запретом по одно- му из входов 1,6-1О’В 0,05 2 0,004
СТоб Память
СТ57 ИЛИ —НЕ ИЛИ на четы- ре входа 1
CTG0 ИЛИ — И на четыре входа 2
СТ67 Два элемента ИЛИ—НЕ ИЛИ на два входа в одной плате 0,002
214
Рис. 9.6. Струйные дискретные элементы больших размеров:
а — размер и маркировка ножек (штуцеров) элементов СТ4(, СТ42, СТ43 и СТ45; б —
размер и маркировка ножек элемента СТ44; в — ж — характеристики переключения
и условные обозначения в схемах элементов СТ41; СТ42; СТ43; СТ44 н СТ45 соответственно
в то время как для решения этой же задачи при использовании элементов СТ41
требуется схема, составленная из двух элементов СТ41.
Элементы СТ43 (рис. 9.6, а, д) и СТ44 (рис. 9.6, б, е) так же, как и элемент
СТ42, обеспечивают более экономное построение управляющих устройств. Реа-
лизуемые ими логические функции можно выполнить и при использовании од-
них лишь элементов типа СТ41, но общее число элементов в устройстве будет
в этом случае большим. В целях сокращения номенклатуры элементов и облег-
чения тем самым эксплуатации устройств относительно простые управляющие
устройства целесообразно строить на одних лишь элементах типа СТ41, пренеб-
регая некоторым увеличением общего числа элементов. Это же относится и к ба-
зовому элементу малого размера СТ55.
У элемента СТ45 (рис. 9.6, а, ж) вход 2 через дроссель соединен с каналом
питания. Срабатывание элемента по входу 2 может быть обеспечено механиче-
ским закрыванием его. Поэтому элемент удобен при работе с датчиком типа
сопло-заслонка, например, в устройствах для контроля уровня. Датчик в этом
случае — простейшее сопло, к которому не надо подводить внешнее питание,
215
Рис. 9.7. Струйные дискретные элементы:
а — шестивходовый элемент ИЛИ — НЕ ИЛИ типа СТ53; б — пассивный элемент ИЛИ
на 12 входов типа СТ54, в — универсальный модуль типа СТ67 (плата с двумя элементами
ИЛИ —НЕ ИЛИ, пакет и характеристика переключения)
а заслонкой служит контролируемый верхний уровень жидкости (или сыпучего
материала) в резервуаре.
Шестивходовый элемент ИЛИ—НЕ ИЛИ типа СТ53 (рис. 9.7, а) имеет боль-
шую длину, чем элементы, описанные выше. Пассивный элемент типа СТ54
(рис. 9.7, б) реализует логическую функцию ИЛИ на 12 входов, ои предна-
значен для считывания программы со стандартной перфокарты ПК-80
(ГОСТ 6198—75). Давление на выходе элемента составляет не менее 15% давле-'
ння иа входе.
Универсальный модуль типа СТ67 (рис. 9.7, в) состоит из функциональной
и коммутационной плат. Каждая функциональная плата содержит два элемента
ИЛИ—НЕ ИЛИ на два входа; коммутационная плата имеет отверстия, полу-
чаемые при отливке плат. Модули монтируют в пакеты с помощью стяжек. Наи-
большее число модулей СТ67 в одном пакете 10. Высота пакета Н в этом случае
составит 32 мм. Такой пакет содержит 20 элементов ИЛИ—НЕ ИЛИ (так как
в одной функциональной плате размещены два элемента). Элементы соединены
каналами, фрезерованными в коммутационных платах, и отверстиями, которые
создают при монтаже удалением (пробиванием) тонких перегородок. Модуль
разработан совместно с НИИтеплоприбором.
Струйные дискретные элементы и аналоговый усилитель малого размера.
Размеры и маркировка иожек элементов этой серии приведены иа рис. 9.8, а.
Элемент типа СТ55 является базовым в серии элементов системы «Волга», имею-
щих площадь сечения канала питания 0,25 мм2; отличается от элемента типа СТ41
216
уменьшенными размерами. Элемент типа СТ56 (рис. 9.8, в) имеет четыре управ-
ляющих входа в отличие от элемента СТ42 большого размера, что позволяет
упростить выставку триггеров. Аналоговый усилитель СТ59 (рис. 9.8, г) пред-
назначен для сравнения и усиления аналоговых и дискретных сигналов в системах
управления, контроля и регулирования. Основные параметры технической ха-
рактеристики приведены в табл. 9.2.
Элемент СТ57 (рис. 9.8, д) реализует логическую функцию ИЛИ—НЕ ИЛИ
на четыре входа и позволяет при проектировании схемы сократить общее число
элементов. Элемент СТ60 (рис. 9.8, е) реализует логическую функцию ИЛИ — И
на четыре входа.
Струйные аналоговые усилители большого размера (рис. 9.9, табл. 9.2)
предназначены для сравнения и усиления аналоговых и дискретных сигналов
0,3
ft
Рч
Hnsm
ог
Рис. 9.8. Струйные дискретные элементы и аналоговый усилитель малого размера:
а — размер и маркировка ножек элементов СТ55, СТ56, СТ57, CTS9 и СТ60; б—е ____ха-
рактеристики переключения и условные обозначения в схемах элемента СТ55 СТ56
СТ59, СТ57 и СТ60 соответственно
217
Рис, 9.9. Струйные аналого-
вые усилители большого
размера:
а — размер и маркировка
ножек, условные обозначе-
ния и статическая характе-
ристика элемента СТ46; б,
в — то же для элементов
СТ47 и СТ52 соответствен-
но
в системах управления, контроля и регулирования. Выходы усилителей СТ46
(рис. 9.9, а) и СТ47 (рис. 9.9, б) можно подключать как к глухой камере, так
и к нагрузке. Размер, маркировка штуцеров условные обозначения и статиче-
ская характеристика усилителя с инверсным выходом типа СТ52 даны иа
рис. 9.9, в.
Компоновка управляющих устройств. На рис. 9.10 приведена компоновка
струйной системы управления, включающей в себя управляющее устройство /,
входные устройства 2 (струйные путевые выключатели, различные датчики и др.)
и выходные устройства 3 (пневматические усилители давления и мощности,
пневмоэлектропреобразователи, электрические пускатели с пневматическим при-
водом и др.). Система управляет работой в заданном режиме исполнительных
механизмов 4, которыми могут быть гидро- и пневмоцилиндры, гидро- и пневмо-
моторы, электродвигатели и др.
Управляющие устройства монтируют в унифицированных стойках высотой
1200—2200 мм. В стойке размещают монтажные блоки СТ183 или СТ195 для
монтажа, главным образом, струйных элементов, а также монтажные панели
СТ198 для монтажа преобразователей и других устройств. Блоки и панели имеют
одинаковые габариты и присоединительные размеры и вставляются в стойку по
направляющим. В нижней части стойки располагают вентиляторный источник
питания струйных элементов, сжатый воздух от которого через нагнетательный
и всасывающий коллекторы и гибкие шланги поступает к монтажным блокам.
При этом обеспечивается замкнутая система питания элементов, так как отра-
ботанный воздух из элементов отсасывается из полостей блоков через всасываю-
щий коллектор в вновь подается вентилятором в нагнетательный коллектор.
218
Таблица 9.2
Техническая характеристика аналоговых усилителей
Параметры СТ46 СТ47 СТ52 СТ59
Диапазон давления питания, кПа 0 — 10 0 — 150
Потребляемый расход воздуха при номи- нальном давлении питания, м‘7с 5,3- 10-5 8-10-6 5,3-10-Б 2,6-10“6
Потребляемая мощность при номиналь- ном давлении питания, Вт 0,2 0,35 0,2 0,09
Пропускаемая частота при номинальном давлении питания, Гц 300 600
Максимальный коэффициент усиления по давлению: при работе на глухую камеру (Q3 = - 0) при нагрузке одним аналоговым эле- ментом 8 5 6 4 7 3 6 4
Масса, кг 0,01 0,004
Примечание. Номинальное давление питания 4 кПа.
Стойка имеет двухстворчатую дверь, через которую ведется монтаж связей между
блоками и панелями, а также подвод внешних связей с помощью разъемов.
Гибкие шланги позволяют выдвигать блоки и панели из стойки без наруше-
ния их работоспособности. Это обеспечивает свободный доступ к элементам в про-
цессе наладки и проверки системы управления.
При необходимости внутри стойки устанавливают блок питания типа СТ 199,
предназначенный для питания усилителей. В нижней части стойки (в зоне вен-
тилятора) может быть установлена дополнительная укороченная панель СТ198-01
для размещения преобразователей и других устройств.
В блоке типа СТ183 можно разместить до 160 струйных элементов большого
размера, в блоке типа СТ195 — до 480 элементов малого размера. Блок СТ195
имеет общий коллектор, заключенный в корпус с направляющими. Через съем-
ные крышки монтируют схемы управления и устанавливают или снимают струй-
ные элементы. На передней панели можно монтировать устройства управления
и индикации. На задней стенке корпуса размещены до десяти пневморазъемов
типа СТ 182 для коммутации внешних соединений. Блок по направляющим встав-
ляют в стойку и фиксируют внутри нее с помощью рычажных фиксаторов. Для
питания элементов блоке помощью гибких шлангов присоединяют к нагнетатель-
ному и всасывающему коллекторам стойки.
Коллектор для установки и питания элементов малого размера собирают
из литых пластмассовых деталей. Элементы (8 шт.) устанавливают штуцерами
в пластмассовую колодку, в которой имеется общий канал питания. Колодки
(до 15 шт.) собирают в пакеты (рис. 9.11) и стягивают шпильками. В блоке СТ 195
размещают четыре таких пакета. Если на передней панели блока СТ195 монти-
руют четыре устройства управления или индикации,то число колодок в пакете
не должно превышать 12. При монтаже схемы с помощью пластмассовых трубок
используют пластмассовые монтажные ниппели. Если серия выпуска одинаковых
219
Рис. 9.10. Компоновка струйной системы управления
управляющих устройств велика, то с целью резкого сокращения числа пластмас-
совых трубок схемы можно монтировать с помощью модулей, собираемых из
литых пластмассовых наборов (рис. 9.12).
Набор содержит монтажную плату, прокладку и пластину. В монтажной
плате предусмотрены сквозные каналы и отверстия, расположенные согласованно
с отверстиями в колодке и разделенные между собой тонкими перемычками.
При сборке модуля перемычки удаляются по трафаретам, соответствующим
заданной схеме. Монтажные платы разделяют между собой тонкими пластмас-
совыми прокладками, отверстия в которых также выполняют по трафаретам.
Наборы склеивают вместе с пластинами, в которых имеются гнезда под монтаж-
ные ниппели. Модули соединяют между собой пластмассовыми трубками.
Панель монтажная типа СТ198 предназначена для монтажа пневмоэлектро-
и электропневмопреобразователей и других устройств. На передней стенке
панели монтируют электрические кнопки и другие устройства, на задней стенке
размещают пневморазъемы СТ182 и электрические разъемы для подвода тока
К преобразователям и другим устройствам.
9.3. ВНЕШНИЕ УСТРОЙСТВА
СТРУЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Связь управляющего устройства с исполнительными механизмами управляемой
машины обеспечивается внешними устройствами, которые подразделяют на
входные и выходные. Одни входные устройства — путевые выключатели, реле
давления, реле температуры и другие реле физических величин — служат для
ввода в управляющее устройство информации о состоянии исполнительных
механизмов (положении, давлении, температуре и других параметрах). Другие
входные устройства (аппаратура ручного управления — кнопки, тумблеры,
переключатели, устройства задания программы и др.) обеспечивают ввод в управ-
ляющее устройство информации (задания) от оператора.
Выходные устройства формируют сигналы для приведения в действие испол-
нительных механизмов управляемой машины, т. е. для изменения состояния этих
механизмов. К выходным устройствам относятся различные преобразователи,
усилители давления и мощности и др. К ним же следует отнести визуальные и
звуковые индикаторы, которые обеспечивают оператора информацией о состоя-
нии управляющего устройства и всей системы управления в целом.
221
220
9
Рис. 9.13. Струйный кольцевой путевой выключатель типа СТ135:
1 — dt = 6 мм; 2 — dt =12 мм; 3 — dt — 18 мм
Струйные путевые выключатели и датчики размера. Путевые выключатели
служат для ввода в управляющее устройство информации о состоянии исполни-
тельных механизмов машины (например, о приходе механизма в заданное конеч-
ное или промежуточное положение), а также для ввода информации о правиль-
ности установки обрабатываемой детали в приспособлении или штампе. Будучи
встроенными в различные реле, выключатели могут давать информацию о дру-
гих технологических параметрах. Техническая характеристика путевых вы-
ключателей приведена в табл. 9.3.
Струйный кольцевой путевой выключатель СТ 135. В выключателе (рис. 9.13, а)
кольцевой канал 1 является питающим, а канал 2 — выходным. На рис. 9.13, б
приведена статическая характеристика для трех типоразмеров выключателя,
показывающая изменение выходного давления рв в зависимости от расстояния s
между торцом выключателя и заслонкой.
Путевой выключатель СТ143 используют в оборудовании, работающем в тя-
желых условиях, например, при высокой запыленности окружающей среды.
Если в паз выключателя (рис. 9.14, а) шириной 5 мм заслонка не введена, то
питающий воздух из верхнего штуцера свободно проходит в канал / и на выходе
в канале 2 образуется разрежение — отрицательный сигнал. Это разрежение
при нулевом расходе составляет «10% давления питания.
Путевой выключатель СТ144 (рис. 9.14,6) выполняют склеенным из двух
частей, отлитых из полистирола. Питание подводят к нижнему штуцеру. Если
в паз шириной 5,5 мм заслонка ие введена, то в верхний штуцер поступает выход-
ной сигнал «1». При вводе заслонки в паз выходной сигнал становится равным «0».
Путевой выключатель СТ173 (рис. 9.14, в) в отличие от рассмотренных
выше — выключатель контактного, клапанного типа. Здесь перемещение упора
исполнительного механизма вызывает поворот на небольшой угол иглы выклю-
чателя, что обеспечивает открытие клапана внутри корпуса выключателя и по-
явление пневматического сигнала «1» иа выходе. Величина зацепления иглы упо-
ром не должна превышать 5 мм. Выключатель отличается полной герметичностью
и поэтому не подвержен воздействию загрязненной окружающей среды.
На рис. 9,15 показаны различные способы подключения струйных путевых
выключателей к системе управления. При коротких линиях связи выходной сиг-
нал с путевого выключателя 1 можно подавать непосредственно на вход струй-
ного дискретного элемента 2 (рис. 9.15, а), при длинных линиях связи рекомен-
дуется выход выключателя соединять с входом триггера Шмитта 3 (рис. 9.15, б),
чтобы усилить слабый выходной сигнал путевого выключателя. Схема подклю-
чения струйного путевого выключателя СТ143 показана на рис. 9.15, в. Так как
у этого выключателя сигналом «1» является разрежение на выходе (когда заслонка
выведена из паза), то выход выключателя соединяется с каналом «запрет» струй-
ного дискретного элемента.
222
Техническая характеристика струйных путевых выключателей
СТ135-00 СТ135-01 СТ135-02 СТ135-03 СТ143 СТ144 | СТ173 1 0 — 1000 | 0 — 200 0 — 100 0 — 10 50 — 100 10—20 । 4—10 1,28-10-* 2,31-10-* 5,22-10-* 8,2-10-* 15-10“5 9-10“s 7,5-10—3 50 10 4 0 — 3,5 0 — 5,5 0—9 0 — 12 — f 10 000 5000 2000 1,5-10* пере- ключений 10 6 3 Металл (с защитой от коррозии) Полистирол Металл н 1 пластмасса От —50 до +80 От —20 От +5 до +50 до + 50 0,009 0,017 0,064 0,194 0,12 0,006 0,12
Параметры Диапазон давления питания, 1 кПа । Рекомендуемое давление пита- ния, кПа Потребляемый рас- мз/с 1 ХОД прн давлении пнта- _ । ния кИа Диапазон измерения, мм Наработка на отказ, ч Показатели надежности - * Срок служ- бы, лет Материал Температура окружающей сре- ды, °C Масса, кг
Примечание. Класс загрязненности 1,3 и 5 по ГОСТ 17433 — 72.
223
20
Рис. 9.14. Струйные путевые выключатели типов СТ143 (а), СТ144 (б) и СТ173 (в)
0 5.5
Рис. 9.15. Схемы подключения струйных путевых выключателей
224
Рис. 9.16. Струйные датчики размера типов СТ140 (я) и СТ158 (-5)
Струйные датчики размера СТ140 и СТ158 (рис. 9.16) предназначены для
бесконтактного измерения размеров при активном и послеоперационном кон-
троле деталей. Изменение измерительного зазора s — расстояния от измеряемой
детали до сопла датчика — вызывает изменение давления в выходном канале
датчика. Основные детали датчиков обоих типов выполняют из коррозионно-
стойкой стали (или других металлов с надежной защитой от коррозии). Диапазон
давления питания 0—100 кПа. Диапазон измерения для датчика СТ140 0—1,2мм,
для датчика СТ158 0—4 мм.
Реле физических величин. На базе струйных и измерительных элементов
могут быть построены различные реле (датчики) физических величин. Типовая
структурная схема реле показана на рис. 9.17, а. Физическая величина (ФВ)
воспринимается первичным измерительным элементом 1. Им может служить из-
мерительное сопло в устройствах измерения размеров, ламинарный или турбу-
лентный дроссель в газовых анализаторах и устройствах контроля температуры,
генератор колебаний в частотных измерителях и др. При помощи измерительного
элемента ФВ преобразуется в пневматический сигнал, который при необходи-
мости усиливается струйным аналоговым усилителем 2 и поступает на порого-
вый элемент 3. Когда измерительный сигнал достигнет настроечного значения,
пороговый элемент переключается и дискретный сигнал подается на сигнальное
устройство 4 или в цепь управления исполнительным органом того или иного
механизма.
На рис. 9.17, б показана принципиальная схема струйного реле для кон-
троля температуры жидкости, обтекающей полую спираль. В левый конец этой
спирали через дроссель R подводится сжатый воздух постоянного давления р'.
В левый входной канал аналогового усилителя 1 поступает сигнал давлением рг,
8 Е. В. Герц и др.
225
которое изменяется в зависимости от температуры жидкости, обтекающей спи-
раль. В правый входной канал усилителя 1 подводится сигнал постоянного дав-
ления р2. Давление на выходе усилителя рв пропорционально температуре Т
жидкости, обтекающей спираль. Когда эта температура достигнет определенной
величины, то на выходе порогового элемента 2 появится сигнал. Для изменения
диапазона измерений и порога срабатывания служат дроссели и R2.
Реле разности давлений показано на рис. 9.17, в. Сигналы с уровнями дав-
ления Pbxi и Рвх2> разность которых надо измерить, подаются на входы анало-
гового усилителя 1 через настроечные дроссели Rx и Р2. Давление выходного
сигнала Арв этого усилителя пропорционально измеряемой разности давлений
входных сигналов. Этот выходной сигнал усиливается аналоговым усилителем 2
и поступает на пороговый элемент 3, переключение которого регулируется с по-
мощью дросселя Rs.
На рис. 9.18, а показано струйное реле расхода с трубкой Вентури. Сиг-
налы давлением рвх1 и рВх2 от трубки Вентури поступают на входы аналогового
усилителя 2. Разность указанных входных давлений пропорциональна скорости
потока в трубопроводе 1. Выходной сигнал усиливается аналоговым усилителем 3
и поступает на пороговый элемент 4, порог срабатывания которого регулируется
дросселем R.
На рис. 9.18, б приведена схема струйного реле уровня. Когда уровень
(жидкости или сыпучего материала) приблизится к уровню h, давление на вы-
ходе преобразователя 1 повысится. Усиленный сигнал от аналогового усили-
теля 2 вызовет переключение порогового элемента 3. При постоянной высоте h
уровень ft1( при котором произойдет переключение порогового элемента 3, может
изменяться путем настройки дросселей Rx и R2.
Рис. 9.18. Струйные реле расхода (а) и уровни (6)
226
Рис. ft. 19. Струйные реле ли-
нейных измерений (а, б) н
измерения плотности жид-
кости (в)
Струйное реле размера представлено на рис. 9.19, а. При изменении рас-
стояния As изменяется сопротивление измерительного сопла датчика 1 и, сле-
довательно, изменяется давление на левом входном канале аналогового усили-
теля 2. Выходной сигнал с усилителя 2 поступает на вход порогового элемента 3,
а с него — на дискретный элемент 4. Величина As и, следовательно, необходимый
размер х настраиваются с помощью дросселей Rx и R2.
Схема реле размера, приведенная на рис. 9.19, б отличается от рассмо-
тренной схемы отсутствием аналогового усилителя. Здесь входной сигнал от из-
мерительного сопла датчика 1 поступает непосредственно на вход порогового
элемента 2, срабатывание которого регулируется с помощью дросселя R. Сигнал
с порогового элемента 2 включает пневмоэлектропреобразователь 3.
Для измерения плотности жидкости может быть использовано струйное реле
(рис. 9.19, в). К двум погруженным на разную глубину трубкам 1 и 2 через
постоянные дроссели 3 подводится сжатый воздух давлением рп. Погруженные
в жидкость выходные концы трубок соединяются с входами аналогового усили-
теля, выход которого соединен с входом порогового элемента. Плотность жидкости
будет прямо пропорциональна давлению рв на выходе аналогового усилителя и
обратно пропорциональна разности глубины погружения трубок 1 и 2 в жидкость.
Подробная информация и сведения о заводах-изготовителях внешних
устройств для струйных СУ приведены в литературе [6, 10]. К основным внеш-
ним устройствам кроме описанных можно отнести: пневмокнопки типов П-ВЗР,
П1КН, 3 (ПК); пневмотумблеры типов П-ВЗФ1, П1Т.2 (ПТ); переключатели типа
П-В4Ф66, ППМ; электропневмопреобразователь типа Ф66-11; реле времени
типа Ф61-21; элемент задержки типа П-ЗС; индикаторы давления типов СТ196,
П-ИДС; усилитель давления типа ПФ67-21; пневмоэлектропреобразователь типа
Ф62-21; пневмопривод для золотников (гидрораспределителей) типа В26-41.
9.4. ПОСТРОЕНИЕ ЛОГИЧЕСКИХ СХЕМ
НА ЭЛЕМЕНТАХ «ВОЛГА»
Реализация логических функций. Проектирование логических схем основано на
использовании законов алгебры логики или булевой алгебры. Основные опера
ции алгебры логики, ее законы, аксиомы и теоремы см. в гл. 10 и в литературе
[2, 4, 8]. Там же рассмотрены вопросы упрощения и минимизации логических
функций. Поэтому перейдем сразу же к реализации логических функций посред-
ством струйных элементов.
Логические функции наиболее наглядно представляются в форме таблиц
истинности, которыми и будем пользоваться в дальнейшем. В этих таблицах
8* ^27
Рис. 9.20. Реализация логических функций
каждому из возможных наборов аргументов ставится значение функции «0»
и «1». В струйных управляющих устройствах наибольшее применение получили
логические элементы СТ41, СТ55, реализующие операцию ИЛИ—НЕ ИЛИ.
На базе этих элементов иа рис. 9.20 показана реализация логических функций
для одной, двух и более переменных. Логические функции могут быть реали-
зованы и с помощью других элементов «Волга»: И — НЕ И, ИЛИ — НЕ ИЛИ
на три входа.
Комбинационные схемы. Логические схемы, сигналы на выходах которых
в каждый момент времени однозначно определяются комбинацией сигналов на
входах этой схемы в тот же момент времени, относятся к комбинационным. На-
пример, комбинационной является схема, реализующая функцию неравнознач-
ности. Эта схема находит широкое применение в программных управляющих
устройствах под названием «сумматор по модулю 2». Рассмотрим построение схемы
«сумматор по модулю 2» для трех переменных, Таблица истинности и построе-
на
Наименование /функции Реализация Тад лица истинности
S. Функция Шеффера И НЕ ' Xi ГД Хг ГЛ I 1—। Xi *г У
0 0 1
0 1 1
1 0 1
1 1 0
9. Обратная импликаиия ЕСЛИ ТО Х1 Х2 У
0 0 1
0 1 0
1 0 1
7 1 ~Г
10. Импликация ЕСЛИ ТО *1 ГЛ ГЛ^=х'-*хг Х1 Хг .V
0 0 1
0 1 1
1 0 0
1 1 1
7/. Равнознач-
ность
7Z Неравнознач-
ность (сумма
по модулю 2)
Исключительное
ИЛИ
Рис. 9.20 (Продолжение)
иие этой схемы на элементах СТ41, СТ52, СТ55 приведены на рис. 9.21, а, О.
Из таблицы истинности и работы схемы видно, что функция у = %] + х2 + х3
истинна, если истинно нечетное число ее аргументов, т. е. сигнал на выходе
схемы появляется только в том случае, когда значение «1» принимает один из
любых аргументов либо три одновременно. Схема для п аргументов может
строиться как последовательным (рис. 9.21, в), так и параллельно-последова-
тельным методами (рис. 9.21, г).
Комбинационная схема — сумма по модулю 2 (неравнозначность) исполь-
зуется для сравнения двоичных чисел при построении цикловых и числовых
управляющих устройств токарными, сверлильными станками и другим обору-
дованием. Во многих случаях достаточно установить равенство либо неравен-
ство двух чисел. Рассмотрим построение схемы сравнения, вырабатывающей
сигнал равенства при совпадении двух двоичных четырехзначных чисел А и В
(см. рис. 9.20). Схему сравнения строим на элементах ИЛИ — НЕ ИЛИ СТ41
Наименование
функции
Реализация
Таблица
истинности
ИЛИ
HE-ИЛИ
И-ИЛИ
К, Кг *з Хз у
0 0 0 0 0 0
0 0 0 0 1 1
0 В 0 1 1 1
0 0 1 1 1 1
0 1 1 1 1 1
1 1 1 ~Т ~Т т
у=х!1-хг + *з +/4 /xs
*4
*з
х>
кг
Кз
Хз ~
Xlf &
~Z У
1 —
у = Z, +хг? Х3 > Х$ + XS
*1 *2 к. *4 х5 У
0 0 0 0 0 1
0 0 0 0 1 0
0 0 0 1 1 0
0 0 1 1 1 0
0 1 1 1 1 0
1 1 1 1 1 0
>5 ---
*/ —
Рис. 9.20. (Окончание)
в инверсных аналоговых усилителях СТ52. На рис. 9.22, а, б приведены таб-
лицы истинности и схема сравнения чисел Л и В. На входах b3, b2, b3, bt запи-
сывается число (т. е. на эти входы с помощью каких-либо устройств подаются
сигналы «1» и «0», например, запишем число В-0110). На входы alt а2, а3, а4 по-
ступают сигналы от устройства, и если на этих входах появятся сигналы в по-
следовательности ОНО, то на выходе у схемы появится сигнал «1». Значительное
сокращение элементов в схемах сравнения дает использование модуля СТ60 [7].
На рис. 9.22, б показана схема последовательного действия, при совпаде-
нии сигналов в младшем разряде сигнал от него должен пройти последовательно
через все разряды, что снижает быстродействие данной схемы. В тех случаях,
когда к быстродействию устройства предъявляются повышенные требования,
целесообразно использовать параллельно-последовательную схему. Отличие
этой схемы от рассмотренной выше состоит в том, что выходы всех разрядов соеди-
нены с входами многовходового элемента ИЛИ — НЕ ИЛИ (рис. 9.22, в). При
создании управляющих устройств промышленными роботами, станками и дру-
230
Рис. 9.21. Схема суммы по модулю 2 для трех переменных
гим оборудованием необходимо не только установить равенство двоичных чисел
А и В, но и решить задачи: А > В; А < В. Решение этих задач достигается с по-
мощью ячейки сравнения (см. рис. 9.23, б), которая имеет два двухразрядных
входа для сравниваемых чисел А и В и два, а иногда и три выхода. На рис. 9.23, а, б
приведены таблица истинности и схема ячейки сравнения, построенная на эле-
ментах ИЛИ—НЕ ИЛИ [8, 9]. Схема работает следующим образом (см. таб-
лицу истинности): если А = В, то сигналы на выходах у и г равны между собой;
когда у = z = 1; числа А и В — нечетные, а если у = г = 0, то числа А и В —
четные. В случае неравенства чисел: А > В, у = 1; z = 0; если А < В, то у =
= 0, г = 1.
Для сравнения чисел, число разрядов которых больше двух, ячейки соби-
рают в пирамидальную схему. На рис. 9.23, в изображена пирамидальная схема
сравнения двух четырехразрядных чисел.
Запрет ИЛИ. Функция у = хг «- х2 + х3 <- + xs <- х6 + х7 хй реали-
зуется схемой, показанной на рис. 9.23, г. Здесь же приведена таблица истин-
ности рассматриваемой логической операции. Эту схему часто используют для
формирования тактовых импульсов в цикловых управляющих устройствах.
сражения В А У
iff в? “7 Cj я,
А*в 0 1 1 0 0 0 0 0 0
0 1 1 0 0 0 0 1 0
0 1 1 0 0 0 1 0 0
к* 8 0 1 1 0 0 0 1 1 0
А^В 0 1 1 п D 7 0 0 0
А^В 0 1 0 0 1 0 1 0
А = В 0 1 1 0 0 7 1 0
0 1 1 0 0 1 1 1 0
A#S 0 1 1 0 I 1 0 I" 0 0
а)
Рис. 9.22. Схемы сравнения двоичных чисел
231
Рис. 9.23. Таблица истинности и схемы сравнения двух двоичных чисел [больше (а),
меньше (б), равно (в)]; схема реализации функции «запрет ИЛ И» для восьми переменных (г)
Последовательностные схемы. В отличие от комбинационных схем в последо-
вательностных (многотактных) схемах кроме внешних входных сигналов имеются
внутренние входные сигналы, обусловленные наличием обратных связей. Состоя-
ние последовательности схемы или цифрового автомата прн отсутствии внешних
входных сигналов, определяется сигналами в линиях обратных связей. В резуль-
тате этого выходные сигналы цифрового автомата зависят как от внешних вход-
ных сигналов, так и от сигналов в цепях обратных связей.
Простейшим цифровым автоматом является триггерная схема, которая имеет
два устойчивых состояния: нулевое и единичное. В управляющих устройствах
эту схему используют в качестве памяти. Рассмотрим работу триггерной схемы,
которая имеет два входа R и S для внешних сигналов, два выхода Qn+1, Qn+1 и
два входа и Qn для сигналов обратных связей. Первым внешним входным сиг-
налом схема устанавливается в нулевое состояние, вторым входным сигналом
в единичное, при отсутствии входных сигналов схема сохраняет прежнее состоя-
ние. Работа схемы описывается таблицей истинности, которая для цифровых ав-
томатов называется таблицей переходов, так как отражает процесс перехода
схемы из одного состояния в другое. В таблице переходов (рис. 9.24, а) индексы
п и п + 1 означают последовательные моменты времени. Индекс я + 1 соот-
ветствует моменту, когда сигналы на выходе схемы под воздействием входных
сигналов принимают значения, соответствующие последующему состоянию.
232
Триггер с раздельными входами в струйной технике может быть реализован
на базе одного струйного элемента, в котором сигналы обратных связей образуются
в результате аэродинамических эффектов. Так, в элементе, изображенном на
рис. 9.23, б, сигналы обратных связей Qn и Qn возникают вследствие попереч-
ного перепада давления, образуемого давлением внутренней обратной связи и
давлением, возникающим вследствие эжекционных свойств струи, вытекающей
из канала питания. Очевидно, что устойчивость струи после снятия внешнего
входного сигнала будет Определяться величиной поперечного перепада давления,
удерживающего струю у одной из стенок. Физическая модель, условное обо-
значение и график работы триггера с раздельными входами приведены иа
рис. 9.24, б, в, г. Задержка распространения сигнала обратной связи опреде-
ляет время переключения триггера, т. е. чтобы сигнал, переключающий триггер,
успевал получить подтверждение обратной связью, его длительность должна
быть больше длительности переключения триггера.
Другим типом триггерных схем являются триггеры с внешними входами для
сигналов обратных связей. К этим триггерам с раздельными входами следует
отнести триггеры, построенные иа элементах ИЛИ — НЕ ИЛИ (СТ41 и СТ55),
И — НЕ И (СТ43). Для триггеров данного типа необходимо, чтобы длительность
входного сигнала была больше времени задержки распространения сигнала
обратной связи в двух элементах. На рис. 9.24, д показана схема триггера на
элементах ИЛИ — НЕ ИЛИ с внешними обратными связями.
Триггеры, со счетным входом имеют один счетный вход и два выхода. Для
установки триггера в исходное состояние имеются один или большее число уста-
новочных входов. Управляющий сигнал, поступающий на счетный вход, пере-
ключает триггер из текущего состояния в противоположное. Таким образом,
если иа счетный вход триггера поступает четное число импульсов, то схема при-
нимает исходное состояние, а при нечетном числе импульсов схема изменяет
первоначальное состояние, т. е. триггер со счетным входом представляет собой
двоичный счетчик импульсов, поступающих на его вход. Работа струйных счет-
ных триггеров рассмотрена в литературе [2, 7, 9, 10].
На рис. 9.25 приведены схемы счетных триггеров, построенных на дискрет-
ных элементах ИЛИ — НЕ ИЛИ: СТ41 (рис. 9.25, а); СТ55 и СТ56 (рис. 9.25, б);
Рис, 9.24. Триггер с раздельными входами
233
Рис. 9.25. Триггер
со счетным входом
(рис. 9.25, г). Схема, построенная на базе триггеров с раздельными входами,
отличается более высоким быстродействием, так как содержит меньшее число
элементов в схеме, однако требует настройки с помощью дросселей. На этом же
рисунке приведен график работы триггеров со счетным входом, реализованных
на элементах ИЛИ — НЕ ИЛИ СТ41, СТ55 и триггерах с раздельными входами.
Пропускаемая частота при давлении питания 3,5 кПа составляет: для счетного
триггера, построенного на элементах СТ41 50 Гц, для триггера на элементах
СТ551 150 Гц, для триггера на элементах СТ55 и СТ56 (рис. 9.25,6) 350 Гц.
Быстродействие счетных триггеров с повшением давления питания возрас-
тает: так, для схемы счетного триггера (рис. 9.25, в), построенного на эле-
ментах СТ56, СТ59, при давлении питания более 10 кПа, частота счета им-
пульсов достигает 1000 Гц.
Счетчик двоичного кода представляет собой цепочку последовательно со-
единенных триггеров со счетным входом. Работа счетчика описывается графиком
либо таблицей последовательных чисел. Состояния трехразрядного двоичного
счетчика приведены на рис. 9.26, а.
На вход счетчика поступают импульсы Тя. Младший разряд изменяет свое
состояние при изменении значения счетного импульса с «1» на «0», а каждый
последующий разряд счетчика изменяет свое состояние при изменении состояния
предыдущего разряда с «1» на «0» (рис. 9.26, а, в). На рис. 9.26, б, в приведены
схема трехразрядного двоичного счетчика и график его работы. Максимальная
пропускаемая частота счетчика определяется быстродействием его младшего
разряда. Числа, формируемые счетчиком, выводятся из него в параллельной
форме путем одновременного опроса всех разрядов счетчика. Списывать числа
можно только между сигналами счета, т. е. после завершения переходного про-
цесса переключения триггеров счетчика. Поэтом}' минимальный период следо-
вания счетных импульсов должен быть равен периоду времени, необходимому
для переключения всех разрядов счетчика и времени опроса его состояния.
Счетчик, схема которого показана на рис. 9.26, б, является суммирующим.
Счетчик по схеме (рис. 9.26, г) выполняет вычитание или обратный счет. Из со-
234
стояния трехразрядного вычитающего счетчика (рис. 9.26, 5) следует, что ис-
ходному состоянию счетчика соответствует единичное состояние всех его раз-
рядов. Вычитающий счетчик, как суммирующий, образуется, посредством по-
следовательного соединения счетных триггеров; отличие состоит в том, что ну-
левые выходы разрядов соединяются с входами последующих разрядов. График
работы трехразрядного вычитающего счетчика приведен на рис. 9.26, е. Наряду
с рассмотренными счетчиками на элементах струйной техники могут быть по-
строены реверсивные, двоично-десятичные и другие счетчики [8, 9]. Состояние
счетчика в каждый момент времени определяется с помощью дешифратора, уста-
новленного на выходах счетчика. Назначение дешифратора состоит в преобра-
зовании разрядного двоичного кода в десятичный. Число выходов дешифратора
должно соответствовать числу состояний счетчика; так, у дешифратора трех-
разрядного счетчика число выходов равно восьми. Выходные сигналы дешифра-
тора есть конъюнкции сигналов «1» или «О» выходов каждого из разрядов счет-
чика. Состоянию трехразрядного счетчика 101 соответствует логическое произ-
ведение и т. п.
В результате неодновременного переключения разрядов счетчика на его
выходах могут появляться промежуточные состояния, что в ряде случаев при-
водит к появлению ложных сигналов на выходах дешифратора или других схем,
работающих совместно со счетчиком. На рис. 9.27, а, б приведены схема двух-
разрядного счетчика с дешифратором состояний, в которой показаны ложные
сигналы работы этой схемы. Ложные сигналы, возникающие при работе счет-
чика, исключены введением сигнала стробирования на входы дешифратора (штри-
ховая линия на рис. 9.27, а).
Командозадающие устройства, или распределители импульсов являются
одним из основных узлов управляющего устройства; они обеспечивают последо-
Рис. 9,26. Счетчики- суммирующий (а—в) и вычитающий (а—е)
235
Рис, 9.27. Двухразрядный счетчик с дешиф
ратором
вателыюсть выполнения операций, их часто используют для поэтапного ввода
программы в цикловых системах управления. В общем случае командозадающие
устройство представляют собой простейший сдвигающий регистр, в котором сдвиги
происходят с частотой тактовых импульсов. Известно большое число различных
схем командозадающих устройств [8, 9], которые могут быть применены при
решении задач автоматизации производственных процессов.
Четырехразрядное командозадающее устройство на элементах «Волга» и
его условное обозначение в схемах приведены на рис. 9.28, а, график работы
этого устройства — на рис. 9.28, б. На вход устройства поступают тактовые
импульсы Та от генератора тактовых импульсов (временное командозадающее
устройство) или от логических устройств, контролирующих окончание какой-
либо операции. На выходах п±—п4 появляются сигналы с частотой поступления
на вход устройства тактовых импульсов. Входным элементом командозадающего
устройства является триггер со счетным входом, хотя могут быть реализованы
схемы и без этого элемента.
Регистры предназначены для хранения и выдачи при опросе отдельных ин-
формационных слоев (чисел). Сдвигающие регистры (рис. 9.29) могут быть ис-
пользованы для схем индикации, адресных схем в запоминающих устройствах
систем управления станками, роботами и другими машинами. Сдвигающий ре-
Рис, 9.28. Четырехразрядное ком ян**
дозадающее устройство
236
Рис. 9.29. Сдвигающий регистр
гистр строят на основе триггера с раздельными входами и логической схемой,
выполняющей операцию «ЗАПРЕТ». Схема, образованная этими элементами,
представляет собой устройство, в котором информация задерживается на полу-
такт, и называется схемой, или ячейкой задержки на полутакт. Эта схема строится
на элементах НЕ ИЛИ , И, равнозначность. Схема (рис. 9.29, а) работает сле-
дующим образом: сигналы xlt х2, поступающие на входы триггера с раздельными
входами, передаются на выходы или п2 только в том случае, если тактовый
сигнал Тп = «О», при Ти — «1» сигналы на выходе схемы равны «О», потому что
тактовый сигнал поступает на вход элементов НЕ ИЛИ. Таким образом, если
иа вход триггера поступит сигнал при тактовом сигнале, равно «1», то этот сиг-
нал будет храниться в ячейках до тех пор, пока тактовый сигнал не станет рав-
ным «О».
Разряд сдвигающего регистра образуется последовательным соединением
двух ячеек задержки иа полутакт. Схема разряда сдвигающего регистра
(рис. 9.29, б) работает следующим образом: тактовый сигнал Ти — «1», а Ти =
— «О», на вход х схемы подается сигнал «1» в результате чего на выходе триг-
гера устанавливается сигнал «1». Последующее переключение тактового сигнала
Ли = «О», Та — «1» приводит к тому, что единица переписывается в следующий
237
Рис. 9.30. Сдвигающий регистр на модулях СТ60
триггер разряда. После смены уровней тактового сигнала записанная единица
появляется на выходе регистра. В это же время на вход регистра может быть
подан другой сигнал, который при подаче тактовых сигналов будет последова-
тельно передан на выход разряда.
Сдвигающий регистр на несколько разрядов п образуется соединением от-
дельных разрядов в последовательную цепочку. Схема регистра приведена на
рис. 9.29, в. Сдвиги в регистре производятся с частотой тактовых импульсов,
т. е. сдвигающий регистр представляет собой линию задержки, в которой скорость
перемещения информации определяется частотой тактовых импульсов.
Для ввода чисел в струйные цифровые устройства используют кольцевой
сдвигающий регистр, предназначенный для динамического хранения чисел
(рис. 9.29, г). В рассматриваемой схеме через три такта первые сигналы запи-
санные «0» или «1», появляются на выходах регистра. Начиная с этого момента,
сигналы, записанные «0» или «1», один за другим появляются на выходах регистра
синхронно с тактовыми сигналами. Это происходит потому, что схема заколь-
цована и в ней циркулируют сигналы, записанные «0» или «1» Входная схема ре-
гистра обычно имеет более сложную структуру, обусловленную условиями
выбора чисел от различных источников информации. Для ввода чисел можно
использовать несколько регистров, образующих групповой регистр. В этих
регистрах информация, как правило, снимается с последнего разряда. Схема
сдвигающего регистра на модулях СТ60 изображена рис. 9.30, а. На рис. 9.30, б
изображена ячейка задержки на полутакт, построенная из модулей СТ60, а на
рис. 9.30, в — ее условное обозначение. Эта схема представляет собой триггер
с входными элементами И.
Формирователи тактовых импульсов. В струйных системах управления ис-
пользуют как однофазную систему тактовых импульсов (рис. 9.31), так и двух-
фазную — с импульсами, находящимися в противофазе (см. рис. 9.31, б). (Здесь
Т’и — длительность импульса; Т — длительность периода импульса.) Скваж-
ностью импульсов называют отношение Q = Т/Тп. В двухфазной системе Q = 2.
На рис. 9.31, в показаны основные параметры тактовых импульсов (ри — ам-
плитуда основного импульса; р0 — остаточное давление в паузе между импуль-
сами; p'j — амплитуды первого положительного и первого отрицательного
выбросов; рт,, р~2 — амплитуды второго положительного и второго отрицатель-
ного выбросов; Та — длительность основного импульса, определяемая на уровне
0,5ри, ?ф, 1ст> — длительности фронта и среза импульса). На надежность работы
цифровых устройств струйной техники могут существенно влиять вторые и по-
следующие положительные и отрицательные выбросы. Первые выбросы, как
правило, не оказывают существенного влияния на работоспособность схем.
Форму тактовых импульсов в реальных устройствах необходимо приблизить,
насколько это возможно, к идеальной, т. е. длительность фронта и среза должна
быть значительно меньше длительности импульса; амплитуда выбросов (вторых
и последующих) должна быть минимальной.
238
Тактовые импульсы формируются при помощи струйных задающих генера-
торов, которые, как правило, строят на базе струйных дискретных и усилитель-
ных элементов. Они должны удовлетворять следующим основным требованиям:
обеспечивать высокую стабильность частоты генерируемых колебаний и малые
искажения формы импульсов при изменении окружающей температуры, давле-
ния питания и др.
Схемы струйных генераторов, удовлетворяющие указанным требованиям,
изображены на рис. 9.31, г—е. Генератор (рис. 9.31, г) построен на аналого-
вых усилителях. Триггер с раздельными входами, установленный на выходе
(рис. 9.31, д) служит для исключения вторых и последующих выбросов импуль-
сов, генерируемых элементом ИЛИ — НЕ ИЛИ с аналоговым усилителем в цепи
обратной связи. Генератор (рис. 9.31, е) построена на триггере с раздельными
входами. Генерируемая частота зависит от длины L соединительных трубок для
генератора показана на рис. 9.31, г в пределах 10—1000 Гц; для генератора
на рис. 9.31, д — в пределах 10—500 Гц; для генератора на рис. 9,31, е — в пре-
делах 100—500 Гц.
В ряде случаев при построении управляющих устройств необходимо полу-
чить импульсы малой длительности. На рис. 9.32, а, б приведены схемы и гра-
фики работы формирователей импульсов: при появлении сигнала «0» на входе
(см. рис. 9.32, а) и при появлении сигнала «1» (см. рис. 9.32, б). На рис. 9.32, в
показан формирователь импульсов, который формирует импульсы большей дли-
тельности, чем сигналы, поступающие на его вход, и график его работы.
На рис. 9.32, г показана схема счетного триггера, использующего в своей
работе формирователь импульсов. Триггер с раздельными входами, установлен-
Рис. 9.31. Системы такто-
вых импульсов (а—б) и ге-
нераторы тактовых импуль-
сов (г—е)
239
Рис. 9.32. Формирователи импульсов
ный на выходе формирователя, играет роль фильтрующего элемента, исклю-
чающего влияние шумов, которые возникают при переключении дискретных эле-
ментов, на работу счетного триггера. Такой счетный триггер часто называют
импульсным. Триггер обеспечивает высокое быстродействие: так, при исполь-
зовании в схеме элементов СТ55, СТ56 и СТ59 частота импульсов на входе дости-
гает 400 Гц.
Реле времени (рис. 9.33), построенное исключительно на струйных элементах,
широко используют для построения струйных управляющих устройств. Назна-
чение реле заключается в получении заданной выдержки времени при включении
или выключении каких-либо элементов, управляющего устройства. В структур-
ную схему реле (см. рис. 9.33, а) входят следующие основные части: восприни-
мающая /, состоящая из струйных логических элементов, обеспечивающих за-
пуск и сброс реле времени; задающая 2, представляющая собой генератор так-
товых импульсов, частота работы которого определяет дискретность реле вре-
мени; линия задержки сигнала 3, обеспечивающая заданную выдержку времени
с момента подачи управляющего сигнала (линия задержки может быть построена
на основе двоичного, кольцевого счетчика или простейшего сдвигающего ре-
гистра); выходная 4, обеспечивающая формирование одного или нескольких
выходных сигналов с задержками на заданную величину времени.
На рис. 9.33, б показана схема реле времени, построенная на основе двоич-
ного счетчика и схемы совпадения. Время выдержки задается числовым кодом alt
а2, ая, at на входах схемы сравнения. Например, на реле, построенном на четырех-
разрядном двоичном счетчике и генераторе тактовых импульсов, посылающем
в схему реле импульсы через 0,1 с, могут быть получены задержки времени от
0,1 до 1,5 с дискретностью 0,1 с. Увеличение разрядов двоичного счетчика поз-
волит получить выдержки времени сколь угодной длительности. Реле имеет
один выход и обеспечивает получение 15 различных выдержек времени с дискрет-
ностью 0,1 с.
Ж
На рис. 9.33, в приведена схема реле времени, построенная на основе про-
стейшего сдвигающего регистра (командозадающего устройства), показанного
на рис. 9.28. В этом регистре непрерывно сдвигается только одна кодовая по-
следовательность 00010 ... 0 с частотой тактовых импульсов задающего генера-
тора. Максимальная задержка времени тактового реле определяется числом раз-
рядов регистра, а дискретность зависит от частоты тактовых импульсов генера-
тора. Число выходов реле равно числу разрядов регистра. Выходная часть схемы
строится на основе коммутационного поля.
Схема реле времени; использующая в своей работе групповой регистр, изоб-
ражена на рис. 9.34.
Регистр предназначен для динамического хранения четырехразрядных чисел
и выдачи их в схему сравнения при поступлении тактового сигнала от управляю-
щего устройства. Групповой регистр в данной схеме состоит из четырех регистров
по три разряда в каждом и позволяет записать в него три четырехразрядных
числа в двоичном коде. Прн записи чисел в регистр на его четыре входа подается
первое число, например ОНО, ровно через один такт подается второе число —
1011 и еще через такт третье— 1110. Через три такта появляется на выходе ре-
гистров первое записанное число, через четыре такта — второе, затем — третье
и, начиная с этого момента, с каждым новым тактом записанные числа в задан-
ной последовательности появляются иа выходах регистра и поступают на входы
схемы сравнения. На входы схемы сравнения поступают сигналы от четырех-
разрядного двоячного счетчика, работающего от генератора тактовых импульсов,
посылающего на вход счетчика импульсы через 0,1 с. При совпадении чисел
на выходах счетчика и выходах регистра иа выходе схемы сравнения появляется
сигнал.
Таким образом, первый сигнал от реле времени, соответствующий числу
ОНО, появится на шестом импульсе и время выдержки будет соответствовать
0,6 с. После этого регистр сдвигается и на его выходах появляется второе за-
писанное число 1011. Это число соответствует одиннадцати импульсам тактового
генератора, т. е. сигнал на выходе реле времени появится через 1,1с после за-
В)
Рис. 9.33. Реле времени
84!
Запись
bffxf °BxZ °ВхЗ
Л 4
СЗВаг ГИ
Рис, 9.34. Реле времени с групповым сдвигающим регистром
пуска счетного триггера. Третий сигнал на выходе реле времени появится при
поступлении четырнадцатого тактового импульса на вход счетчика и будет соот-
ветствовать времени, равному 1,4 с. Очевидно, что для получения более длитель-
ных задержек времени необходимо увеличить число разрядов двоичного счет-
чика и сдвигающих регистров. Увеличение времени задержки может быть до-
стигнуто увеличением дискретности реле времени. Например, если будем пода-
вать тактовые импульсы через 0,2 с, то максимальная выдержка времени у реле
составит 3 с, т. е. возрастет в 2 раза. Триггер с раздельными входами, установ-
ленный на выходе генератора тактовых импульсов, является фильтром шумов.
Усилительные и пороговые схемы. В тех случаях, когда мощность управ-
ляющего сигнала недостаточна для приведения в действие какого-либо струйного
устройства, используют схемы, которые строят на аналоговых усилителях СТ46,
СТ59 и др. Последовательное соединение нескольких элементов образует много-
каскадный струйный усилитель (рис. 9.35, а) с общим коэффициентом усиления
k = krk2 ,..., kn, где k2, kn—коэффициенты усиления первого, второго и
последующих каскадов.
Пусть требуется переключить управляющим давлением, равным 20 Па,
струйный дискретный элемент, давление срабатывания которого, с учетом запа-
сов по надежности равно 600 Па. Коэффициент усиления струйного элемента
одного каскада многокаскадного усилителя k — 4. Тогда коэффициент усиления
трехкаскадного усилителя k « 4X4X4 = 64, а так как k = Арв/Арвх, то при
Арвх = 20 Па будет Арв ~ k Арвх = 64 X 20 = 1280 Па. Сигнал с таким
уровнем давления на выходе усилительной схемы более чем достаточен для сра-
батывания дискретного элемента,! подающего сигнал в схему управляющего
устройства. Для надежной работы многокаскадного усилителя целесообразно
на вход первого каскада подавать давление смещения. Это давление обеспечи-
вает надежное отключение схемы при уменьшении управляющего сигнала. Из-
меняя величины давления смещения, можно регулировать порог срабатывания
схемы в очень широких пределах — от отрицательных величин давления сраба-
тывания до величин, равных давлению питания. Схемы этого типа можно ис-
пользовать для построения реле физических величин, и в частном случае для
реле контроля геометрических размеров обрабатываемых деталей. В литературе
их называют пороговыми устройствами, или триггерами Шмитта.
Простейшая схема триггера Шмитта и его характеристика переключения при-
ведены на рис. 9.35, б, в. Триггер Шмитта может быть построен и на одном струй-
ном элементе. Например, аналоговый усилитель, работающий в релейном режиме
и изменяющий свой порог срабатывания вследствие изменения величины дав-
242 '
Рис. 9.35. Усилительные и пороговые схемы
ления смещения дросселем, включенным в линию обратной связи, представ-
ляет собой пороговый элемент — триггер Шмитта (рис. 9.35, г).
Изменить порог срабатывания аналогового усилителя, работающего в ре-
лейном режиме, можно также заданием давления смещения с помощью дрос-
селя, соединяющего линию обратной связи с атмосферой (рис. 9.35, Э). Анало-
гично этому могут быть построены пороговые схемы и иа дискретных элементах.
Однако, как показали исследования и практика внедрения устройств контроля,
триггеры Шмитта, построенные на аналоговых усилителях, имеют меньший раз-
брос по давлению срабатывания и тем самым обеспечивают более высокую точ-
ность устройств контроля.
9.5. ПОСТРОЕНИЕ СТРУЙНЫХ УПРАВЛЯЮЩИХ УСТРОЙСТВ
Устройства управления последовательностью операций. Технологический про-
цесс изготовления детали или изделия на машинах-автоматах (станках, прессах),
как правило, подразделяется на ряд последовательных операций. Функциями
струйного управляющего устройства являются: контроль выполнения операции
и управления последовательностью и длительностью операций; обеспечение мер
защиты и блокировок; обеспечение заданного режима работы — ручного, авто-
матического; выдача оператору информации о работе управляющего устройства
с помощью визуальной индикации.
При проектировании управляющего устройства необходимо анализировать
следующие факторы, характеризующие условия и технологический процесс изго-
товления изделия:
условия производства (пожаро- и взрывобезопасность, квалификация об-
служивающего персонала, качество питающего воздуха в заводской сети и т. п.),
тип и характер производства — мелкосерийное, серийное с редко меняющимся
243
ЦйкЛом работы, серийное с неизменным циклом работы станка (в зависимости
от типа и характера производства определяется и тип управляющего устройства,
т. е. с программным цикловым либо числовым управлением или же с фикси-
рованной, т. е. неизменной программой);
обеспечение режимов работы — ручной, полуавтоматический и автомати-
ческий;
функциональное назначение системы защиты и блокировок;
характер окружающей среды и влияние ее на управляющее устройство;
связь оператора с системой управления и машиной с помощью органов руч-
ного управления и устройств индикации;
надежность работы связывающих машину и систему управления устройств—
струйных путевых выключателей, преобразователей, разъемов, трубопрово-
дов и др.;
напряженность цикла, длительность отдельных операций и цикла в целом
(исходя нз этих данных можно выбрать управление переходом от одной операции
к другой либо по путевым выключателям или же по временном сигналам);
выбор устройств, управляющих исполнительными механизмами, и их связи
с исполнительными механизмами;
удобство обслуживания системы управления (этим определяется ее компо-
новка, выбор средств и методов индикации правильности функционирования
системы управления).
Важным фактором при проектировании является выбор технологии изго-
товления системы управления, ее элементной базы, логической структуры и
источника питания (вентилятор, заводская сеть).
Правильно принятые решения на основе оценки указанных факторов поз-
волят создать экономичную и высоконадежную систему управления.
Построение устройств управления последовательностью операций. Рассмо-
трение этого вопроса начнем с простейших примеров, последовательно усложняя их.
Пример 1. Автоматическое возвратно-поступательное движение рабочего органа
осуществляется пневмо- или гидроцилиндром. Контроль выполнения операций обеспе-
чивается нормально открытыми бесконтактными путевыми выключателями типа СТ144,
у которых при отсутствии управляющего воздействия на выходе устанавливается сигнал
«1». Начало и конец работы контролируются кнопками (нормально закрытыми) Кп —
«Пуск» и Кс — «Стоп».
Цикл работы запишем в виде А+, А-, А+, А“; знак «-}-» означает выдвижение штока
цилиндра, знак «—» — возврат штока.
Схему управляющего устройства составляют по таблице состояний входных уст-
ройств — путевых включателей, кнопок и др. (табл. 9.4). На рис. 9.36, а приведена схема
управляющего устройства, реализующая заданный цикл. Схема построена на струйных
логических элементах ИЛИ — НЕ ИЛИ; для переключения распределителей используют
усилители давления, в которых давление управляющих сигналов усиливается до 0,2 —
0,3 МПа.
Пример 2. Схема управляющего устройства для двух цилиндров, работающих
по циклу A-J-, В2; А—; В—, приведена на рис. 9.36, б.
В табл. 9.5 дана таблица состояний входных устройств, на основании которой пост-
роена схема. Управляющее устройство, построенное на основе этой схемы, не обеспечивает
защиты исполнительных механизмов прн аварийных ситуациях. В нем отсутствует также
ручное управление отдельными цилиндрами. В следующем примере введем соответствую-
щие блокировки и ручное управление отдельными механизмами.
Пример 3. Пресс форма с формовочной массой подается цилиндром А. Ци-
линдр В прессует массу в пресс-форме до заданной высоты, контролируемой путевым
выключателем Ь2 (рис. 9.36, в). Положение штоков контролируется нормально открытыми
путевыми выключателями. Начало и окончание работы контролируется нормально закры-
тыми кнопками «Пуск» и «Стоп». Управляющее устройство должно обеспечивать работу
в наладочном, ручном и автоматическом режимах. Цикл работы А-Н В 4*; В—; А—.
Составим таблицу состояний входных устройств путевых выключателей, кнопок
(табл. 9.6). Состояние путевых выключателей в строках второй и четвертой совпадает.
Это говорит о том, что в логической схеме необходимо ввести элемент памяти, чтобы разли-
чать условия на выдвижение штока цилиндра В и на возврат штока цилиндра А. Элемент
памяти — триггер с раздельными входами — запоминает сигнал выключателя Ь2, фикси-
рующего нижнее положение штока цилиндра В. Введем в четвертую строку таблицы допол-
нительное условие ПВ2 (сигнал от триггера), в результате чего получим в строках второй
и четвертой различные условия на выдвижение штока цилиндра В и на возврат штока ци-
линдра А.
Схема устройства, реализующая заданный цикл работы, приведена на рис. 9.36, в.
Ручной режим работы устройства обеспечивается кнопками (А“), Кн (В+), /<Н(В-)
и тумблером — «автомат-наладка». В ручном режиме тумблер соединяет кнопки ручного
управления с источником питания с помощью усилителя и распределителя. В автоматиче-
ском режиме питание не подается к кнопкам и разрешается работа триггеров /, 2, 3.
244
Рис. 9.36. Простейшие схемы управления работой цилиндров
245
Таблица 9.4
Таблица состояний входных устройств
к рис. 9. 36, а
Таблица 9.5
Таблица состояний входных устройств
к рис. 9.36, б
Опе- рация Входы Выход У Опе- рация Входы Вы- ходы
я. '<с ^2 bi ь, Ух У2
А+ А- А+ А- А+ 0 0 0 0 0 1 1 1 1 А+ в+ А“ в- 1 0 0 0 0 0 0 1 1 0 0 0 1 1 0
Схема перехода от ручного режима к автоматическому может быть решена и другими
методами.
Рассмотрим, в какой степени схема, приведенная иа рис. 9.36, в, отвечает требова-
ниям защиты н блокировок, связи оператора с управляющим устройством. Предположим,
что в результате нарушения уплотнений в цилиндре, отказов в работе распределителей
или другой аппаратуры произойдет произвольное перемещение штоков цилиндров. Наибо-
лее опасным будем считать произвольное перемещение штока цилиндра В вниз. Это дви-
жение штока приводит к аварии — выходу из строя пресс-формы и других механизмов,
приводимых штоком цилиндра Л. В схеме блокировки, предотвращающей указанную
аварию, нет. Действительно, шток цилиндра А выдвигается по сигналам путевых выклю-
чателей = 0, bi — 0 и перемещается в дальнейшем независимо от состояния путевого
выключателя blt так как триггер 2 с раздельными входами, восприняв информацию, непо-
средственно управляет распределителем цилиндра А. И если шток цилиндра В по каким-
либо причинам начнет перемещаться во время движения штока цилиндра А, произойдет
авария.
Аналогичная ситуация возможна и при произвольном перемещении штока цилин-
дра А. Рассматриваемая схема ие обеспечивает защиты от возможных аварийных ситуа-
ций. При возникновении аварийной ситуации оператор должен остановить работу, нажав
на кнопку «Стоп», ио схема ие гарантирует останов, так как кнопка «Стоп» — нормально
закрытая и засорение каналов, обрыв трубопровода, связывающего кнопку и логические
элементы, ие обеспечат прохождение сигнала на останов. Использование кнопки «Стоп»
нормально открытого исполнения исключает подобные ситуации, так как засорение, обрыв
трубопровода приведут к останову машины.
Причинами аварий при работе машин часто являются ложные сигналы от путевых
выключателей, которые могут возникнуть в результате их засорений, поломок, обрывов
трубопроводов и др. В схеме, приведенной иа рис. 9.36, в, отсутствует защита системы
от ложных сигналов путевых выключателей. Рассматриваемое управляющее устройство
ие обеспечивает и связи оператора с машиной, так как отсутствует индикация выполнения
операций, прохождения основных сигналов, отказов путевых выключателей и т. д.
На рис. 9.37 показана схема управляющего устройства для того же цикла,
но с изменениями, которые удовлетворяют требованиям базопасности работы и
обеспечивают связь оператора с машиной и системой управления. Увеличение
числа элементов в схеме вследствие их низкой стоимости и высокой надежности
практически не отражается на стоимости и надежности устройства в целом, но
значительно улучшает ее обслуживание и технические качества.
Предотвращение аварийных ситуаций, возникающих в результате произ-
вольных перемещений штоков цилиндров А и В, достигается установкой эле-
ментов НЕ — ИЛИ 1 на выходе триггера с раздельными входами и введением
Таблица состояний входных устройств к рис. 9.36, в
Таблица 9. 6
Операция Входы Выходы
<?2 Ьх У1 Уз Уа Уз
А+ В+ в- А- 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1
246
9 ИС. 9.37. Управляющее устройство с индикацией отказов путевых выключателей, вклю-
чения усилителей я блокировками
247
механизмам
Рис. 9.38. Структурная схема управляющего
устройства из типовых функциональных узлов
непосредственно на их входы сигналов от
путевых выключателей bj и а2. Команда
«Стоп» подается нормально открытой кноп-
кой, что обеспечит прохождение команды
в случае отказа кнопки или обрыва тру-
бопровода.
Схема, изображенная на рис. 9.37,
предусматривает блокировку и индика-
цию отказов путевых выключателей.
Вероятной причиной отказа нормально
открытых выключателей и подачи ими
ложных сигналов является их засорение
или обрыв трубопроводов; тогда в случае возникновения ложного сигнала на
одном из выключателей одновременно подаются сигналы «О» путевыми вы-
ключателями, установленными на одном исполнительном механизме. Блоки-
ровка отказов путевых выключателей цилиндра А выполняется соединением
входов элемента ИЛИ — НЕ ИЛИ 1 с выходами путевых выключателей аг и а2.
Таким образом, при сигналах = 0, а2 = 0 сигнал «1» с выхода элемента /
поступает на вход элемента 2. Далее сигнал, проходя через элементы 3, 4, пере-
ключает триггер 5 и дает команду на останов, отключая распределитель 6. Одно-
временно сигнал элемента 1 включает индикатор отказов 7. Аналогично прово-
дятся блокировка и индикация отказов путевых выключателей цилиндра В.
Эта защита обеспечивается элементом 8 и индикатором 9. Блокировки отказов
нормально закрытых выключателей выполняются таким же образом, но с исполь-
зованием струйных элементов, реализующих логическую операцию И.
Схема дает информацию оператору о прохождении сигналов от устройства
к распределителям с помощью индикаторов, подключенных к элементам 10, 11,
12, 13. Блокировки при работе в ручном режиме предусмотрены. Схема обеспе-
чивает «нулевую защиту» и другие меры защиты введением блокировочных сиг-
налов на вход элемента 3. Струйные управляющие устройства строятся и при
помощи других методов, использование которых обусловлено стремлением раз-
работчиков уйти от интуитивного способа построения схем управляющих
устройств. Эти методы предусматривают использование для построения схем
управляющих устройств отработанных логических структур отдельных блоков.
На рис. 9.38 приведена структурная схема управляющего устройства,
включающая в себя функциональные типовые блоки: питания и защиты 1; фор-
мирования тактовых импульсов 2; командозадающего устройства 3; блокировок
(логики) 4; входных устройств 5; индикации 6.
Построим схему управляющего устройства, реализующего цикл А+; В+;
Б—; А—, в отличие от рассмотренных выше на основе функциональных блоков
в соответствии со структурой, приведенной на рис. 9.38.
Разработку схемы начнем с анализа циклограммы, в которой работа ци-
линдров разбита на отдельные такты (рис. 9.39, а). Первый такт -т- выдвижение
штока цилиндра А; второй — выдвижение штока цилиндра В; третий — возврат
штока цилиндра В; четвертый такт — возврат штока цилиндра А. В схеме управ-
ляющего устройства используют типовые функциональные блоки (см. рис.
9.39, а).
I. Питание и защита. Этот блок обеспечивает питание устройства, осуще-
ствляет «нулевую защиту» и блокировки.
II. Формирователь тактовых импульсов, предназначенный для выработки
тактовых импульсов при изменении состояний путевых выключателей.
III. Командозадающее устройство, последовательно сдвигающее импульсы
в каждом такте.
IV. Логические условия — блокировки.
V. Входные устройства.
VI. Индикация.
248
249
Одним из важных свойств этого управляющего устройства является то,
что без каких-либо изменений его логической структуры возможно управлять
работой двух цилиндров в любой последовательности. Для этого достаточно
перекоммутировать трубопроводы, связывающие выходы элементов 1, 2, 3, 4
с входами элементов 9, 10. Пусть требуется обеспечить работу цилиндров в сле-
дующей последовательности: В+; В—; А+; А.-—. Работа по этому циклу будет
обеспечена соединением выходов^ элементовжНЕ ИЛИ 1, 2, 3 с входами элемен-
тов 6, 7, 5 и введением требуемых блокировок на входы элементов 9, 10. Анало-
гично можно управлять работой цилиндров и с другой последовательностью.
Использование того или иног-о метода построения управляющих устройств
в каждом конкретном случае следует определять как техническими, так и эконо-
мическими соображениями.
Пример 4. Управление последовательностью операций по времени.
Когда нет возможности установить элементы, контролирующие выполнение операций
на исполнительных органах машин, используют временное управление последователь-
ностью операций. Простейшая схема управляющего устройства, обеспечивающего работу
двух цилиндров в полуавтоматическом режиме по циклу А+; В+; В-; А-, показана на
рис. 9.39, б. Схема включает в себя генератор временных тактовых импульсов 1, командо-
задающее устройство 2, логические элементы ИЛИ 3, наладочные кнопки 4, блок пуска
и нулевой защиты 5, кнопки «Пуск», «Стоп» 6.
Пусть для выполнения технологических операций требуются следующие выдержки
времени: выдвижение штоков цилиндров (А+) — 1 с, (В+) — 1 с, возврат Штоков (А-) —2 с,
(В-) — 3 с. Исходя из того, что минимальная длительность операции 1 с, используем
генератор с частотой следования тактовых импульсов, равной 1 Гц. Частота следования
импульсов корректируется дросселем 7, установленным на входе усилителя 3. Длитель-
ность цикла равна 7 с с наименьшим временным интервалом 1 с; таким образом, для
построения схемы используем командозадающее устройство на семь разрядов, в кото-
ром тактовые импульсы сдвигаются от разряда к разряду через 1 с.
Сигналы длительностью 1 с на выдвижение штоков цилиндров А и В поступают на
усилители распределителей с первого и второго разрядов комаидозадающего устройства.
Сигнал длительностью 2 с на возврат штока цилиндра А поступает от четвертого и треть-
его разрядов командозадающего устройства, через элемент 9, выполняющего операцию
суммирования (ИЛИ). Сигнал иа возврат штока В обеспечивается суммированием сигна-
лов пятого, шестого и седьмого разрядов регистра элементами 10, 11, т. е. на время возврата
штока цилиндра В отводится 3 с.
Струйные системы циклового программного управления (ЦПУ) применяют
при автоматизации металлорежущих станков, промышленных роботов и других
машин, используемых преимущественно в крупносерийном производстве. В си-
стемах ЦПУ программируется только логическая и технологическая инфор-
мации (последовательность выполнений операций, режимы обработки, время
выполнения операций и др.), размерная информация выполняется с помощью
регулируемых упоров или других устройств, предназначенных для подачи сиг-
налов в логическое устройство при достижении механизмом заданной величины
перемещения. Во временнйх системах ЦПУ эта величина перемещения задается
продолжительностью операции (чаще в промышленных роботах). В связи с тем,
что логическое устройство освобождено от переработки размерной информации,
системы циклового программного управления отличаются простотой.
В крупносерийном производстве при длительной обработке одной партии
деталей, в промышленных роботах, обслуживающих станки, прессы и другие
машины с редко меняющимся циклом системы ЦПУ нередко могут явиться пред-
почтительными по сравнению с другими системами программного управления.
Это связано с тем, что эти системы просты по структуре, более надежны в эксплуа--
тации и проще в обслуживании, чем системы с числовым программным управ-
лением.
Функциональная схема. На рис. 9.40, а изображена функциональная схема
струйной системы ЦПУ, в которую входят следующие основные устройства:
задания и ввода программы; переработки информации, нанесенной на программо-
носителе; контроля отработки этапа — такта программы — (входные устрой-
ства— путевые выключатели и др.); выходные и исполнительные устройства.
Рассмотрим назначение и структуру основных устройств функциональной схемы.
Устройство задания и ввода программы содержит информацию о цикле,
которая отражена в программоносителе — перфокарте, перфоленте, штеккер-
ной панели или наборном поле. Программоноситель является составной частью
устройства задания программы. В устройстве поэтапного ввода программы вы-
250
Рис. 9.40. Функциональная схема струйной системы ЦПУ (а) и структурная схема уст-
ройства задания и ввода программы (б)
рабатываются тактовые импульсы, которые поступают в устройство задания
программы. Тактовые команды последовательно выдаются с помощью сдвигаю-
щего регистра (струйно-механического либо струйного). Тактовые импульсы,
поступая в устройство задания программы, перерабатываются в соответствии
с программой, заданной на программоносителе, и с помощью считывающих эле-
ментов, направляются в устройство переработки информации. В логическом блоке
устройства переработки информации выполняются блокировки, вырабатываются
команды, которые поступают на усилители, преобразователи, а затем на пневмо-,
гидрораспределители или же на другие исполнительные элементы н далее на ис-
полнительные механизмы, осуществляющие технологические операции. Выпол-
нение операций контролируется путевыми выключателями и другими датчиками,
сигналы от которых поступают в устройство переработки информации, в блок
логики и в блок формирования тактовых импульсов. Тактовые импульсы от
формирователя поступают в устройство поэтапного ввода программы, в котором
командозадающее устройство (сдвигающий регистр) сдвигает тактовые импульсы.
Сдвигаемые в каждом такте импульсы поступают в устройство задания программы
и затем в соответствии с программой, нанесенной на программоносителе, —
в блок логики либо непосредственно на исполнительные элементы.
Классификация струйных систем ЦПУ рассмотрена в работе [3]. Здесь
ограничимся классификацией струйных систем ЦПУ по конструктивным призна-
кам и способу получения тактового импульса на переход от одной операции
к другой. Существует два способа получения тактовых импульсов: первый —
выполнение предыдущей операции не контролируют путевыми выключателями
251
и другими устройствами, и тактовые импульсы на переход от одной операции
к другой формируются в блоке логики по командам от путевых выключателей.
Второй способ — контроль по времени — используют тогда, когда нельзя уста-
новить путевые выключатели. В тех случаях, когда безопасность работы не обес-
печена, вводят блокировки для защиты как отдельных механизмов, так и опера-
тора с помощью путевых выключателей. В ряде случаев при проектировании
струйной системы ЦПУ целесообразно использовать одновременно оба способа
получения тактовых импульсов.
В струйных системах ЦПУ получили распространение в основном три типа
устройств поэтапного ввода программы, отличающиеся конструктивным испол-
нением.
Первый тип устройств состоит только из струйных логических элементов,
образующих струйное счетно-командозадающее устройство. Второй тип выпол-
нен в виде струйно-механнческого или пневмомеханического обегающего устрой-
ства (шагового искателя). Третий тип состоит из струйного командозадающего
устройства, каждый выход которого связан с мембранным усилителем, пред-
назначенным для усиления сигналов от струйных элементов и их последующего
размножения и ввода в устройство задания программы. Этот тип известен как
струйно-мембранное командозадающее устройство.
Конструкция устройства задания программы может быть выполнена в виде
штекерной панели, наборного поля, клавишной или кнопочной панели и другого
устройства с внутренней памятью, либо в виде механизма для считывания про-
граммы с программоносителей (перфокарты, перфоленты и т. п.) — устройства
задания программы с внешней памятью. Любое из этих устройств задания про-
граммы может быть использовано в каждой из классифицированных нами систем
ЦПУ. Выбор какого-то определенного устройства задания программы следует
определять технологическим процессом изготовления детали на машине-авто-
мате, экономичностью, удобством в эксплуатации и рядом других факторов,
которые должны быть проанализированы в каждом конкретном случае отдельно.
В струйных управляющих устройствах ЦПУ промышленными роботами и
станками наибольшее распространение получили устройства задания программы,
выполненные в виде наборного поля. Это объясняется их конструктивной просто-
той и удобством в эксплуатации.
Устройство задания и ввода программы. На рис. 9.40, б показана структур-
ная схема струйного устройства задания и ввода программы системы ЦПУ, в ко-
торой выполнение предыдущей операции контролируется путевыми выключа-
телями, а устройство задания программы выполнено в виде наборного коммута-
ционного поля.
Тактовые импульсы от формирователя поступают на вход устройства поэтап-
ного ввода программы, которое представляет собой струйное командозадающее
устройство, где сдвиги происходят в соответствии с частотой тактовых импульсов.
Другими словами, устройство поэтапного ввода представляет собой линию за-
держки, где скорость распространения информации определяется частотой так-
товых импульсов. Число разрядов регистра определяется числом тактов, необ-
ходимых для выполнения всех операций в цикле. В устройстве задания и ввода
программы предусмотрена индикация сдвига тактового импульса в каждом раз-
ряде. Съем информации с выходов командозадающего устройства выполняется
блоком размножения сигналов. Блок состоит из логических элементов, назначе-
ние которых сводится к распределению сигналов с каждого разряда командо-
задающего устройства по нескольким каналам (причем, уровень сигнала «1»
по расходу и давлению должен сохраняться в любом из этих каналов). Размножен-
ные в блоке сигналы поступают к наборному полю, которое представляет собой
ряд тактовых трубок (штуцеров). Число трубок зависит от числа тактов и числа
одновременно включаемых механизмов в одном такте.
Другой ряд выходов, установленных на наборном поле, служит для приема
размноженных сигналов от устройства поэтапного ввода программы. Этими труб-
ками с наборным полем связаны многовходовые схемы ИЛИ илн многовходовые
элементы ИЛИ, назначение которых состоит в обеспечении повторяемости одной
и той же операции в цикле и формировании выходных команд, поступающие
в блок логики либо непосредственно на усилители,
252 *
Рис. 9.41. Командозадающее устройство
Соединяя гибкими шлангами тактовые трубки с выходными трубками, можно
изменять последовательность выполнения отдельных операций в цикле, включать
различное число механизмов в разных тактах, повторять одну и ту же операцию
несколько раз в течение пикла (включать один и тот же исполнительный ме-
ханизм).
Использование в качестве устройства задания программы наборного поля
обеспечивает: высокое быстродействие, низкую стоимость и экономичность ус-
тройства, возможность корректировки программы для получения оптимальных
режимов непосредственно во время наладки машины; высокую надежность, так
как устройство задания и ввода программы построено на струйных элементах
и не имеет подвижных частей.
Рассмотрим работу отдельных элементов, входящих в устройство задания
и ввода программы.
Устройство поэтапного ввода программы представляет собой простейший
сдвигающий регистр — командозадающее устройство, полная схема которого,
график работы и условное обозначение показаны на рис. 9.41.
Тактовые импульсы от формирователя импульсов поступают на вход триг-
гера со счетным входом, являющегося составной частью командозадающего ус-
тройства. Импульса у и у триггера со счетным входом являются сдвигающими.
Каждый разряд состоит из триггера с раздельными входами, построенного на
элементах ИЛИ—НЕ ИЛИ либо на основе триггеров с раздельными входами.
253
1 2
Yt Yz Y} Yy
От разряда
командозадаю-
щего устройстда,
О
В Влок логики
Размноженные сигналы
командозадающего
устройства
Рис. 9,42, Схемы размножения сигналов (а), схема ИЛИ для устройства задания и ввода
программы (б) и схема повторною включения исполнительных механизмов в одном такте (в)
Исходное состояние регистра устанавливается подачей сигнала на вход е триггера
с раздельными входами первого разряда и на установочный вход d триггера со
счетным входом. Подача импульсов на входы е и d приводит к установке всех
разрядов в нулевое состояние (на выходах п1 ... nlr появляются сигналы «О»),
Это состояние соответствует исходному состоянию устройства поэтапного ввода
программы. Подача тактового импульса Тп на счетный вход триггера приводит
к его переключению из исходного (нулевого) состояния в единичное. При этом
на выходе у получаем сигнал «О», в результате чего сигнал «1» с выхода элемента 1
поступает на вход первого разряда. Переключением триггера с раздельными вхо-
дами этого разряда на его выходе i устанавливается сигнал «О». Следовательно,
на выходе пх первого разряда появляется сигнал «1». Подача второго тактового
импульса на счетный вход изменяет состояние триггера со счетным входом, в ре-
зультате чего на выходе у возникает сигнал «1», а на выходец — сигнал «О»,
при этом происходит переключение триггера с раздельными входами во втором
разряде и на выходе п2 устанавливается сигнал «1». Первый разряд устанавли-
вается в нулевое состояние. Таким образом, в схеме командозадающего устрой-
ства происходит сдвиг тактового импульса.
Блок размножения сигналов. Струйная система ЦПУ, как правило, должна
обеспечивать возможность включения нескольких механизмов в одном такте,
поэтому при проектировании СУ необходимо на основе анализа технологиче-
ского процесса определить максимальное число одновременно включаемых уси-
лителей (выходов) в одном такте. Включение нескольких механизмов достигается
размножением сигнала с выхода командозадающего устройства с помощью схемы,
приведенной на рис. 9.42, а. Если, например, требуется получить в одном такте
четыре команды, то схема, показанная на рисунке, должна распределить сигнал
командозадающего устройства по четырем каналам. Сигнал с выхода командо-
задающего устройства поступает на вход элемента 1 и с выхода ух этого элемента
получаем сигнал «1», а второй инверсный выход у2 элемента связан со входом
элемента 2, с инверсного выхода также получаем сигнал «1» и т. д. Выход
ИЛИ элемента 2 соединен с входом следующего элемента, инверсный выход
которого у3 также является размноженным сигналом. Таким образом, каждое
повторение тактового сигнала требует дополнительного струйного элемента.
254
Выходы z/j, z/2, y:!, yi условно назовем тактовыми выходами. Эти выходы
гибкими трубками соединяются с входами многовходовых элементов ИЛИ.
Блок многовходовых элементов ИЛИ. Обеспечение многократного включения
(повторяемости) одного и того же механизма в цикле достигается использова-
нием схемы ИЛИ с большим числом входов. Число входов схемы ИЛИ, образу-
ющей выходную команду устройства задания и ввода программы, определяет
повторяемость, т. е. число входов схемы соответствует требуемому числу вклю-
чений одного и того же механизма в течение цикла.
Схема ИЛИ может быть построена на многовходовых элементах ИЛИ пассив-
ных либо активных. Схема ИЛИ устройства задания и ввода программы пока-
зана на рис. 9.42, б, в. На входы xlt х2.хп поступают размноженные сигналы
от командозадающего устройства. Так, выходная команда может быть реали-
зована в течение цикла 6 раз, так как число входов элемента ИЛИ, обеспечива-
ющих отработку этой команды, равно шести. Повторяемость включения дости-
гается коммутацией размноженных схемой тактовых импульсов с входами схемы
ИЛИ. Входы схемы ИЛИ связаны с коммутационными штуцерами (выходами),
установленными на наборном поле.
Наборное поле представляет собой панель, на которой в определенном по-
рядке размещены тактовые и выходные штуцера, которые связаны воздухо-
проводами с выходами схемы размножения и с входами схемы ИЛИ. Выходные
команды 21, z2..zn устройства задания и ввода программы включаются комму-
тацией размноженных тактовых сигналов с соответствующими входами схемы
ИЛИ. Как видно из рис. 9.42, в изменение числа включаемых механизмов в такте,
последовательности и повторяемость их работы в течение цикла обеспечивается
соединением коммутационными трубками надлежащих тактовых и выходных
штуцеров. Так, на наборном поле (см. рис. 9.42, в) набрана программа, обеспе-
чивающая включение в первом такте сигналом одновременно трех выходных
команд 21, z2 и 2Л. Во втором такте сигналом п2 включаются команды Zj и z2 и в по-
следнем такте сигналом регистра пп включается команда z2. Следовательно про-
стой перекоммутацией трубок I легко изменить набранную программу.
Формирователи тактовых импульсов. Сдвиги в комаидозадающем устройстве
происходят с частотой тактовых импульсов ТИ. В струйных устройствах ЦПУ
каждый сдвиг соответствует окончанию предыдущего такта и началу последу-
ющего. Информация о завершении такта в СУ вводится путевыми выключате-
лями либо другими элементами. В процессе работы станка или манипулятора
любой из исполнительных механизмов может находиться в определенном поло-
жении, взаимодействуя при этом с соответствующим путевым выключателем,
сигнал от которого будет постоянно поступать в струйное управляющее устрой-
ство. Если в это же время будут работать другие механизмы, то сигналы от дру-
гих путевых выключателей будут подавлены сигналом первого выключателя,
т. е. не приняв определенных мер, не получим импульсов для сдвига регистра
после окончания такта. Вместе с тем, при работе станка в одном и том же
такте могут работать несколько исполнительных механизмов, время прихода
которых в крайние положения может быть различным. Эти исполнительные
механизмы взаимодействуют со своими путевыми выключателями и выдают ко-
манды.
Необходимо получить тактовый импульс для сдвига командозадающего
устройства независимо от числа работающих в такте исполнительных механиз-
мов и времени их взаимодействия с путевыми выключателями, датчиками и дру-
гими устройствами контроля. Итак, назначение формирователя тактовых импуль-
сов состоит в формировании одного тактового импульса после отработки такта
любым числом исполнительных механизмов независимо от длительности взаимо-
действия этих механизмов с путевыми выключателями.
На рис. 9.43 приведены схема формирования тактовых импульсов и график
ее работы. Пусть в каком-либо такте работают два исполнительных механизма —
цилиндры А и В, выдвижение штоков которых контролируется путевыми выклю-
чателями а2, Ь2, а исходное положение — выключателями alt Ьг. Цилиндры А, В
не одновременно достигают своих крайних положений, и в связи с этим путе-
вые выключатели могут включаться не одновременно; так, в одном такте цикла
255
в
А
Рис. 9.43. Формирование тактовых импульсов
цилиндр А может опередить цилиндр В, а в том же такте следующего цикла
цилиндр В опередит цилиндр А. Действительно, тактовый импульс Та появ-
ляется только тогда, когда цилиндры А и В достигают своих крайних положе-
ний, при которых выключатели а2 и Ь2 выдают сигналы «О», а сигнал на возврат
цилиндра А, формируемый этим импульсом, равен «1». Как только сигнал на
возврат цилиндра А поступит в схему формирователя тактовых импульсов,
тактовый импульс Та на выходе элемента исчезнет. Аналогично формируется
тактовый импульс Та на возврат цилиндра В. Таким образом, с приходом
сигнала на включение какого-либо механизма тактовый импульс Ти, формиру-
ющий этот сигнал, исчезает, что, несомненно, является достоинством приведен-
ной схемы.
Система ЦПУ (рис. 9.44) обеспечивает работу управляемой машины в на-
ладочном, операционном полуавтоматическом и автоматическом режимах, позво-
ляет программировать рабочие циклы с изменяемой последовательностью опе-
раций при числе тактов, равном 20 и числе выходов 8. В любом из тактов одно-
временно могут быть включены два исполнительных механизма, и любой меха-
низм в течение цикла может быть включен 3 раза. Программа задается иа набор-
ном поле путем коммутации воздухопроводами соответствующих тактовых и
выходных трубок. Поэтапно программа вводится двадцатиразрядным командо-
задающим устройством II.
СУ работает следующим образом. В соответствии с набранной на наборном
поле программой включаются в определенной последовательности усилители
давления А 4~ А—, В+, В—, С+, С—, D-г, D—, обеспечивая заданный
цикл машины. Путевыми выключателями aj, а2, blt b2, с2, clt dlt d2 контроли-
руется перемещение рабочих органов и подаются команды в схему III форми-
рования тактовых импульсов. Сформированные тактовые импульсы поступают
на вход командозадающего устройства и выполняют в нем сдвиги. Выходные
сигналы от разрядов через схему размножения поступают к наборной панели
и далее в соответствии с заданной программой проходят на входы многовходовых
элементов ИЛИ и далее иа входы усилителей. После отработки всех операций,
запрограммированных в цикле, проходит последняя запрограммированная ко-
манда «Конец цикла». Этой командой командозадающее устройство устанавли-
вается в исходное состояние.
Устройства контроля размеров. Элементы «Волга» вместе с применяемыми
в пневматических устройствах первичными преобразователями типа сопло-
заслонка, выключателями СТ135, датчиками СТ140 и СТ158 могут быть исполь-
зованы в устройствах для автоматического контроля линейных размеров. Струй-
ные устройства можно применять как в активном, так и в послеоперационном
контроле. Их можно успешно эксплуатировать в широком диапазоне темпера-
256
Рис. 9.44. Упрощенная схема струйной системы ЦПУ
9 Е. В. Герц и др.
257
Рис. 9.45. Схемы устройств активного контроля
туры при наличии электромагнитных полей и вибраций. Применение струйных
устройств контроля вследствие низкого уровня и отрицательного значения дав-
ления входных сигналов позволяет расширить диапазон измерения и увеличить
измерительный зазор за счет более полного использования возможностей эжек-
торных, кольцевых и эжекторно-кольцевых преобразователей.
В зависимости от требуемой точности измерения используют различные
первичные преобразователи и схемы построения устройств контроля. На рис. 9.45
приведены принципиальные схемы устройств активного контроля типа КС.
Устройства предназначены для контроля геометрических параметров шлифоваль-
ных кругов в процессе механической обработки и могут быть использованы в дру-
гих отраслях машиностроения. На рис. 9.45, а показана принципиальная схема
258
устройства с использованием в качестве измерительного элемента эжекторного
датчика. Схема работает следующим образом. Сжатый воздух от узла 1 при по-
стоянном давлении ра = 0,075 МПа подается к эжекторному преобразователю
(датчику) 4 и одновременно через дроссель 2 к коллектору 3 питания струйных
элементов. Сигнал от преобразователя поступает на входы усилителей 5 и 10.
Элементы 5, 6, 7 н 10, 11, 12 образуют два триггера Шмитта с регулируемыми
в результате изменения сопротивлений и 7?3 порогами срабатывания.
При уменьшении измерительного зазора s давление на входах 2 элементов 5,
10 увеличивается, что приводит к последовательному срабатыванию триггеров
Шмитта и загоранию лампочек «Внимание» и «Размер» при включении триг-
геров 8, 9, 13, 14 с раздельными входами. При поступлении команды «Размер»
через элемент 17 включается усилитель 18, отводящий датчик в исходное поло-
жение. Кнопки 15, 16 служат для ручного управления механизмом подвода и
отвода датчика из зоны обработки.
В схеме устройства активного контроля (рис. 9.44, б) в качестве измеритель-
ного давления используется разрежение, создаваемое датчиком 4 (СТ140). При
большем расстоянии между срезом сопла и контролируемой поверхностью на
выходе датчика имеется значительное разрежение, под действием которого си-
ловая струя в элементах 5 и 10 полностью отклонена влево в сторону вход-
ных каналов (3), при этом на прямом выходе 5 элемента 7 и инверсном вы-
ходе (4) элемента 11 сигналы отсутствуют. По мере уменьшения измерительного
зазора s падает разрежение на выходе датчика 4. Силовая струя в элементе 5
возвращается в исходное положение, и на инверсном выходе (4) появляется
сигнал, который усиливается элементом 6, и при определенной величине входного
вакуума происходят срабатывание элемента 7 н включение лампочки «Внима-
ние» через триггеры 8, 9 с раздельными входами. Вследствие большого коэффи-
циента усиления элемента 10 (СТ46) по сравнению с элементом 5 (СТ52) возврат
струи в нейтральное положение в элементе 10, срабатывание элемента 11 и за-
горание лампочки «Размер» произойдут при меньшем измерительном зазоре.
Схема на требуемый размер настраивается перемещением датчика 4.
На рис. 9.45, в показана схема устройства активного контроля с использо-
ванием в качестве первичного преобразователя датчика СТ135 с кольцевым соп-
лом. Для измерения используют положительную ветвь характеристики датчика.
В целях повышения точности выполнения команд триггеры Шмитта выполнены
на двух усилителях типа СТ59 (1, 2) и (3, 4), точки срабатывания которых
регулируются переменными сопротивлениями Путевой выключатель 5
триггера Шмитта (6, 7) служит для блокировки индикаторов «Внимание» и «Раз-
мер» при выходе датчика из зоны измерения.
На рис. 9.45, г приведена схема устройства активного контроля, исполь-
зующая для измерения отрицательную ветвь рабочей характеристики датчика
СТ135 с кольцевым соплом; с усилителя измерительный сигнал поступает на
показывающий прибор 1. Сигналом «1» с блокировочного путевого выключа-
теля 2 является также отрицательное давление (разрежение). В остальном
работа схемы аналогична описанным выше.
Монтаж и эксплуатация струйных систем управления. Элементы и устройства
струйной автоматики можно монтировать в любом положении: вертикальном,
горизонтальном, наклонном. При монтаже струйных систем управления необ-
ходимо выполнять Хнеобходимые условия.
Коллекторы и трубопроводы являются одним из основных элементов си-
стем управления, и при их коиструироваиии, изготовлении и монтаже необходимо
использовать металл с антикоррозионным покрытием нли же антикоррозионные
металлы н материалы. После сборки коллекторов их следует тщательно очистить
от грязи, окалины н других частиц, попавших во внутренние полости коллек-
торов при изготовлении. До установки элементов в блоки управляющего устрой-
ства надо подключить устройство к источнику питания и продуть его сжатым воз-
духом в течение 2—3 ч. Емкость коллекторов должна обеспечивать равномерное
распределение давления питания перед всеми устройствами, питаемыми от кол-
лектора. Для' контроля давления питания в коллекторах в каждом из них должны
быть контрольные точки для замера. Питающие н_ другие коллекторы должны
иметь пробки для их очистки в процессе эксплуатации струйной системы управ-
9’ 259
Ления. Межэлементные связи монтируют с помощью полихлорвиннловых и по-
ливинилхлоридных трубок. Трубки изготовляют в соответствии с ГОСТ 19034—73.
Внутренний диаметр трубопроводов, связывающих путевые выключатели, уси-
лители давления и другие элементы, если они расположены вне управляющего
устройства, должен быть равен 4—5 мм.
Внутренний диаметр трубопроводов для соединений элементов в управля-
ющем устройстве должен быть для элементов: СТ55 1,8—2,5 мм; СТ41 3—4 мм,
толщина стенки трубопроводов не менее 0,8 мм.
Внешние устройства. Входные, выходные и вспомогательные устройства
следует располагать в местах, удобных для обслуживания. Установка путевых
выключателей должна обеспечить защиту от возможного попадания в их каналы
минеральных масел, стружек и других загрязнений. Надежная работа путевых
выключателей и управляющего устройства при работе в запыленных условиях
достигается установкой фильтрующих элементов на выходах путевых выключа-
телей. Четкая работа выключателей может быть обеспечена при правильном
конструировании упоров. Заслонки, закрепленные на упорах, должны входить
в паз выключателя, не контактируя с его корпусом.
Усилители давления надо располагать в непосредственной близости к пневмо-
и гидрораспределителям. Усилители должны быть защищены от попадания
на них масла, стружки (обычно их закрывают кожухом).
Входные и другие устройства следует закреплять так, чтобы их штуцера
не были нагружены трубопроводами, а трубопроводы, в свою очередь, не под-
вергались воздействию массы аппаратов. Пневмокабели, гибкие шланги, связы-
вающие внешние устройства с управляющим устройством и объединяющие
отдельные блоки, должны быть жестко закреплены так, чтобы штуцера разъе-
мов не были нагружены их весом.
Электроаппаратура. Устройства, содержащие электрические элементы,
следует изолировать от других устройств так, чтобы была обеспечена безопас-
ность работы при монтаже, ремонте и наладке системы управления.
Эксплуатация. Надежная и долговечная работа струйной системы управле-
ния может быть обеспечена при условии сохранения постоянства геометрии
рабочего профиля элемента. Поэтому струйные элементы и устройства в целом
следует питать сжатым воздухом, очищенным в соответствии с ГОСТ 17433—72
не ниже 5-го класса, а для питания струйных элементов малого размера — не
ниже 3-го класса. Источник питания (заводскую сеть или вентилятор) надо вы-
бирать на основе анализа условий работы управляющего устройства, энергетиче-
ских затрат и других факторов.
Питание струйных систем управления и контроля может осуществляться
от сети сжатого воздуха или от индивидуальных источников. При питании эле-
ментов от сети сжатого воздуха в качестве понизителя давления можно применять
постоянные и переменные дроссели или эжектор, который, засасывая значитель-
ную часть воздуха из окружающей среды, позволяет резко сокращать расход
сжатого воздуха. Дроссельное питание в основном применяют для схем с малым
числом логических элементов (1—30), например в устройствах контроля и регу-
лирования. Эжекторное питание целесообразно использовать для схем, содержа-
щих среднее число элементов (50—200). Индивидуальные источники питания
(вентиляторы илн воздуходувки) рекомендуется применять дли схем с большим
числом логических элементов (системы программного управления роботами,
станками, прессами и другим оборудованием).
Для лабораторных испытаний СУ в качестве индивидуальных источников
питания можно использовать всевозможные пылесосы с уменьшенной частотой
вращения. Снижают частоту вращения пылесосов включением их в сет через
лабораторный регулировочный автотрансформатор модели ЛАТР-2М.
Известны два способа организации питания струйных элементов: первый —
по разомкнутой схеме, второй — по замкнутой или полузамкнутой [7, 10].
В замкнутой схеме весь воздух, подаваемый на питание (в полузамкнутой —
часть воздуха) многократно используется в элементах, которые находятся в про-
странстве, изолированном от окружающей среды. Это позволяет предотвратить
попадание в рабочие камеры (через атмосферные отверстия) струйных элементов',
загрязнений из окружающей среды и тем самым повысить надежность СУ.
260
Пуск в эксплуатацию. Перед пуском системы управления необходимо ви-
зуально проверить систему, правильность монтажа; отсоединить питающие шланги
блоков управляющего устройства и включить источник питания для дополни-
тельной продувки — очистки коллекторов; после продувки подсоединить трубо-
проводы; измерить в соответствии с техническими требованиями уровни давле-
ния питания элементов, выходных сигналов на усилители, сигналов от путевых
выключателей и других устройств; проверить давление питания усилителей.
Обслуживание н ремонт. Перед выполнением профилактических и ремонтных
работ системы управления необходимо отключить питающую сеть электродви-
гателя вентилятора и другой электроаппаратуры. Отключить питание высокого
давления для выходных устройств и других аппаратов. Ежедневно проверять
уровень давления питания в управляющем устройстве; сливать из фильтров-
влагоотделителей влагу, удалять с путевых выключателей грязь и пыль — обя-
зательно при выключенном управляющем устройстве; осматривать линии связи.
Еженедельно проверять затяжку крепежных деталей путевых выключателей,
кнопок, усилителей, внешних трубопроводов и других устойств; крепление
заслонок и штанг конечных выключателей; правильность входа заслонок в пазы
путевых выключателей; крепления пневмоприводов гидро- и пневмораспредели-
телей; плотность закрытия крышек логического блока. Ежемесячно очищать
фильтры путевых выключателей и сопла и проверять уровень выходного сигнала;
проверять уровень выходных сигналов к усилителям; осматривать пневмопри-
воды гидро- и пневмораспределителей и устранять утечки масла в полость при-
вода; удалять из коллекторов накопившуюся влагу и грязь. Через каждые шесть
месяцев очищать блок питания.
Ежегодно проверять рабочее состояние всех устройств системы.
Управляющее устройство. Снять выборочно не менее пяти логических эле-
ментов и проверить их характеристики на соответствие паспортным данным.
Результаты проверки занести в журнал. При несоответствии характеристик пас-
портным данным элементы снять и продуть чистым сухим сжатым воздухом
давлением 0,1—0,2 МПа. Если продувкой восстановить характеристики не
удаетси, то элементы необходимо промыть спиртом и снова продуть чистым су-
хим сжатым воздухом давлением 0,1—0,2 МПа или заменить новыми. Расход
спирта — 2 г на один элемент.
Входные и выходные устройства. Снять выборочно не менее трех устройств
каждого наименования (путевые выключатели, кнопки, преобразователи, датчики,
усилители, пневмоприводы и др.) и проверить их на соответствие паспортным
данным. Результаты проверки занести в журнал. При несоответствии характе-
ристик паспортным данным надо снять все устройства данного наименования,
очистить от грязи и продуть сжатым воздухом давлением 0,1—2 МПа. Все де-
тали с видимыми значительными следами разрушений должны быть заме-
нены.
Блок питания. Снять усилитель пневмораспределителя и проверить на
соответствие паспортным данным. Результаты проверки занести в журнал; снять,
очистить и продуть сжатым воздухом все аппараты очистки воздуха.
Коллекторы и трубопроводы. Снять все трубопроводы с коллекторов, про-
чистить внутренние стенки, продуть сжатым воздухом; проверить плотность
соединения трубопровода с разъемами и штуцерами. При проведении ремонтных
работ в системе управления со снятием трубопроводов штуцера и все остальные
отверстия во всех блоках закрывать пластмассовыми или металлическими проб-
ками. Применение пробок из тряпок и дерева категорически запрещается.
Некоторые неисправности в струйной системе управления н их возможные
причины. Нарушение цикла работы системы управления. Возможные причины:
засорение путевого выключателя; прижим лепестка к выходному соплу путе-
вого выключателя, работающего на принципе соударения струй; перегиб, обрыв
трубопроводов; неплотность соединений, выход из строя усилителя вследствие
засорения или износа деталей; выход из строя пневмоприводов распределителей;
несоответствие уровней питающих давлений логических элементов уровням
питающих давлений входных и выходных устройства; выход из строя схемы вы-
ставки триггеров; выход из строя логического элемента вследствие засорения
или старения материала;
261
Отсутствие питания в системе управления. Возможные причины: засоре-
ние фильтров блока подготовки воздуха; выход из строя усилителя пневморас-
пределителя блока питания; выход из строя пневмораспределителя; нарушение
блокировок, разрешающих включение усилителя пневмораспределителя в блоке
питания; выход из строя вентиляторного источника питания; нарушение уплот-
нения питающих шлангов; разрыв шлангов.
СПИСОК ЛИТЕРАТУРЫ
L Залманзон Л. А. Аэрогидродинамические методы измерения входных парамет-
ров автоматических систем. М.: Наука, 1973. 464 с.
2. Залманзон Л. А. Теория аэрогидродинамических систем автоматического управ-
ления. М.г Наука, 1977, 416 с.
3. Залманзон Л. А. Специализированные аэрогидродинамические системы автома-
тического управления. М.: Наука, 1978. 400 с.
4. Лазарев В. Г., Пийль Е. И. Синтез управляющих автоматов. М.: Энергия, 1970,
72 с.
5. Лебедев И. В., Трескунов С. Л., Яковенко В. С. Элементы струйной автоматики.
М.: Машиностроение, 1973. 345 с.
6» Струйные логические элементы и устройства программного управления станками
и промышленными роботами. Каталог. М.: НИИМАШ, 1979. 72 с. (НИИМАШ).
7. Филиппов А. Г., Белкин О. С. Проектирование логических узлов ЭВМ. М.:
Советское радио, 1974. 167 с.
8. Цикловое программное управление металлорежущими станками. М.: Машино-
строние, 1971. 112 с.
9. Чудаков А. Д. Цифровые устройства пневмояики. М.: Энергия, 1971. 68 с.
10. Элементы и устройства пневмоавтоматики низкого давления (струйной техники).
Каталог-справочник. М.: 1973 (НИИМАШ).
Глава 10
ПРОЕКТИРОВАНИЕ
ПНЕВМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ
Под пневматической системой управления (ПСУ) понимают совокупность
определенным образом связанных пневматических устройств, обеспечивающих
формирование заданной последовательности и (или) величины выходных сигна-
лов в зависимости от состояния объекта управления и внешних управляющих
воздействий. Носителем информации обычно является давление сжатого воздуха.
ПСУ могут быть аналоговыми и дискретными.
В аналоговых системах давление может принимать любое значение из при-
нятого диапазона и каждому значению давления соответствует определенное
состояние пневматических устройств системы и параметров регулируемого объ-
екта. Аналоговые системы применяют преимущественно для стабилизации или
изменения по определенному закону параметров автоматизируемого объекта.
В дискретных системах давление может принимать только два резко разли-
чимых значения обозначаемых «О» и «1» (обычно «О» соответствует атмосферному
давлению, а «1» — рабочему). Дискретные ПСУ применяют преимущественно
для обеспечения заданной последовательности работы рабочих органов автома-
тизированного объекта.
Схемы представляют собой условное графическое обозначение устройств
и линий связи систем управления (СУ).
ПСУ могут быть реализованы на пневматических элементах различных типов:
высокого, среднего или низкого уровня давлений. К элементам высокого уровня
давления относятся элементы, которые функционируют при давлении питания
той же величины, что и исполнительные пневматические механизмы, т. е. порядка
0,2—1,6 МПа. Элементы среднего уровня давления действуют при давлении 0,1—
0,3 МПа. Это обычно мембранные элементы. Наиболее широко из этой группы
применяют элементы универсальной системы элементов промышленной пневмо-
автоматики (УСЭППА), для которых величина давления питания установлена
0,24 ± 10% МПа. К элементам низкого уровня давления относятся в основном
струйные элементы, питание которых составляет не более 0,01 МПа.
В данной главе рассмотрены вопросы проектирования дискретных ПСУ,
методы их формализованного синтеза на основании математической логики, при-
ведены краткие сведения по математической логике и способы реализации схем
на пневматических элементах различных типов.
10.1. ИСХОДНЫЕ ДАННЫЕ И ПОРЯДОК РАЗРАБОТКИ
ПНЕВМАТИЧЕСКИХ СХЕМ
Типы схем в зависимости от основного назначения, а также общие требования
к их выполнению определены ГОСТ 2.701—76. Пневматические схемы следует
выполнять по ГОСТ 2.704—76.
В процессе разработки принципиальных пневматических схем выбирают
логические элементы и устройства, предназначенные для автоматизации опре-
263
деленного технологического процесса. В ряде случаев при построений схем
управления выбор аппаратуры сочетают с предварительными расчетами системы,
выполняемыми на основе статических и динамических характеристик автомати-
зируемого объекта и технических требований к качеству управления. Задачу
автоматизации наиболее эффективно решают в процессе разработки объекта авто-
матизации, так как при этом объект и СУ рассматривают во взаимосвязи, причем
на базе технико-экономического анализа можно наиболее рационально приспо-
собить друг к другу СУ и автоматизируемый объект.
При модернизации действующих объектов СУ разрабатывают применительно
к существующей технологической схеме. При этом необходимо наметить требу-
ющиеся изменения технологической схемы, мероприятия по механизации обору-
дования и выявить практические возможности их осуществления. В том и другом
случае для составления принципиальной схемы необходимы следующие исходные
материалы: описание и техническая характеристика автоматизируемого объекта;
циклограмма работы объекта, т. е. описание порядка (последовательности)
работы исполнительных механизмов объекта; значения контролируемых пара-
метров, требования к точности контроля, сведения об источниках питания (пнев-
матических и при необходимости электрических и гидравлических); чертежи
технологического оборудования, на котором предусматривается установка средств
автоматизации; условия эксплуатации СУ; необходимые данные для подсчета
технико-экономической эффективности; при модернизации существующих объ-
ектов — перечень мероприятий по возможным изменениям технологического
процесса.
Порядок разработки принципиальной схемы следующий: составление фор-
мализованного описания алгоритма функционирования СУ на основании описа-
ния, технических характеристик и требований, циклограммы работы автомати-
зируемого объекта; составление на основании формализованного описания алго-
ритма функционирования СУ, математического описания СУ; построение на осно-
вании математического описания СУ структурной схемы; выбор аппаратуры и
необходимые расчеты отдельных звеньев СУ; корректировка структурной схемы
в соответствии с возможностями принятой аппаратуры и вычерчивание прин-
ципиальной схемы.
10.2. содержание схем
На принципиальных пневматических, пневмогидравлических, пневмоэлектри-
ческих схемах изображают всю аппаратуру автоматизации, с помощью которой
управляют технологическим циклом машины.
На схемах показывают элементы и устройства, преобразующие измеряемую
величину в пневматический сигнал, элементы, выполняющие логические опера-
ции, устройства сигнализации, переключатели, аппаратуру для ручного и ди-
станционного управления, исполнительные устройства, а также устройства для
преобразования пневматических сигналов в гидравлические и электрические и
контрольно-регулирующие аппаратуру. Изображают фильтры, редукционные
пневмоклапаны, маслораспылители, блоки питания воздухом, усилители давле-
ния и мощности, позиционеры, запорную аппаратуру; на принципиальных
схемах — линии связи между элементами с указанием их номеров (маркировки).
В спецификацию на принципиальной схеме должны быть внесены все аппараты,
указанные на чертеже. Сложные устройства, выпускаемые заводами-изготови-
телями, как готовые изделия (блоки подготовки воздуха и др.), следует специфи-
цировать комплектно, без расчленения на отдельные элементы.
На сложных пневматических схемах для облегчения их чтения желательно
приводить условия их работы (условия управления, блокировки, сигнализации),
выполненные в виде поясняющего текста либо функциональных зависимостей.
На схемах должна быть приведена таблица взаимосвязи входных и исполни-
тельных устройств. Для облегчения понимания схем, а также для того, чтобы
при их чтении не требовалась дополнительная уточняющая документация, на
чертежах приводят необходимые поясняющие надписи, примечания и т. п. В за-
висимости от характера все дополнительные данные могут быть приведены в виде
таблиц, выносок, примечаний.
264
10.3. ОБЩИЕ ТРЕБОВАНИЯ
К РАЗРАБАТЫВАЕМЫМ СИСТЕМАМ УПРАВЛЕНИЯ
Общие технические требования к ПСУ и пневмогидравлическим СУ регламен-
тированы ГОСТ 18460—73 и ГОСТ 17411—72. Ниже приведены некоторые основ-
ные положения и требования, которыми необходимо руководствоваться при
проектировании СУ.
ПСУ питается от заводских сетей сжатого воздуха (индивидуального источ-
ника) с соответствующей подготовкой и стабилизацией сжатого воздуха в зави-
симости от применяемой в СУ аппаратуры (высокого, нормального или низкого
давления). Для питания гидравлических устройств, как правило, необходимо
предусматривать индивидуальный источник.
СУ должна иметь защиту от перегрузок, исключать возможность одновре-
менной подачи командного сигнала от устройств ручного и автоматического
управления. При управлении из двух и более мест СУ должны быть построены
таким образом, чтобы исключалась возможность одновременного управления
из разных пунктов. СУ должна обеспечивать возможность прекращения выпол-
нения технологического процесса на любой стадии (аварийный останов) и после-
дующего его пуска (с доработкой цикла или через нулевую защиту с начала
цикла), она должна быть построена так, чтобы для ее реализации потребовалось
оптимальное число аппаратуры.
При проектировании следует стремиться к применению однотипных средств
автоматизации. Использование однотипной аппаратуры дает значительные
эксплуатационные преимущества как с точки зрения ее обслуживания, так и
в отношении обеспечения ремонта, запасными частями, настройки и т. п. Тип
аппаратуры надо выбирать тот, который определяется действительными требо-
ваниями автоматизируемого объекта.
Разработанную СУ следует проанализировать с технико-экономической точки
зрения (при необходимости разрабатывается несколько вариантов СУ для выяв-
ления наилучшей). СУ должна обладать помехоустойчивостью, т. е. отсутст-
вием сбоев в производственных условиях при механических вибрациях и уда-
рах, производственных допусках на условия эксплуатации, допустимых колеба-
ниях уровней давления командных сигналов. Для обслуживания и текущего
ремонта СУ не должны требоваться специально подготовленные специалисты,
эти функции должен выполнять наладчик после подготовки, полученной
во время освоения новых изделий.
Входные и выходные сигналы ПСУ должны стыковаться с входными, выход-
ными сигналами пневмогидравлических, пневмоэлектрических преобразователей,
приборами и устройствами ГСП. На схеме все устройства изображают в исходном
положении. При наличии отклонений необходимо давать ссылку на чертеже.
В ПСУ необходимо предусматривать глушители шума. Подпор, создаваемый глу-
шителями, не должен оказывать вредного влияния на работоспособность СУ.
Важным требованием, которое следует учитывать при проектировании СУ,
является ее надежность. Однако отсутствие систематизированных данных и про-
веренных практикой инженерных методов расчета надежности ведет к тому, что
расчетная оценка этого фактора в процессе проектирования затруднена. Требова-
ния по надежности СУ обеспечивают рядом технических мероприятий, таких,
как применение наиболее надежных элементов и устройств, резервирование эле-
ментов, автоматический контроль за исправностью системы и т. п.
СУ должна обеспечивать возможность быстрого и простого выбора необхо-
димого режима работы, перехода от автоматического управления на ручное,
снятие и введение блокировок. СУ проектируют так, чтобы ее эксплуатация
в производственных условиях была предельно простой, требовалось минимум
затрат труда и внимания обслуживающего персонала, обеспечивалась возмож-
ность проведения ремонтных и наладочных работ с ссблюдением необходимых
мер безопасности.
Проектируемая СУ должна удовлетворять требованиям техники безопас-
ности (ГОСТ 12.3.001—73 и ГОСТ 16028—70).
Монтаж СУ необходимо выполнять с учетом компактности и удоства обслужи-
вания при эксплуатации.
265
10.4. МЕТОДЫ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
Оптимальные или близкие к ним СУ можно построить, используя методы матема-
тической логики. В дискретных ПСУ сигналом управления, как указывалось
выше, служит давление сжатого воздуха. Оно должно иметь два четко различае-
мых значения: наличие избыточного давления на входах нли выходах элементов
или системы в целом (в дальнейшем обозначать будем цифрой «1»), отсутствие
избыточного давления (обозначать будем цифрой «0»),
Математическим аппаратом анализа и синтеза этих систем является дву-
значная алгебра логики (булева алгебра).
Некоторые определения и функции алгебры логики. Переменные в алгебре
логики (булевой алгебре) обозначают буквами латинского алфавита и они прини-
мают только два значения «0» и «1». Основу аппарата булевой алгебры состав-
ляют элементарные логические (булевы) функции, название и обозначения кото-
рых, и состояние переменных приведены в табл. 10.1.
Основой соотношений и законов булевой постулаты: алгебры являются следующие
х=0, если х=4=1; 0-0 = 0; х = 1, если х=4=0; 0 4-0 = 0; 1.0 = 0-1 = 0; 6 = 1; Ы = 1; 14-1 = 1; 0 4-1 = 14-0 = 1; 1 =0.
Операции над булевыми функциями, которые проводят при синтезе схем,
основываются на следующих соотношениях и законах
х + 1 = 1 хЦ-х=1
х-1 = х х-х = 0
х+0=х х = х
х-0 = 0
Закон перестановки
Xj-Xa = х2-хх; хх + х2 = х2 + xv
Сочетательный закон
(хгх2)-х3 = хг (х2-х3); (хг + х2) + х9 = Xj + (х3 + xj.
Распределительный закон
Xj- (х2 4- х3) = xvx2 + х1'Х3;
Xi + х2х3 = (xr + Ха) - (xt + х3).
Закон повторения
х-х ... х — х; х + х + ... +х = х.
Закон инверсирования
х-х2 = Xj 4- х2; Xi -)- х2 = xj-xa.
Дополнительные соотношения ' ,
х1 + х1ха=х1; хх (х, + х2) = хх; x-i + ххх„ — хх + х2;
Xr(Xi+ Х2) = ХГХ2; ХХХ2 + ххх3 = Xj (х3 + х3).
(хх + х2) (Xi + х3) = Xj + х2х8; хг х2 4- х2х3 4- ххх3 = ххх2 4- ххх3;
(*i 4- х2) (хх 4- х3) = xtx2 4- ххх3.
Логические операции умножения, сложения, инверсии, импликации и дру-
гие являются взаимно зависимыми и выражаются друг через друга. Системы
логических операций, с помощью которых можно выразить все другие операции,
266
Таблица 10.1
Логические функции
Х1 0 0 1 1 Обозначение логической Функции Логическая функция Обозначение по ГОСТ 2.743—72
х2 0 1 0 1
fl 0 0 1 I fl = *1 Повторение (функция ДА) X / f
f 2 0 1 0 1 fl — X2 То же
f, 1 1 0 0 fl — Xi Отрицание (функция НЕ, инверсия Xi) —П—f
fl 1 0 1 0 ft — X2 Отрицание (функция НЕ, инверсия х-) —ЕЗ—f
ft 0 1 1 1 f 5 — Xi + Xg (fb = Xi v X2) Дизъюнкция (логическое сло- жение, функция ИЛИ) *1~ — 1 — F
/в 0 0 0 1 X'lXg (fe — Xi Д x2) Конъюнкция (логическое умножение, функция И) X, х2 & — f
f? 1 0 0 I f 7 = Xi ~ X2 (f, = xt = X2) Равнозначность (эквивалент- ность) А,— Ч~~ —J—f
f. 1 1 0 1 fs = Xt -> x2 Импликация (импликация от Xi к х2; функ- ция ЕСЛИ—ТО) 1 *)—<Г" xz—L — f
fo 1 0 1 1 f9 ~ Xi <- X2 (f9 = X2 -> Xi) Обратная импликация (импликация., от х2 к хц функ- ция ЕСЛИ —ТО) 1
fl' 0 1 I 0 fio === Xi ~ x2 (fio = Xj V x2) (flO — Xj ф X2) Неравнознач- ность (сумма по модулю 2; аль- тернатива, исключающее ИЛИ) X, x2 m2 —f
267
Продолжение табл. 10 1
Х1 0 0 1 1 Обозначение логической функции Логическая функция Обозначение по ГОСТ 2.743 — 72
х2 0 1 0 1
fll 1 0 0 0 111 = *! 1 *1 (f 11 = *1 T Xs) (fu = »iO x2) Стрелка Пирса (отрицание дизъюнкции, функция Вебба, функция НИ-НИ) 4—
/12 1 1 1 0 112 = X,/X2 (112 = xrx2) Штрих Шеффера (инверсия конъюнкции) h—LJ
f 13 0 0 1 0 113 = x2 x2 Запрет по х2 (отрицание импликации от Xi к х2)
/14 0 1 0 0 f 14 = X2 _> Xi Запрет по Xi (отрицание импликации от х2 к хх) x —SCI Г —f h—1 1
fit» 1 1 1 1 111 = 1 Единичная функция (кон- станта единица, всегда истинная функция) —
fit 0 0 0 0 fie — о Нулевая функ- ция (константа ноль, всегда ложная функ- ция) —
называют функционально полными. Так, простейшими функционально полными
будут системы: конъюнкции и инверсии; дизъюнкции и инверсии; операции
Стрелка Пирса; импликации и др.
Выражение логических функций с помощью функционально полных систем
требует в большинстве случаев выполнения значительного числа логических
операций. Применение таких систем целесообразно лишь тогда, когда аппара-
тура, с помощью которой выполняются логические операции, будет элементарно
простой по конструкции, недорогой по стоимости и обладать достаточно высоким
быстродействием. Во всех других случаях для реализации логической функции
целесообразно использовать какую-либо избыточную систему, позволяющую
сокращать число логических операций.
Наибольшее распространение получил избыточный набор, состоящий из
трех логических функций — конъюнкции, дизъюнкции и инверсии (И, ИЛИ, НЕ).
Выражение элементарных логических функций через указанный набор
приведено в табл. 10.2.
Любая булева функция (фукция любой сложности и любого количества
переменных) может иметь множество равносильных формул, отличающихся
используемым видом элементарных функций. Все это множество при помощи
формул булевой алгебры может быть приведено к форме, представляющей собой
268
Таблица 10.2
Логические функций
Функция Формула
Равнозначность f = ~ х2 = xt- х2 + Xf х2
Импликация от к х2 f = Xi -> Х> — Xi + х2
Импликация от х2 к Xi f = Xi <- Х2 — Xi -f- *2
Неравнозначность f = Xi~ X2 — XjX2 + xt.r2
Стрелка Пирса f —— Xi 4- x2 — Xi x2
Штрих Шеффера f = Xj/xj — X1X2
Функция запрета по х2 f = Xi > x2 = xt-xz
Функция запрета по Xi f = X2 ~ X, = x,- x2
дизъюнкцию (конъюнкцию) элементарных конъюнкций (дизъюнкций), называе-
мой дизъюнктивной — ДНФ (конъюнктивной — КНФ) нормальной формой.
Логическую функцию к нормальной форме приводят в следующем порядке:
знаки операций импликации, равнозначности, неравнозначности, Штриха Шеф-
фера, Стрелки Пирса, используя логические формулы заменяют на знаки конъюнк-
ции, дизъюнкции и инверсии; знаки инверсии относят только к отдельным пере-
менным; раскрывают все скобки; устраняют лишние знаки отрицания, исходя
из того, что х = х = *; х — х.
Пример, f = зд (xt ~ х2) = (xL + х3) (ххх2 ф- *хх2) = xLx2 xix1x2 ф-
+ *1*2*3 + *1*2*3 = XiX2 (1 + *з) + *i*2*3 - х,х2 + едхз.
Если ДНФ не содержит одинаковых слагаемых, г.е имеет слагаемых, содер-
жащих одинаковые множители или переменную вместе с ее отрицанием и содер-
жит в каждом слагаемом все входящие в форму переменные или их отрицания,
то ее называют дизъюнктивной совершенной нормальной формой (ДСНФ). Ана-
логично определяют конъюнктивную совершенную нормальную форму (КСНФ).
Для предыдущего примера, преобразуя первый член путем ххх2 = *1*2*3 "г
ф-*2X3X3, так как xxx2x3 + ххх2х3 = хгх2 (*з + *з) = *1*2> получим ДСНФ
f = *Х*2Х3 ф- Xj*2*3 ф- *1Х2*3.
Кроме описанного метода задания булевых функций алгебраическим спо-
собом они могут задаваться и другими способами.
Булевые функции могут быть изображены с помощью таблиц истинности.
Таблицы истинности состоят из (п ф- 1) столбцов, где п столбцов отводятся для
значений переменных изображаемой функции, а последний столбец — для зна-
чений самой функции. Число строк таблицы 2п. В каждую строку записывают
одну из возможных комбинаций значений переменных и соответствующее ей
значение функции. Пример табличного изображения булевой функции трех
переменных приведен в табл. 10.3.
Методика перехода от табличного изображения к алгебраическому в форме
ДСНФ (КСНФ) следующая: выделить строки с единичным значением булевой
269
Таблица 10.3
Булева функция трех
переменных
функции (с нулевым значением булевой функции);
выписать для каждой отмеченной строки элемен-
тарные конъюнкции переменных (элементарные
дизъюнкции инверсий переменных); соединить их
знаком дизъюнкции (конъюнкции).
Пример. В табл. 10.3 выделяем строки с единич-
ным значением функции — ОН; НО; 111.
Алгебраическое изображение булевой функции,
представленной в табл. 10.3 в форме дизъюнкции эле-
ментарных конъюнкций, имеет вид:
f — + *х*2*з + *1*2*3
Если в этой же таблице выделить строки с нуле-
выми значениями функции: ООО; 001; 010; 101; 100, то
алгебраическая форма выразится в виде конъюнкции эле-
ментарных дизъюнкций инверсий переменных:
f — (*1 + *2 4“ *з) (*1 “F *2 “Ь *з) (*1 “Ь *2 4“ *з) (*1 4~ *2 + *з) (*Д + *2 4" *1)
Если в таблице истинности число строк с единичным и нулевым значениями функции
одинаково, то безразлично, по какому пути следовать. Одиако если в столбце, соответству-
ющем значениям функции, преобладают единицы, то проще получать функцию но стро-
кам, соответствующим нулевым значениям функции.
Если же имеется сравнительно мало строк, которым соответствует единичное значе-
ние функции, то надо поступать наоборот.
Синтез систем управления. СУ реализует логическую функцию, если всем
возможным значениям переменных этой функции поставить в соответствие та-
кие же сочетания значений входных сигналов СУ и если при этом значения функ-
ции совпадают со значением выходного сигнала.
Устройства, реализующие элементарные логические функции называют ло-
гическими элементами. Логической системой управления называют СУ, построен-
ную из логических элементов с целью реализации заданной функции.
Процесс синтеза СУ можно выполнять различными методами [1, 2, 4—8]
и в общем случае его подразделяют на следующие этапы: составление формали-
зованного описания работы системы по известной циклограмме или словесному
описанию; составление логических уравнений; упрощение логических уравне-
ний; построение принципиальной схемы.
В зависимости от условий работы различают однотактные (комбинационные)
и многотактные (последовательностные) СУ. В однотактных СУ состояние вы-
ходов однозначно зависит от состояния входов в данный момент времени. В много-
тактных СУ состояние выходов определяется состоянием входов в данный мо-
мент времени и внутренним состоянием СУ, которое обусловлено комбинациями
входных сигналов, поступивших в предыдущие моменты времени. Учет ранее
поступивших входных сигналов обеспечивается введением элементов памяти
(ЭП) или элементов (линий) обратной связи.
Элемент памяти в общем случае представляет собой устройство, в котором
при поступлении входных сигналов значение выходных сигналов меняется на
противоположное и остается неизменным («запоминается») после изменения зна-
чений входных сигналов на нулевые. Элементы (линии) обратной связи служат
для введения в СУ промежуточных сигналов, определяемых состоянием выходов
системы и назначением элементов обратной связи. Сигналы от элементов обратной
связи в совокупности с входными сигналами определяют внутреннее состояние СУ.
Под состоянием СУ понимают совокупность значений входных, выходных
и промежуточных переменных в некотором интервале времени, в течение кото-
рого указанные переменные сохраняют неизменные значения. Состояния СУ
могут быть устойчивыми, когда остаются неизменными состояния входных, выход-
ных и промежуточных переменных, и неустойчивыми, когда состояние входных
переменных изменилось, а состояние промежуточных и выходных переменных
еще им не соответствует.
Состояние входных переменных называют условным, если соответствующее
им состояние выходных сигналов не определено. Условные состояния могут
возникнуть, когда соответствующие состояния входов не могут иметь место
(например, пе могут быть одновременно включены два конечных выключателя,
270
оооо
0 0 10
0 10 0
0 1 1 1
10 0 0
10 11
110 1
1 1 1 —(1*)
ограничивающие с двух сторон перемещение одного Таблица 10.4
и того же подвижного органа), или когда проекта- Таблица состояний
ровщику безразлично, как в этом случае срабо-
тает СУ.
Состояния входных переменных называют со-
седними, если они отличаются значением одной
переменной.
Синтез однотактных систем управления обычно
выполняют с помощью таблиц состояний [2, 6] или
по методу Карно.
Рассмотрим метод синтеза однотактных СУ
первым способом на примере построения СУ ци-
линдром, шток которого выдвигается при включе-
нии двух из трех входных устройств. По условиям
функционирования СУ три входных устройства не
могут быть включены одновременно.
По заданным условиям работы составляется таблица состояний, т. е. таблица
истинности (табл. 10.4). В таблицу состояний записываются все возможные ком-
бинации входных переменных (хт—х3), причем для каждой комбинации простав-
ляется соответствующее значение выходной функции / («0» или «1»).
Условные состояния отмечаются в таблице, например, прочерками, с их
помощью можно упростить структуру СУ путем задания значения выхода (0*
или 1*) на дальнейших этапах, исходя из получения более простого выражения
для выходной функции.
В соответствии с правилами перехода от таблицы истинности к алгебраиче-
ской форме записи для данного примера запишем: f — XjX2x3 + xtx2x3+ XjX2x3.
Если в схеме имеется несколько выходов, то логическая функция записы-
вается для каждого из них. Записанная по таблице состояний функция обычно
содержит избыточность понуждается в упрощении (минимизации).
Под минимизацией понимают сведение к минимуму числа членов логической
функции, числа переменных в каждом члене и числа знаков логических операций,
т. е. в конечном итоге числа логических элементов, необходимых для построения
заданной,СУ.
Из рассмотрения логического уравнения и условного состояния (xj = 1;
х2 = 1; х3 = 1) можно сделать вывод, что если задать для него значение функ-
ции, равное 1, и ввести соответствующий член в логическую функцию, то он
будет отличаться от имеющихся значением одной переменной. Это позволит,
используя соотношения булевой алгебры, упростить выражения. Обозначим соот-
ветствующее состояние выходной функции 1* (см. табл. 10.4) и соответству-
ющим образом перепишем формулу:
f = ХхХ2Х3 + XjX2Xs + XiX2Xs + XjX2X3,
так как Х]Х2х3 — X]X2xa + x1x2xs ..., то можно записать
/ = XiX2X3 + Х^Хд + XjX2X3 + XiX2Xs + XiX-jXg + XiX2X3.
Группируя и вынося общие части за скобки, получаем:
/ .= х2х3 (Xj + xj + xtx;! (х2 + х2) + х,х2 (х3 -J- х3),
так как х + х = 1 и х-1 == х, то / = х2х3 + X]XS + х,х2.
Синтез однотактных СУ вторым способом проводится с помощью матриц
Карно.
Матрицы Карно изображаются в виде прямоугольников, содержащих 2п
клеток, где п — число переменных.
Число столбцов определяется как 2т, а число строк как 2n-m, где 1 < т <
< п. Каждой клетке матрицы соответствует один член ДСНФ. Столбцы и строки
в матрицах обозначают таким образом, чтобы соседние клетки представляли со-
бой соседние состояния переменных, т. е. состояния, отличающиеся значением
одной переменной. В каждую клетку вписывается значение выходной функции
с учетом условных состояний.
271
ющая функцию f = xI (х2 f-
+ х2) -f- х2х3
Для рассматриваемого примера матрица имеет
следующий вид (табл. 10.5).
Учитывая тот факт, что расположенные ря-
дом клетки отличаются одной переменной, и учи-
тывая соотношения, использованные при алгебраи-
ческом упрощении, на основе матрицы Карио
можно сразу записать упрощенное выражение вы-
ходной функции. Для этого вводят понятие под-
куба. В подкубы объединяют клетки, содержащие 1.
Подкубы могут быть двух клеточными — две клетки
отличаются значением одной переменной, такие
клетки называют соседними; четырехклеточными —
каждая клетка должна быть соседней с двумя
клетками; восьмиклеточиыми — каждая клетка
должна быть соседней с тремя клетками.
Конъюнкции переменных записываются не для каждой единицы, входящей
в подкуб, а для всего подкуба, причем переменные, меняющие свое значение
для различных клеток подкуба, исключаются. Таким образом, двухклеточный
подкуб исключает одну переменную, четырехклеточный — две, восьмиклеточ-
ный — три.
В рассматриваемом примере можно организовать три подкуба (табл. 10.6),
причем матрица Карно наглядно показывает, можно ли, используя условное
состояние, упростить функцию.
Получилось такое же выражение, как и при упрощении алгебраическим
способом.
Минимизированную формулу следует попытаться преобразовать в целях
уменьшения числа логических операций (следовательно, и логических элемен-
тов) путем вынесения за скобки и т. п.
f = *1*2 + *1*3 + *2*3 = *1 (*2 + *з) + *2*3
Число операций сократилось с пяти до четырех. Схема, реализующая дан-
ную функцию, приведена на рис. 10.1.
Если требуется построить схему на элементах, реализующих другие виды
элементарных функций, то полученное выражение следует преобразовать, исполь-
зуя соотношения и законы алгебры логики.
Например, для реализации схемы па элементах ИЛИ—НЕ—ИЛИ, запишем
хгх2 = *j + хгх2 = xtx2 = *i + *г; таким образом f = + х.2 + *i -К *з +
+ *2 4- *з-
Синтез многотактных систем управления. Существуют различные методы
построения многотактных СУ. Одним из них является метод Хафмена, который
следует применять для СУ, содержащих небольшое число входов (дотрех, четы-
рех), так как при увеличении числа входов существенно возрастает громоздкость
метода.
Таблица 10.6
11 !0
Таблица 10.5
Матрица Карно
Матрица Карно
f — к2Хц И- Х}Х2
272
Таблица 10.7
Первичная таблица переходов
Хй х2 f
00 01 И 10
<1> 3 <з> 1 4 <4> 2 <2> 0 1 1 0
Таблица 10.8
Первичная таблица переходов
Xi, х2 f
00 01 11 10
< 1 > 4 2 0
3 — — <2> 1
<3> 4 — 2 1
1 <4> — — 0
Рассмотрим этот метод на примере построения СУ работой цилиндра одно-
стороннего действия со следующим циклом:
Хр х2 00 - 10 — 00 — 01 —00
f о — 1 — 1 — о — о,
где Xi и х2 — сигналы от конечных выключателей; f — сигнал на выдвижение
штока цилиндра.
При этом состояние конечных выключателей xr = 1; xs = 1 существовать
не может. Невозможно также одновременное изменение двух переменных.
По заданным условиям работы составляют первичную таблицу переходов
(изменений состояний системы). В левой части таблицы (табл. 10.7) помещают
столбцы с полным набором комбинаций входных переменных, в правой — столбцы,
соответствующие выходам.
Каждому устойчивому состоянию в первичной таблице переходов соответ-
вует одна строка. Устойчивые состояния отмечают скобками. Таким образом
в столбце 00 в первой строке следует записать состояние (1) и соответствующее
ему значение выхода f = 0. При изменении входных переменных в соответствии
с циклом работы система переходит в неустойчивое состояние, отмеченное циф-
рой 2, а затем в устойчивое (2) которое записывают во второй строке. Выход
при этом равен 1.
Аналогично заполняют таблицу для очередных изменений переменных.
Когда СУ перейдет в устойчивое состояние (4), цикл работы заканчивается,
следовательно, при очередном изменении переменных СУ необходимо перевести
в исходное состояпие<1>для обеспечения автоматического цикла работы. По-
этому в четвертой строке столбца 00 поставлена 1. Затем надо проанализировать
таблицу и определить поведение СУ при других возможных переходах. При этом
может появиться необходимость во введении дополнительных строк.
В соответствии с условиями работы СУ состояние Xj = 1; х2 = 1 исключается,
поэтому в столбце 11 (табл. 10.8) ставим прочерки.
Так как невозможно одновременное изменение двух переменных, то в строке
для состояния (2) необходимо поставить прочерк в столбце 01, а в строке для
состояния (4\ — в столбце 10.
Для состояния (1) возможен переход 00—01. Поведение СУ в этом случае
определяется исходя из условий работы. В нашем примере, так как такой переход
не соответствует циклу работы из исходного положения, СУ следует перевести
в состояние (4) с тем, чтобы при обратном переходе вернуться к (1) (другие
переходы от (4) невозможны). Состояние выхода при этом не изменится, т. е.
СУ не отреагирует на такую последовательность изменения входных сигналов.
Следовательно, в первой строке в столбце 01 необходимо поставить 4. В состоя-
нии (3) возможен переход от 00 к 10. СУ следует возвратить в состояние (2),
так как переход от (2) к (3) и наоборот состояние выхода не меняет.
Однако могут быть заданы и другие условия. Например, при нарушении
заданной последовательности изменения входных сигналов на выходе должен
появиться 0 и СУ должна возвратиться в исходное состояние. В этом случае
необходимо ввести новую строчку с устойчивым состоянием (5) в столбце 10
273
Таблица 10.10
Таблица io.9
Вторичная таблица переходов
XT, х2
00 01 11 10
<1>° <3>‘ <4>° 4 — 2 <2>i
Матрица переходов
и выходом, равным 0, и перевести СУ из (3) в (5), а затем в (1) (при этом сле-
дует проанализировать поведение СУ при всех возможных переходах из<5>).
Возможны и другие варианты условий и в каждом из этих случаев таблица
переходов будет выглядеть по разному.
Число строк таблицы переходов определяет число комбинаций дополнитель-
ных или промежуточных переменных (линий обратной связи или ЭП), поэтому
необходимо стремиться к их объединению. Объединение строк выполняют по
следующим правилам.
1. Две строки могут быть совмещены в одну, если номера состояний в соот-
ветствующих столбцах одинаковы или в одной из строк есть прочеркнутое место.
2. Если среди объединяемых номеров состояний одно является устойчивым,
то в совмещенной строке проставляют устойчивое состояние.
3. Если совмещаемые строки имеют различные устойчивые состояния в раз-
ных столбцах, то значения выходов объединяемых строк могут быть различными.
В нашем примере можно объединить первую и четвертую, вторую и третью
строки. Полученную таблицу (табл. 10.9) называют вторичной таблицей пере-
ходов. Значения выходов поставлены над каждым устойчивым состоянием.
Для двухстрочной таблицы переходов требуется одна промежуточная пере-
менная (число возможных комбинаций значений промежуточных переменных
должно быть не меньше числа строк).
Полученную таблицу (табл. 10.10) называют матрицей переходов.
При размещении состояний нескольких промежуточных переменных необ-
ходимо стремиться к тому, чтобы все возможные переходы между устойчивыми
состояниями, находящимися в различных строках, происходили при изменении
значения только одной промежуточной переменной. Это позволит устранить
состязание элементов, т. е. появление ложных сигналов на выходе схемы из-за
некоторого различия времени срабатывания одновременно срабатывающих эле-
ментов. Если этого не удается добиться, то можно допустить одновременное
изменение состояний двух промежуточных переменных для тех переходов, кото-
рые выполняются при устойчивых состояниях, находящихся в столбцах, не име-
ющих других устойчивых состояний.
По матрице переходов составляют матрицы Карно для промежуточных и
выходных переменных. Матрицы Карно строят таким образом, чтобы строки соот-
ветствовали состояниям промежуточных переменных, а столбцы — состояниям
входных переменных. В матрицах для промежуточной переменной (табл. 10.11)
вместо номеров устойчивых состояний записывают состояния промежуточных
переменных, соответствующих строкам, в которых находятся устойчивые состоя-
Таблица 10.11 Матрица промежуточных переменных Xi', х2 00 01 И 10 Матрица выходов А 00 Г. Х2 01 Таблица 10.12 11 10
0 0 0 — 1 0 0 0 — 1
1 1 0 — 1 1 1 0 — 1
274
ния. Для неустойчивых состояний записывают те же значения,'что и для соответ-
ствующих устойчивых состояний.
Матрицу выходов (табл. 10.12) строят аналогично, но вместо устойчивых
состояний в клетки матрицы записывают соответствующие им значения выходов.
В клетку с неустойчивым состоянием можно записывать любое значение, позво-
ляющее упростить схему, если при данном неустойчивом состоянии происходит
смена значения выхода. В противном случае для неустойчивого состояния пишут
то же значение, что и для устойчивого.
Последующий порядок — упрощение, запись логических формул для функ-
ций выхода f и функций промежуточных переменных (у) — построения много-
тактных СУ проводится так же, как и для однотактных СУ.
Метод построения систем управления с применением логических схем алго-
ритмов. Для формализованного описания работы СУ может быть применен
язык ЛСД (логических схем алгоритмов) [1, 6, 7]. ЛСА записывают в виде
выражения, состоящего из символов операторов, логических условий и специаль-
ных знаков, указывающих последовательность выполнения операторов.
Выполнению операторов в ЛСА соответствует формирование на определен-
ном выходе СУ командного сигнала. Так как пневматические исполнительные
устройства обычно имеют два (включающий и выключающий) управляющих
входа (например, пневмоцилиндры, распределители с двухсторонним управлением)
выделено два типа операторов: А?( — соответствует появлению сигнала, вклю-
чающего i—е исполнительное устройство; А^ — соответствует появлению сиг-
нала, выключающего I—е исполнительное устройство. Последовательность вы-
полнения операторов в ЛСА определяется порядком записи. Операторы, выпол-
няемые одновременно, заключаются в скобки.
Логические условия интерпретируются как сигналы от конечных выключа-
телей, кнопок, временных устройств и т. п. и содержат информацию о выпол-
нении предыдущего оператора, разрешающих и запрещающих командах. По-
следовательность проверки логических условий определяется порядком их
записи.Одновременно выполняемые логические условия заключаются в скобки.
Последовательность работы СУ обозначают в помощью стрелок. Начало
f k
й-й стрелки (обозначается !) стоит справа от проверяемого логического усло-
( k 'l
вия, а ее конец (обозначается | / слева от того члена ЛСА, который должен
выполняться, если логическое условие не выполнено (имеет нулевое значение).
Если логическое условие выполнено (приняло единичное значение), то выпол-
няется член ЛСА (оператор или логическое условие), записанный непосредст-
венно справа от данного логического условия. Отсутствие стрелки перехода
справа от логического условия означает переход от выполнения оператора Л2/г_1
(записанного слева от логического условия) к оператору Лг (записанного справа)
при выполнении логических условий. Невыполнение такого логического усло-
вия означает останов цикла. При задании ЛСА удобно использовать логические
условия, тождественно равные нулю, — всегда ложные логические условия.
Их обычно обозначают <в. Применение логического условия <в поясним на при-
мере ЛСА:
i J i
• Л2со f | А3 • • | At • •.
Так как <в = 0, то после оператора А2 всегда выполняется оператор А/,
Л i
а переход к А3 возможен только по стрелке f .
Рассмотрим пример ЛСА
ЛСА U = | хп | A^xiA^x.2A^x3 | А^х^А^ | Л^х2Л^х7 | X
х | Аг2 t “ t |
275
описывает следующую последовательность работы СУ. По сигналу хп вклю-
чается исполнительное устройство гу (выполняется оператор А$ — на выходе zf
СУ появляется единичный сигнал). После выполнения проверяется логи-
ческое условие Xi- При х, = 1 выполняется оператор А$ и так далее до пов-
торного выполнения оператора А%, после чего проверяется логическое условие
2
х4-х8. При х4 -х8 = 1 следует переход по | , выполнение оператора А^ и начало
1
нового цикла. Прн х4-л8 = 0 следует переход по t . В этом случае новый цикл
может начаться только после подачи сигнала хп-
Выполнение оператора (или группы одновременно выполняемых операторов)
характеризуется ситуацией, которая определяется состоянием входных, проме-
жуточных и выходных переменных, т. е. в общем случае каждой ситуации должно
соответствовать определенное состояние ЭП. В целях уменьшения числа ЭП
полученную ЛСА можно разделить на макроситуации. Макроситуацией называют
часть ЛСА, не содержащую одновременно операторов включения и отключения
одного и того же исполнительного устройства. Деление ЛСА на макроситуации
выполняют с помощью прямых вертикальных линий, слева от которых простав-
ляют номер макроситуации (см. запись ЛСА) [7].
Синтез логических уравнений по полученной ЛСА выполняют аналогично
методу, описанному ниже.
Метод построения многотактных систем управления, разработанный во
ВНИИГидроприводе позволяет проектировать схемы с любым числом входных
сигналов.
Проектируемую СУ строят таким образом, чтобы содержался блок памяти,
т. е. совокупность ЭП, логические цепи включения (отключения) ЭП и исполни-
тельные устройства. Пример компоновки блока памяти приведен на рис. 10.2,
где в качестве ЭП использованы трехлинейные пневмораспределители с двух-
сторонним пневматическим управлением. Как видно из рисунка, при работе
СУ включенным остается только один ЭП, его выходной сигнал у: отключает
предыдущий ЭП (поступая на вход У?,.,) и участвует в формировании сигнала Si+1,
включающего следующий в цикле ЭП. L[ — сигнал из схемы управления. Тогда
процесс построения СУ сводится к определению числа ЭП н размещению их
состояний, а также к построению однотактных цепей (схем включения—отклю-
чения) ЭП и исполнительных устройств.
Для формализованного описания СУ применен язык режимов, условий
и ситуаций ЯРУС, разработанный под руководством О. П. Кузнецова в инсти-
туте проблем управления. Описание СУ на языке ЯРУС состоит нз трех разде-
лов: первого, содержащего списки входов и выходов СУ; второго, состоящего
из пунктов и ограничений; и третьего,
содержащего метаописание.
Под пунктом понимается описа-
ние работы отдельных частей СУ. Опи-
сания СУ делят на пункты из техно-
логических, конструктивных, функ-
циональных и других соображений.
Например, отдельными пунктами могут
быть описаны работа СУ или ее ча-
стей в разных режимах, параллельная
работа частей ПСУ и т. п.
Описание работы СУ или ее ча-
стей внутри пункта состоит из ука-
зания ситуаций, возникающих в про-
цессе функционирования СУ. Под
ситуацией понимается состояние
исполнительных устройств (напри-
мер, для пневмоцилиндра шток втя-
нут или выдвинут), а также состояние
памяти СУ. Ситуации «Ь соответ-
276
ствует предпусковое состояние СУ (или ее части). При автоматическом повто-
рении циклов СУ в ситуацию «1» может не попасть. Описание пункта может быть
представлено в виде графа (см. рис. 10.3), вершины которого, изображенные на
рисунке в виде кружков, интерпретируют как ситуации (упрощенно можно
считать, что вершине соответствует, например, движение исполнительного ус-
тройства от одного конечного положения к другому), а линии—как переходы
из одной ситуации в другую, причем направление перехода на рисунке указано
стрелкой. Условия перехода указываются на дугах выше или слева от черты и
задаются булевыми функциями, причем вне скобок записываются сигналы,
вызывающие и разрешающие данный переход (назовем их сигналами возбужде-
ния), а в скобках — сигналы, равные единице на данном переходе, но не оказы-
вающие на этот переход влияния.
Ниже или справа от черты указывают сигналы включения или отключения
исполнительных устройств. Отсутствие сигнала означает, что состояние соответ-
ствующего исполнительного устройства не изменяется.
Метаописание содержит сведения о взаимодействии между пунктами и об-
щие сведения для СУ в целом.
Рассмотрим пример построения СУ формовочным полуавтоматом, заданного
следующим словесным описанием.
Исполнительными устройствами полуавтомата служат пневмоцилиндры
(Z/t—-Z/5), которым соответствуют выходы системы управления гх—г6, вибра-
торы Ве и В7 (выходы г6—г;) и сопло для обдува формы С8 (сигнал выхода г8).
Цилиндр Ц, поднимает и опускает опоку, причем нижнее исходное положение
контролируется конечным выключателем х-, а верхнее — конечным выключа-
телем ха. Цилиндр Ц2 производит подпрессовку, исходное положение цилиндра
контролируется конечным выключателем х6, а конечное — реле времени т(гу’)
(настройка которого определяет продолжительность подпрессовки). Цитиндр Ц3
служит для выполнения протяжки. Цилиндр Ц4 отодвигает шибер, что приводит
к заполнению опоки формовочной смесью, причем исходное положение шибера
контролируется конечным выключателем ха, а конечное — х10. Цилиндр Ц6
ставит траверсу в рабочее положение, которое контролируется конечным выклю-
чателем х1х.
Цикл работы начинается с нажатия на пусковую кнопку (хх = 1), в резуль-
тате чего опока перемещается вверх (zj5 = 1) и останавливается в верхнем поло-
жении. Затем по сигналу (ха = 1) включается вибратор (z$ = 1) и выдвигается
шибер (z$ = 1), при этом формовочная смесь заполняет опоку, после чего по
сигналу (х10 = 1) шибер возвращается в исходное положение. По сигналу (х9 =
= 1) отключается вибратор (z‘3 = 1) и опускается опока (z^ = 1). Затем по
сигналу (х7 = 1) траверса устанавливается в рабочее положение. По сигналу
(хц = 1) поднимается опока (г$ — 1) и происходит подпрессовка (z| = 1), про-
должительность которой контролируется реле времени, по сигналу т(г^ = 1)
опускается опока (zj? = 1), заканчивается подпрессовка (zB = 1), выдвигается
цилиндр протяжки (zS = 1) и включается вибратор опоки (z-S = 1).
По сигналу х6-х7 = 1 траверса возвращается в исходное положение (гВ = 1)
и выключается вибратор опоки (г% = 1). После этого оператор вручную вклю-
чает (х4 = 1) обдув формы (г$ = 1) и отключает протяжку (г% = 1). Цикл за-
канчивается.
СУ полуавтоматом должна обеспечивать два режима работы — полуавтома-
тический и наладочный, для чего установлен переключатель режимов. Аварий-
ный останов полуавтомата производится в любом режиме по сигналу х2 = 1
путем прекращения подачи сжатого воздуха к исполнительным устройствам
с помощью клапана безопасности.
Описание работы полуавтомата на языке ЯРУС имеет следующий вид
Раздел 1. ОБЩИЙ
Xi — кнопка пуска; хг — клапан безопасности; хэ — переключатель режимов
в позиции «Автомат»; хл — переключатель режимов в позиции «Наладка»; х4 —кнопка
обдува формы.
277
Остальные данные приведены в. табл. 10.13.
Таблица 10.13
Выходные сигналы Входные сигналы
Автоматический режим Наладка
Промежу- точные
Обо- зна- чение Операции исходное положе- ние конечное положе- ние конечные выключ атели обо- наи- зна- мено- чение вание Вклю- чение От- клю- чение
2i Перемещение опоки . . *? *8 — *12 *13
z2 Подпрессовка . . Xi Х 0) — — *и *1Ь
Z3 Протяжка — — Xia *1 7
z4 Перемещение шибера х9 *10 — — *18 X 19
z5 Перемещение траверсы — *ц — — Хго *21
zft Встряхивание опоки , . — — — *22 *23
Z? » бункера — — — — *24 *26
zs Обдув формы ..... — — — — *4 *4
Раздел 2. ПУНКТЫ И ОГРАНИЧЕНИЯ
Пункт 1. Полуавтоматический режим (табл. 10.14)
Т аблица 10.14
Номер ситуации Единичные входные сигналы Единичные выходные сигналы Номер следующей ситуации Ограничения
1 X, (x6x,xs) 2 х3 = 1
2 xs (хйхг) 3 X, = 1
3 *10 (*5*s) 4 Хз = 1 1'
4 X, (хйх,) 5 Хз = 1
5 Xi (х5хэ) 6 *3=1
6 Хц (х5х7х„) Zs 2s Z1 ’ г2 7 *3=1
7 т (zf) (W11) ~R ZR ZS JS z\ • г2 ’ z3 ’ "6 8 Хз = 1
8 х5х7 (хэХц) «<0 9 Хз = 1
9 *4 ( *6*7 *э) M hi CDQq 10 Хз = 1
10 х, (х3х,х,) ZR ZS 1 Хз = 1
278
Таблица 10.15
Пункт 2. Наладка (табл. 10.15)
Номер | ситуации Единичные входные ' сигналы 1. . Единичные выходные сигналы 1 Номер сле- дующей си- 1 туации (V т а а я о. к О я Номер ситуации Единичные входные сигналы Единичные выходи ые сигналы Номер сле- дующей си- туации ! Ограииче- I иия
1.1 Хц 2 Хз = 1 2 *13 1 Хз = 1
1.2 Хц 3 *2—1 3 *15 1 Хз — 1
1.3 Хц 4 Х3 = 1 4 *17 1 Хз == 1
1.4 *18 5 Хз = 1 5 *19 $ 1 Хз = 1
1.5 *20 6 Х3 = 1 6 *21 1 1 Хз = 1
1.6 *22 7 Х3 = 1 7 *23 Z6 1 Хз = 1
1.7 *24 8 Хз = 1 8 *2 5 ZR г7 1 Хз = 1
1.8 Х4 г1 9 Хз = 1 9 *4 zR г8 1 Хз — 1
Раздел 3. МЕТАОПИСАНИЕ
Исходная ситуация:
входы: = х9= ], если х2 = 1, то цикл прерывается.
На рис. 10.3 изображен граф, соответствующий пункту 1, а на рис. 10.4 —
граф, соответствующий пункту 2 раздела 2 описания рассматриваемого примера.
Очевидно, что схема СУ для автоматической или полуавтоматической ра-
боты с минимальным числом аппаратов может быть получена при использовании
на каждом переходе только сигналов возбуждения. Однако это не всегда воз-
можно из-за противоречий, возникающих между этими сигналами в различных
переходах и вызывающих неправильное функционирование СУ. Устранение
Рис. 10.3. Граф ситуаций автоматического ре-
жима
Рис. 10.4. Граф ситуаций наладоч
кого режима
279
этих противоречий может быть произве-
дено с помощью сигналов, поступающих
от ЭП, введенных в СУ.
В общем случае каждой ситуации
(вершине графа) может быть поставлен
в соответствие сигнал от одного ЭП.
Число ЭП может быть сокращено объеди-
нением в макроситуации следующих друг
за другом ситуаций, которые не содер-
жат сигналов включения и отключе-
ния (z^), одного и того же исполнитель-
ного устройства (на графе это соответ-
ствует операции «стягивание или сжатие»
вершин). С этой целью, начиная с первой
вершины, проверяют выходные сигналы,
соответствующие вершинам графа. Вер-
шина, которой соответствует выходной
сигнал, противоположный какому-либо
из выходных сигналов на предыдущих
вершинах, отделяется. Затем проверку выходных сигналов аналогичным образом
продолжают, начиная с отделенной вершины до тех пор, пока не будут про-
смотрены все вершины. Если граф содержит несколько контуров, состоящих
из последовательно расположенных вершин, т. е. СУ либо переналаживаемая
и имеет несколько режимов автоматической или полуавтоматической работы,
либо распадается на ряд независимо и одновременно работающих участков, либо
определенная часть последовательности операций должна повториться неопре-
деленное число раз, например до получения необходимого размера, то каждый
контур проверяют отдельно. Под контуром в теории графов понимают череду-
ющуюся последовательность вершин и дуг, в которой все вершины различны,
а первая и последняя вершины совпадают.
Полученные таким образом подмножества вершин в рассматриваемом при-
мере на рис. 10.3 обведены штриховой линией. Включение в одну макроснтуа-
цию ситуаций 1 и 10 в данном случае допустимо, так как сигналы xt = 1 и
х4 = 0 подаются вручную от кнопки «Обдув формы» и нарушения последователь-
ности работы исполнительных устройств вызвать не могут.
В случае переналаживаемой СУ в одну макроситуацию могут быть включены
вершины, расположенные в разных цепях графа, так как цикл работы СУ может
осуществляться только по одной из цепей. При этом должно быть выполнено
условие, чтобы объединения вершин разных цепей ие входили в другие объеди-
нения.
После удаления всех дуг между вершинами одной макроситуации и объеди-
нения этих вершин в одну получим новый граф (рис. 10.5), вершины которого
интерпретируются как макроситуации. Условия перехода (S/) из р,-й макроситуа-
ции в последующую / указывают на дугах и задают булевыми функциями. Зна-
чения этих условий равны условиям перехода из последней ситуации (вершины)
|л-й макроситуации в ближайшую ситуацию (вершину) /-й макроситуации. Теперь
сигнал от одного ЭП может быть поставлен в соответствие одной макроситуации.
Исключение составляет случай, когда в СУ содержатся две макроситуации. Тогда
целесообразно использовать один ЭП с двумя взаимноинверсными выходами.
Включение /-го ЭП (соответствующего /-й макроситуации) может быть про-
изведено либо из предпускового состояния СУ при выполнении условий пуска,
либо при выполнении условий перехода из предшествующей макроситуации, свя-
занной на графе дугой с данной, а также при наличии сигнала от ЭП, соответ-
ствующего этой предшествующей макроситуации.
На основании изложенного выше запишем выражения для функций вклю-
чения (S) и отключения (/?) ЭП:
si = хр+ У, thiXq (j, ft, q = 1,2, . . ., k),
280
где хр и Хр — конъюнкция сигналов возбуждения, указанных На дуге, исходя-
щей из первой вершины и на </-й дуге, входящей в вершину /-й макроситуации;
Ур — выход предыдущего /-му ЭП; k — число ЭП.
Выражение несправедливо для участка СУ, распадающегося на ряд неза-
висимо и одновременно работающих контуров, сходящихся в одной вершине,
являющейся началом /-й макроситуации.
В этом случае следует пользоваться следующими выражениями
S/ = Хр + & УрХд
R) = Е Уч lb v = !. 2- • • й).
где yv — выход следующего за /-м ЭП.
Для СУ с одним ЭП выражения принимают вид
S1 = Хр + Е Х<7-; S2 = Е Х*"; (У' * У"')-
Включение (отключение) ПУ в i-й ситуации может быть произведено при
выполнении условий перехода из предшествующей ситуации при наличии сиг-
нала от ЭП текущей макросигуации. Тогда функция для выходного сигнала zr
с учетом возможности его многократного появления в течение цикла работы
СУ запишется:
zr = хсу/ (г = 1, 2...........m; с = 1, 2, . . ., га),
где хс — конъюнкция сигналов возбуждения, указанных на дуге, входящей
в Z-ю вершину (ситуацию); т — число исполнительных устройств; га — число
дуг (переходов).
При совпадении условий перехода в г-ю ситуацию с условиями перехода
в /-ю макроситуацию указанная выше функция принимает вид: zr = У у/.
Для рассматриваемого примера СУ функции включения и отключения ЭП
имеют вид:
Si =х3(хъх-,у^ + xj); R\ = х3уп;
5ц — x3x10r/i; ^ll=X3yill,
5ц i =х3хп(/ц; Rin — x3y!v;
51У = х3т(г^)уш; ^iv = хзУт>
а функции выходов при работе СУ в автоматическом режиме будут
zf = х3 (х^ + (/ш); zf — (х9^11 + У'м) Х3>
4=X3^IP ZR - z2 ’ = 3r3yIV;
гз ~ хзУ1у> zR - z3 - =
г4=х3хяу{; ZR z4 = х3уц;
z5 ~ хЗХ7Уи’’ z5 = W
г6 = Х3^1 V’ zR - z6 = x3yi;
г7 =хзх8^; ZR z7 = x3X9I/iI.
4 = .
Как следует из анализа полученных таким образом выражений, реализуе-
мая по ним схема СУ обладает повышенной надежностью — защитой за преде-
лами макроситуации против ложных срабатываний конечных выключателей.
Так, сигнал х8 может действовать только в течение первой макроситуации (если
сигнал уг = 1).
281
Однако эта надежность дости
гается ценой некоторой избыточности
числа аппаратов в схеме. Избыточ-
ность может быть устранена в резуль-
тате исключения из схемы некоторых
элементов И, связывающих входные
сигналы с сигналами отЭП. Это допу-
стимо для входных сигналов, действу-
ющих только в пределах одной мак-
роситуации. При этом следует иметь
в виду, что в несложных СУ эти сиг-
налы могут быть определены при про-
смотре графа.
Для устранения упомянутой из-
быточности по графу СУ (см. рис. 10.3)
строим новый граф (обозначим его
буквой К.) таким образом, что каж-
дая из его вершин соответствует
конъюнкции сигналов возбуждения.
Из каждой вершины исходят дуги в те
Рис. 10.6. Граф К
вершины, конъюнкции сигналов воз-
буждения которых полностью содер-
жатся во входном наборе исходной вершины. Если граф СУ содержит не-
сколько контуров, то граф /< целесообразно строить для каждого контура
отдельно. На рис. 10.6 представлен граф К. для рассматриваемой СУ.
Далее на графе /< штриховой линией обводим относительно входов получен-
ные для макроситуаций объединения. Затем на графе /< найдем вершины, в ко-
торые не входят дуги, исходящие из вершин других макроситуаций (на
рис. 10.6 отмечены звездочкой). Если такие вершины имеются, то для пере-
ходов, в которых действуют соответствующие этим вершинам конъюнкции сиг-
налов возбуждения, функции принимают вид соответственно:
S/ — Хр + у Xq', S, — Хр + & Xq', Zr — У' Xc.
На основании изложенного выше для рассматриваемого примера СУ функ-
ции включения и отключения ЭП принимают вид:
Si = х3 (x-ax;yiv + хх); Ri = x3yi\-,
Sn =x3Xf0; Яц=х3ущ;
Sjn = xsx11Wl; ₽iii=x3(/1v;
•Siv = X3T (* 22 )>’ «iv = x?^h-
Функции выходов:
zf =x3(xI + y11I); zf = x3 (yn + yIV);
2^~хзУ111> z2 ~ X3^IV’
23 = ХД1 v'- z3 = X3X4’
z4 =x3x8*/i; г4 =хзУ11;
z5 X3X7^II > z5 = ХЗУ\’
26=XdW 2f=x3^P
z^=x3x8j/i; zf=x3x9yn.
^8 — #з#4>
282
Подчеркнуты функции, претерпевшие измененья в результате проведенной
операции, которая в рассматриваемом примере позволила сэкономить пять эле-
ментов И.
После определения функций включения и отключения ЭП и функций выхо-
дов для каждого пункта с учетом требований метаописания (останов машины,
возврат исполнительных устройств в исходное положение и т. п.) составляют
обобщенные соотношения, описывающие проектируемую СУ
3) = *3 (ХЪХ~У’М + *1)’>
Зц = х3х10;
Зщ = х3х11г/ц;
SIV =х3т(г*);
г1 = х3 (*1 + Уп l) + *3*12:
г^==хз^п1 + хзхн;
г3 = *3^IV + Х3Х16>
zf = х3хяУ1 + х3х18;
4 = *зХ7£/Ц + Х3Х2О’
г6 = X3^IV + Х3Х22>
«7 = Х3Хз7Л + *3*24’
г3 = *3*4 Ч~ *3*4 — *4'
= г/11*3;
Rli = У\ 11*з!
Rill = У1Ухз'>
Riv ~ УЛ’’
г? — (^п + Ум} хз + хЛз'
= *3^1 V + *3Х1о >
г3 = *3Х4 + *3Х17 ’
z4 = хзУп + *3Х19*
z5 = X3^I + *3Х21 ’’
гк = ХзУ1 + *3Х23’
Z7 = *3Х9^П + *3Х25’
Аварийный останов в данном случае производят с помощью клапана безопас-
ности путем отключения подачи питания к исполнительным устройствам. Схема,
построенная по полученным выражениям функций приведена на рис. 10.7.
Во ВНИИГидроприводе разработай комплект алгоритмов и программ, поз-
воляющих проводить автоматизированное проектирование ПСУ на электронных
цифровых вычислительных машинах.
В отличие от рассмотренных методов синтеза СУ на основе элементов, выпол-
няющих элементарные логические функции, применяют и методы агрегатного
построения [8].Такие методы позволяют синтезировать схему СУ из отдельных
нормализованных блоков, что упрощает ее построение и снижает время проекти-
рования. Основным недостатком агрегатных методов синтеза является то, что
в ряде случаев они дают избыточную структуру схемы и, следовательно, приводят
к большим аппаратурным затратам при ее реализации.
Системы управления с командоаппаратами. Построение СУ с помощью пневма-
тических командных устройств (командоаппаратов) в ряде случаев позволяет
упростить СУ, обеспечить их перенастройку на любой требуемый цикл (в пре-
делах максимального числа команд), и возможность визуального контроля цикла
работы [3].
Командоаппараты служат для последовательного введения в СУ командных
сигналов в соответствии с программой, зафиксированной на программоносителе.
Различают командоаппараты со сменными кулачками, барабанного типа, ротор-
ные, с перфокартой или перфолентой, на базе логических элементов и др. По
характеру движения программоносителя командоаппараты могут быть с непре-
рывным движением и шаговые.
В наиболее распространенных шаговых командоаппаратах переключение
с такта на такт осуществляется’командным сигналом, поступающим от СУ. При-
меняют временной, путевой и смешанный способы управления командоаппара-
тами.
Управление с временнйм контролем цикла (рис. 10.8, а) обеспечивается по-
дачей команды от реле времени, генератора импульсов или других устройств по
^стечении определенного времени от начала предыдущего такта без проверки
Ж
Рис. 10.7. Структурная схема СУ формовочным полуавтоматом
Рис. 10.8. Структурная схема управления командным устройством с контролем по времени
(а), по конечному положению (б) и со смешанным контролем (в):
1 — командное устройство;' 2 — временной блок; 3 — логический блок; 4 — конечные
выключатели
выполнения ранее поданных команд. Этот способ обеспечивает простоту СУ,
четкость временного цикла и легкость распределения операций во времени.
Недостатки управления по времени — это возможность нарушения цикла н
более низкая по сравнению с другими способами управления производительность.
Первый недостаток обусловливается отсутствием контроля выполнения предыду-
щей операции, а второй — тем, что время, отведенное на каждую операцию
цикла для большей уверенности выполнения последовательности, берется не-
сколько завышенным.
При управлении с путевым контролем цикла (рис. 10.8, б) команда на выпол-
нение следующего такта программы поступает после проверки завершения дей-
ствия по предыдущей команде. Командные сигналы поступают в логический блок,
формирующий командный сигнал на переключение командоаппарата. При таком
управлении контролируются операции, но временной цикл при этом нечеток,
т. е. распределение операций по времени недостаточно определенно.
При управлении со смешанным контролем цикла (рис. 10.8, в) используется
одновременно временной и путевой контроль. Ряд операций выполняется во вре-
менной последовательности, а там, где требуется особый кошроль по пути, пере-
ход на следующий такт осуществляется по сигналу выполнения предыдущего
действия. Такой способ управления позволяет обеспечить и контроль исполнения
и краткость времени цикла.
Применяют командоаппараты с различными типами программоносителей.
В командоаппаратах со сменными кулачками вал обычно приводится во вращение
через редуктор пневмо- или электродвигателем или непосредственно вращающимся
органом машины. Определенным образом спрофилированные кулачки воздей-
ствуют на конечные выключатели (распределители с механическим управлением),
которые выдают пневматические сигналы в соответствии с заданным циклом
работы. Кулачковые командоаппараты обычно находят применение для управле-
ния объектами с временном контролем несложных рабочих циклов.
Командоаппараты барабанного типа более гибки в программировании.
В них в качестве программоносителя применяют барабаны, на поверхности кото-
рых размещены кулачки. Программирование выполняется смещением кулачков
по поверхности барабана. Барабан вращается храповым механизмом, управляе-
мым как сигналами от конечных выключателей, так и сигналами от временного
устройства. Здесь так же, как и в кулачковых командоаппаратах, в качестве уст-
ройств, выдающих командные сигналы, используются конечные выключатели.
Аналогично работают и командоаппараты с бесконечной кулачковой лентой,
смонтированной на вращающемся барабане. Лента может быть снята и сохранена
для повторного использования.
Недостатком командоаппаратов с механическим воздействием на конечные
выключатели является износ контактирующих элементов. Однако дешевизна и
простота их конструкции позволяют использовать командоаппараты с кулачками
в СУ с относительно небольшим числом исполнительных механизмов и несложным
циклом.
Командоаппараты с перфокартой или перфолентой основаны на считывании
программы, нанесенной в виде отверстий или прорезей на программоносителе.
Считывание может быть контактным или бесконтактным. При контактном счи-
тывании считывающая головка поджимается к программоносителю специальным
устройством. Преимуществом контактного способа является отсутствие непроизво-
дительных потерь воздуха, возможность получения выходных сигналов высокого
285
284
Рис. 10.9. Функциональные схемы командоаппаратов из универсальных блоков:
а — с возможностью останова только в конце цикла; б — с возможностью останова в лю-
бом такте; в — с управлением от генератора импульсов
уровня давления. При бесконтактном считывании головка упрощается, износ
перфоленты минимальный, однако непроизводительный расход воздуха велик,
что ограничивает область его применения в основном для получения выходных
сигналов низкого давления.
Командоаппараты из универсальных блоков могут быть реализованы на базе
логических элементов низкого, среднего или высокого уровней давления.
Каждому такту последовательности работы в командоаппаратах этого типа
соответствует универсальный блок, состоящий из ЭП и логических элементов для
обеспечения различных условий работы, пуска и останова. Последовательное
соединение блоков позволяет строить командоаппарат на любое число выходов.
В качестве ЭП в командоаппаратах применяют триггеры с раздельными входами.
Схема командоаппарата из универсальных блоков представлена на рис. 10.9, а.
Каждый блок состоит из элемента И и триггера с раздельными входами. Триггер
включается выходным сигналом элемента И данного блока, а выключается —
выходным сигналом триггера следующего блока. Первоначальный пуск командо-
аппарата производится пусковым сигналом хп, который поступает на один из
входов элемента И. При наличии разрешающего сигнала х± и хп на выходе
элемента И образуется единичный сигнал, включающий триггер первого блока.
Выходной сигнал zt триггера первого блока поступает к исполнительному меха-
низму или на усилитель, а также на один из входов элемента И второго блока
и иа отключение триггера последнего такта командоаппарата. Выходной сиг-
нал zn триггера последнего такта поступает на вход элемента И первого блока,
подготавливая триггер первого блока к срабатыванию. Таким образом проис-
ходит автоматическая работа командоаппарата. Если переход с одного такта
иа другой связан с выполнением ряда блокировок или осуществляется от ие-
286
Рис. 10.10. Схема командоаппарата роторного типа
скольких конечных выключателей, необходимо построение дополнительной соби-
рательной схемы из элементов И для суммирования разрешающих сигналов в
один с последующей выдачей его иа вход элемента И основной схемы.
Схема блоков командоаппарата усложняется при введении возврата в исход-
ное положение из любого промежуточного или при введении команды «Стоп»,
запрещающей включение триггера.
На рис. 10.9, б приведена схема командоаппарата, в котором включение триг-
гера каждого блока происходит только при условии хах(-, где х&— хСт + ?i-i
(хст — команда «Стоп»), Отключается триггер сигналом zi+1.
Пневматические командоаппараты, построенные из отдельных блоков на базе
ЭП и логических элементов, могут работать как по сигналам последовательности
хг; х2,..., хп, поступающим от конечных выключателей, так и по периодической
команде от генератора импульсов (рис. 10.9, в), выдающего сигналы xt и X/ оп-
ределенной длительности. Для обеспечения наглядности хода цикла и простоты
поиска неисправностей каждая секция командоаппарата должна быть снабжена
сигнальной лампой.
На рис. 10.10 показана схема командоаппарата роторного типа (позициями
со штрихами обозначены элементы схемы аналогичные позициям элементов без
штрихов), в которой в качестве привода используется пневмоцилиндр 1 с храповым
механизмом 2, а в качестве распределительных органов — роторные краны 3
и 4. Принцип работы такого командоаппарата со тоит в следующем. После подачи
выходной команды к исполнительному органу 6 по линии 5 шток последнего пере-
ключает в конце хода конечный выключатель 7 и сигнал с его выхода по линии 8
через кран 3 и конечный выключатель 9 поступает в управляющую полость распре-
делителя 10. Его переключение вызывает выдвижение штока цилиндра 1 и поворот
кранов 3 и 4 на один шаг с выдачей следующей выходной команды по линии 5.
Цилиндр 1 в исходное положение возвращается в результате срабатывания ко-
нечного выключателя И, после чего цикл командоаппарата повторяется.
Для реализации последовательности с многократного повторяющимися ко-
мандами необходимо добавить логические элементы ИЛИ для суммирования сиг-
налов, поступающих в управляющую полость одного и того же распределителя
с разных выходов крана, выходы же с конечного выключателя, отмечающего вы-
полнение многократно подаваемой команды, подключают непосредственно сразу
к нескольким выходам краиа 3.
287
10.5. РЕАЛИЗАЦИЯ БУЛЕВЫХ ФУНКЦИЙ
СРЕДСТВАМИ ПНЕВМОАВТОМАТИКИ
Если'описание работы СУ задано в форме булевой функции, то последователь-
ность реализации может быть следующая.
В предлагаемой булевой функции выделяют элементарные логические функ-
ции и по табл. 10.16 определяют название этих функций.
Пусть дана функция вида:
у = xsx2 + х2х3 + у (х2 -ф х4) -ф х4х3х4 -ф х3,
где х4х2—операция конъюнкции (четвертая строка, табл. 10.16); х2х3 — операция
«Запрет» (седьмая строка, табл. 10.16).
Третье слагаемое у (х2 -ф х4) преобразуем следующим образом: по табл. 10.16
в шестой строке определяем, что сомножитель (х2 -ф х4) обозначает элементарную
логическую функцию «Штрих Шеффера», которая может выражаться также в форме
(х2х4). Произведя замену конъюнкции х2х4 = г, получим yzlt что определяет ло-
гическую функцию «Запрет» (табл. 10.16, седьмая строка).
В следующем слагаемом х4х3х4 по аналогии с предыдущим, выделим два мно-
жителя х4х4 и х3. Первый множитель х4х4(табл. 10.16, пятая строка) обозначает
логическую функцию «Стрелка Пирса», которую можно представить в форме
Булевые функции
Таблица 10.16
Наименова- ние функции Обозна- чение функция
Повторение X
Отрицание X
Дизъюнкция Х1 + х2
Х1 Ф Х2
Конъюнкция Х1Х2 Т х2
Стрелка Пнрса Xi + Х2 Xi-X2
Штрих , Шеффера | Xl Хг Xi-X2 Xi + х2
Запрет Х1 _> х2 Х1-Х2 Xi ф х2
Импликация Xi. х2 Х1 + Х2 Х1 ф х,
Неравно- значность Xi ~ х2 (Х1 -> Х2) + 4- (-«1 Т *1) (Х1 ф xs)_+ + (Xi ф х2) Х2Х2 + Х1*2
Равнознач- ность Xi ~ х2 (^1 -> х2) "F (-^1 <- Х2) (X, -> х2) X X (*! <- х2) ЛдЯ2 + А*2 {Xi 4- х2) + 4- (Xi 4- ^2)
288
Рис. 10.11. Реализация логической функции «повторение»
Рис. 10.14. Реализация логической функции «конъюнкция»
10 Е. В. Герц и др.
289
Рис. 10.15. Реализация логической функции <Стрелка Пирса»
Рис. 10.16. Реализация логической функции «Штрих Шеффера»
Рис. 10.17. Реализация логической функции «Запрет».
290
Рис. 10.18. Реализация логической функции «импликация»
Xi + х4. Произведя замену дизъюнкции получим z2xa, что’определяет логическую
функцию «Запрет» (табл. 10.16, седьмая строка).
Оставшиеся слагаемые объединяем логической операцией «дизъюнкция»
(табл. 10.16, третья строка).
По рис. 10.11—10.20, где показаны условные обозначения логических функ-
ций (а) по ГОСТ 2.743—72 и схемы реализации логических функций на аппаратуре
высокого давления (б), на реле типа П1Р.1(в), на реле типа П1Р.З (г), на струйном
элементе ИЛИ—НЕ—ИЛИ (б), отыскивают нужную в зависимости от выбранной
аппаратуры схему, которая реализует данную логическую функцию. Для реали-
зации операций дизъюнкции и конъюнкции применяют также специальные эле-
менты ИЛИ и И, работающие как на высоком, так и на среднем и низком уровнях
давления.
Рис. 10.19. Реализация логической функции «неравнозначность»
10*
291
Рис. 10.20. Реализация логической функции «равнозначность»
Рис. 10.21. Реализация сложной булевой функции на реле типа П1Р.1
292
Таблица 10.17
Реалимция логических функций иа пятилинейных распределителях
Функции Состояние входов и выходов Принципиальная схема
1. Повторение It = *12 2. Отрицание ft = *12 *12 f2 7. f}\ \f" 2 4
0 1 0 1 1 0 Л/2 ll А/
1. Дизъюнкция fl = *12 + *S 2. Отрицание ft = *12 *12 *8 А ft |4 z « . _jzl \\J /TU *«“ 7 1 11 f f-rlVV
0 0 1 1 0 I 0 1 0 1 1 I 1 1 0 0
I. Конъюнкция f2 = X12'Xi 2. Запрет no xi2 ?4 — Xl -> *12 *li *1 f. ft 'ill 4
0 0 1 1 0 1 0 1 0 0 0 I 0 1 0 0 2 ♦
л,,—» ft /V
*, A 7 P Jr
I. Импликация от х12 к х6 f4 = Х12 -> Хъ 2. Повторение fa — *12 *12 *6 ft ft 4 4
0 0 1 I 0 I 0 1 I 1 0 1 0 0 1 1 A
111
J^jl 1
I. Стрелка Пирса ^4 = *12 | *3 2. Дизъюнкция f 2= *}2 + *3 *12 4 fl «2 '2
0 0 1 1 0 I 0 I 1 0 0 0 0 I 1 1 ,1 J_ s ^2 J 5 , L“- !~Г1 l=V
I. Штрих Шеффера ?2 „1 /х1 '4 ” *12' Х1 2. Конъюнкция f2 - х1 X1 »2 ~ *12*1 *ь *3 fl fl 1*4
/2
0 0 1 1 0 1 0 1 1 1 1 0 0 0 0 1 J 4 И i, Й
1. Равнозначность ,2 1 2 ?2 ~ *12 ~~ *12 л 9 2. Запрет по ху2 х2„1 ~„2 '4 “ *12 *12 *12 х2 *12 f2 '2 fl J
0 0 1 1 0 1 0 1 1 0 0 1 0 0 1 0 J I7Z ^-2
/>- -*«.—।
293
Так, слагаемое Х]Х2 определяет логическую функцию конъюнкция, реализа-
ция которой представлена на рис. 10.14. На рис. 10.17 представлена реализация
логической функции «Запрет» и т. д.
Выбранные схемы, реализующие элементарные логические функции, затем
объединяем дизъюнкцией (см. рис. 10.13). Полученная схема, реализованная
на аппаратуре УСЭППА, прдставлена на рис. 10.21.
Ряд пневматических устройств имеют более широкие функциональные воз-
можности и позволяют реализовать сложные логические функции или несколько
элементарных логических функций двух переменных одновременно. Например,
в табл. 10.17 приведены логические функции, которые могут быть реализованы
на пятнлинейных распределителях.
10.6. РЕАЛИЗАЦИЯ ФУНКЦИОНАЛЬНЫХ УСТРОЙСТВ
СРЕДСТВАМИ ПНЕВМОАВТОМАТИКИ
Ниже приведены схемы функциональных устройств наиболее часто встречающихся
в пневматических системах управления.
Временнйе устройства предназначены для управления технологическим про-
цессом по времени путем формирования сигналов требуемой длительности. Они
построены на принципе заполнения воздухом рабочего объема (емкости) или исте-
чения воздуха из него, в результате чего давление в емкости изменяется до зна-
чения, равного значению давления срабатывания аппарата, выдающего командный
сигнал. Возможно также одновременное заполнение и опорожнение одной емкости
(проточной полости).
Таким образом, основными элементами пневматических временнйх устройств
являются пневматическое инерционное звено (емкость и дроссель или несколько
дросселей) и пневматический аппарат релейного действия, дающий по окончании
выдержки времени дискретный сигнал.
К временном устройствам относятся: устройства задержки дискретного сиг-
нала (по переднему фронту; по заднему фронту; по переднему и заднему фронту);
импульсаторы; генераторы импульсов.
Устройства задержки дискретного сигнала по переднему фронту представ-
лены на рис. 10.22.
На рис. 10.22, а’представлена схема, выполненная на аппаратуре высокого
давления. При подаче сигнала х сжатый воздух через дроссель 1 наполняет ем-
кость 2 и камеру управления распределителя 3 до давления переключения распре-
делителя. Время задержки Tj определяется величиной емкости 2 и настройкой дрос-
селя 1. После прекращения действия сигнала х сжатый воздух из емкости через
Рис. 10.22,Реализация задержки дискретного сигнала по переднему фронту
294
обратный клапан выходит в атмосферу. Конструктивно приведенная схема может
быть реализована одним устройством (пневмоклапан выдержки времени) или соб-
рана из отдельных аппаратов. При этом если применяется распределитель не об-
ладающий релейным эффектом, то для повышения стабильности работы устройства
следует в схему добавить клапан последовательности (рис. 10.22, б)-
0 устройстве, реализованном на аппаратуре УЭСППА (рис. 10.22, в) входной
сигнал х поступает в верхнюю камеру управления реле 3 и переключает его, разоб-
щая верхнюю камеру управления реле 4 с атмосферой. Давление сжатого воздуха,
поступающего в верхнюю камеру управления реле 4 через дроссель 2 и емкость 1,
плавно возрастает и через некоторое время Tj переключает реле 4. На выходе уст-
ройства появляется сигнал, равный 1. После прекращения действия входного сиг-
нала х реле 3 переключается и сообщает емкость и верхнюю камеру реле 4 с ат-
мосферой.
На рис. 10.22, г показана схема задержки сигнала, состоящая из реле вре-
мени 1 типа Ф61-21 и струйного элемента ИЛИ—НЕ-—ИЛИ 2. В исходном состоя-
нии на выходе устройства сигнал равен 0. Сигнал, поступивший на вход реле,
проходит по двум каналам: через отверстие 1.2 в камеру Б и через регулируемый
дроссель 1.1 в камеру А. Нижняя мембрана 1.3 под действием давления закрывает
сопло 1.6, запирая камеру А. При этом давление в камере А плавно возрастает.
При достижении определенного давления в камере А верхняя мембрана 1.5 про-
гибается и заслонка 1.4 прерывает питающую струю струйного датчика 1.8.
Значение сигнала на выходе реле изменяется с 1 на 0. Струйный элемент при этом
переключается, на выходе устройства появится единичный сигнал. Требуемую
задержку времени т?! устанавливают настройкой регулируемого дросселя. После
прекращения действия выходного сигнала х-мембрана 1.3 опустится, воздух, на-
ходящийся в камере А выйдет в атмосферу, мембрана 1.5 примет исходное состоя-
ние и на выходе устройства задержки времени вновь появится нулевой сигнал.
Устройство задержки времени (рис. 10.22, д) состоит из элемента задержки
времени 2 типа П-ЗС и двух струйных элементов ИЛИ—НЕ—ИЛИ 1 и 3, подклю-
ченных соответственно на вход и выход элемента задержки времени 2. Этот эле-
мент выполнен в виде единой конструкции, включающей в себя две камеры А
и Б, разделенные гибкой мембраной 2.1, величина прогиба которой может изме-
няться с помощью регулировочного винта 2.2. В исходном состоянии давление из
магистрали питания подается на питающие входы элементов ИЛИ—НЕ—ИЛИ.
При появлении входного сигнала х на управляющем входе элемента ИЛИ—НЕ—
ИЛИ 1 происходит его переключение и сжатый воздух поступает в камеру А
элемента 2, соединенную с входом элемента ИЛИ—НЕ—ИЛИ 3. Давление в ка-
мере А практически не возрастает до тех пор, пока мембрана имеет возможность
прогибаться, увеличивая объем камеры. Величина прогиба мембраны и, следова-
тельно, время задержки определяются положением регулировочного винта 2.2.
После прекращения действия сигнала х элемент 1 переключится и мембрана вер-
нется в исходное положение. Графическая зависимость выходного сигнала от
входного изображена на рис. 10.22, е. Время задержки — по переднему фронту.
Устройства задержки дискретного сигнала по заднему фронту представлены
на рис. 10.23 (работа аналогична работе устройств, представленных на рис. 10.22),
а устройства задержки сигнала по заднему и переднему фронту — на рис. 10.24.
Схемы на рис. 10.24, б, г позволяют раздельно регулировать время т, задержки
по переднему фронту и время т2 задержки по заднему фронту.
Импульсаторы предназначены для получения на выходе устройства импульсов
заданной длительности. На рис. 10.25 показаны схемы импульсаторов. Длитель-
ность импульсов определяется настройкой дросселя и величиной емкости, причем
длительность импульса не может быть больше длительности входного сигнала.
Генераторы импульсов (рис. 10.26) предназначены для получения импульсов
давления сжатого воздуха заданной частоты и длительности. В схемах на
рис. 10.26. а, б содержится по одному дросселю, с помощью которого настраива-
ется работа генератора. При этом длительность единичного сигнала определяется
временем заполнения через дроссель емкости и камеры управления аппарата,
а длительность нулевого сигнала — временем истечения воздуха через тот же
дроссель из указанных полостей. Схемы, в которых выходной сигнал устройства
через инерционное звено поступает в камеру управления этого же устройства,
295
Рис. 10.23. Реализация за-
держки дискретного сигнала
по заднему фронту:
а — на аппарате высокого
давления; б — на аппарату-
ре УСЭППА; в — зависи-
мость выходного сигнала от
входного
Рис. 10.24. Реализация задержки сигна-
ла по переднему и заднему фронту;
а, 6 — на аппаратуре высокого давле-
ния; е, е — иа аппаратуре УСЭППА;
д — зависимость выходного сигнала от
входного
296
Рис. 10.25. Реализация импульсатора:
а — на аппаратуре высокого давления; б на аппаратуре УСЭППА; в — зависимость
выходного сигнала от входного
могут обеспечить четкое функционирование, если указанное устройство обладает
ярко выраженным релейным эффектом и достаточно большим дифференциалом,
т. е. имеется различие между давлением включения и выключения. На
рис. 10.26, в, г приведены схемы, позволяющие раздельно регулировать длитель-
ность единичного и нулевого сигналов. Применение пятилинейных (четырехлиней-
ных) распределителей (рис. 10.26, в) позволяет получать генератор с двумя вы-
ходами — прямым и инверсным.
Элементы памяти. В пневмоавтоматике в качестве ЭП могут быть исполь-
зованы различные устройства, в том числе распределители (триггеры). По функцио-
нальному назначению триггеры разделяют на триггеры с раздельными входами
и триггеры со счетным входом.
Триггер с раздельными входами—это устройство, имеющее два входа
(включающий S и выключающий R) и один выход г или два взаимно инверсных вы-
Рис. 10.26. Реализация генератора импульсов:
а, г — иа аппаратуре высокого давления, б, в — иа аппаратуре УСЭППА; д — график,
иллюстрирующий работу генератора
297
Рис. 10.27. Реализация памяти (триггера с раздельными входами):
а, б — на аппаратуре высокого давления; в, д — на реле типа П1Р.1; г — на реле типа
П1Р.З; е — на струйных элементах ИЛИ —НЕ —ИЛИ
хода. В исходном состоянии S = R — г = 0. Переключение триггера происходит
только при поочередном появлении единичных сигналов на независимых входах S
и R. Повторное появление единичного сигнала на том же входе не меняет состоя-
ния триггера. Триггеры могут быть либо с доминирующим нулем (при S = R = 1
z = 0), либо с доминирующей единицей (при S = R — 1; z = 1).
На рис. 10.27, а изображен четырехлинейный двухпозиционный распредели-
тель с пневматическим управлением. При S =- 1; z = 1; z = 0. Запоминание по-
зиции производится за счет сил трения; при R — 1; z — 0; z — 1. Обычные кон-
струкции распределителей с двухсторонним управлением не допускают сочета-
ния входных сигналов S -- R =1, так как в этом случае состояние выходов яв-
ляется неопределенным.
На рис. 10.27, б изображена схема триггера, состоящая из двух трехлинейных
распределителей 1 и 2 и клапана ИЛИ 3. При S = 1 распределитель 1 переклю-
чается. Сигнал с выхода распределителя 1 поступает в канал питания распредели-
теля 2, г = 1. Запоминание происходит за счет сигнала, поступающего с выхода
на второй вход клапана ИЛИ. При R = 1 распределитель 2 переключается,
выход триггера соединяется с атмосферой, z = 0.
На рис. 10.27, в показана схема, состоящая из двух реле / и 2 типа П1Р. 1
и клапана ИЛИ 3. При S = 1 реле 2 откроется, соединив выход с магистралью пи-
тания. На выходе реле 1 (выход триггера) z = 1. Запоминание происходит за счет
сигнала, поступающего с выхода реле 1 через клапан ИЛИ в верхнюю камеру
управления реле 2. При R = 1 реле 1 закроется, выходной канал соединится
с атмосферой z = 0.
На рис. 10.27, г показана схема триггера, состоящая из реле 1 типа П1Р.З
и клапана ИЛИ 2. При S = 1 реле I откроется, выход реле соединится с маги-
стралью питания, z = 1. При S -- 0;z = 1 за счет сигнала, поступающего с вы-
хода триггера через клапан ИЛИ в верхнюю камеру управления реле 1. При R =
= 1 реле 1 закроется, выходной канал соединится с атмосферой, z = 0.
Триггер, изображенный на рис. 10.27, д, отличается от триггера па
рис. 10.27, в наличием двух взаимно инверсных выходов, полученных вследствие
введения дополнительного реле, выполняющего функцию НЕ.
298
На рис. 10.27, е изображена схема триггера из двух струйных элементов
ИЛИ—НЕ—ИЛИ. При S = 1; г — 1; г = 0. При S — 0 г~ 1 за счет сигнала,
поступающего с инверсного выхода элемента ИЛИ—НЕ—ИЛИ / на второй управ-
ляющий вход элемент ИЛИ—НЕ—ИЛИ 2. Смена состояний выходов произойдет
при 7?= 1. При этом z=0; z= 1. При R = 0 состояние выходов останется
прежним за счет сигнала, поступающего с инверсного выхода элемента ИЛИ—
НЕ—ИЛИ 2 на второй управляющий канал элемента ИЛИ—НЕ—ИЛИ 1. Этот
триггер имеет следующую особенность: при подаче давления питания в питающие
каналы элементов состояния выходов неопределены. В связи с этим триггеры не-
обходимо устанавливать в исходное положение. Достигается это подачей устано-
вочного сигнала R во входной канал.
Триггеры со счетным входом — это устройства, имеющие один выход z
(либо два взаимно инверсных выхода z; z) и один счетный вход х. При этом значе-
ние выхода меняется на противоположное при каждом очередном появлении сиг-
нала на счетном входе.
Триггеры со счетным входом могут иметь еще два дополнительных входа:
S — устанавливает на выходах триггера значения сигналов г = 1, z = 0, R —
значения сигналов z = 0, z= 1.
На рис. 10.28, а показана система управления, реализованная на распре-
делителях. Примем за исходное состояние х = 0, z = 0, z= 1. При
подаче входного сигнала х, последний отключает распределители 2 и 4, через рас-
пределитель 3 поступает в камеру управления распределителя 1 и переключает
его. На выходах распределителя 1 устанавливаются значения z= 1, z = 0.
Сигнал z = 1 поступает к распределителю 2, однако не проходит через
него, пока существует давление сигнала х. При снятии давления сиг-
нала распределитель 2 под действием пружины переключается и сигнал z = 1
поступает в камеру управления распределителя 3 и переключает его. Таким об-
разом, при следующем появлении сигнала х на распределителе 3 он передается
по другому каналу и возвращает распределитель 1 в исходное положение.
Система (рис. 10.28, б) отличается от указанной выше наличием двух до-
полнительных распределителей, подключенных по схеме ИЛИ в целях организа-
ции входодЗ и R.
На рис. 10.28, в изображена схема, реализованная на реле типа П1Р1. В ис-
ходном состоянии (подано давление питания, х =- 0) z = 0, z = 1. Поданный на
счетный вход триггера сигнал х через дроссель 2 запирает реле 1, попадает в пи-
тающее сопло реле 3, открывает реле 9, соединяя выход последнего с м агистралью.
Далее сжатый воздух через реле 8 и 5 поступает в верхнюю камеру управления
реле бив нижнюю камеру управления реле 7. Реле 6 и 7 переключаются, в ре-
зультате чего 2=0, z = 1.
При х = 0 состояние выхода не изменится, так как единичный сигнал с вы-
хода z переключает реле 8, обеспечив запоминание: z = 1, z — 0. С выхода z = 1
сигнал также поступит через реле 1 в реле 3 н переключит его. При повторном
появлении сигнал х = 1 подается через реле 3 в верхнюю камеру управления
реле 4, соединяя нижнюю камеру управления реле 5 с магистралью. Реле 5,
6 и 7 переключаются: z = 0, г = 1. При х = 0 состояние выходов не изменится.
Для стабильности работы триггера необходимо, чтобы реле 4 выключилось раньше,
чем закрылось реле 1. С этой целью в схему триггера введен дроссель 2.
На рис. 10.28, г показана схема триггера со счетным входом, состоящего из
семи реле типа Г11Р.З. В исходном состоянии (подано давление питания, х = 0)
г=0г = 1. При х— 1 сигнал подается через реле 1, переключает реле 7, со-
единяя выход последнего с магистралью. Далее сжатый воздух от реле 7 через
реле 3 подается в камеру управления реле 5 и 6, выход z соединяется с магистралью,
выход z — с атмосферой. Прекращение действия сигнала х на состояние выходов
не влияет благодаря сигналу z = 1, который поступает в камеру управления реле 3,
выходной сигнал которого удерживает мембранные блоки реле 5 и 6 в прежнем
положении. Сигнал z = 1 через реле 2 подастся также и на реле 1, переключая его
мембранный блок в нижнее положение. При следующей подаче сигнала х сжатый
воздух через реле 1 поступает в верхнюю камеру управления реле 2 и переключает
его, сообщая выход реле с магистралью, чем удерживает мембранный блок реле 1
в нижнем положении. Сигнал с выхода реле 1 открывает реле 4, соединяя выход
299
Ряс. 10.28. Реализация триггера со счетным входом:
а, б — на аппаратуре высокого давления; в — на реле ГИРЛ; г — на реле П1Р.З
300
реле с магистралью. С выхода реле сжатый воздух поступает в нижнюю камеру
управления реле 5, переключая последнее. При этом г = 0, i = 1. Состояние си-
стемы при х — 0 не изменится.
При реализации СУ средствами пневмоавтоматики следует иметь в виду осо-
бенности конкретного вида аппаратуры. Наиболее важные из этих особенностей
следующие.
Нагрузочная способность струйных элементов системы «Волга» — не более
двух элементов; выключателей путевых типа Ф76-11, Ф76-21, 2Ф76-21—не
более четырех струйных элементов; пневмокнопок типа П-ВЗР и пневмотумбле-
ров типа П-ВЗФ1 — не более трех струйных элементов.
Давление сжатого воздуха (сигналов управления) поступающего на входы
струйных логических элементов, должно быть в пределах (0,25—0,8) рппт.
При использовании входа «Запрет» в струйных элементах ИЛИ—НЕ—ИЛИ
для входных сигналов должно выполняться условие рзап 5» рУПр- Кроме того,
необходим тщательный подбор внутреннего сопротивления линии связи, соеди-
няющий вход «Запрет» с выходом другого устройства СУ, так как при большом со-
противлении может появиться эффект запоминания.
Отдельно взятые элементы системы «Волга» работоспособны в большом диапа-
зоне давления питания. Однако для обеспечения надежной работы СУ давление
сжатого воздуха, подаваемого к совместно работающим элементам, не должно
отличаться более чем на 5%.
Существенно влияет на работоспособность СУ, реализованных на элементах
систем «Волга» и УСЭППА, загрязненность сжатого воздуха. При этом следует
иметь в виду, что загрязнения поступают в СУ в основном по каналам питания,
а в струйные СУ и по каналам управления от датчиков, конечных выключателей
и т. п. и подсасываются из окружающей среды самими элементами. Для этих
СУ необходима тонкая очистка и осушка питающего воздуха, изоляция струйных
элементов от окружающей среды, фильтрация воздуха, поступающего от струй-
ных входных устройств (датчиков и др.).
Струйные элементы системы «Волга» позволяют производить межэлементную
коммутацию с помощью каналов, выполненных в монтажной плате, или гибкими
трубками. Несмотря на то, что межэлементная коммутация с помощью каналов
обладает рядом преимуществ, применение такого способа монтажа снижает на-
дежность логического блока. Наличие в каналах г, П- и Г-образных переходов
повышает их сопротивление, а наличие уплотнительных крышек увеличивает ве-
роятность возникновения перетечек между каналами. Применение межэлементной
коммутации гибкими трубками устраняет указанные недостатки.
Состояние триггера, реализованного на элементах системы «Волга», при
подаче питания непредсказуемо, поэтому в схеме должна быть предусмотрена бло-
кировка, препятствующая самопроизвольному включению исполнительных
устройств. Триггер, реализованный на элементах УСЭППА, а также на аппаратуре
высокого давления по схеме, изображенной на рис. 10.27, б, после отключения
питания возвращается в исходное положение (отключается).
При переключении трехмембранного реле возникает «короткое замыкание»,
т. е. сообщение питающего, выходного и атмосферного каналов, что в некоторых
случаях может нарушить работу СУ.
10.7. ПРИМЕРЫ ТИПОВЫХ ПНЕВМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ
Схема управления цилиндром по конечному положению (рис. 10.29) обеспечивает
работу в ручном и автоматическом режимах при выполнении разрешающих усло-
вий (блокировок). С помощью тумблера 1 устанавливается режим работы — руч-
ной или автоматический. При автоматической работе сжатый воздух подводится
к конечным включателям 2 (7) и 2 (2), которые через клапаны ИЛИ 3 (7) и 3 (2)
дают сигналы па переключение пневмораспределителя 4 при достижении штоком
цилиндра 5 соответствующего конечного положения. Кроме того, сигнал от конеч-
ного выключателя 2 (7) подается через пневмораспределители 6 (7) ..., 6 (п),
представляющие собой ячейку блокировок. Автоматическая работа схемы возможна
301
Рис. 10,29, Схема управления цилиндром по конечному положению
только в том случае, когда условия блокировок выполнены, т. е. распредели-
тели 6 ..., 6 (п) включены. При нарушении условий блокировки шток цилин-
дра 5 останавливается во втянутом положении. При восстановлении условий бло-
кировки автоматическая работа схемы возобновляется. При переключении тум-
блера 1 на ручной режим работы сжатый воздух подается в кнопки 7 (/) и 7 (2),
с помощью которых через клапаны ИЛИ 3 (/) и 3 (2) осуществляется управление
распределителем 4, а следовательно, и цилиндром 5. Индикатор 8 показывает
режим работы схемы.
На рис. 10.30 приведена схема управления цилиндром по давлению. При
включении тумблера 1 воздух поступает через конечный выключатель 2 (шток
втянут и выключатель включен) к распределителю 3, который переключается,
и шток цилиндра 4 выдвигается. Когда давление в поршневой полости цилиндра
(а следовательно, и усилие на штоке) достигает заданного значения срабатывает
пневмоклапаи последовательности 5, выходной сигнал которого через распреде-
литель 6 переключает распределитель 3 и шток втягивается. Если тумблер 1
включен, то продолжается работа в автоматическом режиме. При выключении
тумблера 1 шток останавливается во втянутом положении. Если клапан последо-
вательности не обеспечивает необходимой мощности выходного сигнала, то для
уменьшения времени срабатывания, особенно при длинных трубопроводах и
большом объеме управляющей
полости распределителя 3, це-
лесообразно применять усили-
тель мощности. Роль усилителя
выполняет распределитель 6.
На рис. 10.31 приведена
схема управления цилиндром по
конечному положению, обеспе-
чивающая работу в автоматиче-
ском режиме с выстоем штока
в конце хода. При включении
тумблера 1 сжатый воздух
пройдя через включенный ко-
нечный выключатель 2 (/) пе-
реключает распределитель 3,
шток цилиндра 4 выдвигается
Рис. 10.30. Схема управления ци-
линдром по давлению
302
Рис, 10.31, Схема управления
цилиндром по конечному поло-
жению с выстоем штока в конце
хода
Рис. 10.32. Схема управления
рукой манипулятора, реализо-
ванная на элементах высокого
давления:
1, 2> 3 — входы от задающего
устройства; 2' — выходы
к задающему устройству; 4 —
элементы блокировок; 5 — ци-
линдр выдвижения руки; 6 —
цилиндр захвата детали; 7 —
цилиндр подъема’руки
303
Рис. 10.33. Схема управления рукой манипулятора, реализованная на струйных элементах:
1, 2, 3 — входы от задающего устройства; Г, 2' — выходы к задающему устройству;
4 — вход от схемы выставки триггеров; 5 - элементы блокировок; 6 — цилиндр выдви-
жения руки; 7 — цилиндр захвата детали; 8 — цилиндр подьема руки
Id
и включает конечный выключатель 2 (2). Сжатый воздух поступает иа вре-
менное устройство 5, выходной сигнал которого переключает распределитель 3.
Клапан последовательности, обладающий релейной характеристикой, и распре-
делитель — усилитель мощности — следует включать в схему временного устрой-
ства при повышенных требованиях к точности выдержки времени. В остальных
случаях выход емкости временного устройства с целью сокращения числа аппа-
ратов целесообразно соединять непосредственно с управляющей полостью рас-
пределителя 3.
На рнс. 10.32 приведена схема управления рукой манипулятора, обслуживаю-
щего автоматизированный объект и реализованная на элементах высокого давле-
ния. Схема управления обеспечивает выполнение следующей последовательности.
При подаче сигнала 1 от задающего устройства (например, штекерной панели)
и при выполнении условий блокировки происходят выдвижение руки, захват
детали и подъем руки с деталью, после чего выдается сигнал Г на переключение
задающего устройства на следующий такт. При появлении командного сигнала 2
от задающего устройства происходят втягивание руки, опускание руки, разжим
детали и выдача сигнала 2' на переключение задающего устройства на очередной
такт. Сигнал 3 от задающего устройства включает ЭП, прерывая сигнал 2'.
304
Для определенного класса СУ применение аппаратуры высокого давления
позволяет значительно сократить общее число элементов в схеме. В качестве
примера на рис. 10.33 приведена схема управления рукой манипулятора, реали-
зующая тот же цикл, что и схема на рис. 10.32, ио построенная на технике низкого
давления (струйной технике). В этом случае общее число аппаратов (исключая
цилиндры и управляющие ими распределители, имеющие в большинстве случаев
достаточно большой условный проход) увеличилось с 11 до 28.
На рис. 10.34 приведена схема управления манипулятором с контролем цикла
по времени, используемая, например, для подачи заготовок в штамповое простран-
ство однокривошипных листоштамповочиых прессов.
Схема обеспечивает управление в наладочном (ручном), полуавтоматическом
и автоматическом режимах цилиндрами, приводящими в действие руку и захват,
а также требуемую последовательность работы пресса и приспособлений, на ис-
полнительные механизмы которых командные сигналы подаются от коммутацион-
ной панели. При автоматическом или полуавтоматическом режиме работы от гене-
ратора импульсов через определенные промежутки времени поступают сигналы
установленной длительности (величина временных параметров регулируется дрос-
селями с обратным клапаном и является постоянной для всех тактов) на' обегаю-
щее устройство. Обегающее устройство последовательно подает сжатый воздух
к тактовым входам коммутационной панели, выходные сигналы от которой в со-
ответствии с заданным алгоритмом работы подаются к механизмам и устройствам,
работающим в данном такте. Если требуется проверка положения исполнительных
механизмов, заготовок и т. п., то в соответствующем такте сигнал от обегающего
устройства поступает на конечный выключатель, определяющий, например, пра-
вильность положения заготовки и т. п. Если условия блокировки выполнены, то
сигнал через конечный выключатель поступает на коммутационную панель и ра-
бота схемы продолжается.
В противном случае генератор выключается, при этом воздух под давле-
нием иа очередной вход коммутационной панели не поступает, и работа схемы оста-
навливается. Работа возобновится после восстановления условий блокировки и
нажатия кнопки «Пуск». Программа работы на коммутационной панели наби-
рается пересоединением трубок, с помощью штекеров и т. п.
Схема обегающего устройства (на 20 тактов) приведена на рис. 10.35. В исход-
ном состоянии воздух под давлением подается на выход обозначенный цифрой 0.
Остальные выходы соединены с атмосферой. При подаче каждого очередного сиг-
нала иа вход триггера со счетным входом (от генератора импульсов) сигнал с пре-
дыдущего выхода снимается и подается на очередной выход. Схема работает по
замкнутому циклу, так как при поступлении сигналов от генератора после 19-го
выхода включается нулевой выход и т. д. При подаче сигнала на вход х0 —
«установка 0» — и при отсутствии сигнала от генератора схема из любого состоя-
ния возвращается в исходное.
В ПСУ для счета импульсов применяют двоичные счетчики, которые бывают
трех типов: суммирующие, вычитающие и реверсивные. Реверсивные счетчики
обеспечивают автоматическое изменение направления счета.
Двоичные счетчики состоят из одинаковых последовательно соединенных под-
схем (рис. 10.36) — разрядов счетчика, соответствующих разрядам двоичного
числа, представленного на выходах счетчика как результат подсчета импульсов.
Разряд счетчика содержит триггер со счетным входом.
Состояния выходов zx—z, суммирующего счетчика в зависимости от количе-
ства импульсов, поступивших на счетный вход, приведены в табл. 10.18.
305
Рис. 10.34. Схема управления манипулятором с контролем цикла по времени:
РУЧ_НОГО Управления; 2 — конечные выключатели блокировок; 3 —выходы к
кнопка питания; 6 — тумблер переключения наладочного и рабочего режимов работы; 7 — тумблер
кнппкя иртяоло°^ н „ г]о,11УавтоматнЧеСКОГО режимов работы; 8 — выход «Конец цикла»; 9 — кнопка «Пуск»; 10 — кнопка
iiwnuuyq^r-o,, ° .И/г —генератора импульсов; .13—обегающее устройство; 14 — выход к схеме управления прессом;
чмхйя-гя- панель, 16 цилиндры поворота руки; 17 — поворотный двигатель захвата; 18 — цилиндр выдвижения руки;
захвата, 20 -- цилиид р подъема рукн
схеме управления прессом; 4 — кнопка ава-
переключения
«Стоп»; // —
/5 — коммута-
19 — цилиндр
•А
Рис. 10.36. Схема двоичного
счетчика:
2 и х — взаимно инверсные
выходы триггеров; х — счет-
ный вход счетчика (н триг-
гера): 3 — вход для уста-
новки иа выходе ? сигнала
равного 1; R — вход Для ус-
тановки сигнала, равного 0
В вычитающем счетчике необходимо для соединения со счетным входом по-
следующего триггера использовать тот выход предыдущего триггера, на котором
представляется результат счета.
Реверсивные счетчики содержат в каждом разряде кроме триггера со счет-
ным входом дополнительные устройства, которые позволяют автоматически из-
менять направление счета.
СПИСОК ЛИТЕР.МУРЫ
1. Баранов С. И. Синтез микропрограммных автоматов. Л.: Энергия. 1974. 216 с.
2. Герц F.. В., Зенченко В. П., Крейннн Г. В. Синтез пневматических приводов, М.:
Машиностроение, 1966. 212 с.
3. Гогричиани Г. В. Пневматические командные устройства для управления техноло-
гическими машинами. — Вестник машиностроения, 1975, № 8, с. 13 — 16.
4. Келлерман К). И. О синтезе пневматических систем управления, заданных на
я-ь‘ке ЯРУС. — В кн.: Пневматика и гидравлика. Вып. 4. М.: Машиностроение, 1977.
с. 1Q8—U2.
5. Келлерман Ю. И., Черкашенко м. В. К минимизации структуры пневматических
систем управления. — Приборы и системы управления. 1978, № 1, с. 27 — 28.
6. Лазарев В. Гм Пнйль Е. И. Синтез управляющих автоматов. М.: Энергия, 1970.
400 с.
7. Элементы и устройства пневмоавтоматики высокого давления. Каталог-спра-
вочник. М.: 1973, 67 с. (НИИМАШ).
8. Юдицкий С. А., Тагаевская А. А., Ефремова Т. К.. Агрегатное построение пнев-
матических систем управления. М.: Энергия, 1973. 1 12 с.
Глава 11
ДИНАМИЧЕСКИЕ РАСЧЕТЫ
ПНЕВМАТИЧЕСКИХ
ПРИВОДОВ И УСТРОЙСТВ
Пневматические системы машин состоят из различных устройств, которые по
функциональному назначению рекомендуется разделять па исполнительные,
распределительные и управляющие [1—5].
К исполнительным устройствам относятся пневмодвнгатели поршневого,
мембранного и других типов.
К распределительным устройствам относятся пневмоаппараты, предназна-
ченные для изменения направления рабочей среды в двух или более ппевмолиниях
в зависимости от внешнего управляющего воздействия. Наиболее часто приме-
няются золотниковые, клапанные и крановые распределители, которые управляют
пневмодвига гелями.
Распределительные устройства, в свою очередь, приводятся в действие
управляющими устройствами, связи которых с оператором, исполнительными уст-
ройствами и между собой обеспечивают выполнение заданного цикла. В роли уп-
равляющих устройств в системах управления обычно применяют распределители
небольших размеров с различными видами управления, мембранные пневмореле,
различные логические элементы и др.
Несмотря на разное функциональное назначение, все эти устройства имеют
полости, заполняемые сжатым воздухом, под давлением которого перемещаются
поршни, мембраны, золотники, клапаны и другие твердые тела. Пневмолинии
(трубопроводы, соединения, каналы монтажно-коммутационных устройств) также
можно рассматривать как полости, объемы которых эквивалентны объемам этих
пневмолиний.
Для удобства в дальнейшем все твердые подвижные тела ппевмоустройств
будем называть поршнями, а распределители, логические элементы, пневмореле
и т. п. — управляющими устройствами.
Так как характер и время перемещения поршней зависит от термодинамиче-
ских процессов, протекающих в полостях пневматических устройств, то целе-
сообразно рассмотреть отдельно полости основных типов и привести расчетные
зависимости для определения времени срабатывания устройств различных типов
и величины давления воздуха в их полостях.
Полости в общем случае являются полостями переменного объема вследствие
движения поршней. Однако в частных случаях, когда можно пренебречь временем
движения поршня по сравнению с временем нарастания давления (например, в за-
жимных цилиндрах), полость можно рассматривать как полость постоянного
объема. Полости всех ппевмоустройств имеют постоянный объем до начала движе-
ния поршня (в подготовительный период) н после окончания движения (в заключи-
тельный период). Поэтому рассмотрим термодинамические процессы в полостях
как переменного, так и постоянного объема.
Полость может иметь один или несколько входов и выходов или быть изоли-
рована в определенные интервалы времени; на входе и полость может быть уста-
новлен дроссель. Таким образом, полости устройств могут иметь различную струк-
туру, в соответствии с которой следует применять те или иные расчетные формулы.
309
В этих формулах не учитывается теплообмен с окружающей средой и приняты
допущения, обычные при расчете пневмоприводов [1, 3]; во всех формулах ис-
пользуется абсолютное давление.
Применяемый далее термин «давление в магистрали» означает величину дав-
ления сжатого воздуха, обеспечиваемую настройкой редукционного клапана,
установленного на входе в данный пневмопривод или систему управления.
11.1. УСТРОЙСТВА С ПОЛОСТЯМИ ПОСТОЯННОГО ОБЪЕМА
Полость с одним входом без дросселя (рис. 11.1). Воздух под давлением маги-
страли поступает в полость при срабатывании управляющего устройства, не
показанного на рисунке. В момент, когда давление достигает давления рд, пор-
шень начинает двигаться. Рассмотрим время изменения давления от величины ра
(давление окружающей среды) до величины рд, не учитывая время t1 срабатывания
управляющего устройства и время С распространения волны давления от устрой-
ства до полости.
Время наполнения полости до заданного давления сжатого воздуха [1]
t3 = 3,62-10"3 —^(^-фИо!)],
(П-1)
где Vo ~ Vj + VT; = Pj/pM; с2'= р±рм'> lyn VT — объем собственно полости
и трубопровода, м3; Pi и р2 — начальное и конечное абсолютное давление воздуха
в полости; рм— абсолютное давление в магистрали; /уТ — суммарная эффектив-
ная площадь проходного сечения управляющего устройства и трубопровода
в м2; гр! (с) — функция давления, значения которой можно найти по графику на
рис. 11.2.
Суммарную эффективную площадь определяют из уравнения
(Н-2)
где и —эффективная площадь проходного сечения управляющего устройства,
установленного иа входе трубопровода, и трубопровода = '
цт — коэффициент расхода трубопровода, который можно найти по графику на
рис. 11.3 в зависимости от коэффициента сопротивления С.
Рис. 11.1. Полость постоянно! о объема с од-
ним входом
Рис. 11.2, Функции давления при наполне-
нии полости (а) и при истечении из по-
лости (а)
310
Рис. 11.3. Зависимость коэффициента расхода ц от коэффициента сопротивления $ трубо-
провода:
а — для малых значений £: б — для больших значений £
Коэффициент сопротивления [3]
$=Xnp/T/2dT, (11.3)
где /т—длина трубы; dT— внутренний диаметр трубы; Хпр — приведенный
коэффициент трения, принимающий значения в пределах 0,01—0,04 в зависимости
от шероховатости стенок, диаметра и материала трубы [1,3].
Объем VT подводящего трубопровода определяют подлине трубы от управляю-
щего устройства до полости Vj.
Эффективную площадь трубопровода определяют по длине трубы от управ-
ляющего устройства до полости, а также подлине трубы на входе в управляющее
устройство.
Обычно в начале процесса наполнения магистрали сжатым воздухом оу —
= са = ра/рм (где ра — давление окружающей среды), а в конце процесса о2 =
= сд = рл!рм (где — давление в момент начала движения поршня).
Формулу (11.1) используют при определении длительности подготовитель-
ного и заключительного периода работы различных пневматических устройств
(цилиндров, распределителей, логических элементов и др.) и при определении вре-
мени наполнения различных емкостей постоянного объема (полостей времеиийх
устройств, ресиверов и др.).
Критический массовый расход воздуха из магистрали при надкритическом
режиме истечения, т. е. при р/рм < с* = 0,5288
G* fy.r /VP (°*) _ 1) RTu ’ (П-4)
Ф (<\) = = 0,2588, = 77 >
где k = 1,4 — показатель адиабаты; R = 287 Дж/(кг-К) — газовая постоянная;
7М — температура воздуха в магистрали, К; р* — критическое давление; р —
текущее давление.
При 7'м = 293 К (20° С) критический массовый расход
G* — 0,00236/уТ Рм,
где G* — в кг/с, /уТ — в м2, ры — в Па.
Расход воздуха из магистрали при подкритическом режиме истечения, т. е.
при 0,5288 <С о <С 1:
Ом-.= 0,156/7рмФ(с)/777, • (11.5)
где <р (а) --= I '' о2//г — о(/г+1,//г;
Kj\rR =0,156, K=j/ a = p/pM.
311
Рис. 11.4, Расходная функция <р (о)
входе
Рис. 11,5. Полость постоянного объема
с дросселем на
Значения расходной функции (о) даны в приложении к монографии [3],
а также на рис. 11.4.
При Тм = 293 К расход GM = 0,00912 /уТр„<₽ (с).
Давление с жатого воздуха при наполнении полости в момент времени t [1]:
при надкритическом режиме
k
p^ — G,RTMt;
* о
при подкритическом режиме
k
dp = .. - GM7?7\[
* о
Полость с дросселем на входе (рис. И.5). Наполнение полости сжатым воз-
духом происходит через дроссель.
Время наполнения полости до заданного давления
is = 3,62-Ю'8-^ № («д)-^ (аО].
I э
Формула (11.8) отличается от формулы (11.1) тем, что в ней используются экви-
валентный объем Кэ и эквивалентная эффективная площадь
Уэ= ^4- ЛКТ;
,Э.Э
/к» ут
(11.6)
(11.7)
(И.8)
(Н.9)
П =
(11.10)
где А — коэффициент приведения объемов; — эффективная площадь сечения
дросселя.
Коэффициент А приведения объемов [5] определяют по графикам рис. 11.6,
построенным при = <та = 0,2 ис2 = сд для различных значений безразмерного
объема Л и безразмерного сопротивления й;
Ат. (11.11)
Коэффициент А можно также определить в интервалах изменения Й = 0,3 —
10, Л= 0,5 — 100, <та = 0,1 — 0,5, Од от (<та 4- 0,05) до 0,95 по следующей фор-
муле [5]:
л 1 0,12 4-0,02Й + 0,093ЙОД u П/1 „ Ч1
А = 7TW “ пд[Л + 0,148 (Й-Т,35)4' L1 [4’°4 (<7и еа)1
312
При Л > 20 и Од > (аа +и0,1) коэффициент
/1 ........— .
V1 + Q2
Величиной присоединенных объема Ут и сопротивления можно пренебречь,
если при заданных Q и значение Л лежит ниже соответствующей штриховой
кривой, показанной на рис. 11.7, а; в этом случае можно принимать Уэ = yi
и f| = f*. Это может быть, например, когда объем трубопровода значительно
меньше объема полости, а эффективная площадь намного больше В тех
случаях, когда значение Л лежит выше соответствующей сплошной кривой
(рис. 11.7, а), значение f3K можно пе учитывать и принять V3 — Vj ~Ь V, и /| =
=/уТ. Погрешность, вызванная этими допущениями, не превышает 10%. Это
имеет место при объемах трубопровода больших, чем объем полости, и при условии,
что определяющим является сопротивление трубы.
Давление сжатого воздуха в полости находят по формулам (11.6) и (11.7),
в которые вместо Уо подставляют Пэ из формулы (11.9).
При определении расхода воздуха по формулам (11.5) и (11.4) следует вместо
/уТ подставить /| из формулы (11.10).
Рнс. 11,6. Коэффициенты А
приведения объемов прн на-
полнении полости (<Га=0,2):
а — Q — 1; б — Q = 2;
в — Q — 4; г — £2 = 10
313
Рис. 11.7. Графики для определения границ влияния присоединенных объема и сопротивле-
ния в линии управления:
а — наполнение: б — истечение
Пример 1. Определить время наполнения воздухом до давления Рд = 0,35 МПа
полости пневмоцнлиидра с начальным объемом = 45» 10“° м3, управляемого от пневмо-
э
распределителя с эффективной площадью проходного сечения fy = 52,5- 10-в м2. Внутрен-
ний диаметр трубопровода dT = 0,01 м, длина трубопровода между распределителем и ци-
линдром Z — 2 м, длина трубопровода на входе в распределитель = 1 м. На входе
э
в полость установлен дроссель с эффективной площадью fK = 23,5» 10“6 м2. Приведенный
коэффициент потерь в трубе ?«пр = 0,03. Давление в магистрали рм = 0,5 МПа.
Площадь сечения трубы
= 0,785d2 = 0,785-0,012 = 0,785-ю'4 м2.
314
Коэффициент сопротивления трубопровода длиной = 7 + I по формуле (11.3)
_ Хпр7т 0,03 (2 + D
' 2dT 2-0,01
Коэффициент расхода трубопровода длиной 3 м по рис. 11.3, а цт = 0,335;
эффективная площадь сечения трубопровода
э —4 “6
[т = цт|т = о,335-0.78510 =26,3-10 м2
эффективная площадь сечения линии
с учетом распределителя по формуле (11.2)
э э
f yfr
Ял)2+(^)2
52,5-26,3
)/'52,5г + 26,32
10~6 = 23,5-10 6 м2;
объем наполняемой части трубопровода
VT = = 0,785-10-‘-2 = 157-IO-* м>;
безразмерное давление в начале и конце процесса
а1 = аа
0,35
0,5
= 0.7.
СТ2 =СТД
Функции давления по рис. 11.2 Фх (CTi) = 0.2 и фх (ст2) “ 0,704;
параметры присоединенного объема и сопротивления по формуле (11.11)
По рис. 11.7, а определяем, что при Й = 1 значение Л = 3,49 лежит выше сплошной
кривой, соответствующей = 0,7, и. следовательно, при использовании формулы (11.8)
э э
можно принять Кэ = Vj + VT и f3 = /ут. Тогда время нарастания давления от <JX до ст8
'з = 3,62-10-’ [Ф1 (ад) (°а)] =
/ ут
= 3,62-lQ-J ^sVlO-”0 8 <0-7-°-2) = 16.7-10-3 с.
Полость с одним выходом без дросселя (рис. 11.8, а). Пренебрегая време-
нем t[ срабатывания управляющего устройства и временем /2 распространения
волны давления, определим время истечения из полости до заданного давления [1 ]
/' =2,53-10-2
р (*-1)/2*
/ут^'а
(11.12)
где фг (о)—функция давления, значения которой определяют по графику рис. 11.2.
Остальные параметры см. на с. ЗЮ.
Рис. 11.8. Полость постоянного объема с одним выходом:
а — без дросселя па выходе; б— с дросселем на выходе
315
Формулу (11.12) используют при определении длительности подготовитель-
ного и заключительного периодов работы различных пневматических устройств
и времени истечения сжатого воздуха из различных емкостей постоянного объема
(полостей временных устройств, ресиверов и др.).
Обычно при определении подготовительного периода устройств Oj = 1 и
о, = Од, где Од — безразмерное давление в начале движения в полости выхлопа.
При расчете пневмоцилиндров и других устройств следует помнить, что на-
чальный объем при истечении больше начального объема при наполнении на ве-
личину Fs, где F — площадь поршня, s — его ход.
Массовый расход воздуха из полости
G == 0,156/уТрмо^-1)'/2*ф1 (о)///7\, (11.13)
где Ф1 (о) = ф (oa/o)/(oa/o)<i+1)/2A.
При Тм = 293 К
G == 0,00912/уТрмо^+1^2*гр1 (о),
где G — в кг/с, — в м2, рм — в Па.
Давление сжатого воздуха при истечении из полости постоянного объема [1]
, kRTG ... ...
dp =-------— dt, (Н-14)
причем значение G подставляют из формулы (11.13), имея в виду, что расход воз-
духа будет переменным как при подкрнтическом, так и при надкритическом ре-
жимах [3].
Полость с дросселем иа выходе (рис. 11.8, б). Истечение воздуха из полости
в атмосферу происходит через дроссель. Время истечения воздуха из полости до за-
данного давления
V’9
^2’53^СТ
'эиа
(11.15)
В формуле (11.15), в отличие от (11.12), используются эквивалентный объем V’3
и эквивалентная эффективная площадь f3
v'3=Vr+BVt. (11.16)
Коэффициент В приведения объемов [5] определяется по графикам
(рис, 11.9), построенным при оа = 0,2; Oj = 1, о,, — о' для различных значений
безразмерного объема Л и безразмерного сопротивления Q. Как и при наполне-
нии полости, Л и О определяют по формулам (11.11).
Коэффициент В можно определить в интервалах изменения И = 0,3-Ь 10,
Л = 0,5-=-100, оа = 0,1 — 0,5, Од от (оа + 0,05) до 0,95 и но формуле [5]
/1 + Q2
0,1430д + О.ОЗбОдП + 0.07Q
Л + 0,17 (й— 1,67)»
In [8,78 (1 -о;)].
При Л > 20, Од< 0,9 коэффициент
Ki +Q2 ’
Величиной присоединенных объема VT и сопротивления /уТ можно пренеб-
речь, если при заданных значениях й и Од значение Л лежит ниже соответствую-
310
щей штриховой кривой, показанной на рис. 11.7, б; в этом случае можно прини-
мать Уэ — Vy и ff = Когда значение Л лежит выше соответствующей сплош-
ной кривой можно не учитывать величинуи принимать Уэ = у -|- ут и __
= /уТ. Погрешность, вызванная этими допущениями, не превышает 10%.
При определении расхода воздуха по формуле (11.13) следует вместо /ут
подставить значение полученное из формулы (11.10), а при определении дав-
ления по формуле (11.14)'вместо У' подставить У^ нз (11.16).
Пример 2. Определить время падения давления от рм до рд в полости пневмо-
цилиндра при истечении из нее сжатого воздуха через линию с параметрами, приведен-
ными в примере 1. Эффективная площадь дросселя на выходе из полости = 12- 10~• мг.
Объем полости V' = 1615* 10-6 м*. Давление в магистрали рм = 0,5 МПа, давление
в начале движения Рд = 0,25 МПа.
Коэффициент сопротивления трубопровода длиной / по формуле (11.3)
- ^пр^т2 0.03-2 _
2</т 2-0,01 '
находим коэффициент расхода трубопровода по рис. ИЗ ц = 0,38;
317
a)
5)
Рис. 11.10. Проточная полость, управляющая повышением (а) и понижением
(б) давления воздуха
эффективная площадь сечения трубопровода
э —4 ~6 2
fT = UTfT = 0,38-0,785.10 = 30-10 м;
эффективная площадь линии с учетом распределителя по формуле (11.2)
Фт
.э _
/ут —
52,5-30 -6 -6 2
-=— 10 =2610 м
2 /52,524-302
безразмерное давление в начале и конце процесса
= 0,2 и -^- = ^ = 0,4;
Рм 0,5 0,25
функции давления по рис. 11.2 Ф2(<*1) = 0,795 и "фг (ст2)л= 0,877;
безразмерный присоединенный объем Ли Л
э
V_ 157-Ю-9 ~ f\T
Л = Х = ^ик= 0’097 н й=4-
1 /к
При Й = 2,17 значение Л лежит ниже штриховой кривой, соответствующей Од =
= Рд/рм ~ 0,5, и при использовании формулы (11.15) можно принять I'g = Vj и
сопротивление Й по формулам (11.11)
= 2,17.
1210-’
t' = 2,53-10-2 -161^10 * (0,877 - 0,795) = 0,351 с.
3 1210“б-0,2°’1П
Проточная полость, управляющая повышением давления воздуха
(рис. 11.10, о). В полость поступает воздух под давлением рм, при этом часть воз-
духа удаляется в атмосферу через отверстие малого размера (/’ < fyT).
Время наполнения полости до заданного давления [1]
о2
Vo
t =------—
kK !/rt\ /;т
du
(р (^) ~
О1
(И.17)
где Vo = Vi + Ут, Qa = ^a/^T, а=р/рм;
При постоянной температуре в полости
t ____________lzoA_____
8 62,72 fyT ’
причем значения интеграла
о,
J <р (О) — Qao<p(_A.)
О, \ О )
обычно <Jr = оа и а2 = од.
(П-18)
318
берут по графику (рис. 11.11, а), построенному в функции ад при аа = 0,2 для
различных значений <: 1. При этом следует пользоваться значениями, ограни-
ченными сверху штриховой линией.
Давление сжатого воздуха в проточной полости
kpj<n Г
dp —
Vo
ф (о) — оПа 1/ ф
' 1 м
dt.
(11.19)
Установившееся давление оу сжатого воздуха в проточной полости при Т =
= const определяют по формуле [1]
О _ Ф (Ру)
Я
(11.20)
Давление в момент начала движения поршня 1 должно быть меньше устано-
вившегося, т. е. Од < оу, в противном случае поршень не сдвинется с места. Если
на входе в полость имеется дроссель, то вместо Уо и fyT в выражениях (11.17)
и (11.18) используют соответственно Уэ и fl, определяемые по формулам (11.9)
и (11.10).
Проточная полость, управляющая понижением давления воздуха
(рис. 11.10, б). Полость связана с атмосферой отверстием большей площади /уТ
по сравнению с отверстием, соединяющим ее с магистралью /э.
Время опорожнения полости до заданного давления [1]
Vi
<з=----------
62,72 // 7'м £
Значения интеграла
0.9
(11.21)
do
J ф (о) — п;оф (—М
°д 4 '
где Па = /уТ/7р берут по графику (рис. 11.11, б), построенному при оа = 0,2
для различных значений Qa > 1 как функция Од, Следует пользоваться значе*
319
Рис. 11.12. Зависимость установившегося давления ру от коэффициента й' пропускной
способности при различном давлении рм воздуха в магистрали
ннями, ограниченными сверху штриховой линией. Давление воздуха в полости
определяют по формуле (11.19), в которой
йа=/;т//!> 1-
Установившееся давление в'у сжатого воздуха в проточной полости может быть
найдено из формулы (11.20). Необходимо учитывать, что давление в момент начала
движения поршня 1 должно быть больше установившегося, т. е. > Оу или
Рд> Ру, в противном случае поршень не сдвинется с места и нужно будет изме-
нить параметры устройства.
Установившемуся значению давления соответствует минимально допустимая
пропускная способность О' mjn, а следовательно, и предельная длина трубопровода,
соединяющего полость с управляющим устройством. На рнс. 11.12 приведены за-
висимости установившегося давления от коэффициента Й' пропускной способности
при различном давлении воздуха в магистрали. Пользуясь этими графиками,
можно определить минимальную пропускную способность Qan,in, если известно
давление в момент начала движения поршня, которое принимают равным уста-
новившемуся давлению р’ Определив отсюда эффективную площадь f’, а затем
приведенный коэффициент расхода р трубы по известной площади /т ее сечения,
определяют коэффициент сопротивления С по графику иа рис. 11.3 и находят пре-
дельную длину 1Т трубы по формуле (11.3). Если на выходе из проточной полости
имеется дроссель, то вместо Уо и fyT в формуле (11.21) заменяют соответственно
на V3 и /ф, определяемые по формулам (11.16) и (11.10).
11.2. УСТРОЙСТВА С ПОЛОСТЯМИ ПЕРЕМЕННОГО ОБЪЕМА
Под временем срабатывания дискретного пневматического устройства понимают
отрезок времени от момента приложения управляющего воздействия к управляю-
щему устройству до момента окончания движения поршня в одну сторону (пря-
мой или обратный ход).
На рис. 11.13 представлена циклограмма одностороннего устройства, на верх-
ней диаграмме изображена последовательность выстоя и движения поршня при
прямом и обратном ходе, на нижней — изменение давления в напорной полости,
соответствующее различным периодом работы устройства. В случае двустороннего
устройства добавляется аналогичная диаграмма для выхлопной полости. Время
прямого хода t = + *тп и время обратного хода t' = + /ц -ф
ф /рр где ф (или ф) — время от момента приложения управляющего воздействия
320
Рис. 11.13. Циклограмма од-
ностороннего пневматиче-
ского устройства
до начала движения поршня (подготовительный период); (или /р) — время
движения поршня на длине хода s; (или Гш) — время изменения давления до
заданной величины после останова поршня (заключительный период).
Подготовительный период состоит из трех интервалов: Zj = ~Ь + t3
и t\ = /( ~|- Г, ~г t’3, где (или — время срабатывания управляющего уст-
ройства; t2 (или t'2) — время распространения волны давления от управляющего
устройства до рабочей полости; t3 (или t's) — время изменения давления в полости
до начала движения поршня.
Время ?! обычно указано в технической характеристике. Для применяемых
в промышленности распределителей = 0,007-4-0,7 с в зависимости от типов,
размеров и условий их работы, и в некоторых случаях оказывается пренебрежимо
мало по сравнению с длительностью цикла работы устройства.
Время распространения волны давления
*2 = -^, (11-22)
где 1т — длина трубопровода, м; а — скорость распространения звука в воздухе,
м/с (при Т = 290 К а — 341 м/с).
Время t3 определяют по формуле (11.1) или (11.8), а время — по формуле
(11.12) или (11.15).
Время движения поршня определяют по графикам, полученным численным
интегрированием системы нелинейных дифференциальных уравнений, описываю-
щих изменение термодинамических параметров сжатого воздуха в полостях уст-
ройства и движение поршня (эти уравнения будут приведены ниже). Графики по-
строены в безразмерных параметрах и позволяют определять быстродействие уст-
ройств в широком диапазоне изменения их размеров и параметров. Большинство
графиков построено для безразмерного времени т, соответствующего сумме
значений времени ts, изменения давления в полости и времени /ц движения поршня.
В некоторых случаях приведены графики для времени ts, соответствующего вре-
мени /л движения поршня (без подготовительного периода).
Предварительно определяют результирующую всех сил, действующих на
поршень, кроме сил давления сжатого воздуха,
Р ~ Pi — Pz Рз — Р« — Ра.Рщ! (11.23)
где ?! — сила трения; Р2 — сила полезного сопротивления; Ps— вес груза и по-
ступательно движущихся частей пневматического устройства; Ро — сила на-
чального натяжения пружины; Рш — площадь штока; ра — давление окружаю-
щей среды.
Следует отметить, что Р3 учитывают только при вертикальном расположении
устройства, Ро — только для устройств с пружиной, PaFm — только для пневмо-
цилиндров двустороннего действия с односторонним штоком"для пневмоаппара-
туры отсутствует сила полезного сопротивления.
11 Е. в. г ерц и др.
321
Сила трения Рг в уплотнениях устройства зависит от размеров поршня,
конструкции уплотнений, смазки трущихся поверхностей и других факторов.
Например, для пневмоцилиндров с диаметром поршня 0,05 м с некоторым запасом
можно принять /\ = 0,25 pMF, а с диаметром поршня 0,3 м Рг = (0,034-0,05)
pMF [3], где F— площадь поршня.
Составляющую и результирующую сил, действующих на поршень, считают
положительными, если их направление совпадает с направлением сил сопротив-
ления, и отрицательными, если оно совпадает с направлением движущих сил.
Ниже приведена общая последовательность расчета пневматических устройств
По исходным данным определим основные параметры, влияющие на динамику
устройства.
Безразмерная нагрузка
Z = 0,785pMD2 ’ (11,24)
где D — диаметр поршня.
Коэффициент пропускной способности
^21=-^- и = * (11.25)
/1 21 /2
где fl и — эффективные площади проходных сечений подводящей и выхлоп-
ной пневмолиний.
Коэффициент &21 или й12 определяют только при расчете устройств, имеющих
две пневматических полости.
Безразмерный конструктивный параметр
где Р3 и т — вес и масса груза и всех других поступательно движущихся ча-
стей; рм — в Па.
Отношения площадей торцов поршня
ц _ -Oj и П = -4lJZL СИ 27)
1121 1112 F2 DI ’ I11-27)
где Fj и f2 — площади торцов поршня; D± и О2 — диаметры торцов поршня.
Коэффициенты П21 или П12 определяют только при расчете устройств, имею-
щих две пневматических полости.
Безразмерные начальные объемы (приведенные начальные координаты
?01=^4- и ?02=^, (11.28)
Гр Г
где У01 и У02 — начальные объемы полостей пневматических устройств (при не-
обходимости с учетом присоединенных объемов линий управления).
Безразмерное атмосферное давление оа ~ PaJpu характеризует давление в ма-
гистрали рм, так как атмосферное давление ра обычно всегда принимают ~ 106 Па.
Методика расчета составляющих времени срабатывания устройства и приве- •
денных выше безразмерных параметров зависит от наличия дросселя возле его
полости и от величины присоединенных объема УТ1 и сопротивления /уТ j линии
управления по отношению к размеру начального объема V, полости устройства и
сопротивления дросселя. Эти соотношения определяются
Л = 1щ- и Ц = - (11.29)
Vi f3
1 /К1
322
Таблица 11.1
Определение времени и изменения давления в полости
до момента начала движения поршня
.Цроссель иа входе в полость Расположение Л (или Л') при заданных Q и сд (или Пд.) на рис. 11.7 Эффектив- ная пло- щадь линии п Расчетный начальный объем Время (или fg) по Фор- муле
при прямом ходе (на- полнении) при обрат- ном ходе (истечении)
Отсут- ствует — !э ' ут1 по (11.2) + VT1 Vi + FiS + + ^Т1 (11.1) или (11.12)
Имеется Ниже штрихо- вой линии ,э _.э 'э! ~'к1 = V, -J- Fts (11.8) или (11.15)
Выше сплошной линии *Э1 'ут1 по (11.2) = Vl + vT1 < = + + Fls + ^Tl
Между сплош- ной и штрихо- вой линиями /э1 по (11.10) V3 = = F1+47t1 V3 = ''I + + Fp + £VT1
Время t3 изменения давления до начала движения при прямом ходе (включе-
нии) и f3 при обратном ходе (выключении) определяют в соответствии с рекоменда-
циями, приведенными в табл. 11.1. Время движения поршня и время срабатыва-
ния определяют по одному из трех вариантов в соответствии с рекомендациями
табл. 11.2 для обратного хода и табл. 11.3 для прямого хода.
Время обратного хода поршня рассчитывают только для односторонних пнев-
матических устройств. Если дроссель на входе в полость отсутствует, то расчет
проводят по первому варианту (безразмерное время ts и т' находят по графикам).
При наличии дросселя возле полости устройства определяют время движе-
ния TsQ или т(0, поршня, найденное из условия и Уо = УрТ. е. без учета
объема и сопротивления трубопровода (rs0 т(0 находят по графикам).
Определяем
г _ т5рОд Г' — Ts°q«
l,2g01 С “ l,2g01 •
Если Л/П <: С или Л/£2 < С', то расчет при прямом и обратном ходе можно
вести по второму варианту. Время движения в этом случае xs = xs0 ит'= xsQ
При этом ошибка расчета ие превышает 20% . Для получения более точных резуль-
татов расчет следует вести по третьему варианту.
Если Л/П > С или Л/£2 > С', то расчет необходимо вести по третьему ва-
рианту, причем влияние присоединенных объема и сопротивления для прямого и
обратного хода учитывается по-разному.
Время т' обратного хода поршня (см. табл. 11.2) по третьему варианту оп-
ределяют исходя из значений эквивалентного начального объема У' и эквивалент-
ной эффективной площади fl проходного сечения, как н при расчете времени под-
готовительного периода.
II* 323
Таблица П.2
Определение времени срабатывания односторонних пневматических
устройств при обратном ходе (выключении)
Исходные данные для устройства ГЭ1 ДЛЯ расчета Q 21 н Лг Расчетный началь- ный объем Время движения Время сра- батывани я *'='з+ X
Без дросселя на входе в полость 'ут! по (11.2) V1 + 1'т1 Fts [&01П12 = ^1 + ^т1 Г F2s J V затем ts по (11.34) т', затем t' (11.34) или Z3 + *s
С дросселем на входе в полость Л TsOgfl а " [ л 1 * La" i,2501n„ J f3 'к! Ts = TsO затем t по (11.34) Чо’ затем по табл. 11.1 *з + ^0
С дросселем на входе в полость Л xsO°A а i,2|01 Г_л_ таО°д 1 ‘ L & 1,2|01П12 J £Э 1Э1 по (11.10) У. + ВУ^ FiS [в»1П12 = = Vt + BFri] * f2s J т затем t по (11.34) ф затем по табл. 11.1 *з+ Ч
Примечания: 1. Для дифференциальных устройств для расчета N используют 2. Для расчета и N прн наличии дросселя ПРН его отсутствии 72 = 7ут2- * Формулы в квадратных скобках — приведены для односторонних устройств с пневматическим возвратом (см. с. 332).
При расчете времени ts прямого хода поршня (см. табл. 11.3) по третьему
варианту вначале определяют превышение Дод давления в трубопроводе над дав-
лением в полости управления в момент начала движения
02
-°'234 -(Л+1)5< <"-30>
затем определяют время тн нарастания давления в трубопроводе от момента на-
чала движения поршня до момента достижения величины рм
тн = т3 (---------------1). (11.31)
\ о-д — <та + Д<Тд ) 1 ’
Если тн < 0, то давление в трубопроводе перед дросселем в момент начала дви-
жения поршня достигло величины рм, и следует принимать ts = Tso.
324
Таблица 11.3
Определение времени срабатывания пиевмоустройств
при прямом ходе (включении)
Исходные данные для устройства fl Для расчета Й21 и N Расчетный началь- ный объем Время движения Время срабаты- вания t — = {s + *s
Без дросселя на входе в полость .э ' ут1 по (11.2) _ + ^т1 S“‘ Fts = + КГ1 г F2s J xs, затем f no (11.34) %, затем t no (11.34) или *3 *S
С дросселем на входе в полость прн Л < TSQgA й " 1,25,, Г л Tsoga 1 * L Q " 1,2|„П12 J 'к1 E - V1 FiS xs = XS0’ затем ts no (11.34) tSQ, затем fs no табл. 11.1, ts + h
С дросселем на входе в полость при Л Т50аД й l,2got Г Л Уд 1 * L Й I,2g01nl2 J e - F,s [a01n12 = -^-] ‘ Г JO * TS0’ затем ts no (11.30)- (11.34) ts, затем tg по табл. 11.1 *s + (s
Примечания: I. Для дифференциальных устройств для расчета N используют Й. 2. Для расчета и 2V при наличии дросселя /э — , при его 2 2 Kz- э э отсутствии f2= fyT2- * Формулы в квадратных скобках — приведены для односторонних устройств с пневматическим возвратом (см. с. 332).
Если тн ts0, то безразмерное время прямого хода поршня
т = 0,8 1/т* -------------Тз- ; (11.32)
s г so СТд(<Тд —ста + Лстд)
если же 0 < тн < Tso, то безразмерное время перемещения определяют по фор-
муле
Т = Т + 0,8 1/4----1------Тз-,-А -Г — ТН- (11 -33)
S SO - К и Од (<Тд — <Та + Аод) н
Формулы (11,30)—(П-33) справедливы как для действительного времени t>
так и для безразмерного времени т. Все величины времени, используемые в фор"
мулах, должны иметь одинаковую размерность.
Если график для ts отсутствует, а имеется график для т, то время ts находят
как разность т — т3 времени срабатывания и времени изменения давления до на-
чала движения.
325
Безразмерной время т й действительное время I сЯязанЫ следующей зависи-
мостью
t = 1,03-МНт, (11.34)
/Г
Где t — в с; з и D — в м; — в м2.
При отсутствии графиков для требуемых исходных данных время ts можно
рассчитать по приближенным формулам для/равномерного (установившегося)
или равноускоренного движения. Этн упрощенные зависимости ts от N нанесены
на некоторых графиках (см. рис. 11.15,11.17 и 11.18), приведенных ниже, прямыми
штриховыми линиями (для установившегося движения — горизонтальными, для
равноускоренного — наклонными). Наклонная и прямая штриховые линии про-
ходят довольно близко к соответствующей сплошной кривой и пересекаются
в точке, которой соответствует значение конструктивного параметра N* [3].
При значениях N < Л/ можно считать движение установившимся, а при N >
> (Д'* — равноускоренным. Наибольшие погрешности упрощенных расчетов име-
ют место при значениях 7V, близких к N*, так как этим значениям соответствует
переходный режим.
Приближенные формулы [1] для определения безразмерного времени дви-
жения т/и безразмерной установившейся скорости приведены в табл. 11.4.
От времени ts к действительному времени движения Zs переходят по формуле
(11.34), а от |у к действительной установившейся скорости xv — по формуле:
j =974 -21 £ (11.35)
О2
где ху — в 'м/с, / — в м2, Di — в м.
Установившуюся скорость обратного хода для любых односторонних уст-
ройств можно определить следующим образом. При любых колебаниях движущей
силы, например веса груза, возвратной пружины, давления подпора и т. п., и
силы сопротивления движению, пока результирующая сила, действующая на
поршень, больше (рКР — ра) Ft = 0,89 p^Flt т. е. когда режим истечения надкри-
тический, скорость поршня будет постоянной [3]. Величину этой установившейся
скорости можно определить по приближенной формуле
Ошибка вычислений по этой формуле увеличивается с возрастанием влияния
присоединенного объема.
Из приведенной зависимости видно, что при надкритическом истечении воздуха
скорость поршня не зависит от результирующей силы. Таким образом, чтобы
получить высокую скорость обратного хода, требуется обеспечить надкрити-
ческий режим истечения и выбор соотношения и
Время движения поршня при установившемся режиме
^S=s/xy. (11.37)
Пример 3. Определить время подготовительного периода при прямом и обратном
ходе пневмопривод i с исходными данными, приведенными в примерах I и 2. Время сраба-
тывания распределителя при включении (прямой ход) — 0,080 с и при выключении
Г' = 0,1 с.
Время распространения волны давления по трубопроводу по формуле (11.22)
= f' = /т2 !а =- 2/341 0,006с;
время подготовительного периода при включении с учетом времени fj, найденного в при-
мере 1
= ^ + ^2 + ^3 = 0,030 4- 0.006 + 0,016 = 0,102с;
327
326
i’nc. 11.14, Расчетная схема односто-
роннего устройства без пружины
время подготовительного пе-
риода прн включении с учетом
времени ta, найденного в примере 2
4- 0,006 4- 0,351 = 0,457с.
Одностороннее устройство
без пружины. Одной из часто
применяемых разновидностей
подъемник, расчетная схема
таких устройств является пневматический
которого представлена на рис. 11.14. Вертикальное расположение цилиндра подъ-
емника позволяет совершать ход поршня вниз под действием силы тяжести, при-
чем воздух из подпоршневой полости выходит в атмосферу, а ход поршня вверх,
при котором поднимается груз, происходит под действием сжатого воздуха. По
такому же принципу работают подъемные цилиндры некоторых манипуляторов.
Рассмотрим дифференциальные уравнения динамики подъемников.
Уравнение движения поршня вверх
mx = (Р1 — pa)F — Р,
где Р определяют по формуле (11.23).
Уравнение давления воздуха в полости при ее наполнении
. ЩкРыурт~к kPi .
P1 Pl (*01 + *) ф 01 («01 + x) X'
Уравнения (11.38), (11.39) после перехода к безразмерным параметрам (11.24),
(11.26) и (11.28) примут вид
У^^-Ха;
da
Soi ~г 5
где
(11.38)
(11.39)
(11.40)
k
(Н-41)
FjSi
№VVr, ’
Уравнение движения поршня вниз
mx = F(pa — р2) — Р';
3k—1
kf32Kp2 2k
p2 — --
Ха = X + Оа-
(11.42)
kp-i
; ( . х. (11.43)
(s+x02 — X) ~
k — 1
F2 (s + x02 — x) pM 2k
Результирующая сила P' в уравнении (11.42) должна иметь знак минус,
Чтобы поршень двигался вниз, т. е. необходимо, чтобы в формуле (11.23) Р2 -|-
+ Р3> Р, («отрицательная» нагрузка).
Уравнения (11.42) и (11.43) в безразмерной форме
N ~ - X ;
________________k Г а ~2k ф (-22- А — 1 •
Л2 g02 + 1 - S L п21 °2 ф \ a J dx J
Обычно у подъемников П21 = 1, см. (11.25) и П21 = 1, см. (11.27).
328
(11.44)
k
(11.45)
Рис. 11.15. Безразмерное время rs движения поршня одностороннего устройства без пру-
жины (<та = 0,2):
а — |0 = 0,05; б — Ь — 0,1; в — = 0,2 (прямой ход); г — = 0,2 (обратный ход)
Уравнения движения поршня и давления воздуха в полости решаются сов-
местно для определения времени движения ts или ts поршня до конца рабочего
хода х = s или 5=1.
На рис. 11.15 приведены расчетные графики зависимости безразмерного вре-
мени ts и т' движения поршня вверх и вниз от конструктивного параметра N
для различных значений безразмерной нагрузки %а и %' при давлении аа = 0,2.
Влияние начального объема 5о на время обратного хода невелико. Поэтому графи-
ками на рис. 11.15, г можно пользоваться при значениях £0 от Одо 0,3. Рекоменда-
ции по использованию этих графиков и по определению времени подготовитель-
ного периода приведены в табл. 11.1—11.3. Штриховые линии соответствуют
приближенным формулам, приведенным в табл. 11.4. Для расчета времени подго-
товительного периода необходимо определить давление начала движения поршня
в полости ад при ходе вверх и од при ходе вниз
Од = X + *а = Ха! °Д = X + ®а = Ха.
где X и l! — безразмерная нагрузка при прямом и обратном ходе.
В работах [2, 3] приведены графики безразмерного времени т как функции N,
включающие подготовительное время (т = т s -т т0-
329
Рис. 11.16. Расчетная схема односто-
роннего устройства с возвратной пру-
жиной
Одностороннее устройство
с возвратной пружиной. В устрой-
ствах этого типа прямой ход со-
вершается под действием давления
сжатого воздуха в полости на пор-
шень (другая полость постоянно
сообщена с атмосферой), а обратный
ход — под действием возвратной
пружины.
На рис. 11.16 приведена рас-
четная схема одностороннего пнев-
моцилиндра с возвратной пружи-
ной, управляемого от распредели-
теля 1. Эта схема и изложенный
ниже метод расчета распространя-
ются на различные распределители
и другие аппараты с пружинным
возратом, а также на мембранные
двигатели.
Уравнение движения поршня при прямом ходе (см. рис. 11.16)
тх = (рх — ра) F — сах — Р,
(11.46)
где сп — жесткость пружины.
Это уравнение решается численно совместно с уравнением (11.39) давления pt
воздуха в полости.
Уравнение (11.46) после перехода к безразмерным параметрам (11.24), (11.26):
примет вид
N^r =<h-vng-xa, (11.47)
cns
rAeVn-pMF
безразмерная жесткость пружины.
Уравнение давления в безразмерной форме — то же, что и для подъемника
(11.41).
Уравнение движения поршня при обратном ходе
тх =сп (s — х) — (р2 — ра) F — Р'. (11.48)
Уравнение давления при истечении воздуха — см. (11.43).
Уравнение (11.48) в безразмерной форме
^-S- = vn(1~ S)-(a2-cra) -X'
(11.49)
для определения времени движения поршня т' следует решать совместно с уравне-
нием (11.45), в котором П21 = Q21 ~ 1.
На рис. 11.17 приведены графики [1] для определения безразмерного вре-
мени xs прямого хода устройства с возвратной пружиной, а на рис. 11.18 — вре-
мени т' обратного хода в зависимости от конструктивного параметра N при раз-
личных значениях безразмерной нагрузки Ха и х' и безразмерной жесткости пру-
жины vn. Графиками можно пользоваться при 5о = 0 — 0,3.
Рекомендации по использованию графиков xs (У) и по определению времени
подготовительного периода приведены в табл. 11.1—11.3. Штриховые линии на
рис. 11,18 проведены в соответствии с приближенными формулами табл. Ц.4.
Давление в момент начала движения при прямом ходе
Да = X + °а = Ха-
330
Рис. 11.17. Безразмерное
время rs движения поршня
одностороннего устройства с
возвратной пружиной при
прямом ходе (£0 = 0,15):
а — vn = 0,05; б — vD =
= 0,1; * — Vu —0,2; г —
Vn= 0,4
00
30
Z0
10
ts
30
го
ю
о Z 4 6 8 N 0 2 0 6 в #
в) г)
t’s
30
20
10
о
1s
20
10
0 I 4 6 8 N 0 2 4 6 8 N
6) г)
Рис, 11.18. Безразмерное вре-
мя ts движения поршня од-
ностороннего устройства с
возвратной пружиной при
обратном ходе (|о = 0,15):
а — vn = 0,05; б — vn = 0,l;
в — Уц = 0,2; г — vn = 0,4
331
Рис. 11.19. Расчетные схемы односторонних
устройств с пневматическим возвратом:
а — дифференциального цилиндра; б — рас-
пределителя с односторонним управлением
Давление в момент начала движения при обратном ходе
Од == 7.' + Оа + vn = %а + Vn.
При обратном ходе при надкритическом режиме истечения из полости, т. е.
при любых колебаниях нагрузки и усилия пружины, пока результирующая сила,
действующая на поршень, больше 0,89 pafi скорость поршня будет постоянной,
а ее значение определяют по формуле (11.36). Таким образом, чтобы получить вы-
сокую скорость обратного хода, требуется выбор усилия пружины, обеспечиваю-
щий надкритический режим истечения и выбор соотношения и Fp
Для зажимных цилиндров, имеющих обычно небольшой ход, время движения
поршня относительно невелико по сравнению с временем подготовительного и за-
ключительного периодов. Поэтому при расчете таких устройств в качестве сум-
марного времени можно принять время наполнения полости с выд-
винутым штоком, т. е. с объемом Vo ~ Vi + Fs + Ут или VB = + Fs + AVT
до давления, определяемого исходя из требуемого усилия зажима.
При расчете мембранных устройств в расчетные формулы вместо площади
поршня Fj следует подставлять эквивалентную площадь мембраны FK, опреде-
ляемую по формуле
Fk = |2 (^м + ^мОо -|- До); (11.50)
где DM—диаметр мембраны в месте заделки; Do—диаметр опорного диска.
Одностороннее устройство с пневматическим возвратом. Устройства этого
типа имеют две полости, площади торцов поршня со стороны которых различны.
На рис. 11.19, а приведена расчетная схема дифференциального цилиндра, управ-
ляемого специальным распределителем 1. На рис. 11.19, б приведена расчетная
схема пневмораспределителя с односторонним пневматическим управлением и
пневматическим возвратом, управляемого распределителем 1. Полость большого
диаметра при переключении распределителя сообщается то с магистралью (пря-
мой ход), то с атмосферой (обратный ход), а полость меньшего диаметра сообщена
с магистралью постоянно с помощью канала 2.
Уравнение движения при прямом ходе
тх =p1F1 — p2F2 — pa(F1 — F„)--~ P (11.51)
решается численно совместно с уравнением давления р± (11.39) в поршневой и урав-
нением давления р2 (11.43) в штоковой полостях, причем в последнее уравнение
вместо Од следует подставить сга = 1, так как возможное истечение сжатого воз-
духа из этой полости происходит не в атмосферу, а в магистраль.
Аналогично уравнение (11.51), выраженное в безразмерных параметрах
(11.24)—(11.29),
№-g-=(T1-n21a2- (1-П21)аа-Х (Н-52)
332
решается совместно с уравнениями (11.41) и (11.45) после подстановки в последнее
уравнение аа = 1.
Уравнение движения поршня при обратном ходе, когда поршневая полость
(см. рис. 11.19) соединяется с атмосферой,
тх = p2F2 + ра (F, — F2) — P1Fj — Р' (11.53)
решается совместно с уравнением давления (11.39) в штоковой полости, в индексы
членов которого следует подставить 2 вместо 1 (например р2 вместо plt х02 вместо х0|
и т. д.) и с уравнением (11.43) давления рг в поршневой полости после обратной
замены индексов (Рг вместо F2, oj вместо <т2 и т. д.).
Уравнение (11.53) в безразмерной форме
= П21<т2 + (1 — П21) <та — а, — %' (11.54)
решается совместно с уравнениями (11.41) и (11.54) после аналогичной замены
в нем индексов.
Время срабатывания устройств этого типа можно определить по графикам,
приведенным на рис. 11.20—11.25. Графики построены для безразмерного вре-
мени т = т3 4~ xs прямого хода, т' = т3 + т' обратного хода и суммарного вре-
мени т + т' в зависимости от коэффициента П12 — соотношения площадей торцов,
и безразмерной нагрузки %. Эти графики построены при скачкообразном из-
менении нагрузки, характеризуемой коэффициентом Р = %д/% = 1,5, где Хя —
нагрузка в начале движения, и при постоянной нагрузке (р = 1) для следующего
диапазона параметров: Q21 — 0,254- 1,0; N = 0,2-?-1,0; П12§01 = 0,64-4,0. Ими
можно пользоваться при оа = 0,154-0,3.
Рис. 11.20. Безразмерное время срабатывания t и г' устройства одностороннего действия
с пневмовозвратом (й21 — 0,25; П12£01 — 0,6; |02 = 0,2); штриховая Линия — ft = 1,
сплошная — ft = 1,5
Рис. 11.21. Безразмерное время срабатывания гиг' устройства одностороннего действия
с пневмовозвратом (Й21 = 0,25; П12|01 — 4; £02 = 0,2); штриховая линия — ft = 1,
сплошная — р — 1,5
333
Рис. 11.22. Безразмерное время срабатывания хит' устройства одностороннего действия
с пневмовозвратом (Й21 = 0,5; П12|01 = 0,6; £02 — 0,2); штриховая линия — р — 1,
сплошная — р — 1,5
Рис. 11.23. Безразмерное время срабатывания т и т' устройства одностороннего действия
с пиевмовозвратом (й21 = 0,5; П12£01 — 4; g02 = 0,2); штриховая линия — р = 1,
сплошная — р — 1,5
Рис. 11.24. Безразмерное время срабатывания тих' устройства одностороннего действия
с пиевмовозвратом (Й21 = 1; П12£01 = 0,6; £02 == 0,2); штриховая линия — р == 1;
сплошная — р = 1,5
Рис. 11.25. Безразмерное время срабатывания тих' устройства одностороннего действия
с пиевмовозвратом (fl21= 1; П121о1 ~ 4’, I02 = 0,2); штриховая линия —= р = 1, сплош-
ная — р 1,5
334
Время движения поршня также можно определить по приближенным форму-
лам. Для прямого хода при Р = 1
Ts = (Я21 + 1) + 3,1) [ 1 + 1,! (п12 Zl’1.2) ] (! ^п’’2 ) ’
(11.55)
н при р = 1,5
ts = (Q21 + d (-щ^-4-з) [1+-2-17(п1-2°1т2) ] (1“’ЙЬ31п^):
(11.56)
для обратного хода при Р = 1.
Ts = (4.38Й21 — 0,2 — 0,1^01П12) П12 + 0,385о1П12 + I—Q21 +
+ (Х — о,1) £2 + £221 (ё01П12 - 0,6)1 (11.57)
и при 3=1,5
ts = 0.8Й21 (5,3 — 0,25^01П1г) П12 + О,25£о1П12 + 1,2 (1 — Q21). (11.58)
Давление воздуха в полости в начале движения поршня
1 + 17а (П12 — 1) + X ' 1 + °а (П12 — 1) — х'
Од------------------------ И Од---------------------------,
1112 П12
где X и х' — безразмерная нагрузка при прямом я обратном ходе.
Коэффициент П12 следует выбирать из условия
Общий порядок расчета времени срабатывания приведен выше, рекоменда-
ции по методике расчета — в табл. 11.1—11.3. Для пневмоцилиндров, у которых
сила сопротивления отлична от силы трения, следует принимать р = 1; для транс-
портирующих или зажимных пневмоцилиндров, золотниковых распределителей
и других устройств, где в процессе движения преодолеваются только силы трения,
или клапанных распределителей, где в момент начала движения происходит дис-
кретное уменьшение сил сопротивления, следует принимать Р= 1,5.
Влияние коэффициента р на быстродействие колеблется от 3—5% при X = 0,1
до 20—30% при х = 0,4. Влияние конструктивного параметра N и безразмерного
объема g02 на время срабатывания несущественно, поэтому пользоваться приведен-
ными графиками и формулами (11.55)— (11.58) можно при значениях N от 0,1
до 2 и с02 от 0,02 до 0,5. Время срабатывания т, т' и т + т' линейно увеличивается
по мере возрастания начального объема §01П12 и коэффициента пропускной способ-
ности fi21. С увеличением безразмерной нагрузки х время срабатывания сущест-
венно возрастает и это влияние уменьшается с увеличением П12.
Если графики для требуемых значений £01П12, £221 и X отсутствуют, то искомое
время срабатывания можно получить методом линейного интерполирования или
по формулам (11.55—11.58); линейная зависимость времени срабатывания от
?01П12 н Q21 позволяет определять быстродействие и за пределами диапазона из-
менения этих параметров, охваченного графиками.
Из приведенных графиков видно, что с увеличением отношения площадей
поршня П12 время прямого хода уменьшается, а время обратного хода увеличи-
вается; кривые зависимости суммарного времени т 4- т' от П12 имеют на всех гра-
фиках ярко выраженный минимум при значении ПТ2 = П]02ПТ' соответствующем
наибольшему общему быстродействию пневматических устройств. Это оптималь-
ное значение П°2Т и следует принимать, за исключением тех случаев, когда огра-
ничения по быстродействию распространяются только на прямой или только на
обратный ход.
335
Рнс. 11,26. График для выбора оптимального значения коэффициента отношения
площадей в функции Qt2; штриховая линия — £ = 1, сплошная — £ = 1,5
Рис. 11.27, График для выбора оптимального значения коэффициента П^11" отношения
площадей в функции нагрузки %; штриховая линия -0=1, сплошная — £ = 1,5
Поэтому для удобства определения П?2птнарис. 11.26 приведена зависимость
этого параметра от й12, а на рис. 11.27 — от %. Характер этих зависимостей —
линейный.
Пример 4. Дифференциальный цилиндр с диаметром поршня D 2 = 0,063 м,
ходом s = 0,2 м н начальным объемом полостей = 160» 10“tt м3 и V2 = 60* 10”® м3
преодолевает силу полезного сопротивления Рг = 160 Н. Сила трения Рх = 150 Н,
вес перемещаемых деталей Pz — 300 Н, эффективная площадь проходного сечення обеих
линий — 23,5*10“® м^, объем трубопроводов ^тз= 157* 10~6 м3. Давле-
ние в магистрали рм — 0,5 МПа. Определить больший диаметр DL из условия обеспече-
ния минимального времени срабатывания при прямом и обратном ходе.
Площадь поршня со стороны меньшего диаметра
Е2 = 0,7850г = 0.785-0.0632 = 31,16-10-4 м2.'
конструктивный параметр по (11.26)
г
N =352 —i—
D°
352-23,5 10-6 1 / 300
0.0633 У 5-105-0,2
безразмерная нагрузка по (11.24)
Рх Н- Р2 = 150 4- 160
PmF2 5-105-31,16-10-4
коэффициент пропускной способности по (11.25)
/.? 23,5.10-6
Э21 = =----------— =1;
If 23,5-IO"6
безразмерные начальные объемы по (11.28)
V2 +VT2
(60 4- 157) 10-6
----1---------------- 0,348;
31,16-10-4-0,2
336
принимая ориентировочно П12 = 2, определим
7,+7т1 (160 + 157) 10~б
=_—1—. Т1 =--------------------=0,254;
П12г2-5 2-31,16-10-4-0,2
для X = 0,2, Q2i = 1 и (3 — 1,0 (см. рнс. 11.26) оптимальное соотношение площадей
торцов поршня по (11.27) П°пт = 1,58.
Оптимальное значение диаметра из (11.27)
допт = О2 ]/П™т = 0,063 /1^8 = 0,0792 м;
принимаем ближайшее значение Dt = 0,08 из ряда по ГОСТ 12448—80. Тогда
П12 *= Р1/О| = 0,082/0,0632 = 1,61;
суммарное безразмерное время срабатывания цилиндра (см. рнс. 11.24. и 11.25
для О21 = 1, X = 0,2, Р — 1 получаем для Пj2|оi = О»6 t + V = 19,5 и для П12|0i = 4
т 4- т' = 32,2; экстраполируя для уточненного значения П12Во1 — 0,254* 1,61/2 = 0,205,
получаем
(т 4* т'), — <т + т')п в
« + *'>0,205 = <* + *'> 0-в----------------ЬО------------— (°'6 - °'205> = 19'5 ~
32/_0g9,5 (0,6 - 0,205) =18,02.
Действительное время по (11.34)
t t' = 1.03Л0-8
Л?
(т + V) =
1,03-10~3-0,2-0,0632
23,5-Ю-»
18,02 = 0,627 с.
Двустороннее устройство с начальным перепадом давления воздуха на поршне.
Обычно двусторонние цилиндры управляются с помощью двухпозиционного
устройства 1 (рис. 11.28), которое сообщает попеременно каждую из полостей
двухстороннего устройства то с магистралью, то с атмосферой. В начале
каждого переключения управляющего устройства в одной из полостей атмо-
сферное давление рл = ра, в другой — магистральное р02 = рм. Поэтому та-
кие устройства назовем устройствами с начальным перепадом давления на
поршне. К устройствам этого типа относятся главным образом пневмоцилиндры
двустороннего действия. На рис. 11.28 приведена схема с дросселированием
на входе.
После переключения управляющего устройства с одной полости устройства
давление воздуха повышается, а в другой — падает. Поэтому давление в полостях,
соответствующее моменту начала дви-
жения поршня, зависит от соотноше-
ния объемов напорной и выхлопной
полостей и эффективных площадей се-
чения напорной и выхлопной линий,
определяемого параметром [3]
0 = (V01/?)/(Wn,
(11.59)
(Г и fa определяется по табл. 11.1
для наполнения, a VQ2 и /а — по той же
таблице для истечения).
Рис. 11.28. Расчетная схема двустороннего
устройства с начальным перепадом давле-
ния воздуха иа поршне
337
Рис. 11.29. Номограмма для определения давления начала движения поршня двустороннего
устройства с начальным перепадом давления при П21 = 1 и сга= 0,2
Полученный параметра и заданный % используют для нахождения с помощью
рис. 11.29 величин <тдн и одн. Если П21 — 1 и рк = 0,5 МПа, то од = <тдн и од =
= адн. При 0,85 С П21 < 1,15 искомые давления начала движения од = <тдН —
-0,5(1 - П21), (см. рис. 11.29), о^н = о;-0,1(1-П21)р“/рм,
где р” = 0,5 МПа — давление, для которого построена номограмма на рис. 11.29.
Если давление в рабочей полости достигает рм до начала движения, т. е.
Од = 1, то давление в выхлопной полости в момент начала движения
Од = 1—X/n2i. (11.60)
Найденные значения од и од могут быть использованы для определения по
рекомендациям табл. 11.1 значений t3 и t'% и большее из них (обычно ^) — для рас-
чета времени подготовительного периода.
Рассмотрим дифференциальные уравнения динамики двустороннего пневмати-
ческого устройства.
Уравнение движения поршня
тх -= plF1 — р2Р2— ex — Р‘, (11.61)
уравнение давления воздуха в напорной полости
. #?*рм|/^м kP1
P1 ’ Fl (*oi + *) Ф 1 (*01 + X)
уравнение давления воздуха в выхлопной полости
3£-1
2fe И КТц / оа \ kp2
р . . _*zl, 45 \ о2 ) + s + х02 — х '
F2 (s + х02 — х) рм 2k
(11.62)
(11.63)
338
где к=V
Ф(о) = <р(ох) = ф ) =0,2588 при о <0,528 и
\ /
]/ 2 fe+1
<р (о) = Г ст * — о к при 0,528 < о < 1 [3].
Переменная линейно-изменяющаяся нагрузка в функции перемещения поршня
характеризуется коэффициентом с. Это может быть сила сопротивления при тех-
нологических операциях, например при прессовании, транспортировании из-
делий, или сила сопротивления пружины (с — сп). Постоянную составляющую Р
нагрузки определяют по формуле (11.23).
Уравнения динамики (11.61)—(11.63) в безразмерных параметрах (11.24)—
(11.29) и (11.47) примут вид
~ — П21стг —- vn$ — %, . (Н.64)
[Ф (ст1) ~ > (11 - 65)
Sol ъ аТ J
ЗА--1
-^=- в 2/; (ц-66)
<7т £02+1 — S L Щ1 \ °2 / dr J
Из общих уравнений динамики (11.61)—(11,66) двустороннего устройства можно,
как частный случай, получить уравнения динамики всех приведенных выше
устройств. Поэтому эти уравнения удобны для разработки программ расчета на
ЭВМ.
Время срабатывания т двусторонних устройств с начальным перепадом дав-
ления, равноет3+ rs, можно определить по графикам, приведенным на рис. 11.30—
11.34, а также по графикам, приведенным в работах [2, 3].
По графикам можно определять время срабатывания устройств с N — 04-4,5,
оа — 0,154-0,3. Значения %, N, П21, Q21, |0 см. на рисунке.
Графики для расчета времени срабатывания устройств этого типа с началь-
ным объемом £01 в пределах от 1 до 5, коэффициентом П12 в пределах от 0,2 до 3,
а также при нагружении переменными силами, пропорциональными перемещению
н скорости, приведены в работах [2, 3]. Общий порядок расчета времени см. выше,
а рекомендации по методике расчета — в табл. 11.1 —11.3.
Пример 5. Определить время движения поршня горизонтально расположенного
пневмоцнлиндра двустороннего действия с диаметром поршня = 0,1 мн ходом s =
= 0,2 м, преодолевающего усилие Р2 = 1600 Н. Диаметр штока d = 0,025 м. Вес поршня
и связанных с ннм деталей Р3 — 1 000 Н. Начальные объемы полостей =
= 45* 10-в м3. В линиях между распределителем н цилиндром возле цилиндра установ-
лены дроссели с обратным клапаном, как показано на рис. 11.28. Эффективная площадь
проходного сечения клапана /^1 = 23,5* 10 м2, дросселя — 12’ Ю м2. Остальные
данные о напорной линии см. в примере 1, о выхлопной — в примере 2. Давление в маги-
страли рм = 0,5 МПа.
Силу трення Pi в уплотнениях поршня принимаем равной
ОДр^ = 0,1-5-10ь-0,785-0,12 = 392,5 Н.
Безразмерную нагрузку определяем по формуле (11.24). Давление атмосферы на
площадь штока не учитываем, так как площадь штока составляет около 6% площади
поршня
Pt + Pz
Рм O.^-Oi
1600 4- 392
5•10s 0,785 0,I!
= 0,503 ® 0,5;
величина параметра О по (11.59)
45-10“6-12-10-6
О = —24-?- =------------------~ =0,51;
V Р 45-Ю-6 23,5 10-6
339
340
Рис. 11.30. Безразмерное время т срабатывания двустороннего уст-
ройства в функции 2V (О’- = 0,15-7-0,3; £=0.14-1,0; П,, =
— 0,8): 1 01 21
а — Q21 = 0,5; б — Я21 = 1,5; в — Q21 = 2; г — Q21 = 3
г)
Рис. 11.31. Безразмерное время г срабатывания двустороннего устрой-
ства в функции W (а = 0,15 4- 0,3; £ =0,14-1,0; П = 0,91:
\ <1 °01 21 /
а — Q2i ~ 0’5; б — &2i = 1,5; в —- Q2i = 2; г — Q2i = 3
Рис. 11.32. Безразмерное время т срабатывания двустороннего устрой-
ства в функции N (СГа = 0,15 4- 0,3; £ = 0,1 4- 1,0; П21 = 1):
а — Й21 = 0,25; б — Й21 = 0,5; в ~ Й21 — 0,75; г — £21 = 1
со
Рис. 11.33. Безразмерное время т срабатывания двустороннего
устройства в функции N /о = 0,15 4- 0,3; £ = 0,1 4- 1,0; П =
\ d U1 21
= 1):
а — £221 = 1,5; б — Q2, = 2; в — Q2i = 3; г — Q2i = 5
Рис. 11.34. Безразмерное время х срабатывания двустороннего устрой-
ства в функции W (ста = 0,15 0,3; = 0,1 1,0; П21 = 1,1р
а — &21 = о,5; б — Й21 = 1; в — Й21 = 1,5; г — Йг1 = 3
по графику на рис. 11.29 определяем, что при х = 0,5 и Ф — 0,51 давление в полости
наполнения достигает Рмдо начала движения поршня и, следовательно, расчет т5 следует
вести по варианту 2 (см. табл. 11.3), т. е. ts — т Для этого по формуле (11.26) определяем
352-23,5-Ю'6 1 1000
0.13 I/ 5-10-5-0,2
= 0,83;
так как графики для определения т$ отсутствуют, находим т = т&, поскольку оно
мало зависит от £0. воспользуемся графиком на рис. 11.32, б; для заданных условий т —
Действительное время срабатывания по (11.34)
sD2
t = 1,03-Ю“3_____L_
Jk\
1,03-10~3-0,2-0,12•14 ,
23,5-10-» -1,22/ с;
для определения времени подготовительного периода найдем давление <т« начала
движения по (11.60)
а' = 1 ~ X _ 0— 0.5 ) 0,785 0,1»
Д П21 0,785 (0,1» - 0,025»)
По рис. 11.7, б для Од = 0,533, а также по найденным в примере 2 значениям Л =
= 0,097 и (1 = 2,17, определяем, что при использовании формулы (11.14) можно принять
Удо = + Fsh /э2 — fx- Тогда, как и в примере 2, 7g = 0,351 с.
Время движения поршня
ts =t — t3 = 1,227 - 0,351 = 0,876 с,
Двустороннее устройство без начального перепада давления воздуха иа
поршне. Двустороннее устройство можно включать в схему таким образом, что
обе его полости в исходном положении будут сообщены с атмосферой, т. е. перепад
давления по обе стороны поршня будет отсутствовать. Такие схемы являются
обычными для распределителей с двусторонним пневматическим или электро-
342
Рис. 11.35. Расчетная схема двустороннего уст-
ройства без начального перепада давления возду-
ха на поршне
Рм
пневматическим управлением. Их можно
применять и для управления пневмоцилинд-
рами двустороннего действия. При включе-
нии управляющего устройства в одной по-
лости быстро нарастает давление, в то время
как в другой, по крайней мере, на первой
половине хода противодавление почти отсут-
ствует. Вследствие этого достигается сокра-
щение времени подготовительного периода,
интенсивное нарастание скорости поршня и,
следовательно, высокое быстродействие
устройства. При определенном соотношении
параметров устройства (начальных объемов
полостей и пропускной способности линий)
возможен так называемый режим автотор-
можения, при котором достигается плавный
останов поршня в конце хода при наиболь-
шем быстродействии [3].
Расчетная схема двустороннего устройства без начального перепада давле-
ния воздуха на поршне приведена на рис. 11.35.
Уравнения динамики этого устройства аналогичны уравнениям для устройств
с начальным перепадом давления, однако начальные условия здесь другие: атмо-
сферное давление воздуха ра или оа в обеих полостях. Поэтому уравнения изме-
нения давления в выхлопной полости (11.63) и (11.66) несколько изменяются
dt
3k — 1
2k
k 02_____ / Oa \ ft
, g02+ i-l n21 2 dt
2*
Время подготовительного периода определяют в соответствии с табл. 11.1,
причем давление в начале движения поршня од = % -f- П21оа. Безразмерное время
ts движения поршня и общее время т срабатывания устройства определяют по
графикам, приведенным на рис. 11.36—11.43 и построенным в зависимости от кон-
структивного параметра N при различных значениях безразмерной нагрузки %,
безразмерных начальных объемов полостей tf!1 = Еэ2, коэффициентов и Р, при
оа = 0,15-т-0,3 и коэффициенте П21 = 1.
Порядок расчета времени срабатывания приведен выше, рекомендации по
методам расчета — в табл. 11.2 и 11.3.
Серии сплошных кривых па рис. 11.36—11.43 зависимости т и ts от конструк-
тивного параметра У ограничены слева штриховой наклонной линией, представ-
ляющей собой геометрическое место точек, соответствующих минимальной ско-
рости в конце хода поршня и значениям У = N&. Чем круче поднимается кривая
т (У) или ts (N) к точке минимальной скорости, тем эффективнее торможение
поршня в конце хода и тем ближе режим замедления скорости к режиму автотор-
можения, т. е. к режиму безударного останова, и тем больше время движения
поршня.
Левее штриховых линий лежит область многократных замедлений и остано-
вов поршня, приводящих к неоправданному увеличению времени срабатывания
343
Рис.
11.36. Безразмерное время rs движения поршня двустороннего
устройства без начального перепада давления /<г = 0,154-0,3; П =
= 1; О21 = 0,5; р = 1,0): 21
•а — Во = 0,2; б - = 0,4; в - 5„ = 0,7; г - g0 = 1
Рис. 11.37. Безразмерное время Ts движения поршня двусторон-
него устройства без начального перепада давления (о = о, 15 —
0,3; П21 = 1; Й21 = 0,5; р = 1,5): Э
а — Во = 0,2; б — = 0,4; в — g„ = 0,7; г — = 1
а) 5)
Рис. 11.38. Безразмерное время xs движения поршня двусторон-
него устройства без начального перепада давления (<га = 0,15 4- 0,3;
оэ п21 = °21= 1: 0= Ь0):
сл о — Во = 0,2; б — — 0,4; в — = 0,7; г — = 1
a) S)
Рис. 11.39. Безразмерное время Xs движения поршня двустороннего
устройства без начального перепада давления(о'а = 0,150,3; П =
= 1; О21 = 1; р = 1,5):
а — = 0,2; б — go = 0,4; в - g0 = 0,7; г — g0 = 1
Рис. 11.40. Безразмерное время т срабатывания двустороннего
устройства без начального перепада давления (<та = 0,15 ч- 0,3;
П21= '• а21 = о.з; ₽ = 1.0):
а — So = 0,2; б — So = 0,4; в — So = 0,7; г — g0 = 1
Рве. 11.41. Безразмерное время т срабатывания двустороннего устрой-
ства без начального перепада давления (<га = 0,15 -t- 0,3; П-у = It
S21 = 0,5; ₽=1,5);
а - So - 0 2; б - So — 0,4; в ~ So = 0,7; г — So - I
0,2 0,4 0,0 0,0 1.0 1.2 7.4 1,8 1.8 Я 0Л 0,4 0,0 0,8 1,0 1,2 1,4 1,0 1,8 Я
в) г)
Рис. 11.42. Безразмерное время т срабатывания двустороннего уст
ройствабез начального перепада давлений (а — 0,154-0,3; П = 1
о21 = 1.0; ₽= 1,0): 21
а - = 0,2; б - |о = 0,4; е - Ь = 0,7; г — = 1
Рис. 11.43. Безразмерное время т срабатывания двустороннего устрой
ства без начального перепада давления (ст = 0,15 ~ 0,3; П = 1
О21 = 1,0; Р= 1,5):
а — So = 0,2; б — So = 0,4; в — So = 0,7; г — So = 1
4
устройства. После очередного останова может последовать разгон н приход поршня
в конечное положение с высокой скоростью. Поэтому использование устройств
двустороннего действия без начального перепада с значениями конструктивного
параметра М < N-A нецелесообразно.
Исходя из изложенного, полученные для области многократных остановов
расчетные значения на графиках не приведены.
Графики, приведенные на рис. 11.36—11.43, позволяют проследить влияние
основных параметров на динамику рассматриваемых устройств. С повышением
безразмерной нагрузки х увеличивается как время движения поршня, так и время
подготовительного периода, а точки, соответствующие режиму безударного оста-
нова, смещаются в область больших значений конструктивного параметра N.
С возрастанием начального объема полостей время подготовительного
периода увеличивается, а время движения и значение Na уменьшается, причем
это влияние уменьшается с ростом коэффициента Q21. При малых значениях
Q2i «0,14-0,2 и при малых начальных объемах резко возрастает влияние кон-
структивного параметра N, нагрузки х и коэффициента Р на режим останова в об-
ласти N& и на время движения поршня. Например, уже незначительное измене-
ние сечения дросселя f* может привести к существенному увеличению скорости
поршня в конце хода.
С увеличением коэффициента Р дискретного уменьшения нагрузки в начале
движения (для пневмоцилиндров, у которых сила сопротивления отлична от силы
трения, следует принимать Р = 1; для транспортирующих и зажимных цилиндров
распределителей Р= 1,5) время движения поршня уменьшается (особенно при
больших х), снижается и влияние начального объема на величину N&. При Р =
= 1,5 и £о = 0,7-4-1,0 влияние нагрузки х на время движения поршня становится
незначительным.
На рис. 11.44 приведены графики для выбора оптимального значения пара-
метров устройства из условия безударного останова поршня в конце хода. По
заданным значениям двух параметров, например, нагрузки X и начального объема
можно найти оптимальное значение третьего, например, конструктивного пара-
метра Na. Штриховые участки кривых на рис. 11.44, в, г соответствуют значениям
Рис. 11.44. Графики для
выбора оптимального значе-
ния параметров двусторон-
него устройства без началь-
ного перепада из условия
безударного останова порш-
ня (Оа = 0,2):
а — Р == 1; й = 0,5; б —
Р = 1,5, й = 0,5; е — ₽ =
= 1; й = 1; г — р = 1,5
Я = 1
348
a) Ц
Рис. 11.45. Графики для определения параметров устройства из условия обеспечения
минимального времени движения и безударного останова при Ог1 = 0,5:
а - ₽ = 1: б - ₽ = 1,5
безразмерной скорости в конце хода £> 0,1. Значение действительной скорости х
можно найти по формуле (11.35).
На рис. 11.45 и 11.46 приведены графики для выбора диаметра D1 поршня из
условия обеспечения наименьшего времени движения и плавного останова поршня
в конце хода, при условии, что эффективная площадь /э напорной линии не превы-
шает некоторой величины /jmax. Длина хода s, масса т подвижных деталей, прео-
долеваемое усилие Р и начальный объем должны быть известны из исходных
данных. При условии безударного останова с увеличением D1 также возрастает
, а время движения уменьшается. Порядок определения D1 следующий. Опре-
деляем параметр [3]
Hmax-^245-lm^M- 1/-gi-. (11.67)
Г г S
По графикам на рис. 11.45 и 11.46 для Птах и заданного £0 находим параметр %,
а затем диаметр поршня
= 1,13 1/-^-. (11.68)
Полученное значение DL округляем до ближайшего меньшего из стандарт-
ного ряда и по формуле (11.24) вычисляем уточненное значение %, которое затем
Рис. 11.46. Графики для определения параметров устройства из условия обеспечения
минимального времени движения и безударного останова при £J21 = 1:
а — ₽ = 1; б — ₽ = 1,5
349
Рис. 11.47. Графики для определения параметров устройства из условия обеспечения за-
данного времени движения и безударного останова при Й21 = 0,5; штриховая линия —
= 1, сплошная — р = 1,5
Рис. 11.48. Графики для определения параметров устройства из условия обеспечения
заданного времени движения и безударного останова при Q2i — 1» штриховая линия —
р = 1; сплошная — р = 1,5
Л/а используем для определения времени движения по графикам на рис. 11.36—
11.43 и /э по формуле (11,26).
На рис. 11.47—11.48 приведены графики для определения диаметра поршня
по заданному времени его движения ts при условии обеспечения плавного останова
в конце хода, Длина хода, масса подвижных частей, преодолеваемое усилие и на-
чальный объем должны быть известны из исходных данных.
Порядок определения D, следующий. По формуле [3] находим параметр
Js = ts 1/ .
s s V ms
По графику иа рис. 11.47—11.48 для полученного значения Js и заданного
находим соответствующие им значения Л/а и %. Полученную по формуле (11.68)
величину D1 округляем до большей стандартной величины, чтобы время движения
ие превышало заданного, а затем используем для вычисления уточненного значе-
ния % по формуле (11.24), а значение Ма определяем по графикам на рис. 11.44 и
используем для определения ts по графикам на рис. 11.36—11.43 и по формуле
(11.26). 1
Пример 6. Определить диаметр горизонтально расположенного цилиндра,
включенного по схеме на рис. 11.35 и преодолевающего внешнюю силу Р2 — 1200 Н, из
условия обеспечения режима автоторможения н обеспечения минимального времени дви-
жения поршня при эффективной площади линий < 2б« 10~^ м^. Заполняемый
объем трубопроводов между распределителем и цилиндром V = VT2 = 157* 10"в м5.
Вес подвижных частей Ps = 1500 Н. Давление в магистрали Рм~ 0,5 МПа. Ход порш-
ня s = 0,1 м.
Коэффициент пропускной способности линий по (11.25)
силу трения, по аналогии с предыдущим примером, принимаем равной 390 Н, тогда
результирующая всех сил Р == Pt + Р9 = 390 4" 1200 = 1590 Н;
задаемся величиной начального объёма полостей I/ = V2 == 45* 10** полагая,
что диаметр цилиндра близок к 0,1 м, тогда по (11.28)
по формуле (11.67)
,э _______ _________________________________
тт ... 'Imax^M l/ Ps 245-26-Ю~6-5. ЮБ 1 [ 1500 _
[7—245 — ------- |/ — =----------------------- \ isao.Q,! = 6-13:
по графику на рис. 11.46’ б для Р — 1,5 Ь = 0,258 и U = 6,15 находим X = 0,192;
диаметр поршня по (11.68)
Di=1>13 V zzz=lil3y = 0,м5 м.
К РМХ V 5105-0,192
округляя полученное значение до ближайшего меньшего из стандартного ряда, прини-
маем Dx — 0,125 м;
уточняем значение безразмерной нагрузки по (11.24)
х = _L_ ____________1®0_____________ ,;59,
Л рыРг 5-106-0,785-0,1252 " ’
для стандартных цилиндров с Dx = 0,125 м Vzt = 60- 10’* м8, уточненное значение
безразмерного начального объема
, = /l+Zlk = (80 + 157)-10~~6 = о 177
So Fxs 0,785-0,1252-О,I
по графику на рис. 11.44, е находим W == 0,6; эффективная площадь линии из (П.25)
э э A'aDl 1/ Pms 0,6 0.1253 1/ 5-10s-0,l _6 2-
= V -РГ-—2-------------------------- V -П50Г- = 19-2'10
безразмерное время движения поршня по графикам на рис. 11.39 xs = 2,5;
действительное время по (11.34)
sD^ 1,03-10-3-0,1-0,1252-2,5
/.= 1,03-ю-’-------— Т. =--------------------------= 0,21 с.
s s 19,2-10-®
СПИСОК ЛИТЕРАТУРЫ
1. Герц Е. В. Пневматические приводы. Мл Машиностроение, 1969. 359 с,
2. Герц Е. В., Вилков Б. П. Определение времени срабатывания дискретного Двусто-
роннего пневмопривода. — В кнл Механика машин. Вып. 43. Мл Наука, 1974. 494 с.
3. Герц Е. В., Крейнин Г. В. Расчет пневмоприводов. Мл Машиностроение, 1975.
272 с.
4. Пятидверный А. П., Лимонов Ю. М. К определению времени подготовительного
периода работы пневматических устройств. — В ки. Пневматика и гидравлика. Вып. 6.
Мл 1979. 153-159 с.
5. Элементы и устройства пневмоавтоматики высокого давления. Каталог. М. :
1978, 154 с. (НИИМАШ).
Глава 12
КОНДИЦИОНИРОВАНИЕ
СЖАТОГО ВОЗДУХА
Кондиционирование сжатого воздуха включает комплекс мероприятий по очистке
и осушке сжатого воздуха, внесению смазочных материалов для подачи их с по-
током воздуха к трущимся поверхностям пневматических устройств, борьбе с шу-
мом и загрязнением окружающей среды при выхлопе сжатого воздуха в атмо-
сферу.
12.1. ОЧИСТКА СЖАТОГО ВОЗДУХА
ДЛЯ ПНЕВМАТИЧЕСКИХ СИСТЕМ
Загрязиеиия сжатого воздуха и их воздействие на пневматические устройства
и системы. Компонентами загрязнений сжатого воздуха являются вода и
компрессорное масло в жидком и парообразном состоянии, твердые и газообразные
загрязнения. Наибольшую часть загрязнений систем обычно составляют вода и
компрессорное масло.
Вода. Источником содержащейся в сжатом воздухе воды является водяной
пар, всасываемый компрессором в систему вместе с воздухом. Иногда вода посту-
пает в линию нагнетания из-за негерметичности промежуточных и концевых
холодильников, а также из-за отсутствия заградительных козырьков на заборных
устройствах всасывающей линии в дождливую погоду. Влагосодержание воздуха
зависит от температуры и относительной влажности паровоздушной смеси. Для
атмосферного воздуха эти параметры определяются климатическими условиями и
временем года.
Сжатие поступившего в компрессор воздуха сопровождается повышением
температуры на 100—130 °C. В процессе сжатия содержание влаги в удельном
объеме воздуха увеличивается пропорционально росту давления, ио при этом
вследствие повышения температуры его относительная влажность в значительной
степени снижается. Так, при давлении в системе 0,7 МПа и относительной влаж-
ности всасываемого воздуха 80% сжатый воздух на выходе из компрессора имеет
относительную влажность 6—10%. При движении по трубопроводам и другим
элементам системы воздух охлаждается вследствие теплообмена с окружающей
средой, происходит перенасыщение воздуха водяными парами и их конденсация.
Максимально возможное влагосодержание воздуха, г/кг
аи = 622 —,
Р ' Рип
где р — абсолютное давление сжатого воздуха; раа — парциальное давление
(упругость) насыщенного водяного пара.
Значения давления (упругости) насыщенного водяного пара приведены
в Приложении 2.
Относительная влажность (р (отношение действительного влагосодержания
воздуха а к максимально возможному ая при данных значениях температуры и
352
Рис. 12.1. Зависимость влагосодержаиия
воздуха, насыщенного парами воды, от тем-
пературы и абсолютного давления
давления) выражается в долях еди-
ницы или в процентах и достигает
максимального значения, равного еди-
нице (100%), когда а = ан.
Способность сжатого воздуха
удерживать пары воды уменьшается
с понижением температуры и с повы-
шением давления. При этом его отно-
сительная влажность возрастает, а
после достижения состояния насыще-
ния (<р = 1) происходит конденсация
избыточного количества паров и появ-
ление воды в жидком состоянии (кон-
денсата). Температура, при которой
это происходит, называется точкой
росы /Р. При более высокой темпера-
туре (и том же давлении) конденсация
водяных паров не происходит. Поэтому
точка росы сжатого воздуха часто ука-
зывается как мера содержания в нем
водяных паров.
На рис. 12.1 приведена зависимость
влагосодержания насыщенного воздуха
(<р = 1) от давления и температуры. Эту зависимость можно использовать для
определения количества конденсата, выпадающего в системах при охлаждении
сжатого воздуха.
Масло. Источниками загрязнения сжатого воздуха маслом могут являться
смазка компрессоров и пневматических устройств, масляные фильтры на линии
всасывания компрессоров, пары и распыленное масло в окружающем воздухе.
В сжатом воздухе масло обычно находится в парообразном и жидком состоянии.
Предельная концентрация паров масла в воздухе, как и паров воды, уменьшается
с понижением температуры и повышением давления.
Маслосодержание воздуха, насыщенного парами масла, можно определить
по формуле
P Ptm
где рнп — парциальное давление насыщенного масляного пара;if— коэффициент,
зависящий от молекулярной формулы масел
0 = ^-,
Км
R и RM — газовая постоянная воздуха и паров масла: R = 287 Дж/(кг-К); Rm =
= —-эд— Дж/(кг-К); М — молярная масса химических соединении, из которых
состоят пары масел. Для компрессорного масла М= 2104-400 кг/кмоль.
На рис. 12.2 приведена экспериментальная зависимость давления насыщен-
ных паров некоторых сортов масла от температуры. Штриховой линией нанесены
кривые, полученные расчетом, сплошной линией — экспериментально [4].
Для вязких сортов компрессорного масла давление насыщенных паров при-
ведено ориентировочно, так как экспериментальные данные отсутствуют.
Вынос в линию нагнетания смазки компрессоров обычно является основной
причиной загрязнения сжатого воздуха маслом.Количество масла, поступающего
llz 12 Е. В. Герц и др. 353
₽ИС. 12.2. Зависимость давления насыщенных паров минеральных масел от температуры
(/ — компрессорного; 2 — машинного, 3 — индустриального-^, 4 — индустриального-!#)
в линию нагнетания, можно определить, исходя из норм расхода смазки в поршне-
вых компрессорах различных типов по ГОСТ 18985—79.
В ротационных и винтовых маслозаполненных компрессорах вынос масла
в линию нагнетания в 1,5—2 раза выше, чем в поршневых, и в среднем может быть
принят: для компрессоров малой производительности 200—300 мг/м3; средней и
большой производительности 50—100 мг/м3.
В центробежных и мембранных компрессорах вынос масла в линию нагнета-
ния практически отсутствует.
Высокая температура в поршневом пространстве компрессоров и на началь-
ном участке линии нагнетания (от 160 до 220 °C) приводит к парообразованию и,
частично, термическому разложению масла. В результате этих процессов до 5—
6% масла окисляется и в виде нагара и лакообразной пленки осаждается на вну-
тренних полостях компрессоров и трубопроводов, а легкие фракции в виде паров
и мелкодисперсной фазы уносятся воздухом в систему.
Твердые загрязнения. Концентрация, дисперсный состав и природа твердых
загрязнений сжатого воздуха зависит от загрязненности воздушного бассейна
в зоне всасывания компрессора, состояния, режимов эксплуатации и обслужива-
ния трубопроводов и пневматических устройств. Основное количество твердых
загрязнений вносится при передаче сжатого воздуха по трубопроводам и соедине-
ниям. Эти загрязнения на 95—98% состоят из ржавчины и окалины. При наруше-
нии технологии изготовления и монтажа в трубопроводы попадают частицы уплот-
няющих материалов и промышленная пыль. Усредненная концентрация ржав-
чины и окалины в межцеховых трубопроводах может составлять до 25 мг/м3 воз-
духа, в цеховых — до 12,5 мг/м3. При хорошем состоянии трубопроводов концен-
трация ржавчины и окалины обычно не превышает 2—4 мг/м3, однако разовые
концентрации загрязнений в момент начала подачи воздуха, прн сотрясениях и
гидравлических ударах в трубопроводах могут быть значительно большими.
Металлические частицы появляются в системах в результате износа поршневых
колец компрессоров и подвижных деталей устройств, а стружка, притирочные со-
ставы и абразивы — при неправильной подготовке внутренних полостей пневма-
тических устройств. Плотность твердых загрязнений воздуха составляет от 0,1
до 8 г/см3. -у
Газообразные загрязнения. Основную часть газообразных загрязнений, по-
падающих в системы вместе с атмосферным воздухом, составляют дымовые газы от
сжигания топлива; газы, образующиеся при химических процессах; пары кислот
и щелочей; растворители и др. Наиболее часто в сжатом воздухе содержится серни-
стый газ SO2, который при соединении с конденсатом образует серную кислоту и
354
Таблица 12.1
Классы загрязненности сжатого воздуха
К ласс загрязнен- ности Размер твердой частицы, мкм, ие более Содержание примесей, мг/м3, не более
Твердые частицы Вода (в жидком состоянии) Масла (в жидком со- стоянии)
0 0,5 0,001 Не допускаются
1 5 1
2 500 Не допускаются
3 10 2 Не допускаются
4 800 16
5 25 2 Не допускаются
6 800 16
7 40 4 Не допускаются
8 800 16
9 80 4 Не допускаются
10 800 16
11 Не регламен- тируется 12,5 Не допускаются
12 3 200 25
13 25 Не допускаются
14 10 000 100
Примечания: 1. Содержание посторонних примесей указано для воздуха, приведенного к условиям: температура 293,15 К (20 °C) и давление 101 325 Па. 2. Размер твердой частицы принимают по наибольшему измеренному зна- чению.
сернистый ангидрид, разрушающий наряду с другими растворами кислот, щело-
чей и озоном поверхности устройств и уплотнений.
Классы загрязненности сжатого воздуха. СТ СЭВ 1704—79 по составу и содер-
жанию посторонних примесей устанавливает 15 классов загрязненности сжатого
воздуха, предназначенного для питания пневматических устройств и систем, ра-
ботающих при давлении до 2,5 МПа (табл. 12.1).
Температура точки росы сжатого воздуха должна быть: для классов загряз-
ненности 0 и 1 ниже минимальной температуры не менее чем на 10 °C, но не выше
—10 °C; для классов 3, 5, 7, 9, 11 и 13 — ниже минимальной рабочей температуры
не менее чем на 10 °C; для классов 2, 4, 6, 8, 10, 12 и 14 — не регламентируется.
355
За минимальную рабочую температуру принимают наименьшую из температур:
минимальную температуру сжатого воздуха или минимальную температуру окру-
жающей среды при эксплуатации пневматических устройств и трубопроводов.
Загрязнениями считаются все сорта масел и смазок при использовании сжа-
того воздуха в системах, не требующих внесения смазочных материалов при ра-
боте. В сжатом воздухе для питания систем, требующих внесения смазочных ма-
териалов при работе, загрязнениями считаются все сорта консервирующих и ком-
прессорных масел и смазок.
Независимо от класса загрязненности стандарт допускает наличие в сжатом
воздухе только следов кислот и щелочен, т. е. концентраций, не оказывающих
вредного воздействия на пневматические системы и устройства. Классы загряз-
ненности сжатого воздуха следует указывать в технических требованиях к экс-
плуатации пневматических систем и устройств. Методы измерения загрязненности
регламентированы СТ СЭВ 1705—79.
Воздействие загрязнений. Анализ данных эксплуатации и проведение иссле-
дования свидетельствуют о том, что загрязнения сжатого воздуха значительно
снижают надежность и долговечность пневматических систем, приводят к нару-
шению технологических процессов. Из-за воздействия загрязнений сжатого воз-
духа износ устройств увеличивается в 2—7 раз, а выход устройств из строя по
той же причине составляет до 80% общего числа отказов.
Воздействие загрязнений на пневматические системы и устройства можно
разделить на физическое, химическое и электролитическое.
Физическое воздействие загрязнений заключается в закупорке отверстий и
сопел влагой, льдом и твердыми частицами, в смывании смазки, в повреждении
рабочих поверхностей клапанных пар, мембран, золотников, в износе и заклини-
вании трущихся деталей и т. п.
Химическое воздействие загрязнений проявляется в коррозии металлических
деталей, разрушении покрытий и резиновых деталей, растворами кислот, щело-
чей и других химических активных компонентов.
Электролитическому воздействию загрязнений подвержены устройства с кон-
тактирующими деталями из разных материалов или покрытий. В этом случае
кислотные и щелочные растворы являются электролитом, а детали — электродами;
в результате происходит разрушение их поверхностей, даже если они выполнены
из легированных сталей, латуни или бронзы.
Загрязнения сжатого воздуха приводят к нарушению технологического про-
цесса в ряде производств химической, пищевой, керамической, бумагоделательной
и других отраслей промышленности, где используется энергия сжатого воздуха.
Так, содержание масла недопустимо при использовании сжатого воздуха для рас-
пыления ряда красок и лаков, при подготовке кислородных баллонов и холодиль-
ных агрегатов, в фармацевтическом и керамическом производствах.
Выбор степени очистки сжатого воздуха. Для повышения долговечности
и надежности пневматических систем управления было бы идеальным полное уда-
ление загрязнений сжатого воздуха. Однако присутствие определенного количе-
ства загрязнений в ряде устройств практически не сказывается иа их работоспо-
собности. Поэтому полная очистка сжатого воздуха, связанная с значительными
затратами, в большинстве случаев экономически нецелесообразна. Требования
к очистке воздуха зависят от конструктивного исполнения и материала элементов
систем управления и механизмов, размеров и точности, величины зазоров и от-
верстий, от требований к надежности и долговечности, от эксплуатационных усло-
вий и характера воздействия загрязнений. Установлено, что интенсивность из-
носа устройств тем выше, чем выше твердость частиц, а увеличение твердости и
пористости трущихся поверхностей повышают износостойкость.
Абразивный износ и заклинивание могут быть значительно снижены, если
размер твердых частиц, поступающих в устройства с воздухом, не превышает
3/4 величины наименьшего зазора трущихся пар [13]. Примерные величины зазо-
ров подвижных деталей различных устройств даны в табл, 12.2.
Определение степени осушки сжатого воздуха на основных участках про-
мышленных систем. Степень осушки сжатого воздуха зависит от чувствительности
конкретных устройств к содержанию влаги. К группе устройств, для которых не
требуется строгая регламентация содержания влаги в жидком состоянии, отно-
356
Таблица 12. Т
Примерные величины зазоров подвижных деталей
пневматических устройств
Устройства Трущиеся пары Зазор, мкм
Пневмоцилнндры Пневмодвигатели: шиберные (пластинчатые) шестеренные поршневые Пневмораспределителн: с плоским золотником с цилиндрическим золотни- ком с уплотнением за счет зазоров с цилиндрическим золотни- ком с мягкими уплотнениями Шток — втулка Поршень — гильза Ротор — боковой диск Ротор — статор Лопатка — паз Шестерня — боковой диск Шестерня — статор Поршень — гнльза Ротор — распределительный диск Золотник — основание Золотник — втулка Золотник — втулка 40 — 80 100 — 300 15 — 40 100—150 100 — 200 15—40 40—60 5-25 1—2 2-5 1,5 — 5 50—100
сятся коммуникации систем, емкости, оборудование силовых приводов мембран-
ного типа и сильфонные устройства, имеющие надежное антикоррозийное покры-
тие, в которых трущиеся поверхности непосредственно со сжатым воздухом не-
соприкасаются.
Содержание жидкой влаги в сжатом воздухе рекомендуется ограничивать для
пневмооборудования систем механизации и автоматизации производственных про-
цессов (цилиндров, моторов и аппаратуры). Не допускается содержание жидкой
влаги в сжатом воздухе, используемом для питания пневматических систем управ-
ления с повышенными требованиями к надежности для станков, прессов, автома-
тических линий и других устройств; пневматических приборов и средств автомати-
зации, на которые распространяются требования ГОСТ 11882—73; систем, рабо-
тающих при минусовых температурах окружающей среды. Для этой группы уст-
ройств должна быть исключена возможность конденсации паров воды и масла.
Условием исключения конденсации является ненасыщенность сжатого воздуха
парами воды и масла.
Существенное влияние на выбор степени осушки оказывает изменение термо-
динамических параметров сжатого воздуха. Зная действительное значение термо-
динамических параметров, можно установить возможность процесса конденсации,,
количество конденсата и требуемую степень осушки.
Трубопроводы. В магистральных трубопроводах скорость потока воздуха от-
носительно невелика (от 6 до 18 м/с), следовательно, изменение температуры про-
исходит в основном из-за теплообмена с окружающей средой. Обычно температура
сжатого воздуха на выходе из компрессорной выше, чем температура окружающей,
среды, что приводит к охлаждению его и конденсации влаги. Для металлических
трубопроводов без теплоизоляции понижение температуры на заданной длине без
учета влияния на теплоотдачу загрязнений теплопередающей поверхности можно
определить из формулы
т- - т‘ + -’-.)»₽( — - z , - , J ,
[ Ср \ cCjd,. "Г a2dH 2Лтр П dH / )
где Тд и Тх — температура сжатого воздуха соответственно в начале трубопро-
вода и на расчетном участке; Та— температура окружающей среды; х — длина
трубопровода от начала до расчетного участка; ср — удельная теплоемкость воз-
духа при постоянном давлении; Q — расход свободного воздуха, протекающего
по трубопроводу; и а2 — коэффициенты теплоотдачи от сжатого воздуха
12 Е. В. Герц и др.
357
Формулы для определения коэффициентов теплоотдачи
Таблица 12.3
Течение воздуха «2
Турбулентное течение воз- духа в труба в области критерия Re - = 1 -104^5-10в ч 0,019 х а 1 w,dT \0,8 —
Турбулентное течение воз- духа вдоль труб в области Re = 1 • 1 О4* 5-106 — КВ ( W2dn \°>8 0.019^-
Ламинарное течение возду- ха вдоль труб — 0.17 Мф33 </н k v /
Поперечное омывание тру- бопроводов при угле атаки 90° в области Re = = 1 • 103«-2 • 106 — 0 18 Х', / w2dH \0-62 "н к v )
Теплопередача горизон- тальных труб в спокойном воздухе — *тр ИРх-'э'Г dH L v‘Tx J
Примечание. Лв — коэффициент теплопроводности воздуха; V — коэф-
фициент кинематической вязкости воздуха; — скорость течения сжатого воз-
духа; w2 — скорость течения окружающего воздуха; g — ускорение свобод-
ного падения.
к стенке и от стенки к окружающему воздуху; dT и da — внутрепн ий и наружный
диаметры трубопровода.
Коэффициенты теплоотдачи можно определить по обобщенным зависимостям,
приведенным в работах А. Шака (табл. 12.3).
При течении сжатого воздуха в нагнетательных трубопроводах со скоростью
потока wt < 50 м/с, что имеет место при подаче воздуха к потребителям с непре-
рывным расходом (моторам, ручному инструменту, вибраторам и т. д.), характер
термодинамического процесса аналогичен рассмотренному выше для магистраль-
ных трубопроводов.
В выхлопных трубопроводах промышленных систем процесс истечения воз-
духа в атмосферу из устройств с непрерывным расходом при надкритическом ре-
жиме приводит к значительному понижению температуры и конденсации влаги,
а в определенных условиях может вызвать обмерзание выхлопных отверстий.
При этом температура воздуха на участке непосредственного выхлопа в атмосферу
может быть приближенно определена по формуле Т = 0,84 Тг при докритическом
режиме истечения и Т = Т1 (-^2- ) при надкритическом режиме, где 7\ и p-L—
\ Pi J
температура, К, и давление сжатого воздуха в трубопроводе; ра — давление атмо-
сферы.
Следует отметить, что фактическая температура воздуха всегда будет не-
сколько выше расчетной.
358
Рис. 12.3. Изменение температуры сжа-
того воздуха по длине трубопровода
при Wj = 20 м/с; «>2 = 0; р& =
= 0,7 МПа. х “ 390 Вт/(м-К); </т =
— 25 -г- 40 мм
На рис. 12.3 представлены
графики изменения температуры
сжатого воздуха по длине трубо-
проводов.
Местные сопротивления. Прн
малых перепадах давления, что
характерно для большинства со-
противлений пневматических уст-
ройств, температуру на входе и
на выходе можно принять одина-
ковой. В ряде устройств (редукци-
онные клапаны, дроссельные от-
верстия) из-за значительного рас-
ширения газа на выходе температура его резко падает, что может привести
к конденсации влаги.
Температуру воздуха на выходе из сужения можно определить приближенно
по формуле
где’/?! и Тг — давление и температура сжатого воздуха перед сужением; р2 и Т2—
давление и температура сжатого воздуха на выходе из сужения; £ — коэффициент
сопротивления.
На некотором расстоянии от сопротивления скорость потока в трубопроводе -
падает до значений, близких к скорости потока перед сопротивлением, а темпера-
тура воздуха возрастает, приближаясь к первоначальной. Повышение темпера-
туры воздуха при уменьшении давления приводит к испарению сконденсирован-
ной влаги и уменьшению относительной влажности.
При течении воздуха через капилляры происходит дросселирование (мятне).
Температура воздуха за сопротивлением при дросселировании
Т2 = Tt + а (р2 — />!).
Для диапазона давления и температуры систем промышленных предприятий
можно принимать а = 1,6 4- 2,5 К/МПа.
В длинных капиллярах из-за значительного влияния сил трения и теплооб-
мена с окружающей средой температуру воздуха на выходе из капилляра можно
принимать равной температуре окружающей среды. Конденсация влаги в этом
случае может произойти, если температура окружающей среды ниже температуры
сжатого воздуха на входе в капилляр Та < Тг.
Пневмодвигатели. Конденсация паров воды и масла в двигателях (цилин-
драх и моторах) возможна в полости выхлопа при расширении воздуха в период
истечения его в атмосферу и в рабочей полости вследствие быстрого, перемещения
поршня при отсеченной или задросселированной подаче воздуха в рабочую по-
лость. Определение термодинамических параметров воздуха в полостях двигате-
лей представляет достаточно сложную задачу. Для приближенных расчетов можно
использовать уравнения политропического расширения при следующих значениях
показателя политропы п: для цилиндров и мембранных камер п = 1,25-4-1,38;
для поршневых и шестеренных моторов п = 1,26-4-1,36; для шиберных (лопастых)
моторов п ~ 1,22-4- 1,32.
При работе моторов на полных оборотах и цилиндров со свободным выхлопом
процесс расширения воздуха при истечении приближается к адиабатическому и
значение показателя политропы принимают равным k. При малых скоростях
12* 359
0,05 0,15 025 0,55 0,45 0,55р,МПа-
в)
S)
Рис. 12.4. Изменение температуры
сжатого воздуха в полости выхло-
па пневматических устройств в за-
висимости от степени расширения
его при начальном абсолютном дав-
лении р'10б Па:
а — 2,4; б — 5; в — 7,3 и при пока-
зателях политропы, / — п == 1,1;
2 — 0 = 1,2; 3 — о=1,3;4 — о==
= 1,4
перемещения поршней цилиндров и вращения моторов процесс происходит с за-
метным влиянием теплообмена с окружающей средой, поэтому при определении
температуры показатель политропы принимают ниже указанных средних значе-
ний.
Для цилиндров и пневмомоторов минимальную температуру воздуха в вы-
хлопной полости можно определить по формуле
п-1
Тв = Ти (-М " ,
\ Рм /
где рв — абсолютное давление в выхлопной полости.
Для цилиндров периодического действия, когда время между срабатыва-
ниями достаточно велико, значения температуры и давления воздуха в полости
цилиндра до истечения принимают равными значениям в подводящей магистрали
Г, = Тм, Pi = рм [3]- Абсолютное давление рв рекомендуется принимать в пре-
делах 0,15—0,25 МПа с учетом характера изменения нагрузки, сопротивления
линии выхлопа и подвода. Дросселирование на выхлопе и высокие скорости дви-
жения поршня увеличивают рв.
Для моторов в зависимости от режимов работы, пропускной способности под-
водящей и выхлопной линий абсолютное давление в полости до начала истечения
принимают р, = (0,7-=-1) рм, в конце процесса расширения рв= 0,16-=-0,28 МПа.
Температура в полости расширения 7, « 7М. Температуру в полости выхлопа
можно определить также с помощью графиков, показанных на рис. 12.4.
Способы очистки сжатого воздуха. В промышленности для очистки сжатого
воздуха нашли применение силовые поля, фильтрация и осушка. В схемах и уст-
ройствах очистки часто последовательно используют несколько способов очистки.
Область применения этих способов и их эффективность для промышленной очистки
воздуха определяются характеристиками очистных устройств, реализованных на
указанных способах. Поэтому перед рассмотрением основных способов очистки
воздуха приведем основные понятия о важнейших параметрах очистных устройств.
360
Эффективность очистки. Для устройств очистки этот параметр принято ха-
рактеризовать коэффициентом очистки, определяемым по формуле [8]
11" TUo- 2
где т}фР( — фракционный коэффициент очистки, определяемый отношением массы
уловленных'загрязнений данной фракции к общему количеству, внесенному со
сжатым воздухом в очистное устройство за это же время; Ф; — содержание частиц
заданных фракций по массе на входе в очистное устройство, %.
Из-за сложности определения действительного значения дисперсного состава
загрязнений в сжатом воздухе и фракционного коэффициента очистки возникает
необходимость выражать эффективность очистки косвенными параметрами: для
устройств очистки с применением силовых полей — минимальным диаметром за-
держиваемых частиц; для устройств очистки фильтрующего типа— номинальной
и абсолютной тонкостями фильтрации.
Для устройств осушки эффективность очистки определяется точкой росы
сжатого воздуха на выходе.
Гидравлическое сопротивление. Этот параметр характеризует величину энер-
гетических потерь в устройствах очистки. Гидравлическое сопротивление (потери
давления) указывается в единицах давления при номинальном значении расхода
сжатого воздуха через устройство.
Расходная характеристика. В настоящее время не существует единого кри-
терия оценки качества различных устройств очистки по этому параметру. В тех-
нических данных часто указывают пропускную способность или номинальный
расход воздуха как параметр, определяющий расход воздуха при наибольшем ре-
комендуемом перепаде давления или при наибольшей скорости воздуха, устанав-
ливаемой исходя из условия обеспечения параметра эффективности очистки. Для
устройств очистки инерционного типа указывают также величину наименьшей
скорости потока, при которой еще обеспечивается заданная эффективность очи-
стки.
Срок службы. Для устройств очистки этот параметр связан с продолжитель-
ностью работы до замены или регенерации фильтроэлементов, электродов или
адсорбентов.
Термостойкость определяет рабочий интервал температуры окружающей
среды и потока сжатого воздуха, в котором гарантируется нормальная работа
устройств очистки и осушки.
В табл. 12.4 приведены обобщенные данные о важнейших параметрах уст-
ройств очистки различных типов. Способы очистки имеют много разновидностей,
эффективность которых может изменяться в указанных пределах в зависимости от
конструктивных параметров, концентрации, дисперсности и вида загрязнений.
Очистка воздуха путем фильтрации. Процесс очистки сжатого воздуха от
загрязнений вследствие их взаимодействия с элементами пористой перегородки
называется фильтрацией. Фильтрующие материалы (пористые перегородки) ус-
ловие разделяют на два вида: поверхностные (частицы удерживаются поверх-
ностью фильтрующего материала) и объемные (частицы удерживаются не только
на поверхности, но и в толще фильтрующего материала). К поверхностным филь-
трующим материалам относятся сетки, бумага, ткани, к объемным — картон, ме-
таллокерамика, керамика, войлок и т. д., а также пакеты, состоящие из несколь-
ких слоев поверхностных фильтрующих материалов.
В табл. 12.5 приведены обобщенные данные об эффективности очистки основ-
ных типов фильтрующих материалов.
Наибольшее применение для очистки сжатого воздуха пневматических си-
стем получили металлокерамические и волокнистые фильтрующие материалы.
Металлокерамические фильтрующие материалы применяют в подавляющем
большинстве современных конструкций фильтров-влагоотделителей, имеющих
тонкость фильтрации от 5 до 75 мкм. Это объясняется их прочностью, температур-
ной стойкостью в широком диапазоне, возможностью получения деталей практи-
чески любой формы, хорошей обрабатываемостью, достаточно высокой однород-
ностью пор.
361
GO
to Основные параметры различных способов очистки сжатого воздуха Таблица 12.4
Способ очи- стки воздуха Схема устройств, приме- няемых для очистки воздуха Эффективность очистки Гидравли- ческое со- противле- ние, Па Пропуск- ная способ- ность, м3/мии Срок службы Начальная стоимость устройств, руб. * Эксплуата- ционные расходы на 1000 м3 воздуха, руб. **
С примене- нием сило- вых полей: гравитацион- ный Г) = 20-4-60 %; rfmln = 60 ыкм 50 — 100 0 — 500 Не лимити- руется 500 0,001 —0.01
электроста- тический .fо L. Т] = 70^85 %; ^mln ~ 0’01 мкм 50 — 500 0 — 400 Не лимити- рутеся *** 12 000 — 18 000 0,5 —0,8
инерционный t и = -10-470 %; ^mln = 10 мкм 250 — 15 000 i—,— 0,04—400 Не лимити- руется 200 — 1 500 0,01—0,25
Продолжение табл.
12.4
Способ очи-
стки воздуха
Фильтрация:
грубая
нормальная
тонкая
особо тонкая
Схема устройств, приме-
няемых для очистки воздуха
Эффективность очистки Гидравли- ческое со- противле- ние, Па Пропуск- ная способ- ность, м3/мии Срок службы Начальная стоимость устройств, руб. *
Тонкость филь- трации, мкм 2 000—50 000 0—16 6 000 — — 10 000 ч (с регенера- цией филь- тров) 200—1 500
номи- нальная абсо- лютная
60 25 — 60 5-25 0,2 — 1 100 40 — 80 10 — 40 0,3 — 5
Эксплуата-
ционные
расходы на
1000 м3
воздуха,
руб. **
0,01—0,25
Осушка: охлаждение Точка росы 2 — 10 °C 50 — 500 0 — 500 Не лимити- руется 7 500 — 10 000 0,03 — 0,1
абсорбция TEST Точка росы 5 — 20 °C 4 000 — 8 000 0 — 320 Не лимити- руется *** 2 800 — 3 800 0,05 — 0,25
адсорбция со о ак& Точка росы (-Ю)М-ВО) °C 4 000—10 000 0 — 100 6 лет **** 9 000 — 16 000 0,3-1,2
СО ——' . - . । —
Продолжение табл. 12.4
Эксплуата- 1 циоиные расходы на 1 1000 м* воздуха, i руб. ** 0,1—0,8 о с» 1 иимальный диаметр задерживаемых частиц, инальным расходом Q 30 мэ/мин. зациониых отчислений.
। Начальная стоимость устройств, руб. * i 1 1 ооо г—ооо 1 200 — 400 1
Срок службы Не лимити- руется 1 1 1 Не лимити- руется I 1 !
Пропуск- ная способ- ность, М3/МИН 1 ооо—о 01^0
Гидравли- ческое со- противле- ние, Па 1 50 — 100 1 X 1 о4— -25 X 10s
1Л
Эффективность очистки При подогреве с 20 °C до 50 °C сжатого воздуха р = 0,6 МПа,ф — = 80 %, отно- сительная влаж- ность умень- шается до 15 % При редуциро- вании сжатого воздуха с 1,1 до 0,5 МПа, t = 20 °C, Ф = | = 80 %, отно- ' сительная влаж- 1 иость умень- 1 шается до 35 % | 1 истин; dmin — ми я устройств с иом м с учетом амортн электродов, (яется адсорбент.
Схема устройств, приме- няемых для очистки воздуха ft ф t 1 Г -Т1 оэффнциент оч > приведена дл эсходы указан) ская очистка « яется или мен
1 J Примечание. т| — к * Начальная стоимости ** Эксплуатационные р; *** Требуется периодиче **** Периодически добавл
Способ очи- стки воздуха j со о g. C.<u £• 5s Ef >> Я о =с м S О) с е.
364
Таблица 12.5
Эффективность очистки основных типов фильтрующих материалов
Филы рующие материалы Тонкость фильтра- ции, мкм Эффективность очистки, %
твердые частицы вода в жидком состоянии минераль- ное масло в жидком состоянии
Сетчатые: сухие масляные 15—200 5—200 70 — 95 * До 80 *• До 80 До 80
Металлокерамические . . 0,5 — 200 90 — 98 * До 90 До 90
Керамические 1 — 100 90 — 98 * До 90 До 90
Волокнистые: бумажные тканые особо тонкие .... > 10 15-30 > 0,2 60 — 80 * До 99,999 До 95 До 95 До 99,95 До 95 До 95 До 99,95
* Эффективность очистки от частиц размером иальной тонкости фильтрации. * * Эффективность очистки от атмосферной пыли. соответствую щнм иоми-
Металлокерамические фильтры с порами размером 0,5—3 мкм, как и другие
фильтрующие материалы с аналогичной пористостью, можно при достаточно низ-
ких скоростях фильтрации применять для очистки от мелких капель масла (ту-
мана) и воды.
Эффективность осаждения жидких частиц увеличивается в результате гидро-
фобизации (обработки кремиийоргаиическими жидкостями) фильтрующих эле-
ментов.
Пропускная способность металлокерамических фильтров лимитируется ги-
дравлическим сопротивлением и снижением эффективности при высокой скорости
фильтрации (явление продувки). Гидравлическое сопротивление фильтроэлемен-
тов этого типа зависит от диаметра частиц порошка и толщины стенки. Обычно
площадь фильтрующих элементов принимают в 20—30 раз больше площади попе-
речного сечения подводящего трубопровода, а рекомендуемая скорость фильтра-
ции составляет 0,5—2 м/с. При этом гидравлическое сопротивление фильтрующих
элементов с тонкостью фильтрации 20—40 мкм в среднем составляет 0,003 МПа,
с тонкостью фильтрации 12—20 мкм — 0,005 МПа, с тонкостью фильтрации 5—
10 мкм — 0,008 МПа.
Важным преимуществом металлокерамических фильтроэлемеитов по сравне-
нию с бумажными, волокнистыми и тканевыми является возможность восстанов-
ления пропускной способности путем очистки от загрязнений обратным потоком
воздуха или химического растворителя, либо прокаливанием фильтроэлемента
в потоке горячего газа.
Металлические проволочные сетки применяют в основном для очистки всасы-
ваемого компрессором атмосферного воздуха, а также для предварительной
очистки сжатого воздуха от твердых частиц размером более 80 мкм.
Параметры сеток по ГОСТ 6613—73, наиболее часто применяющихся для
очистки сжатого воздуха, представлены в табл. 12.6.
Волокнистые фильтрующие материалы в основном применяют для очистки
атмосферного воздуха (на всасывающих линиях компрессоров).
Бумажные фильтрующие элементы объемного типа некоторые фирмы исполь-
зуют в фильтрах-влагоотделителях контактного типа для очистки сжатого воз-
духа от воды и масла в жидком состоянии и от твердых^загрязиений.
365
Таблица 12.6
Параметры сеток по ГОСТ 8813—73
Номер сеток Номи* иальный размер стороны ячейки в свету, мм Максималь- ное откло- нение от номиналь- ного раз- мера, % Допустимое число ячеек с макси- мальным размером, % Предельное отклонение среднего арифмети- ческого размера от номи- нального, % Номи- нальный диаметр прово- локи, мм Предель- ное от- клонение, мм
0063 0,063 70 9 ±12 0,040 ±0,004
008 0,030 60 ±10 0,050 ±0,004
01 0,100 0,060 0,006
016 0,160 50 ±9 0,100 ±0,010
02 0,200 0,120
025 0,250 0,120
Эффективность очистки волокнистыми материалами в значительной степени
зависит от толщины волокон, глубины слоя, плотности и равномерности упаковки.
Это объясняется тем, что волокнистые материалы типа фетра, бумаги с различ-
ными пропитками и другие имеют в значительной степени неоднородные поры,
пропуская 20—40% частиц размером, соответствующим средней тонкости фильтра-
ции, На рис. 12,5 приведены типичные кривые зависимости коэффициента проскока
от диаметра частиц этих материалов [12]. При высокой концентрации загрязне-
ний фильтры этого типа быстро засоряются, поэтому их не рекомендуют для обес-
печения грубых классов загрязненности сжатого воздуха. Эффективность филь-
тров этого типа по атмосферной пыли и стандартному масляному туману (СМТ)
приведена в табл. 12.7 [8].
Эффективность отделения масляного тумана (размер частиц до 5 мкм) бумаж-
ными фильтрующими гофрированными элементами составляет 95%, бумажными
дисками — 99%.
Эффективность очистки воздуха от капельного масла одним войлочным филь-
трующим элементом толщиной 12 мм и диаметром 100 мм при скорости фильтра-
Рис. 12.5. Зависимость коэффи-
циента проскока А»пр от диаметра
частиц rfq загрязнителя:
1 ~ хлопчатобумажная ткань',
2 — фетр: 3 — бумага; 4 — бу-
мага с резиновой пропиткой
Таблица 12.7
Эффективность волокнистых фильтров
Фильтрующий материал Диаметр волокон, мкм Эффективность •ух О/ 1 > - ,0
по атмо- сферной пыли по СМТ
Воздушный висци • новый фильтр . . 125 80 0
Тонкие маты из стеклянного во- локна 20 90 10
4 95 — 99 10
1 100 80
Бумага 0,5 100 99,9
,366
Таблица 12.8
Основные характеристики фильтрующих материалов ФП
Материал Полимер Предельная температура : воздуха, °C Потери давления при ско- рости филь- трации 1 см/с, Па Толщина слоя без подложки, мм
ФПП 15 * Перхлорвинил 60 15 30 60 0,2 0,4 0,8
ФПП 25 * 60 15 30 60 0,2 0,4 0,8
ФПС 15 • Полистирол 80 15 30 60 0,2 0,4 0,8
ФМП 15 * Пол иметнл мета к рилат 40 15 30 60 0,2 0,4 0,8
ФПА 15 * Полимер а цетилцеллюлоз а 150 15 0,2
30 60 0,4 0,8
• • Устойчив к щелочам и Не устойчив к щелочам кислотам; гидрофобен. и кислотам; гидрофилен.
ции 0,07 м/с составляет 80%, а при установке последовательно шести фильтров
эффективность увеличивается до 99,7% [13].
В последние годы большое применение в промышленности получили высоко-
эффективные фильтрующие волокнистые материалы типов ФПП и ФПА, предназ-
наченные для очистки воздуха от аэрозолей и субмикронных частиц. Проверка их
эффективности с помощью стандартного масляного тумана (размер частиц 0,3 мкм)
показала хорошие результаты — 99,95% [1, 8]. Частицы размером 0,1—0,5 мкм
наиболее свободно проникают через фильтрующие среды.
Рекомендуемые скорости фильтрации для тонковолокнистых фильтров (на-
пример, ФП) обычно равны 0,01—0,1 м/с, редко 0,5 м/с. Потери давления при ско-
рости фильтрации 0,1 м/с составляют 200—1000 Па. С увеличением скорости по-
тери давления значительно возрастают.
Срок службы фильтров с волокнистыми ультратонкими элементами в значи-
тельной степени зависит от концентрации загрязнений в подводимом сжатом воз-
духе. Их рекомендуется применять при концентрации твердых частиц не более'
0,5—5 мг/м3 и отсутствии воды и масла в жидком состоянии, так как смачивание
уловленного осадка твердых частиц и волокон быстро выводит фильтр из строя.
Особенно опасно для этих фильтрующих элементов наличие масла с концентрацией
в жидкой фазе свыше 1 мг/м3. Обычно перед фильтрами тонкой очистки устанавли-
вают очистные и осушивающие устройства, обеспечивающие снижение концентра-
ции загрязнений до приемлемых значений (1 мг/м3).
Для производства фильтрующих материалов ФП используют перхлорвинил
(ФПП), диацетатцеллюлозу (ФПА), полистирол (ФПС) и др.
Основные характеристики этих фильтрующих ,материалов, . по данным
В. В, Недииа и О. Д. Нейкова, приведены в табл. 12.8,
367
Рис. 12.6. Принципиальные
схемы инерционных очистите-
лей:
а — центробежного; б — аэро-
динамического; в —•с ударом
воздуха о перегородку
Инерционный способ очистки. Очистка сжатого воздуха с использованием
инерционных сил проводится в центробежных, аэродинамических устройствах и
с ударом воздуха в перегородку (рис. 12.6).
Наибольшее применение получили центробежные очистители, в которых
загрязнения выходят из потока, совершающего круговое (спиральное) движение,
под действием центробежных сил. Благодаря характеру движения потока воздуха
•большая группа устройств этого типа получила название циклонных очистителей.
Циклонные очистители обладают довольно высокой эффективностью
(табл. 12.9).
Эффективность циклонов возрастает с увеличением концентрации загрязне-
ний на входе, хотя при этом на выходе концентрация несколько повышается.
На рис. 12.7 показана кривая фракционной эффективности циклонов. Зона А
содержит частицы, которые должны были бы пройти через циклон, но улавли-
ваются вследствие коагуляции или в результате столкновений с более крупными
частицами. В зоне Б находятся частицы, которые должны были бы улавливаться,
но остаются в воздушном потоке из-за его турбулентности или срыва частиц со
стенок вихрем.
При применении очистных устройств циклонного типа для очистки сжатого
воздуха, содержащего воду, масло и твердые загрязнения, эффективность улавли-
вания твердых частиц должна увеличиваться
вследствие усиления эффекта столкновения
и коагуляции в зоне А и уменьшения эф-
фекта срыва частиц вихрем от влажной
стенки в зоне Б.
Рис. 12.7. Кривые фракционной эф-
фективности циклонов в зави-
симости от размера d4:
1 — теоретическая; 2 — экспери*
ментальная
Таблица 12.9
Эффективность циклонных очистителей
Предельный размер частиц, мкм Предельная эффектив- ность улавливания пылн, % по массе
Обычные циклоны Высокоэф- фективные циклоны
<5 <50 50 — 80
5-20 50 — 80 ВО —95
15 — 40 80 — 95 95 — 99
> 40 95—99 95 — 99
368
Потери давления в устрой-
ствах циклонного типа, исполь-
зуемых в пневматических си-
стемах, обычно составляют 500—
5000 Па. В фильтрах-влагоотде-
лителях центробежного типа
с фильтроэлементом (типа В41)
они больше — до 15-103 Па при
номинальном расходе. Расход-
ная характеристика устройств
этого типа, как правило, опре-
деляется скоростью воздуха
в зоне отделения. В фильтрах-
влагоотделителях типов В41,
ДВ41 и П-В максимальная ско-
рость потока в зоне отделения
составляет 8 12 м/с, а МИНИ- Рис. 12.8. Гравитационная пылеулавливающая.,
мальная 1,5—3 м/с. камера
Срок службы устройств
этого типа без фильтроэлемеита
обычно не лимитируется, а с фильтроэлементом (В41-1, ДВ41-1) определяется^
временем работы фильтроэлемеита.
Преимущества очистителей инерционного типа: постоянство степени очистки,
незначительные потери давления и эффективное удаление основной части загряз-
нений в процессе длительной эксплуатации при высокой долговечности, неболь-
ших размерах, низкой первоначальной и эксплуатационной стоимости.
Гравитационный способ очистки. Очистка сжатого воздуха с использованием,,
гравитационных сил проводится в воздухосборниках, отстойниках и специальных
устройствах (рис. 12.8). Кроме того, гравитационные силы используются для от-
вода влаги и твердых частиц из рабочей зоны инерционных, фильтрующих и дру-
гих устройств.
Коэффициент очистки для устройств этого типа определяют по формуле, при-
веденной на с. 361, при подстановке фракционного коэффициента очистки, кото-
рый находят из выражения
100%,
где — скорость осаждения частиц по заданным фракциям (рис. 12.9); L и-
Н — длина и высота рабочей зоны камеры осаждения устройства; ш — скорость,
потока воздуха в устройстве.
На рис. 12.10 показана теоретическая зависимость фракционной эффектив-
ности устройства этого типа от диаметра частиц. Минимальный диаметр частиц,
rfmin, которые полностью оседают из потока, может быть определен по формуле,
приведенной в работах П. Уайта и С. Смита
я 1/ 18т]дЯщ
- V SL (рч-рп)
где т]д’— коэффициент динамической вязкости воздуха; рч — плотность частиц;-
рР — плотность сжатого воздуха; g— ускорение свободного падения.
Хотя очистители этого типа могут обеспечить достаточно высокую степень
очистки сжатого воздуха от твердых частиц и жидкой влаги, их промышленное
применение в качестве очистных устройств ограничено из-за больших размеров и
жестких требований к конструкции, которая должна исключать завихрения и не-
равномерность скорости потока.
При ориентировочных расчетах гидравлическое сопротивление гравитацион-
ных устройств очистки может быть принято равным сопротивлению эквивалент-
ного ему по длине подводящего трубопровода.
369
Рис. 12,9. Зависимость скорости осаждения сферических частиц в спокойном воздухе от
размера частиц
Рис. 12.10. Зависимость фракционной эффективности от диаметра частиц (pq = 1 г/см*)
1 — теоретическая; 2 — реальная
Пропускная способность устройств этого типа зависит от заданного размера
частиц, которые должны быть удалены из потока воздуха, и конструктивных
параметров. Наибольший расход воздуха можно определить по формуле
п ____ dmiv.gLFn (Рч — рр)
vmax —---------------------
18г|дЯ ’
где Гп — площадь сечения потока воздуха в рабочей зоне камеры осаждения уст-
ройства.
Для обеспечения надежного осаждения частиц заданного размера фактический
расход рекомендуется принимать в 1,5—2 раза меньше расчетного.
Срок службы обычно не лимитируется. В процессе эксплуатации требуется
регулярно продувать систему или устанавливать автоматический коидеисатоот-
водчик.
Способы осушки сжатого воздуха. От паров воды и масла воздух осушают
поглощением его различными веществами (адсорбция и абсорбция) или охлажде-
нием. В некоторых случаях для предотвращения конденсации паров целесооб-
разно применить подогрев или редуцирование сжатого воздуха.
Адсорбция. Адсорбционная осушка воздуха основана иа свойстве природных
или искусственных пористых материалов избирательно концентрировать на по-
верхности водяной пар. Количество адсорбированного водяного пара возрастает
с понижением температуры и увеличением его концентрации в сжатом воздухе.
Эти свойства определяют такое важное свойство адсорбентов, как обратимость
(регенерируемость), т. е. способность к полному или частичному удалению (де-
сорбция) водяных паров при повышении температуры или при снижении парци-
ального давления водяного пара в газовой фазе над слоем адсорбента.
Краткие сведения об адсорбентах. Для осушки воздуха наиболее широкое
распространение получили следующие адсорбенты: силикагели, активная окись
алюминия и цеолиты — молекулярные сита. В основном они отличаются друг от
друга влагоемкостью, ее зависимостью от температуры, глубиной осушки и меха-
ническими свойствами.
Влагоемкость — предельное количество адсорбированной влаги иа единицу .
массы адсорбента — выражается обычно в процентах или в граммах поглощенной
влаги на 100 г адсорбента. В зависимости от условий поглощения различают ста-
.370
тическую и динамическую влагоемкость. Под статической влагоемкостью пони-
мают максимальное количество влаги, поглощенное из воздуха единицей массы
адсорбента к моменту достижения полного насыщения адсорбента при данной тем-
пературе и концентрации влаги в осушаемом газе. Под динамической влагоем-
костью понимают количество влаги, поглощенное единицей массы адсорбента
в слое данной высоты из воздушного потока с определенным влагосодержаннем
при данной скорости и температуре воздуха до момента проскока влаги в воздухе,
покидающем слой адсорбента.
Время с начала процесса поглощения до момента проскока принято называть
временем защитного действия слоя адсорбента.
Важным свойством адсорбентов является их механическая прочность. Износ
адсорбентов обусловливается следующими факторами: изменением температуры
в стадиях адсорбции и регенерации, наличием влаги в осушаемом воздухе и давле-
нием лежащих выше слоев адсорбента. Потери адсорбента в результате механи-
ческого разрушения за год ориентировочно составляют (в процентах от первона-
чального количества):
Активная окись алюминия, алюмогель н цеолиты NaA................ 5 — 10
Цеолиты типов СаА, NaX .......................................... 8—12
Силикагели разные............................................... 10 — 15
Силикагели в зависимости от преобладающего диаметра пор подразделяют иа
мелко- и крупнопористые. Отечественная промышленность выпускает силикагели
по ГОСТ 3956—76.
Мелкопористые силикагели обладают большей влагоемкостью в области ма-
лых парциальных давлений водяного пара, крупнопористые — в области высоких
парциальных давлений. Предельное остаточное влагосодержаиие осушенного воз-
духа, обеспечиваемое крупнопористыми силикагелями, соответствует температуре
точки росы от —25 до —30 °C, мелкопористыми — от —40 до —55 °C. Главным
достоинством силикагелей является их сравнительно малая энергоемкость при
горячей регенерации. Существенным недостатком силикагелей является невысо-
кая механическая прочность, а также растрескивание и разрушение гранул при
попадании иа них капельной влаги.
По параметрам пористой структуры и некоторым другим показателям алюмо-
гель во многом аналогичен мелкопористым силикагелям. Степень осушки воздуха,
достигаемая с помощью этого адсорбента, практически такая же, как и на цеоли-
тах, однако температура регенерации алюмогелей значительно ниже.
Значительными преимуществами активной окиси алюминия являются
ее высокие механическая прочность и устойчивость к воздействию капель-
ной влаги. В СССР выпускают различные марки активной окиси алюминия.
Для осушки воздуха лучше всего использовать активную окись алюминия —
осушитель газов, — характеризующуюся более высокой насыпной массой и одно-
родностью пористой структуры.
Цеолиты могут обеспечить осушку воздуха до температуры точки росы —60 °C
и ниже. Влагоемкость цеолитов мало изменяется с повышением температуры.
Недостатками цеолитов являются их невысокая механическая прочность и боль-
шие энергозатраты при горячей регенерации.
Основные показатели адсорбентов, используемые при их выборе и расчетах
устройств осушки, приведены в табл. 12.10 [4, 5].
В табл. 12.11 [5] приведены свойства промышленных адсорбентов.
При выборе адсорбента исходят из требований степени осушки, температурных
условий, метода регенерации и т. п. Наиболее целесообразна многослойная за-
грузка адсорберов несколькими адсорбентами. Обычно первыми по ходу воз-
духа располагают адсорбенты, обладающие высокой устойчивостью к ка-
пельной влаге и большой влагоемкостью при высокой относительной влаж-
ности сжатого воздуха (активная окись алюминия, крупнопористые сили-
кагели), а в конце — поглотители с высокой влагоемкостью в области малых
парциальных давлений (мелкопористые силикагели, цеолиты).
Удаление паров масла. Очистка сжатого воздуха от паров масла проводится
адсорбционным способом. В качестве адсорбента используют активированные
угли, активную окись алюминия н силикагель.
371
Таблица 12.10
Основные показатели адсорбентов
Показатель Силикагели Активная окись алюминия Цеолиты
Насыпная масса, кг/м3 Размер зерен (таблеток), мм Теплоемкость, кДж/(кг*К) Теплопроводность (30 °C), кДж/(м*ч-К) Теплота адсорбции паров воды, кДж/кг Достигаемая температура точки’ росы (практически), °C Динамическая влагоемкость, %: в процессе эксплуатации свежего адсорбента Температура регенерации, °C: на входе в адсорбер на выходе нз адсорбера Температура применения, СС, не более 500 — 700 3-7 0,92 0,71 2500 — 25-ь—55 5-8 18 — 21 180 — 220 80—140 35 350 — 850 3 — 7 0,84 2500 — 55^—60 4—6 13—15 230 — 280 100 — 150 25 600 — 650 2 — 4,5 0,8 2,10 4200 —60 н ниже 8 — 16 320 — 370 120 — 200 35 и более
Данные о динамической активности различных адсорбентов по парам ком-
прессорного масла ограничены. Активированные угли способны поглощать из
воздуха масла до 20—50% собственной массы. Увеличение времени контакта воз-
духа с углем приводит к повышению степени удаления паров. Так, увеличение
высоты слоя активированного угля в 3 раза повышает поглощение масла на 20—
30%. Активированные угли по сравнению с силикагелем и активной окисью алю-
миния по парам масла более эффективны. Однако при 45%-ном насыщении акти-
вированного угля влагой начинается вытеснение поглощенного масла в воздуш-
ный поток.
Так как в короткоцикловых безнагревных установках насыщение адсорбентов
обычно не превышает 10—25% массы адсорбента, эти установки могут быть ис-
пользованы для удаления масла из насыщенного водяным паром воздуха.
Степень очистки воздуха от паров масла в короткоцикловых безнагревных
установках с силикагелем зависит от высоты слоя адсорбента, скорости осушки и
продолжительности цикла регенерации и может достигать 98%.
Абсорбция. Способ состоит в пропускании сжатого воздуха через вещества
(абсорбенты), химически взаимодействующие с водяным паром. Некоторые твер-
дые абсорбенты при этом меняют свою консистенцию, разжижаются.
Для очистки влажных технологических газов в химической промышленности
известен способ осушки газов жидкими абсорбентами (диэтиленгликолем или три-
этиленгликолем) [10].
Вследствие того что одни абсорбенты не восстанавливаются и не пригодны
для повторного использования, а для восстановления других требуется специаль-
Основные свойства адсорбентов
Таблица 12.11
Показатель Силикагель Активная окись алюми- ния Цеолит
Степень осушки Влагоемкость при парциаль- ных давлениях: низких высоких Устойчивость к капельной влаге Устойчивость к кислым ком- понентам (СО2, SO2 н т. Д.) Механическая прочность Стоимость Глубокая Низкая Высокая Не устойчив Устойчив Прочный Низкая Глубокая Низкая Высокая Устойчив Не устойчив Прочный Очень высокая Сверхглубокая Высокая Высокая Не устойчив Ограниченно устойчив Ограниченно прочный Высокая
372
ная технология, промышленное применение абсорбентов для осушки сжатого
воздуха ограничено.
Осушка сжатого воздуха охлаждением. При охлаждении воздух становится
насыщенным, и часть влаги, равная разности между действительным содержа-
нием ее в воздухе и содержанием, соответствующим насыщению воздуха при дан-
ной температуре, выпадаете виде жидкости. Воздух охлаждают с помощью конце-
вых холодильников или специальных холодильных установок. В качестве охла-
ждающей среды для концевых холодильников применяют воду или воздух. Тем-
пература применяемой для охлаждения воды в летнее время достигает 25—30 °C,
а зимой 5—10 °C. Обычно считают, что температура сжатого воздуха на выходе
из водяных холодильников на 10 °C выше температуры поступающей воды. Сле-
довательно, воздух можно охладить до 35—40 °C летом и до 15—20 °C зимой.
В холодильниках с воздушным охлаждением температуру выходящего потока
сжатого воздуха принимают на 15—20 °C выше температуры охлаждающего
потока.
Для обеспечения более эффективного охлаждения воздуха применяют холо-
дильные установки с использованием в качестве охладителей фреона, аммиака
и др. Температура точки росы, обеспечиваемая осушителями сжатого воздуха
этого типа (будем в дальнейшем называть их рефрижераторными), составляет
2—10 °C.
Подогрев сжатого воздуха. Одним из способов предотвращения конденсации
паров воды и масла является использование в пневматических системах горячего
сжатого воздуха, температура которого с учетом изменения термодинамических
параметров при эксплуатации пневматических устройств выше точки росы. Это
может быть достигнуто предотвращением охлаждения сжатого воздуха, поступа-
ющего из компрессора, с помощью изоляции воздухопровода или подогрева воз-
духа перед потребителями с предварительным охлаждением и удалением всей вы-
делившейся влаги.
При использовании горячего воздуха необходимо учитывать опасность воз-
горания и даже взрыва паров масла, которое уносится из поршневых и ротацион-
ных компрессоров.
Часто горячий сжатый воздух используют для воздушных молотов, песко- и
дробеструйных аппаратов, печей мартеновских цехов, сушки электрических ма-
шин и др.
Редуцирование сжатого воздуха. Понижение давления сжатого воздуха при-
водит к уменьшению относительной влажности, что может быть использовано для
осушки сжатого воздуха в системах эпизодического действия (например, в пневмо-
приводах электрических высоковольтных выключателей). В этом случае капель-
ная влага должна быть удалена из сжатого воздуха до его редуцирования.
Комбинированные способы осушки. Для уменьшения эксплуатационных рас-
ходов рекомендуется применять комбинированные осушители с использованием
нескольких способов осушки. Так, применение комбинации осушителей рефри-
жераторного и абсорбционного типов обеспечивает достаточно хорошую степень
осушки (температура точки росы от —5 до —15 °C) при низких эксплуатационных
расходах [11]. Известны осушители с комбинацией адсорбционных и абсорбцион-
ных способов, в которых в зависимости от температуры окружающей среды авто-
матически переключаются режимы работы; при более низкой температуре рабо-
тает осушитель адсорбционного типа, при более высокой температуре — осуши-
тель абсорбционного типа.
Сравнительные данные устройств осушки сжатого воздуха различных типов
приведены в табл. 12.12 (рис. 12.11; 12.12).
Конструкция и техническая характеристика устройств для очистки
и осушки воздуха. Фильтры-влагоотделители. На рис. 12.13 представлена кон-
струкция центробежного фильтра-влагоотделителя типа I по ГОСТ 17437—72,
предназначенного для предварительной очистки от капельной влаги и твердых
частиц. Технические данные этих фильтров-влагоотделителей приведены
в табл. 12.13. Для выбора типоразмера фильтра-влагоотделителя в зависимости
от расхода и давления сжатого воздуха пользуются диаграммой, показанной на
рис. 12.14. На диаграмме для каждогоDy показаны номинальный и минимальный
расходы воздуха, приведенного к нормальным условиям (СТ СЭВ 521—77). Для
373
Таблица 12.12
Сравнительные данные осушителей различных типов
Показатели Тип осушителей
адсорбционный рефрижераторный абсорбционный
Расход воздуха, м8/мин Поглощающие ве- щества Вид энергии, по- требляемой осуши- телями Температура точки росы прн давле- нии 0,7 МПа Удаление масла Перепад давления, МПа Температура сжа- того воздуха иа входе, °C: максимальная минимальная Температура окру- жающей среды, °C максимальная минимальная Размещение Объем * Масса * Начальная стои- мость Эксплуатационные расходы Предварительная очистка сжатого воздуха От 0,14 до 200 От 0,14 до 860 От 0,03 до 440
Силикагель, ак- тивная окись алю- миния, цеолиты Электричество: для безнагревных 0,1 —0,5 кВт на 1 м8/мнн; с терми- ческой регенера- цией — 0,9 — 1,2 кВт иа 1 м’/мин. Пар и воздух для реге- нерации адсорбен- та От —20 до —70 °C Температура точки росы зависит от расхода и давле- ния воздуха н на протяжении каж- дого ннкла посте- пенно поднимает- ся, но не больше чем на 3 °C Не применяется для удаления мас- ла 0,007 — 0,014 35 - 2 35 2 В помещении 1,25 1,5 См. рнс. 12.11 См. рис. 12.12 Требуется защита адсорбента от за- грязнений тверды- ми частицами и капельной влагой (водой и маслом) Электричество: 0,1—0,25 кВт на 1 м8/мнн; вода для охлаждения в кон- денсаторах и осу- шителях с водя- ным охлаждением 2 — 10 °C Температура точки росы постоянная, не зависит от рас- хода, давления н температуры сжа- того воздуха на входе Удаляется конден- сацией при охлаж- дении сжатого воз- духа 0,025 — 0,035 45 2 45 4 В помещении и вие помещения, при температуре не ниже 4 °C I 1 См. рнс. 12.11 См. рнс. 12.12 Требуется защита от масла н твер- дых частиц для предотвращения засорения труб теплообменников. Номинальная тон- кость фильтрации устройств очистки на входе 50 — 80 мкм Химикаты (в виде таблеток); карба- мид (в виде шари- ков) На 12 °C ндже тем- пературы сжатого воздуха яа «коде Удаляет масло в виде капель Менее 1 % давле- ния на входе 35 Не лимитируется 35 Не лимитируется В помещении или вне помещения 0,4 0,4 См. рнс. 12.11 См. рис. 12.12 Обычно не требует- ся, за исключением, когда от компрес- сора поступает зна- чительное коли- чество масла
* Сравнительные данные приведены без фильтров предварительной н окон- чательной оч нстки. За единицу принята величина для устройств осушкн рефриже- раторного типа.
374
Продолжение табл. 12.12
Показатели Тип осушителей
адсорбционный рефрижераторный . абсорбционный
Необходимость установки уст- ройств очистки после сушки Обслуживание: постоянное периодическое Ремонт Требуется уста- новка фильтра для удаления пыли адсорбента Не требуется Замена адсорбента каждые два—трн года. Ежегодный контроль степени осушкн н чистоты сжатого воздуха на выходе, замена фильтрующих эле- ментов Требуется квали- фицированный обслуживающий персонал Не требуется, если не предъявляются особые требования в отношении со- держания твер- дых загрязнений Не требуется Очистка тепло- обменников от грязи продувкой. Очистка или заме- на фильтрующих элементов. Наблю- дение за устройст- вами для автома- тического отвода конденсата Требуется квали- фицированный обслуживающий персонал Как н для рефри- жераторных осу- шителей Требуется прн руч- ном отводе конден- сата Замена абсорбента каждый один—че- тыре месяца Не требуется Отсутствуют дви- жущиеся части
выбора требуемого типоразмера фильтра-влагоотделителя необходимо найти
точку, соответствующую заданным расходу и давлению. Если точка лежит в об-
ласти, где заданный расход соответствует нескольким типоразмерам, предпочте-
ние следует отдать тому, для которого точка расположена ближе к середине или
к верхнему пределу диапазона расхода.
Рис. 12.11. Зависимость начальной стоимости II осушителей от их производительности Q :
н о
J — адсорбционного типа с термической регенерацией; 2 — адсорбционного типа с хо-
лодной регенерацией; 3 — рефрижераторного типа; 4 — абсорбционного типа
Рис. 12.12. Зависимость эксплуатационной стоимости Цэ осушителей от их произво-
дительности
/ — адсорбционного типа; 2 — рефрижераторного типа; 3 — абсорбционного типа
375
Рис. 12.13. Фильтр-влагоотделитель центробежного
действия типа 1 по ГОСТ 17437—72
В конструкциях центробежных фильтров-
влагоотделителей типа 2 по ГОСТ 17437—72,
изображенных на рис. 12.15, а под крыльчаткой 1
встроен металлокерамический фильтрующий
элемент 2. Под ним расположен отражатель 3,
предотвращающий захват потоком воздуха
скопившихся на дне резервуара загрязнений.
Дефлектор 4 (рис. 12.15, б) способствует созда-
нию необходимой скорости в зоне отделения и
срыву пленки влаги, а отражатель 5 — экрани-
рованию фильтрующего элемента от захватыва-
емых потоком жидких загрязнений.
Технические данные фильтров-влагоотдели-
телей типа 2 по ГОСТ 17437—72, серийно изго-
товляемых черкесским заводом «Гидропневмо-
нормаль», приведены в табл. 12.14. Диаграмма
для выбора типоразмера в зависимости от тре-
буемых расхода и давления сжатого воздуха по-
казана на рис. 12.14. На рис. 12.15, г представ-
лена конструкция фильтров тонкой очистки типа
П-В, выпуск которых организован на Симферо-
польском опытном заводе пневмоаппаратуры.
Фильтрующий патрон состоит из нескольких
слоев фильтрующих материалов. Радиальные
потоки воздуха, идущего сверху, сначала по-
падают на фильтрующий цилиндр, выполненный
из прессованного картона. Этот фильтроэлемент является предварительной сту-
пенью очистки, задерживающей крупные твердые
ситового эффекта.
частицы, в основном за счет
Техническая характеристика фильтров-влагоотделителей типа I
по ГОСТ 17437 — 72 (номинальное давление 1,0 МПа,
тонкость фильтрации 80 мкм; степеиь влагоотделеиия 85 %)
Таблица 12.13
Обозначение Ус- лов- ный про- ход, мм Расход воздуха, * м’/мии Номи- нальн ый перепад давлений, МПа, не более Номи- нальная емкость для сбора конден- сата, дм’ Размеры, ММ
номи- наль- ный мини- маль- ный длина шири- на высота
1-32Х80 32 6,3 2,0 0,0050 4,0 275 200 720
1-40Х80 40 10,0 3,2 0,0063
1-50X80 50 16,0 5,0 0,0080 6,3 335 275 975
1-63X80 63 25,0 8.0 0,0100
1-80X80 80 40,0 12,5 0,0125 10,0 390 315 1225
1-100X80 100 63,0 20,0 0,0150
1-160Х 80 160 160,0 50,0 0,0150 460 375 1785
1-200X 80 200 250,0 80,0 0,0150 670 585 2775
1-250X80 250 400,0 125,0 0,0150
• Воздух приведен к условиям по СТ СЭВ 521—77. Номинальный расход
воздуха принят при скорости течения сжатого воздуха (при давлении 0,63 МПа)
17 — 18 м/с в трубопроводе с внутренним диаметром, равным Dy фнльтра-влаго-
отделителя.
376
0,02 0,05 0,1 0,2 1,0 2,0 1,0 5,0 10 20 30'Ю 100 200 WO 1000
О,м3/мин
Рис. 12.14. Диаграмма для выбора типоразмера фильтров-влагоотделителей типа I (штри-
ховые линии), типа 2 (сплошные линии) по ГОСТ 17437—-72
Рис. 12.15. Фильтры-влагоотделители по ГОСТ 17437—72:
а — 22-12 X 40 и 22 - 16 X 40 с ручным отводом конденсата (В41-1); б — 22-25 X 40
и22-40 X 40 с ручным отводом конденсата (ДВ41-1); в — 26-12 X 40, 26-16 X 40 и 26-25 X
X 40 с автоматическим отводом конденсата (В41-3); г —• фильтр тонкой очистки типа П-В
13 Е. В. Герц и др.
377
Техническая характеристика фильтров-влагоотделителей типа 2 по ГОСТ 17437-72
(номинальные давление 1,0 МПа, тонкость фильтрации 40 мкм; степень влагоотделения 90
ВХВЭНЭйНОя rtroaio poootr) о ex Автома- тический воздуха
jm ‘Booew 1,05 1 1,05 1,80 3,50 7,40 2,20 2,20 1,90 зжатого
1 | Размеры, мм 175 245 175 245 290 i 1 400 235 235 24 0 1 ечения < теля.
r о. л s я Д 86 86 86 £6 120 165 86 86 ' 86 >рости т □отдел и
w X 4 86 86 86 86 130 | 165 86 86 105 При скс гра-влаг
‘GLB3H9tfUOH ed -орэ edeXa -dasad чиомиэ ввнчувннмоН 0.10 0,25 0,10 0.25 0.40 1.00 - оздуха принят вным Dy филь-
aairop ан *RUW ‘инн Veuodau Н1Ч HHirun hwoH 0.008 0,008 0.010 0.010 0,020 0,025 0.008 0,010 0.020 1ьнь!й расход в диаметром, р;
Расход воздуха, м-’/мин s Л JSS s 5 3 £ £ B 0.25 0.25 0.40 । 0,40 1,25 3.20 0,25 0,40 1,25 Номина; тренним
i J5 <s S 42 ° S s Д s 1 1.25 1,25 2,00 । 2,00 5,00 12,50 1,25 2,00 5,00 ч—77. : ie с вну
го — II19 19OJ ou кемээьнноя Bpqcad венчцэх -HHH^ooHdU 3/8" 3/8" 1/2" 1/2" 1 " 1 1 1/2" 3/8" | 1/2" 1 1" I по СТ СЭВ 52 : в трубопрово;
ww ‘'Дох -odll gRHflOlfO^ 1 ! 12 12 । 16 I 16 1 25 1 40 12 1 16 25 'СЛОВНИК — 23 м/с
ЭИНЭ11 -внеоро aodeiQ со а д - 7 Т- v Sc
Обозначение no ГОСТ 17437 — 72 22-12Х40 22-12Х40У 22-16X40 22-16Х40У ‘2-25X40 22-40Х 40 26-12X40 26-16X40 26-25X 40 * Воздух п (при давле нни G.
378
Рис. 12.16. Фильтры типов ФВ (а), ФВ6-336 (О’), ФВ-2 (в) и ПОФ-2 (г)
Следующий после фильтрующего цилиндра слой состоит из микроскопиче-
ских тонких гидрофобных материалов (стекловолокно или ткань ФПП) с разме-
рами 0,2—0,5 мкм. Слой захватывает мельчайшие аэрозольные жидкие частицы
воды и масла размером 0,2—0,5мкм, которые коалесцируют (сращиваются) в круп-
ные капли, увеличивающиеся по направлению к наружному диаметру второго
слоя; крупные капли легко под действием сил тяжести опускаются вниз.Последний
слой представляет собой вещество типа поролона, препятствующее выносу капе-
лек жидкости с потоком выходящего воздуха. Крупные частицы жидкости опу-
скаются внутри слоя и, огибая донный фланец, попадают в отстойник под филь-
трующим патроном.
Эффективность отделения капельной влаги этим фильтром-влагоотделителем
99,9%, расход воздуха для условного прохода 12 мм — 0,5 м3/мин, для 16 мм —
1,0 м3/мин.
Фильтры. Конструкция фильтра типа ФВ, предназначенного для оконча-
тельной очистки сжатого воздуха, изображена на рис. 12.16, а. Предварительно
воздух очищается при прохождении его через слой стеклянных волокон 1, за-
ключенных в фильтрующий стакан 2. Снаружи стакан 2 обмотан тремя слоями 3
фильтрующей ткани Петряиова, проходя через которые воздух окончательно очи-
щается от частиц размером 0,1—0,5 мкм.
Техническая характеристика фильтров типа ФВ
Номинальное рабочее давление, МПа...................
Степень очистки воздуха, не менее, % ...............
Номинальная тонкость фильтрации, мкм ...............
Номинальный расход воздуха, м3/ч....................
Номинальный перепад давления, не более, МПа . . . .
Размеры, мм.................................. . . ,
Масса, кг.........................................,
ФВ6 ФВ25
0,8
99,95
0,2
6 25
0,02
78X 115 85X 135
0,4 0,6
На рис. 12.16,6 изображена конструкция фильтра ФВ6-336 (ГОСТ 14266—69),
предназначенного для окончательной очистки сжатого воздуха. Воздух очищается при
прохождении через фильтрующий патрон из ультратонких волокон.
Техническая характеристика фильтра ФВ6-336
Присоединительная резьба по ГОСТ 6111—52 .....................
Номинальное давление, МПа .......................................
Степень очистки воздуха, не менее, % ............................
Номинальная тонкость фильтрации, мкм.............................
Номинальной расход воздуха прн давлении па выходе 0,3 МПа, м3/мин
Номинальный перепад давлений, ие более, МПа .....................
Размеры, мм .....................................................
Масса, кг ....................„..................................
К 1/8"
0,63
99,95
0,2
0,1
0,02
52Х И4
0,22
13‘
379
7
Рис. 12.17. Дренажные уст-
ройства клапанного типа с
фиксацией и помощи пру-
жинного кожуха (а) и пру-
жинного кольца (б)
Фильтры ФВ6 серийно выпускает московский инструментальный завод
«Калибр».
В фильтрах ФВ-2 (рис. 12.16, в), изготовляемых заводом «Старорусприбор»
г. Старая Русса Новгородской области), применен керамический фильтр.
Техническая характеристика фильтра ФВ-2
Присоединительная резьба по ГОСТ 6111 —52 К 1/8"
Номинальное давление, МПа ................... 1,0
Тонкость фильтрации, мкм . '................ 40 — 50
Размеры, мм................................. 80X140
Масса, кг ............................... о,45
Фильтр типа ПОФ-2 (рис. 12.16, г) входит в УСЭППА, его применяют для
тонкой очистки воздуха перед устройствами, склонными к засорению. Воздух очи-
щается с помощью нескольких сменных войлочных дисков, сжатых пробкой.
Присоединительная резьба М6Х0.75.
Фильтры ПОФ-2 изготовляет Усть-Каменогорский завод приборов.
Устройства для отвода загрязнений из пневматических систем. Для отвода
воды, масла в жидком состоянии и других загрязнений применяют ручные и авто-
матические дренажные устройства, к которым относятся всевозможные краны,
вентили и другие запорные устройства, а также конденсатоотводчики с автомати-
ческим и дистанционным приводом.
Ручные дренажные устройства целесообразны при небольшом количестве
конденсата, накапливающегося в воздухосборниках, водосборниках и очистных
устройствах. Дренажные устройства применяют в виде кранов, вентилей или ори-
гинальных компактных конструкций (рис. 12.17).
Дренажное устройство, изображенное на рнс. 12.17, а, имеет клапанное
уплотнение 1 и вертикально перемещающийся шток 2, который удерживается
в верхнем положении пружинным кожухом 5, входящим в наружный паз штуцера
4. Винтовая пружина 3 закрывает клапан и способствует надежной герметизации
уплотнения 1 в закрытом положении. В конструкции дренажного устройства,
представленного на рис. 12.17, б, шток 4 с уплотнением 1 связан с управляющей
кнопкой 5 и удерживается в верхнем положении пружинным кольцом 3. Уплот-
нительное кольцо 2 предотвращает утечку вдоль штока в открытом верхнем поло-
жении.
В серийных конструкциях фильтров-влагоотделителей (В41-1) исполь-
зуется шариковый запорный клапан (см. рис. 12.15, а, б).
Автоматические конденсатоотводчики могут быть выполнены в виде отдель-
ных устройств, которыми оборудуются воздухосборники, водосборники и влаго-
отделители. В автоматических конденсатоотводчиках запорное устройство от-
крывается при достижении определенного уровня конденсата в резервуаре и за-
380
крывается после его сброса. В качестве запорного элемента применяют клапан,
цилиндрический золотник или кран (шибер).
Автоматическое устройство для отвода конденсата фильтра-влагоотделителя
типа В41-3 изображено на рис. 12.18, а. Серийное производство этих фильтров
организовано на черкесском заводе «Гидропневмонормаль». Когда конденсат
в резервуаре 1 отсутствует или его мало, клапан 6 закрыт, полость А отсекается
от давления сжатого воздуха и сообщается с атмосферой. Давление, действующее
на диафрагму 3 снизу, и усилие пружины 4 удерживают запорный клапан 5 в за-
крытом положении.
Когда жидкость достигнет уровня, при котором выталкивающая сила преодо-
левает вес поплавка 2,клапан 6открывается,сжатый воздух проходитв полость А,
запорный клапан открывается под действием давления на мембрану сверху. Про-
межуток времени между открытием и закрытием запорного клапана определяется
соотношением площадей проходных сечений отверстия Б, закрываемого клапаном
поплавка, и демпферного отверстия В.
Закупорка демпферных отверстий и набухание поплавка часто являются при-
чиной отказов работы конденсатоотводчика.
В изображенной на рис. 12.18, б конструкции для очистки демпферных от-
верстий предусмотрен игольчатый стержень.
Для удаления конденсата из емкостей, расположенных в труднодоступных
местах, применяют конденсатоотводчики с дистанционным управлением.
В изображенном на рис. 12.18, в конденсатоотводчике конденсат сбрасы-
вается небольшими порциями в закрытую полость Г с последующим отсечением
полости Б, которая сообщается через отверстие В с опорожняемой емкостью. Сигнал
управления подается в полость А, в результате чего поршень 1 перемещается вниз,
открывая верхний клапан и закрывая нижний. Конденсат переходит в полость Г.
При отсутствии давления в полости А клапан под действием пружины 2 возвра-
щается в исходное положение, а влага из полости вытекает через отверстие.
На рис. 12.18, г показан конденсатоотводчик, который присоединяется к си-
стеме с помощью штуцера 2 с вмонтированным в него фильтром 1. Конденсат по-
ступает через фильтр 1 в камеру А, где размещен клапан 4, прижатый пружиной 3
к седлу 6. При подаче сжатого воздуха в полость под мембрану 7 выступ 8 подни-
мает клапан 4 и конденсат стекает через канал Б. Из-за разности площадей мем-
браны и клапана клапан открывается при давлении меньшем, чем давление в сети.
При открытии клапана выступ открывает отверстие, давление под мембраной па-
дает, и клапан 4 под действием пружины 3 закрывает проход. Работоспособность
конденсатоотводчика при минусовых температурах обеспечивается нагревателем 5.
Для установки конденсатоотводчиков с дистанционным управлением тре-
буется дополнительная линия трубопровода управления и устройство для ручного
или автоматического приведения конденсатоотводчика в действие.
Рис. 12,18. Конденсатоотводчики:
а и б — поплавковые; в и 9 — с дистанционным управлением
381
Устройства осушки адсорбционного типа. Простейшее устройство для осушки
сжатого воздуха представляет собой наполненную адсорбентом емкость, через
которую проходит поток воздуха.
Более совершенными являются конструкции патронного типа. Адсорбент
в этих устройствах содержится в патроне, монтируемом в резервуаре осушителя.
После насыщения адсорбента патрон вынимают для регенерации, а вместо него
Монтируют другой, заранее подготовленный для работы.
Осушители большой пропускной способности представляют собой автомати-
зированные установки, состоящие из устройств предварительной очистки воздуха,
адсорберов, аппаратуры автоматического управления и фильтров для очистки
воздуха от пыли адсорбента. В зависимости от метода регенерации адсорбента
установки осушки разделяют на две группы, существенно отличающиеся друг от
друга режимом работы и конструктивным оформлением. К первой группе отно-
сятся установки осушки с термической регенерацией (с подводом теплоты извне),
ко второй — безнагревные установки (без подвода теплоты извне). Осушка сжа-
того воздуха в устройствах с термической регенерацией адсорбента прекращается
незадолго до момента проскока влаги. Следующей стадией процесса является уда-
ление поглощенной адсорбентом влаги. Нагревают адсорбент либо подачей в ад-
сорбер горячего воздуха, либо подогревом слоя извне и изнутри с помощью спе-
циальных нагревателей, причем в последнем случае для ускорения процесса ре-
генерации слой продувают для удаления десорбируемой влаги. После нагрева
адсорбент обычно охлаждают до рабочей температуры потоком осушенного воз-
духа или же естественным остыванием.
Блоки осушки воздуха адсорбционного типа с термической регенерацией
имеют следующие недостатки: большие размеры адсорберов; значительные энерго-
затраты вследствие расхода теплоты на нагрев адсорбента и корпуса адсорбера;
необходимость использования силовой электроэнергии или внешних источников
теплоты; сравнительную сложность технологической схемы и системы управле-
ния температурным режимом.
Техническая характеристика установок осушки адсорбционного типа с тер-
мической регенерацией, серийно изготовляемых Курганским заводом химического
машиностроения, приведена в табл. 12.15.
Работа установок осушки воздуха с холодной регенерацией основана на ис-
пользовании метода короткоцикловой безнагревной адсорбции.
Сущность этого метода заключается в том, что влажный воздух попеременно
пропускают через циклично работающие адсорберы. Адсорбент регенерируют про-
тивоточной продувкой его частью потока осушенного воздуха. Адсорберы пере-
Таблцца 12.15
Техническая характеристика установок осушки типа УОВ
Параметр УОБ-ЮМ1 УОВ-20М1 УОВ-ЗОМ1 УОВ-100
Номинальный расход воздуха ♦, м’/мин Температура точки росы осушенного воздуха, °C 10 20 40 30 100
Расход воздуха для регенерации, м’/мин 1,7 3,4 5,0 14
Количество адсорбента (для двух башен), кг 350 700 1050 2240
Расход воды для теплообменника, м8/ч 3 6 9 30
Потребляемая мощность, кВт 9-12 22 — 24 30 — 34 87
Ток Номинальное давление, МПа Переменный, 0,8 380 В, 50 Гц 1,6
Температура воздуха на входе в блок осушки, °C 25 — —
* Номинальный расход указан для воздуха, СТ СЭВ 521 —77 при давлении 0,8 МПа. приведенного к условиям по
382
ключаются через короткие промежутки времени, недостаточные для установления
состояния равновесия по водяному пару между воздухом и адсорбентом. Опти-
мальное значение полуцикла осушки (полный цикл состоит из полуциклов адсорб-
ции и десорбции) рекомендуется or 1 до 5 мин [5].
Объемный расход осушенного воздуха, который необходимо отобрать для ко-
роткоцикловой безнагревной регенерации можно определить из уравнения мате-
риального баланса влаги в адсорбционной установке:
Qo = (Qo + Q₽)
\ Pi
где Qo — объемный расход сухого воздуха, выводимого из установки; (% — объем-
ный расход сухого воздуха, поступающего на регенерацию адсорбента в один из
адсорберов; и р0 абсолютные давления адсорбции и десорбции.
Так, если pj = 0,6 МПа и р0 = 0,1 МПа, из установки может быть отобрано
следующее количество сухого воздуха;
Из рассматриваемого уравнения видно, что чем меньше давление, при кото-
ром происходит адсорбция, тем больше требуется воздуха на регенерацию. На
практике обычно на регенерацию адсорбента используется примерно 15—20%
всего количества осушенного воздуха.
Техническая характеристика установок осушки воздуха с холодной регенера-
цией, серийно изготовляемых Курганским заводом химического машиностроения,
приведена в табл. 12.16.
Выбор устройств для очистки воздуха и схемы их применения. Очистка воз-
духа на предприятии — это комплекс мероприятий по рациональному выбору,
размещению, монтажу и эксплуатации очистных устройств на трех участках
пневматической сети: на компрессорной станции, на магистральных воздухопро-
водах и у потребителя. Ниже приведены данные о наиболее характерных схемах
использования очистных и дренажных устройств на воздухопроводах и у потреби-
теля.
Удаление загрязнений из магистральных воздухопроводов. Выбор схем и уст-
ройств очистки воздуха в магистральных трубопроводах зависит от класса загряз-
ненности сжатого воздуха на выходе из компрессорной станции (установки) и от
требований к чистоте сжатого воздуха у потребителей.
В том случае, когда на компрессорной станции применена одна из схем с хо-
лодильником, по мере удаления от компрессорной станции концентрация загряз-
нений в магистралях возрастает вследствие конденсации паров воды и масла и
внесения трубопроводами и соединениями окалины, ржавчины, краски и др. Очист-
Таблица 12.16
Техническая характеристика установок с холодной регенерацией типа УОВБ
Параметр УОВБ-0.5М УОББ-2М УОВБ-5М
Номинальное давление, МПа Температура воздуха иа входе в блок осушки, °C Номинальный расход воздуха *, м8/мин Температура точки росы осушенного воз- духа, °C Расход воздуха для регенерации, м8/мин Расход воды для охлаждения, м3/ч Потребляемая мощность. кВт Ток ♦ Номинальный расход указан д; СТ СЭВ 521—77 при давлении сжатого 0,8 0,5 0,1 0,2 Перемс 1я воздуха, пр воздуха 0,6 М 1,0 25 — 40 1 5 ?,'2 | \ 0,5 нный, 220 В, 50 Гц иведенного к условиям по Ла.
383
иые устройства в магистральных воздухопроводах не только защищают их от
чрезмерного загрязнения и обводнения, но и предохраняют групповые и индиви-
дуальные очистные устройства от перегрузки и снижения эффективности, возмож-
ных при чрезмерных концентрациях загрязнений.
Определяющим фактором при выборе рационального места, конструкции,
размера и числа очистных устройств в магистрали является характер процесса
конденсации и накопления влаги при движении воздуха в трубопроводах.
Понижение температуры воздуха происходит в результате прохождения воз-
духа по длинным участкам воздухопроводов, расположенным вне помещений, на
участках воздухопроводов после литейных, термических, термоконстан»ных и
других цехов.
Обычно в магистральных трубопроводах устанавливают очистные устройства
инерционного типа, так как применение устройств фильтрующего типа приводит
к увеличению потерь давления при прохождении воздуха и усложняет эксплуа-
тацию магистральных очистных устройств. Воду и масло в жидком состоянии уда-
ляют из магистралей при помощи водосборников или очистных устройств. Водо-
сборники устанавливают в низких местах и коленах трубопроводов при большом
содержании конденсата перед магистральными влагоотделителями. Устройства
для улавливания влаги размещают в местах максимального скопления конден-
сата на входе в цехи. Для обеспечения нормальной работы водосборников и влаго-
отделителей необходимо принимать меры против замерзания в них конденсата
при минусовых температурах, по возможности располагать их в помещениях или
утеплять.
Если па компрессорной станции проводится очистка сжатого воздуха, исклю-
чающая конденсацию воды и масла в трубопроводах, с использованием адсор-
бентов или с помощью глубокого охлаждения, то надобность в установке водо-
сборников и влагоотделителей отпадает.
Удаление загрязнений у потребителя. Требуемая степень очистки сжатого
воздуха для различных групп потребителей может быть обеспечена установкой
соответствующих очистных устройств (рис. 12.19). Цифры внутри стрелок озна-
чают: на входе в схему — класс загрязненности сжатого воздуха, поступающего
из магистрали; на выходе из схемы — класс загрязненности сжатого воздуха,
обеспечиваемый в результате применения в данной схеме очистного устройства
(или устройств). Абсолютная топкость фильтрации в микрометрах указана под
каждым из устройств. Степень влагоотделения устройств очистки в схемах I—VIII
и X должна быть не менее 90%. Применение устройств очистки в схемах I—VIII
не исключает наличия определенного количества воды и масла в жидкой фазе в по-
токе воздуха (классы загрязненности воздуха на выходе 2, 4, 6, 8, 10, 12).
Для пневматических систем и технологических процессов, не допускающих
содержания в воздухе воды и масла в жидкой фазе, рекомендуются схемы IX—XX,
обеспечивающие очистку в соответствии с классами загрязненности 0, 1,3, 5, 7,
9 и 11.
В качестве примера применения схем и монтажа очистных устройств рассмо-
трим часть типовой пневматической системы (рис. 12.20). После компрессора 4
установлен концевой холодильник 3, затем влагомаслоотделитель 2, уменьшающий
количество попадающего в ресивер 1 компрессорного масла и конденсированной
в холодильнике влаги. Так как в ресиверах в результате расширения воздуха вы-
деляется значительное количество воды, после них установлены магистральные
влагоотделители 13 и 17, уменьшающие поступление воды в магистральный воз-
духопровод 15. Водосборник 12 и конденсатоотводчик 18 предохраняют влагоот-
делители 13 и 17 от перегрузки влагой.
Если магистральный трубопровод 9 имеет большую протяженность, то при
движении по нему воздуха успевает выделиться большое количество влаги и мо-
жет потребоваться несколько влагоотделителей.
Загрязнения из трубопроводов удаляются в наиболее низких точках 26, 27,
33, 38, 40 и 41 с помощью дренажных устройств (направления, в которых сни-
жаются трубопроводы, указаны стрелками 16, 23, 24, 25, 35 и др.). В местах, где
требуется удаление большого количества конденсата, установлены конденсато-
отводчики. Так как они чувствительны к твердым загрязнениям, вызывающим
заедание подвижных частей и засорение демпферных отверстий, конденсатоот-
384
~2Ш
SQunu 5мкм
25 м км
SOmkm
40нкм
40 мкм
40 мкм
5 или 0,5нкм
Юнкн
80 или 10 нкн
ООнкм
Рис. 12.19. Схемы очистки
сжатого воздуха у потреби-
теля
40 нкн
водчики 6 и 18 применяют совместно с водосборниками. Водосборником служит
труба 10, где оседают твердые загрязнения; водосборник периодически проду-
вается при открытии вентиля 11. Для той же цели предназначен вентиль 8, через
который удаляют отстой из ресивера, а конденсатоотводчик, присоединяемый выше
допустимого уровня скопления отстоя, через вентиль 7 отбирает более чистый
конденсат. Вентили 5 и 7 позволяют отсоединять конденсатоотводчик для ремонта
или замены без ненужного расхода сжатого воздуха.
Для подачи к потребителям сжатого воздуха с классом загрязненности 12
достаточно установить центробежный фильтр-влагоотделитель 20. Сжатый воздух
у потребителя в соответствии с классом загрязненности 8 или 10 очищается филь-.
трами-влагоотделителями 19 по ГОСТ 17437—72. Более высокая степень очистки
(классы загрязненности 2, 4 и 6) может также быть обеспечена фильтрами-влаго-
отделителями 34 и 42 этого типа, с требуемой тонкостью фильтрации. Рекомен-
дуется в этом случае устанавливать перед ними фильтры-влагоотделители 29 для
предварительной очистки.
Подача к потребителям сжатого воздуха, не содержащего жидкой влаги
(классы загрязненности 0, 1, 3, 5, 7, 9, 11), может быть обеспечена применением
установок осушки (например, типа УОВ), в комплект которых входят адсорберы
37 и узлы предварительной и окончательной очистки воздуха от загрязнений.
При централизованной сушке воздуха на компрессорной станции или в цехе
перед потребителем достаточно установить фильтр соответствующей тонкости
фильтрации; например, для класса 0 загрязненности можно применять фильтры
ФВ6-336 ГОСТ 14266— 69 или ФВ6. В этом случае также рекомендуется предвари-
тельно устанавливать фильтры с номинальной тонкостью фильтрации 10, 25 мкм.
Для пневматических систем низкого и среднего уровня давления, к надеж-
ности которых не предъявляется высоких требований, например цикловые системы
385
управления станками, прессами и литейными машинами, рекомендуется следую-
щая схема установки очистных устройств: групповой фильтр-влагоотделитель 21
типа В41-1, фильтр тонкой очистки 30 типа П-В, осушитель 28 типа П-О,
Для струйных устройств после устройств очистки устанавливают эжектор 31.
12.2. СМАЗКА ПНЕВМАТИЧЕСКИХ УСТРОЙСТВ
Одним из важнейших средств повышения надежности пневматических устройств
является обеспечение оптимального режима смазывания их трущихся по-
верхностей. Смазка трущихся поверхностей пневматических устройств снижает
трение покоя и движения в 2—5 раз, скорость износа в 1,5—2,5 раза, коррозии
в десятки раз.
Смазочные системы, используемые для подачи смазочного материала к тру-
щимся поверхностям устройств, классифицируют по следующим основным при-
знакам:
по виду смазочного материала — с жидким или пластичным смазочным мате-
риалом;
по виду подачи жидкого смазочного материала к поверхностям трения — ка-
пельная, струйная, аэрозольная; под капельной, струнной и аэрозольной смазоч-
ными системами понимают системы с жидким смазочным материалом, в которых
масло к поверхностям трения подается соответственно в виде капель, образую-
386
щихся под действием гравитационных сил, в виде струи и масляного тумана, соз-
даваемого распылением смазочного материала струей воздуха;
по способу дозирования подачи смазочного материала — объемного или дрос-
сельного дозирования; в системе объемного дозирования количество масла, пода-
ваемого к поверхностям трения, зависит от рабочего объема смазочного насоса или
питателя, а в системе дроссельного дозирования — от степени дросселирования
потока смазочного материала;
по характеру подачи смазочного материала — непрерывной подачи (система
обеспечивает постоянную подачу смазочного материала во время работы устрой-
ства) и периодической подачи (подача смазочного материала обеспечивается во
время работы устройства периодически);
по числу пневматических устройств (пар трения), к которым подается сма-
зочный материал — индивидуальная и централизованная;
по возможности контроля подачи смазочного материала — с неконтролируе-
мой подачей, с автоматическим и визуальным контролем;
в зависимости от степени автоматизации процесса подачи смазочного мате-
риала — ручные и автоматические.
Основными элементами смазочных систем являются смазочные нагнетатели,
аппараты и емкости.
Смазочные нагнетатели по назначению и конструктивной схеме подразделяют
на смазочные насосные агрегаты и станции, смазочные и заправочные шприцы.
Насосные агрегаты и станции предназначены для автоматической, а шприцы для
ручной подачи смазочного материала в устройства и резервуары смазочных
аппаратов и емкостей. Конструкции и технические характеристики серийно выпу-
скаемых смазочных нагнетателей приведены в работах [6, 7].
Смазочные аппараты — это смазочные питатели, маслораспылители и пресс-
масленки.
Смазочные питатели предназначены для подачи смазочного материала к од-
ной или нескольким парам трения пневматического устройства определенными
порциями. На рис. 12.21, а показана схема устройства и работы смазочного пита-
теля с подачей смазочного материала от централизованной смазочной системы.
При включенном гидрораспределителе Р смазочный материал через отверстие Б
поступает в полость над распределительным золотником 3, перемещает его в край-
нее нижнее положение и через канал 7 проходит в полость над поршнем 4 и запол-
няет ее. При переключении гидрораспределителя Р масло из смазочной системы
через отверстие А поступает под золотник 3, перемещает его в крайнее верхнее
положение и через канал 2 проходит в полость под поршнем 4. При этом поршень
4 выдавливает находящийся над ним смазочный материал через каналы 7 и 8 и об-
ратный клапан К в полость пневмоцнлиндра Ц. Последующие переключения
гидрораспределителя приведут к повторению цикла. Количество смазочного ма-
териала регулируется с помощью винта 6, завинченного в трубку визуального
контроля 5. Управление парораспределителем Р может быть ручным, от кулачка,
электрическим, пневматическим н т. п.
Для обеспечения надежной подачи смазочного материала к трущимся по-
верхностям пневматических устройств давление в централизованной смазочной
системе должно быть выше давления в сети.
На рис. 12.21, б, в приведены принципиальные схемы с шариковыми питате-
лями, обеспечивающие подачу смазочного материала при срабатывании пневма-
тического устройства. В схеме, изображенной на рис. 12.34, б, смазочный материал
из централизованной смазочной системы поступает в питатель П, наполняя ка-
меру Б при сообщении полости А пневмоцнлиндра Ц с атмосферой. При этом под
действием давления шарик 1 перекрывает отверстие 2. При подаче давления
в полость А шарик 1 перемещается вверх, отсекая камеру Б от смазочной системы,
и порция смазочного материала поступает в полость А.
На рис. 12.21, в показана схема с шариковым питателем П, смазочный ма-
териал к которому подается из емкости М, находящейся под давлением воздуха.
Как и в предыдущей схеме, зарядка питателя П смазочным материалом происходит
при сообщении штоковой полости пневмоцилиндра Ц с помощью пневмораспреде-
лителя Р с атмосферой, а подача смазочного материала в пиевмоцилиндр — прн
сообщении его с магистралью.
387
388
Для обеспечения надежной подачи смазочного материала усилие, развиваемое
давлением в смазочной системе на шарик питателя, должно быть меньше суммар-
ного усилия пружины и давления сжатого воздуха в штоковой полости цилиндра.
Питатели рекомендуется располагать выше уровня цилиндра и подсоединять непо-
средственно к его полости или входному штуцеру.
Маслораспылители обеспечивают подачу в пневматические устройства рас-
пыленного жидкого смазочного материала. По принципу подачи смазочного мате-
риала из емкости в поток сжатого воздуха маслораспылители могут быть эжек-
торного и фитильного типов.
В маслораспылителях эжекторного типа подача смазочного материала (мине-
ральных масел) обеспечивается при условии: Др > уыН, где Др — разность между
значениями давления в емкости маслораспылителя и давления в месте ввода мине-
рального масла в поток сжатого воздуха; уи — удельный вес минерального
масла; Н — высота, на которую необходимо поднять столб минерального масла
над его уровнем в емкости.
В маслораспылителях фитильного типа подача смазочного материала в зону
распыления происходит в основном за счет сил, действующих в капиллярах пори-
стого стержня.
Для подачи смазочного материала к трущимся поверхностям устройств наи-
большее применение в отечественной и зарубежной практике получили маслорас-
пылптелн эжекторного типа с однократным распылением смазочного материала
(рис. 12.21, г).
Выпускают также маслораспылители эжекторного типа с двукратным рас-
пылением смазочного материала. Характерным отличием этой конструкции масло-
распылителей является принцип отвода распыленного масла. В маслораспылителях
однократного распыления все масло, поступившее в зону распыления, уносится
потоком сжатого воздуха в систему, а в маслораспылителях двукратного распыле-
ния поток воздуха с распыленным маслом проходит через резервуар, где крупные
частицы масла осаждаются, а мелкораспыленное масло поступает к выходному от-
верстию. Подачу масла регулируют с помощью дросселя 1 (рис. 12.21, д), изме-
няющего перепад давления между полостями резервуара и под колпачком.
Повышение стабильности подачи масла при изменении расхода воздуха дости-
гается применением специального устройства (рис. 12.21, г), обеспечивающего ав-
томатическое изменение площади канала при изменении расхода воздуха и
поддерживающего постоянной скорость потока воздуха в канале эжекторного
сопла. Однако при понижении уровня масла в резервуаре маслораспылителя его
подача в зону распыления уменьшается. Этот недостаток особенно характерен для
маслораспылителей со значительной высотой резервуара.
На рис. 12.21, е показана конструкция устройства для поддержания постоян-
ства высоты всасывающего столба масла при изменении его уровня в резервуаре.
Устройство состоит из трубок 2 и 3, по которым сжатый воздух транспортирует
масло в емкость 1, откуда оно поступает в зону распыления.
В последнее время для устройств с малой величиной хода и расположением
их иа разных по уровню частях станков и машин в отечественной и зарубежной
практике находят применение смазочные питатели импульсного действия.
Подача смазочного материала устройствами этого типа происходит следующим
образом.
При подаче воздуха из магистрали в резервуар (рис. 12.21, ж) масло по
трубке 1 поступает под клапан 3, установленный с зазором в корпусе 2. Масло
в полость цилиндра через отверстие 5 подается в момент, когда клапан занимает
промежуточное положение между верхним и нижним седлами, ограничивающими
его ход. Полость цилиндра в это время сообщена с атмосферой. Настройка вели-
чины подачи масла обеспечивается регулированием усилия пружины 4 с помощью
винта 6, что изменяет время перемещения клапана от нижнего к верхнему седлу.
В одной пневмосистеме может быть смонтировано несколько питателей, что
обеспечивает подачу смазочного материала к отдельно расположенным пневмати-
ческим устройствам.
Для подачи смазочного материала в индивидуальных смазочных системах
с помощью нагнетателей применяют пресс-масленки по ГОСТ 19853—74, встроен-
ные в устройства.
389
1
Рекомендуемые смазочные системы и устройства
(смазочный материал — жидкий)
Таблица 12.17
Пневмоустройства Режим работы пневмоустройств Я- Тип смазочной системы Тип устройства подачи сма- зочного мате- риала
Пневмомоторы и пневмоинструмент с встроенным рас- пределителем Непрерывный до 120 включ/мнн Автоматическая, непрерывной подачи с дрос- сельным или объемным дози- рованием Маслораспыли- тели Смазочные пи- татели
Пневмомоторы ре- версивные с дистан- ционным располо- жением распреде- лителя реверса До 60 включ/мнн > 2
<2 Смазочные пи- татели
Свыше 60 включ/мип
Пневмоцнливдры, иеполноповоротные двигатели н другие устройства цикли- ческого действия До 4 включ/мин > 2 Маслораспыли- тели, смазочные питатели
<2 Смазочные пи- татели
От 4 до 60 включ/мин > 2 Маслораспыли- тели, смазочные питатели
<2 Смазочные пи- татели
Свыше 60 включ/мнн
Распределители, тормозные дроссе- ли, обратные, ре- дукционные и дру- гие клапаны
До 60 включ/мин Маслораспылн- тели, смазочные питатели
То же с изменением направления пода- чи сжатого возду- ха при работе До 60 включ/мии > 2 То же Смазочные пи- татели
<2
Свыше 60 включ/мип
Пневмоустройства всех типов Кратковремен- ный до 1 включ/ч * Ручная, реже автоматическая с периодической или непрерыв- ной подачей Напорные на- ливные маслен- ки, пресс-мас- лепки, шпряиы, маслораспылн- тели, смазочные питатели
Примечания: — отношение объема рабочей полости пневмо- двигателя (Для пиевмомоторов суммарный объем за одни цикл включения) к вну- треннему объему подводящнх трубопроводов (от пневмораспределителя до вход- ного отверстия пневмодвигателя); Vn/Vy — отношение объема сжатого воздуха, проходящего через проточное ПУ, к объему сжатого воздуха в подводящей пнев- молинии от места установки устройства подачн смазочного материала до входного отверстия проточного ПУ. * Смазочный материал — жидкий и пластичный.
390
Смазочные емкости. Для смазывания ряда устройств применяют безнапорные
фитильные и с запорной иглой масленки, а также напорные наливные масленки,
обеспечивающие периодическую подачу смазочного материала при завинчивании
колпачковой гайки, или при сообщении питателя 1 с пневмоприводом через пнев-
мораспределитель 2 с питанием (рис. 12.21, з).
Выбор смазочных устройств и систем. Большое разнообразие промышлен-
ных пневмосистем и объектов их применения не позволяет дать рекомендации по
выбору смазочных устройств и систем для всех случаев, вследствие чего эти реко-
мендации могут быть приведены только для типовых пневматических устройств.
В табл. 12.17 указаны области предпочтительного применения смазочных
устройств и систем для наиболее широко используемых в промышленности пнев-
матических устройств.
При выборе конкретных типов смазочных устройств и систем из рекомендуе-
мых в табл. 12.17 необходимо учитывать: тип, число, расположение и режим ра-
боты пневмоустройств в пневмосистеме; требования к надежности и периодичности
обслуживания пневмосистемы; требования к расходу смазочного материала;
технические характеристики, стоимость смазочных устройств и т. п.
Ниже приведен ряд рекомендаций по областям предпочтительного применения
различных типов устройств подачи смазочного материала.
1. Маслораспылители однократного распыления надежны и просты в эксплуа-
тации, что позволяет использовать их для подачи смазочного материала в пневмо-
устройства различных типов. Однако при режимах работы, расположении и пара-
метрах пневмоустройств, указанных в п. 2, их не рекомендуют к применению, так
как они не обеспечивают надежного смазывания устройств. Техническая характе-
ристика серийных маслораспылителей однократного распыления приведена
в табл. 12.18.
Типовые схемы установки маслораспылителей для пневмомоторов и пневмо-
инструмента приведены на рис. 12.22, а, б; для пневмодвигателей циклического
действия на рис. 12.22, е, ж; для проточных пневмоустройств на рис. 12.22, к, л.
При постоянном расходе воздуха место установки маслораспылителя не оказывает
существенного влияния на работу маслораспылителя. Однако при малой скорости
течения сжатого воздуха в трубопроводах смазочные масла перемещаются только
под действием гравитационных сил, вследствие чего рекомендуется монтировать
трубопроводы с уклоном в сторону смазываемых пневмоустройств.
Таблица 12.18
Техническая характеристика маслораспылителей однократного (В44-1)
н двухкратного (В44-2) распыления
Параметры
Условный проход, мм ..............
Давление, МПа:
номинальное ..................
минимальное ..................
Расход воздуха при давлении 0,4 МПа,
ма/мип:
максимальный..................
минимальный ..................
Потеря давления при максимальном
расходе МПа, не более ............
Пропускная способность л/мин
Диапазон регулирования подачн масла
при постоянном расходе воздуха,
капл/мин:
максимальном .................
минимальном ..................
Полезная емкость резервуара для
масла, см3 .......................
Долговечность, ч .................
Масса, кг.........................
СО TJ< СО СО 04 04 СО 04
3 2 3 S 3 3
12 16 25 12 16 25
1,0 0, 2 0,63
од 1.0 0,2 2,5 0,4 j 0,4 I 0,2 | 0,8 0.4 Д25
20 40 0,0 100 25 16 1 35 100
0—40 0 — 15 0 — 40
200 1,00 200 6000 1,00 400 1,64 200 1,00 200 5000 1,00 400 1,64
391
2. Маслораспылнтели двухкратного распыления из-за повышенного расхода
масла и возможности загрязнения рабочих помещений масляными аэрозолями,
как правило, не рекомендуют для смазывания пневмоустройств. Их применяют
в смазочных системах подшипниковых узлов, закрытых передач, для транспор-
тирования масляных аэрозолей к смазываемым узлам на значительные расстояния
(до 30 м) с установкой на выхлопе из смазываемых устройств фильтров или конден-
саторов для улавливания масляных аэрозолей.
3. Пневматические питатели импульсного действия рекомендуются для по-
дачи смазочного материала в пневмосистемах: с малой величиной хода подвижных
деталей пневмоустройства, прн резко отличающемся потреблении сжатого воз-
духа разными устройствами; в тяжелых условиях по запыленности н влажности
окружающей среды, при высоких нагрузках и требованиях к надежности; при
наличии большого числа смазываемых пневмоустройств, расположенных на раз-
ных уровнях; при значительной протяженности пневмолнний от распределителя
к исполнительному устройству.
На рис. 12.22, г, и, м приведены типовые схемы установки пневматических
питателей импульсного действия. Рекомендуется подключать линию подвода сма-
зочного материала от питателя непосредственно к входному штуцеру смазывае-
мого устройства с расположением питателя выше уровня установки писвмоуст-
ройства.
4. Питатели централизованной смазочной системы станков, прессов и других
машин незаменимы для пневмоустройств с высокой цикличностью, в которых
пневматические питатели не могут быть использованы из-за их относительно низ-
кого быстродействия. Типовые схемы их установки приведены на рнс. 12.22,
в, д, з, к.
5. Безнапорные наливные масленки рекомендуют для подачи смазочного ма-
териала в подшипниковые опоры и редукторы пневмоустройств, работающих в отно-
сительно легких режимах (например, эпизодического действия), а также в нера-
бочие полости пневмоустройств (рис. 12.22, л).
6. Напорные наливные масленки могут быть использованы как в случаях,
указанных для безнапорных масленок, так и для периодической ручной подачи
392
смазочного материала к трущимся поверхностям втулки и штока пневмоцилиидра,
муфты подвода воздуха и т. п.
7. Пресс-масленки и смазочные шприцы применяют для ручного ввода сма-
зочного материала в пневмоустройства, работающие в относительно легких по
нагрузке и цикличности режимах работы. Кроме того, эти устройства нашли при-
менение в системах, где использование устройств автоматического ввода в поток
смазочного материала (минеральных масел) не допускается из-за выноса масля-
ных аэрозолей в атмосферу.
Краткая характеристика смазочных материалов. Для смазывания трущихся
поверхностей пневмоустройств используют жидкие, пластичные (консистентные)
и твердые смазочные материалы. В последнее время в пневмоустройствах все шире
применяют самосмазывающиеся материалы. При выборе смазочных материалов
необходимо учитывать следующие факторы: материал трущихся поверхностей,
рабочую температуру, частоту вращения или линейную скорость, нагрузку,
эксплуатационные требования и др.
Системы с жидким смазочным материалом имеют следующие преимущества:
низкий коэффициент трения, возможность применения при высокой частоте вра-
щения и линейной скорости, охлаждающее действие и возможность обеспечения
непрерывной подачи нового масла. К недостаткам этих систем относятся утечка,
относительно большой расход смазочного материала, загрязнение окружающей
среды масляными аэрозолями и парами. К положительным свойствам смазочных
систем с пластичным смазочным материалом следует отнести: возможность приме-
нения для смазывания трущихся поверхностей пневмоустройств, работающих
при высокой температуре, вибрациях, большой нагрузке; длительность смазы-
вающего эффекта; меньшую, по сравнению с жидкой смазкой, чувствительность
к наличию влаги в сжатом воздухе; простоту конструкции. Недостатками систем
с пластичным материалом являются относительно высокий коэффициент трения,
ограниченность применения при низких температурах, высокая трудоемкость об-
служивания устройств из-за необходимости периодического контроля и ручного
способа смазывания. Применение самосмазывающихся материалов в пневмо-
устройствах является в перспективе наиболее оптимальным решением проблемы
смазывания их трущихся поверхностей, однако серийный выпуск пневмо-
устройств такого типа в настоящее время отсутствует. Поэтому рациональный
выбор жидких смазочных материалов является наиболее актуальной задачей при
проектировании и эксплуатации пневмосистем.
Из жидких смазочных материалов наибольшее применение в пневмосистемах
получили минеральные масла, обеспечивающие хорошее распыленней последую-
щее осаждение капель на смазываемых поверхностях пневмоустройств.
Надежность работы маслораспылителей в значительной степени зависит от
вязкости применяемого масла. Масло с вязкостью до ЗОХ 10~4 м2/с (30 сСт) может
хорошо распыляться без подогрева, а при использовании масла с более высокой
вязкостью для обеспечения эффективного распыления, как правило, необходим
подогрев масла или сжатого воздуха. При неизменной настройке маслораспыли-
теля изменение вязкости масла влияет на его расход и количество полученного
масляного тумана. Поэтому для поддержания постоянства производительности
маслораспылителя изменение температуры масла при работе должно быть мини-
мальным.
При значительных изменениях температуры окружающей среды сорт масла
выбирают с учетом его нагрева (или охлаждения) и соответствующего изменения
вязкости. Применяющийся в системах сжатый воздух часто может содержать
влагу, которая вместе с масляным туманом поступает в пневмоустройство. По-
этому в масло целесообразно вводить антикоррозийную присадку, а в пневмоси-
сте.мах удалять влагу. При низких температурах окружающей среды применяют
масло с пониженной вязкостью или подогревают его. Для высоких температур
рекомендуются сорта масел с вязкостью до 10~2 м2/с (100 сСт) при температуре
50 °C. Для пневмоустройств, работающих в условиях ударных нагрузок и вибра-
ции, рекомендуются сорта масел, имеющие высокопрочную пленку.
Расход смазочных материалов определяют конструктивными параметрами и
материалами трущихся пар, а также режимом и условиями его работы (частота
включений, температура и др.).
393
Величины подачи минеральных масел обычно устанавливают из расчета
двух—пяти капель масла на 1 м3 свободного воздуха, поступающего в устройство.
Пластичные смазочные материалы (ЦИАТИМ-201, 221) используют для сма-
зывания эпизодически работающих пневмоустройств при невозможности или не-
допустимости применения жидких смазочных материалов. Расход пластичных
смазочных материалов определяют периодичностью смазывания пневмоустройства.
При качественной очистке сжатого воздуха (отсутствие влаги в жидком состоя-
нии) и правильном выборе трущихся пар период между внесением пластичного
смазочного материала обычно составляет 5000—50 000 включений пневмоустрой-
ства. Наличие влаги в сжатом воздухе значительно сокращает время между пе-
риодами смазывания.
Смазочные материалы для пневмоустройств должны быть стойкими к окисле-
нию, не должны оказывать разрушающего воздействия на материал уплотнений
и образовывать отложений.
12.3. БОРЬБА С ШУМОМ И ЗАГРЯЗНЕНИЕМ
ОКРУЖАЮЩЕЙ СРЕДЫ ПРИ РАБОТЕ ПНЕВМОСИСТЕМ
Увеличение быстродействия и энергоемкости пневматических устройств привело
к резкому возрастанию интенсивности шума и загрязнению окружающей среды
масляными аэрозолями из-за выноса смазочных материалов с отработанным воз-
духом. Шумы, возникающие при работе устройств, могут быть механического
и аэродинамического происхождения.
Шумы механического происхождения возникают при ударах поршней, зо-
лотников, клапанов, вибрации трубопроводов и т. п.; снижение их уровня до
требований санитарных норм достигается в результате оптимизации конструк-
тивных параметров этих устройств или введения тормозных и амортизирующих
устройств.
Наиболее сложной задачей является борьба с шумами аэродинамического
происхождения, возникающими в основном из-за турбулентного смешения сжа-
того воздуха с окружающей средой при выхлопе. Интенсивность этого шума про-
порциональна восьмой степени скорости истечения струи сжатого воздуха.
Так как давление сжатого воздуха в промышленных пневмосистемах состав-
ляет 0,4—0,6 МПа, истечение сжатого воздуха в атмосферу при выхлопе происхо-
дит, как правило, в надкритическом режиме со скоростью потока, близкой к ско-
рости звука.
Уровень шума при работе наиболее распространенных пневмоприводов, не
оснащенных устройствами его снижения, составляет 95—120 дБА, причем наи-
большие значения уровня расположены в высокочастотной части спектра.
Таким образом, уровень шума при работе пневмоприводов существенно пре-
вышает действующие санитарные нормы, а импульсный и высокочастотный харак-
тер шума усугубляют вредное воздействие его на человека.
Компрессорное масло и смазочные материалы для смазывания пневмоуст-
ройств, содержащиеся в сжатом воздухе, при выхлопе распыливаются и загряз-
няют воздух производственных помещений. Концентрация масляных аэрозолей
(масляного тумана) более 5 мг на 1 м3 воздуха производственных помещений может
привести к ингаляционному повреждению легких.
Для снижения уровня шума при выхлопе сжатого воздуха применяют актив-
ные и реактивные глушители. Активные глушители (глушители трения) наиболее
универсальны и эффективны в широком диапазоне частоты (25—8000 Гц). Их из-
готовляют как отдельные устройства, реже — встроенными, для применения с раз-
личными видами пневмоприводов, в том числе с пневматическими двигателями
поступательного и вращательного движения. Реактивные глушители (акустиче-
ские фильтры) используют, как правило, для снижения шума пневматических
моторов и инструментов с определенной полосой частот наибольшей интенсивности
шума. Сопротивление реактивных глушителей меньше, чем активных, однако
большой размер и появление из-за вихреобразования собственного низкочастот-
ного шума значительно сужает область их применения.
Из применяемых глушителей наиболее широкое распространение получили
активные глушители с радиальным выходом потока воздуха. Звукопоглощающий
394
Рис. 12.23. Конструкции, устройств для снижения
шума:
о — с втулкой из пористой керамики или пластмас-
сы; б — из пористой металлокерамики; в — фильтр-
глушитель
элемент в глушителях этого типа представляет
собой пористую втулку, изготовляемую из по-
ристого материала (синтетики, металлокерами-
ки, шамотной керамики и т. п.).
Наиболее эффективны глушители с втулками
из пористой синтетики с порами размером до
100 мкм, имеющие достаточно высокую про-
пускную способность и обеспечивающие улав-
ливание масляных аэрозолей в отработанном
сжатом воздухе.
На рис. 12.23, а приведена конструкция,
а в табл. 12.19 [9] даны основные параметры
глушителей типа П-ГН, выпускаемых черке-
сским заводом «Гидропневмонормаль». К недостаткам глушителей этого типа
(с втулками из керамики и пористой пластмассы) следует отнести большие раз-
меры и низкую прочность звукопоглощающего элемента.
Глушители шума с втулками из пористой металлокерамики (рис. 12.23, б)
имеют небольшие размеры и высокую прочность, однако их эффективность по
улавливанию масляных аэрозолей ниже.
При повышенных требованиях к улавливанию масляных аэрозолей при вы-
хлопе сжатого воздуха необходимо использовать специальные глушители комби-
нированного типа. Конструкции глушителей этого типа могут быть построены на
базе фильтров-влагоотделителей типа 3 по ГОСТ 17437—72.
При поступлении в фильтр-глушитель (рис. 12.23, в) сжатый воздух проходит
через первый мелкопористый слой фильтроэлемеита, в котором мелкие частицы
масла объединяются в более крупные капли, затем проходит через второй, грубо-
волокнистый слой фильтроэлемеита. Расширение сжатого воздуха во втором слое
фильтроэлемеита и на выходе приводит к значительному снижению скорости по-
тока воздуха, и капельки масла под действием силы тяжести выпадают и соби-
раются в нижней части резервуара. Выхлоп воздуха в атмосферу происходит через
пористую втулку. Устройства этого типа эффективно снижают шум и улавливают
масляные аэрозоли. Учитывая более сложную конструкцию, более высокую стои-
мость и увеличенные размеры, целесообразно устанавливать фильтр-глушитель
иа общем выхлопном трубопроводе для всей пневмосистемы.
Техническая характеристика глушителей типа П-ГП
(номинальное давление в системе 0,63 МПа,
потеря давления при номинальном расходе 0,02 МПа)
Таблица 12.19
Параметр П-ГП 8/0,63 П-ГП 12/0,63 | П-ГИ 16/0,63 | П-ГП 20/0,63
Условный проход, мм , . Номинальный расход воз- 8 12 16 20
духа, м’/мии Общий уровень шума, дБА Долговечность, ч , „ . , 0,4 1.0 1,6 85 5000 2.5
Масса, кг 0,180 0,300 | 0,450 0.750
395
СПИСОК ЛИТЕРАТУРЫ
1. Басманов П. И.г Борисов Н. Б. Фильтры АФА. Каталог — справочник. М.:
Атомиздат, 1970. 44 с.
2. Башта Т. М. Машиностроительная гидравлика. Справочное пособне. М.: Машнно»
строение, 1971. 542 с.
3. Герц Е. В., Крейнин Г. В. Динамика пневматических приводов машин-автома-
тов. М.: Машиностроение, 1969. 236 с.
4. ЛишневскиЙ М. И. Воздухоснабжение пневматических систем автоматизации.
Тематический обзор. М.: 1973. 80 с. (ЦНИИТЭнефтехим).
5. СидоровА. И., Шумяцкий Ю. И. Адсорбционная осушка газов. М.: 1972. 104 с
(МХТИ).
6. Смазочное оборудование. Каталог. М.: 1979. 142 с. (НИИМАШ).
7. Смазочное оборудование. Каталог—справочник. М.:, 1969. 225 с. (НИИМАШ).
8. Ужов В. Н.,Мягков Б. И. Очистка промышленных газов фильтрами. М.: Химия,
1970. 148 с.
9. Элементы и устройства пневмоавтоматики высокого давления. Каталог. М.
1978. 154 с. (НИИМАШ).
10. Newman Р. Е., Connel С. F. Selecting dry compressed air sistems <Air Conditio-
ning, Heating and Ventilating», november, 1978, p. 47—51.
11. O' Keete W. Air dryers, aftercoolers and filters. — Power, 1972, № 12, p. 21—28.
12. Pneumatic Handbook. Second Edition Morden, Surrey, Trade and Technical Press
Ltd., 616 p.
13. Warring R. H. Filters and filtration. Morden, Surrey, Trade and Technical Press
Ltd. 1969. 228 p.
ПРИЛОЖЕНИЕ 1
Значения установившихся значений скорости и давления
(X =0,1, Пг1 = 0,9)
й °а = = 0,1 °а = 0,15 °а = 0,2 °а = 0,25
Ч’ °1У 1у °1У ^У °1У Ёу °!У
0,5 0,1261 0,9500 0,1261 0,9500 0,1261 0,9500 0,1261 0,9500
1,0 0,2468 0,8220 0,2468 0,8220 0,2468 0,8220 0,2468 0.8220
1,5 0,3592 0,6817 0,3592 0,6817 0,3592 0,6817 0,3592 0,6817
2,0 0,4627 0,5582 0,4627 0,5582 0,4627 0,5582 0,4625 0,5584
2,5 0,5606 0,4620 0,5597 0,4624 0,5583 0,4630 0,5406 0,4797
3,0 0,6526 0,3960 0,6526 0,3960 0,6526 0,3960 0,5928 0,4383
5,0 0,9961 0,2630 0,8791 0,2920 0,7720 0,3354 0,6819 0,3780
Q ста = 0,3 ста = 0,4 ста = 0,5 ста = 0,6
5’ °1у ^У °1У -у °1У Ёу а1У
0,5 0,1261 0,9500 0,1261 0,9500 0,1251 0,9509 0,1176 0,9536
1,о 0,2468 0,8220 0,2459 0,8227 0,2349 0,8363 0,2090 0,8650
1,5 0,3592 0,6817 0,3450 0,6995 0,3102 0,7434 0,2649 0,7999
2,0 0,4522 0,5703 0,4080 0,6220 0,3530 0,6893 0,2945 0,7631
2,5 0,5108 0,5065 0,4442 0,5790 0,3773 0,6593 0,3109 0,7425
3,0 0,5474 0,4760 0,4654 0,5552 0,3914 0,6420 0,3204 0,7300
5,0 0,6084 0,4254 0,4980 0,5196 0,4130 0,6161 0,3357 0,7113
(X = о. 2. П„ = 0,9)
Й °а = 0,1 °а = 0,15 °а = 0,2- °а = 0,25
ty °1У Ч’ °1У Ёу °1У Ёу °1У
0,5 0,1240 0,9487 0,1240 0,9487 0,1240 0,9487 0,1240 0,9487
1.0 0,2421 0,8275 0,2421 0,о275 0,2421 0,8275 0,2421 0,8275
1.5 0,3508 0,6922 0,3508 0,6922 0,3508 0,6922 0,3508 0,6922
2,0 0,4497 0,5730 0,4494 0,5734 0,4490 0,5736 0,4380 0,5860
2,5 0,5392 0,4800 0.5392 0,4800 0,5292 0,4890 0,4865 0,5319
3,0 0,6236 0,4150 0,6047 0,4279 0,5590 0,4630 0,5130 0,5040
5,0 0,7950 0,3250 0,6950 0,3723 0,6162 0,4190 0,5529 0,4680
й ° а = = 0,3 ° а = 0,4 °а = 0,5 ° а = 0,6
°1У Ёу °1У 1у aiy Ч’ а1У
0,5 0,1240 0,9487 0,1240 0,9487 0,1190 0,9525 0,1044 0,9631
1,0 0,2421 0,8275 0,2375 0,8340 0,2126 0,8619 0,1735 0,9039
1,5 0,3469 0,6972 0,3156 0,7365 0,2697 0,7939 0,2151 0,8591
2,0 0,4152 0,6135 0,3593 0,6819 0,2982 0,7586 0,2324 0,8392
2,5 0,4517 0,5707 0,3822 0,6532 0,3141 0,7384 0.2444 0,8249
3,0 0,4720 0,5477 0,3952 0,6370 0,3243 0,7256 0,2504 0,8177
5,0 0,5018 0,5164 0,4153 0,6132 0,3360 0,7100 0,2591 0,8071
397
Продолжение
(X = 0,3, П,1 = 0,9)
Й °а = 0,1 °а “ 0,15 0 а = 0,2 °а = 0,25
Sy °1У 1у °1У Sy aiy Sy °1У
0,5 0,1217 0,9509 0,1217 0,9509 0,1217 0,9509 0,1187 0,9528
1,0 0,2344 0,8341 0,2344 0,8341 0,2344 0,8341 0,2344 0,8341
1,5 0,3411 0,7044 0,3411 0,7044 0,3411 0,7044 0,3367 0,7099
2,0 0,4343 0,5911 0,4343 0,5911 0,4216 0,6058 0,3953 0,6396
2,5 0,5150 0,5025 0,4958 0,5219 0,4606 0,5605 0,4240 0,6027
3,0 0,5718 0,4525 0,5243 0,4935 0,4799 0,5390 0,4391 0,5852
5.0 0,5882 0,4390 0,5588 0,4630 0,5048 0,5126 0,4592 0,5619
й °а = 0,3 °а = 0,4 °а = 0,5 °а = 0,6
Sy °1у Sy °1У Sy °1У 1у °1У
0.5 0,1157 0,9550 0,1097 0,9595 0,0957 0,9689 0,0707 0,9828
1,0 0,2340 0,8346 0,2178 0,8560 0,1806 0,8968 0,1260 0,9479
1,5 0,3211 0,7295 0,2752 0,7872 0,2189 0,8663 0,1505 0,9262
2,0 0,3659 0,6734 0,3033 0,7520 0,2367 0,8341 0,1598 0,9174
2,5 0,3880 0,6460 0,3178 0,7338 0,2464 0,8224 0,1663 0,9111
3,0 0,3999 0,6314 0,3253 0,7244 0,2520 0,8250 0,1696 0,9076
5,0 0,4172 0,6109 0,3381 0,7082 0,2600 0,8030 0,1743 0,9032
(X = 0, 4, П„ = 0,9)
Й °а = = 0,1 °а = 0,15 °а = = 0,2 °а = 0,25
aiy Sy а1У Sy aiy Sy °1У
0,5 0,1188 0,9526 0,1188 0,9526 0,1188 0,9526 0,1182 0,9527
1,0 0,2300 0,8417 0,2300 0,8417 0,2300 0,8417 0,2296 0,8423
1,5 0,3297 0,7188 0,3297 0,7188 0,3248 0,7248 0,3062 0,7484
2,0 0,4150 0,6134 0,4031 0,6279 0,3728 0,6636 0,3416 0,7038
2,5 0,4706 0,5493 0,4329 0,5922 . 0,3949 0,6377 0,3579 0,6833
3,0 0,4791 0,5399 0,4464 0,5768 0,4054 0,6250 0,3655 0,6739
5,0 0,5089 0,5085 0,4617 0,5593 0,4195 0,6084 0,3782 0,6583
Й °а = = 0,3 ° а ' = 0,4 ° а = = 0,5
°1У 1у °1У Sy °1У
0,5 0,1160 0,9549 0,1095 0,9596 0,0832 0,9762
1,0 0,2214 0,8519 0,1861 0,8910 0,1311 0,9430
1,5 0,2814 0,7795 0,2233 0.8497 0,1527 0,9240
2,0 0,3086 0.7453 0,2400 0,8298 0,1624 0,9150
2,5 0,3216 0,7289 0,2487 0,8196 0,1675 0,9099
3,0 0,3297 0,7188 0,2533 0,8138 0,1699 0,9077
5,0 0,3397 0,7062 0,2610 0,8048 0,1749 0,9027
398
Продолжение
(X = 0.5. Пг1 = 0,9)
Q Оа = °.1 Оа - 0,15 °а — 0,2 Оа = 0,25
ty °1У “У aiy °1У 1у aiy
0,5 1,0 1,5 2,0 2,5 3,0 5,0 0,1156 0,2227 0,3158 0,3822 0,4036 0,4128 0,4216 0,9555 0,8504 0,7362 0,6532 0,6270 0,6161 0,6056 0,1156 0,2227 0,3111 0,3497 0,3644 0,3726 0,3807 0,9555 0,8504 0,7421 0,6936 0,6753 0,6650 0,6550 0,1156 0,2227 0,2885 0,3154 0,3267 0,3325 0,3404 0,9555 0.8504 0,7706 0,7368 0,7226 0,7153 0,7053 0,1156 0,2110 0,2598 0,2785 0,2890 0,2940 0,3011 0,9555 0,8637 0,8061 0,7831 0,7699 0,7637 0.7548
Q °а = = 0,3 % = = 0,4
°1У 1у °1У
0,5 1,0 1,5 2,0 2,5 3,0 5,0 0,1115 0,1916 0,2284 0,2435 0,2513 0,2554 0,2615 0,9581 0,8851 0,8438 0,8254 0,8164 0,8114 0,8041 0,0867 0,1353 0,1555 0,1644 0,1688 0,1713 0,1754 0.9742 0,9394 0,9214 0,9130 0,9086 0,9061 0,9022
(X — 0,6, П21 — 0,9)
Й °а = 0,1 °а = 0,15 °а = 0,2 Оа = 0,25
°1У 1у °1У aiy Sy °1У
0,5 1,0 1,5 2,0 2,5 3,0 5,0 0,1107 0,2127 0.2821 0,3227 0,3310 0,3353 0,3420 0,9580 0,8609 0,7782 0,7271 0,7170 0,7101 0,7033 0,1107 0,2111 0,2606 0,2863 0,2925 0,2972 0,3044 0,9580 0,8618 0,8049 0,7740 0,7660 0,7599 0,7515 0,1105 0,1951 0,2341 0,2484 0,2533 0,2583 0,2627 0,9584 0,8822 0.8366 0,8203 0,8140 0,8088 0,8031 0,1101 0,1808 0,2001 0,2082 0,2137 0,2176 0,2213 0,9589 0,9029 0,8775 0,8658 0,8611 0,8571 0,8526
й ° а = 0,3
£ Ъу °1У
0,5 1,0 1,5 2,0 2,5 3,0 5.0 0,0962 0,1374 0,1540 0,1660 0,1700 0,1730 0,1760 0,9719 0,9377 0,9229 0,9109 0,9078 0,9050 0,9018 |
399
Продолжение
(Х = 0,7, П21=0,9)
Q ° а = 0,1 °а = 0,15 °а = 0,2 ° а = 0,25
^у °1У «у °1У °1У Ч aiy
0,5 0,1072 0,9615 0,1022 0,9618 0,0954 0,9690 0,0710 0,9827
1,0 0,2016 0,8750 0,1845 0,8978 0,1453 0,9300 0,1017 0,9650
1,5 0,2383 0,8323 0,2044 0,8712 0,1630 0,9148 0.1123 0,9580
2,0 0,2542 0,8136 0,2133 0,8617 0,1690 0,9085 0,1157 0,9550
2,5 0,2574 0,8091 0,2167 0.8574 0,1720 0,9055 0,1181 0,9530
3,0 0,2622 0,8032 0,2187 0,8550 0,1737 0,9038 0,1190 0,9520
5,0 0,2633 0,8021 0,2216 0,8518 0,1760 0,9014 0,1220 0,9500
ПРИЛОЖЕНИЕ 2
Давление (упругость) насыщенного водяного пара
Тем- пера- тура, °C Давление Рнп насы- щенного водяного пара, Па Тем- пера- тура, °C Давление рнп насы- щенного водяного пара, Па Тем- пера- тура, °C Давление рнп насы- щенного водяного пара, Па
-60 1,08 -22 85,3 + 16 1915
— 58 1.41 -20 102 --18 2 062
— 56 1,84 -18 125 --20 2 337
—54 2,37 — 16 151 --22 2 642
— 52 3,07 -14 181 --24 2 982
— 50 3,93 -12 218 --26 3 360
— 48 5,04 -10 260 --28 3 778
— 46 6,41 -8 310 --30 4 241
— 44 8,12 -6 369 4-32 4 753
-42 10,2 -4 437 + 34 5 318
— 40 12,9 — 2 517 --36 5 940
— 38 16,1 0 610 --38 6 624
— 36 20.1 + 2 706 + 40 7 375
—34 24,9 + 4 813 + 42 8 198
— 32 30,9 + 6 935 -44 9 100
— 30 38,1 1072 --46 10 085
— 28 46,8 + 10 1227 --48 И 162
— 26 — 24 57,3 70,1 + 12 + 14 1401 1597 + 50 12 335
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Абсорбция 372
Адсорбция 363, 370
Б
Безразмерная нагрузка 41, 322
— установившаяся скорость 327, 396
Безразмерное время 321, 323—327
— давление 322, 328, 330, 396
---- атмосферное 322
Безразмерный конструктивный параметр
I 322, 327
— начальный объем 322
— параметр нагрузки 41, 322
В
Виды управления распределителей 82
Влагоемкость 370—372
— динамическая 371
— статическая 370
Влагосодержание воздуха 353
Влажность абсолютная 8
— относительная 8
Воздействие загрязнений на пневмоустрой-
ства
физическое 356
---------химическое 356
--------- электролитическое 356
Воздух влажный 8, 353
Воздухосборник 23
Временное устройство 294
Время безразмерное 321, 323—327
— защитного действия слоя адсорбента
371
— истечения из полости до заданного дав-
ления 315, 316, 319
— наполнения полости до заданного дав-
ления 310, 312, 318
— распространение волны давления 321
Время срабатывания 19, 27, 42, 320
— — Дискретного пиевмоустройства 320,
322, 324, 325
----пневмораспределнтелей 86, 87
Выбор материала прокладок 143
--- и типа трубопроводов 170
— пневмораспределителей 84
— пневмоцилиндра с заданным законом
движения поршня 42
— редукционных пневмоклапанов 127
— смазочных устройств н систем 391
— степени очистки сжатого воздуха 356
— типа пневмомоторов 59, 60
— устройств для очистки воздуха 383
— — осушки сжатого воздуха 383
Выключатель путевой струйный 222
Г
Газ идеальный 9, 10
— реальный 10
Газовая постоянная удельная 10, 13,
311, 353
Генератор импульсов 294
Герметизация гибкими разделителями 157
— манжетными уплотнениями 151 — 154
— неподвижных соединений 140
— — — иеразборных 140
------ — разборных 140
— соединений с возвратно-поступательным
движением 147
Герметичность пиевмоустройств 140
Гидравлический радиус 123
Гндрофобизация 366
Глушитель активный 394
— реактивный 394
Д
Давление абсолютное 8, 12, 13, 20, 21
— атмосферное 8
— безразмерное 322, 328, 330
— в магистрали 310
— избыточное 8, 69
— номинальное 95—109
— нормальное атмосферное 8
— питания 109
— установившееся 319, 396
Датчик размера 221
— температуры 193
— уровня жидкости 193
401
Движение изоэнтропическое 10
Дроссель см. пневмодроссель
3
Загрязнения сжатого воздуха 352
-------водой 352
— —. _. газообразные 354
— — — маслом 353, 355
-------твердые 354. 355
Задатчик 200
Закон Бойля —Мариотта 9
— Гей-Люссака 9
— термодинамики первый 10
— Шарля 9
И
Импульсатор 294
Индикатор давления 71, 76, 77
— — малогабаритный 77
К
Клапан см. пиевмоклапаи
Классы загрязненности сжатого воздуха
355
Командоаппарат 192, 283 — 287
Компрессор 23 — 25
Кондиционирование сжатого воздуха 352
Конструктивный параметр безразмерный
322, 326, 327
Контур графа 280
Концевой холодильник 280
Коэффициент динамической вязкости 10, 13
— кинематической вязкости 10, 358
— очистки 361, 363
--- фрикционный 361
— - полезного действия 59
— пропускной способности 322
— расхода 12, 18, 126, 310, 311
— сопротивления 125, 311, 317
— теплопроводности 358
— теплоотдачи 358
Л
Логическая система 270
Логические функции 267, 293
— — в дизъюнктивной нормальной форме
269
— — в конъюнктивной нормальной форме
269
---в дизъюнктивной совершенной нор-
мальной форме 269
— — в конъюнктивной совершенной нор-
мальной форме 269
Логический элемент 195
м
Манжета 143
Макросптуация 280
Маслораспылитсль 389 ;
Маслодержяние воздуха 353
Материалы уплотнений 166
Матрица Карно 271
---для’выходных переменных 274
---для промежуточных переменных 274
— переходов 274
Мембрана 332
Метаописание 277, 279
Метод Хафмеиа 272
— построения систем управления с при-
менением логических схем алгоритмов
275
Методика расчета пневмоустройства 322,
325
Минимизация логической функции 271
Монтаж струйных систем 259
— трубопроводов 259
— электроаппаратуры 260
Мощность струйных элементов 211
Муфты подвода воздуха 187
И
Нагрузка безразмерная 41, 322
Надежность пневматических устройств и
систем 19, 212
Напряжения, допускаемые для листовой
резины 44
О
Общие требования к системам управления
265
Объем безразмерный 322
— — начальный 322
— удельный 8, 9, 13
— эквивалентный 312, 316
Оператор 275
Основные данные по металлическим тру-
бопроводам 174
-------пластмассовым трубопроводам 177
— __ _ пневмокабелям 178
— — — рукавам и резиновым трубкам 177
—- —- — соединениям для металлических
труб 184
Основные параметры пиевмомоторов порш-
невых 52
— — — различных типов 60
— — — пластинчатых 54
— — — шестеренных 52
-------радиально-поршневых 56
— показатели адсорбентов 372
— свойства адсорбентов 371
Осушитель рефрижераторного типа 373
Осушка сжатого воздуха комбинирован-
ными способами 373
— _ — охлаждением 373
— — — редуцированием 373
Отношение давлений критическое 13
402
надкритическое 13
подкритическое 13
Очиститель циклонный 368
П
Параметр безразмерной нагрузки 41, 322
----конструктивный 322, 326
Переключатель 191
Период заключительный 321
— подготовительный 321
Плотность 9, 13, 14
Площадь эффективная 18, 310, 312
---- мембраны 322
---- эквивалентная 322
Пневматическая система управления 263,
309
— — — аналоговая 263
-------дискретная 263
Пневматический конечный выключатель
192
Пневмоаппаратура направляющая 78
— регулирующая 121, 130, 264
Пневмовытеснитель 64
— без разделителя сред 64
— с разделителем сред 64
Пневмогидроаккумулятор 67, 73, 74
Пневмогидронасос 66
Пневмогидропреобразователь 65, 73, 74
Пиевмодвигатель камерный 32
— мембранный 31, 33, 43—45
— поворотный 32, 45—49
— поршневой 29 — 36, 359
— сильфонный 32, 45
— шиберный 47 — 49
— шланговый 32
Пневмодроссель 121, 197, 312
— выхлопной 121, 316
— ламинарный 126
— нерегулируемый 121
— переменный 122, 125
— постоянный 123
— регулируемый 121, 126
— с механическим управлением 121
— с обратным клапаном 132, 135
— тормозной 121, 122, 137
— турбулентный 123, 126
— цилиндрический 122, 123, 126
— щелевой 122, 123, 125
Пневмоемкость 198
Пневмоклапаи быстрого выхлопа 88, 89
— выдержки времени 92, 119
— логический «И» 91, 118 • -
----«ИЛИ» 91, 118
— обратный 87, 114
— последовательности 89, 116, 117
— предохранительный 128—130, 137
— редуктивный 127, 130—134
Пневмокиопка 191
Пневмолинии 170
Пиевмомотор 32, 49 — 83, 359
— винтовой 33, 58
— мембранный 33, 57, 58
— пластинчатый 33, 49, 53—55
---нереверсивный 53, 54
— — реверсивный 54
— поршневой 33, 55—57
— — пятицилиндровый 56
— турбинный 33, 58, 59
— шестеренный 32, 50—53
Пневмопреобразователь 64
Пневморазъем 189
Пневмораспределитель 78
— клапанный 79, 83
— крановый 78, 84
— нормально закрытый 79
открытый 79
— с золотником цилиндрическим 83
— — — плоским 79, 84
Пневмотумблер 191
Пневмоцилиндр 29, 83
— поршневой 29, 30, 34 — 36, 38
— — вращающийся 31, 36, 37
— — — с полым штоком 31
— — — со сплошным штоком 31
---двустороннего действия 29, 30, 35 —
40
— с двусторонним штоком 30,
35-40
— — зажимной 30, 40
— — одностороннего действия 29, 30, 34
— — с гибким штоком 38
ударный 39
— сдвоенный 34, 35
— — с внешним нагружением 45
---с внутренним нагружением 45
---транспортирующий 40, 41
Пневмоэлектропреобразователь 77, 198
Повторитель 196
Подкуб в матрице Карно 272
Позиционер поршневой 36—38
Полость объема переменного 309, 320
— — постоянного 309, 310
--- — проточная 318, 319
Проектирование пневматических систем
управления 263
---------- на элементах «Волга» 227
Пропускная способность 17, 18, 322
— — распределителя 85
Прокладки 144
Проход условный 16, 95 — 109
Процесс термодинамический 10, 11, 68,
74, 75
Р
Расход воздуха критический 20 — 22, 311
— — массовый 12, 23, 125, 311
— — объемный 17—19, 22, 23, 42
— — — в двигателях 62
403
•-------в дросселях 125
-------- в моторах 62, 63
Расчет динамический пневматических уст-
ройств 309, 322, 327, 335
---------с полостями постоянного объ-
ема 310—318
— мембран 332
— пиевмогидроаккумуляторов 68, 74, 75
— пневмораспределителей 84
— пневмоцилиидров 40—42, 328, 330,
337, 342
— прокладочных уплотнений 145
— трубопроводов 170, 179
Реализация булевых функций средствами
пневмоавтоматики 288
---------на аппаратуре высокого давле-
ния 291
---------пятилииейиых распределите-
лях 294
---------реле УСЭППА 291
---------струйных элементов 291
Режим течения ламинарный 123
— — турбулентный 123
— истечения надкритический 311, 312
--- подкритический 311, 312
— — установившийся 327
Реле давления 69, 75
--- дифференциальное 69
— расхода 226
— — измерительное 69
— трехмембраииое 194
— указательное 200
— физических величин 225
С
Свойства воздуха 8
Сигнал пневматический 19, 86
— управляющий 19
Синтез систем управления многотактных
272
-------- однотактных 271
Система элементов «Волга» 211, 227
---СТАРТ 202
---УСЭМПА 191, 201
---ЦИКЛ 204
Системы управления миоготактные 263
— — однотактиые 270, 272
---программного 250
— — с комаидоаппаратами 283 — 287
— смазывания 386
Скорость воздуха в трубопроводах 171
— безразмерная установившаяся 326, 327,
396
Смазка пневматических устройств 386
Смазочный нагнетатель 387
— емкости 391
— питатели 387
— устройства импульсного действия 389
Соединения 179
404
— быстроразъемиые 183, 187
— вращающиеся 187
— для пластмассовых трубопроводов 183
— неразъемные 179
— по внутреннему конусу 181
— поворотные 187
— по наружному конусу 181
— разъемные 180
— с вращающимся кольцом 181
---конусными муфтами 181, 183
---торцовым уплотнением 181
— фланцевые 180, 182
Соотношение между единицами измерения
давления 9
---температурными шкалами 9
Соотношения и законы булевой алгебры
266
Состояние входных переменных соседнее
271
—------условное 270
— системы управления 270
------- неустойчивое 270
------- устойчивое 270
Способ очистки сжатого воздуха гравита-
ционный 369
—------— инерционный 368
Способ осушки сжатого воздуха 370
— очистки сжатого воздуха 360, 362
--------- комбинированный 373
— установки манжет 151 —153
---резиновых колец 148—150
Стоимость сжатого воздуха 4, 23
Схема комбинационная 228
— логическая 227
— пороговая 242
— последовательностная 232
Т
Таблица состояний (истинности) 271
— переходов вторичная 274
— __ первичная 275
Температура абсолютная 8, 311, 316
Теплоемкость 10, 11
— удельная 10, 11
— — прн постоянном давлении 10, 11, 13
—------— объеме 10, 11, 13
Техническая характеристика глушителей
395
— _ индикаторов давления 76, 77
— — маслораспылителей 391
_ __ переключателя 109
— — пиевмогидроаккумуляторов 75
_ _ пневмогидропреобразователей 7 3
— — пневмодвигателей поворотных 47
---пиевмодросселей с обратными кла-
панами 136, 137
— тормозных 138
— пиевмоклапанов выдержки времени
120
------- «И* 120
-------«ИЛИ» 118
—-------- обратных 116
------- последовательности 116, 117
-------предохранительных 136, 137
--------- редукционных 132—134
---пиевмораспределителей 96—107, 115
— — пневмоцилиидров вращающихся 37
---пневмоэлектропреобразователей 19 8
— — приборов СТАРТ 202
— — реле давления 76
— — струйных аналоговых усилителей 219
—------дискретных элементов 214
-------путевых выключателей 223
---установок осушки адсорбционного
типа с термической регенерацией
382
---------с холодной регенерацией 383
---фильтров-влагоотделнтелей центро-
бежных 376
---фильтров для окончательной очистки
сжатого воздуха 379
---элементов УСЭППА 201
Течение ламинарное 13, 125
— турбулентное 13, 125
Точка росы 353, 355
Триггеры с раздельными входами 213, 297
— со счетным входом 233, 297, 299
Трубопроводы 170, 357
У
Удаление загрязнений из магистральных
трубопроводов 383
---иа выходе из компрессора 383
— — — линии всасывания компрессора
384
--- у потребителя 384
Уплотнение кольцами круглого сечення
140, 148
-------— плавающими 148
— — из металла и пластических материа-
лов 150
— — комбинированного типа 151
---прямоугольного сечения 149
— манжетами 151, 153, 155
Уплотнение лабиринтное 165
— сальниковое 155, 161
— торцовое 162
— щелевое 157
Уравнение Бернулли 12
— неразрывности потока 12
— процесса адиабатического 11, 12
— — изобарического 11
— — изотермического 11
---изохорического 11
— — политропического 11
— состояние газа 9
— давления 312, 316, 319, 328, 343
— движения 328, 330, 332, 338
— динамики 338, 339, 343
Уровни давления 4
Усилители 196
Устройство внешнее 221
вспомогательное 200
— входное 190
— выходное 198
— двустороннее без начального перепада
давления 342
---с начальным перепадом давления 337
— для отвода загрязнений 380
— задержки дискретного сигнала по зад-
нему фронту 294
---------По переднему фронту 294
----------по переднему и заднему фронту
294
— исполнительное 264, 275, 297, 309
— контроля размеров 256
— мембранное 332
— односторонние с пневмовозвратом 332
— — без пружины 328
---с пружиной 330
* - осушки абсорбционного типа 370
--- адсорбционного типа 370, 372
--- комбинированного типа 373
— распределительное 309
— с полостями переменного объема 309,
320—350
---постоянного объема 310—320
— струйное 206
— уплотнительное 140
---для соединений с возвратно-поступа-
тельным движением 147
---------с вращательным движением 160
— управляющее 212, 243, 261, 309
— центральной части 194
Утечки 19
Ф
Фильтрация 360, 361
Фильтрующие материалы волокнистые 355
---металлокерамические 355
---объемные 361
— — поверхностные 361
---сетчатые 355
Фильтры 204, 373, 376 — 380
Формирователи тактовых импульсов 255
Функция расходная 312
X
Характеристика настроечная Дросселя 122,
126
— расходная 16—18, 85, 122, 126, 361
— — пиевмораспределителей 86
--- редукционного пиевмоклапаиа 128
405
— регулировочная редукционного пневмо-
клапана 128
— смазочных материалов 390
— фильтрующих материалов 367
Ц
Циклограмма 321
Цилиндр пневматический 29, 34 — 38, 40—
45
— пневмогидравлический 38, 39
Ч
Число Рейнольдса 13, 123
Ш
Шум аэродинамический 394
— механический 394
Э
Электропневмопреобразователь 198
Элемент обратной связи 270
— памяти 270, 297
— струйный 206
---аналоговый 210, 218
---дискретный 210, 213 — 217
Энергия внутренняя 10
— — удельная 10
Энтальпия 10
Эффективность очистки 361, 368,' 379
— цикловых очистителей 368
Я
Язык логических схем алгоритмов 275
Язык ЯРУС 276
ОГЛАВЛЕНИЕ
Предисловие ...................
Введение.......................
Список литературы . .-.........
Глава 1. Общие сведения
о пневматических устройствах
и системах..................
1.1. Свойства воздуха ..........
1.2. Термодинамические процессы
1.3. Основные закономерности те-
чения газов ...................
1.4. Структура пневматических си-
стем и устройств ........... .
1.5. Основные параметры пневма-
тических устройств ............
1.6. Рабочее давление и расход
сжатого воздуха................
1.7. Общие сведения о компрессо-
рах и воздухосборниках . . .
1.8. Сравнительная оценка пнев-
матических и других
систем управления ....
Список литературы .............
Глава 2. Пневмодвигатели
2.1. Поршневые пневмодвигатели
2.2. Мембранные пневмодвигатели
2.3. Сильфонные пиевмодвнгатели
2.4. Поворотные пиевмодвнгатели
2.5. Пневмомоторы..............
Список литературы..........
Г л а в а 3. Пиевмопреобразо-
ватели ....................
3.1. Пневмовытеснители . . .
3.2. Пневмогидропреобразователн
3.3. Пневмогндроиасосы . . . .
3.4. Пневмогпдроаккумуляторы
3.5. Реле давления.............
З.б. Индикаторы давления . .
3.7. Технические характеристики
серийных преобразователей
Список литературы ............
Глава 4. Направляющая
пиевмоаппаратура .........
4.1. Пиевмораспределители . . .
4.2. Пневмоклапаны обратные . .
4.3. Пневмоклапаны быстрого вы-
хлопа ........................
4.4. Пневмоклапаны последова-
тельности ....................
3
4
6
8
8
10
12
14
16
20
23
28
28
29
29
43
45
45
49
63
64
64
65
66
67
69
71
73
77
78
78
87
88
89
4.5. Логические пневмоклапаны 91
4.6. Пневмоклапаны выдержки
времени.......................... 92
4.7. Конструкция и технические
данные серийной направляю-
щей пневмоаппаратуры ... 93
Список литературы .......... 120
Глава 5. Регулирующая
пиевмоаппаратура ............ 121
5.1. Пиевмодроссели ............. 121
5.2. Редукционные пневмокла-
паны ............................ 127
5.3. Предохранительные пиевмо-
клапаны.......................... 128
5.4. Технические характеристики
серийной регулирующей инев-
моаппаратуры .................... 130
Список литературы............ 139
Глава 6. Уплотнительные
устройства................... 140
6.1. Герметизация неподвижных
соединений ...................... 140
6.2. Уплотнительные устройства
для соединений с возвратно-по-
ступательным движением . . 147
6.3. Уплотнительные устройства
для вращающихся соединений 160
6.4. Материалы уплотнений . . . 168
Список литературы.......... 169
Глава 7. Пиевмолииин 170
7.1. Трубопроводы............... 170
7.2. Соединения ................ 179
Список литературы .......... 189
Глава 8. Пневматические
элементы и устройства сред-
него уровня давления .... 190
8.1. Входные устройства .... 190
8.2. Устройства центральной части 194
8.3. Элементы УСЭППА непрерыв-
но-дискретного действия . . • 195
8.4. Выходные устройства . . . 198
8.5. Вспомогательные устройства 200
8.6. Агрегатн о-модульная систем а-
средств циклической автома-
тики ЦИКЛ.......................
Список литературы............. 205
407
Глава 9. Элементы и уст-
ройства струйной техники . . 206
9.1. Струйные системы автоматиче-
ского управления ................. 206
9.2. Элементы и конструкция уп-
равляющего устройства . . . 212
9.3. Внешние устройства струйных
систем управления ..... 221
9.4. Построение логических схем
на элементах «Волга» . . . 227
9.5. Построение струйных управ-
ляющих устройств............ 243
Список литературы ......... 262
Глава 10. Проектирование
пневматических систем управ-
ления ........................ 263
10.1. Исходные данные и порядок
разработки пневматических
схем............................. 263
10.2. Содержание схем ..... 264
10.3. Общие требования к разра-
батываемым системам управ-
ления .................... .... 265
10.4. Методы проектирования си-
стем управления ................. 266
10.5. Реализация булевых функ-
ций средствами пневмоавто-
матики .......................... 288
10.6. Реализация функциональных
устройств средствами пневмо-
автоматики .................. 294
10.7. Примеры типовых пневмати-
ческих систем управления 301
Список литературы .... 308
Глава 11. Динамические рас-
четы пневматических приво-
дов и устройств............... 309
11.1. Устройства с полостями по-
стоянного объема ..... 310
11.2. Устройства с полостями пе-
ременного объема.............. 320
Список литературы . . . 351
Глава 12. Кондиционирование
сжатого воздуха ............ 352
12.1. Очистка сжатого воздуха для
пневматических систем . . 352
12.2. Смазка пневматических уст-
ройств .......................... 386
12.3. Борьба с шумом и загрязне-
нием окружающей среды при
работе пневмосистем . . . 394
Список литературы . . . 396
Приложение 1 397
Приложение 2.................. 400
Предметный указатель.......... 401
ИБ № 3158
Елена Васильевна Герц, Алексей Иванович Кудрявцев,
Олег Викторович Ложкин, Анатолий Прокофьевич Пятидверный,
Евгений Андреевич Рагулин, Эдуард Иванович Чаплыгин,
Василий Иванович Щербаков
ПНЕВМАТИЧЕСКИЕ УСТРОЙСТВА И СИСТЕМЫ
В МАШИНОСТРОЕНИИ
Редактор Н. А. Иванова
Художественный редактор И. К. Капралова
Технический редактор А. И. Захарова. Корректоры И. Л1. Борейша и А. М. Усачева
Оформление художника В. П. Астафьева
Сдано в набор 09.04.81. Подписано в печать 23.10.81. Т-23686.
Формат 60X90l/ie- Бумага типографская № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 25,5 Уч.-изд. л. 34,1, Тираж 15 000 экз.
Заказ 534. Цена 2 р. 20 к.
Ордена Трудового Красного Знамени
издательство «Машиностроение», 107076, Москва, Стромынский переулок, 4
Ленинградская типография № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
193144, г. Ленинград, ул. Моисеенко, 10.